/


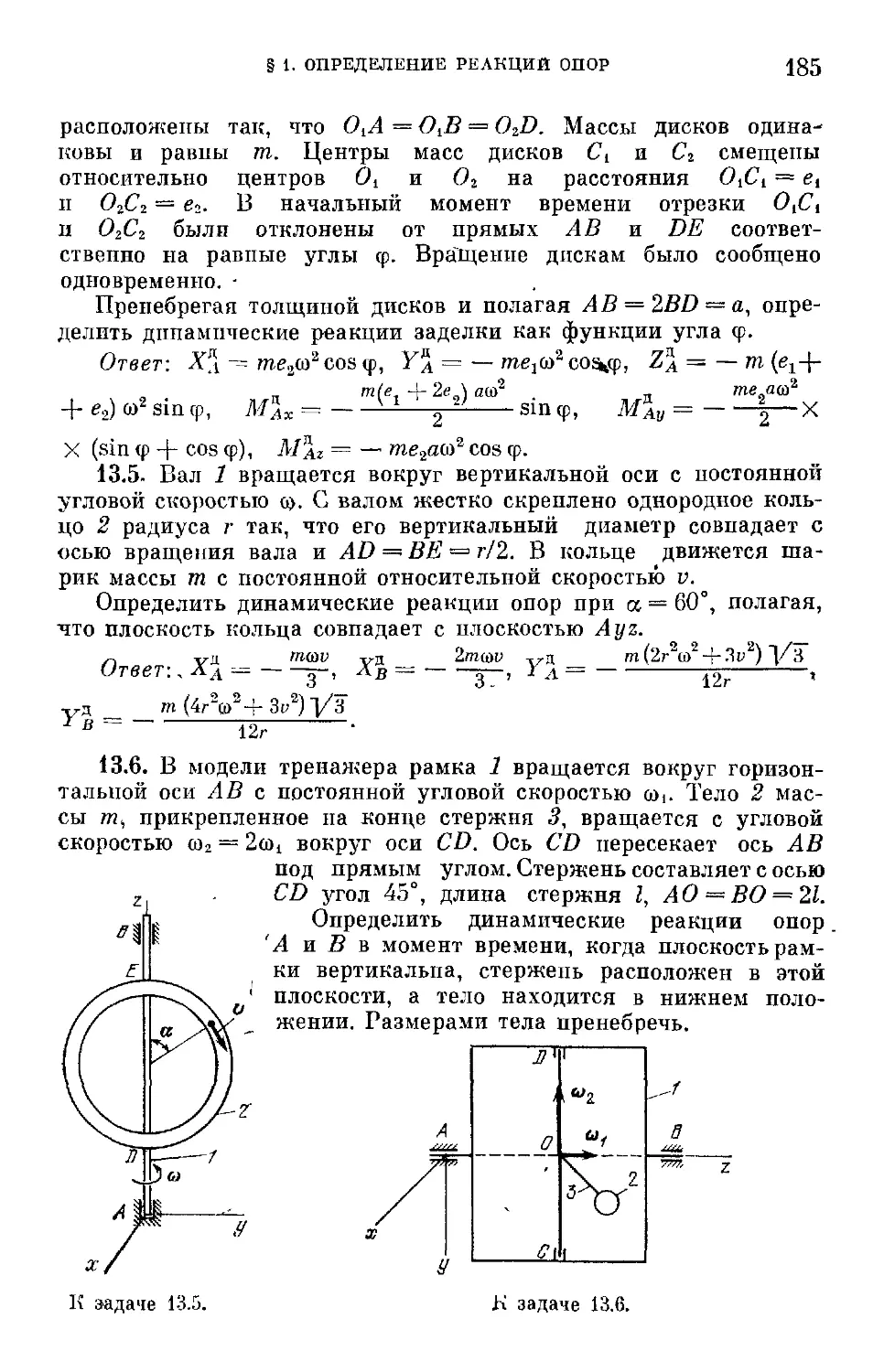
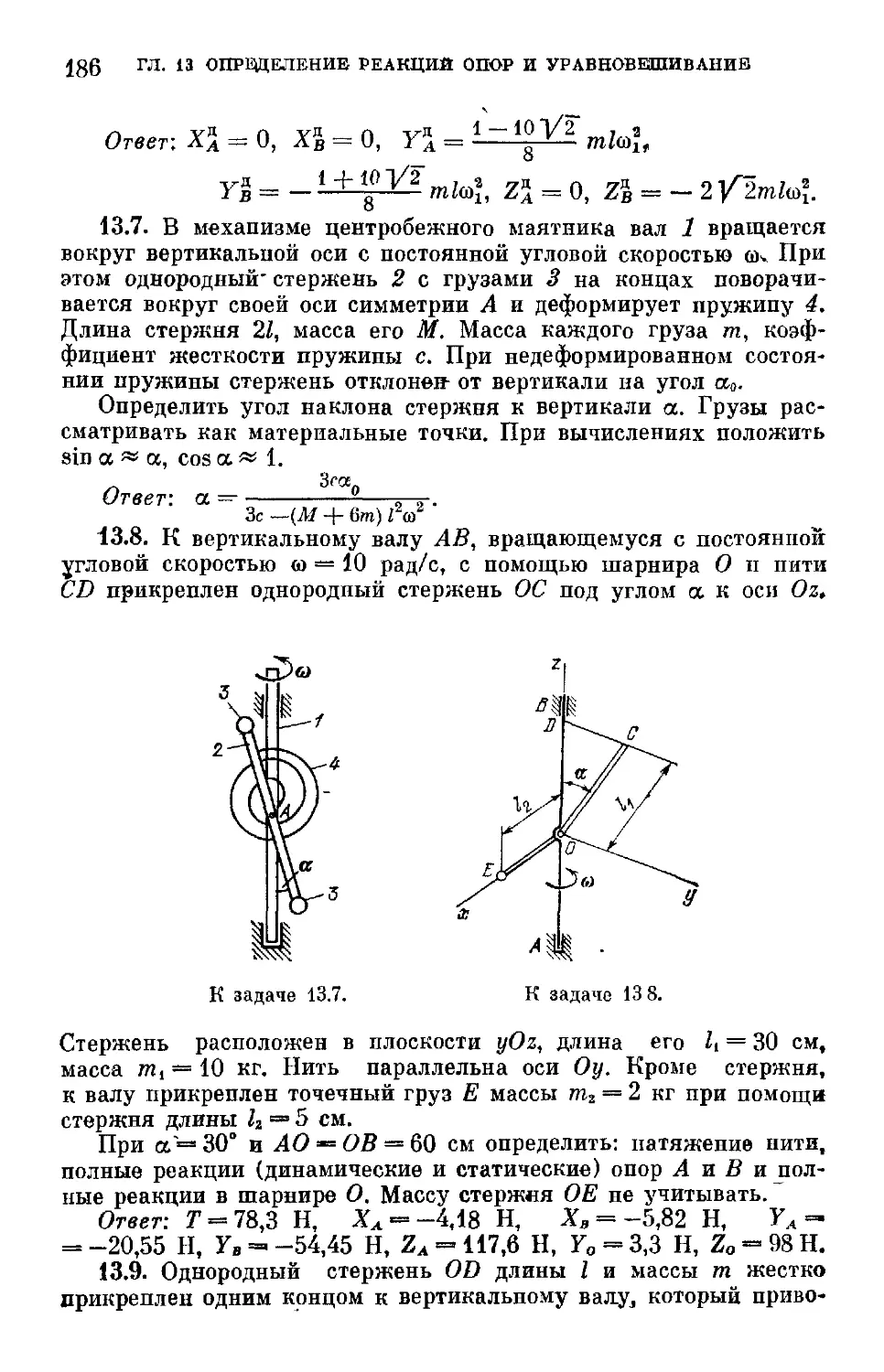


Author: Колесников К.С.
Tags: общая механика механика твердых и жидких тел физика теоретическая механика задачи по физике
Year: 1983




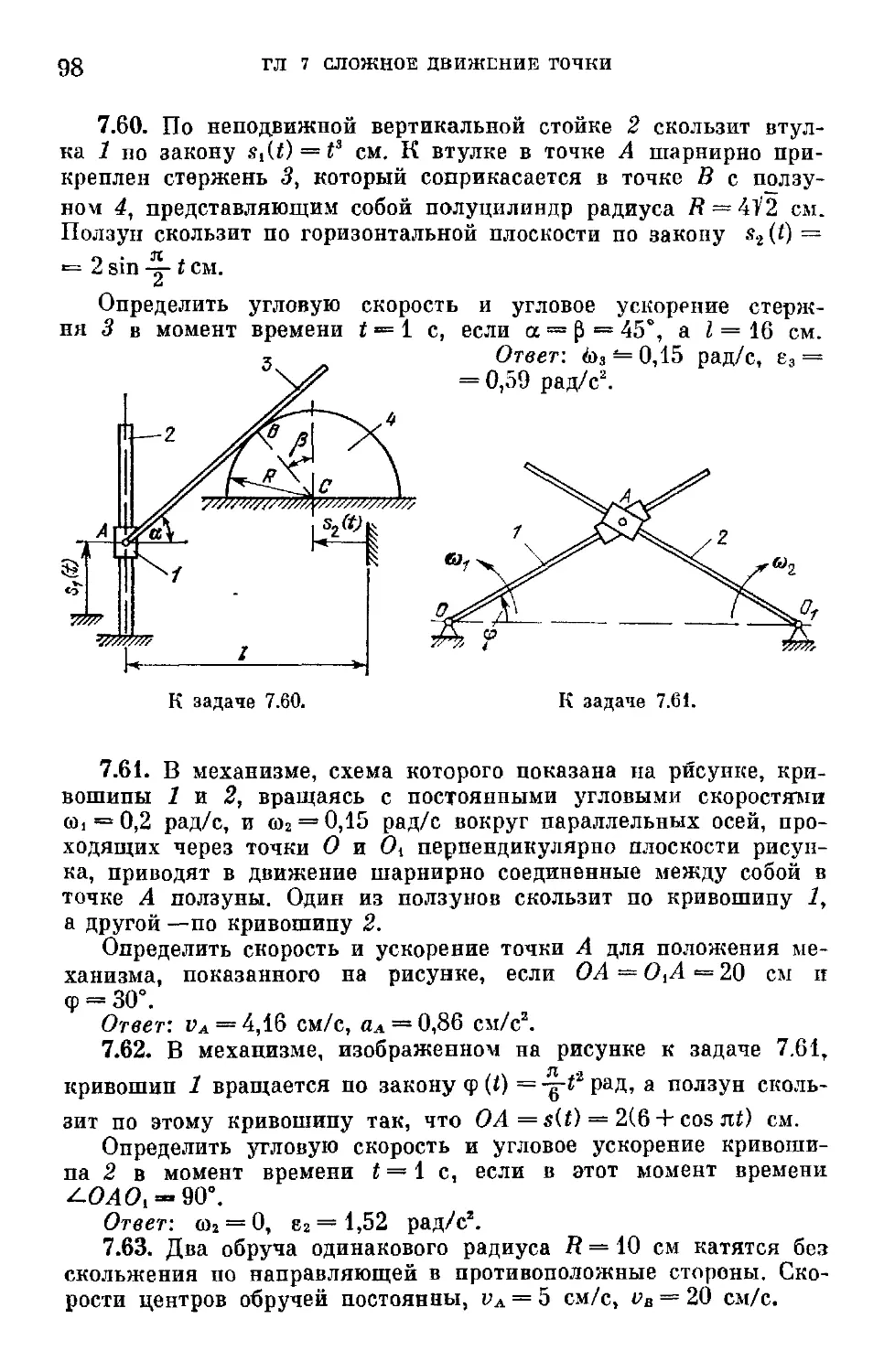
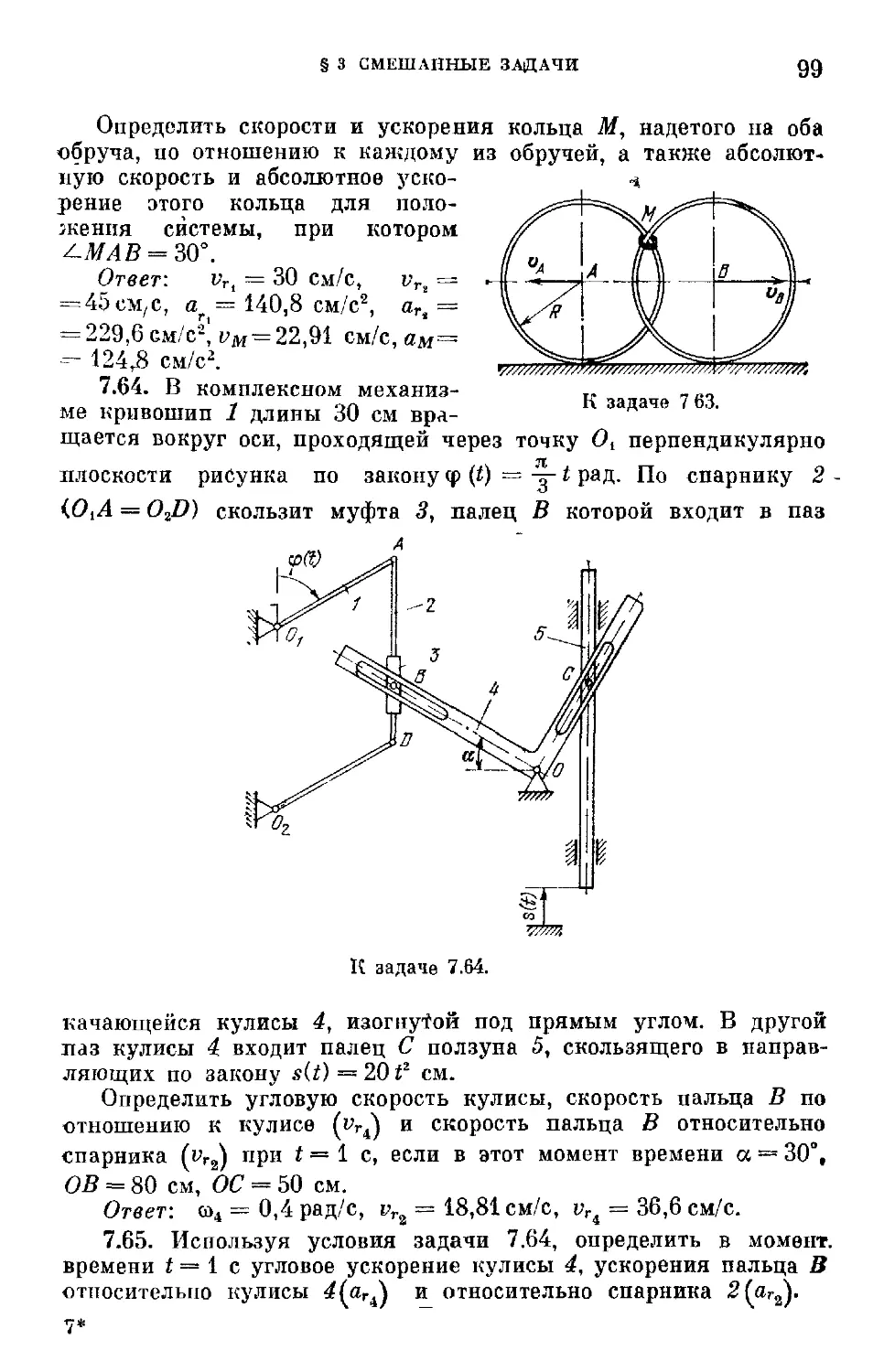
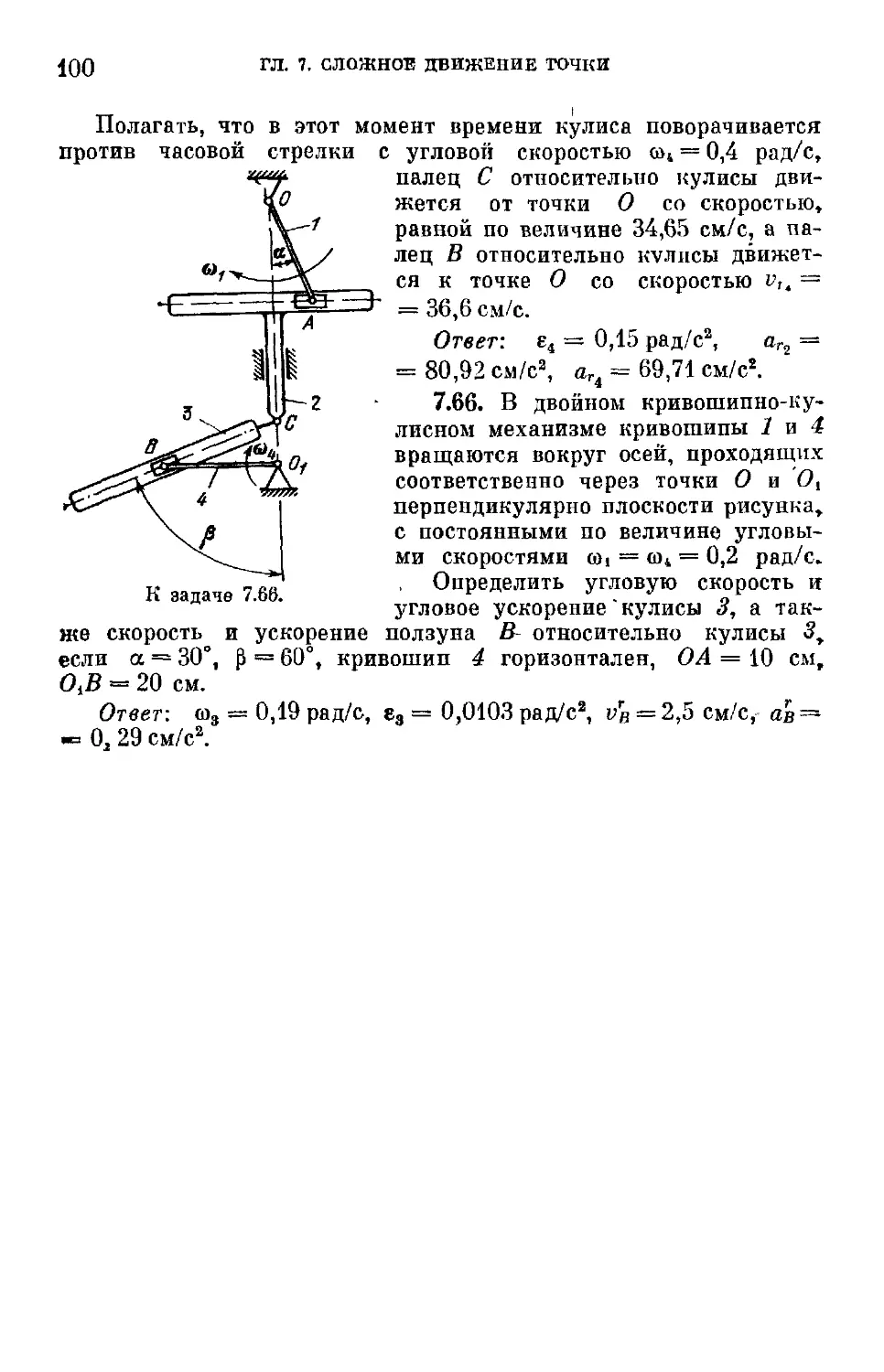
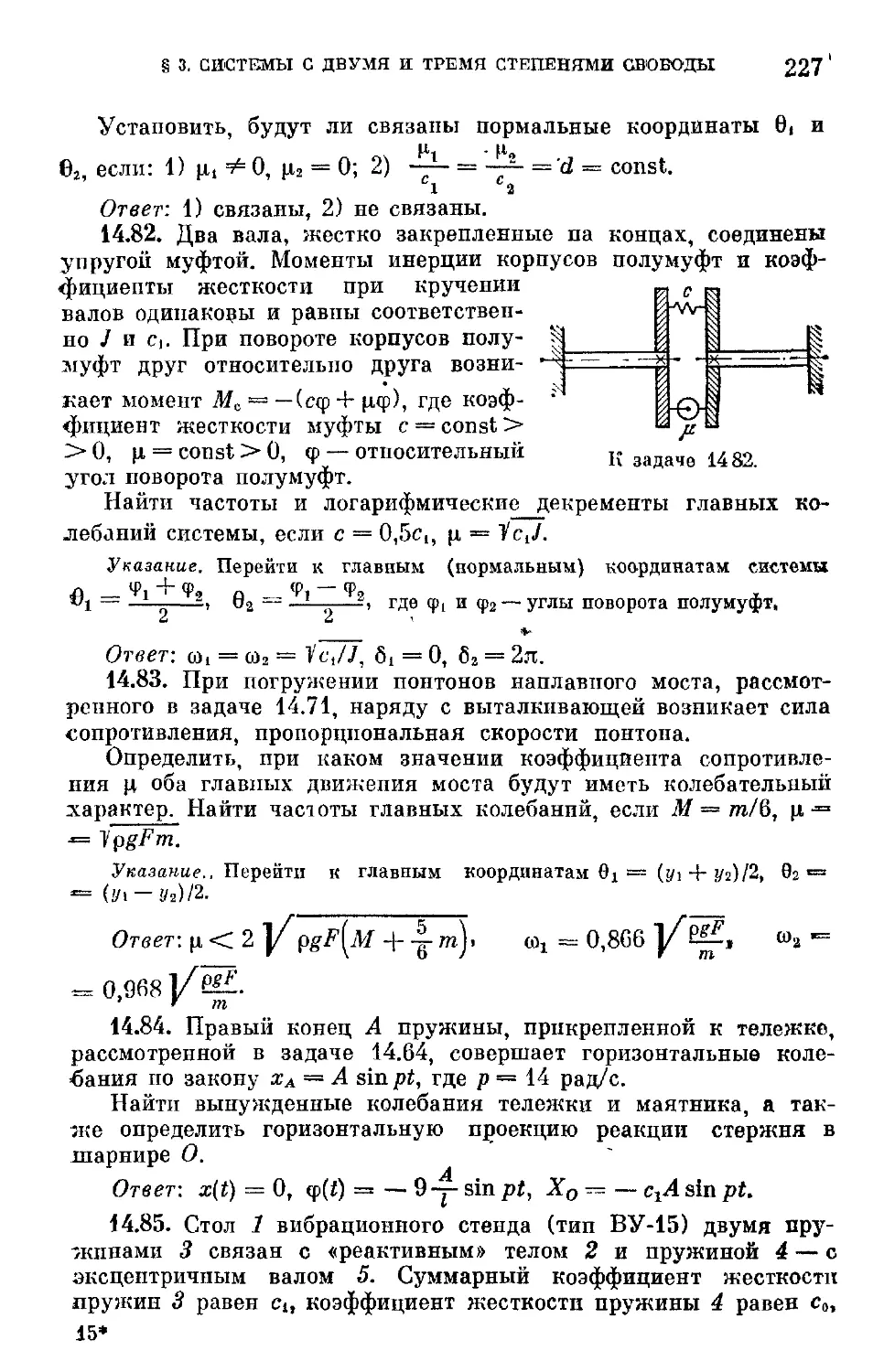
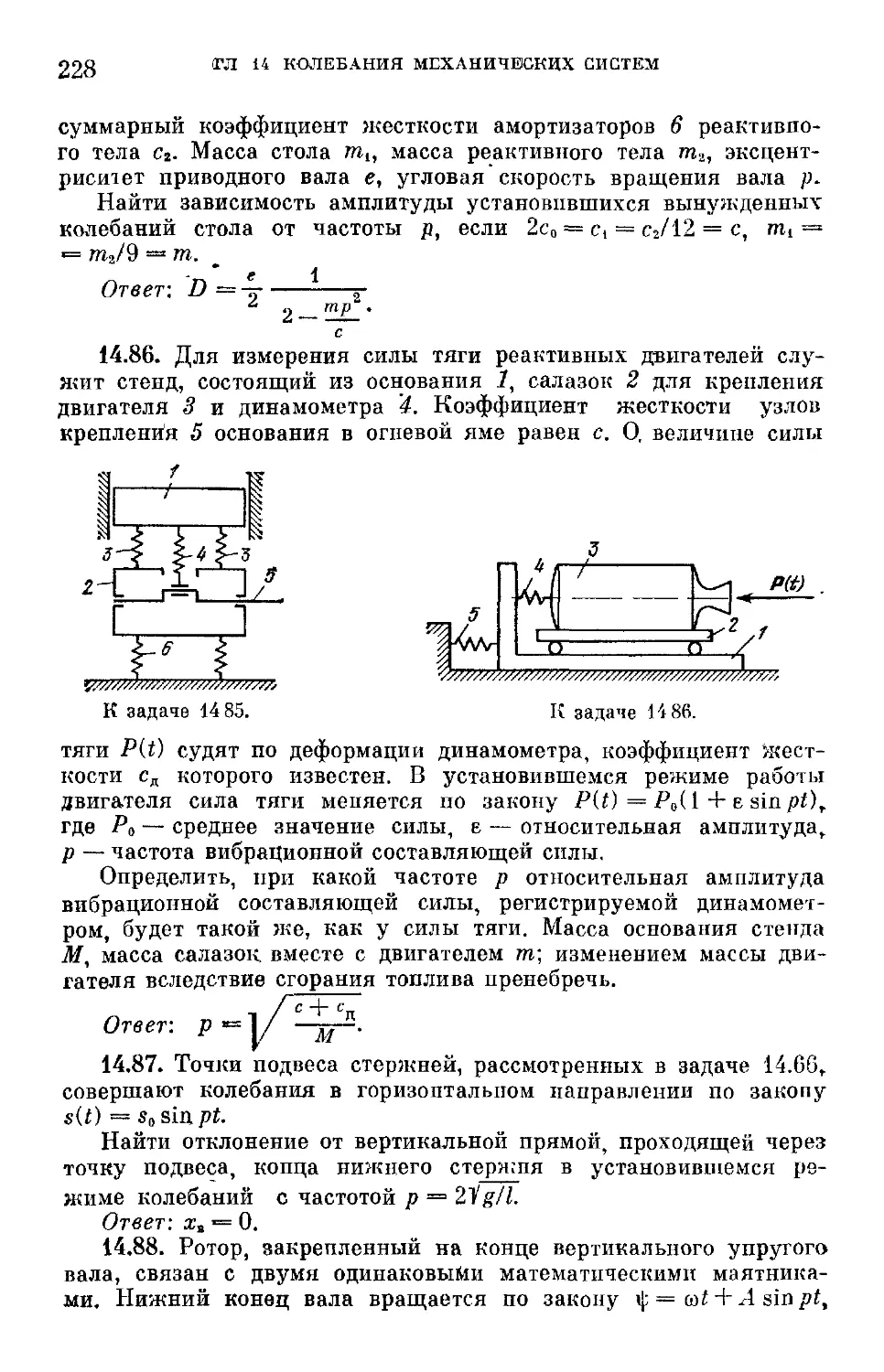
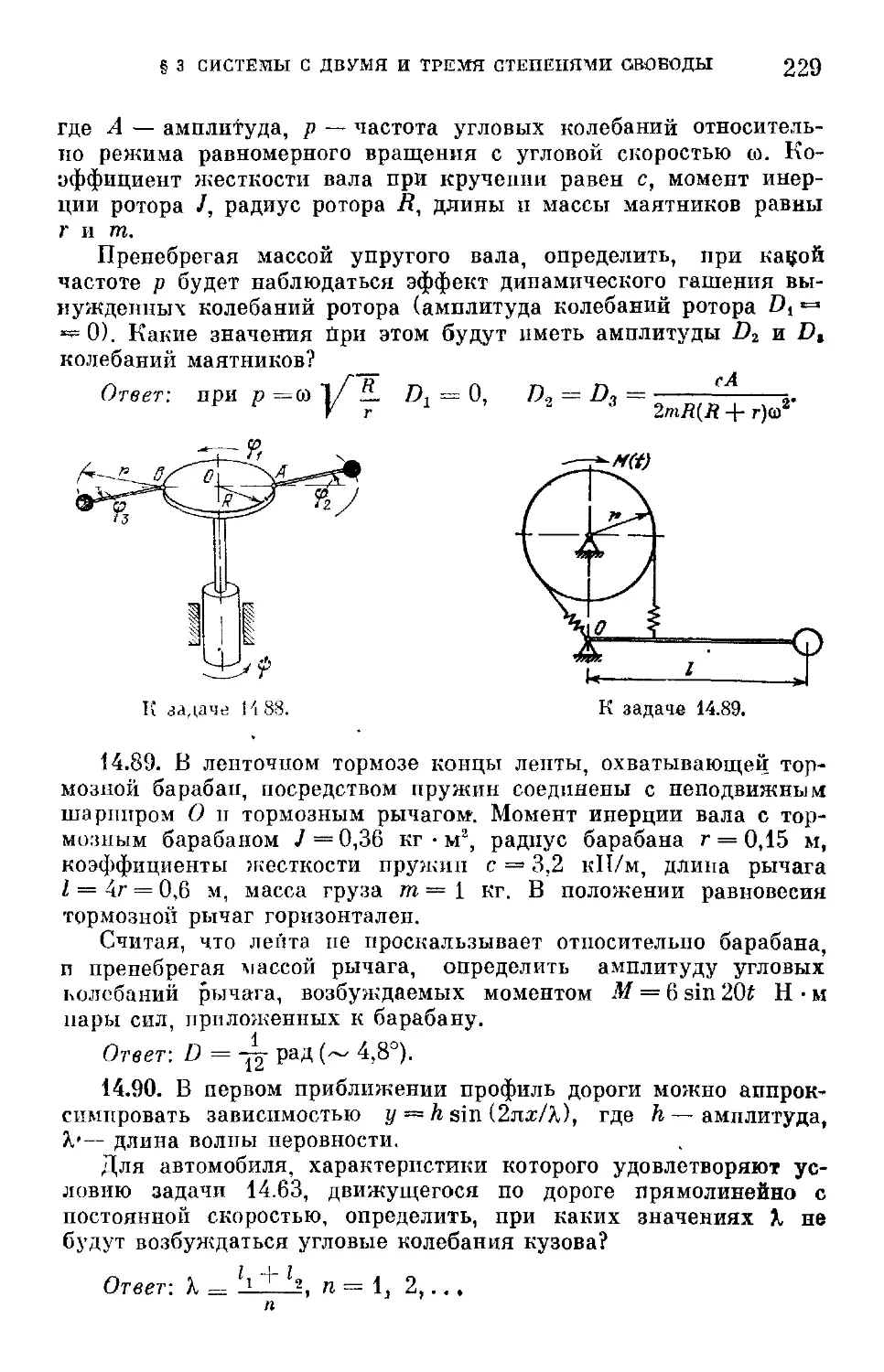
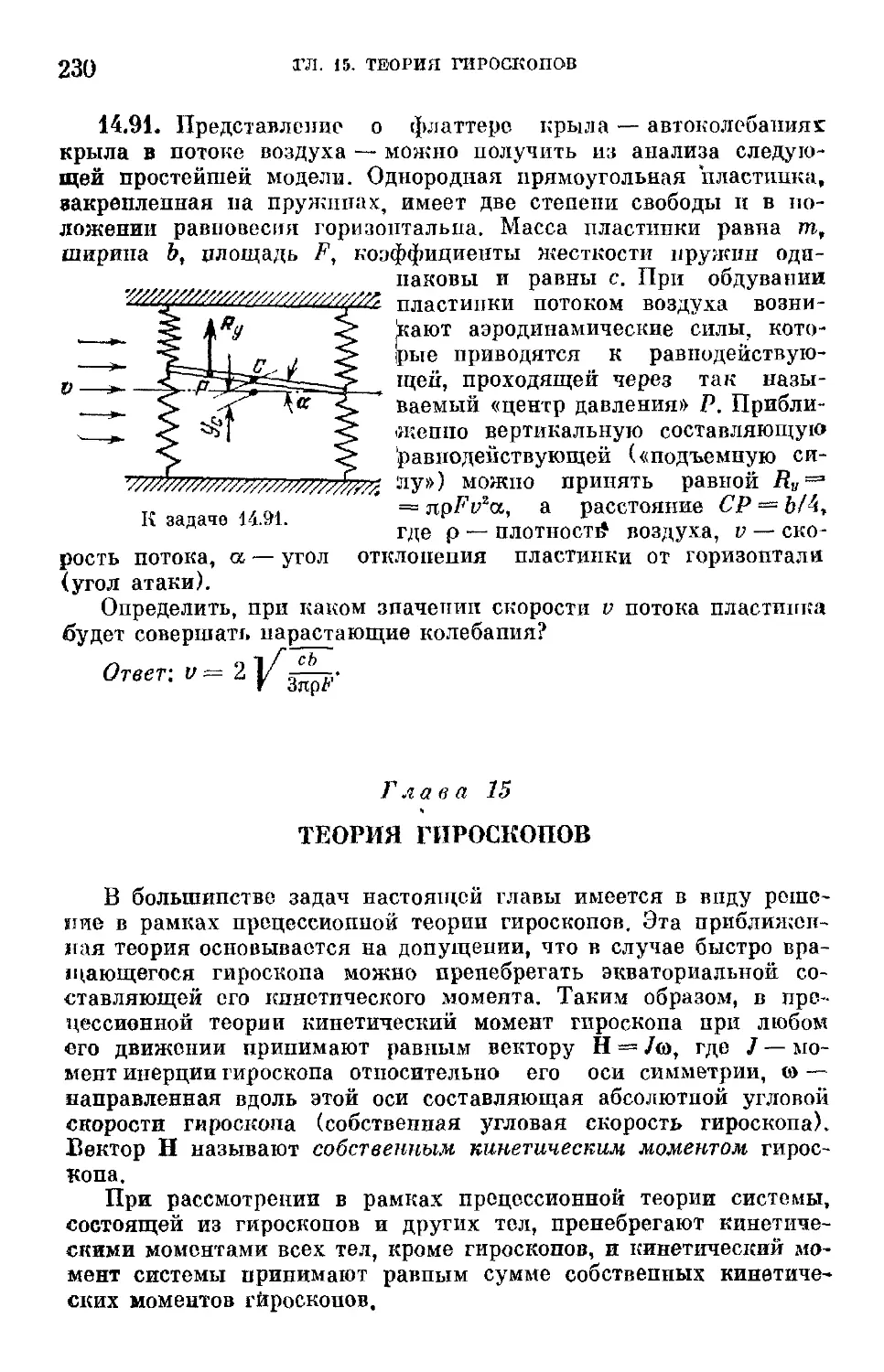
Text
СБОРНИК ЗАДАЧ
ПО ТЕОРЕТИЧЕСКОЙ
МЕХАНИКЕ
под редакцией
К. С. КОЛЕСНИКОВА
Допущено Министерством
высшего и среднего специального образования СССР
в качестве учебного пособия для студентов
высших технических учебных заведений
МОСКВА <НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
1983
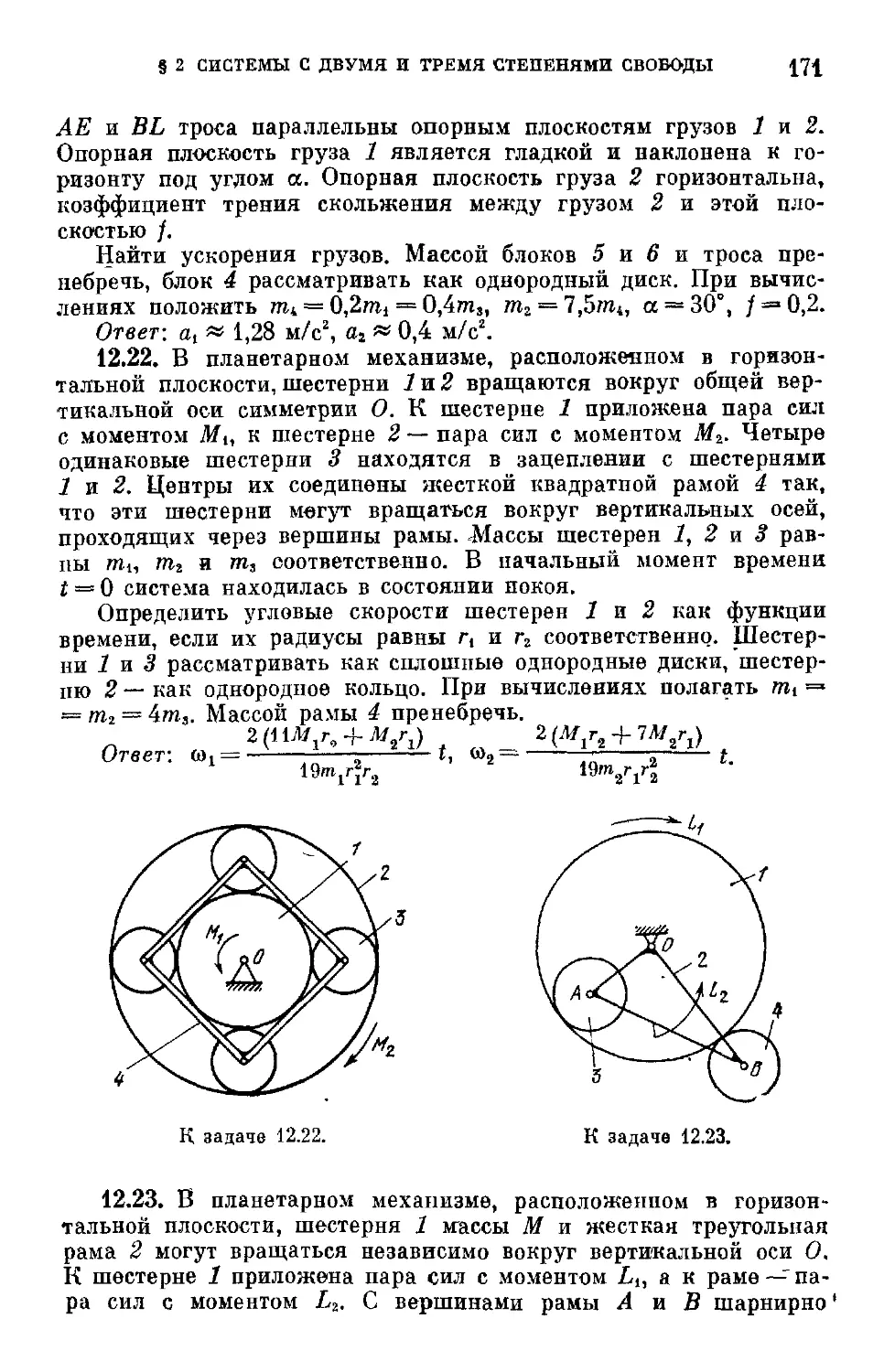
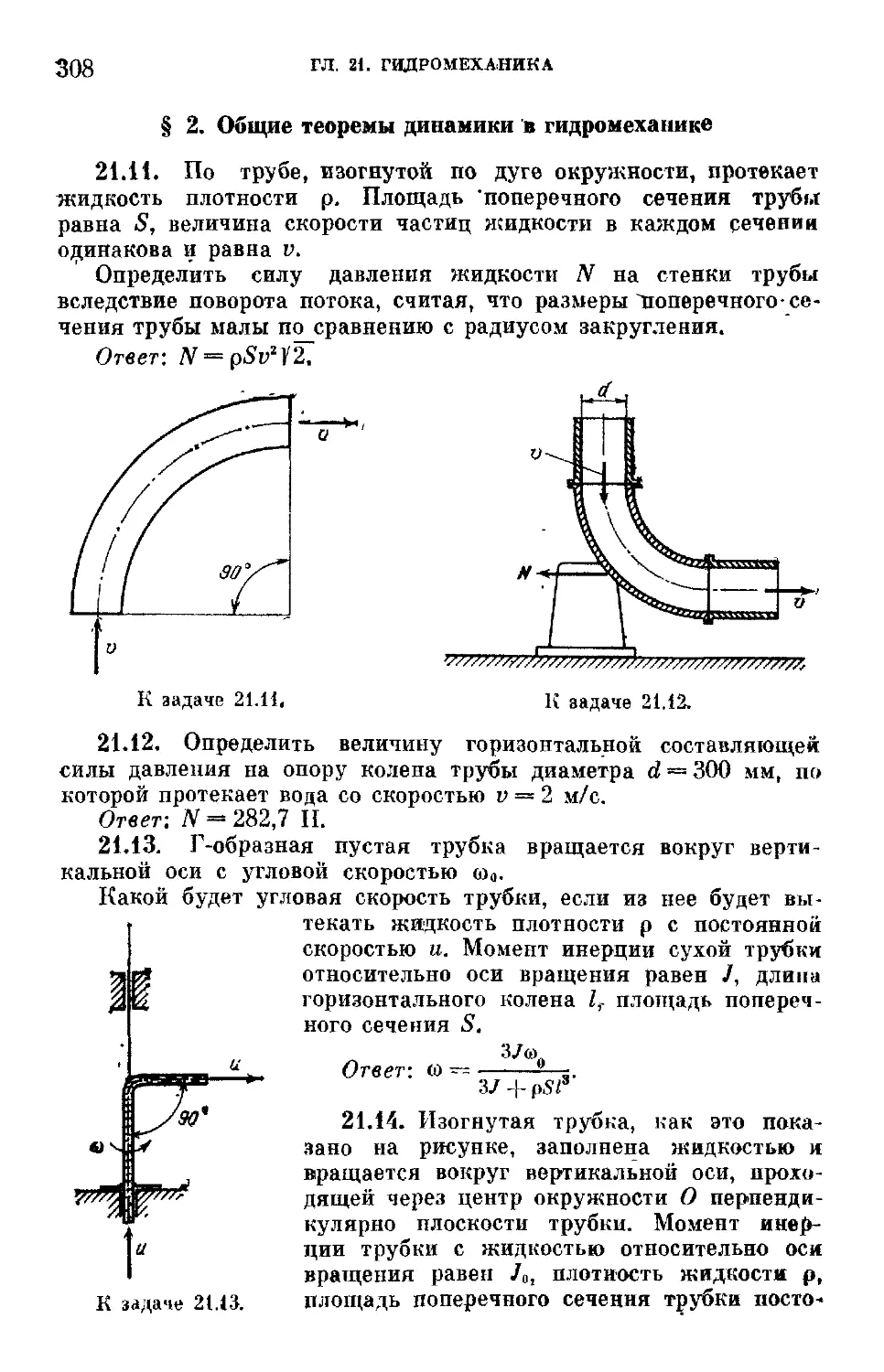
22.21
С 23
УДК 531
АВТОР Ы-
К. С. КОЛЕСНИКОВ, Г. Д. ВЛЮМИН, В. И. ДРОИГ
В. В. ДУБИНИН, М. М. ИЛЬИН, А. И. ОГУРЦОВ '
Л. А. ПОЖАЛОСПШ, Ю. С. САРАТОВ
Сборник задач по теоретической механике/Под ред. К. С. К о л е с н и-
кова.-М.: Наука, Главная редакция физико-математической литературы.
1 ММ.-320 с.
Сборник задач охватывает все разделы курса Теоретической механики
и наряду с этим содержит главы «Электромеханика», «Гидромеханика»,
«Автоматическое управление и регулирование», выходящие за рамки тра-
дициопного курса. Значительно расширены в сравнении с другими задач-
задачниками главы, относящиеся к теории гироскопов, теории устойчивости, уда-
удару, теории колебаний. Сборник отличается от других также наличием боль-
большого числа прикладных задач, в которых рассматриваются реальные ме-
механизмы, машины, устройства, встречающиеся в современной технике,
В каждом из разделов сборника имеется часть задач повышенной сложно-
«|и; они могут быть использованы для углубленного изучения механики в
кружковой работе, при подготовке к олимпиадам. Сборник предназиачается
для студентов высших технических учебных заведений.
Илл. 634.
п/с <£? Издательство «Наука»,
— СМ6 t Главная редакция
123-82 физико-\гатечагическо* литературы,
1983
_, 12382 физи
0оЗ@2) 83 1983
ОГЛАВЛЕНИЕ
Предисловие
Раздел первый
СТАТИКА
Глава 1. Плоская система сил , ^
§ 1. Равновесие тела .... 7
§ 2 Равновесие системы тел . <•
§ 3. Равновесие с учетом трения 1^
Глава 2. Пространственная система сил 21
§ 1. Приведение системы сил к центру 21
§ 2 Равновесие произвольной системы сил . .... 22
§ 3. Равновесие пространственных стержней 26
§ 4. Равновесие механизмов с лубчатыми парами ^9
Раздел второй
КИНЕМАТИК\
Г I а в а 3. Кинематика точки . . , 31
| 1. Естественный способ задания движения точки .... 31
§ 2. Коордииатпые способы задания движения точки .... ^2
Глава 4. Простейшие движения твердого тела . _. 40
§ 1 Вращение тела вокруг неподвижном-оси. Поступательное дви-
движение тела 40
§ 2. Преобразование простейших: днижении тела 44
Глава 5. Плоское движение твердого тела 51
§ 1. Системы с одной степенью свободы SI
§ 2. Системы с двумя степенями свободы f»l
Глава 6. Сферическое движепие и общий случай движения твердо-
твердого тела *>8
| 1 Сферическое движепие и общий случай движения тела . . fiS
{ 2. Пространственная ориентация 74
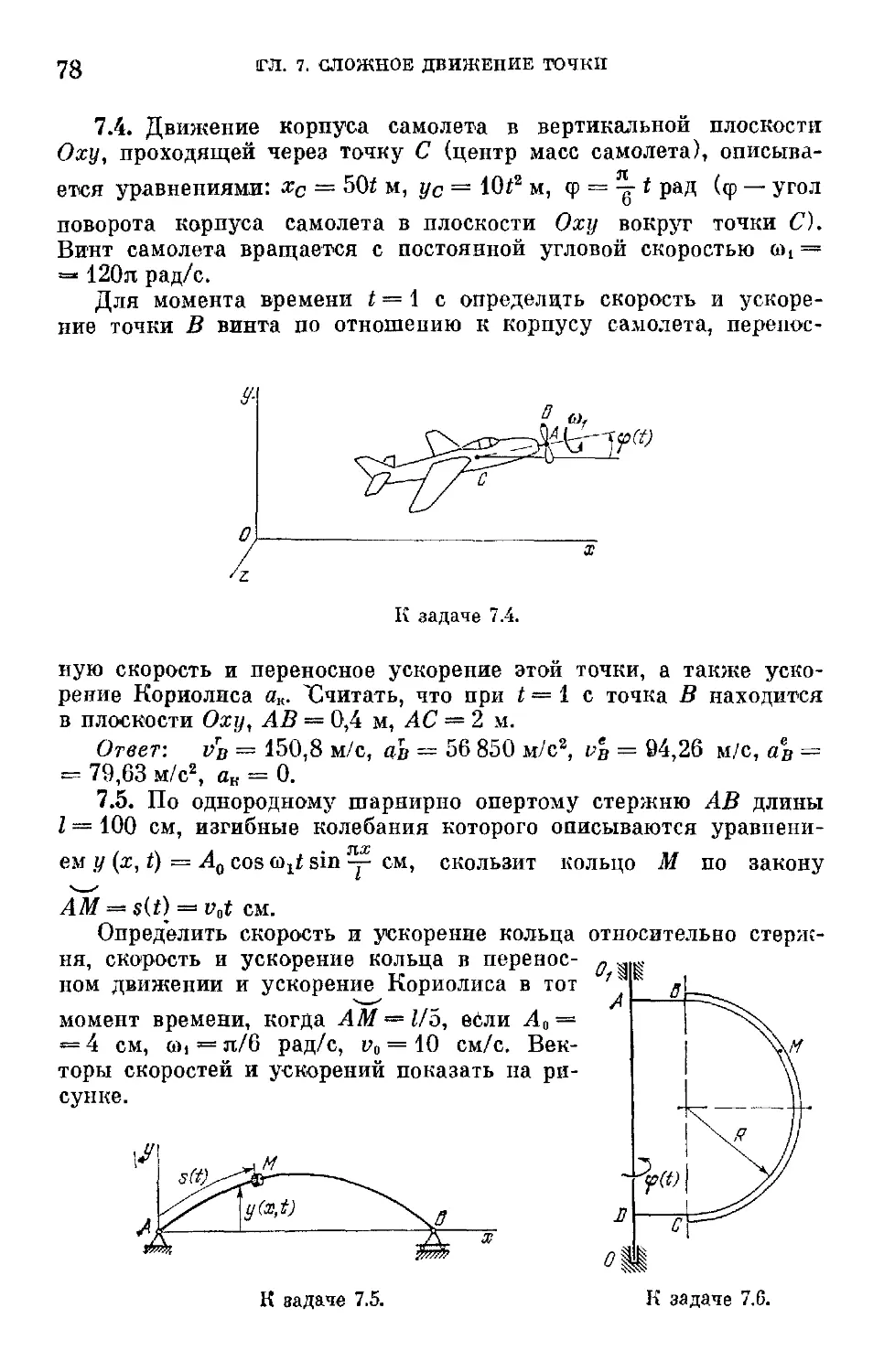
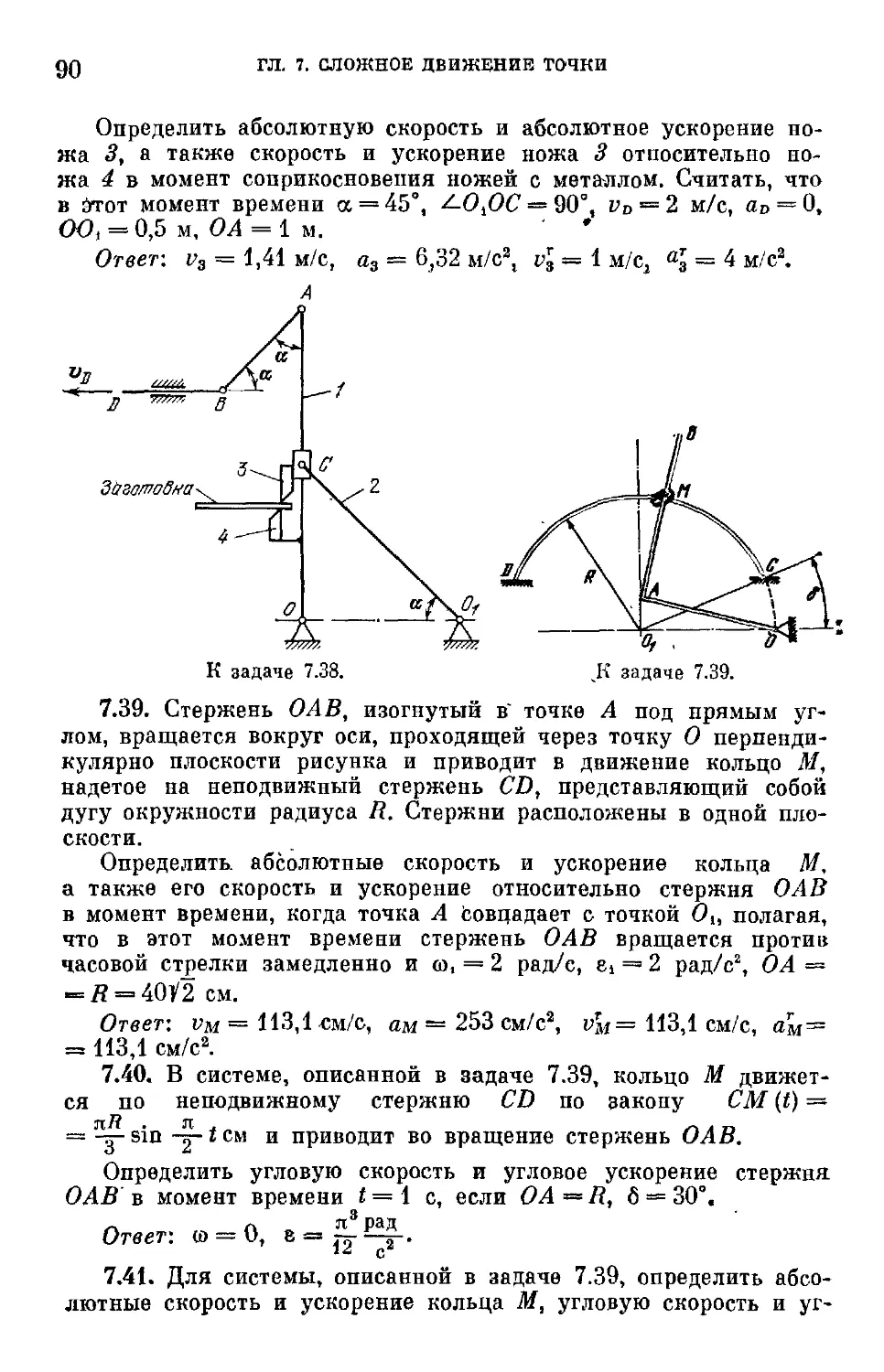
Глава 7. Сложное движение точки 7rt
| 1. Движение точки нри заданных переносном и относительном
ее движениях 78
!♦
4 ОГЛАВЛЕНИЕ
S 2. Двц/кенче точки при извесгвои траектории ее абсолютного
■- движения , 82
| 3. Смешанные задачи 95
Раздел третий
ДИНАМИКА
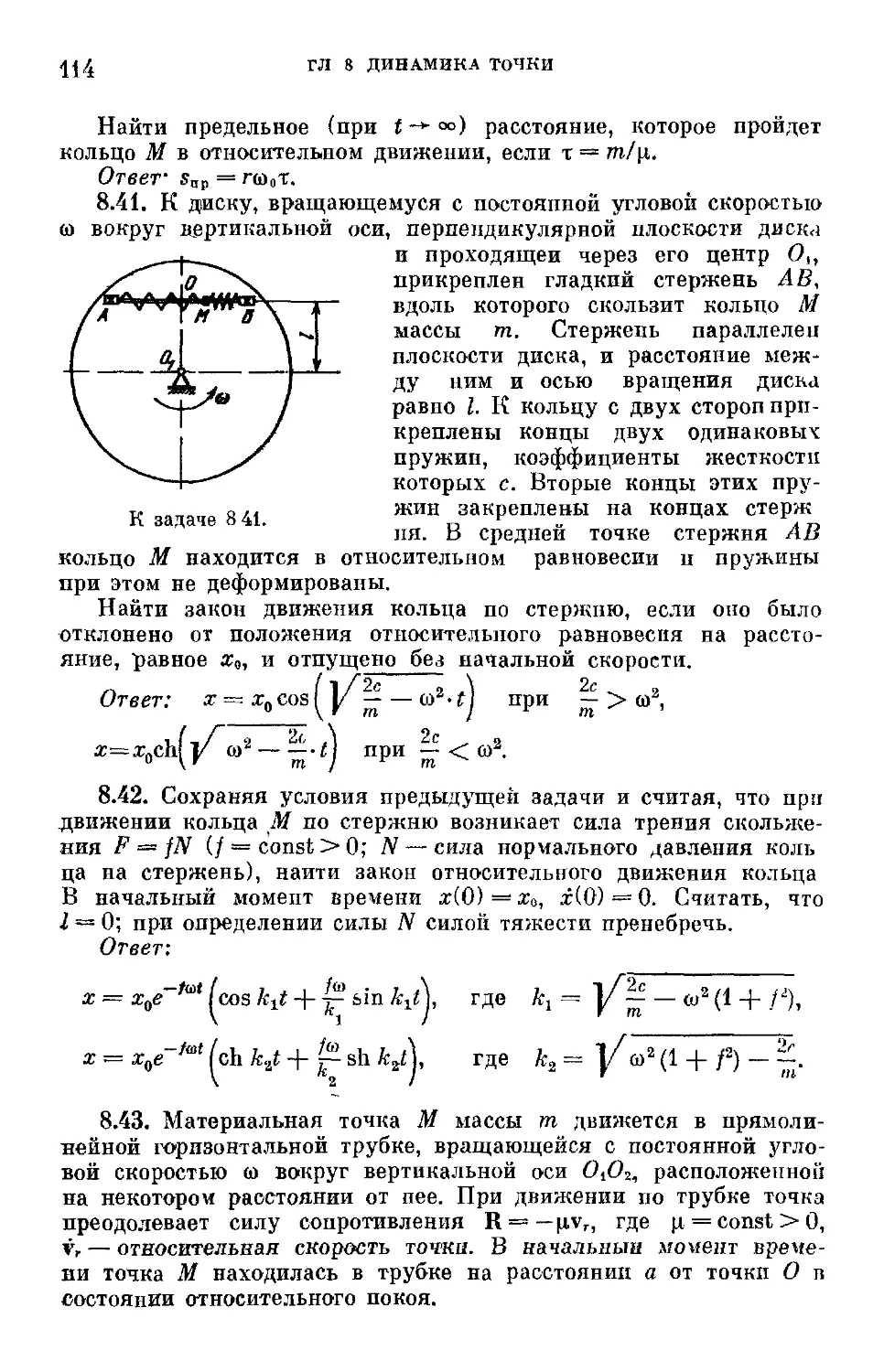
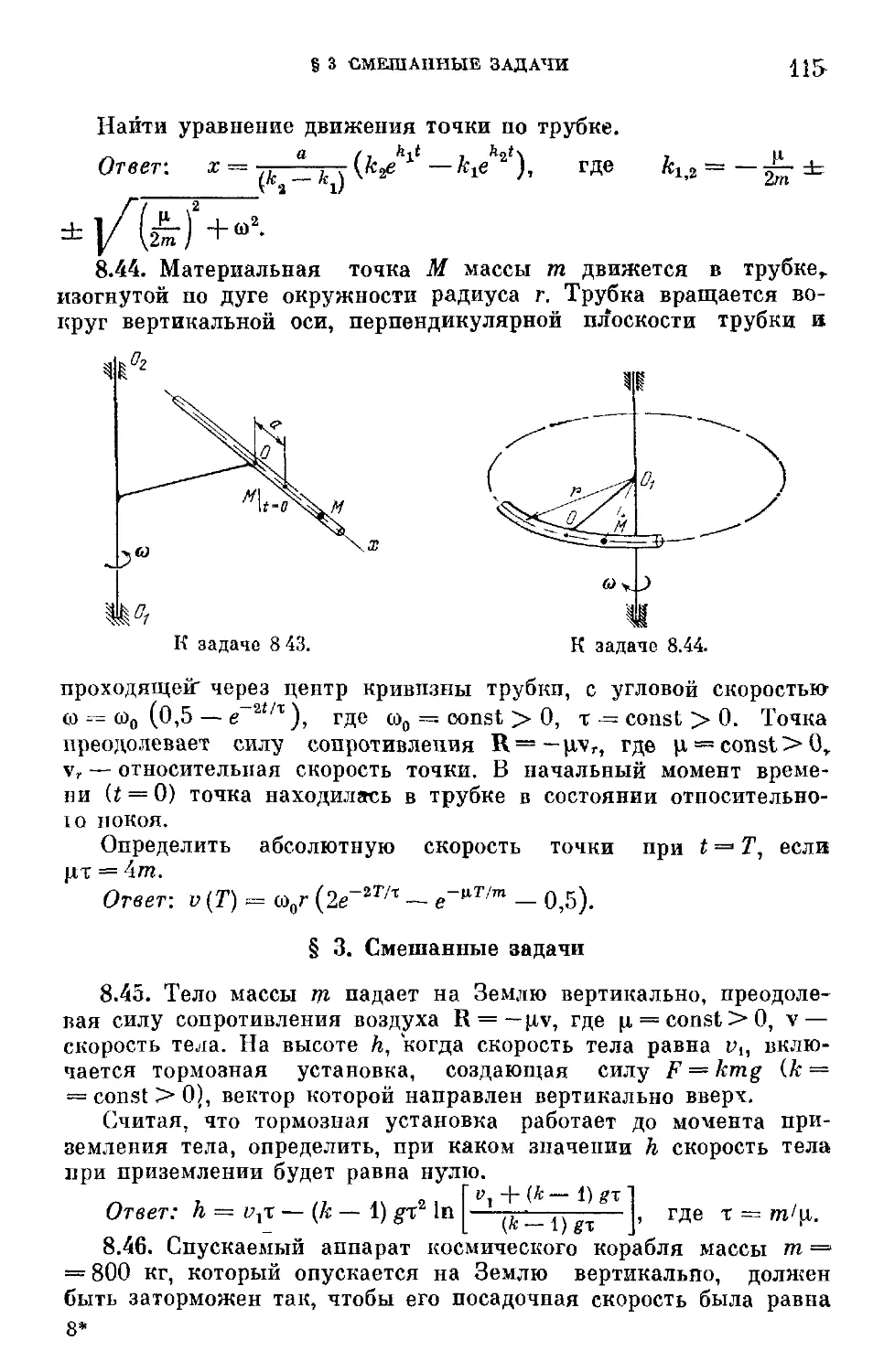
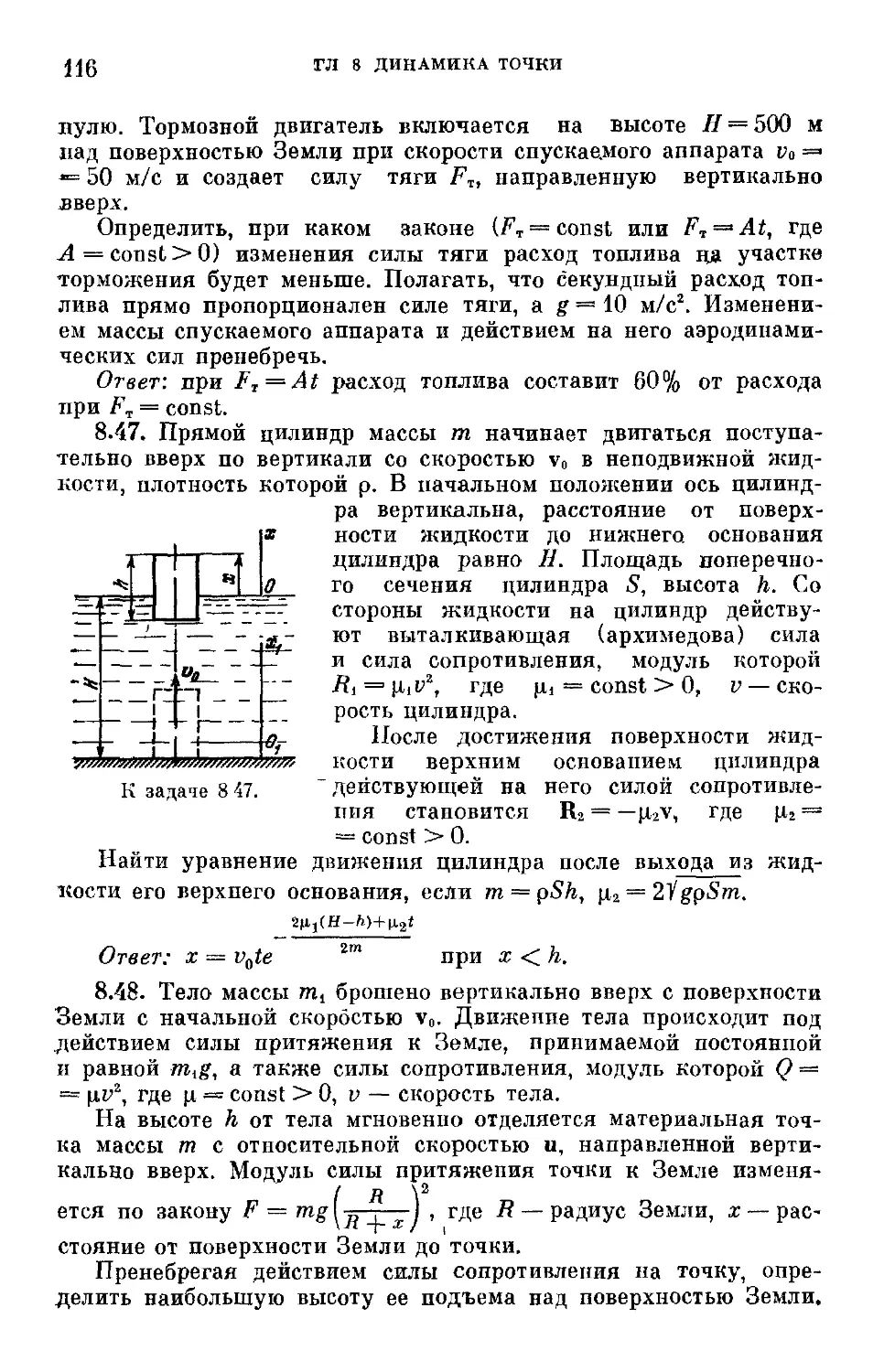
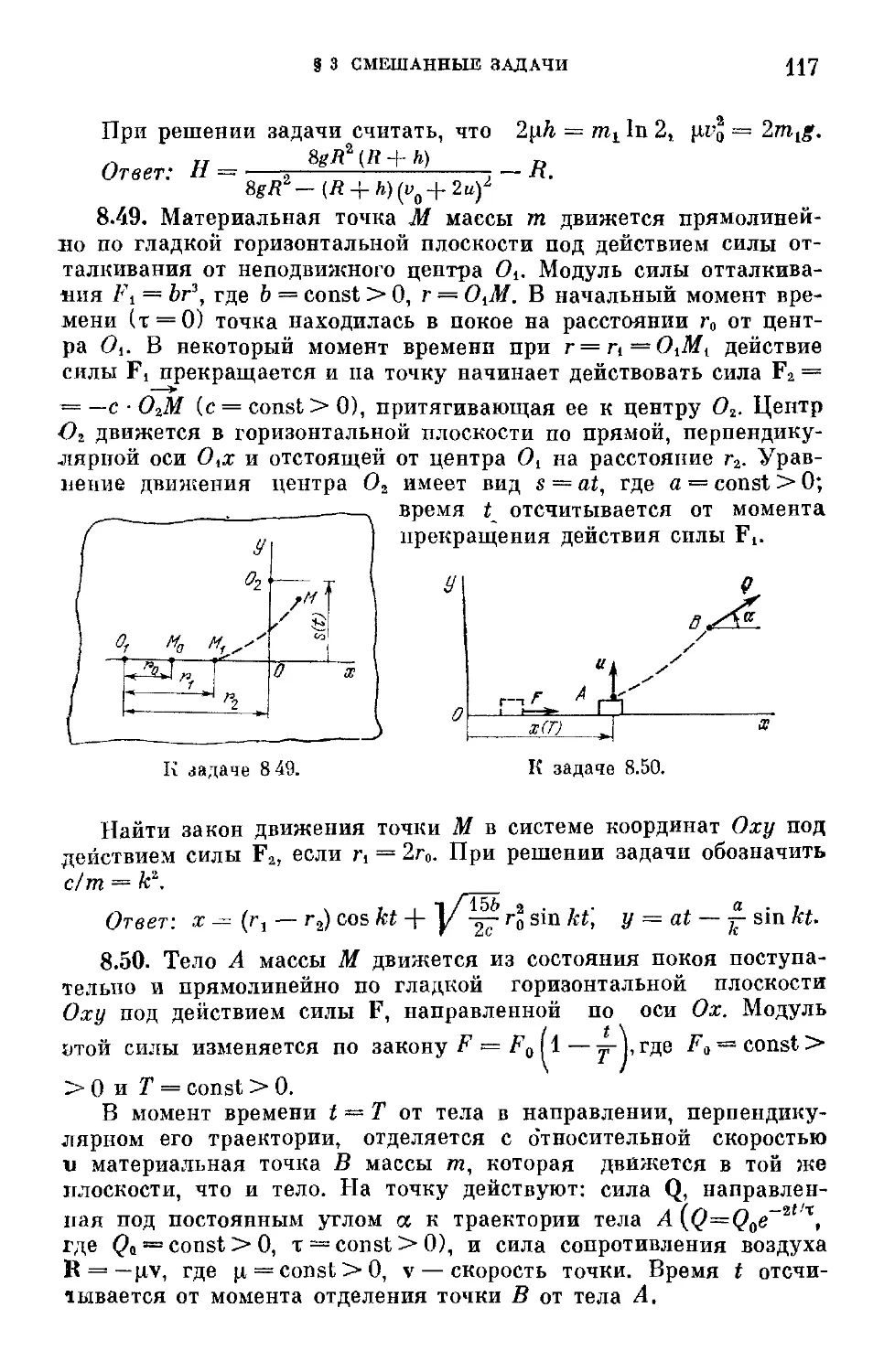
Глава 8. Динамика точки .-.,.. 10*
| 1. Движение точки в иперциальной системе отсчета .... 101
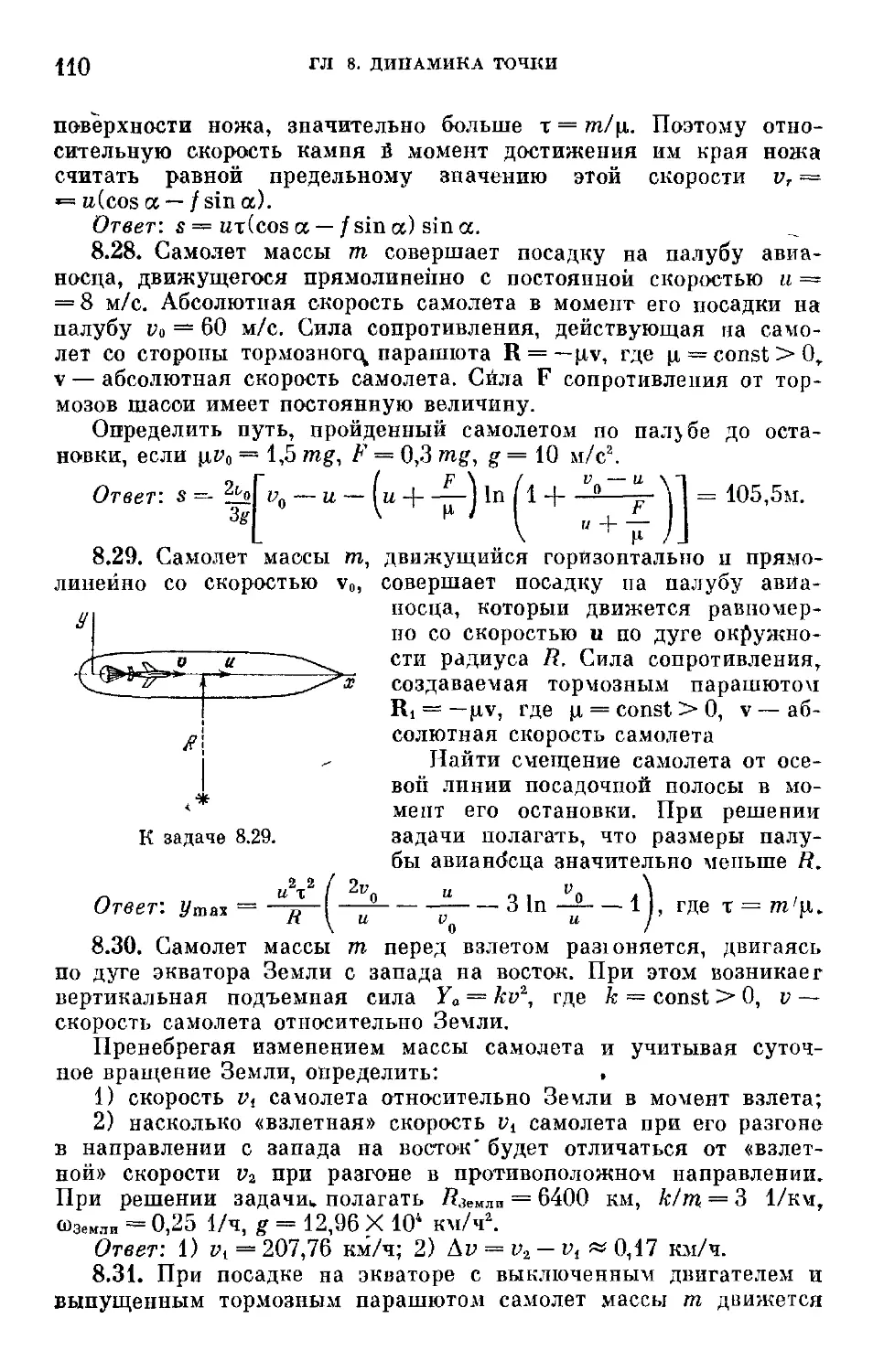
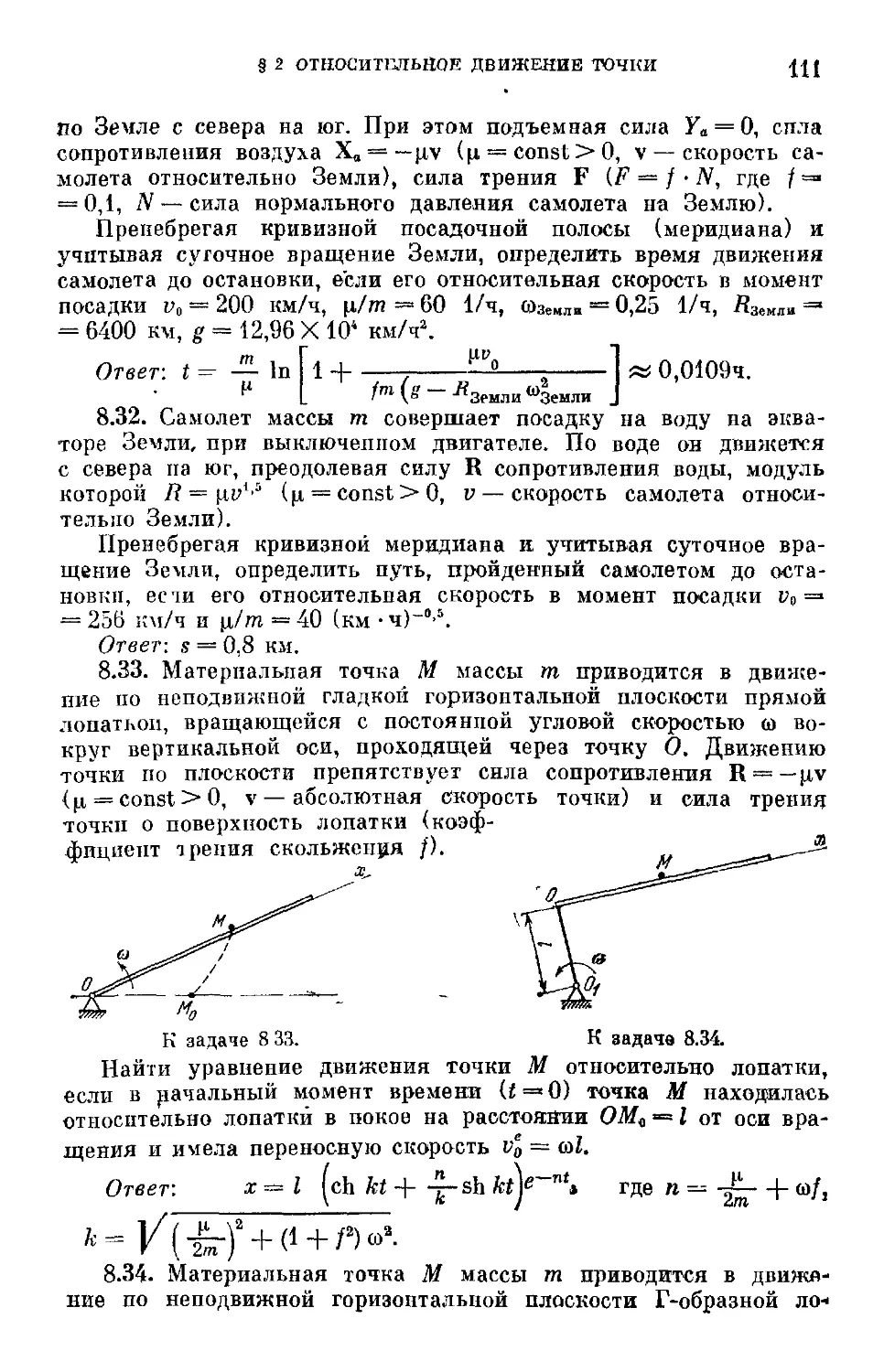
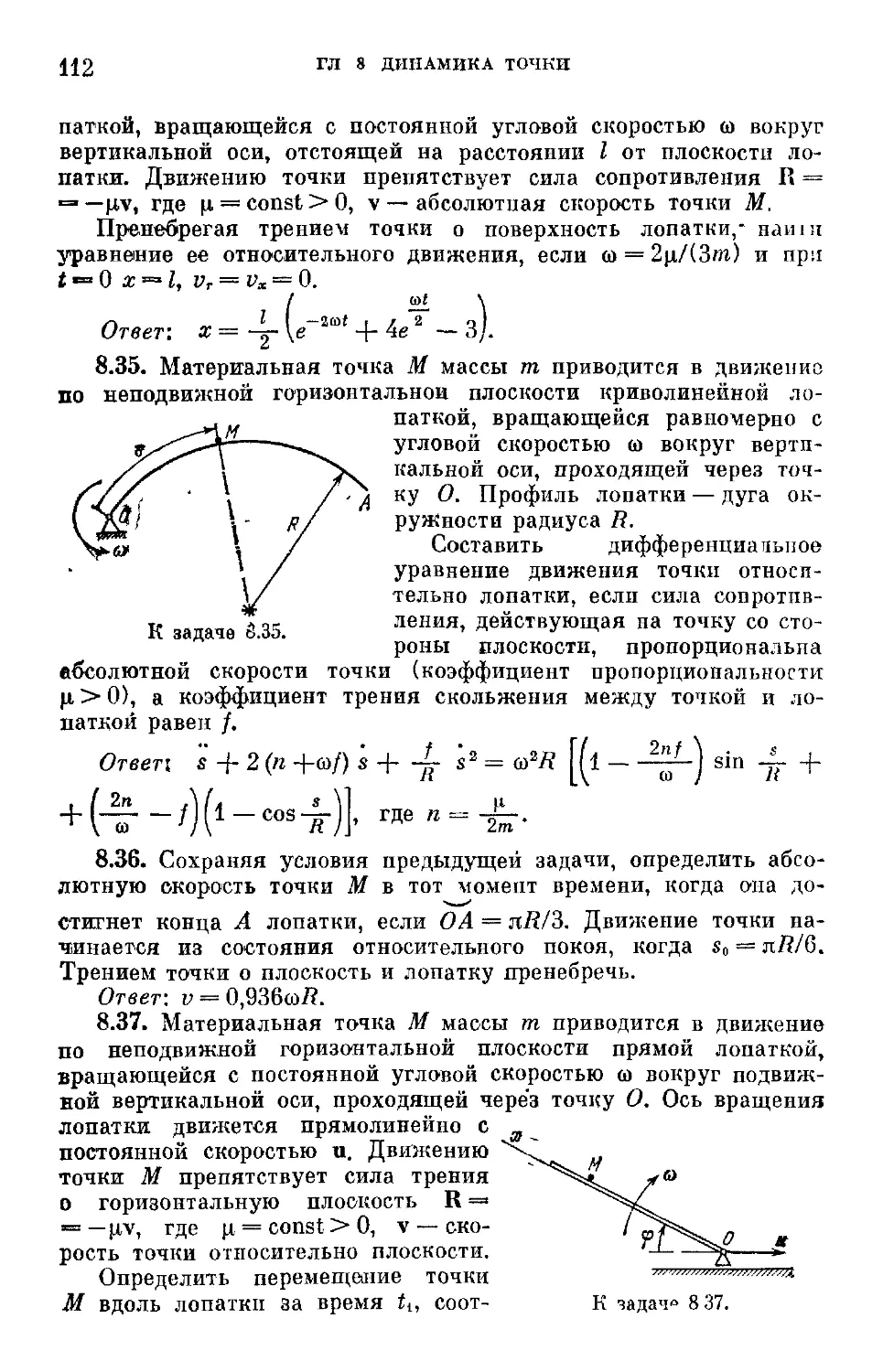
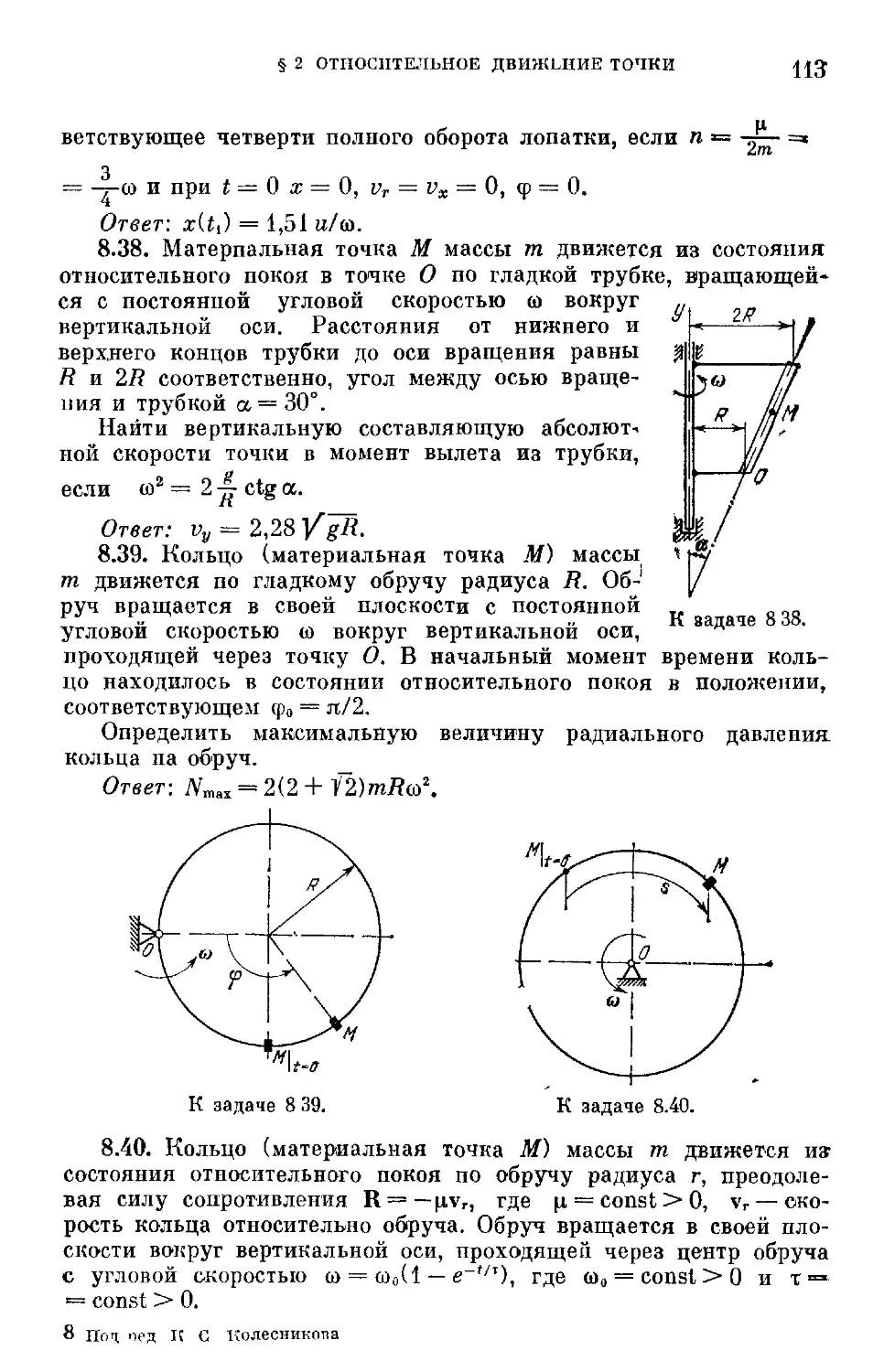
§ 2. Относительное движение точки 107
| 3. Смешаипые задачи 115
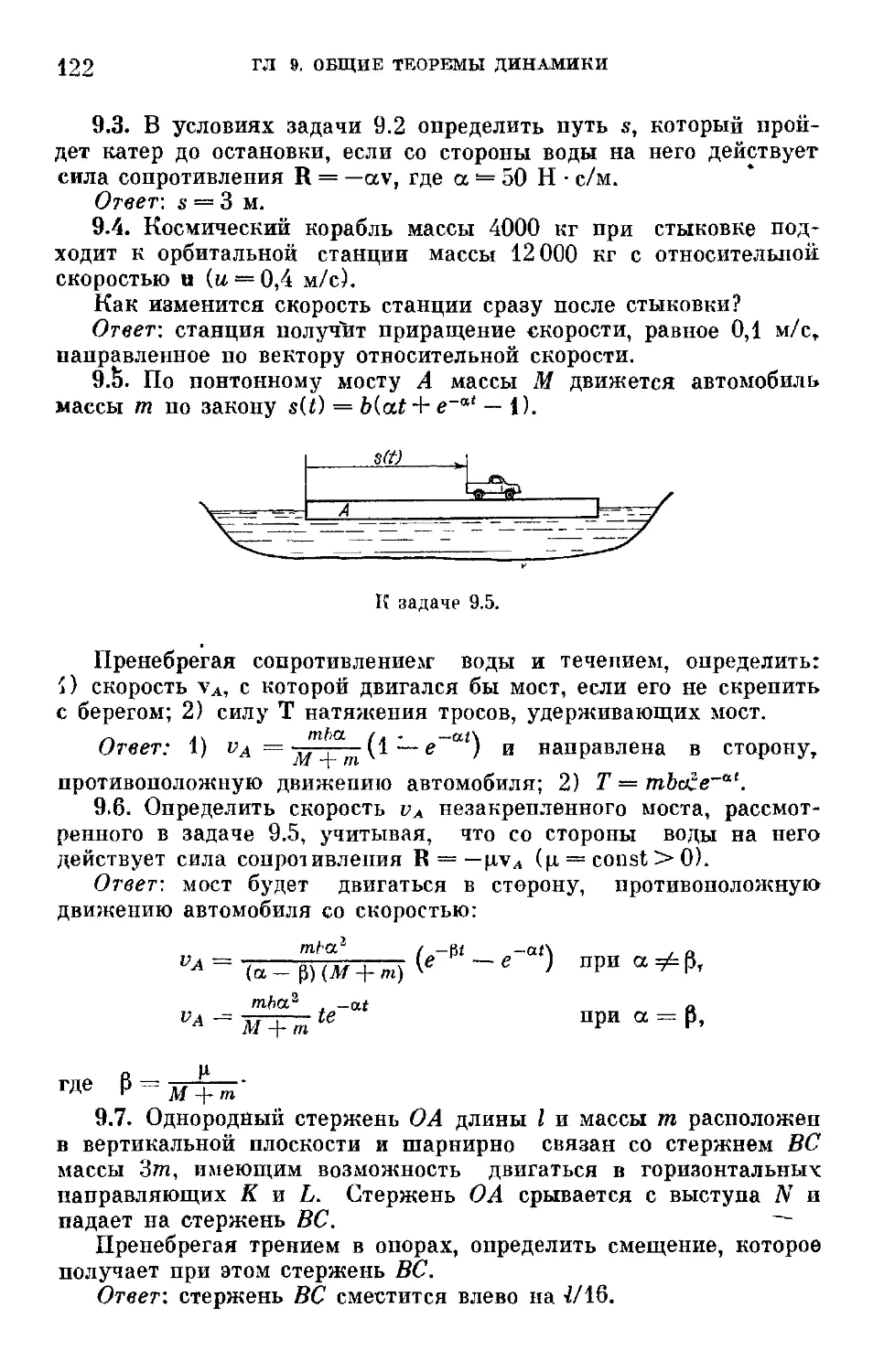
Глава 9. Общие теоремы динамики . - . ... . , . . . 121
§ 1. Теорема об изменении количества движения. Теорема о дви-
движении центра масс механической системы 121
| 2. Теорема об изменении квиетического момент%. Дифференци-
Дифференциальное уравнение вращения твердого тела вокруг неподвиж-
неподвижной оси , 125
| 3. Теорема об изменении кинетической энергия .... 13?.
§ 4. Смешанные задачи 138
Глава 10. Динамика твердого тела 145
| 1. Плоское движение тела , 145
§ 2. Сферическое движепие тела 149
Глава 11. Принцип возможных перемещений . 151
§ 1. Системы с одной степенью свободы 151
§ 2. Системы с двумя степенями свободы 160
Глава 12. Уравнения Лаграижа II рода. Общее уравнение механики 161
§ 1 Системы с одной степенью свободы 161
| 2 Системы с двумя и тремя степенями свободы 1<?4
Глава 13 Определение реакций опор и уравновешивание твердых
тел, вращающихся вокруг неподвижных осей ... . . 183
| 1. Определение реакций опор . 183
§ 2. Уравновешивание тела, вращающегося вокруг неподвижной
оси . 194
Гчава 14. Колебания механических еистем . . . . .-. . . 109
§ 1. Свободные колебания систем с одной степенью свободы . . 199
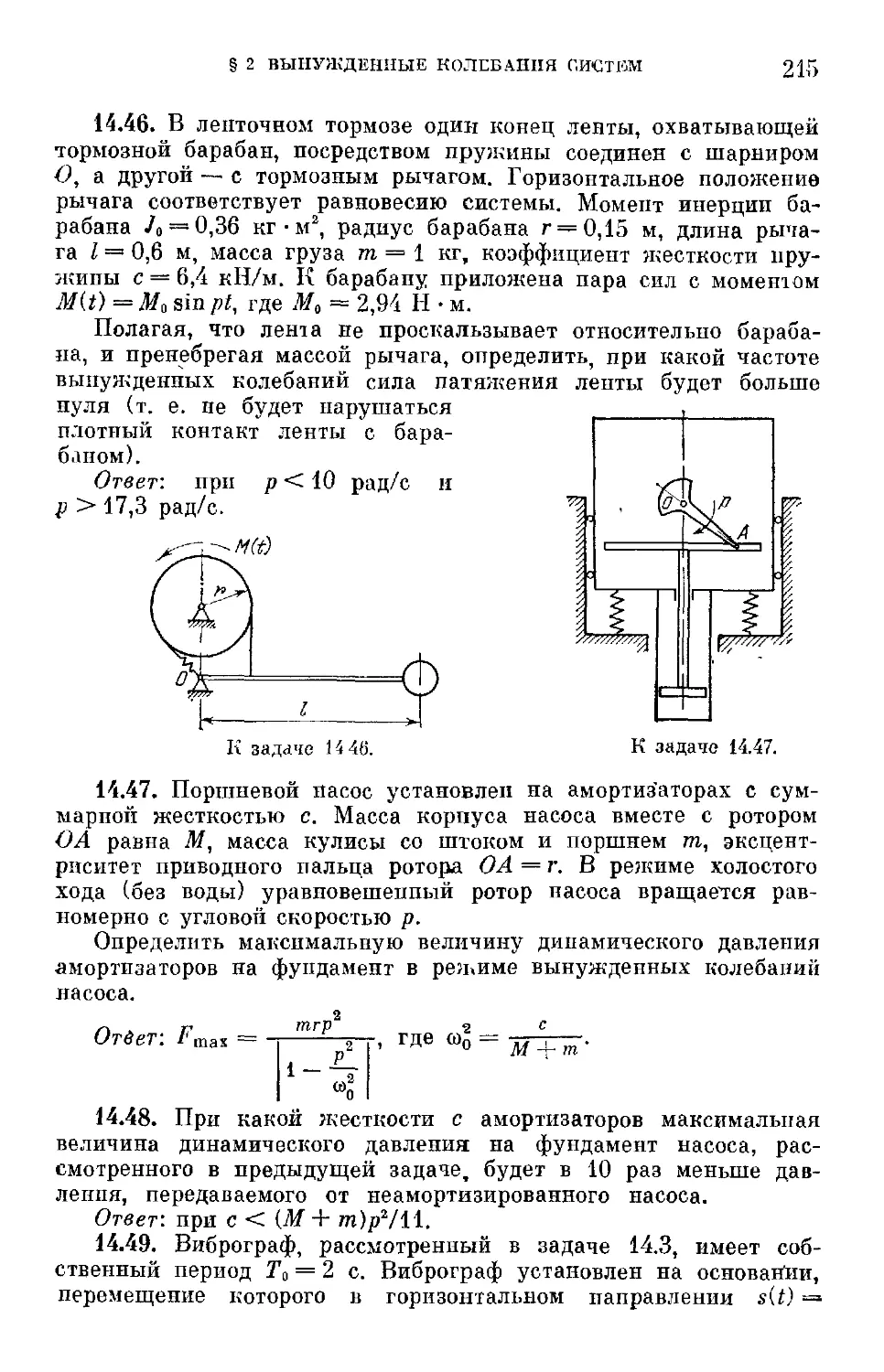
§ 2 Вынужденные колебания систем с одной степенью свободы 212
$ 3, Системы с двумя и тремя степенями свободы .... 219
Глава 15. Теория гироскопов , , 230
i 1. Закон прецессии Гироскопический момент 231
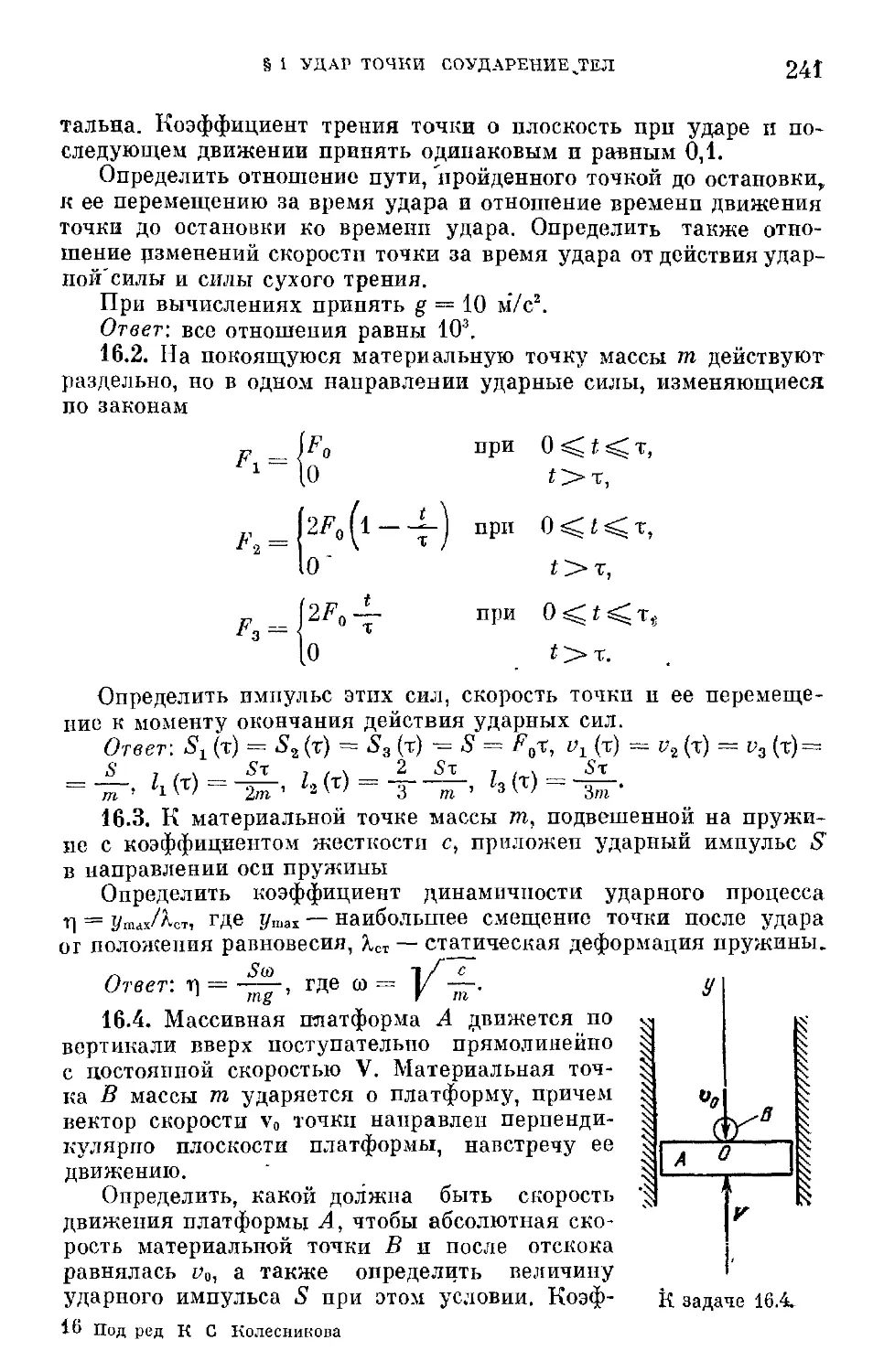
| 2. Простейшие гироскопические приборы 2!3
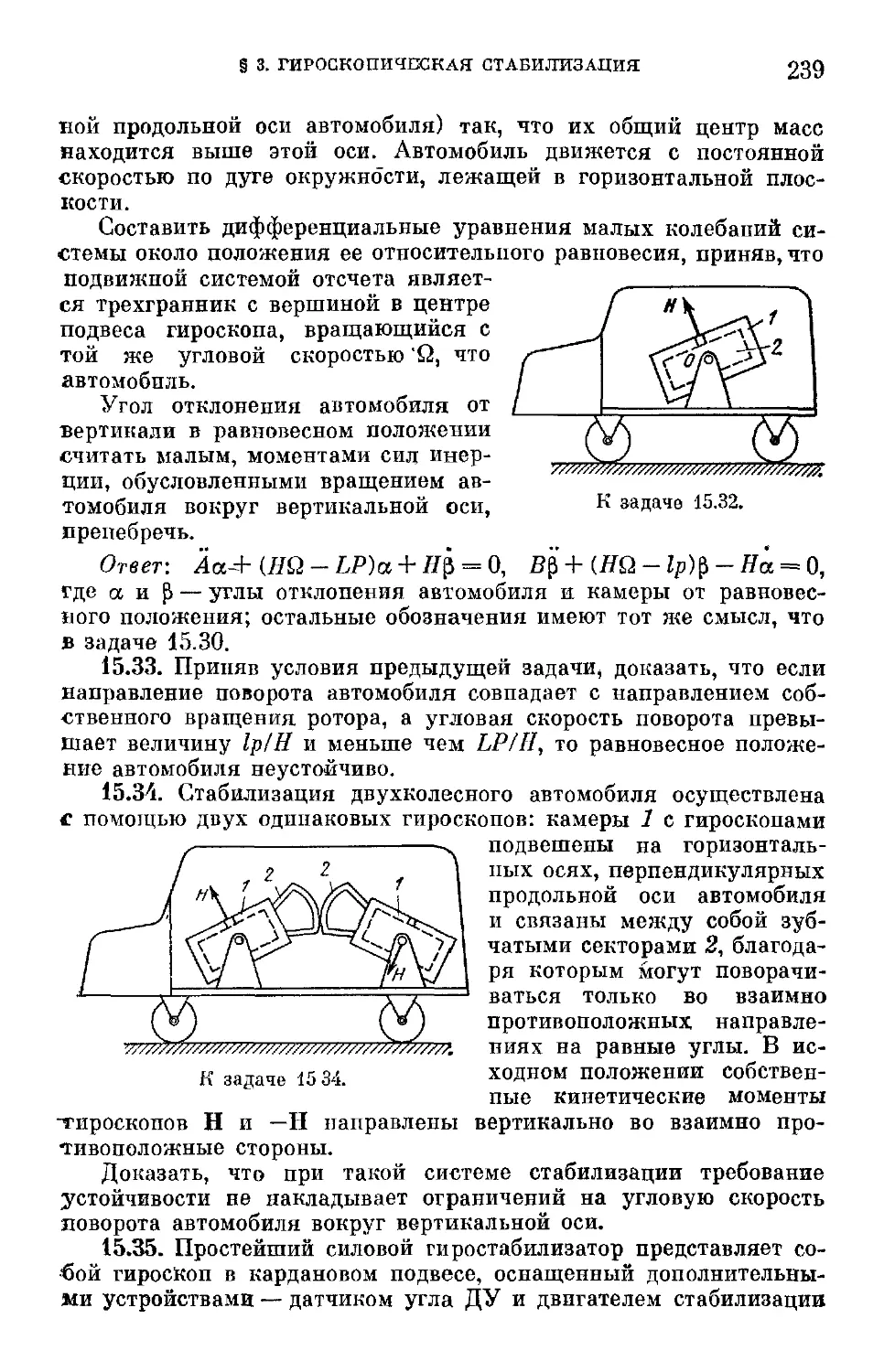
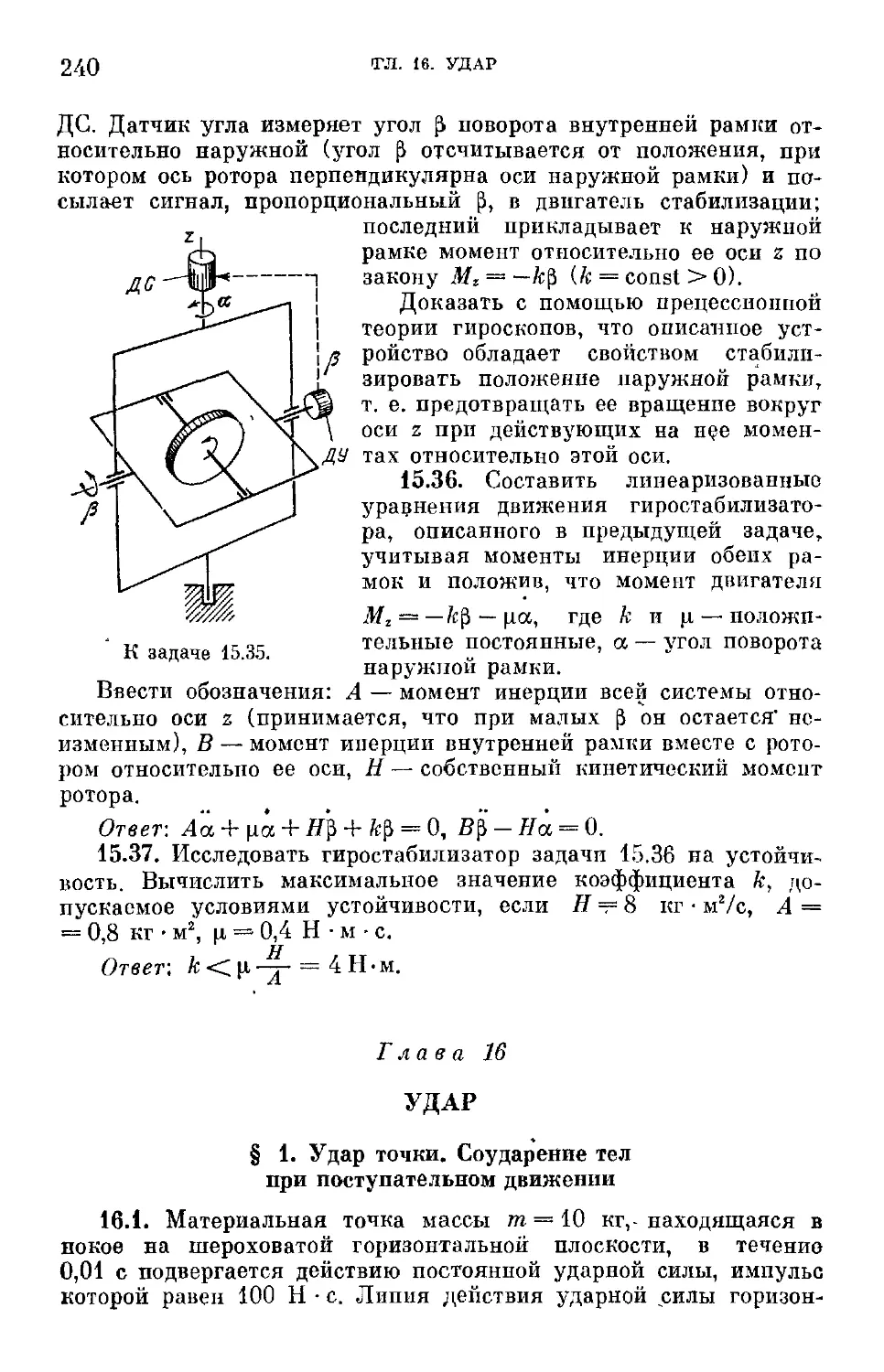
§ 3. Гироскопическая стабилизация , 238
Глана 16. Удар 240
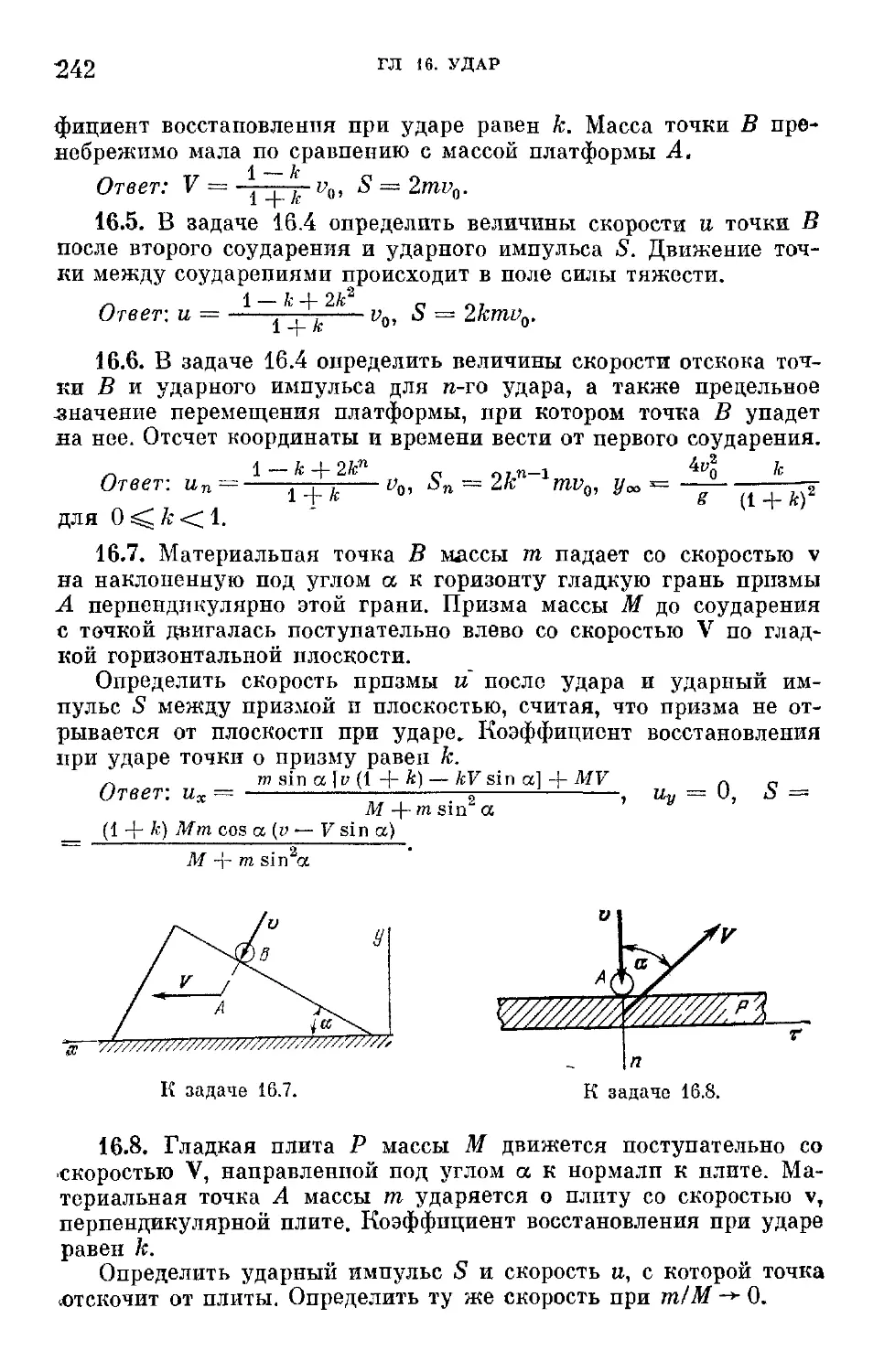
% 1. Удар точки. Соударение тел при поступательном движении 240
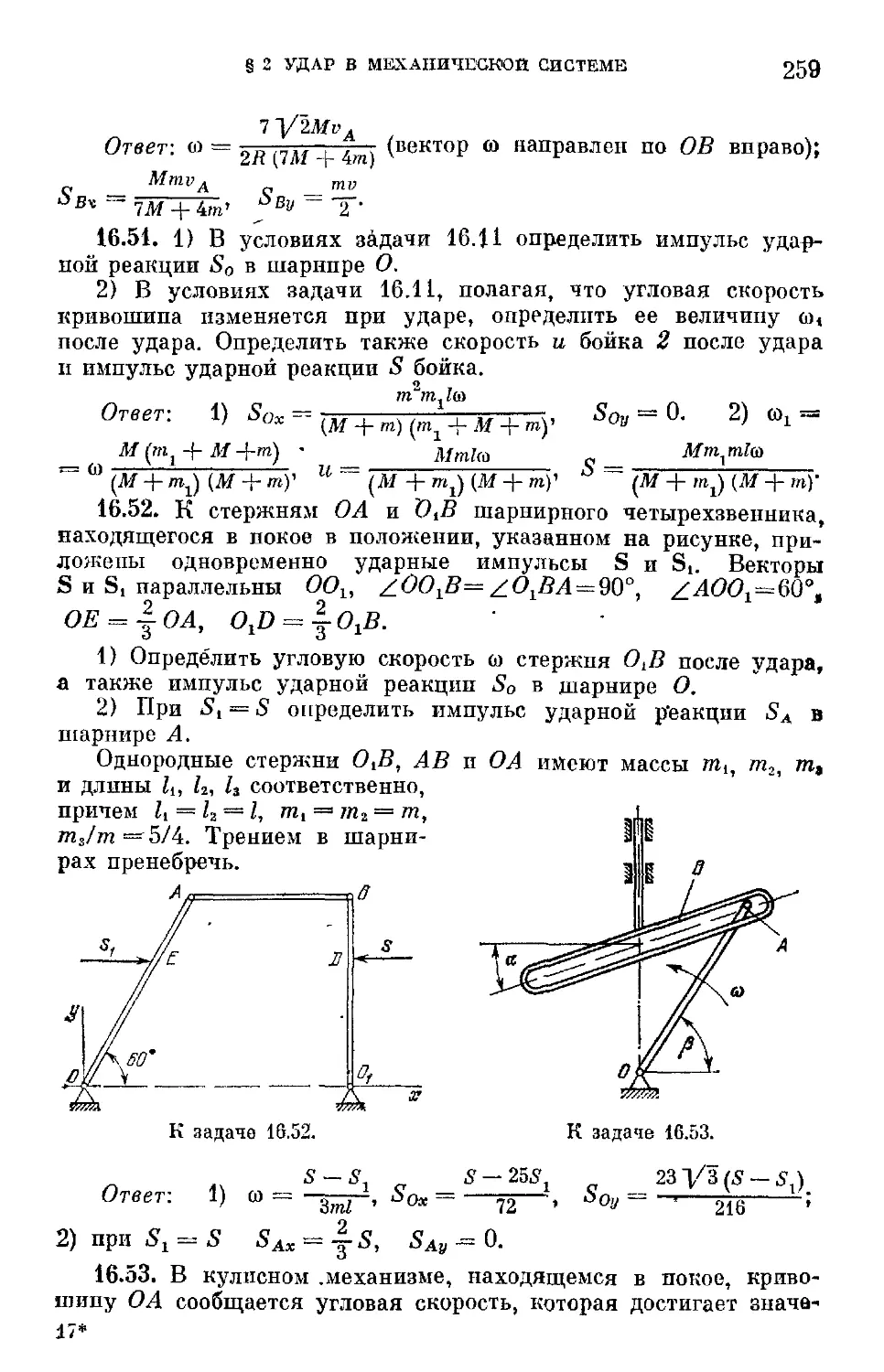
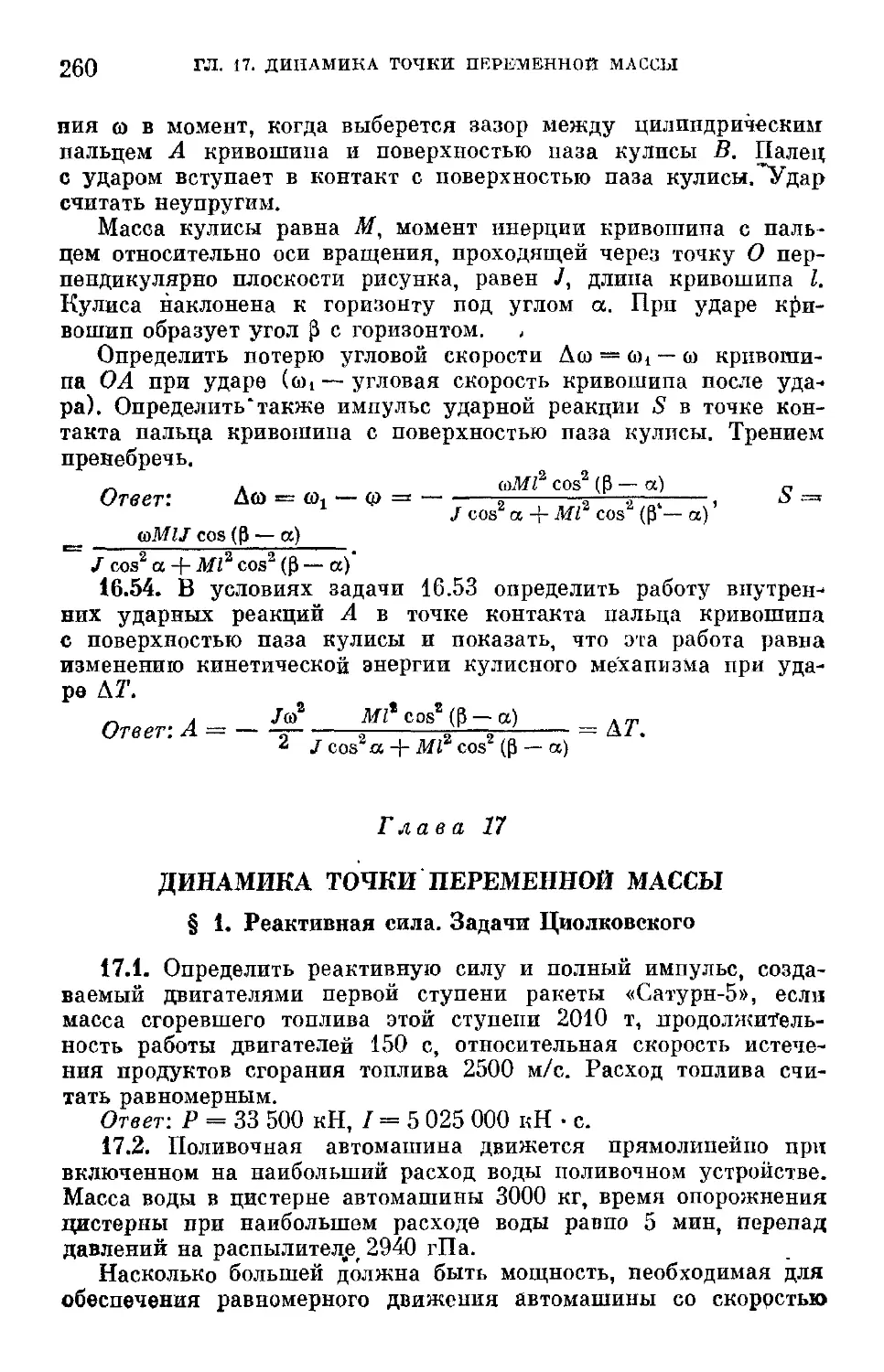
S 2 Удар в механической системе 246
ОГЛАВЛЕНИЕ 5
Глава 17. Динамика точки переменной массы ,,,.... 260
S 1. Реактивная сила. Задачи Циолковского 260
J 2. Дифференциальные уравнения движения точки .... 262
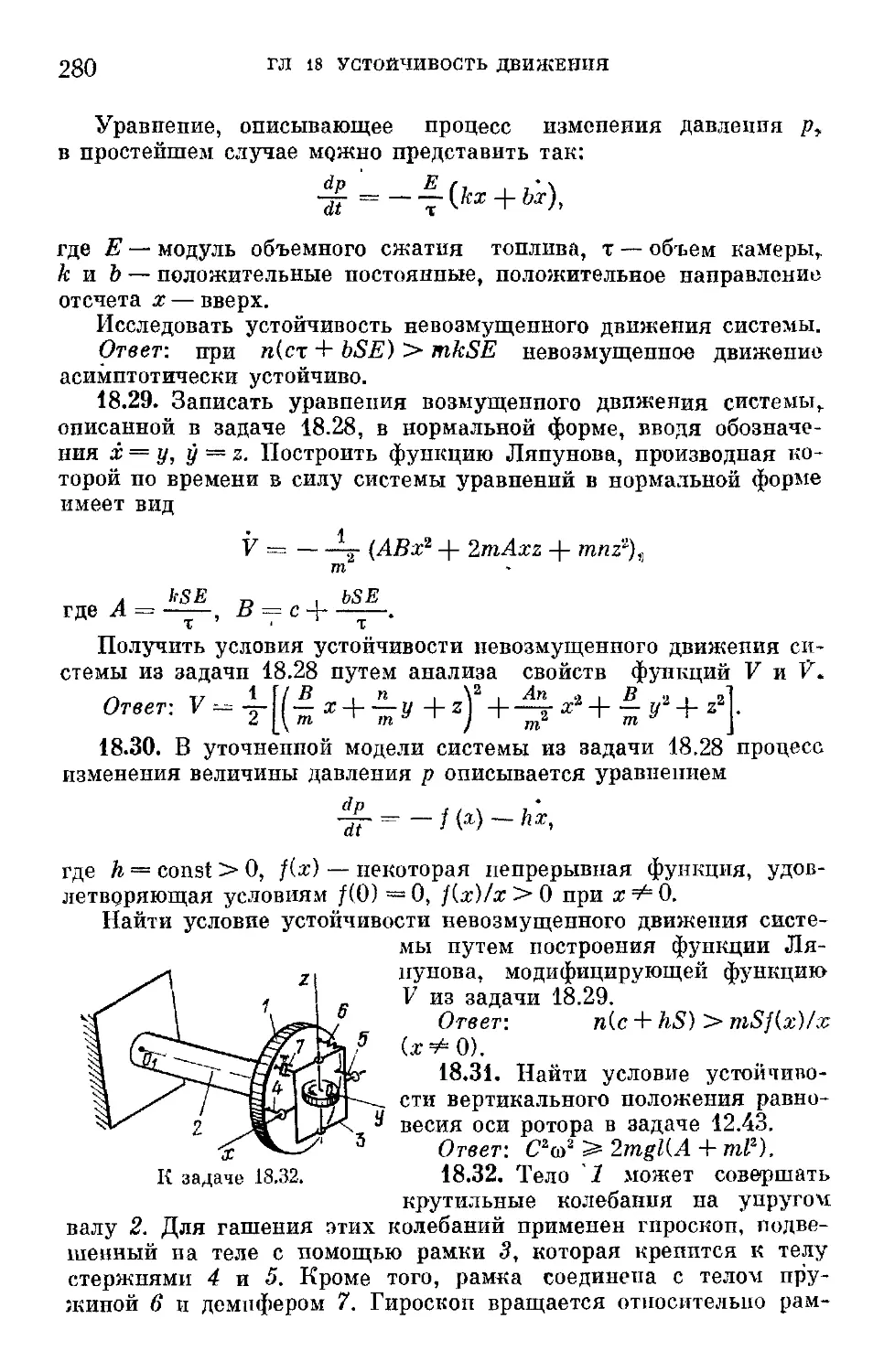
Глава 18. Устойчивость движении . . , 267
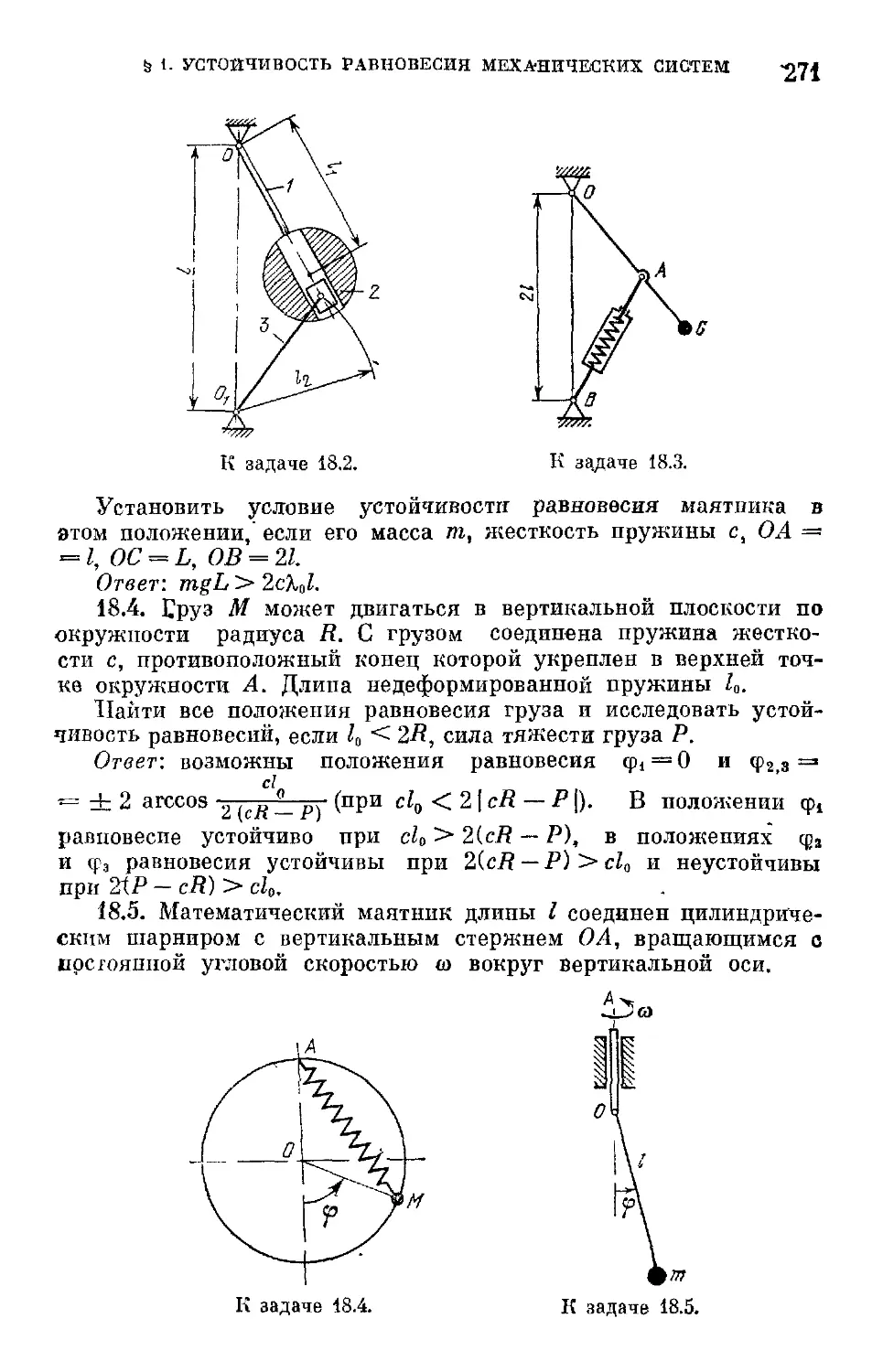
§ 1. Устойчивость равновесия механических систем .... 270
S 2. Асимптотическая устойчивость невозмущениых движении . . 275
Глава 19 Электромеханика . . 283
§ 1. Динамика материальной точки в электромагнитном поле 284
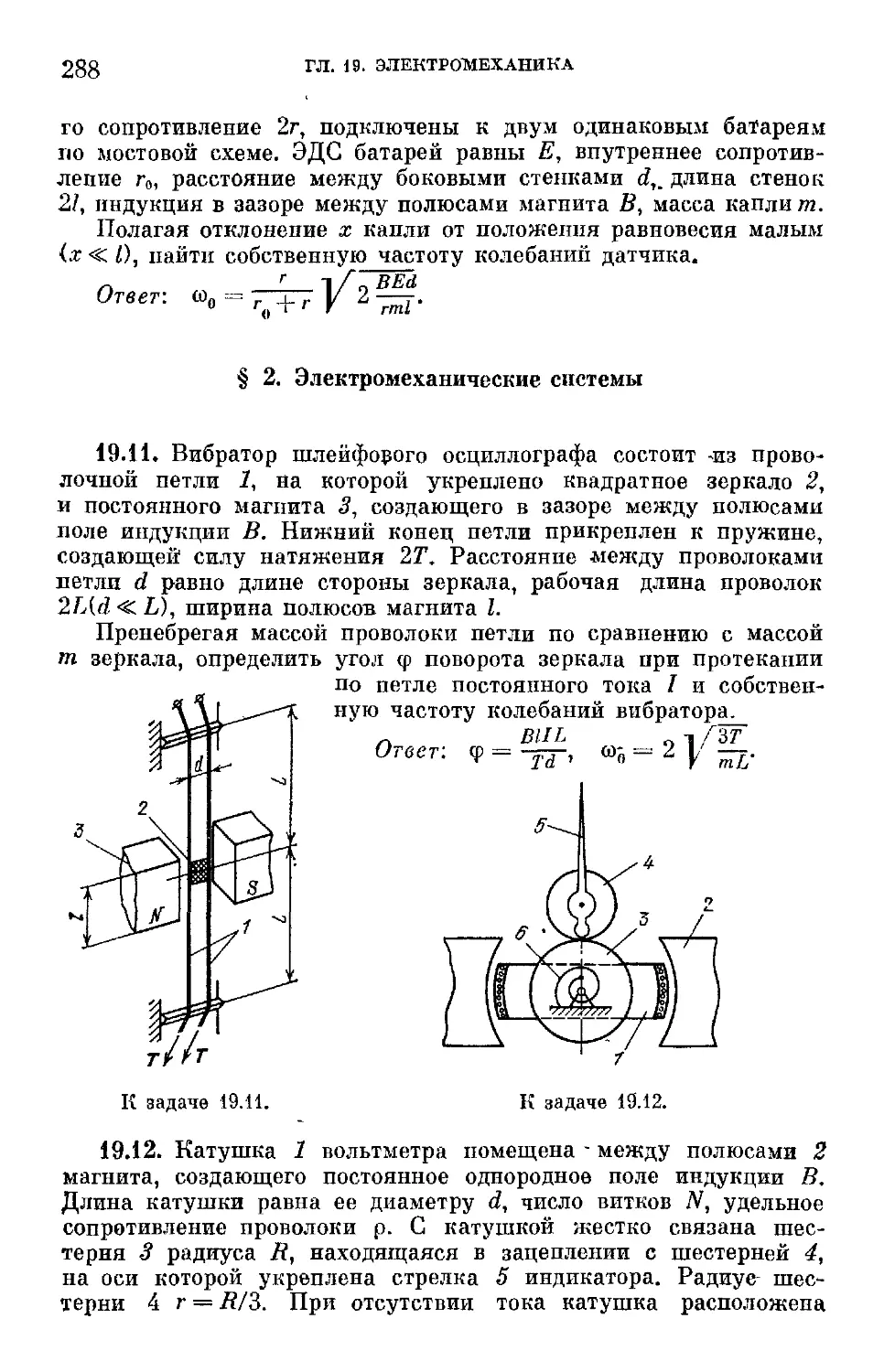
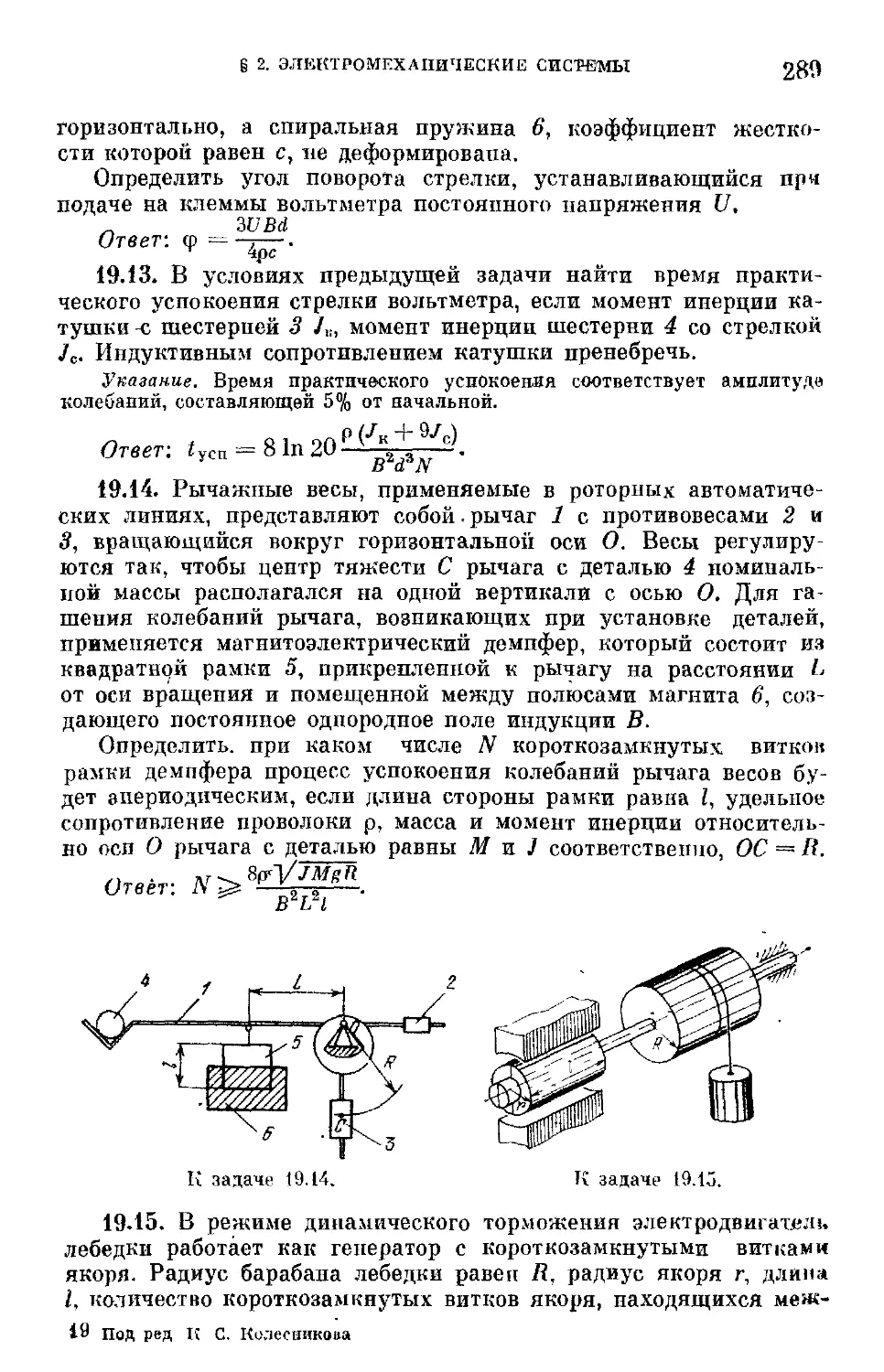
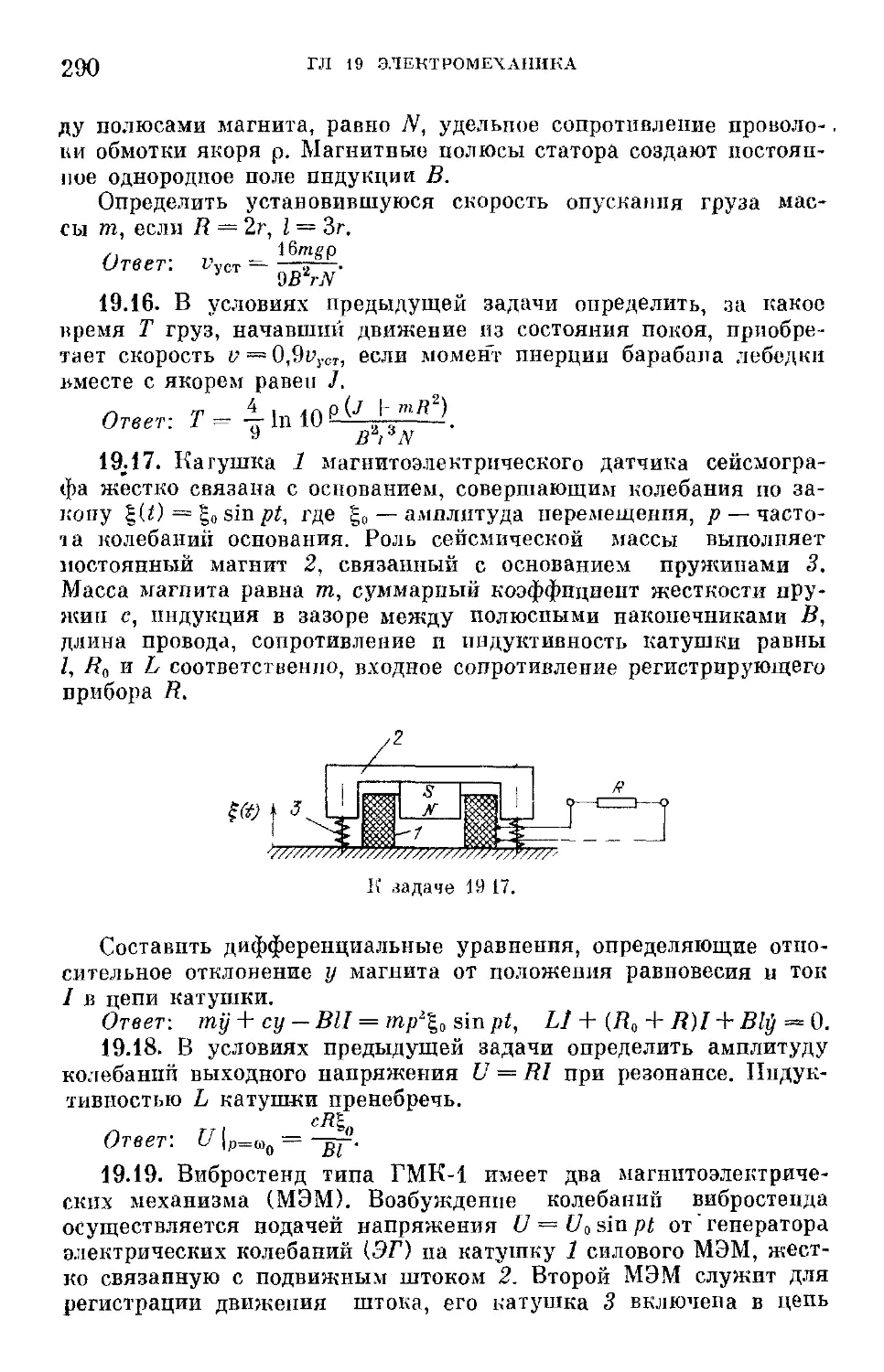
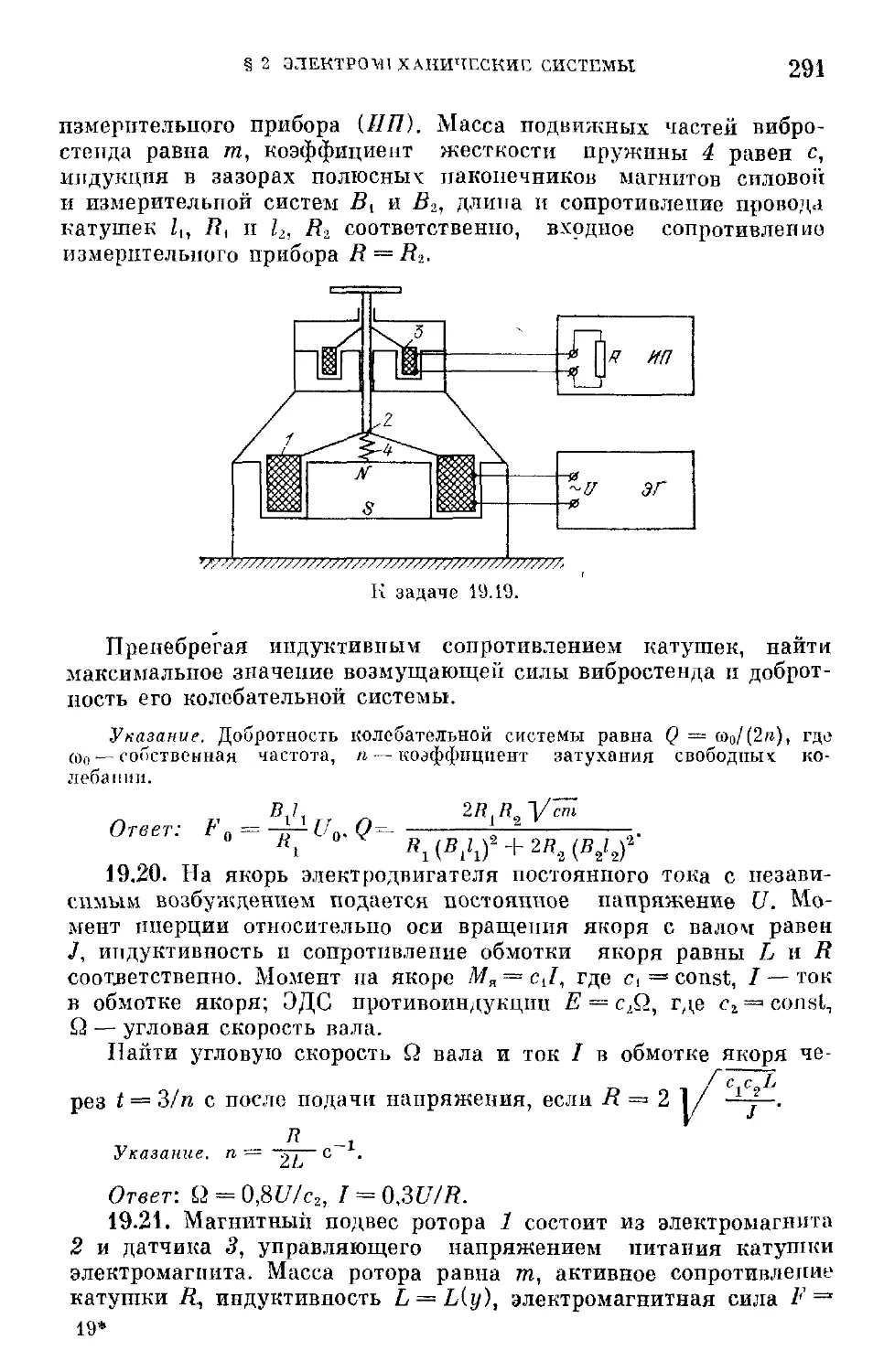
§ 2. Электромеханические системы 288
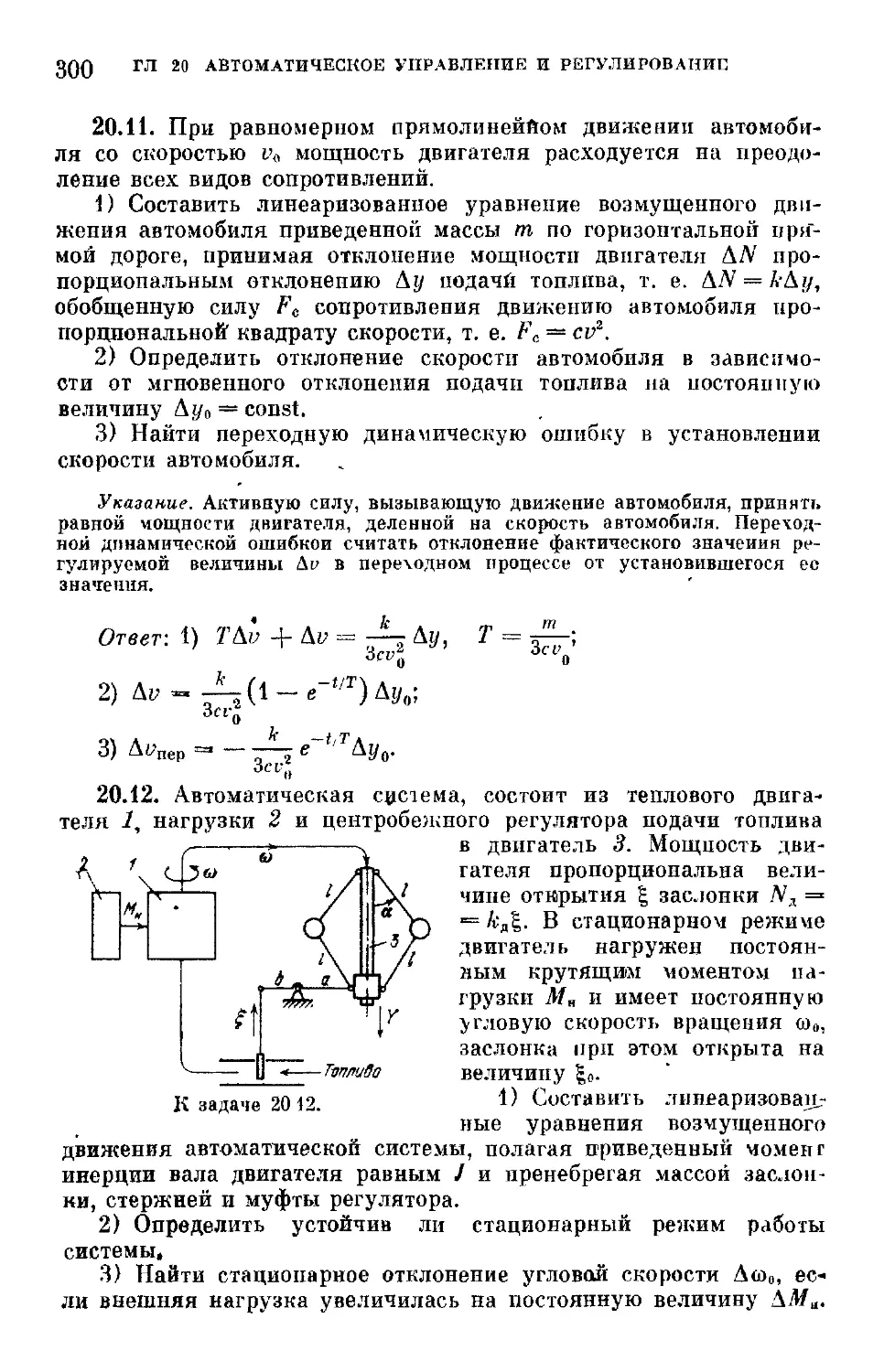
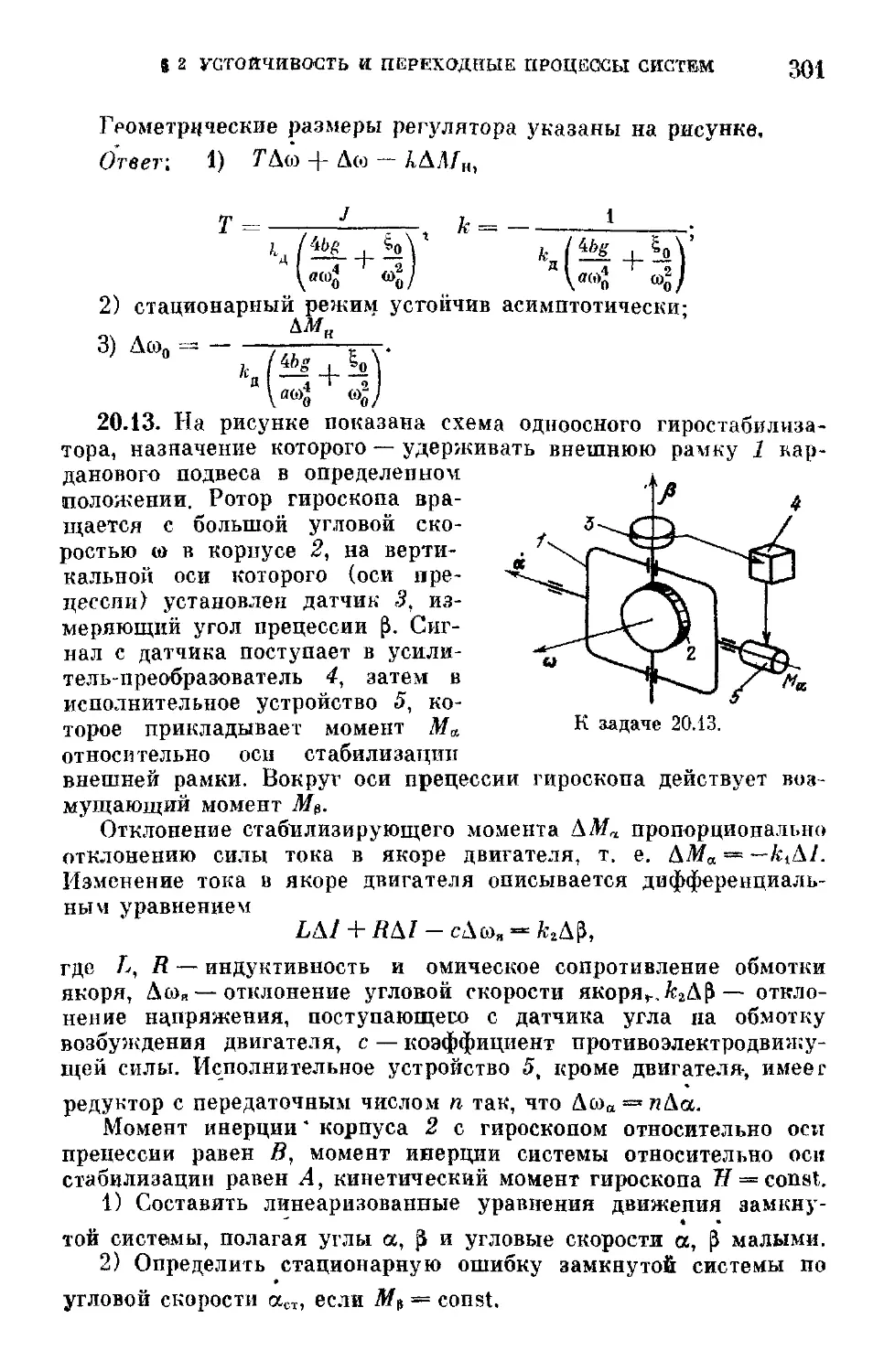
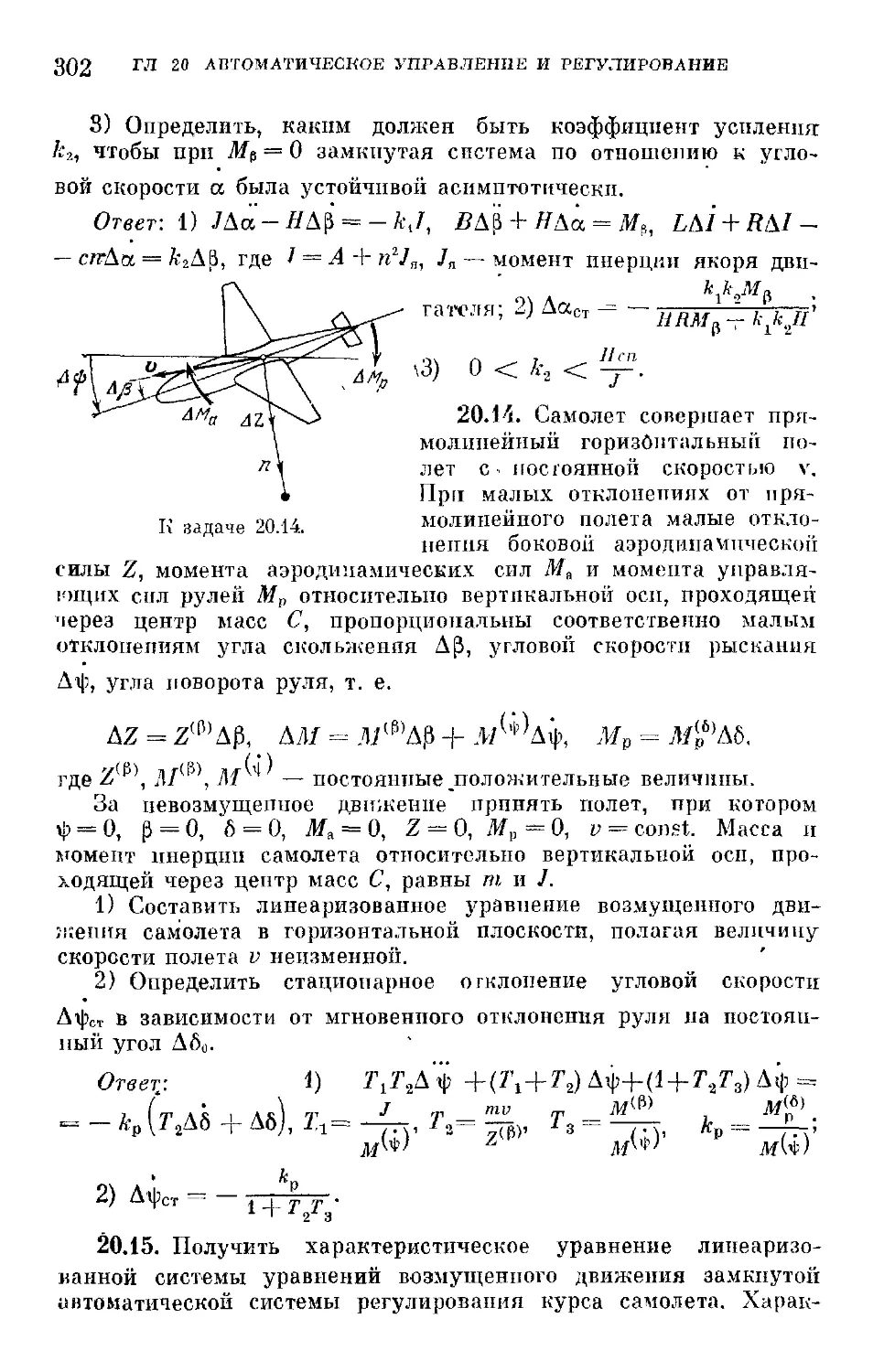
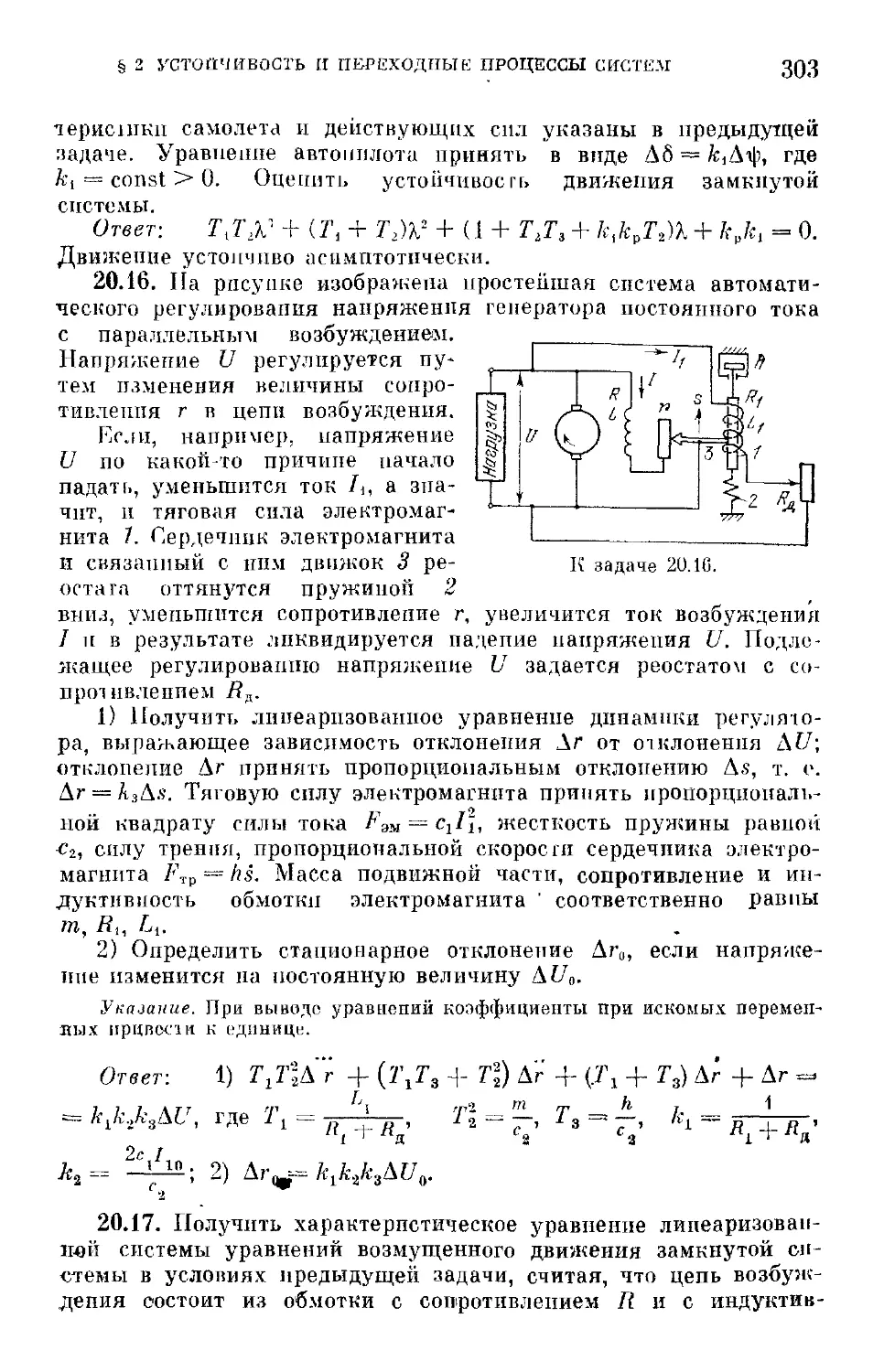
Глава 20. Автоматическое управление и регулирование .... 294
§ 1 Частотные характеристики 296
§ 2. Устойчивость и переходные процессы линейных систем 298
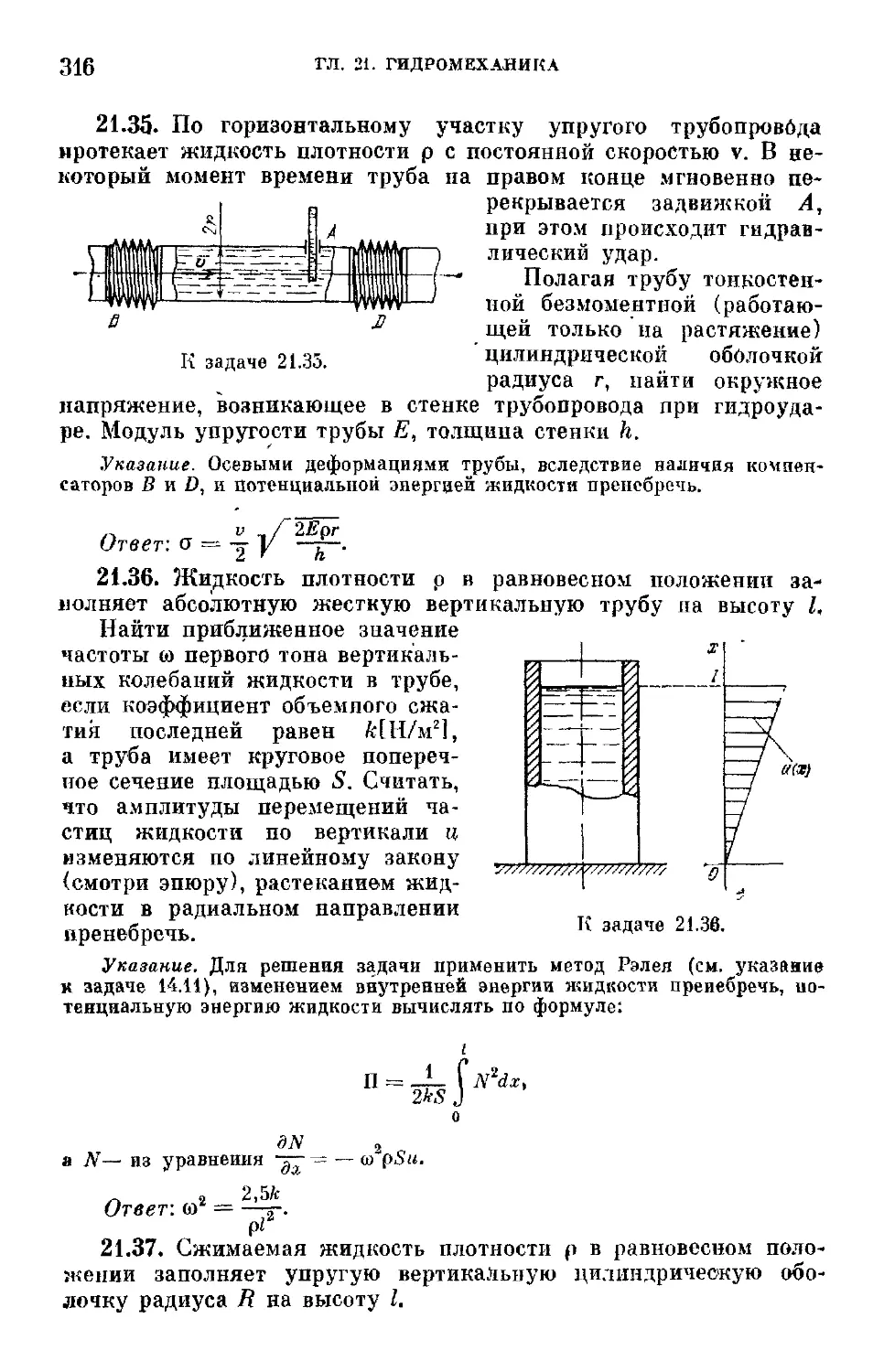
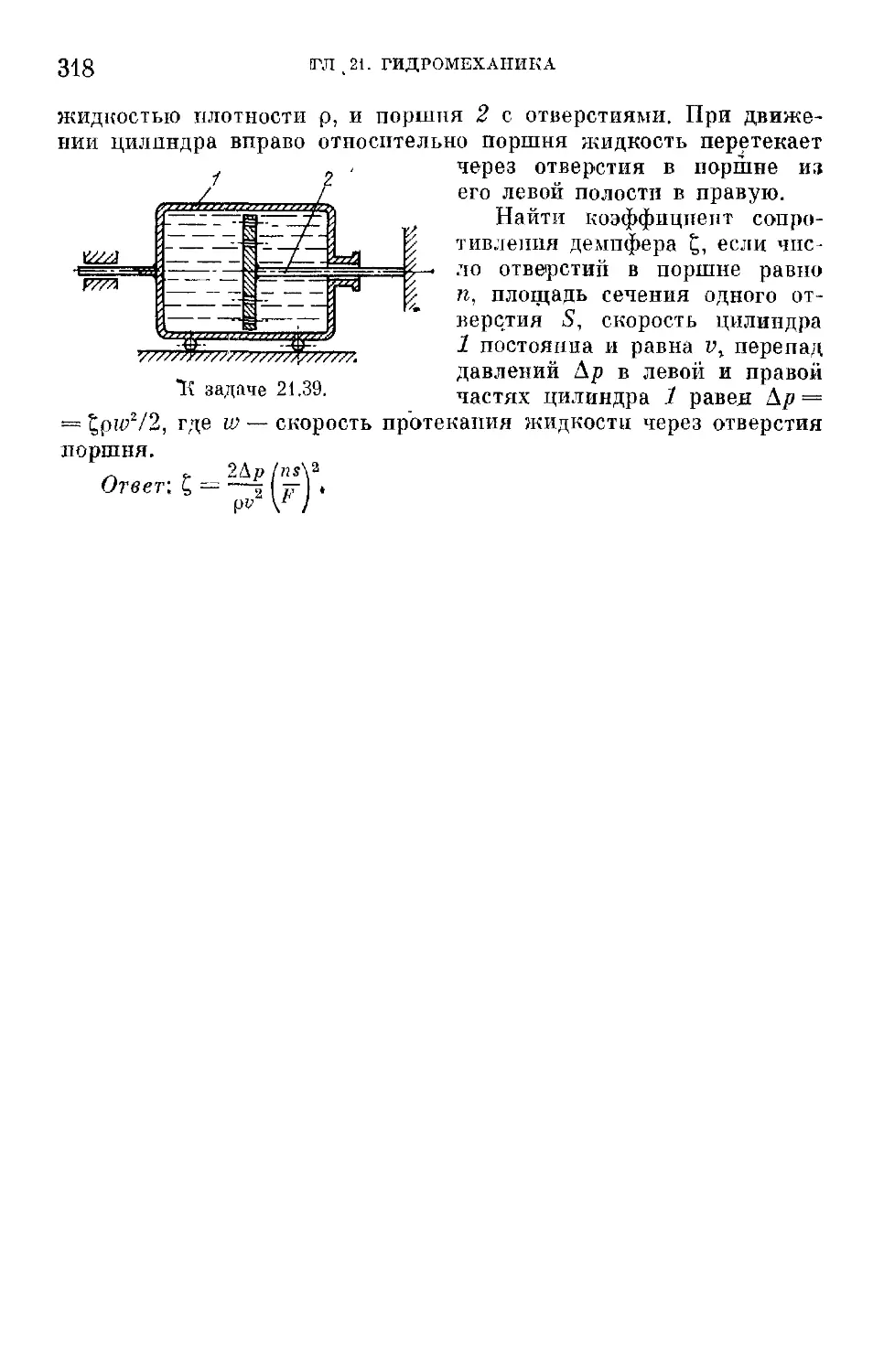
Глава 21. Гидромеханика 804
§ 1. Статика. Относительное равновесие 304
^ 2. Общие теоремы динамики в гидромеханике 308
§ 3. Смешанные задачи , 313
ПРЕДИСЛОВИЕ
Предлагаемьга сборнпк задач составлен на оспованни опыта работы ка-
кафедры теоретической механики МВТУ им. Н. Э. Баумана. Он предназначен
для студентов технических вуаов. Авторы по возможности стремились в ос-
основу задач положить схемы машин, механизмов, приборов, с тем чтобы,
с одной стороны, наполнить курс теоретической механики инженерным со-
содержанием и, с другой стороны, на ранней стадии знакомства с предметом
развивать у студента "правильное понимание необходимости применения
моделей реальных объектов и роли моделей в проведении расчетов и иссле-
исследований.
По сравнению со сборником задач И. В. Мещерского расширены разде-
разделы по устойчивости движения, теории колебаний, удару, теории гироскопа.
Некоторые задачи имеют комплексный характер и рассчитаны на примене-
применение теорем из различных разделов курса. Поэтому их расположение по гла-
главам является довольно условным.
Законы и теоремы теоретической механики являются основополагающи-
основополагающими для всех разделов прикладной механики. И чтобы расширить нредстан-
ление студентов о применимости методов теоретической механики к реше-
решению различных задач техники, подчеркнуть фундаментальную роль теоре-
теоретической механики для прикладных дисциплин, в сборник задач в качестве
самостоятельных введены главы «Электромеханика», «Автоматическое уп-
управление и регулирование», «Гидромеханика». В этих главах подобраны за-
задачи, которые при использовании сравнительно простых физических пред-
предположений, решаются на основании теорем теоретической механики.
Некоторые задачи сборника могут быть рекомендованы для самостоя-
самостоятельной работы хорошо успевающим студентам, их учебно-исследователь-
учебно-исследовательской работы, для подготовки к олимпиадам.
Главы 1, 2, 20 написаны К. С. Колесниковым; 3, 17 — В. И. Дронгом;
4, 21 — А. А. Пожалостиным; 5 — М. М. Ильиным, В. В. Дубининым; 6, 15—
Г. Д. Бчюминым; 7 — В. И. Дронгом, В. В. Дубининым; 8 — В. II. Дронгом,
А. И. Огурцовым, 10. Ci Саратовым; 9—М. М. Ильяным, В. В. Дубининым;
10—М. М. Ильиным, Г. Д. Блюминым; 11, 12 — А. И. Огурцовым, В. В. Ду-
Дубининым; 13 — А. И. Огурцовым, В. В. Дубининым; 14 — Ю. С. Саратовым,
К. С. Колесниковым; 16 — В. В. Дубининым; 18 — А. И. Огурцовым; 19 -^
Ю. С. Саратовым.
К. С. Колесников
Раздел первый
СТАТИКА
Глава 1
ПЛОСКАЯ СИСТЕМА СНЛ
§ 1. Равновесие тела
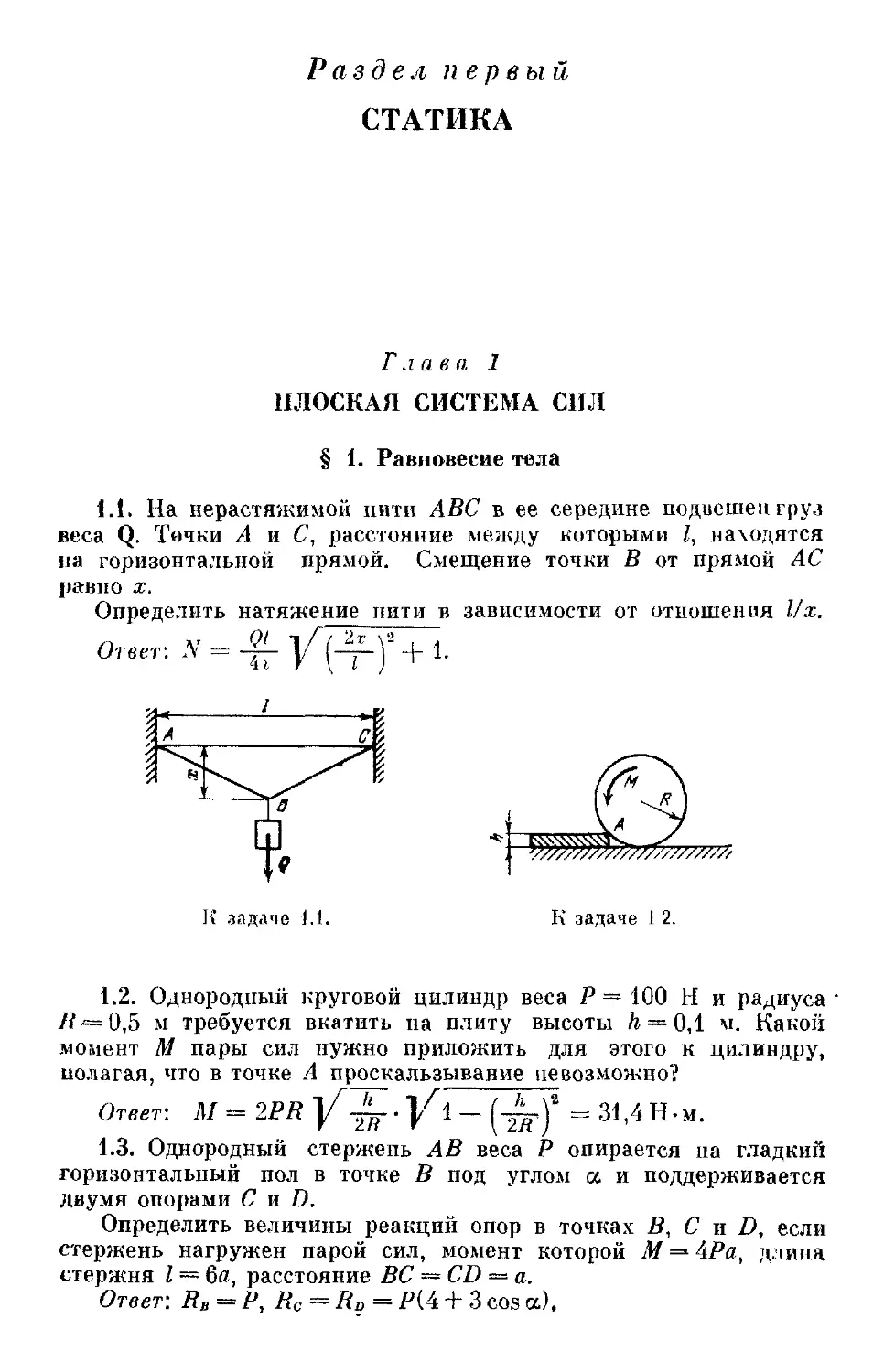
1.1. На нерастяжимой нити ABC в ее середине подвешен груз
веса Q. Точки А а С, расстояние мегкду которыми /, находятся
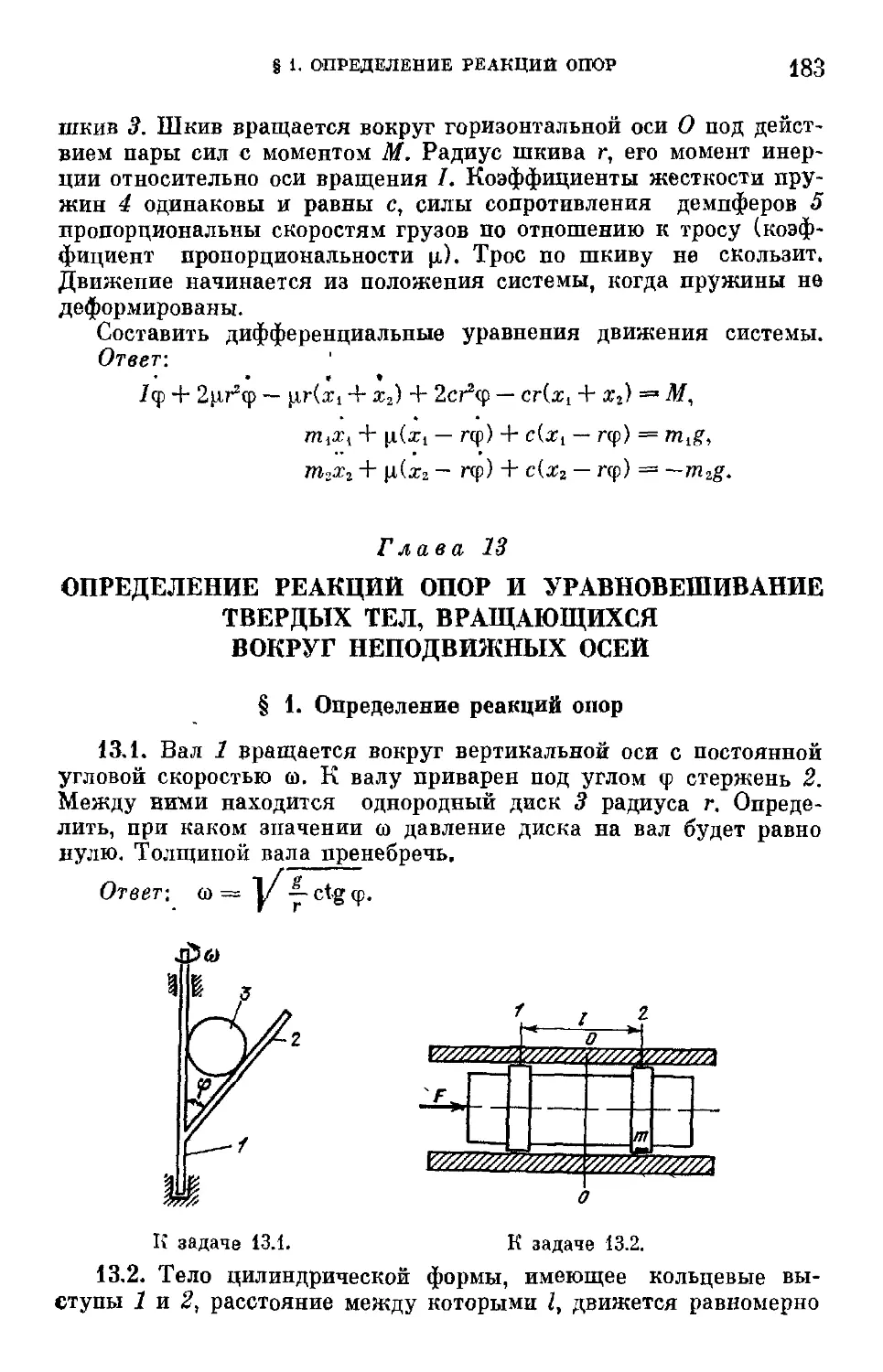
на горизонтальной прямой. Смещение точки В от прямой АС
равно х.
Определить натяжение нити в зависимости от отношения Их,
Ответ: N = -£ /(^П
К задаче 1.1.
'//////7/77/7///////////?
К задаче I 2.
1.2. Однородный круговой цилиндр веса Р — 100 Н и радиуса
# = 0,5 м требуется вкатить на плиту высоты h = 0,1 м. Какой
момент М пары сил нужно приложить для этого к цилиндру,
иолагая, что в точке А проскальзывание невозможно?
Ответ: М = 2PR YTr 'V* - (-jiff =31,4Н-м.
1.3. Однородный стержень А В веса Р опирается на гладкий
горизонтальный пол в точке В под углом а и поддерживается
двумя опорами С и D.
Определить величины реакций опор в точках В, С и D, если
стержень нагружен парой сил, момент которой М = 4Ра, длина
стержня I = 6й, расстояние ВС — CD = a.
О ( 3
Ответ: RB
= Rd = P(i + 3 cos a).
ГЛ 1 ПЛОСКАЯ GHCILMA СИЛ
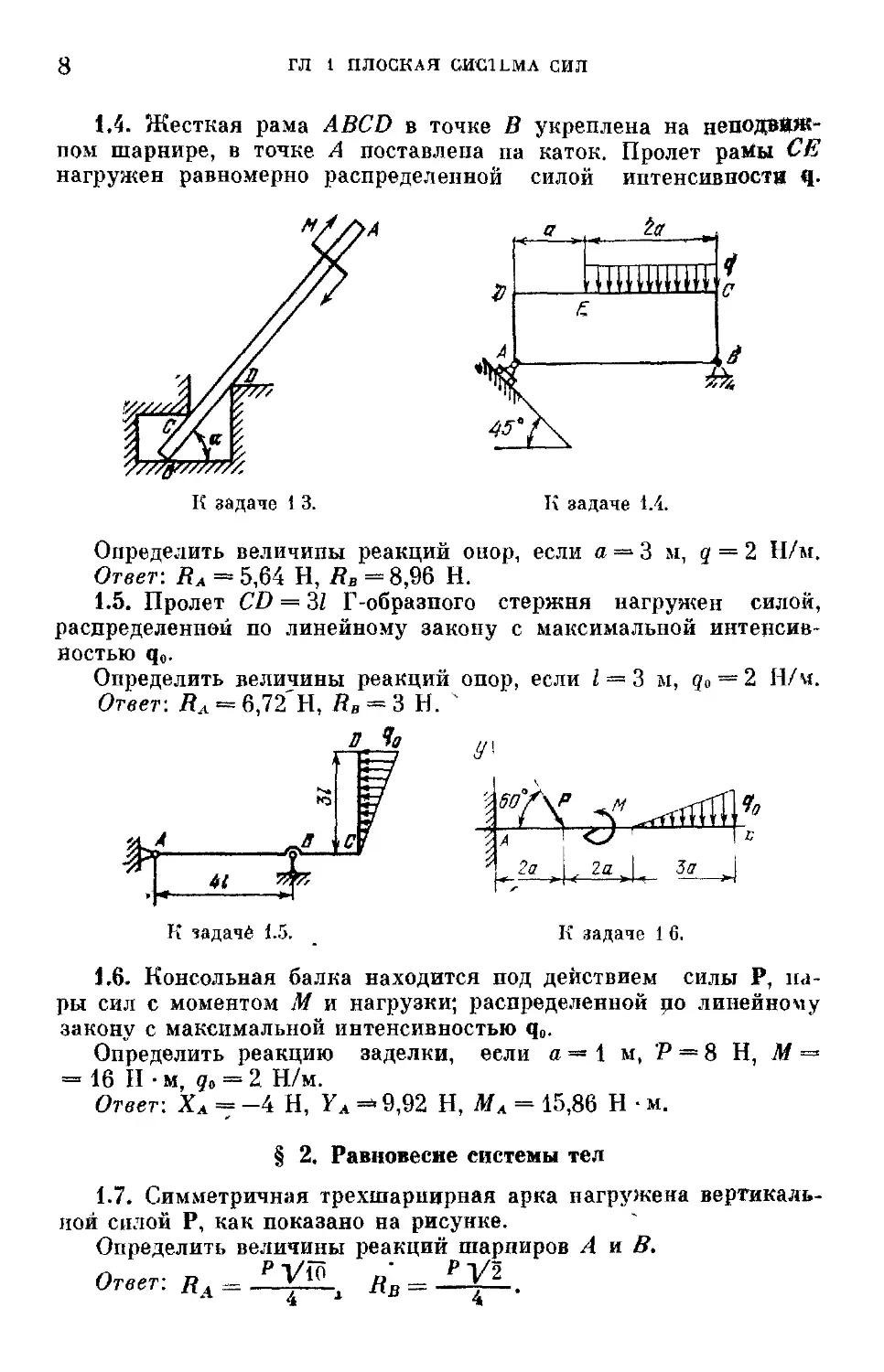
1.4. Жесткая рама ABCD в точке В укреплена на неподвйЖ-
пом шарнире, в точке А поставлена па каток. Пролет рамы СЕ
нагружен равномерно распределенной силой интенсивности Ч-
( а
F,
К задаче 1 3.
К задаче 1.4.
Определить величипы реакций опор, если а = 3 м, q = 2 Н/м.
Ответ: RA = 5,64 Н, RB = 8,96 Н.
1.5. Пролет CZ> = 31 Г-образпого стержня нагружен силой,
распределенной по линейному закону с максимальной интенсив-
интенсивностью q0.
Определить величины реакций опор, если 1 = 3 и, q0 — 2 Н/м.
Ответ: RA •= 6,72'Н, Re = 3H/
В 1а ,, |
^^_
К задаче 1.5.
К задаче 1 6.
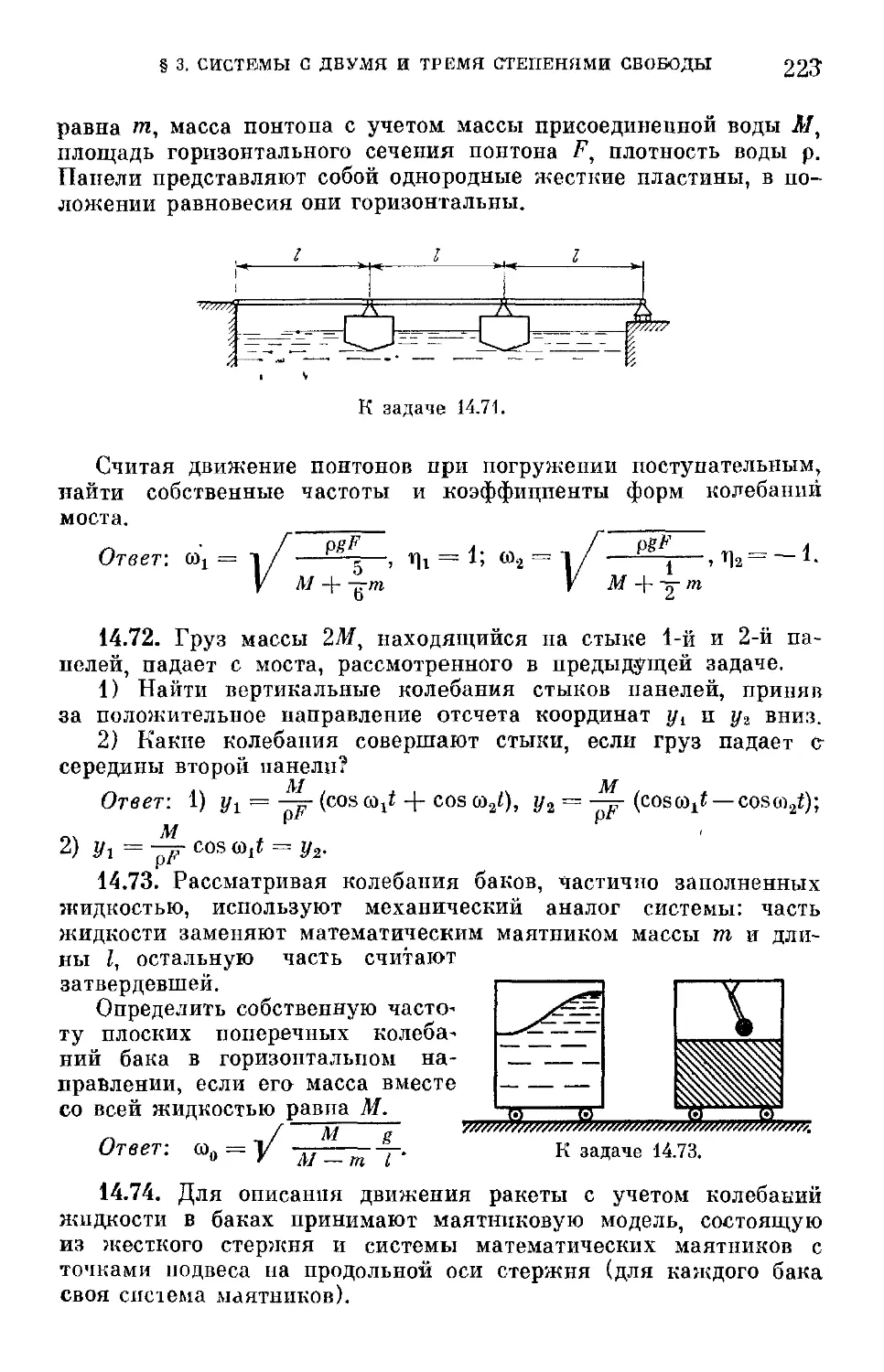
1.6. Консольная балка находится под действием силы Р, на-
нары сил с моментом М и нагрузки; распределенной ро линейному
закону с максимальной интенсивностью q0.
Определить реакцию заделки, если а ~ 1 м, Р = 8 Н, М =
= 16 II • м, q» = 1 Н/м.
Ответ: ХА = -4 Н, YA - 9,92 Н, Л/А = 15,86 Н • м.
§ 2, Равновесие системы тел
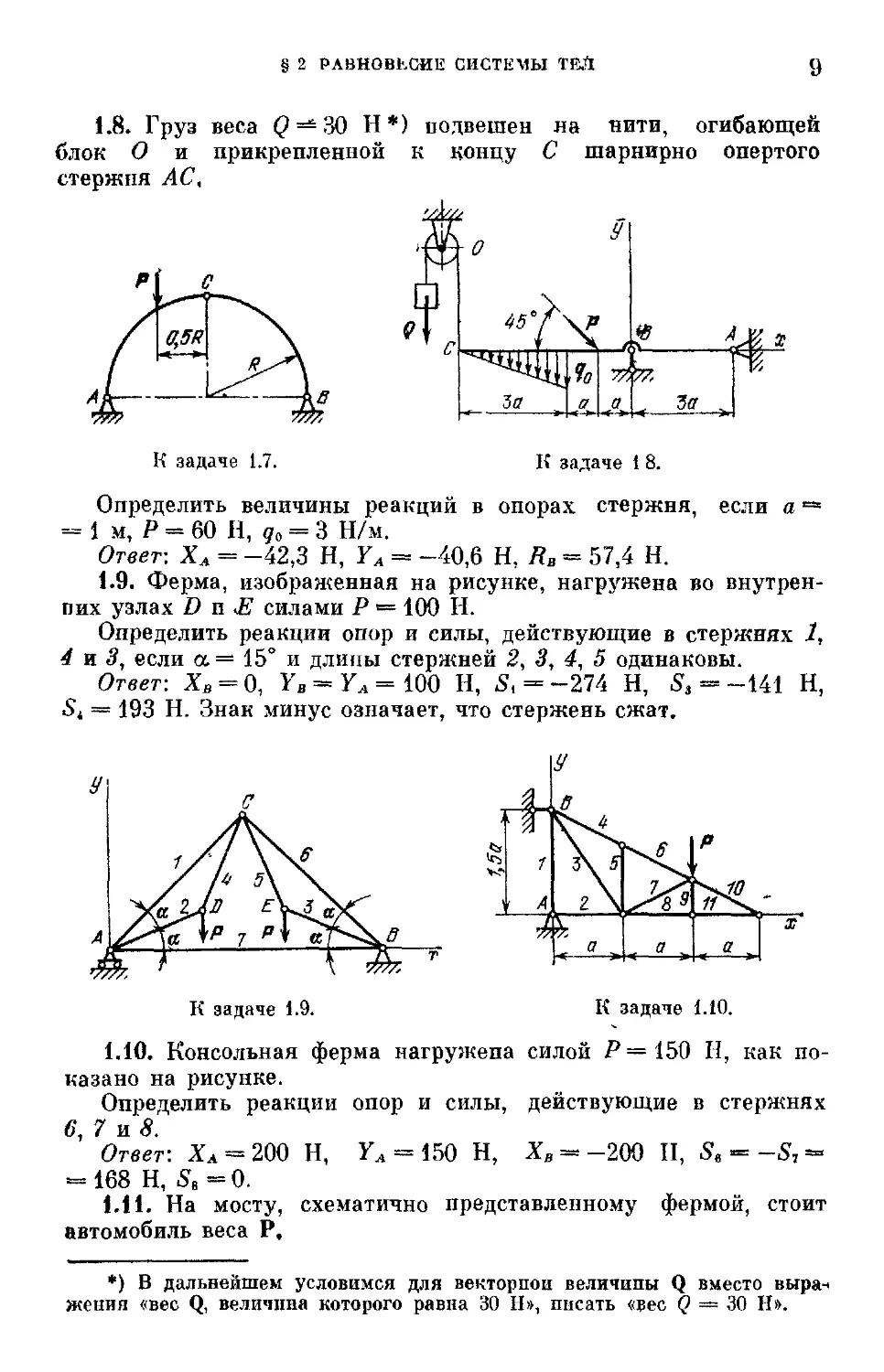
1.7. Симметричная трехшариирная арка нагружена вертикаль-
вертикальной силой Р, как показано на рисунке.
Определить величины реакций шарниров А а В.
Ответ: й.= PVlT
_
§ 2 РАВНОВЕСИЕ СИСТЕМЫ ТЕЛ
9
1.8. Груз веса Q — 30 Н*) подвешен на нити, огибающей
блок О и прикрепленной к концу С шарнирно опертого
стержня АС,
К задаче 1.7.
К задаче 1 8.
Определить величины реакций в опорах стержня, если а ■==
= 1 м, Р = 60 Н, д„ = 3 Н/м.
Ответ: Хл = -42,3 Н, YA = -40,6 Н, RB = 57,4 Н.
1.9. Ферма, изображенная на рисунке, нагружена во внутрен-
внутренних узлах D п -Е силами Р = 100 Н.
Определить реакции опор и силы, действующие в стержнях 1,
4 я 3, если а— 15° и длииы стержней 2, 3, 4, 5 одинаковы.
Ответ: Хв = 0, YB = YA = 100 Н, 5, = -274 Н, 5, = -141 Н,
Si = 193 Н. Знак минус означает, что стержень сжат.
К задаче 1.9.
К задаче 1.10.
1.10. Консольная ферма нагружена силой Р=150 Н, как по-
показано на рисунке.
Определить реакции опор и силы, действующие в стержнях
<?, 7 и 8.
Ответ: Ха = 200 Н, Ya = 150 Н, Хв = -200 II, St - -5, -
«=-168 Н, 5, = 0.
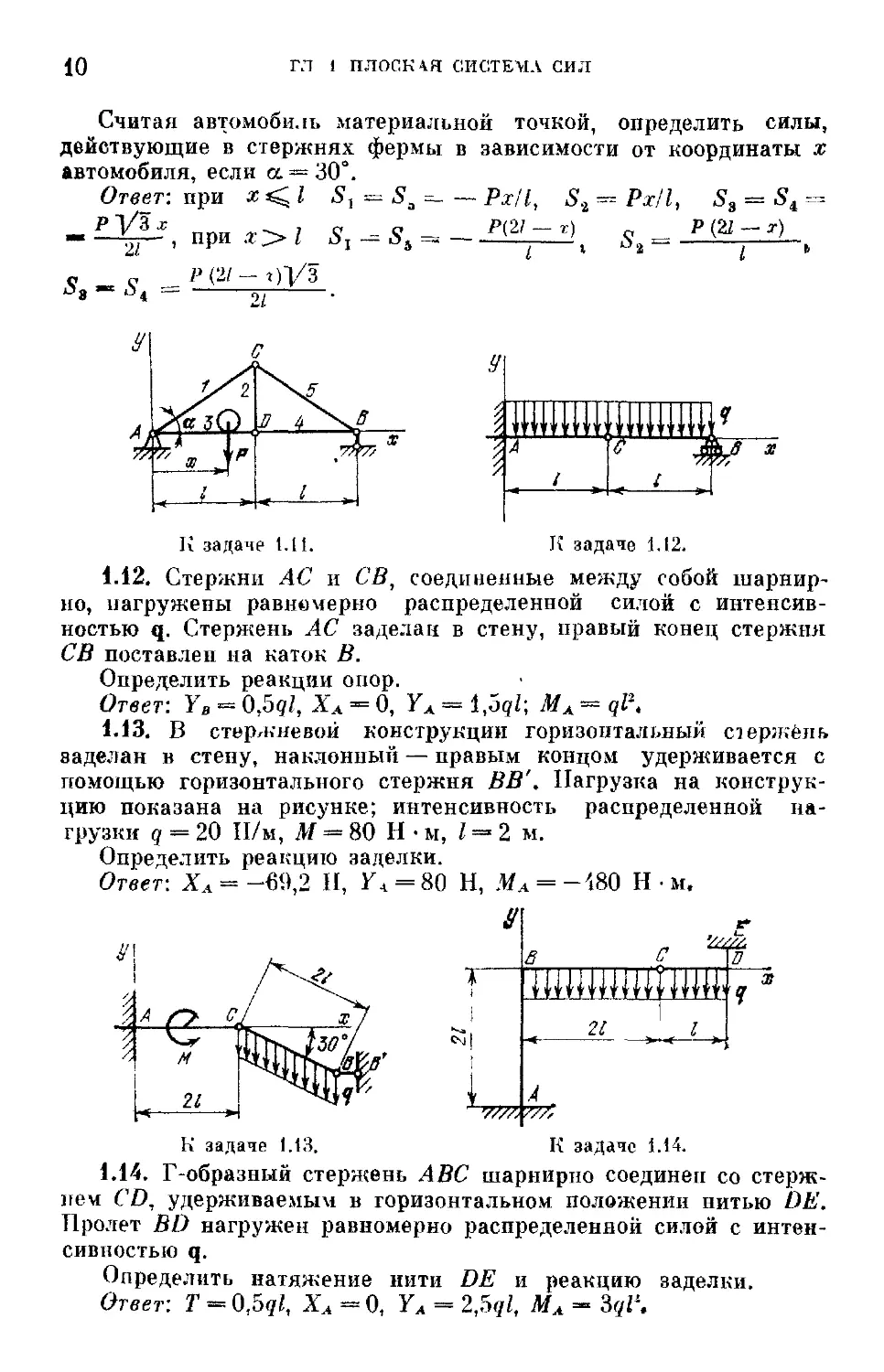
1.11. На мосту, схематично представленному фермой, стоит
автомобиль веса Р,
*) В дальнейшем условимся для векторной величины Q вместо выра->
жения «вес Q, величина которого равна 30 Н», писать «pec Q = 30 Н».
10
ГЛ 1 ПЛОСК4Я СИСТЕМА СИЛ
Считая автомобиль материальной точкой, определить силы,
действующие в стержнях фермы в зависимости от координаты х
автомобиля, если а. — 30°.
" , =- — Pxll, St - Px/l, S3 = S4 =
= — Р{21 ~ г) <? Р B/ — д-)
I i "a = i ь
омобиля, если а. —
Ответ: при х < I
ffl
К задаче 1.11. К задаче 1.12.
1.12. Стержни АС и СВг соединенные между собой шарнир-
но, нагружены равнвмерно распределенной силой с интенсив-
интенсивностью q. Стержень АС заделан в стену, правый конец стержня
СВ поставлен на каток В.
Определить реакции опор.
Ответ: Y, -= 0,5ql, ХА = 0, YA = i,oql; МА = ql\
1.13. В стержневой конструкции горизонтальный саержель
ааделан в стену, наклонный — правым концом удерживается с
помощью горизонтального стержня ВВ'. Нагрузка на конструк-
конструкцию показана на рисунке; интенсивность распределенной па-
грузки q = 20 Н/м, М = 80 Н • м, / =» 2 м.
Определить реакцию заделки.
Ответ: ХА = -69,2 II, К, = 80 Н, МА = -480 Н • м.
8
1
шшиштщ,.
К задаче 1.13. К задаче 1.14.
1.14. Г-образный стержень ABC шариирно соединен со стерж-
стержнем CD, удерживаемым в горизонтальном положении нитью DE.
Пролет BD нагружен равномерно распределенной силой с интен-
интенсивностью q.
Определить натяжение нити DE и реакцию заделки.
Ответ: Т == 0,5^, Хл - 0, YA = 2,5?/, Мл - Sql\
8 2 РАВНОВЕСИЕ CHCTEIWbl ТЕЛ
il
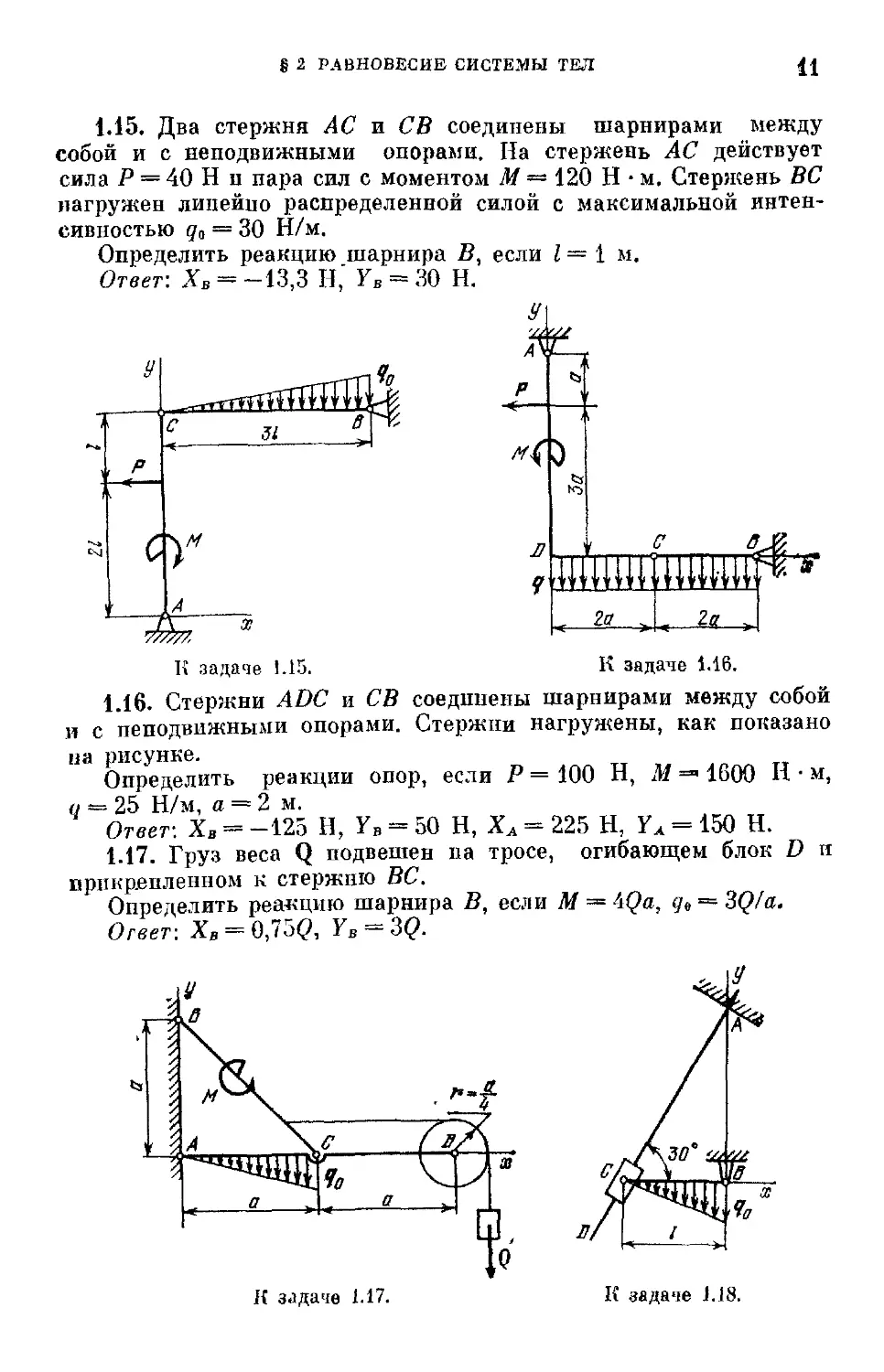
1.15. Два стержня АС и СВ соединены шарнирами между
собой и с неподвижными опорами. Иа стержень АС действует
сила Р = 40 Н н пара сил с моментом М = 120 Н ■ м. Стержень ВС
нагружен линейно распределенной силой с максимальной интен-
интенсивностью qa = 30 Н/м.
Определить реакцию шарнира В, если I ~ 1 м.
Ответ: JB = -13,3 H," Y, = 30 Н.
У
а
м
м
2а
К задаче 1.15. К задаче 1.16.
1.16. Стержни ADC и СВ соединены шарнирами между собой
и с неподвижными опорами. Стержни нагружены, как показано
на рисунке.
Определить реакции опор, если Р = 100 Н, М =■ 1600 И • м,
о = 25 Н/м, а = 2 м.
Ответ: Хв = -125 Н, YB = 50 Н, ХА = 225 Н, YA = 150 Н.
1.17. Груз веса Q подвешен на тросе, огибающем блок D и
прикрепленном к стержню ВС.
Определить реакцию шарнира В, если М = АОа, д„ = ЗО/а.
Ответ: Хв — 0,75B, Ув = 3(?.
К задаче 1.17.
К задаче J.18.
12
ГЛ 1 Ш10СКАЯ СИСТЕМА СИЛ
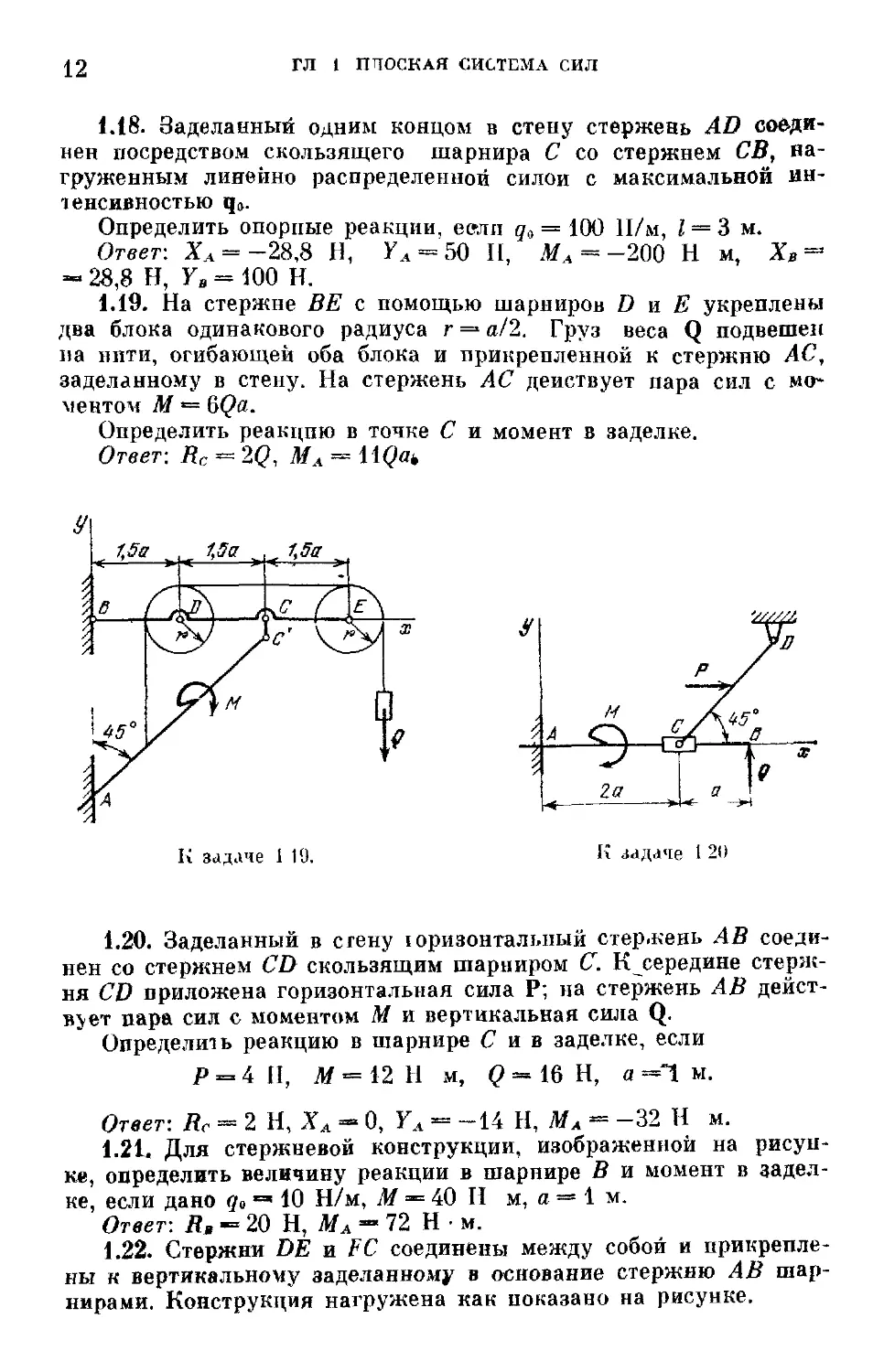
1.18. Заделанный одним концом в стену стержень AD соеди-
соединен посредством скользящего шарнира С со стержнем СВ, на-
нагруженным линейно распределенной силой с максимальной ин-
интенсивностью q».
Определить опорные реакции, если д„ = 100 11/м, 1 = 3 и.
Ответ: Хл = -28,8 Н, У л = 50 И, МЛ = -200 Н м, Хв =>
- 28,8 Н, Ya = 100 Н.
1.19. На стержне BE с помощью шарниров D и Е укреплены
два блока одинакового радиуса г = а/2. Груз веса Q подвешен
на нити, огибающей оба блока и прикрепленной к стержню АС,
заделанному в стену. На стержень АС действует пара сил с мо-
моментом М = %Qa.
Определить реакцию в точке С и момент в заделке.
Ответ: Rc = 2Q, МА = WQak
_ 1,5а
К задаче I 19.
К задаче 1 20
1.20. Заделанный в сгену iоризонтальный стер.кень АВ соеди-
соединен со стержнем CD скользящим шарниром С. К середине стерж-
стержня CD приложена горизонтальная сила Р; на стержень АВ дейст-
в>ет пара сил с моментом М и вертикальная сила Q.
Определить реакцию в шарнире Сив заделке, если
р = 4 II, М = 12 Н м, Q - 16 Н, а =1 м.
Ответ: Rc - 2 Н, ХА - 0, YA - -14 Н, Л/а ■= -32 Н м.
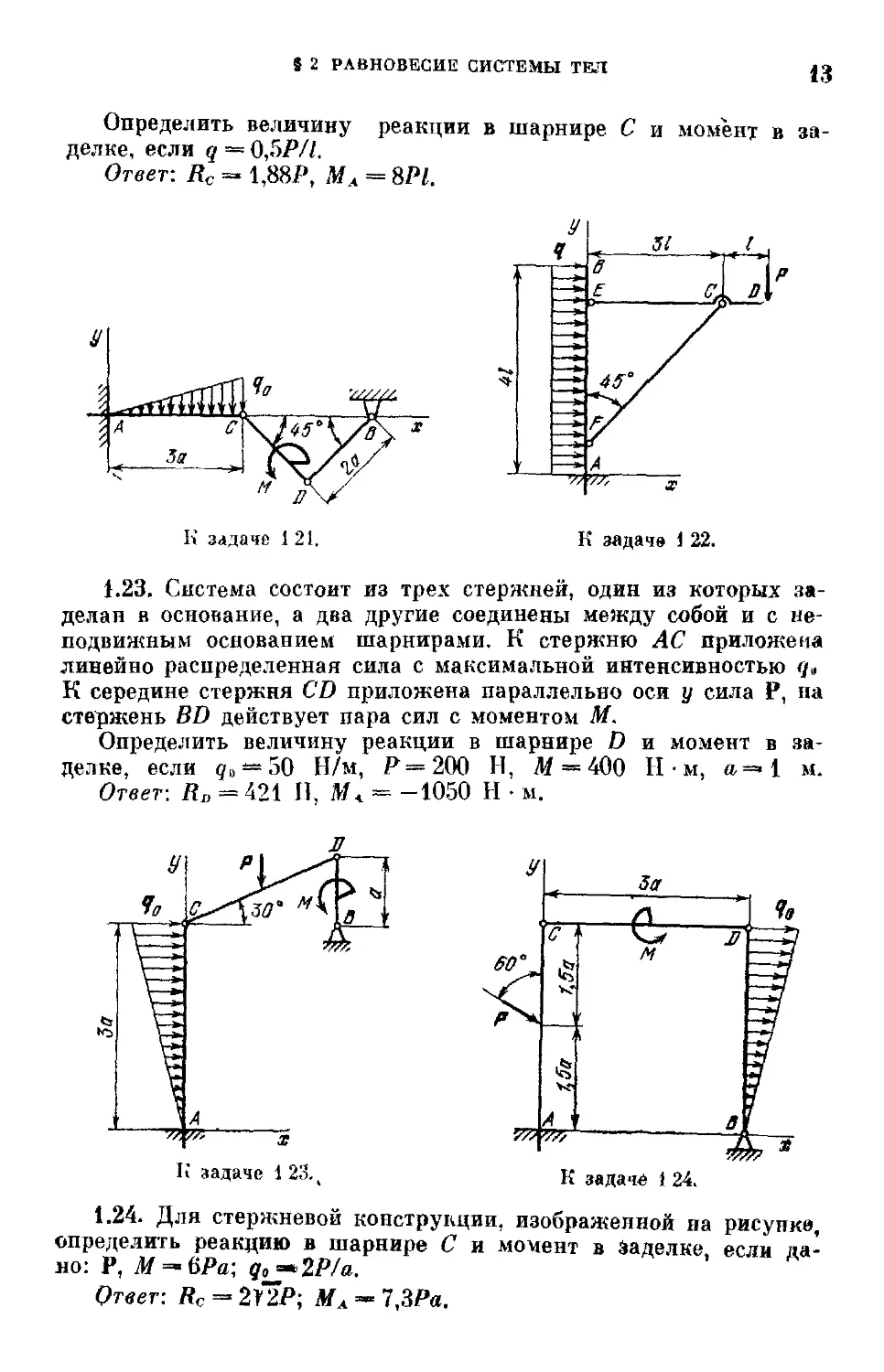
1.21. Для стержневой конструкции, изображенной на рисун-
рисунке, определить величину реакции в шарнире В и момент в задел-
заделке, если дано qe га 10 Н/м, М =-= 40 И м, а = 1 м.
Огвег: Д, -= 20 Н, МА - 72 Н • м.
1.22. Стержни DE и FC соединены между собой и прикрепле-
прикреплены к вертикальному заделанному в основание стержню АВ шар-
шарнирами. Конструкция нагружена как показано на рисунке.
§ 2 РАВНОВЕСИЕ СИСТЕМЫ ТЕЛ л<л
it]
Определить величину реакции в шарнире С и момент в за-
заделке, если q — 0,5/V/.
Ответ: Rc - 1,88Р, МА = 8Р1.
К задаче i 22.
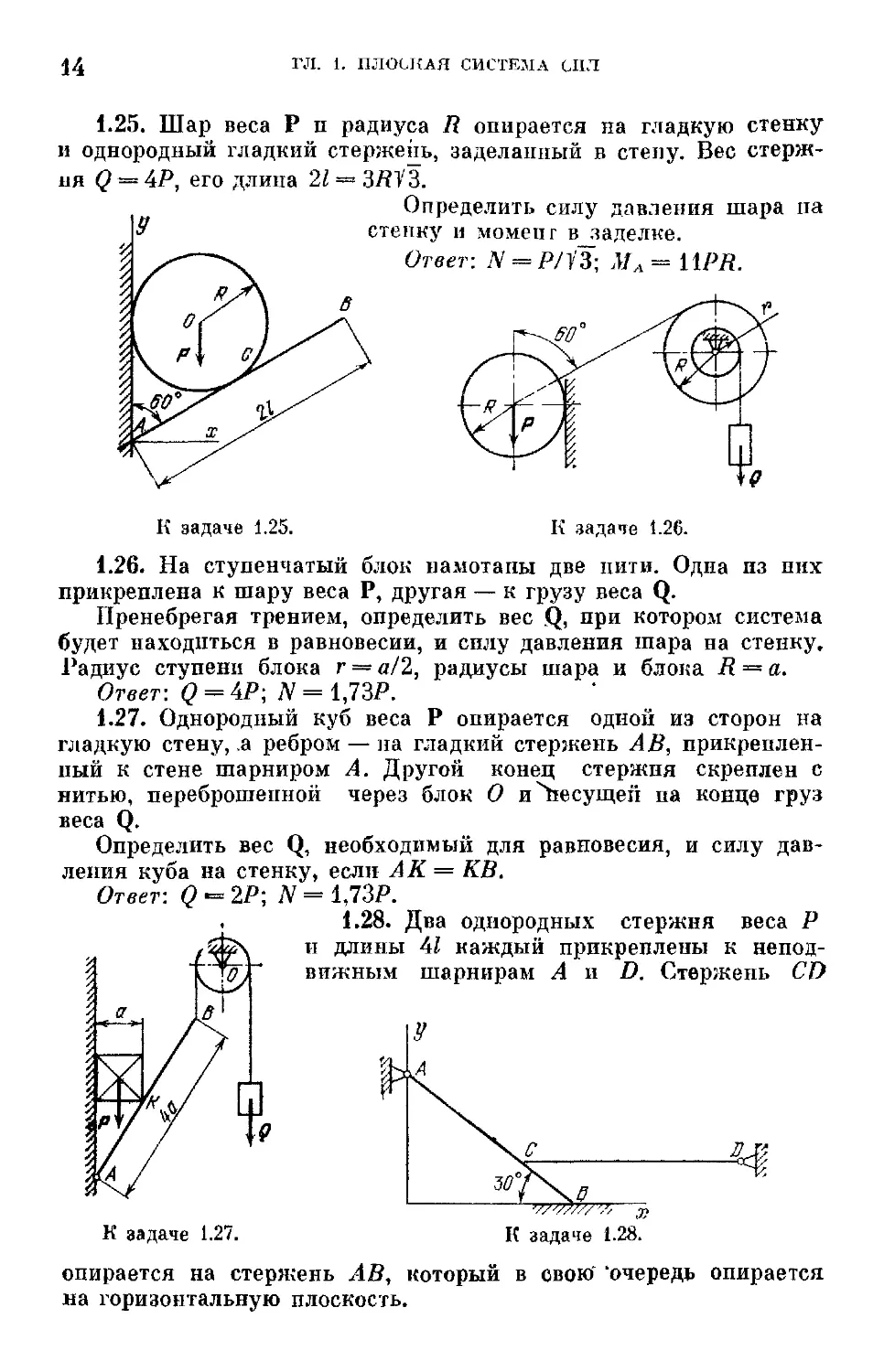
1.23. Система состоит из трех стержней, один из которых за-
заделан в основание, а два другие соединены между собой и с не-
неподвижным основанием шарнирами. К стержню АС приложена
линейно распределенная сила с максимальной интенсивностью q»
К середине стержня CD приложена параллельно оси у сила Р, на
стержень BD действует пара сил с моментом М.
Определить величину реакции в шарнире D и момент в за-
заделке, если 9„-50 Н/м, Р=200 Н, М = 400 Ы • м, а=«1 м.
Ответ: RD = 421 И, М< = -1050 И • м.
К задаче 1 23. к
с ■'
А '
м
К задачи 1 24.
1.24. Для стержневой конструкции, изображенной на рисунке,
определить реакцию в шарнире С и момент в Заделке если да-
дано: Р, М=°6Ра; Яо^гР/а.
Ответ: Rc - 2У2Р; МА - 7,ЗР«.
14
ГЛ. 1. ПЛОСКАЯ СИСТЕМА СИЛ
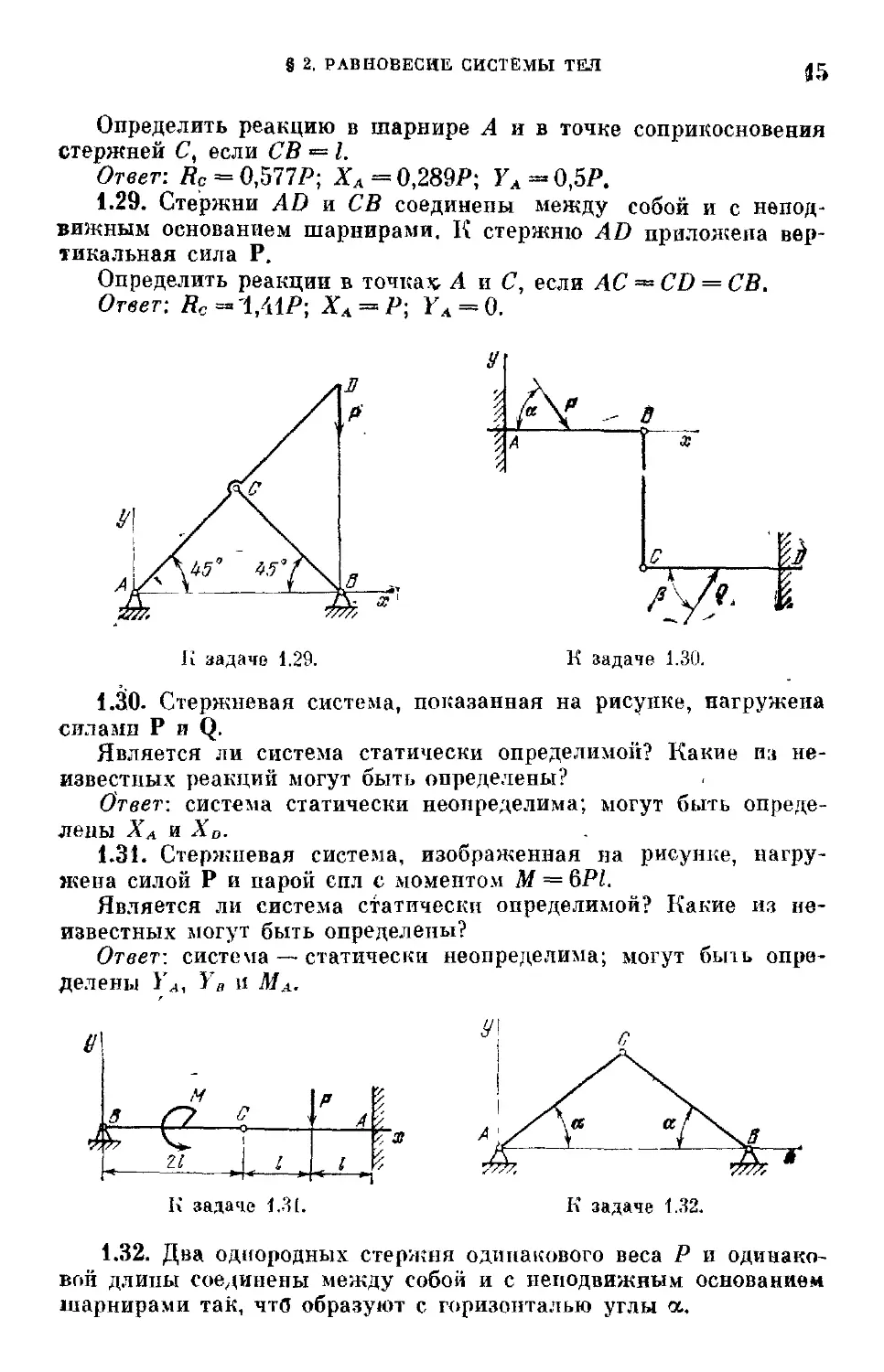
1.25. Шар веса Р п радиуса Я опирается на гладкую стенку
и однородный гладкий стержень, заделанный в стену. Вес стерж-
стержня <? = АР, его длина 21 = ЗДУЗ.
Определить силу давления шара на
стенку и момент в_заделке.
Ответ: N = Р/УЗ"; МА = HPR.
В
ff
К задаче 1.25.
К задаче 1.26.
1.26. На ступенчатый блок намотапы две нити. Одна пз них
прикреплена к шару веса Р, другая — к грузу веса Q.
Пренебрегая трением, определить вес .Q, при котором система
будет находиться в равновесии, и силу давления шара на стенку,
Радиус ступени блока г = а/2, радиусы шара и блока R = a.
Ответ: <? = 4Р; N = 1,73P.
1.27. Однородный куб веса Р опирается одной из сторон на
гладкую стену, а ребром — на гладкий стержень А В, прикреплен-
прикрепленный к стене шарниром А. Другой конец стержня скреплен с
нитью, переброшенной через блок О и Несущей па конце груз
веса Q.
Определить вес Q, необходимый для равновесия, и силу дав-
давления куба на стенку, если А К = КВ.
Ответ: Q «= 2Р; N = 1,73Р.
1.28. Два однородных стержня веса Р
и длины 41 каждый прикреплены к непод-
неподвижным шарнирам А и D. Стержень CD
К задаче 1.27.
К задаче 1.28.
опирается на стержень АВ, который в свою 'очередь опирается
на горизонтальную плоскость.
g 2, РАВНОВЕСИЕ СИСТЕМЫ ТЕЛ
Определить реакцию в шарнире Лив точке соприкосновения
стержней С, если СВ ■= /.
Ответ: Щ = О,577Р; ХА = 0.289Р; YA - 0,5/\
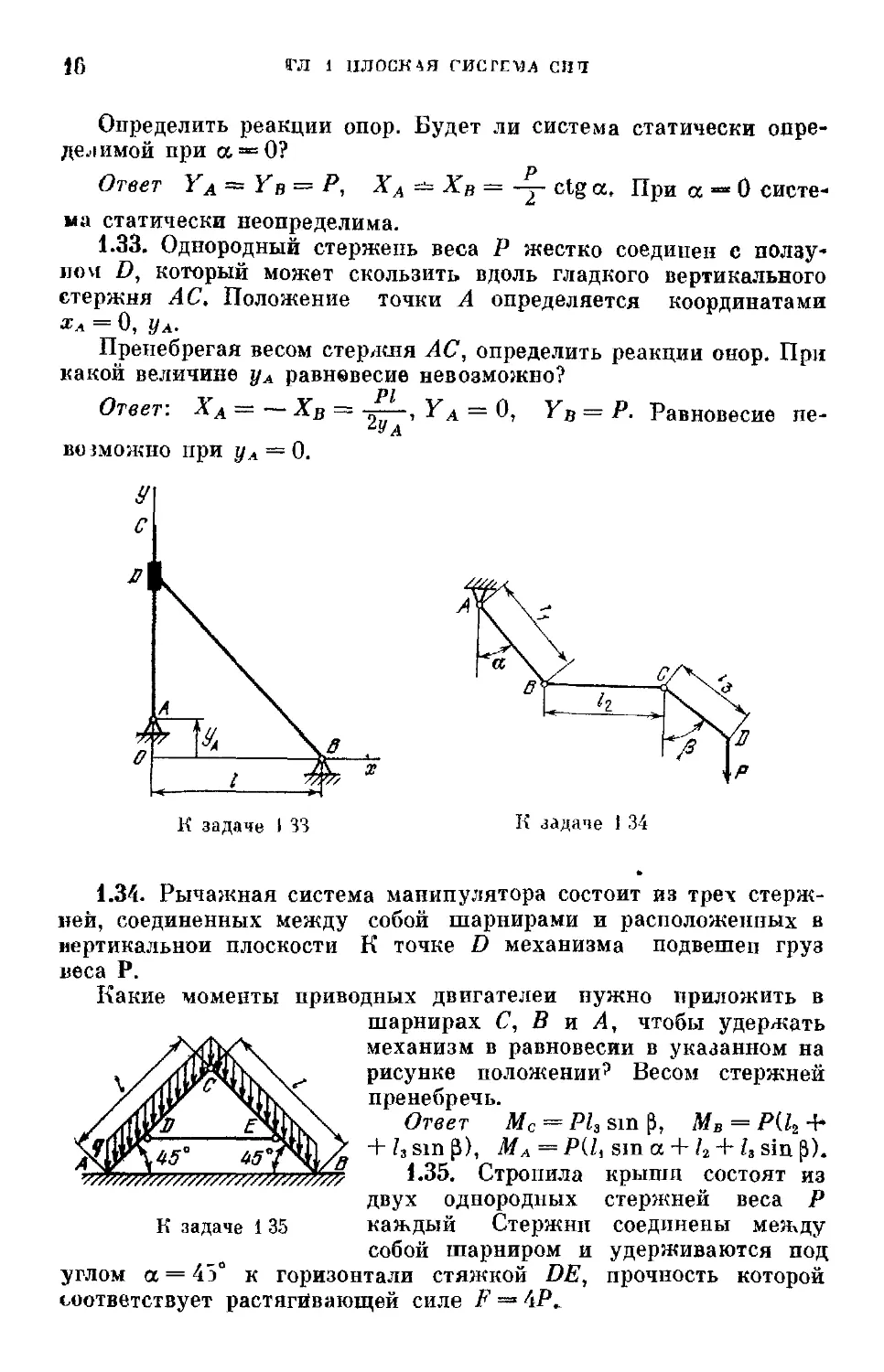
1.29. Стержни AD и СВ соединены между собой и с непод-
неподвижным основанием шарнирами. К стержню AD приложена вер-
вертикальная сила Р.
Определить реакции в точкам А и С, если АС — CD = СВ.
Ответ: Rc^'l/ЛР ХР У 0
К задаче 1.29.
К задаче 1.30.
1.30. Стержневая система, показанная на рисунке, нагружена
силами Р и Q.
Является ли система статически определимой? Какие ал не-
неизвестных реакций могут быть определены?
Ответ: система статически неопределима; могут быть опреде-
определены ХА и Xd.
1.31. Стержневая система, изображенная на рисунке, нагру-
нагружена силой Р и парой спл с моментом М = 6Р1.
Является ли система статически определимой? Какие из не-
неизвестных могут быть определены?
Ответ: система — статически неопределима; могут бьпь опре-
определены YA, Ув и Мл.
м
s Г7 с
г1 ) /
р
А
_ /
\
'/
/
/
s
К задаче 1.31.
К задаче 1.32.
1.32. Два однородных стержня одинакового веса Р и одинако-
одинаковой длины соединены между собой и с неподвижным основанием
шарнирами так, что образуют с горизонталью углы а.
ГЛ 1 ПЛОСКАЯ СИСТЕМА CJI1
Определить реакции опор. Будет ли система статически опре-
определимой при а = 0?
Ответ YA = YB = Р, ХА =±= Хв = -у ctg а. При а — 0 систе-
система статически неопределима.
1.33. Однородный стержень веса Р жестко соединен с ползу-
ползуном D, который может скользить вдоль гладкого вертикального
стержня АС, Положение точки А определяется координатами
хл = 0, у а.
Пренебрегая весом стерлшя АС, определить реакции онор. При
какой величине уА равнввесие невозможно?
Ответ: ХА — — Хв = -^-, YA = О, YB = P. Равновесие пе-
возможно при ул = 0.
К задаче I 33
К задаче i 34
1.34. Рычажная система манипулятора состоит вз трех стерж-
стержней, соединенных между собой шарнирами и расположенных в
иертикальнои плоскости К точке D механизма подвешен груз
иеса Р.
Какие моменты приводных двигателей нужно приложить в
шарнирах С, В и А, чтобы удержать
механизм в равновесии в указанном на
рисунке положении'' Весом стержней
пренебречь.
Ответ Мс = PI, sin р, Мв = P(k +
+ /, sin р), МА = P(l, sin a + h + h sin p).
1.35. Стропила крышл состоят из
двух однородных стержней веса Р
К задаче 135 каждый Стержни соединены между
собой шарниром и удерживаются под
углом а = 45° к горизонтали стяжкой DE, прочность которой
соответствует растягивающей силе F =» 4Р_
§ 2 РАВНОВЕСИЕ СИСТЕМЫ ТЕЛ
Определить интенсивность равномерной нагрузки q от снежно-
снежного покрова, при которой стропила еще удерживаются стяжкой^
если DC = ЕС — 0,75/. Весом стяжки пренебречь.
Ответ: q < ЪР/1.
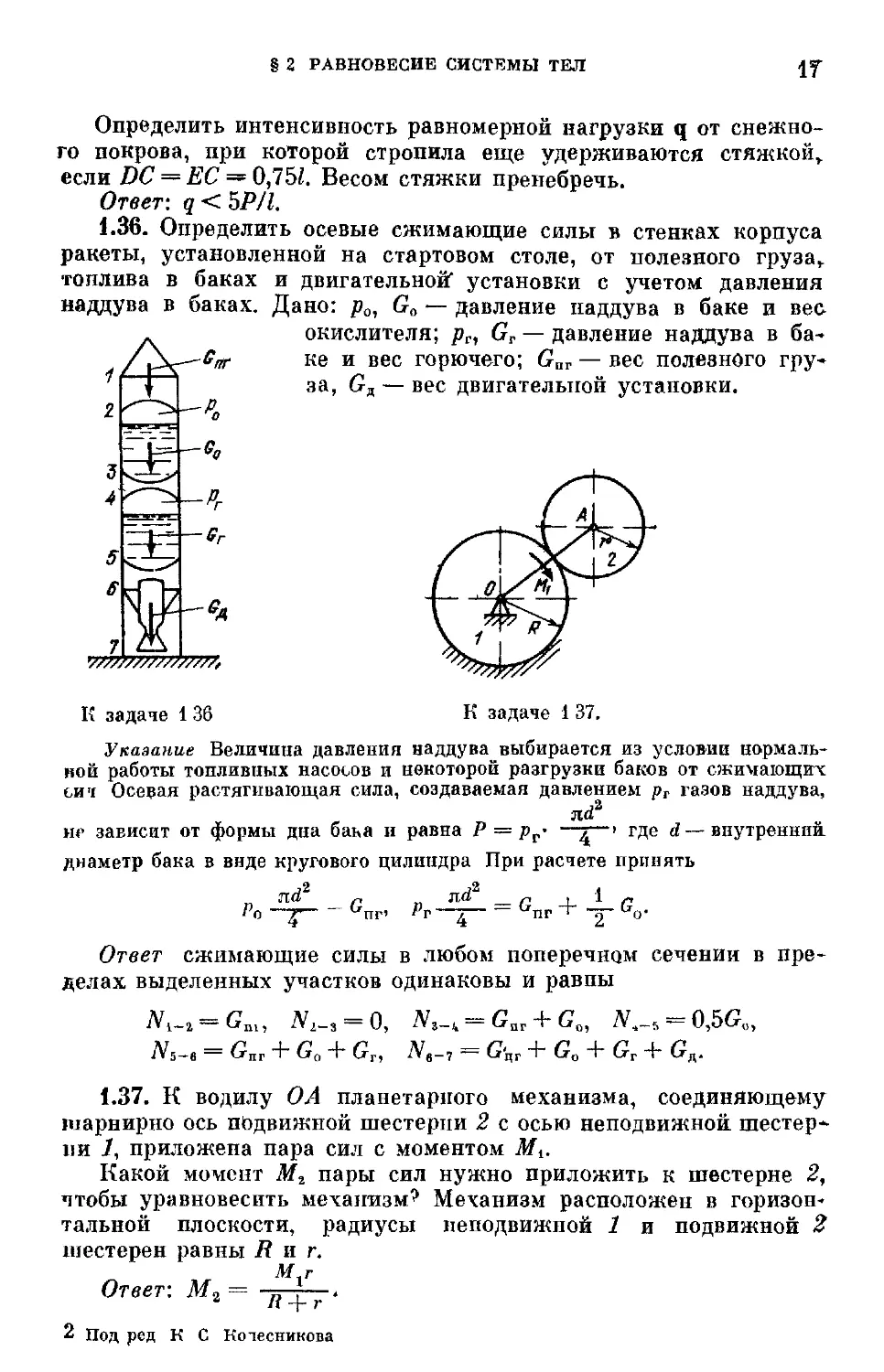
1.36. Определить осевые сжимающие силы в стенках корпуса
ракеты, установленной на стартовом столе, от полезного груза,,
топлива в баках и двигательной" установки с учетом давления
наддува в баках. Дано: р0, Go — давление наддува в баке и вес
. окислителя; ре, Gr — давление наддува в ба-
/ ,\—~еяг ке и вес горючего; Gnr — вес полезного гру-
| | | за, бд — вес двигательной установки.
К задаче 136
К задаче 1 37.
Указание Величина давления наддува выбирается из условии нормаль-
нормальной работы топливных насосов и некоторой разгрузки баков от сжимающих
сич Осеэая растягивающая сила, создаваемая давлением рг газов наддува,
не зависит от формы дна баьа и равна Р = рт
nd*
> где d—внутренний
диаметр бака в виде кругового цилиндра При расчете принять
nd
= Gnr+J-G0.
Ответ сжимающие силы в любом поперечном сечении в пре-
пределах выделенных участков одинаковы и равпы
Л^-G,,, N^ = 0, W3_4 = Gnr + Go, tf._s = 0,5Go,
1.37. К водилу ОА планетарного механизма, соединяющему
шарнирно ось подвижной шестерни 2 с осью неподвижной шестер-
шестерни 1, приложепа пара сил с моментом М±.
Какой момент Мг пары сил нужно приложить к шестерне 2,
чтобы уравновесить механизм' Механизм расположен в горизон-
горизонтальной плоскости, радиусы неподвижной 1 и подвижной 2
шестерен равны R и г.
Ответ: Ма = -^-г—*
2 Под ред К С Колесникова
18
ГЛ. 1. ПЛОСКАЯ СИСТЕМА СИЛ
§ 3. Равновесие с учетом трбпияг
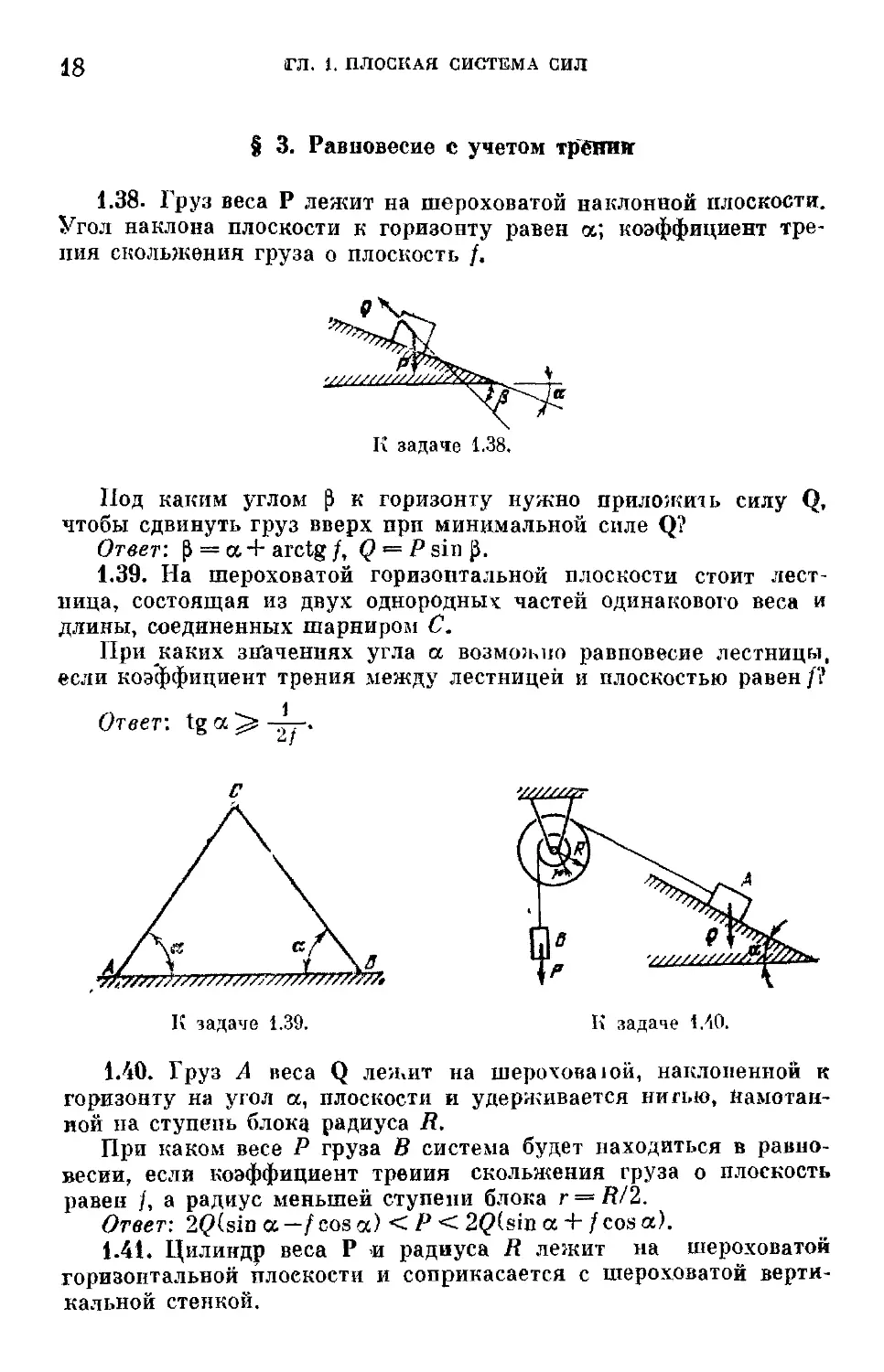
1.38. Груз веса Р лежит на шероховатой наклонной плоскости.
Угол наклона плоскости к горизонту равен <%; коэффициент тре-
трения скольжения груза о плоскость /.
К задаче 1.38.
Под каким углом р к горизонту нужно приложить силу Q,
чтобы сдвинуть груз вверх при минимальной силе Q?
Отеет: $ = а + arctg /, Q = Р sin |J.
1.39. На шероховатой горизонтальной плоскости стоит лест-
лестница, состоящая из двух однородных частей одинакового веса и
длины, соединенных шарниром С.
При каких значениях угла а возможно равновесие лестнищл.
если коэффициент трения между лестницей и плоскостью равен /?
Ответ: tg а ^ ——.
\а с/
К задаче 1.39.
К задаче 1.40.
1.40. Груз А веса Q лежит на шероховаюй, наклоненной к
горизонту на угол а, плоскости и удерживается нигью, Намотан-
Намотанной на ступень блока радиуса R.
При каком весе Р груза В система будет находиться в равно-
равновесии, если коэффициент треиия скольжения груза о плоскость
равен /, а радиус меньшей ступени блока г = Д/2.
Ответ; 2(>(sin а — / cos а)< Р < 2(Hsin а + } cos а).
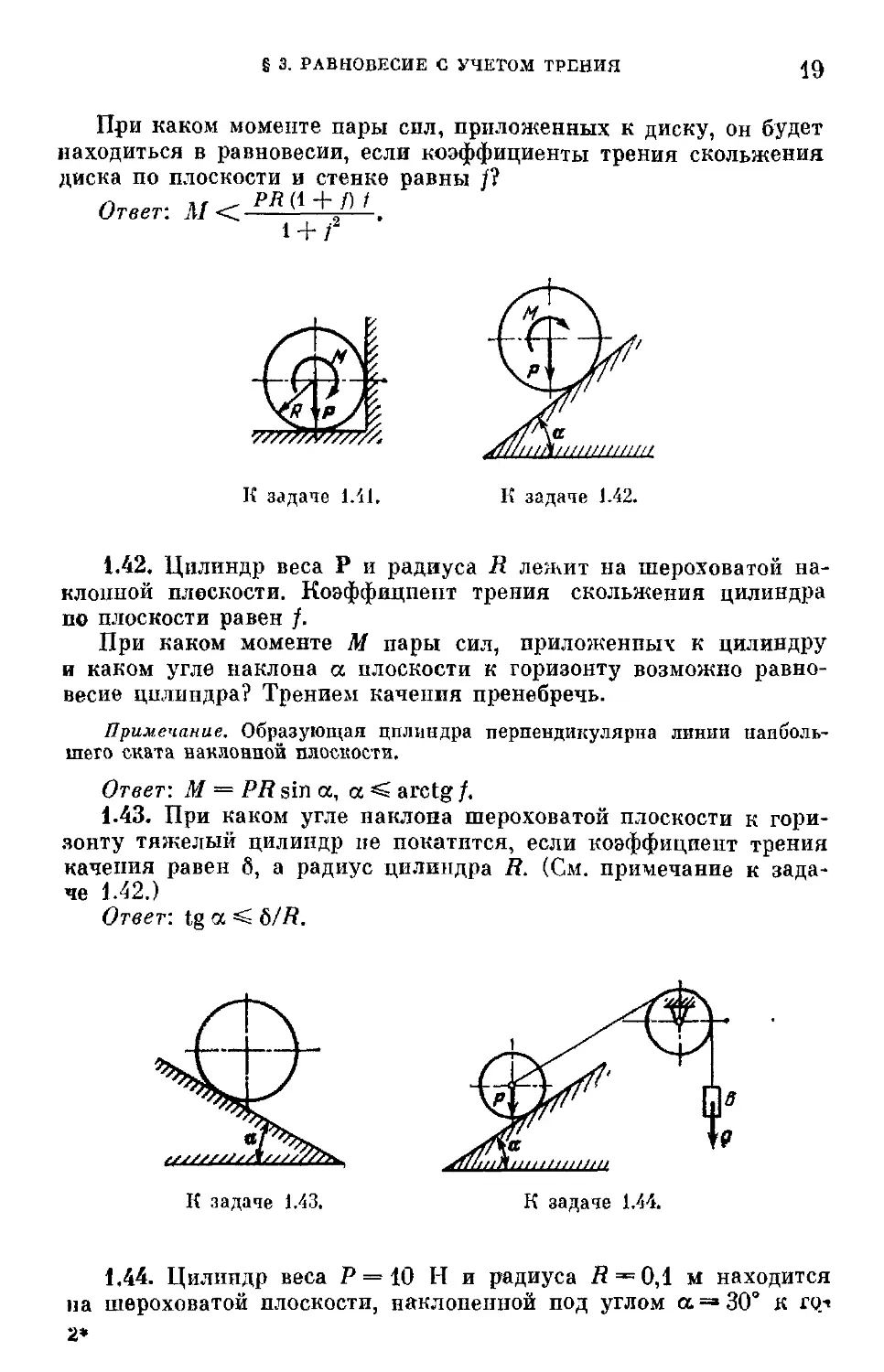
1.41. Цилиндр веса Р и радиуса R лежит на шероховатой
горизонтальной плоекости и соприкасается с шероховатой верти-
вертикальной стенкой.
§ 3. РАВНОВЕСИЕ С УЧЕТОМ ТРЕНИЯ
19
При каком моменте пары сил, приложенных к диску, он будет
находиться в равновесии, если коэффициенты трения скольжения
диска по плоскости и стенке равны /?
Ответ: М <!*£+£!..
1 + /2
7777.
К задаче 1.41.
К задаче 1.42.
1.42. Цилиндр веса Р и радиуса Л лежит на шероховатой на-
клоцной плескости. Коэффициент трения скольжения цилиндра
по плоскости равен /.
При каком моменте М пары сил, приложенных к цилиндру
и каком угле наклона а плоскости к горизонту возможно равно-
равновесие цилиндра? Трением качения пренебречь.
Примечание. Образующая цплиндра перпендикулярна линии наиболь-
наибольшего ската наклонной плоскости.
Ответ: М = PR sin ее, ее < arctg /.
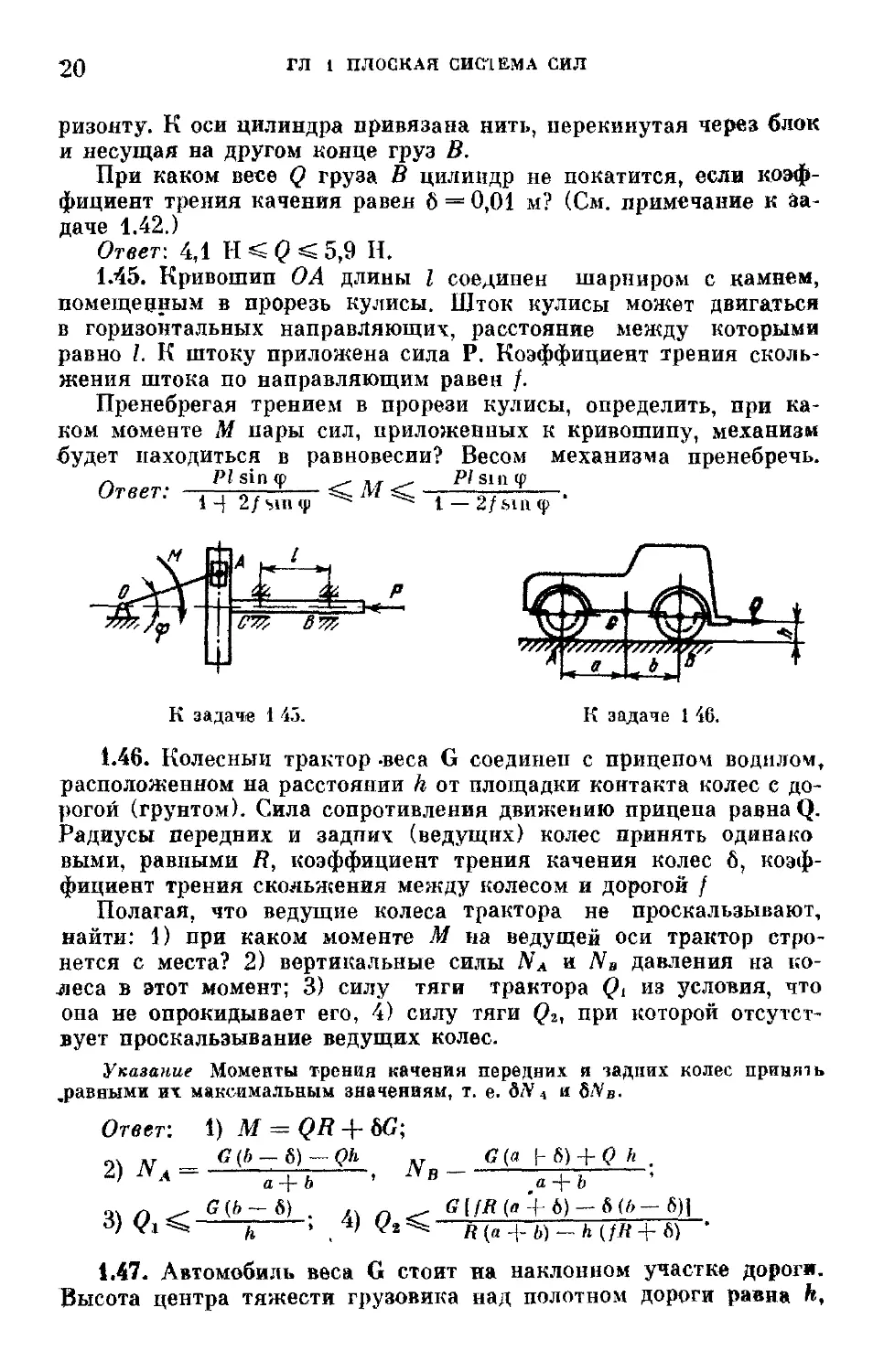
1.43. При каком угле наклона шероховатой плоскости к гори-
горизонту тяжелый цилиндр не покатится, если коэффициент трения
качения равен б, а радиус цилиндра R. (См. примечание к зада-
задаче 1.42.)
Ответ: tg a < б/R.
К задаче 1.43.
К задаче 1.44.
1.44. Цилиндр веса Р = 10 И и радиуса Д="=0,1 м находится
на шероховатой плоскости, наклоненной под углом а = 30° к гоч
2»
20
ГЛ 1 ПЛОСКАЯ СИС1ЕМА СИЛ
ризонту. К оси цилиндра привязана нить, перекинутая через блок
и несущая на другом конце груз В.
При каком весе Q груза В цилиндр не покатится, если коэф-
коэффициент трения качения равен б = 0,01 м? (См. примечание к за-
задаче 1.42.)
Ответ: 4,1 И < О sS 5,9 Н.
1.45. Кривошип ОА длины I соединен шарниром с камнем,
помещенным в прорезь кулисы. Шток кулисы может двигаться
в горизонтальных направляющих, расстояние между которыми
равно /. К штоку приложена сила Р. Коэффициент трения сколь-
скольжения штока по направляющим равен /.
Пренебрегая трением в прорези кулисы, определить, при ка-
каком моменте М пары сил, приложенных к кривошипу, механизм
будет находиться в равновесии? Весом механизма пренебречь.
~ P/sin<p ^- л/г ^- /Vsilllp
Ответ: -
2/ sin ф
1 — 2/Mm
К задаче 1
К задаче 1 46.
1.46. Колесный трактор -веса G соединен с прицепом воднлом,
расположенном на расстоянии h от площадки контакта колес с до-
дорогой (грунтом). Сила сопротивления движению прицепа равна Q.
Радиусы передних и задних (ведущих) колес принять оданако
выми, равными R, коэффициент трения качения колес б, коэф-
коэффициент трения скольжения между колесом и дорогой /
Полагая, что ведущие колеса трактора не проскальзывают,
найти: 1) при каком моменте М на ведущей оси трактор стро-
стронется с места? 2) вертикальные силы NA и Na давления на ко-
колеса в этот момент; 3) силу тяги трактора Qi из условия, что
она не опрокидывает его, 4) силу тяги Ог, при которой отсутст-
отсутствует проскальзывание ведущих колес.
Указание Моменты трения качения передних я задних колес принять
.равными их максимальным значениям, т. е. дЛ^ и 6/Vb.
Ответ: 1) М = QR + SC;
2) NA = —
G(a h 6) + Q h
G{b— 6)
4)
G[fR(a + b)
— 6I
R(a-\-b)
1.47. Автомобиль веса G стоит на наклонном участке дорог*.
Высота центра тяжести грузовика над полотном дороги равна h,
v § 1 ПРИВЕДЕНИЕ СИСТЕМЫ СИЛ К ЦЕНТРУ
21
расстояние между центрами колес Ъ; коэффициент трения сколь-
скольжения колес о дорогу равен /.
При каком угле наклона дороги а к плоскости горизонта мо-
может произойти опрокидывание грузови-
грузовика и ьогда може! начаться боковое
скольжение?
Ответ: опрокидывание — при />
w ft
> tga ~^> -nj-'i боковое скольжение —
при '-пт- > tg a > /.
1.48. Какого веса состав {GCOCT) мо-
жег стронуть с места электровоз на го-
горизонтальном участие пути, если вес задаче 1 »7
электровоза <?э, все его колеса — ведущие, радиусы колес элект-
электровоза и вагонов одинаковы и равны Д, коэффициент трения
скольжения колес о рельсы / = ОД, коэффициент трения каче-
качения ко теса но рельсу б = 0,004Д, трением качения в осях колес
пренебречь.
Ответ: Ссост =С —т~ ^э = 75(?э.
Глава 2
ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
§ 1. Приведение системы сил к центру
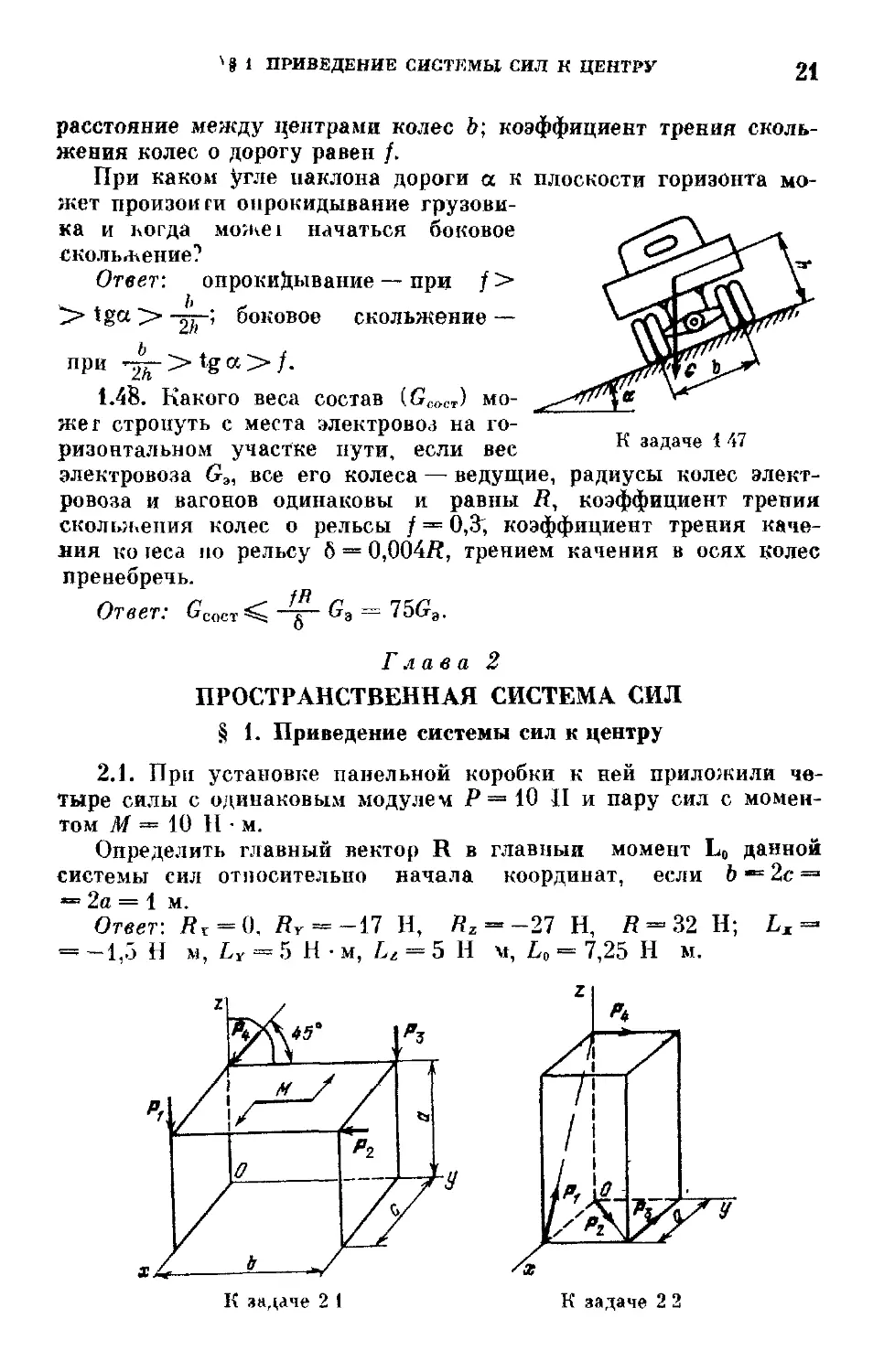
2.1. При установке панельной коробки к ней приложили че-
четыре силы с одинаковым модулем Р = 10 II и пару сил с момен-
моментом М = 10 Н ■ м.
Определить главный вектор R в главный момент Lo данной
системы сил относительно начала координат, если Ь •= 2с =»
— 2а = 1 м.
Ответ: /?v = 0, Дг = -17 Н, Я2 = -27 Н, R = 32 Н; Lx =■
= -1,5 Н м, Ly = 5 Н • м, Lt = 5Н \t, Lo = 7,25 Н м.
К задаче 2 1
К задаче 2 2
22
ГЛ. 2. ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
2.2. К вершинам прямоугольного параллелепипеда, основание
которого квадрат со стороной а = 0,5 м, а высота 1,5 м, прило-
приложено четыре силы, модуль каждой из которых равен Р =■ 20 Н.
Определять главный вектор R и главный момент La этой си-
системы сил относительно начала координат.
Ответ: Л^ = —12,2 Н, йг = 34 Н, Rz = 18,8 Н, R = 40,8 Н;
Lx = -30 Н ■ м, LY = -9,4 Н • м, Ьг - 10 Н • м, U = 33 Н • м.
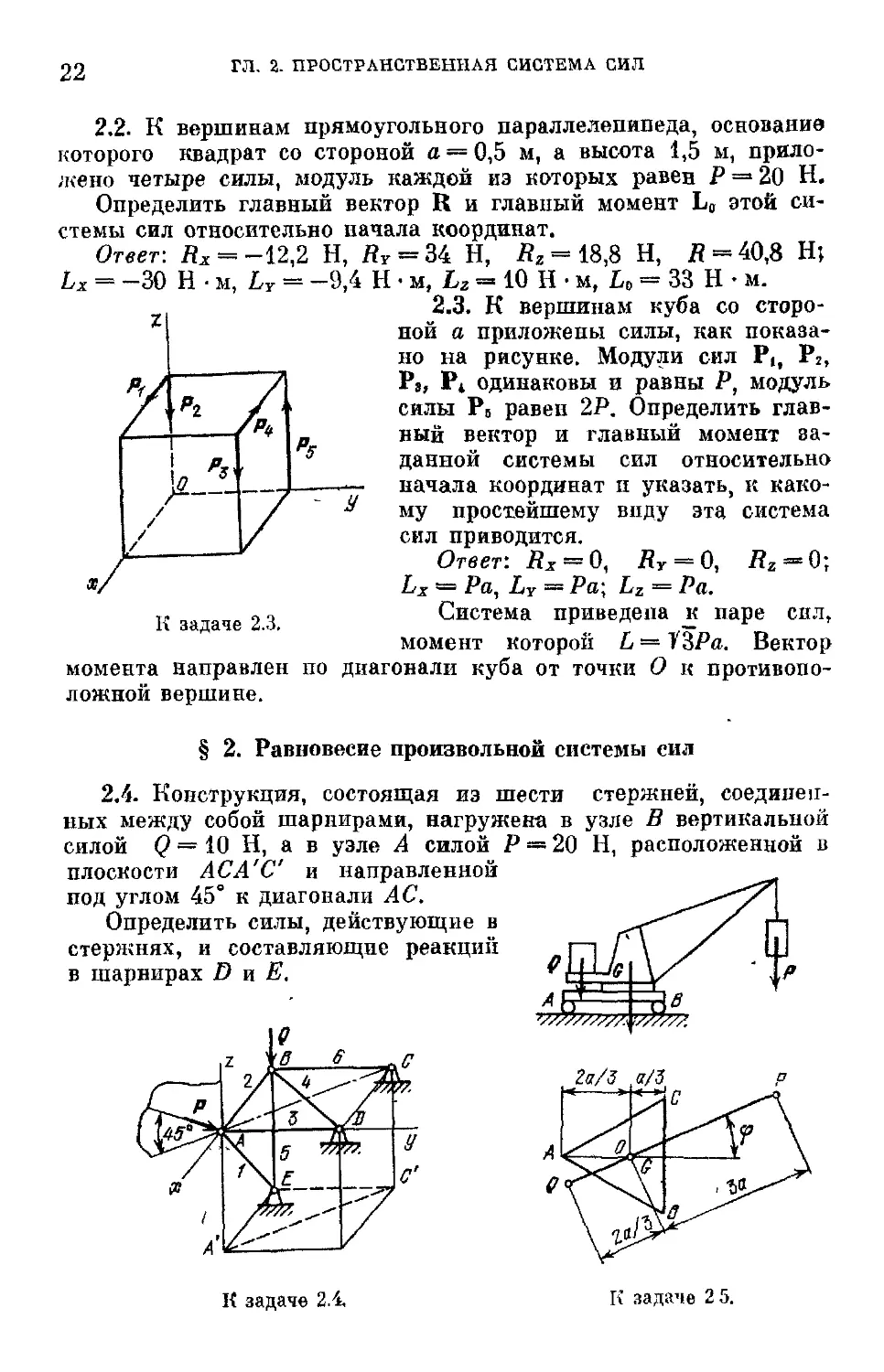
2.3. К вершинам куба со сторо-
стороной а приложены силы, как показа-
показано на рисунке. Модули сил Р,, Р2,
Рз, Pt одинаковы и равны Р, модуль
силы Рв равен 2Р. Определить глав-
главный вектор и главный момент 8а-
данной системы сил относительно
начала координат и указать, к како-
какому простейшему виду эта система
сил приводится.
Ответ: Д* = 0, ЛУ = 0, #z = 0;
Lx = Pa, LY = Pa; Lz = Pa.
Система приведена к паре сил,
момент которой L = УЗРа. Вектор
момента направлен по диагонали куба от точки О к противопо-
противоположной вершине.
§ 2. Равновесие произвольной системы сил
2.4. Конструкция, состоящая из шести стержней, соединен-
соединенных между собой шарнирами, нагружена в узле В вертикальной
силой О = 10 Н, а в узле А силой Р == 20 Н, расположенной в
плоскости АС А'С и направленной
под углом 45° к диагонали АС.
Определить силы, действующие в
стержнях, и составляющие реакций
в шарнирах D и Е.
К задаче 2.3.
К задаче 2.4,
К задаче 2 5.
§ 2. РАВНОВЕСИЕ ПРОИЗВОЛЬНОЙ СИСТЕМЫ СИЛ
Ответ: £,«-20 Н, 5,-4,111, Л--ЮН, 54--5,8 1Т,
5S ■= —10 Н, St — 4,1 II (знак минус означает, что стержень сжат);
Хв - 14,1 Н, YB = 0; ZB - 24,1 Н, XD = -4,1 II, YD = -10 Н, ZD=0.
2.5. Кран с поворотной стрелой установлен на трехколесной
тележке. Вес крана без противовеса G; центр тяжести крана иа-
ходится на вертикали, проведенной яз центра О равносторон-
равностороннего треугольника ABC, в вершинах которого располагаются ко-
колеса. Поворот стрелы осуществляется вокруг вертикальной оси,
проходящей через точку О.
Рассчитать вес противовеса О и грузоподъемность Р крана из
условия его пеопрокидывания, если вылет стрелы равен За; вы-
вылет, противовеса 2а/3. Какой максимальный груз РШа* может
поднять кран из условия неопрокидывапия при том же противо-
противовесе.
Ответ: Q<G,P< G/2, Рт„ = 5С/7.
2.6. Полагая в предыдущей задаче Q = G, Р = 0,5G найти
давления колес на рельсы в зависимости от угла поворота стрелы
крана.
итеет: Л д = —s- " (-1 — cos cjy,
V - ^ (Ю л" 5 cos у — 5 "у/з sin (p)
5 cos <p -|- 5 ~1/3 sin
—
12
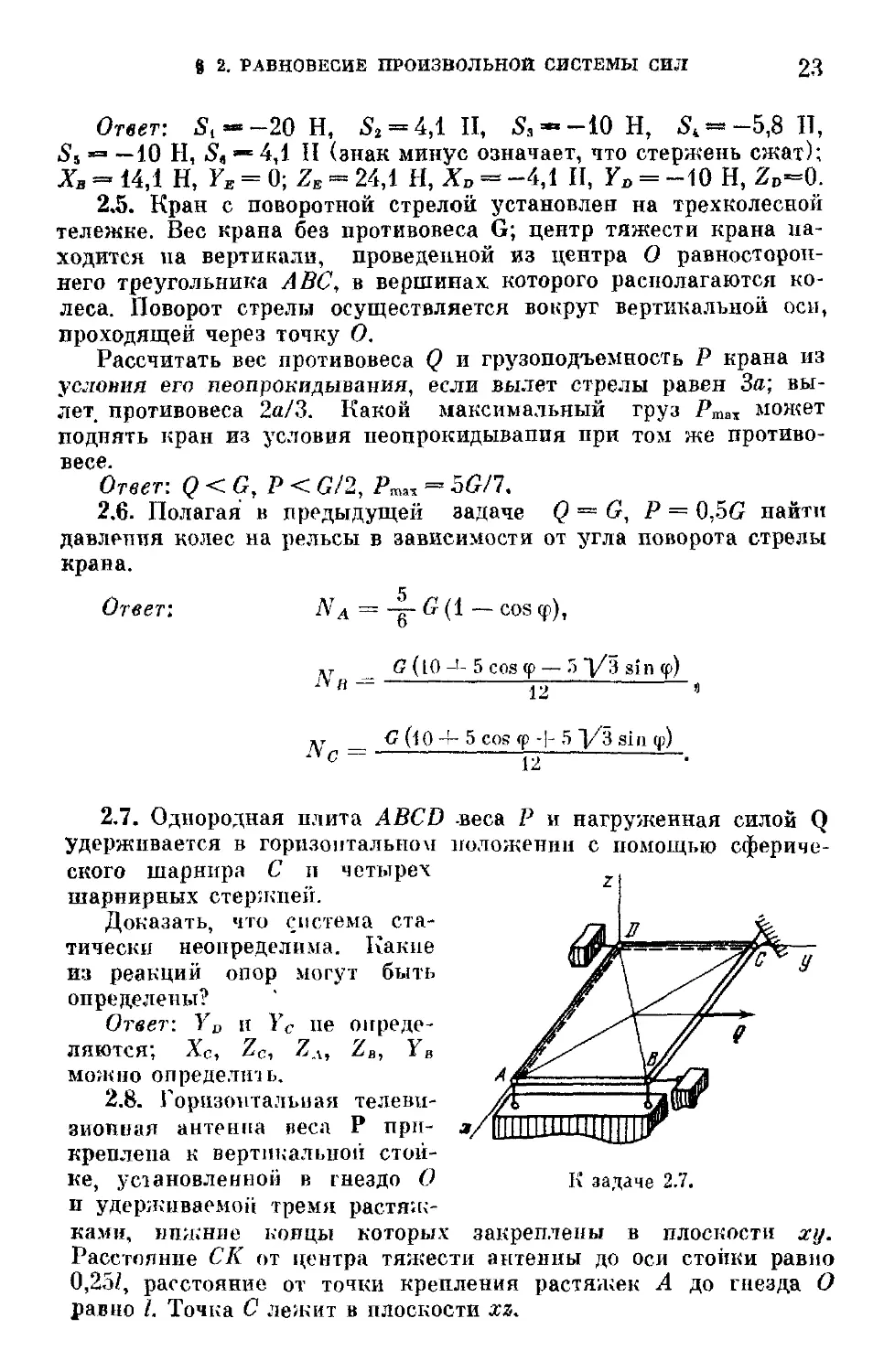
2.7. Однородная плита ABCD -веса Р и нагруженная силой Q
удерживается в горизонтальном положении с помощью сфериче-
сферического шарнира С п четырех
шарнирных стержней.
Доказать, что система ста-
статически неопределима. Какие
из реакций опор могут быть
определены?
Ответ: YD n Yc
ляются; Хс, Zc,
не
шлшпщщР
онреде-
7 У Y
можно определить.
2.8. Горизонтальная телеви-
телевизионная антенна веса Р при-
прикреплена к вертикальной стой-
стойке, установленной в гнездо О
и удерживаемой тремя растяж-
растяжками, нижние концы которых закреплены в плоскости ху.
Расстояние С К от центра тяжести антенны до оси стоики равно
0,25/, расстояние от точки крепления растяжек А до гнезда О
равно /. Точка С лежит в плоскости xz.
К задаче 2.7.
24
ГЛ 2 ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
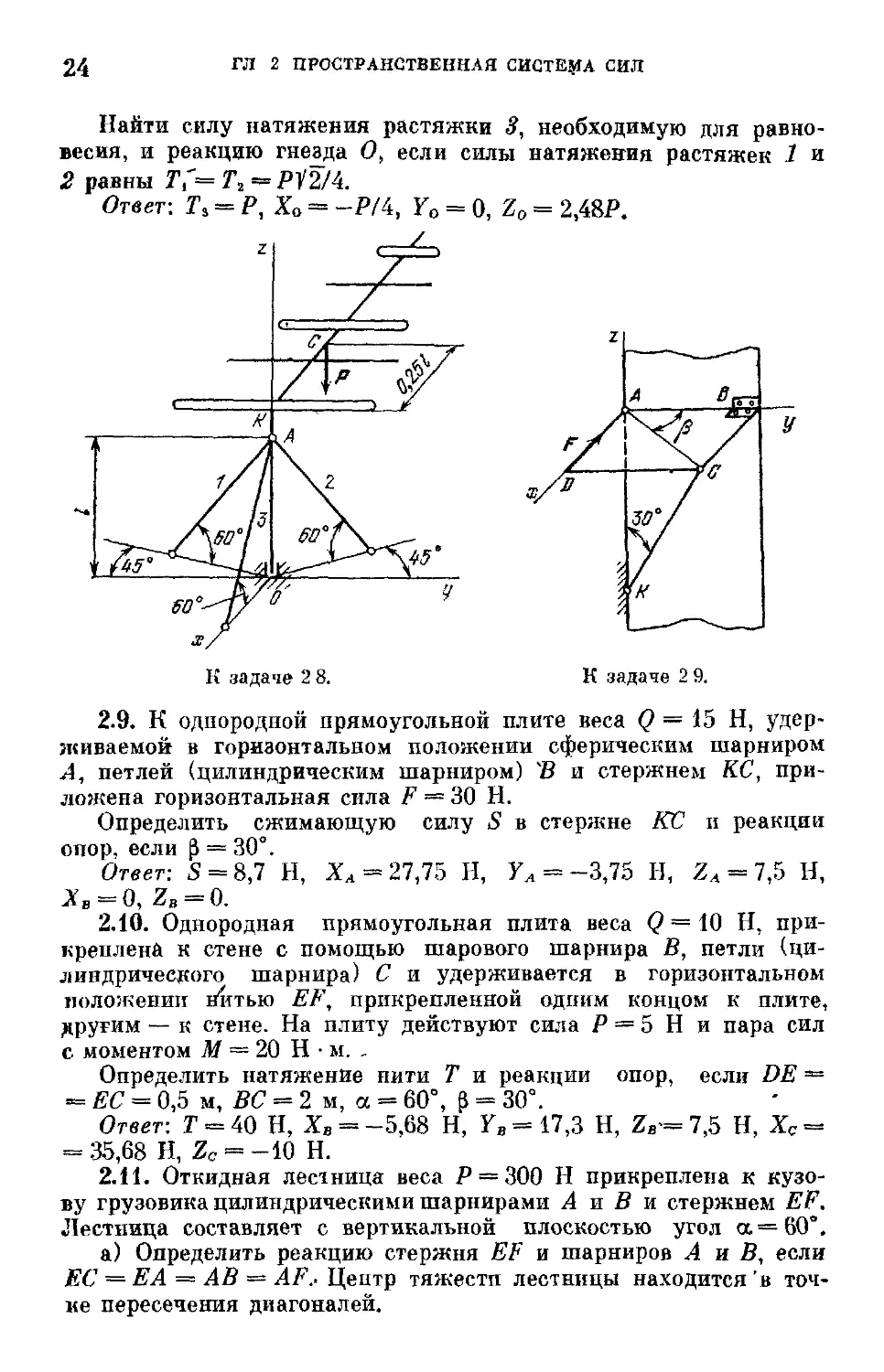
Найти силу натяжения растяжки 3, необходимую для равно-
равновесия, и реакцию гнезда О, если силы натяжения растяжек 1 и
2 равны ГГ= Тг = PV2/4.
Ответ: Т% = Р, Хо = -Р/4, Го = О, Zo = 2,48Р.
К задаче 2 8.
К задаче 2 9.
2.9. К однородной прямоугольной плите веса Q = 15 Н, удер-
удерживаемой в горизонтальном положении сферическим шарниром
А, петлей (цилиндрическим шарниром) Ъ и стержнем КС, при-
приложена горизонтальная сила F = 30 Н.
Определить сжимающую силу S в стержне КС и реакции
опор, если $ = 30°.
Ответ: S = 8,7 Н, Хд = 27,75 Н, YA = -3,75 Н, ZA = 7,5 Н,
*„ = 0, ZB = 0.
2.10. Однородная прямоугольная плита веса Q — 10 Н, при-
прикреплена к стене с помощью шарового шарнира В, петли (ци-
(цилиндрического шарнира) С и удерживается в горизонтальном
положении н1гтыо EF, прикрепленной одним концом к плите,
другим — к стене. На плиту действуют сила Р = 5 Н и пара сил
с моментом М — 20 Н • м. ,
Определить натяжение нити Т и реакции опор, если DE =
= ЕС = 0,5 м, ВС = 2 м, а = 60°, р = 30°.
Огвег: Г = 40 Н, Хв = -5,68 Н, Гв = 17,3 Н, ZB = 7,5 Н, Хс =
= 35,68 Н, Zc = -10 Н.
2.11. Откидная лестница веса Р = 300 Н прикреплена к кузо-
кузову грузовика цилиндрическими шарнирами А я В я стержнем EF.
Лестница составляет с вертикальной плоскостью угол а =60°.
а) Определить реакцию стержня EF и шарниров А и В, если
ЕС = ЕА = АВ = A.F.. Центр тяжести лестницы находится в точ-
точке пересечения диагоналей.
8 2 РАВНОВЕСИЕ ПРОИЗВОЛЬНОЙ СИСТЕМЫ СИЛ
25
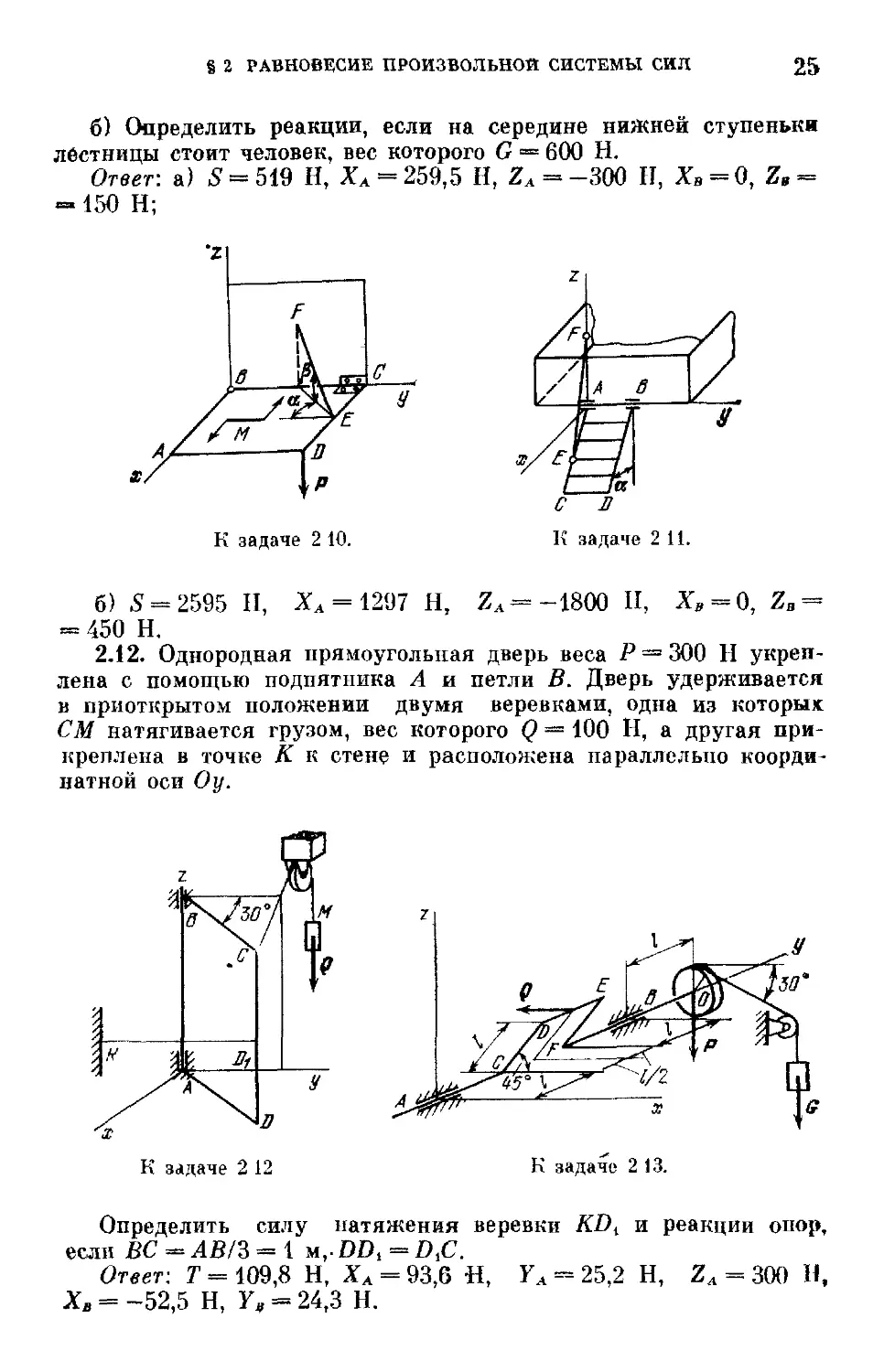
б) Оаределить реакции, если на середине нижней ступеньки
лестницы стоит человек, вес которого G = 600 Н.
Ответ: а) 5 = 519 Н, ХА = 259,5 Н, ZA = -300 И, Ха = 0, ZB =
- 150 Н;
К задаче 2 10.
Its
С Л
К задаче 2 11.
б) 5 = 2595 II, ХА = 1297 Н, ZA=-1800 II, Хя = 0, 2Я =
-450 Н.
2.12. Однородная прямоугольная дверь веса Р = 300 Н укреп-
укреплена с помощью подпятника А и петли В. Дверь удерживается
и приоткрытом положении двумя веревками, одна из которых
СМ натягивается грузом, вес которого О = 100 Н, а другая при-
прикреплена в точке К к стене и расположена параллельно коорди-
координатной оси Оу.
К задаче 2 12
К задаче 2 13.
Определить силу натяжения веревки KDi и реакции опор,
если ВС = ABIZ = 1 м,- DD, = /),С.
Ответ: Т = 109,8 Н, ХА = 93,6 -Н, УА = 25,2 Н, ZA = 300 И,
Хв = -52,5 Н, У, = 24,3 Н.
26
ГЛ. 2. ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
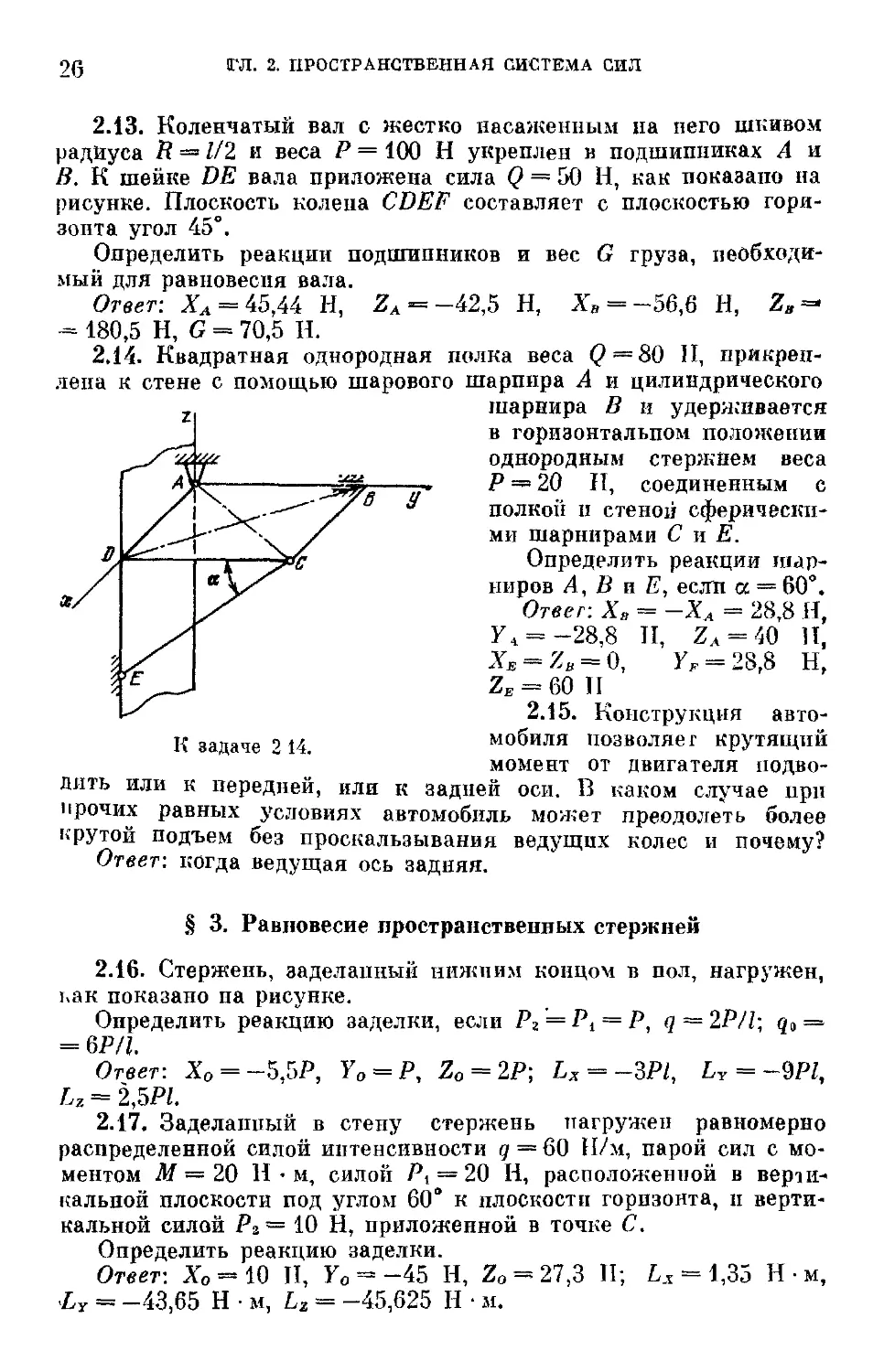
2.13. Коленчатый вал с жестко насаженным на него шкивом
радиуса Й = 1/2 и веса Р = 100 Н укреплен и подшипниках А и
В, К шейке DE вала приложена сила Q = 50 Н, как показано на
рисунке. Плоскость колена CDEF составляет с плоскостью горя-
зонта угол 45°.
Определить реакции подшипников и вес G груза, необходи-
необходимый для равновесия вала.
Ответ: Хл = 45,44 Н, ZA =-42,5 Н, Хв = -56,6 Н, ZB=*
•= 180,5 Н, G = 70,5 Н.
2.14. Квадратная однородная полка веса О = &0 II, прикреп-
прикреплена к стене с помощью шарового шарпнра А и цилиндрического
шарнира В и удерживается
в горизонтальном положении
однородным стержнем веса
Р = 20 II, соединенным с
полкой и стеной сферически-
сферическими шарнирами С и Е.
Определить реакции шар-
шар°
пиров А, В а Е, если а = 60°.
Ответ: Хв = -Х„ = 28,8 Я,
У, = -28,8 II, ZA = 40 II,
ZE = ZB = О, УР = 28,8 Н,
ZE = 60 II
2.15. Конструкция авто-
К задаче 2 14 мобиля позволяв г крутящий
момент от двигателя подво-
подводить или к передней, или к задней оси. В каком случае при
прочих равных условиях автомобиль может преодолеть более
крутой подъем без проскальзывания ведущих колес и почему?
Ответ: когда ведущая ось задняя.
§ 3. Равновесие пространственных стержней
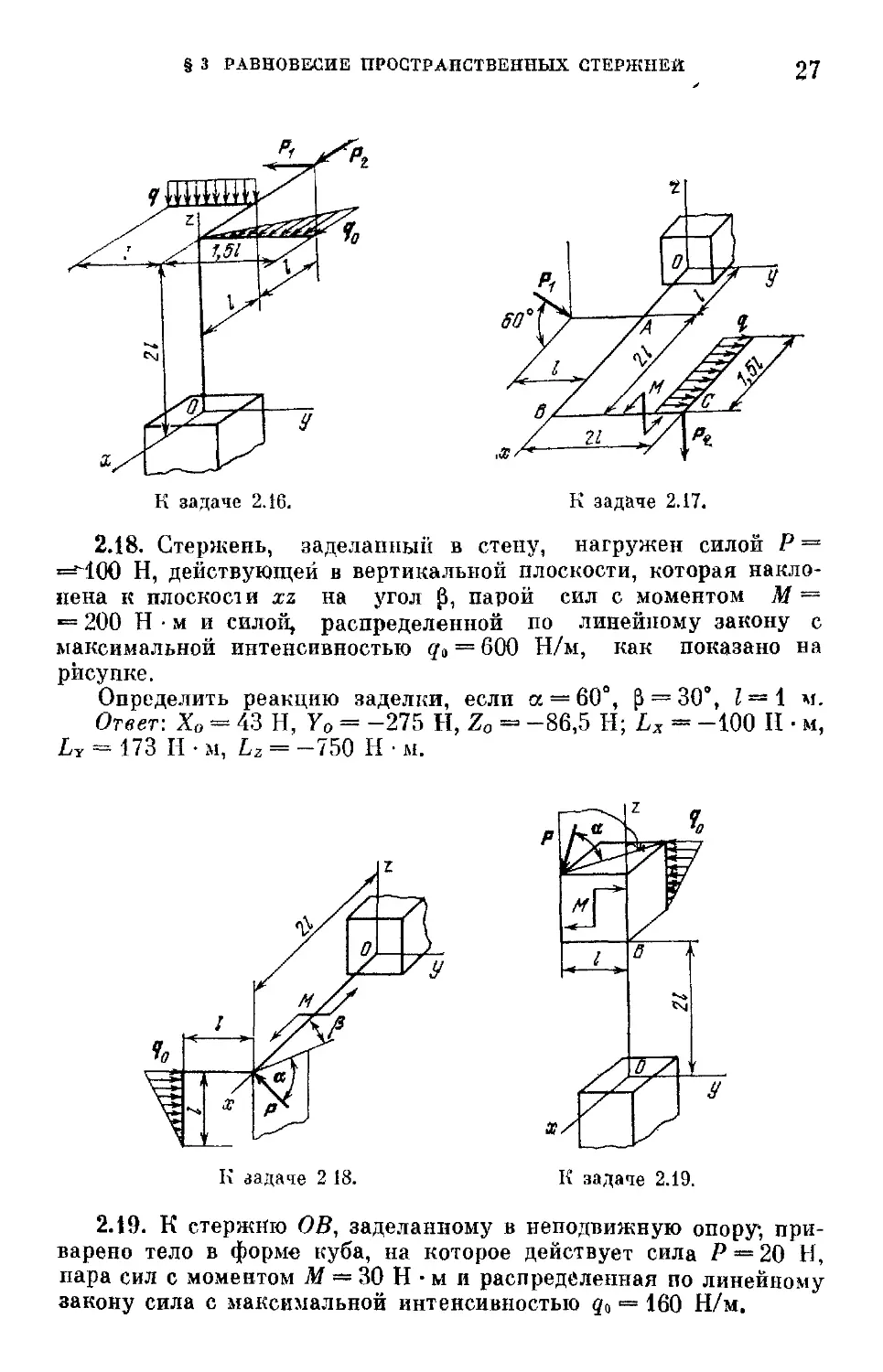
2.16. Стержень, заделанный нижним концом в пол, нагружен,
как показано на рисунке.
Определить реакцию заделки, если Рг = Pi = P, q~ 2P/1; qa =
= 6Р/1.
Ответ: Хо = -5,5Р, Уо = Р, Z0 = 2P; Lx=*-3Pl, LY = -9PZ,
Lz = 2.5P/.
2.17. Заделанный в стену стержень нагружен равномерно
распределенной силой интенсивности q = 60 Н/м, парой сил с мо-
моментом М = 20 И • м, силой Р, = 20 Н, расположенной в верш-
кальпой плоскости под углом 60" к плоскости горизонта, и верти-
вертикальной силой Р% = 10 Н, приложенной в точке С.
Определить реакцию заделки.
Ответ: Хо = 10 И, Yo = -45 Н, ZO = 27,3 II; Lx == 1,35 Н ■ м,
Ly = -43,65 Н • м, Lz = -45,625 Н • м.
§ 3 РАВНОВЕСИЕ ПРОСТРАНСТВЕННЫХ СТЕРЖНЕЙ
27
К задаче 2.16.
К задаче 2.17.
2.18. Стержень, заделанный в стену, нагружен силой Р =
=^100 Н, действующей в вертикальной плоскости, которая накло-
наклонена к плоскости xz на угол £, парой сил с моментом М =
■= 200 Н • м и силой, распределенной по линейному закону с
максимальной интенсивностью qa = 600 Н/м, как показано на
рисупке.
Определить реакцию заделки, если а = 60°, ^ = 30°, 1 = \ м.
Ответ: Хо = 43 Н, Yo = -275 Н, Zo = -86,5 Н; Lx - -100 II • м,
LY = 173 Н • м, Lz = -750 Н • ы.
К вадаче 2 18.
К задаче 2.19.
2.19. К стержню OS, заделанному в неподвижную опору, при-
приварено тело в форме куба, на которое действует сила Р = 20 Н,
пара сил с моментом М — 30 Н • м и распределенная по линейному
закону сила с максимальной интенсивностью qa =» 160 Н/м.
28
ГЛ 2 ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
Определить реакцию заделки, если а = 60°, £-=0,5 м.
Ответ: Хо-7 Н, Уо = 47 Н, Ъо = 17,3 Н, £, = -42,6 Н • м,
Lr = -10,6 Н • м, L* - -23,5 Н • м.
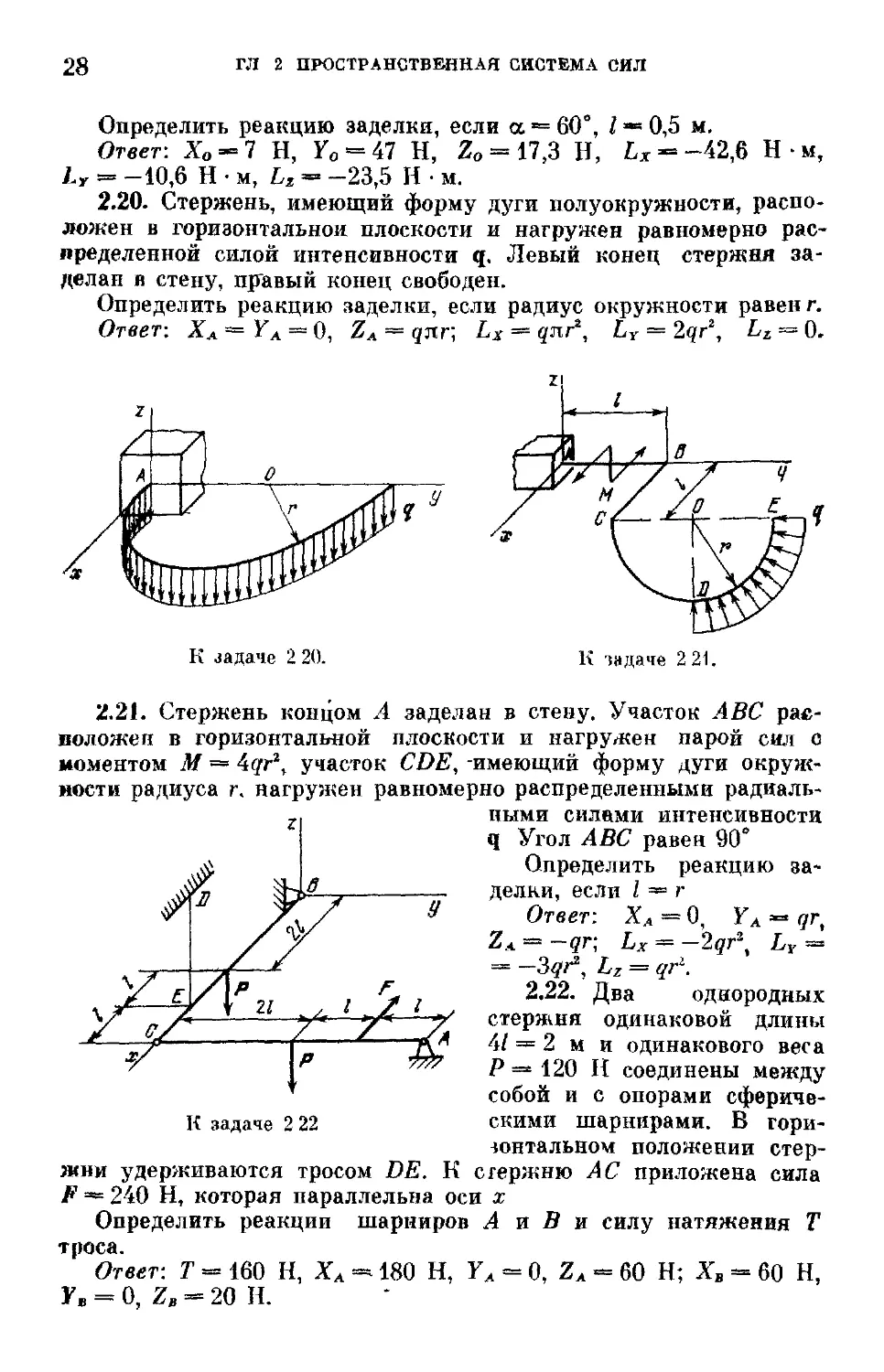
2.20. Стержень, имеющий форму дуги полуокружности, распо-
расположен в горизонтально!! плоскости и нагружен равномерно рас-
распределенной силой интенсивности q. Левый конец стержня за-
заделан в стену, правый конец свободен.
Определить реакцию заделки, если радиус окружности равен г.
Ответ: ХА = YA = 0, ZA = qnr, Lx = qni*, Lr = 2qr\ Lz = 0.
К задаче 2 20.
К задаче 2 21.
2.21. Стержень концом Л заделан в стену. Участок ABC pae-
иоложеи в горизонтальной плоскости и нагружен парой сил о
моментом М == 4дгг, участок CDE, -имеющий форму дуги окруж-
окружности радиуса г, нагружен равномерно распределенными радиаль-
радиальными силами интенсивности
q Угол ABC равен 90°
Определить реакцию за-
заделки, если / = г
Ответ: ХА =0, YA - qrt
ZA*=-qr; Lx = -2qr\ Lv -
= -3^-r8, Lz = ?r2.
2.22. Два однородных
стержня одинаковой длины
4/ = 2 м и одинакового веса
Р = 120 Н соединены между
собой и с опорами сфериче-
сферическими шарнирами. В гори-
горизонтальном положении стер-
~У
К задаче 2 22
"-*** *«*■***»**via UWJlWlXCClHil I/it? П-
жни удерживаются тросом DE. К сгержню Л С приложена сила
F = 240 Н, которая параллельна оси х
Определить реакции шарниров А и В и силу натяжения Г
троса.
Ответ: Т = 160 Н, ХА - 180 Н, Ул - 0, ZA - 60 Н; Хв = 60 Н
Г, = 0, ZB = 20 Н.
% 4 РАВНОВЕСИЕ МЕХАНИЗМОВ С ЗУБЧАТЫМИ ПАРАМИ 2&
§ 4. Равновесие механизмов е зубчатыми парами
2.23. Зубчатое колесо 2 радиуса R, закрепленное на валу ле-
лебедки, находится в зацеплении с колесом 1. Сила натяжения ка-
каната лебедки Т — 100 Н направлена параллельно оси х. Сила дав-
давления Р зуба колеса 1 на зуб колеса 2 напраэлена по линии,.
К задаче 2 23.
образующей угол а = 20° с касательной к окружности колеса а
точке зацепления.
Определить силу Р и реакции подшипников А и В, если ра-
радиус барабана лебедки г = /?/2, АВ -* Зг. Весом лебедки пре-
пренебречь
Ответ. Р-53;2 Н, ХА = -8,33 Н, ZA = 15,17 Н, Хв^ 41,67 Н,
ZB = 3,03 Н
2.24. К валу I зубчатого редуктора приложена пара сил с мо-
моментом Mi. Определить момент Мг пары сил, приложенных к ва-
валу //, и реакции подшипников промежуточного вала CD в усло-
условиях равновесия. Считать, что силы давления зубчатых колес
7T-..S
А
и
J
, 1
if
3
1
г
о\
LJ
С.
2
:_ т
К
задаче 2 24
Р^г и /V3 направлены под у!лом « = 20° к касательным к ок-
окружностям в точках зацепления, гг = 4гь гз •= rt, rt = 2r,.
Ответ: Л/2 = 8Л/,; Хс = 0,67Л/,/г,, Zc = 0,73Л/ ,/г,, XD =
- 2,mMJru ZD = l,09Af,/r,.
30 1'Л 2. ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
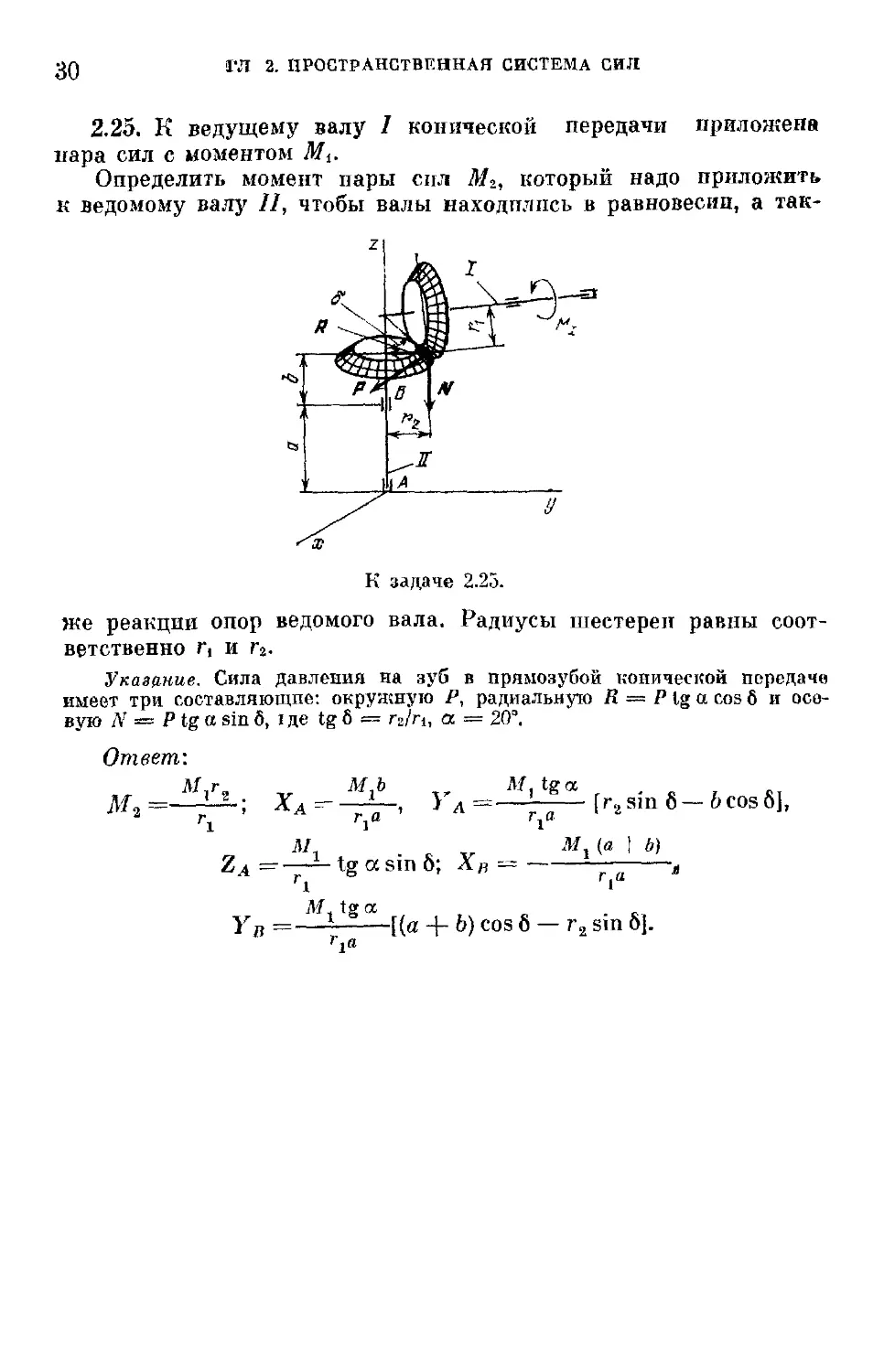
2.25. К ведущему валу / конической передачи приложена
пара сил с моментом Mt.
Определить момент пары сил Л/2, который надо приложить
к ведомому валу //, чтобы валы находились в равновесии, а так-
К задаче 2.25.
же реакции опор ведомого вала. Радиусы шестерен равны соот-
соответственно г, и г2.
Указание. Сила давления на зуб в прямозубой конической передаче
имеет три составляющпе: окружную Р, радиальную R — Р ig a cos 6 и осо-
вую N — Р tg а sin б, i де tg 6 == п/п, а = 20°.
Ответ:
Af,tg«
М —
Ад — — _--
fr2sin б— 6 cos б],
М М. (а | Ь)
Z а ~ —— tg ot. sin б; Хв — — „
А ri ria
М tga
^п =—. {(« -f- о) cos б — r2 sin б].
Раздел второй
КИНЕМАТИКА
Гла в.а 3
КИНЕМАТИКА ТОЧКИ
§ 1. Естественный способ задания движения точки
3.1. Точка М движется прямолинейно по закону s(t) =
>= Ae~nt (coswi -4" — sin ton, где А, п и « — некоторые положи-
положительные числа.
Найти путь, пройденпый точкой за время от t = 0 до t =
= Зя/B<в). За начало отсчета расстояний принять произвольную
точку на траектории точки М.
\ СО /
3.2. Конькобежец, двигаясь равномерно по беговой дорожке
стадиона, проходит путь L = 1000 м за 1 мин 15 с.
Полагая, что траектория, по которой движется конькобежец,—
п.юская кривая, состоящая из двух прямолинейных участков и
двух криволинейных, имеющих вид полуокружностей радиуса
Л = 30 м, определить наибольшую п наименьшую величинь.
ускорения конькобежца.
Ответ: аюа1 = 5,93 м/с2; аШ!п = 0.
3.3. Материальная точка движется на плоскости с постоян-
постоянной ио величине скоростью va по траектории, уравнение которой
у = bxz, где Ъ = const > 0.
Определить величину максимального ускорения точки, изоб-
изобразить ее траекторию и вектор максимального ускорения.
Ответ: агаал = 26t'o-
3.4. Материальная точка движется на плоскости с постоян-
постоянной по величине скоростью v0 по траектории, уравнение ко-
2 2 1
торой Дг" -\—^2~ = 1 F > с, Ь = const>0 и с = const > 0).
be
32
ГЛ 3 КИНЕМАТИКА ТОЧКИ
Найти величины и направления векторов наименьшего и наи-
наибольшего ускорений точки, указать местоположения точки на
траектории, которым соответствуют эти ускорения.
Ответ: amjn = v0—j-,amaix — v0 —%-. Ускорение точки будет
Ь с
наименьшим там, где ее координата х = 0, а паибольшим — где
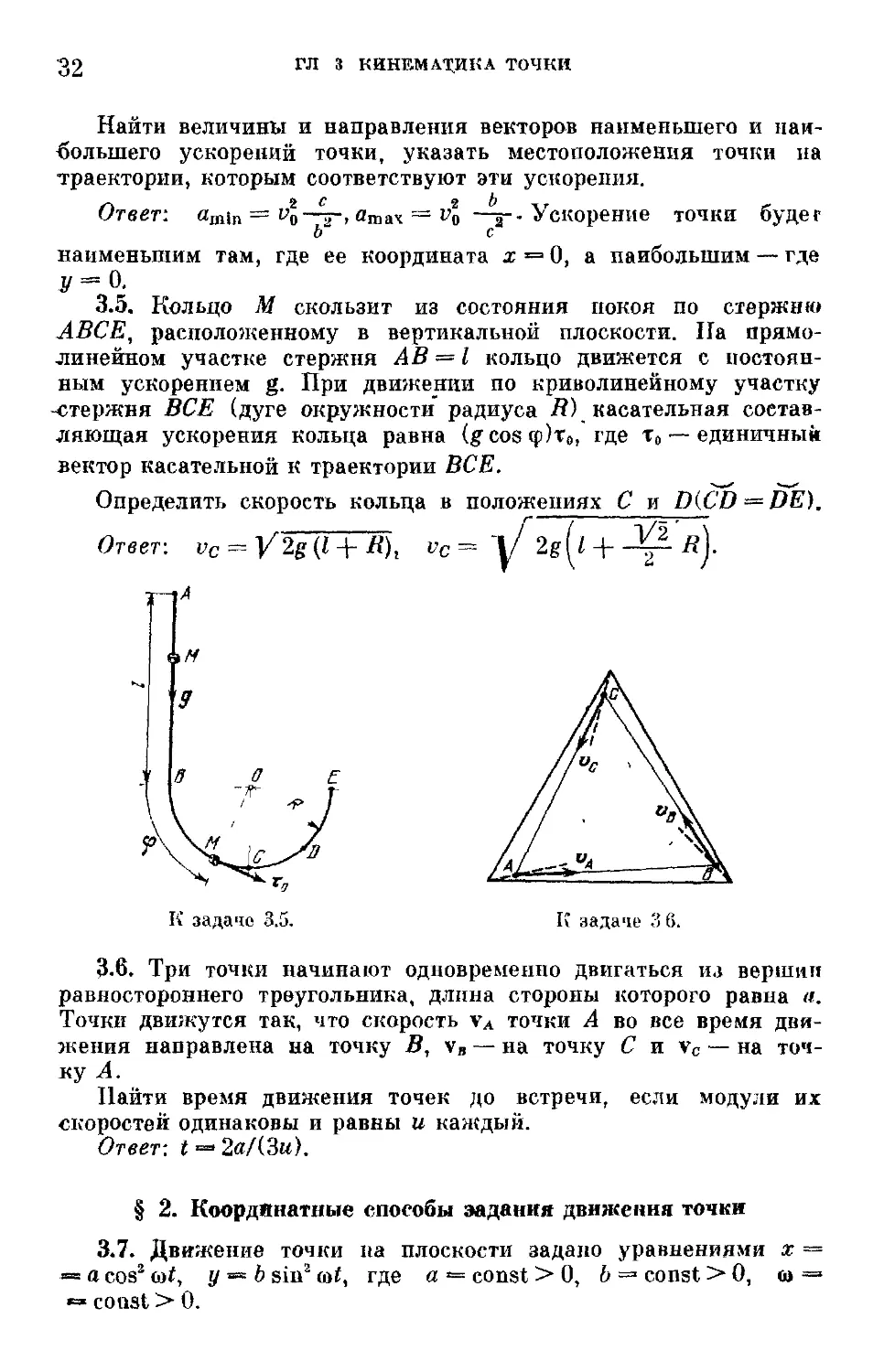
3.5. Кольцо М скользит из состояния покоя по стержню
АВСЕ, расположенному в вертикальной плоскости. На прямо-
прямолинейном участке стержня АВ = I кольцо движется с постоян-
постоянным ускорением g. При движении по криволинейному участку
-стержня ВСЕ (дуге окружности радиуса R) касательная состав-
составляющая ускорения кольца равна (gcos(p)T0, где т0 — единичный
вектор касательной к траектории ВСЕ.
Определить скорость кольца в положениях С и D(CD = DE).
Ответ: vc
vc =
2g(l
R
].
н
К задаче 3.5.
К задаче 3 6.
3.6. Три точки начинают одновременно двигаться ил вершин
равностороннего треугольника, длина стороны которого равна а.
Точки движутся так, что скорость vA точки А во все время дви-
движения направлена на точку В, \в — на точку С и vc — на точ-
точку А.
Найти время движения точек до встречи, если модули их
скоростей одинаковы и равны и каждый.
Ответ: * — 2a/Cw).
§ 2. Координатные способы задания движения точки
3.7. Движение точки аа плоскости задано уравнениями х
■■ а cos2 bit, у = b sin2 ott, где а = const > 0, b =• const > 0, ы
» coast > 0.
§ 2. КООРДИНАТНЫЕ СПОСОБЫ ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ 33
Найти уравнение траектории точки, радиус кривизны траек-
траектории, а также дуговую координату s и величины скорости v
и ускорения а точки как функции времени. Изобразить графи-
графически траекторию точки и построить графики s = s(t), v — v(t),
a = a(t).
Ответ: уравнение траектории точки
гдеО^х^а, р = оо, s (t) = ■ .7"— A —cos
= со У а* + b* sin 2со£, a (t) = 2со2
3.8. Движение точки па плоскости в интервале времени 0 ^
<£<jx/Bco) задано уравнениями: x = bsecwt, {/■=»btgcof, где
Ь = const > 0, (о = const > 0.
Найги: 1) траекторию точки; 2) проекции скорости и уско-
ускорения точки па естественные и полярные оси координат в мо-
момент времени t = 0.
За полюс полярной системы координат принять начало де-
декартовой системы координат, за полярную ось — горизонтальную
прямую, совпадающую с осью х. Траекторию точки, а также
векторы ее скорости и ускорения при t — 0 изобразить графи-
графически.
Ответ: 1) траектория точки — ветвь гиперболы хг — уг = Ьг;
2) 1\@) = Ь(о, йД0) = 0, ап(в)=>Ъы\ i\@) = 0, vp{0) = Ъы, аЛ0) =
= 6со2, ор@)=0.
3.9. Движение точки на плоскости задано в декартовой си-
системе координат Оху уравнениями х = at cos (at, у — at sin w£, где
й = const > 0, со = const > 0.
Найти: 1) радиус кривизны траектории точки в начальный
момент времепи (t = 0) и предельную (при t ->-<») величину это-
этого радиуса; 2) траекторию точки в полярных координатах;
3) проекции скорости и ускорения точки на орты полярной си-
стемьд координат. За полюс принять начало декартовой системы
координат, за полярную ось — ось х.
Ответ: 1) р @) = —-, рпр = оо; 2) г = -^ ф — спираль
Архимеда; 3) vr = a, vp ■= awt, aT =« — aw2t, ap = 2aw.
3.10. Движение точки на плоскости задано в полярных коор-
координатах уравнениями г = ае°", ф = utt, где а = const > 0, со =»
=■ const > 0.
Найти траекторию точки и проекции скорости и ускорения
точки на оси полярной и естественной систем координат.
Ответ: г = ае* — логарифмическая спираль; vT = vv "'
вг = 0, ap = 2aco2e"', у, = >2 acoe"', a, = «„ =- У2"ao^»'.
g Под ред. к С Колесниьова
34
ГЛ. 3. КИНЕМАТИКА ТОЧКИ
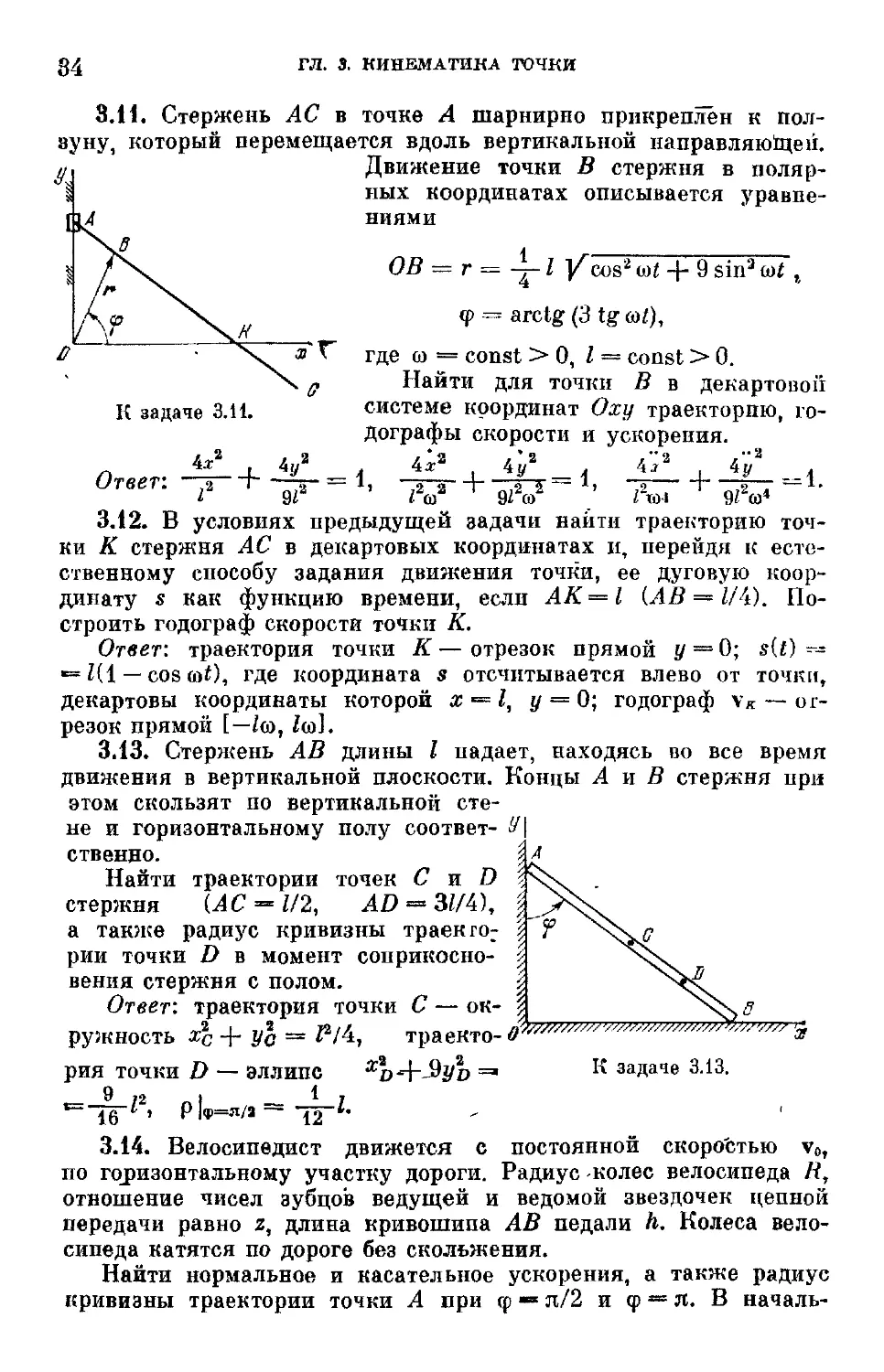
З.И. Стержень АС в точке А шарнирно прикреплен к пол-
ползуну, который перемещается вдоль вертикальной направляющей.
Движение точки В стержня в поляр-
полярных координатах описывается уравне-
уравнениями
ОВ = г = -j-1
К задаче 3.11.
Ответ:
Ф = arctg C tg at),
где w = const > 0, I = const > 0.
Найти для точки В в декартовой
системе координат Оху траекторию, го-
Дографы скорости и ускорения.
~\ _i*L. _*£._< ' '"а
— Д1 .2 2 "Т~ ° ** J *
Г ' 91" ' Гы" ' Ш'а* ' /гто4
3.12. В условиях предыдущей задачи найти траекторию точ-
точки К стержня АС в декартовых координатах и, перейдя к есте-
естественному способу задания движения точки, ее дуговую коор-
координату s как функцию времени, если AK = l (AB = 1/4). По-
Построить годограф скорости точки К.
Ответ: траектория точки К — отрезок прямой у = 0; s{t) --
■» Hi — cos (at), где координата s отсчитывается влево от точки,
декартовы координаты которой х •= I, у = 0; годограф vK — ог-
резок прямой [—/to, I®].
3.13. Стерлгень АВ длины I падает, находясь по все время
движения в вертикальной плоскости. Концы А и В стержня при
этом скользят по вертикальной сте-
стене и горизонтальному полу соответ- У
ственно.
Найти траектории точек С и О
стержня (АС - 1/2, AD = 31/4),
а также радиус кривизны траекто-
траектории точки D в момент соприкосно-
соприкосновения стержня с полом.
Ответ: траектория точки С — ок-
окружность Хс + Уо=* Р/4, траекто-
рия точки D — эллипс ^о-НЭг/о =" к заДаче 3.13.
9 ,2 , 1 ,
v=~Jq > Р1<р=я/а f2~'-
3.14. Велосипедист движется с постоянной скоро'стью v0,
по горизонтальному участку дороги. Радиус -колес велосипеда R,
отношение чисел зубцов ведущей и ведомой звездочек цепной
передачи равно z, длина кривошипа АВ педали h. Колеса вело-
велосипеда катятся по дороге без скольжения.
Найти нормальное и касательное ускорения, а также радиус
кривизны траектории точки А при ф •= л/2 и ф = я. В началь-
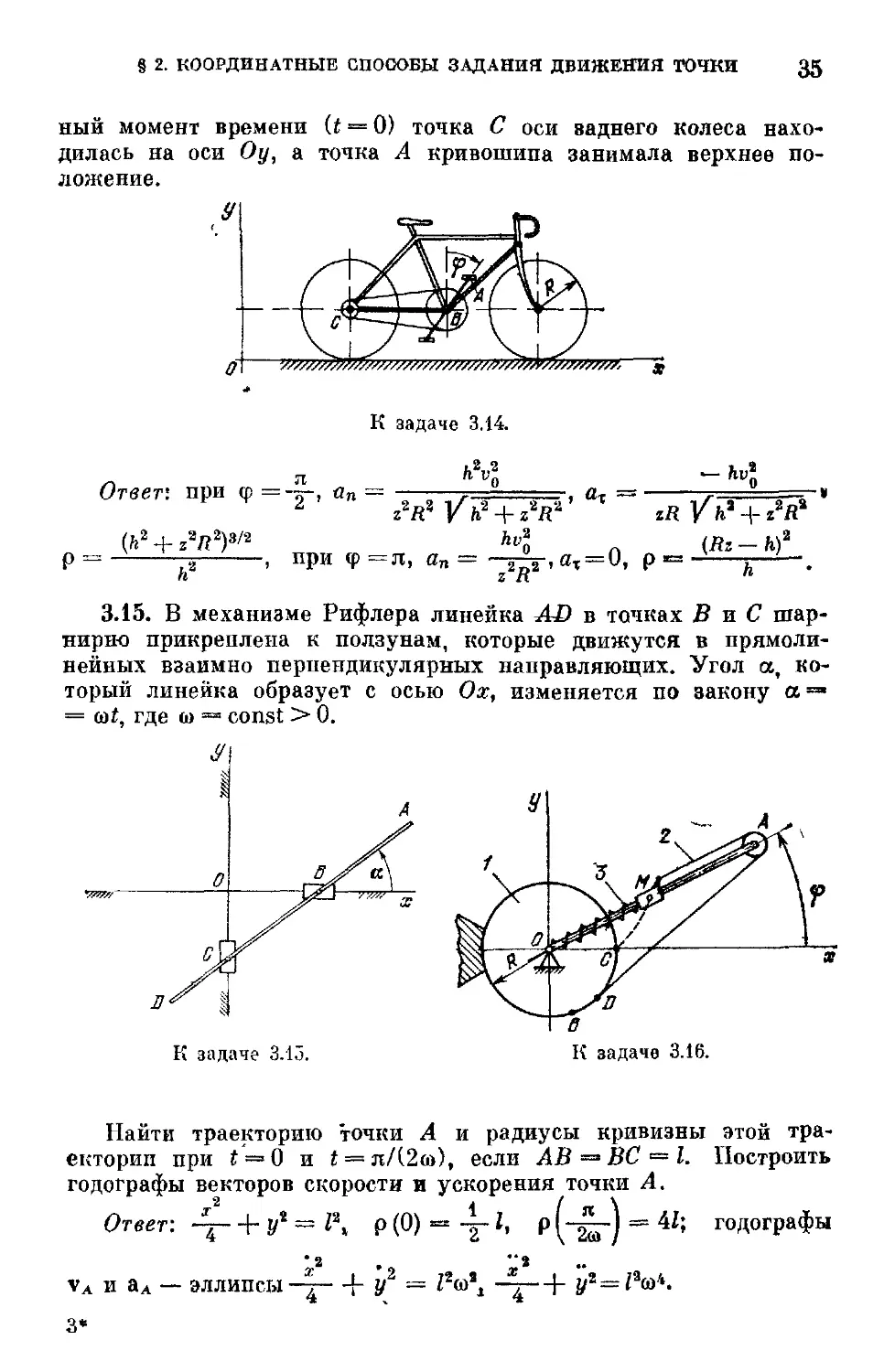
§ 2. КООРДИНАТНЫЕ СПОООВЫ ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ
35
ный момент времени (t = 0) точка С оси заднего колеса нахо-
находилась на оси Оу, а точка А кривошипа занимала верхнее по-
положение.
У1У VI У
К задаче 3.14.
Ответ: при а> =-тг, «п =
2
ах —
-ч
при ф=Л, й„=
3.15. В механизме Рифлера линейка AD в точках В ж С шар-
нирно прикреплена к ползунам, которые движутся в прямоли-
прямолинейных взаимно перпендикулярных направляющих. Угол а, ко-
который линейка образует с осью Ох, изменяется по закону а =•
= at, где со = const > 0.
В
К задаче 3.15.
К задаче 3.16.
Найти траекторию точки А и радиусы кривизны этой тра-
траектории при t = 0 и £ = я/B(й), если АВ =■ ВС — I. Построить
годографы векторов скорости и ускорения точки А.
Ответ: J~ + y^l\ р @) - -^ *' Р [~w) * 4Z; г°Д°гРаФы
vA и а а — эллипсы
у2 =
\- yi=
3*
36
ГЛ. 3 КИНЕМАТИКА ТОЧКИ
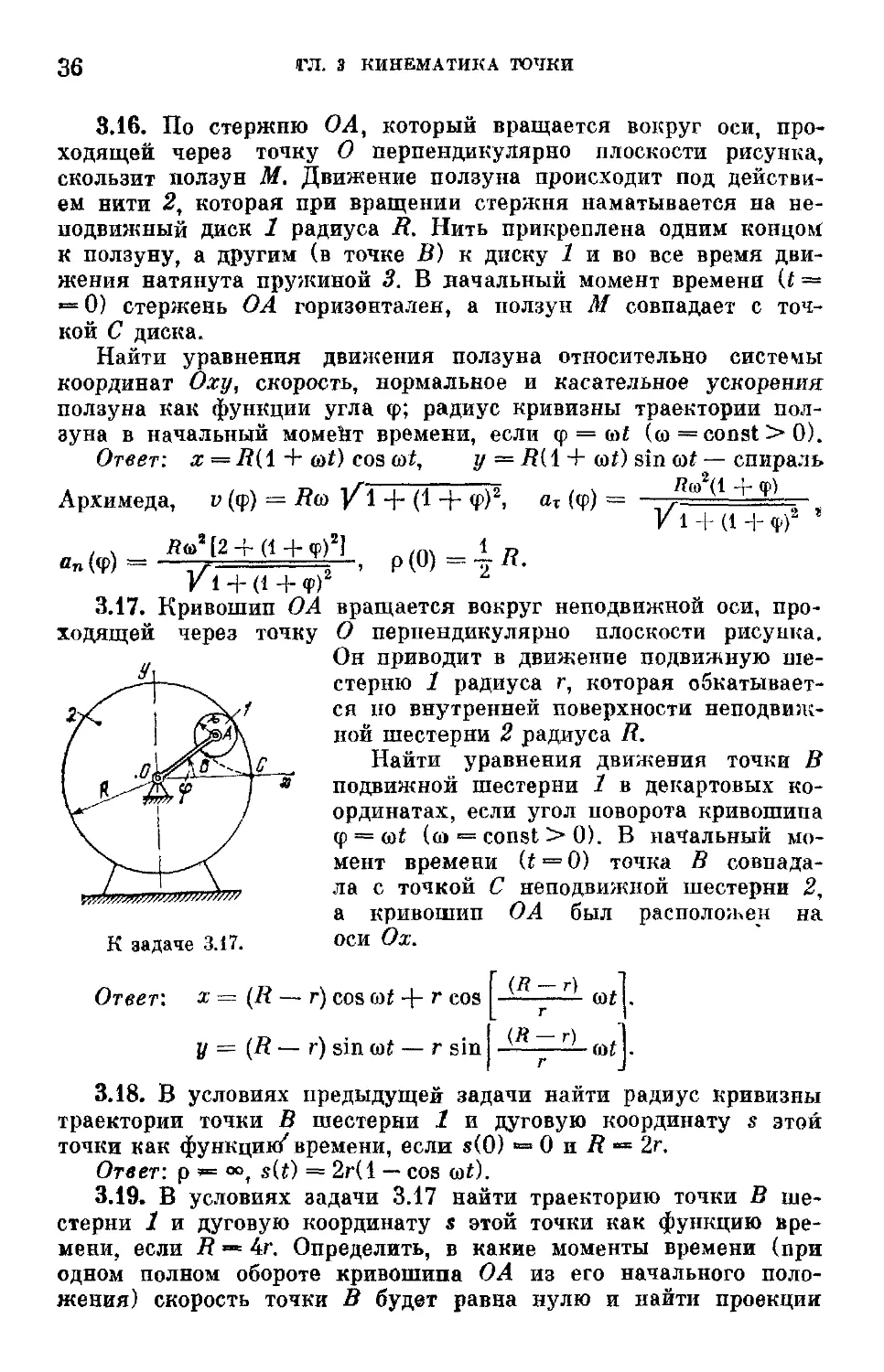
3.16. По стержню ОА, который вращается вокруг оси, про-
проходящей через точку О перпендикулярно плоскости рисунка,
скользит ползун М. Движение ползуна происходит под действи-
действием нити 2, которая при вращении стержня наматывается на не-
неподвижный диск 1 радиуса R. Нить прикреплена одним концом
к ползуну, а другим (в точке В) к диску 1 и во все время дви-
движения натянута пружиной 3. В начальный момент временя it =
•— 0) стержень ОА горизонтален, а ползун М совпадает с точ-
точкой С диска.
Найти уравнения движения ползуна относительно системы
координат Оху, скорость, нормальное и касательное ускорения
ползуна как функции угла ф; радиус кривизны траектории пол-
ползуна в начальный момент времени, если ф = Ы (а = const > 0).
Ответ: x = R{l 4- at) cos at, у = R( 1 + at) sin at — спираль
Архимеда, v (ф) = Ra Y\ + A -f- фJ, ax (<p) = ^-L+JP-—
v\
ап (ф) =
3.17. Кривошип ОА вращается вокруг неподвижной оси, про-
проходящей через точку О перпендикулярно плоскости рисунка.
Он приводит в движение подвижную ше-
шестерню 1 радиуса г, которая обкатывает-
обкатывается но внутренней поверхности неподвиж-
неподвижной шестерни 2 радиуса R.
Найти уравнения движения точки В
подвижной шестерни 1 в декартовых ко-
координатах, если угол поворота кривошипа
Ф = at (си = const > 0). В начальный мо-
момент времени (t=0) точка В совпада-
совпадала с точкой С неподвижной шестерни 2,
а кривошип ОА был расположен на
К задаче 3.17. оси Ох.
Ответ: х= (R — г) cos at + г cos ——^~- at .
у = (R — г) sin at — г sin
(Я-г)
М.
3.18. В условиях предыдущей задачи найти радиус кривизны
траектории точки В шестерни 1 и дуговую координату s этой
точки как функции/времени, если s@) «= 0 и R = 2г.
Ответ: р *= оо, sit) = 2r(l — cos at).
3.19. В условиях задачи 3.17 найти траекторию точки В ше-
шестерни 1 и дуговую координату s этой точки как функцию вре-
времени, если R — 4г. Определить, в какие моменты времени (при
одном полном обороте кривошипа ОА из его начального поло-
положения) скорость точки В будет равна нулю и найти проекции
§ 2 КООРДИНАТНЫЕ СПОСОБЫ ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ
37
ускорения точки В на полярные оси в эти моменты времешт.
За полюс полярной системы координат принять точку О, за по-
полярную ось — ось Ох.
Ответ: траектория точки В — астроида я2/3+ j/2/3=Dr)a''3,s(t)-=
= 6rsin2(o£, v — 0, ar = —12rto2, av = 0 при t = Г~ п,
где п = 1, 2, 3, 4.
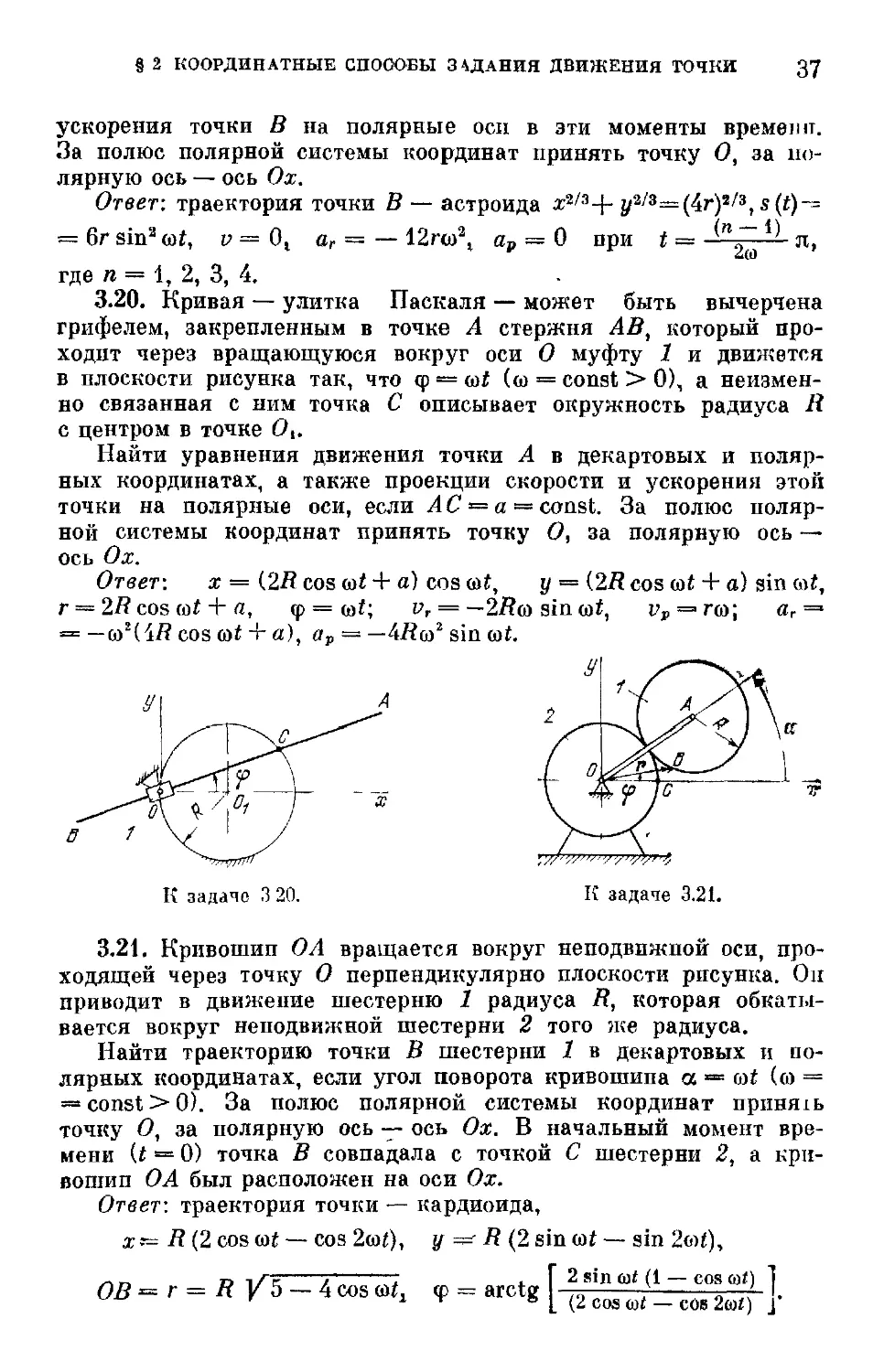
3.20. Кривая — улитка Паскаля — может быть вычерчена
грифелем, закрепленным в точке А стержня ABt который про-
проходит через вращающуюся вокруг оси О муфту 1 и движется
в плоскости рисунка так, что у —at (a = const > 0), а неизмен-
неизменно связанная с ним точка С описывает окружность радиуса R
с центром в точке Ох.
Найти уравнения движения точки А в декартовых и поляр-
полярных координатах, а также проекции скорости и ускорения этой
точки на полярные оси, если .4 С = а = const. За полюс поляр-
полярной системы координат принять точку О, за полярную ось —
ось Ох.
Ответ: х = BД cos at + a) cos at, y={2Rcosat +a) sinat,
г — 2R cos at + а, ф = tat; vr = — 2Ra sin at, 1>р = го); ar =
= — аг(Ш cos at + a), ap — —ARa2 sin at.
В 7
К задаче 3 20.
К задаче 3.21.
3.21. Кривошип ОА вращается вокруг неподвижной оси, про-
проходящей через точку О перпендикулярно плоскости рисунка. Он
приводит в движение шестерню 1 радиуса R, которая обкаты-
обкатывается вокруг неподвижной шестерни 2 того же радиуса.
Найти траекторию точки В шестерни 1 в декартовых и по-
полярных координатах, если угол поворота кривошипа а — at (о =
= const >0). За полюс полярной системы координат приняв
точку О, за полярную ось — ось Ох. В начальный момент вре-
времени it = 0) точка В совпадала с точкой С шестерни 2, а кри-
кривошип ОА был расположен на оси Ох.
Ответ: траектория точки — кардиоида,
ж«= R B cos at — cos 2(oZ), у =• R B sin at — sin 2ъН),
38
гл.^з. кинематика точки
3.22. В условиях лредыдущей задачи найти наименьшее и
наибольшее значения скорости и ускорения точки В за время
одного полного оборота кривошипа ОА из его начального поло-
положения. Кроме того, найти радиус кривизны траектории точки В
в момент времени t = я/ш.
Ответ: i>min=0, аю1п = 2Я<о3 при * = 0, t>mai = 4Дсо, ашм =
= бДсо2 при £ = я/со; р(л/ю) = 8Й/3.
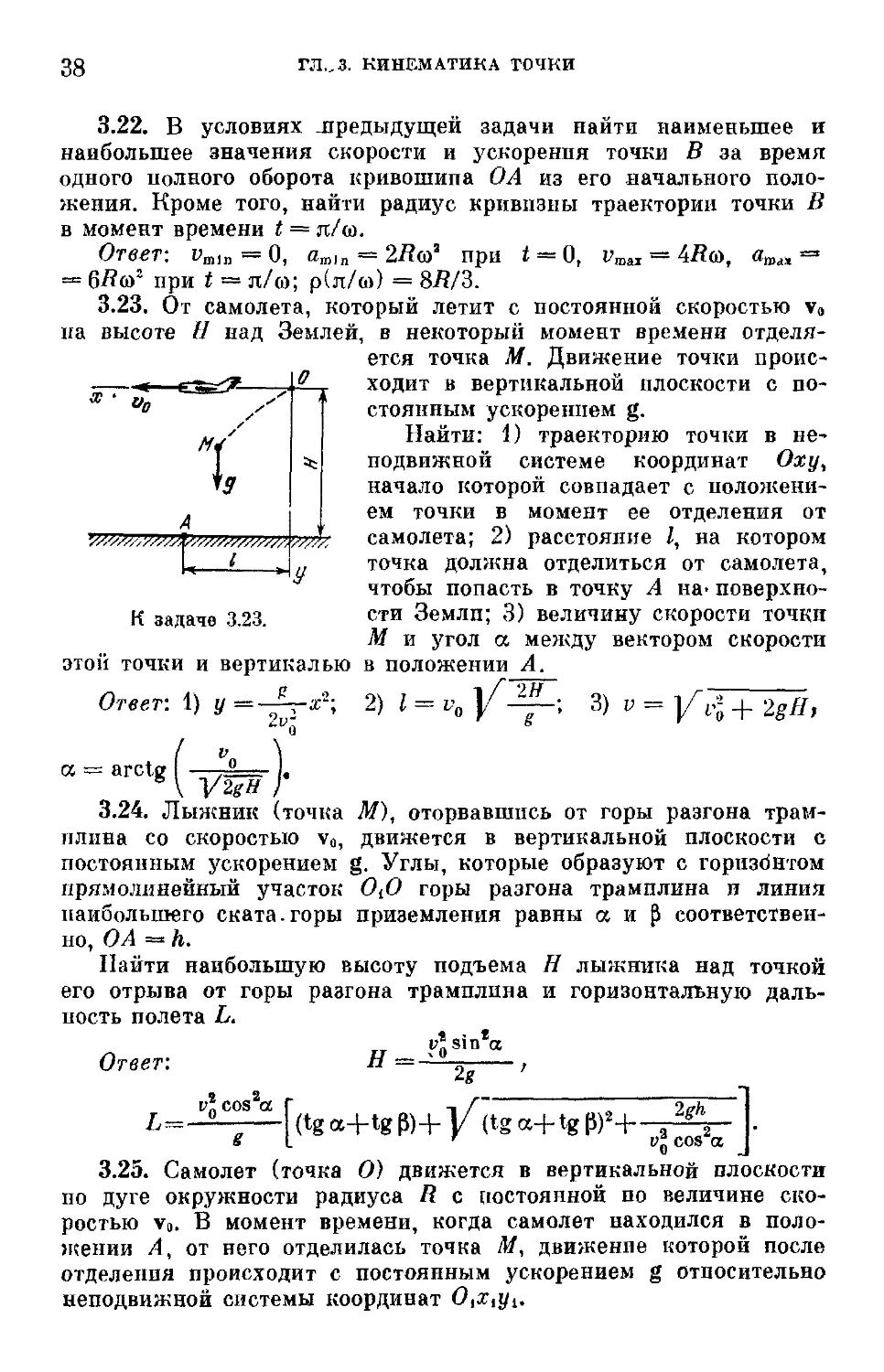
3.23. От самолета, который летит с постоянной скоростью v0
на высоте // над Землей, в некоторый момент времени отделя-
отделяется точка М. Движение точки проис-
происходит в вертикальной плоскости с по-
постоянным ускорением g.
Найти: 1) траекторию точки в не-
неподвижной системе координат Оху,
начало которой совпадает с положени-
положением точки в момент ее отделения от
самолета; 2) расстояние /, на котором
точка должна отделиться от самолета,
чтобы попасть в точку А на- поверхно-
сти Земли; 3) величину скорости точки
М и угол а между вектором скорости
А
щ
//7777//'///////,
„
К задаче 3.23.
этой точки и вертикалью в положении А.
Ответ: 1) у =-^г*2; 2) I = v0 ]/"-
3) v =
Ч8Н,
a = arctcr —° L
V V2gH I
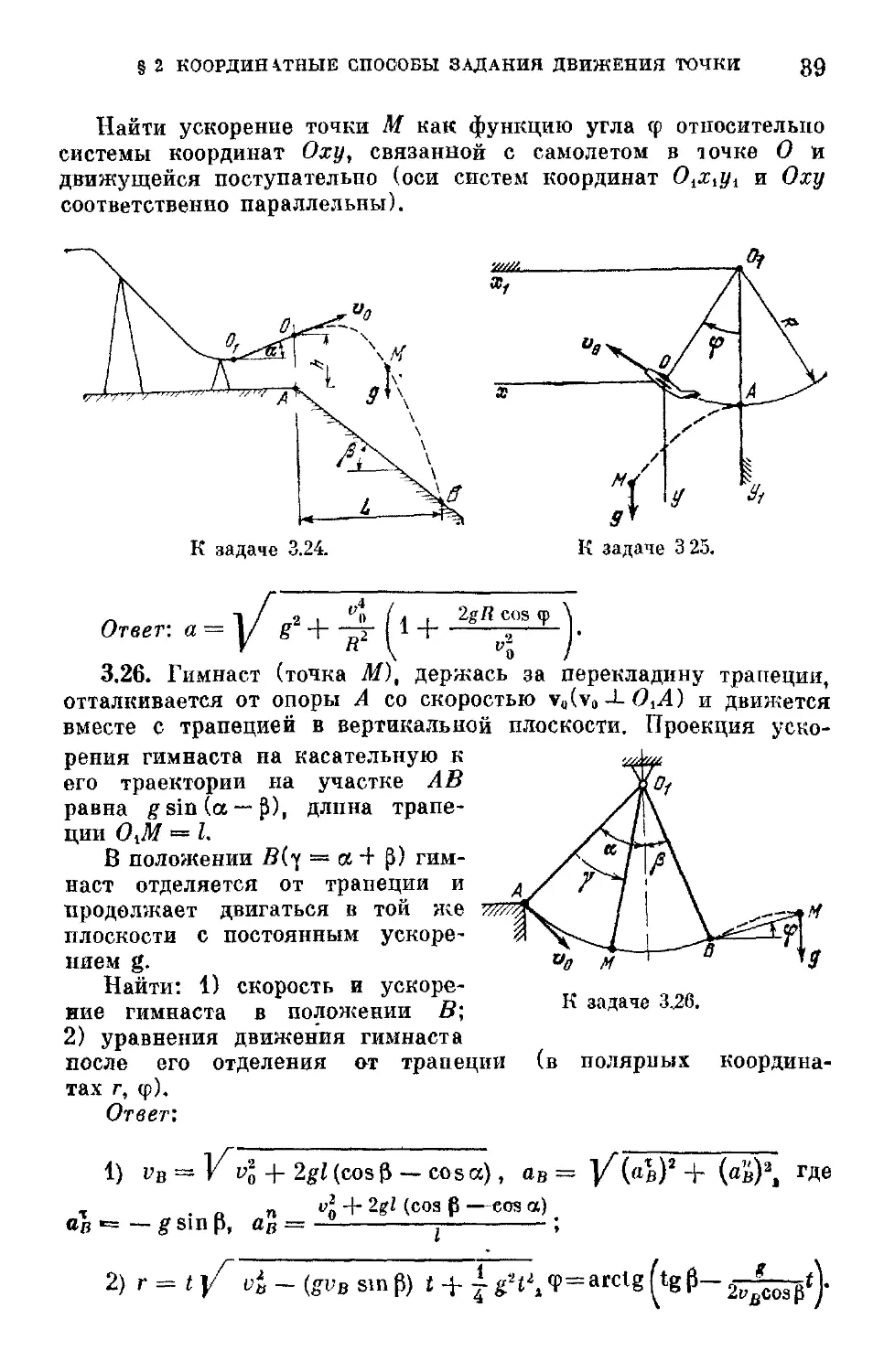
3.24. Лыжник (точка М), оторвавшись от горы разгона трам-
трамплина со скоростью v0, движется в вертикальной плоскости с
постоянным ускорением g. Углы, которые образуют с горизонтом
прямолинейный участок Ofi горы разгона трамплина и линия
наибольшего ската.горы приземления равны аир соответствен-
соответственно, О А = h.
Найти наибольшую высоту подъема Н лыжника над точкой
его отрыва от горы разгона трамплина и горизонтальную даль-
дальность полета L.
Ответ:
vices a
^2gfe^ I
3.25. Самолет (точка О) движется в вертикальной плоскости
по дуге окружности радиуса R с постоянной по величине ско-
скоростью Vo. В момент времени, когда самолет находился в поло-
положении А, от него отделилась точка М, движение которой после
отделения происходит с постоянным ускорением g относительно
неподвижной системы координат O,xiyi.
§ 2 КООРДИНАТНЫЕ СПОООВЫ ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ
89
Найти ускорение точки М как функцию угла tp относительно
системы координат Оху, связанной с самолетом в ючке О и
движущейся поступательно (оси систем координат O^ij/i и Оху
соответственно параллельны).
К задаче 3.24.
К задаче 3 25.
1 / 2 i "l>
COS
3.26. Гимнаст (точка Л/), держась за перекладину трапеция
отталкивается от опоры А со скоростью vo(v0-L OtA) и движется
вместе с трапецией в вертикальной плоскости. Проекция уско-
ускорения гимнаста на касательную к
его траектории на участке АВ
равна gsin(a — p), длина трапе-
трапеции OiM — I.
В положении В(-{ = a -f fi) гим-
гимнаст отделяется от трапеции и
продолжает двигаться в той же
плоскости с постоянным ускоре-
ускорением g.
Найти: 1) скорость и ускоре-
ускорение гимнаста в положении В;
2) уравнения движения гимнаста
после его отделения от трапеции (в полярных координа-
координатах г, ф).
Ответ;
"о м
К задаче 3.26.
1) VB = Vvl + 2gl (cos 0 - cos a), aB = V(axB)' + {al)\ где
i- (gvB 8mP) t -f тв'^<Р=
40
ГЛ 4. ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
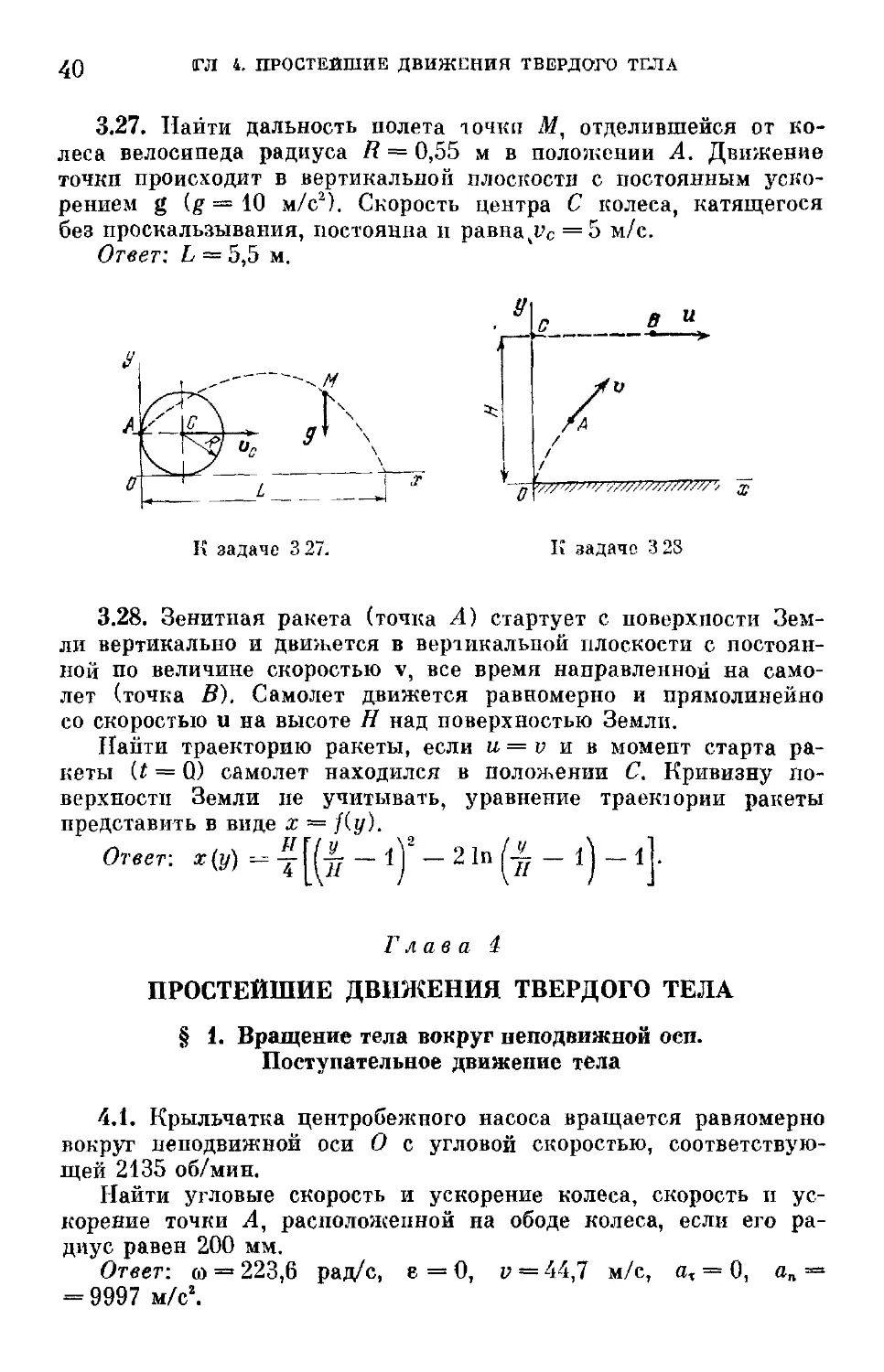
3.27. Найти дальность полета ючкн А/, отделившейся от ко-
колеса велосипеда радиуса R = 0,55 м в положении А. Движение
точки происходит в вертикальной плоскости с постоянным уско-
ускорением g ig = 10 м/с2). Скорость центра С колеса, катящегося
без проскальзывания, постоянна и равна ус =5 м/с.
Ответ: L = 5,5 м.
М
К задаче 3 27.
У
в «
К задаче 3 2S
3.28. Зенитная ракета (точка А) стартует с поверхности Зем-
Земли вертикально и движется в верткальной плоскости с постоян-
постоянной по величине скоростью v, все время направленной на само-
самолет (точка В), Самолет движется равномерно и прямолинейно
со скоростью и на высоте Н над поверхностью Земли.
Найти траекторию ракеты, если и = v и в момент старта ра-
ракеты (t = Q) самолет находился в положении С. Кривизну по-
поверхности Земли ие учитывать, уравнение траектории ракеты
представить в виде х — }(у).
Ответ: ^B/)^|[(
Глава 4
ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
§ 1. Вращение тела вокруг неподвижной осн.
Поступательное движение тела
4.1. Крыльчатка центробежного насоса вращается равномерно
вокруг неподвижной оси О с угловой скоростью, соответствую-
соответствующей 2135 об/мин.
Найти угловые скорость и ускорение колеса, скорость и ус-
ускорение точки Л, расположенной на ободе колеса, если его ра-
радиус равен 200 мм.
Ответ: о =» 223,6 рад/с, е = 0, v — 44,7 м/с, а% = 0, ап =
- 9997 м/с2.
§ 1 ВРАЩЕНИЕ ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
41
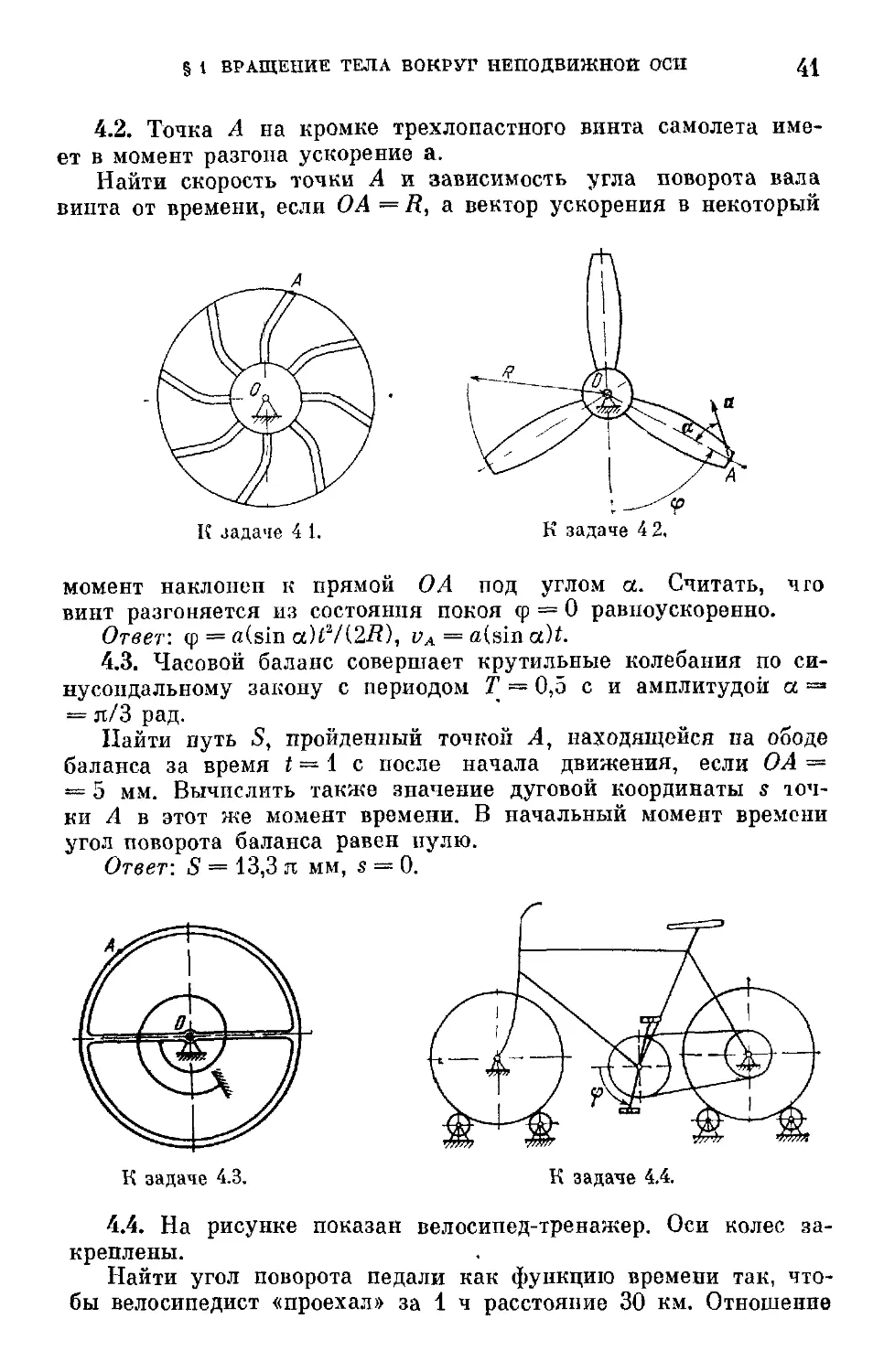
4.2. Точка А на кромке трехлопастного винта самолета име-
имеет в момент разгона ускорение а.
Найти скорость точки А и зависимость угла поворота вала
винта от времени, если О А = R, а вектор ускорения в некоторый
К задаче 4 1.
К задаче 4 2,
момент наклонен к прямой О А под углом а. Считать, чго
винт разгоняется из состояния покоя ср = 0 равноускоренно.
Ответ: ф = «(sin a)f/{2R), vA = a(sina)t.
4.3. Часовой баланс совершает крутильные колебания по си-
синусоидальному закону с периодом Т = 0,5 с и амплитудой а =■
— л/3 рад.
Найти путь 5, пройденный точкой А, находящейся па ободе
баланса за время t — 1 с после начала движения, если О А =
= 5 мм. Вычислить также значение дуговой координаты s iоч-
iочки А в этот же момент времени. В начальный момент времени
угол поворота баланса равен нулю.
Ответ: S = 13,3 л мм, s — 0.
К задаче 4.3.
К задаче 4.4.
4.4. На рисунке показан велосипед-тренажер. Оси колес за-
закреплены.
Найти угол поворота педали как функцию времени так, что-
чтобы велосипедист «проехал» за 1 ч расстояние 30 км. Отношение
42
ГЛ. 4. ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
чисел зубьев ведущего зубчатого колеса к ведомой шестерне
равно 2, радиус заднего колеса равен 50 см. Вычислить также
угловую скорость и число оборотов в минуту ведущего зубча-
зубчатого колеса, полагая его вращение равномерным.
Ответ: ф = 8,33f рад, ы = 8,33 рад/с, п = 79,6 об/мип.
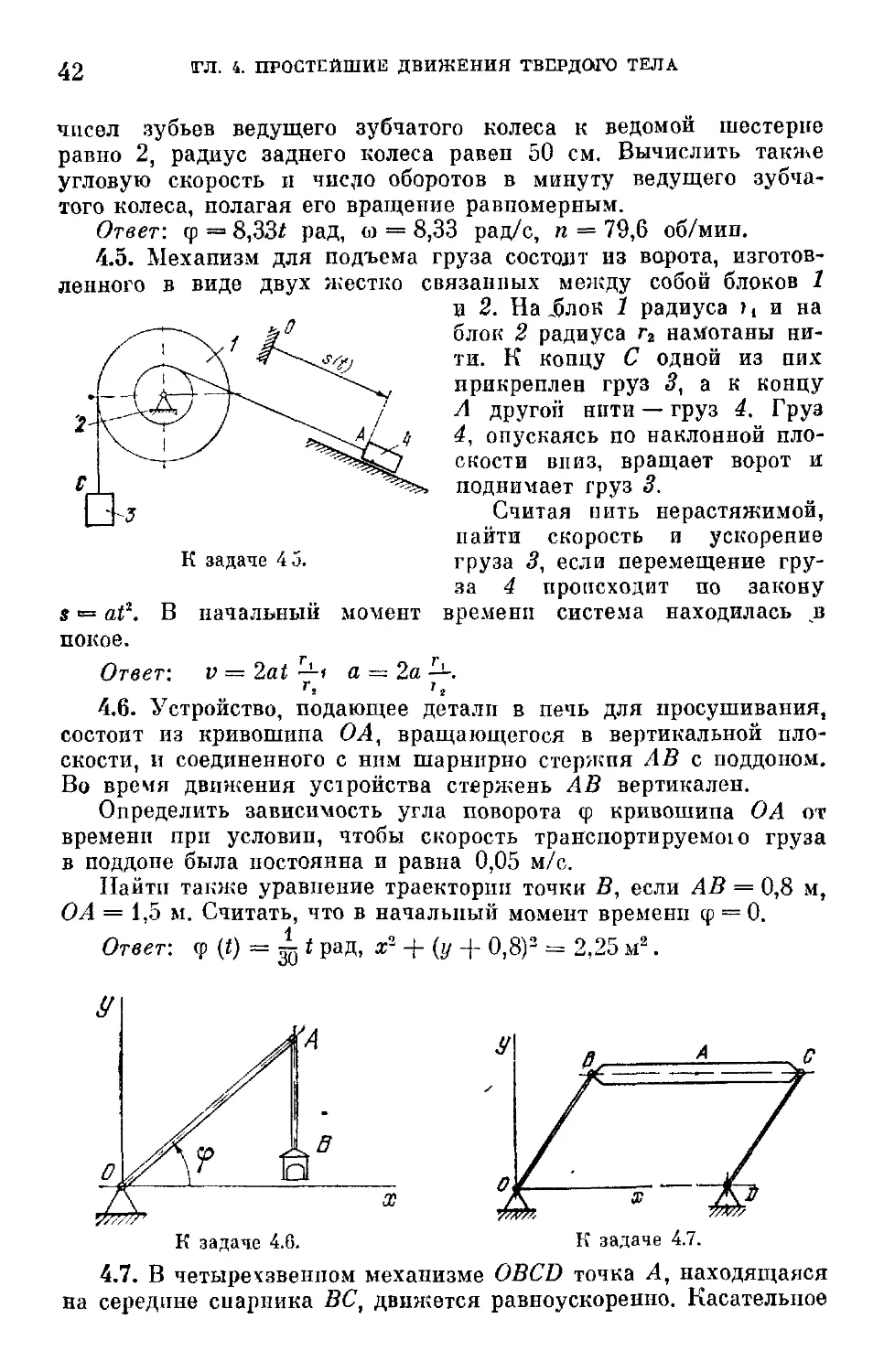
4.5. Ыехапизм для подъема груза состоят из ворота, изготов-
изготовленного в виде двух жестко связанных между собой блоков 1
и 2. На .блок 1 радиуса ?4 и на
блок 2 радиуса гг намотаны ни-
нити. К концу С одной из них
прикреплен груз 3, а к концу
Л другой нити — груз 4, Груз
4, опускаясь по наклонной пло-
плоскости вниз, вращает ворот и
поднимает груз 3.
Считая нить нерастяжимой,
найти скорость и ускорение
К задаче 4 3. груза 3, если перемещение гру-
груза 4 происходит по закону
начальный момент времени система находилась .в
В
2а X
'г
s = at1.
покое.
Ответ: v = 2at^-
4.6. Устройство, подающее детали в печь для просушивания,
состоит из кривошипа ОА, вращающегося в вертикальной пло-
плоскости, и соединенного с ним шарнирно стержня АВ с поддоном.
Во время движения ус1ройства стержень АВ вертикален.
Определить зависимость угла поворота ср кривошипа ОА от
времени при условии, чтобы скорость транспортируемою груза
в поддоне была постоянна и равна 0,05 м/с.
Найти также уравнение траектории точки В, если АВ = 0,8 м,
О А = 1,5 м. Считать, что в начальный момент времени ф = 0.
Ответ: ф (t) = ^ t рад, я3 + (у + 0,8J = 2,25 и2.
У
х
К задаче 4.7.
К задаче 4.0.
4.7. В четырехзвенпом механизме OBCD точка А, находящаяся
на середине сиарника ВС, движется равноускоренно. Касательное
§ 1, ВРАЩЕНИЕ ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
ускорение этой точки а^=5м/сг. Длина спариика ВС == 1 м, а кри-
кривошипа OB = DC = 50 см. В начальном положении стержень ОВ
горизонтален, а угловая скорость его равна 0.
Найти уравнение траектории точки Л, угловую скорость и
угловое ускорение кривошипа, скорость и ускорение точки В.
Ответ: Уа + Ыа ^г) = ОВг, сода = 10/ рад'с, еОв —
= 10 рад/с2, vB = 5 t м/с, ав = 5]Л + 100 t* м/с2.
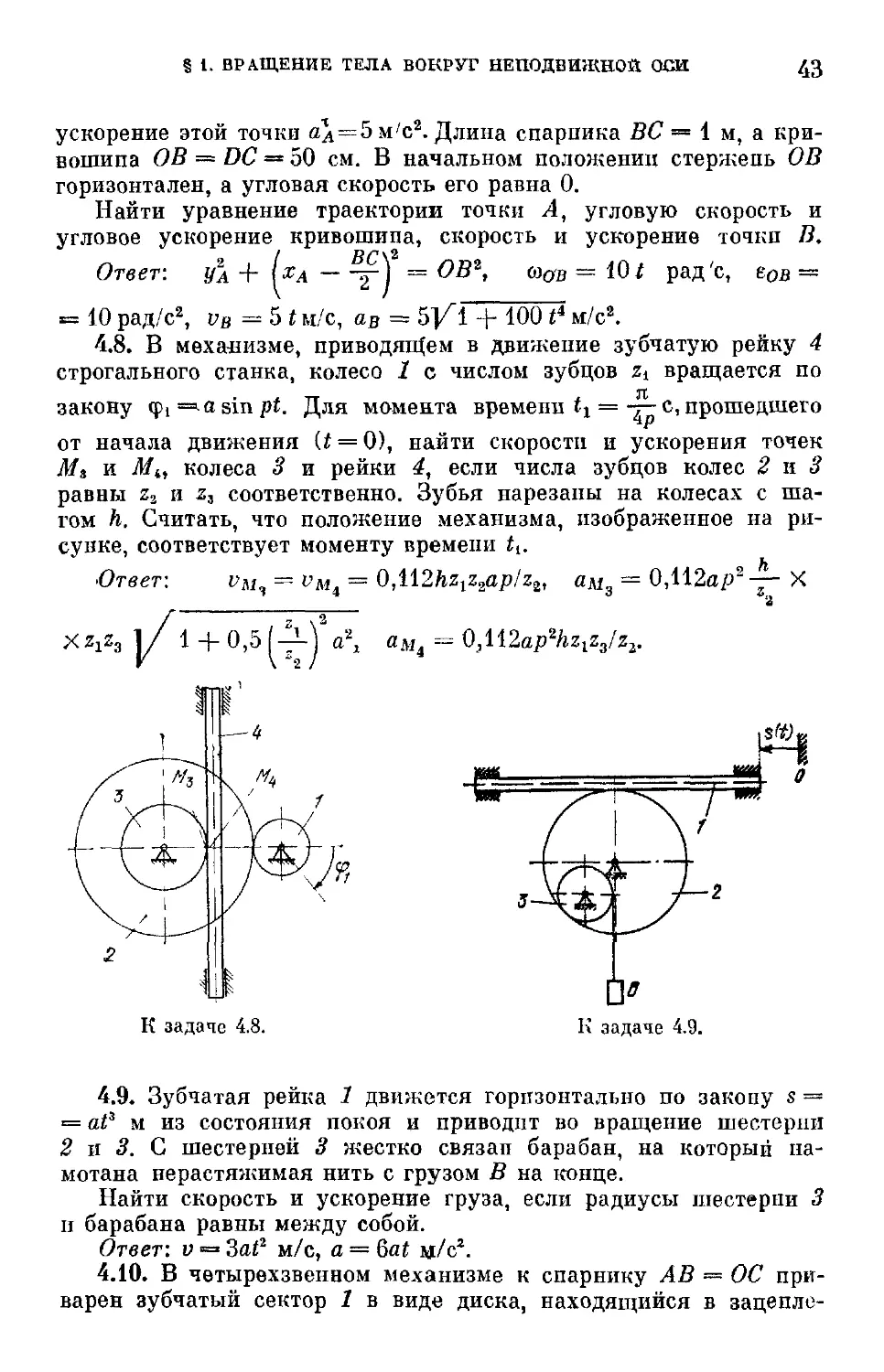
4.8. В механизме, приводящем в движение зубчатую рейку 4
строгального станка, колесо I с числом зубцов z4 вращается по
закону <pi=-asmpt. Для момента времени tj =-т—с, прошедшего
от начала движения U = 0), найти скорости и ускорения точек
Л/3 и Л/4, колеса 3 и рейки 4, если числа зубцов колес 2 и 3
равны г3 и z, соответственно. Зубья нарезаны на колесах с ша-
шагом h. Считать, что положение механизма, изображенное на ри-
рисунке, соответствует моменту времени t{.
■Ответ: ищ = vMt = Q^ilhz^aplz^ aMg = 0,112ap2 — X
К задаче 4.8.
К задаче 4.9.
4.9. Зубчатая рейка 1 движется горизонтально по закону s =
= at3 м из состояния покоя и приводит во вращение шестерни
2 и 3. С шестерней 3 жестко связап барабан, на который на-
намотана нерастяжимая нить с грузом В на конце.
Найти скорость и ускорение груза, если радиусы шестерни 3
и барабана равны между собой.
Ответ: v «=• 3af м/с, а = eat м/с2.
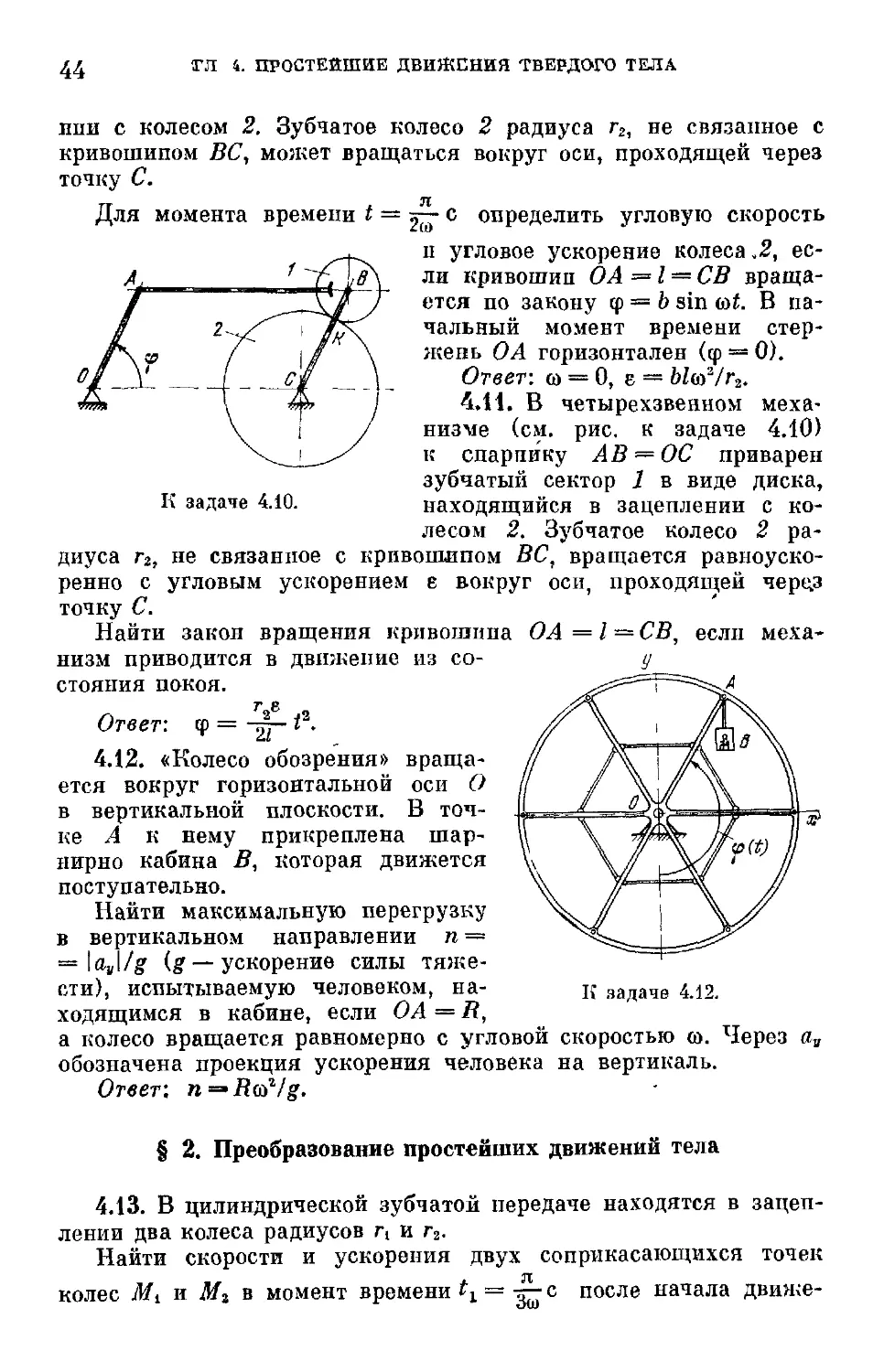
4.10. В четырехзвенном механизме к спарнику АВ = ОС при-
приварен зубчатый сектор 1 в виде диска, находящийся в зацепле-
44
ГЛ 4. ПРОСТЕЙШИЕ ДВИЖСНИЯ ТВЕРДОГО ТЕЛА
К задаче 4.10.
нпи с колесом 2. Зубчатое колесо 2 радиуса г2, не связанное с
кривошипом ВС, может вращаться вокруг оси, проходящей через
точку С.
Для момента времени t = j^- с определить угловую скорость
ц угловое ускорение колеса,2, ес-
если кривошип О А = I = С/? враща-
вращается по закону ф = Ь sin (of. В на-
начальный момент времени стер-
стержень О А горизонтален (ср = 0).
Ответ: © = 0, е = Ы(аг/г2.
4.11. В четырехзвенном меха-
механизме (см. рис. к задаче 4.10)
к спарнику АВ = ОС приварен
зубчатый сектор 1 в виде диска,
находящийся в зацеплении с ко-
колесом 2. Зубчатое колесо 2 ра-
радиуса г2, не связанное с кривошипом ВС, вращается равноуско-
равноускоренно с угловым ускорением е вокруг оси, проходящей черцз
точку С.
Найти закон вращения кривошипа О А = I — СВ, если меха-
механизм приводится в движение из со-
состояния покоя.
Ответ: ф = -т|- t2.
4.12. «Колесо обозрения» враща-
вращается вокруг горизонтальной оси О
в вертикальной плоскости. В точ-
точке А к нему прикреплена шар-
нирно кабина В, которая движется
поступательно.
Найти максимальную перегрузку
в вертикальном направлении п =
= la»l/gr (g — ускорение силы тяже-
тяжести), испытываемую человеком, на-
находящимся в кабине, если О А = R,
К задаче 4.12.
а колесо вращается равномерно с угловой скоростью ©. Через ая
обозначена проекция ускорения человека на вертикаль.
Ответ; nRtf/
§ 2. Преобразование простейших движений тела
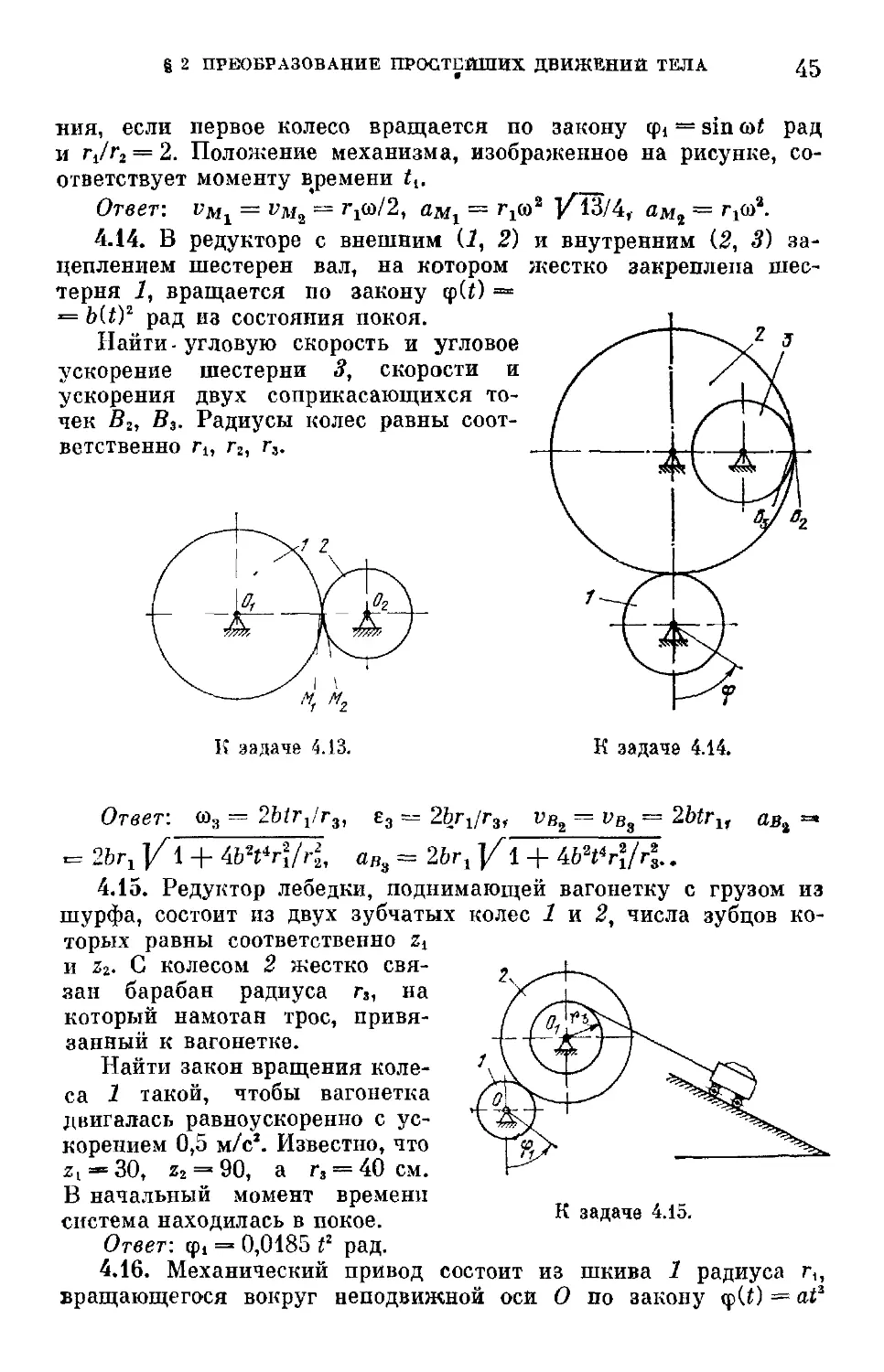
4.13. В цилиндрической зубчатой передаче находятся в зацеп-
зацеплении два колеса радиусов г{ и г2.
Найти скорости и ускорения двух соприкасающихся точек
колес Mi и Л/j в момент времени tl = -^ с после начала движе-
g 2 ПРЕОБРАЗОВАНИЕ ПРОСТЕЙШИХ ДВИЖЕНИЙ ТЕЛА
45
ния, если первое колесо вращается по закону цц — sin (At рад
и rjr2 = 2. Положение механизма, изображенное на рисунке, со-
соответствует моменту времени tt.
Ответ: vMl = уМа = г^/2, аЫг = ^ю2 /13/4, ам2 = гх<а%.
4.14. В редукторе с внешним U, 2) и внутренним B, 3) за-
зацеплением шестерен вал, на котором жестко закреплена шес-
шестерня 1, вращается по закону cpU) =
= ЬШ2 рад из состояния покоя.
Найти-угловую скорость и угловое
ускорение шестерни 3, скорости и
ускорения двух соприкасающихся то-
точек В2, В3. Радиусы колес равны соот-
соответственно ги г2, г3.
К задаче 4.13.
Г
К задаче 4.14.
Ответ: щ = 2btrl/r3, e3 = 2Ьгг/г3,
= vBa = 2btr
u
4.15. Редуктор лебедки, поднимающей вагонетку с грузом из
шурфа, состоит из двух зубчатых колес 1 и 2, числа зубцов ко-
которых равны соответственно zt
и ъ%. С колесом 2 жестко свя-
связан барабан радиуса г,, на
который намотан трос, привя-
привязанный к вагонетке.
Найти закон вращения коле-
колеса 1 такой, чтобы вагонетка
двигалась равноускоренно с ус-
ускорением 0,5 м/с1. Известно, что
z, = 30, z2 = 90, а г, = 40 см.
к задаче 4.15.
В начальный момент времени
система находилась в покое.
Ответ: ф1 = 0,0185 f рад.
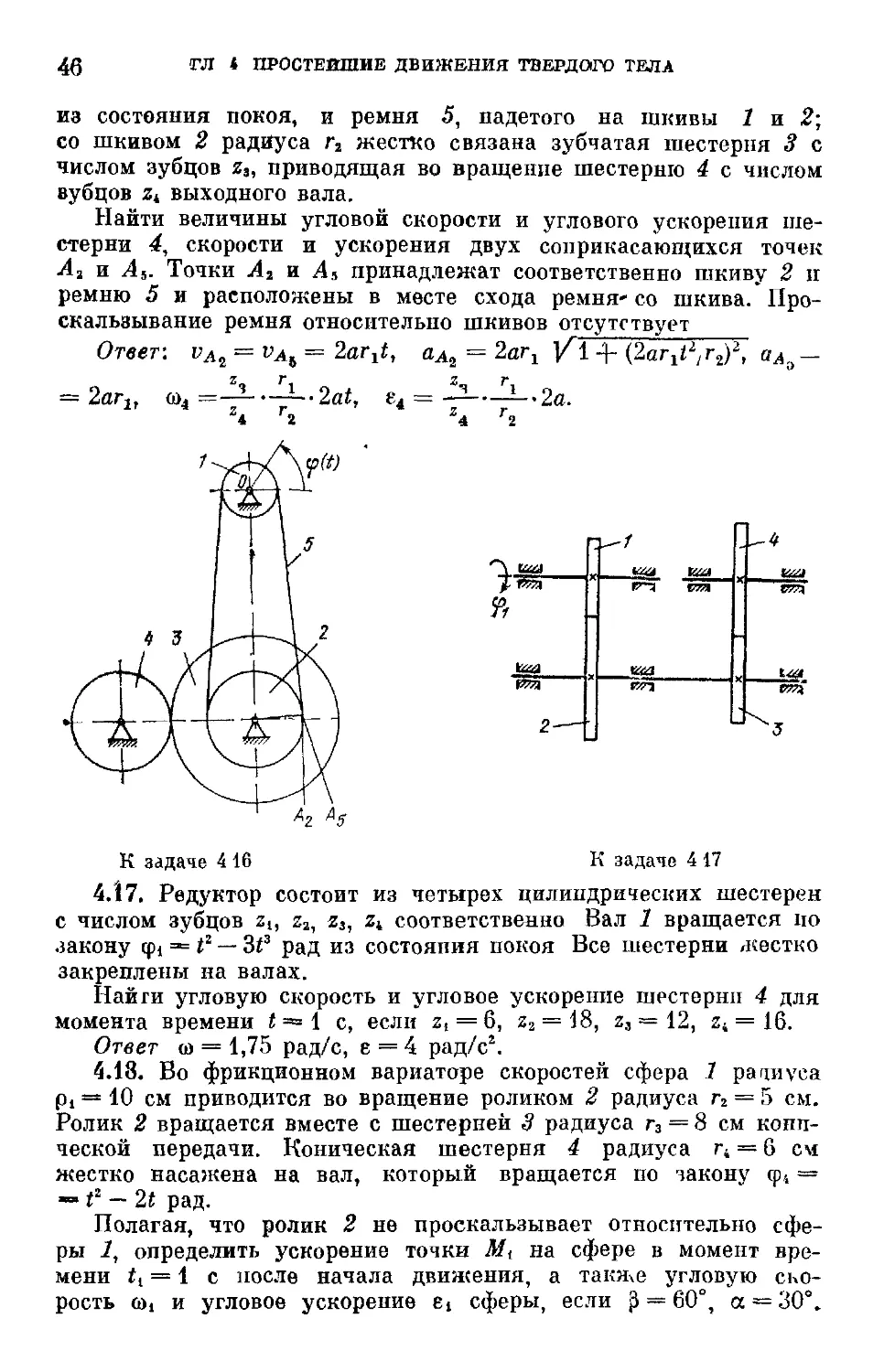
4.16. Механический привод состоит из шкива 1 радиуса г,,
вращающегося вокруг неподвижной оси О по закону q>U) = a?
46
ГЛ * ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
из состояния покоя, и ремня 5, падетого на шкивы 1 и 2;
со шкивом 2 радиуса гг жестко связана зубчатая шестерня 3 с
числом зубцов z3, приводящая во вращение шестерню 4 с числом
Бубнов zt выходного вала.
Найти величины угловой скорости и углового ускорения ше-
шестерни 4, скорости и ускорения двух соприкасающихся точек
Аг и Аь. Точки Аг и А5 принадлежат соответственно шкиву 2 и
ремню 5 и расположены в месте схода ремня- со шкива. Про-
Проскальзывание ремня относительно шкивов отсутствует
Ответ: vAi = vAj) = 2ar1t, aAi = 2ar1 /l -f {lar^jtf, aAo-
ft
->
r/n
К задаче 416 К задаче 4 17
4/17. Редуктор состоит из четырех цилиндрических шестерен
с числом зубцов 2l( za, z3, z4 соответствеано Вал 7 вращается но
закону ф4 = f — 3f рад из состояния покоя Все шестерни жестко
закреплены на валах.
Найги угловую скорость и угловое ускорение шестерни 4 для
момента времени t = 1 с, если 2, = 6, z3 = 18, z3 = 12, zt = 16.
Ответ о) = 1,75 рад/с, е = 4 рад/с2.
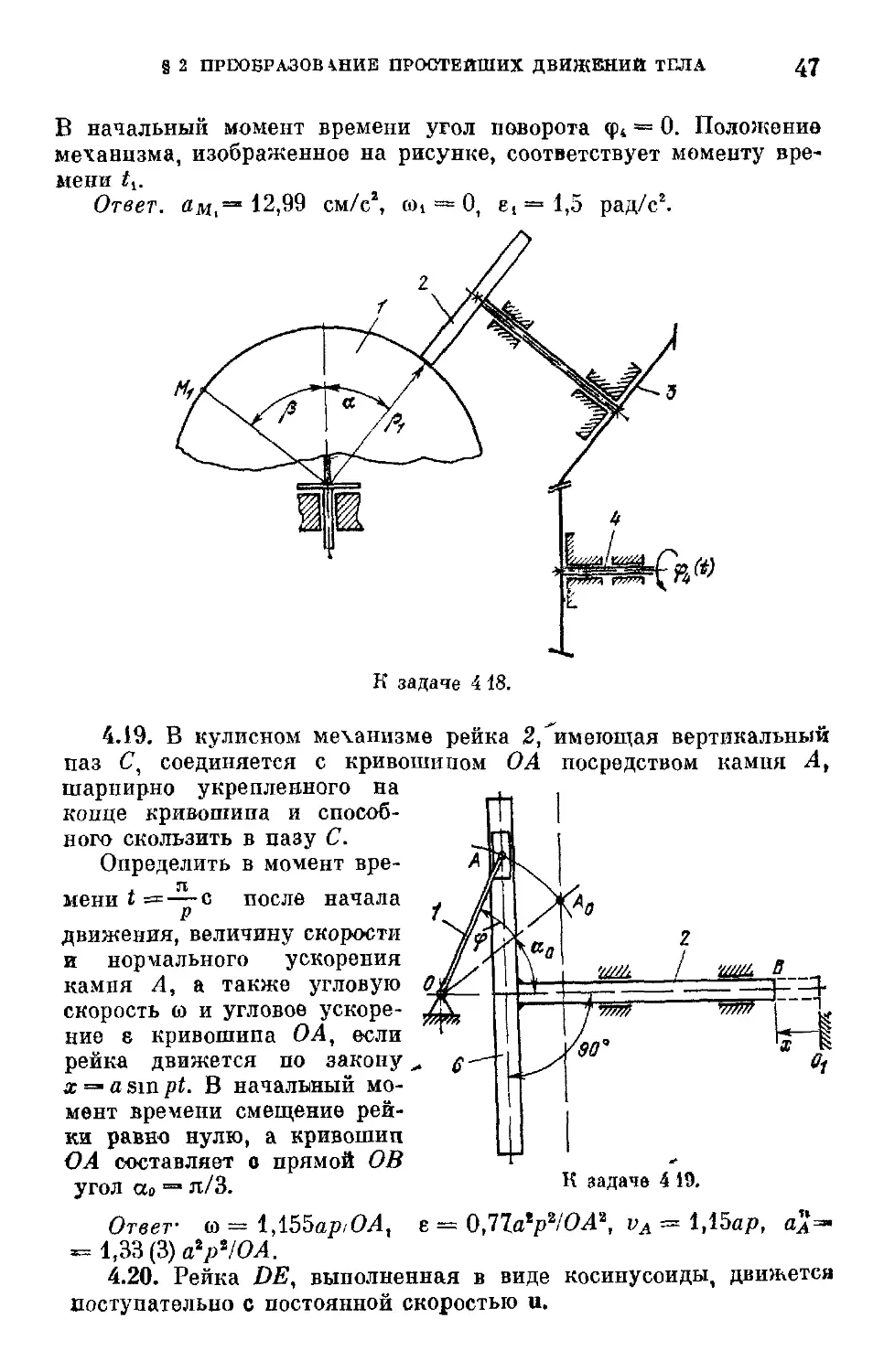
4.18. Во фрикционном вариаторе скоростей сфера 1 рациуса
Pi = 10 см приводится во вращение роликом 2 радиуса гг = 5 см.
Ролик 2 вращается вместе с шестерней 3 радиуса г3 = 8 см кони-
конической передачи. Коническая шестерня 4 радиуса г4 = 6 см
жестко насажена на вал, который вращается по закону ср4 =
- ? - 2t рад.
Полагая, что ролик 2 не проскальзывает относительно сфе-
сферы 1, определить ускорение точки Mt на сфере в момент вре-
времени tl = \ с после начала движения, а такяче угловую сьо-
рость ©1 и угловое ускорение Ei сферы, если {J = 60°, а — 30°.
§ 2 ПРШБРАЗОВ ШИЕ ПРОСТЕЙШИХ ДВИЖЕНИЙ ТЕЛА
47
В начальный момент времени угол поворота <р4 = 0. Положение
механизма, изображенное на рисунке, соответствует моменту вре-
времени ti.
Ответ. ам,— 12,99 см/с2, ю4 = 0, е, = 1,5 рад/с2.
К задаче 4 18.
t
4.19. В кулисном механизме рейка 2, 'имеющая вертикальный
паз С, соединяется с кривошипом ОА посредством камня А,
шарнирно укрепленного на
конце кривошипа и способ-
способного скользить в пазу С.
Определить в момент вре-
. п
мени1= — с после начала
движения, величину скорости
и нормального ускорения
камня А, а также угловую Oi
скорость (о и угловое ускоре-
ускорение е кривошипа О А, если
рейка движется по закону _
х «=■ a sin pt. В начальный мо-
момент времени смещение рей-
рейки равно нулю, а кривошиц
ОА составляет о прямой ОВ
I
угол а„ — я/3.
К задаче 4 19.
Ответ- (о = \,1ЬЬар,ОАх е = 0,ПагрЧОА\ vA = 1,15ар,
33C)гг/ОЛ
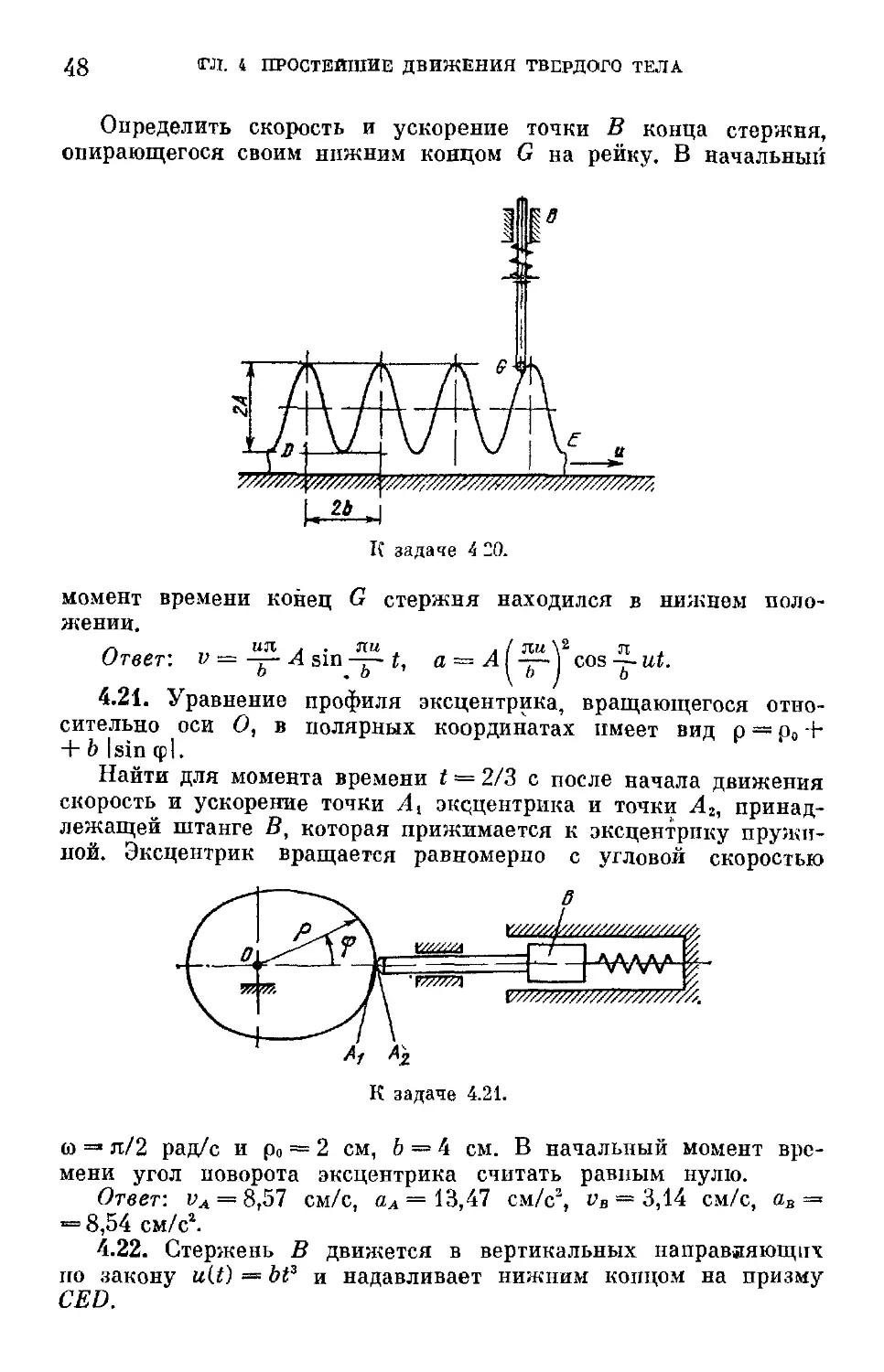
4.20. Рейка DE, выполненная в виде косинусоиды, движется
поступательно с постоянной скоростью и.
48
ГЛ. 4 ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Определить скорость и ускорение точки В конца стержня,
опирающегося своим нижним концом G на рейку. В начальный
К задаче А 20.
момент времени конец G стержня находился в нижнем поло-
положении.
^ UJI . . Пи
Ответ: v — -j- A sin -г- t,
а = Л{-5- cos-~i*t.
ь . ь
4.21. Уравнение профиля эксцентрика, вращающегося отно-
относительно оси О, в полярных координатах имеет вид р = р0 +
+ Ь Isin ф|.
Найти для момента времени t — 2/3 с после начала движения
скорость и ускорение точки Ак эксцентрика и точки А2, принад-
принадлежащей штанге В, которая прижимается к эксцентрику пружи-
пружиной. Эксцентрик вращается равномерно с угловой скоростью
К задаче 4.21.
(о =■ я/2 рад/с и р0 == 2 см, 6 = 4 см. В начальный момент вре-
времени угол поворота эксцентрика считать равным нулю.
Ответ: ул = 8,57 см/с, аА = 13,47 см/с2, tfB = 3,14 см/с, ав =
•= 8,54 см/с2.
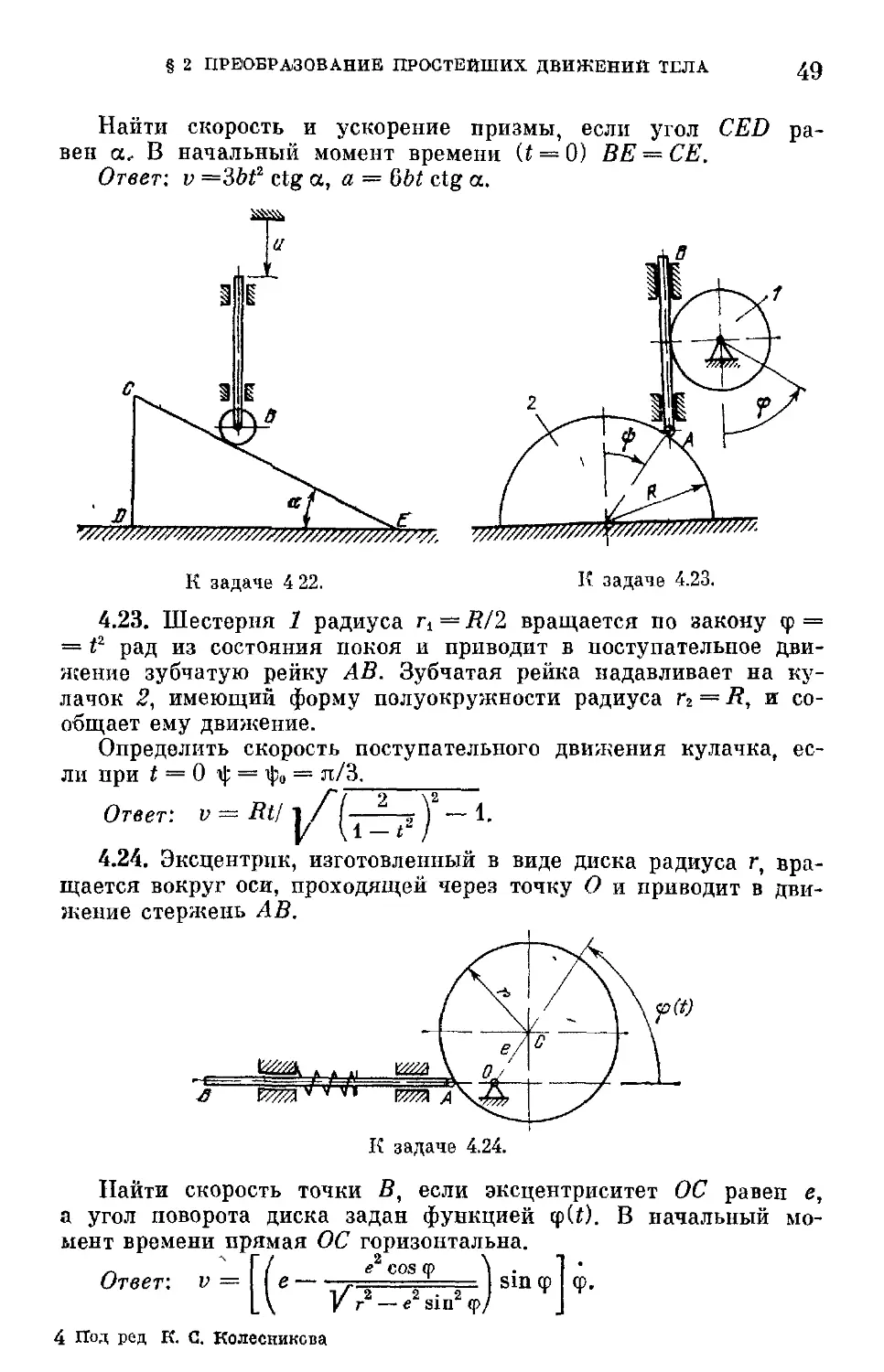
4.22. Стержень В движется в вертикальных направляющих
но закону u{t) = bt3 и надавливает нижним концом на призму
CED.
§ 2 ПРЕОБРАЗОВАНИЕ ПРОСТЕЙШИХ ДВИЖЕНИЙ ТЕЛА
49
Найти скорость и ускорение призмы, если угол CED ра-
равен а, В начальный момент времени U = 0) BE —СЕ.
Ответ: v =3bf ctg a, a = ЬЫ ctg a.
К задаче 4 22.
К задаче 4.23.
4.23. Шестерня 1 радиуса г4 = R/2 вращается по закону ср =
= tz рад из состояния покоя и приводит в поступательное дви-
движение зубчатую рейку АВ. Зубчатая рейка надавливает на ку-
кулачок 2, имеющий форму полуокружности радиуса Гг — R, и со-
сообщает ему движение.
Определить скорость поступательного движения кулачка, ес-
если при t = 0 ■§ = ■§<,=* я/3.
Ответ: v —
: v = Rt/i /7—~ f - 1.
4.24. Эксцентрик, изготовленный в виде диска радиуса г, вра-
вращается вокруг оси, проходящей через точку О и приводит в дви-
движение стержень АВ.
К задаче 4.24.
Найти скорость точки В, если эксцентриситет ОС равен е,
а угол поворота диска задан функцией ср(£). В начальный мо-
момент времени прямая ОС горизонтальна.
/л Г / <?г COS Ф \ . 1 '
Ответ: v = \[е- , т = sinф ф.
4 Под ред К. С. Колесникова
50
ТЛ. 4. ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
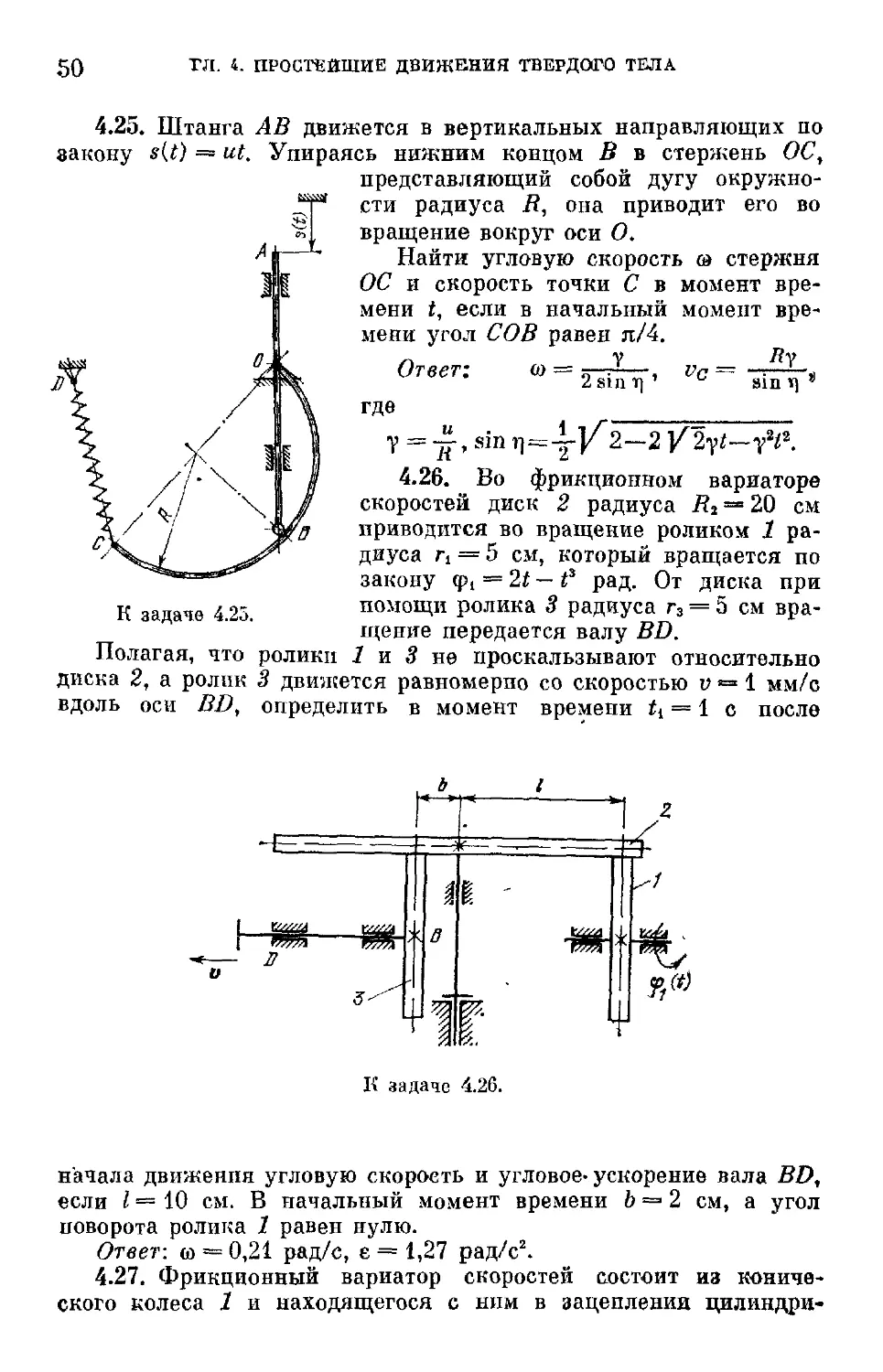
4.25. Штанга АВ движется в вертикальных направляющих по
закону s{t) = ut. Упираясь нижним концом В в стержень ОС,
представляющий собой дугу окружно-
окружности радиуса R, она приводит его во
вращение вокруг оси О.
Найти угловую скорость ю стержня
ОС и скорость точки С в момент вре-
времени t, если в начальный момент вре-
времени угол СОВ равен я/4.
Y
Ответ:
(О =
2 sin
sin
где
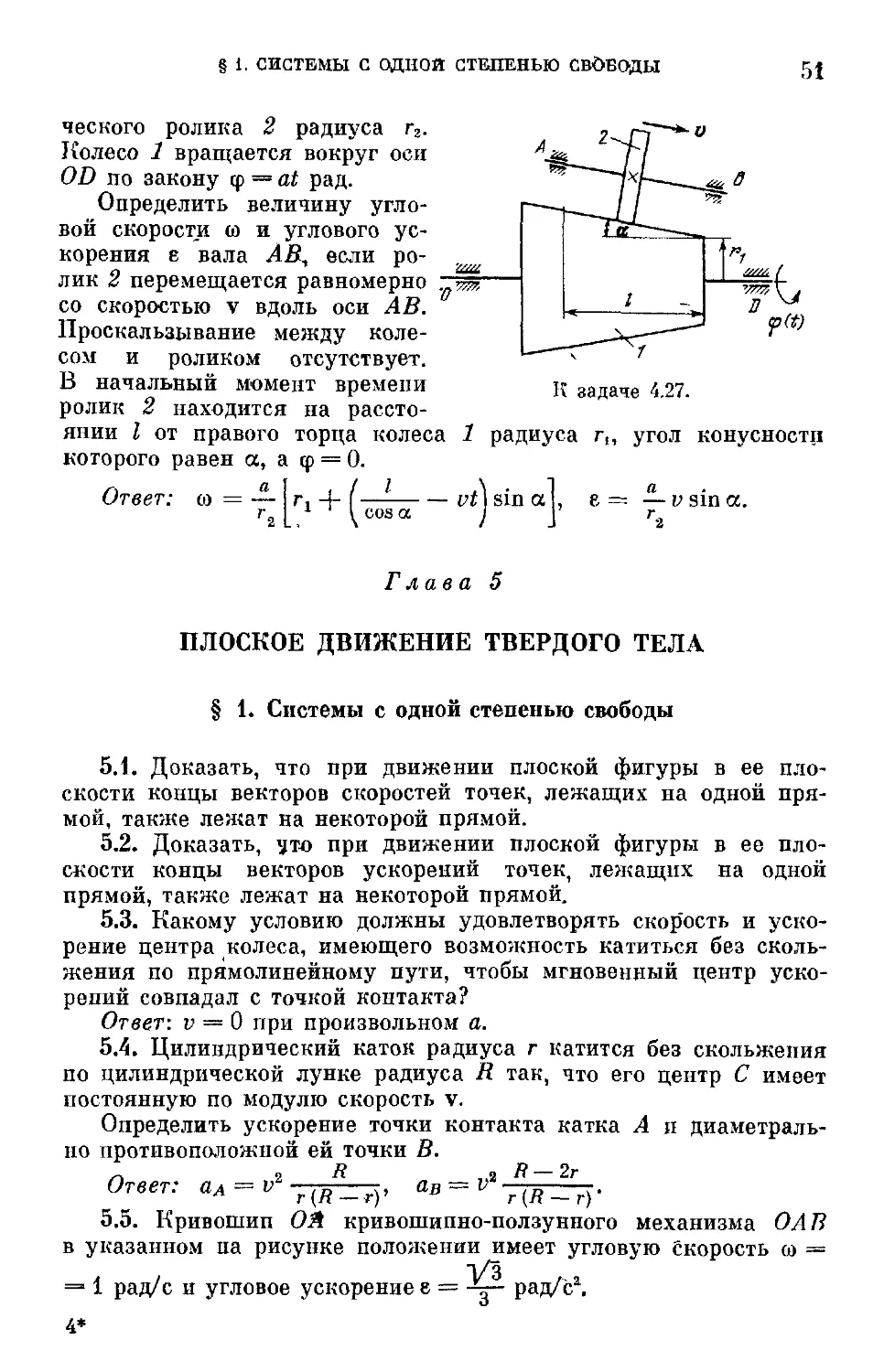
4.26. Во фрикционном вариаторе
скоростей диск 2 радиуса R2 = 20 см
приводится во вращение роликом 1 ра-
радиуса п = 5 см, который вращается по
закону ф, = 2* — f рад. От диска при
помощи ролика 3 радиуса г3 = 5 см вра-
вращение передается валу BD.
Полагая, что ролики 1 и 3 не проскальзывают относительно
диска 2, а ролик 3 движется равномерно со скоростью v «=■ 1 мм/с
вдоль оси BD, определить в момент времени 14 = 1 с после
К задаче 4.25.
Ъ
*—•
■Шг
Р//А
К задаче 4.26.
начала движения угловую скорость и угловое- ускорение вала BD,
если I = 10 см. В начальный момент времени Ь=-2 см, а угол
поворота ролика 1 равен нулю.
Ответ: (о = 0,21 рад/с, е = 1,27 рад/с2.
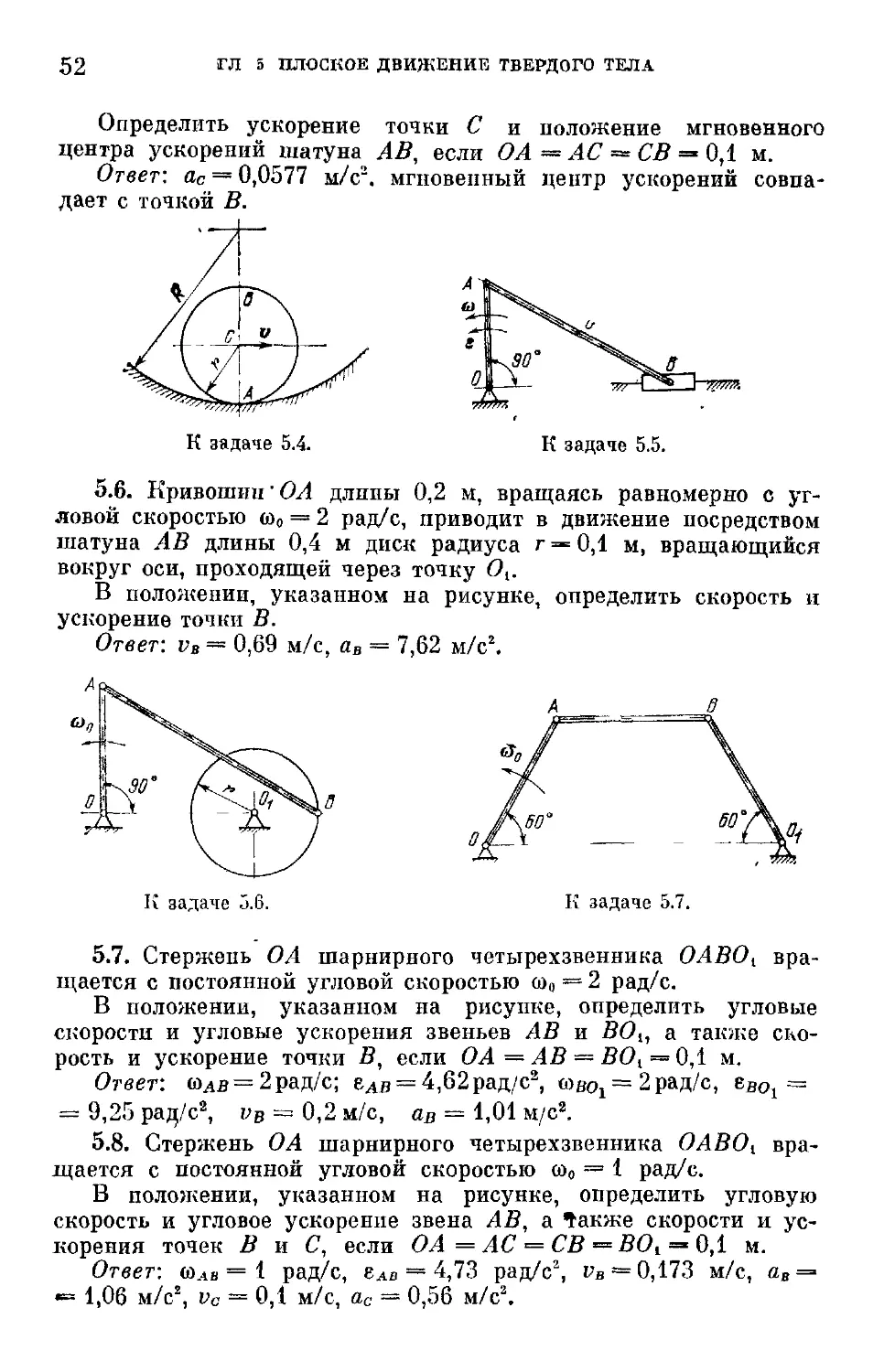
4.27. Фрикционный вариатор скоростей состоит из кониче-
конического колеса 1 и находящегося с ним в зацеплении цилиндри-
§ 1. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
51
ческого ролика 2 радиуса г2.
Колесо 1 вращается вокруг оси
OD по закону ср = at рад.
Определить величину угло-
угловой скорости (о и углового ус-
ускорения е вала АВ, вели ро-
ролик 2 перемещается равномерно
со скоростью v вдоль оси АВ.
Проскальзывание между коле-
колесом и роликом отсутствует.
В начальный момент времени
ролик 2 находится на рассто-
К задаче 4.27.
янии I от правого торца колеса 1 радиуса г,, угол конусности
которого равен а, а ср = 0.
Ответ: со = — г, -f- I—■ vt\ sin а ,
Г2 L \ C0S а / J
е = — у sin а.
Глав а 5
ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
§ 1. Системы с одной степенью свободы
5.1. Доказать, что при движении плоской фигуры в ее пло-
плоскости концы векторов скоростей точек, лежащих на одной пря-
прямой, также лежат на некоторой прямой.
5.2. Доказать, что при движении плоской фигуры в ее пло-
плоскости концы векторов ускорений точек, лежащих на одной
прямой, также лежат на некоторой прямой.
5.3. Какому условию должны удовлетворять скор'ость и уско-
ускорение центра колеса, имеющего возможность катиться без сколь-
скольжения по прямолинейному пути, чтобы мгновенный центр уско-
ускорений совпадал с точкой контакта?
Ответ: v = 0 при произвольном а.
5.4. Цилиндрический каток радиуса г катится без скольжения
по цилиндрической лунке радиуса В. так, что его центр С имеет
постоянную по модулю скорость v.
Определить ускорение точки контакта катка А л диаметраль-
диаметрально противоположной ей точки В.
Ответ: aA = v* r(/_r), ** = * ?~*гу
5.5. Кривошип Oft кривошипно-ползунного механизма ОАБ
в указанном па рисунке положении имеет угловую скорость со =
= 1 рад/с и угловое ускорение е = -Цг— рад/с1.
52
ГЛ 5 ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Определить ускорение точки С и положение мгновенного
центра ускорений шатуна^ АВ, если ОА = АС = СВ =• 0,1 м.
Ответ: ас = 0,0577 м/с2, мгновенный центр ускорений совпа-
совпадает с точкой В.
К задаче 5.4.
К задаче 5.5.
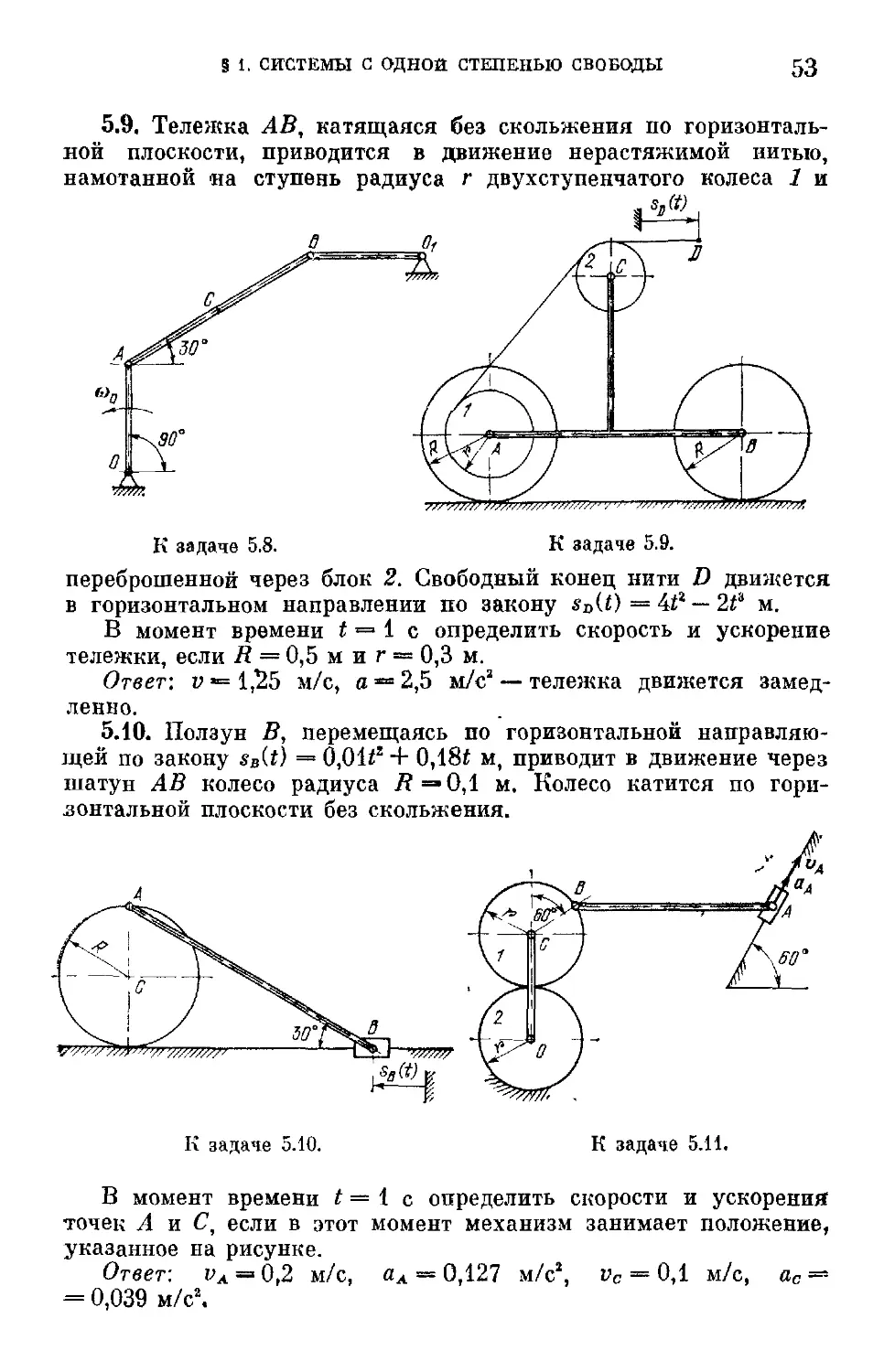
5.6. Кривошин ■ ОА длнны 0,2 м, вращаясь равномерно с уг-
угловой скоростью (оо = 2 рад/с, приводит в движение посредством
шатуна АВ длины 0,4 м диск радиуса г = 0,1 м, вращающийся
вокруг оси, проходящей через точку Ot.
В положении, указанном на рисунке, определить скорость и
ускорение точки В.
Ответ: vB = 0,69 м/с, ав = 7,62 м/с2.
К задаче о
К задаче 5.7.
5.7. Стержень ОА шарнирного четырехзвенника ОАВОК вра-
вращается с постоянной угловой скоростью ©о — 2 рад/с.
В положении, указанном на рисунке, определить угловые
скорости и угловые ускорения звеньев АВ и BOh а также ско-
скорость и ускорение точки В, если ОА = АВ — ВО{ = 0,1 м.
Ответ: (оАв = 2рад/с; еАв = 4,62рад/с2, (oBOl = 2рад/с, eBOl =
= 9,25 рад/с2, vB =■ 0,2 м/с, ав = 1,01 м/с2.
5.8. Стержень ОА шарнирного четырехзвенника ОАВО{ вра-
вращается с постоянной угловой скоростью (Оо = 1 рад/с.
В положении, указанном на рисунке, определить угловую
скорость и угловое ускорение звена АВ, а ^акже скорости и ус-
ускорения точек В и С, если ОА = АС -=СВ — SC\ = 0,1 м.
Ответ: (Олв = 1 рад/с, еЛв = 4,73 рад/с2, vB — 0,173 м/с, а„ =
«= 1,06 м/с2, ус = 0,1 м/с, ас = 0,56 м/с2.
S 1. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
53
5.9. Тележка АВ, катящаяся без скольжения по горизонталь-
горизонтальной плоскости, приводится в движение нерастяжимой нитью,
намотанной <на ступень радиуса г двухступенчатого колеса 1 и
К задаче 5.8. К задаче 5.9.
переброшенной через блок 2. Свободный конец нити D движется
в горизонтальном направлении по закону sD{t) = 4f* — 2f и.
В момент времени t •=> 1 с определить скорость и ускорение
тележки, если R — 0,5 м и г == 0,3 м.
Ответ: v «= 1,25 м/с, а = 2,5 м/с2 — тележка движется замед-
замедленно.
5.10. Ползун В, перемещаясь по горизонтальной направляю-
направляющей по закону sB(t) = 0,01f2 4- 0,18* м, приводит в движение через
шатун АВ колесо радиуса /?=»О,1 м. Колесо катится по гори-
горизонтальной плоскости без скольжения.
К задаче 5.10.
К задаче 5.11.
В момент времени (=1 с определить скорости и ускорения
точек А и С, если в этот момент механизм занимает положение,
указанное на рисунке.
Ответ: 1>а = 0,2 м/с, ал = 0,127 м/с2, vc = 0,1 м/с, ас =
= 0,039 м/с2.
54
ГЛ * ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
5.11. Ползун А, перемещаясь по прямолинейной направляю-
направляющей, приводит в движение через стержень АВ колесо 1 радиу-
радиуса г — 0,1 м, которое катится без скольжения по неподвижному
колесу 2 того же радиуса.
В положении, указанном на рисунке, определить скорости и
ускорения точек В к С, если в данный момент ползун А имеет
скорость уА = 0,3 м/с и ускорение aA^O.l м/с2. Длина стержпя
АВ равна 0,4 м.
Ответ: vB = 0,173 м/с, vc = 0,l м/с, ав =» 0,496 м/с2, ас =
- 0,295 м/с2.
5.12. В механизме, рассмотренном в задаче 5.11, кривошип
ОС вращается с постоянной угловой скоростью (о0 = 1 рад/с.
В положении, указанном на рисунке, определить скорость и
ускорение ползуна А.
Ответ: vA = 0,6 м/с, аА = 3,09 м/с1.
5.13. В стержневом механизме, состоящем из двух шарнирно
связанных стержней с ползунами на концах, ползун А движется
по вертикальной направляющей с постоянной скоростью vA =*
= 0,6 м/с, а ползуны В и D скользят по горизонтальной направ-
направляющей.
В положении, указанном на рисунке, определить скорость и
ускорение ползуна D, а также угловую скорости и угловое уско-
ускорение стержня CD, если АС — СВ = 0,2 м, CD = 0,2УЗ м.
Ответ: vB = 0,346 м/с, aD = 3,2 м/с2, <»cd = 1 рад/с, еСв =
= 0,577 рад/с3.
В П
К задаче 5.13.
5.14. Стержень АВ имеет на концах ползуны Лий, один
из которых А скользит по прямолинейной направляющей с по-
постоянной скоростью vA = 0,4 м/с, а другой В — по криволиней-
криволинейной направляющей, представляющей собой дугу окружности ра-
радиуса R = 0,2 м.
§ 1 СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
55
В положении, указанном на рисунке, определить скорости и
ускорения точек В и С, а также угловую скорость и угловое
ускорение стерншя, если АС = СВ ■=» 0,2 м.
Ответ: vB = 0,4 м/с, v0 — 0,346 м/с, ав = 1,22 м/с2, ас = 0,61 м/с2,
<длв =■ 1 рад/с, елв = 2,89 рад/с2.
5.15. Кривошип ОА, вращаясь вокруг оси, проходящей черев
точку О с постоянной угловой скоростью и = 2 рад/с, приводит
в движение посредством шатуна АВ коле-
колесо радиуса г, катящееся без скольжения
по цплиндрической лунке радиуса R.
В положении, указанном на рисунке,
определить скорости и ускорения точек В
и С, а также положение мгновенного цент-
центра ускорений (МЦУ) колеса, если ОА —
= 45 = Д = 2г=1 м.
Ответ: vs = 2 м/с, ав = 8 м/с2, v0 =
= 2,83 м/с, ас = 11,31 м/с2; МЦУ находит-
находится на ободе колеса в точке, противополож-
противоположной точке К,
5.16. В механизме, рассмотренном в задаче 5.15, кривошип ОА
вращается вокруг оси, проходящей через точку О по закону
<рШ = £2 — t рад. В момент времени t = l с определить скорости
н ускорения точек 5 и С, а также положение мгновенного цент-
центра ускорений колеса, если в данный момент механизм занимает
положение, указанное на рисунке. -
Ответ: 1?„ = 1 м/с, ав = 2,83 м/с2, i>c = l,41 м/с, ас — 5,66 м/с2;
МЦУ находится на ободе колеса в точке, лротивоположной
точке С.
5.17. Колесо радиуса г катится без скольжения внутри ци-
цилиндрической лунки радиуса R. Стержень ВС шарнирно связан
К задаче 5.15.
К задаче 5.17.
«с точкой В на ободе колеса и ползуном С. Центр колеса — точ-
точка А движется по закону sA{t) = 0,3 е'~1 м.
В момент времени / = 1 с определить скорость и ускорение
.ползуна С, если в этот момент точка В диаметрально противоио-
56
ГЛ 5 ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
ложна точке контакта колеса с поверхностью лунки. Известно,
что R = 4г = 1,2 м, ВС = О,6УЗ м.
Ответ: vc = 1,2 м/с, ас = 1,7 м/с2.
5.18. В механизме, рассмотренном в задаче 5.17, ползун С
движется в направлении против хода часовой стрелки по закону
sc(t) = о,б(б£-г2) м.
В момент времени t = 1 с определить скорость и ускорение
центра колеса А, если в этот момент механизм занимает поло-
положение, указанное на рисунке.
Ответ: vA = 0,6 м/с, аА = 0,5 м/с2.
5.19. Стержень АВ скользит своими концами по вертикаль-
вертикальной и горизонтальной направляющим. К нижнему концу стерж-
стержня привязана нерастяжимая нить, намотанная на колесо, катя-
катящееся по горизонтальной плоскости без скольжения.
Считая, что нить не скользит по колесу, определить угловую
скорость и угловое ускорение стержня, а также скорость и уско-
ускорение центра колеса С, если в данный момент времени скорость
и ускорение точки А равны vA = 0,5 м/с и аА — 2УЗ~ м/с2,
а стержень составляет с вертикалью угол в 30°. Длина стержня
равна 1 м.
Ответ: @ав=1 рад/с, гАВ = 5,2 рад/с2, vc= 0,433 м/с, ас =
=> 2 м/с'.
К задаче 5 19.
К задаче 5.20.
5.20. Двухступенчатый каток с радиусами ступеней г п R =
= 2г = 0,2 м катится без скольжения по горизонтальным направ-
направляющим благодаря нити, намотанной на наружную ступень. Ко-
Конец D нити движется горизонтально по закону sD{t) =
=,lef-' м.
Определить скорость и ускорение точки А в момент времени
i=l с. Положение точки А в этот момент указано на рисунке.
Нить по катку не скользит.
Ответ: vA = 0,28 м/с, аА = 0,383 м/с2.
§ 1 СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
57
К задаче 5 21.
5.21. Двухступенчатый блок с радиусами
ступеней г = 0,05 м и R = 0,1 м подвешен
на двух нитях, намотанных на малую и
большую ступени блока. Конец D нити BD
движется вертикально по закону sD(t) =
= 0,0U3 м. *
Полагая, что нити не скользят по бло-
блоку, определить скорость и ускорение точ-
точки А блока в момент времени t = 1 с. По-
Положение точки А в этот момент указано на
рисунке.
Ответ: vA = 0,0283 м/с, аА = 0,0594 м/с2.
5.22. Двухступенчатый барабан А с радиусами ступеней г =
= 0,1 м и R = 0,2 м вращается вокруг оси, проходящей через
точку О, по закону фШ = F — 3t рад. Нерастяжимая нить намо-
намотана на ступени барабана А и охватывает блок В.
Считая, что нить не скользит по поверхностям блока и бара-
барабана, определить в момент времени ( = 1 с скорости и ускоре-
ускорения точек С, D и Е, а также угловую скорость и угловое ускоре-
ускорение блока В. Положение точек С, D и Е в этот момент указало
на рисунке.
Ответ: vc = 0,0о м/с, vD = 0,2 м/с, vE = 0,1 м/с, ас = 0,1 м/с2,
aD = 0,427 м/с2, аЕ = 0,25 м/с2, сов = 1 рад/с,
ев = 2 рад/с\
5.23. Двухступенчатый каток Л и односту-
пенчатый каток В, катящиеся без скольжения
vy/^/V/ /1/7/ Y//Y
К задаче 5.22.
К задаче 5.23.
по прямолинейным направляющим, связаны между собой нерас-
нерастяжимой нитью, намотанной на катки. Точка С катка А
двшкется по закону sc(t) = 0,2t — 0,05f2 м.
Считая, что скольжение нити по каткам отсутствует, опреде-
определить для момента времени t =■ 1 с скорость и ускорение точки
D, если Д = 2г = 0,1 м. Положение точки D в этот момент ука-
указано на рисунке.
Ответ: v» = 0,0707 м/с, aD = 0,0559 м/с2.
58
ГЛ. 5. ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
5.24. В планетарном механизме колесо 1 неподвижно, а кри-
кривошип ОСг вращается вокруг осы, проходящей через точку О по,
произвольному закону ()
К задаче 5.24.
Выяснить, при каких соотношениях между радиусами колес,
колесо 3 будет двигаться поступательно.
Ответ: Ri = R3, радиус Л2 произволен.
5.25. Для механизма, рассмотренного в задаче 5.24, считая,
что #i = 0,3 м, /?2 *= Ra = 0,2 м, определить скорость и ускоре-
ускорение точки А на ободе колеса 3, если в данный момент времени
угловая скорость и угловое ускорение кривошипа, вращающегося
ускоренно, равны: и = 1 рад/с, е = 3 рад/с2.
Ответ: vA = 0,8 м/с, ал = 2,58 м/с2.
5.26. В планетарном механизме кривошип О А, вращаясь во-
вокруг оси, проходящей через точку О по закону (fit) = Ы — f рад
приводит в движение шестерни 2 и 3, жестко связанные между
собой. Шестерня 2 обкатывается по неподвижной шестерне 1,
а шестерня 3 находится в зацеплении с шестерней 4.
В момент времени t = 2 с определить угловую скорость и уг-
угловое ускорение шестерни 4, а также ускорения соприкасающих-
соприкасающихся точек Bj и Bk, если r, = rs = 2r2 = 0,2 м.
Ответ: (о4 = 1,8. рад/с, е4 = 3,6 рад/с2, ав,= 2,77 м/с2, ав,=^
= 2,42 м/с2.
К задаче 5.26,
К задаче 5.27,
§ 1. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
59
5.27. В зубчато-рычажном эллипсографе звено ОА вращается
вокруг оси, проходящей через точку О с постоянной угловой
скоростью ©о «= 0,5 рад/с. Звено СМ шарнирно связано со спар-
спарником АВ в точке С и находится в зубчатом зацеплении со
звеном О А.
Определить скорость и ускорение точки М в положении, ука-
указанном на рисунке. Известно, что О А = 0,5 = 0,6 м, СМ = 0,4 м.
Ответ: vM = 0,436 м/с, а» «■ 0,132 м/с2.
5.28. В зубчато-рычажном механизме ведущее звепо ОА вра*
щается вокруг оси, проходящей через точку О, имея в данный
момент времени угловую скорость со = 2 рад/с и угловое уско-
ускорение е = 4 рад/с2.
Определить угловую скорость и угловое ускорение зубчатого
колеса 2, если в этот момент времени механизм занимает поло-
положение, указанное на рисунке. Известно, что О А = АВ = 50, =
= 0,5 м, R = 0,3 м, г = 0,2 м.
Ответ: ©2 = 8,83 рад/с, е2 = 11,32 рад/с2.
К задаче 5.28.
К задаче 5.29.
5.29. Ось вращения диска радиуса г = 0,2 м проходит через
точку D стержня АВ, на концах которого имеются ползуны А
и В, движущиеся соответственно по вертикальной и горизон-
горизонтальной направляющим. Точка С на ободе диска шарнирно свя-
связана со стержнем СО, вращающимся вокруг оси О. Ползун А
движется по закону sA(t) ~t3 — t* + t м.
В момент времени t = 1 с определить угловую скорость и уг-
угловое ускорение диска, если в этот момент механизм занимает
положение, указанное на рисунке. Дано: АВ = 1 м, СО = 0,5 м,
AD - DB.
Ответ: со = 8,66 рад/с, е = 72,7 рад/с2.
5.30. В механизме, изображенном на рисунке, оси колес свя-
ваны стержлем АВ, на конце А которого находится ползун, дви-
жущийся по вертикальной направляющей по закону ^(г)=-^-|!
60
ГЛ 5 ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Считая, что скольжение между колесами и колесом 1 и го-
горизонтальной плоскостью отсутствует, определить в момент вре-
времени t = 1 с угловую скорость и угловое ускорение колеса 2,
если в этот момент механизм занимает положение, указанное на
рисунке, а радиусы колес одинаковы и равны 0,5 м.
Ответ: a>i = 6 рад/с, е2 = 1,86 рад/с2.
К задаче 5.30.
К задаче 5 31.
5.31. Пластина А перемещается по горизонтальной плоскости
по закону sA(t) — 0,Ш4 + 7,50 м. На пластине находится каток
радиуса R — 0,2 м, обмотанный нерастяжимЪй нитью, конец Е
которой закреплен на стене.
Считая, что скольжение катка по пластине и нити по катку
отсутствует, определить в момент времени t = 0,5 с ускорения
точек В, С и D катка, указанных на рисунке.
Ответ: ав = 0,8 м/с2, ас = 0,15 м/с2, aD =■ 0,854 м/с2.
5.32. Пластина А движется по наклонной плоскости по за-
закону sAt) ■= OAt2 + 0,it м. По пластине катится без скольже-
скольжения каток радиуса R — 0,2 м. С точкой
D на ободе катка шарнирно связан
стержедь ED длины 0,4 м, вращаю-
вращающийся вокруг оси Е.
В момент времени t = 1 с опреде-
определить угловую скорость и угловое уско-
ускорение катка, а также скорости и уско-
ускорения точек В, С и D, если в этот мо-
момент механизм занимает положение,
указанное на рисунке.
Ответ: © = 1 рад/с, е = -у рад/с -,
vB = 0,6 м/с, vc = 0,4 м/с, vD = 0,346 м/с,
«в = 0,283 м/с2, ас =г 0,067 м/с2, aD =>
= 0,332 м/с3.
К задаче 5.32.
g 2 СИСТЕМЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
G1
5.33. В механизме, рассмотренном в задаче 5.32, каток вра-
вращается в направлении против часовой стрелки по закону <р(/) •=
«=0,5i2 рад.
В момент времени t = 2 с определить скорость и ускоренно1
пластины, если механизм занимает в этот момент положение,
указанное на рисунке.
Ответ: vA = 1,2 м/с, аА — 1,8 м/с2.
5.34. Два кривошипа О А и OtD соединены спарником ADr
по которому скользит ползун С, связанный стержнем ВС с кри-
кривошипом О А. В положении механизма, указанном на рисунке,
кривошипы имеют угловую скорость и = 2 рад/с и угловое уско-
ускорение е = 1 рад/с2.
Определить скорость и ускорение ползуна С, если ОВ =АВ —
= 0,1 м.
Указание. Рассмотреть движение ползуна С как сложное.
Ответ: vc = 0,2 м/с, ас = 0,793 м/с2.
К задаче 5 34.
К задаче 5.35.
5.35. Два катка радиуса В = 0,2 м, связанные спарником BD,
катятся по горизонтальной плоскости без скольжения. Uo спар-
спарнику BD скользит ползун С, связанный шатуном АС с осью А.
Положение механизма, указанное на рисунке, соответствует мо-
моменту времени t = 1 с.
Для этого момента времени определить угловую скорость и
угловое ускорение шатуна АС, скорость и ускорение ползуна С,
если центр каша А движется по закону sA(t) = 0,6в'~' м»
Указание. Рассмотреть движение ползуна С как сложное.
Ответ: Иас = 1 рад/с, глс = 3,62 рад/с2, vc = 0,83 м/с, ас =
- 1,29 м/с2.
§ 2. Системы с двумя степенями свободы
5.36. Пластина А движется по горизонтальной плоскости но
закону sA{t) — 0,Ш4 + 7,50 м. На пластине находится каток ра-
радиуса В =» 0,5 м, обмотанный нерастяжимой нитью, конец кото-
которой, точка £, движется горизонтально по закону »*Ш =■= 0,2/2 м.
62
ГЛ 5 ШЮСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
-Считая, что скольжение катка по пластине и нити по катку
отсутствует, определить в момент времени t = 0,5 с ускорения
точек В, С и D катка, указанных на рисунке.
Ответ: ав = 0,64 м/с2; ас = 0,05 м/с2; ав = 0,588 м/с'.
К задаче 5 36. К задаче 5.37.
5.37. В зубчато-рычажном механизме кривошип QA и ше-
шестерня 1 вращаются по законам ф(г) = 2*2рад, i|)(t)
В момент времени t = 0,5 с определить угловую скорость и
угловое ускорение шестерни 2, а также ускорение ее точки D,
если в зтот момент механизм занимает положение, указанное
на рисунке, и 04 = 0,3 м, ЛВ = 0,6 м, г -=0,2 м, Д=>0,4 м.
Ответ: и„ = 1 рад/с, ег = 14,02 рад/с\ aD -= 1,31 м/с*.
5.38. Движение катка радиуса R = 0,5 м по прямолинейному
пути задано законом перемещения его центра С и углом пово-
поворота: sc({)=0,5e<-1 м, cp{t) = f-2t рад. С катком связан ша-
шатун АВ.
ой-)
у///////// у/у;/'//.
К задаче 5.38.
К задаче 5.39.
Считая, что в момент времени t = 1 с механизм занимает
положение, указанное* на рисунке, определить скорость и уско-
ускорение ползуна В.
Ответ: vB =* 0,5 м/с, ав = 1,5 м/с2.
g 2 СИСТЕМЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
63
5.39. Каток радиуса R = 0,1 м катится со скольжением по го-
горизонтальной плоскости, вращаясь по закону ф(<) = 2t2 рад.
С помощью шатуна АВ длины 4ff он связан с ползуном А, ко-
который движется по горизонтальной направляющей по закону
sA(t) =• 0,4* м.
Определить угловую скорость и угловое ускорение шатуна
А В, а также скорость и ускорение центра С катка в момент
времени t = 1 с, если в этот момент механизм занимает поло-
положение, указанное на рисунке.
Ответ: <аАВ = 1 рад/с, еДв = 2 рад/с2, vc = 0,965 м/с, ас =»
-1,13 м/с1.
5.40. Ползуны А я С, соединенные двумя стержнями АВ
длины 0,4 м и ВС длины 1 м, движутся по прямолинейным, вза-
взаимно перпендикулярным направляющим соответственно по зако-
законам вАA) = 0,иг м, sc(t) = 0,it — 0,Иг м. В момент времени t •=
д_ = 1 с механизм занимает поло-
положение, указанное на рисунке.
Для этого момента времени
определить угловые скорости и
К задаче 5.40.
К задаче 5 41.
угловые ускорепия стержней АВ и ВС, а также скорость и уско-
ускорение точки В.
Ответ: Иде = 0,707 рад/с, гАВ = 0, wBc = 0, гвс = 0,0828 рад/с1,
vB = 0,2 м/с, ав = 0,153 м/с2.
5.41. В представленном на рисунке механизме кривошип О А
вращается вокруг точки О по закону <pU)=3£ — 2t2 рад,
а ползун С перемещается горизонтально по закону Scit) = 14-
4- 0,5*» м.
Считая, что указанное на рисунке положение соответствует
моменту времени t = 1 с, определить в этот момепт скорость и
ускорение точки В, если О/1 = АВ = 1 м.
Ответ: vB = 2 м/с, ав = 4,12 м/с2.
5.42. В дифференциальном механизме с внешним зацеплени-
зацеплением шестерня 1 и кривошип ОС вращаются независимо друг от
друга вокруг оси О по законам срШ = 3iz — It рад и ob (£) = -к-13 рад
о
соответственно.
ГЛ 5 ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
В момент времени t= 1 с определить скорости и ускорения
точек А и В шестерни 2, занимающих в этот момент положения,
указанные на рисунке, если Rt — R% — 0,1 м.
Ответ: vA = 0,283 м/с, аА = 0, vB = 0, ав = 0,632 м/с2.
5.43. В дифференциальном ме-
механизме с внутренним зацеплени-
зацеплением шестерня 1 и кривошип ОВ
К задаче 5.42.
К задаче 5.43.
вращаются независимо друг от друга по законам cpU) — it—f рад
и 1|>Ш = t-hO,5f рад соответственно.
В момент времени t =» 1 с определить скорость и ускорение
точки Л шестерни 2, если Л = 0,3 м, г = 0,1 м, а точка А зани-
занимает положение, указанное на рисунке.
Ответ: vA = 0,447 м/с, ал = 0,2 м/с2.
5.44. В дифференциальном механизме шестерни 1, 3 и криво-
кривошип ОЛ могут вращаться вокруг оси О независимо друг от дру-
друга. Шестерня 2 одинакового радиуса с шестерней 3 шарнирнд
связана с кривошипом ОА и находится в зацеплении с шестер-
шестернями 1 а 3, Известно, что шестерня 1 и кривошип ОА враща-
вращаются против часовой стрелки с постоянными угловыми скоростя-
скоростями @) И О).
Определить: 1) в каком соотношении- должны находиться
и со, чтобы шестерня 3 не вращалась; 2) угловую скорость
шестерни 3, если ы! =
Ответ: 1) (й! = 4и/3; 2)
щаться по часовой стрелке.
= — 2о> — шестерня 3 будет вра-
К задаче 5.44.
К задаче 5.45.
§ 2 СИСТЕМЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
65
5.45. В дифференциальном механизме шестерня 1 и криво-
кривошип ОС» вращаются независимо друг от друга вокруг оси О по
законам (pU)=r2t — tz рад, \p{t) = t + 0,5*г рад соответственно.
Считая, что в момент времени t = 1 с механизм занимает по-
положение, указанное на рисунке, определить в этот момент скоро-
скорости п ускорения точек А а В шестерни 3, если Ri = R3 = 0,4 м,
Д2 = 0,2 м.
Ответ: *Уд = ув = 2,4 м/с, яА = 4,18 м/с2, ав=* 4,82 м/с*.
5.46. Механическая система состоит из катка 1 радиуса г=»
= ОД м, шестерни 2 радиуса Д = 2г, скрепленной с катком, кри-
кривошипа АВ, шарнирно соединенного с осью А катка, и шестер-
шестерни 3 радиуса г. Каток катится без скольжения, при атом ось А
движется по закону sAU) = 0,1е'~' м, а угол отклонения криво-
кривошипа АВ от вертикали изменяется по закону
Ф (*) = ТГ
- 2< + 0,5ia рад.
В момент времени t = 1 с определить угловую скорость и уг-
угловое ускорение шестерни 3, а также скорость и ускорение ее
нижней точки D.
Ответ: из = 1 рад/с, е3 = 5 рад/с2, yD = 0,3 м/с, aD = 0,874 м/с*.
К задаче 5.4 Q.
К задаче 5.47.
5.47. Зубчатые рейкя Л и В суммирующего механизма дви-
движутся горизонтально по законам sA(t) — 6t — 2tf м, SaU) = t* — 3f м
соответственно. С точкой D шестерни радиусами = 0,2 м шарнир-
шарнирно связан стержень DE длины 1 м, имеющий на другом конце
ползун £, движущийся по горизонтальной прямолинейной на-
направляющей.
В момент времени t = 1 с определить скорость и ускорение
ползуна Е, если в этот момент механизм занимает положение,
указанное на рисунке.
Ответ: уЕ = 3,1 м/с, а£ = 35,4 м/с2.
5 Под |)ед К С Колесникова
66
ГЛ. 5. ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
5.48. В механизме, рассмотренном в задаче 5.47, зубчатая рей-
рейка А движется по закону sMU)=2e'~1 м, а ползун Е перемеща-
перемещается слева направо с постоянной скоростью vB •=• 1,5 м/с.
В момент времени t = i с определить скорость и ускорение
рейки В, если в этот момент механизм занимает положение, ука-
указанное на рисунке.
Ответ: vB = 3,37 м/с, ав = 9,2 м/с2.
5.49. Барабан / радиуса г = 0,1 м и барабан 2 радиуса R =>
= 0,2 м, вращающиеся по законам ц>Ш ==5е°-ъ-' рад и ^00 —
41/2 . п , „ _
= гс ■ sin y f РаД вокруг осей О и
О, соответственно, связаны нерастяжи-
нерастяжимыми нитями с двухступенчатым бло-
блоком 3. Нити по барабанам и ступеням
блока не скользят, В момент време-
времени t = 0,5 с определить ускорения то-
точек А, В и С блока, указанных на ри-
рисунке.
Ответ: яд = 0,538 м/с2, ав = 0,186 м/с2,
ас = 0,271 м/с2.
5.50. В механизме, рассмотренном
в задаче 5.49, барабан 1 вращается
вокруг оси О по закону фШ ^ве0'5"' рад,
а центр блока 3 — точка С — опускается вниз по закону $СШ ■=»
=*f м.
В момент времени t = 0,5 с определить угловую скорость и
угловое ускорение барабана 2.
Ответ: и2 = 5,5 рад/с, е2 = 17 рад/с2.
5.51. Ползун А, двигаясь по закону sAU) =«0,1D** — t3) м, при-
приводит в движение линейку А В длины 0,5 м, с которой шарнирио
связаны ползун В и блок 1 радиуса R = 0,3 м. Барабан 2 радиуса
К задаче 5.49.
К задаче 5.51.
К задаче 5.52.
§ 2. СИСТЕМЫ С ДВУлМЯ СТЕПЕНЯМИ СВОБОДЫ
67
г = 0,1 м вращается вокруг оси О по закону q>U) = 4e4"' рад, на-
наматывая перастяжимую нить, переброшенную через блок 1 и
скрепленную с грузом Е.
В момент времени t = 1 с определить скорость и ускорение
точки D бдока, а также ускорение груза Е, если в данный мо-
мепт мехапизм занимает положение, указанное на рисунке,
а скольжение нити по барабапу и блоку отсутствует.
Ответ: vd= 1,4 м/с, aD = 2,94 м/с2, а£= 1,15 м/с2.
5.52. В механизме, представленном на рисунке, оси колес 1
и 2 одинакового радиуса R = 0,5 м связаны стержнем АВ, один
из концов которого движется вместе с ползуном А по вертикаль-
ной направляющей по закону sA (t) = -*у- £3м. При этом колесо 1
катится по пластине С, перемещающейся по горизонтальной пло-
плоскости по закону sc(t) = Ы — 2£2 м.
Считая, что скольжение между колесами и между колесом 1
и пластиной С отсутствует, определить в момент времени t — 1 с
угловую скорость и угловое ускорение колеса 2, если в этот мо-
момент механизм занимает положение, указанное на рисунке.
Ответ: «г — 2 рад/с; е2 = 6,14 рад/с2.
5.53. В механизме, рассмотренном в задаче 5.52, ползун А
т/з
движется по закону sA (t) =—*g- ^Зм, а колесо 2 вращается по
закону (pit) = Ы — 1,5гг рад (положительное направление враще-
вращения против часовой стрелки).
В момент времени t=*\ с определить скорость и ускорение
пластины С, если механизм в данный момент занимает положе-
положение, указанное на рисунке.
Ответ: vc = 2 м/с, ас — 0,57 м/с2.
5.54. Ворот радиуса г = 0,1 м, вращаясь по закону фШ =
= 2? — Gt рад, приводит в движение посредством нерастяжимой
нити каток радиуса R — 0,2 м, который катится без скольжения
V/////////////A
К задаче 5.54.
К задаче 5.55.
68 ГЛ. в. СФЕРИЧЕСКОЕ ДВИЖЕНИЕ И ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ
по грани треугольной призмы. Призма перемещается по горизон-
горизонтальной плоскости по закону sit) = O,1U2 + t) м.
Считая, что скольжение нити по вороту и катку отсутствует,
определить в момент времени t «= 0,5 с скорости и ускорения то-
точек А, В и С, указанных на рисунке.
Указание. Рассмотреть движение катка как сложное.
Ответ: ил = 0,582 м/с, ув = 0,2 м/с, ус = 0,386 м/с, аА =
= 0,248 м/с2, я„=* 0,346 м/с*, ас = 0,104 м/с2.
5.55. Кривошип ОА вращается вокруг оси, проходящей через
точку О, по закону <рШ =* е'~1 рад. Кривошип АС вращается
вокруг оси, проходящей через точку А, поворачиваясь относи-
тельно шатуна АВ на угол ф (t) — 4j— t -f-12 рад.
Определить в момент времени t — I с скорость и ускорепие
ползуна D, если АВ = 20А = 2 м, CD = 2ЛС = 1 м, и в данный
момент угол АОВ равен 90°.
Указание. Рассмотреть движение ползуна D как сложное.
Ответ: vD = 1,455 м/с, aD = 1,382 м/с2.
Глава 6
СФЕРИЧЕСКОЕ ДВИЖЕНИЕ И ОБЩИЙ СЛУЧАИ
ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
§ 1. Сферическое движение и общий случай движения тела
6.1. Углы Эйлера, определяющие положение твердого телв с
одной неподвижной точкой, изменяются по закону: <р —at, i|j=b£,
6 = с sin тг-1, a, b,c — постоянные.
Определить величину угловой скорости тела для момента вре~
мени t = 1 с.
Ответ: и = Уа2 + Ьг + 2ab cos с.
6.2. Определить величину .углового
ускорения тела, если углы Эйлера за-
заданы уравнениями ф = nt, ф = mt, 8 =■
= 6о, п, m и 6о — постоянные.
Ответ: е = nm sin 60.
6.3. Положение тела с неподвижной
точкой задано углами Крылова. Углы
Крылова определяют ориентацию свя-
связанного с телом трехгранника Oxyz
относительно какой-либо системы отсче-
та 0|ti£, как это показано на рисунке.
Получить формулы, аналогичны»
К задаче 6.3, кинематическим уравнениям Эйлера,
g 1. СФЕРИЧЕСКОЕ ДВИЖЕНИЕ И ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ
выразив угловую скорость тела через углы Крылова и их прбиз-
водные.
Ответ: проекции угловой скорости тела на связанные с ним
оси равны
и, = a cos jl cos i + jl sin *f,
ы„ = —a cos jl sin *f + P cos f,
(o2 = a sin jl + f.
6.4. Доказать, что если проекции абсолютной угловой скоро-
скорости тела на связанные с ним оси остаются постоянными, то дви-
движение тела представляет собой вращение вокруг неподвижной
оси с постоянной скоростью.
6.5. Колесо 1 может свободно поворачиваться на своей оси
относительно рамки 2. При вращении последней вокруг какой-
либо оси г', не совпадающей с осью z, колесо вынуждено также
совершать некоторое вращательное движение. Если колесо сим-
симметрично относительно оси « и трение отсутствует, то движение
его будет таким, что проекция абсолютной угловой скорости ко-
колеса на ось z является величиной постоянной (это доказывается
методами динамики).
В начальный момент рамка и колесо покоились, затем рамку
повернули вокруг неподвижной оси z на 360°.
Какова будет ориентация колеса к концу этого поворота?
Ответ: по отношению к первоначальному положению колесо
окажется повернутым вокруг оси z на угол ф = 4л sin2 -^-, где
в— угол между осями z и z .
.-2
К задаче 6.5.
К задаче 6.6.
6.6. Волчок 7, помещенный в обойму 2, опертую в неподвиж-
неподвижной точке О, прецессирует так, что обойма вращается вокруг
вертикали с постоянной угловой скоростью \|з, а волчок вращается
70 ГЛ 6 СФЕРИЧЕСКОЕ ДВИЖЕНИЕ И ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ
относительно нее с постоянной угловой скоростью <р; при этом
ось волчка образует с вертикалью постоянный угол в.
Определить абсолютную угловую скорость и угловое ускоре-
ускорение волчка в проекциях па оси Oxyz, скрепленные с обоймой
(ось волчка лежит в плоскости xz).
Ответ: (ox = (psin6, ы„ = 0, шг = cpcos 6 + -ф, гх= ег =0, е„ =
•= qn|)sin6.
6.7. В условиях предыдущей задачи вычислить скорость точ-
точки А волчка с координатами х = ъ = 10 см, у = 0, если ср =
= 30 рад/с, ф = 3 рад/с, 9 = 30°.
Ответ: vx = 0, vy= 140 см/с, vt = 0.
6.8. В условиях задачи 6.6 вычислить ускорение точки А
волчка в момент, когда координаты точки равны х = у = 0, z =
•= 20 см.
Ответ: ах = 96 м/с2, ау =0, az = —45 м/с2.
6.9. Оптический визир 1 установлен в кардановом подвесе,
наружная ось 2 которого вертикальна, а внутренняя 3 горизон-
тальна; оптическая ось визи-
ра горизонтальна и направлена
Цепь на Север. При наведении ви-
.# зира на цель пришлось повер-
повернуть его вокруг вертикальной
оси на угол а = 45°, а вокруг
горизонтальной — на угол £} =
= 60°.
Вычислить углы, образуе-
образуемые линией визирования с ося-
осями |, т|, t,, направленными соот-
соответственно на Восток, Север и в
Зенит (трехгранник Дарбу, ори-
ориентированный географически).
Ответ: углы, образуемые с осями £, х\, |, соответственно рав*
ны: 110*40', 69°20', 30°.
6.10. В условиях предыдущей задачи получить формулы, оп-
определяющие скорость цели по измеряемым текущим значениям
углов а, р и расстоянию R до цели.
Ответ: проекции скорости цели на оси трехгранника Дарбу
равны:
Vi — Я(($ sin a sin р — а cos а cos [5) — R sin а cos {5,
yn = — Ж? cos а sin [} + а sin а cos ^) + R cos a cos [J,
vt = R$ cos £ + i? sin £.
6.11. Визир, установленный в пункте с широтой ф, следит за
подвижной целью.
ij(Cedsp)
К задаче 6.9.
§ 1. СФЕРИЧЕСКОЕ ДВИЖЕНИЕ И ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ 71
Получить формулы, позволяющие вычислить абсолютную уг-
угловую скорость визира по измеряемым углам наведения аир.
(Здесь под абсолютной угловой скоростью подразумевается ско-
скорость вращения в инерциальной системе отсчета.)
Ответ: co5 = pcosa, ton = [5 sin се + U cos ф, (oc = a+t/sin(p, где
U — угловая скорость Земли.
6.12. Самолет совершает горизонтальный полет курсом 45°
со скоростью v = 800 км/ч, качка отсутствует. (При горизонталь-
горизонтальном полете курс самолета — это угол между вектором скорости
самолета и направлением па Север.)
Вычислить абсолютную угловую скорость ш самолета в мо-
момент пересечения им параллели 80° (со — угловая скорость в
инерциальной системе^ отсчета).
Выразить и в дуговых минутах
в минуту времени С/мин).
Ответ: проекции абсолютной
угловой скорости на оси трех-
грапника Дарбу равны он =
= —5,17мин, ып = — 7,77мин, шс =
= 43,57мин.
6.13. Конический роликовый
подшипник состоит из внутренне-
внутреннего кольца 1, насаженного на ось
ротора 2, наружного кольца 3 ч
нескольких конических роликов 4.
При указанных на рисунке
размерах определить угловую ско-
скорость и угловое ускорение ролика, если он катится без проскаль^
зывания, а угловая скорость ротора постоянна и равна Q.
-. cos(P + 2a) n cos (р + 2a) cos ft o2
Ответ: Ю = sin 2а "' Е = 2eosacos(P + a) " '
6.14. Вычислить угловое ускорение ролика (см. задачу 6.13)
при переменной угловой скорости ротора Q; ось ротора принять
лежащей в плоскости yoz.
Ответ: проекции вектора углово1 о ускорения на оси' коорди-
cos (Р + 2a) cos p n2 cos(P + 2a) RdQ
нат равны гх =2соа^сов(р + а) Q2«h ± cosР
(P + 2) М
К задаче 6.13.
«h, =
cosРЛ'
~ sm2a
6.15. В условиях задачи 6.13 определить скорость точки А
ролика и ускорение точки В касания его с наружным кольцом.
Ответ: vAx = «6 sin a, vAy = vAz = 0, aBx = 0, aBy = г~^; х
XsinP, авг — z——cosp, © и е указаны в ответе к задаче 6.13.
6.16. Для точной доводки поверхности детали, имеющей фор-
форму шара, ее обрабатывают (притирают) с помощью инструмен-
инструмента 1, представляющего собой чашу, внутренняя поверхность .ко-
72 ГЛ. в. СФЕРИЧЕСКОЕ ДВИЖЕНИЕ И ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ
торой концентрична обрабатываемой сфере и прилегает к ней.
Шар и инструмент вращают — первый вокруг оси Z с угловой
скоростью (о4, второй вокруг оси Z, с угловой скоростью и2;
оси Z и Zi пересекаются в центре шара.
Вычислить наибольшую и наименьшую скорости, с которыми
точки инструмента движутся относительно поверхности шара,
если радиус шара R = 10 см, ф «*• 60°, 26 = 40°, сог = 5,25 рад/с,
и4 = 1,04 рад/с.
Ответ: Наибольшую скорость имеет точка В, наиболее уда-
удаленная от мгновенной оси относительного вращения; эта ось
наклонна к оси Z под углом 5ГОЗ'.- Скорость скольжения (отно-
(относительная скорость) точки В направлена перпендикулярно пло-
плоскости осей Z и Zi от читателя и равна 28,5 см/с. Наименьшую
скорость скольжения, равную нулю, имеет точка инструмента,
лежащая на мгновенной оси относительного вращения.
К задаче 6.16.
К задаче 6.17.
6.17. Велосипедист движется по круговой дорожке трека с по-
постоянной скоростью v.
Каковы при этом угловая скорость и угловое ускорение коле-
колеса велосипеда? Радиус трека R, радиус колеса г; принять, что
во время движения плоскость колеса остается вертикальной и:
оно катится без проскальзывания.
Ответ: со = v-
г —
Rr ' " Яг- .
6.18. Определить в предыдущей задаче угловое ускорение ко-
колеса во время разгона велосипедиста, когда скорость его изменя-
изменяется по закону v = at (a = const).
Ответ: проекции углового ускорения на оси х, у, г равны:
е* = а/г, ву = v*/iRr), 8, = —а/г (ось z вертикальна и проходит
через центр траектории, ось х проходит через центр колеса).
6.19. Колесо 1 насажено на горизонтальную ось АВ, укреп-
укрепленную в вилке 2, вращающейся вокруг вертикальной оси 3.
При этом колесо катится по горизонтальной плоскости без про-
проскальзывания, касаясь ее одной точкой С,
§ 1. СФЕРИЧЕСКОЕ ДВИЖЕНИЕ И ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ
73
К задаче 6.19.
Ж
Показать, что в каждый момент вре-
времени на колесе имеются точки, скорости
которых противоположны скорости центра
колеса; указать расположение этих точек.
Ответ: эти точки расположены ниже
линии ОС.
6.20. В условиях предыдущей задачи
определить модуль и направление уско-
ускорения центра колеса и точки касания его
с плоскостью, если OD = 4м, радиус колеса 1 м, угловая скорость
вилки 2 постоянна и равна 0,3 рад/с.
Ответ: ускорение центра колеса равно 0,36 м/с2 и направле-
направлено к точке О; ускорение точки касания С равно 1,48 м/с2 и на-
направлено перпендикулярно линии ОС вверх.
6.21. Передача вращения от вала / к валу // с переменным
передаточным числом осуществляется
с, помощью фрикционной пары дисков
1 и 2, насаженных на эти валы.
Приняв, что диски касаются в од-
одной точке, проскальзывание отсутству-
отсутствует, угловая скорость ведущего диска
равна (л = const, его радиус равен г,
определить угловую скорость и угловое
ускорение ведущего диска относитель-
относительно системы отсчета, связанной с ведо-
ведомым диском.
Ответ:
= ы2г/а.
6.22. В условиях предыдущей задачи указать те точки веду-
ведущего диска, скорость которых_относительно ведомого диска рав-
равна нулю, если а = 9 см, r=3V3 см.
Ответ: такими точками являются те, которые располон«ены па
мгновенной оси относительного вращения; эта ось проходит че-
через точку касания дисков С и наклонена к валу / под углом 30°.
6.23. Центр масс С космической станции движется по круго-
круговой орбите вокруг Земли с первой кос-
космической скоростью v = li'gR, где R —
радиус Земли. Ось симметрии станции
остается все время направленной к
центру Земли. Одновременно с этим
станция вращается вокруг оси симмет-
симметрии, делая два оборота в минуту.
Вычислить угловую скорость и угло-
угловое ускорение станции в проекциях
на оси орбитальной системы координат.
(Орбитальная система координат — со-
сопровождающий станцию ортогональный
К задаче 6 21.
со„
= ©Уг2 + а2/а,
Q
Ь Цента Земли
К задаче 6.23.
74 ГЛ 6 СФЕРИЧЕСКОЕ ДВИЖЕНИЕ И ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ
трехгранник, ось z которого направлена к центру Земли, а ось
у—по касательной к траектории.)
Ответ: Их =» 1,24 • 10~3 рад/с, ы„ = 0, и2 = 0,21 рад/с, е* = ег =
>= 0, е„ = 0,26 • 10"* рад/с2.
6.24. Вычислить абсолютные ускорения точек А и В станции,
описанной в предыдущей задаче, если координаты этих точек в
орбитальной системе равны: хА — 100 м, уА = 0, zA = 20 м; хв ==■
= 0, ув = 100 м, zB = 20 м.
Ответ: для точки Л : ах = —4,4 м/с2, ау = 0, а2 ~ — g; для точки
В : ах = 0, а„ =ч—4,4 м/с2, а, « —^.
6.25. Получить формулы, определяющие ускорение любой точ-
точки станции, совершающей описанное в задаче 6.23 движение,
обозначив угловую скорость вращения
станции вокруг оси з через Q.
Ответ: ax——Qzx, ay = — (v2 + O2)j/,
аг = 2Qvx — v2z — g, где х, у, z — коорди-
координаты точки в орбитальной системе,
к се
6.26. На рисунке изображен гироскоп
в кардановом подвесе. Положение ротора
относительно основания прибора может
быть определено с помощью трех следую-
следующих углов: а — угол поворота наружной
К задаче 6 26. рамки X относительно основания, [5 —
угол поворота внутренней рамки 2 отно-
относительно наружной, 7 — угол поворота ротора 3 относительно
внутренней рамки.
Получить выражение абсолютной угловой скорости ротора
через эти углы, полагая основание неподвижным.
Ответ: со = V а? + £2 + у2 + 2ау sin f> (если {* отсчитывать
от положения, при котором ось , ^ гCени/п)
ротора перпендикулярна оси
наружной рамки).
§ 2. Пространственная
ориентация
6.27. Для задания простран-
пространственной ориентации самолета
с ним обычно связывают пря-
прямоугольную систему координат
Cxyz, начало которой — точ-
точка С — совпадает с центром
масс самолета, ось х — с продольной осью самолета, а ось у рас-
располагается в плоскости его симметрии. Ориентацию этих осей,
а следовательно, и самолета, с которым они связаны, относи-
■у(СвВер)
К задаче 6.27.
2 ПРОСТРАНСТВЕННАЯ ОРИЕНТАЦИЯ
75
тельно трехгранника Дарбу (см. задачу 6.9) задают тремя сле-
следующими углами: к — курс самолета, д — угол тангажа, ф — угол
крена (направление отсчета этих углов показано на рисунке).
Выразить через эти углы направляющие косинусы самолет-
самолетных осей относительно осей трехгранника Дарбу.
Ответ:
i
11
с
X
sin к
COS
cos ft
A: cosO
sin d
cos A:
—sin
V
sin ф —
fc sm <p -
cos©
sin к sin {
- sm ft cos
COS ф
1-е
fc
os ф
coscp
cos к
sin d
COS ф +
sin ф cos
—sm ф
t
sin
k-
cos
к sin
sin fc
d
Ф sin 0
COS ф
6.28. Гирогоризонт представляет собой специальное гироско-
гироскопическое устройство 1 (на рисунке оно условно изображено в
виде параллелепипеда), установленное на внутренней рамке 2
кардапова подвеса и действующее таким образом, что плоскость
S этой рамки сохраняет
горизонтальное положение
при любых качаниях ко-
корабля; наружная ось под-
подвеса параллельна продоль-
продольной оси корабля. При этом
угол а поворота наружной
рамки относительно кораб-
корабля и угол [5 поворота внут-
внутренней рамки относитель-
относительно паружной служат ме-
мерой бортовой и килевой
качки корабля. С внутрен-
внутренК задаче 6.28.
ней рамкой (площадкой S) связали трехгранник Oxyz (ось и
совпадаете осью внутренней рамки, ось z перпендикулярна пло-
площадке S), а с кораблем — трехгранник О0х0у0г0 (ось х0 параллель-
параллельна продольной оси корабля, ось з0 перпендикулярна палубе).
Найти выражения направляющих косинусов осей х0, у0, z0
относительно осей х, у, z через углы качки корабля.
Ответ;
X
■*■(!
Ч
cos р
sin a sin P
^ып Р cos а
и
0
cos а
sin а
г
sin P
—sin а cos ft
cos а cos P
76
ГЛ 7 СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
6.29. .Пользуясь одним гирогоризоптом (см. предыдущую за-
задачу), создают искусственные горизонтальные площадки в раз-
различных точках корабля. Чтобы получить подо&ную площадку,
достаточно подвесить ее в такой
же карданов подвес, как у гиро-
горизонта, и, получая от него
информацию, поворачивать пло-
площадку Si относительно кораб-
корабля иа те же углы а и §, на
которые повернута площадка S
гирогоризонта. Допустим, что
вследствие неточности началь-
еюй выставки наружная ось
подвеса площадки 5! отклонена от одноименной оси гирого-
гирогоризонта на малый угол б, оставаясь параллельной палубе.
Какова в этом случае ошибка стабилизации (т. е. отклонение
от горизонта) площадки ~St?
Указание Составив таблицы направляющих косинусов осей гиг,
(нормалей площадок S a S,) относительно осей корабля, сравните их между
собой.
Ответ: в таблице приведены направляющие косинусы осей з
и г, относительно осей корабля. В третьей строке указаны раз--
пости соответствующих косинусов, вычисленные с точностью до
малых второго порядка относительно угла б. -*• .
К задаче 6 29
z
«I
COS 6
2
sin
sin
X,
sin
3 +
Pr
p
sin 6
- 6 sin
sin a cos
a cos p
P
—sin а с
sin 6 чп P —
_ ** s,n a
V.
osP
sin a
eosp
cos
-6
Ptosf
sin P
cos a
6 cos
г»
cos P
a cos P
0
Гласа 7
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
§ 1. Движение точки при заданных переносном
и относительном ее движениях
7.1. Колесо обозрения 1 радиуса R = 12 м вращается с посто-
постоянной угловой скоростью И| =• 0,2 рад/с вокруг оси, проходящей
через точку О перпендикулярно плоскости рисунка. Кабины 2
и 3 шарнирно прикреплены к ободу и поворачиваются по отно-
отношению к колесу с постоянными угловыми скоростями (о2 =
= 0,2 рад/с.
8 i. ДВИЖЕНИЕ ПРИ ЗАДАННЫХ СОСТАВНЫХ ДВНЩЕНИЯЯ
77
Определить абсолютные скорости и ускорения точек С и D,
находящихся на вертикалях, проходящих соответственно через
точки А и В, если АС = BD = 2 м.
Ответ: Vc = vD = 2,4 м/с, ас = aD = 0,48 м/с2.
К задаче 7 1.
К задаче 7 2.
7.2. Вал 1 вращается вокруг вертикальной оси OiO2 с посто-
постоянной угловой скоростью и, = 2 рад/с. К валу в точке О при-
прикреплена горизонтально расположенная ось,
вокруг которой равномерно вращается диск2
радиуса R = 15 см
Определить абсолютные скорости и ус-
ускорения точек А а В диска, если ы, = w2.
Ответ: vA = 42,43 см/с, ал = 120 см/с2,
гв = 30 см/с, ав = 134,2 см/с2.
7.3. Для охлаждения жидкостного ракет-
ракетного двигателя один из компонентов жидкого
топлива прокачивается через полость, за-
заключенную между внутренней 1 и наруж-
наружной 2 стенками двигателя
Полагая, что поток жидкости, охлажда-
охлаждающей камеру сгорания двигателя, одномер-
одномерный и его скорость vr относительно стенок
камеры постоянна по модулю, определить
абсолютное ускорение частицы М жид-
жидкости как функцию угла ф. Двигатель вращается вокруг
оси, проходящей через точку О, перпендикулярно плоско-
плоскости рисунка с постоянной угловой скоростью к». Радиус цилинд-
цилиндрической обечайки камеры сгорания г, величиной зазора между
внутренней и наружной стенками двигателя по -сравнению с г
пренебречь.
Ответ: ам = иУ(о)г + 2vTY + <aV ctg2 <p.
К задаче 7 3.
78
ГЛ. 7. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
7.4. Движение корпуса самолета в вертикальной плоскости
Оху, проходящей через точку С (центр масс самолета), описыва-
описывается уравнениями: хс = 50i м, ус = 10i2 м, ф = -^ t рад (ф — угол
поворота корпуса самолета в плоскости Оху вокруг точки С).
Винт самолета вращается с постоянной угловой скоростью со, =
=• 120я рад/с.
Для момента времени t = 1 с определить скорость и ускоре-
ускорение точки В винта по отношению к корпусу самолета, перенос-
К задаче 7.4.
ную скорость и переносное ускорение этой точки, а также уско-
ускорение Кориолиса а„. ^Считать, что при t = 1 с точка В находится
в плоскости Оху, АВ = 0,4 м, АС — 2 м.
Ответ: vB = 150,8 м/с, ав = 56 850 м/с2, ув = 94,26 м/с, ав =
«= 79,63 м/с2, о„ = 0.
7.5. По однородному шарнирно опертому стержню АВ длины
I — 100 см, изгибные колебания которого описываются уравнени-
уравнением у (х, t) = Ао cos cuj^ sin — см, скользит кольцо М по закону
AM — s(t) — vot см.
Определить скорость и ускорение кольца относительно стерж-
стержня, скорость и ускорение кольца в перенос- . „
ном движении и ускорение Кориолиса в тот '
момент времени, когда AM = l/э, если Ао =
= 4 см, и, = я/6 рад/с, v0 = 10 см/с. Век-
Векторы скоростей и ускорений показать на ри-
рисунке.
\М
м
К задаче 7.5.
К задаче 7.6.
§ 1. ДВИЖЕНИЕ ПРИ ЗАДАННЫХ СОСТАВНЫХ ДВИЖЕНИЯХ
79
Ответ: ам = 0,08 см/с2, им = 10 см/с, ам = 0,32 см/с2, vm =»
= 1,07 см/с, ап = 0,92 см/с2.
7.6. По трубке ВС, изогнутой по дуге окружности радиуса
R = 6 см и вращающейся вокруг неподвижной оси ОО, по закону
фШ = iE — t) рад, движется точка Л/. Уравнение движения точ-
точки М относительно трубки ВМ — nt2 см.
Определить абсолютную скорость и абсолютное ускорение точ-
точки if в момент времени 't = 2 с, если АВ = CD = 4 см.
Ответ'. vM =■ 15,57 см/с, ям = 47,46 см/с2.
7.7. По поверхности диска радиуса R ■= 6 см, вращающегося
с постоянной угловой скоростью и = 1 рад/с вокруг оси, прохо-
проходящей через точку О перпендикулярно плоскости рисунка, дви-
движется точка М. Траектория точки М на поверхности диска обра-
образована двумя полуокружностями радиусов г, = 2 см и гг = 4 см
с центрами в точках О, и Ог. Дуговая координата точки М при
движении ее относительно диска изменяется во времени по за-
закону AM = sit) = 2п? см.
Определить абсолютную скорость и абсолютное ускорение
точки М в момент времени ( = 1 с, если £-OCD = 60°.
Ответ: vM = 9,17 см/с, ам = 21,44 см/с2.
К задаче 7.7. К задаче 7.8.
7.8. Диск радиуса /? = 8,16 см вращается с постоянной угло-
угловой скоростью и = 2 рад/с вокруг оси О,О2. По поверхности диска
движется точка М. Уравнения ее движения относительно диска
имеют вид: ОМ = г (t) = 3ef см, qp (f) = -у t рад.
Определить абсолютную скорость и абсолютное ускорение
точки М в момент времени t = 1 с, если / = 4,08 см. Считать
е = 2,72.
Ответ: vM ■= 12,3 см/с, ам ■= 31,69 см/с2.
7.9. Катер пересекает реку так, что его центр масс — точка
С — движется по кривой у = кхзп — Ь (ось х направлена вдоль
берега) с постоянной скоростью v ~ 9 км/ч, вектор которой обра-
вует постоянный угол а = 30° с продольной осью катера. Пас-
80
ГЛ. 7 СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
сагкир движется вдоль катера по прямой АВ от точки Д. к В с
постоянной относительно катера скоростью и = 0,5 м/с.
Найти абсолютную скорость и абсолютное ускорение пасса-
пассажира в тот момент, когда он находится в точке С катера, а точ-
точка С удалена от берега на расстояние у = 400~ м. Коэффициенты
к и Ь равны: к - 0,5 м5; b = 100 м.
Ответ: v = 2,94 м/с; а = 0,74 • 10~3 м/с2.
К задаче 7 9.
К задаче 7 10.
7.10. В механизме Копировального станка копир 1, скользя
в неподвижных направляющих со скоростью Vi = 21 см/с, при-
приводит в движение ползун 2 и шарнирно соединенный с ним го-
горизонтальный шток 3.
Определить скорость и ускорение точки В штока 3 в момент
времени t = 1 с, если ползун А в системе координат Оху, свя-
связанной с копиром, описывает траекторию у а ие (хл — 2J см и в
указанный момент времени его координата хл = 3 см.
Ответ: vB = 1 см/с, ав = 0.
7.11. Полагая в задаче 7.10, что движение ползуна 2 в декар-
декартовой системе координат Ожг/, связанной с копиром 2, описыва-
описывается уравнениями хлШ =*= 2 + t см, </АШ = f см, определить ско-
скорость и ускорений точки В штока 3 в момент времени f = 1 с,
Ответ: vB = l см/с, ав = 0.
7.12. Вал 1 с жестко прикрепленным к нему стержнем CD
вращается вокруг оси ОО1 с постоянной угловой скоростью coi ==
= 2 рад/с. По валу OOi и стержню CD движутся муфты Лив,
шарнирно соединенные со стержнем 2 длины 1 м. Муфта А дви-
движется по валу OOt вверх с постоянной скоростью vA = 0,2 м/с.
Определить угловую скорость и угловое ускорение стержня 2
в относительном (по отношению к валу OOJ движении, абсолют-
абсолютные скорость и ускорение муфты В> если а = 60°.
Ответ: 0J = 0,23 рад/с, еа = 0,03 рад/с2, ув = 1,74 м/с, ав =•
■« 3,56 м/с2.
§ 1 ДВИЖЕНИЕ ПРИ ЗАДАННЫХ -СОСТАВНЫХ ДВИЖЕНИЯХ
81
7.13. По шатуну 2 кривошипно-ползунпого механизма сколь-
скользит кольцо М по закону AM = sit) = 10 f см.
Определить абсолютную скорость и абсолютное ускорение
кольца в момент времени t = 2 с,
,0т если о, «= 1 рад/с, 8i = 3 рад/с2,
ЛОВ 90° ОЛ 40
а = 30°,
, р,
= 90°, ОЛ = 40 см.,
К задаче 7.12.
К задаче 7.13.
Ответ: vv = 77,27 см/с, ам = 95,94 см/с2.
7.14. Кольцо М скользит с постоянной по величине относи-
относительной скоростью £>г = 2 м/с по обручу радиуса /? = 0,5 м, ко-
который катится без скольжения, по прямолинейному желобу.
Для показанного на рисунке положения системы определить
абсолютную скорость и абсолютное ускорение кольца, полагая
^ = 4м/сиас = 1 м/с2, где С — центр обруча.
От-еет: vM = 10 м/с, ам - 72,03 м/с2.
К задаче 7 14.
У////////////////////////?////////////
К задаче 7.15.
7.15. По рельсу катится без скольжения колесо радиуса R =
-= 2 м, причем центр колеса имеет постоянное ускорение ас =
= 0,5 м/с2. Одновременно вдоль радиуса С А колеса от его центра
к ободу движется точка М по закону СМ — sit) — 0,25£2 м.
Определить абсолютное ускорение точки М в тот момент вре-
времени, когда CM — R/2, а радиус С А горизонтален (как это пока-
показано на рисунке). В начальный момент времени (£ = 0) колесо
находилось в покое.
Ответ: ам = 1,46 м/с1.
6 Под ред Ц С Колесникова
82
ГЛ. 7. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
К задаче 7.16.
7.16. Кольцо 2, внутренний радиус которого R = 5 см, в
ках А и В шарнирно прикреплено к равным по длине кривоши-
кривошипам 1 та 3. Кривошипы вращаются
вокруг параллельных осей, проходя-
проходящих через точки О и Oi перпенди-
перпендикулярно плоскости рисунка. По
внутренней образующей кольца
скользят ползуны С и D, соединен-
соединенные линейкой CD длины 5V3 см.
Скорость ползуна С по отношению к
кольцу постоянна по величине и рав-
равна 10 см/с.
Определить абсолютную скорость
и абсолютное ускорение ползуна
■ D для положения механизма, пока-
показанного на рисунке, если а = 60°, OOi'= АВ, ©j = 2 рад/с = const,
О А = 10 см.
Ответ: vD — 29,09 см/с, aD ■= 58,19 см/с2.
§ 2. Движение точки при известной траектории
ее абсолютного движения
7.17. Призма движется поступательно и прямолинейно по го-
горизонтальной плоскости по закону sit) =» 2t{5 — t) см. К наклон-
наклонной грани призмы прижимается концом А с помощью спираль-
спиральной пружины рычаг длиной 20 см, который вращается вокруг
оси, проходящей через точку О перпендикулярно плоскости
рисунка.
Определить угловую скорость и угловое ускорение рычага в
момент времени t — 1 с, если в этот момент времени р" = 60°,
а угол а равен 30°.
Ответ: © = 0,17 рад/с, е = 0,13 рад/с2.
К задаче 7.17.
К задаче 7.18.
7.18. Призма 1, двигаясь поступательно и прямолинейно по
горизонтальной плоскости, приводит в движение шток 2, который
§ 2 ДВИЖЕНИЕ ПРИ ИЗВЕСТНОМ АБСОЛЮТНОМ ДВИЖЕНИИ
83
помещен в вертикальные направляющие и с помощью пружины
прижимается нижним концом к поверхности цилиндрической вы^
емки призмы радиуса R = 12 см. Уравнение движения призмы
. — COS-тг t) CM.
Определить абсолютные скорость и ускорение штока, а также
его скорость и ускорение относительно призмы в момент времени
t = 2 с.
Ответ: v=n см/с, а=0,29л2 см/с2, уг=2я см/с, аг=0,ЗЗяг см/с2.
7.19. В механизме для резания листового металла («летучие
ножницы») стол 1 движется в неподвижных направляющих по
закону s (t) = 20 sin -j1 см. Ползун А с ножом 2, шарнирно при-
прикрепленный к кривошипу 3 длины 60 см, скользит по направля-
направляющей 4,, которая жестко связана со столом 1 (а = 90°).
Определить скорость и ускорение ножа 2 относительно стола,
угловую сьорость и угловое ускорение кривошипа 3 при t = 1 с,
если в этот момент времени ф = 60°.
Ответ: v\ — 6,05 см/с, а% — 13,78 см/с2, <о3 — 0,2 рад/с, е3 =
= 0,39 рад/см2.
s(t)
Заъатавка
К задаче 7.19.
К задаче 7 20.
7.20. Стержень ОАВ, изогнутый в точке А под прямым углом,
вращаясь вокруг оси, проходящей через точку О перпендикуляр-
перпендикулярно плоскости рисунка, приводит в движение кольцо М, надетое
на этот стержень и на неподвижный стержень CD.
Определить абсолютные скорость и ускорение кольца М,
а также скорость' и ускорение кольца М относительно стержня
ОАВ, если о = 2 рад/с, е = 1 рад/с\ О А = I = 40 см, ср = 30°.
Ответ: vm = 160 см/с, ам — 474,3 см/са, vM = 160 см/с, ам =
= 474,3 см/с2.
7.21. В «секансном» механизме кривошип 1 (изогнутый под
прямым углом стержень ОАВ) вращается вокруг неподвижной
оси, проходящей через точку О перпендикулярно плоскости ри-
6*
84
ГЛ. 7. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
сунка и приводит в движение толкатель 2, который скользит в
направляющих.
Определить скорость и ускорение толкателя 2, а также ско-
скорость и ускорение точки С толкателя относительно кривошипа
в тот момент времени, когда <р = 30°, ш, = 1,5 рад/с, ei = 2 рад/с2,
ОА = 10V3 см.
Ответ: 1>2 = 17,32 см/с, аг = 5129 см/с2, vc — 34,64 см/с, ас —
= 13,81 см/с".
«У,
К задаче 7.21.
К задаче 7.22.
7.22. В механизме пресса кулачок 1, представляющий собой
диск радиуса R = 4 см, вращается с постоянной угловой ско-
скоростью ш( = 0,2 рад/с вокруг оси, проходящей через точку О
перпендикулярно плоскости рисунка, и приводит в движение пол-
ползун 2, который скользит в направляющих.
Для показанного на рисунке положения механизма опреде-
определить скорость и ускорение ползуна, если ОС = 3 см и отрезок
ОС горизонтален.
Ответ: у2 = 0,6 см/с, а2 = 0.
7.23. Диск / радиуса R — 40 см, вращаясь с постоянной угло-
угловой скоростью Mi = 2 рад/с вокруг оси, проходящей через точку
0 перпендикулярно плоскости рисунка, приводит в движение два
шарнирно соединенных между собой ползуна. Один из ползунов
скользит вдоль паза, расположенного на диске на расстоянии
1 = R/2 от оси диска, а второй — вдоль неподвижного стержня 2.
Определить скорости и ускорения точки А, расположенной
на оси шарнира ползунов, относительно диска 1 и относительно
стержня 2 в тот момент времени, когда точка А достигнет кон-
конца паза.
Ответ: vrA = 160 см/с, а\ = 1109 см/с8, vA = 138,6 см/с, аА =
= 1120 см/с2
§ 2 ДВИЖЕНИЕ ПРИ ИЗВЕСТНОМ АБСОЛЮТНОМ ДВИЖЕНИИ
85
7.24. На неподвижный проволочный обруч 1 радиуса R = 4 см
надето кольцо М, через которое проходит стержень 2. Стер-
Стержень 2 вращается вокруг оси, проходящей через точку О пер-
перпендикулярно плоскости рисунка по закону ф(£) = It — Ыг + t* рад,
00, = 3 см.
К задаче 7.23.
К задаче 7.24.
Для момента времени t — 2 с и положения механизма, по-
показанного на рисунке, определить абсолютную скорость и абсо-
лютнре ускорение кольца М.
Ответ: v = 6,25 см/с, а = 14,3 см/с2.
7.25. Стержень 1, изогнутый по дуге окружности радиуса
Л = 20 см, вращаясь вокруг оси, проходящей через точку О пер-
перпендикулярно плоскости рисунка, приводит в движение коль-
кольцо М. Кольцо М одновременно надето на этот стержень и на не-
неподвижный стерн«ень 2, изогнутый по дуге окружности того же
радиуса, что и стержень 1. Точка О совпадает с центром кри-
кривизны стержня 2.
Определить абсолютную скорость и абсолютное ускорение
кольца М, а также его скорость и ускорение по отношению
к стержню 1 в тот момент времени, когда центр кривизны стерж-
стержня 1 совпадает с точкой В и coi = 0,5 рад/с, Si = 0,2 рад/с4.
Ответ: vM — Ю см/с, аи = 6,4 см/сг, vrM = 0, атм~ 0.
К задаче 7.25.
К задаче 7 26.
7.26. Диск 1 радиуса Д = 4УЗ см, вращаясь вокруг оси, про-
проходящей через точку О перпендикулярно плоскости рисунка,
« постоянной угловой скоростью (Oi = 1,5 рад/с, приводит в дви-
86
ГЛ. 7. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
жение стержень 2, который прижимается к диску спиральной
пружиной 3. Стержень вращается вокруг оси, проходящей через
точку $1 параллельно оси вращения диска.
Определить скорость и ускорение точки D для положения ме-
механизма, показанного на рисунке, если ф = 30°, OtD = A см.
Ответ: vD — 3 см/с, aD = 4,48 см/с2. ,
7.27. Кулачок 1, вращаясь вокруг оси, проходящей через точ-
точку О перпендикулярно плоскости^ рисунка, приводит в движение
толкатель 2, который соприкасается с кулачком в точке А.
Для показанного на рисунке положения механизма, при ко-
котором толкатель 2 и сторона CD кулачка горизонтальны, опре-
определить угловую скорость и угловое ускорение толкателя, а также
ускорение точки А относительно кулачка, если coi = 1 рад/с,
е, = 3 рад/с2, В. = 2 см, О,А = 4V3 см, а = 60°.
Ответ: со2 = 0,5 рад/с, е2 = 1,21 рад/с2, аА = 0,8 см/с2.
К задаче 7.28.
7.28. В обращенном эллиптическом циркуле кривошип АВ
длины 60 см (ОА — ОВ) вращается вокруг оси, проходящей через
точку О перпендикулярно плоскости рисунка. Ползуны А и В,
шарнирно соединенные с кривошипом, приводят во вращепие
вокруг оси, параллельной оси вращения кривошипа и проходя-
проходящей через точку Ои стержень COJ), изогнутый под прямым
углом.
Определить угловую скорость и угловое ускорение стержня
COJ) в момент времени t == 1 с, если угол поворота кривошипа
АВ ф = -| t2 рад.
Ответ: о = я/4 рад/с, е = я/4 рад/с2.
7.29. Толкатель 2 скользит во втулке, наклоненной иод углом
а, == 30° к горизонту под действием диска 1 радиуса Д = 4 см,
который катится без скольжения по горизонтальной плоскости.
Для показанного на рисунке положения механизма (точки А
и С находятся на оси толкателя) определить скорость и ускоре-
ускорение толкателя, если vc = 12 см/с, ас = 4 см/с2.
Ответ: у2 = 10,39 см/с, а2 = 12,46 см/с2.
§ 2. ДВИЖЕНИЕ ПРИ ИЗВЕСТНОМ АВСОЛЮТНОМ ДВИЖЕНИИ
87
7.30. Обруч радиуса R = 0,5 м, скатываясь без скольжения
по наклонной плоскости, приводит в движение кольцо М, надетое
на обруч и неподвижный стержень АВ. Стержень АВ паралле-
параллелен линии наибольшего ската наклонной плоскости.
К задаче 7.29.
К задаче 7.30.
Определить абсолютные скорость и ускорение кольца для по-
положения механизма, показанного на рисунке, если vc = 2 м/с,
ас = 2 м/с2, I = 0,75 м.
Ответ: vM = 2 м/с, аи = 2 м/с2.
7.31. В кулисно-ползунном механизме ползун 1, скользя вдоль
направляющей, приводит в движение кулису 2, камень 3 которой
вращается вокруг оси, проходящей через точку В перпендику-
перпендикулярно плоскости рисунка.
Для показанного на рисунке положения механизма опреде-
определить угловую скорость и угловое ускорение кулисы 2, скорость
и ускорение точки В относительно кулисы 2, если а = 45°, I =
= 6 см, vA = 6 см/с, аА = 4 см/с2.
Ответ: со2 = 0j5 рад/Cj, еа = 1/6 рад/саА vB = 4,24 см/с, атв —
*= 4,95 см/с3.
К задаче 7.32.
88
ГЛ. 7. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
7.32. Диск 1 радиуса Я = 0,2 м катится без скольжения по
плоскости и приводит во вращение вокруг оси, проходящей че-
через точку О перпендикулярно плоскости рисунка, стержень 2
длины 0,4 м, который соприкасается с диском в точке А.
Определить угловую скорость и угловое ускорение стержня 2,
если а = 60°, 0 = 30°, vc = 0,8 м/с, ас = 0,2 м/с2.
Ответ: ©2 = 1 рад/с, е2 = 6,15 рад/с2.
7.33. По рельсу катится без скольжения колесо 1 радиуса
R = 1 м. Ускорение центра колеса ас = 0,5 м/с2 — const. К обо-
ободу колеса в точке А шарнирно прикреплен ползун 2, который
скользит по стержню 31 вращающемуся вокруг оси, проходящей
через точку О перпендикулярно плоскости рисунка.
Определить угловую скорость и угловое ускорение стержня 3
для показанного на рисунке положения механизма, которое со-
соответствует моменту времени t = 2 с после начала движения.
В начальный момент времени (£ = 0) колесо находилось в покое.
Ответ: о)а = 0,5 рад/с, еа = 0.
К задаче 7.33.
К задаче 7.34.
7.34. Диск 1 радиуса jR = 0,4 м катится без скольжения по
плоскости и при помощи ползуна 3, шарнирно прикрепленного
к ободу диска в точке А, приводит в движение изогнутый под
прямым углом стержень 2. Стержень 2 скользит в направляю-
направляющих. Скорость центра диска постоянна и равна vc = 0,8 м/с.
' Определить скорость и ускорение стержня 2, а также ускоре-
ускорение точки А относительно стержня 2 в показанном на рисунке
положении механизма, если I = 0,6 м.
Ответ: v2 = 0,69 м/с, аг = 0,8 м/с2, атА = 1,38 м/с2.
7.35. В механизме с качающейся кулисой диск 1 радиуса
Д = 0,1 м катится без скольжения по направляющей и при по-
помощи ползуна 3, шарнирно прикрепленного к ободу диска в точ-
точке А, приводит в движение кулису 2. Скорость центра диска по-
постоянна, vc -= 0,2 м/с. Кулиса вращается вокруг оси, проходя-
проходящей через точку О перпендикулярно плоскости рисунка.
§ 2 ДВИЖЕНИЕ ПРИ ИЗВЕСТНОМ АБСОЛЮТНОМ ДВИЖЕНИИ
89
Определить угловую скорость и угловое ускорение кулисы,
а также ускорение точки А относительно кулисы, если а = 60",
точки О, А и С находятся на одной прямой, а I = 0,2УЗ м.
Ответ: щ = 1,24 рад/с, е2 = 0,83 рад/с2, а'А = 0,86 м/с2.
К задаче 7.33.
К задаче 7.36.
7.36. В механизме с качающейся кулисой кривошип 1 длины
12 см вращается вокруг оси, проходящей через точку О перпен-
перпендикулярно плоскости рисунка, с постоянной угловой скоростью
<ot = 2 рад/с. К шатуну 2 в точке С шарнирно прикреплена ку-
кулиса 3, камень 4 которой вращается вокруг оси, проходящей че-
через точку D параллельно оси вращения кривошипа ОА.
Определить угловые скорости шатуна 2 и кулисы 3, скорость
точки D по отношению к кулисе 3 для показанного на рисунке
положения механизма, если <р = 60°, точки А, С и D находятся
на одной прямой, ОА «= АВ = OD = 12 см, АС = 6 см.
Ответ: ша = 2 рад/с, щ = 4 рад/с, vrD — 20,78 см/с.
7.37. Используя условия задачи 7.36, определить угловые ус-
ускорения шатуна 2 и кулисы 3, а также ускорение точки D по
отношению к кулисе, если при <р "^ 60° кулиса 3 вращается про-
против часовой стрелки с угловой скоростью ©s = 4 рад/с, скорость
точки D по отношению к кулисе vrD = 20,78 см/с и вектор этой
скорости направлен от точки D вниз по кулисе.
Ответ: е2 = 0, г3 = 20,79 рад/сг, агв = 96 см/с2.
7.38. Механизм для резания листового металла («летучие нож-
ножницы») приводится в движение штоком BD, скользящим в на-
направляющих. При этом кривошипы 1 и 2 вращаются вокруг осей,
проходящих перпендикулярно плоскости рисунка через точки О
и 0i соответственно.
90
ГЛ. 7. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
Определить абсолютную скорость и абсолютное ускорение но-
ножа 3, а также скорость и ускорение ножа 3 относительно но-
ножа 4 в момент соприкосновения ножей с металлом. Считать, что
в йтот момент времени а = 45°, £-О£)С = 90°, vD = 2 м/с, aD = 0,
00, = 0,5 м, ОЛ = 1 м.
Ответ: v3 = 1,41 м/с, а3 — 6j32 м/с3, р£ = 1 м/с, аз = 4 м/с3.
дЬготобна
К задаче 7.38.
.К задаче 7.39.
7.39. Стержень ОЛВ, изогнутый в" точке А под прямым уг-
углом, вращается вокруг оси, проходящей через точку О перпенди-
перпендикулярно плоскости рисунка и приводит в движение кольцо М,
надетое на неподвижный стержень CD, представляющий собой
дугу окружности радиуса R. Стержни расположены в одной пло-
плоскости.
Определить, абсолютные скорость и ускорение кольца М,
а также его скорость и ускорение относительно стержня ОАВ
в момент времени, когда точка А совцадает с точкой Ои полагая,
что в этот момент времени стержень ОАВ вращается против
часовой стрелки замедленно и ш, = 2 рад/с, е4 = 2 рад/с2, О А =
- R = 40V2 см.
Ответ: им = 113,1 «м/с, аи — 253 см/са, vTM= 113,1 см/с, атм—
= 113,1 см/с2.
7.40. В системе, описанной в задаче 7.39, кольцо М движет-
движется по неподвижному стержню CD по закону CM (t) =■
— 2— sin -у- 2 см и приводит во вращение стержень 0Л5.
Определить угловую скорость и угловое ускорение стержня.
ОАВ в момент времени t = 1 с, если (94 = Л, б = 30°,
7.41. Для системы, описанной в задаче 7.39, определить абсо-
абсолютные скорость и ускорение кольца М, угловую скорость и уг-
§ 2. ДВИЖЕНИЕ ПРИ ИЗВЕСТНОМ АБСОЛЮТНОМ ДВИЖЕНИИ
91
ловое ускорение стержня ОАВ в момент времени t — 1 с, если
AM(t) =10/l — cosyijcM и ОА = Я = 10 см.
Ответ: vM = 5л см/с, ам = 3,54 л2 cm/cj, со = 0,5я рад/с; 8 = 0.
7.42. Движение точек А и В на плоскости описывается в де-
декартовой системе координат Оху уравнениями
е{~' см, г/А(«)=2е1-' см;
xB(t\ = i + 5 см, yB{t) = i3 + 1 см.
Определить скорость и ускорение точки А по отношению к
точке В в момент времени £ = 1 сл
Ответ: vA = 5,38 см/с, атА = 4,12 см/са.
7.43. Диск 7 вращается с постоянной угловой скоростью
«( = 1 рад/с вокруг оси, проходящей через точку О перпендику-
перпендикулярно плоскости рисунка, а диск 2 радиуса R = 5 см — вокруг
оси OtOa с постоянной угловой скоростью @2 = 2 рад/с. Расстоя-
Расстояние между осями вращения дисков ОС = 25 см.
Для положения системы, при котором плоскости дисков сов-
совпадают, определить скоростью ускорение точки А диска 2 по от-
отношению к системе координат Oxyz, связанной с диском 1. Точ-
Точка А находится на прямой ОС (С — центр диска 2).
Ответ: vTA =31,62 см/с, аА = 50 см/са.
21
К задаче 7.43.
К задаче 7.44.
7.44. В кривошипно-кулисном механизме штампа кривошип 1,
вращаясь вокруг оси, проходящей через точку О перпендикуляр-
перпендикулярно плоскости рисунка, приводит в движение ползун 2 с пуансо-
пуансоном. Ползун 2 движется внутри прямолинейной кулисы 3, пере-
перемещая ее по направляющей 4.
Определить скорость и ускорение кулисы относительно на-
направляющей, а также скорость и'ускорение ползуна относитель-
относительно кулисы в момент времени, когда ф = 45°, coi = 2 рад/с, 8j =
*= 4 рад/с2, О А «= 25 см.
Ответ: v3 = 35336 см/с^ а3 = 141^4 см/с^ vrt = 35^36 см/с, а£=0.
92
ГЛ. 7. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
7.45. В кривошипно-кулисном механизме высадочного пресса
кривошип 1, вращаясь вокруг оси, проходящей через точку О
перпендикулярно плоскости рисунка, приводит в движение ка-
камень 2, который скользит по наклонному пазу пуансона 3. Пуап-
сон движется в неподвижных направляющих.
Определить скорость и ускорение пуансона относительно
направляющих, если Mi «= 2 рад/с, ei = 1 рад/с2, ф = 60°, О А =*
= 20 см, б - 60°.'
Ответ: Vi = 40 см/с, аг — 26,19 см/с2.
К задаче 7.45.
К задаче 7.46.
7.46. Кольцо А скользит по неподвижному стержню 1, изо-
изогнутому по дугам двух полуокружностей, и приводит во враще-'
ние вокруг оси, проходящей через точку О перпендикулярно пло-
плоскости рисунка, стержень 2. Движение кольца А по стержню /
описывается уравнением В А = s(t) = 30л£2 см.
Определить угловую скорость и угловое ускорение стержня 2,
а также ускорение кольца А относительно стержня 2 в момент
времени f=»l с, если R = 30 см, г ==20 см, ОС = 40УЗ см.
Ответ: сог = 1,18 рад/с, е2 = 3,63 рад/са, агА = 274,3 см/с3.
7.47. В мальтийском механизме кривошип 1 вращается вокруг
оси, проходящей через точку О перпендикулярно плоскости ри-
рисунка, с постоянной угловой скоростью tot = У2 рад/с. Палец А,
неподвижно прикрепленный к кривошипу, сколбзит вдоль паза
диска 2 радиуса R и приводит его во вращение вокруг оси, про-
проходящей через точку О{ параллельно оси вращения кривошипа.
Для показанного на рисунке положения механизма опреде-
определить угловую скорость и угловое ускорение диска 2, а также ус-
ускорение пальца относительно диска, если О А = R = 20 см,- а =»
= 45°.
Ответ: «J = 1 рад/с, е2 = 3,4 рад/са, агА — 48,2 см/с2.
7.48. Кривошип 1 длины 20 см вращается вокруг оси, прохо-
проходящей через точку О перпендикулярно плоскости рисунка, и при
помощи ползуна 3, шарнирно прикрепленного к кривошипу в точ-
точке А, приводит в движение криволинейную кулису 2. Кулиса,
6 2. ДВИЖЕНИЕ ПРИ ИЗВЕСТНОМ АБСОЛЮТНОМ ДВИ>КЕНИИ
изогнутая по дуге окружности радиуса R = 20 см, вращается во-
вокруг оси, проходящей через точку О\ параллельно оси вращения
кривошипа.
К задаче 7.47.
К задаче 7.48.
Определить угловую скорость и угловое ускорение кулисы,
а также скорость и ускорение точки А относительно кулисы, ес-
если ф = 60°, о»! «= 0,1 рад/с, е, = 0,2 рад/с2, ООК = О А.
Ответ: щ — 0,1 рад/с, е2 = 0,2 рад/с2, vrA— 2 см/с, атА «(#.д)т=
= 4 см/с2.
7.49. В механизме ножниц кривошипы 1 и 2 одинаковой дли-
длины i = 40 см вращаются вокруг осей^ проходящих через точки О
и Oi перпендикулярно плоскости рисунка. Они приводят в по-
поступательное движение рычаги 5
„ ^iu, и 6, к которым прикреплены но-
2v ^<П - жв 3 и 4.
К задаче 7.49. К задаче 7.50.
Определить скорость и ускорение ножа 4 относительно но-
ножа 3 (скорость и ускорение резания), при а = ^ = 60°, если ai~
•= 1 рад/с -= const.
Ответ: v\ = 69,29 см/с, а\ = 40 af/c2.
7.50. "Кривошип 1 длины 30- см вращается вокруг оси, прохо-
проходящей через точку О перпендикулярно плоскости рисунка, и при
94
ГЛ. 7. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
помощи ползуна 3, который шарнирно прикреплен к кривоши-
кривошипу 1 в точке А, приводит в движение диск 2 радиуса R = 20 см.
Ползун скользит вдоль паза в диске на расстоянии I = 10 см
от центра диска. Диск 2 катится без скольжения по пло-
плоскости.
Определить угловую скорость, угловое ускорение диска 2 и
ускорение ползуна относительно диска в показанном на рисунке
положении механизма, если coi = 0,2 рад/с, et = ОД рад/с2.
Ответ: со2 = 0,35 рад/с, е3 = 0,52 рад/са, аА = 12,3 см/са.
7.51. Ползун 3, прикрепленный в точке А к линейке / дли-
длины 0,4 м с помощью шарнира, скользит вдоль направляющей.
В точке С к линейке при-
прикреплена шарнирно муфта
5, через которую проходит
стержень 2, вращающийся
вокруг оси, проходящей
через точку О перпендику-
перпендикулярно плоскости рисунка.
Для положения меха-
механизма, показанного на ри-
рисунке, определить угловую
скорость и угловое ускоре-
ускорение стержня 2, скорость и
ускорение точки С по от-
30°, АС = ВС, точка В находится
на одной вертикали с точкой О, I = 0,2 м, vA — 0,6 м/с, ал =0,2 м/с2.
Ответ: со2 = 1,73 рад/с, "е2 = 2,31 рад/с2, атс = 1,2 м/с3, vrc = 0.
7.52. Для положения механизма, показанного на рисунке к
задаче 7.51, определить скорость и ускорение точки С сте'ржня 2
по отношению к стержню 1, если а = 30°, точки О и В находят-
находятся на одной вертикали, / = 0,2 м и
стержель 2 вращается вокруг оси О
с постоянной угловой скоростью
<й2 = 2 рад/с против часовой стрелки.
Ответ: Ус=0, а£,= 1,6м/с2.
7.53. Ползуп А, прикрепленный
шарнирно' к копцу линейки АВ дли-
длины 20У2 см, движется вдоль горизон-
горизонтальной направляющей с постоян-
постоянной скоростью vA = 60 см/с. В точке
В к линейке шарнирно прикреплены
ползун 3, движущийся вдоль верти-
вертикальной направляющей, и муфта 4,
которая скользит по стержню 2. Стержень 2 вращается вокруг
оси, проходящей ч-ерез точку О перпендикулярно плоскости ри-
рисунка.
К задаче 7.51.
ношению к стержню 2, если а'
К задаче 7.53.
g 3. СМЕШАННЫЕ ЗАДАЧИ
95
Определить угловую скорость и угловое ускорение стержня 2,
а также скорость и ускорение точки В по отношению к стерж-
стержню 2 для положения механизма, показанного на рисунке, если
а = 45°, & = 60°.
Ответ: (о2 = 1,3 рад/с, е2 = 13,6 рад/с2, vtb = 51,96 см/сг а'в =»
= 272,8 см/с3. ^
§ 3. Смешанные задачи
7.54. Кулачок 1 радиуса г = 2 см, вращаясь с постоянной уг-
угловой скоростью 0*1 = 2 рад/с- вокруг оси, проходящей через точ-
точку 01 перпендикулярно плоскости рисунка, приводит в движение
изогнутый под прямым углом рычаг -AOD, Рычаг AOD вращает-
вращается вокруг оси, проходящей через точку О параллельно оси вра-
вращения кулачка, и с помощью муфты 3, соединенной шарнирно со
стержнем 4 в точке В, приводит в поступательное движение
стержень 4.
Определить 'угловую скорость и угловое ускореппе рычага 2,
ускорение точки А относительно кулачка 1, а также абсолютную
скорость и абсолютное ускорение стержня 4, если а = 60°, I, =
= 4 см, h — 3 см.
Ответ: щ = 0,67 рад/с, е2 = 0J рад/с24 аА = 20,12 см/са, vt =
= 8 см/с; а4 = 10,08 см/с2.
К задаче 7.54.
К задаче 7.55.
7.55. Режущий механизм ножниц приводится в движение кри-
кривошипами 1 та 2, которые вращаются вокруг осей, проходящих
перпендикулярно плоскости рисунка через точки О и Oi соответ-
соответственно.
96
ГЛ. 7. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
Определить скорость и ускорение ножа 5 относительно но-
ножа 4 в момент соприкосновения ножей с заготовкой, считая, что
в этот момент времени ©i = 1 рад/с, г{ = 0, и2 = 2 рад/с, е2 = О,
а = 45°, $ = 60°, АВ = 50 см и стержень 3 вертикален,
О А = 60 см.
Ответ: vrb = 127,3 см/с, а\ = 141,3 см/с2.
7.56. В механизме для разрезания листового металла («лету-
(«летучие ножницы») кривошип 1 вращается равномерно с- угловой
скоростью o)i = 1 рад/с вокруг оси, проходящей через точку О
перпендикулярно плоскости рисунка.
Определить абсолютные скорости ножей 3 и 4, а также ско-
скорость ножа 4 относительно ножа 3 в момент их соприкосновения
с металлом, если в этот момент времени £-ОАВ =? 150°, ^-ОАС ==
= 90°, угол между стержнем 2 и горизонталью а «?= 30°, а точки
О ж С находятся на одной вертикали. Длина кривошипа 1 рав-
равна 20 см, АВ = 40 см, АС = 50 см.
Ответ: v3 — 11,56 см/с, i>4 = 23,08 см/с, v\ — 20 см/с.
в_
If/
Заъогл
К задаче 7.56.
К задаче 7 57.
7.57. В кривошипном механизме с двумя кулисами криво-
кривошип 1 длины 20 см вращается вокруг оси, проходящей через
точку О перпендикулярно плоскости рисунка и при помощи кам-
камня 4 приводит во вращение вокруг оси, которая проходит через
точку Ои кулису 2. С кулисой 2 в точке С шарнирно соединена
кулиса 3, камень 5 которой вращается вокруг неподвижной оси,
проходящей через точку В. Оси вращения кулисы 2 и камня 5
параллельны оси вращения кривошипа О А.
Определить угловые скорости и угловые ускорения обеих
кулис, а также ускорение точки В по отношению к кулисе 3,
если а = 60°, ВС = 75 см, ОО, = ОА, Ofi = 60 см, ш,=0,5 рад/с =
= const.
Ответ: Юг^О^Бгад/с^ ег = 0, (Оз^ДгаД/0! е3 = 0,078рад/с^
ав= 2,630м/с2.
§ 3 СМЕШАННЫЕ ЗАДАЧИ
97
7.58. В двойном кулисном механизме кривошип ОА длины
10 см вращается с постоянной угловой скоростью o)i = 1 рад/о
вокруг оси, проходящей через точку О перпендикулярно плоско-
плоскости рисунка, и при помощи
камня 4 приводит в движе-
движение кулису 2. Кулиса 2 в
ючке В шарнирпо соединена
с кулисой 3, камень 5 кото-
которой вращается вокруг оси,
проходящей через точку С
параллельно оси вращения
кривошипа /.
Определить угловую ско-
скорость и угловое ускорение
кулисы 3, а также скорость
п ускорение точки С по отно-
отношению к этой кулисе для
положения механизма, пока- К задаче 7.58.
занного на рисунке, если а =
= 60°, р = 30°, I = 50 см.
Ответ: щ = 0,075 рад/с, е3 = 0,14 рад/са, vrc = 2,5 см/с, агс =•
= 4 см/с2.
7.59. По неподвижной вертикальной стойке 1 скользит пол-
ползун А по закону Siit) = 20<2 см. К ползуну А шарнирно прикреп-
прикреплен стержень АВ длины 32 см. Другой конец стержня шарнир-»
но связан с ползуном В, который скользит по горизонтальной
полке уголка 2. Уголок движется в вертикальных направляю-
направляющих но закону £а {t) = 10 sin -5- t см.
О
К задаче 7.59.
Определить угловую скорость и угловое ускорение стержня 3,
а также ускорение ползуна В относительно уголка 2 при t
если в этот момент времени а =• 45°.
Ответ: ю3 = 2 рад/с, е3 = 2^65 рад/с\ агв = 150г5 см/с2.
* Под ред К С Колесникова
■1 С,
98
ГЛ 7 СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
7.60. По неподвижной вертикальной стойке 2 скользит втул-
втулка 1 по закону s,U) = £3 см. К втулке в точке А шарнирно при-
прикреплен стержень 3, который соприкасается в точке В с ползу-
ползуном 4, представляющим собой полуцилиндр радиуса /? = 4V2 см.
Ползун скользит по горизонтальной плоскости по закону s2 (t) —
■= 2 sin -s- t см.
Определить угловую скорость и угловое ускорение стерж-
стержня 3 в момент времени t = 1 с, если а — р = 45°, а I = 16 см.
3 Ответ: ё3 — 0,15 рад/с, е3 =
м =0,59 рад/с2.
К задаче 7.60.
К задаче 7.61.
7.61. В механизме, схема которого показана на рисунке, кри-
кривошипы 1 и 2, вращаясь с постоянными угловыми скоростями
Mi = 0,2 рад/с, и ш2 = 0,15 рад/с вокруг параллельных осей, про-
проходящих через точки О и Oi перпендикулярно плоскости рисун-
рисунка, приводят в движение шарнирно соединенные между собой в
точке А ползуны. Один из ползунов скользит по кривошипу 1,
а другой —по кривошипу 2.
Определить скорость и ускорение точки А для положения ме-
механизма, показанного на рисунке, если О А = ОА = 20 см и
Ф = 30°.
Ответ: vA = 4,16 см/с, ал = 0,86 см/с2.
7.62. В механизме, изображенном на рисунке к задаче 7.61Т
кривошип 1 вращается по закону ф (t) = -g-£2 рад, а ползун сколь-
скользит по этому кривошипу так, что О А = s(t) = 2F + cos nt) см.
Определить угловую скорость и угловое ускорение кривоши-
кривошипа 2 в момент времени t = 1 с, если в этот момент времени
Ответ: ш2 = 0, е2 = 1,52 рад/с2.
7.63. Два обруча одинакового радиуса R = 10 см катятся без
скольжения по направляющей в противоположные стороны. Ско-
Скорости центров обручей постоянны, vA = 5 см/с, vB — 20 см/с.
§ 3 СМЕШАННЫЕ ЗАДАЧИ
99
Определить скорости и ускорения кольца М, надетого на оба
обруча, но отношению к каждому из обручей, а также абсолют-
абсолютную скорость и абсолютное уско- *
рение этого кольца для поло-
положения системы, при котором
Ответ: vTt = 30 см/с, vTt =
= 45 СМ/с, ат = 140,8 см/с2, аГа =
= 229,6 см/с5', им = 22,91 см/с,ам=
- 1243 см/с2.
7.64. В комплексном механиз- .. _ „ч
ме кривошип 1 длины 30 см вра- задаче
щается вокруг оси, проходящей через точку Ot перпендикулярно
плоскости рисунка по закону ф (i) = -g- i рад. По спарнику 2
{О,А = OJ)) скользит муфта 3, палец В которой входит в паз
А
К задаче 7.64.
качающейся кулисы 4, изогнутой под прямым углом. В другой
паз кулисы 4 входит палец С ползуна 5, скользящего в направ-
направляющих по закону sit) = 20 f см.
Определить угловую скорость кулисы, скорость пальца В по
отношению к кулисе (уг4) и скорость пальца В относительно
спарника (vr2) при t = 1 с, если в этот момент времени а — 30°,
ОВ = 80 см, ОС = 50 см.
Ответ: щ = 0,4 рад/с, vr% = 18,81 см/с, vTi — 36,6 см/с.
7.65. Используя условия задачи 7.64, определить в момент,
времени t = 1 с угловое ускорение кулисы 4, ускорения пальца В
относительно кулисы 4{аТ/^ и относительно спарника 2{ат^.
100
ГЛ. 7. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
Полагать, что в этот момент времени кулиса поворачивается
против часовой стрелки с угловой скоростью <й4 = 0,4 рад/с,
палец С относительно кулисы дви-
движется от точки О со скоростью,
равной по величине 34,65 см/с, а па-
палец В относительно кулисы движет-
движется к точке О со скоростью vu =
= 36,6 см/с.
Ответ: е4 = 0,15 рад/с2, аТг =
= 80,92 см/с3, ач = 69,71 см/с1.
7.66. В двойном кривошипно-ку-
лисном механизме кривошипы 1 и 4
вращаются вокруг осей, проходящих
соответственно через точки О и Ot
перпендикулярно плоскости рисунка,
с постоянными по величине угловы-
угловыми скоростями Mi = оL = 0,2 рад/с.
Определить угловую скорость и
угловое ускорение кулисы 3, а так-
также скорость и ускорение ползуна В- относительно кулисы Зг
если а = 30°, р = 60°, кривошип 4 горизонтален, О А = 10 см.
К задаче 7.66.
B = 20 см.
Ответ: ш3 — 0,19 рад/с, е3
02 29 см/с2.
0,0103 рад/с2, vrB — 2,5 см/с,- ав
Раздел третий
ДИНАМИКА
Глава 8
ДИНАМИКА ТОЧКИ
§ 1. Движение точки в инерциальной системе отсчета
8.1. Материальная точка массы m начинает двигаться из со*
стояния покоя под действием силы Fit) постоянного направле-
направления. Величина этой силы F(t)=a— btt где a==const>0 и b —
= const > 0.
Определить время и пройденное точкой расстояние до смены
направления движения.
Ответ: *, = —, s{h) = y
8.2. Материальная точка массы m начинает двигаться из со-
состояния покоя под действием силы, изменяющейся во времени
по закону
{а — Ы при 0 ^ t ^ alh
0 при t>a/b%
где а = const>0 и 6 = const> 0.
Полагая, что сила Fit) не меняет своего направления, найти
уравнения движения точки.
()
8.3. Деталь (материальная точка) массы m лежит иа горизон-
горизонтальной плите. Коэффициент трения скольжения для пары де-
деталь — плита равен /. В некоторый момент времени {t «= 0) не-
неподвижную деталь начинают обдувать однородным потоком воз-
воздуха, вектор скорости которого направлен под постоянным углом
а к горизонту, а_модуль этого вектора изменяется во времени по
закону va = 2,5У2 ■ t м/с. Воздушный поток воздействует на де-
деталь с силой R = ц\г, где и. — const > 0, vr — скорость потока от-
относительно детали.
Определить время начала движения детали и зависимость
скорости детали от времени, если ти = 0,1 кг, / = 0,2, а«=45\
|i«= 0,1 Н ■ с/м, g = 10 м/с2.
Ответ: ti = 1 с, v(t) = 2ft + еA-() - 2] м/с.
102 гл- 8 динамика точки
8.4. Тело массы т падает без начальной скорости па Землю,
преодолевая сопротивление воздуха. Сила сопротивления пропор-
пропорциональна скорости тела. Коэффициент пропорциональности ра-
равен ц (ц = const > 0).
Полагая поле сил тяжести однородным, определить предель-
предельную (максимальпую) скорость падения тела.
Ответ: 1>пр = mg/l*~
8.5. Лодка массы иг, получив начальную скорость v0, движет-
движется поступательно и прямолинейно, преодолевая сопротивление
воды. Сила сопротивления R = — u,v, где v — скорость лодки,
u. == const > 0.
Полагая m = 48 кг п_^0 = 10 м/с, определить:
1) коэффициент ц силы сопротивления, если после прохожде-
прохождения расстояния в 50 м скорость лодки равна 5 м/с, а также
найти время, за которое лодка пройдет это расстояние;
2) наибольшее расстояние, которое пройдет лодка и время
прохождения этого расстояния.
Ответ: 1) ц = 4,8 Н • с/м, * = 10 In 2 с; 2) smas = 100 м, t = <*>.
8.6. Тело массы т, прикрепленное к концу недеформировап-
ной пружины, покоится на гладкой горизонтальной плоскости.
Ось пружины горизонтальна. В некоторый момент времени U = 0)
тело приводится в прямолинейное поступательное движение с на-
начальной скоростью v0, направленной по оси* пружины. Зависи-
Зависимость силы упругости пружины от ее деформации X имеет вид
F = cks, где с = const > 0.
Определить, при какой деформации пружипы скорость тела
уменьшится в -п раз по сравнению с его начальной скоростью.
* f2mv\{r?-\)
Ответ: X = 1 / —-—»
у сп
8.7. Тело массы тп, прикрепленное к концу недеформирован-
ной пружины, приводится в прямолинейное поступательное дви-
движение по гладкой горизонтальной плоскости с начальной ско-
скоростью* v0, направленной по оси пружины. Величина силы упру-
упругости пропорциональна деформации пружины X, т. е. F — ск, где
с = const > 0. Кроме пружины, к телу прикреплен шток с порш-
поршнем, помещенным в цилиндр, заполненный жидкостью. При дви-
движении поршня возникает сила сопротивления, величина которой
R = [I иг, где v — скорость поршня, ц = const > 0.
Найти значение начальной скорости тела, при котором оно
остановится, пройдя путь, равный I.
Ответ: v0 =
8.8. Ползун 1 и тело 2 массы пг, присоединенное к нему при
помощи пружины, коэффициент жесткости которой равен с, на-
находятся в покое на гладкой наклонной плоскости, образующей
§ 1. ДВИЖЕНИЕ ТОЧКИ В ИНЕРЦИАЛЬНОЙ СИСТЕМЕ ОТСЧЕТА
103
угол а с горизонтом. В некоторый момент времени (t ■■ 0) пол-
ползун начинает двигаться вверх с постоянной скоростью и, сжимая
пружину и приводя в движение тело. При движении тело пре-
преодолевает силу сопротивления среды R = — илг, где v — скорость
тела, u. = const > 0.
К задаче 8.7.
К задаче 8.8.
Считая, что начало отсчета координаты х совпадает с поло-
положением покоящегося тела, получить уравнение его движения
по наклонной плоскости. При решении задачи обозначить с/т =-
= к1 и принять ц/т = 2к.
Ответ: x(t)^ut--^- + ^-(i + kt)e~kt.
8.9. Материальная точка массы тп, двигавшаяся прямолинейно
но гладкой горизонтальной плоскости (совпадающей с плоскостью
рисунка) с постоянной скоростью \т0, в некоторый момепт време-
времени U = 0) касается упругой нити в ее середине и при дальней-
дальнейшем движении растягивает эту нить. В момент касания скорость
v0 точки перпендикулярна нити. Предварительное натяжение ни-
нити пренебрежимо мало и при ее растяжении возникает сила уп-
упругости Т = сК, где К — деформация нити, c = const>0.
Найти максимальную величину силы натяжения нити.
Ответ:
К задаче 8.9.
К задаче 8.10.
8.10. Прямой круговой цилиндр массы m погружается, остава-
оставаясь в вертикальном положении, в неподвижную жидкость, плот-
плотность которой р. В начальный момент времени цилиндр находил-
находился в покое и его нижнее основание касалось поверхности жид-
жидкости. Высота цилиндра h, площадь поперечного сечения S,
104
ГЛ 8 ДИНАМИКА ТОЧКИ
Пренебрегая силами сопротивления и полагая т = pSh, найти
скорость цилиндра в тот момент, когда его верхнее основание сов-
совпадет с поверхностью жидкости.
Ответ: v «= Уgh. ч
8.11. Прямой круговой цилиндр массы m движется поступа-
поступательно, вертикально вниз в жидкости. В начальный момент вре-
времени U = 0) его верхнее оспование находилось на поверхности
жидкости и цилиндр имел скорость v0. На цилиндр действует на-
направленная по его оси вниз сила F, величина которой F =»
■= bt (b = const > 0) и сила сопротивления жидкости R = — \iv,
где ц = const > 0, v — скорость цилиндра.
Считая, что величина выталкивающей силы, приложенной к
погруженному цилиндру, равна силе тяжести, найти зависимость
скорости цилиндра от времени.
Ответ:
.-£*
— _
_
* 1
.
— .
1 -
ft
1
-I-
— •-
—.
—— :
X
\\ /
P \ /
1/2 ^
\J
С
tr
К задаче 8 11.
К задаче 8.12.
8.12. Материальная точка массы m начинает двигаться без
начальной скорости из точки А по гладкой направляющей, урав-
2пх
нение которой у = a cos —— ■
Определить силу давления точки на направляющую в тот мо-
момент, когда она проходит через точку В.
Ответ: N = mg A -f 16л8 -V \
8.13. Материальная точка массы m движется по гладкой го-
горизонтальной плоскости Оху под действием силы FU), направ-
направленной параллельно оси х. Модуль силы изменяется по закону
F = bf, где Ъ •= const > 0. Начальная скорость v0 направлена под
углом а < зт/2 к линии действия силы Fit).
Получить уравнение траектории точки.
Ответ: ^^{^f
8 I ДВИЖЕНИЕ ТОЧКИ В ИНЕРЦНАЛЬНОЙ СИСТЕМЕ ОТСЧЕТА
105
8.14. Материальная точка М массы т движется в вертикаль-
вертикальной плоскости по кольцу радиуса R. В начальный момент вре-
времени материальная точка находилась в точке А на горизонталь-
горизонтальном диаметре кольца и ей была сообщена скорость ve. Коэффи-
Коэффициент трения скольжения между точкой и кольцом равен /.
К задаче 8 13.
К задаче 8.i4,
Найти наименьшее значение начальной скорости, при кото-
котором точка М достигнет противоположного конца горизонтального
диаметра кольца. ___
Ответ: v0 — 1 / -. ж- 0 ~Ь е )•
\ A + */)
8.15. Материальная точка Ж массы m движется в вертикаль-
вертикальной плоскости под действием постоянной горизонтальной силы
тяги F, силы сопротивления R = — \а\ (ц = const > 0, v — ско-
скорость точки) и вертикальной подъемной силы Q, величина йото-»
рой О = kvx, где к = const > 0.
Получить уравнение движения точки в направлении оси у,
если в начальный момент врелгени (t — 0) ее положение совпада-
совпадало с началом системы координат, а ее начальная скорость гори-
горизонтальна и равна v0.
Ответ: у —
m kF
t/x) t — т2(ах + а2) (l
к (F - ууо)
s tlx
% где
0
и
Ра
\
\
\ U
x(h) 1 -
гя
К задаче 8.15.
К задаче 8.16.
8.16. Тело массы иг, падавшее на Землю в спокойном возду-
воздухе вертикально, с постоянной скоростью v0 = wig/|j, (p,-= const >'
106 Гл 8 ДИНАМИКА ТОЧКИ
> 0), на высоте h над поверхностью Земли попадает в воздуш-
воздушный поток, который движется горизонтально с постоянной ско-
скоростью и. Сила сопротивления, действующая на тело в воздуш-
воздушном потоке, R13* — y.vr, где vr — скорость тела относительно пото-
потока воздуха.
Определить величину горизонтального отклонения тела ог
первоначального направления его движения в момент падения на
Землю.
-[l~e gx2j\,
Ответ: x(h) — u%\—-,—11 — е / , где т = т/и.
8.17. Материальная точка массы т, прикрепленная к нерастя-
нерастяжимой нити, движется по гладкой горизонтальной плоскости,
преодолевая сопротивление вязкой среды Сила сопротивления
R = — [iv, где ц. = const > 0, v — скорость точки. Нить наматыва-
наматывается на тонкий вертикальный стержень с постоянной скоростью,
равной и. Начальная скорость v0 точки перпендикулярна нити,
а начальная длина нити равна I.
Найти зависимости скорости точки и натяжения нити от вре-
времени. При решении задачи рекомендуется использовать поляр-
полярные координаты.
., 1Р Ш т?2;2*~ т
V 1С ч "IX/гЛ, 6
Ответ: vr=-~u, vp = —^ —, N = flu -| ^—.
j8.18. Используя условия задачи 8.17, найти уравнения дви-
движения точки в полярных координатах и предельное (при t-*-°°)
"значение силы натяжения нити, если скорость наматываемой на
стержень нити не постоянна, а изменяется во времени по зако-
закону и "= ale~a\ где а = const > 0, I — начальная длина нити,
Ответ: г = 1е , <р = -
7 [ ,.!Г.~.. •
^(,=00 =
при
при
-£■ = За,
оо при —— < За.
8.19. Две материальные точки Mt и Мг, массы которых рав-
равны rtii и тпг соответственно, связаны нерастяжимой нитью, про-
проходящей через отверстие в гладкой горизонтальной плоскости.
В начальный момент времени точка М1 находилась на плоскости
на расстоянии г<> от отверстия и ей была сообщена скорость v0
(вектор скорости расположен в горизонтальной плоскости и пер-
перпендикулярен нити). Точка М2, подвешенная на нити, покоилась.
§ 2 ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ ТОЧКИ
107
Составить дифференциальное уравнение движения точки М(
для координаты rit) = OMi. Кроме того, определить величину
К задаче 8 19.
печальной скорости v0 точки Ми при которой точка М2 пе будет
двигаться в вертикальном направлении.
8 2
Ответ: (jnx
г — тх
m%g =
Г
= 0, v0 = у
§ 2. Относительное движение точки
8.20. Материальная точка ,М- массы т движется по гладкой
горизонтальной плоскости под действием сил притяжепия, на-
направленных к центрам О a A: Ft = — сх • ОМ, F2 = —е4 • AM, где
с, ~ const > 0 и с2 = const > 0. Центр О неподвижен, а центр А
движется равномерно и прямолинейно со скоростью и по оси Ох.
В начальный момент времени U = 0) точка М находилась в по-
покое и ее координатами были х0 = 0, уо = d, а подвижный центр А
совпадал с неподвижным центром О.
У\ Vi i
К задаче 8 20.
К задаче 8 21.
Найти уравнения движения точки М в неподвижной системе
координат, а также ее траекторию в подвижной системе коорди-
координат BxiUi, движущейся поступательно и прямолинейно в направ-
направлении оси Ох со CKopocTbioWi^c^a/^+Ca). В начальный момент
времени точка В совпадала с центром О. При решении задачи
обозначить (с^с^/т— к2.
108
гл 8 динамика точки
A \ 2 / \ 2
—-) + I-ТГ-) =1.
и\ I \ й I
8.21- Материальная точка М массы т, находящаяся на глад-
гладкой горизонтальной плоскости, притягивается к подвижному
центру А силой F = — с ■ AM, где с = const > 0. Центр А дви-
движется в той же плоскости равномерно се скоростью и по оси Ох.
При движении точка преодолевает сопротивление среды, причем
сила сопротивления R = — (xv, где ц = const > 0, v — скорость
точки. В начальный момент времени точка находилась в покое
и ее координатами были ха = 0, у« = d, а центр А совпадал с на-
началом неподвижной системы координат Оху.
Найти уравнения движения точки М в системе координат
Axlyi, движущейся поступательно, если ц — 21ст. При решении
задачи обозначить 2т/ и, = т.
Ответ: хл = -lux [l - (l + -£-)*"' т], yi=-d(l + ±-) е~г1\
8.22. Грузу А массы m = 20 кг, находящемуся на поверхно-
поверхности неподвижной плиты В массы wi4 = 80 кг, в момент времени
t ■*= 0 сообщили скорость Vo(i>o = Уозс = 4 м/с). При if = i4 == 2 с пли-
плита начинает двигаться вяево поступательно и прямолинейно по
вакону six) = 0,25т2 м, где x=at — ti. Сила сопротивления движе-
движению плиты по полу R = \xvN, где ц = 0,01 с/м, v — скорость пли-
плиты, N — сила давления плиты на пол. Коэффициент трения сколь-
скольжения для пары груз — плита / == 0,1.
Определить: 1) в какой момент времени Ti скорость груза
относительно плиты будет равна нулю, 2) зпачепие силы G при
т2 =* 6 с, которую нужно приложить к плите для обеспечения
ее движения по заданному закону
six). При вычислениях полагать
g = 10 м/с1.
Ответ: 1) ti«=4c; 2) G = 80H.
Pf"
В
sen
К задаче 8 22.
К задаче 8 23
8.23. Материальная точка М может двигаться в трубке АВ,
которой сообщается поступательное движение в вертикальной
плоскости при помощи кривошипов О А и О1В одинаковой длины г,
вращающихся с постоянной угловой скоростью о. Коэффициент
трения скольжения между точкой М и трубкой равен /. В на-
начальный момент времени точка М находилась на конце А трубки
в состоянии относительного покоя, а трубка и кривошипы рас-
располагались горизонтально.
§ 2 ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ ТОЧКИ
109
Определить перемещение точки М пв трубке за время, соот-
соответствующее четверти оборота кривошипов, если / = 0,2 и ш «=■
- 2T/gf/r.
Ответ: s = 0,806г.
8.24. Материальная точка М движется из крайнего нижнего
положения по шероховатой поверхности бака, имеющего форму
полусферы радиуса R. В начальный
момент времени U = 0) точка на-
находилась в состоянии относительно-
относительного покоя в положении Ма. Бак дви-
движется поступательно и прямолиней-
прямолинейно по горизонтальной плоскости с по-
постоянным ускорением а. Коэффици-
ент трения точки о поверхность ба- к
ка равен /. д
Составить дифференциальное уравнение движения точки М
для координаты s = М0М.
Ответ: s -f- —^ s2 = (а — gf) cos -^- — {g + а/) sin ~.
8.25. Используя условия предыдущей задачи и полагая, что
движение системы началось из состояния покоя, определить, при
каком ускорении а точка М достигнет верхнего края бака, если:
1) поверхность бака гладкая, 2) поверхность шероховатая и f «*=
Ответ: 1) a = g; 2) a — l,79g.
8.26. Бульдозер, движущийся по горизонтальной плоскости
равномерно и прямолинейно со скоростью и, встречает ножом
камень массы т. Камень мгновен-
мгновенно приобретает переносную скорость,
равную и, и одновременно начинает
скользить вдоль ножа (iv@) = 0).
Сила сопротивления движению кам-
камня по горизонтальной плоскости
R = — [*v, где ц = const > 0, v — абсо-
лютная скорость камня. Коэффици*
ент трения скольжения между кам-
/ У
К задаче 8 26
р ду
пем и поверхностью ножа равен /. Угол наклона ножа к направо
лепию движения бульдозера а.
Рассматривая камень как материальную точку и полагая
ctg a > /, найти относительную скорость камня.
Ответ: vr — и (cos a — / sin a) \i — е '
8.27. Сохраняя условия предыдущей задачи, определить, на ка-
какое расстояние s от края ножа будет отброшен камень в направ-
направлении, перпендикулярной и. При решении задачи полагать, что
промежуток времени, в течение которого камень скользит по
ГЛ 8. ДИНАМИКА ТОЧКИ
поверхности ножа, значительно больше т = m/\i. Поэтому отно-
относительную скорость камня й момент достижения им края ножа
считать равной предельному значению этой скорости vr =
•= h(cosoc — /sin a).
Ответ: s = ut(cos а — / sin а) sin а.
8.28. Самолет массы m совершает посадку на палубу авиа-
авианосца, движущегося прямолинейно с постоянной скоростью и =
= 8 м/с. Абсолютная скорость самолета в момент его посадки на
палубу Vo — 60 м/с. Сила сопротивления, действующая яа само-
самолет со стороны тормозного, парашюта R = —|xv, где ц, = const > 0r
v — абсолютная скорость самолета. Сила F сопротивления от тор-
тормозов шасси имеет постоянную величину.
Определить путь, пройденный самолетом по палубе до оста-
остановки, если u,i>o = 1,5 wig, F = 0,3 mg, g = 10 м/с2.
Ответ: s =. h>[v0 — и — [и + —) In (l + "р ~ " Л"] = 105,5м.
Ч I "+£JJ
8.29. Самолет массы ш, движущийся горизонтально и прямо-
прямолинейно со скоростью Vo, совершает посадку па палубу авиа-
авианосца, который движется равномер-
равномерно со скоростью и по дуге окружно-
' ^^^ сти радиуса R. Сила сопротивления,
_^-^*х создаваемая тормозным парашютом
Ri = — (xv, где ц, = const > 0, v—аб-
v—абсолютная скорость самолета
Найти смещение самолета от осе-
осевой линии посадочпой полосы в мо-
момент его остановки. При решении
К задаче 8.29. задачи полагать, что размеры палу-
палубы авиано'сца значительно меньше R.
Л2 ( 2v и v \
Ответ: Ушах = —б— т—■ т. 3 In — 1 ), где т = wi'u.
.1
о
8.30. Самолет массы т перед взлетом разюняется, двигаясь
по дуге экватора Земли с запада на восток. При этом возникает
вертикальная подъемная сила Ya = kvz, где к = const > 0, v —
скорость самолета относительно Земли.
Пренебрегая изменением массы самолета и учитывая суточ-
суточное вращение Земли, определить: .
1) скорость Vi самолета относительно Земли в момент взлета;
2) насколько «взлетная» скорость vi самолета при его разгоне
в направлении с запада на восток' будет отличаться от «взлет-
«взлетной» скорости Vi при разгоне в противоположном направлении.
При решении задачи,, полагать /?земЛИ = 6400 км, к/т = 3 1/км,
(ОзеМЛИ = 0,25 1/ч, g = 12,96 X 104 км/ч2.
Ответ: 1) yt = 207,76 км/ч; 2) Av = vz-vt «0,17 км/ч.
8.31. При посадке на экваторе с выключенным двигателем и
выпущенным тормозным парашютом самолет массы пг движется
§ 2 ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ ТОЧКИ Щ
По Земле с севера на юг. При этом подъемная сила Ya = 0, сила
сопротивления воздуха Ха = — jxv (ц = const > 0, v — скорость са-
самолета относительно Земли), сила трения F (F — / • N, где / =•
==0,1, N — сила нормального давления самолета на Землю).
Пренебрегая кривизной посадочной полосы (меридиана) и
учитывая сугочное вращение Земли, определить время движения
самолета до остановки, если его относительная скорость в момент
ПОСаДКИ Vo = 200 КМ/Ч, Ц.//П = 60 l/ч, СОземли = 0,25 l/ч, #3емли =■
= 6400 км, g = 12,96 X 104 км/ч2.
Ответ: t =■ — In [l Н ^ 1 « 0,0109ч.
- ЛЗемли «Земли
1 « 0,
J
[ ( З Зе J
8.32. Самолет массы m совершает посадку на воду на эква-
экваторе Земли, при выключенном двигателе. По воде он движется
с севера па юг, преодолевая силу R сопротивления воды, модуль
которой R = jj,i/'5 (|х = const > 0, v — скорость самолета относи-
относительно Земли).
Пренебрегая кривизной меридиана и учитывая суточное вра-
вращение Земли, определить путь, пройденный самолетом до оста-
остановки, еечи его относительная скорость в момент посадки v<> =
= 25В км/ч и ц/m = 40 (км • ч)-0-5.
Ответ: s = 0,8 км.
8.33. Материальная точка М массы тп приводится в движе-
движение по неподвижной гладкой горизонтальной плоскости прямой
лопаткой, вращающейся с постоянной угловой скоростью <а во-
вокруг вертикальной оси, проходящей через точку О. Движению
точки по плоскости препятствует сила сопротивления R = — jxv
{^ == const > 0, v — абсолютная скорость точки) и сила трения
точки о поверхность лопатки (коэф-
(коэффициент а рения скольжения /).
К задаче 8 33. К задаче 8.34.
Найти уравнение движения точки М относительно лопатки,
если в начальный момент времени (£=»0) точка М находилась
относительно лопатки в покое на расстоянии ОМй -= I от оси вра-
вращения и имела переносную скорость ve0 — al.
Ответ: x=l (ch kt + -J-sh А*)*""*. где п - -^- + о/,
()
8.34. Материальная точка М массы m приводится в движя-
ние по неподвижной горизонтальной плоскости Г-образной ло-«
112 гл 8 динамика точки
паткой, вращающейся с постоянной угловой скоростью <а вокруг
вертикальной оси, отстоящей на расстоянии I от плоскости ло-
лопатки. Движению точки препятствует сила сопротивления R =
■= —Jliv, где ц. = const > 0, v — абсолютная скорость точки М.
Пренебрегая трением точки о поверхность лопатки,- наши
уравнение ее относительного движения, если м = 2иУC/п) и при
t «= 0 х =» I, vr = vx = 0.
Ответ: a: = -s- \e + 4e — 3/.
8.35. Материальная точка М массы пг приводится в движение
по неподвижной горизонтальной плоскости криволинейной ло-
лопаткой, вращающейся равномерно с
угловой скоростью <й вокруг верти-
вертикальной оси, проходящей через точ-
точку О. Профиль лопатки — дуга ок-
руЖности радиуса R.
Составить дифференциа яьное
уравнение движения точки относи-
относительно лопатки, еслп сила сопротнв-
К задаче S 35. ления, действующая на точку со сто-
стороны плоскости, пропорциональна
абсолютной скорости точки (коэффициент пропорциональности
и, > 0), а коэффициент трения скольжения между точкой и ло-
лопаткой равен /.
Отвеп s + 2 (» +©/) s + -L s2 = a2R \U -
()()]
sin -i-
8.36. Сохраняя условия предыдущей задачи, определить абсо-
абсолютную скорость точки М в тот момент времени, когда она до-
достигнет конца Л лопатки, если О А = лй/3. Движение точки на-
начинается из состояния относительного покоя, когда s0 = л/?/6.
Трением точки о плоскость и лопатку пренебречь.
Ответ: 1> = О,936со#.
8.37. Материальная точка М массы пг приводится в движение
по неподвижной горизонтальной плоскости прямой лопаткой,
вращающейся с постоянной угловой скоростью <а вокруг подвиж-
подвижной вертикальной оси, проходящей через точку О. Ось вращения
лопатки движется прямолинейно с
постоянной скоростью и. Движению
точки М препятствует сила трения
о горизонтальную плоскость R =■
= —|xv, где |x = const>0, v — ско-
скорость точки относительно плоскости.
Определить перемещение точки
М вдоль лопатки за время tlt coot- К чадач° 8 37.
§ 2 ОТНОСИТЕЛЬНОЕ ДВИЖЫШЕ ТОЧКИ
ветствующее четверти полного оборота лопатки, если п = -^- =»
3
= -7-со и при t = 0 х = О, vr = уж = 0, ф = 0.
Ответ: xiti) = 1,51 и/м.
8.38. Матерпальная точка М массы m движется из состояния
относительного покоя в точке О по гладкой трубке, вращающей»
ся с постоянной угловой скоростью <й вокруг „
вертикальной оси. Расстояния от нижнего и
верхнего концов трубки до оси вращения равны
R и 27? соответственно, угол между осью враще-
вращения и трубкой а =30°.
Найти вертикальную составляющую абсолют-
абсолютной скорости точки в момент вылета из трубки,
если и2 = 2 J- ctg a.
Ответ: vv = 2,28 /р.
8.39. Кольцо (материальная точка М) массы
тп движется по гладкому обручу радиуса R. Об-
Обруч вращается в своей плоскости с постоянной
угловой скоростью и вокруг вертикальной оси,
проходящей через точку О. В начальный момент времени коль-
кольцо находилось в состоянии относительного покоя в положении,
соответствующем ф0 = я/2.
Определить максимальную величину радиального давления
кольца па обруч.
Ответ:
н
К вадаче 8 38.
К задаче 8 39.
К задаче 8.40.
8.40. Кольцо (материальная точка М) массы m движется и»
состояния относительного покоя по обручу радиуса г, преодоле-
преодолевая силу сопротивления R = — цуг, где ц = const > 0, vr — ско-
скорость кольца относительно обруча. Обруч вращается в своей пло-
плоскости вокруг вертикальной оси, проходящей через центр обруча
с угловой скоростью ю = шоA — е~'/т), где <й0 = const >0 и т =
= const > 0.
8 Под чед It С Колесникова
114
ГЛ 8 ДИНАМИКА ТОЧКИ
К задаче 8 41.
Найти предельное (при t-*°°) расстояние, которое пройдет
кольцо М в относительном движении, если т = т/\к.
Ответ' Sap = Г(Л0Х.
8.41. К диску, вращающемуся с постоянной угловой скоростью
<й вокруг вертикальной оси, перпендикулярной плоскости диска
и проходящей через его центр О„
прикреплен гладкий стержень А В,
вдоль которого скользит кольцо М
массы т. Стержень параллелен
плоскости диска, и расстояние меж-
между ним и осью вращения диска
равно I. К кольцу с двух стороп при-
прикреплены концы двух одинаковых
пружин, коэффициенты жесткости
которых с. Вторые концы этих пру-
пружин закреплены на концах стерж
ля. В средней точке стержня АВ
кольцо М находится в относительном равновесии ц пружины
при этом не деформированы.
Найти закон движения кольца по стержню, если оно было
отклонено от положения относительного равновесия на рассто-
расстояние, равное #о, и отпущено без начальной скорости.
Ответ: х — хвcosI у — — со2-п при — > <а2,
х=хоск[у со2 — ~tj при ^<со2.
8.42. Сохраняя условия предыдущей задачи и считая, что при
движении кольца М по стержню возникает сила трения скольже-
скольжения F = jN (f — const > 0; N — сила нормального давления коль
ца на стержень), найти закон относите ль ного движения кольца
В начальный момент времени х@) = ха, х@) = 0. Считать, что
1 = 0; при определении силы N силой тяжести пренебречь.
Ответ:
х =
£ &in кЛ
'/cos к
1 Uh ktt + ~ sh к А
где kt = ]/^ — tu2 A -f /J),
где k2 - |/©2 A + f) - К
8.43. Материальная точка М массы пг движется в прямоли-
прямолинейной горизонтальной трубке, вращающейся с постоянной угло-
угловой скоростью <й вокруг вертикальной оси OiO2, расположенной
на некотором расстоянии от пее. При движении по трубке точка
преодолевает силу сопротивления R = —цуг, где u, = const > 0,
vr — относительная скорость точки. В начальный момент време-
времени точка М находилась в трубке на расстоянии а от точки О п
состоянии относительного покоя.
§ 3 СМЕШАННЫЕ ЗАДАЧИ
Найти уравнение движения точки по трубке,
а
Ответ:
Л)
где
JL
± у [&.
8.44. Материальная точка М массы т движется в трубкег
изогнутой по дуге окружности радиуса г. Трубка вращается во-
вокруг вертикальной оси, перпендикулярной плоскости трубки и
Л
К задаче 8 43.
проходящей" через центр кривизны трубкп, с угловой скоростью
о =■= соо @,5 — е~п1х), где соо = const > 0, т — const > 0. Точка
преодолевает силу сопротивления R=— \i\T, где ц = const >0r
v, — относительная скорость точки. В начальный момент време-
времени (t = 0) точка находилась в трубке в состоянии отпосительно-
10 ПОКОЯ.
Определить абсолютную скорость точки при t = T, если
Ответ: v (Т) = coor Be'iT/x - е1™ - 0,5).
„-2Г/Т e-llT/m
§ 3. Смешанные задачи
8.45. Тело массы т падает на Землю вертикально, преодоле-
преодолевая силу сопротивления воздуха R = — jxv, где |j. = const>0, v —
скорость тела. На высоте h, когда скорость тела равна vt, вклю-
включается тормозная установка, создающая силу F = kmg (к —
= const > 0), вектор которой направлен вертикально вверх.
Считая, что тормозная установка работает до момента при-
приземления тела, определить, при каком значении h скорость тела
при приземлении будет равна нулю.
-],
Ответ: h = vxx — (к — 1).
где т = m/\i.
(к-I)
8.46. Спускаемый аппарат космического корабля массы пг >
= 800 кг, который опускается на Землю вертикально, должен
быть заторможен так, чтобы его посадочная скорость была равна
8*
116
ГЛ 8 ДИНАМИКА ТОЧКИ
нулю. Тормозной двигатель включается на высоте Н = 500 м
над поверхностью Землд при скорости спускаемого аппарата va ==•
~= 50 м/с и создает силу тяги FT, направленную вертикально
Определить, при каком законе (FT = const или F^ = At, где
А = const >0) изменения силы тяги расход топлива нд участке
торможения будет меньше. Полагать, что секундный расход топ-
топлива прямо пропорционален силе тяги, a g = 10 м/с2. Изменени-
Изменением массы спускаемого аппарата и действием на него аэродинами-
аэродинамических сил пренебречь.
Ответ: при Ft=At расход топлива составит 60% от расхода
при FT = const.
8.47. Прямой цилиндр массы m начинает двигаться поступа-
поступательно вверх по вертикали со скоростью v0 в неподвижной жид-
жидкости, плотность которой р. В начальном положении ось цилинд-
цилиндра вертикальна, расстояние от поверх-
поверхности жидкости до нижнего основания
цилиндра равно Н. Площадь поперечно-
поперечного сечения цилиндра 5, высота h. Co
стороны жидкости на цилиндр действу-
действуют выталкивающая (архимедова) сила
и сила сопротивления, модуль которой
Ri = \iiVz, где u-i = const > 0, v — ско-
скорость цилиндра.
После достижения поверхности жид-
жидкости верхним основанием цилиндра
К задаче 8 47. ~ действующей на него силой сопротивле-
сопротивления становится R2 = —|x2v, где |х2 =
— const > 0.
Найти уравнение движения цилиндра после выхода из жид-
жидкости его верхнего основания, если m = pSh, jx2 = 2VgpS7n.
Ответ: х
vote
2m при х < h.
8.48. Тело массы m.i брошено вертикально вверх с поверхности
Земли с начальной скоростью v0. Движеппе тела происходит под
действием силы притяжения к Земле, принимаемой постоянной
и равной m{g, а также силы сопротивления, модуль которой Q =
== ци2, где |х = const > 0, v — скорость тела.
На высоте h от тела мгновенно отделяется материальная точ-
точка массы тп с относительной скоростью и, направленной верти-
вертикально вверх. Модуль силы притяжения точки к Земле изменя-
( R \2
ется по закону F = тё\ъ \х) > гДе ^ — радиус Земли, х — рас-
расстояние от поверхности Земли до точки.
Пренебрегая действием силы сопротивления на точку, опре-
определить наибольшую высоту ее подъема над поверхностью Земли,
§ 3 СМЕШАННЫЕ ЗАДАЧИ
117
При решении задачи считать, что 2\ih = m^ In 2, \iv\ =
Ответ: И = ■
8gR' (Я + Л)
8.49, Материальная точка М маесы тп движется прямолиней-
прямолинейно по гладкой горизонтальной плоскости под действием силы от-
отталкивания от неподвижного центра Ot. Модуль силы отталкива-
отталкивания Fi = br3, где Ъ = const > 0, г = О1М. В начальный момент вре-
времени (т = 0) точка находилась в покое на расстоянии г0 от цент-
центра Oi. В некоторый момент времени при r=ri — OiMi действие
силы F, прекращается и па точку начинает действовать сила F2 =
— —с ■ OZM (c = const > 0), притягивающая ее к центру О2. Центр
Ог движется в горизонтальной плоскости по прямой, перпендику-
перпендикулярной оси Otx и отстоящей от центра О, на расстояние гг. Урав-
Уравнение движения центра О2 имеет вид s — at, где а = const > 0;
время t отсчитывается от момента
прекращения действия силы F^
iSv1
X
К задаче 8 49.
К задаче 8.50.
Найти закон движения точки М в системе координат Оху под
действием силы F2, если п = 2г0. При решении задачи обозначить
dm = k\
Ответ, х -= (гг — r2) cos kt +
15&
271
sin kt, у = at
т- sin kt.
8.50. Тело А массы М движется из состояния покоя поступа-
поступательно и прямолинейно по гладкой горизонтальной плоскости
Оху под действием силы F, направленной по оси Ох. Модуль
этой силы изменяется по закону F = F0(l — у-],где 7^ = const >
> 0 и Т = const > 0.
В момент времени t — Т от тела в направлении, перпендику-
перпендикулярном его траектории, отделяется с относительной скоростью
и материальная точка В массы тп, которая движется в той же
плоскости, что и тело. На точку действуют: сила Q, направлен-
направленная под постоянным углом а к траектории тела A {Q~Q0e~2tx,
где фи «= const > 0, т — const > 0), и сила сопротивления воздуха
R = — |xv, где |x = const>0, v — скорость точки. Время t отсчи-
ишвается от момента отделения точки В от тела А.
118
ГЛ 8 ДИНАМИКА ТОЧКИ
т =
Найти закон движения точки В по траектории, если а = 60°,
т
2М
Л/
2т'
s(t) =
„-</*>
Ответ:
8.51. Материальная точка М массы m начинает двигаться и*
состояния покоя по гладкой трубке' длины I, которая лежит на
наклонной плоскости, образующей угол а с горизонтом. Угол
между трубкой и линией наибольшего ската наклонной плоско-
плоскости равен р. После вылета из трубки точка движется по наклон-
наклонной плоскости, преодолевая силу сопротивления R = — jiv, где
\i = const, v — скорость точки.
Полагая наклонную плоскость достаточно протяженной, най-
найти величину предельного (при t -*■ °о) удаления точки от оси
абсцисс системы координат Оху, если а = ^ = 45°.
Ответ: упр =~
A
2'
«К
0
У
, i
\
■
>
К задаче 8 51.
К задаче 8 52.
8.52. Материальная точка массы m движется из состояния
покоя по шероховатой плоскости, наклоненной под углом акп-
ризонту, и попадает в прямоугольный бак с жидкостью. Началь-
Начальная высота точки над поверхностью жидкости равна h, коэффи-
коэффициент трения скольжения точки о плоскость /, высота бака /7,
ширина I. При движении в жидкости точка преодолевает силу
сопротивления R = — jxv, где ц. = const > 0, v — скорость точки.
Найти величину промежутка времени Т от момента попада-
попадания точки в бак до ее удара о стенку и глубину, на которой
2
произойдет удар, если а = 45е, f = 0,25, I = ¥• V^Sgh; —j- < (Н —
— /) Выталкивающей (архимедовой) силой пренебречь.
Ответ: Г = -1п2;
, (Г) = ИЦ. AП 2 _ 0,5) + /.
g 3 СМЕШАННЫЕ ЗАДАЧИ
119
8.53. Планер массы т разгоняется из состояпия покоя по го-
горизонтальной плоскости с помощью катапультирующего устрой-
устройства, создающего горизонтальную силу THraF(F=F0(l—j-j,
где Fo = const > 0, s — координата планера на прямолинейном
участке 0,0, / — длина участка разгона). При s = l действие
катапультирующего устройства прекращается. Дальнейшее дви-
движение планера происходит в вертикальной плоскости Оху под
действием силы тяжести и аэродинамической силы Q с проекция-
проекциями Qx = — \ivx, Qv = kvx, где |х = const>0, к — const> 0, vx —
проекция вектора скорости планера на ось Ох.
Найти зависимость от времени вертикальной составляющей
скорости планера после его отделения от Земли. Силами сопр >-
тивления, действующими на планер на участке разгона, пре-
пренебречь.
Ответ:
где т=-.
К задаче 8 53
К задаче 8 54.
8.54. Тело массы т. начинает движение в воде на глубине h
с вертикальной скоростью v0 и движется вверх, преодолевая силу
R4 сопротивления воды. Модуль этой силы /?i = |Xii>2, где |xf =
= const > 0, v — скорость тела. После выхода тела из воды на
него в течение Т секунд действует сила F = const, линия действия
которой в течение всего отрезка времени наклонена под углом
а. — 30° к горизонту. Сила сопротивления воздуха R2 = — ^2v, где
|i2 = const > 0.
Пренебрегая выталкивающей силой, действующей на тело в
воде, найти высоту И его подъема над поверхностью воды в мо-
момент окончания действия силы F, если F = Amg, (х,у0 = 2цг,
2\ixh = m In
mg
Ответ:
и поле сил тяжести однородно.
mg T
( ~—Т \
■\е m —!)■
120
ГЛ. 8. ДИНАМИКА ТОЧКИ
8.55. Лыжник массы m, находящийся на вершине горы высо-
высоты h, за счет толчка приобретает скорость v0 и скользит вниз по
склону в вертикальной плоскости. Вначале траекторией лыжника
является дуга окружности радиуса г = h, затем траекторией ста-
становится прямая линия — касательная к дуге окружности в точке
А и наклоненная под углом а = 30° к горизонту. Сила сопротив-
сопротивления, возникающая при движении лыжника на прямолинейном
участке, R = —jxv, где ц = const >0, v — скорость лыжника.
Найти закон движения лыжника на прямолипейном участке
спуска, пренебрегая силами сопротивления на криволинейном
участке и полагая v0 = Q,\gh.
Oreer: .- f [i - ± (Щ. - 1,92,.) (l
К задаче 8.55.
К задаче 8.56.
8.56. Материальная точка массы т движется из состояния от-
относительного покоя по гладкому пазу диска радиуса г, вращаю-
вращающегося с постоянной угловой скоростью <й вокруг вертикальной
оси, проходящей через центр диска перпендикулярно его плос-
плоскости. Паз находится на расстоянии I = г/2 от центра диска.
В момент начала движения координата материальной точки х =
•= ха =* г/3. После вылета из паза точка продолжает двигаться по
горизонтальной плоскости, преодолевая силу сопротивления R =*
•= — M.v, где ц = const > 0, v — абсолютная скорость точки.
Найти путь, пройденный точкой по плоскости до остановки.
Ответ; s = 1,56шсог/ц.
8.57. Материальная точка М массы пг движется в прямоли-
прямолинейной гладкой трубке длины I, которая вращается в горизон-
горизонтальной плоскости с постоянной угловой скоростью <й вокруг вер-
вертикальной оси, проходящей через ее конец. В начальный момент
времени точка находилась на расстоянии а от оси вращения и
имела скорость v0 = аа>, направленную от оси вращения вдоль
трубки. После вылета из трубки точка движется по горизонтальной
§ i. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
121
плоскости, преодолевая силу сухого трения. Коэффициент трения
скольжения равен /.
Определить путь, пройденный точкой по плоскости до оста-
остановки.
Ответ: s— ~тт—-
8.58. Материальная точка М массы m движется из состояния
относительного покоя по наклонной грани прямоугольной призмы
вследствие того, что сама призма
движется поступательно и прямо-
прямолинейно по закону s(i) = @,5gX
Xtga)i2 + b£3 (b = const>0, a —
угол наклона грани призмы к го-
горизонту). Сила сопротивления
движению точки по призм» R! =
= — HiVr, где \ii — const > 0, v, —
скорость точки относительно приз-
призмы. Через Т секунд после начала движения точка покидает
призму и продолжает движение в воздухе, преодолевая силу
•сопротивления R2 = — \i2\, где \iz =? const > 0, \ — скорость точки.
Найти высоту 'h точки над горизонтальной плоскостью, про-
проходящей через верхнее ребро призмы, как функцию времени
{время отсчитывается от момента схода точки с призмы). При
решении задачи полагать Т = т/ц,,, Ъ = g^e/m (e — основание
натурального логарифма), a —15°. Обозначить: m/\ii — Xi,
= т2.
Ответ: h (t) =-#т2 [(т2 + Зтх/2) (l — e~t/x*) ~ t].
К задаче 8.58.
Глава 9
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
§ 1. Теорема об изменении количества движения.
Теорема о движении центра масс механической системы
9.1. По борту стоящего свободно на воде катера массы 600 кг
и длины 5 м с носа на корму переходит человек массы 80 кг.
Пренебрегая сопротивлением воды, определить направление и
величину перемещения катера.
Ответ: вперед на 0,59 м.
9:2. С кормы катера массы 600 кг, стоящего перпендикуляр-
перпендикулярно причалу, на причал прыгает человек массы 60 кг.
Какую скорость v приобретет при этом катер, если скорость
человека относительно катера в момент отталкивания от него
равна 2,75 м/с?
Ответ: v = 0,25 м/с.
122 гл 9- ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
9.3- В условиях задачи 9.2 определить путь s, который прой-
пройдет катер до остановки, если со стороны воды на него действует
сила сопротивления R = —av, где a — 50 Н • с/м.
Ответ: s — 3 м.
9.4. Космический корабль массы 4000 кг при стыковке под-
подходит к орбитальной станции массы 12 000 кг с относительной
скоростью а (и = 0,4 м/с).
Как изменится скорость станции сразу после стыковки?
Ответ: станция получит приращение скорости, равное 0,1 м/с,,
направленное по вектору относительной скорости.
9.5. По понтонному мосту А массы М движется автомобиль
массы m по закону s(t) = b(at + e~at — 1).
sit)
К задаче 9.5.
Пренебрегая сопротивлением- воды и течепием, определить:
i) скорость vA, с которой двигался бы мост, если его не скрепить
с берегом; 2) силу Т натяжения тросов, удерживающих мост.
^ л\ mho. I. . —at\
Ответ: 1) vA = -тт-г—U—£ ) и направлена в сторону,
противоположную движению автомобиля; 2) T=mbc£e~at.
9.6. Определить скорость vA незакрепленного моста, рассмот-
рассмотренного в задаче 9.5, учитывая, что со стороны воды на него
действует сила сопротивления R = — \л\л {\i~ const>0).
Ответ: мост будет двигаться в сторону, противоположную
движению автомобиля со скоростью:
mba2 -at
мТ^te при a =
где
9.7. Однородный стержень ОА длины / и массы m расположен
в вертикальной плоскости и шарнирно связан со стержнем ВС
массы Зтп, имеющим возможность двигаться в горизонтальных
направляющих К и L. Стержень ОА срывается с выступа N а
падает на стержень ВС. —
Пренебрегая трением в опорах, определить смещение, которое
получает при этом стержень ВС.
Ответ: стержень ВС сместится влево на i/lQ.
§ 1 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
123
К задаче 9.7.
9.8. Два тела масс т, и т2,
связанные между собвй пру-
пружиной с коэффициентом жест-
жесткости с, лежат на горизонталь-
горизонтальной гладкой поверхности.
К задаче 9.8.
Определить ненулевую частоту собственных колебаний си-
системы.
Ответ: <*1=С-^±!^-
9.9. В стиральной машине типа «Эврика-3», схематически
изображенной на рисунке, стирка и отжим белья происходят и
барабане с горизонтальной осью вращения.
Определить горизонтальное дви-
движение машины при отжиме, если
масса Мокрого белья равна 5 кг, сме
• щение ОС его центра масс относи-
относительно оси вращения барабана рав-
равно 0,085 м, скорость вращения ба-
барабана при отжиме равна 380 об/мин,
а масса самой машины равна 80 кг.
Трением в осях опорных роликов
и их массой пренебречь,
совершать колебания с амплитудой
К задаче 9.9.
Ответ: машина будет
0,005 м и частотой 39,8 рад/с F,3 Гц).
9.10. В условиях задачи 9.9 определить силу давления маши-
машины на пол в процессе отжима.
Ответ: N = 833 + 673,2 cos 39,8г Н (угол поворота барабана
отсчитывается от положения,
когда центр масс белья нахо-
находится в нижней точке).
9.11. На вертикальной пла-
пластине Е, связанной с плитой
D, лежащей на горизонталь-
горизонтальной гладкой плоскости, укреп-
укреплен механизм эллипсографа.
Кривошип ОС длины I начина-
начинает вращаться с постоянной уг-
угловой скоростью ю.
Определить закон движения
плиты, если массы ползунов
А и В равны пг, масса плиты
К задаче 9.11.
124
ГЛ 9. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
с пластиной равна 16т, а массы кривошипа и линейки пре-
пренебрежимо малы. В начальный момент плита D находилась в по-
покое, ползун А занимал крайнее правое положение.
Ответ: б (t) = -у A — cos <et).
9.12. Решить задачу 9.11 для случая, когда плита находится
на гладкой наклонной плоскости с углом наклона а = 30°. В на-
начальный момент плита находилась в покое.
Ответ: б (t) = Zj- + -у A — cos (at).
9.13. Механизм, рассмотренный в задаче 9.11, помещен па
юризонтальную шероховатую плоскость.
Определить, при каком значении угловой скорости ю плита
будет скользить по плоскости, если угол трения между плитой и
плоскостью равен q>.
Ответ: w > 3|/ -|-sin(p.
9.1-4. Призма DEFH массы 6т находится на гладкой горизон-
a(t) ' тальпой плоскости. По стороне DE
~ призмы, составляющей с горизонтом
угол а = 60°, катится без скольжения
каток С массы 2т под воздействием
нерастяжимой нити, обмотанной вокруг
него. Барабан А массы т и радиуса
г наматывает нить, вращаясь по закону
<рШ = 0,5е£2 рад.
Учитывая, что блок В имеет массу
т, определить закон движения призмы,
если при t = 0 она находилась в покое.
Ответ: bit) = 0,025erf2.
что перемещению
V777777/
tit)
К задаче 9 14
9.15. Решить задачу 9.14, предположив,
призмы по горизонтальной плоскости препятствует пружина с ко-
йффициентом жесткости с. В начальный момент времени призма
находится в покое, пружина не'
нагружена.
Ответ:
X
l — cos
_£_
10m
)•
В
9.16. На плите D, лежащей на
горизонтальной гладкой плос-
плоскости, установлен механизм, в ко-
котором используются два наглухо
соединенных между собой взаим-
взаимно перпендикулярных ползуна С,
обеспечивающих стержню АВ по-
№ t
К задаче 9.16.
§ 2 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
ступательное движение. Кривошип ОА, представляющий собой
однородный стержень длины I и массы т, вращается вокруг оси
О с постоянной угловой скоростью а. Масса стержня АВ рав-
равна 4т, масса ползунов С равна2т, масса остальной конструкции
20т.
Определить: 1) закон горизонтального движения плиты bit);
2) силу N(t) давления плиты на плоскость; 3) угловую скорость
вращения акр, при-которой плита начинает подпрыгивать. При-
Принять 6@) = 0.
Ответ: 1) 8(£) = -g-(l — coscoi);
2) N (t) = 21_mg — 6,5 maH sin at;
9.17. Определить закон горизонтального движения плиты D
механизма, рассмотренного в задаче 9.16, если со стороны гори-
горизонтальной плоскости на нее действует сила сопротивления R =
— — цув, где ц = const > 0, Vd — скорость плиты.
Ответ: б (t) = -тг " 2 [со {e~nt — cos at) -j- n sin atJ, где п —
= (x/B7m).
§ 2. Теорема об изменении кинетического момента.
Дифференциальное уравнение вращения твердого тела
вокруг неподвижной оси
9.18. Для ликвидации вращения орбитальной космической
станции с угловой скоростью а0 вокруг оси Oz, являющейся од-
одной из главных осей инерции, использованы два одинаковых
управляющих ракетных двигателя, создающих, пару сил тяги о
плечом d в плоскости, перпендикулярной оси вращения.
Определить величину импульса тяги каждого двигателя, если
известно, что момент инерции станции относительно оси Oz ра-
равен J.
Ответ: S^JaJd.
9.19. Орбитальная космическая станция вращается вокруг оси
Oz, являющейся одной из ее главных осей инерции, с угловой
СКОРОСТЬЮ йH-
До какой угловой скорости относительно станции аг необхо-
необходимо раскрутить находящийся внутри станции маховик, ось ко-
которого совпадает с осью вращения станции, чтобы угловая ско-
скорость вращения станции уменьшилась в два раза? Момент инер-
инерции маховика t\ = 0,01/, где /— момент инерции самой станции
относительно оси вращения. В начальный момент маховик отно-
относительно станции не вращался.
Ответ; (ог = —j—- -£- = 50j5(o0.
126
ГЛ. 9. ОБЩИЕ ТЕОРЕМЫ ДИНАЛШКИ
9.20. Горизонтальная платформа, представляющая собой од-
однородный диск радиуса R и массы М, вращается вокруг верти-
.кальной оси с угловой скоростью ю0. На платформе на расстоянии
d = 0,4/? от оси вращения находится
маховик, ось которого вертикальна.
Он представляет собой однородный
диск радиуса г = 0,2Я и массы т =
==0,1Л/. В начальный момент маховик
относительно платформы не вращался.
До какой угловой скорости юг от-
относительно платформы необходимо рас-
раскрутить маховик, чтобы платформа
остановилась? Сопротивлением враще-
вращению пренебречь.
Ответ: шг = ( М
К задаче 9.20. = 259ю0.
9.21. В условиях задачи 9.20 определить, какова будет угло-
угловая скорость и>1 в_ращения платформы, если маховик раскрутить
в сторону вращения платформы до относительной угловой ско-
скорости ©г = 49ю0.
30
Ответ: щ «= -й-й0.
9.22. Исполнительный механизм промышленного робота вра-
вращается с угловой скоростью ш0 вокруг вертикальной оси. Щтан-
га АВ, несущая на конце В «схват», находится в положении, при
котором ось вращения прохо-
проходит через середину ее длины.'
Какова будет скорость вра-
вращения (ot, если штанга выдви-
выдвинется горизонтально так, что
конец А будет находиться на
оси вращения? Как изменится
скорость вращения, если после
этого штанга повернется в вер-
вертикальной плоскости на угол ос.
При решении задачи предпо-
предполагать, что ' момент привода
уравновешивается моментом сил
трения в опорах, штангу считать однородным стержнем массы m
и длины /, «схват»—точечной массой М, сопротивлением воз-
воздуха пренебречь. Момент инерции остальных вращающихся
частей механизма равен /,
Ответ:
К задаче 9.22.
12/ + (iml2 + 12Mi2) cos2a
§ 2. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
127
9.23. Космическая станция с кольцевым и радиальными кори-
коридорами движется поступательно со скоростью v, перпендикуляр-
перпендикулярной плоскости DD. Космонавт, находящийся в точке А, начинает
двигаться по кольцевому коридору с относительной скоростью и.
Определить величину угловой скорости, которую приобретает-
в результате этого станция.
Станцию считать симметрич-
симметричным телом массы М, центр
масс ее В находится в точке
пересечения оси симметрии Oz
с плоскостью DD, радиус инер-
инерции станции относительно оси
Oz p = ОД/?. При решении за-
задачи космонавта считать ма-
материальной точкой массы т =
= 0,005М. Определить также
К задаче 9.23.
1
приращение скорости центра
масс станции В.
Ответ: со = -=- -з
Р М + ,.
R* m + 1
ции приобретает дополнительное движение в плоскости DD со-
= 0,00771-^-; центр масс стан-
станскоростью Avb~
М
/Г
= 0,00494и.
9.24. Для создания искусственной тяжести в кольцевом кори-
коридоре космической станции, рассмотренной в задаче 9.23, ее рас-
раскрутили с помощью ракетных двигателей вокруг оси Oz до угло-
угловой скорости оH. В м'омент раскрутки космонавт находился в
центре, на оси вращения станции. -
Как изменится угловая скорость вращения станции, если
космонавт, двигаясь по радиальному коридору, достигнет коль-
кольцевого коридора (точки А). - "
Ответ: to ==
<•>„
=■ 0,9923ш0.
М
9.25. К ведущему валу привода, имеющему момент инерции /,
приложен постоянный вращающий момент М. После того как
вал приобретет угловую скорость о>о, к нему подключается с по-
помощью муфты сцепления А ведо-
ведомый вал, имеющий момент инерции.
Л = ЗУ.
Учитывая, что на ведомый вал
действует момент сил сопротивле-
сопротивления, пропорциональный угловой ско-
К задаче 9.25. Рости М» = а@- гДе а = const > 0„
128
ГЛ. 9. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
определить закон изменения угловой скорости системы после
включения муфты. Считать, что муфта включается мгновенно.
Ответ: а>@ = 0,25ш0е iJ -\-~^\i - e 4
9.26. Решить задачу 9.25, полагая, что момент сопротивления
на ведомом валу пропорционален квадрату угловой скорости Мс —
= fito2, где ^ = const > 0. Выяснить, при каком значении j}Itp угло-
ная скорость системы после включения муфты будет оставаться
постоянной. Определить угол поворота системы как функцию
времени t.
Ответ: ©(*)=
% sh yt + 4 |/"^|
= IGM/ah Ф @ = -¥- In fch v< 4- — l/"-4 sh v* I
p \ 4'Af • /
К задаче 9.27.
9.27. Для торможения вращающегося
в жидкости тела, имеющего момент инер-
инерции J и угловую скорость вращения (оо
используется гидродинамический тор-
тормоз, представляющий собой стержень АВ,
поворачивающийся вокруг оси, перпен-
перпендикулярной оси вращения, и выходящий
из тела через специальные прорези.
Пренебрегая массой стержня АВ и по-
полагая, что момент сил сопротивления при
включенном тормозе пропорционален уг-
угловой скорости: Л/С = а(о, где а = const >
> 0, определить закон изменения угловой
скорости и предельное значение угла по-
поворота тела.
Ответ: ю (t) = шое
7*
oo; Jim q> (t) = —
a wo
9.28. Решить задачу 9.27 предполагая, что наряду с момен-
моментом сопротивления Мс = асо, пропорциональным угловой скорости,
на тело действует постоянный момент сил сухого трения в опо-
опорах, равный йсшо, где к = const > 0. Определить закон изменения
угловой скорости, время, необходимое для остановки тела, и угол,
на который повернется тело до остановки.
Ответ:
i-f *
-;
(o@ == ©0 A + /с) е J —
^) .-= —©0 1 — A- In —j-
§ 2. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО. МОМЕНТА
129
9.29. Решить задачу 9.27, полагая, что масса стержня равна
ы, а его длина / = У3//т. Временем, включения тормоза прене-
пренебречь.
Ответ: ю (t) = —-
Нт ф (t) — J(ao/a.
t-*oo
9.30. Однородный диск радиуса В. = 0,05 м и массы М может
вращаться вокруг горизонтальной оси О, проходящей через его
центр. К диску приварен* стержень длины 1 = R, имеющий на
конце точечный груз массы пг.
Полагая М = 8т, определить закон вращения получившегося
физического маятника, если его отклонили от положения равно-
равновесия на малый угол ф0 и отпустили без начальной скорости.
Массой стержня пренебречь.
Ответ: ф(г)=ф0сой7г.
К задаче 9.30.
К задаче 9.31.
9.31. Квадратная рамка ABCD, сваренная из тонких однород-
однородных стержней, может вращаться вокруг горизонтальной оси,
проходящей через точку А, Рамку отклонили от положения рав-
равновесия на. малый угол ф0 и отпустили без начальной скорости.
Определить закон движения рамки, если ее диагональ d рав-
равна 0,96 м.
Ответ: фШ = ф0со8 3,5£.
9.32. Определить частоту малых колебаний рамки, рассмотрен-
рассмотренной в задаче 9.31, если ее ось вращения" совпадает с серединой
одной из сторон.
Ответ: ■ щ
-§- = 3,518 рад/с.
9.33. Три шарика одинаковой массы m прикреплены к ниж-
нижним концам сварной стержневой конструкции, имеющей возмож-
возможность вращаться вокруг горизонтальной оси О.
9 Под ред. К. С. Колесникова
130 гл 3 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Пренебрегая размерами шариков и
массой конструкции, определить час-
частоту малых колебаний системы, если
г = 0,48 м.
Ответ: ш0 — I/ -^- = 3,5 рад/с.
К задаче 9.33.
9.34. Решить задачу 9.33 полагая, что каждый из однородных
стержней длины I, составляющих стержневую конструкцию, имеет
массу тп.
Ответ: ©0 = ]Agf = 3,256 рад/с.
9.35. При включении вентилятора на него, наряду с моментом
от двигателя, действует момент сил аэродинамического сопротив-
сопротивления лопастей, продорциопальный квадрату угловой скорости,
Ма => аю2, где а — const > 0.
Считая момент двигателя М постоянным, определить угол по-
поворота вентилятора как функцию времени, если момент инерции
его относительно оси вращения равен /.
Ответ: m @ — — In en ^ a t.
ОС J
9.36. После выключения двигателя вентилятор, вращавшийся
с угловой скоростью ©о, тормозится силами аэродинамического
сопротивления, момент которых пропорционален квадрату угло-
угловой скорости Ме = аш2, где а = const > 0.
Определить время, за которое угловая скорость вентилятора
уменьшится вдвое, и угол, на который повернется вентилятор за
это время, если его момент инерции относительно осп вращения
равен /.
Ответ: fi = , m = — In 2.
9.37. После того как выключен двигатель вентилятора, рас-
рассмотренного в задаче 9.35, при торможении, наряду с моментом
аэродинамического сопротивления Мс = аш2, действует постоянный
момент трения в опорах, который задан в виде LTp = кгаа\, где
к = const >'0.
Определить время, необходимое для остановки вентилятора,
и угол, на который он повернется в процессе торможения.
9.38. Твердое тело может вращаться вокруг вертикальной
оси. Спиральная пружина с коэффициентом жесткости с создает
при его повороте восстанавливающий момент, пропорциональный
углу поворота. Тело повернули из положения равповесия на угол
tp0 а отпустили без начальной скорости.
§ 2 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
131
Определить угловую скорость, которую будет иметь тело в мо-
момент первого прохождения положения равновесия, если при дви-
движении на него действует момент сопротивления, пропорциональ-
пропорциональный квадрату угловой скорости Мс = ао>2, где а = const > 0. MoJ
мент инерции тела относительно оси вращения равен J.
( __2£L ^
Ответ: со2 = { — ср0 + -—;и\Д — £ J
9.39. Однородная пластина ABCD массы
m и длины АВ — 1, имеющая возможность
вращаться вокруг горизонтальной оси MN,
поднята до горизонтального положения и
отпущена без начальной скорости.
Определить угловую скорость пластины
я нижнем положении, если на пластину в
процессе движения действует момент сил
аэродинамического сопротивления, пропор-
пропорциональный квадрату угловой скорости Мс =
■ ссш , где а :
Ответ:
: const > 0.
mgl
/— 2ае
an
■),
где / = /nZ2/3.
9.40. Решить задачу 9.39, полагая, что
в начальный момент пластина находится в
К задаче 9 39.
верхнем вертикальном положении н опускается без начальной
скорости.
Ответ:
9.41. Вагонетка А массы
J
К задаче 9.41.
, где / = mZ2/3.
s поднимается по наклонному сли-
слипу с углом наклона а при помо-
помощи нерастяжимого троса, намо-
намотанного на ступень радиуса г
двухступенчатого ворота В, имею-
имеющего массу тп и радиус инерции
относительно оси вращения р.
На ступень ворота радиуса R на-
намотан другой нерастяжимый трос,
к концу которого подвешен про-
противовес С массы тп2. Ворот
приводится в движение постоян-
постоянным вращающим моментом М,
Пренебрегая массой тросов, массой колес вагонетки, трением
в их осях и в подшипниках ворота, определить ускорение а ва-
вагонетки.
М -1- g (mJ{ — тхг sin a)
Ответ:
а =
132
ГЛ. 9. ОБЩИЕ ТЕОРБМЫ ДИНАМИКИ
§ 3, Теорема об изменении кинетической энергии
9.42. Автомобиль, двигающийся со скоростью 60 км/ч, при
Ежстренном торможении проходит тормозной путь длины 30 м.
Как изменится длина тормозного путиг если автомобиль бу-
будет двигаться со скоростью 90 км/ч? При решении задачи счи-
считать, что со стороны дороги на автомобиль с заторможенными
колесами действует постоянная сила трения скольжения; сопро-
сопротивлением воздуха пренебречь.
Ответ: увеличится в 2,25 раза и будет равен 67,5 м.
9.43. В условиях задачи 9.42 определить, каков будет тормоз-
тормозной путь автомобиля, если при скорости в 60 км/ч он тормози г
на уклоне крутизной в 10° (sin 10° =0,174, cos 10° = 0,985).
Ответ: 48,7 м.
9.44. Центру С цилиндрического катка радиуса г, имеющего
возможность катиться без скольжения по наклонной плоскости,
сообщена скорость v0, направленная параллельно плоскости
вверх.
Какова будет скорость центра катка, когда он вернется в ис-
исходное положение, если коэффициент трения качения равен 6,
а угол наклопа плоскости к горизонту а.
9.45. В кулисном механизме однородный стержень ОА длины
1,2 м и массы 5 кг приводит в движение по горизонтальной
плоскости груз В массы 15 кг.
В начальном положении угол от-
отклонения стержня от вертикали
а. => 30° и механизм 'находится в
покое.
Определить угловую скорость
со, которую надо сообщить стерж-
стержню, чтобы он достиг вертикаль-
вертикального положения. Расстояние от
оси вращения стержня О до
плоскости h = 0,9 м. -Рассеянием
энергии за счет сил трения пре-
пренебречь.
Ответ: а = 0,573 рад/с.
9.46. В условиях задачи 9.41 определить скорость вагонетки
v в зависимости от ее перемещения s, полагая, что движение на-
чпнается из состояния покоя.
К задаче 9 45,
Ответ: v —
М + g
гпгг sin a)
2rs.
mp2
9.47. В шарнирно-параллелограммном механизме с внутрен-
внутренним зацеплением подъем груза D массы Ют происходит за счет
постоянного момента М = 40m gr, приложенного к кривошипу О А,
S 3 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
133
Определить скорость груза после того, как кривошип ОА по-
повернется из состояния покоя на один оборот, если кривошипы
О А и OiB представляют собой однородные стержни длины I =• Ъг
и массы т каждый, масса звена АВ равна Ът. Блок-шестерня С
имеет массу Зт ,и радиус инерции относительно собственной оси
вращения р = 2г/3. Кроме того, R =» Зг и п = 0,5г, Трением в под-
подшипниках пренебречь.
Ответ: vD = 2Vngr.
9.48. Ползуны А и В одинаковой массы тп, шарнирно соеди-
соединенные однородным стержнем АВ длины I, имеющим также мас-
массу тп, могут скользить без
трения по взаимно перпенди-
перпендикулярным направляющим, рас*
К задаче 9 47.
К задаче 9.48,
положенным в вертикальной плоскости. В положении Ал ползу-
ползуну А сообщается начальная скорость v0.
Определить, при каком значении начальной скорости стер-
стержень достигнет горизонтального положения,
Ответ: v0 — -ту 2gl(, к 3 — 1).
9.49. Два однородных цилиндриче-
цилиндрических катка радиуса г и массы m каж-
каждый, оси которых шарнирно связаны
однородным стержнем А В длины I —
= 2У2г и массы mi = 0,5m, могут ка-
катиться без скольжения внутри цилинд-
цилиндра радиуса R = Зг с горизонтальной
образующей.
Определить, пренебрегая трением
качения, скорости осей катков в тот
момент, когда стержень АВ займет го-
горизонтальное положение, если в на-
К задаче 9.49,
чальный момент катки были отведены в положение, указанное
на рисунке, и отпущены без начальной скорости.
Ответ: yA = yB=|/r-|-(/2-l)gr=c,01788/i?.
134
ГЛ 9 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
9.50. В планетарном механизме, расположенном в вертикаль-
вертикальной плоскости, шестерня 1 находится во внутреннем зацеплении
с неподвижной шестерней 2. С шестерней 1 жестко связан бара-
барабан того же радиуса, на который намотана нерастяжимая нить с
грузом А массы т на свободном конце.
Чему должна быть равна суммарная масса шестерпи 1 п свя-
связанного с ней барабана, чтобы механизм остановился после того,
как кривошип ОС повернется на угол ср. В начальный момент
шестерня 1 находилась в покое в крайнем нижнем положении.
При решении задачи, считая нить достаточно длинной, пре-
пренебречь маятниковым движением груза. Массу кривошипа и ни-
нити не учитывать.
Ответ: тпл — тп
ф — 1 + COS ф
1 — COS ф
К задаче 9.50.
К задаче 9.5).
9.51. Затвор ОА, закрывающийся под действием собственного
веса, представляет собой однородную прямоугольную пластину
массы тп, имеющую возможность вращаться вокруг горизонталь-
горизонтальной оси О. Для уменьшения удара затвора об упоры в нижнем
положении с ним связан посредством троса, перекинутого через
блоки В и С, противовес D массы mt. Известно, что ОА = ОБ = /.
Затвор удерживается в горизонтальном положении фиксато-
фиксатором Е.
Определить угловую скорость ш затвора при его опускании
после снятия фиксатора как функцию угла поворота ср. При ка-
каком значении mt угловая скорость затвора в нижнем положении
будет в два раза меньше по сравнению со случаем отсутствия
противовеса? При решении задачи трос считать нерастяжимым,
массой блоков и троса, трением в опорах, & также сопротивлени-
сопротивлением воздуха пренебречь.
§ 3. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
135
Ответ:
0,64т.
gg msinfp— 2"]/2
T
sin ф— l)
2m -|- Ът^ A — sin
'8B-1/2)
9.52. Используя решение задачи 9.51, выяснить, возможно ли
подобрать массу противовеса тп1 таким образом, чтобы угловая
скорость затвора в нижнем положении равнялась нулю.
Ответ* нет; для этого необходимо иметь mt — 0,854m, но для
того, чтобы затвор после снятия фиксатора двигался вниз, долж-
должно быть rrii < 0,707m.
9.53. Для обеспечения равномерности опускания груза А мас-
массы m используется пневматический тормоз — крыльчатка, наса-
насаженная на барабан, с которого сматывается трос, несущий груз.
Определить скорость груза как функцию его перемещения h,
если момент инерции барабана с крыльчаткой равен J, радиус
барабана г и при вращении крыльчатки возникает момент сопро-
сопротивления, пропорциональный квадрату угловой скорости Мс =
= aw2, где а = const > 0. Движение начинается из состояния по-
покоя. Массой троса и сопротивлением воздуха движению груза
пренебречь.
h
Отвег.
9.54. Груз А массы m находится на гладкой наклонной плоско-
плоскости с углом наклона а и связан пружиной с коэффициентом
жесткости с с пепйдвижной точкой В.
Пружину сжимают из свободного состоя-
состояния на величину s, после чего груз от-
отпускают без начальной скорости.
К задаче 9.53.
К задачо 9.54.
Определить: 1) скорость груза в тот момент, когда его удале-
удаление от точки В будет равно длине свободной пружины, 2) макси-
максимальное растяжение пружины.
Ответ: l),= /
il)S, 2) X =
9.55. Груз А массы тпи имеющий возможность скользить вдоль
гладкого стержня DE, наклоненного под углом а к горизонту,
136
ТЛ. В ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
связап с помощью нерастяжимой нити, перекинутой через блок
М, с грузом В массы т2. В начальный момент груз А отведен от
положепия С, в котором нить перпендикулярна стержню, вверх
на величину s и отпущен без начальной скорости.
Обозначив через к отношение ■
t , установить, при каких
значениях к груз А сможет остановиться, пройдя от положения
С некоторое расстояние X вниз, и определить X как функцию к
и s. Расстояние от блока М до стержня DE равно I. Размерами
блока, массой блока и нити пренебречь.
Ответ: A<l;^^1 + ^ + 2fc9V7+7.
К задаче 9 56.
9.56. Ползун А массы М, имеющий возможность двигаться в
i оризонтальных направляющих, связан со стержневым ромбом
BCOD, образованным однородными стержнями длины I и массы
m каждый. Пружина с коэффициентом жесткости с связывает
вершины С и D ромба. Механизм находится в покое (пружина
CD не нагружена), когда угол COD равен 90°.
Какую начальную скорость надо сообщить ползуну, чтобы
вершина ромба В переместилась в положение В', если ВО —
«= 2В'О. Трение в шарнирах и направляющих не учитывать.
Ответ:
0,625 ■
ЗМ + 5т '
9.57. Двухступенчатый барабан массы mi = l5 кг связан с
•иеподвйжной точкой А посредством нерастяжимой нити, намо-
намотанной на малую ступень барабана радиуса г. Большая ступень
барабана радиуса R ■=» 2г обмотана двумя нерастяжимыми нитя-
нитями; к одной из них подвешен груз D массы т% — 15 кг, а к кон-
концу другвй приложена сила F ■=• 196 Н.
Найти скорость и ускорение, груза D после того, как он опус-
опустится на величину s = 1 м. Радиус инерции барабана относитель-
относительно оси, проходящей через его центр С, равен р = ТДг; нити
§ 3 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
137
остаются в процессе движения вертикальными; движение начи-
начинается из состояния покоя. Массой нитей пренебречь.
Указание. Для определения ускорения воспользоваться теоремой об из-»
мененпи кинетической энергии в дифференциальной форме.
Ответ: vD = 4,43 м/с, aD = 9,8 м/с2.
'щх 9.58. Груз А массы mt = 40 кг, екользя-
щий по гладкой наклонной плоскости о
1 углом а = 30°, прикреплен к нерастяжимои
нити, переброшенной через блок В массы
К задаче 9.57.
К задаче 9 58.
7Я2 =, 4 кг и намотанной на каток С. Каток, представляющий со-
собой однородный сплошной цилиндр массы т3 — 80 кг, имеет воз-
возможность катиться по горизонтальной плоскости без скольжения. т
Пренебрегая массой нити, трением качения и трением в осп
блока, определить скорость груза А после того, как он пере-
переместится по наклонной плоскости на расстояние s = 1 м. В на-»
чальный момент система находилась в покое; масса блока равно*
мерно распределена по ободу.
Ответ: vA = 4 \/ ■
V
sin 30°
-gs = 2,3 м/с.
2
9.59. Решить задачу 9.58 с учетом трения качения катка по
плоскости, если отношение коэффициента трения качения б к ра-
радиусу катка R равно 0,05.
Ответ: vA — 4
sin 30° — 0,5m,6/ R
TCj -j- 8m
gs = 2,18 м/с.
9.60. Желоб образует в вертикальной плоскости петлю в вида
кругового кольца радиуса R.
Определить начальную высоту h центра масс, необходимую
для того, чтвбы скатывающееся тело обошло всю петлю, не отде-
отделяясь от нее^ если в качестве тела используются: 1) однородный
диск радиуса г, 2) кольцо радиуса г с массой, равномерно рас-
распределенной по ободу; считать, что качение происходит без сколь-
скольжения. Трением качения и сопротивлением воздуха пренебречь.
где р —радиус
инерции тела относительно оси, проходящей через центр масс пер-
перпендикулярно плоскости кольца; Л, = 2,75Д — 1,75г; А, = ЗЛ —2г.
Ответ: й>4[E + -7)Л-
138
ГЛ 9 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
9.61. Груз A массы mi = 60 кг прикреплен к нерастяжимой
нити, переброшенной через блок В — однородный диск массы
тг — 6 кг и намотанной на барабан D катка Е, который может
катиться без скольжения по двум параллельным рельсам, накло-
наклоненным к горизонту на угол а = 30°. Барабан D радиуса #=»
= 0,4 м жестко связан с катком Е радиуса г = 0,2 м, их общая
масса равна т3 = 100 кг, радиус инерции относительно оси катка
р = 0,3 м и центр масс лежит па оси катка.
К задаче 9.W.
К задаче 9.61,
Пренебрегая трением качения, трением в оси блока п массой
нити, определить скорость груза А после того, как он опустится
на s = l м. В начальный момент система находилась в покое.
Ответ:
2,36 м/с.
-l/ 2gs(R-r)
m (R — rj -I- m„rsm a
(mk -f 0,5m,,) (R - rJ + m3 (p2 + i2)
§ 4. Смешанные задачи
9.62. Грузовой автомобиль везет в кузове тяжелую бетонную
плиту, двигаясь со скоростью v.
При каком минимальном тормозном пути (торможение счи-
считать постоянным) плита не сместится относительно кузова, если
. коэффициент трения скольжения между
\ ..!.„, плитой и кузовом равен /,
2
/ ^0 Ответ: smin
9.63. Маятник ударного копра, исполь-
используемого для испытания материалов, может
вращаться вокруг горизонтальной оси О. Пе-
Перед ударом его отклоняют от положения:
равновесия на угол ф0 и отпускают без на-
начальной скорости.
Определить давление на ось О маятника в начальный момент
движения, если его масса равна тп, радиус инерции относительно
К задаче 9.63.
§ 4 СМЕШАННЫЕ ЗАДАЧИ
139
оси вращения
вращения I.
Ответ:
р, расстояние от центра масс маятника С до оси
о = mg\/ I — \(l — 0,5-^-Wl —
V p V P /
cos 2cp0),
9.64. Маятник ударного копра, рассмотренный в задаче 9.63,
отклоняют от положения равновесия на угол ф0 = 90° и отпускают
без начальной скорости.
Определить давление на ось маятника как функцию угла ф
отклонения его от положения равновесия. Трением в оси и сопро-»
тивлением воздуха пренебречь.
Ответ:
Ro - mg л/1 + il-f 2,5-^- + 2>~(i + 0,5-^
v p p p \ p
2cp.
9.65. Треугольник ОАВ, стороны которого представляют собой
однородные тонкие стержни равной длины, массы m каждый,
может вращаться вокруг горизонтальной оси, проходящей через
вершину О перпендикулярно плбскости ОАВ, Из положения,
когда сторона ОА горизонтальна, треугольник отпускают без на-
начальной скорости.
Определить давление на ось О в начальный момент движения
и в момент, когда сторона АВ станет горизонтальной,
Ответ: Ri = mqib, R2 = bmg.
(\
4
,l,
К задаче 9 65,
К задаче 9.66.
9.66. Для отделения искусственного спутника Земли (ИСЗ)
массы m от последней ступени ракеты-носителя массы М исполь-
используется пружинный толкатель, рабочим элементом которого явля-
является пружина, коэффициент жесткости которой равен с.
Определить относительную скорость vr ИСЗ после разделения,
если ход штока толкателя равен 2 и по окончании движения
толкателя пружина не напряжена. Разделение происходит в
пустоте после окончания работы двигательной установки послед-
последней ступени. Зависит ли относительная скорость ИСЗ от скорос-
скорости, приобретенной последней ступенью вместе со спутником к
моменту разделения?
Ответ: vr= 1у м ' не зависит-
140
ГЛ. 9. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
9.67. В пружинном ружье для подводной охоты выброс гар-
гарпуна массы т происходит за счет пружинного толкателя, имею-
имеющего ход I. Попав в воду, гарпун преодолевает силу сопротивле-
сопротивления, пропорциональную скорости движения, R = — (iv, где (* =
= const > 0.
Какой коэффициент жесткости с должна иметь пружина тол-
толкателя, чтобы после горизонтального выстрела гарпун преодолел
расстояние L. У незаряженпого ружья пружина сжата на вели-
величину %, равную 111. Считать, что после выстрела гарпун движется
по горизонтальной прямой, движением ружья (отдачей) пре-
пренебречь. *
Ответ: с ==
2ml2
9.68. Каток, представляющий собой
однородный сплошной цилипдр радиу-
радиуса г, может катиться без скольжения
' К задаче 9.67. К задаче 9.68.
внутри цилиндрической лупки радиуса Я с горизонтальной обра-
зующей.
Определить скорость оси катка в тот момент, когда он прохо-
проходит нижнее положение, если каток был отведен из этого положе-
положения на угол yft>C«=q>0 и отпущен без начальной скорости. Коэф-
Коэффициент трения качения равен б.
Ответ:
й d } аФо <*■ J -
где а = б/г.
9.69. В механизме, расположенном в вертикальной плоскости,
стержень А В длины |=1ми массы М = 6 кг имеет на концах
ползуны А и В, один из которых А скользит по вертикальной
направляющей, а другой по дуге окружности радиуса R = I =■ 1 м
с центром в точке О, лежащей на одной вертикали с ползуном А.
Стержень начинает движение из вертикального положения.
Определить скорость ползуна А, а также количество движения
механизма в тот момент, когда угол ОАВ будет равен 30°. Ползу-
Ползуны считать точечными массами т=>1 кг, трением в направляю-
направляющих и шарнирах, пренебречь.
У &
Отаетх vA
El A - cos 30°) = 2,12 м/с, Q -■
§ i СМЕШАННЫЕ ЗАДАЧИ
Ш
К задаче 9.69. ' К задаче 9.70.
9.7ft. В положении, показанном на рисунке пунктиром, к кри-
кривошипу ОА шарнирного четырехзвенника ОАВОи расположен-
расположенного в горизонтальной плоскости, приложен постоянный момент
М, после чего механизм пришел в движение из состояния покоя.
Определить угловую скорость кривошина ОА и количество
движения механизма в тот момент, когда кривошип повернется
на угол в 90° и механизм займет положение, показанное на ри-
рисунке. Звенья механизма считать однородными стержнями с" дли-
длинами ОА — I, АВ = 21, BOi = I и массами т,
2т и т соответственно; трением в шарнирах
пренебречь.
Ответ: со =
= -Tjjj- у
Q = Ъти>1
1,5
9.71. Нерастяжимая нить, охватывающая
шкив 1, намотана на ступени двухступен-
двухступенчатого барабана 2. Масса шкива, представ-
ляющеге собой однородный сплошной Ци-
Цилиндр, равна 2т; масса барабана равна т,
а его раднус_инерщщ относительно оси вра-
вращения р =» l/Rr, причем R — 2г.
Считая, что нить по шкиву и ступеням -
не скользит, определить скорость центра х задаче 9.7 .
шкива — точки С и кинетический момент системы относительно
оси вращения Oz в тот момент, когда центр шкива опустится
вниз на величину h. В начальный момент система находилась
в покое.
Ответ: vc = 2 }/-fg-, KOz - 9,5mycr = mr У~Шф.
9.72. В условиях задачи 9.71 определить натяжение левой и
й й
правой ветвей нити и реакцию в оси О.
Ответ: r)M=.i£Lfrnp-*=£
19
142
ГЛ 9 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
9.73. Эллиптический маятник состоит из ползуна Mt массы
т, находящегося на горизонтальной гладкой плоскости, и шарика
М2 той же массы т, соединенного с ползуном стержнем АВ дли-
длины I, имеющим возможность вращаться вокруг оси А, связаннон
с ползуном и перпендикулярной плоскости рисунка. Стержень
АВ приводят в горизонтальное положение и отпускают без на-
начальной скорости.
Определить угловую скорость стержня в момент, когда шарик
будет находиться в крайнем нижнем положений. Размерами ша-
шарика и массой стержня АВ пренебречь.
Ответ: со =
К задаче 9 73.
К задаче 9 74.
9.74. На гладкой горизонтальной плоскости помещена тре-
треугольная призма ABD массы m с углом а = 30°. По грани приз-
призмы АВ катится без скольжения однородный круглый цилиндр
массы тп.
Определить скорость центра цилиндра С в тот момент, когда
он опустится на высоту h. В начальный момент призма и ци-
цилиндр находились в покое.
Ответ: vc— Ylghlb.
9.75. Тележка А массы М может перемещаться по горизон-
горизонтальной плоскости Материальная
точка В массы m помещена в кру-
круговую трубку радиуса R, связанную
с тележкой. В начальный момент
точка находится в верхней позиции
С, и вся система покоится
Определить скорость тележки и
абсолютную скорость точки для двух
моментов времени, когда точка на-
находится в позициях D и Е. Сопро-
Сопротивлением движению точки в трубке
и тележки по длоскости пренебречь.
К задаче 9 75.
Ответ, в точке D vA — 0, vB = V2g/?; в точке Е
vA-=2m у -j
М (М + т)
M A/ -\ m)'
4 СМЕШАННЫЕ ЗАДАЧИ
143
_ А ДА ДА ДА * ДАНИ ». ,
VVVv v V V VWVV —
V//////////// '///'///////////////////У////////////
К задаче 9 76.
9.76. Два груза А и В, имеющие массы т и 1т соответствен-
соответственно, связаны между собой пружиной с коэффициентом жестко-
жесткости с и находятся на горизонталь-
горизонтальной гладкой плоскости. В началь- ^ •
ный момент грузы развели в сто-
стороны, так что пружина растя-
растянулась из свободного состояния
на величину К, и отпустили без
начальной скорости.
Определить скорость груза А в тот момепт, когда деформация
прулшны станет равна нулю.
Ответ: vA = X у -^—.
9.77. Ось С однородного сплошного цилиндра А массы 2т,
имеющего возможность катиться без скольжения по горизон-
горизонта 1ьной шероховатой плоскости, связана при помощи пружины
с коэффициентом жесткости с с грузом В массы т, лежащим на
горизонтальной гладкой плоскости. В начальный момент пружи-
пружина растянута на величину К, после чего цилиндр и груз отпуще-
отпущены без начальной скорости.
Определить скорость оси цилиндра С в тот момент, когда де-
деформация пружины станет равна нулю. Трением качения прене-
пренебречь.
Ответ: vc = ~ т/ _£_.
А ' Лпг
о /
К задаче 9 77-
К задаче 9 78.
9.78. Материальная точка А массы т, опускаясь вниз по пря-
прямолинейному пазу тела В, наклоненному к горизонту под углом
<х = 60°, приводит в движепие тело В массы 4/п, которое можег
двигаться по горизонтальной гладкой плоскости. С телом В свя-
связан нерастяжимои нитью однородный сплошной цилиндр массы
2т, который может катиться по шероховатой горизонтальной пло-
плоскости без скольжения.
Пренебрегая трением качения и сопротивлением движению
материальной точки в пазе, определить скорость тела В в тог
момент, когда точка А опустится в крайнее нижнее положение.
В начальный момент времени точка занимала крайнее верхнее
144
ГЛ. 9. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
положение, и вся система находилась в покое. Высота тела В
(равна h.
Ответ: vb ~ -~ у -of-
9.79. Задача Гарни, В жесткой трубе находятся*, абсолютно
твердые тела 1 и 2 с плотностями и длинами, соответственно рав-
равными р,, 6i и р2, ба, а также взрывчатое вещ&ство (ВВ), имеющее
плотность р0, длину I и энергию единицы массы Ео.
1) Щ>и условии, что вся потенциальная энергия ВВ перехо-
переходит в кинетическую энергию движения тел и продуктов взрыва,
выделение энергии мгновенное, и частицы продуктов взрыва име-
имеют скорость, изменяющуюся по длине ВВ по линейному закону,
определить скорости метания тел. 2) Определить скорость мета-
метания первого тела в случае отсутствия второго. Использовать обо-
Рп' Р '
значения:
РА
Ответ; 1) -тг- =
X
2) (ги-*«>т-!
2 £В t
А в
К задаче 9.79.
К задаче 9.80.
9.80. Два одинаковых точечных груза 'А и. В массы тп каж-
каждый, связанные нерастяжимой нитью длины I, могут скользить
по гладкому однородному стержню CD длины 3^-и массы т.
В начальный момент времени, когда груз А находился на верти-
вертикальной оси EF, системе сообщили угловую скорость е>0.
Найти натяжение нити Т в тот момент, когда груз В достиг-
достигнет конца D стержня.
Отвеп Т i= -TTx-al.
§ 1. ПЛОСКОЕ ДВИЖЕНИЕ ТЕЛА
145
9.81. В условиях задачи 9.80 определить относительную ско-
скорость связки грузов в тот момент, когда груз В достигнет конца
D стержня.
Ответ: vr = у ~2 <fl0Z.
9.82. Круглая горизонтальная платформа может вращаться
вокруг вертикальной оси, проходящей через ее центр. На краю
платформы стоит человек.
Какую работу необходимо совершить человеку, чтобы, дви-
двигаясь по радиальному пути, дойти до центра платформы, если
момент инерции платформы относительно оси вращения равен /,
радиус R, ее начальная угловая скорость Юо. Человека считать,
точечной массой т.
m.R% (J + mR2) ml
Ответ: А = ^ .
Глава 10
ДИНАМИКА ТВЕРДОГО ТЕЛА
§ 1. Плоское движение тела
10.1. К концу D нити, намотанной на барабан А радиуса г„
жестко связанный с катком В радиуса R, приложена горизон-
горизонтальная сила Р. Радиус инерции катка с барабаном относительно
общей оси симметрии С равен р.
Выяснить, при каком соотношении между радиусами R и г
и радиусом инерции р каток будет катиться по горизонтальной
поверхности без скольжения, независимо от величины силы Р,
при любом отличном от нуля значении коэффициента трения
скольжения. Трением качения пренебречь.
Ответ: Rr = о2.
M(t)
К задаче 10.1.
К задаче 10.2.
10.2. К однородному сплошному цилиндру радиуса R и мас-
массы тп, находящемуся в покое на горизонтальной шероховатой
плоскости, приложены'сила Q{t) = 0,12mg(f + 1) и момент M(i) =»
— 0,24mgfl(i2 + t).
10 Под ред К С Колесникова
146
ГЛ 10 ДИНАМИКА ТВЕРДОГО TIJJIA
Определить момепт времени t( смены направления силы тре-
трения и момент 1г начала скольжения цилиндра по плоскости. Ко-
Коэффициент трения скольжения / = 0,14, трением качения пре-
пренебречь.
Ответ: U = 0,25 с,' U = 0,75 с.
10.3. Каток А радиуса г может катиться вверх по наклонной
плоскости под воздействием вертикальной силы Р, приложенной
к концу D нерастяжимой нити, намотанной на барабан В радиуса
R = 2г. Барабан жестко связан с катком, их масса равна m ==>
= 2P/g, а радиус инерции относительно общей оси симметрии С
равен р = УДг.
Определить предельное значение угла а наклона плоскости
к горизонту, при котором каток будет катиться без скольжения,
если коэффициент трения скольжения / = 2/3. Трением качения
пренебречь, нить по барабану не скользит.
1 1.8
О
Ответ: cos а — i
4-arcsin4- = 31°22\
К задаче 19 3.
К задаче 10
10.4. К концу D нерастяжимои нити, намотанной на барабан
А радиуса г, жестко связанный с катком В радиуса R = 2r, прп-*
ложена под углом а к горизонту сила Р. Масса катка с бараба-
барабаном тп = P/g, их радиус инерции р относительно общей оси сим-
симметрии С равен УRr.
Определить максимальное значение угла а, при котором ка-
каток будет катиться по горизонтальной шероховатой плоскости
без скольжения, если коэффициент трепия скольжения равен / =
= 0,1. Трением качения пренебречь, пить по барабану во
скользит.
Ответ: tg-2- = Ц=г = 0,279; а = ЗГ12'.
1+ I/ ^
10.5. Груз А массы m прикреплен к нерастяжимой нити, пе-
перекинутой через блок В массы 2т и присоединенной к оси С
катка D, представляющего собой однородный цилипдр массы 4/п.
Пренебрегая трением в оси блока п трением качения между
катком if"плоскостью, определить минимальное значение коэф-
§ 1 ПЛОСКОЕ ДВИЖЕНИЕ ТЕЛА
147
К задаче 10.5.
фициента трения скольжения/mm, м.
при котором каток будет катиться
по горизонтальной плоскости без
скольжения. Блок В считать од-
однородным цилиндром.
Ответ: /mln = 0,0625.
10.6. Решить задачу 10.5, учи-
учитывая трение качения между
катком и плоскостью, если коэф-
коэффициент трения каления 5 ==
= 0,05Я, где R — радиус катка.
Ответ: /ш,„ = 0,1.
10.7. Груз А~ массы m прикреплен к нерастяжимой нити, пе-
перекинутой через невесомый блок В и намотанной на каток D
массы 2т. Каток представляет собой однородный цилиндр, име-
имеющий возможность кататься по наклонной плоскости.
Пренебрегая трением качения и
трением в оси блока, определить:
1} минимальное значение коэффици-
коэффициента трения скольжения /т1„, при
котором возможно качение без сколь-
скольжения при нулевом значении угла
наклона а; 2) максимальное значе-
значение угла наклона атах, при котором
возможно качение без скольжения,
если / = 0,3.
К задаче 10 7.
mm — ~лТ> Ч 1й 9
Ответ: 1) /mm = ^4~; 2) tg —^— = i+'щ—'~~~' атах ~~
= 21%'.
10.8. В условиях задачи 10.7, приняв угол а равным 30°,
а коэффициент трения скольжения / равным 0,3, определить ко-
количество движения Q и кинетическую энергию Т систему как
функции времени t, полагая, что в начальный момент времени
система находилась в покое.
Ответ: Q = 0,2&lmgt, Т = 0,0734/ng Нг — качение со сколь-
скольжением.
10.9. Решить предыдущую задачу при си = 30° и / = 0,4.
Ответ: Q = 0,286mg?, Т = 0,0714тгг^2^ — качение без сколь-
скольжения.
10.10. В условиях задачи 9.58 определить минимальное зна-
значение коэффициента трения скольжения /mln, при котором каток
будет катиться без скольжения.
Ответ: /ш1п = 0,0338.
10.11. В условиях задачи 9.58 выяснить, при каком значении
коэффициента трения качения 5 каток будет катиться без сколь-
10*
148
ГЛ. 10 ДИНАМИКА ТВЕРДОГО ТЕЛА
жения независимо от величины коэффициента трения скольже-
скольжения /.
Ответ: б = О,0595Д, где R — радиус катка.
10.12. В условиях задачи .9.61 определить минимальное зна-
значение коэффициелта трения скольжения /т1,„ при котором каток
Е будет катиться без скольжения.
Ответ: /mln = 0,237.
10.13. Для системы, рассмотренной в задаче 9.61, полагая ко-
коэффициент трения скольжения / равным 0,2, определить переме-
перемещение центра катка sit) и его угол поворота <рШ.
Указание. Воспользоваться ответом задачи 10.12.
Ответ: sit) = 1,3«2 м, ф) = 6,99f рад."
10.14. Грузы А и В массы m каждый прикреплены к нерас-
нерастяжимым нитям, переброшенным через блоки D и Е и скреп-
скрепленным с катком Gr пред-
представляющим собой одно-
однородный цилиндр массы Am.
Одна нить намотана на ка-
каток, а другая соедипепа с
И его осью С.
Считая, что нить пе
скользит по катку, опреде-
К задаче 10.14. лить минимальное значение
коэффициента трения сколь-
скольжения /mm между катком и горизонтальной плоскостью, при ко-
котором каток будет катиться без скольжения. Трением качения,
трением в осях блоков D п Е н их массой препебречь.
Ответ: /mm = 0,159.
'10.15. Для системы, рассмотренной в задаче 10.14, определить
движение катка при двух значениях коэффициента трения сколь-
скольжения: 1) /| = 0,1 и 2) /2 = 0,2. В начальный момент система на-
находилась в тжое.
Ответ: 1) качение, со скольжением: xdt) = 0,173f2 м, Rq>(t) =
= 0,922f2 м; 2) качение без скольжения: xc(t) = Ryit) = 0,445f2M.
Ось Ох направлена слева направо, положительное направление
угла поворота <p(f) — по часовой, стрелке, Д -г радиус каткаг
10.16. Тонкое однородное кольцо А массы
m движется в вертикальной плоскости, пере-(
катываясь без скольжения по неподвижному
цилиндрическому валу В. Ось вала О горизон-
горизонтальна.
Определить силу трения в точке контак-
контакта К в зависимости от ее положения
{угла а).
Ответ: F Тп = -тг me sin а. „ .„.„
v 2 ° К задаче 10.16,
§ 2. СФЕРИЧЕСКОЕ ДВИЖЕНИЕ ТЕЛА
149
10.17. Оси С однородного цилиндра радиуса г, находившегося
ъ нижнем положении внутри цилиндрической полости радиуса R
с горизонтальной образующей, сооб-
сообщили начальную скорость, равную
Определить до какого значения ут-
утла ф цилиндр будет катиться внутри
полости без скольжения, если коэффи-
коэффициент трения скольжения / равен 1/7.
Трением качения . и сопротивлением
воздуха пренебречь, К задаче 10.17,
Ответ: ф = 45°.
10.18. В условиях задачи 10.17 выяснить, какую наименьшую
скорость надо еообщить оси цилиндра в нижнем положении,
чтобы он, двигаясь без скольжения, достиг положения, опреде-
определяемого углом ф = 90°.
Ответх v0 = УЦ- (R - г) g.
§ 2. Сферическое движение тела
10.19. Однородный куб массы то с ребром 2а вращается с уг-
угловой скоростью @.
Найти кинетический момент куба относительно "какой-либо
точки его диагонали, когда мгновенная ось вращения куба сов-
совпадает с этой диагональю.
Ответ: кинетический момент Ко направлен вдоль -указанной
диагонали; Ко = 2/па2со/3.
10.20. Прямой круговой цилиндр массы тп с радиусом основа-
основания R п высотой h вращается с угловой скоростью ш вокруг
мгновенной оси, проходящей через
центр цилиндра и образующей с его
у^ осью симметрии угол а.
' Найти кинетический момент Кс
цилиндра относительно его центра
и относительно какой-либо точки,
лежащей на оси вращения.
Ответ: Кс~*~ УFВ* + /ia)a sin2 a + 36Я* cos2 а. Вектор Ке
образует с осью симметрии цилиндра угол ф, определяемый ра-
. , ЗЛ2 + Л3 .
венством tg гр = 1— tg а. Кинетический момент относитель-
6R
но любой точки оси вращения равен Кс.
10.21. Доказать, что при движении тела с неподвижной точ-
точкой кинетическая энергия тела остается неизменной в том и
К задаче 10.20.
150 ГЛ- 10- ДИНАМИКА ТВЕРДОГО ТЕЛА
только том случае, когда кипетический момент тела К относи-
относительно неподвижной точки все время остается ортогональным
вектору его углового ускорения е.
Указание. Учесть, что кинетическая энергия Т тела с неподвижной точ-
точкой равна К<а/2.
10.22. Тело подвешено на подвижной тележке с помощью
сферического шарнира, центр которого совпадает с центром мас&
тела.
Доказать, что после остановки тележки тело будет вращать-
вращаться с постоянной угловой скоростью <а, где <а — угловая скорость,
которой обладало тело в момепт остановки тележки.
10.23. На симметричное однородное твердое тело, . вращаю-
вращающееся вокруг неподвижной точки, совпадающей с его центром
масс, действуют силы сопротивления среды, главный момент ко-
которых относительно этой точки М = —цсо, где ц = const > О,
<я — угловая скорость тела.
По какому закону изменяется угловая скорость тела?
-R-t -JLt
Ответ: сое = cof0e А , az = согое с ,где сое, ш2 — экваториаль-
экваториальная составляющая и проекция на ось симметрии угловой ско-
скорости тела; ыео, сог0 — начальные значения этих величин; А, С —
экваториальный и полярный моменты инерции тела.
10.24. Показать, что при свободной регулярной прецессии
твердого тела угловая скорость ср собственного вращения его и
ф
угловая скорость прецессии ф связаны соотношением -f- —
= —~—cos 6, где Э — угол нутации; А и С — экваториальный
и полярный моменты инерции тела.
10.25. Симметричное твердое тело совершает регулярную пре-
прецессию.
Найти выражение для кинетического момента тела через уг-
угловые скорости собственного вращения ср и прецессии if.
Ответ: Ко — [С<р+(С — А)т!рс05в]е1 + А$е2, где е( и е2 — орты
осей собственного вращения и прецессии, Э — угол нутации, А и
С — экваториальный и полярный моменты инерции тела.
10.26. Каков должен быть главный момент Lo внешних сил,
приложенных к симметричному твердому телу, чтобы они сооб-
сообщали ему регулярную прецессию.
у руру рц
Ответ: Lo = С'фф (е2 X ej A -j ^— -г- cos 6 I. Обозначения
\ ф '
025
те же, что и в задаче 10.25.
10.27. В условиях задачи 10.22 положить, что центр шарнира
не совпадает с центром масс тела.
§ 1. СИСТЕМЫ С (ЭДНОЙ СТЕПЕНЬЮ СВОБОДЫ
151
Доказать, что при поступательном движении тележк-и с неко-
некоторым ускорением, движение тела относительно тележки будет
таким же, как если последняя неподвижна; но в центре масс те-
тела приложена сила F = — т -^-, где т — масса тела, v = v(t) —
закон, определяющий скорость тележки во время ее движения,
10.28. Бегуны 1 дробильной
мельницы, имеющие форму усе-
усеченных конусов, приводятся в дви-
движение мотором 2 через верти-
вертикальный вал 3 и кривошип 4;
при этом бегуны катятся без про-
проскальзывания по дну конической
чаши.
Определить закон изменения
угловой скорости со вала 3 при
разгоие, если момент М, развива-
развиваемый мотором, постоянен, .масса каждого бегуна т, главные
центральные моменты инерции его Jx и /г, расстояние от вала
3 до центра масс бегуна I, угол наклона дна чаши а. Массой
дривогаипа и диссипативными силами пренебречь.
Ответ: to = -g-£, где Е = 2 (Jx -f- /*ctg2a + ml°)-
--Z
К задаче 10.28.
Глава 11
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИИ*)
§ 1. Системы с одной степенью свободы
11.1. Грузы 1 и 2, связанные перастяжимой нитью, распо.ло-
зкены на сторонах кругового сектора с углом 2а, как показано
на рисунке. Сектор находится в вертикальной цлоскости, сторона
OD- горизонтальна. Вес груза 1 равен Р.
Определить вес О груза 2 при рав-
равновесии системы.
Ответ: Q = 2Ps\na.
К задаче 11.1.
К задалв 11.2.
*)В задачах данпой главы, если не делается специальных оговорок, си-
силы трения не учитываются.
152
ГЛ 11. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
11.2. Определить соотношение между величинами вертикаль-
вертикальных сил. Р и Q, при котором клиновой механизм, изображенный
на рисунке, находится в равновесии. Весом клиньев 1, 2, 3 пре-
пренебречь по сравнению с силами Р и Q, Острые углы при верши-
вершинах-едина 3 равны р
Ответ: P =
tgp
tga*
11.3. В механизме для зажима заготовок к шестерне 1 ради-
радиуса г прикладывается пара сил с моментом М. Посредством ше-
шестерни 2, находящейся в зацеплении с шестерней 1 и зубчатыми
рейками штоков 3 и 4, движение передается штокам, которые
зажимают заготовку 5. Механизм находится в вертикальной пло-
плоскости, стержень 6 однороден, О А = ОВ,
К задаче 11.3.
Определить силы N, сжимающие заготовку в положения рав-
равновесия системы.
Ответ'. N = -я—.
11.4. Шарнирный трехкратный параллелограмм находится под
действием горизонтальных сил F и Q. Сила F задана.
Определить величину силы Q, которая обеспечивает равнове-
равновесие параллелограмма.
Ответ: Q = 2F.
К задаче 11.4.
К задаче 11.5.
11.5. Шестерня 1 жестко связана со сларпикон АВ и нахо-
находится в зацеплении с шестерней 2 радиуса R. К кривошипу ОА
длины г приложена пара сил с моментом Л/1? а к шестерне 2 —
пара с мом&нтом Л/2. Мехализм расположен в горизонтальной
плоскости.
§ 1 СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
153
При заданной величине момента М2 определить величину мо-
момента Mi, при которой механизм находится в равновесии.
Ответ: Мх = -& М%.
11.6. В механизме пресса шаг винта 1 равен h. К винту при-
приложена пара сил с моментом М.
Определить силу давления, развиваемую прессом в положепии
равновесия, при котором стержень АВ составляет с осью винта
угол а.
Ответ: <? =
11.7. В механизме регулировки подпятника 1 карусельного
«танка радиусы шестерен 2 и 3 равны соответственно г2 и г,,
шаг винта 4 равен h. Уг.ол регуляровочлого клина равен а. На
подпятник действует вертикальная сила Q, а на шестерню 2 —
пара сил.
Определить значение момента М пары сил, при котором ме-
механизм находится в равновесии.
Qh
Ответ: М = -
К задаче 11 7,
К задаче US.
154
ГЛ. 11. ПРИПЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
11.8. В винто-рычажпом механизме с шаровым шарниром В
ОА—АВ = 1, ^-АОВ — <х, шаг винта 1 равен h. К винту в пло-
плоскости его нормального сечения приложена пара сил с моментом
1,,ак стержню б А в плоскости рисунка — пара с моментом Mz.
Определить соотношение между этими моментами в положе-
положении равновесия Механизма, изображенном на рисунке. Весом
стержней ОА и АВ пренебречь.
шм
Ответ: М* =
since.
11.9. В винто-рычажном механизме поворота диска винт I
имеет резьбу шага h. При вращении винта диск 2 радиуса г мо-
может поворачиваться вокруг оси V. К винту в плоскости его нор-
нормального сечения приложена пара сил с моментом Mi, а к диску
в его плоскости — пара с моментом Af2. В положении равновесия,
изображенном на рисупке, ОА = ОТ) = г, /LOBA = ^-OCD = ее.
К задаче 119.
Определить соотношение между моментами Mt п М2 в этом
положении, пренебрегая весом стержней АВ и CD.
MJi
Ответ:
2nr
■etga.
11.10. В кулионо-рычажпом механизме качающегося цилинд-
цилиндра, расположенном в вертикальной плоскости, на конце коленча-
коленчатого рычага ОАВ насажен блок 1, ось которого перпендикулярна
плоскости рычага. Блок охватывается тросам 2, один конец ко-
которого закреплен. К свободному копцу троса приложена верти-
вертикальная сила F(, а к поршню 3 — вертикальная сила F2. Длины
колен рычага равны ОА = h
К задаче 11.10.
Найти соотношение между ве-
величинами сил Fs и F2 в положе-
положении равновесия механизма, при
котором колено ОА горизонталь-
горизонтально, а шток поршня 4 вертикалей.
Вес звеньев механизма пе учи-
учитывать..
Ответ: Fo=
—f-cosccV
§ 1 СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
155
11.11. Система, изображенная
на рисунке, находится в равно-
равновесии. Линия действия силы F
перпендикулярна стержню ВС,
система распределенных сил ин-
интенсивности q приложена к стерж-
стержню АС под прямым углом.
Определить проекцию реакции
Заделки на ось Ах и момент за-
заделки, если F=10 кН, q=2 кН/м.
Весом стержней пренебречь.
Ответ: Хд = -2,87 кП, М =
= -45 кН • м.
К задаче 11.11.
11.12. В кулисном механизме, расположенном в горизонталь-
горизонтальной плоскости, ООХ = ОА. К механизму приложены пары сил с
моментами Mt и Мг.
К задаче 41.12.
К задаче 11.13.
Определить соотношение между этими моментами, при кото-
котором механизм будет находиться в равновесии при любом допу-
допустимом значении угла а.
Ответ: М2 = 2ЛГ1.
11.13. В стержневой системе, изображенной па рисунке,
= АС, BD = 2AB, сила Т приложена к ползуну, который
может скользить по стерж-
стержню BD.
Определить, при каком
соотношении между си-
силами F и Т система на-
находится в равповесии в
положении, показанном
па рисунке. Весом всех
звеньев пренебречь»
Ответ: F = ЗГ.
11.14. В кулисно-ры-
чажном механизме, изоб-
■Af
К задаче И 11
раженном на рисунке и
156
ГЛ. 11. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
расположенном в горизонтальной плоскости, О А => АВ = I,
АОВ LOiV
p
. При каком соотношении между силами F, S и моментом М
механизм находится в равновесии в указанном на рисунке по-
положении?
Ответ: Af = 2Z(F + Ssin£)sina.
11.15. В кривошипно-подзунном механизме с присоединенной
кулисой, расположенном в горизонтальной плоскости, АВ = АС.
На механизм действуют три пары сил с моментами Ми Мг и М3.
Определить, при каком соотношении между этими моментами
механизм находится в равновесии в положении, при котором
9О°, ^-АОС = а (а ¥=45°).
Отвеп Мх = М» ctg2 а — Af, ,а .
2 sin a
К задаче 11.15-. К задаче 11.16.
11.16. В зубчато-кулисном механизме, расположенном в гори-
горизонтальной плоскости, палец О жестко связан с шестерней 1. Ку-
Кулиса 2 может скользить по направляющей 3, которая надета на
палец и может вращаться вокруг оси пальца. Скольжению ку-
кулисы противодействует пружина 4. Кулис,а посредством шарнира
А соединена с шестерней 5, находящейся в зацеплепии с шестер-
шестерней 1. К шестерне 5 приложена пара сил с моментом Ми а к ше-
шестерне 1 — пара с моментом Мг. В положении равновесия, изо-
изображенном на рисунке, продольная ось кулисы составляет с от-
отрезком OtA угол а, а с отрезком О2О — угол р.
Определить силу упругости пружины в этом положении, если
ОгО = а.
Ответ:
Mi ~
R sin a—a sin f
11.17. В кривошипно-лолзунном механизме с зубчатым секто-
сектором 1 и зубчатой рейкой 2, расположенном в горизонтальной пло-
g 1. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
157
скости ОА — АВ = I, ^-АОВ = а. На кривошип ОА действует па-
пара сил с моментом М.
Определить силу - упругости пружины в положении равнове-
равновесия, изображенном на рисунке.
Ответ:
К задаче 11.17*
К задаче 11.18.
11.18. Подъемно-качающийся стол механизма подъемных кле-
клетей прокатных станов вместе с находящимся на нем грузом веса
Q удерживается в равновесии парой сил с моментом М и пружи-
пружиной с коэффициентом жесткости с. Плоскость стола при этом
горизонтальна, стержень АВ вертикален, а стержень ОА образу-
образует угол ос с горизонтом.
Определить деформацию пружины, если О А = 0{D =-r,
Z-BOJ) ==90°.
Л , | МЬ — Qar cos a I
Ответ: л = ъ •
cr* cosa
11.19. Механизм шлакового стопора закрывает лётку до-
доменной печи под действием груза 1 веса Р. Механизм распо-
расположен в вертикальной плоскости, СК = DF, отрезки BE, OOit
О2О3, CD горизонтальны и
равны между собой. В по-
положении равновесия стер-
стержень ОВ образует с верти-
вертикалью угол а, а стержень
КС'— угол р.
Определить силу давле-
давления шлака на пробку 2, если
О А ■= а, ОВ = Ъ,
- 90°, ^PCD = 90°.
л „ аР
.Отвел Q^-
К задаче 11.19.
11.20. В механизме обжатия к колесам 1 прикладываются па-
пары сил, имеющие одинаковые по величине моменты М, но про-
158
ГЛ. 11. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
тивоположные направления действия. Посредством шатунов 2,
связанных шарнирно с колесами 1 и рычагами 3, движение пе-
передается штокам 4, которые зажимают тело 5. Штоки поджима-
поджимаются к рычагам пружинами 6, коэффициент жесткости кото-
которых с. В нерабочем положении равновесия механизма силы уп-
упругости пружин равны Fo. Механизм расположен в горизонталь-
горизонтальной плоскости, прямая 00 параллельна направляющим штоков,
/-AOD = 90°.
Определить силы сжатия в рабочем положении равновесия
системы, если в этом положении точки О, В п О, лежат иа одной
прямой, перемещения штоков из нерабочего положения равнове-
равновесия равны а, О^В = b, OB = WlBl О~А = -■ ОгВ, OD = О А, стерж-
стержни 3 составляют с прямой 00 утлы ее.
Ответ: N = ру—'- — Fo — сц.
°г /
К задаче 11.21.
11.21. В стержневой системе, расположенной в вертикальной
плоскости, АО{ = ОуОг, стержни 1 и 2 однородны и имеют вес Р4
и Р2 соответственно.
Определить силу патя.жения пружины, если в положении рав-
равновесия системы, изображенном на рисунке, ^~OtAB = a,
^-АВОг = 90°, точки Л, Oi и Ог лежат на одной прямой.
Ответ; F=(Pi + Рг) ctg a.
11.22. В зубчато-рычажном механизме шестерня 1 находится
ъ зацеплении с зубчатой рейкой 2, которая .может перемещаться
по неподвижной направляющей 3. С рейкой шарнирно связан
стержень 4. Стержень 5 шарниром А связан с шестерней, а шар-
шарниром В — со стержнем 4. Стержни 4 и 5 соединены также спи-
спиральной пружиной 6. В положении равновесия механизма, изо-
изображенном па рисунке, угол между стержнем 4 и рейкой равен
90°, точки О, А и В расположены на одной прямой, наклоненной
к рейке под утлом а.
§ 1. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
159
Определить момент, развиваемый пружиной в. этом положе-
положении, считая, что ОА_=АВ, а = 45°, и пренебрегая весом стержней.
Ответ: М = М1Ш.
11.23. В механизме для разделения отливок движение криво-
кривошипа ОА передается через шатун АВ и распорный механизм,
состоящий из жесткого равностороннего треугольника BCD и
стержня OiC, ползуну 1. Длина кривошипа ОА равна г, Ofi =
= CD. К кривошипу приложена пара сил с моментом М,
К задаче 11.22.
К задаче 11.23.
Определить силу давления ползуна на отлявку 2 в положении
равнов&сия, при котором АВ -L OJ), а = 15°, ^-ОАВ — 120°. Ве-
Весом элементов механизма пренебречь.
Ответ: N = —^-—.
11.24. В зубчато-рычажном планетарном механизме, располо-
расположенном в горизонтальной плоскости, ОА = OtB, ОО% = 8Д/3, R —
= 4/73. К стержню 1 приложена пара сил с моментом Mit а к
шестерне 2 — пара с моментом М% При некотором соотношении
между Mi и Mi механизм остается равновесном положении, при
котором ABWOOi.
К задаче 11.24.
К задаче 11.25,
160
ГЛ. П. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Найти это соотношение.
Ответ: М3=~^М1. .
11.25. Колесо 1 радиуса г может катиться без проскальзыва-
проскальзывания но горизонтальной плоскости так, что его центр движется
до окружности радиуса R с центром на вертикальной оси.
Определить, при каком соотношении между моментом М, мо-
моментом трения М, на оси колеса,' моментом трения качения Мг
и моментом трения М3 в опоре 2 колесо находится в равновесии.
(А/, + Мг) R + М3г
Ответ: М ~
R
§ 2. Системы с двумя степенями свободы
11.26. Каток 1 радиуса г может катиться с проскальзывани-
проскальзыванием по шероховатой горизонтальной направляющей. С катком по-
посредством шарнирного стержня АВ связан ползун 2, который
может сксЙгьзите по. гладким горизонтальным направляющим.
К катку приложена пара сил с моментом М, а к ползуну — по-
постоянная горизонтальная сила F:
Определить значения момента М и силы трения скольжения
между катком п направляющей, при которых система находится
jb равновесии, если CD -L ВС; /L.ABC = a, ^ADC = 90° - а.
Ответ: М = 2rF, FTP = F.
К задаче И.26.
К задаче 11.27.
11.27. В рычажном механизме, расположенном в горизонталь-
горизонтальной плоскости, О А = г, ВС =■ CD. При перегрузке опора 2 рыча-
рычага 1 перемещается, преодолевая силу трения зажима 3.
Считая момент М заданным, определить значения силы F и
силы трения в положении равновесия, показанном на рисунке
(O4B 90° AOB )
Ответ: F == -f sin a, FTp = 2F.
11.28. В стержневой системе, находящейся в' равновесии в
вертикальной плоскости, ОВ — ВС = 1, CD — DE, /LOBC=*
= £-ВСЕ = 90°. Однородный стержень СЕ соединен с неподвиж-
§ 1. СИСТЕМЫ ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
161
пой опорой пружиной 1 с коэффициентом жесткости си а одно-
однородный стержень ОВ соединен с шарнирной опорой спиральной
пружиной 2 с коэффициентом жесткости с2. На стержень ВС
действует перпендикулярная к нему распределенная система сил
с максимальной интенсивностью qm.
Определить деформации пружин X (для пружины 1) и ср (для
пружины 2), если вес стержня О В
равен Р. Весом стержня ВС пре-
пренебречь.
Ответ:
В
К задаче 11 2S.
К задаче 11.29.
11.29. Блок 3 веса Р подвешен на нити, которая намотана
на блок 1 и перекинута через блок 2. Свободный конец нити
прикреплен к пружипе 5, коэффициент жесткости которой с.
К центру блока 3 подвешен груз 4 веса Q. К блоку 1 приложена
пара сил с моментом М, радиус этого блока г.
При каком значении М система паходится в равновесии? Че-
Чему будет равна при этом деформация пружины?
Л л г (Р + Q) г л P + Q
Ответ: М = s , ^ = -57--
Глава 12
УРАВНЕНИЯ ЛАГРАНЖА II РОДА.
ОБЩЕЕ УРАВНЕНИЕ МЕХАНИКИ*)
§ 1. Системы с одной степенью свободы
12.1. Ползун 1 движется по гладкой горизонтальной направ-
направляющей под действием силы F. Посредством шатуна 2 движение
*) Во всех задачах данной главы, если не оговорено противное, силы
трения не учитываются. Массы ннтей и пружин считаются пренебрелшмо
малыми по сравнению с массами других тел.
11 Под ре&. К. С Колесникова
162 ГЛ 12 УРАВНЕНИЯ ЛАГРАЯЖА. ОБЩЕЕ УРАВНЕНИЕ МГХАНИКИ
передается ступенчатому блоку, который перемещает рейку 4,
скользящую в гладких горизонтальных направляющих. Момент
инерции блока относительно его оси вращения /, маоса рейки т.
В начальный момент времени точка А занимала крайнее нижнее
положение, движение началось из состояния покоя.
Найги скорость рейки как функцию перемещения ползуна s,
предполагая, что длина шатуна значительно больше радиуса
меньшей ступени. Массами ползуна и шатуна пренебречь.
Ответ: v, « R ~\/
4
12.2. Кулачок 1 массы М скользит по горизонтальной плоско-
плоскости под действием силы F и перемещает толкатель 2 массы т.
Толкатель движется в вертикальных,
направляющих. Пружина 3, коэффи-
коэффициент жесткости которой с, прижимает
К задаче 12.1.
К задаче 12 2
толкатель к нулачку. В начальный момент времени система на-
находилась в покое и пружина была пе деформирована.
Определить закон движения толкателя s = s(t), полагая
Ответ: s *= АН — cos kt), где А
F — mg tg a
,*■■
12.3. В кулачковом механизме, расположенном в вертикаль-
вертикальной плоскости, кулачок 1, представляющий собой однородный
диск радиуса г и маосы пг, вращается вокруг горизонтальной оси,
проходящей через точку О1# К кулачку приложена пара сил с
моментом М. Толкатель 2, являющийся зубчатой рейкой, движет-
движется в вертикальных направляющих и вращает ступенчатый блок
3, с которым он находится в зацеплении. С блоком 3 шарнирно
связан спарник 4. Массы толкателя и спарника равны гпг и mt
соответственно. Момепт инерции блока относительно его оси вра-
вращения /.
Составить дифференциальное уравнение движения системы,
полагая Л, — 2г„ г, ** 2г/3, шг = яг/3, mt = m/Q, I = 2?nr\
8 1 СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
163
Массой кривошипа 5 прейебречь.
Ответ: (у + 6 sin2<р 1 тг2ф -f- Згаг2ф2 sin 2ф + ^r gr sin ф sin ]-^ х
— у mgr sin ф = Л/.
12.4. Ротор 1 радиуса Rt движется
под действием грузов 2 та. 3 так, что
его вал 4 катается без скольжения по
направляющей 5, изогнутой в виде
К задаче 12 3.
дуги окружпости радиуса R. Масса ротора пги его радиус инер-
инерции относительно оси симметрии, рерпендикулярнои плоское! а
рисунка, равен р. Массы грузов 2 и 3 равны тп2 и то, соответст-
соответственно (т3 > тпг). Трос, на котором подвешены грузы 2 и 3, по
поверхности ротора не скользит. В начальный момент времени
центр ротора находился на вертикали, проходящей через
точку О.
Составить дифференциальное уравнение двджения системы,
если радиус вала 4 равен г. При вычислениях полагать тп% =•
= ш, = 2т2, Л, = 5г/2, Л = 4г, р = 2г.
Огвег: C81 — 60 sin ф) ф — ЗОфа cos <р — 10 е- A — 2 sin ф) = 0.
12.5. Кулачок 1, представляющий собой однородный круглый
диск радиуса г и массы гп, может вращаться вокруг горизонталь-
горизонтальной оси, проходящей через точку О перпендикулярно его плоско-
плоскости и отстоящей от его центра да
расстояние г/2. К кулачку прило-
приложена пара сил с моментом М.
Движение кулачка передается че-
через тарелку 2 штанге 3, которая
перемещается в направляющей 4.
Непрерывный контакт кулачка и
тарелки обеспечивает пружина 5,
коэффициент жесткости которой
11*
г з
К задаче 12.5,
ГЛ. 12 УРАВНЕНИЯ ЛАГРАНЖА ОБЩЕЕ УРАВНЕНИЕ МЕХАНИКИ
с. Общая масса тарелки и штанги равна т. В начальный мо-
момент времени тарелка находилась на расстоянии г/2 от точки О,
а пружина при этом была не деформирована.
Составить дифференциальное уравнение движения механиз-
механизма. Определить ускорение тарелки в момент времени, когда ку-
кулачок повернется на 90° из начального положения, если
Jlf-fcr».
Ответ: 2mrC + sin2 ф)ф + тг2ф2 sin 2ф + 2cr2(l — cos ф) sin ф +
+ imgr cos ф = 8М, аг = erfm.
§ 2. Системы с двумя и тремя степенями свободы
12.6. В механизме для шлифования цилиндрических поверх-
поверхностей маятник 1 приводится в движение вокруг горизонтальной
оси О пружиной 2, один конец которой закреплен на краю одно-
однородного диска 3. Масса диска т, радиус г. Коэффициент жестко-
жесткости пружины с. Центр маое маятника находится на оси О, его
момент инерции относительно этой оси равен /0. К диску при-
приложена пара сил с моментом М — Мо cos cat, которая сообщает
ему вращение вокруг горизонтальной оси О,, В положении рав-
равновесия механизма ось симметрии маятника вертикальна, пру-
пружина не деформирована, а ее ось горизонтальна и находится па
расстоянии I от оси О. При движении механизма возникает мо-
момент сил вязкого трения, модуль которого Д/, = ге|ф| (га =
= const >0).
Составить дифференциальные уравнения движения системы,
считая углы отклонения ф и ф от положения равновесия малыми.
Ответ: /оф + Щ + сЦ1ц> — г\|)) = 0, ^-г|> + сг (г-ф— /ф) —
•= Мо cos (at.
12.7. Колесо 1 двухколесной тележки катится по горизонталь-
горизонтальной плоскости без скольжения, а коле-
колесо 2 — со скольжением. Радиусы колес
R, их массы mi и т2 соответственно.
К колесу 1 приложена пара сил с мо-
моментом М, к центру колеса 2 — гори-
зонтальная сила F. Коэффициент тре-
трения скольжения между колесами и
опорной плоскостью /.
f
К задаче 12.С.
К задаче 12.7.
§ 2 СИСТЕМЫ С ДВУМЯ И ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ
165
Определить ускорение стержня 3 и угловое ускорение колеса
2, рассматривая колеса как сплошные однородные диски. Массой
стержня 3 пренебречь.
ЦМ + FR
-
а3 -
e2 -
^ ^ R , e2 - R .
12.8. На пластине 1, вращающейся вокруг неподвижной вер-
вертикальной оси под действием пары сил с моментом Л/,, закрепле-
закреплена вертикальная ось, вокруг которой вращается однородный
диск 2 радиуса г. К диску приложена пара сил с моментом Мг.
Момент инерции пластины относительно ее оси вращения /.
Масса диска пг, расстояние от его осп вращения до оси вращения
пластины равно I.
Определить угловое ускорение пластины 1 и угловое ускоре-
ускорение диска 2 относительно пластины.
Ответ: ct =
л/.
2Л/2
М,
шГ
mr I |- тГ'
12.9. Однородный диск 1 радиуса г и массы m вращается
вокруг горизонтальной оси, которую песет вилка 2, жестко
прикрепленная к стержню 3.
К диску приложена пара сил с
моментом L, Стержень 3 может
К задаче 12 8.
К задаче 12.9.
вращаться вокруг оси О цилиндрического шарнира,' параллель-
параллельной оси вращения диска. Стержень связан с опорой спиральной
пружиной 4, коэффициент жесткости которой с. Суммарная мас-
масса вилки и стержня М, их центр масс С находится на расстоя-
расстоянии а от оси О, OOi = Ъ. Суммарный момент инерции вилки и
стержня относительно оси О равен 1В. При вертикальном поло-
положении стержня пружина не деформирована.
Составить дифференциальные уравнения движения системы.
mr2 -
Ответ: — (ф + в) = L, A0 + mb2) в +св—(Ма+тпЬ)gainQ=0.
12.10. К рейке 4, движущейся поступательно в горизонталь-
горизонтальных направляющих, жестко прикреплена шестерня 1 радиуса R,
расположенная в вертикальной плоскости. Общая масса шестер-
шестерни и рейки wii. К центру шестерни 1 шарпирно прикреплено во-
6 ГЛ. 12. УРАВНЕНИЯ ЛАГРАЮКА. ОБЩЕЕ УРАВНЕНИЕ МЕХАНИКИ
дило 3, которое несет ось шестерни 2 массы тг. Шестерня 2 на-
находится в зацеплении с шестерней 1. К рейке приложена гори-
вонтальная сила F = Fo cos <at.
Составить дифференциальные уравнения движения. Шестер-
Шестерню 2 рассматривать как однородный диск радиуса г.
Ответ: (mi + тпг)х — mz(R + г)ф cos ф + тпг(И + г)ф2 sin ф =
3 ....
■= Fu cos at, -^- (jR + г)ф — х cos ф + ^sin ф = 0.
г I
■ж
В-
■////////////7/У/Л
К задаче 12.10.
К задаче 12.11.
12.11. На каток 1 массы mt намотана нерастяжимая нить,
перекинутая через блок 2 массы тп%. К концу нити прикреплен
груз 3 массы т3. Каток катится без скольжения по брусу 4 .мас-
.массы пгь, который перемещается по гладкой горизонтальной пло-
плоскости. Нить по блоку и катку не скользит.
Определить абсолютные ускорения груза и оси катка, а так-
также силу натяжения в ветвях нити / и //. Каток рассматривать
как однородный, круглый цилиндр, блок — как однородный диск.
При вычислениях положить тг = 0,Ъти m, — Q,75mu m4 = 0,25m1.
5 2 7 1
Ответ: a3 = -§g, «с = -g g, ^i = §6 mi8' Tu = ~3 mi8-
12.12* Призма 1 массы тп{ может скользить по горизонталь-
горизонтальной плоскости. По наклонной грани призмы, образующей угол а
с горизонтом, катится со скольжением однородный круглый ци-
цилиндр 2 массы т2. Цилиндр обмотан посередине нерастяжимой
нитью, конец которой прикреплен в точке А к кронштейну, жест-
жестко связанному с призмой. Ось цилиндра перпендикулярна, а уча-
участок АВ нити параллелен линии наибольшего ската наклонной
грани призмы.
Найти ускорение призмы а ускорение центра цилиндра отно-
относительно призмы, as также натяжение нити. При вычислениях
положить тг = 2тпи mt = 5,l кг, а = 30°.
Ответ; «! = ^-g а 2,82 м/с2, ас = \ g ot 4,9 м/с3, Т = 25 Н.
§ 2. СИСТЕМЫ С ДВУМЯ И ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ
167
12.13. Призма 1 массы т, движется по горизонтальной пло-
плоскости. По верхней грани призмы, параллельной опорной пло-
плоскости, катится без скольжения однородный круглый цилиндр 2
массы тг. По наклонной грани, образующей с горизонтом угол а,
скользит груз 3 массы т%. Ось цилиндра и груз связаны нерас-
нерастяжимой нитью, переброшенной через блок 4.
'V//////////////////////
К задаче 12.12.
//////////////////////////7/7,
К задаче 12.13.
Определить ускорения призмы и груза относительно призмы,
а также силу давления призмы на горизонтальную плоскость.
Массой блока пренебречь. При вычислениях положить тг = 0,6т,,
т3 = 0,4т„ т, == 10 кг, а = 60°.
Ответ: а, = 1,388 м/с2, а, = 3,47 м/с2, N-> 184 Н.
12.14. Однородный круглый цилиндр 1 массы т, и радиуса R
катается без скольжения по горизонтальной плоскости. К нему
приложена пара сил с моментом Л/ = Д/о cos w£. К оси цилиндра
шарнирно прикреплен .физический маят-
маятник 2 массы гпг. Момент инерции маят-
маятника относительно оси, проходящей-через
точку О перпендикулярно основанию ци-
линдра, /0. Центр масс маятника нахо-
дится в точке A, OA — h. Точка О соеди-
неиа горизонтальной пружиной 3 с непод-
вижной опорой. Коэффициент жесткости i-
пружины с. В начальный момент време-
пи t = 0 система покоилась, пружина бы-
ла не деформирована и <р = 0.
Составить дифференциальные уравнения движения системы
и для начального момента времени определить реакцию шарни-
шарнира О. При вычислениях положить шг = 0,257га,, Мо = mlgR, m, =■
40 кг, Го = 0,1т,Да, h = 0,6Д.
к задаче 12.14.
C \ .. ..
тг ml -f- m31 x -j- mji(f cos cp — тг/гф2 sin <p
— со;, /оф -f- тф,х cos ф + тз^Л sin ф = 0s Xo @) =
-—cos <ot —
ТГ
6,4
168 ГЛ 12 УРАВНЕНИЯ ЛАГРАНЖА ОБЩЕЕ УРАВНЕНИЕ МЕХАНИКИ
«Й.
12.15. По наклонной грани призмы 1, образующей угол а с го-
горизонтом, скатывается без скольжения однородный круглый ци-
цилиндр 2 массы т2. При этом призма перемещается по гладкой
горизонтальной плоскости, деформируя пружину 3, соединяющую
ее с вертикальной стеной. Масса приз-
призмы ти коэффициент жесткости пружи-
пружины с, ось пружины горизонтальна.
В начальный момент времени пружина
была не деформирована.
Составить дифференциальные урав-
уравнения движения системы, отсчитывая
I *'/ r; координату Xi от начального положе-
положения призмы,
Ответ: (те, + m2)x\ — mzx2 cos a +
К задаче 12.15. . п о о- о п
+сх1 = 0, Зх2 — lXi cos a — Zg sin a = U.
12.16. В брусе 1 массы mt сделана цилиндрическая выточка
радиуса R в которой катается однородный круглый цилиндр 2
массы тпг и радиуса г. Оси выточки и цилиндра параллельны.
Брус движется по горизонтальной плоскости под действием го-
горизонтальной силы F = Fo sin mt и силы упругости пружины 3,
коэффициент жесткости которой с. Ось пружины горизонтальна.
В начальный момент времени t = 0 система покоилась, пружина
была не деформирована, угол ф был равен 30°, а х = 0.
К задаче 12.16.
К задаче 12.17.
Составить дифференциальные уравнения движения системы и
для начального момента времени определить ускорение бруса и
угловое ускорение цилиндра. При вычислениях положить т4 =
= 5т2, R =■ 0,2 м, г = 0,05 м.
■ Ответ: (my -f- т2) х -f- m2 (R — г) ср cos ф — т3 (R — г) ф2 sin ф ~
— Fo sin cof — сх, у(Я —^ф + жсоэф + ^зтф = 0; х@)яз
at 0,515 м'сг, ф @) = — 23,78 рад/са.
12Д7. Однородный круглый цилиндр 1 массы т, и тонкостен-
тонкостенный цилиндр 2 массы тпг обмотаны двумя нерастяжимыми нитя-
§ 2 СИСТЕМЫ С ДВУМЯ И ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ
169
ми. Цилиндр 1 вращается вокруг неподвижной горизонтальной
оси, совпадающей с его продольной осью симметрии. Цилиндр 2
падает так, что его ось остается параллельной оси цилиндра 1.
Нити по цилиндрам не скользят. Радиусы цилиндров равны rt и
гг соответственно. К цилиндру 1 прикреплен конец спиральной
пружины 3, коэффициент жесткости которой с. Другой конец
пружины закреплен неподвижно. В начальный момент времени
пружина была не деформирована.
Составить дифференциальные уравнения движения системы.
Определить натяжение нити в начальный момент времени.
Ответ: r\ (mi -f- 2то2) q^ + 2m2r1r^^ + 2ccpt = 2r1mig, rl(p1 +
(;2)
12.18. Однородный круглый цилиндр 1 массы т4 катится без
скольжения по наклонной плоскости, образующей угол а с гори-
горизонтом. На цилиндр намотана нить, свободный участок которой
перекинут через блок 4 и на его конце подвешен подвижный
блок 2 массы тпг. С блока 2 сматывается другая нить, на конце
которой находится груз 3 массы пг3. Обе нити нерастяжимы и по
блоку и цилиндру пе скользят. Участки нитей Ц и /// во время
движения остаются вертикальными, а участок нити / — парал-
параллельным линии наибольшего ската наклонной плоскости.
Определить ускорения оси цилиндра 1 и груза 3, а также си-
силы натяжения нитей. Блок 2 рассматривать как однородный диск,
массой блока 4 пренебречь. При вычислениях положить т2 =
= т3 = 0,5т4, а = 30°.
Ответ: flc = 0,44g, а3 = 0,96^, 7\ = Тп = 0,08т,г, Тш = 0,02т,£.
//////
К задаче 12 18.
К задаче 12.19.
12.19. Стержень 1 длины I шарнирно прикреплен в точках А
и В к ползунам 3 и 4 одинаковой массы т. Ползун 3 скольаит
по вертикальным направляющим, а ползун 4 — по горизонталь-
горизонтальным. К ползуну' 3 прикреплены концы двух не?растяжимых ни-
нитей, которые намотаны на однородный круглый цилиндр 2. Кон-_
|70 ГЛ- 12- УРАВНЕНИЯ ЛАГРАНЖА. ОБЩЕЕ УРАВНЕНИЕ МЕХАНИКИ
цы нитей, находящиеся на цилиндре, закреплены-на нем. Ци-
Цилиндр имеет массу М и падает так, что его ось остается перпен-
перпендикулярной плоскости, в которой движется стержень.
Составить дифференциальные уравнения движения системы.
Массой стержня пренебречь.
Ответ: 21{2т + Л/со8гф)ф — 2Mscos ф — Шф2 вт2ф = 4mgcos ф,
3s — Z<p cos ф + 1(рг sin ф = 2g.
12.20. Однородный круглый цилиндр 1 массы т1 может вра-
вращаться вокруг неподвижной горизонтальной оси, совпадающей
-с его продольной осью симметрии. На поверхность этого цилинд-
цилиндра, а также на внешнюю ступень подвижного блока 2 массы тг
намотаны концы нерастяжимой нити 4. Один конец другой не-
нерастяжимой нити 5 намотан на внутреннюю ступень блока 2,
а ее второй конец прикреплен к ползуну 3 массы т3. Ползун
движется в вертикальных направляющих под действием силы F.
При этом нити по поверхностям блока и цилиндра не скользят,
а их свободные участки остаются вертикальными. Радиус инер-
инерции блока относительно оси, проходящей через его центр масс
перпендикулярно вертикальной плоскости, равен р. Радиусы его
наружной и внутренней ступеней равны R и г соответственно.
Составить дифференциальные уравнения движения системы
и определить натяжения нитей 4 и 5, полагая т2 = Зт4, т3 = т,,
F •=» 6m,g, Д=* 2г, р = г.
Ответ: (9т4 + 4т2).г2— Fт4 + 2тг)х3~= — 2m,g, — (Зт, + тг)хгЛ;
+ {2т, + тг + т3)х3 = F - m3g, Tk = 0,61m,g, Г5"= 3,72m,g.
2 &
К задаче 12.20.
К задаче 12.21.
12.21. Грузы 1 массы т, и 2 массы тп% связаны перастяжи-
мым тросом, перекинутым через блоки 5, 6 и охватывающим
блок 4. Масса блока 4 равна т4, 'к оси этого блока подвешен
груз 3 массы 77ij. Оси блоков 5 и 6 параллельны и лежат в одной
горизонтальной плоскости. Трос по блокам не скользит. Участки
8 2 СИСТЕМЫ С ДВУМЯ И ТРКМЯ СТЕПЕНЯМИ СВОБОДЫ
171
АЕ и BL троса параллельны опорным плоскостям грузов 1 и 2.
Опорная плоскость груза 1 является гладкой и наклонена к го-
горизонту под углом а. Опорная плоскость груза 2 горизонтальна,
коэффициент трения скольжения между грузом 2 и этой пло-
плоскостью /.
Найти ускорения грузов. Массой блоков 5 и б и троса пре-
пренебречь, блок 4 рассматривать как однородный диск. При вычис-
вычислениях положить m4 = 0,2wt = 0,4m3, тг = 7,5яг4, а = 30°, / = 0,2.
Ответ: а, » 1,28 м/с2, аг « 0,4 м/с2.
12.22. В планетарном механизме, расположенном в горизон-
горизонтальной плоскости, шестерни 1 и 2 вращаются вокруг общей вер-
вертикальной оси симметрии О. К шестерне 1 приложена пара сил
с моментом Ми к шестерне 2 — пара сил с моментом М%. Четыре
одинаковые шестерни 3 находятся в зацеплении с шестернями
1 та 2. Центры их соединены жесткой квадратной рамой 4 так,
что эти шестерни мегут вращаться вокруг вертикальных осей,
проходящих через вершины рамы. Массы шестерен 1, 2 и 3 рав-
равны тпи тпг и тп, соответственно. В начальный момент времени
t = 0 система находилась в состоянии покоя.
Определить угловые скорости шестерен 1 и 2 как функции
времени, если их радиусы равны rt и г2 соответственно. Шестер-
Шестерни 1 и 3 рассматривать как сплошные однородные диски, шестер-
шестерню 2 — как однородное кольцо. При вычислениях полагать nit =
= m2 = 4m,. Массой рамы 4 пренебречь.
2A1^ + ^)
Ответ: w1 =
)
t.
К задаче 12.22.
К задаче 12.23.
12.23. В планетарном механизме, расположенном в горизон-
горизонтальной плоскости, шестерня 1 массы М и жесткая треугольная
рама 2 могут вращаться независимо вокруг вертикальной оси О.
К шестерне 1 приложена пара сил с моментом L,, а к раме — па-
пара сил с моментом Ьг, С вершинами рамы А и В шарнирно'
172 Гл 12- УРАВНЕНИЯ ЛАГРЛНЖА ОБЩЕЕ УРАВНЕНИЕ МЕХАНИКИ
скреплены центры двух одинаковых шестерен 3 и 4, находящихся
в зацеплении с шестерней 1. Масса каждой из этих шестерен т.
Система приходит в движение из состояния покоя.
Найти зависимость угловой скорости шестерни 1 от времени.
Шестерни 3 и 4 рассматривать как сплошные однородные диски
радиусов г, шестерню 1 — как однородное кольцо радиуса R. При
вычислениях положить М = 2т, R = Зг. Массой рамы пренебречь.
Ответ: Й! = з-^ t.
12.24. Колебания стойки расточного станка, возникающие
вследствие упругости элементов конструкции, могут быть иссле-
исследованы с помощью модели, изо-
изображенной на рисунке. Пластина
1 массы 7?г скользит вдоль непод-
неподвижной горизонтальной направ-
направляющей 2 и вращается вокруг под-
подвижной горизонтальной оси, про-
проходящей через точку О пластины
перпендикулярно ее плоскости.
Коэффициенты жесткости пружин
3 и 4 равны с, и сг соответствен-
соответственно. Сила сопротивления демпфе-
К задаче 12.21 ра 5 R = — Ь\, где v — скорость
поступательного движения пласти-
пластины, b — const >0. Кроме того, к пластине приложен момент сил
сопротивления Мо = — пы (w — угловая скорость пластины, п =
= const>0). Центр масс пластины находится'в точке С, ОС — I.
В положении равновесия системы прямая ОС вертикальна, а пру-
пружины не деформированы. Момент инерции пластины относитель-
относительно ее оси вращения /0.
Составить дифференциальные уравнения движения пластины.
Ответ: тпх + mltp cos ф — mlqi2 sin ф + bx + 2ciX = О,
(Io + тр)ф + mix cos ф + /гф + с2ф — mgl sin ф = 0.
12.25. Ступенчатое колесо 1 массы mi приводится в движение
параллельными горизонтальными рейками 3 и 4. К рейке 3 мас-
массы т3 приложена горизонтальная сила F. Рейка 4 находится в
зацеплении с маховиком 2 массы тг, к которому приложена
пара сил с моментом М. Радиус инерции колеса относительно
его оси симметрии, перпендикулярной плоскости рисунка, ра-
равен р.
Найти величину углового ускорения маховика и величину ка-
касательной силы S в зацеплении маховика с рейкой 4. Все зацеп-
зацепления в системе считать зубчатыми. Маховик рассматривать как
однородный диск радиуса /\j, массой рейки 4 пренебречь. При
§ 2 СИСТЕМЫ С ДВУМЯ И ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ
173
2 1 „ М D
вычислениях положить m2 — -g-"ix, m3 =-g-/»i, /* = ■£-, пх — 2ги
Ответ: е, =
279Д/
S =
84Л/
12.26. Рейки 1 и 2 одинаковой массь! от движутся в парал-
параллельных направляющих, расположенных в горизонтальной плос-
плоскости. К рейке 2 прикреплен конец пружины 4, коэффициент
/ 3
У/Л
Г//Л
А
Х//Л
К задаче 12.23.
Г
1 ъ г
К задаче 12.26.
жесткости которой с. Другой конец пружины закреплен непод-
неподвижно. Рейки находятся в зацеплении с однородным диском 3
массы М и радиуса г. К диску приложена пара сил с моментом
L. В начальный момент времени пружина была пе деформиро-
деформирована.
Составить дифференциальные уравнения движения системы.
Ответ: r(8m + 3M)xt + тМхг = 4£, rMx, + r(8m-+ ЗМ)хг + 8сгхг =
= -4L.
12.27. В вибротрамбующем механизме к кривошипу 1 массы
m и длины I, вращающемуся в вертикальной плоскости, прило-
приложена пара сил с моментом L. Движение кривошипа через шатун
2 массы m и длины I передается ползуну 3, который перемещает-
перемещается в вертикальных направляющих. Ползун 3 соединен пружиной
Л (jo штоком трамбующей плиты 4. Масса плиты вместе со што-
штоком равна М. Пружина 6 имитирует упругие свойства грунта.
Коэффициенты жесткости пружин 5 и 6 равны d и с» соответст-
соответственно. Статическая деформация пружины 5 равна Я,о.
Составить дифференциальные уравнения движения системы,
отсчитывая координату х от положения статического равновесия
плиты 4. Массой ползуна 3 пренебречь, кривошип и шатун рас-
рассматривать как однородные стержни.
174 ra- 12- УРАВНЕНИЯ ЛАГРАНЖА. ОБЩЕЕ УРАВНЕНИЕ МЕХАНИКИ
Ответ; ml2
— cos 2ф] <p
sin 2(p-{-2ctl sin ф [А,о+ 21 A
^— cos ф) — ж] + 2mgi sin ф= L, Mx + (cx+c2) a;—2^2 A—cos ф) = О.
12.28. Блоки 1, 2 и 3, имеющие одинаковые радиусы г и мас-
массы т, могут вращаться вокруг параллельных горизонтальных
осей, совпадающих с их осями симметрии. При
»том оси блоков 2 и 3 неподвижны, а блок /
подвешен на пружине, коэффициент жесткости
которой с. Нить 4 охватывает блок 1, а ее кон-
цы намотаны на блоки 2 и 3. К блоку 3 при-
К задаче 12.27.
Л*
К задаче 12.28.
ложепа пара сил с моментом Л/, а к блоку 2 — пара сил с мо-
моментом L. Нить по блокам не скользит и остается натянутой во
все время движения.
Найти закон движения s = s{t) центра блока 1, полагая s(Oy^=
= 0, s@) = 0. Блоки считать сплошными однородными дисками.
Ответ: s (t) = ———A — cos w t), где со = 1/ £-.
12.29. В механизме вариатора скоростей гладкий кулачок 1
движется по горизонтальной гладкой плоскости под действием си-
силы F и приводит в движение шток 2, перемещающийся в верти-
вертикальных направляющих. Шток вращает однородный диск 3 ра-
радиуса R, движение которого передается ролику 4, жестко скреп-
скрепленному со штангой 5, скользящей в горизонтальных направля-
направляющих. Массы названных элементов механизма mt, тпг, тп,, тп^ и
га5 соответственно. Шток прижимается к кулачку пружиной бу
коэффициент жесткости которой с. К штанге приложена сила Q,
а к ролику — сила Т, перпендикулярная плоскости диска и не
показанная на рисунке. Поверхность диска такова, что проскаль-
проскальзывания между роликом и диском в вертикальном направлении
нет, а коэффициент трения скольжения в горизонтальном направ-
§ 2 СИСТЕМЫ С ДВУМЯ И ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ
175
лении /. В начальный момент вре-
времени пружина не деформирована
и s = 0.
Составить дифференциальные
уравнения движения системы, по-
полагая т, = т3 = 2тг. Ролик рас-
рассматривать как однородный диск,
штангу 5 — как стержень.
■ ■ '"■
Ответ:
Ш
I
Y
/
К задаче 12.29,
12.30. Каток i массы Л/ и радиуса г катится без скольжения
по горизонтальной плоскости под действием пары сил с моментом
L. Движение катка через стержень 2 массы m передается ползу-
ползуну 3, который соединен пружиной 4 с ползуном 5 массы т.
Ползуны движутся в горизонтальных направляющих. Масса пол-
ползуна 3 равна 2т, коэффициент жесткости пружины с. В началь-
начальный момент времени £ = 0 система находилась в покое и пружи-
пружина была не деформирована.
К задач» 12.30.
Найти уравнение движения ползуна 5 $ — s{t), полагая М =
«=4m, s@)=0, ф@)-=0. Трением между ползунами и их направ-
направляющими пренебречь. Каток рассматривать как однородный диск.
Ответ: *=-20Srl* 5Г 8Ш Т j- где w = У <^?
12.31. Составить дифференциальные уравнения движения си-
системы из задачи 12.15, считая опору призмы шероховатой и по-
полагая коэффициент трения скольжения между призмой и опорой
равным /.
Ответ:
^—m% cos a
sin a] sign ^-=
ГЛ 12 УРАВНЕНИЯ ЛАГРАНЖА. ОБЩЕЕ УРАВНЕНИЕ МЕХАНИКИ
(+ 1 при х1 > О,
stgn х, = {
I— 1 при зх <О;
Зх2 — 2 cos <ххх — 2g sin a — О.
12.32. Решить задачу 12.30 с учетом трения скольжения меж-
между ползуном 3 и направляющими, полагая коэффициент трения
скольжения между ними / = 2/13. Трением между ползуном 5
и направляющими пренебречь.
Угол наклона стержня 2 к горизонту принять равным 45°.
i5L—5mgr / , 40га . v(ot\ l/ilc
' = —■««„- U -~h7sin tг где ^^V^
12.33. Кривошип i, являющийся однородным стержнем мас-
массы m, и длины I, вращается в вертикальной плоскости вокруг
оси,, проходящей через точку О. Движе-
Движение передается шестерне 2 массы тг че-
рез шатун 4 длины I. Шестерня 2 нахо-
находится в зацеплении с рейкой 3 массы т3,
которая скользит в горизонтальных на-
направляющих. К рейке приложена сила F,
~| а к кривошипу — пара сил с моментом М.
V ^* В начальный момент времени меха-
низм находился в покое и кривошип
К задаче 12.33. занимал при этом горизонтальное поло-
положение.
Составить дифференциальные уравнения движения системны и
для начального момента времени определить угловые ускорения
кривошипа и шестерни. Массой шатуна пренебречь. Шестер-
Шестерню рассматривать как однородный диск радиуса г. При вычисле-
вычислениях положить тг == 2тп3 = 10 кг, F =■ 20 И, М = m^gl, 1 — 2 м,
г = 0,5 м.
Ответ: 2V \тх + 12 (m2 + ma)su '
+ Зт^1 cos ф — 12^/ sin ф = 6М, (;п2 + 2т3) nf +
(ф sin ф + ф2 cos ф) = 2^, ег ({„) = — |- да 7,35 рад/с2,
12.34. Маховик 1 массы т4, вращающийся вокруг горизонталь-
горизонтальной оси Ог под действием пары сил с моментом Л/, приводит в
движение горизонтальную рейку 4. Рейка передает движение од-
однородному ступенчатому колесу 2 массы тг, которое катится по
неподвижной горизонтальной направляющей 5. Радиус инерции
колеса относительно его оси симметрии, перпендикулярной плос-
плоскости рисунка, равен р. Радиусы наружной и внутренней ступе-
ступеней колеса равны Нг и гг соответственно. К центру колеса шар-
g 2. СИСТЕМЫ С ДВУМЯ И ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ
177
нирно прикреплен стержень 6 длины I с
грузом 3 массы т3 на конце. В началь-
начальный момент времени груз 3 запимал ниж-
нижнее положение.
Составить дифференциальные уравне-
уравнения движения системы, считая все за-
зацепления в ней зубчатыми. Найти вели-
величину углового ускорения колеса в началь-
начальный момент времени. Маховик 1 рас-
рассматривать как однородный диск радиу-
радиуса п, а груз 3 — как материальную точку.
Массами рейки 4 и стержня 6 прене-
пренебречь. Прп вычислениях положить т, =
= тг/20, т3 = т2/80, й2 = 2r2, r, = rJ2,
р = Зг2/2.
К задаче 12 34.
Ответ:
X (V sin i
, . 24(W
[т, (г2 + #2J -f 2т2 {г\ + р2) -f 2m3rl] Ф
— г|э cos if) = 2Л/ -^_—£ > ^ _ r^ cos -ф -f- ^ sin \p == 0,
2m3r2lx
12.35. Однородный диск i массы те, и радиуса г катится без
скольжения по цилиндрической поверхности радиуса R. Диск
приводится в движение стержнем 3, к ко-
которому приложена пара сил с мо-
моментом М. К стержню 3 -присоединен
один конец спиральной пружины 5,
коэффициент жесткости которой с.
Другой конец пружины закреплен непод-
неподвижно. К диску 1 в точке А шарнирно
прикреплен стержень 4 длины I, на сво-
свободном конце которого находится груз 2
массы тг. При начальном положении си-
системы оба стержня были вертикальны,
а пружина была пе деформирована.
Составить дифференциальные уравне-
уравнения движения системы и для начального
момента времени найти величины абсолютных угловых ускоре-
ускорений стержней, полагая R = I = 2г. Массами стержней пренебречь.
Ответ:
К задаче 12 35.
(Зт,
-f-
sin q> + ccp = M,
-f- {R — r) <p cos (o|) — ф) + (R — г) ф2 sin (\|з — ф) -f- g sin ib = 0г
2M „ ч М
е.ч г„) =
12 Под ред К С. Колесникова
178 ГЛ- 12- УРАВНЕНИЯ ЛАГРАНЖА. ОБЩЕЕ УРАВНЕНИЕ МЕХАНИКИ
12.36. Однородное кольцо 1 радиуса R и
массы М вращается вокруг горизонтальной оси,
перпендикулярной его плоскости и прохо-
проходящей через точку О„ под действием
пары сил с моментом L =- La sin v>t. Внутри
кольца находится однородный стержень 2
массы т и длины 21. В начальный мо-
момент времени t = 0 система находилась в по-
покое. При этом центр кольца О занимал край-
крайнее нижнее положение, а стержень распола»
гался так, что отрезок ОС составлял с продол-
продолжением отрезка OtO угол 30°.
Составить дифференциальные уравнения движения системы и
определить угловое ускорение кольца при t = 0, полагая R =■ 21. ■
Ответ: R%{2M+m)"y~mR /Д2-г> cos (<р + ф) +
+ mR VR^—P \f sin (ф 4- 1(з) + g {M + m) R sin ф
К задаче 12.36.
Lo sin at,
12.37. Однородный диск 1 массы т, п радиуса R вращается
вокруг; неподвижной горизонтальной оси, перпендикулярной его
ллоскости и проходящей через центр О.
В точке А к диску шарнирно прикреп-
прикреплен стержень 4 с грузом 2 массы т%
на конце. Длина стержня I, О А = а.
К стержню приложена пара сил с мо-
моментом М. Спиральная лружина 3,
коэффициент жесткости которой с, при-
прикреплена своими концами к диску и
стержню.
Составить дифференциальные урав-
уравнения движения, полагая что углы <р
и t|j отсчитывдются от вертикальных
направлений и что вр ф = ty = 0 пру-
пружина не деформирована. Массой стер-
стержня пренебречь.
Ответ: (miR2 + 2т2а2)ф + 2тпг<гЩ соз (<р + ф) —
— 2тп1аЩг sin (ф + ■§) — 2m2ga sin ф + 2с(ф + ф) •=» О,
тга1ц> cos (ф + *|>) + тг1г$ — m2alq>2 sin (ф +1|>) +
+ m2gl sin t|3 + с(ф + of») -= M.
12.38. Однородный диск 1 массы т, катится без скольжения
по горизонтальной плоскости. К центру диска шарнирно при-
прикреплен одним своим концом стержень 4 длины I. К- стержню
приложена пара сил с моментом М. Другой конец стержня шар-
К задаче 12.37,
g 2. СИСТЕМЫ С ДВУМЯ И ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ
179
нирно прикреплен к ползуну 2 массы т2, движущемуся в вер-
вертикальных направляющих. К ползуну с помощью пружины 5,
коэффициент жесткости которой с, подвешен груз 3 массы т.).
Составить дифференциальные уравнения движения системы,
выбрав в качестве обобщенных координат угол поворота ф стерж-
стержня 4 и перемещение s ползуна 3. Пружина 5 при ф = 0 и s = О
не деформирована. Массой стержня пренебречь.
Ответ: 2Cm, sin2 ф + 2тг cos2 ф)Гф +Cmi — 2т2)Рфгsin 2ф +
+ icld sin ф — s) cos ф + 4тгд1 cos ф = AM,
m3s + c{s— I sin ф) + m3g = 0.
■L&-2 *
К задаче 12.38.
'//////////////7///////////////.
К задаче 12.39.
12.39. Колесо 1 радиуса R и массы М катится без скольжения
по горизонтальной плоскости под действием пары сил с моментом
L. По колесу 1 катится без скольжения колесо 2 радиуса г й мас-
массы т. Ось колеса 2 шарнирно прикреплена к стержню 3, враща-
вращающемуся вокруг горизонтальной оси, проходящей через точку Ot.
Стержень 3 соединен с осью колеса 1 спиральной пружиной 4,
коэффициент жесткости которой с. В начальный момент времени
t = 0 стержень занимал верхнее вертикальное положение, а пру-
пружина была не деформирована.
Составить дифференциальные уравнения движения системы и
найти угловое ускорение колеса 1 при t = 0. Массой стержня
пренебречь. Колеса" считать однородными дисками.
Ответ:
j^2sini|) = 2L,
3m (Д -(- r)\|i + mR (R + r) A — 2 cos -ф)<р +
г) (Дф1|) — g) sin \|з + 2сг|> == О;
e, @) =
(дм + 8m) Я3
12.40. В дифференциальном механизме шестерня 1 массы /и,
и водило 4 вращаются независимо друг от друга вокруг верти-
12*
180 rJL 12 УРАВНЕНИЯ ЛАГРАНЖА. ОБЩЕЕ УРАВНЕНИЕ МЕХАНИКИ
кальной оси, проходящей через точку О. Шестерня 1 находится
в зацеплении с шестерней 2 массы т2, а последняя — с шестер-
шестерней 3 массы т3. Оси шестерен 2 ж 3 укреплепы на водиле 4.
К шестерне 1 и водилу 4 приложены пары сил с моментами Li
и Lk соответственно. К шестерне 3 приложен момент сопротивле-
сопротивления Ь3.
Определить угловые ускорения шестерни 1 и водила. Шестер-
Шестерни рассматривать- как однородные диски радиусов rs, r2 и г3 со-
соответственно. Массой водила пренебречь. При вычислениях поло-
положить mi = тг = 9тг = 90 кг, L4 = 150 Н • м, L3 = 120 Н • м, £4 =
==■ 180 Н • шг г, = Гз = Зп == 0,3 м.
Ответ: et = 3,72 рад/с2, е4 = 3,04 рад/с2.
1 2 3 Ч
К задаче 12.40.
К задаче 12.41.
12.41. В стержневом механизме, расположенном в горизон-
горизонтальной плоскости, стержень ОВ вращается вокруг вертикальной
оси, проходящей через точку О, под действием пары сил с мо-
моментом М. К стержню BD приложена пара сил с моментом L.
Длина стержня BD равна I, длины стержней ОВ п АЕ равны 21,
О А = АВ. Массы стержней ОВ и АЕ одинаковы и равны т.
Все стержни однородны.
Определить, при каком соотношении между моментами М н
L угловое ускорение стержня ОВ будет больше углового ускоре-
ускорения стержня АЕ в тот момент, когда они будут располагаться
на одной прямой. Масса-
Массами ползуна D и стержня
BD пренебречь.
Ответ: M>1L.
12.42. В стержневом
механизме, расположенном
в вертикальной плоскости,
ползуны 1 и 2 могут
скользить по горизонталь-
К задаче 12Л2. пой направляющей 3.
§ 2 СИСТЕМЫ С ДВУМЯ И ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ
181
9mg~iiF
Стержень BD в точке С шарнирно соединен с ползуном 2. К его
свободному концу приложена горизонтальная сила Г. Пружины 4
и 5 имеют одинаковые коэффициенты жесткости с. Масса стерж-
стержня АВ равна т, масса стержня BD равна 2т. Система приходит
в движение из состояния покоя, при котором стержни наклоне-
наклонены под углами 45° к направляющей, а пружины не деформи-
деформированы.
Составить дифференциальные уравнения движения системы,
полагая АВ = ВС — CD = I. Определить величину ускорения пол-
ползуна 1 в начальный момент времени. Стержни считать однород-
однородными, массами ползунов пренебречь.
Ответ: 6ms + 9m£ (ф sin ф -f- ф2 cos ф) + 2cs — 2F,
2ml A+8 sin2 ф) ф + 8т/ф2 sin 2ф + 9ms sin <p +
+ id ( /2 — 2 cosфУзт q> + mgcos ф = 6Fsinq>, ax(
12.43. Гироскопический маятник состоит из ротора 1, уста-
установленного в кардановом подвесе, и грузика 2, который прикреп-
прикреплен к рамке 3. Оси рамок 3 и 4 пересекаются в точке О, явля-
являющейся центром масс ротора. Ротор вращается вокруг своей оси
симметрии Oz с постоянной угловой скоростью со. Грузик распо--
ложен в точке пересечения оси Oz с рамкой 3 на расстоянии I
от точки О. Масса грузика т, полярный момент инерции ротора
С, экваториальный — А. В начальный момент времени ось Oz бы-
была выведена из вертикального положения равновесия так, что от-
отклонение грузика от его крайнего верхнего положения было мало.
Предполагая отклонения оси Oz от вертикали малыми во все
последующие моменты времени, составить линеаризованные диф-
дифференциальные уравнения движения гиромаятника. Массой ра-
рамок пренебречь.
Ответ: {А + mlz)a + C<i>$ = mgla, (A + ml2)$ — Ca>a.=mgl$, где
а и р — углы Крылова (см. задачу 6.3).
12.44. Модель центрифуги состоит из
кожуха 1, ротора 2 и груза 3. Кожух
связан с неподвижной опорой с помощью
Z
К задаче 12.44.
182 ГЛ 12 УРАВНЕНИЯ ЛАГРАНЖА. ОБЩЕЕ УРАВНЕНИЕ МЕХАНИКИ
сферического шарнира 4. Ротор вращается с постоянной угловой
скоростью, ш вокруг своей оси симметрии, имеющей неподвижную
точку О в центре этого шарнира. Суммарная масса кожуха и ро-
ротора равна М, масса груза 3 равна М/4. Расстояния от тачки О
до центров масс груза 3 и кожуха совместно с ротором одинако-
одинаковы и равны I. Момент инерции ротора относительно оси враще-
вращения Oz равен /<>, моменты инерции кожуха вместе с ротором от-
относительно осей Ох и О у равны 1Х = /„ = ЗМР/2. В точке А, на-
находящейся на продолжении оси Oz на расстоянии О А = а,
с центрифугой связаны пружины 5 и 6, коэффициенты жесткости
которых одинаковы и равны с. При вертикальном положении оси
Oz пружины не деформированы и их оси параллельны осям Qx
и Оу соответственно. При отклонениях оси Oz от вертикали на
центрифугу действует момент сил сопротивления, проекции век-
вектора которого на оси Ох и Оу имеют соответственно вид Мк =
«= — пых, Му — — пщ (и = const > 0).
Составить линеаризованные дифференциальные уравпения
движения системы при малых отклонениях оси Oz от вертикали.
Размерами груза 3 пренебречь.
Ответ: 7М1г'а + 4иа + 4/ош'р + (8саг - BMgDa = 0, IMl^ + 4n[> -
— 4/0<ва+ (8са2 — 3Mgl)$ = Q, где а и ^ — углы Крылова (см. за-
задачу 6.3).
12.45. Колеса двухколесной тележки катятся со скольжением
по горизонтальной плоскости. Радиусы колес R, масса колеса 1
равна ml, масса колеса 2 равна т2. К цент-
центру колеса 2 под углом а к горизонту прило-
приложена сила F. Коэффициент трения сколь-
скольжения /.
Составить дифференциальные уравнения
движения тележки, рассматривая колеса
как сплошные однородные диски. Массой
стержня 3 пренебречь.
К задаче 12 45. К задаче 12.46.
Ответ: (t»i + щ) х = F (cos а + / sin а) — g {mx + шг) f, Яф =■
= 2gf, m3Ry = 2/ (m^ - F sin а) при .f > ^^ f^a-
12.46. В модеди лифта грузы 1 и 2, массы которых m, z m,
соответственно, подвешены к концам троса, перекинутого через
§ 1. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ ОПОР
183
шкив 3. Шкив вращается вокруг горизонтальной оси О под дейст-
действием пары сил с моментом М. Радиус шкива г, его момент инер-
инерции относительно оси вращения /. Коэффициенты жесткости пру-
пружин 4 одинаковы и равны с, силы сопротивления демпферов 5
пропорциональны скоростям грузов по отношению к тросу I коэф-
коэффициент пропорциональности ц,). Трос по шкиву не скользит.
Движение начинается из положения системы, когда пружины не
деформированы.
Составить дифференциальные уравнения движения системы.
Ответ:
/ф + 2|лгЧр - \yrCx, + хг) + 2сЛр - crix, + хг) =* М,
(i, - щ)
- щ) =
т2хг +
mzg.
Глава 13
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ ОПОР И УРАВНОВЕШИВАНИЕ
ТВЕРДЫХ ТЕЛ, ВРАЩАЮЩИХСЯ
ВОКРУГ НЕПОДВИЖНЫХ ОСЕЙ
§ 1. Определение реакций опор
13.1. Вал 1 вращается вокруг вертикальной оси с постоянной
угловой скоростью а. К валу приварен под углом ф стержень 2.
Между ними находится однородный диск 3 радиуса г. Опреде-
Определить, при каком значении о давление диска на вал будет равно
нулю. Толщиной вала пренебречь.
Ответ; о = |/ —
3 6)
V/////////
г
Jr ° n
н
Г/////////?////////,
m
К задаче 13.1. К задаче 13.2.
13.2. Тело цилиндрической формы, имеющее кольцевые вы-
выступы 1 и 2, расстояние между которыми /, движется равномерно
184 ГЛ- 13- ОПРЕДЕЛЕНИЕ РЕАКЦИЙ ОПОР И УРАВНОВЕШИВАНИЕ
поступательно внутри горизонтальной трубы радиуса /?, вра-
вращаясь относительно ее оси с постоянной угловой скоростью w.
Коэффициент трения скольжения /. Тело имеет неточность в из-
изготовлении, которая показана на рисунке в виде дополнительной
сосредоточенной массы тп. Масса тела без учета массы т равна
М. Плоскость 00, перпендикулярная оси трубы и проходящая
посередине между выступами, является плоскостью симметрии
тела (без учета массы тп).
Определить величину силы, обеспечивающей равномерное по-
поступательное движение тела, а также величину силы трения
скольжения на выступе 2 в момент, когда масса тп занимает
нижнее положение. Считать реакции сосредоточенными силами,
приложенными к выступам лишь снизу.
Ответ: F = J[(M + m)g + mR(o\ F f[M\2m
13.3. В треугольнике ABD AB = BD, ^ABD = 90°. Диск 1
массы m вращается с постоянной угловой скоростью <в вокруг
оси, проходящей через его геометрический центр Ю перпендику-
перпендикулярно его плоскости. Точка О находится* на равных расстояниях
от концов стержня BD. Центр масс диска С смещен по его радиу-
радиусу относительно точки О на величину е.
Определить проекции динамической реакции в шарнире В
на оси Вх и By как функции угла ф. Толщиной диска прене-
пренебречь.
2 2
Ответ: л.в — — B, cos <р — sin ф), У £ = ^— sin ф.
13.4. Коленчатый. стер5кень ABDE изогнут в точках В и D
под прямыми углами и укреплен в заделке А так, что колено АВ
перпендикулярно плоскости Axz.
Диски 1 и 2 вращаются с одинако-
одинаковыми постоянными угловыми ско-
скоростями о) вокруг осей, проходящих
через их геометрические центры Ot
г i
К задаче 13.3.
К задаче 13.4.
и 02 перпендикулярно пх плоскостям. Плоскости дисков парал-
параллельны плоскостям Ayz и Axz соответственно. Центры Ot п Ог
§ 1. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ ОПОР
185
расположены так, что OtA = OiB = O2D. Массы дисков одина-
одинаковы и равны т. Центры масс дисков Су и Сг смещены
относительно центров О1 и Ог на расстояния О^СУ = е,
п ОгС2 — е2. В начальный момент времени отрезки Otd
п О2С2 были отклонены от прямых А В и DE соответ-
соответственно на равные углы ср. Вращение дискам было сообщено
одновременно. -
Пренебрегая толщиной дисков и полагая АВ = 2BD — а, опре-
определить динамические реакции заделки как функции угла ср.
Ответ: Хл\ — me2a2 cos ср, YA = —те^со^, ZA =—т (е1-(-
m(ei ~\~ 2O я®"
Mn _ -1
'АИ —
*",**'
X
X (sin ф + cos ф), MAz = — me2aco2 cos ф.
13.5. Вал 1 вращается вокруг вертикальной оси с постоянной
угловой скоростью о). С валом жестко скреплено однородное коль-
кольцо 2 радиуса г так, что его вертикальный диаметр совпадает с
осью вращения вала и AD = BE = г/2. В кольце движется ша-
шарик массы т с постоянной относительной скоростью v.
Определить динамические реакции опор при а = 60°, полагая,
"что плоскость кольца совпадает с плоскостью Ayz.
Ответ: ,Ха— g-, Х% = s—, Уд = 1
vz m ['"'"'"
i в =
12г
12г
13.6. В модели тренажера рамка 1 вращается вокруг горизон-
горизонтальной оси АВ с постоянной угловой скоростью со,. Тело 2 мас-
массы т, прикрепленное на конце стержня 3, вращается с угловой
скоростью ш2 = 2©! вокруг оси CD. Ось CD пересекает ось АВ
под прямым углом. Стержень составляет с осью
CD угол 45°, длина стержня I, АО = ВО = 21.
Определить динамические реакции опор
'Л и В в момент времени, когда плоскость рам-
рамки вертикальна, стержень расположен в этой
плоскости, а тело находится в нижнем поло-
положении. Размерами тела пренебречь.
х
К задаче 13.5.
К задаче 13.6.
186 ГЛ. 13 ОПРВДЕЛЕНИЕ РЕАКЦИЙ ОПОР И УРАВНОВЕШИВАНИВ
Ответ: ад = U, лв =
—10
mlaii,
= - 1 + 1801/2 mtoj, ZA = 0, Zl =
8
13.7. В механизме центробежного маятника вал 1 вращается
вокруг вертикальной оси с постоянной угловой скоростью ок При
этом однородный' стержень 2 с грузами 3 на концах поворачи-
поворачивается вокруг своей оси симметрии А и деформирует пружину 4.
Длина стержня 21, масса его М. Масса каждого груза т, коэф-
коэффициент жесткости пружины с. При недеформированном состоя-
состоянии пружины стержень отклонен- от вертикали на угол а0.
Определить угол наклона стержня к вертикали а. Грузы рас-
рассматривать как материальные точки. При вычислениях положить
sin а да а, cos а » 1.
Ответ: а —
Зс-
-{М + 6т) /V
13.8. К вертикальному валу АВ, вращающемуся с постоянной
угловой скоростью <а = 10 рад/с, с помощью шарнира О п нити
CD прикреплен однородный стержень ОС под углом а к оси Oz.
a
К задаче 13.7.
К задаче 13 8.
Стержень расположен в плоскости yOz, длина его lt = 30 см,
масса т, = 10 кг. Нить параллельна оси Оу. Кроме стержня,
к валу прикреплен точечный груз Е массы тпг = 2 кг при помощи
стержня длины 1г = 5 см.
При а == 30° и АО =-= 0В = 60 см определить: натяжение нити,
полные реакции (динамические и статические) опор А и В и
ные реакции в шарнире О. Массу стержня ОЕ не учитывать.
Ответ: Г-78,3 Н, ХА--4,18 Н, Хя = -5,82 Н, Уд-
= -20,55 Н, Ув=.-54,45 Н, ZA = 117,6 Н, УО = 3,3 Н, ZO = 98H.
13.9. Однородный стержень OD длины I и массы m жестко
прикреплен одним концом к вертикальному валу, который приво-
§ 1. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ ОПОР
187
дится во вращение из состояния покоя с постоянным угловым
ускорением е. Угол между стержнем и осью вращения равен а.
Определить динамические реакции подпятника А и подшип-
подшипника /?, если АО = ВО = I.
Ответ: Х\ — —~ [1 ——cos a) sin а, Х% = —~г A 4- q- cosa ] X
2 \
д=- j (eiJ|l
2 \ .
-g-cosajsma,
7-TT
в =
2 \
-5-cosalsina.
13.10. У трубы длины / оси наружной и внутренней поверх-
поверхностей параллельно смещены на величину б.
Центр нормального сечения внешней поверхности находится
в точке 01, центр нормального сечения внутренней поверх-
поверхности — в точке Ог. Радиус внутренней
поверхности г. Плотность материала тру-
трубы 1- Труба вращается вокруг горизон-
горизонтальной оси симметрии внешней поверх-
поверхности с постоянной угловой скоростью а.
У////////////////////////.
Ж/////////////////,
Ь
К задаче 13.9.
К задаче 13.10.
Доказать, что силы инерции трубы приводятся к равнодейст-
равнодействующей и найти ее величину.
Ответ: |R| = я^бг2©2.
13.11. В механизме центробежного маятника вал 1 вращается
вокруг вертикальной оси с постоянной угловой скоростью «.
Однородное кольцо 2 массы М поворачивается при этом вокруг
оси А, совпадающей с его диаметром, и деформирует спиральную
пружину 3. Коэффициент жесткости пружины с. При недеформи-
рованном состоянии пружины плоскость кольца наклонена к вер-
вертикали под углом а0. Внешний радиус кольца Я, внутренний
радиус г = Я/2.
Определить приращение угла отклонения плоскости кольца
Да — а — а0, считая Да малым.
5Л/Л2ш2 sin 2aft
Ответ: Да = —-. „ „ г-.
2 A6с — ЬМП® cos 2a0)
13.12. Однородный стержень 1 и точечный груз вращаются с
постоянной угловой скоростью со == 10 рад/с вокруг вертикальной
188 гл- 13 ОПРЕДЕЛЕНИЕ РЕАКЦИЙ ОПОР И УРАВНОВЕШИВАНИЕ
оси Oz. Стержень 1 крепится одним концом к валу с помощью
пружины, другим — шарнирно к горизонтальному стержню 2,
жестко скрепленному с валом. Длина стержня 1 Zt = 30 см, мас-
масса М = 10 кг, длина стержня 2 1г = Ъ см. При вертикальном по-
положении стержня 1 пружина не деформирована и ось ее горизон-
горизонтальна, коэффициент жесткости пружины с = 20 Н/см. На конце
стержня 1 находится точечный груз D массы т = 1 кг.
5. t
\\ч\\\\\\\ч
К задаче 13.11.
К задаче 13.] 2.
При АО = ОВ = 60 см определить: угол отклонения стержня
а, полагая его малым, полные (статические и динамические)
реакции подшипников и полные реакции в шарнире О4. Массой
стержня 2 пренебречь.
Ответ: а = 4,2°; ХЛ = Хв = 0, УА = - 18,6Н, Ув =-49,5Н,
ZA-107,8 Н, ГО, = -24,ЗН, Zo, = 107,8 Н.
13.13. Однородный стержень 1 крепится к вертикальному валу
с помощью пружин и шарнирно к горизонтальному стержню 2,
жестко скрепленному с валом.
Длипа стержня U = 30 см, мас-
масса m = 10 кг, длипа стержня 2
h = Ю см. Пружины не деформи-
деформированы и оси их горизонтальны,
когда стержень 1 отклонен от
вертикали на угол а = 5°, коэф-
коэффициенты жесткости пружин Ci =»
= 10 Н/см и сг = 20 Н/см. Вал
вращается с постоянной угловой
скоростью о = 20 рад/с.
При О А = ОВ = 60 см опре-
определить: угол а отклонения стерж-
стержня, полагая его малым; силы на-
К задаче 13.13, тяжения пружин Fnp и F^p, пол-
§ i. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ ОПОР
189
1/4 1/8
ные (статические и динамические) реакции опор А и В. Массой
стержня 2 пренебречь.
Ответ: а = 9°; F% = 10,5 Н, <> = 21 Н, ХА = Хв = 0, Уд=
= - 204 Н, YB=- 196 Н, ZA = 98 Н.
13.14. Вал 1 вращается вокруг вер-
вертикальной оси с постоянной угловой
скоростью со. С валом жестко связана
тонкая однородная квадратпая пластин-
пластинка 2 массы М, имеющая квадратный
вырез, размеры которого указаны на
рисупке.
Определить динамические реакции
в опорах вала, если АС = BD — 1/2.
Ответ: ХяА = 0, Х% = 0, YA =
13.15. Вал 1 вращается вокруг вер-
вертикальной оси с постоянной угловой
скоростью со. К валу приварепы в од-
одной точке два стержня OD и ОЕ дли-
длины I каждый. К противоположным кон- К задаче 13.14.
цам стержней жестко прикреплен тон-
тонкий однородный прямоугольник массы М так, что его плоскость
совпадает с плоскостью стержней. Продольная ось прямоуголь-
прямоугольника образует с вертикалью угол а. Ось симметрии конструкции
Оу' перпендикулярна оси вращения. '
Определить динамические реакции в опорах вала, если длина
прямоугольника I, ширина h, О А — ОВ = 1/2. Массой стержней
пренебречь.
От*гт:Х\ = -Х\ = ^ъшг*1 Y\= YB= -^f (h+lV%.
13.16. Вал 1 враща%тся верти-
вертикальной оси с постоянной угловой ско-
скоростью со. Перпендикулярно к валу при-
:\
К задаче 13.15.
К задаче 13.16.
19Q ГЛ. 13. ОПРВДЕЛЕНИЕ РЕАКЦИЙ ОПОР И УРАВНОВЕШИВАНИЕ
варен стержень 2 длины I, на противоположном конце которого
жестко укреплена однородная толстостенная труба 3 массы М и
длины 21. Внешний радиус трубы Л, внутренний радиус г = Л/2.
Ось стержня перпендикулярна боковой поверхности трубы и де-
делит ее образующую пополам. Ось трубы составляет с вертикалью
угол а.
Определить динамические реакции в опорах вала, если АО =
= ОВ = 1,1 = ЗЛ. Массой стержня пренебречь.
Ответ: АА = --
= -2ЖЯа>2.
13.17. Сплошной однородный круговой цилиндр массы m кг,
радиуса г и высоты h вращается вокруг вертикальной оси АВ
с постоянным угловым ускорением е рад/с2. Стержень OD, удер-
удерживающий цилиндр в вертикальном положении, перпендикуля-
перпендикулярен оси вращепия и боковой поверхности цилиндра. Точка D
отстоит от нижнего основания цилиндра на расстояние Л/3.
Определить динамические реакции в опорах А и В в момент
времени ( = 2с, есла О А = OB = OD = I м, h = 21/3, г = 1/4. Мас-
Массой стержня OD пренебречь. Движение начинается из состояния
локоя.
Ответ: ХА = — — m/ёН, Хд = •—gg/re/eH, Уд = ат/е2Н,
Yl = bmle2H, а = - 20/Эс2, Ь=— 25/9Л
К задаче 13.17.
К задаче 13.18.
13.18. Однородная квадратная пластинка может вращаться
вокруг горизонтальной оси, неизменно связанной с вертикальным
валом, вращающимся с постоянной угловой скоростью со =•
= 20 рад/с. Сторона пластинки а = 20 см, масса т = 3 кг. Верх-
Верхний конец пластинки прикреплен к валу с помощью пружины,
коэффициент жесткости которой с = 20 Н/см. В начальный мо-
§ 1. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ ОПОР
191
мент угол отклонения пластинки от вертикали а0 = 5°, пружина
при этом не деформирована.
При АО — 40 см, ОВ = 60 см определить: угол отклонения
пластинки, полагая его малым; натяжение пружины; полные (ди-
(динамические и статические) реакции подпятника А и подшип-
подшипника В.
Ответ: а = 6,25°, Fap = j (a - а0) ^4,36 Н; ХА = 69Н,
Хв = 51 Н, YA *= - 0,436 Н, YB = 0,436 Н, ZA = 29,4 Н.
13.19. Однородная прямоугольная пластинка шарнирно при-
прикреплена к горизонтальному стержню ODj приваренному к верти-
вертикальному валу, вращающемуся с постоянной угловой скоростью
а) = 20 рад/с. Ось шарнира горизонтальна и перпендикулярна
стержню. Длина пластинки а = 20 см, масса m = 3 кг. Длина
стержня OD I = 5 см. Верхний конец пластинки прикреплен к
валу при помощи пружины, коэффициент жесткости которой с =
= 20 Н/см. В пачальный момент пластинка находилась jb верти-
вертикальной плоскости, пружина при этом была не деформирована.
При АО = 40 см, ОБ — 60 см определить: угол а отклонения
пластинки, полагая его малым; натяжение пружины; полные (ди-
(динамические и статические) реакции подпятника А и подшипни-
подшипника В. Массой стержня OD пренебречь.
Ответ: а = 5,63°; Fnp = 39,3 Н, ХА = 33,7 Н, Хв = 38 Н, YA -
= 0, YB = 0, ZA = 29,4 II.
К задаче 13.19.
К задаче 13.20.
13.20. Прямоугольная однородная пластинка 1 массы М вра-
вращается вместе с валом 2 вокруг вертикальной оси АВ с постоян-
постоянной угловой скоростью о. Одновременно она может поворачи-
поворачиваться " вокруг горизонтальной оси KL, перпендикулярной ее
плоскости в проходящей через ее центр. Пластинка соединена
с валом пружиной 3, коэффициент жесткости которой с. В на--
192 ГЛ 13 ОПРВДЕЛЕНИЕ РЕАКЦИЙ ОПОР И УРАВНОВЕШИВАНИЕ
чальный момент времени продольная ось пластинки составляла
с вертикалью малый угол а0. Пружина при этом была не дефор-
деформирована и ее ось была параллельна горизонтальной прямой ОС.
Определить угол а в произвольный момент времени, считая
отклонение от начального положения малым. Определить также
динамические реакции в опорах А а В, полагая ОБ = ОС — а,
АО = h = -г а, I = - а, с = —^—i ао ~ " РаД- Массой вилки *
4 4 I У
пренебречь.
Ответ: а= -| рад; | R^ | = ~ Маа2, \ R| | = ^ Маю2.
13.21. Прямоугольная однородная рамка 1 массы М враща-
вращается вместе с валом 2 вокруг вертикальной оси АВ с постоянной
угловой скоростью о. Одновременно она может поворачиваться
вокруг горизонтальной оси KL, лежащей в ее плоскости. Стерж-
Стержни 4 и 5, соединяющие вал с пластиной, находятся в горизон-
горизонтальной плоскости и жестко прикреплены к валу. Расстоянио
между осями АВ и KL равно За.
Рамка соединена с валом пружиной 3, коэффициент жест-
жесткости которой с. При вертикальном положении рамки пружина
не деформирована и ее ось горизонтальна.
К задаче 13,21.
К задаче 13 22.
Определить величину суммы динамических реакций в под-
подшипниках К и L, считая угол отклонения рамки от вертикали
малым. Массами стержней 4 и 5, а также изменением направле-
направления оси пружины пренебречь. При вычислениях положить о =
= fg/a, с = AMg/a.
Ответ: ! R& + R£ | « l,MMg.
13.22. Однородный диск радиуса г = 10 см и массы nii — S кг
шарнирно крепится к вертикальному валу, вращающемуся с
§ i. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ ОПО-Р
193
К задаче 13.23.
постоянной угловой скоростью о) = 10 рад/с. Верхний конец дис-
диска прикреплен к валу с помощью пружины, коэффициент жест-
жесткости которой с = 10 Н/см. В точке пересечения оси шарнира с
краем диска прикреплен точечный груз D массы тпг =• 0,4 кг.
В начальный момент времени диск отклонен от вертикали на
угол а0 = 10°, пружина при этом не деформирована.
При АО ==■ ОВ = 50 см определить: угол а отклонения диска,
полагая его малым; натяжение пружины: полные (динамические
и статические) реакции подпятника А и под-
подшипника В.
Ответ: а =11,5°; Fnp = 3,98H; Хд =
= -1,39 Н, Хв = -2,07 Н, УА = -0,91 Н,
Ув = -2,11 Н, ZA = 33,32 Н.
13.23. Однородное кольцо шариирно кре-
крепится к горизонтальному стержню OD, при-
приваренному к вертикальному валу и вращаю-
вращающемуся вместе с валом с постоянной угло-
угловой скоростью со = 10 рад/с. Ось шарнира
в точке D горизонтальна и перпендикуляр-
па стержню. Диаметр кольца d = 30 см,
масса mi = 3 кг. Длина стержня OD U =
= 20 см. Точка // кольца соединена с ва-
валом пружиной, коэффициент жесткости ко-
которой с = 6 Н/см. В точке Е к валу прива-
приварен горизонтальный стержень под прямым углом к стержню OD.
Длина этого стержня 12 = 25 см, на его конце прикреплен то-
точечный груз К массы тп2 = 0,5 кг. В начальный момент кольцо
находилось в вертикальной плоскости, пружина при этом была
пе деформирована.
При АО = АО см, ОВ — 60 см определить: угол а отклонения
плоскости кольца, полагая его малым; наТяжение пружины; пол-
полные (динамические и статические) реакции подпятника А и под-
подшипника В. Массой стержней
пренебречь.
Ответ: а=13,07°; ^-41,05 Н;
OQ QK ТТ V О £О XI Т —-.
А — iiO,JO П, I А — ii,OZ Г1, &а
= 34,3 И, Хв = 4б,3 Н, Ув =
= 9,98 Н.
13.24. Материальная точка Е
массы т, = 2 кг удерживается
пружиной на горизонтальном
j стержне 1, который приварен к
вертикальному валу, вращающе-
вращающемуся-~с постоянной угловой ско-
скоростью <й = 10 рад/с. Коэффици-
Коэффициент жесткости пружины с =■
К задаче 13 24. = 10 Н/см, длина педеформиро-
13 Под ред К С Колесникова
О-,
v v s/ v '
-194 ГЛ- 13 ОПРЕДЕЛЕНИЕ РЕАКЦИЙ ОПОР И УРАВНОВЕШИВАНИИ
вапной пружины Zo =» 20 см. Материальная точка D массы mz =
«= 3 кг прикреплена на конце горизонтального стержня 2, при-
приваренного к валу под прямым углом к стержню 1.
Определить силу натяжения пружины и данамические реак-
реакции опор А и В при максимальном отклонении точки Е от оси
вращения, если АО = 00, = О,В = OD = 20 см. Скорость точки
Е по отношению к стержню 1 в момент начала вращения вала
положить равной пулю. Массой
стержней пренебречь.
Ответ: Рщ, = 100II; Х\ =. - 40 Нг
£=-20 Н,
П= ™ Н,
К задаче 13.25.
13.25. Однородная прямоугольная
полка ABCD массы М прикреплена
к вертикальной стене с помощью*
шарниров в точках А и В так, чта
может вращаться вокруг горизон-
горизонтальной оси АВ. Полка удерживается
в горизонтальном положении равновесия пружиной, ось которой
вертикальна и проходит через середину свободного края пол-
полки. В пекоторый момент времени в центр полки кладется мате-
материальная точка К массы т.
Определить полные реакции шарпиров в момент касания точ-
точки К с полкой, считая скорость точки К в этот момент рав-
равной нулю.
Mg , Afnig
Ответ:
= 0, Ув=0.
§ 2. Уравновешивание тела, вращающегося
вокруг неподвижной оси
13.26^ К вращающемуся с постоянной угловой скоростью вер-
вертикальному валу жестко прикреплен под углом а = 30° однород-
однородный стержень 1 длины I и массы т,. На конце стержня прикреп-
прикреплена материальная точка 2 массы ш2.
При U = 2Z/3 и ОО, — I определить, каковы должны быть то-
точечные массы в точках С и D, чтобы в опорах А и В не возни-
возникало динамических реакций.
Ответ: тс = 0,217GП, + Зт2), mD = 0,158т, + 0,101тг.
13.27. Три тела с массами тпи тг и т3 вращаются в парал-
параллельных плоскостях вокруг одной общей оси с постоянной угло-
угловой скоростью.
Определить, где следует поместить материальную точку мас-
массы тк в плоскости вращения массы т3 и точку массы т5 в плос-
плоскости Н —11, чтобы при их, совместном вращении с тремя исход-
§ 2 УРАВНОВЕШИВАНИЕ ВРАЩАЮЩИХСЯ ТЕЛ
195
ными телами динамические реакции в опорах А и В были равны
нулю. Плоскость Н — Н перпендикулярна оси вращения. При
вычислениях положить т, = 8 кг, т2 = га3 = 10 кг, иг4 = 6 кг,
то5 = 12 кг, Г! = 18 см, г2 = 28 см, г3 = 36 см,
h = к = 16 см, /3 = 36 см, а = 60°. -Тела с мас-
массами mi, m2 и т3 считать материальными
точками.
Н\
О
h
2
т-0
И\
К задаче 13 2G.
К задаче 13.27.
ч
\х
Ответ: х,, = —8,67 см, г/4 = —52 см, я, = 0,67 см, j/5 = 0.
13.28. На рисунке изображено однородное колено вала, вра-
вращающегося вокруг оси АВ с постоянной угловой скоростью. Для
гъ
К задаче 13.28.
его уравновешивания применяются две одинаковые массы 1 и 2
"в форме параллелепипедов с двумя заданными сторонами а и 2Ь.
Определить третий размер этих параллелепипедов с, предпо-
предполагая, что плотность материала колена и противовесов одинакова.
При вычислениях полагать а = 4 см, Ь — 3 см, I = 6 см, R = б' см,
7* = 3 см, d = 3 см.
Ответ: с — 4,46 см.
13.29. К вращающемуся с постоянной угловой скоростью вер-
вертикальному валу жестко прикреплен под углом а однородный
стержень 1 длины I и массы Му.
При заданной массе Ыг точечного груза 2 выбрать такие раз-
размеры а и 6, чтобы в подпятнике А и подшипнике В не возника-
возникало дипамических реакций.
2
Ответ: a — -~l cos
Ь —
sin a.
13*
196 ГЛ. 13 ОПРЕДЕЛЕНИЕ РЕАКЦИЙ ОПОР И УРАВНОВЕШИВАНИЕ
Jf
К задаче 13.29. К задаче 13 30.
13.30. Вертикальный вал вращается с постоянной угловой ско-
скоростью. К валу в плоскости Oyz жестко прикреплены однородный
тонкий круглый диск массы Mt и радиуса г, а также точечные
грузы С я D[на равных расстояниях
от оси Оу.
При заданных Z2 и h выбрать
такие массы грузов С и D, чтобы в
подпятнике А и подшипнике В не
возникало динамических реакций.
г М, г М.
Ответ; М2 — ,—к^, М3 = -г -тА
'2 Л 13 г
13.31. Вертикальный вал враща-
вращается с постоянной угловой скоростью.
К валу жестко прикреплен горизон-
горизонтальный стержень длины 1г = 5 см.
К этому стержню жестко под углом
а — я/4 к вертикали в плоскости
Oyz прикреплен однородный стер-
стержень длины li = 10 см и массы
Mi =» 50 кг. Расстояния от точки прикрепления до концов этого-
стержня одинаковы.
При заданной массе точечного груза С Ма = 10 кг выбрать
такие размеры а и Ь, чтобы в подпятнике А и подшипнике В
не возникало динамических реакций. Массой горизонтальных
стержней пренебречь.
/? м.
Ответ; а = -577- sin 2а = 0,833 см, Ъ — j— Z2 = 25 см.
13.32. Тонкая однородная прямоугольная пластинка длины I,
ширины h и массы М вращается вокруг вертикальной оси АВ
с постоянной угловой скоростью. Стержень ОС перпендикулярен
оси вращения и плоскости пластинки. Он удерживает пластинку
К задаче 13.31.
§ 2 УРАВНОВЕШИВАНИЕ ВРАЩАЮЩИХСЯ ТЕЛ
197
в положении, при котором ее продольная ось наклонена под уг-
углом а к вертикали. Точка С является центром пластинки, О А =-
= ОБ =» I, ОС = 2Z/3.
Для комденсации динамических реакций опоры В необходимо
установить противовесы Кг и К2 так; что DKt II ОС, ЕКг -L ОС,
OD — ОН = 1/2, DKt = 2l, HKz=*l/i. Массы противовесов предпо-
предполагаются сосредоточенными в точках.
Определить необходимые массы противовесов mt и тг, пола-
полагая h < I. Массой стержней пренебречь.
Ответ: тх= -ггМ, т2 = -=■ 1 г sin 2a.
К задаче 13 32.
К задаче 13 33,
13.33. Тонкая однородная прямоугольная пластинка 1 массы
М вращается вокруг вертикальной оси АВ С постоянной угловой
скоростью о. Одновременно она может поворачиваться вокруг
горизонтальной оси KL, перпендикулярной ее продольной оси.
Пружиной 2 пластинка связана с валом 3. Длина пластинки I,
расстояние между осями АВ и KL равно 1/2. Стержни OL и OR
расположены в горизонтальной плоскости. Коэффициент жест-
жесткости пружины с, при вертикальном положении пластинки пру-
пружина не деформирована и ее ось перпендикулярна плоскости
пластинки. Для того ^чтобы обеспечить отсутствие динамических
реакций в опорах А и В, необходимо установить противовес аа-
данной массы т.
Определить координаты противовеса Н относительно системы
отсчета Oxyz, плоскость Oyz которой неизменно связана о плос-
плоскостью симметрии конструкции. Угол отклонения пластинки от
вертикали считать малым, размерами противовеса и массой стерж-
стержней, пренебречь. При вычислениях полагать w = 1/g/l, с ш* 2Mg/l,
/-> п 23 ЛГ , \ 13 .
Ответ: *н = 0, Vs=a-u-i% zB = ^l.
J98 ГЛ 13. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ ОПОР И УРАВНОВЕШИВАНИЕ
13.34. Вал 1 вращается вокруг неподвижной оси. Однородный
круглый диск 2 радиуса R = 5 см и толщины h = 2 см насажен
на вал с перекосом так, что ось вращения проходит через центр
симметрии диска, а нормаль к торцам диска образует с этой
осью угол а = 15'. Для уравновешивания диска могут быть ис-
использованы две одинаковые точечные массы т. Они должны быть
укреплены на .краях разных торцов диска в точках, лежащих на
прямой, проходящей через его центр.
Определить величину, уравновешивающих масс, если масса
диска М = 1250 г.
Ответ: m ~ 3,2 г.
L
К задаче 13.34. К задаче 13.35.
13.35. На рисунке изображена простейшая балансировочная
машина. Ротор, представляющий собой прямой круговой ци-
цилиндр радиуса г, помещен на станине 1, которая может качаться
па оси О и связана с основанием пружинами 2. При вращении
несбалансированного ротора возникают вынужденные колебания
станины, но амплитуде и фазе которых можно судить о величине
и расположении добавочных масс, необходимых для балансиров-
балансировки. Ротор поместили так, что его левый торец находится против
оси О, продольная ось ротора и станина горизонтальны. Момент
инерции станины с ротором относительно оси О равен /. Допол-
Дополнительный момент сил упругости пружин, возникающий при по-
повороте станины на угол ф, равен сер, где c = const>0. Амплиту-
Амплитуда установившихся колебаний станины при вращении ротора с
постоянной угловой скоростью to оказалась равной ф„.
Определить величину добавочной массы, которую необходимо
поместить для балансировки на правом торце ротора на расстоя-
расстоянии г от его оси вращения. Влиянием сил трения на амплитуду
вынужденных колебаний пренебречь.
Ф (с—/ю2)
Ответ: m = — g— (с > ^ш )•
13.36. Известно, что динамические реакции опор вращающего-
вращающегося ротора равны нулю тогда и только тогда, когда его ось враще-
вращения является главной центральной осью инерции ротора. Дина-
Динамическая балансировка ротора состоит в том, что в распределе-
распределение его масс вносят такие коррективы, в результате которых
достигается выполнение указанного условия.
§ i. СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМ
199
Доказать, что балансировку ротора можно осуществить пу-
путем присоединения к нему лишь двух точечных масс, располо-
расположенных в двух любых заданных нормальных поперечных сече-
сечениях ротора на заданных расстояниях от его оси вращения.
Г л ав а 14
КОЛЕБАНИЯ МЕХАНИЧЕСКИХ СИСТЕМ
§ 1. Свободные колебания систем
с одной степенью свободы
14.1. Математический маятник длины I подкреплен пружи-
пружиной, отстоящей от оси вращения на расстоянии а. Масса груза
равна т, коэффициент жесткости пружины с.
Найти п сравнить собственные частоты колебаний маятника
относительно трех различных положений равновесия, показан-
показанных на рисунке.
Ответ: а) и0 =- у± [^f + f, б) ©0 = f У ~г в) «0 «
vm
If
JU/VW
О
6
ift.
в)
К задаче 14.1.
К задаче 14.2.
14.2. Определить собственную частоту радиальных колебаний
тонкого круглого кольца. Радиус кольца равен R, площадь по-
поперечного сечения F, плотность материала р, модуль упругости
1-го рода Е.
Указание. Упругая сила в поперечном сечении кольца при растяже-
растяжении — сжатии равна N = EFjt, гДе «> — радиальная деформация кольца
(положительные значения w и N соответствуют растяжению кольца),
/) 1 л/Ж
Ответ: соп = ёг V —•
0 R г о
200
(ГЛ. 14 КОЛЕБАНИЯ МЕХАНИЧЕСКИХ СИСТЕМ
14.3. В вибрографах, предназначенных для записи низкоча-
низкочастотных горизонтальных колебаний, применяется маятник, свя-
связанный с основанием спиральной пружиной, которая при верти-
вертикальном положении маятника не дефор_мировапа. Регулировка
собственного периода колебаний маятника осуществляется за
счет изменения расстояпия I от оси вращения О до центра масс
точечного груза массы т.
Пренебрегая массой стержня, найти зависимость собственно-
собственного периода Tt колебаний от расстояния I н расстояние 4р, при
котором равновесие маятника в вертикальном положении стано-
становится неустойчивым. Коэффициент жесткости пружины равен с.
mgl . с
g"с —mgl' кр ~ ~mg'
Ответ: Гв =
К задаче 14.3.
К задаче 14.4.
14.4. В планетарной передаче подвижная шестерня, представ-
представляющая собой однородный диск радиуса г и массы т, обкаты-
обкатывается по неподвижной шестерне радиуса R. С кривошипом ОЛ
шестерня связана спиральной пружиной, коэффициент жестко-
жесткости которой с; при вертикальном положении кривошипа пружи-
пружина не деформирована.
Пренебрегая массой кривошипа, определить критическое зна-
значение скр коэффициента жесткости пружины, при котором рав-
равновесие системы, соответствующее вертикальному положению
кривошипа, становится неустойчивым, и найти собственную ча-
частоту колебаний системы, если R = Ъг и с = 10скр.
Ответ: скр =; ■% mgr, соо = V2glr.
14.5. Кривошипно-ползунный механизм состоит из маховика,
представляющего собой однородный диск радиуса г = 0,3 м и
массы Ttii = 5 кг, шатуна длины 1 = г и массы гп2 = 3 кг и пол-
вуна маесы тп3 ==■ 4 кг. Центр масс шатуна находится на рас-
расстоянии АС —1/3, радиус инерции шатуна относительно цент-
1. СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМ
201
ральной оси pCz = 1/31/2. Маховик укреплен па конце упругого
вала (условно показан в виде спиральной пружины), коэффи-
коэффициент жесткости которого при кручении с = 317,52 Н • м/рад;
при вертикальном положении шатуна вал не деформирован.
Определить, является ли равновесие в показанном на рисун-
рисунке положении устойчивым, и найти собственную
частоту колебаний системы.
Ответ: устойчиво, Сйо = 28 рад/с.
14.6. Эллипсограф состоит из кривошипа дли-
длины Z = 0,16 м, липейки длины 21 и спиральной
К задаче 14.5.
К задаче 14 6.
пружины, коэффициент жесткости которой равен с=19,6 Н ■ м/рад.
Кривошип и линейка представляют собой однородные стержни
массы m = 2 кг и 2т соответственно. В положении равновесия
кривошип вертикален и перпендикулярен линейке. При отклоне-
отклонении кривошипа от вертикали концы линейки движутся по вза-
взаимно перпендикулярным направляющим, наклоненным к верти-
вертикали под углом 45°.
Определить, является ли равновесие системы в показанном
па рисунке положении устойчивым, и найти собственный период
колебаний системы. Массой ползунов пренебречь.
Ответ: устойчиво, То = 0,293 с.
14.7. Механизм управления заслонкой трубопровода состоит
из зубчатого сектора, жестко связанного с заслонкой, шестерни
и упругого приводного вала (условно показан в виде спиральной
пружины). Вал не деформирован, ког-
когда центр масс С сектора находится на
вертикали, проходящей через оси вра-
вращения сектора и шестерни. Сектор и
шестерня являются однородными тела-
телами; масса сектора т, = 8 кг, радиус
И — 0,3 м, масса шестерни т2 ==■ 2 кг,
радиус г = 0,1 м, коэффициент жест-Г""
кости
вала
при
кручении
4 т->
«= 11,76 Н • м/рад, l = 0C = 2-
Зп'
мае-
К задаче 14.7.
сои заслонки можно пренебречь.
Определить амплитуду угловых колебаний сектора, если при-
приводной вал, вращающийся с угловой скоростью 10 рад/с, был
202
ГЛ. 14. КОЛЕБАНИЯ МЕХАНДЧШКИХ СИСТЕМ
мгновенно заторможен при прохождении системой положения
равновесия.
Ответ: А = 0,228 рад (-13°).
14.8. Для гашения крутильных колебаний вращающихся ро-
роторов применяются маятники, ось которых располагается с экс-
эксцентриситетом г относительно оси ротора О.
Полагая, что движение математического маятника длины I
происходит в горизонтальной плоскости, определить собственный
период его колебаний в относительном дви-
движении при угловой скорости вращения ро-
ротора, равной Q.
К задаче 14 8.
К задаче 14.9.
Ответ: То =
14.9. Пневматический амортизатор .состоит из цилиндра и
поршня со штоком. Свободный объем цилиндра ненагруженного
амортизатора равен Va, площадь поршня F, давление воздуха
при заправке р0. Под действием веса G амортизируемого груза
поршень осаживается в положение статического равновесия.
Полагая процесс статической осадки изотермическим (pF =
= const), а процесс расширения — сжатия воздуха при колеба-
колебаниях около положения равновесия адиабатическим [р • У = const,
к = const > 0), определить частоту малых {х < I) колебаний
штока с амортизируемым грузом, если G > p0F.
Указание. Зависимость давления р воздуха от объема V при адиабати-
адиабатическом процессе plpc^= (F/FCT)ft, где рвт, Уст —давление и объем возду-
воздуха при статическом равновесии поршня, следует разложить в ряд по сте-
степеням координаты х и удержать члены до первого порядка малости.
Ответ: соо =
14.10. Груз массы m с помощью пружины прикреплен к кон-
концу упругой балки. Коэффициент жесткости пружины равен сп,
длина балки I, погонная жесткость при изгибе EJZ (E — модуль
упругости 1-го рода, J» — осевой момент инерции площади по-
поперечного сечения).
§ i СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМ
203
Пренебрегая массой пружины и бал-
балки, определить частоту свободных верти-
вертикальных колебаний груза.
Указание. Прогиб конца копсольной балки
при нагружении его вертикальной силы Р под-
считывается по формуле у = Pl/CEJZ).
К задаче 14.10.
14.il. В условиях предыдущей задачи найти методом Рэлея
приближенное значение низшей собственной частоты системы с
учетом масс пружины тп и балки тъ, если сш=с6 = с.
Указания. 1) Уравнение изогнутой оси балки при колебаниях принять
в виде у — -т I -г I I 3 ~ I > гДе ^о — статическое смещение груза;
2) по методу Рэлея частота свободных гармонических колебаний систе-
системы определяется из закона сохранения полпои механической энергии
утах = Птах, при этом в Гта* учитывается кинетическая энергия деформи-
деформируемых элементов. Распределение скоростей точек по их длине принимает-
принимается соответствующим распределению статических
смещений or недеформированного состояния.
33
К задаче 14.12.
Ответ: са0 =
14.12. Основной частью прибора, исполь-
используемого для измерения моментов инерции
деталей, является колебательная система,
состоящая из легкой рамки 1, в которой за-
закрепляется деталь 2, и спиральной пружи-
пружины 3. Последовательно замеряют периоды
колебаний: Тх — одной рамки, Г2 — рамки
с эталоном, момент инерции /э которого из-
известен, и Ts — рамки с деталью.
, р д
Найти с помощью перечисленных данных момент инерции
детали относительно оси, проходящей через опоры рамки.
2 2
Ответ: /=.
!|
|/э.
14.13. Колебательная система спускового регулятора часово-
часового механизма (на 30—60 с) состоит из двухкрылого баланса с
моментом инерции /0 и плоской пружины с погонной жесткостью
при изгибе EJZ {E — модуль 'упругости 1-го рода материала пру-
пружины, Jг — осевой момент инерции площади поперечного сече-
сечения). Регулировка периода колебаний регулятора осуществляет-
осуществляется путем изменения рабочей длины пружины, при этом длина
плеча h остается постоянной и равпой 10,5 мм, а длина 1г может
изменяться от 10,5 до 13,5 мм.
204
ГЛ. 14. КОЛЕБАНИЯ МЕХАНИЧЕСКИХ СИСТЕМ
Пренебрегая трением в опорах, определить, в каких преде-
пределах обеспечивается регулировка периода, если при lt — 1г =
- 10,5 мм, Г, - 0,0074 с.
Указание. Восстанавливающий момент плоской пружины связан с уг-
/1 1 \
лом ф поворота двухкрылого баланса формулой М = ЪЕ1 г (~ + ~ I Ф-
Ответ: То - 0,0074—0,0078 с.
14.14. Груз массы М укреплен на .
конце зубчатой рейки массы тп, при- I | I
водимой в движений системой зубчатых '—«—'
К задаче 14.13.
К задаче 1414.
колес. Моменты инерции колес равны /( и /2, радиусы г, Rt, R2,
коэффициент жесткости приводного вала (условно доказан в ви-
виде спиральной пружины) с. >
Определить собственную частоту колебаний системы^
Ответ: ю0 =» —
т) г2
14.15. Планетарный редуктор состоит из центрального колеса
1 радиуса г„ укрепленного на конце входного вала 2, двух
шестерен 3 радиуса г2, обкатывающихся по внутренней поверх-
поверхности неподвижной шестерни, и водила 4, связанного с выход-
выходным валом 5. Моменты инерции центрального колеса и водила
равны Л и Ji, массы шестерен, представляющих собой однород-
однородные диски, т, коэффициенты жесткости при кручении входною
и выходного валов ct и с2. '
Полагая концы валов жестко закрепленными, определить соб-
собственную частоту колебаний системы.
"I/
Г
где кг =
2 '
§ 1 СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМ
205
14.16. В гипоциклиЧеском механизме подвижная шестерня,
представляющая собой однородный диск радиуса г и массы т,
обкатывается по внутренней поверхности неподвижного колеса
радиуса R = 2r. С подвижной шестерней шарниром А связан
прямой стержень массы М, движущийся в вертикальных на-
направляющих.
К задаче 14 15.
К задаче 1416.
Определить собственную частоту колебаний системы, если
М = 2,5т.
Ответ: Шо = 2Vg/r.
14.17. Стол 1 продольно-строгального станка приводится в
движение кривошипно-кулисным механизмом, состоящим из ку-
кулисы 2, маховика 3, приводной }—_
шестерни 4 и вала 5. Расстояние &?%*
между осями вращения маховика g
и кулисы OOt = L, эксцентри-
эксцентриситет приводного пальца OtA =•
= е, передаточное отношение
rjr2 = i, длина кулисы OB = R.
Масса стола равна тп, момент
инерции маховика J, коэффициент
жесткости при кручении привод-
приводного вала с.
Пренебрегая массами кулисы
и приводной шестерни с валом,
определить собственную частоту колебаний стола в нейтральном
положении (приводной палец находится в крайнем верхнем по-
положении).
К задаче 14.17.
Ответ
: <*>„==]/
206
ГЛ 14 КОЛЕБАНИЯ МЕХАНИЧЕСКИХ СИСТПМ
14.18. В тех случаях, когда требуется обеспечить ориентацию
спутника на орбите в течение длительного времени, но с не-
невысокой точностью применяется гравитационный метод ориента-
ориентации: после выведения на орбиту из корпуса спутника на доста-
достаточно длинной штанге A6—20 м) выдвигается груз, и спутник
с течением времени устанавливается так, что штанга распола-
располагается по прямой, направленной к центру Земли.
Полагая корпус спутника п 1руз материальными точками,,
соединенными жестким стержнем, определить период малых ко-
колебаний спутника, центр масс которого обращается по круговой:
орбите высоты Н = 1000 км.
Указание. При вычислепип восстанавливающего момента пренебречь,
членами второй и более высоких степеней относительно ijRo, где I — длина
штанги, До — радиус орбиты.
Ответ: Т -=60,7 мин.
К задаче 14 18.
К задаче 14 19.
14.19; При плоском движении ракеты распределенные по кор-
корпусу аэродинамические силы приводят к равнодействующей,
приложенной в центре давления. Момент от аэродинамических
сил относительно поперечной оси Cz, проходящей через центр
масс ракеты, при малых углах атаки а приближенно равен
Мг = m%Slpr2cc, где maz — аэродинамический коэффициент, I и S
длина и площадь миделева сечения ракеты, р — плотность воз-
воздуха, v—скорость поле 1 а. Автомат стабилизации управляет
поворотными двигателями по закону б = kta + /с2а, где б — угол
отклонения поворотного двигателя от оси ракеты. При малых
углах б поперечная управляющая сила от поворотного двига-
двигателя Ур = Р • б.
Определить частоту угловых колебаний ракеты, если ее мо-
момент инерции относительно центральной поперечной оси равен
J2, а расстояние от центра масс ракеты С до оси вращения по-
поворотного двигателя I.
Ответ:
-—тг ~Л"г7Г/ •
§ 1 СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМ
207
14.20. При прохождении стола продольно-строгального стан-
станка, рассмотренного в задаче 14.17, через нейтральное положе-
положение приводной вал был мгновенно остановлен тормозной
муфтой.
Определить максимальную величину угла закручивапия вала,
если скорость стола в момент остановки вала равнялась у.
Ответ: Фтах = г-^--—•
14.21. Шток массы лг( = 10 кг связан тягой АВ = 0,49 м о
ползуном массы т2 = 50 кг, движущимся в вертикальных на-
направляющих. Вследствие удара по торцу шток, находившийся
в равновесии, приобрел скорость v0 = 0,5 м/с.
Пренебрегая массой тяги, определить период и амплитуду
колебаний штока.
Ответ: То = 0,628 с, А = 5 см.
К задаче 14 21.
К задаче 14.22.
14.22. Однородный диск радиуса r = Z/2=*0,049 м и массы
irii = 1,02 кг, катясь без скольжения, поворачивает кулису О А =
= 21, несущую на конце груз массы тпг = 1,53 кг. При верти-
вертикальном положении кулисы спиральная пружина, коэффициент
жесткости которой с = 26,46 Н • м/рад, не деформирована. В по-
положении равновесия оси С катка, находящегося в покое, сооб-
сообщили в горизонтальном направлении ударный импульс S =
= 1,5 Н-с.
Полагая груз материальной точкой и пренебрегая массой ку-
лисы, найти период и амплитуду колебаний оси диска.
Ответ: То = 0,314 с, А = 0,98 см.
14.23. Стержень длины I с грузом массы m на конце связан
цилиндрическим шарниром О с вертикальным валом. Вал вра-
вращается с угловой скоростью Q = Yg/l.
Полагая груз материальной точкой и пренебрегая массой
стержня, найти угол а0, соответствующий положению устойчи-
208
ГЛ. 14. КОЛЕБАНИЯ МЕХАНИЧЕСКИХ СИСТЕМ
вого относительного равновесия, и квадрат частоты малых ко-
колебаний стержня около этого положения.
Ответ: cs0=arccos -~% v>\ — -у cos а0 — Q2 cos :
а0 = Q2 — h|) .
К задаче 14.24.
14.24. Центробежный регулятор состоит из четырех соеди-
соединенных шарнирами стержней длины I каждый, двух грузов мас-
массы m каждый и муфты массы И. Регулятор вращается вокруг
г\ ^ т /~М + m в
вертикальной оси с угловой скоростью ь1 > у —-^ j.
Полагая грузы материальными точками и пренебрегая мас-
массой стержней, найти квадрат частоты' малых колебаний регу-
регулятора около положения устойчивого относительного равновесия,
g [M-\-m) cos a — mlQ2 cos 2а
Ответ: g>q =
-, где a0 = arccos
IM+r,
ml + 2MI sin2 a0 ' " " , V
14.25. Угловая скорость вращения вала центробежпого регу-
регулятора, рассмотренного в предыдущей задаче, мгновенно изме-
изменилась от значения Qt ■=■ l/5g/l до зпачения Q2 ■= l/ftg/l.
Определить угловые колебания стержней регулятора в отно-
относительном движении, если М = 2т.
Ответ: а = ~ — 0,12 cos @,433fiai).
14.26. Катушка для кабеля катится вверх по плоскости, на-
наклоненной к горизонту под углом а =» 30°, под действием двух
канатов, намотапных да ступень радиуса г. Канаты располо-
расположены симметрично относительно срединной плоскости катушки
и вытягиваются с помощью лебедки с постоянной скоростью
и ■= 0,35 м/с. В момент мгновенной остановки вращения вала
лебедки удлинение ветвей канатов между валом и катушкой
равно X =* 2,5 см.
§ 1 СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМ
20»
К задаче 14.26,
Полагая, что качение по плоскости
ободов радиуса R происходит без
проскальзывания, определить макси-
максимальную величину удлинения канатов
при колебаниях катушки, если ее ра-
диус инерции относительно оси р0 =
= У.Й • г.. Зависимость силы 2" натяже-
натяжения канатов от деформации X принять
линейной Т/Тст — К/Кст, где Тст, Яст —
статические значения силы натяжения
н деформации.
Ответ: Хт„ = 5,0 см.
14.27. В момент остановки вала лебедки (см. задачу 14.26)
произошел обрыв одного из канатов.
Определить максимальную величину удлинения оставшегося
каната при условии, что движение катушки остается плоским.
Ответ: ?imax. = 9,33 см.
14.28. Ленточный тормоз состоит из груза массы m = 2 кг,
подвешенного на конце гибкой нерастяжимой ленты, охватываю-
охватывающей тормозной барабан массы М — 8 кг. Ось барабана уста-
установлена на амортизаторах с суммарной
жесткостью с = 18 кН/м. В началь-
начальном положении система находится в по-
покое, а груз поднят так, что лента приле-
прилегает к поверхности барабана, по ug
напряжена.
Полагая барабан однородным цилинд-
цилиндром, пайти вертикальные колебания гру-
груза, возникающие при его освобождении^
g * 10 м/с2.
К задаче 14.28. Ответ: х = ~ cos 30i см.
У
14.29. В условиях предыдущей задачи определить, при каком
минимальном («критическом») значении цнр коэффициента со-
сопротивления демпфера, создающего силу R = — u,v0, где v0 — ско-
скорость оси барабана, |х = const > 0, движение груза будет аперио-
апериодическим. Найти движение груза, если \х = |х,ф.
Отгвет:
1,2-
., х = 4- A + 300 е
,—sot
9
см.
14.30. При каком значении коэффициента |х сопротивления
деЪтфера, создающего силу, пропорциональную скорости муфты
(R = —|xvB), логарифмический декремент затухающих колебаний
центробежного регулятора (см. задачи 14.24 и 14.25) относитель^
но положения, соответствующего сс0 = л/3, будет равен б = к/У2„
л 4 У 2 Р
Ответ: ц= —т т=г.
14 Поч ред. К С Колеси
210
ГЛ 14 КОЛЕБАНИЯ МЕХАНИЧЕСКИХ СИСТЕМ
•t/'W/f.
14.31. Кривошипно-ползунный механизм рас-
расположен в вертикальной плоскости и состоит
из кривошипа, шатуна, ползуна и демпфера. Мас-
Масса кривошипа равна mi = 9,8 кг, масса ползуна
т2 — 10 кг, длины кривошипа и шатуна О А =■
. и = АВ = I = 0,6 м, коэффициент сопротивления
3D—1| демпфера и. = 9,8 Н ■ с/м.
Полагая кривошип однородным стержнем и
пренебрегая массой шатуна, найти частоты и ло-
логарифмические декременты свободных колеба-
колебаний кривошипа с учетом демпфера и без него.
Ответ: Г =0,568 с, 6=0,852; Г, = 0,563 с,
к ,,„. 14.32. В результате обработки осциллограммы
задаче . . сводОдНЫХ затухающих колебаний системы най-
найдены время ti-e — 1,16 с и последовательные амплитуды первых
посьми колебаний
I
А ;, ММ
1 1 2 3
45,1 1 35,8 1 28,2
4
22,0
5
17,0 *
6
13,4
7
10,6
8
8,3
9
6,6
Считая сопротивление, обусловливающее затухание колеба-
колебаний системы, линейным, найти собственную частоту ш0 и доб-
добротность системы (шо — частота
свободных колебаний системы
без трения).
Ответ: ш0 = 43,36 рад/с,
# 131
к задаче 14.33.
14.33. Наплавной мост со-
состоит из двух панелей, стык
которых поддерживается пон-
понтоном. Панели представляют
собой однородные пластины длины I и массы тп. Масса понтона
совместно с массой присоединенной воды равна М, площадь
горизонтального сечения F. Горизонтальное расположение пане-
панелей соответствует равновесию системы; при погружении понтона
наряду с выталкивающей (архимедовой) возникает сила сопро-
сопротивления R = — \х\А, где u. = const > 0, vA — скорость понтона.
Полагая, что понтон при движении не имеет крена, опреде-
определить, при каких значениях коэффициента и. свободное движение
сцстемы будет иметь колебательный характер.
Ответ: \i < Цкр= 1\ gpF (M -\--^ пг\, где р — плотность воды.
g i СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМ 211"
14.34. Груз массы 2Л/, лежащий по середине панели наплав-
наплавного моста, рассмотренного в предыдущей задаче, сбрасывают
в воду.
Найти уравнение вертикальных колебаний понтона, если дви-
движение началось из состояния покоя и ц = 0,6ц,кр.
Ответ: j, = ^^(cosffli + Tsmfi4 где о, --= 0,8 ]/ j^f^y
п = Зш/4.
14.35. Полагая, что отклонения от положения равновесия
штока пневматического, амортизатора (см. задачу 14.&) не яв-
являются малыми, составить дифференциальное уравнение его коле-
колебаний с точностью до членов третьего порядка малости относи-
относительно безразмерной координаты | = х/1.
Ответ: i + »в£ == - Ц1- «о {? + Ц1
{
14.36. Шток связан тягой с ползуном, движущимся в верти-
вертикальных направляющих (см. рис. к задаче 14.21). Длина тяги
равна I, массы штока и ползуна равны.
Полагая, что отклонения штока от положения равновесия не
являются малыми, составить дифференциальное уравнение его
колебаний с точностью до членов третьего порядка малости от-
относительно безразмерной координаты g = х/1 и найти зависи-
зависимость частоты колебаний штока от амплитуды А безразмерной
координаты |.
Указание Применить один из приближеппых методов решения нели-
нелинейных уравнений.
Ответ: 6 + -f E^-lrS'-E-б», »
14.37. При отклонении от положения равновесия баланса
спускового регулятора, рассмотренного в задаче 14.13, пружина
изгибается и концы ее проскальзывают в опорам. К упругому
моменту пружины добавляется момент от сил трения в опорах,,
зависящий от коэффициента трения /, угла наклона 6 концов
пружины и направления угловой скорости вращения баланса.
Полагая lt — h = l и учитывая, что 6 = ф/2, определить пе-
период и декременг свободных колебаний баланса. Применить ме-
метод осреднения.
Ответ: Т = То = 2я j/^-, т, = -£- « 1 + Ц- Ak.
14.38. Система амортизации ходовой тележки грузового ва-
вагона состоит из надрессориой балки 7, на которую опирается
кузов 2 вагона, и комплекта E—7 шт.) винтовых пружин. Две
пружины комплекта подпирают клинья 3, выполняющие функ-
функции демпфера сухого трения. Клинья размещены в боковых па-
пазах надрессорной балки и скользят по вертикальным направля-
направляющим окна рамы 4 тележки. "Угол наклона плоскости клина к
14*
212
ГЛ 14 КОЛЕБАНИЯ МЕХАНИЧЕСКИХ СИСТЕМ
вертикали равен а, коэффициент трения клина по направляю-
направляющим /, количество пружины в комплекте п, нагрузка па один
комплект Р, статическая деформация пружин Кп =■ P/{nc)t где
« — коэффициент жесткости одной пружины.
Пренебрегая членами порядка f, найти зависимость восста-
восстанавливающей силы R системы амортизации от безразмерной ко-
координаты | = х/кст (х — отклонение надрессорной балки от по-
положения статического равновесия).
Ответ: -£ = - [g + sign | . JZ. ctg а A + £)]•
К задаче 14.38.
14.39. Масса надрессорной части четырехосного вагона равна
20 т, статическая деформация каждого из четырех комплектов
пружин ХСт = 2 см. На платформу вагона без пачальной скоро-
скорости опускают груз массы 40 т так, что амортизаторы нагружа-
нагружаются одипаково.
Воспользовавшись зависимостью, найденной в предыдущей за-
задаче, определить максимальную величину деформации "Кт<а сжа-
2 f
рц
2 f
= —
тия пружин и период Т колебаний вагона, еслир
Учесть величины порядка до {J2.
Ответ: Uax = 9 см, Т = 2я V^f- f1 ~ 4 И = °'
ctga= 0,2.
484с'
14.40. В условиях предыдущей задачи найти период и закон
убывания амплитуд колебаний вагона одним из приближенных
методов (осреднения или гармонической линеаризации).
Ответ: Т = Го= /~
р
: Т = Го= 2л л/~
§ 2. Вынужденные колебания систем
с одной степенью свободы
14.41. Зубчатое колесо, представляющее собой однородный
диск радиуса г и массы тп, находится в зацеплении с двумя
рейками, движущимися по горизонтальным направляющим.
Верхняя рейка пружиной связана со штоком А и через демп-
§ 2. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ СИСТЕМ
213
фер — со штоком В. Коэффициент жесткости пружины с, коэф-
коэффициент сопротивления в демпфере |х.
Приняв за обобщенную координату отклонение х верхней
рейки от положения равновесия, найти обобщенную возмущаю-
возмущающую силу Q(t) для следующих случаев:
а) на зубчатое колесо действует сила Fit) = Fosinpt и пара
сил с моментом M{i) ~ M<, sin pt; нижняя рейка и штоки непод-
неподвижны;
б) штоки А и В совершают колебания по закону sA{t) =
*= sA sin pt, sBit) = sB sin pt; нижняя рейка неподвижна;
в) нижняя рейка совершает колебания по закону so{t) =
; штоки неподвижны.
К задаче 14.41.
Положительным значениям F, Mt sA, sB, s0 соответствуют на-
направления, указанные на рисунке стрелками.
Ответ: a) Q (t) = ~- \F0 + ~) sin pt, б) Q (t) = csA sin pt -{-
-f [ipsB cos pt,B) Q (t) = ^- p\ sin pt.
14.42. Механизм эллипсографа
расположен в горизонтальной плос-
плоскости, и состоит из кривошипа дли-
длины £ = 0,14 м, линейки длины 21, пол-
ползунов и спиральной пружины. Кри-
Кривошип и линейка представляют со-
собой однородные стержни массы тп =»
= 4 кг и 2/п соответственно. Коэф-
Коэффициент жесткости' пружины с =
=» 147 Н • м/рад; пружина не дефор-
деформирована, когда кривошип перпен-
перпендикулярен линейке.
Пренебрегая массой ползунов, найти амплитуду вынужден-
вынужденных колебаний кривошипа, возбуждаемых приложенной к нему
парой сил с моментом Mit) = М„ sin pt где Мо == 5,88 Н • м,
р = 20 с-'.
Ответ: D=; 1/9 рад F°22').
К задаче 14.42.
214
ГЛ. 14. КОЛЕБАНИЯ МЕХАНИЧЕСКИХ СИСТЕМ
14.43. Маховик, представляющий собой однородный диск ра-
радиуса г = 0,2 м и массы mt = 8 кг, связан посредством шатуна
ЛВ массы пг2 = 10 кг с ползуном массы т3 = 2 кг. Пружина,
коэффициент жесткости которой с = 3845 Н/м, не деформирова-
деформирована, и система находится в равновесии, когда шарнир А распола-
располагается на одной вертикали с осью О маховика.
Найти амплитуду вынужденных колебаний ползуна В, воз-
возбуждаемых приложенной к нему горизонтальной силой F(t) =
= Fo sin pt, где Fe = 35 II, p = 20 рад/с.
Ответ: D = 12,5 мм.
К задаче 14.43.
К задаче 14 44.
14.44. Кривошипно-ползунный механизм состоит из кривоши-
кривошипа О А длины Z = 0,l м, шатуна АВ, ползуна и пружины. Пра-
Правый конец пружины прикреплен к штоку, перемещение кото-
которого s{t) = s0 sin pt, где s0 = 2 см, p =i 6 рад/с. Кривошип и ша-
шатун представляют собой однородные стержни массы т,, = тг —
= 0,75 кг, масса ползуна ms = 1,0 кг, коэффициент жесткости
пружины с = 126,5 Н/м. При вертикальном положении криво-
.а? типа и s = 0 пружина не дефор-
деформирована.
Определить амплитуду выпуждеп-
пых колебаний кривошипа.
Ответ: D = 0,2 рад (-11,5°).
14.45. Зубчатое колесо, представ-
представляющее собой однородный диск
массы m = 1,6 кг, находится в за-
зацеплении с двумя зубчатыми рейка-'
ми, движущимися по горизонталь-
горизонтальным паправляющим. Верхняя рейка
массы М = 0,4 кг связана с основа-
|j~wwv-c:
К задаче 14 45.
ннем пружиной, коэффициент жесткости которой с = 0,4 кН/м.
Нижняя рейка движется по закону sit) = s0 sin pt, где s0 = 6 см,
p = 2ш0, Шо — собственная частота системы.
Найти закон движения х — x{t) верхней рейки, если система
в начальный момент времени находилась в положении равнове-
равновесия и покоилась.
Ответ: х = 1,6B sin 20t - sin Ш) см.
§ 2 ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ СИСТЕМ
215
14.46. В ленточном тормозе один конец ленты, охватывающей
тормозной барабан, посредством пружины соединен с шарниром
О, а другой — с тормозным рычагом. Горизонтальное положение
рычага соответствует равновесию системы. Момент инерции ба-
барабана /0 = 0,36 кг • м2, радиус барабана г = 0,15 м, длина рыча-
рычага I = 0,6 м, масса груза т = 1 кг, коэффициент жесткости пру-
пружины с = 6,4 кН/м. К барабану приложена пара сил с моментом
M(t) = Ма sin pt, где Л/о = 2,94 Н • м.
Полагая, что лента не проскальзывает относительно бараба-
барабана, и пренебрегая массой рычага, определить, при какой частоте
вынужденных колебаний сила патяжения ленты будет больше
нуля (т. е. не будет нарушаться
плотный контакт ленты с бара-
барабаном).
Ответ: при р < 10 рад/с и
р > 17,3 рад/с.
К задаче 14 46.
К задаче 14.47.
14.47. Поршневой насос установлен на амортизаторах с сум-
суммарной жесткостью с. Масса корпуса насоса вместе с ротором
ОА равна М, масса кулисы со штоком и поршнем т, эксцент-
эксцентриситет приводного пальца ротора ОА = г. В режиме холостого
хода (без воды) уравновешенный ротор насоса вращается рав-
равномерно с угловой скоростью р.
Определить максимальную величину динамического давления
амортизаторов на фундамент в ре>ьиме вынужденных колебаний
насоса.
2
г. г тгр з с
Ответ: /'max = ~, где
М ■
14.48. При какой жесткости с амортизаторов максимальная
величина динамического давления на фундамент насоса, рас-
рассмотренного в предыдущей задаче, будет в 10 раз меньше дав-
давления, передаваемого от неамортизированного насоса.
Ответ: при с < {М + m)p2/li.
14.49. Виброграф, рассмотренный в задаче 14.3, имеет соб-
собственный период То = 2 с. Виброграф установлен на основании,
перемещение которого в горизонтальном направлении sit) =»
216
ГЛ. 14. КОЛЕБАНИЯ МЕХАНИЧЕСКИХ СИСТЕМ
= sosmpt (s0 — амплитуда, р — частота колебаний основания).
В приборе регистрируется относительное отклонение х « 1ц> гру-
груза от вертикали.
Определить, при какой частоте р амплитуда регистрируемых
вынужденных колебаний груза будет отличать-
отличаться от амплитуды колебаний основания не бо-
более чем на 1СНУо.
Ответ: при р > 1,67 Гц.
14.50. Стол вибростевда с центробежным
приводом соединен амортизаторами с опорной
плитой, не прикрепленной к фундаменту.
Суммарная жесткость, амортизаторов с, масса
стола вместе с ротором те,, масса опорной
плиты т2, дебаланс ротора центробежного при-
привода тег.
Определить, при каких значениях угловой скорости р вра-
вращения ротора опорная плита в режиме вынужденных колебаний,
не будет отделяться от фундамента..
Ответ: при
при р
К задаче 14.50.
Примечание. Верхпяя граница р существует, если с
14.51. Система состоит из штока массы 7^=4 кг, тяги AR
длины I = 0,5 м, ползуна массы те2 = 10 кг и демпфера с ко-
коэффициентом сопротивления .
ц = 14 Н • с/м. Прямолипеи-
ные направляющие штока и
ползуна взаимно перпенди-
перпендикулярны и расположены в
одной вертикальной плос-
плоскости.
Найти амплитуду уста-
установившихся вынужденных
.колебаний штока, возбужда-
возбуждаемых горизонтальной силой
Fit) '= Fo sin pt, где Fo =>
К задаче 14.51.
= 3,92 Н, р = 7 рад/с/
Ответ: D = 4 см.
14.52. Вибрационный стол массы М установлен на кривоши-
кривошипах ОА и ВС одинаковой длины R. На конце стержня CD, явля-
§ 2 ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ СИСТЕМ
217
ющегося продолжением кривошипа ВС, на расстоянии г от оси
укреплен точечный груз массы те, причем tnr — MR. Криво-
Кривошип ОА связан с основанием спиральной пружиной, коэффи-
коэффициент жесткости которой равен с; пружина не деформирована
лри вертикальном положении кривошипа. Коэффициент сопро-
сопротивления ]к гидравлического демпфера составляет 0,2 от значе-
значения, соответствующего апериодическому режиму свободного дви-
движения стола.
Пренебрегая массой кривошипов, определить, при каком зна-
значении частоты р возмущающей силы Fit) = Fo sm pt, действую-
действующей на стол, амплитуда его вынужденных колебаний будет иметь
максимальное значепие, и найти, ото значение.
Ответ: при р = 0,959
йг (М + m) ^max ~ л>"" с •
14.53. Система состоит из груза, движущегося в вертикальных
направляющих, блока, представляющего собой однородный диск,
нерастяжимого гибкого троса, связанного пру-
пружиной с подвижным штоком, и гидравлического
демпфера. Масса груза т, = 6 кг, масса бло-
блока тг = 4 кг, коэффициент жесткости пружи-
пружины с = 4,8 кН/м, коэффициент сопротивления
F(t) A
' С,
л
К задаче 14.52.
К задаче 14.53.
в демпфере и. = 0,48 кН • с/м. Шток совершает вертикальные гар-
гармонические колебания с амплитудой s0 = 4 мм.
Полагая, что трос не проскальзывает относительно блока,
найти частоту и амплитуду установившихся вынужденных коле-
колебаний груза при резонансе.
Ответ: р = о>о = 40 с"', Dpe, = 2,0 мм.
14.54. Зубчатая рейка массы m = 19,6 кг находится в зацеп-
зацеплении с шестерней, радиус которой R — 0,3 м и момент инер-
инерции /0 = 0,441 кг • м\ Шестерня спиральной пружиной связана
« ры-чагом, совершающим угловые колебания по закону if(t) =
•= фо sin pt, где ^0 = 0,02.82 рад, р = 15 рад/с. Коэффициент же-
жесткости пружины с = 372,4 Н • м/рад, коэффициент сопротивле-
сопротивления демпфера, связывающего, рейку со стеной, ц = 73,5 Н • с/м.
218
ГЛ. 14. КОЛЕБАНИЯ МЕХАНИЧЕСКИХ СИСТЕМ
Определить амплитуду и угол сдвига фаз вынужденных ко-
колебаний рейки.
Ответ: 25 = 2,0 см, е = 2,46 рад (~14Г).
14.55. Рычажная передача состоит из педали АВ массы nti ■=*=
= 0,45 кг, штока массы тпг = 0,8 кг, пружины, коэффициент же-
жесткости которой с = 1,6 кН/м, и демпфера. Опорное основание
пружины и демпфера совершает вертикальные колебания по
закону sit) = s0 sin pt, где s0—амплитуда перемещения, р — ча-
частота колебаний основания. При угле наклона педали к горизон-
горизонту ее = 30° и s = 0 система находится в равновесии.
К задаче 14.54.
К задаче 14.55.
Считая педаль однородным стержнем, определить, при какой
частоте возбуждения р амплитуда вынужденных колебаний што-
штока будет меньше s0.
Ответ: при р>40У2 рад/с.
14.56. В условиях предыдущей задачи найти сдвиг фаз вы-
гужденпых колебаний штока и колебаний основания при часто-
частоте ^ = 40У2 рад/с, если коэффициент сопротивле-
сопротивления в демпфере и. = 20У2 Н • с/м.
Ответ: {$ = я/2.
14.57. Кабина лифта массы те опускается в
шахту с постоянной скоростью и. Коэффициент
податливости > (удлинение от единичной силы)
единицы длины троса равен 5i H~'. В некоторый
момент времени, когда длина троса равна /, тор-
тормозная система начинает тормозить барабан ле-
лебедки, обеспечивая его равномерное замедлепие
в точение времени т.
Пренебрегая изменением жесткости тросаг
обусловленным увеличением его длины при тор-
торможении (т. е. полагая v%/2 < I), найти переме-
перемещение кабины относительно положения, соответ-
соответствующего моменту начала торможения U = 0).
Ответ: х = vl 11 — 4г-) + ~ A — cos a>ot) при t < т, х = Ц- +
-(- -4~ [cos ш0 (t — т) — cos oa0f] при t > т^ где ш» =- -^j.
К задаче 14 57.
§ 3 СИСТЕМЫ С ДВУМЯ И ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ 219
14.58. В условиях предыдущей задачи найти силу натяжения
S троса в конце торможения (t ^= г), если замедление барабана
лебедки происходило но линейному закону е ~аЛ и время тор-
торможения составило половину собственного периода колебаний
кабины х = TJ2 = я/ш0 с.
Ответ: S (т) = mg\ 1 + -—7=-\ где % = mgbxl — статическая
V я VgX, )
деформация троса.
14.59. Перемещение основания вибрографа, рассмотренного в
задаче 14.3, происходит по закону
при f<2\
s(t) = O при t>T,
где s0 = 4 см. В начальный момепт времени маятник вибрографа
находился в покое в положении равновесия.
Найти уравнение относительного горизонтального отклонения
груза х да £ф, если длительность движения основания равна соб-
собственному периоду вибрографа Т = То = 2 с. Направления поло-
положительного отсчета координат х п s принять одинаковыми.
Ответ: х = —nt sin nt при t^T, x = —2n sin nt при t> T.
14.60. По наплавному мосту, рассмотренному в задачах 14.33
и 14.34, следует колонна автомобилей одинакового веса Р с ин-
интервалами друг от друга, равными 21. Скорость v автомобилей
такова, что время Т движения по мосту каждого из них равно
собственному периоду~Т0 колебаний моста.
Полагая автомобили материальными точками и пренебрегая
зависимостью от времени коэффициеша инерции системы, найти
вынужденные колебания понтона, возбуждаемые действием пе-
периодической возмущающей силы (от веса Р). Ограничиться при
этом двумя первыми гармониками в разложении возмущающей
силы в ряд Фурье.
Ответ: У = г^Р \i - °'675 sin 2п Т~ °'092 Сся FяТ — 2'72У|-
§ 3. Системы с двумя и тремя степенями свободы
14.61. Натяжная станция ленточного конвейера состоит из
барабана 1, ось О которого укреплена в ползуне 2, и натяж-
натяжного винта 3. Коэффициент жесткости натяжного винта с, рас-
расстояние между осями натяж-
натяжного 1 и приводного 4 бараба-
барабанов I, коэффициент податли-
вости (удлинение от единичной
силы) единицы длины ленты 6t.
Считая барабаны конвейера
однородными цилиндрами мае- К задаче 14.61.
220
ГЛ. 14. КОЛЕБАНИЯ МЕХАНИЧЕСКИХ СИСТКМ
сы т, определить собственные частоты колебаний системы, если
приводной барабан заторможен.
2
Ответ:
2 + С8Л
14.62. В условиях предыдущей задачи определить собствен-
собственные частоты колебаний конвейера, если приводной барабан рас-
расторможен.
/" 2 + сёЛ
Ответ: щ = 0, ш2 = у ■ mb t , ш3 =
14.63. Масса кузова автомобиля равна М, радиус инерции
кузова относительно центральной оси, перпендикулярной про-
продольной вертикальной плоскости р, расстояния от осей колес до
поперечной центральной плоскости U и 12, эквивалентные коэф-
коэффициенты жесткости рессор и пневматиков переднего и заднего
шасси с( и с2.
Пренебрегая массами шасси, установить, при каких соотно-
соотношениях параметров автомобиля:
1) вертикальные поступательные колебания («подпрыгива-
(«подпрыгивание») кузова и его угловые колебания в продольной плоскости
(«галопирование») будут не связаны;
2) частоты этих колебаний будут одинаковы.
Ответ: 1) cJt = сг1г; 2) c,Z, = c2l2 и р = УЦг.
К задаче 14.63.
К задаче 14.64.
14.64. Тележка массы М с маятниковым гасителем колеба-
колебаний связана с основанием пружиной, коэффициент жесткости
которой равен ct. Маятник гасителя представляет собой стер-
стержень длины I = 20 см с грузом массы m на конце. Маятник
связан с тележкой спиральной пружиной, коэффициент жестко-
жесткости которой равен с2; при вертикальном положении маятника
пружина не деформирована.
Определить парциальные и собственные частоты системы,
если М = 8т, с2 = bmgl, ct = 3&mg/l. _ _
Ответ>-П1 = щ = 14 рад/с, о>4 = 7V3 рад/с, сй2 = 7У6 рад/с.
14.65. При частотных испытаниях двухпанельное крыло сол-
солнечной батареи установили вертикально. Для того чтобы обес-*
§ 3 СИСТЕМЫ С ДВУМЯ И ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ
221
печить соответствие условий испытаний и работы на орбите p
невесомости), к центрам масс панелей присоединили эластичны»
шнуры и натянули их так, чтобы силы натяжения уравновесили
силы тяжести панелей. Коэффициенты угловой жесткости узла
крепления крыла и стыка панелей таковы, что при горизонталь-
горизонтальном расположении концов крыла статический прогиб стьша Лст =»
= 1/10 — 20 см, где I — длина панели.
Считая панели однородными жесткими пластинами, опреде-
определить собственные частоты колебаний крыла. >
Ответ: «1 — 1,83 рад/с, со2 = 12,16 рад/с.
К задаче 14.65.
К задаче 14.6
14.66. Два стержня одинаковой массы и длины I соединены
двумя нерастяжимыми нитями длины I и с помощью двух нитей
такой же длины подвешены к потолку.
Найти собственные частоты и коэффициенты форм колебаний
для абсолютных углов поворота, если:
1) стержни движутся поступательно параллельно вертикаль-
вертикальной продольной плоскости;
2) стержни вращаются вокруг вертикальной оси, проходящей
через их середины.
Ответ:
1 и' V~g
1)
2)
0,765
1,326
a'Vi/g\ ii
1,848
3,200
1,41
2,41
л,
—1,41
-0,41
14.67. Стержням, рассмотренным в предыдущей задаче, за-
задаются начальные отклонения от положения равновесия в вер-
вертикальной продольной плоскости; начальные скорости равны
нулю.
222
ГЛ 14 КОЛЕБАНИЯ МЕХАНИЧЕСКИХ СИСТЕМ
Найти движение, стержней для следующих вариантов зада-
задания начальных условий: 1) ф10 = ф0, фго = 0; 2) фю — Фо, Фго =
— фоУ2; 3) ф10 = фо, фго = — фо^2, где ф10 и ф20 — начальные зна-
значения углов отклонения от вертикали верхней и нижней нитей.
CD m "I /*J
Ответ: 1) w1 — ~~ (cosoj^ -(- cosw2i), ф2 = ° * (cos coji —
_ 2
— cos o>2i); 2) ф! = ф0со8 ю^, ф2 = ф0 у 2cosco1f; 3)ф1= ф0соз(й2£,
Фа ~ — Фо У2 cos co2i.
14.68. В момент сцепки двух вагонов одинаковой массы m
один из них находился в покое, а другой имел скорость г;0. Ко-
Коэффициент жесткости сцепки равен с.
Пренебрегая трением, найти максимальную величину упру-
упругой силы, действующей в сцепке вагонов.
Ответ: jffmax ~ -тр- У 2cm.
14.69. В момент сцепки трех вагонов одинаковой массы пг
два из них находились в покое, а один имел скорость v0. Коэф-
Коэффициент жесткости сцепок равен с.
Пренебрегая трением, найти максимальную величину уско-
ускорения среднего вагона.
Ответ:
- v» У з^Г-
14.70. Электродвигатель, ротор 1 которого имеет момент инер-
инерции /1( через одноступенчатый редукюр передает вращение
маховику 2, момепт иперции которого равен /2. Передаточное
•отношение редуктора i = rjr2 = 1/3, ,
коэффициенты жесткости при кручении
входного 3 и выходного 4 валов равны
Ci и с2 соответственно.
£Е
1—*-
t
О
О 0
TL
г
4
_]
\
-
К задаче 14.69.
К задаче 14.70.
Пренебрегая массой валов и шестереп редуктора, определить
собственную частоту колебаний системы, если ic2 = ct = с,
V / /
Ответ: и = |/ -£j-.
14.71. Наплавной мост состоит из трех панелей длины I каж-
каждая, стыки которых поддерживаются понтонами. Масса панели
§ 3. СИСТЕМЫ С ДВУМЯ И ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ
223
равна т, масса понтона с учетом, массы присоединенной воды А/,
площадь горизонтального сечения понтона F, плотность воды р.
Панели представляют собой однородные жесткие пластины, в по-
положении равновесия они горизонтальны.
К задаче 14.71.
Считая движение понтонов при погружении поступательным,
найти собственные частоты и коэффициенты форм колебаний
моста.
Ответ: щ =
л/-^
V M + -g
14.72. Груз массы 2М, находящийся на стыке 1-й и 2-й па-
панелей, падает с моста, рассмотренного в предыдущей задаче.
1) Найти вертикальные колебания стыков панелей, приняв
за положительное направление отсчета координат у, п уг вниз.
2) Какие колебания совершают стыки, если груз падает с-
середины второй панели?
Ответ. 1) уг = —у- (cos юхг + cos «20. Уг = -Тр (coso)x« — cos(o2f);
у
2) y-i=—f cos (Ojf = y2.
14.73. Рассматривая колебания баков, частично заполненных
жидкостью, используют механический аналог системы: часть
жидкости заменяют математическим маятником массы т и дли-
длины I, остальную часть считают
затвердевшей.
Определить собственную часто-
ту плоских поперечных колеба-
колебаний бака в горизонтальном на-
направлении, если era масса вместе
со всей жидкостью равна М.
Ответ: ю„ = у м _т\- К задаче 14.73.
14.74. Для описания движения ракеты с учетом колебаний
жидкости в баках принимают маятниковую модель, состоящую
из жесткого стержня и системы математических маятников с
точками подвеса на продольной оси стержня (для каждого бака
своя cxicieMa маятников).
■224
ГЛ. 14. КОЛЕБАНИЯ МЕХАНИЧЕСКИХ СИСТЕМ
Определить "квадрат, частоты малых поперечных колебаний
стержня с одним маятником при плоском движении вне поля
земного тяготения под действием следящей (направленной все
время по оси стержня) силы />, если дано: т, I — масса и длина
маятника, М, J — масса и момент инерции стержня с маятником,
располагающимся по оси стержня, относительно поперечной осн,
проходящей через центр масс С системы, L =.ОС — I.
Изменением положения центра масс н момента инерции си-
системы при малых отклонениях маятника пренебречь.
Ответ:
i-H-
mL
М
14.75. Кабина 1 лифта- соединена пружинным амортизато-
амортизатором 2 с концом нерастяжимого троса, намотанного на барабан 3
К задаче 1!4.74,
К задаче 14.75.
лебедки. Другой конец этого троса амортизатором 4 соединен
с противовесом 5. Массы кабины и противовеса, а также коэф-
коэффициенты жесткости амортизаторов равны: mi — m2 = m, с, =>
= с2=с. Радиус барабана лебедки равен г, приведенный к валу
барабана момент инерции привода лебедки /0 = -у mr2.
Определить собственные частоты системы:
Ответ: «1 = 0, и2 = 1с/тп, а»3 = V5c/m.
14.76. В условиях предыдущей задачи найти коэффициенты
форм колебании т]2 = гф/хь и г\3
Ответ:
со.
1
1
ш.
0
—1
ш3
—4
1
§ 3. СИСТЕМЫ С ДВУМЯ И ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ
225
14.77. Крылья 1 солнечной батареи крепятся к корпусу 2
спутника с помощью узлов 3. Момент инерции корпуса относи-
относительно центральной продольной оси равен /0, расстояние от оси
до узлов крепления крыльев #, длина крыльев I, масса кажДого
крыла т.
Коэффициент угловой жесткости с узла крепления таков, что
статический угол отклонения крыла от горизонтали в наземных
условиях "составляет фст = 0,1 рад
f
К задаче 14.77,
Считая крылья однородными жесткими пластинами, найти
частоты угловых колебаний спутника на орбите, если I = 6Й =
= 3 м, /0 = 16шй2. При невесомости статическому равновесию
крыльев соответствует их располо-
расположение в центральной продольной
плоскости спутника.
Ответ: ю, = 0, и2 = 7,0 рад/с,
и, = 12,67 рад/с.
14.78. Тонкий шкпв укреплен
на однородном невращающемся
валу с жесткостью на изгиб EJ
(Е — модуль упругости 1-го ро-
рода материала вала, J — момент
инерции площади поперечного
сечения относительно оси, перпен-
перпендикулярной оси вала). Масса
шкива равна тп, момент инерции
К задаче 14.78.
относительно центральной оси, перпендикулярной оси вала, /С1 =
= mP/2.
Пренебрегая массой вала, определить собственные частоты
колебаний шкива для вариантов его закрепления на валу, пока-
показанных на рисунке.
Указание. При составлении дифференциальных уравнении относитель-
относительно перемещения ус и угла ф поворота шкива следует применить принцип.
Даламбера вычислив предварительно коэффициенты влияния б,-, — прогиоы
и углы поворота поперечного сечения С вала от единичной поперечной «глы
и изгибающего момента. ^_____ 4
Ответ: а) а>х = 1,39 1/ -^г. (о2 = 3,23
- 0,76
/
ml9
15 Под ред К С. Колесникова
226
ГЛ. 14. КОЛЕБАНИЯ МЕХАНИЧЕСКИХ СИСТЕМ
14.79. Вилочный камертон состоит из двух грузов, укреплен-
укрепленных на концах П-образного шарнирно опертого стержня. Массы
грузов равны т, жесткость стержня при изгибе в плоскости ри-
рисунка EJ.
Считая грузы материальными точками и пренебрегая массой
стержня, найти зависимость отпошепия собственных частот от
размеров I и а камертона.
/f1
14.80. Груз массы m прикреплен к оси подвижного блока,
котерый подвешен на тросе, огибающем блок и намотанном на
К задаче 14.79.
К задаче 14.80.
барабан радиуса г. Момент инерции барабана равен /0, коэф-
коэффициенты жесткости ветвей троса с,, коэффициент жесткости при
кручении приводного вала барабана с2 (вал условно показан к
виде спиральной пружины).
Пренебрегая массой блока, найти собственные частоты и ко-
коэффициенты ц — щ1х форм колебаний системы, если Jo =*
L
= 0,828, ш, = 2,613 V-=г-
Ответ: о, = 1,082 Л/
п 4 828
14.81. В системе, рассмотренной в предыдущей задаче, при
деформации троса наряду с упругой возникает сила сопро-
сопротивления, пропорциональная скорости деформации Fo = \Jnd7Jdt,
rim
а при закручивании вала возникает момент
jit = coast > 0, ця = const > 0.
§ 3. СИСТЕМЫ С ДВУМЯ И ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ 227 '
Установить, будут ли связаны нормальные координаты 8( и
62 если: 1) Lit ^ О, М-2 = 0; 2) —— = —— ='<2 = const.
Ответ: 1) связаны, 2) не связаны.
14.82. Два вала, жестко закрепленные па концах, соединены
упругой муфтой. Моменты инерции корпусов полумуфт и коэф-
фициепты жесткости при кручении
валов одинаковы и равны соответствен-
соответственно / и С]. При повороте корпусов полу-
полумуфт друг относительно друга возни-
возникает момент Мс ~ — (сф + цф), где коэф-
коэффициент жесткости муфты с = const >
>0, (Л = const > 0, ф — относительный К задаче 1482
угол поворота полумуфт.
Найти частоты и логарифмические декременты главных ко-
колебаний системы, если с = 0,5с1; ц = T/cJ.
Указание. Перейти к главным (нормальным) координатам системы
Т
Указание. Перейти к г
Фх + ф, д ф, — ф, .
— —L——£, О2 = —-, где ф! и ф2 — углы поворота полумуфт.
Ответ: и, = Из = McJJ, б, = 0, б2 = 2я.
14.83. При погружении понтонов наплавного моста, рассмот-
рассмотренного в задаче 14.71, наряду с выталкивающей возникает сила
сопротивления, пропорциональная скорости понтона.
Определить, при каком значении коэффициента сопротивле-
сопротивления ц оба главных движепия моста будут иметь колебательный
характер. Найти часюты главных колебаний, если М — m/Q, ц •=
= ypgFm.
Указание., Перейти к главным координатам вх = (у\ + у-гI2, 02 =
()/2
Ответ: ц < 2 ]/pgF(M + ^ та). е^ = 0,8G6
0,968
m
14.84. Правый конец А пружины, прикрепленной к тележке,
рассмотренной в задаче 14.64, совершает горизонтальные коле-
колебания по закону хА = A sin/»*, где р = 14 рад/с.
Найти вынужденные колебания тележки и маятника, а так-
также определить горизонтальную проекцию реакции стержня в
шарнире О.
Ответ: x(t) = 0, ф(г) = — 9 -у- sin pt, Xo — — сгА sin pt.
14.85. Стол 1 вибрационного стенда (тип ВУ-15) двумя пру-
пружинами 3 связан с «реактивным» телом 2 и пружиной 4 — с
эксцентричным валом 5. Суммарный коэффициент жесткости
пружин 3 равен ct, коэффициент жесткости пружины 4 равен с0,
15*
228
СГЛ 14 КОЛЕБАНИЯ МЕХАНИЧЕСКИХ СИСТЕМ
суммарный коэффициент жесткости амортизаторов 6 реактивно-
реактивного тела Сг. Масса стола ти масса реактивного тела иг2, эксцент-
эксцентриситет приводного вала е, угловая скорость вращения вала р.
Найти зависимость амплитуды установившихся вынужденных
колебаний стола от частоты р, если 2с0 = ct = с2/12 = с, mt =
= mj% = т.
Ответ: D =-= я-
2 — тр
с
14.86. Для измерения силы тяги реактивных двигателей слу-
служит стенд, состоящий из основания 1, салазок 2 для крепления:
двигателя 3 и динамометра 4. Коэффициент жесткости узлов
крепления 5 основания в огневой яме равен с. О, величине силы
Pit)
К задаче 14 85.
V//////////////////////////////////////////////////////
К задаче I4 86.
тяги P(t) судят по деформации динамометра, коэффициент Жест-
Жесткости сд которого известен. В установившемся режиме работы
двигателя сила тяги меняется по закону P(t) = Р„([ + е sinpt)r
где Рц — среднее значение силы, е — относительная амплитуда,
р — частота вибрационной составляющей силы.
Определить, при какой частоте р относительная амплитуда
вибрационной составляющей силы, регистрируемой динамомет-
динамометром, будет такой же, как у силы тяги. Масса основания стенда
Л/, масса салазок вместе с двигателем т; изменением массы дви-
двигателя вследствие сгорания топлива пренебречь.
Ответ: р •
14.87. Точки подвеса стержней, рассмотренных в задаче 14.66t
совершают колебания в горизонтальном направлении по закону
s(t) — So %\X\,pt.
Найти отклонение от вертикальной прямой, проходящей через
точку подвеса, конца нижнего стержпя в установившемся ре-
режиме колебаний с частотой р = 2Уg/l.
Ответ: хя = 0.
14.88. Ротор, закрепленный на конце вертикального упругого
вала, связан с двумя одинаковыми математическими маятника-
маятниками. Нижний конец вала вращается по закону §= at + A sin pt,
§ 3 СИСТЕМЫ С ДВУМЯ И ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ
229
где А — амплитуда, р — частота угловых колебаний относитель-
относительно режима равномерного вращения с угловой скоростью со. Ко-
оффициент жесткости вала при кручений равен с, момент инер-
инерции ротора /, радиус ротора R, длины и массы маятников равны
г и т.
Пренебрегая массой упругого вала, определить, при ка^ой
частоте р будет наблюдаться эффект динамического гашения вы-
вынужденных колебаний ротора (амплитуда колебаний ротора Dt •=•
**= 0). Какие значения при этом будут иметь амплитуды D2 и 2?»
колебаний маятников?
/"iL Dj = 0,
D2 = D3
2mR{R +
К задаче i 4 88.
К задаче 14.89.
14.89. В ленточном тормозе концы ленты, охватывающей тор-
тормозной барабан, посредством пружин соединены с неподвижным
шарниром О н тормозным рычагом-. Момент инерции вала с тор-
тормозным барабаном / = 0,36 кг • м2, радиус барабана г = 0,15 м,
коэффициенты жесткости пружин с = 3,2 к11/м, длина рычага
I = 4г = 0,6 м, масса груза т — 1 кг. В положении равновесия
тормозной рычаг горизонтален.
Считая, что лента не проскальзывает относительно барабана,
п пренебрегая массой рычага, определить амплитуду угловых
колебаний рычага, возбуждаемых моментом М = 6 sin 2Ы Н • м
пары сил, приложенных к барабану.
Ответ: D = -рг рад(~ 4,8°).
14.90. В первом приближении профиль дороги можно аппрок-
аппроксимировать зависимостью у — h sin Bлх/К), где h—амплитуда,
К'— длина волны неровности.
Для автомобиля, характеристики которого удовлетворяют ус-
условию задачи 14.63, движущегося по дороге прямолинейно с
постоянной скоростью, определить, при каких значениях X не
будут возбуждаться угловые колебания кузова?
Ответ: Я = -1
?, п= I, 2,...
ГЛ. 15. ТЕОРИЯ ГИРОСКОПОВ
14.91. Представление о флаттере крыла — автоколебаниях
крыла в потоке воздуха — можно получить из анализа следую-
следующей простейшей модели. Однородная прямоугольная пластинка,
закрепленная на пружинах, имеет две степени свободы и в по-
положении равновесия горизонтальна. Масса пластинки равна т,
ширина Ъ, площадь F, коэффициенты жесткости пружин оди-
одинаковы и равны с. При обдувании
пластинки потоком воздуха возни-
возникают аэродинамические силы, кото-
которые приводятся к равнодействую-
равнодействующей, проходящей через так назы-
называемый «центр давления» Р. Прибли-
Приближенно вертикальную составляющую
'равнодействующей («подъемную ся-
ЙУ»> можпо принять Рав™й RyJT
= npFv2a, a расстояние СР = 0/4,
К задаче 14.91. где р _ ПЛ0ТН0СТ1* воздуха, v — ско-
скорость потока, а —угол отклонения пластинки от горизонтали
(угол атаки).
Определить, при каком значении скорости v потока пластинка
будет совершать нарастающие колебапия?
Ответ: v^ 2 /
Глава 15
ТЕОРИЯ ГИРОСКОПОВ
В болыпипстве задач настоящей главы имеется в виду реше-
решение в рамках прецессионной теории гироскопов. Эта приближен-
приближенная теория основывается на допущении, что в случае быстро вра-
вращающегося гироскопа можно пренебрегать экваториальной со-
составляющей его кинетического момента. Таким образом, в пре-
прецессионной теории кинетический момент гироскопа при любом
его движении принимают равным вектору Н = /<а, где / — мо-
момент инерции гироскопа относительно его оси симметрии, о --
направленная вдоль этой оси составляющая абсолютной угловой
скорости гироскопа (собственная угловая скорость гироскопа).
Вектор Н называют собственным кинетическим моментом гирос-
гироскопа.
При рассмотрении в рамках прецессионной теории системы,
состоящей из гироскопов и других тел, пренебрегают кинетиче-
кинетическими моментами всех тел, кроме гироскопов, и кинетический мо-
момент системы принимают равным сумме собственных кинетиче-
кинетических моментов гироскопов.
§ 1. ЗАКОН ПРЕЦЕССИИ. ГИРОСКОПИЧЕСКИЙ МОМЕНТ
231
В случае, когда имеется в виду решение задачи с учетом мисс
всех тел, составляющих систему, и экваториальной составляющей
кинетического момента гироскопа, это следует из условия задачи.
§ 1. Закон прецессии. Гироскопический момент
15.1. Волчок прецессирует, будучи установлен на шерохова-
шероховатую горизонтальную поверхность.
Дано: полярный момент инерции волчка / = 9000 г • см2, уг-
угловая скорость его собственного вращения и = 209 рад/с, масса
волчка т = 900 г, расстояние от точки опоры волчка до его цент-
центра масс / = 6 см, угол наклона оси 9 = 30°.
Каков должен быть коэффициент трения / между этой поверх-
поверхностью и ножкой волчка, чтобы волчок но скользил по поверх-
поверхности?
Ответ: j 2= 0,024.
* г
К задаче 15.1.
К задаче 15.2.
15.2. Спутник движется по круговой орбите (такова траекто-
траектория его центра масс) так, что ось z все время проходит через
центр Земли, а период обращения равен 84,4 мин. На спутнике
имеется мотор, ось ротора которого расположена в плоскости
Oxz, перпендикулярной плоскости орбиты Oyz и наклонена под
углом а — 60° к оси г. Ротор делает 3000 оборотов в минуту, его
полярный момент инерции / = 1 кг • м2.
Определить модуль и направление момента, который должны
развивать реактивные двигатели спутника, чтобы гироскопический
момент ротора не нарушал заданную ориентацию спутника.
Ответ: момент М должен быть параллелей вектору скорости
центра масс спутника, |М| =0,196 Н • м.
15.3. Корабль совершает циркуляцию и одновременно испыты-
испытывает килевую качку. При этом на корабль действует- гироскопи-
гироскопический момепт ротора корабельной турбины, (Циркуляция — дви«
232
ГЛ 15 ТЕОРИЯ ГИРОСКОПОВ
жение корабля по окружности, килевая качка — качания корабля
вокруг поперечной оси.)
Найти проекции Lx, Ly, Lz указанного момента на оси х, у, г
(см. рисунок), если ось ротора параллельна продольной оси ко-
корабля.
Дано: скорость корабля v, радиус циркуляции Д, полярный J
и экваториальный А моменты инерции ротора, его собственная уг-
угловая скорость to, закон качки 8 = 60 sin pt, где 8 — угол качки,
6( и р — постоянные величины.
Вычислить проекции момента при: v = 43 км/ч, R = 0,6 км
/ = 2,88-103 кг-м2, 0 = 167 рад/с, А = 1,5 • 103 кг-м2, ео = 6°
р-0,1 с-1.
- / Av§ sin pt \
Ответ: Ьх ~ — [ /со ^ JpQ0 cos pt, Ly = — AQV sin pt x
X (vVR - p2) + waJIR, Lz = 0; Lx =• — 0,5.10*cosO,lf Н-ы, Ly=-
=0,96-1С4Н-м (величины Lx, Lu, Li определены с точностью до
х\ " малых первого порядка относи-
относительно угла качки),
15.4. Артиллерийский снаряд
при полете в атмосфере совер-
совершает сложное движение:' он
вращается с некоторой угловой
К задаче 15.3.
К задаче 15.4.
скоростью toi вокруг своей оси симметрии z^ одновременно
вследствие действия на снаряд сил сопротивления воздуха эта
ось вращается с угловой скоростью и2 вокруг касательной Czi к
траектории центра масс снаряда.
Рассматривая снаряд как быстровращающийся гироскоп, вы-
вычислить момент этих сил относительно центра масс снаряда, по-
положив, что toi = 30 рад/с, оJ = 0,8 рад/с, масса снаряда тп — 15 кг,
радиус инерции его относительно оси симметрии р = 4 см, угол
между осями Cz£ и Cz2 равен а = 10°.
Ответ: 0,1 Н • м.
15.5. Вычислить гироскопический момент ролика в подшипни-
подшипнике, описанном в задаче 6.13, при следующих данных: угловая ско-
скорость ротора соответствует 3000 об/мин, масса ролика 80 г, его
радиус инерции относительно оси симметрии 0,7 см, а = 10°.
Ответ: 0,44 Н • м.
15.6. Во время виража турбовинтового самолета гироскопиче-
гироскопический момент ротора турбины может вызывать наклоны самолета.
Чтобы парировать действие этого момента, пилот отклоняет гори-
§ 2 ПРОСТЕЙШИЕ ГИРОСКОПИЧЕСКИЕ ПРИБОРЫ 233
зонтальные рули самолета; возникающие при этом аэродинами-
аэродинамические силы удерживают самолет в горизонтальном полёте.
Определить момент этих сил (его величину и направление),
если ось ротора параллельна продольной оси самолета, ротор вра-
вращается с угловой скоростью, соответствующей 3000 об/мин, мо-
момент инерции его относительно" оси симметрии J = 4.00 кг • мг,
скорость самолета v = 100 м/с, радиус описываемой им окруж-
окружности R = 2,5 км.
Ответ: момент равен Мс = 5030 Н • м. Если вектор угловой
скорости ротора направлен к носу самолета, то вектор Мс направ-
направлен к правому борту при правом вираже п к левому — при левом.
15.7. Как известно, велосипедист при движении по кривой
наклоняется в сторону центра кривизны ее.
Определить, в какой мере на величину угла наклона влияет
гироскопический момент колес велосипеда, положив, что он дви-
движется со скоростью v = 20 км/час по дуге окружности радиуса
Я = 30 м, масса колеса 2,5 кг, его радиус г = 0,5, радиус инерции
0,3 м, масса всей системы (велосипедист + велосипед) 75 кг, высо-
высота ее центра тяжести 1 м.
Ответ: угол отклонения велосипеда от вертикали без учета
гироскопического момента колес равен 6°. За счет гироскопиче-
гироскопического момента он увеличивается на 4'.
§ 2. Простейшие гироскопические приборы
15.8. Двухстепенной гироскоп установлен на горизонтальной
площадке так, что при любых поворотах рамки ось ротора оста-
остается параллельной площадке.
Доказать, что в равновесном относительно Земли положении
эта ось устанавливается в направлении юг — север и, следователь-
следовательно, прибор может служить гирокомпасом.
15.9- Для прибора, описанного в преды-
предыдущей задаче, получить формулу, определяю-
определяющую период малмх колебаний системы около
положения равновесия, приняв, что заданы:
момент инерции рамки с ротором относи-^
телыю оси рамки А, собственный кинетиче-
кинетический момент гироскопа Я, географическая
широта места ф. (Пренебречь величиной
BU cos ф в сравнении с Я, где В — момент
инерции рамки с гироскопом относительно у
я U — угловая скорость Земли.)
Отерт' Т = 2л V - К задаче 15-8>
итвет. л tny ни соа ц> '
15.10. В условиях задачи 15.8 предположить, что вокруг оси
рамки действует момент сил вязкого трения, пропорциональный
угловой скорости а рамки относительно Земли.
234
ГЛ. 15. ТЕОРИЯ ГИРОСКОПОВ
К задаче 15.11.
Доказать, что из двух положений равновесия системы лишь
одно {когда собственный кинетический момент ротора направлен
на север) устойчиво.
15.11. Двухстепенной гироскоп установлен на поверхности
Земли так, что ось ротора вынуждена оставаться в плоскости ме-
меридиана места: это достигается тем, что рамка 1 с гироскопом 2
подвешена па оси, перпендикулярной
плоскости меридиана.
Доказать, что если центр масс рам-
рамки с ротором расположен на оси рамки,
то в положении равновесия ось ротора
параллельна оси Земли.
15.12. Прибор, описанный в преды-
предыдущей задаче, может служить указате-
указателем географической широты места: она
равна углу между осью гироскопа и
плоскостью горизонта в данном месте.
Какова будет ошибка прибора, если центр масс ротора с рам-
рамкой ле точно совпадает с центром подвеса и смещен вдоль оси
тутора па некоторую величину I. Масса ротора т. = 1 кг, его
кинетический момент 4 Н ■ м • с, широта места <р = 60°, I = 1 мкм.
Указание. Учитывая, что 1<й (В — радиус Земли), положить, что сила
тяжести ротора параллельна линии, соединяющей центр Зомли с центром
подвеса.
Ответ: ошибка в широте « 1°.
15.13. Определить период малых колебаний около положения
равновесия системы, описанной в задаче 15.11, учитывая массу
рамки. Полярный момент инерции ротора С « 2 • 104 г • см2, мо-
момент инерции рамки вместе е ротором относительно оси рамки
А =■ 4 • 104 г • см2, собственная угловая скорость ротора со =
=2090 рад/с.
Ответ: Т = 2я ]/ А
CioU
23с (U — угловая скорость Земли).
15.14. Гироскопический измеритель угловой скорости (гиро-
тахометр) устроен в виде двухстепенного гироскопа, рамка 1 ко-
которого связана с основанием прибора
пружиной 2. При покоящемся осно-
напйи ось ротора параллельна осно-
основанию. Если оспование вращается
вокруг перпендикулярной ему оси х,
то рамка отклоняется на некоторый
угол р, при этом пружина деформи-
деформируется на величину, пропорциональ-
пропорциональную р. Демпфер 3 предназначен для
демпфирования собственных колеба-
колебаний системы — он создает момент
пропорциональный р.
К задаче 15.14,
§ 2. ПРОСТЕЙШИЕ ГИРОСКОПИЧЕСКИЕ ПРИБОРЫ
235
Доказать, что при вращении основания вокруг оси х с посто-
япной угловой скоростью Q рамка устанавливается в положении,
при котором угол [} (для малых углов) пропорционален величине
Q. Вычислить й, если р == 2°, жесткость пружины с — 9 Н/ом,
АС = о = 10 см, собственный кинетический момент гироскопа
// = 3 кг • м7с.
Ответ: В = -4-£2, й = О,105 рад/с.
а с
15.15. Доказать, что если в приборе предыдущей задачи уб-
убрать пружину, оставив демпфер, то прибор может служить интег-
интегратором угловой скорости или указателем угла поворота основания
относительно пнерциалышго прост-
пространства.
15.16. Получить выражение кинети-
кинетической энергии гироскопа в кардаповом
подвесе. Положить при этом, что оси
рамок и ротора пересекаются в одной
точке, являющейся центром масс каж-
каждого из этих тел и совпадают с их
главными осями иперции.
Ввести обозначения: Аг, Вг, Сг — мо- w
менты инерции внутренней рамки со- ft
ответственно относительно осей х, у,
z, связанных с внутренней рамкой, А3.
В,, С3 — моменты инерции ротора отно-
относительно тех же осей; р — угол поворо-
поворота внутреппей рамки относительно на-
наружной, а — угол поворота наружной
рамки (р = 0, когда плоскости рамок взаимно перпендикулярны);
А, — момент инерции наружной рамки относительно ее оси; f —■
угол поворота ротора относительно внутренней рамки.
К задаче 15.16.
■Ответ: Г = 4
* + Иг + Л) «2 cos2 р + (В2 + В3) рг +
+ С% a2 sin2 р + С3 (а sin Р + у)
15.17. Вследствие неточности изготовления центр масс гирос-
гироскопа в кардановом подвесе оказался смещенным относительно
центра подвеса вдоль оси ротора на 2 микрона. (Центром подвеса
называют точку пересечения осей рамок и ротора.)
С какой скоростью будет отклоняться ось гироскопа от перво-
первоначального положения (ji = 0), если ось наружной рамки верти-
вертикальна и при р = 0 ось ротора горизонтальна. Полярный момспт
инерции ротора С~ 12 • 10~4 кг • м2, его собственная угловая ско-
скорость ш = 2090 рад/с, масса m = I us.
Ответ: а = 7,8 • 10-" рад/с, р' = 0.
15.18. К наружной рамке гироскопа в кардаповом подвесе при-
приложена сила F, параллельная оси z (см. рис. к задаче 15.16).
236
ГЛ. 15. ТЕОРИЯ ГИРОСКОПОВ
Определить угловые скорости а и р" при [} = 0 и кинетическом
моменте Н = 1,96 кг • м7с, А В = 0,2 м, F = 0,1 Н.
Ответ: а = 0, £ = — 0,58 град/с.
15.19. В условиях предыдущей задачи определить а и
при
К задаче 15.21.
Ответ: а —0, р" = — 1,17 град/с.
15.20. Решить задачу 15.19 при условии, что, кроме силы F,
действует момент сил сухого трения вокруг оси внутренней рам-
а ки, максимальная величина которого
равна 10~4 Н • м.
Ответ: а « —10,5 град/ч, {} =•
■= —0,58 град/с.
15.21. К внутренней рамке гиро-
гироскопа в кардановом подвесе с верти-
вертикальной осью наружной рамки под-
подвешен грузик массы т=0,1 кг. Ки-
нетический момент гироскопа Н —
= 0,23 Н ■ м ■ с. Вокруг оси наружной
рамки действует момент сухого тре-
трения, максимальная величина кото-
которого равна 10~2 Н • м, АВ = 5 см.
Определить угловые скорости ра-
рамок при р" = 45°.
Ответ: а = 12,2 град/с, E = —3,52 град/с.
15.22. Решить предыдущую задачу при условии, что учиты-
учитывается также момент сил сухого трения на оси 'внутренней
рамки и максимальная величина его равна 0,01 Н • м.
Ответ: а = 8,69 град/с, р" = —3,52 град/с.
15.23. Гироскоп .в кардановом подвесе установлен так, что ось
наружной рамки вертикальна, а ось ротора горизонтальна и об-
образует с направлением на север малый угол а.
Кинетический момент ротора Н, географическая
широта ф.
Какие моменты следует приложить на осях
внутренней и наружной рамок гироскопа, чтобы
ось ротора сохраняла указанную выше ориен-
ориентацию.
Ответ: на оси наружной рамки момент
HUacos(f, на оси внутренней HU sin ф, где
U — угловая скорость Земли.
15.24. Гиромаятник представляет собой гиро-
гироскоп, подвешенный с помощью вилки 1 и сфе-
сферического шарнира 2 так, что ось ротора на-
направлена вдоль линии, соединяющей центр под-
подвеса с центром масс С системы. К задаче 15.24.
§ 2. ПРОСТЕЙШИЕ ГИРОСКОПИЧЕСКИЕ ПРИБОРЫ
237
Определить положение равновесия системы с учетом враще-
вращения Земли. Массой вилки пренебречь. Дано: Я,— кинетический
момент ротора, <р — широта места, Р — сила тяжести ротора,
С 1
Ответ: ось ротора
HV cos m
отклонена от вертикали на угол
в плоскости меридиана, где и — угловая
а — ff(/sinm-|- p
скорость Земли.
15.25. Определить период Т малых колебаний около положе-
положения равновесия гиромаятника, описанного в предыдущей задаче.
Массой вилки пренебречь.
тт
Ответ: Т -- 2я г, , ,—„„ . .
Р-1 + НО sm ф
15.26. Гироскоп простейшего гироскопического компаса под-
подвешен с помощью вилки 1 и сферического шарнира 2 так, что
при невращающемся роторе его ось занимает
j оризонтальное положение.
Докажите, что при вращающемся ратг*ре
ось ротора в равновесном положении распола-
располагается в плоскости меридиана места.
15.27. Получить выражение периода Т ма-
малых колебаний гирокомпаса, описанного в пре-
предыдущей задаче. (Массой вилки и ее колеба-
колебаниями вокруг оси ротора пренебречь, учесть
также, что в практических случаях Р1 >
> HU coscp.) Использовать обозначения зада-
задачи 15.24.
Ответ: Т
= 2я]/-
н
К задаче 15.26.
PtU cos ф '
15.28. На рисунке изображен гироскоп с внутренним упругим
подвесом рсгтора ?. Последний имеет форму кольца и приводится
в движение мотором 2, вал которого соединен с ротором посред-
посредством кольца 3 и двух пар торсионов 4 и 5; благодаря такому со^
единению ротор имеет две степени свободы относительно вала.
В равновесном положении ось ротора сов-
совпадает с осью вала; при отклонении от
этого положения возникает восстанавли-
восстанавливающий момент упругих сил торсионов,
пропорциональный углу отклонения.
Пренебрегая массами торсионов и вну-
внутреннего кольца и полагая «жесткости
обеих пар торсионов одинаковыми, полу-
получить закон движения ротора при малом
начальном отклонении его от положения
равновесия.
Ответ: ротор совершает гармонические
К задаче 15.28. колебания вокруг о,сей торсионов с часто-
238
ГЛ 15 ТЕОРИЯ ГИРОСКОПОВ
тами
С и
а+
{ С
где а==\~ ~ 2
соответственно полярный и экваториальный моменты
инерции ротора, и — угловая скорость вала, с — угловая жест-
жесткость каждой пары торсионов.
15.29. Динамической настройкой гироскопа, описанного в пре-
предыдущей задаче, называется такой подбор угловой скорости ва-
вала, при котором гироскоп ведет себя как свободно подвешепный
в одной точке,— ось ротора сохраняет неизменное направление в
пространстве, несмотря на колебания основания прибора (как ес-
если бы жесткость торсионов обратилась в нуль).
Определить указанное значение угловой скорости.
Ответ: ш3 = А°_с (А > С).
§ 3. Гироскопическая стабилизация
15.30. На рисунке изображен вагон однорельсовой железной
дороги, построенный по схеме Шиловского — Шерля. Для прида-
придания ему устойчивости в вагоне установлен гироскоп, подвешенный
в рамке 1, которая может поворачиваться относи-
относительно вагона на оси 2, перпендикулярной оси
рельса. Центр масс рамки с ротором смещеп от-
относительно оси рамки вдоль оси Z.
Получить уравнения малых колебаний системы
. около положения равновесия, приняв следующие
Jj обозначения: ч
для всей системы: Р — сила тяжести, А — мо-
момент инерции относительно оси рельса, L — рас-
ГТ 77 стояние от центра масс до рельса;
\д П // для системы рамка + ротор: р-—сила тяжести,
В — момент инерции относительно оси рамки, / —■
расстояние от центра масс до оси рамки, 11 —
собственный кинетический момент ротора.
К задаче 15 30.
Приняв, что ввиду малых размеров рамки ее качания не-
изменяют геодхетрии масс системы в целом.
Ответ: Аа + H$ = PLa, B$ — IIa = pl$, где а — угол отклоне-
отклонения вагона or вертикального положения, ^ — угол отклонения
плоскости рамки от вертикальной плоскости.
15.31. Доказать, что если вагон, описанный в предыдущей за-
задаче, движется с постоянной скоростью по прямолинейному рель-
рельсу, то для устойчивости его необходимо, чтобы центр масс рамкк
с ротором находился выше оси рамки и вместе с тем выполнялось
неравенство Я2 > AрА + LPB).
15.32. Стабилизация двухколесного автомобиля осуществлена
по схеме Шиловского — Шерля (см. зад. 15.30): камера 1 с распо-
расположенным в ней ротором 2 подвешена на оси О (перпендикуляр-
§ 3. ГИРОСКОПИЧЕСКАЯ СТАБИЛИЗАЦИЯ
239
К задаче 15.32.
ной продольной оси автомобиля) так, что их общий центр масс
находится выше этой оси. Автомобиль движется с постоянной
скоростью по дуге окружности, лежащей в горизонтальной плос-
плоскости.
Составить дифференциальные уравнения малых колебаний си-
системы около положения ее относительного равновесия, приняв, что
подвижной системой отсчета являет- _ ^
ся трехгранник с вершиной в центре
подвеса гироскопа, вращающийся с
той же угловой скоростью 'Q, что
автомобиль.
Угол отклонения автомобиля от
вертикали в равновесном положении
считать малым, моментами сил инер-
инерции, обусловленными вращением ав-
автомобиля вокруг вертикальной оси,
пренебречь.
Ответ: Aa^-(HQ-LP)a + H$ = O, Вр1' + (HQ- 1р)$ -Яа = 0,
где а и $ — углы отклонения автомобиля и камеры от равновес-
равновесного положения; остальные обозначения имеют тот же смысл, что
в задаче 15.30.
15.33. Приняв условия предыдущей задачи, доказать, что если
направление поворота автомобиля совпадает с направлением соб-
собственного вращения ротора, а угловая скорость поворота превы-
превышает величину lp/Н и меньше чем LP/fl, то равновесное положе-
положение автомобиля неустойчиво.
15.34. Стабилизация двухколесного автомобиля осуществлена
с помощью двух одинаковых гироскопов: камеры 1 с гироскопами
^ ^ подвешены на горизонталь-
пых осях, перпендикулярных
продольной оси автомобиля
и связаны между собой зуб-
зубчатыми секторами 2, благода-
благодаря которым могут поворачи-
поворачиваться только во взаимно
противоположных направле-
направлениях на равные углы. В ис-
исходном положении собствен-
пые кинетические моменты
вертикально во взаимно про-
V///////77777///////////7////////////7////////S.
К задаче 15 34.
"гироскопов Н и —Н направлены
тивоположные стороны.
Доказать, что при такой системе стабилизации требование
устойчивости не накладывает ограничений на угловую скорость
поворота автомобиля вокруг вертикальной оси.
15.35. Простейший силовой гиростабилизатор представляет со-
<5ой гироскоп в кардановом подвесе, оснащенный дополнительны-
дополнительными устройствами — датчиком угла ДУ и двигателем стабилизации
240
ГЛ. 16. УДАР
ДС. Датчик угла измеряет угол $ поворота внутренней рамки от-
относительно наружной (угол ji отсчитывается от положения, при
котором ось ротора перпендикулярна оси наружной рамки) и по-
посылает сигнал, пропорциональный [}, в двигатель стабилизации;
последний прикладывает к наружной
рамке момент относительно ее оси z по
закону Мг — — к$ (к = const > 0).
Доказать с помощью прецессионной
теории гироскопов, что описанное уст-
\в ройство обладает свойством стабили-
зировагь положение наружной рамки,
<Л V*ss=>4 vs=>^sr т- е- предотвращать ее вращение вокруг
\ Jr*>) ' оси 2 при действующих на н<?е момен-
^ДУ тах относительно этой оси.
15.36. Составить линеаризованные
Ъ X^-"""*" ^J уравнения движения гиростабилизато-
ра, описанного в предыдущей задаче,
учитывая моменты инерции обеих ра-
рамок и положив, что момент двигателя
Mz — — /ф — ца, где к и ц — положп-
К задаче 15 35 тельные постоянные, а — угол поворота
наружной рамки.
Ввести обозначения: А — момент инерции всей системы отно-
относительно оси z (принимается, что при малых р он остается' не-
неизменным), В — момент инерции внутренней рамки вместе с рото-
ротором относительно ее оси, Н — собственный кинетический момент
ротора.
Ответ: Аа + ца + Щ + Ц = 0, Bji - На = 0.
15.37. Исследовать гиростабилизатор задачи 15.36 на устойчи-
устойчивость. Вычислить максимальное значение коэффициента к, до-
допускаемое условиями устойчивости, если Н = 8 кг • м7с, А =
= 0,8 кг • м2, и = 0,4 Н • м • с.
тт
Ответ: к<.\1—д- = 4Н-м.
Глава 16
УДАР
§ 1. Удар точки. Соударение тел
при поступательном движении
16.1. Материальная точка массы то = 10 кг,- находящаяся в
покое на шероховатой горизонтальной плоскости, в течение
0,01 с подвергается действию постоянной ударной силы, импульс
которой равен 100 Н • с. Линия действия ударной силы горизон-
§ 1 УДАР ТОЧКИ СОУДАРЕНИЕ ТЕЛ
241
тальца. Коэффициент трения точки о плоскость при ударе и по-
последующем движении принять одинаковым и равным 0,1.
Определить отношение пути, 'пройденного точкой до остановки,
к ее перемещению за время удара и отношение времени движения
точки до остановки ко времени удара. Определить также отно-
отношение изменений скорости точки за время удара от действия удар-
ударной силы и силы сухого трения.
При вычислениях принять g = 10 м/с2.
Ответ: все отношения равны 103.
16.2. На покоящуюся материальную точку массы тп действуют
раздельно, но в одном направлении ударные силы, изменяющиеся
по законам
при
при 0 ^ t ^ т,
t>x,
при О ^ t ^ t,j
О
Определить импульс этих сил, скорость точки и ее перемеще-
перемещение к моменту окончания действия ударных сил.
Ответ: S1 (т) = S2 (т) = 5в (т) ■= 5 = Л,т, ух (т) = у2 (т) = v3 (т) =
_ S , 5т , , s 2_ 5т 7 / \ _ Sx
m ' 1 \ ' 2m ' 2^^ 3 m' 3I-' 3m
16.3. К материальной точке массы тп, подвешенной на пружи-
пружине с коэффициентом жесткости с, приложен ударный импульс S
в направлении оси пружины
Определить коэффициент динамичности ударного процесса
г| = г/шахует, где ушах — наибольшее смещение точки после удара
ог положения равновесия, Хсг — статическая деформация пружины.
Ответ: г, = -^-, где ш = Y~. у
16.4. Массивная платформа А движется по
вертикали вверх поступательно прямолинейно
с достоянной скоростью V. Материальная точ-
точка В массы тп ударяется о платформу, причем
вектор скорости v0 точки направлен перпенди-
перпендикулярно плоскости платформы, навстречу ее
движению.
Определить, какой должна быть скорость
движения платформы А, чтобы абсолютная ско-
скорость материальной точки В и после отскока
равнялась у„, а также определить величину
ударного импульса S при этом условии. Коэф-
16 Под ред К С Колесникова
LZ.
к задаче 16.4.
242
ГЛ 16. УДАР
фициент восстановления при ударе равен к. Масса точки В пре-
пренебрежимо мала по сравнению с массой платформы А,
Ответ: V = ^ к v0, S = 2mv0.
16.5. В задаче 16.4 определить величины скорости и точки В
после второго соударения и ударного импульса S. Движение точ-
точки между соударениями происходит в поле силы тяжести.
Ответ: и =
1 _ к + 2Г
v0, S = 2kmv0.
16.6. В задаче 16.4 определить величины скорости отскока точ-
точки В и ударного импульса для re-го удара, а также предельное
-значение перемещения платформы, при котором точка В упадет
на нее. Отсчет координаты и времени вести от первого соударения.
Ответ: ип —■
mv0, yx
для
8 A + *)
16.7. Материальная точка В массы m падает со скоростью v
на наклоненную под углом а к горизонту гладкую грань призмы
А перпендикулярно этой грани. Призма массы М до соударения
с точкой двигалась поступательно влево со скоростью V по глад-
гладкой горизонтальной плоскости.
Определить скорость прпзмы и поело удара и ударный им-
импульс S между призмой и плоскостью, считая, что призма не от-
отрывается от плоскости при ударе. Коэффициент восстановления
при ударе точки о призму равен к.
i \ A + к)
Ответ: их =
A + к) Mm cos а (у
ру р
m sin a \v A + к) — W sin а] + MV
'—+——■ 1 —
Uy
= 0, S =
V sin а)
М + m sin a
у///////////////////////////
К задаче 16.7.
К задаче 16.8.
16.8. Гладкая плита Р массы М движется поступательно со
скоростью V, направленной под углом а к нормалп к плите. Ма-
Материальная точка А массы m ударяется о плиту со скоростью v,
перпендикулярной плите. Коэффициент восстановления при ударе
равен к.
Определить ударный импульс S и скорость и, с которой точка
«отскочит от плиты. Определить ту же скорость при пг/М -*■ 0.
Ответ: S =
§ 1. УДАР ТОЧКИ. СОУДАРЕНИЕ ТЕЛ
Mm ,, , ,.
ч m.v—
5 а), и„=.
243
cos a-\-kv]
16.9. Два гладких тара с массами mj и /?г2, двигаясь поступа-
поступательно, сталкиваются. В момент столкновения скорость центра
масс первого шара vi направлена вдоль линии центров, а скорость
центра масс второго шара v2 перпендикулярна линии центров.
Определить, при каком условии первый шар остановится пос-
после удара, а также скорость второго шара щ после соударения при
этом условии. Удар считать упругим, коэффициент восстановле-
восстановления к.
.Ответ: к =
+ <4 =
v\.
К задаче 16.9.
К задаче 16.10.
16.10. В пружинном ударном механизме пружина 1 с коэффи-
коэффициентом жесткости с, упирающаяся в корпус и ударник 2, сжи-
сжимается взводящим устройством из недеформированного состояния
на длину хъ. Стопор А убирается мгновенно, и ударник 2 массы
М, разогнавшись, ударяет по бойку 3 массы тп. Коэффициент вос-
cjановлепия при ударе равен к. Расстояпие между бойком и удар-
ыпком во взведенном состоянии равно I > Хо. После удара ударник
стопорится, а боек движется в среде, в которой сила сопротивле-
сопротивления пропорциональна его скорости: R = — \i\, \i — const >0.
Определить, насколько боек углубится в среду за один удар,
а также к. п. д. механизма т; = Тт/П, где Тт — кинетическая энер-
энергия бойка после удара, П — потенциальная энергия сжатой пру-
пружины.
Ответ: II —
(М -I-
У Mel BxQ - I), т) = \Z , _..a 7
(M+m)*
-X
16.11. В ударном механизме кривошип ОС длины I с точечным
грузом С массы m на конце при вращении с постоянной угловой
скоростью со вокруг оси, проходящей через точку О перпендику-
16*
244
OVT 16 УДАР
лярно плоскости рисунка4 и связанной жестко с рамой 1, создает
движение раме. Масса рамы равна М.
Движение кривошипа начинается из положения, когда Ш =
= л/2, рама в этот момент находится в покое. Рама ударяет по
бойку 2 массы т4 в момент, когда
ее скорость достигает наибольшего значе-
значения. Угловая скорость кривошипа сохра-
сохраняется во время удара. Удар абсолютно
неупругий. Механизм находится на глад-
гладкой горизонтальной плоскости и имеет
гладкие направляющие.
Определить скорость и бойка 2 после
удара, а также отношение ц кинетической
энергии бойка 2 после удара и кинети-
кинетической энергии груза в относительном дви-
движении по отношению к раме.
л mid)
Ответ:
и=
m -\- M -\- m '
К задаче 16.11. =
(тх + М + mf
16.12. Решить задачу 16.11, считая удар упругим. Коэффици-
Коэффициент восстановления равен к.
п _ A + к) mto _ A + kfmm1
Ответ: и- m^ + M + m, т, - {m^ + M + m)i-
16.13. Из ствола стационарной установки, помещенной на не-
неподвижных гладких горизонтальных направляющих, производится
выстрел снарядом А массы тп. Ствол
1 жестко скреплен с лафетом 2 и
установлен под углом а к горизонту.
Скорость снаряда при выстреле отно-
относительно ствола равна v.
Определить путь отката установ-
установки после выстрела L, если ее масса
равна М, сила сопротивления тормо-
тормоза отката 3 равна R = b + piVz F,
ц = const > О, V — скорость отката
установки), а также импульс силы
давления пороховых газов S, сооб-
сообщающий снаряду скорость v. До выстрела установка была непод-
неподвижна. Поверхности соприкосновения снаряда и ствола гладкие.
mv cosa Y
У//////////////////////////////////////////У/
К задаче 16.13.
_ r M ,
Ответ: L = -^ In
Ь + и
M
mv
16.14. В пневмомеханической ковочной машине горизонталь-
горизонтального расположения подвижные массы М и тп разгоняются из со-
■стояния покоя энергией сжатого газа, находящегося в неподвиж-
§ 1 УДАР ТОЧКИ СОУДАРЕНИЕ ТЕЛ
245
ных цилиндрах 1 и 2. Давление газа в цилиндрах изменяется по
закону —— = —— I , 1 = 1,2. Здесь ро„ I, — начальные давления
Рщ \ xi /
п координаты поршней, х, — текущие координаты поршней.
1) Определить массу т из условия, что после абсолютно не-
неупругого удара подвижные массы остановятся.
2) Найти массу т из условия, что после удара масса М оста-
остановится, если удар упругий и коэффициент восстановления к —
= 0,2.
К задаче 15 11
При расчетах принять —- = ——,
- 1,Ггт.
XV ь*\ж \Л л. X J-
Здесь Жю, x2ls — координаты поршней в момент удара, s(, s2 —
площади поперечного сечения поршней, М — масса подвижных
частей в цилиндре 1 вместе с заготовкой.
Ответ: 1) тга = 1 т; 2) m = 590 кг.
16.15. Свая длины I и массы m забивается в грунт, сила сопро-
сопротивления которого изменяется по закону F = F« + ex, где Ft,, с =
= const > 0, х — глубина погружения сваи в грунт. Масса ударной
бабы равна Ж, коэффициент восстановления при одном ударе ра-
равен к. Работой силы тяжести пренебречь.
Определить, какое число п ударов потре-
потребуется, для того чтобы полностью погрузить
сваю в груш, если перед каждым ударом
скорость бабы равна v, и удары совершают-
совершаются по остановившейся после предыдущего
удара свае {п округляется до целого числа
в большую сторону).
Ответ: п—-
М
16.16. В ударном механизме боек 1 мас-
массы тп1 ударяет по промежуточному телу 2
массы т2, а затем тело 2 передает удар свае
3 массы тп,. До удара тело 2 и свая 3 непод-
неподвижны. Коэффициенты восстановления при
соударении бойка 1 и тела 2 и соответст-
16.16.
246
<ГЛ 16. УДАР
тела 2 и сваи 3 равны &12, &2», а при непосредственном со-
соударении тел 1 и 3 коэффициент восстановления равен кщ.
Определить коэффициент передачи энергии от бойка 1 к свае
3 (ц, = TJTU где Т,, Tt — кинетические энергии сваи 3 после
удара и бойка 1 до удара).
Определить таюке условия, при которых коэффициент пере-
передачи энергии г|3 в схеме соударения с промежуточным телом 2
выше, чем коэффициент передачи энергии п2 при непосредствен-
непосредственном соударении бойка и сваи, приняв А2 = к23 = к1а = к = 0,8;
Ответ: Чз =
; при к -0,8
"*о
:_L для_1-=10 0,134-
,746.
'3 * 3 "Ч
16.17. Используя условия задачи 16.16, определить массу про-
промежуточного тела, при которой коэффициент передачи энергии
от бойка к свае будет наибольшим, и найти его величину. При-
Принять коэффициенты восстановления равными к. Определить ус-
условие, При КОТОРОМ Т], max > Т]2.
{i + kfmm
mjWljj, Т1з max ~= ,,у— ,/-—Vi' гЬ шах >УЬ ПРИ
§ 2. Удар в механической системе
16.18. В коробке скоростей ведущий вал / вращается с посто-
постоянной угловой скоростью со, а передача вращения па ведомый вал
II сначала осуществлялась зацеплением шестерен 1 и 2 с радиу-
Y///1
К задаче 16.18.
§ 2. УДАР В МЕХАНИЧЕСКОЙ СИСТЕМЕ 247
сами г,, г2. Затем произвели переключение зацепления на шестер-
шестерни 3 и 4 с радиусами г3, г4 = г.
Определить импульс ударной окружной реакции, возникающей
в момент переключения передач, предполагая, что угловая ско-
скорость ведущего вала за время удара не изменяется. Массы шес-
шестерен 2 к 4 равпы М2 и М4 = М соответственно; rjrk = 1, г,/г2~
— 1/2, MJMl = 9/4. Шестерни 2 и 4 считать однородными диска-
дисками, массой вала // пренебречь.
Какой необходимо обеспечить импульс момента на ведущем
залу, чтобы сохрапить со во время удара?
Ответ: S = J ,гы , / = Sr.
16.19. В задаче 16.18 определить угловую скорость вала //
после переключения зацепления на шестерни 3 и 4. Моменты
иперции вращающихся частей валов I я II относительно их осей
вращения равны соответственно Л и Jz. Пере-
Переключение произведено на холостом ходу, т. е,
угловая скорость ведущего вала изменяется при
ударе.
/-> г. ~+~^7 2 + ~7\
Ответ: ъ1 = - -v- со = г- со.
16.20. В приборе, демонстрирующем наличие
центра удара, однородный стержень длины In s
массы М имеет возможность вращаться вокруг го-
горизонтальной неподвижной оси, проходящей че- к задаче 16 20.
рез его конец О и перпендикулярной ему.
В положепии равновесия, указанном на рисунке, по стержню
производится удар так, что ударный импульс S перпендикулярен
•стержню и оси вращения.
Определить положение центра удара стержня и угловую ско-
скорость стержня после удара со.
2
Ответ: Ь = -т- Z, где Ь — АО — расстояние от центра удара до
2S
оси вращения; ю = .
16.21. В цирковом аттракционе используется подкидная доска,
на правый конец которой с высоты Я падает шар А массы М, и
остается па доске в точке контакта. На другом конце доски нахо-
находится шар В массы Мг, который, приобретя скорость, отделяется
от доски при повороте ее вокруг горизонтальной оси. Момент
инерции доски относительно горизонтальной оси вращения, про-
проходящей через точку Q, равен /, угол наклона доски к горизон-
горизонту а.
1) Определить наибольшую высоту подъема шара В, если
248
1ГЛ 1С УДАР
2) Решить задачу, если шару В сообщена в конце удара отно-
относительная по отношению к доске скорость v, направленная пер-
перпендикулярно доске.
Ответ: 1) утах — Н cos4a
2)
cos a
s/////////////
К задаче 16.21.
У/////////
К задаче 16.22.
16.22. Ударная машина для испытания образцов на растяже-
растяжение имеет вращающийся вокруг горизонтальной оси, проходящей
через точку О, маховик 1, из которого при заданной угловой ско-
скорости со выбрасывается захват 2. Захват жестко скрепляется с
маховиком вдоль его радиуса и ударяет по упору 3 массы ти
прикрепленному к испытуемому образцу. При ударе захват не
отскакивает от упора, удар производится концом захвата (точкой
D) при его горизонтальном положении. Захват считать однород-
однородным стержнем длины OJ) = 1 и массы т. Момент иперцни махо-
лика относительно горизонтальной оси вращения, проходящей че-
через точку О, Jo = nJc, где п — постоянная, Jc — момент инерции
захвата относительно горизонтальной оси, проходящей через центр
масс С захвата перпендикулярно рисунку.
Определить расстояние^ 001, на котором необходимо закре-
закрепить захват при ударе, чтобы отсутствовали ударные реакции в
подшипнике О, а также скорость упора 3 после удара при выпол-
выполнении этого условия. Массой образца пренебречь.
Ответ: ОО1 = х(«-2), и= 6j(tl + 1} m + (га + 4) т,] ■
16.23. Рейки 1 и 2 масс m( и тг могут двигаться по парал-
параллельным прямолинейным направляющим, приводя в движение
шестерню С массы М радиуса г. Механизм расположен на глад-
гладкой горизонтальной плоскости. К рейке 2 приложен ударный им-
импульс S.
§ 2 УДАР В МЕХАНИЧЕСКОЙ СИСТЕМЕ 249
Определить скорости реек и угловую скорость шестерни после
удара. Шестерню принять за однородный диск. До удара система
находилась в покое. Поверхности контакта реек и направляющих
гладкие.
MS
A1)lt
(ЗА/ + 8m,) S 2 (Л/ + 2m{\S
= Л/2 + ЗЛ/(m(-| m2) \ bmfm2 ' Ы ~~ г [Л/2 + оЛ/ (п^ — mg) + Sw^
(направлена по часовой стрелке).
/////////////////////////////////Л
//,////////////,
"""""
1
г
\
д.
о
О'//////'' '////////////////////Л п '////'/У/'//////////////////////////////////
К задаче 16.23. К задаче 16.24.
16.24. К шестерне С механизма,- описанного в предыдущей за-
задаче, приложена пара ударных импульсов с моментом L.
Определить скорости реек и угловую скорость шестерни С
после удара, используя данные предыдущей задачи.
_ £ 2(М + mt + т2)
г [Л/2 +ЗМ(т1-( т2)+8т1Пг2] ' f2 мг + ЗЛ/ (^ + т2) + вт
(направлена против часовой стрелки).
16.25. Рейки 1 и 2 масс те, и m2,
движущиеся по параллельным прямо-
линейным направляющим, находятся
в зацеплении с шестерней С массы
М и радиуса г. Рейка 2 наталкивает-
наталкивается на уступ, имея скорость v2, и мпго-
венно останавливается. Угловая ско-
рость шестерни до удара равна ш. к эадачо 16 25
Шестерня при ударе по рейкам не
проскальзывает.
Определить скорость и^ рейки 1 после удара, а также импульс
ударной реакции уступа S. Шестерню считать однородным дис-
диском, поверхности контакта реек и направляющих гладкие.
Ответ: и1х = 2гсо+ \м + ^\ S = ^^ LJPf.
16.26. Однородный диск радиуса г — 0,5 м и массы Л/ = 10 кг
с прямолинейным пазом движется в вертикальной плоскости.
В тот момент, когда угловая скорость диска со = б рад/с, скорость
250
ГЛ 16 УДАР
центра масс диена vc горизонтальна и равна 3 м/с, а паз накло-
иев под углом ос = 45° к горизонту, стержень АВ мгновенно по-
попадает в паз диска. После этого диск скользит по остановившему-
остановившемуся стержню. Поверхности скольжения паза и стержня гладкие.
Размерами паза пренебречь.
Определить суммарный импульс ударной реакции стержня .У
а расстояние СО от центра масс до точки приложения импульса
ударпой реакции. Определить также
скорость v диска при опускании его-
центра на высоту h = 1,05 м.
Ответ: 5=21,2 Н • с, £70=0,353 м,.
v = 5 м/с.
К задаче 16.26.
К задаче 16.27.
16.27. Однородный стержень длины ! = 2м и массы М пахо-
дится в состоянии покоя на горизонтальной гладкой плоскости.
Материальная точка массы ш, движущаяся со скоростью-
v = 23 м/с, направленной перпендикулярно стержню, ударяет
но нему в точке Е, расположенной на расстоянии Ь от его-
центра масс.
Определить угловую скорость и скорость центра масс стерж-
стержня после удара, если удар абсолютно неупругий; М/т = 4, b/l =
= 1/4.
Ответ: со = 6 рад/с (направлена против часовой стрелки), иСх =
= 0, иСу = 4 м/с.
16.28. В условиях предыдущей задачи найти положение мгно-
мгновенного центра скоростей (МЦС) стержня при ударе и показать,
что если в МЦС поместить шарнир, то импульс ударпой реакции
в нем будет равен пулю.
Определить величину ударного импульса при ударе точки о
стержень, если масса точки m = 4 кг. Получить формулу для рас-
расстояния СР от центра масс стержня С до МЦС — точки Р, если
радиус инерции стержня относительно оси, проходящей череа
центр масс стержня перпендикулярно плоскости его движения,
равен р.
Ответ: СР = 2/3 м, S = 64 Н • с, СР = р7Ь.
16.29. Из реактивного самолета, совершающего прямолиней-
прямолинейный полет со скоростью v под углом а к горизонту, катапульти-
катапультируется летчик вместе с креслом с относительной скоростью Wr
перпендикулярной продольной оси самолета в плоскости его сим-
§ 2 УД\Р В МЕХАНИЧЕСКОЙ СИСТЕМЕ
251
метрии. Катапультирование происходит из точки продольной осп
самолета, расположенной от его цетра масс на расстоянии I. Мас-
Масса летчика с креслом т, масса самолета М, момент инерции само-
самолета относительно оси, проходящей через его центр масс перпен-
перпендикулярно плоскости рисунка, равен Л
К задаче 16.29.
Пренебрегая сопротивлением воздуха, найти уравнения дви-
движения самолета при падении. Летчика с креслом принять за ма-
материальную точку. Угол поворота ср продольной оси самолета в
плоскости ху отсчитывать от положения OOt.
Ответ: q>~ko~-Wt (по часовой стрелке), хс = (у cos a +
jjf W sin а)*> Ус = \v sin a
W cos
а) г Г"»
где
Указание к задачам 16.30—16.35. При решентш использовать гипотезу
Рауса для удара: условие отсутствия проскальзывания цртг ударе
где / — коэффициент трепия скольжения при ударе, S г, S v — соответствен-
соответственно касательный и нормальный импульсы ударных реакций; при наличии
проскальзывания
fsN.
В задачах, где говорится об отсутствии проскальзывания катка при
ударе, имеется в виду, что проскальзывание может закапчиваться в
лроцессо удара или в фазе деформирования, или в фазе восстановления.
16.30. В плоскости симметрии однород- i
яого катка массы m и радиуса г к гори-
горизонтальной оси, проходящей через центр
масс С и перпендикулярной этой плоско-
плоскости, приложен ударный импульс S под
углом ос к горизонту. До удара каток
находился в покое па шероховатой го-
горизонтальной плоскости, при ударе ка- ч к задаче 16.30.
а
«У
252
(ГЛ 16 УДАР
ток от плоскости не отскакивает. Коэффициент трепия сколь-
скольжения при ударе равен /.
Определить, при каких значениях угла а каток при ударе
не проскальзывает, а также угловую скорость катка <о после
удара при отсутствии проскальзывания.
у-, , ^.9, 2S cos a
Ответ: ctga^o/ ы
16.31. В условиях предыдущей задачи, допустив наличие про-
проскальзывания катка при ударе, определить скорость точки кон-
контакта катка с плоскостью после удара.
Ответ: икх = —^ (cos a — 3/ sin a) >0, ику = 0.
16.32. Колесо, представляющее собой однородный диск ра-
гиуса г, падает па i оризонталытую шероховатую плоскость так,,
что ось колеса параллельна плоскости, скорость центра колеса
vc перпендикулярна плоскости, угловая скорость колеса ш. Ко-
Коэффициент трения скольжения при ударе равен /.
Считая удар колеса о плоскость абсолютно пеупругим, опре-
определить условие проскальзывания при ударе, найти положение
мгновенного центра скоростей колеса (точку Р) и скорость точки
касания К колеса с плоскостью после удара при наличии про-
гкальзыватши.
iv r
Ответ: /<-т—, СР = -~— , иКх — З/i-'c—r<tf<0, uKy=0.
У///////Х/////////
л
К задаче 10 32.
'////////////у////////??,
91
К задаче 10 33.
16.33. Колесо после подскока на неровности ударяется о го-
горизонтальную шероховатую плоскость, имея угловую скорость
<о. Скорость центра колеса vc направлена под углом а к гори-
воиту. При "ударе колесо от плоскости не отскакивает. Колесо
считать однородным диском радиуса г.
Определить величину коэффициента трепия скольжения при
условии отсутствия проскальзывания при ударе.
| ? со — vn соч a 1
Ответ: 3f> ' ^ '.
16.34. В условиях предыдущей задачи найти скорость центра
колеса после удара ис при отсутствии проскальзывания, а так-
§ 2 УДАР В МЕХ ШИЧЕСКОЙ СИСТЕМЕ
255
же определить условие, при котором касательная составляющая
импульса ударной реакции Sr обратится в нуль.
то + 2vq cos a
Ответ: ис = ^ ; Sp = 0 при rco =
16.35. В условиях задачи 16.33, считая, что колесо при ударе-
проскальзывает, определить скорость це-нтра колеса ис и его-
угловую скорость ah после удара. Коэффициент трения сколь-
скольжения при ударе равен /.
Ответ: ис — vc (cos a ± / sin a),
= и
2/
sin a
(верхний знак при гш >yccosa, нижний знак при гы < yccosa).
16.36. Колесо радиуса г скатывается без скольжения по на-
наклонной плоскости па горизонтальную плоскость. Наклонная
плоскость образует с горизонтом угол а. Движепие колеса может
осуществляться в двух вариантах: а) по сопряжению радиуса R;
б) без сопряжения. В обоих случаях колесо начинает движение
из состояния покоя из одного и того же положения / на наклон-
наклонной плоскости. В варианте б) колесо не отрывается от горизон-
горизонтальной плоскости и катится по ней без скольжения.
'У/// '''Y/V//////,
К задаче 16.36.
Определить скорость центра колеса С в положении II для
обоих случаев скатывания. Трением качения пренебречь. Колесо
считать однородным диском.
_ 1 -J- 2 cos а,
Ответ: гСб =■ з v
гдо
= щ У g(R — r)(l —cosa).
16.37. В условиях предыдущей задачи определить импульс
ударной реакции в точке Л, если масса колеса равна М.
Ответ: Sn = Mvca sin a, Sp = -у vCa A — cos a).
16.38. Колесо массы М и радиуса г, катясь без скольжения
по горизонтальной направляющей 7WV, наталкивается на уступ О
В, огибая его, поднимается на горизонтальную направляющую»
ОМ. Высота уступа h. Удар колеса об уступ неупругий, сколь-
скольжение при ударе и огибании уступа отсутствует.
254
ГЛ. 16 УДАР
Определить, какова должна быть скорость центра С колеса
перед ударом, чтобы колесо вкатилось на верхнюю направляю-
направляющую.
При заданной скорости центра колеса vc до удара определить
импульс ударной реакции уступа S. Колесо считать однородным
диском.
Ответ: vc> т V%\ : Sx = Mvc A- \2^- - б), Sv = Mvc X
* ¥7
¥7
U — 2. A. \y JL 12 — Л \ Решение справедливо приО < й/г *£ 1.
ffYT//////////
К задаче 10.38.
К задаче 16.39.
16.39. Ползун А массы тп, движущийся по гладкой горизон-
горизонтальной направляющей ММ, соединен шарнирно со стержнем
АВ, который в точке В шарнирно соединен с однородным ди-
диском массы М п радиуса г с центром в точке С. Диск катится
по горизонтальной плоскости. В некоторый момент времени, ког-
когда точки Л, В, С и D лежат на одной прямой, диск наталкива-
наталкивается на упор D, имея угловую скорость ы0, скорость ползуна А
равна vA, а стержень наклонен под углом а к горизонту. Диск
при ударе не отскакивает от упора D и не проскальзывает по
нему. Массу стержня АВ не учитывать.
Определить угловую скорость диска <а, скорость ив точки В
ж скорость иА ползуна А после удара, а также импульс реакции
SA при ударе ползуна А о направляющую,
то + 2vA si>~ a
—, ив = 2rw, иА =-0, SA — mvA tga.
Ответ: Ci5 = ■
3r
16.40. В механизме предыдущей задачи считать, что однород-
однородный стержень АВ длины I обладает массой тп; массой ползуна А
пренебречь.
Определить угловую скорость <в диска и скорость точки В
после удара. Определить также угловую скорость (аАВ стержня
АВ после удара.
6 [М + m) vA sin a + иг (ЗМ + 4m)
Ответ: со = г(9м + 8ш) ' ив =
_ 2(ог
§ 2. УДАР В МЕХАНИЧЕСКОЙ СИСТЕМЕ
255
16.41. Ползуны А и С соединены стержнями АВ и ВС оди-
одинаковой длины. Ползун А массы т движется по горизонтальной
направляющей, а ползун С — по вертикальной. Однородный
стержень ВС имеет массу М. В положении, указашюм на ри-
рисунке (а = 45°, ^-АВС ==90°), ползун С попадает па концевой
выключатель и внезапно останавливается. Перед остановкой ско-
скорость ползуна С была Vc, скорость ползуна А в тот же момент
времени равна VA.
Определить скорость ив точки В после удара, а также им-
импульс ударной реакции SA в точке А, если VC/VA= 1,2;
М/т =- 5.
Массами пол'зуна С и стержня АВ пренебречь. Направляю-
Направляющие считать гладкими.
Ответ: ив
11
22
!Г
К задаче 16.41.
К задаче 16.42.
16.42. Ступенчатое зубчатое колесо 1 массы М катилось па
неподвижной зубчатой рейке NN без скольжения. До зацепле-
зацепления в точке В с зубчатой рейкой 2 массы m = 10 кг скорость
точки А колеса была равна \А. Рейка 2 до зацепления с коле-
колесом 1 имела скорость v и двигалась поступательно параллельно
NN. При зацеплении с рейкой 2 колесо в точке Р не проскаль-
проскальзывает.
Определить угловую скорость колеса со после зацепления с
рейкой 2, а также импульс ударной реакции SP в точке Р. При
вычислениях принять М/т = 2, R/r — 2, p/r=Vl,5, vjv=\,
г = 0,2 м, v — 16 м/с (г, R — радиусы ступеней колеса, р — ра-
радиус инерции колеса относительно оси, проходящей через центр
колеса С и перпендикулярной плоскости движения колеса).
Ответ: со = 23 рад/с, 5^ = 2 Н • с, 5Р„ = 0.
16.43. В условиях предыдущей задачи определить, при ка-
каком условии импульс ударной реакции SP в точке Р равен нулю
и нрн этом условии определить угловую скорость колеса со после
вацеиления с рейкой 2, а также пмпульс ударной реакции SB в-
точке В.
250
ГЛ 16 УДАР
Ответ: SP = О при р2 = rR, ш = 22,85 рад/с, SBx = 22,85 Н ■ с,
16.44. Зубчатое колесо 1 массы М и радиуса Я катилось по
неподвижной зубчатой рейке NN без скольжения. В момент вре-
А1ени, когда скорость центра масс С колеса 1 была равна vc,
произошло зацепление колеса в
точке А с зубчатой рейкой 2.
Рейка 2 массы m до зацепления
двигалась поступательно парал-
параллельно NN со скоростью v. При
зацеплении с ударом (v Ф vc) ко-
колесо проскальзывает в точке К.,
1) Определить угловую ско-
скорость ш колеса, его кинетический
77 И момент Кк относительно оси, пер-
К задаче 16.44. пендикулярной плоскости рисун-
рисунка и проходящей через точку К,
и скорость рейки 2 после удара и, если принять горизонтальную
составляющую импульса ударной реакции в точке К равной пу-
пулю (SKx = 0). Эти же величины определить при М/т -»- 0.
2) Определить угловую скорость со и горизонтальную состав-
составляющую импульса ударной реакции SAx в точке А, если SAl =
= nSKx, где п > 0. Определить эти же величины при М/т ->■ 0.
Колесо считать однородным диском.
Mvc 4- т Bv — ис)
Ответ: 1) со =-
2Mvc ~\
R (
2) со =
-. При-
2v-
2 (М + Зт)
(n
ЗД
— /и B A — п) v -f (и — 3) гс
пЛ/m (и — 2i'c)
~zr ->-0 со =
[
2(п
пМ (у
. -1) > "л*- Зге-1
16.45. При включении мальтийского механизма палец А вхо-
входит в гладкий паз диска — мальтийского креста — с ударом. По-
Поводок ОА до соударения вращался с угловой скоростью со0, диск
был неподвижен. В момент включения механизма поводок ОА
горизонтален, паз наклонен под углом а к горизонту. .Определи!ь
угловую скорость диска со после удара и ударный импульс S
в точке А, а также величину угла а при безударной работе
механизма.
Поводок ОА считать однородным стержнем дл.ины I и мас-
массы М, момент инерции диска относительно оси вращения, про-
проходящей через центр Ои равен /; О,А = г.
Hflra cos a JMIoi cos а
Ответ: ю - .. , . °„. 5~, S =■ „ . " , ; S = 0 при
§ 2. УДАР В МЕХАНИЧЕСКОЙ СИСТЕМЕ
257
16.46. Кривошип О А вращается вокруг оси, проходящей че-
через точку О и перпендикулярной плоскости рисунка, с постоян-
постоянной угловой скоростью Ш|. Колесо В движется по прямолиней-
прямолинейной направляющей NN и переходит па направляющую ММ без
отскока и без проскальзывания, причем угловая скорость его
перед сменой направления движения равна о.
К задаче 16.45.
К задаче 16.46.
'Определить скорость uD точки D колеса после удара. Колесо
радиуса г считать однородным диском, массой шатуна АВ пре-
пренебречь. О А = АВ = Z, а- 45°, ^ОАВ = 90°.
Ответ: uD =
(шг
16.47. В сочлененной системе однородный стержень OD мас-
массы М — 20 кг и--длины 1 = 1 м соединен пружиной с коэффици-
коэффициентом жесткости с = 88,1 кН/м с изогнутым под прямым углом
стержнем ВС А, заделанным в стену.
К стержню OD приложены распределен--'
ные ударные пмпульсы с наибольшей
интенсивностью sm№ = 300 Н • с/м, а к
стержню ВС А — распределенные силы
с наибольшей интенсивностью qm&s. =
= 200 Н/м.
1) Определить угловую скорость fi>
стержня OD после удара и ударную ре-
реакцию So в опоре О.
2) Определить наибольшую опорную
реакцию в точке А, если СВ = 0,2 м,
АС = 3 м. Массой стержня ВС А пре-
пренебречь. Деформацию пружины счи-
считать малой.
К задаче 16.47.
Ответ: 1) @=15 рад/с (направлена по часовой стрелке), Sox =■
= Soy =-0; 2)ХАюах= - 11,5кН,УА Юах=300Н,МАюах==-2,9кН.м.
16.48. На горизонтально установленную с помощью пружины
и цилиндрических шарниров в точках А я В прямоугольную
однородную плиту ABCD массы М с высоты h падает груз G
массы m в точку О — центр масс плиты. Удар груза о плиту
абсолютно неупругий.
17 Под ред. К. С Колесникова
258
(ГЛ. 16. УДАР
Определить ударные реакции опор, а также скорость груза и
после удара.
лес Mm ~\f"Lgh. осп ?">
Ответ: ЪАх = ЬВх = —^.mTq^h ЬАу = SBy = 0, и
Zmy
W
К задаче 16.48. К задаче 1Ь.49.
16.49. Однородный шар массы М и радиуса R подвешен на
шаровом шарнире О. В точке D к покоящемуся шару приложен
ударный импульс S, направленный по касательной к параллели,
центр которой лежит па оси, проходящей через неподвижную-
точку О и центр шара С.
Определить угловую скорость ц шара после удара и расстоя-
расстояние ОК от шарнира О до плоскости, в которой приложен ударный
импульс, если ударная реакция в шарнире О равна нулю.
= 0^ ^)OJf *
)
16.5Q. Однородный диск массы
М и радиуса Н, закрепленный в
точке О с помощью шарового
шарпира и стержня ОС, жестка
скрепленного с диском и перпен-
перпендикулярного плоскости диска,
перекатывается по горизонтальной
плоскости без скольжения. В по-
положении, указанном па рисунке,
когда скорость точки А диска
равна Va и направлена параллель-
параллельно оси х, в центр диска ударяет
точка D массы тп со скоростью
v, направленной параллельно АО. Удар иеупругий. Массу стерж-
1Гя ОС не учитывать; ^-АОВ=§0°. " •
Определить абсолютную угловую скорость <о диска после уда-
удара, а также ударный импульс <SB в точке В. При ударе диск
не проскальзывает nor плоскости. Зацепление диска с плоскостью
зубчатое.
К задаче 16.50.
g 2 УДАР В МЕХАНИЧЕСКОЙ СИСТЕМЕ
259
7 yiMv.
Ответ: и = 2д пм 4- Am) (вектоР ** направлен по ОВ вправо);
MmvA mv
16.51. 1) В условиях задачи 1641 определить импульс удар-
ударной реакции So в шарнире О.
2) В условиях задачи 16.11, полагая, что угловая скорость
кривошипа изменяется при ударе, определить ее величину at
после удара. Определить также скорость и бойка 2 после удара
и импульс ударной реакции S бойка.
Ответ: 1) SOx = (M + m){m*+M + my
MJml + M -f-m) - Mrnko
= 0. 2)
(Л/
S =
те)' " (Л/ + mx) (M + m)"
16.52. К стержням ОА и 045 шарнирного четырехзвенника,
находящегося в покое в положении, указанном на рисунке, при-
приложены одновременно ударные импульсы S и S,. Векторы
S и S, параллельны OOU zOO^B= zOxBA = W°, ZAOO1=6Q°I
1) Определить угловую скорость ы стержня ОкВ после удара,
а также импульс ударной реакции So в шарнире О.
2) При Si = S определить импульс ударной р'еакции SA в
шарнире А.
Однородные стержни OtB, АВ п ОА имеют массы m,, m2, mt
и длины U, 1г, 1г соответственно,
причем h = h — I, mt = тг — m,
mjm — 5/i. Трением в шарни-
шарнирах пренебречь.
А,. П/У
К задаче 16.52.
S
К задаче 16.53.
S-S1 S-25S1 23 УЗ (Я-S)
Ответ: 1) со = -^j-, Sox = —?2—• 5°^ = ~" 2Тб '
о\ ттптт ^! ■ Q Q ■ Cf Cf —- О
■^7 иУА1 ^i — *-* & Ax — "q" *^ > *^Ay — ^*
16.53. В кулисном .механизме, находящемся в покое, криво-
кривошипу ОА сообщается угловая скорость, которая достигает знача-
17*
260 ГЛ- I7i ДИНАМИКА ТОЧКИ ПЕРЕМЕННОЙ МАССЫ
пия й в момент, когда выберется зазор между цилиндрическим
пальцем А кривошипа и поверхностью паза кулисы В. Палец
с ударом вступает в контакт с поверхностью паза кулисы. ~Vдар
считать неупругим.
Масса кулисы равна М, момент инерции кривошипа с паль-
пальцем относительно оси вращения, проходящей через точку О пер-
перпендикулярно плоскости рисунка, равен J, длина кривошипа I.
Кулиса наклонена к горизонту под углом а. При ударе кри-
кривошип образует угол {S с горизонтом. ,
Определить потерю угловой скорости Асо == ы{ — ы кривоши-
кривошипа О А при ударе (coi — угловая скорость кривошипа после уда-
удара). Определить'также импульс ударной реакции S в точке кон-
контакта пальца кривошипа с поверхностью паза кулисы. Трением
пренебречь.
„ А шМ72 cos2 (Р — а) с
Ответ: Д© = а>, — ф = ъ „ ,— , Ь =»
1 / cos2 a + Ml% cos2 (P- о)
(aMU cos (P — к)
J cos2 а + М? cos2 (p — а)"
16.54. В условиях задачи 16.53 определить работу внутрен-
внутренних ударных реакций А в точке контакта пальца кривошипа
с поверхностью паза кулисы и показать, что эта работа равна
изменению кинетической энергии кулисного механизма при уда-
ударе А21.
Ответ: A^-J4 ™«с-'(р-,) = дг.
2 / cos3 a + МГ cos2 (P — а)
Глава 17
ДИНАМИКА ТОЧКИ ПЕРЕМЕННОЙ МАССЫ
§ 1. Реактивная сила. Задачи Циолковского
17.1. Определить реактивную силу и полный импульс, созда-
создаваемый двигателями первой ступени ракеты «Сатурн-5», если
масса сгоревшего топлива этой ступени 2010 т, продолжитель-
продолжительность работы двигателей 150 с, относительная скорость истече-
истечения продуктов сгорания топлива 2500 м/с. Расход топлива счи-
считать равномерным.
Ответ: Р = 33 500 кН, / = 5 025 000 кН • с.
17.2. Поливочная автомашина движется прямолипейпо при
включенном на наибольший расход воды поливочном устройстве.
Масса воды в цистерне автомашины 3000 кг, время опорожнения
цистерны при наибольшем расходе воды равпо 5 мин, перепад
давлений на распылителе^ 2940 гПа.
Насколько большей должна быть мощность, необходимая для
обеспечения равномерного движения автомашины со скоррстью
§ 1. РЕАКТИВНАЯ СИЛА. ЗАДАЧИ ЦИОЛКОВСКОГО 261
36 км/ч при направлении струи воды в сторону ее движения по
сравнению с тем случаем* когда струя воды перпендикулярна
направлению движения автомашипы. Потери на трение при дви-
движении автомашипы считать постоянными.
Указание. Скорость истечения воды v = 1/ —-, где Ар — перепад
давлений на распылителе, р — плотность воды.
Ответ: на 2,43 кВт.
17.3- Одноступенчатая ракета, стартовая масса которой
12 900 кг, движется вертикально вверх в однородном ноле сил
тяжести из состояния покоя. Время работы двигателя 64 с,
относительная скорость истечения продуктов сгорания топлива
2200 м/с, конечная масса ракеты 4900 кг.
Считая тягу двигателя равной реактивной силе, секундный
расход топлива постоянным и пренебрегая сопротивлением воз-
воздуха, определить наибольшую скорость ракеты.
Ответ: и= 1501,7 м/с.
17.4. Сохраняя условия предыдущей задачи, определить, на
какую высоту h поднимется ракета в момент окончания работы
двигателя и полную высоту Н ее подъема.
Ответ: h = 37,2 км, Н = 152,1 км.
17.5. Используя условия задачи 17.3 и считая, что масса
ракеты во время работы двигателя уменьшается по закону М =
= Мое'а', где а — const > 0, определить полную высоту Н подъ-
подъема ракеты.
Ответ: Н = 163 км.
17.6. Используя условия задачи 17.3, определить максималь-
максимальную высоту /imai, которую может достичь в момент окончания
работы двигателя ракета, если уменьшение ее массы во время
работы двигателя происходит по закону М — Moe~at,- где а =•
= const > 0.
Ответ: hmsx = 57,79 км.
17.7. Воображаемая ракета, стартовая масса которой 2765 т,
состоит из трех ступеней. Масса топлива в первой ступени 2010 т,
во второй 420 т и в третьей 104 т. Массы конструкции первой
и второй ступеней ракеты равны 135 т и 43 т соответственно.
Относительная скорость истечения газов при работе двигателей
первой ступени 2500 м/с, а при работе двигателей второй и
третьей ступеней 4250 м/с. *
Считая, что отработавшая ступень отделяется от оставшейся
части ракеты с нулевой относительной скоростью и пренебрегая
сопротивлением воздуха и силой тяжести, определить конечную
скорость ракеты.
Ответ: v = 12 669 м/с.
17.'8. Воображаемая трехступенчатая ракета, для всех ступе-
ступеней которой одипаковы числа Циолковского и относительные
262 ГЛ- 17- ДИНАМИКА ТОЧКИ Ш.'РЕМЕННОЙ МАССЫ
скорости истечения газов vT — 2500 м/с, должна сообщить косми-
космическому кораблю массы 43 т конечную скорость 12 670 м/с.
Масса конструкции каждой ступени составляет 7% массы топ-
топлива этой ступени.
Считая относительную скорость отработавшей ступени равпой
нулю и пренебрегая сопротивлением воздуха и силой тяжести,
определить стартовую массу ракеты.
Ответ: М ==20 714 т.
§ 2. Дифференциальные уравнения движения точки
17.9. По какому закону должна изменяться'масса тела, сколь-
скользящего по горизонтальной плоскости за счет отделения от пего
частиц с постоянной относительной скоростью и, направленной
против движения тела, чтобы скорость самого тела была носю-
ЯИНОЙ,
Коэффициент трения скольжения между телом и плоскостью
/ = eionst, начальная масса тела гп0.
Ответ: m (t) = moe u .
17.10. По какому закону должпа изменяться масса тела,
скользящего спизу вверх по наклонной плоскости, образующей
угол а с горизонтом, чтобы ею ускорение было постоянно и.
равно а0.
Относительная скорость и отделяющихся от тела частиц по-
постоянна и направлена прошв движения тела. Коэффициент тре-
трения скольжения тела о плоскость / = const, начальная масса
тела то.
Ответ: m (t) = moe " ' .
17.11. По какому закону должна изменяться масса тела,
скользящего по горизонтальной плоскости за счет отделения от
него частиц с постоянной относительной скороегью и, направлен-
направленной против движения тела, чтобы ускорение самого тела уве-
увеличивалось пропорциопалыю времени с коэффициентом пропор-
пропорциональности к. Начальная масса тела тпа.
Ответ: m (t) — mQe 4U .
17.12. Найти скорость точки переменной массы как функцию
времени, если масса точки уменьшается по закопу ш =
■=■ mue~ai (a—const > 0, ma — начальная масса точки) и скорость
точки в момент начала отделения от нее частиц была равна v0.
Точка скользит но гладкой горизонтальной плоскости, отпоситель-
ная скорость и отделяющихся частиц постояппа и паправлепа
против начальной скорости точки v0.
Ответ: v{t) = i>0 + aul\
§ 2 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ
263
17.13. Материальная точка М, масса которой уменьшается по
закопу т — тпое~°" (а = const > 0, т0 — начальная масса точки),
движется в вертикальной плоскости в однородном поле сил тя-
тяжести. Векторы относительных скоростей отделяющихся от точ-
точки М частиц горизонтальны и равны по величине и — const.
Найти траекторию точки М в неподвижной декартовой си-
системе координат Оху и путь, пройденный точкой до падения
на Землю. В начальный момент времени (t = 0) точка М совпа-
совпадала с началом координат и ее скорость была равна нулю. Со-
Сопротивлением воздуха пренебречь. Высота точки О над поверх-
поверхностью Земли //.
Ответ: У~~
S - И
и М
'/777777777777777/
К ладачо 17.13.
К задаче 17.14.
17.14. Материальная точка М скользит в вертикальной пло-
плоскости по гладкой цилиндрической поверхности радиуса R. Мас-
Масса точки М уменьшается по закону тп = тпое~а', где a=const">
> 0, та — начальная масса точки. Относительная скорость и
отделяющихся частиц постоянна по величине, направлена но
касательной н траектории точки в сторону, противоположную ее
" движению. В начальный момент времени it —= 0) точка М совпа-
совпадала с точкой А поверхности и имела скорость v0.
Определить скорость материальной точки М в тот момент
времени, когда опа достигнет точки В на цилиндрической по-
поверхности, если ф = 45°.
Ответ: v -= ]/'v\ + gR B — /2) + 0,5лсшД .
17.15. Модель крылатой ракеты, привязанная к концу троса,
второй-конец которого закреплен-неподвижно, движется так, чго
ее центр масс описывает окружность в горизонтальной плоско-
плоскости. Масса модели уменьшается'по закопу т/г==т0 A — at), где
a = const > 0, то,, — начальная масса модели. Относительная ско-
скорость и истечения продуктов сгорания топлива постоянна по
величине и направлепа но касательной к траектории центра
масс модели.
264 ГЛ- 17- ДИНАМИКА ТОЧКИ ПЕРЕМЕННОЙ МАССЫ
Пренебрегая сопротивлением воздуха, определить силу Т на-
натяжения троса в тот момент времени, когда мас'са модели станет
вдвое меньше начальной. Длина троса I, начальная скорость мо-
модели равна v0.
Ответ: Т = ^f (v0 + U In 2J.
17.16. Используя условия задачи 17.15, найти уравнение s{f>
движения центра масс модели и определить, как изменится на-
натяжение троса в момент времени, когда масса модели ракеты
станет вдвое меньше начальной, если уменьшение массы будет
происходить по закону m — moe~ai (a = const > 0, m0 — началь-
начальная масса модели ракеты).
( аи \
Ответ: s (t) — [v0 + -g- t)t, натяжение троса не изменится.
17.17. Материальная точка М, масса которой уменьшается по
закону m = mae'dl (a = const > 0, пг„ — начальная масса точки),
скользит по гладкой горизонтальной
SE, трубке, вращающейся вокруг верти-
вертикальной оси с постоянной угловой ско-
скоростью со. Движение «точки М начинп-
::^=_ _ j^ ется от осп вращения трубки из состоя-
ff\ // W иия покоя. Относительная скорость и
отделяющихся частиц постоянна и на-
направлена к оси вращения трубки..
Получить уравнение движения точ-
WA ки М относительно трубки.
К задаче 17.17. ^ ' ,.-. аи . , . .
Ответ: х (г) = —j (en cot — 1).
со
17.18. Решить задачу 17.17, принимая во внимание шерохо-
шероховатость стенок трубки. Коэффициент трения скольжения между
точкой М и стенкой трубки /; влиянием силы тяжести точки М
на силу трения пренебречь.
аи Г e~nt - 1
Ответ: х (£) = —ГЛ (о>х cli ы^ -f- n sh a>J) — 1 I где п =/со,
со" L Ш1 J
17.19. Тяжелая цепь, изготовленная из одинаковых звепьев
и сложенная кучкой на краю стола, сползает с него под дей-
действием сил тяжести. Движение начинается из состояния покоя
за счет того, что в начальный момент времени со стола свеши-
свешивалось только одно звено цепи.
Пренебрегая арением и сопротивлением воздуха, определить,
во сколько раз путь, пройденный первым звеном цепи за первую
после начала движения секунду, будет меньше пути, пройден-
пройденного свободно падающей точкой за то же время.
Ответ; в три раза.
§ 2 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ
265
17.20. Жидкость, находящаяся в баке большой емкости, от-
делепа от короткой вертикальной трубы поршнем, который за-
закреплен в месте соединения трубы с баком. В пекоторый момент
времени поршень освобождается.
Получить дифференциальное уравнение движения поршня по
трубе под действием вытекающей из бака жидкости.
Жидкость считать идеальной. Изменением уровня Н жидко-
жидкости в баке, массой поршня и трением между поршнем и стен-
стенками трубы пренебречь.
Ответ: х ■ х + х2 — gx = gH.
%W
'•Ww
1
-
—i- _;
-q—
-T
<
-
1
К задаче 17.20.
x\
К задаче 17 21.
17.21. Получить дифференциальное уравнение движения и
определить период малых колебаний поршня клапана, который
закрывает выход идеальной жидкости из вертикальной трубы,
соединенной с баком большой емкости.
Масса поршня клапана т, коэффициент жесткости пружины
с, плотность жидкости р, площадь поперечного сечения трубы /.
Расстояние от днища бака до поршня клапапа при равновесии
сиоемы равно /0-
Ответ: (т + pfl0)* + p/s• * + Р/*2 + (с — gpf) х - О, Т =■
17.22. Из бункера комбайна, который движется прямолинейно
с постоянной скоростью v, зерно пересыпается в кузов автома-
автомашины, движущейся рядом с комбайном. Масса автомашины без
зерна М, радиус ее колес Я, коэффициент трения качения 6.
Масса зерна, загружаемого в кузов автомашины в течение одной
секунды, тп.
•Определить крутящий момент на ведущих колесах автома-
автомашины как функцию расстояния s, пройденного автомашиной от
(ГЛ. 17 ДИНАМИКА ТОЧКИ ПЕРЕМЕННОЙ МАССЫ
положения, занимаемого ею в момент начала загрузки. Считать,
что колеса автомашины катятся без с.кольжения, сопротивлением
воздуха пренебречь.
Ответ: J£Kv = £° (М + -^- sj.
17.23. Масса самолета, двигавшегося горизонтально с посто-
постоянной но величине скоростью v0, начиная с некоторого момента
времени U = 0) увеличивается вследствие обледенения по
закону МШ = Мо + at, где a = const>0, Ma — масса самолета
при t ~ 0.
Получить дифференциальное уравнение движения самолета в
вертикальном направлении, полагая, что горизонтальная состав-
составляющая полной -аэродинамической силы в каждый момент вре-
времени уравновешена силой тяги двигателей, а вертикальная со-
составляющая этой силы пропорциональна скорости самолета (ко-
(коэффициент пропорциональности к). Движение самолета рассмат-
рассматривать в неподвижной декартовой cucieMe координат Оху, юч-
ка О которой совпадает с центром масс самолета при t = 0, ось
Ох направлена в сторону скорости v0, а ось Оу — вниз.
Ответ: у -г- -jj—j—г у — « i » »
17.24, Используя условия задачи 17.23, получить уравнения
движения самолета, если его масса вследствие обледенения уве-
увеличивается по закону М — Мпеа\ где a = const>0, МО — масса
самолета в момент начала обледенения (( = 0). Скорость само-
самолета при t = 0 равна va.
: х-±A- е^), *=£[»-£(!-
Ответ
17.25. С цилиндрической катушки^ которая скатывается но
наклонной плоскости, образующей угол а с i оризонтом, сматы-
сматывается бумажная лента. Конец ленты прикреплён к плоскости.
В момент начала движения масса катушки с накрученной на
нее лептой Л/, их общий момент инерции относительно оси ка-
катушки / ■== Мр2, где р — радиус инерции, наружный радиус
ьатушки с лентой равен R. Погонная масса ленты и..
Определить ускорение точки на оси катушки и натяжение
.генты при f=, е!ли в этот момент времени центру масс ка-
катушки была сообщена скорость v в направлении линии наиболь-
наибольшего ската паклонной плоскости.
Ответ: а @) - , 1 р2 (g sin a + -Si „«), S @) = {^+^ x
X [Mp*g siu'a — p (Л2 — p2) v*\:
ГЛ. 18 УСТОЙЧИВОСТЬ ДВИЖЕНИЯ 267
Глава IS
УСТОЙЧИВОСТЬ ДВИЖЕНИЯ
Пусть имеется механическая система со стационарными, го-
лопомнылш, двусторонними связями, обладающая к С1епенями
свободы. Ее кинетическая эпергия равна
к
1де с/г — обобщенные коордипаты системы (£ = 1, 2, ..., к).
Уравнения движения такой системы в форме Лаграюка име-
имеют вид
d ! E2L\ _J^_ _г) а \ -у п
где (?, — обобщенные силы системы, являющиеся в общем случае
функциями обобщенных координат, обобщенных скоростей и
времени. Произведя соответствующие дифференцирования функ-
функции ,Т и разрешив эти уравнения относительно </j, получим урав-
уравнения движения в виде
'Л = Ufa, Q, t).
После подстановки <h = Vi, ГД° Рг — новые переменные, получа-
получается пкчема уравнений иервого норядка
Ч, ■= Р» Л = Я/*, q, p).
К аналогичной шегеме уравнений можно прийти и для ме-
механической системы с нестационарными связями.
Таким образом, уравнения движения большого класса меха-
механических (а также электромеханических) систем могут быть
представлены в виде
-Zr=-Y,(t,ylt...tyJ (s*l, ...,»), A)
где аргументы i/(, ..., у„ с математической точки -зрения совер-
совершенно равноправны.
Предположим, чго изучается некоторое конкретное движение
механической системы, описываемое решением системы A)
У* ^ /«(«) («= 1, •■.,«),
соотвоютвующпм заданным начальным \.словиям
2Q8 ГЛ 18. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ
Оно может быть, в частности, состоянием равновесия {кратко —•
равновесием)
q, — a, — const, q, = 0.
Это движение, интересующее исследователя в условиях постав-
лепной задачи, принято называть невозмущенным движением,
а все другие движения, которые может совершать система, на-
называются возмущенными. Любое возмущенное движение cncie-
мы будем обозначать ya(t).
Невозмущонное движение системы называется устойчивым
(по Ляпунову)*), если по любому заданному числу е > 0 можно
подобрать такое число б > 0, что выполнение неравенств
1».(*.)-/.(*вI<6 B)
обеспечивает выполнение неравенств
Ы0-/„иI <е при t>U. C)
Если, кроме того, выполняются соотношения
lim I у, @ - /. (О | = 0,
t->oo
то невозмущенное движение называется асимптотически устой-
устойчивым.
Невозмущенное движение называется неустойчивым, если ус-
условие C) нарушается хотя бы для одного возмущенного движе-
движения, сколь бы малым ни выбиралось для него число 6.
Разности ySt) — /ДО называются отклонениями. Обозначим
Если в уравнениях A) произвести замену зависимых перемен-
переменных с помощью соотношений
у, =xs + fs(t),
то получатся уравнения вида
-^j— = Xs (t, xlt ..., xn), D)
которые называются уравнениями возмущенного движения. При
втом невозмущенному движению соответствует нулевое решение
•) Все определения, приводимые далее, даются в нестрогом изложении.
С более точными формулировками необходимо познакомиться в системати-
систематических руководствах по теории устойчивости:
Маркин Д. Р. Введение в теорию устойчивости движеяия.— М.: Нау-
Наука, 1971; 2-е ивд., 1976.
Кузьмин П. А. Малые колебания и устойчивость движения.— М.: На-
Наука, 1973.
Ч с т а е в Н. Г Устойчивость движения. Работы по аналитической ме-
механике— Ы . Изд-во АН СССР, 1962.
ГЛ 18 УСТОЙЧИВОСТЬ ДВИЖЕНИЯ
269
системы D). В случае, когда в качестве невозмущенного движе-
движения взято состояние равновесия, и принято, что в положении
равновесия все qs — 0, уравнения возмущенного движения совпа-
совпадают с исходными уравнениями движения системы.
Устойчивость состояния равновесия консервативной системы
можно исследовать без составления уравнений движения. Для
этого достаточно записать выражение для потенциальной энер-
энергии системы в возмущенном движении и потребовать выполпе-
ния условий ее минимума в исследуемом положении равновесия
(критерий ЛаграЪжа). Неустойчивость устанавливается с по-
помощью теорем Четаева (см. библиографические ссылки на
стр. 268). -
Если уравнения возмещенного движения являются линейны-
линейными с постоянными коэффициентами, т. е. имеют вид
dx
-^- =■ aslxx + ... + атхп (asl = const, 1 = 1, ...,п), E)
то об устойчивости невозмущенного движения можно судить по
корням характеристического уравнепия системы E), которое
имеет вид
hi
=-0.
Если действительные части всех корней характеристического
уравнения отрицателыш, то нулевое решение системы E) ус-
устойчиво асимптотически. Представив характеристическое уравне-
уравнение в виде
Л0|лп + Л1,ия-1 + ... + Лп_1|л + Л„ = 0, F)
составляют следующую матрицу размерЕшети пХп;
II
0 0 0
Для того чтобы все корни уравнения F) имели отрицательпую
вещественную часть, необходимо и достаточно, чтобы все ми-
норБ1 этой матрицы, расположенные по ее главной диагонали,
были положительны (критерий Гурвица), т. е. чтобы выполня-
выполнялись неравенства
■0, Д, -
, ...,detff
270 ГЛ 18 УСТОЙЧИВОСТЬ ДВИЖЕНИЯ
Если система D) является нелинейной, то, полагая отклоне-
пия xs малыми, в ней выделяют линейную часть. Полученные
таким образом линеаризованные уравнения называют уравне-
уравнениями первого приближения. По ним можно в ряде случаев
судить об устойчивости нулевого решения исходной нелинейной
системы D). Если по каким-либо соображениям исследования
одних лишь уравнений первого приближения недостаточно для
суждения об устойчивости системы, то применяется метод функ-
функций Ляпунова (см. источники, указанные в сноске на стр. 268).
Для механических систем, находящихся под действием толь-
только потенциальных и диссипативных сил, в качестве функции
Ляпунова может быть принята полная механическая энергия
в возмущенном движении и испояьзовано известное соотношение
•—-—£-—- = — 2Я, где R — диссипативная функция.
Для получения условий асимптотической устойчивости при
знакопостоянной функции dV/dt часто оказывается полезной
теорема Барбашина и Красовского.
Если на систему, кроме потенциальных и диссипативных, дей-
действуют гироскопические силы, то для суждения об ее устойчивости
можно воспользоваться известными теоремами Томсона и Тэта
(см. книгу Д. Р. Меркина «Введение в теорию устойчивости дви-
движения»).
§ 1. Устойчивость равновесия механических систем
18.1. Составить дифференциальное уравнение малых свобод-
свободных колебаний механической системы с одной степенью свободы
около положения равновесия под действием потенциальных сил
при отсутствии сопротивления.
Предполагая, что потенциальная энергия системы в положе-
положении равновесия имеет минимум, доказать устойчивость ее равно-
равновесия путем непосредственной оценки общего решения системы
уравнений возмущенного движения.
18.2. Математический маятник 1 вибрографа соединен посред-
посредством кулисы 2 со стержнем 3, который может вращаться на
оси Oi. Длина маятника Z4, его масса т,, длина стержня U,
его масса т2; О£ОГ= L.
Установить условие устойчивости равновесия маятника в
нижнем вертикальном положении. Массой ползуна пренебречь.
Ответ: ^> 2/л .
18.3. Для ослабления зависимости периода колебаний маг-
магматического маятника от его амплитуды при больших ее значе-
значениях можео1 бить использовано нружиппое устройство, показан-
показанное на рисунке. Когда маятник находится в нижнем вертикаль-
вертикальном положении, пружина сжата и ее деформация равна Я,о.
1. УСТОЙЧИВОСТЬ РАВНОВЕСИЯ МЕХАНИЧЕСКИХ СИСТЕМ
•271
К задаче 18.2.
К задаче 18.3.
Установить условие устойчивости равновесия маятника в
этом положении,' если его масса т, жесткость пружины с, ОА =
= I, ОС = L, ОБ = 21.
Ответ: mgL > 2сХ„1.
18.4. Сруз М может двигаться в вертикальной плоскости по
окружности радиуса R. С грузом соединена пружина жестко-
жесткости с, противоположный конец которой укреплен в верхней точ-
точке окружности А. Длина недеформированной пружины 1„.
Найти все положения равновесия груза и исследовать устой-
устойчивость равновесий, если l0 < 2R, сила тяжести груза Р.
Ответ: возможны положения равновесия ф4 = 0 и ф2 3 =*
с!
~ ± 2 arccos 2(cR — p) (ПРИ с^о < 2 [ ей — Р |). В положении q>4
равновесие устойчиво при cl0 > 2(сЯ — Р), в положепиях фа
и ф3 равновесия устойчивы при 2(сЯ — Р)> cl0 и неустойчивы
при 2ХР - cR) > с2„.
18.5. Математический маятник длины I соединен цилиндриче-
цилиндрическим шарниром с вертикальным стержнем ОА, вращающимся о
постоянной угловой скоростью со вокруг вертикальной оси.
М
К задаче 18.4
К задаче 18.5.
272
ГЛ. )8. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ
Найти все положения равновесия маятника относительно си-
системы отсчета, вращающейся вместе со стержнем О А, и иссле-
исследовать устойчивость равновесий.
Ответ: при Ш2<g возможны положения равновесия ф( = 0 и
<р2 ■= п. В положении cpt равновесие устойчиво, в положении ср±
неустойчиво. При /ш2 > g возможны
фх = 0, ф2 = л, ф3>4 = ± arccos—г
to
положения равновесия
положениях ф, и ф»
равновесия неустойчивы, а в положениях ф3 и ф4 устойчивы!
18.6. Однородный тяжелый стержень 1 длины / соединеп ци-
цилиндрическим шарниром с вертикальным стержнем 2, вращающим-
вращающимся с постоянной угловой скоростью со вокруг вертикальной оси.
Найти все положения равновесия стержня относительно си-
системы отсчета, вращающейся вместе со стержнем 2, и исследо-
исследовать устойчивость равновесий.
Ответ: при 21аг «SI '3g возможны положения равновесия ф4 — О
н ф2 == л. В положении ф( равновесие устойчиво, в положении ср2
неустойчиво. При 21ыг > 3g возможны положения равновесия
Ф! = 0, ф2 = я, ф3D — ± arccos гл. В положениях <р, и ф2 равно-
21ь)
веспя неустойчивы, а в положениях ф3 и ф4 устойчивы.
1 <
*^з
К задаче 18.6.
К задаче 18.7.
18.7. Однородный стержень 1 массы /п, и длины 21 может
вращаться в вертикальной плоскости вокруг 'цилиндрического
шарнира О, с которым он связан спиральной пружиной 2 же-
жесткости с. К противоположному концу стержня с помощью пру-
'жины 3 подвешен груз 4 массы тг. При равновесии в верхнем
вертикальном положении стержня груз находится на расстоя-
расстоянии I от его концов. Пружина 2 при этом не напряжена.
Найти условие устойчивости равновесия системы в атом по-
положении.
Ответ: с > g(mi + mjl.
g 1. УСТОЙЧИВОСТЬ РАВНОВЕСИЯ МЕХАНИЧЕСКИХ СИСТЕМ
273
18.8. Два одинаковых математических маятника массы т и
длины 21 каждый связапы между собой и с пеподвижньши опо-
опорами тремя одинаковыми горизонтальными пружинами. При вер-
вертикальном положении маятников пружины не напряжены.
Определить, при каком значении коэффициента жесткости с
каждой пружины равновесие при верхнем вертикальном поло-
положении маятников будет устойчивым.
Ответ: с > 2mg!l.
К задаче 18.8.
дата!
К задаче 18.9.
-о-
18.9. Математический маятник 1 маосы-m и длины 31 связатг
горизонтальной пружиной 2 с математическим маятником 3
массы m и длины 11. Пружина не напряжена при показанном
на рисунке вертикальном положении маятников.
Определить, при каком значении коэффициен-
коэффициента жесткости пружины с равновесие в этом поло-
положении будет устойчивым.
Ответ: с > Qmg/l.
18.10. Два. математических . маятника длипы I
каждый несут на концах грузы с одипаковой массой
тп. Маятники соединены шарниром в точке А и
удерживаются в верхнем вертикальном положении
двумя одинаковыми спиральными пружинами.
Определить, при каких значениях коэффициен-
коэффициента жесткости каждой пружины с равновесие систе-
системы в указанном положении будет устойчивым.
Ответ: с > A + i2)mgl.
18.11. Однородный брус 1 массы- /п, удерживается в верти-
вертикальном положении равновесия пружиной 2 жесткости с. Стер-
Стержень 3 может вращаться вокруг точки О и удерживается в го*
ризонтальном ивложеиии пружиной 4. На конце стержня нахо-
находится груз 5 массы тп2.
18 Под ред. К. С. Колесникова
К задаче 18.10.
274
ГЛ. 18. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ
Найти условие устойчивости равновесия системы в указан-
указанном положении. 'Массой стержня 3 пренебречь.
Ответ: с > (rat + mjg • Z.
В
■ 2-
11
К задаче 18.11.
К задаче 18.12.
18.12. Два однородных стержня ОА и ОВ массы m и длины
21 каждый, жестко соединенные между собой под прямым уг-
углом, удерживаются пружиной / жесткости с в положении рав-
равновесия, при котором стержень ОА горизонтален. На правый
конец стержня ОА через невесомый стержень 2 и пружину 3
опирается груз 4, который может перемещаться
в вертикальных направляющих.
Найти условие устойчивости равновесия систе-
системы в указанном положении.
Ответ: с > mgl.
18.13. Два тела 1 и 2, подвешенные на пружи-
пружинах 3 и 4, могут перемещаться только парал-
,4 лелыю вертикальной оси Ох. Характеристика
пружины 3 является нелинейной, сила упруго-
упругости ее определяется соотношением Fx = f(x), где
Fx — проекция силы на ось Ох, х — координата
груза 1, отсчитываемая от положения, в котором
пружина не деформирована. Пружина: 4 имеет
линейную характеристику, жесткость этой пру-
пружины с.
Предполагая, что в положении равновесия df/dx > 0, дЬказать
устойчивость равновесия системы.
Указание. Исследовать свойства функции Ляпунова, в качестве кото-
которой принять полную механическую энергию систем» в ее возмущенном
двияеении.
18.14. В задаче 12.4 найти положения равновесия системы
м исследовать устойчивость равновесий двумя способами: а) с
-а?
К задаче 18.13.
g 2 АСИМПТОТИЧЕСКАЯ УСТОЙЧИВОСТЬ ДВИЖЕНИЙ 275
помощью критерия Лагранжа; б) с помощью прямого метода
Ляпунова.
Ответ: возможны положения равновесия q)i = я/6 п ф2 = 5я/6.
В положении ф1 равновесие устойчиво, в положении ф2 не-
неустойчиво.
18.15. Крыло самолета при испытаниях в аэродинамической
трубе укрепляется с помощью специального упругого подвеса.
Вектор скорости потока воздуха v
имеет постояпную величину и на-
направлен параллельно продольной
оси нормального сечения S крыла.
Предполагается, что движением кры- -
ла в направлении потока можно пре-
пренебречь. Кроме того,- движение кры-
крыла считается плоским и аэродинами-
аэродинамические силы приводятся в центре
масс С к вертикальной силе F = к задаче 18.15.
= кц> и паре сил с моментом М — щ
{к и п — постоянные, зависящие от v; ф — угол поворота про-
продольной оси сечения, отсчитываемый от направления потока в
направлении действия пары). Масса крыла т, его момент инер-
инерции относительно горизонтальной поперечной ося, проходящей
через точку С, равен /.
Найти условия устойчивости равновесия крыла, считая от-
отклонения малыми. Коэффициенты жесткости элементов подвеса
указаны на рисунке.
Ответ: 0<4(аий22 — а,2аи) ^ (ап + а22J, где, ап — {сг +
а 12 = (яс, — be» — к)/т, аи = {ас1— Ьс2)/1, о22 = (й2с, + Ь2сг —
§ 2. Асимптотическая устойчивость невозмущенных движений
18.16. На механическую систему с одной степенью свободы
действуют потенциальные силы и силы сопротивления, пропор-
пропорциональные первой степени обобщенной скорости.
Предполагая, что потенциальная энергия системы в положе-
положении равновесия имеет минимум, доказать асимптотическую ус-
устойчивость' ее равновесия путем оценки общего решения системы
уравнений возмущенного движения.
Доказать также, что если к рассматриваемой системе прило-
приложить силы, являющиеся непрерывными функциями времени, то вы-
нуладепное движение системы будет асимптотически устойчивым.
18.17. Математический маятник может колебаться в верти-
вертикальной плоскости в некоторой среде. При этом на тяжелую точ-
точку действует сила сопротивления R = — u.v, где u. = const > О,.
v —» скорость этой точки.
Доказать асимптотическую устойчивость равновесия маятни-
маятника в нижнем вертикальном положении путем исследования
18*
276
ГЛ 18. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ
свойств функции Ляпунова, в качестве которой принять полную
механическую энергию маятника в возмущенном движении. Ма-
Малость пачальных отклонений не предполагается.
18.18. Физический маятник массы т с горизонтальной осью
подвеса может колебаться в среде, создающей момент соиротив-
ления М = —га©, где со — угловая скорость маятника, га = const >
> 0. Центр масс маятника расположен на расстоянии 1 от оси
подвеса, момент инерции маятника относительно этой оси ра-
равен /. В плоскости, перпендикулярной оси подвеса, к маятнику
.приложена пара сил с постоянным моментом L(L<mgl).
Найти положения равновесия маятника и исследовать устой-
устойчивость равновесий.
Ответ: возможны положения равновесия q^ = arcs in—т
и ф2 = я — arcsin —j. В положении ф, равновесие асимптотиче-
асимптотически устойчиво, в положении ср2 — неустойчиво.
18.19. Два тела 1 и 2, массы которых пг1 и тпг
соответственно, подвешены на двух пружинах, как
показано на рисунке. Жесткости пружин с£ и с2.
К телу 1 присоединен демпфер 3, создающий
силу сопротивления R = —цу (ц = const > 0, v —
скорость тела 1).
Проверить асимптотическую устойчивость рав-
равновесия системы, предполагая, что ее возмущен-
возмущенные движения могут происходить только в верти-
вертикальном направлении.
18.20. Демпфер в системе задачи 18.19 созда-
создает нелинейную силу сопротивления R = —f(v)\/v
(v — скорость тела 1, /@) = 0).
Найти условие устойчивости равновесия си-
системы путем исследования свойств функции Ля-
Ляпунова, в качестве которой принять полную механическую энер-
энергию системы в возмущенном движении.
Ответ: f{v)/v>0 при v¥*0.
18.21. На рисунке изображена схема, служащая в некоторых
-случаях для исследования малых свободных вертикальных коле-
колебаний передней и задней частей автомобиля. Масса М эквива-
эквивалентна массе исследуемой подрессоренной части, m — масса оси
и двух колес, величины с, и р характеризуют упругие и демпфи-
демпфирующие свойства передней или задней подвески, пружипа жест-
лости с2 имитирует упругие свойства шин. Предполагается, что
демпфирующая сила пропорциональна относительной скорости
перемещения тел с массами М и m (коэффициент пропорциоиаль-
лости равен и,).
Исследовать устойчивость равновесия системы.
Ответ: равновесие системы асимптотически устойчиво.
задаче 18.19.
§ 2. АСИМПТОТИЧЕСКАЯ УСТОЙЧИВОСТЬ ДВИЖЕНИЙ
277
18.22. Два однородных стержня массы т и длины 21 каждый
подвешены как показано на рисунке. Жесткости спиральных
пружин равны с, и с2. При нижнем вертикальном положении
стержней пружины не напряжены. К точке D стержня АВ при-
присоединен демпфер, создающий силу сопротивления R = —[xvD, где
(г = const > 0, vD — скорость точки D.
К задаче 18.21.
К задаче 18.22.
Доказать, что равновесие в нижнем вертикальном положении
стержней будет асимптотически устойчивым при любых началь-
начальных отклонениях независимо от расположения точки D на стерш-
стершие АВ.
18.23. В задаче 12.4 учесть трение качения на валу ротора,
предполагая, что момент трения М = — то, где ю — угловад ско-
скорость ротора, п = const > 0.
Принимая поочередно за невозмущенные движения системы
ее равновесия в положениях ф! = я/6 и <р2 = 5я/6, составить урав-
уравнения возмущенных движений. Исследовать устойчивость равно-
равновесий в этих положениях с помощью функции Ляпунова,. пред-
представляющей собой полную ме-
механическую энергию системы в
возмущенном движении.
Ответ: равновесие при ф =
= ф1 асимптотически устойчи-
устойчиво, при ф = ф2 неустойчиво.
18.24. На рисунке изображе-
изображена схема, служащая для иссле-
исследования малых свободных коле-
колебаний наземных экипажей (ав-
(автомобиль, трактор, железнодо-
железнодорожный вагон) в вертикальной К задаче 18.24.
278
ГЛ 18 УСТОЙЧИВОСТЬ ДВИЖЕНИЯ
продольной плоскости. К телу 1 массы М присоединены пружи-
пружины 2, 3 и демпферы 4, 5. В положении равновесия тело 1 распо-
располагается так, что его продольная ось АВ горизонтальна. В воз-
возмущенном движении демпферы создают силы "вязкого трения
R4 = — n,vD a R5 = — \xz\E, где vD и vE — скорости точек D н Е,
[ii н |л2 — положительные постоянные. Момент инерции тела от-
относительно горизонтальной поперечной оси, проходящей череа
его центр масс С, равен /.
Исследовать устойчивость равновесия системы.
Ответ: равновесие системы асимптотически устойчиво.
18.25. Исследовать устойчивость равновесия стойки расточно-
расточного станка, описанной в задаче 12.24, приняв в качестве фугткции
Ляпунова полную механическую энергию системы в возмущен-
возмущенном движении.
Ответ: равновесие асимптотически устойчиво «в малом» при
с2 > mgl. »v
18.26. Однородный стержень 1 массы m положен на два ци-
цилиндрических шкива, имеющих одинаковые радиусы. Шкивы вра-
вращаются в противоположных направлениях вокруг параллельных
горизонтальных осей, их центры О£ и О2 находятся на горизон-
горизонтальной прямой. Коэффициент трения скольжения между стерж-
стержнем и шкивами /*. Стержень соединен горизонтальной пружиной
#, коэффициент жесткости которой с, с ползуном 2 массы тг.
2
4
г-±Ь-
К задаче 18.26.
находящимся на гладкой горизонтальной плоскости. При движе-
движении ползуна 2 демпфер 4 создает нелинейную силу сопротивле-
сопротивления R = —/(i?2)e, где р2 — скорость ползуна, е = \Jvt — единичный
вектор, /@)=0, f(v2)/v2 > 0 при и^ФО. В положении равновесия
системы центр масс стержня С находится на середине расстоя-
расстояния Ofii, а пружина не деформирована.
Исследовать устойчивость равновесия системы.
Ответ: равновесие системы асимптотически устойчиво.
18.27. Стержень 1 массы ти положенный на шкивы, описаи-
ыыв в задаче 18.26, соединен демпфером 4 с ползуном 2 массы
т2, находящимся на гладкой горизонтальной плоскости. Ползун
прикреплен пружиной 3, ось которой горизонтальна, к непод-
неподвижной опоре. Демпфер создает силу сопротивления R = — [ivrt
§ 2 АСИМПТОТИЧЕСКАЯ УСТОЙЧИВОСТЬ ДВИЖЕНИЯ
279
тде ц. = const > 0, v, — скорость стержня 1 по отпошению к пол-
ползуну 2. Сила упругости F пружины 3 определяется нелинейной
зависимостью Fx = f{x), где Fx — проекция силы F на ось х, & х—
координата ползуна, отсчитываемая от положения, в котором пру-
пружина не деформпрована; /@) = 0, при х Ф 0 f{x)/x > 0. В поло-
положении равновесия системы центр тяжести стержня С паходится
на середине расстояния О,Оъ, а пружина не деформирована.
Исследовать устойчивость равновесия системы.
Ответ: равновесие системы асимптотически устойчиво при
ь т*е х и устойчиво при f !х) s
К задаче 18.27.
18.28. На рисунке изображена схема форсунки двигателя Ди-
Дизеля. Игла 1 массы тп, подвешенная на пружине 2 жесткости с,
в состоянии равновесия находится в крайнем нижнем положении
и перекрывает отверстие 3, ведущее к цилиндру. Камера 4 при
этом заполнена топливом. При подаче насосом дополнительного
количества топлива через отверстие 5 дав-
давление в камере увеличивается, игла под-
поднимается вверх и происходит подача
топлива в цилиндр. Давление в камере
падает и игла снова перекрывает отвер-
отверстие 3.
За невозмущенное движение системы
принимается состояние, при котором за
один цикл подачп среднее отклонение иг-
иглы от 'ее равновесного положения пмеет
некоторое определенное значение ха, а сред-
нее давление в камере — значение р0. При
наличии возмущений возникают отклоне- к задача 18 28
ния х и р соответствующих параметров
от величин х0 и р„. Уравнение возмущенного движения иглы име-
имеет вид
тпх + пх + сх — pS,
где в = const > 0, S — площадь сечения А — А.
280
ГЛ 18 УСТОЙЧИВОСТЬ ДВИЖЕНИЯ
Уравпепие, описывающее процесс измопеиия давления
в простейшем случае можно представить так:
где Е — модуль объемного сжатия топлива, т — объем камеры,.
к и Ь — положительные постоянные, положительное направление
отсчета х — вверх.
Исследовать устойчивость невозмущенного движения системы.
Ответ: при в(ст + bSE) > mkSE невозмущенное движение
асимптотически устойчиво.
18.29. Записать уравпения возмущенпого движения системы,,
описанной в задаче 18.28, в нормальной форме, вводя обозначе-
обозначения х = у, у — z. Построить функцию Ляпунова, производная ко-
которой по времени в силу системы уравнений в нормальной форме
имеет вид
1
V = — -V (АВх2 + 2mAxz + mnz\
USE
m
bSE
где А = т , _ _ , т .
Получить условия устойчивости невозмущенного движения си-
системы из задачи 18.28 путем анализа свойств функций V и V,
Ответ: V —-7г\\—аН */+z Н г # Н Ч 4- z .
2 |д m ' m э ' у ' ,ге2 ' m 3 ' J
18.30. В уточнешюй модели системы из задачи 18.28 процесс
изменения величины давления р описывается уравнением
где h == const > 0, fix) — некоторая непрерывная функция, удов-
удовлетворяющая условиям /@) =0, f(x)/x > 0 при х^О.
Найти условие устойчивости невозмущенного движения систе-
системы путем построения функции Ля-
Ляпунова, модифицирующей функцию
V из задачи 18.29.
Ответ: nic + hS) > mSf(x)/x-
18.31. Найти условие устойчиво-
устойчивости вертикального положения равно-
равновесия оси ротора в задаче 12.43.
Ответ: CW > 2mgl(A + ml1).
К задаче 18.32. 18.32. Тело 1 может совершать
крутильные колебания на упругом
валу 2. Для гашения этих колебаний применен гироскоп, подве-
подвешенный на теле с помощью рамки 3, которая крепится к телу
стержнями 4 и 5. Кроме того, рамка соединена с телом пру-
пружиной 6 и демпфером 7. Гироскоп вращается относительно рам-
§ 2 АСИМПТОТИЧЕСКАЯ УСТОЙЧИВОСТЬ ДВИЖЕНИЯ 281
ки с постоянной угловой скоростью со. При колебаниях тела
вокруг оси OtY рамка с гироскопом колеблется относительно тела,
при этом демпфер гасит те и другие колебания.
Момент инерции тела относительно оси Oty равен /0. Центр
масс ротора гироскопа О расположен на оси Oty. Оси Ох, Оу, Оъ
являются главными центральными осями инерции ротора, его
полярный и экваториальный моменты инерции равны С ш А со-
соответственно.
В равновесном состоянии вал 2 не закручен, пружина 6 но
деформирована. Жесткость вала на кручение равна с. Момент,
развиваемый пружиной при отклонении рамки от равновесного
положения, Mav~k\a\, где а. — угол поворота рамки вокруг оси
Ох, к = const > 0. Момент силы сопротивления демпфера Мя —
= ralal (п — const> 0).
Доказать, что невозмущенное состояние системы асимптоти-
асимптотически устойчиво по первому приближению. Массой рамки пре-
пренебречь.
18.33. С помощью теорем о влиянии структуры сил на устой-
устойчивость движения (см. сноску на стр. 268) доказать, что верти-
вертикальное положение центрифуги в задаче 12.44 является асимпто-
асимптотически устойчивым при 8ca2 > 3Mgl. '
18.34. Тяжелая однородная сфера радиуса г, погруженная
наполовину в покоящуюся жидкость, совершает поступательное
прямолинейное равномерное движение в горизонтальном направ-
направлении. Сила тяжести сферы ураввовещена при этом выталкиваю-
выталкивающей силой жидкости. Поверхность жидкости плоская.
В некоторый момент времени на сферу действуют в верти-
вертикальном направлении мгновенные возмущающие силы, такие, что
отклонение ее центра от поверхности жидкости по вертикали не
превосходит г, а возмущенное движение является поступатель-
поступательным. Сила сопротивления жидкости R = —j{v)\/v, где v — ско-
скорость сферы, /@) = 0, f(v)/v > 0 при v Ф 0.
Доказать асимптотическую устойчивость невозмущенного дви-
движения сферы.
18.35. Тяжелая однородная сфера, погруженная в покоящую-
покоящуюся жидкость, совершает поступательное равномерное прямолиней-
прямолинейное движение, при котором центр сферы остается в одной гори-
горизонтальной плоскости.
Доказать асимптотическую устойчивость этого движения, пред-
предполагая, что любое возмущенное движение сферы может быть
только вращением вокруг ее центра. Момент сил сопротивления
жидкости относительно центра сферы при этом М — —/(ю)©/©,
где ю — мгновеппая угловая скорость^ сферы, /@) = 0, /(со)/(о>0
при о Ф 0.
18.36. При отклонении корабля от заданного поступательного
прямолинейного движения рулевой отклоняет руль АВ на неко-
некоторый угол |} с целью устранения возникающих возмущений.
282 гл- 18 устойчивость движения
В первом приближении можно принять, что (} = — JcAQ (к = const)
и что возмущенное движение Судна описывается следующей си-
системой дифференциальных уравнений:
где Да и АР — отклонения углов а и 9, аи а2, ^з, bu 62, b3 — не-
некоторые постоянные.
Найти условие, которому должен удовлетворять коэффициент
ft, чтобы поступательное прямолинейное движение корабля было
асимптотически устойчивым.
От.ет:
18.37. При изучении движения самолета в вертикальной плос-
плоскости в качестве невозмущенного движения иногда принимается
поступательное движение по прямой, составляющей с горизонтом
V//У////'/У/У/У/У/ '
К- задаче 18.36. К задаче 18.37.
некоторый угол 9. Положение продольной оси самолета опреде-
определяется углом Ф ее наклона к горизонту.
При некоторых дополнительных упрощающих предположениях
уравнения возмущенного движения самолета имеют вид
~- + at (ДО - Д6) + Й2Д6 =- О,
^ Л6) = Ъ№,
где ДЭ и № — отклонения указанных углов, аь а2, Ь„ Ь2, Ь3 —
постоянные.
Найти условия асимптотической устойчивости невозмущен-
невозмущенного движения самолета в этом простейшем случае.
Ответ: а+Ь(>0, azbz + ab3>0, {a + bl){abi + bi + b3) >
rh ab3t где а== а2 — at.
§ 2 АСИМПТОТИЧЕСКАЯ УСТОЙЧИВОСТЬ ДВИЖЕНИЙ 283
18.38. На рисунке изображена схема движения корабля, со-
совершающего циркуляцию. Центр тяжести корабля С описывает
при этом окружность в горизонтальной плоскости щ ско-
скоростью v, а корпус корабля поворачивается вокруг вертикаль-
вертикальной оси с угловой скоростью о). В некоторый момент времени
величины v, о и а получают- малые отклонения. Линеари-
Линеаризованные уравнения возникшего возмущенного
движения могут быть приведены к впду
dAv » i > i д
-jj- = яиДу + я1гД(о + а13Да,
d\tA
dt
a31Av -f язгДсо -f аазДа, к задаче 18.38.
dt
где Av, Дю, Да — отклонения в произвольный момент времен»,
(Ц) (i = 1, 2, 3; ; = 1, 2, 3) — некоторые постоянные. ./
Написать матричное уравнение для функции Ляпунова V,
производная которой по времепи в силу системы (*) имеет вид
Т^ = — [с,(ДуJ + с2(Д<»J + с3(ДаJ] (cj, с2, сэ — положительные но-
стояпные).
Ответ: функция V имеет вид V -= х^Вх, где х = Асо I В—-
II Да ||
= 11Ь„Н F,j = const, т — знак транспонирования), причем А7В +
+ БЛ = С, где А = 11а„П, С == llcjl (сц = 0 при i Ф j, cti = —с,; j, у ==»
-1,2,3).
Глава 19
ЭЛЕКТРОМЕХАНИКА
В настоящей главе рассматриваются механические системы,
движение которых в существенной мере определяется силами
электромагнитной природы.
Сила, действующая на заряженную материальную точку,
движущуюся в электромагнитном поле, зависит от заряда q, ско-
скорости v точки, напряженности Е электрического и индукции В
магнитного полей. При положительном заряде
Если поле создается точечным зарядом Q, то его напряжен-
напряженность Е определяется законом Кулона
Е==_1 0_
4ле
284 гл 19 электромеханика
где б — диэлектрическая проницаемость среды (для вакуума е =
— 6О = 8,85 • 10~'2 Кл/(Н • м2), для воздуха е » е0).
Электрические поля точечных зарядов являются сферически
симметричными й удовлетворяют принципу суперпозиции: напря-
напряженность поля, создаваемого несколькими зарядами, равна гео-
лштрической сумме напряженности, создаваемых каждым заря-
зарядом в отдельности.
Электрическое поле между двумя заряженными параллельны-
параллельными пластинами является однородным, т. е. напряженность в лю-
любой точке между пластинами равна
Е = U/d,
где U — разность потенциалов, d — расстояние между пласти-
пластинами.
Основными элементамп электромеханических систем явля-
являются проводпики с током, движущиеся в электромагнитном поле.
Сила, действующая на проводник с током / в магнитном поле,
определяется законом Ампера. При равномерном поле (В = const)
F = (IXB)Z.
Направление силы F определяется по правилу левой руки.
Ток /, протекающий в проводнике, в свою очередь зависит от
цепи и определяется вторым законом Кирхгофа: алгебраическая
сумма всех ЭДС контура равна сумме падений папряжений на
всех сопротивлениях цепи. Для цепи, содержащей индуктивность
L, активное сопротивление R и емкость С, закон Кирхгофа име-
имеет дифференциальную форму
В системах магнитоэлектрического типа в последнем урав-
уравнении важную роль играет ЭДС ипдукции. В частном случае,
когда проводник длины I перемещается в равномерном магпиг-
ном поле перпендикулярно вектору индукции В, наведенная
ЭДС индукции определяется по формуле
Еавл = Blv.
Направление наведенной ЭДС определяется по правилу правой
руки.
§ 1. Динамика материальной точки в электромагнитном поле
19.1. Латунная монета, двигаясь по вертикалр под действием
силы тяжести, пролетает между полюсами электромагнита счет-
счетного устройства. Скорости монеты при входе в устройство и при
выходе из него оказываются одинаковыми.
§ 1. ДИНАМИКА ТОЧКИ В ЭЛЕКТРОМАГНИТНОМ ПОЛЕ
285
Насколько изменится температура монеты, если удельная
теплоемкость латуни с = 390 Дж/(кг-К), а ширина полюсов
h = 4 см.
Ответ: At = Ю К.
19.2. Материальная точка М массы тп, имеющая заряд q, мо-
может двигаться в горизонтальной плоскости по прямой, соединяю-
соединяющей два закрепленных точечных заряда одинаковой величины
О. Все заряды имеют одинаковые знаки, расстояние между заря-
зарядами О равно 2а. В начальный момент времени точке М, нахо-
находившейся посередине между зарядами, сообщили скорость v0.
Пренебрегая трепием, определить максимальное отклонение
£max точки от начального положе-
положения (диэлектрическая проницае-
проницаемость воздуха е ~ е0).
Ответ:
|/;
°в
К задаче 19 2. ,
К задаче 19.3.
19.3. Материальная точка массы тп, имеющая заряд q, может
двигаться в горизонтальной плоскости по гладкой 1рубке, кото-
которая перпендикулярна прямой, соединяющей два закрепленных
точечных заряда одипаковой величины О. Расстояния между
трубкой и зарядами равны а, знак заряда точки противоположен
знаку зарядов О.
В начальный момент времени точка имела отклонение от пря-
прямой, соединяющей заряды, Жо — яТЗ и начала двигаться без на-
начальной скорости.
Определить максимальное значение скорости утах точки при ее
колебаниях (диэлектрическая проницаемость воздуха е»е0).
Ответ: vm3X •= v |ж==0 «
19.4. Математический маятник помещен в одпародное электро-
электростатическое поле, вектор Е напряженности которого направлен
вертикально вверх. Длина маятника равна I, масса тп, величина
положительного электрического заряда груза д. Определить ча-
частоту ю„ малых колебаний маятника, если Eq < mg.
Ответ; ©о
j (g - -^-J.
У
г ■
d
'llttll
0
•
X
28G гл- 19 электромеханика
19.5. Электростатический фильтр смонтирован в вертикальной
трубе прямоугольного поперечного сечения. Длина пластин фильт-
фильтра равна /, 'расстояние и разность потенциалов между пластина-
пластинами равны соответственно d и Ua. По трубе с постоянной ско-
скоростью и движется ламинарный поток
воздуха, содержащий пылевые части-
частицы одинаковой массы т и заря-
заряда q. Сила сопротивления движению
частиц в воздухе R = —\ivr (ц = const,
vr — относительная скорость частицы). По
всей длине фильтра вертикальные состав-
составляющие скорости частиц постоянны и име-
имеют установившиеся значения Ууи = и/2,
горизонтальные составляющие скорости
при входе в фильтр равны нулю.
К задаче 19 5 Полагая, что концентрация частиц в
потоке невелика и поэтому взаимодей-
взаимодействием их друг с другом можно пренебречь, определить, при
каком напряжении Uo все частицы будут достигать стенок фильт-
фильтра, если и = 1/gl.
Указание. Установившаяся скорость у>ст частнцы определяется из ус-
условия уУс;т == v \t~,x>-
Ответ: г/0> 1,325 ql .
19.6. Измерительный механизм статического вольтметра пред-
представляет собой плоский воздушный конденсатор, одна из пластип
которого неподвижна, а другая имеет упругий подвес. При по-
подаче напряжения подвижная пластина поворачивается вокруг
горизонтальной оси О и приводит в движение стрелку индикато-
индикатора. Длина каждой пластины равна /, ширина Ь, масса тп, расстоя-
расстояние между пластинами d (при £/ = 0), коэффициент угловой жест-
жесткости упругого подвеса с.
Определить, на какой угол а повернется подвижная пластина
измерительного механизма вольтметра при подаче напряжения
U (диэлектрическая проницаемость воздуха е ~ е0).
Указание. Полагая угол поворота а подвижной пластипы малым (а? <С
■< d), учесть в выражениях моментов величины до второго порядка мало-
малости относительно aljd.
Ответ: а = c
19.7. Материальная точка массы иг, имеющая электрический
заряд q, пролетает между полюсами1 магнпта, создающего посто-
постоянное однородное поле; вектор скорости тачки в момент входа
в магнитное поле расположен в горизонтальной плоскости и равен
\„, вектор магнитной индукции поля В направлеп по вертикали.
§ 1. ДИНАМИКА ТОЧКИ В ЭЛЕКТРОМАГНИТНОМ ПОЛЕ
287
Определить угол а поворота гори-
горизонтальной проекции вектора скорости
v от первоначального навравления, ес-
если ширина полюсов магнита равна I.
Ответ: а = arcsin
iqB
19.8. Материальная точка массы тп,
имеющая электрический заряд д, начи-
начинает двигаться из состояния покоя под
действием силы тяжести в однородном
К задаче 19.7.
магнитном поле. Вектор В магнитной индукции поля направлен
по горизонтали и постоянен.
Пренебрегая сопротивлением среды, найти траекторию-точки.
Ответ: циклоида х = ~ A — cos kt), у ~\{kt — sin kt), где
к= ~ В, ось"ОХ направлена вертикально вниз, ОУ-J-B.
19.9. В плазменных установках нагретый до высокой темпе-
температуры ионизованный газ изолируют от стенок реактора с по-
помощью магнитного поля. Частицы плазмы, обладающие массой
m и положительным зарядом q, поступают в полость реактора со
скоростью v0, перпендикулярной силовым "линиям однородного по
сечению р'еактора и постоянного магнитного поля. Сила сопротив-
сопротивления движению частицы F = — цу, где ц = const, v — скорость-
частицы.
Полагая, что силы тяжести частиц уравновешены силами дей-
действия электростатического поля с напряженностью E(qE = mg)>
определить, при каком значении индукции В магнитного лоля
частицы плазмы не будут con- p
рикасаться со стенками реакто-
реактора радиуса R.
Ответ: В ^ —~.
\
К задаче 19.9.
К задаче 19.10.
19.10. В сейсмическом датчике капля 1 ртути помещена меж-
между полюсами постоянного магнита 2 я изолирована от них про-
прокладками 3. Боковые стенки, одна из которых 4 является хоро-
хорошим проводником, а другая 5 выполнена из материала, имеюще-
288
ГЛ. 19. ЭЛЕКТРОМЕХАНИКА
го сопротивление 2г, подключены к двум одинаковым батареям
по мостовой схеме. ЭДС батарей равны Е, впутреннее сопротив-
сопротивление г0, расстояние между боковыми стенками й,ш длина стенок
21, индукция в зазоре между полюсами магнита В, масса капли т.
Полагая отклонение х капли от положения равновесия малым
(х < /), найти собственную частоту колебаний датчика.
Ответ: озп =
■v>
REd
rml '
§ 2. Электромеханические системы
19.11. Вибратор шлейфового осциллографа состоит -из прово-
проволочной петли 1, на которой укреплено квадратное зеркало 2,
и постоянного магнита <?, создающего в зазоре между полюсами
поле индукции В. Нижний конец петли прикреплен к пружине,
создающей силу натяжения 2Т. Расстояние между проволоками
петли d равно длине стороны зеркала, рабочая длина проволок
2L(d <£ L), ширина полюсов магнита I.
Пренебрегая массой проволоки петли по сравнению с массой
m зеркала, определить угол ср поворота зеркала при протекании
по петле постоянного тока / и собствен-
собственную частоту колебаний вибратора.
BUL
У/т
К задаче 19.11.
К задаче 19.12.
19.12. Катушка 1 вольтметра помещена - между полюсами 2
магнита, создающего постоянное однородное поле индукции В.
Длина катушки равна ее диаметру d, число витков N, удельное
сопротивление проволоки р. С катушкой жестко связана шес-
шестерня 3 радиуса R, находящаяся в зацеплении с шестерней 4,
на оси которой укреплена стрелка 5 индикатора. Радиус- шес-
шестерни 4 г = R/3. При отсутствии тока катушка расположена
g 2. ЭЛЕКТРОМЕХАНИЧЕСКИЕ СИСИ1МЫ
289
горизонтально, а спиральная пружина 6, коэффициент жестко-
жесткости которой равен с, не деформирована.
Определить угол поворота стрелки, устанавливающийся при
подаче на клеммы вольтметра постоянного напряжения U,
_ WBd
Ответ: у^^—.
19.13. В условиях предыдущей задачи найти время практи-
практического успокоения стрелки вольтметра, если момент инерции ка-
катушки -с шестерней 3 /,:, момент инерции шестерни 4 со стрелкой
/с. Индуктивным сопротивлением катушки пренебречь.
Указание. Время практического успокоения соответствует амплитуде
колебаний, составляющей 5% от начальной.
Ответ: fycn^81n2OP(/""t9/c).
19.14. Рычажные весы, применяемые в роторных автоматиче-
автоматических линиях, представляют собой. рычаг 1 с противовесами 2 и
3, вращающийся вокруг горизонтальной оси О. Весы регулиру-
регулируются так, чтобы центр тяжести С рычага с деталью 4 поминаль-
поминальной массы располагался на одной вертикали с осью О. Для га-
гашения колебаний рычага, возникающих при установке деталей,
применяется магнитоэлектрический демпфер, который состоит из
квадратной рамки 5, прикрепленной к рычагу на расстоянии L
от оси вращения и помещенной между полюсами магнита 6, соз-
создающего постоянное однородное поле индукции В.
Определить, при каком числе N короткозамкнутых витков
рамки демпфера процесс успокоения колебаний рычага весов бу-
будет апериодическим, если длина стороны рамки равна I, удельное
сопротивление проволоки р, масса и момент инерции относитель-
относительно осп О рычага с деталью равны М и J соответственно, ОС = Я.
Ответ: N ^
К задаче 19.14.
К задаче 19.1о.
19.15. В режиме динамического торможения электродвигатели
лебедки работает как генератор с короткозамкнутыми витками
якоря. Радиус барабана лебедки равен R, радиус якоря г, длина
/, количество короткозамкнутых витков якоря, находящихся меж-
19 Под ред К С. Колесникова
290 Гл 19 ЭЛЕКТРОМЕХАНИКА
ду полюсами магнита, равно N, удельное сопротивление проволо-,
ни обмотки якоря р. Магнитные полюсы статора создают постоян-
постоянное однородное поле пндукции В.
Определить установившуюся скорость опускания груза мас-
массы т, если R = 2г, 1 = Ъг.
\JT6BTt ^\ст ^~~ 5 •
19.16. В условиях предыдущей задачи определить, за какое
нремя Т груз, начавший движение из состояния покоя, приобре-
приобретает скорость v = 0,9у5.ст, если момент инерции барабана лебедки
имеете с якорем равен J.
Ответ: T^\lnlOp{j^'nR2).
в N
19.17. Кагушка 1 магнитоэлектрического датчика сейсмогра-
сейсмографа жестко связана с основанием, совершающим колебания по за-
закону §Ш = £0 sin pt, где |(| — амплитуда перемещения, р — часто-
частота колебаний основания. Роль сейсмической массы выполняет
постоянный магнит 2, связанный с основанием пружинами 3.
Масса магпита равна яг, суммарный коэффициент жесткости пру-
пружин с, индукция в зазоре между полюсными наконечниками В,
длина провода, сопротивление п индуктивность катушки равны
/, /?0 и L соответственно, входное сопротивление регистрирующего
прибора R.
К задаче 19 17.
Составить дифференциальные уравнения, определяющие отно-
относительное отклонение у магнита от положения равновесия и ток
/ в цепи катушки.
Ответ: ту + су -Bll = mp% sin pt, Ы + (До + R)I + Bl$ =0.
19.18. В условиях предыдущей задачи определить амплитуду
колебаний выходного напряжения U = RI при резонансе. Индук-
Индуктивностью L катушки пренебречь.
cR%
Ответ: U |р=ш0 = -gp
19.19. Вибростенд типа ГМК-1 имеет два магнитоэлектриче-
магнитоэлектрических механизма (МЭМ). Возбуждение колебаний вибростеида
осуществляется нодачей напряжения U — Uo sin pt от генератора
электрических колебаний (ЭГ) па катушку 1 силового МЭМ, жест-
жестко связанную с подвижным штоком 2. Второй МЭМ служит для
регистрации движения штока, его катушка 3 включена в цепь
§ 2 ЭЛЕКТР0М1 ХАНИЧЕСКИС СИСТЕМЫ
291
измерительного прибора (ИП). Масса подвижных частей вибро-
степда равна т, коэффициент жесткости пружины 4 равен с,
индукция в зазорах полюсных; наконечников магнитов силовой
и измерительной систем #, и В2, длина и сопротивление провода
катушек U, R, и Z2, R2 соответственно, входное сопротивление
измерительного прибора R = /?2.
К задаче 19.19,
Пренебрегая индуктивным сопротивлением катушек, найти
максимальное значение возмущающей силы вибростенда и доброт-
добротность его колебательной системы.
Указание. Добротность колебательной системы равна Q = a>JBn), где
соо — собственная частота, п — коэффициент затухания свободных ко-
колебании.
Ответ:
19.20. На якорь электродвигателя постоянного тока с незави-
независимым возбуждением подается постоянное напряжение U. Мо-
Момент инерции относительно оси вращения якоря с валом равен
J, индуктивность и сопротивление обмотки якоря равны L и R
соответственно. Момент па якоре М„ = cj, где ct =• const, / — ток
в обмотке якоря; ЭДС противоиндукщш Е = czQ, где сг == const,
Q — угловая скорость вала.
Найти угловую скорость Q вала и ток / в обмотке якоря че-
через t = Ъ/п с после подачи напряжения, если R = 2 1 / ■1J .
Указание, n— -^
П
с
Ответ: S2==0,8C//c2, / = 0,ЗС//й.
19.21. Магнитный подвес ротора 1 состоит из электромагнита
2 и датчика 3, управляющего напряжением питания катушки
электромагнита. Масса ротора равна яг, активное сопротивление
катушки R, индуктивность L = L(y), электромагнитная сила V =*
19*
292
ГЛ
ЭЛЕКТРОМЕХАНИКА
К задаче 19.21.
Ответ; тп
—Р{у, /), где у — величина воздуш-
воздушного зазора в магпитопроводе, /—
ток в цепп катушки. Напряжение
питания катушки U = ку, где к =
= const > 0.
Полагая изменения величины воз-
воздушного зазора у и тока / в цепи
катушки малыми по сравнению с их
значениями г/0 и /0, соответствующи-
соответствующими статическому равновесию ротора,
составить дифференциальные урав-
уравнения движения системы.
Указание. В разложениях функций
L(y) 11 F(y, 1) в степенные ряды учесть
члены до первого порядка малости относи-
относительно £ = у — i/o и i = / — /о.
dt2
где Lo = L (г/0), /0 = -^-°t
19.22- Пренебрегая индуктивным сопротивлением катушки
электромагнита и учитывая, что
— kx — const < 0, Ijj) = к2 ~ const > 0,
установить, при каком условии равновесие ротора, рассмотрен-
рассмотренного в предыдущей задаче, устойчиво в положении, соответствую-
соответствующем у = j/0.
19.23. Акселерометр — прибор для измерения ускорений —
состоит из маятника, груз 1 которого имеет двойной подвес и по-
помещен между полюсами электромагнита 2. Датчик 3 измеряет
отклонение^груза от положения
равновесия и подает на катуш-
катушку 4 электромагнита напряже-
напряжение U, пропорциональное ско-
скорости груза, U = kty, где к, =
= const. Масса груза маятника
равна т, длина нитей подвеса
/, индуктивность катушки L.
Пренебрегая сопротивлением
катушки и полагая, что сила
действия магнитного поля па
груэ маятника пропорциональна
К вадаче 19.23.
§ 2 ЭЛЕКТРОМЕХАНИЧЕСКИЕ СИСТЕМЫ
293
току / в катушке F = k2l, где fa = const, определить собственную
частоту акселерометра.
Ответ: со0 =
у ±.
+ ■
к. к
1 2
19.24. В акселерометре, рассмотренном в предыдущей задаче,
регистрируется ток / в цепи катушки.
Показать, что для установившегося положения маятника при
движении акселерометра с постоянным ускорением а ток пропор-
пропорционален ускорению, и найти величину /уот тока.
к
Ответ: /уст —
ч
а.
19.25. Маятник Байкова состоит из электродвигателя постоян-
постоянного тока с независимым возбуждением, статор 1 которого может
+ S
0 _
pi
У
К задаче 19.25.
вращаться вокруг горизонтальной оси О, груза 2, жестко связан-
связанного со статором, и датчика 3. Датчик измеряет отклонение гру-
груза 2 от вертикали и выдает в цепь якоря 4 напряжение, пропорг
циональное угловой скорости маятника, U = &,<{>. Индуктивность
цепи якоря равна L, масса груза т., расстояние от оси вращения
статора до центра масс груза ОС = /, момент инерции якоря от-
относительно оси вращения /, момент на якоре Мя = кг1, где kL —
•= const, i — ток в обмотке якоря.
Пренебрегая сопротивлением цепи якоря и трением в осях,
показать, что маятник, установленный на подвижном объекте,
работает как измеритель пройденного пути, т. е. угол поворота
\р якоря пропорционален s. Влиянием собственных колебаний пре-
пренебречь.
к к „,!
°Твет: V-b^
294 гл 2rt АВТОМАТИЧЕСКОЙ УПРАВЛЕНИЕ И РЕГУЛИРОВАНИЕ
19.26. Логарифмический декремент колебаний математическо-
математического маятника длины I равен б. При электрическом моделировании
процесса его свободных колебаний катушку с индуктивностью L
включили последовательно в цепь с конденсатором и резистором.
При каких значениях емкости С конденсатора и сопротивле-
пия R резистора затухающие колебания тока в контуре будут
иметь такую же частоту и декремент, что_и колебания маятника?
7&
19.27. Индуктивность L п активное сопротивление R катупг-
ки индуктивности можно определить методом резонансных испы-
испытаний, подключив ее последовательно с конденсатором, емкость
С которого известна, к генератору напряжения U(t) = Uo sin pt.
Плавно меняя частоту р колебании напряжения U, регистрируют
частоту /v, " амплитуду тока /""х при резонансе.
Найти характеристики катушки индуктивности но указанным
данным.
Ответ:
19.28. Электрическим аналогом сцепки из двух вагонов, рас-
рассмотренной в задаче 14.68, является идеальных! контур из двух
одинаковых катушек индуктивности, соединенных параллельно
с конденсатором.
т
Г
К задаче 19 28.
При каких индуктивности L катушек п емкости С конденса-
конденсатора собственные частоты колебаний систем будут одинаковыми?
Ответ: LC = ml с.
Глава 20
АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ И РЕГУЛИРОВАНИЕ
Методы теоретической механики широко используются в тео-
теории автоматического управления и регулирования. В главе пред-,
латается ряд задач, в которых методами теоретической механики
(или электромеханики) требуется составить дифференциальные
уравнения движения, провести ах- анализ и получить ответы в
формулировках теории автоматического регулирования. Выбраны
лишь две группы задач, наиболее близко примыкающие к вузов-
вузовскому курсу теоретической механики,— задачи на получение ча-
частотных характеристик и задачи на оценку устойчивости движе-
ГЛ. 20. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ И РЕГУЛИРОВАНИИ 295
пия и переходных процессов линейных систем. Частотные харак-
характеристики систем управления дают полное представление о дина-
динамических свойствах систем при внешнем гармоническом воздей-
воздействии.
Допустим, что к линейной системе приложено внешнее воз-
воздействие, изменяющееся по гармоническому закону Fe""'. Через
какой-то промежуток времени в системе установятся вынужден-
вынужденные колебания с постоянной амплитудой, характеризуемые част-
частным решением дифференциального уравнения, которое может
быть представлено в виде
Зависящая от частоты ш комплексная функция
be
называется амплитудно-фазовой частотной характеристикой си-
системы. Функция А(.ы) называется амплитудной частотной ха-
характеристикой системы (в теории колебаний график Ж<а) назы-
называется резонансной кривой), а функция ф(ю) — фазовой частот-
частотной характеристикой системы. На комплексной плоскости амщш-
тудпо-фазовую характеристику обычно строят в прямоугольных;
(U, iV) или полярных (А, ф) координатах
= Ш(л) + iV(<a), ff(iffl) = АЫ)е««°\
где
U (со) = А (о) cos ф (и), V (о))»» А (ю) sin q> («)„
А (со) = /C72(co) + F2(co), lg <р (со) = Щ.
Системы автомашческого регулирования и управления долж-
должны быть устойчивыми и обладать хорошими качествами пере-
переходного процесса: быстрым затуханием собственных колебании,
малым перерегулированием и т. д.
Переходный процесс — это процесс перехода системы из од-
одного стационарного режима (в частном случае положения) к дру-
другому. Он возникает при любом воздействии оа систему. С точки
зрения теоретической механики переходный процесс есть движе-
движение системы от момента воздействия на нее до момента, когда
установится новый стационарный режим. Наиболее просто его
характеристику можно получить из решения однородного диф-
дифференциального уравнения или уравнения с постоянной правой
частью. Например, для уравнения системы
Ту + у = ув (г/о = const).
переходный процесс при нулевых начальных условнях будет вы-
выражаться формулой
296
ГЛ 20 АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ Я РЕГУЛИРОВАНИЕ
Так как реальные системы обладают нелинейными .свойства-
.свойствами, то оценку устойчивости при малых отклонениях системы от
цевозмущенного движения во многих случаях производят на ос-
основании анализа свойств линеаризованных уравнений возмущен-
возмущенного движения для отклонений переменных величин.
Для оценки устойчивости без определения корней характе-
характеристического уравнения системы разработан ряд критериев, в част-
частности алгебраический критерий Рауса — Гурвица, частотный кри-
критерий и др.
Заключение об устойчивости системы можно сделать также
из анализа фазовых траекторий. В простейшем случае для одной
переменной фазовая траектория может быть построена на плос-
плоскости в прямоугольных координатах (у=х, х), которые называ-
называются фазовыми. Если фазовые траектории линейной системы при
неограниченном возрастании "времени асимптотически приближа-
приближаются к началу координат, то такая система устойчива асимпто-
асимптотически.
§ 1. Частотные характеристики
20.1. На устойчивую линейную механическую колебательную
систему с одной степенью свободы действует внешняя сила, и.?-
IY 1 меняющаяся по гармоническому закону с
"" частотой «. Дифференциальное уравнение
движения данной колебательной системы
имеет вид
Ы=оо
х 4- 2е х -\- а>1 х --
К ответу задачи 20.1.
Ответ: W (ш)
Получить выражение амплитудно-фа-
амплитудно-фазовой характеристики системы и построить
ее график.
* =U(a) + iV (a), U (©) «
m [(&1 — (в2) -f 12ш]
— 2ew
Г/ 3 2\2 , / 2 21' У ' — XI 2 S\» , , 2 21 '
т I('"'о — ) ~l~ I m ly^o — w J + 4е u> I
20.2. В условиях предыдущей задачи получить выражения
амплитудной частотной Жсо) и фазовой частотной (р(со) характе-
характеристик системы и построить их графики. Определить максималь-
максимальный сдвиг по фазе между выходными и входными колебаниями.
Ответ: А (©)
V (wo ~
)
4е
tg q> (<»)=—■
2ео»
— П.
§ 1 ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
297
20.3. Уравнение вращения вала двигателя как объекта регу-
регулирования при отклонениях от стационарного режима имеет вид
/Дм + ЬЛсо = ДЛ/дв,
где / = const, Ъ = const > 0, ДЛ/Д„ Дю — отклонения момента на
валу двигателя и угловой ско-
скорости от их стационарных зна-
значений.
Получить выражение ампли-
тудио-фазовой характеристики
двигателя и построить ее график.
iV
К ответу задачи 20 2.
К ответу задачи 20.3.
Определить максимальный сдвиг по фазе между выходными и
входными колебаниями.
к \ J
Ответ: W (ш) = i + .Тш , А:=—, Т =—, фтах((й= оо)=— л/2.
20.4. Динамические свойства объекта регулирования выража-
выражаются следующим дифференциальным уравнением:
Тхг{1) + xz(t)
- т),
где Т > 0 — постоянная времени, к > 0 — коэффициент усиления,
т > 0 — время запаздывания начала изменения выходной вели-
величины Xz(t) после начала изменения входной величины Xiit — т).
Получить выражение амплитудно-фазовой характеристики
объекта регулирования и построить
ее график. Получить выражения фа-
фазовой частотной характеристики для
случаев т =• 0 и т Ф 0.
Указание. При решении дифференци-
дифференциального уравнения правую часть его пре-
преобразовать так:
ы-0
—т)
Ответ: W (im)— -r
ке'
(ит. К ответу задачи 20.4.
, tg ф |т^0 = — Та», ф l^o = ц |т=0 —
298 ГЛ 20 АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ И РЕГУЛИРОВАНИЕ
§ 2. Устойчивость н переходные процессы
линейных систем
20.5. Получить выражение фазовой траектории для системы,
переходный процесс которой описывается дифференциальным
уравнением
Тх + х = 0.
Построить график фазовой траектории и по его виду сделать
заключение об устойчивости движения системы.
Ответ: у = — -jrx; система устойчива асимптотически.
20.6. Получить выражение фазовой траектории для системы,
переходный процесс которой описывается дифференциальным
уравнением
х -f- ы\х-=0.
Построить график фазовой траектории и по его виду сделать
заключение об устойчивости движения системы.
Ответ: -^-7г-\ — — 1 (у = х А — произвольная постоян-
пая); система устойчива.
20.7. Тело массы тп, входящее в состав замкнутой автомати-
автоматической системы, может двигаться по прямолинейной направляю-
направляющей. Дифференциальное уравнение движения тела имеет вид
х -f- 2ех -f- coq.c = 0 (е < ш0).
В состоянии покоя по телу произведен удар, н.мпульс которого
вдоль направляющей равен 1.
Определить переходный процесс в системе.
Ответ: Жпер @ = ^~е* ь*п ^Л ь>х == у col — е2.
20.8. Плоское движение летательного аппарата (ЛА) вокруг
его центра масс может быть выражено дифференциальным урав-
уравнением
где AZP = крАб — отклонение управляющей силы, к — коэффи-
коэффициент пропорциональности, Дб — отклонение угла поворота руля,
Аф — малое отклонение or курса, /—момент инерции ЛА отно-
относительно поперечной оси, проходящей через центр масс. Обычно
с . >■ 0, а коэффициент с,и может быть положительным, равным
нулю или отрицательным. В последнем случае ЛА называют аэро-
аэродинамически неустойчивым.
§ 2 УСТОЙЧИВОСТЬ И ПЕРЕХОДНЫЕ ПРОЦЕССЫ CHCTFM 299
Для обеспечения устойчивости движения автопилот в прос-
простейшем случае обеспечивает поворот руля по закону Аб = А^Дф.
К задаче 20 «S.
Каким должен быть коэффициент усиления ки чтобы при
сф!|) > 0 аэродинамически неустойчивый ЛА (с^ < 0) с автопи-
автопилотом в результате возмущений совершал затухающие колеба-
колебательные движения?
( ** ■
(heer: к1 > у-^- I —
р р \
20.9. В условиях предыдущей задачи определить коэффициент
усиления автопилота при регулировании по угловой скорости по
лакопу Лб = /c2Aip, чтобы при с^ > 0 максимальное отклонение
угла Дт|;, вызванное внешними кратковременно действующихиг
силами fit), уменьшилось в е раз через период колебаний Т = 1 с.
Oreei: к, — , , B — с
20.10» Динамические свойства замкнутой ешмемы автомати-
автоматического регулирования характеризуются дифференциальным
уравнением
х + 2ег + шог = / (t) (г < а0),
где jit) — стационарное внешнее возмущение.
В каком стационарном режиме будет работать система, если
1) /U)=/o = const; 2) /U) =/о sin pi?
Указание Стационариый режим в системе установится через боль-
большой промежуток вречони.
/ sin (pi 4-Ф)
Ответ: 1) Дго(О = /О'Ч2; 2) **,(*) = гт= 2 , 2 -3;
300
ГЛ 20 АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ И РЕГУЛИРОВАНИЕ
20.11. При равномерном прямолинейном движении автомоби-
автомобиля со скоростью г.',, мощность двигателя расходуется на преодо-
преодоление всех видов сопротивлений.
1) Составить линеаризованное уравнение возмущенного дви-
движения автомобиля приведенной массы т по горизонтальной прн~-
мой дороге, принимая отклонение мощности двигателя ДЛ^ про-
порциопальным отклонению Ау нодачй топлива, т. е. AN = кАу,
обобщенную силу Fe сопротивления движению автомобиля про-
пропорциональной" квадрату скорости, т. е. Fc = cvz.
2) Определить отклонение скорости автомобиля в зависимо-
зависимости от мгновенного отклонения подачн топлива на постоянную
величину Дг/о — const.
3) Найти переходную динамическую ошибку в установлении
скорости автомобиля.
Указание. Активную силу, вызывающую движение автомобиля, принять
равной мощности двигателя, деленной на скорость автомобиля. Переход-
Переходной динамической ошибкой считать отклонение фактического значения ре-
регулируемой величины &v в пере\одном процессе от установившегося ее
значения.
Ответ: 1) TAv + Av = ^ Ay, T = ^-;
2) Av «• -ЦA — e~t!T) Ay0;
Зсг0
3) А^пер ^ $ е~* Т^Уо-
3cvtl
20.12. Автоматическая сисаема, состоит из теплового двига-
двигателя 1, нагрузки 2 и центробелшого регулятора подачи топлива
в двигатель 3. Мощность дви-
двигателя пропорциональна вели-
величине открытия | заслонки N^ =
■= кя\. В стационарном режиме
двигатель нагружен постоян-
постоянным крутящим моментом на-
нагрузки М„ и имеет постоянную
угловую скорость вращения ш0,
заслонка при этом открыта на
величину |0.
1) Составить линеаризован,-
ные уравнения возмущенного
движения автоматической системы, полагая приведенный момент
инерции вала двигателя равным / и пренебрегая массой заслон-
заслонки, стержней и муфты регулятора.
2) Определить устойчив ли стационарный режим работы
системы,
3) Найти стационарное отклонение угловой скорости А(о0, ес-
если внешняя нагрузка увеличилась на постоянную величину АМЛ.
Топтдо
К задаче 20 12.
S 2 УСТОЙЧИВОСТЬ И ПЕРЕХОДНЫЕ ПРОЦЕССЫ СИСТЕМ
301
Геометрические размеры регулятора указаны на рисунке.
Ответ: 1) ТАы + Дсо - кАМ„,
**«
2) стационарный режим устойчив асимптотически-
чч. л Ш"
3) До)о = — -
К задаче 20.13.
"в "'о/
20.13. На рисунке показана схема одноосного гиростабилиза-
тора, назначение которого — удерживать внешнюю рамку 1 кар-
данового подвеса в определенном
положении. Ротор гироскопа вра-
вращается с большой угловой ско-
скоростью *» в корпусе 2, на верти-
вертикальной оси которого (оси пре-
прецессии) установлен датчик 3, из-
измеряющий угол прецессии р\ Сиг-
Сигнал с датчика поступает в усили-
усилитель-преобразователь 4, затем в
исполнительное устройство 5, ко-
которое прикладывает момент Ма
относительно оси стабилизации
внешней рамки. Вокруг оси прецессии гироскопа действует воз-
возмущающий момент Mt.
Отклонение стабилизирующего момента АМа пропорционально
отклонению силы тока в якоре двигателя, т. е. АМа = —кгА1.
Изменение тока в якоре двигателя описывается дифференциаль-
дифференциальны vi уравнением
LAI + RAI - сДо>„ -= кгА$,
где L, R — индуктивность и омическое сопротивление обмотки
якоря, До)я — отклонение угловой скорости якоря,../г2Д?— откло-
отклонение напряжения, поступающего с датчика угла на обмотку
возбуждения двигателя, с — коэффициент противоэлектродвижу-
щей силы. Исполнительное устройство 5, кроме двигателя-, имеет
редуктор с передаточным числом п так, что Дк>а = «Да.
Момент инерции * корпуса 2 с гироскопом относительно оси
прецессии равен В, момент инерции системы относительно оси
стабилизации равен А, кинетический момент гироскопа И — const.
1) Составить линеаризованные уравнения движепия замкну-
замкнутой системы, полагая углы a, {J и угловые скорости а, ^ малыми.
2) Определить стационарную ошибку замкнутой системы по
угловой скорости аст, если М$ = const.
302
ГЛ 20 АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ И РЕГУЛИРОВАНИЕ
3) Определить, каким должен быть коэффициент усиления
кг, чтобы при Mf = О замкнутая система по отношению к угло-
угловой скорости а была устойчивой асимптотически.
Ответ: 1) JAa — ЯД(} = — А\/, ВА$ + НАа — Л/р, LAI + RAI ~
— сттАа = к2А$, где / = А + пг]п, /„ — момент инерции якоря дви-
двигателя; 2) Даст — -
Мл/
0
20.И. Самолет совершает пря-
прямолинейный горизонтальный по-
полет с- постоянной скоростью v.
При малых отклонениях от пря-
прямолинейного полета малые откло-
отклонения боковой аэродинамической
силы Z, момента аэродинамических сил Ма и момента управля-
управляющих сил рулей Мр относительно вертикальной оси, проходящей
через центр масс С, пропорциональны соответственно малым
отклонениям угла скольжения Др, угловой скорости рыскания
К задаче 20.14.
угла поворота руля, т. е.
р,
AM = Л
-f Л
где -^ , Л/ , М — постоянные положительные величины.
За невозмущепиое движение принять полет, при котором
\р = 0, р = 0, 6 = 0, Л/а = 0, Z = 0, Л/р == 0, у = const. Масса и
момент инерции самолета относительно вертикальной осп, про-
проходящей через центр масс С, равны m и /.
1) Составить линеаризованное уравнение возмущенного дви-
движения самолета в горизонтальной плоскости, полагая величину
скорости полета v неизменной.
2) Определить стационарное отклонение угловой скорости
Дфст в зависимости от мгновенного отклонения руля на постоян-
постоянный угол Дбо-
Ответ/.
-h
2) /
1)
М
(♦)'
м
НУ
к
20.15. Получить характеристическое уравнение линеаризо-
панной системы уравнений возмущенного движения замкнутой
автоматической системы регулирования курса самолета. Харак-
2 УСТОЙЧИВОСТЬ II ПЕРЕХОДНЫЕ ПРОЦЕССЫ СИСТЕМ
303
терисшкп самолета и действующих сил указаны в предыдущей
задаче. Уравнение автопилота принять в виде Лб = k,Aty, где
А', == const > 0. Оценить устойчивость движения замкнутой
системы.
Ответ: TJX1 + (Г, + ТЖ + A + TJ3 + kjcjjl + &„&, = 0.
Движение устойчиво асимптотически.
20.16. Па рисунке изображена простейшая система автомати-
автоматического регулирования напряжения генератора постоянного тока
с параллельным возбуждением.
Напряжение U регулируется пу-
путем изменения величины сопро-
сопротивления г в цепи возбуждения.
Если, например, напряжение
U по какой-то причине начало
падать, уменьшится ток 1и а зна-
значит, и тяговая сила электромаг-
электромагнита 1. Сердечник электромагнита
и связанный с ним движок 3 ре- К задаче 20.10.
оста га оттянутся пружиной 2
вниз, уменьшится сопротивление г, увеличится ток возбуждения
/ н в результате ликвидируется падение напряжения U. Подле-
Подлежащее регулированию напряжение U задается реостатом с со-
сопротивлением -йд.
1) Получить линеаризованное уравнение динамики регулято-
регулятора, выражающее зависимость отклонения Лг от отклонения At/;
отклонение Дг принять пропорциональным отклонению As, т. о.
Дг = h3As. Тяговую силу электромагнита принять пропорциональ-
пропорциональной квадрату силы тока F3M = c1ll, жесткость пружины равной
•с2, силу трения, пропорциональной скорости сердечника электро-
электромагнита /Aтр = hs. Масса подвижной части, сопротивление и ин-
индуктивность обмотки электромагнита ' соответственно равны
тп, R,, L(.
2) Определить стационарное отклонение Дг0, если напряже-
напряжение изменится на постоянную величину AU0.
Указание. При выводе уравЕгепий коэффициенты при искомых перемеп-
яых нрцпоок к единице.
Ответ: 1) TjlA'r -f (TJa + Т\) Дг + (Т, + Т3) Аг + Дг =.
2Vm,
где '1\ =
2)
20.17. Получить характеристическое уравнение линеаризован-
линеаризованной системы уравнений возмущенного движения замкнутой си-
системы в условиях предыдущей задачи, считая, что цепь возбуж-
возбуждения состоит из обмотки с сопротивлением R и с индуктив-
3Q4 ГЛ 2Ь ГИДРОМЕХАНИКА
ностью L и сопротивления г. Сопротивлением и индуктивностью
якоря пренебречь и считать, что генератор вырабатывает на-
напряжение, пропорциональное силе тока в обмотке возбужде-
возбуждения, т. е. U ==» к'1. Массой подвижных частей электромагнита
пренебречь.
Пользуясь критерием Рауса — Гурвица, получить условия
асимпотической устойчивости замкнутой системы.
Указание. При выводе уравнений* коэффициенты при искомых перемен-
переменных привести к единице.
Ответ: TJJ&* + iTJ, + Г,(Г, + ТЖ + (Г. + 7\ + Т,)Х + A +
г Ik'
+ hktfalc,) = 0, где То = д , _А„ А-о =- „ , ° _fe,. Условия
.асимптотической устойчивости А;„ > 0, L^fj + f3(^u + Z\)
+ Г4 + Г,) - ГоГ.ГД! + кЛк2к3) > 0.
Глава 21
ГИДРОМЕХАНИКА
Во всех задачах настоящей главы, если это особо не огова-
оговаривается, жидкость считается идеальной (невязкой), однородной,
несжимаемой (плотность жидкости постоянна), изотермичной
(пагреванием, охлаждением пренебрегается). Теченне жидкости
считается безвихревым и безотрывным, потерями на гидросопро-
гидросопротивление пренебрегается, давление газа над свободной поверх-
поверхностью жидкости полагается равным пулю.
Сама жидкость рассматривается как совокупность материаль-
материальных частиц, сплошным образом заполняющих некоторый движу-
движущийся объем. Для идеальной жидкости считается, что поверхно-
поверхностные силы, приложенные к элементам поверхности некоторого
объема, представляют собой нормальные давления, направлен-
направленные внутрь этого объема (по внутренней нормали к элементу по-
поверхности).
§ 1. Статика. Относительное равновесие
21.1. Найти равнодействующую F и координаты центра С си-
системы параллельных сил давления жидкости ^а прямоугольную
крышку, если ее верхний край находится на глубине //. Высота
крышки равна а, ширина ft, плотность жидкости р.
Ответ: F-pgab(H + a/2), zc = 0, yc = а{2а + ЗЯ)/13(о + 2ЯI.
21.2. Прямоугольный щит АВ ирригационного канала, накло-
наклоненный под углом а к горизонту, может вращайся вокруг го-
1. СТАТИКА ОТНОСИТЕЛЬНОЕ РАВНОВЕСИЕ
305
ризонталыгой оси О, проходящей через его центр масс. Если
уровень воды мал, то щит прижат нижней кромкой к выступу
дна канала А. Расстояние от оси до нижней кромки щита рав-
равно h.
Определить, при какой высоте уровня Н щит будет повора-
поворачиваться и пропускать воду в канал. Трением па осп прене-
пренебречь.
Ответ: Н ^ ЗА sin a.
Мрышнй .
к
7///7///?777
й
I
И
*, у
У
(Г
b
X
1 >
К задаче 21.1.
У7777777777/ '////////////
К задаче 21.2.
21.3. Судно имеет вертикальные боковые стенки. Площадь
горизонтального сечения судна на уровне поверхности воды рав-
равна F, плотность воды р, масса судна с учетом присоединенной
массы жидкости т.
Определить период малых вертикальных поступательных ко-
колебаний судна.
Ответ: Т0=2л
1
"Т
к д
-
К задаче 21 3.
К задаче 21.4.
21.4. На рисунке показано поперечное сечение морского суд-
судна длины /, высоты 2d. Масса судна равномерно распределена по
его объему, а его центр масс лежит в плоскости симметрии на
уровне поверхности воды (плотность воды равна р).
Полагая отклонения малыми, найти величину восстанавливаю*
щего момента и частоту колебаний судна при бортовой качке,
20 Под ред К С (Колесникова
306 ГЛ- 21- ГИДРОМЕХАНИКА
характеризующейся углом ср поворота корпуса, если Ь = 6 м,
Ответ: Мв — Gpgcp, ю = 1,06 рад/с.
21.5. Поперечное сечение корабля представляет собой квад-
квадрат со стороной 2а, а его центр масс расположен на высоте у
над дном, кото-рое погружено в воду на глубину а. Найти вели-
величину у, при которой равновесие безразлично.
Ответ: у — -г а.
К задаче 21.5.
21.6. В условиях задачи 21.5 вычислить период колебаний
корабля при бортовой качке. Принять, что центр масс корпуса
С расположен на вертикальной оси симметрии, на расстоянии а
от дна, момент инерции корпуса относительно продольной оси,
проходящей через центр масс, с учетом присоединенной массы
жидкости равен J. Считать метацентрическую высоту МС рав-
равной а/6, а массу корабля равной т.
Указание. Метацеитрической высотой называется расстояние от центра
тяжести до метацентра — точки пересечения липии действия равнодейству-
равнодействующей R полного давления воды (поддерживающей силы), действующей на
корпус корабля, с осью у.
Ответ: Т = 2яУ M/(amg).
21.7. Цистерна движется по прямолинейному горизонтально-
горизонтальному участку с постоянным ускорением а.
Определить, под каким углом а к горизонту установится сво-
свободная поверхность жидкости в
цистерне.
Ответ: а = arctg (a/g).
21.8. Жидкостный акселеро-
акселерометр состоит из изогнутой труб-
трубки, наполненной маслом и рас-
'{//w////////////77?YS7s/7/7f положенной в вертикальной плос-
К задаче 21.7. кости.
-32-
§ i. СТАТИКА. ОТНОСИТЕЛЬНОЕ РАВНОВЕСИЕ
307
Определить величину ускорения а поступательно движуще-
движущегося по горизонтальной плоскости вагона, если уровень жидкости
в канале трубки по направлению движения понижается до вели-
величины hi, а в противоположном конце повы-
повышается до величины /г2, углы, образуемые
трубкой с горизонтальной плоскостью,
равны соответственно at и а2.
Ответ: а
К задаче 21.8.
К задаче 21.9.
21.9. Цилиндрический сосуд, наполненный жидкостью, вра-
вращается вокруг вертикальной оси Z с постоянной угловой ско-
скоростью со.
Найти уравнение свободной поверхности жидкости в равно-
равновесном состоянии в связанной с сосудом цилиндрической rOz
системе координат. Высота уровня жидкости в покоящемся со-
сосуде равна Я, радиус цилиндра R.
Ответ: Z— -у-1 г" ^-
21.10. Прямоугольный сосуд, заполненный жидкостью на вы-
высоту И, соединен тягой АС с колесом, которое вращается во-
вокруг горизонтальной оси О с по-
постоянной угловой скоростью о>.
Радиус колеса R, ширина со-
сосуда Ь.
Полагая, что тяга во все вре-
время движения сосуда сохраняет
вертикальное положение, найти
•величину угловой скорости коле-
колеса, при которой жидкость не бу-
будет выливаться из сосуда. Коле-
Колебания свободной поверхности жид-
жидкости пренебречь. Кроме того,
считать, что g/(<a2/?) > 1.
Ответ: и2 <
20*
К задаче 21.10.
308
ГЛ. 21. ГИДРОМЕХАНИКА
§ 2. Общие теоремы динамики в гидромеханике
21.11. По трубе, изогнутой по дуге окружности, протекает
жидкость плотности р. Площадь 'поперечного сечения трубы
равна S, величина скорости частиц жидкости в каждом сечения
одинакова и равна v.
Определить силу давления жидкости N на стенки трубы
вследствие поворота потока, считая, что размеры Поперечного-се-
Поперечного-сечения трубы малы по_сравнению с радиусом закругления.
Ответ: N = pSv42~.
cf
К задаче 21.11,
К задаче 21.12.
21.12. Определить величину горизонтальной составляющей
силы давления на опору колена трубы диаметра d = 300 мм, по
которой протекает вода со скоростью v = 2 м/с.
Ответ; /V = 282,7 II.
21.13. Г-образная пустая трубка вращается вокруг верти-
вертикальной ОСИ С УГЛОВОЙ СКОрОСТЬЮ <йо-
Какой будет угловая скорость трубки, если из нее будет вы-
вытекать жидкость плотности р с постоянной
скоростью и. Момент инерции сухой трубки
S*teJ относительно оси вращения равен J, длина
;>Щ горизонтального колена 1Т площадь попереч-
поперечного сечения S.
Ответ: «о —
21.14. Изогнутая трубка, как это пока-
показано на рисунке, заполнена жидкостью и
вращается вокруг вертикальной оси, прохо-
проходящей через центр окружности О перпенди-
перпендикулярно плоскости трубки. Момент инер-
инерции трубки с жидкостью относительно оси
вращения равен Jo, плотность жидкости р,
К задаче 21.13. площадь поперечного сечення трубки посто-
\а
§ 2 ОБЩИЕ ТЕОРВМЫ ДИНАМИКИ В ГИДРОМЕХАНИКЕ
309
япяа и равна S, угловая скорость вращения трубки при непод-
неподвижной ЖИДКОСТИ <йо-
Определить величину угловой скорости вращения трубки, ес-
если жидкость протекает внутри нес с постоянной относительной
скоростью и в направлении, указаппом на рисунке стрелками.
При какой величине скорости жидкости угловая скорость вра-
вращения трубки станет равной нулю?
О)
К задаче 21. И.
К задаче 21.15.
21.15. Изогнутая, как показано на рисунке, трубка заполне-
заполнена водой, опущена одним концом в жидкость и вращается во-
вокруг вертикальной оси. Другой конец трубки находится выше
свободной поверхности на расстоянии h.
При какой угловой скорости вращения вода будет заполнят(.
трубку доверху, если длина горизонтального колена равна г.
Ответ: (u2>2gh/rt.
21.16. В условиях задачи 21.15 определить, при какой, угло-
угловой скорости вращения жидкость будет вытекать из трубки с по-
постоянной скоростью v.
Ответ: и2 ■" (и2 ~Ь 2gh)/r*.
21.17. Г-образная трубка может вращаться вокруг вертикаль-
вертикальной оси, проходящей через точку О перпендикулярно плоскости
рисунка.
Найти величину угловой скорости трубки, если- из нее вытека-
вытекает жидкость со скоростью v — const. В начальный момент време-
времени система находилась в покое. Плотность жидкости р погонная
масса трубки ц,, длина колена I, площадь поперечного сечения
трубки S.
Ответ' <° = ibT+psir
310
ГЛ. 21. ГИДРОМЕХАНИКА
К задаче 21.17.
К задаче 21 18.
21.18. Внутрь прямоугольной в плане цистерны из наклонен-
наклоненной под углом а трубы вытекает жидкость плотности р со ско-
скоростью v. Жидкость вытекает us емкости, которая имеет доста-
тоипо большой объем.
Найти зависимость скорости цистерны и от времени, если
масса цистерны М, площадь поперечного сечения трубы S. В на-
начальный момент времени цистерна покоилась. Считать, что по-
поверхность жидкости остается плоской и горизонтальной, массой
колес пренебречь.
„ pSv2 cos at
Ответ: и — ,, „ .
21.19. Из цистерны, стоящей неподвижно на горизонтальном
участке пути, в некоторый момент времени начинает вытекать
жидкость плотности р чере.з наклоненную под углом а трубку.
Найти, как мепяется скорость цистерны и на малом проме-
промежутке времени, если площадь поперечного сечения трубки S,
масса цистерны с жидкостью М. ,
Трением и изменением высоты I
уровня жидкости Н в цистерне
пренебречь.
Ответ: ц~ 2
//////////г///////7
К задаче 21.19.
К задаче 21.20,
21.20. Колесо 1 радиуса R с каналами 2 может вращаться
вокруг вертикальной оси, проходящей через точку О. Момент
§ 2 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ В ГИДРОМЕХАНИКЕ
311
инерции колеса с учетом массы жидкости относительно оси вра-
вращения равен /0, расстояние от оси канала до оси колеса г.
Найти величину угловой скорости со вращения колеса, если
массовый расход жидкости в подводящем трубопроводе 3 посто-
постоянен и равен Q, каналы взаимно перпендикулярны. В началь-
начальный момент система находилась в покое.
Указание. Массовый расход равен Q = pvS, где р — плотность жидко-
жидкости, v — скороеib жидкости, S — площадь сечения трубопровода.
Ответ: ю ■= Or /Л2 — г2/.Г0.
21.21. Жидкость вытекает из резервуара по трубке 1, длина
горизонтальной части которой г. Трубка вращается вокруг вер-
шкальной оси с постоянной угловой скоростью (о.
Пренебрегая изменением уровня жидкости Н в резервуаре,
найти величину скорости v истечения жидкости из трубки.
Ответ: v = Усогг2 + 2gII,
К задаче 21.21.
К задаче 21.22.
21.22. Жидкость вытекает из р'езервуара по трубке 1. Трубка,
соединенная муфтой с резервуарсм, может вращаться вокруг вер-
вертикальной оси. Площадь поперечного сечения трубки S, расстоя-
расстояние от центра выходного сечения трубки до оси вращения г,
угол между касательной к оси трубки в выходном сечении и ра-
радиусом E, плотность жидкости ,р.
Какой момент надо приложить к трубке, чтобы оиа остава-
оставалась в покое. Изменением уровня жидкости // в резервуаре пре-
пренебречь.
Ответ: М = 2oSrgH sin £.
312
ГЛ 21. ГИДРОМЕХАНИКА
21.23. В активной ковшовой гидротурби-
гидротурбине струя воды диаметра d = 60 мм симмет-
симметрично натекает на ковш со скоростью v =•
= 50 м/с.
Найти величину силы давления струи на
пеподвижный ковш, если выходной угол ков-
ковша Р = 9°, трением пренебречь.
Ответ: /? = py2™f(l + cosp)/4 = 14,05 кН.
21.24. В условиях задачи 21.23 найти ве-
величину силы, действующей на ковш актив-
активной гидротурбины, если ковш движется впра-
вправо поступательно с постоянной скоростью
и = 25 м/с.
Ответ: /?=p(y-uJ(l+cosp)^- =3,5 кН.
21.25. В активной гидротурбине струя воды натекает на ло-
лопасти рабочего колеса под углом а — 30° по отношению к его
боковой плоскости.
Найти величину угла наклона f входной кромки лопасти, при
которой будет иметь место безударное натекание струи на ло-
лопасть, если скорость струи и = 50 м/с, а средняя (по высоте)
окружная скорость лопасти постоянна и равна и = 30 м/с.
Указание Безударным называется такое натекание струи на лошипь,
при котором относительная скорость жидкой чаетнцы будет направлена по
касательной к кромке лопасти.
К задаче 21 23.
Ответ: tgy —
v sin a
v cos a — u'
L
a
^А-ЛШЖТ
г ГТ^ШШХ
/Рабочее
колесо
К задаче 21.25. '
К задаче 21.26.
21.26. В рабочее колесо 2 реактивной гидротурбины поток
воды поступает из неподвижного направляющего аппарата 1 со
скоростью v = 25 м/с под углом а = 19° по отношению к его
боковой плоскости. Шаг лопастей рабочего колеса h = 60 мм,
высота лопасти Ъ = 40 мм, выходной угол лопасти ^ =■ 25°, плот-
лость жидкости р.
§ 3 СМЕШАННЫЕ ЗАДАЧИ
313
Найти (в расчете на один канал рабочего колеса) окружную
силу R, развиваемую потоком ни рабочем колесе, если последнее
имеет среднюю (по высоте лопасти колеса 2) окружную скорость
и = 20 м/с. Трением пренебречь.
Указание. Относительная скорость выхода частиц жидкости Vi опреде-
определяется из условия неразрывности течения жидкости в канале, т. е. предпо-
предполагается, что жидкость сплошным образом заполняет пространство между
лопатками турбины а что во время движения не происходит ни потери ве-
вещества, ни его возникновения.
Ответ: F = pi> sin abh{v cos a — и + vt cos fi) =■ 404 II.
21.27. Рабочее колесо центробежного насоса радиуса
R = 0,2 м имеет сум-
суммарную площадь выход-
выходных сечений каналов (по
окружности радиуса Л)
S — 0,063 м2, а выходной
угол лопастей а = 19°. Уг-
лозая скорость вращения
колеса и = 22 рад/с, про-
производительность насоса
О — 0,23 м'/с, плотность
жидкости (вода) р.
Определить момент па-
пары сил М, действующей
на колесо.
Указание. 1. Воспользоваться теоремой об изменении кинетического мо-
момента.
2. Радиальную проекцию абсолютной скорости считать равной vr =»
■= QIS.
К задаче 21 27,
Ответ: М = pQR (дсо — j ctg a)=1573Нм.
§ 3. Смешанные задачи
21.28. Крышка массы m расположена на поверхности жидко-
жидкости плотности р, налитой в прямоугольный бассейн длины а и
ширины Ь. Толщиной крышки и кинетической энергией жидко-
жидкости пренебречь.
Найти частоту малых угловых колебаний плоской крышки
вокруг горизонтальной оси О, перпендикулярной плоское! и
рисунка.
Указание Для решения задачи воспользоваться методом Рэлея. Крат-
Краткие оведеиия о методе Рэлея см. в указании к задаче 14 И,
- Ответ: со1 = pgab/m,
21.29. Дифференциальный манометр состоит из открытой U-
образной трубки постоянного поперечного сечения, заполненной
жидкостью на длину /.
314
ГЛ 21. ГИДРОМЕХАНИКА
7777777777777777777777777777/ '•
i
Т
К задаче 21.28.
К задаче 21.29.
Определить частоту колебаний уровня жидкости.
Ответ: ю = I2gil.
21.30. Вычислить частоту вертикальных колебаний «воздуш-
«воздушной пробки» в горло колбы резонатора Гольмгольца. Энергию
сжатия воздуха в колбе учесть, полагая, что давление и объем:
связаны адиабатическим законом pV" = const, где р— давление
газа, к — показатель адиабаты. Плотность воздуха о, площадь
сечения горла S, длина горла /, объем кол-
колбы V. Кинетической энергией воздуха в колбе
и потенциальной энергией в горле колбы пре-
пренебречь.
Ответ: &=У fin-
К задаче 21.30.
К задаче 21.31.
21.31. Жесткая вертикальная трубка с площадью поперечного
сечения S заполнена жидкостью плотности р до высоты Я. Ниж-
Нижним концом она прикреплена к упругой сферической оболочке
радиуса R.
Найти частоту малых колебаний столба жидкости в трубке,
считая, что прогиб в любой точке сферической оболочки равен
wit), т! е. она представляет собой (в деформированном состоянии)
сферу,' концентричную с оболочкой в положении равновесия. По-
§ 3 СМЕШАННЫЕ ЗАДАЧИ 315
тешшальпую энергию П (растяжение — сжатие) оболочки вы-
вычислять по формуле: П = caw2/2. Здесь с0 — приведенный коэффи
циент жесткости оболочки. Кинетической энергией жидкости в
оболочке и инерцией самой оболочки пренебречь.
Указание Для решения ладачн воспользовался методом 1'элоя, краткиэ
сведелия о котором даны в указании к задаче 1111.
21.32. По упругой тонкостенной трубе, шариирно закрепленной
на концах, протекает жидкость плотности р с постоянной ско-
скоростью v. Площадь попереч-
нота сечения трубы постоян- о
па но длине и равна S.
Рассматривая трубу по
схеме балки с постоянными
но длине изгибной жест-
жесткостью EJ0 и погонной мае- К задаче 21.32.
сой и0, составить дифферен-
дифференциальное уравнение поперечного движения трубы (для малы к
отклонений от положения равновесия) с учетом жидкости. Счи-
Считать, что в положении равновесия труба горизонтальна.
Ответ: EJ0^+pS^--^0+pS)U.
дх да at
24.33. В условиях задачи 21.32 для упругой тонкостенной трубы
длины I, закрепленной шарнприо по концам, определить мини-
минимальную величину скорости течения жидкости v, при которой пря-
прямолинейная форма равновесия трубы становится неустойчивой.
Указания. 1. В дифференциальном уравнении движения трубы поло
жить погонную массу равной нулю.
2. Решить полученное уравнение методом Фурье.
3. Неустойчивость прямолинейной формы равновесия надо понимать
так, чго при некотором (критическом) значении скорости жидкости суще-
существуют другие (при сколь угодно малых отклонениях), отличные от прямо
лииейпои, формы равповесия трубы с протекающей по ней жидкостью.
Ответ: v=- у ^
21.34. В условиях задачи 21.32 для упругой, тонкостенной,
прямолинейной трубы длины /, заполненной жидкостью и закреп-
закрепленной шарнпрно но концам, найти собственные частоты малых
поперечных колебаний. Определить также частоты колебаний си-
системы с учетом протекания жидкости ио трубе (у = const).
Указание. Для решения задачи воспользоваться методом Фурье.
Ответ: при у = 0 к>й = ■
при ифО &п =
316
ГЛ. 2i. ГИДРОМЕХАНИКА
21.35. По горизонтальному участку упругого трубопровбда
нротекает жидкость плотности р с постоянной скоростью v. В не-
некоторый момент времени труба на правом конце мгновенно пе-
перекрывается задвижкой Л,
при этом происходит гидрав-
гидравлический удар.
Полагая трубу тонкостен-
тонкостенной безмоментной (работаю-
(работающей только на растяжение)
цилиндрической оболочкой
радиуса г, найти окружное
К задаче 21.35.
ру
напряжение, возникающее в стенке трубопровода при гидроуда-
гидроударе. Модуль упругости трубы Е, толщина стенки h.
Указание. Осевыми деформациями трубы, вследствие наличия компен-
компенсаторов В и D, и потенциальной энергцеи жидкости пренебречь.
Ответ: о — -=■
21.36. Жидкость плотности р в равновесном положении за-
молняет абсолютную жесткую вертикальную трубу па высоту I,
Найти приближенное значение
частоты со первого тона вертикаль-
вертикальных колебаний жидкости в трубе,
если коэффициент объемного сжа-
сжатия последней равен &[Н/м2],
а труба имеет круговое попереч-
поперечное Сечение площадью S. Считать,
что амплитуды перемещений ча-
частиц жидкости по вертикали и
изменяются по линейному закону
(смотри эпюру), растеканием жид-
жидкости в радиальном направлении
пренебречь.
К задаче 21.36.
Указание. Для решения задачи применить метод Рэлея (см. указание
к задаче 14.11), изменением внутренней энергии жидкости пренебречь, ио-
тенциальную энергию жидкости вычислять по формуле:
^ N*dx,
dN
a N— из уравнения
Ответ: or — —г.
pi
21.37. Сжимаемая жидкость плотности р в равновесном поло-
положении заполняет упругую вертикальную цилиндрическую обо-
оболочку радиуса R на высоту I.
£ 3. СМЕШАННЫЕ ЗАДАЧИ
317
Найти приведенную эквивалентную скорость звука в упругой
оболочке, если модуль упругости материала оболочки Е, толщина
Л, коэффициент объемного сжатия жидкости к. Оболочку считать
работающей' на растяжение — сжатие в окружном направлении^
Изменением внутренней энергии жидкости пренебречь.
Указание. Скорость звука — скорость распростраиения малых возмуще-
возмущений в жидкости, заполняющей жесткую оболочку — равна я0 = 1'А/р,
Ответ: а3 — ——:
у//////////////////////////,
~~ГТ. ГТ,.! ^ ,.~ , ~Г
4
- -гд-
У///////////////)////////,
»—'
i— X
К задаче 21.37,
К задаче 21.38.
21.38. Жидкость протекает по неподвижной абсолютно жест-
жесткой горизонтальной цилиндрической трубе. Распределение ско-
скоростей по диаметру остается одинаковым в любом поперечном
сечении трубы.
Определить коэффициент сопротивления £ при ламинарном
(частицы жидкости движутся по прямым, параллельным оси тру-
трубы) течении вязкой жидкости. Абсолютное значение напряжения
трения т рассчитывается по закону Ньютона:
где ц — кинематический коэффициент вязкости, и — скорость,
зависящая от радиуса г. Давление, действующее на левый торец
трубы, равно ри а на правый торец р2, диаметр трубы D, длина 1Г
плотность жидкости р. Явлениями теплообмена и изменением
температуры по длин* трубы пренебречь.
Указание: Перепад давлений Др = Р\ —р2 представить в виде: Ар =
--- ф , где v — средняя по сечению скорость потока.
Ответ: £ = ^7), где Re = —- —число Рейндольдса.
21.39. Гидравлический демпфер состоит из цилиндра 1 с пло-
площадью поперечного сечения F, заполненного несжимаемой вязкой
318
ГЛ 21. ГИДРОМЕХАНИКА
жидкостью плотности р, и поршня 2 с отверстиями. При движе-
движении цилиндра вправо относительно поршня жидкость перетекает
через отверстия в поршне из
его левой полости в правую.
Найти коэффициент сопро-
сопротивления демпфера £, если чис-
число отверстий в поршне равно
п, площадь сечения одного от-
отверстия S, скорость цилиндра
1 постоянна и равна у, перепад
давлений Ар в левой и правой
"К задаче 21.39. частях цилиндра 1 равен Ар =
= t,pw2/2, где w — скорость протекания жидкости через отверстия
поршня.
Ответ; С =
Константин Сергеевич Колеснипов, Григорий Давыдович Блюмии,
Владислав Иванович Дролг, Владимир Валентинович Дубинин,
Михаил Михайлович Ильин, Алексей Иванович Огурцов,
Алексей Алексеевич Понсалостин, Юрий Сергеевич Саратов
СБОРНИК ЗАДАЧ
ПО ТЕОРЕТИЧЕСКОЙ МЕХАНИКЕ
Редакторы В А. Романов, А. Г. Мордвинцев
Техн редактор II. Ш. Акселърод
Корректоры О. А. Сигал, В. П. Сорокина
ИВ М 11395
Сдано в набор 16 07 82 Подписано к печати 09 02 83 Формат
Б>мага тип .\t 3. Обыкновенная гарнитура Высокая печать Ус лови,
печ л. 20. Уч.-изд л, 21,23. Тираж 65 000 эьз. Заьаз Л» 269,
Цена 85 коп
Издательство «Наука»
Главная редакция физико-математической литературы
117071, Москва, В-71, Ленинский проспект, 15
4-я типография издательства «Наука». 630077, Новосибирец, 77, Сгани*
славского, 25.