/


















































































































































































































Author: Бать М.И. Джанелидзе Г.Ю. Кельзон А. С
Tags: общая механика механика твердых и жидких тел задачи теоретическая механика
Year: 1973




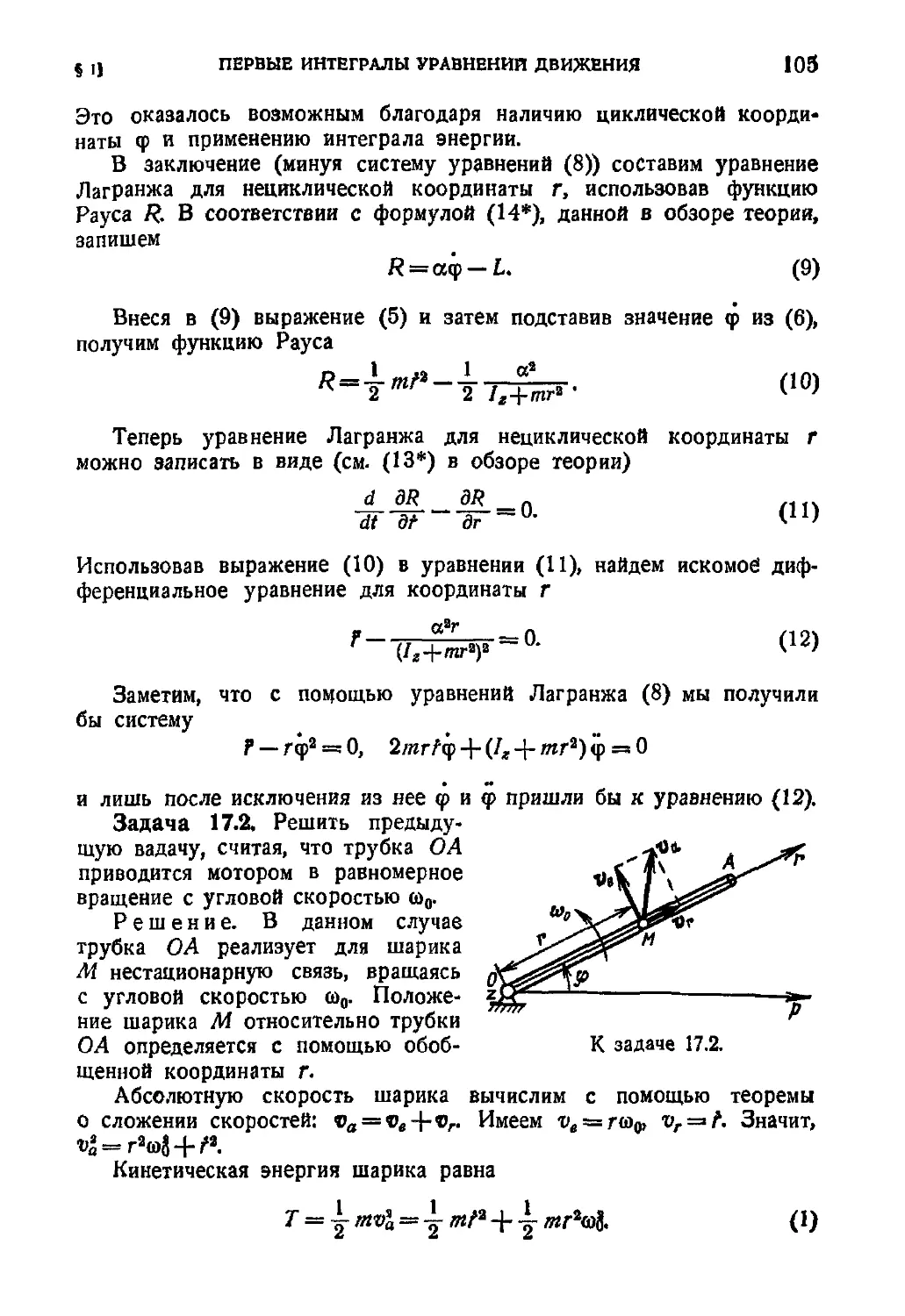
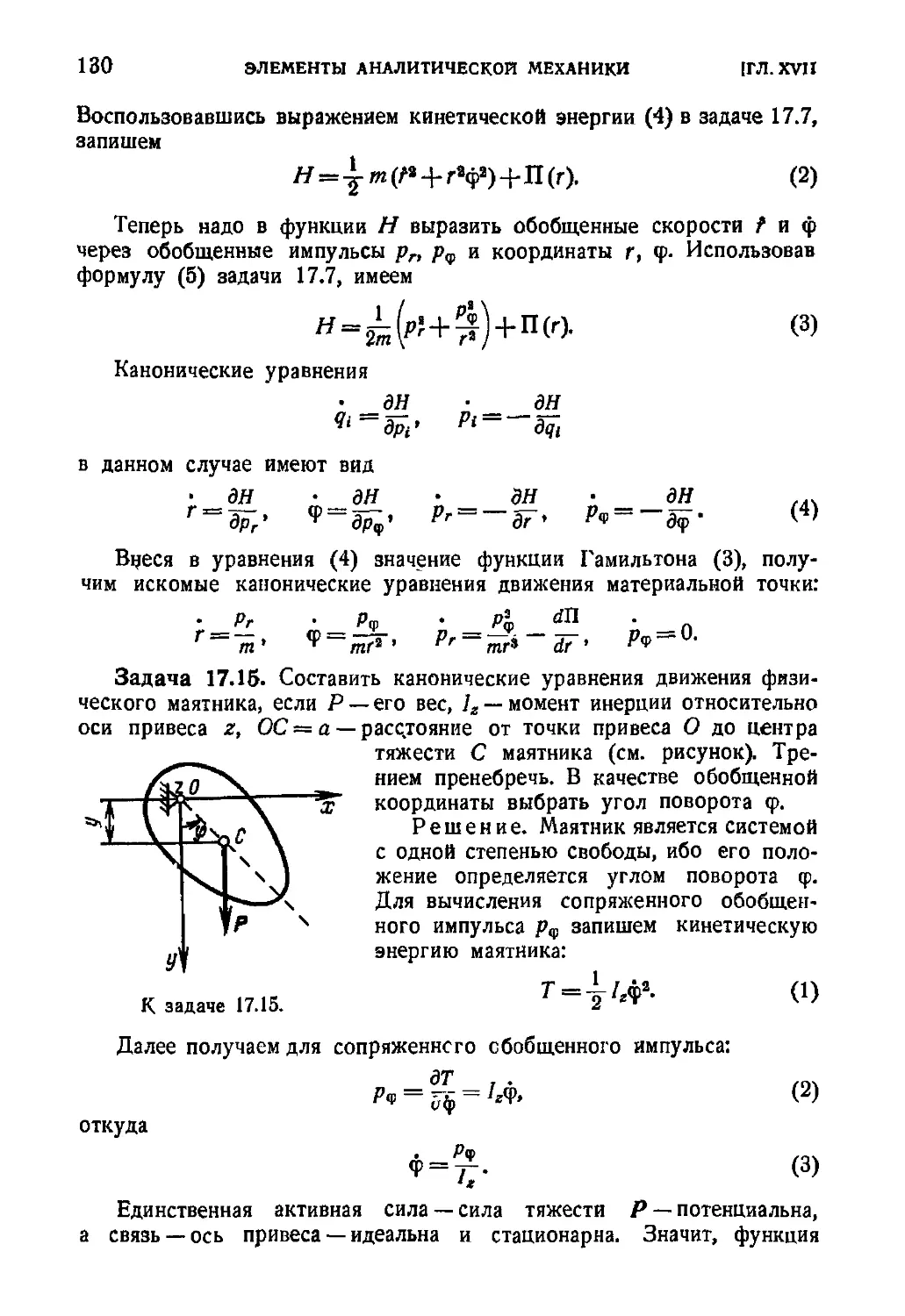
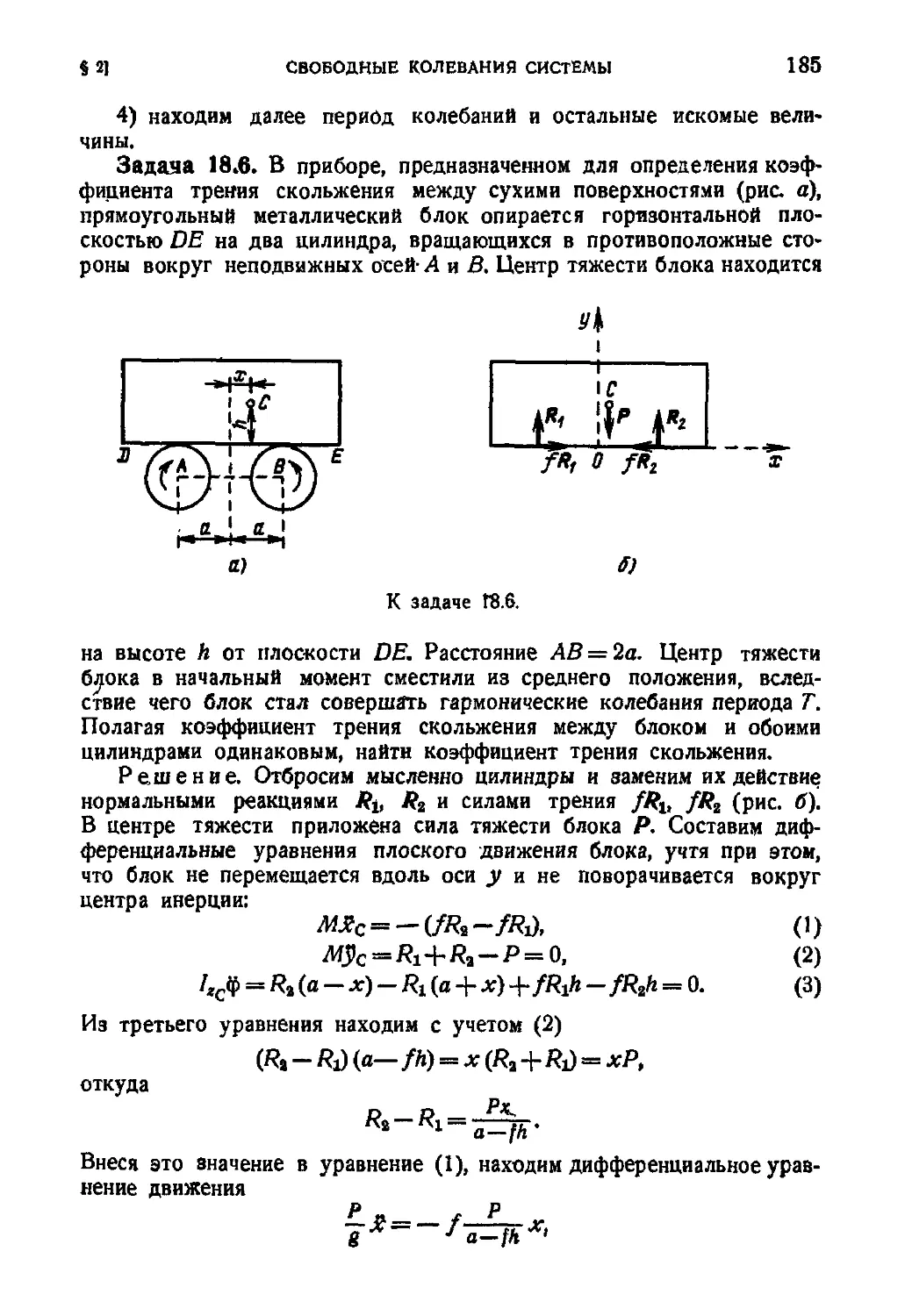
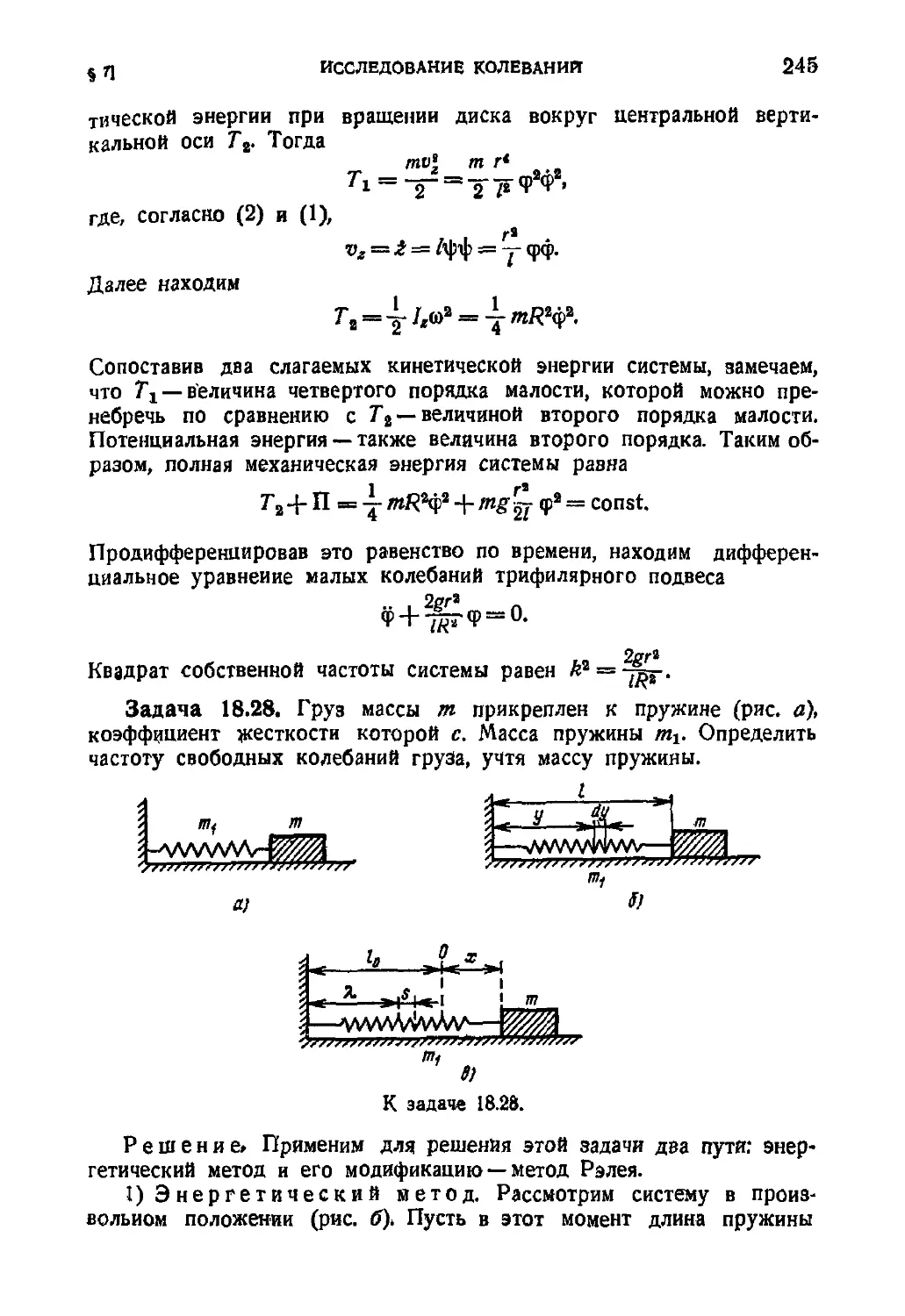
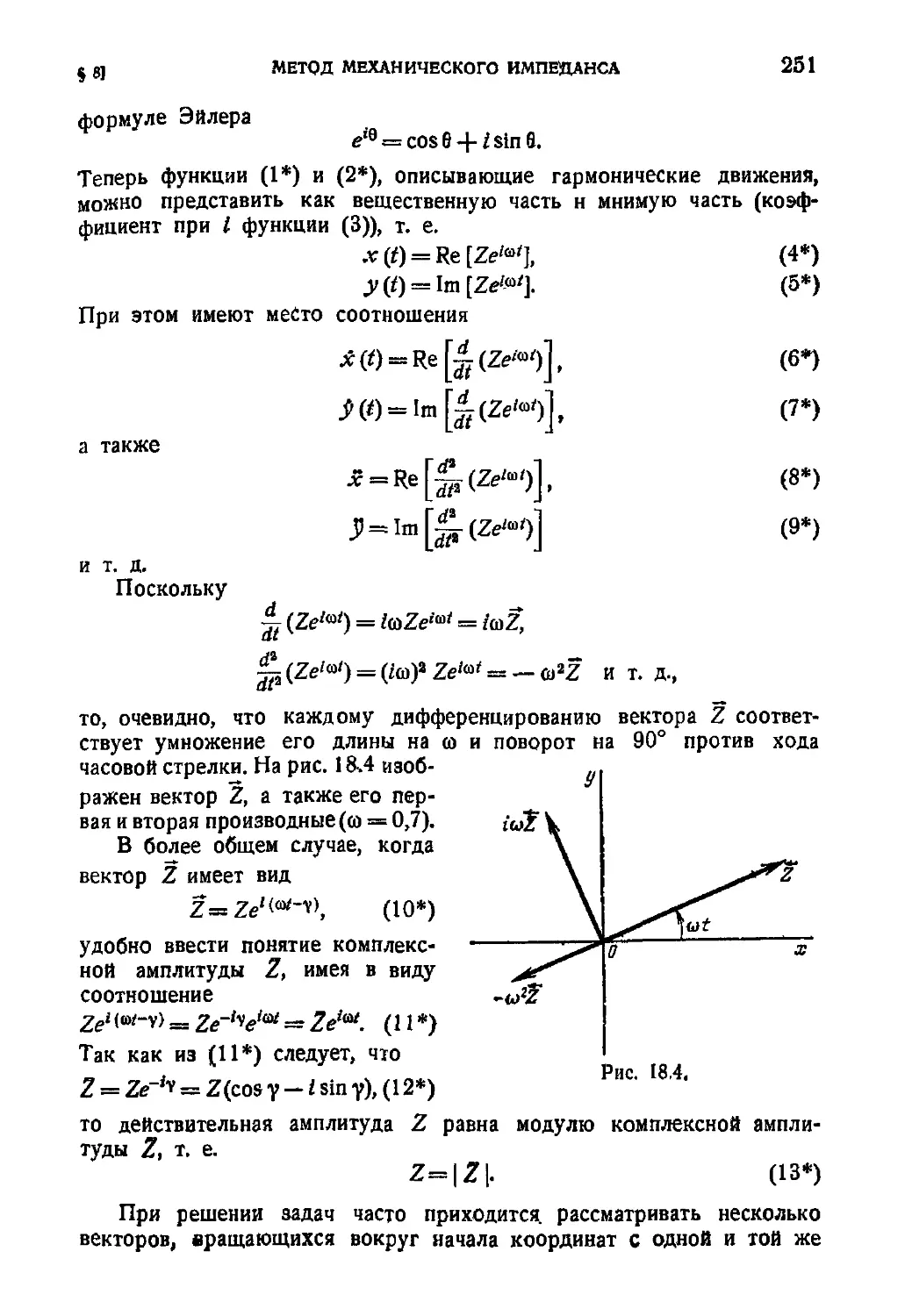
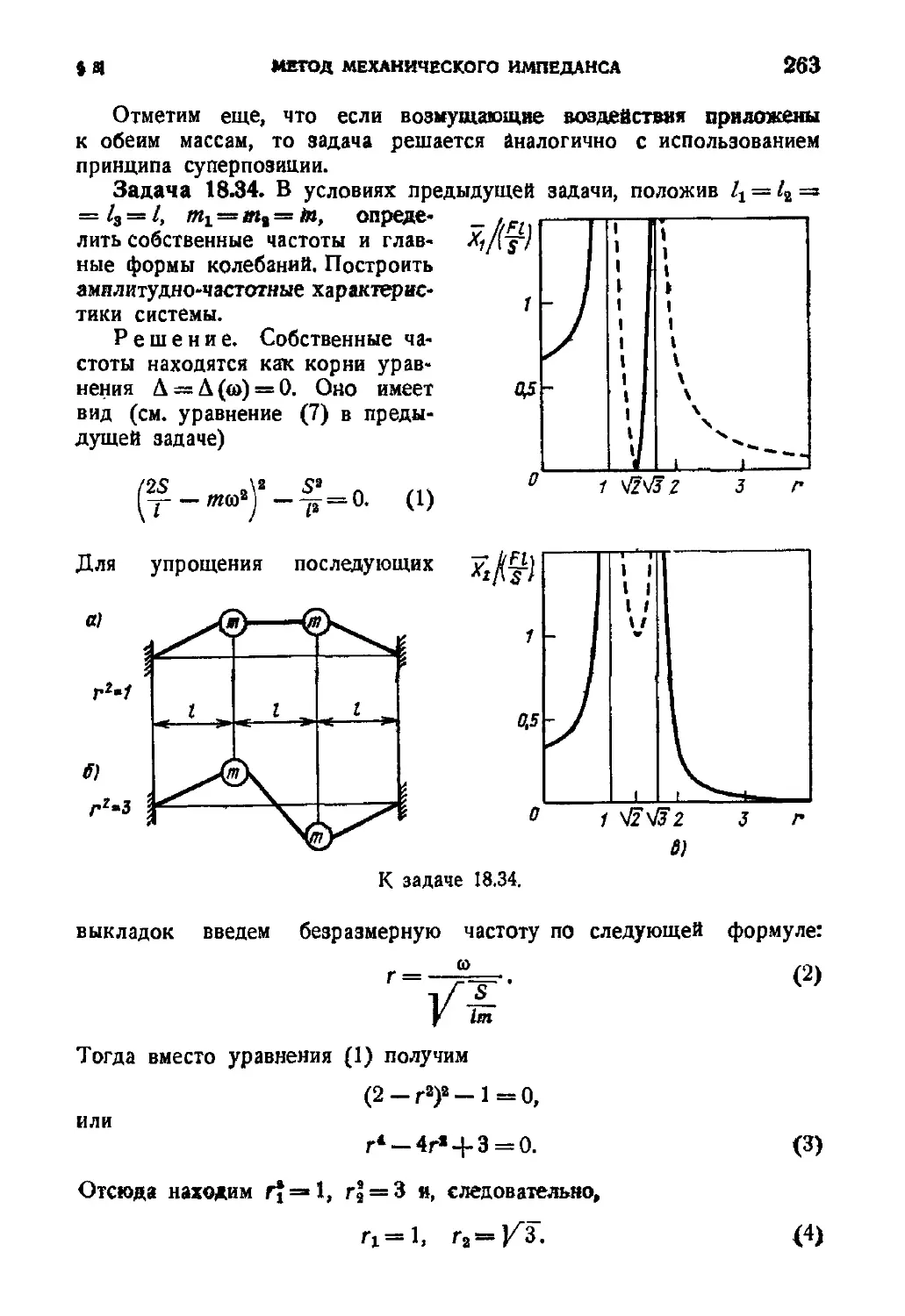
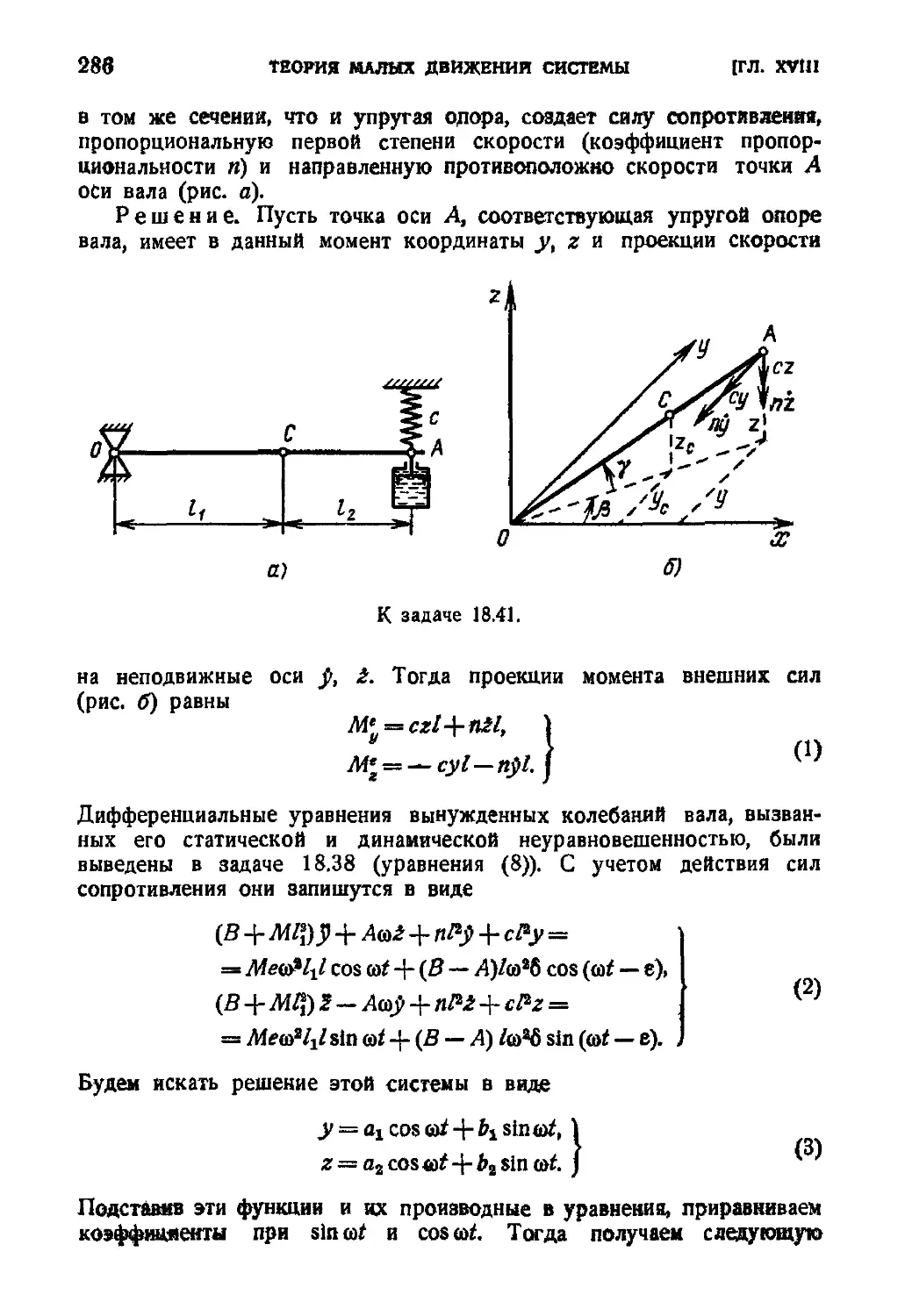
Text
М. И. БАТЬ, Г. Ю. ДЖАНЕЛИДЗЕ, А. С. КЕЛЬЗОН
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
В ПРИМЕРАХ И ЗАДАЧАХ
Под редакцией
Г. Ю. ДЖАНЕЛИДЗЕ и Д. Р. МЕРКИНА
ТОМ ТРЕТИЙ
СПЕЦИАЛЬНЫЕ ГЛАВЫ МЕХАНИКИ
Допущено Министерством
высшего и среднего специального образования СССР
в качестве учебного пособия
для студентов высших технических учебных заведений
ИЗДАТЕЛЬСТВО <НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА 1973
631
Б 28
УДК 531
Теоретическая механика в примерах и задачах, т. III (спе-
(специальные главы механики), Бать М. И., Джанелид-
Джанелидзе Г. Ю., К е л ь з о н А. С, под редакцией Г. Ю. Джанелидзе
и Д. Р. Меркина, учебное пособие, М. Главная редакция физи-
физико-математической литературы изд-ва «Наука», 1973 г., 488 стр.
Книга представляет собой пособие по решению задач тео-
теоретической механики для студентов, а также для лиц,
занимающихся самообразованием. В каждом из разделов и
подразделов книги после конспективного обзора теории указы-
указываются типы задач, решаемые с помощью перечисленных в об-
обзоре теорем и положений; приводятся рекомендации о после-
последовательности действий при решении задач. Затем даются
примеры решения конкретных задач, причем часто сравнива-
сравниваются и оцениваются различные методы решения. Цель посо-
пособия— научить студентов самостоятельно решать задачи по
курсу теоретической механики (изучение теории должно
производиться по какому-либо из существующих учебников).
В третьем томе содержится около 160 решенных задач по
равновесию гибкой нити, кинематике точки в криволинейных
координатах, динамике твердого тела, космической динамике,
динамике точки переменной массы, аналитической механике,
линейным и нелинейным колебаниям.
Рисунков 169.
@ Издательство «Наука», 1973,
Б 0242~1834 138-73
042 @2)-73
ОГЛАВЛЕНИЕ
Предисловие 7
РАЗДЕЛ ЧЕТВЕРТЫЙ
СПЕЦИАЛЬНЫЕ ГЛАВЫ МЕХАНИКИ
Глава XIII. Равновесие гибких нерастяжимых подвесных нитей ... 9
§ 1. Основные определения и зависимости 9
§ 2. Параболическая нить 13
§ 3. Цепная линия 25
Глава XIV. Кинематика точки в криволинейных координатах 37
§ 1. Основные определения и зависимости 37
§ 2. Системы криволинейных координат. Координатные оси, линии
и поверхности. Коэффициенты Ляме 38
§ 3. Скорости и ускорения точек в системах криволинейных коор-
координат , 45
Глава XV. Динамика твердого тела, вращающегося вокруг непод-
неподвижной точки 56
§ 1. Движение по инерции твердого тела, имеющего неподвижную
точку 56
§ 2. Регулярная прецессия симметричного твердого тела, имеющего
неподвижную точку 61
Глава XVI. Космическая динамика. Динамика точки переменной
массы 70
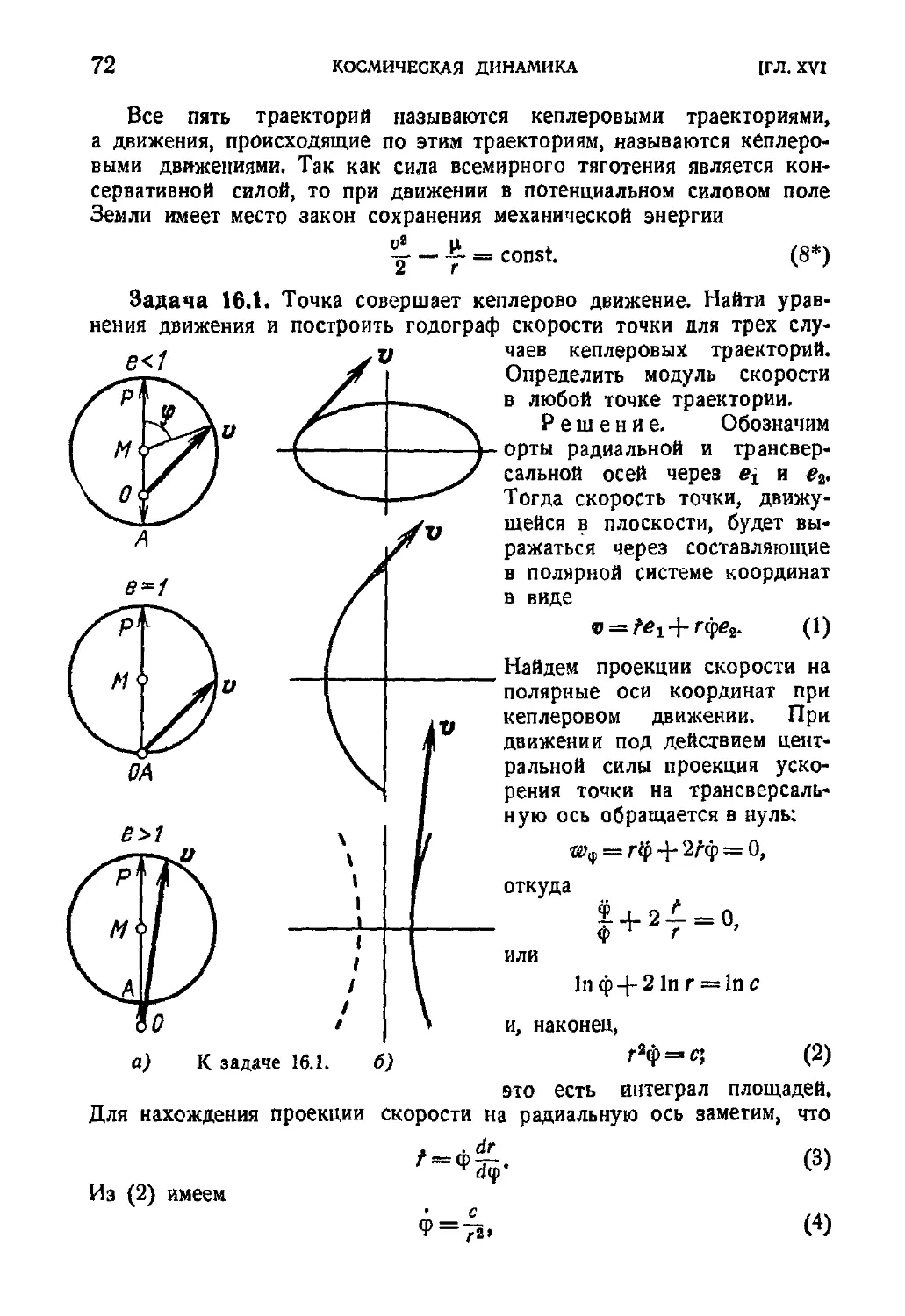
§ 1. Кеплерово движение (движение под действием центральной
силы) 71
§ 2. Динамика точки переменной массы 86
Глава XVII. Элементы аналитической механики 99
§ 1. Первые интегралы уравнений движения. Обобщенный интеграл
энергии. Циклические координаты. Функция Рауса 99
§ 2. Уравнения Лагранжа первого рода ПО
1*
4 ОГЛАВЛЕНИЕ
§ 3. Канонические уравнения Гамильтона 119
1°. Обобщенные импульсы . . . 119
2°. Функция Гамильтона . . . 122
3е. Канонические уравнения Гамильтона 126
4°. Первые интегралы канонических уравнений Гамильтона 133
§ 4. Уравнение Гамильтона—Якоби 135
1°. Канонические преобразования 135
2°. Уравнение Гамильтона—Якоби 137
3°. Интегрирование уравнения Гамильтона—Якоби методом от-
отделения переменных. Определение первых интегралов кано-
канонических уравнений с помощью уравнения Гамильтона—
Якоби 139
§ 5. Принцип Гамильтона—Остроградского 158
Глава XVIII. Теория малых движений системы с конечным числом
степеней свободы. Устойчивость равновесия и движения системы 169
§ 1. Устойчивость равновесия системы 169
§ 2. Свободные колебания системы с одной степенью свободы .... 181
1°. Свободные колебания системы без учета сил сопротивления 181
2°. Свободные колебания системы с учетом сил сопротивления 197
§ 3. Свободные колебания системы с одной степенью Свободы. Вос-
Восстанавливающая сила и обобщенный коэффициент жесткости 203
1°. Вычисление коэффициента жесткости при малых перемеще-
перемещениях 204
2°. Вычисление коэффициента жесткости, восстанавливающей
силы при конечных перемещениях 208
§ 4. Вынужденные колебания системы с одной степенью свободы 215
1°. Вынужденные колебания без учета сил сопротивления . . . 216
2°. Влияние вязкого трения на вынужденные колебания сис-
системы с одной степенью свободы 223
§ 5. Свободные колебания системы с двумя степенями свободы . . . 228
§ 6. Вынужденные колебания системы с двумя степенями свободы
под действием синусоидальных возмущающих сил 235
§ 7. Исследование колебаний энергетическим методом. Определение
собственной частоты 240
§ 8. Метод механического импеданса 250
§ 9. Влияние гироскопических сил и сил вязкого сопротивления на
свободные и вынужденные колебания твердого тела с двумя
степенями свободы 265
1°." Влияние гироскопических сил на свободные колебания твер-
твердого тела 265
2°. Влияние вязкого трения и гироскопических сил на свобод-
свободные колебания твердого тела 271
3е. Вынужденные колебания твердого тела с учетом гироско-
гироскопических сил 274
ОГЛАВЛЕНИЕ 5
4а. Влияние гироскопических сил на вынужденные колебания
твердого тела при резонансе 282
5°. Влияние вязкого трения и гироскопических сил на вынуж-
вынужденные колебания твердого тела 285
§ 10. Влияние гироскопических сил на свдбодные и вынужденные
колебания твердого тела с четырьмя степенями свободы. Само-
Самоцентрирование жесткого ротора, вращающегося в двух упругих
опорах 289
1°. Влияние гироскопических сил на свободные колебания
твердого тела 289
2°. Влияние гироскопических сил на вынужденные колебания
твердого тела. Самоцентрирование 296
3°. Влияние гироскопических сил на вынужденные колебания
при резонансе 307
4°. Применение уравнений Лагранжа в обобщенных координа-
координатах к составлению дифференциальных уравнений Свободных
и вынужденных колебаний вращающегося вала 312
§ 11. Устойчивость движения 317
1°. Исследование по общему решению 317
2°. Устойчивость движения по первому приближению 322
3*. Устойчивость движения при наличии гироскопических сил 329
4°. Второй метод Ляпунова 333
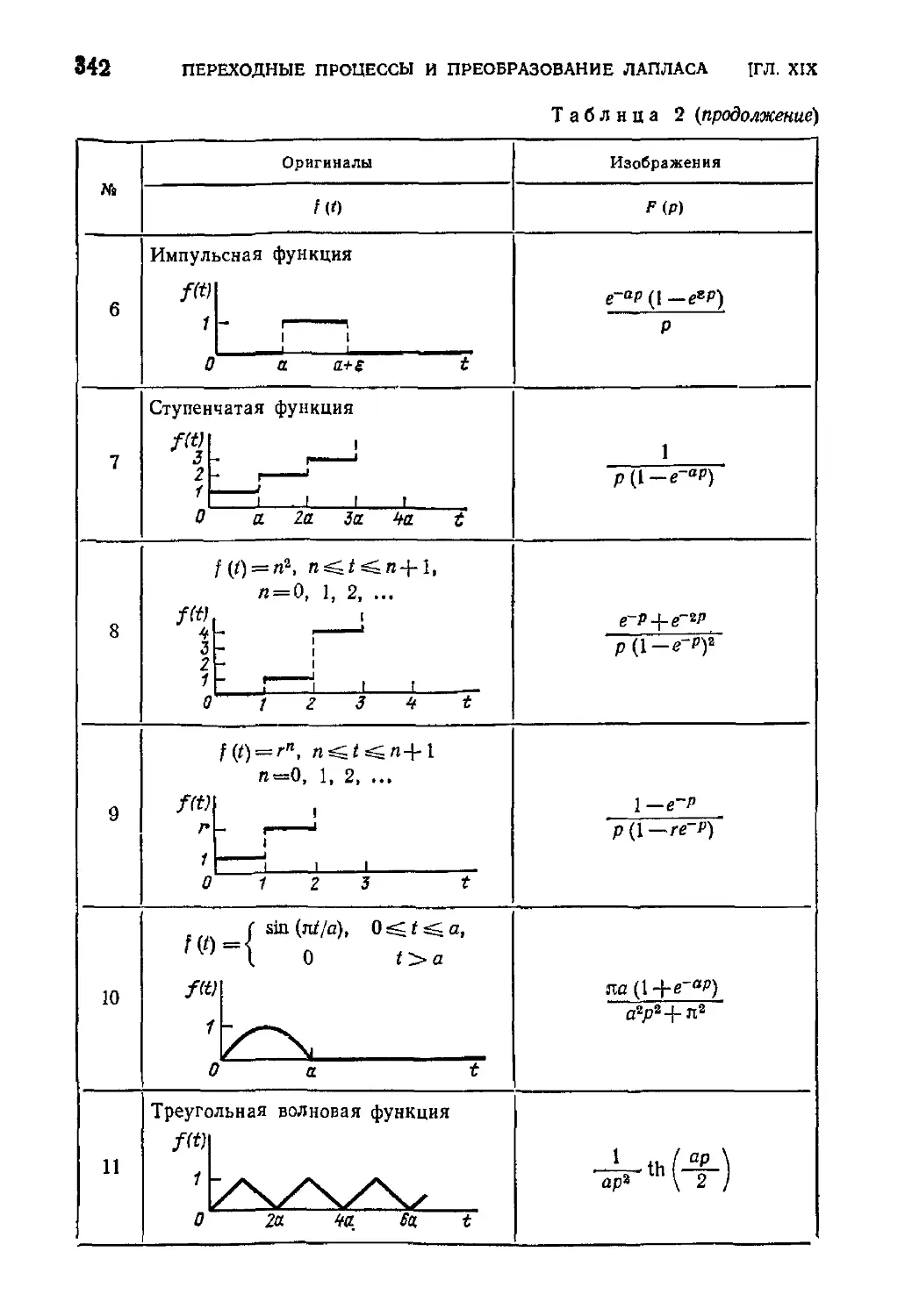
Глава XIX. Переходные процессы и преобразование Лапласа 337
§ 1. Преобразование Лапласа 337
1°. Вводные замечания 337
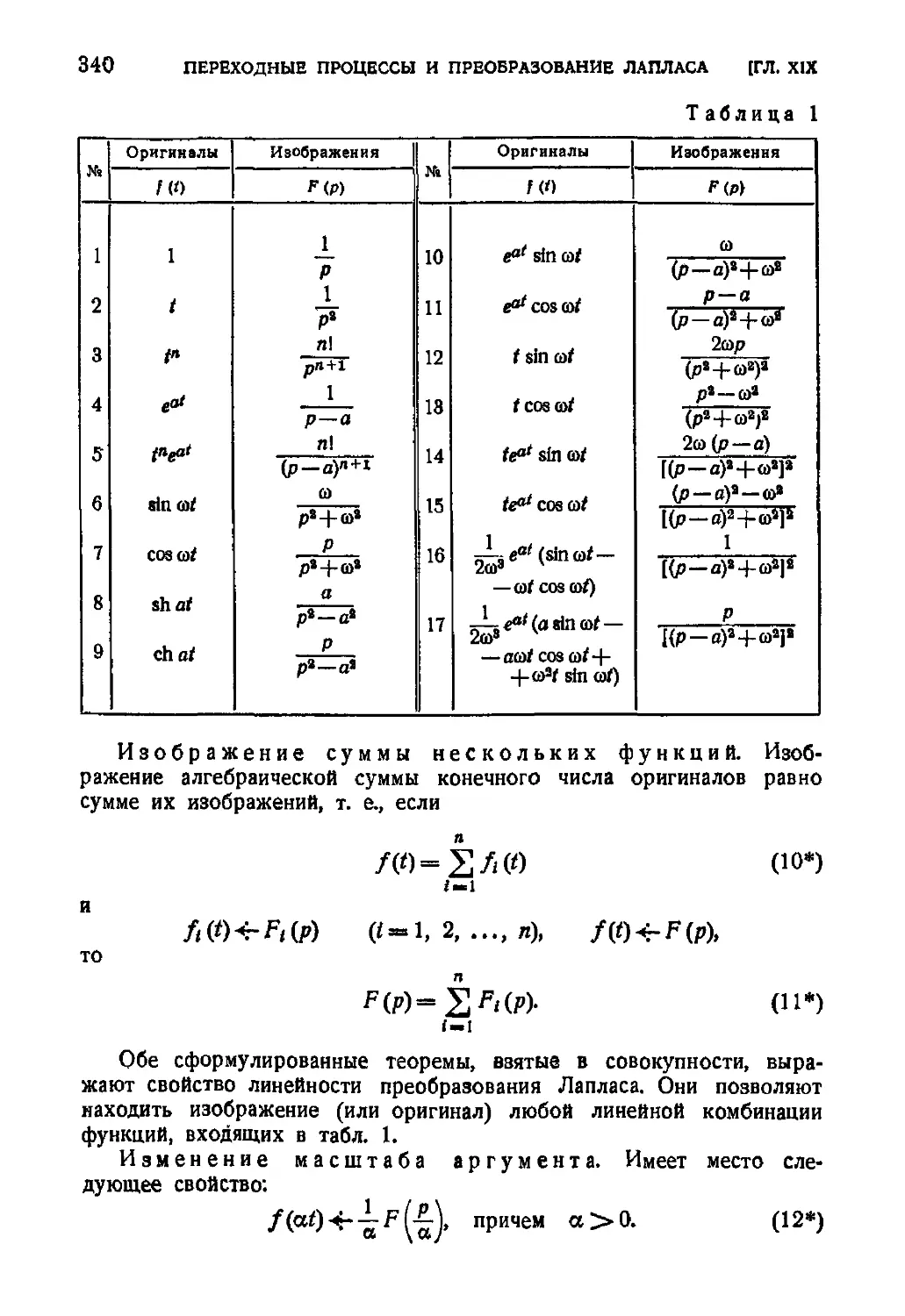
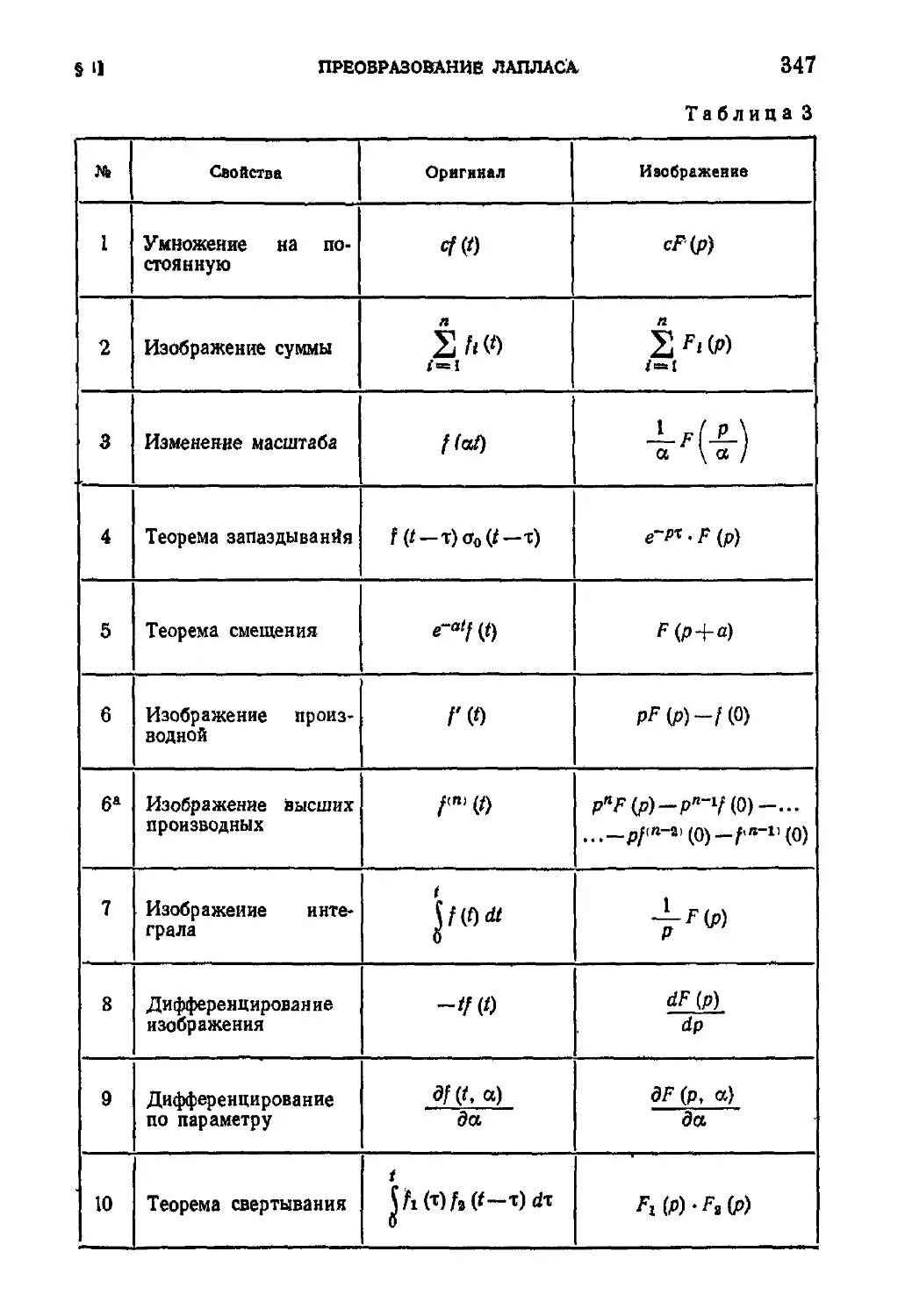
2°. Основные свойства преобразований Лапласа 339
3°. Нахождение оригиналов для дробно-рациональных изобра-
изображений 346
§ 2. Переходные процессы 348
Глава XX. Нелинейные колебания 372
<} 1. Примеры нелинейных систем 372
§ 2. Свободные колебания нелинейных систем (аналитические методы) 375
1°. Метод поэтапного интегрирования 375
2° Метод малого параметра 378
3°. Метод медленно меняющихся амплитуд (метод Ван-дер-Поля) 385
4°. Метод эквивалентной линеаризации (метод Крылова и Бого-
Боголюбова) 391
§ 3. Вынужденные колебания нелинейных систем (аналитические
методы) 397
1°. Метод поэтапного интегрирования 397
2°. Метод последовательных приближений . . . _. 403
3° Метод медленно меняющихся амплитуд (метод Ван-дер-Поля) 409
4°. Вариационный метод (метод Бубнова—Галеркина) 413
О ОГЛАВЛЕНИЕ
§ 4. Краткий обзор аналитических методов решения задач нелиней-
нелинейных колебаний 424
1°. Вводные замечания 424
2°. Свободные нелинейные колебания 424
3°. Вынужденные нелинейные колебания 431
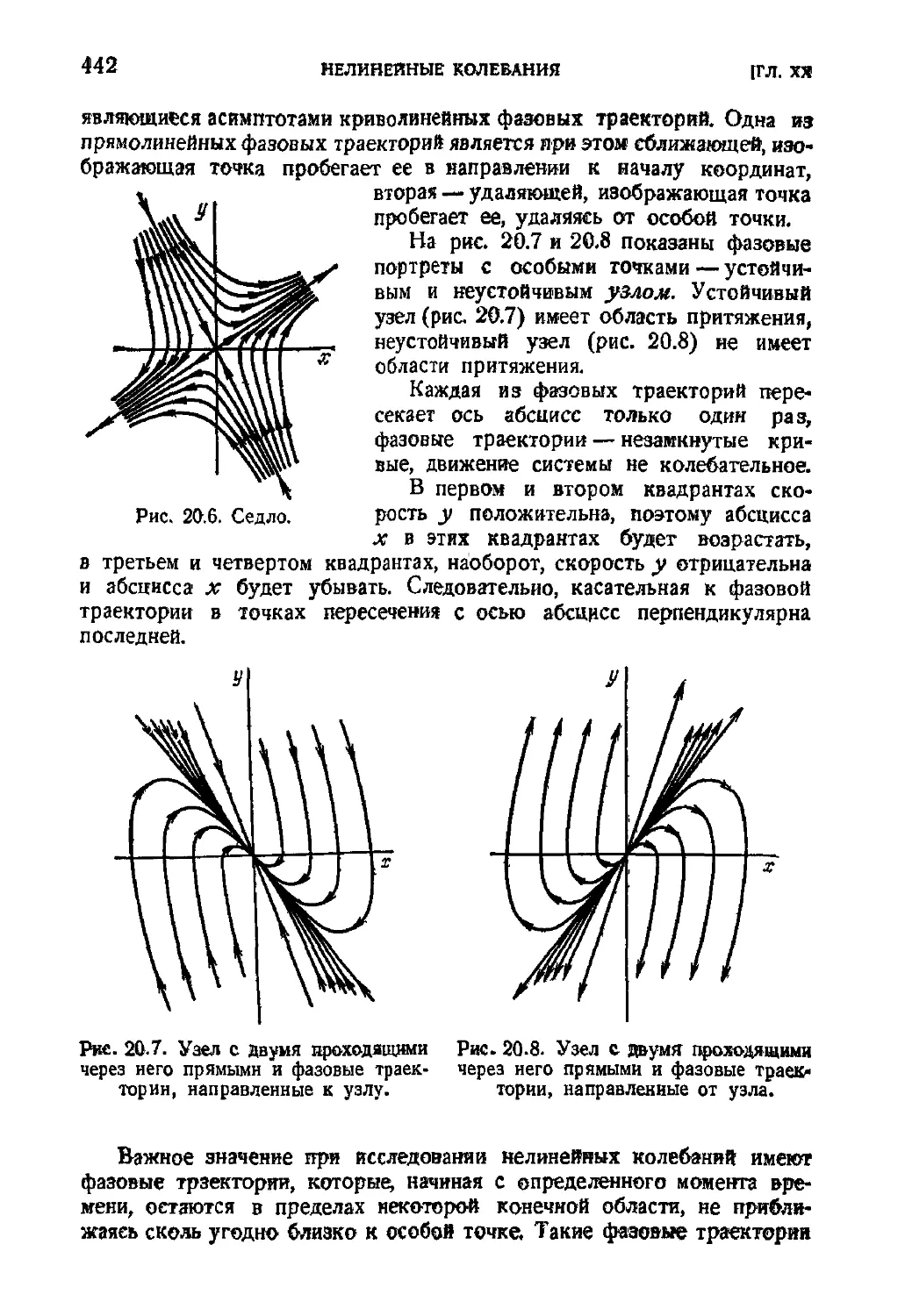
§ 5. Исследование нелинейных колебаний на фазовой плоскости . . . 438
1°. Основные определения 438
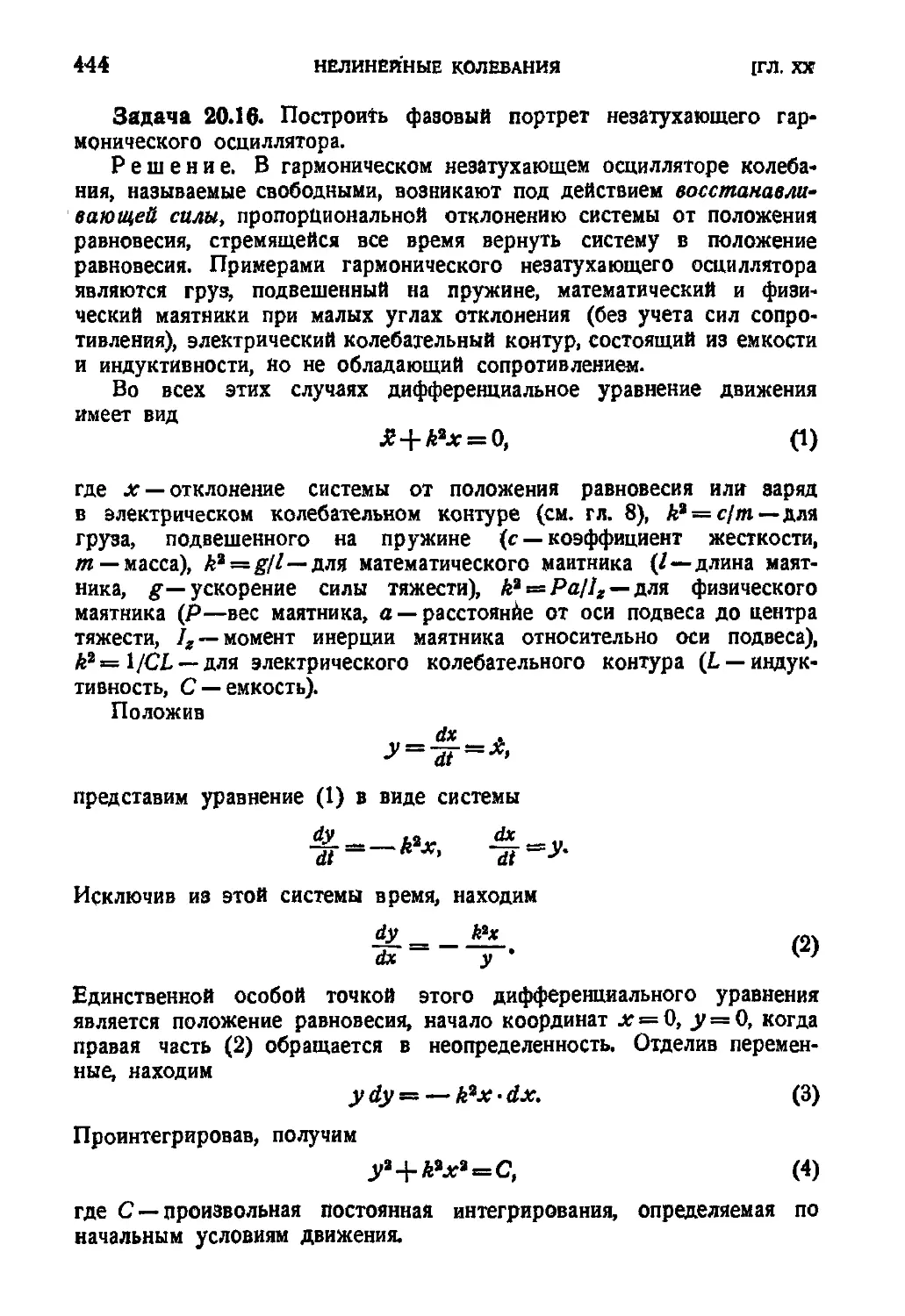
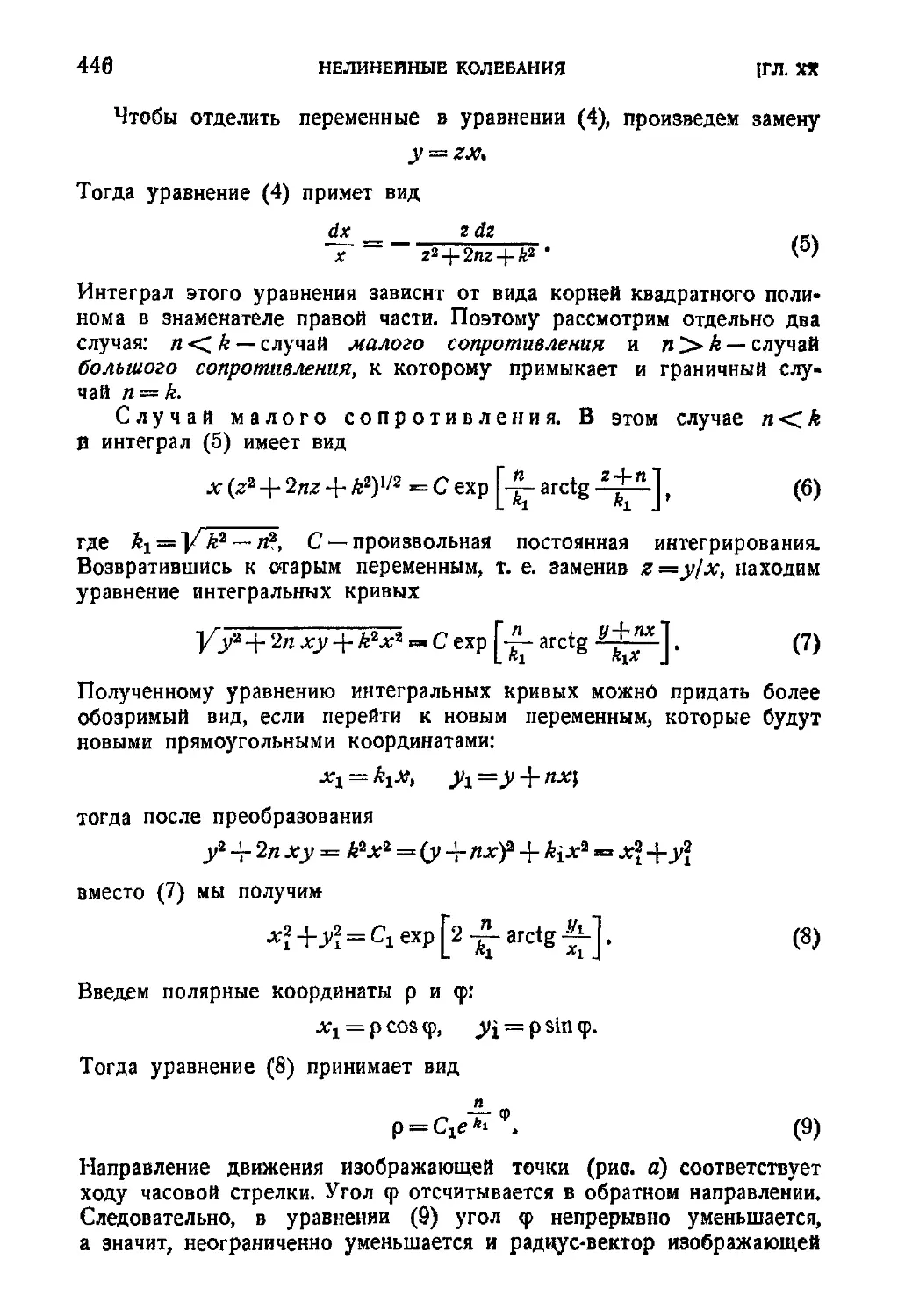
2°. Фазовые портреты линейных систем 443
3°. Дельта-метод 451
§ 6. Автоколебания 467
1°. Примеры автоколебательных систем 467
2°. Исследование автоколебаний аналитическими методами . . . 469
3е. Исследование автоколебаний на фазовой плоскости 480
Приложение. Международная система единиц (СИ) 485
ПРЕДИСЛОВИЕ
Немногочисленные законы и теоремы, лежащие в основе теорети-
теоретической механики, находят весьма разнообразные и обширные примене-
применения. Поэтому у лиц, изучающих или использующих в своей деятель-
деятельности теоретическую механику, наибольшие затруднения вызывают
приложения общих положений теории к решению конкретных задач.
В обширной литературе, посвященной теоретической механике,
имеется мало книг, ставящих своей целью научить читателя методам
решения задач и примеров. Между тем потребность в таких руко-
руководствах ощущается как студентами в процессе обучения (в особен-
особенности студентами заочных и вечерних факультетов), так и инженерами
и техниками в их практической деятельности.
Авторы настоящей книги, опираясь на многолетний опыт препо-
преподавания теоретической механики в Ленинградском политехническом
институте им. М. И. Калинина и Ленинградском Высшем инженерном
морском училище им. адмирала С. О. Макарова, поставили своей
целью создание руководства по решению задач.
В соответствии с этим замыслом в книге даны в конспективной
форме лишь краткие сведения из теории — предполагается, что для
изучения теории читатель пользуется одним из курсов теоретической
механики. Из большого числа учебников по этому предмету, опубли-
опубликованных в СССР, отметим курс Л. Г. Лойцянского и А. И. Лурье «Теоре-
«Теоретическая механика», т. 1, т. 2 (книга, определившая современные
традиции преподавания механики во втузах), а также учебники: Н. В. Бу-
тенин, Я. Л. Лунц, Д. Р. Меркин, Курс теоретической механики,
т. 1, т. 2, В. В. Добронравов, Н. Н. Никитин, А. Л. Дворников, Курс
теоретической механики, С. М. Тарг, Краткий курс теоретической
механики, А. А. Яблонский, Курс теоретической механики. Кроме то-
того, рекомендуем при изучении отдельных глав настоящего тома сле-
следующие книги: Н. В. Бутенин, Введение в аналитическую механику,
1971, А. И. Лурье, Аналитическая механика, 1961, Я. Л. Лунц, Вве-
Введение в теорию гироскопов, 1972, Д. Р. Меркин, Введение в теорию
устойчивости движения, 1971, Я. Г. Пановко, Введение в теорию меха-
механических колебаний, 1971.
В настоящем руководстве основное внимание уделено решению
конкретных задач, специально составленных для того, чтобы, с одной
стороны, избежать разбора задач, входящих в сборник И. В. Мещер-
8 ПРЕДИСЛОВИЕ
ского и иные распространенные в СССР задачники, а с другой — дать
возможность после изучения книги (или ее разделов) самостоятельно
решать главные типы задач. Для облегчения активного изучения мате-
материалов в каждом разделе книги даны краткие рекомендации о после-
последовательности решения тех или иных типов задач и лишь после
этого приведено подробное рассмотрение подобных задач, причем за-
зачастую сравнены и оценены различные методы решения.
Предполагается, что параллельно с разбором материала по руко-
руководству читатель на основе изученного решает соответствующие задачи
из сборника задач И. В. Мещерского (переработанное 32 издание
1970 г. и последующие издания) и тем самым научается применять
полученные знания.
Сравнительно большой объем руководства объясняется тем, что
оно составлено в расчете как на последовательное изучение, так и
на выборочное использование. Последний способ и является главной
формой применения ввиду различия объема материала и порядка его
прохождения в различных высших учебных заведениях.
Первое издание этой книги вышло в свет в двух томах в 1961 г.
С тех пор книга неоднократно переиздавалась.
Идя навстречу многочисленным пожеланиям, авторы внесли в насто-
настоящее издание новые главы, освещающие дополнительные разделы
курса теоретической механики.
Из большого числа неохваченных ранее вопросов были выбраны
немногие разделы, получившие за последние годы наиболее важное
и широкое применение в современных инженерных расчетах и иссле-
исследованиях. Это потребовало увеличения объема книги, в связи с чем
настоящее издание выходит в трех томах.
Первые два тома охватывают материал, отвечающий основному
курсу теоретической механики, а третий том содержит колебания
системы материальных точек и дополнительные главы механики. В связи
с этим некоторые разделы перенесены из первых двух томов в эту книгу.
В настоящем томе главы 15, 17, §§ 1, 2, 3, 4 и пункты 1° и 2°
§ 6 главы 20 написал М. И. Бать. Главы 13, 14, 16, 18, 19, а также
§ 5 и пункт 3° § 6 главы 20 написал А. С. Кельзон.
Авторский коллектив понес невосполнимую утрату в лице без-
безвременно скончавшегося профессора Г. Ю. Джанелидзе, соавтора и
первого редактора книги.
Авторы считают своим приятным долгом принести глубокую бла-
благодарность Н. В. Бутенину, Д. Р. Меркину, В. К. Прокопову за цен-
ценные советы, позволившие улучшить рукопись; Н. И. Алексеевой,
Ь. Г. Бергер, А. П. Зобнину и В. И. Прядилову за тем« некоторых задач;
Р. А. Кельзону за участие в написании глав 13 и 19.
Ленинград, март 1971 г. М. Я. Бать, А. С. Кельзок
РАЗДЕЛ ЧЕТВЕРТЫЙ
СПЕЦИАЛЬНЫЕ ГЛАВЫ МЕХАНИКИ
ГЛАВА XIII
РАВНОВЕСИЕ ГИБКИХ НЕРАСТЯЖИМЫХ ПОДВЕСНЫХ НИТЕЙ
§ 1. Основные определения и зависимости
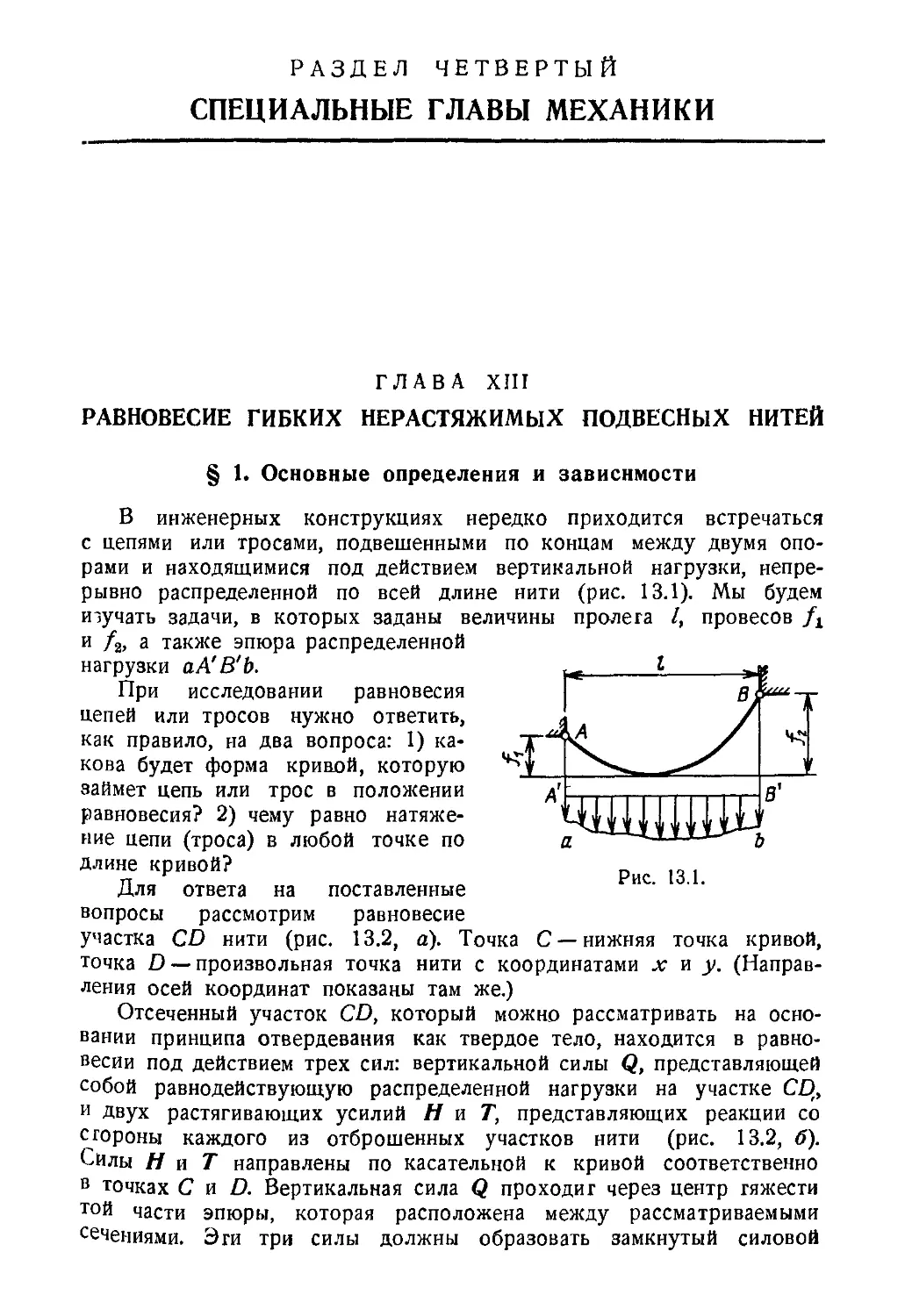
В инженерных конструкциях нередко приходится встречаться
с цепями или тросами, подвешенными по концам между двумя опо-
опорами и находящимися под действием вертикальной нагрузки, непре-
непрерывно распределенной по всей длине нити (рис. 13.1). Мы будем
изучать задачи, в которых заданы величины пролега /, провесов /х
и /2, а также эпюра распределенной
нагрузки аА'В'Ь.
При исследовании равновесия
цепей или тросов нужно ответить,
как правило, на два вопроса: 1) ка- jT^\
кова будет форма кривой, которую
займет цепь или трос в положении
равновесия? 2) чему равно натяже-
натяжение цепи (троса) в любой точке по
длине кривой?
Для ответа на поставленные
вопросы рассмотрим равновесие
участка CD нити (рис. 13.2, а). Точка С —нижняя точка кривой,
точка D — произвольная точка нити с координатами х и у. (Направ-
(Направления осей координат показаны там же.)
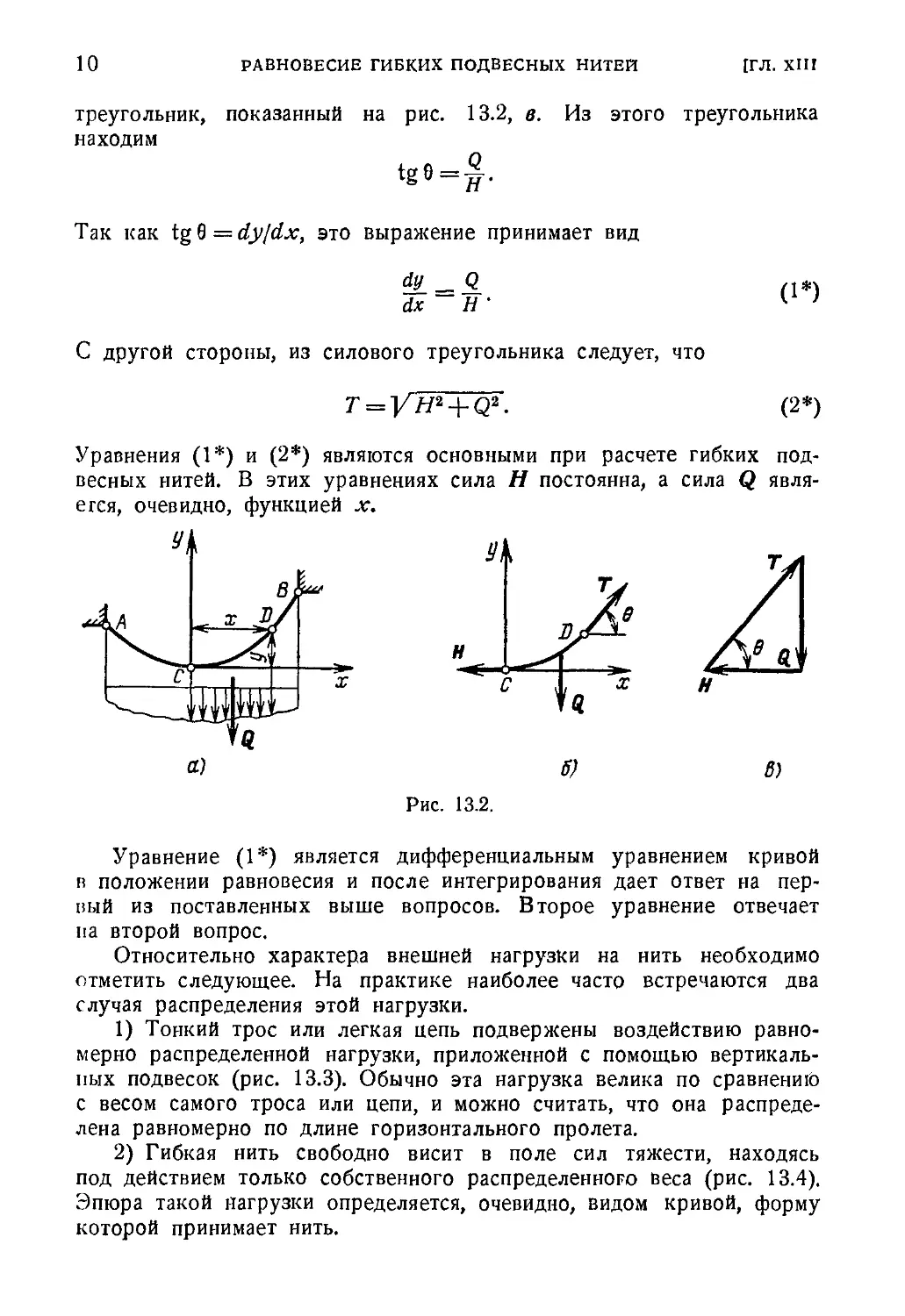
Отсеченный участок CD, который можно рассматривать на осно-
основании принципа отвердевания как твердое тело, находится в равно-
равновесии под действием трех сил: вертикальной силы Q, представляющей
собой равнодействующую распределенной нагрузки на участке CD,
и двух растягивающих усилий Н и Т, представляющих реакции со
стороны каждого из отброшенных участков нити (рис. 13.2, б).
Силы Н и Т направлены по касательной к кривой соответственно
в точках С и D. Вертикальная сила Q проходит через центр тяжести
той части эпюры, которая расположена между рассматриваемыми
сечениями. Эги три силы должны образовать замкнутый силовой
10
РАВНОВЕСИЕ ГИБКИХ ПОДВЕСНЫХ НИТЕЙ
[ГЛ. ХШ
треугольник, показанный на рис. 13.2, в. Из этого треугольника
находим
Так как tg б = dy/dx, это выражение принимает вид
dx И ¦
С другой стороны, из силового треугольника следует, что
A*)
B*)
Уравнения A*) и B*) являются основными при расчете гибких под-
подвесных нитей. В этих уравнениях сила Н постоянна, а сила Q явля-
является, очевидно, функцией х.
и
а)
б)
В)
Рис. 13.2.
Уравнение A*) является дифференциальным уравнением кривой
в положении равновесия и после интегрирования дает ответ на пер-
первый из поставленных выше вопросов. Второе уравнение отвечает
на второй вопрос.
Относительно характера внешней нагрузки на нить необходимо
отметить следующее. На практике наиболее часто встречаются два
случая распределения этой нагрузки.
1) Тонкий трос или легкая цепь подвержены воздействию равно-
равномерно распределенной нагрузки, приложенной с помощью вертикаль-
вертикальных подвесок (рис. 13.3). Обычно эта нагрузка велика по сравнению
с весом самого троса или цепи, и можно считать, что она распреде-
распределена равномерно по длине горизонтального пролета.
2) Гибкая нить свободно висит в поле сил тяжести, находясь
под действием только собственного распределенного веса (рис. 13.4).
Эпюра такой нагрузки определяется, очевидно, видом кривой, форму
которой принимает нить.
ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И ЗАВИСИМОСТИ
11
В первом случае нагруженная гибкая нить принимает форму пара-
параболы, во втором — цепной линии. Приведем основные формулы для
определения характеристик нити в обоих основных случаях.
Параболическая нить. Если на нить действует равномерно
распределенная по длине пролета / вертикальная нагрузка интенсив-
интенсивности q (рис. 13.3), то уравнение равновесной кривой нити при
выбранном направлении осей координат имеет вид
„ 9*2 п*1
У 2Н t \ '
т. е. нить образует участок параболы с вертикальной осью.
Ук
Рис. 13.3.
Рис. 13.4.
Натяжение нити вдоль кривой изменяется в соответствии с урав-
уравнением B*)
D*)
откуда следует, что натяжение нити будет минимальным в самой ниж-
нижней точке С (где оно равно Н) и что оно увеличивается к концам
нити, достигая максимума в верхней опоре.
Силы натяжения на концах нити в точках А и В соответственно
равны
T V V E*)
где расстояния а и b нижней точки С относительно опор А и В
определяются из уравнений
или из уравнений
a=aT-(ft~qf?H' b'*T + fft~qliH- (б*б)
Во всех этих уравнениях остается пока неизвестной величииа
минимального натяжения Н. Она определяется по формуле
12 РАВНОВЕСИЕ ГИБКИХ ПОДВЕСНЫХ НИТЕП [ГЛ. XIII
В этом уравнении знак плюс соответствует случаю, когда вер-
вершина параболы, определяющей положение равновесия нити, располо-
расположена между опорами, как это показано на фигуре. Знак минус отно-
относится к тому случаю, когда вершина параболы лежит по одну сто-
сторону от обеих опор.
В важном частном случае, когда обе опоры находятся на одном
уровне, имеем
/i=/2=/, а = Ь = { и H = q?.
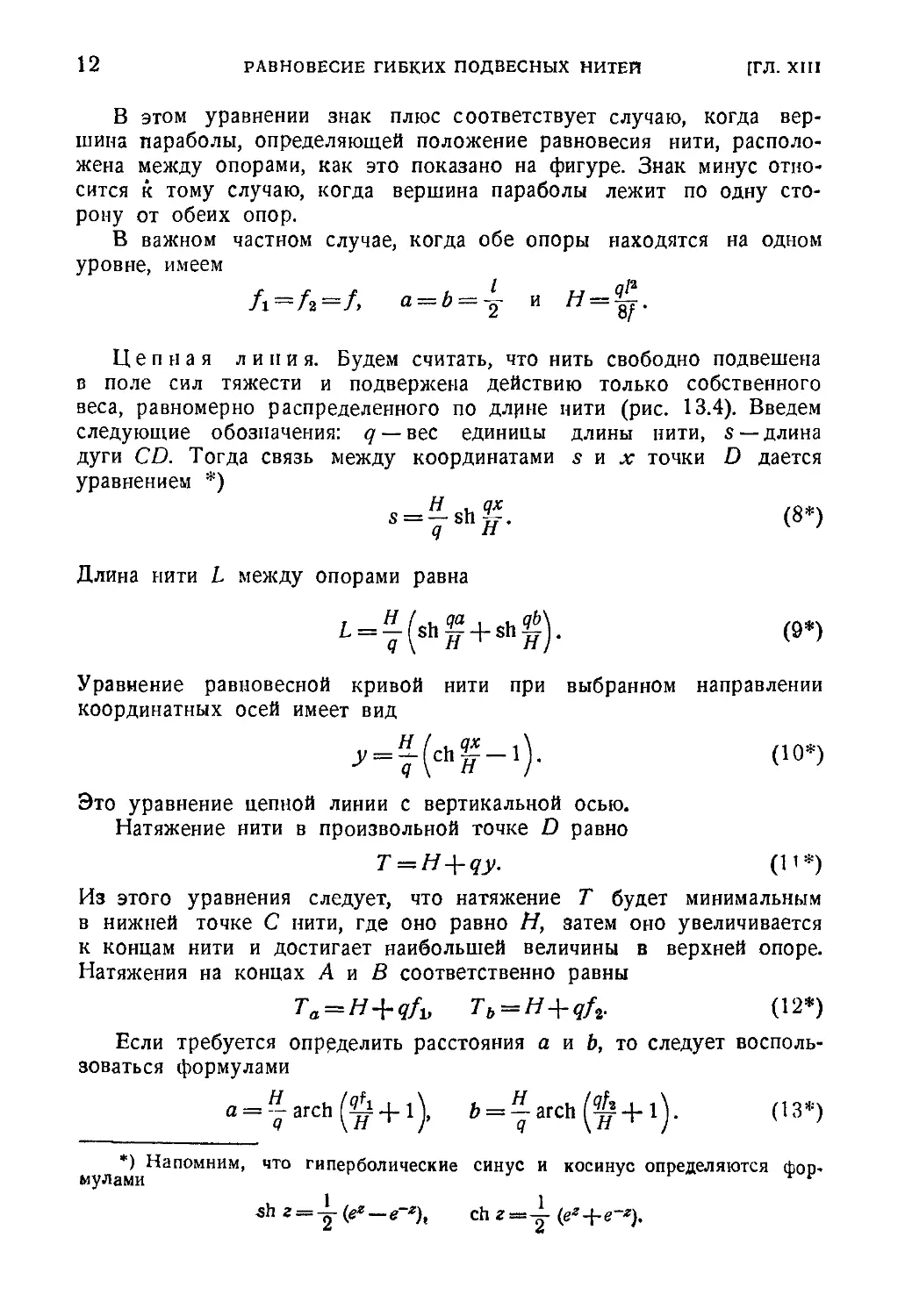
Цепная линия. Будем считать, что нить свободно подвешена
в поле сил тяжести и подвержена действию только собственного
веса, равномерно распределенного по длине нити (рис. 13.4). Введем
следующие обозначения: q — вес единицы длины нити, s — длина
дуги CD. Тогда связь между координатами s н х точки D дается
уравнением *)
-f-bg. (8*)
Длина нити L между опорами равна
Уравнение равновесной кривой нити при выбранном направлении
координатных осей имеет вид
Это уравнение цепной линии с вертикальной осью.
Натяжение нити в произвольной точке D равно
T = H + qy. (И*)
Из этого уравнения следует, что натяжение Т будет минимальным
в нижней точке С нити, где оно равно Н, затем оно увеличивается
к концам нити и достигает наибольшей величины в верхней опоре.
Натяжения на концах А и В соответственно равны
Ta = H + qfh Tb = H+qU A2*)
Если требуется определить расстояния а и Ъ, то следует восполь-
воспользоваться формулами
(§) |(^) A3*)
)
мулами
*) Напомним, что гиперболические синус и косинус определяются фор-
shz = -^(.eZ —e~*)t спг=у
§2]
ПАРАБОЛИЧЕСКАЯ НИТЬ
13
Наконец, величина Н находится из уравнения
A4*)
с помощью таблиц гиперболических функций.
При решении задач на равновесие гибких ни-
нитей необходимо:
1) определить вид нагрузки, действующей на нить (собственный
вес, нагрузка, равномерно распределенная по горизонтальному про-
пролету, и т. п.);
2) выбрать систему координат и составить дифференциальное
уравнение равновесия нити и уравнение для растягивающего усилия Т;
3) проинтегрировав уравнение равновесия, найти уравнение равно-
равновесной кривой нити;
4) в зависимости от конкретных условий задачи найти искомые
параметры.
§ 2. Параболическая нить
Задача 13.1. На рис. а изображен трос подвесного моста, несу-
несущий равномерно распределенную по его горизонтальной длине /
нагрузку Q = 54 Т. Определить вид кривой, которую займет трос,
и максимальное натяжение -троса, если /=30 м, /=3,6 м, h = 2> м.
К задаче 13.1.
Решение. Выбираем систему координат, помещая начало
п нижней точке троса С и направляя ось х горизонтально вправо,
а ось у — вертикально вверх (рис. б). Провисания троса, очевидно,
равны /,=/=3,6 м, /2=/+й = 6,6 м. Интенсивность равномерно
54
распределенной нагрузки q = Q/l — -~-7r—l,8 Т/и.
Чтобы .написать уравнение равновесной кривой троса, восполь-
воспользуемся уравнением A*). В данном случае сила Q равна
и уравнение принимает вид
dx
дх
Н •
14 РАВНОВЕСИЕ ГИБКИХ ПОДВЕСНЫХ НИТЕЙ [ГЛ XIII
Интегрируя, получаем
Поскольку при выбранной системе координат при лг»=О координата
у = 0, произвольная постоянная С2 = 0 и уравнение равновесной кри-
кривой троса будет
g О)
Это уравнение параболы с вертикальной осью и с вершиной в точке
С. Для нахождения натяжения троса Т воспользуемся уравнением
B*), которое примет вид
гУ
Поскольку, как это следует из формулы, натяжение Т возрастает
по мере удаления от точки С, максимальное натяжение троса будет
иметь место в точке В и составит величину
где Ь — расстояние точки С от опоры В, взятое по горизонтали.
Для нахождения неизвестных пока величин Ъ и Н можно вос-
воспользоваться формулами F*) и G*); проделаем это подробнее.
Применив уравнение равновесной кривой троса A) к точкам А
и В, найдем
f-WL f_J*i B)
Jl~ 1Н » н 2Н '
Вычтя первое уравнение из второго, получим
2 (Л -А) Н= q F2 -а*).
Одновременно имеем, что
Из последних двух уравнений следует
п J ql ' ° 2 + qt l ;
Выражение для нахождения величины Н может быть найдено
подстановкой полученного значения для Ъ во второе уравнение сис-
системы B). Получаем
(Л -hftp - qp (/а+Л) н+?jL = о;
Решая это квадратное уравнение, находим
Н=. ЯР__
«2]
ПАРАБОЛИЧЕСКАЯ НИТЬ
15
В этом уравнении следует принять знак плюс, так как вершила пара-
параболы лежит между опорами. Следовательно, минимальное натяжение
Н равно
Н-.
1,8-30*
>40,6 Т.
Величину Ь можно теперь найти либо из второго уравнения B)»
либо из второго уравнения C). Воспользовавшись последним, получаем
1Я 30 , F,6-3,6)-40,6 <7д«
2" ГТ8Т30 ' ° М-
2 ' ql
Теперь уравнение A) равновесной кривой троса принимает вид
,, _ 1'8 yt |
У 2-40,6 ~"
Максимальное натяжение троса
Т.
Задача 13.2. Канат несет нагрузку в 150 кГ на каждый метр
длины горизонтального пролета (рис. а). Определить максимальное
ем
[\\ II
/
/
/
j
/
[ 15ркГ/м
а)
6)
К задаче 13 2.
растягивающее усилие в канате, если натяжение в точке В в 2 раза
больше, чем в точке А. Размеры конструкции даны на рис. а.
Решение. Предположим, что вершина С параболы, определяю-
определяющей положение равновесия каната, лежит слева от обеих опор (рис. б).
Обозначим, как обычно, через а и Ъ расстояния опор А и В от вер-
вершины С по горизонтали, а через /х и /2 эти же расстояния по вер-
вертикали.
Имеем очевидные равенства
A)
B)
16 РАВНОВЕСИЕ ГИБКИХ ПОДВЕСНЫХ НИТЕЙ [ГЛ. ХШ
В задаче указано, что натяжение каната в точке В в 2 раза
больше, чем в точке А. Запишем это условие в виде уравнения,
использовав непосредственно формулы E*) -и учитывая равенство A).
Имеем
+ «?2а2 = УН2 + q* (а + бJ, C)
где Я —натяжение каната в точке С в кГ, q — интенсивность распре-
распределенной нагрузки в кГ/м. В этом уравнении два неизвестных а
и И. Для их определения необходимо составить еще одно уравнение.
Оно получается из B), если величины fx и /2 выразить по формулам
F*а) и уесть снова равенство A)
2/7
Возводя обе части уравнения C) в квадрат и раскрывая скобки
в левой части уравнения D), получим после некоторых упрощений:
Н ^ Н
Из второго уравнения этой системы находим
Я=9(а + 3). F)
Подставляя это значение Н в первое уравнение системы E), полу-
получаем квадратное уравнение
2а2 + 2а — 3 == О,
откуда
— 1 ±
в
Таким образом, имеется два значения а.
Выбрав положительное значение, находим
0,823 м.
a = Z±?
Из уравнения F) определяем Н:
Н = q (a + 3)= 150 @,823 + 3)^573,4 к Г.
Возвратившись опять ко второй формуле E*), находим искомое
максимальное усилие в канате
В этом случае вершина параболы С лежит слева от обеих опор
(рис. б).
S2J
ПАРАБОЛИЧЕСКАЯ НИТЬ
17
Если же выбрать второй отрицательный корень, то
a=zJLz?L^_i>823 м.
и першина параболы лежит между опорами. Для этого случая нахо-
находим:
Ь = 4,177 м, Н= 176,6 кГ, Та = 325,5 к Г,
Г„ = 65\ кГ, Л = 1,46 м, /2 = 7,46 м.
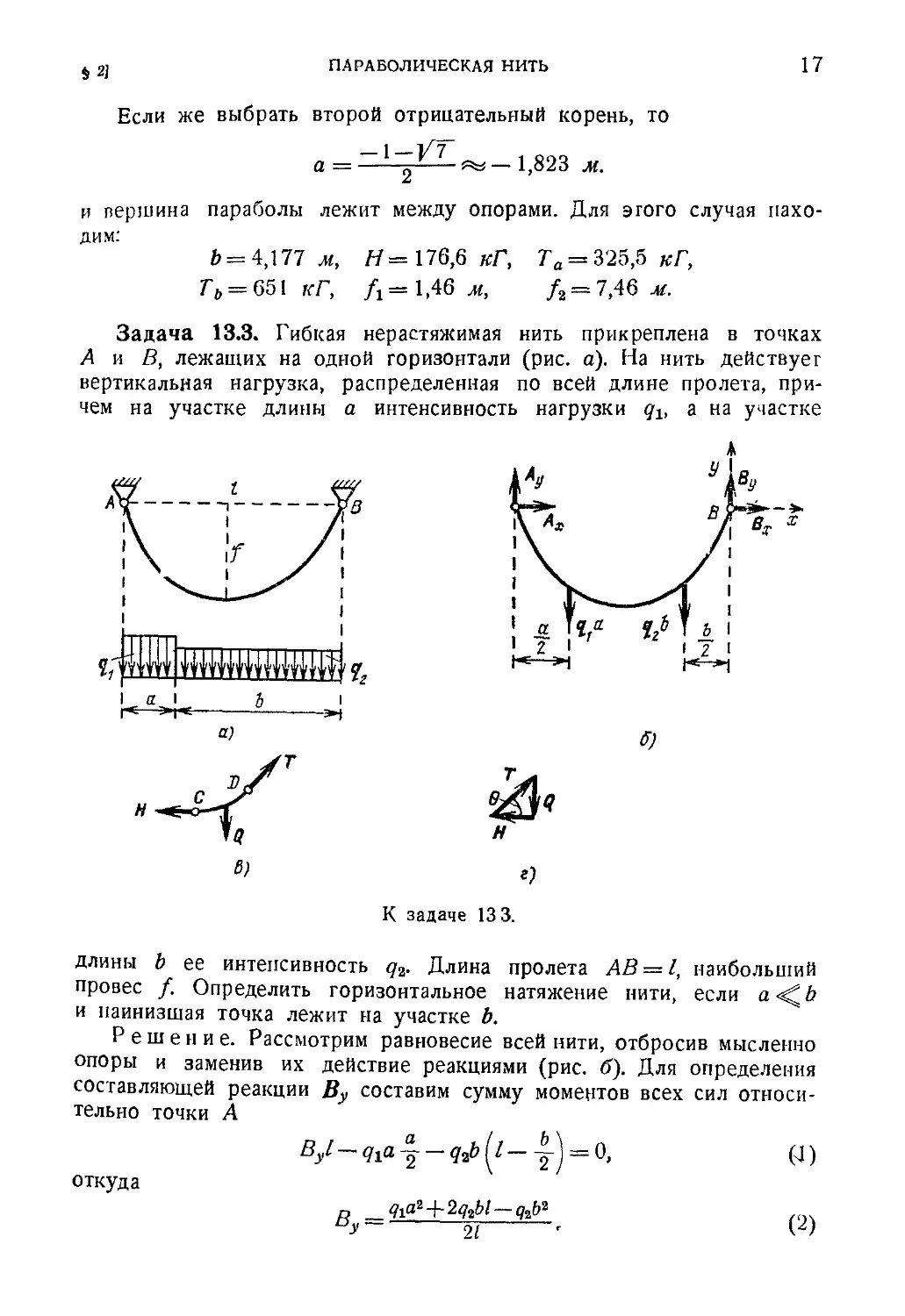
Задача 13.3. Гибкая нерастяжимая нить прикреплена в точках
А и В, лежащих на одной горизонтали (рис. а). На нить действует
вертикальная нагрузка, распределенная по всей длине пролета, при-
причем на участке длины а интенсивность нагрузки дь а на участке
И
г)
К задаче 13 3.
длины Ъ ее интенсивность q2. Длина пролета АВ — 1, наибольший
провес /. Определить горизонтальное натяжение нити, если а<^Ь
и наинизшая точка лежит на участке Ь.
Решение. Рассмотрим равновесие всей нити, отбросив мысленно
опоры и заменив их действие реакциями (рис. б). Для определения
составляющей реакции Ву составим сумму моментов всех сил относи-
относительно точки А
откуда
21
1 8 РАВНОВЕСИЕ ГИБКИХ ПОДВЕСНЫХ НИТЕЙ [ГЛ. XIII
Рассмотрим равновесие отрезка гибкой нити CD, где С —наинизшая
точка, a D — произвольная точка правой части нити. Она находится под
действием трех сил: натяжения Н в точке С, натяжения Т в точке
D и вертикальной нагрузки Q (рис. в). Строим на этих трех силах
замкнутый силовой треугольник, откуда
Но вертикальная нагрузка
Q = By- q2x, D)
где х отсчитывается по горизонтали от опоры В.
Внеся D) в C), имеем
dx H " У '
Отделяя переменные и интегрируя, находим
\ (в)
Произвольная постоянная Q = 0, так как при х = 0 у = 0. С другой
стороны, в точке С
S = 0 G)
и из E) определяем
Подставив в уравнение F)_у=/, а вместо х его значение (8), получим
Внеся в это равенство значение Ву из B), окончательно находим
Задача 13.4. Канат подвешен к точкам А и В, лежащим на
одной горизонтали. Он несет нагрузку, равномерно распределенную
по горизонтали интенсивности q кГ/м. Расстояние АВ — 1. Провес
в середине пролета /.-Определить длину каната, а также изменение
провеса, если длина каната вследствие температурного скачка изме-
изменилась на величину Д5". Ввиду малости отношения f/l^ 1/10 членами,
содержащими его в степени выше второй, пренебречь.
Решение. Выбираем начало координат в точке А. Тогда урав-
уравнение A*) примет вид
dy Ч*
15 "
§ 2] ПАРАБОЛИЧЕСКАЯ НИТЬ 19
Интегрируя его, находим уравнение кривой
У=—Щ- + С1Х + С*. B)
Граничные условия:
у = О при х = О,
у = 0 при х = /.
Внося эти условия в уравнение B), получаем уравнение кривой
у = ±х{1-х). C)
Это парабола с вертикальной осью.
Вычисляя от C) производную по х и приравнивая ее нулю, нахо-
находим, что наибольший провес расположен посредине и равен
7 8Я ' *• ;
Длину каната вычисляем по формуле
VT^x, E)
внося в эту формулу значение
/=^(/-2,) = ^A-2А) F)
Разлагая подынтегральную функцию в ряд и интегрируя, находим
Для параболы с малой стрелкой прогиба, ограничиваемся прибли-
приближенно значением
Отсюда находим зависимость вариации провеса от вариации длины
Д5=у|д/ (9)
или окончательно
Л/=-^ jA& A0)
Заметим, что формула (8) с учетом D) может быть записана в виде
20
РАВНОВЕСИЕ ГИБКИХ ПОДВЕСНЫХ НИТЕЙ
[ГЛ XIII
Задача 13.5. Гибкая нерастяжимая нить, закрепленная в точках
и В, лежащих на одной горизонтали, и нагруженная равномерно
распределенной по горизонтали
I
шштшппишшшшп
а I a I
К задаче 13 5.
нагрузкой q кГ/м, имеет провес fq.
Расстояние АВ = /. Затем нить до-
догрузили симметрично расположен-
расположенной равномерно распределенной
по горизонтали нагрузкой р кГ/м
на участке длиной 2а (рис. а).
Найти уравнения кривой равновесия
нити, полагая стрелку провеса ма-
малой. Определить изменения провеса
/ и горизонтального натяжения Н.
Найти отношение 2а//, при кото-
котором провес / становится макси-
максимальным.
Решение. Обозначим буквой
С точку нити, расположенную на
вертикали, проходящей на расстоя-
расстоянии а от центральной оси. Точка
С делит нить AD на две парабо-
параболические ветви АС и CD, которые
в точке С имеют общую касатель-
касательную (рис. б).
В самом деле, разрежем мыс-
мысленно нить в точке С и рассмотрим
равновесие этой точки. На точку
С действуют две реакции — на гяже-
нйе части нити АС и части нити
CD. Под действием двух сил точка
С может находиться в равновесии
только при условии, что они нап-
направлены по одной прямой. Но на-
натяжения направлены по касательным
к соответствующей части нити. Сле-
частям нити АС и CD в точке С должны
дователыю, касательные к
совпадать.
Выбирая оси координат с началом в точке А, запишем уравнение
ветви АС, согласно A*), в виде
dy
dx
qx
Интегрируя его и учитывая начальное условие у = 0 при х = 0,
получим
Ч i /"^ /О\
§ 21 ПАРАБОЛИЧЕСКАЯ НИТЬ 21
Аналогично находим уравнение ветви CD:
dy _ q+P
ii—r
интегрируя которое находим
В точке С с абсциссой xt = -=— а равны ординаты обеих ветвей
и их производные, определяющие угол наклона касательных:
F)
Из E) и F) находим
Di^Ct + jfX» G)
D^-^jxl (8)
Тогда уравнение параболической ветви CD будет
^ ^ (9)
Для определения произвольной постоянной интегрирования Сг вос-
воспользуемся условием горизонтальности касательной к кривой посре-
посредине пролета, т. е.
¦^ = 0 при лг = //2. A0)
Подставляя эти условия в (9), находим
г — ql л. ра
Итак, уравнение ветви CD окончательно будет
Из этого уравнения находится провес /, если подставить значе-
значение х = Ц2:
p?] A3)
Заметим, что формулу A3) можно получить и другим путем.
Действительно, рассмотрим равновесие половины нити AD (рис. в),
22 РАВНОВЕСИЕ ГИБКИХ ПОДВЕСНЫХ НИТЕЙ [ГЛ. XIII
находящейся под действием нагрузок: ql/2, pa, горизонтальных
реакций Н и вертикальной составляющей реакции YA. Из равенства
нулю суммы проекций всех сил на ось у находим
Составляя далее сумму моментов всех сил относительно точки D,
получим
или
что совпадает с A3).
Уравнение ветви АС получаем, внося в равенство B) значение
произвольной постоянной интегрирования A1):
Найдем абсциссу точки Е вершины параболы АС. Для этого при-
приравняем нулю производную A4)
dy _ ql pa qx3 _ n ., -.
откуда
Переходим к определению горизонтального натяжения Н. Для
этого Находим длину половины нити AD0 при равномерно распреде-
распределенной по горизонтали нагрузке q, согласно равенству (8) предыду-
предыдущей задачи
(|» A7)
где /? —провес нити под действием нагрузки q. После приложения
добавочной равномерно распределенной по горизонтали нагрузки р
длина половины нити AD найдется из равенства (рис. б)
AD = AE — CE + CD. A8)
Находим слагаемые правой части, пользуясь формулой A1) предыду-
предыдущей задачи. Имеем
Далее, замечая, что с учетом A6)
§2]
ПАРАБОЛИЧЕСКАЯ НИТЬ
23
находим
CD = <
6Я*
B0)
B1)
Ввиду того, что нить нерастяжима, длина участка нити AD0 — AD.
Внося значения A9), B0) и B1) в формулу A8) и приравнивая ее
A7), найдем
1 ,
J+
6Я2 J'
B2)
где обозначено p/q — n, 2a[l = z. При этом учтено, что L — l(\-\-zn).
Согласно формуле D) предыдущей задачи
Я -^
Тогда формула B2) может быть переписана в виде
B3)
H = Н„У 1 + Ъпг + 3nzz* - Bn2 + n) z3. B4)
Заменяя Н и Hq через / и fq по формулам A3) и B3), находим
/? ~ V1 + Зпг + Зл2г2 — B/г2 +7^р " ( 5)
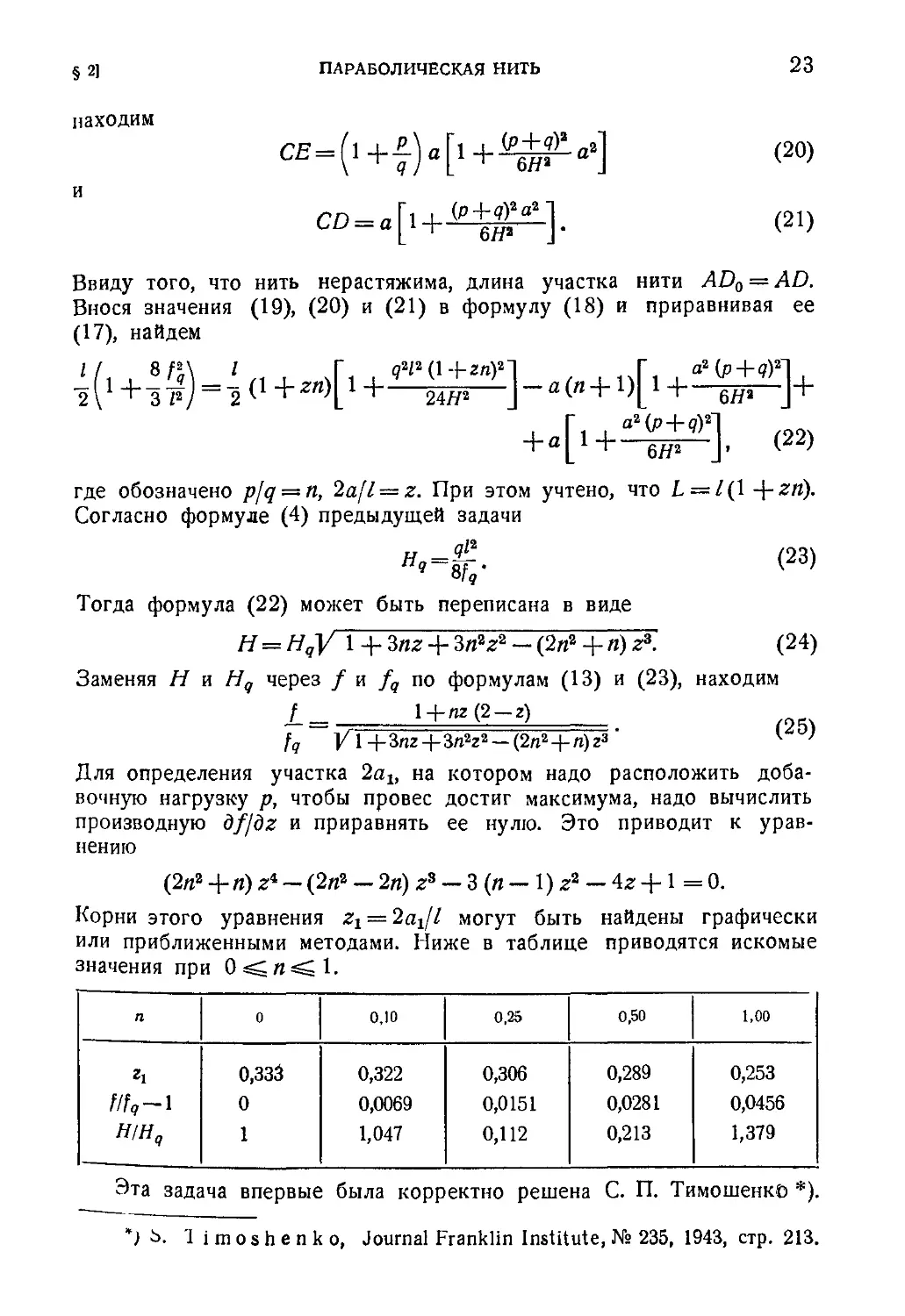
Для определения участка 2аъ на котором надо расположить доба-
добавочную нагрузку р, чтобы провес достиг максимума, надо вычислить
производную df/dz и приравнять ее нулю. Это приводит к урав-
уравнению
Bя2 + я) z* — Bя2 — 2я) z3 — 3 (я — 1) z% — 4z + 1 = 0.
Корни этого уравнения гх = la-^l могут быть найдены графически
или приближенными методами. Ниже в таблице приводятся искомые
значения при
л
fIf ч-1
HlHq
0
0,333
0
1
0,10
0,322
0,0069
1,047
0,25
0,306
0,0151
0,112
0,50
0,289
0,0281
0,213
1,00
0,253
0,0456
1,379
Эта задача впервые была корректно решена С. П. Тимошенко *).
*) Ъ. 1 i m о s h e n k о, Journal Franklin Institute, № 235, 1943, стр. 213.
24
РАВНОВЕСИЕ ГИБКИХ ПОДВЕСНЫХ НИТЕЙ
[ГЛ ХШ
Задача 13.6. Гибкий нерастяжимый канат подвешен к шарнирам
А и В, лежащим на одной горизонтали. Канат находится под дейст-
действием нагрузки q kFjm, равномерно распределенной по горизонтали.
Затем в наинизшей точке к канату приложили сосредоточенную силу
Р (рис. а).
Требуется определить изменение провеса и горизонтального натя-
натяжения, если отношение ///^10 и членами, содержащими это отно-
отношение в степени выше второй) можно пренебречь.
1/2 **"
К задаче 13.6.
Решение. Кривая, образованная канатом при одновременном
действии двух нагрузок, состоит из двух симметричных ветвей пара-
парабол AD и BD (рис. б). В точке D обе кривые образуют угловую
точку D.
Горизонтальное натяжение Нд при действии только распределен-
распределенной нагрузки q равно
1*0=2? • о>
Проектируя все силы, действующие на канат (включая силу Р),
на вертикальную ось и замечая, что Av — By ввиду симметрии, находим
Av = -^{ql-\-P) = ^ A -f-v), B)
где обозначено Pjql = v.
Разрежем мысленно канат в точке D и составим сумму моментов
всех сил относительно этой точки:
пу~2 ч у Т J ~
Тогда, подставляя в это уравнение величину Ау из B), получаем
C)
«>
Согласно условию канат нерастяжим. Следовательно, длины дуг AD0
до приложения силы Р и AD после приложения силы Р равны.
§ 3] ЦЕПНАЯ ЛИНИЯ 25
Длина дуги AD0 равна (см. формулу (8) задачи 13.4)
1 ' 8 ^ E)
С другой стороны, длина дуги AD = AE — DE.
Пользуясь формулой A1) задачи 13.4, находим
«а»
где L/2 — расстояние до вершины параболы Е от вертикали, прохо-
проходящей через шарнир А, Ъ — расстояние от той же точки Е до вер-
вертикали, проходящей через точку D. Так как канат нагружен только
вертикальными силами и горизонтальные натяжения в любой точке
каната равны, то расстояние b можно найти, приравнивая вертикаль-
вертикальную составляющую в точке D. Фиктивная вертикальная нагрузка
на участке DE, равная qb, должна равняться вертикальной нагрузке
в точке D, равной для левой половины каната PJ2, т. е.
или
Р /v
Приравнивая длины дуг AD0~AD с учетом E) и F), находим
8
Если учесть A), то после несложных преобразований находим
Н = Н„
Эти формулы определяют изменения горизонтального натяжения
и провеса, вызванные приложением сосредоточенной силы Р.
§ 3. Цепная линия
Задача 13.7. Гибкая нить длины 30 м и веса единицы длины
7,5 кГ/м свободно подвешена к двум опорам, находящимся на вза-
взаимном расстоянии 15 м и на одном уровне. Определить стрелу про-
провисания в середине пролета и максимальное натяжение нити.
Решение. Изобразим схематически равновесное положение нити.
в задаче заданы: расстояние между опорами /=15 м, длина всей
ниги L = 30 м и вес единицы длины нити q = 7,5 кГ/м. Зд^сь имеет
26
РАВНОВЕСИЕ ГИБКИХ ПОДВЕСНЫХ НИТЕЙ
[ГЛ XII.-
место второй основной случай нагружения, когда нить принимает
форму цепной линии.
Для определения величины провисания нити / необходимо соста-
составить уравнение равновесной кривой нити. Выбрав систему координат
Сху, как показано на рисунке, воспользуемся
основным дифференциальным уравнением A*),
которое принимает вид
К задаче 13.7.
где s — длина дуги CD.
Для интегрирования этого уравнения
надо предварительно выразить длину s как
функцию координат хну. Для этого используем известное соот-
соотношение
которое после подстановки в него значения dyjdx из уравнения A)
примет вид
ds
/'
¦ = dx.
Проинтегрировав это уравнение, получим
|^ B)
Постоянная интегрирования Сх определяется из условия, что для выб-
раннбй системы координат s = 0 при л; = 0. Отсюда Сх = 0. Тогда
уравнение B) принимает вид
S = fshf. C)
Подставив это выражение для s в уравнение A), получаем диф-
дифференциальное уравнение равновесной кривой нити
После интегрирования найдем
Н
Поскольку при х = 0 координата у = 0, получаем С2 = — H/q и оконча-
окончательно
!«) D)
§ i] ЦЕПНАЯ ЛИНИЯ 27
Теперь мы имеем все уравнения, необходимые для решения задачи.
Действительно, положив в уравнении C) х = 1/2, получим
L _H ql
или, после подстановки числовых значений,
112,5 __ и 56,25
Это уравнение вида 2z = sh z. С помощью таблиц гиперболического
синуса находим подбором его решение *)
откуда определяем натяжение нити в точке В: //я« 25,84 кГ.
Искомое провисание нити найдется теперь из уравнения D), если
положить в нем х — 1/2:
Для определения натяжения нити используем основное соотно-
соотношение B*). Вспомнив, что Q — qs, и, применив уравнение C), найдем
Подставив это в уравнение B*), получим
или, используя соотношение D),
T=H+qy.
Из последнего уравнения следует, что натяжение нити достигает
максимума в точках закрепления А и В, где оно равно
7\пах = Я+?/= 25,84+ 7,5-11,94^ 115,4 кГ.
Задача 13.8. Часть гибкой нити с равномерно распределенным
по длине весом лежит на горизонтальной плоскости. Остальная часть
ниги проходит над небольшим блоком А (рис. а). К концу нити
прикладывается постепенно увеличивающаяся сила Т. При этом длина
линии контакта ВС нити с плоскостью уменьшается и стремится
к какому-то определенному пределу с, при котором начинается
скольжение нити по плоскости. Определить это предельное значе-
значение с, если d = 60 м, /i = 6 м, коэффициент трения между нитью
и плоскостью /0 = 0,5.
*) О других способах решения подобных уравнений см. в задаче 13.8.
28
РАВНОВЕСИЕ ГИБКИХ ПОДВЕСНЫХ НИТЕЙ
[ГЛ. XIII
Решение. Участок АВ нити, который примет форму цепной
линии, изображен схематически на рис. б. При решении этой задачи
будем пользоваться формулами, данными в начале этой главы, учи-
учитывая, что в данном случае точка В является нижней точкой кривой.
О-)
б)
90
55
50
45
40
55
30
75
-
-
-
i
с У
/
_—-—jr— т
/
i i
Z+arch A*—)
i i i
30
35 40 44,145 50 55 60
С
в)
К задаче 13.8.
Следовательно, во всех этих формулах надо положить а — I, b = 0,
/2 = 0, 7-ft = Я, Та = Т.
С увеличением силы Т возрастает и натяжение нити И в точке В.
Нить начнет скользить, когда это натяжение станет равным силе
трения между участком ВС нити и плоскостью. Запишем это усло-
условие в виде уравнения
f О)
где q — вес единицы длины нити.
ЦЕПНАЯ ЛИНИЯ
29
Величина Н должна удовлетворять уравнению (Н*), которое
с данной задаче принимает вид
7T =
як
+1).
B)
Исключая из уравнений A). и B) величину Н, получаем уравнение
из которого и определяется искомый размер с. Поскольку l = d-
эго уравнение можно записать в виде
¦с.
с/о fo "
или, подставляя сюда известные величины,
120 о . /12 , Л ,оч
— —2 = arch —+ 1 • C)
Разрешить это трансцендентное уравнение относительно с с помощью
точных алгебраических методов не представляется возможным. Поэ-
Поэтому для нахождения его корней приходится пользоваться прибли-
приближенными способами. Рассмотрим два таких способа: графический и
метод итераций.
Графический способ заключается в том, что на одном чертеже
строятся графики левой и правой частей уравнения. Абсциссы точек
пересечения этих графиков и дают приближенные значения корней.
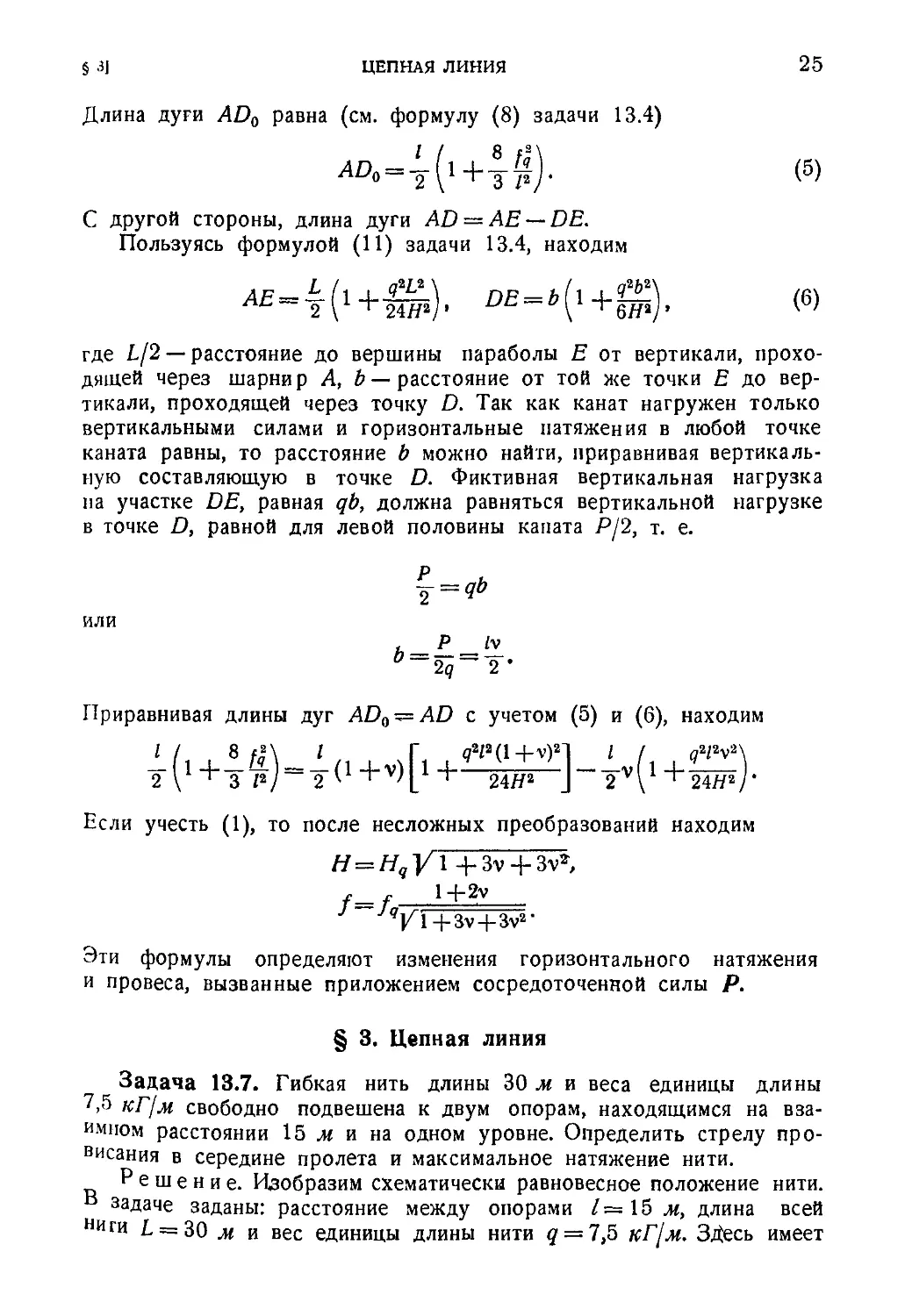
Для некоторого упрощения представим сначала уравнение C) в виде
2 + arch^+l
Графиком левой части уравнения D) является биссектриса первого
координатного угла. Для построения графика правой части вычислим
ее величину при нескольких значениях с, взятых около предполага-
предполагаемого значения корня. Результаты вычислений сведены в табл. 1.
Таблица 1
С
30
35
40
45
50
55
12
с
0,4000
0,3429
0,3000
0,2667
0,2400
0,2182
1,4000
1,3429
1,3000
1,2667
1,2400
1,2182
0,8670
0,8062
0,7557
0,7150
0,6800
0,6491
2+aTch(l + ~\
2,8670
2,8062
2,7557
2,7150
2,6800
2,6491
120
2+ arch A + 7)
41,86
42,76
43,55
44,20
44,78
45,30
Сек 44,1 М
30
РАВНОВЕСИЕ ГИБКИХ ПОДВЕСНЫХ НИТЕЙ
[ГЛ. XIII
По данным таблицы построен рис. в, из которого следует, что иско-
искомое значение с равно 44,1.
Метод итераций состоит в следующем. Данное уравнение F (х) =
= 0 записывают в виде х = ф (х) и находят более точное значение
корня хг по первому приближению х0 с помощью формулы хх =
= Ф (•*¦<))• Повторив этот процесс несколько раз, можно получить
значение корня с любой степенью точности, если на интервале между
корнем уравнения и первым приближением |<р'(х)| ¦< 1. Если же
это условие не выполнено, то уравнение следует преобразовать
(хотя бы переходом к обратной функции).
Нетрудно убедиться, что модуль производной правой части урав-
уравнения D) при 30<с<55 меньше 1. Следовательно, это уравнение
можно итерировать, приняв за первое приближение с0 значение с из
указанного интервала.
Принимая со = 46 м, находим
и далее
2 + archgl+l
120
= 44,3 м
= 44,12 м,
120
= 44,08 м.
На этом процесс итераций можно закончить, приняв окончательно
с = 44,1 м.
Задача 13.9. Гибкая нерастяжимая нить подвешена к опоре А и
пропущена в точке В через ничтожно малый блок. Вес единицы
длины нити q. Определить длину сво-
свободно свешивающейся части нити, при
которой равновесие не нарушится. Тре-
Трением в блоке пренебречь.
Решение. Выбрав начало коор-
координат в наинизшей точке кривой, вос-
воспользуемся для нахождения уравнения
кривой уравнением A*)
, dy _ Q
где Н—натяжение в точке с.
Тогда, замечая, что приращение вертикальной нагрузки dQ = q ds,
имеем
§ 3] ЦЕПНАЯ ЛИНИЯ 31
или, подставляя
ds = Vl+y'2dx A)
и отделяя переменные, находим
dy' =±dr
V\ +у'2 Н
Интегрируя, получим
B)
где для краткости обозначено H/q = a.
Так как
то ct = 0 и окончательно уравнение B) имеет вид
у+-/Г+72 = е^. C)
Из уравнения C) следует, что
у' _ у\ -|.у2 = _ e-xiat D)
в чем легко убедиться, перемножив C) на D).
Сложив уравнения C) и D), имеем
-\\е°-е г).
У -2
Интегрируя последнее уравнение, находим
Положив лг = 0 и _у = 0, находим са = а.
Перенесем начало координат в точку О @, — а). Тогда уравне-
уравнение E) запишется в виде
Ось Oxi называется основанием цепной линии. Так как нить нахо-
находится только под действием вертикальной нагрузки, то проекция
натяжения на горизонталь неизменна:
rdx .. _, j,ds
ТШ = Н, или Т~НГх.
Согласно A) это равенство можно переписать в виде
РАВНОВЕСИЕ ГИБКИХ ПОДВЕСНЫХ НИТЕЙ
[ГЛ ХШ
Вычитая из C) равенство D), находим
-е а =ii
' а
и окончательно получаем выражение для натяжения ниги в произ-
произвольной точке кривой
„ Н
Т = —yt = qу,.
Следовательно, нить будет в равновесии, бели длина свисающей
части будет равна ух = BD.
Задача 13.10. Гибкая нерастяжимая нить перекинута через нич-
ничтожно малый гладкий блок А. Концы нити покоятся на двух шеро-
шероховатых горизонтальных плоскостях. Левая плоскость расположена
выше правой на величину Ь. Оп-
Определить в предельном случае
равновесия разность длин гори-
горизонтальных частей нити / — 1Ь
11 У \ Решение. В предыдущей
задаче была получена формула
для натяжения нити
К задаче 13.10. где у — координата, отсчитываемая
от основания цепной линии. Так
как на блоке А натяжения левой и правой цепных линий одинаковы,
то и основания у них должны быть одинаковыми.
Обозначая параметры цепных линий через а и ах, запишем, сог-
согласно условидо,
а — ау — Ь. (\у
Натяжение в низшей точке цепной линии Н=ад должно
равняться силе трения, т. е.
aq =*fql. B)
Аналогично для второй цепной линии имеем
Вычитая из B) равенство C), получаем с учетом A)
/ / а—ai b
Задача 13.11. Электрический провод на переправе через реку
подвешен к двум опорам высотой /гх и 1ц. Длина провода L, а рас-
расстояние между основаниями опор /. Вес единицы длины провода q.
i 31
ЦЕПНАЯ ЛИНИЯ
33
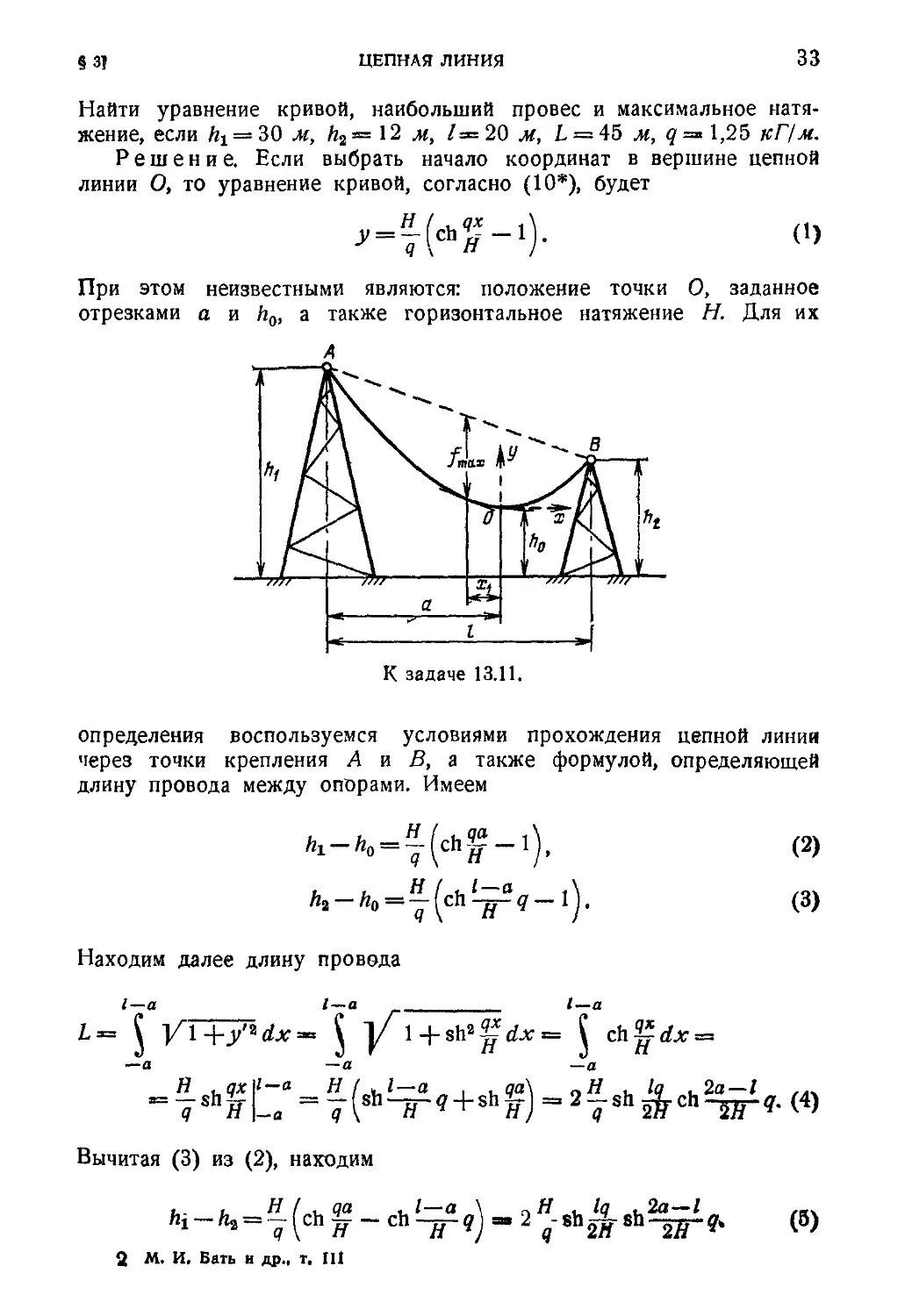
Найти уравнение кривой, наибольший провес и максимальное натя-
натяжение, если /гх = 30 м, Л2= 12 м, /=20 м, L = 45 м, q=* 1,25 кГ/м.
Решение. Если выбрать начало координат в вершине цепной
линии О, то уравнение кривой, согласно A0*), будет
A)
При этом неизвестными являются: положение точки О, заданное
отрезками а и h0, а также горизонтальное натяжение И. Для их
К задаче 13.11.
определения воспользуемся условиями прохождения цепной линии
через точки крепления А и В, а также формулой, определяющей
длину провода между опорами. Имеем
_ , _ я I .да А
Находим далее длину проведа
1—а 1—а
Вычитая (З) из B), находим
3 М. И, Бать и др., т. Ш
B)
C)
1—а
K
h D)
34 РАВНОВЕСИЕ ГИБКИХ ПОДВЕСНЫХ НИТЕЙ [ГЛ ХШ
Для определения горизонтального натяжения Н возведем D) и E)
в квадрат и вычтем из первого второе:
Из этого уравнения находим
8h Ь д 1Я л/Т* lfc=W .... о 06 lq
Это трансцендентное уравнение вида sh z = 2,06 z решается графи-
графически построением двух кривых (или подбором по таблице) f\{z) =
= sh z, /2 (z) = 2,06z. Их пересечение дает z = lq/2H = 2,23, откуда
^=__20-e448 « F)
q 4,46 ' ° M> W
Я= 4,48 • 1,25 = 6,6 кГ.
Для нахождения а разделим E) на D). Имеем
откуда
Остается найти Ао из B) с учетом F)
ho = hi-j(chf-1^2,28 м.
Уравнение кривой найдем, подставив найденные значения в уравне-
уравнение A)
Переходим далее к определению наибольшего провеса провода. Наи-
Наибольший провес будет в той точке кривой, где касательная к ней
будет параллельна прямой АВ:
Из этого равенства находим абсциссу искомой точки кривой
_... -fi^-3,61 м.
§ 3] ЦЕПНАЯ ЛИНИЯ 35
Наибольший провес равен
h0 —у (Х{) =
?B&-l) = 18,74 м.
/max = Й1 iIJ-^ (a — Хг) — h0 —у (Х{) =
Натяжение провода, согласно (И*), будет
fto) = 4O,5 кГ,
ho)=n,8 кГ.
Задача 13.12. Цепью равного сопротивления называется цепь
переменной толщины, у которой толщина в каждой точке пропор-
пропорциональна натяжению Т. У такой цепи вероятность разрыва во всех
точках одинакова. Определить уравнение равновесной кривой и закон
изменения толщины цепи.
Решение. Обозначим буквой 0 переменное сечение цепи, изме-
изменяющееся вдоль ее длины. Если обозначить вес единицы объема
цепи через р, а ее длину через s, то вес элемента ds равен pads.
Выберем начало координат в самой низкой точке цепи. Для нахо-
нахождения уравнения кривой воспользуемся уравнением A*)
dx~N' V>
где //—натяжение в самой низкой точке цепи.
Замечаем, что приращение вертикальной нагрузки dQ=pads,
а натяжение цепи, согласно условию, пропорционально толщине, т. е.
равно Т = ka, где k — коэффициент пропорциональности.
Вычисляя от обеих частей равенства A) дифференциал, находим
d/ = § = P?ds. B)
С другой стороны, так как на цепь действует только вертикальная
нагрузка, то проекция натяжения на горизонтальную ось х есть
величина постоянная
г, -т. dx , dx ,
Н = Т -г- — ka -г- = const,
ds ds
откуда
Н ds „
а = ТТх- <3)
Значение а вносим в уравнение B). Тогда находим
где учтено, что ds = У~1 +У2 dx. Отделяя переменные, получим
2*
36 РАВНОВЕСИЕ ГИБКИХ ПОДВЕСНЫХ НИТЕЙ [ГЛ. ХШ
и, интегрируя, имеем
arctg/ = ^х + сг.
Начало координат выбрано в самой низкой точке, где у кривой
минимум. Следовательно, при х = 0 у' = 0 и сх = 0. Итак,
у' = tg-| х, D)
dy = tg -|- x dx.
Интегрируя, находим
k
-lncos-?
Р k
При х — 0 y = Q и с2~0.
Итак,
— -^¦y = lr\cos-~ х, е k =cos-^-je
или окончательно
c*J'cos-|-x= 1.
Это и есть уравнение кривой равного сопротивления. Чтобы найти
закон изменения толщины цепи, воспользуемся равенством C), откуда
получаем с учетом D)
Эта задача была впервые рассмотрена Кориолисом.
ГЛАВА XIV
КИНЕМАТИКА ТОЧКИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ
§ 1. Основные определения и зависимости
Три величины qlt q2, q3 называются криволинейными координа-
координатами точки, если они однозначно определяют положение этой точки
в пространстве. Если принято правило отсчета этих величин для
любого положения точки в пространстве, то тем самым определена
криволинейная система координат. Так как радиус-вектор точки г и
криволинейные координаты i?i> Чъ <7з независимо и однозначно опре-
определяют положение точки, то можно рассматривать радиус-вектор
как функцию криволинейных координат
r = r(qb <ь Ы A*)
Координатной линией (q{) называется линия, которую описывает
конец радиуса-вектора г при изменении координаты qx и фиксиро-
фиксированных значениях двух других координат (q2ul q30). Уравнение этой
координатной линии будет
r = r(qlt/qi0, ?зо)- B*)
Аналогичным образом могут быть получены две другие координат-
координатные линии
г = г (<71(), ?2> Чбй)> r — r(q10, q20, q3),
проходящие через точку Мо(<7ю, <7го> 9зо)- Следовательно, через каж-
каждую точку пространства можно провести три координатные линии
Ш, (Чг), Ds)-
Касательные, проведенные в данной точке к каждой из трех ко-
координатных линий, называются координатными осями и обозначаются
\чЛ> \Ч?\> [Яз]- Положительное направление каждой координатной оси
выбирается в сторону возрастания соответствующей криволинейной
координаты. Орты координатных осей будем обозначать kb ft2. &з-
Координатными поверхностями называются поверхности, прохо-
проходящие через фиксированную точку Мо, определяемые уравнениями:
r = r(qb q2, <?зо)> поверхность (qb q2),
r = r(q10, q%, qa), поверхность {q2, q3),
r = r(qh qw, qs), поверхность- (q3, qj.
38 КИНЕМАТИКА ТОЧКИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ [ГЛ XIV
Система криволинейных координат называется ортогональной,
если в каждой точке пространства оси координат взаимно перпен-
перпендикулярны. Условием ортогональности является
ferfty = 0 при 1ф}. C*)
Коэффициентами Ляме называются
Орты криволинейных осей координат выражаются через коэффи-
коэффициенты Ляме формулами
Дифференциалы дуг координатных линий равны
Пользуясь этими формулами, можно легко находить коэффициенты
Ляме для различных систем криволинейных координат.
Проекции скорости и ускорения на оси криволинейных коорди-
координат даются формулами
Vq.^Htfi A=1, 2, 3), F*)
~ Щи' ^
где
т = I vi = т
Решение задач на кинематику точки в криволи-
криволинейных координатах рекомендуется вести в следу-
следующей последовательности:
1) для заданной системы криволинейных координат определить
коэффициенты Ляме;
2) установить, является ли система криволинейных координат
ортогональной;
3) найти проекции скорости на оси криволинейных координат;
4) найти проекции ускорения на оси криволинейных координат.
§ 2. Системы криволинейных координат. Координатные оси,
линии и поверхности. Коэффициенты Ляме
Задача 14.1. Выразить в декартовых координатах условия, при
которых система криволинейных координат будет ортогональной.
Проверить ортогональность сферической системы координат.
Решение. 1) Общий случай. Пусть положение точки М
в пространстве определяется в прямоугольной декартовой системе
§21
СИСТЕМЫ КРИВОЛИНЕЙНЫХ КООРДИНАТ
39
координат координатами х, у, z, в криволинейной системе коорди-
координат координатами qlt q2, q3. Радиус-вектор точки М, проведенный
из начала декартовой системы, равен г — xl-{-yj-{-zk. Координат-
Координатная линия криволинейной системы координат является годографом
радиуса-вектора r — r(qlt q2, q3) при изменении только одной кри-
криволинейной координаты q{. Тогда, задавая направление координат-
координатных осей [qj], [q2], [q3] ортами kh k2, k3 и замечая, что коорди-
координатная ось направлена по касательной к координатной линии (в сто-
сторону возрастания координаты), можно записать
О)
ni-\drldqiy
Это равенство следует из того, что оба вектора dr/dqt и ki направ-
направлены по касательной к годографу радиуса-вектора в сторону уве-
увеличения координаты qi. Знаменатель в A) равен коэффициенту Ляме
дг
дх
i/r(dx \
Я,- ' dqi
Тогда формула A) может быть переписана в виде
(/ = 1, 2, 3). B)
Условие ортогональности криволинейной системы координат есть
Учитывая равенство B), получим вместо C)
что дает три равенства
дг
дг
dq3
.0.
D)
Выразив радиус-вектор через декартовы координаты, запишем D)
в виде
дх дх ,
? у_ ду ¦ дг ^ дг ~
dQi ' dq2 + dft ' dq2 ~*~ dqi ' dq2 ~ '
^? ^fi^ 5^4-— — П
deft' dqa + dq2' dq3 Щг' Щз ^ '
^.°^4-^.^4-— • —= 0
0<7i dqt~ dqt dq3~ dqt dq3
E)
Эти равенства — аналитические условия ортогональности криволиней-
криволинейной системы координат.
40
КИНЕМАТИКА ТОЧКИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ ГГЛ XIV
2) Сферическая система координат (см. рисунок). Сфе-
Сферические координаты таковы:
Координатная линия (г) и ось [г] совпадают, это — прямая, про-
реденная через начало координат и точку М. Координатная линия F)—
окружность большого круга, проведенного радиусом ОМ, ось [б] —
касательная к этой окружности,
проведенная в точке М в сторону
возрастания угла б. Координатная
линия (ф) — окружность парал-
параллельного круга радиуса г sin S,
ось [ф] — касательная к этой
окружности, проведенная в точке
М в сторону возрастания угла ф.
Декартовы координаты мо-
могут быть выражены через сфери-
сферические соотношениями
й
X = Г Sin 6 -СОБф,
у = г sin б этф,
К задаче 14 1. z = r cos б.
Внеся эти значения координат в систему уравнений E), находим
дх дх ,ду ду . дг дг
л^' лй~гл^'ла'5г'<36~~
дг дЬ
= г sin 6 • cos б (cos2 ф + sin2 ф) — г sin б • cos 6 = 0,
дв
дв ' «Эф
дв ' дер
= — г2 cos б • cos ф • sin б • sin ф + г2 cos б • cos ф • sin б • sin ф = 0.
Таким образом, сферическая система координат ортогональна.
Задача 14.2. Уравнения движения точки заданы в цилиндриче-
цилиндрической системе координат. Зная фбрмулы перехода от цилиндрических
координат к декартовым:
х = р cos ф, у = р sin ф, z= z,
проверить ортогональность цилиндрической системы координат.
Найти координатные линии, оси и координатные поверхности.
Решение. Подставив аналитические условия ортогональности
криволинейной системы координат E) из задачи 14.1 qx — p, д2 = ф|
СИСТЕМЫ КРИВОЛИНЕЙНЫХ КООРДИНАТ
41
qs = z и воспользовавшись зависимостями A), найдем
— р cos ф • sin <р + р sin ф • cos ф = О,
— р sin ф • 0 -)- р • cos ф • 0 + 0 • 1 =0,
cos ф • 0 + sin ф • 0 + 0 • 1 = 0.
Таким образом, цилиндрическая система координат ортогональна.
Это показано на рисунке, где в точке М
проведены цилиндрические оси коор-
координат: [р], [ф], [г]. Координатными
линиями в этом случае являются: линия
(р) —прямая AM, проходящая через
точку М, вдоль которой ф = const и
z = const; линия (ф) — дуга окружности
ВМС, вдоль которой ф = const и
z = const. Координатными поверхно-
поверхностями в системе цилиндрических коор-
координат являются: а) поверхность BCED
цилиндра радиуса р с осью Oz, прохо-
проходящая через заданную точку М,
К задаче 14.2.
для которой р = const; б) полуплоскость OAMMi проходящая
через ось Oz и точку М, для которой ф = const; в), горизонтальная
плоскость ABC, проходящая через точку М> для которой z = const.
Задача 14.3. Эллиптическими координатами на плоскости называ-
называются координаты Tji, г|а, связанные с декартовыми координатами
уравнениями у
У2 _i
A)
B)
где а и b — постоянные величины.
Определить границы изменений эл-
эллиптических координат Tjx. и гJ так,
чтобы A) представляло семейство со-
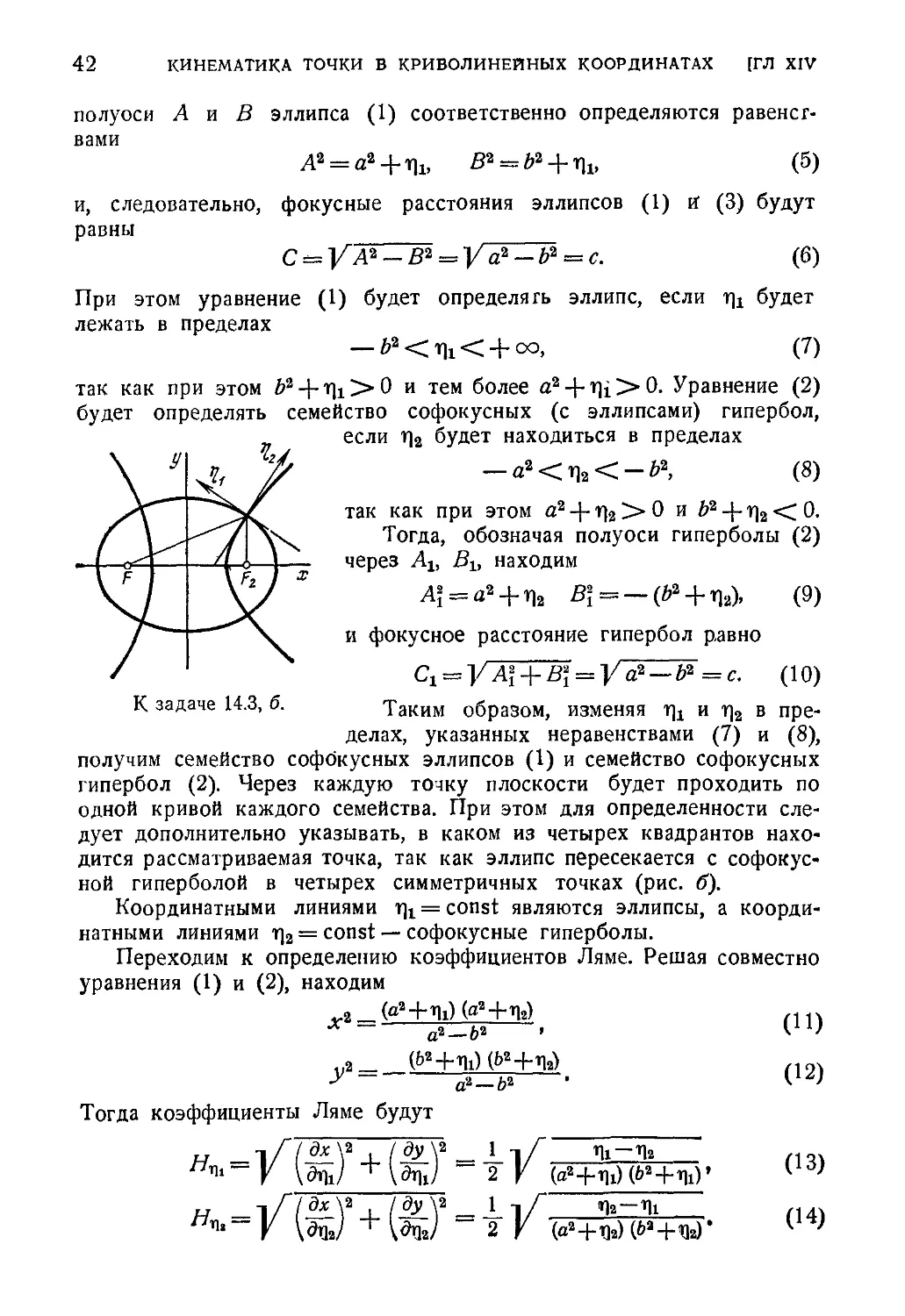
софокусных эллипсов, а уравнение B) — к задаче 14.3, а.
семейство софокусных гипербол (рис. а).
Найти коэффициенты Ляме, координатные линии и оси, проверить
ортогональность системы, если а>Ь.
Решение. Докажем, что уравнение A) представляет собой
семейство эллипсов, софокусных эллипсу
C)
В самом деле, фокусное расстояние эллипса C) равно
D)
42
КИНЕМАТИКА ТОЧКИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ [ГЛ XIV
полуоси А и В эллипса A) соответственно определяются равенст-
равенствами
А2 — a2 -j- r\b B2 = b2-\- %, E)
и, следовательно,
равны
фокусные расстояния эллипсов A) и" C) будут
При этом уравнение
лежать в пределах
С ±= У А2 -В2 =
A) будет определять эллипс, если
будет
G)
так как при этом Ь2 + 1ц1>0 и тем более а2-\-щ>0. Уравнение B)
будет определять семейство софокусных (с эллипсами) гипербол,
если т]2 будет находиться в пределах
*/. . . . .. (8)
так как при этом а2 + х\г >• 0 и Ъ2 -\- г]2 < 0.
Тогда, обозначая полуоси гиперболы B)
через Аъ Въ находим
А\ = а2 + Г]2 В\~ — (Ь2 + г]2), (9)
и фокусное расстояние гипербол равно
A0)
= У аъ — Ъ2=с.
К задаче 14.3, б.
Таким образом, изменяя % и % в пре-
пределах, указанных неравенствами G) и (8),
получим семейство софокусных эллипсов A) и семейство софокусных
гипербол B). Через каждую точку плоскости будет проходить по
одной кривой каждого семейства. При этом для определенности сле-
следует дополнительно указывать, в каком из четырех квадрантов нахо-
находится рассматриваемая точка, так как эллипс пересекается с софокус-
ной гиперболой в четырех симметричных точках (рис. б).
Координатными линиями \\1 = const являются эллипсы, а коорди-
координатными линиями тJ = const — софокусные гиперболы.
Переходим к определению коэффициентов Ляме. Решая совместно
уравнения A) и B), находим
..О I \ / _9 I \
(И)
Тогда коэффициенты Ляме будут
' +
(
A2)
A3)
A4)
СИСТЕМЫ КРИВОЛИНЕЙНЫХ КООРДИНАТ
43
Исследуем ортогональность системы. Аналитическое условие орто-
ортогональности для эллиптической системы координат имеет вид
дх дх , ду ду
дг\г ' дх\2 ' дщ ' дг^
= 0.
A5)
Вычисляя указанные частные производные, исходя из A1) и A2), я
внося их в A5), получим после несложных преобразований
_1_ _
4 'а2
-б2
4 а* —
; = 0.
A6)
Система координат ортогональна. Это следует и из известного свой-
свойства касательной к гиперболе — она делит угол между радиусами-
векторами, проведенными из фокусов в точку касания, пополам, каса-
касательная к эллипсу является равнонаклоненной к тем же радиусам-век-
радиусам-векторам (рис. б).
Примечание. Эллиптические координаты иногда вводятся и при
помощи других зависимостей. Так, например, переменные | и у, связанные
с декартовыми координатами соотношениями
jc=cch?cos у,
_у=с shg sin у,
также называются эллиптическими координатами и могут быть определены
как функции эллиптических координат г^ и %, рассмотренных в задаче.
Можно легко показать, что координатные линии g=const являются эллип-
эллипсами, а координатные линии у = const — софокусными гиперболами, фокусное
расстояние которых равно с.
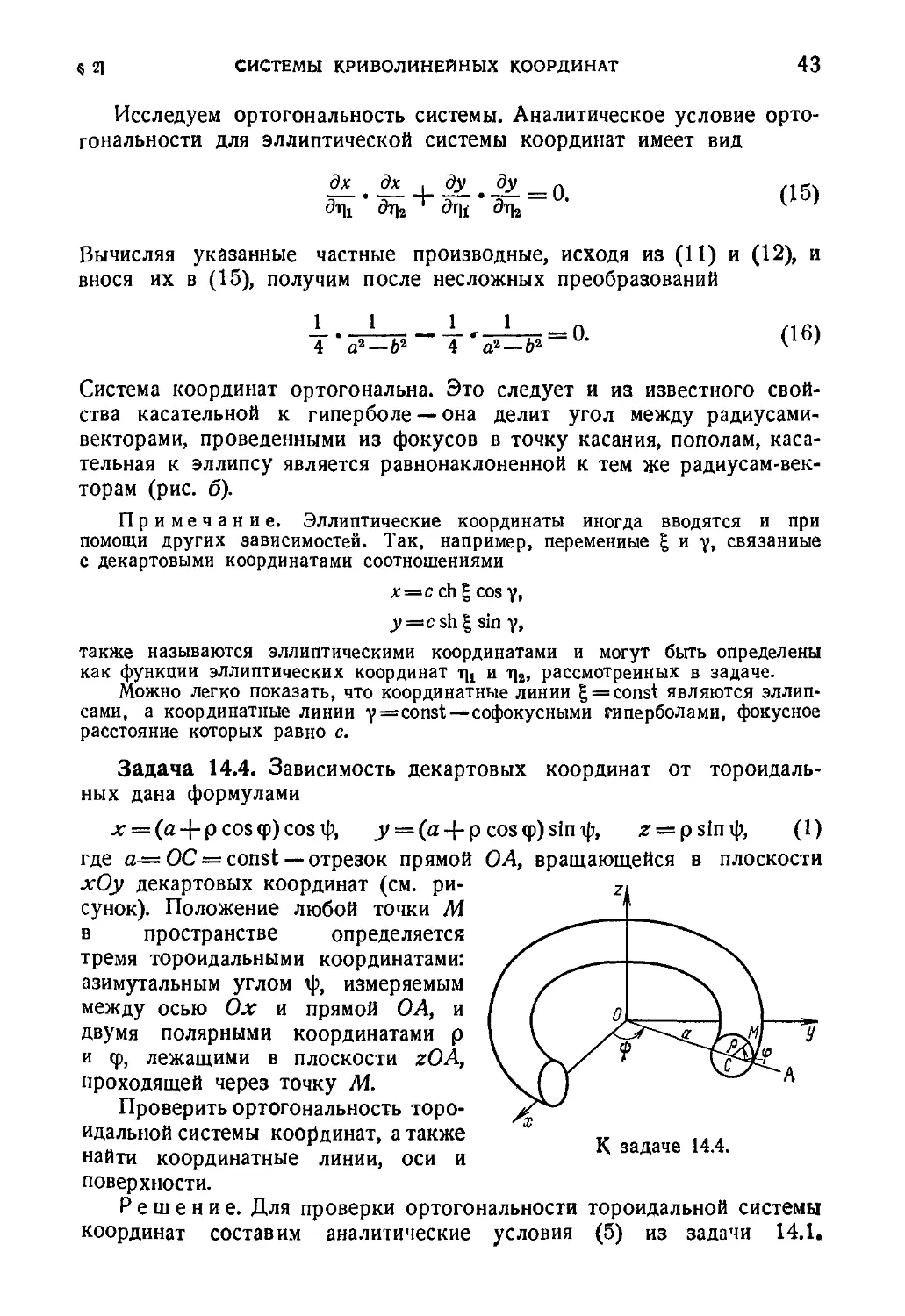
Задача 14.4. Зависимость декартовых координат от тороидаль-
тороидальных дана формулами
х = (а + р cos ф) cos г|?, у = (a -f- p cos <p) sin ip, гг = р sin tp, (I)
где а-= ОС — const — отрезок прямой О А, вращающейся в плоскости
хОу декартовых координат (см. ри-
рисунок). Положение любой точки М
в пространстве определяется
тремя тороидальными координатами:
азимутальным углом а|), измеряемым
между осью Ох и прямой ОА, и
двумя полярными координатами р
и ср, лежащими в плоскости zOA,
проходящей через точку М.
Проверить ортогональность торо-
тороидальной системы координат, а также
найти координатные линии, оси и
поверхности.
Решение. Для проверки ортогональности тороидальной системы
координат составим аналитические условия E) из задачи 14.1.
К задаче 14.4.
44 КИНЕМАТИКА ТОЧКИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ [ГЛ. XIV
Вычисляя частные производные и внося их в E), имеем
— р cos ф sin ф cos2i|> — р cos ф sin ф sin21|5 + p sin ф cos ф = О,
р sin ф cos г|) (а + р cos ф) sin г|) —
— р sin ф sin ij) (а + р cos ф) cos i|) + Р cos ф • 0 = О,
— cos ф cos \f> (а + р cos ф) sin г)) +
+ cos ф sin г|з (а + р cos ф) cos г|) + sin ф • 0 = 0.
Таким образом, тороидальная система координат ортогональна.
Переходим к определению координатных линий и осей. Коорди-
Координатная линия (р) найдется, если положить ф = const и г|э = const. Это
будет полупрямая СМ, которая одновременно будет являться и коор-
координатной осью [р]. Координатная линия (ф) найдется, если положить
р = cons,t и г|) = const. Это будет окружность с центром С и радиу-
радиусом р, лежащая в плоскости zOA. Касательная к этой окружности,
направленная в сторону возрастания угла ф, будет координатной
осью [ф]. Координатную линию (ф) получим, положив р = const и
Ф = const. Это будет окружность с центром на оси z в точке
г = р51пф, радиусом (a-f-pcosг|з), лежащая в плоскости, параллель-
параллельной хОу. Касательная к этой окружности в точке М, направленная
в сторону возрастания угла \|>, будет координатной осью [ф].
Координатными поверхностями будут: при р = const — поверхность
тора, при ф = const — поверхность конуса с углом раствора я/2 — ф,
при а|) = const — плоскость zOA.
Задача 14.5. Определить коэффициенты Л яме для тороидальных
координат р, ф, if, связанных с декартовыми координатами форму-
формулами A) из задачи 14.4 (см. рисунок к задаче 14.4).
Решение. Для нахождения коэффициентов Ляме воспользуемся
формулами D*):
н
Для криволинейной координаты р находим
и, следовательно,
Яр = У cos2 ф cos2 г]) + cos2 ф sin2i|) ¦+¦ 81п2ф = I.
Для криволинейной координаты ф имеем
и, следовательно,
ф = У р2 (sin2 ф cos2 ife -f sin2 ф sin2 ¦уз + cos2 ф) = р.
§ 3] СКОРОСТИ И УСКОРЕНИЯ ТОЧЕК 45
Для криволинейной координаты л|з получим
ъ~, — — (а + Р cos ф) sin гЬ; зт = (а + р cos ф) cos гЬ; -^ = 0.
То. да
Ну — У (a -f- p cos фJ (sin21|) -f cos2 я|>) = а 4- р cos ф.
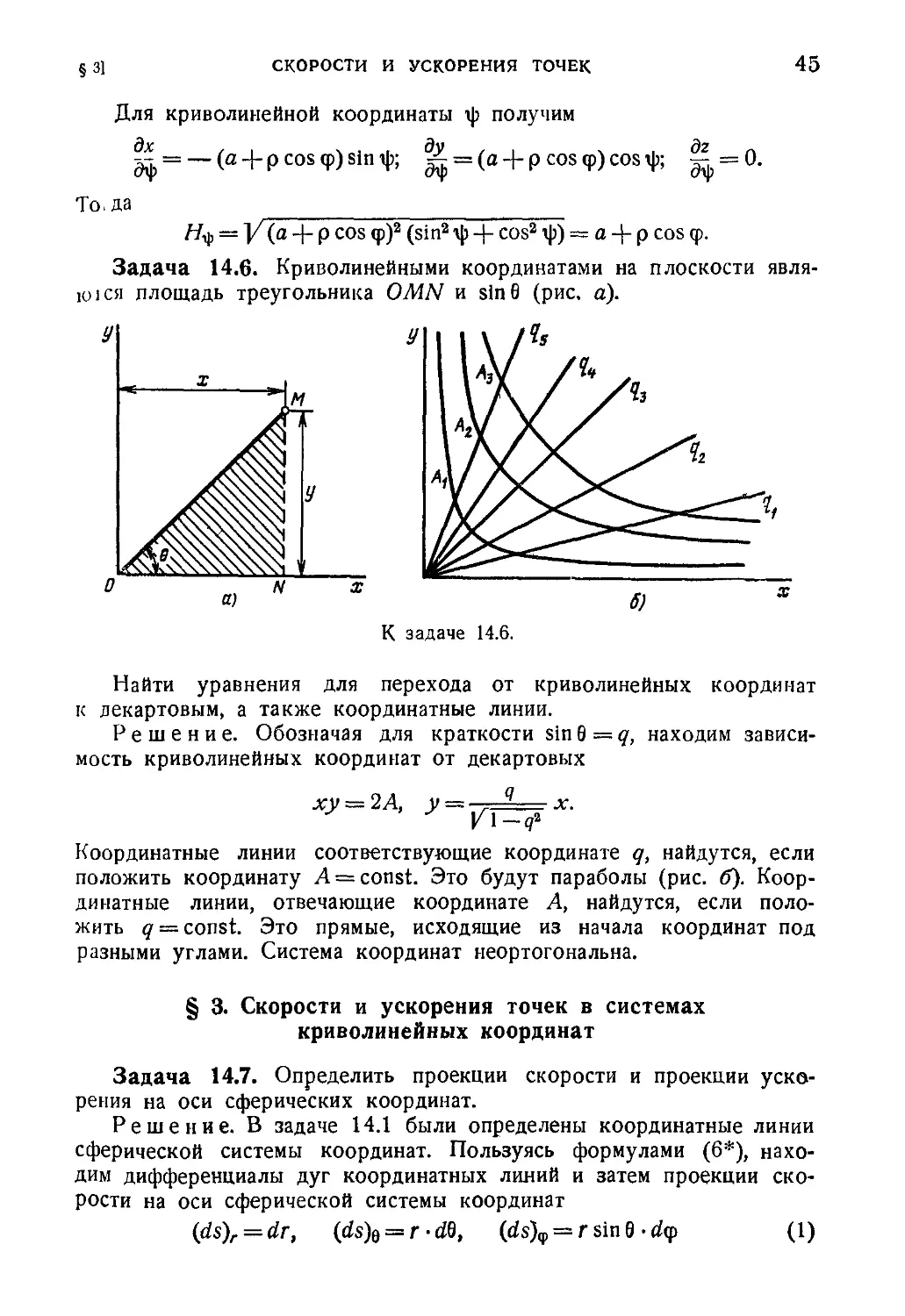
Задача 14.6. Криволинейными координатами на плоскости явля-
ю1ся площадь треугольника 0MN и sin 6 (рис. а).
К задаче 14.6.
Найти уравнения для перехода от криволинейных координат
к декартовым, а также координатные линии.
Решение. Обозначая для краткости sin 6 = q, находим зависи-
зависимость криволинейных координат от декартовых
___
Координатные линии соответствующие координате q, найдутся, если
положить координату А = const. Это будут параболы (рис. б). Коор-
Координатные линии, отвечающие координате А, найдутся, если поло-
положить q = const. Это прямые, исходящие из начала координат под
разными углами. Система координат неортогональна.
§ 3. Скорости и ускорения точек в системах
криволинейных координат
Задача 14.7. Определить проекции скорости и проекции уско-
ускорения на оси сферических координат.
Решение. В задаче 14.1 были определены координатные линии
сферической системы координат. Пользуясь формулами F*), нахо-
находим дифференциалы дуг координатных линий и затем проекции ско-
скорости на оси сферической системы координат
(ds)r = dr, (ds)e — r-dQ, (ds)9 = r sin6 • dq> A)
46 КИНЕМАТИКА ТОЧКИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ [ГЛ. XIV
и, следовательно,
Vr^f, г»е==г6, т»ф = г81пб-ф, B)
где роль обобщенных координат играют сферические координаты
3i = r, #2 = 8, ?3 = Ф- C)
Тогда, учитывая формулу F*)
Vqi = Щ ¦ $i,
находим коэффициенты Ляме
Яг=1, Щ = г, tf^rsinG. D)
Зная эти коэффициенты, ищем проекции ускорения на оси сфери-
сферических координат, пользуясь формулой (8*):
и формулой G*)
так как
Wq = — ( ; j = r§ -f- 2/*8 — r sin 6 • cos 9 • cp2, G)
так как
дТ „л d ат
так как
— Ц^ = г2 sin2 0 • ф + 2г - ^ - sin3 6 •
Задача 14.8. Определить проекции скорости и ускорения точки
на оси тороидальной системы координат (см. рисунок к задаче 14.4).
Решение. Пусть прямая О А вращается вокруг точки. О в пло-
плоскости Оху. Возьмем точку С на этой прямой за полюс и обозначим
расстояние ОС = а. Положение любой точки М можно определить
заданием трех координат: азимутального угла ij>, образованного
осью х и прямой ОА, при котором плоскость zOA пройдет через М,
§ 3) СКОРОСТИ И УСКОРЕНИЯ ТОЧЕК 47
и двух полярных координат риф точки М в этой плоскости при
полюсе С. Координаты р, <р, ij; называются тороидальными координа-
координатами. Декартовы координаты выражаются через тороидальные коор-
координаты формулами
х = (а + Р cos ф) cos ijj,
у = (а + Р cos ф) sin ip,
z = psin(p.
Находим коэффициенты Ляме, пользуясь равенствами F*):
ds1^H1dp, ds2 = H2d<p, dsa — H3dty. A)
Заметив, что
ds! = dp, ds2 = p dcp, ds3 = (a + p cos ф) dty, B)
и сопоставляя A) и B), имеем
#р=*1, Яф = р, Яф^= а + р cos ф.
Тогда проекции скорости на оси тороидальных координат будут
ф ч р
г»ф = Яф • ф == (а + Р cos ф) ф.
Модуль скорости точки равен
2ф2 + (а + Р cos фJ -фг.
Переходим к определению проекций ускорения на оси тороидаль-
тороидальных координат. Находим
Т = 1 г;2 -1 [р2 + PV + (а + Р cos фJ фа].
Тогда
Аналогично
Й [(а + р C0S фJ ^ = *(а+Р C0S ф) + 2^
зф — рф sin ф).
48
KHHFMATHKA ТОЧКИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ [ГЛ XIV
Задача 14.9. Определить проекции скорости на оси цилиндри-
цилиндрических координат (см. рисунок).
Решение. Зависимость декартовых координат от цилиндри-
цилиндрических выражается формулами
z = z.
Находим коэффициенты Ляме:
"»=/(t)'+(t)'+(S)'='/<^+si»2»=1'
Тогда проекции скорости на оси цилиндрических координат равны
Задача 14.10. Найти проекции ускорения точки на оси цилиндри-
цилиндрической системы координат (см. рисунок к задаче 14.9).
Решение. Криволинейные координаты р, ф, z определяют поло-
положение точки М в цилиндрической си-
[zj стеме координат. Зависимость декар-
декартовых координат от цилиндрических
определяется равенствами
psin<p, z — z.
Коэффициенты Ляме, согласно D*),
равны
К задаче 14 9.
Ищем проекции ускорения на оси цилиндрической системы коор-
координат. Находим
Тогда
1 / d дТ дТ\
1 / d дТ дТ
\ d
dt
дТ\_ \ d 2
дТ дт
§ 3J СКбРОСТИ И УСКОРЕНИЯ ТОЧЕК 49
Первые два уравнения являются одновременно проекциями ускорения
точки на полярные оси координат, применяемые в случае движения
точки на плоскости.
Задача 14.11. Точка М движется по винтовой линии согласно
уравнениям
x.=azoskt, A)
у = a sin kt, B)
z=*bt, C)
где a, k, b — постоянные.
Определить уравнения траектории в цилиндрических координатах
и ее скорость.
Решение. Цилиндрическими координатами являются
Находим первую цилиндрическую координату
р = qr — ~\f x* -\-у2 — а = const. D)
Вторая цилиндрическая координата
Ф = «. E)
Третья цилиндрическая координата дается непосредственно равенством
C). Исключая время из уравнений C) и E), получаем
* = *f. F)
которое вместе с равенством D) и дает уравнение траектории
точки—уравнение винтовой линии в цилиндрических координатах.
Винтовая линия навивается на поверхность цилиндра радиуса а.
Согласно задаче 14.9 проекции скорости на цилиндрические оси
координат равны
VP = tfp.p = 0,
так как в данном случае р = const. Далее
1/ф = Яф-ф = р-А.
Наконец,
Задача 14.12. Определить проекции скорости движущейся точки
на оси эллиптической системы координат.
Решение. В задаче 14.3 были найдены коэффициенты Ляме
для эллиптических координат у\х и тJ, связанных с декартовыми
координатами уравнениями
где a, b — постоянные величины.
50 КИНЕМАТИКА ТОЧКИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ [ГЛ. XIV
Коэффициенты Ляме равны
И = l i/" ¦bi—b H _ 1 -i/
""• 2 К (a2 + %)(b2+ru)' "Ч1~2 И (
Тогда проекции скорости на оси эллиптической системы координат
будут
Модуль скорости равен
Следует иметь в виду, что % и \\г должны лежать в пределах, ука-
указанных в задаче 14.3.
Задача 14.13. Уравнения движения точки заданы в полярных
координатах уравнениями
Р ==Рое » A)
ф = «. B)
Определить траекторию, скорость, ускорение, секториальную скорость
и радиус кривизны траектории.
Решение. Для нахождения траектории в явном виде исключим
из уравнений A) и B) время
р **~~ j^o К )
Для определения проекций скорости точки на полярные оси восполь-
воспользуемся значениями коэффициентов
Ляме (см. задачу 14.9)
Тогда, согласно (б*),
vp = Яр • 'р = — крое-ы, E)
г>ф = Яф.ф = рй = ро&г«. F)
Отсюда модуль скорости равен
х
К задаче 14.13. t) = ]/2 p0Ae'w. G)
Направление скорости показано на рисунке. Проекции ускорения на
полярные оси, согласно задаче 14.10, равны
w4 = 2pq> + рф = — 2?2po?Tw. (9)
Таким образом, полное ускорение точки равно vf
i 31
СКОРОСТИ И УСКОРЕНИЯ ТОЧЕК
61
Для определения радиуса кривизны траектории вычисляем каса-
касательное ускорение
__dv_
Wr~dt~~
Нормальное ускорение равно
Радиус кривизны траектории
у3 2plk*e~ikt
ы _
Секториальная скорость равна
ds 1
A0)
A1)
A2)
A3)
Секториальная скорость связана с проекцией ускорения на транс-
(х)гкоординитные линии
версальную ось формулой
1 d , ,.ч 2 da
х
К задаче 14.14.
Задача 14.14. Семейство
парабол (см. рисунок), опреде-
определяемых уравнениями
у = Ьх2, A)
заполняет собой плоскость ху.
Каждому значению bt = const
соответствует одна парабола.
Задаваясь значениями b и X,
можно определить любую точку
в плоскости, так как каждой
паре значений Ь и х соответствует определенное значение у. Выбрав
Ъ и х в качестве криволинейных координат на плоскости ху, найти
коэффициенты Ляме, проекции скорости на координатные оси [Ь]
и [х], а также выражение T = -~-v2.
Решение. Обозначив криволинейные координаты
<7i = b, q2 = x, B)
вапишем зависимость декартовых координат от криволинейных в виде
х — q%, (о)
D)
52 КИНЕМАТИКА ТОЧКИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ [ГЛ. XIV
Для нахождения коэффициентов Ляме находим вначале
? ? F)
и далее
Проекции скорости на криволинейные оси координат
Щ = //!$! = *»?, (9)
г)г = Я2^ = У1 + 462Р.х. A0)
Так как оси неортогональны, то найдем косинус угла между осями,
пользуясь формулами C*) и E*). При этом произведение ортов в C*)
и определит искомый косинус, который для неортогональной системы
не равен нулю
- . 1 !дх дх , ду
Внеся в формулу A1) значения входящих в нее величин, получим
Далее находим по теореме косинусов
v^ ^v\+vl-^2v1vicos (qCqd- A3)
Внеся в эту формулу значения всех величии, имеем окончательно
±± A4)
Координатными линиями (х) являются параболы, так как для каждой
из них b = const. Координатные оси [х] — касательные к параболам.
Координатными линиями (Ь) и осями [Ь] являются прямые параллель-
параллельные оси у, для которых х — const.
Задача 14.15. Корабль движется с постоянной Скоростью г» и под
постоянным курсовым углом а к географическому меридиану. Опре-
Определить проекции ускорения на оси сферических координат, ускоре-
ускорение корабля и радиус кривизны траектории.
Решение. Выбираем сферические координаты: в — широта, ф —
долгота местоположения корабля на сфере и r = i? = const, где R—
5 3)
СКОРОСТИ И УСКОРЕНИЯ ТОЧЕК
53
радиус сферы. Тогда проекции скорости корабля на сферические оси
будут
г», = f = 0, vq = rb =< v cos ос, г»ф = г cos6-9 = i>sina. A)
Траектория корабля — локсодромия была найдена в задаче 5.25 («Тео-
(«Теоретическая механика в примерах и зада- .
чах», том I, 1971).
Для нахождения проекций ускорения _L»«
на оси сферических координат составим
выражение
л»»
B)
и будем искать проекции ускорения, поль-
пользуясь формулой G*)
<Н Hi\dtdqi dqi)'
К задаче 14 15.
Коэффициенты Ляме для сферических координат будут
Нг=\, Нь = г, /Уф = г cos 6. C)
Ищем проекцию ускорения:
а) на ось г
следовательно,
б) на ось 8
D)
Но из второго уравнения системы A) следует, что 9 —const и,
следовательно, 6 = 0. Тогда, учитывая равенство A), находим
E)
в) на ось ф
^ |? = ^ (г2 cos2 8 • ф) = jt (v sin a • г cos 6) = — v sin a • r ¦ sin 9 • б =
v sin a • r • sin 6 • v cos a
—v2 sina ¦ cos a • sin 6,
дф
Тогда, учитывая C), имеем
Wy ==— ysina-cosa-tg9.
F)
54 КИНЕМАТИКА ТОЧКИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ (ГЛ. XIV
Ускорение корабля находится по формуле
r G)
и направлено по главной нормали локсодромии, так как скорость
корабля постоянна и касательное ускорение равно нулю.
Радиус кривизны локсодромии будет (так как v = const, то wn — w)
a»
' (8)
ia ct • tga Q
Задача 14.16. Пространственное движение точки задано уравне-
уравнениями движения в цилиндрических координатах:
где ро, фо, г"о> Р — постоянные величины. Найти траекторию, скорость
и ускорение точки, радиус кривизны траектории.
Решение. В цилиндрических координатах дифференциалы дуг
координатных линий равны
dse = dz. A)
Сравнивая эти выражения с формулами F*), находим сразу коэффи-
коэффициенты Л яме:
Нр=\, И,=>р, tf,= l. B)
Формулы F*) позволяют найти проекции скоростей точки на цилин-
цилиндрические оси координат:
C)
Модуль скорости равен
= р
v = V «& + К + ** = Р Ур»О+Фа) + г5 = const. D)
Проекции ускорения на цилиндрические оси координат определяются
формулами
,f^ РФг°Р3 _
A+W*
E)
F)
Модуль ускорения равен
И1 =
$ 3) СКОРОСТИ И УСКОРЕНИЯ ТОЧЕК 55
Так как величина скорости неизменна, то касательное ускорение
равно нулю и ускорение F) является нормальным ускорением. Отсюда
определяется радиус кривизны траектории R из равенства
О*
откуда
Исключая время из равенств, определяющих координаты риф, на-
находим
и, следовательно,
откуда
= фо1п-?-,
Ро
(8)
Это первое уравнение, определяющее траекторию движущейся точки.
Второе уравнение находим, исключая время из равенств, определяю-
определяющих координаты риг:
Таким образом, из (8) и (9) следует, что траектория является пере-
пересечением цилиндрической поверхности, образованной логарифмиче-
логарифмической спиралью и поверхностью круглого конуса. Точка движется по
этой траектории равномерно.
ГЛАВА XV
ДИНАМИКА ТВЕРДОГО ТЕЛА, ВРАЩАЮЩЕГОСЯ ВОКРУГ
НЕПОДВИЖНОЙ ТОЧКИ
§ 1. Движение по инерции твердого тела, имеющего
неподвижную точку
Твердое тело, вращающееся вокруг неподвижной точки, имеет три
степени свободы. Его положение можно определить тремя углами
Эйлера.
Главные моменты количеств движения твердого тела относительно
координатных осей, начало которых находится в неподвижной точке,
даются формулами
1Х = 1х<йх — 1ху<Оу — 1гхЩ,
Если оси х, у, г являются неподвижными, то осевые и центро-
центробежные моменты инерции твердого тела переменны. Если оси х, у
и z жестко связаны с движущимся твердым телом, то его осевые и
центробежные моменты инерции постоянны. В случае, когда оси х,
у, г являются главными осями инерции твердого тела в неподвижной
точке, т. е. при /yt = Izx = /xy = 0, формулы принимают вид
Здесь Ix, 1у, 1г — главные моменты инерции твердого тела относи-
относительно неподвижной точки.
Динамические уравнения Эйлера для твердого тела, вращающе-
вращающегося вокруг неподвижной точки, в проекциях на оси х, у, г, Связан-
Связанные с движущимся твердым телом, имеют вид
где /»*, т'у от* —главные моменты внешних сил относительно осей
§ 1] ДВИЖЕНИЕ ПО ИНЕРЦИИ ТВЕРДОГО ТЕЛА 57
координат, (ол, и>у, юг —проекции угловой скорости твердого тела
на оси координат.
Если оси х, у, z, связанные с твердым телом, являются главными
осями инерции в неподвижной точке, то динамические уравнения
Эйлера записываются так:
— /у) (Oy®z =
= т
у,
Добавим к этим трем дифференциальным уравнениям кинематиче-
кинематические уравнения Эйлера, выражающие зависимости между проекциями
угловой скорости на соответствующие оси координат, углами Эйлера
и их производными по времени:
(дх = ф sin 8 sin ф -f- 6 cos ф,
(ау = ф sin б cos ф — 8 sin ф,
аг = ф cos 8 + ф;
мы получили систему шести обыкновенных дифференциальных урав-
уравнений движения.
Проинтегрировав эту систему уравнений (при наличии заданных
начальных условий движения), определяют а>х, <Оу, о)г, а также урав-
уравнения вращения твердого тела вокруг неподвижной точки
Ф=Д(9, ч>=/,(9, в=/а(О.
Решение обратных задач динамики твердого тела, вращающегося
вокруг неподвижной точки, сопряжено с большими трудностями и
приводится к квадратурам только в исключительных случаях.
Обобщенные динамические уравнения Эйлера для подвижных осей
не связанных с твердым телом, имеют вид
dL%
-jr + <Oir,Ls - to1?Ln = mt,
dLn
dLr
где mi, me и me. — главные моменты внешних сил относительно по-
подвижных осей |, т|, ?,, не связанных с твердым телом, Lj, Ln и Ls —
главные моменты количеств движения твердого тела относительно
осей |, т), g, а (Од, щц, щ^ — проекции угловой скорости вращения
триэдра подвижных осей |, r\, t, на эти оси.
Задача 15.1. Исследовать движение по инерции твердого тела,
центр тяжести которого совмещен с неподвижной точкой. Эллип-
58
ДИНАМИКА ТВЕРДОГО ТЕЛА
[ГЛ. XV
соид инерции твердого тела в неподвижной точке является эллип-
эллипсоидом вращения.
Решение- Твердое тело совершает движение по инерции вокруг
неподвижной точки О при наличии двух внешних сил; силы тяжести
тела, приложенной в центре тяжести О, и реакции опорной точки О.
Мгнобетая ос&
К задаче 15.1.
Применяем тоерему об изменении главного момента количеств
движения системы материальных точек относительно точки О:
Так как обе внешние силы приложены в неподвижной точке О (на
рисунке силы не изображены), то тео = 0, т. е. dLo/dt = 0 и ?о ока-
оказывается постоянным. Итак, при движении по инерции твердого тела
вокруг неподвижной точки имеет место случай сохранения главного
момента количеств движения твердого тела относительно этой точки.
Выбрав начало системы неподвижных осей координат в непо-
неподвижной точке О, направим ось гг вдоль вектора Lq, направление
которого при движении твердого тела остается неизменным. Затем
построим неподвижные оси хх и ух так, чтобы они вместе с осью
Z\ образовали правую систему осей координат.
Начало системы подвижных осей координат х, у, г, связанных
с твердым телом, выберем в той же точке О. Ось z направим по оси
симметрии твердого тела. Затем введем подвижные оси х и у,
S 11 ДВИЖЕНИЕ ПО ИНЕРЦИИ ТВЕРДОГО ТЕЛА 59
которые являются главными осями инерции в точке О (см. рис. а).
Так как эллипсоид инерции является эллипсоидом вращения, то 1Х = 1у.
Запишем динамические и кинематические уравнения Эйлера для
случая> когда 1х — 1у и тх = т'и = т'г — 0 (напомним, что тЬ = 0):
= 0, A)
= 0, B)
/А = 0, C)
(йх = tj) sin S sin <p + 6 cos ф, D)
(Dj, = ф sin 6 cos <p — 6 sin ф, E)
<o, = t|>cos6 + tp. F)
Из уравнений A), B) и C) находим два первых интеграла. Ум-
Умножив уравнение A) на <ох, уравнение B) на (оу, уравнение C) на
и>г и затем сложив их, получим
т. е.
откуда
1х(й1 + 1уагу + 1г<о1 = Съ G)
где Сх — постоянная величина.
Так как кинетическая энергия твердого тела, вращающегося вокруг
неподвижной точки, имеет вид
то из первого интеграла G) следует постоянство кинетической энер-
энергии твердого тела (этот результат легко получить с помощью теоремы
об изменении кинетической энергии системы материальных точек,
так как внешние силы приложены к твердому телу в неподвижной
точке и, следовательно, сумма работ внешних сил равна нулю).
Для определения другого первого ингеграла умножим уравнение
A) на /*©*, уравнение B) —на !уау, уравнение C) —на /гсог. После
сложения получим
т. е.
отсюда
/Ж+/>J+/!<»! = Q, (8)
где С2 — постоянная величина.
Нетрудно видеть, что первый интеграл, записанный в формуле (8),
свидетельствует о постоянстве модуля главного момента количеств
SO ДИНАМИКА ТВЕРДОГО ТЕЛА [ГЛ. XV
движения твердого тела относительно неподчинений точки О. Дейст-
Действительно, так как оси х, у и г являются главными осями инерции
твердого тела в точке О, то
*¦* = 1х®х, Ly = Iy4iy, Lz — Iju» (9)
следовательно,
Ц«>1+Ifal + /Joel = L\ + Ц +11«1Ь = C2.
Для упрощения интегрирования системы дифференциальных урав-
уравнений C) — F) запишем проекции главного момента количеств дви-
движения твердого тела Lx, Ly, Lt на подвижные оси х, у и z, связан-
связанные с твердым телом, учтя при этом, что вектор Lq расположен на
оси z-i (см. рис. а). После проектирования LQ на оси Охуг находим
?« •= Lo sin 6 sin ф, Ly = Lo sin 8 cos q>, ?.e = Locos8. A0)
Воспользовавшись формулами (9), перепишем выражение A0) в виде
1х(пх = Lo sin & sin ф, A1)
1уфу — Lq Sin 6 COS ф, A2)
A3)
Из дифференциального уравнения C) находим, что шг постоянна.
Если в начальный момент ©г = (о2о> то и при движении (ог = (о2в. Те-
Теперь из уравнения A3) получим
^, A4)
где Lo = УЦ + Ц + Ц = V Д»* +/>* + Л«в. — постоянная. Следо-
Следовательно, IffOzJLo — тоже постоянная величина и угол нутации 9 при
движении твердого тела остается неизменным:
е = 66; A5)
отсюда вытекает, что
6 = 0.
Теперь уравнения D)—(б) можно записать короче.'
&х = -ф sin в0 sin ф, A6)
©У = ijj sin 60 cos ф, A7)
©*„ — фсовво + ф. A8)
Подстановка значения а>х из уравнения A6) в формулу A1), а
также значения а>у из уравнения A7) в формулу {12) приводит к ре-
результату $ = Lo/Ix = L0/Iy, т. е. ¦ф постоянна (предполагается, что
sin В0ф0, а угол ф может принимать различные значения). Обозна-
Обозначим: Lo/Ix — Lo/Iy — Щ- Итак,
¦ -«в* A9)
т. е. прецессия совершается с постоянной угловой скоростью щ.
$ 2] РЕГУЛЯРНАЯ ПРЕЦЕССИЯ СИММЕТРИЧНОГО ТЕЛА 61
Проинтегрировав выражение A9), получим (при tf = 0, if = t|>o)
B0)
Подставив в уравнение A8) вместо ф величину ©ь найдем
ф = (йго — ©х COS б0.
Таким образом, ф постоянно; после введения обозначения
СО*, — (»i COS 60 = щ
находим
ф*=<о2, B0
т. е. собственное вращение твердого тела совершается с постоянной
угловой скоростью (оа.
Проинтегрировав выражение B1), запишем (при f —О, <р
Итак, при движении по инерции симметричного твердого тела,
центр тяжести которого совмещается с неподвижной точкой, имеет
место движение, называемое регулярной прецессией» Оно опреде-
определяется уравнениями
Ось симметрии г твердого тела описывает круговой конус с уг-
углом при вершине О, равным 2б0, равномерно вращаясь вокруг неиз-
неизменного по направлению вектора Lo, расположенного на оси zit
с угловой скоростью щ. При этом твердое тело вращается вокруг
своей оси симметрии z с угловой скоростью со2. Вектор мгновенной
угловой скорости ш, изображаемый диагональю параллелограмма,
построенного на векторах щ и щ (см. рис. а), лежит на мгновенной
оси.
При движении твердого тела параллелограмм угловых скоростей,
оставаясь неизменной фигурой, поворачивается вокруг оси гх с по-
постоянной угловой скоростью a>i, т. е. ось симметрии твердого тела г
описывает круговой конус вокруг оси zv
Неподвижным аксоидом является круговой конус, описываемый
мгновенной осью вокруг оси zx (см. рис. б). Подвижным аксоидом
является круговой конус, описываемый мгновенной осью вокруг оси г.
Движение твердого тела можно интерпретировать посредством каче-
качения без скольжения подвижного аксоида по неподвижному.
§ 2. Регулярная прецессия симметричного твердого тела,
имеющего неподвижную точку
Симметричное твердое тело вращается с постоянной угловой ско-
скоростью ш вокруг оси, кбторая в свою очередь вращаете* вокруг
другой оси с постоянной угловой скоростью щ. В результате сло-
сложения вращений вокруг двух пересекающихся осей твердое тело
63
ДИНАМИКА ТВЕРДОГО ТЕЛА
[ГЛ. XV
совершает вращение вокруг неподвижной точки. Это вращение на-
называется регулярной прецессией. Угол 6 между векторами со и щ
называется углом нутации (рис. 15.1). При этом ©j^ угловая ско-
скорость прецессии, © — угловая скорость собственного вращения.
Начала подвижных осей ?т]? и. неподвижных осей х^г^ взяты
в неподвижной точке О. Ось Zy направлена вдоль вектора щ. Оси
х и у выбраны так, чтобы сов-
совместно с осью zt образовать пра-
правую систему осей. Ось ? направ-
направлена вдоль вектора <а, т. е. вдоль
оси симметрии твердого тела.
Ось | направлена вдоль линии
узлов (т. е. ось | перпендикуляр-
перпендикулярна к плоскости векторов © и
©i), ось ц выбрана так, чтобы
совместно с осями ? и ? образо-
образовать правую систему осей коор-
координат. Подчеркнем, что подвиж-
подвижные оси O|ti? не связаны с
движущимся твердым телом.
Для того чтобы симметрич-
симметричное твердое тело совершало ре-
регулярную прецессию, к нему долж-
должны быть приложены внешние
силы, главный момент которых
относительно точки О направлен по оси |, и его проекция равна
-а»,
|—линия узлов
Рис. 15.1.
т\ — Ш1гж Sin 6 |/{;<й? + (/; — /„) <0Ut COS 6].
, то Ото совпадает с положительным
направлен противоположно моменту
Если /j©; -f- (/g — /,,) со]г1 cos 0
направлением оси |.
Гироскопический момент
те0, т. е. /пз«р = — те0.
В случае быстро вращающегося гироскопа со^^Иц.,. Пренебрегая
при этом вторым слагаемым в квадратной скобке, получим выраже-
выражение главного момента внешних сил:
/wf =
sine.
Если векторы ю и щ взаимно перпендикулярны, то 6 = я/2, и это
выражение для от| является точным.
Обычно приходится решать задачи на регулярную прецессию твер-
твердого тела, в которых требуется:
а) по заданным и, щ 6, /j, /ч определить главный момент внеш-
внешних сил или какую-либо внешнюю силу;
б) по заданным ©,
регулярной прецессии
те0, 6, /; и /„ вычислить угловую скорость
§2]
РЕГУЛЯРНАЯ ПРЕЦЕССИЯ СИММЕТРИЧНОГО ТЕЛА
63
Решать задачи на регулярную прецессию твер-
твердого тела рекомендуется в следующем порядке:
1) выбрать неподвижные оси координат хгу^г\ и подвижные оси
?г]?, не связанные с твердым телом;
2) изобразить на рисунке внешние силы, приложенные к твер-
твердому телу;
f3) а) если даны ю, щ, 0, /Е, Д,, то по формуле
т\ = ©u, sin б [/j(ot + (k — Л|) »1г, cos 9]
определить главный момент mi внешних сил относительно оси | либо
одну из внешних сил;
б) если даны внешние силы, а также av 6, /j, /^ то, определив
главный момент внешних сил относительно неподвижной точки, из
той же формулы найти проекцию на ось гг угловой скорости регу-
регулярной прецессии а^.
Задача 16.2. Вывести формулу для проекции главного момента
внешних сил
т{
sin б
icos
при регулярной прецессии симметричного твердого тела.
Решение. Неподвижные xxyxz\ и подвижные |ti? координатные
оси направляем так, как было указано выше, в обзоре теории. Сле-
дуег помнить, что подвижные оси gr)? с твердым телом не связаны.
ц-лилия узлов
К задаче 15.2.
В то время как подвижные оси |ti? вращаются вокруг оси гг в уг-
угловой скоростью оь твердое тело вращается вокруг мгновенной оси
с угловой скоростью ®а =s ti -f ©ь где w — угловая скорость относи-
относительного вращения, щ—угловая скорость переносного вращения.
64 ДИНАМИКА ТВЕРДОГО ТЕЛА [ГЛ. XV
При вычислений проекций <яа и щ на оси ?, т), ? следует иметь
в виду, что параллелограмм угловых скоростей лежит в плоскости т&
Как видно из рисунка,
ц ,sin©, ou = mUlcos6. A)
Использовав эти выражения, найдем
©о5 = Ч + «к ~ °» юал = ffln+ffliti - «i^ sin 8>
0)o; = 0); + 0>ц — G)C + fi>iZl COS S.
Следовательно, главные моменты количеств движения симметрич-
симметричного твердого тела относительно осей |, т), g, являющихся главными
осями инерции в неподвижной точке О, имеют вид
B)
Так как L^, L^ и Z,; постоянны, то
Для определения главного момента внешних сил относительно
точки О воспользуемся динамическими уравнениями Эйлера
д; m\>
После подстановки значений и^, и1л, соц из формул A), выражений»
L|, Lt,, Lj из формул B) и dLyJdt, dl^dt, dL{/dt из формул C)
уравнения Эйлера примут вид
т\ — ffiii, sin 9 [/;юс + ('с — А|) ®1г, cos 9]»
Следовательно, главный момент внешних сил т'о относительно
неподвижной точки О лежит на линии узлов | и совпадает с поло-
положительным направлением оси |, если
— /п) ©I», cos 9 > 0.
Задача 15.3. Вычислить угловую скорость регулярной прецессии
симметричного твердого тела, центр тяжести которого расположен
в неподвижной точке, если 9 — угол между осью симметрии и осью
прецессии, /; —момент инерции твердого тела относительно оси сим-
РЕГУЛЯРНАЯ ПРЕЦЕССИЯ СИММЕТРИЧНОГО ТЕЛА
65
метрии, /| = /„ — экваториальные моменты инерции твердого тела,
at — угловая скорость собственного вращения (вокруг оси симметрии ?).
Решение. Начала подвижных &п? и неподвижных Х\Ухг1 осей
находятся в неподвижной точке О. Неподвижная ось zx направлена
по оси прецессии, а оси хх и
yt — так, чтобы вместе с осью
Z\ образовать правую систему
осей координат. Подвижная
ось ? направлена по оси сим-
симметрии твердого тела, ось \—
по линии узлов, ось т] вы-
выбрана так, чтобы вместе с ося-
осями | и ? образовать правую
систему осей координат.
На твердое тело действуют
две силы: сила тяжести и опор-
опорная реакция. Так как центр
тяжести совмещен с неподвиж-
неподвижной точкой О, то обе внешние
силы приложены в точке О
и их главный момент относи-
относительно точки О равен нулю,
следовательно, т\ = 0.
Поэтому формула, определяющая проекцию главного момента.
—линия умов
К задаче 15.3.
т\ *=
cos 8
os 0]
принимает вид
@Ul COS в [ItfOj + (/; — IJ Wl*. COS S ] = 0,
откуда находится искомая угловая скорость регулярной прецессии
Рассмотренная регулярная прецессия твердого тела возникает при
движении по инерции. Заметим, что регулярная прецессия по инерции
возможна вокруг любой оси, проходящей через неподвижную точку.
Задача 15.4. Определить угловую скорость регулярной прецес-
прецессии «! симметричного твердого тела веса Р, происходящей под дей-
действием силы тяжести. Расстояние от центра тяжести С твердого тела
до неподвижной точки О равно а..
Даны моменты инерции твердого тела относительно главных цен-
центральных осей инерции, угловая скорость вращения <а вокруг оси
симметрии и угол 8 между осями симметрии и прецессии.
3 М. И. Бать и др., т. III
66
ДИНАМИКА ТВЕРДОГО ТЕЛА
[ГЛ. XV
Решение. Неподвижные Xiyrzr и подвижные |т]? координатные
оси направлены так, как в предыдущей задаче.
К твердому телу приложены внешние силы: Р — сила тяжести
твердого тела, /?ь /?2, /?8 — составляющие опорной реакции в точке О,
Вычислим главный момент
внешних
оси |:
сил относительно
Pa sin 6.
Подставив это значение mi
в формулу
К задаче 15.4.
получим квадратное уравнение
относительно проекции на ось
yi Z\ искомой угловой скорости
регулярной прецессии coiZl:
l — Pa = 0.
Решив квадратное уравнение относительно &>IZl, находим два его
корня:
— 1^) Pa cos в
2 (/?—/¦„) cos в
A)
т. е. твердое тело может совершать регулярные прецессии с разными
угловыми скоростями (конечно, это движение возможно только при
выполнении условия /|о>|- -f- 4 (/е — /л) Pa cos 0 > 0; при достаточно
больших значениях проекции угловой скорости со; это неравенство
всегда выполняется).
Вычислим величины coiZl в случае вращения твердого тела с боль-
большой угловой скоростью собственного вращения щ.
Приближенное определение дискриминанта квадратного уравнения
дает
§2]
т. е.
РЕГУЛЯРНАЯ ПРЕЦЕССИЯ СИММЕТРИЧНОГО ТЕЛА
2(/j—/п)Ро cos 8
2 (^~Ai) A* cos 9
67
B)
Внеся значение B) в формулу A), находим искомые приближен-
приближенные проекции угловой скорости регулярной прецессии:
угловая скорость медленной прецессии
и угловая скорость быстрой прецессии
121 (/;-/„) cos 6 *
Значение проекции угловой скорости быстрой прецессии совпа-
совпадает со значением проекции угловой скорости регулярной прецессии
по инерции, полученной в предыдущей задаче.
Значение проекции угловой скорости медленной прецессии сов-
совпадает с результатом, подсчитанным при решении аналогичной за-
задачи с помощью приближенной теории гироскопов (см. втооой том
стр. 563).
Задача 16.5. Вычислить дополнительный динамический момент,
возникающий при движении системы, описанной в вадаче 10.66 (см.
второй том).
К задаче 15.5.
Решение. Направления неподвижных х^^ и подвижных
осей координат указаны на рисунке.
Колесо 2 совершает регулярную прецессию с угловой скоростью
а>1 вокруг оси zv Угол нутации в равен л/2.
3*
68 ДИНАМИКА ТВЕРДОГО ТЕЛА [ГЛ. XV
Вычислим главный момент внешних сил во формуле
/и| == <oiz, sin 0 [/t<at -f GC — 7^) tolz, cos 0]. A)
При 0= ~ находим: /»| = i?«>ja)j2i, что соответствует результату,
полученному в формуле C) задачи 10.66 (см. второй том), так как
Использование формулы (I) быстрее приводит к результату, чем
применение теоремы Резаля, с помощью которой была решена
задача 10.66, но требует наличия у читателя сведений по динамике
твердого тела, вращающегося вокруг неподвижной точки.
Формулу A) можно также с успехом применить при решении
задач 10.64 и 10.66 второго тома.
Задача 16.6. Решить задачу 10.16 (см. второй том), воспользо-
воспользовавшись теорией регулярной прецессии симметричного твердого тела.
Решение. Решение задачи 10,16 второго тома, основанное на
методе кинетостатики, было довольно громоздким. Оно сводилось
к системе четырех уравнений
NAx + N'Bx = Жлгс©2+Мусе,
NAy + N'By = My со? — Mxce,
NAya — N'Byb s= — 1уга2 -+- lxye,
— NAxa -\- N'Bxb = Ixy<& + \угг. ¦
При этом предварительно были определены центробежные
моменты инерции 1хг и Iyz. Вычисление 1хг и Цг потребовало ряда
выкладок, выполненных в решении задачи 9.12 второго тома.
Эту задачу можно решить значительно короче, если рассматри-
рассматривать вращение цилиндра вокруг оси г как частный случай регуляр-
регулярной прецессии при отсутствии его собственного вращения вокруг
оси ?.
Для этого достаточно определить гироскопический момент /»гир
цилиндра, являющийся моментом его сил инерции, которые приво-
приводятся к паре искомых боковых дополнительных динамических давле-
давлений на опоры А и В: тгяр = — те0.
Угол нутации В в данной задаче обозначен а, следовательно,
дагир = ©u, sin a [/;и; + G5 — /ч) coiri cos a]. A)
Ввиду отсутствия собственного вращения 005 = 0, а <oiZl следует
заменить на ш, так как угловая скорость вращения цилиндра вокруг
оси z-i является угловой скоростью регулярной прецессии. Теперь
формула A) принимает вид
(/t __ /^ ша Sjn a cos a>
*2J РЕГУЛЯРНАЯ ПРЕЦЕССИЯ СИММЕТРИЧНОГО ТЕЛА 69
Для цилиндра 7c = Pr2/2g и /„ - — (~ + ?), т. е.
Гироскопический момент является моментом пары дополнительных
боковых давлений на опоры Л и В с плечом AS — 2ft. Поэтому
Метод решения »той задачи может быть с успехом использовал
при решении ряда задач на определение динамических боковых дав-
давлений, приложенных к опорам твердого тела, вращающегося вокруг
неподвижной оси.
ГЛАВА XVI
КОСМИЧЕСКАЯ ДИНАМИКА. ДИНАМИКА ТОЧКИ
ПЕРЕМЕННОЙ МАССЫ
§ 1. Кеплерово движение (движение под действием
центральной силы)
Две материальные точки взаимно притягиваются с силой, модуль
которой равен
F-/2S**, A*)
где mt и /яа — соответственно массы первой и второй точек,/—посто-
точек,/—постоянная всемирного тяготения, г — расстояние между точками.
Формула A*) выражает закон всемирного тяготения, открытый
Исааком Ньютоном. Иногда этот з"акон называют законом Ньютона.
Если взаимно притягиваются не материальные точки, а тела, то
формула A*) сохраняет свой простой вид, если тела имеют сфери-
сферическую структуру: каждое из тел имеет форму шара и плотность
одинакова во всех точках тела, находящихся на одном и том же
расстоянии от его центра. В этом случае задача исследования движе-
движения центров инерции двух тел под действием взаимного притяжения
не отличается от исследования движения двух точек, взаимно притя-
притягивающихся согласно закону Ньютона.
Эта задача называется классической задачей двух тел. Ее гео-
геометрическое решение дал впервые И. Ньютон. Аналитическое реше-
решение было затем дано Даниилом Бернулли. Леонарду Эйлеру принад-
принадлежит подробное исследование этой задачи.
Сила всемирного притяжения A*) является консервативной силой.
Силовая функция поля этой силы U определяется формулой
B*)
Положив %=1 в формуле B*), получим функцию
?/=/", C*)
называемую ньютоновым потенциалом *).
*) В этой формуле опущен индекс у массы. В научной литературе к фор-
формуле C*) всегда применяется указанное название, которого и мы будем при-
придерживаться, хотя точнее называть ее ньютоновой силовой функцией.
§ 1]
КЕПЛЕРОВО ДВИЖЕНИЕ 71
Если тело не имеет сферической структуры, то потенциал силы
притяжения всего тела дается формулой
?/=/ [ ^, D*)
где г1 — расстояние от частицы dm до притягиваемой точки единич-
единичной массы. Интеграл вычисляется по всей массе тела.
Если рассматривать Землю как тело сферической структуры, то
ее ньютонов потенциал равен
где [л. = fM — гравитационный параметр, равный произведению посто-
постоянной всемирного тяготения на массу Земли, г — расстояние от
центра Земли до притягиваемой материальной точки. Численно (д. =
= 3,98- 10в км9/сек3.
Сила притяжения Земли равна
/>„ = -/»? г, F*)
где от —масса притягиваемой точки, г — радиус-вектор притягиваемой
точки, проведенный из центра Земли.
При изучении движения космического аппарата вблизи Земли
последнюю в первом приближении рассматривают как тело сфериче-
сферической структуры, а космический аппарат —как материальную точку.
При этом масса Земли М несоизмеримо больше массы космического
аппарата т, вследствие чего можно пренебречь действием массы т
на массу М. Задача о движении космического аппарата в этом случае
является частным случаем классической задачи двух тел. Траектория
космического аппарата, движущегося под действием силы притяже-
притяжения Земли, дается формулой
G*)
г =
1—ecoscp'
где г — радиус-вектор, проведенный из центра Земли к космическому
аппарату, е — эксцентриситет, р — фокальный параметр конического
сечения, q> — угол между полярной осью и радиусом-вектором г. Это
уравнение конического сечения, которое в зависимости от величины
эксцентриситета определяет:
при e<Z 1 эллипс,
при е = 1 параболу,
при е >1 гиперболу.
Величина е зависит от начальных условий движения. Кроме ука-
ванных случаев, траектории могут быть при определенных началь-
начальных условиях радиальными (прямолинейными) и круговыми.
72
КОСМИЧЕСКАЯ ДИНАМИКА
[ГЛ. XVI
Все пять траекторий называются кеплеровыми траекториями,
а движения, происходящие по этим траекториям, называются кеплеро-
кеплеровыми движениями. Так как сила всемирного тяготения является кон-
консервативной силой, то при движении в потенциальном силовом поле
Земли имеет место закон сохранения механической энергии
?-?- const.
(8*)
Задача 16.1. Точка совершает кеплерово движение. Найти урав-
уравнения движения и построить годограф скорости точки для трех слу-
случаев кеплеровых траекторий.
Определить модуль скорости
в любой точке траектории.
Решение. Обозначим
орты радиальной и трансвер-
сальной осев через ei и ег.
Тогда скорость точки, движу-
движущейся в плоскости, будет вы-
выражаться через составляющие
в полярной системе координат
в виде
A)
Найдем проекции скорости на
полярные оси координат при
кеплеровом движении. При
движении под действием цент-
центральной силы проекция уско-
ускорения точки на трансверсаль-
ную ось обращается в нуль:
К задаче 16.1
б)
откуда
или
In ф + 2 In r = In i
и, наконец,
г\ = с;
B)
это есть интеграл площадей.
Для нахождения проекции скорости на радиальную ось заметим, что
Из B) имеем
с
!7»'
C)
D)
i 1] КЕПЛЕРОВО ДВИЖЕНИЕ 73
а из уравнения конических сечений в полярных координатах
Г = Р I е\
1+гСО8ф k '
находим
rfr pe sin у
Перемножая D) и F), согласно C) и E) будем иметь
, с_ ре sin ф _ cg-einq) ,~
г~гг ' (l+ecosf)a~ p * *- '
Внеся B) и G) в формулу A), получим
С С
© = — eslncp^-j—ег.
Или, заменив г согласно E), найдем
^]. (8)
Проведем через начало полярной системы координат оси х, у.
Тогда направляющие косинусы между ортами полярных и декарто-
декартовых осей координат будут
к к
ех cos ф sin ф
е% — sin ф cos ф
Спроектировав скорость (8) на декартовы оси, найдем
с , с
v* p '-— •" -у р
Исключив из этих уравнений угол ф, получим уравнение годографа
Из уравнения E) при ф = 0, получим
р_
г°-1+е-
С другой стороны, из A) имеем
С учетом G), B) и (б) последнее равенство преобразуем к виду
74 КОСМИЧЕСКАЯ ДИНАМИКА IIVI.XVI
Эта формула определяет модуль скорости в каждом месте йеплеро-
вой траектории с радиусом г.
Обозначив через о0 значение скорости при <р = 0, получаем из A1)
с учетом A0)
Обозначим для краткости
с
~Р
Тогда равенство (9) перепишется в виде
-eR? = R*. A2)
Уравнение A2) представляет уравнение окружности радиуса R.
При е = 1 полюс годографа скорости лежит на окружности. Тра-
Траектория точки — парабола.
При е < 1 полюс годографа скорости находится внутри окруж-
окружности. Траектория — эллипс.
При е > 1 полюс годографа скорости расположен вне окружности.
Траектория — гипербола.
Все три случая изображены на рис. а. Соответствующие им поло-
положения точек на траекториях даны на рис. б.
Из уравнения A1) находим модуль скорости, соответствующий
параболической траектории, когда точка находится от центра при-
притяжения на расстоянии г. Для этого положим е = 1. Тогда
\. A3)
Для параболического движения находим граничную скорость (при
Ф = 0), внеся значение го—р/2 из A0) в A3)
Таким образом, при г>0<2#, vo = 2R и vo>2R точка описывает
соответственно эллипс, параболу или гиперболу.
Ускорение точки направлено параллельно касательной к годографу.
Следовательно, угол vMP равен полярному углу <р, а скорость v0
направлена по трансверсальной оси.
Отрезки ОР на рис. а дают вектор скорости точки в перигее,
а отрезки О А — вектор скорости в апогее.
Задача 16.2. Скорость планеты, совершающей кеплерово движе-
движение, разложить на две составляющие: «^ — перпендикулярную к ради-
радиусу-вектору г и г»2 —перпендикулярную к большой оси эллипса.
Определить модули этих составляющих скорости и доказать, что это
разложение дает непосредственно полярный годограф скорости.
§11
КЕПЛЕРОВО ДВИЖЕНИЕ
75
Решение. Разложим скорость планеты на радиальную и транс-
версальную составляющие:
г>ф = гф = ^-, A)
B)
В формуле A) обозначено
это — интеграл площадей.
Вывод формулы B) дан в предыдущей задаче — формула G). Раз-
Разложим скорость планеты на составляющие чъ перпендикулярную
к радиусу-вектору г, и Ф2> перпендикулярную к большой оси (рис. с).
К задаче 16.2.
Тогда, заметив, что угол, образованный
углу ф, находим
X>i = 1»ф — V2 COS ф, V% =
б)
и <оъ равен полярному
sin
Внеся в эти уравнения значения A) и B), получим
-— г>2 cos ф
..(I-
е cos ф\ с
р
Таким образом, составляющая v2 неизменна по модулю и направлению,
составляющая <t>i постоянна по модулю.
Отложим от полюса О (рис. 6") вектор ОМ = Ф2> а из его конца
вектор vb перпендикулярно к радиусу-вектору г. Сумма этих векто-
векторов дает скорость планеты v, а угол наклона вектора «i к продол-
продолжению ОМ равен полярному углу <р. При движении планеты конец
76
КОСМИЧЕСКАЯ ДИНАМИКА
[ГЛ. XVI
вектора с будет описывать окружность радиуса vt с центром М,
которая и будет являться годографом скорости.
Задача 16.3. Космический аппарат массы т выведен ракетой-но-
ракетой-носителем на расстояние г„ = /? + й0 от центра Земли. В момент отде-
отделения радиус-вектор образовывал угол <р0 с избранным фиксированным
направлением; скорость аппарата была v0 и составляла угол 0О с транс-
версальной осью.
Найти параметры траектории космического аппарата: эксцентри-
эксцентриситет е, параметр кривой р, угол фь образованный избранным фикси-
фиксированным направлением с фокальной осью
i кривой.
_„_«,^ ! Решение. Для составления диффе-
дифференциального уравнения движения косми-
космического аппарата воспользуемся проек-
проекциями ускорения на полярные оси коор-
координат. Проекция ускорения на радиальную
ось равна
wr = ?-r$\ A)
((
\ *
ч
К задаче 16.3.
1
Проекция ускорения на трансверсальную
ось равна
B)
Проекции силы ньютоновского притяжения на те же оси таковы:
^=-7Г, ^ф-0- C)
Дифференциальные уравнения движения в проекциях на. эти оси будут
E)
Переписав уравнение E) в виде
-1 + 2-^ = 0
и проинтегрировав, получим
In ф-]-2 In r = ln с,
или
гаф = с == const.
Таким образом, секторная скорость, равная
F)
G)
S II КЕПЛЕРОВО ДВИЖЕНИЕ 77
постоянна. Перейдя далее к уравнению D) и введя к**1/г, найдем
с учетом F)
— ^ ПАР du dtp 1 du_ djp d« ,~
Ш ** da " dtp ' It "" 5» dtp ' Л ** d<p" ^ '
Тогда
Внеся это значение f с учетом F) в уравнение D), найдем дифференциаль-
дифференциальное уравнение движения космического аппарата
S + -
где введено обозначение р=*с*/ц.
Уравнение A0) является неоднородным линейным дифференциаль-
дифференциальным уравнением второго порядка с постоянными коэффициентами.
Решение его складывается из общего решения однородного уравне-
уравнения и частного решения полного уравнения.
Для нахождения общего решения однородного уравнения заме-
замечаем, что корни характеристического уравнения чисто мнимые zlt 2=
=±/. Частное решение полного уравнения w=\jp. Следовательно,
решением дифференциального уравнения A0) является
и = ~—Cjcoscp— Casin<p,
или
и= j[l—ecos(«p-<pi)],
где Сх и С2 или соответственно в и щ — постоянные интегрирования.
Вернувшись к исходной переменной г, находим уравнение траек-
траектории в окончательном виде
i-^l-CiCOSq) — Casin q>, A1)
или
r=
l-ecos(qj—
Найдем зависимость между постоянными интегрирования Сь Са
(первая форма записи траектории) и постоянными е, фг (вторая форма
записи).
Переписав уравнение A2) в виде
l = _L_.?.cos(<p-cp1)
и сопоставив с A1), находим
^ 9j). A3)
78 КОСМИЧЕСКАЯ ДИНАМИКА [ГЛ. XVI
Отсюда
Перейдем далее к непосредственному определению зависимости пара-
параметров траектории от начальных условий движения. Согласно G)
Dia^-iE — , A0)
ИИ
С другой стороны, проекция скорости на трансверсальную ось равна
г»ф == v0 cos е0 si гофО) A7)
следовательно,
р$ coss 6(> • г|! ,. й\
Рв ? ' A8)
Введем безразмерную величину, равную отношению кинетической энер-
энергии точки, движущейся по кеплеровой траектории к ее ньютонову
потенциалу:
Тогда A8) запишется в виде
0. B0)
Это второе выражение параметра кривой через начальные условия
движения.
Для выражения двух других параметров из A1) находим
CiCOsq>-f-Casincp = i- — ~. B1)
Дифференцируя это равенство по переменной <р, имеем
1 B2)
Так кгк
dr , „ dw о cos 8
y=vet)8tae ^ =
то
%-тЪЪ. B4)
Внося это значение производной в B2), получим
—*^. B5)
$ Ц КЕПЛЕРОВО ДВИЖЕНИЕ 79
Решая совместно B1) и B5), находим
Сг = (j - |) cos Ф -181 sin ф> B6)
C,-(l-l)slnV+^co8q)L B7)
Теперь, согласно A4),
(fL('!!)\ B8)
Перейдем к параметру kb пользуясь B0). Тогда
ег = A - 2kt cos2 0J + Bkt cos 9 sin 6)я
или окончательно
<?2=1 — 4^A-^) cos2 8. B9)
Наконец, согласно A6) и B6), B7),
Сх (r-p)cos<p--ptg8sinq>'
Формулы B0), B9) и C0) представляют искомые зависимости пара-
параметров р, е, ф! от начальных условий движения. Пользуясь этими
равенствами, можно установить зависимость характера траектории от
начальных условий движения.
Действительно, рассмотрим, пользуясь указанными тремя форму-
формулами, условия, при которых космический аппарат будет двигаться по
одной из пяти кеплеровых траекторий.
1) Прямолинейная траектория возможна согласно уравнению
A7), если во все время движения, а следовательно, и в начальный
момент
6 = ±-J. C1)
2) Круговая траектория возможна, если во все время движения
и в том числе в начальный момент времени
0 = 0, C2)
т. е. скорость направлена по касательной к окружности. Однако это
условие, выполненное в начальный момент, является необходимым, но
недостаточным.
Из формулы A2) следует, что модуль радиуса-вектора точки
остается неизменным, если эксцентриситет е равен нулю. Тогда из
B9) с учетом C2) имеем
ег = sin2 S + О - 2А02 cos2 6 = A - 2k{f = 0
или
*i = T- C3)
80 КОСМИЧЕСКАЯ ДИНАМИКА [ГЛ. XVI
Согласно формуле A9) это условие можно записать в виде
, tlV 1
C4)
откуда находится первая космическая скорость. Действительно, поло-
положив г«/?, где # — радиус Земли, и ц =•#•/?*, найдем
км/сек. C5)
Итак, для того чтобы космический спутник обратился в искусствен-
искусственный спутник Земли, движущийся по круговой траектории вблизи
земной поверхности, необходимо выполнить два независимых условия:
C5) и C2).
Если космический аппарат описывает круговую траекторию на
расстоянии h от поверхности Земли, то его скорость будет, согласно
C4).
C6)
Заметим, что эту скорость можно получить и непосредственно, про-
проектируя уравнение движения по круговой траектории на нормаль
или
откуда, полагая го = /?+А, приходим вновь к C6).
3) Параболическая траектория космического аппарата в соот-
соответствии с B9) будет при к-у=ж\, так как при этом е=1. Из A9)
при этом следует
откуда
Скорость г>2 называется параболической скоростью. Космический аппа-
аппарат, которому сообщена в начальный момент эта скорость, не воз-
возвратится на Землю.
При А = 0 получаем вторую космическую скорость
г»а = V2gRt**l\,2 км/сек.
4) Эллиптическая траектория будет, согласно B9), при 0<
< Аг < 1, так как <?<1. Единственное исключение Ах=1/2 и 6 = 0;
в этом случае, как было показано, аппарат движется по круговой
траектории. Скорость космического аппарата при этом должна нахо-
находится в пределах
§11
КЕПЛЕРОВО ДВИЖЕНИЕ
8)
5) Гиперболическая траектория космического аппарата, согласно
B9), будет при ki>\, так как при этом в>1. Скорость космиче-
космического аппарата при этом должна быть
Таким образом, параметр ki (равный отношению кинетической энер-
энергии к потенциалу) определяет характер траектории космического
аппарата. Напомним, что ньютонов потенциал определяется равенст-
равенством C*)
Следовательно, если кинетическая энергия точки единичной массы
меньше ньютонова потенциала, то точка не удаляется в бесконечность
и будет описывать вокруг центра притяжения замкнутую траекторию,
эллипс. Если же кинетическая энергия равна или больше ньютонова
потенциала, то точка удалится в бесконечность по параболической
или гиперболической траектории.
Задача 16.4. Космический аппарат, доставленный ракетой-носи-
ракетой-носителем на высоту h над поверхностью Земли, имеет при дальнейшем
кеплеровом движении начальную скорость, направленную под углом 8
к местному горизонту (см. рисунок).
Определить, при каком модуле началь-
начальной скорости г>0<г>2 траектория аппа-
аппарата пройдет вне Земли? Скорость
щ — вторая космическая скорость*).
Решение. Из уравнения траекто-
траектории при кеплеровом движении
Ц.Г'.
f = -
—ecos (ф—(p\)
находим максимальное и минималь-
минимальное значения радиуса-вектора, полагая
cos(<p — <рх) = ±1, откуда
г — Р
'шях -¦¦" | л ш
I —в
К задаче 16.4.
Траектории рассматриваемого аппарата
в зависимости от величин v0 и 60 могут
пересекать поверхность Земли или ее не пересекать. Очевидно, что
траектория будет располагаться вне поверхности Земли, если
rmin>R, или
*) Н. В. Б уте нин, А. Г. Бессонов, Е. М. Морозов, Введение
в динамику твердого тела, движущегося в поле силы земного притяжения.
Основы космонавтики. Ленинградский институт авиационного приборострое-
приборостроения, 1965.
82 КОСМИЧЕСКАЯ ДИНАМИКА [ГЛ. XVI
Полагая 60 заданным по условию, найдем минимальное значение хг01,
при котором траектория аппарата будет траекторией искусственного
спутника Земли. Это будет при
или при
Выразим р и е через начальные условия движения, согласно B0) и
B9), предыдущей задачи. Тогда находим
cos2 60 - Rf =[sin2 б0+A - 2AjJ cos2 60] R2.
Раскрыв скобки и сократив на 4A1cos20o, не равное нулю, получим
Rl~ (r* cos2 e0 ~R*)
или, заменив параметр kx его значением A9) предыдущей задачи и
учтя, что ro = R-\-h, имеем
2Rh
(J?+A)»cos*e0—Я*"
п
Если начальная скорость •ро>г>о1 и cosб0">о~Гь• т0 траектория
не пересечет поверхность Земли.
Если начальная скорость vo<iv01 или cos90<;b^t, to траекто-
траектория пересечет поверхность Земли и аппарат будет не искусственным
спутником Земли, а баллистической ракетой.
Заметим, что при h—О скорость vot может существовать только
при б0 = 0. Раскрывая неопределенность под вторым радикалом, нахо-
находим, что она равна единице и, следовательно,
где i>i —первая космическая скорость.
Задача 16.5. Космический аппарат, движущийся под действием
силы всемирного тяготения вблизи Земли, имеет в начальный момент
радиус-вектор г0 и скорость v0. Определить модуль скорости аппа-
аппарата в любой момент времени.
Решение. Для нахождения модуля скорости в любой момент
времени применим теорему об изменении кинетической энергии. При-
Приращение кинетической энергии на элементарном перемещении равно
элементарной работе силы тяготения:
Сократив на массу т и проинтегрировав в пределах от начальной
$ I] КЕПЛЕРОВО ДВИЖЕНИЕ 83
скорости до скорости в произвольном месте траектории левую часть
и от г0 до Г правую часть, находим
или
Таким образом, модуль скорости в любой точке траектории опреде-
определяется формулой
(!1) (!1) (О
Эта формула верна при движении аппарата по любой кеплеровой
траектории: прямолинейной, круговой, эллиптической, параболической
и гиперболической, так как при ее выводе никаких ограничений не
вводилось.
Если траектория аппарата оканчивается на поверхности Земли, to
модуль скорости в момент падения будет определяться формулой
где R — радиус Земли.
При движении по круговой траектории, согласно A), модуль ско-
скорости остается неизменным.
Задача 16.6. Определить наибольшую высоту полета космиче-
космического аппарата, движущегося по любой из пяти кеплеровых траек-
траекторий.
Решение. Рассмотрим отдельно движение по каждой из кепле-
кеплеровых траекторий.
Радиальная траектория. При движении космического аппарата
по прямолинейной радиальной траектории аппарат достигает наиболь-
наибольшего удаления от Земли в тот момент, когда его скорость обращается
в нуль. Положив в формуле A) предыдущей задачи скорость v рав-
равной нулю, находим наибольшее удаление аппарата от центра Земли
= ¦
Здесь, как и ранее, отношение кинетической энергии в начальный
момент к работе, которую надо затратить, чтобы перенести аппарат
в бесконечность из начального положения, обозначено k0. Максималь-
Максимальная высота полета над поверхностью Земли будет
"max = Лпах К= j ^ *\>
при k0 ^ 1 аппарат не возвратится на Землю.
84 КОСМИЧЕСКАЯ ДИНАМИКА 1ГЛ.ХУ1
Круговая траектория. В этом случае высота полета неизменна.
Эллиптическая траектория. При движении по эллиптической
траектории минимальная высота называется перигеем, наибольшая вы-
высота—апогеем, если вся траектория лежит вне пределов Земли. Из
уравнения траектории
Гж= Р.
1—есо8(ф—фх)
следует, что экстремальные значения радиуса-вектора будут при
cos(<p — ф!)=г±:1.
Следовательно,
Р Р
Гтах = -{^Г7' Гт1п~Т+7'
Соответственно наибольшая и наименьшая высота над поверхностью
Земли будут
Если траектория оканчивается на поверхности Земли, то высота полета
изменяется от нуля до максимальной величины, определяемой той же
формулой A).
Параболическая и гиперболическая траектории. Если эти тра-
траектории располагаются вне пределов Земли, то наименьшая высота
полета hm\n также определяется формулой A), а Атах="оо. Если же
эти траектории пересекаются с поверхностью Земли, то высота по-
полета меняется от нуля до бесконечности, если движение начинается
^. от Земли. Если же аппарат движется к Зем-
" ле, то высота полета изменяется от беско-
бесконечности до нуля.
Задача 16.7. Искусственный спутник
Земли движется по круговой орбите радиуса
rv Он должен быть переведен на новую
круговую орбиту радиуса г2 > гх. Перелет
с первой круговой орбиты на вторую со-
совершается по траектории, являющейся поло-
половиной эллипса. Касательные к эллипсу и
обеим круговым орбитам в точках сопри-
К задаче 16.7. косновения совпадают. Этот перелет назы-
называется перелетом Хомана и производится
путем приложения к спутнику мгновенного начального импульса Avt
и мгновенного конечного импульса Дя2, совпадающих по направлению
соответственно со скоростями тг и v2. Определить величины Avx и
Дфа как функции радиусов гх и г8.
Решение. Скорость спутника при движении по первой круго-
круговой орбите равна _
(О
f 1] КЕПЛЕРОВО ДВИЖЕНИЕ 85
После сообщения спутнику импульса At»i он движется по эллипсу,
у которого перигей равен гь а апогей г2.
Имеем для перигея и апогея значения
Исключив из системы B) эксцентриситет е, находим
'-%&• <3>
С другой стороны, на основании теоремы о сохранении момента ко-
количества движения для двух крайних положений спутника на эллип-
эллиптической орбите можно записать
¦с, D)
¦с E)
Для нахождения с воспользуемся равенством C) и соотношением
л
Из C) и F) имеем
с — -[/"ЗрУ* /7)
г ^i -\~ <*а "
Внеся в D) найденные значения G) и A), получим
С другой стороны, из E) с учетом G) находим
Чтобы перевести спутник с эллиптической траектории на круговую
траекторию радиуса г%, необходимо сообщить спутнику импульс Ат?2>
определяемый из равенства
которым дается новая скорость спутника в движении по круговой
орбите радиуса г2. Внеся в равенство A0) значение х»а из (9), нахо-
находим искомый импульс
Формулы (8) и A1) определяют минимальные импульсы, обеспечива-
обеспечивающие перелет с одной круговой орбиты на другую.
86 КОСМИЧЕСКАЯ ДИНАМИКА 1ГЛ, XVJ
§ 2. Динамика точки переменной массы
Телом переменной массы называется тело, масса которого изме-
изменяется в процессе движения вследствие отделения от него или при-
присоединения к нему точек. Будем считать, что после присоединения
точки становятся точками рассматриваемого тела, после отделения
точки перестают взаимодействовать с телом и исключаются из даль-
дальнейшего рассмотрения. Таким образом, присоединяющиеся и отделя-
отделяющиеся точки не возникают вновь и не исчезают, а только лишь
вводятся или исключаются из рассмотрения.
Будем полагать, что массы присоединяющихся и отделяющихся
точек в единицу времени малы по сравнению с массой тела и что
процесс присоединения и отделения точек происходит непрерывно.
Основоположник динамики точки переменной массы И. В. Мещер-
Мещерский так характеризует этот процесс. Будем полагать, что «... к сис-
системе непрерывно присоединяются частицы бесконечно малых масс таким
образом, что скорости точек системы изменяются непрерывно, тогда
как скорости частиц изменяются на конечные величины в момент
их присоединения к системе».
Динамика точки переменной массы с развитием реактивной тех-
техники приобрела особо важное значение.
Если можно пренебречь вращательными элементами движения
тела по сравнению с кинематическими элементами его поступательного
движения, то вместо динамики тела переменной массы рассматривают
динамику точки переменной массы. Если же кинематические враща-
вращательные элементы должны учитываться, то рассматривается динамика
тела переменной массы.
Для точки переменной массы основной закон динамики записы-
записывается в виде
^ A*)
где т — мгновенное значение массы материальной точки; © — скорость
материальной точки, F— главный вектор внешних сил, действующих
на точку переменной массы, Ф — реактивная сила равная
ф = §(я_„) = |Ч. B*)
Здесь и — абсолютная скорость присоединяющихся или отделяющихся
частиц, vr— их относительная скорость, dmldt — секундное измене-
изменение массы. Уравнение A*) называется уравнением Мещерского и фор-
формулируется так: «уравнение движения точки переменной массы имеет
вид уравнения движения точки постоянной массы, если к приложен-
приложенным к точке силам добавить реактивную силу».
Отметим два частных случая. Если абсолютная скорость присое-
присоединяющихся частиц равна нулю, то основной закон динамики точки
5 21 ДИНАМИКА. ТОЧКИ ПЕРЕМЕННОЙ МАССЫ 87
переменной массы имеет вид
~(mv) = F. C*)
Если относительная скорость присоединяющихся или отделяю-
отделяющихся частиц равна нулю, то уравнение A*) принимает вид
*»?-* D*)
Следует учитывать, что и в C*) и в D*) масса является переменной.
При решении задач динамики тела переменной массы применяются
теорема об изменении количества движения и теорема об изменении
главного момента количества движения с учетом изменения массы
тела и его моментов инерции.
Решение задач в этом разделе надо вести в сле-
следующей последовательности:
1) определить из условия задачи, относится ли она к динамике
точки или к динамике тела переменной массы;
2) если задача относится к динамике точки переменной массы,
то, применяя уравнение Мещерского, составить дифференциальное
уравнение движения точки переменной массы, проинтегрировать его
и определить произвольные постоянные интегрирования;
3) если задача относится к динамике тела переменной массы, то,
применяя теорему об изменении количества движения и теорему об
изменении главного момента количества движения, получить диф-
дифференциальные уравнения движения. Проинтегрировать их и опре-
определить произвольные постоянные интегрирования.
Задача 16.8. Ракета с запасом топлива имеет начальную массу т0.
Топливо сжигается с постоянным расходом, так что dm/dt = —с,
где т — мгновенная масса ракеты. Продукты сгорания выбрасываются
с постоянной относительно ракеты скоростью vr. Пренебрегая сопро-
сопротивлением воздуха, найти скорость v ракеты, движущейся вертикально
вверх, в произвольный момент времени t. Ускорение силы тяжести g
считать постоянным.
Решение. Рассматривая ракету как материальную точку пере-
переменной массы, запишем для нее уравнение Мещерского
dv _ . dm
В проекциях на вертикальную ось, направленную вверх, это даст
поскольку сила тяжести и относительная скорость отходящих газов
направлены вниз. Имея в виду, что dm[dt = —с и, следовательно,
88 КОСМИЧЕСКАЯ ДИНАМИКА 1ГЛ. XVI
m=tmo-~ct, запишем уравнение (I) в виде
(т0 - cf) — — — (т0 -cf)g+ cvf
или
Проинтегрировав и вспомнив, что vr постоянна, находим
е> t t
ct »
где через v0 обозначена начальная скорость ракеты.
Тогда
v — v0 = —^ — vr
Окончательно запишем
Задача 16.9. В условиях предыдущей задачи, считая, что ракета
стартует с поверхности Земли с нулевой начальной скоростью, найти
максимальную высоту подъема ракеты и время, необходимое для
достижения этой высоты. Принять, что отношение веса первоначаль-
первоначального заряда топлива к стартовому весу /я0 ракеты равно а.
Решение. Для удобства интегрирования перепишем полученную
в задаче 16.8 формулу для скорости ракеты в виде
где s —путь, пройденный ракетой, и учтено, что т>0
Проинтегрировав уравнение A), найдем
. J .,1.A -^Л-
Поскольку J In x dx «= х In x — x, мы получим
Окончательно
$ 2] ДИНАМИКА ТОЧКИ ПЕРЕМЕННОЙ МАССЫ 89
Уравнение B) определяет закон движения ракеты на активном
участке траектории (при работающем двигателе). Время tx полета на
активном участке траектории равно времени сгорания всего запаса
топлива, т. е.
Ctx =¦> СШо>
откуда
'i~<*?. C)
Скорость ракеты в конце активного участка
Vl — v,\n(l-U^-gtx~- t>,ln(l-a)-ea!Jf D)
а высота подъема
Далее на пассивном участке траектории ракета движется, как сво-
свободное тело брошенное вертикально вверх со скоростью vx. Поэтому
скорость ракеты определяется уравнением
а пройденный путь
Время t2 достижения ракетой наивысшей точки находится из усло-
условия v = 0, т. е.
откуда с учетом C) и D) получим
Максимальная высота подъема ракеты s2 = s(^2) равна
-i \т1пП-
90 КОСМИЧЕСКАЯ ДИНАМИКА [ГЛ. XVI
Раскрывая квадратные скобки и приводя подобные члены, найдем
*а = tva ^ + TV'jHn (t - а) + ! Ш* A - а).
Задача 16.10. Запуск ракеты производится с поверхности Земли
вертикально вверх. Стартовая масса ракеты w0. Определить скорость
ракеты к моменту полного сгорания топлива, если масса ракеты
без топлива тк. Сопротивлением воздуха и силой тяготения к Земле
пренебречь. Эффективная скорость истечения газа из сопла реактив-
реактивного двигателя постоянна и равна VB.
Решение. Эту задачу впервые решил К. Э. Циолковский. Урав-
Уравнение Мещерского в этом случае запишется так:
dv dtn ,. ч
где т — масса ракеты — является непрерывной и дифференцируемой
функцией времени, «в = dv/dt — ускорение ракеты, dm/dt < 0 —
секундный расход массы, V9 — эффективная скорость истечения газов.
Под эффективной скоростью понимается следующее. Тяга двига-
двигателя Т при движении в пустоте складывается из реактивной силы Ф
и силы, вызванной давлением газового потока на срезе сопла
где 5 — площадь выходного сечения сопла, р — давление в газовом
потоке на выходе из сопла. Заменяя реактивную силу ее значением,
находим
где vr — относительная скорость истечения газов.
Эффективной скоростью называется сумма, заключенная в скобки
Направим ось г вертикально вверх. Тогда, спроектировав равен-
равенство A) на ось г и учтя направления скоростей о и vb, получим
. dm
Проинтегрировав, получим (по условию г»э = const)
v = — va\nnt + C, C)
где С —произвольная постоянная интегрирования.
Так как при t — 0 т=*т0, ¦о0 = 0, то, подставив эти значения
переменных в C), найдем произвольную постоянную
С = v3 In m0.
8 21 ДИНАМИКА ТОЧКИ ПЕРЕМЕННОЙ МАССЫ 91
Внеся значение С в уравнение C), получим
Это — формула Циолковского. Она дает вначение скорости в зависи-
зависимости от количества сгоревшего топлива в ракете.
Пусть в некоторый момент времени t = tK топливо в ракете
полностью сгорело. Обозначим массу ракеты без топлива через /як,
тогда скорость ракеты к концу сгорания топлива, согласно D), будет
T>B — *.ln--J. E)
Отношение массы ракеты с топливом к массе ракеты без топлива
называется «числом Циолковского»:
Формулу E) можно переписать в виде
vK = vt\nz. G)
Эта формула определяет максимальную скорость, которую сооб-
сообщит ракете реактивный двигатель в момент полного сгорания топлива.
Соотношение G) позволяет сделать следующие выводы. Макси-
Максимальная скорость пропорциональна эффективной скорости истечения
продуктов сгорания и натуральному логарифму от числа Циолков-
Циолковского. Конечная скорость ракеты не зависит от того, по какому
закону происходит сгорание топлива, медленно или быстро. Однако
ускорение ракеты тем больше, чем быстрее сгорает топливо. Таким
образом, чем быстрее сгорает топливо, тем раньше ракета достигнет
конечной скорости. Следует иметь в виду, что прочность ракеты,
работоспособность приборов управления и приборов, предназначен-
предназначенных для научных исследований, не позволяет допускать весьма боль-
большие ускорения. Еще большие ограничения на ускорения накладывает
присутствие в ракете человека.
Для получения большой конечной скорости необходимо увели-
увеличивать эффективную скорость истечения газов или увеличивать
число Циолковского. Воспользуемся формулой G) и подсчитаем,
каково должно быть число Циолковского для достижения конечной
скорости vk — 9000 м/сек, если эффективная скорость vt = 2400 м/сек.
Имеем
г = eV". = е90оо/2400 ^ ез,75 ^ 42,5.
Таким образом, масса корпуса ракеты должна составлять 1/42,5
стартовой массы ракеты. Соответственно топливо должно составлять
41,5/42,5 стартовой массы ракеты. Такое соотношение между мас-
массами корпуса ракеты и топлива недостижимо для современной
техники. Между тем, если учесть потери на преодоление не учтенных
92
КОСМИЧЕСКАЯ ДИНАМИКА
[ГЛ. XVI
ТТолетый
1 ступень
1 ступень
ш
1
Ъ субранета.
i ,
2 субракета ,
1 субракета.
в нашем расчете сопротивления воздуха и силы притяжения к Земле,
то конечная скорость 9000 м]сек снизится и не будет превышать
первой космической скорости, необходимой для создания искусствен-
искусственного спутника Земли.
Таким образом, достижение первой космической скорости
с помощью одноступенчатой ракеты при современных технических
средствах практически невозможно. Трудности, возникающие при
этом, могут быть преодолены применением многоступенчатых ракет.
Задача 16.П. Запуск многоступенчатой ракеты производится
с поверхности Земли вертикально вверх. Эффективная скорост»
истечения газа из сопла реактивного
двигателя постоянна, одинакова для
всех ступеней и равна v9. После из-
израсходования топлива в соответствую-
соответствующей ступени она отделяется от ра-
ракеты.
Пренебрегая притяжением к Зем-
Земле и сопротивлением воздуха, опре-
определить конечную скорость после
использования всех ступеней, если
известны числа Циолковского для
каждой субракеты.
Примечание. Многоступенча-
Многоступенчатая ракета состоит из полезного груза
(искусственного спутника Земли или космического летательного аппарата) и
ступеней, каждая из которых включает двигатели, топливо и приборы управ-
управления. Субракетой называется система, состоящая из работающей ступени и
всех неработающих ступеней вместе с полезным грузом. Для данной субра-
субракеты масса всех неработающих ступеней и конечного груза является полез-
полезным грузом. Таким образом, каждая субракета рассчитывается как односту-
одноступенчатая ракета, по формулам, приведенным в предыдущей задаче (см. рису-
рисунок).
Решение. Для определения скорости ракеты, после окончания
действия двигателей первой ступени, применим полученную в пре-
предыдущей задаче формулу Циолковского G)
f ki — *\»i 1л zv
где t>Kl—скорость ракеты в момент отделения первой отработанной
ступени, val — эффективная скорость истечения в первой ступени,
Zi~число Циолковского для первой субракеты.
Аналогично находим скорость ракеты в момент отделения второй
ступени
vкг = +
К задаче I6.ll.
Здесь вва — эффективная скорость истечения во второй ступени,
Zi~ число Циолковского для второй субракеты. Продолжая расчет,
§ 2] ДИНАМИКА ТОЧКИ ПЕРЕМЕННОЙ МАССЫ 93
найдем скорость космического аппарата после отделения последней
ступени
¦»кп = •»,! In Z{ + vM In гг+... -f vtn In zn.
Если положить в соответствии с условием, что эффективные ско-
скорости истечения равны для всех ступеней, то формула G) из предыду-
предыдущей задачи принимает вид
vKr=vBlnzizz..,zn=svelm, A)
где ZT=zlZa...zn.
Заметим, что в случае, если числа Циолковского для всех суб-
субракет одинаковы, то, обозначив их общее значение через zt, мы смо-
сможем записать равенство A) в виде
vK = nvt In zi-
Следовательно, в этом случае конечная скорость пропорциональна
числу ступеней.
Найдем число Циолковского zt, которое должна иметь каждая
субракета для того, чтобы космический аппарат получил вторую
космическую скорость vK — 11 200 м/сек, полагая, как и в предыду-
предыдущей задаче, г»9 = 2400 м/сек. Для одноступенчатой ракеты имеем
zt = еи 2оо/24оо ^ 106,8. Для двухступенчатой ракеты zt = е11 200/2-2400 ^
(=«10,4. Для трехступенчатой ракеты г| = е11200/3-2400 я«4,76. Сопо-
Сопоставляя эти значения числа Циолковского для одноступенчатой и
многоступенчатых ракет, видим, что использование многоступенчатых
ракет резко снижает число Циолковского, позволяя инженерам соз-
создать реальную конструкцию.
Задача 16.12. Ракета массы т0 стартует вертикально с поверх-
поверхности Земли. Относительная (эффективная) скорость истечения газов
г»э постоянна. Пренебрегая сопротивлением воздуха и учитывая силу
тяготения к Земле, найти закон изменения массы ракеты с течением
времени, если ускорение ракеты на активном участке траектории
поддерживается постоянным, равным w = bg, где g ускорение силы
тяжести на поверхности Земли, b — const — коэффициент допустимой
перегрузки (перегрузкой называется отношение максимального уско-
ускорения объекта к ускорению силы тяжести).
Решение. Для составления дифференциального уравнения дви-
движения ракеты воспользуемся уравнением Мещерского. Силу тяготе-
тяготения к Земле можно представить формулой
где от —масса ракеты в произвольный момент времени, /? —радиус
Земли, h — расстояние ракеты от поверхности Земли в данный момент
времени.
94 КОСМИЧЕСКАЯ ДИНАМИКА [ГЛ. XVI
Тогда уравнение Мещерского запишется в виде
dv _ mgR* dm fU
т'di (R+Hf *dt' K)
где v — абсолютная скорость ракеты, Ф = — vt -я — проекция на
вертикаль реактивной силы, причем ~ < 0. Согласно условию уско-
ускорение ракеты
w=% = bg. B)
Следовательно, путь пройденный ракетой от поверхности Земли, най-
найдется интегрированием B) при начальных условиях: при ? = 0, й0 —0,
v0 •= 0. Тогда из B) находим
f C)
Внеся значения B) и C) в дифференциальное уравнение A), получим
или, разделяя переменные,
Проинтегрировав, получим
— its In in + С =
Подставив начальные условия при tn — m0, t = 0, определим постоян-
постоянную интегрирования:
С = г»в In /и0.
Тогда из D) найдем
Это уравнение и дает закон изменения массы ракеты с течением вре-
времени.
§ 2]
ДИНАМИКА ТОЧКИ ПЕРЕМЕННОЙ МАССЫ
95
Задача 16.13. Составить уравнения движения ракеты, запущенной
под углом е0 к горизонту, в проекциях на касательную и нормаль
к траектории. Найти закон изме-
изменения угла 6 наклона траектории
к горизонту, считая, что касатель-
касательное ускорение ракеты постоянно.
Вес ракеты Q = mg, где т~ пере-
переменная масса ракеты, а ?—ускоре-
?—ускорение силы тяжести. __
Реактивная сила Р и сила соп-
сопротивления воздуха Q направлены ^ задаче 16.13.
по касательной к траектории.
Решение. Спроектировав основное уравнение динамики на
касательную и нормаль к траектории (см. рисунок), получим
и2 ^
т — = О cos 0,
B)
где г — радиус кривизны траектории.
Поскольку кривизна траектории равна
Ida
_
db
Tt
ds
Tt
_^ 1
V
и в данном случае dQ/dt <; 0, то
db\
Tt\
t db
г Vdf
С учетом этого соотношения запишем уравнения A) и B) движения
ракеты в виде
C)
vj; =¦ — ?cos е>
D)
где р = P/m — реактивная сила, отнесенная к единице массы, q = Q/tn —
сила сопротивления воздуха, отнесенная к единице массы. При
dv/dt — w = const уравнение D) легко интегрируется и дает искомый
закон изменения угла 0. Действительно, это уравнение можно запи-
записать в виде
db _ g w dt
cos 8 w • v '
9б КОСМИЧЕСКАЯ ДИНАМИКА ?ГЛ, XV
Преобразуя и интегрируя, получим
.. *(т-) „.
где vo~ скорость ракеты в момент схода с направляющей.
Поскольку \ -—- =* intg-|-+C, мы найдем
Пропотенцировав, запишем окончательно
U 2
Уравнение E) показывает, что изменение направления скорости ра-
ракеты на активном участке траектории зависит от отношения скоро-
скоростей в конце и в начале дуги v/v0 и отношения ускорений gjw.
Задача 16.14. Весомая цепь, собранная в клубок, лежит на краю
горизонтального стола. Найти скорость свешивающегося со стола
конца цепи, считая, что в начальный момент длина этого конца рав-
равна 1, а скорость его равна 0.
Решение. Обозначим через х длину, а через т массу свеши-
свешивающейся и движущейся части цепи. Эта масса непрерывно возрастает
аа счет присоединения элементов dm части цепи, лежащей на столе.
При этом скорость присоединяющихся элементов возрастает в момент
присоединения от нуля до скорости движущейся части. Поэтому
в данной задаче можно воспользоваться уравнением C*), которое
в проекции на вертикальную ось х имеет вид
3f(m>) = F. A)
Обозначив через у вес единицы длины цепи, имеем: т = ?-х, v = &,
F — yx. Уравнение A) дает
Cx
или
xx + x^gx. B)
Это нелинейное уравнение второго порядка не содержит явно неза-
независимой переменной — времени t и поэтому допускает понижение по-
порядка на единицу. Здесь удобнее всего за новую неизвестную функ-
$ 2] ДИНАМИКА ТОЧКИ ПЕРЕМЕННОЙ МАССЫ 97
цию принять и = хг, а за новую независимую переменную взять х.
Тогда
„ d* d* . \ d (.г. 1 du
и уравнение B) приводится к линейному уравнению первого порядка
или
? + *-* C)
Представим переменную и как произведение двух функций
и = v ¦ w. D)
Тогда
и' =v'
Внеся эти значения в уравнение C), получим
Для нахождения переменных v и w одну из них можно выбрать
произвольно. Полагаем
w'~-±w, F)
или dw/w = — 2dx/x, откуда In -ву = In A/лг2) и, наконец,
• -Л G)
Внеся F) и G) в уравнение E), получим
Л; _1_ = 2
Следовательно,
и, согласно D),
Возвратившись к исходной переменной, находим
4 М, И, Бать и др„ т. Ш
98 КОСМИЧЕСКАЯ ДИНАМИКА [ГЛ XVI
Подставив в это уравнение начальные условия: при л?=1, Ji = 0,
находим произвольную постоянную интегрирования
с—h-
Тогда
\ ж*) 3 8 х*
или
l/2
=У т*
Это была исторически первая задача динамики переменной массы,
решенная в 1857 г. английским математиком Кэйли.
Задача 16.15. Найти закон изменения массы во времени для ра-
ракеты, движущейся на активном участке траектории с постоянным
ускорением а. Считать, что движение происходит в пустоте при
отсутствии силы тяжести.
Решение. Для решения этой задачи воспользуемся формулой
Циолковского, полученной в задаче 16.10 (уравнение D)):
где т>9 — постоянная эффективная скорость истечения, т0 — начальное
значение массы ракеты, от —текущее значение массы ракеты, v —
скорость ракеты.
В данной задаче г»@) = 0 и а — dv/dt = const. Поэтому v = at
и уравнение A) примет вид
, т at
Пропотенцировав, найдем
или, окончательно,
ГЛАВА XVII
ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ
§ 1. Первые интегралы уравнений движения. Обобщенный
интеграл энергии. Циклические координаты.
Функция Рауса
Напомним, что движение голономной материальной системы с s
степенями свободы, находящейся под действием потенциальных сил,
описывается системой s уравнений Лагранжа второго рода
А. ?к _ Ёк. — о п*\
dtd4i dqt~ ' l >
где г—1, 2,,.,,s; здесь ^ — обобщенная координата, ^ — обоб-
обобщенная скорость, L — функция Лагранжа, причем С = Т — П, где Т —
кинетическая, а П —потенциальная энергии материальной системы.
Уравнения Лагранжа являются обыкновенными дифференциальными
уравнениями второго порядка и представляют собой, вообще говоря,
зависимости вида
4ь Яь *) = 0, B*)
где /»=1, 2, .,., s. Поэтому для определения уравнений движения
qt = qt (t) приходится интегрировать систему дифференциальных урав-
уравнений второго порядка.
В этом параграфе рассмотрены случаи, когда возможно, минуя
интегрирование уравнений Лагранжа, непосредственно получить все
или некоторые из первых интегралов, т. е. уравнения
4,D,, qb i, C{) = 0, C*)
где /=1, 2, ..., s, a Ct — постоянные интегрирования.
В этих случаях задача значительно упрощается, ибо для нахож-
нахождения уравнений движения qj = qj(t, C{, CI), вместо интегрирования
системы B*) второго порядка, остается Проинтегрировать систему C*)
первого порядка.
К числу наиболее распространенных методов определения первых
интегралов относятся:
а) применение обобщенного интеграла энергии,
б) использование циклических координат.
4»
100 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ XVII
а) Применение обобщенного интеграла энергии.
Рассмотрим голономную материальную систему, находящуюся под
действием потенциальных сил. Ее кинетическая энергия 7* зависит,
вообще говоря, от обобщенных скоростей, обобщенных координат
и времени, т. е.
„ qt, t),
где /= 1, 2, ..., S, a s—число степеней свободы. Кинетическую энер-
энергию Т можно представить в виде
D*)
где 7*а> 7"i и То являются однородными функциями обобщенных ско-
скоростей fa, причем 7*а — второй степени, 7*! —первой степени, а 7—
нулевой степени, т. е. Г0 = 7(^, t). При этом, вообще говоря, Тг
и 7"i также зависят от обобщенных координат qt и времени г.
Если связи голономны, а кинетическая энергия D*) явно от вре-
времени не зависит (это всегда справедливо при стационарных связях,
но может быть и при нестационарных связях; см., например, вадачу
17.2), то имеет место обобщенный интеграл энергии:
Тг — То + П = const, E*)
который иногда называют интегралом Якоби.
Обобщенный интеграл энергии не является физическим интегралом
энергии, т. е. законом сохранения механической энергии 7* -4- П = С,
ибо Т ??¦ 7*2 — То, а вычисляется по формуле D*). Член 7*0 стоит
в (б*) со знаком минус, а член Ть линейно зависящий от обобщен-
обобщенных скоростей fa, в E*) вообще не входит. Он называется иногда
гироскопическим членом кинетической энергии. Только в случае
стационарных связей 7*i = ro = O. Тогда формула D*) принимает вид
Т = 7. При этом, как следует из (б*), обобщенный интеграл энергии
становится законом сохранения механической энергии:
= const. F*)
Итак, закон сохранения механической энергии F*) имеет место
для материальных систем, подчиненных голономным и стационарным
связям и находящимся под действием потенциальных сил, не завися-
зависящих от времени.
б) Циклические координаты, функция Рауса. Цик-
Циклическими называются обобщенные координаты qi, q^, ..., qt, не вхо-
входящие явно в выражение кинетической энергии Т, которым соответ-
соответствуют обобщенные силы, равные нулю: Qi = Qi=... = Qis=0.
Если не все активные силы потенциальны, то пользуются урав-
уравнениями Лагранжа в виде
где i=lt 2, ...,
§ ч ПЕРВЫЕ ИНТЕГРАЛЫ УРАВНЕНИЙ ДВИЖЕНИЯ 101
Допустим, что первые / обобщенных координат являются цикли-
циклическими. Тогда Qi = 0, -§— = 0. где /= 1, 2, ...,1а уравнения G*)
принимают вид ^1-щ- = ^ Отсюда следует:
дТ
а, = const, (8*)
где 1 = 1» 2, ...» I.
Уравнения (8*) ябляются первыми интегралами уравнений дви~
жения. Их число равно числу циклических координат.
Итак, при наличии циклических координат частные производные
кинетической энергии по соответствующим циклическим обобщен-
обобщенным скоростям постоянны. Эти частные производные называют
обобщенными, импульсами. Из формулы (8*) следует, что обобщен-
обобщенные импульсы, соответствующие циклическим координатам, постоянны.
Так, если материальная система имеет s степеней свободы при
наличии I циклических координат qi, g2, .,., qt, то можно, минуя
интегрирование, непосредственно найти / первых интегралов (8*):
&-<* ?-«*-. §-*¦ <9*>
Постоянные а? а2, ..., <xi следует определить с помощью на-
начальных условий движения.
При наличии / первых интегралов (9*) необходимо интегрировать
уже не s, а только s — l уравнений Лагранжа второго рода, соот-
соответствующих нециклическим координатам.
Для непосредственного составления этих уравнений удобно поль-
пользоваться функцией Рауса
Я- S a»h-T. (io*)
В выражении A0*) из кинетической энергии Т, с помощью первых
интегралов (9*), исключены обобщенные циклические скорости $ъ
При наличии функции Рауса R уравнения Лагранжа для нецикли-
нециклических координат имеют вид
d dR dR n rnn
Q ( }
где /==/-|-1, /-f 2, ..., s.
Таким образом, с помощью функции Рауса удается из уравнений
Лагранжа исключить циклические координаты (способ игнорирования
координат).
В частном случае потенциальных сил Qjs* — ¦з—. Так как обоб-
обобщенные силы, соответствующие циклическим координатам, по усло-
условию равны нулю, то dU/dqi = 0, т. е. циклические координаты qt явно
102 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVIT
не входят в выражение потенциальной энергии, а значит, и в выра-
выражение функции Лагранжа L = Т — П (напомним, что, по определению,
кинетическая энергия явно не зависит от циклических координат).
Итак, в случае потенциальных сил циклические координаты qt
явно не входят в выражение функции Лагранжа, т. е. dL/dqt = 0.
При этом уравнения A*) принимают вид
dt d4i —
Отсюда следуют первые интегралы уравнений движения
щ^ = Щ = const.
Так, если материальная система, на которую действуют только
потенциальные силы, имеет s степеней свободы при наличии / ци-
циклических координат цъ цг qt, то можно, минуя интегрирование,
непосредственно найти / первых интегралов:
dL dL dL /1ОЙ.
Wi=ai> W,=a* Wt=ai A2)
(нетрудно видеть, что формулы (9*) и A2*) тождественны, так как
потенциальная энергия не зависит от обобщенных скоростей).
Для остальных s — l координат можно с помощью функции Рауса R
непосредственно составить s —/ уравнений Лагранжа:
TtWi~'dqI = °' *13**
где i = /+l» l-\-1, ..., s, а функция Рауса имеет вид
i
R» 2 a»4k-L. A4*)
ft = l
Здесь из функции Лагранжа L с помощью формул A2*) исключены
циклические скорости $ъ q2, ..., ^i-
В случае материальной системы, на которую дей-
действуют потенциальные силы, непосредственное со-
составление первых интегралов уравнений Лагранжа
для циклических координат, а также составление
с помощью функции Рауса уравнений Лarpанжадля
нециклических координат, рекомендуется выпол-
выполнять в следующем порядке:
1) выяснить число степеней свободы s материальной системы
и яыбрать соответствующие обобщенные координаты;
2) составить выражение кинетической энергии Г;
3) составить выражение потенциальной энергии П;
4) определить функцию Лагранжа L = Т — П;
§ 1] ПЕРВЫЕ ИНТЕГРАЛЫ УРАВНЕНИЯ ДВИЖЕНИЯ 103
5) при наличии / циклических координат qb q2, ,,,, qu т. е,
координат, явно не входящих в выражение функции Лагранжа L'
составить с помощью формул A2*) / соответствующих первых ин-
интегралов;
6) решить систему уравнений A2*) относительно циклических
скоростей $1( (?2, ,,., qt, выразив их в зависимости от времени t,
нециклических координат q^i q!+i, ..., qs, их производных по вре-
времени ^/+1, 4ц2> . ¦•> is и постоянных аъ а2, ..., at;
7) подставить циклические скорости, найденные в предыдущем
пункте, в функцию Рауса A4*);
8) составить уравнения Лагранжа A3*) для « — /.нециклических
координат qt+b qiJr2, ,.., qs.
Число уравнений п. 8) может быть уменьшено на единицу за счет
применения обобщенного интеграла энергии E*) (если функция Лаг-
Лагранжа L не зависит явно от времени), либо закона сохранения ме-
механической энергии F*) (при наличии стационарных связей). Так,
если к материальной системе с двумя степенями свободы, имеющей
одну циклическую координату, можно применить обобщенный интег-
интеграл энергии, то оба первых интеграла можно непосредственно по-
получить без составления и интегрирования уравнений Лагранжа вто-
второго рода.
Задача 17.1. Трубка ОА может вращаться в горизонтальной
плоскости вокруг вертикальной оси г, проходящей через ее конец О
(на рисунке показан вид сверху).
Внутри трубки находится шарик М
массы т. Момент инерции трубки
относительно оси z равен 1г. Ша-
Шарик считать точечной массой. Си-
Силами сопротивления пренебречь.
Принять в качестве обобщенных
полярные координаты г и ф.
Показать, что координата ф яв- К задаче 17.1.
ляетея циклической. Найти первые
интегралы уравнений движения. Составить с помощью функции Рауса
уравнение Лагранжа для нециклической координаты г.
Решение. Материальная система имеет две степени свободы.
Обобщенными координатами по условию являются полярные коорди-
координаты гиф (см. рисунок).
Кинетическая энергия системы равна
Т = ТТ? + ТШ, A)
где Гтр —кинетическая энергия трубки, а Тш — шарика. Имеем
W 7- |я(г«ф» + '1) B)
(здесь использована формула, выражающая квадрат скорости точки
в полярных координатах: Vs = г8фг + /2).
104 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ (ГЛ. XVII
Внеся B) в A), запишем
Т = ±-{1, + тг*)ф+±тР. C)
Активными силами являются сила тяжести трубки ОА и сила
тяжести шарика М. Учтя, что движение происходит в горизонтальной
плоскости, получим потенциальную энергию равной нулю:
П = 0. D)
С помощью формул C) и D) определим функцию Лагранжа:
L^T-n = j(Iz + mr*)y* + ^mt\ E)
Координата ц> является циклической, ибо она явно в выражение
функции Лагранжа не входит. Поэтому в соответствии с форму-
формулой A2*), приведенной в обзоре теории, непосредственно получим
один из двух первых интегралов
?-=«•
dtp
С учетом выражения E) имеем
(/г + /яг2)ф = а. F)
Нетрудно видеть, что первый интеграл F) фиксирует постоянство
главного момента количеств движения материальной системы относи-
относительно оси г.
Для получения другого первого интеграла используем интеграл
энергии (см. (б*) в обзоре теории). Это возможно, так как активные
силы — силы тяжести — потенциальны и на систему наложена стацио-
стационарная связь (ось вращения трубки). Стационарности связи соответст-
соответствует выражение кинетической энергии C), которая является однород-
однородной квадратичной формой обобщенных скоростей / и <р, т. е. Т — Та
(в данном случае Тх и Го — члены в выражении кинетической энер-
энергии D*), соответствующие первой и нулевой степеням обобщенных
скоростей равны нулю).
Записав закон сохранения механической энергии: Г + П = С,
внеся в него значения C) и D) и использовав результат F), получим
другой первый интеграл
S
Итак, искомые интегралы уравнений движения имеют вид F) и
G). Мы их определили, минуя составление и интегрирование двух
уравнений Лагранжа:
dt dt- dr ' dt ftp up W
ПЕРВЫЕ ИНТЕГРАЛЫ УРАВНЕНИЙ ДВИЖЕНИЯ
105
Это оказалось возможным благодаря наличию циклической коорди*
наш ф и применению интеграла энергии.
В заключение (минуя систему уравнений (8)) составим уравнение
Лагранжа для нециклической координаты г, использовав функцию
Рауса R. В соответствии с формулой A4*), данной в обзоре теория,
запишем
/? = омр — L. (9)
Внеся в (9) выражение E) и затем подставив значение «р из F),
получим функцию Рауса
Теперь уравнение Лагранжа для нециклической координаты г
можно записать в виде (см. A3*) в обзоре теории)
Использовав выражение A0) в уравнении A1), найдем искомое диф-
дифференциальное уравнение для координаты г
Заметим, что с помощью уравнений Лагранжа (8) мы получили
бы систему
и лишь после исключения из нее <р и <р пришли бы к уравнению A2).
Задача 17.2, Решить предыду-
предыдущую задачу, считая, что трубка ОА
приводится мотором в равномерное
вращение с угловой скоростью а>0.
Решение. В данном случае
трубка О А реализует для шарика
М нестационарную связь, вращаясь
с угловой скоростью <оо. Положе-
Положение шарика М относительно трубки
ОД определяется с помощью обоб- К задаче 17.2.
щенной координаты г.
Абсолютную скорость шарика вычислим с помощью теоремы
И З
о сложении скоростей:
ve+vr. Имеем г>е = /чо0> vr=> Л Значит,
Кинетическая энергия шарика равна
106 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVII
В соответствии с формулой D*), приведенной в обзоре теории,
найдем
Тг = ~тР, Т0 = ~тгЩ, B)
где 7\j — квадратичная функция обобщенной скорости f, а То не
содержит обобщенной скорости.
Движение происходит в горизонтальной плоскости, следовательно,
потенциальная энергия равна нулю:
п=о, C)
и функция Лагранжа L — T — TI имеет выражение A):
L = ^mP+Ymr^b. D)
В данном случае первым интегралом является обобщенный интег-
интеграл энергии (см. E*) в обзоре теории)
7-г-Г0 + П = С, E)
ибо функция Лагранжа D) явно от времени не зависит.
Использовав в E) выражения B) и C), найдем искомый первый
интеграл
/»-r»a8=Q F)
(здесь постоянная С разделена на 2т).
При решении этой задачи нетрудно впасть в ошибку, применив
вместо обобщенного интеграла энергии E) закон сохранения механи-
механической энергии
Г + П = С. G)
Внеся в G) результаты B) и C), ошибочно найдем
В этой задаче нельзя применить закон сохранения механической
энергии G), так как в выражение кинетической энергии A), кроме
T2 = y т?г — квадратичной функции обобщенной скорости t, входит
также член Т0=^-^тгг(а1, не зависящий от t. Этот член появился
в выражении кинетической энергии A) в связи с нестационарностью
связи, которая в данной задаче имеет вид ф = ш<^, т. е. явно содер-
содержит время.
Обращаем внимание, что, не смотря на нестационарность связи,
время t в явном виде в выражение кинетической энергии A) и
в функцию Лагранжа D) не входит. Это обстоятельство дает воз-
возможность применить обобщенный интеграл энергии D).
ПЕРВЫЕ ИНТЕГРАЛЫ УРАВНЕНИИ ДВИЖЕНИЯ
107
Предоставляем читателю самостоятельно убедиться в правильности
равенства F) и в ошибочности формулы G). Для этого нужно при-
применить уравнение Лагранжа
df dt dr
и проинтегрировать его, умножив предварительно на dr.
Задача 17.3. Гироскоп движется под действием силы тяжести,
имея неподвижную точку О. Подвижная система осей Охуг связана
с гироскопом, причем ось z направлена по его оси симметрии, на
К задаче 17.3.
которой лежат центр тяжести С и неподвижная точка О. Эллипсоид
инерции гироскопа является для его неподвижной точки О эллипсо-
эллипсоидом вращения. Даны осевые моменты инерции 1Ж, 1у, 1г, а также
ОС = й; масса гироскопа равна т\ силами сопротивления пренебречь.
Минуя составление и интегрирование уравнений Лагранжа второго
рода, найти первые интегралы уравнений движения. Принять в качестве
обобщенных координат углы Эйлера ф, 1|э и 8.
Решение. Введем неподвижные оси Охху&ъ. Кинетическая
энергия твердого тела, вращающегося вокруг неподвижной точки,
вычисляется по формуле
Ось z является осью симметрии, а оси х и у перпендикулярны
к плоскости симметрии гироскопа в точке О. Поэтому
'уж'
= 0.
B)
108 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVIF
По условию эллипсоид инерции в точке О является эллипсоидом
вращения. Значит,
1Х = 1У. C)
Приняв во внимание B) и C), запишем формулу A) в виде
Напомним, что кинематические уравнения Эйлера имеют вид
со* = гр sin 8 sin ф + 8 cos ф,
@^ = 11; sin 8 cos ф — 6 sin ф,
(Oj = ljj COS 0 + ф.
Из первых двух уравнений E) найдем
o>|-f- Ц = 'Ф2 sin2 8 + б2. (б)
Подставив третью формулу E) и результат F) в D), получим выра-
выражение кинетической энергии
Т = т [/* (Ф* sin2 8 + ?) +1. (op cos 8 + ФJ]. G)
Потенциальная энергия равна
П = nlgzi = mgh cos 0. (8)
Внеся выражения G) и (8) в функцию Лагранжа 1 = 7 —П, найдем
I = i- [lx (^,2 sin* 8 + еа) + /г (ij? cos 8 + фJ1 - mgh cos 0. (9)
Углы Эйлера ф и i|> входят в (9) только своими производными,
т. е. явно в функции Лагранжа отсутствуют и, значит, являются цик-
циклическими координатами. Зная, что частные производные функции
Лагранжа по циклическим скоростям постоянны (см. формулу A2*),
приведенную в обзоре теории), запишем:
Лк = щ, $k- = a.n A0)
Внеся в формулы A0) выражение (9), получим два искомых первых
интеграла
/г(фсоз8 + ф) = а1. A1)
¦ о* A2)
$ 1J ПЕРВЫЕ ИНТЕГРАЛЫ УРАВНЕНИИ ДВИЖЕНИЯ 109
Решив систему уравнений (Н) и A2) относительно ф и if, мы
найдем
Ixsin*6 •
i (aa-~a1cose)cos8
7 77Ш
Для отыскания последнего первого интеграла можно применить
закон сохранения энергии (сила тяжести потенциальна, а опора О
реализует стационарную связь)
Г+ 11 = const. A6)
Приняв во внимание A1), найдем кинетическую энергию G) в виде
Подставив выражения A6) и (8) в уравнение A5) и включив посто-
постоянный член A6) ai/2/,, в постоянную С, получим
у Ix (t2 sin* б + 6а) + mgh cos 8 — С. A7)
Внеся в первый интеграл A7) выражение if> из A3) и затем решив
его относительно в, найдем
2wgftcos6
Г
lx /°sin*6 1Л
/1Й
A8)
Итак, искомые обобщенные скорости, являющиеся первыми про-
производными углов Эйлера по времени, даны формулами A3), A4) и A8).
Обращаем внимание, что мы их легко получили, минуя составле-
составление и интегриррвание системы уравнений Лагранжа второго рода:
dt dtp dtf "" " dt аф а-ф =™ ' dt дд дб
Это удалось сделать благодаря наличию двух циклических коор-
координат <р и 1|з, а также применению закона сохранения анергии.
Данную задачу, называемую случаем Лагранжа, можно при нали-
наличии начальных условий движения решить в квадратурах до конца и
определить уравнения движения гироскопа <p = q>@» 'Ф=:'Ф(О» В = 9 @«
Наряду со случаем Эйлера (см. задачу 15.1), случай Лагранжа отно-
относится к числу тех редких задач динамики твердого тела с неподвиж-
неподвижной точкой, в которых дифференциальные уравнения движения могут
быть проинтегрированы при произвольных начальных условиях дви-
движения.
110 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVII
§ 2. Уравнения Лагранжа первого рода
В § б гл. X второго тома были приведены дифференциальные
уравнения движения материальной системы, называемые уравнениями
Лагранжа второго рода. Помимо этих широко распространенных
уравнений, существуют и другие формы дифференциальных уравнений
движения системы, в частности —уравнения Лагранжа первого рода.
Рассмотрим несвободную материальную систему в составе я мате-
материальных точек, подчиненную г голономным связям. Число s степеней
свободы этой системы определяется по формуле
s — Ъп — г.
Если связи заданы уравнениями
fl (*1> Л, *Ъ •••> Хл, Уп, Zn), A *)
где 1=1, 2, ..., г, то уравнения Лагранжа первого рода имеют вид
УЬР- B*)
где ?«=1, 2, ..,, я; 2=1, 2, ..., г.
Здесь Fkx, Ff,y, Fkz — проекции на оси х, у, z равнодействующей
активных сил, приложенных к й-й материальной точке, а %ъ
кг, ..., %г — неопределенные множители. (Уравнения Лагранжа первого
рода иногда называют уравнениями Лагранжа с множителями.)
Эти Зя уравнений B*) совместно с г уравнениями связей A*)
образуют систему Зя + r уравнений с Зя + г неизвестными (Зя коор-
координат и материальных точек и г неопределенных множителей).
Суммы, стоящие в правых частях уравнений B*), численно равны
где k=l, 2, ..., я; Z=l, 2 г.
Здесь Rkx, Rky, Rkz — проекции на оси х, у, z равнодействующей
реакций связей, наложенных на й-ю материальную точку.
Определив г множителей %lt можно по формулам C*) найти
реакции связей.
Задачи на определение законов движения точек
системы и реакций связей с помощью уравнений
Лагранжа первого рода рекомендуется решать
в следующей последовательности:
1) изобразить на рисунке активные силы;
2) выбрать систему декартовых осей координат;
§ 21 УРАВНЕНИЯ ЛАГРАНЖА ПЕРВОГО РОДА 111
3) вычислить проекции на декартовы оси координат равнодейст-
равнодействующих активных сил Fkx, Fky, Fka приложенных к материальным
точкам системы (й = 1, 2, ..., и);
4) составить уравнения A*) связей ft = O, наложенных на мате-
материальные точки системы (/=1, 2, ..., г);
5) вычислить частные производные левых частей уравнений свя-
связей по декартовым координатам материальных точек системы: -Ф-,
j?-, -|i-, где 1=\, 2, ..., г, А=1, 2, .... я;
6) использовав результаты подсчетов в пп. 3) и б), составить
систему Ъп уравнений Лагранжа первого рода B*). В эти уравнения
войдут г неопределенных множителей V. К К;
7) выбрав уравнения в числе, равном числу г неопределенных
множителей %{, решить эти уравнения относительно %х, Яг, ..., ЯГ
(при этом множители Яг окажутся, вообще говоря, функциями коор-
координат и их производных по времени);
8) подставить полученные в п. 7) значения г множителей Xt
в остальные Зя —г уравнений Лагранжа первого рода;
9) присоединить к этим Зя —г уравнениям Лагранжа г уравнений
связей и, проинтегрировав эту систему Зя уравнений, определить
искомые законы движения материальных точек системы;
10) подставить координаты точек системы, а также их производ-
производные по времени в выражения множителей "кь определенных в п. 7);
11) вычислить проекции искомых реакций связей Rkx> Rky, Rkz,
где А =1, 2, ..., я, по формулам C*);
12) определить модули искомых реакций и направляющие коси-
косинусы по формулам
где k—\, 2, ..., п.
Заметим, что решение системы дифференциальных уравнений, ука-
указанных в п. 9), обычно представляет большие трудности. Поэтому
законы движения точек системы определяют с помощью других диф-
дифференциальных уравнений, например уравнений Лагранжа второго
рода. Затем, применяя уравнения Лагранжа первого рода, находят
реакции связей в виде функций времени. Последовательность реше-
решения задач остается прежней. Выпадает лишь п. 9), ибо законы дви-
движения точек системы определяются помимо уравнений Лагранжа
первого рода.
При движении материальной точки массы m по гладкой поверх-
поверхности, заданной уравнением
f(t,x,y,z) = 0, D*)
112 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVII
уравнения Лагранжа первого рода имеют вид
mZ = Fx + k^, «j> = F, + X-§-, mS"F, + ^ E*)
или в векторном виде
mw = F-\-Xgtzuf,
где F — равнодействующая активных сил, приложенных к точке,
а X — неопределенный множитель.
Исключив из трех уравнений E*) множитель К, получим два
уравнения. Добавив уравнение связи D*), получим систему трех
уравнений. Проинтегрировав эту систему, можно найти х, у, z —
искомые уравнения движения материальной точки по гладкой поверх-
поверхности—и затем вычислить К. Реакция поверхности определяется по
формуле
*=bgrad/, (б*)
где
При движении материальной точки массы т по гладкой кривой,
которая является пересечением двух, поверхностей, заданных уравне-
уравнениями
А V, х, у, z) =.0, /а (t, х, у, z) - 0, (9*)
уравнения Лагранжа первого рода имеют вид
яг. At
m% — Fx-
или в векторном виде
F+Ai grad /x -f Яа grad /2)
где F—равнодействующая активных сил, приложенных к материаль-
материальной точке, a hi и Кг — неопределенные множители.
Исключив из трех уравнений A0*) Ai и Я2, получим одно урав-
уравнение. Добавив к нему два уравнения связи (9*), получим систему
трех уравнений. Проинтегрировав эту систему, можно найти х, у,
z —искомые уравнения движения материальной точки по гладкой
кривой й затем вычислить hi и А*
5 2]
УРАВНЕНИЯ ЛАГРАНЖА ПЕРВОГО РОДА
113
Реакция кривой определяется по формуле
Ях grad ft+Яг grad /2,
т. е.
дг1
Задача 17.4. Два груза с массами тг и т2 соединены невесомой
нерастяжимой нитью, переброшенной через неподвижный невесомый
блок.
Определить уравнения движения грузов и реакцию нити, если
в начальный момент система находилась в покое, а свисавшие с блока
участки нити, поддерживающие первый и второй
грузы, соответственно равнялись 1Х и 1г.
Решение. Система состоит из двух материаль-
материальных точек, на которые наложена одна связь — нить.
Изобразим на рисунке активные силы системы:
Рх — сила тяжести левого груза, Рг — сила тяжести
правого груза. Ось у, направим по вертикали вниз,
взяв начало отсчета О в центре блока. Проекции
на ось у активных сил, приложенных к грузам,
равны
Fty^Pb /> = Ра. A)
Уравнение связи — нерастяжимой нити — имеет вид
/== °» B)
К задаче 17.4.
где ух и у2 — ординаты грузов, а буквой Z обозначена длина нити.
Частные производные левой части уравнения связи B) имеют вид
df
9-
дУг
1.
C)
Уравнения Лагранжа первого рода A*), приведенные в обзоре
теории, в данном случае имеют вид
J- D)
Использовав формулы A) и C), запишем уравнения D) в виде
E)
Дифференциальные уравнения E) содержат множитель Лагранжа Я,
подлежащий последующему определению.
Вычислим Я из второго уравнения E):
F)
114 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVII
подставив его в первое уравнение E), получим
Pi. G)
Присоединим к дифференциальному уравнению G) уравнение
связи B). Для решения этой системы уравнений дважды продиффе-
продифференцируем уравнение B):
0. (8)
Теперь из системы уравнений G) и (8) находим
Используем при интегрировании системы (9) начальные условия
движения: при ? = 0 имеем $i = #a=0, ji=/i, у% — Ц в результате
мы находим искомые уравнения движения грузов
Для определения реакции нити предварительно вычислим множи-
множитель %, подставив в формулу F) значение % из второго уравнения
(9). Получим
^^ A0)
Согласно формулам C*), приведенным в обзоре теории, имеем
Учтя в формулах A1) результаты A0) и C), находим
Эта легкая задача рассмотрена для иллюстрации последователь-
последовательности решения задач с помощью уравнений Лаграннса первого рода.
В данном случае значительно эффективнее применение общего урав-
уравнения динамики в сочетании с дифференциальным уравнением движе-
движения одного из грузов.
Задача 17.6- Материальная точка массы т движется под дей-
действием силы тяжести внутри гладкого полого цилиндра радиуса г.
Ось цилиндра горизонтальна.
Применив уравнения Лагранжа первого рода, составить диффе-
дифференциальное уравнение движения материальной точки и определить
реакцию цилиндра. В начальный момент точка находилась в покое.
§2]
УРАВНЕНИЯ ЛАГРАНЖА ПЕРВОГО РОДА
115
Решение. К материальной точке приложена одна активная
сила —сила тяжести Р. Направим ось z вдоль горизонтальной оси
цилиндра, а оси х и у — в плоскости его поперечного сечения.
Проекции силы тяжести Р на оси х,
у и z равны
Рх = Р. Ру = Рг = 0. A)
На материальную точку наложена одна
связь —внутренняя гладкая поверхность
цилиндра, уравнение которой имеет вид
f=,r* — x?—j/* = 0. B)
Частные производные левых частей урав-
уравнения связи B) равны
df __о
Тх г
Щ/
К задаче 17.5.
Уравнения Лагранжа первого рода E*), приведенные в обзоре
теории, в данном случае имеют вид
= Рх-\-%
~дх
nty-
Ъ- D)
Подставив результаты A) и C) в уравнения D), получим
пй = О, E)
где X — множитель Лагранжа, подлежащий последующему определению.
Из третьего уравнения E) находим 2х==С1. По условию мате-
материальная точка в начальный момент находилась в покое, т. е. 20 = 0.
Поэтому 2 = 0 и, следовательно,
z = C2. F)
Из уравнения F) следует, что движение точки происходит в се-
сечении цилиндра, перпендикулярном его оси г. Для определения дви-
движения точки в этом сечении воспользуемся первыми двумя диффе-
дифференциальными уравнениями E). Умножим первое уравнение на у,
второе уравнение на —х и сложим их. После сокращения на общий
множитель т найдем
т. е.
dt
(xy~y~x) =
G)
Выразим декартовы координаты точки М в зависимости от угла
<р отклонения подвижного радиуса ОМ от оси х (см. рисунок):
х = г cos ф, у — г sin (p.
(8)
116 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVII
Вычислив производные (8) по времени t, имеем
j} =. —Гф Sin ф, j> = Гф COS ф. (9)
Использовав формулы (8) и (9), находим
?у—рх*=. — г V sin2 ф — г2ф8 cos8 ф = —г8ф. A0)
Подстановка результатов (8) и A0) в дифференциальное урав-
уравнение G) дает —Гф — ^пф, т. е.
увШф A1)
Таково искомое дифференциальное уравнение движения материаль-
материальной точки в поперечном сечении полого цилиндра. Это уравнение
проще было получить, применив теорему об изменении момента коли-
количества движения материальной точки относительно оси г, либо
с помощью дифференциального уравнения движения точки в проекции
на касательную т (см. рисунок). Точное и приближенное решение
этого дифференциального уравнения было приведено во втором томе.
Для определения реакции Rn внутренней поверхности цилиндра
воспользуемся формулами F*) и G*), приведенными в обзоре тео-
теории. В проекции на главную нормаль п запишем:
f) (И,
Определим множитель К из второго уравнения E):
*—$•• С")
Использовав выражения C), получим
Подстановка результатов A3) и A4) в формулу A2) дает
R* = -mrjf. A5)
Для выражения нормальной реакции Rn в зависимости от угла
отклонения ф воспользуемся при вычислении ф второй формулой
(9). Находим
JJ = — г ф2 sin* ф + г ф cos ф. A6)
Применив результат A6) и вторую формулу (8) в выражении A5)
получим
A7)
,21
УРАВНЕНИЯ ЛАГРАНЖА ПЕРВОГО РОДА
117
Подставив в A7) значение ф из уравнения A1), получим проек-
проекцию- на главную нормаль искомой реакции внутренней поверхности
цилиндра:
Rn^mrqP + mg cosy. A8)
Для выражения ф в зависимости от q> надо знать начальные усло-
условия движения точки и проинтегрировать дифференциальное уравне-
уравнение A1), предварительно умножив его на dy. Заметив, что ф<&р =
= Ф d(f, найдем
-%-= — cos ф-f-С. A9)
По условию в начальный момент точка находилась в покое.
Если при этом ее положение определялось углом ф0, то при ф = О
имеем ф = ф0- Подстановка этих значений
С = — -?. совфд. Поэтому уравнение
т
A9) запишется в виде
Да _ 2 -i- (cos ф — cos ф0). B0)
т
Использование выражения B0) в
формуле A8) окончательно дает
Rn — mS С3 cos ф — 2 cos ф0).
Задача 17.6. Кольцо М массы т,
надетое на гладкую проволоку, изог-
изогнутую по винтовой линии, соскаль-
соскальзывает под действием силы тяжести.
Определить уравнения движения
кольца и реакцию проволоки в виде
функции времени. Винтовая линия
является пересечением двух поверх-
поверхностей, заданных уравнениями
х = a cos kz, y = a sin kz.
в уравнение
Ь0
A9) дает
К задаче 17.6.
В начальный момент кольцо М находилось в покое в положении М0)
указанном на рисунке.
Решение. На кольцо действует одна активная сила Р. Ее про-
проекции на оси х, у, z равны
Р* = Р, = 0, Рг = Р. A)
Единственная связь реализуется проволокой, изогнутой по винто-
винтовой линии. В соответствии с условием, ее уравнения имеют вид
— acoskz^O,
B)
118 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVII
Частные производные левых частей уравнений B) равны
TST-1- f—°- §• = «**¦**. C)
Уравнения Лагранжа первого рода, приведенные в обзоре теории
в формуле A0*), в данном случае имеют вид
Подставив результаты B) и C) в уравнения D), получим
= hi, тер = Я2, /я2 = tng 4- Ях a? sin kz — K^ak cos Д>г, E)
где %{ и Я2 — множители Лагранжа, подлежащие последующему опре-
определению. Исключив Ях и Я2 из системы уравнений E), найдем
т2 = mg-\- makxsin kz — mak$ cos Ал (б)
Для интегрирования дифференциального уравнения F) присоединим
к нему уравнения связей B). Взяв первые и вторые производные
по времени функций B), получим
Jt = — aktsinkz, x = — ak2 sin kz — a#>ia cos kz, G)
p = akz cos kz, JJ = ak2 cos Аг — ak?2% sin A2.
Подставив значения G) x к $ в уравнение F), после несложных
преобразований получим т2 — mg — тагк4, т. е.
2 = *, (8)
где обозначено
и 8
По условию кольцо в начальный момент находилось в покое
в положении Мо, т. е. при * = 0 г — 0 и 2 = 0. Поэтому, проинтег-
проинтегрировав дифференциальное уравнение (8), получим
*-«.* = ?• (9)
Подставив значение z из второго уравнения (9) в уравнения свя-
связей B), найдем
j» = asln-^-, A0)
Совокупность уравнений (9) и A0) определяет искомые уравнения
движения кольца.
§ 31 КАНОНИЧЕСКИЕ УРАВНЕНИЯ ГАМИЛЬТОНА ] 19
Переходим к вычислению реакции проволоки. В соответствии
с уравнениями A1*), данными в обзоре теории, проекции искомой
реакции равны
Подставив значения C), получим
Rx = kh Ry = ^2, Rt = Xiuk Sitl kZ—KiukcXiSkz. A1)
Из первых двух уравнений E) следует
%1 — тх, %2 — ту. A2)
Теперь уравнения A1) принимают вид
Rx = ntx, Ry — wJJ, Rz — makx sin ^г — ma kyl cos fe.
Использовав значения х, у и г из формул (9) и A0), получим
после очевидных преобразований
Rx*=— makb (sin ~ + Ш2 cos ~\
Rll = — таЧЧ,
где
Модуль реакции равен R = ]^Rx + Rl + Rl- После подстановки
значений A3) найдем
R = makb
Направляющие косинусы могут быть вычислены по формулам
Применение в этой задаче уравнений Лагранжа первого рода
для определения реакции проволоки оказалось целесообразным.
§ 3. Канонические уравнения Гамильтона
1°. Обобщенные импульсы. Обобщенным импульсом plt
соответствующим обобщенной координате qt, называется частная
производная кинетической энергии Т по обобщенной скорости fa,
т. е.
120
ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ
1ГЛ. XVH
Число обобщенных импульсов материальной системы равно числу
ее обобщенных координат. Значит, число обобщенных импульсов рав-
равно числу степеней свободы материальной системы.
Размерность обобщенных импульсов аависит от размерности соот-
соответствующих обобщенных координат (см. задачи 17.7 и 17.8). Обоб-
Обобщенные импульсы применяются в канонических уравнениях Гамиль-
Гамильтона.
Если на материальную систему с s степенями свободы наложены
голономные стационарные связи, то кинетическая энергия системы
является однородной квадратичной функцией s обобщенных Ско-
Скоростей ф ^ q
Т
.... 4s, т. е.
Здесь коэффициенты ati зависят от обобщенных координат цъ
..., qs и времени t. Применение формулы A*) приводит к ре-
ьтятямг
'-1,
S
'.-2
Яг,
зультатам:
дТ
=Wi"
дТ
2
дТ
-2
B*)
В соответствии с формулами B*) обобщенные импульсы являются
линейными функциями обобщенных скоростей.
Решение Системы уравнений B*) относительно обобщенных ско-
скоростей ^1( 4г> • • • > is Дает возможность выразить их в зависимости
от обобщенных импульсов рь р* ..., ps и обобщенных координат
Чъ Чь •••> 4s> входящих в коэффициенты ач, т. е.
4i (Яъ 42, ...» 4s, Ръ ^г» ...» Ps),
C*)
где /= 1, 2, ..., s.
Задача 17.7. Вычислить обобщенные импульсы материальной
точки массы m и выразить обобщенные скорости в зависимости от
обобщенных импульсов и обобщенных координат, если движение
точки задано: а) в декартовых координатах, б) в полярных коорди»
катах, в) в сферических координатах.
Решение, а) При движении материальной точки массы m
в декартовых координатах ее обобщенными координатами являются
§3]
КАНОНИЧЕСКИЕ УРАВНЕНИЯ ГАМИЛЬТОНА
121
qx = x, <7а=.У, q$ = z- При этом обобщенные скорости равны $i = x,
д2— j>, #8 = ?, а кинетическая энергия имеет вид
Обобщенным координатам х, у, z соответствуют обобщенные
импульсы рж, ру, рг. Использовав выражение A), найдем
дТ
py ¦¦
дТ
¦m$,
дТ
B)
т. е. обобщенные импульсы равны проекциям количеств движения
материальной точки на соответствующие декартовы оси координат.
S)
К задаче 17.7.
Решив систему уравнений B) относительно обобщенных скоро-
скоростей Л, у, г, имеем
m
т
В данном случае обобщенные скорости являются линейными функ-
функциями обобщенных импульсов и не зависят от обобщенных коорди-
координат X, V, Z.
б) При движении материальной точки массы т в полярных коор-
координатах ее обобщенными координатами являются Ц\=*г, дй = ц>. При
этом обобщенные скорости равны ^j,=*f, ^ — Ф- Учтя, что v2=
+г2фа, запишем кинетическую энергию в виде
D)
J-»««—!-«(>•+ г«ф*)-
Обобщенным координатам г и ср соответствуют обобщенные им-
импульсы рг и р9. Использовав выражение D), получим
122 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ (ГЛ-XVU
Решив систему уравнений E) относительно обобщенных скоростей
f и ф, найдем
В данном случае обобщенная скорость ф зависит не только от
обобщенного импульса /?<р, но также от обобщенной координаты г.
в) При движении материальной точки массы т в сферических
координатах ее обобщенными координатами являются 4i=p, <7г — Ф>
^s = 6. Соответствующие обобщенные скорости будут ^i = p*, ^2 = Ф»
Учтя, что г;2 == рг + р2ф2 sin2 0 + р202, запишем кинетическую энер-
энергию в виде
Т *= 1 mv2 = у яг (рг + р2ф2 sin8 6 + р2ба). G)
Обобд1енным координатам р, ф, в соответствуют обобщенные
импульсы рр> Ру, р^. Использовав выражение G), найдем
$ Ф, pv^ pe> рь 9, (8)
Ор Оф ОТ
Решив систему уравнений (8) относительно обобщенных скоро-
скоростей р, ф к 8, получим
. _ Рр . _ РФ • __ Р^
В данном случае обобщенные скорости ф и Ь зависят не только
от обобщенных импульсов, но также от обобщенных координат.
Задача 17.8. Твердое тело вращается вокруг неподвижной оси
z по закону ср =/@- Момент инерции твердого тела относительно,
оси z равен 1г. Приняв угол поворота ф за обобщенную координату,
определить обобщенный импульс.
Решение. Кинетическая энергия твердого тела, вращающегося
вокруг неподвижной оси, имеет вид
Т=ъ 4Ф2. A)
Использовав выражение A), вычислим искомый обобщенный импульс:
^ = f = /^. B)
В данном случае обобщенный импульс является главным моментом
количеств движения твердого тела относительно его оси вращения г.
2°. Функция Гамильтона. Функцией Гамильтона И назы-
называется выражение
JL, D*)
§31 КАНОНИЧЕСКИЕ УРАВНЕНИЯ ГАМИЛЬТОНА 123
где L = Г — П — функция Лагранжа (кинетический потенциал), s —
число степеней свободы материальной системы, ^ — обобщенная i-я
скорость, Pi — обобщенный /-й импульс.
Обобщенные скорости fa, входящие в функцию Гамильтона D*),
должны быть выражены в зависимости от обобщенных координат qi
и обобщенных импульсов pi (см. формулу C*) в обзоре теории пре-
предыдущего пункта). Поэтому функция Н, вообще говоря, имеет вид
,,Pi), E*)
где / = 1, 2, ..., s.
Функция Гамильтона, которой приходится пользоваться при состав-
составлении канонических уравнений (см. следующий пункт этого пара-
параграфа), имеет размерность энергии.
В случае стационарных связей функция Гамильтона Н равна
полной механической энергии, т. е.
Н = Т + П. F*)
Обобщенные скорости fa, входящие в выражение кинетической
энергии Т в формуле F*), должны быть выражены в зависимости
от обобщенных координат qi и обобщенных импульсов pi (см. фор-
мулу C*)).
Итак, при наличии стационарных связей функция Н зависит от
обобщенных координат qit обобщенных импульсов /?( и не зависит
явно от времени t:
H = H(qb Pl), G*)
где /= 1, 2, ..., s.
Если на материальную систему наложены нестационарные связи,
то при составлении функции Гамильтона приходится пользоваться
формулой D*). При стационарных связях проще применять формулу
F*). В это'м случае рекомендуется следующая пос-
последовательность действий:
1) выяснить число степеней свободы материальной системы и выб-
выбрать равное ему число обобщенных координат;
2) вычислить кинетическую энергию Т материальной системы,
выразив ее в зависимости от обобщенных координат и обобщенных
скоростей, т. е. T=T(qh fa), где /=1, 2, ..., s;
3) найти обобщенные импульсы системы по формуле A*), при-
приведенной в обзоре теории предыдущего пункта, выразив их в виде
функций обобщенных координат qt и обобщенных скоростей fa;
4) решить систему уравнений, полученную в п. 3), относительно
обобщенных скоростей fa, т. е. получить fa = fa (qt, pi), где /=1,2,,.., s;
5) вычислить потенциальную энергию П материальной системы;
6) воспользовавшись результатами пп. 2) и 5), вычислить функцию
Гамильтона #=Г+П;
7) в выражении Н, найденном в предыдущем пункте, заменить
обобщенные скорости fa с помощью зависимостей, полученных в п. 4).
124 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ {ГЛ. XVII
Задача 17.9. Составить функцию Гамильтона для свободной мате-
материальной точки массы т, движущейся в поле силы тяжести. В качестве
обобщенных выбрать декартовы координаты точки.
Решение. В задаче 17.7 а) были выполнены четыре первых
пункта решения.
Потенциальная энергия материальной точки равна
П^/ngz. A)
Так как материальная точка свободна, то функция Гамильтона
вычисляется по формуле F*), приведенной в обзоре теории. Исполь-
Использовав равенство A) и формулу (I) задачи 17.7, запишем
//.= 7" +П «aim (#+*• +*¦) + ««*. B)
Заменим Jt, $ и ? в формуле B) с помощью зависимостей C) задачи
17.7. Окончательно искомая функция Гамильтона получит вид
H + ^W+pl+pD + mgz. C)
Данная функция Н зависит от обобщенных импульсов рх, ру> рг
и обобщенной координаты г.
Задача 17.10. Решить предыдущую задачу, приняв в качестве
обобщенных сферические координаты точки.
Решение. В задаче 17.7 в) были выполнены четыре первых
пункта решения.
Потенциальная энергия П материальной точки равна
П = mgz.
Учтя, что z = pcose (см. рис. б к задаче 17.7), имеем
n = /«gpcos8. C)
Материальная точка свободна. Поэтому функция Гамильтона равна
ее полной механической энергии, т. е. Н=Т-\-П. Воспользовавшись
формулой G) задачи 17.7 и выражением A), запишем
Н=-§- m (p2 -f p V sinafl + р2в2) + mgp cos 8. B)
Остается в формуле B) заменить обобщенные скорости р, <р и 8
на обобщенные импульсы, использовав соотношения (9) задачи 17.7.
Получим
4|
Итак, искомая функция Гамильтона C) зависит от обобщенных
импульсов рр, /?„,, pe> a также от обобщенных координат р и 8.
Мы вычислили функцию Гамильтона по формуле Н=Т-\-П, при-
применимой в случаях потенциальных сил и стационарных связей. Можно
было провести вычисления по более общей формуле D*), приведен-
§3] КАНОНИЧЕСКИЕ УРАВНЕНИЯ ГАМИЛЬТОНА 125
ной в обзоре теории. Эта формула, применяемая при нестационар-
нестационарных связях, в данном случае имеет вид
н в 2 Ш — *• = />рР +РфФ+Ре9 — L, D)
где 1 = Г —П.
Воспользовавшись формулой A), а также выражением G) за-
задачи 17.7, запишем
L-T — П = -g- л« (ра + Р2Ф sin2 8 + Рава) — wgpcose. E)
Внеся результат E) в формулу D), получим
Н=рРр +/yj> +РФ - -Jя» (ра + PV sin2 6 + P2S2) + «SP cos 6. F)
Для получения искомой функции Гамильтона остается в формуле F)
заменить обобщенные скорости с помощью зависимостей (9) за-
задачи 17.7. После несложных преобразований получим выражение C).
Сопоставление двух методов составления функции Гамильтона
показывает, что при стационарных связях эффективнее пользоваться
формулой Н=Г + П.
Задача 17.11. Показать, что в случае консервативной материаль-
материальной системы, находящейся под действием потенциальных сил и под-
подчиненной стационарным связям, функция Гамильтона равна полной
механической энергии, т. е. Н =7" + П.
Решение. Предварительно заметим, что при стационарных свя-
связях кинетическая энергия Г является однородной квадратичной функ-
функцией обобщенных скоростей, т. е.
Т = i (a,rfl + a»#i + • • •+assfs + 2оа^,+...+ 2as_1as^_l4s), A)
где коэффициенты ay, —вообще говоря, функции обобщенных коор-
координат qb Чг Я*-
Согласно теореме Эйлера об однородных функциях для квадра-
квадратичной функции имеем
Читатель, незнакомый с формулой B), может без большого труда
убедиться в ее справедливости. Для этого, воспользовавшись выра-
выражением A), надо вычислить частные производные кинетической энер-
энергии Т по обобщенным скоростям ^ь 4а. «•¦> <?« т- е-
126 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVIT
и подставить эти значения в развернутую левую часть формулы B),
т. е. в сумму
дТ Л Л дТ Л J L дТ А
После несложных подсчетов эта сумма окажется равной удвоен-
удвоенной кинетической энергии, данной формулой A).
Перейдем к вычислению функции Гамильтона с помощью формулы
D*), приведенной в обзоре теории, т. е.
H=2p,4i-L. C)
Заметив, что, по определению,
dL дТ
P
а функция Лагранжа имеет вид L = T — П, запишем выражение C)
в виде
Внеся равенство B) в формулу D), получим искомое выражение
функции Гамильтона Н=Т-\-Т1.
3°. Канонические уравнения Гамильтона. Рассмот-
Рассмотрим консервативную материальную систему с s степенями свободы.
Выберем s обобщенных координат qb q% qs. Для описания дви-
движения этой системы с помощью уравнений Лагранжа второго рода
надо составить s дифференциальных уравнений второго порядка
dt dfa dqi '
где 1=1, 2, ..., s, a L = T — П — функция Лагранжа.
Снизим порядок каждого дифференциального уравнения со вто-
второго до первого путем удвоения числа уравнений. Это можно сде-
сделать различными методами, в частности, если к s обобщенным коор-
координатам присоединить s дополнительных координат — обобщенные
импульсы рь р2, ,.., ps. Переменные qt и pt (I — 1, 2, .... s) назы-
называются каноническими переменными. Обобщенная координата qt и
соответствующий ее импульс pt называются сопряженными канони-
каноническими переменными. Этим 2s каноническим переменным соответ-
соответствует 2s канонических уравнений Гамильтона:
. дН . дН
b^Wr Pl = -Wi> (8)
где И — функция Гамильтона, a f=l, 2, ..., s.
§ 3] КАНОНИЧЕСКИЕ УРАВНЕНИЯ ГАМИЛЬТОНА 127
Канонические уравнения Гамильтона — это система 2s обыкновен-
обыкновенных (а не в частных производных!) дифференциальных уравнений
первого порядка.
Каноническими уравнениями, помимо механики, пользуются в кван-
квантовой механике, электродинамике и других областях теоретической
физики.
Составление канонических уравнений рекомен-
рекомендуется проводить в следующем порядке:
1) выяснить число степеней свободы данной консервативной мате-
материальной системы и выбрать соответствующие обобщенные коорди-
координаты;
2) найти обобщенные импульсы, сопряженные с выбранными обоб-
обобщенными координатами (см. п. 1° этого параграфа);
3) вычислить функцию Гамильтона (см. п. 2° этого параграфа);
4) составить канонические уравнения с помощью формул (8*).
Задача 17.12. Составить канонические уравнения движения сво-
свободной материальной точки массы т в поле силы тяжести. В каче-
качестве обобщенных координат выбрать декартовы координаты х, у, г.
Решение. Свободная материальная точка имеет три степени
свободы. Значит, для описания ее движения надо иметь шесть кано-
канонических переменных.
Обобщенные импульсы рх, ру, рг были приведены в формуле B)
задачи 17.7.
Для составления шести уравнений Гамильтона (8*), имеющих
в данном случае вид
. _дН . _дН_ ._дН . _ дН . _ дН . дН
Х~д^сг У~дру' Ърг* Р*~ дх' py~~~ty> Р* Ж» V*
воспользуемся функцией Гамильтона Н, которая была составлена
в задаче 17.9 (см. формулу C)): H=2^(pl+Py+pi) + mgz. Подста-
Подставив это значение /f в уравнения A), найдем искомые канонические
уравнения
•*=?• *=% i=Pi> р*=°> ^=0' Р.—ж- B)
Эти шесть канонических уравнений первого порядка относительно
переменных х, у, z, px, ру, рг можно привести к трем дифференци-
дифференциальным уравнениям второго порядка относительно переменных х, у
и г. Действительно, вычислив производные по времени первых трех
канонических уравнений B) и решив их отнбсительно рх, ру, рг,
получим
рх = тх, ру=т$, рг^т2.
Подставив эти значения рх, ру, рг в три последних канонических
уравнения B), после сокращения на т найдем
JB = O, } = Q, 2 g. C)
128
ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ
[ГЛ. XVI'
Нетрудно видеть, что уравнения C) —это дифференциальные
уравнения движения свободной материальной точки, находящейся
в поле силы тяжести, в проекциях на декартовы оси координат.
Задача 17.13. Составить канонические уравнения движения сво-
свободной материальной точки массы т, находящейся под действием
квазиупругой силы F— — сг (см. рисунок), где с — постоянный коэф-
коэффициент. Силой сопротивления движению пренебречь. В качестве
обобщенных координат выбрать декартовы координаты х, у, г.
Решение. Свободная материальная точка имеет три степени сво-
свободы. Трем обобщенным координатам qi~x, q^^y, q» = z соответ-
соответствуют три сопряженных обоб-
обобщенных импульса рх, ру, pz.
Для определения рх, ру, рг
вычислим кинетическую энергию
материальной точки
0)
Обобщенные импульсы равны
дТ . дТ
К задаче 17.13.
дТ .
Рг = Ж — mi-
B)
Так как сила F потенциальна, а связи отсутствуют, то функция
Гамильтона равна ее полной механической энергии, т. е.
Н=Т + П. C)
Напомним, что потенциальной энергией называется работа, которую
совершает потенциальная сила при перемещении материальной точки
из данного положения в нулевое. Поэтому в данном случае
о о
П=\р.<1г = — с ^r-dr=*c-~. D)
т г
Заметив, что гг == х% +уа -J- г2, запишем формулу D) в виде
П = |(*«+У + г«). E)
Подставив результаты A) и (б) в формулу C), найдем
F)
Выражение F) еще не является требуемой функцией Гамильтона,
ибо последняя должна зависеть от обобщенных координат и обоб-
§3] КАНОНИЧЕСКИЕ УРАВНЕНИЯ ГАМИЛЬТОНА 129
щенных импульсов. Поэтому, воспользовавшись формулами B), выра-
выразим обобщенные скорости в зависимости от обобщенных импульсов:
Рх Pv . Рг
т* У т1 т
Внеся выражения х, у, ? в формулу F), получим функцию
Гамильтона в виде
). G)
Перейдем к составлению канонических уравнений
i дН дН
которые в данном случае имеют вид
. дН . дН . дН . дН . дН . дН ,~
¦*-ай* *-Щ' *=W,' Рх=~ьс< Py = -dj> Р*=-ъ- (8>
Подставив в уравнения (8) выражение функции Н из формулы G),
получим искомые канонические уравнения движения
¦*"«• *т* i = m> Р* = ~сх> Ру = — сУ> Рг = -сг. (9)
Мы получили шесть канонических уравнений первого порядка,
соответствующих шести каноническим, переменным х, у, г, рж, ру, рг.
Эти уравнения можно привести к трем дифференциальным уравне-
уравнениям второго порядка в проекциях на декартовы оси координат.
Для этого надо продифференцировать три первых канонических урав-
уравнения (9), ватем решить их относительно рх, Ру, рг и подставить най-
найденные pXt py, pt в три последних уравнения (9). Получим
тХ = — сх, т$ = — су, mS = — сг. A0)
Уравнения A0) являются проекциями векторного уравнения тча —
= F, т. е. nvw ~ — cr на декартовы оси координат.
Задача 17.14. Составить канонические уравнения движения сво-
свободной материальной точки массы т, находящейся под действием
центральной силы. Потенциальная энергия равна П = П (г). В качестве
обобщенных выбрать полярные координаты г и ср.
Решение. Двум обобщенным координатам г и ф соответствуют
два сопряженных импульса рг и /?ф, которые вычислены в решении
аадачи 17.7 ((см. формулу (б)).
Так как центральная сила F потенциальна, а связи отсутствуют,
то функция Гамильтона равна полной механической энергии:
A)
б М. И. Бать в др., т. III
130 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVII
Воспользовавшись выражением кинетической энергии D) в задаче 17.7,
запишем
Теперь надо в функции Н выразить обобщенные скорости t и ф
через обобщенные импульсы pr, pv и координаты г, <р. Использовав
формулу E) задачи 17.7, имеем
Н — сг- />? + -! -Ь П (г). C)
Канонические уравнения
дН • дН
в данном случае имеют вид
¦ дН ' дН ' дН ' дН ,..
г = -^— ( ш = ——- рг:!=: — я~» Рш == —~ я— • ' '
Внеся в уравнения D) значение функции Гамильтона C), полу-
получим искомые канонические уравнения движения материальной точки:
Задача 17.16. Составить канонические уравнения движения физи-
физического маятника, если Р — его вес, ]г — момент инерции относительно
оси привеса г, ОС — а — расстояние от точки привеса О до центра
тяжести С маятника (см. рисунок). Тре-
Трением пренебречь. В качестве обобщенной
координаты выбрать угол поворота <р.
Решение. Маятник является системой
с одной степенью свободы, ибо его поло-
положение определяется углом поворота <р.
Для вычисления сопряженного обобщен-
обобщенного импульса />ф запишем кинетическую
энергию маятника:
7-=4/гфа. A)
B)
Далее получаем для сопряженного обобщенного импульса:
— ??- — i •
откуда
C)
Единственная активная сила — сила тяжести Р — потенциальна,
а связь — ось привеса — идеальна и стационарна. Значит, функция
$ 3] КАНОНИЧЕСКИЕ УРАВНЕНИЯ ГАМИЛЬТОНА 131
Гамильтона равна полной механической энергии маятника:
#=7 + 11. D)
Потенциальная энергия маятника равна
П = — Ру =—Pacosy. E)
Внеся результаты A) и E) в формулу D), найдем
tf = y4<Pa-P«cos<p. (б)
Напомним, что этим выражением для Н нельзя воспользоваться
при составлении канонических уравнений, ибо функция Гамильтона
должна быть выражена в зависимости от обобщенных координат и
импульсов. Воспользовавшись формулой C), исключим из выраже-
выражения F) обобщенную скорость ф:
P% Pacosqx G)
В данном случае канонические уравнения имеют вид
. дН • дН
9 р
Внеся в уравнения (8) значение G) функции Гамильтона, полу-
получим искомые уравнения движения физического маятника
q> = 7j, V Axsincp. (9)
Два канонических уравнения (9) первого порядка эквивалентны
одному дифференциальному уравнению второго порядка. Продиффе-
Продифференцировав первое уравнение (9) по времени и затем исключив /?ф
из второго уравнения (9), получим дифференциальное уравнение кача-
качаний маятника
/гф = —Pa sin ф.
Задача 17.16. Вывести с помощью канонических уравнений
Гамильтона закон сохранения полной механической энергии.
Решение. В формуле E*), приведенной в п. 2° этого параграфа,
было указано, что функция Гамильтона Н в случае голономной
системы зависит, вообще говоря, от времени, обобщенных коорди-
координат и обобщенных импульсов, т. е.
H = H(t, qh p,), A)
где г=1, 2, ..., s — число степеней свободы материальной системы.
б*
132 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVII
Вычислим производную функции A) по времени:
dH дИ ,дН . ,дН , дН , дН . , дН . , ,дН.
ИЛИ
dH дН,Х\дНА,Х)дН
dt *~ dt~*
С помощью канонических уравнений
. дН дН
Ь-щ, Pi Wl
заменим ^ и pt в выражении B). Тогда
дН, у дЦдНу <ШдЦ
dt dt ~i~ ? dqi dpi Zd dpt dqi
или
dH дН /о\
Tt = dt' C)
Если связи стационарны, то время t явно не входит в уравне-
уравнение A). В этом случае дН/д(*=*0 и формула C) примет вид dfi/dt —
= 0, т. е.
Н=const. D)
Так как в рассматриваемом случае функция Гамильтона равна
полной механической энергии, т. е. Я^Г + П, то из уравнения D)
следует закон сохранения полной механической энергии
7 + II==const.
Итак, закон сохранения полной механической энергии имеет
место в случае консервативной материальной системы, т. е. при
наличии потенциальных сил и стационарных связей.
Задача 17.17. На материальную систему действуют потенциаль-
потенциальные силы, а связи голономны и идеальны.
Показать, что функции Гамильтона Я и —t являются сопряжен-
сопряженными каноническими переменными.
Решение. В предыдущей задаче был получен результат C)
dH дН /, дН m
•^--37, т.е. НA)
Сопоставив формулу A) с каноническим уравнением
. дН
P=
§3} канонические уравнения гамильтона 133
видим, что подобно pi и q{ H и —t являются сопряженными кано-
каноническими переменными. Этими переменными пользуются в квантовой
механике.
4°. Первые интегралы канонических уравнений Га-
Гамильтона. Первым интегралом канонических уравнений называется
функция f(t, qt, pi), которая остается постоянной при любых значе-
значениях канонических переменных qt и pt и удовлетворяет канониче-
каноническим уравнениям
41 dpi' Pt~ dqt'
где 1 = 1, 2 s, т. е.
f(t, Яъ Яг, .... qs> Ръ Ръ ¦••» Ps) = const.
Проинтегрировать 2s канонических уравнений, значит, найти 25
независимых первых интегралов
fj(t, q-u ?а. .-•. Я» Рь Рг, •••» Ps) = Cj, ^*)
где /==1, 2, ..., 2s, лбо, решив уравнения (9*) относительно кано-
канонических переменных цъ q* ..., qs, ръ pit ..., ps, найдем:
Сь С2, ..., Cis),
Съ Са, ..., Cts),
Cb Ca, ..., Cis),
, Ch С* ...
Ps=Ps(t,Cv Ca, .... C2S).
Эти значения qt и pt, где 1=1, 2, ..., s, по определению первых
интегралов, удовлетворяют каноническим уравнениям Гамильтона.
Если материальная система консервативна, то одним из ее пер-
первых интегралов является полная механическая, энергия Г+П = й,
равная в этом случае функции Гамильтона, т. е. h — H. Этот первый
интеграл называется интегралом энергии.
Значительно упрощается отыскание первых интегралов при нали-
наличии циклических координат.
Напомним, что циклическими (см. стр. 102) называются обобщен-
обобщенные координаты, которые явно не входят в функцию Лагранжа L=*
= Т — П. Например, координата qj является циклической, если
L = L(t, qb qit ..., qj_b qJ+1, ..., qs, $b fa, .... Qs).
При этом координата qj не входит также явно в функцию Га-
S
мильтона Н= ^jprft—L, т. е.
H=H{tt qb 5a, ..., qj-ь ?;+ь •••> Я» Ръ Рг> •••» Ps)-
134 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVII
Если одна из обобщенных координат з> — циклическая, то сопря-
сопряженный с ней обобщенный импульс/^ постоянен, т. е. pj = Cj = const
и является одним из первых интегралов канонических уравнений.
Итак, число постоянных обобщенных импульсов, являющихся
первыми интегралами канонических уравнений, равно числу цикли-
циклических координат. Поэтому при выборе обобщенных координат надо
стремиться к тому, чтобы среди них оказалось возможно большее
число циклических координат.
Если все координаты являются циклическими, а связи — стацио-
стационарными, то функция Гамильтона зависит только от постоянных
обобщенных импульсов: Н = Н(рь р2, .... ps). При этом все обоб-
обобщенные координаты оказываются линейными функциями времени:
qt = y,t+Db A0*)
где / = 1, 2 s, fi = ^— = g^- = const, Dt — постоянные интегри-
интегрирования. В этом случае интегрирование канонических уравнений не
составляет труда.
Поэтому, если бы можно было в ходе решения задачи перейти
от избранных обобщенных координат к циклическим координатам,
то интегрирование канонических уравнений совершалось бы элемен-
элементарно. Однако этот переход к циклическим координатам в общем
случае неизвестен.
Задача 17.18. Найти с помощью канонических уравнений Гамиль-
Гамильтона закон движения свободного твердого тела, совершающего по
инерции плоское движение параллельно плоскости Оху. Даны началь-
начальные условия движения: при t = 0 имеем лгс = 0, ус — 0, <р = 0, хс — vox,
рс — Щу, Ф = оо0, где С —центр масс твердого тела.
Решение. Для определения положения твердого тела зададим
три обобщенных координаты: х& Ус и ф- Кроме этих обобщенных
координат, каноническими переменными являются обобщенные
импульсы рХСг рУс, Рф.
Кинетическая энергия твердого тела равна Т = у Mv3c + у 4cws.
Так как vb = хЬ + ус, а <о2 = ф2, то
Т=±М{хЬ+Гс)+±1*с<(*- (О
Потенциальная энергия свободного твердого, движущегося по
инерции тела равна нулю:
П = 0. B)
Внеся результаты A) и B) в функцию Лагранжа L — Т — П,
найдем
± ^I^. C)
§ 4] УРАВНЕНИЕ ГАМИЛЬТОНА—ЯКОВИ 135
Воспользовавшись выражением C), вычислим обобщенные импульсы
Р*с> рус> /V
В данном случае все три обобщенных координаты Хс, Ус и Ф
не входят в функцию Лагранжа L C) и являются циклическими.
Поэтому все обобщенные импульсы D) постоянны, т. е. три первых
интеграла канонических уравнений равны
c Ус яф = /гсф = С3. E)
Использовав в E) начальные условия движения: при t = 0 дано
¦*с = vOx, #с = voy, Ф = ©о. найдем:
Ф = <оо. F)
Проинтегрировав дифференциальные уравнения (б) и применив
начальные условия движения: при ? = 0 дано хс = 0, ус = 0, ф = 0,
получим еще три первых интеграла канонических уравнений — иско-
искомые уравнения движения
Уравнения G) соответствуют формуле A0*) в обзоре теории.
Наличие всех трех циклических координат дало возможность,
минуя составление канонических уравнений, легко получить их шесть
первых интегралов.
§ 4. Уравнение Гамильтона — Якоби
1°. Канонические преобразования. В п. 4° § 3 этой
главы было показано, что при наличии стационарных связей и всех
обобщенных циклических координат можно сразу записать первые
интегралы, минуя составление и интегрирование канонических урав-
уравнений. Это обстоятельство подчеркивает особую важность удачного
выбора переменных при решении каждой конкретной задачи. Однако,
начиная решать задачу, очень трудно сразу найти наиболее целесо-
целесообразную комбинацию переменных, которые предельно упростили бы
интегрирование соответствующих канонических уравнений. В связи
с этим возникает задача о каноническом преобразовании, т. е. о пере-
переходе от одних переменных к другим, упрощающим интегрирование
соответствующих канонических уравнений.
Назовем первоначально избранные переменные qt (координаты) и
Pi (импульсы) старой системой переменных, а искомые переменные
It (координаты) и т]( (импульсы) — новой системой.
136
ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ
1ГЛ. XVII
Необходимо найти зависимость между старыми и новыми пере-
переменными, т. е.
it — giV, li, и, ..., Is, tii, %, .... л»)»
Pi—Pi(t, |ьа. •••» Is» Ль Лг> •••» 4s),
где /»1, 2, ..., s, обеспечивающую переход от канонических урав-
уравнений старой системы
, ОН . дН
ь-щ* Pi—э«'
— L(t, qit pi), к канони-
где функция Гамильтона равна #=
ческим уравнениям новой системы;
i ___ dR • dR
s
где функция Гамильтона равна R= ^^th — Lit, ?г, r\i).
Для большей наглядности составим следующую таблицу:
Старая
?1> Ял,
Pit Pit
$
Н=^Рт-
ан
где /=1
система
... t
• ¦ • у
-L(t
Pi =
, 2,.
4s
Ps
,P
""¦
' • 1
*• <7i)
дИ
s
обобщенные координаты
обобщенные импульсы
функция Гамильтона
канонические уравнения
Новая
li. I*.
%. 'Па.
а
R = 2.,*\&f
где *=1
система
...
...
-1
, 2
, Ь
(t. It, *i«)
dR
s
Для канонического преобразования, т. е. для перехода от старой
системы переменных к новой, надо выбрать функцию V, называемую
производящей функцией и зависящую от времени, старых и новых
обобщенных координат, т. е.
= V(t,
A*)
При наличии производящей функции V для функций Гамильтона R
и Н имеет место соотношение
5 4J УРАВНЕНИЕ ГАМИЛЬТОНА-ЯКОБИ 137
а старые и новые канонические переменные связаны зависимостями
_ W dV ,g~
где /=1, 2, ..., s.
Произведя вычисления по формулам C*), получим
7i> ?2> •••> 4s> ?i. 1а> •••» D>
где / = 1, 2 s.
Решив систему,,уравнений D*) относительно li и i\i, выразим но-
новые канонические переменные |< и т){ в зависимости от старых pi и
?ь т. е.
li = liit, Чь Pi), r\i = r\,(t, qit p,) A = 1, 2, ..., s).
Задача 17.19. Дана система переменных qi и pt. Требуется найти
новые переменные ^ и т];, выразить их в зависимости от старых пе-
переменных qi и р\ и вычислить новую функцию Гамильтона R в зави-
зависимости от старой функции Н, если производящая функция V имеет
вид V =
Решение. Использовав формулы C*), получим
т. е. новые переменные равны
Ь=Ри 4t = — qi,
где 1=1, 2, ..., s.
Итак, в новой системе переменных старые импульсы стали новыми
координатами, а отрицательные значения старых, координат стали но-
новыми импульсами.
s
Производящая функция V = ^ qi%i явно от времени не зависит.
i=i
Поэтому dV/dt = O и, следуя формуле B*), получим R = H.
2°. Уравнение Гамильтона — Якоб и. Поставим задачу об
отыскании производящей функции V, которая позволила бы перейти
от первоначальных избранных переменных qi и pj к новым постоян-
постоянным координатам |j = ai = const и новым постоянным импульсам т^ =
= Pi = const, где <=1, 2, ,.., s. Подобное каноническое преобразо-
преобразование привело бы к зависимостям старых переменных qi и pt от вре-
времени и от постоянных а( и p*j, т. е. дало бы возможность, минуя
интегрирование, легко найти первые интегралы канонических урав-
уравнений.
138 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVU
Для определения соответствующей производящей функции V надо
решить уравнение Гамильтона — Якоби:
Это — уравнение в частных производных первого порядка, второй
степени. В том, что это уравнение второй степени, нетрудно убе-
убедиться, вспомнив, что в функции Гамильтона Н импульсы pi содер-
содержатся в квадратах. Так как при каноническом преобразовании pi —
— dV/dqi (см. формулу C*) в п. 1°), то частные производные dV/dqi
войдут в Н и, следовательно, в уравнение E*) во вторых степенях.
Итак, решение одного уравнения Гамильтона—Якоби E*) в част-
частных производных эквивалентно решению 2s обыкновенных канони-
канонических уравнения. Заметим сразу, что объем вычислений примерно
одинаков.
Решение задач на составление уравнения Гамиль-
Гамильтона—Якоби рекомендуется выполнять в следующей
последовательности:
1) составить функцию Гамильтона Н (см. 2° § 3 данной главы);
2) заменить в функции Н обобщенные импульсы pi по формулам
P /
3) подставить полученное в п. 2) выражение Н в уравнение Га-
Гамильтона—Якоби E*).
Задача 17.20. Составить уравнение Гамильтона—Якоби для опи-
описания движения в поле силы тяжести свободной материальной точки
массы т. В качестве обобщенных взять декартовы координаты х,
У, z.
Решение. В формуле C) задачи 17.9 была записана соответст-
соответствующая функция Гамильтона:
В данном случае на основании формулы C*), приведенной в об-
обзоре теории п. 1° этого параграфа, имеем px = dVjdx, py = dVjdy,
рг = дУ/дг, и функция Н принимает вид
Использовав формулу A) в уравнении E*), запишем искомое
уравнение Гамильтона—Якоби:
Задача 17.21. Решить предыдущую задачу, приняв в качестве
обобщенных сферические координаты р, ф, 0.
% 4J УРАВНЕНИЕ ГАМИЛЬТОНА-ЯКОБИ 239
Решение. В формуле C) задачи 17.10 была записана соответ-
соответствующая функция Гамильтона
На основании формулы C*), приведенной в обзоре теории п. 1°
этого параграфа, имеем: pp = dV/dp, pff—dV/dy, pQ = dV/dQ и функ-
функция И принимает вид
Внеся выражение A) в формулу E*), получим искомое уравнение
Гамильтона—Якоби
Задача 17.22. Составить уравнение Гамильтона—Якоби для опи-
описания движения физического маятника, если Р — его вес, /* — момент
инерции относительно оси привеса, а —расстояние от точки привеса
до центра тяжести маятника. В качестве обобщенной координаты вы-
выбрать угол <р отклонения маятника от вертикали.
Решение. В формуле G) задачи 17.15 дана соответствующая
функция Гамильтона
Н=~р% — Pa cos ф.
На основании формулы C*), приведенной в обзоре теории п. 1°
этого параграфа, имеем
„ dV
и функция Н принимает вид
Использовав выражение A) в формуле E*), получим искомое
уравнение Гамильтона—Якоби
3е. Интегрирование уравнения Гамильтон а—Я к о б и
методом отделения переменных. Определение пер-
первых интегралов канонических у равнений с помощью
уравнения Гамильтон а—Я к о б и. Из теории дифференциаль-
дифференциальных уравнений известно, что полный интеграл уравнения в частных
производных (не отождествлять полный интеграл с общим, интегра-
интегралом, который в этой книге не рассматривается) содержит постоянные
интегрирования в числе, равном числу независимых переменных. Иско-
Искомая производящая функция V= V(t, qu \i), где i— 1, 2, ..., s, дает,
140 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVII
возможность совершить каноническое преобразование к постоянным
координатам h~<%i = const и постоянным импульсам r\t = fa = const,
т. е. V= V(t, qb at), где / = 1, 2, ..., s. Поэтому функция V зави-
зависит от s-fl переменной (время t к s координат q,), и значит, полный
интеграл уравнения Гамильтона—Якоби содержит s +1 постоянную
интегрирования.
Одна из постоянных (aJ+i) может стоять отдельным слагаемым, ибо
искомая производящая функция V входит в уравнение Гамильтона—
Якоби E*)
{?+«(* *?)-•
только под знаком частных производных dVfdt и dV/dqt. Поэтому
в результате интегрирования уравнения Гамильтона—Якоби искомая
функция V определится в виде
V=S(t, qb q*> .... q» ob a2, .... a,)+a4+1> F*)
где ai, a as являются новыми постоянными координатами и
одновременно — постоянными интегрирования. Заметив, что dV/dt =
= dS/dt и dV/dqi — dS/dqi, впредь будем пользоваться уравнением
Гамильтона—Якоби в виде
?(*'1Н G*>
где /= 1, 2, ..., s.
Интегрирование уравнения Гамильтона—Якоби G*), подобно ин-
интегрированию канонических уравнений, представляет значительные
трудности. В некоторых случаях, указанных ниже, можно несколько
облегчить интегрирование применением метода отделения пере-
переменных.
Напомним, что функция Гамильтона зависит, вообще говоря, от
времени, обобщенных координат qt и сопряженных с ними обобщен-
обобщенных импульсов рь т. е. H = H(t, qit pt), где i = l, 2, ..., s —число
степеней свободы материальной системы.
Рассмотрим случай, когда в Н входят сопряженные неременные q±
и pi в виде функции ф! = ф! (qb рД не содержащей других перемен-
переменных, т. е.
t, ф1 (qh Pl), qb Pi] <i = 2, 3, ..., s).
Такая структура функции Гамильтона дает возможность упростить
интегрирование уравнения Гамильтона—Якоби G*) методом отделения
переменных. Это уравнение в данном случае имеет вид
3S , „Г. / dS\ dS
где /=1, 2, ..., s.
$4] УРАВНЕНИЕ ГАМИЛЬТОНА-ЯКОВИ 141
Если в искомой производящей функции 5 отделить переменную qi,
т. е. записать ее в виде
4i) (* = 2, 3, ..., s), (9*)
то уравнение Гамильтона—Якоби (8*) приводится к двум уравнениям
«!, где ах = const (И)*)
и
д-щ- + н{г, аь q{, §) = 0 (/=2, 3, .... s). A1*)
Дифференциальное уравнение A0*) является обыкновенным, а урав-
уравнение (II*), хотя и остается в частных производных, но в нем число
переменных уменьшится на единицу. Тем самым упрощается его ин-
интегрирование.
Аналогично, если в функцию Гамильтона И входит не одна пара,
а I пар сопряженных переменных q}, pj в виде функций фу =в фу (qjt pj),
где У=1, 2, ..., /, причем фу не содержит других переменных, т. е.
H=zH[t, фу(?у, pj), qu pi\,
где /=1, 2, ..., I, i — l+\, 1+2, ..., s, то в искомой производя-
производящей функции 5 можно отделить переменные и записать ее в виде
qt), A2*)
где
В этом случае уравнение Гамильтона—Якоби приводится к /
обыкновенным дифференциальным уравнениям
, г^1) = сх, A3*)
и одному дифференциальному уравнению в частных производных
~дГ
где j—l, 2, ..., /, 1 = 1+1, 1+2, ..., s. Это уравнение интегриро-
интегрировать легче, чем исходное уравнение G*). (В уравнении G*) s+l
переменная: t, qb q2 qs, а в уравнении A4*) s — /+1 перемен-
переменная: t, yJ+l) ql+i) ..., qs, т. е. в уравнении A4*) на / переменных
меньше.)
Методом отделения переменных удобно также пользоваться при
наличии циклических координат. Так, если имеется / циклических
координат qb ?a> •••» Чь гДе 1<.$> то искомую производящую
142 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVII
функцию 5 можно записать в виде
(t, qtj, ?M, ..., qs). A5*)
Для определения So надо решить уравнение Гамильтона—Якоби
qt+b qt+2, ..., qs, аъ a2, .... a,, щ^, щ^, ..., g^)=°-
A6*)
Уравнение A6*) содержит уже не s + 1, а только s — /+1 пере-
переменных, т. е. число переменных уменьшилось на число I циклических
координат.
Если связи стационарны, то полная механическая энергия h = 7"+
-f П является одним из первых интегралов канонических уравнений.
В этом случае производящую функцию 5 можно записать в виде
qlt ft, ..., qs, аъ «г, ..., а,_ь Ю, A7*)
где роль as играет полная механическая энергия А.
Для определения функции Sa надо решить следующее уравнение
Гамильтона—Якоби:
а а ^ ^ ^h\ — h П8*1
92, .... Я* д-^, д^, •••, Щ1)-п- У10 >
Если при наличии / циклических координат система также кон-
консервативна, то искомая производящая функция 5 имеет вид
S= — ht + a1q1 + a2q2 + ...-{-aiqi + S0(qi+1, fr+8, ..., qs), A9*)
где h — полная механическая энергия материальной системы.
В этом случае для определения So надо решить уравнение Га-
Гамильтона—Якоби
..., qs, аь а2 а„ Ц-, *k g) = h. B0*)
Уравнение B0*) содержит только s — l переменных.
Наконец, если материальная система по-прежнему консервативна
и все обобщенные координаты, кроме одной qs, являются цикличе-
циклическими, то
5 = _ М + а1?1 + а^ +... + as _!?,_! + So (qs). B1 *)
При этом уравнение в частных производных B0*) превращается
в обыкновенное дифференциальное уравнение
/*. B2*)
где Л —полная механическая энергия материальной системы.
f 4) УРАВНЕНИЕ ГАМИЛЬТОНА-ЯКОБИ 143
Решение задач динамики материальной системы
с помощью уравнения Гамильтона—Я коб и реко мен-
дуется проводить в следующей последовательности:
1) составить уравнение Гамильтона—Якоби (см. п. 2° этого пара-
параграфа)
где 1=1, 2, ..., s —число степеней свободы материальной системы;
2) решить уравнение Гамильтона—Якоби и найти производящую
функцию 5
С ~_ С* /4 Л Л м \
О = о yi, Чх, «f2> '"г 4s> СЦ> &Ъ • • • > "s/i
где аъ аг, ..., as являются новыми, пока неизвестными постоянными
обобщенными координатами и одновременно — постоянными интегри-
интегрирования;
3) применив формулы
pt = ^-, 6, = -^-, B3*)
где 1=1, 2, ..., s, найти
Pt=Pt(t, Яь at), Pi=Pitf, qt, Щ), B4*)
где 1=1, 2, ..., s (напомним, что pi — старые обобщенные импульсы,
a Pi — новые, пока неизвестные постоянные обобщенные импульсы);
4) решив систему 2я алгебраических уравнений B4*) относи-
относительно q{ и pi, найти канонические переменные
где 1 = 1,- 2, ..., s. Здесь at и р4 —новые, пока неизвестные по-
постоянные канонические переменные, которые одновременно являются
постоянными интегрирования:
б) использовав 2s начальных условий движения: при t = 0 дано
4i — qio> Pi—Plot определить 2s постоянных интегрирования о^ и (J;, где
/=1, 2, ..., s. Подставив их значения в B5*), найти первые интег-
интегралы канонических уравнений, т. е. искомые канонические переменные
Если материальная система консервативна и производящая функ-
функция 5 ищется в виде A7*), то формулы B3*) принимают вид
1 = Ш
Щ* где
где / = 1' 2 s:
B6*)
B7*>
144 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVII
Заметим, что 2s—1 уравнений B6*) не содержит явно времени.
Они называются уравнениями траектории. Уравнение B7*), содер-
содержащее явно время, иногда называется уравнением движения по тра-
траектории. (Напомним, что уравнения Лагранжа второго рода не дают
возможности непосредственно, отдельно получить уравнения траекто-
траектории и уравнения движения. В этом преимущество использования кано-
канонических уравнений.) В уравнениях B6*) и B7*) содержится 2s
постоянных интегрирования аь <х2, .... a5_i, h, рь Ра» •••> Ps- Для
их определения должны быть заданы 2s начальных условий движе-
движения: при *=0 дано 9г = #ю> Pi = p№ где /=1, 2, ..,, s.
Задача 17.23. Найти закон малых колебаний математического
маятника с помощью уравнения Гамильтона—Якоби. В начальный
момент маятник находился в покое, а его нить дли-
длиной / была отклонена от вертикали на угол <р0. Си-
Силами сопротивления движению пренебречь.
Решение. Математический маятник имеет одну
степень свободы. В качестве обобщенной коорди-
координаты q выберем угол <р отклонения маятника от
вертикали, т. е. q — q>.
Так как сила тяжести потенциальна, а нить по-
постоянной длины / реализует стационарную связь, то
функция Гамильтона Н равна полной механической
энергии, т. е.
К задаче 17.23. H=T + U = h. A)
Кинетическая энергия маятника, являющегося точечной массой,
равна
Т~^тФ=^тРф. B)
Обобщенный импульс /?ф, вычисляемый по формуле /><р = ч-> равен
Р9 = т1% C)
откуда найдем
¦-S- <4>
Потенциальная энергия маятника определяется (см. рисунок) по
формуле Il = mgAx, где Дд; = /A — costp), т. е.
Il = /«g/(l-cos<p). E)
Разложение cos<p в ряд по степеням ф имеет вид cosq>=l —
— ?- + SL —,.. Считая колебания маятника малыми, ограничимся пер-
первыми двумя членами разложения, т. е. примем cos <р <=& 1 — %¦. Теперь
потенциальная энергия E) запишется в виде
. (в)
$ 41 УРАВНЕНИЕ ГАМИЛЬТОНА-ЯКОБИ 145
Использовав формулы B) и F) в выражении A), найдем
Функция Гамильтона Н должна быть выражена в зависимости от
обобщенных координат и обобщенных импульсов. Поэтому, внеся
в G) значение ф из формулы D), получим
#=2^Ф+^Фа- (8)
Напомним, что решение задачи об определении первых интегра-
интегралов канонических уравнений с помощью уравнения Гамильтона—Якоби
сводится к отысканию производящей функции 5. Эта функция дает
возможность совершить каноническое преобразование от, старых пере-
переменных обобщенных координат и импульсов к Новым постоянным
координатам и импульсам. В данном случае старым переменным <р
и р9 соответствуют новые, пока неизвестные постоянные аир.
В соответствии с формулой A7*), приведенной в обзоре теории, в дан-
данном случае при s—\ искомая производящая функция 5 имеет вид
5 ht + Soto, h), (9)
где ft —полная механическая энергия, причем a = ft. Этой постоян-
постоянной h соответствует постоянный обобщенный импульс р, подлежащий,
подобно А, последующему определению.
Для вычисления функции So применим уравнение Гамильтона—
Якоби A8*), приведенное в обзоре теории. В данном случае при
5=1 и q = ф имеем
Я(ф, *!)-*. A0)
Заменив в выражении (8) рч на dS0/d<p и затем внеся его в урав-
уравнение A0), получим уравнение Гамильтона—Якоби в виде
Так как So зависит только от одной переменной <р [см. (9)], то
f = f и, значит,
Итак, уравнение Гамильтона—Якоби в частных производных в дан-
данном случае оказалось приведенным к обыкновенному дифференци-
дифференциальному уравнению A1). Решив уравнение A1) относительно dSd
получим
Нб ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ (ГЛ. XVII
После разделения переменных и интегрирования найдем
Внеся значение A2) в выражение производящей функции (9), будем
иметь
-^ф* dy. A3)
Теперь нетрудно применить формулы B6*) и B7*), приведен-
приведенные в обзоре теории. При s = 1 имеем
2 v
Вычислив интегралы, стоящие в формулах A4), найдем
^ A5)
Как следует из выражений A5), новой постоянной координатой
оказалась полная механическая энергия Ь, а новый постоянный им-
импульс р, сопряженный с координатой ft, имеет размерность времени.
Для определения h и {} воспользуемся начальными условиями
движения маятника: при ? = 0 имеем <р = ф0, ф = tp0 == 0. Применив
формулу C), найдем: />ф|) = /й^фо = 0.
Подставив в уравнения A5) / — 0, ф — <р0, ^ф=^фо —0, получим
A6)
Внеся значения A6) в уравнения A5), после несложных преобра-
преобразований найдем искомые первые - интегралы канонических уравнений
— <p2), ф =
Конечно, уравнение ф = ф0 cos l/ =? t можно было легко получить,
применив дифференциальное уравнение вращения вокруг неподвижной
оси тР(р = —mglsmy, и затем, положив 5Шф«йф, его проинтегри-
проинтегрировать. Однако, решив задачу с помощью уравнения Гамильтона —
Якоби, удалось выяснить физический смысл новых сопряженных
канонических постоянных. Ими оказались полная механическая энер-
энергия h и время t Этот результат играет существенную роль в кван-
квантовой механике.
§ 4| УРАВНЕНИЕ ГАМИЛЬТОНА-ЯКОБИ 147
Задача 17.24. Найти закон движения и уравнение траектории
свободной материальной точки массы т, движущейся в поле силы
тяжести. В качестве обобщенных выбрать декартовы координаты
х, у, z. Решить задачу с помощью уравнения Гамильтона—Якоби.
Решение. В задаче 17.20 было получено уравнение Гамильто-
Гамильтона—Якоби (см. B)).
dV .
Воспользовавшись формулой F*),. данной в обзоре теории, запи-
запишем уравнение A) в виде
as I \(dS \« , (dS \» , (dS у] ,9
Так как в данном случае имеет место интеграл энергии, а коорди-
координаты х и у являются циклическими, то, применив метод отделения
переменных, в соответствии с формулой B1*), приведенной в обзоре
теории, будем искать производящую функцию 5 в виде
S = -W + ax*+atf+&<*), C)
где А —полная механическая энергия, ах и а2 — новые постоянные
координаты, одновременно являющиеся постоянными интегрирования.
Заметим, что h, аъ аг и S0(z) пока неизвестны.
Вычислив производные функции C) по t, x, у и г, получим
dS dS dS dS dS0 dS0 ил
Внеся результаты D) в уравнение B), найдем
A. E)
Итак, благодаря интегралу энергии, а также наличию двух цикли-
циклических координат х и у уравнение Гамильтона—Якоби B) в част-
частных производных превратилось в обыкновенное дифференциальное
уравнение E). Это уравнение можно было непосредственно получить,
применив формулу B2*), приведенную в обзоре теорий.
Решив уравнение E) относительно dS0/dz, найдем
§ a\--a\. F)
Разделив переменные в дифференциальном уравнении F) и проинте-
проинтегрировав его, получим
So = $ y2m(h-mgz)-a,\-<4 dz. G)
Внеся значение G) в выражение C) производящей функции 5, найдем
5 = — Ы + aiX+a2y + $ У 2т (ft — mgz)-a\-a\ dz. (8)
Здесь пока неизвестны h, аг а а2.
148 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ, XVII
Для установления зависимости между старыми переменными обоб-
обобщенными координатами х, у, г и старыми импульсами рх, ру, рг,
а также новыми постоянными координатами А, аь ctg и новыми по-
постоянными импульсами рь р2, р8, применим формулы B3*), приве-
приведенные в обзоре теории:
Рх**?-аъ Ру = Щ>^ос2, pz=o? = V2m{h~mgz)-a\-a\, (9)
ft - dS __ Y dS° ft - dS - и dS»
Воспользовавшись результатом G), найдем
dS0 _, f —atdz aSg __ f — щ,йг
dcti J Vim(h—mgz) — a\—a*' da» J |/m(A—mgz)—a\ — a» '
dS0
Вычислив эти интегралы, получим
Теперь уравнения A0) принимают вид
Pi = —* ~
Рз = <+~ V^m (А - /и^) - «I - oj. A2)
trig
Итак, получена система шести уравнений (9), A1) и A2), уста-
устанавливающих зависимость между старыми каноническими перемен-
переменными х, у, г, рх, ру, рг и новыми каноническими постоянными h, alt
&2> Pi. Рг. Ps. которые одновременно являются постоянными инте-
интегрирования.
Для определения постоянных интегрирования должны быть заданы
начальные условия движения: при * = 0 пусть даны х = х0, У=*Уо,
2==г0, Рх—Рх0, Ру = Ру„ Рг = Рг„-
Два уравнения A1) являются искомыми уравнениями траектории
материальной точки (траекторией является кривая, по которой пере-
пересекаются цилиндрические поверхности, описанные уравнениями A1)).
Уравнение A2), содержащее явно время, определяет искомый закон
движения материальной точки.
В заключение получим с помощью формул (9), (И) и A2) урав-
уравнения свободного падения материальной точки, происходящего вдоль
§ 4] УРАВНЕНИЕ ГАМИЛЬТОНА-ЯКОБИ 149
оси z с высот» о. Как известно, уравнения траектории — оси z —
имеют вид
х=у = 0, A3)
а закон движения дается уравнением
*-а-?. A4)
В этом случае начальные условия движения таковы:
при * = 0 имеем х = 0, у = 0, z = a, x = 0, j> = 0, i = 0. A6)
В соответствии с формулой B) задачи 17.7 а) запишем обобщенные
импульсы:
рх = тх, Ру = тр, pt =* mz.
При х=у = г = 0 начальные значения обобщенных импульсов будут
Внеся A5) и A6) в уравнения (9), найдем
-aj-a|. A7)
Использовав начальные условия A6) в уравнениях A1) и A2), по-
получим
A8)
Решив систему уравнений A7) и A8), найдем
ai = 0, a8 = 0, h = mga, р\ = 0, ра = 0, р8 = 0. A9)
Внесение значений A9) в уравнения A1) и A2) приводит к форму-
формулам A3) и A4):
Конечно, применение уравнения Гамильтона—Якоби при решении
столь простой задачи нецелесообразно. Оно было дано для иллюст-
иллюстрации использования метода отделения переменных при интегриро-
интегрировании уравнения Гамильтона—Якоби'.
Задача 17.26. Найти уравнения движения и уравнение траектории
материальной точки, движущейся в плоскости под действием централь-
центральной силы, если потенциальная энергия равна П = П(г), где г —пе-
—переменное расстояние от материальной точки до неподвижного центра.
Применить уравнение Гамильтона—Якоби в полярных координатах.
Даны начальные условия движения: при t = 0 имеем ф = 0, <р = ф0,
Г = Гц, / s= f^.
160 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ (ГЛ. XVII
Решение. Материальная точка, движущаяся в плоскости, имеет
две степени свободы. В качестве обобщенных примем полярные
координаты точки, т. е. q^ — r, 92 = ф-
Кинетическая энергия материальной точки равна
г—!-«*¦—!-«(/>+ г*Ф»), 0)
где т — масса материальной точки,
Обобщенные импульсы рг и рф равны
Решив уравнения B) относительно ? и ф, имеем
,-*, ф= *L C)
Так как свободная материальная точка движется в потенциаль-
потенциальном поле, то функция Гамильтона Н равна ее полной механической
энергии h, т. е.
/У=А, D)
где
. E)
По условию П = П(г). Поэтому, учтя выражение A), найдем
1/и(^ + гф) + П(г). F)
Координата ф явно не входит в F) и поэтому является циклической.
При подстановке выражения F) в функцию Гамильтона D) надо
испольаовать соотношения C). Получим
Напомним, что в случае консервативной материальной системы
уравнение Гамильтона—Якоби имеет вид
H = h. (8)
Используя в (8) функцию Гамильтона G), надо заменить в ней рг
на dS/dr, а Рф — на dS/ду, где 5 —пока неизвестная производящая
функция. Выполнив эти замены в (8), получим уравнение Гамильтона—
Якоби
Так как система консервативна, а координата <р является цикли-
ческой, то, использовав формулу B1*), приведенную в обзоре теории,
запишем
г), A0)
i 4] УРАВНЕНИЕ ГАМИЛЬТОНА-ЯКОБИ 151
где механическая энергия h и постоянная а одновременно являются
новыми постоянными обобщенными координатами, подлежащими
последующему определению.
Использовав функцию A0), найдем
dS dSt dS0 dS
Внесем результаты A1) в уравнение Гамильтона—Якоби (9):
Оно в данном случае оказалось обыкновенным дифференциальным
уравнением.
Решив уравнение A2) относительно dSJdr, получим
A3)
откуда dS0 = y2tn(h — П) — ~ dr, т. е.
So= J ^и (Л-П)-* dr. A4)
Внеся результат A4) в формулу A0), получим преобразующую
функцию в виде
[ yrm(h-U)-^dr. A5)
Для определения зависимостей между старыми обобщенными
координатами г, <р и старыми обобщенными импульсами рп pv,
а также новыми — постоянными обобщенными координатами h, a.
и новыми — постоянными обобщенными импульсами р\ и р*2> приме-
применим формулы B3*), приведенные в обзоре теории. В данном случае
Эти формулы имеют вид
dS _dS с. dS a _ dS
Использовав выражения A3) и A5), получим
)-^ , рф = а, A6)
Pi Ф-^$|Лй*(А-П)-~<*г, A7)
152 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVII
Вычислив частные производные в (t7) и A8), запишем:
09)
B0>
Уравнения A6), A9) и B0) содержат четыре неизвестных постоянных
h, a, Pj и pV Для вычисления их воспользуемся начальными усло-
условиями движения: при t = 0 имеем г = г0, ср^=О, ? = /0» Ф = Фо- Значе-
Значение потенциальной анергии П в момент * = 0 обозначим через По.
Использовав выражения B) в формуле A6), запишем
П)-^, /иг4ф = «- B1)
Подставив во второе уравнение B1) г — г0, ф = ф0, найдем
B2)
Внеся в первое уравнение B1) r = r0, f = /Ol П = П0 и использовав
Y
результат B2), получим mt0 = Y^ (h — По) — mzrl$, откуда
« + гЙ»0 + П B3)
Заметим, что формулу B3) можно было непосредственно полу-
получить, подставив в F) r=*r0, t=^f0, ф = фв, П = П0.
Внеся результаты B2) и B3) в уравнения A9) и B0), запишем
dr -, B4)
у
rdr B5)
Для вычисления интегралов, стоящих в B4) и B5), надо знать
функциональную зависимость П = П(г) (см. следующую задачу).
Затем, использовав начальные условия движения, следует определить
постоянные Pi и ра.
Соотношение B4) является искомым уравнением траектории мате-
материальной точки в полярных координатах, а выражение B5) —иско-
—искомым уравнением движения точки.
Задача 17.26. Воспользовавшись условием и решением преды-
предыдущей задачи, рассмотреть движение космического аппарата под
действием силы притяжения, обратно пропорциональной квадрату рас-
расстояния от аппарата до центра Земли. Ускорение силы тяжести у
поверхности Земли равно g, R — радиус Земли.
УРАВНЕНИЕ ГАМИЛЬТОНА-ЯКОБИ
153
Найти уравнение траектории и уравнение движения аппарата, счи-
считая его материальной точкой.
В начальный момент аппарат отстоял от центра Земли на рас-
расстоянии г0 и имел начальную скорость v0, образующую угол 9
с вертикалью (см. рисунок). Силой
сопротивления движению пренебречь.
Решение. Проекции начальной
скорости v0 на оси г0 и <р0 равны
A) Земля
По условию проекция Fr силы
притяжения F на ось г выражается
зависимостью
рг = -4, B)
К задаче 17.26.
где k —^коэффициент, подлежащий последующему определению. На
поверхности Земли, т. е. при г — /?, сила F равна силе тяжести Р.
Поэтому для определения коэффициента k внесем в формулу B)
значения r = R, Fr = — Р = — mg, где буквой т обозначена масса
аппарата. Получим —mg— — k/R?, откуда k = mgR?. Подставив это
значение k в формулу B), найдем
mgR*
F, ¦
C)
Перейдем к вычислению потенциальной энергии П. Напомним,
что потенциальная энергия равна величине работы потенциальной
силы при перемещении материальной точки из данного положения
в нулевое. Приняв во внимание, что при г-*-оо мы имеем F-^0,
запишем
Использовав выражение C), найдем
т. е.
п -
В начальном положении аппарата при т = г0 имеем
п wg^"
'а
D)
E)
154 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVII
Использовав зависимости A), D) и E) в формулах предыдущей
задачи A9), B0), B2) и B3), запишем:
adr
F)
р.- * У mrdr G)
а = /яг0г>0 sin 6, (8)
? (9)
После вычисления интегралов, стоящих в формулах F) и G),
получим искомое уравнение траектории и уравнение движения ракеты.
Обозначим интеграл формулы F) через А. Сделав подстановку
_1_
г
и найдя —dr/r2 = dz, запишем:
Добавив и отняв под знаком радикала m^RVa2, получим
А=[ adz (И)
Ум—*н
где обозначено
/ ^. A2)
Сделав в интеграле A1) подстановку
*z-^ = x, A3)
найдем adz = dx, т. е. dz = dx/a. Теперь интеграл A1) примет вид
А— \ ^ т. е. А = — arccos —. Внеся это значение интеграла
в формулу F), найдем р*х = — ф — arccos (x/y), откуда
x = Ycos(<p + p1). A4)
Использовав в уравнении A4) формулы A2) и A3), получим
откуда
§4J УРАВНЕНИЕ ГАМИЛЬТОНА-ЯКОБИ 155
Применив A0), запишем
г =
СЕ" ОС
т. е»
r==—a™'g«- Aб)
Введя обозначения
получим искомое уравнение A5) траектории аппарата в виде
Г== 1+ecosip-
Как известно из курса аналитической геометрии, уравнение A9)
является уравнением кривых второго порядка в полярных коорди-
координатах, причем р (см. A6)) называется параметром кривой, а е
(см. A?)) —ее эксцентриситетом. Угол plf значение которого пока
не определено, фиксирует положение оси симметрии кривой.
Внеся в A2) значения (8) и (9), найдем
B0)
Затем, использовав в формулах A6) и A7) соотношения (8) и B0),
получим
rMsin'8
Р- gw .
B2)
Траектория аппарата является: а) окружностью при е = 0, б) эллип-
эллипсом при 0<е<;1, в) параболой при е=1, г) гиперболой при е>1
(см., например, подробнее исследование уравнения A9) в задаче 8.33
второго тома, стр. 72 — 74).
Определим угол (J1( фиксирующий положение оси симметрии тра-
траектории аппарата. Полярные координаты начального положения аппа-
аппарата равны г = г0, <р = 0. Внеся эти значения в формулу A5), найдем
а?
г.- У • B3)
166 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVII
Решив уравнение B3) относительно cospx, получим
Подставив в это равенство значения (8) и B0), после несложных
преобразований найдем
cos fc r^nn'e-^ B4)
Vwl (rou? - 2gR*) sin2 в+g*R*
В заключение займемся определением уравнения движения аппа-
аппарата по эллипсу. Для этого надо воспользоваться уравнением G),
в котором постоянная р*а подлежит последующему определению.
Введя обозначение
?} = С . wr dr
J K2mAr
B6)
+g? —a»'
запишем уравнение G) в виде
При движении аппарата по эллипсу эксцентриситет е меньше
единицы. В соответствии с формулой B2) это имеет место при
условии roi>* — 2gRa < 0. При этом полная механическая энергия h
(см. (9)) оказывается отрицательной: А<0,
Для вычисления интеграла B5) сделаем подстановку:
2/яйг2+2/»я?Каг - аа ==г. B7)
Вычислив дифференциал B7), найдем
4mhrdr + 2m*gR3dr = dz. B8)
Приняв во внимание B7) и B8), запишем интеграл B5) в виде
в __J_ С 4mhr+2m*gRt df m'gffl f dr
4A J К2тйга+2тгг/?»-а» 2А J |/тЛг»+2/вяг^я—а2'
в = 1 С ^ ^gg^' С
2AJ2Vr2 2A J
+й о»'
Вычислив первый интеграл в B9), получим
2ЛК -г sv 2A J V^2ntAr*|2/ngi?Va9 V '
2Л
Для вычисления интеграла в C0) воспользуемся равенством
2mhr* + 2m*gR*r -a« » - т3^*+2Аа' + » BrA + »«RV.
Затем обозначим
W*«» = a>) y^Zl.prt + ^elW-* C1)
§ 4) УРАВНЕНИЕ ГАМИЛЬТОНА-ЯКОБИ 157
(Напомним, что й<0.) Тогда
K-hdr = dx, т.е. dr
Поэтому интеграл, стоящий в формуле C0), можно записать в виде
Использовав равенства C1), найдем
—2mA
C2)
\r2mhr*+2mgR*r—a.i
Внеся выражение C2) в- формулу C0), получим значение В. Затем
подставив его в уравнение B6), найдем
- a3 -
4А»
Для определения постоянной интегрирования 03 подставим в C3)
начальное условие движения: при f = 0 имеем г = г0. Найдем
Ра= - ^У
Внесем это значение Р2 в формулу C3) и одновременно заменим
в ней а и Л с помощью выражений (8) и (9). После несложных
преобразований окончательно получим
~ ^^C0S tf]
]
вJ *
л
~
Sin»
Напомним, что в этом искомом уравнении движения аппарата по
эллипсу переменными величинами являются rat начальное поло-
положение аппарата определено параметрами г0, ¦»„ и б, g— ускорение
силы тяжести у поверхности Земли, Я—радиус Земли. Движение
аппарата по эллиптической орбите имеет место при выполнении
условия rovl — 2gR?<0.
Аналогично можно получить уравнения движения космического
аппарата по параболе и по гиперболе.
158
ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ
1ГЛ. XVII
Применение уравнения Гамильтона — Якоби при решении двух пос-
последних задач оказалось целесообразным, ибо дало возможность одно-
одновременно определить как уравнения движения, так и уравнения тра-
траектории точки.
§ б. Принцип Гамильтона — Остроградского
Рассмотрим голономную материальную систему с тремя степенями
свободы. Любому частному значению времени t~t* соответствует
значение трех обобщенных координат qi = q*, q<t=*q%, q» = q*> одно-
однозначно определяющих положения всех точек системы.
Построим систему осей координат qi, qt, qa (рис. 17.1) и обозна-
обозначим в ней точку М с координатами q*, q%, q%, которая называется
изображающей точкой. Пространство, связанное с системой осей qb
qv q3, называется пространством
м ^^Цг конфигураций. При движении ма-
-~~~"^ териальной системы обобщенные
координаты qit <fc, q3 изменяются
с
Рис. 17.1.
V
Рис. 17.2.
в зависимости от времени. При этом изображающая точка М описы-
описывает траекторию, называемую «прямым путем». Так, за промежуток
времени Arf = ?2-~*i изображающая точка опишет «прямой путь» МхМ^
(рис. 17.2), причем моменту времени tx соответствует положение Мъ
а моменту ^ — положение М2.
Если голономная материальная система имеет s степеней свободы,
то изображающая точка М движется в пространстве s измерений.
Значит, в любой момент времени положение изображающей точки М
в пространстве s измерений определяется с помощью s обобщенных
координат qt, q2, .... qs.
Уравнения qi = qi(f), q% = q2{t), ..., qs = qsit) описывают движе-
движение данной материальной системы. Это движение происходит под
действием системы, приложенных к ней сил при наличии заданных
начальных условий движения.
Рассмотрим возможное движение этой материальной системы,
допускаемое наложенными связями. Оно описывается уравнениями:
?9=
При этом изображающая точка, которая ранее двигалась по «прямому
§б] ПРИНЦИП ГАМИЛЬТОНА-ОСТРОГРАДСКОГО 159
пути>, получит другую траекторию, называемую «окольным путем».
Так как вариации обобщенных координат 6qb Sqit ..., 8qs произ-
произвольны, то изображающая точка может иметь бесчисленное множество
«окольных путей» (на рис. 17.2 «окольные пути» изображены пунк-
пунктирными линиями).
Наложим следующее условие на вариации обобщенных коорди-
координат: будем считать, что на концах интервала (tb t^) они равны нулю,
т. е. при t = ti и t = t2 будем иметь 6qi = 8q2 =... = bqs = 0. Это
значит, что в точках Мг и М2 «прямой путь» и «окольные пути»
соединяются (см. рис. 17.2).
Введем понятие действия S по Гамильтону:
S = lLdt, A*)
где I = Т — П — функция Лагранжа.
Движению изображающей точки М по «прямому пути» РЛ-уМъ
(сплошная линия на рис. 17.2) соответствует действительное движе-
движение материальной системы за промежуток времени bd —12 — tv Вычис-
Вычислив кинетическую энергию Т, потенциальную энергию П и затем
функцию Лагранжа L, определим по формуле A*) величину действия &
Движениям изображающей точки по «окольным 'путям» (штрихо-
(штриховые линии на рис. 17.2) соответствуют возможные варьированные
движения, допускаемые свявями, за тот же промежуток времени Д? =
= ti — t1. При этом Т, П и L будут иметь другие значения. Вычис-
Вычислив действие 5 по Гамильтону при движении изображающей точки N
по «окольным путям», получим значения Si, S% и т. д.
Сопоставив значение 5 с соответствующими значениями Sb S2, ...,
можно обнаружить, что при движении по «прямому пути» действие
имеет экстремальное значение (максимум или минимум). Это имеет
место при равенстве нулю первой вариации действия по Гамильтону.
Принцип Гамильтона — Остроградского можно сформулировать так:
если при движении материальной системы, подчиненной идеаль-
идеальным, голономным связям, находящейся под действием потенци-
потенциальных сил, «.прямой» и «окольные пути» соединяются в крайних
точках, то при движении системы по «прямому пути» первая
вариация действия S равна нулю, т. е. действие имеет стацио-
стационарное значение:
U
\dt = 0. B*)
Можно показать, что при достаточно малом промежутке времени
At действие 5 достигает минимума при движении изображающей
точки по «прямому пути», по сравнению с ее движениями по «околь-
«окольным путям», за один и тот же промежуток времени Д? (см.
А. И. Лурье, Аналитическая механика, Физматгиз, 1961).
160 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVII
В более общем случае, когда отсутствует условие потенциаль-
потенциальности сил, имеет место интегральный принцип Гамильтона — Остро-
Остроградского
и
$FА + 67)<# = О, C*)
U
где 6Д —работа активных сил на возможных перемещениях точек
системы, а 87 — вариация кинетической энергии.
Надо помнить, что в интегральном и вариационном принципах
Гамильтона — Остроградского сопоставляются величины действий 5
при действительном и возможном движениях материальной системы,
т. е. при движениях изображающей точки по «прямому» и «околь-
«окольным путям» за один и тот же промежуток времени Ы = t% — t^.
(В других вариационных принципах, не излагаемых в этой книге,
накладываются другие условия.)
Общность интегрального и вариационного принципов Гамиль-
Гамильтона — Остроградского заключается в их независимости от выбора
какой-либо определенной системы отсчета.
Этими принципами пользуются при составлении дифференциаль-
дифференциальных уравнений движения материальных систем с распределенными
параметрами, при выводе различных форм уравнений динамики,
например уравнений Лагранжа второго
рода, канонических уравнений Гамильтона
и др., а также при решении задач дина-
динамики приближенными методами (см. задачи
20.12 и 20.13). Кроме того, эти прин-
принципы являются исходной точкой обобще-
обобщений на неклассические области механики
(волновая механика, квантовая механи-
1
с
с
г
К
Vi
i
i
i i
•С:
>
[ У
мг
задаче
17.27.
Задача 17.27, Вычислить действие 5
по Гамильтону для случая свободного па-
дения с высоты h материальной точки
массы т (см. рисунок). Сопоставить по-
полученный результат с величиной^ действия ? при варьированном дви-
движении, описываемом уравнениями
Л^О, jP =e sin п У fat, г=^,
где в —постоянный малый параметр.
Решение. Свободное падение материальной точки происходит
по закону
* = 0, у = 0, г = ^. A)
5 5] ПРИНЦИП ГАМИЛЬТОНА-ОСТРОГРАДСКОГО 161
Кинетическая энергия материальной точки равна
Т = ±т(Х*+у + П B)
Потенциальная энергия- равна
П = — mgz. C)
Использовав при вычислении функции Лагранжа L результаты B) и
C), запишем
± D)
Вычислив производные функций A) по времени, найдем
*-0, j> = 0, z = gt. E)
Подстановка формул E) и A) в функцию Лагранжа D) дает
(б)
Для вычисления величины действия 5 по Гамильтону используем
формулу A*), приведенную в обзоре теории. В данном случае ^ = 0,
a t2 равно моменту времени, соответствующему падению материальной
точки с высоты А. Учтя уравнение A) z = gt*/2, найдем ti — Y2hlg.
Итак,
Использовав пределы интегрирования G) при вычислении действия 5
по формуле A*), запишем
У?
5= I Ldt (8)
о
Подставив результат F) в выражение (8) и вычислив интеграл,
найдем искомую величину действия:
В соответствий с условием варьированное движение, т. е. движе-
движение по «окольному пути», происходит по закону
*, г=^. A0)
Как следует из уравнений A0), это движение происходит по синусо-
синусоиде в плоскости Оуг.
Напомним, что «прямой» и «окольный путь» должны соединяться
по концам интервала, т. е. в точках 0@, 0, 0) и Мл@, 0, h).
6 М. И. Бать и др., т. III
162 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVII
Точке О соответствует момент времени ^ = 0, а точке М2 — момент
t2 = V 2h/g. Подставив в уравнения (I) и A0) значение ^ = 0, полу-
получим x = Jc = 0, y*=y = 0, z=?z = 0. Затем, внеся t^ — Yihlg в урав-
уравнения A) и A0), найдем j? = jc = O, у~у =0, z = z~h. Итак, усло-
условие соединения «прямого» и «окольного» путей в крайних точках О
и М2 выполнено.
По аналогии с формулой D) функция Лагранжа L при движении
по синусоиде имеет вид
i^% (П)
Вычислив производные A0) по времени, найдем
? = 0, ^ = ея'|/Л^со8луГ^, k^gt: A2)
Подстановка формул A2) и A0) в функцию Лагранжа A1) дает
*. A3)
Вычисление действия 5 при варьированном движении проведем
по формуле
V4
5= ] Ldt, A4)
о
Заметим, что пределы интегрирования в формулах (8) и A4)
должны быть одинаковыми, ибо по условию, положенному в основу
принципа Гамильтона — Остроградского, движения по «прямому» и
«окольному пути» происходят за один и тот же промежуток времени.
Подставив результат A3) в формулу A4) и учтя при интегри-
интегрировании, что
получим искомую величину действия S при движении по синусоиде:
A5)
Для сопоставления величин действий при движениях по «пря-
«прямому» и «окольному пути» вычтем (9) из A5):
A6)
Как следует из формулы A6), при произвольном значении пара-
параметра е действие 5 при движении по «прямому пути» (вдоль оси г)
меньше действия S при движении по «окольному пути» (варьирован-
(варьированное движение по синусоиде).
§ 51 ПРИНЦИП ГАМИЛЬТОНА-ОСТРОГРАДСКОГО 163
Задача 17.28. Вывести дифференциальное уравнение вращения
твердого тела вокруг неподвижной оси с помощью интегрального
принципа Гамильтона — Остроградского.
Решение. Напомним, что интегральный принцип Гамильтона —
Остроградского имеет вид
и
A)
Для применения уравнения A) надо предварительно вычислить
вариацию 6Г кинетической энергии и работу ЬА активных сил F?t
Ft, • • •, F% на возможных перемещениях их точек приложения.
Твердое тело, вращающееся вокруг неподвижной оси, имеет одну
степень свободы. В качестве обобщенной координаты выберем его
угол поворота, т. е. q = q>- Дадим твердому телу возможное угловое
перемещение бф. Как известно, выражение работы имеет вид
|> B)
где z — ось вращения твердого тела.
Кинетическая энергия твердого тела, вращающегося вокруг не-
неподвижной оси, равна
/Ф» C)
где 1г — момент инерции твердого тела относительно оси вращения г.
Проварьировав функцию C), получим
6Г «/зфбф. D)
Воспользуемся тождеством
^ фбф. (б)
Так. как -г- бф = бф (считаем, что варьирование и дифференцирова-
дифференцирование — переставимые операции), то с помощью E) запишем:
^ F)
Подставив результат F) в формулу D), найдем
G)
Для применения принципа Гамильтона — Остроградского внесем
результаты B) и G) в уравнение (I):
6*
164 элементы аналитической механики [гл. xvii
т. е.
\[il да«(/?*) -/л]вфЛ+'(«*(Лфвф)-О. (8)
Нетрудно видеть, что второй интеграл в формуле (8) обращается
в нуль. Действительно,
(9)
i
Напомним, что в основу вывода интегрального принципа Гамиль-
Гамильтона — Остроградского положено условие соединения начала и конца
«прямого» и «окольного» путей. Значит, в данном случае при t = i%
и t — tt имеем б<р = О. Поэтому интеграл (9) обращается в нуль и
уравнение (8) принимает вид
О. A0)
Согласно основной лемме вариационного исчисления и учтя произ-
п
вольность о<р, из уравнения A0) получим ? mg{Fl) — IJp = Qi, т. е.
искомое дифференциальное уравнение вращения твердого тела вокруг
неподвижной оси будет
Задача 17.29. Упругий однородный нерастяжимый стержень
постоянного сечения, жестко заделанный верхним концом, совершает
изгибные колебания в вертикальной
плоскости Оху —плоскости рисунка.
Длина стержня равна I, р —его плот-
плотность, Е — модуль упругости, /—мо-
/—момент инерция площади постоянного
поперечного сечения.
Применив вариационный принцип
Гамильтона — Остроградского, соста-
составить дифференциальное уравнение из-
гибных колебаний стержня в плоско-
плоскости Оху.
х Решение. Рассматриваемый уп-
К задаче 17.29. ругий стержень представляет матери-
материальную систему с распределенными
параметрами, т. е. материальную систему с бесчисленным множе-
множеством координат.
В недеформированном состоянии стержень занимал вертикальное
положение О А. Изобразим его на рисунке в процессе изгибных коле-
§ 51 ПРИНЦИП ГАМИЛЬТОНА-ОСТРОГРАДСКОГО 165
баний б промежуточном положении ОАг. При этом произвольная
точка стержня переместилась из положения К в К\ с координа-
координатами х и у.
Если принять у за величину первого порядка малости, то прет
условии нерастяжимости стержня разность Длг между абсциссами
точек К и Кх (см. рисунок) окажется величиной второго порядка
малости. Пренебрегая ею, будем считать, что абсцисса х точки К
в ходе колебаний остается постоянной и, следовательно,
*-0. A)
Величина у зависит от положения точки К на стержне, т. е. от х.
В процессе колебаний у меняется также в зависимости от вре-
времени t, т. е.
у=у{х, 0. B)
Для применения вариационного принципа Гамильтона — Остроград-
'«
ского определим действие S = ^Ldt, где функция Лагранжа L равна
'i
разности кинетической я потенциальной энергий, т. е. L — T — U.
Приняв во внимание непрерывное распределение масс, вычислим
кинетическую энергию стержня с помощью определенного интеграла:
C)
где р —плотность, а щ —скорость точки стержня. При вычислении
квадрата скорости по формуле t»s==^2+J>a, учитывая равенство A),
найдем: tia=j>a. Внеся это значение ©а в подынтегральную функ-
функцию C), получим
i
D)
8
Как известно из курса сопротивления материалов, потенциальная
энергия упругой деформации изгиба равна
где Е — модуль упругости, а / — момент инерции площади постоян-
постоянного поперечного сечения стержня.
Впредь для упрощения записи введем следующие обозначения
частных производных по х:
166 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVH
Поэтому запишем формулу E) в виде
i
Ъ = Ц\у"*йх. F)
Определим функцию Лагравжа I = Т — П. Приняв во внимание
результаты D) и F), найдем
i
9)dx. G)
t,
Как известно, действие 5 по Гамильтону равно S=*\Ldt.
h
Использовав выражение G), получим
<< i
% (8)
Вычислим вариацию действия S, данного формулой (8):
")dx. (9)
/. о
Согласно принципу Гамильтона — Остроградского, решение вариа-
вариационной задачи об отыскании зависимости у=у(х, t) сводится к
определению такой - функции у, при наличии которой действие 5
имеет стационарное значение, т. е. то значение, при котором первая
вариация действия 4$ равна нулю:
65=0. A0)
Напомним, что искомая функция у—у(х, t) должна быть непре-
непрерывной и иметь непрерывные частные производные по х и по t,
а ее вариации в начальный t\ и конечный t2 моменты времени должны
быть равны нулю (это эначит, что «прямой» и «окольные пути» по
концам интервала Д< = <2~^ соединяются):
*i) = 0, 8у(*,<,)=-0. A1)
Подставив выражение (9) в уравнение A0), получим
t, i
\ dt \фу 6>-Е1у"Ьу")dx=*Q. A2)
и о
Выполним ряд преобразований уравнения A2). Использовав переста-
вимость варьирования и дифференцирования, запишем:
6j> = J-6>, by"-?fly\
§ 51 ПРИНЦИП ГАМИЛЬТОНА-ОСТРОГРАДСКОГО 167
Теперь уравнение A2) примет вид
и i
5 dt\ (py±6y-EIy"-^by')dx = Q. A3)
Заметим, что
У "ж W=-к WW -y'"W> о 5)
Подставив A6) в A5), найдем
у"жбу'=ж(у"бу'~У"
Внеся результаты A4) и A7) в уравнение A3), получим
tx 0
т. е.
t, i иг
о \ dt \ -г; (J> by) dx — \ dt \
El J dt\ ^Cv'y -/'fi/) dx = 0. A8)
h 6
Для последующих преобразований уравнения A8) вычислим
= \[у(х, t2)8y(x, t2) —у(х, tj)by(x, tj\dx.
о
Приняв во внимание соотношения A1), найдем
\ dt \ -4- (у by) dx = 0. A9)
Далее
i
д /.,'"«.. .."s«.'wv=_y"(/( t)by(l, t)—y"(l, f)§y'(l, t)
-У" @, 0 6y @, t) +y" @, Q вУ @, *). B0)
168 ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [ГЛ. XVJI
В точке х — 0 стержень закреплен. Поэтому by (О, t) —. О, by' @, t) = О
и формула B0) примет вид
i
(У "Ьу -У'ЬУ) dx -У" (/, t) by (I, 0 -У (/. t) Ьу' (/, t). B1)
Внесем результаты A9) и B1) в уравнение A8):
+ El \ [у'" (I, t) by (/, t) -у" (I, t) by' {I, t)} dt = 0. B2)
h
Так как вариации, стоящие в уравнении B2), произвольны, то,
согласно основной лемме вариационного исчисления, из этого урав-
уравнения следует
pjJ+?/yv = O, B3)
/'(U) = 0, У "{I, t) = Q. B4)
Выражение B3) является искомым дифференциальным уравнением
в частных производных изгибных колебаний стержня. Соотношения B4)
представляют собой условия для конца А стержня.
Заметим, что краевые условия для неподвижного конца О стержня
имеют вид уф, t) = O,y'(O, t) = 0. Для интегрирования уравнения
B3), кроме краевых условий, должны быть заданы начальные усло-
условия движения стержня.
Применение вариационного принципа Гамильтона — Остроградского
при составлении дифференциального уравнения B3) изгибных коле-
колебания упругого стержня v-материальной системы с распределенными
лараметрами — оказалось целесообразным и эффективным.
ГЛАВА XVIII
ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ С КОНЕЧНЫМ ЧИСЛОМ
СТЕПЕНЕЙ СВОБОДЫ. УСТОЙЧИВОСТЬ РАВНОВЕСИЯ
И ДВИЖЕНИЯ СИСТЕМЫ
§ 1. Устойчивость равновесия системы
Равновесие системы материальных точек называется устойчивым,
если после сообщения точкам системы весьма малых начальных
отклонений от положения равновесия и весьма малых начальных ско-
скоростей система в своем последующем движении будет весьма мало
отклоняться от рассматриваемого равновесного положения.
Ограничимся изучением устойчивости равновесия системы, под-
подчиненной голономным, стационарным и идеальным связям. Если такая
система находится в консервативном силовом поле, то устойчивость
равновесия системы определяется согласно тебреме Лагранжа —Ди-
—Дирихле или теоремам Ляпунова. Теорема Лагранжа — Дирихле гласит:
если в положении изолированного равновесия системы потенциальная
энергия имеет минимум, то положение равновесия устойчиво.
Потенциальная энергия системы может быть разложена в ряд по
степеням обобщенных координат. Это разложение начинается с членов
не ниже второго порядка относительно координат, если за начало
отсчета координат принято положение равновесия и потенциальная
энергия в положении равновесия считается равной нулю:
Если в положении равновесия значение потенциальной энергии
не является минимальным, то для суждения об устойчивости равно-
равновесия следует применить теоремы Ляпунова, которые формулируются
следующим образом..
а) Равновесие системы неустойчиво, если отсутствие минимума
потенциальной энергии может быть определено по членам второго
порядка в разложении потенциальной энергии A*), без рассмотрения
членов высших порядков.
б) Равновесие системы неустойчиво, если потенциальная энергия
имеет в положении равновесия максимум, который может быть уста-
170
ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ
[ГЛ. XVirt
новлен из рассмотрения членов наинизшего порядка, действительно
имеющихся в разложении потенциальной энергии в ряд A*).
Обозначим производные второго порядка потенциальной энергии,
вычисленные в положении равновесия, через
B*)
Коэффициенты ckj — постоянные числа. Теперь выражение для потен-
потенциальной энергии A*) примет вид
П = у (с»?» + • • •+с»пЯп + 2*a?tf4 + •. •+2c,_j. „?„_!?„) +..., C*)
где точками обозначены члены высшего порядка относительно qlt ...
Бели квадратичная форма
(C? + • • • + с>тЯп
¦ •. + 2с„.1г nqn_yqn) D*)
определенно положительна (положительна при всех значениях дь ...
..., qn, не равных нулю одновременно), то и полная потенциальная
энергия П, определяемая формулой C*), будет при достаточно малых
значениях «?i> .... qn определенно положительной. Это означает, что
потенциальная энергия будет иметь в положении равновесия минимум.
Согласно теореме Лагранжа — Дирихле в этом случае положение
равновесия будет устойчиво.
Составим из коэффициентов cbJ матрицу
Согласно равенству B*)
E*)
Cjb>
т. е. матрица E*) симметрична. Вычислим главные диагональные
миноры матрицы E*):
*п
F*)
В высшей алгебре доказывается следующий критерий Сильвестра:
если все главные диагональные миноры Д1; Д2, ..., Д„ матрицы E*)
положительны
Ai>0, Дг>0, ..., Дя>0, G*)
то квадратичная форма D*) определенно положительна. Если хотя бы
« !) УСТОЙЧИВОСТЬ РАВНОВЕСИЯ СИСТЕМЫ 171
один из главных диагональных миноров отрицателен, то квадратич-
квадратичная форма D*) может прийимать отрицательные значения.
Из теоремы Лагранжа — Дирихле следует, что при выполнении
условия Сильвестра G*) положение равновесия консервативной сис-
системы будет устойчиво. Если же хотя бы одно неравенство G*)
имеет противоположный смысл, то на основании первой теоремы
Ляпунова положение равновесия будет неустойчиво.
Для системы с одной степенью свободы критерий устойчивости
принимает совсем простой вид:
/д»П\ j >0 устойчивое равновесие,
О неустойчивое равновесие.
Этот критерий указывает, что равновесие является устойчивым
или неустойчивым, если при бесконечно малом перемещении системы
6)
Рис. 18.3. о) Равновесие шарика устойчиво; б) равновесие шарика неустой-
неустойчиво; в) равновесие шарика безразличное.
из положения равновесия потенциальная энергия соответственно уве-
увеличивается или уменьшается.
Для наглядности приводим рис. 18.1 для потенциальной энергии
силы тяжести.
При решении задач на устойчивость равнове-
равновесия системы с одной степенью свободы, находя-
находящейся под действием потенциальных сил, реко-
рекомендуется следующий порядок действий:
1) выделить тело или систему тел, равновесие которых подлежит
рассмотрению, и выбрать обобщенную координату, задание которой
определяет положение системы;
2) составить выражение потенциальной энергии системы;
3) вычислив производную от потенциальной энергии системы по
обобщенной координате и приравняв ее нулю, найти возможные поло-
положения равновесия системы;
4) вычислив значения второй производной от потенциальной энер-
энергии по обобщенной координате для каждого из возможных положе-
положений равновесия, найти знаки этой производной и по ним судить об
устойчивости.
Задача 18.1. Однородный призматический брус веса Р квадрат-
квадратного сечения со стороной, равной а, опирается своими боковыми
172
ТЕОРИЯ МАЛЫХ ДВИЖЕНИЯ СИСТЕМЫ
[ГЛ. XVIII
гранями на параллельные ребра двух опор, лежащие в одной гори-
горизонтальной плоскости на расстоянии Ь одно от другого, причем
Ь<аУ! (рис. о).
Предполагая грани бруса гладкими, найти возможные положения
равновесия и опорные реакции, соответствующие этим положениям.
Определит* условия устойчивости положений равновесия.
F
Б)
К задаче Л 8.1.
Решение. Рассмотрим равновесие призматического бруса, нахо-
находящегося в консервативном силовом поле тяжести. Отбрасываем мыс-
мысленно опоры и заменяем их действие реакциями Ra и Rb (рис. б).
За обобщенную координату, определяющую положение бруса, при-
принимаем угол 6, образованный диагональю вертикального поперечного
сечения бруса с вертикалью.
Находим высоту и центра тяжести над прямой АВ (рис. б):
и = -—- cosS — Ь sin 90 cos %
или
и = -?=-cos 8 — 4- sin 2G0.
У 2 *
Но углы 6 и 80 связаны зависимостью
и, следовательно,
или
и=~~r cos в—y cos 29-
A)
§ 1] УСТОЙЧИВОСТЬ РАВНОВЕСИЯ СИСТЕМЫ 173
Потенциальная анергия силы тяжести равна
;
учитывая A), имеем
n^P^-iLcose -~cos28J.
Находим производную от П по 0 и приравниваем ее нулю:
Из этого уравнения следует, что возможны два положения равно-
равновесия. Первое положение равновесия будет при sin 6 = 0, или 8=0.
Второе положение равновесия будет при
или
Это положение равновесия возможно, есля
у^/2Г B)
Найдем теперь вторую производную:
Для решения вопроса об устойчивости равновесия следует найтя
знак этой производной для каждого из возможных положений рав-
равновесия. В первом положении fls=ei=0. Подставив это значение
в уравнение C), имеем
I (РП
Следовательно, по теореме Лагранжа — Дирихле это положение рав-
равновесия устойчиво, если
В противном случае положение равновесия неустойчиво.
Во втором положении равновесия
6 = 0а = arccos U~ • ~).
174 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ 1ГЛ. XVIII
Подставив это значение угла в уравнение C), находим
р de
¦?¦- 26» <0.
Но, согласно B),
Следовательно,
т. е. положение равновесия 8=92 по теореме Ляпунова неустойчиво.
Исключение составляет случай, когда 8 = 0 и
что соответствует первому положению равновесия, рассмотренному
ранее.
Возможные положения равновесия твердого тела могут быть
определены и другим путем. Составим три уравнения равновесия для
произвольного положения бруса (рис. б), определяемого углом 0.
Первое уравнение — равенство нулю суммы проекций всех сил на
горизонтальную ось:
/?д cos 80 — R$ sin 80 = 0. D)
Второе уравнение —равенство нулю суммы проекций всех сил на
вертикальную ось:
RA sin 80 + Rb cos 8o—Р = 0. E)
Третье уравнение — равенство нулю суммы моментов сил относительно
точки А:
RB • Ь cos 0О — Р \-у=- sin 9 4- b sin2 80) = 0. F)
\У2 /
Из уравнений D) и E) находим
RB = Р cos 80.
Подставив это значение в уравнение F), получим
РЬ cos2 80 — Р(ф=г sin 8 -j- Ъ sin8 8„] = 0,
или
*cos290—-~ sin 9 = 0,
6 cos 2 (^- — 8) —-?="Sin9 = 0,
& sin 28—?=-sin9 = 0
V2
>b окончательно
sin 8 [2b cos 8 —%=¦ | = 0,
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ СИСТЕМЫ
175
откуда находятся значения угла б, соответствующие двум возможным
положениям равновесия:
1) sin 8 = 0 и, следовательно, 9 = 61 = 0;
« V2 а „ „ (V2 а \
2) cos в = —- -g- и, следовательно, б = 6а = arccos I —^- • -г-).
Первое решение соответствует симметричному положению бруса,
при котором его грани наклонены под углом 45° к горизонту.
Второе решение возможно, если а «С 261/2". При а = 26|/2 на-
находим cos62 = 1, т. е. 311162 = 0, и мы возвращаемся к первому случаю.
Находим значения реакций в первом возможном положении рав-
равновесия:
во втором положении равновесия:
RA = *~
Сопоставляя оба способа решения, видим, что первый способ
позволяет прямым путем определить возможные положения равнове-
равновесия системы и характер устойчивости этих положений равновесия.
Однако этот способ не приводит к нахождению реакций опор. Вто-
Второй способ позволяет непосредственно определить возможные поло-
положения равновесия системы и соответствующие им реакции опор, но
не оценивает устойчивости равно-
равновесия системы и характер устойчи-
устойчивости этих положений равновесия.
Конечно, после определения
реакций и положений равновесия
по этому способу для ответа на
вопрос об устойчивости равно-
равновесия надо вернуться к теореме
Лагранжа — Дирихле.
Задача 18.2. Два стержня х
длины / и веса Q каждый соеди- -*-
нены шарнирно в точке А. Конец
одного из стержней шарнирно
в в„
К задаче 18.2.
укреплен в точке О, а конец вто-
второго В опирается на гладкий горизонтальный пол. В точке В
приложена горизонтальная, постоянная по модулю сила Р. В поло-
положении равновесия стержень ОА образует угол а с вертикалью, а стер-
стержень АВ — угол р с горизонталью. Определить устойчивость равно-
равновесия системы.
176 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ [ГЛ. XVIII
Решение. Рассмотрим равновесие системы, состоящей из стерж-
стержней ОА и АВ. Выберем угол р за обобщенную координату, опре-
определяющую положение системы.
Начало координат выбираем в точке Во на пересечении вертикали,
проходящей через точку О, с горизонтальной плоскостью. Ось х на-
направим влево, ось г —вверх.
На систему действуют три активные силы Qi=Q8 и Р> Потен-
Потенциальная энергия системы равна
U^Q^ + zJ+Px, A)
где zi, z2 и х — соответствующие координаты точек Q, Са и В.
Выразим zb z% и х через обобщенную координату р*. Имеем
ap1=-g-sinp, z^/fsinp + ycosaj, x = /(cosp*— sina).
Из рисунка найдем связь между углами а и 0:
где А —расстояние между точками О и Z?o.
Из последнего равенства находим
^. B)
i dp sm a v '
Теперь выражение для потенциальной энергии можно привести
к виду [несущественная постоянная ?-1 отброшена]
II = Q/slnp + P/(cosP — sin a). C)
Отсюда
Щ = Q/cos p - P/(sin p + cos a ~)
или, учитывая значение da/dp из B),
Щ = Ql cos р - Р/ (sin p + cos p ctg a). D)
Приравнивая dll/dp нулю, найдем условие равновесия системы
E)
Дифференцируя D) по р и учитывая, что -Л = ^2-6 получим
Jj? Q/slnp-P/(cosp-sinpctga-g|).
Исключая с помощью E) из этого выражения значение Q, найдем
й»П _ p/cos»p—sta'a .
ар» ~" cos p sin» a •
$1]
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ СИСТЕМЫ
177
Согласно (8*) равновесие устойчиво, если даП/др8>0, что равно-
равносильно
sin a < cos p,
или
Это приводит к условию
cos (-5 — а] < cos p.
а+р<-?.
G)
Если условие G) удовлетворяется, то равновесие системы устойчиво.
Это условие эквивалентно расположению точки В левее точки Во.
Действительно, замечая, что при совпадении точки В с точкой Во
П
находим, что равновесие устойчиво, если точка В располагается ле-
левее Во, и неустойчиво, если точка В —
правее Во.
Задача 18.3. Однородный стержень
ОА веса Р и длины- 2/ закреплен своим
концом в шарнире О, а в точке В опи-
опирается на стержень ВС, который укреплен
своей серединой в шарнире Оь Стержень
ВС веса Р и длины 21 нагружен верти-
вертикальной силой Q — 2P, приложенной в
точке С. Расстояние 00^1. Определить
возможные положения и устойчивость
равновесия системы.
Решение. Составим потенциальную
энергию системы, состоящей из стержней
ОА и ВС. За обобщенную координату вы-
выбираем угол ф, образованный стержнем ОА с вертикалью. Потен-
Потенциальная энергия системы выразится формулой
или
К задаче 18.3,
П = — P/cosqp — Q^-f'cosA80° — 2<p)]
П = — P/cos ф — Q (I — /cos 2ф).
Для определения возможных положений равновесия находим про-
производную от потенциальной энергии по обобщенной координате:
Ш
= PI sin у —2QI sin 2у
и приравниваем ее нулю:
PI sin ф — 2QI - 2 sin ф cos ф s= 0.
178 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ [ГЛ. XVIII
Заметив, что Q = 2P, находим из последнего уравнения
sin<p(l — 8cos<p) = 0.
Следовательно, равновесие возможно, если sin<p = O или cos ф = 1/8,
т-. е. при двух значениях угла:
1) фх = 0 и 2) <р2 = агсс08 4- = 82о48'.
о
Для определения устойчивости каждого из этих положений на-
находим вторую производную от потенциальной энергии по обобщен-
обобщенной координате
или
rr-j- = PI (cos ф — 8 cos2 ф + 8 sin4 ф).
Далее находим величину этой производной в первом положении рав-
равновесия, подставив значение ф = 0:
= ~7РК0.
Согласно (8*) первое положение равновесия неустойчиво. Во втором
положении равновесия при ф = arccos 4- мы
о
получаем
Второе положение равновесия устойчиво.
Задача 18.4. Материальная точка М веса
Р может перемещаться в вертикальной пло-
плоскости по гладкой окружности радиуса г.
Точка притягивается к двум центрам А и В,
м расположенным на горизонтальном диаметре,
К задаче 18.4. симметрично относительно центра окруж-
окружности, с силами, прямо пропорциональными
расстояниям: Fji — a-MA, Fg — fi-MB, где а, |5 —постоянные ко-
коэффициенты. Расстояния О А = ОВ = а. При каком угле ф точка М
находится в равновесии? Исследовать устойчивость равновесия точки.
Решение. На точку М действуют три активные силы: сила тя-
тяжести Р, направленная по вертикали вниз, две силы притяжения, на-
направленные соответственно по МА и MB.
Возможное перемещение точки М направлено по касательной
к окружности и равно по модулю
bs = r §ф.
Составим элементарную работу всех сил на возможном перемещении.
$ II УСТОЙЧИВОСТЬ РАВНОВЕСИЯ СИСТЕМЫ 179
Реакция гладкой окружности нормальна к возможному перемещению.
Следовательно, ее работа равна нулю. Работа силы тяжести равна
6А1 = Р cosy r бф.
Для вычисления работы сил притяжения замечаем, что
и, следовательно,
Так как вектор МО нормален к возможному перемещению, то
FА • б« = — a ar 6ф sin <j>,
Fb • 6s = p* ar бф sin ф.
Таким образом, элементарная работа всех сил на возможном пе-
перемещении равна
6А = г[Рсо8ф + (§— a)asin<p]6>. A)
Следовательно,
~? = _r[Pcos(p + (P — о) в sin ф]. B)
Приравняв это выражение нулю, находим положение равновесия
точки:
^. C)
Далее
или, с учетом равенства C),
m(«-ft)
Здесь возможны четыре случая:
1) если а>р и угол Ф<у, то ^
2) если а<р и угол у<ф<я, то -^>0.
В этих случаях положение равновесия устойчиво, точка Ж нахо-
находится на нижней половине окружности, в первом или втором квад-
квадрантах.
3) Если а>р и я<ф<|я, то ^
4) если а<р и -|я<ф<2я, то ^-
В двух последних случаях положение равновесия неустойчиво,
точка М находится на верхней половиие окружности, в третьем или
четвертом квадрантах.
180
ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ
[ГЛ. XVIII
рр
в точке А и сила
Задача 18.5. Двойной маятник состоит из стержней длин ОА = 1г
и АВ — 1^ соединенных шарнирно друг с другом и прикрепленных
шарнирно в точке О к фундаменту. Силы тяжести приложены Рх
Ра в точке В. В шарнирах О и Л к стержням
прикреплены спиральные пружины, которые
находятся в недеформированном состоянии при
вертикальном положении маятников.
Пренебрегая трением в шарнирах, опреде-
определить жесткости спиральных пружин сг и с2>
при которых вертикальное положение равнове-
равновесия является устойчивым.
Решение. Система имеет две степени
свободы. Углы ф! и фа, определяющие откло-
отклонения стержней маятника от вертикали, примем
за обобщенные координаты.
Направив ось у вверх, а ось х вправо, со-
составим выражение потенциальной энергии си-
системы как суммы потенциальной энергии сил
тяжести и потенциальной энергии, спиральных
пружин. Если принять ось х за нулевой уровень потенциальной энер-
энергии сил тяжести маятников, то последняя выразится формулой
К задаче 18.5.
где координаты уь у% определяются через обобщенные координаты
формулами
Итак,
Tlt = Pxk cos ф!+ Ps (h cos фх -f- /j cos ф2) =
= (Pi+P«) h cos ф!+Pa/2 cos ф 8.
Потенциальная энергия спиральных пружин равна
Па » у ci4>* 4- y c« fas — V&»
где угол закручивания второй пружины равен ф2 — q^. Потенциальная
энергия системы равна
или
П = (Pi+Pi) h cos фх+P%k cos фа + у CM + у с8 (ф2 - фО2. A)
Согласно теореме Сильвестра, для того чтобы система с двумя степе-
степенями свободы была устойчива, необходимо и достаточно, чтобы глав-
главные миноры матрицы квадратичной формы (I) были положительны:
At = cu>0, B)
ста си . _, ^ Л /q.
§2] СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ 181
Здесь учтено, что с19 = с&,. Замечаем, что так как сц>0, то из C)
следует см>0.
Переходим к вычислению обобщенных коэффициентов жесткости
по формулам
/д»П\ / 341 \ /дЧ1\
Внеся в эти формулы значение потенциальной энергии A), находим
сначала
^ = - (Рх+Р„) k sin q>i+ct9i -
Щ = - Р2/а sin фа + ct (ф8 - ф!)
и далее
D)
—'*
Согласно условиям B), C) и c3S>0, являющемуся следствием из них,
верхнее равновесное положение маятников будет устойчивым, если
G)
(8)
Из G) имеем
Р1 (9)
Разделив равенство (8) на (са —Ра^), находим
откуда
^^ A0)
Итак, если жесткости спиральных пружин сг я са удовлетворяют
неравенствам (9) и A0), то верхнее вертикальное положение маят-
маятников устойчиво.
§ 2, Свободные колебания системы с одной
степенью свободы
1°. Свободные колебания системы без учета сил
сопротивления. Механическая система называется системой
с одной степенью свободы, если ее положение в пространстве может
быть однозначно определено заданием одной величины q, называемой
1&2 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ 1ГЛ. XVIH
обобщенной координатой. Движение системы в пространстве при этом
описывается зависимостью обобщенной координаты от времени.
Принимая положение устойчивого равновесия за начало отсчета
обобщенной координаты и за нулевой уровень потенциальной энергии,
рассмотрим малые движения системы около этого положения равно-
равновесия. Отклонение системы от положения равновесия при таком вы-
выборе начала отсчета будет определяться значением обобщенной коор-
координаты.
Полагая при составлении дифференциальных уравнений малых
движений обобщенные координаты (отсчитываемые от положения
равновесия) и обобщенные скорости малыми величинами, ограничимся
в дифференциальных уравнениях движения линейными членами. Этот
прием, заключающийся в отбрасывании в нелинейных дифференциаль-
дифференциальных уравнениях членов, содержащих квадрат и более высокие сте-
степени обобщенных координат и скоростей, называется линеаризацией
уравнений. Такая линеаризация, естественно, в известной мере иска-
искажает действительную картину движений, однако чем меньше откло-
отклонения системы от положения устойчивого равновесия, тем точнее
будут описывать линеаризованные уравнения движение системы. Ли-
Линеаризация дифференциальных уравнений позволяет получить замкну-
замкнутое решение для таких систем, для которых нахождение интегралов
точной, нелинейной системы уравнений в конечном виде, как правило,
невозможно.
Удобным способом составления дифференциальных уравнений ма-
малых колебаний системы является использование уравнений Лагранжа.
Эти уравнения для системы с одной степенью свободы имеют вид
Tt\dq) dq ~ У) V }
где Т — кинетическая энергия системы, выраженная через обобщенную
координату q и обобщенную скорость ф Q —обобщенная сила.
Кинетическая энергия системы, подчиненной стационарным связям,
выражается через обобщенные координаты и скорости формулой
7 = 1 Л (*)*«, B*)
где A(q) является положительной функцией обобщенной коорди-
координаты q. Далее для линеаризации выражения кинетической энергии
разлагаем A(q) в ряд Маклорена
^Bq» + ... C*)
Внеся это значение в формулу B*), находим
]а. D*)
S 2} СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ 183
Тогда, полагая q и ^ малыми величинами, приближенно принимаем
i=|af, E*)
где для краткости постоянная Л@) обозначена а.
Эта постоянная всегда положительна. Ее называют инерционным
коэффициентом. Для линейных обобщенных координат инерционный
коэффициент а имеет размерность массы, для угловых координат —
размерность момента инерции твердого тела.
Потенциальная энергия системы является функцией обобщенной
координаты
П П() F*)
Разложим эту функцию в ряд Маклорена около положения устойчи-
устойчивого равновесия
В этом выражении
П@) = 0, (8*)
так как положение равновесия выбрано за нулевой уровень потенци-
потенциальной энергии. Обобщенная сила в положении равновесия также
равна нулю, следовательно,
и поэтому ряд G*) начинается с третьего слагаемого. Отбросив члены
более высокого порядка и обозначив для краткости П"@) = с, по-
получим
П(9) = ~^а, A0*)
где постоянная с называется квазиупругим коэффициентом. В случае
устойчивого равновесия с>0. Внеся значения кинетической E) и по-
потенциальной A0*) энергий в уравнение Лагранжа A*), получаем диф-
дифференциальное уравнение малых свободных колебаний системы
с одной степенью свободы
0. (И*)
Это уравнение имеет структуру, аналогичную дифференциальному
уравнению свободных колебаний материальной точки, возникающих
под действием линейной восстанавливающей силы. Общий интеграл
уравнения (И*) имеет вид
A2*)
184 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ [ГЛ XVIU
где для краткости обозначено ?' ¦= —. Здесь А — амплитуда колеба-
колебаний, а —начальная фаза, Af-j-os — фаза колебаний, Л — круговая ча-
частота колебаний (ее часто называют просто частотой колебаний).
Амплитуда и начальная фаза колебаний определяются по началь-
начальным условиям. Обозначив начальные значения обобщенной координаты
и ее производной при ? = 0 через q = q0, 4 = 4o> получим
A3*)
Период колебаний
t-t-**VJ- <14>
Свободные, или, иначе, собственные колебания системы, опреде-
определяемые уравнением A2*), являются гармоническими колебаниями. Их
частота и период не зависят от начальных данных —это свойство
называется изохронностью малых колебаний.
Следует заметить, что дифференциальное уравнение свободных
колебаний (И*) может быть, конечно, составлено и без применения
уравнений Лагранжа.
При решении задач на свободные колебания си-
системы с одной степенью свободы рекомендуется
следующий порядок действий.
Первый способ — применение уравнений Лагранжа:
1) выбираем обобщенную координату q;
2) составляем выражение кинетической энергии Т;
3) находим потенциальную энергию П (только в случае, если си-
стека является консервативной) или вычисляем значение обобщенной
силы;
4) подставив Т и П (или выражение обобщенной силы) в урав-
уравнение Лагрзыжа, получаем дифференциальное уравнение малых ко-
колебаний;
б) проинтегрировав это уравнение и определив произвольные по-
постоянные интегрирования, находим уравнение движения системы;
6) определяем период колебаний и другие искомые величины.
Второй способ —применение осндвного уравнения
динамики или одной из общих теорем динамики си-
системы:
1) исходя из условий задачи, выбираем путь составления диффе-
дифференциального уравнения —основное уравнение динамики, теорему
о движении центра инерции, теорему об изменении кинетической
энергии, теорему об изменении главного момента количеств движения;
2) применив избранную теорему, составляем дифференциальное
уравнение малых колебаний системы;
3) проинтегрировав это дифференциальное уравнение, определяем
по начальным данным произвольные постоянные интегрирования;
§2]
СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ
185
4) находим далее период колебаний и остальные искомые вели-
величины.
Задана 18.6. В приборе, предназначенном для определения коэф-
коэффициента трения скольжения между сухими поверхностями (рис. а),
прямоугольный металлический блок опирается горизонтальной пло-
плоскостью DE на два цилиндра, вращающихся в противоположные сто-
стороны вокруг неподвижных отсей- Аи В. Центр тяжести блока находится
б)
К задаче Г8.6.
на высоте h от плоскости DE. Расстояние АВ — 2а. Центр тяжести
блока в начальный момент сместили из среднего положения, вслед-
вследствие чего блок стал совершать гармонические колебания периода Т.
Полагая коэффициент трения скольжения между блоком и обоими
цилиндрами одинаковым, найти коэффициент трения скольжения.
Решение. Отбросим мысленно цилиндры и заменим их действие
нормальными реакциями Jfy, Rt и силами трения /Ць fR% (рис. б).
В центре тяжести приложена сила тяжести блока Р. Составим диф-
дифференциальные уравнения плоского движения блока, учтя при этом,
что блок не перемещается вдоль оси у и не поворачивается вокруг
центра инерции:
B)
C)
VP = R* (a - •*) - Rt {a + x) +fRJi -
Из третьего уравнения находим с учетом B)
откуда
Внеся это значение в уравнение A), находим дифференциальное урав-
уравнение движения
186
или
ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ
[ГЛ. XVIII
Это — дифференциальное уравнение свободных гармонических коле-
колебаний, где квадрат частоты k равен
Период этих колебаний определяется формулой
откуда искомый коэффициент трения скольжения равен
К задаче 18.7.
Задача 18.7. Рама балансировочной машины состоит иа рычага АВ,
который может поворачиваться вокруг неподвижной точки С, совпа-
совпадающей с его центром тяжести, тяги BD
и вала OD с насаженным на него дис-
ком Е. Вал OD закреплен шарнирно
своим концом О. Концы рычага А и В
соединены вертикальными пружинами с не-
подвижным фундаментом. Вес рычага АВ
равен 12 кГ; его радиус инерции относи-
относительно горизонтальной оси, проходящей
через центр тяжести С, равен 3 дм. Вал
OD веса Q = 2 кГ имеет постоянное по-
перечное сечение. Вес диска Е равен
^/=4,5 кГ. Коэффициент жесткости каж-
каждой из пружин равен сх = 32 кГ/дм. Размеры: АС —2 дм, ВС =12 дм,
0^=14 дм, DEz=,4 дм.
Пренебрегая весом тяги BD, определить частоту собственных ко-
колебаний системы. Массу диска считать сосредоточенной в точке Е.
Решение. Для нахождения частоты собственных колебаний си-
системы применим уравнение Лагранжа. Система имеет одну степень
свободы. Выберем в качестве обобщенной координаты угол поворота
рычага АВ. Обозначим &тот угол ф. Кинетическая энергия системы
равна
Т = 1лв% + 1оо$, A)
где 1ав — момент инерции рычага АВ относительно горизонтальной оси,
проходящей через центр тяжести С; /0D —момент инерции вала OD
вместе с насаженным на него диском относительно горизонтальной
5 Ч СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ 187
оси, проходящей через неподвижный центр О; qpi — угол поворота
вала OD.
При малых движениях вертикальные перемещения точек В и D
равны. Следовательно, ВС ¦ у — 0D ¦ <рь откуда
<Р<Р B)
Продифференцировав B) по времени и подставив значение <pi r A),
выражаем кинетическую энергию через обобщенную скорость
Переходим к вычислению обобщенной силы. Пусть горизонталь-
горизонтальное положение рычагов является положением статического равновесия.
Обозначим угол поворота рычага АВ, соответствующий переходу от
ненапряженного состояния пружин к положению равновесия, через фст.
Даем углу ф бесконечно малое приращение бф из положения равно-
равновесия, направленное против хода часовой стрелки, и записываем эле-
элементарную работу всех сил
б А = — сг (АСУ (ф + фст) бф — сг (ВСJ (ф + фст) бф —
OD
или
бЛ = — сх (АСУ ф • бф — сг (ВСУ ф • бф —
- [в4 (АСУ ф?Т + ct (ВСУ фст + N • ОЕ ¦ k + Q Ц- ft] бФ, D)
где, согласно B), k = BC/OD. Здесь элементарная работа силы упру-
упругости, к примеру пружины А, подсчитана по формуле
= - сгАС (ф + ф„) АС бф = — Сг (АСУ (<р + фСт) бф.
В силу уравнения равновесия квадратная скобка в D) равна нулю и,
следовательно,
6Л = <2Ф • бф = — сгц> [(АСУ + (ВСJ] бф,
откуда обобщенная сила равна
Q(p = — ?i<P [{АСУ -f (ВСУ). E)
Для составления уравнения Лагранжа подставляем в
d /дТ\ дТ л
значения кинетической энергии C) и обобщенной силы из (б). По-
Получаем
/B™U С1[(АСУ + (ВСу\<р. F)
188 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ [ГЛ. -XVIII
Найдем коэффициенты этого уравнения, выразив их в кГ, дм и сек:
Тогда
~" 294 «
с i [(АСУ + (ВС)*}=D +12») • 32 = 148 • 32.
Внеся численные значения коэффициентов в уравнение F), находим
Тогда собственная частота системы будет равна
\jceK.
Задача 18.8. Центробежный регулятор вращается вокруг верти*
калькой оси с постоянной угловой скоростью (о. Шары регулятора А
и В веса Р каждый укреплены на концах стержней ОА и ОВ, шар-
иирно соединенных в точке О. Муфта М может перемещаться вдоль
а)
К задаче 18.8.
В)
вертикальной оси. Муфта шарнирно соединена со стержнями МС и
MD, которые в свою очередь соединены шарнирами С и D со стер-
стержнями О А и ОВ. Длины стержней ОА = ОВ = 1, кроме того, ОС =
= OD = MC = MD. Стержни в положении динамического равновесия
образуют с вертикалью углы а0. В некоторый момент регулятор был
выведен из равновесного положения и предоставлен самому себе. При
этом будем считать, что угловая скорость регулятора со вокруг вер-
вертикальной оси осталась неизменной (регулятор не соединен с ма-
машиной).
5 21 СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ 189
Найти период его малых колебаний около равновесного положе-
положения. Массой стержней и муфты пренебречь. Шары А я В принять за
материальные точки.
Решение. Разобьем решение на два этапа. Сначала определим
методом кинетостатики положение динамического равновесия системы.
На втором этапе, воспользовавшись уравнениями Лагранжа в обоб-
обобщенных координатах, составим дифференциальное уравнение малых
колебаний системы и найдем частоту и период этих колебаний.
Первый этап. Применим к шару А в положении динамического
равновесия метод кинетостатики. На шар А (рис. б) действует сила
тяжести Р, реакция стержня N, направленная по стержню АО. К этим
силам, согласно методу кинетостатики, следует прибавить силу инер-
инерции Jn.
Так как шары вращаются с постоянной угловой Скоростью ©
вокруг вертикальной оси, то будет существовать только нормальная
сила инерции, равная по модулю
Jn = ml sin а„ы*,
где от— масса шара.
Три силы Jn, P, N можно рассматривать как находящиеся в равно-
весии (рис. б). Строим силовой треугольник (рис. в), из которого
находим
Р tg ctfr=Jn = ml sin Oo©a.
Отсюда находится угол Оо, соответствующий положению динамиче-
динамического равновесия:
^ A)
Второй этап. Даем углу а0, образованному стержнями с вер-
вертикалью, малое приращение 6а = р\ Тогда
« = ао + р, B)
а шары начнут совершать малые колебания около положения равно-
равновесия.
Регулятор представляет собой систему с двумя степенями сво-
свободы. Примем за обобщенные координаты угол а, определяющий
отклонение стержней с шарами от вертикали, и угол Ф — угол пово-
поворота регулятора вокруг вертикальной оси.
Составим первое уравнение Лагранжа для обобщенной коорди-
координаты а. Рассматриваем движение шара как составное: переносное (вра-
(вращение вокруг вертикальной оси) и относительное (вращение вокруг
горизонтальной оси, проходящей через точку О); находим абсолют-
абсолютную скорость шара по теореме сложения скоростей
190 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ [ГЛ. XVIII
Модули переносной и относительной скорости равны
10e| = /sina-<o = /sina-(p, \vr\==la.
Заметив, что vr лежит в плоскости, совпадающей с ромбом ОАВМ,
а ve перпендикулярна к этой плоскости, имеем
v2 = 1>| + г»? = Р (фа sin* а+а2).
Кинетическая энергия двух шаров равна
7- = 2^ = ^/2(cp*sinaa+da). C)
Переходим к определению обобщенной силы. Вертикальная коор-
координата шара z равна
Ее вариация есть
6z = — /sin аба.
Элементарная работа силы тяжести IP, единственной активной силы,
приложенной к системе, равна
6 А — 2Р 6z = — 2Р1 sin a 6a,
и следовательно, обобщенная сила равна
<3с = — 2 Л^ sin a. D)
Подставляем найденные значения кинетической энергии и обобщен-
обобщенной силы в уравнение Лагранжа
d (дТ\ дТ п .-,
имеем
ЗТ „ Р «. . дТ л Р m . .
дт- = 2 — Ра, д- = 2 — Лр* sin a cos а.
Заменив, согласно B),
получим вместо E)
2 j /*р - 21- /V sin (ав + Р) cos (а0 + р) = — 2Р1 sin (а„ + 0) F)
или, разделив на коэффициент при старшей производной и заметив,
что ф = (о, находим
р -г ю* sin (о, + Р) cos (о, + Р) у sin (оо + Р). G)
Угол р, согласно условию, — малая величина. Следовательно,
sin (а„ + Р) !"** sin а0 + Р cos ав, ^
cos (ад -f- Р) «^ cos aj — р sin aj, J
где приближенно принято sin p *=« р, cosP^el.
§21
СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ
191
Внеся значения (8) и заменив g/l = ш* cos а0, согласно A), в урав-
уравнении G), получим
Р — <о2 (sin а0 + Р cos а0) (cos а0 — Р sin а0) -f-
4- aa cosa0 (sin a0 + P cosa0) = 0,
или
P + a>2 sin2 aep + <o2 sin a0 cos aop2 = 0.
Отбросив о2 sin a0 cos aop2 как величину второго порядка малости, на-
находим окончательно дифференциальное уравнение свободных малых
колебаний центробежного регулятора
P4-toasin2a0p = 0.
Частота свободных колебаний есть
A = cosinao.
Период свободных малых колебаний равен
_ _ 2я _ 2я
k CO Sin Оо '
(9)
A0)
Второе уравнение Лагранжа, соответствующее обобщенной коор-
координате <р, не потребовалось. Это объясняется тем, что в условии задачи
изменение координаты <р задано. Ее производная, угловая скорость
регулятора при вращении вокруг вертикальной
оси постоянна.
Задача 18.9. Груз веса Р подвешен к не-
нерастяжимой нити АВ, перекинутой через блок
с неподвижной осью О. Вес блока F. Его масса
распределена равномерно по поверхности круга
радиуса г. Конец нити В прикреплен к вер-
вертикальной пружине, коэффициент жесткости
которой равен с. Определить колебания груза,
если в начальный момент груз находился в по-
покое, его вес уравновешивался натяжением пру-
пружины и ему сообщили начальную скорость v0,
направленную по вертикали вниз. Трением между
осью блока и подшипниками пренебречь. Весом
нити пренебрегаем.
Решение. Воспользуемся уравнениями
Лагранжа второго рода. Выбираем ось х с на-
началом в положении равновесия груза и направляем ее по вертикали
вниз. Тогда координата х груза в произвольный момент времени пол-
полностью определяет положение системы и может быть принята за обоб-
обобщенную координату.
192 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ [ГЛ. XVIII
Кинетическая энергия системы складывается из кинетической энер-
энергии груза и кинетической энергии блока:
Напоминаем, что 1г %
Скорость груза равна по величине скорости точки на ободе бяока
Следовательно, окончательно выражение кинетической энергии си-
системы через обобщенную скорость принимает вид
Для определения обобщенной силы дадим системе возможное пе-
перемещение 6х и составим элементарную работу задаваемых сил.
Элементарная работа складывается из работы силы тяжести груза и
работы упругой силы пружины
8А = Р>Ьх — с(х + гь,у8х = (Р-с-Ь — с-хNх = — сх-8х,
ибо в положении равновесия сД = Л. Буквой Л обозначено статиче-
статическое удлинение пружины. Обобщенной силой является коэффициент
при возможном перемещении бх в выражении для элементарной ра-
работы
Q = — ex. A)
Заметим, что в этой задаче обобщенная сила Q может быть легко
вычислена и другим путем. Составим выражение потенциальной энер-
энергии системы, выбрав за нулевой уровень положение равновесия
груза Р. Тогда
и обобщенная сила равна
Q = — ш= — сх,
что совпадает с A).
Составляем уравнение Лагранжа. Так как
то
или
S 2J СВОБОДНЫВ КОЛЕБАНИЯ СИСТЕМЫ 193
Решение этого однородного линейного дифференциального уравнения
с постоянными коэффициентами имеет вид
B)
где частота k находится из равенства
R ~ P+0.5F '
Произвольные постоянные интегрирования а и р1 определяются из на-
чальных условий:
при ? = 0 имеем д:0 = 0, ?9 = va.
Подставив эти значения в B), находим
p, или Р = 0.
Далее из B) имеем
jt = ak cos kt,
и, следовательно, при * = 0
щ = aft или а = -&-ш
Внеся значения произвольных постоянных в B), получаем оконча-
окончательно
Период свободных колебаний груза равен
Задача 18.10. Яолушар веса Q и радиуса т удерживается в рав-
равновесии на абсолютно гладкой горизонтальной плоскости нитью АВ.
При этом плоская часть поверхности полушара составляет угол а
с горизонтом (рис. а). Определить после обрыва нити АВ скорость
центра О и ее максимальное значение, наибольшее давление полу-
полушара на горизонтальную плоскость. Найти также, полагая угол a
малым, приведенную длину эквивалентного математического маятника.
Решение. После обрыва нити (рис. б) на полушар действуют
две силы, вес Q в реакция гладкой плоскости N. Обе силы направ-
направлены по вертикали. Согласно теореме, о движении центра инерции
ускорение центра тяжести С будет также направлено вертикально.
Так как начальная скорость точки С, так же как и остальных точек
полушара, равнялась нулю, то центр инерции будет двигаться прямо-
прямолинейно по вертикали. Центр полушара О находится от гладкой
7 М. И. Бать и др., т. Ш
194
ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ
[ГЛ. XVIII
плоскости на постоянном .расстоянии г. Следовательно, точка О пе-
перемещается по горизонтальной прямой, параллельной опорной пло-
плоскости. Таким образом, скорость точки С направлена по вертикали,
скорость точки О —по горизонтали. Восставив к скоростям этих двух
точек перпендикуляры, находим мгновенный центр скоростей 0*.
В
5)
К задаче 18.10.
Применив теорему об изменении кинетической энергии к переме-
перемещению полушара из начального положения, определяемого углом а,
в произвольное положение (угол ф), мы получим, обозначив ОС че-
через /(
у 7^фг = mgl (cos ср — cos а). A)
В левой части равенства стоит выражение кинетической энергии
в конце перемещения (в начальный момент кинетическая энергия по-
полушара равнялась нулю, так как он находился в покое). В правой
части подсчитана работа силы тяжести при переходе полушара из
начального положения в конечное. Работа реакции N равна нулю,
так как эта реакция направлена перпендикулярно к перемещению
точки D.
Момент инерции полушара относительно мгновенного центра ско-
скоростей & может быть, выражен на основании теоремы Штейнера
следующим образом:
Ir = Ic + mP sin* у. B)
Таким образом, 1$. является известной функцией угла ф. Опре-
Определим /с —момент инерции полушара относительно горизонтальной
оси, проходящей через центр инерции и перпендикулярной к пло-
плоскости чертежа. Момент инерции однородного шара 2/0 относительно
любой центральной оси равен
где М = 2/и —• масса однородного шара.
j 2] СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ 195
Тогда момент инерции однородного полушара относительно горя*
вонтальной оси, перпендикулярной к плоскости чертежа и проходя-
проходящей через точку О, будет
Расстояние центра инерции полушара от точки О равно /= Зг/8.
Воспользовавшись теоремой Штейнера, находим
^•-^лг'-Ця** C)
Внеся это значение в формулу B), находим
Обозначив для краткости 83/45 = sa, из A) получим
.a_2g(CO8<p-COS«)
Скорость точки О—-центра полушара —равна по величине
^ = OP-aM = lcosq>-<v = jrcosip-<$=±VbiF<xsyy
Скорость точки О будет максимальной при q> = 0:
f •
Для определения давления полушара на горизонтальную плоскость
составим дифференциальное уравнение движения центра инерции
в проекции на вертикальную ось у:
my*c = N-Q. F)
С другой стороны, ордината центра инерции равна
_yc = r — /cosq>.
Вычислив вторую производную от ус, найдем
G)
Воспользовавшись (б), находим вторую производную от угла <р
по времени
Внеся в уравнение G) значения первой и второй производных от
7*
1S& ТЕОРИЯ МАЛЫХ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ XVIII
угла ф и подставив значение jfe в F)> после несложных преобразо-
преобразований найден
(s*+2s* ~$2's!na ф ~2s* cos ф"cos a)'
Учтя далее равенства C) и D), получаем окончательно
~-
Наибольшее давление лолушара на плоскость будет при ф
N= Q ~- [1С + тР A4- cos2 ф — 2 cos ф cos a)].
Дифференциальное уравнение колебаний полушара находится из
A) дифференцированием по времени
/*Ф+Т Ф -?- = — mgl sin ф,
или
/^ + т/аз1пфсо8ф'ф2 = — mgl sin <р. (8)
Для перехода от составленного уравнения к уравнениям малых
движения подсчитаем все члены с точностью до величин первого
порядка малости включительно. Получим
Приведенная длина эквивалентного математического маятника
/ -83г
*прив — Х20
Переходим ко второму способу составления дифференциального
уравнения малых колебаний при помощи уравнений Лагранжа. Выби-
Выбираем угол ф за обобщенную координату системы. Тогда кинетиче-
кинетическая энергия системы может быть представлена формулой
1 . 1
Т = ~п /,рф8 = -g" Uc "т"m** sin8 ф) <Р8'
Для составления уравнений Лагранжа вычисляем
и далее
^ i~r = (/с + упР sin8 ф) ф + ф». тР • 2 sin ф cos ф.
Производная от кинетической энергии по обобщенной координате
будет
g- а» тР • ф2 sin ф cos ф.
«21
СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ 197
Для нахождения обобщенной силы даем системе возможное пере-
перемещение 6ф и вычисляем работу всех сил на этом перемещении
Q бф =» mgl [cos (ф + бф) — cos ф] я» — mgl sin ф 5ф.
Ввиду малости 6ф принято 81п6фг=«бф, cos6q>«=;l. Внеся полученные
значения в уравнение Лагранжа
dt д4 dq ~ У>
находим
GС + mP slns ф) ф + тР Ф* s'n ф cos ф = — mgl sin ф,
что соответствует уравнению (8), выведенному ранее другим путем.
2°. Свободные колебания системы с учетом сил
сопротивления. Согласно полученным решениям свободные ко-
колебания, раз возникнув, длятся неограниченное время, и амплитуда
этих колебаний не меняется. Между тем из опыта известно, что сво-
свободные колебания постепенно затухают, амплитуда их уменьшается
и через некоторый промежуток времени колебания прекращаются,
система возвращается в положение устойчивого равновесия.
Это несоответствие теории и опыта объясняется тем, что в диф-
дифференциальных уравнениях движения не учитывались силы сопротив-
сопротивления движению: сопротивление воздуха, трение, которые всегда
действуют на систему.
Рассмотрим влияние вязкого трения на свободные колебания си-
системы с одной степенью свободы. Будем полагать, что сила сопро-
сопротивления пропорциональна первой степени скорости, что соответствует
малым скоростям. Только в этом случае движение системы будет
описываться линейными дифференциальными уравнениями. Если же
сила сопротивления пропорциональна квадрату скорости (что верно
при больших скоростях) или действует сила сухого трения, меняю-
меняющая скачкообразно свое направление, то дифференциальное уравнение,
описывающее движение системы, нелинейно. При сопротивлении, про-
пропорциональном первой степени скорости, на отдельные точки системы
действуют силы
Ft РА,
где rt — скорость i-й точки, р*< — положительный коэффициент про-
пропорциональности, численно равный модулю силы сопротивления при
скорости, равной единице.
Обобщенная сила сопротивления в этом случае может быть вы-
вычислена по формуле
п *>
где
ММ*
2 *
198 теория литых движении системы inn. xviii
Функция Ф была впервые введена Рэлеем и названа в его честь
диссипативной функцией Рэлея или функцией рассеяния *).
Диссипативная функция Ф равна половине скорости изменения
полной механической энергии, которую имела бы система при от-
отсутствии сил сопротивления.
Функция Рэлея, представленная через обобщенную скорость си-
системы, имеет вид
4
где Р>0.
Тогда уравнение Лагранжа второго рода примет вид
±Q]i_dT_ _<ЯГ_дФ
dt д$ dg dq d$ •
где
Подставив эти значения в уравнение Лагранжа, получим дифферен-
дифференциальное уравнение движения системы
или
? + 2в4 + А2? = 0, A6*)
где введены для краткости обозначения
Общий интеграл уравнения A6*) будет
а) При малом сопротивлении, когда n<Ck,
A7*)
где ki = У^к2 — л2 — круговая частота колебаний; а — начальная фаза
колебаний.
Амплитуда колебаний уменьшается по закону геометрической
прогрессии. Если я<^?, то ^e&k, и можно определять круговую
частоту колебаний без учета сил сопротивления, как это часто де-
делается в инженерных расчетах. Период затухающих колебаний опре-
определяется формулой
^ I?A8*)
Период свободных колебаний без учета сил сопротивления Т — 2к/к
*) W, Rayleigh, Theory of sound, 1878. (Русский nepeeoflt 2 изд.
Рэлей, Теория звука, т. 1, 2, Гостехиздат, 1955.)
«21
СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ 199
меньше периода 7V Будем называть фактором затухания отношение
последующей амплитуды к предыдущей
Логарифмический декремент затухающих колебаний равен nTi/2.
б) При большом сопротивлении, когда n^k, движение системы
будет описываться уравнениями
Движение апериодическое — при неограниченном возрастании времени
система возвращается в положение равновесия без колебаний.
При решении задач на свободные колебания си-
системы с одной степенью свободы с учетом сил со-
сопротивления рекомендуется следующий порядок
действ и й.
Первый способ—применение уравнений Лаг-
ран ж а:
1) выбираем обобщенную координату q\
2) составляем выражение кинетической энергии Т;
3) вычисляем обобщенную силу;
4) внеся кинетическую энергию и обобщенную силу в уравнение
Лагранжа, находим дифференциальное уравнение малых колебаний
системы;
5) проинтегрировав это уравнение и определив произвольные по-
постоянные интегрирования, получаем уравнение движения системы;
6) определяем период колебаний, частоту и другие искомые ве-
величины.
Второй способ—применение основного уравне-
уравнения динамики или общих теорем динамики системы:
1) исходя из условий задачи, выбираем для составления диффе-
дифференциального уравнения: основное уравнение динамики, теорему о
движении центра инерции, теорему об изменении главного момента
количеств движения;
2) применив избранную теорему, составляем дифференциальное
уравнение малых колебаний системы;
3) далее, выполняем пп. 5) и б), указанные в первом способе.
Задача 18.11. На конце жесткого стержня массы m и длины /
прикреплена точечная масса М. Посредине стержень зажат двумя
горизонтальными пружинами одинаковой жесткости с. На конце
стержня установлен линейный вязкий демпфер, сила сопротивления
которого пропорциональна скорости (F = —
200
ТЕОРИЯ МАЛЫХ ДВИЖЕНИЯ СИСТЕМЫ
[гл
Составить дифференциальное уравнение малых колебаний си-
системы. Определить границы апериодического движения. Найти пе-
период малых колебаний и наибольшее отклонение стержня при
начальных условиях: г = 0, ф = 0,
Решение. Первый спо-
способ. Для составления уравнений
Лагранжа выбираем в качестве
обобщенной координаты угол ср от-
отклонения стержня от равновесного
положения, т. е. от вертикали.
Составляем далее выражение ки-
кинетической энергии системы Т как
сумму кинетической энергии стерж-
стержня и кинетической энергии мас-
массы М:
т — **ю3 _1_ М& _ml* . а , МР . а
1 2~ + Г4" +"*'
A)
М
К задаче 18.11.
где I, = тР/3 — момент инерции стержня относительно горизонталь-
горизонтальной оси, проходящей через точку О; ¦о = /© = /ф — скорость конца
стержня.
Для нахождения обобщенной силы составляем элементарную ра-
работу каждой силы:
1) Элементарная работа сил упругости пружин равна
где х — перемещение середины стержня.
2) Элементарная работа силы сопротивления
ЬАг = — Рх> ¦ dxt =
где dxi — перемещение конца стержня.
Диссипатийная функция Рэлея в этом случае равна
Ф =
в обобщенная сила сопротивления равна
что совпадает с коэффициентом при dq> в выражении
3) Элементарная работа силы тяжести стержня
=—mgY sin ф
— mg-x ф • dtp,
j4 СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ 201
где _ tug -к sin ф — момент силы тяжести стержня относительно гори-
горизонтальной оси, проходящей через шарнир О.
4) Элементарная работа силы тяжести точечной массы
Полная элементарная работа всех сил равна сумме четырех элемен-
элементарных работ
Обобщенная сила — коэффициент при d<p:
cg± B)
Вносим значения кинетической энергии и обобщенной силы в урав-
уравнение Лагранжа
Находим
(^ф(с!^ ) C)
или дифференциальное уравнение малых колебаний системы можно
кратко записать так:
Ф + 2«ф + *аФ = 0, D)
где
9я--Л_ ,а_ 3(cl+mg+2Mg) ..
гп~ т + Ж' k Цт+ЗМ) ' {0)
Движение системы будет колебательным, если k^>rt, или
/i
/(m+3M)
Если же Asg/i, то движение системы будет апериодическим. Если
условие F) соблюдено, то уравнение движения системы будет
ф = <?-"* (dcosУ k?-n2t+Сг sinула-в4). G)
Для нахождения произвольных постоянных интегрирования подставим
в G) начальные условия t = О, ф = 0; тогда получим d = 0. Для
определения второй произвольной постоянной вычисляем произвед-
ную от G):
ф = _ n6-«t Са sin У k% — n2t + У k2 — п2 е'1* Са cos У А2 — иа ^.
Подставив в это уравнение второе начальное условие ?=¦(), ф = фа>
находим
202
или
ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ
1ГЛ. ЗД.1Ц.
Итак, уравнение движения системы G) будет
yks—я»
Для определения максимального отклонения стержня вычислим ф:
(8)
(9)
— я sin A^i + kx cos ^i = 0,
где fei = у А» — л2.
Приравняв ф нулю, найдем время tly при котором ф =
Имеем
ф -, p. e-nh [_ n sin kyti + *i cos Vil = 0.
l
Отсюда
или
и, следовательно,
sin АЛ =.-7^== = ^,
Внеся эти значения в (8), найдем
-»гие*т
Период колебаний системы равен
2я
В случае я > ft решение уравнения D) будет
Ф
A2)
Для определения произвольных постоянных интегрирования вычисляем
производную от угла ф:
ф =, _ ne-nt (Cjef*^1 < + С2е- V*^' t) +
Подставив в A2) и A3) начальные условия t = Q, ф = 0, ф = ф0, по-
получаем два алгебраических уравнения для определения Сг и Са
$3] СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ 203
откуда находим
г — г —
Движение, определяемое уравнением A2), является апериодическим
затухающим движением.
Второй способ. Дифференциальное уравнение малых коле-
колебаний системы можно получить, применив вместо уравнений Лагранжа
дифференциальное уравнение вращения твердого тела вокруг непо-
неподвижной оси
/*Ф = Л&
Заметим, что момент инерции равен
а главный момент внешних сил
Ml = — Mglsin ф — mg-^-sin <р — pftp — с-^ sin ф.
Для малых колебаний положим приближенно
sin ф яа ф.
Мы получим дифференциальное уравнение движения
-mg^ ф - р/аф — с ¦?¦ ц>,
которое естественно совпадает с C). Дальнейшее решение не отли-
отличается от приведенного в первом способе.
§ 3. Свободные колебания системы с одной степенью
свободы. Восстанавливающая сила и обобщенный
коэффициент жесткости
В главе VIII второго тома этой книги было дано элементарное
определение восстанавливающей силы и коэффициента жесткости.
Вычисление коэффициента жесткости, определение восстанавливающей
силы и составление дифференциальных уравнений движения в более
сложных случаях рассматриваются в настоящем параграфе.
Если точка или твердое тело, находится под действием нескольких
упругих сил, то для определения обобщенного коэффициента мыс-
мысленно сообщают точке или твердому телу перемещение (линейное
или угловое).
Если восстанавливающая сила (или момент) линейно зависит от
перемещения q, то коэффициент при q в выражении для восстанав-
восстанавливающей силы (или момента) называется обобщенным коэффициентом
204
ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ
[ГЛ. XVtH
жесткости. При этом приращение восстанавливающей силы и пере-
перемещение вычисляются в одном и том же направлений. Так, например,
пусть масса т находится в равновесии под действием нескольких
пружин различной жесткости
(рис. 18.2).
Для того чтобы вычислить
обобщенный коэффициент жест-
жесткости в направлении х, следует
мысленно дать перемещение точ-
точке от в направлении х и вычис-
вычислить сумму проекций всех упру-
упругих сил на направление х.
Коэффициент при перемещении
равен приведенному или обобщен-
обобщенному коэффициенту жесткости.
Аналогично можно определить эк-
Рис. 18.2. виваяентный коэффициент жестко-
жесткости в направлении хг (рис. 18.2).
При этом следует различать определение приведенного коэффи-
коэффициента жесткости в двух случаях:
а) при малых перемещениях,
б) при конечных перемещениях.
1»°. Вычисление коэффициента жесткости при ма-
малых перемещениях. При малых перемещениях обобщенный
коэффициент жесткости,определяется по формуле
л
?*= У, Ci cos2ai (I*)
для я пружин, присоединенных к телу и направленных соответственно
под углом а{ к перемещению; здесь ct — коэффициент жесткости /
пружины и равновесное положение точки имеет мест» при щ.
Эта формула верна при малом перемещении точки из положения
равновесия, если в положении равновесия нет предварительного на-
натяга пружин.
При последовательном соединении я пружин, действующих в од-
одном направлении, обобщенный коэффициент жесткости находится по
формуле
B*)
причем эта формула верна и для малых и для конечных перемеще-
перемещений. После того как обобщенный коэффициент жесткости найден,
можно составить дифференциальное уравнение движения, определить
частоту и период свободных колебаний.
§3)
СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ
206
При решении задач на вычисление обобщенного
коэффициента жесткости при малых перемещениях
составление дифференциальных уравнений движе-
движения, определение частоты и периода колебаний еле'
дует придерживаться следующей последователь-
последовательности действий:
1) определить положение равновесия точки, находящейся под
действием упругих сил;
2) дать точке малое перемещение в том направлении, в котором
требуется определить коэффициент жесткости;
3) вычислить проекции упругих сил, возникающих вследствие пе-
перемещения точки, на направление перемещения;
4) найти обобщенный коэффициент жесткости, разделив получен-
полученную сумму проекций упругих сил на перемещение точки;
5) упростить полученный результат, отбросив величины выше
первого^ порядка малости;
6) составить дифференциальное уравнение движения системы;
7) определить частоту и период колебаний.
Задача 18.12. К точке массы т прикреплена пружина жестко-
жесткости с, второй конец которой закреплен в точке 0%. При угле а = а0
К задаче 18.12,
пружина длины 10 недеформирована. Определить обобщенный коэф-
коэффициент жесткости пружины при малых перемещениях точки по оси х.
Найти частоту малых колебаний точки, если вся система находится
в горизонтальной плоскости.
Решение. Выберем положение равновесия точки за начало
координат О. Дадим точке малое перемещение 0А = х. Тогда пру-
пружина будет образовывать с осью х угол а, а ее длина станет U
Модуль силы упругости найдется по формуле
Эта сила направлена от А к О
направление перемещения равна
(рис. б). Проекция этой силы на
A)
206 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XVIII
Перемещение ОА определится равенством
OA-cjfeJcosa — /Ocosa0. B)
Обобщенный коэффициент жесткости в направлении х будет
\FX\_ с(/
с* И х * w
С другой стороны, из рис. в следует
Jcrcosa + /Ocos8a = /. D)
Но 6а —малая величина первого порядка малости, следовательно,
можно приближенно принять
откуда
E)
Внеся это значение в равенство C), находим
(б)
Формула A*) представляет собой обобщение полученного результата
F) на случай любого числа упругих связей, присоединенных к точке
под разными углами. Составляем дифференциальное уравнение малых
колебаний точки
тХ — — с cos* a0 • х,
или
Частота колебаний равна
Период колебаний
Задача 18.13. Груз массы т прикреплен к пружинам согласно
схеме, представленной на рис 18.2.
Определить обобщенный коэффициент жесткости при малом пере-
перемещении груза в направлении оси х. Составить дифференциальное
уравнение движения, определить частоту и период колебаний.
Решение. Находим коэффициент жесткости пружины, эквива-
эквивалентной трем пружинам, действующим под углом at к оси х. Две
пружины с коэффициентами ct и са, соединенными параллельно, экви-
эквивалентны одной пружине с коэффициентом жесткости A*) сх-\-сг.
Следовательно, под углом ах действуют две пружины, соединенные
3j СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЕ! 207
последовательно, с коэффициентами жесткости (fi-f <?g) и с# Коэф-
Коэффициент жесткости приведенной пружины равен B*)
откуда
Далее определяем коэффициент жесткости приведенной пружины, дей-
действующей под углом а3:
сь
откуда
Пользуясь далее формулой A*), находим коэффициент жесткости
приведенной пружины при малом перемещении в направлении оси х
сх = Cat cos2 ax + са% cos2 a2 + са> cos2 а8.
Внося в это равенство найденные значения A) и B), а также учиты-
учитывая, что са, = с4. окончательно получаем
Здесь сс3 = 270° и cosa3 = 0.
Дифференциальное уравнение малых колебаний точки будет
tnx = — сj, х,
откуда частота колебаний
а период колебаний
Задача 18.14. Точка массы т находится под действием я ра-
диально расположенных пружин, лежащих в одной плоскости и обра-
образующих соответственно углы щ с осью х и имеющих коэффициенты
жесткости €{.
При каких соотношениях между с{ и а; обобщенный коэффициент
жесткости в любом радиальном направлении будет одинаков при малых
перемещениях точки.
208
ТЕОРИЯ МАЛЫХ ДВИЖЕНИЯ СИСТЕМЫ
[ГЛ. XV1U
Решение. Выберем произвольное направление у, образующее
угол ф с осью х, я найдем приведенный коэффициент жесткости
при малом перемещении точки вдоль оси у
A)
Преобразуем это равенство
a<cos2 *p+sin*а*sln2 ф) -
п
-2jc| cos а, sin o^ cos ф sin ф. B)
Из B) следует, что приведенный коэффициент жесткости не будет
зависеть от величины угла ф, если
Эти два условия могут быть запи-
записаны и так:
cos 2щ = 0,
Пользуясь этими условиями, можно,
К задаче 18.14. в частности, легко показать, что
три, четыре, шесть и т. д. радиаль-
радиальных пружин одинаковой жесткости, расположенных симметрично, об-
образуют при малых перемещениях однородное упругое поле.
2°. Вычисление коэффициента жесткости восста-
восстанавливающей силы при конечных перемещениях.
Для определения восстанавливающей силы при
конечных перемещениях рекомендуется следующий
порядок действий:
1) определяем положение равновесия точки, закрепленной с по-
помощью пружин;
2) даем точке конечное перемещение в направлении, в котором
требуется найти обобщенный коэффициент жесткости;
3) вычисляем сумму проекций упругих сил на .направление пере-
перемещения, которая и является искомой восстанавливающей силой;
4) вычисляя производную от восстанавливающей силы по пере-
перемещению, находим обобщенный коэффициент жесткости.
«31
СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ
209
Задача 18.15. Составить дифференциальное уравнение свобод-
свободных колебаний материальной точки массы т (рис. а) в направлении
оси х. Точка прикреплена к четырем пружинам одинаковой жест-
жесткости. Коэффициент жесткости каждой пружины с, длина в равно-
равновесном состоянии I, предварительный натяг Д, длина нерастянутой
пружины /0.
/х
К задаче 18.15.
Решение, Дадим точке конечное перемещение От, равное х.
На точку будут действовать четыре упругие силы. Первая сила по
модулю равна (рис. б)
F
где Ы—удлинение пружины вследствие перемещения точки. Оно
равно
Проекция силы F^ на ось х будет
Fu = — с (У /Ч- х* - /+A) cos а,
где
cosa = -
Тогда вследствие симметрии
— сх{\ —
/-Д
Проекции сил F2 и F4 на ось х, совпадающую с ними, будут
Ргх~ — с(х — A), f^—c^ + A)-
Следовательно, на точку вдоль оси х действует сила
4=1
-2сх [2 —
/-Д
210
ТЕОРИЯ МАЛЫХ ДВИЖЕНИЯ СИСТЕМЫ
1ГЛ. XVI1J.
Дифференциальное уравнение колебаний точки будет
Некоторое представление о напряженном состоянии системы
в данном направлении можно составить по производной от силы по
перемещению, которую иногда называют коэффициентом жесткости
в данном положении. Конечно, в данном случае восстанавливающая
сила не равна сх. Найдем обобщенный коэффициент жесткости
в направлении оси х
с*=чг—s
В этом случае обобщенный коэффициент жесткости является функ-
функцией перемещения.
Задача 18.16. В условиях предыдущей задачи определить вос-
восстанавливающую силу при конечных перемещениях точки вдоль оси х.
Ось х, делит угол между соседними
пружинами пополам.
Решение. Даем точке смеще-
смещение ОМ — х (см. рисунок) вдоль
оси и определяем силы, действую-
действующие на точку, считая все пружины
растянутыми. Тогда модуль упругой
силы
где Д/i — удлинение соответствую-
соответствующей пружины, вызванное смещением
точки ОМ, равно
К задаче 18.16. '
Из треугольника ОАМ, пользуясь теоремой косинусов, находим
откуда
Тогда
Аналогично из треугольника СОМ находим
COSCC:
«31
СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ
Применив теорему косинусов для определения стороны ОС<**1, по-
получим
2x+V21
и тогда
Таким образом, искомая восстанавливающая сила при смещении точки
вдоль оси х будет
Задача 18.17. Найти дифференциальное уравнение колебаний
материальной точки массы т в направлении оси х, составляющей
К задаче 18.17.
угол 60° с ОА. Точка прикреплена к трем радиальным симметрич-
симметричным пружинам одинаковой жесткости с, расположенным в одной
плоскости (рис. а). В равновесном состоянии длина каждой пружины
где /0 —длина свободной пружины, Д —ее предварительный натяг.
Решение. Дадим точке конечное перемещение ОМ — х (рис. б).
Тогда, считая все пружины растянутыми, найдем модули сил Flt F2,
Рз- Имеем
где Ы — удлинение первой или второй пружины, вызванное переме-
перемещением точки из О в Ж. Это удлинение равно
212 теория малых движении системы 1гл. xviii
Применив теорему косинусов к стороне ОА треугольника ОАМ,
находим
Р = AM9 + ОМ2+2АМ - ОМ • cos a =
+ У + 2 — Ixcosa,
откуда
Проекция силы Ft или F2 на ось х будет
2VP-f^—/дс
Проекция силы F3 на ось лг равна
Тогда дифференциальное уравнение колебаний вдоль оси х будет
или окончательно
Находим далее обобщенный коэффициент жесткости, вычислив про-
производную от Rx по координате х:
Задача 18.18. Исследовать неоднородность упругого поля системы
из задачи 18Л7 при конечных и при малых перемещениях точки
в произвольном направлении в плоскости расположения пружин.
Решение. Рассмотрим упругое поле системы в случае конеч-
конечных перемещений. Дадим точке т конечное перемещение От = х
в произвольном направлении Ох. Тогда на точку т будет действо-
действовать восстанавливающая сила Fx, направленная к положению равно-
равновесия, точке О (рис. а). Для нахождения этой силы поступим сле-
следующим образом. Найдем реакции каждой из трех пружин Fx, Fit
Fs и спроектируем эти силы на направление оси х. Это и будет
искомая сила Fx. Обозначим угол, образованный осью Ох с началь-
начальным направлением пружины ОА, через а, а углы между направле-
направлениями пружин и осью Ох после смещения — соответственно Р, у, я|з
(рис. а).
Реакция первой пружины равна по модулю
СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ 213
удлинение пружины, вызванное смещением точки т, равное
§ 3]
где
Для того чтобы спроектировать силу Fx на ось х, найдем угол JS.
А
а)
К задаче 18.18.
Из треугольника ОАт по теореме косинусов находим сторону ОА:
(OAf = (ОтJ + (AmJ - 20т ¦ Am ¦ cos"(l80o - 0)
или
-*:8 — 3/Jf cos a + 2лг уТЧ- ^2 - Ых cos а • cos p.
Отсюда мы получаем
cosp :
Таким образом, проекция силы /^ на ось х равна
Jcosa—
Реакция второй пружины равна по модулю
. О)
где Ы2 — удлинение пружины, вызванное смещением точки т, равное
б/г= Вт — I У
x*-2lx cos A20°- a) -I.
Находим далее угол у. По теореме косинусов из треугольника 0Вт
находим
откуда
хг— 2/*cosA20° — a)-cosv,
со;у_ < cos A20°-a)-
214 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ [ГЛ. XVIII
Проекция силы F3 на ось х равна
] X
/cos A20°- а) -х B)
X
Аналогично находим для третьей силы
где
6/3 = У/а + л*--2/* cos A20°
Воспользовавшись теоремой косинусов, получаем
—2U cos A20° + а)
/cos A20°+ а) -* ,3ч
У/»+**—2/* cos A20° + а)"
Воспользовавшись A), B), C), находим восстанавливающую силу,
стремящуюся вернуть точку в положение равновесия
, /cos A20°-a) — x , I cos A20° + a)-x Ъ
УР + х*—21х cos A20° — a) V>+x*— 2/xcos(l20°+a)Jr
Выражение для приведенного коэффициента жесткости упругого
поля в любой точке плоскости может быть найдено дифференциро-
дифференцированием Fx по переменной х:
дх \ »•
sin2A20°-«) i 8шгA20°+а) 1) ,4-.
_2/д; cos(l2b° —a)]3/2 [/2+**—2^cosA20°+a)]3/2J/'
Имея систему с заданными величинами / и Д, подставив в получен-
полученную формулу определенное значение х, можно, придавая углу a
значения от 0 до 2л, получить кривую зависимости сп{а). Заметим,
что коэффициент жесткости каждой пружины с не скажется на форме
кривой, поскольку с является общим множителем для всего выра-
выражения. На рис. б в полярной системе координат (с, а) показаны
две такие кривые при одинаковых / и г, но при различных перво-
первоначальных натягах Д. Кривая / при 1=2, jc = 0,1, Д = 0,1. Кривая 2
при 1-Х д;=гО,1, Д = 0,2.
Рассмотрим теперь упругое поле системы в случае малых пере-
перемещений и при отсутствии начального натяга. Система состоит из
j 4j ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ СИСТЕМЫ 215
трех «параллельно» соединенных пружин. Для опредедения приве-
приведенного коэффициента жесткости воспользуемся формулой
п
cn=2^cosaa,, A*)
где сп — коэффициент жесткости упругого поля в направлении оси х,
ct — коэффициент жесткости /-й пружины, aj —угол между этой пру-
пружиной и осью х. Для рассматриваемой системы
сп = с [cos» a + cos» A20° - a) + cos* A20° + a)] = a/t с E)
Таким образом, при малых отклонениях приведенный коэффици-
коэффициент жесткости поля не зависит от угла а, т. е. в окрестности поло-
положения равновесия упругое поле однородно. На рис. б показана
окружность (кривая 3), изображающая зависимость с (а) при малых
отклонениях. При наличии первоначального натяга можно найти при-
приведенный коэффициент жесткости в точке равновесия О, положив
в формуле D) перемещение х = 0. Тогда найдем
Сопоставляя E) и F), замечаем, что первоначальный натяг влияет
на коэффициент жесткости упругого поля при малых перемещениях.
При использованных для построения кривых на рис. б данных
(/ = 2, Д = 0,1) из F) находим
— 11.—
Это окружность, радиус которой на 0,1 больше радиуса окружности
3 на рис. б.
Неоднородность упругого поля опор вращающегося вала может
привести к особому виду опасных колебаний, называемых параметри-
параметрическим резонансом *).
§ 4. Вынужденные колебания системы с одной
степенью свободы
Если на систему, которая может совершать малые колебания около
положения устойчивого равновесия, действует возмущающая сила,
являющаяся известной функцией времени, то возникают сложные
колебания. Эти колебания являются результатом наложения вынуж-
вынужденных и свободных колебаний. Дифференциальные уравнения дви-
движения системы могут быть составлены применением уравнений Лаг1-
ранжа второго рода или с помощью общих теорем динамики.
•) А. С. Кельзон, К. К. Малиновский, В. И. Яковлев,
Влияние неоднородности упругого поля опор на параметрические колебания
Жесткого вала, Доклады Академии наук СССР, т. 193, № 6, 1970.
216 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ [ГЛ. XVrtt
1°. Выну жденные колебания без учета сил сопро-
сопротивление. Обозначим обобщенную возмущающую силу Q (t). Тогда
уравнение Лагранжа второго рода будет
d 1дТ\ дТ д
где # —обобщенная координата системы, Т ~ кинетическая энергия
системы, П — потенциальная энергия системы.
Полагая отклонения системы от положения устойчивого равно-
равновесия малыми, можно представить кинетическую и потенциальную
энергии в виде
T-^af, П^±сЧ\ B*)
где а, с — положительные постоянные коэффициенты: о —инерцион-
—инерционный, с — квазиупругий коэффициенты. Внеся значения B*) в уравне-
уравнение Лагранжа A*), получим линейное неоднородное дифференциаль-
дифференциальное уравнение второго порядка с постоянными коэффициентами
ад _(- cq — Q (j^t C *)
или
? + **? = —Q0)» D*)
где введено, как и ранее, обозначение cfa = k2.
Решение дифференциального уравнения D*) в случае, когда воз-
возмущающая сила Q@ является синусоидальной функцией или может
быть представлена" рядом Фурье, дано во втором томе (гл. VIII, § 4,
п. 4°. Вынужденные колебания материальной точки). При произволь-
произвольной зависимости возмущающей силы от времени решение уравнения'
D*) дается формулой
q =? q0<os kt + ^ sin kt + ~ ( Q (x) sin k (t - т) dx, E*)
где qa и 4o — значения обобщенной координаты и обобщенной ско-
скорости системы в начальный момент времени.
Сумма первых двух членов правой части E*) определяет свобод-
свободные колебания системы, возникающие из-за сообщения системе, нахо-
находившейся в равновесии, начального отклонения и начальной скорости:
ft = q0 cos kt + ^ sin kt. F*)
Второе слагаемое правой части E*) определяет вынужденные
колебания системы, возникающие под действием возмущающей силы
Q(t), приложенной к системе, находящейся в начальный момент в рав-
равновесии;
t
G*)
jfl ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ СИСТЕМЫ 217
Если возмущающее воздействие приложено к системе в виде единич-
единичного импульса 5=1, прилагаемого в начальный момент к покоя-
покоящейся системе, то ее последующее движение дается формулой
эта функция называется реакцией системы на единичный импульс.
Если к покоящейся системе приложить в момент t = 0 постоянную
силу Q=l, то движение системы определяется уравнением
t
% @ = [ Vi (t) dx = ^ A - cos kt). <9*)
Эта функция 4{i) называется реакцией системы на единичное воз-
возмущение или переходной проводимостью.
При решении задач на вынужденные колебания
системы с одной степенью.свободы рекомендуется
следующий порядок действий:
1) выбрать обобщенную координату, определяющую положение
системы;
2) составить выражение потенциальной и кинетической энергии
системы, выразив их через обобщенную координату и обобщенную
скорость;
3) внеся выражения потенциальной и кинетической энергии в урав-
уравнения Лагранжа второго рода, получить дифференциальное уравнение
малых колебаний системы;
4) сопоставив собственную частоту с частотой возмущающей силы,
определить, будет резонанс или нет;
5) проинтегрировав дифференциальное уравнение колебаний, найти
уравнение движения системы.
Задача 18.19. На прямоугольной плите веса Рь установленной
на четырех симметричных пружинах жесткости с каждая, находится
двигатель веса Ра. Двигатель имеет криво- ^
шип радиуса г, который вращается с посто-
постоянной угловой скоростью и. На конце
кривошипа, массой которого пренебрегаем,
прикреплен груз М веса Рь.
Полагая, что движение начинается из
положения статического равновесия и на- К задаче 18.19.
чальная скорость плиты равна нулю, найти
уравнение движения плиты и собственную частоту колебаний системы.
Решение. Система имеет одну степень свободы, и ее положе-
положение определяется одной обобщенной координатой х, смещением по вер-
вертикали вниз от положения статического равновесия. Такое заключение
можно сделать, так как угол поворота кривошипа является заданной
Функцией времени и не может поэтому рассматриваться как вторая
218 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ [ГЛ. XVHI
обобщенная координата, требующая своего определения. Для состав-
составления уравнений Лагранжа второго рода, найдем потенциальную
и кинетическую энергии системы. Обобщенная потенциальная энергия *>
системы запишется в виде
П (х, t) = -i с г (х +/„)* - (Pt + Р2+Ра) х+Раг A - cos at) + const,
где са = 4с— суммарная жесткость четырех пружин, /ст — статическая
деформация пружин, которая может быть определена из условия
минимума потенциальной энергии в положении статического равно-
весия:
откуда
/ст -
"Тогда окончательное выражение потенциальной энергии системы при-
примет вид
П= 2c[x +
Кинетическая энергия системы складывается из двух слагаемых:
где ^—кинетическая энергия плиты и двигателя, движущегося
вместе с плитой как одно тело, Тг — кинетическая энергия груза,
закрепленного на кривошипе. Имеем
? B)
Кинетическую энергию груза найдем, рассматривая Ъго абсолютную
скорость как геометрическую сумму скорости полюса D и скорости
во вращательном движении по отношению к полюсу D. Тогда
Га = ! % = 1 ^ (
Переносная и относительная скорости по модулю равны
ve — х, vr = <лг.
Следовательно,
T*=ij ^+т 7* ¦*"+? Л(дГ cos (90°
где (90е+ шО —угол между векторами ve и vr.
*) А. И. Лурье, Аналитическая механика, Физматгиз, 1961, стр. 195.
§ 41 ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ СИСТЕМЫ 219
Просуммировав B) и C), найдем окончательное выражение кине-
кинетической энергии
1 1 Р Pi
Т — ~- (Pi -f- P2 -f- P8) x* -f- -g- — <a2ra * xar sin ®t. D)
Переходим к составлению уравнения Лагранжа второго рода:
d /дТ\ дТ дП
с
Находим
(Pl+р2+Рз) ^
Ш
Внеся эти значения в E), получим
(Pi + P2 + Ps)x + 4cx a>rcosv)t. F)
о о
Обозначая для краткости
запишем уравнение (б) в виде
G)
где k = 1/ п . -а—;¦¦„¦¦ — собственная частота колебаний системы.
V ^ + +^
V 1 + 2+Э
Решением, уравнения G) является функция х = хх -\- х2, где xt —
общее решение соответствующего однородного уравнения х + /ггх = 0
и хг — частное решение уравнения G). Следовательно,
Для определения произвольных постоянных интегрирования восполь-
воспользуемся начальными условиями движения: при ? = 0 имеем х — 0,
«? = 0. Внеся эти значения переменных в (8), найдем
/ . А__
ci— fta_co2-
Продифференцировав (8), получим
(?)
220 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ [ГЛ. XVIII
Внеся в это уравнение второе начальное условие, найдем es = 0.
Следовательно, уравнение колебаний плиты будет
Таким образом, движение плиты складывается из колебаний, имеющих
частоту свободных колебаний (первое слагаемое правой части) и
вынужденных (второе слагаемое правой части) колебаний.
Задача 18.20. Твердое тело массы т движется в прямолиней-
прямолинейных горизонтальных гладких направляющих под действием силы при-
притяжения к центру О, пропорциональной расстоянию от точки О до
центра инерции тела (коэффициент пропорциональности с). К телу
приложена сила
направленная вдоль -направляющих. 6 начальный момент центр инер-
инерции совпадал с центром О и его скорость равнялась нулю.
Найти вынужденное движение тела.
Решение. Выберем ось х совпадающей с горизонтальными
направляющими и примем центр О за начало координат. Для состав-
составления дифференциального уравнения движения применим теорему о
движении центра инерции в проекции на ось х. Имеем
от* = — cx + Fe~at. A)
где х — координата центра инерции тела. Запишем уравнение A)
в виде
= He-at, B)
где для краткости обозначено
Дальнейшее решение проведем двумя способами.
1 -й. с п о с о б. Приложим к твердому телу вместо заданной возму-
возмущающей силы Q = Fe~ai единичный мгновенный импульс 5=1
в момент времени t = 0. Под действием этого импульса тело полу-
получит начальную скорость
х S 1
Х
но не получит начального отклонения. Таким образом, движение тела
при *>0 найдется интегрированием уравнения
при начальных условиях 1 = 0, xQ = 0, xQ=l/m.
ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ СИСТЕМЫ 221
Решением является реакция системы на единичный импульс (8*)
gj D)
Если единичный импульс прикладывается не в начальный момент,
а при t = x, то вместо D) движение тела будет описываться урав-
уравнением
10 при *<т0,
^ E)
Представим действие произвольной силы Q(t) за время от 0 до t
как последовательное приложение бесконечно малых импульсов
dS=Q(T)-dx. F)
Согласно E) движение, вызываемое элементарным импульсом dS>
определится произведением
G(TLh(<-t)<fr. G)
Результирующей движение определится как наложение движений,
вызываемых каждым элементарным импульсом. Следовательно, движе-
движение тела описывается определенным интегралом
1 t
х = J Q(T).\M*-T)dT=-^ [ Q(t)-sln*(t-T)«fT. (8)
До сих пор вывод сделан для произвольной возмущающей силы
Q(t) и результат (8) естественно совпадает с формулой G*). Внеся
в (8) значение Q(t) = Fe~at, находим
х = ~ С е~ах sin (kr - kt) dx
о
или окончательно
Это и есть уравнение колебаний тела при нулевых начальных усло-
условиях движения.
2-й способ. Решение линейносо неоднородного дифференциаль-
дифференциального уравнения с постоянными коэффициентами
B)
ищем как сумму решений
+
222 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ ИГЛ. XVUL
Здесь Xi — общее решение однородного уравнения
равное
jci = Aco$kt-\-Bs\nkt (9)
Второе слагаемое, есть частное решение полного уравнения B), ищем
его в виде
xt = De-at. A0)
Вычислив от хй вторую производную по времени я подставив выра-
выражения для лг2 и ^2 B уравнение B), находим
^F /in
m(a*+k*)'
Таким образом, интегралом уравнения B) является
х = A cos kt + В sin U + т J+kt) е-0'. A2)
Для нахождения произвольных постоянных интегрирования А и В
воспользуемся начальными условиями хв = 0, ?0 = 0 при ? = 0. Внеся
в A2) первое начальное условие, находим
или
Для определения второй произвольной постоянной продифферен-
продифференцируем A2) по времени:
х = — Ak sin kt + Bk cos kt-am (/+fea) e~ot. A4)
Подставив в A4) второе начальное условие, получим
О — я а^
откуда
Внеся эначения произвольных постоянных в решение A2), находим
окончательно
что совпадает с решением, полученным первым способом. Заметим,
что определять произвольные постоянные интегрирования из уравне-
9Ч] ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ СИСТЕМЫ 223
ния (9) нельзя, так как движение тела описывается уравнением A2),
а не (9).
2°. Влияние вязкого трения на вынужденные
колебания системы с одной степенью свободы. Урав-
Уравнения Лагранжа второго рода в этом случае имеют вид
где Т = у aq2 — кинетическая энергия системы, П *=» -=- сф — потен-
потенциальная энергия системы. Ф = у р$2 — диссипативная функция, Q (f) —
возмущающая сила, являющаяся заданной функцией времени. Внеся
эти значения в уравнение A0*), находим
или
п *
где обозначено е/а —А4, р7а = 2я.
Решение дифференциального уравнения (И*) в случае, когда
возмущающая сила Q (t) является синусоидальной функцией или может
быть представлена рядом Фурье, дано во втором томе (гл. VIH,
§ 4, п. 4°).
При произвольной зависимости возмущающей силы от времени
решение уравнения A1*) дается формулой
Ч = e~nt (?o cos kit + ^±^- sin kj
t
+ ш; \Q (T) e"n {t'x) sin kl <? ~T) dx> A2*>
где qQ и ^„ — начальные значения обобщенной координаты и обоб-
обобщенной скорости, kx = У k2 — я* — собственная частота системы.
Первое слагаемое правой части определяет свободные колебания
системы, возникающие из-за сообщения системе начального отклоне-
отклонения от положения равновесия и начальной скорости
qi = e~nt [q0 cos kxt + ^+i»sin
Второе слагаемое правой части A2*) описывает вынужденные дви«
жения системы, возникающие под действием возмущающей силы Q (t),
приложенной к системе, находящейся в начальный момент в равно-
равновесии
t
^hx)^. A4*)
224 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ [ГЛ. XVIH
Если возмущающее воздействие приложено к системе в виде единич-
единичного импульса «5=1, прилагаемого а начальный момент к покоящейся
системе, то ее последующее движение происходит согласно урав-
уравнению
Функцию A5*) называют реакцией системы на единичный импульс.
Еели к покоящейся системе приложить в начальный момент посто-
постоянную единичную силу Q = l, то движение системы будет происхо-
происходить согласно уравнению
t
l[^f ] 06*)
Функцию A6*) называют реакцией системы на единичное возмущение
или переходной проводимостью.
При решении задач на вынужденные колебания
системы с учетом сил вязкого сопротивления реко-
рекомендуется следующий порядок действий:
1) выбрать обобщенную координату, определяющую отклонение
системы от положения равновесия;
2) составить выражения потенциальной и кинетической энергии
системы и диссипативной функции, выразив их через обобщенную
координату и обобщенную скорость;
3) пользуясь уравнениями Лагранжа второго рода, составить
дифференциальные уравнения малых кодебаний системы,
4) проинтегрировав дифференциальное уравнение колебаний, найти
уравнение движения системы.
Задача 18.21. Прибор для измерения вертикальных колебаний
корпуса, на котором он установлен, состоит из массы т, прикреплен-
прикрепленной к концу пружины, коэффициент жесткости
которой с. Масса т соединена с жидкостным
демпфером, создающим силу сопротивления,
пропорциональную относительной скорости мас-
массы (коэффициент пропорциональности р4). Верх-
Верхнему концу пружины сообщают колебания со-
согласно уравнению
К задаче 18.21. Частота свободных колебаний массы т равна
со, а коэффициент демпфирования {J составляет
от критического значения (когда затухающие колебания превра-
превращаются в апериодическое движение). Определить амплитуду устано-
установившихся вынужденных, относительных колебаний массы по отноше-
отношению к раме, регистрируемую прибором на барабане.
§ «j ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ СИСТЕМЫ 225
Решение. Составим дифференциальное уравнение движения
груза при одновременном колебании груза и рамы, к которой при-
прикреплена пружина.
Обозначив через г координату смещения массы относительно
корпуса прибора и пользуясь методами динамики относительного
движения, мы найдем
»»2 = — cz-pi-отр. A)
Здесь J7 — ускорение точки подвеса, —т$ — переносная сила инерции.
После упрощений мы получим
% B)
где обозначено р/от = 2я, c/m = k2.
Из условия задачи следует, что
Внеся это значение в уравнение B), находим
S + 2п2 -\-k2z = Нр* cos pt. C)
Частное решение, определяющее вынужденные колебания массы, будет
— Нрг = cos/rf. D)
Согласно условию значение р = 2я-/я равно l/*j/ значения крити-
критического демпфирования, при котором р = 2|//яс или k — n. Следо-
Следовательно, в рассматриваемой задаче в>=А/У~. Подставив это значе-
значение в D), находим
г cos pt.
Амплитуда этих колебаний равна
Задача 18.22. Система состоит яз стержня ОБ с насаженным на
него шаром В; стержень закреплен шарнирно в точке О (рис. а).
Момент инерции колеблющейся системы относительно горизонтальной
оси, проходящей через точку О перпендикулярно к рисунку, равен
/ = 26,83 кГ-см-сек\ К стержню прикреплена в точке А пружина,
коэффициент жесткости которой равен с =120 кГ/см. Второй конец
пружины D совершает заданные вертикальные колебания согласно
Уравнению
у = 0,05 cos 6я* см*
8 М. И. Бать и др., т. III
226
ТЕОРИЯ МАЛЫХ ДВИЖЕНИЯ СИСТЕМЫ
[ГЛ. XVHt
К точке В приложена сила вязкого сопротивления, пропорциональная
скорости, коэффициент пропорциональности {1 = 0,2 кГ- сек/см.
Определить уравнение вынужденных колебаний шара В, макси-
максимальное растяжение пружины и наибольшую силу, приложенную
к точке D, если О А — 10 см, АВ—Ы см.
а.)
К задаче 18.22.
Решение. Для составления уравнения Лагранжа второго рода
выбираем в каяестве обобщенной координаты угол поворота стержня
ОВ, обозначим его через ф и будем отсчитывать от положения ста-
статического равновесия. Тогда потенциальная энергия системы, равная
п_ cjx-y^
(где х — перемещение точки А), выразится через обобщенную коор-
координату так:
тт _ с(Юф—0,05cos6яОа ...
Кинетическая анергия системы равна
1 — 2 '
Диссипативная функция Рэлея имеет вид
B)
C)
Подставим значения этих функций в уравнение Лагранжа второго
рода
d (дТ\ дТ дП дФ
} 4} ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ СИСТЕМЫ 227
Последовательно находим:
|5 = с A0ф - 0,05 cos 6я0 • 10,
Внеся эти значения в D), получим
/ср + р@Я2)ф+ЮОс(р = 0,5с cos 6я*. E)
или
26,83$ + О»2 • 24?Ф +12 000<р =* 60 cos бл*.
Разделив обе части уравнения на коэффициент при старшей произ-
производной, найдем
ф+4,3ф+447<р = 2,24 cos 18,85*.
Амплитуда вынужденных колебаний определится по формуле
или
224 « (б)
т /D47— 18,8ба)»+4,Зя-18,85»
Уравнение вынужденных колебании центра шара В будет
хв = 24 • 0,018 cos A8,85* - 0,7217), G)
так как разность фаз равна
Найдем максимальное растяжение пружины (рис. tf). Максимальное
перемещение верхнего конца пружины D равно аЪ = 0,05 ел. Максим
мальное перемещение нижнего конца пружины, точки с, равно bd =
= 10.0,018 = 0,18 ел. Откладываем эти отрезки под углом 41°21*
(разность фаз). Замыкающая сторона треугольника ad равна макси-
максимальному удлинению пружины (рис. б). По теореме косинусов на-
находим
ai = 1/0,05* + 0,18е — 2. 0,05 • 0,18. cos 4Г21'« 0,15 ^.
Наибольшая сила, приложенная к точке D, будет
Q = c.ed= 120.0,16= 18 юГ.
8*
228 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ (ГЛ. XVIII
§ б. Свободные колебания системы с двумя
степенями свободы
Рассмотрим малые колебания механической системы с двумя сте-
степенями свободы, подчиненной голономным идеальным и стационар-
стационарным связям. Обозначим обобщенные координаты, определяющие поло-
положение системы в пространстве, через qy gz. Кинетическая энергия
такой системы будет однородной квадратичной формой обобщенных
скоростей
Т = у [АиЯ + 2ЛаМ,+A^ffl. A *)
В этой формуле коэффициенты Ап, Ап, Ли являются функциями
обобщенных координат. Положение устойчивого равновесия, около
которого происходят малые движения системы, примем за начало
отсчета обобщенных координат. Следовательно, в положении равно-
равновесия все обобщенные координаты равны нулю. Раскладываем каждый
коэффициент в ряд Маклорена по степеням обобщенных координат:
. B*)
Ограничиваясь в разложении первым слагаемым, так как обобщенные
координаты и скорости считаются малыми величинами, и обозначая
для краткости постоянные коэффициенты
А1к@)=аш C*)
находим окончательное выражение для кинетической энергии системы
Величины а1Ъ а1г, а^ называются инерционными коэффициентами.
Если система движется в потенциальном силовом поле, то потенци-
потенциальная энергия системы может быть разложена по степеням обобщен-
обобщенных координат в ряд Маклорена
Так как выбор начала отсчета потенциальной энергии произволен,
то положим потенциальную энергию системы в положении равнове-
равновесия равной нулю:
П@) = 0. F*)
В положении равновесия в нуль обращаются все обобщенные силы;
§ 5] СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ 229
и, следовательно, в разложении E*) исчезают члены, содержащие
обобщенные координаты в первой степени. Тогда потенциальная энер-
энергия системы, совершающей малые движения около положения устой-
устойчивого равновесия, будет однородной квадратичной формой обобщен-
обобщенных координат:
П ~ у (cuq\ + 2<:12?1?2 + <тм?1), (8*)
где для краткости постоянные коэффициенты обозначены
Коэффициенты си, с12, с2г называются квазиупругими коэффициентами.
Внося полученные значения кинетической и потенциальной энер-
энергий в уравнения Лагранжа
находим дифференциальные уравнения движения системы:
¦0.J
В КОТОРЫХ Л21 = пц, Ci2 = ^21"
Частное решение уравнений (П*) ищем в виде
qx = В sin (kt + a), q% = D sin {kt -fa), A2*)
где В, D, a — неизвестные постоянные. Для их определения вносим
значения A2*) обобщенных координат в систему уравнений A1*) и
сокращаем на общий множитель sin(kt-\-a). Тогда получаем
В (сц - й2вц) + D (си - &ап) = О,
В (с21 - k*aa)+D (c2i - k*an) = 0. A3*)
Эта система линейных однородных алгебраических уравнений всегда
имеет тривиальное решение В = 25 = 0, соответствующее равновесию
системы. Система уравнений A3*) может иметь другие, отличные от
нуля решения, если определитель, системы будет равен нулю:
L1"f2aU> Cl2~f2flla =0. A4*)
Из уравнений A3*) находится отношение амплитуд
IT ~~ Сц — bin.. ~ ~~ г.. — Ып..' V10 '
Определитель A4*) выражает равенство отношений амплитуд, най-
найденных независимо из первого и второго уравнений A3*). Следова-
Следовательно, если условия A5*) выполняются, то уравнения A3*) являются
230 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ [ГЛ. XVIir
зависимыми и из них может быть определено только отношение
амплитуд.
Раскрыв определитель A4*) или из A5*) находим уравнение
частот, иначе называемое вековым уравнением:
(ап«га - а?9) k* - (апст + аг2сп — 2cl2al2) k* -f- (сцс^ — cj,) = 0. A6*)
Исследуемые движения будут малыми и, следовательно, равнове-
равновесие устойчиво, если корни этого уравнения положительны:
*J>0, AJ>0- A7*)
Если же k\ или k\ отрицательны или являются комплексными вели-
величинами, то решение A2*) будет включать гиперболические функции
и движения около положения равновесия не будут малыми. Корни k\
и k\ будут положительными при удовлетворении неравенств
аи>0, й2а>0, пгг м>,
сп>0, <тм>0 cnc-c\>0 ( >
Могут встретиться два особых случая. Первый случай, когда одно-
одновременно
При этом обеим координатам соответствуют гармонические колеба-
колебания одинаковой частоты:
Второй случай, когда
^11^12-^ = 0. B1*)
В этом случае один из корней уравнения частот обращается в нуль.
После того как найдены корни уравнения частот kx и k^ опреде-
определяются главные колебания системы. Первое главное колебание опи-
описывается уравнениями
B2*)
а второе главное колебание — формулами
^ = 52sin(^ + aa), ya = Dasin(?a*+ce2). B3*)
Общее решение в силу линейности уравнений является суммой част-
частных решений
« = Bt sin №+ах)+В% sin {k4+aj, B4*)
q% = ?>! sin (kxt + otj) + Ог sin (V + «a* B5*)
$ 5] СВОБОДНЫЕ КОЛЕБАНИЙ СИСТЕМЫ 231
Подставив в A5*) значения kx и затем кг, определяем отношения
амплитуд:
Тогда
ft - PA sin ( V + «i) + PA «in (V + aa), B7*)
q, = Dj sin (V+«i)+Da sin (A^ + a2). B8*)
Произвольные постоянные интегрирования Dlt Dt, a1( a2 после этого
находятся по начальным условиям движения.
Наряду с уравнениями Лагранжа для составления дифференциаль-
дифференциальных уравнении малых колебаний системы с двумя степенями свободы
могут быть применены общие теоремы динамики.
При решении задач на исследование малых коле-
колебании й консервативной системы с двумя степенями
свободы рекомендуется следующий по.рядок дей-
действий.
Первый способ —использование уравнений Ла-
Лагранжа:
1) выбираем обобщенные координаты qt и щ,
2) составляем выражение кинетической энергии Т;
3) определяем потенциальную энергию системы П или вычисляем
обобщенные силы;
4) внеся выражения Т и П (или обобщенные силы) в уравнения
Лагранжа, получаем систему двух дифференциальных уравнений малых
колебаний;
5) задавшись частным решением этой системы, подставляем част-
частное решение в систему дифференциальных уравнений движения;
6) исключив из полученной системы алгебраических уравнений
амплитуды колебаний, находим уравнение частот;
7) решив уравнение частот, определяем собственные частоты си-
системы;
8) внеся найденные частоты в частное решение, получаем фор-
формулы, описывающие, два главных колебания;
9) сложив уравнения главных колебаний для каждой обобщенной
координаты, находим общее решение;
10) определяем четыре произвольные постоянные из начальных
условий движения.
Второй способ—использование общих теорем
динамики:
1) исходя из условий задачи, выбираем путь составления диффе-
дифференциальных уравнений — основное уравнение динамики или какую-
либо из общих теорем динамики;
2) применив избранную теорему, составляем дифференциальные
уравнения малых колебаний системы;
232
ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ
[ГЛ. JEV1IT
3) задавшись частными решениями системы, вносим эти частные
решения в систему дифференциальных уравнений;
4) решив полученную систему уравнений, находим уравнение ча-
частот, из которого определяем собственные частоты системы;
5) внеся найденные частоты в частное решение, находим уравне-
уравнения главных Колебаний;
6) складывая уравнения главных колебаний для каждой обобщен-
обобщенной координаты, находим общее решение системы;
7) воспользовавшись начальными условиями движения, определяем
произвольные постоянные интегрирования.
Задача 18.23. На абсолютно гладкой горизонтальной плоскости
лежат два тела, массы которых /ях и /иа. Первое тело прикреплено
к стене пружиной, коэффициент жесткости которой равен cv Второе
да,
с,
vhwwwMv
J*
т.
1—¦,
I I
1 I
т,
///S//////////////////t
a.)
S)
К задаче 18.23.
тело присоединено к первому пружиной, коэффициент жесткости
которой с2 (рис. а). Определить уравнения движения системы, если
в' положении, когда обе пружины не растянуты, второму телу сооб-
сообщили скорость г'о. Найти собственные частоты системы.
Решение. Система имеет две степени Свободы. Ее положение
может быть определено двумя обобщенными координатами. Первая
обобщенная координата дг определяет перемещение первого тела от
начального положения, вторая обобщенная координата q2 измеряет
перемещение второго тела от его начального положения (рис. а).
Применим уравнения Лагранжа для составления дифференциальных
уравнений малых колебаний системы. Находим выражение кинетиче-
кинетической энергии системы
Потенциальная энергия системы складывается из потенциальных энер-
энергий двух-пружин:
п-^ + а^г^, B)
так как qt является удлинением первой пружины, а (?2 — ft) — удли-
удлинением второй пружины.
Переходим к составлению дифференциальных уравнений Лагранжа
d (дТ\ дТ _ дП
§ 5J СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ 233
где <«= 1, 2, так как система имеет две степени свободы. Поскольку
Ш
...
то первое дифференциальное уравнение движения системы принимает
вид
m^i = — c1q1 + c3(q1-ql). E)
Так как
ОТ ш . d (дТ\ тЯ дТ п
то второе дифференциальное уравнение движения запишется так:
— *2(?8-ft). G)
Таким образом, получена система двух дифференциальных уравнений
движения E) и G).
С целью нахождения общего интеграла этой системы линейных
однородных дифференциальных уравнений с постоянными коэффици-
коэффициентами будем искать частные решения в виде
qx — Bbin{kt-\-a), q2 = Ds\n{kt-\-a). (8)
Для этого внесем значения (8) в уравнения E) и G). Сократив на
общий множитель sln(W + a), находим
В этих двух уравнениях три неизвестных В, D и k. Из них опреде-
определяется отношение амплитуд; из первого уравнения находим
— = ——с-2
D
из второго уравнения
В
D
Приравняв правые части двух последних равенств, находим урав-
уравнение частот
откуда получаем
234 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ [ГЛ. XVHt
Из этого биквадратного уравнения определяются собственные частоты
системы
l/" ( Щ ^f^ c±^)a--^-. A4)
+ Щ + 1^0,25f + )
лц «h I У \Щ Щ ) mimt
Таким образом, существуют две вещественные частоты kx и &2.
Ввиду линейности системы уравнений E) и G) общий интеграл
может быть найден как сумма двух частных решений (8) с различ-
различными частотами, амплитудами и начальными фазами:
, 1
где
q^Biunikjt + au, qi = D1sia(k1t + ai) A6)
описывают первое главное колебание системы, а
q1 = B2sin(kit + az), ft = D2sin(A^ + a2) A7)
— второе главное колебание.
С другой стороны, отношение амплитуд в первом главном коле-
колебании находится из A0) подстановкой fe = A1:
Аналогично получаем для второго главного колебания
rf = 1 = Р*
где обозначения $х, р2 введены для краткости записи. Следовательно,
общее решение A5) принимает вид
sin (ktt+a2), \
j). J ( }
Произвольные постоянные Di, D2, ait a2 определяются по начальным
условиям движения. Согласно условиям задачи при t = 0
9i = 0, ^ = 0, <72 = 0, 4%=ть B1)
Внеся эти значения переменных в уравнения B0), находим
PiDi sin at + p2D2 sin a2 = 0, Dj sin a2 + D% sin a2 = 0, ^
PiD^cosai + PaDj^cosaa31^ Пфх cos a% + DaA2 cos a2 = v0, /
откуда определяются все произвольные постоянные интегрирования:
a1 = a2 = 0, т. е. начальные фазы обоих главных колебаний равны
нулю, а амплитуды главных колебаний будут
5 6] ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ СИСТЕМЫ 235
Движение системы, согласно B0), представляет наложение двух
гармонических колебаний с разными частотами.
Для составления дифференциальных уравнений движения можно
применить и другой способ, использовав основной закон динамики.
Рассмотрим произвольное положение системы, определяемое обоб-
обобщенными координатами qb q% (рис. б).
Тогда, воспользовавшись уравнением динамики материальной точки
и учитывая упругие силы пружин, составляем дифференциальные
уравнения движения каждого груза:
?i>- B4)
Эти уравнения идентичны уравнениям E) и G), полученным при
помощи уравнений Лагранжа.
Применение основного закона динамики ведет в данной задаче
быстрее и проще к составлению дифференциальных уравнений дви-
движения, однако первый путь — использование уравнений Лагранжа
в обобщенных координатах является более общим методом.
§ 6. Вынужденные колебания системы с двумя степенями
свободы под действием синусоидальных возмущающих сил
Если на систему действуют внешние возмущающие силы в тече-
течение всего процесса колебаний, то возникают сложные колебания,
являющиеся результатом наложения вынужденных и свободных коле-
колебаний системы. Дифференциальные уравнения движения системы могут
быть составлены применением уравнений Лагранжа
dt
где ^ — обобщенные координаты системы, Т — кинетическая энергия
системы, П — потенциальная энергия, Q{ (t) — возмущающие силы. Если
система имеет две степени свободы, то t = 1, 2.
Для случая двух степеней свободы подстановка Т и П в урав-
уравнения A*) приводит к системе дифференциальных уравнений
= #i sin (pi + 6), \
= Ha sin {pt + 6), J
где возмущающие силы Qi(t) взяты изменяющимися по синусоидаль-
синусоидальному закону (часто встречающийся случай, рассмотрением которого
мы ограничимся ввиду значительного практического значения):
C*)
Общее решение системы B*) дифференциальных уравнений скла-
складывается из общего решения однородной системы уравнений и част-
частного решения неоднородной системы. Общее решение однородной
236 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ [ГЛ. XVtir
системы представляет ранее рассмотренные свободные колебания
и находится согласно методам, приведенным в § б этой главы. По-
Поэтому мы остановимся на определении частного решения этой системы,
представляющего вынужденные колебания системы.
Частное, решение ищем в виде
fc-DtelnOtf + e), q2 = D2sm(pt + 6). D*)
Внеся эти значения в уравнения B*), приходим к системе алгебра-
алгебраических уравнений
р*аЛ1)О1 + {съ-рга1г)Ог*=Нъ \
Dl-Wi, J ( }
откуда определяются неизвестные Db Ог.
Определитель этой системы обращается в нуль,
(си - р2ац) (с22 - р*ап) - (с12 -рЧгJ = 0, F*)
при резонансе, когда jp = Ai или p = k2. В этом, случае частное ре-
решение системы не может быть найдено в форме D*).
Дифференциальные уравнения движения системы могут быть также
составлены с помощью общих теорем динамики.
При решении задач на определение вынужденных
колебаний рекомендуется следующая последова-
последовательность действий.
Первый способ —использование уравнений Лаг-
ран ж а:
1) выбираем обобщенные координаты и составляем выражение
кинетической энергии системы;
2) находим выражение потенциальной энергии или вычисляем обоб-
обобщенные силы;
3) составляем дифференциальные уравнения движения системы,
внеся значения кинетической и потенциальной энергий (или обобщен-
обобщенных сил) в уравнения Лагранжа;
4) ищем частные решения дифференциальных уравнений движения
системы и находим значения амплитуд обобщенных координат;
б) приравняв нулю знаменатель в выражениях амплитуд, находим
значения частот возмущающей силы, при которых возникает резонанс.
Второй способ —применение общих теорем дина-
динамики: после выбора обобщенных координат системы непосредст-
непосредственно составляют дифференциальные уравнения движения, исходя из
избранных теорем динамики. Дальнейший ход решения тот же, что
и при первом способе.
Задача 18.24. В измерительном приборе блок массы т может
перемещаться по абсолютно гладкой горизонтальной плоскости.
Он соединен пружиной) коэффициент жесткости которой равен с,
с концом однородного стержня длиной О А = / и массы М. Стержень
§ 6]
ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ СИСТЕМЫ
237
вторам концом закреплен шарнирно. Центр тяжести стержня нахо-
находится на расстоянии ОС = а от шарнира. Определить вынужденные
колебания блока, если на него действует горизонтальная сила
F = Fosin(ut. При каких значениях to в колебаниях блока наступит
резонанс.
К задаче 18.24,
Решение. Система имеет две степени свободы. Ее положение
можно определить двумя координатами: углом поворота стержня <р,
который будем отсчитывать от вертикали, и координатой блока х,
которую будем отсчитывать от равновесного положения блока при
вертикальном положении стержня (очевидно, что при этом пружина
не деформирована).
На блок действует реакция пружины и возмущающая сила. Диф-
Дифференциальное уравнение прямолинейного движения блока будет (рис. в)
тх =— с(х—l-(p)-\-Fosina>t, A)
где (х — Iqi) — удлинение пружины при малых углах отклонения стер-
стержня. Для составления дифференциального уравнения вращения стержня
(рис. б) заметим, что момент силы тяжести относительно горизонталь-
горизонтальной оси, проходящей через точку О, равен
— Alga sin <р я« — Mgatp.
Момент реакций пружины относительно той же оси равен
Qlcos ф я*# с [х — /qp) /.
Здесь для малых углов поворота принято cos<p^«l. Тогда диф-
дифференциальное уравнение малых колебаний стержня будет
Др = — Mgaq> + c(x — /ф)/. B)
Перепишем дифференциальные уравнения A) и B) в виде
— cly = F0 sin at,
238 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ [ГЛ. XV1H
решение системы складывается из общего решения однород-
однородной системы уравнений и частного решения неоднородной системы.
Так как, согласно условию, требуется определить вынужденные коле-
колебания блока, то будем искать только частное решение неоднородной
системы, определяющее искомые колебания. Частное решение ищем,
положив
х = A sin at, ф = В sin at. D)
Тогда
jf = — Aa28inat, ip=* — Ba2sinat.
Подставив эти значения переменных и их вторых /производных в сис-
систему C), сократив затем на sin tut, находим систему алгебраических
уравнений для определения А а В
cP + Mga
Отсюда определяем
(с-таг)А-с1В = Р0>\
¦ о.) E)
А:
Ft ~cl
О (cP+Mga—/<п»)
(с—/пш2) —с/
— cl
F)
т. е. амплитуду вынужденных колебаний блока. Внеся это значение
А в первое из уравнений D), находим вынужденные колебания блока
G)
Координата х, определяющая колебания блока, неограниченно
возрастает, когда знаменатель в правой части последнего равенства
обратится в нуль:
mla* — (c/+ mcl* -\- mMga) ю8 + cMga = 0.
Отсюда находим резонансное значение <о:
„ cI+mcP+mMga ± У' (cl+mcli+mMga)*—AcmMIga „.
Из четырех значений © два отрицательных значения не имеют смысла.
Таким образом, согласно (8), существуют два резонансных значения ©.
Задача 18.25. Груз Pt (рис. а) подвешен к неподвижной точке
А при помощи пружины, коэффициент жесткости которой сх.
К грузу Рх приложена вертикальная возмущающая сила Q = Qosinaf.
Груз Рь являющийся виброгасителем, подвешен к грузу Рх при помощи
пружины с коэффициентом жесткости сг. Пренебрегая массами пружин,
определить коэффициент жесткости с% и вес второго груза Р^, при
§ 6)
ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ СЙСТЕМЙ
239
„,„„„„„,„„/А
которых амплитуда вынужденных колебаний первого груза будет
равна нулю.
Решение. Выберем положение равновесия грузов за начало
отсчета (рис. б). Система имеет две степени свободы. За обобщен-
ные координаты принимаем от-
клоненйе первого груза от поло-
жения равновесия хх и смещение
второго груза от своего положе-
положения равновесия х2. Тогда к пер-
первому грузу будут приложены три
силы: упругая сила верхней пру-
жины
Ft с&ъ 0)
4
упругая сила нижней пружины
F,-*,(*,-*,), B)
C)
возмущающая сила
Q = Q0 sin orf.
Ко второму грузу приложена одна
сила: упругая сила нижней пру-
пружины
Fz = — Cs (хг — #i). D)
Составляем дифференциальные
к задаче 18.25.
уравнения движения грузов
— xd + QiSinad, E)
!*,--*,(*,-*,). F)
Частное решение этой системы, определяющее вынужденные колеба-
колебания грузов, ищем в виде
•#! = ?•! sin arf, x2 = D%slncit. G)
Подставив значения переменных G) в уравнения (б) и F), находим
(ci+tfi-^^Di-cA-O, - *,Di+(*,[-?• «в») D.-Q. (8)
Из этих уравнений определяются величины амплитуд вынужденных
колебаний
D
240 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ [ГЛ. XVIII
Согласно уравнению (9) амплитуда вынужденных колебаний первого
груза обращается в нуль, если выбрать коэффициент жесткости вто-
второй пружины сг и вес Рг так, чтобы
с,-^ю«-0. A1)
Таким образом, при заданной частоте возмущающей силы © можно
всегда подобрать коэффициент жесткости добавочной пружины и
вес второго груза так, чтобы погасить вынужденные колебания пер-
первого груза. При этом следует остерегаться резонанса, который насту-
наступает при обращении в нуль знаменателя в (9) и A0):
С| = 0. A2)
Значение углорой скорости со, определяемой из. равенства (И), не
обращает в нуль знаменатель в (9) и A0) и, следовательно, не
удовлетворяет A2). Однако не всегда удается точно поддерживать
одно и то же значение со. При случайном изменении угловой ско-
скорости и возможно возникновение опасных резонансных колебаний.
§ 7. Исследование колебаний энергетическим методом.
Определение собственной частоты
Собственная частота системы является важным параметром, опре-
определяющим характер как свободных, так и вынужденных колебаний
системы. В сложных системах, наряду с ранее рассмотренными спо-
способами, часто применяется энергетический метод определения соб-
собственной частоты системы. Во многих случаях энергетический метод
проще и быстрее ведет к цели.
Для консервативной системы полная механическая энергия, рав-
равная сумме потенциальной и кинетической энергий, сохраняет неиз-
неизменной свою величину
n A*)
Это закон сохранения механической энергии при движении системы
в потенциальном силовом поле. Здесь Т — кинетическая энергия,
П — потенциальная энергия системы.
Пользуясь законом A*) для системы с одной степенью свободы,
можно идти дальше двумя путями:
1) Вычислив от обеих частей равенства A*) производную по
времени, находим дифференциальное уравнение движения системы,
из которого непосредственно определяется собственная частота
системы.
2) Будем отсчитывать потенциальную энергию от положения равно-
равновесия системы.
Тогда из закона сохранения механической энергии Следует: когда
потенциальная энергия достигает максимального значения, кинети-
§71
ИССЛЕДОВАНИЕ КОЛЕБАНИИ 241
ческая энергия обращается в нуль, и наоборот, когда кинетическая
энергия максимальна, то потенциальная равна нулю. Следовательно,
Ттах = Птах, B*)
так как каждая из величин выражает полную механическую энергию,
остающуюся неизменной.
Полагая движение точки гармоническим колебательным движе-
движением
можно представить максимальную кинетическую энергию в виде
^ mvm*x mcfik*
~2 2— ™~ """ ' ' ^
Обозначим максимальную потенциальную энергию
Птах = «Э. D*)
Тогда, согласно B*),
*'—!¦• E*)
Если же потенциальная и кинетическая энергия всей системы скла-
складываются из энергий ее отдельных частей, то формула E*) преоб-
преобразуется к виду
В этом случае метод носит название метода Рэлея и может быть
обобщен на системы с распределенными массами.
Выбрав произвольно, но о соблюдением граничных условий, форму
колебаний — функцию, описывающую отклонения масс системы
в момент, когда потенциальная энергия достигает максимума, и
полагая, что колебания всех точек системы происходят с одной и
той же частотой и находятся в одной и той же фазе, получим основ-
основную формулу Рэлея для балки с распределенной массой
G*)
где /(л:) —форма колебаний, ?/—жесткость балки на изгиб. Рэлей
показал *), что эта формула дает точное значение собственной
частоты, если выбранная форма колебаний в точности совпадает
с действительной формой.
') РэлеЙ, Теория звука, тт. 1 и 2, изд. 2, Гостехизда^ MocKBat 1955.
242
ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ
1ГЛ. XVIII
Однако в большинстве случаев действительная форма колебаний
неизвестна и, выбирая форму, удовлетворяющую граничным условиям,
находим по формуле G*) близкое к истинному значение собственной
частоты, причем, как показал Рэлей, это значение всегда больдие
ИСТИННОГО.
При решении задач первым путем рекомендуется
следующий порядок действий:
1) составляем выражение кинетической и потенциальной энергии
в произвольном положении системы;
2) вычислив производную по времени от полной механической
энергии системы, находим дифференциальное уравнение движения
системы;
3i) по коэффициентам дифференциального уравнения движения
определяем собственную частоту системы;
4) проинтегрировав дифференциальное уравнение движения и
определив произвольные постоянные по начальным данным, находим
уравнение движения.
При решении задач вторым путем Следует приме-
применять такую последовательность действий:
1) задаемся формой колебаний, возможно более близкой к истин-
истинной и, во всяком случае, удовлетворяющей граничным условиям задачи;
2) вычисляем максимальную кинетическую и максимальную потен-
потенциальную энергии;
3) приравнивая их друг другу, находим квадрат собственной
частоты Системы.
Задача 18.26. Жидкостный маятник состоит из изогнутой трубки
постоянного поперечного сечения, в которой находится столб жид-
жидкости длиной / и удельным весом у.
В положении статического равновесия
жидкость находится на уравне 0.
Определить собственную частоту и
период свободных колебаний столба
жидкости. Трением жидкости о стенки
трубки пренебречь.
Решение. 1) Пусть столб жидко-
сти в левой вертикальной трубке
поднялся на высоту у над уровнем
равновесного положения, а соответ-
соответственно в правой вертикальной трубке
этот столб опустился на у. Тогда на
столб жидкости будет действовать восстанавливающая сила, равная
весу столба жидкости высотой 2у. Этот вес равен 2уау, где площадь
поперечного сечения трубки обозначена буквой а. Масса колеблю*
щейся жидкости равна
К задаче 18.26.
5 71 ИССЛЕДОВАНИЕ КОЛЕБАНИИ 243
Составляем дифференциальное уравнение колебаний столба жид-
жидкости
Знак минус указывает, что восстанавливающая сила всегда направ-
направлена в сторону, противоположную координате у.
Внеся а это равенство значение массы, находим
ПериоА колебаний и собственная частота отсюда равны
Таким образом, эквивалентный математический маятник имеет длину
1/2. Удельный вес и площадь поперечного сечения трубки не влияют
на собственную частоту и период колебаний столба жидкости.
2) Эта же задача может быть решена энергетическим методом
(первый путь).
Находим кинетическую энергию системы
Tx-imfi-±f?. B)
Для вычисления потенциальной энергии вспомним, что она равна
работе сил поля при перемещении из данного положения в нулевое
о о
П = — \,cydy = — ^уау dy = уау\ C)
У У
Здесь с — квазикоэффициент жесткости, равный 2уа.
Полная механическая энергия остается неизменной. Следовательно,
^'WL const.
Вычислив от обеих частей уравнения производные по временя, нахо-
находим дифференциальное уравнение движения жесткости
Собственная частота и период колебаний равны
k
что совпадает с результатом A).
3) Эта задача легко решается также энергетическим методом
(второй путь).
У:
244 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ
Задаемся формой колебаний
откуда
$=*Bk cos kt
Находим максимум кинетической энергии согласно B):
1ГЛ. XVHI
и максимум потенциальной энергии в соответствии с C):
Внеся эти значения в формулу B*),
Т lmax s=-'-
получаем
k2 = -f-, ИЛИ k
-Y4-
Задача 18.27. Трифилярный подвес состоит из диска радиуса R
и массы иг, подвешенного на трех симметричных нитях одинаковой
длины I. Нити прикреплены на расстоя-
расстоянии г от центра диска. Определить соб-
собственную частоту малых колебаний диска,
происходящих около вертикальной оси,
проходящей через центр диска.
Решение. Обозначим малый угол
поворота диска вокруг центральной вер-
вертикальной оси через ф и малый угол,
на который при этом отклонилась от
вертикали каждая нить через 1|). С точно-
точностью до малых величин первого порядка
включительно находим
К задаче 18.27.
гц> =
0)
Составим выражение для потенциальной энергии диска. Обозна-
Обозначив вертикальное перемещение диска z, получаем
П
Но
B)
mgz.
Учтя A) и B), находим окончательно
Кинетическую энергию диска будем искать как сумму кинетиче-
кинетической энергии при поступательном вертикальном движении Тх и кине-
ИССЛЕДОВАНИЕ КОЛЕБАНИИ
245
тическои энергии при вращении диска вокруг центральной верти-
вертикальной оси Тг. Тогда
mo* m r*
гае, согласно B) и A),
Далее находим
Сопоставив два слагаемых кинетической энергии системы, замечаем,
что 7"х —величина четвертого порядка малости, которой можно пре-
пренебречь по сравнению с 7 — величиной второго порядка малости.
Потенциальная энергия — также величина второго порядка. Таким об-
образом, полная механическая энергия системы равна
% + П
RV + mg~ фг = const.
Продифференцировав это равенство по времени, находим дифферен-
дифференциальное уравнение малых колебаний трифилярного подвеса
Квадрат собственной частоты системы равен k2 -
Задача 18.28. Груз массы т прикреплен к пружине (рис. а),
коэффициент жесткости которой с. Масса пружины mv Определить
частоту свободных колебаний груза, учтя массу пружины.
т,
т
m
К задаче 18.28.
Решение» Применим для решения этой задачи два пути; энер-
энергетический метод и его модификацию — метод Рэлея.
1) Энергетический метод. Рассмотрим систему в произ-
произвольном положении (рис. б), Пусть в этот момент длина пружины
246 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ [ГЛ. XVIII
равна /. Выделим элемент пружины длиной dy, находящийся на рас-
расстоянии у от точки закрепления. Скорость выделенного элемента
пружины может быть задана различными формулами. Положим, что
скорость элемента пружины vt равна
Z-
A)
где V — скорость груза, прикрепленного на конце пружины. Эта фор-
формула удовлетворяет граничным условиям: если у = 0, то Ф* = 0, что
соответствует точке закрепления; если у = /, то vt t= v,, что соответ-
соответствует скорости конца пружины, скорости rpysa. Однако, как будет
показано далее, формула A) не является единственной формой рас-
распределения скоростей по длине пружины.
Кинетическая энергия системы определится как сумма кинетиче-
кинетических энергий груза и пружины
где dm = («х/0 &У — масса элемента пружины. Вычислив интеграл,
находим
Потенциальная энергия системы равна
П = 1слг*, D)
где х — координата груза, отсчитываемая от положения статического
равновесия.
Система, состоящая из груза и пружины, консервативна. Следова-
Следовательно, полная механическая энергия, равная сумме кинетической и
потенциальной энергий, остается неизменной:
^ + у<^2 = с°Ш5Г- E)
Заметив, что скорость груза равна
вычислим от обеих частей равенства E) производную по времени:
Это и есть дифференциальное уравнение движения груза с учетом
массы пружины. Частота свободных колебаний груэа будет
,-лГ Ъ
§ 7] ИССЛЕДОВАНИЕ КОЛЕБАНИЯ 247
Таким образом, для учета массы пружины достаточно к массе коле-
колеблющегося груза прибавить одну треть массы пружины.
2) Метод Рэлея. Рассмотрим ту же задачу методом Рэлея
(рис. в). Груз т прикреплен к концу пружины массы тх. Натураль-
Натуральная длина пружины /0. В положении О груз находится в равновесии.
Перемещение груза х отсчитывается от положения равновесия. Масса
единицы длины пружины в нерастянутом положении равна mjlo. Рас-
Рассмотрим элемент пружины d\, находящийся (при нерастянутой пру-
пружине) на расстоянии X от места крепления пружины. Перемещение
этого элемента из положения статического равновесия в процессе
движения обозначим s. Будем полагать перемещения х и s малыми
по сравнению с начальной длиной нерастянутой пружины /0.
Тогда кинетическая энергия пружины 7\ выразится формулой
0 б
Для вычисления этого интеграла надо выразить s как функцию вре-
времени и положения, т. е. s=f(t, X). Зависимость перемещения s от
времени возьмем согласно уравнению
s = asin (?*-j-P)> A0)
Тогда максимальное значение скорости элемента
j _. fcs A1)
и максимальная кинетическая энергия пружины получатся подста-
подстановкой A1) в (9)
1 с°
' lmax ==^2~*7~ \5тахЯЛ = АА. \У^)
Здесь для краткости буквой А обозначено отношение максимальной
кинетической энергии пружины к квадрату собственной частоты си-
системы. Для окончательного вычисления интеграла A2) зададимся
зависимостью smax от X. Рассмотрим два случая:
а) т ^> tti\, б) от «^ otj.
В случае а), когда масса груза больше массы пружины, будем
полагать, что максимальное перемещение линейно зависит от %. Обо-
Обозначив через X максимальное перемещение груза, найдем
а) х
Smax ^ Xу- При tn^> ttl\, A3)
это уравнение, как легко видеть, удовлетворяет граничным условиям.
В случае б), когда масса пружины больше массы груза, примем
синусоидальную зависимость максимального перемещения от X. Тогда,
с учетом граничных условий, запишем
б)
S при т^тх. A4)
248 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ (ГЛ. XVIH
Внеся значения A3) и A4) в интеграл A2), находим в этих двух
случаях максимальную кинетическую энергию пружины:
Tl=i- f k*\ (A)s x* d%=1 ^
6)
Итак, если масса груза больше массы пружины, то для получения
максимальной кинетической энергии всей системы к массе груза надо
прибавить одну треть массы пружины. Если же масса груза меньше
массы пружины, то для получения максимальной кинетической энер-
энергии системы к массе груза следует прибавить половину массы пру-
пружины.
Таким образом, максимальная кинетическая энергия всей системы
равна в каждом случае
а)
T~Tt + Tt~^*X*[m + ±m^t A7)
б)
7- = 7'1 + 7'2 = |^a(w+i-»Il). A8)
Переходим к вычислению потенциальной энергии системы. Выбрав
положение статического равновесия за начало отсчета, получим по-
потенциальную энергию системы равной потенциальной энергии пру-
пружины. Для спиральной пружины постоянного радиуса потенциальная
энергия может быть вычислена, как для растянутого или сжатого
стержня. Потенциальная энергия растяжения или сжатия элемента дли-
длиной dk равна
бП = у0Мг<а, A9)
где а — напряжение, е — относительное удлинение, N— площадь попе-
поперечного сечения стержня.
Исключим из A9) напряжение при помощи закона Гука, согласно
которому
о = еЕ, B0)
где Е — модуль упругости при растяжении или сжатии. Тогда фор-
формула A9) преобразуется к виду
6П = -^ЛЖеа<а. B1)
Абсолютное упругое удлинение Л стержня под действием растяги-
растягивающей силы F равно
А
§ 7] ИССЛЕДОВАНИЕ КОЛЕБАНИЯ 249
Отсгам коэффициент жесткости выражается формулой
'-Т-ТГ- <23>
Исключив при помощи этого соотношения из B1) произведение NE,
получим
с/е^Я. B4)
Относительное удлинение рассматриваемого элемента пружины равно
Внеся это значение в B4) и проинтегрировав по всей длине пружины,
находим потенциальную энергию системы
B6)
Для вычисления максимума потенциальной энергий примем, как и
раньше, зависимость s от % согласно A3) для случая а и согласно
A4) для случая б. Тогда мы в рассматриваемых случаях гоответст-
венно получим
I
сХ* B7)
п—Kt
Сопоставив полученные два выражения для максимальной потен-
потенциальной энергии пружины, замечаем, что в случае, когда масса пру-
пружины болыие массы колеблющегося груза, максимальная потенциаль-
потенциальная энергия-системы больше в я2/8 = 1,234 раза.
Для нахождения собственной частоты колебаний системы прирав-
приравниваем (в каждом случае отдельно) максимальные значения кинети-
кинетической и потенциальной энергий:
а)
| **** (т + 1 OTl) - 1 сХ*, B9)
i- k*X* [m + |«,) - 1 ^ сЛ». C0)
Отсюда находим собственную частоту:
а)
б)
А = Т1/*^ЬГГ ПРИ
250
ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ
[ГЛ. XVIIT
Результат C1) совпадает с полученным ранее первым путем зна-
значением собственной частоты (8). Этого и следовало ожидать, так как
в обоих случаях распределение перемещений и скоростей вдоль пру-
пружины принято линейным.
Значение собственной частоты колебаний в случае, когда масса
груза меньше массы пружины C2), можно сравнить с известным точ-
точным значением собственной частоты колебаний пружины без груза.
Положив в C2) значение т = 0, имеем
что совпадает с точным решением. Если положить м = 0в формуле
C1) и сопоставить с C3), то ошибка в этом случае может достигать
десяти процентов.
Заметим, что обе формулы C) и C2) дают одинаковое значение
собственной частоты при /я1/от = 2,63. Следовательно, формулой C2)
следует пользоваться при значениях /их/от>2,63.
§ 8. Метод механического импеданса
Метод механического импеданса позволяет быстрее и проще, по
сравнению с классическим методом (интегрирования дифференциаль-
дифференциальных уравнений движения), рассчитать установившееся движение линей-
линейной системы, подверженной гармоническому возмущающему воздей-
воздействию. Он применим к линейным системам с одной и несколькими
степенями свободы. Прежде чем излагать сущность метода, остано-
остановимся вкратце на векторном представ-
представлении гармонических величин.
Рассмотрим на комплексной плоско-
плоскости Оху вектор Z постоянной длины Z,
исходящий из начала координат и вра-
вращающийся вокруг него с постоянной
угловой скоростью ш (рис. 18.3). Про-
Проекции вектора на действительную
(ось х) и мнимую (ось у) оси в любой
момент времени равны соответственно
OP=>x(t) = Z cos at, (I*)
OQ =y (t) = Z sin at B*)
Pncf 18.3.
и представляют собой гармонические
функции с амплитудой Z и круговой
частотой ы. Сам вектор Z может быть представлен в виде комп-
комплексного числа в тригонометрической или показательной форме:
Z= Z(cos со* 4-' sin ©О = Ze'ffl(. C*)
Переход от одной формы записи к другой основан на известной
5 8] МЕТОД МЕХАНИЧЕСКОГО ИМПЕ&АНСА
формуле Эйлера
251
Теперь функции A*) и B*), описывающие гармонические движения,
можно представить как вещественную часть и мнимую часть (коэф-
(коэффициент при / функции C)), т. е.
х (t) = Re [Zelat], D*)
у (t) = Im [Ze1**]. E*)
При этом имеют место соотношения
F*)
а также
и т. д.
Поскольку
G*)
(8*)
(9*)
dt
{1еш) =
= laZ,
я т. д.,
то, очевидно, что каждому дифференцированию вектора Z соответ-
соответствует умножение его длины на <а и поворот на 90° против хода
часовой стрелки. На рис. 18.4 изоб-
изображен вектор Z, а также его пер-
первая и вторая производные(ш = 0,7).
В более общем случае, когда
вектор Z имеет вид
7 = 7el (<*t-y) (\О*\
удобно ввести понятие комплекс-
комплексной амплитуды Z, имея в виду
соотношение
Так как из A1*) следует, что
Z = Ze-'v = Z(cos v - ^ sin y), A2*)
то действительная амплитуда Z равна модулю комплексной ампли-
амплитуды Z, т. е.
Z=|Z|. A3*)
При решении задач часто приходится рассматривать несколько
векторов, вращающихся вокруг начала координат с одной и той же
Рис. 18,4.
252 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ [ГЛ. XVIII
угловой скоростью со. Естественно, что в этом с луча* представляет
интерес только их взаимное расположение. Поэтому соответствующую
векторную диаграмму строят в какой-то фиксированный момент вре-
времени, например при t = 0. Положение вектора A0*) в момент t — 0
совпадает с положением вектора, изображающего комплексную ампли-
амплитуду A2*).
Из алгебры известно, что сложение и вычитание двух и более
комплексных чисел равносильно сложению и вычитанию изображаю-
изображающих эти числа векторов. Поэтому при сложении вращающихся с одной
и той же угловой скоростью векторов можно пользоваться правилом
параллелограмма.
На этом, однако, аналогия между комплексными числами и век-
векторами заканчивается. Так, умножение комплексных чисел и умноже-
умножение векторов совершенно различные операции, а делению комплекс-
комплексных чисел в векторной алгебре не соответствует вообще никакая
операция.
При решении линейных дифференциальных уравнений введение
комплексных показательных функций вида Ze'(<B/"'v) вместо действи-
действительных гармонических функций вида Z cos (tat — у) или Zsin(<o? — у),
как правило, значительно упрощает выкладки и оказывается весьма
полезным. При этом используется следующая важная теорема.
Если линейное уравнение
d*x , . dn-гх , , . dx , _F{t) A4,}
1П
имеет действительные коэффициенты а^*) и Fz=Fi + iF2, где /^ и
Ft также действительны, то его ре-
решение будет комплексным: х =
= x1-\-ix2> причем хь и лс2 будут
решениями уравнения A4*) с пра-
правой частью, равной Соответственно
Р1 и Pv
Метод механического импеданса
I основывается на этой теореме, а
I # также на том обстоятельстве, что
iF-suibtt установившееся движение линейной
I системы, подвергающейся гармониче-
'г скому возмущению частоты ©, опи-
Рис 18.5. сывается гармонической функцией
той же самой частоты и. Поэтому
для определения этого движения достаточно найти соответствующую
комплексную амплитуду.
Рассмотрим общ«й -случай линейной системы с одной степенью
свободы, поднимающейся синусоидальному возмущающему воздейст-
воздействию (рис. 18.5). Точка О обозначает положение статического равно-
•) Они могут быть постоянными или функциями L
; 81 МЕТОД МЕХАНИЧЕСКОГО ИМПЕДАНСА 253
весия, от которого отсчитывается координата х массы т. Жесткость
пружины обозначена буквой с, а постоянная демпфера (коэффициент
пропорциональности) — буквой а. Движение рассматриваемой системы
описывается уравнением
A5*)
Введем комплексную возмущающую силу
F = FeM. A6*)
Очевидно, что действительная возмущающая сила
Fsinco* = ImF. A7*)
Установившееся движение системы происходит с той же частотой ©,
но отстает от возмущения на фазовый угол q>. Поэтому комплексную
координату записываем в виде {10*)
). A8*)
Тогда на основании сформулированной выше теоремы действительное
перемещение найдется как
x(t)=lmX=Xsin((at-y). A9*)
Расчет установившегося движения системы сводится, таким образом,
к определению комплексной амплитуды перемещения X=Xe~i<r, что
равносильно нахождению величин
Х**{Х\ И Ф = — argX B0*)
Для этого следует комплексную функцию, стоящую в правой части
равенства A8*), представить в виде Хеш, найти ее первую я вторую
производные по времени t{X от времени не зависит) и подставить
эти величины в левую часть уравнения движения A5*) вместо х, х
и х соответственно, а правую часть уравнения записать в виде Fet№t.
Тогда после сокращения на eim находим
Зная комплексную амплитуду B1*), нетрудно написать формулы для
действительной амплитуды X и фазового угла <р, используя формулы
B0*). Имеем
F [F
(с-тсо») + 1<ш I ~ У (с-тш2)*+(ото)»
(модуль частного равен частному модулей) и
Л = afCtg c~^
254 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЯ [ГЛ. XVIII
(argi=— argZ, где 2—любое комплексное число]. Подставив най-
найденные значения X и ф в уравнение A9*), найдем установившееся
движение системы.
При решении конкретных задач с числовыми данными нет смысла
пользоваться готовыми формулами B2*) и B3*), которые пришлось
бы в этом случае запомнить. Лучше, проделав все выкладки, найти
комплексную амплитуду X, а потом определить модуль и аргумент
полученного числа.
Если возмущающая сила была бы задана в виде F cos cor, то вместо
A7*) мы имели бы
Fcosa>t = ReF, A7'*)
а вместо A9*)
x(t) = ReX = X*os(<ut-<[>). A9'*)
Все остальное остается без изменения.
Трехчлен с-\-1аш — та>2, стоящий в знаменателе выражения B1*),
называется полным импедансом рассмотренной колебательной системы,
а величины (—/и<й2), ta<s> и с — импедансами элементов массы, демп-
демпфирования и упругости. Таким образом, импеданс элемента упругости
равен упругой постоянной этого элемента, импеданс элемента демп-
демпфирования равен коэффициенту затухания, умноженному на to, а им-
импеданс элемента массы равен массе, умноженной на (—©8). Полный
механический импеданс (полное механическое сопротивление)системы
равен сумме импедансов ее элементов.
Заметим, что размерность механического импеданса определяется
как сила, деленная на перемещение. В электротехнике используется
аналогичное понятие электрического импеданса.
Задача 18.29. Уравнение движения системы, показанной на рис. а,
имеет вид
m$ + aJt + cx = F sin at. A)
Рассматривая на основании принципа Даламбера это уравнение как
уравнение равновесия сил, представить эти силы в виде вращающихся
векторов. Определить положение векторов, когда: 1) масса т дви-
движется вниз и находится ниже положения статического равновесия О;
2) масса т движется вверх, но находится ниже точки статического
равновесия О; 3) масса т движется вверх и находится выше точки
статического равновесия О; 4) масса т движется вниз, но находится
выше точки статического равновесия О. Показать графически, что
уравнение A) удовлетворяется во всех этих случаях, приняв да=10 кг;
а = 300 н-сек/м; с = 600 н/м; F±=50 н; о = 2 рад/сек.
Решение. При построении векторных диаграмм нам понадо-
понадобятся величины амплитуды перемещения X и фазового угла <р. Для
МЕТОД МЕХАНИЧЕСКОГО ИМПЕДАНСА
а>
оо
а.
ы
1
•si
2S5
256 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ [ГЛ
их вычисления воспользуемся непосредственно формулами B2*) и
B3*). Имеем
F ^0
К(ста>»)<» + (атJ КE001022J+C002)* '
52°30'-
На рис. <Г представлены векторы перемещения X, скорости iaX и
ускорения (—аРХ) для четырех состояний массы т, указанных в усло-
условии задачи. Действительно, в случае 1), например, перемещение и ско-
скорость массы положительны, так как они направлены вниз, а ускоре-
ускорение отрицательно, так как направлено вверх. Поскольку в дайной
задаче х = 1га X, х = Im [iaX] и х = Im [—<л%Я\ то рис. б полностью
соответствует этому состоянию системы. Точно так же можно убе-
убедиться в соответствии рис. в, г и д состояниям 2), 3) и 4).
При построении силовых диаграмм надо учесть следующее. Упру-
Упругая (восстанавливающая) сила сх пропорциональна перемещению х
и всегда противоположна ему по знаку. Демпфирующая сила ах про-
пропорциональна скорости и направлена в противоположную сторону.
Наконец, инерционная сила тЯ пропорциональна ускорению и, опять-
таки, противоположна ему по направлению. Поэтому векторы, соот-
соответствующие этим трем силам, будут равны (—сХ), (—iouoX) и тагХ.
Нетрудно вычислить их длины:
| — сХ | = сХ= 500 ¦ 0,066 = 33 н,
| — iau>X\ =асоЛГ= 300 ¦ 2 ¦ 0,066 = 39,6 н,
= 10 • 22 ¦ 0,066 = 2,64 «.
Пользуясь этими данными и кинематическими диаграммами на
рис. б, в, г и д, строим силовые диаграммы для всех четырех состо-
состояний системы: рис. е, ж, з, и.
Поскольку четыре силы, представленные на каждой диаграмме,
находятся в равновесии, их векторная сумма равна нулю, т. е. они
должны составлять замкнутый многоугольник. Такой многоугольник
достаточно построить только один, ввиду того, что диаграммы на
рис е, ж, з, и отличаются одна от другой только углом поворота
относительно координатных осей. На рис. к построен силовой мно-
многоугольник для момента времени t = ф/со, так что at — q> = 0. В лю-
любой другой момент времени этот многоугольник будет повернут отно-
относительно начала координат на некоторый угол, как твердое целое.
Из рисунка видно, что силовой многоугольник замкнутый, поэтому
уравнение A) удовлетворяется во всех указанных в условии задачи
случаях.
Задача 18.30. Движение колебательной системы описывается
уравнением
+ F A)
j 8] МЕТОД МЕХАНИЧЕСКОГО ИМПЕДАНСА 257
Определить установившееся движение системы методом механического
импеданса.
Решение. Вместо действительной возмущающей силы
введем комплексную
Очевидно, что
? B)
Комплексное перемещение запишем с учетом равенства частот и от-
отставания по фазе б виде
X — Хе* («>'+v-<p) \
где X = Xe~i<f — комплексная амплитуда перемещения.
Комплексная скорость равна
а комплексное ускорение равно
Хе{ «* + v) = _
Подставляя в уравнение A), вместо действительных возмущающей
силы, перемееиеяяя, скорости и ускорения, соответствующие комплекс-
комплексные величины, получим
(— та* + to© + с) Хе1 «*+« =
Сократив на e*(«'+v^ найдем
с—тш*+1<ш
Из последнего соотношения определяем амплитуду установившихся
колебаний
х-Щ— F C)
и отставание по фазе
•р: arg^^arctg-^^- D)
(сравнить с формулами B2*) и B3*)).
Учтя соотношение B), запишем уравнение установившегося дви-
движения системы в виде
где X и ф определяются равенствами C) и D).
? М. И: Бать н др., т. Ш
258 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XVIII
Задача 18.31. Машина весом 225 н смонтирована на пружинах
и демпферах, как показано на рисунке. Общая жесткость пружин
равна 17 559 к/л*. Общий коэффициент затухания Z5Q н-сек/м.
Точка О соответствует положению статиче-
статического равновесия.
Определить методом механического им-
импеданса установившуюся реакцию системы,
если к машине приложена возмущающая сила
88 cos 35^ я.
Решение. По условию задачи имеем
т = |щ- = 23 кГ, а = 350 нсек/м,
К задаче 18.31. с в п ббб н/м; F = 88 н, и = 35 рад/сек.
Подсчитываем полный механический импеданс системы:
с — та2 J^taa — n 550- 23- 35а + *- 350-35 = — 10620 +/12 250 =
, . 12 250
— /arctgf
= ]/10 620а+12 2502 • е~~ *ш ем e 16 200e~°-a№l.
Согласно уравнению B1*) комплексная амплитуда перемещения равна
= ле .
Отсюда сразу следует, что действительная амплитуда колебаний
равна
Х=0,00543 м = 5,43 мм,
а фазовый угол равен
ф = _ 0,855 jpad = — 49°.
Поскольку возмущающая сила косинусоидальная, то и перемещение
записываем в виде
х (t) = X cos (atf — <р)
или окончательно
х @ = 0,00543 cos C5* -f 0,855) м.
Задача 18.32. Составить уравнение движения для системы, пока-
показанной на рис. а, и определить установившееся движение этой системы
методом механического импеданса.
Решение. На рис. бив показаны силовые схемы для массы
т и демпфера а соответственно. На основании первой схемы пишем
уравнение движения массы т:
тх -j- а (х — jta) + ex -f cx (x — x x)=0,
МЕТОД МЕХАНИЧЕСКОГО ИМПЕДАНСА
359
подставив вместо хх заданное синусоидальное перемещение, получим
mX+a(jt—jtt) + (c+c1)x = c1X1stni»t, A)
Демпфер а и пружина сг соединены последовательна Поэтому демп-
демпфирующая сила равна силе натяжения пружины, т. е.
*д-ькг B)
Можно исключить из этих уравнений координату демпфера хь под-
подставив в уравнение A) в места а(л —jc») его значение, взятое из B),
сх
т
а.
Сгхг
6)
в)
К задаче 18.32.
и решив полученное таким образом уравнение относительно х2- Имеем
тх -\- с2х2 -4- (с + ci) х — ctXi sin (at,
откуда
1
дг2 = — foA^ sin юг — тх — (с + сг)х]. C)
Продифференцировав равенство C) по времени и подставив резуль-
результат в A), получим
тх + ах — —
Х cos Ы — тЛ—(с
или после несложных преобразований
= <"А sin at
D)
Таким образом, движение рассматриваемой системы описывается си-
системой уравнений A) и B) или одним уравнением третьего поряд-
порядка D).
Правая часть уравнения D) имеет вид A cos <ot-\-В sin at и может
быть, как известно, записана в виде одной гармонической функции
A cos Ы + В sin Ш = С sin (Ш + а),
9»
260 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ 1ГЛ. XVIII
где С ят у А * + В2 — амплитуда, а а = arctg (А/В) — фазовый угол. Пе-
Переписав правую часть уравнения D) в виде одной гармонической
функции, можно применить к этому уравнению метод механического
импеданса для нахождения установившейся реакции системы.
Можно, однако, поступить и иначе —применить метод механиче-
механического импеданса непосредственно к уравнению D) дважды, каждый
раз оставляя в правой части одно из двух стоящих там слагаемых.
Поскольку уравнение D) линейное, то сумма найденных таким обра-
образом решений даст на основании принципа суперпозиции (принципа
наложения решений) искомую установившуюся реакцию системы.
Существует еще и третий путь, в данном случае наиболее удоб-
удобный. Его мы и будем придерживаться. Применим метод механического
импеданса прямо к системе уравнений A) и B). Для этого введем
комплексное возмущение с^е'**, а соответствующие_комплексные
перемещения запишем в виде Хеш и Х^ш, где X и Хг — комплекс-
комплексные амплитуды. Подставив эти величины в уравнения A) и B), по-
получим после сокращения на еш систему двух линейных алгебраиче-
алгебраических уравнений относительно неизвестных X и Х2, а именно
— та>*Х+1<ш (Х-
или
(с + ci — от<
— 1ав>Х-\- (ct — laa) Xz = 0,
Полученную систему уравнений решаем с помощью теоремы Крамера.
Находим определитель системы
Д = (с -f- c-i — ямо* -j- /оса) (са + taco) + ага>2,
или после упрощений
Д = с% {с -\- еу — та3) + lata (с + «i + С2 — тих2).
Определители для неизвестных X а.Хъ равны
Следовательно,
~y __х i
у
3"~ Д ~ ,c3(c+ct—mafy+iauotc+Cx+Ci—mcoa) '
Из двух последних уравнений можно найти действительные ампли-
амплитуды X и Xs и фазовые углы q> и <pa> учитывая, что
Х=*Хе-1* и ~Х% = Хге-ъ*.
МЕТОД МЕХАНИЧЕСКОГО ИМПЕДАНСА
261
Формулы для этих величин приводить не будем ввиду их громозд-
громоздкости. Зная действительные амплитуды и фазовые углы для обеих
координат системы и прмня, что возмущение синусоидально, записы-
записываем установившиеся реакции системы в виде
x=-Xsin(a>t — ф),
хг=Хг sin {at — фа).
Задача 18.33. На горизонтально натянутой невесомой струне
(см. рис. а) закреплены две массы тх и т%, к первой из которых
приложено вертикальное синусоидальное возмущение F sin wt. Соста-
Составить уравнение малых колебаний системы, считая натяжение 5 струны
I Fsinut
К задаче 18.33.
постоянным, и определить установившееся движение методом меха-
механического импеданса.
Решение. На рис. б изображена система, выведенная из со-
состояния статического равновесия. Составляем дифференциальные урав-
уравнения движения обеих масс в вертикальной плоскости;
i о
(О
B)
(В этих уравнениях синусы малых углов заменены тангенсами,)
После несложных преобразований уравнения A) и B) принимают вид
F sin at,
D)
Пользуясь методом механического импеданса для определения уста-
установившегося движения, подставим в уравнения C) и D) Реш вместо
F sin at, Htf1®1 вместо xt{t) и Х^еш вместо X2(f), где Л^ и ~Хг —
комплексные амплитуды перемещений xt и хг. Сократив на еш а.
262 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЯ СИСТЕМЫ П71. XVIII
преобразовав уравнения, получим
\-Р, E)
?,-0. F)
Комплексные амплитуды Xt и Хг определяются из этих уравнений
с помощью правила Крамера. Определитель системы равен
Определители для неизвестных Х± и Х2 равны соответственно
ДX =
Ат,=
F
0 5
5 (т
г р
0
Комплексные амплитуды найдутся так:
_ А^ — дх
Заметим, что все коэффициенты уравнений E) и F) — вещественные
величины. Поэтому и комплексные амплитуды Хх = Xte~iv* и Хг =
= XtfTW* в данном случае действительные. Это означает, что фазо-
фазовые углы <рх и <ра могут равняться либо нулю, если соответствую-
соответствующая комплексная амплитуда положительна, либо 180°, если она отри-
отрицательна. Таким образом, колебания могут либо совпадать по фазе
с возмущающей силой, либо находиться с ней в противофазе. Это
замечание относится ко всем системам без демпфирования.
Поскольку возмущающая сила синусоидальна, то установившееся
движение будет также синусоидальным:
Х2 = Хъ%\п(Ы— фа),
Xi = \Xi\> Хг=\Хг\—действительные амплитуды.
МЕТОД МЕХАНИЧЕСКОГО ИМПЕДАНСА
263
1 -
Отметим еще, что если возмущающие воздействия приложены
к обеим массам, то задача решается аналогично с использованием
принципа суперпозиции.
Задача 18.34. В условиях предыдущей задачи, положив /1=:/2=г
= /3 = l> ttti — **g = in, опреде-
определить собственные частоты и глав-
главные формы колебаний. Построить
амплитудно-частотные характерис-
характеристики системы.
Решение. Собственные ча-
частоты находятся как корни урав-
уравнения Л = Д (<о) = 0. Оно имеет
вид (см. уравнение G) в преды-
предыдущей задаче)
2S —та*J — — = 0 A)
Для упрощения последующих j?^
а)
¦J
\
1 J
S)
Ч^
К задаче 18.34.
выкладок введем безразмерную частоту по следующей формуле:
со ,2)
Ш
Тогда вместо уравнения A) получим
B — га>а — 1 == 0,
или
C)
Отсюда находим rf =¦ 1, г\ — Ъ я, следовательно,
264 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ 1ГЛ. XVIII
Собственные частоты системы равны
lm' Щ У tm'
Комплексные амплитуды равны (см. предыдущую задачу)
П 2-г>
2S Л* 5» ~~ S " г*-
а действительные амплитуды
Л о
1
G)
В выражениях G) и (8) под знаком модуля стоят вещественные ве-
величины. Поэтому фазовые углы q>x и <р2 могут быть равны 0° или
180° в зависимости от того, положительно или отрицательно соот-
соответствующее число.
Отношение комплексных амплитуд равно
S 2r.
Подставив сюда значения собственных частот D), находим отношения
действительных амплитуд главных форм колебаний
фь = 2 — 1 ==« 1 при га=1,
{1=^2-3 =—1 при га = 3.
Соответствующие главные формы колебаний показаны на рис. а и б.
Для построения амплитудно-частотных характеристик системы
воспользуемся уравнениями E) и F). Задаваясь различными значе-
значениями безразмерной частоты г, находим соответствующие значения
безразмерных комплексных амплитуд ~Xxl{^P\ и Xj(^). Результаты
вычислений сведены в табл. 1. По данным табл. 1 построены кривые,
показанные на рис. в. Сплошные линии соответствуют положитель-
положительной комплексной амплитуде, т. е. нулевому фазовому углу, штрихо-
штриховые линии ~ отрицательной комплексной амплитуде, т. е. колебаниям
в противофазе.
5 91
ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ
265
Таблица 1
г
0
0,5
0,75
1.0
U
1.2
1,3
V2
0,667
0,838
1,34
00
-2,10
—0,816
-0,343
0
*/(?)
0,333
0,485
0,935
оо
-2,66
-1,46
—1,105
-1,00
г
1,5
1,6
Кз
1,9
2,0
2,5
3,0
4,0
*/№)
0,266
0,816
оо
—1,012
—0,667
—0,249
—0,146
—0,072
-1,065
—1,46
оз
0,628
0,333
0,0586
0,0208
0,005
§ 9. Влияние гироскопических сил и сил вязкого сопротивления
на свободные и вынужденные колебания твердого тела
с двумя степенями свободы
1°. Влияние гироскопических сил на свободные
колебания твердого тела. При составлении дифференциаль-
дифференциальных уравнений малых колебаний с учетом гироскопических сил можно
применять теорему об изменении главного момента количеств движе-
движения относительно неподвижных осей координат
k = l
где Lx, Ly, Lt-~ главные моменты количеств движения относительно
л
неподвижных осей координат х, у, г; ^ т (F%) — главные моменты
внешних сил относительно тех же осей.
Если осесимметричное твердое тело, имеющее неподвижную точку,
вращается с большой угловой скоростью ш вокруг оси симметрии,
которая совпадает при равновесии тела с неподвижной осью х, то
с точностью до величин первого порядка малости главные моменты
количеств движения относительно неподвижных осей координат будут
B*)
где А — момент инерции твердого тела относительно оси симметрии,
В — момент инерции относительно любой оси, перпендикулярной к оси
симметрии и проходящей через неподвижную точку, р4 — малый угол
поворота оси симметрии, отсчитываемый от неподвижной оси х в пло-
плоскости ху, у —малый угол поворота оси симметрии, отсчитываемый
от неподвижной оси х в плоскости xz.
263
МАЛЫХ ДВИЖЕНИЯ СИСТЕМЫ
1ГЛ. xvrn
При решении задач на свободные колебания
твердого тела, вращающегося вокруг своей оси,
рекомендуется следующий порядок действий:
1) выбираем две системы координат — неподвижную и подвиж-
подвижную—с началом в неподвижной точке;
2) вычисляем главные моменты всех внешних сил относительно
неподвижных осей х, у, z и главные моменты количеств движения
относительно этих осей;
3) пользуясь теоремой об изменении главного момента количеств
движения относительно осей х, у, г, находим дифференциальные
уравнения малых колебаний системы;
4) задаемся частным решением системы и подставляем его в диф-
дифференциальные уравнения движения. Находим уравнение частот, из
которого определяем собственные частоты системы;
5) находим далее отношение амплитуд колебаний, соответствую-
соответствующих каждой частоте;
6) составляем уравнения первого и второго главных колебаний
и общее решение как сумму главных колебаний.
Задача 18.35. Ротор, имеющий неподвижную точку О, вращается
с угловой скоростью о вокруг оси симметрии Ос и совершает малые
колебания вокруг неподвижных осей
у, г. Найти главный момент ко-
количеств движения ротора с точно-
точностью до величин первого порядка
малости. Момент инерции ротора
относитедано оси Ос равен А, а от-
относительно главных осей инерции
а и b равен В.
Решение. Выберем неподвиж-
неподвижную систему координат хуг с на-
началом в неподвижной точке О и
подвижную систему осей а, Ь> с,
являющихся главными осями инер-
инерции твердого тела в точке О. Най-
Найдем пересечение плоскости ас с пло-
плоскостью лгу —линию узлов ON и будем определять положение под-
подвижной системы осей при помощи углов Р и у.
Тогда составляющие угловой скорости ротора будут: <о, направ-
направленная по оси Ос, Р, направленная йо оси z, у, направленная в отри-
отрицательную сторону оси Ob. Находим проекции угловой скорости
ротора на главные оси инерции а, Ь, с.
N
К задаче 18.35.
Полагая углы р* и у, а также их производные малыми величи-
величинами первого порядка, найдем значения проекций угловой скоросх*
««I
ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ
267
на главные оси инерции с точностью до малых величин первого по-
порядка включительно. Тогда sinY***?, cosyc^l и далее
©о = р\ щ — — у*
Главные моменты количеств движения относительно главных осей
инерции abc будут
Ie = Bp, Lb=* — By, Lc^A(u.
Далее находим проекция главного момента количеств движения на
неподвижные оси:
Lx = Lc cos у cos P — La sin у cos p — Lb sin P «^ Aa> — Bfyy + ByP»
Ly=Le cos y« sin P — La sin у sin
1г = Lc sin 7+to cos у я«
Отбросив члены, порядок малости которых выше первого, окон-
окончательно получим
1ж = Д<о, Lj, = A©P — By,
Задача 18.36. Горизонтальный вал массы М вращается с по-
постоянной угловой скоростью ш вокруг оси симметрии. Левый конец
К задаче 18.36,
вала вращается в шарнирно закрепленном самоустанавливающемся
подшипнике, который может свободно поворачиваться вокруг центра О.
268 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ [ГЛ. XVIII
Правый конец вала вращается в упруго закрепленном подшипнике А
Коэффициент жесткости с упругого поля, в котором перемешается
правая опора А, одинаков в любом направлении, перпендикулярном ОА.
Центр тяжести вала находится в точке С (рис. а) на расстоянии 4
от точки О и на расстоянии /2 от опоры А. Расстояние между опо-
опорами /. Главные центральные моменты инерции вала: А — относи-
относительно его продольной оси О А и В — относительно любой оси,
перпендикулярной ОА и проходящей через центр тяжести С. В гори-
горизонтальном положении вал находится в положении статического
равновесия.
Найти малые колебания вращающегося вала около положения
равновесия.
Решение. Выберем неподвижные оси координат xyz (рис. а)
с центром в неподвижной точке О, направив ось х вдоль оси вала в
положении статического равновесия, ось .у — в горизонтальной плоскости
и ось z — вертикально. Оси xyz образуют правую систему координат.
Для вывода дифференциальных уравнений свободных малых ко-
колебаний ротора воспользуемся теоремой об изменении главного мо-
момента количеств движения в проекциях на неподвижные оси х, у, z A*).
Значения Lx, Ly, Ьг получены в предыдущей задаче. Так как, согласно
условию, вал вращается вокруг оси симметрии с постоянной угловой
скоростью со, то Lx — A<u = const. Проекции главного момента коли-
количеств движения (кинетического момента) на неподвижные оси у, z
равны
A)
B)
где (рис. б) смещенное произвольное положение вала вполне опре-
определяется координатами у, z правой опоры вала. Действительно,
малые углы у и р\ образованные смещенной осью вала с неподвиж-
неподвижными координатными плоскостями ху a xz, с точностью до малых
величин первого порядка малости равны
р-4, C)
V-T- D>
Координаты центра тяжести ус, zq также могут быть выражены
через у, г:
Ус=У11, E)
Выражение (В-\-М1\) представляет в A) и B), согласно теореме
Штейнера, момент инерции вала относительно любой оси, перпенди-
5 в] ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ 269
кулярной оси вала и проходящей через шарнир О. Так как отклоне-
отклонения вала отсчлтываются от положения статического равновесия, где
вес вала уравновешен реакциями шарнирной и упругой опор, то
проекции главного момента внешних сил на неподвижные оси коор-
координат равны
п
л
s — cyl, (8)
где проекции реакции упругой опоры равны
К су, (9)
Fl^ — cz. A0)
Подставив в уравнение A*) значения проекций кинетического момен-
момента A) и B) и проекций главного момента внешних сил G) и (8),
освободившись далее от углов р" и 7 при помощи формул C) и D),
получим дифференциальные уравнения свободных малых колебаний
вала около* положения статического равновесия
¦0.1
.0./
<П)
Здесь — Лсор и -+¦ А®2 — гироскопические члены.
Решение этой системы однородных линейных дифференциальных
уравнений с постоянными коэффициентами ищем в виде
у = a cos (pt -fa), г = Ь sin (pt -f a). A2)
Подставив эти значения переменных и их производных в уравнения
A1), сократив ватем уравнения соответственно на stn(pt+a) и
cos(p*-f-a), получим систему алгебраических уравнений для опреде-
определения постоянных
Система A3) имеет нетривиальное решение, когда определитель равен
нулю. Отсюда получаем частотное уравнение
А*®У - [сР - (В + М%)рл]2 - 0. A4)
Корни этого уравнения определяют собственные частоты малых коле-
колебаний вала. Если подставить эти корни в уравнения A3), то можно
найти отношение амплитуд колебаний а[Ь. Проще всего найти корни
Отсюда следует, что существует два типа главных, или нормальных
колебаний вала. Частоты первого главного колебания определяются
и» уравнения
(В + Mlftp* - А<вр - сР - 0.
Решив это квадратное уравнение, находим первые две собственные
частоты
Щв+Ш\) •
Так как значения частот A6) не обращают в нуль первый сомно-
сомножитель во втором уравнении A5), то им соответствует равенство
а — 6 = 0, или а = Ь. A7)
Частоты второго главного колебания находятся из уравнения
(B+Mlf)p* + Aa)p-cP = O, A8)
откуда
_ А*УАЫ+4с
Ря>*= щв+щ
Значения частот A9) не обращают в нуль первый сомножитель в пер-
первом из уравнений A5). Следовательно, им соответствует равенство
=Ъ, ила а = —Ь. B0)
Заметив, что
Л=—А» А-«—Л B1)
заключаем, что существует два типа главных колебаний вала. Пер-
Первый тип главных колебаний описывается формулами
y = a1sin(p1f+ad, г = at cos (pit -f a^. B2)
Второй тип главных колебаний определяется выражениями
у = a2 sin (ptt + а2), z = — а2 cos (p4f + aa). B3)
При главных колебаниях первого типа точка А будет описывать
окружность, вокруг аеягра, расположенного на оси jr. Движение
точки А при этой совпадает по направлению с собственным враще-
вращением; тела. Это движение называют прэмой регулярной прецессией*
270 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ [ГЛ. XVTTI
уравнения частот A4) следующим образом. Сложив я вычтя равен-
равенства A3), найаем
a2), \
— oa cos (ptt + a2). J
Четыре произвольных постоянных интегрирования af, a2, аь Оа
находятся по начальным условиям движения — значениям у, z, у, г
при * = 0.
Если положить в уравнении A4) угловую скорость собственного
вращения вала w равной нулю, то уравнение
(В + М^)р2-сР = 0 B5)
определит собственную частоту невращающегося вала
сР
p*~±Y'i
Сравнив положительные значения собственных частот вращающегося
вала со значением собственной частоты невращающегося вала, на*
ходим, что они располагаются в следующем порядке:
Pi>+Po>Pa-
Как показывает проведенное исследование, учет действия гиро-
гироскопических сил приводит к удвоению числа собственных частот.
С увеличением угловой скорости вала значения частот рх и pt все
больше и больше отличаются от величины р0 (рис. в). Заметим, что
отрицательные значения корней частотных уравнения р%, р3 приводят
к решениям, линейно зависимым от выше найденных, и, таким обра-
образом, не вносят ничего нового.
2°. Влияние вязкого трения и гироскопических
сил на свободные колебания твердого тела. В п. 1°
этого параграфа было рассмотрено влияние гироскопических сил на
свободные колебания системы с двумя степенями свободы. При этом
не учитывались диссипативные силы, которые в виде вязкого сопро-
сопротивления среды, сухого трения и внутреннего трения в материале
всегда сопутствуют движению. Ив всех разновидностей диссипативных
сил, учитывая значительное распространение этих сил в технике, мы
рассмотрим в этом пункте только силы вязкого трения.
В добавление к тому, что было сказано в п. 1° относительно
составления дифференциальных уравнений малых колебаний системы,
следует учесть при составлении главного момента внешних сил и
При втором типе главных колебаний точка А описывает окруж-
окружность вокруг центра, находящегося на оси х, в направлении, обрат-
обратном собственному вращению вала. Такое движение называют обратной
прецессией.
Общее решение дифференциальных уравнений, определяющих сво-
свободные колебания вала, складывается из двух главных колебаний
«aj .влияние гироскопических сия 271
272 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ 1ГЛ. XVIII
момент сил вязкого трения. Эти силы считают пропорциональными
первой степени скорости и направленными прямо противоположно
скорости.
Покажем, как учитывается влияние вязкого трения на примере
решения задачи о малых колебаниях вала.
Задача 18.37. В условиях задачи 18.36 определить малые коле-
колебания вала, полагая, что силы вязкого трения создают моменты:
относительно оси у равный ( + yi) и относительно оси z равный
( — уJH где я — некоторый постоянный коэффициент.
Решение. Согласно теореме об изменении главного момента
количеств движения вала относительно осей у, z имеем
Внеся в эти уравнения значения р и. у, полученные в предыдущей
задаче, получаем дифференциальные уравнения малых колебаний вала
в виде
O,
(В + Mil )$ + Аа>г + пу + сРу = 0.
Для интегрирования этой системы дифференциальных уравнений вве-
введем комплексную переменную "K = z-\-iy. Умножив второе уравнение
B) на i и сложив его с первым уравнением B), лолучим
(? + Л4ф?+(л + Мш)А + <ДО1-0. C)
Это линейное дифференциальное уравнение с постоянными коэф-
коэффициентами. Для его интегрирования составляем характеристическое
уравнение
2M4 /a 0 D)
и находим его корни
-(п+1АЩ ±
*1а
Сокращенно эти корни могут быть записаны в виде
~(n+iAm)±Val + ibl ,~
~™. V3)
где
i 9} ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ 273
Согласно формуле Муавра для дробного показателя можно опреде-
определить два значения
где
р = Уа\ 4- Ь\ = У [п* - Лай)г ~ 4 E + М It) сР\> + 4лаЛ аша,
Таким образом, можно представить
- 4 E4- Ml't) d*Yh +r?= {V[n2 - Ааша -
Тогда корни характеристического уравнения могут быть записаны
в виде
Общее решение дифференциального уравнения D) будет
ХаС^ + С,^', A0)
где Сг и С8 — комплексные постоянные величины вида
Сх-^ + Ю» Ct = D, + tD# (И)
Подставив эти значения произвольных постоянных в A0), получим
Отделив в этом уравнении вещественную и мнимую части, находим
исходные переменные у, z:
274 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ [ГЛ. XVJfil
Из (8) видно, что всегда п > а2. Следовательно, координаты правого
конца вала убывают с течением времени. Свободные колебания вала
под влиянием вязкого трения затухают.
3°. Вынужденные колебания твердого тела с уче-
учетом гироскопических сил. При составлении дифференци-
дифференциальных уравнений в этом случае движения может быть использована
теорема об изменении главного момента количеств движения. Выра-
Выражения для главного момента количеств движения, приведенные в п. 1°
этого параграфа, определенные уравнениями B*), сохраняют силу.
В отличие от ранее рассмотренных случаев малых колебаний, в глав-
главный момент внешних сил относительно неподвижных осей входит
момент возмущающих сил.
Наиболее распространенным в технике видом возмущающих сил,
действующих на твердое тело, вращающееся вокруг оси, являются
силы, вызванные неуравновешенностью ротора.
При решении задач на определение вынужденных
Колебаний твердого тела с двумя степенями сво-
свободы при действии гироскопических сил реко-
рекомендуется следующая последовательность действий:
1) выбираем неподвижную и подвижную системы координат;
2) составляем выражения для главного момента количеств движе-
движения тела и главного момента внешних сил относительно неподвижных
осей координат;
3) находим дифференциальные уравнения малых колебаний, поль-
пользуясь теоремой об изменении главного момента количеств движения;
4) ищем частное решение системы дифференциальных уравнений,
определяющее вынужденные колебания системы;
б) определяем критические угловые скорости ротора, при кото-
которых возникает явление резонанса;
6) находим предельные значения искомых переменных при неог-
неограниченном возрастании угловой скорости вращения ротора.
Покажем, как исследуются вынужденные колебания ротора, выз-
вызванные собственной неуравновешенностью, на следующих примерах.
Задача 18.38. Определить вынужденные колебания вала, вызван-
вызванные его статической и динамической неуравновешенностью, в усло-
условиях задачи 18.36.
Статическая неуравновешенность, вызванная неточностью изготов-
изготовления вала, задана смещением центра тяжести на малое расстояние
е (эксцентриситет) от геометрической оси вращения.
Динамическая неуравновешенность, возникающая также из-за неточ-
неточности изготовления, задана малым углом б между главной централь-
центральной осью инерции и геометрической осью вращения. Определить
также динамические составляющие реакций упругой и шарнирной
опор.
Решение. Для составления дифференциальных уравнений малых
колебаний вала воспользуемся теоремой о движении центра инерции
991
ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ
275
и теоремой об изменении главного момента количеств движения
в относительном движении по отношению к центру инерции вала.
Эти теоремы записываются так:
о)
B)
dL,
s? - 2 тслп), v - 2 wc<
*=¦!
где ^ «с—координаты центра инерции вала, Р?у, F& — проекции
главного вектора внешних сил на оси у, z, Lg», 1сг — главные мо-
моменты количеств движения вала относительно осей, параллельных
неподвижным осям у, z и проведенных через центр инерции вал*,
1 П
2] тсу (/'I), 2 тсг (ft) — главные моменты внешних сил относи-
тельно тех же осей.
Пусть точка А оси вала, лежащая в плоскости упругой опоры,
получила малые смещения у, z по осям неподвижных осей. Тогда
координаты центра инерции вала будут
C)
гс —z-?¦•{• е sin ®?
Углы, образуемые главной центральной осью инерции с координат-
координатными плоскостями хг и ху, будут
Р + б cos (wt — е) = ? + S cos (at — е),
= у + 6 sin (at - е) = -j+о sin (a>t - e).
D)
Здесь р, у—углыл образованные геометрической осью вращения
с координатными плоскостями хг и ху, угол ш? — в составлен пло-
плоскостью, проходящей через ось вращения и главную центральную
ось инерции, с плоскостью ху. Кинетический момент (главный мо-
момент количеств движения) имеет проекции на оси координат
E)
276 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ (ГЛ. XVIH
Главные моменты внешних сил относительно осей у, г, проходящих
через центр инерции вала, равны
F)
= _ су1ъ-1
(8)
где Rly, RXz — проекции на соответствующие оси реакции шарнирной
опоры, — су, —CZ — проекции на оси реакции упругой опоры. Та-
Таким образом, проекции внешних сил на оси координат таковы:
К = - су + Rly> Rl--cz+Ru. G)
Подставим в уравнения A) и B) найденные значения (б), F), G),
с учетом формул C) и D). Исключив затем из сисхемы четырех
уравнений неизвестные -проекции реакции шарнирной опоры Rly> Ru>
находим окончательно
(В + M/'t) 1 - Аау + cPz ш*
= Mtfoo'Vsin at + (В — А) 1фЧ sin (at — г),
(В + М1[) j) + А аг + сРу =
= МеаЧг1 cos to* -f E — А) /<в2б cos (at — e).
Полное решение этой системы обыкновенных неоднородных линейных
дифференциальных уравнений с постоянными коэффициентами состоит
из общего решения однородной системы, которое было получено
в задаче 18.36, и из частного решения неоднородной системы. По-
Последнее определяет вынужденные колебания системы. Будем искать
частное решение в виде
у = a, cos at-\-bt sin at, \
) (9)
z =» c3 cos at + b3 sin at. )
Подставив значения переменных (9) и их производные в систему
уравнений (8), приравниваем затем коэффициенты при одноименных
тригонометрических функциях (sin со*, cos to*) в каждом из полученных
алгебраических уравнений. Мы получим систему алгебраических урав-
уравнений с неизвестными аъ Ъх, а2, Ьг. При -условии
ЬО A0)
находим значения неизвестных
. Ме№>Чх1 -\-(В—A) foa6 cos e
. _ * ._ -(B-^)to»6sine f <И>
i flf ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ 277
С учетом полученных значений а{, bt, частное решение (9) может
быть записано в виде
г = — bcosmt + aSlnat j
или
где
H=Va\ + b\, a = arctg|i. A4)
Таким образом, при вынужденных колебаниях точка А вала будет
описывать окружность радиуса Н, вращаясь с угловой скоростью га
в направлении собственного вращения вала. Ось вала при этом бу-
будет описывать боковую поверхность кругового конуса с вершиной
в неподвижной точке О.
Вынужденным колебаниям, вызванным неуравновешенностью вала,
соответствует прямая прецессия вала с угловой скоростью со, равной
по величине собственной угловой скорости вала. Если изменять угло-
угловую скорость вала от нуля, то до тех пор, пока будет сР + Аа>2>
>(В + Л1/|)юа, вынужденные колебания вала и возмущающая сила
будут совпадать по фазе, когда же будет (В + МР{) со2 > сР +• Лю2,
то они будут находиться в противоположных фазах.
Если неограниченно увеличивать угловую скорость собственного
вращения вала, то из уравнений A1) найдутся предельные значения
ах, bj:
_ — 1Ме1г1+(В — Л)/6 cos е]
A5)
.!!-*—ЧбЯчЗ=
Воспользовавшись далее формулой (И), можно найти предельное зна-
значение радиуса окружности, описываемого правым концом вала.
Общее решение дифференциальных уравнений (8) складывается
из общего решения этих уравнений без правой части и частного ре-
решения неоднородного уравнения. Общее решение системы однородных
уравнений B7) было найдено в задаче 18.36. Сложив это решение
с частным решением A3), находим уравнения движения правого конца
вала под действием возмущающей силы, вызванной статической и ди-
динамической неуравновешенностью вала:
у = аг sin (pit + at) + аг sin (ptt + a2)+H cos (Ы — a), 1
t — a). J
z = ax cos {p4 -j- ai) — a2 cos (ptt -f aa) + H sin (cat
Это решение получено без учета сил сопротивления, препятст-
препятствующих колебаниям вала. Как бы малы ни были силы сопротивления,
278 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XVIII
они ведут к быстрому ватуханию свободных колебаний, определяемых
первыми двумя слагаемыми в правой части уравнений A6). Это было
показано в задаче 18.37 для случая сил вязкого трения. Поэтому при
изучении колебаний, вызванных неуравновешенностью вала, в уста-
установившемся режиме (при to = const) можно опустить первые два сла-
слагаемых в правой" части уравнений A6).
Это нельзя делать при изучении переходных режимов: при пуске
и остановке вала, переходе с одного режима на другой, т. е. во всех
случаях, когда угловая скорость вала меняется.
Рассмотрим критические скорости вращения вала. Если прирав-
приравнять нулю определитель системы алгебраических уравнений, полу-
полученных в результате подстановки частного решения (9) в дифферен-
дифференциальные уравнения (8), то получим частотное уравнение
А)а>*] = 0, A7)
откуда получаем два уравнения
Эти уравнения не имеют общих корней (за исключением случая <в = 0,
что соответствует отсутствию гироскопических сил), в чем легко убе-
убедиться, если вычесть одно из другого. Из уравнений A8) находятся
критические скорости вала
00)
Таким образом, у вала две критические скорости вращения. Сравнив
значения этих критических скоростей со значением собственной ча-
частоты невращающегося вала (з.адача 18.36), находим
<»1 > Ро > Щ-
Вращение вала, удваивая число критических скоростей,, делает одну
из них меньше, а вторую больше собственной частоты невращающе-
невращающегося вала. Заметим, что в случае
одно значение критической скорости становится мнимым.
Как следует из уравнений (И), при вынужденных колебаниях
вала, вызванных его статической и динамической неуравновешенностью,
возникают резонансные колебания, соответствующие только одной
критической скорости. Действительно, резонансные колебания воз-
возникнут при обращении в нуль знаменателя правой часта уравнений A1),
I 9} ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ 279
что дает значение критической скорости A9). Резонансных колеба-
колебаний, соответствующих второму значению критической скорости B0),
в случае возмущающих сил, вызванных неуравновешенностью вала,
возникнуть не может.
Переходим к определению динамических составляющих реакций
опор. Для нахождения реакции упругой опоры составим дифферен-
дифференциальные уравнения движения этой опоры, отбросив мысленно вал
и заменив его действие искомой реакцией Ra- Имеем
B1)
Здесь т — масса той части опоры (подшипника), которая не вра-
вращается вместе с валом, но колеблется вместе с ним. Перемещения
у, г упругой опоры найдены ранее A3). Подставив эти функции и их
производные в уравнения B1), получим
{с — трР) Н cos (at — a),
az (с — от©2) Я sin (atf — а).
Отсюда
RA = (c-mu>*)-H. B2)
Из этой формулы видно, что реакция упругой опоры (точнее ее ди-
динамическая составляющая) обращается в нуль при наличии статиче-
статической и динамической неуравновешенности вала, если масса опоры
будет удовлетворять равенству
»-5Г. С23)
Зная рабочую скорость вала и коэффициент жесткости опоры (ко-
(который обычно выбирается из соображений оптимального расположе-
расположения критической угловой скорости вала), можно надлежащим выбором
массы невращающихся частей упругой опоры добиться, чтобы на за-
заданной рабочей скорости динамическая составляющая реакции упру-
упругой опоры была близка к нулю. Если вал имеет некоторый диапазон
рабочих скоростей, то, подбирая массу опоры согласно B3) для не-
некоторой средней рабочей угловой скорости, можно значительно
уменьшить реакцию опоры по сравнению с ее величиной в случае
жесткого крепления опоры.
Определим динамическую составляющую реакции шарнирное опоры.
Для этого мысленно освободим вал от шарнирной опоры и заменим
ее действие искомой реакцией /?i- Составляем дифференциальные
уравнения движения центра инерции вала в проекциях на оси A)
с учетом Gу
МРС cy + Rly\
K }
280
ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ
(ГЛ. XVIU
Подставив в эти формулы значения _ус> zc в соответствии с C) и пе*
ремещения у, г упругой опоры A3), находим
Rly = (с — Ма>2 -J-) Н cos (<at — а) — МеаР cos at,
Ru = (c — Ma* !f\ Я sin (at - а) -
откуда получаем
#x = У (с - Мсо2 -^)а Н* + Мга>*е* - 2М<о*е (с - Ma3 -j")я •
При увеличении угловой скорости вала реакция шарнирной опоры
неограниченно возрастает.
Закача 18.39. В условиях задачи 18.36 определить вынужденные
колебания вращающегося «ала, если на него действует возмущающая
К задаче 18.39.
сила F, направленная параллельно оси у и приложенная на расстоя-
расстоянии а от неподвижной 1очк,и О (см. рисунок). Проекция возмущаю-
возмущающей силы на ось у изменяется согласно формуле
F = F0cosa>t, A)
где Fo —наибольшее значение возмущающей силы, © — угловая ско-
скорость собственного вращения вала.
Решение. Воспользуемся проекциями кинетического момента
на неподвижные оси у, г из задачи 18.36:
где
B)
C)
«ty ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ 281
Проекций главного момента внешних сил на неподвижные оси у, z
будут
— с/у —
D)
Внеся эти значения в теорему об изменении главного момента коли-
количеств движения, находим
Г . 1 т
jt [Ащ 4- (В 4- Щ) Р] - — с/у - Foa cos <о*.
Подставив в эти уравнения значения углов C), получим
{B + Mtftz-Aay + cPz^O, \
(В 4- М%) j? 4- ^coi 4- сРу ~ — /'ов I cos ш^. J "^
Частное решение уравнений F), определяющее вынужденные колеба-
колебания вала, ищем в виде
у «= b cos (at, z=d sin orf. G)
Подставив G) в уравнение F) и сокращая соответственно на cosorf
и sin©*, получаем систему алгебраических уравнений для определе-
определения bad:
АтЧ 4- [сР - (В 4- Mil) ©a] d == 0, \
[СР-(В + М® со*] Ь 4- Лш2 d = — FoaA ) (8)
Из уравнений (8) находим
«... F*dlcP-
Обращение в нуль знаменателя в этих равенствах указывает на не-
неограниченное возрастание амплитуды колебаний правого конца вала.
Это явление называется резонансом.
Итак, резонанс наступает при
*]* = 0. A0)
282 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ 1ГЛ. XVHt
Отсюда находятся два значения критической скорости
Vb+mi\— a '
(И)
Таким образом, В отличие от рассмотренных в предыдущей задаче
вынужденных колебаний, вызванных неуравновешенностью вала, в дан-
данном случае резонанс наступает при любом из двух значений крити-
критической угловой скорости вращения вала.
Найдем отношение амплитуд вблизи резонанса, соответствующего
второму значению критической скорости. Из* (9) имеем
Ь с?-(В+М1*)«>$ B+MPi + A
d * -Aw* ~ . cl* = " <¦ '
Л В+Ш\+А\
Отсюда следует, что при этих колебаниях ось вала описывает кру-
круговой конус в направлении, обратном собственному вращению вала.
Такое движение называется обратной прецессией вала.
Найдем далее отношение амплитуд вблизи резонанса, соответ-
соответствующего первому значению критической скорости. Имеем
Ы*
Ь сР-(В + М1>)а>1 cP~(B+M®
1= =Щ " .
В этом случае движение оси вала соответствует прямой прецессии.
Итак, если вынужденные колебания вызываются силой, постоян-
постоянной по направлению, перпендикулярной оси вала, величина которой
меняется с частотой собственного вращения вала, то возможно появ-
появление резонансных колебаний двух видов, соответствующих обоим
значениям A1) критической скорости. Первые колебания соответ-
соответствуют прямой прецессии, а вторые обратной прецессии вала.
4°. Влияние гироскопических сил на вынужден-
вынужденные колебания твердого тела при резонансе. Диф-
Дифференциальные уравнения движения твердого тела составляются в со-
соответствии с общими правилами, указанными в §§ 4, 6 и 9, п. 3°,
настоящей главы.
При решении задач на определение вынужден-
вынужденных колебаний твердого тела при резонансе ре-
рекомендуется следующая последовательность дей-
действий:
1) выбираем обобщенные координаты;
2) пользуясь уравнениями Лагранжа или общими теоремами дина-
динамики, составляем дифференциальные уравнения движения твердого тела;
i щ влияние гироскопических сил 283
3) рассматривая задачу о свободных колебаниях тела, находим
частоты свободных колебаний (резонансные частоты);
4) для случая резонанса находим частное решение неоднородной
системы дифференциальных уравнений движения и, накладывая на
него общее решение однородной системы, получаем искомое общее
решение задачи.
Задача 18.40. Определить вынужденные колебания вала, вращаю-
вращающегося с постоянной угловой скоростью и вокруг оси симметрии,
если вал закреплен шарнирно в точке О и имеет в точке А упругую
опору с коэффициентом жесткости с в любом направлении, перпен-
перпендикулярном оси симметрии вала. Центр тяжести вала находится
в точке С. Главные центральные моменты инерции вала относительно
оси симметрии А и относительно любой оси перпендикулярной оси
симметрии В. Расстояния ОА = 1, АС = 1Ъ ОС = 12. Вследствие неточ-
неточности изготовления центр тяжести вала находится на- расстоянии е
от геометрической оси вращения, а главная центральная ось образует
угол б с геометрической осью вращения. Найти вынужденные коле-
колебания вала при резонансе.
Решение. Воспользуемся результатами, полученными при реше-
решении задачи 18.38, когда для этого же вала были найдены вынужден-
вынужденные колебания при значениях угловой скорости вращения, отличных
от резонансных.
Дифференциальные уравнения малых колебаний вала имели вид
l sin at -f (В — A) 1аЧ sin (at - г),
= МеаЧ-J co$ at + (B — А) /ш2б cos (at - e),,
где у, z — координаты точки А вала.
Частное решение, определяющее вынужденные колебания, дается
формулами
— a), |
—а). )
Это решение удовлетворяет системе дифференциальных уравнений
движения вала при всех значениях угловой скорости вращения, кроме
критического (резонансного), равного
& = C)
для которого знаменатель коэффициентов %, Ьх в B) обращается
ъ нуль.
Перейдем к определению вынужденных колебаний вала при резо-
давсе, хогда угловая скорость вала равна критической. Тогда частное
284 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ [ГЛ. XYIII
решение системы дифференциальных уравнений A) вследствие ее
структуры следует искать в виде
у = (<ц-{-b^t) cos at+ (аг + Ьъ*) sin at, D)
z = (a8 + b8t) sin art + (a4 + btt) cos at. E)
Подставляем эти функции и их производные в систему A) -и при-
приравниваем коэффициенты соответственно при sinarf, cos со/, t sin at,
t cos at в левых и правнх частях уравнений A). Действительно, так
как полученные после подстановки D) и E) в A) уравнения должны
быть справедливы в любой момент времени, то сумма коэффициентов
при каждой тригонометрической функции должна быть равна нулю.
В результате получаем систему восьми линейных алгебраических
уравнений с восемью неизвестными af, bt (/=1, 2, 3, 4). Сгруппи-
Сгруппируем эти уравнения так, чтобы они составили две независимые
системы из четырех уравнений с четырьмя неизвестными каждая;
[сР -(В + MPt) со2] ах+Л©8а3 + 2 (В + MPt) ab2 + Aabt =
= Me<i>4tl+(В - А) /<о2б cos e, F.1)
+ [с/2 - (В + М%} as] as - Aab2 - 2 (В + Mt[) <о2>4 =
= МеаЧ-J, + (В - А) /<о2б cos e, F.2)
F.3)
F.4)
[ct* —(B + М® аг]а2 — Дш2а4 — 2 (В + Ml\) abx + Aabs =
= E — A)la26sim, G.1)
[cP-(B + Mll)ai)bl + Aa2b8 = 0, G.2)
- Л(о2аа + [сР -(В + Mil) о2] а4— АаЬг + 2 (S + M/f) ш*8 =
ше, G.3)
G.4)
Рассмотрим систему F). В силу выполнения равенства C) уравнения
F.3) и F.4) не отличаются друг от друга и имеют решения
h~-bv (8)
Далее сложим и вычтем почленно F.1) и F.2):
{[сР - (S + Щ) юа] + А®2} (% +-й3) + [2 E + Жф о» - Аа\ (Ьг - bt) =
= 2МеаЧх1 + 2 (В — А) 1агЬ cos e, (9)
[сР ~(В + М® а2 - Ли2] (ах - о8) +
+ [2(В + Л1^)со + Л<й](&!! + й4) = 0. A0)
Выражение в фигурной скобке в первом из полученных уравнен»»
5'flJ ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ 285
равно нулю по условию C). Тогда с учетом (8) из (9) находим
h — h -..Melt +[В-А) 6cos в .
Рассмотрим систему G). Совершенно аналогичным образом из G.2)
и G.4) получаем
h~h, A2)
а вычитая G.1) и G.3), находим
и и (В—А) 18 sin в
Подставив найденные значения bt в уравнения D) и (б) и положив
в последних а( = 0, так как эти слагаемые становятся пренебрежимо
малыми с возрастанием времени, получаем резонансные составляющие
уравнений движения вала, вращающегося с критической угловой ско-
скоростью,
у = t {px cos at -f ^ sin at),
A4)
л = t (b\ sin at — bs cos at). J
Введя обозначения
&x = Dcosa, fta = Z)sina, A5)
перепишем уравнения движения A4) в виде
у —Dt cos (at — a),
z = Dt sin (at — a).
Ось вала описывает конус, радиус основания которого
возрастает пропорционально времени, причем обход поверхности
конуса происходит с угловой скоростью, равной углевой скорости
собственного вращения вала.
5°. Влияние вязкого трения и гироскопических
сил на вынужденные колебания твердого тела.
Рассмотренная в предыдущих пунктах теория вынужденных колеба-
колебаний системы хорошо согласуется с действительностью во всем, за
исключелием одного результата. Хотя при резонансе и наблюдается
рост амплитуды колебаний, но этот рост никогда не становится
неограниченным, как это получалось в предыдущих задачах. Объяс-
Объяснение этого несоответствия кроется в наличии сил сопротивления,
которые не учитывались в пп. 3° и 4°. Поэтому рассмотрим ниже
задачу 18.38, но с добавочным учетом сил сопротивления.
Задача 18.41. В условиях задачи 18.38 определить вынужденные
колебания вала при наличии демпфера. Демпфер, расположенный
288
ТЕОРИЯ МАЛЫХ ДВИЖЕНИЯ СИСТЕМЫ
[ГЛ. XVtII
в том же сечения, что и упругая одора, создает силу сопротивления,
пропорциональную первой степени скорости (коэффициент пропор-
пропорциональности п) и направленную противоположно скорости точки А
оси вала (рис. а).
Решение. Пусть точка оси А, соответствующая упругой опоре
вала, имеет в данный момент координаты у, z и проекции скорости
а)
К задаче 18.41.
на неподвижные оси у, &. Тогда проекции момента внешних сил
(рис. б) равны
A)
= ~cyl—nj>l.J
Дифференциальные уравнения вынужденных колебаний вала, вызван-
вызванных его статической и динамической неуравновешенностью, были
выведены в задаче 18.38 (уравнения (8)). С учетом действия сил
сопротивления они запишутся в виде
(В + Ml\) jJ + Aai -f nPy 4- сРу =
= МеаР1г1 cos at+(В — АI(йЧ cos (at — е),
\l sin (at -f (В — А) /е>*6 sin (<at — e).
Будем искать решение этой системы в виде
у = ах cos at -f &i sinai,
z — a2 cos tat+fta sin ©^.
B)
C)
Подставив эти функции и юс производные в уравнения, приравниваем
коэффициенты при sinat и cos at. Тогда получаем следующую
ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ
287
систему алгебраических уравнений для определения ah bt:
со
- А) /to26 cos e,
[сР —
[с/2
(В —
D)
— Л)Ло28 cos e.
Почленно сложим и вычтем два крайних и два средних уравнения
системы D). Получим тогда две следующие системы:
[сР - (В 4 Mt\ 4 А) со2] (ах - &2) 4 пР(й (h 4- а2) = 0, \
= 0, J (б)
F)
G)
(8)
2Ме®Ч11+ 2(В-А)/со8б cose,
= 2 (В — Л)/са2б81пе.
Определитель однородной системы E) равен
Д4 = [СР — (В 4- МPt 4 А) <в2]* 4- я2^щ* ^ 0.
Следовательно, система E) имеет решение
т. е.'
(9)
Подставив (8) в неоднородную систему (б), находим
[сР — (В 4- Щ — А) а>2К 4 nl*®h =
= MetftJ+iB - А) Лоаб cos e,
— пРаа! 4 [сР - (В 4 М1\ - А) со2] &i =
«=(В —i4)/©26sine.
Решив систему (9), получаем
ах = Ьг = {[с^ - (В 4- М1\ - А) ш2] [МешЧх1+{В-А) /ш2о cos e] -
—пР«? (В - А) б sin е} {[с/2 - (В 4- Л*3 - А) со2]3 4- я2/*©2},
*х = — аг = {[сР - (В 4 Щ - А) се2] (S - Л) /со2б sin e 4-
+ пРа? [Ме1г 4 (В - А) Ь cos е]} {[с/2 - (В 4- М1[ - Л) со2]2 + я2/4©"}.
A0)
288 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XVtn
Как и в случае одномерного движения точки под действием силы-
упругости, силы сопротивления и синусоидальной возмущающей силы,
амплитуды колебаний не растут неограниченно ни при каком значе-
значении угловой скорости. В данном случае угловая скорость является
частотой возмущающей силы. Решение C) с учетом (8) имеет вид
y = ai cos at + Ъх sin at, \
z = a1sinat — b1cosat. j
Введя обозначения at = Hcosa, bt = Hsina, перепишем A1) в виде
y = Hcos(at-a), z = Hsin (at — a). A2)
Точка оси вала, лежащая в плоскости упругой опоры, описывает
окружность радиуса
Ы = у й\ -(- Ь\, A2)
Ось вала описывает конус с вершиной в шарнирной опоре, обегая
поверхность в сторону вращения вала и с угловой скоростью, рав-
равной угловой скорости вращения вала.
Найдем квадрат радиуса. После алгебраических преобразований
получим
" ' " "" 1—ЛNcose]
и
п [el*—
Замечаем, что в числителе коэффициент при (о* не зависит от угло-
угловой скорости вала. Следовательно, для нахождения максимума ампли-
амплитуды Н необходимо исследовать функцию
[cl*-(B+Mt*—j
Вычислив производную от A5) по (о и приравняв ее нулю,
/'@)) = 0, A6)
находим корни A6)
A7)
Амплитуда Н достигает максимума, когда а — щ. Внеся это значение
угловой скорости в A4), находим наибольшую амплитуду колебаний,
квадрат которой равен
w» _ 4с' [МЧЧ\+{В-А)Ч*+2Ме11(В-А)Ьcose]
Пта*"~ п*[4с(В + М1» А)п*1Ч *
§ ioi влияние гироскопических сил 289
§ 10. Влияние гироскопических сил на свободные
и вынужденные колебания твердого тела с четырьмя степенями
свободы. Самоцентрирование жесткого ротора,
вращающегося в двух упругих опорах
При конструировании современных высокооборотных валов необ-
необходимо предусмотреть меры, обеспечивающие возможно больший срок
службы подшипниковых опор. Реакции между валом и опорой, если
рассматривать вал и опоры жесткими, возрастают пропорционально
квадрату угловой скорости (см. т. 2, гл. X, § 3). Поэтому при боль-
больших угловых скоростях вращения указанные реакции даже при самой
тщательной статической и динамической балансировке достигают
столь больших значений, что ресурс подшипников исчисляется сот-
сотнями, а иногда и десятками часов.
Одним из эффективных методов увеличения долговечности под-
подшипников является установка между корпусом и подшипником упру-
упругих элементов. Жесткий вал, вращающийся в двух упругих опорах,
самоцентрируется после перехода через второе критическое число
оборотов. Реакции между валом и упругими опорами во много раз
меньше тех же реакций в случае жесткого крепления опор. Одно-
Одновременно применение упругих опор позволяет осуществлять переход
через критические числа оборотов при малых амплитудах.
Динамика жесткого вала, вращающегося в двух упругих опорах,
рассматривается в этом параграфе. Исследуются свободные колеба-
колебания вала, вынужденные колебания вала и эффект самоцентрирования,
вынужденные колебания вала при резонансе, применение уравнений
Лагранжа к составлению дифференциальных уравнений колебаний вала.
1° Влияние гироскопических сил на свободные
колебания твердого тела. Для составления дифференциаль-
дифференциальных уравнений малых колебаний твердого тела при наличии гироскопиче-
гироскопических сил следует применять теорему о движении центра инерции системы
материальных точек вместе с теоремой об изменении главного момента
количеств движения системы материальных точек в относительном
движении по отношению к центру инерции.
Согласно первой теореме имеем
Rl, О*)
где Ж —масса твердого тела, хс, Ус> Zc ~ координаты центра инер-
инерции (тяжести) твердого тела в системе неподвижных осей координат,
R'j R* ^ — проекции главного вектора внешних сил, приложенных
к твердому телу.
Вторая теорема приводит к соотношениям
B*)
dt _
10 M, И, Бать и др., т. Ш
290 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ [ГЛ. XVIII
где Lcx, ?-cv> 1*сг — главные моменты количеств движения относительно
осей, движущихся поступательно вместе с центром инерции (тяжести)
п
твердого тела, ^т Ср ~~ главные моменты внешних сил относи-
относительно тех же осей.
Если осесимметричное твердое тело вращается с большой угло-
угловой скоростью со вокруг оси симметрии, которая совпадает при
отсутствии малых колебаний тела с осью л:, то с точностью до
величин первого порядка малости главные моменты количеств дви-
движения относительно осей координат, движущихся поступательно вме-
вместе с центром инерции твердого тела, будут
¦ Лео,
C*)
где А — момент инерции твердого тела относительно оси симметрии,
В —момент инерции твердого тела относительно любой оси, перпен-
перпендикулярной оси симметрии и проходящей через центр инерции тела,
р —малый угол поворота оси симметрии, отсчитываемый от оси х
в плоскости ху, у—малый угол поворота оси симметрии, отсчиты-
отсчитываемый от оси х в плоскости xz.
При изучении поперечных колебаний обычно пренебрегают малыми
продольными перемещениями твердого тела, т. е. полагают коорди-
координату Хс неизменной. Тогда первое уравнение A*) отпадает. Если,
кроме того, рассматривается равномерное вращение твердого тела,
то отпадает и первое уравнение системы B*).
Для решения задач о свободных колебаниях
твердого тела, в которых возможны вышеуказан-
вышеуказанные допущения, может быть рекомендован следую-
следующий порядок действий:
1) выбираем две системы координат: первую систему, жестко свя-
связанную с твёрдым телом, и вторую — неподвижную систему координат;
2) применяя теорему о движении центра инерции, составляем два
дифференциальных уравнения движения центра тяжести;
3) пользуясь теоремой об изменении главного момента количеств
движения в относительном движении по отношению к осям, движу-
движущимся поступательно вместе с центром инерции, составляем осталь-
остальные два дифференциальных уравнения малых колебаний твердого
тела;
4) проинтегрировав полученную систему дифференциальных урав-
уравнений движения твердого тела, находим частоты свободных колеба-
колебаний, главные колебания ротора и общее решение задачи.
Задача 18.42. Жесткий ротор массы М вращается в двух упру-
упругих опорах Аг и Вь Коэффициенты жесткости левой опоры сь
ею]
ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ
291
правой сг (рис. й). Расстоя-
Расстояние между опорами равно I.
Центр тяжести С ротора
вместе с подшипниками на-
находится на расстоянии 1Х от
опоры Ах и на расстоянии
/г от опоры Вх. Ротор
вращается вокруг оси сим-
симметрии с постоянной угло-
угловой скоростью <о. Момент
инерции ротора относитель-
относительно оси симметрии равен А,
относительно оси, перпенди-
перпендикулярной к оси вращения и
проходящей через центр
тяжести ротора, равен В.
Найти свободные колебания
ротора.
Решение. Рассмотрим
малые колебания ротора
около положения равновесия
(равномерного вращения око-
около горизонтальной оси). Не-
Неподвижную систему коорди-
координат хуг выбираем так (рис. б),
чтобы ее начало совпало с
левой опорой в положении
равновесия.
Дадим ротору произ-
произвольное перемещение (рис. б).
Координаты левой опоры
обозначим уъ zb координаты
правой опоры Уъ г%, коор-
координаты центра тяжести ус, zc.
Изменением координат xlt
хг, xq, как величинами более
высокого порядка малости,
будем пренебрегать. Угол
между проекцией оси ротора
на плоскость ху и осью х
назовем 0; угол между осью
ротора и ее проекцией на
плоскость ху обозначим Y-
На рис. в, г, ось ротора
спроектирована на коорди-
координатные плоскости ху и xz.
10*
Щ)
\т п „
ш 1
, и
—-—-
Уг
8)
ь
% FT
1 1 1г
г)
К задаче 18.42.
292 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ [ГЛ. XVI1T
Выразим координаты центра тяжести и углы р, -yi через незави-
независимые координаты ylt zv yit z2, вполне определяющие положение
ротора. Имеем на основании рис. б, в и г
Ус yi^+Уш-^, A)
ZC = — Z!-!f- + Z2-!f-, B)
C)
D)
На основании теоремы о движении центра инерции можно написать
два дифференциальных уравнения
E)
М2С = — С!*! -г- C2Zj, F)
где в правой части стоят проекции на соответствующие оси упругих
реакций пружин.
Переходим к составлению дифференциальных уравнений малых
колебаний ротора вокруг осей, параллельных у, z и проведенных
через центр инерции колеблющейся системы.
Главные моменты количеств движения системы с точностью
до малых величин первого порядка малости включительно будут
Lx = A<o, G)
1у = Ао% — By, (8)
1г = Л©у + Вр. (9)
Главные моменты внешних сил относительно осей, проведенных
через центр инерции, легко находятся из рис. а:
2 »с* </=*) = О, A0)
I] тСу (К) = - *icA - гхсх1ь A1)
A2)
Используя теорему об изменении главного момента количеств движе-
движения в относительном движении по отношению к центру инерции
и выражения (8) — A2), имеем
— By = — гаса/2 — ZiC-Jb A3)
§ 101 ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ 293
Подставив в уравнения E), F), A3), A4) значения ус, Zq, р\ у,
получим для нахождения уь у2, zlt гг систему четырех линейных од-
нородных дифференциальных уравнений
= 0, A5)
M Aх1г — 1г2 J + c-ylz-i + с zlz2 — 0, A6)
-y{) — В E2 — 5Х) + с^1г1гг + cxlxlzx = 0, A7)
Л ю (?2 — ij) -f- В (_^2 —J*i) — ca/g/v2 — с-Jilyi= 0. A8)
Частное решение этой системы будем искать в виде
>>! = Asin(p*-r-a),
у2 = A sin (/>* + a),
^==DsCOs(p^+a), (
г4 = О4С08^4-а),
где A.» Dt> ^«> ^4> Z7» a — постоянные, которые должны быть опре-
определены так, чтобы A9) удовлетворяло системе дифференциальных
уравнений A5) —A8). Внеся A9) в A5) —A8), получим после сок-
сокращения соответственно на sin (pt -f- a) и cos (pt -\- a) и приведения
подобных членов однородную систему четырех алгебраических урав-
уравнений относительно А> As> A>> At:
B0)
Легко показать, что система B0) распадается на две. Действительно,
сложив и вычтя первые два и последние два уравнения, получаем
*) Da + (c2l - М1&*) Dt = 0,
*) D3 + (сг121+ Вр*) Ц, = 0,
(Вр2 — cJtJ) Dy — (Вр2 + с2V) D2+ЛюрД, — Лйу»Д4 = 0.
t) = 0,
(ег1+Mltf*) (Dx - D3) + (ctl - Ml,?) (As - D4) = 0,
> + 0|) = 0,
- A.) - (Вр2 - Аар + сМ (A, - A4) = 0.
Сгруппировав уравнения, получаем систему для нахождения А. + А,
8+А0=о.
B1)
= 0,'
294
ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ
[ГЛ. XVHf
и систему для нахождения D1~Di и Da — Dt
(Clt + Mb?) (?>! - А,) + Ы - М1#*) (Д, - ДО = О,
(Вр* - Аа>р - cxht) (Dt - D3) - B2)
— (Вр8 — Аар + с2/20 (А» - ДО == 0. .
Приравняв определители систем B1) и B2) нулю, получаем два
частотных уравнения*)
+ с2 - М»г) + fa/i + с А? = 0 B3)
Мр*) + (Ci/i + сг/а)а = 0. B4)
{Вр* + Ащ - с2% -
(Вр*—Аар - с4\ -
Докажем, что уравнения B3) и B4) не имеют общих корней.
Предположим, что общий корень рх существует. Тогда прир=рг
оба уравнения удовлетворяются одновременно. Вычитая из первого
уравнения второе, получаем
т. е. общими корнями могли бы быть
но оба эти значения не удовлетворяют исходным уравнениям. Пока-
Покажем теперь, что корни частотных уравнений вещественны. Для этого
рассмотрим функции
Л (Р) = (ВР2 + Аар- сД - СгП) (ct + с, - Мр*)+(cj/, + сг1г)\ B 5)
Л 0») = (Вр* - Аыр - с & - erf) (Cl + с2- Мр*)+ (сЖ + с^. B6)
и найдем их значения для некоторых характерных значений аргу-
аргумента р:
р
— оо
V М
0
+ 00
fl(p)
— со
-CAP
— оо
f, (p)
— 00
— CO
*) По существу описанная операция означает разложение на множителе
частотного уравнения системы B0),
§101
ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ
295
Из таблицы видно, что непрерывные функции ft(p) и /г(р) при
изменения аргумента р от — оо до + оо четыре раза меняют знак.
Вспомнив, что B3) и B4) являются уравнениями четвертой степени,
можно утверждать, что каждое из уравнений B3) и B4) имеет по два
отрицательных и два положительных корня, т. е. корни обоих урав-
уравнений вещественны. Отметим, что рассматриваемые корни обладают
интересным свойством: отрицательные корни одного уравнения равны
по абсолютной величине положительным корням другого, и наоборот.
При угловой скорости со, равной нулю, уравнения B3) и B4)
совпадают и принимают вид
=, 0.
B7)
Корни уравнения B7) определяют частоты свободных колебаний
невращающегося ротора. На рис. д представлены графики функций
fi(P)> Л00 и /о(Р)> причем через fo(p) обозначена левая часть B7).
Как видно из графика, положитель-
положительные корни этих уравнений, т. е. часто-
частоты свободных колебаний ротора, рас-
располагаются в следующем порядке:
P*<Po<Pi<P2<Po<Pi- (Щ
Здесь рф р'о — частоты свободных коле-
колебаний невращающегося ротора.
Из уравнений B1) и B2) видно,
что для корней первого частотного урав-
уравнения частное решение будет иметь вид
B9)
К задаче 18.42, д.
так как система B2) в этом случае имеет только тривиальное реше-
решение D1 — D9 = 0 и ??2 ~ Dt = 0. Аналогично для корней второго
частотного уравнения получаем
C0)
— ?>! cos (pt -f a),
: — D2 cos {pt -f a).
Легко проверять, что вследствие указанной выше особенности кор-
корней частотных уравнений можно ограничиться подстановкой в B9)
и C0) лишь положительных корней соответствующих частотных
уравнений, ибо отрицательные корни не приведут к новым линейно
независимым частотным решениям.
296
ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ
[ГЛ. XVIir
В итоге корням рх и р\ отвечают первое и второе главные коле-
колебания, при которых ось ротора описывает круговой конус, вращаясь
в том же направлении, что и ротор. Эти движения называются «пря-
«прямой» прецессией ротора. При «прямой» прецессии вектор угловой
скорости твердого тела (при вращении вокруг оси симметрии) и
вектор угловой скорости оси ротора образуют острый угол.
Корням р2 и р'% отвечают третье и четвертое главные колебания,
при которых ось ротора описывает круговой конус, вращаясь в на-
направлении, обратном вращению ротора.
Эти движения называются «обратной» прецессией ротора. При
«обратной» прецессии вектор угловой скорости твердого тела (при
вращении вокруг оси симметрии) и вектор угловой скорости оси
ротора образуют тупой угол.
Таким образом, свободные колебания ротора складываются из
четырех гармонических колебаний, два из которых соответствуют
«прямой» прецессии и два «об-
ратной».
Подчеркнем, что частоты
свободных колебаний вращаю-
вращающегося ротора, как видно из
уравнений B3) и B4), зависят
от его угловой скорости.
Заметим еще, что задача
решена для горизонтального
ротора, центр тяжести ротора
лежит вне участка между опо-
опорами. Если же центр тяжести ротора лежит между опорами (рис. е),
то во всех уравнениях надо изменить знак перед /а на противопо-
противоположный.
2°. Влияние гироскопических сил на вынужден-
вынужденные колебания твердого тела. Самоцентрирование.
При составлении дифференциальных уравнений малых движений
твердого тела можно применить теорему о движении центра инерции
системы материальных точек и теорему об изменении главного мо-
момента количеств движения системы материальных точек в относитель-
относительном движении по отношению к центру инерции.
Указанные теоремы используются в форме п. 5° настоящего пара-
параграфа (уравнения A*), B*), C*)).
Дифференциальные уравнения вынужденных колебаний отличаются
от рассмотренных в п. 1° этого параграфа уравнений свободных
колебаний наличием в правых частях возмущающих сил и их молен-
тов. К весьма распространенной в технике категории возмущающих
сил относятся силы, вызванные статической и динамической неуравно-
неуравновешенностью роторов.
Статическая неуравновешенность обусловливается смещением центра
инерции ротора от геометрической оси вращения. Динамическая
К задаче 18.42, е.
$ 101 ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ 297
неуравновешенность является следствием наклона главной оси
инерции твердого тела по отношению к геометрической оси вра-
вращения.
При решении задач на определение вынужден-
вынужденных колебаний твердого тела с четырьмя степе-
степенями свободы рекомендуется следующая последо-
последовательность действий:
1) выбираем обобщенные координаты;
2) пользуясь теоремой о движении центра инерции, составляем
два дифференциальных уравнения движения центра инерции твердого
тела;
3) составляем выражения главного момента количеств движения
системы в относительном движении по отношению к центру инер-
инерции и выражение главного момента внешних сил относительно
осей, движущихся поступательно вместе с центром инерции твер-
твердого тела;
4) пользуясь теоремой об изменении главного момента количеств
движения в относительном движении по отношению к центру инер-
инерции, выписываем еще два дифференциальных уравнения малых коле-
колебаний;
5) находим частное решение неоднородной системы дифферен-
дифференциальных уравнений, определяющее вынужденные колебания.
Задача 18.43 *). Горизонтальный жесткий ротор массы М вра-
вращается с постоянной угловой скоростью со в двух упругих опорах Ах
и Bv Опоры перемещаются в однородном упругом поле. Коэффи-
Коэффициенты жесткости опор: левой сь правой са. Расстояние между опорами /.
Расстояние от центра тяжести ротора С до опоры А{ равно 1Ъ
до опоры #! равно /а. Далее Л —момент инерции ротора относи-
относительно оси симметрии, В — момент инерции ротора относительно
оси, перпендикулярной к оси вращения и проходящей через его
центр.
Определить вынужденные колебания ротора, вызванные его ста-
статической и динамической неуравновешенностью, если центр тяжести
ротора отстоит от геометрической оси на расстоянии е, а главная
ось инерции ротора, близкая к геометрической оси, образует с по-
последней угол S. Плоскости, проведенные через геометрическую ось
и центр тяжести, а также через геометрическую ось и главную ось
инерции, образуют двугранный угол, равный е.
Найти также закон вынужденного движения ротора и определить
предельные значения координат центра тяжести ротора и угла откло-
отклонения главной оси инерции от геометрической оси ротора при не-
неограниченном увеличении угловой скорости ротора.
*) А. С, К е л ь з о н, Самоцентрирование и уравновешивание жесткого
ротора, вращающегося 6 двух упругих опорах, Доклады АН СССР, т. НО,
вып. 1, 1956.
М2С — — ci4 —
Aafi - By = —
298 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ ГГЛ. XVIII
Решение. Будем исходить из дифференциальных уравнений
движения ротора, полученных в предыдущей задаче:
A)
Если обозначить через у, г координаты точки геометрической
оси ротора, лежащей на пересечении этой оси с плоскостью, пер-
перпендикулярной к оси вращения и проходящей через центр тяжести
ротора, то координаты центра тяжести будут:
Ус =У + е cos at, j
Zc = z-\-e sin at. j
Обозначим через fl угол между проекцией главной центральной оси
на плоскость ху и осью х. Угол между проекцией геометрической
оси на плоскость ху и осью X обозначим ^2. Эти углы связаны
соотношением
e), C)
где (ю? —е) — угол между плоскостью, в которой лежит угол б, и
плоскостью ху.
Обозначив аналогично через у угол между проекцией главной
центральной оси инерции на плоскость xz и осью х, и у3 угол
между проекцией геометрической оси на плоскость xz и осью х,
находим
— e). D)
Подставив найденные значения ус, zc, Р, V в дифференциальные
уравнения движения ротора A), имеем
^КР + сxyi + с2у2 — MeaP cos at,
Меа? sin a>t,
\ E)
— (В — А) оааб sin (at — е), '
Аау2 + В рг — сгкУг — с\кУ\ = (В — А) ©8б cos (<ot — e).
Правые части этих уравнении представляют возмущающие факторы,
вызванные статической и динамической неуравновешенностью ротора.
Использовав установленные в предыдущей задаче соотношения
F)
«tot
ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ
299
G)
и систему уравнений E), находим
jyi + сг1уг = Mela* cos at,
cxlzx + съ1гг « /We/ca2 sin со/,
Л» СЛ -A) - В ft - h) + *V* + ^A&i -
= — [B — A) a2lb sin (со* - e),
Aa (it - h)+В (fa -jy - сг1г1у% - cxlxlyx =
= (B - A) @2/S cos (at — e).
Полученная система линейных неоднородных дифференциальных урав-
уравнений с постоянными коэффициентами описывает малые колебания
ротора, вызванные статической и динамической неуравновешенностью.
Решение этой системы складывается из общего решения системы
без правой части и частного решения полной системы.
Общее решение системы без правой части найдено в предыдущей
вадаче —оно отвечает свободным колебаниям ротора.
Частное решение полной системы, которое будем искать в виде
^i = <*i cos ®t + Ъх sin cat,
Z\ — аг sin Ы -f- &j cos at,
Уъ — e8 cos ^ + *зsin ffl^>
г8 я= u4 sin <i>t -f- bx cos at,
определяет искомые вынужденные колебания.
Для того чтобы найти значения постоянных alt bi, подставим
решение (8) в уравнения движения G). Так как эти уравнения должны
быть удовлетворены в произвольный момент времени, то необходимо
раздельно приравнять нулю сумму всех членов, содержащих множи-
множителем cosorf, и сумму всех членов, содержащих множителем sin oof.
В итоге получаем две системы алгебраических уравнений:
(8)
Мои2
Мы2 (/aa2 —
— Aa2 (a3 — aj) + Ba2 (at —
2las
Mela2,
Mela2,
: — (В — А) 18а2 cos e,
(at — aa) — Ba2 (as — a^ —
Mm2 (Цц -
= (B-A)lba2cose,
г1Ъь = О,
О,
f — Л) б/о5а sin в,
(b3 -
A0)
300 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ [ГЛ. XVIII
Из этих двух систем могут быть найдены значения всех восьми
постоянных аъ я2, а* аь blt bif b3, bt так, чтобы частное решение
удовлетворяло исходной системе дифференциальных уравнений.
Проще всего эти постоянные определяются, если сложить и
вычесть первые два и последние два уравнения каждой системы.
Тогда из первой системы получим
(М1г<й* + Cil) (их - а2) - (Al/j©2 - c2l) (а8 - aj = 0, A1)
[(В + А) со* - d/Щ {at - а2) - [(В + А) ю2 + c2tf2] (а, - ад - 0, A2)
(Л*/2«>* + са/) (ах + а2) — (М ^ю2 — c2l) (ая + aj = 2Mela2, A3)
\(В - А) и2 - с^] (ах + а2) - [(.В - А) ю* + с8//2] (а8 + а4) =
= 2(Я-Л)/6шгсо5е. A4)
Аналогично из второй системы находим
(Л*/.,©3 + гх/) <рх - h) - (Af/,(n» - с2/) (*8 - ft«) = 0, A5)
[(В - А) и2 - Cl//i] (ftx - *2) - [(В - А) а2 + <:2У] B>8 - *4) =
l6a>*slnR, A6)
*4) = 0, A7)
[(В + А) ©2 - d//»] (ftx + Ьг) - \(В + А) о>2 + с2/2/] (^ + *«) = 0. A8)
Рассмотрим совместно уравнения A1), A2), A7), A8), представляющие
по существу две группы однородных уравнений относительно сумм
и разностей искомых величин. Если
Л И = [(^ + А) со2
- [(В + А) ша - ^/у (Ж/!©2 - с2/) Ф 0, A9)
то эти системы однородных алгебраических уравнений имеют только
тривиальное решение
Подставив найденные значения искомых постоянных в оставшиеся
уравнения A3), A4), A5), A6), получаем
B1)
(Л!/2е>2 + cxt) at — (Mli<aP — c2/) ай = Mela?,
[{В - А) ю* - ^/y fll - [(B - A) o» + ca/2/] a8 =
= (B-AN/<B2COS8,
[(B - A) ©a - d^i] *i - [(B - А)
= (B — AN/@2.sine.
Теперь легко находятся все искомые величины.
§ 101 ВДИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ 301
Если, кроме того,
/2 (со) = [{В - А) (о2 + с2/а/] (Л1/а©2 + Ci/) -
— [(В — А) ©2 — cjlj] (Ж4@* — c%t) ф О, B2)
то постоянные будут равны
L Л) и" + сМ -
— (Ml^ — czt) (В-А) 1Ьа>* cos г}, B3)
А) та ~
— (М1г<й* + с^(В — Л)/бш2со8 8}, B4)
_ _L- (Ж/i©2 — СаО E — Л) /бсо8 sin e, B5)
Л - л)/5а)!! sln е- <26>
Введя вместо постоянных аъ а2, аз, а4> *i, &2. ^з> ^4 новые посто-
постоянные rlf Га, з(, i|), связанные с ними соотношениями
Гх cos & &! = —^«rjsinx, 1
|3, J
перепишем уравнения (8) в виде
yi = r1co
Zi — rx sin (at — X),
B8)
На оснований уравнений B8) заключаем, что вынужденные коле-
колебания ротора, вызванные его статической и динамической неурав-
неуравновешенностью, представляют «прямую» прецессию с угловой скоро-
скоростью се, равной угловой скорости ротора.
Заметим, что статическая и динамическая неуравновешенность
в данной системе не могут вызвать вынужденные колебания, соответ-
соответствующие «обратной» прецессии ротора.
Найдем теперь предельные значения постоянных, определяемых
равенствами B3) —B6) при неограниченном возрастании угловой
скорости:
lim Gj = /цб cos e — е,
ш-»оо
lim a3 = 1гЬ cos e — е,.
limV '*--- \ B9)
lim ba = 12& sin e.
W-»oo
302 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XVIII
Внеся предельные значения постоянных в уравнения (8), находим
выражения координат при ш —оо:
Нт ух — — е cos at -f- /гб cos (<в* — е),
со-» со
lim zx = — е sin at -f- 48 sin (at — е),
fi>"*°° J. C0)
lim уг — — e cos at¦+¦ /2&cos (cor — e), '
0)->co
lim гй— — еsin at-f /гб sin (at — e).
<o-»oo
Для определения предельных значений координат центра тяжести
ротора и угла отклонения его главной оси инерции от геометрической
оси ротора подставим предельные значения координат C0) в урав-
уравнения B), C), D). Используем зависимости F). В итоге получаем
с = 0, lim гс = 0,'
lim P = 0, lim y = Q
<в-юо в->со
C1)
Следовательно, при неограниченном увеличении угловой скорости
вращения неуравновешенный статически и динамически ротор стре-
стремится совместить ось вращения с главной центральной осью инерции.
При неограниченном увеличении угловой скорости жесткий ротор,
вращающийся в двух упругих опорах, располагается так, что устра-
устраняется его статическая и динамическая неуравновешенности.
Ротор с четырьмя степенями свободы (не считая вращения вокруг
оси) обладает замечательным свойством самоцентрирования. Это
свойство находит широкое применение при конструировании совре-
современных высокооборотных машин.
Задача 18.44. В условиях предыдущей задачи определить кри-
критические угловые скорости ротора (при отсутствии сил трения).
Критическими называются значения угловых скоростей ротора,
при которых амплитуды вынужденных колебаний неограниченно воз-
возрастают.
Решение. Как следует из уравнений (8) предыдущей задачи,
координаты точек ротора неограниченно возрастают одновременно
с коэффициентами alt b±
Из равенств B3) —B6) видно, что это будет при
/а (а) = [(В - А) соа + с21*1] (Ml&x* + cxt> -
- [(В — A) to2 - c-Jlx] (MljeP — сг1) = 0. A)
Представим функцию /а(со) в виде
/2 (©)= (В - А) аЧ [с{ + с2 - Мю?] -f MFeo* (aft + с2/|) - с&Р B)
и исследуем ее. Для этого для значений ©, равных 0, V -
«10!
ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ
303
находим значения /2 (©). При этом следует различать два случая:
В>А и А>В.
Результаты вычислений сведем в таблицу:
ее
0
V м
+ са
в>л
Мш)
— с&Р
Цсги+сМ*
— со
А>В
f.«B)
— Сх^Р
+ СО
Из таблицы видно, что при В>А уравнение A) имеет два поло-
положительных вещественных корня a»i и ш2) т. е. что резонанс насту-
наступает при этих двух значениях угловой скорости ротора. В этом слу-
случае имеется два значения критической угловой скорости, причем
У
Во втором случае, при А >¦ В, уравнение A) имеет один поло-
положительный вещественный корень а>ъ т. е. у ротора одна критическая
угловая скорость, причем o^ < j/ ^р2.
Упомянутые критические угловые скорости жесткого ротора
в двух упругих опорах определяются как корни биквадратного урав-
уравнения A)
1
i ±Vl$-4M<fi-A) clC2f»
Ш[В-А)
C)
где
При Д = 0 формула C) дает значение критической угловой ско-
скорости без учета гироскопического эффекта.
До сих пор при определении вынужденных колебаний ротора
мы предполагали, что Д (со) -ф 0. Рассмотрим теперь особый случай,
когда
Л(»)-0. D)
Найдем разность
-Л
- Ж©2).
E)
Из (б) следует, что при условии D) функция /2 (©) не обращается
в нуль, если ci-\-cz ф Жсо2 яй^О. Найденные в предыдущей задаче
значения ah bt и при условии D) удовлетворяют исходным диффе-
дифференциальным уравнениям движения. Значит, в этом случае мы имеем
304
ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ
[ГЛ. XVI1Г
те же резонансные колебания и критические угловые скорости, кото-
которые уже определены уравнением C). На этом основании можно
заключить, что при воздействии на ротор возмущающих сил, вызван-
вызванных его статической и динамической неуравновешенностью резонанс-
резонансных колебаний, соответствующих обращению в нуль, функции Л(<1))
возникнуть не могут. Однако при действии других возмущающих
сил, изменяющихся с частотой, равной угловой скорости ротора ел,
резонансные колебания, соответствующие обращению в нуль /х (ю),
могут возникнуть. Доказательство этого утверждения приводится
в следующей задаче.
Задача 18.45. В условиях задачи 18.43 определить критические
угловые скорости ротора, если возмущающая сила равна
F—Fq cos <at.
Возмущающая сила с постоянной амплитудой приложена в центре
тяжести ротора и сохраняет неизменное направление, параллельное
оси у.
К задаче 18.45.
Решение. Дифференциальные уравнения движения ротора будут
(см. уравнения (б), F), A3), A4) задачи 18.42)
Щс +1\ Ух + с 2 у*
— Ву-\- ctl2zt + cxl
0,
4 101 ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ 305
Подставив выражения для у с, zq, р\ Y (см- уравнения A) —D) за-
задачи 18.42) в эти уравнения, находим
B)
Решение этой системы линейных неоднородных дифференциальных
уравнений с постоянными коэффициентами складывается из общего
решения системы без правой части и частного решения полной
системы.
Общее решение системы без правой части уже найдено, —это
уравнение свободных колебаний ротора (см. задачу 18.42).
Частное решение полной системы, определяющее вынужденные
колебания ротора, будем искать в виде
+ сг1у% = /у cos at,
М (/А - 4А) + ffi&i + фж = 0,
Асе tfc -^i) - В Bг - Sj) + с^1г2 + c^lzx = О,
Асо (?г - ix) + В (& - jy - с, V>r, - с»/^ = 0.
= а2sinotf, \
rt. J
z2 — a4 sin art.
Подставив C) в дифференциальные уравнения движения B) и
сократив соответственно на slnatf или cos art, получаем систему
алгебраических уравнений для определения постоянных аъ а2, а3, а4
D)
в1 + (сш1 - М1ф*) а3 = Fol,
х = О,
) а4 = О,
со») аь = 0.
Сложив и вычтя первые два и последние два уравнения, находим
(сх/+NUisF) (ar + a2) + (с,/ - Mlx<sP) (a3 + a4) = Fol,
[(B - А) о» - c^/] (% + a4) - [(S - A) <oa + c2/2/] (a8 + a4) = 0,
- Ж/1<йа) (в, - a4). Fo/,
- a4) = 0.
(б)
Из этих уравнений получаем
га
308 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ [ГЛ. XVHI
откуда
2~
3~ %<«•) "*" 2Д (в)
_jy[(B-i4)«»'-«A/] Л*ИВ +
4 sft(a>)
F)
Формулы F) показывают, что at, а2, аз> а4 неограниченно возра-
возрастают, когда fi((n) приближается к нулю. При решении предыдущей
задачи было установлено, что /i(u>) и /2(ю) не имеют общих кор-
корней. Следовательно, когда /ц (со) -*- 0, то /2 (и) принимает отличное
от нуля значение. Поэтому при малых /г (со) первые слагаемые в фор-
формулах F) пренебрежимо малы по сравнению со вторыми.
Следовательно, для приближенного определения постоянных можно
в F) отбросить первые части. Тогда
«! = —а2, \
aa = — at. J
G)
Поэтому уравнения движения точек ротора, совпадающих с цент-
центрами нижней и верхней опор, будут иметь вид
Ух = aj cos Ы,
Zi = — «j sin art,
, = — aa sin ®t j
Из уравнении (8) видно, что характер колебаний, вызываемых
силой F вблизи резонанса при соответствующей критической угло-
угловой скорости, определяемой из уравнения /х (со) = 0, отвечает синхрон-
синхронной «обратной» прецессии ротора.
Значения критических угловых скоростей «обратной» прецессии
находятся из уравнения (см. задачу 18.43)
Л (со) = [(В + А) (о2 + с./4I (М№ + Cit\ -
- [{В + А) ю* - cJk](Mljufl - cj) = 0, (fl)
откуда
_
где
«а = («1 + ^ (В + Л) + М (cx/J
причем эти значения всегда вещественны.
Таким образом, при действии возмущающей силы постоянного
направления, изменяющейся по синусоидальному закону с частотой,
§ 101 ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ 307
равной угловой скорости ротора, существуют четыре иля три крити-
критические угловые скорости ротора (в зависимости от соотношения
моментов инерции А и В).
3°. Влияние гироскопических сил на вынужден-
вынужденные колебания при резонансе. Дифференциальные урав-
уравнения движения твердого тела составляются в соответствии с общими
правилами, указанными в § 4, 6, 9, 10 настоящей главы.
При решении задач на определение вынужден-
вынужденных колебаний твердого тела при резонансе реко-
рекомендуется следующий порядок действий:
1) выбираем обобщенные координаты;
2) пользуясь уравнениями Лагранжа или общими теоремами дина-
динамики, составляем дифференциальные уравнения движения твердого
тела;
3) находим собственные частоты из задачи о свободных коле-
колебаниях тела и критические скорости, исходя из задачи о вынужден-
вынужденных колебаниях твердого тела;
4) для случая резонанса находим частное решение неоднородной
системы дифференциальных уравнений движения и, прибавляя к нему
общее решение однородной системы, получаем искомое общее реше-
решение задачи.
Задача 18.46. В условиях задачи 18.43 определить вынужденные
колебания жесткого вала, вращающегося в двух упругих опорах,
при резонансе. Центр тяжести вала лежит между опорами.
Решение. Дифференциальные уравнения малых колебаний ста-
статически и динамически неуравновешенного вала были получены
в задаче 18.42. В случае, когда центр тяжести лежит между опорами,
уравнения имеют вид
A)
+ Ух>+ сх1уг r|- c2iy2 = Mela* cos e>t,
M AXS2 + /22i) + Ci^t 4- c^ = Mela? sin at,
Aa> (ft -fa) —В Cs - Ъ) - сг1г1гг + cxtxlzx =
= — (B - А) аЧЬ sin (at — e.%
(B — A) a48 cos (at — e).
Решение этой задачи для любого значения угловой скорости а, при
котором
= [(В - Л) ©а
+ [(В - А) ш* - Cly 1 (сг1 - М1гп*) Ф 0 B)
было получено. Ось вала описывает в этом случае поверхность ко-
конуса, вращаясь в ту же сторону, что и вал, с угловой скоростью
вала. Рассмотрим случай резонанса, полагая, что вал вращается
308 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ 1ГЛ. XVIII
с критической угловой скоростью, при которой определитель B)
обращается в нуль:
А(со) = О. C)
Будем искать частное решение системы A) в виде
Уг = (.ai + М)cos ©f + Ф\ + dit) sin at,
Zi =¦ (Яг + fat) sin cat + (Ьг + dzf) cos at,
cos «^ + ih + rf*0 sin m^>
= (^4 + fat) sin at + (bt -+- dtt) cos at.
D)
Подставляем эти функции и их производные в систему A). В по-
полученных уравнениях, которые должны быть- справедливы в любой
момент времени, приравняем коэффициенты соответственно при cosorf,
sin at, t cos at и t sin at в. левой и правой частях каждого из четырех
уравнений A).
Тогда находим шестнадцать алгебраических уравнений с шестнад-
шестнадцатью неизвестными {at, bit hi, dt), которые разбиваются на две си-
системы E) и F), каждая из восьми уравнений с восемью неизвестными.
Первая система уравнений:
(Ci/ - М12а2) ах + (c2l — Ж/!©2) а8 + 2Ml7,ad1 + 2Mlxada = Mela2, E.1)
0, E.2)
0^ = Ме/ша, E.3)
= 0. F.4)
o4 — Aadx —
— 2Bad2 + Aad9 + 2Badt = — (B — A) иа/б cos e, E.5)
— АаЧг + (c-ihl - Bta2) d2 + i4<o2d8+(Bco2 - c2l2t) dt = 0, E.6)
- Ci/iO rfx + АаЧг + (c2 V - Bco2) d8 - Л(оМ4 = О, E.7)
— Bco2) a8 + Лю2а4 —
2Badb+Лш^4 = (В — Л) а>2/6 cos e. E.8)
Вторая система уравнений:
2)Ъг + {c2l-М1га*)Ъг-2Ml1ahs-2М1гаНг = 0, F.1)
{сг1 — Ж/х©*) ft8 + (ctl—Л1 /аша) Ах = 0, F.2)
(сх1—М1га2) Ъ% + (са/ - Mlta2) bt + 2Ml2ahu + 2Mliaht = 0, F.3)
(Cl/ - Ml2a*) fa + (c2l - Al/x©2) fa = 0, F.4)
- ^a>2*i + (ctltl - Ba*) Ъг + Аю*Ь8 - (с21г1 - ?co2) b4 - A tufa +
+ 2Bah2 + Aafa - 2Bafa = (B — A) ©2/6 sin 8, F.5)
АаЩ + (c^l — Ba2) fa — Aa2h8 — (с2121 - Ba*) ht = 0, F.6)
- («aV—Ba2) h + АаЧг + (c2l2l — Ba2) ba - АаЧ4 + 2Bafa —
— Aafa — 2Bafa + Aafa = (B — A) <oVfi sin e, F.7)
- {c^l - Ba2) fa - Aa4% + (c2l2l - Ba2) fa + Aa2fa = 0. F.8)
§ 10J ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ 309
Рассмотрим вначале систему E). Сложим и вычтем попарно урав-
уравнения E.1) и E.3); E.2) и E.4); E.5) и E.8); E.6) и E.7). Получим
снова восемь уравнений, но они разобьются на две системы по че-
четыре уравнения с четырьмя неизвестными каждая:
G)
а2
D - 4) + 2М11(о (d3 - 4) =
- M 4toa) D - 4) + (сг1 - Mlxv?) (da - 4) = 0,
[(B-A)to*-exlj\(«i+*•) + fc,V~(B-A)о*](а, + Й4)+
+ (A r- 25) a (dL — dt) -f BB — A) © {da - dt) =
= 2(В-А) <оЩ cos г,
[(В - Л) ©a - c^/J № - dJ+[czl2l-(B-A) и*] (ds-rfj=0,
- M l^) (a8 - c4) +
t) = 0,
0,
[{B 4- Л) to2 - dV] (fll - аг) + [c^l - (B+A) to8] (a8 - aj-
- Bfi 4- А) и (dr + d2) 4- B5 4- Л) ш (d8 + dj = 0,
+ [(В + Л) оJ — с2/2/] D + 4) = 0.
Однородная система (8) имеет определитель
(8)
О 0 (с,/—yMiaa>2)
iB+AWUcM— (В
О 0
Этот определитель не обращается в нуль при значениях угловой ско-
скорости, соответствующих уравнению C).
Действительно, можно показать, что уравнения
/i (<и) = Wif—(В — Л) ©2] (с2/—iM/jffl2) +
+ [сгУ—(В — А) <ва] (ctl—Ж/2со2) = 0
и
+ [с2/г/ — (В + Л) со8] (q/ — Misfit2) = 0
не имеют общих корней. Для этого достаточно вычесть одно уравне-
уравнение из другого. Тогда значение <и, обращающее по условию в нуль
Л (<о), соответственно приводит к Д(8) Ф 0.
Следовательно, система (8) имеет нулевое решение
310 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ [ГЛ. XVUI
или ai = a2; а8 = о4; dx =—d2; d8 ——dt. Тогда система G) может
быть переписана в следующем виде:
(сх1—М/2©2) «? + {сг1—Ж4соа) аа + 2Ml2adi + 2MIxads = Mela?, (9.1)
(cxl - М/г©а) dx -f {с%1 - MlifiP) d9 = 0, (9.2)
[(В — А) ©8 - cxlxl\ а? + [CjV — E — Л) и2] а3 + (Л - 25) ©^ +
+ BB — A)ad3 = (B-A)(a45cose, (9.3)
[E - Л) <оа - с^/] rfj + [c%kl -(В-A) ©a] ds = 0. (9.4)
Уравнения (9.2) и (9.4) в силу C) имеют пропорциональные коэф-
коэффициенты. Действительно, представим C) в развернутом виде:
[(В - А) ©а - сгЩ (cj - Ж/2©2) + [(В - Л) и* - cjxl\ (сг1 - М1Х<&) ш. 0.
Если ни одна из скобок в этом уравнении не обращается в нуль,,
(случай обращения в нуль будет рассмотрен особо), то можно за-
записать
u
При таком обозначении система (9) может быть переписана в таком
виде:
(сг1 — М/г©2) (ах - ka3) + 2М1гЫг + Ж1х<ай3 = Mela2, A1.1)
- Wxl -(В-А) ю2] («! - kas) + (Л - 2S) ©^ + BS - Л) ©cf3 =
= E — A) ©2/fl cos e, A1.3)
Равенства A1.2) и A1.4) идентичны. С их учетом остальные два
уравнения могут быть записаны в виде
A2)
Неизвестное {ах — kab) содержит коэффициенты тех слагаемых вы-
вынужденных колебаний вала, которые не возрастают со временем.
Исключив ax — kaz из системы A2), находим
- [ciV - (В - Л) ю2] (flj - fta3) + B5 - Л) © A - k) d9 =
. _ Me [Cjljl- (В - А) ма] + (ci*- Mltfi,*) (В —А) & cos г
а'~BВ-
Me [сг1г1 - (В - А) со*] - (са/—М1^) (В-А)& cos е
~BВ-А) (сх+сг-М<а*) + 2М [сх11+сг11-(В-А) <*>*]
{ 10| ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ 311
Если переписать C) в виде
J-jB-A) to» _ c&l-jB-A) cu» _ ., ....
и обозначить для краткости знаменатель в A3) через
L = BB-A)(c1 + c2- Мсо2) + Ш W\ + c2l\ -(В~А) <&*], A5)
то формулы A3) примут вид
A6)
ds =(Cl? ~ ^'#2) [k^Me + (В - А) б cos e] • а,
Рассмотрим далее систему F). Совершенно аналогичным путем
находим
b-i = —Ьг, ba = —bt.
_. со (В — А) б sin e (cil~Mli<ut)
ft! —ft2 — B6-/1) (с1+са-Л1соа) + 2М [с^ + с^-
_. со (В — А) б sin e (ctl — М 1аа>8)
"з —Я* — BВ
или, с учетом обозначения A5),
Ьх= *Ы~*№ (Д-Л) б sine,
Тогда, резонансные слагаемые решения D), определяющие члены,
возрастающие с течением времени, будут
A8)
• t,
Zx — (ht sin at — dt cos co^) • t,
Уг — (ha cos at + rf3 sin a>t) • t,
z2 = (ha sin to^ — d3 cos &>t) • t.
Если ввести обозначения
hx = Нх cos оц,
a, \
2> j
то уравнения движения A8) запишутся в виде
Ух = Hit cos (cof — ах), Z\ = Htt sin (Ы — аг),
ya = WJcos((u< — a A z9 = J
312 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ
Угол сдвига фаз определяется из равенств
__ di kjMe -f (В — А) 6 cos в
~~1^=а~~ (B-ANsine '
__ ds _ kjMe + jB — A) 6 cos e
~" A3 ~~ (B —/1N sin 8
Отсюда следует, что
Ось вала описывает при резонансе усеченную коническую поверх-
поверхность с угловой скоростью, равной угловой скорости вала, причем
оба радиуса оснований неограниченно возрастают с течением времени.
4°. Применение уравнений Лагранжа в обобщен-
обобщенных координатах к составлению дифференциаль-
дифференциальных уравнений свободных и вынужденных коле-
колебаний вращающегося вала. Впп. 1°иЗ° этого параграфа
дифференциальные уравнения свободных и вынужденных колебаний
вращающегося вала были вы-ведены с помощью теоремы о движении
центра инерции системы и теоремы об изменении главного момента
количеств движения системы. Покажем, что эти же уравнения могут
быть получены применением уравнении Лагранжа в обобщенных коор-
координатах.
Задача 18.47. В условиях задачи 18.42 определить дифферен-
дифференциальные уравнения свободных колебаний при помощи уравнений
Лагранжа в обобщенных координатах.
л л
\
1 1
/
<%
t
С
Г'
а)
S)
К задаче 18 47.
Решение. Выберем неподвижные оси с началом в центре левого
подшипника в положении статического равновесия. Ось х направим
вдоль оси вала вправо, ось г — вертикально вверх, ось у — так,
чтобы система осей была правой. Кроме неподвижной системы
осей координат, возьмем подвижные оси хь yh z^, совпадающие
с главными центральными осями инерции вала и перемещающиеся
вместе с ним.
[ГЛ. XVIII
§ 10) ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ 313
Потенциальная энергия системы равна
* Су?+*D+у
A)
где, согласно условиям задачи 18.41, введены обозначения: уь zb у2,
z2 — координаты соответственно левой и правой опор, которые выби-
выбираем за обобщенные координаты, clf c2 — коэффициент жесткости
левой и правой опор.
Кинетическая энергия вала, согласно теореме Кенига, равна сумме
кинетической энергии центра инерции вала, считая в нем сосредото-
сосредоточенной всю массу системы, и кинетической энергии вала в его отно-
относительном движении вокруг центра инерции
у AfflJ, +~B Kt + to!,)- B)
1М СРЬ'
Здесь 00*1, ©у!, <йгХ — проекции угловой скорости вала на подвижные
оси координат. Заметив, что угловая скорость вала состоит из трех
составляющих: © — угловой скорости собственного вращения вала,
направленной по оси хь Ь — направленной по оси г, у —направлен-
—направленной по оси уг, с точностью до величин второго порядка малости
включительно и с учетом знаков проекций, находим
Юл = (о + 0 sin y *"« ю + P*Y» C)
v>yi=* — y, D)
ал — P cos 7 s=» p. E)
Подставив эти значения в выражение кинетической энергии вала и
заменяй ус, zc, P, у их выражениями (см. задачу 18.41)
zc — zi — + z% — i У \ ,
получаем
Сохранив в этом выражении величины второго порядка малости,
находим
314 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ [ГЛ. XVIir
Подставив значения потенциальной A) и кинетической G) энергий
в уравнения Лагранжа
d (дТ\_дТ , дП _ „
dt Щ) <% + dqj~v'
где qj—Уъ гь у2, гг, находим дифференциальные уравнения движе-
движения вала
^^О, (8)
(M+M)' + A»>^f в^ + см^О, (9)
= 0, A0)
= о. (И)
(_ 3xt% + зд 4 - Лш&= + В h
Для выделения поступательной части движения сложим уравнения (8)
и (9), а также A0) и A1), предварительно умножив их на /. Тогда,
учтя, что li — l^ — l, получим
0, A2)
0. A3)
Для выделения вращательной части движения вала умножим уравне-
уравнения (8) и A0) на Пъ а уравнения (9) и A1) на 11Ъ и снова сложим
(8) и (9), а также A0) и A1). Тогда найдем
-Si) - В С?2 - *i) + cA*i + с2//2г-2 = 0, A4)
Л со (i, - *,) + В СР2 -J>J - са//, У1 - с&у, = 0. A5)
Полученные уравнения совпадают с дифференциальными уравнениями
малых колебаний вала A5—18), найденными в задаче 18.41.
Особенностью составления дифференциальных уравнений движения
с помощью уравнений Лагранжа в обобщенных координатах является
необходимость сохранять члены второго порядка малости в выраже-
выражении для кинетической энергии. Это объясняется тем, что в уравне-
уравнениях Лагранжа кинетическая энергия дифференцируется по малым
переменным — обобщенной координате и обобщенной скорости.
Задача 18.48. В условиях задачи 18.43 составить дифференциаль-
дифференциальные уравнения вынужденных колебаний вала с помощью уравнений
Лагранжа в обобщенных координатах.
Решение. Рассмотрим вынужденные колебания вала, вызванные
его статической и динамической неуравновешенностью. Статическая
неуравновешенность вызвана смещением центра инерции на малое
расстояние е от оси вращения. Динамическая неуравновешенность
определяется отклонением главной центральной оси вращения на
малый угол б от оси вращения.
S 101 ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ 316
Потенциальная энергия системы равна
]L A)
как и в предыдущей задаче.
Координаты центра инерции вала и углы, определяющие положе-
положение оси вала, равны (см. задачу 18.43)
B)
= — гх -~ + гг — -f e sin (at, C)
р + б cos (toU - е) =^=^i + 6 cos (at - e), D)
—e), E)
где у, z — координаты точки геометрической оси вала (оси вращения),
лежащей на пересечении этой оси с плоскостью, перпендикулярной
к оси вращения и проходящей через центр инерции;^, zq — коор-
координаты центра инерции;^, zu y2, z2 — координаты левой и правой
опор; р\ у — углы между проекциями геометрической оси ротора
соответственно на плоскость ху и осью х, на плоскость xz и осью
•*; Pi» Ti ~ аналогичные углы, образованные проекциями главной
центральной оси вала.
Направив, как и в предыдущей задаче, подвижные оси координат
по главным центральным осям инерции вала, найдем проекции угло-
угловой скорости на эти оси:
со + PiSin Yi «=* ш + Py ~~ ^и sin (ю^ — е) Y + Р^ sin (ш^ — е) =
=^8in(cirf-eX F)
= — ^ = — у — бо) cos (w* — е) = ^—1 — бю cos (©* — е), G)
= рх cos Yi = Р — б« sin (<o< — е)=^а~^ — бю sin (о>< — е). (8)
Кинетическая энергия вала, согласно теореме Кенига, равна
Т = у Ж (/с+i2c) + у ^«« + у 5 Ki + й«)- W
Подставив в это выражение значения проекций скорости центра
инерции и угловой скорости, найдем
Т = у ir Ur-hk +M ~ en* sin ©О2 + (- hk+М + е«>^ cos со*J] +
4-1В {р=^ + б<о cos (со^ - еIа+ р^рА - бсо sin (ш* - е)?|. A0)
316 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ {ГЛ. XVIII
Подставим найденные значения потенциальной и кинетической энер-
энергии в уравнения Лагранжа
d ( дт\ ..._ дт .1 m — о
dt\d4j) dq,^ dqf-V'
где qj — принимает значения уг, zx, Уь *г- Имеем
¦\- M^f е<& ыъЫ + В ~-to%{tot — е) — A ip-cos (со* - е) = О, A1)
-e) = 0, A2)
e) —A-^sin(urf —е)=±0, A3)
— Ж Ae(o2sin(o<— B~sin((o^-e) + A-^-sln(coi; — e) = 0. A4)
Для выделения поступательной части движения сложим A1) с A2),
а A3) с A4), предварительно умножив их на / и учтя, что lx — lz — l.
Тогда получим
(—Л4 + jVi) + С\1У\ + Ч1Уг = Меи? cos oat, A5)
М (— 2Л + ^a/J + Cllzx + c%lz% = ЛГесоа sin ©f. A6)
Для выделения вращательной части движения вала умножим уравне-
уравнения (И) и A3) на Иь а уравнения A2) и A4) на 11г и сложим A1)
и A2), а также A3) и A4). Находим
-Л) -B(St-
= — (В - A) <oa6/ sin (at - e), A7)
A(s> {*i — it) -f В ($г — j>x) — Ci/Zj^i — сг11гуъ =
—e). A8)
Уравнения A5) —A8) идентичны дифференциальным уравнениям
малых колебаний вала, полученным в задаче 18.43. И в этом слу-
случае в выражении для кинетической энергии нельзя отбрасывать вели-
величины второго порядка малости, чтобы получить в уравнениях Лаг-
ранжа уравнения с точностью до малых величин первого порядка
малости.
§ И) УСТОЙЧИВОСТЬ ДВИЖЕНИЯ 317
§11. Устойчивость движения
1°. Исследование по общему решению. Для изучения
устойчивости движения системы материальных точек запишем диф-
дифференциальные уравнения движения в виде системы первого порядка
¦^--Г*<Л.Лм..,Л,9 (А = 1,2,...,2Л), A*)
где yk ~ обобщенные координаты или обобщенные скорости системы,
являющиеся функциями времени t.
Если система функций
Л =Л @. Л -Л (t), ..., Л -Л @ B*)
является частным решением системы A*), соответствующим заданным
начальным условиям движения
ЛвЬ У*=Ут> -••> Ун=Ум при * = 0, C*)
то решение B*) определяет невозмущенное движение системы.
Невозмущенное движение системы называется устойчивым, если
при малом изменении начальных условий решения системы B*) пере-
переходят в решения, мало отличающиеся от исходных для сколь угодно
больших значений t Такое невозмущенное движение называют также
движением устойчивым в малом.
Если отклонения от невозмущенного движения, кроме того, при
неограниченном возрастании времени стремятся к нулю, то такое
невозмущенное движение называется асимптотически устойчивым.
В некоторых технических задачах недостаточно исследовать
устойчивость движения в малом. Тогда следует отбросить ограниче-
ограничения, наложенные на отклонения начальных условий возмущенного
движения, от начальных условий невозмущенного движения.
Невозмущенное движение системы называется асимптотически
устойчивым в целом, если при любых иных начальных условиях, чем
C*), решение системы уравнений A*), начиная с некоторого опре-
определенного значения времени, будет отклоняться от решения B*) на
величину, меньшую наперед заданной.
Отклонения начальных условий движения от заданных уравне-
уравнениями C*) называются возмущениями.
Возможны и другие определения устойчивости движения. В част-
частности, во многих задачах современной техники важно обеспечить
малые отклонения в решении дифференциальных уравнений возму-
возмущенного движения от решения невозмущенного движения на конечном
интервале времени.
При решении вадач на устойчивость движения в этом пункте
будет применен прямой метод интегрирования дифференциальных
уравнений возмущенного движения. Этот метод наиболее эффекти-
эффективен по своим результатам, однако его применение ограничено неболь-
небольшим числом возможных приложений ввиду математических труднос-
трудностей, связанных с получением решения в замкнутом виде.
318 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ [ГЛ XVIII
При решении задач на устойчивость движения
методом и нтег р и р о в а ни я диффер енци а л ь н ы х урав-
уравнений возмущенного движения рекомендуется сле-
следующий порядок действий:
1) составляем дифференциальные уравнения невозмущенного дви-
движения системы;
2) находим частное решение этой системы дифференциальных
уравнений, соответствующее заданным начальным условиям и опре-
определяющее невозмущенное движение системы;
3) задаемся другими начальными условиями движения;
4) составляем дифференциальные уравнения возмущенного дви-
движения;
5) проинтегрировав дифференциальные уравнения возмущенного
движения, находим их решение;
6) сопоставляя решения дифференциальных уравнений невозму-
невозмущенного и возмущенного движений, судим об устойчивости невозму-
невозмущенного движения.
Задача 18.49. Точка А движется равномерно и прямолинейно
со скоростью vs. Точка В находилась в начальный момент на рас-
расстоянии а0 от точки А. Прямая АВ, соединяющая обе точки, в началь-
начальный момент образовывала угол i|H с перпендикуляром, восставленным
к прямолинейной траектории точки А (рис. а).
Угол Yo, образованный скоростью точки В с линией АВ, назы-
называется углом упреждения. Точка В будет сближаться с точкой А,
вплоть до точного попадания, по прямолинейной относительной тра-
траектории, если выбрать угол упреждения у0 согласно равенству
sinYo = — cosi|50 = ftcosi|>0, (I)
так как при этом относительная скорость точки В будет направ-
направлена по ВА (рис. в).
Равенству A) соответствуют два значения угла ±г|з0 (рис. б)
B)
Таким образом, прямолинейное движение точки В возможно при
подходе к точке А с передней полуплоскости и с задней полу-
полуплоскости по прямым ВА и В^А.
Определить устойчивость движения точки В по ВА и BiA.
Решение. Рассматривая движение точки В как сложное дви-
движение, складывающееся из переносного движения вместе с точкой А
и относительного движения по отношению к точке А, замечаем, что
при соблюдении равенства A) вектор относительной скорости
точки В направлен в точку А (рис. в). Наблюдатель, движущийся
устойчивость движения
319
вместе с точкой А, видит точку В движущейся по прямолинейной
относительной траектории ВА с постоянной скоростью с,. Это и
будет невозмущенное движение точки В.
а
К задаче 18.49.
Рассмотрим теперь возмущенное движение точки В, полагая, что
угол упреждения у не удовлетворяет равенству A). Обозначив рас-
расстояние АВ через а, находим проекции относительной скорости
на АВ и на ось, перпендикулярную АВ:
а = — ticosv — T^sinip, C)
a^ = vsiny — T^cosip. D)
В этих уравнениях через \|) обозначен угол между осью х и прямой
АВ в данный момент времени.
Разделим уравнение C) на равенство D) и помножим обе части
на cty\ Тогда найдем
da _ ocosy+Pf simp .
a u. cos 1b — я sin v ••'
vs cos 1|> — v sin 7
F)
При интегрировании этого уравнения с разделенными перемен-
переменными необходимо рассмотреть три частных случая:
!; 2)
= k2; 3)
320 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЯ СИСТЕМЫ |ГЛ. XVIII
Первый случай (малый угол упреждения: sin*у<k2). Про-
Проинтегрировав E), находим
cos у
,„ Са - Щ [( Sin?*^ \ /
cos if -(- К fea—sinsy sin фу
где С — произвольная постоянная, а через k обозначено отношение
скоростей k = vs/v.
Освободившись от логарифмов и определив С по начальным усло-
условиям (при t = 0 имеем а = а0, 1|з = %\ находим
JL =! Г—ft + sin у cos tfto-f- l^k2— sin8 у sin ф>
a° L—fe-j-siny cosilJ-l-V'fe2 — sin2y sin ф
cos у
-l/
siny — fecosr|)
stay—ftcosijjflj siny—ft cos ф '
Это уравнение относительной траектории точки В в возмущенном
движении.
Заметим, что при разных k показатель степени различен:
при
при А=1, (8)
при А>1.
Если k<.l, то точка S настигнет точку А при угле 1{>а, опре-
определенном равенствами
так как тогда а обратится в нуль, что следует из G). Сопоставив
значения % по формуле (9) с равенствами A) и B), заключаем, что
угол т|>г = — % для угла упреждения у. Иначе говоря, в конце дви-
движения точка В выходит на траекторию невозмущенного движения,
находящуюся в вадней полуплоскости. Следовательно, движение по
относительной траектории АВ, находящейся под углом (—ty0)
к оси х, устойчиво в большом. Каково бы ни было начальное воз-
возмущение, точка В в конце движения вернется на прямую АВ,
С другой стороны, из равенства D) имеем
§ ill устойчивость движения 321
Следовательно, при переходе через прямую, расположенную под
углом ф1( определяемым равенствами (рис. г)
A1)
угловая скорость вращения линии АВ меняет знак.
Если начальный угол \|э„ меньше % и больше ф2, то в процессе
движения угол ij) монотонно уменьшается вплоть до ip«=ip2, когда
точка В совмещается с точкой А.
Если угол г|H больше г^, но меньше ty2, то угол в процессе дви-
движения монотонно увеличивается вплоть до 11) = %, при котором
опять-таки точка В совмещается с точкой А (рис. г). Следовательно,
невозмущенное движение по относительной траектории АВ, распо-
расположенной в передней полуплоскости, неустойчиво в малом.
Как бы мало ни было отклонение точки от траектории невозму-
щенного движения, находящейся в передней полуплоскости, она при
дальнейшем движении будет все дальше отклоняться от невозму-
невозмущенной траектории, приближаясь к другой прямолинейной траектории
невозмущенного движения, расположенной в задней полуплоскости.
Второй случай (sin2у — k2). Проинтегрировав уравнение E)
и определив произвольную постоянную интегрирования по начальным
условиям (при t =» 0 имеем а = а0, гр =» t|>0)> находим уравнение отно-
относительной траектории возмущенного движения
Л_ _ 1—cos\|H е l (ctg Т ~ ctg ~t)
Со 1—cosij) "
Уравнение A0) в этом случае принимает вид
¦ф = -^-A — cosip). A3)
Следовательно, угловая скорость поворота линии ВА всегда поло-
положительна.
Из уравнения A2) следует, что расстояние а обращается в нуль
при 1JI-+0 с отрицательной стороны. Таким образом, в этом случае
обе траектории невозмущенного движения (рис. г) сливаются в одну
прямую Ах, углы i|>i и я}?2 обращаются соответственно в нуль. В этом
случае следует судить об устойчивости движения по прямой Ах на
основании знака возмущения. Если начальное отклонение находится
в первой четверти, то точка В будет отклоняться все дальше от пря-
прямой Ах и совпадет с точкой А при i|5-»-0 с отрицательной стороны.
Если начальное отклонение лежит в четвертой четверти, то точка В
будет приближаться к прямой Ах, угол i|j0 будет Стремиться к нулю.
В этом случае движение устойчиво в большом.
Третий случай (sinaу>¦ k2). Проинтегрировав уравнение E)
и определив произвольную постоянную интегрирования по начальным
11 М. И. Бать я др., т. III
322 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЯ СИСТЕМЫ (ГЛ. XVIII
условиям (а = ао, ty = ifo при t — Q), находим уравнение относитель-
относительной траектории возмущенного движения
JL e /stay—
\einy—Ascosip
Из этого уравнения следует, что расстояние до точки А обраща-
обращается в нуль при неограниченном возрастании угла ф.
Из уравнения D) находим угловую скорость поворота прямой
откуда следует, что угловая скорость не меняет знака. Ее знак совпа-
совпадает со знаком sin-у.
Таким образом, возмущенная траектория точки В — спираль,
проходящая через точку А.
Из уравнения A5) следует, что угловая скорость вращения пря-
прямой ВА по мере приближения точки В к А неограниченно возрас-
возрастает.
2°. Устойчивость движения по первому приближе-
приближению. Решение задач на определение устойчивости движения прямым
методом интегрирования дифференциальных уравнение возмущенного
движения в большинстве случаев не может быть осуществлено ввиду
невозможности получения решения в замкнутом виде.
В связи с этим широкое распространение получил способ опре-
определения устойчивости движения по первому приближению. Этот спо-
способ был известен задолго до появления классического труда А. М. Ляпу-
Ляпунова (Общая задача об устойчивости движения, 1892 г). Однако
именно А. М. Ляпунов впервые установил условия, при которых
первое приближение позволяет судить об устойчивости движения
исходной системы, движение которой описывается нелинейными
дифференциальными уравнениями.
Способ определения устойчивости движения по первому прибли-
приближению заключается в следующем. Пусть
л -л т. л -/• со..... л -л w о*)
является частным решением, системы дифференциальных уравнений
первого порядка
Ф—ПСи, л..., л. О B*)
при заданных начальных условиях движения
Л -Л* Л = Ун» "-гУп^Упо при t - 0. C *)
I щ устойчивость движения ЯВ8
Решение A*) определяет невозмущенное движение Системы. При
других начальных условиях Движения значения переменных yk, опре-
определяющие движение системы, можно представить в виде
Тогда уравнения B*) примут вид
& ¦. 4 E*)
Вычтя из каждого соответственного уравнения E*) уравнение
B*), найдем
получим систему дифференциальных уравнений возмущенного дви-
движения
^ F*)
Обозначив правую часть этих уравнений для краткости через
G*)
дви-
дви? (8*)
Из G*) следует, что
*»@, 0 0,0 = 0 (9*)
и, следовательно,
*1 = *а = ... = *„ = 0 A0*)
является частным решением системы (8*), соответствующим невозму-
невозмущенному движению.
Для рассмотрения устойчивости по первому приближению в'системе
уравнения (8*) в правой части выделяются линейные слагаемые. При
этом ограничимся случаем, когда время не входит явно в правую
часть уравнений
^ х, хп), (И*)
где а* = (-Д-4-) , a Ffe(*i. ...,*«) содержит слага-
емые второго и более высоких порядков относительно переменных дг*.
Тогда для исследования устойчивости по первому приближению
составляют систему, получаемую из (II*) отбрасыванием нелинейных
слагаемых
n A2*)
и находят характеристическое уравнение системы A2*)
zn + Alzn-1 + Aa?n-* + ... + An = Q. A3*)
11*
324
ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ
[ГЛ. XVIII
Согласно первой теореме Ляпунова невозмущенное движение,
определяемое уравнениями A*), устойчиво, если все корни харак-
характеристического уравнения A3*) имеют отрицательную вещественную
часть. В этом случае отброшенные нелинейные слагаемые в правой
части уравнений A1*) не влияют на устойчивость движения.
Согласно второй теореме Ляпунова невозмущенное движение, опре-
определяемое уравнениями A*), неустойчиво, если среди корней харак-
характеристического уравнения A3*) имеется хотя бы один корень с поло-
положительной вещественной частью. И в этом случае отброшенные
нелинейные слагаемые в правой части уравнений (И*) не могут
влиять на устойчивость движения.
Таким образом, исследование по первому приближению позволяет
окончательно ответить на вопрос об устойчивости движения в тех
случаях, когда корни характеристического уравнения имеют отри-
отрицательную или положительную вещественную часть.
Если в числе корней характеристического уравнения имеются
корни, вещественная часть которых равна нулю, т. е. нулевые или
чисто мнимые корни, то судить об устойчивости движения по пер-
первому приближению нельзя. В этих случаях, называемых «критичес-
«критическими», как показал А. М. Ляпунов, необходимо учитывать в диффе-
дифференциальных уравнениях члены порядка выше первого.
О знаке корней характеристического уравнения можно судить
на основании теоремы Гурвица, которая формулируется следующим
образом. Уравнение и-й степени с вещественными коэффициентами
(ао>0)
аох
.. •+ап = О
A4*)
имеет все корни с отрицательной вещественной частью, если все
определители вида
ая а2
а3
«о
а2
О
а0
п! а0 О
о8 п2 п±
«5 О* а8
.. О
.. О
A5*)
положительны. При этом af=0, если 1>п. Это условие является
необходимым и достаточным.
При решении задач на исследование устойчи-
устойчивости движения системы по первому приближению
рекомендуется следующий порядок действий:
1) определяем число степеней свободы системы и выбираем обоб-
обобщенные координаты;
14
УСТОЙЧИВОСТЬ ДВИЖЕНИЯ
325
2) пользуясь уравнениями Лагранжа, составляем дифференциаль-
дифференциальные уравнения невозмущенного движения;
3) составляем дифференциальные уравнения возмущенного движе-
движения, полагая, что обобщенные координаты и обобщенные скорости
в возмущенном движении отличаются от значений в невозмущенном
движении на величины первого порядка малости;
4) в полученных дифференциальных уравнениях отбрасываем
слагаемые второго и более высоких порядков малости;
5) вычитаем из дифференциальных уравнений возмущенного дви-
движения соответственные дифференциальные уравнения невозмущенного
движения;
6) для случая системы линейных дифференциальных уравнений
в вариациях с постоянными коэффициентами составляем характе-
характеристическое уравнение;
7) пользуясь теоремой Гурвица, определяем знаки вещественных
частей корней характеристического уравнения и затем судим об
устойчивости движения исходной системы.
Задача 18.50. Центробежный регулятор Уатта предназначен для
поддержания равномерного вращательного движения. Он состоит из
двух стержней ОА и ОВ
одинаковой длины /, шар-
нирно укрепленных в не-
неподвижной точке О. На
концах стержни несут два
шара массы т каждый
(рис. а). При помощи двух
стержней СЕ и DC муфта
С, которая может скользить
по вертикальной оси, шар-
нирно соединена со стерж-
стержнями, несущими шары. Шары
считать материальными точ-
точками. При увеличении угло-
угловой скорости вращения
шары расходятся, муфта С К задаче 18.50.
подымается, уменьшая впуск-
впускное отверстие для пара. При уменьшении угловой скорости шары сбли-
сближаются, муфта С опускается и увеличивает отверстие для впуска пара.
Пренебрегая массами стержней и муфты, а также силами трения,
определить устойчивость движения регулятора. Момент инерции вращаю-
вращающихся частей относительно вертикальной оси равен /0 (без учета шаров).
Восстанавливающий момент, вызванный отклонением угла ф от
невозмущенного значения ф0, равен
Lt= — й(ф-ф0),
где к — постоянный положительный коэффициент.
326 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ 1ГЛ. XVIII
Решение. Регулятор в целом представляет собой систему с двумя
степенями свободы. Выбираем обобщенные координаты: угол пово-
поворота вокруг оси ОС, который обозначим р\ и угол поворота стержней
ОА и ОВ вокруг горизонтальной оси, перпендикулярной к плос-
плоскости ОАВ, который назовем ф. Определим значение угла ф0, соот-
соответствующее вращению системы с постоянной заданной угловой ско-
скоростью ji0 = a>0. Для этого достаточно рассмотреть относительное
равновесие одного из шаров (см. рис. б). К шару приложены: сила
тяжести Р (Р = mg) и реакция стержня JV. Присоединив к этим силам
нормальную силу инерции Jn (Jn = ml sin фо(о§), можем рассматривать
совокупность трех сил как уравновешенную систему.
Спроектировав все силы на направление, перпендикулярное N,
найдем
Jacosy0 — mg sin q>0 = О, A)
откуда
^B)
Таким образом, заданной угловой скорости вращения системы соот-
соответствует вполне определенный угол ф0. Это установившееся движе-
движение системы называется невозмущенным движением.
Для составления дифференциальных уравнений движения системы
воспользуемся уравнениями Лагранжа. Кинетическая энергия системы
равна
±[fr &\ C)
Момент инерции /х относительно оси z (рис. а) складывается из
момента инерции /0 всех вращающихся частей, кроме шаров (этот
момент инерции остается неизменным при изменении угла ф), и из
момента инерции шаров, зависящего от угла ф:
Ix = I0 + 2mP sin2 ф. D)
Момент инерции /2 шаров относительно оси х (рис. а) равен
E)
Таким образом, кинетическая энергия системы выражается в обобщен-
обобщенных координатах в виде
Г = -^(/0 + 2я/»81п«ф)^ + 2/яЛф»]. F)
Переходим к определению обобщенных сил. Первая обобщенная
сила Qg находится как коэффициент при соответствующем возмож-
возможном перемещении в выражении для элементарной работы:
бЛх = ^.бр. G)
§ 11J УСТОЙЧИВОСТЬ ДВИЖЕНИЯ 327
Следовательно, обобщенная сила будет
Qp = L,=-А(Ф-ФО). (8)
Вторая обобщенная сила <3Ф находится как частная производная
от потенциальной энергии по углу <р. Действительно, при изменении
угла ф работу совершает только сила тяжести шаров, так как центр
тяжести остальных вращающихся частей системы остается неизмен-
неизменным, а работа момента Lz при изменении угла ф равна нулю. Тогда
с точностью до произвольной постоянной потенциальная энергия
шаров равна
П= —2mglcQsy. (9)
Составляем далее уравнения Лагранжа
Рассматривая малые колебания системы около положения невозму-
невозмущенного движения B), полагаем
i ) A2)
где х, у — малые приращения переменных ф, |J. Внеся значения пере-
переменных в уравнении A0), находим
= — k(q> — ф„) A3)
или, учтя A2),
2mP sin (ф0 + х) cos (ф0 + х) х (щ +J)) +
+ [/0 + 2mP sin2 (Фо + х)] JJ = - kx. A4)
Для составления уравнения малых движений подсчитываем все
члены с точностью до величин первого порядка малости включительно,
полагая s'mx^x, cosjr^l. После несложных преобразований
находим
G0 + 2mP sin2 ф0)^ + mP sin 2ф0 • ^ + kx = 0. A5)
Второе дифференциальное уравнение малых движений находим
из A1)
/2ф — Р • тпР' 2 sin ф • cos ф = — 2mglsin ф. A6)
Внеся в это уравнение значения A2) и E), получаем
•* - у (Ро +$Y sin Bф0 + 2х) + j- sin (Фо + х) = 0. A7)
Раскрываем скобки и подсчитываем для малых движений все члены
с точностью до величин первого порядка малости включительно.
328 ТЕОРИЯ МАЛЫХ ДВИЖЕНИИ СИСТЕМЫ (ГЛ. XVH1
После несложных преобразований, учтя равенство B), найдем
= 0. A8)
Таким образом, получена система двух дифференциальных уравнений
A5), A8) малых движений системы. Для решения этой системы
линейных уравнений с постоянными коэффициентами полагаем
х = dep/, $ = С2ер/, A9)
где Сь Са, р — постоянные величины. Подставив эти значения в урав-
уравнения A5), A8) и сократив на общий множитель epi, получаем
характеристическое уравнение
(-^5--r-Sirf ф„У + P8SH1* ф0 (l +2 СО8*ф0+ "г^Г
.-^^„зтгфо^О. B0)
Кратко это уравнение записывается в виде
где
аа - pgsin* ф0 (l + 2 cos* Фо + -^,
B1)
B2)
Условие Гурвица отрицательности вещественной части корней
уравнения третьей степени имеет вид
ci a0
о8 а2
B3)
= а3(а1аг — аяае)>0.
= ахп2 — пдпа > 0,
из
0
а0
0
0
«X
Так как в данном случае ао>О, аа>0, а8>0, ai = O, то условия
Гурвица не удовлетворяются, и следовательно, малые движения регу-
регулятора, в сделанных предположениях, неустойчивы. Этот факт, уста-
установленный сравнительно давно экспериментально, приводит к необхо-
необходимости вводить дополнительные звенья в систему регулирования.
Задача 18.61. Пусть уравнение возмущенного движения системы
с одной степенью свободы определяется уравнением Ван-дер-Поля
? + а(лг*-1);г + лг = О, (if
где а>0. Исследовать устойчивость движения.
§ Щ УСТОЙЧИВОСТЬ ДВИЖЕНИЯ S29
Решение. Запишем уравнение движения A) в виде системы
двух уравнений
Это допустимо, так как, вычислив из второго уравнения системы B)
производную по времени и внеся туда значение j> согласно первому
уравнению системы B), возвращаемся к исходному уравнению A).
Для определения устойчивости возмущенного движения по первому
приближению линеаризуем систему B), отбросив члены выше первого
порядка малости:
~=у+ах, C)
Составляем характеристическое уравнение системы
а-Х +1
-1 — К
Раскрыв определитель, получаем
= 0.
<Х E)
Корни характеристического уравнения E) таковы:
^I. F)
При а Э* 2 оба корня вещественные и положительные; при а < 2
оба корня комплексные с положительной вещественной частью.
Следовательно, невозмущенное движение х = 0, х*=0 системы
неустойчиво в малом.
3°. Устойчивость движения при наличии гиро-
гироскопических сил. Система, неустойчивая сама по себе, может
быть сделана устойчивой по первому приближению путем введения
гироскопических сил только в том случае, если число неустойчивых
степеней свободы четно. Эта теорема была доказана Кельвином.
Гироскопическая стабилизация движения возможна только для
консервативной системы. Диссипативные силы, как бы малы ни были,
действуя достаточно долго, уничтожат устойчивость, созданную гиро-
гироскопическими силами. Поэтому устойчивость, созданная гироскопиче-
гироскопическими силами, называется «временной», в то время как устойчивость
консервативной системы является «вековой».
Таким образом, диссипативные силы усиливают устойчивость дви-
движения при действии одних консервативных сил и разрушают устой-
устойчивость, если она достигнута благодаря добавлению гироскопических
сил.
330
ТЕОРИЯ МАЛЫХ ДВИЖЕНИЯ СИСТЕМЫ
1ГЛ. XVUI
При решении задач на исследование устойчи-
устойчивости движения при действии гироскопических сил
рекомендуется следующая последовательность
действий:
1) определяем число степеней свободы системы и выбираем обоб-
обобщенные координаты;
2) находим невозмущенное движение системы;
3) задаваясь малыми отклонениями начальных условий движения,
составляем дифференциальные уравнения возмущенного движения,
пользуясь уравнениями Лагранжа или общими теоремами динамики;
4) полагая, что обобщенные координаты и обобщенные скорости
в возмущенном' движении отличаются от значений в невозмущенном
движении на величины первого порядка малости, линеаризируем диф-
дифференциальные уравнения, отбрасывая слагаемые второго и более
высоких порядков малости, вычитаем из дифференциальных уравнений
возмущенного движения соответствующие уравнения невозмущенного
движения;
б) исследуем устойчивость системы по первому приближению не-
непосредственным интегрированием дифференциальных уравнений воз-
. мущенного движения или применяя
х] критерий Гурвица к дифференци-
дифференциальным уравнениям в вариациях.
Задача 18.52. Ротор веса Q
вращается с постоянной угловой ско-
скоростью со вокруг собственной оси
симметрии, совпадающей с непод-
неподвижной вертикальной осью х. Точка
О, являющаяся центром сферической
_ опоры ротора, неподвижна. Центр
с тяжести ротора С находится на вы-
высоте ОС*=12. Расстояние OAt = l;
буквой Ах обозначена крайняя ниж-
нижняя точка ротора. Момент инерции
ротора относительно оси симметрии
равен А, а момент инерции относи-
относительно оси, проходящей через точку
О и перпендикулярной к оси сим-
симметрии ротора, равен В.
Исследовать устойчивость вер-
вертикального положения оси ротора.
Решение. Ротор представляет собой систему с двумя степе-
степенями свободы. Выберем в качестве обобщенных координат коорди-
координаты >'ь 2i крайней точки ротора Av Для составления дифферен-
дифференциальных уравнений движения применим теорему об изменении глав-
главного момента количеств движения относительно неподвижных
осей у, г.
Ж////А
\У\ f///////,
К задач* 18.52.
§ II) УСТОЙЧИВОСТЬ ДВИЖЕНИЯ
Пользуясь формулами B*) из § 9 этой главы, определяющими
главные моменты количеств движения относительно неподвижных осей
координат, находим
fo-Qlfy!. A)
Внеся в эти уравнения значения углов {S и у,
Р —^, Т —¦?, B)
получаем
C)
D)
Кососимметричные члены (— Aatfi) и (Aooix) соответствуют гиро-
гироскопическим силам.
Решение этой системы однородных линейных уравнений с постоян-
постоянными коэффициентами найдем, введя комплексную переменную
b~*i + tyi- (б)
Умножив уравнение D) на I и сложив его с уравнением C), имеем
SM-M«u-Q4A = 0. F)
Составляем характеристическое уравнение
BS* + lAu>S-Qlu=:O. G)
Определяем корни этого уравнения:
61 = ?2j , (о)
Если выполнено условие
AW>iBQl2, A0)
то корни являются чисто мнимыми величинами и могут быть для
краткости записаны в виде
51=^i, b-tkb A1)
где
2В
— вещественные числа. В этом случае решение уравнения FJ будет
332 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ [ГЛ. XVIII
где ?>! и ?J — комплексные произвольные постоянные вида Dx = Bi-\-
+ 1Ва, Вй = Вг-\-1В^ Тогда уравнение A4) примет вид
% = (В1 + 1Ва) (cos k-yt + i sin *!*) + (fi2 + ^4) (cos k^t + / sin ?a*). A5)
Далее находим исходные переменные yt и zlt отделив в уравне-
уравнении A5) вещественную часть от мнимой:
cos *Л
гх =r fij cos kxt — Bg sin kxt -{¦ B$ cos /fea^ — Bt sin A2? A7)
В этих уравнениях Вь Bit B8, Bt — произвольные постоянные интег-
интегрирования, определяемые по начальным данным у10, j>10, г10, i10 при
t =* 0. Так как _ух и zx являются линейными функциями косинуса и си-
синуса, то координаты нижнего конца ротора не растут с течением
времени.
Итак, при выполнении условия A0) точка Ах совершает периоди-
периодическое движение (полагаем, что kx и k2 соизмеримы), складывающееся
из четырех гармонических колебаний. Следовательно, если угловая
скорость ротора
Ж A8)
что вытекает из A0), то вертикальное положение оси ротора устой-
устойчиво, несмотря на то, что центр тяжести занимает наивысшее поло-
положение и равновесие такого же невращающегося стержня неустойчиво.
Гироскопические силы стабилизируют неустойчивую консервативную
систему. Рассмотрим далее случай, когда
A9)
Корни характеристического уравнения G) будут комплексными чис-
числами вида
Sl = _a-H?, s^a + tb, B0)
где
- ш .-О, *=-~<0. B1)
В этом случае общее решение уравнения F) будет
•«'. B2)
Здесь, так же как и в первом случае, ^n-Bi+ZSg, Da = B% + tBt.
Следовательно, уравнение B2) после этой замены примет вид
Л «(Вг + 1ВЬ) е-* (cos bt + i sin bt) -f
(cos bt+1 sin bt). B3)
§ III УСТОЙЧИВОСТЬ ДВИЖЕНИЯ 833
Исходные переменные у\ и zx получим, отделив вещественную часть
от мнимой:
ух ж* е~ы (Вг sin Ы + Вя cos bt)+е°* [В% sin bt+Вх cos bt), B4)
гг = е-<* (Вг cos bt — Ва sin bt) -f e"* E, cos bt — Bt sin W). B5)
Вторые слагаемые в этих уравнениях содержат множитель е°* и, сле-
следовательно, им соответствуют все возрастающие колебания. Верти-
Вертикальное положение оси ротора в этом случае неустойчиво.
4°. Второй метод Ляпунова. Запишем систему дифферен-
дифференциальных уравнений возмущенного движения в виде
Ц**-Хк(хьх% хп), A*)
ограничиваясь случаем, когда функции Хк не зависят явно от вре-
времени. В этом случае невозмущенное движение называется установив-
установившимся.
Под хк следует понимать обобщенные координаты и обобщенные
скорости системы, которые в задачах устойчивости играют одинако-
одинаковую роль.
Будем считать, что в некоторой области
(А=1, 2, ..., л)
функции Хк непрерывны и допускают для каждой совокупности на-
начальных условий единственное решение. Здесь е — достаточно малое
положительное число.
Уравнения возмущенного движения A*) в большинстве случаев
нелинейны и не смогут быть проинтегрированы в замкнутом виде.
Ввиду этого Ляпунов предложил качественный метод исследования
устойчивости движения.
Пользуясь этим методом, можно, не интегрируя дифференциальные
уравнения возмущенного движения, ответить на вопрос об устойчи-
устойчивости невозмущенного движения системы. Второй метод Ляпунова
основан на исследовании некоторых функций
V{xt *„), B*)
называемых функциями Ляпунова.
Эти функции будем полагать однозначными, имеющими непре-
непрерывные частные производные и обращающимися в нуль при хх =
= ...=- хп~0.
1) Функция V(xlf ,.., хп) называется знакоопределенной (опре-
(определенно-положительной или определенно-отрицательной), если она при
C*)
принимает значения только одного определенного знака (положитель-
(положительного или отрицательного) и обращается в нуль только при х1 =
334 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ 1ГЛ. XVIII
2) Функция V(jfi, .... лг„) называется знакопостоянной (положи-
(положительной или отрицательной), если она в области C*) может прини-
принимать значения только одного определенного знака, но можег обра-
обращаться в нуль не только при хг = ...=* хп =» 0.
3) Функция V(xlt ,.,, хп) называется знакопеременной, если она
в области C*) может принимать как положительные так и отрица-
отрицательные значения.
Общих критериев, позволяющих относить функции Ляпунова к од-
одному из вышеуказанных типов, не существует, однако можно сфор-
сформулировать некоторые частные теоремы. Так:
1) любая форма нечетного порядка является знакопеременной
функцией;
2) если форма является квадратичной, то, согласно теореме Силь-
Сильвестра, для того чтобы квадратичная форма была определенно-поло-
определенно-положительной, необходимо и достаточно, чтобы все главные миноры ее
дискриминанта были положительны (см. § 1 этой главы),
3) знакоопределенность или знакопеременность однородной формы
остается неизменной, если к ней добавить любую форму от тех же
переменных и того же порядка с достаточно малыми коэффициен-
коэффициентами,
4) если функция не содержит всех координат, то она не может
быть знакоопределенной. Такая функция может быть знакопостоянной
или знакопеременной,
б) если по совокупности членов наинизшего порядка в разложе-
разложениях аналитических функций можно судить о знакоопределенности
или знакопеременное™ этих функций, то для достаточно малых зна-
значений | хk | члены более высоких порядков можно не рассматривать.
Если по совокупности членов наинизшего порядка в разложениях
аналитических функций можно установить, что последняя является
знакопостоянной, то в этом случае знакоопределенность или знако-
знакопеременность решается из рассмотрения членов более высоких по-
порядков.
Производная по времени от функции Ляпунова имеет вид
Внеся в это выражение значения производных х^ из A*), найдем
полную производную от функции Ляпунова, составленную в силу
уравнений возмущенного движения:
dV dV y . dV y , , dV у
Перейдем к формулировке основных теорем второго метода Ля-
Ляпунова об устойчивости и неустойчивости движения:
Теорема А. Если для дифференциальных уравнений возмущен-
возмущенного движения можно найти знакоопределенную функцию У(хг, ...
§111 УСТОЙЧИВОСТЬ ДВИЖЕНИЯ 835
..., х„), полная производная которой по времени, составленная в силу
этих уравнений, есть функция знакопостоянная, знака, противополож-
противоположного с V, или эта производная тождественно обращается в нуль, то
невозмущенное движение устойчиво.
Теорема Б. Если для дифференциальных уравнений возмущен-
возмущенного движения можно найти знакоопределенную функцию У(х1г ...
..., хп), полная производная которой по времени, составленная в силу
этих уравнений, есть функция знакоояределенная знака, противопо-
противоположного с V, то невозмущенное движение устойчиво асимптотически.
Теорема В. Если для дифференциальных уравнений возмущен-
возмущенного движения можно найти функцию V(xt, ..., х„) такую, что ее
полная производная по времени, составленная в силу этих уравнений,
есть функция знакоопределенная, а сама функция V может принимать
значения знака, противоположного с dV/dt, то невозмущенное дви-
движение неустойчиво.
Задача 18.53. Дана система дифференциальных уравнений возму-
возмущенного движения
g djL A)
Определить устойчивость частного решения х=у — 0
Решение. Составим функцию Ляпунова в виде
у. B)
Производная по времени от этой функции будет
It ~ X di ~ry dt •
Заменим производные dx/dt и dy/dt их значениями из уравнений A).
Тогда получим
**. = х (_ у + о*») +у (х+ay") = a (xi +y% C)
При а > 0 функция Ляпунова B) и ее полная производная по
времени C) будут знакоопределенными одного знака (определенно-
положительными). Следовательно, согласно теореме В, невозмущенное
движение х = 0, у => 0 неустойчиво.
При а <; 0 функция Ляпунова B) и ее полная производная по
времени C) будут знакоопределенными функциями противоположного
знака. Согласно теореме Б частное решение устойчиво асимптоти-
асимптотически.
При а = 0 уравнения возмущенного движения принимают вид
2Г36 ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ [ГЛ. XVI»
Продифференцировав первое из этих уравнений по времени и учтя
второе, находим
Аналогично находим
Отсюда получаем
?+*-«•
= asin(t-\-t0).
Таким образом, при а <= 0 движение устойчиво. Заметим, что систе-
систему D) можно рассматривать как линеаризованную систему уравне-
уравнений A). Ответ, полученный в данном случае для линеаризованной
системы, не совпадает с правильными ответами, полученными для
исходной системы. Характер движения здесь определяется именно
нелинейными членами и отбрасывать их нельзя.
ГЛАВА XIX
ПЕРЕХОДНЫЕ ПРОЦЕССЫ И ПРЕОБРАЗОВАНИЕ ЛАПЛАСА
Для многих динамических систем, содержащих силы сопротивления,
под установившимся движением понимается движение, не зависящее от
начальных условий и определяемое только действующими на систему
силами. Простейшим примером установившегося движения являются вы-
вынужденные колебания, возникающие в линейной механической системе.
Это движение устанавливается не сразу, а через некоторый про-
промежуток времени после начала движения. Процесс лрихода системы
к установившемуся движению называется переходным процессом.
Обычно переходный процесс является затухающим колебательным
или затухающим апериодическим.
В машинах переходный процесс возникает при пуске и остановке,
при переходе с одного режима работы на другой, а также при сбросе
или увеличении полезной нагрузки.
Во многих случаях при исследовании переходных процессов
в динамических системах удобно пользоваться не классическим мето-
методом интегрирования дифференциальных уравнений движения, а опе-
операционным исчислением, в основе которого лежит преобразование
Лапласа. Одна из причин этого состоит в том, что при интегриро-
интегрировании дифференциальных уравнений вычисление постоянных интегри-
интегрирования при большрм их числе является трудоемкой операцией. При
использовании преобразования Лапласа начальные условия учитыва-
учитываются автоматически и операция вычисления произвольных постоян-
постоянных отпадает. Вторая причина заключается в том, что преобразова-
преобразование Лапласа позволяет заменить операции дифференцирования и интег-
интегрирования функций простыми операциями умножения и деления. Это
дает возможность сводить решение дифференциальных уравнений
к решению алгебраических уравнений.
§ 1. Преобразование Лапласа
1°. Вводные замечания. Изображением по Лапласу (L-изобра-
женаем) или преобразованием по Лапласу функции /(/) вещественного
аргумента t называется интеграл
{/@} - f/W e-#dt=F(p), (I *)
338 ПЕРЕХОДНЫЕ ПРОЦЕССЫ И ПРЕОБРАЗОВАНИЕ ЛАПЛАСА [ГЛ. XIX
где p = s-{-la — некоторый комплексный параметр. Поскольку р
в подынтегральном выражении является параметром, значение интег-
интеграла определяется величиной этого параметра и видом функции /(О,
но не зависит от переменной интегрирования t Таким образом,
интеграл является функцией комплексного аргумента р, что и под-
подчеркнуто в равенстве A*).
Функцию f(i) называют оригиналом, а функцию F (р) — изобра-
изображением и кратко записывают это обстоятельство так:
F(p)+f{t) или f(t)+~F(p), B*)
что читается «/(О преобразуется в F (р)» (стрелка всегда направ-
направлена к оригиналу).
Условимся оригиналы обозначать малыми буквами латинского
алфавита, а их изображения — соответствующими большими латин-
латинскими буквами. Например, будем считать, что
xV)<-X(p), У®+У(Р). C*)
Для многих часто встречающихся функций составлены таблицы
изображений, которыми и следует пользоваться при решении задач.
Обратим внимание на следующие обстоятельства:
1) Интеграл в равенстве A*) является несобственным интегралом
первого рода, если функция fit) непрерывна или имеет только раз-
разрывы первого рода, что будет в дальнейшем предполагаться. Следо-
Следовательно, встает вопрос о его сходимости. Можно показать, что для
функций, растущих не быстрее, чем экспоненциальная функция eat,
этот интеграл всегда сходится, если вещественная часть s числа р
достаточно велика. Поэтому в тех простейших приложениях, которые
будут рассмотрены, можно не исследовать сходимость интеграла A*),
условившись раз навсегда, что s достаточно велико. Однако следует
помнить, что существуют функции, например f(t) = ei\ которые
растут быстрее экспоненты и для которых интеграл A*) расходится;
следовательно, изображение в этом случае не существует.
2) Очевидно, что изображение, определяемое формулой A*),
зависит только от значений функции /(г) при t^O, поскольку ниж-
нижний предел в интеграле равен 0. Значения fit) при отрицательных t
никакой роли не играют и могут быть какими угодно. Удобно счи-
считать, что fit) = 0 при t < 0. Для упрощения письма это обстоятель-
обстоятельство, как правило, не записывается, а только подразумевается. Так,
например, запись
/@-< D*)
следует понимать как
0 при
t при
] ПРЕОБРАЗОВАНИЕ ЛАПЛАСА 839
В частности единичную функцию Хевисайда (единичный скачок)
°^»-\1 при <>0 F)
будем обозначать просто 1, т. е. вместо f(t) =»о @ писать /@ = 1.
График единичной функции изображен на рис. 19.1. Единичная
функция очень удобна для записи тех функций, которые будут рас-
рассматриваться в этой главе. Так,
например, запись
¦too (О С7*)
равносильна записи E*). Анало-
Аналогично любую функцию f(i), с ко- ^j
торой эдесь придется иметь дело, °
можно представить как f(t)ao(t)- Рис. 19.1.
Однако для упрощения формул
множитель с0 @ будем опускать, если это не может повести к не-
недоразумениям, но о его существовании всегда следует помнить.
3) Формула A*) однозначно определяет изображение по ориги-
оригиналу. Оригинал по изображению также определяется однозначно
в точках непрерывности оригинала, а в точках разрыва ему можно
приписать любое значение, поскольку значения f(t) в отдельных
точках не влияют на величину интеграла A*) и, следовательно, не
могут быть определены из F(p). За значение оригинала в точках
его разрыва принимается предел справа, т. е.
f(tt)=f(ti + O), (8*)
где tt — точка разрыва функции f(t).
Для нахождения изображения по оригиналу, а также оригинала
по изображению в простейших случаях можно* пользоваться сравни-
сравнительно небольшой таблицей изображений. Если изображение в таб-
таблице отсутствует, то во многих, случаях его можно привести к виду,
имеющемуся в таблице, с помощью теорем об основных свойствах
изображений, речь о которых пойдет ниже. Приведем краткие таб-
таблицы изображений (табл. 1 и 2), достаточные для решения задач,
которые нам встретятся. В литературе можно найти более подроб-
подробные таблицы.
2°. Основные свойства преобразования Лапласа.
Знание основных свойств изображений необходимо для практического
использования операционного исчисления. Все эти свойства выводятся
из формулы A*).
Умножение на постоянную. При умножении оригинала
на постоянную величину с изображение умножается на ту же посто-
постоянную, и наоборот, т. е.
fF (9*)
340
ПЕРЕХОДНЫЕ ПРОЦЕССЫ И ПРЕОБРАЗОВАНИЕ ЛАПЛАСА [ГЛ. XIX
Таблица 1
№
1
2
3
4
S
6
7
8
9
Оригиналы
МО
1
/
Ре*
since/
COS (О/
sha/
cha/
Изображения
1
1
p»
n!
1
p—a
n\
CO
p
a
P
10
11
12
18
14
15
16
17
Оригиналы
MO
е°* sin at
eflt cos со/
/ sin со/
/cos со/
fe«< sin to/
/e^ cos со/
—со/ cos со/)
— aeo/cos со/+
+соа/ since/)
Изображения
F{p)
Ш
p — a
(p-a)s+cos
2cop
p»—со»
2co (p — a)
{p-a)s-co»
[(p-a)a+to»]»
1
P
Изображение суммы нескольких функций. Изоб-
Изображение алгебраической суммы конечного числа оригиналов равно
сумме их изображений, т. е., если
в
то
/i @ «- ft (/»)
(<= 1, 2, ..., л),
f(p)=i;^(p).
/@ Ч- Я (Р),
(Ю*)
си*)
Обе сформулированные теоремы, взятые в совокупности, выра-
выражают свойство линейности преобразования Лапласа. Они позволяют
находить изображение (или оригинал) любой линейной комбинации
функций, входящих в табл. 1.
Изменение масштаба аргумента. Имеет место сле-
следующее свойство:
/(«04~Sf(?) причем а>0. A2*)
ПРЕОБРАЗОВАНИЕ ЛАПЛАСА
341
Таблица 2
Оригиналы
Изображения
Р (Р)
Прямоугольная волновая функция
f(t)
-1
i i i i
,а йа
№ \5а t
Выпрямленный синус волновой функ-
функции
f(t)
2а За
Половина выпрямленного синуса вол-
волновой функции
fit)
1
О
г\ г\
a Za. За 4а t
1— е~аР)
Пилообразная волновая функция
ар1
_ е-ар)
Единичная функция Хевисайда
U(f-a)
fit)
i
О
е~аР
342
ПЕРЕХОДНЫЕ ПРОЦЕССЫ И ПРЕОБРАЗОВАНИЕ ЛАПЛАСА 1ГЛ. XIX
Таблица 2 (продолжение)
Ns
6
7
8
9
10
11
Оригиналы
/@
Импульсная функция
mi
0 a cL+s
Ступенчатая функция
f(t)\ ,
t-гГ.
0 а 2а За
я = 0, 1, 2, .
3
2
1
0
! I i
/ г з
f(t)~rn, n^tsz
n=0, 1, 2, .
f(tn ,
0 1 Z 3
fit)
f'tl
0
( siB (nt/a), 0
= l о
a.
i
ha.
i
;n+i
f>a
Треугольная волновая функция
0 2a Md
Ba.
t
t
t
t
t
t
Изображения
F(P)
e_ap((_eep)
P
1
p(l_e«P)
p(l-«-P)
na A +e-°P)
§1]
ПРЕОБРАЗОВАНИЕ ЛАПЛАСА 343
Случай а<0 не рассматривается ввиду следующего обстоятель-
обстоятельства. При а<0 и *>0 имеем at<0, т. е. оригинал тождественно
равен нулю. Но согласно принятому условию при ^<0 любой ори-
оригинал равен нулю. Поэтому при а< 0 следует считать, что/(«0 = 0
при любом t, кроме, может быть, точки t = 0.
Теорема запаздывания (теорема смещения оригинала).
Рассмотрим два процесса, представленных на рис. 19.2а и б. Графики
f(t)e,(t)*i-F(fi)
а) 6)
Рис. 19.2. а) График процесса/ (t) о0 (*); б) График запаздывающего процесса
/ (t-r) со <*-*).
на обоих рисунках одинаковые, но вторая кривая смещена на вели-
величину т вдоль оси t, т. е. начало второго процесса как бы запазды-
запаздывает на время х по отношению к началу отсчета времени.
Теорема запаздывания позволяет, зная изображение функции
f(t)ao(t), определяющей течение во времени некоторого процесса,
найти изображение функции f(t — т) • а0 (t — т), которая определяет
течение того же процесса, но запаздывающего на время т (рис. 19.2).
В сокращенной записи теорема запаздывания выглядит так:
f(t~T)<-e-ptF(p), где
причем здесь необходимо сделать оговорку, что при ?<т левая
часть тождественно равна нулю.
Эту теорему можно записать в строгой форме с помощью еди-
единичной функции Хевисайда. Она имеет вид
f(t-T)<J0(t-T) + e-»*F(p), A3*)
где
FO)/@ и °
При точной записи равенство нулю оригинала при t<% обеспе-
обеспечивает множитель O0{t<-x). Условие т^гО необходимо, так как при
т<0 в промежутке т<*<0 получается, что ^~т>0 и f(t — т),
вообще говоря, не равно нулю, тогда как по принятому соглашению
оригинал должен быть равен нулю при *<0,
Функция Дирака. Изображение произвольной импульсивной
функции определяется шестой строкой табл. 2. Если основание пря-
прямоугольника е стремится к нулю, а его высота неограниченно воз-
возрастает так, что площадь прямоугольника (величина импульса) остается
344 ПЕРЕХОДНЫЕ ПРОЦЕССЫ И ПРЕОБРАЗОВАНИЕ ЛАПЛАСА [ГЛ. XIX
все время равной единице (единичный импульс), то соответствую-
соответствующая функция называется дельта-функцией Дирака (по имени извест-
известного физика). Обозначается дельта-функция Дирака символом 8(t — т),
где т —момент начала действия импульса. Изображение дельта-функ-
дельта-функции Дирака определяется соотношением
6(*-т) = е-Р*. A4*)
Теорема смещения. Эта теорема дает возможность найти
Оригинал для изображения F{p-\-a), если известен оригинал /@-<г
¦*rF(p). Теорема записывается так:
Р(р + а) + ег«№ A5*)
где о — любое число, вообще говоря, комплексное.
Теорема смещения позволяет, например, получить строку 11 табл. 1
из строки 7 той же таблицы. Поскольку в таблице имеются почти
все простейшие оригиналы с множителем е~ы, теорема смещения
будет использоваться редко.
Изображение производной. Теорема об изображении
производной являете^ основной, так как на ней покоится сама идея
операционного метода. Записывается теорема так:
В важном частном случае, если /@) = 0, имеем
f'(t)+-pF(p), A7*)
т. е. операции дифференцирования оригинала соответствует умноже-
умножение изображения на число р.
Пользуясь теоремой A6*), можно многие строчки табл. 1 полу-
получить из других строчек этой же таблицы.
Изображения высших производных. Для производ-
производных порядка п имеет место соответствие
/с» (о ^ р*р о,) - sV1"*-1/™ (°)« с18*)
или в более подробной записи
<rP"F (р) -^/(О) -РПТ @) -...
... -р/С-2) @) _/C-i) @). A9*)
Здесь, как обычно, за производную нулевого порядка принимается
исходная функция. В частности, если
/@) =/' @) =/" @) =... =/("> @) -... =/1-» @) = 0, B0*),
то
W B1*)
§ 1] ПРЕОБРАЗОВАНИЕ ЛАПЛАСА 345
Для производной второго порядка, которая часто встречается
в задачах механики, имеем
f"®4rfF(P)-pm-n% B2*)
а при нулевых начальных условиях, когда /@)=/'@)=0,
f"{t)+-p*F(p). B3*)
Изображение интеграла. Теорема об изображении инте-
интеграла имеет вид
i ?f B4*)
т. е. интегрированию оригинала в пределах от 0 до t соответствует
деление изображения на число р.
Эта теорема применяется при решении уравнений, содержащих
интегралы. Ею можно также пользоваться для нахождения изобра-
изображений некоторых функций по известным изображениям других функций.
Дифференцирование изображения. Имеет место сле-
следующее свойство:
*n?L + -tm B5*)
т. е. дифференцированию изображения по р соответствует умножение
оригинала на (— f).
В общем случае производной порядка я имеем
B6*)
Легко заметить аналогию между свойством дифференцирования
оригинала и свойством дифференцирования изображения.
Соотношениями B5*) и B6*) можно пользоваться для получения
одних изображений через другие, а также при решении линейных
дифференциальных уравнений с переменными полиномиальными ко-
коэффициентами.
Дифференцирование по параметру. Это свойство
относится к часто встречающемуся случаю, когда оригинал зависит
не только от независимой переменной t, но и or некоторого пара-
параметра ос. Например, для функции ?4 sin at множитель to является
параметром; функция е"* cos со* содержит два параметра: а и ю.
Если оригинал зависит от параметра, то от этого же параметра зави-
зависит и соответствующее изображение. Табл. 1 дает немало примеров
этому.
Имеет место следующая георема:
df(t, а) . dF(p, а) г27#ч
848 ПЕРЕХОДНЫЕ ПРОЦЕССЫ И ПРЕОБРАЗОВАНИЕ ЛАПЛАСА [ГЛ. XIX
т. е. изображение производной оригинала по параметру равно про-
производной изображения оригинала по тому же параметру. Эта теорема
вытекает из теоремы Лейбница о дифференцировании определенного
интеграла по параметру и требует выполнения некоторых условий,
при которых справедлива формула Лейбница. Для тех функций,
с которыми здесь придется сталкиваться, эти условия всегда выпол-
выполняются.
Теорема свертывания (теорема Бореля). Сверткой или
складкой двух функций /х (t) и /8 (t) называется функция
B8*)
Очевидно, что в этой формуле функции Л и /а можно поменять
местами — результат от этого не изменится. Операция получения
складки называется свертыванием функций, откуда и происходит
название теоремы.
Теорема формулируется так: если
то
t
\ Л (т)Л (* — i)dt-±- Fx (p) • F2 (p), B9*)
о
т. е. изображением свертки двух функций является произведение
изображений этих функций. Эту теорему называют также теоремой
об умножении изображений.
Теорема свертывания позволяет выразить реакцию системы на
сложное воздействие через ее реакцию на более простое воздейст-
воздействие, что часто представляет определенные выгоды.
Основные свойства преобразования Лапласа, рассмотренные в этом
параграфе, сведены в табл. 3.
3°. Нахождение оригиналов для дробно-рацио-
дробно-рациональных изображений. При применении преобразования Лап-
Лапласа к решению линейных дифференциальных уравнений с постоян-
постоянными коэффициентами встречаются изображения в виде дробно-рацио-
дробно-рациональной функции, т. е. отношения двух полиномов:
причем алгебраическая дробь C0) правильная, т. е. п>т. Необхо*
димо поэтому уметь находить оригиналы для изображений вида C0*).
Этот вопрос и будет рассмотрен в настоящем параграфе.
§11
ПРЕОБРАЗОВАНИЕ ЛАПЛАСА.
347
Таблица 3
1
2
3
4
5
6
6*
7
8
9
Ю
Свойства
Умножение на по-
постоянную
Изображение суммы
Изменение масштаба
Теорема запаздывания
Теорема смещения
Изображение произ-
производной
Изображение Высших
производных
Изображение инте-
интеграла
Дифференцирование
изображения
Дифференцирование
по параметру
Теорема свертывания
Оригинал
cf{t)
f(*-T)o-0tf—г)
r*/(Q
ПО
да
Изображение
сР(р)
S*i(p)
а \а /
e-pt • f (p)
f (p + fl)
pF (P)-/@)
p*F(p)-p^f{0)--
TF(P)
dF(p)
dp
af (p, a)
3a
?g ПЕРЕХОДНЫЕ ПРОЦЕССЫ И ПРЕОБРАЗОВАНИЕ ЛАПЛАСА 1ГЛ. XIX
для решения поставленной задачи в общем случае применяется
известный из курса математики прием — разложение правильной алгеб-
алгебраической дроби на простейшие. При этом можно использовать как
элементарные методы разложения, так и излагаемую в руководствах
по преобразованию Лапласа теорему разложения Хевисайда. И в том,
и в другом случае необходимо знать корни знаменателя" дроби, т. е.
значения рь для которых Q(p,) = 0. В простейших случаях эти корни
известны или легко находятся подбором, в более сложных приходится
определять их приближенными способами. Поскольку это всегда
можно сделать, будем считать корни знаменателя известными. Они
могут быть простыми и кратными, вещественными и комплексными.
Коэффициенты bt полинома Q(p) будем считать вещественными, тогда
комплексные корни будут попарно сопряженными.
В зависимости от корней знаменателя в разложении дроби C0*)
могут встретиться простейшие дроби четырех типов:
' р — а '
где А, В, Ъ, с — вещественные постоянные, a k — натуральное число.
Типы 1) и 2) соответствуют вещественным корням знаменателя, причем
величина а—р{, где pf — корни Q(p), а типы 3) и 4) соответствуют
комплексным корням знаменателя (в частном случае чисто мнимых
корней Ь = 0).
Оригиналы для дробей типов 1) и 2) имеются в строках 4 и 5
табл. 1 (постоянный множитель может быть приписан в обеих частях
согласно свойству 1 табл. 3). В случае нулевого корня (а = 0) сле-
следует использовать строки 1, 2 и 3 табл. 1.
Оригиналы для простейших дробей типа 3) имеются в строках 10
и 11 табл. 1. При построении этих оригиналов1 приходится исполь-
использовать также первое свойство преобразования Лапласа. Для приведе-
приведения дроби к табличному виду нужно выделить в знаменателе полный
квадрат. При чисто мнимых корнях используются строки 6 и 7.
§ 2. Переходные процессы
Как уже говорилось, метод преобразования Лапласа позволяет
свести задачу интегрирования линейных дифференциальных уравнений
к алгебраическим операциям. Преимущество этого метода перед клас-
классическим заключается, с одной стороны, в автоматическом учете
начальных условий, с другой стороны, в существенном упрощении
процесса решения уравнений, в правой части которых стоят функции,
имеющие различные аналитические выражения на различных отрезках
изменения аргумента, или неэлементарные функции, например функ-
функция Дирака. Кроме того, рассматриваемый метод позволяет находить
S 2} ПЕРЕХОДНЫЕ ПРОЦЕССЫ 849
независимо друг от друга установившееся движение и переходный
процесс.
Рассмотрим колебательную систему с одной степенью свободы,
приведенное дифференциальное уравнение движения .которой имеет
вид
C1*)
Начальные условия запишем в общем виде
*о. C2*)
Введя обозначения
X(p) + x(t) и H(p) + h(f) C3*)
и воспользовавшись теоремой об изображении производных, получим
2пх + 2п[рХ(р)-хе),
k*x+-k*X(p).
Тогда согласно C1*), изображающее уравнение будет
C4*)
Отсюда находим изображение искомой функции
^ C5*>
Уравнение C5*) можно коротко записать в виде
C6*)
где
C7*)
Структура уравнения C6*) является типичной для изображений
решений, получаемых с помощью преобразования Лапласа. Первый
сомножитель правой части О(р) зависит только от параметров сис-
системы. Он представляет собой величину, обратную характеристической
функции системы (т. е. левой части характеристического уравнения
системы) и называется передаточной функцией системы. Второй сом-
сомножитель при заданных параметрах системы определяется видом
возмущающего воздействия и начальными условиями. Понятием пере-
передаточной функции широко пользуются в теории автоматического
регулирования.
Искомая функция х (f), определяющая движение системы, находится
из C6*) путем обратного преобразования.
360 ПЕРЕХОДНЫЕ ПРОЦЕССЫ И ПРЕОБРАЗОВАНИЕ ЛАПЛАСА [ГЛ, XIX
Уравнение C5*) можно переписать в виде
р+п
Применив теорему свертывания (для первого члена) и воспользовав-
воспользовавшись таблицей изображений, находим искомый оригинал:
V-n*(t-x)-
k*-»*t-3rnx'+*<> «in Yk*-n* t). C9*)
У ka—ns
Обратимся снова к уравнению C6*), к которому приводится
линейное дифференциальное уравнение любого порядка с постоян-
постоянными коэффициентами. Предположим, что возмущающее воздействие
представляет собой единичный импульс, т. е.
а все начальные условия — нулевые. Тогда, поскольку di(f)*rl,
из C7*) следует F\р)-=Н{р), и уравнение C6*) принимает вид
откуда
*01(9 = g(9. D0*)
где g(f)<-Q(j>).
Таким образом, реакция системы на единичный импульс при нуле-
нулевых начальных условиях дается оригиналом передаточной функции
системы. Поэтому функцию g(t) называют реакцией (ответом, откли-
откликом) системы на единичный импульс (при нулевых начальных усло-
условиях).
Если система подвергается произвольному возмущающему воздейст-
воздействию h(t) при произвольных начальных условиях х@) = хо, Я@) = хо
и т. д., то из уравнения C6*) на основании теоремы свертывания
следует
t t
\ g(T)f(t-x)dx= \ g(t-x)f(r)dx, D1*)
где f(t) 4rF(p) — оригинал полного возмущающего воздействия на сис-
систему. Уравнение D1*), впервые полученное Борелем, позволяет нахо-
находить реакцию системы на любое воздействие, зная ее реакцию
на единичный импульс.
ПЕРЕХОДНЫЕ ПРОЦЕССЫ
351
Решение задач рекомендуется производить в сле-
следующем порядке:
1) составить дифференциальное уравнение движения системы;
2) перейти к изображающему уравнению, заменив все члены диф-
дифференциального уравнения их изображениями по Лапласу, с учетом
начальных условий;
3) решить изображающее уравнение относительно изображения
искомой функции;
4) использовав таблицу изображений, основные теоремы опера-
операционного исчисления и методы, рассмотренные в § 3, перейти от най-
найденного изображения искомой функции к ори-
оригиналу.
Задача 19.1. Система масса —пружина —демп-
—демпфер подвергается синусоидальному возмущающему
воздействию. Определить движение системы при
нулевых начальных условиях.
Решение. Дифференциальное уравнение дви-
движения колебательной системы имеет вид
т
Обозначив 2л = {J//», k*~c/m, й=///и, перепи-
перепишем его в виде
Пусть
Л + 2пЯ + А2* = A si" «&'•
(О
///////////77777777
Тогда, применив правило об изображении про- к задаче 19.1.
изводных и учтя, что хо — ?о = О, запишем урав-
уравнение A) в изображениях по Лапласу (см. также табл. 1, строку 6)!
B)
отсюда сразу находится изображание искомого решения
у ,„чА»
C)
Чтобы осуществить переход от изображения к оригиналу, раз-
разложим дробь, стоящую в правой части равенства C) на простейшие
дроби.
Рассмотрим чаще всего встречающийся на практике случай малого
сопротивления n<.k. Тогда корни квадратного трехчлена в знаме-
знаменателе будут комплексными и можно записать:
.Ap+B.+_Cp±D
D)
где А, В, С и D — постоянные, подлежащие определению.
352 ПЕРЕХОДНЫЕ ПРОЦЕССЫ И ПРЕОБРАЗОВАНИЕ ЛАПЛАСА [ГЛ. XIX
На основании равенства D) можем записать
/иэ = (Ар + В) (/>» + 2пр + k*) + (ср + D) (ра + «»),
или
/но = (А+С) р* + Bв А + В + D) р*+(k*A + 2пВ + согС) р +
^_^54-coaD. E)
Приравняв в обеих частях этого тождества коэффициенты при одина-
одинаковых степенях р, получим систему линейных алгебраических урав-
уравнений относительно неизвестных коэффициентов А, В, С та D:
Я»: А + С = 0,
/>*: 2пА+ В+ D = 0,
Решив эту систему, найдем
4nsca2 + (А* - ш*
„ ®k(№—со2)
4л*ш»+(** — (
Тогда, исходя из C) и D), можно записать
,Vfn1_ to/l ( 2ПР I *'""* I
л УУ} 4«*ш|!+(k*—0)»)а \ р*+ш2 ~ р2 + со2 ~
ео» + 4па-А«\ _.
Имея в виду воспользоваться таблицей изображений, преобразуем
полученное выражение
(8)
С помощью таблицы изображений и теоремы смещения находим
искомый оригинал
@ = in42+Hikl_aiJ {(*2 - ®») sin со/ - 2всо cos at +
"»'I (со2 + 2лг - А2) „ м sin ^F^n51 +
L к fea—«2
+ 2mo cos |/Aa~»a <]}. (9)
t 21 ПЕРЕХОДНЫЕ ПРОЦЕССЫ 353
Полученное решение можно представить в более компактной форме,
если учесть, что
A sin at + B cos со* = УДа + 52 sin (at + ф),
где tgcp = ij-, причем 0<<р<у при Л>0, В>0,
<Ф<п при Л<0, В>0,
Имеем
я<ф<-|-п при Л<0 и Я<0,
-|-я<<р<2л; при Л>0 и 5<0.
+ e~nS У (ша -1- 2ла - А2J + 4ла (А2 — л2)
где
или после упрощений
х (t) = гт========= fsin i
/ L
(И)
Второе слагаемое в квадратных скобках убывает с возрастанием вре-
времени L Оно описывает переходный процесс в системе, т. е, свобод-
свободные затухающие колебания. Первое слагаемое дает установившееся
движение системы — вынужденные гармонические колебания с часто-
частотой, равной частоте возмущающей силы.
При отсутствии сопротивления следует положить в формуле (9)
и = 0. Тогда получим
Рассмотрим явление резонанса. При отсутствии сопротивления
(л=*0) изображение G) принимает вид
При резонансе, если положить ь)«?, правая часть превращается
в неопределенность вида 0/0. Пользуясь правилом Лопиталя, получим
ah d I 1 1 \ (ah
da>
12 М, И. Бать и др., т. Ш
354 ПЕРЕХОДНЫЕ ПРОЦЕССЫ И ПРЕОБРАЗОВАНИЕ ЛАПЛАСА [ГЛ. XIX
ИЛИ
Находим для каждого сомножителя изображения оригинал по табл. 1
- , . h I . А
По теореме свертывания находим оригинал
t
с i \ n t \ h 2мр . С h
Итак, при резонансе
^( A6)
Второй член в скобках с течением времени неограниченно воз-
возрастает по модулю, что и свидетельствует о наличии резонанса.
Задача 19.2. В условиях предыдущей задачи определить движе-
движение, если возмущающее воздействие представляет собой единичный
скачок.
Решение. Дифференциальное уравнение движения имеет вид
Л -f- 2 п х -J- k2x «= ha0 (t). A)
Поскольку начальные условия нулевые, а сг0 (?)«•- —, то уравне-
уравнение A) в изображениях запишется так:
р »
откуда
C)
Считая, как и ранее n<C.k, разложим дробь, стоящую в правой части
равенства C), на простейшие. Имеем
1 А ¦ Бр+С
р ~ р2+2пр+№* к '
откуда
1 = А (р« + 2пр + А2) + (JBp + С) р. E)
Для определения неизвестных А, В и С применим метод частных
вначений. Положив в тождестве E) р = 0, получим
и А = ±.
§ 2) ПЕРЕХОДНЫЕ ПРОЦЕССЫ
Значения р = \ и р = — 1 дают еще два уравнения
855
l=A(l~2n-\-k*) + B-C.
Подставив сюда найденное значение для А, после упрощения найдем
RJL.C- 1+2п
В + С р-,
В-С-.
1—2п
отсюда
2п
Теперь равенство C) можно переписать в виде
vr/ k*\p ps+2rtp + fesy
Выделив в знаменателе второй дроби полный квадрат, после преоб-
преобразования получим
п
(б)
-А2—л» j/ft2—иа (p+ny+k*
С помощью таблицы изображений и теоремы смещения находим оригинал
@ = ет [l —
' *^ 1/~иъ -<» ' I I * ^ '
'А2—л2
Первый член полученного решения дает установившееся движение,
т. е. в данном случае новое положение статического равновесия системы.
Второй и третий члены описывают затухающие колебания системы
около этого нового положения равновесия, т. е. переходный процесс
К задаче 19.3.
Задача 19.3. К массе т, подвешенной на пружине жесткостью с
приложено возмущение в виде пилообразной функции периода Т (см
рисунок). Найти движение системы при нулевых начальных условиях
Решение. Уравнение движения системы имеет вид
отЯ+ **=/('> С1
12*
356 ПЕРЕХОДНЫЕ ПРОЦЕССЫ И ПРЕОБРАЗОВАНИЕ ЛДПЛАСА (ГЛ. XIX
Перейдя в этом уравнении от оригиналов к изображениям с учетом
начальных условий и изображения пилообразной функции (см. табл. 2),
получим
Обозначив, как обычно, c/m = ka, найдем из B) изображение иско-
искомой функции
Чтобы перейти к оригиналу, разложим выражение, стоящее в квад-
квадратных скобках, на простейшие дроби. В данном случае это проще
всего сделать с помощью несложного искусственного приема. Имеем
1 1 *» 1
Те-Рт
p
Подставив найденные разложения в выражение C), получим
Заметив, что
и воспользовавшись таблицей изображений, найдем искомый оригинал
...]. E)
Как видно из полученного решения, на член И, неограниченно воз-
возрастающий с течением времени, на-
кладываются различного вида коле-
бания.
1 Задача 19.4. Найти закон дви-
К задаче 19,4. жения груза массы от, если коэф-
коэффициент жесткости пружины с. На
груз, кроме того, действует сила F = F0?costo? В начальный момент
времени груз был прикреплен к концу нерастянутой пружины и
его скорость равнялась нулю.
§ 2J
ПЕРЕХОДНЫЕ ПРОЦЕССЫ
357
Решение. Составим дифференциальное уравнение движения
груза
тХ + сх = Fot cos ®L (I)
Переходим к изображениям, учитывая нулевые начальные условия:
B)
Из этого уравнения находим
Чтобы осуществить переход от изображения к оригиналу, разложим
дробь, стоящую в правой части равенства C) на простейшие дроби
Ра-<п'
Ар+В
+ ¦
Ep+H
т
Здесь А, В, С, D, Е, Я—неизвестные коэффициенты. Для их нахож-
нахождения приводим правую часть к общему знаменателю и приравниваем
в левой и правой частях тождества D) коэффициенты при одинако-
одинаковых степенях р:
А 0
E)
~ + D —
tn m
Решив эту систему линейных алгебраических уравнений, найдем
л-с-^о, в—н-ЁЗ,. о—яЙ,. (в)
Внеся эти значения коэффициентов в равенство C), имеем
2^
m [(c/m—
G)
358 ПЕРЕХОДНЫЕ ПРОЦЕССЫ И ПРЕОБРАЗОВАНИЕ ЛАПЛАСА [ГЛ. XIX
Переходя от изображений к оригиналам, получаем
... FQ Г с/т+а>2 sin of 2&>8 sin at—at cos at
X^~"m [(c/m — w2)a' ~S с/т — со2 * 2Ш^
_ (c/m+ <¦>") sin Кс/отП g.
(c/m—ее*)» |/c/m j' ^
После приведения подобных членов находим закон движения груза
w (c-raii)8)' ^c~mm2 -.Г с V m KJ
(c-mco*J у ^
Задача 19.5. Груз массы т покоился на конце пружины жест-
жесткости с. Определить закон движения груза, если точка подвеса пру-
пружины А начнет двигаться по вертикали согласно
А закону
"Г- xA = ae-ntsmV7imt,
|х где я = сс/2/и, а — коэффициент вязкого сопротив-
А ления среды, пропорционального скорости груза.
Решение. Выбирая начало неподвижных ко-
координат в положении статического равновесия груза
_ .. и направляя ось х по вертикали вниз, составим
Г дифференциальное уравнение движения груза
? •*• tfi 4* ^= -. /» (у» г V* *\ - «у1 (Л \
или, учитывая значение
К задаче 19.5.
Обозначая для кратности а/т = 2л, с/яг = k*, запишем уравнение B)
в виде
Переходя от оригинала к изображениям, получим (х0 = 0, хо = 0)
Р2Х(р)-\-2ltpX(p)-{-k2X(p) = ia_Lfca • D)
Отсюда находим изображение
Разложим Х(р) на простейшие дроби. Для этого, обозначив для
краткости p-\-n=z, представим дробь в виде
1 Az+B Cz+D ,fi
S 2J
ПЕРЕХОДНЫЕ ПРОЦЕССЫ
359
Приводя правую часть к общему знаменателю и приравнивая коэф-
коэффициенты при одинаковых степенях z в левой и правой частях тож-
тождества F), получаем
G)
(8)
Решая полученную систему алгебраических уравнений, находим
Тогда, изображение может быть записано в виде
+(^-n»)J •
Возвращаясь от изображений к оригиналам, найдем закон движения
груза
ae~ni I
- пЧ -
х
О Т/2
Задача 19.6. Материальная точка К задаче 19.6.
массы т движется по оси х под действием
силы F(t), изображенной на рисунке и направленной вдоль оси х.
Полагая начальные условия заданными и нулевыми: лго = О, ?0 = 0
при f = 0, найти уравнение движения точки.
Решение. Найдем изображение функции F (i)
Г/2
Г/2
360 ПЕРЕХОДНЫЕ ПРОЦЕССЫ И ПРЕОБРАЗОВАНИЕ ЛАПЛАСА [ГЛ. XIX
Дифференциальное уравнение движения точки запишется в виде
B)
Переходя от оригиналов к изображениям, получим
откуда
*<WeSf ?<* -Ъг'т*+*¦'*). D)
Возвращаясь от изображения к оригиналу, находим
Таким образом, точка движется согласно уравнениям
F» т
ЗшТ
при j<t<T, F)
Если бы искать решение этой задачи обычным интегрированием
дифференциальных уравнений движения, то следовало бы проводить
интегрирование на каждом из трех участков, находя начальные усло-
условия для второго участка из конечных значений переменных на пер-
первом участке. Аналогично нужно было бы поступить на стыке второго
и третьего участков.
Задача 19.7. Груз массы пг, подвешенный к пружине жесткости
с начал движение, имея начальное отклонение от положения равно-
равновесия равное х0 и начальную скорость z»0.
Спустя Т сек на груз начала действовать
постоянная сила Fo, направленная по оси х.
f(t)
Определить закон движения груза.
! Решение. Скачок силы может быть
записан с помощью единичной функции Хе-
' * висайда
К задаче 19.7. F(t) = Foa0(t — T). A)
Тогда дифференциальное уравнение движения груза на пружине можно
записать в виде
F0o0(t-T). B)
Переходя к изображениям, преобразуем уравнение B) по. Лапласу
C)
5 21 ПЕРЕХОДНЫЕ ПРОЦЕССЫ 361
Решая это алгебраическое уравнение, находим изображение
D)
где для краткости обозначено с/т = к*.
Разлагая последнее слагаемое на простейшие дроби, получим
Возвращаясь от изображений к оригиналам, находим искомое урав-
уравнение движения груза
^ ^[l -cosk{t — T)]aQ(t — T). F)
Таким образом, груз движется согласно уравнениям
[ ^ при t<T,
F G)
^[l- cosk(t — T)] при t>T.
С помощью преобразования Лапласа решение в этой задаче было
получено сразу для всего процесса. Если бы при решении задачи
применить классический метод интегрирования дифференциальных
уравнений движения, то пришлось бы составлять на каждом интер-
интервале времени (t^T) и (i>7") свое дифференциальное уравнение
движения и «сшить» оба решения, приравняв конечные значения
координаты и ее производной на первом участке начальным значе-
значениям этих переменных на втором участке.
Задача 19.8. Решить предыдущую эадачу, если к грузу в момент
Т приложен мгновенный импульс Fo.
Решение. Мгновенный импульс может быть записан с помощью
функции Дирака
(t-T). A)
Дифференциальное уравнение движения груза будет
m х+сх = FqG it — Г). С2;
Переходя к изображениям, имеем (см. формулу A4*))
(F Ш \р*Х (р) -рх0 - ©0] + еХ (р) - Ftfrf*. C)
362 ПЕРЕХОДНЫЕ ПРОЦЕССЫ И ПРЕОБРАЗОВАНИЕ ЛАПЛАСА
Решая это алгебраическое уравнение, находим
е-РТ
m
[ГЛ. XIX
D)
где обозначено с]т — №.
Возвращаясь от изображений к оригиналам, находим уравнение
движения груза
^ E)
х (t) = х0 cos kt + v-± sin kt + ^ sin k(t-T)ao{t~T).
Таким образом, движение груза определяется уравнениями
х0cosЫ + ~sinkt
при t<.T,
при t>T.
F)
Применение преобразования Лапласа позволило получить решение
аадачи в единой аналитической ваписи.
Задача 19.9. Шлюпка (рис. а) веса Q, поперечное сечение кото-
которой можно приближенно считать неизменным по высоте, покоится
ла воде в доке. Трос, коэффициент жесткости которого с, прикреплен
F(t)
К задаче 19.9.
к шлюп-балке и не растянут. Воду из дока начинают выпускать так,
что ее уровень равномерно падает, вследствие чего сила, действующая
на шлюпку по вертикали вниз изменяется согласно закону, представ-
представленному на рис. б. Найти уравнение движения шлюпки, если одно-
одновременно с выпуском воды шлюпке сообщили скорость v0.
ПЕРЕХОДНЫЕ ПРОЦЕССЫ
3G3
Решение. С помощью функции Хевисайда можно записать силу
F(t) следующим образом:
F @ = ?Лх0 (9-?('-<)) *<>('-to A)
Дифференциальное уравнение движения шлюпки на тросе будет
% ?%tJ. B)
Начальные условия: хо = О, x — v0. Преобразуем уравнение, заменяя
оригиналы изображениями и обозначая c-g/Q = k2:
или
Отсюда
D)
+ Й2)J •
Дроби в квадратной скобке можно разложить на простые:
Возвращаясь от изображений к оригиналам, находим
или
Окончательно получаем
Q , . sinkt
(8)
при
864
ПЕРЕХОДНЫЕ ПРОЦЕССЫ И ПРЕОБРАЗОВАНИЕ ЛАПЛАСА [ГЛ. Х(Х
Задача 19.10. Груз массы т подвешен к концу пружины жест-
жесткости с. В начальный момент груз находится в положении статиче-
статического равновесия и его скорость равна нулю. Определить движение
груза под действием силы Q (г), ступен-
ступенчато возрастающей с каждым размахом
(рис. о).
а) Решение. Дифференциальное
уравнение движения груза
тх + сх = Q @
или
0)
B)
где введено обозначение с/т = kz.
Переходя от оригиналов к изобра-
изображениям по Лапласу, имеем
F 1
р2Х О) + k2X (р) = ^ р ^ _ e-pn/kj. C)
Из C) находим
mk2 \
1
J •
Возвращаясь от изображений к орши-
налам, получаем
@ [Л@Л@1
К задаче 19 10.
где графики функций fx (r) и /2 (/) даны на рис. tf, в.
Таким образом, для нахождения в любой момент времени коор-
координаты х, определяющей положение груза, надо от значения /х(/)
(рис. б) вычесть величину /2(г)
(рис. в) и полученную разность
умножить на Fjc.
Задача 19.11. Тело массы т
К задаче 19.11. прикреплено к концу, нерастянутой
пружины, коэффициент жесткости
которой с. Начальная скорость тела равна нулю. Определить движение
тела, если на него подействовала сила F (t) = Fe8 (t), гле б (t) —
функция Дирака (единичный импульс).
Решение. Дифференциальное уравнение движения тела
A)
§ 21 ПЕРЕХОДНЫЕ ПРОЦЕССЫ 365
Переходя к изображениям по Лапласу и учитывая, что система удов-
удовлетворяет нулевым начальным условиям, находим
mp*X(p) + cX(p) = F0.l. B)
Из этого уравнения имеем
где обозначено с/т = кг.
Возвращаясь от изображения к оригиналу, получим закон движения
jk D)
у тс
Задача 19.12. Решить предыдущую задачу, если к телу допол-
дополнительно приложена сила вязкого сопротивления, пропорциональная
скорости точки: /?= — ах, и коэффициент а удовлетворяет равен-
равенству a — 2mk.
Решение, Дифференциальное уравнение движения тела имеет
вид
тх = — сх — ах + F„6 @ A)
или
^ B)
где обозначено с/от = к2, а/т = 2«.
Переходя к изображениям, запишем уравнение B) в форме
Из уравнения C) находим (n
C)
Возвращаясь от изображений к оригиналам, получим уравнение дви-
движения тела
* (О = ?•*«-'. E)
Задача 19.18. На точку массы т, которая может перемещаться
в плоскости ху, действуют две силы: одна притягивает точку к оси
х, и величина ее пропорциональна расстоянию до оси у, вторая при-
притягивает точку к оси у, и она пропорциональна расстоянию до оси
х. В начальный момент координаты точки ха = а, у0 = Ь, а скорость
равна нулю. Определить движение точки.
Решение. Дифференциальные уравнения движения материальной
точки будут
П) ту-
- слх. J
366 ПЕРЕХОДНЫЕ ПРОЦЕССЫ И ПРЕОБРАЗОВАНИЕ ЛАПЛАСА [ГЛ. XIX
Обозначая с^т = к\ и с^т = k\, запишем систему уравнений в виде
B)
Переходим от оригиналов к изображениям:
-о' I
C)
Тогда уравнения B) преобразуются так:
= 0, 1
:0. j
Или
ЩХ{р)+р^(р)=РЬ. ) E)
Решая эту систему алгебраических уравнений, находим
Pfeffei • F)
Аналогично имеем
Разложим Х(р) и Y(p) на простые дроби
+ 2ka ¦ pt_kiki , (8)
Q
Переходя or изображений к оригиналам, находим искомые уравне-
уравнения движения точки
jb.ooeVT5
Задача 19.14. Два одинаковых маятника длины а и массы т
каждый соединены на уровне Ъ упругой пружиной жесткости с,
прикрепленной концами к стержням маятников.
Определить малые колебания системы в плоскости равновесного
положения маятников, если начальные отклонения и начальные угло-
угловые скорости маятников соответственно равны: ф10, фго> ®ы>
Массами стержней маятников и массой пружины пренебречь.
,2]
ПЕРЕХОДНЫЕ ПРОЦЕССЫ
367
Решение. Рассматриваемая система является консервативной.
Поэтому для составления дифференциальных уравнений движения
системы воспользуемся уравнениями Лагранжа в обобщенных коорди-
координатах в виде \\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\
d dL
dt
3L -
dq ~
=1,2, ...,s),
A)
,_fe
6
где L — T — VI — лагранжеэа функ-
функция, или кинетический потенциал,
равная разности кинетической к
потенциальной энергий системы.
Обозначая радиус инерции каж- К задаче 19,14.
дого маятника относительно цент-
центральной оси перпендикулярной плоскости качаний через р, найдем
кинетическую энергию
Г = ОТ(р* + а2)ФШ1 B)
и потенциальную энергию (углы <рх и <р2, по предположению, малы)
Подставляя значения B) и C) в уравнения Лагранжа, получим
.. . mga+cb* dfi
^+ ф1~ т(р'+а«) ** =
cb*
.. . mga+cb2
Обозначая для краткости
mga+cb* _ ,2 с6а
т(ра+аа) ~к ' т(ра+аа)
перепишем уравнения D) в виде
2т _„ (\
D)
E)
Найдем решение системы при заданных начальных данных с помощью
преобразования Лапласа. Переходя к изображениям, запишем уравне-
уравнения E) в виде
i (Р) - РЧи - °»ю + *афх (Р) - »2фа (Я) = 0, \
ИЛИ
(Ода./
868 ПЕРЕХОДНЫЕ ПРОЦЕССЫ И ПРЕОБРАЗОВАНИЕ ЛАПЛАСА [ГЛ. XIX
Отсюда находим
(Ра
:а (РФ» + «Ра,)
Раскладываем <Dj.(p) и Ф2(р) на простые дроби
Для нахождения коэффициентов Аъ BJt Clt Di, Аг, Вг, С2, D2 при-
приравниваем правые части соответственных уравнений (8) и (9). Опре-
Определив коэффициенты, записываем изображения
A0)
где для краткости обозначены
Возвращаясь от изображений к оригиналам, находим уравнения дви-
движения маятников
Фа @
*
cos*i*+
A2)
Согласно этим уравнениям колеблются упруго связанные маятники.
Интересно отметить, что при нулевых начальных координатах в нуль
обращаются нечетные слагаемые в правых частях уравнений A2),
При - нулевых начальных скоростях в нуль обращаются четные сла-
слагаемые правых частей в A2).
ПЕРЕХОДНЫЕ ПРОЦЕССЫ
869
Задача 19.16. На рисунке показана колебательная система с
двумя степенями свободы. На первый груз действует возмущающая
сила F = 4 sin t (кГ). Заданы массы грузов: т± = 4 кГ • м'1 • сек% и
тг~ 1 кГ• лГ1 • сек* и жесткости пружин: сх = 20 кГ/см, са = 2 кГ/см,
с — 4 кГ/см.
////////////////
К задаче 19.15.
Найти движение системы при следующих начальных условиях:
Решение. Составляем уравнения движения системы
В - „ „(у. „ПС
*•]_ ^— —^ ^"^1 ^~ ^ \**1 ^" / 1"^ •
¦¦}
A)
Подставляя числовые данные, записываем уравнения после преобра-
преобразований в виде
^! Ч- 6ЛГХ — ЛГ2 = Sin <, к
4 t* ^~* 0 ¦
Преобразуя эти уравнении по Лапласу с учетом начальных условий,
получим уравнения в изображениях
(p)-l+6AiCp)-W10>)=-0
или
Определитель системы равен
-4
1+Р+Р3
1.
' (Р* + бJ - 4 - (/?Ч- 8) О»2 + 4).
D)
E)
Числители в формулах для неизвестных Xi(p) и Х^(р) равны
1+Р+Р»
1+р» г
1 я2+6
1+Р+Р8
-4
1
1+р'
(б)
1+Р9
370 ПЕРЕХОДНЫЕ ПРОЦЕССЫ И ПРЕОБРАЗОВАНИЕ ЛАПЛАСА [WI. XOff
Следовательно,
G)
Д (р»+8)(р*+4)(р*+1) »
Далее раскладываем Xi(p) и Х2(р) на простые дроби
(8)
Приравнивая коэффициенты при одинаковых степенях р в выраже-
выражениях G) и (8), получаем системы уравнений:
Решая эти системы,
А — 1
Следовательно:
9
28'
получаем
1
Dl~l2
F =-
= 7, 4fia 4- 8 Da + 32Fa = 10.
Л = — 1, #2 = -6",
°2 14^1 Щ — "i
" г> _ 1 Р — 4
(9)
A0)
1 9
Ра+8
4 , Р+Т
¦+ „1-ш
-2Т
A1)
4 21 ПЕРЕХОДНЫЕ ПРОЦЕССЫ 871
С помощью таблицы изображений находим искомые оригиналы
*i @ - y (cos 2 Т/27-28^ sin 21/2*)+'
1 (сов2/ + 4-81п2/) + А8|П/
2 \ 12 /21 J A2)
,ТЙ-8{ПЛ
Первые скобки в Xxtf) и j;a(t) — слагаемые, соответствующие первой
форме свободных колебаний, вторые скобки отвечают второй форме
свободных колебаний, последние слагаемые-^ это вынужденные коле-
колебания, имеющие частоту возмущающей силы.
ГЛАВА XX
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
§ 1. Примеры нелинейных систем
В главе VIII второго тома, а также в предыдущей главе были
рассмотрены колебания материальной точки и материальной системы,
которые описывались линейными дифференциальными уравнениями.
Так, при колебаниях материальной точки сила упругости (f =—сг)
и сила сопротивления движению (R<=—Р») изменялись по линейному
закону.
Во многих механических системах движение описывается нелиней-
нелинейными дифференциальными уравнениями. Значительному количеству
электромеханических и электрических систем также соответствуют
нелинейные уравнения. Появление в уравнениях нелинейных членов
обусловлено, например, наличием силы упругости или силы сопро-
сопротивления движению, либо тока, изменяющихся по нелинейному закону.
Линеаризация подобных дифференциальных уравнений движения,
т. е. замена точных нелинейных приближенными линейными уравне-
уравнениями, влияет не только на количественные результаты, но сущест-
существенно искажает качественную сторону рассматриваемых явлений,
присущих только нелинейным системам.
Так, изохронность, т. е. независимость частоты линейных коле-
колебаний маятника от начальных условий движения, отсутствует в слу-
случае нелинейных колебаний. Амплитуда линейных вынужденных коле-
колебаний при наличии силы сопротивления, пропорциональной скорости,
являющаяся однозначной непрерывной функцией коэффициента рас-
расстройки, изменяется скачкообразно в случае нелинейных вынужден-
вынужденных колебаний (явление «скачка»). Природу автоколебаний невоз-
невозможно объяснить с помощью приближенных линеаризованных диф-
дифференциальных уравнений.
В связи с отсутствием общих методов интегрирования нелиней-
нелинейных дифференциальных уравнений за последнее время были разра-
разработаны и получили широкое применение приближенные аналитические
и графические методы.
Рассмотрим некоторые примеры нелинейных материальных систем,
т. е. систем, движение которых описывается нелинейными дифферен-
дифференциальными уравнениями.
ПРИМЕРЫ НЕЛИНЕЙНЫХ СИСТЕМ
373
Обычно приближенно считают, что модуль силы упругости изме-
изменяется по закону Гука, т. е. по линейному закону в зависимости от
смещения Д (см, штриховую прямую на рис. 20.1). Это предположе-
предположение приводит к линейному дифференциальному уравнению свободных
колебаний
Вместе с тем законом Гука можно приближенно пользоваться
лишь в определенных пределах. У ряда материалов, например у резины
и кожи, сила упругости растет быстрее,
чем по линейному закону (см. кривую
/ — / на рис. 20.1). Соответствующая
характеристика изменения силы упругости
называется «жесткой». У некоторых ма-
материалов, например у чугуна, сила упру-
упругости растет медленнее, чем по линейному
закону (см. кривую 2 —2 на рис. 20.1).
В этих случаях характеристика называется
«жягкой».
«Жесткой» характеристике соответ-
соответствует проекция силы упругости Fx =
= —с±х — с3х3 — сьхъ — ..., а «мягкой»
f* = — с1х-\-сах* + слх* + ...,где cx>0
и с3 ~> 0. Если в дифференциальное урав-
уравнение движения tnx = Fx подставить эти
обозначения kz = c1lm, y=*Cs/mt р = сБ/от,
ференциальное уравнение; в случае «жесткой»
упругости
Рис 20.1.
значения Fx, то, приняв
получим нелинейное диф-
дифхарактеристики силы
а в случае «мягкой» характеристики
т. е., вообще говоря,
*+/(*)-0,
где /(лг) — некоторая нелинейная функция х.
Примером нелинейной системы является также маятник. Напом-
Напомним, что дифференциальное уравнение колебаний маятника имеет вид
Считая колебания .малыми, заменяют sin ф на <р и затем прибли-
приближенно интегрируют линейное дифференциальное уравнение ф-{-?2<р = О.
При учете влияния нелинейности надо в разложении
374
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
(ГЛ XX
удержать несколько первых членов (не менее двух). Так, прибли-
приближенное нелинейное дифференциальное уравнение при сохранении пер-
первых трех членов разложения примет и
В некоторых случаях нелинейная характеристика силы упругости
оказывается линейной на отдельных участках. На рис. 20.2, а изоб-
изображена в плане система с зазорами. При движении груза А в гра-
границах зазора MN сила- упругости
отсутствует. За пределами зазора
груз контактирует с правой или ле-
левой пружиной и появляется сила
упругост-и. Характеристика этой
силы, являясь линейной на отдельных
участках, оказывается в целом не-
нелинейной (рис. 20.2, б).
Источником нелинейности может
также быть сила сопротивления дви-
движению. Так, проекция аэродинамиче-
аэродинамической силы сопротивления прибли-
приближенно изменяется по закону Rx =
= — $х | х |. Если материальная точка
массы т совершает свободные ко-
колебания под действием силы упру-
упругости (Fx = — сх) и силы сопро-
сопротивления (Rx = — рх | х |), то нелинейное дифференциальное уравнение
движения имеет вид х + px\x\ + k2x = 0, где р = р/от, k2 = c/m.
Движение в автоколебательных системах (т. е. системах, соверша-
совершающих незатухающие колебания, которые не зависят от начальных
условий, см. задачи 20.24, 20.25, 20.26) описывается нелинейными
дифференциальными уравнениями вида
6)
Рис. 20.2.
или
= 0,
где f(x) и (р(х)~нелинейные функции х и х.
Многим электрическим и электромеханическим системам соот-
соответствуют нелинейные дифференциальные уравнения. Так, для элект-
электронной лампы-триода зависимость анодного тока ia от напряжения и
на сетке лампы является нелинейной. Также зависимость тока I от
магнитного потока <р электрической цепи, которая в первом прибли*
жении считается линейной, при более точных расчетах принимается
равной 2 = сир — рф3, где а и |} — положительные постоянные. Подоб-
$ 21 СВОБОДНЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 876
ным электрическим цепям соответствуют нелинейные дифференциаль-
дифференциальные уравнения.
В этой главе рассмотрены нелинейные колебания материальных
систем с одной степенью свободы.
§ 2. Свободные колебания нелинейных систем
(аналитические методы)
Iе. Метод поэтапного интегрирования (метод при-
пасовывания). Нередко встречаются нелинейные системы, являющиеся
линейными на отдельных участках. Это, например, имеет место
в случаях, когда характеристика силы упругости оказывается состав-
составленной из нескольких прямолинейных отрезков. Здесь можно полу-
получить точное решение на каждом участке, проведя интегрирование
поэтапно. Для этого период колебаний надо разбить на части, каж-
каждая из которых соответствует прямолинейному участку характеристики
силы упругости. На каждом этапе дифференциальное уравнение
является линейным, и его интегрирование не представляет затруднений.
Зная начальные условия движения, можно проинтегрировать уравне-
уравнение на первом этапе и определить обобщенную координату, а также
обобщенную скорость в конечный момент времени. Эти конечные
значения координаты и скорости одновременно являются начальными
для следующего — второго этапа. Поэтому, проведя интегрирование
линейного дифференциального уравнения, соответствующего второму
этапу, надо в качестве начальных условий движения использовать
конечные значения координаты и скорости первого этапа. Этот прием
следует распространить на все этапы.
В итоге нелинейные свободные колебания описываются несколь-
несколькими линейными уравнениями, число которых равно числу линейных
этапов. (Метод поэтапного интегрирования иногда называется мето-
методом припасовывания или методом стыковки *).)
Задача 20.1. На рис. а изображен груз А массы т, который
под действием двух пружин может двигаться в прямолинейных напра-
направляющих. Коэффициенты жесткости правой и левой пружин, не при-
прикрепленных к грузу, соответственно равны сх и сг. В начальный
момент груз находился в крайнем правом положении, определенном
координатой х = jc0 >• 0, и был отпущен без начальной скорости.
В положении равновесия О пружины не напряжены.
Написать уравнение движения груза и найти период его свободных
колебаний, считая, что силы упругости пружин подчиняются закону
Гука.
») Вообще методом поэтайного интегрирования можно пользоваться в тех
случаях, когда нелинейные дифференциальные уравнения интегрируются на
отдельных участках.
376
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
[ГЛ. XX1
а)
б)
К задаче 20.1.
Решение. В положении равновесия О пружины не напряжены
и с грузом не скреплены. Поэтому при движении груза направо от
нуля к нему приложена сила упругости одной правой пружины,
а при движении налево от нуля —одной левой пружины. Эта нели-
нелинейная система оказывается линейной на отдельных этапах, ибо
при дг = О имеем с — О, при х>0 имеем с — с1 = const, при х<0
имеем c = c2 = const. Поэтому характе-
характеристика силы упругости оказывается
составленной из двух прямолинейных
отрезков (рис. б).
Разобьем период колебаний на че-
четыре этапа, соответствующие движе-
движению груза:
1) под действием правой пружины
из крайнего правого положения в ну-
нулевое;
2) под действием левой пружины из
нулевого положения в крайнее левое;
3) под действием левой пружины из
крайнего левого положения в нулевое;
4) под действием правой пружины
из нулевого в крайнее правое положение.
Рассмотрим движение на первом этапе из крайнего правого поло-
положения в нулевое. Движение описывается дифференциальным уравне-
уравнением: тх = — схх, т. е.
*+*!*-Q» A)
где обозначено k\=c^m.
Общее решение линейного уравнения A) имеет вид
х = Cj cos kit + С2 sin kjt. B)
Вычислим производную по времени:
х = - СА sin kjt + C2kt cos kit. C)
Согласно условию в начальный момент, т. е. при * = 0, имеем х — ха,
х = 0. Подставив эти значения в уравнения B) и C) и решив их
относительно Сг и С* получим С1 = х0, С2 = 0. Внеся эти значения
в уравнения B) и C), найдем закон движения груза под действием
правой пружины из крайнего правого положения в нулевое:
x = x0cosk1t, D)
Хг= — k^oSillkjt. E)
Движению груза, описываемому уравнением D), соответствует
промежуток времени
где Т! — пока неизвестный момент времени, соответствующий приходу
груза в нулевое положение.
$ 21 СВОБОДНЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 377
Для нахождения координаты и проекции скорости в конце пер-
первого этапа подставим в уравнение D) t = xh x — x(r^) = 0, а в E):
t = Tu х = х(х1), где Jt(Ti) пока неизвестно. Получим
О = Хо COS kiTx, X (Tj) = — ktX0 Sin kit* F)
Из первого уравнения F) найдем kxXi — nl2, т. е.
Внеся это значение тг во второе уравнение F), получим х (tJ = — ktxu.
Итак, в момент ti окончания первого этапа, т. е. в момент при-
прихода груза в нулевое положение, т. е. при t^tl = n/2kb имеем
лг = дг(т1) = О, Л = ^(т1)=-А1дг0. (8)
Эти значения для х и х являются начальными при движении
груза на втором этапе под действием левой пружины из нулевого
положения в крайнее левое.
Для упрощения последующих вычислений будем теперь отсчиты-
отсчитывать время с момента начала второго этапа. Поэтому, использовав
результаты (8), запишем начальные условия для второго этапа:
f = 0, * = 0, x=-klXo. (9)
Движение на втором этапе описывается дифференциальным урав-
уравнением тх~= —с%х, т. е.
jl + klx^O, A0)
где обозначено Щ=^сг1т.
Общее решение линейного уравнения A0) имеет вид
•* = C8cos/V + C4sin/^. A1)
Вычислим производную по времени:
х = — Cak% sin k2t + C4ft2 cos k2t. A2)
Подставив в уравнения A1) и A2) начальные условия (9), най-
найдем С3 = 0, С4 = — т^-*о- Внеся эти значения Са и С4 в A1), полу-
чим уравнение
^ A3)
описывающее движение груза на втором этапе под действием левой
пружины из нулевого положения в крайнее левое. Это движение
происходит в промежутке времени 0^t^.%it где т2 —пока неиз-
неизвестный момент времени, соответствующий приходу груза в крайнее
левое положение.
Вычислим проекцию скорости груза на втором этапе, взяв про-
производную A3) по времени:
х = — kxxо cos krf. A4)
878 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
Для определения х и х в конце второго этапа, т. е. в момент т2,
подставим в A3) t — t2> х = х{ха), а в A4) <=т2( .? = .* (т2) — 0.
Получим
х (т2) = — -~ х0 sin Аата, 0 = — kiX0 cos А2т2. A5)
Из второго уравнения A5) найдем ?2т2 = я/2, т. е.
Подстановка этого значения т2 в первое уравнение A5) дает
х (т2) = — -г- х0. Итак, в момент т2 окончания второго этапа, т. е.
в момент прихода груза в крайнее левое положение, т. е. при
* = т2 = я/2?2, его координата и проекция скорости равны
х^х(ъ)=--^хй, х = х(Хъ) = 0. A7)
Значения A7) одновременно являются начальными условиями дви-
движения груза на третьем этапе под действием левой пружины из
крайнего левого положения в нулевое.
Последующее решение задачи нецелесообразно, ибо движению на
третьем этапе соответствует дифференциальное уравнение A0) и
уравнение движения A3), а движение груза на четвертом этапе из
нулевого положения в крайнее правое описывается дифференциаль-
дифференциальным уравнением A). Искомый период Т свободных колебаний груза
равен 2(т1 + т2). Использовав формулы G) и A6), получим
где k1 = \rc1jm, к2 = У Czltn. Как следует из формулы A8), период
рассматриваемых нелинейных колебаний не зависит от начальных
условий движения, т. е. колебания изохронны.
2°. Метод малого параметра. Нелинейная материальная
система называется автономной, если ее движение описывается диф-
дифференциальным уравнением, явно не зависящим от времени. Например:
х + к*х = у,/(х,х), A*)
где ц — некоторый параметр, стоящий коэффициентом при нелинейной
непрерывной дифференцируемой функции f{x, x).
Ниже разыскивается периодическое решение уравнения A*)
в предположении, что параметр ц мал, а функция / зависит только
от координаты х, методом разложения в ряд по степеням малого
параметра ц. Этот метод, изложенный в трудах А. Пуанкаре, полу-
получил свое дальнейшее развитие в работах А. А. Андронова,
§ 21 СВОБОДНЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 379
А. А. Витта*), Н. М. Крылова, Н, Н. Боголюбова, Ю. А. Мвтро-
польского *•).
Запишем искомое периодическое решение в виде
., B*)
где х0, хь Хг — неизвестные периодические функции круговой
частоты р и частот, кратных р, подлежащих последующему опреде-
определению. Одновременно разложим р2 —квадрат искомой круговой
частоты —также по степеням малого параметра ja:
р = » + а& + сф*+..., C*)
где <%!, а2 — постоянные коэффициенты, определяемые в ходе интег-
интегрирования уравнения A*). Значения оса, аа выбираются такими,
чтобы решение B*) было периодическим, т. е. чтобы в нем отсутст-
отсутствовали так называемые «резонансные» или «вековые» члены, неогра-
неограниченно возрастающие с течением времени. Для пояснения допустим,
что в ходе решения задачи следует интегрировать дифференциальное
уравнение
J?+* Mt sinpt + N, sin bpt+...,
причем коэффициент Mt зависит от at. Среди частных решений
этого уравнения имеется неограниченно возрастающее «резонансное»
Mi
решение —s-=-/cos/tf. Для того чтобы искомый закон движения был
периодическим, надо считать Mt равным нулю. Из уравнения Mi — О
определяется искомый коэффициент а*.
Решать задачи указанным методом на определе-
определение закона свободных нелинейных колебаний ре-
рекомендуется в следующем порядке:
1) составить дифференциальное уравнение движения (l*), пред-
представив его в виде X-\-k*x — \i-f(x) = 0;
2) с помощью формул B*) и C*) записать искомый закон дви-
движения х и квадрат неизвестной круговой частоты р в разложении
по степеням малого параметра щ
3) использовав выражение B*), вычислить X к х,
4) подставить значения х, х и х из пп. 2) и 3) в дифференциаль-
дифференциальное уравнение п. 1). Одновременно коэффициент &а заменить с помощью
формулы C*), т. е. написать A2s=/?a —о^ц,—а2ца— ... В результате
этих подстановок получится дифференциальное уравнение с членами,
содержащими разные степени малого параметра ft, а также с членами,
свободными от (д.;
•) А. А. Андронов, А. А. Витт и О. Э. Хайкия, Теория
колебаний, Физматгиз, 1959.
**) Н. М. Крылов и Н. Н. Боголюбов, Введение в нелиней-
вую механику! Изд-во Ш УССР1 Киев, 1937.
380 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ XX
5) собрать в дифференциальном уравнении п. 4) члены, содержа-
содержащие одинаковые степени малого параметра ц, а также члены, сво-
свободные от |х, т. е. представить уравнение в виде
6) приравнять нулю коэффициенты, стоящие при разных степенях
малого параметра ц, а также члены, свободные от ц, т. е. Ао = 0,
Аг = 0, Л2 = 0, ... В результате получится система дифференциаль-
дифференциальных уравнений
*o+P2*o = O,
х = Fj (аь х0),
2 = Fi(ab аа, дг0, Ху),
7) записать начальные условия движения для дифференциальных
уравнений п. 6). Так, если по условию при * = 0 мы имеем х@) = а,
.?{0) —0, то на основании выражений х и X п. 3) получим при t = 0
•МО)-а, *i@) = 0,
8) использовав начальные условия п. 7), проинтегрировать диф-
дифференциальное уравнение х~0-\-р2х0 = 0 и найти xo(t)\
9) внести полученное выражение xu(t) в дифференциальное урав-
уравнение
1 = F1(a1, х0),
которое после простых тригонометрических преобразований в его
правой части примет вид
= My COSpt + Nx COS Zpt +...
Для того чтобы Ху с течением времени неограниченно не возрастало,
надо считать My равным нулю. Из уравнения My = 0 определим ах;
10) использовав начальные условия движения п. 7), проинтегри-
проинтегрировать дифференциальное уравнение
J?! -\-ргХу = Ny cos 3/tf -J-...
и определить jei@;
11) внести значения xo(t), «i и Jfi(<), полученные в пп. 8), 9) и
10), в дифференциальное уравнение
*з+Р9*» = ^2 (ai. aj, х0, Ху).
Повторив выкладки, аналогичные расчетам пп. 9) и 10), определить
аа и хъ(() и т. д.;
12) определить искомые x(f) и р2 п. 2), внеся в них вычисленные
значения xo(t), av Xy{t), а2, х3(() и т. д.
§ 2) СВОБОДНЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 881
При решении задач ряды B*) и C*) обычно обрывают на чле-
членах, содержащих ц или ц2. Например:
Задача 20.2. Определить методом малого параметра уравнение
и круговую частоту колебаний физического маятника конечной амп-
амплитуды, если Р —его вес, / — расстояние от его оси подвеса z до
центра тяжести (см. рисунок), 1г~момент инерции ч
маятника относительно оси подвеса. В начальный \ А**
момент маятник был отклонен от вертикали на
угол, равный а0, и отпущен без начальной ско-
скорости.
Решение. Применим дифференциальное
уравнение вращения твердого тела вокруг непод-
неподвижной оси z
Внешними силами являются Я—сила тяжести, К задаче 20.2.
R\> Rt — составляющие реакции оси г.
Сумма моментов внешних сил равна ?тг (F^) — — P^sin q>. По-
Поэтому дифференциальное уравнение примет вид /г(р= — P/sincp, т.е.
= 0, A)
где обозначено А2==Р///г.
Уравнение A) является нелинейным. Разложим sin<p в степенной ряд
sin<p = <p-3f + |^-... B)
В случае малых колебаний, т. е. при sinqi^ep, уравнение A)
оказывается линейным:
При заданных начальных условиях t = Q, cp = a0> ф = 0, его решение
имеет вид
Ф = а0 cos kt. C)
Для определения закона колебаний конечной амплитуды, сохраним
в ряде B) два первых члена, т. е. возьмем sin (р = ср — ^-. При этом
уравнение A) примет вид
<Р4-*»ф —цф« = 0, D)
где малый параметр ц имеет значение
Ц = ?. (б)
332 нелинейные колебания [гл, хж
Для определения закона колебаний маятника применим метод
малого параметра. Будем вести расчеты с точностью до членов, со-
содержащих |х в первой степени включительно. Поэтому искомый угол
отклонения <р и квадрат неизвестной круговой частоты р% запишем
в виде
F)
G)
где фо(О» <Pi(Q и постоянная с^ подлежат последующему определению.
Использовав F) и G), внесем в уравнение D) ф"
и k2=p2~ цссх. Найдем
Ро + Wi) - М- (Фо + H9i)s = 0.
С точностью до членов, содержащих малый параметр ц в пер-
первой степени включительно, это уравнение примет вид
+P2<Pi ~ «1Фо - Ф?) = 0.
Приравняв нулю члены уравнения, свободные от ц, а также коэф-
коэффициент, стоящий в скобке при \i, запишем
(8)
C)
Использовав заданные начальные условия t = 0, ф = а0, $ = 0
в уравнениях
в
запишем
Приравняв в каждом из этих уравнений слева и справа члены, свобод-
свободные от ц, а также слагаемые, содержащие |х, получим начальные
условия для функций фо(О и ф1(^): при ? = 0 имеем
Фо @) = а0, ф1 @) = 0, ф0 @) ^ 0, ф! @) = 0. A0)
Переходим к интегрированию дифференциального уравнения (8).
Как известно, его общее решение имеет вид
ф0 (t) = Сг cos pt -\- C2 sin pt,
а производная по времени равна
фо= — Cjp sin pt-\-C$> cos pi.
Внеся в эти уравнения начальные условия A0) tf = 0, ф0 = ао> Ф = 0>
найдем Ci = a0, C2 = 0. Следовательно,
Фо @ = ^0 cos pt. (И)
5 2) СВОБОДНЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 683
Это —первое приближение, в котором круговая частоту р пока не
определена.
Для интегрирования дифференциального уравнения (9) внесем
в его правую часть результат A1) и используем формулу cosso*»=
3 1
= -j- cos pt -f -j cos Zpt. Получим
/ 3 \ 1
<f>i +P\i = Щ («i+ -j «o) cos pt + -y a8 cos 3/rf. A2)
Частное решение этого уравнения, соответствующее первому сла-
слагаемому правой части, неограниченно возрастает (напомним, что диф-
дифференциальному уравнению X-\-р*х = Н cos pt соответствует частное
решение х = -n~t sin pt). Так как искомый закон движения является
периодическим, то коэффициент, стоящий в уравнении A2) при cospt,
должен быть равен нулю, т. е. a1~J--7-ao = O, откуда
ai=~laS. A3)
Теперь уравнение A2) примет вид
4/A A4)
Его общее решение фх равно сумме
ф1 = <р'," + ф1% A6)
где «pi*' —частное решение уравнения A4), а «pi11 — общее решение
соответствующего однородного уравнения $i+p2«pi = 0. В данном
случае
<р\>' = Di cos pt + D2 sin pt, qi is * = A cos Zpt.
Подставив ф!*' и ф1" =• -г. 9Арг cos 3^ в уравнение A4), найдем
А= —аЦЪ2рК Теперь общее решение A5) запишется в виде
A6)
Подставим в функцию A6) и в ее производную по времени
4k ш. — Dip sin p^ + ?>гР cos /rf -t-^- sin 3/rf
начальные условия движения A0) * = 0, фх@) = 0, ф],@) = 0, най-
найдем /Эх «= ag/32jt>a, Dg=»0. Внесем эти значения Dt и D2 в уравнение Aб)«
9l-^(«»^--CO8 3/tf). A7)
Для определения искомого закояа колебаний <р, а также круга»
вой частоты р маятника используем результаты A1), A3) и A7)
384 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
в выражениях (б) и G): ф = а0 cos/rt-f-ц ^—(cospt — cos3pt), /?2 =
~ кг — -J- [iaj. Использовав значение E) малого параметра ft, окон-
окончательно пойдем второе приближение
ср ¦= а0 cos pt + ~ (~J al (cos pt - cos Zpt), A8)
A9)
где a0 — начальный угол отклонения маятника от вертикали, а й2 = РЦ1г.
Из выражения A9) найдем р=»АA — -ь-о?) • Приняв во внимание,
что с точностью до членов, содержащих al включительно, имеем
a) ^ 1 а?ь
П —g~ao) ^ 1 —fg- а?ь найдем искомую круговую частоту р:
B0)
Как следует из формулы B0), маятник колеблется по закону A8)
с круювой частотой р B0), зависящей от а0 — начального отклонения
маятника. Значит, колебания не изохронны, т. е. зависят от началь-
начальных условий движения.
Напомним, что приближенному линейному дифференциальному
уравнению ф + Л2ф = 0 соответствовали изохронные гармонические
колебания C) <р = a0 cos kt, где круговая частота к — ~\fpljlz не зави-
зависела от начальных условий движения. Таким образом, даже прибли-
приближенное решение нелинейного уравнения, выполненное в этой задаче,
дало возможность обнаружить отсутствие изохронности колебаний.
Влияние начального углового отклонения а0 маятника на круго-
круговую частоту р незначительно. Так, при со = ЗО° = 0,52 рад из фор-
формулы B0) получим р— 0,983Уг.
В заключение, использовав результат B0) в уравнении A8) и при-
применив при этом приближенное равенство j ^М-угОД, най-
1 -16a,
дем искомый закон колебаний маятника в виде
B1)
Если в уравнении B1) пренебречь членами, содержащими al, то
придем к приближенному результату C) ср = а0 cos kt, соответствующему
линейному дифференциальному уравнению ф-)-А2ф = 0*).
*) Ниже данная задача решена методом медленно меняющихся амплитуд
(задача 20.3), а также методом эквивалентной линеаризации (задача 20.5)
и приведена сравнительная оценка разных способов решения.
§ 2) СВОБОДНЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 385
3°. Метод медленно меняющихся амплитуд (метод
Ван-дер-Поля)*). Этим методом удобно, пользоваться в случаях,
когда движение материальной системы описывается дифференциаль-
дифференциальным уравнением с малой нелинейностью:
*), D*)
где f{x, i) — нелинейная функция х и $, а ц — малый параметр.
При f(x, jc) = O уравнение D*) обращается в линейное: JE-j-
+ k2x — 0, общее решение которого, как известно, имеет вид
x = as[n(kt + a), a х = akcos(kt4-а).
В 1926 г. Ван-дер-Поль предложил считать, что при малой нели-
нелинейности общее решение уравнения D*) и его первая производная
по времени имеют вид, соответствующий линейному уравнению Jc +
+ k*x = 0, т. е.
x = asin(kt + a), x = akcos(kt + a), E*)
где амплитуда а и начальная фаза а являются медленно меняющимися
функциями времени
a —a (t), а = а (t).
Этот метод получил в дальнейшем математическое обоснование
в работах Л. И. Мандельштама и Н. Д. Папалекси**).
Можно показать, что данное нелинейное дифференциальное урав-
уравнение второго порядка D*) эквивалентно двум нелинейным диффе-
дифференциальным уравнениям первого порядка:
а = -|- /(а sin op, ak cos тр), /g#v
а = — ~ /(о sin i|3, ak cos 1$,
где введено обозначение ty
Было предложено вместо этих точных уравнений интегрировать
приближенные — «.укороченные» уравнения, которые получаются из
F*) путем замены их правых частей соответствующими усреднен-
усредненными значениями в пределах от 0 до 2я, т. е.
2л
а = -^ \ /(а sin % ak cos \ДО cos \j) <ft|?, G*)
о
2л
*= ~~2nka \f(asinylP> aA cos чр) sin гр cfip. (8*)
о
•) B. Van der Pol, A theory of the amplitude of free and forced
triode vibration, Radio Review, 1, 701A926).
**) Л. И. Маидел ьшта м, Н. Д. Папа л екси, Об обосновании од-
одного метода приближенного решения дифференциальных уравнений, ЖЭТФ,
т. IV, 1934.
Vi 13 № И. Бать и др,, т. Ш
386 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ XX
При вычислении интегралов, стоящих в правых частях этих при-
приближенных нелинейных уравнений, амплитуду а надо считать пос-
постоянной.
Интегрирование дифференциальных уравнений
свободных колебаний с малой нелинейностью мето-
методом В а н-д е р-П ояя рекомендуется проводить в сле-
следующем порядке:
1) составить дифференциальное уравнение свободных колебаний,
записав его в виде D*);
2) приняв jf = a sin ajj, & = akcosty, вычислить определенные ин-
интегралы
2я 2я
^ /[asinifi, aAcosip)cost|5flhJ), J /(с sin if, aAcos\|>)slm|jdij),
о о
считая при этом а постоянной величиной;
3) внести результаты предыдущего пункта в правые части «уко-
«укороченных» уравнений Ван-Дер-Поля G*) и (8*);
4) проинтегрировать уравнение G*) и вычислить общий интеграл
5) подставив полученное значение a {t, C%) в «укороченное» диф-
дифференциальное уравнение (8*), проинтегрировать его и вычислить
общий интеграл a = a(t, Сь Cs);
6) подставить полученные значения a (t, Cx) и о (t, Сь Сг) в урав-
уравнения E*) и с помощью заданных начальных условий движения
t~0, х = х0, jt=*xo определить постоянные интегрирования Cj и С2;
7) внести полученные значения С\ и С2 в а = a(t, Ci) и a = a(t,
Сь Са)> вычисленные в пп. 4) и 5);
8) подставить в искомое уравнение движения
х = а @ sin [kt + a {t}]
значения a (t) и a(t), полученные в предыдущем пункте.
Задача 20.3. Решить задачу 20.2 методом медленно меняющихся
амплитуд.
Решение. Запишем дифференциальное уравнение D) задачи
20.2 в виде
<p + ?2<p = uq>s, A)
где
H = J. B)
Будем искать решение уравнения (I), и его первую производную
по времени в виде
ср = о (t) sin [kt -f a (t)], ф = k ¦ a (t) cos [kt + a (t)\, C)
§ 21 СВОБОДНЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 387
где переменная амплитуда a{t) и переменная начальная фаза <x(t)
подлежат последующему определению.
Сопоставив уравнения A) и D*), приведенное в обзоре теории,
видим, что в данном случае при дг = (р мы получаем
/(ф. Ф) = Ф3-
Обозначив (p = asini|), и q> = a&cosi|3, запишем
/(a simp, aftcosij)) = o8sln8'vj). D)
Для определения a(t) и a(t) предварительно вычислим определен-
определенные интегралы
2п 2л
J /(a-slni|j, a?cosi|j)cosi]5tfi|) й J /(asini|3, oAcosij))sini|)rfiJ),
о о
которые при наличии D) и в предположении, что величина а посто-
постоянна, примут вид
^ f(a sin \|), ak cos 1J3) cos ¦ф dijj = a3 J sin31|) cos if d\J),
о о ,кч
2Я 2я E)
^ /(a sin % ak cos г|з) sin ij? dip = a9 $ sin* i|) A|).
0 a
Ийюльзовав в первом интеграле E) подстановку slnt|j = z, а во
3 1 1
втором интеграле E) формулу sin*$ = -g- — -5-cos 2ijj-f-g-cos 4ф,
найдем
2л
{ /(о sin ij), ak cos 1|з) cos г|з А|> = 0,
u F)
\/(asini|3, aAcost]))sin-фЛ|з =-jпа8.
8
Внеся значения интегралов F) в «укороченные» уравнения Ван-
дер-Поля G*) и (8*), приведенные в обзоре теории, и приняв во
внимание B), получим
а = 0, й = — ~ка%. G)
Из первого уравнения G) найдем
a(f) = d. (8)
После подстановки (8) во второе уравнение G) qho примет вид
a = —rz kC\. Проинтегрировав его, получим
а@ = -±кС1*+С* (9)
4% 13*
388 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ 1ГЛ. XX
Подстановка результатов (8) и (9) в уравнения C) дает
(Ю)
A1)
Внеся в A0) t = 0, <р = а0, a в A1) 2 = 0, ф = 0, получим систему
уравнений ao = C1sinC2, 0 = ACiCOsC2. Решив эту систему, найдем
Ci = aQ, Са = л/2 (при Q = 0 решение системы тождественно обра-
обращается в нуль). Подставив полученные значения Сх и С2 в A0),
найдем искомое уравнение колебаний маятника
A2)
Как видно из A2), круговая частота р колебаний маятника, зави-
зависящая от его начального углового отклонения а0, равна
A3)
Сопоставление формулы A2) с результатом B1) задачи 20.2,
решенной методом разложения по малому параметру, показывает,
что методом Ван-дер-Поля, при несколько меньшем объеме вычисле-
вычислений, получено первое — основное — слагаемое уравнения B1) за-
задачи 20.2. Величина же круговой частоты р, найденная двумя мето-
методами, оказалась одинаковой (см. выражение A3) и формулу B0)
задачи 20.2). Поэтому применение метода Ван-дер-Поля для опреде-
определения первого приближения следует считать целесообразным и эффек-
эффективным *).
Задача 20.4. Материальная точка массы т движется вдоль оси х
под действием сил упругости и сопротивления, проекции которых
соответственно равны Fx = — ex, Rx = — PiX — P8-*s- гДе с> Pi и Рз —
положительные постоянные. В начальный момент точка находилась
в крайнем положении, определяемом координатой х — а0 и была
отпущена без начальной скорости.
Найти уравнение движения точки методом Ван-дер-Поля.
Решение. Дифференциальное уравнение движения точки
имеет вид
При заданных значениях Fx и Rx запишем
тх = — сх — р!.* — p3^s,
или
х + №х = — 2tii± — п3х3,
*) Ниже эта задача решена методом эквивалентной линеаризации (за-
(задача 20.5) и дана сравнительная оценка разных способов решения.
§ 21 СВОБОДНЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 389
где обозначено кг — с[т, 2пг = pVOT> п'3 = р3//«, причем пх и п3 поло-
положительны.
Ищем решение х уравнения A) и его первую производную х
по времени в виде
x = a(t) sin [kt + a(f)\, x = ka(t)co$[kt + a(t)], B)
где л @ и a (t) — переменные амплитуда и начальная фаза, подлежа-
подлежащие последующему определению.
Сопоставив уравнения A) и D*), приведенные в обзоре теории,
находим \if(x, х) — — 2п1х — п3Л3. Обозначив je = asintf>, а X —
= ak cos if>, запишем
\if(a sin if, ak cos ijj) = — In^ak cos ty — n3a3k3 cos3 г|). C)
Для нахождения a (О и a (?) предварительно вычислим определен-
определенные интегралы
2я 2п
^ (х/(a sin if, aA cos ijj) cos ij) cfi|), ^ji/(asini|), aAcos^sinxfcfi}),
о о
которые при наличии равенства C) и в предположении, что а —
постоянно, примут вид
2л
о
2л 2л
= — гл^А [ cos2 ijj di|3 — n3a3k9 J cos4 гр cfijj, D)
о о
in
^ |x/(a sin ijj, aA cos t|>) sin \f cfif =
о
2л 2я
= — 2/iiaA ( cos ty sin ^ ?ft|) — n3a3k3 f cos8 ij) sin if dip. E)
о о
Использовав при вычислении интегралов D) формулы
1 3 11
cos21|) = у A -f cos 213). cos* ^ = "o- + y cos ^ + -g- c°s 4ij3
и сделав в интегралах E) подстановку cosijj —z, найдем
2я
\ \xf{a sin ij), ak cos ip) cos if eafij) = — 2n«iaA — -j nnsask3, F)
2л
5 [i/(a sini|), a* cos ij)) sin -ф rfij) = 0. G)
о
13 M. И, Бать и др., i. Ill
390 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. X»
Внеся вначения интегралов F) и (?) в <укороченные> уравнения
Ван-дер-Поля G*) и (8*), приведенные в обзоре теории, получим
й = _ nia(l + •§¦**?¦ а2), (8)
о = 0. Ч (9)
Обозначив в уравнении (8)
и отделив переменные, найдем
da
Приняв во внимание, что
1 1
(+) а
запишем
da Wada
7
Проинтегрировав это уравнение, получим
1пй--~1п(
т. е.
Cltt =
1я Cltt = -. у, (П)
где постоянная интегрирования Сг подлежит последующему олре»
делению.
Решив уравнение A1) относительно а, найдем
=. A2)
Интегрирование уравнения (9) дает
а = Са. A3)
Внесем результаты A2) и A3) в уравнения B)i
% 21 СВОБОДНЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 391
Подставив в равенство A4) начальные условия tf = 0, x**ao,
а в равенство A5) начальные условия t = 0, x=*0, получим урав-
уравнения
0 = r7=?==cosC!,.
Решив эту систему, найдем Сг«=я/2, Cf =» У 1 -f- Я,2а||/а0.. Исполь-
Использовав эти значения Сх и Сг, запишем искомое приближение в виде
во*""' , fns^ A6)
Из равенства A6) следует, что при /-*-оо получаем дг->-0,
т. е. движение затухает *),
4°. Метод эквивалентной линеаризации (метод
Крылова и Боголюбова)**). На основе работ Н. М. Кры-
Крылова и Н. Н. Боголюбова создан ряд приближенных методов инте-
интегрирования дифференциальных уравнений нелинейных колебаний ***).
Здесь приводится метод эквивалентной линеаризации.
Рассмотрим нелинейное дифференциальное уравнение
(*, х), (9*)
где f(x, ^ — нелинейная функция от х и х, а р, —малый параметр.
При ц = 0 уравнение (9*) вырождается в линейное дифферен-
дифференциальное уравнение свободных колебаний Jf + ^2-* = 0, решение кото-
которого имеет вид jf = a sin if, где a = const, ij) = A?-j-K, a =« const, и,
следовательно, x*=ak cos i|>.
Метод эквивалентной линеаризации основан на предположении,
что нелинейность в уравнении (9*) мала и колебания близки к гар-
гармоническим. Поэтому ищем х и х для уравнения (9*) в виде
jc = asinijj, х~а(йсо&% A0*)
где
ty = (ot + a. A1*)
Здесь a = a(t) и <о — м[a(t)] — медленно меняющиеся функции
времени, а а — постоянная, причем а, ю, ф и а подлежат после-
последующему определению.
Можно показать, что с точностью до членов, содержащих малый
параметр \и в первой степени включительно, колебания, описываемые
*) Ниже эта задача решена методом эквивалентной линеаризация
(задача 20-6) и приведена сравнительная оценка различных способов решения.
**) Н. М. Крылов и Н. Н. Боголюбов, Введение в нелинейную
механику, Изд-во АН УССР, Киев, 1937.
***) Н. Н. Боголюбов, Ю. А. Митропольский, Асимптоти-
Асимптотические методы в теории нелинейных колебаний, Физматгиз, 1958.
392 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. X*
нелинейным дифференциальным уравнением (9*), эквивалентны коле-
колебаниям, описываемым линейным дифференциальным уравнением
*0, A2*)
где
ел
я = — Tg~~ \ fifl. sin % a® cos i|>) cos ^ eNf, A3*)
2Л
©*=:# — iL C/(aslnij), a(ocos^)sinij)flfij3. A4*)
о
Заметим, что я » <o являются функциями от a.
Как известно (см. п. 3° § 4 гл. VIII второго тома этой книги)
линейное дифференциальное уравнение A2*) описывает свободные
колебания при наличии силы сопротивления, пропорциональной ско-
рости. Бго решение имеет вид Jtr = asini|>, где a=*Ce~nt, tj) =»
— У(о«-»а^а. Так как п (см. 13*) является величиной порядка
малости ц, то с принятой, степенью точности запишем ty^u>t-\-a
и, следовательно,
•ф = ю. A6*)
Учтя, что а = Ce~nt, получим а = — nCe~nt, т. е.
а = — па. A6*)
Таким образом, задача об интегрировании данного нелинейного
дифференциального уравнения (9*) второго порядка сводится к ин-
интегрированию системы двух дифференциальных уравнений A6*) и
A5*) первого порядка.
В заключение заметим, что с точностью до членов, содержащих
малый параметр ц в первой степени включительно, результаты, полу-
полученные данным методом, эквивалентны результатам, найденным мето-
методом медленно меняющихся амплитуд (см. предыдущий п. 3° этого
параграфа).
При интегрировании дифференциальных уравнений с малой не-
нелинейностью методом эквивалентной линеаризации нет необходимости
в составлении линейного уравнения A2*).
Рекомендуем следующую последовательность
решения задач:
1) составить дифференциальное уравнение свободных колебаний,
представив его в виде
где f(x, .?) —нелинейная функция от х и jt, а ц, —малый параметр;
2) приняв лр = a sin i|>, .? = aeo cos ф, записать
f{x, jfr)=/(asini)>, acocostj));
СВОБОДНЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 393
3) вычислять, определенные интегралы
2я 2я
5/(a sin ф,
иф
7)
8)
4) использовав результаты предыдущего пункта, вычислить п я
о>* по формулам A3*) и A4*). При этом получим п = п(а, ©), со = а(а);
5) внеся значение ш в я, найти я = я(а);
6) полученные в пп. 4) и 5) выражения со (а) и п (а), подставить
в дифференциальные уравнения A6*) и A5*);
7 проинтегрировав уравнение A6*), найти a = a{t,.C^)\
) внести полученное значение a = a(t,Ci) в уравнение A5*),
проинтегрировать его и найти я)з = ty (t, Съ Cs);
9) подставить результаты, полученные в пп. 7) и 8\ в уравнения
A0*) и с помощью начальных условий движения <<=0, х = х0, Л =
= ?0 найти постоянные интегрирования Q и С2;
10) внести значения Q и С2 в а и if, вычисленные в пп. 7) и
в), и определить a = a(t) и i|) = i|)@;
11) найти искомый закон движения, подставив a(t) и ty(t) в пер-
первое уравнение A0*): Jf = asini|J.
Если все силы потенциальны, а связи стационарны, то происходят
незатухающие колебания с постоянной амплитудой а. При эхом
da/dt = O. Использовав A6*) и A3*), получим
2Л
\f{a sin % во cos ij>) cos тр dty » 0,
о
Это —условие наличия установившегося режима колебаний.
Задача 20.5. Решить задачу 20.2 методом эквивалентной линеа-
линеаризации.
Решение. Определение закона движения физического маятника
было выполнено дважды: методом малого параметра в задаче 20.2
и методом медленно меняющихся амплитуд в задаче 20.3. (При
ссылках на решение задачи 20.3 номера формул будем заключать
в квадратные скобки.)
Воспользовавшись формулами [1] и [2], решим дифференциальное
уравнение
<p + A*<p=W3. (I)
где
Р-ТГ. B)
методом эквивалентной линеаризации.
Сопоставив уравнение A) и уравнение (9*), приведенное в обзоре
теории, находим
894 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
Будем искать ф —решение уравнения A) и его первую про-
производную ф по времени в виде
<р = азшф, ф = асо cos ф, D)
где a^affj, ф»=ф(/) и (о >= a [a (f)] подлежат последующему опре-
определению.
Подставив в C) выражения D), запишем
/(a sin ф, аи cos ф) = а» sin3 ф. (б)
Вычислим определенные интегралы
2л
$ /(я sin ф, аа cosф) cos ф dog
о
и
Sn
] f(a sin ф, аш cos ф) sin ф йф.
о
Использовав в подынтегральных выражениях формулу E), получим
2я 2я
^ /(a sin ф, ав> cos ф) cos ф с^ф = й8 J sin3 ф cos ф йф = 0, F)
о о
2Л 2Я
V /(а sin ф, асо cos ф) sin ф йф = а* \ sin* ф йф =¦ -j- яо8. G)
При вычислении интеграла F) была сделана подстановка sin ф = z,
а в интеграле G) была- использована формула
3 1 1
sin* ф = -g- — -к cos 2ф -\- -g cos 4ф.
Внеся результат G) в формулу A4*), проведенную в обзоре
теории, получим ш2 — k2 — -j- fiaa. С точностью до членов, содержа*
щих малый параметр ц в первой степени включительно, найдем
Приняв во внимание обозначение B), получим
Внеся результат F) в формулу A3*), данную в обзоре теории,
найдем
л-0. (9)
Теперь на основании метода эквивалентной линеаризации, можно
нелинейное дифференциальное уравнение A) заменить системой двух
f 2J СВОБОДНЫЕ КОЛЕВАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 395
дифференциальных уравнений первого порядка A5*) и A6*), приве-
приведенной в обзоре теории. Воспользовавшись формулами (8) и (9),
запишем эту систему в виде
d=>0, A0)
Из уравнения D0) следует, что амплитуда а колебаний посто-
постоянна, т. е.
а*=Сх. A2)
При этом уравнение A1) примет вид
Проинтегрировав его, получим
1> = a (i--§-)*+<:,. 03)
Подставив значения A2) и A3) в первое уравнение D), найдем
искомый закон движения физического маятника
]. A4)
Уравнения A4) и [10] тождественны. После определения посто-
постоянных интегрирования Сх и Са получим результат [12].
Из сопоставления решения этой задачи и задачи 20.3 следует,
что объем вычислений и степень трудности примерно одинаковы.
Задача 20.6. Решить задачу 20.4 методом эквивалентной линеари-
линеаризации.
Решение. Воспользуемся дифференциальным уравнением [1J
задачи 20.4 (номера формул задачи 20.4 будем заключать в квадрат-
квадратные скобки):
A)
Сопоставив уравнение A) и уравнение (9*), приведенное в обзоре
теории, запишем
ц/(х, -*) = — Ъг^х-щх3. B)
Будем искать решение х уравнения A) и его первую производную
х по времени в виде
лг = a sintj), x=*aacosty, C)
где a = a(t), ^ = ^(t) и a = <a[a(t)] подлежат последующему опре-
определению;
899 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
Подставив C) в B), получим
ц/(a sin 1|>, а<*> cos ip) = — 2я1аи cos ty — «sa8eu8 cos8 \|5. D)
Нетрудно видеть, что правые части формул D) и [3] одинаковы.
Поэтому, минуя вычисление определенных интегралов, воспользуемся
результатами [б] и [7J:
гя
ц V /(a sin ip; а© cos 1|>) cos if di|5 = — гя/^асо — -|- яяяа8©8, (б)
(i J /(a sin^J?, aco cos 1|з) sin i|j dij: = 0. F)
Внеся выражения E) и F) в формулы A3*) и A4*), данные
в обзоре теории, найдем
л^^ + уИзй2*2, <о = А. G)
В данном случае параметр со оказался постоянным.
Подставив значения со и л из формул G) в уравнения A6*) и
A5*), приведенные в обзоре теории, получим систему двух диффе-
дифференциальных уравнений первого порядка
y, (8)
ф = *. (9)
Так как уравнения (8) и (8] одинаковы, то, воспользовавшись
результатом интегрирования уравнения [8], приведенным в формуле
[12], запишем
где %2 дано формулой [Ю], а Cj — постоянная интегрирования.
Проинтегрировав уравнение (9), найдем
A1)
где Cj—постоянная интегрирования.
Подставив A0) и A1) в первое уравнение C), получим искомый
закон движения в виде
vc\—X4~2n
Уравнения A2) и [14] тождественны. После определения Q и С2
(см. решение вадачи 20;4), получим результат [16].
Степень трудности и объем вычислений в решения* этой задачи
а задачи 20.4 примерно одинаковы.
S 3] ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 39?
§ 3. Вынужденные колебания нелинейных систем
(аналитические методы)
1°. Метод поэтапного интегрирования. В п. 1° § 2
был рассмотрен метод поэтапного интегрирования в применении
к свободным колебаниям нелинейных систем. Этим методом можно
также пользоваться при исследовании вынужденных колебаний нелиней-
нелинейных систем в случаях, когда характеристика силы упругости или силы
сопротивления составлена из нескольких прямолинейных отрезков *).
Решение задач сводится к интегрированию линейных дифферен-
дифференциальных уравнений, соответствующих прямолинейным участкам харак-
характеристики силы. При этом должны выполняться условия сопряжения
уравнений; конечные условия движения на данном этапе должны быть
равны соответствующим начальным условиям движения на следующем
этапе.
В итоге вынужденные нелинейные колебания описываются систе-
системой уравнений, число которых равно числу прямолинейных отрезков
характеристики силы упругости.
Применение метода поэтапного интегрирования к задачам на вынуж-
вынужденные колебания оказывается брле,е сложным по сравнению с при-
применением к соответствующим задачам на свободные колебания. При
этом приходится решать довольно громоздкие трансцендентные урав-
уравнения.
Задача 20.7**). Вал, жестко заделанный одним концом и несущий
на другом свободном конце массу с моментом инерции 1г, где г — ось
симметрии вала, совершает крутильные колебания. К массе приложен
возмущающий момент, изменяющийся по гармоническому закону
с круговой частотой ш. Наибольшая величина возмущающего момента
равна М& К валу подключен фрикционный демпфер (поглотитель)
крутильных колебаний. Демпфер создает момент сил сопротивления,
прямо пропорциональный углу поворота вала.
Суммарная, так называемая «треугольная» характеристика изме-
изменения момента сил упругости вала и момента сил сопротивления
демпфера изображена на рисунке. При повороте колеблющейся сис-
системы из положения равновесия оба момента, имея одинаковый знак,
складываются (ветвь с{), а при ее возвращении в положение равно-
равновесия эти моменты, имея разные знаки, вычитаются (ветвь c,j).
При этом происходит разрыв характеристики и уменьшение суммар-
суммарного момента на величину (сг — са)ф0, где <р0 — максимальное значе-
значение q>, а С\ и съ — коэффициенты упругости, соответствующие верхней
*) Вообще Методом поэтапного интегрирования можно пользоваться
в случаях, когда нелинейное дифференциальное уравнение интегрируется на
отдельных участках.
*¦) М. И. Бять, Вынужденные колебания в системе о гистерезисом,
ПММ, Новая серия, том IV, вып. 2, 1940.
399
нелинейные колебания
[ГЛ. X*
К задаче 20.7,
и нижней ветвям характеристики. При повороте колеблющейся сис-
системы в другую сторону от положения равновесия суммарная харак-
характеристика получается аналогичной. В результате образуется гистере-
зисная петля в виде двух равных треугольников с общей вершиной
и сторонами, служащими продолжением
одна другой. Сумма площадей этих тре-
треугольников равна численному значению
работы, поглощенной за один период
колебаний. (Подобная «треугольная» ха-
характеристика имеет также место у листо*
Р вых рессор железнодорожных вагонов.)
В случае отсутствия демпфера характерис-
характеристика изменения момента сил упругости
вала была бы прямой (см. штриховую
линию на рисунке) с коэффициентом уп-
1
РУГОСТИ С = у(С? + С2).
Найти уравнение крутильных коле-
колебаний, считая, что они совершаются по
периодическому закону с круговой частотой <о, равной круговой
частоте возмущающего момента.
Решение. Суммарная нелинейная «треугольная» характеристика
моментов сил упругости и сопротивления является на отдельных
участках линейной. Поэтому для исследования данной нелинейной
системы целесообразно применить метод поэтапного интегрирования,
разбив период колебаний 7=2л/о> на четыре этапа:
1) поворот из ненапряженного — нулевого — положения в крайнее
положение — претив хода часовой стрелки,
2) возвращение из крайнего в нулевое положение,
3) поворот из нулевого положения в другое крайнее положе-
положение—по ходу часовой стрелки и
4) возвращение из крайнего в нулевое положение.
«Треугольная» характеристика симметрична относительно полупе-
полупериода. Поэтому первый и второй этапы происходят за первый полупе-
полупериод Г/2 = я/<в, а второй и третий этапы — за второй полупериод я/<о.
Поворот из нулевого положения в крайнее происходит при коэффи-
коэффициенте сь а возвращение в нулевое положение — при с2. причем
ci > съ. Поэтому продолжительность отклонения из нулевого поло-
положения в крайнее не равна продолжительности возврата из крайнего
положения в нулевое. Обозначим через х пока неизвестную продол-
продолжительность отклонения из нулевого положения в крайнее. В связи
с, этим этапы будут происходить в следующие промежутки времени;
2)
$ 31 ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 809
При наличии момента сил сопротивления имеет место отставание
по фазе движения от возмущающего момента. Поэтому считая, что
в начальный момент, т. е. при ? = 0, угол поворота равен нулю
Ф = 0, введем некоторое опережение движения возмущающим мо-
моментом по фазе и обозначим его юр", где р пока неизвестно. В связи
с этим запишем возмущающий момент в виде
Движение на первом этапе из нулевого положения в крайнее при
Os^ts^x соответствует верхней ветви с^ «треугольной» характери-
характеристики. Дифференциальное уравнение движения имеет вид
/«$i = — с 1ф1 + Af0 sin © (t+р),
A)
где обозначено k^Ci/l^ то = Мо/1г.
Движение на втором этапе —из крайнего положения в нулевое
при т ^ t ^ я/© соответствует нижней ветви с2 «треугольной» харак-
характеристики и описывается дифференциальным уравнением /ф =
+Mi(t+$) т. е.
ifz+*S<p. - Щ sin ш (t + p), B)
где обозначено ?! = Cj//*» т0 = М0/1г.
Третьему этапу соответствует дифференциальное уравнение A),
а четвертому — уравнение B).,
Общие решения дифференциальных уравнений A) и B) имеют
вид
J C)
= С8 cos *2* + С4 sin V + щ=дг sin © (< + Р). D)
Случаи ki = a и Ла«:(а ниже не рассматриваются.
Для определения шести- неизвестных: четырех постоянных интегри-
интегрирования Сь С2, Са, С4, а также тир воспользуемся начальными и
конечными условиями движения на отдельных этапах, а также усло-
условиями сопряжения.
Взяв производные функций C) и D) по времени, запишем
фа = - CjAj sin kjt + C2*i cos Aaf + —^ cos и (* + 0), E)
ф, =: — Caks sin V + C4A2 cos k4 + .J". cos ®(t + 6).. F)
Подставим в уравнение C) значения t = 0, <pj = 0, в уравнение D)
значения * = я/@, фа = °» в уравнение E) значения t=x, ф1 = °»
400 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. .50?
в уравнение F) значения * = т, фа = 0. Решив полученную систему
уравнений, найдем
7S Г х
т
г i
X [cos A2t sin ©p + —- cos о (* + P) sin ft8 -~ ,
X [sin k2x sin cop — -j- cos со (t + P) cos Aa -^-1.
После внесения этих значений G) в уравнения C) и D) в урав-
уравнениях остаются неизвестными тир, для определения которых вос-
воспользуемся условиями сопряжения:
1) Ф1 (т) - <ра (т); 2) фх @) = ф2 (-?-).
Для применения первого условия сопряжения подставим в урав-
уравнения C) и D) значение t=v и приравняем их правые части
Сх cos k,x + Сг sin kjx -f ™° a- sin w (т+P) —
= C» cos An т 4- С л sin Aa^ "f* "П—¦—? s^n © (t + B). (S)
Для использования второго условия сопряжения подставим
в уравнение (б) значение rf*=0, в уравнение F) значение t = n/<a
и приравняем их правые части, предварительно поменяв в F) знаки
на обратные. Получим
- Cak2 sin Aa -?- -.С4*2 cos h ~ + fe^y cos ©p. (9)
Заметим, что в уравнениях (8) и (9) постоянные интегрирования Сь
Cg, C8( С4 определяются по формулам G).
8 8} ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 401
После ряда несложных преобразований уравнения (8) и (9) при-
принимают вид
А —В Vp sin ют—
К—A cos сот
_ ? |
~-7=.— A sin шт
УР
где приняты обозначения
? Р стЛ/ ~т Р cos—т7=-(я—сот)
г р F р
1 ^.tg-i/T^, 1 . 1_ (л и
р) г р I-/? VV
e)T+-J— tg-J^(«-OT), K-^ ——.
1— р Ур (д—р)A—р)
Из системы трансцендентных уравнений A0) и A1) можно найти
искомые значения т и tgw|3 для фиксированной пары значений р
и q, т. е. для заданного соотношения между сь с2 и <а. Решив эту
систему уравнений, например, графически, найдем tgcaj) и ют. Напом-
Напомним, что через т обозначен промежуток времени отклонения от нуле-
нулевого положения в крайнее, Поэтому сот —это фаза, т. е. угол, соот-
соответствующий моменту х, В связи с этим величину сот будем впредь
называть «углом наибольшего отклонения». Для определения tgcop
и сот используем декартовы оси координат. На оси абсцисс будем
откладывать значения сот, а на оси ординат—величины tgcof). Задавая
ряд значений сот и определяя по A0) и A1) соответствующие зна-
значения tgtofi, строим по точкам кривые
tgtop=./i(<uT), tgtoP=/!!(cuT),
соответствующие уравнениям A0) и A1). Координаты точки пересе-
пересечения этих кривых фиксируют искомые значения ют и tg cof}. Внеся
их в уравнения C) и D), получим искомый закон крутильных коле-
колебаний.
Для определения угловой амплитуды колебаний ф0 можно вос-
воспользоваться любым из этих уравнений, ибо при t = i мы имеем
ср1 = ф2 = ср0. Например, из уравнения C) получим
tj>0 =»С,, cos ktx+Casin AjT + р"^ш1 sin со (т + 0), A2)
причем «от и сор определены в результате графического решения
системы трансцендентных уравнений A0) и A1), а Сх и Са —форму-
—формулами G).
402 нелинейные колебания [гл. хх
На практике крутильные колебания валов часто происходят при
величине т0, пропорциональной to2. Поэтому будем считать т0 = о<?>\
где а — некоторый положительный постоянный коэффициент. В этом
случае формула A2) примет вид
| , A3)
где р = ю7А|, q = k\/k\ = cjc%.
Как следует из анализа формулы A3), по мере увеличения q,
т. е. момента сил сопротивления, амплитуда колебаний ср0 убывает.
При p = q амплитуда <р0 неограниченно возрастает.
Условимся в этой нелинейной задаче понимать под резонансом
явление вынужденных колебаний, имеющее место при равенстве кру-
круговой частоты со возмущающего момента круговой частоте k соб-
собственных колебаний. Круговая частота к- определяется при отсутствии
момента сил сопротивления, т. е. при вырождении «треугольной"»
характеристики в прямую линию (см. штриховую линию на рисунке)
с коэффициентом жесткости, равным с = -^ (с?+cz^ Разделив с на
момент инерции 1Х, получим Аа = --у '
т. е,
Значит, при резонансе, т. е. при a> = k, получим q = k\}k\ *=»
е= c-Jct = 1, р = ©7*1 — аV^S = 1 • Подставив значения q = р = 1
в формулу A3), найдем, что резонансная амплитура <рд неограниченно
возрастает.
Вместе с тем с появлением и по мере увеличения момента сил
сопротивления, т. е. при q > 1 наибольшие амплитуды колебаний
имеют место уже не при со/Дгв 1, а несколько смещаются в сторону
увеличения <a]k.
Как показывают подсчеты, «угол наибольшего отклонения» сот
сравнительно близок к 90°. Так, для случая колебаний с большим
сопротивлением q — 3 угол сот равен сот я« 77° при резонансе и затем
монотонно возрастает с увеличением со, приближаясь к 90°; уже при
a/k = 2,1 имеем <от е« 87°. При малых значениях момента силы сопро-
сопротивления, т. е. при 1<ог<1,25, угол наибольшего отклонения от
колеблется при резонансе (со/й=1) в пределах 88°<<от«<900, при-
приближаясь к 90° по мере увеличения со/А *).
*) Ниже эта задача решена вариационным методом (задачи 20.10 и 20.11)
и приведена сравнительная оценка разных способов решения.
S 3) ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 403
2°, Метод последовательных приближений. Инте-
Интегрирование нелинейного дифференциального уравнения вынужденных
колебаний можно выполнить с помощью лриближенного метода
последовательных приближений.
Многочисленные опыты и наблюдения ва действующими установ-
установками, совершающими нелинейные вынужденные колебания, указывают
на наличие установившихся периодических движений. Поэтому, при-
применяя метод последовательных приближений, будем искать периоди-
периодические решения с круговой частотой, равной круговой частоте возму-
возмущающей силы.
Поясним идею этого метода на примере дифференциального
уравнения
Д? & = ц/(х)+A sin pt,
где |л и /г —малые параметры, f{x) — непрерывная нелинейная нечет-
нечетная функция х.
В первом приближении, опустив в этом уравнении нелинейную
часть р/(х), находят частное решение х± соответствующего линей-
линейного дифференциального уравнения
1 = h sin pt.
Нетрудно видеть, что решение
удовлетворяет этому уравнению.
Затем, для отыскания второго приближения х2, подставляют полу-
полученное значение Хх в нелинейную функцию \if(x), т. е. вычисляют
/() и затем интегрируют дифференциальное уравнение
sin pt.
Решив это уравнение, определяют второе приближение
л:2 = ^sin pt -\-bssin3pt -\-b6sln5pt+...
Внеся х2 в нелинейную функцию \if(x), т. е. вычислив |
переходят к нахождению третьего приближения х3. Его можно полу-
получить, проинтегрировав уравнение
х3 + k*xz = ц/(*2)+h sin pt.
Аналогично определяются последующие приближения.
Ниже приведена последовательность решения
задач на вынужденные колебания нелинейной си-
системы с помощью несколько видоизмененного ме-
метода Дуффинга*), в основе которого лежит метод
последовательных приближений:
*) G. Duffing, Erzwungene Schwingungen bet veranderHcher Eigenfre-
quenz und ihre technische Bedeiitung, Braunschweig 1918.
404 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
1) составить дифференциальное уравнение вынужденных колебаний
нелинейной системы
х+k*x = \if(x) + h sin pt,
где |л и ft —малые параметры, а /(л:) —непрерывная нелинейная
функция х. Здесь рассмотрен случай, когда f(x) является нечетной
функцией, т. е. /(—х) ——f(x), а проекция возмущающей силы
равна ft sin pt;
2) определить первое приближение хь считая ц = 0, т. е. инте-
интегрируя линейное уравнение Jc + k2x = h sin pt. В качестве xi принять
частное решение
где коэффициент ах подлежит последующему определению;
3) добавить слагаемое pzx в левую и правую части уравнения
п. 1) и записать его в виде
х+р*х = (р2 - А2) х + \if(x) + h sin pt;
4) для определения второго приближения х3 внести значение
п. 2) в правую часть уравнения п. 3), т. е.
5) использовав простейшие формулы, выразить нечетную функцию
/(хг)= f(at sin pt) в виде тригонометрического ряда ?Xisinipt, т. е.
/(*i) = 2;a.isln(p<, где /=1, 3, б, ...;
6) внести этот результат в дифференциальное уравнение п. 4),
представив его в виде
х+р2х = [(ра — k2) щ + \ili+ft] sin pt+ц 2 Я, sin f/rf,
где i = 3, 5, ...;
7) в связи с отысканием периодического решения этого уравне-
уравнения принять коэффициент при sin pt равным нулю и, решив уравнение
(р2 — к^)аг + (iXi4-fc = 0, определить значение ai (заметим, что при
(р2 — k3) ax -f- \i%i -\-кфО одно из частных решений дифференциального
уравнения предыдущего пункта неограниченно возрастает по закону
— — о tco&pt и искомое решение оказывается непе-
непериодическим);
8) при выполнении условия (рг — А2)^+ fiAi+A = O дифферен-
дифференциальное уравнение п. 6) принимает вид
где I = 3, 5, 7, ... Проинтегрировав это уравнение, найти второе
приближение
^2 = ^1 sinpt-\-bzsin 3pt + bbsinbpt-{-...
Здесь первое слагаемое bxs\npt является общим решением соответ-
соответствующего однородного уравнения х-{-р2х = 0, а все остальные сла-
слагаемые—частными решениями данного неоднородного уравнения;
» 3] ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 405
9) следуя Дуффингу, приравнять коэффициенты bL и аъ стоящие
коэффициентами в первом (п. 2) и втором приближениях п. 8) при
sinpt, т. е. считать
sin
где сц определено в п. 7);
10) определить хл — третье и последующие приближения, сог-
согласно последовательности вычислений, изложенных в пп. 4) —9).
Метод последовательных приближений Дуффинга является одним
из весьма распространенных приближенных способов интегрирования,
нелинейных дифференциальных уравнений вынужденных колебаний.
Если требуется определить одно лишь первое приближение хг=>
= a1sinpt, то все же надо составить дифференциальное уравнение
второго приближения, приравнять в нем нулю коээффицент при sinpt
(см. п. 7)) и вычислить амплитуду ах. После этого вычисление вто-
второго приближения не составляет большого труда (см. пп. 8) и 9)).
Заметим, что при переходе от второго к третьему приближению
(и особенно ко всем последующим) объем вычислений резко возрас-
возрастает при незначительном повышении точности результата. Поэтому
обычно ограничиваются определением второго приближения.
Задача 20.8. Найти периодический закон вынужденных колебаний
материальной точки массы т, движущейся вдоль оси х под действием
нелинейной силы упругости F, имеющей «жесткую» характеристику,
и возмущающей силы 5. Проекции этих сил на ось х равны Fx =
»=я —С1Х — сах*, SX = Hsinpt, где Cj, сг и //—постоянные положи-
положительные коэффициенты, причем cs и Н являются малыми параметрами.
Задачу решить методом последовательных приближений Дуффинга,
изложенным в обзоре теории. Найти первое и второе приближения.
Решение. Дифференциальное уравнение движения материаль-
материальной точки mX = Fx-{-Sx после подстановки значений Fx и Sx при-
принимает вид
тХ = — схх — ctx*+H sinpt,
т. в.
Х= —k*x—yx*+hsiapt, (I)
где обозначено As = ci//», y^crfm, h=H/m.
Заметим, что подобно с8 и Н, коэффициенты у и А являются
малыми параметрами, причем y>Q и Л>0.
При определении первого приближения Хх будем в уравнении A)
считать -ys=0. Нетрудно видеть, что линейному дифференциальному
уравнению # = — Aa.*? + ftsin/tf удовлетворяет решение
xl = alslnpt, B)
где at—постоянная, подлежащая последующему определению.
Выражение B) примем в качестве первого приближения нелиней-
нелинейного дифференциального уравнения A).
406 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ PVI. ХЯ
Переходим к определение второго приближения. Для этого доба«
вим в левую и правую части уравнения A) слагаемое p*xi
%+р*х = (р* - k*) х ~ уха+ h sin pt. C)
Вычисление второго приближения сводится к интегрированию диф-
дифференциального уравнения C), в правую часть которого вместо я
подставлено первое приближение B), т. е.
%-\-р2х = ai(pa — k*)sinpt —уа\ sitfpt + hsinpt.
Приняв во внимание, что sins/tf=-j- C sin pt —sin 3pt), представим это
уравнение в виде
j, D)
где обозначено
^ E)
Нетрудно видеть, что дифференциальному уравнению D) соответ»
ствует случай резонанса, ибо в правой части содержится слагаемое
Asinpt. Действительно, одним из его частных решений является
х=—n-t cos pt, которое с течением времени неограниченно возра-
возрастает. По условию же разыскивается периодический аакон движения
точки. Поэтому в правой части уравнения D) должно отсутствовать
слагаемое Asinpt, т. е. коэффицент А должен быть равен нулю.
Использовав выражение E), найдем
ax(?-k*)~JVa?+A-0. F)
Уравнение F) дает возможность определить величину амплитуды
ai первого приближения в зависимости от круговой частоты р воз-
возмущающей силы. Графический метод решения этого уравнения будет
приведен ниже.
При выполнении условия F) дифференциальное уравнение D)
принимает вид
*х = ^уа\ sin Zpt. G)
Общее решение х2 уравнения G), которое является искомым
вторым приближением, определяется по формуле
х^хГ + хГ, (8)
где хЧ' — решение соответствующего однородного уравнения, а х$'
— частное решение уравнения G).
Нетрудно видеть, что
'^ b (9)
I 31 ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 407
является одним из решений однородного уравнения Х+р*х = 0.
Параметр bt будет определен ниже.
В соответствии с правой частью уравнения G) ищем частное реше-
решение x'i' в виде
A0)
Подставив функцию A0) и ее вторую производную по времени
X'i> = — 9Z5/>a sin 3/?^ в уравнение G), найдем D=» — уа\/32р*, затем
внесем это значение D в частное решение A0):
Использовав результаты (9) и A1) в (8), получим второе прибли-
приближение
х% =в bi sin pt——^ sin Ърк A2)
Следуя Дуффингу, приравняем коэффициенты ах и bv стоящие
при snip* в первом B) и втором A2) приближениях. Тогда оконча-
окончательно получим второе приближение искомого периодического дви-
движения
Сопоставив первое B) и второе A3) приближения, видим, что их
разность хг — хг является величиной порядка [малости параметра у
Х$ — ХХ )Я тшт пп о Sin Optm
В заключение займемся графическим решением уравнения F) для
определения зависимости амплитуды аг первого приближения от кру-
круговой частоты р возмущающей силы. Заметим, что уравнение F),
которое запишем в виде
является кубичным относительно at. Поэтому некоторой области
значений р соответствуют три значения ах.
Обозначив левую и правую части уравнения A4) через у, запишем
На рис. а изображены декартовы оси координат, причем на оси
абсцисс отложены значения аь а на оси ординат — значения^. Функ-
ции у = -г р- а\ соответствует кубическая парабола, не зависящая or
408
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
[ГЛ. XX
К задаче 20.8,а.
величины p]k. Функции jh = А+^-_1^Й1 соответствует пучок пря-
прямых, проходящих через точку О1(о>^\, Угловые коэффициенты этих
п»
прямых, равные -^~ I зависят от отношения круговых частот p/k
возмущающей силы и свободных колебаний. Так, значению p/k = О
.соответствует прямая а —а с
угловым коэффициентом, рав-
равным минус единица, значению
p/k =ч 1 — прямая р — р с угло-
угловым коэффициентом, равным
нулю; значению p/k = оо ¦— пря-
прямая, совмещенная с осью у,
— с угловым коэффициентом, рав-
' ным бесконечности. Значит, при
непрерывном изменении p/k от
нуля до бесконечности прямая
а —а поворачивается в нап-
направлении против хода часовой
стрелки вплоть до совмещения
с осью у. При p/k = 0 прямая
а — а пересекает параболу
в одной точке (см. рис. а). Затем при некотором значении p/k прямая
касается одной ветви параболы и пересекает ее другую ветвь. При
дальнейшем увеличении p/k, сопровождаемом поворотом прямой, пря-
прямая пересекает параболу в трех точках. Абсциссы точек пересечения
прямой и параболы фиксируют искомые величины <*1( которые впредь
будем называть амплитудами нелинейных вынужденных колебаний.
(Это название условно, но достаточно оправдано тем, что в фор-
формуле A3) a1>vaf/32pa.)
На рис. б построены кривые | at \ =f(p/k). Как видно, некоторой
области значений p/k соответствует не одно, а три значения ампли-
амплитуды йх. По сравнению с соответствующим графиком для линейной
силы упругости (см. рис. в. 14 на стр. 111 второго тома) амплитудная
кривая в случае «жесткой» характеристики (см. кривую 1 — 1 на
рис. 20.1 на стр. 373), оставаясь разрывной, наклоняется в сторону
увеличения p/k (отметка / на оси абсцисс на рис. б" соответствует
резонансу при линейной силе упругости).
Если решить соответствующую задачу с учетом силы сопротив-
сопротивления, пропорциональной скорости, то кривая станет непрерывной
(см. штриховые кривые на рис. б). При этом по мере увеличения
силы сопротивления область трех значений амплитуд уменьшается.
Подобное движение рассмотрено ниже в задаче 20.9.
Если решить данную задачу для случая «мягкой» характеристики
силы упругости (см. кривую 2-2 на рис. 20.1 на стр. 373), т. е.
ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ
409
при Fx= — CiX+cax*, где Cj>0 и с8>0, то амплитудная кривая
(см. рас в) наклоняется в сторону уменьшения p/k. При наличии
силы сопротивления, пропорциональной скорости, кривая становится
непрерывной.
ы
1
6)
d
4
i
N
К задаче 20.8.
Рассмотрим случай, когда при нелинейных вынужденных колеба-
колебаниях турбины, при «жесткой» характеристике силы упругости, источ-
источником возмущающей силы оказывается неуравновешенность турбин-
турбинного диска. В простейшем случае круговая частота р возмущающей
силы равна угловой скорости со вращения турбинного диска. При
включении турбины и постепенном увеличении угловой скорости
величины амплитуд растут по ветви аЪ (см., рис. г) до некоторой
точки d, затем скачкообразно уменьшаются в положение т, переходя
с ветви аЬ на ветвь nl и далее убывают по ветви я/. Это резкое
изменение величины амплитуды называется «явлением скачка». Оно
характерно для нелинейных вынужденных колебаний и связано с попа-
попаданием колеблющейся системы в зону неустойчивости.
При выключении турбины (см. рис. д) величины амплитуд возра-
возрастают по ветви In до некоторой точки s, затем происходит «скачок»
— резкое увеличение величины амплитуды в точку q и далее непре-
непрерывное убывание по ветви Ьа.
3°, Метод медленно меняющихся амплитуд (метод
Ван-дер-Поля). В п. 3° § 2 этой главы при интегрировании диф-
дифференциальных уравнений свободных нелинейных колебаний был при-
применен метод Ван-дер-Поля. Этим методом можно с успехом поль-
пользоваться при изучении вынужденных колебаний нелинейных систем.
Читателю следует ознакомиться с обзором теории п. 3° § 2.
410 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. ХЗ»
При определении закона вынужденных нелиней-
нелинейных колебаний, происходящих с круговой частотой
изменения возмущающей силы, рекомендуется сле-
следующая последовательность решения эадач:
1) сосгавить дифференциальное уравнение
Х + &х = р/(х, Л) + h sin/7/,
где слагаемое hsinpt соответствует возмущающей силе, \i — малый
параметр, a f(x, х) — нелинейная функция х и х;
2) представить посредством добавления к левой и правой частям
члена р2х уравнение п. 1) в виде
= F(x, х, t),
где F(x, x, t)^(p2-k2)x + \if(x, x)+ h sinpt;
3) искать закон вынужденных колебаний в виде
х = a sin \|) = a sin {pt -f- a),
где постоянная амплитуда а и постоянная начальная фаза а подлежат
последующему определению;
4) подставить в правую часть уравнения п. 2) функции л: = a sin ij>,
ф
р
т. е.
F(x, х, t) = F (a sinty, арcosty, ^
б) составить систему уравнений
х Ffasinijj, йр cos if», -3—— j cos -ф с?тр = 0, A*)
0
F(asin% o/?cosiJj, -fc^)siniJ)rfiJ> = Oj B*)
\ PI
6) вычислив определенные интегралы, алгебраически решить сис-
систему уравнений A*) я B*) относительно а и а;
7) подставить полученные значения а и а в искомый закон дви-
движения, записанный в п. 3).
Применение метода Ван-дер-Поля является эффективным приемом
определения первого приближения решения дифференциального урав-
уравнения вынужденных колебаний нелинейной системы.
Задача 20.9. Вал, защемленный одним концом и несущий на
другом, свободном, конце уравновешенный диск с моментом инерции
/г, где г —ось симметрии вала, совершает крутильные колебания.
К диску приложены: момент сил упругости ти — — <?i<P — с8ф3,
момент сил сопротивления тгя = — Рф, возмущающий момент т3г —
= М0 sin pt, где сь с8) Р, Мо, р — положительные постоянные, причем
с3 —малый параметр, а ф — угол поворота вала. Массой вала пренебречь.
I SI ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 411
Применяв метод медленно меняющихся амплитуд Ван-дер-Поля,
найти закон вынужденных колебаний диска, происходящих с круго-
круговой частотой изменения возмущающей силы.
Решение. Использовав дифференциальное уравнение вращения
твердого тела вокруг неподвижной оси г, запишем
1$ = гп1г + т %г + «зг-
Подставив заданные значения mlz, т2г и тъг, представим это
уравнение в виде
sinpt,
где обозначено № — сх11г, у — св/1г, 2я —р//г, Л=Ж„//г, причем, подо-
подобно с8, у является малым параметром.
Добавив к левой и правой частям этого уравнения ffiy, получим
= Р(Ф, ф, 0, A)
где
F(tp, ф, *) = О2 — А2)ф — уч>*-2пу-\-кsinpt. B)
Будем искать решение уравнения ^\) в виде
ц> —a sin (pt +а), C)
где а и а —постоянные амплитуда и начальная фаза, подлежащие
последующему определению, а р — круговая частота изменения воз-
возмущающего момента.
Для определения а и ее подставим в B) функции cp = asitn(>,
ф = ар cos 1|з, t = -—-; найдем
F(<p, ф, t) = F(asiai\>, a/?cos\J),
— Battp + ft sin a) cos ф — ya? sin3 -ф. D)
В данном случае, в соответствии с D), система уравнений A*),
B*) имеет вид
[(р3 — №) а -f- h cos a] \ sin if cos if <uf — Banp + A sin a) [ cos2\|5 rfij) —
о о
2л
•— ve8 \ sin*i|j cos Уз сГф = 0, E)
о
2Я 2Л
Г(ра — Л2) a + ft cos a] ^ sin2i|) dif — Bая/? + ft sin a) ^ cos ф sin ф dif —
о о
2Я
) = 0. F)
412 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
При вычислении определенных интегралов применим формулы
cos*i|> = у A + cos 2i|j), sinai|) = у A — cos 2т|з), sinhj) = -| - -|-cos 2if> +
+ чг cos 4i|>, а в первом и третьем интегралах уравнения E) и во
втором интеграле уравнения F) воспользуемся подстановкой sitnp = z.
После вычисления интегралов в уравнениях E) и F) получим
0, G)
(|-7a8 = 0. (8)
Заметим, что при отсутствии силы сопротивления, т. е. при л = 0
из G) найдем а = 0. При этом уравнение (8) примет вид формулы
A4) аналогичной задачи 20.8, решенной методом Дуффинга для слу-
случая отсутствия силы сопротивления.
Для решения системы G), (8) представим эти уравнения в виде
h sin a = — 2апр, h cos с* = (k2 —p2) a+~yas. (9)
После возведения уравнений (9) в квадрат и сложения их найдем
Л» = [(А* -р*у> + 4яУ] а" + 4 v (А2 -Л а4 + ^ ?8а« A0)
Для определения искомой амплитуды а решаем уравнение (И)
графически.
Введя обозначения а* — х и приравняв у левую и правую части
уравнения A1), получаем
„_
Затем в системе осей лгу строим по точкам кривую, соответствую-
соответствующую второму уравнению A2), а также проводим прямую, описанную
первым уравнением A2). Абсциссы точек их пересечения фиксируют
искомые значения х = а2. При построении кривой и прямой надо
сохранять постоянными параметры h, k, n, у и изменять величину
отношения pjk. При этом окажется, что Определенной области зна-
значений pjk соответствует одна точка пересечения прямой я кривой,
некоторому одному значению pjk отвечают две точки пересечения,
наконец, остальной области значений p/k соответствуют три точки
S 3] ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 413
пересечения. Для уяснения вышесказанного рекомендуем ознакомиться
с графическим решением уравнения A4), подробно описанном в ре-
решении задачи 20.8 (см. стр. 407—408) и с графикрм | at \ =f{pjk), по-
построенным на рис. б задачи 20.8 для случая аналогичного движения,
но при отсутствии силы сопротивления.
Выполнив в дайной задаче графическое решение уравнения A1),
получим зависимость |а|=/(р/&) для фиксированного значения п~
Если же провести ряд графических решения уравнения A1) при
разных значениях п, то можно получить семейство кривых | а | =/(р/*),
каждая из которых соответствует определенной величине параметра п,
характеризующего момент силы сопротивления. Эти кривые изобра-
изображены штриховыми линиями на рис. б задачи 20.8. В данном случав
также имеет место явление «скачка», описанного в задаче 20.8.
Зная величину а амплитуды, найдем из первого уравнения (9)
соответствующее значение начальной фазы а, являющейся сдвигом
между фазами возмущающего момента и вынужденных колебаний.
Получим
^ A3)
Знак минус в формуле A3) указывает на отставание по фазе вынуж-
вынужденных колебаний от возмущающего момента.
Использовав формулу A3) в уравнении C), запишем искомый
закон вынужденных колебаний:
ф = a sin (pt—arcsin ¦
где амплитуда а является корнем уравнения A1), решенного графи-
графически.
В заключение заметим, что при отсутствии нелинейности, т. е.
при у = 0 из уравнения A0) получим известный результат
h
4°. Вариационный метод (метод Бубнова — Галер»
к и н а). Рассмотрим нелинейные вынужденные колебания материаль-
материальной системы с одной степенью свободы, описываемые дифференциаль-
дифференциальным уравнением в форме Лагранжа
d дТ дт п „
где Т — кинетическая энергия материальной системы, q — обобщен-
обобщенная координата, Q — обобщенная сила, имеющая период 2я//>.
Применение интегрального принципа Гамильтона — Остроградского
(FТ + 6Л) dt = O
414 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
является одним из наиболее распространенных приближенных мето»
дов отыскания периодического решения данного дифференциального
уравнения. Интегральным принципом следует пользоваться в виде
ti+2n/p
В качестве движения, сравниваемого с искомым периодическим
движением, обычно выбираются периодические движения того же пе-
периода 2я/р.
Так, если при отсутствии силы сопротивления возмущающая сила
изменяется по 8акону fisinpt, то искомое приближенное решение
ищется в виде
q = at sinpt-{- o8 sin 3/tf-f аъ sin 5pt-{-.,., D*)
где параметры a1( a3) aB, ... подлежат последующему определению.
Подставив это значение q, а также его вариацию
bq = бй? sin pt + 6a3 sin Zpt + 6aB sin bpt \.,,
в уравнение (З*), получим
ой],
4-6a8 \
h
где буквой Ф обозначен результат подстановки q D*) в выражение
d дТ дТ п
Учитывая независимость вариаций 6аь да3, 8а5, ... получим сие*
тему уравнений
Решив эту систему уравнений, определим аъ а3, а5, ... и, следо-
следовательно, приближенный закон движения
q^at sin pt + а3 sin 2pt + a6 sin bpt+...
В первом приближении можно искать решение в виде q = a1sinpt,
последовательно добавляя во втором, третьем и последующих при-
приближениях члены ряда D*). По мере уточнения решения, т. е. при
переходе от первого приближения ко второму, от второго к третьему
J3] ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 415
и т. д., объем вычислений резко возрастает. Вместе с тем уже пер-
первое приближение обычно приводит к достаточно точным резуль-
результатам. Поэтому часто при решении нелинейных задач вариационным
методом ограничиваются первым приближением.
Заметим, что использование метода Бубнова—Галеркина не свя-
связано с малой нелинейностью системы (например, с малостью пара-
параметра ц). Это обстоятельство значительно расширяет рамки его при-
применения.
Решать задачи на вынужденные колебания нели-
нелинейных систем вариационным методом Бубнова—.Га-
Бубнова—.Галеркина рекомендуется в следующей последова-
последовательности:
1) составить дифференциальное уравнение вынужденных колеба-
колебаний, перенеся в его левую часть все члены, отличные от нуля, т. в.
(в частных случаях получаем тХ—]?Fkx — 0,/г<р—?mz(Fek)~®
и т. д.);
2) выбрать уравнение искомого периодического решения q = q (t),
которое должно иметь круговую частоту р, равную круговой частоте
возмущающей силы (возмущающего момента). Это уравнение содер-
содержит неизвестные параметры;
3) вычислить вариацию 8q искомого решения q = q (t). Эта ва-
вариация оказывается выраженной в зависимости от вариаций неизвест-
неизвестных параметров;
4) подставив искомое решение q и его вариацию 6q в уравнение
d дТ дТ
+fП1" I d дТ ^
представить его левую часть в виде суммы произведений независимых
вариаций параметров на некоторые коэффициенты;
5) приравняв нулю все коэффициенты, упомянутые в предыдущем
пункте, составить систему уравнений в числе, равном числу вариаций
параметров;
6) вычислив интегралы, стоящие в составленной системе урав-
уравнений, алгебраически решить эту систему и определить неизвестные
параметры;
7) подставив полученные значения параметров в q = q(t) (см.
п. 2)), найти искомое приближенное решение данного дифференциаль*
ного уравнения.
Задача 20.10. Ознакомившись с решением задачи 20.7 методом
поэтапного интегрирования, решить ее вариационным методом Буб-
Бубнова—Галеркина.
416 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. X»
Найти в первом приближении уравнение крутильных колебаний
вала *).
Решение. Крутильные колебания происходят под действием
возмущающего момента УИ0 sin co^. При решении задачи методом по-
поэтапного интегрирования, который впредь будем называть точным
методом, было предположено, что продолжительность т отклонения
из нулевого положения в крайнее не равна продолжительности
——т возврата из крайнего положения в нулевое.
Решая задачу в первом приближении вариационным методом,
предположим, что время отклонения равно времени возврата и, сле-
следовательно, равно четверти периода колебаний, т. е. т = Г/4 = я/2ю.
Будем также в первом приближении считать, что колебания происхо-
происходят по гармоническому закону с круговой частотой to, равной кру-
круговой частоте возмущающего момента и с отставанием по фазе на
©р искомого закона движения от возмущающего момента Мо sin at, т.е.
ф = фх sin (о (t — Р), A)
где q>x — угловая амплитуда колебаний вала, ар — момент времени,
соответствующий ненапряженному состоянию вала, т. е. ф = 0. Пара-
Параметры фх и р* подлежат последующему определению.
Поворот вала против хода часовой стрелки из нулевого положе-
положения в крайнее соответствует ветви сг «треугольной» характеристики"
(см. рис. к задаче 20.7). Он происходит в промежуток временя
P<^sS-5—+ P и описывается дифференциальным уравнением
/гф = — с?ф -f- Mo sin at,
т. е.
—да0 sin со* = 0, B)
где обозначено: к\ = \ ^
Возврат из крайнего положения в нулевое происходит согласно
ветви с2 «треугольной» характеристики. Ему соответствует диффе-
дифференциальное уравнение
т. е.
~т0 sin ®t = 0, C)
где обозначено kl^cjm, mQ
Это движение происходит за- промежуток времени -^- + р
*) Си. вторую сноску на стр. 397.
f Щ ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 41?
Затем поворот по Ходу часовой стрелки из нулевого положения
в крайнее происходит по ветви сгв течение -^- + Р^*^ Р
соответствует дифференциальное уравнение B).
Наконец, возврат из крайнего положения в нулевое происходит
по ветви с% в течение v^" + p^^^~+ff и описывается диффе-
дифференциальным уравнением C).
Применив вариационный метод, вычислим вариацию функции A):
бф *=» бф2 sin to (t — Р) — бр • фхш cos to (t — Р). D)
Выражение ~jt-=a §— — Q, стоящее в скобке уравнения C*),
равное в данной задаче, на соответствующих промежутках времени,
левым частям уравнений B) и C), обозначим через Alti. Внесем
в А1л значение ф из формулы A):
Мл = Ф" + *!,2ф — Щsin at = ф! {k\t2—©а) sin ca (t — ji) — да0 sin <oA E)
Кроме того, 6^, t\ и р, которые значатся в уравнении C*), при-
приведенном в обзоре теории, в данной задаче равны б<? = бф (см. фор-
формулу D)), *! = p, р = (о.
Поэтому уравнение C*) принимает вид
В связи с симметричностью движения относительно полупериода
я/а> нечетные и четные слагаемые в этом уравнении соответственно
равны. Следовательно,
F)
где А{ и Аг даны формулой E).
Внеся в уравнение F) выражение вариации D) и собрав члены,
содержащие бф и бр, запишем
а ^ i a
[
L
A2siaa>(t —
Г
L
=0.G)
418 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. Щ
Вариации 6фА и бр независимы. Поэтому оба коэффициента, стоящие
в G) при этих вариациях, должны быть равны нулю, т. е.
(8)
(9)
Использовав формулу E) в уравнениях (8) и (9) и вычислив
интегралы в уравнениях (8) и (9), получим
фа (&а — со8) — т0 cos top, A0)
Ф1(*!-А|)-"ЯИО81П©Р, (И)
где обозначено ^а = у (Af + Аз).
Решив систему уравнений A0) и A1) относительно щ и tg cop,
найдем
""ь A2)
Внеся эти значения в A), получим искомое уравнение крутиль-
крутильных колебаний
Aй^\ A4)
(
где k\ = cYllz, k\*=c%ll,., j
(Нетрудно видеть, что при отсутствии момента силы сопротив-
сопротивления, когда «треугольная» характеристика вырождается в линейную
с коэффициентом жесткости с, т. е. при AJ = A|, уравнение A4) при-
принимает вид, обычный для соответствующей линейной задачи: ф =
)
)
Можно, воспользовавшись формулами A2) и A3), построить кри-
кривые изменения амплитуды фх и угловой разности фаз сор1 в зависи-
зависимости от w, при разных величинах момента силы сопротивления,
определяемых параметром q — k\jk\ = с,/с9. При этом обнаруживается
аналогия с подобными кривыми, построенными для силы сопротивле-
сопротивления, пропорциональной скорости, и линейной силы упругости. Правда,
наибольшие амплитуды колебаний по мере увеличения момента силы
сопротивления и, следовательно q, сдвигаются по отношению к так
$ 3J ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 419
называемому резонансу (ajk — 1) в сторону увеличения <o}k. Так, при
9 = 2 имеем a/ft = 1,02, а при <? = 3 имеем co/ft = l,05. (Напомним,
что при силе сопротивления, пропорциональной скорости, и линей-
линейной силе упругости наибольшие значения амплитуд вынужденных
колебаний смещались в сторону уменьшения a/k, т. е. имели место
при ©/?•< 1.
Задача 20.11. Ознакомившись с условием и решением предыду-
предыдущей задачи, выполнить второе приближение вариационным методом
Бубнова — Галеркина *).
Решение. При рассмотрении в предыдущей задаче первого приб-
приближения было сделано предположение о том, что продолжительность
отклонения колеблющейся системы из нулевого положения в крайнее
равно продолжительности возврата в это положение, т. е. четверти
периода колебаний Г/4 = л/2со. В действительности же продолжи'
тельность отклонения меньше продолжительности возврата, так как
<i>% Учтем эту особенность колебаний во втором приближений.
Искомая функция ф — ф (t) должна удовлетворять следующим усло-
условиям:
( W 2) ПРИ * = Р имеем ф = 0; 3) при t = —
имеем ф = 0; 4) ф(р) = —ф(—+ Р]; 5) при ? = т+Р, причем 0<
<Т<Ш' имеем Ф^0'
Нетрудно видеть, что всем этим условиям удовлетворяет функция
Ф = ф! sin <a (t — Р) + фз [cos «a (if — р) - cos За (t - р)], A)
где фь фз и р — три постоянных, пока неизвестных параметра. Сопо-
Сопоставив функцию A) с первым приближением ф = ф! sin со (? — Р)
(см. формулу A) предыдущей задачи), видим, что функция A) отли-
отличается от первого приближения слагаемым фа [cos ю (t — Р) —
— cos Зсо it — Р)].
Примем функцию A) за второе приближение при решении диф-
дифференциальных уравнений B) и C) предыдущей задачи, которые
можно записать в виде
ф — /и0 sin ю/= 0, B)
причем kl^cjlg надо брать при
а к\ = сг]1г при
и JL + p<^? + T+fc C)
iL + P и ^ + т + р^г^^ + Р. D)
*) См. вторую сноску на стр. 397,
420 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
Применяя вариационный метод Бубнова — Галеркина C*), в дан-
данной задаче запишем
(Ф + Щ, яф — Щ sin tat) бф <# = 0. (б)
Подставив из A) значение <р в ф + k\,9ф — mosin<bt и обозначив
результат подстановки через Аг для k\ и через Аъ для k\, получим
Alt а = ф! (AJ, 9 — о8) sin <o (t — Р) + ф8 (?J, а — <о*) COS © (^ — 0) —
— фз (*'.«— 9со*) cos 3© (t — Р) — /и0 sin o>*. F)
Вычислив вариацию 6<р функции ф (си. A)), найдем
бф = бф! Sin И (t — Р) + бф8 [COS СО (^ — Р) — СО? Зй) (^ — Р)] -f
-)- 6Р • (о [фа sin ш (* — Р) — Зф8 sin Зш (i — Р) - ф! cos a(t — p)],
или
6ф = бф1-а + бф,.* + бРч»-^ G)
где обозначено
—P), b = cos<i)(i — P) — cos3(o(^-P), \
<: = ф8 sin и (И - Р) - Зф8 sin Зю (t - р) - фх cos со (t — Р). /
Использовав формулы F) и G) в уравнении E), разбив интеграл
от р до — + Р на ряд интегралов в соответствии с C) и D) и соб-
собрав члены, содержащие вариации бф^ бф8 и 6р, найдем
бф;
+ бфз
ъ
+»
= 0. (9)
Вариация 6ф1, бфэ, бр независимы. Поэтому все коэффициенты,
стоящие при етих вариациях, равны нулю.
5 Л ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 421
Так как движение симметрично относительно полупериода л/ш,
то нечетные и четные слагаемые, стоящие в каждой из квадратных
скобок уравнения (9), соответственно равны. Поэтому имеем
\ At-adt = O, (Ю)
Подставив в уравнения A0), A1), A2) значения у4х и Ла из фор-
формулы F), а также а, & и с из (8), после вычисления интегралов и
ряда преобразований соответственно получим
+ 2ф8 sip* ют - ~^з cos fi>p - 0, A3)
ф! sin4 <от -Ь 4>s ют — 4- sin 2ют — -j sin 4ют +
Л0, A4)
0. A6)
В трех уравнениях A3), A4) и A5) содержится четыре неиз-
неизвестных параметра фх, ф8, Риг. Поэтому, составляя четвертое урав-
уравнение, используем условие: при ? = T-fP имеем ф = 0. Вычислив
производную A) по времени и подставив / = T-fp\ ф = 0, найдем
Фх cos ©т — ф8 (sin ют — 3 sin Зют) = 0. A6)
Решение системы уравнений A3), A4), A5) и A6) проводим
в следующем порядке: из уравнений A3) и A4) определим eoscop
и sina>p, затем полученные значения coscoP и sincoP подставим
в уравнение A5). Найдем
sin» ют (фх + 2ф8 sin 2ют)а —
- {2ф| sin* ют + 2ф1ф8 [сот + "(giy> -
— у sin Зют cos сот B — cos 2ютI —
ют} = 0. A7)
422 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ XX
Выразим из уравнения A6)
С08ШТ
Ф*^1 апсот-ЗапЗцт '
подставляем это значение q>8 в уравнение A7). После сокращения
на ф* найдем
sin* от Г1 + 2cosMT.sin2coT 1* _ _
L мпют —3 sin 3©т J
coscot Г , n(ft| —о»8) . 1
2 cos2 шт • sin* сот » ,,n4
a A9)
Отделив в левую часть уравнения A9) все слагаемые, содержа-
содержащие тригонометрические функции ют, а в правую — слагаемые, зави-
зависящие от ю и ют, получим трансцендентное уравнение относи-
относительно ют
I8 C0S? 2fflT + СО8г т- <Sin йт ~ 3 sin
у - ^- sin бют = ют + " (*Г?"^ • <20)
Уравнение B0) решаем графически. Обозначив левую часть этого
уравнения через уь а правую часть — через уг, запишем:
У1 =fi (ют), Л =/» (®т).
Возьмем декартовы оси координат и отложим на оси абсцисс ют,
а на оси ординат ух и у2. Построим кривую ^1==/!(ют) и прямую
•У2=/г(а>т). Абсцисса их точки пересечения фиксирует искомое зна-
значение сот, а значит, и т при заданных значениях kb kt и ю.
Для определения фх решаем уравнение A3) относительно
ьЛ-ьа cos юр, уравнение A4) — относительно -т^т? sin юр1, возводим
каждое из них в квадрат и складываем:
+ 4ф1ф8 {sin* ют [ют + n(k{Iki) - h[n 2шт] +
4- 2 sin* ют [ют + " %f Zff2) - j sin Зют cos ют B - cos 2ют)]} +
§ {[ют + " ^ГУ - jsin Зшт cos"«B ~ cos 2<BT)f +sin8 (
8 3] ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ 423
Подставив в это уравнение значение ф8 из A8), после ряда пре-
преобразований полупим
(q
где
р = a'/kl q = k\!k\, a = та/ю\
.,Wi
и в свою очередь
где
F = 2
AT = 2 (В + 22ДС + 20A2D),
" апют-ЗапЗсот ' "-— 2 O1
С = sin4 (от, D = ют — j sin 2сот — -|- sin 4сот + ~
Определив таким образом ц>ь значение фа вычисляем по фор-
формуле A8).
Теперь из уравнения A3) можно определить cof:
сор = arccos — < -jjj- |ф! я + (д — 1) (сот — у sin сот jl +
- % B2)
Таким образом, задача отыскания второго приближения в виде A)
решена.
Подсчеты следует начинать с определения сот графическим мето-
методом, затем вычислить <рх по формуле B1), ф8 —по A8) и, наконец,
юр*-по B2).
Теперь нетрудно определить амплитуду колебаний ф0, внеся
в уравнение A) выражения * = т + Р, ф = ф0.
Находим
ф0 = фх sin oat -f фз (cos ю1; •*- cos Зсот). B3)
Для оценки величины ф3, по сравнению с ф1; были проведены
подсчеты, которые показали, что даже при большом моменте силы
сопротивления (q = c-Jc% = 3) величина ф3 составляет при разных
значениях со всего лишь от трех до одного процента от щ.
Вместе с тем объем вычислений, связанный с определением вто-
второго приближения, в несколько раз превышает объем, соответствую-
соответствующий подсчетам, при отыскании первого приближения (см. предыдущую
задачу).
424 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
Таким образом, при определении амплитуды колебаний ф0 неце-
нецелесообразно заниматься громоздкими вычислениями для определения
второго приближения и следует ограничиться вычислением первого
приближения.
Подсчеты, проведенные для сопоставления точного решения,
полученного методом поэтапного интегрирования (см. задачу 20.7),
с первым и вторым приближениями, найденными вариационным мето-
методом Бубнова — Галеркина, показали следующее: даже при большом
моменте силы сопротивления (? = Ci/Сг = 3) величины углов поворота
Ф =/(?), полученные точным решением, отличаются в меньшую сто-
сторону в пределах 5% от соответствующих результатов, найденных
в первом приближении. Результаты, вычисленные по второму при-
приближению, ложатся между соответствующими значениями, найденными
точным решением и первым приближением. Таким образом, сопо-
сопоставление этих подсчетов показывает целесообразность использования
первого приближения.
Напомним, что в случаях точного решения и второго прибли-
приближения приходится графически решать трансцендентное уравнение
относительно сот, что значительно усложняет решение.
Конечно, при необходимости определить угол наибольшего откло-
отклонения (ах приходится пользоваться точным решением (см. задачу 20.7),
либо вторым приближением. При этом надо, бесспорно, отдать пред-
предпочтение менее громоздкому точному решению.
§ 4. Краткий обзор аналитических методов решения
задач нелинейных колебаний
1°. Вводные замечания. В настоящее время все еще отсут-
отсутствуют общие методы интегрирования нелинейных дифференциальных
уравнений. В связи с этим за последнее время получили большое
развитие точные и приближенные аналитические методы: поэтапного
интегрирования, разложения -по малому параметру, медленно меняю-
меняющихся амплитуд, эквивалентной линеаризации, последовательных при-
приближений, вариационный метод и многие другие.
При решении задач возникают трудности, связанные с отсутствием
навыков в выборе того или иного метода интегрирования. Для при-
приобретения подобных навыков надо продумать и сопоставить различ-
различные методы и приемы решения нелинейных задач.
В данном параграфе приведен краткий обзор некоторых аналити-
аналитических методов решения задач динамики свободных и вынужденных
нелинейных колебаний материальных систем с одной степенью сво-
свободы.
2°. Свободные нелинейные колебания. Здесь рас-
рассмотрены и сопоставлены методы поэтапного интегрирования, малого
параметра, медленно меняющихся амплитуд и эквивалентной линеа-
линеаризации.
$ 4] КРАТКИЙ ОБЗОР АНАЛИТИЧЕСКИХ МЕТОДОВ 425
Методом поэтапного интегрирования (стыковки, припасовывания)
удобно пользоваться в случаях, когда нелинейные дифференциальные
уравнения движения интегрируются на отдельных участках. В част-
частности, данный метод целесообразно применять когда нелинейная
система является линейной на отдельных этапах. Это, например,
имеет место при нелинейной характеристике силы упругости, соста-
составленной из нескольких состыкованных прямолинейных отрезков.
В этом случае можно получить точные решения линейных диффе-
дифференциальных уравнений на отдельных этапах движения. Припасовы-
вание этих решений совершается на основе равенства обобщенных
координат и обобщенных скоростей в точках стыковки движений.
Методом малого параметра удобно пользоваться при интегриро-
интегрировании автономных нелинейных дифференциальных уравнений вида
где f(x) — нелинейная функция х, а fx — малый параметр. Достоин-
Достоинством этого метода является возможность отыскания периодического
решения, вычисленного с точностью до членов, содержащих малый
параметр в требуемой степени (ц, fx2, jx3, ,..). Искомое решение
ищется в виде разложения по степеням малого параметра |х:
где х0, Xi, xit х3 — периодические функции некоторой круговой
частоты р и кратных ей круговых частот, подлежащих последую-
последующему определению.
Квадрат искомой круговой частоты р также записывается в раз-
разложении по степеням малого параметра [х:
рг = k? + H<zi + цЛх2 + |х3а3 +...
Значения постоянных аь а2, а3, ... выбираются так, чтобы в реше-
решении уравнения отсутствовали неограниченно возрастающие (резо-
(резонансные) члены.
Метод малого параметра дает хорошие приближения при малом
числе членов разложения искомого периодического решения. Обычно
оказывается достаточным решение задачи с точностью до членов,
содержащих малый параметр в первой степени.
Методами медленно меняющихся амплитуд и эквивалентной линеа-
линеаризации пользуются при интегрировании нелинейного дифференциаль-
дифференциального уравнения движения Х + кгх = \и-/(х, х), где f{x, ^ — нели-
нелинейная функция х и х, а ц — малый параметр.
Оба метода эквивалентны друг другу и дают возможность полу-
получить первое приближение в виде х — a sin ф, где a = a(t) — медленно
меняющаяся функция времени.
Применяя метод медленно меняющихся амплитуд Ван-дер-Поля,
фазу колебаний ищут в виде ty{t) = kt + a.(t), где k — постоянная,
14 М. И, Бать и др., т, ,111
426 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ 1ГЛ. ХЯ
в случае же метода эквивалентной линеаризации Крылова, Боголю-
Боголюбова—в виде i|>(/) = <o?-f а, где а> = ю [а (?)], а а — постоянная.
Решение уравнения X -f k%x ~ ц • /\х, х) сводится к интегриро-
интегрированию системы двух приближенных дифференциальных уравнений;
а) метод медленно меняющихся амплитуд:
2я
/(a sin ij>, а? cos i|>) cos
aA cos *)sin
б) метод эквивалентной линеаризация!
2я
d e i S /(a sin * ato cos ^cos
ГД8
\1 /(a sin i|3, aco cos ф) sin
Степень трудности и объем вычислений при решении этими мето-
методами примерно одинаковы.
Хотя изложенный ранее метод малого параметра дает возмож-
возможность найти решение не только в первом и втором приближениях,
но также с точностью до членов, содержащих ц,2, ц3, ,,., но при
этом объем вычислений резко возрастает, не изменяя существенно
результатов. Надо помнить, что метод малого параметра применяется
при нелинейности, зависящей только от координаты [х + kPx —
= |А •/(*)], в то время как два данных метода можно использовать
при нелинейности, зависящей как от координаты, так и ее произ-
производной по времени [X-\-k2x = \i-f(x, x)]. Например, при интегриро-
интегрировании дифференциального уравнения движения Z -j- k%x = — ц A -f р^а)х
можно применить метод медленно меняющихся амплитуд или экви-
эквивалентной линеаризации, но нельзя воспользоваться методом малого
параметра.
Задача 20.12. Груз массы т (на рис. а он изображен в плане)
движется в прямолинейных направляющих. В среднем положении он
соприкасается с двумя ненапряженными и неприкрепленными к нему
пружинами. Коэффициент упругости каждой из них равен сь Коле-
Колебания груза в границах KL = 21 происходят попеременно под дей-
действием одной из этих пружин. Если колебания выходят за пределы
KL = 21, то груз входит дополнительно в соприкосновение с боко-
I 41
краткий обзор аналитических методов
выми пружинами, имеющими предварительный натяг. Суммарный
коэффициент упругости основной и двух боковых пружин равен сг.
Силы упругости всех пружин изменяются по закону Гука. На рис. б
изображена характеристика сил упругости. Она составлена из прямо-
прямолинейных участков с коэффициен-
коэффициентами упругости сх и сг.
Определить амплитуду и пе-
период колебаний груза, если в на-
начальный момент ему в среднем по-
ложении была сообщена слева
направо скорость <оо.
Решение. Нелинейная ха-
характеристика силы упругости явля-
является линейной на отдельных участ-
участках. Поэтому можно применить
метод поэтапного интегрирования.
Для описания движения груза
следует воспользоваться двумя
дифференциальными уравнениями.
Одно из них, X-\-k\x = Q, где
k\ = cxjm, соответствует движению
груза под действием одной из
\
\х
где
-Л, а
0) '/
г
SI
к
У
t
'МО-
t
¦-
-
F
0
У
1
0
¦¦
—
/
*^
L
\
А
Д
К задаче 20.12.
средних пружин при \
второе, ¦? + ?!* = О, где k\
= Ci/m, — при \х\^1, т. е.
при одновременном действии трех левых или трех правых пружин.
При заданных начальных условиях движению груза в пределах
jj;|^/ соответствует уравнение
Груз придет в соприкосновение с боковыми пружинами в момещ
При | х \ ^ I уравнение движения имеет вид
х -1 cos k?t + -i- У«{"*Лк1 sin ktt
(с момента стыковки ? = т? отсчет временя начат вновь от нуля)
Для припасовывания этих двух уравнений движения выполнены уело
вия равенства координат и проекций скорости при г = т1.
Груз придет в крайнее положение через та секунд после момевд<
стыковки при
3g*T
14*
427
428 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
Амплитуда колебаний равна
[ГЛ. XX
а период колебаний равен
В заключение заметим, что для решения этой задачи нельзя
использовать методы малого параметра, медленно меняющихся ампли-
амплитуд и эквивалентной линеаризации, так как нелинейность системы
не является малой.
Задача 20.13. Упругая невесомая балка (рис. а), защемленная
концом О, при колебаниях соприкасается с криволинейными направ-
направляющими. При этом часть балки, не контактирующая с направляющими,
становится короче и жестче. К концу балки прикреплен груз А.
массы т. Проекция на горизонтальную ось х
силы упругости, приложенной к грузу, равна
Fx= — сх — усх3 (рис. б), где 0<у^1.
Найти уравнение движения груза x—f(t),
если в начальный момент он был отклонен
из вертикального положения равновесия на
-х х-=а и отпущен без начальной скорости.
Решение. Запишем дифференциальное
уравнение движения mJc — Fx при Fx =*
= —сх — усх3 в виде
JP-f k*x=—
A)
Д где обозначено k2 = с/т, ц, = ус/т = yk%.
При наличии малой нелинейности (ц—
малый параметр) уравнение A) может быть
решено любым из трех методов: малого
параметра, медленно меняющихся амплитуд
и эквивалентной линеаризации.
Решая задачу методом малого парамет-
параметра, будем искать периодическое решение
уравнения A) с точностью до членов разложения, содержащих пер-
первую степень малого параметра \к
К задаче 20.13.
где х0, Xi — пока неизвестные периодические функции круговой
частоты р и кратных ей круговых частот, причем
Здесь с*1 — постоянная, подлежащая последующему определению.
4| КРАТКИЙ ОБЗОР АНАЛИТИЧЕСКИХ МЕТОДОВ 429
Дифференциальное уравнение A) сводится к системе уравнений
~xb. J
Найдем- их периодические решения:
хо = a cos pt,
причем at = -j- о*. Формула C) определяет первое приближение реше-
решения уравнения A).
Искомый закон движения с точностью до членов, содержащих
первую степень ц, т. е. второе приближение, имеет вид
а*
= acospt-\-\i -ggrr <cos bpt — cos pt), D)
где \к — укг, а круговая частота р равна
) E)
Если перейти от второго к третьему приближению, т. е. искать
решение х и круговую частоту р в виде
где xs — неизвестная периодическая функция, а а* — неизвестная
постоянная, то к системе уравнений B) добавляется уравнение
Найдем его периодическое решение
причем ot2 = —jojr т- Искомое третье приближение, содержащее
вторую степень малого параметра ц-, имеет вид
rt3
х = a cosj»^+ц • -^-5- (cos 3Р^ —
где малый параметр \>,=*ук2, а круговая частота равна
430 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
Если принять а=\ см, ix, = yk? = Q,lk2, то с точностью до чле-
членов, содержащих fi в первой степей», круговая частота за счет нели-
нелинейности системы возрастет на 3,75 % (см. формулу E)). Переход
от второго к третьему приближению с точностью до ц,2 (см. фор-
формулу G)) при двукратном увеличении объема вычислений изменит
предыдущий результат лишь на 0,01 %. Поэтому целесообразно
ограничиться отысканием второго приближения, т. е. решения, содер-
содержащего первую степень малого параметра |л (формулы D) и E)).
При решении этой задачи методом медленно меняющихся ампли-
амплитуд ищем закон движения в виде
(t)]. (8)
Интегрирование дифференциального уравнения A) сводится к реше-
решению системы уравнений
Следовательно, ait)~Cb а = цу-^-? + С2, т. е. x = Cxs
-j- ц-g--^ W + Cjj I. Подстановка начальных условий движения t = 0,
х = а, х = 0 дает Сх = а, С2 = я/2, т. е. окончательно искомое реше-
решение G) примет вид
х = a cos pt, (9)
где обозначено
(^?) A0)
Решая эту эадачу методом эквивалентной линеаризации, ищем
8акон движения
* = a@sina|)@. A1)
Интегрирование дифференциального уравнения A) сводится к реше-
решению системы уравнений
4-0, Ф =
Следовательно,
После подстановки a(t) и i|)(i) в уравнение (И) и вычисления посто-
постоянных Ct и Сг получим результаты (9) и A0), найденные методом
медленно меняющихся амплитуд.
Сопоставив формулы A0) и E), а затем (9) и C), видим, что
значение круговой частоты и закон движения груза, определенные
тремя разными методами, одинаковы. Уравнение движения (9), опре-
определенное методами медленно меняющихся амплитуд и эквивалентной
i 41 КРАТКИЙ ОБЗОР АНАЛИТИЧЕСКИХ МЕТОДОВ 431
линеаризации, входит в качестве основного слагаемого во второе D)
и третье F) приближения, полученные методом малого параметра
с точностью до членов, содержащих \i в первой и второй степенях.
3°. Вынужденные нелинейные колебания. Решение
задач на вынужденные нелинейные колебания является более громозд-
громоздким и сложным по сравнению с решениями соответствующих задач
на свободные колебания.
Здесь рассмотрены и сопоставлены методы поэтапного интегриро-
интегрирования, последовательных приближений Дуффинга, медленно меняю-
меняющихся амплитуд Ван-дер-Поля и вариационный метод Бубнова—-Галер-
кина.
Методом поэтапного интегрирования (стыковки, припасовывания)
можно пользоваться в случаях, когда нелинейное дифференциальное
уравнение интегрируется на отдельных участках. Достоинство метода
заключается в том, что он является точным, если нелинейная в целом
система оказывается линейной на отдельных участках (например, при
характеристике силы упругости, составленной из нескрльких состы-
состыкованных прямолинейных отрезков). Припасовывание точных решений
совершается на основе равенства обобщенных координат и обобщен*
ных скоростей в точках стыковки. Серьезным недостатком этого
метода является громоздкость, обычно связанная с необходимостью
решения ряда трансцендентных уравнений.
Методом последовательных приближений Дуффинга удобно поль-
пользоваться при интегрировании дифференциального уравнения движения
Л -|- кгх — jx •/ {х) + h sin pt,
где / (х) — непрерывная нелинейная функция х, а ц и h — малые
параметры.
Этот метод позволяет найти периодическое решение с круговой
частотой р изменения возмущающей силы и кратными ей частотами.
Первое приближение ищется в виде Jc1 = a1sin;tf решения соот-
соответствующего линейного уравнения Л Jrk2x = h sin pi. В последующих
приближениях хг, х3, ..., помимо основной гармоники круговой
частоты р, появляются гармоники частот кратных р. При этом пола-
полагают, что в силу малой нелинейности уравнения основная гармо-
гармоника ux$inpt, полученная в первом приближении, остается неизменной.
В зависимости от требуемой степени точности можно найти любое
число последовательных приближений. Однако если два первых при-
приближения вычисляются достаточно просто, то при переходе к третьему
приближению объем вычислений резко возрастает при незначительном
уточнении результатов. Поэтому целесообразно ограничиться опреде-
определением двух первых приближений.
Метод медленно меняющихся амплитуд Ван-дер-Поля, рассмотрен-
рассмотренный выше при изучении свободных нелинейных колебаний, дает
возможность найти приближенное уравнение установившихся вынуж-
вынужденных нелинейных колебаний.
432 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
Этот метод применяют при интегрировании дифференциального
уравнения ?-\-k?x = [i -f{x, х, t), например в частном случае
J? + k*x = VL-f(x,x) + h sinpt,
где f(x, х)—непрерывная нелинейная функция х я х, ациЛ —
малые параметры. Записав это уравнение в виде
где F(x, х, t) = (p2 — k2)x + \i-f(x, x) + hsinpt, ищут его периоди-
периодическое решение в виде х = asim|>, причем ty=pt-\-a, а а и а —по-
—постоянные. Значения а и а находят из системы уравнений
2л
I pfaslnty, apcosty, -infLjcosij;Л|з = 0,
2л
VFlasinip, c^cosij), --!——] sinфcfi}> — 0.
Метод Ван-дер-Поля эффективен и достаточно прост. Полученные
им приближенные результаты соответствуют первому приближению
по методу Дуффинга. Область применения метода Ван-дер-Поля шире,
так как им пользуются при нелинейных функциях f(x, Л), завися-
зависящих как от х, так и от х. (Напомним, что метод Дуффинга приме-
применяется при нелинейных функциях f{x), зависящих только от х.)
Вместе с тем, вычисляя методом Дуффинга второе и последующие
приближения, можно получить более точные результаты, чем методом
Ван-дер-Поля.
Так, если движение описывается дифференциальным уравнением
X + 2пх + k2x + цх3+v х3 = h sin pt,
где (х, v и h — малые параметры, то его можно решить методом
Ван-дер-Поля, но нельзя пользоваться методом Дуффинга. К уравне-
уравнению же
Ф -f А2ф 4" Ц • Ф8 = A cos <ot,
где (г и А —малые параметры, можно применить любой из этих двух
методов.
Вариационный метод Бубнова — Галеркина является в настоящее
время одним из наиболее распространенных приближенных методов
интегрирования нелинейных дифференциальных уравнений вынужден-
вынужденных колебаний.
Он основан на вариационном принципе Гамильтона — Остроград-
Остроградского, записываемом в виде
d дТ дТ
» 41 КРАТКИЙ ОБЗОР АНАЛИТИЧЕСКИХ МЕТОДОВ 433
где б? —вариация искомой обобщенной координаты q, ар —круговая
частота изменения возмущающей силы.
Если возмущающая сила изменяется по закону S =зН sin pt, а нели-
нелинейная функция является нечетной, то обобщенная координата q
ищется в виде
q = ax sin/rf-т- о8 sin Zpt -f ab sin bpt+...,
где параметры alt a^, аъ подлежат последующему определению. Для
первого приближения принимают q = aislnpt, для второго q — ai$\npt-\-
-f- aasin3pt и т. д.
Вариационный метод имеет широкую область применения, так как
его использование не связано с малой нелинейностью системы. (Напом-
(Напомним, что методы Дуффинга и Ван-дер-Поля применимы только в урав-
уравнениях, содержащих при нелинейной функции малый параметр ц,
т. е. в уравнениях с членами ц >/(х) или ц -/(х, х).) Обычно при
определении вариационным методом второго и последующих прибли-
приближений объем вычислений резко возрастает при незначительном уточ-
уточнении результатов. Поэтому большей частью целесообразно ограни-
ограничиваться отысканием первого приближения.
Задача 20.14. Решить задачу 20.12 дополнительно, считая, что
на груз действует возмущающая сила, проекция которой на ось х
равна <$* = // sin pt. Случай резонанса не рассматривать.
Решение. Данная нелинейная система является на отдельных
участках линейной. Поэтому применим метод поэтапного интегриро-
интегрирования.
Движение груза описывается двумя линейными дифференциаль-
дифференциальными уравнениями:
а) под действием средних пружин при \х\^1
A)
где k\ = cjjm, h — H/tn;
б) под действием средней и боковых пружин при \х\^1
х + klx = h sin pt, B)
где k\ = c2lm, h = Hjm.
Проинтегрируем эти уравнения и выполним условия их припасо-
вывания: при г = та имеем х — 1, х = хх; в результате мы найдем
закон движения груза:
а) при }х\^1
б) при \х\^1 (отсчет времени е момента стыковки начат от нуля)
434 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
где j?Ti — проекция скорости груза в момент стыковки, равна
А, = (ч> - ?j~s) cos kiXx+-щУ-р cos рхь
а момент стыковки Xi определяется из трансцендентного уравнения
/ = O. C)
Продолжительность движения та от стыковки до прихода груза
в крайнее положение находится из трансцендентного уравнения
— /A, sin k2t2 + (xXl - i^pj cos А2т3 +?j^i cos№ = °- D)
Искомая амплитуда колебаний груза равна
а = / cos Агт2 + ^ (лт, - S|3pi)sln A2ta+^7sln ^T2 •
Искомый период колебаний груза равен
причем Ti и тг находятся из уравнений C) и D). -Итак, в ходе реше-
решения задачи методом поэтапного интегрирования приходится решать
два трансцендентных уравнения C) и D). Решение является точным,
но громоздким, и целесообразнее применить один из приближенных
методов. В данном случае нелинейность не является малой. Поэтому
нельзя воспользоваться методами Дуффинга или Ван-дер-Поля и сле-
следует применить вариационный метод.
Будем считать, что период колебаний груза равен периоду Т
изменения возмущающей силы, т. е. T — 2njp.
В первом приближении ищем закон движения в виде
х — a sin pt, E)
где амплитуда а подлежит последующему определению.
В момент %х стыковки груза с боковыми пружинами х — 1,
т. е. l — asmprh откуда
к
Для определения т? решим уравнение
Т, Я/2р
SC* + ftJ*-Aslnjrf)8xd*+ i (X+klx-hslnpt)8xdt=*O. G)
0 Tt
Подставив в уравнение G) x = asinpt, bx = 6asinpt, найдем
[a (k{ -p2) - h] sina/rf dt + I [a {k\ -/?") - h] sin2pt dt = 0.
4
I 4J КРАТКИЙ ОБЗОР АНАЛИТИЧЕСКИХ МЕТОДОВ 435
Вычислив интегралы и использовав формулу F), получим трансцен-
трансцендентное уравнение
^ К*! -Л Bрт* - sin 2/rtf + (ftj -Р*) (я - 2ртх + sin 2рт1) - nfe = О,
из которого следует найти Тх. Затем искомую амплитуду колебаний
и уравнение движения груза определим по формулам F) и E).
Этому приближенному решению вариационным методом следует
отдать предпочтение по сравнению с точным решением методом поэтап-
поэтапного интегрирования.
Задача 20.15. Найти закон периодических вынужденных колеба-
колебаний груза, рассмотренного в задаче 20.13, если дополнительно дей-
действует возмущающая сила, проекция которой на ось х равна S* =
*=Hsinpt, где 0<#<1.
Решение. В правую часть дифференциального уравнения A)
задачи 20.13 добавляется слагаемое hsinpt, где h = Н\ т, как и \i,
является малым параметром, т. е.
A)
Это уравнение можно приближенно проинтегрировать наиболее
общим — вариационным методом. Наличие малых параметров |i и h
дает возможность применить метод Ван-дер-Поля. Учитывая, что при
малых параметрах \i и h нелинейный член хг зависит только от х,
можно также использовать метод Дуффинга.
Уравнение A) при f* = Y проинтегрировано методом Дуффинга
в задаче 20.8 (см. стр. 405—407) и получены два первых приближения.
Первое приближение:
t B)
причем амплитуда ах бпределяется из кубического уравнения
их (ра — k%) — -т- \ка\ -J- h я= 0. C)
Второе приближение:
xz = их sin pt~\i' ~^ sin 3/»^ D)
Покажем, что решение задачи значительно усложняется при пере-
переходе от второго к третьему приближению. Записав уравнение (i)
в виде
Л -\-p*x = (p*-k*)x~\jLX*+hsinpt, E)
заменим в его правой части х на х2 из формулы D) и представим
эту правую часть в виде суммы гармоник круговой частоты р и
кратных ей круговых частот:
X -\-рях = В sin pt + K sin Zpt -f I sin 5pt + Ж sin 7pt + Nsin 9pt, F)
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
где обозначено
Для того чтобы решение уравнения F) было периодическим, надо
считать В = 0, т. е.
Итак, для определения аг надо, вместо кубического уравнения C),
решить уточненное уравнение (8) седьмой A) степени, которое отли-
отличается от него лишь на члены второго и третьего порядков малости
параметра ц, т. е. - А^^
Проинтегрировав уравнение F), получим третье приближение
в виде
xs = ац sin pt -f d3 sin 3pt + db sin bpt -j- d, sin 7pi + d, sin 9pt, (9)
причем
где К, L, M a N приведены в формулах G), а амплитуда at первого
приближения определяется из уравнения (8).
Нетрудно видеть, что при переходе от второго к третьему при-
приближению объем вычислений увеличился в несколько раз при незна-
незначительных уточнениях результатов. Поэтому целесообразно ограни-
ограничиться вычислением второго приближения.
Применяя метод Ван-дер-Поля, ищем решение уравнения (б) в виде
A0)
где аг и a — постоянные, подлежащие определению.
Для отыскания ах и а составим систему уравнений
2л
$
Wasini|>, ^ZlfLj Sin -ф cf\^ = 0,
КРАТКИЙ ОБЗОР АНАЛИТИЧЕСКИХ МЕТОДОВ 437
где через ffosinij), ^~"j обозначен результат подстановки х
= a sin t^j и f=$Il® B правую часть уравнения E), т. е.
F (a sin ф, i=2\ = fll (р8 - *•) sin i|> - fief sin» ф -f A sin (tp - а).
После вычисления интегралов получим
ft sin a = О,
(р1 — А») ах+ h cos а — — ца\ =*= 0.
Решив эту систему уравнений, найДем
Искомое решение A0) при а = 0 примет вид x = a1sinpt первого
приближения B), полученного выше методом Дуффинга. Кубические
уравнения C) и (И), из которых находится аь тоже одинаковы.
Итак методами Ван-дер-Поля и Дуффинга в первом приближении
получены тождественные результаты. Объем вычислений примерно
одинаков. Заметим, что методом Ван-дер-Поля определяется только
одно приближение, в то время как методом Дуффинга можно найти
и последующие. В частности, при незначительном увеличении объема
вычислений находится второе приближение.
При решении данной задачи вариационным методом ищем первое
приближение в виде j? = alsin;rf. Для определения at подставим
в уравнение
2л/р
J (X + k*x + И-*8 -Н sin pt)bxdt = 0 A2)
значения x — axSinpt и 6jf = 6oxsin^. После вычисления интегралов
уравнение A2) примет вид кубических уравнений C) и A1).
Итак, применение трех методов привело к одинаковым результа-
результатам. Определение первого приближения вариационным методом эффек-
эффективнее по сравнению с методами Дуффинга и Ван-дер-Поля.
Вместе с тем уже определение второго приближения вариацион-
вариационным методом значительно усложняет решение задачи.
Действительно, подставив в уравнение A2) искомый закон вто-
второго приближения х — п! sin pt-\-Ob sin 3pt и его вариацию 6j? =
= 6e1sin^-{-6a8sin3^) где ах и а9 подлежат последующему опре-
определению, получим
Зп/р
6ax J Rsibptdt + ba, $ RslnZptdt^O. A3)
о
43$ НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
Здесь обозначено
R х= [Ol (А2 —ра) — h] sin pt + аа (k* — 9р*) sin bpt + |wf sins/rf -f-
-|- Зца Ja8 sin2 /rt sin 3/tf -f- 3nete| sin pt sina 3/»/ -J-jxa| sin8 Spt.
Ввиду независимости вариаций bat и 8a3 из уравнения A3) найдем
2я/р 2я/р
Rsinptdt = O, i Rsin3ptdt = 0.
\
Подставив значение R и вычислив интегралы, получим
1 8 3 s 3 ,
A4)
Для определения ах и а3, входящих в искомый закон движения
x^axsinpt-f-a3sin3/7^, надо решить громоздкую систему кубических
уравнений A4). Поэтому вычисление второго приближения вариа-
вариационным методом нецелесообразно. В этой задаче для второго при-
приближения лучше воспользоваться методой Дуффинга. Вместе
с тем не следует забывать, что использование вариационного метода
не связано с малой нелинейностью, что значительно расширяет рамки
его применения.
§ 5. Исследование нелинейных колебаний на фазовой
плоскости
1° Основные определение!. Среди различных методов
исследования нелинейных колебаний одним из наиболее распространен-
распространенных и детально разработанных является представление движения на
фазовой плоскости или в фазовом пространстве.
Этот метод позволяет, не интегрируя дифференциальные уравнения
движения, ответить на наиболее важные вопросы, характеризующие
движение системы. Это существенно, так как во многих случаях нели-
нелинейные дифференциальные уравнения не могут быть проинтегриро-
проинтегрированы в замкнутом виде.
Представление движения на фазовой плоскости позволяет найти
возможные состояния "равновесия и определить устойчивость равно-
равновесия системы.
С помощью построения на фазовой плоскости можно найти перио-
периодические движения системы и исследовать переходные процессы
к устойчивому состоянию движения в зависимости от различных пара-
параметров я начальных условий движения.
В тех случаях, когда нелинейные дифференциальные уравнения
могут быть проинтегрированы в замкнутой форме, представление
движения на фазовой плоскости позволяет ответить на вопросы
об устойчивости возможных состояний равновесия и движения системы
* Ч ИССЛЕДОВАНИЕ НЕЛИНЕЙНЫХ КОЛЕБАНИЙ 439
и установить влияние различных параметров и начальных условий
движения на устойчивость этих состояний.
Изучая ранее колебания материальной точки, мы строили от-
отклонение точки от положении равновесия как функцию временя.
В тех случаях, когда такие графики снимаются экспериментально
с регистрацией измеренных отклонений на специальном приборе, они
называются осциллограммами.
Эти графики позволяют определить положение точки (или системы)
в любой момент времени, однако не дают представления о зависи-
зависимости скорости от координаты.
Рассмотрим положения, лежащие в основе исследования движения
системы с помощью фазовой плоскости. Дифференциальное уравнение
движения при нелинейных колебаниях системы с одной степенью
свободы может быть записано в виде
•g-+ *•*-/(*, *, *>, (**)
где х, х, х — обобщенная координата системы и соответственно ее
первая и вторая производные по времени, k — круговая частота
системы, i — время, /—некоторая нелинейная функция указанных
в скобке аргументов.
Если функция / зависит явно от времени t, то система называется
неавтономной. Если же время в явном виде в функцию / не вхо-
входит, то система называется автономной.
Обозначив
dt ~y>
можно представить уравнение A*) в виде системы, состоящей из
двух уравнений первого порядка:
*-> I
Ограничиваясь в данном пункте рассмотрением автономных систем,
запишем систему B*) в виде
f=
Плоскость переменных х и y=dxldt, где х и у—декартовы пря-
прямоугольные координаты, называется фазовой плоскостью.
Будем полагать состояние нелинейной системы определенным^
если известны в некоторый момент времени ее координата х и ско-
скорость у. Тогда каждой ючке на фазовой плоскости соответствует
440 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
одно-единственное состояние системы. Поэтому фазовую плоскость
называют иногда плоскостью состояний, а точку на фазовой пло-
плоскости называют изображающей точкой,
При изменении состояния системы изображающая точка будет
перемещаться по фазовой плоскости. Траектория, которую опишет
при этом изображающая точка, называется фазовой траекторией.
Если движение системы периодическое, то фазовая траектория
будет замкнутой кривой. Начало координат на фазовой плоскости,
где х — 0 н у — О, является положением равновесия.
Изменяя начальные условия движения, можно получить семейство
фазовых траекторий, заполняющих фазовую плоскость.
Такая совокупность фазовых траекторий называется фазовым
портретом системы и позволяет ответить на многие вопросы,
касающиеся характера движения системы.
Дифференциальное уравнение фазовых траекторий находится
из C*):
dy _ F(x, у) Г4П
Интегральная кривая, отвечающая уравнению D*), в простейших слу-
случаях является фазовой траекторией, а. в более сложных случаях
соответствует нескольким фазовым траекториям.
Уравнение фазовой траектории определяет зависимость коорди-
координаты от скорости движения исходной механической системы.
Скорость движения изображающей точки на фазовой плоскости
называется фазовой скоростью. Модуль фазовой скорости равен
У1 <5*>
Важное значение при исследовании движения системы имеют ее
состояния равновесия. Система будет находиться в равновесии, если
одновременно ее скорость dxfdt=y и ускорение dy/dt = F(x, у)
обращаются в нуль, так как в этом случае сила обращается в нуль.
Сопоставляя эти условия с выражением E*) для модуля фазовой
скорости, замечаем, что при равновесии системы фазовая скорость
равна нулю.
Через каждую точку фазоввй плоскости проходит одна фазовая
траектория. Исключением являются точки равновесия, называемые
особыми точками. В этих точках одновременно обращаются в нуль
числитель и знаменатель уравнения D*) и, следовательно, направле-
направление касательной к фазовой траектории становится неопределенным.
Таким образом, нарушается одно из условий теоремы Коши об един-
единственности решения дифференциального уравнения D*). Все точки
фазовой плоскости, кроме особых, называют регулярными.
Поведение фазовых траекторий вблизи особой точки зависит от
параметров системы и ог начальных условий движения. Наиболее
581
ИССЛЕДОВАНИЕ НЕЛИНЕЙНЫХ КОЛЕБАНИИ
441
часто встречающиеся случаи поведения фазовых траекторий вблизи
особой точки представлены на рисунках.
На рис. 20.3 представлены фазовые траектории вокруг особой
точки, совпадающей с началом координат. Колебания системы являются
периодическими, фазовые траектории в окрестности особой точки
являются замкнутыми кривыми. Особая
точка обладает областью окружения и на-
называется в этом случае центром.
На рис. 20.4 и 20.5 показаны фазовые
траектории в окрестности особой точки,
называемой фокусом.
Точки пересечения фазовой траектории
(рис 20.4) с осями координат неограни-
неограниченно, асимптотически и монотонно при-
приближаются к особой точке, началу коор-
координат, не достигая ее за конечное время. Колебания системы не-
неограниченно затухают. Особая точка имеет область притяжения.
Особая точка является устойчивым фокусом. Фазовые траектории —
скручивающиеся спирали.
Фазовые траектории на рис. 20.5 — раскручивающиеся спирали.
Колебания исходной механической системы монотонно и неограниченно
Рис. 20.3. Центр.
Рис. 20.4. Фокус со скручиваю-
скручивающимися спиралями.
Рис. 20.5. Фокус с раскручиваю-
раскручивающимися спиралями.
возрастают. Особая точка — неустойчивый фокус, не имеющий области
притяжения.
На рис. 20.6 показан фазовый портрет с особой точкой, называе-
называемой седлом. Каждая ветвь фазовых кривых пересекает ось х только
один раз или ни одного раза, и следовательно, движение исходной
системы не является колебательным. Кроме криволинейных фазовых
траекторий (не проходящих через особую точку), имеется две прямо-
прямолинейные фазовые траектории, проходящие через особую точку,
442
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
[ГЛ. ХЯ
являющиеся асимптотами криволинейных фазовых траекторий. Одна из
прямолинейных фазовых траекторий является ирв этом сближающей, изо-
изображающая точка пробегает ее в направлении к началу координат,
вторая — удаляющей, изображающая точка
пробегает ее, удаляясь от особой точки.
На рис. 20.7 и 20.8 показаны фазовые
портреты с особыми точками — устойчи-
устойчивым и неустойчивым узлом. Устойчивый
узел (рис. 20.7) имеет область притяжения,
неустойчивый узел (рис. 20.8) не имеет
области притяжения.
Каждая из фазовых траекторий пере-
пересекает ось абсцисс только один раз,
фазовые траектории — незамкнутые кри-
кривые, движение системы не колебательное.
В первом и втором квадрантах ско-
скорость у положительна, поэтому абсцисса
х в этих квадрантах будет возрастать,
в третьем и четвертом квадрантах, наоборот, скорость у отрицательна
и абсцисса х будет убывать. Следовательно, касательная к фазовой
траектории в точках пересечения с осью абсцисс перпендикулярна
последней.
Рис. 20,6. Седло.
Рис. 20.7. Узел с двумя проходящими Рис. 20.8. Узел с двумя проходящими
через него прямыми и фазовые траек- через него прямыми и фазовые траек-
траектории, направленные к узлу. тории, направленные от узла.
Важное значение при исследовании нелинейных колебаний имеют
фазовые траектории, которые, начиная с определенного момента вре-
времени, остаются в пределах некоторой конечной области, не прибли-
приближаясь сколь угодно близко к особой точке. Такие фазовые траектории
ИССЛЕДОВАНИЕ НЕЛИНЕЙНЫХ КОЛЕБАНИИ
443
Рис. 20.9.
пересекают бесчисленное число раз ось абсцисс. Возможные формы
таких фазовых траекторий — спирали и замкнутые кривые. Замкнутые
кривые в этом случае называются предельными циклами. Для скручи-
скручивающейся спирали предельный цикл лежит внутри спирали, а для
раскручивающейся спирали — вне ее.
Предельные циклы могут быть устойчивыми и неустойчивыми
(рис. 20.fi). На рисунке показаны два предельных цикла: большего ра-
радиуса — устойчивый — и меньшего радиуса —
неустойчивый.
Устойчивый предельный цикл характери-
характеризуется тем, что при небольших начальных
отклонениях от него изображающая точка
асимптотически по спирали приближается
к предельному циклу.
Устойчивому предельному циклу соот-
соответствуют автоколебания системы.
Если предельный цикл неустойчив, то
при небольших отклонениях от него изобра-
изображающая точка будет удаляться от предель-
предельного цикла.
В следующем пункте будут показаны примеры построения фазовых
портретов для линейных систем с одной степенью свободы.
В п. 3° построение фазовых портретов будет приведено для нели-
нелинейных систем с одной степенью свободы. Из многочисленных при-
приближенных приемов построения фазовых траекторий (метод изоклин,
метод Дробова, метод Льенара, метод Пелла и др.) будет применен
универсальный и получивший наибольшее распространение в послед-
последнее время дельта-метод.
2°. Фазовые портреты линейных систем. Рассмотрим
в этом пункте фазовые траектории и фазовые портреты линейных
систем.
При решении задач на построение фазовых
портретов линейных систем следует придержи-
придерживаться такой последовательности действий:
1) выбрать систему координат так, чтобы ее начало совпадало
С положением равновесия системы;
2) составить дифференциальное уравнение движения;
3) исключить из уравнения время и, проинтегрировав полученное
дифференциальное уравнение фазовых траекторий, найти зависимость
между отклонением (обобщенной координатой) системы и ее обобщен-
обобщенной скоростью;
4) построив на фазовой плоскости интегральные кривые при раз-
различных начальных условиях движения, найти фазовый портрет
системы;
5) ао фазовому портрету определять характер дадяоеанв в равно-
равновесия системы.
444 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
Задача 20.16. Построить фазовый портрет незатухающего гар-
гармонического осциллятора.
Решение. В гармоническом незатухающем осцилляторе колеба-
колебания, называемые свободными, возникают под действием восстанавли-
восстанавливающей силы, пропорциональной отклонению системы от положения
равновесия, стремящейся все время вернуть систему в положение
равновесия. Примерами гармонического незатухающего осциллятора
являются груз, подвешенный на пружине, математический и физи-
физический маятники при малых углах отклонения (без учета сил сопро-
сопротивления), электрический колебательный контур, состоящий из емкости
и индуктивности, но не обладающий сопротивлением.
Во всех этих случаях дифференциальное уравнение движения
имеет вид
= 0, A)
где х — отклонение системы от положения равновесия ил» заряд
в электрическом колебательном контуре (см. гл. 8), Аа = с/т—для
груза, подвешенного на пружине (с — коэффициент жесткости,
от —масса), k2 = g/l—для математического маятника (/—длина маят-
маятника, g— ускорение силы тяжести), ?а = Ря//г — для физического
маятника (Р—вес маятника, а —расстояние от оси подвеса до центра
тяжести, 1г — момент инерции маятника относительно оси подвеса),
A2=1/CL — для электрического колебательного контура {L — индук-
индуктивность, С —емкость).
Положив
У- dt -X,
представим уравнение A) в виде системы
L
1Г
Исключив из этой системы время, находим
dx - у ' К)
Единственной особой точкой этого дифференциального уравнения
является положение равновесия, начало координат дг = О, _у = 0, когда
правая часть B) обращается в неопределенность. Отделив перемен-
переменные, находим
— k*x-dx. C)
Проинтегрировав, получим
У+ #».*» = С, D)
где С — произвольная постоянная интегрирования, определяемая по
начальным условиям движения.
S«l ИССЛЕДОВАНИЕ НЕЛИНЕЙНЫХ КОЛЕБАНИЯ 445
Уравнение D) представляет фазовый портрет системы. Это
семейство эллипсов (см. рис. 20.3), симметричных относительно осо-
особой точки —начала координат. Каждый эллипс является фазовой
траекторией. Особая точка — центр — находится из D) как эллипс,,
выродившийся в точку при начальных условиях, соответствующих
Какой из эллипсов соответствует данному периодическому дви-
движению системы? Его параметры зависят только от начальных усло-
условий движения. Если начальные условия определены, то изображающая
точка будет описывать один и тот же эллипс в течение всего времени
движения системы. Таким образом, каждая из интегральных кривых
в данном случае является целой фазовой траекторией. Период коле-
колебания не зависит от начальных условий движения. Следовательно,
любой из эллипсов изображающая точка описывает со скоростью
v = ~
за один и тот же промежуток времени, перемещаясь по ходу часо-
часовой стрелки. Заметим, что уравнение D) одновременно является зако-
законом сохранения механической энергии (кинетической и потенциаль-
потенциальной) для рассматриваемой консервативной системы.
Задача 20.17. Найти фазовый портрет гармонического- осцилля-
осциллятора с вязким трением.
Решение. В гармоническом осцилляторе с вязким трением к
восстанавливающей силе добавляется сила сопротивления (вязкое
трение, электрическое сопротивление), пропорциональная первой сте-
степени скорости и направленная в сторону, противоположную скорости.
С учетом силы сопротивления дифференциальное уравнение движе-
движения системы будет
Jf -j-2я.? 4-A2Jf = 0, A)
где 2я==а/от, а а — коэффициент пропорциональности силы сопро-
сопротивления (Rjc~ — aty- Величина я имеет такую же размерность,
как и k, т. е. сек'1, если время измеряется в секундах. Обозначив,
как и ранее, Я—у, перепишем уравнение A) в виде системы двух
уравнений
¦?-* w
Исключив из этой системы время, находим
их у ' W
Отсюда следует, что особой точкой уравнения D) является начало
координат —положение равновесия, где правая часть обращается в
неопределенность вида 0/0.
446 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
Чтобы отделить переменные в уравнении D), произведем замену
y — zx.
Тогда уравнение D) примет вид
dx гйг
х
E)
Интеграл этого уравнения зависит от вида корней квадратного поли-
полинома в знаменателе правой части. Поэтому рассмотрим отдельно два
случая: я<С& —случай малого сопротивления и п > k — случай
большого сопротивления, к которому примыкает и граничный слу-
случай n — k.
Случай малого сопротивления. В этом случае n<Zk
й интеграл E) имеет вид
х(г2 + 2nz + k*)V* *= Сexp \~arctgЛ+Л] F)
где kx = V k2 — я?, С — произвольная постоянная интегрирования.
Возвратившись к отарым переменным, т. е. заменив z=y/x, находим
уравнение интегральных кривых
УУ + 2л лгу + Рх* ш. С ехр [-?- arctg ^f^-]. G)
Полученному уравнению интегральных кривых можно придать более
обозримый вид, если перейти к новым переменным, которые будут
новыми прямоугольными координатами:
тогда после преобразования
У + 2л ху = k*x* = (у+nx
вместо G) мы получим
^ = Q exp J2JL arctg |-]. (8)
Введем полярные координаты р и <р:
Хх = р cos ф, 3*i = Р s^n Ф-
Тогда уравнение (8) принимает вид
Направление движения изображающей точки (рио. а) соответствует
ходу часовой стрелки. Угол ц> отсчитывается в обратном направлении.
Следовательно, в уравнении (9) угол <р непрерывно уменьшается,
а значит, неограниченно уменьшается и радиус-вектор изображающей
«5]
ИССЛЕДОВАНИЕ НЕЛИНЕЙНЫХ КОЛЕБАНИЙ
447
точка р. Интегральные кривые — скручивающиеся спирали (рис. а),
навивающиеся на начало координат. Каждая интегральная кривая
является в этом случае фазовой траекторией.
Фазовая скорость равна по модулю
•а = "J/ х2 -{-уг = 'Vryi + B/ty -р- №х)*. A0)
Так как фазовая скорость по мере приближения изображающей
точки к положению равновесия неограниченно уменьшается, то изоб-
изображающая точка не может достигнуть начала координат за конечное
St
а)
К задаче 20.17.
время, хотя и приближается к нему асимптотически. Особая точка
в этом случае называется устойчивым фокусом.
При любых начальных условиях изображающая точка стремится
к началу координат, следовательно, равновесие системы, соответст-
соответствующее началу координат, будет устойчивым.
Линейное преобразование x1 = k1x, yi=y + nx не изменяет
характера интегральных кривых. Действительно при малой величине
n[k\ на плоскости ххух спирали близки к окружности
Эта окружность, если вернуться к исходным переменным, превра-
превращается при малой величине n(k{ в эллипс
У -f- 2я ху + *а х* = const
Таким образом, на плоскости ху спирали фазовых траекторий близки
к этому эллипсу (рис. б).
Перейдем к определению шага спирали (рис. а). Из рисунка
видно, что шаг спирали равен х„ — *я+1. С другой стороны, как
448 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
известно, решением исходного дифференциального уравнения A)
является
х = Ае~ы sin(y*a — wa*-f P), A1)
где Лир определяются по начальным условиям движения. Период
колебания равен
2" A2)
l f
тогда шаг спирали будет равен
ха-хп+1 = А-Ае-пТ=-АA-е-'>т). A3)
Если я7<^1, то равенство A3) можно приближенно представить,
разложив функцию в ряд
Тогда шаг представится следующей приближенной формулой:
Таким образом, при пТ ^ 1 шаг спирали пропорционален логариф-
логарифмическому декременту.
Случай большого сопротивления. Проинтегрировав
уравнение E) при л>А и внеся затем в полученный результат зна-
значение г, находим
<*=" . (.4)
Правая часть этого уравнения легко раскладывается на множители
следующим образом:
f + 2я ху + k*x* ~(y+nxf- (n2 - &)лг» а (у + biX){у + bxx),
где для краткости введены обозначения
Тогда уравнение A4) может быть записано в виде
(y + bixt* = Ct{y + btxy». A5)
Если рассматривать дгх и ylt тождественно удовлетворяющие равен-
равенствам
хг =у + Ьхх, уг ==у + btx,
как новые прямоугольные координаты, то уравнение A5), опреде-
определяющее семейство интегральных кривых, примет вид
*i=C8yi( A6)
где s = bdbx>l. Интегральные кривые представлены на рис. в.
ИССЛЕДОВАНИЕ НЕЛИНЕЙНЫХ КОЛЕБАНИЙ
449
Из A6) бидно, что dxJdy^^Q при-у1 = 0 и, следовательно, все
кривые касаются оси уг в начале координат. Вычислив вторую про-
производную от д?! по уг, находим
'('-I)
Эта величина всегда положительна, следовательно, все интегральные
кривые обращены выпуклостью
к оси у{.
Возвратившись к фазовой пло-
плоскости ху, находим на ней урав-
К задаче 20.17, в. К задаче 20.17, г.
нение осиуь касательной к интегральным кривым, для чего полагаем
отсюда уравнение искомой прямой будет
У = — Ьгх.
Аналогично мы получим на фазовой плоскости уравнение оси xv
приравняв нулю у-у.
Ух=у + Ь2х~0.
Следовательно, уравнение прямой будет
Наконец, найдем уравнение прямой, пересекающей интегральные
кривые в точках, где касательная горизонтальна. В этих точках
равенство D) обращается в нуль и, следовательно, уравнение прямой
будет
№ ЬЬ
Интегральные кривые показаны на рис. г. Следует отметить, что
в данном, случае каждая интегральная Кривая включает три фазовые
траектории: ветвь, идущую в начало координат справа, ветвь, идущую
450
нелинейные колебания
[гл. хх
J
ox F
е]
в начало координат слева, и особую точку. В данном случае по всем
фазовым траекториям изображающая точка движется в начало коорди-
координат, к особой точке— устойчивому узлу.
Характер апериодического движения, совершаемого исходной меха-
механической системой, легко определяется по расположению изобра-
изображающей точки на фазовой траектории. Если изображающая точка в
начальный момент находится в положении /, то скорость ее вначале
положительна и расстояние исходной системы от положения равно-
равновесия возрастает до момента, когда изображающая точка пересечет
ось х. После этого скорость становится отрицательной и исходная
система асимптотически приближается к положению равновесия.
Если в начальный момент изображающая точка находится в поло-
положении 2, то исходная система будет асимптотически двигаться к
положению равновесия, так как
отклонение системы положи-
положительно, а скорость направлена
да в отрицательную сторону оси х.
*~ Задача 20.18. Тело, лежа-
лежащее на горизонтальной не-
негладкой плоскости, прикрепле-
прикреплено пружиной к стене (рис. а).
Коэффициент жесткости пру-
пружины с, максимальное значение
силы сухого (кулонова) тре-
трения F. Сила трения при дви-
движении постоянна по модулю и
направлена в сторону, противо-
противоположную скорости. Начало
координат выбрано в конце
нерастянутой пружины. Тело
в начальный момент отодвину-
К задаче 20.18. ли на расстояние дг0 и отпус-
отпустили без начальной скорости.
Найти уравнение движения тела, построить зависимость переме-
перемещения от времени и фазовую траекторию, если jco=12--.
Решение. Составим дифференциальное уравнение движения
тела
тх>--~-cxqzF, A)
знак минус соответствует положительной проекции скорости, знак
плюс отвечает отрицательной проекции скорости на ось х. Обозна-
Обозначим через
д — — = const
с
максимальное отклонение тела (от положения пря нерастянутой пру-
пружине), при котором сила трения будет уравновешивать реакцию
¦S 5) ИССЛЕДОВАНИЕ НЕЛИНЕЙНЫХ КОЛЕБАНИЙ 451
пружины. Тогда уравнение A) можно записать в виде
(х±А) = 0 B)
или
где обозначено с\т = А2. Полагаем х =у. Тогда
Отсюда
аУ _ *д х± А
ах у
или, после интегрирования,
В этом интеграле знак плюс соответствует х =_у>0 и минус —
х=у<0.
Пусть в начальный момент при t = 0 мы имеем х = х0 > О,
_?=_у = 0. Сразу после начала движения _у = х < 0 и в уравнении C)
нужно брать знак минус. Получим уравнение окружности с центром
в точке N с координатами дг = А, _у = 0. При x = Xi тело теряет
скорость и затем оно двигается вверх (х=у>0). В уравнении C)
нужно взять знак плюс. Получим уравнение окружности с центром
в точке Ж( —Д, 0). Точка хг симметрична х0 относительно N,
точка х2 симметрична хг относительно Ж и т. д. Фазовая траекто-
траектория представлена на рис, б, а зависимость перемещения от времени
на рис. в.
3°. Дельта-метод. Одним из эффективных способов качествен-
качественного исследования нелинейных систем с одной степенью свободы
является дельта-метод, предложенный в 1952 г. Якобсеном*). Он
позволяет приближенно построить фазовый портрет системы, не интег-
интегрируя ее дифференциального уравнения, которое часто связано с гро-
громоздкими вычислениями.
При построении фазовых траекторий будем исходить из общего
дифференциального уравнения, описывающего движение неавтономной
нелинейной системы, а именно
х+к*х=Нх, х, t), F*)
где х, Jt, J? — координата системы, ее первая и вторая производные
соответственно, k — круговая частота, t — время, /—некоторая нели-
нелинейная функция своих аргументов. В частном случае автономной сис-
системы эта функция не зависит явно от t
*) L. S. Jacobsen, On a General Method of Solving'Second —order Ordi-
Ordinary Differential Equations by Phase—plane Displacements, J. Appl. Mecha-
Mechanics! vol. 19, N 4, 1952» 543-553.
452 нелинейные колебаний 1гл. хх
Преобразуем исходное уравнение (б*) в «дельта-форму». Для этого
введем безразмерное время x = kt и соответствующую скорость v =
=*dx/d%, имеющую ту же размерность, что и перемещение х. Тогда
будем иметь
dt-*ih-*v dt R dx ~R dx * dx dx'~/ivdx'
Уравнение F*) теперь можно записать в виде
или
dv _ 1 Г / (*' ^ Т) 1
57 ~" VL ft* J"
Величина
6 = б(^, v, т)= Kki ' G*)
называется дельта-функцией, откуда и происходит название самого
метода.
Используя обозначение G*), получим из предыдущего уравнения
дифференциальное уравнение фазовых траекторий или дельта-форму
уравнения F*):
dx v ' (S >
Хотя Ь является функцией трех аргументов, для малых прираще-
приращений Ддг, Av, At ее можно считать постоянной. Тогда уравнение (8*)
сразу интегрируется разделением переменных, в результате чего
получается уравнение фазовых траекторий в конечном виде
(*+6)a + va = C*, (9*)
где С—произвольная постоянная интегрирования, определяемая из
начальных условий.
На фазовой плоскости Oxv уравнение (9*) описывает семейство
окружностей с центром в точке Qo( —S; 0). Таким образом, малые
отрезки фазовой траектории могут быть приближенно заменены дугами
окружностей с центром в указанной точке. С переходом от одной дуги
окружности к следующей изменяются, вообще говоря, абсцисса ее
центра и радиус. Однако непрерывность фазовой траектории при
этом не нарушается, т. е. начало последующей дуги совпадает с концом
предыдущей.
Построение начинается (рис. 20.10) с точки Р& координаты кото-
которой хо = х(О) и vo = v(O> определяются начальными условиями при
ИССЛЕДОВАНИЕ НЕЛИНЕЙНЫХ КОЛЕБАНИЙ
453
то = О. По этим же данным находятся величина 60=6(х^ v0; т0)
и радиус р0 = У (,-хо + 60)а + vo- Впрочем, радиус не имеет смысла
вычислять по формуле. Когда точка Ро и центр окружности Qo пост-
построены, радиус замеряется циркулем как длина отрезка Q0P0. Из точки
Qo как из центра радиусом p0 = QoPo проводится небольшая дуга
P0Pi окружности в направлении против хода часовой стрелки, что
соответствует возрастанию безразмерного' времени г. Длина дуги
должна быть выбрана в некоторых оп-
оптимальных пределах, так как с ее
уменьшением, с одной стороны, увели-
увеличивается точность, а с другой стороны,
возрастает трудоемкость построения
(подробнее об этом см. задачу 20.19).
Чтобы найти абсциссу ( —6i) цент-
центра следующей дуги окружности, надо
снять с чертежа значения хг и vi,
а величину тх найти по формуле
= Д0О (т0 = 0), A0*)
Рис. 20.10.
где Дб0 — радианная мера первой дуги
P0Pi, и воспользоваться формулбй G*)
для определения b1 = d(Xi, \ц Tt). Затем из центра Qt( — бц 0)
радиусом рх = QiPi проводится следующая дуга окружности и т. д.
Формула A0*) нуждается в некоторых пояснениях. Из нее сле-
следует, что приращение безразмерного времени Дт равно радианной
мере соответствующей дуги Д8. Покажем это. Из соотношения v =
= dx(dx следует
Л—?. A1*)
С другой стороны, из рассмотрения рис. 20.10, где малые конеч-
конечные приращения величин могут быть заменены их дифференциалами,
имеем
¦~. 02*)
Последний переход в равенстве A2*) основан на том обстоятель-
обстоятельстве, что из уравнения (8*) следует
Сравнивая выражения
и, следовательно, Дт = Д9.
dx) ~
A1*)
и A2*), получаем,, что
454 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
Таким образом, для любого шага построения фазовой траектории
имеет место соотношение
A3*)
Часто дельта-функция зависит только от одного аргумента х
или v. (Если она зависит только от t, то уравнение F*) является
линейным).
Так, свободные колебания консервативной системы описываются
уравнением
* A4*)
и б зависит только от х. С другой стороны, колебания диссипатив-
ной или автоколебательной (в зависимости от вида функции /) сис-
системы описываются уравнением
A5*)
и 6 зависит только от v.
В этих случаях полезно бывает построить графики функций
6 = 6 (х) и 6 = 6 (v). Эти дельта-кривые характеризуют тип системы
и степень ее нелинейности. В частности, для линейной системы 8
тождественно равно нулю.
Кроме того, если имеется дельта-кривая, то при построении фазо-
фазовых траекторий системы можно брать необходимые значения 6 непо-
непосредственно с чертежа, избегая соответствующих вычислений.
Задача 20.19. Построить фазовую траекторию для нелинейной
колебательной системы с сопротивлением, пропорциональным квад-
квадрату скорости. Уравнение движения системы имеет вид
x + n\x\x + k*x = 0. A)
Начальные условия принять равными
0. B)
Коэффициент п = 3/2д:0. Исследовать влияние числа шагов (или длин
дуг) на точность построения.
Решение. Сравнивая уравнения A) и F*), замечаем, что в дан-
данном случае
/(*, х, t)~-n\x\x
и, следовательно, по G*)
L
C)
отсюда видно, что сопротивление пропорционально 8. Дельта-кри-
Дельта-кривая, определяемая уравнением C), показана на рис. а сплошной линией.
Следует заметить, что на этом и следующих рисунках отклоне-
отклонение х отложено по оси ординат, а. пропорциональная скорости вели*
$51
ИССЛЕДОВАНИЕ НЕЛИНЕЙНЫХ КОЛЕБАНИИ
455
чина V —по оси абсцисс; изображающая точка в соответствии с этим
движется против хода часовой стрелки.
Переходя к построению фазовой траектории, заметим, что мак-
максимально возможная длина дуги равна полуокружности, что соот-
соответствует одному размаху колебания. При такой большой длине
дуги представляется разумным за величину 6 принять не ее значение
в начальной точке, а некоторое среднее значение, найденное с уче-
учетом изменения б в пределах этой дуги. Среднее значение б0 вели-
величины б при изменении аргумента от нуля до текущего значения v
равно
1
±nlvlv = -8.
D)
График величины б0 показан на рис. а штриховой линией. Из
формулы D) следует, что площади заштрихованных криволинейных
треугольников на этом рисунке
равны.
Теперь нетрудно построить фа-
фазовую траекторию с помощью дуг
максимальной длины, т. е. полу-
полуокружностей. Для этого с помощью
циркуля отыскиваем после ряда
попыток центр Ох первой дуги так,
чтобы отрезки О^хй и OiQi были
равны, и проводим дугу x^Q^i.
Затем выбираем центр О2 второй
дуги так, чтобы выполнялось равен-
равенство O2^i = OaQa> и строим вторую
дугу х^2х2 фазовой траектории.
Продолжая этот процесс дальше,
можно построить всю фазовую
траекторию, которая представляет
собой спиралевидную кривую, на-
накручивающуюся на начало координат. (На рис. а построение доведено
до точки х4). Начало координат является здесь особой точкой типа
устойчивого фокуса. Она соответствует состоянию устойчивого рав-
равновесия (х = \ = 0), к которому система стремится вернуться, будучи
из него выведенной.
Рассмотрим теперь другие возможности усреднения величины 6.
Работа силы сопротивления за один размах может быть найдена
в предположении, что фазовая траектория есть полуокружность ра-
радиуса vmex. Сила сопротивления, как уже отмечалось, пропорциональна
величине б, а последняя при сделанном предположении равна
К задаче 20.19, о,
6 = /ZV2 = /IVmax
456
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
[ГЛ. XX
Перемещение, отсчитываемое от крайнего положения, равно
? = уШах A — COS kt),
откуда
dl = vmax sin ktd(kt).
Следовательно, работа №i демпфирующей силы за один размах
пропорциональна величине
л я
*n-\uAsin*ktd(kt) = ~,
т. е.
W^-gnVmtx. (О)
Введем теперь в рассмотрение эквивалентную постоянную силу
сопротивления, пропорциональную величине б9КВ. Работа Wb произ-
х0~5,00
веденная этой силой за один
размах, пропорциональна ве-
величине
D
т. е.
W2 ~ 26eKBvmax- (в)
Приравняв друг другу ра-
работы" Wi и Wb или, что то
же самое, правые части со-
соотношений E) и F), нахо-
находим
беи "* Т Wmax • G)
Сравнив полученное равенство с уравнениями C) и D), заключаем,
что имеют место соотношения
6экв = -|б = 2б0. (8)
Точность этих вычислений тем больше, чем ближе фазовая траекто-
траектория для одного размаха к полуокружности.
На рис. б построены две первые полуокружности фазовой траек-
траектории при различных способах усреднения величины 6, а именно
для среднего значения б по отношению к v, когда б0 = S/.3; для про-
произвольно взятого значения 6' = 6/2; для значения б" =s 26/3 = бвиа.
и, наконец, для максимального сопротивления, когда 6'" = б.
$5}
ИССЛЕДОВАНИЕ НЕЛИНЕЙНЫХ КОЛЕБАНИЯ
457
Возникает вопрос, какая из этих кривых точнее. Ответ, вообще
говоря, можно получить, построив фазовую траекторию с помощью
большего числа шагов. Однако в Данном конкретном случае известно
точное (численное) решение задачи, которое дает ^ = 1,64 и Jtg =
= 0,94. Следовательно, наибольшая точность при выбранном мини-
минимальном числе шагов достигается, если за усредненную дельта-кри*
вую принять кривую, лежащую
Хд~5,оа
между кривыми б'= 6/2 и б"
= 26/3 ближе к первой.
х~5,00
2DS'
1,55(№Г
WS4WS')
К задаче 2О.*19, в, а.
Вообще решение с минимальным числом шагов, т. е. один шаг
на размах, может дать удовлетворительные результаты только в том
случае, если найден достаточно надежный способ усреднения вели-
величины б. Кроме того, при таком решении длительность каждого раз-
размаха, определяемая углом 8, постоянна и равна п. Это противоречит
хорошо известному факту, что при наличии сопротивления, пропор-
пропорционального квадрату скорости, период колебаний уменьшается одно-
одновременно с уменьшением амплитуды, асимптотически приближаясь
к величине 2njk.
На рис. в показана фазовая траектория, построенная с помощью
четырех неравных шагов по оси v для первого размаха и трех шагов
для второго размаха. Амплитуды хх и xz несколько больше соот-
соответствующих величин, полученных точным расчетом, а длительности
цервого размаха и первого колебания измеряются углами 206° и 388°
соответственно. Следовательно, наличие квадратичного сопротивления
увеличивает продолжительность первого, размаха от величины я/А до
16 М, И, Бать н др., т. III
458 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
величины 206л;/18 Oft, т. е. на 14%, тогда как увеличение продолжи-
* , s 388—360
тельности первого колебания (двух первых размахов) равно ¦
что составляет 8%.
Наконец, на рис. г дано построение фазовой траектории при
девяти шагах для первого размаха и четырех шагах —для второго.
Величина амплитуды х1=\,ЪЪ при 8 = 206° совпадает очень хорошо
с точным значением, указанным в скобках, а значение х2 = 0,95 также
хорошо согласуется с точной величиной 0,942.
Резюмируя, заключаем, что точность построения фазовой траекто-
траектории всегда может быть увеличена путем увеличения количества шагов.
Однако степень точности данного конкретного построения в случае,
если тонное решение неизвестно, может быть оценена только «экспери--
ментально» путем увеличения числа шагов. Кроме того, очевидно, что
влияние длин дуг на точность построения не всюду на фазовой плос-
плоскости одинаково. При построении с более чем одним шагом за размах
это влияние тем заметнее, чем больше излом траектории в точках
сопряжения дуг. Так на рис. в этот излом, определяемый углами pY f52
и т. д., примерно одного порядка во всех точках сопряжения (за
исключением точки 4), тогда как на рис. г) он более значителен
в точках 4, 5, 6 и //.
Задача 20.20. Движение физического маятника описывается урав-
уравнением
Я-И2 sin л; = 0. A)
Построить фазовые траектории маятника для следующих начальных
условий при г = 0:
а) х0 — 36° — 0,2я, v0 = 0;
б) х0 = 90° = 0,5л, vo = O;
B)
в) х0-
В случае г) начальная скорость достаточно велика, чтобы обеспечить
непрерывное вращение маятника.
Решение. Преобразуем данное в условии задачи уравнение
к виду A*):
: = k*(x~slnx). C)
Поскольку в данном случае
f(x, jc, t) = А2 (л: — sin x),
имеем по B*)
6" = б (х) — sin х — х. D)
Дельта-кривая, построенная по этому уравнению, показана на
рис. б. Там же построены фазовые траектории для ьсех заданных
51
ИССЛЕДОВАНИЕ НЕЛИНЕЙНЫХ КОЛЕБАНИЙ
459
в условий задачи случаев. На рис. а приведен график восстанавли-
восстанавливающей силы R.
В случае а) отклонения маятника от положения равновесия
невелики, величина 6 очень близка к нулю, а фазовая траектория
незначительно отличается от окружности с центром в начале коор-
динат —первая от центра кривая на рис. б).
й)
К яадаче 20.20.
В случае б) величина б уже ааметно отклоняется от нуля и фазо-
фазовая траектория принимает форму овала, вытянутого вдоль оси х.
В случае в) фазовую траекторию строим путем разбиения участка
[— я, я] на оси х на 20 равных участков (по 0,1я) и усреднения
величины б на каждом участке по формуле
Так, для 1-го участка 0,9л
0,9я
S
имеем
0,
Следовательно, координаты центра Ог первой дуги фазовой траек-
траектории равны хг = -^ fij = 2,83, Vx — O, а радиус pi=xo — Xi =
= л — 2,83 я= 0,31. По этим данным строим первую дугу в интер-
интервале @,9я; я) по оси х.
16*
460
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
[ГЛ. XX
Аналогично находим для 2-го участка 0,8л
0,8я
0,9я
Таким образом, центр Ог второй дуги фазовой траектории имеет
координаты хй =— ба=*=2,22, v2 = 0. Радиус второй дуги ра проще
всего найти, измерив расстояние от точки Ot до конца первой дуги.
Проделав это, проводим вторую точку в интервале @,8я; 0,9я)
по оси х.
Продолжая так же дальше, строим всю фазовую траекторию,
учитывая при этом, что она симметрична относительно обеих коор-
координатных осей. Траектория еще более сильно, чем в случае б),
вытянута вдоль оси х. Заметим, что вблизи точек х — ±п траекто-
траектория имеет заведомо неправильную форму. Это видно из того, что
при стремлении х к ±я величина б стремится к —х, и, следова-
следовательно, радиус фазовой траектории стремится к нулю, так как
в этих точках v = 0.
Однако эта неточность построения мало сказывается в точках,
достаточно удаленных от указанных, например в точках пересече-
пересечения траектории с осью v, которые определяют максимальную ско-
скорость колебания vmax> равную в данном случае 2.
Любая фазовая траектория, лежащая внутри траектории для слу-
случая в), представляет собой замкнутую кривую, окружающую начало
координат. Для всех таких траекторий начало координат является
особой точкой типа центра.
Наконец, в случае г) фазовые траектории представляют собой
незамкнутые бесконечные кривые, вытянутые вдоль оси х. Маятник
не колеблется, а вращается вокруг точки подвеса с переменной угло-
угловой скоростью, положительной или отрицательной.
Задача 20.21. Тело М массы т лежит на горизонтальной глад-
гладкой плоскости. К телу (рис. а) прикреплена вертикальная пружина
м
м
К задаче 50.21, а, б.
ОМ = I, коэффициент жесткости которой равен с. В исходном,
вертикальном положении пружина не натянута.
$ S] ИССЛЕДОВАНИЕ НЕЛИНЕЙНЫХ КОЛЕБАНИЙ 461
Составить дифференциальное уравнение малых колебаний тела
вдоль горизонтальной прямой х. Построить фазовый портрет динами-
динамической системы.
Решение. В произвольном положении Mi (рис. б\ на тело
действует восстанавливающая сила пружины F, пропорциональная
удлинению пружины, направленная от Мх к О. Обозначив коорди-
координату точки Mt через х, ММх = х, находим модуль силы F
р = с(у/* + х*-1). A)
Разложив корень в ряд
и ограничившись первыми двумя членами ряда, находим
Следовательно, при малых отклонениях тела от вертикального поло-
положения равновесия сила F пропорциональна квадрату отклонения.
Переходим к определению проекции силы F на ось^е. Заметив, что
находим
Fx = F cos a p« — x3
Дифференциальное уравнение малых колебаний будет
С о
или
Обозначив для краткости с/2да/а==р, получим
= 0. C)
Таким образом, восстанавливающая сила в данном случае при
малых отклонениях тела от равновесного положения пропорциональна
кубу отклонения тела.
Переходим к построению фазового портрета системы. Перепи-
Переписываем уравнение C) в форме
D)
откуда находим
462
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
[ГЛ. XX
Из уравнения (б) следует, что б равно нулю при x = ±kf}/^. Это
означает, что в соответствующих точках центр дуги окружности,
аппроксимирующий фазовую траекторию, лежит в начале координат.
На рис. в приведен график восстанавливающей силы — кубическая
парабола, а на рис. г показаны дельта-кривая и фазовые траектории
для трех энергетических уровней (начальных координат и скоростей),
причем принято р/Аа = 0,4. Фазовые траектории «остроены с по-
помощью равных шагов (Длс = 0,2) по оси х.
x+JSx!=O
К задаче 20.21, в, г.
На рисунке подробно показаны первый и шестой шаги для самой
большой фазовой траектории.
При малых перемещениях и скоростях фазовые траектории имеют
форму сильно вытянутых вдоль оси х небольших овалов с центром
в начале координат. С возрастанием энергетических уровней траек-
траектории приближаются к прямоугольнику, короткая сторона которого
параллельна оси х, а центр совладает с началом координат. Начало
координат является здесь особой точкой типа центра, однако движе-
движение фазовой точки около него происходит не по окружности.
Заметим, что задача может быть решена точно. Действительно,
уравнение C) можно записать в виде системы
Разделив F) на G), найдем
dt
dt
dy.
dx
F)
G)
(8)
ИССЛЕДОВАНИЕ НЕЛИНЕЙНЫХ КОЛЕБАНИИ
463
Отделив переменные и проинтегрировав, получим точное уравнение
фазовой траектории
= С, (9)
которое позволяет при сопоставлении его с приближенным решением
оценить точность дельта-метода.
Задача 20.22. Построить фазовый портрет нелинейной колеба-
колебательной системы, описываемой уравнением
Х+Рх — а]х\х = 0. A)
Решение. График восстанавливающей силы приведен слева на
рис. а. Эта сила положительна при x<Z — ks/a и 0<дг<Аа/а и
К задаче 20.22.
отрицательна в интервале —ks/a<x<C0 и при x^>k2la. Следова-
Следовательно, система может быть неустойчивой. Величина б в данном
случае определяется уравнением
— jj|*|* B)
Соответствующая дельта-кривая показана на рис. б. На том же
рисунке имеется и фазовый портрет системы. Он достроен с помощью
464
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
(ГЛ. XX
малых и не равных между собой шагов &х, так чтобы яснее была
видна изломанность приближенных фазовых траекторий.
Характерными точками на фазовой плоскости являются точки
x = ±ks/a, v = 0. Они могут быть названы «точками застоя», так
как в них фазовая точка становится неподвижной и, следовательно,
графическое определение времени невозможно. Однако даже выпол-
выполненное довольно грубое геометрическое построение доставляет весьма
точную информацию о внутренних свойствах системы. Фазовая траек-
траектория, проходящая через упомянутые точки застоя, называется сепа*
ратрисой. Она не только отделяет внутреннюю область — область
замкнутых фазовых траекторий — от внешней — области незамкнутых
траекторий, — но и разделяет эту последнюю область. Так, например,
если движение системы начинается из точки / фазовой плоскости,
тс фазовая траектория уходит в бесконечность в третьем квадранте,
а если исходной точкой служит точка II, то фазовая траекторий
удаляется в бесконечность в первом квадранте. Точки 1 к II лежат
по разные стороны от сепаратрисы.
Внутренняя замкнутая часты сепаратрисы отделяет область устой-
устойчивых колебаний — внутреннюю область — от области неустойчивого
движения — внешней области.
Время, как и всегда при фазовых представлениях, определяется
углами, стягиваемыми дугами окружностей, т. е. At = AB/k, Это обсто-
обстоятельство указывает на то, что радиусы дуг должны быть конечными.
Задача 20.23. Построить фазовую характеристику системы, вос-
восстанавливающая сила которой дается графиком, приведенным на
рис. а, если к системе внезапно прило-
приложена постоянная возмущающая сила F.
Решение. График на рис. а изобра-
изображает петлю гистерезиса. Такую характерис-
характеристику имеет любой упругий элемент, в ко-
тором в процессе колебаний достигается
предел упругости материала и, следова-
следовательно, имеют место пластические дефор-
деформации.
При перемещении системы из начала
координат в направлении оси х с положи-
положительной скоростью восстанавливающая сила
достигает предела упругости в точке L при x = Xlt затем линейно
м
К задаче 20.23, а.
р уру
возрастает с угловым коэффициентом с9 до точки М при
В этой точке система останавливается, скорость изменяет знак, и
восстанавливающая сила затем линейно убывает вдоль прямой МР.
Если движение заканчивается в какой-либо точке этой прямой и
внешняя сила устраняется, то возникает остаточное перемещение QN
и теряется внутренняя работа гистерезиса, пропорциональная пло-
площади 0LMN. Если движение не заканчивается на отрезке МР,
а продолжается с отрицательной скоростью, новый предел упругости
$ 5) ИССЛЕДОВАНИЕ НЕЛИНЕЙНЫХ КОЛЕБАНИЙ 465
достигается в точке Р, причем МР =— 20L. Дальнейшее движение
влево переводит систему в точку Q, где происходит вторичная оста-
остановка. Если внешнюю силу устранить в этой точке, то система бу-
будет колебаться с собственной частотой между точками — ЪХг и — Xlt
причем в конце концов придет к состоянию покоя в точке S. Оста-
Остаточным перемещением будет тогда 05 и дополнительное количество
потерянной работы гистерезиса будет пропорционально площади NPQS.
Гистереаисная диаграмма, изображенная на рис. а, сильно упро-
упрощена. На практике пределы упругости не так четко выражены и
угловые коэффициенты с4 обычно не постоянны. Кроме того, наклоны
линий РМ и QS часто больше, чем сх благодаря наклепу материала
и длина отрезка МР не всегда равна 20L. Следует отметить, что
все эти отступления от идеализированной гистерезисной диаграммы
могут быть учтены при использовании дельта-метода и вызовут
только простые изменения дельта-кривой.
Представленная на рис. а зависимость восстанавливающей силы
от перемещения является кусочно-линейной. Колебания такой системы,
вызванные внезапно приложенной постоянной силой, могут быть исследо-
исследованы аналитически. Однако при большом числе линейных участков на ди-
диаграмме зависимости восстанавливающей силы от перемещения (на рис. а
пять участков) аналитическое исследование громоздко, и целесообраз-
целесообразнее провести построение фазового портрета системы при помощи
дельта-метода.
В случае свободных гармонических Колебаний дифференциальное
уравнение имеет вид
O, где *!-?. A)
Уравнение линейно, и для него Ьг=*О. Для того чтобы использовать
и в этом случае 6-метод, введем в уравнение A) произвольный новый
параметр kl = c2/m, не равный kt, где ^—коэффициент жесткости
некоторой фиктивной пружины. Сделаем это следующим образом.
Запишем A) в виде
X + k\x+klx~klx = Q B)
или.
Х+кЦх + Ь)=*О, C)
где обозначено
•-GM--S-1)* <4>
Применяя этот способ к рассматриваемой билинейной задаче, вы-
выберем сг и сг из диаграммы, представленной на рис. а.
Семейство фазовых кривых для шести различных значений вели-
величины F/ci построено с помощью дельта-метода на рис. в при значе-
значении Сх/съ = 4,8. На рис. б приведена Диаграмма восстанавливающей
силы. Четыре из фазовых траекторий доведены до конечной конфи-
конфигурации. Шаги построения фазовых траекторий изменяются от вели-
466
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
[ГЛ. XX
чины, меньшей чем Хь до величины 5/3^; углы в градусах указаны
на концах каждого шага. Дельта-кривые представляют собой прямые
линии с угловым коэффициентом
Рассмотрим подробнее фазовую кривую, соответствующую наиболь-
наибольшему значению F/c1 = 3X1. Вначале движение гармоническое вплоть
500° 1000' t
171'
К задаче 20.23, б, в, г.
до смещения Х{, что соответствует углу бх = 49°. В этой точке до-
достигается предел упругости и начинается эллиптическая фазовая тра-
траектория, протекающая в пластической области фазовой плоскости,
где угловой коэффициент восстанавливающей силы равен с2. Далее
фазовая траектория аппроксимируется тринадцатью дугами окружно-
окружностей с использованием кривой 8V Она дает максимальное смещение
х = 22,3^ в момент времени, определяемый углом 384°, Это соот-
соответствует точке Mi на диаграмме восстанавливающей силы, которая
дает силу, в 5,6 раза превышающую предел упругости.
$ 61 АВТОКОЛЕБАНИЯ 467
Возвратное движение происходит вдоль силовой линии M±Lit центр
дуги окружности на фазовой плоскости находится путем продолже-
продолжения этой линии до пересечения с осью х в точке О8 и добавления
смещения dXv вызванного возмущающей силой. В точке ?а угол ра-
равен 459° и система опять входит в пластическую область с2. Это
означает, что должна быть построена кривая б2, как показано на ри-
рисунке. С помощью этой кривой построена эллиптическая траектория,
аппроксимированная шестью дугами окружностей. В конце ее сме-
смещение составляет примерно 1О,6Л^ в момент времени, соответствую-
соответствующий углу 712°. Восстанавливающая сила, определяемая линией Z.2M2,
убывает до величины, примерно равной 1,5 предела упругости или
половины величины F.
Затем опять начинается движение в сторону увеличения коорди-
координаты х, при котором восстанавливающая сила определяется линией
MiLz. Центр соответствующей дуги траектории, как и прежде, нахо-
находим путем продолжения прямой М21а Д° точки О8 и добавления сме-
смещения SXlt вызываемого возмущающей силой. В точке L3 система
в третий раз входит в пластическую область с4, где эллиптическая
траектория аппроксимируется двумя дугами окружностей между уг-
углами 784е и 890° с использованием кривой б8. В конце этой траек-
траектории восстанавливающая сила определяется точкой Мг.
Дальнейшее движение системы представляет собой свободное
колебание, при котором зависимость восстанавливающей силы от пе-
перемещения дается линией Ж3О4. Центр соответствующей окружности
на фазовой плоскости определяется, как и ранее, и расположен
в точке дгяа 13,2^. Эта точка определяет остаточную деформацию
упругого элемента системы.
На рис. г построены графики зависимости перемещения от вре-
времени, поясняющие характер движения системы. Из их рассмотрения
видно, что внезапно приложенная возмущающая сила, величина ко-
которой равна трехкратному пределу упругости, вызывает вначале макси-
максимальное перемещение, в 22,3 раза большее смещения, соответствую-
соответствующего пределу упругости, и в конце концов приводит систему к ко-
колебаниям с частотой сг около точки, соответствующей остаточному
смещению, равному 13,2Хх.
В задачах этого пункта даны основные результаты Якобсена,
автора дельта-метода.
§ в. Автоколебания
1°. Примеры автоколебательных систем. Известно,
что свободные линейные колебания при наличии силы сопротивления,
пропорциональной скорости, затухают. Для того чтобы колебания не
затухали, они должны быть вынужденными, т. е. должна также дей-
действовать возмущающая сила. Но существуют нелинейные системы, кото-
которые лри отсутствии возмущающей силы могут колебаться, не затухая.
468
нелинейные колебания
[ГЛ. XX
Напомним, что свободные линейные колебания, происходящие при
наличии силы сопротивления, пропорциональной скорости, описы-
описываются дифференциальным уравнением
Я+2пХ + к2х=~0
и в случае п<? затухают по закону
х = ае~ы • sin (У к* — пЧ + а), где и>0.
Если параметр п был бы отрицательным, то колебания не затухали
бы, а неограниченно возрастали.
Рассмотрим случай, когда при силе сопротивления, изменяющейся
по нелинейному закону, дифференциальное уравнение движения имеет
вид
предела и
начальных
т. е.
Jc + Bn + yx2)x + k2x = 0, A*)
где и<0, a v>°-
Нетрудно видеть, что при малых значениях х коэффициент, сто-
стоящий в скобке при х, отрицателен, т. е. колебания возрастают, а
при больших значениях х этот коэффициент положителен и, значит,
колебания затухают. В итоге амплитуда изменяется до некоторого
затем сохраняет постоянное значение, не зависящее от
условий движения. Возникают устойчивые, не зависящие
от начальных условий периодические
незатухающие свободные колебания,
которые называются автоколебаниями.
Так, автоколебания появляются в
случаях, когда модуль силы трения
^р изменяется в зависимости от. модуля
относительной скорости vr скольжения
одного тела по отношению к дру-
другому. На рис. 20.11 изображена нели-
нелинейная характеристика изменения модуля
силы трения Ftp в зависимости от величины относительной ско-
скорости ч>г скольжения одного тела по отношению к другому. При
малых скоростях скольжения (участок flfxd2) сила трения примерно
постоянна, затем с увеличением скорости (нисходящая ветвь d2d3)
сила трения уменьшается, но при последующем увеличении скорости
(восходящая ветвь d8dt) сила трения возрастает.
Если колебания происходят со скоростями, соответствующими
нисходящей ветви d2ds, то с уменьшением силы трения скорость
движения и, значит, амплитуда колебаний увеличиваются. Однако
при этом скррость попадает в зону, соответствующую восходящей
ветви d3dit и сила трения начинает возрастать. Это в свою очередь
ведет к уменьшению амплитуды колебаний. Так происходит процесс
Рис. 20.11.
«в]
АВТОКОЛЕБАНИЯ
469
установления колебаний и появляется установившийся режим авто-
автоколебаний, не зависящий от начальных условий движения.
Системы, в которых происходят автоколебания, называются авто-
автоколебательными. Эти системы имеют широкое распространение в
различных областях техники. Так, автоколебания возникают в элек-
электрических генераторах, в системах автоматического регулирования,
в металлорежущих станках при снятии резцом стружки. При дви-
движении смычка по струне появляется сила трения, вызывающая авто-
автоколебания и звучание струны. Сердечно-сосудистая система также
является автоколебательной: движение крови в сосудах вызывает
поперечные колебания их стенок, которые в свою очередь способ-
способствуют движению крови в сосудах.
При решении задач на автоколебания можно пользоваться изло-
изложенными выше приближенными методами интегрирования нелинейных
дифференциальных уравнений. Так, в п. 2° показано применение
аналитических методов, а в п. 3° — графического метода на фазовой
плоскости.
2°. Исследование автоколебаний аналитическими
методам и.
Задача 20.24. На рис. а изображен физический маятник А веса Р,
насаженный на вал В, который вращается с постоянной угловой
скоростью со вокруг неподвижной оси г. При этом между валом В
и маятником А возникает момент силы трения ттр.
0
- Ы
S) 6)
К задаче 20.24.
На рис. б приведена характеристика изменения момента силы
трения оттр в зависимости от фг —относительной угловой скорости
вращения маятника по отношению к валу (см. описание соответ-
соответствующей характеристики в п. I0)- Значению постоянной угловой
скорости со вала соответствует точка перегиба L на нисходящей ветви
MN характеристики. Этой ветви соответствует уравнение «тр = /(ФД
Найти уравнение установления автоколебаний маятника, а также
амплитуду его установившихся автоколебаний, если /„ — момент инер-
инерции маятника относительно оси вращения г; /—расстояние от точки
привеса до центра тяжести С маятника.
4 ТО НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ XX
В начальный момент маятник находился в покое и был отклонен
от вертикали на угол ф0. Радиусом вала пренебречь.
Решение. Положение маятника определяется углом поворота ф,
отсчитываемым от вертикали. Проекция его угловой скорости на
ось г равна ф. Разложим вращение маятника на переносное враща-
вращательное вместе с валом с угловой скоростью (о и относительное
ло отношению к валу с угловой скоростью <вг. Так как cooz = <ви +
+ <&„, то ©„ = (»ог — соег. В данном случае согг = ф„ <ааг = ф, <в„ =
= —to. Поэтому получим
. A)
Использовав формулу A), разложим момент трения /»тр=/(фл)
в ряд Тейлора по степеням ф:
=/Ы =/(» + Ф) =/(©) +/' (а) Ф + \f" (<о) фа +
1 . B)
Здесь штрихами обозначены- производные по ф.
По условию величина постоянной угловой скорости ш соответ-
соответствует точке перегиба L на ветви MN характеристики момента тре-
трения (см. рис. б) т1р— /(ФД Как известно, в точке перегиба
/"(«>) = о. C)
Учтя, что ветвь MN является нисходящей, имеем
/'(«)< 0,/"'(ш)>0. D)
Приняв во внимание равенство C) и ограничившись в вычисле-
вычислениях членами разложения, содержащими ф в третьей степени вклю-
включительно, запишем формулу B) в виде
/я1Р=/(<о)+/'(ю)Ф + -§-/'"(с0)ф3. E)
Перейдем к составлению дифференциального уравнения вращения
маятника вокруг неподвижной оси z. При отклонении маятника
в сторону возрастания угла поворота <р к маятнику со стороны
вала приложен момент трения оттр в направлении хода часовой
стрелки (см. рис. а). Дифференциальное уравнение вращения имеет
вид
/гф = тг (Р) +
Приняв во внимание, что отг(Р)*= — Р/зШф, тг (#0 =i m2 (jR3) = 0,
ттрг = — ттр> использовав формулу E), а также приближенно при-
приняв бШфг^ф, заггишем:
/,Ф = - Ply -/(«) -/' (со) ф - \f" (со) ф". F)
S ej автоколебания 471
На рис. в изображено положение статического равновесия оси
DE маятника при вращающемся вале в направлении хода часовой
стрелки с угловой скоростью со. В этом положении маятник откло-
отклонен на угол р. Итак, при ф = 0 и ср = О имеем ф = — р. Подставив
эти значения в формулу F), найдем условие статического равновесия
-/(©) = 0. G)
Перейдем к отсчету угла поворота 9 маятника от положения
статического равновесия. Воспользовавшись рис. в, имеем
Ф=е-р (8)
и, следовательно,
ф = б, ф = б. (9)
Внеся соотношения (8) и (9) в уравнение F), найдем
/гб= Р/Э + Р/р -/(й)-/' (w)b-±-f" (юN8. A0)
Использовав условие G), запишем уравнение A0) в виде
6 + Bи1 + /г86а)б + Аа8=О, A1)
где обозначено
Приняв во внимание неравенства D), найдем
ла>0. A3)
Нетрудно видеть, что уравнение A0) и уравнение A*), приве-
приведенное в обзоре теории, тождественны. Следовательно, маятник совер-
совершает автоколебания.
Запишем уравнение A1) в виде
Ъ + кЧ = — 2я1Й-я363. A4)
Аналогичное уравнение [1] в задаче 20.6 было проинтегрировано
методом эквивалентной линеаризации. Различие между этими уравне-
уравнениями заключается лишь в том, что в задаче 20.6 было Лх^О, а
в данном случае пг < 0.
Подобно формулам C) задачи 20.6, будем искать 8 и б в виде
9 = asin(p, Й = асосо8ф. A5)
Не повторяя решения задачи 20.6, используем ее уравнения
L8]n[9]:
i^^ A6)
A7)
472 нелинейные колебания [гл. хх
Из дифференциального уравнения A7) следует
A8)
где С{ — постоянная интегрирования.
Напомним, что в задаче 20.6 имело место nt>0, »,Х), В дан-
данном случае «1<0, я$>0 (см. A3)). Поэтому интегрирование уравне-
уравнения A6) дает отличный от решения уравнения [8] результат.
Разделив в дифференциальном уравнения A6) переменные, запи-
запишем
«<« A9)
Введя обозначения
_«1 = v>0> Яя = -|-^-ааАа, B0)
представим уравнение A9) в? виде
Приняв во внимание при интегрировании уравнения B1), что
1 1
а{1 — Я,%а) ~ a
найдем
Решив это уравнение относительно а, получим
а «====-. B2)
Внесем результаты A8) и B2) в уравнения A5):
6 = k cos {kt + Ci). B 3)
Во втором уравнении B3) учтена вторая формула [7] задачи 20.6:
© = ?.
Согласно условию задачи при ? = 0 имеем ф = <р0, ф = 0. Исполь-
Использовав (8) и (9), запишем эти Начальные условия движения в виде:
при t=rO имеем &=фо+р\ 6 = 0. Подстановка их в B3) приводит
к системе уравнений
slnC °
I в] АВТОКОЛЕБАНИЯ 473
Решив эту систему, найдем
г я
ci—г-
После подстановки значений B4) в первое уравнение B3), учтя,
что 6 = ф + Р, получим
Ф —.л, ¦ л y9iP ,/ cos # - р, B5)
где, согласно формуле G), $—f((a)/Pi.
Уравнение B5) описывает искомый режим установления автоколе-
автоколебаний маятника. Эти колебания, вызванные моментом силы трения
между валом и маятником, происходят с постоянной круговой часто-
частотой k и переменной «амплитудой»
а @ фо~^ —г-
V» (Фо+Р)а+П -М (<Ро+Р)83 ^avr
С течением времени а(^) увеличивается и стремится к пределу,
равному
Нш о (t) = Ига ф8+Р 4
Учтя выражение B0) для №, получим
где
Итак, процесс установления приводит к автоколебаниям с по-
постоянной угловой амплитудой B6), не зависящей от ф0 —начального
положения маятника.
Если бы по условию задачи требовалось определить только
амплитуду установившегося режима автоколебаний, то, минуя интегри-
интегрирование уравнений A6) и A7), можно было бы сразу получить
искомый результат. Действительно, при постоянной амплитуде а ее
первая производная й по времени равна нулю. Поэтому, приравняв
нулю правую часть уравнения A6), и учтя, что —«i = v, непосред-
непосредственно придем к результату B6).
В заключение рассмотрим движение маятника, на который, помимо
момента силы трения между валом и маятником, действует также
момент вязкого трения, изменяющийся по закону Отел.*531 — ^Ф> где
Ь > 0, а <р — проекция угловой скорости маятника на ось г. При
наличии этого дополнительного момента уравнение F) примет вид
1/р « _ Р1<р -/(со)- [Ь +/' (со)] ф - A-/"' (to) ф».
474 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
Перейдя к углу поворота 8, отсчитываемому от положения статиче-
статического равновесия, получим уравнение A1), в котором k2 и па имеют
значения, указанные в формуле A2), а через 2пх обозначено не
. B7)
Так как Ъ > О, а /' (со) < 0, то коэффициент 2nt может быть
положительным, отрицательным или равным нулю.
Повторив решение уравнения A1), придем к уравнению A9),
которое выше было проинтегрировано для случая щ. < 0. Итак,
в соответствии с обозначением B7) при Ъ +/' (ш) ¦< 0 маятник совер-
совершает автоколебания амплитуды a = -j-1/ ~-~ (см. формулу B6)), где
b+f (со)
Дополнительно рассмотрим следующие случаи.
При «i>0, т. е. при й+/'(ш) > 0 уравнение A9) примет вид
da ndt B8)
где обозначено
Уравнение B8) было проинтегрировано в ходе решения задачи 20.4.
Запишем его решение (см. формулу A2) задачи 20.4 на стр. 390)):
<30)
где щ и у даны формулами B7) и B9). При г-*со имеем а-*-0,
т. е. движение маятника затухает.
В случае ^ = 0, т.е. при &+/'(со) = О из уравнения A6) найдем
й = — раа,
где обозначено
р = |-л3*2>0. C1)
Отделим переменные: da/a3 = — pdt; проинтегрировав, получим
' C2)
где р дано формулой C1). При t-+oo имеем а-*-0, т. е. движение
маятника затухает.
Итак, при наличии дополнительного момента вязкого трения
/п,.т.г = — йф, где &>0, при условии «1<0, т.е. b+f (ю)<0
маятник совершает автоколебания по вакону B6) при v = — nx =»
S6)
АВТОКОЛЕБАНИЯ
475
. В случаях же %>0 и % = (), т.е. при
и Ц/' (ад) = 0 колебания маятника затухают (см, формулы C0)
и C2)).
Обычно в автоколебательных системах различают три элемента:
1) источник питания (в данном случае —вал В, вращающийся.
с постоянной угловой Скоростью ю), 2) нелинейный или чувстви-
чувствительный элемент (момент трения между маятником Л и валом В),
3) колебательный контур (маятник А).
Задача 20.25. На рис. а изображена упрощенная схема лампо-
лампового генератора. Основными элементами электронной лампы —триода
Е — являются катод К, анод А и сетка D.
S)
К задаче 20.25.
На аноде А эа счет внешней батареи, не показанной на рисунке,
создается положительный потенциал по отношению к катоду. Таким
образом в лампе имеется электрическое поле, направленное от анода
к катоду.
Катод К нагревается при пропускании по нему тока от внешнего
источника (батареи канала, не показанной на рисунке). При нагреве
катода начинается термоэмиссия электронов, которые увлекаются
к аноду имеющимся внутри лампы электрическим полем. На пути
электронов расположена проволочная сетка D.
В цепь сетки D включен контур, состоящий из конденсатора
емкостью С, сопротивления R и катушки с индуктивностью L. Анод-
Анодная цепь лампы содержит катушку индуктивности V', имеющую
индуктивную связь с катушкой сеточного контура. Взаимная индук-
индуктивность двух контуров равна М.
Любое иеменение напряжения а на сетке ведет к изменению
потока электронов внутри лампы и, следовательно, к изменению тока
iA в анодной цепи. Это в свою очередь вновь, за счет взаимной
индуктивности М, изменяет напряжение к на сетке D и т. д., что
приводит к возникновению и установлению автоколебаний.
Зависимость анодного тока 1А от напряжения и на сетке D опре-
определяется экспериментально и называется характеристикой триода.
476 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ [ГЛ. XX
Типовая характеристика лампы показана на рис. б и приближенно
аппроксимируется уравнением
где р\ и ps — положительные постоянные.
Найти закон изменения сеточного напряжения и при установлении
автоколебаний, а также постоянную величину амплитуды напряжения
установившегося режима. Выяснить условия как затухания, так и само-
самовозбуждения колебаний.
Даны начальные условия: при f = 0 имеем и = и0, й — щ.
Решение. Применим 3-й закон Кирхгофа к сеточному контуру:
при отсутствии в нем источника э. д. с. сумма падений напряжений
в этом замкнутом контуре должна быть равна нулю, т. е.
0. A)
Падение напряжения uL на катушке равно
и^Щ, B)
где L — самоиндукция катушки, а д — заряд.
Падение напряжения uR на сопротивлении R дается формулой
ия=Щ. C)
Падение напряжения «с на конденсаторе определяется зависи-
зависимостью
ис = -?-, D)
где С —емкость конденсатора.
Падение напряжения за счет явления взаимной индуктивности
равно
им = М^, (б)
где Ж —взаимная индуктивность двух катушек, а /д —анодный ток
цепи.
Внеся результаты B) —E) в уравнение A), найдем
^ ^- = 0. F)
Разделив уравнение F) на LC и произведя замену переменных
по формуле u(t) = q/C, где а —напряжение на сетке, получим
й + 2яй + Ааи + ЖАа-5р = 0. G)
Здесь обозначено
^ (8)
i в] АВТОКОЛЕБАНИЯ 477
Характеристика триода задана уравнением <д = р1«—s-fW-
о
Вычислив производную 1а по времени, запишем
Использовав этот результат в уравнении G), найдем нелинейное
дифференциальное уравнение, описывающее процесс автоколебаний
Ц+k4 = — рй+Жр8й2м2«, (9)
где обозначено
Для интегрирования нелинейного уравнения (9) применим метод
медленно меняющихся амплитуд Ван-дер-Поля (см. п. 3° § 2 этой главы).
Будем искать решение уравнения (9) и (г) и первую производ-
производную ы@ по времени в виде
а (9 = а (*) sin [А*+ <*(*)], и = о (f) k cos [kt + a (г)], A1)
где a(t) и a (t) — медленно изменяющиеся функции времени, подле-
подлежащие последующему определению.
Обозначив правую часть уравнения (9) через /(и, и) и подставив
в нее и = a sin ц>, ii = ak ces ф, получим
/(а, и) =*f(a sin q>, ak cos ф) = — pak cos ф + жр8а3^3 s'n8 Ф cos Ф- A2)
Затем, воспользовавшись выражением A2), вычислим определен-
определенные интегралы
J /(a sin ф, а? cos ф) cos ф dq> =
о
= — pak J cos2 ф йф + Aipso8As J sin2 «р cosa ф с^ф, A3)
о о
^ /(а sin ф, аи cos ф) sin ф dq> =
= — раА J С08фз1пфсгф + Л1р3а3А8 J 81п3фсозфйф. A4)
При вычислении интеграла A3) учтем, что
COS2 ф = у A + COS 2ф), Sin8 ф СОБ^ф = -g- A -f COS 4ф),
а в интеграле A4) применим подстановку 51пф = г-. В результате
получим
2л
\ /(a sin ф, ak cos ф) cos ф d<p = — яраА -f- -r ЛГР8а8Аа, A5)
Ь
2л
/(о sin ф, ak cos ф) siH ф dq> = 0. A6)
478 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ 1ГЛ. XX
Напомним, что «укороченные» уравнения Ван-дер-Поля имеют вид
2я
1 С
:;?—и \ /(я sin ф, ak cos ю) cos i
A7)
a — — s-t- \ /(a sin ф, ak cos (p) sin ф cf<p.
V
Использовав в уравнениях A7) выражения A5) и A6), получим
а = 0, A8)
где обозначено
Из второго уравнения A8) сразу найдем
а = Сг. B0)
После отделения переменных первое уравнение A8) примет вид
da p ,,
После интегрирования уравнения B1), учтя, что
1 1 , Я. К
2A-to)
получим
Решив это уравнение относительно а, определим
1 B2)
Теперь внесем результаты B0) и B2) в уравнения (И):
и @ = ' sin (kt + С2),
k cos («+ C2). B3)
Для определения постоянных интегрирования Сх и Cj подставим
в уравнения B2) начальные условия ?=0, и —и0, й = й0. Получим
систему уравнений
ип = . sin С2, ил = , cos С«.
0 /W + Cf КЯ2 + С|
§ 61 АВТОКОЛЕБАНИЯ 479
Решив эту систему, найдем
Для определения искомого процесса установления автоколебаний
подставим эти значения С1 и С2 в первое уравнение A1) и приведем
его к виду
rr(f) , y^f+ui -inf'-f lirrtС^1 B4)
Остается выяснить условия затухания, а также условия самовоз-
самовозбуждения колебаний. Для этого, воспользовавшись формулой, B2),
совершим предельный переход при t -*¦ оо. Нетрудно видеть, что
при р > 0 мы получим lim a (t) = 0 и, значит, lim я (*) = 0, т. е. коле-
f-»CO i-»00
бания затухают, изменяясь по закону B4). Из неравенства р > О,
использовав A0), найдем 2л + M^k%>0,' откуда М> — 1п\\хк\
Приняв во внимание (8), запишем
Л1>-^. B5)
Соблюдение неравенства B5) является условием затухания коле-
колебаний.
В случае р<0 из формулы B2) получим: tima(t) = l/h. Boc-
пользовавшись выражениями (8), A0) и A9), найдем
lim а @ = 21/^+^1 и const. B6)
Итак, при р <С0 амплитуды постепенно увеличиваются, имея пре-
пределом величину B6), которая не зависит от начальных условий н0
и й0. Переход к автоколебаниям происходит по закону B4). Заме-
Заметим, что автоколебания обусловлены наличием нелинейности в харак-
характеристике триода, т. е. членом — -j р3 в выражении 1А = рхи —
¦—5~Рзн3- Действительно, в случае линейной характеристики 1А =
О
= PiH> Рэ = 0 и формула B6) примет вид; lim a (t) — со, т. е. коле-
бания неограниченно возрастают.
Из неравенства р<0, учтя A0), запишем 2я -f- MpxA2 <; 0, откуда
М •< — 2n/pxfea. Приняв во внимание (8), получим
M<-^j. B7)
Соблюдение неравенства B7) является условием самовозбуждения
автоколебаний.
В заключение заметим, что если бы по условию задачи требова-
требовалось найти только амплитуду установившегося режима автоколебаний,
480
нелинейные колебания
[ГЛ. XX
то, минуя интегрирование системы дифференциальных уравнении A7),
можно было бы непосредственно получить результат из первого
уравнения A7). Действительно, при установившемся режиме, т. е. при,
a (t) = const, имеем: d = 0. Поэтому, в соответствии с первым урав-
уравнением A7), находим
2л
/(a sin ф, ak cos q>) cos ф dq> = 0.
Воспользовавшись формулой A5), запишем
Отбросив нулевой корень при решении этого уравнения относи-
относительно а, получим
а — -
Подставив в эту формулу значения (8) и A0), найдем резуль-
результат B6).
3°. Исследование автоколебаний на фазовой пло-
плоскости.
Задача 20.26. Построить фазовую траекторию системы, изобра-
изображенной на рис. л. Нелинейное сопротивление, действующее на массу»
Скорость
К задаче 20.26, а, б.
пропорционально скорости колебания ? в степени 3/2. К системе
подводится энергия приводным ремнем, движущимся с постоянной
скоростью г» и воздействующим на массу т с силой трения, рав-
равной mgf. Коэффициент трения / не постоянен; он равен постоянной /<„
если масса находится в абсолютном покое или, другими словами,
если относительная скорость ремня и массы равна v. Если .?-поло-
.?-положительна, относительная скорость ¦» — Л будет меньше, а если j&
отрицательно, то больше v. Предполагая, что диапазон изменения
относительной скорости v^A не слишком велик, принять, в хоро-
«в] АВТОКОЛЕБАНИЯ 481
шем соответствии с действительностью, линейную зависимость коэффи-
коэффициента трения от Л, т. е. (рис. б)
/-/. + Р-*. A)
Первоначально масса находится в покое в начале координат. В момент
t — О к ней внезапно приложен малый положительный импульс
0,0445 нсек.
Решение. Дифференциальное уравнение движения системы запи-
запишем в виде
B)
Разделив обе части уравнения на от и перегруппировав члены, получим
C)
Это уравнение ясно показывает, что принятая в задаче линейная зави-
зависимость коэффициента трения от относительной скорости ремня и
массы приводит к появлению члена — $gjt и что динамический эффект
этого члена равносилен эффекту отрицательного вязкого сопротив-
сопротивления; если наклон р* отрицателен, то демпфирующий член $gjb поло-
положителен и система не может совершать автоколебания.
Отклоняясь несколько в сторону, предположим, что сопротивле-
сопротивление системы пропорционально первой степени скорости Л, а не сте-
степени три вторых. В этом случае знак величины a — $g определяет
положительное или отрицательное вязкое трение. Это в свою оче-
очередь показывает, будет ли движение системы динамически устойчиво
или неустойчиво, т. е. будут ли произвольно малые возмущения исче-
исчезать или раскачивать систему с непрерывно возрастающей амплиту-
амплитудой. Очевидно, что в действительности ни а, ни fig не остаются
постоянными в достаточно широком диапазоне движений системы, и
следовательно, внак их разности легко может измениться с плюса
на минус и наоборот.
Ввиду этого следует заключить, что при изучении автоколебаний
нелинейные члены в дифференциальных уравнениях движения играют
первостепенную роль и пренебрежение ими недопустимо.
Возвращаясь к рассматриваемой системе, используем деяьта-метод
для решения уравнения C). Переписав его в стандартной дельта-
форме, получим
* + *•(* + «)=/«* D)
где
^[^||&] (б)
Уравнение D) ясно показывает, что система имеет «среднее» рав-
равновесное смещение, равное fag/k2 (рис. в). Поэтому помещаем начало
482
нелинейные колебания
[ГЛ. XX
координат на фазовой плоскости- в точку x=fag/k2 и строим дельта-
кривую (см. рис. е). Численные значения величин приняты следующие:
/ng = 4,45 н, /а = 0,5, c = 175h/jk, а= 15,7 {смсек)-1^,
Р = 2,0 сек/м.
При этих данных абсцисса среднего равновесного положения равна
^ = -^?=1,27 см,
собственная частота системы k =19,7 сек'1, а уравнение E) для б
принимает вид
б = 6 (v) = 3,54v3/2 - 0,98v м. (б)
При действии на массу указанного в условии задачи импульса мгно-
мгновенно возникает положительная скорость, равная Л = 0,098 м/сек,
а соответствующая координата
равна приблизительно
v = ~- = 0,00497 м
— фазовая точка А. Отправ-
Отправляясь от этой точки, строим
фазовую траекторию ранее
рассмотренным графическим
методом.
Фазовая траектория развер-
развертывается в виде спирали, до-
достигая через один оборот точ-
точки В, через два оборота точки
С и через четыре с неболь-
небольшим оборота точки Е. После
этого она все больше и боль-
больше приближается к штриховой
предельной траектории. Штри-
Штриховая траектория описывает установившееся движение системы. Она
соответствует автоколебаниям с амплитудой, равной примерно семи-
семикратному среднему равновесному смещению. Эта траектория не явля-
является окружностью, несмотря на то, что точки' пересечения ее с коор-
координатными осями равноудалены от начала координат. Поэтому движение
системы только приблизительно синусоидальное. Эта фазовая траек-
траектория, описывающая установившееся автоколебание системы, называется
предельным циклом.
Очень важным является то обстоятельство, что траектория пре-
предельного цикла не зависит от начальных условий и от любых
последующих возмущений движения. Если начальные условия таковы,
что исходная фазовая точка А лежит вне предельного цикла, то
фазовая точка будет двигаться снаружи по спирали, приближающейся
цикл
К задаче 20.26, в.
4 6] АВТОКОЛЕБАНИЯ 483
все ближе и ближе к штриховой траектории. Покажем это. Пусть
к массе т в начальный момент времени приложен положительный
импульс, равный 1,35 нсек. Тогда в момент времени t = 0 масса
будет иметь положительную скорость хо = 1,35/0,454 = 2,96 м/сек,
а координата vo = xjk будет равна vo = 2,96/19,7 = 0,15 м.
Построим фазовую траекторию для этих начальных условий:
vo = O,15, xQ = 0. Изображающая точка в начальный момент нахо-
находится вне предельного цикла. Фазовую траекторию будем строить
с помощью произвольных шагов по оси v.
1) Первый шаг: 0,1 <v«S 0,15.
Среднее значение 6-функции в этом интервале, согласно F),
будет
Vi 0,1
$!= ^ [ 8(v)dv=: 2. { C,54V3/2-0,98v)dv = 0,035 м.
V, 0,15
Координата л:х центра Ох первой дуги фазовой траектории будет
Xi = — Sj = — 0,035 м. Из центра с координатами (— 0,036; 0), через
начальную точку фазовой траектории с координатами @; 0,15) про-
проводим первую дугу в интервале v = 0,15 -т-0,1.
2) Второй шаг: 0,05 ssSv< 0,1.
Среднее значение б-функции в этом интервале находится анало-
аналогично первому шагу: 6а = 0,0005. Координата х% центра Ог второй
дуги будет хг= — 6а = —0,0005 м. Таким образом, координаты вто-
второго центра О2 будут (—0,0005; 0). Из этого центра через конец
первой дуги фазовой траектории проводим вторую дугу в интер-
интервале v = 0,1т-0,05.
3) Третий шаг: 0«sv*s0,05.
Среднее значение fi-функции для третьего интервала будет
б8 = — 0,0085 м. Третью дугу строим аналогично предыдущим.
Данные для дальнейших шагов сведены в таблицу, которая при-
приводится для проверки самостоятельной работы читателя:
4) - 0,05 sg v «S 0, х4 = - 0,0085 м,
5) — 0,1 < v < — 0,05, хъ = 0,0005 м,
6) - 0,12 ^ v < - 0,1, хъ= 0,02 м,
7) - 0,12 sev=sS- 0,1, лг, =0,02 м,
8) — 0,1 < v s? — 0,05, х8 = — 0,0005 м,
9) -0,05<v*gO, *e = —0,0085 м,
10) 0 < v йЦ 0,05, х10 — 0,0085 м,
11) 0,05 < v < 0,1, хп = - 0,0005 м,
12) 0,1 <v=sS 0,11, дг1а== -0,0158 м,
13) 0,1 s=Sv<0,l, дг18= —0,0158 м,
14) 0,05 ss? v =sS 0,1, хи = - 0,0005 м,
484
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
[ГЛ. XX
15) 0 =sj v ess 0,05,
16) - 0,05 < v < 0,
17) -
18) -
19) -0,105<v<-0,1,
20) - 0,К v < - 0,05,
21) - 0,05 < v < 0,
22) 0 < v <* 0,05,
23) 0,05 < v < 0,1,
24) 0,05 sg v < 0,1,
25) 0=^v<0,05,
и т.
хи = 0,0086 м,
хи = - 0,0085 м,
*„«. -0,0005 м,
дгао
,,
- 0,0005 м,
лц - 0,0085 м,
лгм = 0,0085 м,
лги = 0,0005 м,
лг24 = 0,0005 л,
дг25 = 0,0085 л
д.
На рис. г представлена фазовая траектория, полученная в резуль-
результате построения. Это скручивающаяся спираль все более и более
приближающаяся к тому же пре-
предельному циклу, обозначенному
на рис. z штриховой линией.
Исходя из сказанного, заклю-
заключаем, что предельный цикл опи-
сыйает единственное установив-
установившееся движение системы и,
следовательно, все фазовые точки,
не лежащие на штриховой траек-
траектории, включая точку средне-
равновесного положения, изобра-
изображают динамически неустойчивые
состояния системы.
В рассмотренном примере тра-
траектория предельного цикла почти
круговая, установившееся движе-
движение поэтому почти синусоидальное,
а частота автоколебаний очень близка к величине k, собственной
частоте системы без сопротивления. Однако во многих других зада-
задачах на автоколебания траектория предельного цикла сильно отлича-
отличается от окружности, а частота автоколебаний мржет совсем не
совпадать с величиной k.
К задаче 20.26, в.
ПРИЛОЖЕНИЕ
МЕЖДУНАРОДНАЯ СИСТЕМА ЕДИНИЦ (СИ)
В декабре 1960 г. XI Генеральная конференция по мерам и весам приняла
единую Международную систему единиц (СИ), которая должна применяться
как предпочтительная во всех областях науки, техники и народного хо-
хозяйства.
Процесс введения этой системы в практику (и особенно тех ее единиц,
которые еще не получили широкого распространения) будет осуществляться
постепенно в течение ряда лет—в переходный период, конечно, будут сохра-
сохраняться и традиционные единицы систем СГС и МкГС, использованные в насто-
настоящей книге.
Приведем для справок таблицу Международной системы единиц по
ГОСТу 9867-61:
Наименование величины
Единица измерения
Основные единицы
Длина
Масса
Время
Сила электрического тока
Метр
Килограмм
Секунда
Ампер
Дополнительные единицы
Плоский угол
Телесный угол
Радиан
Стерадиан
Сокращенные обозна-
обозначения единицы
русские
м
кг
сек
а
рад
стер
латнпскхе
или гре-
греческие
m
kg
s
А
rad
4S6
ЛРИЛОЖЕНИВ
П родолжение
Наименование величины
Единица измерения
Производные единицы
Площадь
Объем
Частота
Объемная масса (плотность)
Скорость
Угловая скорость
Ускорение
Угловое ускорение
Сила
Давление (механическое на-
напряжение)
Динамическая вязкость
Кинематическая вязкость
Работа, энергия, количество
теплоты
Мощность
Количество электричества
Электрическое напряжение,
разность потенциалов,
электродвижущая сила
Напряженность электриче-
электрического поля
Электрическое сопротивле-
сопротивление
Электрическая емкость
Поток магнитной индукции
Индуктивность
Магнитная индукция
Напряженность магнитного
поля
Квадратный метр
Кубический метр
Герц A/сек)
Килограмм на куб.
МРТП
Метр в секунду
Радиан в секунду
Метр на секунду в
1ГПЯ ЛПЯФА
п-ВаЩНЦъ
Радиан на секунду
в квадрате
Ньютон (кг-л/сек»)
Ньютон на кв. метр
Ньютон-секунда на
кв. метр
Кв. метр на секунду
Джоуль (н-м)
Ватт (дж/сек)
Кулон (а • сек)
Вольт (em/a)
Вольт на метр
Ом (в/а)
Фарада (к/в)
Вебер (к/ом)
Генри (вб/а)
Тесла (вб/яа)
Ампер на метр
Сокращенные сбозиа-
чения
русские
Л»
Я»
щ
кг/м*
м/сек
рад/сек
м/сек3
рад/сек2
н
н/м*
н сек/м*
м*[сек
дж
em
к
в
в/м
ом
ф
вб
гн
тл
а/м
единицы
ttfh'rUU^I/ITA
лихинскис
или гре-
греческие
т»
т«
Hz
kg/m»
m/s
rad/s
m/s*
rad/s»
N
N/m«
Ns/m»
m*/s
J
W
С
V
V/m
Q
F
Wb
H
T
A/m
Определения основных единиц
Метр—длина, равная 1650 763,73 длины волн в вакууме излучо-
иия, соответствующего переходу между уровнями 2р10 и 5of6 атома крип-
тона-86.
Кил огр а мм—единица массы — представлен массой международного
прототипа килограмма.
ПРИЛОЖЕНИЕ 487
Секунда —1/31 556925,9747 часть тропического года для 1900 г. янва-
января 0 в 12 часов эфемеридного времени.
Ампер —сила неизменяющегося тока, который, проходя по двум парал-
параллельным прямолинейным проводникам бесконечной длины и ничтожно малого
кругового сечения, расположенным на расстоянии 1 м один от другого в вакууме,
вызвал бы менаду этими проводниками силу, равную 2 • 10 * единиц силы
Международной системы на каждый метр длины.
Некоторые переводные множители
1 кГ=9,80665 к =«9,81 н 1 кГл = 9,80665 джъ9,81 дж
1 дина= 10"8 н 1 эрг= 10~7 дж
1 кГ/см*=98 066,5 н/м* 1 кал = 4,№8 дж
1 дина/см*=0,1 к/ж*
Моисей Иосифович Бать
Георгий Юстинович Джанелидзе
Анатолий Саулович Кельзон
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
в примерах и задачах
Том III
М... 1973 г.. 488 стр. с илл.
Редактор А. Г. Мордвшщев,
Техн. редактор С. Я. Шкляр.
Корректор Т. А. Панькова.
Сдаио в набор 20/VI 1973 г. Подл, к печати
31/Х 1973 г. Бумага 60X90'/i«. Тип. № 3. Физ. печ.
л. 30,5. Условн. печ. л. 30,5. Уч-изд, л. 27,64. Ти-
Тираж 100 000 SK3. Т-16936. Цена книги 87 коп.
Заказ Hi 883.
Издательство «Наука»
Главная редакция
физико-математической литературы
117071, Москва, В-71, Ленинский проспект, 15
Ордена Трудового Красного Знамени Ленинград-
Ленинградская типография )Й 1 «Печатный Двор» имени
А. М. Горького Союзполиграфпроиа при Государ-
Государственном комитете Совета Министров СССР по
делан издательств, полиграфии и книжной, тор-
торговли. Ленинград, Гатчинская ул., 26,