/










































































































































































































































































































































































Author: Кондратенков Г.С. Фролов А.Ю.
Tags: электротехника радиолокация радиотехника радиоэлектроника
ISBN: 5-88070-071-2
Year: 2005



Text
Г. С. Кондратенков, А. Ю. Фролов
РАДИОВИДЕНИЕ
Радиолокационные системы
дистанционного зондирования Земли
Под редакцией докт. техн. наук,
проф. Г. С. Кондратенкова
Рекомендовано УМО по образованию в области радиотехники,
электроники, биомедицинской техники и автоматизации
в качестве учебного пособия для студентов высших учебных заведений,
обучающихся по специальностям 200700 «Радиотехника»,
201600 «Радиоэлектронные системы», 201700 «Средства
радиоэлектронной борьбы» направления подготовки дипломированных
специалистов 654200 «Радиотехника»
Москва, «Радиотехника», 2005
УДК 621.396.96
К64
ББК 32.95
Рецензенты
докт. техн. наук, проф. А. Н. Детков
докт. техн. наук, проф. Б. Г. Татарский
Кондратенков Г.С., Фролов А.Ю.
К64 Радиовидение. Радиолокационные системы дистанционного
зондирования Земли. Учебное пособие для вузов I Под ред. Г. С. Кон-
дратенкова. — М.: «Радиотехника», 2005. — 368 с: ил. (Сер.
Радиолокация).
ISBN 5-88070-071-2
Излагаются необходимые сведения для изучения
радиолокационных систем дистанционного зондирования Земли. Основное внимание
уделено принципам построения авиационных и космических
радиолокационных систем с синтезированной апертурой антенны (РСА),
предназначенных для детального наблюдения (радиовидения) земных объектов
естественного и искусственного происхождения. Рассмотрены режимы
РСА для получения детальных трехмерных радиолокационных
портретов объектов. Показана возможность определения характеристик
объектов и распознавания целей по их радиолокационным портретам.
Для студентов вузов, а также инженеров и научных
работников, занимающихся проблемами радиовидения Земли. Может быть
рекомендовано при подготовке инженеров по специальности 201600
«Радиоэлектронные системы».
УДК 621.396.96
ББК 32.95
ISBN 5-88070-071-2
Издательство «Радиотехника», 2005
Оглавление
Список применяемых сокращений 5
Введение 7
Глава 1. Структура радиолокационного канала 11
Глава 2. Основы теории синтезированных апертур 17
Глава 3. Пространственная селекция объектов при синтезировании
апертуры 26
3.1. Общие закономерности пространственной селекции 26
3.2. Функция неопределенности прямолинейной
синтезированной апертуры 36
3.3. Пространственная селекция при модулированном
зондирующем сигнале 40
3.4. Функция неопределенности синтезированной апертуры
с учетом диаграммы направленности антенны 47
3.5. Функция неопределенности траекторного сигнала РЛС
планового обзора 56
Глава 4. Модель РСА 61
4.1. Структура модели РСА 61
4.2. Поле облучения 65
4.3. Функция отражения 66
4.4. Характеристики функции отражения 71
4.5. Траекторный сигнал 81
4.6. Классификатор целей 91
4.7. Идентификация функции отражения 102
Глава 5. Принципы построения РСА землеобзора 109
5.1. Структурная схема РСА землеобзора 109
5.2. Приемопередающий тракт 111
5.3. Антенная система 122
5.4. Алгоритмы обработки сигналов РСА землеобзора 135
Глава 6. Системы обработки сигналов РСА 160
6.1. Оптическая система обработки 160
6.2. Цифровые системы обработки 174
6.3. Система компенсации нестабильностей траекторных
сигналов РСА землеобзора 196
6.3.1. Влияние искажений траекторного сигнала
на характеристики РСА 196
6.3.2. Компенсация траекторных нестабильностей
с помощью ИНС 205
6.3.3. Автофокусировка изображения в РСА 213
3
Олгавл ение
Глава 7. Характеристики РСА землеобзора 240
7.1. Разрешающая способность и динамический диапазон
изображения 240
7.2. Характеристики зоны обзора 247
7.3. Дальность обнаружения целей РСА землеобзора 250
7.4. Распознавание объектов 265
7.5. Точность измерения координат целей 272
7.6. Помехозащищенность РСА землеобзора 279
7.6.1. Помехозащищенность РСА в условиях РЭБ 279
7.6.2. Скрытность работы РСА землеобзора 280
7.6.3. Помехоустойчивость работы РСА 288
Глава 8. Режимы работы РСА землеобзора 294
8.1. Поляризационный режим 294
8.2. Режим селекции движущихся целей 302
8.2.1. Алгоритмы селекции движущихся целей 302
8.2.2. Селекция движущихся целей в РСА путем
доплеровской фильтрации сигналов 304
8.2.3. Селекция движущихся целей в системах
с остановленным фазовым центром 309
8.2.4. Селекция движущихся целей в РСА
с моноимпульсной антенной 312
8.2.5. Селекция целей по тангенциальной
скорости 318
8.3. Режим формирования скоростного портрета 330
8.4. Методы обратного (инверсного) синтезирования
апертуры 337
8.5. Интерферометрический режим измерения высоты
объектов 349
8.6. Многопозиционный режим 354
Приложение 364
Литература 366
Список применяемых сокращениий
GPS - спутниковая навигационная система (Global Position System)
АП - антенный переключатель
АЦП - аналогово-цифровой преобразователь
БД - база данных
БЗУ - буферное запоминающее устройство
БПФ — быстрое преобразование Фурье
БС - быстрая свертка
БЦВМ - бортовая цифровая вычислительная машина
БЦО - блок цифровой обработки
ВПП - взлетно-посадочная полоса
ГА - гармонический анализ
ДИСС - доплеровский измеритель скорости и угла сноса
ДН - диаграмма направленности
ДОЛ — доплеровское обужение луча
ДПФ —дискретное преобразование Фурье
ЗГ - задающий генератор
ЗУ — запоминающее устройство
ИНС — инерциальная навигационная система
КНД - коэффициент направленного действия
ЛЦ - ложные цели
ЛЧМ - линейная частотная модуляция
МИЧ - мгновенное измерение частоты
НРТР - непосредственная радиотехническая разведка
НС - навигационная система
ОБПФ — обратное быстрое преобразование Фурье
ПБО - переднебоковой обзор
ПЗУ - постоянное запоминающее устройство
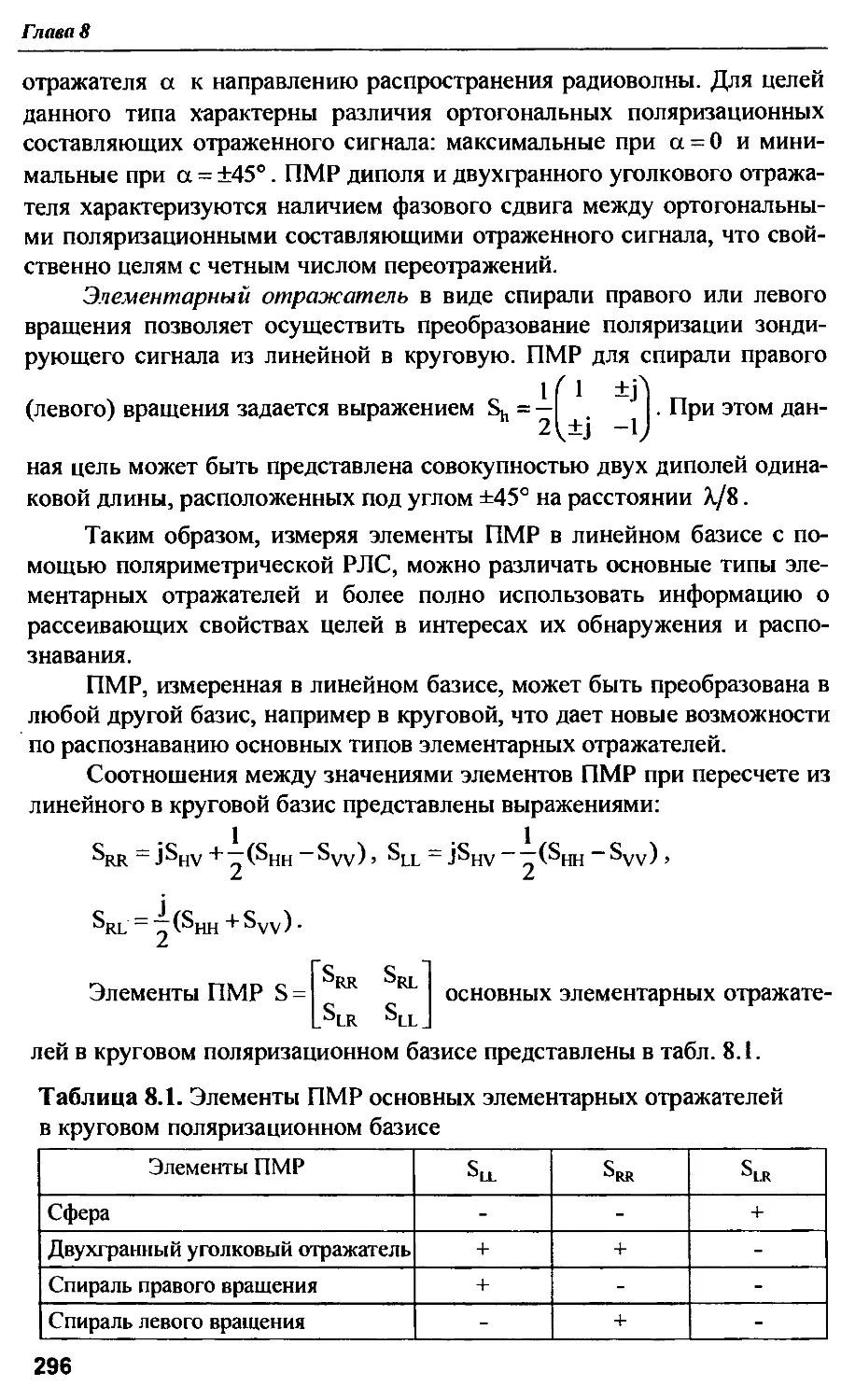
ПМР - поляризационная матрица рассеяния
ПО - программное обеспечение
ППЗ - полное поляризационное зондирование
ППМ - полный поляризационный прием
ПРД - передатчик
ПРМ - приемник
ПС - прямая свертка
ПФ - предварительный фильтр
РЛИ — радиолокационное изображение
РЛС — радиолокационная станция
Список применяемых сокращений
РСА — радиолокатор с синтезированной (искусственной) апертурой антенны
РСН - равносигнальное направление
РТР - радиотехническая разведка
РЭБ — радиоэлектронная борьба
РЭП - радиоэлектронное подавление
РЭС - радиоэлектронное средство
СА — синтезированная апертура
САП - станция активных помех
СДЦ - селекции движущихся целей
СДЧ - средняя доплеровская частота
СКО - среднеквадратическое отклонение
См - смеситель
СО - система обработки
СО - секторный обзор
ТН - траекторные нестабильности
ТО - телескопический обзор
УМ - усилитель мощности
УПЧ - усилитель промежуточной частоты
ФД - фазовый детектор
ФН - функция неопределенности
ФС - формирователь сигналов
ЦП - цифровой процессор
ЦСО - цифровая система обработки
ЭВМ — электронно-вычислительная машина
ЭЛТ - электронно-лучевая трубка
ЭМВ - электромагнитная волна
ЭПР — эффективная площадь рассеяния
ВВЕДЕНИЕ
От радиолокации к радиовидению
Обладание материальными средствами и информацией является
основой любой человеческой деятельности, причем в последнее время
обладание информацией становится решающим фактором успеха. Сложность
и объемность выполняемых задач, их комплексный характер привели к
необходимости сбора информации в глобальном масштабе, т.е. обо всех
процессах, происходящих на Земле и в космическом пространстве. Появился
термин «глобальный мониторинг» (разведка), подразумевающий сбор
информации непрерывно, независимо от времени суток, погодных и других
условий в масштабе всего земного и околоземного пространства.
Разведка (мониторинг) — одно из главных направлений развития
вооруженных сил в XXI веке.
Под разведкой понимается сбор детальной информации обо всех
воинских подразделениях и объектах в реальном масштабе времени. При этом
благодаря созданию новых информационных технологий возможно
получение оперативной, детальной и полной информации об определенном
участке местности и объектах с генерированием трехмерного изображения с
любым нужным разрешением. Интегрированный компьютерный центр
обеспечивает сбор данных от всех источников для получения детальной
информации о заданном районе ведения боя.
Среди технических средств разведки выделяются системы
радиовидения, под которыми обычно понимают активные радиолокационные станции
(РЛС) воздушного, наземного и космического базирования со сверхвысокой
разрешающей способностью. Это позволяет получать с их помощью
радиолокационные изображения наблюдаемых объектов, сравнимые по
детальности с фотоизображениями.
Радиовидение — наблюдение объектов в радиодиапазоне волн с
детальностью оптических систем. В отличие от оптических систем системы
радиовидения дают возможность получать изображения объектов
независимо от метеоусловий и естественной освещенности, на значительном
удалении и одновременно в широкой зоне обзора, в том числе объектов,
невидимых в оптическом диапазоне волн.
Радиовидение позволяет решать новые задачи всепогодной разведки:
обнаружение малоразмерных наземных целей (танки, тактические
ракеты, зенитно-ракетные комплексы, самолеты, вертолеты, автотранспорт), в том
числе скрытых растительностью, неподвижных и движущихся;
обнаружение скоплений войск, фортификационных сооружений,
переправ, новых дорог, минных полей, плотин, дамб, нефтепроводов;
оценка состояния аэродромов, железнодорожных узлов, морских портов;
Введение
детальное наблюдение поля боя, определение линии боевого
соприкосновения, оценка результатов боевой деятельности.
Наряду с военными задачами (разведка, наведение высокоточного
оружия, десантирование, навигация) системы радиовидения используются
для картографирования местности, ведения инженерной и геологической
разведки, определения ледовой обстановки, составления карт
растительности и снежного покрова, определения состояния волнения моря,
обнаружения нефтяных пятен, загрязнений и следов кораблей на водной
поверхности, оперативного контроля чрезвычайных ситуаций (катастроф
транспортных средств, землетрясений, наводнений, пожаров), а также для решения
многих других задач.
История развития систем радиовидения началась в 50-х годах
прошлого века практически одновременно в СССР (Военно-воздушная инженерная
академия имени проф. Н.Е.Жуковского) и США (Мичиганский
университет) сначала применительно к задачам воздушной и космической разведки.
Такие системы получили название радиолокаторов с синтезированной
(искусственной) апертурой антенны (РСА). Первые монографии, обобщающие
опыт научных исследований и разработки РСА, опубликованы в 1970 г. [1,2].
Основной задачей для обеспечения радиовидения является получение
высокой (сверхвысокой) разрешающей способности РЛС по дальности и
углу. Проблема получения высокого разрешения по дальности к тому
моменту была решена путем использования широкополосных зондирующих
сигналов. А для обеспечения высокого разрешения по углу необходимы
были антенны очень больших размеров (сотни метров), размещение
которых на летательных аппаратах невозможно.
Идея метода получения высокого разрешения по углу при малых
размерах антенны была основана на формировании большой апертуры
антенны на борту летательного аппарата - носителя РЛС искусственным
способом. Для этого апертура синтезировалась, т.е. формировалась,
последовательно во времени при полете самолета по определенной, точно известной
(обычно прямолинейной) траектории путем запоминания отраженного от
объекта электромагнитного поля — амплитуды и фазы траекторного сигнала.
Отсюда название метода — синтезирование апертуры антенны. Иногда
такую антенну называли также искусственной или фантомной антенной,
подчеркивая ее отличие от реальной антенны малого размера, используемой в
бортовой РЛС.
Когерентное (синфазное) суммирование сигналов, принятых и
запомненных за время пролета заданного участка траектории (траекторного
сигнала), эквивалентно синфазному суммированию сигналов, принимаемых
реальной линейной фазированной антенной решеткой такого же большого
размера. Поэтому угловая разрешающая способность и, следовательно,
детальность радиолокационного изображения объекта повышаются
приблизительно во столько раз, во сколько синтезированная апертура больше
реальной апертуры антенны РЛС. В настоящее время это улучшение может быть
в тысячу и более раз, что обеспечивает высокую детальность (1 м и лучше)
радиолокационных изображений (радиовидение).
8
Введение
Создание РЛС с синтезированной апертурой потребовало решения
ряда научно-технических проблем, среди которых выделяются своей
сложностью две:
1) обеспечение высокой когерентности траекторного сигнала (время
когерентности составляет десятки секунд при ширине полосы частот
модуляции 100 МГц и более);
2) обеспечение когерентного (синфазного) накопления этих сигналов в
течение единиц секунд одновременно в большом числе (тысячи) каналов.
В практическом плане наибольшие сомнения вызывала возможность
выдерживания заданной прямолинейной траектории носителя РЛС в
процессе синтезирования апертуры с точностью по боковому отклонению
порядка миллиметра на интервале в сотни метров, чтобы обеспечить
синфазное (когерентное) сложение сигналов. Это казалось фантастикой. Однако
летные эксперименты показали, что самолет, благодаря своей значительной
массе, при полете без маневра в невозмущенной атмосфере перемещается
строго по прямолинейной траектории на значительное расстояние (до 100 м).
При использовании специальных методов измерения и компенсации
отклонений траектории от заданной, так называемых методов микронавигации и
автофокусировки, возможно синтезирование апертуры размером сотни и
более метров при маневрировании и полете в турбулентной атмосфере.
Большие успехи были также достигнуты в создании когерентного
приемопередающего тракта бортовых РЛС, что в результате обеспечило
получение когерентного траекторного сигнала РСА.
Более сложной оказалась проблема обработки траекторного сигнала
на борту носителя РСА, что требовало выполнения алгоритмов
синтезирования в реальном масштабе времени. Аналоговые электронные устройства
не могли решить эту сложную задачу, и все надежды возлагались на
цифровую обработку. Однако, хотя прошло более 40 лет с момента начала работ в
этом направлении, и сегодня требования к объему памяти и
быстродействию вычислительных систем достигают предельных значений
возможностей бортовых ЭВМ.
Поэтому на первом этапе развития РСА для решения столь сложной
задачи обработки траекторного сигнала пришлось разрабатывать
принципиально новые системы с использованием когерентных оптических
устройств [3]. Иногда их называют голографическими системами.
Впервые идеи использования когерентных оптических систем с аку-
стооптическим преобразователем радиолокационных сигналов в световые
волны были предложены для спектрального анализа радиолокационных
сигналов [4] и впоследствии применены в бортовых системах
непосредственной радиотехнической разведки.
Тогда же разрабатывались когерентные оптические системы для РСА
[5]. В таких системах на борту носителя РСА траекторный сигнал
записывается на фотопленку с сохранением его фазовой структуры. Обработка
траекторного сигнала и получение радиолокационного изображения объекта
осуществляется в наземных оптических устройствах путем освещения
проявленной фотопленки с записью траекторного сигнала (радиоголограммы)
Введение
лазерным светом, формирования изображения объекта с помощью
специальной оптики и записи этого изображения на вторичную фотопленку.
Естественно, что при этом происходит большая задержка информации,
обусловленная временем доставки и обработки фотопленки, достигающая
нескольких часов. Однако и в настоящее время, благодаря уникальным
свойствам (высокое качество изображений, широкая полоса обзора, регистрация
изображения) оптические системы используются в тех случаях, когда
задержка информации не играет решающей роли.
В настоящее время радиовидение переживает этап бурного развития:
значительно повышаются тактико-технические характеристики, резко
расширяются области применения РСА. Практически все новые системы
используют цифровые методы обработки сигналов, что позволяет работать в
реальном масштабе времени. Значительно (на порядок и более) возросла
разрешающая способность РСА. Так, авиационные системы разведки имеют
разрешение до 3 м, и ведутся работы по увеличению разрешения до 1 м и
даже 10 см.
Космические РСА также имеют максимальное разрешение порядка
1 м, что позволяет обнаруживать и распознавать не только крупные цели, но
и большое число малоразмерных целей.
Введение второго, разнесенного по высоте, приемного канала (интер-
ферометрические РСА) позволило получать трехмерные изображения
(рельеф) земной поверхности.
Остро стоящая задача распознавания целей привела к разработке
поляриметрических РСА с полным поляризационным зондированием и
приемом. В этом случае используются четыре приемных канала (четыре
изображения) для всех видов поляризации (ВВ, ГГ, ВГ и ГВ).
Большинство существующих РСА работают в сантиметровом
диапазоне волн. Вследствие высокого поглощения радиоволн этого диапазона
листвой деревьев, травой, почвой такие РСА не могут обнаруживать цели,
скрытые растительностью или грунтом. Поэтому появились системы,
работающие в дециметровом (70 см) и метровом (2,5 м) диапазонах волн. Такие
РСА могут наблюдать цели под пологом леса, в районах затоплений,
скрытые растительностью и многие другие замаскированные объекты.
В данном учебном пособии изложены принципы построения и
использования РЛС авиационного и космического базирования,
обеспечивающих детальное наблюдение (радиовидение) наземных и морских
объектов естественного и искусственного происхождения — радиолокаторов с
синтезированной апертурой антенны.
Учебное пособие не содержит закрытой информации, все числовые
примеры носят иллюстративный характер. Характеристики известных
авиационных и космических РСА, приведенные в приложении, взяты из
открытых опубликованных работ [7] и [8]и рекламных проспектов.
Авторы выражают благодарность за помощь при написании книги
своим коллегам А.А. Герасимову, Е.Е. Колтышеву, И.Н. Умнову, И.Н. Чер-
вякову, И.А. Юрчику, В.Т. Янковскому.
10
ГЛАВА 1
Структура радиолокационного канала
РЛС впервые появились как средство обнаружения и определения
координат самолетов в системах противовоздушной обороны перед
Второй мировой войной. С тех пор радиолокация развивается
гигантскими темпами и в настоящее время используется практически во всех
комплексах вооружения и при решении многих хозяйственных задач.
Главный качественный скачок в радиолокации произошел, когда от
обнаружения и измерения координат перешли к распознаванию объектов.
В современной трактовке радиолокация — это обнаружение заданных
объектов, определение их координат и других характеристик путем
обнаружения и измерения параметров радиоволн, приходящих от объектов.
Радиолокация как наука основана на использовании ряда
физических законов, связанных с распространением и рассеянием
электромагнитных волн.
Важнейшим для радиолокации свойством электромагнитных волн
является их рассеяние при падении на объекты. Это позволяет,
принимая рассеянные объектом волны и измеряя их параметры, судить о
наличии и свойствах объекта. В общем случае объект рассеивает волны во
все стороны, в том числе и в сторону, обратную направлению прихода
падающей волны. Таким образом, облучая объект, можно принимать
отраженную волну в том же месте, откуда распространяется волна
облучения. При многопозиционной радиолокации рассеянные волны
принимаются также с других, отличных от облучения, направлений.
Закон о прямолинейности распространения электромагнитных
волн в однородной среде используется для определения угловых
координат объекта путем измерения направления прихода волны как
вектора, перпендикулярного фазовому фронту волны.
Постоянство скорости распространения электромагнитных волн
позволяет определять дальность до объекта путем измерения задержки
волны при распространении ее от объекта до радиолокатора.
Важным свойством электромагнитных волн является их малое
затухание при распространении в атмосфере и космосе, что позволяет
получать большие дальности обнаружения объектов практически в
любых метеоусловиях. Только при переходе к миллиметровым волнам за-
11
Глава I
тухание в атмосфере значительно ограничивает дальность
распространения электромагнитных волн, особенно в дожде.
Электромагнитные волны, рассеянные движущимся объектом,
имеют другую длину волны по сравнению с волной облучения (доплеров-
ское смещение частоты). Этот эффект позволяет выделять движущиеся
объекты и определять их скорость путем измерения величины смещения
частоты.
Радиодиапазон электромагнитных волн, используемых в радиолокации,
обычно исчисляется от десятков метров до миллиметров. Еще более
короткие волны используются в оптических локаторах, при этом основные
принципы локации в радио- и оптических диапазонах одинаковые.
Кроме перечисленных основных законов, используются
многочисленные закономерности рассеяния электромагнитных волн объектами в
зависимости от геометрических размеров, формы, электрических
свойств материала объекта, а также длины волны, углов падения,
поляризации и напряженности электромагнитного поля облучения.
Характеристики распространения радиоволн в различных средах также зависят
от типа среды (атмосфера, ионосфера, космос, снег, почва и т.п.) и ее
неоднородности (турбулентность, облачность, концентрация электронов
и т.п.), что учитывается при анализе рассеянного объектом поля.
Часто к радиолокации относят также два других направления
науки и техники, связанные с излучением и приемом радиоволн,
приходящих от объектов.
Первое направление — радиометрия, или теплорадиолокация,
использует для изучения объектов их собственное излучение как
нагретого тела в радиодиапазоне частот, которое принимается и анализируется
широкополосным приемником. Иногда этот метод называют пассивной
радиолокацией.
Второе направление - радиолокация с активным ответом.
Характерным примером этого направления является система
государственного опознавания, в которой объект оснащен активным ответчиком,
излучающим электромагнитную волну в ответ на запросную (облучающую)
волну радиолокатора. В данной книге оба эти направления
рассматриваться не будут.
Структура радиолокационного канала. Она включает в себя
собственно РЛС (3), носитель РЛС (6), среду распространения радиоволн (2),
группу объектов (1), систему навигации (4) и систему индикации и
управления каналом (5) (рис. 1.1). Все эти элементы структуры участвуют в
процессе обнаружения и определения характеристик заданных объектов.
1. Группа объектов состоит из заданных объектов (целей),
вспомогательных объектов (ориентиров), сопутствующих объектов (фона),
объектов излучающих или переизлучающих помеховые сигналы
(источников помех).
12
Структура радиолокационного канала
Группа
объектов:
цели,
ориентиры,
фон,
источники
помех
РЛС
Синтезатор
сигналов
т
Процессор
обработки
сигналов
БЦВМ
управления и
обработки
данных
У -v
S
S
X
а
га
Ы
X
ц
X
S
ев
s
и
5
s
X
X
V
5
а
о.
Система
навигации
Рис. 1.1. Структура радиолокационного канала
Цели - заданные объекты, т.е. объекты нашего интереса, могут
иметь различную физическую природу: воздушные цели (самолеты,
ракеты, облака, дождь, турбулентности атмосферы и т.п.), наземные цели
(скопление войск и отдельные виды техники, взлетные полосы
аэродромов и сельскохозяйственные угодья, инженерные сооружения и дороги и
т.п.), морские цели (корабли, ледовые поля, морская поверхность).
Ориентиры - вспомогательные объекты, которые помогают
решать основную задачу обнаружения и определения характеристик
целей. Так, например, ориентир — объект с известными координатами
используется для высокоточного определения координат целей,
расположенных вблизи этого объекта. Другой пример: сигналы от
малоразмерных (точечных) отражателей используются в системе автофокусировки
для получения детального радиолокационного изображения даже при
наличии значительных искажений радиолокационных сигналов.
Фон - сопутствующие объекты, которые обычно препятствуют
обнаружению целей. Так, если малоразмерная цель наблюдается на фоне
подстилающей (земной) поверхности, то фон маскирует цель. Сигнал от
фона намного превышает сигнал от цели, что требует особой системы
обработки сигналов для подавления сигнала фона и выделения сигнала
цели. В то же время в РЛС с внешней когерентностью сигнал фона
является опорным сигналом. При этом сигнал разностной частоты биений
опорного сигнала и сигнала цели используется для обнаружения цели,
т.е. фон выступает в роли вспомогательного объекта.
13
Глава 1
Активные и пассивные источники помех являются объектами,
которые излучают или переизлучают сигналы, мешающие обнаружению
сигналов цели. Помехи обычно используются в процессе
радиоэлектронной борьбы, однако они могут быть и непреднамеренными
(естественными), например в виде излучения других радиопередающих
устройств. Пассивные помехи создаются специальными отражателями
(облака диполей, аэрозолей и других образований), отражения от которых
маскируют сигналы целей.
2. Среда распространения радиоволн - пространство между РЛС и
объектом. Обычно считается, что электромагнитная волна от объекта до
РЛС распространяется прямолинейно и с постоянной скоростью.
Наличие неоднородности среды (коэффициента преломления) вносит
ошибки в процесс измерения характеристик цели, а потери энергии
вследствие поглощения в среде приводят к уменьшению дальности
обнаружения целей. Поэтому при решении радиолокационных задач требуется
учитывать характеристики среды распространения.
В зависимости от решаемой радиолокатором задачи, различные объекты и
даже среда распространения могут изменять свое назначение. Так,
турбулентность атмосферы, являясь обычно характеристикой среды
распространения, в другой задаче может быть объектом нашего интереса, т.е.
целью, например в метеорологической РЛС. Земная поверхность в случае
обнаружения малоразмерной цели, например танка, является фоном, при
картографировании — целью. Также часто, особенно в
многофункциональной РЛС, меняют свое назначение ориентиры и цели.
3. Радиолокационная система (РЛС) - включает в себя собственно
аппаратуру РЛС («железо») и программное обеспечение (ПО) работы
РЛС. Выделение ПО в отдельный элемент обусловлено как важнейшей
ролью ПО в решении всех радиолокационных задач, так и ее
специфическим видом, как продукта сугубо интеллектуальной деятельности,
стоимость которого намного превышает стоимость аппаратуры РЛС.
Интеллект РЛС материализован в виде алгоритмов и программ
процессоров и вычислительных машин, т.е. в программном обеспечении.
Конечно, этот интеллект может быть реализован только при наличии
соответствующей аппаратурной части РЛС, которая в свою очередь также
требует больших интеллектуальных вложений (технология создания и
эксплуатации).
Аппаратура РЛС включает в себя следующие основные блоки:
антенные и приемо-передающие модули. Антенно-фидерные
устройства модулей обеспечивают направленное излучение и прием
радиоволн с учетом их поляризации. Передающие модули обеспечивают
усиление, амплитудную и фазовую модуляцию радиочастотных колебаний.
Приемные модули обеспечивают малошумящее усиление и
преобразование частоты принимаемых радиочастотных колебаний;
14
Структура радиолокационного канала
синтезатор сигналов, который генерирует колебания заданной
радиочастоты, частот модуляции и преобразования для
приемопередающих модулей;
процессор обработки сигналов, выполняющий с помощью
аналоговых и цифровых устройств заданный алгоритм обработки
принимаемых колебаний (синтезирования апертуры);
БЦВМ управления и обработки данных, обеспечивающая
согласование работы и режимов всех устройств РЛС и носителя РЛС в
соответствии с решаемой задачей, а также обработку данных с выхода
сигнального процессора.
Кроме перечисленных составных частей РЛС, в нее также входят
устройства технической диагностики, источники питания, сеть
распределения сигналов и коммутационные устройства (на рисунке не
показаны).
4. Система навигации снабжает необходимой информацией
системы обработки сигналов и управления.
5. Система индикации и управления обеспечивает связь между
оператором и РЛС с использованием устройств отображения информации и
интеллектуальных систем управления, реализуемых с помощью ЭВМ.
6. Носитель РЛС выполняет не только транспортные функции, но
и обеспечивает заданное пространственное положение РЛС
(траекторию), исходя из задачи формирования требуемого пространственно-
временного траекторного сигнала.
Функционирование радиолокационного канала начинается с
задания оператором тактической задачи, исходя из которой система
управления через БЦВМ управления формирует структуру канала и его
режимы работы. Коммутационные устройства обеспечивают
реконфигурацию (изменение структуры) РЛС путем переключения
приемопередающих модулей и вычислительных модулей процессоров и изменения
способов объединения сигналов и данных с помощью сети
распределения (шины), соединяющей все модули. Кроме того, система управления
изменяет состав модулей программного обеспечения процессоров и
БЦВМ для выполнения заданных алгоритмов управления, обработки
сигналов и индикации. Сложные задачи реконфигурации аппаратуры
РЛС и программного обеспечения требуют большой интеллектуальной
поддержки оператора РЛС соответствующим программным
обеспечением ЭВМ системы управления, которое высвобождает мышление
оператора (летчика) для решения тактических задач.
В соответствии с заданным режимом работы синтезатор сигналов
вырабатывает высокочастотные колебания несущей частоты зондирующего
сигнала, а также частоты преобразования и модуляции сигналов. Наличие
высокостабильного генератора опорной частоты обеспечивает взаимную
когерентность всех сигналов, вырабатываемых синтезатором.
15
Глава 1
Каждый передающий модуль осуществляет модуляцию и усиление
сигналов синтезатора. В соответствии с программой процессора
управления фазовращатели каждого передающего модуля осуществляют
взаимное фазирование излучаемых электромагнитных волн так, чтобы
сформировалась требуемая диаграмма направленности (ДН) на передачу.
Излученная электромагнитная волна, пройдя среду
распространения от РЛС до объекта, формирует поле облучения объекта. В
зависимости от свойств объекта и параметров поля облучения,
характеризуемых функцией отражения объекта, формируется рассеянная объектом
ЭМВ, распространяющаяся в сторону РЛС.
Отраженная от объекта электромагнитная волна, пройдя среду
распространения от объекта до РЛС, возбуждает поле на апертуре приемных
антенных модулей. В соответствии с программой процессора управления
фазовращатели каждого приемного модуля осуществляют фазирование
принимаемых электромагнитных колебаний так, чтобы сформировать
требуемую диаграмму направленности на прием. Приемные модули
усиливают и преобразуют по частоте и модуляции принимаемые сигналы.
Формирование приемной диаграммы направленности возможно как аналоговым
сумматором сигналов после фазовращателей, так и в процессе обработки с
использованием цифровых фазовращателей. Для этого аналоговые сигналы
с помощью АЦП преобразуются в цифровые.
Процессор обработки сигналов и БЦВМ выполняют заданные
алгоритмы синтезирования апертуры, обнаружения, определения
координат и распознавания цели, обеспечения помехозащищенности и другие
алгоритмы. Полученные данные используются оператором и подаются в
другие системы (разведка, оружие, оборона и т.п.).
Дополнительные каналы (обычно другой физической природы)
обеспечивают необходимой информацией процессоры обработки и
БЦВМ управления. Это прежде всего система навигации, которая
совместно с носителем обеспечивает требуемую траекторию перемещения
антенных модулей РЛС, исходя из необходимости решения заданной
тактической задачи. Так, при использовании РЛС в качестве
информационной системы для наведения носителя РЛС на малоразмерную
наземную цель управление траекторией предусматривает получение
высокой разрешающей способности (радиовидение цели) и выдерживание
заданного вектора путевой скорости относительно объекта.
Структура радиолокационного канала включает в себя собственно
РЛС, носитель РЛС, среду распространения радиоволн, группу
объектов, систему навигации, систему индикации и управления каналом.
16
ГЛАВА 2
Основы теории синтезированных апертур
Синтезирование апертуры антенны является одним из наиболее
перспективных направлений развития радиолокации, появившееся в
конце 50-х годов и сразу привлекшее к себе широкое внимание.
Основным преимуществом этого направления является многократное (в 1000
и более раз) увеличение угловой разрешающей способности РЛС. При
этом обеспечивается возможность радиовидения объектов
радиолокации и обнаружения малоразмерных объектов, повышение точности
целеуказания и помехозащищенности РЛС. На первом этапе развития
этого направления основные успехи были достигнуты в значительном
повышении эффективности воздушной и космической разведки. В
дальнейшем методы синтезирования апертуры начали использоваться в
разведывательно-ударных комплексах, многофункциональных РЛС
самолетов для обнаружения малоразмерных и групповых целей и наведения
на них управляемого оружия, в РЛС планового обзора, системах
радиотехнической разведки и навигации.
В развитии теории и практики от радиолокации к радиовидению
было два этапа.
На первом этапе благодаря использованию широкополосных
(100 МГц и более) зондирующих сигналов удалось обеспечить высокое
разрешение по задержке сигналов и как следствие высокое разрешение
по дальности (единицы метров и лучше). Разрешение по дальности
определяется выражением
6r = c/(2Af),
где с - скорость распространения радиоволн; Af - ширина спектра
зондирующего сигнала.
Однако получение высокого разрешения по угловой координате
наталкивалось на непреодолимое вначале препятствие - необходимость
использования антенных систем большого размера. В бортовых РЛС,
где размер антенны не превышает единиц метров, а для боевых систем -
нескольких десятков сантиметров, разрешающая способность по углу
обычно равна нескольким градусам. Разрешение по углу можно оценить
соотношением 8G = A/d, где X - длина волны РЛС; d - размер антенны,
а линейное разрешение 5^ на дальности R будет ЬС = R5G = XR/d.
17
Глава 2
При размере антенны .1 м и длине волны 3 см на дальности 100 км
линейное разрешение ЪС =3 км. и говорить о радиовидении при таком
разрешении невозможно.
Формирование ДН реальной антенны. Для пояснения принципа
синтезирования апертуры вначале рассмотрим формирование
диаграммы направленности реальной антенны, которая и определяет
разрешающую способность по угловой координате обычной РЛС.
Пусть имеется линейная
Фронт волны ,
апертура антенны размером d,
на которую падает плоская
электромагнитная волна под
углом 0 (рис. 2.1), т.е. антенна
■"■"** работает на прием.
Под апертурой (раскры-
вом) понимается та часть
антенны, которая участвует в из-
Рис. 2.1. Формирование диаграммы луЧении или приеме электро-
направленности реальной апертурой антенны ^
магнитной волны. Фронт
волны - это поверхность равных фаз. В рассматриваемом случае это
плоскость. Фаза электромагнитной волны вдоль апертуры (ось X)
определяется запаздыванием фронта волны относительно центра апертуры:
. 2п 2пх . _
<р(х) = — г(х) = — sin6,
Л. А
где г(х) - расстояние от фронта волны до точки х на апертуре.
Диаграмма направленности формируется в результате синфазного
суммирования электромагнитной волны, падающей на апертуру:
d/2
E(G)= j Eoexp{jcp(x)}dx,
-d/2
где Ео — напряженность электромагнитной волны.
Нормированная диаграмма направленности в этом случае равна
Под разрешающей способностью по угловой координате обычно
понимают ширину ДН Ен(8) на уровне 0,7 или, что то же, 0,5 по мощности:
При работе одной антенны не только на прием, но и на передачу
ДН определяется как
18
Основы теории синтезированных апертур
а эквивалентная ширина ДН на передачу и прием
60 = 0,64X/d.
Таким образом, ширина ДН антенны и соответственно разрешение
по угловой координате РЛС определяются относительным размером
апертуры антенны d/A..
Характерные величины относительного размера апертуры для РЛС
истребителя d/X= 20...30, для систем радиолокационного дозора и наведения
А1"к = 80... 100, для РЛС воздушной разведки, имеющей вдольфюзеляжную
антенну, ЛИ. = 200...300.
В более общем случае апертура антенны задает объем
анализируемого пространственно-временного сигнала, который представляет собой
зависимость напряженности, фазы и поляризации электромагнитного
поля от пространственных координат и времени. Таким образом,
апертура характеризуется геометрическими размерами анализируемого
объема электромагнитной волны, временем анализа, поляризационными и
частотными параметрами. В этом случае разрешающая способность по
угловой координате определяется изменением
пространственно-временного сигнала в апертуре антенны в зависимости от углового положения
источника электромагнитной волны.
Известными примерами такого пространственно-временного
сигнала могут служить объемные голографические линзы и
синтезированные апертуры.
Синтезирование апертуры. Основное отличие синтезированных
(искусственных) апертур от обычных (реальных) апертур антенны состоит
в том, что синтезированная апертура (СА) формируется последовательно во
времени. В каждый данный момент прием электромагнитной волны
ведется реальной апертурой, а синтезированная апертура является результатом
последовательного во времени приема электромагнитной волны реальной
апертурой при различном ее
положении относительно
источника электромагнитной
волны. Рассмотрим процесс
синтезирования на примере
формирования прямолинейной
апертуры РСА (рис. 2.2).
Антенна РЛС перемеща- Рис. 2.2. Формирование диаграммы
ется по прямолинейной траек- направленности синтезированной
тории (ось X), последовательно апертурой антенны
19
Глава 2
занимая положения 1, 2, ... , N. В каждом положении антенна работает
на передачу и прием, т.е. излучает зондирующий и принимает
отраженный от точечной цели сигналы в виде плоской электромагнитной волны.
Фронт волны расположен под углом в относительно траектории.
Процессор обработки сигналов в структуре РЛС имеет в своем составе устройство
памяти для запоминания амплитуды и фазы электромагнитной волны,
принимаемой в каждом положении антенны, формируя, таким образом, траек-
торный сигнал — аналог распределения поля по апертуре в обычной
антенне. Устройство формирования апертуры (носитель РЛС) обеспечивает
перемещение антенны РЛС по прямолинейной траектории. БЦВМ
управления синхронизирует излучение и прием сигналов РЛС с ее положением на
траектории. Процессор обработки сигналов суммирует запомненные
сигналы с учетом их фазы (синфазно). Так как размер антенны равен d и
перемещение антенны от одного положения к соседнему также равно d,
то имеем как бы непрерывную апертуру размером Хс = Nd. Ее
диаграмма направленности на прием определяется так же, как и ДН
реальной апертуры. Набег фазы волны между двумя положениями реальной
антенны на траектории
9d=2—r(d) = 2—sine
в два раза больше, чем у обычной апертуры, что обусловлено двойным
проходом электромагнитной волной расстояния г (при передаче и при
приеме). В результате ширина диаграммы направленности у
синтезированной апертуры РСА такого типа оказывается меньше, чем у реальной
апертуры такого же размера:
ес=0,44— = Х
X, Nd
с
Главный результат синтезирования апертуры в том, что размер
апертуры увеличился в Л^раз по сравнению с размером реальной апертуры.
Таким образом, разрешение по угловой координате антенны с
синтезированной апертурой при приеме сигналов определяется относительным
размером ХД. синтезированной апертуры, сформированной в результате
перемещения реальной антенны. В данном случае эффект достигается
увеличением объема анализируемого поля в пространстве и времени.
Основные свойства синтезированной апертуры. Рассмотрим
основные свойства синтезированной апертуры.
1. Метод синтезирования апертуры в РЛС (РСА) позволяет получать
апертуру большого размера, используя антенну малого размера. Дня
современных методов увеличение апертуры Xc/d составляет 102... 104 для борто-
20
Основы теории синтезированных апертур
вых самолетных и космических систем. Типовые значения относительных
размеров апертур различных систем следующие:
Системы: панорам- РЛС боко- глаз чело- РСА оптические
ные РЛС вого обзора века системы
10...50 200...3000 5-103 1О3...1О5 1О4...1О6
Благодаря большому размеру апертуры РСА возможно получение
высокого линейного разрешения по угловой координате на больших
дальностях:
5f = GcR = 0,44—R.
При Х<Д. = 10s на дальности 100 км линейное разрешение равно 0,44 м,
что соответствует условиям радиовидения объектов. При этом размер СА
Хс = 3 км и А = 3 см, что примерно в 1000 раз превышает размер реальной
антенны. Оптические системы в большинстве случаев по погодным
условиям (облачность, дымка) или в отсутствие естественного освещения не
позволяют наблюдать объекты на таком расстоянии.
2. Синтезированная апертура формируется в результате приема и
обработки отраженных от цели сигналов, т.е. синтезированная апертура
определяет ДН только на прием. ДН на передачу при синтезировании
апертуры определяется ДН реальной антенны. Поляризационные и
частотные свойства СА также определяются реальной антенной.
3. При синтезировании апертуры одновременно может работать
(излучать, принимать) всего один антенный элемент (реальная антенна).
В этом случае не возникает электродинамических задач при
формировании всей апертуры, так как нет взаимодействия элементов по
электромагнитному полю. Задача синтезирования апертуры и формирования
диаграммы направленности фактически сводится к разработке
алгоритмов и их выполнению процессором обработки траекторного сигнала.
Как и для реальной антенны, ДН синтезированной апертуры есть
зависимость сигнала на выходе процессора от угловой координаты
точечного источника излучения или переизлучения (в случае активной РСА).
ДН может быть однолучевой, многолучевой, моноимпульсной,
адаптивной и т.п.
4. Вследствие большого относительного размера СА Хс/>. объекты
наблюдения РСА в большинстве случаев находятся в промежуточной
зоне (зоне Френеля) апертуры, а не в дальней зоне, как у большинства
реальных антенн. При приеме в дальней зоне фронт волны на апертуре
считается плоским. С увеличением размера апертуры (или уменьшени-
21
Глава 2
ем расстояния до объекта) сферичностью фронта волны уже
пренебрегать нельзя. Обычно условие дальней зоны записывается как
Rfl,>2d2A.
Для реальной антенны бортовой РЛС граница дальней зоны
порядка 100 м, а при синтезировании она исчисляется тысячами
километров. Поэтому в РСА при обработке траекторного сигнала необходимо
учитывать сферичность фазового фронта электромагнитной волны. В
простейших РСА, когда размер СА небольшой, кривизну фронта
электромагнитной волны не учитывают. Такой режим называют «дотеров-
ск1ш обужением луча» (ДОЛ), и увеличение разрешения при этом
невелико (10...30) раз.
Учет сферичности фронта волны при обработке траекторного
сигнала называют фокусировкой, а апертуру соответственно
фокусированной апертурой. На рис. 2.3 показано распределение поля нефокусиро-
ванной (ДОЛ) (а) и фокусированной (б) апертур в промежуточной и
дальней зонах ДН.
0cR=5/>
X
Рис. 2.3. Распределение поля в промежуточной и дальней зонах ДН
22
Основы теории синтезированных апертур
Обычная апертура предполагает прием плоских электромагнитных
волн, что соответствует фокусировке на бесконечное расстояние
Яф = со . ДН такой апертуры до границы дальней зоны Кд 3 имеет
постоянное сечение, равное примерно размеру апертуры. Затем сечение ДН
линейно расширяется в соответствии с угловым размером 0С = А./Хс и
зависимостью Ы = 9CR .
Фокусированная апертура подобна оптической линзе, которая
фокусирует изображение. Такая апертура имеет минимальное сечение
5(?=9сКф на расстоянии фокусирования, т.е. такое же, как и у обычной
антенны в дальней зоне. Можно сказать, что процесс фокусирования
переносит свойства направленности апертуры из дальней зоны в
промежуточную.
Так как сферичность фронта волны зависит от расстояния до
объекта, необходим различный закон фокусирования для разных
дальностей, т.е. для обеспечения фокусировки СА нужен многоканальный по
дальности алгоритм обработки траекторного сигнала.
Благодаря фокусировке СА обеспечивает в промежуточной зоне
разрешение не только по углу, но и по дальности даже при немодулиро-
ванном сигнале. Однако обычно оно невелико, и разрешение по
дальности обеспечивается за счет модуляции зондирующего сигнала.
5. Для обеспечения синфазного сложения сигналов в процессе
синтезирования апертуры необходимо, чтобы сигналы были когерентными.
Когерентность сигнала — априорное знание структуры сигнала, т.е. для
синфазного сложения требуется точное знание фазы траекторного
сигнала. Обычно в антеннах считается допустимой максимальная ошибка
положения точек апертуры относительно заданного порядка а/8, что
соответствует ошибке фазы я/4.
Основными источниками ошибок — некогерентности траекторного
сигнала — являются фазовые нестабильности приемопередающих
модулей, траекторные нестабильности носителя РСА и нестабильности
среды распространения электромагнитной волны. Так, допустимая ошибка
в знании траектории перемещения антенны равна нескольким
миллиметрам (в сантиметровом диапазоне электромагнитной волны). Это
требует специальных мер компенсации этих ошибок с помощью систем
микронавигации и алгоритмов автофокусировки.
6. Энергетические характеристики С А (отношение
сигнал/внутренний шум) определяются коэффициентом усиления реальной антенны и
временем синтезирования, т.е. временем когерентного накопления
сигналов. Помехозащищенность от внешних активных и пассивных помех
23
Глава 2
определяется как ДН реальной антенны, так и направленными
свойствами СА, т.е. пространственной селекцией помех.
Действительно, в каждом положении антенны при синтезировании
апертуры мощность принятого сигнала определяется мощностью
излучения и коэффициентом усиления антенны, а синфазное сложение этих
сигналов при синтезировании эквивалентно накоплению энергии
сигнала за время синтезирования при постоянной спектральной мощности
внутренних шумов. По отношению к источникам внешних помех, кроме
того, возможна угловая селекция, эффективность которой зависит от ДН
реальной и синтезированной апертур.
7. Относительное перемещение антенны и объекта, необходимое
для формирования СА, можно выполнить различными методами.
Формирование СА в результате движения антенны при неподвижном
объекте называют прямым синтезированием, а формирование СА при
движении объекта и неподвижной антенне — обратным синтезированием. При
этом возможно формирование СА в результате вращения объекта, что
эквивалентно движению антенны вокруг объекта.
Использование в процессе синтезирования одновременно не
одной, а многих антенн позволяет синтезировать не только линейные, но и
плоские и объемные СА.
8. Обработка траекторного сигнала для получения сверхвысокой
разрешающей способности по дальности и азимуту в реальном масштабе
времени (режим радиовидения) требует высокого быстродействия (107...109
операций/с) и большого объема памяти процессора (106...108 байт), что
представляет исключительно сложную задачу для бортовых ЦВМ. В
наземных условиях эту задачу успешно решает оптический процессор, в
котором используется запись траекторного сигнала на фотопленку и
аналоговая обработка сигнала с помощью когерентной оптической системы.
9. Синтезирование апертуры требует определенного времени, что
приводит к задержке информации в РСА. Минимальное запаздывание
информации определяется временем синтезирования, т.е. временем
формирования СА. Обычно оно составляет десятые доли — единицы секунд.
Максимальная задержка определяется с учетом времени выполнения
алгоритма синтезирования соответствующим процессором обработки
траекторных сигналов. Наибольшую задержку имеют наземные оптические
процессоры. Она состоит из времени полета самолета в зоне работы
РСА, времени возвращения на базу, времени доставки фотопленки с
записью траекторных сигналов в лабораторию, времени фотохимической
обработки пленки, оптической обработки и записи изображения на
вторичную фотопленку и, наконец, фотохимической обработки вторичной
пленки. Это время может достигать нескольких часов.
24
Основы теории синтезированных апертур
Для получения режима радиовидения необходима сверхвысокая
разрешающая способность РЛС по дальности и азимуту (от единиц
метров до десятков сантиметров).
Разрешение по дальности обеспечивается использованием
широкополосных зондирующих сигналов (100 МГц и более).
Разрешение по азимуту обеспечивается синтезированной апертурой
антенны размером в сотни метров и даже километров при обычном
(малом) размере антенны.
Синтезированная апертура формируется путем относительного
перемещения антенны РЛС и цели. При неподвижной цели
синтезирование называется прямым, а при неподвижной антенне и перемещении
цели — обратным. Возможно также синтезирование апертуры за счет
вращения цели при неподвижной РЛС.
Синтезированная апертура формирует ДН только на прием путем
обработки траекторного сигнала. Используя соответствующие
алгоритмы, процессор обработки может формировать различные ДН
(суммарные, моноимпульсные, многолучевые и т.п.).
Алгоритм обработки траекторного сигнала должен учитывать
сферичность волн, отраженных от цели (осуществлять фокусировку).
При небольших размерах СА можно не применять фокусировку.
Такой режим РСА называют доплеровским обужением луча (ДОЛ).
Обработка траекторного сигнала эквивалентна синфазному
суммированию, что требует обеспечения когерентности сигнала. Нарушение
когерентности обусловлено, прежде всего, траекторными нестабиль-
ностями относительного перемещения антенны РЛС и цели, а также
нестабильностями приемопередающего тракта и среды
распространения электромагнитной волны. Для компенсации нестабильностей
используются системы микронавигации и алгоритмы
автофокусировки при обработке траекторного сигнала.
Обработка траекторного сигнала в реальном масштабе времени
требует высокого быстродействия (до 109 операций/с) и большого объема
памяти (до 108 бит) бортового процессора.
Использование наземной оптической системы обработки приводит к
задержке информации до нескольких часов.
25
ГЛАВА 3
Пространственная селекция объектов
при синтезировании апертуры
3.1. Общие закономерности пространственной
селекции
Пространственная селекция определяет детальность получаемого
радиолокационного изображения (РЛИ). Чем выше пространственная
селекция и соответственно детальность РЛИ, тем больше малоразмерных
объектов и элементов крупных объектов можно наблюдать (обнаруживать,
определять координаты и другие параметры) в зоне обзора РЛС.
Пространственная селекция РСА так же, как и обычной РЛС,
характеризуется разрешающей способностью по дальности 8г и линейной
разрешающей способностью по угловой координате (азимуту) 54?. В
свою очередь разрешение определяется свойствами пространственно-
временного траекторного сигнала РСА, т.е. синтезированной апертурой
антенны и модуляцией зондирующего сигнала. Поскольку сигналы и
шумы РСА имеют статистическую природу, т.е. носят случайный
характер, разрешающая способность так же, как и обнаружение объектов,
должна определяться вероятностными характеристиками. Однако на
практике использование вероятностных характеристик крайне неудобно,
так как разрешение зависит от большого числа параметров объектов,
сигналов и шумов, статистические сведения о которых обычно отсутствуют.
В то же время, при всем различии алгоритмов обработки сигналов,
основным фактором, влияющим на разрешающую способность РСА,
является размер базы (апертуры) сигнала. С учетом того, что
накопление энергии сигналов на фоне шумов является важнейшим критерием
при выборе алгоритма обработки, выходное изображение РСА
формируется путем согласованной обработки траекторного сигнала.
Оценку разрешающей способности обычно производят на
основании критерия Рэлея. Согласно этому критерию два точечных объекта
могут быть разрешены, если в их изображении наблюдается провал
между двумя максимумами (двугорбая кривая). Так как в РСА величина
провала зависит еще и от соотношения начальных фаз и амплитуд сиг-
26
Пространственная селекция объектов при синтезировании апертуры
налов объектов, более удобным является оценка разрешения по ширине
изображения одиночного точечного объекта на определенном уровне
(обычно -ЗдБ). В этом случае возможность разрешения параметров
сигнала РСА, в которых закодированы дальность и угловая координата
объекта, определяется функцией рассогласования траекторного сигнала
точечного объекта и опорного сигнала на выходе согласованной
системы обработки:
j(Ay)= JsT(x)s*(x,Ay)dx,
х
где sT(x) — пространственно-временной траекторный сигнал РСА как
функция вектора х = х, у, z, t; X - область, где задан и анализируется
(обрабатывается) сигнал sT(x); Ay - смещение параметра у
относительно параметра сигнала у0; s* - комплексно-сопряженный опорный
сигнал.
В частном случае функция рассогласования для параметров задержки
сигнала х и частоты f носит название функции неопределенности:
со
J(x,f)= JsT(t)sT*(t-x)exp{j27ift}dt.
В дальнейшем будем использовать это более привычное название
в расширенном смысле для всех параметров сигнала и объекта.
Анализ пространственных
закономерностей проведем на
примере линейной С А (рис. 3.1),
при которой антенна
перемещается по заданной (опорной)
траектории в течение времени
синтезирования Тс от t, до t2:
Сигнал, отраженный от
точечного объекта, находящегося в
Рис. 3.1. Траектория движения фазового начале координат 0, т.е. траек-
центра антенны при СА торный сигнал, зависит от
многих параметров и прежде всего от
модуляции зондирующего сигнала, параметров траектории движения
РЛС, несущей частоты и ДН реальной антенны. Ширина спектра,
обусловленная модуляцией зондирующего сигнала, обычно исчисляется
десятками мегагерц. Частотная модуляция траекторного сигнала,
обусловленная движением антенны по траектории и соответственным из-
27
Глава 3
менением доплеровской частоты, имеет спектр шириной в единицы
килогерц. Наконец, амплитудная модуляция траекторного сигнала,
обусловленная перемещением ДН антенны, обычно весьма узкополосная
(единицы герц). Такое соотношение спектров модуляции позволяет
анализировать их влияние на пространственную селекцию РСА порознь.
Поэтому вначале будем полагать, что ДН антенны — всенаправ-
ленная, излучение передатчика РСА — монохроматическое на длине
волны Я., антенна перемещается со скоростью, намного меньшей
скорости распространения электромагнитной волны. Объект полагается
неподвижным. В этом случае будем анализировать свойства СА по
пространственной селекции объекта путем рассмотрения функции
неопределенности J(p) в зависимости от вектора р изменения
пространственной координаты объекта.
Траекторный сигнал можно записать в виде
= Uo(t)exp{jk2ro(t)},
где U0(t) — амплитуда траекторного сигнала; <p(t) — фаза траекторного
сигнала; к = 2я/Х — волновое число; ro(t) — расстояние от начала
координат до траектории перемещения антенны в момент времени t.
Траектория в общем виде имеет произвольный характер. Будем
полагать, что другие причины изменения фазы сигнала за время
синтезирования (кроме изменения расстояния) отсутствуют. В дальнейшем
влияние изменения характеристик среды распространения
электромагнитной волны, параметров приемопередающего тракта и траекторных
нестабильностей будет рассмотрено отдельно.
Функция неопределенности (ФН) такого траекторного сигнала
t2 t2
JC(P)= j*T(tK(t)dt= Juo(t)Up(t)exp{jk2[ro(t)-rp(t)]}dt, (3.1)
ti t,
где sp - траекторный сигнал от точечного объекта с координатой р;
rp (t) - расстояние от этой точки до траектории в момент времени t
При р = 0 функция неопределенности СА
h «2
Jc(0)= jsT(t)S;(t)dt= JuJ(t)dt = Ec,
«I t,
где Ec - энергия сигнала, равная UqTc , если амплитуда сигнала U0(t)
постоянна за время синтезирования Тс = t2 — t,.
28
Пространственная селекция объектов при синтезировании апертуры
При отклонении координаты точки объекта от начала координат
фазовый член в (3.1), пропорциональный Гг0 (t) — rp (t) |, изменяется, что
приводит к уменьшению ФН Jc (p). На этом и основана возможность
пространственной селекции, которая характеризуется величиной
разрешающей способности.
Будем определять разрешающую способность по координате р
как ширину модуля ФН на уровне 0,7, либо квадрата модуля на уровне
0,5 (-3 дБ).
Рассмотрение ФН (3.1) показывает, что С А в общем случае
обеспечивает пространственную селекцию по всем координатам (х, у, z),
однако степень селекции различна, что определяется скоростью изменения
фазового члена A<p = 2k(ro-rp) при изменении вектора р.
Проанализируем зависимость разрешающей способности СА по различным
координатам от параметров траекторного сигнала.
Рассмотрим траекторию в
плоскости (х, у) (рис. 3.2), которая является
проекцией траектории общего вида на
эту плоскость. Аналогично можно
рассмотреть любую другую плоскость. Для
упрощения записи систему координат
выберем так, чтобы траектория была
расположена симметрично относительно
оси Y. В этом случае ось X
соответствует азимуту I, а ось Y - дальности г .
Будем полагать, что нас
интересует СА, обеспечивающая высокое
разрешение по сравнению с расстоянием
от РСА до объекта, т.е. р « г0. При
таких малых изменениях расстояния амплитуду траекторного сигнала
можно считать неизменной, т.е. Up (t) = Uo (t).
Произведем в (3.1) замену переменной t на угол Р, учитывая, что
ro(t),t = t(p):
Р/2
JC(P)= j ио(Р)ир(Р)йР)ехр{]к2[го(Р)-гр(Р)]}с1р,
-Р/2
где t (р) - производная функции t(p), обратной функции P(t); Ро -
угловой размер СА, т.е. угловой сектор, внутри которого размещена СА,
а центр сектора совпадает с объектом наблюдения.
29
Рис. 3.2. Формирование СА
на плоскости
Глава 3
Амплитудная функция угла р под интегралом изменяется
значительно медленнее по сравнению с фазовой функцией, определяемой
изменением расстояния (г0 - гр ) с учетом множителя к = 2тт/Л. Изменение
расстояния всего на Л/2 приводит к изменению фазы на 2л и
соответственно к резкому уменьшению ФН. Поэтому разрешающая способность
определяется в основном фазовым множителем ФН, а амплитудный
множитель влияет только на форму ФН и уровень боковых лепестков. В
дальнейшем будем анализировать нормированную ФН траекторного
сигнала, полагая амплитудный множитель постоянным:
Ро/2
j
о/
= 7T jexP{j2k[r0(p)-rp(p)]}dp.
Ро
-Ро/2
Так как размер элемента разрешения намного меньше расстояния
до объекта (р « г0 ), можно считать, что
2k[ro(p)-rp(p)] =
что следует непосредственно из геометрических соотношений рис. 3.2.
С учетом этого допущения ФН траекторного сигнала при
синтезировании апертуры
1 Ч* Г 471
Jc(p,ot) = — J expjj—psin(ot
Ро
-Ро/2
(3.2)
Анализ (3.2) показывает, что ФН определяется только угловым
размером СА Ро и длиной волны Л и напрямую не зависит от
дальности до объекта, вида траектории, скорости перемещения антенны и
времени синтезирования.
На рис. 3.3 представлены различные виды траектории при
синтезировании апертуры, имеющие одинаковые угловые размеры и,
следовательно, обеспечивающие одинаковую разрешающую способность.
При этом не играет роли, за какое время перемещалась антенна по
траектории в процессе синтезирования апертуры.
Рис. 3.3. Различные типы СА с одинаковыми угловыми
размерами
30
Пространственная селекция объектов при синтезировании апертуры
Одно и то же разрешение можно получить при скорости 300 м/с и Г = 1 с,
а также если скорость будет равна 150 м/с, но время синтезирования Тс. = 2 с,
при одинаковой дальности до объекта.
Предельные возможности СА проиллюстрируем на примере
круговой траектории (рис. ЗА,а).
Полностью круговая траектория вокруг объекта соответствует
угловому размеру СА ро = 2л . Тогда ФН
J_
2л
я а+я
Jexp{j2kpsin(ct+P)}dp = — | exp{j2kpsinp}dp = J0(2kp),
X
2л
-я а-я
где Jo - функция Бесселя 0-го порядка.
Ширина ФН для всех а, т.е. по всем пространственным координатам
на плоскости (X,Y):
5p = l,15/k = 0,18X. Таким
образом, пространственная раз-
X решающая способность круго-
Y*
0
вой (вокруг объекта) СА равна
0,18Л. по всем координатам (и
по углу, и по дальности).
Рис. 3.4. Круговая (а) и полукруговая (о) СА ,-, - ~, А
VJ VJ При полукруговои СА
(рис. 3.4,6) ро = л0. Тогда ФН по оси X (азимут, а = 0)
.*/2
jc(x) = - f exp{j2kxcosP}dp = J0
71 J
-я/2
имеет тот же вид, что и при круговой СА. Следовательно, разрешение
по оси X 5х = 0,18А.. ФН по оси Y (дальность) соответствует a = тс/2:
я/2
Jc(y) = - f exP{j2kycosp}dp =
л J,
-я/2
я я
= -fcos(2kysinp)dp-j-Jsin(j2kysinP)dp = J0(2ky)-jQ0(2ky),
о о
где Qo - функция Ломмеля-Вебера. Ширина Jc(y) на уровне 0,7 (раз-
ре-шение по оси Y) 5Y = 2,6/k = 0,4A., т.е. разрешение по дальности
ухудшается по сравнению с круговой траекторией примерно в 2 раза.
31
Глава 3
Таким образом, потенциальные характеристики пространственной
селекции при больших угловых размерах СА обеспечивают разрешение
порядка длины волны одновременно по азимуту и дальности.
Возможность разрешения по дальности при немодулированном сигнале
объясняется фокусирующими свойствами СА в промежуточной зоне дальностей
подобно фокусирующим свойствам объектива фотоаппарата, где резкое
(детальное) изображение достигается для объектов, расположенных в
плоскости фокусирования.
В большинстве случаев работы РСА угловой размер СА не
превышает несколько градусов (Р «1). Представим фазовый множитель в виде
sin(oc+p) = sina-0,5j32sina+Pcosa, что справедливо для малых углов р.
Тогда ФН по азимуту (координате С ) при a = 0 можно записать как
Ро
и разрешение
-Ро/2
(3.3)
Разрешение по дальности 6г определяется шириной ФН при a = л/2:
+Ро/2
Р° -Ро/2
а модуль этой ФН
где С и S - интегралы Френеля; U = Р0Л/кг/(2л) .
Разрешение по дальности
. (3-4)
Сравнение разрешения по углу (3.3) и
дальности (3.4) показывает, что при Ро «1 разрешение по
дальности значительно хуже, чем по углу.
Для других направлений в пространстве
объекта (0 < а < л/2) разрешение
Рис. 3.5. Сечение ФИ
На рис. 3.5 показан типичный вид сечения вкоординатах{С,г)
ФН в координатах ((, г ).
При работе РСА в дециметровом и метровом диапазонах волн
получение высокого разрешения требует использования больших угловых
32
Пространственная селекция объектов при синтезировании апертуры
размеров С А. Для произвольного угла Ро интеграл (3.2) может быть
представлен в виде обратного преобразования Фурье путем замены
переменной 2к sin (а + Р ) = сор :
-i-fl
Poi
dcop
где F(cop) - спектр пространственных частот в пределах от
2ksin(ct-po/2) до 2ksin(ct+po/2).
Ширина функции неопределенности определяется шириной спектра
F(cop) и разрешающая способность соответственно по азимуту и дальности:
о j- A „ А.
4sin(po/2)
;5r =
(3.5)
4sin2(P0/4)
Очевидно, что одна и та же СА имеет различный угловой размер в
зависимости от направления наблюдения, т.е. положения объекта
относительно апертуры (рис. 3.6). Однако независимо от направления
наблюдения закономерности пространственной селекции не изменяются,
т.е. разрешающая способность по дальности 5г и азимуту ЬС
определяется соответствующим данному направлению угловым размером
Poi> Ро2> Роз на Рис- 3-6. При этом ось г совпадает с направлением на
объект (направлением наблюдения), а ось С перпендикулярна оси г.
Рис. 3.6. Системы координат «дальность— азимут» при различных углах
наблюдения
Таким образом, для определения пространственной разрешающей
способности в любом направлении относительно СА необходимо по-
2—3169 33
Глава 3
вернуть систему координат по дальности г и углу С так, чтобы
направление наблюдения совпало с осью дальности, и определить
значениеуглового размера С А (30 для этого направления.
Общие закономерности пространственной селекции не
изменяются, если рассматривать любые другие плоскости, например не (X,Y), a
(Z,Y). В этом случае необходимо определить проекцию траектории СА
на эту плоскость и ее угловой размер относительно направления
наблюдения. Рассмотрение всех проекций СА позволяет определить объем
разрешаемого пространства объектов. Так, например, на рис. 3.7
показана круговая апертура в плоскости (Х(, Zi), параллельной плоскости
(X, Z) и находящейся на расстоянии Yo. В этом случае угловой размер
апертуры Ро будет одинаковый для любых проекций в плоскостях,
совпадающих с осью Y. Поэтому разрешающая способность в плоскости
(X, Z) будет одинаковой во всех направлениях, а разрешение по оси Y
соответствует разрешению по дальности. Объемный элемент
разрешения будет иметь вид эллипсоида, большая ось которого направлена
вдоль оси Y (дальности).
X
Рис. 3.7. Тело ФН при кольцевой СА
До сих пор рассматривались закономерности пространственной
селекции объектов применительно к РСА, когда в процессе синтезирования
апертуры перемещается одновременно приемная и передающая (единая)
антенна. Если перемещается только приемная антенна, например
передатчик находится на стационарной орбите и подсвечивает объект, а приемная
антенна находится на летательном аппарате, то разрешающая способность
уменьшается в два раза при том же угловом размере апертуры. Это
объясняется тем, что фазовый набег на апертуре обусловлен в этом случае только
однократным прохождением волны при приеме.
Аналогичные закономерности будут при неподвижной приемной
антенне и перемещении передающей антенны. Возможность синтезирования
апертуры в этом случае можно пояснить тем, что движущийся источник в
34
Пространственная селекция объектов при синтезировании апертуры
каждом направлении излучает электромагнитные волны различной длины
(доплеровское смещение частоты) и как бы подкрашивает отдельные
элементы объекта различной краской. Приемная антенна воспринимает этот
эффект путем спектрального анализа отраженного от объекта сигнала.
Если приемопередающая антенна РСА неподвижна, а перемещается
объект, то угловой размер СА определяется траекторией перемещения
объекта. При этом закономерности пространственной селекции сохраняются.
Аналогичным образом СА может быть сформирована поворотом
объекта при неподвижной антенне. Разрешающая способность по углу и
дальности при этом
где ф0 - угол поворота объекта за время синтезирования соответствует
угловому размеру СА, т.е. ф0 = ро.
Следует подчеркнуть, что, поскольку в этом случае угловой размер
СА ро не зависит от дальности, данный метод обеспечивает
радиовидение на любых дальностях, которые ограничены только возможностью
приема отраженного сигнала.
Так, при повороте объекта за время синтезирования всего на 3° возможно
получение линейного разрешения по углу ЪС = ЮЛ., т.е. порядка 30 см при
X = Зсм , в том числе при наблюдении удаленных, например космических,
объектов.
Синтезированная апертура может осуществлять пространственную
селекцию объектов по всем трем координатам при немодулированном
зондирующем сигнале и ненаправленной антенне.
Пространственная разрешающая способность СА не зависит от вида
траектории в пространстве и времени, а определяется только угловым
размером синтезированной апертуры относительно объекта и длиной волны
радиосигналов. Угловой размер СА в плоскости равен ширине сектора, в
котором размещается проекция апертуры на эту плоскость.
Наилучшее разрешение достигается при таком направлении
наблюдения и в такой плоскости, при которых угловой размер апертуры
относительно объекта максимален.
Проекция синтезированной апертуры в плоскости обеспечивает
наилучшее линейное разрешение по азимуту (перпендикулярно
направлению наблюдения), а наихудшее - по дальности (вдоль направления
наблюдения). При этом разрешение по азимуту пропорционально
угловому размеру апертуры р„, а разрешение по дальности
пропорционально квадрату углового размера апертуры: Ы = Х/2р„ и 5г = 4Х/р„ .
Предельно высокое и одинаковое разрешение по азимуту и дальности
достигается при угловом размере СА, равном 2л, т.е. когда носитель
35
Глава 3
РСА осуществляет круговой облет района наблюдения либо объект
поворачивается относительно неподвижной РЛС на 360°.
Синтезирование апертуры возможно либо путем перемещения
приемной и (или) передающей антенн при неподвижном объекте, либо
перемещением или вращением объекта при неподвижных антеннах.
При перемещении одновременно приемной и передающей антенн
разрешение увеличивается в два раза.
3.2. Функция неопределенности прямолинейной
синтезированной апертуры
Наиболее важным для практики случаем является прямолинейное
движение антенны или объекта с постоянной скоростью за время
синтезирования апертуры (рис. 3.8). При этом формируется С А с линейным
размером Хс, угловой размер которой (при (30 «1)
К
н »
где RH - дальность наблюдения; 6Н - угол наблюдения; V - путевая
скорость; Тс - время синтезирования.
X
Рис. 3.8. Система координат при прямолинейной СА
Vt
Используя (3.2) и делая замену переменной Р =—sin6H, получим
RH
ФН для случая разрешения по азимуту (а = 0):
1
х *■
exp
с -Тс 2
. 2kfVsin6,
J^7
^ввy^^sme.!. (3.6)
36
Пространственная селекция объектов при синтезировании апертуры
Разрешающая способность по азимуту
Ы= XR" = —, (3.7)
2VTcsinGH 2p0
т.е. совпадает с получаемой непосредственно из общей формулы.
Так как разрешение по азимуту ухудшается с уменьшением угла
наблюдения 6Н (в переднем секторе обзора), то для поддержания
постоянства разрешающей способности необходимо увеличивать время
синтезирования обратно пропорционально синусу угла наблюдения:
где ТСБ0 - требуемое время синтезирования при боковом обзоре
I Так, при угле наблюдения 6Н=6° необходимо увеличить время
синтезирования в 10 раз.
Непосредственно из рис. 3.8 следует, что все соотношения
справедливы для углов ±0Н, т.е. ФН прямолинейной апертуры симметрична
относительно апертуры для любой плоскости сечения, проходящей
через ось X (апертуру). Так, в горизонтальной плоскости прямолинейная
СА не различает (не разрешает) объекты, находящиеся слева и справа
относительно вектора путевой скорости (апертуры) на одной дальности
и под одними углами ±GH.
Разрешение по дальности определяется шириной ФН при а=я/2.
Подставляя sin(a + p) = l-p2/2 и делая замену переменной р на t, получим
+TJ2
-III — | CAD <k 1КГ r Sin DH f QX .
С \ / rp< I * I •* w-. 7 HI
C "Тс/2
Модуль ФН
VT
где C(U), S(U) - интегралы Френеля; U = ■ c
:sineH /7
Разрешающая способность по дальности, полученная
непосредственно из ФН, естественно совпадает с более общей формулой:
5г =
V2Tc2sin2eH
При формировании СА путем перемещения носителя РЛС по
прямолинейной траектории с постоянной скоростью отраженный от объек-
37
Глава 3
Z* V
порционально cosGH, т.е. fA=-^-cosGH. Эффект синтезирования апер-
та сигнал смещается по частоте вследствие доплеровского эффекта про-
2V
Т
туры в этом случае часто объясняют доплеровской фильтрацией траек-
торного сигнала.
При изменении угла азимута на величину А0 доплеровская
частота изменяется на
ы.Ш*,*.. (з.8)
А
Таким образом, смещение объекта по углу относительно
направления наблюдения вызывает пропорциональное смещение частоты тра-
екторного сигнала.
Соответственно разрешение по частоте траекторного сигнала
5f = 1/Тс эквивалентно разрешению по угловой координате 6 при
условии Affl = 5f :
59 =
2VTcsin6H
AR
и разрешению по азимуту Ы = , равному (3.7).
2VTcsin8H
Такое разрешение соответствует ширине отклика на точечную
цель согласованной системы обработки траекторного сигнала. При ус-
ловии работы PC А в дальней зоне, когда RH>Rfl3 = ^£-sin20H, согла-
А
сованная система обработки представляет собой спектроанализатор до-
плеровских частот, где каждому частотному фильтру соответствует
свой элемент разрешения объекта по азимуту. Поэтому режим работы
РСА в дальней зоне называется доплеровским обужением луча (ДОЛ). В
этом режиме максимальный размер СА из условия RH > Rfl3 равен
а разрешающая способность в режиме ДОЛ не может быть лучше
ХС. (3.9)
В случае переднего обзора (вн = 0 ) разрешающая способность по
углу определяется шириной ФН с учетом того, что при постоянном
размере С А Хс угловой размер ро зависит от координаты С (рис. 3.9):
38
Пространственная селекция объектов при синтезировании апертуры
. Ро/2
-Ро/2
где ро = (Хс/к1 - угловой размер апертуры.
Рис. 3.9. Система координат при СА при переднем обзоре
Ширина синтезированной ДН при наблюдении строго по
направлению вектора путевой скорости (вперед)
(зло)
Таким образом, угловое разрешение в переднем секторе (9н = 0)
пропорционально ^/A/Xc , а не А/Хс, как при переднебоковом обзоре,
что не позволяет значительно увеличивать разрешение методом
синтезирования апертуры по сравнению с разрешением реальной антенны.
Действительно, так как ширина ДН реальной антенны 90 « X/d, а СА
0С = 1,3Л/Х./ХС , то, например, при 9С = 3° С А должна иметь длину
Хс«103Х (при Х = 3сы Хс = 30 м).
Следует отметить, что при использовании различных траекторий
движения передающей и приемной антенн и объекта это ограничение
может быть преодолено. Далее это будет показано на ряде примеров
(полуактивное синтезирование и синтезирование по движущимся объектам).
При перемещении носителя РЛС по прямолинейной траектории с
постоянной скоростью угловой размер формируемой СА определяется
временем синтезирования Тс, путевой скоростью полета носителя V,
дальностью наблюдения RH и углом наблюдения 6Н. Поэтому
разрешающая способность зависит от всех этих параметров и длины
волны. Разрешение по азимуту при небольших угловых размерах СА
2VT sinG.
39
Глава 3
Разрешение по дальности при немодулированном сигнале в сотни раз
хуже разрешения по азимуту.
При увеличении дальности наблюдения для поддержания
постоянства разрешения по азимуту необходимо пропорционально увеличивать
время синтезирования.
При увеличении скорости полета носителя РЛС требуемое время
синтезирования уменьшается.
Разрешение по азимуту при переходе от бокового обзора (6„ =90°) к
переднему обзору (8Н = 0 ) резко падает и для поддержания
постоянства разрешения необходимо увеличивать время синтезирования
обратно пропорционально sin6H . Поэтому в секторе углов ±5° получить
достаточно высокое разрешение по азимуту за счет синтезирования
апертуры возможно только на малых дальностях.
Ширина ФН (разрешение по азимуту) в переднем секторе обзора при
8Н = 0 в отличие от бокового обзора определяется квадратным
корнем из отношения длины волны к интервалу синтезирования:
8* = 1.3RB>/ty(VTc).
Функция неопределенности прямолинейной СА симметрична
относительно апертуры, поэтому СА не различает объекты, находящиеся
слева и справа относительно вектора путевой скорости.
Эффект синтезирования апертуры при прямолинейном полете с
постоянной скоростью часто объясняют доплеровской фильтрацией
траекторного сигнала. При этом разрешение по частоте, равное
5f = 1/Тс, эквивалентно разрешению по азимуту при интервале
синтезирования Тс.
В режиме ДОЛ синтезирование апертуры эквивалентно доплеровской
фильтрации траекторного сигнала и разрешение по азимуту не
превышает
3.3. Пространственная селекция
при модулированном зондирующем сигнале
Модуляция зондирующего сигнала расширяет временной спектр
SA траекторного сигнала, что позволяет
1.0г 1 1 повышать разрешающую способность
РСА по задержке сигнала (дальности).
—ь- Пусть зондирующий сигнал имеет
равномерный спектр частот в полосе
Af
Af (рис. 3.10). Волновые числа при
Рис. 3.10. Спектр зондирующего „ къг /^
р -д w щ этом изменяются от К0-АК/2 до
40
Пространственная селекция объектов при синтезировании апертуры
Ко + АК/2, где Ко = 2л fo/c. Преобразование Фурье от такого спектра
представляет собой зондирующий сигнал
К0+ДК/2
s(t)= | exp{jkct}dk. (3.11)
К0-АК/2
Соответственно траекторный сигнал
Ко+ДК/2
sT(t)= J exp{jk[ct-2ro(t)]}dk,
К0-ДК/2
а функция неопределенности
Тс Ко+ДК/2
Jc(p)= JJ J exP{j[(k,-k2)ct + 2(k2rp-k1ro)]}dk,dk2dt.
О К0-ДК/2
Рассматривая фазу подынтегрального выражения, можно сделать
следующие заключения. Член (k, -k2) ct пропорционален скорости
распространения радиоволн и, следовательно, изменяется гораздо быстрее
члена (Ц -k2)r0(t), который в свою очередь пропорционален скорости
перемещения антенны. В этом случае подынтегральное выражение есть
квазигармоническая функция, и интеграл по времени от этой функции
отличается от нуля только при к, = к2 .
Тогда функция неопределенности
Тс К0+ДК/2
Jc(p)=J J exp{j2k(rp-r0)}dtdk.
О К0-ДК/2
Рассмотрим ФН по дальности при модулированном узкополосном
сигнале, когда полоса частот много меньше несущей частоты. В этом
случае гр - r0 = rcosP . Заменяя переменную trap, получим, что
+Р„/2 К0+ДК/2
i I exp{j2krcosp}dkdp =
-ро/2 К0-ДК/2
г sin(AKrcosP) , , JO
J —h ^exp j2k0rcosp ф.
Так как Ро «1 и АК « Ko, а амплитудный множитель в
подынтегральном выражении изменяется при изменении р в пределах Ро
незначительно по сравнению с фазовым множителем и может быть
вынесен за знак интеграла, то
41
Глава 3
+Ро/2
— f exp{j2k0rcosp}dp.
ДКг но -
Первый член sin (ДКг)/(ДКг) описывает влияние модуляции и
представляет собой ФН по дальности зондирующего сигнала без учета
синтезирования, а второй член этого выражения есть известная ФН СА
по дальности при немодулированном зондирующем сигнале.
Таким образом, ФН синтезированной апертуры по дальности при
модулированном узкополосном сигнале равна произведению ФН при
немодулированном сигнале на ФН зондирующего сигнала по дальности.
Разрешающая способность по дальности определяется шириной ФН
зондирующего сигнала:
где хи - длительность сжатого импульса сигнала с полосой Af.
Таким образом, разрешение по дальности определяется шириной
спектра узкополосного зондирующего сигнала, и влиянием
синтезирования апертуры можно пренебречь.
Функция неопределенности по углу соответствует условию
г0 - гр = гр и определяется выражением
+Р0/2К0+ЛК/2
J J exPU2k^}dkdP =
-ро/2 К0-ДК/2
m]dB_sin(K/P0) sin(O,5AK0o)
VX oP/P Кофо 0,5ДКф0
Последнее выражение получено в результате интегрирования по
частям и пренебрежения малыми членами, учитывая, что ДК « Ко .
Первый сомножитель есть ФН СА при немодулированном сигнале
( ДК = 0 ). Второй сомножитель определяет влияние на ФН модуляции
сигнала. Разрешение по углу С А за счет модуляции зондирующего сигнала
s, 5,6 с 25г
ot
обычно значительно хуже разрешения СА, определяемого несущей
частотой:
6Г = ^.
так как ширина полосы спектра частот модуляции зондирующего сиг-
Haj
42
нала Af « f0
Пространственная селекция объектов при синтезировании апертуры
ФН синтезированной апертуры по угловой координате равна
произведению ФН при немодулированном сигнале и ФН, обусловленной только
модуляцией зондирующего сигнала. При этом разрешение по азимуту за
счет модуляции при малом угловом размере апертуры и узкополосном
зондирующем сигнале значительно хуже разрешения СА по азимуту при
немодулированном сигнале и хуже разрешения по дальности.
Таким образом, разрешение по азимуту определяется угловым
размером СА, и влиянием модуляции зондируклцего сигнала можно пренебречь.
В РСА обычно используют
импульсный периодический
зондирующий сигнал, что
обусловлено возможностью эффективной
развязки передающего и
приемного трактов при использовании
единой приемопередающей
антенны. Кроме того, ФН
импульсного периодического сигнала
имеет зону, свободную от
боковых лепестков, что упрощает
решение многих задач, связанных с
наблюдением объектов на фоне
земной поверхности. ФН
импульсного периодического сигнала
имеет периодическую структуру
(рис. 3.11).
Неоднозначность по дальности, т.е. наличие вторичных
максимумов ФН по оси т, объясняется приходом в одно и то же время сигналов с
задержкой т и т. + Тп от предыдущего зондирующего сигнала, что
соответствует неоднозначности по дальности.
Неоднозначность по частоте объясняется тем, что при импульсном
режиме работы РЛС измеряет не доплеровскую частоту траекторного
сигнала, а фазу каждого приходящего импульса и изменение этой фазы
от импульса к импульсу, которое соответствует частоте биений. Частота
биений численно равна доплеровской частоте сигнала, если набег фазы
за время между соседними импульсами меньше 2л.
Если два сигнала отличаются по частоте на величину 1/Тп (f\ и
f2 = fi + 1/Тп), то в моменты времени t и t + Тп фазы сигналов отличаются
точно на 2л (один период), т.е. частоты биений будут равны (строб-
эффект). Например, если фазы сигналов <р, = 0 и <р2 = 0 при t = 0, то при
ц
в а а
■ » а
ш
У//У
а ■ ■
в а •
1
J- -
Тп
и.
ч
Тп 2Тп
т„
а а
а а
а
в
а
в "в*
Т
■
ш
ш
Рис. 3.11. ФН импульсного
периодического сигнала
43
Глава 3
Неоднозначность по частоте эквивалентна в РСА неоднозначности
2V
по углу (3.8) 1/Тп = Af = —- Д6 sin 6Н, откуда
А.
де=—-—, (3.12)
2VTnSineH
что приводит к неоднозначности по угловой координате объектов:
2VTnsineH
Зона, свободная от боковых максимумов ФН, имеет размер
2ТП • 2/Тп = 4 (на рис. 3.11 заштрихована).
Траекторный сигнал РСА при периодическом зондирующем
сигнале имеет вид
-w ■ Zs(i -f- пТ«)ехр{Ц' - т)} ■
где N — число периодов за время синтезирования; s(t) — функция модуляции
зондирующего сигнала внутри периода повторения (импульс); ю0 -
несущая частота. Центр апертуры соответствует времени t = NTn/2.
ФН синтезированной апертуры
М-1 / _
Л
-mTn exP{j2k(r0-rp)}dt.
_юП=О m=0 V /
Так как за время длительности зондирующего сигнала (импульса)
ts изменением разности фаз траекторного сигнала Д<р =
2юо(го-гр)
с
обусловленного движением носителя РЛС, можно пренебречь, фазовый
множитель можно вынести за знак интеграла. Это условие
представляется в виде Vts « d, т.е. за время длительности зондирующего
импульса носитель проходит расстояние, гораздо меньшее размера реальной
антенны. Это справедливо всегда, когда xs « Тп .
В этом случае ФН имеет вид
N-IM-I +*> / _r \
Jc(p) = 2, /,exPi J2k(r0 — г )> I s(t -nTn)s t —2 — — mTn dt.
n=0 m=0 _,„ v J
44
Пространственная селекция объектов при синтезировании апертуры
Рассмотрим область ФН в районе центрального пика, когда
(го ~ ГР) = Ф по УГЛУ и (го ~ гр)= г по дальности. При этом изменением
разности задержки зондирующего импульса ф за время
синтезирования можно пренебречь. Тогда ФН
J
s(t)s*| t — 2— I dt
n=0 _^
есть произведение ФН СА при смодулированном сигнале, которая
определяет разрешение по углу, и ФН зондирующего сигнала, которая
определяет разрешение по дальности.
При прямолинейной СА ФН по угловой координате
nNsin9H
V* f. 2k£V sin GH _ 1 . ( 2^VTnN sin 6.Л /(
= > exp-^ j -nTn > = sin -° /
Полученное выражение совпадает с (3.6) для случая немодулиро-
ванного сигнала при условии, что Тс = NTn.
ФН по дальности является обычной ФН по задержке сигнала
+СС
Jc(r) = Js(x)= Js(t)s*(t-T)dt,
где т = 2г/с.
Например, если в РСА используется импульсный зондирующий
сигнал с линейной частотной модуляцией внутри импульса
где ц - индекс частотной модуляции; xs - длительность импульса с
единичной амплитудой, то ФН такого сигнала по дальности
t2l f M(t-2r/cf 1 .
а разрешающая способность по дальности
TIC
6r = —.
И*.
Выбирая индекс частотной модуляции и длительность импульса
ц ts, что эквивалентно выбору ширины полосы частот модуляции и со-
45
Глава 3
ответственно длительности «сжатого» импульса, можно обеспечить
требуемое разрешение по дальности, независимо от разрешения по углу.
Обычно обеспечивают Ьг = Ы.
ФН в области первых боковых пиков неоднозначности по дальности и
углу соответствует большим значениям (г0 - гр) и требует учета в этом
выражении не только линейных, но и квадратичных членов.
Для определенности рассмотрим прямолинейную СА, для которой
с учетом квадратичных членов
ro(t)-rp(t)=r+evtsineH +
iev2t2coseHsineH e2v2t2sin2eH rv2t2Sin2eH
RH RH 2RH(RH+r)'
где r — отклонение по дальности; 0 — отклонение по углу.
В области первых боковых пиков по дальности ( г ± сТп/2 ) ФН по
дальности не изменяется, так как по-прежнему изменение линейного и
квадратичных членов за время длительности импульса пренебрежимо
мало. ФН по углу 8 существенно изменится вследствие влияния
второго квадратичного члена при г = сТп/2:
1 I
JS(G) = -Jexp J2k
с о I
о.,, . а стп v2t2sin2eH
GVt sin 6„ —-
2 2RH(RH+cTn/2)
>dt.
Угловая ширина бокового пика ФН будет равна
59r^ , ч.
2 RH(RH+cTn/2)
Если синтезирование производится в пределах всей ширины ДН
_ _ Xcsin0
реальной антенны Эо = р0 = — , то угловая ширина бокового пика
RH
ФН будет приблизительно равна ширине ДН реальной антенны
50R=eo.
В области первых боковых пиков ФН по углу ( 6 = ±Д6) изменение
ФН будет незначительным. Так, квадратичный набег фазы за Тс при
боковом обзоре (0Н = я/2) и Л6 = VVTn равен
и его влияние возможно только при больших апертурах:
N>iJbL(Aq> = j!/4). (3.13)
z V А.
46
Пространственная селекция объектов при синтезировании апертуры
Т i
На рис. 3.12 представлен вид сечения центральной области ФН
РСА при импульсном периодическом зондирующем сигнале.
Вследствие
периодического характера ФН возможно:
1) появление ложных
отметок;
2) неоднозначное
измерение координат объекта;
3) снижение
динамического диапазона изображения
и характеристик обнаружения
объектов на фоне местности в
результате приема
дополнительных сигналов фона от
участков местности,
расположенных в области боковых
пиков ФН.
Рис. 3.12. ФН С А при импульсном
периодическом зондирующем сигнале
Для устранения этих нежелательных явлений обычно используют
направленные свойства реальной антенны.
В РСА используется импульсный периодический зондирующий
сигнал.
ФН такого сигнала имеет боковые пики неоднозначности по
задержке, расположенные через период повторения импульсов Тп, и по
частоте — через частоту повторения Fn=l/Tn, что соответствует
неоднозначности по дальности Аг = сТп/2 и по азимуту А( = XRH/2VTn sin8H .
Центральный пик ФН определяет разрешающую способность по
дальности §r = c/2Af, пропорциональную полосе частот спектра
зондирующего сигнала, и по азимуту ЬС = >.RH/2VNTnsin8H,
пропорциональную числу N импульсов в пачке траекторного сигнала.
В области первого бокового пика по дальности (г - 2Аг) ФН по
дальности не изменяется, а по азимуту расширяется вследствие
расфокусировки траекторного сигнала.
В области первого бокового пика по азимуту (С = 2Д1) ФН и по
дальности, и по азимуту изменяется незначительно при N < —
3.4. Функция неопределенности синтезированной
апертуры с учетом диаграммы направленности
антенны
Диаграмма направленности реальной антенны влияет на многие
свойства РСА. Ее характеристики определяют:
47
Глава 3
• вид обзора (переднебоковой, секторный, телескопический);
• размер и местоположение зоны обзора;
• степень подавления областей неоднозначности ФН;
• максимальное разрешение при переднебоковом обзоре;
• энергетические и поляризационные характеристики РСА.
При переднебоковом обзоре ДН антенны неподвижна
относительно вектора путевой скорости носителя РСА и ее ось направлена под
углом 6Н по азимуту, что определяет направление обзора (рис. 3.13).
Отклонение ДН по углу места задается дальностью RH зоны обзора, а
ширина ДН определяет максимально возможную одновременную ширину
зоны обзора. Такой обзор обеспечивает возможность наблюдения
непрерывной полосы местности по траектории носителя РСА. Скорость
обзора определяется скоростью полета носителя. ДН по азимуту
ограничивает максимальное значение размера синтезированной апертуры:
Хо = 0ORH и, следовательно, максимальное угловое разрешение.
X
Рис. 3.13. Переднебоковой обзор
ФН по азимуту с учетом ДН антенны
+Ро/2
Ес (С) = J G2 (р) ехр {j2Mp} dp,
-Ро/2
где G(P) = exp|-2,78p2/Go| - выбранная для упрощения формул форма
диаграммы направленности антенны шириной 90 = A/d .
Выполняя интегрирование при Ро = Эо, получим, что
1С1
2-2,78
48
Пространственная селекция объектов при синтезировании апертуры
Ширина ФН и, следовательно, максимально возможное
разрешение при переднебоковом обзоре Ь(ыт = d/2 .
Таким образом, при переднебоковом обзоре максимально
возможное разрешение по азимуту равно половине размера реальной антенны и
не зависит от направления наблюдения, если 60 = X./d = const. При
использовании неподвижной антенны типа ФАР ширина ДН зависит от
направления наблюдения. у,
Секторный обзор
используется для уменьшения
времени обзора заданной зоны
по сравнению с переднебоко-
вым обзором при требуемой
ширине зоны
Аеобз>е0. на
Зона обзора
рис. 3.14 в качестве примера XciXc2XC3
показан ряд последовательных
интервалов синтезирования
Хс„Хс2,Хс3, на каждом из ко-
торых формируется зона
обзора шириной 60. В результате
того что Хс < Хо, время
обзора зоны шириной 38 0 меньше
времени обзора этой зоны при
переднебоковом обзоре. Мак-
симальное разрешение
вследствие того, что ро < 0О, будет
Рис. 3.14. Секторный обзор
Зона обзора
0,
Рис. 3.15. Телескопический обзор
хуже, чем при переднебоковом обзоре, и определяется временем
синтезирования Tc=60/QCK , где Пск - угловая скорость сканирования ДН
антенны.
Телескопический обзор обеспечивает непрерывное наблюдение за
заданной зоной обзора путем изменения угла наблюдения 6Н при
движении PC А по траектории (рис. 3.15). Угловая ширина зоны обзора в
этом случае равна или меньше ширины ДН антенны: Д9об, <90.
Разрешающая способность определяется угловым размером апертуры,
который может быть гораздо больше ширины ДН (р0 >0О). При
непрерывном слежении за объектом в зоне обзора длительность траекторного
сигнала и соответственно возможная длина синтезированной апертуры
ограничены только техническими возможностями системы обработки сигнала.
Поэтому при телескопическом обзоре разрешение может быть лучше, чем
49
Глава 3
d/2 . Время непрерывного наблюдения зоны обзора определяется
требуемым разрешением. При выполнении этого условия расширение зоны
обзора Д6обз >90 возможно дополнительным секторным или переднебоковым
обзором.
Важным предназначением ДН реальной антенны является
подавление областей неоднозначности ФН синтезированной апертуры.
Прямолинейная апертура (рис. 3.16) является осью симметрии для
всех плоскостей, включающих эту прямую. Функция неопределенности
в каждой из этих плоскостей будет одинаковой. В этом случае
разрешаемый объем, границы которого определяются в каждой плоскости
сечением ФН на уровне 0,7, будет представлять собой тело вращения
относительно апертуры.
Zf
Y
X
Рис. 3.16. ФН прямолинейной СА в трехмерном пространстве
На рис. 3.16 показаны разрешаемые объемы для двух углов
наблюдения 6Н = 90° и 0Н = 45° . Сечения объемов плоскостью (X,Y)
представляют собой разрешаемые площадки (на рисунке заштрихованы) на
наблюдаемой плоскости (плоскость XY). При такой ФН объекты,
расположенные в пространстве симметрично апертуре, например слева и
справа, на одинаковой дальности и под одним углом, разрешаться не
будут. Для разрешения симметричных областей используется ДН
реальной антенны, которая выделяет только одну (левую или правую)
область. Для обеспечения наблюдения объектов, находящихся по обе
стороны траектории синтезирования, в РСА используют две антенны,
диаграмма направленности каждой из которых обеспечивает прием
сигналов только с одной стороны.
Подавление областей неоднозначности, обусловленных импульсным
периодическим сигналом, показано на рис. 3.17, на котором изображены
сечения областей ФН синтезированной апертуры и ДН реальной антенны в
50
Пространственная селекция объектов при синтезировании апертуры
плоскости (X,Y). Пересечение этих областей в районе RH,8H определяет
разрешающую площадку 5Д,5/; в плоскости (X,Y).
Zt
Д
Рис. 3.17. ФН СА с учетом диаграммы направленности антенны
Область 1 определяется ФН СА по угловой координате при немо-
дулированном сигнале и имеет малый размер 5^ по углу и большой 5г
по дальности.
Область 2 определяется ФН СА сигнала модуляции. Ее малый
размер 5Д = 5г/со8фн будет определять разрешение в плоскости (X,Y) по
дальности, а большой размер b(s определяет разрешение по углу за
счет синтезирования на видеочастоте. Так как bCs » д£, то угловое
разрешение в плоскости (X,Y) будет определяться ФН СА при немодули-
рованном зондирующем сигнале.
Область 3 определяется сечением ДН реальной антенны шириной
по азимуту 60 и углу места Фо. Размеры сечения области 3 A£'=8HRH и
АД = RHO0/sin(pH значительно превосходят размеры областей 1 и 2.
Области 4 и 5 определяются боковыми пиками ФН при
периодическом зондирующем сигнале. ДН антенны выбирается таким образом,
чтобы первые боковые пики ФН находились вне зоны 3 и не влияли на
качество радиолокационного изображения.
51
Глава 3
Рассмотрим случай наблюдения в передней зоне обзора (рис. 3.18)
при прямолинейном полете носителя в течение времени синтезирования
Тс. Для устранения неоднозначности по азимуту (лево-право) используется
моноимпульсная антенна.
Рис. 3.18. Наблюдение целей при переднем обзоре
Доплеровская частота сигнала цели, находящейся под углом ±6Ц
относительно вектора путевой скорости, определяется выражением:
В общем случае угловое положение цели в процессе
синтезирования меняется:
RH-Vt
Однако в тех случаях, когда перемещение носителя за время
синтезирования много меньше дальности до цели (Vt « RH), влиянием
изменения углового положения цели можно пренебречь: 8Ц = const. В
дальнейшем будем рассматривать этот случай.
Частота сигналов отражателей, находящихся в направлении
вектора путевой скорости (8ц=0), будет максимально возможной в спектре
отраженных сигналов:
Функция неопределенности траекторного сигнала в режиме
переднего обзора определяется выражением:
Тс/2
j(eu)= J sT(o,t)s;(eu,t)dt =
-TJ2
Тс/2 Тс/2
= J exP{j2KfMaKCt}exp{-j2Tif(eu)t}dt= J expfj^ffejt} dt,
-Тс/2 -TJ2
где А^бц) - разница между максимальной частотой fMaKC и частотой
на выходе системы обработки, которая определяется выражением:
52
Пространственная селекция объектов при синтезировании апертуры
Для малых углов 6Ц, характерных для режимов переднего обзора,
sin6u«6u и
V
Следовательно, угловое положение цели по азимуту Gu и ее допле-
ровская частота связаны соотношением:
Учитывая связь разрешающей способности по частоте и времени
синтезирования (5f = l/Tc ), разрешение по азимуту в направлении
вектора путевой скорости (в нулевом доплеровском фильтре) можно
записать в виде:
Здесь учтено, что функция неопределенности симметрична
относительно вектора путевой скорости.
Рассмотрим зависимость разрешающей способности РСА по
азимуту во всей передней зоне обзора, определяемой диаграммой
направленности антенны. При использовании обработки типа гармонического
анализа изображение по азимуту формируется в равноотсчетных по
частоте точках через интервал разрешения 8f, определяемый временем
синтезирования Тс. Первый и последующие фильтры настроены на частоты
fn= n5f (n =1,2,...), что соответствует углам:
е„ =
Расстройка частот каждого фильтра 5f/2 определяет разрешающую
способность по углу:
X(nSf + 0,5Sf) MnSf-0,58f)
V V V
Формула справедлива для углов, при которых можно считать, что
cos8 = l-62/2. Для больших углов используется известная формула
53
Глава 3
59=A./(2VTcsin8u). Начиная со второго фильтра, эти формулы
практически совпадают (sin6u « 6Ц):
5f / X
50„ = —
(3.14)
так как v2n + l- V2n-1 » l/v2n при п>2. Разрешение по углу быстро
возрастает с увеличением угла 6Ц. На рис. 3.19,а показаны элементы
разрешения по частоте, а на рис. 3.19,6 - соответствующие им элементы
разрешения по азимуту.
А,дБ<|
А,дБ>
О 5f 26f 3Sf 48f 58f 68f f
a) 6)
Рис. 3.19. Разрешение по частоте и азимуту при переднем обзоре
На рис. 3.20 приведена
зависимость разрешающей
способности по азимуту при
переднем обзоре от
углового положения цели,
вычисленная по формуле (3.14)
при V = 200 м/с, А, = 3 см,
Т = 1 с. Из рисунка видно,
что разрешающая способ-
" 12 3 4 5 6 7 8 0ц, град ность с увеличением угла
Рис. 3.20. График зависимости разрешающей Резко возрастает.
способности по азимуту от углового Улучшение разрешаю-
положения цели при переднем обзоре щей способности РСА по
сравнению с нулевым допле-
ровским фильтром описывается выражением: 56п/560 = ^1/8 п .
При наблюдении в передней зоне обзора существует
неоднозначная зависимость частоты сигнала и азимута цели:
Ш, град
0.8
0.6
0.4
0.2
u :
-———
Сигналы целей, расположенных симметрично (слева и справа)
относительно вектора путевой скорости, имеют одинаковую доплеров-
54
Пространственная селекция объектов при синтезировании апертуры
скую частоту и, следовательно, попадают в один и тот же доплеровский
фильтр (см. рис. 3.18).
Разделение таких сигналов возможно при использовании
моноимпульсной (суммарно-разностной) антенны. Сигналы целей,
принимаемые с углов ±0Ц на частоте ш(8ц) = 2яГ(6ц), будут описываться
выражениями:
А,(-ид=v
; а2(-ец)=
где Аь фо1, А2, фог — амплитуды и начальные фазы сигналов,
отраженных от целей с углов +0 ц и -6 ц соответственно.
В суммарном канале моноимпульсной антенны на частоте со ц будет
приниматься сумма сигналов:
) ()() (3-15)
где Ge(0) — диаграмма направленности антенны суммарного канала.
В разностном канале моноимпульсной антенны на частоте соц
сигнал будет иметь вид:
)() ()() (3.16)
где GA(8) - диаграмма направленности антенны разностного канала.
Таким образом, выражения (3.15) и (3.16) являются системой
уравнений с двумя неизвестными: А,(+8Ц) и А2(-8Ц). Решение этой
системы на основе наблюдений й£((оц) и пд(соц) позволят вычислить
оценки амплитуд сигналов А,(+0Ц) и А2(-6Ц), приходящих слева и
справа относительно вектора путевой скорости:
(3.17)
При вычислении необходимо учитывать зависимость
cou=(4n/A.)VcosGu.
В случае, когда равносигнальное направление антенны направлено
вдоль вектора путевой скорости, можно считать, что Gv(-6U) = G^+Gu) и
Сд(-вц) = -Од(0ц). Выражения для нахождения амплитуд в левом и
правом каналах примут вид:
55
Глава 3
Диаграмма направленности антенны РСА определяет вид
обзора (переднебоковой, телескопический, секторный), размер и
местоположение зоны обзора, энергетические и
поляризационные характеристики РСА, максимально возможное
разрешение по азимуту при переднебоковом обзоре и подавляет пики
неоднозначности функции неопределенности сигнала по
азимуту и дальности.
3.5. Функция неопределенности
траекторного сигнала РЛС планового обзора
В РЛС планового обзора формируется двухмерная
синтезированная апертура. Непрерывный немодулированный зондирующий сигнал
облучает одновременно всю заданную зону обзора, находящуюся под
ЛА. Отраженный сигнал принимается линейной приемной антенной
решеткой размером Ya, расположенной поперек линии пути. Амплитуда
Y Z
4 4
■уД
ун н
X
Рис. 3.21. Система координат двухмерной С А
56
Пространственная селекция объектов при синтезировании апертуры
и фаза отраженного сигнала в каждом элементе решетки запоминаются
в течение времени Тс, т.е. при перемещении по участку траектории
движения размером XC=VTC формируется двухмерная синтезированная
апертура размером XcYa (рис. 3.21). На выходе системы обработки
получается двухмерный сигнал, амплитуда и фаза которого соответствуют
амплитуде и фазе коэффициента отражения соответствующего участка
зоны обзора, т.е. изображению местности и объектов в зоне обзора.
Характеристики разрешения определяются функцией
неопределенности
Тс/2 Ya/2 ,- . п\
= J J 8т(хн>Ун>2нЛуК(хн,Ун,2нЛ Дхн, Дун, AzH) dtdy,
-Тс/2 -Y./2
где Тс, Ya - интервалы обработки траекторного сигнала по времени и вдоль
оси Y, соответствующие размерам апертуры; хн, у„, zH - координаты
объекта; Ах„, Aym AZh - смещение координат объекта; sT - траекторный сигнал на
входе системы обработки. Для точечного объекта
Мхн>Ун, ZH.t»y) = so(xH,yH,zH,t,y)exp{jkro(xH,yH,zH,t,y)},
где s0 - огибающая сигнала, определяемая ДН антенной решетки; г0 -
суммарное расстояние от передатчика до объекта ij и от объекта до
приемного элемента антенной решетки г2.
Расстояние
Суммарное расстояние гр от передатчика до произвольной точки
пространства, смещенной относительно объекта с координатами хн, у„,
zH на величины Ах„, Аун, Az^ и обратно, до произвольного приемного
элемента, определяется формулой:
Функция неопределенности (3.18) для двухмерного сигнала
J(xH,yH,zH,AxH,AyH,AzH) =
Тс/2 Ya/2 /3 1ПЛ
= J J W(t,y)exp{jkAr(xH,yH,zH,AxH,AyH,AzH,t,y)}dtdy,
-Tc/2 -Y./2
где W(t, у) - весовая функция системы обработки, которую будем
считать независимой от малых смещений параметров Ахн, Аун, Azh.
Разность расстояний Аг при смещении координат объекта
57
Глава 3
->/(xH+AxH+Vt)2+(yH+AyH)2+(zH+AzH)2-
4'
■S
(3.20)
->/(xH+AxH+Vt)2+(yH+y+AyH)2+(zH+AzH)2.
Здесь и далее сделана замена Vt = х.
Для упрощения (3.20) рассмотрим случай, когда расстояние от
РЛС до объекта значительно больше размеров апертуры и разрешающей
способности станции (RH » Хс, R,,» Ya, RH » 5p). Кроме того, заменим
координаты Дхн, Аун, Аг„ координатами г, £, и, т.е. представим функцию
неопределенности в координатах дальность - азимут - угол места.
Для упрощения расчетов ДН антенны и весовую функцию
обработки зададим в виде
При введении такой функции допустимо без больших ошибок
брать интеграл (3.19) в бесконечных пределах.
Разлагая выражение (3.20) в ряд и пренебрегая членами 2-го
порядка малости, можно с учетом сделанных выше замечаний
представить интеграл (3.19) в виде
(3.21)
а = 2nuHsmyH( rH uHctg(pH|,
, 5,56 .2л, ч . 2п . . 5,56 . 2л
Ьо =—^- + j—т(г -и ctg9 ) ;с0 =-j £И; d0 =—r- + j—г
Х2 XR2V н я' ° XR H ° Y2
Когда цель находится в передней зоне обзора (ун=0),
^ jт( g9 ) ;0 jИ; 0
Хс2 XR2V н я' ° XRH H ° Ya
Квадрат модуля интеграла (3.21), нормированный по своему
максимальному значению, равен
ехр
+
R,, RH
Фн
5,56
^"(«•«-"„С^Фн)
1+
* |Ya4r"
I 5,562
(3-22)
58
Пространственная селекция объектов при синтезировании апертуры
Разрешение по дальности
обусловлено фокусирующими
свойствами апертуры XcYa, а по
углу места — диаграммой
направленности синтезированной
апертуры Хс. Вид функции
неопределенности в координатах
дальность — угол места,
построенной по (3.22), изображен на
рис. 3. 22.
Оценивая разрешающую
способность как ширину
функции неопределенности вдоль
соответствующей координаты на уровне 0,7, получили
5у = 0,88Ш/Ya sin(pH , 5x = 0,45Ш/Х sin3 (pH,
7Ш2
5z=
Рис. 3.22. Тело ФН при плановом обзоре
(3.23)
2Xc2sin3<pH + Ya2sin3<pH '
На рис. 3.23 приведены графики разрешающей способности РЛС
планового обзора при X - 8 мм, Н = 1 км, Ya = 2 м, Хс = 30 м, из которых
видно, что РЛС планового обзора обладает высокой разрешающей
способностью по всем координатам в зоне обзора непосредственно под ЛА.
0.1
70 80 Ф,,, град
Рис. 3.23. Графики зависимости разрешающей способности от угла <р
при плановом обзоре
Для подавления областей неоднозначности ФН используется ДН
реальной антенны. Пики неоднозначности по азимуту подавляются ДН
антенны по азимуту, а пики неоднозначности по дальности — ДН
антенны по углу места.
ДН антенны определяет положение зоны обзора и вид обзора.
При переднебоковом обзоре (ПБО) ДН антенны по азимуту
направлена под постоянным углом 0н к вектору путевой скорости, а по углу
59
Глава 3
места — в заданную зону обзора по дальности. Предельное разрешение
ПБО равно 5l = d/2.
При телескопическом обзоре (ТО) ДН по азимуту непрерывно
отслеживает заданную зону путем изменения угла 0н. Разрешение по
азимуту при ТО определяется времением слежения и может быть
лучше d/2.
Для уменьшения времени обзора заданной зоны по азимуту
используется секторный обзор (СО), при котором ДН сканирует по
азимутальному углу. Располагаемое время синтезирования и, следовательно,
разрешение при СО меньше, чем при ПБО.
Разрешающая способность в передней зоне обзора определяется
квадратным корнем из отношения длины волны к интервалу
синтезирования (8С« fiJVTJPJ )•
Функция неопределенности прямолинейной СА симметрична
относительно апертуры. Поэтому СА не различает объекты, находящиеся
слева и справа относительно вектора путевой скорости.
Использование моноимпульсной антенной системы позволяет
разрешить неоднозначность зависимости доплеровской частоты цели и ее
углового положения. Это позволяет получать детальное
радиолокационное изображение местности в передней зоне обзора.
РЛС планового обзора обладает высокой разрешающей способностью
в зоне обзора непосредственно под ЛА.
60
ГЛАВА 4
Модель РСА
4.1. Структура модели РСА
Рассмотренная в гл. 1 структура радиолокационного канала далее
конкретизируется для радиолокатора с синтезированной апертурой.
Структура модели РСА состоит из физических элементов (объекты,
поля, системы и др.), процессов, происходящих в них, и математических
моделей элементов и процессов (рис. 4.1).
Объекты включают в себя все возможные их типы при заданной
решаемой тактической задаче. В зависимости от задачи изменяются
возможные объекты радиовидения, их количество и характеристики.
Объекты характеризуются физическими свойствами, т.е. типом объекта
(танки, сооружения, конкретная местность, аэродромы, корабли и т.п.),
их функциональным состоянием (вид деятельности, движение,
изменение параметров и т.п.) и местоположением, т.е. расположением в
заданном районе, квадрате, точке с известными координатами.
Каждый объект в конкретном функциональном состоянии и данном
местоположении представляет один из возможных классов объектов, т.е. i-й
объект из всех классов (i = 0, 1, 2,..., I). Так, один и тот же объект в одном и
том же функциональном состоянии, но расположенный в другом месте,
будет классифицирован как другой объект (под другим номером). Такой
подход позволяет объединить и унифицировать все решаемые системой
радиовидения задачи в единую систему классификации объектов. Общее число
определенных таким образом объектов конечно (IФ ос ). Конкретное число
объектов I зависит от решаемой задачи. Нулевой класс соответствует
отсутствию объекта. Например, при решении задачи простой селекции
движущихся целей, объекты можно представить в виде трех классов: нулевого
(объекты отсутствуют), первого (объекты присутствуют и неподвижны) и
второго (объекты присутствуют и движутся). Такие простые задачи
встречаются редко, и обычно при радиовидении классификация объектов
включает в себя все задачи: обнаружения, распознавания до типа и
функционального состояния, а также определения местоположения. Задача РСА в
этом случае состоит в формировании траекторного сигнала
(синтезированной апертуры), в котором заключена информация об объекте,
преобразовании этого сигнала в изображение объекта с одновременной оценкой его
характеристик и классификации объекта, т.е. отнесение его к одному из I
объектов заданной классификации.
61
О)
to
1
Объект
Функция Среда Траекторный
отражения расиростра- сигнал
нения
Поле
облучения
h(x)
UTi(xj
i
Помехи,
шум
Формирование траекторного сигнала
Система Сигнал
первичной изображения
обработки объекта
Априорные
данные
Формирование
изображения
объекта
Система Выходной Решающее
вторичной сигнал устройство
обработки
Опорная функция
Априорные
данные
Классификация объекта
Рис. 4.1. Структура модели РСА
Модель РСА
Исходя из такой логики решения задач радиовидения каждый
объект в РСА характеризуется своей функцией отражения, которая, в свою
очередь, является результатом облучения объекта электромагнитным
полем зондирующего сигнала (передатчика) РСА. Пространство
функций отражения S, однозначно соответствует пространству объектов,
т.е. i-й объект имеет функцию отражения 8;, которая отличается от
функции отражения j-ro объекта: S, ф $j .
Функция отражения $;(х), где x = (x,y,z,t), представляет собой
комплексную функцию, соответствующую локальной матрице
рассеяния объекта в заданном поляризационном базисе при всех остальных
заданных характеристиках поля облучения. Облучающее поле в
результате рассеяния на объекте формирует поле отражения вблизи объекта, в
котором заключена информация о функции отражения объекта. В
дальнейшем будем полагать, что поле облучения, поляризация облучающей
и принимаемой волн, углы облучения объекта и приема отраженной
волны известны. В качестве характеристики объекта в этом случае
выступает функция отражения. Часто ее называют также локальной
функцией рассеяния как зависимость изменения во времени амплитуды и
фазы рассеянной волны отдельными элементами объекта с координатами
(х, у, z). Термины рассеяние и отражение волны в задачах
радиолокации обычно используются в одинаковом смысле.
Отраженное от объекта поле распространяется к антенне РЛС в среде
распространения, которую можно считать линейной системой. Поле вблизи
антенны РЛС в этом случае можно описать как результат прохождения
отраженной волны через линейную систему с импульсной переходной
характеристикой h(x). Антенна РЛС находится на движущемся носителе,
следовательно, есть случайные отклонения от заданной траектории (траектор-
ные нестабильности) и, кроме того, существуют неоднородности
параметров среды распространения. Поэтому характеристика h(x) имеет как
регулярную hp(х), так и случайную Ьсл (х) составляющие:
h(x)==hp(x)hCJ1(x).
Принятое антенной поле на всей траектории носителя РЛС
формирует траекторный сигнал, который включает в себя также различного
рода помеховые сигналы от посторонних источников помех и
внутренние шумы:
где s^ — траекторный сигнал i-ro объекта; п(х) — внутренние шумы и
помехи.
63
Глава 4
Обычно внутренние шумы являются белыми
(некоррелированными), а помехи (фон, активные помехи) - коррелированными в
пространстве и времени.
Сформированный траекторный сигнал служит основным
источником информации для решения задачи классификации объектов, т.е.
обнаружения, распознавания и определения местоположения. В
дальнейшем на основе синтеза оптимального классификатора задача
распределяется на два этапа:
первичную обработку — получение радиолокационного изображения;
вторичную обработку — решение задачи классификации объекта
по его изображению.
Такое деление обусловлено несколькими причинами. Траекторный
сигнал несет в себе большое число неинформативных параметров
(мощность передатчика, параметры нестабильностей, скорость носителя и
т.п.), и первичная обработка устраняет эти избыточные
неинформативные параметры. Кроме того, первичная обработка использует всю
возможную априорную информацию, общую для всех объектов (длина
волны, поляризация, дальность обзора, высота полета, мощность фона и
помех и т.п.). В результате первичная обработка, устраняя
несущественную информацию, сохраняет достаточную статистику для решения
всех необходимых задач классификации.
Разделение классификации на два этапа позволяет на втором этапе
использовать априорную информацию о конкретном классе объекта и в
том числе уникальные возможности оператора-дешифровщика, который
может использовать сложную логически-интуитивную априорную
информацию при анализе изображения объекта. Современные экспертные
(интеллектуальные) системы не могут заменить в полной мере опытного
оператора, который всегда будет принимать окончательное решение,
возлагая на ЭВМ-классификатор вспомогательные задачи.
Первичная обработка траекторного сигнала сводится к его
пропусканию через линейную систему с импульсной переходной
характеристикой h* (x), что обеспечивает на выходе получение
преобразованной функции отражения i-ro объекта $ci (х), т.е. радиоизображение
объекта.
Вторичная обработка обеспечивает корреляционную обработку
радиоизображения 9ci (х) с опорными функциями отражения $ *.
Максимум корреляции соответствует совпадению классов объектов
изображения и опорной функции j = i. Это соответствует решению, что объект
принадлежит к классу i , так как каждый класс есть изолированная от
других точка в пространстве решений.
64
Модель РСА
Задачей радиовидения является классификация объектов, которая
заключается в определении наличия объекта (обнаружение), его типа
и функционального состояния (распознавание) и местоположения
(координаты объекта).
Модель классификатора объектов предполагает разбиение всех
возможных в решаемой тактической задаче объектов с их
характеристиками на конечное число непересекающихся областей (точек), каждой
из которых присваивается свой номер класса.
Модель РСА в классификаторе состоит из 1) системы формирования
траекторию™ сигнала путем облучения объекта и приема
отраженного поля по траектории движения носителя; 2) системы первичной
обработки траекторного сигнала для формирования изображения
объекта; 3) системы вторичной обработки для классификации объектов
по их изображению.
4.2. Поле облучения
Поле облучения определяется ДН передающей антенны и
траекторией ее перемещения относительно объекта. Если апертурная функция
передающей антенны задана как распределение поля по апертуре
Е(4,л) > то поле в дальней зоне реальной антенны в полярной системе
координат 0,<p,R (рис. 4.2,а)
ik
ik r
E0(8,<p,R) = ——exp{-jkR}
27iR ■»
где A - площадь на плоскости (£,т|) ■> для которой задана апертурная
функция Е(£,г|).
По определению нормированная функция Е0(8,ф) есть ДН
передающей антенны F(0,(p).
Пусть антенна РЛС расположена так, что ось, нормальная к плоскости
(£,г| ), направлена в центр зоны обзора под углом 0Н относительно вектора
скорости V носителя РЛС, а ось £ находится в плоскости V,RH
(рис. 4.2,6). При движении носителя РЛС с постоянной скоростью V
возникает доплеровское смещение несущей частоты, пропорциональное
косинусу угла между направлением на объект и вектором путевой скорости
носителя. В этом случае напряженность поля облучения
xexp{jkVtcos0H}exp{jkVtsin6Hsin6cos<p}F(6,<p).
3—3169 65
Глава 4
а)
Рис. 4.2. Формирование поля облучения
Поле облучения в зоне обзора определяется ДН передающей антенны.
Каждому направлению в зоне обзора в данный момент времени
соответствует поле облучения с определенной доплеровской частотой.
Среднее значение частоты в центре зоны обзора определяется
фазовым множителем ехр{ jkVtcos9H}, а доплеровская частота внутри
зоны обзора - множителем ехр{ jkVt sin6H sin 0 coscp}.
4.3. Функция отражения
Рассеивание электромагнитной волны возникает тогда, когда есть
неоднородности среды распространения в виде того или иного объекта
(самолет, грозовое облако, элементы земной поверхности и т.п.).
Отражающие (рассеивающие) свойства объекта определяются его
геометрическими и электрическими характеристиками (формой,
размерами, диэлектрической и магнитной проницаемостями материала
объекта). Неоднородность (изменение) этих характеристик как поверхности
объекта, так и его внутренней структуры вызывает рассеяние падающей
на объект электромагнитной волны. Свойства рассеянного, в том числе
отраженного в сторону облучения, поля определяются
многочисленными факторами: свойствами объекта, параметрами облучающей волны,
условиями облучения и приема отраженной волны. Поэтому
определение функции отражения объекта представляется сложной и зачастую
неоднозначной задачей.
В то же время существуют общие закономерности формирования
отраженного от объекта поля и, следовательно, функции отражения:
I. Рассеянное поле возникает вследствие отличия свойств среды
распространения электромагнитной волны от свойств объекта. Даже
66
Модель РСА
при полном поглощении объектом падающей волны («абсолютно
черное тело») тем не менее образуется рассеянное объектом поле
вследствие изменения среды распространения на границе объекта. Отдельные
элементы объекта также имеют различные отражающие свойства, если
их форма и свойства материала отличаются от соседних элементов
объекта. Неоднородность свойств внутри объекта также может влиять на
функцию отражения вследствие частичного проникновения
электромагнитной волны облучения вглубь материала. При этом диэлектрическая и
магнитная проницаемость материала объекта определяет длину волны и
ее поглощение в материале.
2. Рассеивающие свойства объекта определяются в основном
соотношением длины волны облучения и размеров неоднородностей. Так,
если размер неоднородности меньше длины волны, рассеиваемое им
поле невелико и определяется в основном объемом неоднородности,
как, например, при отражении волны от облаков, дождя и других
неоднородностей атмосферы. Прч размере неоднородности порядка длины
волны наблюдается резонансное взаимодействие и большое рассеивание
волны. Например, головки заклепок на крыле и щель люка самолета
вызывают большое отраженное поле в сантиметровом диапазоне волны.
Если размер неоднородностей намного больше длины волны, отражение
имеет сложный характер взаимодействия различного типа волн.
3. Неоднородности объектов. По свойствам, влияющим на
рассеяние волны, их можно разделить на два больших класса: шероховатые
неоднородности (случайные поля) и гладкие неоднородности.
Шероховатые поверхности формируют диффузное (во все стороны) отражение,
а гладкие - зеркальное.
Случайные поля состоят из неоднородностей, дисперсия и радиус
корреляции которых изменяются в широких пределах в зависимости от
типа объекта. Поэтому такие поля имеют нестационарный характер,
однако при достаточной детальности описания (наблюдения) их можно
представить кусочно-стационарными полями. В этом случае отдельные
наблюдаемые участки объекта с размерами, намного превышающими
радиус корреляции неоднородностей, представляются стационарными
полями с постоянной дисперсией и нормальным законом распределения
параметров неоднородности. Напомним, что объектами радиовидения
являются отдельные элементы техники, сооружений, аэродромов, дорог,
воздушные цели, элементы земной и водной поверхности. Для участков
ровной земной поверхности (степь, пашня, верхушки деревьев леса,
взлетно-посадочная полоса (ВПП), ледовые поля и т.п.) среднее квадра-
тическое отклонение (СКО) и радиус корреляции неоднородностей
изменяется от единиц до десятков и сотен сантиметров. При этом радиус
корреляции rk шероховатостей обычно превышает в несколько раз СКО
67
Глава 4
поверхности по высоте oh: лес, rk/ah = 1,5...2; луг, степь летом,
rk/°h = 5—6'■> серый лед, rk/oh = 10...20; пустыня, rk/<jh = 3...4.
4. Пересеченная местность наряду с неоднородностями
поверхности имеет также неоднородности рельефа, СКО и радиус корреляции
которого исчисляются десятками метров. Рельеф изменяет угол падения
волны на шероховатую поверхность. Вследствие этого изменяется
средняя мощность обратного рассеяния. Существует аналогичная
зависимость мощности отраженного поля от угла падения на поверхность и
других объектов (стены сооружений, ВПП, водная поверхность и т.п.).
Границы стационарных участков поверхности могут быть и плавными
(поле-кустарник-лес) и резкими (реки, дороги в лесу, пашня).
5. Гладкие неоднородности образуются поверхностями с малыми
шероховатостями, когда СКО неоднородностей меньше длины волны
облучения. Такие неоднородности имеют поверхности большинства
объектов военной техники и сооружений, представляющих собой
сочетание различных геометрических фигур с достаточно гладкой
поверхностью (плоскости, сферы, цилиндры, уголки). Это, например,
самолеты, танки, РЛС, автомашины, корабли.
6. Неоднородности с малыми шероховатостями формируют в
основном зеркальные отражения, так что суммарное рассеяние от группы
гладких неоднородностей преобладает в одном или нескольких
направлениях. В результате мощность отражения в этих направлениях
значительно больше, чем при диффузном рассеянии. Наибольшая мощность
обратного отражения (в сторону облучения) формируется
неоднородностями в виде уголковых отражателей, а также плоскостями,
ориентированными перпендикулярно направлению облучения. Неоднородности
такого рода создают зеркальную область отражения, так называемую
зеркальную точку, т.е. вся область отражения имеет один фазовый
центр, из которого излучается отраженная всей областью волна. При
этом расстояние между отдельными зеркальными точками на
поверхности объекта превышает
геометрические размеры
неоднородностей,
порождающих эти точки. Кроме
того, положение
зеркальных точек и мощность
отраженной волны остаются
стабильными при
значительных изменениях углов
облучения, наблюдения и
длины волны.
68
1.7 м
2.5 м
1.7 м
Рис. 4.3. Зеркальные точки отражения
самолета
Модель РСЛ
Типичной целью, имеющей функцию отражения в виде одной зеркальной
точки, является уголковый отражатель. На рис. 4.3 показано положение
зеркальных точек для современного истребителя с переднего ракурса
облучения в сантиметровом диапазоне волн. Точка 1 соответствует носу
фюзеляжа, 2 - воздухозаборникам, 3 - излому кромки крыла. Расстояние
между зеркальными точками значительно превышает размеры областей
отражения, формирующих эти точки. Мощность отражения от других
областей фюзеляжа и крыла обычно на несколько порядков меньше мощности
отражения от зеркальных точек. Эти малые отражения образуются
отражающими точками на поверхностях различной кривизны, на краях и ребрах.
Вносят вклад также краевые и поверхностные («ползущие») волны.
Естественно, что такое радиолокационное изображение самолета мало похоже на
фотографическое даже при большой разрешающей способности.
Другим примером гладких неоднородностей со специально
исключенными зеркальными точками может служить обшивка самолета F-117A,
выполненного по технологии СТЭЛС. Такая обшивка состоит из отдельных
плоских пластинок, расположенных так, что при облучении самолета с
переднего ракурса пластинки отражают волну в боковом направлении в
соответствии с законом оптики «угол падения равен углу отражения». В
обратном направлении отражение минимально, что и обеспечивает
снижение заметности. В этом случае такой объект может рассматриваться как
случайное поле, формирующее диффузное отражение при облучении и
наблюдении с переднего ракурса.
Аналогично сформированы неоднородности обшивки самолета В-2. Все
кромки прямые и ориентированы под острым углом к главным
направлениям облучения РЛС в передней и задней зонах. Объемные конструкции
ограничены криволинейными поверхностями с непрерывно
изменяющимся радиусом кривизны. Все поверхности сделаны наклонными для любого
направления облучения. Линии сопряжения поверхностей направлены под
острыми углами к главным направлениям облучения. Вся поверхность
обшивки гладкая, отсутствуют выступающие головки винтов, заклепок и
защелки люков. Все кромки (передние и задние крыла, воздухозаборников
и выходных сопел двигателей, люков и панелей обшивок, органов
управления, плоских антенн и т.п.) параллельны друг другу. Дополнительно
используются поглощающие материалы, максимально снижающие
отражения от возможных зеркальных точек и кромок. В такой конструкции для
всех направлений облучения, кроме перпендикулярного к кромкам,
достигается минимальное обратное отражение (диффузное отражение),
характерное для случайных полей.
7. Реальные поверхности объектов естественного и
искусственного происхождения имеют как шероховатые, так и гладкие
неоднородности и создают одновременно и диффузное, и зеркальное отражения.
Соотношение между ними определяется размерами неоднородностей,
длиной волны и направлением облучения. Особое влияние оказывают
поляризационные характеристики волны облучения и приемной
антенны. Наибольшее рассеяние происходит в том случае, когда вектор элек-
69
Глава 4
трической напряженности поля совпадает с преобладающим размером
неоднородности. Так, отражение от проводов линий электропередач
максимально при горизонтальной поляризации волны и минимально
при вертикальной.
8. Наряду с пространственными характеристиками отражения
объектов существуют временные характеристики, обусловленные
изменением параметров отражения во времени. Если объекты не изменяют
своих отражающих свойств за время синтезирования, либо их
изменение априорно известно, они имеют когерентную во времени функцию
отражения (неподвижная либо движущаяся по известному закону
техника, лес при отсутствии ветра, отдельный участок морской волны,
вращающиеся лопасти вертолета и т.п.). Когерентность функции
отражения позволяет путем использования когерентной обработки траек-
торного сигнала синтезировать апертуру и получать высокое
разрешение. При случайном движении объекта и его отдельных частей, при
случайном изменении за время синтезирования его ракурса или длины
волны РЛС происходит случайное изменение фазы и амплитуды
отраженного поля, т.е. нарушается когерентность во времени. У реальных
объектов всегда существуют когерентная и некогерентная составляющие
отраженного поля. Соотношение мощностей когерентной и
некогерентной составляющих зависит от типа объекта и условий наблюдения, но
обычно на интервале синтезирования мощность когерентной
составляющей больше некогерентной. Некогерентная составляющая приводит
к расширению функции неопределенности СА и повышению уровня
боковых лепестков, что в свою очередь снижает детальность и контраст
изображения.
9. Когерентность функции отражения во времени обусловлена
постоянством параметров отражения и когерентностью поля облучения.
В то же время функция отражения по пространству объекта в
большинстве случаев носит случайный (некогерентный) характер. Это
обусловлено тем, что отражающие свойства объекта зависят случайным
образом от большого числа факторов (размеров неоднородностей,
материалов объекта, длины волны, поляризации угла падения волны облучения
и т.п.). В результате рассеянное поле по пространству объекта имеет
случайные амплитуду и фазу. Изображение объекта также представляет
собой шумовую «зернистую» картинку, так называемый «спекл-шум».
В отличие от фотографического, радиолокационное изображение
состоит из отдельных случайных по амплитуде и фазе точек (элементов
разрешения). Например, изображение взлетной полосы в сантиметровом
диапазоне волн несмотря на ровный характер поверхности ВПП имеет
случайное пространственное распределение интенсивности, т.е.
зернистый, шумовой вид. Для получения «гладкого» полутонового изображе-
70
Модель PC A
ния необходимо усреднение нескольких независимых реализаций
шумовых изображений, полученных при различных длинах волн,
поляризации, углах облучения и т.п. В оптическом диапазоне такое усреднение
происходит, например, при фотографировании объекта в солнечном
свете, который является некогерентным, состоящим из множества
спектральных составляющих со случайными амплитудами, фазами и
поляризацией.
У некоторых объектов, имеющих регулярную структуру, например
трубопроводов, функция отражения по пространству объекта
коррелированна. Такой объект называется пространственно-когерентным.
Рассеивание электромагнитной волны объектом возникает
вследствие отличия свойств среды распространения от свойств объекта.
Отражающие свойства объекта определяются его геометрическими и
электрическими характеристиками (формой, размерами,
диэлектрической и магнитной проницаемостью) и зависят от параметров
облучающей волны (длины волны, поляризации, направления
облучения).
Пространственные характеристики отраженного объектом поля
определяются в основном соотношением длины волны облучения и
размеров неоднородностей свойств объекта.
Шероховатые неоднородности формируют диффузное (во все
стороны) отражение, а гладкие - зеркальное.
Реальные поверхности объектов естественного и искусственного
происхождения создают одновременно и диффузное и зеркальное
отражения. У большинства объектов техники преобладает отражение в виде
отдельных зеркальных точек.
Рассеянное поле по пространству большинства объектов имеет
случайный характер (случайную амплитуду и фазу), и как следствие
изображение объектов представляет собой шумовую картинку (спекл-
шум).
Временные характеристики поля отражения объекта имеют когерентную
и некогерентную составляющие. Нарушение когерентности вследствие
случайных изменений за время синтезирования свойств объекта и поля
облучения снижает детальность и контраст изображения.
4.4. Характеристики функции отражения
Высокая детальность (разрешающая способность) изображения
при радиовидении позволяет наблюдать отдельные элементы (точки)
объекта. В случае, когда размер элемента разрешения значительно
больше длины волны, в качестве характеристики отражающих свойств
локальных (точечных) элементов объекта используют комплексный
коэффициент рассеяния - комплексное число, равное отношению
напряженности рассеянного точечным отражателем поля Ео к напряженности
71
Глава 4
поля облучения Е при заданных поляризации на передачу и прием,
длине волны и угле облучения:
S(x,y,z,t) = lim л/4^нсЕ(,Х>У'М1- (4.1)
RH->« E0(x,y,z,t)
Мощность отраженного поля определяется эффективной
площадью рассеяния (ЭПР):
2
а = lim 4nR
RH->oo
Ef
(4.2)
-о
Комплексный коэффициент рассеяния связан с ЭПР отражателя:
S = >/aexp{j(p},
где ф - изменение фазы волны при отражении.
Тогда в качестве функции отражения объекта можно использовать
зависимость коэффициента рассеяния от координат точечных
отражателей i-ro объекта:
»4 (х) = ^Щехр{ J94 (x)} . (4.3)
В случае гладких неоднородностей объект состоит из L отдельно
расположенных зеркальных точек, и функция отражения представляется
суммой дельта-функций:
где 9if = -N[o^exp{j(pi<,} - коэффициент рассеяния точечного отражателя.
Расстояние между точками значительно превышает длину волны, а
их положение и мощность отраженной волны относительно устойчивы
при изменении длины волны, поляризации, угла облучения и на
различных интервалах синтезирования.
Мощность отражения от неоднородностей типа «случайное поле»
характеризуется удельной эффективной площадью рассеяния о0, т.е.
ЭПР на единицу площади объекта. Среднее значение мощности
отражения в элементе разрешения оф для пространственно-стационарного
поля (ЭПР фона) постоянно и определяется разрешаемой площадкой РСА,
т.е. разрешением по дальности и углу:
Даже при высоком разрешении число отражателей в элементе
разрешения велико. Поэтому функция отражения элемента фона $ф рас-
72
Модель РСА
пределена по нормальному закону. В этом случае амплитуда элемента
фона Jal распределена по закону Рэлея:
СТф0
°Ф
(где оф0 - среднее значение ЭПР фона). Фаза сигнала фона фф
распределена равномерно от 0 до 2л, а ЭПР фона оф распределена по
экспоненциальному закону. Для стационарного фона такая статистика
отраженного поля сохраняется для любого реального разрешения, когда
Ъг,Ье»1.
Пространственная корреляция функции отражения случайного
поля примерно равна длине волны РСА. Так как размер элемента
разрешения гораздо больше длины волны, то функцию отражения для
случайного поля неоднородностей можно представить в виде
нестационарного (кусочно-стационарного) комплексного некоррелированного шума:
S(x) = ^/o0(x) exp {j(p(x)} n(x) , (4.5)
где n(x) — пространственный белый шум с единичной дисперсией.
В этом случае пространственная корреляционная функция
отражения случайного поля
Rs(xi,x2) = ao(xi)6(xi-x2), ' (4.6)
где о0(Х[) изменяется в соответствии с характеристикой отражения
(ЭПР) конкретного случайного поля (объекта).
Размер объекта с постоянной о0 определяет участок
стационарности функции отражения. Такими участками могут быть ВПП, дороги,
водная поверхность, участки степи, леса, сельскохозяйственных угодий
и т.п. Изменение о0 по пространству (радиус корреляции) обычно
значительно превышает длину волны даже при небольших размерах
объектов случайного поля (отдельные деревья, кусты, обрывы рек, резкие
неоднородности рельефа).
В ряде случаев объект может занимать всего один элемент
разрешения (точку на изображении). В отличие от зеркальной точки,
положение фазового центра которой относительно стабильно, у элемента
разрешения случайного поля фазовый центр изменяет свое положение
при изменении длины волны, направления облучения и при различных
интервалах синтезирования. Также изменяется и напряженность
отраженного поля. Если размер объекта типа случайного поля намного
меньше элемента разрешения РСД, то его функция отражения будет
подобна функции отражения зеркальной точки.
73
Глава 4
Временные характеристики функции отражения случайного поля
зависят от типа объекта и дисперсии скоростей движения его элементов.
Так, для растительности (трава, кустарник, кроны деревьев) СКО
скоростей отражателей ow пропорционально скорости ветра.
Конкретные значения о0, ow пространственных и временных
характеристик отражения в значительной степени зависят от длины волны
РЛС. Поэтому далее рассмотрим особенности функции отражения
различных объектов для трех характерных диапазонов: сантиметрового,
дециметрового (60...90 см) и метрового (единицы метров).
Сантиметровый диапазон. При радиовидении детальность
изображения объектов определяется разрешением по дальности и азимуту.
В зависимости от тактической задачи разрешение РСА составляет от
десятков сантиметров до единиц метров. Радиолокационное изображение
хотя и подобно фотографическому, но имеет ряд особенностей,
обусловленных свойствами функции отражения. При длинах волн единицы
сантиметров и короче, функция отражения неоднородностей земной
поверхности имеет радиус корреляции порядка длины волны, и в
разрешаемый элемент на местности попадает множество отражателей. На
различных интервалах синтезирования, длинах волн, углах наблюдения
и облучения, разной поляризации реализации функции отражения
одного и того же участка земной поверхности (случайного поля)
независимы. Распределение случайной амплитуды изображения в элементе
разрешения подчинено рэлеевскому закону, а дисперсия определяется
удельной ЭПР наблюдаемой местности.
Ориентировочные значения удельных ЭПР приведены в табл. 4.1
для горизонтальной (ГГ) и вертикальной (ВВ) поляризации и различных
углов падения. С увеличением угла падения о0 возрастает. Значение
удельной ЭПР для конкретной местности может значительно (на 5дБ)
отличаться от приведенного в таблице. Это объясняется зависимостью
отражения от целого ряда трудно учитываемых факторов (конкретная
структура поверхности, влажность, внутренние неоднородности и т.п.).
Средняя отражательная способность местности зависит от рельефа
(наклона наблюдаемой площади относительно направления облучения). С
увеличением угла наклона удельная ЭПР растет. Этим объясняется
большее отражение от неоднородностей рельефа местности и кромки
леса со стороны облучения.
Вследствие различия коэффициентов отражения в радио и
оптическом диапазонах волн контраст (отличие мощности отражения)
различных участков местности (лес, кустарник, степь, сельскохозяйственные
угодья) в РСА не всегда соответствуе* контрасту на фотоснимке.
74
Модель РСА
Таблица 4.1. Ориентировочные значения удельных ЭПР
Объекты
Море, волнение
2 балла
Море, волнение
6 баллов
ВПП
Степь, зима,
снег
Степь, лето,
трава
Пустыня, камни
песок
Лес
Угол падения,
град
10
20
50
10
20
50
10
20
50
10
20
50
3
10
20
50
10
20
50
10
20
50
о0,дБ
^ = 3,0 см
ГГ
-40
-38
-35
-35
-30
-27
-40
-32
-20
-23
-17
-14
-35
-16
-15
-12
-18
-15
-12
-14
-14
-12
ВВ
-32
-28
-30
-30
-25
-22
-30
-24
-18
-23
-17
-14
-35
-15
-15
-12
-20
-17
-14
-14
-15
-12
к = 70 см
ГГ, ВВ
-50
-45
-42
-35
-32
-30
-60
-58
-55
-60
-55
-50
-60
-55
-53
-50
-45
-40
-35
-35
-30
-25
Наклонный характер Таблица 4.2. Ориентировочные
облучения вызывает появле- значения коэффициента затухания
ние на изображении теней, электромагнитных волн в различных
что обусловлено сильным материалах
поглощением
электромагнитных волн
сантиметрового диапазона листвой
деревьев и почвой.
Ориентировочные значения
коэффициента затухания
электромагнитных волн в
различных материалах
представлены в табл. 4.2 (при
распространении в одном
направлении).
Временные характеристики функции отражения различных
участков местности определяются колебаниями отражателей (листва
деревьев, кустарник, трава) под действием ветра. Чем больше скорость ветра,
тем больше разброс скоростей отдельных отражателей. СКО скоростей
Тип местности
Глина,
морской лед
Песок, бетон
Снег,
пресный лед
Вода пресная
Кроны деревьев
Коэффициент затухания у,
дБ
А. = 3 см
100
20
1
1000
1,2
X =70 см
10
3
0,1
7
0,12
X = 3 м
8
1
0,05
2
0,05
75
Глава 4
можно оценить формулой 0,005 W13, где W - скорость ветра, м/с.
Зависимость спектра частот отраженного сигнала от скорости ветра для
Л. = 3 см представлена на рис. 4.4,а. Спектральная плотность
l + (f/Af)2 ■
Для скорости ветра 5.. .7 м/с функция отражения от леса имеет полосу
частот порядка 9 Гц. В зависимости от скорости ветра изменяется
соотношение когерентной Рк и некогерентной Рн составляющих мощности
отраженного сигнала леса (рис. 4.4,6).
4
Рн 20
15
10
5
N I»,
О 2 4 6 8 10 12 W.M/C
б)
0 2 4 6 8 10 12 W.m/c
а)
Рис. 4.4. Зависимость спектра (а) и отношения когерентной и некогерентной
составляющих мощности (б) отраженного сигнала леса от скорости ветра
Таблица 4.3. Средние ориентировочные
значения ЭПР объектов
Объекты с размерами,
меньшими элемента
разрешения, например объекты
военной техники,
сооружения, отдельные элементы
местности, линии
электропередач, формируют
изображения в виде отдельных
точек. Средние
ориентировочные значения ЭПР о
таких объектов представлены
в табл. 4.3.
В случае разрешения отдельных точек объекта задается ЭПР каждой
точки. Так, у фронтового истребителя (усредненные значения для различных
самолетов) нос фюзеляжа имеет ЭПР 0,04 м2, воздухозаборник - 2,5 м2,
задняя кромка крыла — 0,08 м2, задняя кромка стабилизатора — 0,06 м2.
Для снижения ЭПР (маскировки) объектов используются радиопо-
глощающие покрытия, типовое поглощение которых составляет 15...25 дБ
в сантиметровом диапазоне.
Объект
Человек
Автомобиль
Танк
Истребитель
Бомбардировщик
Малый корабль
о, м2
Х = 3 см
0,5
5,0
4,0
3,0
10,0
150,0
X =70 см
1,0
20,0
15,0
10,0
100,0
100,0
76
Модель РСА
Временные характеристики функции отражения объекта с гладкими
неоднородностями определяются случайными движениями его отдельных
частей (зеркальных точек) и объекта в целом, а также случайным
изменением за время синтезирования ракурса облучения (наблюдения).
I Время когерентности (интервал корреляции) функции отражения для нема-
неврирующего самолета тк = 0,1...0,3 с, для движущегося танка хк - 0,2.. .0,3 с .
В качестве иллюстрации на рис. 4.5 представлены особенности
функции отражения (амплитуды) различных объектов. Пересеченная
местность имеет функцию отражения типа нормального случайного
процесса с плавно изменяющейся дисперсией. У водной поверхности
дисперсия резко уменьшается. Обрывистый берег реки имеет
значительно большую дисперсию со стороны облучения. Дерево в степи дает
всплеск дисперсии и тень. Функция отражения степи в области тени
резко уменьшается. Объект с гладкими неоднородностями имеет
функцию отражения в виде нескольких зеркальных точек. При этом по
контуру объекта экранируется отражение от подстилающей поверхности
(тень объекта на фоне степи). Кромка леса со стороны облучения дает
всплеск отражения, а с противоположной стороны - тень, размер
которой определяется высотой деревьев и углом облучения.
Направление
облучения
Л
rf1
м
J
..if
х
Обрывистые
берега реки
t
Черкальиме ючкп
объекта
Тень леса
Тень дерева
t
Зона экранирования
объектом отражения
от степи
т
Просека
Пересеченная „
МП-1 НОС 11. ГСКа
Степь
Лес
Рис. 4.5. Функция отражения пересеченной местности
Дециметровый диапазон (Х = 60...90см). В этом диапазоне по
сравнению с сантиметровым начинаются резкие изменения свойств
функции отражения, так как геометрические размеры неоднородностей
поверхности и внутренней структуры большинства объектов становятся
77
Глава 4
меньшими или соизмеримыми с длиной волны. Рассеяние от
мелкоструктурных поверхностей (ВПП, степь) имеет зеркальный характер, и
удельная ЭПР при малых углах облучения резко падает (см. табл. 4.1).
Коэффициент отражения от ровной поверхности, например «степь,
зеленая трава», возрастает с увеличением угла падения. Изображение
таких поверхностей малоконтрастное и низкой интенсивности.
Практически нет контраста изображений ВПП - степь - водная поверхность.
На этом фоне наблюдаются отдельные точки, обусловленные
отражениями от более крупных неоднородностей, например неровностей
рельефа степи (ямы, канавы, бугры и т.п.). Для степи число таких точек
составляет 25...45 на 1 км2, при этом ЭПР точек больше ЭПР фона
(о »Оф ) примерно на 10... 15 дБ. Так как шероховатость таких
неровностей рельефа мала по сравнению с длиной волны, то они имеют
функцию отражения типа зеркальной точки со стабильным фазовым
центром. Аналогично приближаются по свойствам к зеркальным точкам
и функции отражения отдельных элементов (столбы, отдельные
деревья, домики, линии электропередач и т.п.). Наличие таких зеркальных
точек в функции отражения стационарного случайного поля изменяет
пространственное распределение ЭПР от экспоненциального к логнор-
мальному.
У элементов, размер которых соизмерим с длиной волны, ЭПР
значительно возрастает в результате резонансного характера
переотражения. Например, кукурузное поле с высотой растений и расстояниями
между рядами порядка длины волны имеет удельную ЭПР на 1-2
порядка больше, чем в сантиметровом и метровом диапазонах.
Наблюдаются участки местности с обратным контрастом по сравнению с
сантиметровым диапазоном. Так, мелкий кустарник на сухой почве дает
меньшее отражение, а болотные кочки с редкими деревьями - большее
отражение по сравнению с окружающим лесом, тогда как в
сантиметровом диапазоне этот контраст был обратным.
Излучение этого диапазона проникает сквозь листву, отражаясь от
крупных сучьев и стволов. Поглощение электромагнитных волн в
листве деревьев равно 0,12 дБ/м, т.е. в 10 раз меньше, чем в сантиметровом
диапазоне. При вертикальной поляризации поглощение больше
примерно в 2 раза. Изображение лесного массива приобретает более
детальный характер, так как наблюдаются объекты (малые поляны,
лесные дороги, объекты техники и т.п.), ранее затененные листвой.
Наблюдаются водные поверхности (болота, озера, разливы рек), скрытые
листвой (трава, кустарник).
Объекты техники в дециметровом диапазоне в большинстве
случаев увеличивают ЭПР (см. табл. 4.3), что обусловлено увеличением
зеркальной и резонансной части отражения.
78
Модель РСА
Временные характеристики функции отражения более стабильны,
чем в сантиметровом диапазоне. Так, интервал когерентности траектор-
ного сигнала неманеврирующего самолета и движущегося автомобиля
порядка тк = 1...2с.
Радиолокационное изображение объектов в дециметровом
диапазоне характеризуется в целом как стабильное, состоящее из отдельных
точечных структур на малоконтрастном фоне.
Метровый диапазон (А. = 2,5...3,5м ). Радиолокационное
изображение объектов в этом диапазоне характеризуется дальнейшим
усилением отражения от более крупных неоднородностей и практически
полным подавлением фона, т.е. отражений от мелкоструктурных
неоднородностей (степь, пашня, кустарник, дороги, ВПП). Значительно
увеличивается ЭПР и контраст металлических сооружений (мачты, башни,
дома). Резко выделяются крупные неоднородности местности и
искусственных сооружений (обрывы рек, кварталы домов). В лесу хорошо
видна структура полян, отдельных групп деревьев, объекты в лесу.
Размеры объектов военной техники (танки, самолеты, РЛС и т.п.)
становятся соизмеримыми с длиной волны, что изменяет характер
рассеяния электромагнитной волны. Решающую роль начинают играть
резонансные явления, а также ползущие и бегущие волны. Это вызывает
увеличение обратного рассеяния.
Общий вид радиолокационного изображения в метровом диапазоне
волн можно характеризовать как отдельно расположенные зеркальные
точечные отражатели, соответствующие элементам крупных
неоднородностей земной поверхности и сооружений, а также объектам техники.
Итак, в заключение анализа характеристик функции отражения
объектов отметим, что принятие той или иной модели зависит от конкретных
условий работы РСА (длины волны, поляризации, углов наблюдения и
облучения, разрешающей способности и т.п.) и от решаемой задачи
(обнаружения, измерения координат, селекции движущихся целей и т.п.).
Так, для стационарных случайных поверхностей (участки ровной
земной поверхности, ВПП и т.п.) элемент разрешения имеет ЭПР аф с
экспоненциальным распределением (амплитуда распределена по закону Рэлея,
фаза - равномерно в диапазоне 0.. .2тс) независимо от разрешения:
РЮ = expJ
где Оф0 = ао5г5^ - среднее значение ЭПР фона в элементе разрешения.
В случае нестационарной случайной поверхности (большие
участки земной поверхности типа пересеченной местности) значительно
изменяется о0 и ЭПР Оф распределена по логнормальному закону:
79
Глава 4
р(аф,аск,аф0) =
где оа - СКО шСаф/Офд!, равное 25 дБ для среднепересеченной
местности при А. = 3 см.
Наземные и морские цели отличаются сложной конфигурацией.
Наличие плоскостей и углов приводит к сложному характеру
статистики амплитуд отраженных сигналов.
Одна зеркальная точка в элементе разрешения имеет стабильную
ЭПР. Она может быть известна (ЭПР известного уголкового отражателя),
либо неизвестна (случайна для наблюдателя). В последнем случае
плотность распределения ЭПР зеркальных точек зависит от типа
наблюдаемых объектов (корабль, ЗРК, кварталы домов и т.п.). Обычно это
распределение для одного класса целей имеет рэлеевский характер. В случае,
когда в элементе разрешения размещается несколько зеркальных точек,
такой элемент разрешения имеет логнормальное распределение ЭПР или
близкое к нему %2 -распределение с четырьмя степенями свободы:
, . 4а \ 2а
Распределение фаз функции отражения случайных поверхностей
не зависит от разрешающей способности и равновероятно от 0 до 2л.
Значение функции отражения каждой точки объекта есть случайная
комплексная величина — комплексный коэффициент рассеяния
(отражения).
Функция отражения шероховатых неоднородностей имеет
пространственно-нестационарный характер. В этом случае дисперсия
коэффициента отражения отдельных точек изменяется в соответствии с
удельной отражающей поверхностью объекта.
При детальном наблюдении (радиовидении)
пространственно-нестационарную функцию отражения можно представить в виде кусочно-
стационарной, т.е. состоящей из набора стационарных функций с
различными отражающими свойствами, соответствующих однородным
участкам поверхности объекта.
Стационарная случайная функция отражения представляется
комплексным некоррелированным шумом с постоянной дисперсией и
нормальным законом распределения (рэлеевский для амплитуд и
равномерный О...2я для фаз).
Функция отражения гладких неоднородностей представляется
несколькими отдельными зеркальными точками, расположенными на
расстояниях, гораздо больших длины волны.
80
Модель РСА
Каждая зеркальная точка конкретного объекта имеет относительно
стабильные положение фазового центра и эффективную площадь рассеяния.
Распределение амплитуд отдельных зеркальных точек зависит от
типа объекта (обычно рэлеевское), а распределение фаз — равномерное
от 0 до 2я.
Статистические характеристики функции отражения разрешаемого
элемента объекта определяются соотношением размеров элемента и
объекта.
При размере объекта, гораздо меньшем элемента разрешения
(точечный объект), статистические характеристики отражения
соответствуют зеркальной точке.
Если объект занимает один элемент разрешения и содержит
несколько зеркальных точек, ЭПР отражения объекта имеет логнормальное
распределение или % с четырьмя степенями свободы.
Если в элементе разрешения находится участок стационарной
случайной поверхности, ЭПР отражения от такого элемента имеет
экспоненциальное распределение.
Распределение фаз отражения элемента разрешения равновероятно от
0до2я.
Функция отражения во времени имеет когерентную и случайную
составляющие, соотношение между которыми зависит от СКО
скоростей элементарных отражателей.
4.5. Траекторный сигнал
В результате взаимодействия электромагнитной волны облучения
с объектом формируется поле излучения объекта, которое проходит в
среде распространения к антенне РЛС, движущейся по заданной
траектории. Принятое антенной поле усиливается и преобразуется в
траекторный сигнал. Структура формирования траекторного сигнала
показана на рис. 4.6. В дальнейшем для упрощения записи во всех формулах
несущественные для данной задачи множители будут опускаться.
Апертура
функции антенны
ДН
передающей антенны
Р(6,ф)
Среда
распространения
h(x)
Поле облучения
()
Носитель
РЛС
Функция
отражения
Траекторный
сигнал
Поле в апертуре
антенны
Среда
распространения
h(x)
Поле рассеяния
Рис. 4.6. Структура формирования траекторного сигнала
81
Глава 4
Поле возбуждения Е(£,,г)) в апертуре передающей антенны
формирует диаграмму направленности F(0,q>), которая в свою очередь образует
поле облучения Е0(хц) в районе цели. Напомним, что цель есть заданный
объект, т.е. объект нашего интереса. Поле облучения и функция отражения
цели 9(хц) формируют поле рассеяния цели Ец(хц) = Е0(хц) 9(хц).
Пройдя среду распространения от объекта до РЛС поле цели
возбуждает в апертуре приемной антенны поле Ет(£,,т]). Последовательно
перемещаясь в пространстве по заданной траектории с помощью
носителя РЛС, антенна формирует за время синтезирования Тс траекторный
сигнал - синтезированную апертуру. Поскольку размер СА Хс гораздо
больше размера d реальной апертуры, в большинстве случаев цель
находится в промежуточной (а не дальней) зоне СА. Поэтому поле
Ет(£,г)) на траектории определяется как преобразование Френеля (а не
Фурье) от поля рассеяния цели Ец(хц):
[х, (4.7)
где г - расстояние от точки цели хц до точки на СА с координатами
(£,rj) реальной апертуры и х траекторного сигнала.
Физически такая запись означает, что каждая точка цели
формирует сферическую волну ехр{ jkr}/r и общее поле на СА есть сумма
сферических (а не плоских, как в дальней зоне) волн от каждой точки цели.
Рис. 4.7. Формирование траекторного сигнала при прямолинейной траектории
82
Модель РСА
В простейшем случае поле в апертуре реальной антенны Ет(£,т])
суммируется синфазно, образуя суммарную ДН на прием. При
решении задач измерения координат, селекции движущихся целей и ряда
других формируют более сложные ДН реальной антенны, например
моноимпульсные. Для большей наглядности процесс формирования
траекторного сигнала детализируем для одного конкретного случая -
прямолинейной траектории (рис. 4.7) и суммарной ДН антенны на
передачу и прием.
Носитель РЛС движется с постоянной скоростью V вдоль оси X.
Линейная антенна (ось £,) расположена вдоль оси X. В пространстве
целей на расстоянии RH формируется полоса обзора (ХЦ,УЦ). Такой
случай соответствует боковому обзору РСА. Представим расстояние
RH +уц) в виде степенного ряда и отбросим малые члены с
учетом, что RH » Хс, Yu,Хц:
Тогда поле цели на траектории можно записать как
преобразование Френеля поля Ец(хц):
Yu
Будем формировать суммарную ДН антенны на прием F, т.е.
ET(t)= JET(£,t)d^, где d - размер реальной антенны. В результате на-
пряженность поля на выходе антенны (траекторный сигнал sT(t)) как
функция времени (координаты х = Vt траекторного сигнала) имеет вид:
х J JEu(Xu,yu)eXp{-jky,ijexP(-jki^-^}Ff^i]dx1,dyu.
у у I H I \ H /
При интегрировании по £ здесь пренебрегли членом £2, так как
на малой апертуре реальной антенны поле можно считать плоским
83
Глава 4
(дальняя зона реальной антенны). Полагая, что на прием и передачу
используется одна и та же антенна, аналогичным образом запишем поле
облучения в плоскости (Хц, Уц) и после интефирования по £, получим
С учетом, что Ец(хц,уц) = Е0(хц,уц)Э(хц,уц), поле на
синтезированной апертуре будет иметь вид:
Xu Yu
Анализ структуры поля на синтезированной апертуре (траекторного
сигнала) показывает:
ГлЛ
• множитель — expl^kR,,} определяет амплитуду и начальную фазу,
\2)
одинаковую для всех целей в зоне Хц, Yu и постоянную по апертуре;
фазовый множитель exp|-j2kyuj определяет изменение постоянной
по апертуре начальной фазы при изменении координаты дальности
цели;
фазовый множитель expi -jk — — > = expl - — (х2 - 2х„Vt+V2t2) >
[ 2R« I № J
определяет изменение начальной фазы от угловой координаты
цели (член х2), квадратичное изменение фазы сигналов, одинаковое
для всех целей по апертуре (член V2t2), линейное изменение фазы
по апертуре, пропорциональное угловой координате цели (член
2хц\Ч), т.е. доплеровской частоты траекторного сигнала
fu = (2V/A.RH)xu, пропорциональной углу цели 0Ц = xu/RH ;
амплитудный множитель F2 — формируется ДН приемной
2R )
и передающей антенн F(0) и определяет весовую функцию
обработки траекторного сигнала F2(t), интервал синтезирования Тс и
зону обзора по углу F2(xu).
84
Модель РСА
Если пространство целей задано одним точечным отражателем
щ^б^ц-Хщ) с координатами х^, то нормированное значение
поля такой цели на апертуре по определению является импульсной
пространственно-временной характеристикой линейной системы
преобразования пространства объектов (целей) в пространство траекторного
сигнала. Траекторный сигнал в этом случае
где Ьр(хш) - импульсная переходная характеристика, а индекс р означает
ее регулярную часть, так как кроме нее существует случайная
составляющая, обусловленная различного рода нестабильностями системы.
Для нашего конкретного случая бокового обзора импульсную
переходную характеристику системы «функция отражения — траекторный
сигнал» получим, подставляя в (4.8) функцию отражения
В большинстве случаев «гладкой» траектории импульсная
переходная характеристика системы «функция отражения - траекторный
сигнал» может быть представлена в виде
hp(t) = F2(t,Gu)exp JjMviut + aniM + jVoL (4.10)
где Vru - радиальная составляющая скорости носителя относительно
цели; ат — радиальная составляющая ускорения носителя относительно
цели; 9Ц = xu/RH - угол цели; \у0 - начальная фаза, определяемая
расстоянием от цели до носителя при t = 0.
Таким образом, траекторный сигнал РСА есть результат
прохождения функции отражения цели через линейную систему с импульсной
переходной характеристикой, определяемой траекторией носителя РСА,
ДН антенны и характеристиками среды распространения.
Статистические характеристики. Рассмотрим
статистические характеристики траекторного сигнала, определяемые случайным
характером функции отражения. Траекторный сигнал (4.8) в пределах
элемента разрешения по дальности можно представить в виде (4.7),
опуская несущественные в данном случае постоянные множители:
85
Глава 4
00 f
sT(x)= jF2(xu)9(xu)explj-^r(x,xJ
где r(x, хц) - текущее расстояние между РЛС (ось X) и координатой
цели на полоске дальности хц = 0URH.
Будем полагать, что производится телескопический обзор и что
квадратичный и более высокие члены разложения в ряд функции
г(х,хц) скомпенсированы. Тогда траекторный сигнал
sT(x) = fF2(xu)S(xu)exp j-^xxu dxu (4.11)
является преобразованием Фурье распределения поля отражения
F2(xu)S(xu) в пределах полоски дальности.
Корреляционная функция такого сигнала
1)S;(x2)= J Jf2(xu1)F2(xu2)9(xu1)9*(xu2)x
(4.12)
Рассмотрим типовую функцию отражения цели в виде
нестационарного, некоррелированного, комплексного шума с корреляционной
функцией
Кц(хц1, хц2) = 9(хц1)9*(хц2) = ох(хц,)б(хц, - хц2), (4.13)
где ох(хц1) - удельная ЭПР цели в элементе разрешения по дальности
(полоске дальности).
Для такой функции отражения цели корреляционная функция тра-
екторного сигнала (4.12)
т ( л
Кт(х„х2)= [F4(xu)ax(xu)exp]-j-^(x,-x2)x ldxu (4.14)
-i l ark j
является преобразованием Фурье распределения мощности отраженного
сигнала F4(xu)ax(xu) полоски дальности.
С учетом того, что Кт(х,,х2) = Кт(х1-х2) = Кт(Ах) , траекторный
сигнал при телескопическом обзоре является стационарным случайным
процессом, несмотря на то что функция отражения нестационарна.
86
Модель РСА
Определим интервал корреляции траекторного сигнала. Для
упрощения выкладок представим диаграмму направленности антенны (на
передачу и прием) в виде:
|| = «pj-2,78^
F2(G) = exP^ -2,78^ \ = exp \ -2,78-^ \,
где Go — ширина ДН антенны на уровне 0,5.
В этом случае (4.14) имеет вид:
Кт(Ах)=
5,56^j^Axx
кнво лкн
Для стационарного случайного поля отражения (степь, сплошной
лес, ВПП и т.п.) оц(хц) = const и корреляционная функция траекторного
сигнала
%
Ах2
Кт(Ах) = exp j -7,1%Ах21. (4.15)
Интервал корреляции на уровне 0,7
8кг = 0,5Х/в0=0,5<1, (4.16)
где d - размер апертуры антенны.
Время корреляции при движении носителя с постоянной
скоростью V равно
TKT=0,5d/V.
В случае сосредоточенной цели размером много меньше размера
по азимуту полоски дальности (du « G0RH), ЭПР цели можно
представить в виде
.2
где du - размер цели на уровне 0,5 значения ЭПР.
В этом случае интервал корреляции траекторного сигнала
определяется размером цели:
5KT = ARH/2du. (4.17)
Если интервал разрешения РСА равен размеру цели (6хц = du), то
5^. = XRH/25xu. Учитывая, что 5хц = ШН/2ХС , получим, что в этом
случае интервал корреляции траекторного сигнала равен интервалу
синтезирования:
87
Глава 4
Если размер цели много меньше интервала разрешения РСА
(с!ц « 6хц ), т.е. цель точечная, интервал корреляции траекторного
сигнала 6^ » Хс.
При секторном и переднебоковом обзорах диаграмма
направленности антенны и, следовательно, распределение мощности отраженного
сигнала вдоль полоски дальности изменяется в процессе формирования
траекторного сигнала за время синтезирования, что приводит к его
нестационарности.
При боковом обзоре
sT(x) =
Изменения мощности отраженного сигнала в результате смещения
ДН антенны в общем случае приводит к изменению дисперсии
траекторного сигнала, однако интервал корреляции не изменяется.
Случайные изменения фазы. В реальных условиях работы РСА
среда распространения вносит случайные, в основном фазовые,
изменения в электромагнитную волну, нарушающие когерентность
траекторного сигнала. Эти изменения могут быть учтены в виде случайной
составляющей импульсной переходной характеристики:
h(x) = hp(x)hCJ1(x),
где hCJI(x) = exp{j\|i(x)}; у(х) -случайные изменения фазы
траекторного сигнала.
Ионосфера как среда распространения электромагнитных волн при
работе РСА из космоса влияет на фазовые флуктуации траекторного
сигнала в основном на частотах менее 3 ГГц (дециметровый и метровый
диапазоны).
Набег фазы в ионосфере оценивается величиной \\>0 =(N/2f)lO~4, где N -
число электронов в столбе ионосферы сечением 1 м2, равное 10|6...1019 в
зависимости от состояния ионосферы (время года, суток, солнечная
активность и т.п.); f- частота, Гц.
Случайный набег фазы электромагнитной волны в ионосфере
определяется случайным изменением числа электронов вдоль различного пути
распространения вследствие перемещения РЛС. Пространственная
неоднородность ионосферы имеет радиус корреляции менее 150 м и СКО числа
электронов менее 1%, что определяет максимальное СКО случайной фазы,
равное (N/f)-10"6.
На фазовые изменения траекторного сигнала также оказывает
влияние изменение параметров тропосферы. Изменением показателя
преломления тропосферы во времени можно пренебречь, поскольку
88
Модель РСА
время корреляции флуктуации составляет 20... 100 с, что меньше
времени синтезирования. Пространственные изменения показателя
преломления обусловлены турбулентностью атмосферы с размерами областей
вихрей до сотен метров. Разность коэффициентов преломления
п(х,)-п(х2) внутри вихрей является стационарным случайным
процессом, который характеризуется структурной функцией (дисперсией)
Dn(x) = c2x2/3, где с2 - структурная постоянная, определяемая
состоянием атмосферы. В радиодиапазоне частот значения ее лежат в
пределах 10~14...10~16 и существенно убывают с высотой, так что основной
вклад в флуктуации показателя преломления вносит нижний слой
тропосферы толщиной 3... 5 км.
Если плоская электромагнитная волна проходит область
турбулентности на расстояние R и обратно, структурная функция фазы
Dv(x)=[iy(x, +x)-iy(x,)] , т.е. дисперсия разности фаз на СА (ось X),
будет равна
Разность фаз ц/(х,)-\(/(х2) является нормальной случайной
величиной, а ее СКО растет примерно линейно к концу синтезированного
раскрыва, когда (х, - х2 < Хс). При этом, чем короче длина волны РСА,
тем больше влияние турбулентности.
В дециметровом и метровом диапазонах волн поглощение в листве
деревьев мало и электромагнитная волна распространяется сквозь лесной
массив, что позволяет наблюдать объекты под пологом леса. Случайно
расположенные стволы деревьев и сучья вносят случайный набег фазы волны.
Корреляционная функция случайной фазы от угла синтезирования р
где Dy - дисперсия фазы, равная 0,026 рад2 (зимой) и 0,057 рад2
(летом); ф,=4,9 10~2 рад (зимой) и 5,1-Ю"2 рад (летом); ф2 =2,6 10"2 рад
(зимой) и 2,8 10"2 рад (летом) для смешанного леса и X = 70 см .
Наибольшие фазовые ошибки вносят в траекторный сигнал
отклонения движения носителя РЛС от заданной траектории. Траекторные
нестабильности приводят к изменению фазы сигнала вследствие
случайного изменения текущего расстояния r(t) от объекта до фазового
центра антенны РЛС. Эти отклонения обусловлены турбулентностью
среды, в которой движется носитель РЛС, системой управления носите-
89
Глава 4
ля, изгибными колебаниями и вибрациями конструкции носителя и
самой РЛС. Основное влияние на изменение текущего расстояния
оказывают боковые отклонения и рыскание носителя. Корреляционная
функция случайных боковых отклонений для самолетов различного типа
где д/d^I...LOm -СКОотклонений; тк = 2...12с; то = 5...1Ос; тк и т0 -
постоянные времени отклонений.
Для угловых колебаний (рыскания) корреляционная функция
имеет тот же вид, а ее параметры составляют: ^/Ц, = 1...2°; \ = 1...5 с;
io = 5...1Oc.
Обычно в случайную составляющую можно включить также
фазовые нестабильности аппаратуры (антенна, приемопередатчик).
Таким образом, случайная составляющая импульсной переходной
характеристики траекторного сигнала hcn =exp{-j\y(t)} имеет
случайную фазу как результат всех нестабильностей формирования
траекторного сигнала.
Траекторный сигнал РСА (сигнал цели, принимаемый на траектории
носителя) образуется в результате прохождения функции отражения
цели через линейную систему с импульсной переходной
характеристикой, определяемой траекторией носителя РСА, ДН антенны и
характеристиками среды распространения электромагнитной волны.
Импульсная пространственно-временная переходная характеристика
линейной системы преобразования функций отражения объектов
(целей) в траекторные сигналы есть комплексный пространственно-
временной траекторный сигнал точечной цели. Пространством
является плоскость апертуры антенны, а временем — изменение поля на
апертуре приемной антенны при движении носителя по траектории.
При формировании на апертуре антенны одной суммарной ДН
амплитуда переходной характеристики определяется формой и
направлением ДН в пространстве целей.
Фазовая характеристика в большинстве случаев может быть
представлена линейным и квадратичным членами. Линейный член
определяется радиальной составляющей скорости перемещения фазового
центра антенны относительно цели, а квадратичный - радиальной
составляющей ускорения.
Статистические характеристики траекторного сигнала определяются
случайным характером функции отражения объектов и зависят от
соотношения размера объекта и интервала разрешения РСА.
Траекторный сигнал цели с функцией отражения типа случайного поля
имеет интервал корреляции, равный половине размера антенны.
90
Модель РСА
С уменьшением размера цели интервал корреляции траекторного
сигнала увеличивается. При размере цели, равном элементу
разрешения РСА, интервал корреляции траекторного сигнала равен
интервалу синтезирования. При размере цели, много меньшем элемента
разрешения (точечная цель), траекторный сигнал становится
детерминированным и представляет собой импульсную переходную
характеристику.
В реальных условиях работы импульсная переходная характеристика
имеет случайный фазовый множитель, обусловленный случайным
изменением фазовой характеристики приемопередающего тракта и
среды распространения электромагнитной волны, а также
случайными отклонениями траектории носителя от заданной (траекторны-
ми нестабильностями).
Случайное изменение фазы траекторного сигнала разрушает его
когерентность и ухудшает все характеристики РСА.
4.6. Классификатор целей
Почти все задачи радиолокации - обнаружение, измерение
координат, селекция движущихся целей и другие - можно рассматривать с
единых позиций классификации целей. Каждой цели, ее состоянию и
местоположению приписывается
своя функция отражения. Синтез
оптимального классификатора
целей основывается на
статистической теории
многоальтернативного обнаружения, т.е.
строится многоканальная система
(рис. 4.8), каждый канал которой
настроен на оптимальное
обнаружение траекторного сигнала,
соответствующего одной из
всего класса функций отражения целей. Устройство сравнения определяет
канал с максимальным выходным сигналом.
Далее рассмотрим частный, но для радиовидения типовой случай
классификации целей по их геометрическому образу - РЛИ. Каждой i-й
функции отражения из заданного множества {1} соответствует цель с
известным распределением по пространству (х, у, z) локальных
характеристик рассеяния - амплитуды и фазы отраженной волны, т.е. портрет
цели. Другие отличия целей (скоростные, поляризационные) будут
рассматриваться отдельно.
Каждой функции отражения &,(хц) однозначно соответствует
траекторный сигнал
91
s,(x)
Рис.
4.8.
Ц,(х)
и,(х)
О2(Х)
и,(х)
и,(х)
Структура кла
целей
5
к
[ггво ера
Устрой
ссификатора
Глава 4
где hp(x) -регулярная составляющая импульсной переходной
характеристики системы формирования траекторного сигнала. Кроме регулярной
составляющей, есть случайная составляющая импульсной переходной
характеристики h(х) = hp(x)hCJI(х) = hp(х)expj jy(x)}. Разность
случайных фаз на концах интервала синтезирования 4'(xc) = v);(x1)-v}/(x1 + xc)
может превысить 2л и разрушить когерентность траекторного сигнала.
Поэтому разобьем весь интервал наблюдения х на М когерентных
участков синтезирования (рис. 4.9). В этом случае когерентные траекторные
сигналы на различных интервалах синтезирования взаимно
некогерентны, т.е. интервал когерентности траекторных сигналов равен Хс. Такое
представление функции когерентности траекторного сигнала в виде
ступенчатой функции намного упрощает задачу синтеза
классификатора, не снижая общности результатов.
т=1 т=2 т=3 т=М
—I 1 1 1 1 1 1 +
"XT 'V'"
Л с, Лс2
Рис. 4.9. Представление траекторного сигнала в виде суммы когерентных
сигналов
Траекторный сигнал на входе классификатора
м
где n(xm) - сумма внутреннего шума и фона.
Фон будем считать кусочно-стационарным, так что можно считать
n(xm) белым шумом со спектральной плотностью No. Далее не
учитываем также зависимость сигнала фона от координат (£,,л) апертуры
реальной антенны, считая, что используется суммарная ДН антенны.
Полагаем также, что благодаря высокому разрешению РСА все
объекты наблюдаются раздельно (разрешаются), следовательно, синтез
классификатора можно проводить для случая наличия траекторного
сигнала только одного объекта и шума. Задача синтеза оптимального
классификатора сводится к определению апостериорной вероятности
наличия траекторного сигнала цели с заданной функцией отражения.
92
Модель РСА
Синтез классификатора для случая пространственно-
когерентной цели. Функцию отражения такой цели можно записать в
виде суммы L точек:
||{}() (4.18)
где S, и ф, - соответственно амплитуда и фаза каждой точки цели с
координатой х,, изменяющиеся по априорно известному закону от
точки к точке, а случайная начальная фаза ф; одинакова для всех точек.
Такая функция отражения в сантиметровом диапазоне волн может
существовать только у специальных объектов в определенных условиях,
однако с увеличением длины волны РЛС (дециметры-метры) фазу
зеркальных точек функции отражения большинства объектов определяют
более устойчивые закономерности : расстояние между точками, ракурс
цели, геометрические формы цели и т.п. В этом случае для
классификации могут быть использованы и фазовые соотношения между
отдельными точками цели.
Известно, что для сигнала из М некоррелированных частей с
аддитивным белым шумом апостериорная вероятность
\s fviPdxV
m=l x"
"■m
где ki - постоянный коэффициент; Р; - априорная вероятность наличия
цели.
Усредняем Pan(i,vj/m) по случайной начальной фазе i|/m на каждом
из М интервалов синтезирования. Тогда
м
ш=1
где rim =
- модуль корреляционного интеграла
(корреляционный момент входного траекторного сигнала и траекторно-
го сигнала i-й цели, деленного на спектральную плотность шумов No);
dim — отношение сигнал/шум; к2 — постоянный коэффициент.
Учитывая, что монотонная функция от Рап (i) не изменяет положения
максимума Pan(i), используем логарифмическую функцию от Рап и при
93
Глава 4
rim»1, т.е. когда отношение сигнал/шум гораздо больше единицы,
In Io (rjm) = rim . Апостериорная вероятность i-ro класса в этом случае равна:
где «;=
м
м
m; d; = > d^ = Mdim - отношение сигнал/шум для всего
m=l ra=l
траекторного сигнала.
Таким образом, оптимальный классификатор выполняет операцию
корреляции входного траекторного сигнала с опорным траекторным
сигналом каждой цели в отдельном канале на каждом интервале
синтезирования и затем суммирует модули корреляционных моментов всех
интервалов синтезирования. Алгоритм выполнения этих операций в
каждом канале для i-й цели можно представить в виде:
м
m=l
(4.20)
Рассмотрим сигнальную часть (без шумов) корреляционного
интеграла в i-м канале на m-м интервале синтезирования:
icm
и представим ее в частотной области:
'icm
где ST (сох) = Г sT (x) exp (-jcoxx) dx - спектр принимаемого
траекторного сигнала; STi (cox) - спектр траекторного сигнала i-й цели.
В свою очередь спектр принимаемого траекторного сигнала
ST(cox) = V(cox)H(cox), где V(cox) - спектр функций отражения всех
объектов, сигналы которых присутствуют в траекторном сигнале;
Н (tox) = Г h (x) exp(-jcoxx) dx - частотная характеристика системы пре-
—СО
образования «функция отражения - траекторный сигнал».
Аналогично спектр траекторного сигнала i-й цели STi(cox) =
= V, (<ох)Н((ох), где V; (сох) - спектр функции отражения i-й цели.
94
Модель РСА
Корреляционный интеграл с учетом этих преобразований и
перехода из частотной области в пространство целей будет иметь вид:
icm
jv(cox)|HmK)|2V*K)<4
со
где 9ст(хц)= Jv(cox)|Hm(tox)|2exp(-jcoxxu)dcox - комплексное изо-
—СО
бражение функций отражения всех объектов, находящихся в зоне
обзора РСА, формируемое с разрешением 5хц = 1/Асох .
Полоса частот Асох определяется частотной характеристикой РСА
|н(сох)| . Эта характеристика образуется как результат прохождения
функции отражения через систему формирования траекторного сигнала
с импульсной переходной характеристикой h(x), что соответствует
частотной характеристике Н(сох), а затем через согласованный с траек-
торным сигналом фильтр с частотной характеристикой Н*(сох) (рис. 4.10).
.00
н(«О
Рис. 4.10. Формирование оценки функции отражения
Изображение объектов Эс(хц) соответствует сглаженной функции
отражения объектов 9(хц), а степень сглаживания (размытости)
определяется шириной спектра Асох переходной характеристики РСА,
которая в свою очередь определяется угловым размером траекторного
сигнала (синтезированной апертуры). Напомним, что импульсная
переходная характеристика РСА, т.е. отклик РСА на точечную цель, есть
функция неопределенности РСА:
Jc(x»)= Jh(x)h'(xu-x)dx.
хс
95
Глава 4
Преобразование Фурье от Jc(x) соответствует частотной
характеристике РСА |н(ох)| .Интеграл J 9ст(хц)9*(хц)с!хц есть корреляци-
онный момент между сглаженным изображением объектов и функцией
отражения i-й цели.
Таким образом, при комплексной детерминированной функции
отражения цели 9, (хц) оптимальный классификатор на каждом
интервале синтезирования Хт формирует из входного траекторного сигнала
комплексное изображение всех объектов 9ст(хц), находящихся в зоне
обзора, и коррелирует его с эталонной комплексной функцией
отражения i-й цели Э4(хц). Полученные на различных интервалах
синтезирования модули корреляционных моментов хт суммируются, образуя
выходной сигнал i; данного канала (без учета шумовой составляющей):
м
m=l
(4.21)
Кроме сглаженной комплексной функции отражения объектов, в
изображении будут присутствовать сглаженные в соответствии с
частотной характеристикой |н(сох)| шумы пс(хц), которые не изменяют
алгоритма классификации (рис. 4.11).
Ur
Согласованный
фильтр
14*
Коррелятор
Эталонная функция
отражения i цели
Сумматор
М
Vr-m
т= t
Рис. 4.11. Структурная схема оптимального классификатора
для когерентной функции отражения
Если функция отражения цели представляет собой одну
зеркальную точку 91(хц) = |91|5(хц~х1), то изображение точечной цели по
определению есть функция неопределенности РСА Jc(xu), а
корреляционный интеграл
icm
96
Модель РСА
о
имеет максимум в точке х,, если
изображение Jc(xu) есть
изображение i-й точечной цели. На
рис. 4.12 показан ряд последова- s
тельных преобразований
сигналов при получении
корреляционного момента ricm для
одноточечной цели.
Если функция отражения
цели представляет собой две зер-
кальные точки с известным и
постоянным фазовым сдвигом
между ними A\\i:
и
п
и
п
и
п
1
'х
ц) = |91|5(хц-х,)
Ne*
то сглаженное комплексное
изображение цели будет иметь вид:
+|Э2|е*'1с(хц-х2).
Опорная функция равна
Рис. 4.12. Последовательные
преобразования сигнала
при формировании корреляционного
момента
+|92
9* (хц), а корреляционный момент ricm = |9,| +|92|
Синтез классификатора для случая
пространственно-некогерентной цели. Амплитуды и фазы каждой точки функции отражения
такой многоточечной цели случайны и независимы между собой, а ее
модель соответствует большинству объектов радиовидения.
Полагаем, что каждая точка в изображении разрешается и функция
отражения цели
(4-22)
(=\
где амплитуда каждой точки распределена по закону Рэлея, а фаза ф, -
равномерно от 0 до 2п.
Апостериорная вероятность (4.19), усредненная по случайным
амплитудам и фазам, при условии разрешения каждой точки
ехр
L М
ТУ
lifm
Ы\ m=l
4—3169
97
Глава 4
где r1/m =
A JuT(x)s;(x)dx
- модуль корреляционного момента
входного траекторного сигнала и опорного траекторного сигнала 1-й
цели для С-й точки в m-м интервале синтезирования; difm— отношение
сигнал/шум для I -и точки в m-м интервале синтезирования.
Сигнальную часть корреляционного момента С-й точки rifm (без
шумов) подобно предыдущему случаю можно представить в виде:
Vmc ~
—
2
о
где 9с/,т - модуль изображения ( -й точки наблюдаемых объектов в m-м
интервале синтезирования; |9i/P| — модуль функции отражения ^-й
точки i-и цели.
Корреляционный момент i-й цели (сигнальная часть)
~ М L „ L
где |ЭС(,| =
M
(4.23)
- накопленное некогерентно на М интервалах синтезиро-
ш=1
вания амплитудное изображение наблюдаемых объектов в точках Х(.
Таким образом, оптимальный классификатор целей со случайной
функцией отражения формирует на каждом интервале синтезирования
комплексное изображение каждой разрешаемой точки наблюдаемых
объектов и суммирует модули изображений каждой точки отдельно на всех
интервалах синтезирования. Накопленное некогерентно изображение
объектов коррелируется с модулем эталонной функции отражения i-й цели.
Структура классификатора представлена на рис. 4.13.
U,
Согласованный
фильтр
н:
[*
Модуль
Сумматор
Коррелятор
|
Эталонная
функция
отражения \В
Рис. 4.13. Структурная схема оптимального классификатора
для некогерентной функции отражения
98
Модель РСА
Анализ полученных алгоритмов оптимальной классификации
показывает, что независимо от функции отражения цели обработка
траекторного сигнала может быть представлена двумя последовательными
этапами.
Этап I состоит в формировании изображения объектов,
расположенных в зоне обзора РСА.
Этап 2 предусматривает корреляцию полученного изображения с
эталонными изображениями, представляющими собой функции
отражения каждой классифицируемой цели.
Напомним, что в данном примере производилась классификация
неподвижных целей по их радиолокационному изображению.
Статистические характеристики комплексного изображения
объекта (цели). Изображение является результатом согласованной
обработки траекторного сигнала для каждой точки объекта и без учета
аддитивного шума имеет вид:
0с(хс) = ]sT(x)W(x)expf-j-^xcx] dx , (4.24)
1 V *R У
1 V
где W(x) - весовая функция обработки, определяющая размер
синтезированной апертуры; хс — координаты выходного изображения.
Корреляционная функция изображения
Производя замену переменных х, = Ах + х2 и учитывая, что
корреляционная функция траекторного сигнала зависит только от разности
Ах , можно представить корреляционную функцию изображения в виде
ГО 00 / \
Mxclxc2)= { JKT(Ax)exp j^-Axxcl W(x2+Ax)W(x2)x
xexp
X2(Xcl-Xc2
d(Ax)dx2.
Для упрощения выкладок используем весовую функцию в виде
где Хс — ширина функции на уровне 0,5.
99
Глава 4
Ширина функции W(x), равная Хс, намного больше изменения
Ах (интервала корреляции траекторного сигнала). Поэтому можно
принять, что W(x2)W(x2+Ax)« W2(x2) и двойной интеграл
превращается в произведение интегралов.
Первый интеграл от корреляционной функции траекторного
сигнала с учетом (4.14)
/Л
I Кт(Ах)ехр j хс1Ах dAx =
■от \ н /
CO
=1
I H
ccl-xu)id(Ax)dxu.
Интеграл по Ах в бесконечных пределах
OO
exp
= 5(xcl-xu).
Тогда первый интеграл равен F4 (xcl)6x (xc]).
Корреляционная функция изображения в этом случае
Кс(Хс1'Хс2) =
= F4(xd)8x(xd)
dx2.
(4.25)
Корреляционная функция комплексного изображения случайной
( у}\
функции отражения цели с учетом W (х) = ехр -2,78—у имеет вид
кс
= р4 (xci)sx
4тх2Х2
(4.26)
Дисперсия изображения пропорциональна распределению
мощности отраженного сигнала по полоске дальности, а интервал корреляции
(на уровне 0,7) при заданной весовой функции W(x)
6. Л
кс=1,4
(4.27)
Разрешающая способность РСА определяется шириной
изображения точечной цели 9(хц) = б(хц):
100
Модель РСА
СО
с)= jF2(0)W(x)exp
. 4л
н
dx = ехр
4л2Х
с
х
С
хс2 . (4.28)
При выбранной весовой функции W(x) ширина изображения (на
уровне 0,7) равна
8х =
7lXc
и интервал корреляции
6ke=l,4—s- = l,4Sxc. (4.29)
71АС
С
Наиболее часто при радиовидении объекты классифицируются по их
изображению — распределению функции отражения по координатам
дальности и азимута.
Полагается, что каждый объект в зоне обзора разрешается, траектор-
ный сигнал когерентен на каждом интервале синтезирования и
некогерентен от интервала к интервалу, шум и фон - белые.
Задача синтеза оптимального классификатора в этих условиях
сводится к нахождению апостериорной вероятности наличия траектор-
ного сигнала классифицируемой цели.
В случае пространственно-когерентной цели, когда амплитуда и фаза
каждой точки известны, кроме начальной фазы, одинаковой для всех
точек, алгоритм оптимальной классификации сводится к
нахождению корреляционного интеграла входного траекторного сигнала с
опорным траекторным сигналом классифицируемой цели на каждом
интервале синтезирования и суммированию модулей
корреляционных моментов всех интервалов синтезирования.
В области изображений объектов этот же алгоритм сводится к
формированию из входного траекторного сигнала путем согласованной
фильтрации комплексного изображения всех объектов, находящихся
в зоне обзора, и корреляции его с комплексной функцией отражения
классифицируемой цели. Полученные на всех интервалах
синтезирования модули корреляционных моментов суммируются.
В случае пространственно-некогерентной цели, когда амплитуда и
фаза каждой разрешаемой точки функции отражения случайны и
независимы между точками, оптимальный классификатор формирует
на каждом интервале синтезирования комплексное изображение
каждой разрешаемой точки всех объектов в зоне обзора. Модули
изображения каждой точки отдельно суммируются на всех интервалах
синтезирования. Некогерентно накопленное изображение объектов кор-
релируется с модулем функции отражения классифицируемой цели.
Дисперсия комплексного изображения
пространственно-некогерентной цели пропорциональна распределению по изображению
мощности отраженного сигнала, а интервал корреляции примерно равен
интервалу разрешения.
101
Глава 4
4.7. Идентификация функции отражения
Алгоритм классификации объектов сводится к обнаружению
объектов с известной функцией отражения в предположении, что в зоне
анализа благодаря высокой разрешающей способности РСА находится
только один объект. Кроме задачи классификации, существуют также
задачи исследования функции отражения. В данном случае
присутствует известный объект, но его функция отражения неизвестна, и задача
сводится к идентификации объекта и его функции отражения.
Оптимизация алгоритма решения этой задачи может быть выполнена на основе
критерия минимума среднеквадратической ошибки воспроизведения на
выходе РСА функции отражения объекта.
Пусть функция отражения объекта-цел и $(хц) представляет собой
кусочно-стационарное случайное поле отражения. Внутри области
стационарности она представляет собой нормальный случайный
комплексный процесс. Задача сводится к формированию на выходе РСА
изображения заданного участка стационарного поля $с(хц) с минимальной
среднеквадратической ошибкой.
Наблюдаемый сигнал представляет собой сумму траекторного
сигнала и шума:
UT(x) = sT(x) + n(x),
где х - координата траекторного сигнала в памяти системы обработки
(координата радиоголограммы).
Полагаем, что антенна РСА имеет одну точку приема (один
фазовый центр), т.е. обработка траекторного сигнала по пространству
апертуры антенны сводится к формированию суммарной ДН.
Траекторный сигнал есть результат линейного преобразования
функции отражения
sT(x)= |&(хц)И(х-хц)<1хц,
где h(x) — импульсная переходная характеристика системы
формирования траекторного сигнала.
Шум п(х) является нормальным случайным процессом,
некоррелированным с траекторным сигналом. Это может быть внутренний шум
РСА, а также помеховый сигнал. Здесь хц - координата функции
отражения в разрешаемом элементе дальности.
Так как 8(хц) и h(x) - нормальные стационарные комплексные
процессы без постоянной составляющей, траекторный сигнал также яв-
102
Модель РСА
ляется нормальным стационарным случайным процессом. Для
нормальных процессов оптимальная система обработки - линейная. Задача в
этом случае сводится к нахождению оптимальной импульсной
переходной характеристики фильтра Винера без учета «физической
реализуемости», так как после запоминания траекторного сигнала (получения
голограммы) его обработка ведется в машинном, а не реальном
времени. В этом случае пределы интегрирования можно брать от -оо до оо .
Оптимальная переходная характеристика ho(x) системы
обработки должна удовлетворять интегральному уравнению Винера-Хопфа:
ОО
К9и(Дх) = Jho(x)Ku(Ax-x)dx, (4.30)
—ОО
где К8и - взаимная корреляционная функция входного сигнала и функции
отражения цели $ ; Ки - корреляционная функция входного сигнала.
Так как процессы sT(x) и п(х) не коррелированы, то
Ku(Ax) = Ks(Ax) + Kn(Ax), где Ks - корреляционная функция
траекторного сигнала; Кп — корреляционная функция шума.
В свою очередь корреляционная функция траекторного сигнала
определяется импульсной переходной характеристикой траекторного
сигнала и корреляционной функцией Кэ(Ах) функции отражения цели:
00 ОО
Ks(Ax)= J Jh(x,)h*(x2)Ka(x,-x2 + Ax)dx1dx2.
—ос—со
Так как процессы sT(x) и п(х) не коррелированы, то
СО
К8и(Дх) = Kss(Ax) = Jh(Ax - x)K8(x)dx.
Для стационарных процессов Кэи(Ах) = К8и(-Ах) интегральное
уравнение (4.30) можно записать в операторной форме в виде:
h*(-Ax)® Ки(Ах) = ho(Ax)® Ks(Ax) + ho(Ax)® Kn(Ax),
где знак ® означает операцию свертки.
При решении полученного уравнения методом преобразования
Фурье операции свертки превращаются в произведения спектров:
где Н((ох) - частотная характеристика системы формирования
траекторного сигнала; W3(wx) - спектральная плотность функции отраже-
103
Глава 4
ния; Но(сох) - частотная характеристика оптимального фильтра;
Wn(cox) -спектральная плотность шума в траекторном сигнале.
Здесь подразумевается, что амплитуда спектральной плотности
функции отражения W8 пересчитана в соответствии с уравнением
радиолокации в область траекторного сигнала так, чтобы можно было вести
сравнение со спектральной плотностью шумов Wn в траекторном сигнале.
Из полученного уравнения находим частотную характеристику
системы фильтрации траекторного сигнала для формирования
изображения функции отражения цели с минимальной среднеквадратической
ошибкой:
Но(со )- H>*)W8(cox) _ Н>х)
Wn(cox)+|H(cox)|2W8(cox) |Н(«О|2 + \Ув0
Частные случаи фильтрации. Если спектральные плотности
функции отражения и шума постоянны в пределах частотной
характеристики системы формирования траекторного сигнала Н(сзх), т.е.
Wn = const и W8 = const, и, кроме того, шумы велики ( Wn > W8 ), то
оптимальный фильтр является согласованным со спектром траекторного
сигнала точечной цели: Н0(шх) = Н*(сох).
Если шум неравномерный в полосе частот системы формирования
траекторного сигнала, то фильтр также является согласованным со
спектром траекторного сигнала точечной цели, но с учетом «выбеливания»
шума:
С уменьшением спектральной плотности шума оптимальная
характеристика фильтра приближается к обратной характеристике:
Н0(ш )«
w = « .
Wn(o)x)/[w8((ox)H((ox)+H((Ox)J H(ox)
В этом случае частотная характеристика РСА
Н(оэ ) становится равномерной, т.е. можно получить сколь угодно
Н(с)х)
высокую точность воспроизведения функции отражения. Это справедливо,
если Wn(o)x)« W8(cox)H*(o)x) во всем рабочем диапазоне частот, что на
практике, конечно, никогда не выполняется. Последнее объясняется тем,
что в пределах полосы частот системы формирования траекторного сигнала
104
Модель РСА
Н(юх) обеспечивается большое отношение сигнал/шум, а за пределами
полосы отношение сигнал/шум быстро спадает.
Рассмотрим зависимость ошибки воспроизведения функции
отражения цели от частотных характеристик оптимального фильтра и траек-
торного сигнала. Дисперсия ошибки определяется разностью
спектральных плотностей функции отражения и ее изображения:
00
— J[W8W- W^coJlHoK)!2]^ . (4.32)
—00
Учитывая, что WU = W8|H| +Wn и подставляя в (4.32) значение
Н0(юх) из (4.31), получим, что ошибка воспроизведения
f
2ltiwn(o>x)+W8(o>x)|H(Mjf
При большой спектральной плотности шума Wn » Ws ошибка
воспроизведения будет тем больше, чем шире спектр функции отражения:
00
= —jws(cox)d(ox.
271
—оо
Объясняется это тем, что оптимальный фильтр при Wn » Ws
превращается в согласованный с траекторным сигналом фильтр, и чем
больше полоса спектра функции отражения по сравнению с полосой
согласованного фильтра, тем больше ошибка воспроизведения.
При уменьшении спектральной плотности шума ошибка
воспроизведения уменьшается.
Использование оптимального фильтра с характеристикой Н0(шх),
имеющей более широкую полосу по сравнению с Н(оох), эквивалентно
повышению разрешающей способности РСА по сравнению с
использованием согласованного фильтра. При этом, естественно, уменьшается
отношение сигнал/шум на выходе фильтра.
В качестве иллюстрации данного положения рассмотрим пример, когда
при согласованной фильтрации РСА имеют частотную характеристику
|Н(<ох)| = 1—аюх, |асох|<1. При использовании оптимального фильтра
частотная характеристика РСА равна
105
Глава 4
Пусть спектральные плотности функции отражения и шумов постоянны.
На рис. 4.14 изображены частотные характеристики РСА (для wx > 0) при
согласованной и оптимальной фильтрации для различных отношений
q= W8(cox)/Wn (cox). При увеличении отношения сигнал/шум частотная
характеристика оптимального фильтра
спрямляет характеристику РСА,
увеличивая полосу пропускания и.
следовательно, разрешающую способность.
При согласованной фильтрации
полоса частотной характеристики РСА
Асох = l/a , а при q = 100 оптимальный
фильтр приближает ее к максимальной
величине Дсох = 2/а , т.е. разрешение
РСА увеличивается в 2 раза.
В данном примере траекторный сигнал
не содержит частот функции отражения
выше |coj>l/a и, следовательно, мак-
симальное разрешение при использова-
нии оптимального фильтра ограничено
величиной бх = 1/д<ох = a /2 .
0.5
Рис. 4.14. Частотные характеристики
оптимального и согласованного
фильтров
Спектральная плотность функции отражения в траекторном
сигнале W8(cox)H(cox) уменьшается с увеличением частоты, а спектральная
плотность шума в траекторном сигнале Wn(cox) постоянна. Поэтому
расширение полосы пропускания оптимальной системы обработки
приводит к уменьшению отношения сигнал/шум в изображении функции
отражения на выходе РСА по сравнению с согласованным фильтром.
Для обеспечения оптимальной фильтрации необходимо априорное
знание спектральных плотностей функции отражения (сигнала) и шума. На
практике такие знания отсутствуют, и требуется переход к адаптивной
системе фильтрации. В этом случае формируются дополнительные каналы
измерения W8(cox) и Wn(tox) (их отношения). Полученные оценки
используются в качестве данных для определения частотной характеристики
оптимального фильтра. Оценку Wn(«x) можно получить, измеряя сигнал
РСА во время отсутствия отраженных от объектов сигналов, например, во
время прохождения излучения от РЛС до земной поверхности (альтимет-
ровое кольцо). Суммарный сигнал W8(cox) + Wn(cox) измеряется
непосредственно по траекторному сигналу цели. Напомним, что амплитуда
спектральной плотности отражения пересчитывается в область траекторного
сигнала в соответствии с уравнением радиолокации.
106
Модель РСА
Оптимальную частотную характеристику системы обработки
(4.31) можно представить в виде двух последовательно соединенных
систем. Первая система осуществляет согласованную фильтрацию тра-
екторного сигнала и имеет частотную характеристику Н*(юх).
Полученное комплексное изображение функции отражения корректируется
фильтром с амплитудной (взвешивающей) частотной характеристикой
(второй сомножитель в числителе (4.31)). Частотная характеристика
корректора определяется в основном отношением сигнал/шум.
Существо коррекции состоит в уменьшении сглаживающего воздействия
согласованного фильтра путем подчеркивания высоких частот сигнала
изображения. Чем больше отношение сигнал/шум, тем больший подъем
высоких частот может дать корректирующий фильтр, тем выше
разрешающая способность РСА и выше точность воспроизведения функции
отражения. HkJ
На рис. 4.15 изображен пример 20
частотных характеристик корректора
1
10
1.0
ШОГ
f
h
0.5 1.0'схо>х
Рис. 4.15. Частотные
характеристики корректора
Wn(cox) W8(o>x)+|H(coJ2
для случая, изображенного на
рис. 4.14, когда Що)х)=1-осох и
q=W8((ox)/W{1(cox) - значение
отношения сигнал/шум. При увеличении
отношения сигнал/шум в траекторном
сигнале требуется резкий подъем
частотной характеристики на высоких
частотах, что вызывает увеличение мощности шума на выходе
корректора и соответственно в изображении.
Оптимальная обработка обеспечивает минимум среднеквадратичес-
кой ошибки изображения функции отражения типа стационарного
случайного поля, характерной для однородных участков земной поверхности.
Можно отметить, что в большинстве решаемых при радиовидении
задач возможно и целесообразно разбиение оптимальной обработки на
два этапа: первичную согласованную обработку траекторного сигнала
для получения комплексного радиолокационного изображения функции
отражения и вторичную обработку, алгоритм которой определяется
задачами и условиями наблюдения.
Таким образом, оптимальная по точности воспроизведения
функции отражения система так же, как и оптимальный классификатор, на
первом этапе обработки формирует с помощью согласованного фильтра
комплексное изображение функции отражения.
107
Глава 4
Когда функция отражения объекта неизвестна или известна частично,
возникает задача оценки функции отражения с требуемой точностью.
При оценке функции отражения типа стационарного случайного поля,
характерной для однородных участков земной поверхности, используют
критерий минимума СКО воспроизведения функции отражения на
выходе РСА.
При нормальных шумах и помехах оптимальная система обработки
траекторного сигнала линейна, и ее характеристика должна
удовлетворять интегральному уравнению Винера—Хопфа.
Оптимальная частотная характеристика системы обработки
траекторного сигнала при малых отношениях сигнал/шум и постоянных
спектральных плотностях функции отражения и шума является
согласованной с частотной характеристикой системы формирования траекторного
сигнала.
При тех же условиях, но при неравномерной спектральной плотности
шума оптимальный фильтр также согласованный, но с учетом
«выбеливания» шума.
С уменьшением спектральной плотности шума оптимальная
частотная характеристика системы обработки траекторного сигнала
приближается к обратной частотной характеристике системы
формирования траекторного сигнала. В результате частотная характеристика
РСА, равная произведению частотных характеристик траекторного
сигнала и его системы обработки, расширяется, растут точность
воспроизведения функции отражения и разрешающая способность, как
величина, обратная ширине полосы частотной характеристики РСА.
Оптимальная обработка обеспечивает минимум СКО изображения
функции отражения типа стационарного случайного поля,
характерной для однородных участков земной поверхности.
Оптимальная система обработки на первом этапе формирует с
помощью согласованного фильтра комплексное изображение функции
отражения. Вторичная обработка корректирует полученное
изображение путем подъема высоких пространственных частот.
Для обеспечения более высокой точности отображения функции
отражения и увеличения разрешения по сравнению с согласованной
обработкой необходимо значительно (до 10 и более раз при росте
разрешения в 2 раза) увеличивать входное отношение сигнал/шум.
108
ГЛАВА 5
Принципы построения РСА землеобзора
5.1. Структурная схема РСА землеобзора
Структурная схема, отражающая основные элементы РСА при
решении задач землеобзора, изображена на рис. 5.1. Выбор режимов работы
всех устройств РСА осуществляется БЦВМ управления и контроля в
соответствии с решаемой тактической задачей. При этом высокостабильный
опорный генератор высокочастотных колебаний с помощью синтезатора
частот формирует все необходимые колебания как радиочастот (несущих,
промежуточных, частот модуляции), так и частот синхронизации,
обеспечивая тем самым когерентность приемопередающего тракта РСА.
Модулятор формирует заданный вид зондирующего сигнала (амплитудную и
фазочастотную модуляцию) на несущей частоте. Усилитель мощности
обеспечивает требуемую мощность излучения зондирующего сигнала,
сохраняя его когерентность. Через антенный переключатель усиленные
колебания поступают в антенну, которая излучает электромагнитную
волну в пределах заданной диаграммы направленности.
Поляризация излучаемой и принимаемой волн определяется
конструкцией антенны {поляризатора). При полном поляризационном
зондировании и приеме антенна формирует четыре независимых канала на
прием волн с поляризацией ГГ, ВВ, ГВ и ВГ. Далее в структуре РСА
рассматривается один из каналов.
Система стабилизации и управления антенной обеспечивает
стабилизацию и перемещение ДН антенны в соответствии с требуемым
режимом обзора земной поверхности. Например, при телескопическом
обзоре ДН антенны обеспечивает непрерывный подсвет заданного
участка земной поверхности путем слежения за ним при изменении
траектории движения носителя РСА.
Электромагнитные волны, отраженные от всех объектов в зоне
обзора РСА, приходят к антенне и формируют два сигнала,
соответствующие суммарной и разностной ДН антенны. В зависимости от
решаемой тактической задачи возможно использование различного числа
антенных каналов. Так, в режиме измерения координат (азимута)
движущейся цели используют три канала. Приемники суммарного и
разностного каналов обеспечивают усиление и преобразование сигналов на
109
-в
п
■а
3
тз
1
1
П
п
у
о
о
О\
о
■а
Микронавигация
Антенна
1
Усилитель
мощности
—
i
с
уля
■а
»
/
Переключатель
■
1
Приемник
/
/
/
/
JZ /
о.
д S
езатор
стот
/
/ /
/ /
/
Т /
3 о
я -»
^5 о
^ "°
о "г
/
/
/
i
/
Компенсатор
траекторных
нестабильностей
/
/
/
/
/
/
/
Чвтофокусировка
\
\
п
1
Обнаружение
Сопровождение
1
в
С"*
о о
С Sc
•а
\ '
О
о
^ i
Ja 2
S:
О
О
> 1
1
=
о
О О ы
о 3
i
4-
•v. , * ,
1 -N^
* Накопитель
4—
1
Индикатор-регистратор '
о "8 н
э ч
О 2!
со
3
SO9DITJ
Принципы построения РСА землеобзора
промежуточную частоту с последующим формированием с помощью
фазового детектора (ФД) двух квадратурных (sin и cos) сигналов в каждом
канале. На структурной схеме изображена цифровая система обработки
сигналов на борту носителя, когда согласованная фильтрация сигналов по
дальности (задержке) и азимуту (частоте траекторного сигнала)
осуществляется процессором. При использовании наземной системы обработки
(оптической или цифровой) траекторные сигналы (голограмма) записываются
регистратором или транслируются на наземный пункт обработки через
систему передачи данных с выхода буферного регистра.
Управление системой обработки сигналов по дальности (сжатие) и
азимуту (синтезирование) осуществляется БЦВМ. Алгоритмы
получения РЛИ с некогерентным накоплением, селекции движущихся целей,
обнаружения и сопровождения целей используются в зависимости от
решаемой тактической задачи.
На индикаторе телевизионного типа формируется РЛИ
наблюдаемого участка земной поверхности и другая информация (координаты целей,
отметки движущихся целей, результаты классификации целей и т.п.).
Кроме того, РЛИ регистрируется для последующего анализа на земле.
Наличие случайных искажений траекторного сигнала, прежде
всего вследствие траекторных нестабильностей, требует их компенсации,
особенно при полете в турбулентной атмосфере и высоких требованиях
к разрешающей способности РСА. Для этого используются две
системы. Инерциалъная система микронавигации обеспечивает измерение
отклонения движения фазового центра антенны от заданной траектории.
Измеренные значения фазовых флуктуации используются для их
компенсации с помощью управляемого коммутатора фазы на
промежуточной частоте. Система автофокусировки определяет фазовые
искажения траекторного сигнала непосредственно по отраженному сигналу
от объектов и земной поверхности. Результаты измерений используются
при формировании характеристики согласованного фильтра
синтезирования апертуры.
В дальнейшем рассматриваются основные требования к
параметрам сигналов и устройств РСА.
РД Структурная схема РСА землеобзора состоит из антенны
когерентного приемопередатчика, системы обработки (поляризационной,
пространственной, сжатия по дальности, синтезирования, апертуры,
компенсации нестабильностей траекторного сигнала), системы
индикации и БЦМВ управления и контроля.
5.2. Приемопередающий тракт
РСА относится к классу когерентно-импульсных РЛС.
Когерентность — широкое понятие, определяющее степень взаимосвязи различ-
111
Глава 5
ных явлений. Применительно к радиолокации под когерентностью
понимают степень взаимосвязи параметров пространственно-временных
сигналов.
В когерентных радиолокационных системах в отличие от
некогерентных используется информация об изменении не только параметров
амплитуды, но и фазы отраженного от цели сигнала. Фаза является
наиболее чувствительным параметром сигнала. Так, например, изменение
расстояния до цели всего на один сантиметр приводит к изменению
фазы сигнала на 180° (в сантиметровом диапазоне волн), в то время как
амплитуда сигнала и задержка огибающей сигнала остаются
практически неизмененными. Благодаря такой высокой чувствительности
использование фазовой информации в РСА позволяет значительно
повысить эффективность решения всех тактических задач.
Когерентный приемопередающий тракт РСА включает в себя
устройства формирования зондирующего сигнала, усиления и
преобразования на промежуточную частоту принимаемого сигнала, фазовые
детекторы, АЦП.
Выбор зондирующего сигнала РСА землеобзора определяется
многими факторами. Получение высокой разрешающей способности по
дальности требует применения широкополосного зондирующего
сигнала. Для получения радиолокационного изображения малоотражающей
местности и малоразмерных объектов (ВПП, водная поверхность, танки
и т.п.) при большой дальности обзора необходима значительная
мощность излучаемого сигнала (средняя мощность), малые потери
приемопередающего тракта и малые шумы приемника. Обеспечение высокого
динамического диапазона изображения требует малого уровня
мощности боковых лепестков ФН зондирующего сигнала. Наконец, для
обеспечения синтезирования апертуры необходима высокая степень
когерентности зондирующего сигнала и всего приемопередающего тракта.
Основным источником информации при синтезировании апертуры
является фаза сигнала, отраженного от цели, поэтому под
когерентностью приемопередающего тракта РСА обычно понимают наличие
априорного знания закона изменения фазы зондирующего сигнала
относительно опорного сигнала гетеродина при стабильности фазовых
характеристик приемного тракта.
В зависимости от способа обеспечения когерентности
приемопередающего тракта РСА разделяются на два класса: истинно
когерентные и псевдокогерентные.
Истинно когерентные РСА. Когерентность тракта таких РСА
обеспечивается путем формирования всех радиочастотных колебаний и
синхроимпульсов от единого высокостабильного опорного генератора с
помощью синтезатора частот. В качестве опорного генератора обычно
112
Принципы построения PC А землеобзора
используют прецизионные кварцевые генераторы диапазона 10...50 МГц
с последующим умножением (делением) частоты варакторными
умножителями.
Для обеспечения высокой стабильности частот и малых фазовых
шумов генерируемых колебаний принимаются тщательные меры по
стабилизации питающих напряжений, температурной компенсации,
изоляции от механических воздействий и т.п. Усилительные приборы
типа клистронов и ЛЕВ обеспечивают необходимую мощность
излучения зондирующего сигнала, сформированного синтезатором частот и
модулятором. Как и для опорного генератора, для этих приборов
принимаются меры по стабилизации питающих напряжений, так как их
нестабильность порядка 1% приводит к фазовым нестабильностям
выходного сигнала с СКО порядка 5... 10°. Тщательно сконструированный
когерентный передающий тракт имеет малые фазовые шумы и
незначительный уход частоты за время синтезирования.
Структурная схема формирования и преобразования сигнала в
приемопередающем тракте истинно когерентной PC А показана на рис. 5.2.
1
с
VI
fo
сч
•
or
fo'
УМ
f f
*np fnp
ФД
fo
*
АП
(
{
,. fo+ffl
CM
.. f"P+f;,
УПЧ
sin ф| cos<p
Рис. 5.2. Структурная схема когерентного приемопередающего тракта
Опорный генератор ОГ и синтезатор частот СЧ формируют
сигналы несущей частоты f0, промежуточной fnp, их разности f0 - fnp, a
также частоты модуляции зондирующего сигнала fM. С помощью
модулятора М формируется требуемый зондирующий сигнал на несущей
частоте f0, который усиливается усилителем мощности УМ и, пройдя
через антенный переключатель АП, излучается антенной А.
Принимаемый траекторный сигнал, частота которого отличается от излученной на
доплеровскую частоту г"д, преобразуется смесителем СМ на
промежуточную частоту. В качестве сигнала гетеродина синтезатор частот
выдает колебания частоты f0 - f^. После усиления на промежуточной
частоте (УПЧ) отраженный сигнал преобразуется в два видеосигнала
113
Глава 5
(квадратурные составляющие) с помощью фазового детектора ФД. Для
работы ФД синтезатор частот также формирует опорные сигналы на
частоте fnp, сдвинутые относительно друг друга на л/2. Дальнейшая
обработка траекторного сигнала (по задержке и по траектории)
производится после ФД обычно с помощью цифрового процессора сигналов
(на борту ЛА) либо после записи траекторного сигнала с выхода ФД в
наземном цифровом или оптическом устройстве обработки. Иногда
обработка сигнала по задержке (до синтезирования) производится после
УПЧ с помощью аналогового согласованного фильтра.
Обеспечение когерентности тракта РСА при такой схеме
формирования зондирующего сигнала предъявляет высокие требования к
опорному генератору. Так, если излучаемый сигнал имеет фазу
Физл = соо1+Ф(О> гДе ф(0 - паразитная фазовая модуляция опорного
генератора, то задержанный на т0 принимаемый сигнал имеет фазу
ФпР =0)о(1""то)+ф(1~то) • Фазовые флуктуации траекторного сигнала на
выходе ФД составляют A<p(t,T0) = <p(t)-q>(t-T0). Случайный процесс
фазовых нестабильностей опорного генератора (p(t), обусловленный
незначительным уходом частоты генератора за время синтезирования
(единицы секунд), можно считать нормальным случайным процессом с
корреляционной функцией Кф(т). Тогда разность фаз такого процесса
имеет дисперсию
Чем ниже частота фазовых флуктуации опорного генератора, тем
больше значение Яф(т0) и, следовательно, меньше вклад
низкочастотных флуктуации в СКО флуктуации фазы Aip приемопередающего
тракта. Однако опорные генераторы имеют спектральную плотность
фазовых шумов колебаний, возрастающую с уменьшением частоты, что
требует учета всех спектральных составляющих фазовых шумов
опорного генератора.
Наиболее сильно фазовые искажения влияют на интегральный
уровень боковых лепестков выходного сигнала точечной цели (функции
неопределенности), от которого в значительной степени зависит
возможность обнаружения малоразмерных целей на фоне земной
поверхности. При малых СКО флуктуации фазы аДф интегральный уровень
боковых лепестков Ринт[дБ] = 201gaA(p [рад].
Поскольку нарушение когерентности приемопередающего тракта
является лишь одной из причин фазовых флуктуации траекторного сиг-
114
Принципы построения PC А землеобзора
нала, то допустимая величина а^ приемопередатчика обычно не
должна превышать нескольких градусов.
Псевдокогерентные РСА. В РЛС такого класса начальный фазовый
сдвиг между зондирующим импульсом передатчика (обычно магнетронно-
го) и сигналом опорного генератора в каждом периоде повторения является
случайным. Для обеспечения когерентности такой РЛС производится
измерение разности фаз излученного импульса передатчика и сигнала
опорного генератора. Для этого в момент излучения импульса часть его
мощности ответвляется и проходит через тракт приемника так же, как и
отраженные сигналы. На выходе фазового детектора синусный и
косинусный сигналы передатчика запоминаются на время одного периода
повторения. С помощью запомненных сигналов фазовращатель производит
коррекцию фазы принимаемых сигналов. В результате сигналы на выходе
фазовращателя не зависят от случайной фазы импульса передатчика и
определяются только фазой отраженного сигнала. Возможно также вместо
фазы принимаемых сигналов корректировать фазу опорного генератора.
Истинно когерентные РСА обладают рядом преимуществ по
сравнению с псевдокогерентными, поэтому обычно используют
истинно когерентные РСА. У современных опорных генераторов интервал
корреляции фазовых нестабильностей Acp(t) обычно много меньше
времени синтезирования Тс (быстрые нестабильности), а СКО
нестабильностей фазы Аф составляет3... 10°.
Модуляция зондирующего сигнала. Основные характеристики
РСА по разрешению, обнаружению и точности измерения координат
объектов, а также скрытности и помехоустойчивости определяются
модуляцией зондирующего сигнала. Выбор сигналов по большинству
подобных критериев сводится к анализу функции неопределенности
зондирующего сигнала. Например, ширина главного пика ФН определяет
разрешение и точность измерения координат; интегральный уровень
боковых лепестков ФН - динамический диапазон изображения;
расстояние между основным и боковым пиками ФН - неоднозначность
измерения координат и т.п.
Зондирующие сигналы можно разделить на два больших класса:
непрерывные модулированные сигналы и импульсные периодические
сигналы. Для обоих классов ширина основного пика ФН определяется полосой
частот модуляции Afc и длительностью сигнала Тс. Чем шире спектр, тем
выше разрешающая способность по времени задержки сигнала (дальности),
а чем больше длительность - тем выше разрешение по частоте (азимуту).
115
Глава 5
•\
т„
Импульсные
периодические сигналы используются в
РСА по двум причинам.
Первая причина — возможность
получения малого интегрального
к (суммарного) уровня мощности
\ боковых лепестков в зоне
"Vх тмаксА^д отражений от земной
I
I поверхности (рис. 5.3), где
макс
V
— максимальная задержка
(дальность обзора), а Дт"д -
ширина спектра доплеровских
частот траекторного сигнала.
-Afc Так, пачка импульсов без внут-
риимпульсной модуляции име-
Рис. 53. Спектр импульсного периодического ет ФН в виде периодических
сигнала пиков на всей площади 4AfcTc.
В отличие от непрерывного сигнала, у которого вся площадь ФН
4AfcTc заполнена боковыми лепестками, у пачки импульсов площадь
между пиками свободна от боковых лепестков ФН. Пачка простых
импульсных сигналов имеет максимальную среди всех возможных сигна-
2
лов свободную от пиков площадь, равную 2ТП = 4 . Выбирая период
повторения Т„, можно расположить область отраженного сигнала
тмаксА^ в этой свободной зоне. В этом случае отношение сигнал/фон в
изображении будет определяться интегральным уровнем боковых
лепестков лишь в небольшой области вблизи основного пика ФН. Кроме
того, уровень этих боковых лепестков может быть значительно понижен
выбором соответствующей весовой функции при обработке сигнала.
Вторая причина применения импульсного периодического сигнала -
это возможность использования одной антенны на передачу и прием. К
сожалению, использовать простой импульсный сигнал без внутриим-
пульсной модуляции в режиме радиовидения обычно не удается
вследствие низкой средней мощности такого сигнала.
Так, например, при периоде повторения Тп = 1 мс (максимальная
дальность обзора 150 км) и разрешении по дальности 1,5 м (тв = 10 нс)
скважность сигнала Q- Тп/ти -101. При импульсной мощности сигнала
Ри = 10 кВт средняя мощность Рс « 0,1 Вт , что явно недостаточно.
116
Принципы построения РСА землеобзора
Поэтому для увеличения средней мощности используют длинные
(ти = 1...100 мкс) сигналы с внутриимпульсной модуляцией с
последующим сжатием в 100 раз и более. При этом возрастает сложность системы
обработки и требуется выбор специальных видов модуляции,
обеспечивающих малый уровень боковых лепестков в области отражений тмаксА^ .
Максимальная длительность излучаемого сигнала обычно
ограничивается максимально допустимой мертвой зоной, обусловленной
запиранием приемника на время излучения. У многофункциональных РЛС
она обычно не превышает 3-4 км.
Снижение уровней боковых лепестков ФН РСА, как
максимального, так и интегрального, достигается выбором закона модуляции
зондирующего сигнала и алгоритма обработки. Например, используется
согласованная фильтрация и дополнительная весовая обработка. Общее
правило снижения боковых лепестков заключается в сглаживании
переходных процессов модуляции зондирующего сигнала как при
формировании, так и при его обработке. Это приводит к уменьшению внеполос-
ных излучений и мощности боковых лепестков функции
неопределенности с учетом обработки.
Например, при простом (без внутриимпульсной модуляции) зондирующем
сигнале форма импульса (его частотная характеристика) и частотная
характеристика системы обработки выбираются, исходя из заданного уровня
боковых лепестков выходного сигнала. Так, если результирующая
спектральная характеристика (произведение спектра сигнала на частотную
характеристику системы обработки) - прямоугольная, то максимальный
уровень боковых лепестков выходного сигнала точечной цели равен
-13 дБ, что явно велико. Если результирующая частотная характеристика
имеет сглаженный вид, например W(f) = 0,08+ 0,92 cos2(7tf/Af) (функция
Хэмминга), то максимальный лепесток снижается до -42,8 дБ. При этом
происходит некоторое расширение ФН (ухудшение разрешающей
способности по дальности) примерно в 1,5 раза, что необходимо учитывать при
задании длительности импульса. Аналогичные зависимости наблюдаются
и при формировании ФН по частоте (азимуту). В этом случае пачка
импульсов (траекторный сигнал) также взвешивается сглаживающей
функцией, форма которой определяет уровень боковых лепестков по частоте.
Применительно к сигналам с внутриимпульсной модуляцией эти
закономерности означают, что для получения более низкого уровня
боковых лепестков необходимо непрерывное (плавное, без скачков)
изменение параметров (фазы, частоты, амплитуды) импульса.
Из таких сигналов наиболее часто используются периодические
импульсные сигналы с внутриимпульсной линейной частотной
модуляций. ФН таких сигналов, как и у простых импульсных сигналов, имеет
вид отдельных пиков, разнесенных на Тп по задержке и на 1/Тп по час-
117
Глава 5
тоте. В области центрального пика уровень боковых лепестков
определяется весовой функцией обработки сигнала W(t):
^ \ t2l
J,(x) = J W(t)s(t)s*(t - t)dt = J W(t) exp I !M exp
dt,
-co -ти/2
где ц - индекс частотной модуляции.
Если W(t) = l,TO
Полоса спектра такого сигнала составляет Af = |ь1ти/(2л), а
разрешение - 5т = 0,9/Af .
На рис. 5.4 кривая 1 изображает ФН такого сигнала, а кривая 2 -
ФН для случая W(t) = 0,08 + 0,92cos2(тй/ти), [-ти/2<1<ти/2]
(функция Хэмминга). Максимальный уровень боковых лепестков понижается
с -13,2 дБ до -42,8 дБ, а
интегральный с -10,3 дБ до -37 дБ,
1 33
разрешение составляет 8т = ——,
потери энергии сигнала 1,34 дБ.
Такая весовая функция наиболее
часто используется при обработке
сигналов как по задержке, так и по
частоте. Выбирая индекс
частотной модуляции ц. так, чтобы
12 3 4 i/Af лс/цти =XRH/(2Xcsin0H), можно
Рис. 5.4. Сечение ФН зондирующего получить одинаковые ФН по
сигнала по задержке дальности и азимуту.
Зондирующие сигналы с дискретным изменением параметров
модуляции (манипуляции) как правило имеют значительно худшие
значения уровня боковых лепестков, и их использование требует
тщательного учета условий применения РСА, т.е. характеристик функции
отражения в зоне обзора TMaKCAf.
Частотная манипуляция. Разновидностью сигналов с частотной
модуляцией является импульсный сигнал с частотной манипуляцией.
Каждый импульс последовательности с периодом следования Ти имеет
постоянную, но различную несущую частоту. Несущая частота
изменяется скачком от импульса к импульсу так, чтобы за время пачки сигнала
Тп из NM импульсов, равное ТИМИ, перебор всех частот составил пол-
118
Принципы построения РСА землеобзора
ную, требуемую для получения заданного разрешения по дальности бг,
полосу Afc = 1/бт = с/25г. В этом случае вместо импульса с линейной
частотной модуляцией используется пачка импульсов с перестройкой от
импульса к импульсу так, чтобы общая полоса спектра частот пачки
была равна полосе спектра импульса с линейной частотной модуляцией.
Если манипуляция частоты AfM равна ширине спектра немодули-
рованного импульса: AfM = 1/ти , то число импульсов NH при
длительности пачки сигнала THNH определяет общую полосу сигнала
Afc = NHAfM (рис. 5.5). Последовательность изменения (манипуляции)
частоты от импульса к импульсу может быть как линейно
возрастающей, как изображено на рис. 5.5, так и произвольной, лишь бы за время
THNH был набран полный, без пропусков, требуемый спектр сигнала
Afc. Такой сигнал иногда называют синтезированным по частоте
сигналом по аналогии с синтезированием апертуры. Здесь NM = Afc/AfM
определяет коэффициент сжатия импульса ти.
fl f2~ f3 f4 fn fi
Тп
Рис. 5.5. Спектр синтезированного по частоте сигнала
На рис. 5.6 изображено сечение ФН (одна четверть центрального
пика) для пачки простых импульсов (1) и частотно-манипулированных
по линейному закону (2). Размер сечения ФН по оси частот для пачки
простых и ЧМ импульсов одинаков и обратно пропорционален
длительности пачки l/(NHTH) = FH/NH , а по оси задержки равен 1/Afc . Введение
частотной манипуляции сжимает ФН в соответствии с расширением
спектра. Хотя разрешение по дальности (ось т) увеличилось, по оси
эллипса сечения ФН оно осталось приблизительно таким же, как по оси т
для неманипулированных импульсов, и определяется длительностью
импульса. Таким образом, ФН пачки частотно-манипулированных
импульсов аналогична ФН одиночного сигнала с линейной частотной
модуляцией.
119
Глава 5
Рис 5.6. ФН синтезированного по частоте сигнала
с межпериодным расширением спектра
Сечение ФН пачки, состоящей из повторяющихся с периодом Тп
одинаковых пачек частотно-манипулированных импульсов («пачки
пачек»), изображено заштрихованными эллипсами 3 на рис. 5.6. Здесь
Fn = FH/NH = 1/Тп - частота повторения пачек, a Nn - число пачек во всем
сигнале. Разрешение по частоте такого сигнала определяется
длительностью сигнала Тс = NnTn = NnNHTH , а разрешение по задержке - полосой
частот сигнала одной пачки. Боковые пики ФН по частоте определяются
частотой повторения пачек Fn, а по задержке - длительностью пачки
Тп = THNM. Так как передатчик излучает импульсы с частотой повторения
FH, то вся полоса однозначности по дальности сТп/2 разделена
«слепыми» зонами запирания приемника на участки AR < сТи/2.
Очевидными преимуществами такого сигнала являются:
• относительно большая длительность одновременно излучаемого и
принимаемого немодулированного импульса, что резко снижает
требования к широкополосности приемопередающего тракта, ан-
теннофидерных устройств и АЦП при общей широкой полосе
пачки сигналов;
120
Принципы построения РСА землеобзора
• дополнительные степени свободы в выборе частоты повторения
импульсов, изменения частоты манипуляции и порядка
манипуляции частоты от импульса к импульсу. Так, используя высокую
частоту повторения, тем не менее можно принимать сигналы только
от одного заданного участка дальности, поскольку сигналы с
задержкой на Ти и более имеют другую несущую частоту и не
принимаются приемником;
• повышенная помехозащищенность, так как случайное изменение
несущей частоты затрудняет разведку сигналов и организацию помех.
К недостаткам такого сигнала следует отнести большую сложность
системы и алгоритмов преобразования и обработки сигнала.
Фазовая манипуляция. Другим примером дискретной модуляции
являются сигналы с фазовой манипуляцией, когда фаза внутри
импульса изменяется скачком (0-я) в соответствии с выбранным кодом,
например кодом Баркера. Такие сигналы удобно генерировать и
обрабатывать. Разрешение по задержке определяется длительностью элемента
кода, а число элементов в импульсе определяет коэффициент сжатия.
Основным недостатком такого сигнала является значительный
интегральный уровень боковых лепестков, что приводит к снижению
контраста изображения земной поверхности.
Периодическая линейная частотная модуляция. Непрерывные
зондирующие сигналы также нашли применение в РСА. Из всех
возможных непрерывных сигналов обычно используют сигналы с периодической
линейной частотной модуляцией. Период модуляции, как и в случае
использования импульсных сигналов, определяется максимальной
дальностью обзора и шириной спектра доплеровских частот. Изменение несущей
частоты за период модуляции определяет ширину спектра зондирующего
сигнала и соответственно разрешение по дальности. Процедура сжатия
сигнала по дальности в каждом периоде модуляции заключается в
умножении принимаемого сигнала на опорный, в качестве которого используется
зондирующий сигнал, и преобразовании Фурье. В результате формируется
линейка отсчетов сигнала по дальности с высоким разрешением в пределах
заданной зоны обзора по дальности. Дальнейшая обработка пачки,
полученной в соседних периодах модуляции, аналогична синтезированию
апертуры при периодическом импульсном зондирующем сигнале. При
большом периоде модуляции (большой дальности) необходимо учитывать доп-
леровское смещение частоты в процессе сжатия сигнала по дальности.
Основным недостатком использования непрерывных зондирующих
сигналов в РСА является необходимость использования двух антенн
(приемной и передающей) с очень высокой степенью изоляции от
проникновения излучаемого сигнала в приемный тракт. При недостаточной
изоляции фазовые шумы передатчика значительно снижают чувствитель-
121
ГлаваS
ность приемника. Поэтому РСА с непрерывным ЛЧМ-сигналом обычно
имеют небольшую дальность действия.
РСА представляет собой когерентно-импульсную РЛС, в которой
используется информация о фазе отраженных сигналов на траектории
движения носителя РЛС.
В истинно когерентной РЛС все колебания формируются от одного
опорного генератора. В псевдокогерентной РЛС случайная фаза
между зондирующим и опорным сигналами измеряется и используется
для коррекции фазы отраженных сигналов.
Нарушение когерентности приемопередающего тракта РСА
обусловлено фазовыми флуктуациями опорного генератора, СКО которых не
должно превышать 3...100.
Модуляция зондирующего сигнала определяет характеристики РСА
по обнаружению, разрешению, точности измерения координат и
помехозащищенности. В РСА используются импульсные периодические
зондирующие сигналы.
Сигналы без внутриимпульсной модуляции не требуют сложной
системы формирования и обработки и обладают максимальной,
свободной от боковых лепестков зоной ФН. Однако при высоких
требованиях к разрешению по дальности (коротких импульсах) невозможно
получение необходимой средней мощности излучения.
В РСА обзора земной поверхности с высоким разрешением обычно
используют сигналы с внутриимпульсной линейной частотной
модуляцией, которые обладают такой же свободной от боковых лепестков
зоной, как и смодулированные импульсы. Уменьшение уровня
ближайших к основному пику боковых лепестков достигается
соответствующей весовой обработкой при формировании и сжатии импульсов.
Практическая реализация систем формирования и обработки ЛЧМ-им-
пульсов представляет значительные сложности.
Использование дискретных методов внутриимпульсной модуляции,
например фазовой манипуляции, обеспечивает простоту
формирования и обработки сигналов, особенно цифровыми методами. Однако
такие сигналы имеют значительно больший интегральный уровень
боковых лепестков по сравнению с ЛЧМ-сигналами, что снижает
качество изображения, особенно динамический диапазон.
5.3. Антенная система
Параметры антенной системы определяют многие характеристики
РСА: поляризационные, энергетический потенциал, зону обзора,
неоднозначность «дальность-азимут», селекцию движущихся целей,
точность измерения угловых координат и помехозащищенность.
В большинстве случаев с увеличением размера антенны
улучшаются все характеристики РСА. Даже ограничение разрешающей
способности по азимуту при боковом обзоре, равное da/2, может быть
122
Принципы построения РСА землеобзора
преодолено за счет использования многолучевых ДН антенны. Поэтому
обычно используют антенну максимально большого размера, исходя из
возможностей ее размещения на борту ЛА.
Так, для ударных самолетов ее размер обычно не превышает 1.0... 1,5 м, у
истребителей — менее 1,0 м. В разведывательно-ударном комплексе Джи-
старс используется антенна типа ФАР размером 7 м, подвешиваемая вдоль
фюзеляжа. В РСА самолета В-2 используются две вдолькрыльевые ФАР,
каждая размером 2 м.
Энергетический потенциал РСА определяется коэффициентом
усиления антенны
где кА - коэффициент использования раскрыва антенны, равный
0,5...0,7 для зеркальных и 0,6...0,8 для волноводно-щелевых антенн;
А - геометрическая площадь раскрыва антенны; X - длина волны РСА.
Антенны бортовых РЛС обычно имеют усиление порядка 30... 35 дБ.
Потери в антенно-фидерной системе определяются потерями в
волново дном тракте от передатчика до антенны (1,5...2 дБ), в
обтекателе при прохождении волны туда и обратно (1,2... 1,6 дБ) и в волновод-
ном тракте от антенны до приемника (1,3... 1,6 дБ). Шумами антенной
системы по сравнению с шумом входных устройств (усилителей,
преобразователей) обычно пренебрегают.
Для обеспечения заданных характеристик радиолокационного
изображения наиболее важными параметрами ДН антенны являются:
• ширина основного лепестка ДН на уровне -3 дБ: 00,Ф0 ;
• уровень максимального бокового лепестка Р6лмакс;
• интегральный уровень боковых лепестков Ринт как отношение
мощности всех боковых лепестков к мощности основного лепестка ДН.
Мощность основного лепестка обычно определяется в пределах
его ширины, равной 390 . Тогда интегральный уровень мощности
боковых лепестков антенны
от 1,56,, оо 1,560
JG(8)de- J G(G)d9 JG(8)d9)- J G(8)d9
p _^2~''seo~H2 -'.sep
инт
инт 1,56
0
G(9)d6 JG(8)d9
-!.56O -«
где G(8) - нормированная ДН антенны по мощности.
123
Глава 5
а
0
0,58
0,852
1
е0
0,88X/d
l,14X/d
l,33X/d
l,5X/d
p
гбл макс
ДБ
-13,3
-28,5
-42,8
-31,7
p
гбл инт»
дБ
-10,3
-22,2
-37,0
-33,0
1,00
1,26
1,50
1,65
а2
1,00
0,86
0,74
0,67
Иногда основной лепесток определяют по положению первых
нулей G(8), что близко к величине 38О.
Таблица 5.1. Параметры антенны Эти паРаметРы ан"
ч ч тенны в свою очередь
на передачу или прием для различных г
. ~ определяются размером
весовых функции ^ „ ,
антенны и весовой
функцией распределения
напряженности поля на
раскрыве антенны W(x).
В табл. 5.1 представлены
параметры антенны на
передачу или прием для
случая использования
весовой функции вида W(x)=l+acos(7ix), |х|<1 для различных
значений коэффициента а . Так, при равномерном распределении ( а = 0 )
ширина ДН антенны 90 = 0,88A/da , а усиление G = Go. Для других
распределений 0О и Go отличаются коэффициентами 6а = а,80 и Ga = a2G0.
Значение а = 0,852 соответствует весовой функции Хэмминга
W(x) = 0,08 + 0,92 cos (ях/2) = 0,54(1 + 0,852 cos тех).
Положение зоны обзора по азимуту относительно вектора путевой
скорости носителя GH определяется направлением оси ДН антенны и
может изменяться в пределах 0Н = ±90° . Исключение, как правило,
составляет передний сектор ±5...±10°, где разрешение резко падает.
Антенна устанавливается на гироплатформе, что обеспечивает управление
и стабилизацию положения ДН в пространстве при крене, тангаже и
рыскании ЛА. Такие же задачи антенна типа ФАР выполняет
электронным способом.
Ширина ДН по азимуту 0О определяет зону одновременного
обзора по азимуту на дальности RH : AL = 60RH .
1. При телескопическом обзоре ДН антенны непрерывно следит за
заданной зоной обзора (AL, AR ) путем изменения угла 9Н (рис. 5.1,а):
Vt
0О)е
где 6н0 — начальный угол наблюдения при t = 0.
Время слежения определяется требуемым временем ситезирования
и числом обзоров (некогерентных накоплений РЛИ).
124
Принципы построения РСА землеобзора
Если по тактическим требованиям к РСА ширина зоны ДЬ
недостаточна, то используют многолучевую на прием по азимуту ДН. При N
формируемых одновременно лучах ширина зоны обзора ДЬ = N0oRH.
Соответственно в N раз возрастают требования к системе обработки по
быстродействию и объему памяти, а также сложность системы
формирования ДН антенны. Поэтому расширение зоны обзора чаще
достигается путем дополнительного секторного либо переднебокового обзора
за счет увеличения времени обзора заданной зоны.
2. При переднебоковом (полосовом) обзоре угол наблюдения
постоянен (9Н = const) и скорость обзора равна скорости полета носителя
РСА (рис. 5.7,6). Требуемая полоса зоны обзора по азимуту
обеспечивается выбором времени обзора:
Va
R«
4
eu
AR,
Рис. 5.7. Зоны телескопического (а), полосового (б) и секторного (в) обзоров
125
Глава 5
3. При секторном обзоре скорость обзора определяется угловой
скоростью сканирования ДН по азимуту Q& (рис. 5.7,в). Требуемая
полоса обзора:
Сканирование может быть непрерывным либо дискретным с
шагом по времени, равным Тс или TCNH, где NH - число некогерентно
накапливаемых изображений одного и того же участка зоны обзора.
Возможно объединение режимов переднебокового или секторного
обзора с телескопическим, что позволяет обеспечить постоянство
амплитуды траекторного сигнала за время синтезирования. В этом случае
ДН антенны на интервале синтезирования отслеживает зону обзора
ДЬ = 90RH . При переходе к следующему интервалу синтезирования ДН
переходит на соседнюю зону обзора, возможно с перекрытием для
некогерентного накопления изображений в соответствии с заданным видом
обзора (секторным или переднебоковым).
Положение зоны обзора по дальности определяется ДН антенны в
вертикальной (угломестной) плоскости. Дальность обзора РСА
определяет угол положения ДН <рн, отсчитываемый от горизонтальной
плоскости (рис. 5.8): Дн = RH cos(pH (без учета кривизны Земли), а полоса
обзора АДН = ARH/cos<pH .
Д
Рис. 5.8. Зона обзора по дальности
Минимальная дальность обзора Дмин ограничивается ухудшением
разрешения по горизонтальной дальности: 5fl = 6r/cos(pH и не бывает
меньше высоты полета Н. Максимальная ширина зоны обзора по дальности
A/JH=O0ARH/sin9H определяется шириной ДН в угломестной плоскости
126
Принципы построения РСА землеобзора
Фо. Расширение зоны одновременного обзора ДДН возможно за счет
использования ДН специальной формы, например типа
G((p) = cosec2((p)cosI2((p), которая обеспечивает постоянство мощности
отраженного сигнала фона при изменении дальности RH в пределах зоны
обзора. В режиме радиовидения (высокого разрешения) требуемая ширина
зоны обзора ДДН « Дн обычно обеспечивается иглообразным лучом.
Подавление пиков неоднозначности функции неопределенности
сигналов РСА. Это важнейшая функция антенны. Неоднозначность по
азимуту обусловлена периодической структурой сигнала и устраняется
выбором ширины 0О и формы ДН по азимуту. Нижняя граница оценки
требуемой ширины ДН определяется условием теоремы отсчетов при
заданной частоте повторения
, (5.1)
т.е. частота повторения равна ширине спектра траекторного сигнала на
уровне -3 дБ. При заданной скорости V и длине волны А, ширина ДН
0О= s—.
2Vsin0H
При боковом обзоре (0н=тс/2) и 0o = A/da частота повторения
Fn = 2V/da или VTn = da/2 , т.е. за период повторения носитель РСА
перемещается на расстояние da/2.
При использовании антенны с механическим сканированием по
азимуту ширина ДН не зависит от угла наблюдения 0Н . В этом случае
требования к частоте повторения с уменьшением угла наблюдения (пе-
реднебоковой обзор) также уменьшаются:
(5.2)
В случае антенны типа передней ФАР ширина ДН антенны зависит от
угла наблюдения, и эти требования будут определяться формулой
Fn = ^tg0H. (5.3)
При боковой ФАР требуемая частота повторения не зависит от
угла наблюдения.
Условие Рп = Д1д справедливо при использовании двухканальной
системы обработки ( sin и cos ), т.е. на период максимальной доплеров-
ской частоты приходится два отсчета. В одноканальных системах обра-
127
Глава 5
G(6)ti.o
ен
Рис. 5.9. Пики неоднозначности ФН
по азимуту
ботки, например оптической,
требование к частоте повторения
увеличивается в два раза.
На рис. 5.9 показано
угловое положение первого пика
неоднозначности относительно ДН
антенны, если основной пик
находится на краю одновременной
зоны обзора шириной Д8Н=0О и
9н = 0, что соответствует
наиболее неблагоприятному случаю.
Когда угловой размер СА
РО«0О, отношение мощностей
первого пика Pt к основному Ро
L=
G2(80/2)
(5.4)
где G2(6) — ДН антенны по мощности на передачу и прием.
При этом, если Д8, =0О, мощность сигнала первого бокового пика
равна мощности основного пика, т.е. подавления не происходит.
На рис. 5.10,я дан пример ДН антенны для случая распределения
поля в раскрыве W(x) = 1 + O,58cos(rac), а на рис. 5.10,6 - график
зависимости P^Pq от Д8и из которого следует, что угол неоднозначности
Д6, должен быть в два раза больше ширины ДН антенны 0О для
обеспечения подавления пика неоднозначности на 35...40 дБ.
.дБ
~oo 2e0
a) 6)
Рис. 5.10. ДН антенны: а - для случая распределения поля в раскрыве
W(x) = 1 + 0,58cos(7tx) ; б— отношение мощности первого пика
неоднозначности к основному пику ФН
128
Принципы построения РСА землеобзора
При заданной скорости полета и угле наблюдения 8Н угол
неоднозначности AGj определяется выбором частоты повторения Fn
зондирующего сигнала А8, =A,Fn/(2Vsin0H). При этом чем выше частота
повторения, тем больше подавление пиков неоднозначности по азимуту.
Верхняя граница частоты повторения ограничена условием
подавления пиков неоднозначности по дальности. Частота повторения
определяется максимальной дальностью обзора Rf
нмакс "
н макс
Объединяя требования к частоте повторения для обеспечения
подавления пиков неоднозначности одновременно по азимуту и дальности,
получим требование к минимальному горизонтальному размеру антенны:
da>^^sin8H. (5.6)
с
При использовании оптической системы обработки размер
антенны должен быть в два раза больше.
Мощность сигнала фона от участка земной поверхности,
расположенного на расстоянии Rj = RH + RHMaKC, т.е. в области первого пика
неоднозначности, будет уменьшаться по сравнению с сигналом основного
лепестка пропорционально увеличению дальности (в четвертой
степени) и усилению ДН в угломестной плоскости (см. рис. 5.8):
Р, = С2(Ф.) К = G2(<Pi) К
Ро С2(Фн) R4 С2(Фн) (RH + RHMaKC)4'
Наихудший случай, когда RH = RHMaKC:
Р|= О2(ф1) С2(ДФ)
Ро 16С2(Фн) 16G2(0)'
где АФ = Фо RHMaKC/(2AflMaKC) = H/(2RHMaKC).
Вследствие ограниченного размера антенны ширина ДН Фо
обычно соизмерима с величиной Дф , что не позволяет эффективно
подавлять сигнал пика неоднозначности, особенно при Н« RHMaKC • Поэтому
часто выбирают более низкую частоту повторения из условия
Fn<c/(2RHMaKc)-В этом случае RliMaKC<Rn=c/(2Fn) и
Р1=О2(Ф1) r; = G2(A9)R4H
Ро С2(Фн) (RH + Rn)4 G2(0)(RH + Rn)4'
гае
5—3169 129
Глава 5
При наличии точечной цели в первом пике неоднозначности
подавление сигнала цели будет определяться также и расфокусировкой выходного
сигнала, поскольку опорный сигнал настроен на дальность RH, а не на
RH + Rn. В этом случае подавление сигнала неоднозначности будет равно
Р, = О2(ДФ) R; 2(5l)2
Ро G2(0) (RH + Rn)4 XRn
Одновременное выполнение требований по уровню подавления
сигналов неоднозначности по азимуту (5.4) и дальности (5.7)
противоречиво, так как увеличение частоты повторения повышает
эффективность подавления сигналов неоднозначности по азимуту и уменьшает
подавление по дальности. Компромисс находится путем варьирования
скоростью носителя, углом наблюдения, дальностью, формой ДН
антенны и размером антенны (5.6).
Увеличение степени подавления пика неоднозначности по азимуту
возможно путем уменьшения зоны одновременного обзора по азимуту
®обз < ®о' что эквивалентно уменьшению одновременно обрабатываемой
полосы доплеровских частот. В отличие от наихудшего случая,
показанного на рис. 5.9, крайнее положение целей в зоне обзора 0Ц <90/2 и
соответственно положение пика неоднозначности Bj >90/2, что
увеличивает его подавление.
Следует отметить резкую зависимость сигнала неоднозначности
Pi/P0 по азимуту в области &В1 = 20О . На рис. 5.10,а дан пример ДН
антенны, а на рис. 5.10,6 — степень подавления первого пика
неоднозначности в случае расположения цели, как на рис. 5.9. Даже небольшая
ошибка в положении ДН антенны по азимуту относительно
направления наблюдения 9Н может вызвать смещение максимума ДН ближе к
пику неоднозначности, что приведет к резкому росту помехового
сигнала Р|/Ро . Это предъявляет серьезные требования к точности системы
управления и стабилизации ДН антенны относительно вектора путевой
скорости носителя (обычно не хуже 0,1 Go).
Значительное подавление боковых пиков по азимуту возможно
при высоком разрешении, когда вследствие расфокусировки (3.13)
уменьшается амплитуда и увеличивается площадь сечения по азимуту
боковых пиков.
При обеспечении уровня подавления пиков неоднозначности по
дальности (5.7) максимальная полоса обзора по дальности ARH = Rn
определяется размером антенны по азимуту (5.6):
ARH = Cda . (5.8)
н 4Vsin8H
130
Принципы построения РСА землеобзора
Многолучевые ДН. Обеспечение требуемой полосы обзора по
дальности путем выбора соответствующего горизонтального размера
антенны (5.8) приводит к ограничению максимально возможного размера
синтезированной апертуры при полосовом обзоре Хсмакс =60RH/sin6H =
= ^RH/(dasin6H), который определяет минимально возможный размер
элемента разрешения по азимуту Ь( = A.RH/(2XCMaKCsin9H). Кроме того,
ширина ДН антенны 60 ограничивает максимальную ширину зоны
одновременного обзора и телескопического обзора, равную 60RH.
Преодолеть эти ограничения и добиться разрешения 5^<da/2 при
полосовом обзоре можно с помощью многолучевых ДН по азимуту (рис. 5.11).
В этом случае размер антенны и, следовательно, ширина каждой
парциальной ДН выбирается из условия (5.8) в соответствии с требуемой
зоной обзора по дальности. Общая ширина ДН 9^, определяемая суммой
парциальных ДН, выбирается в соответствии с требуемой
максимальной разрешающей способностью и шириной зоны одновременного
обзора. Разделение соседних каналов приема по азимуту обеспечивается
выбором парциальных ДН с низким уровнем боковых лепестков.
V
I
ARH
Рис. 5.11. Обзор с использованием многолучевой диаграммы
направленности антенны по азимуту
Так как ширина суммарной ДН на передачу увеличивается кратно
числу лучей, то соответственно уменьшается коэффициент усиления
антенны, однако при этом увеличивается в то же число раз время
когерентного накопления при синтезировании и как следствие отношение
сигнал/шум не изменяется.
Когда ширина зоны обзора по дальности намного меньше
максимальной дальности наблюдения и угол наблюдения срн в вертикальной
131
Глава 5
плоскости достаточно большой (что характерно при обзоре в ближней
зоне и особенно в космических PC А), для устранения неоднозначности
по дальности целесообразно использовать узкую ДН в вертикальной
плоскости Фо <фн (см. рис. 5.8). В этом случае Фо выбирается так,
чтобы обеспечить заданную полосу обзора по дальности АД на удалении
RH (без учета кривизны Земли):
. (5.9)
Частота повторения теперь выбирается из условия обеспечения
однозначности по дальности в полосе обзора ARH, а не на
максимальной дальности RHMaKC (5.5):
-^ = ARH=MHcos(pH. (5.10)
При этом требуемый размер антенны в вертикальной плоскости d^,
увеличивается и равен
XRH = XRH ^ (5П)
AZJHsincpH ARHtg<pH
а в горизонтальной плоскости (5.6) уменьшается:
. 4VARH . 4УАДН . ,_ .„
da> a.sin6H = ^cos(pHsin<pH. (5.12)
с с
Таким образом, минимальная площадь антенны не зависит от
полосы обзора:
dA>i^!^, (5.13)
где f0 — несущая частота зондирующего сигнала.
Полоса обзора определяется соотношениями размеров антенны da
(5.12) и d,p (5.11). При выполнении условия (5.11) для размера d^
АДн = 4Усо5С\т ' (514)
т.е. для расширения полосы обзора необходимо увеличивать
горизонтальный размер антенны.
При максимальном разрешении (боковой обзор, ЬС = da/2) и
равенстве разрешений (5^ = 5Д) число разрешаемых элементов в полосе
обзора не зависит от размера антенны:
132
Принципы построения РСА землеобзора
5Д 2Vcos(pHsin(pH
Расширение полосы обзора АД путем увеличения размера
антенны da (5.14) ограничено возможностью создания и размещения
большой антенны на носителе РСА. Кроме того, при полосовом обзоре
(боковой, переднебоковой обзор) предельное разрешение по азимуту
ограничено горизонтальным размером антенны (b( = da/2). При
телескопическом обзоре увеличение размера антенны da уменьшает ширину зоны
обзора по азимуту, равную A,RH/da .
Расширить полосу обзора по дальности без увеличения
горизонтального размера антенны можно двумя способами.
1. При использовании многолучевых по углу места ДН антенны
(рис. 5.12) широкая полоса ДД^- составляется из полос меньшей
ширины ДДН и для каждой более узкой полосы антенна формирует свою ДН
в вертикальной плоскости. Теперь требования к горизонтальному da и
вертикальному dv размерам антенны определяются шириной частич-
Рис. 5.12. Обзор с использованием многолучевой диаграммы направленности
антенны по углу места
133
Глава 5
ной, более узкой, полосы обзора ДДН . Чем шире требуемая полоса
обзора АД^, тем большее число лучей по углу места на одной и той же
апертуре антенны требуется сформировать. Разделение соседних полос
обзора АДН (подавление пиков неоднозначности по дальности)
достигается, как и прежде, выбором частоты повторения Fn (5.10), а также
ширины ДН в вертикальной плоскости (5.9).
Так как суммарная ширина ДН на передачу больше в число лучей
раз, соответственно уменьшаются коэффициент усиления антенны на
передачу и отношение сигнал/шум.
2. Увеличить зону обзора по дальности без увеличения
горизонтального размера антенны можно также путем сканирования ДН по углу
места. Однако при этом пропорционально увеличению АДН
уменьшаются располагаемое время синтезирования на каждое положение ДН по
углу места и соответственно разрешающая способность по азимуту.
Очевидно, что, используя многолучевую ДН по азимуту, можно
скомпенсировать этот недостаток.
Антенная система определяет многие характеристики РСА:
поляризационные, энергетические, зону обзора, подавление боковых пиков
неоднозначности «дальность—азимут», селекцию движущихся целей,
точность измерения угловых координат и помехозащищенность.
Коэффициент усиления антенны определяется площадью антенны, а
максимальный и интегральный уровни боковых лепестков -
распределением поля по площади антенны.
Боковые пики функции неопределенности «азимут-дальность»
подавляются ДН антенны соответственно по азимуту и углу места.
При малых углах падения (отношении «высота—дальность наблюдения»)
однозначность и подавление боковых пиков по дальности
обеспечивается выбором периода повторения зондирующих сигналов
пропорционально максимальной дальности наблюдения: Тл = 2RHMaKC /с.
Однозначность по азимуту обеспечивается выбором горизонтального
размера антенны так, чтобы ширина спектра доплеровских частот
траекторного сигнала была меньше частоты повторения
2V
Af4 = —sineH<Fn.
da
Одновременное подавление пиков ФН по азимуту и дальности
обеспечивается при горизонтальном размере антенны
a sin9H.
с
При оптической обработке требования к размеру антенны возрастают
в два раза.
134
Принципы построения РСА землеобзора
При больших углах падения и при полосе обзора по дальности,
намного меньшей максимальной дальности, подавление боковых пиков
по дальности возможно с помощью ДН антенны по углу места.
Положение и форма ДН по углу места определяют положение и
размер зоны обзора по дальности.
Расширение зоны обзора по дальности возможно либо с помощью
многолучевой ДН по углу места, либо сканированием ДН. При
сканировании уменьшаются время облучения цели и соответственно
максимально возможное разрешение по азимуту.
Положение и форма ДН антенны по азимуту определяют положение и
размер зоны обзора по азимуту.
При телескопическом обзоре ДН антенны следит за заданной зоной
обзора по азимуту, и ширина зоны одновременного наблюдения
определяется шириной ДН.
При переднебоковом обзоре угловое положение ДН антенны
относительно вектора путевой скорости носителя РСА выдерживается
постоянным, при этом ширина зоны обзора по азимуту определяется
скоростью носителя и временем обзора.
При секторном обзоре ДН антенны сканирует (непрерывно или
дискретно) в заданном угловом секторе, и ширина зоны обзора
определяется шириной сектора сканирования.
Возможно объединение режимов обзора переднебокового или
секторного с телескопическим.
Предельное разрешение по азимуту 5£ = da/2 при переднебоковом
обзоре может быть увеличено за счет использования многолучевой ДН
антенны по азимуту.
Влияние параметров антенны на точность измерения координат,
характеристики СДЦ и помехозащищенности рассматриваются в
последующих разделах.
5.4. Алгоритмы обработки сигналов РСА
землеобзора
Система обработки сигналов РСА обеспечивает получение
необходимой информации для решения различных тактических задач:
обнаружения, определения местоположения, распознавания и определения
функционального состояния целей.
В большинстве случаев решение этих тактических задач
выполняется в два этапа. На первом этапе процессор обработки сигналов
(сигнальный процессор) РСА формирует РЛИ заданного вида (амплитудные,
фазовые, скоростные, поляризационные портреты целей). На втором этапе
процессор данных (ЭВМ), используя полученные РЛИ, определяет
необходимые характеристики целей для решения заданной тактической
задачи. На основе априорных данных о целях и изображений, полученных
другими датчиками, строится изображение целей в нужном масштабе с
135
Глава 5
выделением особенностей окружающей местности и объектов. Далее
производится автоматическое обнаружение целей с поддержанием
заданного уровня ложных тревог, осуществляется привязка изображения к
земной системе координат с определением местоположения целей и
рельефа местности. Завершается обработка РЛИ определением типа целей и
их функционального состояния (движение, боевая работа).
Функционирование системы обработки обеспечивается набором
алгоритмов решения задач (алгоритмическое обеспечение) и
аппаратными средствами (аналоговыми и цифровыми процессорами и ЭВМ).
Алгоритмы и эффективность решения различных тактических задач
рассматриваются в последующих разделах. В данном разделе
определяются алгоритмы обработки траекторного сигнала РСА землеобзора и
их реализация аналоговой оптической системой обработки и цифровым
процессором.
Источником информации является электромагнитное поле,
отраженное от целей и принимаемое на траектории перемещения антенны
РСА. В зависимости от того, какие параметры поля используются в
системе обработки сигналов, различают следующие этапы (виды)
обработки сигнальным процессором.
1. Поляризационная обработка. При полном поляризационном
зондировании, когда одновременно излучаются электромагнитные
волны с горизонтальной (Г) и вертикальной (В) поляризацией, приемная
антенна (поляриметр) формирует четыре канала различной поляризации
сигналов (ГГ, ВВ, ГВ, ВГ). Сигнал каждого канала содержит
информацию о функции отражения цели при соответствующей поляризации
падающей и отраженной волны. Последующая обработка сигналов
четырех каналов обычно проводится после формирования РЛИ целей в
каждом канале раздельно путем анализа взаимосвязей РЛИ разных каналов.
Поляризационная обработка значительно повышает характеристики
обнаружения и особенно распознавания целей среди множества объектов
и ложных целей.
2. Пространственная обработка. При использовании антенной
системы РСА типа ФАР с раздельным приемом сигналов в каждом
элементе апертуры реальной антенны возможно формирование
многоканальной синтезированной апертуры. Совместная обработка сигналов,
формируемых в отдельных каналах (элементах ФАР), носит название
пространственной обработки (по пространству апертуры реальной
антенны). В простейшем случае все сигналы элементов ФАР суммируются
когерентно, образуя однолучевую (суммарную) ДН антенны. Часто
формируют одновременно суммарную и разностную ДН
(моноимпульсная антенна). Возможно формирование ФАР с несколькими,
разнесенными по апертуре, фазовыми центрами (каналами).
136
Принципы построения РСА землеобзора
В интерферометрических РСА антенная система состоит из двух,
разнесенных по пространству, антенн, формируя два пространственных
канала (две синтезированных апертуры).
Пространственная обработка обычно осуществляется в два этапа.
На первом этапе формируют необходимые ДН и фазовые центры
непосредственно на полотне антенны с помощью мостов, циркуляторов,
фазовращателей и т.п. На втором этапе сигналы полученных антенных
каналов усиливаются, преобразуются и обрабатываются на
промежуточной частоте либо в цифровом виде. Алгоритмы обработки определяются
решаемой тактической задачей (СДЦ, измерение координат,
компенсация помеховых сигналов и др.). В сложных разведывательно-ударных
системах формируется до 15 отдельных пространственных каналов.
3. Внутрипериодная обработка. В РСА используются когерентно-
импульсные периодические сигналы. В каждом периоде повторения
импульсов отраженный сигнал несет информацию о цели. Задержка
огибающей сигнала определяется дальностью до цели. Изменение фазы
сигнала цели относительно опорного колебания определяется изменением
расстояния до цели относительно фазового центра антенны и является
источником информации для синтезирования апертуры. Отношение
энергии сигнала к спектральной плотности шумов определяет вероятность
обнаружения цели. Внутрипериодная обработка сигналов обеспечивает
получение этой информации обычно путем согласованной обработки
сигналов. Иногда внутрипериодную обработку сигналов называют
обработкой в «быстром» времени, в отличие от «медленного» времени
обработки вдоль траектории носителя РСА (синтезирования апертуры).
4. Межпериодная (траекторная) обработка. Основное
назначение траекторией обработки - синтезирование апертуры («сжатие»
сигналов по азимуту). Поскольку «сжатие» сигналов по дальности было
выполнено в процессе внутрипериодной обработки, результатом
траекторией обработки является получение детального изображения функции
отражения целей (радиовидение).
Следует отметить, что в общем случае пространственная (по
апертуре реальной антенны) и временная (внутрипериодная и
межпериодная) обработки являются единым процессом и требуют выполнения
единого пространственно-временного алгоритма.
В РСА землеобзора специфическим и наиболее сложным видом
обработки является согласованная обработка траекторного сигнала. Тра-
екторный сигнал представляет собой последовательность из отраженных
от объектов сигналов, полученных в N периодах повторения
зондирующего сигнала на траектории перемещения фазового центра антенны.
Каждая точечная цель переизлучает сферическую волну в направлении
антенны РСА. В качестве иллюстрации на рис. 5.13 приведен случай с двумя
137
Глава 5
Рис. 5.13. Формирование траекторного сигнала двумя точечными целями
точечными целями, имеющими координаты (Дц1,6ц1,Нц1) и
в пределах ширины ДН антенны 60). Фаза траекториях сигналов целей
определяется расстоянием от точки до фазового центра антенны
(соответственно г, и г7) в N точках на траектории.
Для обеспечения заданного разрешения по дальности в РСА
используют импульсные зондирующие сигналы. В большинстве случаев
одиночный импульс, отраженный от i-ro точечного объекта,
представляет собой зондирующий импульс, задержанный на время х{, которое
определяется текущим расстоянием до объекта г;, т.е. влиянием
изменения задержки за время длительности импульса на его комплексную
огибающую можно пренебречь. В этом случае алгоритм согласованной
обработки можно разделить на два независимых этапа: внутрипериод-
ную обработку каждого импульса и межпериодную обработку пачки
импульсов, т.е. траекторную обработку. Согласованная обработка
является линейной операцией, поэтому порядок следования этих этапов
может быть произвольным. В некоторых случаях, например при
использовании ЛЧМ импульсов и оптической системы обработки, оба этапа
могут выполняться одновременно.
Основными задачами внутрипериодной обработки являются
фильтрация принимаемого сигнала от шумов и получение заданного
разрешения по дальности (при этом может использоваться сжатие
радиосигналов с внутриимпульсной модуляцией). Так как внутрипериод-
ная обработка является хорошо известной операцией, то в дальнейшем
будем рассматривать только обработку траекторного сигнала, представ-
138
Принципы построения РСА землеобзора
ляющего собой выходной сигнал внутрипериодной системы обработки.
Целью этой обработки является, прежде всего, получение
радиолокационного изображения с заданным разрешением по азимуту.
Закономерности формирования траекторного сигнала от
одиночного точечного объекта. Для определения алгоритма согласованной
обработки сигналов при получении РЛИ рассмотрим закономерности
формирования траекторного сигнала от одиночного точечного объекта.
Полагаем, что частота повторения зондирующего сигнала
достаточна для представления траекторного сигнала в виде непрерывной
функции в пределах интервала синтезирования. В этом случае сигнал
Sj(t), принимаемый от i-ro объекта, при условии, что фазовые
искажения, обусловленные неоднородностями среды распространения и неста-
бильностями приемопередающего тракта отсутствуют, можно
представить в виде:
SjCt) = U^ (t)exp |н|^гш(1)-фо; jj, (5.15)
где UpCpoi - случайные амплитуда и фаза сигнала; X - длина волны
РСА; Gj(t)- нормированная функция, характеризующая модуляцию
сигнала ДН реальной антенны (на передачу и прием), которая в свою
очередь определяется текущими угловыми положениями объекта и ДН;
rHi(t) — текущее расстояние от ФЦА до объекта.
В общем случае траектория не является плоской. Для упрощения
записи траекторного сигнала и алгоритма его обработки будем
рассматривать синтезирование апертуры в плоскости (X, Y), содержащей
прямую наклонной дальности RH до объекта и синтезированную апертуру.
Координатная ось азимута £ в зоне обзора перпендикулярна оси
дальности г (рис. 5.14). В этом случае синтезированная апертура есть
проекция траектории на плоскость (X, Y).
хВ большинстве случаев траектория носителя РЛС на участке
синтезирования может быть представлена либо прямой линией, либо
окружностью с известным радиусом разворота Rp. При этом малые
отклонения от заданной траектории того или иного типа будем
рассматривать как траекторные нестабильности. При прямолинейной
траектории и постоянной скорости носителя V текущее расстояние отсчитыва-
ется от точечного объекта до координаты ФЦА на оси X:
+ YH2, (5.16)
где XH,YH,x(t)= Vt - соответственно координаты объекта и текущие
координаты ФЦА в плоскости OXY.
139
Глава 5
О Хя X'
Рис. 5.14. Формирование СА при маневре носителя РСА
Пусть в момент времени t = 0 PJ1C находится в начале системы
координат; при этом объект находится под углом 0Н к оси X в центре
ДН реальной антенны, а текущее время t изменяется от — Тс/2 до Тс/2,
где Тс - временной интервал синтезирования.
Для определения закономерностей отраженного сигнала
представим текущее расстояние rH(t) в виде ряда:
rH(t) = RH-VtcosGH
v2t2sin2eu v3t3sin2e^
2R,
где RH = yjX^ + Y2 - наклонная дальность до объекта в начальный
момент времени.
В тех случаях, когда в интервале -Tc/2<t<+Tc/2 изменение
фазы сигнала, обусловленное кубичным и более высокими членами
разложения, меньше допустимого, для определения фазовой
характеристики траекторного сигнала достаточно использовать квадратичную
аппроксимацию rH(t). Если считать допустимым значением фазового
набега, вызванного кубичным членом на краю апертуры (при t = Тс/2 )
величину, равную л/4, то квадратичная аппроксимация оправданна, когда
разрешение РСА по азимуту 5/'>^/X2RH(ctgGH)/2 .
|Для Х = 3см, RH = 100 км и 9н=30° квадратичная аппроксимация rH(t)
применима, если 6^ > 2,7 м .
140
Принципы построения РСА землеобзора
При невыполнении этого неравенства необходимо учитывать более
высокие члены разложения или представлять траекторию движения ФЦА
относительно объекта в виде нескольких отрезков, на которых допустима
квадратичная аппроксимация текущего расстояния. В дальнейшем будем
считать, что условие использования квадратичной аппроксимации
текущего расстояния между ФЦА и объектом выполняется, т.е.
r,(t) = RH - Vtcos6H + У¥''"е" = RH - Vrt+^, (5.17)
где Vr = VcosGH; ar =IV2sin26Hj/RH - соответственно радиальные
скорость и ускорение движения ФЦА относительно объекта при t = 0,
а фаза траекторного сигнала изменяется по закону:
(pH(t)=-^vtcoseH—
где фн0 = ф0 - постоянная начальная фаза.
Л.
Доплеровская частота траекторного сигнала
f№i(t)
mKt 271 dt И
Из (5.18) видно, что средняя доплеровская частота сигнала
определяется радиальной скоростью движения ФЦА по отношению к объекту
Vr = Vcos0H, которая в свою очередь зависит от его азимутального
положения (угла 0Н ). Она максимальна при наблюдении по линии пути и
равна нулю при боковом обзоре (0Н = л/2).
Второй член в (5.18) определяет линейную частотную модуляцию
(ЛЧМ) траекторного сигнала. Индекс частотной модуляции изменяется
обратно пропорционально наклонной дальности до отражателя и
максимален при боковом обзоре.
Ширина спектра доплеровских частот траекторного сигнала в
пределах ширины ДН антенны 0О = X/da с учетом, что Тсмакс =0oRH/(Vsin0H),
равна
2V
В качестве иллюстрации на рис. 5.15,й показано изменение доплеров-
ской частоты сигналов пяти объектов, расположенных на одной дальности,
но имеющих разное азимутальное положение от 0, до 05. Для разрешения
141
Глава 5
сигналов объектов по азимуту необходимо разрешить их по доплеровскои
частоте при предварительном устранении ЛЧМ сигналов. В этом случае
частота сигналов останется постоянной и будет определяться
азимутальным положением объектов (рис. 5.15,6).
2V
\
2V
2V
6)
Рис. 5.15. Изменение частоты траекторного сигнала без компенсации (а)
и с компенсацией (б) линейной частотной модуляции
При движении носителя РЛС с постоянной скоростью по
окружности с радиусом разворота Rp, соизмеримым с дальностью до объекта
(см. рис. 5.14), расстояние от РЛС до объекта можно представить в виде
следующего ряда:
_ .. Q V2t2sin2eH
= RH-Vtcos0H+Ц
(5.19)
Rpsin9H
142
Принципы построения РСА землеобзора
При использовании квадратичной аппроксимации доплеровская
частота траекторного сигнала равна
Ь\. (5.20)
Как видно, отличие траекторного сигнала при маневрировании
носителя (полете по окружности) по сравнению с прямолинейной
траекторией (5.18) заключается только в изменении крутизны ЛЧМ сигнала.
При импульсном зондирующем сигнале, период повторения
которого выбран исходя из необходимости устранения неоднозначностей по
азимуту и дальности, каждый импульс является дискретным отсчетом
(выборкой) траекторного сигнала (5.15). При этом изменение дальности
до объекта rH(t) в течение времени синтезирования приводит не только
к изменению фазы траекторного сигнала, но и к изменению задержки
огибающей импульсов.
Когда максимальное изменение дальности до объекта на интервале
синтезирования, обусловленное квадратичным членом разложения
(5.17), меньше, чем половина разрешения по дальности 5г, т.е.
V'(V2)W6. = X^ j,
2RH 32Ы2 2
можно считать, что задержка огибающей изменяется линейно в
пределах синтезированной апертуры:
Tm_2(RH-Vtcos6H) 2VtcoseH
THW- -th0 > ^
с с
h0
с с
где тн0 = тн {t = 0} = 2RH/c - задержка сигнала в момент времени t = 0.
При несоблюдении условия (5.21) в законе изменения задержки
огибающей сигнала необходимо учитывать и квадратичные члены
выражения (5.17).
Используя рассмотренные выше закономерности изменения фазы
и задержки огибающей, траекторный сигнал точечного объекта при
импульсном режиме работы РСА можно записать в виде
n) Sl[t-nTn-TH(nTn)]x
xexp-h
(5.23)
-sin2GH+(pH0
X 2RH
где n — номер зондирующего импульса; Тп — период повторения
импульсов; st [...] - функция, описывающая отраженный сигнал на выходе
внутрипериодной системы обработки.
143
Глава 5
Таким образом, траекторный сигнал точечного объекта представляет
собой пачку импульсов, следующих с периодом Тп . Амплитуда импульсов
в пачке плавно изменяется в соответствии с изменением значения ДН и
зависит от закона управления ДН (вида обзора). При среднем (метры)
разрешении можно считать, что задержка отраженных импульсов меняется от
периода к периоду по линейному закону, а фаза - по линейному и
квадратичному, что соответствует ЛЧМ траекторного сигнала.
Из проведенного анализа следует, что для согласованной траек-
торной обработки сигнала система должна обеспечивать когерентное
накопление сигнала с ЛЧМ и регулировку параметров системы так,
чтобы учесть изменение:
амплитуды сигнала, определяемое ДН антенны и видом обзора
земной поверхности;
задержки сигнала, а также зависимость этой задержки от азимута
объекта;
средней частоты сигнала объекта при изменении его азимута;
индекса ЛЧМ в зависимости от азимута, дальности объекта и
радиуса разворота носителя на траектории полета;
ширины спектра доплеровских частот при изменении азимута
объекта.
Алгоритм согласованной обработки траекторного сигнала.
Рассмотрим алгоритм согласованной обработки траекторного сигнала.
Траекторный сигнал U(t) на входе межпериодной системы обработки для
одного элемента разрешения по дальности представляет собой
аддитивную смесь полезного сигнала s(t) и шума n(t):
U(t) = s(t) + n(t).
О
R
X
Рис. 5.16. Ограничения зоны обзора по азимуту и дальности
144
Принципы построения РСА землеобзора
Полезный сигнал s(t) является суперпозицией сигналов
элементарных отражателей, расположенных в пределах ДН антенны и данного
элемента разрешения по дальности (рис. 5.16):
N
(t), (5.24)
где Sj(t) — сигнал точечного отражателя, находящегося на дальности
RH + Г; (наклонная дальность наблюдения) и азимуте 6Н +0;, где 0Н - угол
наблюдения (азимут центра зоны обзора относительно оси X), который
определяется направлением оси ДН в момент времени t = 0; Q{ - угловая
координата отражателя относительно направления на центр зоны обзора.
При квадратичной аппроксимации текущей дальности объекта до
ФЦА(5.17)
s, (t) = U.Gj (t)expjМ Vtcos(6H +e,)--^sin2(6H +G.)]+j(pOl I. (5.25)
[ * 2K+r ) \
Аддитивная помеха n(t) представляет собой стационарный гаусов-
ский белый шум с нулевым математическим ожиданием, спектральной
плотностью No и корреляционной функцией М {n(t,)n(t2)} = N^t, -12).
При всем многообразии подходов к синтезу системы обработки
сигналов РСА процесс синтезирования апертуры антенны (получение
сигнала 1(6;), характеризующего РЛИ элемента разрешения), в данном
случае сводится к реализации алгоритма:
Тс/2
1(6,) =
J U(t)h,(t)dt
(5.26)
-Тс/2
где hj(t) - опорная функция системы обработки для i-й цели.
Обработка сигналов РСА основывается на согласовании опорной
функции с траекторным сигналом от одиночной точечной цели, для
которой определяется значение РЛИ. Поэтому в качестве опорной
функции выбирается функция, комплексно сопряженная с сигналом от
одиночной точечной цели:
h1(t)=W(t)exp|jyrH!(t)j, (5.27)
где W(t) — действительная весовая функция синтезированной
апертуры, от вида которой зависит, прежде всего, уровень боковых лепестков
выходного сигнала. По сравнению с (5.25) фаза имеет
противоположный знак.
145
Глава 5
При квадратичной аппроксимации текущей дальности
h1(t)=W(t)exp \-i~
Vtcos(eil+ei)-
V2t2
-мп2(ви+в4)
(5.28)
Сравнение (5.25) и (5.28) показывает, что целью умножения
сигнала на опорную функцию является демодуляция ЛЧМ сигнала
(устранение квадратичного набега фазы) и сдвиг спектра сигнала на нулевую
частоту (устранение линейного набега фазы) для отражателя,
расположенного в элементе разрешения по дальности, соответствующем
дальности ^ина азимуте 0;. Далее следует накопление такого сигнала в
течение времени Тс (операция интегрирования в (5.26)) и взятие
модуля. Следует отметить, что траекторный сигнал РСА является
импульсным, поэтому значение опорной функции (5.28) определяется в
дискретные моменты времени t = пТп, где п - номер зондирующего
импульса, а интегратор представляет собой сумматор импульсов,
принимаемых в течение времени синтезирования.
Количество каналов в системе обработки зависит от способа
формирования РЛИ при обзоре пространства. Получение РЛИ при кадровом
и построчном алгоритмах для случая бокового обзора (0Н = 90°)
показано на рис. 5.17.
« ^-^
б)
Рис. 5.17. Формирование РЛИ: а - покадровое; 6 - построчное
При кадровом алгоритме формирования РЛИ (рис. 5.17,я) число
лучей, формируемых в результате обработки сигнала на каждом
интервале синтезирования, должно обеспечивать получение РЛИ без
пропусков во всей зоне обзора AL, максимальная величина которой равна
146
Принципы построения PC А землеобзора
При 60 = Т и RH = 100 км получим ALMaxc = 3000 м. Таким образом, при
кадровом алгоритме формирования РЛИ в каждом канале дальности
необходимо иметь N, = kaAL/b( азимутальных каналов лучей, где ЪС —
линейное разрешение РСА по азимуту; ка = 1...2 — коэффициент перекрытия
элементов разрешения по азимуту.
Например, при ка -1 и дС = 3 м для перекрытия зоны обзора размером
ДЬ = ALMaKC требуется NJ1 = 1000 азимутальных каналов.
При наличии в системе обработки только одного канала обзор
заданной зоны AL осуществляется за счет перемещения носителя от одного
интервала синтезирования к другому с формированием одного луча на
каждом интервале синтезирования. При этом направление синтезированного
луча совпадает с направлением ДН - 0Н (т.е. 6; = 0 ), ДН неподвижна
относительно вектора путевой скорости ЛА (6Н = const), а максимальный шаг
смещения апертуры АХ не превышает размера элемента разрешения по
оси X: AX=5^/(kasin6H). При ka = 1 и боковом обзоре (6Н =90° ) Ж=Ь£.
Такой алгоритм получения РЛИ называют построчным (рис. 5.17,6).
В рассматриваемом случае прямолинейной траектории
когерентное накопление сигнала в течение времени Тс обеспечивает разрешение
по частоте §г"д = 1/Тс . Поскольку перед накоплением производится
компенсация ЛЧМ и частота сигнала от каждого объекта остается
постоянной и равной (2V/X)cosGH, то получим, что угловое разрешение по
азимуту из условия бг^ = (2V/A.)cos(0H +69) равно
56=
2VTcsin6H 2Xcsin6H
а линейное разрешение по азимуту
2VTcsineH 2Xcsin9H
где Хс = VTC - размер синтезированной апертуры по оси X.
Следовательно, время синтезирования определяется требуемой
разрешающей способностью:
^н (53О)
2V5^ie
Например, для получения разрешающей способности 8 С - 3 м на
дальности RH = 100 км при длине волны X = 3 см, скорости V = 250 м/с и угле
наблюдения 6Н = 90° время синтезирования должно составлять 2 с, а при
0н = 30° необходимое Тс = 4 с .
147
Глава 5
Из (5.18) и (5.30) следует, что полоса доплеровских частот сигнала,
обрабатываемых в одном канале, равна
2 vsineH
&c , (5.31)
т.е. увеличивается с увеличением путевой скорости и угла наблюдения
и с повышением разрешения. Следует отметить, что произведение
полосы обрабатываемых частот на время синтезирования не зависит от
путевой скорости и угла наблюдения: TcAfo6p = A.RH/25^2.
Компенсация ЛЧМ сигнала перед его накоплением называется
фокусировкой. Если в системе обработки РСА не учитывается ЛЧМ
сигналов (в фазе опорной функции (5.28) отсутствует квадратичная
составляющая), то такая РСА называется иефокусированиой, а
соответствующий режим РЛС называют доплеровским обужением луча (ДОЛ). При
этом в соответствии с (5.26) и (5.28) обработка сводится к
спектральному анализу сигнала, принятому в течение времени Тс, и вычислению
модуля сигнала в каждом фильтре. Изменение частоты сигнала за время
синтезирования не должно превышать разрешения РСА по частоте, т.е.
ДТобр < Af = 1/Тс. Отсюда с учетом (5.31) получим предельное время
синтезирования в режиме ДОЛ:
(5.32)
Подставив найденное значение Тс в (5.29), получим, что величина
разрешения в этом случае равна
2
Таким образом, в режиме ДОЛ предельная разрешающая способность зависит
от дальности до объекта и от длины волны излучения. При X = 3 см и
RH = 100 км в режиме ДОЛ можно обеспечить разрешение не лучше 40 м.
Из анализа траекторного сигнала следует, что для получения РЛИ
всех объектов, расположенных в пределах зоны обзора, определяемой
реальной ДН, в соответствии с алгоритмом (5.26) система обработки должна
учитывать различие параметров сигналов (задержки огибающей и скорости
ее изменения, средней доплеровской частоты, крутизны ЛЧМ и ширины
спектра в зависимости от координат объектов). Система обработки при
этом становится многоканальной. Для упрощения системы обработки
целесообразно для всех сигналов в полосе обзора использовать единый
алгоритм обработки. В большинстве случаев это возможно только при огра-
148
Принципы построения РСА землеобзора
ничении полосы обзора как по дальности, так и по азимуту. При этом всю
заданную зону обзора можно разбить на ряд полос, в каждой из которых
использовать постоянный алгоритм обработки сигналов.
Фаза и задержка огибающей сигнала объекта, расположенного в
центре полосы обзора с координатами 0Н и RH, соответственно равны:
, ч 4тг . 27iV2t2 . 2л , ч Vt
Ф(О = — Vtcos6H ———sin2eH; T(t) = xH cos0H,
Л. ARH с
где тн = 2RH/c - начальная задержка огибающей.
При изменении координаты объекта по наклонной дальности на
величину Аг изменяется начальная задержка огибающей тн и крутизна
JI4M. Фаза траекторного сигнала в этом случае
, ч 4л _ 2nV2t2 . 2_
Ф(г) = — Vt cos 0Н sin2 0Н,
X н ?i(RH+Ar)
а фазовая ошибка на краях апертуры относительно ее центра
= ф -£■ -ф -*- = У—\ и -
Если допустимым значением фазовой ошибки считать Дф = ti/4 и
учесть возможность отклонения дальности относительно RH в обе
стороны, то ширина полосы обзора по дальности, в пределах которой
можно использовать одну и ту же опорную функцию, составляет
(5.34)
А.
I Например, при б/' = 3м и Я. = 3см получим AR = 1200м .
Изменение азимутального положения объекта по координате I на
величину А£ приводит к изменению азимута на величину А0 = Af/RH и
дальности относительно дальности RH на величину A^2/2RH . При этом
максимальное значение А£ ограничено линейным размером ширины
ДН на дальности RH, т.е. A^<60RH/2. Вследствие изменения
начальной дальности объекта начальная задержка сигнала изменяется на
Атн = A^2/cRH; к тому же скорость изменения задержки огибающей
будет зависеть от азимутальной координаты А0 .
Для упрощения системы обработки целесообразно для сигналов
всех объектов, независимо от их азимута, использовать при обработке
единый закон изменения задержки огибающей. В соответствии с (5.22)
это требует изменения начала момента стробирования в соответствии с
выражением:
149
Глава 5
2VnTncos0H
мин мин О
с
где тмин0 - задержка ближайшего строба относительно зондирующего
импульса в момент t = 0.
Однако ширина зоны обработки сигналов по азимуту AL в этом
случае будет ограничена. Если допустить, что при изменении азимута объекта
рассогласование задержки его сигнала тдД1:) с задержкой сигнала от
отражателя, расположенного в центре зоны обзора, x(t) на краю апертуры
(t = Tc/2) не должно превышать величину, соответствующую половине
элемента разрешения по дальности, то
сШ сбг
и <
VT VT ( АС
-^cosG --^cos ен+ —
2 н 2 I R,
Тогда допустимая ширина зоны обработки сигналов по азимуту при
слежении стробами по единому закону составляет
(5.35)
I Для значений 8С - бг = 3 м и X = 3 см получим AL = 600 м .
Для объектов, смещенных по азимуту, изменяется также фазовая
структура отраженных сигналов (средняя доплеровская частота и
крутизна ЛЧМ). Частоту траекторного сигнала можно записать в виде:
2У М . п 2V2t . 2п 2\\М . _
sin6H sin в sin20H
R X Х
Hs
•к RH XRH ХКИ RH
В этом выражении первый член характеризует смещение средней
доплеровской частоты сигнала любого объекта на величину средней
доплеровской частоты сигнала объекта, расположенного в центре зоны
обзора. Эта частота устраняется путем гетеродинирования сигнала.
Второй член показывает отклонение средней доплеровской частоты при
смещении объекта по азимуту. Он пропорционален азимуту объекта, и
именно за счет этого члена осуществляется разрешение объектов по
азимуту (частоте). Третий член показывает ЛЧМ сигнала объекта в
центре зоны обзора, а последний член - изменение частотной модуляции
при смещении объекта по азимуту.
Величина фазовой ошибки, возникающей на краю апертуры
вследствие рассогласования алгоритма, составляет
150
Принципы построения РСА землеобзора
А 2kV2(Tc/2)2 АС . па 2jiV2(Tc/2)2 (АСУ ^
Аф = v ' sin2GH+ v c/ ; • — cos20H.
Если допустимо Аф = л/4, то ширина зоны обработки по азимуту
при боковом обзоре (вн = л/2)
Л1 -у к, op W /*™
AL = 2At = 2RH |—. (5.36)
н\хс
При ограничении ширины зоны обработки по азимуту AL изменение
крутизны ЛЧМ в алгоритме обработки можно не учитывать. В зависимости
от параметров РСА значение AL определяется либо (5.35), либо (5.36).
Таким образом, при получении кадра РЛИ для обработки всех
сигналов, отраженных от объектов в полосе обзора, в общем случае
требуется многоканальная система обработки. При этом каналы должны
отличаться по начальной задержке огибающей сигнала (дальности),
скорости изменения задержки, средней частоте сигнала (азимуту) и по
крутизне его частотной модуляции.
Благодаря уменьшению зоны одновременной обработки сигнала
по азимуту и дальности требования к многоканальное™ можно
существенно ослабить. Так, в ограниченной зоне обзора AR x AL,
определяемой выражениями (5.34), (5.35) и (5.36), опорную функцию (5.28) для
всех сигналов можно представить в виде
h(t,eH+e,) = h(t,eH)exP|jy ve.tsinel, (5.37)

где h(t,6H) — опорная функция, которая осуществляет компенсацию
средней доплеровской частоты сигнала и фокусировку изображения
объекта, расположенного в центре зоны обзора:
Аи
h(t,eH)=W(t)exP -j-^
2*2
V t
VtcosG.. sinze
(5.38)
Подставив (5.37) в (5.26), получим следующий алгоритм обработки:
Тс/2
1(9,) =
u(t)h(t,eH)exP{-j27if(e,)t}dt
-Тс/2
(5.39)
^/лч 2Ve,sin6H „ ,
где f(6,) = ! - смещение доплеровской частоты сигнала объ-
А.
екта с координатой G, относительно доплеровской частоты сигнала
объекта, находящегося в центре зоны обзора. Из этого выражения
видно, что сигнал РЛИ представляет собой модуль преобразования Фурье
151
Глава 5
произведения принятого сигнала и опорной функции, которая
рассчитывается для центра зоны обзора размером не более AR х ДЬ .
Таким образом, при ограниченной зоне обзора система обработки
может быть многоканальной только по дальности и азимуту. В каждом
канале такой системы, отличающемся временем задержки и средней
частотой, осуществляется компенсация ЛЧМ сигналов с одинаковой
крутизной изменения частоты (фокусировка). Каналы по дальности
формируются стробированием по времени. Разнос соседних каналов
определяется разрешающей способностью по дальности 8г, при этом
начальная задержка строба в каждом канале изменяется за время
обработки по линейному закону. Каналы по азимуту формируются путем
спектрального анализа сигнала в пределах полосы частот, определяемой
азимутальным размером зоны обзора AL :
^^ (5.40)
A^(H)s(H)(H)
д X н R/ X н RH X н RH
Если ширина ДН меньше, чем возможный размер зоны обзора, т.е.
2V 2V
G0RH<AL, то А1д = —60cosGH =—cosGH , где da -размер антенны.
X da
Разнос соседних каналов по частоте определяется временем
синтезирования (Sfg = 1/Тс), которое в свою очередь зависит от заданного
разрешения РСА по азимуту (5.30).
В зависимости от решаемой тактической задачи, требуемой
величины зоны обзора и времени обзора в РСА используют: 1) обзор полосы
местности (переднебоковой обзор); 2) обзор сектора (секторный обзор);
3) обзор участка местности в пределах ширины ДН антенны
(телескопический обзор). Другие возможные виды обзора являются либо
частными случаями одного из трех указанных (например, боковой обзор),
либо их комбинацией.
1. При переднебоковом обзоре (ПБО) ось ДН в горизонтальной
плоскости ориентируется под заданным углом наблюдения вн к линии
пути, причем GH = const в течение всего времени формирования РЛИ
заданной зоны обзора. Угол наклона антенны также постоянен в
течение всего времени обзора и определяется высотой полета ЛА и
дальностью до центра зоны обзора. РЛИ местности формируется либо
построчно по мере пролета картографируемой местности, либо в виде
отдельных кадров, которые стыкуются между собой.
При построчном картографировании система обработки на
каждом интервале синтезирования обеспечивает формирование только
одной строки изображения по азимуту в направлении максимума реальной
152
Принципы построения РСА землеобзора
ДН. Для этого в каждом канале дальности принимаемый сигнал
умножается на опорную функцию
+
V2n2T2
н «г» н
2RH
£-sin2e.
(5.41)
и далее накапливается в течение времени Тс, т.е. формируется только
один синтезированный луч. При большой полосе обзора по дальности
приходится учитывать зависимость опорной функции от дальности. Для
этого диапазон от RM11H до RMaKC разбивают на несколько
поддиапазонов шириной AR и для каждого из них формируют опорную функцию
вида (5.41).
При формировании изображения в виде кадров для траекторного
сигнала, записанного в течение времени Тс, в системе обработки с
помощью опорной функции (5.41) компенсируется постоянная средняя
частота и ЛЧМ в направлении максимума ДН и далее производится
спектральный анализ в пределах полосы частот сигнала Affl,
соответствующей ширине кадра AL (5.40).
При ПБО максимальная величина интервала синтезирования
ограничена отрезком пути, на котором принимается отраженный сигнал от
одного и того же участка местности: Хс =60RH/sinGH . Максимальное
разрешение в соответствии с (5.29): Ымт = X/2Q0 - da/2, где da - размер
антенны.
2. При секторном обзоре (СО) антенна непрерывно или дискретно
сканирует по азимуту в секторе 9обз в течение времени Тобз. Полный
кадр РЛИ разделяется на парциальные кадры, изображение каждого из
которых формируется при обработке сигналов на соседних интервалах
синтезирования. Затем парциальные кадры объединяются в полный
кадр РЛИ. Для обеспечения постоянного разрешения 5^ во всем
секторе с уменьшением угла GH необходимо увеличивать время
синтезирования и, следовательно, снижать скорость сканирования ДН. Это
связано с тем, что участок поверхности размером AL, соответствующий
отдельному парциальному кадру РЛИ, должен непрерывно облучаться в
течение времени синтезирования. Из (5.30) следует, что отношение
максимального и минимального времени синтезирования (а следовательно,
максимальной и минимальной скорости вращения ДН) определяется
максимальным углом наблюдения 6н0 и размером сектора обзора:
Тсшш 5')
Тсмакс
153
Глава 5
При изменении угла GH и постоянном разрешении ЬС произведение
полосы обрабатываемых частот на время синтезирования постоянно:
а время синтезирования увеличивается с уменьшением угла 0Н . При
постоянной частоте повторения Fn соответственно увеличивается энергия
сигнала вследствие увеличения числа накапливаемых импульсов Nc.
Для обеспечения постоянства характеристик РЛИ целей
целесообразно поддерживать постоянство энергии сигналов, т.е. постоянство
Nc. Для этого необходимо изменять частоту повторения с изменением
угла наблюдения:
В этом случае TcAfo6p = TcFn = Тс/Тп = Nc = const.
При постоянном интервале синтезирования скорость сканирования
ДН Qa также постоянна и выбирается исходя из заданного времени
обзора и размера сектора обзора Па = ©обз/Товз • Максимальное время
синтезирования в этом случае составляет:
т
сшкс NR.fi NO
н н н
где NH — количество некогерентных накоплений при формировании
РЛИ.
Таким образом, при СО время синтезирования ограничено
шириной зоны обзора и временем обзора и обычно бывает невелико. В связи
с этим при СО достаточно часто осуществляется нефокусированная
обработка (режим ДОЛ), при этом опорная функция компенсирует
среднюю частоту сигналов кадра и не учитывает ЛЧМ сигнал. Средняя
частота рассчитывается для каждого интервала синтезирования:
hk(n)=W(n)exp|-JYVnTncoseHk|, (5.42)
где 0^ - угол наблюдения на k-м интервале синтезирования.
Предельное время синтезирования в режиме ДОЛ определяется
выражением (5.32), а разрешающая способность РСА - выражением (5.33).
3. Телескопический обзор (ТО) применяется при необходимости
получения высокого разрешения и многократного наблюдения одного и
того же участка местности. При этом участок местности, представляю-
154
Принципы построения PC А землеобзора
щий интерес, должен полностью помещаться внутри ДН и его РЛИ
получается путем кадровой обработки сигнала на одном интервале
синтезирования.
РЛИ формируется в виде отдельного кадра в окрестности
выбранной точки (центра кадра), координаты которой задаются дальностью
RH и азимутом 9Н относительно центра интервала синтезирования. ДН
отслеживает центр кадра в течение одного или нескольких интервалов
синтезирования. При этом закон управления ДН по азимуту имеет вид:
Кн0
где 6н0, Rh0 — начальные угол наблюдения и наклонная дальность до
центра кадра на интервале синтезирования.
При ТО в отличие от ПБО и СО отсутствует модуляция сигнала,
связанная с изменением положения ДН. Опорная функция при ТО
изменяется от одного интервала синтезирования к другому по мере
изменения угла наблюдения и дальности центра кадра:
** ry *>
-VnTn cosGH + V nT"sin2eH
■1 H *~tr% H
2R
и
(5.43)
Для получения кадра РЛИ на каждом интервале синтезирования
после умножения сигнала на опорную функцию (5.43) выполняется
спектральный анализ в пределах области частот (5.40). При такой
обработке вследствие применения одной опорной функции зона обзора
(размер кадра) определяется выражениями (5.35) или (5.36) и обычно
меньше максимальной, определяемой шириной ДН. Для получения
кадра РЛИ с максимальным размером ALMaKC = RH60 для каждого элемента
разрешения в кадре РЛИ необходимо применять оптимальный алгоритм
(5.26), что ведет к усложнению системы обработки.
Разрешающая способность при ТО может быть весьма высокой,
так как максимальное время Тс ограничено только вычислительными
возможностями системы обработки и фазовыми искажениями траектор-
ного сигнала.
Среди комбинированных режимов обзора возможно применение сек-
торно-телескопического обзора, когда в течение одного интервала
синтезирования применяют ТО, затем поворачивают ДН и вновь применяют ТО
и т.д., что обеспечивает более широкую зону обзора ДЬ > 90RH .
Алгоритм обработки сигналов РСА землеобзора наряду с
синтезированием предусматривает некогерентное накопление сигналов РЛИ.
155
Глава 5
Некогерентное накопление. РЛИ, полученному с помощью РСА,
как и всякому изображению, полученному с помощью когерентной
системы, присущи особенности, связанные со спекл-шумом. Спекл-шум
проявляется в яркостной пятнистости (зернистости) при изображении
даже статистически ровных поверхностей.
РЛИ в РСА при однократном обзоре представляет собой
пространственный шум, дисперсия которого изменяется в соответствии с
отражающими свойствами объектов, а интервал корреляции примерно равен
разрешающей способности.
Спекл-шум возникает из-за того, что случайные по
характеристикам и расположению элементарные отражатели, представляющие
шероховатую поверхность объектов в элементе разрешения РСА, образуют
случайное поле переизлучения. Следствием этого является случайная
величина ЭПР элементов разрешения объектов. Пятнистость
изображения может заметно снизить вероятность обнаружения объектов и другие
характеристики РСА.
Влияние спекл-шума ослабляется путем дополнительного
некогерентного накопления (сложения) нескольких независимых РЛИ одного и
того же участка местности (объектов). Для формирования
некоррелированных между собой изображений могут использоваться различные методы:
1) параллельная работа РЛС на нескольких разнесенных несущих
частотах;
2) работа с излучением и приемом сигналов различной поляризации;
3) разбиение всей полосы частот зондирующего сигнала на ряд
примыкающих к друг другу полос, ширина которых определяется
требуемым разрешением по дальности;
4) аналогичное разбиение всего траекторного сигнала
длительностью То на примыкающие к друг другу участки, размер Тс которых
определяется требуемым разрешением по азимуту.
Преимущество последнего метода в том, что траекторный сигнал
практически всегда имеет информационную избыточность, т.е. То » Тс,
и для некогерентного накопления необходимы лишь дополнительные
устройства в системе обработки сигналов. Величина То представляет
собой общее время облучения (наблюдения) объекта. При переднебоко-
вом обзоре оно определяется шириной ДН реальной антенны и
скоростью полета ЛА. При секторном обзоре зависит, кроме того, от угловой
скорости вращения антенны по азимуту, а при телескопическом —
теоретически не ограничено. Время корреляции спекл-шума в элементе
разрешения на выходе системы обработки равно времени
синтезирования Тс, поэтому максимально возможное число некогерентных выборок
изображения на всем интервале наблюдения объекта равно
156
Принципы построения РСА землеобзора
N = Т° = Х°
нмакс rp v "
*с Лс
Наиболее просто осуществить некогерентное накопление при
телескопическом обзоре. В этом случае необходимо сложить кадры РЛИ,
полученные на последовательных интервалах синтезирования. При
большом числе некогерентно накапливаемых изображений необходимо
учитывать изменение системы координат изображений при изменении
угла наблюдения. Число лучей, формируемых на каждом интервале
синтезирования при ТО и одном отсчете РЛИ на элемент разрешения по
азимуту (ка = 1), определяется отношением ширины зоны обзора AL и
разрешения по азимуту: Nn = AL/5/1. Если зона обзора определяется
шириной ДН, то:
N RA. (5.44)
Рассмотрим алгоритм некогерентного накопления РЛИ при перед-
небоковом обзоре. Максимальный размер синтезированной апертуры
Хо =90RH/sin6H, а размер апертуры при синтезировании
Хс =A.RH/(25^sin6H). При этом максимальное число некогерентных
изображений одного и того же объекта, которое может быть
сформировано при ПБО и использовании всего траекторного сигнала:
Хс da
При построчном формировании РЛИ одним синтезированным лучом
каждый объект наблюдается за время обзора только один раз, когда
синтезированная ДН совпадает с направлением на объект, т.е. некогерентное
накопление сигналов изображения отсутствует. Поэтому, чтобы обеспечить
некогерентное накопление NH некоррелированных изображений в
пределах Хо , требуется при каждом положении апертуры формировать NH
синтезированных лучей, разнесенных по азимуту на размер синтезированной
апертуры Хс. Разнос необходим для обеспечения некоррелированности
изображений. Сигналы изображения в каждом луче запоминаются на
соответствующее время, пропорциональное Тс, и складываются (рис. 5.18,а). В
результате сложения образуется как бы один синтезированный луч, в
котором выполнено NH некогерентных накоплений.
При формировании РЛИ по кадрам при ПБО изображения кадров
смещены на размер синтезированной апертуры, поэтому для получения
РЛИ без пропусков необходимо Мл = Хс/6х = АИн/25£2 азимутальных
лучей. Однако каждый объект в этом случае наблюдается только один
157
Глава 5
раз, поэтому для некогерентного накопления необходимо, чтобы кадры
РЛИ перекрывались, т.е. в кадре необходимо формировать
N.=u&-
(5.46)
лучей (рис. 5.18,6). Так, при подстановке в (5.32) значения NH = NHMaKC
из (5.31) получим такое же число лучей, как и при ТО. Это объясняется
тем, что для максимального некогерентного накопления при ПБО
количество азимутальных каналов в кадре должно обеспечивать перекрытие
всей зоны облучения, определяемой шириной ДН реальной антенны.
Луч с
некогерентным
накоплением
Кадр с неко-
ге рентным
накоплением
а)
б)
Рис. 5.18. Некогерентное накопление при кадровом и построчном
формировании РЛИ
158
Принципы построения РСА землеобюра
При секторном обзоре и кадровом формировании изображения
возможное число некогерентных накоплений определяется временем
облучения объекта и временем синтезирования NH = Т0/Тс, а время
облучения зависит от скорости сканирования ДН То = 60/Qa .
Обработка принимаемых сигналов РСА выполняется в два этапа:
сигнальным процессором и процессором данных. Сигнальный
процессор формирует радиолокационное изображение заданного вида.
Процессор данных выполняет обнаружение целей, определяет их тип,
функциональное состояние и местоположение.
Сигнальный процессор выполняет поляризационную,
пространственную, внутрипериодную и межпериодную (траекторную) обработку.
В РСА землеобзора реализуется алгоритм согласованной обработки
сигнала.
Сигнальный процессор формирует радиолокационное изображение
путем обработки траекторного сигнала с учетом: изменения амплитуды
сигнала, определяемого ДН антенны и видом обзора; изменения
задержки сигнала, а также зависимости этой задержки от азимута
объекта; изменения средней частоты сигнала объекта при изменении его
азимута; изменения индекса ЛЧМ в зависимости от азимута и
дальности объекта и изменения ширины спектра доплеровской частоты при
изменении азимута объекта.
При среднем разрешении по азимуту порядка единиц метров
справедлива квадратичная аппроксимация изменения фазы траекторного
сигнала, и число требуемых каналов системы обработки может быть
значительно уменьшено за счет использования одинаковых
алгоритмов для всех сигналов в определенной зоне обзора.
Для сглаживания спекл-шумов РЛИ используют некогерентное
накопление изображений объектов, полученных на различных интервалах
синтезирования. Максимально возможное число некогерентных
накоплений определяется отношением всего времени облучения цели к
времени синтезирования.
159
ГЛАВА 6
Системы обработки сигналов РСА
6.1. Оптическая система обработки
Как следует из описания структуры алгоритма обработки сигналов
РСА (5.26), система обработки должна включать: 1) устройство
запоминания сигналов, полученных с выхода когерентного (фазового) детектора; 2)
устройство взвешивания и фокусировки (умножения сигнала на опорную
функцию); 3) суммирующее устройство. Чтобы оценить требования к
системе реализации синтезированной апертуры, рассмотрим случай
прямолинейного полета с постоянной скоростью при боковом обзоре (6н=90°).
Опорная функция системы обработки в этом случае (5.37):
, (6.1)
где W(t) - функция взвешивания, обеспечивает заданный уровень бо-
м TTII 2n\h2
ковых лепестков синтезированной ДН; квадратичный член,
AR
осуществляет фокусировку изображения всех объектов в пределах зоны
обзора, определяемой шириной ДН антенны; — \tQi - линейный член,
А.
определяет доплеровское смещение частоты сигналов объектов в
зависимости от их угловой координаты 0{.
Изменением задержки огибающей сигнала, определяемым
квадратичным членом разложения в ряд, можно пренебречь при условии (5.21)
A RH _
т<5г,
что при Ь£ = 5г справедливо при
16
| Так, при RH = 100 км и Я. = 3 см бг = 2 м .
160
Системы обработки сигналов РСА
Таким образом, задача обработки траекторных сигналов при
боковом обзоре сводится к сжатию ЛЧМ сигнала (фокусированию) на
различных доплеровских частотах (азимутальных каналах) раздельно в каждом
канале по задержке (дальности). Число каналов дальности NR
определяется требуемой полосой обзора по дальности AR и разрешением 8г:
NR = AR/бг ,
а число отсчетов траекторного сигнала Nc в каждом канале зависит от
времени синтезирования Тс (требуемого разрешения по азимуту) и
частоты повторения импульсов Fn:
х, те ХКЛ
Так, для обеспечения разрешающей способности 6£ = бг = 6 м на
дальности RH = 100 км в полосе обзора AR = 6 км при V = 250 м / с , Fn = 1 кГц
в 103 каналах дальности должно быть запомнено 103 отсчетов сигнала.
При этом каждый отсчет сигнала должен содержать амплитудную и
фазовую информацию с учетом того, что динамический диапазон сигнала
может составлять 60 дБ. Поэтому для получения РЛИ в реальном масштабе
времени требуется система обработки с объемом памяти порядка 106... Ю8
бит и быстродействием 1О8...1О9 операций/с, что представляет сложную
задачу даже для современных вычислительных систем.
На первых этапах развития РСА предлагались различные методы
запоминания и обработки сигналов как аналоговые, так и цифровые.
Однако все они в конце 50-х годов не обладали необходимыми
характеристиками как по объему памяти, так и по быстродействию.
Реализация алгоритмов РСА потребовала разработки
принципиально новых методов обработки радиолокационных сигналов - с
помощью когерентных оптических систем. Наиболее эффективным
устройством запоминания сигналов оказалась фотографическая пленка,
обладающая большой емкостью хранения информации. Кроме того,
оптические устройства легко реализуют многоканальную по дальности
систему обработки данных. Объясняется это двухмерностью оптических
систем. Одна координатная ось может быть использована для записи и
обработки азимутальных данных, а другая — для записи этих данных в
различных разрешаемых элементах по дальности.
В РСА с оптической системой обработки (рис. 6.1)
радиолокационные сигналы с выхода приемника поступают в преобразователь, который
превращает их в световые сигналы на входной плоскости когерентного
оптического процессора. Это преобразование осуществляется
пространственным модулятором путем освещения его когерентной световой
волной лазерного источника излучения с помощью расширителя пучка (линз
6—3169 161
Глава б
0\ и Ог). В качестве источника когерентного света используют лазеры
видимого оптического диапазона (длина волны 0,4...0,7 мкм).
Оптический процессор в общем случае представляет собой набор различных
оптических элементов (линз, диафрагм и т.п.), расположенных
определенным образом в пространстве. Необходимый алгоритм обработки
обеспечивается в результате прохождения света, модулированного траекторным
сигналом РСА, через оптические элементы от входной до выходной
плоскости. На выходной плоскости оптической системы формируется РЛИ
объектов, которое поступает на индикатор.
Расширитель Пространст- Оптический Индикатор
пучка венный модулятор процессор
Рис. 6.1. Схема оптической системы обработки сигналов РСА
Благодаря высокой разрешающей способности оптическая система
способна одновременно и практически мгновенно (за время
распространения света от модулятора до выходной плоскости) обрабатывать
большой объем информации при высоком качестве РЛИ. Однако вследствие
того, что в качестве преобразователя сигналов используются
фоторегистраторы с фотохимической обработкой пленки, оптическим системам
обработки сигналов РСА присуще большое время задержки
информации. Кроме того, в них затруднена быстрая смена алгоритма обработки
(при маневре носителя, изменении режима обзора, одновременной
селекции многих движущихся целей). Трудно также осуществлять
оперативную калибровку системы обработки.
Оптическая система включает в себя как оптические, так и
электромеханические, фотохимические и электронные узлы, т.е. имеет
«гибридный» характер, что усложняет ее проектирование, настройку и
обслуживание. Наконец, размещение на борту носителя РЛС и эксплуатация
когерентной оптической системы, имеющей значительные размеры и
чувствительность к вибрациям, также представляет определенные трудности.
162
Системы обработки сигналов РСА
Вследствие этого в настоящее время когерентные оптические
системы обработки сигналов РСА используются в основном в наземных
условиях при таких режимах работы РСА, когда не требуется получение
РЛИ в реальном масштабе времени (картографирование, разведка,
мониторинг и др.).
Структурная схема оптической системы обработки сигналов РСА
землеобзора представлена на рис. 6.2. В оптической системе обработки в
качестве запоминающего устройства используется запись траекторных
сигналов с экрана электронно-лучевой трубки на фотопленку. Сигналы в
каждом периоде повторения с выхода фазового детектора модулируют
яркость экрана электронно-лучевой трубки при однострочной развертке
луча по дальности. Объектив фотокамеры проектирует экран трубки на
фотопленку таким образом, что развертка по дальности располагается
поперек пленки. Фотопленка непрерывно протягивается со скоростью,
пропорциональной скорости полета носителя РСА. В результате вдоль
фотопленки записываются траекторные сигналы в каждом разрешаемом
по дальности элементе. После ьозвращения самолета на аэродром кассета
с пленкой доставляется в лабораторию наземной системы обработки.
В ряде случаев для ускорения доставки информации сигналы с
выхода приемника РЛС передаются по радиоканалу и запись на
фотопленку производится в наземных условиях.
БОРТОВАЯ СИСТЕМА ЗАПИСИ СИГНАЛОВ
Фазовый
детектор
Видеоусилитель
Генератор
опорного
сигнала
Генератор
развертки
Индикатор
У-——. Фотокамера
(*)У-Кассета
НАЗЕМНАЯ СИСТЕМА ОБРАБОТКИ
Система отображения
Вторичная пленка
(РЛИ)
Фотохимическая
обработка пленки
11ервичная пленка
(голограмма)
0
Кассета
Фотохимическая
обработка пленки
Лазер
Оптический
процессор
Рис. 6.2. Структурная схема бортовой и наземной частей
оптической системы записи и обработки сигналов в РСА землеобзора
163
Глава 6
В лаборатории после фотохимической обработки (проявления) так
называемая первичная пленка поступает в оптический процессор.
Участок пленки с записью траекторного сигнала на интервале
синтезирования освещается параллельным пучком света лазера. Пройдя через
оптическую систему процессора (набор линз и диафрагм), световой поток
фокусируется на вторичной пленке в виде радиолокационного
изображения участка местности, траекторные сигналы которого записаны на
освещаемом лазером участке пленки. Первичная и вторичная пленки
протягиваются синхронно, так что на вторичной пленке записывается
радиолокационное изображение полосы обзора местности вдоль
траектории носителя РЛС. Система отображения (диапроектор, фотопланшет
и т.п.) позволяет наблюдать и дешифрировать полученное изображение.
Работа оптической системы обработки. Поясним работу
оптической системы, используя известные принципы оптической
голографии. Запись отраженных сигналов (электромагнитного поля) на
фотопленку аналогична записи голограммы. Роль опорного луча при записи
оптической голограммы в РСА играет опорный сигнал, подаваемый на
фазовый детектор. В случае РСА записываются одномерные
голограммы, представляющие собой интерференционную картину биений
принимаемого и опорного сигналов отдельно в каждом канале дальности.
Каждая голограмма представляет собой чередующиеся прозрачные и
непрозрачные участки пленки, расстояния между которыми
соответствуют фазовой модуляции траекторного сигнала. Множество объектов,
находящихся в зоне обзора, формируют сигнал, который записывается в
виде суммы сигналов точечных цепей, образующих сложный
интерференционный узор-голограмму. Поэтому первичную пленку часто
называют голограммой. Благодаря высокой плотности записи (десятки линий
на миллиметр) внешне голограмма выглядит как равномерно серая
пленка, а интерференционную картину можно наблюдать только при
сильном увеличении.
В оптическом процессоре при освещении голограммы пучком
когерентного света происходит фокусировка света на определенном
расстоянии от пленки и формируется изображение целей. Получение
световой волны при освещении фотопленки лазерным светом аналогично
процессу восстановления волнового фронта в оптической голографии.
Устройство оптической записи сигналов в РСА имеет
электроннолучевую трубку (ЭЛТ) и фотокамеру (рис. 6.3). На экране ЭЛТ
формируется однострочная развертка дальности с яркостной модуляцией,
соответствующей напряжению сигналов на выходе ФД. Линия развертки
дальности проектируется на фотопленку и записывается в виде линии с
переменным почернением (плотностью).
164
Системы обработки сигналов РСА
/'Первичная
фотопленка
(голограмма)
Рис. 6.3. Схема оптической системы записи траекторного сигнала
(голограммы)
Запись развертки дальности выполняется в поперечном
направлении на фотопленке. В процессе записи фотопленка смешается
(протягивается) со скоростью, пропорциональной скорости полета. В результате
линии развертки последовательно одна рядом с другой заполняют
фотопленку, образуя двухмерную запись. Ось Yn поперек пленки
соответствует наклонной дальности до объекта RH, а ось Хп вдоль пленки -
путевой дальности х:
■ = ПхХп=-
где пх и пу - масштабные коэффициенты записи; V^ - скорость
протяжки пленки; с - скорость распространения радиоволн; Vp - скорость
развертки на индикаторе.
Ширина участка записи одиночного сигнала поперек пленки 5уп
определяется разрешающей способностью по дальности.
После фотохимической обработки прозрачность пленки
(коэффициент пропускания) изменяется пропорционально уровню записанного
сигнала. При наличии многих объектов в зоне обзора РСА в результате
суммирования сигналов на первичной пленке образуется запись в виде
сложного интерференционного узора.
Фоторегистратор должен соответствовать основным
требованиям, предъявляемым к фоторегистратору сигналов РСА. Рассмотрим эти
требования.
1. Число разрешаемых элементов вдоль развертки на экране ЭЛТ
должно быть равно Np = kpNR = kp AR/6r, чтобы в процессе записи не
165
Глава б
ухудшить разрешение по дальности (кр - коэффициент запаса по
разрешению ЭЛТ и пленки).
2. Для упрощения системы запись сигналов с выхода ФД ведется
только в одном канале (cos или sin ). При боковом обзоре сигнал цели
имеет в центре записи нулевую доплеровскую частоту (поднесущая
частота отсутствует) (рис. 6Л,а). При освещении такой голограммы
изображение цели фокусируется на
оптической оси. Там же
проходит прямой луч лазера,
обусловленный наличием
постоянной составляющей
прозрачности пленки.
3. Для разделения
прямого луча лазера и
изображения целей запись сигнала
по оси Хп должна
производиться на небольшой
поднесущей частоте FCM, так
чтобы в записи сигнала
отсутствовали нулевые частоты
(рис. 6.4,6). Чем больше FCM,
тем больше смещается
изображение относительно
оптической оси. Повышение
поднесущей частоты
увеличивает требования к частоте
повторения сигналов РСА,
разрешению ЭЛТ и пленки,
а также к стабильности и
скорости протяжки пленки.
*" Поэтому обычно выбирают
г) минимально необходимую
Рис. 6.4.Траекторный сигнал: величину поднесущей час-
а - без поднесущей частоты; б - с поднесущей час- тоты Максимальная частота
тотой; в - изменение прозрачности пленки при за- ,-
писи траекторного сигнала одиночной точечной биеНИИ амплитуды видео-
цели; г - вид записи траекторного сигнала одиноч- импульсов на выходе ФД не
ной точечной цели на фотопленке превышает половины
частоты повторения импульсов
Fn/2. Поэтому поднесущую частоту обычно выбирают равной
половине максимальной частоты биений сигнала, чтобы спектр траекторного
сигнала находился в середине зоны однозначного соответствия допле-
166
!оссооЕоэоооооодсоозэрсароззЕззссзасоэсоэозс
соэоеэаоозссзеозорссозеззедроозэоюсоззеосоееоЧ
Системы обработки сигналов РСЛ
ровской частоты траекторного сигнала и частоты биений сигнала на
выходе ФД, т.е. FCM = Fn/4.
4. Одноканальная запись на поднесущей частоте требует
повышения частоты дискретизации сигнала по азимуту (частоты повторения
Fn ) не менее чем в 2 раза по сравнению с двухканальной системой
записи сигнала, в которой траекторный сигнал разделяется на две
квадратурные составляющие, записываемые раздельно. Напомним, что при
двухканальной системе записи частота повторения выбирается из
условия устранения неоднозначности по азимуту, т.е. Fn > Affl, где
2V
ДГд = —Go sin6H — ширина спектра доплеровских частот траекторного
К
сигнала, определяемая шириной ДН реальной антенны 60.
5. Масштабный коэффициент записи пх должен поддерживаться
постоянным, для чего скорость протяжки пленки изменяют
пропорционально скорости полета самолета. При этом минимально возможная
скорость протяжки (от которой зависит расход пленки) определяется из
условия прописывания максимальных частот биений сигнала fMaKC = Fn/2 :
f F
\^ _ 'макс _ п
™~ 8 ~26 '
где 6X - разрешение системы регистрации вдоль оси хп (в периодах на
1 мм), которое определяется разрешением ЭЛТ, оптической системы
(объектив — пленка) и стабильностью механической системы протяжки пленки.
6. Для правильной записи двухполярного траекторного сигнала в
сигнал на выходе ФД вводится постоянное смещение, определяющее
средний уровень свечения развертки экрана и соответственно среднюю
прозрачность пленки По, так как яркость свечения экрана ЭЛТ и
прозрачность пленки являются величинами, принимающими только
положительные значения. Уровень смещения должен превышать
максимально возможную амплитуду записываемого сигнала (рис. 6.4,в).
7. Для обеспечения линейности тракта записи сигнала необходимо,
чтобы амплитудное пропускание фотопленки ПЕ с записанным сигналом,
т.е. изменение амплитуды (напряженности) света при прохождении через
фотопленку, соответствовало амплитуде видеосигнала на выходе ФД
иФД(1). Так как прозрачность пленки П определяется отношением
интенсивности (мощности) света, освещающего (10) и прошедшего (1П) пленку:
П= 1О/1П , то функция пропускания пленки П(хп) = Пе(хп) должна быть
пропорциональна квадрату амплитуды сигнала П(хп) = (UCM + иФД(1:))2.
167
Глава 6
Суммарная амплитудная характеристика тракта складывается из
характеристик элементов системы записи: ФД, видеоусилителя, экрана
ЭЛТ и фотопленки. Зависимость яркости свечения экрана ЭЛТ и
почернения фотопленки от напряжения сигнала на выходе ФД существенно
нелинейна. Поэтому для устранения нелинейных искажений применяется
предварительное «искажение» сигнала перед записью. Для этого
специальный нелинейный видеоусилитель (его называют гамма-корректором)
обеспечивает на выходе сигнал вида: иву(1) = (исм + иФД(1))~Ук.
Подбором коэффициента ук обеспечивают линейность всего тракта записи.
Для этого необходимо выполнить условие ук =уэуК0Н1р = 2, где уэ = 1...3 -
коэффициент, учитывающий нелинейность зависимости яркости
свечения экрана ЭЛТ от напряжения на модуляторе (амплитуды сигнала);
Укошр = 0,5...5 - коэффициент контрастности фотопленки,
определяемый свойствами пленки и режимом проявления.
Оптическая система преобразует изображения сигналов на
первичной пленке (голограмме) в РЛИ объектов. Для этого первичная
пленка освещается параллельным пучком когерентного света. В
результате прохождения света через пленку и оптическую систему на
выходной плоскости (вторичной фотопленке) формируется РЛИ участка
местности, расположенного в пределах ширины луча реальной антенны.
При протяжке первичной пленки выходное изображение также
перемещается вдоль оси путевой дальности. Для получения радиолокационной
карты большого участка местности и обеспечения некогерентного
накопления вторичная пленка в выходной плоскости оптической системы
движется со скоростью, равной скорости перемещения изображения.
Обработка сигналов в оптическом устройстве сводится к
фокусированию записанного вдоль пленки сигнала (ось Хп ) и передаче без
искажений изображения поперек пленки (ось Yn ) (рис. 6.4,г).
Фокусирование сигнала происходит в процессе распространения
света в свободном пространстве (рис. 6.5). Волны, проходящие через
первичную пленку в
светлых участках записи
сигнала точечной цели, далее
распространяются во все
стороны. В некоторой точке
1 разность хода волны
( Д,,А2,А3 и т.д.) от светлых
участков пленки
оказывается кратной длине волны
света, поэтому в этой точке
Рис. 6.5. Фокусирование изображения
одиночной точечной цели
168
Системы обработки сигналов РСА
волны от светлых участков складываются синфазно. Темные участки
первичной фотопленки значительно ослабляют волны, приходящие в
точку 1 в противофазе. Поэтому в точке 1 образуется яркое пятно -
изображение точечной цели. Расфокусированное изображение (пятно 2)
образуется в результате прямого прохождения луча лазера.
Рассмотрим структуру и характеристики оптической системы.
Задача обработки светового сигнала — аналога траекторного сигнала — при
боковом обзоре сводится к сжатию ЛЧМ сигнала (фокусированию) по
оси Хп раздельно в каждом канале оси Yn. Будем считать, что
обработка сигнала по задержке (дальности) проведена до записи сигнала и
по оси Yn сигнал должен воспроизводиться с наименьшими
искажениями. При высококачественной оптике эта задача не вызывает
трудностей и сводится к проецированию с помощью объектива изображения
входной (первичной) пленки по оси Yn на выходную (вторичную)
пленку по оси YB с заданным масштабом (обычно 1:1).
Алгоритм сжатия ЛЧМ сигнала по оси Хп может быть выполнен
простейшей оптической системой, состоящей из первичной и вторичной
пленок, разнесенных на расстояние Яф. Диафрагма шириной Dn
определяет размер синтезированной апертуры на первичной пленке хп
(рис. 6.6).
Рис 6.6. Распределение света на вторичной фотопленке при формировании РЛИ
При распространении когерентной световой волны в свободном
пространстве на расстояние Яф распределение света Ев(хв) на
вторичной пленке связано линейным интегральным преобразованием с
распределением света Еп(хп) на первичной пленке (без учета здесь и в
дальнейшем несущественных множителей):
169
Глава 6
Е.(х.)= jEn(xn)exp|jA-(xn-xB)2 ldxn =
f kx2] ( kx 1 (62>
En(xn)exp{j-r^Vexp{-j-^xnVdxn ,
Dn l 2КФ J l КФ J
где kc = 2nfkc; Xc - длина волны света.
Квадратичный характер фазовой переходной характеристики
свободного пространства имеет простое физическое объяснение. Точечный
источник света на входной первичной пленке 6(хп) испускает
сферическую волну, которая падает на выходную (вторичную) пленку.
Сферический фронт волны обуславливает квадратичное запаздывание фронта
относительно выходной плоскости. Сравнивая требуемую переходную
характеристику (6.1) и полученную (6.2), можно отметить их идентичность.
Рассмотрим прохождение записанного на первичной пленке траек-
торного сигнала через такую оптическую систему. Распределение света
при освещении первичной пленки параллельным лучом света лазера
будет пропорционально траекторному сигналу:
2л , ч2 ^ F.
(пххп-хн)2+2л
(6.3)
где s0 - постоянный опорный сигнал; пх - масштаб записи по оси Хп ;
хн - координата цели на оси X; 2nFn/(4VIUI) = (onH - поднесущая
частота записанного сигнала; V^ — скорость протяжки пленки.
Запись точечной цели с координатами хн = 0 (боковой обзор)
можно представить в виде трех членов:
S,. [ . Z.H т 1 . I b_ [ . z.)\. 2 2
Пх Xn-jCOnHXn
(6.4)
Подставляя (6.4) в (6.2), получим, что первый и второй члены дают
расфокусированные изображения соответственно s, и s2 на рис. 6.6.
Третий член дает сфокусированное изображение точечной цели:
г \ f I v kc 2imJ, 21
5з(хв)= JSTexpjJ^7—Tr^ "I
Фокусирование происходит при расстоянии Яф между первичной
и вторичной пленками, когда квадратичный член равен нулю:
170
Системы обработки сигналов РСА
XR.
(6.5)
Координата хв вторичной пленки соответствует азимутальной
координате смещения цели. Начало координат (хн = 0) смещено в точку
Хв0 -
2* 4Vm
Расстояние Яф, на котором фокусируется изображение объекта,
определяется наклонной дальностью до объекта RH и масштабом записи
сигнала пх, т.е. расстояние фокусирования изменяется
пропорционально изменению расстояния до объекта RH. Поэтому радиолокационное
изображение местности по путевой дальности формируется на
плоскости, наклоненной к оптической оси системы. Изображение по оси
наклонной дальности формируется проецированием первичной пленки на
наклоненную вторичную пленку с помощью специальной оптической
системы с цилиндрической линзой (рис. 6.7).
Первичная пленка
Вторичная пленка
Рис. 6.7. Формирование изображения на вторичной фотопленке
по оси наклонной дальности
Недостатком такой простой системы обработки является большое
расстояние фокусирования и, следовательно, большое изменение этого
расстояния в пределах полосы обзора РСА (большой угол наклона
вторичной пленки).
Так, при пх = 5,5-103, Я,с = 5-10~7 м, X = 3 см, R = 36 км расстояние
фокусирования будет порядка десятков метров.
Для устранения этого недостатка применяется оптическое
устройство, в котором между первичной и вторичной пленками помещается
телескопическая система (рис. 6.8), состоящая из двух линз L, и L2 с
разными фокусными расстояниями. Расстояние между линзами равно
сумме их фокусных расстояний f{ + f2. Такая система (телескоп) обра-
171
Глава 6
зует в плоскости Р уменьшенное изображение первичной пленки, что
эквивалентно увеличению масштабного коэффициента записи сигналов
пх. Коэффициент уменьшения масштаба изображения телескопической
системой равен отношению фокусных расстояний линз.
L,
Первичная пленка
Вторичная пленка
0
Рис. 6.8. Телескопическая оптическая система
В свободном пространстве между плоскостью Р и вторичной
пленкой происходит фокусирование изображения на плоскость вторичной
пленки. При этом новое расстояние фокусирования определяется по
формуле
(6.6)
ад и
и может составлять всего несколько сантиметров, а угол наклона
выходной плоскости - несколько градусов.
Схема оптической системы показана на рис. 6.9. Линзы Ц и L2
образуют телескопическую систему, формирующую вблизи фокальной
Лазер
Первичная
пленка
Вторичная
пленка
Изображение
Диафрагма
Рис. 6.9. Схема оптической системы обработки
172
Системы обработки сигналов РСА
плоскости линзы L2 изображение записи сигналов вдоль пленки. Для
обеспечения фокусирования изображения во всей полосе обзора по
дальности вторичную пленку располагают под небольшим углом к
оптической оси (единицы градусов). Подбором угла наклона и
перемещением вторичной пленки вдоль оптической оси системы производится
согласование расстояния фокусирования для объектов, расположенных
в ближней и дальней частях полосы обзора РСА.
Для передачи без изменения изображения сигналов по дальности с
первичной на вторичную пленку установлена вторая телескопическая
система с одинаковыми фокусными расстояниями линз L3 и L4. При
этом изображение с первичной пленки проецируется в масштабе 1:1 на
вторичную пленку. Так как вторичная пленка наклонена относительно
оси Yn, то для передачи изображения без искажения первичная пленка
также наклонена, но в другую сторону.
Все линзы оптической системы — цилиндрического типа, т.е. Ц и
L2 действуют только по оси Хп, а линзы L3 и L4 - только по оси Yn .
Участок первичной пленки, освещаемый лучом лазера, ограничен
диафрагмой. Размер окна диафрагмы Dn по оси Хп определяется
требуемым размером синтезированной апертуры Хс с учетом масштаба
пленки вдоль оси Xn:Dn = Xc/nx . По оси Yn диафрагма обеспечивает
освещение всей ширины записи на пленке. Масштаб выходного
изображения по оси Хв: Мх = nx f,/f2 . Масштаб выходного изображения по
оси YB равен масштабу записи на первичной пленке: Mv = п .
Рассмотренная оптическая система осуществляет кадровый
алгоритм обработки траекторного сигнала РСА при ПБО с одновременным
формированием Xo/5x = 2Xcsin0H/da синтезированных лучей,
перекрывающих зону обзора, равную ширине ДН реальной антенны - кадр
РЛИ. При этом максимальное число некоррелированных кадров РЛИ за
интервал наблюдения X0=G0RH/sin6H равно Х0/Хс и, следовательно,
такое число кадров РЛИ может некогерентно накапливаться для
сглаживания спекл-шума изображения.
В заключение отметим, что для устранения шумов, обусловленных
случайным изменением толщины фотоэмульсии на пленке и
колебаниями толщины подложки фотопленки, первичную пленку с записью
сигналов РСА в фильмовом канале оптической системы погружают в
жидкость (иммерсионный фильмовый канал). При этом выбирают
такую жидкость, коэффициент преломления которой равен коэффициенту
преломления фотопленки (четыреххлористый углерод , водный раствор
спирта и т.д.).
173
Глава 6
При использовании оптической системы обработки траекторный
сигнал записывается на борту носителя РСА с экрана
электроннолучевой трубки с однострочной разверткой на фотопленку: поперек
пленки — развертка по дальности, а вдоль непрерывно протягиваемой
пленки — траекторный сигнал.
В наземных условиях проявленная фотопленка (голограмма)
поступает в когерентную оптическую систему. Световой сигнал
формируется в виде распределения амплитуд света на входной плоскости
оптической системы путем освещения проявленной фотопленки лучом
лазера. В результате прохождения света через оптический процессор
на выходной плоскости (вторичной пленке) формируется
радиолокационное изображение.
Оптическая система обеспечивает одновременную многоканальную по
дальности обработку траекторного сигнала, формируя кадр РЛИ во всей
зоне обзора по дальности и азимуту, определяемой ДН антенны.
Для устранения засветки изображения РЛИ расфокусированным
лучом лазера траекторный сигнал на пленке записывается на
небольшой поднесущей частоте.
Фокусировка траекторного сигнала, записанного вдоль пленки,
осуществляется при распространении светового поля в свободном
пространстве между первичной и вторичной пленками. Расстояние, на
котором происходит фокусировка, определяется дальностью до цели
и масштабным коэффициентом записи сигнала на первичной пленке.
Для уменьшения расстояния фокусирования между первичной и
вторичной пленками устанавливается цилиндрическая телескопическая
оптика, которая формирует уменьшенное изображение первичной пленки,
что эквивалентно увеличению масштабного коэффициента записи
траекторного сигнала вдоль пленки. Для обеспечения фокусировки на всех
дальностях зоны обзора вторичная пленка наклонена на небольшой угол
относительно поперечной оси оптической системы.
РЛИ по дальности, записанное поперек пленки, передается на
вторичную фотопленку без искажений с помощью второй
цилиндрической телескопической оптики обычно в масштабе 1:1.
ФД
АЦП
ПО
ЗУ
ЦП
6.2. Цифровые системы обработки
Если основным требованием к РСА землеобзора является получение
изображения заданной зоны
обзора на борту носителя в
реальном масштабе
времени, то используют
цифровую систему обработки
(ЦСО), которая
обеспечивает минимальную задержку
информации (рис. 6.10).
не
Вычислитель
опорной
функции
Рис. 6.10. Цифровая система обработки
174
Системы обработки сигналов РСА
Первая причина задержки связана с необходимостью
формирования требуемого размера синтезированной апертуры, который
определяет разрешающую способность по азимуту. Минимальная начальная
задержка получения изображения равна времени синтезирования Тс.
Время задержки уменьшается с ростом скорости носителя РСА.
Если для уменьшения спекл-шумов используется несколько
некогерентно складываемых изображений NH, то время задержки
увеличивается в NH раз и составляет TCNH.
Вторая причина задержки состоит в том, что требуется
формировать изображение определенного (заданного) участка зоны обзора по
путевой дальности АХ. При боковом обзоре и постоянной скорости
носителя РЛС задержка Т = АХ/V . Если участок АХ меньше ширины ДН
антенны на заданной дальности, можно использовать многоканальную
обработку по азимуту, и время задержки будет определяться только
временем синтезирования.
Третьей причиной задержки получения изображения является
конечное время выполнения операций в системе обработки, которое в
сильной степени зависит от вида системы обработки. Уменьшить это
время можно путем использования ЦСО.
Анализ РЛИ (обнаружение и распознавание цели) обычно занимает
значительное время, поэтому сформированный кадр изображения на экране
индикатора «замораживают» на время принятия решения оператором.
Более жесткие требования к задержке получения информации о
цели предъявляются системами целеуказания и наведения с
использованием РСА. При этом должны оперативно решаться задачи коррекции
РЛИ при маневре носителя РСА (геометрические и амплитудные
искажения, привязка к земной системе координат) и сопровождения цели по
всем координатам.
Далее рассматриваются структурные схемы и алгоритмы
цифровой обработки траекторных сигналов для формирования РЛИ в РСА
землеобзора.
В цифровой системе обработки (см. рис. 6.10) видеосигналы с
выхода фазового детектора (ФД) в каждом периоде повторения
подвергаются дискретизации по времени и квантованию по амплитуде и
преобразуются с помощью быстродействующего АЦП в цифровые сигналы.
Устройство предварительной обработки (ПО) осуществляет
компенсацию эффекта движения носителя РСА по сигналам навигационной
системы (НС) и форматирует цифровые сигналы для регистрации в
запоминающем устройстве (ЗУ). Данные, полученные от всех разрешаемых
по дальности элементов в зоне обзора, запоминаются на участке
траектории, равном синтезированной апертуре, на время выполнения алго-
175
Глава 6
ритма обработки. Цифровой процессор (ЦП) осуществляет обработку
цифровых сигналов, хранящихся в ЗУ, и поступающих из вычислителя
опорной функции. Алгоритм процессора определяется способом
обработки траекторного сигнала при синтезировании апертуры. Далее
считается, что сжатие сигнала по дальности выполнено отдельным
алгоритмом и здесь не рассматривается. Вычислитель опорной функции
снабжает процессор требуемыми опорными сигналами для данного
алгоритма обработки (режима работы) с учетом данных, поступающих из
навигационной системы. В результате на выходе процессора
формируется массив цифровых сигналов, соответствующих амплитуде (или
мощности) сигналов, отраженных от каждого разрешаемого элемента в
зоне обзора РСА, т.е. цифровое изображение местности и объектов,
которое передается в систему отображения.
Главными характеристиками ЦСО являются разрядность и
быстродействие АЦП и процессора, а также объем памяти ЗУ, при этом
требования к ЦСО, а также к вычислителю опорной функции зависят не
только от параметров РСА, но и от способа выполнения алгоритма
обработки процессором.
При использовании цифровой обработки сигналов и цифрового
управления режимами работы к достоинствам РСА кроме
быстродействия, т.е. возможности получения РЛИ просматриваемого участка
местности на борту ЛА в реальном или близком к реальному масштабу
времени, добавляются также широкие возможности по оперативному
изменению разрешающей способности, вида обзора, дальности и угла
наблюдения. Кроме того, при цифровой обработке проще решаются
задачи компенсации искажений сигналов, селекции движущихся целей и
появляется возможность синтезирования апертуры антенны при
маневрировании ЛА.
В заключение отметим, что выбор той или иной системы
обработки определяется задачами, которые возлагаются на РСА, а также
возможностями элементной базы, которая может быть использована при ее
создании.
В цифровой системе обработки квадратурные составляющие
сигнала с выходов ФД в каждом периоде повторения преобразуются в
цифровые сигналы с помощью АЦП и записываются в запоминающее
устройство (ЗУ). Требование к АЦП по быстродействию (частоте
дискретизации FAUn) определяется шириной спектра зондирующего сигнала,
т.е. разрешающей способностью РСА по дальности 5r: FAun = kRc/25r,
где kR - количество отсчетов сигнала на элемент разрешения по
дальности, обычно kR = 1...2. Так, kR=l и 6г = 3м соответствует частота
дискретизации FAun = 50 МГц .
176
Системы обработки сигналов РСА
Число разрядов (длина слова) цифрового сигнала после АЦП
определяется требуемым динамическим диапазоном сигналов РЛИ. Под
динамическим диапазоном LАЦП разрядного цифрового сигнала будем
понимать число уровней квантования сигнала: N^ = 2 АЦП . В
логарифмическом масштабе динамический диапазон ДД=201£1Чкв«6^АЦП, т.е.
добавление одного разряда расширяет динамический диапазон
цифрового сигнала на 6 дБ. Обычно АЦП с 4...8 разрядами считается
оптимальным с точки зрения обеспечения заданного динамического
диапазона при минимальных шумах квантования.
Запись цифрового сигнала в ЗУ в каждом периоде зондирования
ведется строкой по дальности. По мере полета информация в памяти
накапливается. Считывание траекторного сигнала из ЗУ для обработки в
процессоре производится по азимуту (поперек строки дальности). При
этом длина строки цифровой памяти по азимуту (число отсчетов
сигнала Nc) определяется интервалом синтезирования Nc = Тс/Тп = TcFn и,
следовательно, требуемой разрешающей способностью РСА по азимуту.
С учетом памяти по всем каналам дальности объем ЗУ М = 2NcNR^Aun,
где NR = AR/5r - число каналов дальности (при kR = 1), а коэффициент
2 учитывает наличие двух каналов (синфазного и квадратурного).
Подставив значение Nc и NR , получим:
ARF/ AR?FTV (ЫЛ
• — Fi/ АЦП = — 2FnVАЦП • (6-7)
or or
Расчет показывает, что для получения разрешения Ы - 5г = 3 м на
дальности RH = 100 км в полосе обзора по дальности AR - Зкм при угле
наблюдения 6н = 30°, Х = 3см, V = 250m/c, Рп = 1кГц и С^щ =8бит = 1байт
требуемый объем памяти составляет 8 Мбайт.
Важной особенностью этапа записи траекторного сигнала является
необходимость двухканальной системы для получения квадратурных
составляющих. При этом предъявляются высокие требования к
идентичности каналов (ФД, АЦП). Возможно также использование однока-
нальной системы записи на поднесущей частоте. Так, при
использовании поднесущей частоты траекторного сигнала, как и при записи
сигнала в оптической системе обработки, требуется только один канал ФД и
АЦП. При этом частоту выборок траекторного сигнала (частоту
повторения РЛС) необходимо увеличить в два раза. При использовании
промежуточной поднесущей частоты зондирующего сигнала требуется
дискретизация по задержке (дальности) в два раза чаще и, следователь-
177
Глава 6
но, в два раза более быстродействующий АЦП. Частоту повторения
РЛС увеличивать при этом не требуется.
Требования к устройствам, входящим в состав системы ЦСО.
В цифровом процессоре реализуются математические операции
синтезирования апертуры:
Тс/2
J
U(t)h,(t)dt
(6.8)
-Тс/2
где h; - опорная функция системы обработки для i-й цели.
Комплексный траекторный сигнал u(t) в одном канале дальности
представляется в виде суммы двух действительных сигналов
(косинусной uc(t) и синусной us(t) составляющих):
u(t) = uc(t)+jus(t).
Опорная функция для i-й цели также представляется двумя
квадратурными составляющими:
h,(t) = hci(t) + jhsl(t).
Поэтому умножение сигнала u(t) на опорную функцию h;(t)
разбивается на четыре операции умножения и две операции суммирования:
u(t)h1(t)=[uc(t) + jus(t)][hCI(t)
= [uc(t)hci(t)-us(t)hsl(t)] + j[us
а алгоритм согласованной обработки траекторного сигнала может быть
представлен в виде
""^ (6.9)
Тс/2 Тс/2
где с= J [uc(t)hcl(t)-us(t)hsi(t)] dt, s= J [us(t)hcl(t) + uc(t)hsi(t)] dt.
-TJ2 -Tc/2
Структура алгоритма обработки, формирующего один
синтезированный луч в направлении Qi, показана на рис. 6.11.
Требуемое быстродействие процессора при формировании кадра
РЛИ в реальном масштабе времени за время синтезирования
определяется необходимостью выполнить NRNnNcka комплексных операций
умножения сигнала на опорную функцию, где Nn = AL/b£ - число
лучей (разрешаемых элементов) в зоне обзора по азимуту; ка -
количество отсчетов РЛИ на элемент разрешения по азимуту. Кроме того,
необходимо выполнить столько же операций сложения и операций вычисле-
178
Сигнал ПРМ
ФД
Опорный
сигнал
Uc(t)
Умножение на опорную функцию
»
ФД
Us(t)
тс
2
Другие
каналы
обработки ■♦■
по азимуту
X
hc(t)
hs(t)
Вычислитель опорных
функций
Накопление! Взятие модуля
Г -2
(•У
У
(•У
Рис. 6.11. Структура алгоритма обработки траекторного сигнала
(О
Глава 6
ния модуля комплексных чисел. Следует отметить, что умножение
комплексных чисел - операция значительно более сложная, чем их
сложение. Поэтому часто быстродействие ЦСО оценивают в количестве
комплексных операций умножения в секунду, т.е. операции сложения не
учитывают. Добавим к сказанному, что операцию нахождения модуля
также не учитывают, поскольку она выполняется по приближенным
соотношениям и реализуется достаточно быстро. Таким образом, при
формировании РЛИ по кадрам требуемое быстродействие (при ка = 1)
V Tc 6r
Для значений AL = AR = 3 км, 8г = 8£ = 3 м и Fn = 1 кГц требуемое
быстродействие процессора Q = 109 операций / с .
Требования по быстродействию процессора и объему оперативной
памяти могут быть снижены путем введения предварительного фильтра
(ПФ), который позволяет уменьшить частоту отсчетов сигнала на входе
процессора.
Частота повторения зондирующих импульсов выбирается из
условия устранения неоднозначности по азимуту, т.е. из условия передачи
без искажения всего спектра доплеровских частот траекторного сигнала,
имеющего ширину Af0, которая определяется шириной ДН реальной
антенны:
^^. (6.11)
С другой стороны, значение Fn ограничено условием однозначного
определения дальности: Fn < c/2RMaKC, где RMaKC - максимальная дальность
действия РСА.
Предварительный фильтр можно использовать либо когда есть
запас по частоте повторения: Fn > Af0, либо когда можно снизить
требования к разрешающей способности или числу некогерентных
накоплений: Afo6p<Af0.
При кадровом алгоритме формирования РЛИ требуемая полоса
обрабатываемых частот траекторного сигнала определяется числом
лучей в зоне обзора: А^р = N^f = Nn/Tc.
При ТО число лучей зависит от отношения ширины зоны обзора AL
и разрешения по азимуту 5^: Nn = AL/Ы и не зависит от числа
некогерентных накоплений, так как накопление осуществляется путем сложения
полных кадров РЛИ одного и того же участка местности, полученных на
180
Системы обработки сигналов РСА
соседних интерватах синтезирования. Если зона обзора по азимуту
определяется всей шириной ДН (т.е. AL0 = RH90 ), то Afo6p = Af0 .
При ПБО число лучей Nj, и число некогерентных накоплений NH
(6-12)
взаимосвязано: Т"4Л = —"^ 2Н , поэтому
N^sinG.
нмакс
где NH макс = Х0/Хс = 25^/d - максимально возможное число
некогерентных накоплений, которое зависит от отношения максимально
возможного размера синтезированной апертуры Хо (определяемого
шириной ДН 80) и размера синтезированной апертуры Хс,
необходимого для получения заданного разрешения по азимуту.
При выполнении максимально возможного числа некогерентных
накоплений при ПБО получим также, что Afo6p = Af0 .
При построчном алгоритме формирования РЛИ и ПБО на каждом
интервале синтезирования формируется NH лучей, разнесенных по азимуту
на размер синтезированной апертуры Хс. При этом максимальное
значение полосы обрабатываемых частот при максимально возможном числе
некогерентных накоплений, как и при кадровом алгоритме, равно ширине
спектра всего траекторного сигнала Af0. Это объясняется тем, что в
данном случае синтезированные лучи должны перекрывать зону
одновременного обзора, определяемую шириной ДН реальной антенны.
Таким образом, если требуемая полоса частот обрабатываемого
сигнала Af^ < Fn, то, используя в устройстве предварительной
обработки полосовой фильтр (ПФ) для ограничения ширины спектра
траекторного сигнала полосой частот Af^ (рис. 6.12,я), на выходе такого
фильтра можно брать выборки сигнала с частотой Fuo. Эта частота
меньше, чем Fn, что позволяет снизить требования к объему памяти и
быстродействию ЦП.
Допустимая частота выборок преобразованного траекторного
сигнала на выходе ПФ будет определяться выражением
1^, (6-13)
где кПФ — коэффициент запаса по частоте выборок, который определяется
допустимым уровнем перекрытия боковых лепестков спектра сигнала на
выходе ПФ (см. рис. 6.12,я).
181
Глава б
Форма отдельных
участков спектра
преобразованного сигнала и уровень их
перекрытия будут
различными в зависимости от
сложности фильтра и вида весовой
функции. Коэффициент кПФ
обычно изменяется в
пределах 1...2 при уровнях
перекрытия -50... -30 дБ.
В простейшем случае
обработка сигнала в ПФ
может сводиться к простому
суммированию отсчетов в
течение времени ТПФ = 1/Fn0,
при этом число
суммируемых отсчетов NrM)=TrK)/XI=
= ¥п/¥ПФ . Если при этом
интервалы времени, на которых
происходит накопление
сигнала, не перекрываются, ПФ
называется одноканальным.
Такое суммирование
позволяет понизить частоту
отсчетов траекторного сигнала при
сохранении однозначности
РЛИ по азимуту.
Простое суммирование возможно, пока не нужно учитывать
квадратичное изменение фазы сигнала в течение времени суммирования ТПФ .
Если считать допустимым изменение фазы на краях интервала Тпф (по
сравнению с его серединой) на л/4, то минимальную частоту ¥ПФ мин можно
найти из соотношения
\2
б)
Рис. 6.12. Спектр траекторного сигнала (а)
и траекторный сигнал на входе
и выходе предварительного
фильтра (Nrw> = 3) (б)
V sin GH [ ТПФмин
2R.
п
4
Отсюда F,
2V2sin26
ПФмин
ПФ мин
— . Заметим, что Т,
ПФ мин
соответствует предельному времени синтезирования при нефокусированной
обработке сигнала - режиму ДОЛ.
182
Системы обработки сигналов РСА
Для дальности RH =100 км и угла наблюдения 9н = 30°, V = 250 м/с,
Х = 3см значение РПфчин составляет 3,2 Гц.
Если требуемая полоса Afo6p = Af0, то при кПФ = 1 получим, что
_2V(sineH)e0_2VsineH
~ > \
что в eQyjRj2k раз больше, чем РПФмин.
Если размер антенны, скорость носителя, угол наблюдения и
дальность зоны обзора соотносятся так, что имеется запас по частоте
повторения: Fn > Af0, то возможно использование ПФ для устранения этой
избыточности. Будем полагать, что как для ТО, так и для ПБО
Af^p = Af0 , поэтому ¥пф = Af0.
Значение F^ зависит от угла наблюдения (6.14) и в рассматриваемом
примере (V = 250 м/с, da = 1 м ) может составлять величину от 250 Гц при
9Н = 30° до 500 Гц при 9н = 90° .
Число отсчетов, накапливаемых в ПФ,
F F "k F Л
N = = п = п а (6 15)
ПФ РПФ 2V(sin6H)G0 2VsinGH '
Для рассматриваемого примера, когда 1^>А^ (Fn =1 кГц, X = Зсм, da = 1м,
V= 250 м/с, 8Н = 30° , Af0 = 250 Гц ) получим Nn<1( = 4, т.е. число отсчетов
сигнала уменьшается в четыре раза.
Работа простого одноканального ПФ для одного разрешаемого
элемента дальности показана на рис. 6.12,6. Цифровой сигнал u(n)
поступает в ПФ с частотой Fn. В ПФ реализуется операция
N„
n=l
где uno(v) — цифровой сигнал на выходе ПФ.
Надо иметь в виду, что накопление сигнала должно производиться
одновременно в синфазном и квадратурном каналах.
Часто оказывается возможным снизить требования к
быстродействию системы предварительной обработки сигналов. Обычно ширина
зоны обзора по дальности оказывается значительно меньше максимально
возможной по условию однозначности дальности. Это означает, что
период повторения гораздо больше времени приема сигналов, отраженных
183
Глава 6
от заданной зоны обзора. В этом случае запись сигналов в систему
памяти в каждом периоде повторения может производиться в течение этой
малой части периода, а считывание возможно в течение всего периода.
При этом частота считывания снижается во столько раз, во сколько
период зондирования больше времени приема сигналов, отраженных от
заданной зоны обзора. Реализация этого алгоритма требует введения
дополнительного быстродействующего буферного запоминающего
устройства между АЦП и ПФ.
Структурная схема ЦСО с предварительной обработкой показана
на рис. 6.13. Цифровой траекторный сигнал в каждом периоде
зондирования запоминается в буферном ЗУ (БЗУ) до прихода нового сигнала в
следующем периоде зондирования. Емкость БЗУ МБЗУ = 2NR^Alin .
Скорость записи в БЗУ определяется частотой выборок АЦП F^, а
частота считывания равна NRFn.
Режим
работы
НС
Приемопередающий
тракт
ФД
Вычислитель
опорной
функции
! V .. ,
цг
ПФ
Л *_
АЦП
БЗУ
ЦС
ЗУ
ПФ
ЗУ
—N
ЦП
1-й этап
2-й этап
Система
индикации
Цифровая система обработки
Рис. 6.13. Структурная схема цифровой РСА
В ПФ накапливается Nno отсчетов сигнала в каждом канале
дальности. В состав ПФ входят сумматор и блок памяти (ЗУ ПФ), в котором
накапливается и хранится сигнал. Емкость ЗУ ПФ МПФ определяется
конкретным типом ПФ. Для одноканального ПФ: МПФ = 2NRNnofno,
где СПФ - число разрядов двоичного представления сигналов на выходе
ПФ. Накопление сигнала в ПФ приводит к расширению динамического
диапазона цифрового сигнала на 201gNn<I), что требует увеличения
разрядности на (201§1ЧПФ)/6,т.е. ^Пф=^ацп+(201еКпФ)/6.
БЗУ, ЗУ ПФ и сумматор реализуют первый этап обработки. Для
устранения средней доплеровскои частоты траекторного сигнала перед
184
Системы обработки сигналов РСА
ПФ устанавливается цифровой смеситель (ЦС), на который с цифрового
гетеродина (ЦТ) подается сигнал с частотой fflCp = 2Vcos9H/A.. Значение
1дСр рассчитывается в вычислителе опорной функции по данным о
скорости носителя V и положении зоны обзора 6Н . Выходной сигнал ПФ
запоминается в ЗУ на интервале синтезирования для дальнейшей
обработки. Число отсчетов сигнала каждого канала дальности, хранящегося
в блоке ЗУ, равно Nn. Далее в ЦП производится вычисление сигнала
РЛИ, при этом опорная функция определяется по данным,
поступающим от навигационных датчиков (НС) в зависимости от режима работы
РСА. С выхода ЦП РЛИ поступает в систему отображения.
Некогерентное накопление изображений может осуществляться как в ЦП системы
обработки, так и в системе индикации.
Объемы памяти БЗУ и ЗУ ПФ составляют незначительную часть общей
оперативной памяти ЦСО. Так, в рассматриваемом примере, где
NR = ДЯ/ог = 1000, ИПФ = 4, £АЩ1 = 8 бит, объем памяти МБЗУ = 2 Кбайт, а
МПФ =10 Кбайт. При оценке объема памяти необходимо учитывать
увеличение требуемого числа разрядов после накопления сигнала в ПФ:
M3y=2NRN^ = 2NRN,(^ + ^)=2ARR.eo(<yuI1+^»]/8r«.
Для рассматриваемого примера (AR= 3 км, RH = 100 км, X = 3 см, da = 1 м,
(мщ = 8 бит, Nn<1, = 4 и 5г = Ы = 3 м) получим М3у = 2,5 Мбайт.
Требования к ЦСО по быстродействию при использовании ПФ
также уменьшаются. При одноканальном ПФ с равномерной весовой
функцией на первом этапе в течение периода повторения должно быть
выполнено NR комплексных операций (одно сложение и одно
вычитание). При этом скорость поступления данных с выхода фильтра на
процессор определяется частотой выборок ¥пф. Требуемое быстродействие
второго этапа уменьшается благодаря уменьшению количества обра-
N
батываемых отсчетов с N до N =——. Так, при ка =1 (6.10)
Nn<r>
Fn
Тс 5г
Тс
В данном примере Nno =4, поэтому требуемое быстродействие
уменьшается в четыре раза и составляет 250 млн операций/с.
185
Глава 6
Заметим, что при Fn<1) = Af0 число отсчетов сигнала на выходе ПФ
Nn = Nj,, поэтому при кадровом алгоритме и таком выборе полосы ПФ
требование по быстродействию ЦП, в котором реализуется кадровый
алгоритм при непосредственном вычислении соотношения (6.8), может
быть записано в виде
>^=дке^2У(5ше„)90 = дкдц
Тс 8г Ъ(. X or Ь£
Величина задержки информации и требования к быстродействию
ЦСО определяются также способом обработки сигнала в процессоре. При
этом основным направлением снижения объема вычислений в ЦП
является использование при обработке сигналов алгоритма быстрого
преобразования Фурье (БПФ). В этом случае большинство способов сводится к
такому преобразованию траекторных сигналов (фокусировка, компенсация
центральной частоты, учет изменения ширины спектра, компенсация
задержки огибающей), в результате которого каждый траекторный сигнал
представляет собой гармонический сигнал определенной частоты,
состоящий из Nc отсчетов цифровых сигналов в каждом элементе
дальности. Обработка таких сигналов сводится к многоканальному по дальности
спектральному анализу, выполняемому методом БПФ.
При использовании зондирующих сигналов с ЛЧМ удается так
преобразовать траекторные сигналы, что внутрипериодная и межпери-
одная (траекторная) обработки осуществляются одновременно путем
использования алгоритма двухмерного БПФ.
Типовые способы обработки сигналов в РСА. В настоящее время
известно множество способов обработки сигналов в РСА. Типовыми из
них являются: прямая свертка, быстрая свертка и гармонический анализ.
1. Способ прямой свертки (ПС) заключается в непосредственном
вычислении выражения (6.8) для каждой точки картографируемой
поверхности, в которой определяется значение РЛИ. При равномерном
прямолинейном движении ЛА выражение (6.8) переходит в уравнение
типа свертки (отсюда и название способа). Например, при ПБО
алгоритм формирования одного синтезированного луча в направлении
наблюдения 6Н можно записать в виде
Тс/2
J U(t + Tc)h(t,8H)dt ,
-Тс/2
где хв и тс = xB/V -соответственно пространственный и временной сдвиг
текущего интервала синтезирования относительно начала системы
координат. Величина хв в этом случае является координатой РЛИ по азимуту.
186
Системы обработки сигналов РСА
Способ прямой свертки может быть использован при любом виде
обзора и обеспечивает высокое качество РЛИ, однако требует
значительных затрат на формирование РЛИ каждого элемента разрешения
отдельно. Поэтому он применяется в основном при ПБО с построчным
формированием РЛИ.
Структура алгоритма для формирования одного синтезированного
луча способом прямой свертки при ПБО показана на рис. 6Л4,а. Сигнал
с выхода ПФ записывается в ЗУ строками по дальности, а считывается
строками по азимуту. После считывания вычисляется в дискретном виде
выражение (6.8), при этом опорная функция определяется значениями
0; и R, каждого элемента разрешения.
РЛИ
Выход ПФ
Запись
Опорная
функция
1 2 3
N,
а)
Выход ПФ _
Опорная
функция
ЗУ
БПФ
БПФ
ПЗУ
—^
X
1
р.
ОБПФ
1-1
РЛИ
Выход ПФ^
^
ЗУ
б)
X
—^
БПФ
—►
1-1
РЛИ
Т Опорная
I функция
в)
Рис. 6.14. Структурная схема алгоритма обработки траекторного сигнала
способом прямой свертки («), быстрой свертки (б) и гармонического анализа (в)
В простейшем случае ПБО (6Н = 90° ) и режима ДОЛ, когда не
учитывается квадратичное изменение фазы, опорная функция представляет
собой весовую функцию W(t) и алгоритм обработки сводится к сумми-
187
Глава б
рованию с учетом весовой функции синусной и косинусной
составляющих траекторного сигнала:
Nc Nc
C = £wnUcos(<pn); S = £wnUsin(cpn); I =
n=l n=l
При поступлении с выхода ПФ нового отсчета сигналов полоски
дальности первый отсчет в ЗУ «стирается», а все остальные сдвигаются
в сторону первого. Поступивший отсчет записывается в
освободившуюся ячейку и вычисляется новый отсчет РЛИ. Таким образом по мере
полета ЛА формируется РЛИ полосы местности.
Для получения одного отсчета РЛИ во всех каналах дальности
необходимо выполнить Nnc=NRNnNJI комплексных умножений. Для
формирования РЛИ в реальном масштабе эти операции должны
выполняться за интервал времени между поступлениями отсчетов с ПФ:
ТПФ = 1/Рпф . Поэтому требуемое быстродействие
Qnc = £=■ = ^КпМлРПф = ТЧ^ТДЙф .
nc £
*ПФ
Поскольку при таком алгоритме число лучей N,, равно требуемому
числу некогерентных накоплений NH, получим, что в случае ¥ПФ = Af0
При реализации максимально возможного числа некогерентных
накоплений NH = 2o7/da и ¥ПФ = Af0
ДК28оК„2Уео5.п9„ = 2ДЦДК
8r da X da 5r
a A
Для рассматриваемого примера, в котором AR=3km, Rh = 100км, бг=3м,
V = 250м/с , 9Н = 30° , Х = Зсм, а ширина ДН 60 = X/da = 0,03, величина
Qnf. = 1500 млн операций/с. Увеличение требуемого быстродействия в шесть
раз по сравнению с обработкой сигнала способом ПС при кадровом алгоритме
(6.17) в тех же условиях ( F^=Af0) обусловлено формированием 1^=25C/da = 6
лучей для обеспечения некогерентного накопления изображений.
Если некогерентное накопление при строчном алгоритме
отсутствует (формируется один луч в направлении, совпадающем с
максимумом реальной ДН), то
О -м TF2 -AR2RHVsi"eH
Qnc - NRTcFn<1) - ———_. (6.20)
188
Системы обработки сигналов РСА
Как видно из приведенной формулы, при обработке сигнала способом
прямой свертки и строчном алгоритме с одним синтезированным лучом
(без некогерентного накопления) требуемое быстродействие растет
пропорционально третьей степени разрешающей способности РСА по азимуту.
Для рассматриваемого примера (AR = 3 км, 5r = 5f = 3 м , RH = 100 км,
Х = 3см, V = 250м/с и ен = 30°) требуемое быстродействие составляет
20,8 млн операций/с.
В случае формирования одного луча расстояние между отсчетами
РЛИ по оси X: ДХ = УТПФ =6^/siii8H . В частности, при боковом обзоре
Ах = Ъ£. Напомним, что при отсутствии ПФ АХ = VTn < ЪС, т.е.
применение ПФ с полосой пропускания ¥ПФ = VsinGH/6f при строчном
алгоритме позволяет обеспечить необходимый шаг по РЛИ.
2. Способ быстрой свертки (БС) представляет собой реализацию
способа прямой свертки в частотной области. Способ основан на том,
что свертке двух функций u(t) и h(t) во временной области
соответствует преобразование Фурье от произведения спектров этих функций:
Ф{1(т)}=Ф{и(0}Ф{ВД},
где Ф{ } - символ преобразования Фурье. Как видно из приведенного
выражения, при обработке сигнала способом быстрой свертки (БС)
вычисляются прямые преобразования Фурье входного сигнала u(t) и
опорной функции h(t) в пределах интервала синтезирования.
Полученные в результате этих преобразований спектры перемножаются, после
чего результирующий спектр подвергается обратному преобразованию
Фурье. Модуль обратного преобразования Фурье является сигналом,
определяющим РЛИ (рис. 6.14,6).
Все перечисленные преобразования представляют собой
дискретные преобразования Фурье (ДПФ), которые обычно реализуются на
основе алгоритмов быстрого преобразования Фурье (БПФ). Поэтому
свертку в частотной области называют высокоскоростной или быстрой.
Однако эффективность быстрой свертки достаточно высока лишь в том
случае, если преобразование (6.8) сводится к преобразованию типа
свертки. Поэтому этот способ целесообразно использовать при ПБО и
равномерном прямолинейном движении носителя.
Для реализации выражения (6.8) в частотной области при цифровой
обработке сигналов должна быть реализована так называемая линейная
свертка. При этом, строго говоря, число отсчетов как сигнала, так и
опорной функции должно быть бесконечным. Реально же обрабатывается
конечное число отсчетов. Произведение ДПФ двух функций с конечным
числом отсчетов соответствует так называемой кольцевой свертке.
189
Глава б
Одно из свойств кольцевой свертки состоит в том, что при Nn
отсчетах входного сигнала лишь один выходной отсчет соответствует
линейной свертке (N^ = 1), т.е. является «правильным», а все остальные -
«неправильные». Для того чтобы с помощью кольцевой свертки
получить Nnp > 1 «правильных» отсчетов, число отсчетов входного сигнала
необходимо расширить до величины NBX = Nn +(Nnp -1). При этом
число отсчетов опорной функции нужно увеличить до той же величины
путем добавления нулевых по значению отсчетов.
Поэтому при быстрой свертке, в отличие от обработки сигналов
способом прямой свертки, в ЗУ накапливается не Nn отсчетов, а на
N,^-1 больше. После считывания Nn+(Nnp-l) отсчетов сигнала
поступают в процессор БПФ, на выходе которого формируется столько же
отсчетов ДПФ. Опорная функция дополняется (N^ -1) нулевыми
отсчетами, заранее преобразуется с помощью процессора БПФ в Nn + (Nnp -1)
отсчетов ДПФ и хранится в постоянной памяти (ПЗУ) в виде
комплексных коэффициентов. Далее ДПФ сигнала и опорной функции
перемножаются, и результат перемножения преобразуется методом обратного
БПФ (ОБПФ). В результате вычисления модуля комплексного сигнала,
поступающего с выхода ОБПФ, образуется Nn + (Nnp-l) отсчетов
выходного сигнала, из которых лишь первые N отсчетов являются
«правильными», т.е. сигналом РЛИ. Поэтому только эти отсчеты поступают в
систему индикации. После образования группы из N^ отсчетов в
процессе полета ЛА Nnp новых отсчетов сигнала «вытесняют» из ЗУ столько
же устаревших, и цикл обработки повторяется. Таким образом, при
быстрой свертке РЛИ формируется по кадрам.
Для выполнения БПФ или ОБПФ требуется 0,51og2N операций
комплексного умножения, причем N = 2", где п - число итераций при
выполнении БПФ. Поэтому требующееся число операций при быстрой
свертке составляет
Заметим, что для выполнения БПФ и ОБПФ должно выполняться
условие Nn+(Nnp-l) = 2n . Эти операции необходимо выполнить в
течение отрезка времени N ТПФ, поэтому требуемое быстродействие
- IXlog2(Nn + Nnp -1)+ l)Fno
190
Системы обработки сигналов РСА
При обработке сигнала способом быстрой свертки РЛИ
формируется по кадрам, состоящим из N отсчетов, поэтому N представляет
собой не что иное, как число формируемых лучей Nn. При этом сдвиг
кадров по оси X равен АХ = VNnpTno. Если кадр РЛИ должен
перекрывать всю зону обзора, определяемую шириной реальной ДН, то число
правильных отсчетов равно максимальному числу лучей внутри ДН:
Nnp = Nn = RHQ0/M, а полоса пропускания ПФ ¥ПФ = Af0. Так как в этом
случае Nnp = Nn, а ранее было показано, что при ¥пф = Af0 число
отсчетов на выходе ПФ Nn также равно Nn, то N^ = Nn. Поэтому сдвиг
кадров по оси X АХ = VNnTno = VTC - Хс, а требуемое быстродействие
Qec= R " ?f2—~ = -z ~~s—- 1°б2 —7^- \+l ■ (6-21)
6r
J
При выводе выражения учтено, что Nn + N = 2Nn = 2N., =
= 2RH60/X»l. Для рассматриваемого примера, в котором AR = 3km,
Rh = 100km, бг = 3м, V = 250m/c, вн=ЗО°, Х = 3см, с1а=1м и ширина
ДН 0О = X/da — = 0,03, требуемое быстродействие составляет 6 млн one-
da
раций/с. При расчете величина Nn =Nn = RH60/6^ = 1000 принималась
равной 210 = 1024 с целью выполнения алгоритма БПФ.
3. Способ гармонического анализа (ГА) представляет собой
реализацию соотношения (6.8) с помощью многофильтровой системы. Этот
способ основан на том, что азимут любого отражателя однозначно
связан со средней доплеровскои частотой отраженного от него сигнала.
При ГА опорная функция рассчитывается для центра зоны обзора:
Она осуществляет компенсацию средней доплеровскои частоты
зоны обзора и фокусировку изображения (компенсацию ЛЧМ). В
результате траекторный сигнал каждой точки зоны обзора имеет
постоянную доплеровскую частоту. Сигнал РЛИ в каждом канале дальности
формируется путем преобразования Фурье от произведения принятого
сигнала и опорной функции
1(6,) =
Тс/2
U(t)ho(t)exp{j27if^}dt
Тс/2 Г 4 1
J U(t)ho(t)exp|jyVe.tldt
-Тс/2 * Х
191
Глава 6
В результате такой обработки в каждой полоске дальности
формируется РЛИ зоны обзора по азимуту. Отсчет сигнала после ПФ на часто-
2V
те f^ =—64 соответствует сигналу РЛИ на азимутальном угле 04.
А
Процесс обработки сигнала способом ГА заключается в
следующем. В ЗУ записывается NRNn (при отсутствии ПФ - NRNC) отсчетов
сигнала, относящихся к одному интервалу синтезирования (рис. 6.14,в).
Как и при других способах обработки, сигнал в ЗУ записывается
строками по дальности, а считывается строками по азимуту. Считанный
сигнал умножается на опорную функцию, и результат перемножения
поступает в процессор, выполняющий БПФ. Комплексный сигнал с
выхода процессора БПФ направляется в устройство вычисления модуля,
на выходе которого формируется Nn отсчетов сигнала РЛИ. В
результате обработки сигналов всех каналов дальности формируется кадр РЛИ
с NR строками. Далее хранимые в ЗУ отсчеты траекторного сигнала
полностью обновляются. В результате обработки сигнала на другом
интервале синтезирования образуется новый парциальный кадр и т.д.
Каждый отсчет сигнала изображения в парциальном кадре
соответствует определенной доплеровской частоте траекторного сигнала.
Расстояние между фильтрами БПФ по частоте определяется интервалом
синтезирования 8f = 1/Тс, поэтому расстояние между отсчетами РЛИ по
азимутальной координате 6; равно разрешающей способности РСА.
Полоса частот, обрабатываемых процессором БПФ, определяется
частотой повторения входного сигнала, поэтому при отсутствии ПФ и
частоте повторения зондирующих импульсов большей, чем ширина
спектра доплеровских частот принимаемого сигнала на выходе
процессора БПФ, имеются избыточные отсчеты РЛИ вне ширины ДН реальной
антенны. Применение ПФ устраняет избыточные отсчеты и снижает
требование к быстродействию процессора.
Иногда при обработке сигналов способом ГА требуется получить
больше одного отсчета сигнала РЛИ на элемент разрешения по азимуту,
т.е. обеспечить ка > 1. Для этого достаточно дополнить число отсчетов
сигнала на входе процессора БПФ нулевыми отсчетами No = (ka -l)Nn.
Добавление нулевых отсчетов не связано с расширением памяти, однако
повышает требования к быстродействию процессора. Следует отметить,
что в любом случае число отсчетов сигнала на входе процессора БПФ
должно соответствовать числу 2" , поэтому добавление нулевых
отсчетов применяют также для выполнения этого условия.
Требуемое число комплексных умножений для получения всего
кадра РЛИ при ка = 1
192
Системы обработки сигналов РСА
NrA=NRNn(0,5log2Nn + l).
Для получения кадра РЛИ в реальном масштабе времени эти
операции необходимо выполнить за время Тс, а поскольку при ГА число
лучей Nn = Nn , то при максимальном значении Nn = RJdo/b(
= NRNn(0,51og2Nn +1) = AR V(sin6H)eo
ГА Tc 5r Л
При заданных выше параметрах и условиях работы РСА (AR = 3 км ,
Rh = 100km, 6^ = 8г = Зм, V = 250 м/с, 6н = 30°, Х = 3см, da = lM,
Go = X/da = 0,03) QrA =1,5 млн операций/с . При расчете требуемого
быстродействия для обработки сигнала способом ГА так же, как и при
расчете требуемого быстродействия для способа БС, число отсчетов сигнала на
выходе ПФ Nn = N, = RJ^JbC = 1000 было увеличено до 2ю = 1024, что
требуется для выполнения БПФ.
В связи с тем, что при ГА используется одна опорная функция для
всей зоны обзора по азимуту, качество РЛИ по сравнению со способом
прямой свертки снижается. Это объясняется тем, что точно
сфокусированным оказывается только центр кадра по азимуту (выбор размеров
кадра при обработке с одной опорной функцией обсуждался в гл. 5).
Кроме того, все азимутальные каналы имеют одинаковую весовую
обработку W(t), и подстройка алгоритма для каждого частотного канала в
процессе БПФ невозможна. Вместе с тем, поскольку при ГА снижаются
требования к многоканальное™ системы обработки (одна опорная
функция) и используется БПФ, обработка сигнала производится с
высокой скоростью, что особенно важно для получения РЛИ в реальном
масштабе времени.
Для сравнения способов обработки по быстродействию сравним
требования к быстродействию ЦП для получения в реальном масштабе
времени РЛИ одного канала дальности (NR = 1) при использовании ПФ
с полосой пропускания Fn<1) = Af0. В этом случае число отсчетов сигнала
на его выходе Nn = Nn, и выражения для требуемого быстродействия
при различных алгоритмах обработки приобретают вид:
q ^IU-q - 2Nn('°g22Nn + 1) . Кл(0,51оё2Кл+1)
Тс ' Тс ' ГА Тс
где под числом лучей Nn подразумевается число лучей,
перекрывающих всю диаграмму направленности реальной антенны.
7—3169 193
Глава б
, за-
Число лучей Nn, как и время синтезирования Тс =
висит от разрешения по азимуту : Nn = RJdo/M . Число лучей
представляет собой не что иное, как коэффициент сжатия по азимуту ксж = 60/бВ ,
где 56 - ширина синтезированной ДН. Зависимости отношений
QEC _ 2(log2 2ксж +1) . QrA_0,5(log2kc;K+l)
"■еж
от коэффициента сжатия по азимуту приведены на рис. 6.15. При
высоком разрешении (большом ксж ) способ ГА имеет преимущества по
быстродействию перед остальными способами, особенно перед способом ПС.
0 200 400 600 800 1000
Рис. 6.15. Уменьшение требуемого быстродействия процессора при обработке
траекторного сигнала способами ГА и БС по сравнению с ПС
Способы цифровой обработки сигналов в РСА (прямой свертки,
быстрой свертки и гармонического анализа), рассмотренные выше
применительно к случаю синтезирования апертуры при прямолинейном и
равномерном полете J1A, можно обобщить и на случай произвольного
движения ЛА. Необходимым условием для этого является определение
опорной функции для каждого интервала синтезирования.
Некоторые дополнительные особенности синтезирования апертуры
антенны при квадратичной аппроксимации относительного расстояния
«ФЦА-чхель» и произвольном полете Л А присущи лишь способу ГА, так
как в этом случае используется одна опорная функция для всего кадра РЛИ,
т.е. не учитывается изменение крутизны ЛЧМ при изменении азимута
отражателя. Поэтому при отклонении от центра кадра по азимуту разрешение
будет ухудшаться и тем сильнее, чем дальше находится элемент
разрешения от центра кадра. Это приводит к ограничению азимутального размера
кадра допустимой расфокусировкой на его краях. Маневрирование
носителя увеличивает зависимость крутизны ЛЧМ сигнала от азимута отражателя,
194
Системы обработки сигналов РСА
и поэтому ограничение на размер кадра AL становится более жестким.
Например, если представить маневр носителя в виде разворота с радиусом
Rp, соизмеримым с дальностью наблюдения, допустимая величина зоны
обработки по азимуту AL = al/i i- R" ] уменьшается с увеличени-
р /( 2RpsineJ
ем интенсивности маневра (уменьшением R ).
При решении многих тактических задач с использованием РСА
требуется минимизация задержки информации, обусловленной необходимым
временем выполнения операций системой обработки сигналов.
Минимизация времени задержки возможна при использовании
цифровой системы обработки (ЦСО). При этом также достигается
гибкость в управлении алгоритмами обработки при изменении
решаемых задач.
Структура ЦСО состоит из ФД, АЦП, ЭВМ предварительной
обработки для согласования и форматирования траекторных сигналов в
запоминающем устройстве и цифрового процессора (ЦП).
Требуемый объем памяти ЦП определяется числом разрешаемых
элементов в зоне обзора по дальности и азимуту, а также
разрядностью АЦП и достигает 8... 10 Мбайт.
Требования по быстродействию ЦП для обеспечения работы РСА в
реальном масштабе времени достигают значений 1О8...1О9
комплексных операций в секунду.
Снижение требований к быстродействию ЦП возможно за счет
устранения избыточности частоты повторения траекторного сигнала по
сравнению с полосой частот обрабатываемых сигналов и
использования быстрых алгоритмов вычислений (БПФ).
Избыточность частоты повторения траекторного сигнала
устраняется предварительной обработкой — суммированием нескольких
сигналов соседних периодов повторения.
Обычно различают три вида алгоритмов цифровой обработки:
1. Прямой свертки траекторного сигнала с опорной функцией. При
согласовании опорной функции с траекторным сигналом каждой
цели обеспечивается наивысшее качество РЛИ.
2. Быстрой свертки, когда операция свертки ведется в частотной
области с применением БПФ, что обеспечивает выигрыш в требуемом
быстродействии ЦП.
3. Гармонического анализа, когда траекторные сигналы приводят к
форме, позволяющей использовать БПФ одновременно для всех
сигналов в элементе дальности. Это требует предварительного
выполнения над ними операций фокусирования, компенсации центральной
частоты, учета ширины спектра и компенсации задержки огибающей
в заданной зоне обзора по дальности и азимуту.
Алгоритм ГА требует наименьшего быстродействия ЦП, но
ограничивает зону одновременного обзора (обработки) по азимуту.
Требуемое быстродействие ЦСО увеличивается пропорционально
числу некогерентно накапливаемых РЛИ
195
Глава б
6.3. Система компенсации нестабильностей
траекторных сигналов РСА землеобзора
6.3.1. Влияние искажений траекторного сигнала
на характеристики РСА
В реальных условиях работы РСА всегда имеют место искажения
траекторного сигнала, обусловленные различными
дестабилизирующими факторами. К ним, в первую очередь, относятся нестабильности
движения ЛА, среды распространения радиоволн и аппаратуры РСА.
К аппаратурным источникам искажения траекторного сигнала
относятся нестабильности приемопередающего тракта, прежде всего
опорного генератора, синтезатора частот и фазового детектора,
ограничение динамического диапазона приемника и системы обработки, а
также ошибки аппроксимации алгоритмов обработки сигналов.
Искажения траекторного сигнала, которые могут быть как
амплитудными, так и фазовыми, вызывают искажения получаемого РЛИ.
Искажения РЛИ обычно оцениваются по изменению параметров сигнала
изображения точечного объекта.
Для получения сигнала изображения запишем траекторный сигнал
точечного объекта при флуктуациях его амплитуды u(t) и фазовых
искажениях i|/(t). С учетом того, что при прямолинейной траектории и
телескопическом обзоре ширина ДН 90 «1, можно записать
s(t) = u(t)G(9,)exp{ j(27i(fH- f1)t-|n1t2) + jv(t)} , (6.23)
где G(9j) — значение коэффициента усиления антенны в направлении
объекта; fH = 2V(cos9H)/A. - средняя доплеровская частота сигнала,
зависящая от угла наблюдения 9Н ; ff =2V(smQH)fii/'k - смещение допле-
ровской частоты сигнала, определяемое координатой объекта 94 по
V2sin2(9H+9.)
азимуту относительно центра зоны обзора 9Н ; щ = — — -
скорость изменения частоты сигнала.
Следует отметить, что постоянство значения ДН имеет место
только при ТО, однако при других видах обзора изменение ДН в течение
отрезка времени синтезирования может быть скомпенсировано
умножением входного сигнала в каждом канале обработки на специальную
весовую функцию.
Комплексный выходной сигнал согласованной системы обработки
. „ _ 2V(sin9H)9 V2sin2(9H+9)
как функция параметров ее настройки f = — — и ц = — -
Я. ЯИХ
при равномерной весовой функции (W(t) = 1) имеет вид
196
Системы обработки сигналов РСА
Тс/2
} s(f)exP{-j27i[(fH-f)t-nt2]}dt =
(6.24)
Тс/2 V '
}
-Тс/2
Напомним, что под РЛИ понимается модуль сигнала I(f,|a),
поэтому при записи (6.24) полагалось, что случайная начальная фаза
известна и равна нулю.
При отсутствии искажений, когда U(t) = Uo, \\f(i) = 0, и
сфокусированной системе обработки, т.е. ц = щ, получим
i(f)=U0G(e,)TcsinHf-fl)Tc]
(ff)T
Выходной сигнал системы обработки имеет вид функции . Макси-
х
„ . 2У(8шен)е;
мум сигнала наблюдается при f = f4 = — !LL-L, т.е. положение мак-
RHX
симума определяется азимутом объекта В{. Максимальный по величине
выходной сигнал имеет место при 9; = 0, когда f{ = О и G(0) = Go:
1(f)=UoGoTcsin(nfTc)
7tfTc
Основными параметрами неискаженного выходного сигнала
являются: 1) максимальная амплитуда UOGOTC; 2) положение максимума
f = f;, которое определяется азимутом объекта; 3) ширина главного
лепестка 5f = 1/Тс, которая определяет разрешение по азимуту; 4) уровень
первого бокового лепестка по отношению к главному лепестку, который
. sin х , _ _ „
для функции составляет-13,2 дБ.
х
Амплитудные искажения траекторного сигнала обусловлены в
основном ошибками стабилизации ДН антенны и изменением ЭПР цели за
время синтезирования. Они носят медленный характер, и их влияние
эквивалентно изменению весовой функции W(t) системы обработки.
Обычно амплитудные флуктуации траекторного сигнала за время
синтезирования невелики и их влиянием можно пренебречь.
Следствием фазовых искажений траекторного сигнала в системе
обработки являются:
197
Глава 6
1) смещение максимума, что приводит к ошибкам измерения
координат объектов и искажению РЛИ местности;
2) уменьшение максимума выходного сигнала, что равносильно
снижению энергетического потенциала РЛС;
3) расширение главного лепестка, что ухудшает разрешающую
способность;
4) увеличение уровня боковых лепестков, что снижает контраст
РЛИ.
Перечисленные искажения изображения выражаются
функциональной зависимостью основных параметров выходного сигнала РСА от
характеристик искажений траекторного сигнала. Следует отметить, что большие
фазовые искажения могут привести к полному разрушению РЛИ.
Искажающая функция vj/(t) может быть регулярной и случайной,
медленно или быстро изменяющейся в течение времени
синтезирования, возможны также периодические изменения y(t) как следствие
механических вибраций или электрических наводок.
При медленных флуктуациях фазы, когда время синтезирования
значительно меньше времени корреляции фазовых флуктуации т^,
искажающую функцию i[/(t) можно аппроксимировать степенным
полиномом с постоянными, но случайными коэффициентами:
vj/(t) = c,t + c2t2 + c3t3 +....
При vj/(t) = c,t имеют место линейные искажения фазы сигнала. В
этом случае сигнал изображения точечного объекта (6.24) в системе
обработки, согласованной по квадратичному параметру принимаемого
сигнала (ц = Ц;), равен
Форма выходного сигнала при линейном фазовом искажении
траекторного сигнала идентична форме неискаженного выходного сигнала
(6.25), но максимум сигнала наблюдается в канале, настроенном на частоту
ft + с, /271. Это означает смещение РЛИ по координате f на величину
частоты, вызванной линейными фазовыми искажениями: Af = cj2n.
Поскольку линейная азимутальная координата объекта (
определяется частотой сигнала, то линейный набег фазы сигнала (сдвиг
частоты) приводит к сдвигу отметки объекта по азимуту на величину
198
= Af,XR. = сЛК„ ?)
2VsinGH 4nVsin6H
Системы обработки сигналов РСА
Относительная (по отношению к интервалу разрешения 6/?)
величина смещения РЛИ
|J ^. (6.28)
2
Таким образом, относительное смещение объекта по азимуту
пропорционально коэффициенту линейного искажения фазы и
длительности формирования синтезированной апертуры. Допустимая величина
коэффициента линейных фазовых искажений в соответствии с (6.27)
где А^доп - допустимая величина смещения РЛИ.
Если А£ДШ=Ы, то c,/2ti = Af, < 1/Тс = 6f, т.е. рассогласование
системы обработки по частоте, вызванное нескомпенсированным
линейным набегом фазы сигнала, в этом случае не должно превышать
разрешения РСА по частоте. Следует отметить, что при некогерентном
накоплении различное смещение отдельных изображений приводит к
размытию получаемого РЛИ.
В случае квадратичного искажения фазы сигнала, v|/(t) = c2t2,
выходной сигнал канала обработки, настроенного на неискаженный
сигнал, принимаемый с направления 6; = 0,
Тс/2
I(f) = U0G0 | ехр{j(27rft + c2t2)} dt. (6.30)
-Tc/2
После преобразования сигнал может быть выражен через
интегралы Френеля в следующем виде:
Анализ выражения (6.31) показывает, что квадратичные искажения
вызывают уменьшение максимума сигнала изображения точечного
объекта, расширение главного лепестка и увеличение уровня боковых
лепестков. Степень этих искажений зависит от величины фазового набега на
концах синтезированной апертуры относительно ее середины
Ау = с2Тс2/4. Графики зависимости модуля сигнала изображения от
величины Дц/, нормированные к амплитуде неискаженного сигнала, при-
199
Глава б
ведены на рис. 6.16. По оси абсцисс здесь приведена относительная
координата РЛИ £/Ы = f/5f . Влияние квадратичных фазовых искажений
на параметры выходного сигнала в зависимости от величины Ау
показано на рис. 6.17,0. На этих графиках коэффициент Д2 показывает
снижение мощности выходного сигнала; А3 - увеличение ширины
главного лепестка (относительно неискаженного сигнала на уровне 0,5 по
мощности); А4 = Р^к/Рмакс "" отношение мощности первого бокового
лепестка Р1бок к мощности главного лепестка Рмакс.
—-к/2
-Зп/4
к
571/4 •
-2.5 -2.0 -1.5 -1.0 -0.5 0.0 0.5 1.0 1.5 2.0 2.5 f/8f.
Рис. 6.16. Графики зависимости модуля сигнала изображения от величины Avj/
А
0.5
—
, —■—
-—— ■
L. ———
\ "
^^аГ
0.5
2.5 Ay. рад
2.5 А\|/, рад
Рис. 6.17. Влияние квадратичной (а) и кубической (б) фазовой ошибки
на параметры выходного сигнала
При допустимом снижении амплитуды сигнала изображения на 0,5 дБ
соответствующее ему значение фазового набега Ау = л/4, а
допустимый коэффициент квадратичных фазовых искажений равен
200
Системы обработки сигналов РСА
с2<^. (6.32)
Аналогичным образом можно установить степень влияния
фазовых ошибок высших степеней. В частности, кубические искажения
фазы сигнала приводят к смещению положения максимума сигнала
изображения точечного объекта вдоль азимутальной координаты. В этом
случае относительное смещение
Л,=^£, (6.33)
4
где с3 — коэффициент кубических искажений фазы.
Кубические фазовые искажения вызывают также уменьшение
мощности сигнала изображения, расширение его главного лепестка и
ассиметричные изменения боковых лепестков. Влияние кубической
фазовой ошибки на параметры выходного сигнала показано на рис. 6.17,6.
Если считать допустимыми искажения выходного сигнала при
Ду = л/2, то коэффициент с3 должен удовлетворять соотношению:
с3<|Ь. (6.34)
При периодических искажениях фазовый набег v|/(t) = с^ 5т(27Х^ + ф),
где с и fv — соответственно амплитуда и частота изменений фазы
сигнала. Сигнал на выходе системы обработки (6.24), согласованной с
неискаженным сигналом для 6, = 0, при синусоидальных фазовых
искажениях ( ф = 0 )
Тс/2
J
с/
= U0G0 J
"Тс/2
Используя разложение экспоненциальной функции
в степенной ряд, получаем
^sm(7i(f+yre) sin(7t(f-fM,)Tc)
= U0G0Tc| 1-
4 I nfTc 2
7i(f+yrc n(f-yrc
8
sin(n(f-2yTc)
n(f+2fv)Tc Ji(f-2f4))Tc
(6.35)
Первое слагаемое представляет собой неискаженный сигнал
изображения. Его максимум уменьшается пропорционально множителю
), который характеризует снижение энергетического потенциа-
201
Глава б
ла РСА. Другие слагаемые определяют искажение формы сигнала.
Характер искажения зависит от частоты колебаний фазы f4<.
Медленные гармонические изменения фазы имеют место при
fv «1/Тс = 6f . В случае vj/(t) = с^ sin^fyt) » Inc^t, имеет место
линейное искажение фазы с коэффициентом сх = 2ncv(yfV)/, что приводит к
смещению изображения. Согласно (6.28) относительное смещение
Aj = с f Tc, а допустимая величина амплитуды фазовых колебаний
2V(sineH)AV
V f in v '
Иной вид имеют искажения РЛИ при быстрых гармонических
колебаниях фазы (fv »1/Тс = 5f ). В этом случае основной лепесток
сигнала по форме практически не искажается, но с обеих сторон от него на
одинаковом удалении появляются дополнительные боковые лепестки.
При малой величине амплитуды фазовых колебаний можно
ограничиться рассмотрением первой пары боковых лепестков, расположенных на
частотах ±fv . Отношение мощности первого дополнительного бокового
лепестка к мощности основного согласно (6.35) составляет
vtA- (6-37)
1 макс lv S|/ /
Если cv < л/8, что соответствует Ai|/ = 2cV)/ = ti/4 , то уровень
дополнительных боковых лепестков не превышает уровня боковых
лепестков неискаженного изображения (-13,2 дБ). Следует отметить, что
при выполнении этого условия уменьшение амплитуды основного
лепестка также будет несущественным.
Аналогичным образом можно проанализировать влияние косинусои-
дальных гармонических колебаний фазы сигнала vj/(t) = с cos(27tfvt).
При медленных колебаниях, когда fv «1/Тс, фазовые искажения
можно представить в виде vj/(t) = cv - 2cV),7T2f^t2, т.е. в отличие от
предыдущего случая имеют место квадратичные фазовые искажения с
коэффициентом с2 = 2c4,7t2f^ .
При А\\) < л/4 из (6.32) следует условие:
с < 1—. (6.38)
При быстрых колебаниях фазы по косинусоидальному закону в
выходном изображении, как и в предыдущем случае, появляются сим-
202
Системы обработки сигналов РСА
метричные дополнительные боковые лепестки на частотах f = ±nfl(,, где
l(,
Относительное изменение сигнала изображения РСА при
случайных флуктуациях фазы зависит от среднеквадратической разности
фазовых флуктуации на концах апертуры стд, которую можно представить
через коэффициент корреляции г(Тс) разности фаз:
где ам, - СКО флуктуации фазы в любой точке апертуры.
Для случайного процесса с гауссовой корреляционной функцией средне-
квадратическая величина смещения максимума выходного сигнала
(относительно ширины неискаженного сигнала на уровне 0,5) находится в
пределах 20...25% при 0Д =1 рад, а ожидаемое уменьшение максимума
выходного сигнала по мощности Д2 в тех же условиях не превышает 20%
(1дБ). Ожидаемое расширение выходного сигнала относительно ширины
главного лепестка неискаженного сигнала в меньшей степени, чем А, и
А2, зависит от случайных фазовых флуктуации и при ад =1 рад
составляет доли процента. Однако с увеличением СКО случайных флуктуации
фазы сигнала существенно возрастает относительный уровень суммарной
мощности боковых лепестков. Так, при стд=1 рад эта мощность
возрастает на 2... 5 дБ, причем рост боковых лепестков при прочих равных
условиях существенно ускоряется с уменьшением интервала корреляции
фазовых флуктуации.
Таким образом, величина изменений параметров выходного
сигнала зависит от характера фазовых искажений, однако при малых
искажениях для всех видов функции ij/(t) достаточно выполнить условие
|vj/(t)| < Аудоп • Это условие означает, что на интервале
синтезирования Тс максимальные фазовые искажения IvO)^^ не должны
превышать допустимой фазовой ошибки Дудоп - При этом линейный набег
искажения фазы не учитывается, так как он определяется допустимым
смещением частоты сигнала (условие (6.29)), т.е. при регулярных
фазовых искажениях |чЧО|макс рассчитывается по квадратичному и более
высоким членам разложения функции i|/(t).
Допустимый фазовый набег Дудоп определяется величиной допустимых
искажений выходного сигнала и мало зависит от вида искажающей
функции. Так, для медленной периодической фазовой модуляции при макси-
203
Глава б
мальном набеге фазы на краях апертуры, равном л/4, уменьшение
мощности максимума главного лепестка будет составлять 0,5 дБ. Такое же
уменьшение главного лепестка будет наблюдаться и при квадратичном набеге
фазы на краях апертуры на величину л/4 ; при этом относительное
расширение главного лепестка А3 составляет 10%. Для нормального случайного
процесса i|/(t) с гауссовской функцией корреляции при времени корреляции
х « Тс и СКО 0=15 (что приблизительно соответствует максимальному
отклонению у чакс » За^ = л/4) уменьшение мощности в максимуме главного
лепестка составляет 0,4 дБ. При быстрых флуктуациях, когда время
корреляции х гораздо меньше времени синтезирования, потери в главном лепестке
возрастают до 0,6 дБ. При других видах корреляционной функции фазовых
флуктуации снижение мощности выходного сигнала при а = 15° также
составляет 0,5...0,6 дБ. Отношение мощности главного лепестка к суммарной
средней мощности боковых лепестков для выходного сигнала вида sin х/х
при ст = 15° и х - Тс снижается с 10 до 8 дБ.
Допустимый уровень быстрых фазовых флуктуации обычно
определяется допустимым уровнем суммарной (интегральной) мощности
боковых лепестков. Для малых значений av интегральная мощность
боковых лепестков в децибелах равна Р^ = ZOloga^. Обычно
допустимая величина ст^ =6...15°. Быстрые амплитудные флуктуации влияют
так же, как и фазовые флуктуации при малых значениях изменения
амплитуды и фазы. Так, 5%-ные амплитудные флуктуации эквивалентны
флуктуациям фазы в 3°.
Как уже говорилось, в условиях реальной работы РСА основными
причинами фазовых искажений траекторного сигнала являются:
атмосферные неоднородности, нестабильности приемопередающего тракта и
системы обработки, а также нестабильности движения ЛА.
Тропосферные неоднородности имеют пространственный
интервал корреляции порядка 50... 100 м, при этом СКО фазовых искажений
составляет единицы градусов (см. гл. 4). Фазовые нестабильности
приемопередающего тракта зависят от метода обеспечения когерентности. В
целом, путем стабилизации частоты опорных генераторов и повышения
стабильности фазовых характеристик приемного устройства и
устройства обработки СКО фазовых искажений, вызванное аппаратурными
флуктуациями, также может быть доведено до единиц градусов. СКО
фазовых искажений, вызванное траекторными нестабильностями,
упругими колебаниями конструкции носителя РСА и ошибками датчиков
параметров движения ЛА, может достигать десятков и сотен градусов.
204
Системы обработки сигналов РСА
Поэтому основной задачей при получении высокого разрешения
становится снижение ошибок определения параметров траектории движения
фазового центра антенны для обеспечения точной компенсации
медленных, в основном квадратичных, фазовых ошибок.
6.3.2. Компенсация траекторных нестабильностей
с помощью инерциальной навигационной системы
Опорная (заданная) траектория движения (маневр) носителя РСА
выдерживается с помощью инерциальной навигационной системы
(ИНС), которая вырабатывает сигналы управления для автопилота
носителя. Кроме того, для обеспечения заданного положения зоны обзора
РСА относительно опорной траектории задается направление обзора
(азимут 6Н и угол места срн), а также удаление зоны обзора - дальность
RH (рис. 6.18). Заданное направление обзора выдерживается путем
управления ДН реальной антенны относительно строительной оси
носителя РЛС по курсу, крену и тангажу, а удаление зоны обзора - заданием
задержки сигнала тн = 2RH/c в каждой точке траектории.
Z
Траектория ФЦА
Центр зоны
обзора
Объект
Рис. 6.18. Компенсация траекторных нестабильностей с помощью ИНС
Неточности работы системы управления маневром носителя РЛС и
различного рода случайные возмущения при движении носителя в
турбулентной атмосфере вызывают отклонения реальной траектории полета от
заданной. Эти случайные отклонения от опорной траектории принято
называть траекторными нестабильностями (ТН).
205
Глава 6
Хотя изменение параметров движения самолета происходит сравнительно
медленно, однако величина этих изменений может быть достаточно большой.
Так, среднеквадратическое значение линейных отклонений может изменяться
от единиц до десятков метров, угловых отклонений по крену и курсу — от 1 до
2° (по тангажу в 3...5 раз меньше). Время корреляции обычно в 5... 10 раз
больше периода колебаний, который составляет I... 10 с для линейных
отклонений и 1...5 с для угловых колебаний. Конкретные параметры ТН зависят от
типа самолета и характера турбулентности атмосферы.
ТН приводят к нарушению оптимальности обработки отраженных
сигналов. Так, для нормальной работы РСА необходимо знание
траектории носителя для вычисления закона изменения расстояния от РЛС до
наблюдаемого объекта и расчета опорной функции с точностью до
малых долей длины волны РЛС в пределах интервала синтезирования. В
связи с этим встает задача компенсации искажений траекторного
сигнала, вызванных ТН.
Назначение системы компенсации ТН состоит:
• в измерении траекторных нестабильностей;
• коррекции фазы опорного или отраженного сигнала;
• коррекции изменения задержки отраженного сигнала;
• управлении ДН реальной антенны для поддержания заданного
положения зоны обзора на местности;
• привязке получаемого изображения к системе координат индикатора.
Один из вариантов построения системы учета маневра носителя и
компенсации ТН построен на том, что фаза и задержка отраженного
сигнала определяются текущим расстоянием r(t) от фазового центра
реальной антенны (ФЦА) до объекта. Траектория ФЦА вычисляется при
помощи специальной инерциальной системы микронавигации с
точностью, обеспечивающей требуемые характеристики качества РЛИ. ИНС в
этом случае является датчиком параметров траектории движения
носителя РЛС, определяющих алгоритм обработки траекторного сигнала.
Изменения задержки сигнала на интервале синтезирования
учитываются соответствующим сдвигом отсчетов АЦП, а изменения фазы -
сдвигом фазы опорной функции. В дальнейшем рассматривается задача
расчета фазы опорной функции по данным ИНС.
Фаза опорной функции при согласованной обработке сигналов
определяется законом изменения текущего расстояния между ФЦА и
объектом на интервале синтезирования:
ПО) = N/(x,-x(t))2+(y1-y(t))2+H2(t),
где x(t), y(t), H(t) = Z(t) - текущие координаты ФЦА в земной системе
координат O0XYZ (см. рис. 6.18); xi,yl - координаты объекта в той же
системе координат.
206
Системы обработки сигналов РСА
При средних значениях разрешающей способности (единицы
метров) для формирования опорной функции применяется квадратичная
аппроксимация текущего расстояния:
y, (6.39)
где i- - начальная дальность объекта; Vri,ari - соответственно
радиальная скорость и ускорение ФЦА относительно объекта при t = 0,
которые определяются формулами:
v - **)
dt
= (Vx COS 6, + VY вшб^СХЮф, - Vz 51Пф,,
t=0
dt
V2-V2
; н —
t=0 '
где Vx, VY, Vz,ax,aY,az - проекции скорости и ускорения движения
ФЦА на оси нормальной земной системы координат O0XYZ в момент
времени t = 0; V = у Vx + VY+ Vz - модуль полной скорости ФЦА в тот
же момент времени; б^ф, - соответственно азимут в горизонтальной
плоскости и угол наклона в вертикальной плоскости i-й точки земной
поверхности при t = 0.
Для центральной точки кадра изображения (0;=ен,ф1=фн,К1=11н)
опорная функция равна:
{ 4л t2 ]
h(t) = W(t)exp<h—(-Vrt + ar— )\, (6.40)
{ X 2 J
где Vr,ar - радиальные скорость и ускорение движения ФЦА по
отношению к центру зоны обзора;
Vr = (Vx cos 8H + VY sin 6H) cos фн - Vz sin фн;
V2-V.2
ar = ~(ax cos9H + aY sin6H)«^H + a
К
Квадратичная аппроксимация текущего расстояния i-(t) оправдана
с практической точки зрения, так как позволяет уменьшить количество
измеряемых параметров движения ФЦА и частоту их определения до
одного раза на интервале синтезирования. Однако квадратичная
аппроксимация, полученная путем усечения степенного ряда,
сопровождается погрешностью представления функции i-(t). Погрешность
аппроксимации определяется в основном кубическим членом разложения:
207
Глава 6
МД3
r,(t)
= max|ari(t)| — максимальная скорость
dtJ
изменения радиального ускорения на интервале синтезирования.
Определение допустимого времени синтезирования.
Погрешность аппроксимации приводит к искажению РЛИ и, следовательно, к
ограничению максимально возможного времени синтезирования
величиной Тс доп, при которой
\2\
Ф
доп'
где <рдоп — допустимый уровень искажения фазы сигнала.
Кубическая фазовая ошибка, вызванная неучтенным членом
разложения и составляющая я/2 на краях синтезированной апертуры,
вызывает уменьшение амплитуды сигнала на 0,5 дБ и приводит к
расфокусировке изображения на 10%. Если эти искажения изображения считать
допустимыми, то
~~. (6.41)
Величина Мг в свою очередь складывается из скорости изменения
радиального ускорения при отсутствии ТН
At
1=0 (6.42)
Vxax + VYa Y + V,az + Vrar
R
H
которая увеличивается с увеличением интенсивности маневра, и случайной
величины Ааг', вызванной случайными отклонениями радиального
ускорения a,(t) от его математического ожидания вследствие ТН. Эти
отклонения обычно характеризуются корреляционной функцией вида
(643)
где т - временной сдвиг; с^ - СКО флуктуации радиального
ускорения; тк,Тк - соответственно время корреляции и период колебаний
конструкции ЛА, причем тк > Тк .
208
Системы обработки сигналов РСА
Так как корреляционные функции стационарного случайного
процесса Л3г (t) и его производной Ла; связаны равенством RAa,r (т) = R"
то СКО скорости изменения радиального ускорения
1
Если положить, что величина производной радиального ускорения
$уль
рования
в результате ТН Аа, = ±огд , , то из (6.11) допустимое время синтези-
(6.44)
В (6.44) опущена величина 1/тк , так как тк » Тк.
Как следует из полученного выражения (6.44), при квадратичной
аппроксимации r(t) допустимое время синтезирования Тсдоп при
маневре ЛА и наличии ТН зависит от длины волны РСА, статистических
характеристик ТН и скорости изменения радиального ускорения при
целенаправленном маневрировании ЛА.
В качестве маневра рассмотрим разворот в горизонтальной
плоскости, который является составной частью большинства фигур
пилотажа, применяемых в различных условиях. На коротком участке (в
течение отрезка времени синтезирования) перегрузку п можно считать
постоянной. В этом случае самолет совершает движение по окружности с
радиусом разворота R = V2/an и угловой скоростью ш = an/V (см.
рис. 6.18), где V - скорость самолета; an = ^ax+aY+az =ng -
поперечное ускорение; g - ускорение свободного падения.
При выполнении разворота текущие координаты ФЦА по осям
земной системы координат: x(t) = Rpsin(ot, y(t) = Rp(l-coscot),
z(t) = Н. Отсюда параметры движения ФЦА по осям той же системы
координат в момент времени t = 0:
Vx = Rp<o = V,ax=O,ax = -Rpo3 = a2n/v,
VY=0, aY = R2o = an, aY =0,
Vz=az=a^ =0.
Подставив эти выражения в (6.40) и (6.42), получим
209
Глава 6
гг лг о V2(l-COS2eHCOS2(pH)
Vr = Vc cos6H cos<pH , ar = ^ *--
a. =
R.
**■
3ngsineHcos(plf-RH —
(6.45)
cos6Hcos(pH.
Как видно из этих выражений, радиальная скорость Vr относительно
объекта (а следовательно, и доплеровская частота траекторного сигнала)
при маневрировании зависит только от положения объекта и равна
радиальной скорости при прямолинейном равномерном полете. Радиальное
ускорение аг, от которого зависит крутизна ЛЧМ траекторного сигнала,
состоит из двух слагаемых, первое из которых есть радиальное ускорение при
прямолинейном равномерном полете, а второе обусловлено маневром ЛА.
В выражении для аг' первое слагаемое также представляет собой скорость
изменения радиального ускорения при прямолинейном равномерном
полете, а второе - изменение этого значения при маневре.
Графики зависимости TCflOn=f(n) без ТН при сгДаг=О (сплошная
линия) и с учетом ТН при аДаг =0,01 м/с2 для \ = 3см, Rh = 100km,
Vc = 250m/c, 9н=30° и фн«0 приведены на рис. 6.19. Из графиков
следует, что при неэнергичном маневрировании ЛА, когда перегрузка
п<2, и при отсутствии
маневра основное
ограничение на допустимое время
синтезирования при
квадратичной аппроксимации
расстояния накладывают ТН,
причем Тсдоп уменьшается
с уменьшением периода
колебаний Тк ЛА. При
отсутствии траекторных неста-
•с дон» Q
зсм,е„=зо°.ф„=о
R,,=l00 км,V = 250 м/с
бильностей
= 5,6с
с доп
ЧИСЛОВОГО
0 0.5 1.0 1.5 2.0 2.5
Рис. 6.19. Графики зависимости Тсдоп
от перегрузки при маневрировании
для данного
примера.
При маневрировании
ЛА со значением п > 2
влиянием ТН на величину
Тс доп можно пренебречь.
210
Системы обработки сигналов РСА
Если время синтезирования, необходимое для получения заданного
разрешения, оказывается больше допустимого, то интервал синтезирования
можно разбить на ряд участков, на которых допустима квадратичная
аппроксимация текущего расстояния. При этом на каждом участке
необходимо вычислять по данным ИНС радиальную скорость и ускорение
движения ФЦА относительно объекта.
Итак, для вычисления опорной функции при маневрировании
носителя и наличии ТН необходимо измерить с помощью ИНС
составляющие скорости и ускорения носителя по осям нормальной системы
координат (НСК) и с учетом заданного положения зоны обзора (азимута 0Н,
угла места (рн и дальности RH) рассчитать радиальную скорость и
ускорение движения ФЦА по отношению к объекту.
Ошибки ИНС. Ошибки измерения составляющих скорости и
ускорения носителя по осям НСК приводят к ошибкам при вычислении
тангенциальной скорости, радиальной скорости и ускорения движения ФЦА.
Ошибки оценки тангенциальной скорости незначительны и их
влиянием можно пренебречь.
Ошибки оценки на интервале синтезирования радиальной
скорости AVr и радиального ускорения Ааг движения ФЦА приводят к тому,
что формируемая опорная функция оказывается рассогласованной с
отраженным сигналом. В этом случае фазовые искажения траекторного
сигнала имеют вид:
M/(t) = ^(AVrt + Aari-). (6.46)
К 2.
Из последнего выражения видно, что ошибка оценки радиальной
скорости приводит к линейному набегу фазы траекторного сигнала (т.е.
вызывает сдвиг изображения), а ошибка оценки радиального ускорения - к
квадратичному набегу фазы. Следствием последнего является
расфокусировка РЛИ, приводящая к снижению разрешающей способности РСА.
Ошибка измерения радиальной скорости зависит от ошибок
измерения составляющих скорости Vx, VY,VZ, которые в свою очередь
зависят от ошибок измерения соответствующих ускорений с помощью
акселерометров, ибо скорость в ИНС определяется путем интегрирования
выходных сигналов акселерометров. Ошибка измерения радиального
ускорения (6.40) определяется как непосредственно ошибками самих
акселерометров, так и ошибками измерения скорости.
Для оценки влияния случайных ошибок измерения AVr и Ааг на
характеристики РЛИ можно использовать зависимости (6.29) и (6.32) с
4тс ... 2тс
учетом того, что с, = —AV, и с2 = —Аа, .
А. А
211
Глава б
Если потребовать, чтобы вследствие неточного измерения
радиального ускорения ФЦА разрешающая способность РСА не ухудшалась
более чем на 10% (AG^/G^ < 1,1), то из (6.32) следует, что для
интервалов синтезирования Тс = 1...1,5с необходимо измерять радиальное
ускорение с СКО менее чем 10~2 м/с2.
Сдвиг изображения из-за случайной ошибки оценки радиальной
скорости на интервале синтезирования также приводит к размазыванию
РЛИ при некогерентном накоплении. При допустимом сдвиге
изображения на половину элемента разрешения (ств/6сэ ^ 0,5) для Тс = 1...1.5 с
из (6.29) следует, что допустимое СКО ошибки измерения радиальной
скорости составляет 3-10~2 м/с .
Задача определения составляющих вектора скорости и ускорения
движения ЛА в НСК, а также направления на центр зоны обзора
решается в ИНС с помощью акселерометров и гироскопов. При этом важной
характеристикой является полоса пропускания соответствующих
измерителей. Случайные изменения параметров движения ФЦА в результате
ТН являются узкополосными процессами, у которых средние частоты
спектров лежат в пределах 0,2...2 Гц, а ширина спектров колеблется от
0,1 до 0,3 Гц.
Штатные навигационные системы ( в первую очередь ИНС и
ДИСС) предназначены для решения задач навигации, т.е. определения
местоположения ЛА в географической (или ортодромической) системе
координат. Полосу пропускания этих систем выбирают гораздо более
узкой, чем полоса траекторных нестабильностей, чтобы измерять лишь
низкочастотные отклонения ЛА от заданной траектории полета и таким
образом повысить точность навигации.
Для компенсации ТН необходимы измерители, которые должны быть
широкополосными и иметь малые ошибки на интервале синтезирования.
Такие требования не позволяют использовать штатные системы. Кроме
того, штатные навигационные системы располагаются на самолете вблизи
центра масс, а антенна РСА часто выносится в носовую часть самолета.
При таком расположении параметры движения ФЦА могут заметно
отличаться от параметров движения центра масс из-за угловых и упругих
колебаний ЛА. В связи с этим навигационные измерители целесообразно
располагать по возможности ближе к фазовому центру антенны РСА.
Один из вариантов построения системы компенсации ТН состоит в
комплексном использовании двух ИНС - штатной навигационной ИНС
с коррекцией от радиотехнических датчиков (ГЛОНАСС, ДИСС или
РЛС в режиме измерения скорости и угла сноса) и широкополосной
ИНС с системой акселерометров и датчиков угловых скоростей
(микронавигация), устанавливаемых непосредственно на антенне РСА.
212
Системы обработки сигналов РСА
Ошибки (СКО) современных систем микронавигации (ИНС. лазерный
гироскоп, GPS) имеют следующие значения: курс - 0,02°, крен, тангаж —
0,01°, скорость по строительной оси — 0,03 м/с, дальность —16 м (GPS).
В заключение отметим, что интегрирование выходных сигналов
акселерометров ИНС при определении составляющих вектора скорости ЛА
приводит к возрастанию погрешности измерения радиальной скорости и
радиального ускорения с течением времени. Поэтому в системах
компенсации ТН наряду с ИНС применяют следящий измеритель средней допле-
ровской частоты траекторных сигналов в пределах ДН реальной антенны.
Такой доплеровский измеритель позволяет определять медленные по
сравнению с временем синтезирования изменения радиальной скорости
носителя РЛС относительно центра зоны одновременного обзора. При этом
погрешность измерения Vr с течением времени не возрастает.
6.3.3. Автофокусировка изображения в РСА
Для обеспечения высокой разрешающей способности РСА по
азимуту необходимо с точностью до долей длины волны РСА знать
изменение траектории движения фазового центра антенны РЛС на интервале
синтезирования. Эта задача решается специализированной ИНС
микронавигации, которая измеряет параметры движения носителя РСА
(скорости и ускорения по осям нормальной системы координат). Следует
отметить исключительно высокие требования к точности датчиков.
Создание таких датчиков является сложной технической проблемой, и
часто требования к датчикам ИНС не выполняются.
В этом случае для высокоточного измерения фазовых искажений
траекторного сигнала используется другой подход. Он основан на том,
что сам траекторный сигнал или радиолокационное изображение
являются носителями информации о фазовых нестабильностях, которые
могут быть измерены с помощью специальной обработки сигнала. Кроме
того, при таком методе имеется возможность компенсации фазовых
флуктуации, обусловленных не только ТН, а также нестабильностями
аппаратуры РСА и среды распространения радиоволн.
Обычно процесс извлечения информации о фазовых искажениях
из траекторного сигнала или самого РЛИ и компенсации этих
искажений используется для повышения детальности (резкости) получаемого
изображения. Потому он часто называется автофокусировкой подобно
фокусировке изображения в оптических системах.
Целью автофокусировки является обеспечение заданной
разрешающей способности РСА в условиях реального полета при
ограниченной точности микронавигационной системы.
В общем случае процесс автофокусировки изображения,
применительно к системам РСА, включает в себя два этапа:
213
Глава 6
1) оценка фазовой ошибки;
2) компенсация фазовой ошибки.
Этап 1. Источником информации о фазовых искажениях
выступает сам траекторный сигнал. Некоторые алгоритмы автофокусировки
требуют явного знания набора коэффициентов, определяющих фазовую
ошибку. В других алгоритмах коэффициенты присутствуют неявно, в
виде некоторой случайной функции. Простые методы автофокусировки
определяют только квадратичный коэффициент фазовой ошибки, в то
время как более сложные методы позволяют устранить ошибки
практически любого порядка.
Этап 2. При компенсации (удалении) искажений траекторного
сигнала используют оценку фазовой ошибки, полученную на первом
этапе. Второй этап включает в себя:
• расчет опорной функции, компенсирующей траекторные
нестабильности; фаза этой опорной функции равна оцененной на
предыдущем шаге фазовой ошибке, но взятой с обратным знаком;
• умножение траекторного сигнала на опорную функцию;
• обработку исправленных данных с помощью алгоритма
формирования радиолокационного изображения.
Методы автофокусировки можно разбить на две группы.
В первой группе методов используются мощные сигналы
одиночных точечных отражателей (ориентиров). При большом отношении
сигнал/шум и сигнал/фон траекторный сигнал ориентира имеет те же
фазовые искажения, что и траекторный сигнал цели, расположенной в
районе ориентира. Эти искажения измеряются тем или иным способом и
затем компенсируются в траекторном сигнале цели. Достоинством этих
методов является возможность компенсации всех видов искажений, в
том числе быстроизменяющихся в полосе частот до 10...20 Гц.
Недостаток метода - необходимость наличия ориентиров в районе цели.
Вторая группа методов использует траекторный сигнал от всех
объектов и фона местности в диаграмме направленности антенны. Главным
достоинством этих методов является то, что отсутствие точечных
отражателей не вызывает срыва работы алгоритмов автофокусировки, а их
наличие только повышает эффективность процесса автофокусировки.
Далее рассмотрены четыре практически реализуемых алгоритма
автофокусировки:
1) алгоритм автофокусировки радиолокационного изображения на
основе оценки средней доплеровской частоты;
2) фазоразностный алгоритм автофокусировки;
3) автофокусировка по сигналам точечных отражателей;
4) автофокусировка на основе формирования динамического
фазового портрета.
214
Системы обработки сигналов РСА
Перечисленные выше четыре алгоритма осуществляют оценку
фазовой ошибки и выполняют ее компенсацию для всех целей,
присутствующих в зоне обзора, независимо от их координат, т.е. выполняется
пространственно-инвариантная автофокусировка. Однако в
некоторых случаях, например в инверсных РСА, доминирующими являются
фазовые ошибки, зависящие от координат объекта.
Пространственно-зависимая автофокусировка по своей сути
противоречива, так как большинство алгоритмов автофокусировки для
повышения точности оценки траекторных нестабильностей используют
усреднение по многим отражателям. В простейшем случае для
обеспечения пространственно-зависимой фокусировки все радиолокационное
изображение делится на участки, в пределах каждого из которых можно
считать фазовую ошибку пространственно-инвариантной. К каждому
такому участку можно применять указанные выше алгоритмы
автофокусировки. Затем из отдельно сфокусированных участков формируется
полное радиолокационное изображение.
Примером пространственно-зависимой фокусировки является
получение изображения движущегося корабля. Автофокусировка
изображения в этом случае возможна, поскольку движения всех отражателей
корабля взаимно коррелированы вследствие жесткости конструкции.
Пространственно-зависимые методы также необходимы для
корректировки фазовых ошибок, зависящих от высоты объекта. Такие
фазовые ошибки возникают при картографировании гористой или
холмистой местности, когда объекты расположены не на одной плоскости.
Пространственно-зависимая фокусировка необходима также при
формировании радиолокационного изображения целей при их изгибе,
вибрациях и других движениях объекта как нежесткого тела.
Примерами таких целей являются изгиб поезда на криволинейном участке пути,
вибрации крыльев самолета в полете или на рулежной дорожке, изгибы
и колебания конструкции корабля при волнении моря. Эти ситуации
также приводят к расфокусировке изображения и требуют применения
дополнительных мер.
Источниками пространственно-зависимых фазовых ошибок являются
также ограничения и аппроксимации алгоритмов формирования
изображений. Такие ошибки являются детерминированными, однако они не
устраняются в процессе обычной обработки траекторных сигналов.
В качестве измеряемого параметра РЛИ или траекторного сигнала,
обусловленного наличием фазовых нестабильностей, кроме сдвига СДЧ
или РЛИ, используют также другие характеристики. Так, для
сосредоточенных целей, например «корабль на фоне моря», эффективным критерием
компенсации траекторных нестабильностей является контраст РЛИ
корабля либо выбранная функция контраста. При этом компенсируются не
только траекторные нестабильности носителя, но и движения самой цели.
215
Глава 6
Алгоритм автофокусировки радиолокационного изображения
на основе оценки средней доплеровской частоты. Квадратичные
фазовые искажения траекторного сигнала влияют в основном на
расфокусировку РЛИ, что приводит к ухудшению разрешающей способности
РСА и проявляется в снижении резкости изображения и понижении
контрастности РЛИ (уменьшении максимума изображения точечного
объекта и увеличении уровня боковых лепестков).
Метод автофокусировки радиолокационного изображения на основе
оценки средней доплеровской частоты (СДЧ) fCfl4 использует траектор-
ный сигнал от всех объектов и фона местности в диаграмме
направленности антенны. Изменение СДЧ приводит к смещению выходного сигнала
изображения, которое оценивается по сдвигу максимума спектра
траекторного сигнала (рис. 6.20).
Для измерения СДЧ вся синтезированная апертура разбивается на
несколько подапертур, на которых допустима линейная аппроксимация
движения ФЦА. Использование двух подапертур позволяет оценить
квадратичный коэффициент фазовой ошибки, трех подапертур -
кубический и т.д.
S(f)t
Q!
Aty2
Рис. 6.20. Изменение средней доплеровской частоты
Предварительная
фокусировка
сигнала
Формирование
РЛИ первой
подапертурой
и
Деление
сигнала на две
нодалертуры
1
Формирование
РЛИ второй
подапертурой
Расчет
корреляционной
функции
Усреднение
корр. функции
но всем каналам
дальности
Поиск
максимума и
оценка с2
Дофокусировка
сигнала и
формирование
РЛИ
Рис. 6.21. Структурная схема алгоритма автофокусировки на основе
измерения средней доплеровской частоты
216
Системы обработки сигналов РСА
Структурная схема алгоритма представлена на рис. 6.21. Для
оценки квадратичной фазовой ошибки апертура длительностью Тс
разбивается на две неперекрывающиеся подапертуры длительностью Тс/2.
Математическая модель траекторного сигнала s(t) после
фокусировки в одном элементе дальности можно представить в виде произведения
неискаженного ошибкой траекторного сигнала So(t) и экспоненциальной
функции фазовой ошибки - v|/(t)
s(t) = so(t)eJ^,-Tc/2<t<Tc/2. (6.47)
При наличии только квадратичной фазовой ошибки \j/(t) = c2t2, где
с2 - коэффициент квадратичной фазовой ошибки.
Траекторный сигнал в каждой подапертуре длительностью Тс/2
описывается выражениями:
, -Tc/2<t<Tc/2 (6.48)
2 C2Tc
С2Г +-2-£-t
2
'
,-Tj2<t<Tj2. (6.49)
Коэффициент c2Tc/2 в выражениях (6.48) и (6.49) определяет
среднюю доплеровскую частоту сигнала в первой и второй подапертурах
(рис. 6.22). Согласно свойству преобразования Фурье, если F{s(t)} = S(co)
есть пара преобразований Фурье, то F|s(t)ejc0ot] = S(co-(oo). На
основании этого спектры сигналов Si(t) и S2(t), которые является РЛИ, можно
описать выражениями:
Тс/4
51(1)^яа = 801((0 + с2Тс/2), (6.50)
-Тс/4
Тс/4
S2((o)= J s2(t)ejO5tdt = S02((0-c2Tc/2), (6.51)
-Тс/4
где
Тс/4
= J
Тс/4
+ c2Tc/2)= Js(t-Tc/4)e^ 16 VMdt, (6.52)
-Тс/4
Тс/4
SO2(co-c2Tc/2)= Js(t + Tc/4)e^ 16 4JMtdt. (6.53)
-Тс/4
217
Глава 6
Квадратичная фазовая ошибка
на половине апертуры (подапертура 1)
СДЧ
(подапертура I)
-Тс/4 0 т/4 t
РЛИ точечного отражателя
(подапергура I)
с. Тс.
Квадратичная фа юная ошибка
по всей апертуре
VU)t с Т2
{■*,
Корреляционная функция РЛИ,
формируемых двумя поданергурами
с,Тс
Квадратичная фаговая ошибка СДЧ
на половине апертуры (подапертура 2) (подапертура 2)
РЛИ точечного отражателя
(подапертура 2)
2
-Тс/4
Ftt/2 f
Рис. 6.22. Алгоритм автофокусировки на основе измерения средней
доплеровской частоты (СДЧ)
Анализ выражений (6.52) и (6.53) показывает, что |st (ш)| = |S2 (co)|.
Следовательно, изображения, формируемые двумя подапертурами,
представляют собой смещенные друг относительно друга копии одной и той
же функции. Относительный сдвиг между двумя изображениями прямо
пропорционален коэффициенту квадратичной фазовой ошибки с2. Для
оценки этого смещения применимы различные методы. Обычный метод
оценки состоит в том, чтобы измерить положение пика взаимной
корреляции двух изображений, полученных двумя подапертурами.
Из выражений (6.50) и (6.51) видно, что относительное смещение
между изображениями двух подапертур равно Аю = с2Тс. Измерение А©
обеспечивает оценку квадратичного коэффициента ошибки с2:
218
Системы обработки сигналов РСА
Асо
с2 =
*с
т (6.54)
Естественно, сдвиг Лео между изображениями может быть как
положительным, так и отрицательным. Знак Дш определяет знак
коэффициента квадратичной фазовой ошибки с2
Вычисление средней доплеровской частоты за определенный
интервал наблюдения (траектории) приводит к сужению полосы частот
измеряемых нестабильностей. Поэтому такой метод позволяет
компенсировать только медленные нестабильности. Кроме того, большие
ошибки в измерение СДЧ вносят изменения ЭПР отражающей
поверхности по азимуту. Для уменьшения этих ошибок усредняются значения
СДЧ, измеренные в нескольких каналах дальности.
Рассмотренный алгоритм можно расширить для случая оценки
фазовых ошибок более высокого порядка путем деления апертуры
длительностью Тс на более чем две подапертуры. В общем случае
использование N подапертур достаточно для оценки коэффициентов
разложения функции фазовой ошибки N-ro порядка.
Функцию фазовой ошибки можно представить в виде полинома N-й
степени:
4>W = 2>ktk, "Tc/2<t<Tc/2, (6.55)
k=2
где Сь - неизвестные коэффициенты разложения функции фазовой
ошибки.
В выражении (6.55) учтено, что постоянный и линейный члены
полинома не влияют на фокусировку радиолокационного изображения.
В качестве математической модели траекторного сигнала при
наличии траекторных нестабильностей по-прежнему используется модель
(6.47).
Деление апертуры длительностью Тс на N подапертур
длительностью T(/N приводит к тому, что фазовая ошибка в i-й подапертуре
описывается выражением:
ViW = Xck(t-ti)k, -Tc/2N<t<Tc/2N, (6.56)
k=2
где tj - центр i-й подапертуры:
c (6.57)
2N J c
Из выражения (6.56) следует, что средняя доплеровская частота в
i-й подапертуре пропорциональна коэффициентам разложения и
определяется выражением:
219
Глава 6
(6.58)
к=2
Наличие средней доплеровской частоты вызывает сдвиг
изображения, формируемого i-й подапертурой. Относительный сдвиг между
изображениями, сформированными i-й и j-й подапертурами, определяется
выражениями:
(6.59)
к=2
Выражение (6.59) описывает переопределенную систему линейных
уравнений. В матричном виде эту систему уравнений можно
представить как:
А = КС, (6.60)
где А= [Ao)i2...Ao)iN, Аю2з---Лю2ы> Ag)34-A(0n-i,n]t ~ вектор столбец
сдвигов между i-й и j-й апертурами; C=[C2...CN]T — вектор-столбец
коэффициента разложения функции фазовой ошибки и
(6.61)
матрица связи между коэффициентами разложения фазовой ошибки и
сдвигами между апертурами. Элементы матрицы К определяются
выражением:
1,2
2
IN
Sl,3
... 5?2 "
cN
... 5U
I 5^N
2ТС
(6.62)
Уравнения (6.59) и (6.60) имеют N(N-l)/2 входных значений, так
как существуют N(N-l)/2 пар подапертур. Для нахождения
коэффициентов фазовой ошибки необходимо решить переопределенную систему
(6.60). Решение этой системы в матричном виде имеет вид:
С = (ктк)~1КтА.
После вычисления взаимной корреляции всех пар изображений и
оценки относительных сдвигов между ними коэффициенты фазовой
ошибки вычисляются путем перемножения соответствующих матриц.
Избыточность, содержащаяся в выражении (6.60), снижает влияние шумов и
флуктуации амплитуды целей при переходе от одной подапертуры к другой.
Преимущество рассмотренного способа оценки фазовых неста-
бильностей состоит в отсутствии ограничений на вид отражающей
поверхности: появление сигнала от точечного объекта улучшает оценку
220
Системы обработки сигналов РСА
параметров, а его отсутствие не вызывает срыва фокусировки. Кроме
того, такой способ автофокусировки прост в реализации и
нетребователен к производительности вычислительной системы.
Недостатком такого алгоритма автофокусировки является то, что с
увеличением количества не перекрывающихся подапертур уменьшается их
длительность. Уменьшение длительности подапертур вызывает ухудшение
разрешения и отношения сигнал/шум целей в изображении. Эти эффекты
снижают точность оценки сдвига между подапертурами. На практике
алгоритм автофокусировки на основе оценки средней доплеровской частоты
можно применять для оценки фазовой ошибки максимум пятого порядка.
При наличии больших фазовых ошибок отклики целей имеют
значительную протяженность по азимуту. Это приводит к тому, что
относительный сдвиг между изображениями, формируемыми различными
подапертурами, вычисляется с большой ошибкой. Следствием этих
ошибок является неточная оценка коэффициента разложения функции
фазовой ошибки, и, следовательно, фокусировка выполняется не
полностью. Решить эту проблему можно, если примененить алгоритм
автофокусировки последовательно несколько раз. Как правило, трех-четырех
итерации достаточно, чтобы осуществить полную фокусировку
радиолокационного изображения.
Фазоразностный алгоритм автофокусировки. Этот алгоритм
дает результаты, сравнимые с результатами алгоритма на основе оценки
средней доплеровской частоты (СДЧ). Он позволяет точно оценивать
квадратичную (или более высокого порядка) фазовую ошибку при
существенно меньших объемах вычислений.
В этом разделе рассмотрена реализация фазоразностного
алгоритма только для оценки квадратичной фазовой ошибки. Однако, как и в
случае с алгоритмом оценки СДЧ, возможно его расширение для оценки
ошибки более высокого порядка.
Структурная схема алгоритма оценки квадратичной фазовой
ошибки приведена на рис. 6.23. Работа алгоритма начинается с того, что
траекторный сигнал длительностью Тс делится на две подапертуры
длительностью Тс/2. Сигналы в каждом канале дальности первой и второй
подапертур описываются выражениями (6.48) и (6.49). Затем сигналы
первой и второй подапертур перемножаются:
sA(t) = s2(t)sI(t) = s0(t+Tc/4)s;(t-Tc/4)dc^,-Tc/4<t<Tc/4. (6.63)
Преобразование Фурье сигнала sA(t) формирует корреляционную
функцию комплексных изображений каждой из подапертур:
Тс 4 Тс 4
= J sA(t)eirtdt= J 80(1+Тс/4)8;(1-Тс/4)е^е^Л. (6.64)
-Тс 4 -Тс 4
221
Глава б
Комплексное
сопряжение
сигнала первой
иодаиертуры
Предварительная
фокусировка
сигнала
Деление
сигнала на две
подапертуры
X
т
БПФ
Усреднение корр.
функции но всем
каналам дальности
Поиск
максимума и
оценка су
Дофокусировка
сигнала и
формиропание
РЛИ
Рис. 6.23. Структурная схема фазоразностного алгоритма автофокусировки
При отсутствии квадратичной фазовой ошибки (с2=0) пик 8д(ш)
находится на нулевой частоте. При наличии квадратичной фазовой
ошибки положение пика смещается на величину, пропорциональную
значению ошибки. Оценив положение пика корреляционной функции
Лео, можно вычислить значение квадратичной фазовой ошибки:
с2=Дю/Тс. (6.65)
Знак Лео определяет знак квадратичной фазовой ошибки. Для
повышения точности оценки можно также усреднить корреляционную
функцию по всем каналам дальности.
Фазоразностный алгоритм автофокусировки обладает примерно
теми же достоинствами и недостатками, что и алгоритм на основе
оценки СДЧ. Однако фазоразностный алгоритм требует для своей
реализации существенно меньше вычислительных ресурсов. Кроме того,
данный алгоритм обладает большой устойчивостью при малых отношениях
сигнал/шум, так как имеет узкий корреляционный пик. Более узкий
корреляционный пик в фазоразностном алгоритме достигается
благодаря тому, что комплексное перемножение сигналов Si(t) и s2(t) удаляет
квадратичную фазовую ошибку на краях подапертур.
Особенностью работы алгоритма оценки средней доплеровской
частоты и фазоразностного алгоритма является дискретность
вычисления оценки коэффициента квадратичной фазовой ошибки. Это
обусловлено тем, что пик корреляционной функции смещается дискретно. Как
следует из выражения (6.64), смещение пика корреляционной функции
на один отсчет происходит в случае, если за время синтезирования
изменение фазы превышает 2к:
222
Системы обработки сигналов РСА
Таким образом, минимальное значение коэффициента
квадратичной фазовой ошибки, которое вызывает смешение пика корреляционной
функции, а следовательно, и определяет минимальный дискрет
вычисления коэффициента, составляет
Зная дискрет измерения значения коэффициента квадратичной
фазовой ошибки, можно вычислить максимальную фазовую ошибку Avj/ на
краях интервала синтезирования при использовании алгоритма оценки
СДЧ и фазоразностного алгоритма:
Набег фазы на л/2 приводит к снижению мощности сигнала
точечной цели на 1 дБ, что в большинстве задач является допустимым.
Автофокусировка по сигналам точечных отражателей. При
высоком разрешении в зоне обзора почти всегда находятся несколько
ориентиров (точечных отражателей). Алгоритм автофокусировки по
сигналам от точечных отражателей обеспечивает высокую точность
компенсации фазовых нестабильностей, поэтому данный метод получил
наибольшее распространение. Структурная схема РСА с фокусировкой
изображения по сигналу точечного объекта представлена на рис. 6.24.
Если сигнал ориентира намного превышает суммарный сигнал от
других объектов и местности в пределах одного элемента разрешения по
дальности и ширины ДН
реальной антенны, то он может
быть выделен из общего
сигнала путем стробирования по
дальности. В этом случае
селектор опорного сигнала
представляет собой селектор
сигнала от полоски
дальности, в которой находится
прм
Система
обработки
Селектор
опорного
сигнала
РЛИ
опорный ориентир.
Рис. 6.24. Алгоритм автофокусировки
по сигналу мощного точечного
отражателя
Такая система автофокусировки является инвариантной к
фазовым искажениям сигнала, поскольку опорная функция в согласованном
алгоритме получения изображения представляет собой комплексно-
сопряженный сигнал от одиночного точечного объекта. Однако фазовые
флуктуации сигналов от различных объектов будут отличаться, что
обусловлено разностью запаздывания сигналов. Максимальная величина
этой разности определяется шириной зоны обзора по дальности:
Дтмакс = cAR/2. Конкретное значение времени корреляции линейных и
угловых колебаний ЛА зависит от типа ЛА и турбулентности
атмосферы и составляет величину от долей секунды до нескольких секунд, что
223
Глава б
значительно больше Дхмакс. Время корреляции тропосферных
нестабильностей фазы сигнала также превышает Ахмакс.
Фазовые флуктуации приемопередающего тракта имеют различную
природу и обычно подразделяются на медленные, время корреляции
которых хПРМ.ПРд » Атмакс, и быстрые, для которых т^^^д « Дтмакс. Однако
быстрые флуктуации имеют малую дисперсию и могут не учитываться.
Таким образом, в течение периода повторения РСА фазовые флуктуации
сигналов объектов в зоне обзора обладают сильной корреляционной связью.
Вышеизложенное позволяет сделать вывод о том, что сигнал
отдельного точечного объекта можно использовать для компенсации фазовых
искажений сигналов всех объектов, расположенных в определенной зоне
одновременного обзора РСА. При этом устраняется влияние не только ТН, но
и тропосферных нестабильностей и нестабильностей приемопередающего
тракта. При непосредственном использовании сигнала выбранного объекта
в качестве опорного сигнала системы обработки положение любого
объекта на изображении будет пропорционально азимуту этого объекта,
отсчитываемому от координаты опорного объекта.
Однако в большинстве случаев ЭПР опорного объекта сравнима с
ЭПР фона местности в пределах того же элемента разрешения по
дальности и ширины ДН реальной антенны, и качество фокусировки будет
низким вследствие помех от фона местности. Поэтому требуется
принимать специальные меры при формировании опорного сигнала.
Траекторный сигнал u(t) на выходе фазового детектора какого-
либо канала дальности РСА при наличии точечных объектов
представляет собой сумму сигналов фона местности в пределах полоски
дальности и ширины ДН реальной антенны s,|,(t) и объектов Sj(t), искаженных
мультипликативной помехой y(t), принимаемую на фоне внутренних
белых шумов n(t):
u(t) =
(6-66)
1=
где t = tn = пТп (п — номер отсчета сигнала на траектории, Тп — период
повторения зондирующих импульсов); NT0 - количество точечных
объектов в пределах полоски дальности; ц{ь) и Sj(t) - сигналы от фона и
i-ro точечного объекта:
СО , -.
8ф(1)= jv)(t)G(e,t)exp|-j|^r(e,t)|de, (6.67)
s1(t) = AIG(ei,t)exp|-j|^r(ei)t)|, (6.68)
224
Системы обработки сигналов РСА
где и(6) — комплексная функция отражения полоски дальности по
азимутальной координате G, отсчитываемой от положения центра ДН в
момент времени t = 0; G(G,t) - значение ДН реальной антенны в
направлении 0 для момента времени t; r(G,t) - расстояние от элементарного
отражателя с азимутальной координатой 6 до ФЦА в момент времени t
при полете ЛА по расчетной траектории; А; и Qi - соответственно
комплексная амплитуда сигнала i-ro объекта и его азимутальное
положение относительно центра зоны обзора.
В качестве модели функции отражения фона и(6) используется
пространственный неоднородный некоррелированный шум с нулевым
средним значением: М (и(0)} = 0 и корреляционной функцией:
м {о(е,)о*(е2)}=рф(е, же, - е2), (6.69)
где Рф(6) — плотность потока мощности фона, отраженного от
элементарной площадки. Для статистически однородной поверхности Рф(6) =
= Рф= const.
Изменение дальности до отражателя в зоне обзора можно
аппроксимировать квадратичной зависимостью:
+^, (6.70)
где Vr, Vt, а, - соответственно радиальная и тангенциальная скорости и
радиальное ускорение движения ФЦА по отношению к центру зоны обзора.
Значения Vt и аг вычисляются по данным навигационной системы
и используются при расчете опорной функции:
где W(t) — действительная весовая функция; Vr и аг — оценки Vr и аг.
После перемножения с опорной функцией сигналы фона и
точечных объектов примут вид:
jde, (6.71)
,1(t) = AlG(ei,t)W(t)exp]-j — V.e.tl. (6.72)
Фазовые нестабильности vj/(t) определяются фазовым набегом,
вызванным отклонениями носителя от расчетной траектории (ошибками
НС), а также фазовыми нестабильностями среды распространения
радиоволн и приемопередающего тракта РСА vj/H(t):
8—3169 225
Глава б
(vr-Vr)t+(ar-ar)^
(6.73)
Фазовые нестабильности ^„(t) в общем случае являются некоторой
неизвестной случайной функцией.
Сигнал точечных объектов (отражателей) содержит информацию о
фазовых искажениях траекторного сигнала и может использоваться для
автофокусировки изображения. В качестве точечных отражателей могут
выступать малоразмерные объекты, уголковые отражатели и т.п.
Селектор опорного сигнала измеряет фазу этого сигнала
Vi^t^arctgjlmu.^/Reu^t)} для формирования фокусирующей
опорной функции h(t) = exp{-jy(t)}. Непосредственное измерение фазовых
нестабильностей предпочтительней оценки коэффициентов линейного и
квадратичного фазовых набегов, так как позволяет устранить фазовые
набеги более высоких порядков.
Качество фокусировки в такой системе определяется СКО ошибки
измерения фазы vj/(t) сигнала опорного объекта. При большом отношении
фон/шум ошибка зависит от отношения мощности сигнала объекта Р^ к
мощности сигнала фона Оф, принимаемого от земной поверхности,
расположенной в пределах ДН реальной антенны и строба дальности:
а1, = Оф/Роб = l/Чф - Допустимое значение av определяется величиной
допустимых искажений РЛИ. Так, при oVfl0n= я/12 яфдоп = 1/<т^доп «15.
Величина Яф зависит от ЭПР объекта аОб, удельной ЭПР фона а0 и площади
полоски дальности:
го6
Ja6
(6.74)
где RH — дальность наблюдения; 9о — ширина ДН реальной антенны; 8г —
разрешение по дальности.
Таким образом, чтобы <т„б > чфДОпКц6о$г при <т0 = -22 дБ (степь летом),
RH = 50 км, 0О = 1,8° и бг = 3 м необходимо а^ > 500 м2.
Реальные точечные объекты обычно имеют значительно меньшую
ЭПР. Поэтому для автофокусировки в канале дальности с опорным
объектом необходима дополнительная селекция сигнала объекта на фоне
помехи от подстилающей поверхности.
Прямое
БПФ
Фильтрация
спектра
отражателя
Обратное
БПФ
h(t)
Рис. 6.25. Структурная схема алгоритма фильтрации сигнала
точечного объекта в частотной области
226
Системы обработки сигналов РСА
Сигнал точечного объекта s^expljv^t)} выделяется из помех
путем фильтрации в частотной области. Структурная схема этого варианта
представлена на рис. 6.25. После умножения траекторного сигнала u(t)
на вычисленную по навигационным данным опорную функцию h(t) и
прямого БПФ обеспечивается получение спектра траекторного сигнала
(искаженного РЛИ). Далее фильтр с амплитудно-частотной
характеристикой (АЧХ), согласованной с сигналом u;(t), выделяет спектр
сигнала точечного отражателя (изображение опорного объекта). Для
получения оценки сигнала u,(t) выполняется обратное БПФ (ОБПФ). Его фаза
\\j(t) используется для формирования фокусирующей опорной
функции, устраняющей траекторные нестабильности:
, где
= arctg
(6-75)
При этом оценка фазы vj/(t) содержит все нестабильности
траекторного сигнала. Такой способ вычисления опорной функции
уменьшает влияние флуктуации опорного сигнала на РЛИ, однако полученное
изображение оказывается сдвинутым на величину доплеровской
частоты сигнала опорного объекта. Для обеспечения независимости
изображения от положения опорного объекта спектр сигнала на выходе
фильтра перед ОБПФ обычно сдвигают к нулевой доплеровской частоте.
Определим АЧХ фильтра для выделения сигнала опорного
объекта. При использовании гауссовской весовой функции W(t) и опорной
функции, рассчитанной по данным ИНС, модуль спектра сигнала u;(t)
можно аппроксимировать следующей зависимостью:
(6.76)
где fn - частота, соответствующая n-му фильтру БПФ; А; - максимум
амплитуды спектра сигнала | p(fn)|
i-ro объекта; п* - номер ;
фильтра, в котором
наблюдается сигнал i-ro объекта;
5fj - ширина спектра сигнала
i-ro объекта.
Значения А, и 5fj
можно оценить по спектру
сигнала |F(fn)| на выходе БПФ
(рис. 6.26). Тогда в случае рис.6.26. АЧХ фильтра и спектры сигналов то-
стационарного фона в окре-
Спектр сигнала //~Д АЧХ фильтра
опорного объекта А ° i A
! Спектр сигнала 'jj
фона
ценного отражателя и фона
227
Глава б
стности объекта оптимальная АЧХ фильтра для выделения изображения
опорного объекта определяется известным выражением:
Ф(п)=
(6.77)
где Рф ср - средняя мощность фона; К(п) - аппроксимация модуля спектра
сигнала объекта (6.76):
5f;2/5f
(6-78)
где 5f^2/5f2 - отношение ширины спектра сигнала к ширине элемента
разрешения по частоте, которая выражает степень расфокусировки
изображения точечного объекта.
Средняя мощность фона Рф ср в элементе разрешения определяется
по изображению фона ¥^(fn) в окрестности изображения объекта:
Рфср-
макс
X КМ - X
n=0
(6.79)
где N,j, « Nфмaкc - число фильтров в пределах ширины спектра сигнала
опорного объекта; ^MaKC=2VtG(A5f - максимальное число фильтров в
пределах ширины спектра сигнала от фона местности.
Степень расфокусировки изображения точечного объекта
определяется отношением
5f;
,_
5f
(6.80)
Для расчетов берется несколько фильтров справа и слева от П;, для
которых |F(fn)|/Aj > 0,5, и результаты расчетов по всем фильтрам
усредняются.
Требования к ЭПР опорного объекта в случае выделения сигнала путем
фильтрации в частотной области уменьшаются в ^макс / NA4X раз, где
NA4X - ширина АЧХ. Так если ширина АЧХ составляет 5 элементов
изображения (5 фильтров БПФ), то при N,}, макс = 500 требования к ЭПР
объекта уменьшаются в 100 раз и, следовательно, при том же значении о0
необходимо ооб > 5 м2.
228
Системы обработки сигналов РСА
Если в зоне обзора в разных элементах дальности присутствует
несколько точечных объектов, то требования к ЭПР также уменьшаются.
Структурная схема системы обработки сигналов РСА с автофокусировкой
изображения по нескольким точечным объектам приведена на рис. 6.27.
u(t)
h(t)
Предварительная
фокусировка
сигнала
Ав гофокусировка
сигнала
Формирование
РЛИ
РЛИ
Е
3
я
а
с
о
VD
3G
W
ВПФ
*
БПФ
Селекция сигнала
опорного объекта
■
Селекция сигнала
опорного объекта
Рис. 6.27. Структурная схема алгоритма автофокусировки
по сигналам точечных целей с фильтрацией в частотной области
Выбор канала дальности основан на том, что мощность сигнала в
канале дальности с опорным объектом превышает среднюю мощность
траекторного сигнала, усредненную по всем каналам дальности. Для
этого в каждом канале дальности вычисляется коэффициент
_Рш_
т
(6.81)
р
Ф
тг>р-
т=1
где Pm = Tjum(tn)| - мощность сигнала в т-м канале дальности; Nc -
n=l
число отсчетов сигнала на траектории; NR — число каналов дальности.
Для однородной поверхности, при большом отношении фон/шум,
большом числе каналов дальности и наличии одного объекта в m-м
канале Мт =(Ро6+Вф)Д)ф = l + q, где Ро6 - мощность сигнала опорного
объекта. Для автофокусировки следует выбирать каналы дальности со
значением Мт > 1 + Яфдоп, где яФдоп определяется в соответствии с
выражением (6.74).
После выполнения БПФ в каждом выбранном канале дальности
(т.е. получения модуля спектра |F(fn)| и нахождения средней мощности
фона РфСр) определение опорного объекта может осуществляться путем
229
Глава б
сравнения квадрата модуля сигнала в каждом фильтре с порогом qnop =
~ Чф доп "ф ср-
После определения п4 (номера фильтра с максимальной
амплитудой), значения А4=|Р(п;)| и отношения 6ff/5f2 осуществляется
умножение спектра F(rij) на амплитудно-частотную характеристику фильтра
Ф(п), рассчитанную по выражению (6.77). Далее выполняется ОБПФ.
Расчет опорной функции осуществляется путем усреднения фазы,
измеренной для всех объектов. Однако это требует измерения полной
фазы каждого опорного объекта (с учетом перескоков через значение
2л) и устранения начальной фазы сигнала каждого объекта.
Этих недостатков лишен способ, когда измеряется приращение
фазы за период повторения, которое не превышает 2тг:
(к) = у (к) - у (к -1) = arctg
(6.82)
где s; (к) - сигнал i-го объекта на выходе ОБПФ в момент времени tk;
I — число объектов, по которым осуществляется автофокусировка.
В этом случае опорная функция для фокусировки определяется путем
суммирования соответствующих приращений: h(J)0Kyc(k) = exp|-jv);(k)|,
где
причем
На рис. 6.28 представлен пример использования алгоритма авто-
фокусировки на массиве траекторного сигнала с уголковым
отражателем. Потенциальное
разрешение по азимуту
составляет 1 м. После
предварительной фокусировки
по данным от
навигационной системы разрешение
составило 4 м (штриховая
линия). После
автофокусировки (сплошная линия)
было достигнуто
разрешение 1,1м, что близко к оп-
ТИМаЛЬНОМу.
Рис. 6.28. РЛИ точечной цели до
автофокусировки и после
5000
4000
зооо;
2000
1000
100
200
300
400
500
п
600
Нескомпенсированная
фазовая ошибка, рассчи-
230
Системы обработки сигналов РСА
60
80
100
Рис. 6.29. Нескомпенсированная
фазовая ошибка
тайная в соответствии с данным
алгоритмом, представлена на
рис. 6.29. Видно, что фазовая
ошибка имеет ярко выраженный
квадратичный характер, однако
присутствуют и ошибки другого
порядка. На рис. 6.30 показано
увеличение амплитуды сигнала
изображения отражателя после
нескольких последовательных
фокусировок (итераций). Из
рисунка видно, что основной
эффект фокусировки РЛИ
достигается на первом шаге.
Алгоритм
автофокусировки по сигналам точечных
отражателей обладает блестящими
возможностями для
компенсации фазовых ошибок высокого
порядка в широком классе
наблюдаемых целей. Однако
данный алгоритм предъявляет
достаточно жесткие требования к
«точечности» целей. Это
приводит к необходимости примене- 01^з4>б/«пф
ния дополнительных алгоритмов рис 6.30. Зависимость качества
отбора объектов, подходящих для автофокусировки от числа итераций
процедуры автофокусировки, что в свою очередь приводит к увеличению
вычислительной сложности алгоритма. Несмотря на это алгоритм остается
не очень требовательным к вычислительным ресурсам и может быть
достаточно просто реализован на современной вычислительной базе.
Автофокусировка изображения методом формирования
динамического фазового портрета. Недостатком алгоритма фокусировки
по сигналам точечных отражателей является необходимость выбора не
только мощных, но и точечных отражателей. С этой целью
используются различные дополнительные процедуры, основанные на вычислении
корреляции амплитуды и фазы сигнала вдоль траектории. Кроме того,
«неточечность» цели приводит к необходимости итерационных
процедур оценки фазы.
Однако существует метод автофокусировки, не требующий оценки
«точечности» цели, - метод формирования динамического фазового
портрета, при котором измеряется квадратичная фазовая ошибка.
А(пф)
1.0;
0.9;
0.81
0.7i
0.6
(
1 \
1
■ ■ ' ■ ■ :
■ •
{ ■•■•• ;
1
!
{
j :
231
Глава 6
Динамический фазовый портрет — это радиолокационное
изображение объекта, получаемое с высоким пространственным разрешением,
сигнал каждой точки которого пропорционален разности фаз сигналов в
двух разнесенных во времени (а также в пространстве и времени)
каналах РСА соответствующего разрешаемого участка.
Сигнал, отраженный от неподвижной точечной цели, может быть
представлен в виде:
{} (6.83)
где Ац, фоц- случайные амплитуда и фаза сигнала от цели; G(6U, t) -
нормированная функция, характеризующая модуляцию сигнала диаграммой
направленности реальной антенны (на передачу и прием); 6Ц - угловое
положение цели относительно центра кадра; к = 4л/А.; А. - длина волны РСА;
г (бц, t) - расстояние от цели до фазового центра антенны.
Сигнал, принимаемый от полоски дальности на местности,
представляет собой сумму сигналов от независимых элементарных
отражателей фона со случайной амплитудой, распределенной по закону Рэлея,
и фазой, распределенной равномерно на интервале от -я до л:
со
= Je(e)G(e,t)exp{-jkr(e,t)}de, (6.84)
—со
где е(0) - комплексная амплитуда сигнала; G - азимутальная
координата отражателя.
В качестве модели функции отражения местности использован
пространственный комплексный неоднородный некоррелированный
шум. Интервал корреляции траекторного сигнала местности равен
половине размера апертуры антенны da:
8ф = <1а/2. (6.85)
Интервал корреляции траекторного сигнала цели определяется
размером цели du:
Интервал корреляции сигнала, отраженного от местности, много
меньше интервала корреляции траекторного сигнала, отраженного от
сосредоточенной цели: 8ф«5ц.
При однородной местности в районе цели математические модели
квадратурных составляющих сигнала фона можно представить в виде
гауссовского белого шума:
232
Системы обработки сигналов РСА
Ф ф ф ф (6.87)
После компенсации квадратичного фазового набега,
обусловленного изменением расстояния «РЛС-цель», траекторный сигнал,
отраженный от точечной цели, имеет вид:
su(t) = Uuexp{j((pOlI +c2t2)} , (6.88)
где с2 - нескомпенсированная квадратичная фазовая ошибка.
Так как мощность сигнала фона при обнаружении цели обычно
значительно (на 15-20 дБ) превышает мощность внутренних шумов, то
влиянием внутреннего шума пренебрегаем. Задача оценки квадратичной
фазовой ошибки сводится к задаче оценки параметра ЛЧМ сигнала на
фоне белого гаусовского шума:
()(6.89)
Методика оценки с2 с использованием динамического фазового
портрета позволяет формировать одновременно изображение всей зоны
обзора и оценивать коэффициент квадратичной фазовой ошибки по
сигналам всех точечных целей без предварительной оценки их «точечно-
сти» и приведения сигналов к одной частоте.
Синтезированию апертуры соответствует когерентное накопление
траекторного сигнала на интервале от-Тс/2 до Тс/2:
Тс/2 Тс/2
Л = иц J exp{j((pOu + c2t2)}dt+ J
-Тс/2 -Тс/2
Сигнальная часть имеет вид:
UT
J =
ц с
1 ГсТ2>1
Фш = arg{J} = ФОц +-arctg -2-£- . (6.90)
2 { 2п )
Анализ выражения (6.90) показывает, что определить с2 по
фазовой характеристике выходного сигнала невозможно, так как фаза
выходного сигнала зависит не только от квадратичного коэффициента с2,
но и от начальной фазы. Следовательно, необходимо использовать
дополнительный канал.
В качестве двух различных каналов возможно использовать
сигналы, сформированные симметрично расположенными апертурами и
233
Глава б
имеющие различную длительность: Tci и ТС2. Амплитуда и фаза
сигналов цели и фона описываются выражениями:
"1.2=
Тс1,2 2
-т.
с|.2
(6.91)
Синтезируем структуру оптимальной системы оценивания
квадратичного члена С2 по сигналам, формируемым первой и второй
апертурами. Сигнал на входе такой двухканальной системы обработки
описывается выражением:
x=j+ri, (6.92)
где x = [rj1,r]2] - вектор наблюдения, включающий в себя сигналы,
сформированные первой и второй апертурами; j=[j,, J2J ;
n = [n,,n2]T.
Двухмерное распределение процесса Х[ описывается
четырехмерным распределением его квадратурных составляющих. Для гауссовско-
го случайного процесса эта плотность вероятности описывается
выражением:
где Y=[Yic, Yis, Y2c, Y2s]T - вектор сигнала на входе двухканальной
системы обработки; R - корреляционная матрица квадратурных
составляющих; m - вектор математических ожиданий входных сигналов.
(6.93)
Так как квадратурные составляющие Y зависят от с2, то плотность
вероятности является условной и также зависит от параметра с2 в
принимаемых сигналах: p(Y/c2).
Корреляционная матрица R квадратурных составляющих имеет
вид:
Г12
'21 '22
'31 '32
Г13
»23
»33
'14
'24
'34
Г41
«42
l43 M4
234
Системы обработки сигналов РСА
Запишем выражения для корреляционной и
взаимокорреляционной функций квадратурных составляющих сигналов:
г12 = г21 = М {YlcY2c} = r34 = г43 = М {YlsY2s} ,
T
+ 1
1с2
2 т„
(6.94)
_ ^с1
12 2
rl4=~
,4 = r4, = M{Y,cY2,}, r32 = r23=M{Y2cYls} = -r,4,
'Л} = 0, r24 = r42=M{Y,sYls} = 0,
где N,}, — спектральная плотность фона; Я ~ Яф1 ~ отношение сигнал/фон
после когерентного накопления первой апертурой; коэффициент Тс2/Тс1
показывает, во сколько раз отношение сигнал/фон после когерентного
накопления второй апертурой (Tc2>Tci) больше отношения сигнал/фон
после когерентного накопления первой апертурой; функция min(Tci,Tc2)
имеет вид:
;,, если Тс1 < Тс2
;2, еслиТс2<Тс1.
235
Глава б
С учетом (6.94) запишем корреляционную матрицу
гп
Г12
0
Г14
Г12
г22
~Г14
0
и
"Г14
Г11
Г12
Г14
0
Г12
г22
определитель которой det R = г,22+ г142- г, ,г22.
Тогда условная плотность вероятности описывается выражением:
P(Y/C2)= . к . ' . е-ь, (6.95)
47t2x||r122+r142-r11i
22
где
= 2r,4(YlcY2s - Y,sY2c)+2'-12(Y,cY2c + YlsY2s)-(Ylc2 +Yls2)r22-(Y2c2 + Y2s2)ru
Апостериорная плотность вероятности pps(c2) параметра с2
находится с учетом априорной плотности вероятности рРг(сг):
Pps(c2) = Pppr(c2)p{Y/c2} , (6.96)
где p=l/p(Y) - нормирующий коэффициент.
Вид априорной плотности вероятности ррг(с2) зависит от датчиков,
входящих в навигационную систему. В простейшем случае можно
считать, что априорная плотность вероятности ррг(с2) распределена
равномерно в пределах ±смакс.
Оценка с2, оптимальная по критерию максимума апостериорной
вероятности, определяется решением уравнения
lnPps(c2)
dc-
С учетом того, что
dc.
= 0.
(6.97)
y2c2+y2s2=|v2|2,
YlcY2c + YlsY2s = Re Y, Y2 , YlcY2s + Y2cYls = Im Y, Y2 ,
(6.98)
логарифм плотности вероятности (6.95) при подстановке выражений равен
L(c2)=-ln(47t2J|r122+r142-r11r22|)-
2rMhnY1Y2+2rI2ReY1Y2-
2(r!22+r142-rMr22)
(6.99)
236
Системы обработки сигналов РСА
Для решения уравнения (6.95) и нахождения оптимальной оценки
с2 используются численные методы.
С учетом (6.98) и (6.94) апостериорная плотность вероятности
(6.96) принимает вид:
Р 1 --d
Pps(C2) =
2с.
(6.100)
2r14lm Y,Y2 +2r12Re Y,Y2 - YJ r22-
где d =
■ |2
Ml
Структурная схема алгоритма формирования оптимальной оценки
квадратичного члена с2 методом формирования динамического
фазового портрета представлена на рис. 6.31.
40)
М2
J4W*
-Tcl'2
Расчет
Г11»Г12>Г22»Г14
"Jkodt
XoYls
V2C!Y2S
Поиск
максимума
апостериорной
плотности
вероятности
Рис. 6.31. Оптимальный алгоритм автофокусировки методом
формирования динамического фазового портрета
На рис. 6.32.
показана зависимость СКО
оценки коэффициента
квадратичной фазовой
ошибки с2 от отношения
сигнал/фон в одном
импульсе для различных
интервалов накопления
первой и второй
апертурами. Штриховой линией
на этом рисунке показано
допустимое значение
коэффициента с2 макс (при
котором расфокусировку
ос,, 1/с2
и
8
4
2
\
\
\
N
-С
ч
\
Ч
S
!:
— Xti — 0.5 с, ГС2~
- Тс, = 0.75с,Тс^
-—
макс!
d% "
—~_
г€=о
1с)
0.35 с
-- 0.5 с
75 с
75 с)
,. J
8
-10 -8-6-4-20246
Рис. 6.32. Графики зависимости СКО оценки с2
методом динамического фазового портрета
от отношения сигнал/фон
237
Глава б
ac/ou , 1/c2
2мин
j ...
\
\
\
\
4
—-■■■-->
» .
^y
I
i
I
...
i
0.1
0.3
0.5
0.7
0.9 Тс1/Тс2
Рис. 6.33. График зависимости нормированного
значения СКО оценки с2 методом
динамического фазового портрета
от соотношения длительностей апертур
можно считать
незначительной) для различных
интервалов накопления.
График зависимости
нормированного значения
СКО оценки с2 от
соотношения между
длительностями первой и второй
апертур, приведенный на
рис. 6.33, показывает, что
оптимальное
соотношение между первой и
второй апертурами
составляет 0,6...0,8. Эта
зависимость сохраняется для
всех отношений
сигнал/фон, при которых работает данный алгоритм.
В реальных условиях работы РСА параметры траекторного сигнала
изменяются случайным образом вследствие нестабильностей
приемопередающего тракта и среды распространения радиоволн, а также
траекторных нестабильностей.
Основное влияние оказывают фазовые нестабильности траекторного
сигнала. Случайные линейные изменения фазы приводят к
смещению изображения и в результате этого к ошибкам измерения азимута
цели. Квадратичные изменения фазы вызывают расфокусировку
изображения, что ухудшает разрешающую способность РСА. Быстрые
периодические изменения фазы приводят к появлению ложных
отметок, а быстрые случайные изменения вызывают рост интегрального
уровня боковых лепестков, что снижает контраст изображения.
Малый уровень фазовых нестабильностей приемопередающего
тракта обеспечивается тщательным конструированием, а нестабильности
среды распространения в сантиметровом диапазоне обычно невелики.
Основной причиной фазовых нестабильностей траекторного сигнала
являются случайные изменения положения фазового центра антенны,
обусловленные отклонением движения носителя РСА от опорной
(заданной) траектории.
Устранение влияния случайных изменений фазы обеспечивается
системой компенсации нестабильностей траекторного сигнала, которая
измеряет фазовые нестабильности и корректирует фазу опорного
сигнала.
На первом этапе измерение и компенсация случайных отклонений
ФЦА осуществляется специализированной системой
микронавигации, которая обычно состоит из инерциальных датчиков ускорений,
лазерного гироскопа и приемника ГЛОНАСС.
238
Системы обработки сигналов РСА
На втором этапе оставшиеся нескомпенсированными фазовые
ошибки, обусловленные траекторными нестабильностями, нестабильно-
стями приемопередающего тракта и среды распространения
измеряются непосредственно по принимаемому траекторному сигналу целей
(режим автофокусировки).
Методы автофокусировки можно разбить на две группы: методы
автофокусировки по сигналам одиночных точечных отражателей
(ориентиров) и методы автофокусировки по сигналам от всех объектов и
фона местности в пределах диаграммы направленности антенны.
Достоинством методов автофокусировки по сигналам точечных
отражателей является возможность компенсации всех видов
искажений, в том числе быстроизменяющихся в полосе частот до 10...20 Гц.
Недостаток метода - необходимость наличия ориентиров в районе цели.
Достоинством алгоритмов автофокусировки по сигналам от всех
объектов и фона местности является то, что отсутствие точечных
отражателей не вызывает срыва работы алгоритмов автофокусировки, а
их наличие только повышает эффективность процесса
автофокусировки.
В настоящее время основными являются четыре алгоритма
автофокусировки: 1) автофокусировка радиолокационного изображения на
основе оценки средней доплеровской частоты; 2) фазоразностный
алгоритм автофокусировки; 3) автофокусировка по сигналам точечных
отражателей; 4) автофокусировка на основе формирования
динамического фазового портрета. Каждый из рассмотренных алгоритмов
обладает своими достоинствами и недостатками и в зависимости от
условий применения может быть реализован практически.
239
ГЛАВА 7
Характеристики РСА землеобзора
7.1. Разрешающая способность и динамический
диапазон изображения
Эти характеристики определяют качество радиолокационного
изображения при картографировании. Кроме того, разрешающая
способность в значительной степени определяет эффективность решения задач
обнаружения малоразмерных целей, распознавания групповых и
сосредоточенных целей, а также определения их координат и сопровождения.
Разрешающая способность. Количественной мерой разрешения
является ширина изображения точечной цели на определенном уровне,
обычно на уровне —3 дБ от максимума, что соответствует уровню 0,5 по
интенсивности изображения. При оценке разрешающей способности
необходимо устранить влияние искажения формы изображения,
обусловленного ограничением сигнала и наличием шумов. Поэтому ЭПР
цели выбирается таким образом, чтобы сигнал изображения находился в
линейной части амплитудной характеристики выходного устройства
(процессора, индикатора). Чтобы исключить влияние фона и соседних
объектов, в качестве точечной цели обычно используют уголковые
отражатели, расположенные на однородном слабоотражающем фоне.
Изображение группы отдельно расположенных отражателей, ЭПР
которых различаются друг от друга на 5 дБ, может быть использовано для
оценки линейности тракта.
Предварительная оценка разрешения выполняется на основе
известных технических параметров РСА. Разрешение по горизонтальной
дальности (земной поверхности) D :
8D = -*-3_£bL_, (7.1)
cos a 2kC3Kcosa
где 6г - разрешение по наклонной дальности; a - угол между
направлением наблюдения и земной поверхностью; ти - длительность
зондирующего импульсного сигнала; ксж - коэффициент сжатия импульса
при обработке.
Так, если ти = 0,5 мкс ; ксж = 13 ; cosa = 0,96, то 6D = 6м .
240
Характеристики РСА землеобюра
Разрешение по угловой координате на земной поверхности (по
азимуту) при переднебоковом обзоре
<7'2>
где А, - длина волны; RH - наклонная дальность до цели; Тс - время
синтезирования; V - скорость носителя; 9Н - угол наблюдения
относительно вектора путевой скорости.
|Так, если Х = 3см; RH = 160км; V = 200м/с; Тс=4с; 9н=30°, то
Ы = 6м.
Разрешающая способность зависит также от весовой функции при
обработке сигнала и фазовых искажений сигнала, прежде всего
обусловленных траекторными нестабильностями. При использовании
весовой функции Хемминга (табл. 5.1) разрешение ухудшается по
сравнению с (7.1) и (7.2) в 1,3 раза. Обычно траекторные нестабильности
считаются скомпенсированными.
Согласно типовым требованиям разрешающая способность РСА
детальной разведки должна составлять 0,3...3 м, а ударных систем -
1... 10 м в зависимости от дальности обзора.
При относительно низких требованиях к разрешающей
способности РСА (широкий сектор обзора, режим СДЦ), а также при
наблюдении на небольших дальностях используют режим ДОЛ. В этом случае
уменьшается время формирования РЛИ и снижаются требования к
быстродействию процессора. Однако в режиме ДОЛ предельное
разрешение ограничено величиной
|Так, при длине волны X =3 см на дальности RH = 60 км возможно
получение разрешения не лучше 30 м.
Качество радиолокационного изображения наряду с разрешающей
способностью определяется также динамическим диапазоном.
Динамический диапазон характеризует возможность правильной передачи на
изображении отражающих свойств различных объектов и оценивается
интервалом ЭПР одновременно наблюдаемых целей. При этом точность
оценки ЭПР целей в пределах динамического диапазона определяется
радиометрическим разрешением.
Радиометрическое разрешение РЛИ - это минимальная величина
различения ЭПР двух целей. Чем выше радиометрическое разрешение,
тем меньшую разницу между двумя значениями ЭПР целей можно
оценивать. Величина радиометрического разрешения зависит от отношения
241
Глава 7
3.0
2.0
10.
= 3
'—f—~
1—.
-
■— i...
10
сигнал/шум и числа
некогерентных накоплений NH при
получении изображения целей
(рис. 7.1). Обычно
радиометрическое разрешение РСА равно
2-3 дБ. Для оценки ЭПР
однородных поверхностных целей
требования к радиометрическому
с/ш, дБ разрешению возрастают до 1 дБ.
Рис. 7.1. Графики зависимости Динамический диапазон
радиометрического разрешения РЛИ изображения определяется как
от отношения сигнал/шум характеристиками объектов
(функцией отражения) и их взаимным расположением, так и свойствами
РСА (функцией неопределенности, амплитудной характеристикой всего
тракта РСА и шумами).
Входной динамический диапазон сигналов ДДВХ =аишкс/оимт при
высоком разрешении может достигать 60...70 дБ. Например, при разрешении
Ы = бг = I м , сцыакс = 103 м2 (уголковый отражатель), сгцмин = КГ4 м2
(элемент фона типа водная поверхность) ДДВХ = 70дБ . Динамический
диапазон при наблюдении городских построек достигает 60 дБ. В
метровом (дециметровом) диапазоне динамический диапазон может достигать
80 дБ, что объясняется кроме того, наличием мощных излучений
различного рода передатчиков в этом диапазоне.
Различают динамический диапазон при изображении: I)
одиночных точечных целей; 2) двух близкорасположенных точечных целей; 3)
распределенных (многоточечных) целей с малой ЭПР на фоне поля
отражателей с большой ЭПР (отрицательный контраст).
Выходной динамический диапазон РСА землеобзора при изображении
одиночных целей обычно не превышает 40...50 дБ. Для
близкорасположенных друг к другу точечных целей он определяется уровнем первых
боковых лепестков ФН РСА и обычно не превышает 30...40 дБ.
Отрицательный контраст, например изображение дороги в лесу, определяется
уровнем суммарной мощности всех боковых лепестков (интегральным
уровнем) и обычно не превышает 15...20 дБ.
При визуальном наблюдении основное ограничение ДД вносит
индикатор. При телевизионной индикации ДД = 15...20дБ, а при записи
на фотопленку ДД = 25...30дБ.
Основные факторы, влияющие на динамический диапазон РСА
землеобзора. На рис. 7.2 (сплошная линия) представлено сечение по оси
частот типичной ФН РСА при использовании взвешивающей функции
Хемминга в процессе обработки сигналов. Такая обработка обеспечивает
242
Характеристики. РСА землеобзора
достаточно низкий уровень боко- А-дВ
вых лепестков при небольшом _3
расширении основного лепестка.
Разрешение по частоте в этом
случае равно
5f = l,3l/Tc,
максимальный боковой лепесток
Рмакс =-42,8дБ, а интегральный
уровень боковых лепестков
Ринт = -37 дБ . Интегральный
(суммарный) уровень всех
боковых лепестков (заштрихованные
области на рис. 7.2) соотносят к
основному пику, который опре-
-4о
-50
Рис. 7.2. ФН сигнала при весовой
обработке
деляется по нулевому уровню, что соответствует приблизительно
ширине, равной трем элементам разрешения на уровне -3 дБ:
\
ИНТ
_ -l,58f
(7.3)
df
Вкладом боковых лепестков в мощность основного пика можно
пренебречь, что и учтено в формуле (7.3).
Аналогично вычисляется суммарный уровень мощности боковых
лепестков и по задержке (дальности) в случае использования сложных
зондирующих сигналов.
Если, например, цель с большой ЭПР расположена в четвертом
(самом мощном на рис. 7.2) боковом лепестке, то сигнал от нее в
основном лепестке будет на 42,8 дБ ниже, что и определяет в данном примере
потенциально возможный динамический диапазон изображения по
близлежащим целям.
На рис. 7.2 штриховой линией показано сечение ФН для случая
постоянной амплитуды сигнала (без взвешивающей функции).
Максимальный (ближайший) боковой лепесток Рмакс = -13 дБ, а интегральный
Ринт = —10,3 дБ, что явно недостаточно для передачи требуемого
динамического диапазона.
В реальных системах уровень боковых лепестков определяется
также большим числом других факторов: нестабильностями траектории,
среды распространения, приемопередающего тракта и системы
обработки, влиянием неоднозначности ФН по азимуту и дальности, конеч-
243
Глава 7
ной разрядностью вычислений в процессорах и т.п. При этом
максимальный уровень боковых лепестков повышается до -30...-35 дБ, а
интегральный уровень может достигать —15.. .—20 дБ.
Перечисленные выше нестабильности приводят к быстрым
(некоррелированным от одного периода повторения к другому)
колебаниям фазы траекторного сигнала. Интегральный уровень боковых
лепестков ФН при наличии таких нестабильностей определяется СКО фазовых
флуктуации аф: P^^lOlgo,,, при аф«1 (оф в радианах).
Характерные величины Ринт для различных источников
флуктуации приведены в табл. 7.1.
Таблица 7.1. Характерные величины Ринт для различных источников
флуктуации
Источник флуктуации
Траекторные нестабильности
Среда распространения
Приемопередатчик
Фазовый детектор
АЦП (6 разрядов)
Цифровая система обработки (32 разряда)
Неопределенность «азимут - дальность»
* ИНТ
по азимуту, дБ
-25...-30
-25...-30
-25...-35
-30...-35
-30
-40
-30...-40
* ИНТ
по дальности, дБ
-
-
-30...-35
—
-
-40
-40...-50
0
-10
-20
-30
-40
-50
Влияние интегрального уровня боковых лепестков Ринт поясняется на
рис. 7.3. Пусть функция отражения представляет собой однородную
поверхность с удельной ЭПР ао1=-15дБ (лесной массив) с «провалом»
шириной 55г и ЭПР а02 = -40дБ (водная поверхность). Динамический
диапазон функции отражения
такого участка земной
поверхности равен
ДД=а0| /о02 = 25 дБ. Каждый
разрешаемый элемент фона,
окружающего «провал»,
вносит свой вклад в мощность
сигнала изображения
«провала». Этот вклад
пропорционален мощности бокового
лепестка ФН,
соответствующего расстоянию элемента
разрешения от «провала». Таким
Р| Ринг
р»
55г
г. м
Рис. 7.3. Влияние интегрального уровня
боковых лепестков на РЛИ
244
Характеристики. PC А землеобзора
образом, суммарный вклад пропорционален мощности всех боковых
лепестков Р^ .
Пусть интегральный уровень боковых лепестков ФН PC А Ринт = -15дБ, а
уровень всех видов шумов меньше на 3 дБ уровня отраженного сигнала в
«провале», т.е. суммарная мощность внутреннего шума приемника, шумов
системы обработки и внешнего шума Рш = -43 дБ . Тогда общий уровень
мощности сигнала изображения в «провале» Рц2 = Р2 + Р,РИНТ + Рш = 10~4 +
+10~3+ 0,5 КГ1 = -28дБ, где Р, и Р2 пропорциональны соответственно
су01 и с02. В результате динамический диапазон изображения
ДДИ =—— = = 13дБ вместо 25 дБ на входе, т.е. в результате влия-
Рц2 -28дБ
ния боковых лепестков ФН и шумов происходит снижение контраста
изображения.
В случае одиночных целей динамический диапазон РСА на выходе
системы обработки равен отношению максимальной мощности сигнала
при его ограничении Рогр к мощности минимального сигнала Рмин:
Минимальная мощность сигнала обычно определяется мощностью
сигнала фона, которая пропорциональна минимальной удельной ЭПР
фона <7Омин, и разрешением на местности: Рмин = ЬгЪ£о0ы1Ш, в
предположении (как и в предыдущем примере), что мощность всех шумов
меньше минимальной мощности сигнала фона.
Уровень ограничения мощности сигнала Рогр определяется числом
разрядов АЦП при условии минимизации уровня шумов АЦП. Так, для
4-разрядного АЦП оптимальный уровень ограничения устанавливается
на 8 дБ больше среднего уровня сигнала Рср. При этом относительная
мощность шума АЦП Дтп = рацп/РсР = ~19 ДБ • Д™ 6-разрядного АЦП
соответственно Рогр = 10Рср и ДАЦП =-30 дБ. Среднее значение сигнала
Рср определяется суммарным сигналом на входе АЦП от всей полоски
по дальности в пределах ширины ДН антенны:
ст
Рср =~^6оКнаоср>
где ти - длительность зондирующего сигнала до сжатия, если
обработка по задержке (сжатие по дальности) производится после АЦП; 90 -
ширина ДН; RH - дальность наблюдения; стОср - среднее значение
245
Глава 7
удельной ЭПР в полоске дальности, которое зависит от конкретного
района наблюдения и обычно равно —20...—25 дБ.
Рассмотрим числовой пример. Пусть ти = 1мкс (сти/2 = 150м); 00=3°
(0,05 рад); RH =50км (5-Ю4 м); стОср =-25дБ (310~3). Тогда при 4-раз-
ст..
рядном АЦП сф= J^R/^ 1125 м2, 0^ = 6(^(8*6) =6750 м2, Д^=-19дБ;
удельная мощность шума, обусловленного АЦП, <тОш = сТосрДлцп = -44 дБ ;
при разрешении 5г = ЪС = 3 м минимальный сигнал фона Офмин = SrSfo()№IH =
= 910~4м2 (водная поверхность стОмин=-4ОдБ). Пренебрегая удельной
мощностью шума АЦП (-44 дБ) по сравнению с минимальной ЭПР фона
(-40 дБ), получим динамический диапазон изображения ДД, =стогр/сфмин =
= 7,5-106, т.е. близкий к входному диапазону сигналов. В данном примере
мы пренебрегли всеми шумами, кроме шумов АЦП, так как обычно
стараются обеспечить мощность шума приемника на 1...3 дБ меньше
минимальной мощности сигнала фона, а мощность шума процессора еще на
3 дБ меньше. Заметим, что при наблюдении целей и фона с большей
средней удельной ЭПР (о0ср = -10...-15 дБ ) потребуется 6-разрядный АЦП.
Наибольший вклад в ограничение динамического диапазона изображения
одиночных (изолированных) отражателей вносят шумы, обусловленные
отражениями от дождя и организованными помехами. Отражения от дождя
определяются разрешаемым объемом дождя Уд и удельным коэффициентом
отражения от дождя стОд. Разрешаемый объем дождя Уд = ЬгЬСНд, где Нд —
высота сплошного дождя от поверхности земли. Удельный коэффициент
отражения стОд = 1,7-10~7м2/м3 при интенсивности дождя 3 мм/ч и
сОд = 10~6м2/м3 при интенсивности дождя 7 мм/ч при длине волны РЛС
А = 3см. Для нашего примера, когда Нд=3,3км, б^ = бг = 3м и
о0д = 10-6м2/м3,ЭПРдождя сд = УдсОд = 3-10-2м2, ДД и = аогр/сд = 2-10\
т.е. динамический диапазон снижается более чем на порядок.
Основное ограничение динамического диапазона
радиолокационного изображения одиночных целей обычно определяется индикатором.
Поэтому на индикатор выносят лишь часть динамического диапазона
всех целей в зависимости от решаемой тактической задачи. Так, при
наблюдении целей с малой ЭПР (фон местности, малоразмерные цели)
индикатор ограничивает амплитуды сигналов целей с большей ЭПР.
При наблюдении целей с большой ЭПР (корабли, городские постройки)
на линейный участок амплитудной характеристики индикатора
выносятся только сигналы большой амплитуды.
246
Характеристики РСА землеобзора
Недостаточный динамический диапазон может привести к
появлению ложных отметок на изображении. Основными причинами этого
является низкий уровень подавления пиков неоднозначности по азимуту и
дальности, а также значительный уровень боковых лепестков
выходного сигнала при наблюдении мощных отражателей на слабоотражающем
фоне. Примером этого может быть появление ложных отметок
береговой черты на фоне изображения морской поверхности или серии
отметок боковых лепестков по азимуту и дальности («крест») вблизи
изображения точечной цели с большой ЭПР. Вторичные изображения
мощных отражателей на слабоотражающем фоне («горы - море») могут
быть «размазаны» путем введения специального «квазислучайного»
кодирования начальной фазы излучаемого и соответственно опорного
сигналов в каждом периоде повторения.
Важным параметром, определяющим качество передачи отражающих
свойств целей, является степень постоянства амплитудных характеристик
тракта РСА по всему изображению. Различие амплитудных характеристик
приводит к появлению на изображении полос в виде изменения
интенсивности сигналов. Причиной этого являются ошибки управления ДН
антенны, неточность компенсации спада коэффициента усиления на краях ДН
антенны и изменения мощности отраженного сигнала по дальности,
ошибки стыковки соседних кадров и т.п. Обычно допускается нестабильность
интенсивности изображения («полосатость») порядка 1 дБ.
Важнейшими характеристиками РСА землеобзора, определяющими
качество РЛИ, являются: разрешающая способность по дальности и
азимуту и динамический диапазон.
Разрешающая способность определяется как ширина отметки цели на
уровне -3 дБ в изображении точечной цели. Разрешающая
способность определяет детальность РЛИ и зависит от длительности
импульса и коэффициента сжатия (по дальности), интервала
синтезирования, дальности и угла наблюдения (по азимуту).
Динамический диапазон определяется как отношение максимальной
к минимальной интенсивности сигнала РЛИ. Динамический диапазон
определяет правильность передачи отражающих свойств объектов
(их ЭПР) и зависит от многих факторов: уровня боковых лепестков
(максимального и интегрального) функции неопределенности, неста-
бильностей траектории, среды распространения, приемопередающего
тракта, системы обработки и системы индикации, а также от уровня
сигналов помех (дождь, искусственные помехи).
7.2. Характеристики зоны обзора
Зона обзора определяется как область земной (водной)
поверхности, где требуется решение тактических задач с заданными
характеристиками.
247
Глава 7
Зона обзора характеризуется следующими параметрами:
• дальность обзора, т.е. удаление зоны обзора от РСА;
• углы наблюдения, т.е. положение зоны обзора относительно
вектора путевой скорости носителя РСА;
• полоса одновременного обзора по дальности;
• полоса обзора по азимуту;
• время обзора.
Дальность обзора ударных авиационных комплексов обычно
составляет 80... 160 км. Полоса обзора по дальности исчисляется в
элементах разрешения и составляет Nr = (0,5...1,0)-103, что определяется
возможностями индикации и оперативного анализа радиолокационного
изображения оператором. Аналогично определяется полоса обзора по
азимуту Nf =Nr = (О,5...1,О)1О3 элементов разрешения.
Для разведывательных систем полоса обзора по дальности обычно
на порядок больше: Nr = (3...5)103, а полоса обзора по азимуту (путевой
дальности) определяется возможностями системы регистрации траектор-
ных сигналов (изображений) и может составлять сотни километров.
Возможность обеспечения заданной полосы разведки по дальности АД
определяется в основном размерами антенной системы (см. разд. 5.3).
Угол наблюдения для разведывательных систем задается близким к
боковому, а для ударных - любым, обычно за исключением переднего
(заднего) сектора ±(5...10°), вследствие резкого ухудшения
разрешающей способности по азимуту в этих секторах.
Время обзора заданной полосы по азимуту AL при переднебоко-
вом обзоре определяется скоростью полета носителя:
При телескопическом обзоре полоса обзора по азимуту AL = 60RH,
а число разрешаемых элементов в зоне обзора и разрешение по азимуту
связаны соотношением Nf8f <G0RH. Если задано требуемое разрешение
5^ = — (с учетом аподизации и других ухудшающих факторов
VTcsin6H
опущен коэффициент 2), то время обзора зоны
тобз = NHTC = N —^— , (7.4)
где NH =3...4 - число некогерентно накапливаемых изображений,
получаемых на различных интервалах синтезирования.
При этом число элементов разрешения в зоне обзора
248
Характеристики РСА землеобзора
sineH. (7.5)
Ы da v '
Если задано число элементов разрешения N,, то разрешение по
ft R
азимуту должно быть 8С < ——- и соответственно время обзора
Т«- > N Т = N { а
хобз — i^Hic н
Vsin8u
Так, при числе элементов N, = 500 и некогерентных накоплений NH = 4 ,
размере антенны da = 1 м , скорости V = 200 м/с и боковом обзоре время
обзора Тд^ > 10 с . При этих условиях разрешение по азимуту должно
составлять: б^КГ4!*.,, т.е. на дальности Rh = 100km разрешение должно
быть не хуже 10 м.
В случае, если время переднебокового обзора заданной полосы по
азимуту велико либо мала полоса при телескопическом обзоре, то
применяется секторный обзор. Будем полагать, что время облучения цели
при секторном обзоре определяется только угловой скоростью
сканирования ДН антенны, пренебрегая влиянием скорости полета носителя.
При постоянной скорости сканирования
, (7.7)
где Qa - угловая скорость сканирования ДН по азимуту.
Также будем считать, что требуемый сектор сканирования
e063 = L063/RH=naT063- (7-8)
Принятые допущения справедливы при условии, что fiaRH » V ,
6обз» 60 и внутри зоны обзора разрешение изменяется незначительно.
Далее, учитывая, что время облучения определяет интервал
синтезирования Тс и соответственно разрешающую способность: Тобп = NHTC, a
время обзора — число элементов разрешения в зоне обзора:
063 ьс
получаем, что
т =N N''da (7 9)
10бз '^Н Ж, • А ' V '
Vsm6H
249
Глава 7
С учетом принятых допущений время секторного обзора при
заданном числе разрешаемых элементов Nf в зоне обзора не зависит от
разрешающей способности. Это объясняется тем, что с увеличением
разрешения уменьшается требуемая зона обзора и соответственно
требуемая скорость сканирования. В результате увеличивается время
облучения цели и повышается разрешение.
Время обзора, определяемое (7.9), не включает время обработки
сигналов и время анализа изображения, поскольку предполагается, что
система обработки работает в реальном масштабе времени, а анализ
изображения проводит оператор.
Возможно использование гибридных видов обзора, например
объединение телескопического и переднебокового, что при заданном
разрешении позволяет расширить зону обзора AL > 90RH .
Характеристиками зоны обзора РСА являются: дальность обзора, углы
наблюдения, полосы обзора по дальности и азимуту и время обзора.
Полоса обзора определяется числом разрешаемых элементов по
дальности и азимуту и в зависимости от тактической задачи изменяется от
500 до 5000 элементов.
Время обзора заданной полосы определяется видом обзора
(телескопический, секторный и переднебоковой) и числом разрешаемых
элементов в полосе обзора.
7.3. Дальность обнаружения целей РСА
землеобзора
В качестве характеристики обнаружения целей РСА используют
дальность обнаружения, т.е. максимальное расстояние между РЛС и
целью, при котором цель обнаруживается с заданными
характеристиками эффективности: вероятностью правильного обнаружения и
вероятностью ложной тревоги.
Для определения дальности обнаружения задают цель (ЭПР цели
оц и ее статистические характеристики), вероятность правильного
обнаружения Рпо, вероятность ложной тревоги Рпт и условия
функционирования РСА (помехи, фон, дождь и т.п.)
В качестве целей задают типовые объекты, характерные для задач,
решаемых рассматриваемым авиационным или космическим
комплексом (табл. 7.2)
В таблице представлены также усредненные по многим типам
размеры целей. При высоком разрешении РСА в элемент разрешения
может попасть только часть цели. В этом случае в качестве ЭПР цели
250
Характеристики РСА землеобзора
обычно используют ЭПР разрешаемого элемента цели оэц, которая
определяется как отношение площади разрешаемого элемента цели 5SU к
площади цели Su:
= а 55»
В качестве оценки ац и аэц «рукотворных» целей (танки, БМП,
самолеты, ракетные комплексы, корабли) в сантиметровом диапазоне
волн справедлива эмпирическая формула
ац=(0,5...1,0)8ц;озц = (0,5...1,1
Для целей с гладкой поверхностью (крылатые ракеты,
истребители) используется меньшее значение коэффициента, а для сложных по
конфигурации целей - большее значение.
Таблица 7.2. Характеристики ЭПР и размеры наземных и морских
целей (X =3 см)
Цель
Человек
Крылатая ракета на земле
Танк, БМП, САУ
Автомобиль
Истребитель на стоянке
Бомбардировщик на стоянке
Пусковая установка ракет
Подводная лодка на поверхности
моря
Патрульный катер
Фрегат
Эсминец
Крейсер
Десантный корабль
Авианосец
ЭПР ац, м2
0,5
1,0
4...20
10...20
3...15
20... 150
20... 50
10...200
300
3-Ю3
3,5-103
17-Ю3
ЗОЮ3
45103
Размеры цели,
мхм
0,5x0,5
3x0,8
8x4
7x3
12x17
50x40
10x7
300x30
52x8
140x14
170x17
180x20
260x30
330x40
251
Глава 7
В табл. 7.3 в качестве объектов при картографировании
представлены характеристики удельных ЭПР земной и водной поверхности.
Таблица 7.3. Характеристики удельной ЭПР а0 земной и водной
поверхностей
Объекты
Море,
волнение
2 балла
Море,
волнение
6 баллов
впп
Степь, зима,
снег
Степь, лето,
трава
Пустыня,
камни, песок
Лес
Угол
падения
10
20
50
10
20
50
10
20
50
10
20
50
3
10
20
50
10
20
50
10
20
50
ао(Х. =0,8 см)
ГГ
-40
-38
-35
-30
-25
-22
-26
-20
-14
-15
-10
-5
-35
-15
-12
-10
-16
-15
-12
-16
-14
-12
ВВ
-38
-35
-35
-28
-23
-20
-24
-15
-10
-15
-10
-5
-35
-15
-12
-10
-20
-17
-14
-16
-14
-12
ао(Х. =3,0 см)
ГГ
-40
-38
-35
-35
-30
-27
-40
-32
-20
-23
-17
-14
-35
-16
-15
-12
-18
-15
-12
-14
-14
-12
ВВ
-32
-28
-30
-30
-25
-22
-30
-24
-18
-23
-17
-14
-35
-15
-15
-12
-20
-17
-14
-14
-15
-12
ао(А. =70 см)
ГГ
-50
-45
-42
-35
-32
-30
-60
-58
-55
-60
-55
-50
-60
-55
-53
-50
-45
-40
-35
-35
-30
-25
ВВ
-50
-45
-42
-35
-32
-30
-60
-58
-55
-60
-55
-50
-60
-55
-53
-50
-45
-40
-35
-35
-30
-25
Вероятность правильного обнаружения Р,ю определяется ценой
потерь в решении задачи комплексом, обусловленных необнаружением
цели. Так, например, пропуск цели при обзоре на заданной дальности
потребует дополнительного времени для поиска цели и, следовательно,
уменьшает располагаемое время для решения последующих задач
(распознавания, сопровождения и т.д.). При высоком разрешении пропуск в
обнаружении элемента цели приводит к искажению изображения цели.
Обычно при решении разведывательно-ударных задач задают Рто = 0,8
(вероятность пропуска цели 0,2).
252
Характеристики РСА землеобзора
Вероятность ложной тревоги Рлт (ложного обнаружения)
определяется ценой потерь, обусловленных принятием решения на
последующие этапы наблюдения цели при ее отсутствии. Обычно
вероятность ложной тревоги задают на один элемент разрешения
наблюдаемой зоны обзора Рлт = КГ4... КГ6 .
В режиме картографирования участков местности число элементов
разрешения на изображении объекта (цели) обычно очень большое. В
этом случае резко снижаются требования к вероятности правильного
обнаружения элемента разрешения цели (Рпо = 0,5) и вероятности
ложной тревоги (Рлт = 0,1 ).
В конкретных условиях функционирования РСА всегда
существуют неконтролируемые изменения характеристик цели (ЭПР цели и
фона), среды распространения (осадки, поглощение в растительности) и
потерь в тракте РЛС. Эти изменения могут достигать 5...7 дБ. Поэтому
в дальнейшем при расчетах используют формулы без уточняющих
коэффициентов. Их отличие от более точных формул гораздо меньше
неконтролируемых изменений характеристик целей, условий
функционирования и параметров РЛС.
В зависимости от решаемой тактической задачи используются
различные характеристики обнаружения. Обычно рассматривают четыре
типовые задачи: 1) картографирование; 2) обнаружение точечной цели на
слабоотражающем фоне; 3) обнаружение точечной цели на сильноотра-
жающем фоне; 4) обнаружение цели с «отрицательным контрастом», т.е.
когда ЭПР цели меньше ЭПР элемента фона. Эффективность решения
ряда других задач, например обнаружения многоточечной цели, может
быть определена через характеристики обнаружения для перечисленных
четырех случаев. Специальные задачи — селекция движущихся целей и
«скоростной портрет» — будут рассмотрены в других разделах.
1. При картографировании наиболее сложной задачей является
обнаружение элементов земной (водной) поверхности на фоне различного рода
шумов, прежде всего внутреннего шума РСА, отражений от
метеообразований (дождя), а также пассивных и активных помех. В этом случае
используется такая характеристика, как дальность картографирования, т.е.
максимальная дальность, на которой обеспечивается обнаружение
элементов пространственно-распределенной цели с заданными вероятностями
правильного обнаружения и ложной тревоги. Обычно задается тип цели с
минимальной удельной ЭПР (ВПП, водная поверхность и т.п.) и условия
картографирования (тип обзора, метеоусловия, помеховая обстановка).
2. Обнаружение отдельной сосредоточенной (точечной) цели на
слабоотражающем фоне также характеризуют дальностью обнаружения.
При этом задают конкретную цель, например малый корабль (его ЭПР)
253
Глава 7
и фон, на котором она обнаруживается. Также задают тип обзора,
метеоусловия и помеховую обстановку. Полагают, что дальность
обнаружения в этом случае определяется уровнем шумов и помех, а влиянием
фона (отражениями от подстилающей земной или водной поверхности)
на обнаружение можно пренебречь.
3. При обнаружении малоразмерной (точечной) цели на сильноот-
ражающем фоне основное влияние на характеристики обнаружения
оказывает помеховый сигнал фона в элементе разрешения, а внутренним
шумом РСА можно пренебречь. В этом случае характеристикой
обнаружения является вероятность обнаружения конкретной цели на
заданном фоне, например танка на фоне "степь летом" при заданной
вероятности ложной тревоги в элементе разрешения. Основным фактором,
определяющим эффективность обнаружения малоразмерной цели на фоне
отражений от земной поверхности, является разрешающая способность
РСА, так как чем меньше площадь элемента разрешения, тем меньше
помеховый сигнал фона в этом элементе и тем выше вероятность
обнаружения цели. При этом под целью мы понимаем такой объект, размеры
которого меньше размеров элемента разрешения РСА, т.е. объект
полностью размещается внутри одного элемента разрешения.
4. В случае обнаружения цели на сильноотражающем фоне
возможна ситуация, когда ЭПР цели меньше ЭПР фона (отрицательный
контраст), например при обнаружении просеки (дороги) в лесу. Здесь
также задается вероятность обнаружения конкретной цели на
конкретном фоне. Эта вероятность определяется отношением ЭПР фона к ЭПР
цели (контрастом), уровнем шумов, помех и боковых лепестков ФН
РСА, которые уменьшают контраст.
При обнаружении цели на слабоотражающем фоне дальность
обнаружения определяется отношением сигнал/шум в элементе
разрешения.
Если антенна РСА с коэффициентом усиления G излучает
импульсную мощность Ри, то плотность потока мощности в районе цели
будет равна
П -P"G
0611 j"
При этом цель переизлучает мощность Рц, пропорциональную
ЭПР цели ац, в направлении приемной антенны:
В случае однопозиционной РСА расстояние Яц - RH и плотность
потока мощности у приемной антенны
254
Характеристики РСА землеобзора
прм 4пК2/
а мощность принимаемого сигнала
Р = П S
прм прм а '
где Sa — эффективная площадь антенны.
При использовании одной и той же антенны на передачу и прием
площадь антенны равна
X2G
S =■
4л
При этих условиях для одного излучаемого и принимаемого
импульса отношение сигнал/шум
Я-
(7.10)
где X - длина волны РЛС; RH - дальность до цели; Рш - мощность
шума; Ln — потери мощности сигнала цели в высокочастотном тракте и
среде распространения.
Отношение сигнал/шум. Мощность шума определяется прежде
всего внутренними шумами приемника:
Pm=kTAffB1=N0Af, (7.11)
где кТ = 410~21 Вт/Гц; Af = с/25г - полоса приемника, определяемая
требуемым разрешением по дальности; Fm - фактор шума,
определяемый в основном типом входного устройства приемника; No -
односторонняя спектральная плотность шума.
Типовые параметры (динамический диапазон ДД и фактор шума
Рш ) некоторых входных устройств РЛС представлены в табл. 7.4.
Таблица 7.4. Типовые параметры некоторых входных
устройств РЛС
Тип устройства
Параметрический усилитель
ЛБВ
Туннельный диод
Балансный смеситель
РШ,ДБ
2...4
4...8
5...6
6...9
ДД,дБ
30...40
45...50
30...40
60... 70
255
Глава 7
Кроме шумов приемника, существуют внутренние шумы системы
обработки (АЦП, процессора, шумы оптической системы обработки),
которые будем считать на 3...5 дБ меньшими, чем внутренние шумы
приемника. Характеристики обнаружения в присутствии
организованных (пассивных и активных) помех оговаривают особо, задавая помехо-
вую обстановку и методы помехозащиты.
Типовое значение мощности внутреннего шума (10~п...10~12 Вт в
сантиметровом диапазоне радиоволн) намного больше естественного
внешнего шума (1(Г20 Вт), поэтому последние не учитываются. В
дециметровом и метровом диапазонах радиоволн влияние внешних шумов
резко возрастает, что обусловлено излучением многочисленных
телевизионных, связных, навигационных и других передатчиков. Это серьезно
ограничивает дальность обнаружения, и для снижения уровня помех
применяют специальные меры пространственного и частотного
подавления источников помех.
Потери в высокочастотном тракте (передатчик - антенна - обтекатель
антенны - приемник) обычно составляют 4...6 дБ. Потери в среде
распространения (двухстороннего: до цели и обратно) в основном определяются
потерями в дожде, например поглощение волны длиной 3 см при
интенсивности дождя 4 мм/ч равно 0,1 дБ/км. При сплошном дожде на пути
распространении волны, равном 30 км, эти потери составляют 3 дБ.
Увеличение отношения сигнал/шум по сравнению с простым
одиночным импульсом обусловлено когерентным накоплением при сжатии
сигнала по дальности и в результате синтезирования апертуры.
При сжатии импульса отношение сигнал/шум увеличивается
пропорционально коэффициенту сжатия ксж=ти/тэ, гДе T3 = l/Af
-длительность сжатого сигнала, a Af - полоса частот зондирующего
сигнала, т.е. ксж = THAf. Более точные взаимосвязи полосы частот и
коэффициента сжатия, обусловленные выбором конкретной весовой функции
при обработке импульса, обычно учитывают в виде коэффициентов
потерь при сжатии и синтезировании.
При синтезировании апертуры происходит когерентное
накопление Nk = FnTc импульсов, что в Nk раз увеличивает отношение
сигнал/шум. Поскольку время синтезирования определяется требуемым
разрешением по азимуту: Тс = " , то число накапливаемых им-
25A/sin6
н
пульсов можно записать как
Nk =
256
Характеристики РСА землеобэора
Подставляя значения Рш, Nk и ксж в формулу отношения
сигнал/шум для одного импульса, получим отношение мощности сигнала к
мощности внутреннего шума при синтезировании апертуры:
„ РсрСУоц п 191
Чса = ^ ъ » ( ' • 1^)
2(4я)3 RjkTFmLI6£ V sin 6H
где Рср = PHtHFn - средняя мощность излучения; L^ - суммарные
потери в высокочастотном тракте при распространении волны и при
обработке сигнала.
Как видно из (7.12), отношение сигнал/шум в РСА уменьшается
пропорционально R3 , а не R* , как в обычной РЛС. Это объясняется
Н
увеличением числа когерентно накапливаемых импульсов Nk с
увеличением дальности для обеспечения постоянства разрешения по азимуту.
Суммарные потери Ц-, кроме потерь в высокочастотном тракте и
при распространении электромагнитных волн, учитывают также потери
при обработке сигналов. Потери при обработке обусловлены: 1)
несогласованностью характеристик системы обработки и сигналов вследствие
ошибок определения параметров движения носителя и характеристик РСА, а
также ошибок формирования опорной функции процессором; 2)
несовпадением частоты сигнала с частотой настройки одного из гребенки фильтров
обработки; 3) падением амплитуды сигнала на краях ДН антенны и весовой
функции обработки; 4) флуктуациями траекторного сигнала. При
обнаружении точечной цели эти потери достигают 5...8 дБ, а суммарные потери
соответственно 12... 17 дБ.
Необходимое отношение сигнал/шум qca определяется требуемой
вероятностью правильного обнаружения при заданной ложной
тревоге, которые, в свою очередь, определяются статистическими
характеристиками сигнала цели и шумов.
Наземные и морские цели отличаются сложной конфигурацией.
Наличие отдельных плоскостей, уголков, элементов с резонансным
характером отражений приводит к тому, что в элемент разрешения
попадает небольшое число мощных отражателей.
В этом случае плотность вероятности ЭПР малоразмерной цели
или разрешаемого элемента большой цели обычно характеризуется лог-
нормальным законом или законом распределения « х2 с четырьмя
степенями свободы»:
(7.13)
9—3169 257
Глава 7
*П0|
l.Oi
0.8
0.6
0.4
0.2
Плотность вероятности
мощности помехового сигнала Рп в
элементе разрешения обычно
характеризуется экспоненциальным
законом:
-(714)
12
16
Характеристики обнаружения
для этих законов распределения
мощности сигнала и помехи пред-
ч> ставлены на рис. 7.4. Здесь изобра-
Рис. 7.4. Характеристики обнаружения жеНы графики зависимости вероят-
цели ности правильного обнаружения
Рпо от отношения сигнал/помеха q = Рц/Рп при вероятности ложной
тревоги Рот = КГ6 в одном элементе разрешения и различном числе NH обзоров
(накапливаемых независимых изображений цели и помехи). Из графиков
следует, что для обеспечения вероятности правильного обнаружения
Р^ = 0,8 требуется отношение сигнал/помеха q^ = 15 дБ в одном
элементе разрешения при однократном и q^, = 9 дБ при четырехкратном обзоре.
Рассмотрим определение дальности обнаружения для четырех
типовых задач.
1. Обнаружение цели на слабоотражающем фоне. Полагая, что на
максимальной дальности (дальности обнаружения Ro) мощность фона
и других помех меньше мощности внутренних шумов приемника РСА,
определяем дальность обнаружения из (7.12), подставляя вместо qca
требуемое отношение сигнал/помеха (q£a = q^,):
2(47i)3qipkTFUIL5:5^VsineH
(7.15)
Числовой пример. Рср=103Вт, G = 3-103, А. = 310~2м, аи=3м2,
О0 = 10~3, ч1р = 15дБ(32), кТ = 410~21 Вт/Гц, Рш=8дБ(6),
Lv = 20 дБ(ЮО), 6С = 6г = Зм. V = 300 м/с, sin6H = l (боковой обзор).
Дальность обнаружения в этом примере согласно (7.15) равна Ro = 130 км
(округлено). Мощность фона в элементе разрешения намного меньше
мощности внутреннего шума: оф = c06f8r/cosa = 10~2 м2, ои/оф = 300 » q^ .
258
Характеристики РСА землеобзора
2. В режиме картографирования дальность обзора определяется
возможностью обнаружения сигналов, отраженных от заданной
пространственно-распределенной цели с минимальной ЭПР о0мин . В этом
случае дальность обнаружения разрешаемого элемента цели (дальность
картографирования) можно получить, подставляя в (7.15) значение
au=aOM(4H5№r/cosa:
2(4n)3qipkTFUILvV sin 9H cosa
(7.16)
Характеристики обнаружения пространственно-распределенной
цели (фона) отличаются от характеристик обнаружения точечной цели.
Во-первых, распределение ЭПР элемента фона подчиняется
экспоненциальному (а не хи-квадрат) закону (в сантиметровом диапазоне
радиоволн). Во-вторых, пространственно-распределенная цель содержит
большое количество компактно расположенных элементов разрешения
(до 103...104). Это позволяет значительно снизить требуемую
вероятность ложной тревоги на один элемент разрешения, обычно до
10~'...10"2. В этом случае требуемое отношение сигнал/помеха для
одного элемента разрешения равно 3...5 дБ. Иногда в качестве критерия
дальности картографирования используют понятие чувствительности -
минимальной удельной ЭПР о0мин, при которой отношение сигнал/шум
равно единице, т.е. О дБ.
Потери при обработке сигнала фона на 3...5 дБ меньше, чем при
обработке сигнала точечной цели. Это объясняется прежде всего малым
влиянием рассогласования характеристик фильтра и сигнала фона, так
как рассогласование приводит только к перераспределению сигнала
фона между элементами разрешения, не изменяя его общей мощности.
Используя данные предыдущего числового примера для случая
детального картографирования (Ы! = 5г = 3 м )
пространственно-распределенной цели с аОмин = -30 дБ (10~3) при требуемом отношении сигнал/помеха
q^, = 3 дБ (2), потерях Ц- = 15 дБ (32) и cosa = 1, получим дальность
детального картографирования RK =70 км (округлено). Как и ранее
полагаем, что внутренний шум превосходит по мощности все другие помехи.
3. При обнаружении точечной цели на силъноотражающем фоне
влиянием внутренних шумов и помех обычно пренебрегают. В этом
случае характеристики обнаружения определяются отношением
сигнал/фон для одного элемента разрешения. Мощность сигнала фона в
элементе разрешения зависит от удельной ЭПР фона и разрешения РСА:
259
Глава 7
Оф =a0b£br/cosa , а мощность сигнала цели - от ЭПР цели ац. При
заданной величине о0 улучшить характеристики обнаружения можно
только повышая разрешение. Так как cos а близок к единице, то
Так, при Рпо = 0,8 и Р10 = Ю"6 необходимо иметь (см. рис. 7.4) отношение
сигнал/фон q^ = Рц/Рп = сц/аф = 15 дБ при однократном обзоре. Если
оц = 3м2 и о0 = -20 дБ (танк в степи), требуемое разрешение
равно 3 м. При четырехкратном обзоре для
чить разрешение РСА 8/? = 8г = 6 м.
(7.18)
= 9 дБ достаточно
обеспеДальность обнаружения малоразмерной цели на сильноотражаю-
щем фоне определяется двумя условиями: 1) обеспечением на этой
дальности такого разрешения, при котором q = —^-; 2) обеспечени-
ДД = 8АЗ,м
15
ем такого отношения сигнал/шум Рс/Рш » q^,, при котором влиянием
шумов по сравнению с фоном можно пренебречь.
На рис. 7.5 представлены графики зависимости границы требуемого
разрешения от ЭПР цели ац для ее обнаружения на фоне «степь летом»
при вероятности правильного
обнаружения Рпо = 0,8 и вероятности
ложной тревоги Рт = КГ6 .
При обнаружении
малоразмерной цели на фоне а0
значительный вклад в величину
мощности фона элемента разрешения
цели может вносить сильноотра-
жающий фон в окрестностях цели
( о0окр ). Примером такой ситуации
может служить обнаружение цели
ю 20 зо с м2 на поляне в лесу. Влияние сосед-
Рис. 7.5. Графики зависимости"' него сильноотражающего фона в
требуемого разрешения от ЭПР цели этом случае учитывается через ин-
при различном числе NH некогерентных тегральный уровень боковых ле-
накоплений пестков выходного сигнала ( Ринт):
260
Характеристики РСА землеобзора
aucosa
Рп сф
Для рукотворных объектов (корабли, танки, ракетные комплексы,
самолеты на стоянке и т.п.) при высоком разрешении справедлива
эмпирическая формула оценки ЭПР разрешаемого элемента и объекта в
целом:
au = (0,5...1,0)Su,
где Su - площадь объекта или его разрешаемого элемента.
При этом полагается, что площадь объекта больше или равна
площади элемента разрешения РСА. В этом случае требуемое для
обнаружения цели на фоне отношение сигнал/фон
(0,5...1,0)615г _ 0,5...1,0
_ ц _
41
о0
Отношение q^ = 9 дБ (при 4-кратном обзоре) обеспечивается на
любом фоне, удельная ЭПР которого меньше -10 дБ (городские
постройки).
Особый случай представляет обнаружение объектов, находящихся
под слоем растительности, почвы, снега, а также замаскированных
специальными радиопоглощающими покрытиями.
Типовые покрытия имеют в сантиметровом диапазоне поглощение 15...25 дБ
в полосе, составляющей до 20 % центральной частоты. При маскировке таким
покрытием объекта с ЭПР ац = 10 м2 (танк) и поглощением 20 дБ
действующая величина ЭПР будет равна 0,1 м2. При расположении объекта на фоне с
удельной ЭПР а0 = -20 дБ (степь) и разрешении РСА (Зх3 м2) отношение
сигнал/фон будет равно 1, т.е. объект не будет обнаружен.
При переходе в дециметровый диапазон (А. = 70 см) уменьшается средняя
удельная ЭПР фона (на 30 дБ) и значительно уменьшается поглощающая
способность покрытия, что позволяет обнаруживать объекты с ЭПР оц=1... 10 м2.
Аналогично определяется возможность обнаружения объектов,
покрытых слоем почвы и снега. В этом случае поглощение сигнала и
соответственно уменьшение действующей ЭПР объекта определяется
толщиной покрытия и коэффициентом поглощения материала покрытия.
При обнаружении объектов, находящихся под пологом леса,
степень поглощения определяется длиной пути распространения
электромагнитных волн в кронах деревьев (до объекта и обратно):
где hKp - высота крон деревьев, а <рн - угол падения волны.
261
Глава 7
Так, при высоте крон Ькр=5м и фн = 10° RKp = 60 м. В сантиметровом
диапазоне поглощение электромагнитных волн составляет: в листве 1,2 дБ/м
и на пути распространении - 72 дБ, что не позволяет обнаруживать
объекты под пологом леса.
При обзоре под большими углами (фн = 50...60°) значительно
уменьшаются длина пути в кронах деревьев (R^ - 12 м) и соответственно
поглощение электромагнитных волн. Такие углы обзора характерны для
космических РСА и беспилотных ЛА. Поскольку объекты находятся между
деревьями, степень их закрытия листвой при почти вертикальном
зондировании значительно меньше, и поглощение в этом случае уменьшается.
Полагая, что на краях крон деревьев коэффициент затухания у составляет
0,6дБ/м, получим поглощение в листве yR^ =7 дБ и действующую ЭПР
цели ац = 2 м2. В случае, если удельная ЭПР леса а0 = -14 дБ и
разрешение РСА составляет 3x3 м2, ЭПР фона аф = 0,25 м2. Таким образом,
отношение сигнал/фон составляет ац/аф = 8, что позволяет обнаруживать
объекты под пологом леса при больших углах обзора.
В дециметровом диапазоне (Я. = 70 см) поглощение в листве деревьев
уменьшается в 10 раз (у = 0,12 дБ/м ), а а0 - в 100 раз, что позволяет
обнаруживать объекты при любых углах обзора. Однако при этом может
возникнуть проблема распознавания объектов: стволы деревьев — цель.
4. Особо определяются характеристики обнаружения
пространственно-распределенной цели с отрицательным контрастом (просека в
лесу, ВПП, речка с пологими берегами и т.п.), т.е. когда окружающий
фон имеет удельную ЭПР ооф больше, чем ЭПР цели сгОц. В этом
случае задача обнаружения сводится к различению двух сигналов,
отличающихся средней мощностью.
Наиболее сложной является задача обнаружения протяженной цели с
меньшей, чем у окружающего фона удельной ЭПР, когда цель занимает
всего несколько элементов разрешения по одной из координат («провал»).
Уровень мощности сигнала в этих элементах определяется: 1) мощностью
сигнала цели; 2) интегральным уровнем боковых лепестков Ринт ФН
сигналов окружающего фона и сигналов дальнего фона вследствие
неоднозначности по азимуту и дальности; 3) мощностью помех Рп (шумами
приемника, АЦП, процессора и внешними помехами):
cos a w
где Ко - коэффициент, учитывающий характеристики РЛС.
В соседних с целью разрешаемых элементах фона уровень
мощности сигнала в основном определяется отражениями от фона:
262
Характеристики РСА землеобзора
_ К0софб18г
cos а
(7.21)
Полагая, что мощность помех Рп много меньше мощности
сигналов цели и фона, принимаемого по боковым лепесткам, получим
отношение Рф/Рц (контраст изображения):
£ф^о (?22)
Рц а0ц ф
Плотность вероятности мощности сигналов фона и цели
распределяется по экспоненциальному закону (для одного обзора). На рис. 7.6
даны характеристики обнаружения элементов цели с отрицательным
контрастом в зависимости от
контраста изображения.
Поскольку число элементов
разрешения цели и фона велико,
вероятность ложной тревоги
(вероятность принятия цели за фон
в одном элементе разрешения)
можно задавать достаточно
,-1
л-2
0.2
Рис. 7.6. Характеристики обнаружения
цели с отрицательным контрастом
большой (РЛТ = Ю ...10~z)- Для
обеспечения вероятности
правильного обнаружения Рпо=0,8
при однократном обзоре
требуется контраст цели
Рф/Рц = 12дБ, а при 4-кратном
обзоре- Рф/Рц = 5дБ.
В качестве примера рассмотрим обнаружение дороги (о0ц = -30 дБ) на
просеке в лесу (стоф = -15 дБ ). Если интегральный уровень боковых
лепестков Ринт = -15 дБ, то контраст Рф/Рц = 12 дБ, что обеспечивает
обнаружение дороги в лесу при однократном обзоре.
Дальность обнаружения цели с отрицательным контрастом
определяется условием, при котором можно пренебречь влиянием шумов на
величину контраста изображения.
В РСА землеобзора в зависимости от типа решаемой тактической
задачи используются различные характеристики обнаружения целей.
Различают четыре типовые задачи: 1) картографирование; 2)
обнаружение сосредоточенной цели на слабоотражающем фоне; 3)
обнаружение сосредоточенной цели на сильноотражающем фоне; 4) обна-
263
Глава 7
ружение цели с отрицательным контрастом, когда ЭПР цели меньше
ЭПР фона.
В режиме картографирования дальность землеобзора определяется
возможностью обнаружения на фоне внутренних шумов сигналов,
отраженных от разрешаемого элемента заданной пространственно-
распределенной цели с минимальной удельной ЭПР (обычно водной
поверхности).
Плотность вероятности распределения ЭПР разрешаемого элемента
пространственно-распределенной цели подчиняется
экспоненциальному закону. Цель содержит множество элементов разрешения, что
позволяет допустить вероятность ложной тревоги КГ1 и
соответственно требуемое отношение сигнал/шум q^ = 3 дБ при однократном
обзоре; кроме того, уменьшаются на 3...5 дБ потери в системе
обработки.
Обнаружение отдельной сосредоточенной цели на слабоотражающем
фоне определяется отношением мощности сигнала цели к мощности
внутреннего шума на выходе приемника и характеризуется
дальностью, на которой обеспечивается обнаружение цели с заданными
вероятностями правильного обнаружения и ложной тревоги.
Мощность сигнала цели увеличивается пропорционально числу
накапливаемых импульсов при синтезировании апертуры и
уменьшается вследствие потерь в высокочастотном тракте, среде
распространения и системе обработки сигналов. При заданном постоянном
разрешении по азимуту мощность сигнала уменьшается пропорционально
дальности в третьей степени.
Вероятность правильного обнаружения определяется
статистическими свойствами сигналов цели и помех. Плотность вероятности
распределения ЭПР сосредоточенной рукотворной цели обычно
характеризуется логнормальным законом либо законом «хи-квадрат» с
четырьмя степенями свободы. При некогерентном накоплении
статистические характеристики сигнала и шума изменяются, и для
обеспечения той же самой вероятности обнаружения требуется меньшее
отношение сигнал/шум q^. При Р^ =0,8 и Р^ = 10~б и 4-кратном
обзоре q^ = 9 дБ, а при однократном обзоре q^, -15 дБ.
Характеристики обнаружения сосредоточенной цели на сильноотра-
жающем фоне определяются отношением сигнал/фон, при этом
внутренним шумом пренебрегают. Мощность фона пропорциональна
удельной ЭПР и площади разрешаемой площадки на местности.
Поэтому повысить вероятность обнаружения цели на фоне можно,
только увеличивая разрешающую способность РСА. Дальность
обнаружения в этом случае определяется условием, когда отношение
сигнал/шум становится больше требуемого отношения сигнал/фон и
шумом можно пренебречь. Требуемое отношение сигнал/фон при
Рпо = 0,8 и Рлт = 10"6 равно 15 дБ при однократном и 9 дБ при 4-
кратном обзоре.
264
Характеристики РСА землеобзора
Характеристики обнаружения целей с отрицательным контрастом
(«провалом» в изображении местности) определяются отношением
мощности окружающего фона к мощности цели в элементах
разрешения (контрастом). Контраст уменьшается вследствие попадания в
элемент разрешения цели отражений от окружающего фона по
боковым лепесткам. Для обнаружения протяженной цели требуется
контраст Рф/Рц = 12 дБ при однократном обзоре и 5 дБ при 4-кратном
обзоре. Внутренними шумами можно пренебречь.
При высокой разрешающей способности, когда площадь элемента
разрешения меньше площади цели, обнаружение каждого
разрешаемого элемента рукотворной цели обеспечивается на любом фоне.
7.4. Распознавание объектов
Задача распознавания сводится к селекции (выделению) заданных
для вскрытия объектов среди других обнаруженных объектов
естественного и искусственного происхождения. В задачу распознавания
входит также определение класса и типа выделенных объектов и их
функционального состояния. Особенно важной и ответственной задачей при
принятии решения является распознавание специальных ложных целей
(надувных макетов, уголковых отражателей и т.п.), а также объектов по
принадлежности «свой - чужой».
Повышение эффективности решения задачи распознавания
объектов достигается двумя путями:
1) повышением информативности используемых
распознавательных признаков (характеристик) объекта;
2) формированием в РСА новых распознавательных признаков
заданных объектов.
Обычно критерием выбора распознавательных признаков и
методов повышения их эффективности является «принцип разумной
достаточности», так как формирование новых и повышение характеристик
используемых признаков требует перераспределения (расходования)
располагаемых ресурсов (вычислительных, энергетических, временных)
РСА, которые всегда ограничены критическими технологиями и
тактическими требованиями.
Быстрое развитие технологий РСА позволяет использовать
распознавательные признаки все более широкого класса. Далее
анализируются основные распознавательные признаки объектов при их наблюдении
РСА.
Характерные размеры РЛИ объекта. К характерным размерам
объекта относятся его длина, ширина, высота, площадь и объем,
определяемые числом элементов разрешения в РЛИ объекта.
Дополнительным признаком является форма РЛИ объекта.
265
Глава 7
Рассмотрим методику расчета вероятности распознавания цели на
примере использования площади объекта в качестве распознавательного
признака. Вероятность распознавания целей определяется многими
факторами:
• ансамблем распознаваемых целей;
• априорными сведениями о классе наблюдаемых целей;
• свойствами выбранных распознавательных признаков;
• алгоритмом принятия решения о классе цели.
В качестве ансамбля распознаваемых целей принимается набор
типовых целей. При этом каждый раз при определении вероятности
распознавания целей предполагается наличие двух целей с наиболее
близкими параметрами, т.е. наихудший случай. Кроме того, полагаем, что
априорные сведения о наличии той или иной цели отсутствуют, т.е.
наличие двух близких по параметрам целей равновероятно.
В качестве распознавательного признака используем число
пикселов NnK в изображении цели. Для определенности положим, что
разрешения по дальности и азимуту одинаковы и на элемент разрешения
площади цифрового РЛИ приходится четыре пиксела (два на линейный
элемент разрешения). Точность измерения площади изображения цели
(СКО) полагаем равным четырем пикселам (одному элементу
разрешения по площади). При обеспечении эффективности обнаружения
разрешаемого элемента цели (Рп0 = 0,8 и Рлт = КГ6, см. разд. 7.3) такая
точность достигается с запасом.
В качестве алгоритма распознавания обычно используют правило
минимизации среднего риска. Задача сводится к нахождению границы
раздела между значениями площадей двух целей Sj и S2. Если
измеренное значение площади меньше граничного значения: S < S^,,
принимается решение о классе цели №1, а при S > S^, - о классе цели №2.
При одинаковых значениях СКО измерения площадей
изображения всех целей (а = 4 пиксела), одинаковых заданных потерях при
ошибках классификации первого и второго рода, отсутствии потерь при
точных решениях и одинаковых априорных вероятностях появления
целей каждого класса значение площади раздела равно:
Sip=(S1+S2)/2. (7.23)
Вероятность правильной классификации первой цели равна:
PK(S,) = P(S1|S,)[l-P(S1|S2)]. (7.24)
Так как обычно интересуют вероятности правильной
классификации, близкие к 1 (Рк > 0,9), то
266
Характеристики РСА землеобюра
(7.25)
Аналогично определяется вероятность PK(S2). Апостериорную
плотность вероятности оценки S, площади изображения цели можно
аппроксимировать гауссовой кривой:
(726)
где SH, = IS, -SJ/g - нормированное значение оценки S,.
В этом случае вероятность распознавания цели с площадью S, при
наблюдении первой цели определяется интегралом вероятности:
1 S7 { s21
j exp -^ dSHl, (7.27)
—то
где SHrp =(s,p ~Sjj/a - нормированное граничное значение разделения
площади первой цели относительно второй.
Ниже представлены значения вероятностей P(S,|S,) и
вероятностей правильной классификации PK(Sj) = P(Sj | S^fl - P(Sj | S2)]
для различных нормированных значений границы раздела
SHrp=(Srp-S1)//<j = (S2-S1)/2a площадей двух целей St и S2:
3„гР 0,5 1,0 1,5 2,0 2,5
/'(5J5,) 0,69 0,84 0,93 0,98 0,99
0,5 0,7 0,87 0,96 0,98
При SHip =2 и a = 4 разность площадей AS = S2 - S, = SHrp • 2a =
= 2-2-4 = 16 пикселов, что обеспечивает вероятность правильной
классификации 0,96. При разности площадей AS = 8 пикселов (SHrp = l)
вероятность распознавания будет равна 0,7.
На рис. 7.7 дан график зависимости вероятности классификации
цели Рк от числа элементов разрешения N3 на характерном размере
изображения. В табл. 7.4 даны значения требуемой разрешающей
способности РСА для обнаружения и распознавания типовых объектов при
наблюдении их РЛИ опытным оператором.
267
Глава 7
В настоящее время
достигнута разрешающая
способность 0,3x0,3 м , а в отдельных
экспериментах даже 0,1 х 0,1м,
что позволяет распознавать
малоразмерные цели, имеющие
размеры единицы метров.
Решение задачи селекции
ложных целей, имеющих такие
же характерные размеры, как и
заданные цели, требует
привлечения дополнительных
распознавательных признаков.
Амплитудный портрет
объекта. Амплитудный
портрет - это детальное изображе-
0.8
0.6
0.4
0.2
j
J
i
/
/
i |
0 4 8 12 16 20N3
Рис. 7.7. Вероятность классификации
цели от числа элементов разрешения
РЛИ цели
ние объекта в виде распределе- Таблица 7А Значения требуемой
ния ЭПР объекта по элементам разрешающей способности РСА
разрешения РЛИ. В качестве
распознавательных признаков
используются статистические
характеристики ЭПР.
Среднее значение ЭПР,
полученное усреднением
реализации амплитуды РЛИ за
несколько обзоров, характеризует
распределение отражающей
способности объекта по
элементам разрешения.
Корреляционная функция
характеризует взаимосвязь
амплитуд РЛИ как в разрешаемом
элементе от обзора к обзору,
так и между элементами.
Рассматриваются также законы
распределения плотности
вероятности амплитуд РЛИ.
Трудностью
использования этих признаков является получение банка данных для заданного
класса (типов) объектов, что требует больших экспериментальных
работ. Рассматривается также возможность расчета на ЭВМ
статистических характеристик РЛИ объектов.
268
Объекты
Морские порты
Населенные
пункты
Железнодорожные узлы
ВПП
Аэродромы
Самолеты
на аэродроме
РК, ракеты
«ПП»
КП
РЛС
Радиостанции
Склады
Обнаружение
Ы = бг, м
30
60
30
40
6.0
4,5
3,0
3,0
3,0
3,0
1,5
Распознавание класса
5^ = 6г, м
15
30
15
9,0
4,5
1,5
1,5
1,5
0,9
1,5
0,6
Характеристики РСА землеобзора
Поляризационные портреты объекта. В настоящее время при
распознавании объекта используются в основном однополяризационные
функции отражения, когда излучаемая и принимаемая
электромагнитная волна имеет одну и ту же поляризацию (ГГ или ВВ). Развитие
техники антенн-поляриметров дало возможность формировать полную
поляризационную матрицу функции отражения объекта. При этом РЛИ
объекта, полученные при различных поляризациях, несут информацию
о конструкции и структуре материала объекта. Так, значительно
отличаются РЛИ объектов естественного и искусственного происхождения в
зависимости от поляризации, а также у специальных ложных целей.
Основной проблемой при создании полнополяриметрической РСА
является значительное усложнение аппаратной и программной
(алгоритмической) частей. Фактически работают параллельно четыре канала приема
сигнала и обработки данных. Также весьма сложной задачей является
определение (в основном экспериментальное) поляризационной матрицы
функции отражения объектов для различных условий наблюдения.
Трехмерный портрет объекта. Обычно РЛИ объекта
формируется в виде плоской картины в проекции на земную поверхность. В то
же время значительная информация о классе и типе объекта заключена
в высоте объекта. Кроме естественного изменения высоты земной
поверхности (рельефа местности), РСА позволяет получать изображение
микрорельефа объекта, т.е. изменение рельефа местности, связанное с
наличием вскрываемого объекта (капониры, карьеры, отдельные
сооружения, техника и т.п.).
При малых углах визирования и расположении объектов на
плоской поверхности Земли они создают радиолокационные тени, по
которым судят о высоте объекта. Длина тени при малых углах наблюдения
определяется по формуле: £Т - h/<pH, где h - высота объекта; <рн - угол
визирования (в радианах). Так, при угле визирования в 6° объект
высотой h = 10 м дает тень длиной 100 м.
При средних и больших углах визирования, а также при сложном
характере рельефа Земли в районе объекта метод радиолокационных
теней не работает. Поэтому для измерения высоты объекта используют
угломерный способ с помощью реальной антенны РСА. Чем больше
размер антенны, тем выше точность измерения высоты. Для упрощения
конструкции антенны обычно используют две разнесенных в угломест-
ной плоскости антенны (интерферометр). Разность фаз сигналов одного
и того же разрешаемого по дальности и азимуту элемента объекта,
принимаемых антеннами интерферометра, пропорциональна высоте
объекта. По этой информации строится трехмерный портрет объекта.
Основным направлением развития таких интерферометрических
РСА является повышение точности измерения высоты. Для этого уве-
269
Глава 7
личивают разнос антенн. Так, в экспериментальных РСА получена
точность измерения высоты рельефа местности 0,3 м с дискретностью
изображения 1...3 м.
Для уменьшения влияния растительности, покрывающей объекты,
интерферометрическая РСА может работать в дециметровом диапазоне.
Многочастотный портрет объекта. Функция отражения
объекта изменяется значительным образом в зависимости от отношения
размеров неоднородностей его структуры (конструкции и материалов) и
длины волны РСА. Закономерности отражения электромагнитных волн
(диффузное, зеркальное, резонансное и др.) достаточно хорошо
известны, что позволяет определять изменение функции отражения
конкретных объектов при смене частоты излучения РСА. Рассматривая эти
закономерности, обычно отмечают три резко различающихся по
характеру функции отражения диапазона частот: сантиметровый (А. = 3см),
длинный дециметровый (X = 70 см ) и метровый ( X = 2,5 м ).
Рассматриваются также сверхширокополосные системы в диапазонах 215...900
МГц и 100...600 МГц, которые могут работать в двух поддиапазонах -
дециметровом и метровом - с полосой частот 100 МГц. На малых
дальностях (единицы километров) обеспечивается высокое разрешение по
азимуту и дальности, что позволяет получать детальные изображения
объектов в различных диапазонах волн.
Динамический портрет объекта. Движение объекта и его
отдельных частей является одним из самых важных распознавательных
признаков, который лежит в основе не только распознавания класса и
типа, но и функционального состояния объекта.
Задача формирования динамического портрета отдельных
сосредоточенных объектов, наблюдаемых на фоне подстилающей
поверхности, решается на различных уровнях.
В первом случае используется режим СДЦ, который позволяет
селектировать движущиеся объекты по их радиальной скорости. Основное
направление развития режима СДЦ - снижение минимальной радиальной
скорости цели, при которой принимается решение о движении объекта. В
настоящее время считается возможным обнаружение целей, движущихся
со скоростью 1...2 м/с. При этом для подавления сигнала неподвижного
фона используют антенну-интерферометр с двумя разнесенными вдоль
линии пути фазовыми центрами.
В режиме СДЦ осуществляется не только селекция, но и измерение
радиальной составляющей скорости и азимута объектов. Для этого
используется пространственно-временная обработка сигналов, при которой
необходима антенна с тремя и более фазовыми центрами. При
одновременном формировании изображений движущихся и неподвижных
объектов число необходимых фазовых центров возрастает. Возможно также
270
Характеристики РСА землеобзора
одновременное измерение тангенциальной и радиальной составляющих
скорости объекта при точности измерения порядка 2.. .3 м/с.
При распознавании движущегося (вращающегося) объекта
возможно получение детального РЛИ методами обратного (инверсного)
синтезирования. При этом даже небольшое изменение угла наблюдения
объекта (угол поворота объекта относительно линии «объект — РСА»)
или его отдельных элементов позволяет получить высокое разрешение.
Например, при изменении угла на 3° возможно разрешение в плоскости
поворота, равное 5... 10 длинам волн.
Вторым основным направлением использования динамического
портрета является определение функционального состояния объекта.
Боевая работа (стрельба, пуск ракет), а также маневрирование,
движение отдельных частей объекта, работа двигателя вызывают
пространственно-временную модуляцию функции отражения объекта и
соответственно траекторного сигнала РСА. Обнаружение и определение
параметров этой модуляции позволяет распознавать объект (класс, тип, ложная
цель) и судить о его функциональном состоянии.
В случае распределенного объекта (например, водной поверхности)
имеется возможность формирования динамического (частотного,
фазового) портрета поверхности. Так, скоростной портрет морской поверхности
(радиальная скорость движения морской поверхности в координатах
«дальность — азимут») позволяет определять степень регулярного
волнения, турбулентности различного рода, течения. Скоростной портрет
позволяет обнаруживать и распознавать морские объекты по их следам на
морской поверхности, определять степень волнения в интересах
судовождения и участки загрязнения (экология, следы катастроф).
Важным распознавательным признаком являются также
конфигурация и взаимное перемещение группы объектов, что требует точного
измерения координат и вектора скорости всех объектов в группе.
Селекция ложных целей. Проблема селекции (выделения) среди
обнаруженных объектов специально созданных ложных целей (ЛЦ),
схожих по ряду распознавательных признаков с заданными объектами,
является одной из наиболее сложных.
Методы создания ЛЦ непрерывно совершенствуются. На первом
этапе в качестве ЛЦ использовались уголковые отражатели с ЭПР,
равной ЭПР объекта. С ростом разрешающей способности потребовались
более сложные по конфигурации ЛЦ, которые стали повторять
геометрический образ объекта (например, надувные макеты), что определяло
сходство РЛИ объекта и ложной цели. Буксируемые (движущиеся) ЛЦ
повторяют динамику движения объекта.
Основным направлением решения задачи селекции ЛЦ является
увеличение числа распознавательных признаков объекта, формируемых
271
Глава 7
РСА. Чем больше распознавательных признаков используется в РСА,
тем сложнее имитировать функцию отражения, схожую с функцией
отражения объекта. В этом плане эффективно использование
поляризационных и частотных различий функции отражения.
Режимы формирования поляризационных, трехмерных и
динамических портретов будут рассмотрены в дальнейших разделах.
Повышение эффективности решения задачи распознавания объектов
в РСА достигается за счет повышения информативности
используемых распознавательных признаков (характеристик) объекта и
формирования новых распознавательных признаков.
К основным распознавательным признакам объектов при их
наблюдении РСА относят:
• характерные размеры РЛИ объектов;
• амплитудные портреты объектов;
• поляризационные портреты объектов;
• трехмерные портреты объектов;
• многочастотные портреты объектов;
• динамические портреты объектов.
Использование большого количества распознавательных признаков
повышает эффективность распознавания, но требует существенного
усложнения аппаратуры РСА.
7.5. Точность измерения координат целей
Точность определения местоположения цели. Она
характеризуется ошибками измерения координат цели в заданной системе
координат. Точность измерения координат цели определяется в единичном
измерении за время синтезирования. Измерение координат цели во
времени определяется системой слежения, точность которой зависит также от
динамики изменения координат. Точность слежения задается отдельной
характеристикой ошибок сопровождения одной или нескольких целей, а
также дальностью захвата целей на сопровождение. Обычно дальность
захвата на сопровождение составляет 0,7 от дальности обнаружения
цели, а число одновременно сопровождаемых целей в РСА фронтовых
самолетов не превышает 10.
Уменьшение дальности захвата на сопровождение по сравнению с
обнаружением связано с тем, что для предотвращения срыва
сопровождения требуется более высокое отношение сигнал/помеха, так чтобы
СКО измерения параметров при слежении было меньше 1/6 элемента
разрешения по этому параметру.
Параметрами радиолокационного сигнала цели, которые определяют
ее местоположение в системе координат «наклонная дальность RH —
вектор путевой скорости V носителя РСА», являются задержка огибающей и
272
Характеристики РСА землеобзора
доплеровская частота (рис. 7.8).
Для неподвижной цели наклонная
дальность Ян=стц/2, где тц -
задержка прихода
радиолокационного сигнала цели относительно
момента излучения зондирующего
сигнала; с — скорость
распространения радиоволны.
Соответственно угол цели Рц определяется до-
плеровской частотой сигнала цели:
= arccos
ДЦ
-JL+
2
Рис. 7.8. Система координат
«наклонная дальность - вектор путевой
скорости»
2V '
где X - длина волны РЛС; г"дц -
доплеровская частота сигнала
цели; V — путевая скорость носителя РСА.
Потенциальная точность измерения задержки и частоты
сигнала цели. Определяется свойствами сигнала и помех. Источниками
помех являются внутренний шум приемника, отражения от
метеообразований и земной поверхности, шумы квантования системы обработки,
искусственные пассивные и активные помехи. СКО измерений
задержки при аддитивной нормальной помехе и постоянной амплитуде сигнала
1
где Afc — ширина спектра сигнала цели; q — отношение сигнал/помеха.
В системах радиовидения для обеспечения высокого разрешения
по дальности полоса частот сигнала может быть порядка нескольких
десятков и даже сотен мегагерц, поэтому потенциальная точность
измерения дальности достигает десятков сантиметров:
_ССТт_
8г
где 5г - разрешение по наклонной дальности.
Так, если Afc=150MFu, q = 100, с-3-Ю8 м/с, то ctr = 10cm.
Кроме ошибок измерения дальности, обусловленных наличием
помех, существуют погрешности измерений, не зависящие от мощности
сигнала и помех. Это ошибки, обусловленные случайными изменениями
скорости распространения электромагнитных волн в атмосфере и
отклонением траектории волны от прямолинейной вследствие рефракции. Обе
273
Глава 7
эти причины являются результатом изменения коэффициента
преломления атмосферы, прежде всего по высоте, вследствие изменения
влажности, температуры, давления и других условий. Для самолетных РСА эта
ошибка обусловлена прежде всего рефракцией и носит систематический
характер, т.е. остается постоянной за время работы РСА в заданном
районе. Она может достигать 10...20 м. Если имеется возможность измерить
характеристики атмосферы, то эта ошибка может быть скомпенсирована,
что важно, например, при картографировании местности.
Измерение дальности до объекта предполагает указание
определенной точки на объекте, относительно которой вычисляется дальность.
При радиолокационных измерениях это означает, что у цели имеется
один фазовый центр функции отражения (как у уголкового отражателя),
относительно которого измеряется задержка сигнала и вычисляется
дальность. Реальная цель (в элементе разрешения РСА) имеет несколько
переотражателей (зеркальных точек), и положение эквивалентного
фазового центра цели является случайным в пределах геометрического
размера цели, а в некоторых случаях даже выходит за ее пределы. В
результате возникает ошибка измерения дальности до геометрического
центра цели, СКО которой примерно равно половине размера цели по
дальности. Используя различные методы сглаживания РЛИ
(уменьшение спекл-шума), можно снизить эту ошибку.
Кроме того, источниками ошибок измерения дальности могут быть
нестабильности задержки сигнала в приемопередающем тракте, фильтре
сжатия по дальности и дискриминаторе задержки, а также
нестабильности генератора отсчета задержки и квантователя по задержке. Обычно
суммарная ошибка измерения дальности, вызываемая этими причинами,
не превышает 2...3 м.
Потенциальная точность измерения доплеровской частоты.
Так же, как и измерение задержки, определяется характеристиками
сигнала и помех. В случае нормальных аддитивных помех и постоянной
амплитуды сигнала СКО измерений частоты
1
где Тс — время измерения (синтезирования).
2V
Учитывая, что ffl =6Ц—sin0H, СКО измерения угла цели 8ц
А
А 50.
определяется шириной синтезированной ДН 58С. Ошибка измерения
азимута соответственно равна
274
Характеристики РСА землеобзора
При q = 100 потенциальная точность измерения азимута цели
очень высокая и составляет 0,1 разрешения по азимуту.
Азимутальные ошибки, не зависящие от мощности сигнала и
помех, определяются конечным размером цели (половина
геометрического размера по азимуту при отсутствии сглаживания спекл-шумов) и
рефракцией при распространении электромагнитных волн в атмосфере.
Угловая азимутальная ошибка вследствие рефракции для самолетных
РСА обычно мала (меньше 10~5 рад). Кроме того, так же, как и при
измерении дальности, источниками ошибок являются фазовые
нестабильности приемопередающего тракта, частотного дискриминатора, фильтра
сжатия. Обычно эти частотные нестабильности не превышают 1...2 Гц.
Основными источниками угловых ошибок измерения в системе
координат «вектор путевой скорости V - наклонная дальность RH »
являются ошибки навигационных систем при измерении скорости
носителя V . Так, при использовании стандартных доплеровских измерителей
скорости и угла сноса (ДИСС) ошибка измерения скорости av
составляет 0,1% от измеряемой величины, что приводит к ошибке измерения
азимута цели (для углов 9Н, близких к п/2 )
aG = 6uav/V.
Так, при 80С = 1О~4 (5( = 10м, Rh=100km), 0ц=1рад и относительной
ошибке измерения скорости av V=0,l% ошибка измерения по азимуту
цели в 10 раз превышает разрешающую способность по углу ае/60с = 1О и
составляет аг - 100 м.
Более точное измерение путевой скорости возможно по
результатам оценки максимальной доплеровскои частоты спектра траекторного
сигнала.
В большинстве тактических задач измерение угла (азимута) цели
производится относительно строительной оси носителя РСА. В этом
случае основную ошибку в измерение азимута цели вносит неточность
определения угла сноса ссс (см. рис. 7.8). Практически можно считать,
что ошибка измерения азимута цели относительно строительной оси
носителя РСА равна ошибке измерения угла сноса и для типовых ДИСС
составляет aa=510~3, что в 50... 100 раз превышает разрешающую
способность РСА. Поэтому в большинстве случаев угловые координаты
цели (азимут) определяются с помощью реальной (а не синтезирован-
275
Глава 7
ной) ДН антенны. Потенциальная точность определения угла
определяется шириной ДН антенны 60:
Так, при использовании достаточно большой антенны
(60 =10~2рад = 0,6°) и q = 100 точность определения угла азимута
аа =10~3 рад = 3,6', что на дальности 80 км обеспечивает точность
измерения азимута а, = 80 м . При этом предъявляются высокие требования к
точности привязки ДН антенны к строительной оси и точности датчиков
углового положения ДН. Для антенн с механическим сканированием эти
ошибки составляют обычно 3... 10'.
Точность определения местоположения цели в земной системе
координат зависит прежде всего от ошибок навигационной системы,
используемой носителем (ГЛОНАСС, ИНС, РСБН и т.п.).
Благодаря высокой разрешающей способности РСА
(радиовидению) возможна высокоточная привязка цели к ориентирам с
известными координатами. В этом случае точность измерения координат цели
определяется ошибками измерения разности координат цели и
ориентиров. При малых расстояниях между целью и ориентиром ошибки
измерения координат цели и координат ориентира оказываются
коррелированными, так что ошибка измерения разности координат оказывается
близка к потенциальной.
При картографировании точность определения координат цели на
изображении карты местности в земной системе координат
определяется точностью:
1) навигационной привязки центра кадра изображения;
2) точностью измерения положения центра изображения цели;
3) измерения расстояния на изображении между центром кадра и
центром цели.
Точность навигационной привязки кадра изображения
определяется навигационной ошибкой измерения координат носителя РСА.
Точность определения положения центра изображения цели
(ориентира) определяется разрешающей способностью (шириной пятна
изображения точечной цели) и отношением сигнал/помеха в элементе
разрешения.
Точность определения расстояния между центром кадра и центром
изображения цели определяется в основном масштабными искажениями
изображения. Они являются следствием погрешностей определения
путевой скорости и установки скорости развертки изображения на
индикаторе (карте), а также результатом игнорирования кривизны земной
поверхности и несоответствия наклонной и горизонтальной дальностей
276
Характеристики РСА землеобзора
вследствие неровностей рельефа местности. Так, при значительной
неровности рельефа, когда наклонные дальности до целей Ц, и 1Д2
(рис. 7.9) оказываются равными (R, = R2), ошибка определения
горизонтальной дальности равна
«■¥•
где Нц — возвышение цели (рельефа) над горизонтальной
поверхностью; Н - высота полета носителя РСА.
| Так, если H/RH = 0,1 и Нц = 200 м , то ДЦ = 20 м .
Рис. 1.9. Ошибка определения горизонтальной дальности
При использовании ориентиров с известными координатами,
изображение которых присутствует на карте, точность измерения
координат цели определяется точностью определения расстояния между
центрами изображений ориентиров и цели.
Оптимальный измеритель координат (дискриминатор). Для
определения положения максимума функции правдоподобия
параметров траекторного сигнала применяется дискриминатор. При измерении
азимута процедура измерения сводится к взятию производной по
координате азимута £ и приравниванию результата к нулю:
Тс
Обычно алгоритм сводится к эквивалентной процедуре:
dt = O,
где Со - ожидаемое значение параметра (центр элемента разрешения). В
этом случае для каждого разрешаемого по t канала обработки алгоритм
вычисляет разность сигналов в двух соседних каналах:
277
Глава 7
J
t, t0 "
= 0,
тс тс
u
u.
где Д£ = 5^ — разнос настройки каналов по параметру (.. Если
отсутствуют помехи, то ивых = 0 при *?ц = (0.
Структура
дискриминатора представлена на рис. 7.10.
При следящем алгоритме
параметр ^0 подбирается таким
образом, чтобы ивых = 0. В этом
случае Си = С0. При методе
прямого отчета измеряется
величина ивых = кд£ц,
пропорциональная координате £и.
КоэфX
t.
X
[d,
>+~)
f*
—
' -
V
4
Рис. 7.10. Структура дискриминатора
по азимуту
фициент пропорциональности
кд определяется заранее и зависит от параметров дискриминатора. При
использовании метода гармонического анализа оценка азимута цели
эквивалентна оценке доплеровской частоты сигнала цели и коэффициент
кд зависит от формы частотной характеристики соседних каналов,
разноса их настройки и амплитуды сигнала цели.
Потенциальная точность измерения задержки и частоты сигнала
определяется свойствами сигналов и помех:
1
1
Дополнительными источниками ошибок измерения дальности, не
зависящих от мощности сигнала и помех, являются случайные
изменения скорости распространения электромагнитных волн в атмосфере,
отклонение траектории волны от прямолинейной вследствие
рефракции (ошибка может достигать 10...20 м), флуктуации положения
фазового центра цели (до половины геометрического размера цели),
нестабильности аппаратуры (до 2...3 м).
Основными источниками ошибок измерения азимута цели являются
флуктуации положения фазового центра (до половины
геометрического размера цели) и ошибки измерения скорости и угла сноса
носителя (в 50... 100 раз больше разрешающей способности по азимуту). В
большинстве случаев азимут цели определяют с помощью ДН
реальной, а не синтезированной антенны.
Благодаря высокой разрешающей способности РСА (радиовидению)
возможна высокоточная привязка цели к ориентирам с известными
координатами. В этом случае точность измерения координат цели
оказывается близка к потенциальной.
278
Характеристики РСА землеобзора
7.6. Помехозащищенность РСА землеобзора
7.6.1. Помехозащищенность РСА в условиях РЭБ
Помехозащищенность является важнейшей характеристикой РСА,
определяющей возможность эффективного решения функциональных
задач в условиях ведения радиоэлектронной борьбы (РЭБ) [9].
В настоящее время РЭБ определяется как комплекс мероприятий и
действий конфликтующих сторон, направленных на обнаружение и
радиоэлектронное подавление (РЭП) радиоэлектронных средств (РЭС)
противника и радиоэлектронную защиту своих РЭС от преднамеренных
и непреднамеренных помех, а также технической разведки сигналов
РЭС. При этом помехозащищенность РЭС характеризует способность
выполнения функциональных задач с заданной эффективностью в
условиях воздействия преднамеренных и непреднамеренных помех, а также
возможность противодействовать радиотехнической разведке (РТР)
своих сигналов.
Анализ помехозащищенности требует системного (целостного)
подхода с учетом всех структур, участвующих в РЭБ, взаимосвязей
целей, задач и критериев оценки их функционирования в динамике
взаимодействия и развития. Динамика взаимодействия (противоборства)
средств и способов РЭП и РТР составляет основу РЭБ. В этом смысле,
помехозащищенность как часть РЭБ является военно-технической
категорией и означает способность реализовывать целевую функцию при
организованном противодействии противника.
Помехозащищенность РЭС достигается путем сочетания
оборонительных и наступательных действий (рис. 7.11). К наступательным
действиям относится уничтожение постановщиков помех, например,
ударной авиацией путем
наведения ракет на
источник излучения, а также
радиоэлектронное подавление
средств РТР и управления
станциями активных помех
противника (контрРЭП). К
оборонительным действиям
относится защита РЭС от
конкретных помех и
технической разведки, которая
обеспечивается
совокупностью устройств и
алгоритмов РЭС, в том числе
адаптацией к помехоцелевой
обстановке, резервированием Рис-1ЛХ- Применение РСА в условиях РЭБ
279
РСА
Ударная
авиация
Комплекс
контрРЭП
Глава 7
и комплексированием каналов, а также повышением скрытности
излучения, имитации и маскировки.
Оценка помехозащищенности РЭС требует знания сил и средств
РЭБ, возможностей и ТТХ систем противника, взаимной информации о
действиях РЭП и РТР (тактики применения). Поэтому характеристики
помехозащищенности могут быть определены, если заданы все
возможные условия функционирования РЭС (помехоцелевая обстановка) и их
изменения в процессе РЭБ.
Помехозащищенность как часть РЭБ оценивается по многим
критериям: информационным, энергетическим, оперативно-тактическим и
военно-экономическим. Учитывая сложный многофакторный характер
взаимодействия РЭС и систем РЭП в процессе РЭБ, далее
рассматриваются только технические характеристики конфликтующих систем,
которые определяют частные показатели защиты РЭС от конкретных
помех, входящих в общую оценку помехозащищенности.
Применительно к РСА землеобзора помехозащищенность
определяется скрытностью и помехоустойчивостью работы.
Скрытность характеризует степень защищенности излучаемых
сигналов РСА от обнаружения и измерения их параметров системой
РТР противника.
Помехоустойчивость характеризует эффективность
функционирования РСА в условиях воздействия заданных помех.
Таким образом, показатели помехозащищенности определяются в
результате анализа антагонистического конфликта систем РТР, РЭП и
РСА в условиях РЭБ. Так, создание эффективных помех работе РСА
землеобзора возможно только при наличии достаточно полной
информации о параметрах излучения РСА. Поэтому система
непосредственной РТР комплекса РЭБ противника должна осуществлять с требуемой
эффективностью обнаружение и оценку параметров сигналов РСА в
интересах РЭП. В свою очередь, эффективность решения задач РТР
зависит от характеристик излучаемых сигналов РСА, а эффективность
воздействия помех зависит не только от вида помех, но и от алгоритмов
обработки сигналов РСА.
7.6.2. Скрытность работы РСА землеобзора
Хотя скрытность и помехоустойчивость РСА взаимосвязаны
прежде всего со структурой и алгоритмами обработки сигналов,
целесообразно рассматривать их характеристики отдельно. Это обусловлено
последовательностью действий конфликтующих сторон в ходе РЭБ.
На рис. 7.12 представлена функциональная схема
информационного конфликта РСА и комплекса РЭП в виде станции активных помех
(САП). Информационное обеспечение САП выполняет станция
непосредственной радиотехнической разведки (НРТР).
280
Характеристики РСА землеобзора
Источники
излучения и
шумов
r*-w Процессор
■*-*-\ Приемник
*_». Передатчик
РСА
НРТР
Антенна
- -■-
Антенна
—►
Приемник
Генерагор-
усилитель
САП
База данных
Анализатор
радиоэлекгрошгой
обстановки
Формирователь
помехового
сигнала
База данных
Рис. 7.12. Функциональная схема информационного конфликта РСА
и комплекса РЭП
На приемные антенны НРТР приходит поток сигналов РСА и
других источников излучения, находящихся в зоне приема НРТР.
Обнаружение и определение параметров излучения (несущую частоту,
модуляцию, направление прихода) выполняет приемное устройство. На основе
анализа полученных и хранящихся в базе данных (БД) характеристик
сигналов распознаются источники излучения и принимается решение на
подавление работы РСА.
На основе сведений о параметрах рациональных (оптимальных)
помех для обнаруженных сигналов РСА, хранящихся в базе данных
САП, формируется, усиливается (генерируется) и излучается помехо-
вый сигнал в направлении РСА.
Процессор РСА анализирует помехоцелевую обстановку и
изменяет параметры зондирующего сигнала и алгоритм обработки
принимаемых сигналов и помех с целью оптимизации решения заданной
тактической задачи, например картографирования.
Далее процесс противодействия РЭП и РСА повторяется. Важно
отметить, что в информационном конфликте с РЭП инициатива
принадлежит РСА. Реакция РЭП на появление сигналов РСА всегда
запаздывает. Чем более непредсказуемо начало излучения и изменение
параметров сигналов РСА, тем больше запаздывание помехи и тем больше
эффективность работы РСА в условиях РЭБ.
Скрытность работы РСА определяется как свойствами
излучаемого сигнала, так и возможностями системы НРТР по обнаружению и
измерению их параметров.
Основными характеристиками НРТР являются: рабочая
чувствительность, перекрытие по диапазону и одновременная (мгновенная) по-
281
Глава 7
лоса частот приема, точность измерения параметров сигналов,
запаздывание реакции и пропускная способность.
Рабочая чувствительность - это минимальная мощность сигнала
Рр на входе приемника НРТР, при которой обеспечивается решение
задач радиотехнической разведки с заданной эффективностью. Рабочая
чувствительность НРТР изменяется в очень широких пределах в
зависимости от вида сигнала и типа приемного устройства.
Так, потенциальная чувствительность определяется спектральной
плотностью внутренних шумов приемника, которая обычно равна
-130 дБ относительно 1 Вт при полосе Afn = 10 МГц . Кроме внутренних
шумов, на входе приемника РТР присутствуют внешние шумы,
обусловленные многочисленными источниками излучения.
Для РСА землеобзора характерны широкие полосы частот
зондирующего сигнала (100...500 МГц), определяемые требуемым
разрешением по дальности (1,5...0,3) м. Поэтому даже потенциальная
чувствительность не превышает-100...-110 дБВт при работе по сигналам РСА.
В настоящее время в качестве приемных устройств используют
детекторные (энергетические) и супергетеродинные приемники.
Супергетеродинные приемники обеспечивают чувствительность, близкую
к потенциальной. При этом для просмотра всего диапазона частот
(1...10 ГГц) используют быструю перестройку приемника (1...4 ГГц/с)
при одновременной полосе анализа 2... 10 МГц. Последовательный
просмотр диапазона частот приводит к пропуску сигналов и ошибкам
измерения частоты. При быстрой перестройке несущей частоты сигнала РСА
(от импульса к импульсу) последовательный анализ диапазона частот
приводит к недопустимым ошибкам.
Поэтому перспективные системы НРТР строятся по
многоканальной схеме с мгновенным измерением частоты (МИЧ), когда весь
диапазон частот разбивается на прилегающие друг к другу полосы шириной
5... 10 МГц. Анализ и запоминание несущей частоты и модуляции
сигнала осуществляются цифровым процессором с высоким
быстродействием (1О9...1О10 операций/с).
Отношение сигнал/шум на выходе каждого канала определяет
эффективность решения задач обнаружения и оценки параметров
принимаемых сигналов. Обычно при обнаружении сигнала задаются
вероятности правильного обнаружения Рп0 =0,5...0,7 и ложной тревоги
Рлт = 10~6...10~7 в каждом стробируемом элементе сигнала, что требует
величины отношения сигнал/шум 13... 15 дБ.
С учетом всех шумов и потерь рабочая чувствительность, т.е.
минимально необходимая мощность разведываемого сигнала на входе
приемника НРТР, изменяется в широких пределах и зависит как от типа
282
Характеристики РСА землеобзора
приемного устройства, так и от параметров сигнала. Так, при диапазоне
частот 4 ГГц (8... 12 ГГц) многоканальный по частоте приемник с полосами
фильтров 10 МГц имеет рабочую чувствительность -80...-90 дБВт. При
расширении полосы фильтра до 100 МГц, что характерно для РСА,
чувствительность снижается в 5... 10 раз.
Величина мощности сигнала РСА на входе приемника зависит от
коэффициента усиления антенны системы НРТР. Обеспечение
одновременного обнаружения и точного определения координат РСА требует
применения многоканальных (многолучевых) антенн и многоканальных
по частоте приемников. Это приводит к высокой сложности системы
НРТР. Поэтому задачи обнаружения и определения направления
прихода сигнала часто выполняют в два этапа. На первом этапе с помощью
всенаправленной антенны (несколько лучей) производят обнаружение и
измерение несущей частоты сигнала с помощью многоканального по
частоте приемника. На втором этапе определяется направление
прихода и параметры обнаруженного сигнала с помощью
высоконаправленной (многолучевой) антенны. На основе результатов измерений сигнала
и базы данных распознается тип РЛС.
Важнейшей характеристикой системы НРТР и комплекса РЭБ в
целом является время реакции на появление сигнала РСА и его
изменение. Это время определяется запаздыванием, обусловленным
выполнением алгоритмов обнаружения, измерения параметров сигналов и
распознавания типа РЛС, а также временем формирования помехи.
На вход приемника станции НРТР одновременно приходит
большое количество сигналов (до 106...107 импульсов/с), которые
необходимо обнаружить, определить параметры и распознать источник
излучения. Возможности решения этих задач характеризуются пропускной
способностью. Пропускная способность НРТР зависит от многоканаль-
ности приемника и производительности процессора.
Основные направления повышения скрытности работы РСА.
1. Снижение импульсной мощности излучения, требуемой для
обнаружения цели, за счет:
• длительного когерентного накопления сигнала при
синтезировании апертуры и некогерентного накопления выходных сигналов;
• использования зондирующих сигналов с внутриимпульсной
модуляцией большой длительности и согласованной обработки (сжатие
по дальности) в приемном устройстве;
• регулировки импульсной мощности в зависимости от дальности до
цели таким образом, чтобы отношение сигнал/шум оставалось
постоянным (не превышало требуемого);
• использования частоты повторения импульсов исходя из
однозначности по дальности, что обеспечивает максимально возможное
283
Глава 7
количество накапливаемых импульсов при требуемом времени
синтезирования.
У современных РСА произведение коэффициента сжатия на число
когерентно накапливаемых импульсов при синтезировании апертуры
достигает 106. Пропорционально уменьшается импульсная мощность
РСА, требуемая для обнаружения цели, и соответственно уменьшается
вероятность обнаружения сигналов РСА станцией НРТР. Кроме того,
использование в РСА широкополосных сигналов до 100...500 МГц
снижает рабочую чувствительность приемника НРТР по сравнению с
приемом сигналов полосой 2... 10 МГц в 10...250 раз.
2. Обеспечение максимальной непредсказуемости для противника
характеристик РСА. Для уменьшения возможности когерентного и
некогерентного накопления сигналов приемником НРТР изменяется:
• время начала излучения (прерывность работы);
• несущая частота различных диапазонов волн;
• поляризация излучаемой и принимаемой волн;
• вид внутриимпульсной модуляции и модуляции пачек импульсов;
• методы обзора зоны, в том числе с использованием многолучевых
антенн;
• пространственное положение приемной части РСА относительно
передающей при двухпозиционной работе.
В силу неопределенности характеристик РСА для эффективного
приема сигналов требуется использование многоканального по многим
параметрам приемного устройства НРТР, что приводит к большой
сложности систем НРТР.
3. Квазислучайное изменение характеристик зондирующего сигнала:
• начальной фазы каждого импульса;
• несущей частоты различных когерентных пачек сигналов;
• внутриимпульсной модуляции;
• частоты повторения импульсов.
Эти изменения учитываются при обработке сигнала
(компенсируются) РСА, а для противника они являются случайными, превращая
зондирующий сигнал в шумоподобный, что значительно снижает
возможности его обнаружения.
4. Адаптивное изменение характеристик РСА в зависимости от
помехо-целевой обстановки:
• работа в свободном от помех «частотном окне»;
• выбор несущей частоты и времени излучения, близких к
параметрам РЭС противника.
5. Минимизация уровня излучения в направлении на станцию НРТР
путем регулирования уровня боковых лепестков ДН антенны РСА.
284
Характеристики РСА землеобзора
Энергетические показатели скрытности работы РСА. Под
скрытностью работы РСА понимаются условия, при которых сигналы РСА
не могут быть обнаружены станцией НРТР. Полагаем наихудший (для
РСА) вариант, когда станция НРТР расположена в районе цели и ее антенна
направлена точно на РСА. Приемник НРТР построен по многоканальной
схеме и обеспечивает обнаружение сигналов РСА без пропусков за время, в
течение которого сигналы РСА имеют постоянные параметры.
При рабочей чувствительности Рр и коэффициенте усиления
антенны Gp станция НРТР имеет чувствительность по полю
(минимальную обнаруживаемую плотность потока мощности сигнала):
_PL=4nPL
р s Л
где Sp - эффективная площадь антенны станции НРТР; Я. - длина
волp
ны РСА.
I Так при Рр = -90 дБВт , Gp = 100 , к = 3,5 см Пр = 10~7 Вт/м2 .
Для обеспечения скрытности работы плотность потока мощности
излучения РСА в районе станции НРТР должна быть меньше
чувствительности Пр:
Й<П>- (729)
где Ри - импульсная мощность излучения РСА.
С учетом (7.28) получаем, что мощность излучения РСА, при
которой сигнал не обнаруживается во всем диапазоне дальностей, должна
уменьшаться пропорционально квадрату расстояния между РСА и
станцией НРТР:
Р <R2M5l. (7.30)
с р GGX2
В то же время, требуемая для обнаружения цели .мощность излучения
определяется параметрами РСА и ЭПР цели и зависит от расстояния между
РСА и целью в четвертой степени. Так, при приеме одного импульса без
внутриимпульсной модуляции отношение сигнал/шум будет равно
fGVg(7.31)
(4K)3R4kTFmAfLn
где стц - ЭПР цели; кТ = 410~21Вт/Гц; ¥ш - фактор шума приемника
РСА; Af - полоса частот приемника, определяемая требуемой разре-
285
Глава 7
шающей способностью по дальности; Ln — потери мощности сигнала в
тракте PC А.
Для увеличения дальности действия РСА используют
зондирующие сигналы достаточно большой длительности ти, а для сохранения
при этом требуемого разрешения по дальности (полосы частот Af)
применяют внутриимпульсную модуляцию с последующей
согласованной обработкой (сжатием импульсов) в приемнике. В соответствии с
законом сохранения энергии Рити = Рсжтсж мощность сжатого импульса
тоже увеличивается в к^ (коэффициент сжатия) раз:
В результате синтезирования апертуры происходит когерентное
накопление Nk = FnTc импульсов, где Fn - частота повторения импульсов,
Тс - время синтезирования. Кроме того, для уменьшения спекл-шумов в
РСА получают и некогерентно (по мощности) суммируют NH = 3...4 кадра
изображения цели. Так как отношение сигнал/шум в каждом кадре РЛИ
достаточно большое, то некогерентное суммирование эквивалентно
когерентному, т.е. увеличивает выходное отношение сигнал/шум в NH раз.
В результате отношение сигнал/шум увеличивается в ксж NH Nk раз:
(47lyR4kTFmAfLn
Будем полагать, что РСА имеет одинаковое разрешение по
дальности бг и азимуту Ы :
с "к R
^ (7.34)
Ьг = Ы, бг =, 5^ = ,
2Af 2VTC
где V - скорость носителя РСА.
Частота повторения выбирается максимальной, исходя из
требования однозначности по дальности:
Fn = c/2R. (7.35)
Подставляя в (7.33) значения Fn, Тс и Af из (7.34) и (7.35),
получаем значение требуемой мощности излучения Р^, для обеспечения
заданного отношения сигнал/шум q :
(7.36)
286
Характеристики РСА землеобюра
На рис. 7.13 иллюстративно показаны графики изменения Рскр(ЗО)
и Ртр(36) от расстояния между
РСА, целью и станцией НРТР.
Видно, что если дальность
действия РСА меньше RCKp, то
требуемая для обнаружения
цели мощность излучения меньше
мощности, при которой сигнал
РСА обнаруживается станцией
НРТР (станция и цель
находятся рядом).
Приравнивая Р^ = Рскр,
получаем максимальную дальность
RCKp, меньше которой
обеспечивается скрытная работа РСА:
Рис. 7.13. Зависимость мощности
излучения РСА и чувствительности
станции РТР от дальности
(7.37)
Полагая рабочую чувствительность станции НРТР Рр = -90 дБВт и
коэффициент усиления антенны G = 100 , длину волны Л. = 3 см, оц = 10 м2,
ксж = 10% N„=4, кТТ^НГ", q^ = 10 , V = 200 м/с, потери Ьп = 10дБ,
получаем максимальную дальность скрытной работы РСА, равную 85 км.
Характеристики скрытности зависят от положения станции НРТР
относительно РСА и цели. Если станция находится ближе к РСА, чем
цель, т.е. Rp < R, то дальность скрытной работы уменьшается, а при
удалении станции НРТР от РСА и цели скрытность повышается:
,4 _ ХУ*Р
Ц СЖ Н
(7.38)
При изменении положения станции НРТР относительно цели по
угловой координате сигналы РСА излучаются в направлении станции
боковыми лепестками ДН антенны РСА, что увеличивает скрытность
работы РСА. Аналогично повышается скрытность, когда максимум ДН
антенны НРТР не совпадает с направлением на РСА.
Напомним, что приведенные соотношения справедливы, если
мощность излучения РСА регулируется в зависимости от дальности так, чтобы
отношение сигнал/шум для обнаружения заданной цели было постоянным
287
Глава 7
(не более требуемого). Также принято, что разрешения по дальности и
азимуту одинаковы (дг = д£) и поддерживается максимальное значение
частоты повторения Fn = c/2R в зависимости от дальности.
7.6.3. Помехоустойчивость работы РСА
Показатели помехоустойчивости РСА определяют возможности
решения задачи наблюдения целей (обнаружения, определения
координат, распознавания) при наличии различного вида помех.
Помехи могут быть преднамеренными, т.е. специально
создаваемыми комплексами РЭП, и непреднамеренными. К последним
относятся сигналы различного рода источников электромагнитного излучения
(промышленные, связные, навигационные, бытовые и другие
технические устройства), а также сигналы РСА, отраженные от объектов,
земной и водной поверхности, дождя и т.п.
Далее под помехоустойчивостью РСА землеобзора будем
понимать оценку эффективности работы в условиях воздействия
преднамеренных помех, которые являются средством радиоэлектронного
подавления РЛС в условиях РЭБ.
Обычно различают три вида преднамеренных помех:
маскирующие, имитирующие и деструктивные. Маскирующие помехи уменьшают
различие мощностей сигнала цели и шума (отношение сигнал/шум)
путем введения дополнительных шумов (помеховых сигналов).
Имитирующие помехи имеют параметры, близкие к параметрам сигналов
целей, и создают в РСА ложные отметки целей. Деструктивные помехи
представляют собой электромагнитное излучение большой мощности,
которое поступает на вход приемника РСА и выводит из строя
полупроводниковые приборы, прекращая функционирование РСА.
К особому классу помех относят активное воздействие на среду
распространения радиоволн, которое увеличивает поглощение
электромагнитных волн на трассе распространения (поглощающие завесы). Такие
помехи уменьшают энергию сигналов цели. Аналогично действуют
пассивные помехи, которые снижают ЭПР цели либо разрушают фазовую
структуру отраженного сигнала цели. Примером такой помехи могут служить
различного рода поглощающие покрытия, наносимые на цель.
Наиболее опасными для РСА являются:
1) прицельные по частоте и направлению активные маскирующие
помехи;
2) пассивные имитирующие помехи, создаваемые сигналами
надувных макетов целей, уголковых отражателей и облаками дипольных
отражателей;
3) структуры, снижающие ЭПР целей (технология СТЕЛС,
поглощающие покрытия).
288
Характеристики РСА землеобзора
Борьба с пассивными имитирующими помехами сводится к решению
задачи распознавания целей. При высоком разрешении РСА распознавание
ведется по размеру изображения цели, динамике движения целей и т.п.
Снижение ЭПР цели обычно эффективно только в относительно
узком частотном диапазоне волн. Поэтому основными методами борьбы
с такой помехой является переход в другой (обычно длинноволновый)
диапазон работы РСА.
Влияние шумовой помехи. Рассмотрим количественные
показатели помехоустойчивости РСА при воздействии шумовой помехи. Поме-
ховый сигнал представляет собой реализацию случайного процесса. В
пределах ширины полосы частот принимаемого сигнала РСА
спектральная плотность помехи Nn равномерная. В случае, когда полоса
частот помехи шире или равна полосе частот сигнала Afn > Af,
действие помехи эквивалентно маскирующему действию внутреннего шума
приемника РСА.
Отношение сигнал/шум, которое определяет характеристики
обнаружения, измерения координат и распознавания целей, в случае
воздействия шумовой помехи равно:
4 = nTn~' (7'39)
где Ес - энергия сигнала цели, накопленная в процессе обработки;
No = kTFm - спектральная плотность внутренних шумов; Nn -
спектральная плотность помехи.
Таким образом, спектральная плотность аддитивной шумовой
помехи суммируется с спектральной плотностью внутренних шумов и
уменьшает отношение сигнал/шум. Соответственно снижается
эффективность решения всех задач РСА.
Рассмотрим эффект влияния шумовой помехи на примере
снижения дальности обнаружения цели. Энергия одного отраженного от цели
импульса мощностью Ри и длительностью ти на входе приемника РСА
(7.40)
(4ti)jR4
При использовании внутриимпульсной модуляции ти = I
= kC3K/Af, где Af - ширина полосы сигнала и соответственно
приемника РСА.
В результате синтезирования апертуры в системе обработки
происходит когерентное накопление пачки Nk = FnTc импульсов, где Fn -
частота повторения импульсов, а Тс - время синтезирования, а также
Ю—3169 289
Глава 7
некогерентное накопление NH изображений цели. Энергия сигнала цели
в этом случае
_P2GXaLt_
с (47i)JR4AfLn сж k H
где Ln — потери энергии сигнала в тракте PC А.
JlR
Будем считать, что разрешение по азимуту ЬС = (боковой об-
с
зор) не зависит от дальности (интервал синтезирования Тс
увеличивается пропорционально дальности R ) и равно разрешению по дальности
5r = c/2Af. Частота повторения импульсов Fn выбрана максимально
возможной из условия обеспечения однозначности по дальности:
Fn = c/2R . В этом случае
FnTc к
Af ~ 2V "
Подставляя это значение в (7.31), получаем, что
Ес = Ри°, .Оц kC3KNH. (7.42)
2(47i)3R4VLn
В случае отсутствия помехи отношение сигнал/шум
Ч = ^= (AnfRWkjfh (743)
и дальность обнаружения цели
R = j PG. °ц c*N|t . (7.44)
Требуемое отношение сигнал/шум q^ определяется
статистическими характеристиками сигнала цели и шума при заданных
вероятностях правильного обнаружения Рпо и ложной тревоги Рлт. Плотность
вероятности ЭПР малоразмерной цели или элемента разрешения
сложной цели обычно характеризуется логнормальным распределением или
распределением %2 с четырьмя степенями свободы:
(7-45)
где ац - среднее значение ЭПР цели.
290
Характеристики РСА землеобзора
При накоплении некорре- Рпо
лированных сигналов цели 1-0
(кадров РЛИ) изменяются
законы плотности вероятности 0.8
суммарного сигнала и шума.
Характеристики обнаружения о.б
для этого случая представлены
на рис. 7.14, где NH - число
некогерентно накапливаемых
импульсов.
При наличии помех их
спектральная плотность на
входе приемника обычно
гораздо больше плотности
внутренних шумов ( Nn » No ) и
определяется выражением
N =
0.4
о.:
о
8
12
16
20
Afn(4*)2R2
Рис. 7.14. Характеристики обнаружения
цели
(7.46)
где PnGn - произведение мощности помехи Рп на коэффициент
усиления антенны Gn САП - определяет энергетический потенциал помехи,
a PnGn/Afn - спектральную плотность излучаемого сигнала помехи в
полосе частот помехи Afn.
В этом случае отношение сигнал/шум
2Е. PuGA.o" k. N Af
q = ^с _ * ицл"цьсж"н ^'п (7 47)
Nn 47tR2VLn PnG/
Таким образом, для поддержания требуемого (исходя из
характеристик обнаружения цели) отношения сигнал/шум q^ необходимо
увеличивать мощность зондирующего сигнала Ри либо согласиться с
уменьшением дальности обнаружения цели. Мощность сигнала при
наличии помехи должна увеличиваться пропорционально спектральной
плотности излучаемого сигнала помехи:
1тр
(7.48)
Формула (7.48) справедлива при условии Nn » No.
Отношение требуемой импульсной мощности РСА в условиях
помех Рнп к мощности Ри при отсутствии помех для обеспечения
одинаковой дальности обнаружения цели равно:
291
Глава 7
Р„„ N GX2 PG
ип _ * "п ^^ 'п"п /"7 49л
Ри No (4к)2112кТРш' Afn '
Спектральная плотность излучения PnGn/Afn (удельный энергетический
потенциал) у наземных и корабельных САП может достигать
Ю'-.ЛО"3 Вт/Гц, что требует повышения мощности излучения РСА в
тысячу и более раз. Так, при G = 103, X = 3 ■ 10~2 м , R = 10s м, kTFm = 10~19,
PnGn/Afn = 10~3 Вт/Гц мощность излучения РСА должна быть повышена
в случае воздействия такой помехи в 6000 раз. Дальность обнаружения
цели РСА в условиях помех
Ц (47t)qTpVLn PnGn
Так, при P^IO'Bt, G = 310\ X. = 310"2m, оц = 10м2, ксж = 1О3, NH = 4,
q^ = 10 , V = 200 м/с , Ln = 10 , PnGn/Afn = 10"3 Вт /Гц дальность
обнаружения цели равна всего 4 км.
При сохранении прежней мощности излучения дальность обнаружения
цели в условиях помех Rn по сравнению с дальностью обнаружения без
помех согласно следующей формуле уменьшается в сотни раз
РисцксжЫнкТРш
(7.51)
Так, при Ятр = 10, V = 200m/c, Ln=10, Ри = 103Вт, ац = 10м2, ксж = 103,
NH = 4, кТРш = 10"19, PnGn/Afn = 10~3 Вт/Гц дальность в условиях помех
уменьшается в 250 раз.
Таким образом, если противнику известны время работы РСА,
несущая частота зондирующего сигнала и угловое положение РСА
относительно САП, мощная шумовая помеха подавляет работу РСА.
Наряду с повышением скрытности работы, для обеспечения
работоспособности РСА в условиях воздействия мощных шумовых помех
используется пространственное подавление сигналов САП. В этом
случае в ДН антенны РСА формируется провал («ноль ДН») в направлении
САП. При провале -30 дБ мощность помехи на входе РСА
соответственно снижается в 1000 раз.
Эффективным способом повышения помехозащищенности РСА
является переход в двухпозиционный режим работы, когда между
передающей и приемной позициями имеется достаточно большое угловое
расстояние.
292
Характеристики РСА землеобзора
Скрытность работы РСА характеризует степень защищенности
излучаемых сигналов РСА от обнаружения и измерения их параметров
системой РТР противника.
Основными направлениями повышения скрытности работы РСА
являются:
• снижение импульсной мощности излучения, требуемой для
обнаружения цели;
• обеспечение максимальной непредсказуемости для противника
характеристик РСА;
• квазислучайное изменение характеристик зондирующего сигнала;
• адаптивное изменение характеристик РСА в зависимости от поме-
хоцелевой обстановки;
• минимизация уровня излучения в направлении на станцию НРТР
путем регулирования уровня боковых лепестков ДН антенны РСА.
Помехоустойчивость характеризует эффективность
функционирования РСА в условиях воздействия заданных помех.
Выделяют три вида преднамеренных помехи: маскирующие,
имитирующие и деструктивные.
Наиболее опасными для РСА являются прицельные по частоте и
направлению активные маскирующие помехи, пассивные имитирующие
помехи, создаваемые сигналами надувных макетов целей, уголковых
отражателей и облаками дипольных отражателей, и структуры,
снижающие ЭПР целей (технология СТЕЛС, поглощающие покрытия).
Эффективным способом повышения помехозащищенности РСА
является переход в двухпозиционный режим работы.
293
ГЛАВА 8
Режимы работы РСА землеобзора
8.1. Поляризационный режим
При работе РСА информация об объекте заключена в функции
отражения, которая наблюдается в виде отраженной от объекта
электромагнитной волны (ЭМВ) в зоне приемной антенны РСА.
Функция отражения определяется не только свойствами объекта,
но и условиями ее формирования, т.е. системой сигналов в процессе
облучения объекта. Чем большее число сигналов и их параметров
используется в процессе формирования функции отражения и в процессе
наблюдения отраженного сигнала (оценки функции отражения), тем более
полную информацию об объекте можно получить с помощью РСА.
Отраженная от объекта ЭМВ как переносчик информации содержит
большое число параметров, в каждом из которых закодированы свойства
объекта. Элементарная составляющая сложной ЭМВ - гармоническая
волна - содержит девять параметров: напряженность поля, частоту, начальную
фазу, составляющие вектора поляризации и координатные параметры
(направление распространения). Зондирующий сигнал РСА формирует
сложное электромагнитное поле облучения объекта, что определяет сложный
многомерный характер функции отражения.
Основные направления развития РСА связаны с использованием
при радиолокационном наблюдении максимального количества
параметров ЭМВ. При этом наряду с расширением числа сигналов -
несколько частот, большой ансамбль частот модуляции, множество
позиций (направлений облучения и приема) - максимально используют
информацию каждого элементарного сигнала. Прежде всего это
обусловлено необходимостью решения задач распознавания объектов.
Привлечение дополнительной информации о поляризационных
характеристиках функции отражения значительно повышает эффективность
распознавания объекта.
Наиболее полно поляризационные характеристики объекта
выявляются при измерении поляризационной матрицы рассеяния (ПМР)
Snexp{j<p,,} SI2exp{j<p12}
S =
294
S2Iexp{j(p21} S22exp{j(p22}
Режимы работы РСА землеобзора
Элементы ПМР представляют собой комплексные безразмерные
числа и являются характеристикой функции отражения стабильной
цели, так как ПМР определяет амплитуду и фазу отраженной волны для
каждой поляризации при заданных параметрах облучающей волны.
Комплексный характер элементов ПМР указывает на учет фазовых
набегов, обусловленных рассеянием ортогонально поляризованных
компонент зондирующего сигнала.
Для однопозиционной РЛС S12 = S21. В этом случае ПМР является
симметричной и имеет шесть информативных параметров.
Связь свойств объекта с поляризационными характеристиками
функции отражения носит сложный характер, и теоретический анализ возможен
в большинстве случаев только для объектов простых геометрических форм.
Поляризационные характеристики функции отражения
чувствительны к таким свойствам объекта как:
• геометрическая форма объекта;
• ориентация неоднородностей структуры объекта;
• наличие анизотропных отражателей;
• структура шероховатостей поверхности объекта (СКО высот);
• диэлектрическая постоянная материала объекта.
В ряде случаев ПМР сложного объекта может быть представлена
как совокупность ПМР отражателей простых типов - сферы,
двухгранного уголкового отражателя, спирали - с определенными
соотношениями между амплитудами и фазами элементарных отражателей.
Распознавать типы таких элементарных отражателей можно по их
поляризационным матрицам рассеяния S =
Знн
3VH
vv
в линейном
поляризационном базисе.
ПМР сферы и трехгранного уголкового отражателя Ss =
имеет равные диагональные элементы и характеризует цели с нечетным
числом переотражений.
ПМР двухгранного уголкового отражателя Sd =
cos 2a -sin 2а
2
1 • о -2
sin 2а sin а
2
и
диполя Sw =
cos2 а —sin 2а
—sin 2а sin2 а
2
являются функцией угла ориентации
295
Глава 8
отражателя а к направлению распространения радиоволны. Для целей
данного типа характерны различия ортогональных поляризационных
составляющих отраженного сигнала: максимальные при а = 0 и
минимальные при а = ±45°. ПМР диполя и двухгранного уголкового
отражателя характеризуются наличием фазового сдвига между
ортогональными поляризационными составляющими отраженного сигнала, что
свойственно целям с четным числом переотражений.
Элементарный отражатель в виде спирали правого или левого
вращения позволяет осуществить преобразование поляризации
зондирующего сигнала из линейной в круговую. ПМР для спирали правого
(левого) вращения задается выражением Sh = — . . При этом
данная цель может быть представлена совокупностью двух диполей
одинаковой длины, расположенных под углом ±45° на расстоянии А/8.
Таким образом, измеряя элементы ПМР в линейном базисе с
помощью поляриметрической РЛС, можно различать основные типы
элементарных отражателей и более полно использовать информацию о
рассеивающих свойствах целей в интересах их обнаружения и
распознавания.
ПМР, измеренная в линейном базисе, может быть преобразована в
любой другой базис, например в круговой, что дает новые возможности
по распознаванию основных типов элементарных отражателей.
Соотношения между значениями элементов ПМР при пересчете из
линейного в круговой базис представлены выражениями:
2
2
~
Элементы ПМР S =
'RR
>RL
основных элементарных отражате-
лей в круговом поляризационном базисе представлены в табл. 8.1.
Таблица 8.1. Элементы ПМР основных элементарных отражателей
в круговом поляризационном базисе
Элементы ПМР
Сфера
Двухгранный уголковый отражатель
Спираль правого вращения
Спираль левого вращения
-
+
+
-
Srr
-
+
-
+
Slr
+
-
-
-
296
Режимы работы PC А землеобзора
Так, для кругового поляризационного базиса сфера наблюдается
только на кроссовой поляризации, двухгранный уголковый отражатель -
только на основных поляризациях. При отражении от спирали сигнал
будет иметь ортогональную поляризацию, причем для спирали правого
вращения отраженный сигнал будет иметь поляризацию левого
вращения, и наоборот.
Сигналы, отраженные от объектов с различными
деполяризующими свойствами, даже если они находятся в одном элементе разрешения,
могут быть полностью разделены в системе обработки
поляриметрической РЛС при их представлении в различных поляризационных базисах.
Так, формирование изображения по элементам ПМР, измеренной в
линейном базисе, позволяет выделить объекты с преобладанием в
составе отраженного сигнала поляризационных составляющих на
основной или кроссовой поляризации, которые зависят от формы и
ориентации объекта в пространстве. Однако изображение, полученное при
измерении ПМР в линейном базисе, недостаточно полно отражает
механизм деполяризации сигнала элементарными отражателями в составе
сложной цели. Более полно этот механизм описывается при
представлении ПМР объекта в круговом поляризационном базисе.
В сантиметровом диапазоне волн зависимости поляризационных
характеристик от свойств сложных объектов носят статистический
характер. Наиболее часто используются оценки дисперсии и
корреляционного коэффициента у для различных поляризаций:
Уггвв =
r ><SBBSrr
которые зависят от диэлектрической постоянной и СКО высот
поверхности. Аналогичный коэффициент для круговой поляризации зависит
только от шероховатости поверхности. Дисперсия сигнала зависит от
ориентации структур объекта. Рассматривается также поляризационная
энтропия сигналов.
При наличии интерферометра на различных поляризациях
определяют коэффициент интерферометрической когерентности, который
зависит от пространственной когерентности сигнала объекта.
Поляриметрическая интерферометрия позволяет выявлять вертикальные структуры
внутри объема объекта.
Так как спекл-шум РЛИ на разных поляризациях обычно
некоррелирован, для его снижения используют некогерентное сложение РЛИ,
полученных при разных поляризациях.
С увеличением длины волны РСА (дециметры, метры)
поляризационные характеристики становятся более стабильными и предсказуе-
297
Глава 8
мыми. Они определяются ориентацией объекта, его внутренней
структурой и резонансными эффектами отражения.
При наличии банка данных поляризационных матриц объектов
оптимальной обработкой при решении задачи обнаружения —
распознавания является свертка матрицы принимаемых сигналов с опорной
матрицей сигналов обнаруживаемой цели (согласованная обработка).
Поляризационная матрица рассеяния измеряется при реализации
полного поляризационного зондирования (ППЗ) пространства. ППЗ
включает:
облучение объекта последовательно или одновременно сигналом с
двумя видами ортогональных поляризаций (горизонтальная и
вертикальная, левое и правое вращение);
полный поляризационный прием (ППП) - одновременный прием
двух ортогональных поляризаций.
ПМР можно рассматривать как многомерный сигнал, который при
оптимальной обработке существенно расширяет возможности РСА по
обнаружению целей. Повышение информативности при использовании
матрицы рассеяния достигается за счет:
использования некоординатной информации - многомерных
векторных сигналов, соответствующих решаемой задаче;
совместной обработки элементов многомерного сигнала -
поляризационной матрицы рассеяния;
учета при обработке априорной информации о рассеивающих
свойствах объектов заданных типов;
учета при обработке адаптивно оцениваемых поляризационных
параметров мешающих сигналов (определяемых, в свою очередь,
пространственными, временными и частотными характеристиками).
Полный поляризационный прием можно рассматривать как
частичное измерение ПМР, так как обеспечивается измерение половины
матрицы рассеяния. Действительно, если ПМР, измеряемая при ППЗ в
общем случае имеет вид S =
Sn S12
S2l S22
то . и . - это измерения,
которые могут быть получены при ППП при зондировании на первой и
второй поляризациях соответственно.
Известные устройства измерения ПМР позволяют производить
оценку матрицы рассеяния по одному волновому пакету излучаемого
поля. Это достигается выбором ортогональных сигналов s,(t) и s2(t),
для которых выполняются условия /s,(t)s2(t)\ = /s2(t)s^(t)\ = 0. Сигналы
s,(t) и s2(t) могут быть разнесены по несущей частоте сигнала или по
времени (измерители с временным разделением ортогональных компо-
298
Режимы работы PC А землеобюра
нент сигнала). Одновременное измерение на одной несущей частоте
возможно также при ортогональной модуляции сигналов, когда
взаимная корреляция стремится к нулю при увеличении базы сигналов.
Для реализации поляризационных методов бортовая РЛС с ППП и
ППЗ должна включать дополнительные структурные элементы.
Отметим, что в обоих случаях (параллельном и последовательном) имеет
место увеличение объема аппаратуры, так как для одновременного приема
сигналов на двух поляризациях (ППП) необходима реализация двух
параллельных приемных каналов с возможностью измерения
относительной фазы.
Метод оперативного измерения ПМР при поляризационном
зондировании (ППЗ) обычно выбирается исходя из массогабаритных
ограничений. При этом метод одновременного измерения ПМР
предполагает полный комплект элементов, которые обеспечивают одновременное
излучение двух сигналов на ортогональных поляризациях и прием на
четыре канала, что соответствует четырем элементам ПМР. Наличие
двух передатчиков и четырех каналов приема избыточно.
Задающий генератор (ЗГ) вырабатывает гармоническое
напряжение, которое поступает на вход формирователя сигналов (ФС),
ортогональных по временной структуре. Сигналы s,(t) и s2(t),
сформированные для схемы с временным разделением, удовлетворяют условию
s2(t) = s,(t + T). На передатчик (См1 и УМ) поочередно поступают s,(t)
и s2(t). На смесителе См1 с помощью гетеродина (Г) происходит
повышение несущей частоты. Усиленные в усилителях мощности (УМ)
сигналы через антенные переключатели (АП) последовательно
поступают на соответствующие антенны ортогональных поляризаций и
излучаются в направлении на цель. Пара последовательно излученных
сигналов, ортогональных по временной структуре и по поляризации,
формирует сложный составной сигнал, компоненты которого разнесены на
один период излучения.
В режиме приема каждой из антенн последовательно принимаются
сигналы, так что на выходе первой антенны наблюдаем
E11(t) = S11s,(t); E12(t + T) = SllSl(t + T),
а на выходе второй
E22(t + T) = S23s1(t + T); E21(t) = S21s,(t).
Символ E,j(t) означает в данном случае сигнал, принятый i-й
антенной (i = 1,2 ) при излучении антенной с индексом j (j = 1, 2 ).
Принятые сигналы через антенные переключатели поступают на смесители
См2 и СмЗ. Здесь происходит понижение несущей до частоты
задающего генератора с отличием на доплеровскую частоту Рд, обусловленную
299
Глава 8
радиальной скоростью цели. Сигналы с выхода смесителей См2 и СмЗ
поступают на вход двух соответствующих каналов корреляционной
обработки одиночных сигналов, каждый из которых состоит из
последовательно включенных смесителя (См), усилителя промежуточной частоты
(УПЧ) и амплитудного линейного детектора (Д).
Схемы и работа приемных каналов идентичны, поэтому
рассмотрим работу одного из них. На рис. 8.1 представлен вариант структурной
схемы измерителя ПМР с временным разделением. Реализация такого
метода обладает следующими достоинствами:
• в два раза сокращается комплект аппаратуры на передачу и прием;
• упрощается задача электромагнитной совместимости элементов
РЛС;
• по сравнению с однополярным метод измерения с временным
разделением требует минимума дополнительной аппаратуры:
введения второго приемного канала, антенного переключателя и
антенны ортогональной поляризации.
T, F,
ЗГ
ФС
УМ
См1
АП
I
См2
СмЗ
См \-*\ УПЧ
Д
S,,(SI2)
См ]—»| УПЧ
ФД
д
S2KS22)
Рис. 8.1. Структурная схема измерителя ПРМ с временным разделителем
На один из входов смесителей последовательно поступают
принятые сигналы с выхода смесителя См2, т.е. сумма E,,(t) и E12(t + T), на
другой вход - сигнал с выхода ФС, соответствующий каналу передачи
s,(t) и s2(t) = s,(t + T). Этот сигнал в режиме приема сформирован с
учетом радиальной скорости цели, чем обеспечивается компенсация до-
плеровской добавки по частоте ¥п . Временное положение т импульсов
s,(t) и s2(t) определяется дальностью до цели. Смеситель (См) и
узкополосный УПЧ в одном канале выполняют роль коррелятора. В
результате взаимодействия составляющей s,(t) с сигналом E,,(t) (так же, как
s2(t) = s,(t + T) с сигналом E12(t + T)) в корреляторе «См-УПЧ»
происходит свертка спектра. На выходе УПЧ мы имеем гармоническое на-
300
Режимы работы PC А землеобзора
пряжение, которое с точностью до постоянного комплексного
множителя соответствует последовательно измеренным (с интервалом Т)
элементам ПМР S,(t) и S2(t).
Аналогично на выходе второго канала получают напряжения,
которые с точностью до постоянного комплексного множителя к
соответствуют элементам ПМР S21(t), S22(t).
со Т
(Sl(t),Eu(t))= jSl(t),En(t)dt= Js1(t)S11s1(t-T)exp{jQt} = kSn;
-т
т
(s,(t),E21(t)) = Js,(t)E21(t)dt = |s1(t)S21s1(t-x)exp{jQt}dt = kS21;
-co -T
*(t + T),E12
00 1
= Js1(t + T)El2(t + T)dt = Jsl(t+T)S12s(t-T + T)exp{jQt}dt = kS
-T
(Sl(t + T),E22(t
то Т
= Js,(t + T)E22(t + T)dt= Js,(t + T)S21s(t-x + T)exp{jQt}dt = kS22.
-co -T
Таким образом, на выходе каналов обработки последовательно
формируются сигналы, значения которых пропорциональны
амплитудам элементов ПМР (S, { и S12), (S22 и S21), а на выходе фазового
детектора фиксируется относительная фаза А12 и А21. Для совмещения
результатов последовательного измерения ПМР используется условие
^12 = $21 •
Заметим, что в общем случае выбор ортогональных по
поляризации сигналов не ограничивается только линейными поляризациями,
поскольку ортогональность может быть обеспечена и на эллиптических
поляризациях, и на круговых.
Стробы по задержке в двух каналах соответствуют измерениям
одного столбца поляризационной матрицы рассеяния. Вторая половина
ПМР измеряется со смещением на период Т. Таким образом, на выходе
двух каналов можно получить сигналы сразу четырех РСА,
соответствующих четырем элементам ПМР, что позволяет применять алгоритмы
обнаружения и распознавания объектов по поляриметрическим
характеристикам их функций отражений.
301
Глава 8
Повышение эффективности распознавания вскрываемых объектов
требует использования всей возможной информации, которая
заключена в функции отражения, и, в частности, использования
поляризационных характеристик.
Наиболее полно поляризационные характеристики объекта могут быть
получены путем формирования поляризационной матрицы рассеяния.
Для формирования полной поляризационной матрицы в РСА
необходимо излучать последовательно или параллельно два зондирующих
сигнала с ортогональной поляризацией и принимать сигналы
соответственно в двух или четырех каналах с различной поляризацией.
Элементарные отражатели (сфера, уголки, спирали) имеют строго
определенную матрицу рассеяния.
Поляризационные характеристики сложных объектов носят в
основном статистический характер (дисперсии амплитуд сигналов,
корреляция сигналов разных корреляций, энтропия сигналов и т.д.).
Главной проблемой эффективного использования поляризационного
режима РСА является получение (в основном экспериментальным
путем) банка данных поляризационных характеристик объектов при
различных условиях наблюдения.
8.2. Режим селекции движущихся целей
8.2.1. Алгоритмы селекции движущихся целей
Под режимом селекции движуи^ихся целей (СДЦ) в РСА обычно
понимают обнаружение сигналов движущихся сосредоточенных целей
путем подавления сигналов всех других неподвижных целей и фона
местности. При этом целью называют заданный для обнаружения объект,
т.е. объект нашего интереса.
В настоящее время понятие режима СДЦ значительно расширено,
так как в этом режиме решается целый ряд взаимосвязанных задач на
различных уровнях:
1) обнаружение только движущихся с радиальной скоростью
объектов при подавлении сигналов всех других объектов и фона местности;
2) обнаружение только движущихся объектов с измерением их
координат (дальность-азимут) и радиальных скоростей;
3) обнаружение только движущихся объектов с измерением их
координат и векторов скорости (радиальной и тангенциальной);
4) обнаружение одновременно движущихся и неподвижных
объектов с измерением их координат и векторов скорости с индикацией на
фоне радиолокационного изображения (РЛИ) земной поверхности.
Для обеспечения решения задачи обнаружения движущихся
объектов используются специальные алгоритмы и устройства их
реализации. Алгоритмы селекции основаны на различиях пространственно-
временных характеристик сигналов, отраженных от движущихся и не-
302
Режимы работы РСА землеобюра
подвижных объектов. Для их реализации при решении полной задачи
необходима антенная система (или интерферометр) с многими
фазовыми центрами, разнесенными по линии пути носителя РСА, и
многоканальная частотно-временная обработка траекторных сигналов.
Оптимальные алгоритмы СДЦ требуют реализации
многоканальной пространственно - временной обработки сигналов РСА. При этом
под пространственной обработкой понимают обработку принимаемого
электромагнитного поля по раскрыву антенны, а под временной -
обработку сигналов, принимаемых отдельными элементами раскрыва
антенны во время перемещения носителя РЛС по траектории.
Синтез и реализация оптимальных алгоритмов представляет
весьма сложную задачу, и в большинстве случаев используют различные
квазиоптимальные способы обработки сигналов. Обычно
пространственная обработка обеспечивает подавление мешающих отражений
(неподвижных объектов и фона) путем формирования провалов ("нулей")
ДН антенны в направлении на помеху. Временная обработка
обеспечивает доплеровскую фильтрацию сигналов для разделения спектров
сигналов движущихся целей и мешающих отражений, а также выделения
сигналов на фоне шумов. При этом используются более простые
антенные системы: моноимпульсные, двухканальные интерферометры и даже
антенны с однолучевой ДН.
В качестве примера на рис. 8.2 показано сечение распределения
мощности отраженного сигнала фона (неподвижных объектов) в
пределах ширины ДН в0 и движущейся цели в плоскости «азимут - доплеров-
ская частота» (в — fA). При совпадении доплеровских частот движущейся
цели и помехи (сигналы находятся в одном доплеровском фильтре
f, u=fni) их угловые положения (азимуты) отличаются, что позволяет
селектировать сигналы цели путем пространственной обработки. Если
помеха и цель совпадают по азимуту (0Ц=6П2), то они селектируются
путем доплеровской фильтрации (fu * fn2). Оптимальная система
обработки, подавляя фон и выделяя сигнал движущейся цели, обеспечивает
Рис. 8.2. Частоты сигналов движущихся и неподвижных целей
303
Глава 8
максимальное отношение сигнал/фон при минимальной радиальной
скорости цели. Так как в одном элементе дальности может быть
несколько движущихся целей, оптимальная система должна быть
многоканальной не только по доплеровской частоте, но и по азимуту.
Основное назначение систем СДЦ - разделение сигналов
движущихся целей и мешающих отражений, т.е. сигналов всех остальных объектов
(неподвижных объектов, земной и водной поверхности). При этом задача
«обнаружения - распознавания» решается путем построения системы
обнаружения сигналов движущихся целей на фоне коррелированных помех,
образуемых сигналами неподвижных объектов, земной и водной
поверхности, а также различного рода шумов.
Оптимальную структуру такого «обнаружения - распознавания»
можно представить в виде последовательно соединенных устройств:
фильтра подавления сигналов мешающих отражений
(«выбеливающего» фильтра), фильтра, согласованного с сигналами движущихся целей,
и порогового устройства (рис. 8.3). В результате действия первого
фильтра происходит подавление сигналов неподвижных целей (фона).
На выходе фильтра суммарные остатки сигналов мешающих отражений
и шумов имеют равномерную спектральную плотность в пределах
полосы частот сигналов движущихся целей (белый шум), т.е. происходит
«выбеливание» помехового сигнала. Поэтому последующей
оптимальной обработкой является согласованная фильтрация сигналов
движущихся целей, прошедших «выбеливающий» фильтр. На выходе
согласованного фильтра выставленный уровень порога определяет
вероятностные характеристики системы СЦД при обнаружении движущихся
целей. В ряде случаев система СЦД выполняет одновременно (одним
устройством) как выделение сигналов движущихся объектов, так и их
согласованную фильтрацию.
Траекториый
сигнал
Рис. 8.3. Структурная схема реализации алгоритмов СДЦ
8.2.2. Селекция движущихся целей в РСА путем доплеровской
фильтрации сигналов
При использовании однолучевой диаграммы направленности (ДН)
антенны РСА (один фазовый центр антенны) отличие сигналов
движущихся и неподвижных объектов проявляется в различной зависимости
средней доплеровской частоты траекторного сигнала от углового
положения объекта.
Сигнал неподвижного объекта (рис. 8.4) имеет доплеровскую частоту
2V
fAH=^-coseu' (8.1)
А
304
Выбеливающий
фильтр
Согласованный
фильтр
Пороговое
устройство
Режимы работы РСА землеобзора
где 6Ц — угловое положение
цели относительно вектора V
путевой скорости носителя
РСА; А. - длина волны РСА.
При малых изменениях
угла 6Ц (в пределах ширины
ДН антенны)
Цель
2V
2VsinG.
(8.2)
РЛС
РСН
-v
Рис. 8.4. Система координат при
наблюдении движущихся целей
где Рц — угловое положение цели относительно направления оси ДН
антенны (направления наблюдения 6Н).
2V
Известную постоянную составляющую частоты —cos6H будем
Л
полагать скомпенсированной (равной нулю). Тогда
2V
г _ ~_~tn to -зч
где V, = V sin 6Н - тангенциальная скорость носителя.
На рис. 8.5,а показано расположение объектов относительно ДН
антенны. При Рц = 0 объект 1 - неподвижен, а объект 2 - движется. Имеется
т 3
о
Фон
q,
О
Порог
Фон
О
frp
г,
б)
Рис. 8.5. Расположение движущихся и неподвижных объектов относительно ДН
антенны (а), расположение отметок движущихся и неподвижных объектов
на РЛИ (б)
11—3169 305
Глава 8
также неподвижный объект 3 с большой а , сигнал которого принимается
по боковому лепестку ДН. Штрих-пунктирной линией показан уровень а0
фона. На рис. 8.5,6 показано положение РЛИ объектов (SBbIX) по азимуту
(Тд). Неподвижный объект 1 изображается сигналом на нулевой
частоте. При движении объекта 2 сигнал приобретает дополнительное допле-
ровское смещение частоты, определяемое величиной и знаком
радиальной составляющей скорости объекта (скорость в направлении РСА) V^ :
2Vt 2\щ 2Vt Vu
X ц X X ц V,
где знак + соответствует направлению движения объекта к РСА.
Таким образом, сигналы движущихся объектов, принимаемые по
основному лепестку ДН антенны вместе с сигналами неподвижных объектов,
будут отличаться по доплеровским частотам и могут быть отфильтрованы
(селектированы) в системе обработки траекторных сигналов.
Сигналы фона и неподвижных объектов, принимаемые по
основному лепестку ДН, занимают полосу частот (на уровне —3 дБ)
(8.5)
2V 2V 2V V
m X Рц~ X l Фц~ V K '
д А "
где Go - ширина ДН антенны.
Алгоритм селекции движущихся объектов сводится к фильтрации
сигналов с граничной частотой f^, определяемой шириной спектра ДГд:
где кд — постоянный коэффициент (порог селекции).
Если сигнал обнаружен и частота f
ди
объекта больше
, то
считается, что объект движется, а если fm< fip - объект неподвижен.
Такая простейшая система СДЦ имеет ряд существенных
недостатков. Так, сигналы неподвижных объектов с большой ЭПР, хотя и
принимаются по боковым лепесткам ДН антенны, тем не менее могут быть
обнаружены. Так как их угловое положение Рц > 60/2 и соответственно допле-
ровская частота превышает граничную l|fAJ >|fip|), эти неподвижные
объекты будут считаться движущимися (объект 3 на рис. 8.5).
В свою очередь, движущиеся объекты в случае малых радиальных
2V
скоростей, когда —— < fip (рц = 0), будут считаться неподвижными.
А
306
Режимы работы PC А землеобюра
При этом сигнал движущегося объекта попадает в частотную область
сигналов фона и его обнаружение зависит от отношения сигнал/фон.
Эффективность селекции движущихся целей в такой системе
существенно зависит от их углового положения относительно максимума
ДН антенны.
ft- 0
f2.
Spf*
Рис. 8.6. СДЦ при различных угловых положениях цели
относительно равное игнального направления ДН антенны
Так, сигнал цели 1 (рис. 8.6), находящейся в максимуме ДН, в
результате движения цели (сближения с носителем) имеет положительное
приращение доплеровской частоты. Однако поскольку скорость цели мала, то
f1+ <frp, и такая движущаяся цель классифицируется ошибочно как
неподвижная. То же происходит и при удалении цели, так как |fj_| <f .
Если цель 2 находится на правом краю ДН и движется с такой же
скоростью, как и цель 1, частота сигнала цели при сближении с
носителем f2+ будет больше f и цель будет классифицироваться правильно
как движущаяся. Если же цель 2 движется с удалением от носителя, то
частота сигнала такой цели f2_ будет меньше f , и цель будет
считаться неподвижной. В то же время цель 3, находящаяся на левом краю ДН
и движущаяся также с удалением, будет классифицироваться
правильно, а движущаяся от носителя - неправильно.
В связи с этим такая система СДЦ обычно дополняется
логическим алгоритмом выделения движущихся целей при сканировании ДН
антенны.
Еще одним существенным недостатком системы СДЦ является
неопределенность «угловое положение - радиальная скорость»
движущегося объекта. Взаимное положение по азимуту объектов в РЛИ
определяется доплеровскими частотами их сигналов:
дц
2Vt
(8.7)
Поэтому отметка движущегося объекта в изображении будет
значительно смещена по азимуту относительно истинного положения:
307
Глава 8
V V
В,=-^= ш . (8.8)
Рц vt vsineH
Так, при Vur= 10 м/с и V, = 200 м/с на дальности 20 км смещение отметки
движущейся цели по азимуту будет равно 1 км. Используя антенну
большого размера, можно восстановить положение отметки цели, близкое к
истинной. Потенциальная точность измерения угла азимута цели с
помощью антенны ор = Q0/y]q , a ol = 00Rn/y]q . При 0о=Ю~2 и отношении
сигнал/шум q = 100 точность восстановления азимута движущейся цели
будет о( = 20м .
Такая простая система СДЦ используется для выделения
движущихся объектов с большой радиальной скоростью (более 7... 10 м/с).
Учитывая небольшие собственные скорости наземных объектов, а также
возможность их наблюдения под различными ракурсами, необходимо
обеспечивать селекцию объектов, движущихся с радиальными
скоростями 1,0..Л,5 м/с.
Значительное повышение эффективности СДЦ возможно в РСА
землеобзора при высокой разрешающей способности, когда
обеспечивается эффективное обнаружение малоразмерных целей на фоне
отражений от земной поверхности независимо от того, движется цель или нет.
Цель, находящаяся в главном лепестке ДН антенны, обнаруживается по
превышению порога в доплеровском фильтре, настроенном на частоту
сигнала цели. При этом обеспечивается оценка доплеровской частоты
fflU. Задача СДЦ сводится к определению радиальной скорости цели, для
чего необходимо измерить направление прихода обнаруженного
сигнала (азимут цели). Имея оценки азимута и доплеровской частоты
обнаруженного сигнала (8.7) и (8.8), можно определить радиальную
скорость цели:
Цель считается движущейся, если ее радиальная скорость превы-
шает пороговое значение Vn: Vur > Vn . Порог выбирается из условия
обеспечения заданного уровня ложного решения и зависит от ошибок
измерения fm, рц и Vt=Vsin9,,.
Для измерения угла рц можно использовать сканирование однолу-
чевой ДН антенны либо моноимпульсную антенную систему.
Синтезирование апертуры в суммарном канале обеспечивает одновременное
формирование РЛИ неподвижных и движущихся целей, фона и
измерение доплеровской частоты сигналов целей. Разностный канал
обеспечивает измерение азимутальных углов обнаруженных целей. Оценки ра-
308
Режимы работы PC А землеобзора
диальных скоростей и углов позволяют селектировать движущиеся цели
и устанавливать их отметки на РЛИ в истинное положение по азимуту.
Так, при 0О = 3° и отношении сигнал/шум q = 25 точность измерения
азимутального угла ар = 1/100 рад. В этом случае точность измерения
радиальной скорости cv = 2 м/с при V, = 200 м/с. Влиянием ошибок измерения
fm можно пренебречь.
Если значение отношения сигнал/фон недостаточно для
эффективного обнаружения движущейся цели, необходимо использовать системы
СДЦ с пространственным подавлением сигналов фона и неподвижных
целей.
8.2.3. Селекция движущихся целей в системах
с остановленным фазовым центром
В качестве примера рассмотрим структуру системы СДЦ с
остановленным фазовым центром. При этом способе селекции в РСА
используют приемную антенну с фазовыми центрами, разнесенными
вдоль линии пути носителя РСА, либо интерферометр с разнесенными
антеннами (рис. 8.7). Фазовый центр 0 в середине антенны соединен с
передатчиком и формирует ДН на передачу. Фазовые центры 1 и 2
разнесены на расстояние ± d относительно передающего фазового центра и
соединены соответственно с первым и вторым приемными каналами.
X=Vt
Рис. 8.7. Структура системы СДЦ с остановленным фазовым центром
Антенна РЛС перемещается по прямолинейной траектории (ось X
на рис. 8.7) с постоянной скоростью V. В момент времени t излучаются
и принимаются приемниками 1 и 2 сигналы s^t) и s2(t), отраженные
от всех объектов, находящихся в элементе разрешения по дальности в
пределах ширины ДН антенны.
Если за время At антенна перемещается на расстояние d, то
приемный фазовый центр 2 становится на место фазового центра 0, которое
309
Глава 8
тот занимал в момент времени t. Соответственно фазовый центр 0
становится на место приемного центра 1.
Если все характеристики РЛ-системы и объектов за время At не
изменяются, то сигнал s2 (t + At) = si(t), так как электромагнитная волна
проходит один и тот же путь от передающего фазового центра до
объекта и от объекта соответственно до первого и второго приемных фазовых
центров. При вычитании сигналов Si(t) - s2(t + At) будут подавляться
сигналы всех неподвижных объектов и фона при условии стабильности
системы и объектов за время At. При этом на выходе вычитающего устройства
остаются только шумы приемников. Аналогично можно подавить сигналы,
полученные в момент времени t + At и t + 2 At и так далее по всей
траектории, где производится прием и обработка сигналов.
Если объект движется, то условие s2(t+ At) = Si(t) уже не
выполняется и сигналы движущихся объектов подавляются не полностью.
Эффективность селекции движущихся объектов определяется величиной
радиальной скорости объектов и скоростью носителя, разносом фазовых
центров d и стабильностью сигналов неподвижных объектов и фона.
Фазы сигналов s^t) и s2(t) определяются длиной волны РЛС и
соответственно расстояниями ro+ ri и го+ г2 от передающего до приемных
фазовых центров. В условиях дальней зоны приема эти расстояния равны:
ц,
(о.")
Принимаемые сигналы неподвижных объектов и фона на выходе
фазового детектора соответственно будут равны:
s,(t) =
s2(t) = Aucos^(Vt-d/2)coseu+9A
(8.10)
где Ац - амплитуда сигнала; <рц - начальная фаза, определяемая
дальностью Ru элемента разрешения, фазовыми характеристиками
антенны, приемопередающего тракта, функции отражения объекта и среды
распространения.
Аналогично записывается синусная составляющая сигнала на
выходе фазового детектора.
Если за время At антенна перемещается на расстояние d, т.е.
At = d/V, то
Vt + d/2 = V(t + At)-d/2 и
310
Режимы работы РСА землеобзора
Таким образом в системе СДЦ с остановленным фазовым центром
подавляются сигналы всех неподвижных объектов и фона. Эффективность
подавления (уровень остатков) определяется стабильностью сигналов.
При движении цели с радиальной скоростью Ущ сигналы
соответственно будут равны:
(4тг 4тг 1
y(Vt + d/2)cos9ll+<pII+yVIirtl;
(471 471 ^
—(У1-с1/2)со5ец + фц + —V^tl; (8.11)
(4
уццу|
На выходе вычитающего устройства получается разность сигналов
(о. 12)
(
Дальнейшая обработка сигналов движущихся целей сводится к их
когерентному накоплению (доплеровской фильтрации) для обеспечения
обнаружения на фоне остатков сигналов неподвижных целей и
внутренних шумов, а также разрешения по частоте.
Эффективность селекции объектов, движущихся с малой
радиальной скоростью (—VwAt« — ), определяется амплитудой сигнала объекта
К А
на выходе вычитающего устройства Асдц. С учетом того, что At = d/V,
(8.13)
Чем больше разнос фазовых центров антенны d и меньше скорость
носителя, тем выше эффективность селекции.
При больших скоростях объекта, когда sin — УшAt =
{ 27id V 1
= sin — =0, объекты не обнаруживаются («слепые скорости»).
Как правило, в этом случае они обнаруживаются в одном из приемных
каналов обычной фильтровой системы в области боковых лепестков
ДН, как в однолучевой РЛС, либо используется третий канала
интерферометра с меньшим расстоянием d.
311
Глава 8
Следует отметить, что доплеровская частота сигналов движущихся
объектов на выходе вычитающего устройства такая же, как на входе:
fflU=^coseu+^. (8.14)
Поэтому, несмотря на наличие двух пространственно-разнесенных
антенных каналов, рассмотренная система СДЦ имеет такую же
неоднозначность измерения «азимут — радиальная скорость», как и однока-
нальная система. Для измерения угловой координаты (азимута)
движущегося объекта моноимпульсным методом необходимо введение
дополнительного канала.
При выборе величины At, равной периоду повторения импульсов
РСА (At=Tn), условие At=d/V выполняется регулировкой частоты
повторения импульсов: Fn=V/d.
Вместо компенсации (вычитания) сигналов неподвижных объектов
и фона во временной области иногда используют компенсацию в
частотной области, т.е. после формирования комплексных РЛИ в двух
приемных каналах. При этом коэффициент компенсации формируется
адаптивно, в том числе при условии, когда At Ф d/V .
При практической реализации такой интерферометрической
системы СДЦ возможно совмещение передающей антенны с одной из
приемных антенн. Возможно также последовательное переключение
передатчика от одной антенны к другой, что несколько увеличивает угловую
чувствительность интерферометра.
8.2.4. Селекция движущихся целей в РСА с моноимпульсной
антенной
Обнаружение движущихся целей на фоне неподвижных в РСА
обеспечивается не только различиями доплеровских частот сигналов,
отраженных от неподвижных и движущихся целей, но и их
пространственным положением. Для неподвижных целей доплеровская частота
сигналов f,H однозначно определяется их угловым положением
относительно вектора путевой скорости носителя РСА (8.1), а для
движущихся - fw и радиальной скоростью движения цели Уш (8.4).
Если движущаяся и неподвижная цели совмещены в
пространстве, то они тем не менее имеют различные доплеровские частоты и
обрабатываются различными фильтрами. Этими причинами объясняется так
называемый эффект смещения изображения движущихся целей в РСА
на величину Ар= V^VsinG,,.
При совпадении доплеровских частот сигналов неподвижной и
движущейся целей они различаются азимутальным положением. На
этой закономерности и основывается селекция движущихся целей в
моноимпульсной РСА. При этом для подавления сигнала неподвижного
312
Режимы работы РСА землеобзора
РСН
объекта, имеющего ту же частоту, что и сигнал движущейся цели,
используют разностную ДНА, равносигнальное направление (РСН)
которой направлено на неподвижный объект.
Для пояснения принципов работы алгоритма СДЦ с
использованием моноимпульсной антенны рассмотрим количественные соотношения
между сигналом цели и помехой. Пусть РСН антенны направлено под
углом 9Н (рис. 8.8) по отношению к вектору путевой скорости самолета,
а цель, движущаяся с
радиальной скоростью Vur,
отклонена на угол рц. Каждой
i-й точке земной
поверхности соответствует допле-
ровская частота сигнала fj, a
интенсивность сигнала
пропорциональна
коэффициенту направленного действия
(КНД) антенны в
направлении Р;. Сигнал i-й точки
фона в разностной ДН
Рис. 8.8. Принцип работы алгоритма СДЦ
с использованием моноимпульсной антенны
f •„ Г. 2V/ п^ 2V, . _ Чп V2sin20H 2
xexp|-j27i|f0t+y(coseH)t-—(smGjftt ^Г"^1
+ J<P,
(8.15)
где Ai, ф; - амплитуда и начальная фаза сигнала, отраженного от i-й
точки земной поверхности; GA(P) - КНД антенны в направлении р.
Траекторный сигнал, отраженный от земной поверхности,
представляет собой сумму сигналов, отраженных от всех точек земной по-
ОО
верхности в пределах ДНА: sA(t)= /_]sAi(t), а его спектр повторяет
i=0
форму ДНА. Спектр траекторного сигнала фона SA(f) имеет нулевую
интенсивность на частоте (2V/A.)cos9H (Pi=0).
Траекторный сигнал, отраженный от движущейся цели, имеет доп-
леровскую частоту, определяемую углом рц и скоростью V№ а его
интенсивность определяется ДНА в направлении рц:
V2sin20..
I г 2V 2V
-J2n fot+у (cosGH)t-y(sineH)Put - ^r
2V
ur
+J<Pu
(8.16)
313
Глава 8
Если азимутальный угол цели Рц^УцДУбшОн), из формулы (8.16)
получаем, что доплеровская частота сигнала цели равна частоте
сигнала, отраженного от точки Pi=0 (fAU=0), но интенсивность сигнала,
пропорциональная G& (Рц), не равна нулю (см. рис. 8.8).
После компенсации центральной частоты и квадратичной фазы
получаем:
Если в системе обработки используется фильтр с нулевой частотой
без амплитудного взвешивания, то амплитуда полезного сигнала в
разностном канале
U A
Максимальное значение полезного сигнала ицд=АцОд(Рц)Тс в
нулевом фильтре достигается при Pu=VIir/Vsin9H. В частности, при Уцг=0 и
рц=0 выходной сигнал также равен нулю, что свидетельствует о
подавлении неподвижных объектов, находящихся на РСН.
Амплитуда помехового сигнала, отраженного от i-й точки,
описывается выражением (8.17), в котором необходимо положить Р„ = Pj, a
sinr(27i/A.)(2V(sineH)pi)T
c
l
Мощность всех сигналов фона, находящихся в пределах полосы
пропускания доплеровского фильтра
+8р/2
РфА= J ЦЛ^,
-gp/2
где 5р = A./(2TcVsin6H) - угловая разрешающая способность РСА.
При линейной аппроксимации разностной ДНА (в пределах
5р < 90) GA(Pi) = Р/00. Считая, что амплитудная характеристика в
пределах полосы пропускания узкополосного доплеровского фильтра
прямоугольная: sin х/х = 1, получаем выражение для мощности фона в
разностном канале:
314
Режимы работы РСЛ земпеобюра
е„+8р/2 з f fiR \2
рфл=ао f (Pi -вн)2/вос1р; =ст0—^ = СТф —^- , (8.19)
eH-sp/2 ° \ oj
где с0 = — - удельная мощность фона на единицу угла в элементе раз-
5Р
решения по дальности.
Мощность фона в суммарном канале
+SP/2
= J
-8р/2
Таким образом, применение разностной ДН антенны обеспечивает
подавление мощности фона в (2G0/5p) раз.
Мощность полезного сигнала в разностном канапе прямо
пропорциональна квадрату углового положения цели или квадрату радиальной
скорости:
где ац - ЭПР цели.
Чем больше скорость цели, тем больше амплитуда сигнала цели.
Такая закономерность объясняется тем, что при настройке доплеровско-
го фильтра на нулевую частоту в него попадает сигнал, отраженный от
движущейся цели, если она смещена на величину Рц^УцДУБтбн). При
этом на линейном участке разностной ДНА амплитуда сигнала
пропорциональна скорости цели.
Отношение сигнал/фон для моноимпульсного селектора имеет
следующий вид:
Ш^Т (8.20)
т.е. эффективность выделения движущейся цели пропорциональна
квадрату радиальной скорости. В формуле (8.20) не учтен внутренний шум
приемной системы, который может дополнительно ограничивать
характеристики СДЦ. Результаты расчетов эффективности выделения
движущейся цели типа «танк» (ац = 4 м2) на фоне различных подстилающих
поверхностей на дальности 100 км в диапазоне 3 см при скорости полета
носителя V = 200 м/с, G0 = 2,4° и разрешающей способности системы
5^ = 6г = 5 м приведены на рис. 8.9.
315
50
40
30
ч
; *v
; Ч
\
\ Л
. \*
' /
/У
If
i
i
*'■>-
у'
1»"
2
-8
Глава 8
Заметим, что двухка-
нальная (моноимпульсная)
антенна использует для
подавления фона оба канала.
Поэтому для измерения
азимутального угла
движущейся цели
моноимпульсным методом необходимо
иметь еще один канал со
смещенной ДН.
Режим СДЦ с
моноимпульсной антенной
системой можно использовать
совместно с режимом
картографирования местности.
С целью снижения вычислительных затрат обычно используется
обработка сигнала методом гармонического анализа. В этом случае алгоритм
СДЦ имеет вид:
A(f,)-K(f1)UI(fi)|, (8.21)
(Pi) GA(A.fi/2VsineH) „ ,, .
-^-^ = ———- — - весовой коэффициент, форми-
(р4) Gz(Xf,/2VsineH)
8V,,r,M/c
Рис. 8.9. Характеристики СДЦ
с моноимпульсной антенной системой:
3-луг(<то = -16дБ)
где K(f)=
рующий нуль ДН моноимпульсной антенны в направлении i-ro
неподвижного объекта (фона): р{ = Xft/(2Vsin 0Н) .
Амплитуды сигналов фона суммарного и разностного каналов в i-м
доплеровском фильтре
Тс/2
= j Su(t)h*(t)exp{-j2nflt}dt;
-Тс/2
(8.22)
Тс/2
= J Sj-Wh^Oexp^Tif^dt,
-Тс/2
где h(t) - опорная функция, компенсирующая центральную частоту и
квадратичную фазу траекторного сигнала.
Алгоритм обработки траекторного сигнала в такой системе СДЦ
состоит из согласованной доплеровской фильтрации (когерентное
накопление траекторных сигналов в суммарном и разностном каналах,
(8.22)) и пространственной режекции помехи (8.21), при которой
формируется нуль диаграммы направленности приемной антенны на точку
подстилающей поверхности, имеющей доплеровскую частоту, равную
частоте полезного сигнала.
316
Режимы работы РСА землеобзора
Структурная схема РСА, реализующей рассмотренный алгоритм
СДЦ, представлена на рис. 8.10. Блок цифровой обработки (БЦО)
производит обработку траекторного сигнала РСА способом гармонического
анализа. На выходе БЦО суммарного (Е) и разностного (А) каналов
формируются векторы Ui и ид комплексных отсчетов изображений,
соответствующих амплитудам сигнала на выходе доплеровских
фильтров (8.22).
тенна
*
ПРМХ
Датчик
движения ЛА
А
ПРМЛ
—»■
ФД
» К"
г
■
—*
Система
обработки
Система
АЦП
—»■
эбработки ]
БЦО
Вычислитель
л
*
—j->
Индикатор
обзора
Порог
Индикатор
СДЦ
Рис. 8.10. Структурная схема РСА, реализующая алгоритм СДЦ
с моноимпульсной системой
Для вычисления коэффициентов компенсации K(fi) необходимо
априорное знание коэффициентов усиления ДН каналов
моноимпульсной антенны в направлении, соответствующем i-му неподвижному объ-
екту Р; =
2Vsin0
. На практике точные знания о форме ДНА отсутст-
вуют. В этом случае прибегают к адаптивному вычислению
коэффициента компенсации на основе оценки отношения амплитуд сигналов фона
в соответствующих доплеровских фильтрах и последующего
усреднения его по каналам дальности:
N , N
.11 IT I
(8.23)
где n - номер канала дальности.
Число N разрешаемых элементов дальности, по которым
производится усреднение, выбирается так, чтобы сигналы движущихся целей не
оказывали влияния на точность вычисления коэффициента
компенсации. Так как мощность сигнала фона в элементе разрешения может
превышать мощность сигнала цели, то выбирают N > 100. Возможно также
исключение мощных сигналов целей.
Исследования данного алгоритма СДЦ показывают его высокую
эффективность. При скорости полета носителя V=150 м/с, 260/5р>30, от-
317
Глава 8
ношении мощности фона в элементе разрешения к мощности внутренних
шумов приемника Цф/Ш> 20 дБ и отношении мощности сигнала цели к
мощности сигнала, фона Яс/ф> 20 дБ возможно обнаружение целей,
двигающихся с радиальными скоростями Vur > 1,5 м/с.
Следует заметить, что так же, как и при методе остановленного
фазового центра, наличие только двух каналов (суммарного и
разностного) не позволяет однозначно измерять радиальную скорость и азимут
движущейся цели.
8.2.5. Селекция целей по тангенциальной скорости
Существующие методы СДЦ, которые оценивают только
радиальную составляющую скорости объекта, позволяют выделить не более
60% движущихся наземных объектов военной техники. Введение
режима СДЦ по тангенциальной скорости позволяет селектировать до
80...90% таких объектов.
Основой режима СДЦ по тангенциальной скорости является
формирование динамического фазового портрета объектов. Динамический
фазовый портрет - это РЛИ, получаемое с высокой пространственной
разрешающей способностью, интенсивность каждой точки которого
пропорциональна разности фаз сигналов двух разнесенных во времени
(а также в пространстве и времени) каналах РСА соответствующего
разрешаемого участка поверхности.
Динамический фазовый портрет чувствителен к изменению фазы
функции отражения во времени. Это изменение может быть
обусловлено движением отражающей поверхности либо изменением ее свойств.
Изменение фазы функции отражения приводит к изменению
параметров траекторного сигнала объекта. Так как в данном случае нас
интересуют объекты, движущиеся с малой скоростью, то можно считать,
что за время синтезирования амплитуда отраженного сигнала постоянна
Цель
Vt
Рис. 8.11. Система координат
при измерении тангенциальной скорости
цели
318
и вся информация о движении
объекта (цели) заключена в
законе изменения фазы траекторного
сигнала.
Рассмотрим вариант
бокового обзора (0Н = 0). Точечная цель
движется с постоянной
тангенциальной скоростью, Vut = const,
и радиальной скоростью Уш = 0
(рис. 8.11). Траекторный сигнал,
отраженный от цели в элементе
разрешения по дальности,
описывается выражением
Режимы работы РСА землеобзора
su (t) = Ац ехр{ j27if0t} exp {jkr (t) + j9o}, (8.24)
где Ац, фо - амплитуда и начальная фаза отраженного от цели сигнала;
К - длина волны РСА; f0 - несущая частота; к = 4п/Х - волновое
число; r(t) - закон изменения расстояния «РСА - цель».
Закон изменения расстояния «РСА - цель» для случая бокового
обзора можно представить в виде
v+vut)2t2
*' > (825)
где Ru — расстояние от РЛС до центра кадра синтезирования в момент
времени t = 0.
В случае необходимости формирования радиолокационного
изображения с разрешениями лучшими, чем 1 м, необходимо учитывать не
только квадратичные члены, но и коэффициенты разложения более
высокого порядка (третьего, четвертого). Однако следует отметить, что
при решении задач селекции движущихся целей такое высокое
разрешение как правило не требуется.
После компенсации квадратичного фазового набега,
обусловленного собственным движением РСА (умножения на опорную функцию
Г у¥ ]
вида h(t) = exp-| jk >), траекторный сигнал на выходе фазового де-
тектора описывается выражением вида
[
su(t) = Auexp j
где фц0 - начальная фаза сигнала, определяемая расстоянием до цели Ru
и свойствами функции отражения цели.
Учитывая тот факт, что скорость наземных целей много меньше
скорости носителя (Ущ « V), выражение (8.26) можно представить в виде
(8.27)
Сигнал, принимаемый от фона местности в пределах элемента
разрешения по дальности, представляет собой сумму сигналов от
независимых элементарных отражателей фона со случайной амплитудой,
распределенной по закону Рэлея, и фазой, распределенной равномерно на
интервале от -п до я:
СО
5Ф(1)= j8(e)G(0)exp{-jkr(e,t)}de,
—СО
319
Глава 8
где ё(0) — комплексная функция отражения фона в элементе дальности;
6 — азимутальная координата отражателя; G(G) — диаграмма
направленности антенны, r(0,t) - расстояние от отражателя до фазового
центра антенны.
В качестве модели функции отражения местности обычно
используют пространственный комплексный неоднородный
некоррелированный шум. В этом случае интервал пространственной корреляции траектор-
ного сигнала местности равен половине размера апертуры антенны da:
«Ф=^,. (8.28)
Интервал корреляции траекторного сигнала цели определяется
размером цели du:
Ц^ (8.29)
Таким образом, интервал корреляции траекторного сигнала,
отраженного от местности, много меньше интервала корреляции траекторного
сигнала, отраженного от сосредоточенной (точечной) цели (5ф « 5Ц ).
При однородной местности в районе цели математические модели
квадратурных составляющих сигнала фона можно представить в виде
гауссовского белого шума:
Такая же модель соответствует внутреннему шуму приемника
РСА. Полагаем, что мощность шума много меньше мощности фона. В
этом случае траекторный сигнал на входе системы обработки
представляет собой аддитивную смесь сигнала, отраженного от точечной цели, и
белого гауссовского шума, обусловленного отражением сигнала от
подстилающей поверхности:
Синтезированию апертуры соответствует когерентное накопление
траекторного сигнала на интервале от —Тс/2 до Тс/2:
Н2 [( VV ^1 Ч2
П = АЦ Г exp j Фцо+к—^-t2 U+ Гпф(1)А. (8.31)
-Те/2 1Л R« Л -TJ2
Сигнальная часть ц равна:
320
Режимы работы PC А землеобюра
dt=
(8.32)
Анализ выражения (8.32) показывает, что однозначное
определение тангенциальной скорости цели по фазовой характеристике
выходного сигнала невозможно, так как фаза выходного сигнала <рц зависит не
только от параметров движения цели, но и от начальной фазы цели.
Следовательно, для решения задачи необходимо введение
дополнительного канала синтезирования. В роли дополнительного канала может
выступать выходной сигнал, сформированный другой, смещенной по
траектории, апертурой или апертурой другой длительности.
Рассмотрим случай использования синтезированных апертур
различной длительности. Амплитуда и фаза выражения (8.32) при двух
различных значениях длительности накопления траекторного сигнала
ТС1 и Тс2 имеют вид:
Фц1 = arg{jj} = фц0 +-arctg( цТс1)2; (8.33)
Фц2 = arg{J2} = Фцо +-arctg(nTc2)2; (8.34)
2VVIIt
ц = -. (8.35)
Синтезируем структуру оптимальной системы оценивания
тангенциальной скорости цели Vw по сигналам, формируемым первой и
второй апертурами. Сигнал на входе такой двухканальной системы
обработки описывается выражением
х=i+n,
где х = [f|,,f|2] — вектор наблюдения, включающий в себя сигналы,
сформированные первой и второй апертурами; j = Г J1=, J21 ; n = [n,, h2] .
Двухмерное распределение плотности вероятности процесса х
описывается четырехмерным распределением его квадратурных
составляющих. Для гауссовского случайного процесса эта плотность
вероятности описывается выражением
P(V) =
4лЛ
где Y = [Yic, Y)s, Y2c, Y2s]T - вектор сигнала на входе двухканальной
системы обработки системы обработки; R - корреляционная матрица квад-
321
Глава 8
ратурных составляющих; m - вектор математических ожиданий
входных сигналов;
Yk=Re{f|1}; YI1 = Im{f|1};
Y2c=Re{i12}; Y2s=Im{fl2}.
Так как квадратурные составляющие Y зависят от Уш, то
плотность вероятности является условной и также зависит от параметра Vut в
принимаемых сигналах, т.е. р(У/Уш).
Корреляционная матрица R квадратурных составляющих имеет
вид
R
Ml 42 43 '14
Г21 Г22 Г23 Г24
Г31 Г32 Г33 Г34
Г41 Г42 Г43 Г44
Запишем выражения для корреляционной и
взаимокорреляционной функций квадратурных составляющих сигналов:
M, =
N*TC|
+ 1
r22=M{Y2cY2c} = r44 =
T 2
Я~ 2
r12 = r2I = M{YlcY2c} = r34 = r43 = M{YlsY2s} ;
(8.36)
42 =
T
q «2 cos(0,5arctg(^Tc2)2-0,5arctg(nTcl)2)
Т. \ '
I _
•cl
rl4~~"
qb2sin(0,5arctg(^Tc2)2-0,5arctg(nTCI)2)
322
Режимы работы PC А землеобюра
где N,j, - спектральная плотность фона; q = q,^ - отношение сигнал/фон
после когерентного накопления первой апертурой.
Коэффициент Tc2/Tci (причем, Тс2> Tci) показывает, во сколько раз
отношение сигнал/фон после когерентного накопления второй
апертурой больше отношения сигнал/фон после когерентного накопления
первой апертурой.
Функция min(Tcl,Tc2) имеет вид
mm
ЦТс1,Тс2)= '
Тс„ еслиТс1<Тс2
c2, еслиТс2<Тс1.
С учетом этого корреляционная матрица имеет вид:
R
42
'22
О
-г.
14
О -Г,
14
О
44
О
42
122
а ее определитель det R = г12 + г14 - г, ,г22.
Тогда условная плотность вероятности описывается выражением:
1 _•,
г +ri4 гнг22
(8.37)
где
2r,4(Y,cY2s - YlsY2c) + 2r12(YlcY2c + YhY2t)-(Ylc2 + Yb2)ra-(Y2c2
2(r122+r142-r,,r22)
Ь =
Апостериорная плотность вероятности Pps(Vm) тангенциальной
скорости Vut определяется с учетом априорной плотности вероятности рр1(Уш):
где p=l/p(Y) - нормирующий коэффициент.
В простейшем случае можно считать, что априорная плотность
вероятности pPr(Vut) распределена равномерно в пределах ± Ущ макс-
Амплитуды сигналов, формируемых первой и второй апертурами,
при малых различиях времени накопления Tci и Тс2 отличаются
незначительно. В то же время фазы сигналов при наличии тангенциальной
скорости изменяются очень быстро. Это позволяет представить
квадратурные составляющие Y,c, Yjs, Y2c, Y2s в виде
Y,c = A cos <p, Yls = A sin ф,
Y2c = Acostp2 Y2s "
323
Глава 8
Условную плотность вероятности (8.37) в этом случае можно
представить в виде
2rI4 A2sin(A(p) + 2 г., A2 cos(Aq)- А2 г„- А2 г.,
где d = —£ ; , , . v ( -; Аф = фцз - фц1 -
2(Г.2 +Г.4 -Г|1«22)
разница фаз между сигналами, сформированными двумя апертурами.
Для медленно движущихся целей, когда цель за время
синтезирования перемещается не более чем на половину размера элемента
разрешения по азимуту (1/26х ), можно считать, что 1 + (цТс2) «1. С учетом
этого замечания для большого отношения сигнал/фон коэффициенты ri2
и Г|4 описываются выражениями
г12 =
cl
c2)2 -O,5arctg( цТс1)2); (8.39)
r14 =-^-q^
cl
Максимум апостериорной вероятности будет наблюдаться при
выполнении условия:
cos(o,5arctg(nTc2)2-0,5arctg(nTcl)2-A9) = l. (8.40)
При малых значениях х, при которых arctg х « х , уравнение (8.40)
имеет вид
Тогда оценка тангенциальной скорости находится с помощью
выражения:
v^wa;- <842)
\ с2 cl /
где Аф - оценка разности фаз выходных сигналов, формируемых двумя
каналами.
Возможность оценки тангенциальной скорости каждого отражателя
позволяет сформировать алгоритм селекции движущихся целей по их
тангенциальным скоростям. Работа алгоритма заключается в сравнении
разности фаз сигналов, отраженных от цели, с некоторым порогом \. При
превышении порога Ьф принимается решение о том, что цель движется.
324
Режимы работы РСА землеобзора
Величина порога пф определяется траекторными нестабильностя-
ми носителя РСА, мощностью внутренних шумов приемника и фона
местности, нестабильностью функции отражения объекта, а также
случайным изменением фазы сигнала при смене интервала синтезирования
(«неточечностью» цели).
Анализ выражения (8.42) показывает, что для повышения точности
оценки тангенциальной скорости цели необходимо увеличивать разницу
в интервалах накопления траекторного сигнала первой и второй
апертурами. А именно, длительность накопления траекторного сигнала
первой апертуры должна быть минимальной, а второй- максимальной.
При этом следует учитывать, что максимальное время
синтезирования ограничено траекторными нестабильностями, диаграммой
направленности антенны, видом обзора земной поверхности и многими
другими факторами. Минимальное время синтезирования в свою
очередь ограничивается необходимостью обнаруживать цель с заданной
вероятностью; кроме того, при уменьшении интервала синтезирования
резко возрастают фазовые шумы. Получение аналитической
зависимости точности оценки тангенциальной скорости цели с учетом этих, а
также многих других факторов затруднен. Поэтому определение
точности оценки тангенциальной скорости цели обычно проводится методом
имитационного моделирования.
На рис. 8.12. приведены графики зависимости СКО оценки
тангенциальной скорости методом формирования динамического фазового
портрета от соотношения длительностей первой и второй апертур.
Расчеты проводились при следующих параметрах: наклонная дальность
RH = 35 км, длина волны с >мс
X = 3 см, скорость полета
носителя V = 200 м/с,
время синтезирования
второй апертурой Тс2 = 1 с. В
качестве цели
рассматривался танк (оц = 4 м2),
наблюдаемый на фоне
различных подстилающих
поверхностей. Из графика
видно, что минимальное
значение СКО оценки
тангенциальной скорости
цели обеспечивается при
Тс, = (0,5...0,8)Тс2. При
увеличении Tci
увеличивается отношение сиг-
22
20
18
16
14
12
10
8
6
4
2
0
:
;--—..
—.
г -*.
г
■■■■' ■ —
р.т и ■ ■
f" i -|-
1
^-"
... ..
* ■■..1.1 1.
1 . . .
1
—-~
/;
1;
/ !
/ ;
J
J {
' /
0.1 0.2 0.3 0.4 0.5 0.6 0.7
0.8 0.9 Гс,/7с2
Рис. 8.12. Графики зависимости СКО оценки
тангенциальной скорости методом формирования
динамического фазового портрета от соотношения
длительности первой и второй апертур:
/ - трава; 2 — сухая степь; 3 - бетон
325
Глава 8
Cvn,/Gvw
v,,t'
нал/фон в сигнале, формируемом второй апертурой, но при этом
начинает оказывать влияние уменьшение временного разноса между первой
и второй апертурами. При уменьшении Tci падает отношение
сигнал/фон в сигнале, формируемом второй апертурой, и СКО оценки
начинает увеличиваться.
Влияние «неточеч-
ности» цели на
функционирование алгоритма
показано на рис. 8.13. В
качестве сигнала,
отраженного от неточечной цели,
использовалась сумма
двух сигналов,
отраженных от двух точечных
целей, имеющих
одинаковую тангенциальную
скорость, но разнесенных
в пространстве на
различное расстояние бх в
Траекторный
/
t
/
I T
\ т
0.1 0.2
0.3
0.6 0.7 0.8 0.9 1.0 ,
0.4 05
Рис. 8.13. Влияние «неточечности» цели
на точность оценки тангенциальной скорости
сигнал
П
arg{J,}
Дф
п
arg{J2}
т
Отметки
*" целен
пределах размера цели
(ёц). Из рис. 8.13 видно,
что в том случае, когда
цель точечная (du«0),
СКО оценки
тангенциальной скорости цели
минимально, а в
Рис. 8.14. Структурная схема алгоритма СДЦ
по тангенциальным скоростям целей
ситуации, когда du « ох, -
максимально. Проведенные исследования показали, что эта зависимость
не меняется при изменении отношения сигнал/фон во входном сигнале
и изменении времени синтезирования. СКО оценки тангенциальной
скорости цели данного алгоритма в случае, когда du « 8х, увеличивается
более чем в 3 раза по сравнению с СКО точечной цели.
Структурная схема алгоритма представлена на рис. 8.14. Алгоритм
селекции движущихся целей по их тангенциальным скоростям
заключается:
• в формировании двух кадров комплексных изображений одного и
того же участка местности (траекторный сигнал второго кадра
соответствует другому интервалу синтезирования) J,, J2;
• обнаружении сигналов целей на фоне отражений от подстилающей
поверхности (пороговая обработка по амплитуде П);
• вычислении разности фаз Аф сигналов обнаруженных целей;
326
Режимы работы РСА землеобзора
• пороговой обработке разности фаз: при превышении порогового
значения разности фаз пф принимается решение, что цель движется.
Работоспособность алгоритма оценки тангенциальной скорости
методом формирования динамического фазового портрета показана далее
на примере использования записей сигналов РСА, полученных в условиях
реального полета. Амплитудный портрет полигона с уголковыми
отражателями представлен на рис. 8.15. Дня обнаружения целей используется
факт превышения сигнала в элементе разрешения над средним уровнем
сигнала фона в заданное пороговое количество раз (П). На рис. 8.15,я и б
показаны обнаруженные цели при П=5 и П=10 соответственно.
Результаты измерения тангенциальной скорости обнаруженных отражателей в
соответствии с алгоритмом (8.42) показывают, что все отражатели имеют
тангенциальную скорость, близкую к нулю.
УпхЧкжый отражатели
Дальность^
а) б)
Рис. 8.15. Амплитудный портрет полигона с уголковыми отражателями
при различных порогах обнаружения: а - П = 5; б — П = 10
400
300
200
100
I
■ ■ -. I j
.'. . '-
: :
1
I
;
0 20 40 60 80 100 120 140 160 180 200 220 j
Рис. 8.16. Амплитудный портрет точечной цели
327
Глава 8
8
7
6
5
4
3
2
1
0
-1
)
_ j
i—i— —
i
i
■ I /
012:
-;■ ■
..
■
:
j 4
, . |
- - ■ | " "|
• ■ - ■ ■! -!
' !
j !
5 6 7 8 9Vu1
I
tMCT
Рис. 8.17. График зависимости оценки
тангенциальной скорости цели
от истинной скорости движения Vut „ст
При формировании РЛИ
местности в РСА движение
ЛА со скоростью V
относительно наземной цели,
движущейся с некоторой
тангенциальной скоростью Уш,
эквивалентно движению ЛА со
скоростью V + Vut
относительно неподвижной цели.
Этот факт позволяет
имитировать движение отражателя с
тангенциальной скоростью
путем формирования опорной
функции. Для имитации
движущейся цели использовалась
точечная цель (уголковый отражатель). Амплитудный портрет точечной
цели (j - номер фильтра) представлен на рис. 8.16. На рис. 8.17
изображен график зависимости оценки тангенциальной скорости цели от
истинной скорости движения Ушист.
РД Под селекцией движущихся целей (СДЦ) понимается обнаружение -
распознавание двух классов объектов: неподвижных и движущихся.
Движение объекта вызывает изменение параметров
пространственно-временного траекторного сигнала РСА.
Простейшая система СДЦ по радиальной скорости объекта
определяет наличие движения объекта, измеряя смещение доплеровской
частоты его сигнала относительно сигналов неподвижных объектов
(фона). Если смещение превышает ширину спектра сигналов фона,
определяемого шириной ДН антенны, то сигнал движущихся объектов
находится в области сигналов фона, принимаемых по боковым
лепесткам ДН антенны, и может быть выделен с помощью порогового
устройства. Минимальная радиальная скорость объекта, при которой он
селектируется такой системой, обычно более 7...10 м/с.
РСА землеобзора с высокой разрешающей способностью обеспечивает
эффективное обнаружение малоразмерных целей на фоне отражений
от земной поверхности независимо оттого, движутся они или нет.
Задача распознавания движущейся цели в этом случае решается путем
измерения радиальной скорости цели с использованием
дополнительного канала измерения азимута цели моноимпульсной системой.
При высоком отношении сигнал/фон возможна селекция целей при
скорости движения более 1...3 м/с.
Для повышения эффективности СДЦ при недостаточно высоком
отношении сигнал/фон используют антенну (или интерферометр) с не-
328
Режимы работы PC А землеобзора
сколькими разнесенными по линии пути фазовыми центрами, что
позволяет выполнять оптимальную пространственно - временную
обработку траекторного сигнала для подавления сигналов фона. Такая
система позволяет обесспечить минимальную скорость
селектируемого объекта до 1...3 м/с и выделять движущиеся цели, сигналы которых
находятся в области сигналов фона.
Отметки движущихся целей на РЛИ смещаются относительно
истинного положения по азимуту на большое расстояние,
пропорциональное радиальной скорости цели. Для восстановления истинного
положения цели необходимо оценивать угол азимута цели.
При прямолинейной траектории полета носителя РСА доплеровская
частота сигнала движущейся цели связана линейной зависимостью с
радиальной скоростью и азимутом цели, что не позволяет однозначно
оценивать азимут цели по доплеровской частоте сигнала.
Измерение азимутального угла движущегося объекта обычно
выполняется моноимпульсной антенной системой. Точность измерения
определяется размером антенны и отношением сигнал/фон. Если
моноимпульсная антенна используется для обработки сигналов в системе
СДЦ, то для измерения угла цели необходим еще один антенный
канал со смещенной ДН.
Вследствие неоднозначности «азимут — радиальная скорость»
точность измерения радиальной скорости определяется в основном
точностью измерения азимута.
Несмотря на большое разнообразие квазиоптимальных систем СДЦ,
все они так или иначе используют антенную систему с несколькими
фазовыми центрами и многоканальную когерентную обработку
сигналов. Выбор необходимого алгоритма СДЦ определяется решаемой
тактической задачей, возможностью размещения на ЛА
многоканальных антенных систем и требованиями к быстродействию и
объему памяти процессора обработки сигналов. При этом независимо от
способа обработки сигналов потенциальные характеристики
определяются размером базы (разносом фазовых центров антенны),
интервалом синтезирования и отношением сигнал/фон.
Для повышения эффективности СДЦ необходимо увеличивать размер
антенны и число формируемых фазовых центров антенны, а также
разрешающую способность по азимуту.
Используя алгоритм формирования динамического фазового
портрета объекта, можно определить тангенциальную скорость объекта. Для
этого формируют два изображения объектов на различных по
длительности интервалах синтезирования и вычисляют разность фаз
сигналов изображений одних и тех же объектов, которая
пропорциональна их тангенциальной скорости. Потенциальная точность
алгоритма позволяет определить минимальную тангенциальную скорость
цели 1,5 м/с. Однако «неточечность» цели и значительные фазовые
шумы снижают эффективность алгоритма в несколько раз.
329
8.3. Режим формирования скоростного портрета
При вскрытии (разведке) движущихся сосредоточенных объектов
основной задачей является определение радиальной и тангенциальной
составляющих скорости объекта в целом. При высоком разрешении,
когда РЛИ объекта состоит из нескольких (многих) разрешаемых
элементов, возможно определение скоростей перемещения элементов
относительно центра изображения или соседних элементов.
Так, важнейшей разведывательной задачей является наблюдение
морской поверхности, определение ее состояния (волнения) и
выявление различных аномалий (следов движения объектов, участков
загрязнений, мест катастроф и т.п.). Информация о состоянии морской
поверхности, наряду с РЛИ, содержится в распределении скоростей
движения разрешаемых элементов моря.
В этом случае РСА формирует так называемый скоростной
портрет морской поверхности. Обычно РЛИ формируется так, что
интенсивность каждой точки изображения пропорциональна ЭПР
соответствующего разрешаемого элемента морской поверхности (амплитудный
портрет). Для обеспечения требуемой детальности РЛИ используют
методы синтезирования апертуры. Разрешение по дальности
обеспечивается за счет использования широкополосного зондирующего сигнала.
Разрешение по азимуту обеспечивается разрешением по доплеровскои
частоте. Однако в отличие от неподвижной земной поверхности при
наблюдении морской поверхности каждому доплеровскому фильтру
соответствует доплеровская частота сигнала, которая зависит не только от
углового положения (азимута) разрешаемого участка морской
поверхности, но и от радиальной скорости движения морской поверхности.
Вследствие этого при обычном методе формирования изображения
получается искаженное РЛИ морской поверхности как по масштабу
(координатам азимута), так и по интенсивности (ЭПР).
При формировании скоростного портрета морской поверхности
интенсивность каждой точки изображения пропорциональна не ЭПР, а
радиальной скорости движения разрешаемого элемента поверхности. На
рис. 8.18,я дан пример скоростного портрета трех видов движения морской
поверхности: ветровая регулярная волна (1), корабельная волна
(кильватерный след) (2) и турбулентная аномалия (3). На рис. 8.18,6 и в представлены
экспериментально полученные амплитудный и скоростной портреты
кильватерного следа корабля в одном элементе дальности. В амплитудном
портрете мощность сигнала Рс изменяется случайным образом в зависимости от
координаты следа х. В скоростном портрете изменение частоты сигнала fc
(радиальной скорости волнения) носит гармонический характер,
обусловленный регулярностью волнения в следе, что позволяет эффективно
обнаруживать след корабля и определять его параметры.
330
Режимы работы РСА землеобзора
50 100 ISO 200 250 300 *•»
50 100 150 200 250 300 X. м
Рис. 8.18. РЛИ морской поверхности:
а - пример скоростного портрета трех видов движения морской поверхности; б и в -
соответственно амплитудный и скоростной портреты кильватерного следа корабля
Для формирования скоростного портрета используется
специальный режим РСА. Требования к характеристикам скоростного портрета -
пространственному разрешению и точности измерения скорости -
зависят от решаемой задачи обзора морской поверхности. Из всего
большого объема задач можно выделить следующие основные направления:
1) обнаружение и распознавание морских объектов по их следам
на морской поверхности;
2) оценка состояния волнения морской поверхности;
3) обнаружение участков загрязнения морской поверхности;
4) гидрометеорология.
Решение таких задач основывается на анализе
пространственно-скоростных характеристик двух видов движения морской поверхности:
регулярных волн и случайных турбулентных аномалий. Диапазон скорости
движения морской поверхности находится в пределах от 10 см/с (в мелкой
ряби) до единиц метров в секунду (в крупной гравитационной волне).
Пространственное разрешение РСА должно обеспечивать 10...20 элементов
изображения анализируемого участка поверхности. В табл. 8.2
представлены требования к разрешающей способности и точности измерения
скорости при решении некоторых задач наблюдения морской поверхности в
режиме скоростного портрета.
При формировании скоростного портрета измеряется изменение
фазы функции отражения морской поверхности, которое определяется
скоростью движения разрешаемых элементов. В случае регулярных
волновых структур поверхность моря представляется в виде регулярной
волны и наложенной на нее ряби. При этом рябь как бы привязана к
поверхности регулярной волны и движется вместе с ней. При времени
наблюдения (синтезирования) менее секунды можно считать, что структу-
331
Глава 8
pa ряби остается постоянной (замороженной). Длина регулярных волн
лежит в диапазоне от единиц до сотен метров, а длина волн ряби — от
единицы до десятков сантиметров.
Таблица 8.2. Требования к разрешающей способности и точности
измерения скорости
Решаемые задачи
Обнаружение
турбулентных аномалий
Обнаружение регулярных
аномалий
Идентификация волнения
морской
поверхности
1...2 балла
3...4 балла
5...6 баллов
Информационные
признаки
(параметры)
Случайная
составляющая
скорости
Регулярная
составляющая
скорости
Максимальная
скорость
волны (м/с) /
длина волны
(м)
Диапазон
измерения
скорости, м/с
0.1
0...3
0 .0,8/0 .100
0,8.1,35/
100...300
1,35.2,15/
300...500
Требуемая
точность
измерения
скорости, см/с
5 .10
10...20
7 .10
10...15
15.20
Требуемая
разрешающая
способность,
м
3...7
5...20
10.25
25...50
50...70
Радиальная скорость Vr элементов поверхности зависит от высоты
и длины волны морской волны. При развитом (регулярном) волнении
скорость вдоль морской поверхности изменяется по гармоническому
закону:
V/ \ Л. Т * WV *. у О А О Л
/VI — V Clfl ——— РЛС Н IX ЯЛ I
Л
где Vo - максимальная скорость волны; Л - длина морской волны; 8Л -
направление бега волны (ось X) относительно направления облучения.
В случае наблюдения турбулентных скоростных распределений
Vr(x) является случайной функцией, значения которой обычно некорре-
лированы от элемента к элементу разрешения. Дисперсия скорости
определяется характеристиками источника турбулентностей (фоновое
волнение, загрязнения и т.п.). Обычно турбулентные движения
разрушают регулярные волны на морской поверхности. Следы кораблей
имеют как регулярную, так и случайную составляющие скоростей.
В сантиметровом диапазоне волн функция отражения может быть
представлена в виде
= s(x)exp{-jyVr(x)tj,
(8.44)
332
Режимы работы РСА землеобзора
где s(x) - случайная комплексная амплитуда отражения, определяемая
в основном структурой ряби на поверхности волны (постоянна за время
синтезирования).
Фазовая модуляция функции отражения обусловлена радиальной
скоростью движения волны Vr(x).
Рассмотрим траекторный сигнал одного, разрешаемого по дальности,
элемента поверхности для случая дальней зоны, телескопического бокового
обзора и в пределах ширины диаграммы направленности антенны:
st(t,
-j^[ Vr(P) + vp]t|,
(8.45)
где G(P) - амплитудный множитель, определяемый ДН антенны;
Р = x/R - угловое положение элемента морской поверхности; V -
скорость носителя РСА.
Доплеровская частота сигнала
№4)=-[vr(P)+vp]
(8.46)
зависит от угла р и скорости движения поверхности Vr(P). На рис. 8.19
представлено изменение доплеровской частоты траекторного сигнала от
угловой координаты морской поверхности при гармоническом изменении
скорости Vr(P), что соответствует регулярной волне. В отличие от
неподвижной поверхности, для которой справедлива линейная зависимость
доплеровской частоты f,, от угла р (прямая А), для морской поверхности эта
зависимость определяется также текущим значением радиальной
составляющей скорости движения (кривая Б). В результате изображение морской
поверхности в РСА имеет следующие особенности:
Рис. 8.19. График зависимости изменения доплеровской частоты
траекторного сигнала от угловой координаты морской поверхности
333
Глава 8
1. Доплеровская частота смещается на величину,
пропорциональную Vr(P), что не позволяет однозначно определить угловое положение
элемента морской поверхности по его частоте.
2. Разрешающая способность РСА зависит от скоростного
распределения на морской поверхности. Так, разрешение по углу §р при
одинаковом разрешении по доплеровской частоте 5г"д будет различным на
участках Pj, Р2 и р3. Так как интенсивность изображения РСА
определяется мощностью сигнала в каждом доплеровском фильтре, который в
свою очередь зависит от ЭПР разрешаемого участка моря, то изменение
разрешения по углу приводит к изменению интенсивности
изображения. Распределение сигнала РЛИ морской поверхности в этом случае
будет зависеть не только от ЭПР морской поверхности, но и от ее
скорости. Такой эффект носит название скоростной группировки.
3. Однозначная зависимость доплеровской частоты от угла г"д(Р)
нарушается при увеличении скорости движения морской поверхности.
Так, например, одной и той же частоте т"д1 соответствуют сигналы,
отраженные от морской поверхности при углах р,, р2 и рз. В этом случае
в доплеровском фильтре, настроенном на частоту f 1} будут
накапливаться сигналы от этих трех участков и интенсивность изображения
регулярного волнения будет искажаться. Этот эффект носит название
скоростной перегруппировки.
В отличие от обычной РСА, когда оценивается ЭПР морской
поверхности, при формировании скоростного портрета задача сводится к
л
нахождению оценок координат р4 наблюдаемых элементов морской по-
л
верхности и их радиальных скоростей Vri • При этом ЭПР морской
поверхности является сопутствующим параметром. Обычно путем выбора
направления облучения 9Л добиваются однозначной зависимости
fA(Vr,P). В этом случае сигнал частоты т"д1 в каждом i-м фильтре
соответствует отражению от одного участка морской поверхности с коорди-
Л Л
натой Р; и скоростью Vri. Однако использовать для оценки р; и Vri
только значение доплеровской частоты fAi невозможно вследствие их
взаимной линейной зависимости:
2V
(847)
Поэтому в качестве дополнительного источника информации
используют угломерное устройство в виде моноимпульсной антенны либо
334
Режимы работы РСА землеобзора
интерферометра, которое измеряет угол р; независимо от радиальной
скорости Vrj. Угол измеряется для каждого сигнала с частотой 1"Д1,
выделенного доплеровским фильтром, настроенным на эту частоту. В этом
случае оценка радиальной скорости
| (8.48)
где f да — оценка доплеровской частоты сигнала разрешаемого элемента
морской поверхности, в качестве которой обычно используют
центральную частоту настройки доплеровского фильтра.
Совокупность полученных оценок Vr по всем азимутальным
элементам разрешения (доплеровским фильтрам) позволяет получить
скоростной портрет морской поверхности. При этом сигналу каждого доп-
л
леровского фильтра соответствует свое измеренное значение угла р,,
что позволяет построить скоростной портрет в координатах «дальность -
угол». В отличие от равномерной сетки доплеровских частот, когда
каждый отсчет частоты следует с интервалом, равным разрешению по
л
частоте 6ffl = 1/Тс, сетка координат углов р; будет неравномерной, так
как отсчет угла приходящего сигнала на данной частоте f^ зависит как
от угла р{, так и от радиальной скорости Vri:
Pif» • (8-49)
2V V
При больших ошибках измерения угла с помощью антенной сис-
л
темы может быть перепутан порядок следования отсчетов ^ и
соответственно искажено изображение. Для предотвращения перепутывания
ошибка измерения угла не должна превышать размера элемента
разрешения по азимуту, что ограничивает возможный интервал
синтезирования: VTC = ёд/q , где q - отношение сигнал/шум.
Основными характеристиками скоростного портрета являются
пространственное разрешение и точность измерения дальности, угла
азимута и скорости элементов морской поверхности.
Разрешение и точность измерения дальности, как и в обычной
PJ1C, определяются шириной спектра зондирующего сигнала.
Разрешение по азимуту отличается от разрешения РСА по
неподвижной поверхности Ы, так как оно зависит от скорости движения
волны:
335
Глава 8
Ь£ = 8^,аз . , (8.50)
l + RVr(x)/v
где VJ(x) - производная от функции изменения радиальной скорости
волны по оси X.
Точность измерения угла определяется размером антенны и
отношением сигнал/шум:
X
On = f= .
где d - размер апертуры антенны при работе на передачу и прием.
Точность измерения радиальной скорости определяется в
основном точностью измерения угла р, которая в свою очередь зависит
прежде всего от размера антенной системы:
(8М)
В РСА в режиме формирования скоростного портрета используют большую
вдольфюзеляжную антенну либо две, разнесенных на большое расстояние
антенны (интерферометр). Так, при d = 3M, q = 100 hV = 200 м/с СКО
измерения скорости волны aVf = 10 см/с.
При однократном обзоре морской поверхности формируется портрет
радиальных скоростей Vr(^,r), т.е. скоростей движения морской
поверхности, направленных вдоль линии наблюдения (от РЛС или к РЛС). Для
получения портрета полного вектора скоростей движения используют два
обзора при полете по двум ортогональным траекториям. При формировании
скоростного портрета по тангенциальной скорости можно получать вектор
скорости движения морской поверхности при однократном обзоре.
РД РСА в режиме скоростного портрета формирует изображение
распределения скоростей движения поверхности наблюдаемого объекта.
При наблюдении моря распределение скоростей движения водной
поверхности несет важную информацию о состоянии волнения моря,
движении объектов, наличии загрязнений и т.п.
РСА формирует скоростной портрет (распределение радиальных
скоростей) в координатах «дальность - азимут», при этом разрешение по
азимуту обеспечивается путем синтезирования апертуры, а измерение
азимутального угла — за счет использования реальной антенны.
Для обеспечения одновременно высокой точности измерения
скорости и азимутального угла необходимо использовать большие (вдоль
линии пути) антенные системы (единицы метров).
Изменение скоростей движения морской поверхности в регулярных
волнах и аномалиях находится в пределах от единиц до сотен
сантиметров в секунду.
336
Режимы работы РСА землеобзора
Характерные размеры областей распределения скоростей движения
морской поверхности изменяются в широких пределах от единиц до
сотен метров, что требует высокой разрешающей способности РСА
(5...50 м).
Регулярные изменения скоростей морской поверхности, характерные
для установившегося волнения и кильватерных следов кораблей,
обнаруживаются и распознаются с высокой точностью.
8.4. Методы обратного (инверсного) синтезирования
апертуры
В соответствии с теорией пространственной селекции РЛС для
обеспечения разрешения по угловой координате необходимо наблюдать
цели при различных ракурсах, т.е. апертура антенны РЛС должна иметь
определенный угловой размер относительно цели. Так, синтезированная
апертура в виде дуги радиусом RH обеспечивает наблюдение цели
последовательно во времени под различными ракурсами в пределах
углового размера ро = VTC/RH (рис. 8.20,я). В этом случае реальная
апертура увеличивает угловой сектор наблюдения (синтезирует апертуру) за
счет облета цели с радиусом разворота RH и постоянной линейной
скоростью V. При малых угловых размерах синтезированной апертуры ро
разрешение по угловой координате -с при работе антенны только на
прием равно 5^ = Х/р0 . При использовании единой антенны на передачу
и прием у синтезированной апертуры угловое разрешение
увеличивается в два раза: Ы =
\ ft)/
Цель Цель Цель
а) б) в)
Рис. 8.20. Методы формирования синтезированной апертуры
за счет движения приемопередающей антенны РЛМ (а),
перемещения самой цели (б), поворота цели (в)
12—3169
337
Глава 8
Очевидно, что изменение ракурса наблюдения цели возможно не
только за счет перемещения антенны РЛС, но и за счет перемещения
самой цели (рис. 8.20,6). При неподвижной РЛС угловой размер
синтезированной апертуры в этом случае определяется скоростью
перемещения цели Vu и временем синтезирования Тс: ро = VUTC/RH . При
одинаковом угловом размере р0 = V,,TC/RH = VTC/RH обеспечивается такое же
разрешение, как и при синтезировании апертуры за счет движения
приемопередающей антенны РЛС:
Ы = — = -^-. (8.52)
2Р0 2VUTC
Также очевидно, что изменение угла наблюдения цели возможно
при неподвижных РЛС и цели за счет поворота цели (рис. 8.20,в). Угол
поворота цели за время синтезирования определяется угловой
скоростью вращения цели Qu: ро = ОЦТС, что обеспечивает угловое
разрешение
L A_. (8.53)
В отличие от других методов в случае синтезирования апертуры за счет
вращения цели разрешающая способность не зависит от дальности до
цели при постоянном времени синтезирования. Так, например, при угле
поворота цели всего на 3е и длине волны 3 см достигается разрешение Ы =
= 30 см на любой дальности, на которой обеспечивается достаточное для
обнаружения цели отношение сигнал/шум.
Методы синтезирования, основанные на использовании
перемещения и (или) вращения цели, получили название «обратное (инверсное)
синтезирование». Характерными примерами использования обратного
синтезирования являются:
• получение радиолокационных портретов морских целей
(кораблей) за счет использования их качки и рыскания по курсу;
• распознавания групповых воздушных целей;
• оценка ЭПР элементов цели, разрешаемых за счет их вращения на
стенде и др.
Рассмотрим траекторный сигнал РЛС при обратном
синтезировании апертуры. Фаза и задержка траекторного сигнала как основные
источники информации о цели определяются изменением расстояния до
элементов цели в процессе синтезирования апертуры. В общем случае
расстояние изменяется вследствие перемещения цели относительно
РЛС и вращения цели. При этом цель может одновременно вращаться в
различных плоскостях с различной угловой скоростью.
338
Режимы работы РСА землеобзора
Для частного случая получения изображения цели в плоскости
«дальность г - азимут (.», когда ось вращения цели перпендикулярна
направлению на РЛС (рис. 8.21), текущее расстояние R; от РЛС до i-ro
элемента цели при RH »yjr* + i\ можно представить в виде
^^ i^-V^t; (8.54)
где Пц - угловая скорость вращения цели; Vur - радиальная скорость
цели в направлении РЛС.
Рис. 8.21. Система координат цели в плоскости «дальность г - азимут £ »,
когда ось вращения цели перпендикулярна направлению на РЛС
Соответственно фаза траекторного сигнала ф; = — R;, а доплеров-
А.
екая частота
(8.55)
В случае малых угловых размеров синтезированной апертуры,
когда ро = ПЦТС «1, без учета начальной фазы
(8.56)
(8.57)
Таким образом, вращение цели формирует траекторный сигнал с
линейной частотной модуляцией (ЛЧМ). Постоянная доплеровская
частота 2Vur /X образуется вследствие радиального перемещения одновре-
339
Глава 8
менно всех элементов цели относительно РЛС. Обычно производится
оценка и компенсация этой частоты в сигнале.
2С
Доплеровская частота —LQI1 образуется в результате линейной
л.
скорости движения i-ro элемента в направлении РЛС при вращении
цели. Разрешение сигналов по этой доплеровской частоте обеспечивает
разрешение элементов цели по азимуту С.
Линейное изменение частоты сигнала i-ro элемента цели
определяется координатой дальности этого элемента г; относительно центра вращения
цели. Разрешение элементов цели по частотной модуляции траекторных
сигналов при малом размере синтезирования апертуры невелико. Поэтому
разрешение по дальности обеспечивается модуляцией зондирующего
сигнала. При этом в алгоритме обработки траекторного сигнала необходимо
учитывать изменение как частоты сигнала, так и его задержки
Ar.J-^A. (8.58)
С
Эти изменения можно не учитывать, если допустить, что
изменение частоты и задержки за время синтезирования меньше, чем
разрешение по частоте и задержке. В этом случае размер зоны обзора AR x AL
и разрешение 5г = Ы будут связаны следующим условием
AR = AL<45£2/X. (8.59)
При таких ограничениях алгоритм обработки траекторного
сигнала при обратном синтезировании сводится к доплеровской фильтрации
в каждом канале, разрешаемом по дальности. Координата элемента цели
по дальности определяется задержкой сигнала i-=CTj/2, а координата
азимута — доплеровской частотой £{= f^ . Масштаб изображения
цели по азимуту определяется скоростью вращения цели Пц.
Для методов обратного синтезирования применительно к РЛС
землеобзора характерны следующие основные особенности:
• цель движется как единый объект, т.е. отдельные элементы цели
перемещаются по взаимосвязанным траекториям;
• при наблюдении одиночных объектов, например кораблей, размер
зоны обзора определяется размером объекта;
• разрешение по угловой координате определяется углом поворота
цели относительно направления на РЛС за время синтезирования;
• угловой размер апертуры обычно не превышает десятка градусов,
так как при этом уже достигается разрешение порядка нескольких
длин волн;
340
Режимы работы РСА землеобзора
• разрешение по дальности обеспечивается, как и при прямом
синтезировании, за счет модуляции зондирующего сигнала;
• параметры траекторного сигнала определяются параметрами
движения цели (векторами линейной и угловой скоростей), которые в
большинстве случаев неизвестны наблюдателю. Это требует
адаптивной к параметрам движения цели обработки траекторного
сигнала и большого объема априорных сведений о цели.
Полоса доплеровских частот траекторного сигнала и,
следовательно, требуемая частота повторения зондирующих импульсов
определяются размером цели (зоны обзора) по азимуту:
fl (8.60)
А
В общем случае результирующий вектор вращения цели Q ,
образованный одновременным перемещением цели в различных плоскостях,
не перпендикулярен направлению наблюдения. Тогда вектор скорости
вращения цели Оц, определяющий масштаб и положение плоскости
изображения цели (£, г) в пространстве, является проекцией
результирующего вектора Пр на плоскость, нормальную к вектору направления
наблюдения RH (рис. 8.22). Плоскость изображения ((, г) в этом случае
нормальна плоскости, в которой расположены векторы вращения Qp,
Пц и направление наблюдения RH. Масштаб изображения цели по
азимуту, как и ранее, определяется угловой скоростью вращения цели
Qu = Qpsin<p, (8.61)
где ф - угол между векторами Qp и RH .
Рис. 8.22. Система координат при вращении цели
341
Глава 8
Применение метода обратного синтезирования в РЛС землеоб-
зора. В РЛС землеобзора этот метод используется для получения
изображений морских целей (кораблей). Он дает возможность получения
высокого разрешения в передней зоне обзора РСА, так как
необходимый угловой размер синтезированной апертуры обеспечивается за счет
собственного движения (перемещения и вращения) корабля. Кроме
того, обратное синтезирование апертуры позволяет получить высокое
разрешение не только в плоскости «дальность — азимут», но и в плоскости
«дальность — угол места». Применительно к наблюдению кораблей это
позволяет получить изображение вертикального контура надстроек
кораблей, что особенно важно при решении задачи распознавания
морских целей.
Одновременно с перемещением по курсу при волнении моря
корабль испытывает также колебания корпуса вокруг центра масс. Для
задач обратного синтезирования обычно используют рыскание по курсу,
килевую и бортовую качку корабля. Рыскание по курсу (рис. 8.23,я)
соответствуют вращению корабля относительно вертикальной оси.
Килевая качка (попеременный дифферент на нос и на корму) соответствует
вращению корабля относительно поперечной горизонтальной оси (рис.
8.23,6). Попеременный крен (бортовая качка) на левый и правый борт
соответствует вращению корабля относительно продольной
горизонтальной оси (рис. 8.23,в). На рис. 8.23 все оси вращения
перпендикулярны плоскости рисунка.
Л
а) б) в)
Рис. 8.23. Виды колебаний морских объектов при волнении моря:
а — рыскание по курсу; б — килевая качка; в — крен (бортовая качка)
Вращение корабля (качка, рыскание) носят периодический
характер, т.е. угол отклонения корабля от равновесного (нормального)
положения изменяется в соответствии с гармоническим законом:
sin —t
(8.62)
342
Режимы работы PC А землеобзора
где р - соответственно угол крена, рыскания или угол килевой качки;
Рмакс ~ максимальное отклонение корабля по соответствующему углу;
Тк - период колебаний.
Угловая скорость вращения изменяется по гармоническому закону:
dp 2л _ (in Л
= — = Рмакс COS 1 •
dt ТНмакс [Т )
dt Т
[Тк
Максимальное значение скорости
о =—|
макс ~ I
к
макс
(8.63)
(8.64)
достигается в момент прохождения равновесного (как при отсутствии
волнения моря) положения корабля.
У большинства океанских кораблей период колебаний Тк
практически не зависит от степени волнения моря и определяется конструкцией
корабля. Амплитуда угловых колебаний Рмакс определяется многими
факторами: высотой волн, направлением бега волн относительно курса корабля,
скоростью движения и конструкцией корабля. Большой корабль как
колебательная система эквивалентен узкополосному фильтру, и параметры его
колебаний (амплитуду и период) можно считать постоянными за время
синтезирования порядка долей секунд. С уменьшением водоизмещения
корабля (менее 1000 т) амплитуда и период отклонения уже зависят от
характеристик волнения моря и носят случайный характер. Обычно считают, что
угол р является узкополосным нормальным процессом.
В табл. 8.3 даны оценочные значения характеристик колебаний
кораблей различного типа при волнении моря 5—6 баллов.
Таблица 8.3. Оценочные значения характеристик колебаний кораблей
Тип
корабля
Танкер средний
Сухогруз
Лайнер
Вид
колебаний
Крен
Киль
Курс
Крен
Киль
Курс
Крен
Киль
Курс
Период
колебаний Тк, с
10...13
5...8
8...10
13...19
6... 10
8...12
17...30
8...12
10...15
Амплитуда
колебаний рмакс,
град
18...28
3...5
1...2
15...28
3...6
1...2
8...13
3...5
1...2
343
Глава 8
Продолжение табл. 8.3
Крейсер
Авианосец
Крен
Киль
Курс
Крен
Киль
Курс
10...14
5...8
12...15
20... 28
10...13
30...35
15...20
1,5...2
1,5...2
2...3
0,3...0,5
0,5...0,8
Если линия визирования корабля перпендикулярна оси угловых
колебаний (вращения), возможно получение изображения корабля в
различных плоскостях. Килевая качка обеспечивает получение
изображения вдоль корабля и его надстроек, качка по крену - изображение в
боковом направлении корабля и надстроек, рыскание по курсу -
изображение корабля в горизонтальной плоскости. Движение корабля с
постоянными скоростью и курсом эквивалентно движению РЛС при
неподвижном корабле и обеспечивает изображение в горизонтальной
плоскости. В реальной ситуации одновременно существуют все виды
колебаний корабля, что затрудняет определение положения плоскости
изображения относительно корабля. В то же время, наблюдая
«динамическое» изображение корабля, т.е. изображение, изменяющееся в
зависимости от фазы колебаний ко-
Р . рабля во время синтезирования,
можно эффективно
распознавать его класс.
Рассмотрим
характеристики сигнала при обратном
синтезировании в случае бортовой
(крен) и продольной (килевой)
качки корабля. При бортовой
качке изменение rh расстояния
от надстройки на высоте h до
РЛС (рис. 8.24) определяется
выражением
Рис. 8.24. Система координат при
синтезировании апертуры
за счет бортовой качки корабля
rh(t) = hsinP(t) =
sin
(8.65)
где h - высота элемента надстройки, отсчитываемая от оси вращения
корабля.
Учитывая, что угловое отклонение PvaKC «1 (в радианах),
изменение расстояние до РЛС и, следовательно, фазы отраженного сигнала
можно представить в виде
344
Режимы работы РСА землеобзора
Соответственно доплеровская частота равна:
271
(8.66)
(8.67)
(8.68)
Как видно из выражений (8.67) и (8.68), характеристики
отраженного сигнала зависят от момента наблюдения (синтезирования)
t = t0 ± Тс/2. Так, при t0 = 0 корабль наблюдается в момент перехода
угла P(t) через ноль, когда угловая скорость отклонения максимальна
(см. 8.64):
макс ~ ~ Рмакс •
При малом времени синтезирования Тс « Тк доплеровская частота
сигнала при t0 = 0 изменяется незначительно и каждому элементу
надстройки по высоте соответствует своя доплеровская частота
f=-^-B h. (8.69)
В случае t0 = 0 разрешение по высоте надстройки будет
достаточно большим. Учитывая, что изменение угла р за время синтезирования
„ ~ „ 271 „ „ ^870^
получим разрешение по высоте надстройки корабля
i XT
5h = —= —^^—. (8.71)
2Р0 4тфмаксТс
Алгоритм обработки сигналов сводится к доплеровской
фильтрации в каждом элементе разрешения по наклонной дальности.
Полученные зависимости справедливы и при килевой качке корабля и
радиолокационном наблюдении в передней зоне обзора РЛС на встречных
курсах самолета - носителя РСА и корабля (рис. 8.25). Разрешение по
доплеровской частоте в этом случае соответствует разрешению по высоте
надстройки h, а разрешение по задержке зондирующего импульса
соответствует разрешению вдоль корабля.
|При наблюдении крейсера (Тк = 6 с, Рмакс = 2°, Тс = 0,5 с, X = Зсм )
разрешение по надстройке 5h = 90 см .
345
Глава 8
Рис. 8.25. Формирование РЛИ за счет килевой качки корабля
При увеличении времени синтезирования начинают сказываться
изменения доплеровской частоты и задержки сигнала, что необходимо
учитывать в алгоритме обработки. Предельное разрешение без учета
изменений задержки и частоты ограничено величиной (8.59)
(5h)2 >ХЬмакс/4. Для других моментов наблюдения (to#O) при
постоянном времени синтезирования разрешение будет ухудшаться.
Напомним, что вектор угловой скорости лежит в плоскости,
нормальной к направлению наблюдения, а плоскость изображения
нормальна к вектору угловой скорости. Необходимые параметры Пц
можно получить, измеряя характеристики сигнала в каждом доплеровском
канале на выходе моноимпульсной антенны.
Упрощенная структурная схема РСА при обратном
синтезировании по морским целям представлена на рис. 8.26. Антенная система
формирует три пространственных канала приема: суммарный и два
разностных (в горизонтальной и вертикальной плоскостях). После
преобразования на промежуточной частоте принимаемые сигналы с помощью
фазовых детекторов и АЦП превращаются в цифровые сигналы.
Система слежения по частоте определяет среднюю доплеровскую частоту
принимаемых сигналов и ее изменение для компенсации в процессе
обработки сигналов (автофокусировка), а также измеряет изменение
задержки огибающей сигналов для ее компенсации при синтезировании
апертуры. Система измерения вектора угловой скорости вращения
(колебания) корабля обеспечивает определение масштаба и ориентации в
пространстве изображения корабля.
->
•-*■
S
Да,
Дум
УПЧ
УПЧ
УПЧ
ФД
ФД
ФД
-
АЦП
АЦП
АЦП
1
Слежение
по
частоте
А
т
Сжатие
по
дальности
п
Процессор
обработки
у
Формирование
нчобра-
жения
Рис. 8.26. Структурная схема РСА при обратном СА по морским целям
346
Режимы работы РСА землеобзора
Перемещение цели, так же
как и движение носителя РЛС,
создает эффект синтезирования
апертуры, угловой размер
которой определяется взаимным
угловым перемещением РЛС и
цели. Покажем это на примере
разрешения элементов
групповой цели (рис. 8.27), состоящей
из двух синхронно движущихся
малоразмерных объектов
(точечных целей).
Доплеровская частота
траекторного сигнала при взаимном перемещении РЛС с постоянной
скоростью V и цели 1 также с постоянной за время синтезирования
скоростью Уц
2"' " " ). (8.72)
V
Рис. 8.27. Система координат
при обратном СА по групповой цели
Для цели 2, смещенной по углу на величину А9 «1, доплеровская
частота изменяется так, что разница частот сигналов двух целей,
движущихся с одинаковой скоростью, составляет
Afu = ^(VsineH-Vusinau)Ae = ^(Vt-Vut)Ae, (8.73)
где V, и Vu t — соответственно тангенциальные составляющие скорости
РЛС и целей.
Разрешение сигналов двух целей по доплеровской частоте
51д = 1/Тс определяет разрешение целей по углу А9 при Mu = bfR:
59 =
Соответственно линейное разрешение по углу
= R 59 =
(8.74)
(8.75)
2Т (V -V \/R 2OT 2fL
определяется, как и ранее, угловым размером синтезированной
апертуры ро = QTC, где Q - угловая скорость вращения линии визирования
«РЛС - цель».
Алгоритм обработки траекторного сигнала при наблюдении
групповой цели определяется фазовой структурой сигнала, которая в свою
очередь зависит от взаимного перемещения (траекторий) РЛС и целей.
347
Глава 8
При прямолинейных траекториях и постоянных скоростях движения
относительное расстояние «РЛС — цель» (см. рис. 8.27)
)2^. (8.76)
Фазовая функция траекторного сигнала (без учета несущественной
начальной фазы)
(V -V )2
(8.77)
Соответственно доплеровская частота траекторного сигнала
f(t) (4 v)^(4-Vut)2t. (8.78)
Н
Для цели, смещенной на угол Д0 , доплеровская частота
траекторного сигнала
| ^|(У,-Уц,)21. (8.79)
Первый член соответствует постоянной частоте траекторного
сигнала, которая определяется радиальной скоростью взаимного
перемещения (Vr + Vur) РЛС и цели. Такую частоту имеет сигнал цели,
находящейся в центре зоны обзора под углом 0Н на расстоянии RH . Второй
член также соответствует постоянной частоте сигнала цели, смещенной
относительно центра зоны обзора на угол Д0 . Последний член
соответствует линейно изменяющейся частоте траекторного сигнала. В
приближении Д6 «1 он не зависит от углового смещения цели Д0 .
Алгоритм обработки такого траекторного сигнала аналогичен
обработке сигналов неподвижных целей при прямом синтезировании. В
отличие от прямого синтезирования здесь учитываются относительные
скорости перемещения РЛС и цели (Vr + Vur) и (Vt-Vut). Знаки
суммирования скоростей определяются выбранной системой координат (см.
рис. 8.27). Так как Vur и Vm в общем случае неизвестны, требуется
адаптивная к этим параметрам система обработки, например с помощью
автофокусировки.
Аналогичный алгоритм обработки сигналов при обратном синтезировании
возможен также при наблюдении воздушных целей.
Предположение о постоянстве скоростей целей за время синтезирования
справедливо при определенных условиях. Так, групповая воздушная цель
при полете без маневра имеет нестабильность скоростей ov — 0,2...0,4 м/с
348
Режимы работы РСА землеобзора
и интервал корреляции хк =8... 15 с. При энергичном маневре самолетов
нестабильность скоростей увеличивается на порядок. Это приводит к
уменьшению максимально возможного времени синтезирования. Так. при
длине волны Х = 3 см время синтезирования может изменяться от 0,5 до
0,05 с. При адаптивной обработке, например автофокусировке, это время
может быть значительно увеличено.
Разрешающая способность по углу при синтезировании апертуры
определяется угловым размером апертуры, который формируется путем
относительного перемещения РЛС и цели. Формирование
синтезированной апертуры при перемещении (вращении) цели и неподвижной
РЛС называется обратным, или инверсным, синтезированием.
При обратном синтезировании полагают, что цель движется как
единый объект и параметры отраженного сигнала определяются
характеристиками движения цели.
Фаза отраженного сигнала РСА при вращении цели с постоянной
скоростью изменяется по гармоническому закону. При малых
угловых размерах синтезирования формируется траекторный сигнал с
линейной частотной модуляцией. Средняя доплеровская частота
сигнала разрешаемого элемента цели пропорциональна его угловой
координате, а индекс частотной модуляции - координате дальности.
Разрешающая способность по углу определяется временем
синтезирования и угловой скоростью вращения цели в плоскости наблюдения
«РЛС - цель», а получение высокого разрешения по дальности
обеспечивается модуляцией зондирующего сигнала.
При обратном синтезировании по морским целям используется
вращение (колебания) корабля: бортовая и килевая качка и рыскание по
курсу. Угол отклонения корабля от нормального положения изменяется по
гармоническому закону. Период колебаний определяется в основном
типом корабля, а амплитуда колебаний — степенью волнения моря.
При использовании колебаний корабля для обратного синтезирования
возможно получение трехмерного изображения корабля с высоким
разрешением по азимуту, углу места и дальности.
Так как параметры колебаний корабля (векторы угловых скоростей)
неизвестны, требуется адаптивная обработка траекторного сигнала РСА.
Обратное синтезирование возможно также при использовании
линейного перемещения цели (без вращения). Разрешение по азимуту в
этом случае определяется временем синтезирования и угловой
скоростью вращения линии визирования «РЛС — цель».
8.5. Интерферометрический режим измерения
высоты объектов
Данные для формирования РЛИ в обычном режиме РСА получают
в виде распределения ЭПР объекта в координатах «задержка —
доплеровская частота». Затем, полагая, что земная поверхность плоская, пере-
349
Глава 8
считывают координаты соответственно в «дальность — азимут». Рельеф
местности искажает масштаб РЛИ в районе значительных изменений
высоты поверхности. При малых изменениях высоты (микрорельеф) эти
искажения невелики, что не позволяет определить их характеристики по
искажениям масштаба. Высоту отдельных сосредоточенных объектов
(сооружений, деревьев и т.д.) можно определить по их
радиолокационным теням. Длина тени (наклонная дальность тени от объекта высотой
h ) при малых углах визирования фн равна
1Т=Ь/Фн. (8.80)
Так, объект высотой Ь = 100м при угле визирования <рн=6° дает
на плоской поверхности тень 1Т = 1000 м. Однако сочетание плоской
поверхности с малыми углами визирования встречается редко. В то же
время информация о рельефе местности, в том числе о малых
изменениях высоты поверхности (микрорельефа), является важной как для
составления цифровых карт местности, так и для вскрытия ряда объектов
(карьеров, отдельных сооружений и т.д.).
Для получения информации об изменении высоты поверхности
объектов (местности) в РСА используют так называемый интерферо-
метрический режим, при котором измеряется угол места каждого
разрешаемого по дальности и азимуту элемента с помощью специальной
антенной системы — интерферометра. При использовании обычной
антенны точность измерения угла места <р определяется шириной ДН
антенны в угломестной плоскости при работе на прием и передачу Фо и
отношением сигнал/шум q:
Высота рельефа h определяется углом <р, измеряемым антенной
(рис. 8.28):
h = cpRH/cos<pH. (8.81)
Рис. 8.28. Система координат при измерении рельефа местности
350
Режимы работы РСА земяеобзора
Точность измерения высоты рельефа в этом случае равна
(8.82)
Так, при ширине ДН антенны Фо = 1°, q = 100 , RH = 1 км , Фн = 6°
потенциальная точность измерения высоты oh = 2 м.
Чем больше размер антенны, тем выше точность измерения угла
места и соответственно высоты рельефа. Учитывая трудности создания
и размещения большой антенны на ЛА или КА, используют две
относительно небольшие антенны, разнесенные на расстояние, гораздо
большее размера каждой антенны (интерферометр).
Интерферометр формирует в угломестной плоскости многолучевую
ДН (рис. 8.29), при этом ширина каждого луча определяется размером
интерферометра с1и , а число лучей - шириной ДН отдельной антенны.
Рис. 8.29. Структура интерферометрической РСА
Сигналы, принимаемые соответственно первой и второй
антеннами, равны:
u, = Asintot, u2 = Asin(cot + i|/).
Суммарный сигнал детектора на выходе приемника (ПРМ)
uI = 2Acos(\j//2).
Фаза сигнала интерферометра y зависит от угла прихода ф:
-БШф
(8.83)
Измеряя фазу у, можно определить угол ф. Для малых углов ф,
когда sin ф = ф, угол в центральном луче
<р = -^-. (8.84)
2ndH
Точность измерения высоты h РСА интерферометром
определяется точностью измерения фазы а^ - l/^/q :
351
Глава 8
oh = r-= . (8.85)
2n^qaK cos фн
Точность измерений РСА интерферометра (зависимость фазы от
угла) может быть увеличена в два раза, если излучать сигнал
поочередно из верхней и нижней антенн.
Нули суммарного сигнала (ДН) будут повторяться при фазах
\у = л(2п + 1), , что соответствует углам
(8.86)
где п — любое целое число.
В простейшем интерферометрическом режиме РСА на
изображении местности в координатах «дальность — азимут» выводят линии рав-
\СУ<''' ных углов ф.
Расстояние между линиями
характеризует изменение
угла места и
соответственно высоты рельефа
местности.
При измерении
высоты рельефа
используют более сложные
алгоритмы. При
расположении базы
интерферометра в угломерной
плоскости под углом
Рис. 8.30. Система координат в интерферо-
метрической РСА
фа (рис. 8.30) фаза сигнала
(8.87)
Угол ф обычно мал и определяется следующей формулой (по
результатам измерения фазы у):
V
Ф =
XV
8я2Я„(1.. 2nd 2R
(8.88)
Расстояние RH (наклонная дальность) определяется как обычно
задержкой сигнала. Вычислив угол ф и зная угол фа (угол наклона
базы интерферометра), можно определить высоту рельефа:
Ь = Н-Кнсо5(ф + фа). (8.89)
Точность измерения высоты определяется точностью измерения
всех параметров (Н, RH, ф, фа ), что приводит к значительным ошибкам.
352
Режимы работы РСА землеобзора
В большинстве задач нас интересует изменение высоты (от одного
разрешаемого элемента к другому) в пределах относительно
небольшого кадра РЛИ. Иногда такой режим называют дифференциальным. В
этом случае СКО измерения высоты рельефа при постоянной высоте
полета Н определяется точностью измерения фазы интерферометриче-
ского сигнала и при tpd = фн - п/2
^ (8.90)
cos фа v 2га1и cos фа гтх^Ч^и cos фа
При Х = 3см, Rh=1km, q = 100, <1и=3м, <рн = 6° потенциальная
точность измерения высоты ch = 16 см.
Повышение точности измерения высоты достигается путем:
• увеличения базы интерферометра dH ;
• увеличения отношения сигнал/шум в канале измерения фазы ин-
терферометрического сигнала (несколько обзоров при
некогерентном накоплении сигнала РСА);
• использования пространственно-временного фильтра слежения за
фазой сигнала.
В экспериментах достигнута высокая точность измерения
(слежения) высоты рельефа (единицы метров в космических РСА и десятки
сантиметров - в самолетных).
Основной проблемой интерферометрического режима РСА
является устранение влияния растительности на земной поверхности, которая
значительно искажает характеристики рельефа. Снижение влияния
растительности достигается переходом в длинноволновые диапазоны
работы РСА. Однако для получения такой же точности, как в сантиметровом
диапазоне, требуется увеличение базы интерферометра
пропорционально увеличению длины волны.
Интерферометрический режим РСА предназначен для получения
трехмерного РЛИ местности и некоторых объектов в координатах
«дальность — азимут — высота» каждого разрешаемого элемента.
Информация о распределении функции отражения по дальности и
азимуту получается обычным для РСА способом. Для получения
информации о высоте рельефа местности и объектов используется
дополнительный канал измерения угла места каждого элемента разрешения
по дальности и азимуту.
Для измерения угла места используется антенная система РСА, при
этом чем больше размер антенны в угломестной плоскости, тем выше
точность измерения высоты.
Для упрощения конструкции и уменьшения массы используют
антенную систему, состоящую из двух, разнесенных по углу места ан-
353
Глава 8
тенн - интерферометр. Фаза сигнала интерферометра несет
информацию о высоте рельефа.
В простейшем интерферометрическом режиме РСА на РЛИ наносят
линии равных углов места, расстояние между которыми
пропорционально изменению высоты рельефа.
Для повышения точности измерения высоты увеличивают
отношение сигнал/шум в элементе разрешения и используют оптимальные
методы измерения фазы сигнала интерферометра. В настоящее время
достигнуты точности измерения высоты порядка единиц метров.
Основной проблемой повышения эффективности интерферометриче-
ского режима РСА является снижение влияния растительности,
покрывающей поверхность местности и объектов, на точность
измерения высоты. Снизить влияние растительности можно путем перехода
в длинноволновый диапазон работы РСА, что, однако, требует
увеличения базы интерферометра.
V
8.6. Многопозиционный режим
Как следует из теории пространственной селекции целей РСА,
высокое угловое разрешение можно получить путем синтезирования
апертуры антенны при движении передающей и (или) приемной позиции, а
также при перемещении и (или) вращении цели. При этом число
радиолокационных позиций и их взаимное перемещение относительно цели
выбирается исходя из необходимости решения заданной тактической
задачи. Так, например, в современных разведывательных РСА
используется однопозиционная система (совмещенная приемопередающая
антенна) при прямолинейной траектории носителя РСА и переднебоковом
или телескопическом обзоре. Это обеспечивает требуемую (высокую)
разрешающую способность по
азимуту во всей зоне обзора,
кроме переднего сектора.
Передний сектор обзора
(±10° относительно вектора
путевой скорости) имеет
важное значение при решении
многих тактических задач:
разведки, наведения оружия,
десантирования, посадки и т.д.
При прямолинейной
траектории носителя РСА с
совмещенной приемопередающей
антенной разрешение по
угловой координате 5^ определяется угловым размером апертуры при боковом
обзоре po = Xc/RH и углом наблюдения 0Н (рис. 8.31):
354
Рис. 8.31. Система координат при
совмещенной приемопередающей антенне
Режимы работы РСА землеобзора
(8.91)
При обзоре в переднем секторе (8Н -> 0) разрешение по угловой
координате резко падает. Так, при угле 8Н = 6° разрешение по С А в 10 раз хуже,
чем при боковом обзоре. Поэтому в переднем секторе обзора разрешение
СА обычно того же порядка, что и разрешение реальной антенны.
Например, при 6Н = 0 разрешение по углу равно
^ = 13/261 = 18^
(8.92)
где 8с0 = к/2Хс - ширина синтезированой ДН при боковом обзоре;
Ксж = Э0/8с0 - коэффициент сжатия ДН в результате синтезирования при
боковом обзоре.
Как следует из данной зависимости, разрешение по углу в переднем
секторе обзора 88С становится равным ширине реальной ДН 80 при
*Э Л
К^ = -L- . Так, при 80 = 3,4-10"2 рад (2°) синтезирование апертуры в
переднем секторе обзора не дает выигрыша в разрешении по сравнению с
реальной антенной при К^ < 100.
Для получения высокого разрешения в переднем секторе обзора
можно использовать многопозиционные РСА. При этом управление
позициями (траекториями движения передающих и (или) приемных
пунктов) оптимизируется исходя из получения требуемой разрешающей
способности в заданном секторе обзора.
При многопозиционном режиме РСА возможно использование
одновременно многих систем, работающих только в режиме приема, при
одной передающей позиции, которая облучает заданную зону обзора
(рис. 8.32). Отсутствие излучения в таких приемных позициях РСА по-
Рис. 8.32. Многопозиционный режим РСА
355
Глава 8
вышает скрытность работы и боевую устойчивость. При этом
значительно снижается масса и энергопотребление приемных позиций.
Однако одновременно повышаются требования к мощности излучения
передающей позиции, так как она находится на значительном удалении
(обычно вне зоны ПВО противника). Большая высота полета
передающей позиции обеспечивает уменьшение радиолокационных теней.
В качестве носителей передающей позиции могут использоваться
как авиационные, так и космические аппараты, а приемные позиции
могут быть даже неподвижными (наземные и морские станции, аэростаты
и т.п.). Основной проблемой является обеспечение синхронизации
приемных позиций с передающей по несущей частоте, частоте повторения
импульсов и положению зоны обзора.
Полуактивная РСА. Простейшим вариантом многопозиционной
РСА, обеспечивающим высокое угловое разрешение в передней зоне
обзора, является полуактивная РСА, в которой передающая и приемная
позиции разнесены и двигаются по различным траекториям. Приемная
позиция находится в луче
передающей антенны, а
синхронизация сигналов
обеспечивается за счет приема излучения
передатчика специальным
приемником. Так, например
(рис. 8.33), если передающая
позиция ПРД движется по
прямолинейной траектории со
скоростью V, обеспечивая
облучение зоны обзора в
боковом направлении в пределах
ширины ДН антенны 0О, то
V t
VTr
ПРД
G,
Рис. 8.33. Система координат при
полуактивном СА
каждый i-й элемент зоны обзора по углу подсвечивается
электромагнитной волной со своей доплеровской частотой
т.е. в пределах ширины ДН передающей антенны осуществляется
частотное «подкрашивание» каждого направления 6; в пределах зоны обзора.
Поэтому даже при неподвижной приемной позиции ПРМ ( Vn = 0)
достигается угловое разрешение
Ы =А/Ро ,
где Ро = VTC/RH — угловой размер синтезированной апертуры, равный
угловому перемещению передающей позиции относительно цели за время
356
Режимы работы РСА землеобюра
синтезирования. При этом разрешение в передней зоне обзора уменьшается
в два раза по сравнению с разрешением при боковом обзоре в однопозици-
онной РСА с совмещенной приемопередающей апертурой.
По аналогии с известными системами полуактивного наведения
ракет класса «воздух — воздух» метод синтезирования апертуры за счет
движения передающей позиции при движении приемной позиции на
цель также может быть назван полуактивным синтезированием
апертуры. В более общем случае траектории перемещения ПРД и ПРМ
относительно зоны обзора могут быть самыми разнообразными и
определяются решаемой тактической задачей.
Таким образом, при полуактивном синтезировании апертуры
используются две разнесенные и движущиеся по разным траекториям
позиции: передающая и приемная. Структурная схема полуактивной РСА
представлена на рис. 8.34.
Перелающая позиция
СО
ПРД
ПРМ
Приемная позиция
J l_
ПРМ
опорного
сигнала
ПРМ
СО
S
S
Рис. 8.34. Структурная схема полуактивной РСА
Передающая позиция обычно содержит свою приемную часть и
систему обработки (СО) и является активной однопозиционной РСА
целеуказания и подсвета для приемной позиции. С помощью ДН
передающей антенны РСА подсвечивает заданный район расположения
целей (зону обзора). Одновременно передающая позиция, принимая
отраженные сигналы, получает с помощью своей системы обработки
изображение цели и формируют сигналы целеуказания для ПРМ позиции.
Пассивная приемная позиция по сигналам целеуказания перемещается в
район расположения цели и, принимая отраженные от цели
зондирующие сигналы передающей позиции, формирует изображение цели.
Приемная позиция имеет два канала. Основной канал обеспечивает
прием отраженных от цели сигналов. Дополнительный канал (канал
синхронизации) принимает зондирующие сигналы передающей позиции
для формирования опорного сигнала приемника основного канала.
Система обработки обеспечивает получение изображения цели с высокой
разрешающей способностью в зоне обзора приемной позиции.
Для обеспечения разрешения по дальности используется
разрешение отраженных сигналов по их задержке на трассе RH + Ru (рис. 8.35),
357
Глава 8
где Rn - расстояние от цели до ПРМ. Линии постоянной задержки (изо-
дали) RH + Rn представляют собой эллипсы. Для разрешения по
азимуту используется доплеровская селекция сигналов; при этом линии
постоянной доплеровской частоты (изодопы) перпендикулярны
касательным к эллипсам изодалей.
I
бг
Рис. 8.35. Формирование РЛИ при полуактивной РСА
Рассмотрим функцию неопределенности по азимуту полуактивной
РСА при работе по неподвижным целям. ФН по угловой координате t
J(/)= j W(t)exp{j9u(t,0}exp{-J9u(t,0)}dt,
-Тс/2
где W(t) — весовая функция обработки; фц(1, £) — фазовая функция тра-
екторного сигнала приемной позиции в зависимости от азимутального
положения цели £.
Для упрощения записи ФН без ограничения общности выводов
рассмотрим случай, когда в момент t = 0 угол Рп « 0, т.е. ПРД, ПРМ и
цель находятся приблизительно на одной прямой линии. Полагаем
также, что подсвет осуществляется с дальности RH » Rn. Тогда текущие
дальности можно записать в виде:
г =R -VtcosB.
2R.
гп = Rn " Vnt,
v2t2
'н-
Фаза траекторного сигнала цели определяется:
расстоянием гн, которое проходит зондирующий сигнал от ПРД до
цели;
358
Режимы работы РСА землеобзора
• расстоянием гп, которое проходит отраженный от цели сигнал до
ПРМ;
• расстоянием гоп между ПРМ и ПРД позициями (опорный сигнал).
Таким образом, фаза траекторного сигнала представляет собой
разность между суммой фаз зондирующего и отраженного сигналов и
фазой опорного сигнала (здесь не учтена случайная начальная фаза)
= фн + фп -Фол =k(rH + rn -гоп) =
= k RH+Rn-RH+Rn-2Vnt VtR" sin26H .
[ 2RH(RH-Rn) HJ
При условии RH»Rn и VTC«RH последним членом можно
пренебречь. Фаза сигнала цели в этом случае изменяется по линейному
закону: фц(1,0) = — Vnt, т.е. сигнал имеет постоянную доплеровскую
А
частоту.
Так как на приемной позиции скорость Vn известна и известна
геометрия взаимного расположения ПРД, ПРМ и цели (в
рассматриваемом случае — на одной прямой линии), то траекторный сигнал цели
представляет собой гармонический сигнал с известной доплеровской
2V
частотой 1дЦ=—-.
А
Фаза сигнала цели для элемента, смещенного на угловую
координату £, определяется соответствующими расстояниями:
VXl V2t2 о ( t \ Vt
= RH-VtcoseH+-—sineH+—-sin2eH;rn,=Rn-Vt+ — -f;
R 2R ^KJ I
H
RH 2R
Для случая RH » Rn без учета начальной фазы
R.J 2 |^RF
Соответственно доплеровская частота траекторного сигнала цели с
координатой t
С ^ 2V ( С Y
J
359
Глава 8
Таким образом, доплеровская частота траекторного сигнала
определяется угловой координатой цели (^/RH) . Линейная зависимость
частоты от координаты формируется движением передающей позиции со
скоростью V, а квадратичная зависимость - движением приемной
позиции со скоростью Vn.
Функция неопределенности траекторного сигнала при W(t) = 1
= 1 J exp{j[(p(t,O-(p(t,0)]}dt =
с _т ,
'с z
sin
— dt=-
VsinB
Tc
С-ТС2
Свойства ФН полуактивной РСЛ. Рассмотрим основные
свойства ФН при полуактивном синтезировании и наблюдении неподвижной
цели. Заметим, что приУп =V и RH = Rn система соответствует
обычной однопозиционной РСА.
1. Vn = 0 соответствует неподвижной (малоскоростной, Vn « V )
приемной позиции, например наземной, аэростатной, вертолетной.
Квадратичный член ФН в этом случае отсутствует и разрешение в
переднем секторе обзора приемной позиции
VTcsin9H
обеспечивается движением только передатчика и соответственно
меньше в два раза, чем при однопозиционной РСА. Важно отметить, что
разрешение не зависит от скорости движения Vn и дальности Rn
приемной позиции до цели.
2. V = 0 соответствует перемещению только приемной позиции на
цель (передний обзор) со скоростью Vn. Так как движется только
приемник, разрешение в два раза хуже, чем при однопозиционной РСА:
5£?=2,6Rn I .
"VVnTc
3. При приближении приемной позиции к цели ^->0) наступает
момент, когда разрешение Ыг =ЪС{, т.е. начинает влиять разрешение за счет
движения ПРМ. Граничное значение Rn, когда Ы2 -Ы{, при V= Vn равно
360
Режимы работы PC А землеобзора
Например, при RH = 50 км , VTC = 300м, X = Зсм Rnrp = 200 м, т.е.
практически на всей траектории перемещения приемной позиции разрешение
постоянное и определяется только движением передающей позиции.
4. ФН траекторного сигнала имеет два максимума: при <?, = 0 и
при £2 = -
2r:v .
sin GH . Первый и второй максимумы разнесены по углу
на величину
2RnV . . 2Rn
п -sin6H=-- п
R-V.
н п
R
н
ПРМ
которая обьпно больше ширины ДН реальной антенны, т.е. находится вне
зоны обзора. При Rn < Rn ^ второй максимум совпадает с основным.
5. При Ron и RH (Rn « RH ) происходит полная компенсация
фазовых нестабильностей траекторного сигнала, обусловленных траекторными
нестабильностями и нестабиль-
ностями среды
распространения. Это объясняется тем, что и
зондирующий сигнал (опорный)
и сигнал подсвета проходят
один и тот же путь.
Таким образом, при
полуактивном синтезировании
разрешение в передней зоне
обзора неподвижных целей не
зависит от дальности и
составляет половину разрешения
РСА целеуказания и подсвета
при боковом обзоре.
Свойства
полуактивного синтезирования для
общего случая. Рассмотрим
свойства полуактивного
синтезирования при произвольных
траекториях приемной и пере- Р„с. 8.36. Формирование РЛИ
дающих позиций и при на- в полуактивной РСА при произвольном
блюдении движущихся целей движении приемной и передающей
(рис. 8.36). позиций
361
Глава 8
Траекторный сигнал приемной позиции имеет доплеровскую
частоту, определяемую соответственно частотой отраженного сигнала в
основном канале
*до = 7-(V COS0H + Vu COSV + Vu COS(X + Vn COs6u)
К
и частотой опорного сигнала в канале синхронизации
fon=i(vcosen-vncoseon).
Частота траекторного сигнала равна разности этих частот:
fu = f^, - fon . Так как частота опорного сигнала fon не зависит от
параметров цели, то опорный сигнал определяет только изменение несущей
частоты сигнала цели.
Смещение цели на расстояние £ по угловой координате приводит
к смещению угла наблюдения на величину 8i относительно ПРД и 62
относительно ПРМ. Тогда доплеровская частота сигнала основного
канала ПРМ будет равна
=i[vcos(eH-e1)+vlicos(Y-el)+vucos(a+e2)+vncos(eu+e2)].
Частота опорного сигнала при этом не изменяется.
Функция неопределенности траекторного сигнала
тс тс
1 1
— J^ J
с о с о
Разность доплеровских частот при Ql «1 и 82 «1
А.
В случае, когда 6Н « 9П, можно считать, что 9! = C/Kw и82
При этом разность доплеровских частот
f m-
где QH = (V sin 8H + Vu sin y)/Rh - угловая скорость линии визирования
цели относительно передающей позиции; Qn = (Vu sin a - Vn sin 6U)/Rn -
угловая скорость линии визирования цели относительно приемной позиции.
362
Режимы работы РСА землеобюра
Разрешающая способность по угловой координате С (ширина ФН
на уровне -3 дБ) определяется, как и в других случаях, угловым
размером синтезирования апертуры:
р0 (п„-п„)тс
Угловой размер апертуры определяется изменением угла
наблюдения цели относительно передающей и приемной позиций:
P0=(QH-Qn)Tc.
При этом важно учитывать также направление перемещений, поскольку
они могут компенсировать друг друга.
Если ПРМ и ПРД позиции расположены таким образом, что углы
8Н и 6П близки друг другу, то обеспечивается минимальная
разрешающая площадка. Размер ее по дальности определяется шириной спектра
зондирующего сигнала, а по азимуту - угловым размером
синтезированной апертуры.
В многопозиционных РСЛ используется одна передающая позиция,
движущаяся по выбранной траектории и обеспечивающая подсвет
заданной зоны обзора. Взаимно независимые приемные позиции,
используя отраженные сигналы, формируют РЛИ объектов,
расположенных в зоне обзора. Число приемных позиций и траектории их
движения определяются решаемыми задачами.
При многопозиционном режиме обеспечивается:
• высокая разрешающая способность во всей зоне обзора приемной
позиции, в том числе в передней зоне;
• скрытность работы приемных позиций;
• боевая устойчивость передающей позиции, так как подсветчик
может двигаться на больших высотах и на большом удалении от
зоны ПВО;
• малые масса, энергопотребление и стоимость аппаратуры
приемной позиции.
Высокое разрешение по азимуту обеспечивается даже при
неподвижной (наземной, аэростатной) приемной позиции независимо от
дальности за счет движения подсветчика и уменьшается по сравнению с
однопозиционной РСА всего в два раза.
Наиболее сложной задачей при реализации многопозиционной РСА
является обеспечение синхронизации приемных позиций с передающей по
несущей частоте, частоте повторения и направлению ДН антенн.
Простейшим вариантом многопозиционной РСА является
полуактивная РСА, в которой приемная позиция находится в луче ДН
антенны подсветчика и синхронизация обеспечивается прямым
сигналом. Разрешение по азимуту полуактивной РСА определяется
скоростью V подсветчика, его дальностью до цели RH и углом подсвета
цели 8Н.
363
ПРИЛОЖЕНИЕ
Таблица П1. Характеристики космических РСА обзора земной поверхности
РСА
Космический аппарат
Страна
Назначение
Высота орбиты
Угол наклонения
орбиты, град
Широта
географическая, град
Угол падения, град
Длина волны, см
Поляризация на
излучение/прием
Полоса обзора, км
Зона захвата, км
Разрешение:
по дальности, м
по азимуту, м
радиометрическое, дБ
Чувствительность, дБ
Число отсчетов
в элементе
Уровень
неоднозначности, дБ
Синтез апертуры
Периодичность
наблюдения, сутки
Запаздывание
информации
Реализация, год
SEASAT-A
SEASAT-A
Канада
Исследования
800
98
-80...+80
17.23
23
Г
100
100
50
50
2
-30
4
-20
Оптический
8
Прямая
передача
1978
«Меч-К»
(ЭКОР-А)
«Космос-1870»
Россия
Исследования
260
72
-76...+76
40.55
9,6
Г
2x300
20
18.20
18.20
3
-33
1
-20
Оптический
4
2ч
1987-1989
SIR-A/
SIR-B
Space Shuttle
США
Исследования
240
56
-56...+60
23/40...55/23
23
Г
50/-200
50/40
38/20
50
2
-30/-18
4
-18
Цифровой
на земле
По плану
запусков
8 суток
1991
«Меч-КУ»
(ЭКОР-А1)
«Алмаз-1»
Россия
Исследования
275
73
-78...+78
35 .60
9,6
Г
2x350
45/200
12...15
10.15
3
-30
1
-20
Цифровой
на земле
3
0,5 ч
1992
Таблица П2. Характеристики РСА обзора земной поверхности воздушного
базирования
РСА
Летательный аппарат
Страна
Назначение
Длина волны, см
Поляризация на
излучение/прием
Разрешение по азимуту, м
Синтез апертуры
Режимы
ИМАРК
Ту-134А
Россия
Исследования
4,23, 68, 254
Г, В, ГВ
3.12
Цифровой на борту
и на земле
■ Высокое разрешение
■СДЦ
■ Интерферометрический
■ Поляриметрический
AN/APY-3
Е-8А
США
Разведывательно-ударный
комплекс
3
Г, В, ГВ
3
Цифровой на борту
и на земле
■ Высокое разрешение
■ СДЦ с определением типа
(гусеничная или колесная) и
местоположения
364
Приложение
SIR-C/
X-SAR
Space Shuttle
США,
Германия, Италия
Исследования
225
57
-60... +60
17.63
3/5,8/23
B(X-SAR)
ВВГ+ГГВ
-300
15 .90
10...200
10.200
2
-30 и-18
(X-SAR)
4
-20
Цифровой
на земле
По плану
запусков
8 суток
1994 и 1995
Lacrosse
Lacrosse
США
Разведка
685
56
-65... +65
30...60
3
Г
2x1000
4.20
0,6 .3
0,6...3
2...3
-20...-30
1-4
-
Цифровой
на земле
1
-
1988 и 1991
«Траверс»
«Ресурс-О»
и «Мир»
Россия
Исследования
360
51,7
-50...+50
40
8 и 9,6/23
В или Г
50
50
150
150
2
-35
4
-
Цифровой
на земле
8
Прямая
передача
1985 и 1996
ERS-KERS-2
ERS
Европа
Гражданский
783
98,5
-90...+90
23
5,6
В
100
100
30
30
2,5
-25
4
-20
Цифровой
на земле
12
Прямая
передача
1993 и 1995
JERS
JERS
Япония
Гражданский
568
97,7
-90...+90
39
23
Г
75
75
18
18
2
-20
3
-14
Цифровой
на земле
8
Прямая
передача
1995
Radarsat
Radarsat
Канада
Гражданский
743
98,6
-90...+90
20.50
5,6
Г
500...800
45.500
11.100
9. .100
2...3
-18,5
1-8
-18,5
Цифровой
на земле
3
Прямая
передача
1996
P-3/SAR
Р-3
США
Исследования
3, 5,23
Г
0.66
Цифровой на борту
и на земле
-
ASARS-2
U-2S
США
Стратегический разведчик
3
Г
1.18
Цифровой на борту
■ Полосовой
■ Телескопической
■ сдц
AN/APG-76
F-16D
США
Тактическая авиация
1.8
Г
0,3.3
Цифровой на борту
■ Полосовой
■ Телескопической
■сдц
365
Литература
ЛИТЕРАТУРА
1. Реутов А.П., Михайлов Б.А., Кондратенков Г.С, Бойко Б.В.
Радиолокационные станции бокового обзора. - М.: Сов. радио, 1970.
2. Harger R.O. Synthetic aperture radar system. - New-York, London, Academic
Press, 1970.
3. Кондратенков Г.С. Обработка информации когерентными оптическими
системами. - М.: Сов. радио, 1972.
4. Кондратенков Г.С. Ультразвуковой спектроанализатор радиолокационных
сигналов с использованием явления дифракции света на ультразвуковых
волнах в прозрачной среде, возбуждаемых радиолокационными сигналами.
Авторское свидетельство № 21080 заявлено 08.09.59 г.
5. Кондратенков Г.С. Некоторые вопросы теории оптической обработки
радиолокационных сигналов. - Труды ВВИА им. Н.Е. Жуковского № 944,
1962.
6. Кондратенков Г.С, Потехин В.А., Реутов А.П., Феоктистов Ю.А.
Радиолокационные станции обзора Земли / Под. ред. Г.С. Кондратенкова. - М.:
Радио и связь, 1983.
7. Саблин В.Н. Разведывательно-ударные комплексы и радиолокационные
системы наблюдения земной поверхности. - М.: Радиотехника, 2002.
8. Неронский Л.Б., Михайлов В.Ф., Брагин КВ. Микроволновая аппаратура
дистанционного зондирования поверхности Земли и атмосферы.
Радиолокаторы с синтезированной апертурой антенны. - СПб.:
Санкт-Петербургский государственный университет аэрокосмического приборостроения,
1999.
9. Вакин С.А., Шустов Л.Н. Основы радиоэлектронной борьбы. — М.: ВВИА
им. Н.Е. Жуковского, 1998.
366
Учебное издание
РАДИОВИДЕНИЕ
Радиолокационные системы дистанционного
зондирования Земли
Авторы:
Геннадий Степанович Кондратенков
Алексей Юрьевич Фролов
Зав. редакцией
Т. Г. Хохлова
Редактор-оператор
М. Е. Фёдорова
Изд. № 17. Сдано в набор 12.01.2005.
Подписано в печать 09.06.2005. Формат 60x90 1/16
Бумага офсетная. Гарнитура Тайме.
Печать офсетная.
Печ. л. 23. Тираж 700 экз. Зак. № 3169.
Издательство «Радиотехника».
107031, Москва, К-31, Кузнецкий мост, д. 20/6.
Тел./факс: 921-48-37; 925- 78-72, 925-92-41.
E-mail: info@radiotec.ru
www. radiotec.ru
Отпечатано в ООО ПФ «Полиграфист».
160001, г. Вологда, ул. Челюскинцев, д. 3.