/























































































Author: Сухов В.Г. Шутов В.П. Подлесный Д.В.
Tags: физика практические занятия экспериментальная физика физико-математические лицеи
ISBN: 5-9221-0632-5
Year: 2005




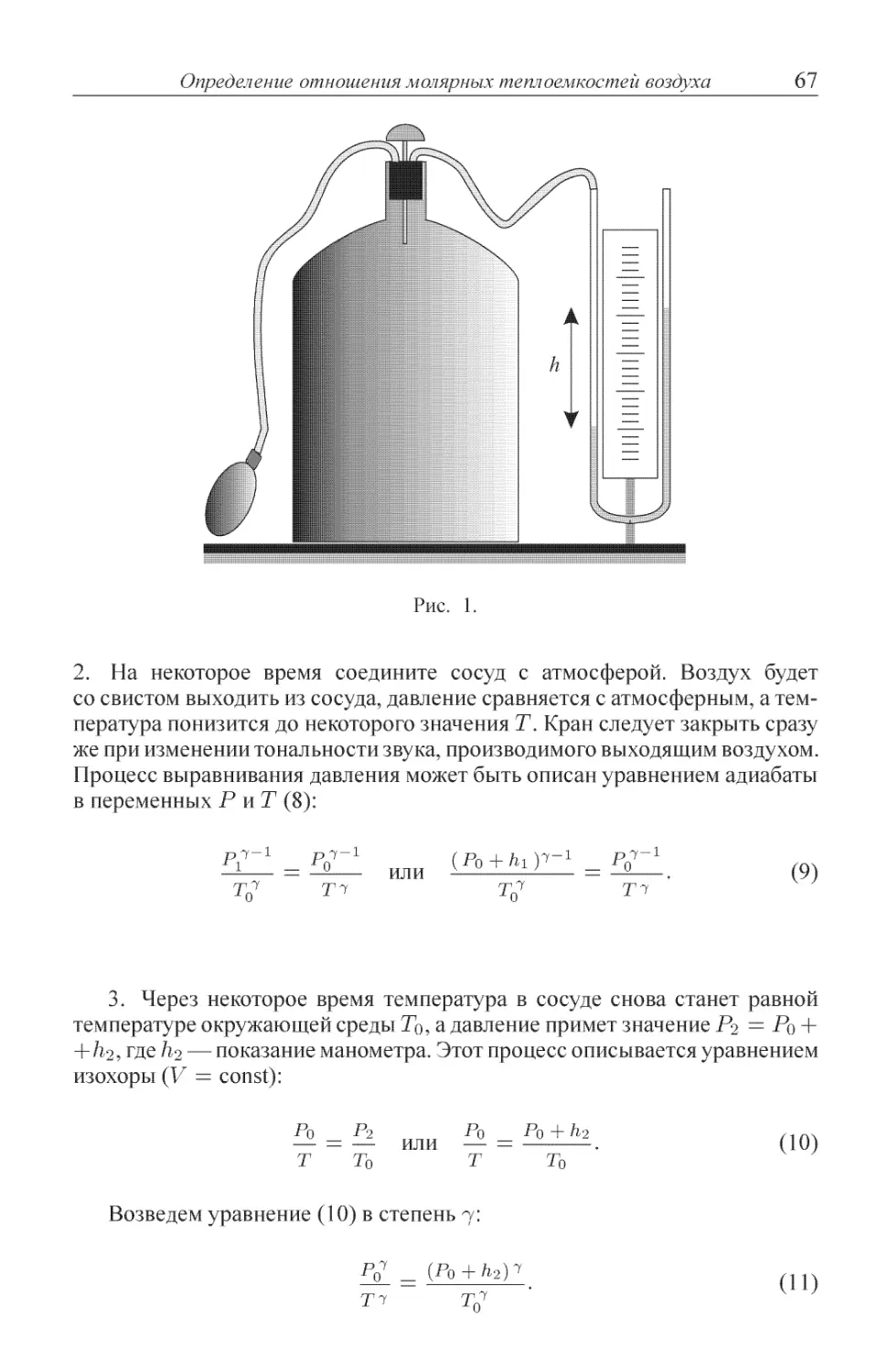
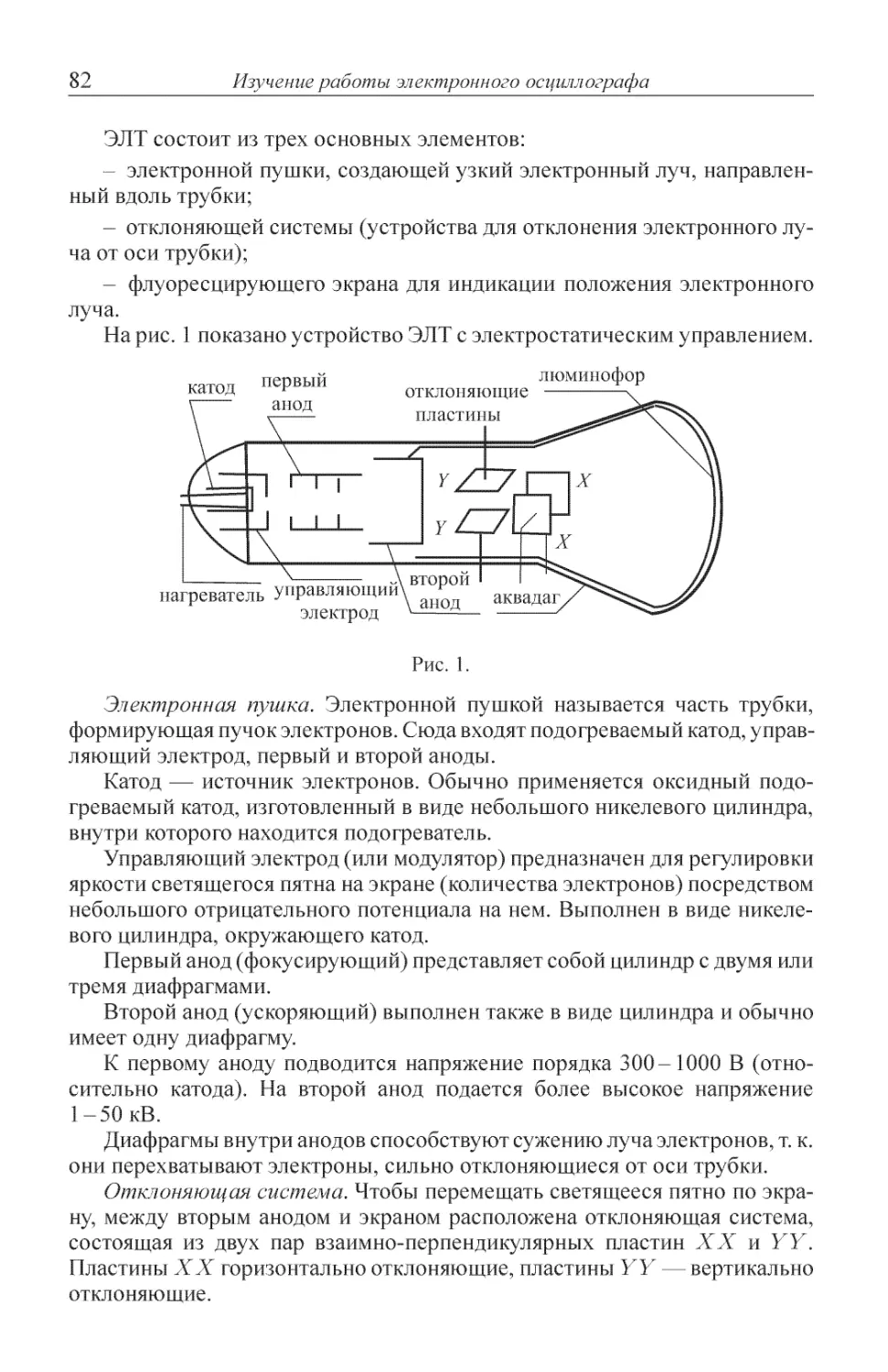
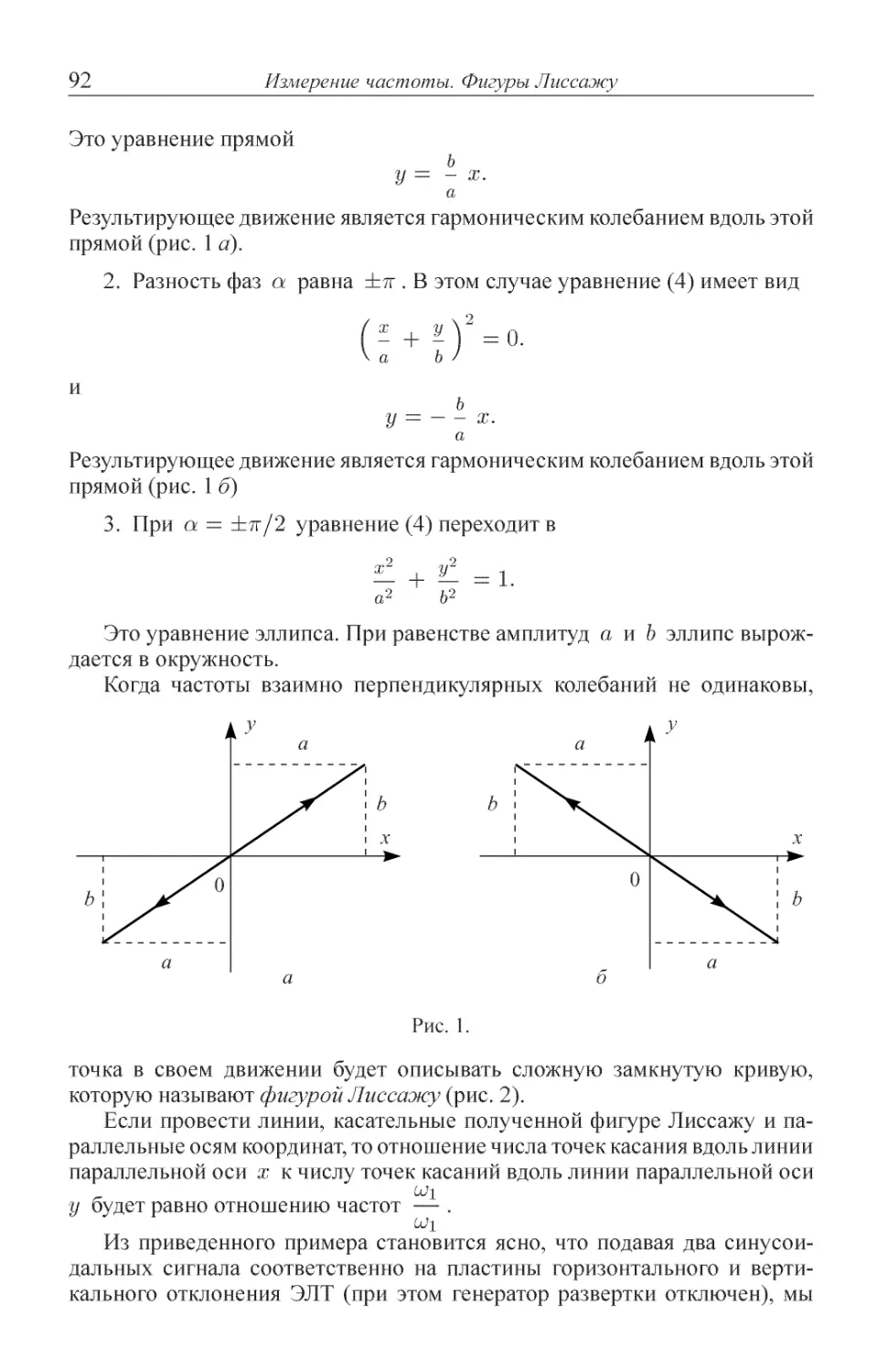
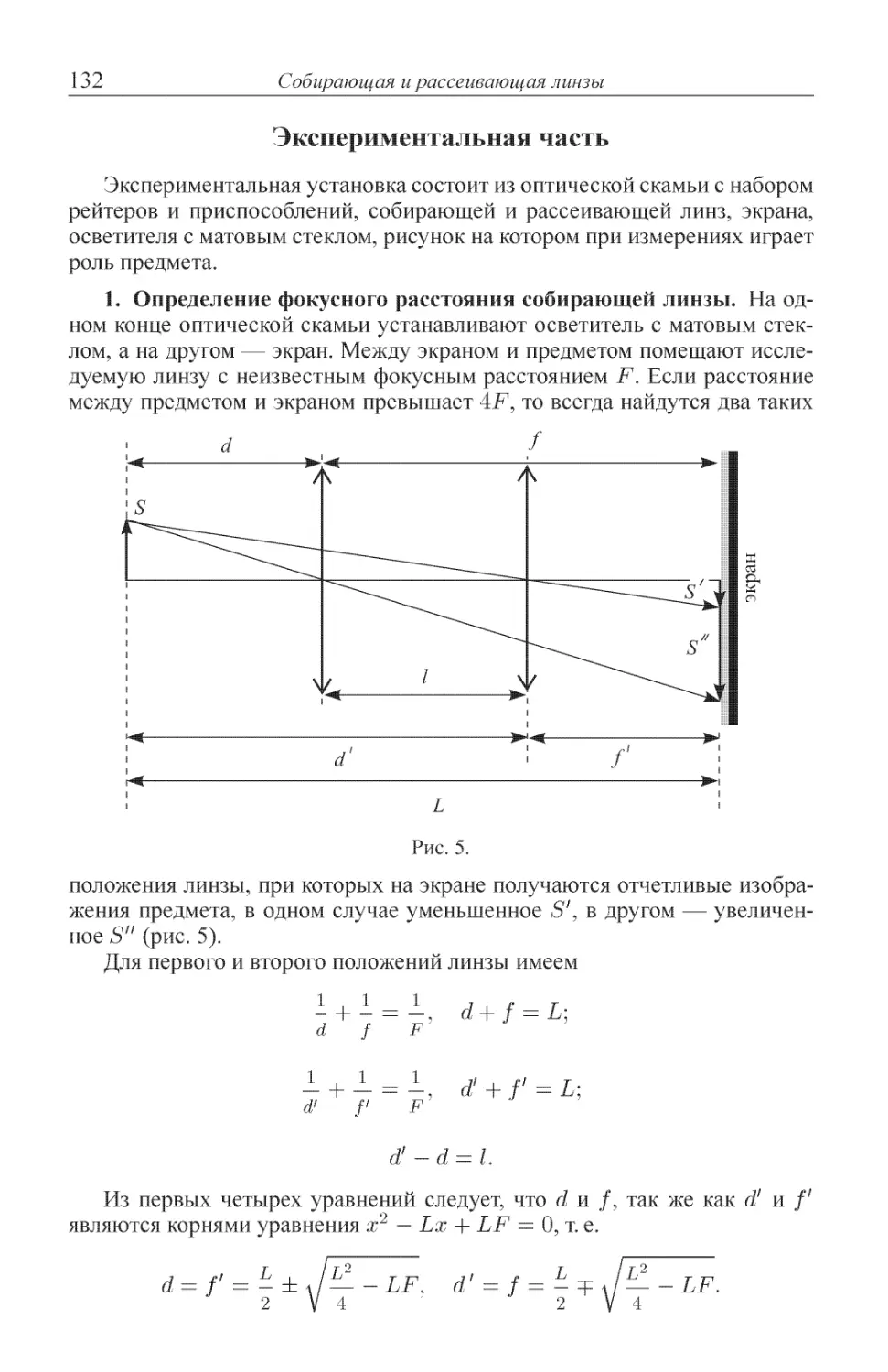
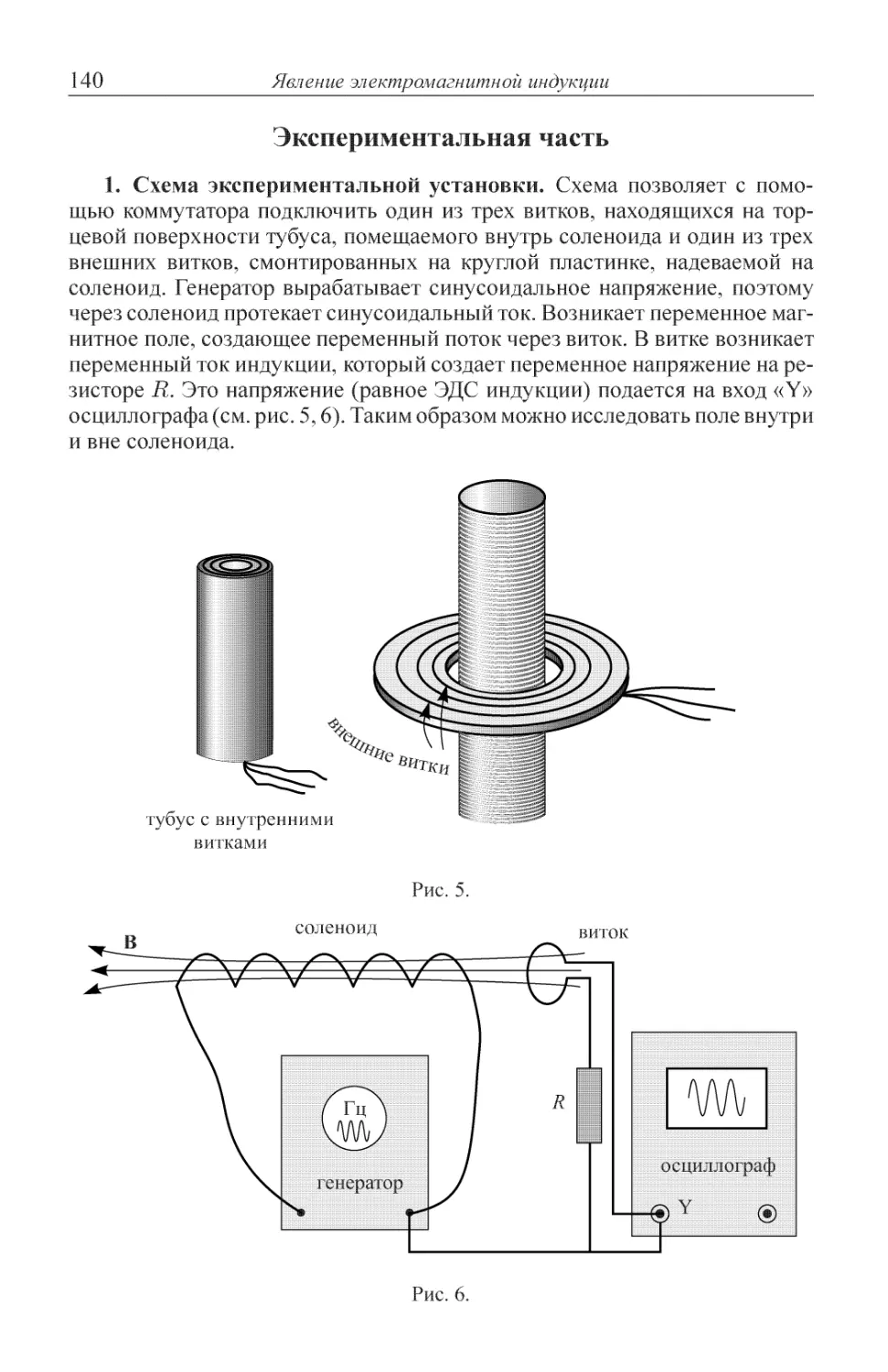
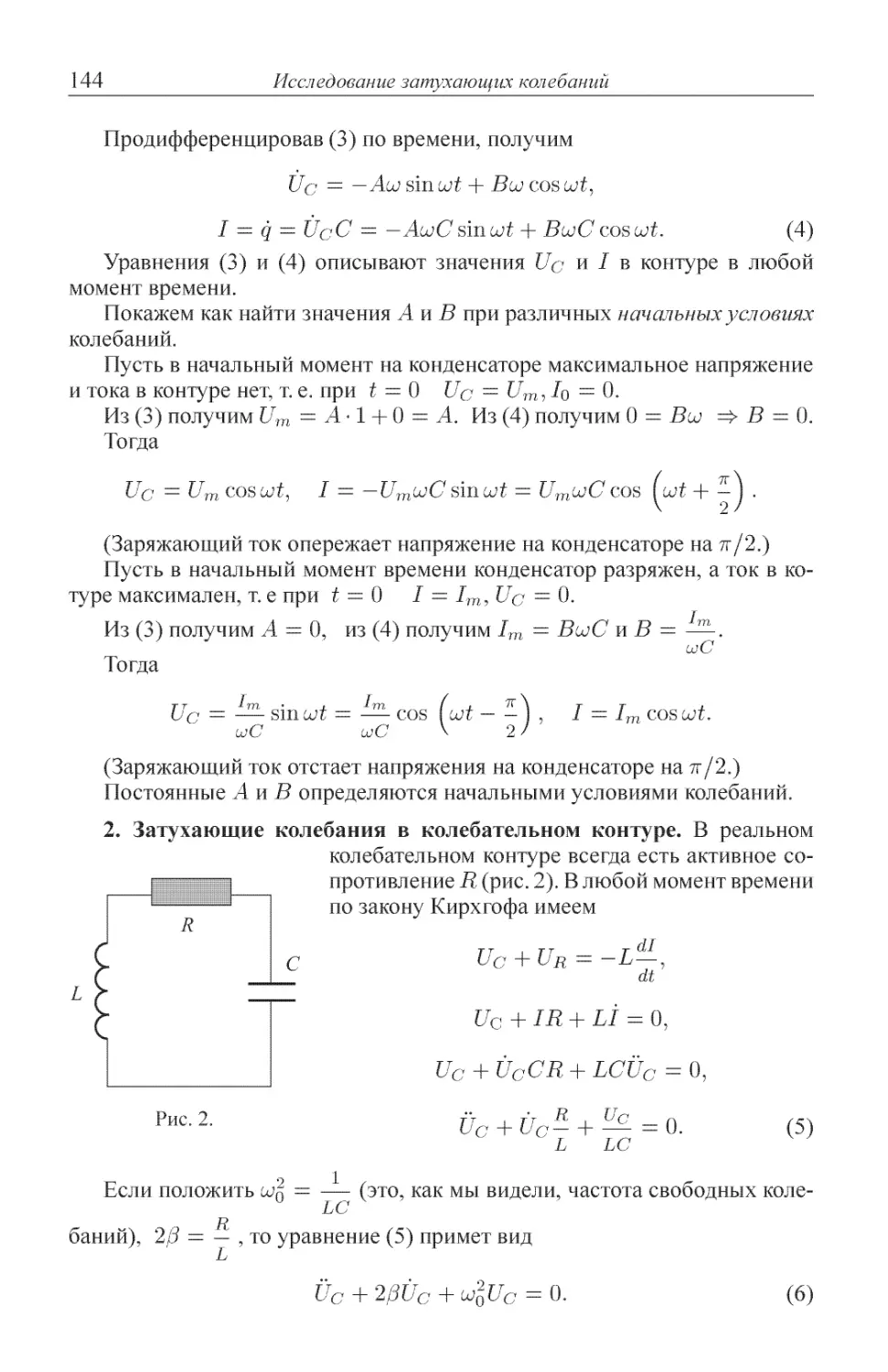
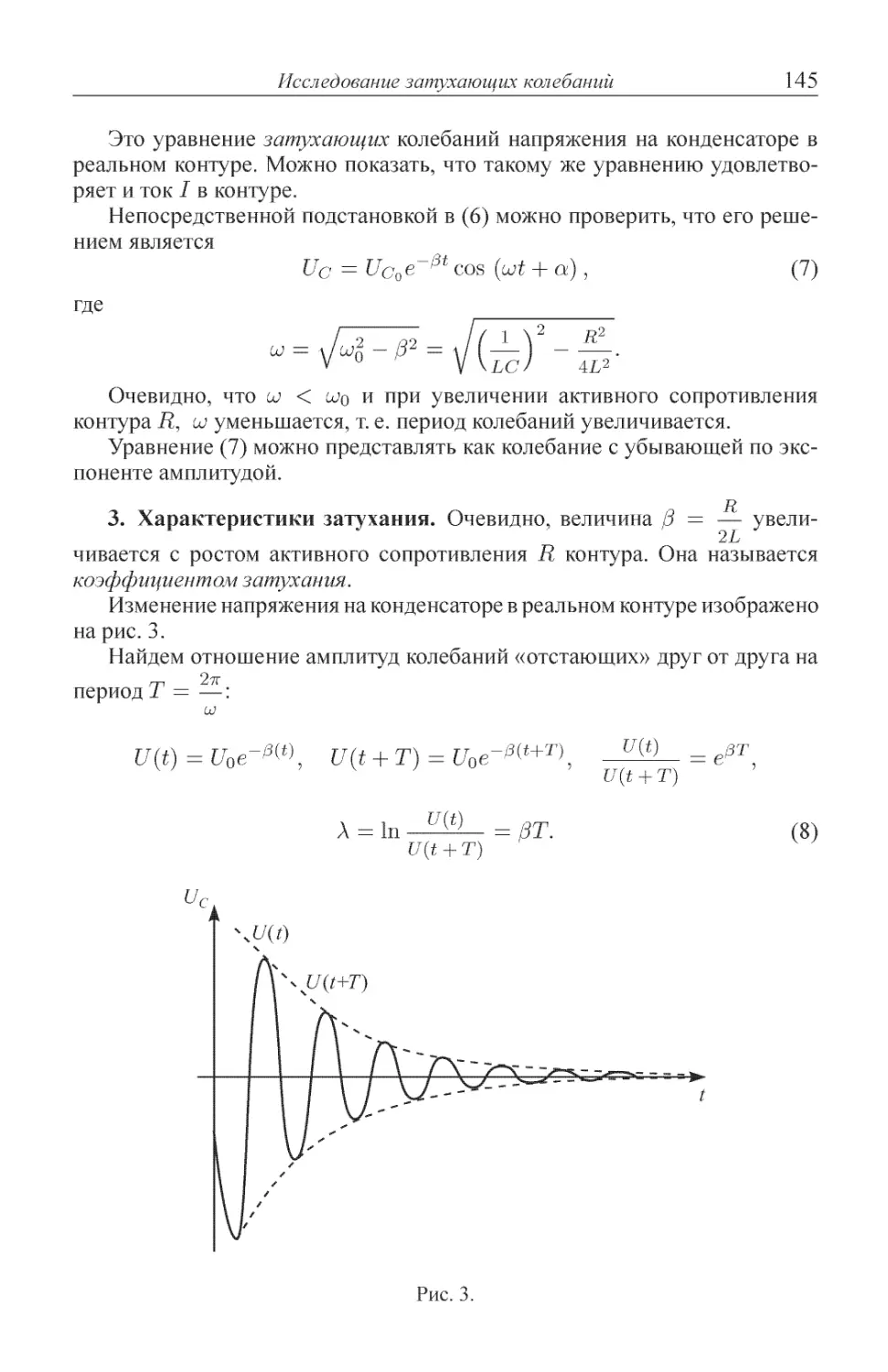
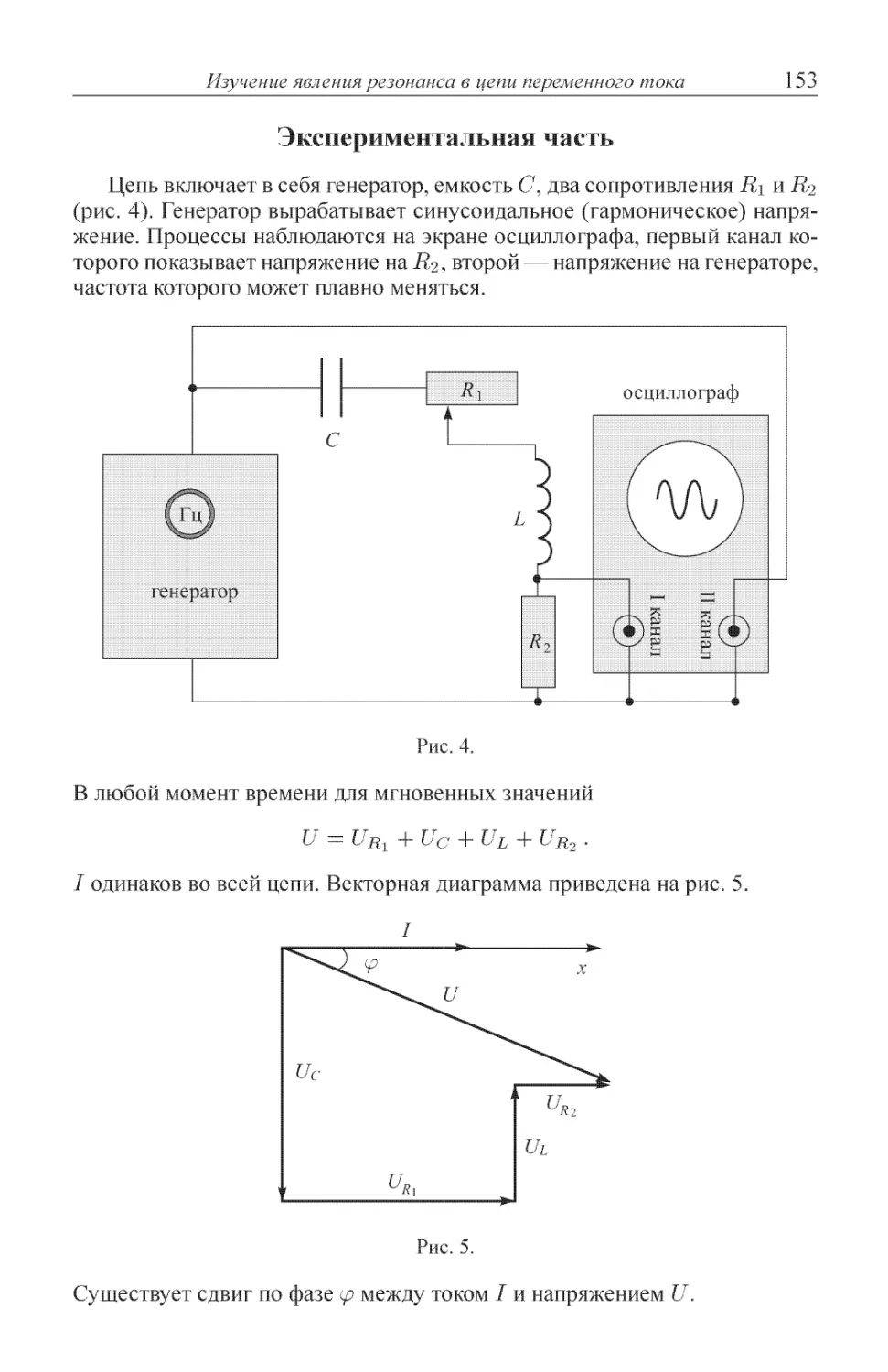
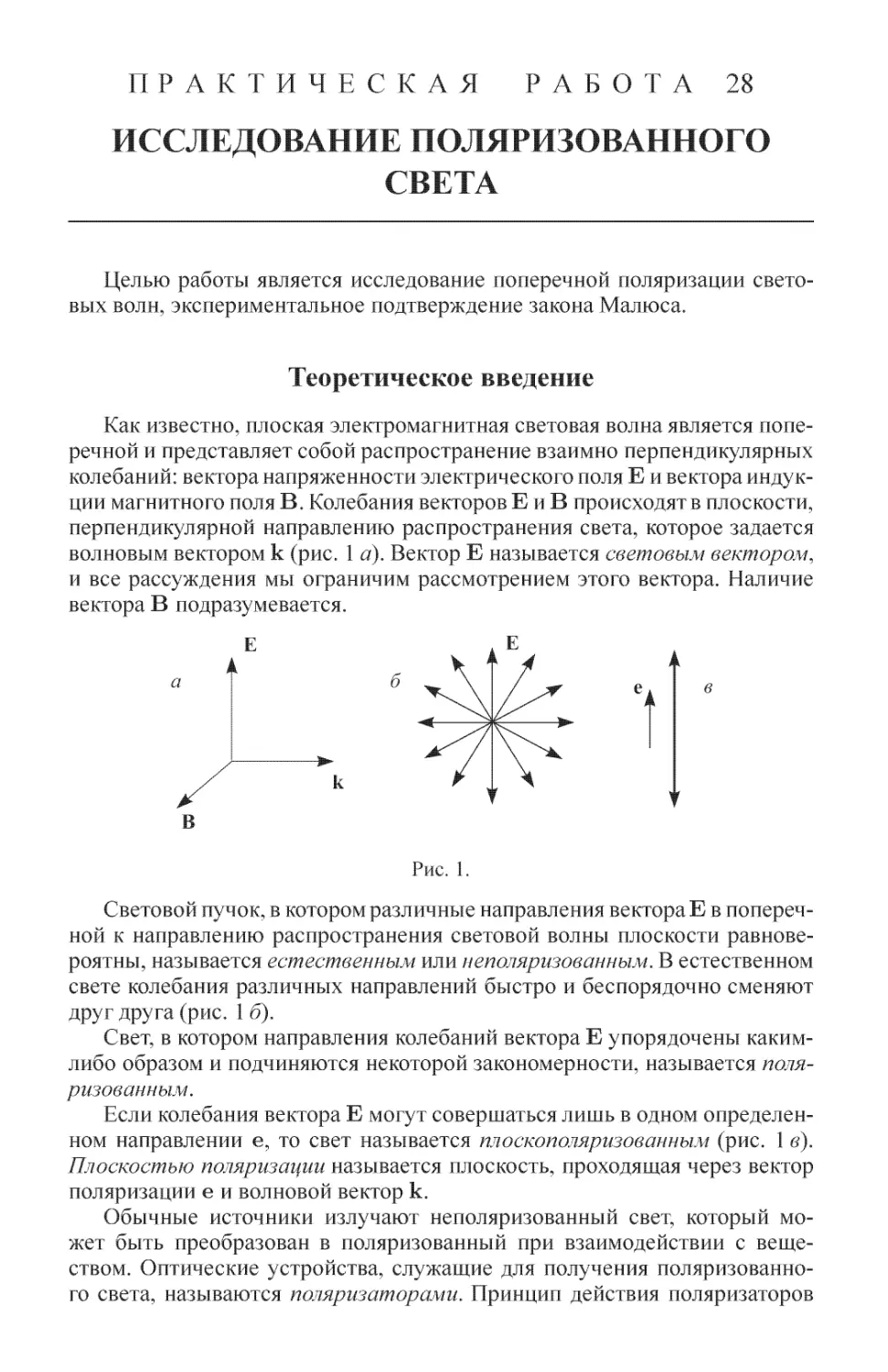
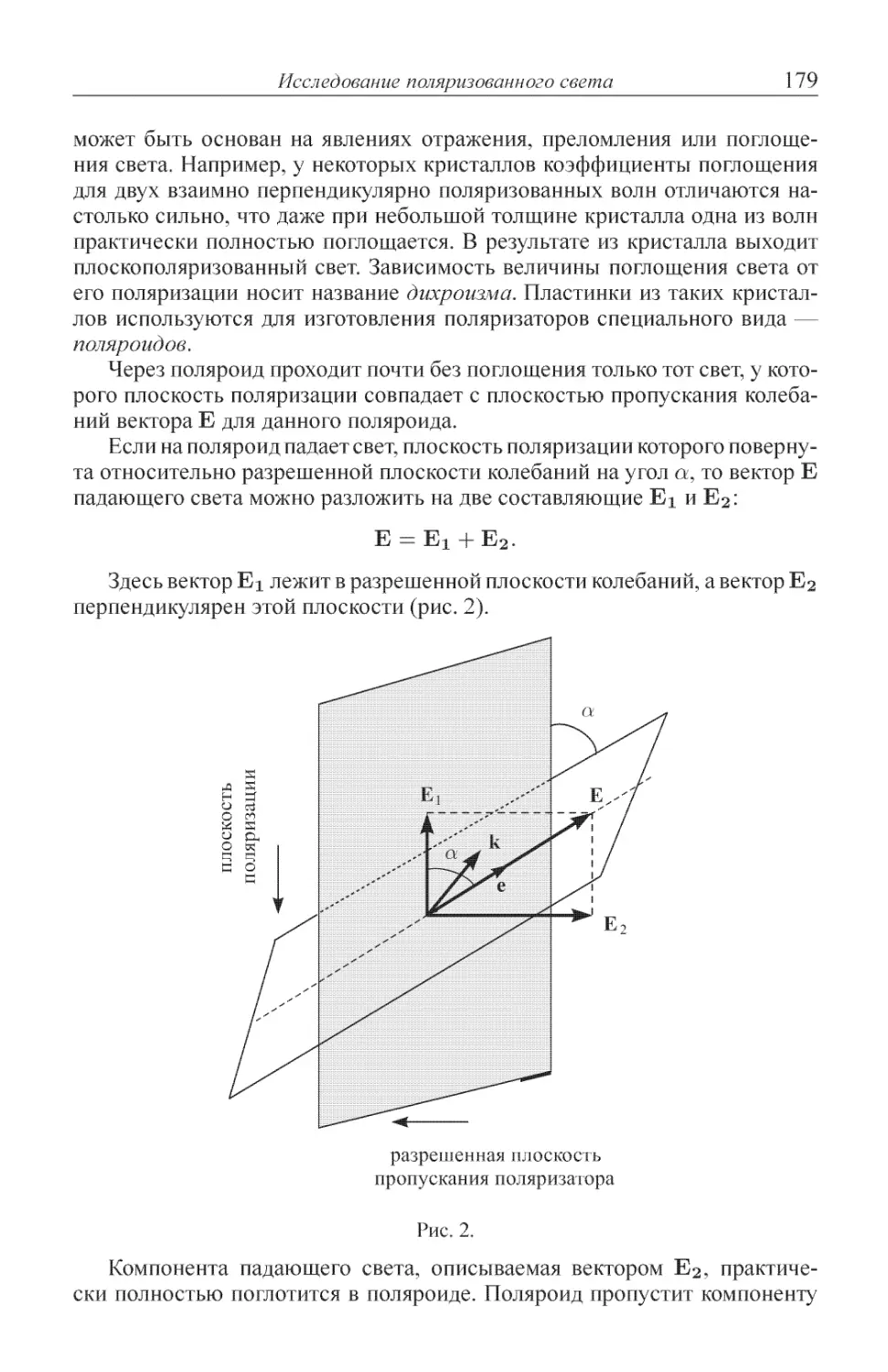
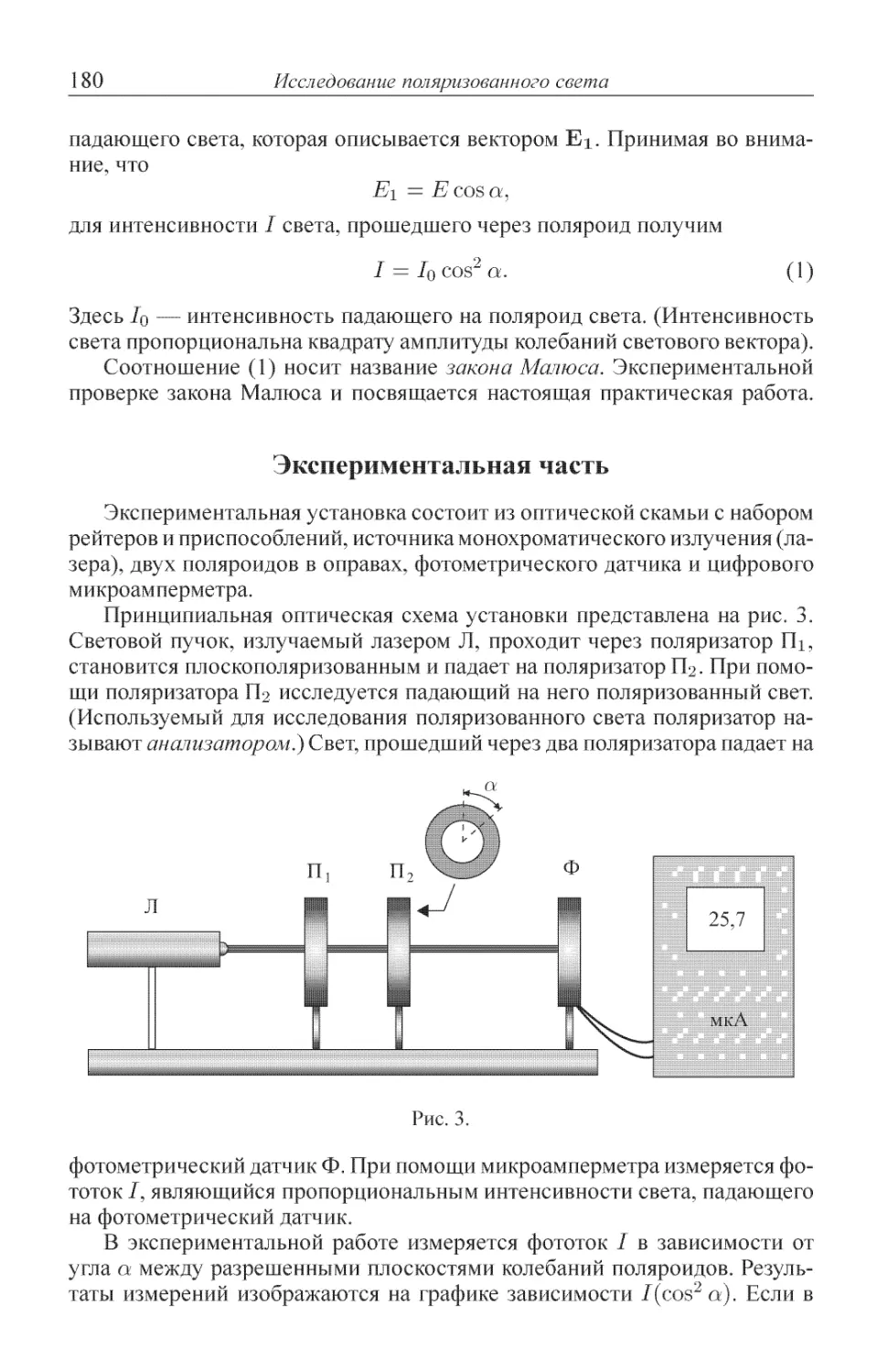
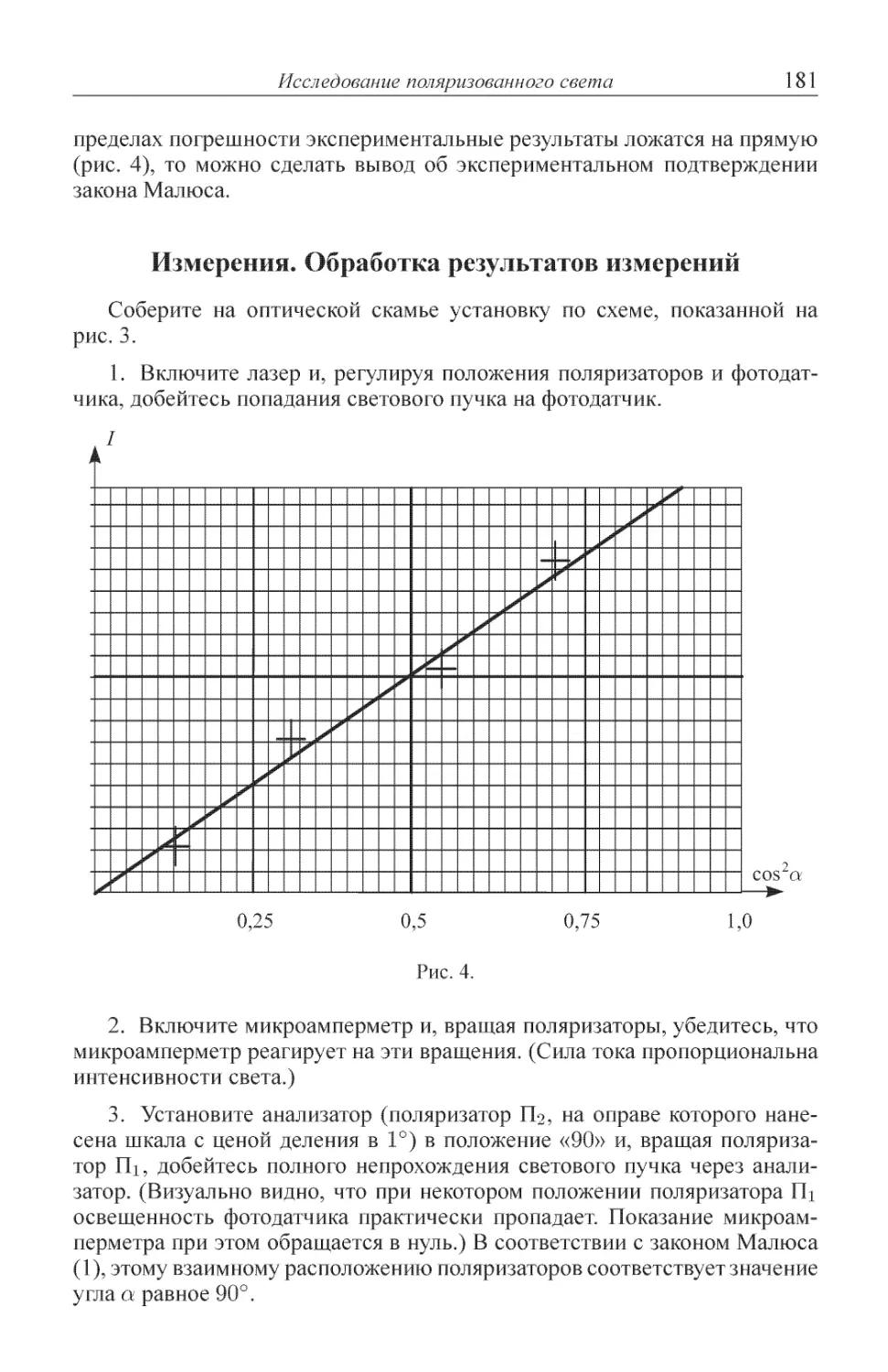
Text
ШУТОВ В. И., СУХОВ В. Г., ПОДЛЕСНЫИ Д. В.
ЭКСПЕРИМЕНТАЛЬНАЯ
ФИЗИКА
ФИЗМАТЛИТ 2005
УДК 53@7.07)
ББК 22.317я 721
Ш97
Шутов В. П., Сухов В. Г., Подлесный Д. В. Эксперимент
в физике. Физический практикум. — М.: ФИЗМАТЛИТ, 2005. — 184 с. —
ISBN 5-9221-0632-5.
Описаны экспериментальные работы, входящие в программу физико-
математических лицеев в рамках физического практикума. Пособие представ-
представляет собой попытку создания единого руководства для проведения практиче-
практических занятий в классах и школах с углубленным изучением физики, а также
для подготовки к экспериментальным турам олимпиад высокого уровня.
Вводный материал традиционно посвящен методам обработки эксперимен-
экспериментальных данных. Описание каждой экспериментальной работы начинается
с теоретического введения. В экспериментальной части приводятся описания
экспериментальных установок и задания, регламентирующие последователь-
последовательность работы учащихся при проведении измерений. Приводятся образцы ра-
рабочих таблиц для записи результатов измерений, рекомендации по методам
обработки и представления результатов и требования к оформлению отчетов.
В конце описаний предлагаются контрольные вопросы, ответы на которые
учащиеся должны подготовить к защите работ.
Для школ и классов с углубленным изучением физики.
© ФИЗМАТЛИТ, 2005
© В. И. Шутов, В. Г. Сухов,
ISBN 5-9221-0632-5 Д. В. Подлесный, 2005
ОГЛАВЛЕНИЕ
Введение ...................................... 5
Погрешности физических величин. Обработка результатов измерений . 7
Практическая работа 1. Измерение объема тел правильной
формы .................................... 16
Практическая работа 2. Исследование прямолинейного движения
тел в поле земного тяготения на машине Атвуда ............ 21
Практическая работа 3. Сухое трение. Определение коэффициен-
коэффициента трения скольжения ........................... 25
Теоретическое введение к работам по колебаниям ............. 31
Практическая работа 4. Изучение колебаний пружинного маят-
маятника ...................................... 36
Практическая работа 5. Изучение колебаний математического
маятника. Определение ускорения свободного падения ........ 42
Практическая работа 6. Изучение колебаний физического маят-
маятника ...................................... 47
Практическая работа 7. Определение моментов инерции тел пра-
правильной формы методом крутильных колебаний ........... 53
Практическая работа 8. Изучение законов вращения твердого тела
на крестообразном маятнике Обербека ................. 59
Практическая работа 9. Определение отношения молярных тепло-
емкостей воздуха .............................. 64
Практическая работа 10. Стоячие волны. Измерение скорости вол-
волны в упругой струне ............................ 70
Практическая работа 11. Определение отношения cp/cv для возду-
воздуха в стоячей звуковой волне ........................ 76
Практическая работа 12. Изучение работы электронного осцил-
осциллографа .................................... 81
Практическая работа 13. Измерение частоты колебаний путем
исследования фигур Лиссажу ....................... 91
4 Оглавление
Практическая работа 14. Определение удельного сопротивления
нихромовой проволоки ........................... 95
Практическая работа 15. Определение сопротивления проводни-
проводников компенсационным методом Уитстона ................ 101
Практическая работа 16. Переходные процессы в конденсаторе.
Определение емкости ............................ 106
Практическая работа 17. Определение напряженности электриче-
электрического поля в цилиндрическом проводнике с током ........... 112
Практическая работа 18. Исследование работы источника в цепи
постоянного тока .............................. 116
Практическая работа 19. Изучение законов отражения и прелом-
преломления света .................................. 123
Практическая работа 20. Определение фокусных расстояний со-
собирающей и рассеивающей линз ..................... 128
Практическая работа 21. Явление электромагнитной индукции.
Исследование магнитного поля соленоида ................ 137
Практическая работа 22. Исследование затухающих колебаний . . 143
Практическая работа 23. Изучение явления резонанса в цепи
переменного тока .............................. 150
Практическая работа 24. Дифракция Фраунгофера на щели.
Измерение ширины щели «волновым методом» ............ 157
Практическая работа 25. Дифракция Фраунгофера. Дифракцион-
Дифракционная решетка как оптический прибор ................... 163
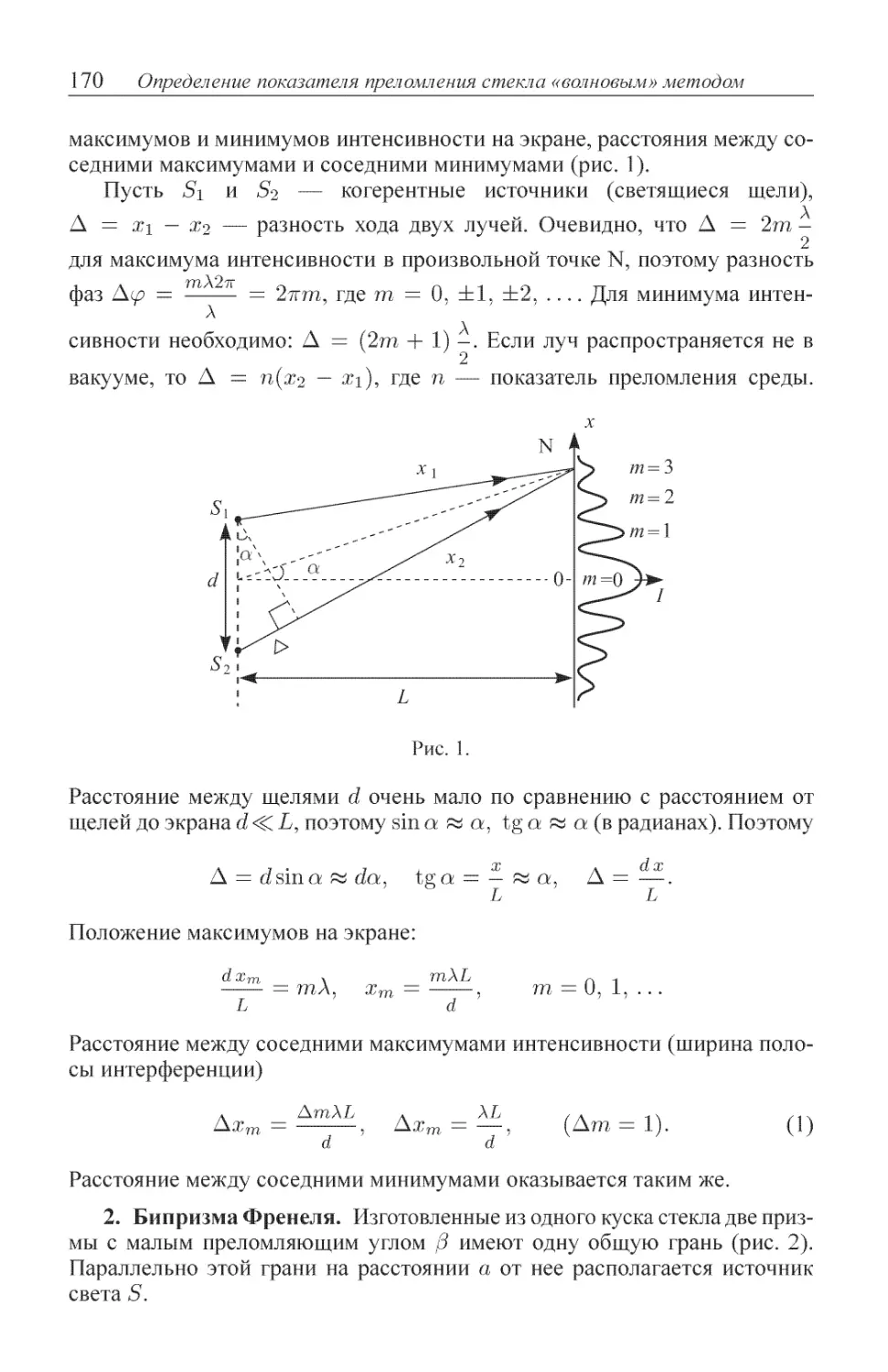
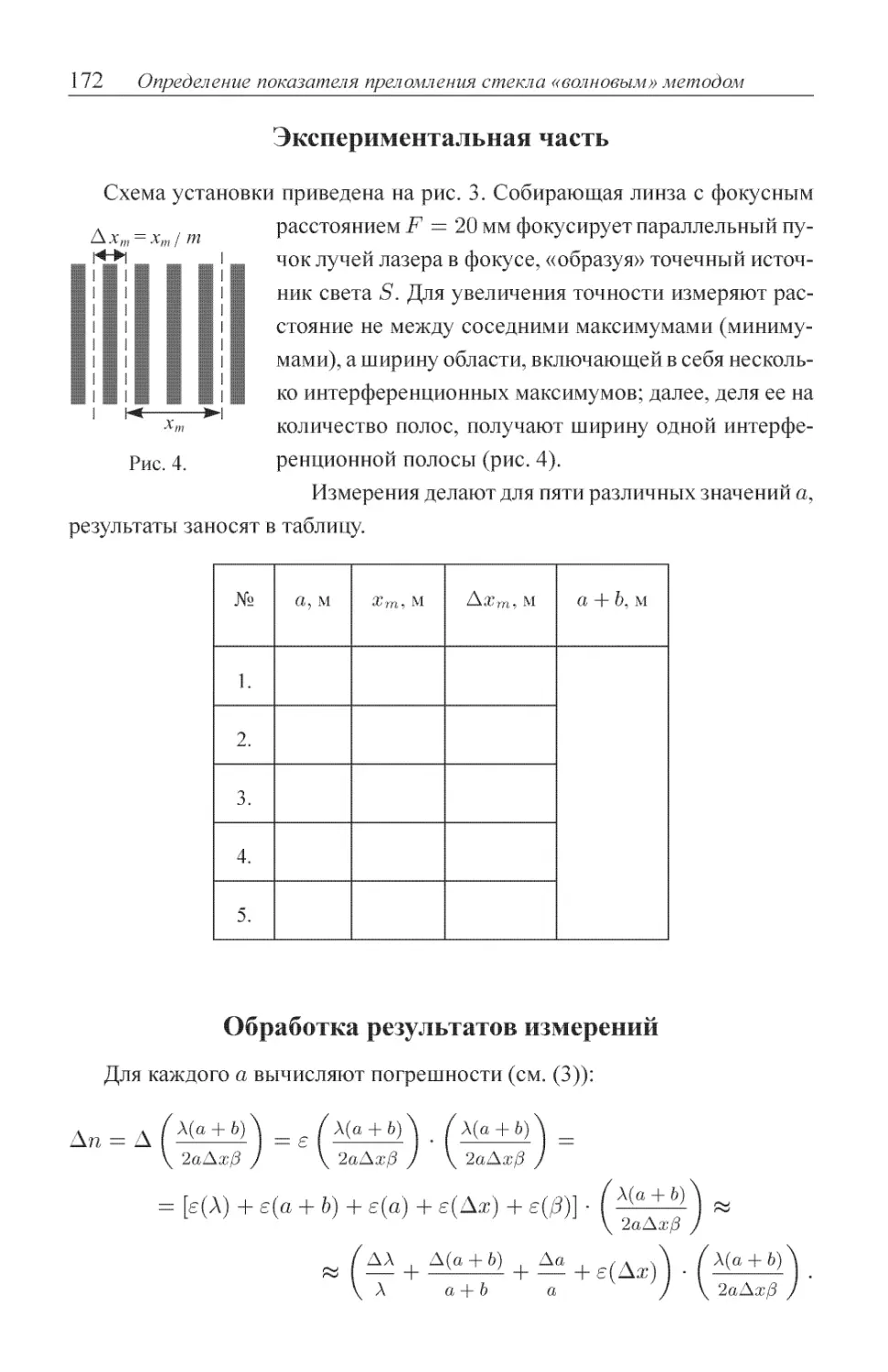
Практическая работа 26. Определение показателя преломления
стекла «волновым» методом ........................ 169
Практическая работа 27. Определение радиуса кривизны линзы в
эксперименте с кольцами Ньютона .................... 174
Практическая работа 28. Исследование поляризованного света . . 178
Литература ..................................... 183
ВВЕДЕНИЕ
Физический практикум является неотъемлемой частью курса физики.
Ясное и глубокое усвоение основных законов физики и ее методов невоз-
невозможно без работы в физической лаборатории, без самостоятельных практи-
практических занятий. В физической лаборатории учащиеся не только проверяют
известные законы физики, но и обучаются работе с физическими прибора-
приборами, овладевают навыками экспериментальной исследовательской деятель-
деятельности, учатся грамотной обработке результатов измерений и критическому
отношению к ним.
Данное пособие представляет собой попытку создания единого руко-
руководства по экспериментальной физике для ведения занятий в физических
лабораториях профильных физико-математических школ и лицеев. Оно рас-
рассчитано на учащихся, не обладающих опытом самостоятельной работы в
физической лаборатории. Поэтому описания работ выполнены подробно
и обстоятельно. Особое внимание уделено теоретическому обоснованию
применяемых экспериментальных методов, вопросам обработки результа-
результатов измерений и оценки их погрешностей.
Описание каждой экспериментальной работы начинается с теоретиче-
теоретического введения. В экспериментальной части каждой работы приводятся
описания экспериментальных установок и задания, регламентирующие по-
последовательность работы учащихся при проведении измерений, образцы
рабочих таблиц для записи результатов измерений и рекомендации по мето-
методам обработки и представления результатов. В конце описаний предлагают-
предлагаются контрольные вопросы, ответы на которые учащиеся должны подготовить
к защите работ.
В среднем за учебный год каждый учащийся должен выполнить 10 —12
экспериментальных работ в соответствии с учебным планом.
Учащийся заранее готовится к выполнению каждой работы. Он должен
изучить описание работы, знать теорию в объеме, указанном в описании,
порядок выполнения работы, иметь предварительно подготовленный ла-
лабораторный журнал с конспектом теории и таблицами, а также, если это
необходимо, иметь миллиметровую бумагу для выполнения прикидочного
графика.
Перед началом выполнения работы учащийся получает допуск к работе.
Примерный перечень вопросов для получения допуска:
1. Цель работы.
2. Основные физические законы, изучаемые в работе.
3. Схема установки и принцип ее действия.
Введение
4. Измеряемые величины и расчетные формулы.
5. Порядок выполнения работы.
Учащиеся, допущенные к выполнению работы, обязаны следовать по-
порядку выполнения строго в соответствии с описанием.
Работа в лаборатории заканчивается выполнением предварительных
расчетов и обсуждением их с преподавателем.
К следующему занятию учащийся самостоятельно заканчивает обработ-
обработку полученных экспериментальных данных, построение графиков и оформ-
оформление отчета.
На защите работы учащийся должен уметь ответить на все вопросы по
теории в полном объеме программы, обосновать принятую методику изме-
измерений и обработки данных, вывести самостоятельно расчетные формулы.
Выполнение работы на этом завершается, выставляется окончательная ито-
итоговая оценка за работу.
Семестровая и годовая оценки выставляются при успешном выполне-
выполнении всех работ в соответствии с учебным планом.
Курс "Экспериментальная физика"практически реализован на комплекс-
комплексном лабораторном оборудовании, разработанном Учебно-методической ла-
лабораторией Московского физико-технического института, включающем в
себя лабораторные комплексы по механике материальной точки, механике
твердого тела, молекулярной физике, электродинамике, геометрической и
физической оптике. Такое оборудование имеется во многих специализиро-
специализированных физико-математических школах и лицеях России.
Коллектив авторов с благодарностью примет конструктивные замечания
и предложения по улучшению курса в техническом и методическом планах.
ПОГРЕШНОСТИ ФИЗИЧЕСКИХ ВЕЛИЧИН.
ОБРАБОТКА РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ
Измерить физическую величину А—значит узнать, сколько раз в А (зна-
(значение физической величины) содержится единица измерения а . Тогда А
можно представить как па . Измерения могут быть прямыми и косвенными.
измерения
прямые
косвенные
В прямы а и.лмсрсм.имА значение физической величины считывается не-
непосредственно со шкалы прибора. Например, измерение длины с помощью
линейки, измерение силы тока амперметром.
При косвенных измерениях значения физической величины определя-
определяются по формулам, выражающим какие-то законы. Например, для измере-
измерения площади круга необходимо сделать прямые измерения диаметра, тогда
площадь вычисляется косвенно по известной формуле S = .
Измерения, проводимые в физической лаборатории с целью проверки
физических законов и определения физических величин и характеристик,
дают, как правило, только приближенные значения.
В результате однократного измерения физической величины х получа-
получается значение х эшт , отличающееся от истинного значения, которое неиз-
неизвестно.
Величина отклонения Ах называется абсолютной погрешностью из-
измерения.
Погрешности прямых измерений
Самыми распространенными являются систематические погрешности,
которые при повторных измерениях остаются постоянными или изменяются
по определенному закону. При этом результаты измерений оказываются во
всех опытах либо завышенными, либо заниженными.
8 Погрешности физических величин. Обработка результатов измерений
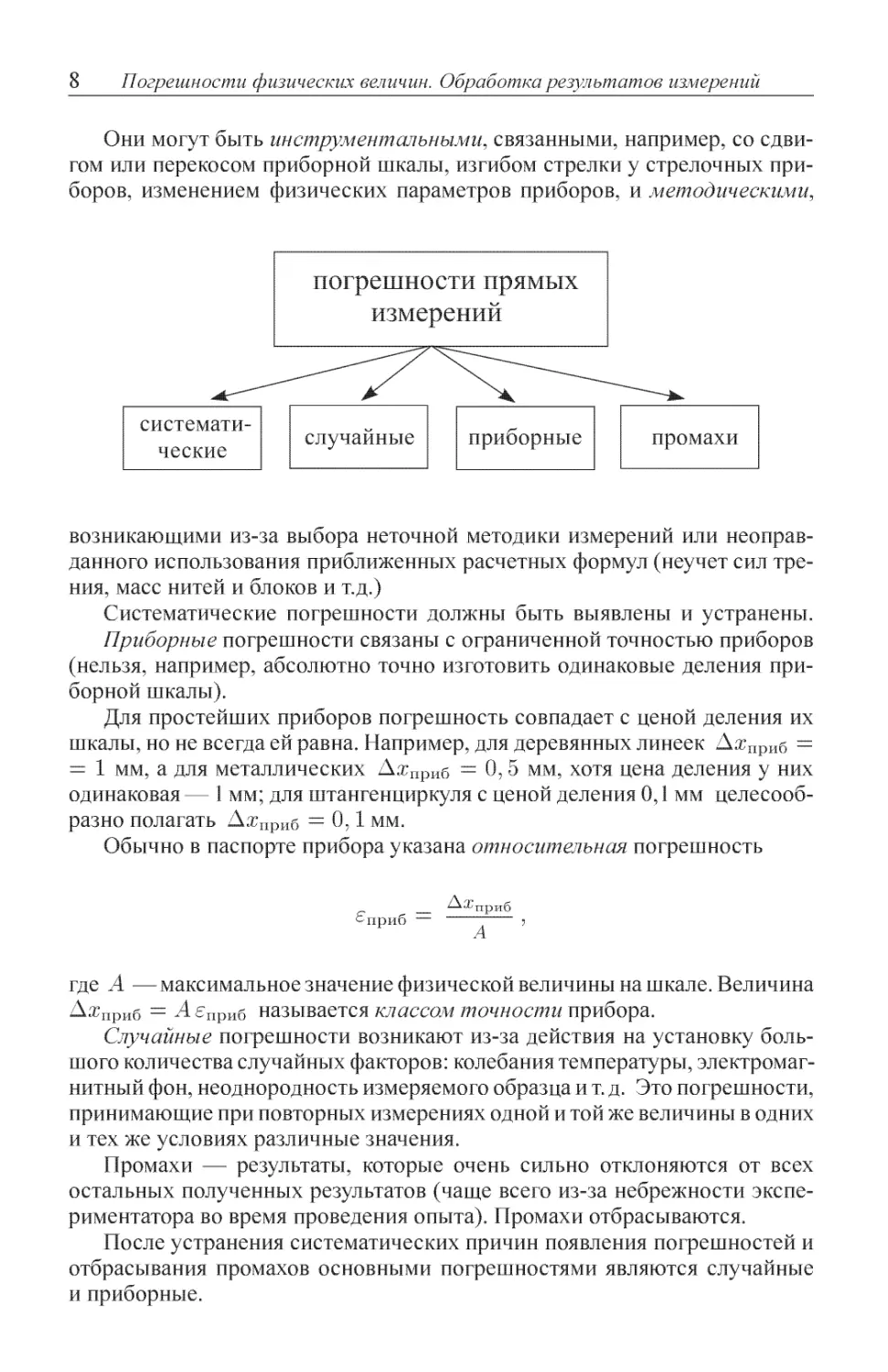
Они могут быть инструментальными, связанными, например, со сдви-
сдвигом или перекосом приборной шкалы, изгибом стрелки у стрелочных при-
приборов, изменением физических параметров приборов, и методическими,
погрешности прямых
измерений
системати-
систематические
случайные
приборные
промахи
возникающими из-за выбора неточной методики измерений или неоправ-
неоправданного использования приближенных расчетных формул (неучет сил тре-
трения, масс нитей и блоков и т.д.)
Систематические погрешности должны быть выявлены и устранены.
Приборные погрешности связаны с ограниченной точностью приборов
(нельзя, например, абсолютно точно изготовить одинаковые деления при-
приборной шкалы).
Для простейших приборов погрешность совпадает с ценой деления их
шкалы, но не всегда ей равна. Например, для деревянных линеек Ажприб =
= 1 мм, а для металлических Ахприб = 0,5 мм, хотя цена деления у них
одинаковая — 1 мм; для штангенциркуля с ценой деления 0,1 мм целесооб-
целесообразно полагать Ажприб — 0,1 мм.
Обычно в паспорте прибора указана относительная погрешность
-приб —
Лт
iLJ-dL/n
где А — максимальное значение физической величины на шкале. Величина
Аждриб = А еПриб называется классом точности прибора.
Случайные погрешности возникают из-за действия на установку боль-
большого количества случайных факторов: колебания температуры, электромаг-
электромагнитный фон, неоднородность измеряемого образца и т. д. Это погрешности,
принимающие при повторных измерениях одной и той же величины в одних
и тех же условиях различные значения.
Промахи — результаты, которые очень сильно отклоняются от всех
остальных полученных результатов (чаще всего из-за небрежности экспе-
экспериментатора во время проведения опыта). Промахи отбрасываются.
После устранения систематических причин появления погрешностей и
отбрасывания промахов основными погрешностями являются случайные
и приборные.
Погрешности физических величин. Обработка результатов измерений 9
Расчет случайных погрешностей прямых измерений
Поскольку истинное значение физической величины неизвестно, за наи-
наиболее близкое к истинному принимается среднее значение величины
Е г
~х (среднее значение х) = — — = -^—. A)
N N
Абсолютные погрешности прямых измерений в силу случайного харак-
характера могут с равной вероятностью принимать положительные и отрица-
отрицательные значения.
Дж1 = х\ —х,
Ах2 = Х2 —X,
Ах3 =хз-х,
АЖ4 = Х4 — Ж, И Т. Д.
При большом числе измерений среднее арифметическое случайных по-
погрешностей отдельных измерений стремится к нулю.
д— Аж1 + Дж2 + Аж3 + • • • + AxN ~
N
поэтому за оценку абсолютной случайной погрешности при N измерени-
измерениях х принимают
_
N(N-1) У N(N-1)
Из математической теории погрешностей следует, что при небольшом
числе измерений необходимо ввести так называемый коэффициент Стъю-
дента ta , зависящий от числа измерений N и надежности а . Например,
значение а = 0,95 предполагает, что 95% измерений окажутся в найден-
найденном нами интервале значений измеряемой величины. В этом случае можно
пользоваться приближенной формулой
• + Ах
случ а К/)
Коэффициенты ta для а = 0,95 приведены в таблице 1.
1. Полная абсолютная погрешность. Относительная погрешность.
Полная абсолютная погрешность прямого измерения включает в себя
Джполная = Ах = у (АжслучJ + (АжприбJ. C)
10 Погрешности физических величин. Обработка результатов измерений
Таблица 1
Число измерений N
2
3
4
5
6
7
8
9
10
12,7
4,3
3,2
2,8
2,6
2,4
2,4
2,3
2,3
Можно также использовать несколько завышенную оценку полной аб-
абсолютной погрешности
/\Х W /\ЖСЛуч Н~ ^жприб-
Относительная погрешность считается как
( \ Ах
е(х) = — .
D)
(Функция, относительная или абсолютная погрешность которой вычис-
вычисляется, чаще всего пишется в скобках после соответствующего значка е
или А .)
Пример. Микрометром измеряют диаметр проволоки. Получены сле-
следующие результаты:
N
d, мм
1
2,35
2
2,37
3
2,33
4
2,38
5
2,31
6
2,36
7.
2,30
л B,35 + 2,37 + 2,33 + 2,38 + 2,31 + 2,36 + 2,30) о оло, л
а = = z, o4z (мм),
= 0,041 (мм),
^приб = 0,01 ММ.
Погрешности физических величин. Обработка результатов измерений 11
Ad и 0,041 + 0,01 = 0,051 (мм).
Окончательный результат округляется по приведенным ниже правилам
и записывается как d = 2,34 ± 0,05 мм, e(d) = 0,022 « 2% . Значение
d — любое из интервала d ± Ad.
Погрешности косвенных измерений
Пусть / = /(ж, у) — косвенно измеряемая физическая величина, где
х и у — прямые измерения. Покажем как находить абсолютную погреш-
погрешность функции / в двух важных случаях.
1. Абсолютизм ошибка суммы (разности) физических величин.
Пусть / = х + у (/ = х — у). В отличие от приращений погрешности
складываются (накапливаются).
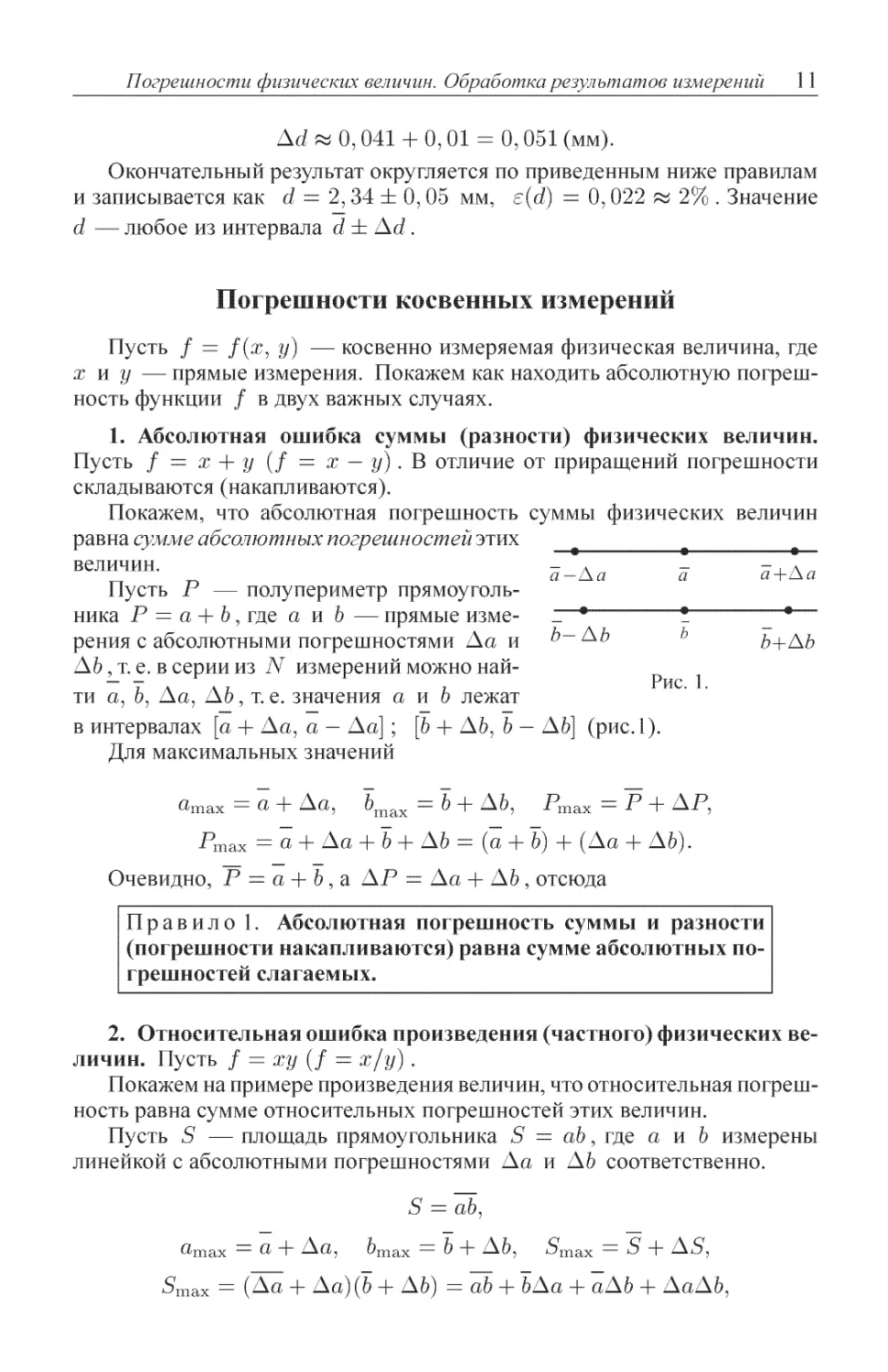
Покажем, что абсолютная погрешность суммы физических величин
равна сумме абсолютных погрешностей этих
ВеЛИЧИН" D а-Аа а а+Аа
Пусть Р — полупериметр прямоуголь-
прямоугольника Р = а + Ъ, где а и Ъ — прямые изме- _ • • •
рения с абсолютными погрешностями Да и Ъ- АЬ ь Ь+АЬ
АЪ, т. е. в серии из N измерений можно най-
найти а, Ь, Да, ДЬ, т.е. значения а и Ь лежат
в интервалах [а + Аа, а — Аа] ; [Ь + ДЬ, Ь — АЪ] (рис.1).
Для максимальных значений
«max = а + Ащ Ьтах = Ъ + АЬ, Ртах =15
Ртах = а + Аа + Ъ + ДЬ = (а + Ъ) + (Аа + АЬ).
Очевидно, Р = а + Ь, а АР = Аа + АЬ, отсюда
Правило 1. Абсолютная погрешность суммы и разности
(погрешности накапливаются) равна сумме абсолютных по-
погрешностей слагаемых.
2. Относительная ошибка произведении (частного) физических ве-
величин. Пусть / = ху (/ = х/у).
Покажем на примере произведения величин, что относительная погреш-
погрешность равна сумме относительных погрешностей этих величин.
Пусть S — площадь прямоугольника S = аЪ, где а и Ъ измерены
линейкой с абсолютными погрешностями Аа т. АЪ соответственно.
S = аЪ^
«шах = а + Аа, ЬП1ах = Ъ + АЬ, 5тах = 5 + AS,
^тах = (Да + Аа)(Ь + АЬ) = аЪ + ЪАа + аАЬ + ДаДЬ,
12 Погрешности физических величин. Обработка результатов измерений
т. к. АаАЬ мало по сравнению с ЬАа и аАЬ, им можно пренебречь и
S'max = ob + ЬАа + аАЬ.
Очевидно AS = ЬАа + аАЬ, и для относительной погрешности получим
/ п\ AS аАЪ -\-ЪАа АЬ , Аа / \ , /i\
e(S)= — = = = + ^ =е(а) + е(Ь).
Ь аи о а
Отсюда следует
Правило 2. Относительная погрешность произведения
(частного) равна сумме относительных ошибок сомножи-
сомножителей.
Только этих двух правил достаточно для вычисления абсолютных и
относительных погрешностей наиболее часто встречающихся функций.
Примеры.
1. Пусть f(x) = ахп , где а и п —постоянные величины.
Применяя правило для подсчета относительной погрешности произве-
произведения, получим
e(f) = е{а) + е(х)п = е(а) + е{х) + ... + е{х) = е{а) + пе{х) = пе(х).
Вычисляем абсолютную погрешность как
1. Пусть /(ж, у) = ах + by2 .
Применяя правило для подсчета абсолютной погрешности суммы
ж, у) = А(
= ^аШ + ^-Ьу 2 = аАх + 2ЬуАу,
e(f)= ^L = аАх + 2
/
х + Ьу2
/ ах + Ьу
В таблице 2 приведены формулы определения погрешностей наиболее
часто встречающихся функций.
Погрешности физических величин. Обработка результатов измерений 13
Таблица 2
№
1.
2_
3.
4.
5.
6.
7.
ж + а
аж
ажп
ах
In ж
sin ж
COS Ж
А/
Аж
аДж
<тж(п-1}Дж
/Аж1п(а)
Д(ж)
ж
Ажсовж
Ажвтж
е(/)
Аж
х + а
Аж
ж
Аж
п
ж
Аж1п(а)
Аж
ж In ж
Axctgx
Aжtgж
Для строгого определения абсолютных погрешностей функций необхо-
необходимо познакомиться с основами дифференциального исчисления.
Абсолютная погрешность для функции /(ж, у, z, ...) вычисляется как
где х, у, z, ... — средние значения прямых измерений, Аж и Аж —
полные абсолютные погрешности.
3. Построение графиков. При построении графиков необходимо учи-
учитывать, что для экспериментального результата мы получаем не точку, а
прямоугольник со сторонами 2Аж и 2Ау, где Аж и Ау откладывают-
откладываются от точки, изображающей среднее значение величины («прямоугольник
ошибок»).
Поэтому при построении графиков необходимо проводить плавную ли-
линию так, чтобы примерно одинаковое количество точек оказалось по разные
ее стороны (рис. 2 а).
14 Погрешности физических величин. Обработка результатов измерений
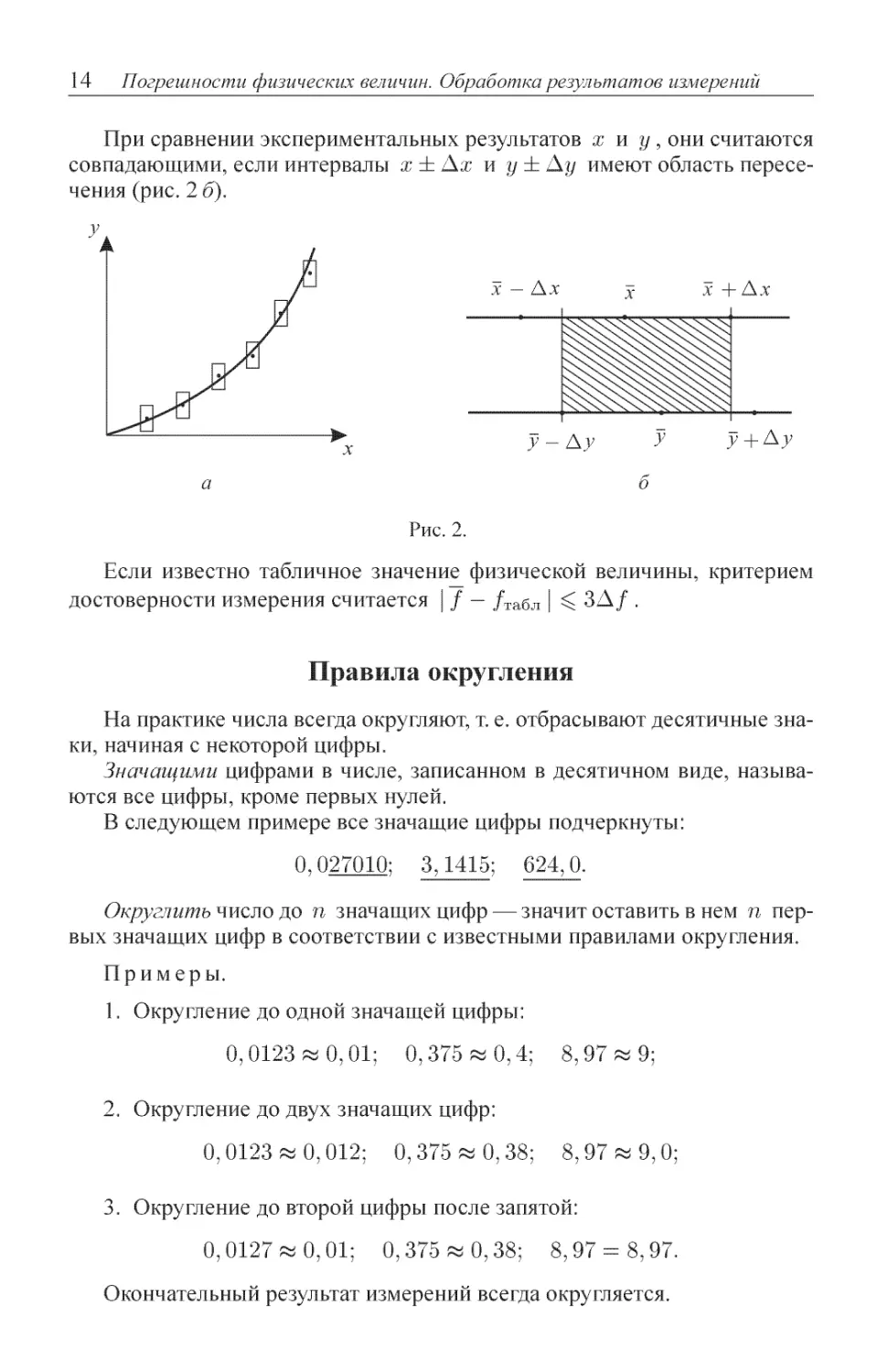
При сравнении экспериментальных результатов х и у , они считаются
совпадающими, если интервалы х ± Ах и ц± Ау имеют область пересе-
пересечения (рис. 2 б).
х - Ах
х + Ах
у — Ау
У + Ау
Рис. 2.
Если известно табличное значение физической величины, критерием
достоверности измерения считается | / — /табл | ^ ЗА/ .
Правила округления
На практике числа всегда округляют, т. е. отбрасывают десятичные зна-
знаки, начиная с некоторой цифры.
Значащими цифрами в числе, записанном в десятичном виде, называ-
называются все цифры, кроме первых нулей.
В следующем примере все значащие цифры подчеркнуты:
0,027010; 3,1415; 624,0.
Округлить число до п значащих цифр — значит оставить в нем п пер-
первых значащих цифр в соответствии с известными правилами округления.
Примеры.
1. Округление до одной значащей цифры:
0,0123 «0,01; 0,375^0,4; 8,97 «9;
2. Округление до двух значащих цифр:
0,0123 и 0,012; 0,375 и 0,38; 8,97 и 9,0;
3. Округление до второй цифры после запятой:
0,0127 и 05 01; 0,375 и 0,38; 8,97 = 8,97.
Окончательный результат измерений всегда округляется.
Погрешности физических величин. Обработка результатов измерений 15
Сначала округляется абсолютная погрешность окончательного ре-
результата до первой значащей цифры, если она не единица и до двух
цифр, если единица.
Затем округляется среднее значение до той же позиции, что и округ-
округленная абсолютная погрешность.
Так же округляется и относительная погрешность окончательного
результата.
Таким образом окончательный результат записывается как
/ = /±А/, e(f) = ...%.
Примеры.
Пусть х = О,647; Ах = 0,143 ; ф)= 0,231.
Окончательный результат: х = 0,65 ± 0,14 ; е{х) =0,2 = 20%.
Пусть х = 0,0008396; Ах = 0,0000974; е(х) = 0,126.
Окончательный результат:
х = 0,0008 ± 0,0001, е(х) = 13%,
или
х = (8±1)-10~4, е(х) = 13%.
Правилами подсчета погрешностей можно пользоваться также для нахо-
нахождения малых приращений функций, что находит применение в различных
физических задачах.
ПРАКТИЧЕСКАЯ РАБОТА 1
ИЗМЕРЕНИЕ ОБЪЕМА ТЕЛ ПРАВИЛЬНОЙ
ФОРМЫ
Целью работы является ознакомление с простейшими методами физи-
физических измерений, овладение навыками обработки результатов измерений.
Определяются объемы цилиндра и шара. Непосредственно штанген-
штангенциркулем и микрометром измеряются линейные размеры тел, по которым
определяется объем.
Теоретическое введение
1. Масштаб. Перед началом измерений определяется цена деления
шкалы прибора — число единиц измерения данной физической величи-
величины, приходящихся на одно деление. Простейший пробор для измерения
линейных размеров — линейка или масштаб. На масштабах нанесены
сантиметровые и миллиметровые деления, позволяющие измерить длину
с точностью до 1 мм.
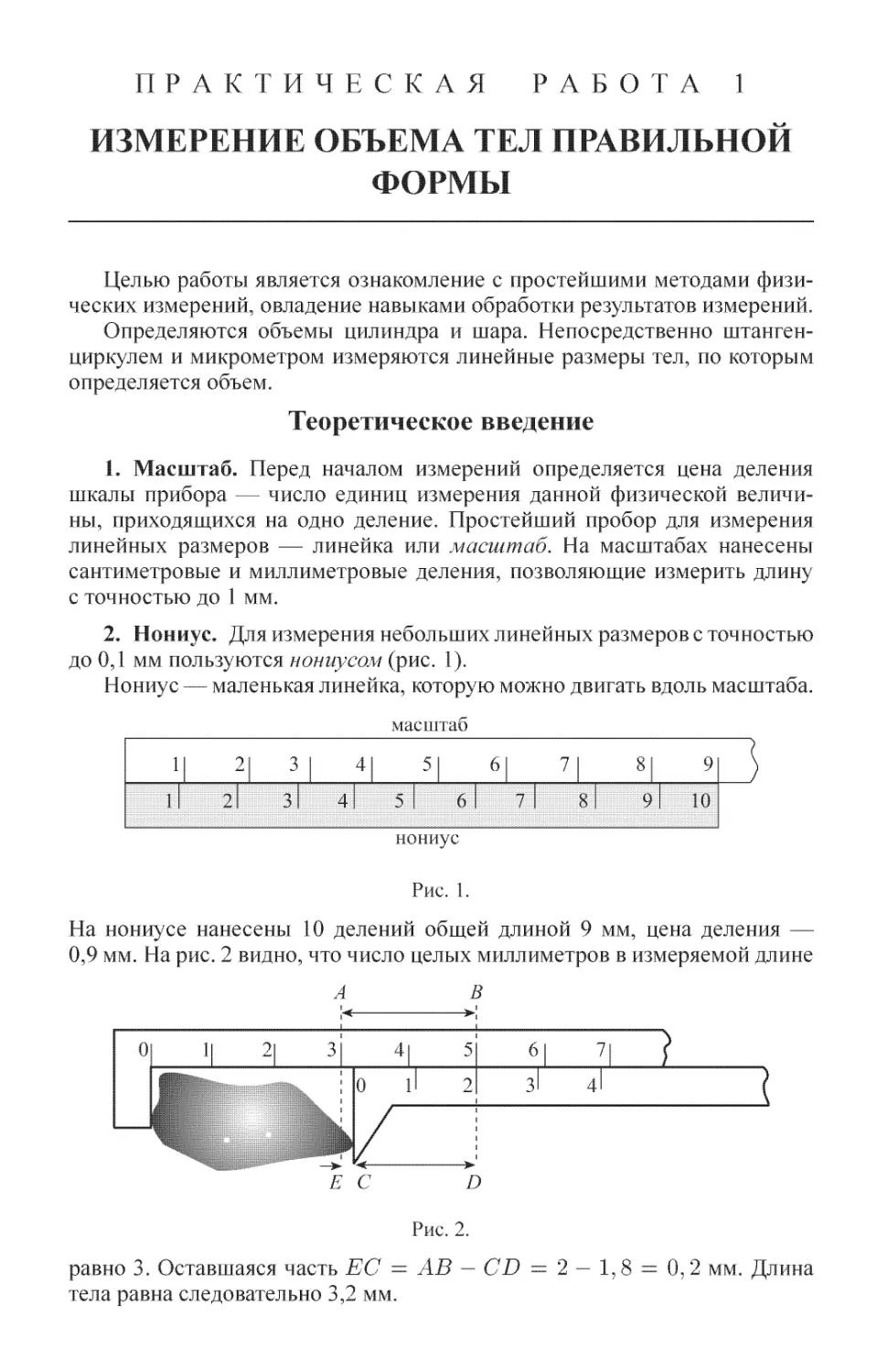
2. Нониус. Для измерения небольших линейных размеров с точностью
до 0,1 мм пользуются нониусом (рис. 1).
Нониус — маленькая линейка, которую можно двигать вдоль масштаба.
масштаб
10
нониус
Рис. 1.
На нониусе нанесены 10 делений общей длиной 9 мм, цена деления —
0,9 мм. На рис. 2 видно, что число целых миллиметров в измеряемой длине
о
1 2
А
3i
0
4I
ll
>]
5
2
6I
з1
71 ?
41 (
Е С
D
Рис. 2.
равно 3. Оставшаяся часть ЕС = АВ — CD = 2 — 1,8 = 0,2 мм. Длина
тела равна следовательно 3,2 мм.
Измерение объема тел правильной формы
17
Число десятых долей миллиметра можно найти быстрее и проще, если
обратить внимание на то, что 2-й штрих нониуса совпал с одним из штрихов
масштаба (у нас — с 5-м), следовательно, сверх целого числа миллиметров
будет две десятых миллиметра.
При такой цене деления нониуса можно пользоваться практическим
правилом:
Число десятых долей миллиметра равно порядко-
порядковому номеру того штриха нониуса, который сов-
совпадает с каким-нибудь штрихом масштаба.
3. Штангенциркуль. Штангенциркуль служит для измерения внеш-
внешнего размера тела (рис. 3 а), измерения внутреннего диаметра отверстия
(рис. 3 б), измерения глубины отверстия (рис. 3 в). Чаще всего штангенцир-
штангенциркуль имеет точность 0,1 мм. Существуют также штангенциркули с точно-
точностью измерения 0,05 мм.
0 1 2
3 4
Illllllllll
Рис. 3.
4. Микрометр. Микрометр способен измерять линейные размеры с
точностью 0,01 мм (рис. 4). Один оборот барабана передвигает винт микро-
микрометра на 0,5 мм. Барабан, связанный с винтом, разбит на 50 делений. Пово-
Поворот на одно деление соответствует смещению винта на 0,01 мм.
F
\ Е
и
с-
ID
В
D — винт
В — трещотка Е — упор
С — стержень F — измеряемый объект
Рис. 4.
18
Измерение объема тел правильной формы
На стержне нанесена линейная миллиметровая шкала (нижняя) и сдвинутая
относительно нее на 0,5 мм вторая миллиметровая шкала (верхняя). Бли-
Ближайший к барабану штрих показывает целое число миллиметров. К нему
нужно прибавить число сотых долей миллиметров, которое соответствует
делению на барабане.
На рис. 4, например
L = 7,00 + 0,30 = 8,30 мм.
Барабан снабжен специальной рукояткой — «трещоткой» (В), позволя-
позволяющей создавать при измерении небольшое давление на измеряемый пред-
предмет. Момент сжатия предмета сопровождается слабым треском. После этого
вращение барабана А недопустимо. Вращать барабан следует только с по™
мощью трещотки!
Экспериментальная часть
Учащиеся определяют объемы двух тел небольших размеров: цилиндра
и шара.
Каждый размер измеряют пять раз. Высота цилиндра, диаметр шара из-
измеряются штангенциркулем, а диаметр цилиндра микрометром. Результаты
записываются в две таблицы для цилиндра и шара соответственно.
Цилиндр
1.
2.
3.
4.
5.
С
Р
е
д
н
и
е
4,мм
1 =
Adi. мм
Ас?^,мм2
Ы, мм
h =
A/ii.MM
Ahf.MM2
Измерение объема тел правильной формы
19
Шар
№
1.
2.
3.
4.
5.
С
Р
е
д
н
и
е
di.MM
1 =
Adi, мм
л 72 2
Adi, мм
Обработка результатов измерений
Все вычисления средних и погрешностей следует проводить с одной-
двумя запасными цифрами с тем, чтобы не накапливать ошибки округления.
Только в окончательном результате следует проводить округление согласно
правилам, описанным во вводном материале по обработке погрешностей
экспериментальных результатов.
Вычисления удобно проводить в следующем порядке:
1. Вычислить средний диаметр d и высоту h цилиндра, случайные и
полные ошибки. За погрешность штангенциркуля принять Априб = 0,1 мм,
а микрометра 0,01 мм.
2. Вычислить средний объем цилиндра: Уц = . Относительную
ошибку вычисляют по формуле s(V) = 2e(d) + e(h) ; абсолютную — по
формуле AV = e(V)V;
/7Tfl
3. Средний объем шара вычисляют по формуле Уш = —-. Относи™
тельную ошибку вычисляют по формуле s(V) = 3e(d), а абсолютную как
AV = e(VJV.
20 Измерение объема тел правильной формы
Представляются окончательные результаты измерений.
V4 = V4± AV, e(V) = ...%.
УШ = УШ± AV, e(V) = ...%.
Контрольные вопросы
• Как устроен нониус? Чему равна точность нониуса?
• Как производятся измерения штангенциркулем?
• Как производятся измерения микрометром?
• Вывести формулу для вычисления абсолютной погрешности объема
прямоугольной пластинки с размерами а, Ь, с с круглым отверстием
в ней радиуса г.
• Вычислить абсолютную погрешность плотности железного шара ра-
радиусом 10,0 ± 0,1 см с концентрической полостью в нем радиуса
5,0 ± 0,1 см, если т = 50, 5 ± 0, 5 г.
ПРАКТИЧЕСКАЯ РАБОТА 2
ИССЛЕДОВАНИЕ ПРЯМОЛИНЕЙНОГО
ДВИЖЕНИЯ ТЕЛ В ПОЛЕ ЗЕМНОГО
ТЯГОТЕНИЯ НА МАШИНЕ АТВУДА
Целью работы является установление на опыте равноускоренного харак-
характера движения грузов на машине Атвуда, а также расчет ускорения свобод-
свободного падения д
Теоретическое введение
Если считать, что сила сопротивления воздуха пренебрежимо мала, то
для падения любого тела второй закон Ньютона выглядит как
mg = ma.
Отсюда независимо от массы g = а. Это свободное падение. Все тела
таким образом свободно падают с одним уско-
ускорением. ш
Время свободного падения тела с высоты
h = 1м t = * — ~ 0,45 с. Такой проме-
V 8
жуток очень трудно измерить. Организовать
большие высоты падения в лаборатории прак-
практически невозможно. Эти трудности позволяет
избежать машина Атвуда. Она замедляет дви-
движение до «удобных скоростей». Конструкция
ее следующая: через легкий блок перекинута
нить, на которой закреплены грузы массой М
каждый. На один из них кладется перегрузок
массой т (рис. 1). Грузы движутся равноуско-
равноускоренно с одинаковыми ускорениями. Согласно
второму закону Ньютона имеем
(
\ (М + т)а = (М + m)g - Г,
Отсюда
a = g-
A)
При т = 0,1 М (так фактически в эксперименте) а
рение а существенно меньше g.
0,05g, т. е. усю>
22
Исследование прямолинейного движения тел на машине Атвуда
Экспериментальная часть
Экспериментально а определяется так: измеряется секундомером вре-
время t9 за которое груз М проходит перемещение h вниз, которое измеряется
обычной миллиметровой линейкой.
Далее по формуле равноускоренного движения с начальной скоростью
vo = 0
2h
а = —.
t2
В эксперименте для пяти различных высот h производятся пять измерений
времени t.
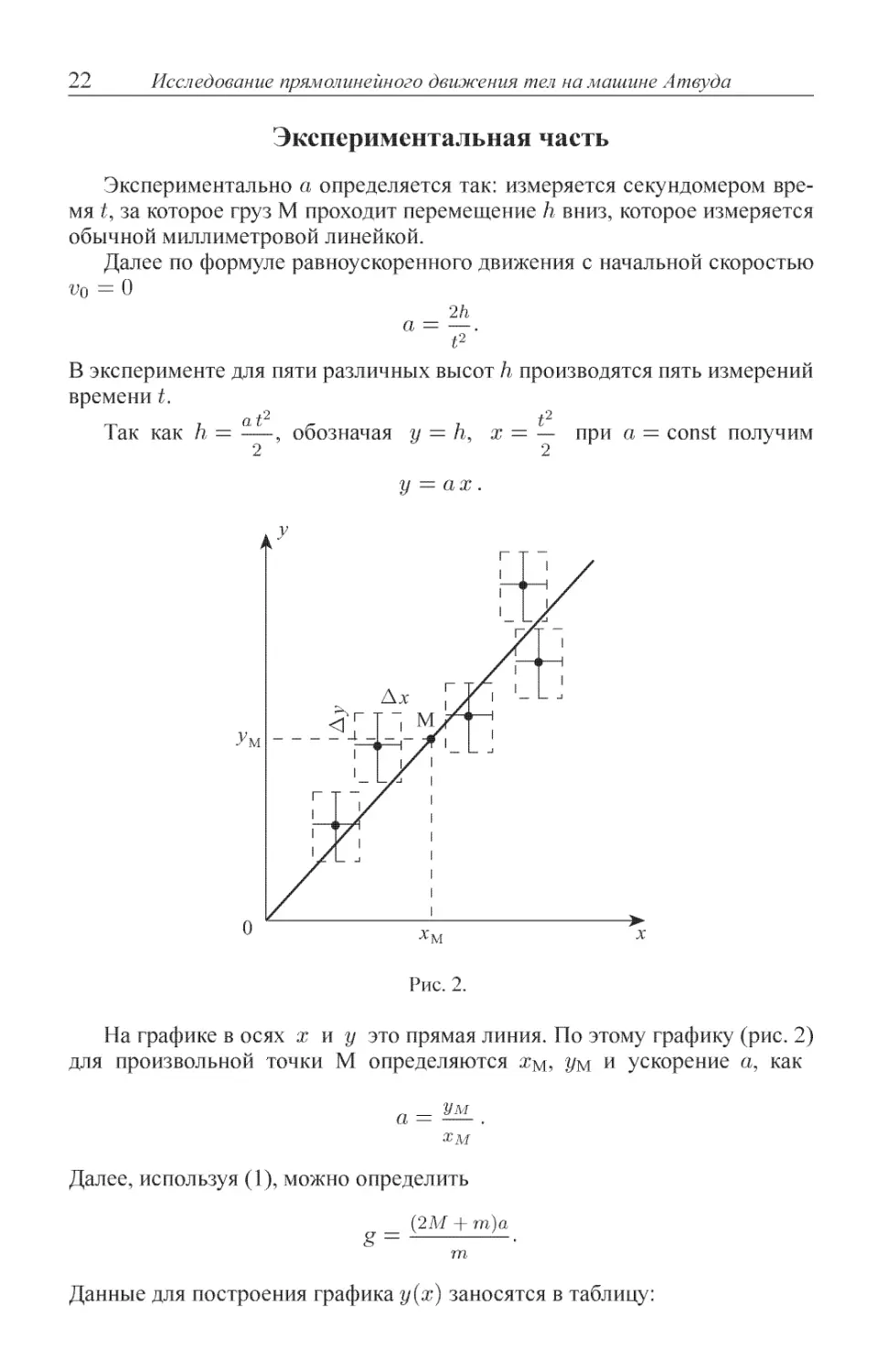
Так как h = —, обозначая у = h, х = — при а = const получим
у = ах.
Ум
u хм х
Рис. 2.
На графике в осях х и у это прямая линия. По этому графику (рис. 2)
для произвольной точки М определяются %, ум и ускорение а, как
а =
Ум
Далее, используя A), можно определить
Данные для построения графика у(х) заносятся в таблицу:
Исследование прямолинейного движения тел на машине Атвуда 23
h, м
ti, с
^2, С
t4, С
t,C
At, с
At2, с2
Примечание. При проведении эксперимента необходимо учесть
и исключить силу трения в оси блока. Поэтому сначала определяют наи-
наибольшую величину «страгивающего перегрузка» ш, еще не вызывающего
движение системы.
Обработка результатов измерений
Для каждой строки таблицы вычисляется точка с « координатами» хиу
по следующей схеме:
1. Вычисление t.
t1+t2+t3+t4+t5
СЛуЧ — Ъа
б » А*случ + Д*приб
За А^приб следует принять 0,2 с (реакция на включение-выключение
секундомера).
2. Вычисление точки графика.
— — t2
у = h, х = —, А|/ = Ah = 1 мм.
е(у) = ^-, е(х) = 2e(t) = ^ , Ах = е(х)х = i At.
у t
Записывается окончательное значение для точки графика:
х = х ± Аж ; е(ж) = ...%,
у = у±Ау; е(у) = ...%.
24 Исследование прямолинейного движения тел на машине Атвуда
3. Построение графика. Вычисление а.
Линия графика проводится так, чтобы она пересекала «прямоугольни-
«прямоугольники» ошибок оптимальным образом (рис. 2). Для произвольной точки гра-
графика определяются значения х и у и вычисляется значение ускорения а:
_ X
а = -.
у
Далее вычисляются относительная и абсолютная погрешности и запи-
записывается окончательный результат:
е(а) = е(у) + е(х), Аа = е(а) а,
а = а±Аа, е(а) = ...%.
4. Вычисление g.
2M + m
g= _ а?
m
2AM , 2MAm , , ч
2M
Средние значения масс и их погрешности должны быть известны.
Окончательный результат: g = g ± Ag = ..., e(g) = ...%.
Выводы
Если | g - ^табл | ^ 3Ag, результат достоверный.
Контрольные вопросы
• Какое движение называется свободным падением?
• От чего зависит и чему равно ускорение свободного падения?
• Оцените массу Земли.
• В чем преимущество предложенного метода исследования движения
тел в поле земного тяготения?
• При каких, упрощающих предположениях выведена формула A)?
• Чем обусловлены случайные погрешности в данной эксперименталь-
экспериментальной работе?
ПРАКТИЧЕСКАЯ РАБОТА 3
СУХОЕ ТРЕНИЕ. ОПРЕДЕЛЕНИЕ
КОЭФФИЦИЕНТА ТРЕНИЯ СКОЛЬЖЕНИЯ
Целью работы является исследование поведения силы сухого трения
при движении тела по наклонной плоскости, а также расчет коэффициента
трения скольжения ц в этом случае.
Теоретическое введение
Трение — неизбежное следствие молекулярного строения тел и обуслов-
обусловлено образованием и разрывом молекулярных связей в зонах микроконтак-
микроконтактов тела и поверхности. Возникающие при этом на молекулярно - атомном
уровне многочисленные явления существенно затрудняют создание общей
теории трения.
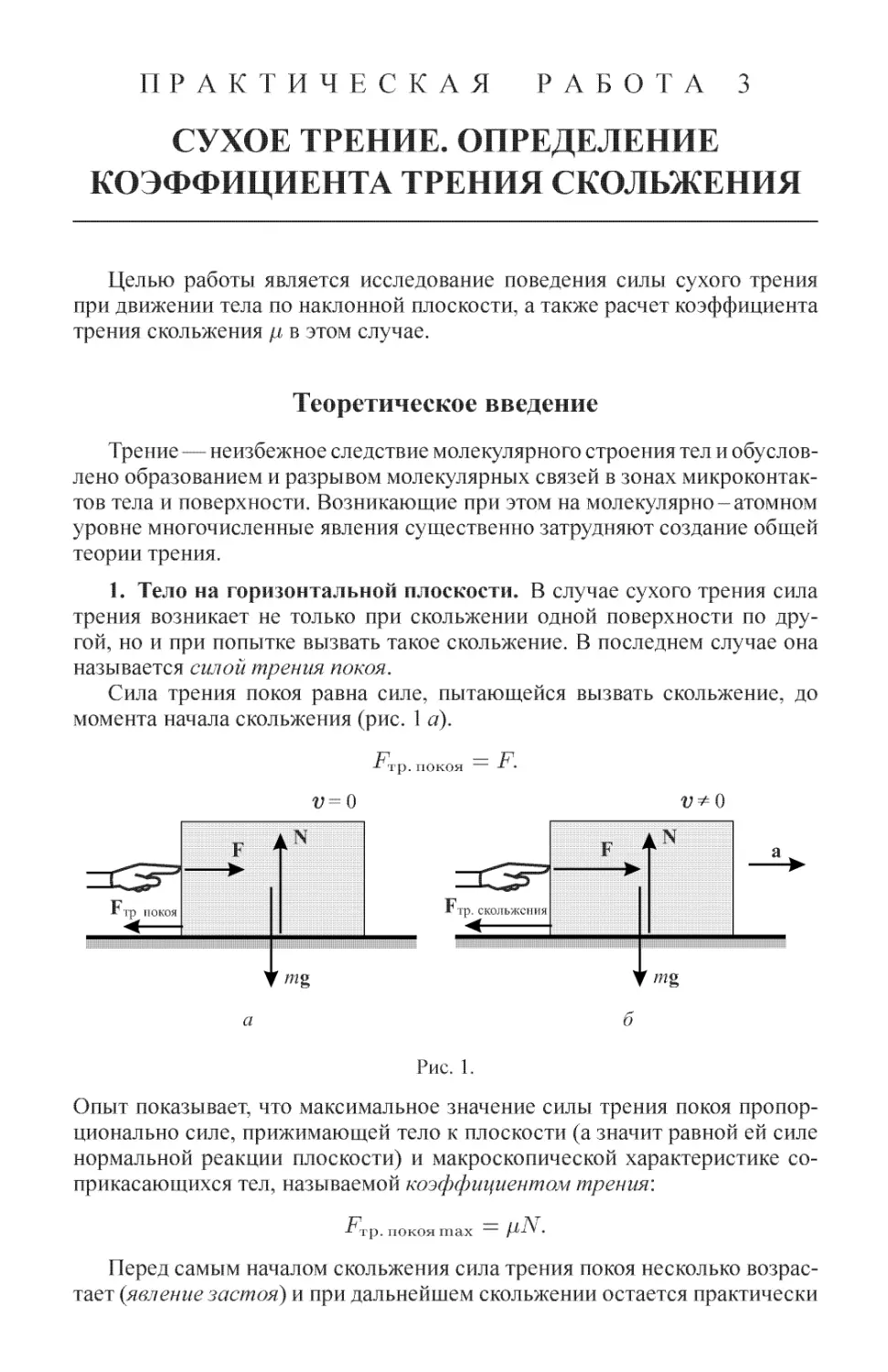
1. Тело на горизонтальной плоскости. В случае сухого трения сила
трения возникает не только при скольжении одной поверхности по дру-
другой, но и при попытке вызвать такое скольжение. В последнем случае она
называется силой трения покоя.
Сила трения покоя равна силе, пытающейся вызвать скольжение, до
момента начала скольжения (рис. 1 а).
Е1 Тр
¦Гтр. покоя — -Г •
mg
Рис. 1.
Опыт показывает, что максимальное значение силы трения покоя пропор-
пропорционально силе, прижимающей тело к плоскости (а значит равной ей силе
нормальной реакции плоскости) и макроскопической характеристике со-
соприкасающихся тел, называемой коэффициентом трения:
А тр. покоя max -
Перед самым началом скольжения сила трения покоя несколько возрас-
возрастает (явление застоя) и при дальнейшем скольжении остается практически
26
Определение коэффициента трения скольжения
равной максимальной силе трения покоя (рис. 1 б).
р. скольжения — ¦&тр. покоя max —
A)
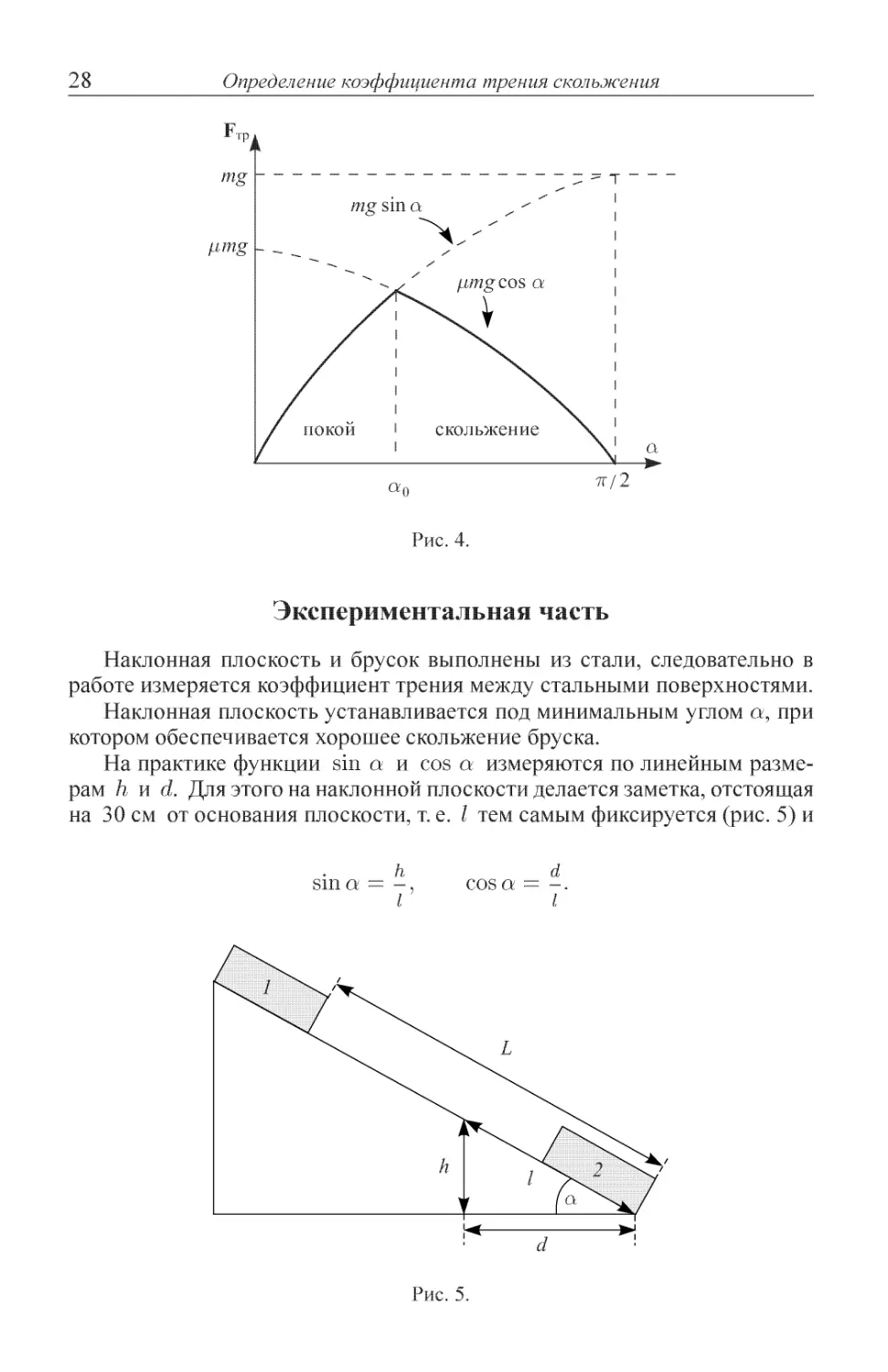
График зависимости силы трения от вынуждающей скольжение силы
приведен на рис. 2. Резкий выступ на графике при переходе к скольже-
скольжению отражает явление застоя.
скольжение
F
Рис. 2.
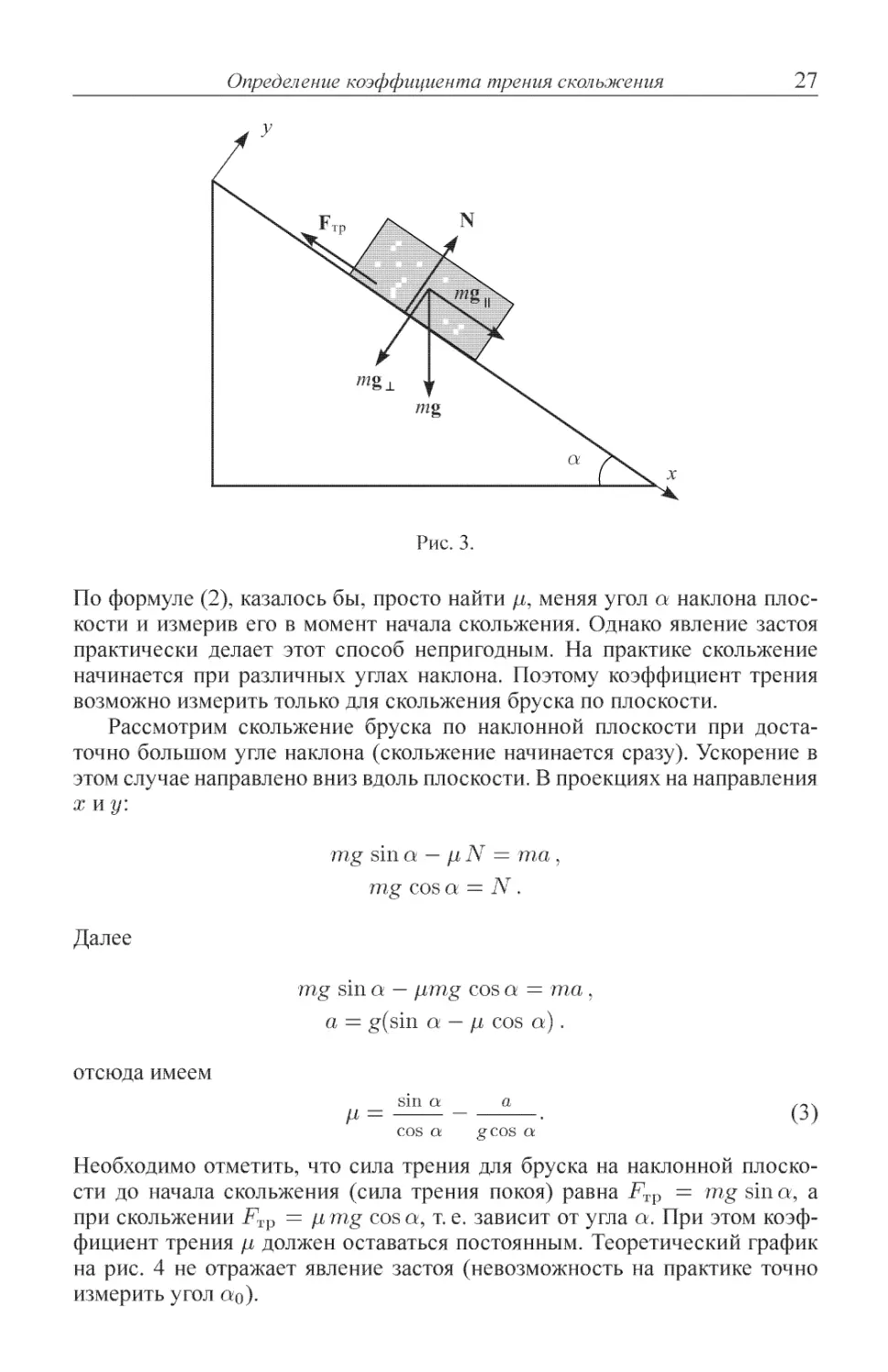
2. Тело на наклонной плоскости. Рассмотрим брусок на плоскости в
момент начала скольжения. Ускорение равно нулю. На брусок действуют в
этот момент три силы: mg, FTp и N. Удобно в этом случае mg представить
суммой двух составляющих сил: вдоль плоскости mg| | (скатывающая сила)
и перпендикулярной ей mg± (прижимающая сила). Из рис. 3 видно, что
= mg sin a ,
mg± = mg cos a .
В проекциях на направления х и у второй закон Ньютона для бруска
выглядит как
mg sin a = FTp ,
mg cos a = N .
ПОСКОЛЬКУ FTp. ПОКОя max = M N, ПОЛуЧИМ
mg sin a = /jl mg cos a , /jl = tg a .
B)
Определение коэффициента трения скольжения
27
N
Рис. 3.
По формуле B), казалось бы, просто найти /х, меняя угол а наклона плос-
плоскости и измерив его в момент начала скольжения. Однако явление застоя
практически делает этот способ непригодным. На практике скольжение
начинается при различных углах наклона. Поэтому коэффициент трения
возможно измерить только для скольжения бруска по плоскости.
Рассмотрим скольжение бруска по наклонной плоскости при доста-
достаточно большом угле наклона (скольжение начинается сразу). Ускорение в
этом случае направлено вниз вдоль плоскости. В проекциях на направления
х и у:
mg sin a — /jlN = та ,
mg cos a = N .
Далее
mg sin a — fimg cos a = ma ,
a = g(s"m a — [i cos a).
отсюда имеем
/i= . C)
cos a gcos a
Необходимо отметить, что сила трения для бруска на наклонной плоско-
плоскости до начала скольжения (сила трения покоя) равна FTp = mg sin a, a
при скольжении FTp = /л mg cos а, т. е. зависит от угла а. При этом коэф-
коэффициент трения /i должен оставаться постоянным. Теоретический график
на рис. 4 не отражает явление застоя (невозможность на практике точно
измерить угол ао).
28
Определение коэффициента трения скольжения
fimg
Рис. 4.
Экспериментальная часть
Наклонная плоскость и брусок выполнены из стали, следовательно в
работе измеряется коэффициент трения между стальными поверхностями.
Наклонная плоскость устанавливается под минимальным углом а, при
котором обеспечивается хорошее скольжение бруска.
На практике функции sin а и cos а измеряются по линейным разме-
размерам h и d. Для этого на наклонной плоскости делается заметка, отстоящая
на 30 см от основания плоскости, т. е. I тем самым фиксируется (рис. 5) и
h
sin a = —
cos a = -.
I
Рис. 5.
Определение коэффициента трения скольжения
29
Таким образом C) можно записать как
h al
fi= - - —.
d gd
D)
Для трех различных углов а измеряются h и d. Для каждого угла
пять раз измеряется время скатывания бруска t. Перемещение по наклонной
плоскости L меньше ее фактической длины на длину бруска (рис. 5).
Результаты заносятся в три одинаковые таблицы для трех различных
углов «1, «2 и «з-
1.
2.
3.
4.
5.
С
Р
е
д
н
и
е
t,c
t =
At, с
Athc2
h, м
Обработка результатов измерений
1. Вычисление t:
7 _
6 —
+12 +13 + и
- tJ + ¦ ¦ ¦ + (t5 - tJ
5 5
За А^приб следует принять 0,2 с (время реакции на включение и выклю-
выключение секундомера).
At =
AtnpH6 = ...
Далее записывается окончательный результат с округлением:
t = t±At, e(t) = ...%.
30 Определение коэффициента трения скольжения
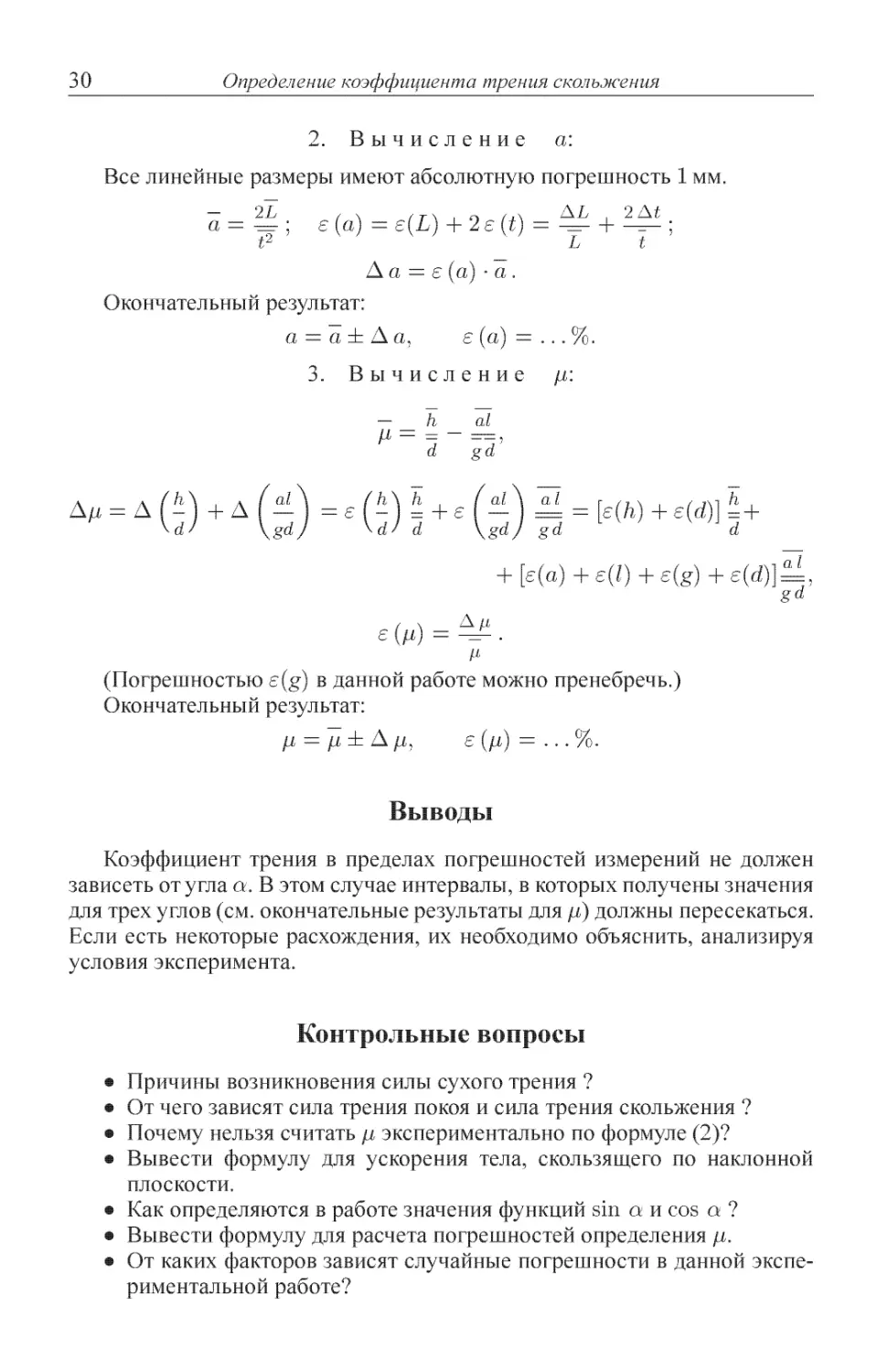
2. Вычисление а:
Все линейные размеры имеют абсолютную погрешность 1 мм.
а = = ; е (а) = ?(L) + 2 е (t) = -=- + ^^ ;
Аа = е (а) • а .
Окончательный результат:
а = а ± А а, ? (а) = ...%.
3. Вычисление //:
- h ~cd
d gd
al \ (h\ h , I al \ al r/i\, / im h
p-d / \dJ a \ pa J pa a
gd) \d/ d \gdj gd
r/\ /f\ / \ / -s\ ~\ Qj I
(Погрешностью e(g) в данной работе можно пренебречь.)
Окончательный результат:
Выводы
Коэффициент трения в пределах погрешностей измерений не должен
зависеть от угла а. В этом случае интервалы, в которых получены значения
для трех углов (см. окончательные результаты для //) должны пересекаться.
Если есть некоторые расхождения, их необходимо объяснить, анализируя
условия эксперимента.
Контрольные вопросы
• Причины возникновения силы сухого трения ?
• От чего зависят сила трения покоя и сила трения скольжения ?
• Почему нельзя считать /л экспериментально по формуле B)?
• Вывести формулу для ускорения тела, скользящего по наклонной
плоскости.
• Как определяются в работе значения функций sin а и cos a ?
• Вывести формулу для расчета погрешностей определения /л.
• От каких факторов зависят случайные погрешности в данной экспе-
экспериментальной работе?
ТЕОРЕТИЧЕСКОЕ ВВЕДЕНИЕ
К РАБОТАМ ПО КОЛЕБАНИЯМ
Колебанием мы называем вид движения, при котором параметры систе-
системы (координаты, скорости и др.) многократно повторяются через равные
промежутки времени.
Для количественного описания колебаний системы необходимо описать
колебания отдельных ее точек.
Будем рассматривать только одномерное движение, когда положение
можно описать одной координатой х как функцией времени x(t).
Периодическим называется движение, при котором любая возможная
координата точки повторяется через строго определенное время Т, назы-
называемое периодом: x(t) = x(t + Т), где t — любой момент времени. (Под
периодом понимается минимальное Т, удовлетворяющее этому условию).
Для характеристики колебаний введем частоту и, как число полных
колебаний за 1 с.
^=—, A)
где N — число полных колебаний за время t. Поскольку период — это
время одного полного колебания, можно записать
Т= — = -. B)
N v
Наиболее распространенным в природе видом колебаний являются гар-
гармонические колебания, происходящие по закону:
x(t) = xm cos (ut + <po), C)
где xm — амплитуда колебаний, т. е. наибольшее отклонение от положения
равновесия, ut + (fo — фаза колебаний, (fo — начальная фаза колебаний,
ш — циклическая (круговая) частота. Найдем связь между и ш и.
При изменении времени на период Т фаза колебания получит прира-
приращение 2тг, равное периоду косинуса:
u(t + T) + (po=Ljt + ipo + 2тг, или шТ = 2тг.
Окончательно получим:
ш = — = 2тг1/ D)
32
Гармонические колебания. Теоретическое введение.
1. Модель, характеризующая основные свойства гармонических
колебаний. Основные свойства, присущие одномерным колебаниям по-
получим с помощью модели материальной точки, равномерно вращающейся
по окружности радиуса г с постоянной скоростью v (рис. 1).
Рис. 1.
Радиус-вектор г, проведенный к материальной точке, образует с осью х
угол (р, который при равномерном вращении с угловой скоростью ш ме-
меняется по закону
(f = OUt + (fo,
где сро — начальный угол между осью х и вектором г. Координата х
изменяется как
х = г cos (р = хт cos (out + (ро). E)
Найдем проекцию ускорения а на ось х. Вектор а направлен к центру
окружности, т. е. противоположно вектору г, поэтому, используя формулу
для центростремительного ускорения, запишем
Следовательно
а = —иг г
ах = —
(а = —, v = иг).
или х + ш2х = О,
F)
где х — вторая производная по времени смещения от положения равнове-
равновесия. Проекция ускорения ах также меняется по гармоническому закону:
ах = х = ^жто;2 cos (cjt + <
Гармонические колебания. Теоретическое введение.
33
Непосредственной подстановкой можно проверить, что решением урав-
уравнения F) является функция, меняющаяся по гармоническому закону C).
Формула F) — уравнение свободных колебаний.
Покажем, что и проекция скорости vx также меняется по гармониче-
гармоническому закону:
= х = v cos f — + ip J = —v sin (p = —шхт sin {uot +
G)
Заметим, что уравнения F) и G) могут быть получены и непосредственным
дифференцированием C) по времени.
2. Частота и период колебаний. Рассмотрим движение горизонталь-
горизонтального пружинного маятника состоящего из невесомой пружины жест-
жесткости к, скрепленной с неподвижной стенкой, и тела массой т,
способного двигаться вдоль оси пру-
жины без трения. Начало оси х
выбрано в положении равновесия
(рис.2).
Уравнение движения тела в про-
проекциях на направление х в любой мо-
момент времени
к
ЛЛЛЛ1
+Хт
тах = i^np ж = -кх,
тах + кх = 0.
(8)
Если положить к/т = о;2, то (8) по
форме совпадает с уравнением F).
Это значит, что тело на пружине со-
совершает гармонические колебания с Рис. 2.
частотой и = \Jk/m.
Частота колебаний ш (а значит и период Т = 2тт/ш) зависят только от
«материальных» характеристик колеблющейся системы.
3. Роль начальных условий. Для того, чтобы система начала колеба-
колебания, необходимо:
а) отклонить грузик от положения равновесия и отпустить;
б) не выводя из положения равновесия, мгновенно сообщить телу ско-
скорость;
в) скомбинировать эти условия.
При t = 0 уравнения E) и G) выглядят как
х@) =х0 =xmcoscp0i (9)
A0)
34 Гармонические колебания. Теоретическое введение.
Поделив уравнения A0) и (9) получим
A. V0 /1 1 \
tg^o = • (II)
Возведя уравнения (9) и A0) в квадрат и сложив их, находим
A2)
Из A1) и A2) видно, что амплитуда смещения от положения равновесия
и начальная фаза колебаний зависят от начальных условий х@) = xq и
Vx@) = Vq.
Пример 1. Начальные условия: х@) = A, vx@) = 0. (Тело т
отклонено от положения равновесия на А, скорость его при этом равна
нулю). Тогда из A1) tg(fo = 0 => ро = 0, из A2) хт = л/А2 = А и
уравнение E) выглядит как
х = A cos cut.
Начальное отклонение А и будет амплитудой колебаний.
Пример 2. Начальные условия: х@) = 0, vx@) = v. (Тело т имеет
скорость v и находится в положении равновесия). Из A1) tg(fo = ^оо
=> (р = —7г/2. Из A2) хт = v/ш. Уравнение E) в этом случае выгля-
выглядит как
х = ( — ) cos (ut——) = ( — ) sino;^ = xm sin (out).
Амплитуда равна хт = v/ou.
Пример 3. Начальные условия: i0 = 0, x@) = A, vx@) = v.
(Тело т отклонено от положения равновесия на А и имеет скорость v).
Тогда из A1) tg(fo = —v/шА, из A2) хт = \/А2 + v2 /ш2у и уравнение
E) выглядит как
х = cos (ujt + axctg(—v/шА)).
Амплитуда, начальная фаза колебаний и вид уравнения E) зависят от
начальных условий.
Все сказанное в этом теоретическом введении является основой для
исследования колебаний пружинного, математического, физического, кру-
крутильного маятников, а также колебательных процессов в электрических
цепях.
Гармонические колебания. Теоретическое введение. 35
Конкретные колебательные системы подробно обсуждаются в теорети-
теоретических введениях к экспериментальным работам.
Контрольные вопросы
• Что такое колебательное движение? Что «колеблется», когда мы го-
говорим о колебаниях?
• Какие условия должны быть выполнены для того, чтобы движение
было колебательным?
• Как с помощью модели гармонических колебаний вывести уравне-
уравнение свободных колебаний, уравнение для смещения, для проекций
скорости и ускорения?
• От чего зависит период гармонических колебаний? Вывести формулу
для периода колебаний пружинного маятника.
• Что такое начальные условия? Какие характеристики колебательных
систем зависят от начальных условий?
• Вывести уравнения для определения амплитуды и начальной фазы
колебаний.
ПРАКТИЧЕСКАЯ РАБОТА 4
ИЗУЧЕНИЕ КОЛЕБАНИЙ ПРУЖИННОГО
МАЯТНИКА
Целью работы является изучение гармонических колебаний пружинно-
пружинного маятника, проверка справедливости формулы для периода гармониче™
ских колебаний Т = 2тг4 /— для периода колебаний, проверка независи-
у /С
мости Т от начальных условий колебаний, связь амплитуды колебаний с
начальными условиями.
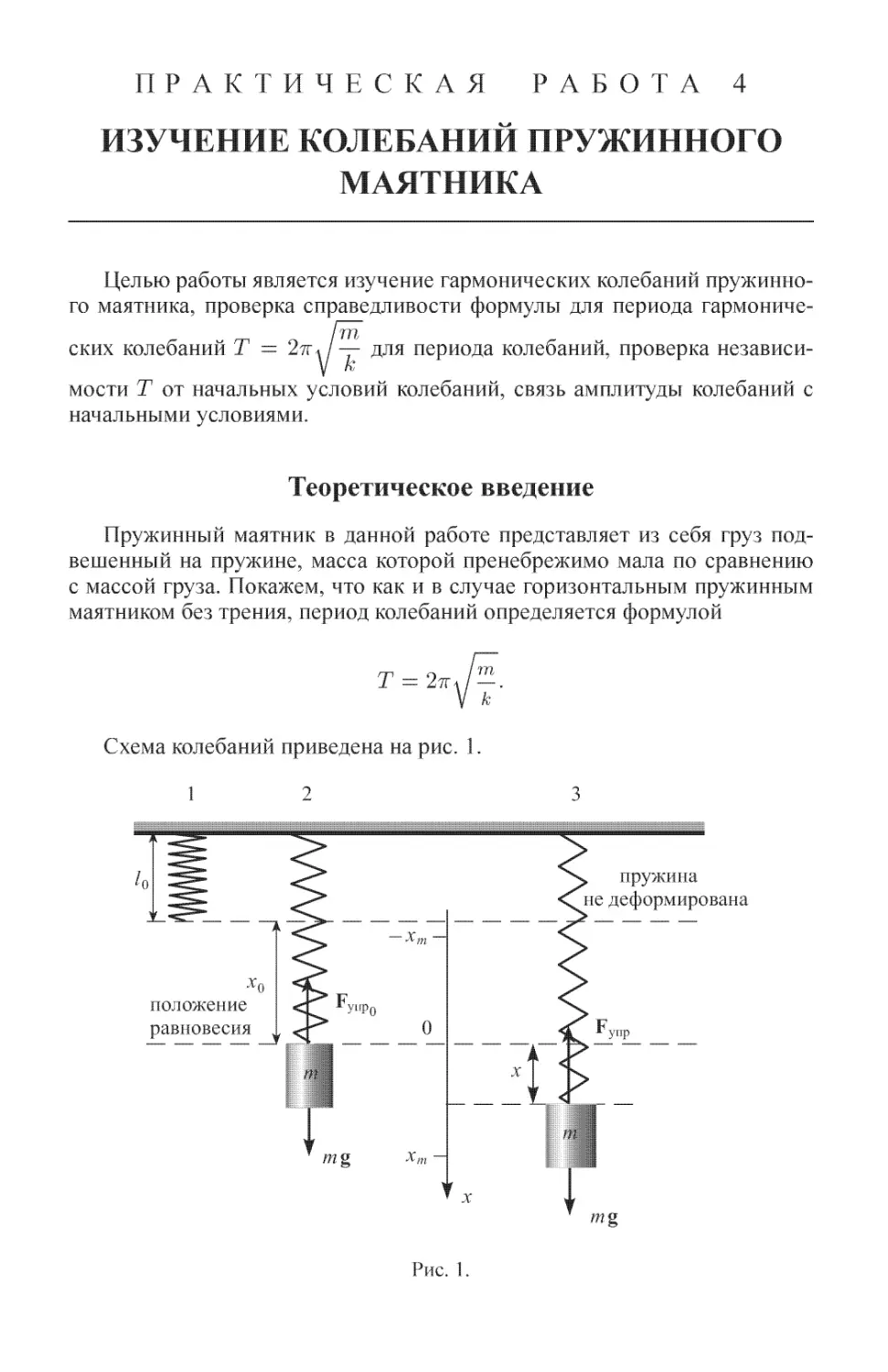
Теоретическое введение
Пружинный маятник в данной работе представляет из себя груз под-
подвешенный на пружине, масса которой пренебрежимо мала по сравнению
с массой груза. Покажем, что как и в случае горизонтальным пружинным
маятником без трения, период колебаний определяется формулой
Схема колебаний приведена на рис. 1.
1 2 3
пружина
не деформирована
Рис. 1.
Изучение колебаний пружинного маятника 37
1. Пружина без груза (не деформирована).
2. Пружина с подвешенным грузом в положении равновесия.
3. Маятник в произвольный момент времени.
В положении равновесия
kx0 = mg. A)
В произвольный момент времени
тах = тх = —к(х + xq) + mg,
или, учитывая A),
тх = —кх.
Это уравнение свободных гармонических колебаний с частотой ш =
= \Jkjm и периодом
i = — = 27Г\ —• B)
w у /с
Частота и период колебаний не зависят от амплитуды, а только от кон-
конструктивных характеристик маятника.
Первая часть работы состоит в экспериментальной проверке этого свой-
свойства гармонических колебаний.
Вторая часть работы посвящена проверке формулы B). При ее выводе
использовались законы динамики Ньютона и упругих деформаций Гука.
Поэтому целью работы можно считать проверку этих законов.
Экспериментальная часть
Упражнение 1. Проверка независимости периода колебаний от
амплитуды.
К пружине подвешивают груз массой т = 200 г. Измеряется время 20
полных колебаний при смещении груза на 1,0, 2,0, 3,0, 4,0 и 5,0 см от
положения равновесия.
Результаты заносят в таблицу 1. По расчетам делается вывод о неза-
независимости периода колебаний от амплитуды в пределах погрешностей
(см. стр. 14).
38
Изучение колебаний пружинного маятника
Таблица'
1.
2.
3.
4.
5.
ж, см
t, с
Тэксп,с
ДТэксп = |,с
NK
20
Период маятника экспериментально находится путем измерения NK
полных колебаний маятника. Приборная погрешность измерения At в основ-
основном определяется временем реакции человека, которое у большинства лю-
людей приблизительно равно 0,2 с.
C)
где t — время NK колебаний.
e(T) = t±L = t±L,
AT - At
LAJ- эксп — •
D)
Упражнение 2. Проверка формулы A) для периода колебаний
пружинного маятника.
Сначала определяется жесткость пружины. Метод понятен из рис. 2.
= 200 г, Ш2 = 300 г, kxo = rrtig кх± =
(
rji2 ~~ mi)
Xi - XQ
42 - mi)
h-h
Изучение колебаний пружинного маятника
39
2-/1
Рис. 2.
Сначала подсчитываете» относительная погрешность, затем абсолют-
абсолютная. Записывается окончательный результат измерения к.
е(к) = e(g) + е(т2 - mi) + е{12 - h) =
Ami +
-mi
h — h
Абсолютные погрешности Ami = Am2 = Am = 0,5 г, All = AI2 =
= AI = 1 мм. Абсолютной погрешностью g можно по сравнению с ни-
ними пренебречь. (В таблицах для нашей местности g = 9,81 ± 0,01 м/с2.)
Поэтому
2Am
2AI
-mi I2 — h
= к±Ак.
После того как жесткость определена, порядок выполнения упражнения
следующий.
1. К пружине подвешивают груз mi = 100 г. Растягивают ее на рас-
расстояние х\ от положения равновесия. Измеряют время 20 колебаний.
2. К пружине подвешивают груз Ш2 = 200 г, пружину растягивают
на расстояние х2 > х\ от положения равновесия. Измеряют время
20 колебаний.
3. К пружине подвешивают груз тз = 300 г, пружину растягивают
на расстояние жз > х2 от положения равновесия. Измеряют время
20 колебаний.
40
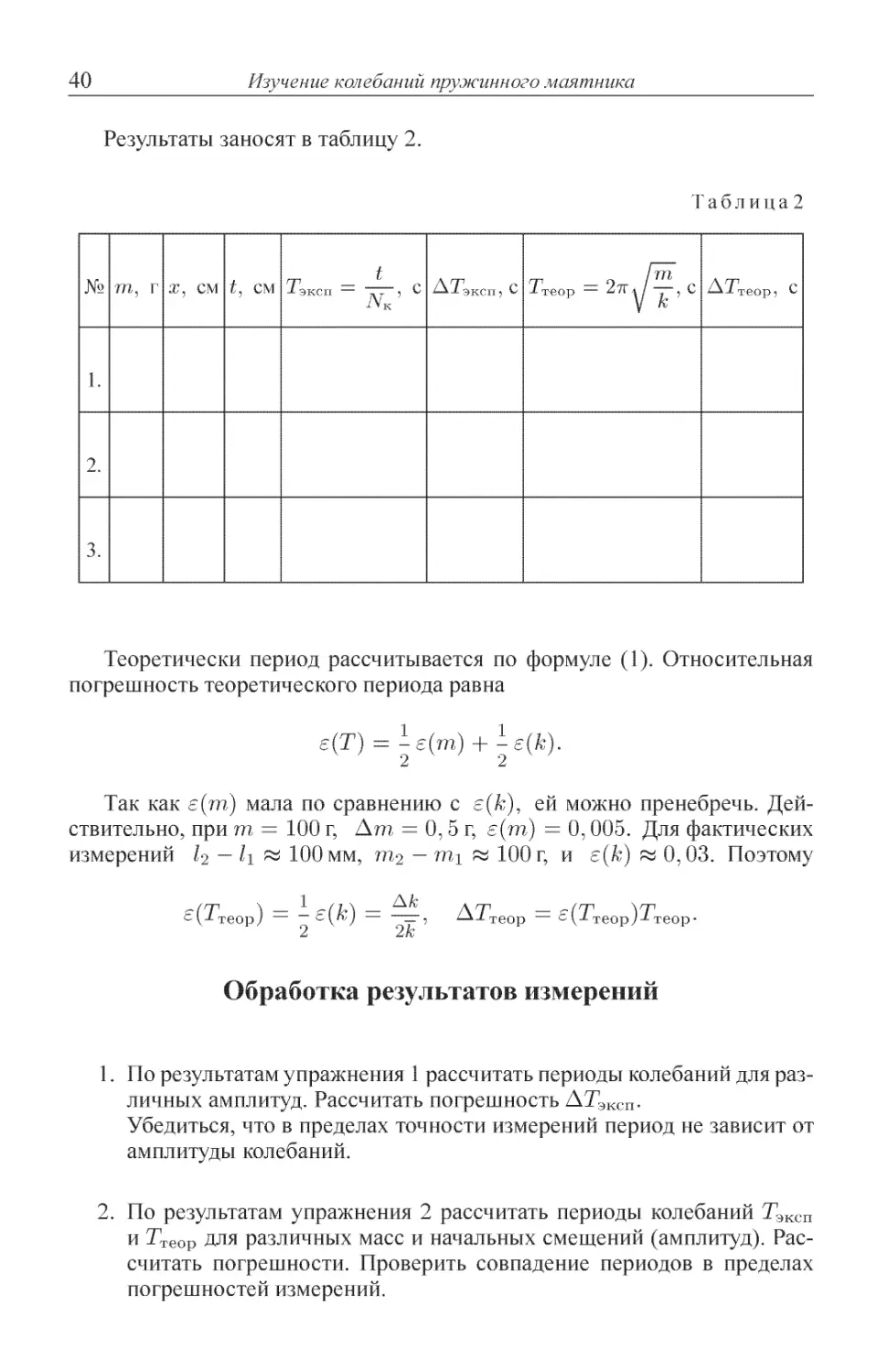
Изучение колебаний пружинного маятника
Результаты заносят в таблицу 2.
Таблица2
№
1.
2
3.
т, г
ж, см
t, см
Гэксп-^, С
"-* ЭКСП5 С
пи _ 9 /™"
-*¦ теор — \/ i ' ^
у "^
"-^теор5 С
Теоретически период рассчитывается по формуле A). Относительная
погрешность теоретического периода равна
Так как е(т) мала по сравнению с е(к), ей можно пренебречь. Дей-
Действительно, при т = 100 г, Am = 0, 5 г, е(т) = 0,005. Для фактических
измерений l^ ~~ h « 100 мм, rri2 — т\ ^ 100 г, и е(к) « 0,03. Поэтому
— ?(л) — -—иг, ZliTeOp —
2 2к
^теор-
Обработка результатов измерений
1. По результатам упражнения 1 рассчитать периоды колебаний для раз™
личных амплитуд. Рассчитать погрешность АТЭКСП.
Убедиться, что в пределах точности измерений период не зависит от
амплитуды колебаний.
2. По результатам упражнения 2 рассчитать периоды колебаний Тэксп
и Ттеор для различных масс и начальных смещений (амплитуд). Рас-
Рассчитать погрешности. Проверить совпадение периодов в пределах
погрешностей измерений.
Изучение колебаний пружинного маятника 41
Контрольные вопросы.
Какие фундаментальные законы физики проверяются в работе?
Вывести уравнения колебаний груза на горизонтальной и вертикаль-
вертикальной пружинной подвеске.
Почему периоды колебаний таких, маятников одинаковы?
Почему период колебаний пружинного маятника не зависит от ам-
амплитуды?
Как выбирается количество колебаний маятника для измерения его
периода?
Вывести уравнение колебаний тела массой т на двух пружинах раз-
разной жесткости при их последовательном соединении тем же методом,
что и в работе. Чему равен период колебаний?
Вывести уравнение колебаний тела массой т на двух пружинах раз-
различной жесткости при их параллельном соединении. Чему равен пе-
период колебаний?
ПРАКТИЧЕСКАЯ РАБОТА 5
ИЗУЧЕНИЕ КОЛЕБАНИЙ
МАТЕМАТИЧЕСКОГО МАЯТНИКА.
ОПРЕДЕЛЕНИЕ УСКОРЕНИЯ СВОБОДНОГО
ПАДЕНИЯ
Целью работы является исследование малых колебаний математическо-
математического маятника. Проверяется справедливость использования модели матема-
математического маятника, вычисляется ускорение свободного падения на основе
этой модели.
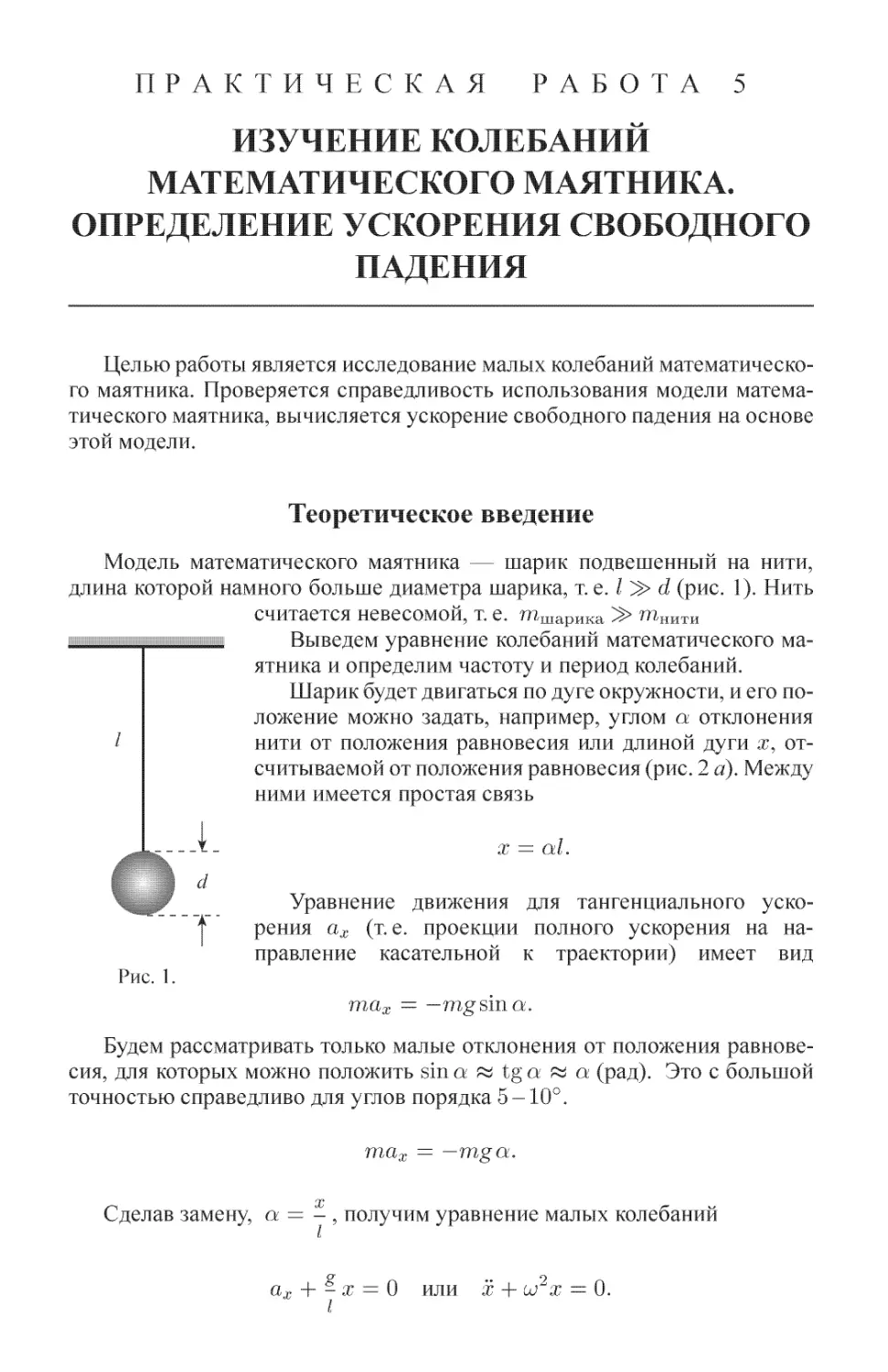
Теоретическое введение
Модель математического маятника — шарик подвешенный на нити,
длина которой намного больше диаметра шарика, т. е. I ^> d (рис. 1). Нить
считается невесомой, т. е. тшарика ^> тнити
Выведем уравнение колебаний математического ма-
маятника и определим частоту и период колебаний.
Шарик будет двигаться по дуге окружности, и его по-
положение можно задать, например, углом а отклонения
нити от положения равновесия или длиной дуги ж, от-
отсчитываемой от положения равновесия (рис. 2 а). Между
ними имеется простая связь
¦~^-~ X — Oil.
d
Уравнение движения для тангенциального уско-
j рения ах (т. е. проекции полного ускорения на на-
направление касательной к траектории) имеет вид
Рис. 1.
тах = —mg sin a.
Будем рассматривать только малые отклонения от положения равнове-
равновесия, для которых можно положить sin«ftitgttwa (рад). Это с большой
точностью справедливо для углов порядка 5-10°.
тах = —mga.
Сделав замену, а = - , получим уравнение малых колебаний
ах + - х = 0 или х + ш х = 0.
Изучение колебаний математического маятника
43
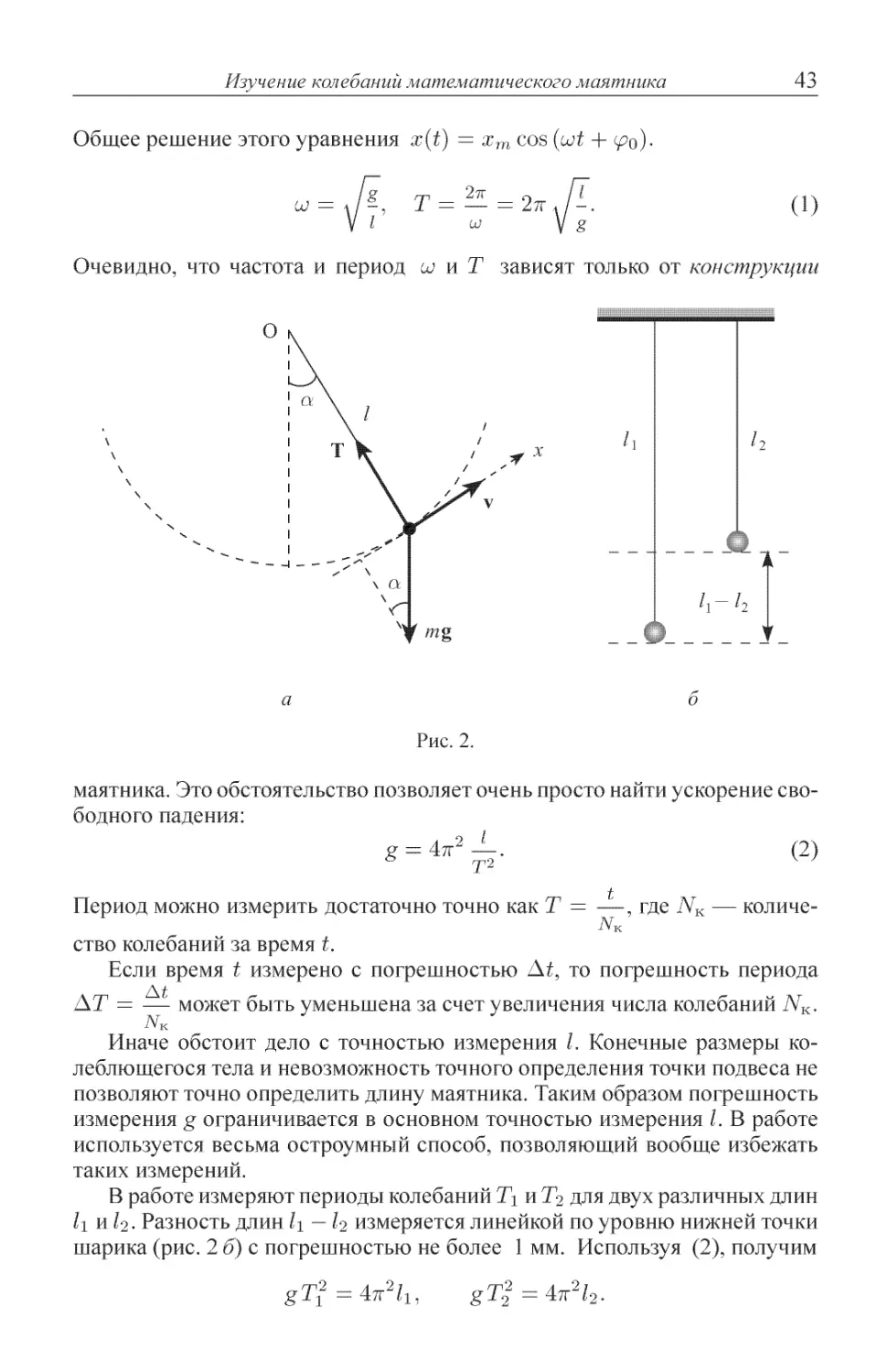
Общее решение этого уравнения x(t) = хт cos (ut +
A)
Очевидно, что частота и период uj ж Т зависят только от конструкции
Рис. 2.
маятника. Это обстоятельство позволяет очень просто найти ускорение сво-
свободного падения:
¦ = 4тг2
Т2
B)
Период можно измерить достаточно точно как Т = —, где Жк — количе-
количество колебаний за время t.
Если время t измерено с погрешностью At, то погрешность периода
AT = — может быть уменьшена за счет увеличения числа колебаний NK.
Иначе обстоит дело с точностью измерения I. Конечные размеры ко-
колеблющегося тела и невозможность точного определения точки подвеса не
позволяют точно определить длину маятника. Таким образом погрешность
измерения g ограничивается в основном точностью измерения I. В работе
используется весьма остроумный способ, позволяющий вообще избежать
таких измерений.
В работе измеряют периоды колебаний Т\ и Т^ для двух различных длин
1\ и I2. Разность длин l\ — h измеряется линейкой по уровню нижней точки
шарика (рис. 2 б) с погрешностью не более 1 мм. Используя B), получим
gT*=4<ir2lu ^Т|=4тг212.
44 Изучение колебаний математического маятника
Из этих уравнений находим выражение для определения ускорения свобод-
свободного падения g в виде зависимости от разности длин:
Вычислим относительную погрешность g, считая абсолютные погреш-
погрешности длины Д / и периода AT известными. Используя формулы для расчета
ошибок частного, разности и степенной функции, найдем
e(g) = e(h - h) + е(Т* - Г|) = ^=М + А_3 "Л* =
h-h Тг -Т2
_ Ali +Аг2
Учитывая, что Ali = AI2 = AI и считая, что А2\ и АТ2 = AT,
получим для относительной погрешности
/1 — /2 Ti -Г2
Первое слагаемое в формуле D) не зависит от числа колебаний, а второе
обратно пропорционально АГК: AT ~ _ .
Як
При большом количестве колебаний погрешность измерения периода
уменьшается. Но здесь уже необходимо учитывать, что при этом возможно
значительное затухание. Разумный компромисс достигается, если исполь-
использовать для определения периода 30 - 40 колебаний.
Экспериментальная часть
Вначале выполняются грубые измерения Т и грубое измерение I с по-
помощью секундомера и приборной линейки. Оценивается число колебаний,
необходимое для проведения эксперимента. Выполняются грубые измере-
измерения g по формуле B).
Расчитывают погрешности:
Сравнивают полученное значение с табличным значением g. Если
табл
> ^Я? устраняют систематические ошибки.
При расчетах целесообразно принимать AtnpH6 = 0,2 с, AI = 1 мм.
Далее для двух различных длин нити h и 1^ пять раз измеряют время NK
колебаний. Результаты заносят в таблицу.
Изучение колебаний математического маятника
45
№
1.
2.
'j
3.
4.
5.
С
Р
е
д
н
и
е
tl,C
h =
Aii, с
At?, с2
*2,С
*2 =
А*2чс
At|,c2
/i — Ь,м
A(Ii -Ь),м
Обработка результатов измерений
1. Вычисление i\.
= ... с,
случ = ... с, А^приб = 0,2 с,
луч) + (А?Приб) = • • •
лучJ + (AtnpH6J
Окончательный результат округляется и записывается как
h =I1±Atb e(h) = ...%.
Вычисление ^2 проводится так же, как и вычисление t\.
2. Вычисление Ti.
Ati
—
Окончательный результат :
Тг =Г1=ЬАГЬ е(Тг) = ...
46 Изучение колебаний математического маятника
3. Вычисление Т2 проводится так же, как и вычисление Т\.
4. Вычисление g.
./ ч _ 2AI 2АГ(Г1+Г2)
\SJ — 7 7 ' 2 2
о 2 2 , \SJ 7 7 2
7\ - Т2 /х - /2 Ti - Т2
Окончательный результат:
Выводы
Если |g — ^табл| ^ ^Ag, результат достоверен. Если это не так, нужны
объяснения по поводу расхождений результатов.
Контрольные вопросы
• Опишите модель математического маятника.
• Выведите уравнение малых колебаний для математического маят-
маятника.
• Чем определяются период и частота колебаний?
• Как в работе «обходится» необходимость измерения длины подвеса
маятника?
• Как можно оценить величину необходимого количества колебаний?
• Выведите формулы для оценки погрешностей вычисления ускорения
свободного падения.
ПРАКТИЧЕСКАЯ РАБОТА 6
ИЗУЧЕНИЕ КОЛЕБАНИЙ ФИЗИЧЕСКОГО
МАЯТНИКА
Целью работы является изучение колебательного движения физическо-
физического маятника, экспериментальная проверка зависимости периода колебаний
от расстояния между точкой подвеса и центром масс, определение приве-
приведенной длины математического маятника.
Теоретическое введение
1. Модель абсолютно твердого тела. Момент инерции. Рассмотрим
систему трех материальных точек mi, nri2 и т%, вращающихся вокруг непо-
неподвижной оси, проходящей через точку О, по орбитам радиусов гь г2, г3
с одинаковыми угловыми скоростями (рис. 1). При вращении расстояния
между материальными точками будут оставаться неизменными. Это про-
простая модель абсолютно твердого тела. (Реальное твердое тело состоит из
огромного количества точек (атомов), колеблющихся около положения
равновесия.)
\ \ \
Рис. 1.
Кинетическая энергия системы:
= IJY- A)
48 Изучение колебаний физического маятника
Здесь Ii = vfiir\ — моменты инерции материальной точки rrii относи-
относительно оси О, I = т\г\ +тя2г| + т$г\ — момент инерции системы. Эта
физическая величина характеризует распределение масс относительно оси
вращения.
Формула A) показывает, что момент инерции абсолютно твердого тела
величина аддитивная, т. е. складывающаяся из моментов инерции частиц
тела. Для деформируемого в процессе движения тела это, конечно, неспра-
несправедливо.
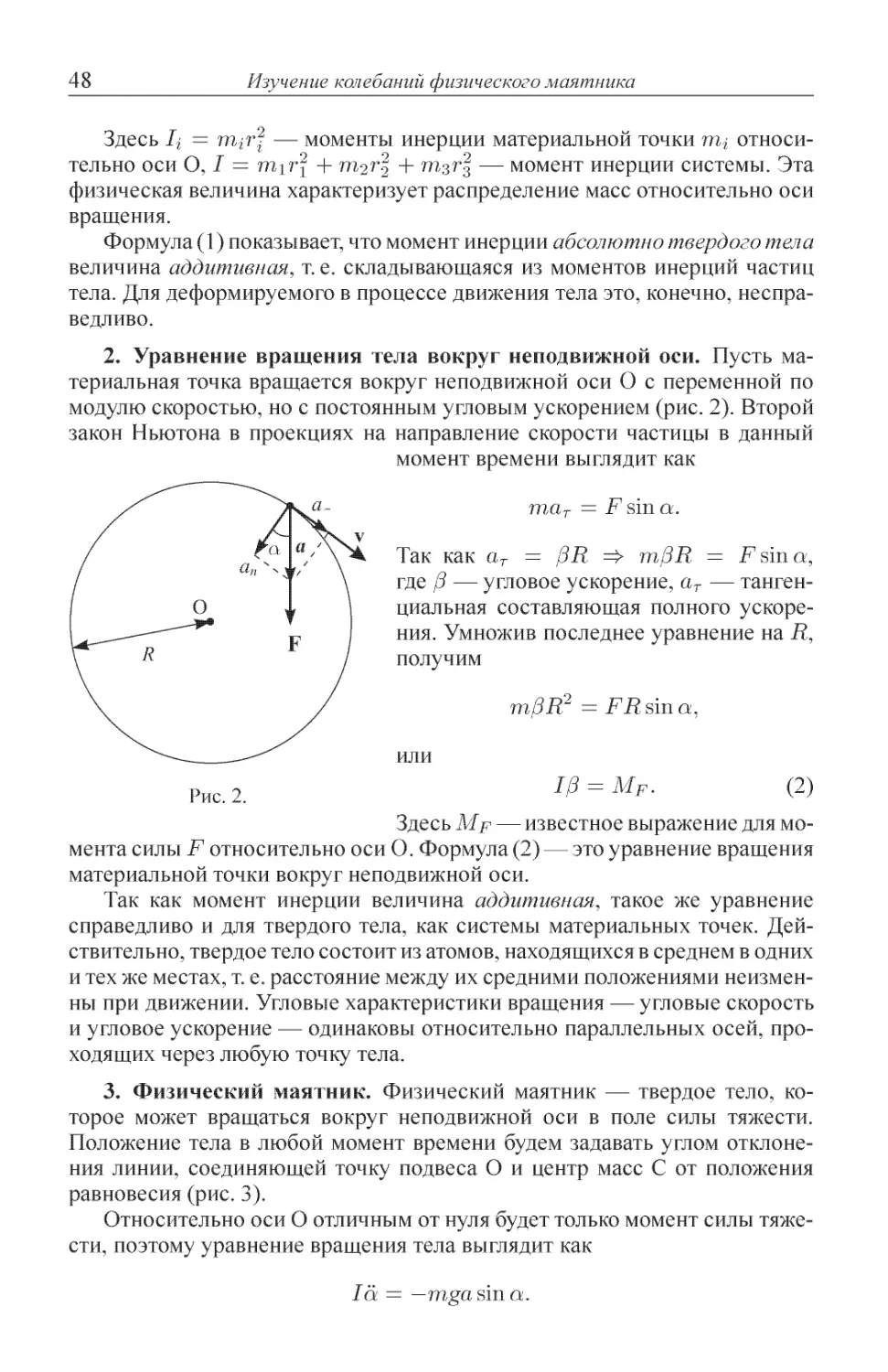
2. Уравнение вращения тела вокруг неподвижной оси. Пусть ма-
материальная точка вращается вокруг неподвижной оси О с переменной по
модулю скоростью, но с постоянным угловым ускорением (рис. 2). Второй
закон Ньютона в проекциях на направление скорости частицы в данный
момент времени выглядит как
таТ = Fslna.
Так как ат = /3R =5> m/3R = Fsina,
где /3 — угловое ускорение, ат — танген-
тангенциальная составляющая полного ускоре-
ускорения. Умножив последнее уравнение на R,
получим
m/3R2 =FRsina,
или
Рис.2. IP = MF. B)
Здесь Мр — известное выражение для мо-
момента силы F относительно оси О. Формула B) — это уравнение вращения
материальной точки вокруг неподвижной оси.
Так как момент инерции величина аддитивная, такое же уравнение
справедливо и для твердого тела, как системы материальных точек. Дей-
Действительно, твердое тело состоит из атомов, находящихся в среднем в одних
и тех же местах, т. е. расстояние между их средними положениями неизмен-
неизменны при движении. Угловые характеристики вращения — угловые скорость
и угловое ускорение — одинаковы относительно параллельных осей, про-
проходящих через любую точку тела.
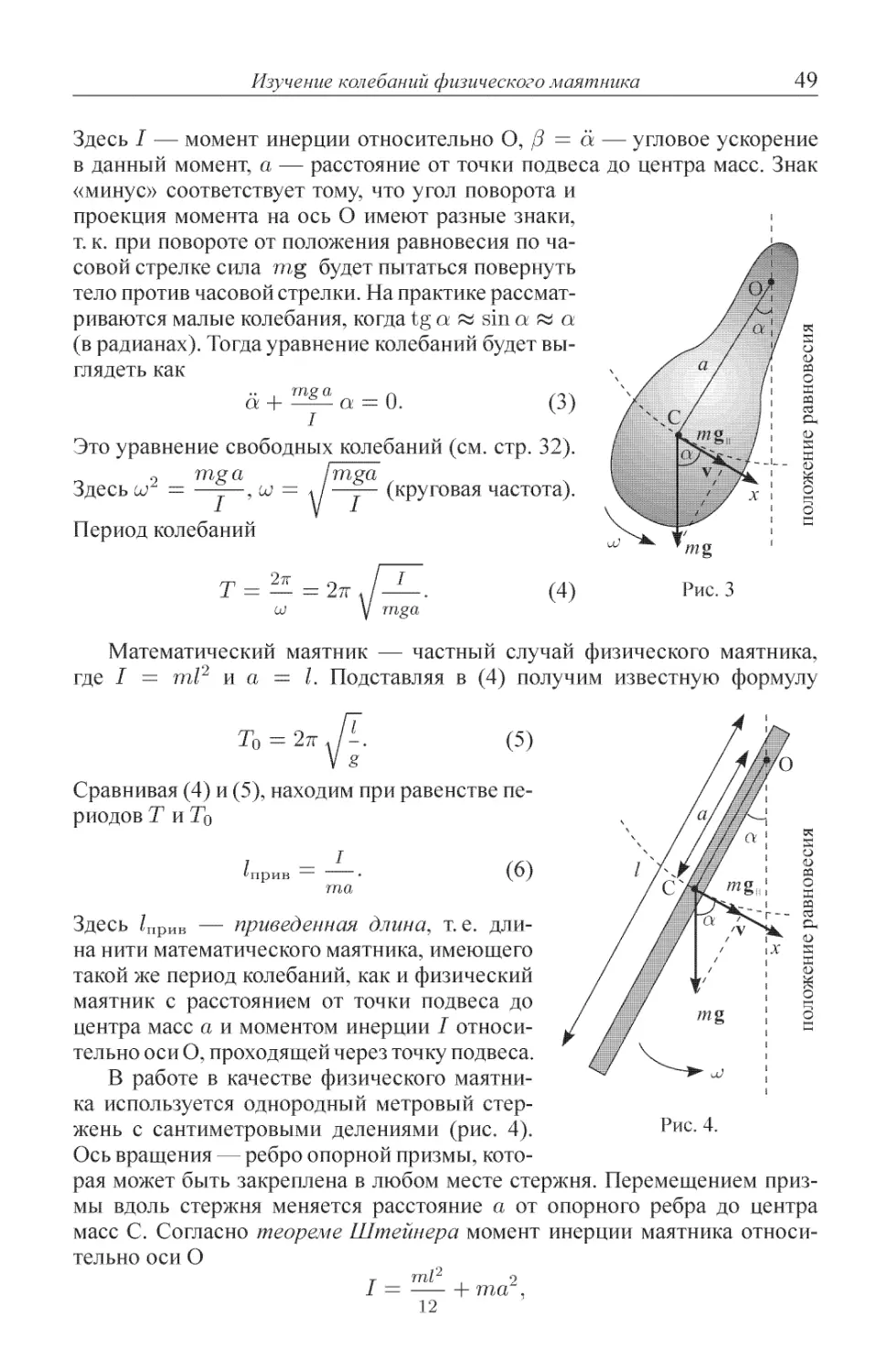
3. Физический маятник. Физический маятник — твердое тело, ко-
которое может вращаться вокруг неподвижной оси в поле силы тяжести.
Положение тела в любой момент времени будем задавать углом отклоне-
отклонения линии, соединяющей точку подвеса О и центр масс С от положения
равновесия (рис. 3).
Относительно оси О отличным от нуля будет только момент силы тяже-
тяжести, поэтому уравнение вращения тела выглядит как
Та = —mga sin a.
Изучение колебаний физического маятника
49
Здесь / — момент инерции относительно О, C = а — угловое ускорение
в данный момент, а — расстояние от точки подвеса до центра масс. Знак
«минус» соответствует тому, что угол поворота и
проекция момента на ось О имеют разные знаки,
т. к. при повороте от положения равновесия по ча-
часовой стрелке сила mg будет пытаться повернуть
тело против часовой стрелки. На практике рассмат-
рассматриваются малые колебания, когда tg a « sin a « a
(в радианах). Тогда уравнение колебаний будет вы»
глядеть как
а+^а = 0. C)
Это уравнение свободных колебаний (см. стр. 32).
Здесь** = -*- ••- /^
Период колебаний
ш = а (круговая частота).
D)
Математический маятник — частный случай физического маятника,
где I = ml2 и а = I. Подставляя в D) получим известную формулу
Го = 2тг
E)
Сравнивая D) и E), находим при равенстве пе»
риодов Т и То
гприв = -L. F)
та
Здесь !прив — приведенная длина, т. е. дли-
длина нити математического маятника, имеющего
такой же период колебаний, как и физический
маятник с расстоянием от точки подвеса до
центра масс а и моментом инерции I относи-
относительно оси О, проходящей через точку подвеса.
В работе в качестве физического маятни-
маятника используется однородный метровый стер-
стержень с сантиметровыми делениями (рис. 4).
Ось вращения — ребро опорной призмы, кото-
которая может быть закреплена в любом месте стержня. Перемещением приз-
призмы вдоль стержня меняется расстояние а от опорного ребра до центра
масс С. Согласно теореме Штейнера момент инерции маятника относи-
относительно оси О
I = + та .
12
Рис. 4.
50
Изучение колебаний физического маятника
где первое слагаемое — момент инерции однородного стержня относитель-
относительно оси проходящей через центр масс.
Представим а в долях I: а = п1, где п = 0,1; 0,2; 0,3; ...
Тогда
I = ТВ — + n I = ш/ —
\12 / \12
Подставляя в D), получим
12
12n2) =
Umgnl
gl2n
О)
Экспериментальная часть
Формула G) справедлива, если справедливо уравнение вращения B)
и теорема Штейнера. Если ее справедливость в результате эксперимента
будет подтверждена, тем самым будет подтверждена и справедливость этих
законов. Для экспериментальной проверки G) следует измерить периоды
малых колебаний маятника при различных положениях опорной призмы и
построить экспериментальные и теоретические кривые зависимости Т от п
(т. е. от а).
Амплитуда колебаний должна быть такой, чтобы выполнялось соотно-
соотношение sin а и а, колебания должны быть изохронными, т. е. период не дол-
должен зависеть от амплитуды. На практике это все справедливо с большой
степенью точности для углов отклонения до и 10°.
Результаты измерений записываются в следующую таблицу:
1.
2.
3.
4.
5.
С
Р
е
д
н
и
е
tl,C
Aii, с
*2,С
h =
At2,c
t3,c
п =
At3,c
п =
At4, С
п =
At5,c
iVK
Изучение колебаний физического маятника 51
Целесообразно измерять время для iVK = 15-20 колебаний в каждом
опыте, поскольку затухание при данном количестве колебаний незначи-
незначительно.
Обработка результатов измерений
1. Вычисление ti—t§. (Производится для каждого из 5-ти измеряемых t
при соответствии: t\ —>¦ п = 0,10; t2 —> п = 0,20; ts —> п — 05 25;
t4 -)> п = 0,30; t5 -»> п = 0,45.)
I = ... с, Д*случ = ... с.
Погрешность AtnpH6 = 0,2 с определяется только реакцией человека на
включение и выключение секундомера.
= . . . С.
Окончательный результат:
t = t±At, e(t) = ... %.
2. Вычисление экспериментальных значений Т\ — Т§.
Г = —, е(Г) = e(t), AT = e{i)T = ^ = ^L,
Окончательный результат
Г = Г± AT, e(T) = ...%.
3. Вычисление теоретических значений Т по формуле G).
Значение длины стержня указано изготовителем: I = 1000 ± 1 мм. Оче-
Очевидно погрешности теоретических значений Т значительно меньше экспе-
экспериментальных. Их можно не учитывать.
4. Построение «экспериментального» и «теоретического» графиков.
В пределах экспериментальных погрешностей два графика должны сов-
совпадать.
5. Рассчитать для каждого значения п соответствующую «приведен-
«приведенную длину» математического маятника.
52 Изучение колебаний физического маятника
Контрольные вопросы
• Вывести формулу для кинетической энергии вращения твердого тела.
• Что такое момент инерции? Для каких, систем момент инерции вели-
величина аддитивная?
• Вывести уравнение малых колебаний твердого тела вокруг неподвиж-
неподвижной оси.
• Что такое приведенная длина?
• Рассчитать приведенную длину для п = 0,15; 0,35. Показать с ис-
использованием физического и математического маятников справедли-
справедливость расчетов.
• Вывести теоретическую зависимость Т(п).
• Доказать теорему Штейнера.
• Вывести формулы для расчета погрешностей экспериментального
определения периода колебаний.
ПРАКТИЧЕСКАЯ РАБОТА 7
ОПРЕДЕЛЕНИЕ МОМЕНТОВ ИНЕРЦИИ ТЕЛ
ПРАВИЛЬНОЙ ФОРМЫ МЕТОДОМ
КРУТИЛЬНЫХ КОЛЕБАНИЙ
Цель работы — определение моментов инерции относительно оси, про-
проходящей через центр масс для квадратной пластинки и круглого диска из
стали на крутильном маятнике и с помощью прямых геометрических изме-
измерений.
Теоретическое введение
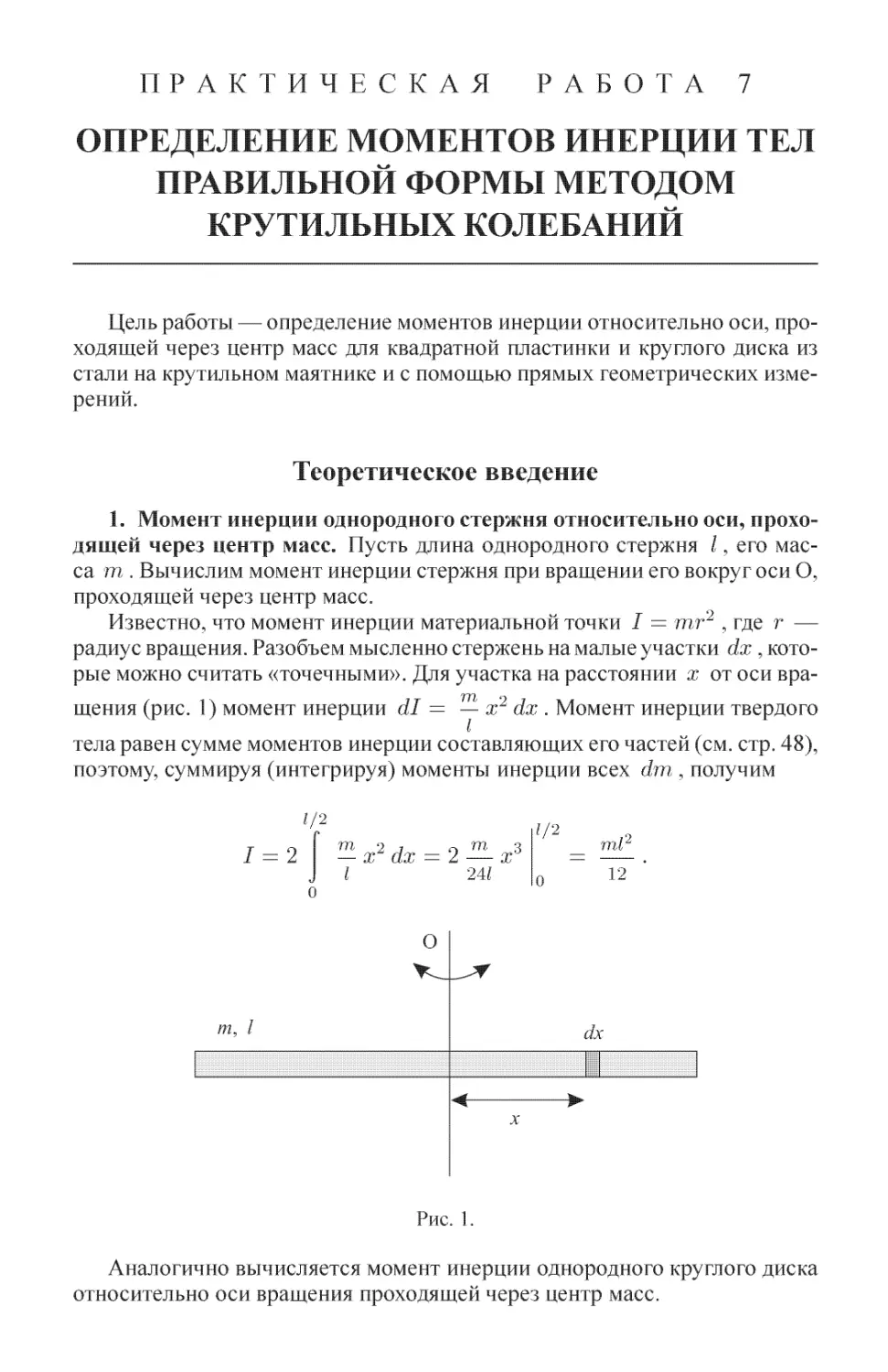
1. Момент инерции однородного стержни относительно оси, прохо-
проходящей через центр масс. Пусть длина однородного стержня I, его мас-
масса т . Вычислим момент инерции стержня при вращении его вокруг оси О,
проходящей через центр масс.
Известно, что момент инерции материальной точки I = тг2 , где г —
радиус вращения. Разобьем мысленно стержень на малые участки dx , кото-
которые можно считать «точечными». Для участка на расстоянии х от оси вра-
вращения (рис. 1) момент инерции dl — — х2 dx . Момент инерции твердого
тела равен сумме моментов инерции составляющих его частей (см. стр. 48),
поэтому, суммируя (интегрируя) моменты инерции всех dm , получим
1/2
р
2 тх2<
Zi XL
J I
0
j су fU 3
241
1/2
0
ml2
12
О
%_
т, 1
X
dx
Рис. 1.
Аналогично вычисляется момент инерции однородного круглого диска
относительно оси вращения проходящей через центр масс.
54
Определение моментов инерции тел правильной формы
2. Крутильный маятник, период свободных колебаний. Крутиль-
Крутильный маятник — рамка, колеблющаяся вокруг вертикальной оси, образован-
образованной тонкими стальными проволоками, к которым
она подвешена. В рамку помещается тело, момент
г инерции которого относительно этой оси желают
О определить (рис. 2).
При повороте крутильного маятника нить закру-
закручивается, возникает момент сил, стремящийся вер-
„ путь рамку в положение равновесия
р
М = -Dip,
где D —коэффициент пропорциональности между
моментом сил и углом закручивания ср .
Уравнение вращения твердого тела вокруг оси О:
Рис. 2.
По аналогии с уравнением свободных колебаний
пружинного маятника тх + кх = 0 (см. стр. 32),
имеем
D
Y
_ D_ rp _ 2тг
Период колебаний рамки без предмета (пустой рамки)
Период колебаний рамки с зажатой в ней телом
= 2тг
Здесь / + /о — момент всей системы в силу его аддитивности.
Возводя в квадрат эти уравнения и деля друг на друга, получаем:
A)
Зная /о — момент инерции пустой рамки, можно найти /
инерции тела, помещенного в рамку.
- момент
Определение моментов инерции тел правильной формы
55
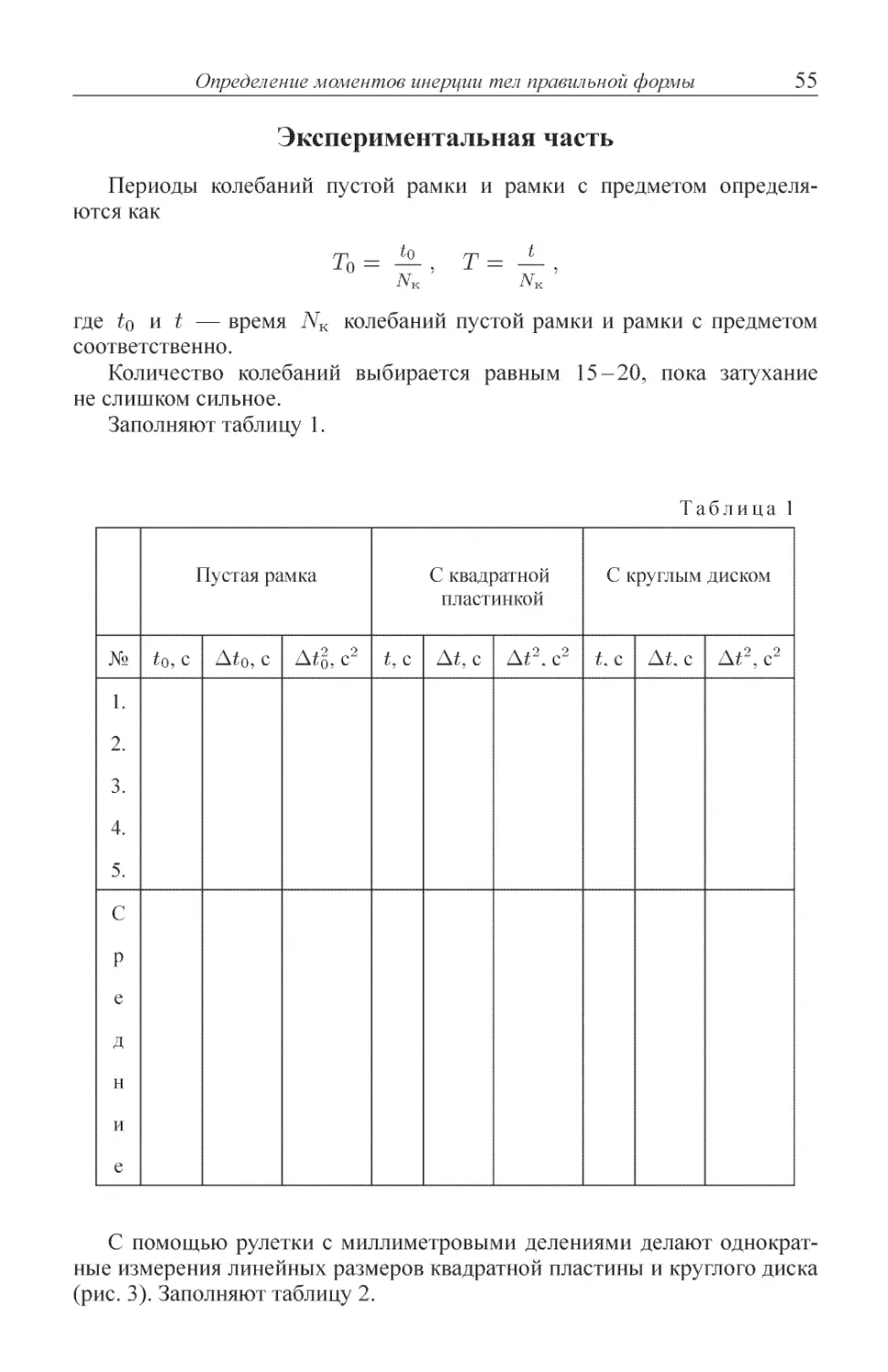
Экспериментальная часть
Периоды колебаний пустой рамки и рамки с предметом определя-
определяются как
Т1 to ГТ1 t
0 = ТГ ' А = 7Г '
где to и t — время JVK колебаний пустой рамки и рамки с предметом
соответственно.
Количество колебаний выбирается равным 15-20, пока затухание
не слишком сильное.
Заполняют таблицу 1.
Таблица 1
№
1.
2.
3.
4.
5.
С
Р
е
д
н
и
е
Пустая рамка
to, с
At0, с
Л4 с2
С квадратной
пластинкой
t, с
At, с
At2, с2
С круглым диском
t,c
Ate
At2, с2
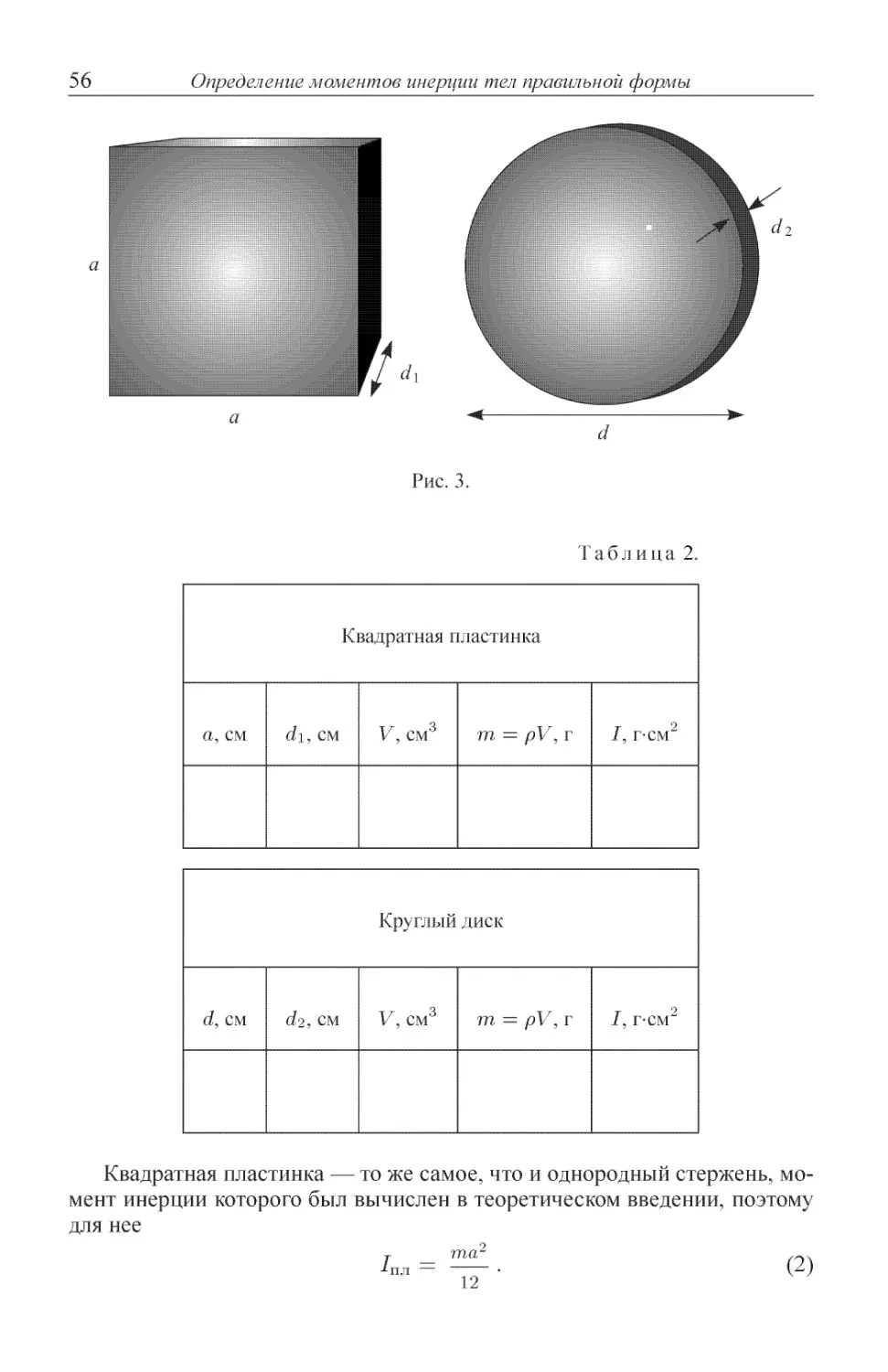
С помощью рулетки с миллиметровыми делениями делают однократ-
однократные измерения линейных размеров квадратной пластины и круглого диска
(рис. 3). Заполняют таблицу 2.
56
Определение моментов инерции тел правильной формы
Рис. 3.
Таблица 2.
Квадратная пластинка
а, см
di, см
V, см3
777. = pV, Г
I, г-см2
Круглый диск
с?, см
С?2, СМ
Г. см3
771 = pV\ Г
/, г-см2
Квадратная пластинка — то же самое, что и однородный стержень, мо-
момент инерции которого был вычислен в теоретическом введении, поэтому
для нее
B)
B)
Определение моментов инерции тел правильной формы 57
Приведем также формулу расчета момента инерции относительно на-
нашей оси вращения для круглого диска:
j md? ,ry-,
-* диска — • \-J)
16
Моменты инерции, рассчитанные по формуле A) из данных, получен-
полученных из таблицы 1, и моменты инерции, полученные по измерениям линей-
линейных размеров (формулы B) и C)), должны совпадать в пределах погрешно-
погрешности (см. стр. 14). Такое совпадение дает экспериментальное подтверждение
формулы A), а значит и законов вращения твердого тела вокруг неподвиж-
неподвижной оси.
Обработка результатов измерений
1. Вычисление to из таблицы 1:
to = •.. ,с At0 = у/д*2луч + At2pil6 и Д*случ + AtnpH6 = .. .с,
Д*приб = 0,2 с, e(t0)
Окончательный результат:
to = t0 ± At0 с, e(t0) = • • •
2. Вычисление t для пластины и диска производится аналогично.
3. Вычисление То .
7Ь = -^ = ...с, e(T0)=e(t0),
/11 0 = ?{to)lo = ~^= = = ... С.
t0 NK NK
Окончательный результат:
4. Аналогично вычисляются Т для пластины и круга.
5. Вычисление I для пластинки по формуле A):
Т0
= ?(/о) + ?(Т2 - П) + ?(Г02) = ^
() (о) + ( П) + @) ^ + ^
Значение /о известно : /о = /о ± А/о = A00 ± 1) • 102 г • см2.
58 Определение моментов инерции тел правильной формы
Окончательный результат:
/ = 7=ЬА/г-см2, еA) = ... %
6. Аналогично вычисляется I для диска.
7. Вычисление I пластинки по измерениям (таблица 2):
7= то* = раМ^ =_ _Г.СМ2; /, = G,8 ±0,1) Г/СМ3.
е(/) = е(р) + 4е(а) + е(*) =^+4^ + ^,
р a di
где Аа = Ad = 0,5 мм.
Окончательный результат:
-^по измерениям — -* ^ ^-* ? ^v J — * * * '^
8. Аналогично вычисляется момент инерции I диска.
Выводы
В пределах вычисленных погрешностей результаты, полученные дву-
двумя способами должны совпадать. Причины расхождений необходимо объ-
объяснить.
Контрольные вопросы
• Как вычисляется момент инерции точечной массы, вращающейся от-
относительно неподвижной оси?
• Вычислить момент инерции системы материальных точек, вращаю-
вращающихся с одинаковой угловой скоростью относительно неподвижной
оси.
• Получить уравнение свободных крутильных колебаний.
• В чем состоит идея эксперимента по определению момента инерции
твердого тела?
• Получить формулу для расчета погрешностей вычисления момента
инерции для крутильных колебаний.
• Получить формулу для расчета погрешностей вычисления момента
инерции круглого диска из непосредственных измерений.
• Что означает в нашей работе «совпадение результатов в пределах
погрешности»?
ПРАКТИЧЕСКАЯ РАБОТА 8
ИЗУЧЕНИЕ ЗАКОНОВ ВРАЩЕНИЯ
ТВЕРДОГО ТЕЛА
НА КРЕСТООБРАЗНОМ МАЯТНИКЕ
ОБЕРБЕКА
Цель работы — изучение законов вращения твердого тела вокруг непо-
неподвижной оси, проверка формул расчета моментов инерции, определе-
определение массы груза на спице маятника Обербека с применением законов
вращения.
Теоретическое введение
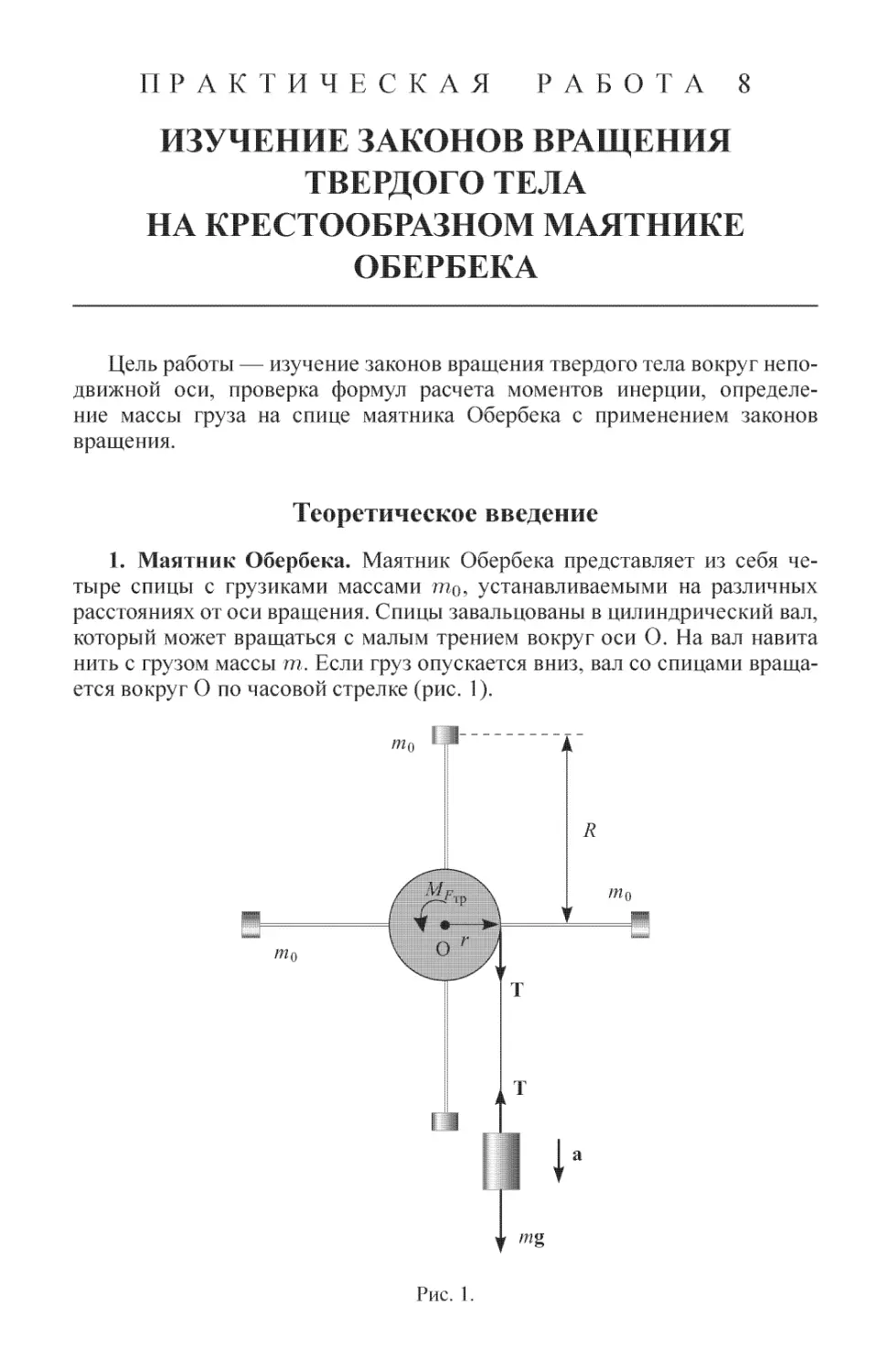
1. Маятник Обербека. Маятник Обербека представляет из себя че-
четыре спицы с грузиками массами то, устанавливаемыми на различных
расстояниях от оси вращения. Спицы завальцованы в цилиндрический вал,
который может вращаться с малым трением вокруг оси О. На вал навита
нить с грузом массы т. Если груз опускается вниз, вал со спицами враща-
вращается вокруг О по часовой стрелке (рис. 1).
т0
т0
1-
т0
1 I
I"
Рис. 1.
60 Маятник Обербека
Уравнение вращения вала со спицами относительно оси О записыва-
записывается как
1/3 = МТ- MFtp или I3 = Tr- MFtp . A)
Уравнение поступательного движения груза т на нити записывается
как
та = mg — Т. B)
Ускорение а груза т является тангенциальным для точки вала, поэтому
связано с угловым ускорением /3 известным соотношением:
а = Рг. C)
Из A), B), C) следует, что
Т = mg ~~ m/3r, 1/3 = mgr ~~ mr2 /3 ~~ Мртр,
I + mr2
На практике mr2 <C /, т. к. г <С R. Тогда
D)
Если мы введем обозначения: х = mgr, C = у, то получим уравнение
прямой в осях ж, у
У=Х-^. E)
При ж = МРтр у = 0, следовательно, строя график прямой у = /(ж), можно
найти МртрУ как точку пересечения прямой с осью х. Момент инерции I
характеризует наклон этой прямой
1 = ^^. (б)
Экспериментальная часть
В данной экспериментальной работе масса m опускается с высоты
h и 80 см с нулевой начальной скоростью.
При двух различных, симметричных относительно О положениях гру-
грузов wq на спицах для пяти различных масс m определяют угловые ускоре-
ускорения /3. По пяти точкам для этих двух случаев строятся два графика у = f(x)
по формуле E). По графикам определяются моменты инерции маятника 1±
и /2, момент силы трения Мртр в оси О. Графики имеют вид, представлен-
представленный на рис. 2.
Маятник Обербека
61
прямоугольник
ошибок
Рис. 2.
В каждом из двух случаев можно вычислить момент инерции
/ = Iq + 4:m®R ,
где Iq — момент инерции вала со спицами, R — расстояние от центра масс
грузика то от оси вращения О. Расположения грузов на спицах представ-
представлено на рис. 3.
1 2
Рис. 3.
При первом расположении G) получаем
h = h +4ш0Д?,
при втором расположении B):
/2 = /0 +4m0i?2-
62
Маятник Обербека
Вычитая эти уравнения, получим
Отсюда формула для расчета массы грузика то:
h -h
т0 = -TTZT, 377-
G)
Масса грузика на спице то «105 г, поэтому, определив по графикам 1±
и /2, можно по формуле G) определить то и убедиться при совпадении в
пределах погрешности в справедливости всех написанных ранее уравне-
уравнений, описывающих законы вращения твердого тела вокруг неподвижной
оси, всех допущений и предположений, сделанных в их приложении к
конкретному случаю, ведь формула G) получена путем их применения.
Экспериментальные данные записываются в две одинаковые таблицы
для измерений с различными моментами инерции 1\ и /2.
Момент инерции /i (/г).
№
1.
2.
3.
4.
5.
777, Г
*1.С
*2,С
*з,с
г, с
#2М
Обработка результатов измерений
Вычисление точки графика.
1. Вычисление t.
h + t2 + t3 + t4 + t5
Маятник Обербека 63
За AtnpH6 следует принять 0,2 с (реакция на включение-выключение
секундомера).
2. Вычисление х = mgr.
х = mgr.
е(х) = е(т) + e(g) + е(г) « ?(т) + г(г) = -=^ + -=^, Ах =
771 Г
За погрешность массы следует принять Am «1г.
3. Вычисление У = Р-
?(/3) = е(Л) + 2e(t) + e(r) = ^ + ^ + ^, Д/? =
h t r
где г = A2, 5 ± 0,1) мм, Ah = 1 мм.
Для каждого графика вычисляются пять точек и представляются в виде
окончательных результатов:
х\ = х\ ± Axi = ...
2/5 = 2/5 ± ^2/5 = • • • еB/б) = ...%•
По графикам определяются значения 1\ и /2 и оценивается момент силы
трения М^тр.
Вычисляется масса wo по формуле G). Делаются выводы о совпаде-
совпадении результатов эксперимента и справедливости применяемых законов.
Контрольные вопросы
• Что такое аддитивность момента инерции?
• Вывести основное уравнение вращения твердого тела вокруг непо-
неподвижной оси.
• Написать уравнения движения для маятника Обербека.
• Как графически определить момент инерции маятника Обербека? Ка-
Какие графики необходимо для этого построить?
• Как в работе определяется MFtp ?
• Вывести формулы для расчета погрешностей w0.
ПРАКТИЧЕСКАЯ РАБОТА 9
ОПРЕДЕЛЕНИЕ ОТНОШЕНИЯ МОЛЯРНЫХ
ТЕПЛОЕМКОСТЕЙ ВОЗДУХА
Целью работы является проверка справедливости уравнения состоя-
состояния идеального газа, экспериментально определяется отношение молярных
тепло емкостей ср и су для воздуха.
Теоретическое введение
1. Первый закон термодинамики. Как известно, изменение внутрен-
внутренней энергии U физической системы складывается из двух частей: она воз-
возрастает за счет полученного количества теплоты Q и убывает за счет про-
произведенной системой работы А. Можно таким образом написать
AU = Q-A, или Q = A?7 + A A)
Здесь А — работа, совершаемая системой над внешними телами. Это важ-
важное соотношение выражает закон сохранения энергии при тепловых про-
процессах. Иначе его называют первым, законом термодинамики.
Необходимо подчеркнуть, что работа и количество теплоты зависят
не только от начального и конечного состояний системы, но и от пути,
по которому происходило изменение состояния системы.
В каждом определенном состоянии система обладает лишь опреде-
определенной внутренней энергией U. Поэтому лишь она является функцией
состояния. Полученное тепло Q и совершенная работа А — функции про-
процесса.
2. Теплоемкость. Если при поглощении теплоты Q температура тела
повышается на AT , то отношение
с=о_
AT
называют теплоемкостью тела.
Различают также молярную и удельную теплоемкости.
Молярная теплоемкость — это количество теплоты, необходимое для
нагревания одного моля вещества на 1 К.
Q г 1 Дж
с = , где v — количество молей; с =
и AT моль • К
Удельная теплоемкость — это количество теплоты, необходимое для
нагревания тела массой 1 кг на 1 К.
с -« [с 1- Дж
пгАТ J"J кг • К
Определение отношения молярных тетоемкостей воздуха 65
При необходимости всегда можно перейти от одной теплоемкости к
другой, поэтому чаще используют в расчетах молярную теплоемкость.
Для процессов с газом важным фактором является изменение объема
газа, а значит совершение им работы над внешними телами, поэтому су-
существенно говорить о теплоемкости при постоянном давлении ср и при
постоянном, объеме су.
Внутренняя энергия идеального газа зависти только от температуры:
для одноатомного газа она вычисляется как U = -vRT, для двухатомного
5
газа как U = -i/RT.
2
Получим молярную теплоемкость при постоянном объеме (изохорный
процесс) для одноатомного газа. Работа газа при неизменном объеме равна
нулю, поэтому
= AU = - i/RAT,
отсюда
Для двухатомного газа
cv = Л- = * д. C)
1/АГ 2
При постоянном давлении (изобарный процесс) работа идеального газа
выражается как А = PAV = uRAT, поэтому для одноатомного газа
Q = - vRAT + PAV = - vRAT + uRAT = - uRAT,
2 2 2
Для двухатомного газа
сР = ^^ = -Д. D)
1/АТ 2 W
сР = ^ = 7^R. E)
и AT 2
Отсюда следует известное соотношение Майера для молярных тепло-
емкостей:
сР = су + R.
Так как АС/ = cyi/АТ, первый закон термодинамики для политропных
процессов (с постоянной теплоемкостью) можно для бесконечно малых
приращений записывать как
Q = cyudT + PdV = cvudT + uRdT.
Из B) и D) для одноатомного газа получим
7=^ = - = 1,67. F)
су 3
66 Определение отношения молярных тетоемкостей воздуха
Для двухатомного газа из C) и E)
7=1 = 1,4. G)
5
Так как в состав обычного воздуха входят в основном двухатомные газы,
формула G) должна для него выполняться с высокой степенью точности.
3. Адиабатический процесс. Это процесс без теплообмена с внешней
средой. На практике адиабатическим процессом можно считать процесс
протекающий достаточно быстро, так что система не успевает обменяться
теплом с окружающей средой за время процесса. Поскольку Q = 0, то
первый закон термодинамики выглядит как
vcyAT + PAV = 0.
Из уравнения состояния PV = uRT, следует соотношение
1/АГ = (PAV + FAP) / К
Исключая AT, получим
АР , AV п сР
— +7 =0, где 7=—•
Р V cv
Решением этого уравнения является произведение PV1 = const. Исполь-
Используя уравнение состояния PV = vRT, можно получить также уравнение
адиабатического процесса в переменных Р и Т:
pj-i
= const. (8)
Т7
Обоснование и методика эксперимента
Прибор для измерения отношений теплоемкостей представляет собой
сосуд, который с помощью вентиля может поочередно соединяться с атмо-
атмосферой, с насосом или закрыт герметично. Давление в сосуде измеряется с
помощью водяного манометра (рис. 1).
1. Накачайте в сосуд некоторое количество воздуха, чтобы разность
уровней воды в манометре была 20 — 25 см. Делайте это осторожно и мед-
медленно, чтобы вода не выплеснулась из манометра. При этом давление и тем-
температура воздуха в сосуде повысятся. Если теперь сосуд закрыть, то через
некоторое время температура в нем станет равной температуре окружаю-
окружающей среды То, а давление примет некоторое значение Р±. Этому значению
будет соответствовать разность уровней в манометре hi.
Можно измерять давление в мм водяного столба, тогда Pi = hi + Pq,
где Pq — атмосферное давление, измеренное в мм водяного столба.
Определение отношения молярных тетоемкостей воздуха
67
Рис. 1.
2. На некоторое время соедините сосуд с атмосферой. Воздух будет
со свистом выходить из сосуда, давление сравняется с атмосферным, а тем-
температура понизится до некоторого значения Г. Кран следует закрыть сразу
же при изменении тональности звука, производимого выходящим воздухом.
Процесс выравнивания давления может быть описан уравнением адиабаты
в переменных Р и Т (8):
,7-1
Т7
i0
ИЛИ
т7
(9)
3. Через некоторое время температура в сосуде снова станет равной
температуре окружающей среды Го, а давление примет значение Р2 = Ро +
+/&25 где /&2 — показание манометра. Этот процесс описывается уравнением
изохоры (V = const):
— = — ИЛИ —
т То т
То
A0)
Возведем уравнение A0) в степень j:
ро _ (^о + Л
A1)
68
Определение отношения молярных тетоемкостей воздуха
Разделим уравнение A1) на уравнение (9):
= -fo,
*°w-l
A2)
Так как — <С 1 и — <С 1, получим по формуле бинома Ньютона
Ро Ро
Ро
1 + 7^,
Ро
Уравнение A2) принимает вид
l + G-l)'
отсюда 7^2 =
— fti, и
^ =7=
— /г 2
A3)
Таким образом, для нахождения величины 7 необходимо снять два пока-
показания манометра hi и h^. Опыт необходимо повторить не менее пяти раз.
Результаты занести в таблицу.
№
1.
2.
3.
4.
5.
hi, мм
/l2, MM
Определение отношения молярных тетоемкостей воздуха 69
Обработка результатов измерений
Поскольку очень сложно создать одинаковое давление Р\ на первом
этапе эксперимента, оно должно устанавливаться существенно различным
в каждом из пяти опытов. Для каждого опыта подсчитывается по формуле
A3) значение j, и окончательный результат является средним значени-
значением. Поэтому погрешности измерений h приборные. Целесообразно считать
Д^приб = 2 мм (с учетом мениска в трубках манометра). Относительная
ошибка 7 в каждом опыте
?G) = ?{hl)+?{hl _ h.2) = ^i
h
hi hi — /12 hi hi — /12
Абсолютная ошибка
AG) = 5GO.
Среднее значение
7= 1 + ^'+ 5.
Окончательный результат записывается в виде:
Контрольные вопросы
Как выглядит первый закон термодинамики для изопроцессов?
Что называется теплоемкостью процесса? Что такое теплоемкости ср
и су ?
Что такое адиабатический процесс?
Почему в таблицах теплоемкостей для газов даются два значения ср
и су, а для жидкостей и твердых тел только одно?
Каковы теплоемкости газов при адиабатическом и изотермическом
процессах?
Почему температура газа на первом этапе эксперимента повышается?
Почему различаются молярные теплоемкости для одноатомных и
двухатомных газов?
ПРАКТИЧЕСКАЯ РАБОТА 10
СТОЯЧИЕ ВОЛНЫ. ИЗМЕРЕНИЕ СКОРОСТИ
ВОЛНЫ В УПРУГОЙ СТРУНЕ
В работе исследуются условия образования стоячих, волн в упругой
струне. Для различных натяжений струны и конфигураций стоячих волн
измеряется скорость поперечной волны в упругой струне.
Теоретическое введение
1. Скорость поперечной волны. Относительно системы отсчета,
движущейся с фазовой скоростью волны и, гармоническая волна представ-
представляется «застывшей синусоидой» (рис. 1). В этой системе отсчета материал
и (волна)
Рис. 1.
струны движется с такой же скоростью в противоположную сторону.
Рассмотрим малый элемент AI струны, примыкающий к точке максималь-
максимального подъема струны (рис. 2). Относительно нашей системы отсчета его
Да/2
Рис. 2.
Стоячие волны. Измерение скорости волны в упругой струне 71
скорость направлена влево. Запишем второй закон Ньютона для этого эле-
элемента в проекциях на направление х перпендикулярное скорости:
пГп . Да и2 а ,
2Tsin — = —Alp,
2 R
где р — масса единицы длины струны. Так как Д/ = Ra (a — в радианах),
и для малого AI можно положить sin — « —, то Т = и2р. Тогда
2 2
U = Ж A)
V р
Таким образом скорость бегущей волны зависит только от натяжения
струны и линейной плотности материала струны.
2. Стоичие волны. Как известно, уравнение гармонической волны,
движущейся в сторону положительного направления х:
2/1 = Ут cos (out — kx),
а для волны, движущейся в противоположную сторону
у2 = ут cos (out + kx).
Действительно, в системе отсчета, движущейся со скоростью волны,
фаза будет оставаться постоянной. Для первого случая
ojt — kx = const, и At - kAx = О
и
— = их = — > 0.
At k
Для второго случая
out + kx = const, ouAt + kAx = 0
и
Аж ш п
— = ux = -- < 0.
At к
В результате сложения таких волн получим
у = yi + 2/2 = 2ут cos kx cos out. B)
Амплитуда 2ym cos kx — функция от координаты. В точках, где | cos kx | =
= 1, колебания максимально усилены, там пучности.
Там, где cos kx = 0, колебаний нет. Это узлы. Выражение B) определяет
стоячую волну.
Характер колебаний точек струны в стоячей волне показан на рис. 3. Рас-
Расстояния между двумя соседними пучностями или двумя соседними узлами
составляют половину длины бегущей волны, т. е. Л/2.
72 Стоячие волны. Измерение скорости волны в упругой струне
Л/2
А/2
Рис. 3.
3. Граничные условия для струны. На закрепленных участках струна
неподвижна — там находятся узлы, поэтому в струне возможны только
такие стоячие волны, когда на длине струны укладывается целое число
полуволн (рис. 4).
п = 2
Рис. 4.
Из этого условия вычисляются возможные длины волн:
= I, т.е. Хп = —, п = 1,2,3...,
2
Стоячие волны. Измерение скорости волны в упругой струне
73
Отсюда
vn\n = и
ип
21
п Т
2l\j-p-
C)
Экспериментальная часть
Для наблюдения стоячих волн в струне и измерения их характеристик
используется установка, приведенная на рис. 5.
упор
магнит
упор
Рис. 5.
Струна закреплена между двумя вертикальными стойками: правый ко-
конец фиксируется на ребре правой стойки. Натяжение струны через непо-
движный блок обеспечивается грузом т. От генератора между конца-
концами струны подается переменное напряжение U = Um cos out, поэтому по
струне протекает переменный ток I = Im cos ut. Частота напряжения уста-
устанавливается соответствующей настройкой звукового генератора и может
быть измерена. В магнитном поле, создаваемом постоянным магнитом, на
струну действует переменная сила Ампера, которая вынуждает струну ко-
колебаться с той же частотой: F& = ImBl cos out.
Регулировкой частоты генератора в струне получают стоячие волны с
п = 1, п = 2, п = 3.
Заполняются две одинаковые таблицы для двух различных натяжений
струны при одинаковой длине струны. Далее вычисляются длины волн и
скорости распространения волн в струне.
74 Стоячие волны. Измерение скорости волны в упругой струне
п
1
2
3
^, Гц
Л,м
и, м/с
п
1
2
3
1/, Гц
Л, м
и, м/с
Обработка результатов измерений
1. Вычисление Ап.
\ 2^ ах 2AI /ЛЧ АЛ Л , 1
Лп = —, АЛ = —, е(Х) = —, А1приб = 1мм.
п п Хп
Для трех значений п = 1,п = 2, п = 3 вычисляют три соответствую-
соответствующих значения Хп, которые записывают в виде окончательного результата:
А2 = А^2, B) ,
А3 = Аз~±АА3, е(Х3) = ...%.
2. Вычисление ип.
iin = i/Anj ?(un) = — + —, Ли = e(y)vXn.
Окончательный результат:
г/3 = ^з ± Aii3, е(щ) = ...%.
Приборная погрешность измерения частоты зависит от конструкции
генератора и определяется в документации.
Скорость поперечной волны зависит от ее натяжения и линейной плот-
плотности материала (формула A)), поэтому в пределах погрешностей
Стоячие волны. Измерение скорости волны в упругой струне 75
(см. стр. 14) значения скоростей ип для одинаковых натяжений должны
совпадать.
Делаются выводы об экспериментальной зависимости и от параметров
колебаний, параметров струны и о соответствии с теорией.
Контрольные вопросы
Вывести формулу для скорости поперечной бегущей волны в струне.
Как образуются стоячие волны?
Почему в струне могут быть только стоячие волны определенного
вида? Как они «выглядят»?
Какой вид имеют стоячие волны в струне с одним закрепленным
концом?
Каким образом возбуждаются вынужденные колебания в струне в на-
нашем эксперименте?
От чего зависит скорость волны в струне?
Предложите альтернативный метод определения скорости бегущей
волны в струне.
ПРАКТИЧЕСКАЯ РАБОТА 11
ОПРЕДЕЛЕНИЕ ОТНОШЕНИЯ cplcv
ДЛЯ ВОЗДУХА В СТОЯЧЕЙ
ЗВУКОВОЙ ВОЛНЕ
Теоретическое введение
1. Скорость продольных волн в упругом стержне. Если волна рас-
распространяется со скоростью и, то фронт волны за малое время At продви-
продвинется на iiAt. Все частицы в объеме SuAt будут двигаться со скоростью v.
vAi
Рис. 1.
За время At частицы в сечении х сдвинутся на vAt (рис. 1). Масса, вовле-
вовлеченная в колебательный процесс: Дш = pSuAt. Закон изменения импульса
для этой массы:
г; Aw = vpSuAt = FAt,
где F — сила деформации, подчиняющаяся закону Гука:
F = —ES*
Здесь Е — модуль Юнга, S — площадь сечения упругого стержня. Если
положить I = и At, Al = vAt, получим
F =
и At
vpSuAt = ^
и
отсюда выражение для скорости продольной волны:
Е
U = 4/—.
Р
A)
Определение отношения ср/су для воздуха в стоячей звуковой волне 11
2. Скорость продольных волн в газе. Звук в газе (в воздухе) — рас-
распространение продольной волны изменения давления ДР.
Чтобы вычислить скорость продольных волн в газе, необходимо выяс-
выяснить, что является в этом случае аналогом модуля Юнга Ег, затем восполь-
воспользоваться формулой A).
Запишем закон Гука:
АР = ^—Ег.
AI
(Знак «—» потому, что когда АР > 0, — < 0). Умножая на S числитель и
знаменатель левой части этого уравнения, получим
Е АР Е
Т, Т B)
Так как изменения давления в областях разрежения и сжатия в звуковой
волне происходят быстро, можно связать давление и объем известным урав-
уравнением адиабаты PV1 = const, где j = ср/су. Из уравнения адиабаты в
приращениях — + 7 = 0 (см. стр. 66) выразим
АР Р
Подставляя в B), получим для газа
Ег = 7Р. C)
Подставив C) в A), найдем выражение для скорости продольной волны
в газе:
и = \—- D)
V р
Воспользовавшись связью плотности и давления идеального газа р =
= PM/RT, получим
u=v^- E)
3. Стоячие волны. Уравнения гармонических волн с равными ампли-
амплитудами, распространяющихся в положительном и отрицательном направ-
направлениях оси ж:
2/i = a cos (out — kx), и у2 = a cos (out ^ kx).
(Так распространяются волны, идущие к преграде и отраженные от нее.)
Результат сложения этих волн
У\ + 2/2 = A cos (kx) cos (out),
78 Определение отношения ср/су для воздуха в стоячей звуковой волне
где А = 2а. Очевидно, амплитуда результирующей волны является функ-
функцией х. В точках, где | со$кх\ = 1 — амплитуда максимальна (пучности),
там где | cos кх\ = О — колебания отсутствуют (узлы) (рис. 2). Это стоячая
волна. Если расстояние между соседними узлами (пучностями) — Ах, то
соответствующая разность фаз А(р = — Ах = тг и
л Л
Ах = -.
2
F)
У i
Л/2
i
\ /
1
Y
A
A
\
4
-——
.-—^^ пучности ^—^^
—~«^
узлы
У
N /
1
}
/
V
к
N
\
-——
¦—-^
4
\
ч
/
\ -
7
Л/2
X
Рис. 2.
Экспериментальная часть
Для определения длины звуковой волны используется установка, при-
приведенная на рис. 3.
Частота звука устанавливается соответствующей настройкой звуково-
звукового генератора (./). Излучатель волны расположен в левом торце трубы-
резонатора B). Звуковая волна отражается от противоположного торца,
таким образом в трубе-резонаторе образуется стоячая волна как суперпози-
суперпозиция одинаковых волн, бегущих в разных направлениях. В торец-отражатель
вмонтирован приемник-преобразователь звуковых колебаний в колебания
электрического напряжения C). Сигнал с преобразователя подается на вход
осциллографа D). При движении торца с приемником вдоль трубы, сигнал
имеет максимальное значение, когда попадает в область пучности, коорди-
координату которой можно фиксировать по линейке на подвижной части трубы E).
Разность координат соседних, пучностей равна половине длины звуковой
волны.
Определение отношения ср/су для воздуха в стоячей звуковой волне 79
1. Определить скорость звука в воздухе можно по известной формуле,
связывающей ее с частотой колебаний и длиной волны:
и = Az/,
G)
где А — удвоенное расстояние между двумя пучностями, v — частота
колебаний, установленная на генераторе.
2. Вычислив и, можно определить отношение ср/су для воздуха из E):
ч2М
7 =
RT
(8)
Рис. 3.
Длина волны вычисляется четырежды по пяти отсчетам на подвижной ча-
части трубы для пяти пучностей при фиксированной частоте генератора.
хг = ... , х2 = ... , х3 = ...
= 2(х2 - a?i), А2 = 2(х3 - ж2), А3 =
Вычисляется среднее значение длины волны:
\г =
Температура измеряется обычным спиртовым термометром.
Обработка результатов измерений
1. Вычисление скорости звука.
и = Хи, {у определяется по шкале генератора);
Аи = (s(X) + s(v))\v = (^ + ^
80 Определение отношения ср/су для воздуха в стоячей звуковой волне
Окончательный результат:
и = и ± Аи = ..., е(и) = ... %
2. Вычисление j.
еG) = 2ф) + е(Т) + е(М) = 2— + ^ + ^55 А7 =
и Т М
Окончательный результат:
7 = 7 =•= ^7 = • • •, ?(т) = • • • %
За погрешность отсчета ж« целесообразно взять Аж = 1 мм; вполне
реально положить АЛ = 4Ах = 4 мм; AT = IK; приборная погрешность
измерения частоты зависит от конструкции генератора и определяется в
документации; М = 2,9 ± 0,1 г/см3.
Контрольные вопросы
• Вывести формулу для скорости звука в однородной упругой среде.
• Когда справедлив закон Гука? Что такое модуль Юнга?
• Почему процессы «сжатия» и «растяжения» газа в звуковой волне
можно считать адиабатическими?
• Вывести уравнения адиабаты в приращениях (переменные Р, V и
Р, Г).
• Вывести формулу для скорости звука в идеальном газе.
• Написать уравнения гармонических волн, распространяющихся в по-
положительном и отрицательном направлениях х.
• Когда образуется стоячая волна? Каковы ее отличия от бегущей
волны?
ПРАКТИЧЕСКАЯ РАБОТА 12
ИЗУЧЕНИЕ РАБОТЫ ЭЛЕКТРОННОГО
ОСЦИЛЛОГРАФА
Целью настоящей работы являются знакомство с принципами работы
электронного осциллографа и получение практических навыков работы с
осциллографом.
Теоретическое введение
Осциллограф, позволяющий не только оценить амплитуду сигнала, но и
исследовать его форму, является универсальным и потому наиболее широко
применяемым измерительным прибором, используемым при настройке и
ремонте электронной теле™ и радиоаппаратуры, а так же в научных иссле-
исследованиях.
Осциллографы используются для
- исследования изменения напряжения или тока быстропеременных
периодических и однократных процессов;
- измерения амплитуды напряжений или токов;
- определения частот электрических колебаний;
- определения частотно-фазовых соотношений двух и более сигналов.
Элементами электронного осциллографа являются: блок питания,элект-
ронно-лучевая трубка, генератор развертки, делители, блок синхронизации,
усилители.
1. Блок питании. Блок питания преобразует сетевое напряжения B20 В,
50 Гц) в постоянные напряжения, обеспечивающие работу всех узлов ос-
осциллографа.
2. Электронно-лучевая трубка (ЭЛТ). Электронно-лучевые трубки
различают по способу фокусировки и отклонения луча, по длительности
послесвечения экрана и по некоторым электрическим и конструктивным
параметрам (чувствительность ЭЛТ, размеры и т. д.)
По способу фокусировки и отклонения луча электронно-лучевые трубки
делятся на
- трубки с электростатическим управлением, в которых для фокусиров-
фокусировки и отклонения луча используется электрическое поле;
- трубки с магнитным управлением;
- трубки с комбинированным управлением лучом: электростатическая
фокусировка и магнитное отклонение луча (телевизионные трубки).
Под длительностью послесвечения экрана понимают время, в течение
которого яркость экрана после исчезновения луча уменьшается до 1% от
первоначальной. Для современных ЭЛТ длительность послесвечения лежит
в пределах от 1 • 10~5 до 100 с.
82
Изучение работы электронного осциллографа
ЭЛТ состоит из трех основных элементов:
- электронной пушки, создающей узкий электронный луч, направлен-
направленный вдоль трубки;
- отклоняющей системы (устройства для отклонения электронного лу-
луча от оси трубки);
- флуоресцирующего экрана для индикации положения электронного
луча.
На рис. 1 показано устройство ЭЛТ с электростатическим управлением.
ттегттаи ЛЮМИНОфор
катод первый ^ f
анод
нагреватель управляющий ^ щшадаг.
электрод * д— /
Рис. 1.
Электронная пушка. Электронной пушкой называется часть трубки,
формирующая пучок электронов. Сюда входят подогреваемый катод, управ-
управляющий электрод, первый и второй аноды.
Катод — источник электронов. Обычно применяется оксидный подо-
подогреваемый катод, изготовленный в виде небольшого никелевого цилиндра,
внутри которого находится подогреватель.
Управляющий электрод (или модулятор) предназначен для регулировки
яркости светящегося пятна на экране (количества электронов) посредством
небольшого отрицательного потенциала на нем. Выполнен в виде никеле-
никелевого цилиндра, окружающего катод.
Первый анод (фокусирующий) представляет собой цилиндр с двумя или
тремя диафрагмами.
Второй анод (ускоряющий) выполнен также в виде цилиндра и обычно
имеет одну диафрагму.
К первому аноду подводится напряжение порядка 300- 1000 В (отно-
(относительно катода). На второй анод подается более высокое напряжение
1-50кВ.
Диафрагмы внутри анодов способствуют сужению луча электронов, т. к.
они перехватывают электроны, сильно отклоняющиеся от оси трубки.
Отклоняющая система. Чтобы перемещать светящееся пятно по экра™
ну, между вторым анодом и экраном расположена отклоняющая система,
состоящая из двух пар взаимно-перпендикулярных пластин XX и YY.
Пластины XX горизонтально отклоняющие, пластины YY — вертикально
отклоняющие.
Изучение работы электронного осциллографа 83
Флуоресцирующий экран. Экран ЭЛТ трубки покрывается специальным
веществом, обладающим способностью флуоресцировать, т. е. светиться в
местах бомбардировки его электронами. Светящиеся покрытия экранов,
называемые люминофорами, определяют также цвет и длительность све-
свечения экрана. Человеческий глаз имеет наибольшую чувствительность к
желто-зеленой части спектра, поэтому ЭЛТ для визуального наблюдения,
чаще всего делают с желто-зеленым свечением.
При эксплуатации ЭЛТ нельзя длительное время оставлять луч непо-
неподвижным, т. к. длительное воздействие электронного луча на одно и тоже
место экрана вызывает ослабление яркости — «утомление» люминофора в
этом месте и его выгорание!!!
Из тех же соображений рекомендуется также ограничивать яркость луча,
что помимо прочего увеличит точность измерений за счет уменьшения
толщины луча.
При падении электронного луча на экран часть кинетической энергии
электронов переходит в световую энергию люминофора экрана в месте
соударения, остальная часть энергии расходуется на нагревание экрана и
на выбивание из него вторичных электронов.
Большая часть вторичных электронов улавливается проводящим графи-
графитовым материалом — аквадагом, нанесенным на внутреннюю поверхность
баллона. Поэтому, несмотря на то, что во время работы трубки на экран
поступают первичные электроны, между количеством первичных и вто-
вторичных электронов устанавливается динамическое равновесие и потенциал
экрана остается почти постоянным примерно на 100 В и ниже потенциала
второго анода. Кроме того аквадаг выполняет роль электростатического
экрана и предохраняет электронный поток трубки от воздействия внешних,
электрических полей, т. к. он соединен со вторым анодом трубки.
3. Фокусировка электронов электрическим полем. В трубках с элек-
электростатическим управлением в состав фокусирующей системы входят все
элементы электронной пушки. Фокусировка производится подбором на-
напряжений на управляющем электроне и первом аноде.
Управляющий электрод. При изменении напряжения на управляющем
электроде электронный луч расширяется или сужается. При этом чем боль-
больше отрицательный потенциал на управляющем электроде, тем уже лучи и
тем ближе к катоду будут сходиться в одной точке — фокусе F1 (рис. 2).
Это — «электрическая линза».
Фокусирующая система двух анодов. На рис. 3 показан вид силовых
линий электрического поля (сплошные тонкие линии) и эквипотенциаль-
эквипотенциальные поверхности (штриховые линии) между анодами. Потенциал второго
анода А2 выше, чем потенциал первого анода Ai. Поэтому между анода-
анодами образуется электрическое поле, направленное от второго к первому. На
электрон, попадающий в это электрическое поле, действует сила, направ-
направленная в каждой точке поля по касательной к силовой линии.
Разложив эту силу по направлениям вдоль и перпендикулярно оси
системы (рис. 4), легко убедиться, что при описанной структуре поля на
84
Изучение работы электронного осциллографа
электрон, отклонившийся в движении от оси системы, действует помимо
ускоряющей, сила, направленная на участке первого анода к оси, а на участ-
участке второго — от оси системы.
катод
Рис. 2.
Рис. 3.
Рис. 4.
Изучение работы электронного осциллографа 85
В рассматриваемой системе собирательное действие электрического поля
преобладает над рассеивающим из-за того, что
—напряженность электрического поля (густота силовых линий) на участ-
участке первого анода больше, чем на участке второго анода;
- электроны двигаются ко второму аноду с ускорением, т. е. проходят
рассеивающий участок с большей скоростью, чем собирательный, следова-
следовательно, на рассеивающем участке траектории искривляются меньше;
- первый анод имеет меньший диаметр, чем второй, следовательно, из-
изгиб силовых линий вблизи оси трубки больше на участке первого. Поэтому
поперечная составляющая поля всегда больше на участке первого анода.
Описанная конструкция как бы «сводит» траектории электронов, груп-
группируя их вдоль оси симметрии системы. Она получила название электри-
электрической линзы.
4. Генератор развертки. Чтобы с помощью осциллографа исследо»
вать изменение величины сигнала (напряжения) как функцию времени,
необходимо подать исследуемый сигнал на пластины вертикального от-
отклонения ЭЛТ. Тогда, если на пластины горизонтального отклонения луча
мы подадим напряжение, линейно возрастающее во времени, то переме-
перемещающееся по экрану световое пятно изобразит в координатах у = f(x)
график зависимости сигнала от времени U = /(?). К сожалению, через
несколько секунд или долей секунд изображение на экране исчезнет, т. к.
луч покинет пределы экрана, а время послесвечения люминофора огра-
ограничено. Но если сигнал периодический, т. е. повторяющийся во времени,
мы можем получить на экране устойчивое неподвижное изображение. Для
этого будем подавать на пластины горизонтального отклонения ЭЛТ так
называемое «пилообразное» напряжение (рис. 5 а). Очевидно, что если при
этом между периодом сигнала Тс (рис. 5 б) и периодом пилообразного на-
напряжения развертки Тр будет выполняться соотношение Тр = п • Тс, где
п — целое число, на экране появится неподвижное изображение, т. к. луч
при движении будет повторно попадать в одни и те же точки поверхности
экрана. Невозможно, однако, мгновенно изменить напряжение на отклоня-
отклоняющих пластинах, поэтому реально пилообразное напряжение на них имеет
вид, приведенный на рис. 5 в.
Оказывается, что только часть времени (Тр) луч перемещается в нуж-
нужном для нас направлении, «разворачивая» сигнал по экрану (рабочий ход).
Время AT необходимо для возврата луча в исходное положение (обратный
ход). Луч на это время гасится; на управляющий электрод подается запира-
запирающее напряжение. Очевидно, что и в этом случае достаточно удовлетворить
равенству Тр + AT = п • Тс и мы получим на экране стабильное изобра-
изображение (правда, на экране мы увидим не п периодов сигнала, а немного
меньше — на AT). Таким образом, для получения неподвижного изобра-
изображения на экране ЭЛТ нам достаточно иметь возможность плавно изменять
в достаточно широких пределах частоту генератора развертки, чтобы подо-
подобрать период непрерывно следующих друг за другом импульсов развертки
кратным периоду исследуемого сигнала.
86
Изучение работы электронного осциллографа
их
И Л
Ly Ly
.щИГ
т
р ш
А
Л
У
\
______
1у ;
AT t
¦> в
Рис. 5.
Такой способ синхронизации развертки (периодическая автоматическая
развертка) используется в ряде простейших электронных осциллографов,
но для точных измерений он мало применим.
Дело в том, что построить генератор пилообразного напряжения, ча-
частота которого плавно изменялась бы в 106 раз и при этом гарантировать
высокую (до 1%) линейность переднего (рабочего) фронта импульса раз-
развертки и высокое постоянство (так же до 1%) длительности нарастания
напряжения — задача технически весьма сложная.
Гораздо проще сделать высоко стабильный генератор развертки на
несколько фиксированных частот. Как же в этом случае согласовать во вре-
времени (синхронизировать) работу генератора развертки с частотой исследу-
исследуемого сигнала, чтобы получить на экране осциллографа не беспорядочное
мелькание, а неподвижное изображение?
В этом нам поможет принцип «ждущей» развертки (рис. 6). Предста-
Представим, что напряжение на пластинах горизонтального отклонения начинает
возрастать не сразу по окончании очередного цикла, а по определенному
сигналу запуска, который будет подаваться в тот момент, когда напряжение
исследуемого сигнала достигнет заранее заданной величины, называемой
уровнем запуска.
Время развертки Тр задается режимом работы самого генератора и
не связано с длительностью сигнала. Таким образом, «ждущая» развертка
позволяет детально изучить осциллограмму сигнала и более точно опреде-
определить амплитуду и временные характеристики сигнала.
Изучение работы электронного осциллографа
87
5. Схема синхронизации. В режиме ждущей развертки схема син-
синхронизации следит за мгновенным значением напряжения сигнала, срав-
сравнивает его с заданным уровнем запуска и выдает запускающий импульс
на генератор развертки. Сигналом, с которым синхронизируется работа
осциллографа, может быть как сам исследуемый, так и любой другой сиг-
сигнал, что иногда более удобно.
Рис. 6.
Делитель и входной усилитель напряжения. Чувствительность ЭЛТ (от-
(отношение смещения светового пятна по экрану к вызвавшему его напряже-
напряжению) — величина постоянная и определяется конструкцией ЭЛТ. На выход
же осциллографа может подаваться исследуемый сигнал амплитудой от
1 мкВ до десятков вольт. Исследуемый сигнал может быть ослаблен с по-
помощью входного делителя или усилен усилителем. На рис. 7 приведена
функциональная схема осциллографа.
регулировки
1?
схема
синхронизации
^ЙГЗ
rh < уровень >
[авт.
ждущ.
генератор
Л развертки
V время / дел.
В / дел.
запуск
Рис. 7.
Изучение работы электронного осциллографа
Исследуемый сигнал подается на вход «Y» (основной вход) осцилло-
осциллографа и далее через переключатель на вход усилителя с делителем, либо
непосредственно («открытый» вход, гальваническая связь,«~») либо через
разделительный конденсатор (емкостная связь, «закрытый» вход, «~»).
Чувствительность усилительного тракта осциллографа изменяется с по-
помощью входного переключателя, ручка которого проградуирована в В/дел
(под делением поднимается ячейка измерительной сетки экрана ЭЛТ), в
некоторых моделях может указываться предел измерений, соответствую-
соответствующий всей высоте экрана.
Усиленный либо ослабленный сигнал подается затем на пластины вер-
вертикального отклонения ЭЛТ, куда поступает также напряжение с потенцио-
потенциометра «вверх-вниз» блока регулировок. Как и в обычном телевизоре здесь
же расположены регулировки яркости и фокусировки (см. описание работы
ЭЛТ) и регулятор смещения луча «вправо-влево», напряжение с которого
подается на пластины горизонтального отклонения ЭЛТ.
На них же поступает сигнал со входа «X» осциллографа при работе ос-
осциллографа с отключенным генератором и разверткой от внешнего сигнала
или сигнал генератора развертки при работе в обычном режиме.
Органами управления генератором развертки является переключатель
скорости развертки и переключатель режима работы. Скорость развертки
обычно задается как время, за которое луч проходит по горизонтали клет-
клетку измерительной сетки (например, «50 мкс/дел»). Иногда скорость может
задаваться как «время/дел», тогда должен быть переключатель, определя-
определяющий, в каких единицах это время измеряется (с/мс/мкс/нс).
Положение переключателя режима работы определяет, будет ли гене-
генератор развертки запускаться сразу же по окончании предыдущего цикла
работы («периодический», «автоматический» режим) либо по получении
запускающего импульса от схемы синхронизации.
Работа схемы синхронизации, в свою очередь, определяется положени-
положением ручки потенциометра («уровень», «синхронизация», «стабильность»),
задающего величину напряжения на выходе самой схемы, при котором про-
происходит ее срабатывание т. е. формирование импульса на запуск генератора
развертки).
На входе схемы установлен переключатель, позволяющий синхронизи-
синхронизировать работу осциллографа либо с сигналом, поступающим на его основ-
основной вход «Y» («внутренний запуск»), либо с каким либо другим сигналом,
подающимся на специальный вход «запуск», «синхронизации» («внешний
запуск»).
Так как область применения электронных осциллографов весьма об-
обширна (с их помощью производятся измерения сигналов с амплитудой от
десятков микровольт до сотен вольт и длительностью от наносекунд до де-
десятков секунд, периодических сигналов и одиночных импульсов) очевидно,
что осциллографы какого-либо одного типа вряд ли могут обеспечить все
виды измерений. Поэтому существует несколько видов осциллографов (на-
(например, С1... —универсальные осциллографы, С8..., С9... —осцилло-
—осциллографы запоминающие и т. п.) Запоминающие осциллографы, в частности,
Изучение работы электронного осциллографа 89
позволяют запомнить и исследовать однократно воспроизведенный сигнал.
В некоторых случаях, например, для исследования фазо-частотных со-
соотношений двух гармонических сигналов, достаточно иметь простейший
(даже без генератора развертки!) осциллограф.
Экспериментальная часть
1. Измерение амплитуды переменного напряжения.
1. Подайте на вход 1 МО 30 пФ одного из каналов синусоидальный
сигнал с генератора.
2. Установите переключатель режима работы усилителя на требуемый
канал.
3. Поставьте переключатель «В/дел» в такое положение, чтобы ампли-
амплитуда изображения составляла около шести делений.
4. Поставьте переключатель «^2, _1_, ~» в положение «~».
5. Ручкой «УРОВЕНЬ» установите устойчивое изображение. Поставь-
Поставьте переключатель «время/дел» в положение, при котором наблюдаются
несколько периодов колебаний.
6. Установите ручку <ф> вертикального перемещения так, чтобы мини-
минимальный уровень сигнала совпадал с одной из нижних линий, а максималь-
максимальный находился в пределах экрана (рис. 9 а). Ручкой «о» горизонтального
смещения сместите изображение таким образом, чтобы один из пиков на-
находился на вертикальной средней линии шкалы.
7. Измерьте количество делений между точками амплитудного откло-
отклонения.
8. Умножьте количество делений на показание переключателя «В/дел».
2. Измерение длительности и частоты.
1. Подайте на вход 1 МО 30 пФ одного из каналов синусоидальный
сигнал с генератора.
2. Установите переключатель «В/дел» в такое положение, чтобы ампли-
амплитуда изображения составляла около шести делений.
3. Установите переключатель «время/дел» в такое положение, в котором
расстояние между измеряемыми точками будет меньше 10 делений.
4. Установите ручкой «УРОВЕНЬ» устойчивое изображение.
5. Установите ручку «|» вертикального перемещения так, чтобы точки,
между которыми измеряется время сигнала находились на горизонтальной
центральной линии (рис. 9 б).
6. Измерьте горизонтальное расстояние между измеряемыми точками.
7. Умножьте это расстояние на коэффициент развертки.
90
Изучение работы электронного осциллографа
8. Для измерения частоты периодического сигнала необходимо изме-
измерить расстояние по горизонтали между точками отстоящими на период Т.
Далее по известной формуле v = — вычислите частоту сигнала.
В работе учащимся предлагается провести вышеуказанные измерения с
сигналами сложной формы, которые получены путем наложения несколь-
нескольких синусоид с различными фазовыми сдвигами.
максимум расположен
на градуированной вертикали
h
у
\
\
\
i
/
1 \1\
У
1
I
/
/
/
(
1
1
X
Л
1
1
\
л
\
\
i
\
i
/
горизонтальное расстояние
-< >
\
\
|
1
/
11/
1
п
/
/
/
/
1
-
-'
\
1
\
1
\
\
\
1
1
\
1
/
/
Рис. 9.
Контрольные вопросы
Перечислить основные узлы осциллографа, их назначение.
Рассказать об основных режимах работы осциллографа.
Объяснить назначение основных органов управления осциллографа.
Как на осциллографе измеряется напряжение сигнала?
Как с помощью осциллографа измерить частоту периодического сиг-
сигнала?
ПРАКТИЧЕСКАЯ РАБОТА 13
ИЗМЕРЕНИЕ ЧАСТОТЫ КОЛЕБАНИЙ
ПУТЕМ ИССЛЕДОВАНИЯ ФИГУР ЛИССАЖУ
Целью работы является изучение сложения взаимно перпендикуляр-
перпендикулярных колебаний, измерение частоты колебаний путем исследования фигур
Лиссажу.
Теоретическое введение
Допустим, что материальная точка может совершать колебания как
вдоль оси х, так и вдоль перпендикулярной ей оси у. Если возбудить
оба колебания, точка будет двигаться по некоторой, вообще говоря, кри-
криволинейной траектории, форма которой зависит от разности фаз обоих ко-
колебаний. Если начало отсчета времени выбрать так, чтобы начальная фаза
колебаний вдоль оси х была равна нулю, уравнения запишутся как
x = acosouiJ у = Ьcos (out + a), A)
где а — разность фаз обоих колебаний. Чтобы получить уравнение тра-
траектории, нужно исключить из A) время. Из первого уравнения следует,
что
cos out = - . B)
а
Поэтому
/ ^2~
C)
Развернув косинус во втором уравнении по формуле для косинуса сум-
суммы, подставляя при этом вместо cos cut и sin cut их значения из B) и C),
получим
- = - cos a ± sin «4 /1 — —.
а а V ft
Последнее уравнение после несложных преобразований можно привести к
виду
х2 . у2 2ху . 2
— + — — —- cos a = sin а.
а2 Ъ2 аЬ
Определим форму траектории для некоторых частных случаев.
1. Разность фаз а равна нулю. В этом случае
92
Измерение частоты. Фигуры Лиссажу
Это уравнение прямой
у= - х.
а
Результирующее движение является гармоническим колебанием вдоль этой
прямой (рис. 1 а).
2. Разность фаз а равна ±тг. В этом случае уравнение D) имеет вид
а Ъ
= 0.
у = — - х.
а
Результирующее движение является гармоническим колебанием вдоль этой
прямой (рис. 1 б)
3. При а = ±тг/2 уравнение D) переходит в
Т2 II2
— + У- =1.
а2 Ь2
Это уравнение эллипса. При равенстве амплитуд а и Ь эллипс вырож-
вырождается в окружность.
Когда частоты взаимно перпендикулярных колебаний не одинаковы,
Ь
х
Рис. 1.
точка в своем движении будет описывать сложную замкнутую кривую,
которую называют фигурой Лиссажу (рис. 2).
Если провести линии, касательные полученной фигуре Лиссажу и па-
параллельные осям координат, то отношение числа точек касания вдоль линии
параллельной оси х к числу точек касаний вдоль линии параллельной оси
у будет равно отношению частот — .
UJl
Из приведенного примера становится ясно, что подавая два синусои-
синусоидальных сигнала соответственно на пластины горизонтального и верти-
вертикального отклонения ЭЛТ (при этом генератор развертки отключен), мы
Измерение частоты. Фигуры Лиссажу
93
можем получить на экране осциллографа при выполнении указанных выше
условий фигуры Лиссажу. При этом вид полученных фигур будет зависеть
от соотношения частот и фаз подаваемых сигналов. При этом, если часто-
частота одного из сигналов известна {опорная частота), то получив на экране
осциллографа устойчивое изображение фигуры Лиссажу, можно найти ча-
частоту исследуемого сигнала. При этом точность оценки определяется, в
основном, точностью определения частоты опорного сигнала и существен-
существенно выше других методов определения частоты.
Экспериментальная часть
1. Отключив генератор развертки, выставьте луч в центр экрана.
2. Подключите сигнал опорной частоты 50 Гц (выход «» ЛИП-90 ко
входу «Y», а исследуемый сигнал с выхода генератора к входу «X» осцил-
осциллографа.
3. Изменяя частоту генератора, добейтесь устойчивого изображения на
осциллографе, зарисуйте в тетради 2^3 формы фигур Лиссажу, определите
соответствующую частоту сигнала генератора.
i
1 У
V 3v
X
•Jv/uJx=l
Uy/a)x=2
Рис. 2.
ujy/ шх= 4/3
Несколько практических советов по работе с осциллографом.
1. Внимательно изучите описание прибора, или (при отсутствии опи-
описания) надписи на панели осциллографа. Если вы представляете принципы
работы осциллографа, то сможете понять назначение органов управления,
которые, как правило, группируются на панели поблочно, в соответствии
со своими функциями.
2. Включив прибор, и не подавая внешнего сигнала, настройте луч
осциллографа. Для этого прежде всего «найдите» его, т. е. выведите линию
на середину экрана (развертка - автоматическая, яркость - максимальная,
ручки фокусировки «вправо-влево», «вверх-вниз», в среднем положении.
Плавно вращая поочередно ручки регулировки положения луча, добейтесь
среднего на экране положения линии. Отрегулируйте яркость и фокуси-
фокусировку.
94 Измерение частоты. Фигуры Лиссажу
3. Не злоупотребляйте яркостью луча. Это приводит к быстрому старе-
старению люминофора и понижает точность измерений.
4. Измерение параметров неизвестного сигнала начинайте, максималь-
максимально загрубив чувствительность входа осциллографа.
5. В большинстве случаев правильное воспроизведение сигнала на
экране прибора зависит от правильности соединения общей точки («зем-
(«земли») осциллографа с общей точкой («землей») исследуемой схемы. На ос-
осциллограф сигнал подается чаще всего по входному коаксиальному кабелю,
имеющему два одинаковых штеккера, присоединенных короткими прово-
проводами с центральной жилой кабеля и его оплеткой, всегда соединяемой с
«землей» прибора.
При этом земляной штеккер маркируется:
— либо знаком «+»;
— либо цветом темного тона: черный, синий, коричневый;
— либо длиной провода; «земляной» провод немного длиннее; при лю-
любых подключениях первым должно подключаться заземление.
Если все-таки не удается по маркировке распознать «земляной» и «сиг-
«сигнальный» провода, —- можно сделать это, используя себя как генератор
и поочередно «подключаясь» к входным проводам. При этом, чтобы не
попасть самому под напряжение и не вывести из строя прибор, нельзя ка-
касаться, проводящей части штеккера! Достаточно взяться рукой за изоляцию
подходящего к штеккеру провода. Если на экране осциллографа было за-
заметно присутствие небольшого сигнала наводки, то при касании земляного
провода его амплитуда уменьшится. Если же Вы коснетесь другого провода,
то будет заметно увеличение амплитуды сигнала.
Контрольные вопросы
• Вывести формулу результирующего колебания при сложении взаим-
взаимно перпендикулярных колебаний.
• Как будет выглядеть результирующее колебание, если отношение ча-
частот равно 1:2 и разность фаз двух взаимно перпендикулярных коле-
колебаний равна тг/2 ?
• Как определить частоту по «фигурам Лиссажу», зная частоту одного
из складываемых колебаний?
• Объяснить назначение основных органов управления осциллографа.
• Как найти «земляной» и «сигнальный» провода входного кабеля?
ПРАКТИЧЕСКАЯ РАБОТА 14
ОПРЕДЕЛЕНИЕ УДЕЛЬНОГО
СОПРОТИВЛЕНИЯ НИХРОМОВОЙ
ПРОВОЛОКИ
Целью работы является проверка законов постоянного тока, приобре-
приобретение навыков измерения «электрических » физических величин, усвоение
понятий, используемых при описании электрических явлений, измерение
удельного сопротивления нихромовой проволоки.
Теоретическое введение
1. Сила тока. Током называется упорядоченное движение частиц. Так,
например, молекулы воды движутся вполне упорядоченно по водопровод-
водопроводным трубам. Если частицы заряжены, мы имеем дело с электрическим
током.
Для существования электрического тока необходимы и достаточны два
условия:
— наличие свободных зарядов.
- наличие электрического поля, заставляющего эти заряды упорядо™
ченно двигаться.
Сила тока определяется как количество заряда, протекающего через
некоторое сечение за 1 секунду
Пример 1. Пусть по проводу сечения S упорядоченно слева направо
движутся электроны (рис. 1 а). Если за время At сечение S пересекут N
электронов, очевидно сила тока
At
Пример 2. Рассмотрим электрон на орбите атома водорода (рис. 2 б).
Произвольное сечение S за время At электрон пересечет г/At раз, поэтому
заряд, перенесенный за это время q = vAt\qe\. Сила тока
т. е. электрон на орбите создает ниточку тока. Это очень важный факт,
лежащий в основе классической теории «магнетизма» вещества.
Заряд электрона в примерах берется по модулю, т. к. по определению
ток — упорядоченное движение положительных зарядов.
96
Определение удельного сопротивления
2. Электрическое напряжение. Силы электрического поля, заставля-
заставляющие заряды перемещаться упорядочение, совершают над ними
работу Арэл.
А
U.
Рис. 1.
Работа электрической силы по перемещению положительного заряда
+1Кл между двумя точками пространства называется разностью потен-
потенциалов или электрическим напряжением,.
При протекании тока по однородному проводнику напряжение на нем по
закону Г. Ома вычисляется как
U = IR, B)
где R — электрическое сопротивление проводника.
3. Природа электрического сопротивления. Известно, что ток в ме-
металлическом проводнике создают упорядочение движущиеся электроны,
утратившие свою связь с атомами, т. е. свободные. Атомы, потерявшие
электроны, становятся положительно заряженными ионами. Они хаотично
колеблются вокруг положений устойчивого равновесия в узлах кристалли-
кристаллической решетки.
«Столкновения» электронов с ионами в классическом объяснении ста-
становятся причиной сопротивления электрическому току.
Чем длиннее проводник, тем столкновений больше, тем больше сопро-
сопротивление. Чем больше сечение проводника, тем меньше столкновений при
прочих равных условиях. Чем сильнее заряжены ионы, тем сильнее они
притягивают движущиеся электроны, тем вероятнее столкновения — тем
больше сопротивление, т. е. сопротивление зависит также от материала про-
проводника.
Определение удельного сопротивления
97
Все это учитывает эмпирическая формула для расчета сопротивления
однородного проводника длиной I и сечением S, сделанного из материала
с удельным сопротивлением рУД.
R=
C)
Из этой формулы очевидно, что удельное сопротивление численно равно
сопротивлению проводника сечением 1м2м длиной 1 м. В этом состоит его
физический смысл.
В настоящей работе измеряется удельное сопротивление нихромовой
проволоки небольшого диаметра. Так как R = —, приравнивая это выра™
жение к C) и учитывая, что S = —, получим окончательную расчетную
формулу
Руд =
7rd2U
411
D)
Экспериментальная часть
1. Измеряя микрометром диаметр нихромовой проволоки, можно рас-
рассчитать площадь ее поперечного сечения 5. Измерения делают пять раз на
различных ее участках. Заполняют таблицу 1.
Таблица!
№>
1.
2.
3.
4.
5.
Средние
di, мм
2 =
Adi, мм
Adi, мм2
98
Определение удельного сопротивления
2. Вычисляют значение абсолютной погрешности диаметра d.
= . . . MM,
1приб = 0,01мм,
Ad = yj'Аё2случ + Ad2npm6 « Айслуч + А^
Окончательный результат:
d = d±Ad, e(d) = ...%.
= . . . MM.
3. Вычисляют значение площади сечения проволоки 5.
Окончательный результат: S' = Sf=bAS', ?E) = ...%.
4. Собирают электрическую схему эксперимента (рис. 3).
Рис. 3.
Проволока с подвижным контактом, положение которого определяет
деление проволоки на два участка (два сопротивления), называется рео-
реохордом.
5. Для семи различных значений длин проволоки, которые устанавли-
устанавливают передвижением подвижного контакта реохорда, измеряют силу тока /
и напряжение U. Заполняют таблицу 2.
Определение удельного сопротивления
99
Таблица2
т
1.
2.
3.
4.
5.
6.
7.
lf,M
с/г,в
Ji,A
Рг уД, Ом-М
р, Ом-м
Напряжение источника не должно превышать 1,5 В. В противном случае
произойдет значительный нагрев вольфрамовой проволоки и сопротивле-
сопротивление ее будет изменяться.
5. Удельное сопротивление для каждой длины проволоки рассчиты-
рассчитывается по формуле D), а затем вычисляется среднее значение удельного
сопротивления как
Руд — —i—•
7
Так как D) является произведением физических величин, удобнее снача-
сначала вычислить относительную погрешность для семи полученных значений
Pi уд, а затем абсолютную:
фуд) = 2e{d)
(U)
= 2e(d) + —
Погрешности для G и / — приборные и определяются в документации
на измерительные приборы; AI = 1 мм.
Принимая за абсолютную погрешность максимальную из семи вычис-
вычисленных абсолютных погрешностей, получим окончательный результат:
Руд = Руд ±
Фуд) = •••
100 Определение удельного сопротивления
Если
Руд Руд.табличное
результат можно считать достоверным.
Контрольные вопросы
Почему не стали исправлять историческое заблуждение о направле-
направлении электрического тока в металлах?
Что такое электрическое напряжение?
Почему сумма падений напряжений в замкнутом контуре равна нулю?
Из-за чего возникает сопротивление электрическому току?
Какой физический смысл удельного сопротивления?
Почему нельзя вместо нихромовой проволоки взять медную в данной
работе?
Почему напряжение источника не может быть достаточно большим?
Вывести формулу для рачета погрешностей измерения рУД.
ПРАКТИЧЕСКАЯ РАБОТА 15
ОПРЕДЕЛЕНИЕ СОПРОТИВЛЕНИЯ
ПРОВОДНИКОВ
КОМПЕНСАЦИОННЫМ МЕТОДОМ
УИТСТОНА
Цель работы — научиться измерять сопротивления с помощью мостика
Уитстона, убедиться на эксперименте в справедливости законов постоян-
постоянного тока.
Теоретическое введение
1. Закон Ома. Сопротивление проводника. Если через некоторую
поверхность переносится суммарный заряд, отличный от нуля, говорят, что
через поверхность течет электрический ток.
Ток может протекать в твердых телах (металлы, проводники), в жидко-
жидкостях (электролиты), в газах и в вакууме.
Необходимые и достаточные условия для электрического тока — нали-
наличие свободных зарядов и наличие электрического поля.
Свободные заряды обычно совершают хаотическое (тепловое) движе-
движение со скоростью и. При включении электрического поля на это движение
накладывается упорядоченное движение со скоростью v. Таким образом,
результирующая скорость носителей тока равна v + u в любой момент
времени. Среднее значение этой скорости
так как средняя скорость хаотического движения и = 0.
Если за время dt (бесконечно малый промежуток времени) через по-
поверхность переносится заряд dq9 то
I = * = q A)
dt
называется силой тока. Размерность силы тока [I] = — = — = А (ампер).
Немецкий ученый Г. Ом экспериментально установил закон, согласно
которому сила тока текущего по однородному проводнику из металла, про-
пропорциональна падению напряжения U на проводнике
I=IU. B)
Коэффициент 1/R называется проводимостью проводника. Вводится так™
же вектор j, равный по модулю силе тока dl через малую поверхность dS,
102 Мостик Уитстона
расположенную «в данном месте» перпендикулярно к направлению движе-
движения зарядов
' - Ъ-
Величина R (сопротивление проводника) зависит от формы и размеров
проводника, от свойств металла
где I — длина однородного проводника, руд — удельное сопротивление,
5 — площадь сечения. Получим теоретическую связь j и Е (напряженность
поля, которое «движет» заряды упорядоченно).
Возьмем элементарный цилиндрический объем с образующими парал-
параллельными векторам j и Е (рис. 1). Через сечение AS течет ток силой
I = jAS. Напряжение, приложенное к цилиндру, равно U = EAL Со-
Сопротивление проводника R = ^-. Подставим эту формулу в B) и получим
jAS=ASEAl^ j = J_E.
РуяА1 Руд
Векторы j и Е имеют одинаковое направление в изотропном проводни-
проводнике (физические свойства такого проводника не зависят от направления),
поэтому
j = — Е. E)
Руд
Формула E) выражает закон Ома в дифференциальной форме.
Плотность тока можно записать также как j = епи, где п — концентра-
концентрация зарядов. Сопоставляя эту формулу с E), можно сказать, что скорость и
упорядоченного движения пропорцио-
^ ^1 ^ нальна Е. Но Е — это сила действующая
со стороны электрического поля на поло-
положительный единичный заряд. Она долж-
|| на быть пропорциональна не скорости, а
ускорению. Значит обязана быть и сила,
направленная противоположно Е, т. е. си-
рис | ла сопротивления. Эта сила вызвана вза-
взаимодействием носителей тока с частица-
частицами, из которых состоит вещество проводника (в металлах это ионы, колеб-
колеблющиеся около положений равновесия в узлах кристаллической решетки).
2. Мостик Уитстона. Схема мостика изображена на рис. 2. Здесь R —
эталонное сопротивление, значение которого известно, Rx — измеряемое
сопротивление, R\ и R^ — сопротивления участков проволоки с длинами
1\ и /2 соответственно. Скользящий по проволоке движок определяет точ-
точку D. Такое устройство называется реохордом. Перемещая движок реохор-
реохорда, добиваются, чтобы ток через гальванометр G стал равным нулю (баланс
Мостик Уитстона
103
схемы). Тогда в точках С и D (узлы схемы) ток не разветвляется: через R
и Rx идет ток Il9 через проволоку — /2, т. е. tpc = 4>d- Между точками
А
R, U.
Рис. 2.
А и D включено сопротивление R\ (участок проволоки длиной 1\). Между
точками D и В — сопротивление i?2 (длина 12) По закону Ома
s
Разделив второе из этих уравнений на первое и сокращая на общие множи-
множители, получим
Rx _ h г> _ Rte
R h ' X h
F)
Экспериментальная часть
В качестве источника питания используется блок питания «Марс», ко-
который должен давать напряжение не более 3 В. При большем напряжении
вольфрамовая проволока сильно нагревается, и ее сопротивление заметно
меняется.
Необходимо собрать схему мостика Уитстона, используя макетную пла-
плату с навесными элементами. В качестве вольтметра используется точный
цифровой прибор, что исключает неточность фиксирования положения
стрелки при использовании зеркальной шкалы. В работе измеряются 4
неизвестных учащимся сопротивления, в качестве эталонного сопротив-
сопротивления используется сопротивление номиналом 300 Ом. Плечи реохорда h
104
Мостик Уитстона
и h определяются с помощью встроенной в установку миллиметровой ли-
линейки. Схема сборки представлена на рис. 3.
R
Рис. 3.
Порядок выполнения работы:
1. Собрать схему установки, включив в нее эталонное сопротивление
300 Ом и неизвестное сопротивление.
2. Передвигая подвижный контакт, добиться баланса схемы.
3. Измерить как можно точнее 1\ и 1<2 в этом положении. Рассчитать Rx
по формуле F).
4. Рассчитать погрешности измерения Rx:
s(Rx) = e(R) + e{h) + s(l2) = s(R) + — +—, A(RX) = Rxe{Rx),
h h
приняв AI = 1 мм, e(R) = 10% (паспортные данные используемых
приборов).
Окончательный результат: Rx = Rx ± ARX1 e(Rx) = ...%.
5. Измерения и расчеты повторяются для четырех предложенных уча-
учащимся неизвестных сопротивлений. При защите экспериментальной ра-
работы рассчитанные сопротивления сравниваются с их действительными
значениями, которые заранее не известны учащимся. В пределах погреш-
погрешностей эти значения должны совпасть, что будет означать качественное
проведение эксперимента.
Мостик Уитстона 105
Контрольные вопросы
Чем обусловлено электрическое сопротивление проводника? Что ут-
утверждает закон Ома?
Для чего вводится понятие плотности тока? Как написать закон Ома
13 дифференциальной форме?
1ак рассчитывается сопротивление проволоки?
1з-за чего на микроскопическом уровне возникает сопротивление
прохождению тока в металле?
Как сопротивление проводника зависит от его материала? Дайте качест-
качественное объяснение.
Показать, как скорость упорядоченного движения зависит от Е. По-
Почему это так?
В чем сущность балансного метода Уитстона?
Почему в качестве напряжения источника используется напряжение
U ^ 3 В?
Почему проволока реохорда сделана из нихрома, а не из алюминия?
ПРАКТИЧЕСКАЯ РАБОТА 16
ПЕРЕХОДНЫЕ ПРОЦЕССЫ
В КОНДЕНСАТОРЕ.
ОПРЕДЕЛЕНИЕ ЕМКОСТИ
В работе исследуются процессы заряда и разряда конденсатора в элек-
электрической цепи с помощью осциллографа. Определяется емкость конден-
конденсатора.
Теоретическое введение
Конденсатор — система двух изолированных проводников, простран-
пространство между которыми может быть заполнено диэлектриком. Эти проводни-
проводники называются обкладками.
Чтобы внешние тела не оказывали влияния на конденсатор, его обкладки
располагают друг относительно друга так, чтобы поле, создаваемое накап-
накапливающимися на них. зарядами, было сосредоточено практически полно-
полностью внутри конденсатора. Это означает, что линии вектора напряженно-
напряженности Е, начинающиеся на одной обкладке, должны заканчиваться на другой,
т. е. заряды на обкладках должны быть одинаковы по модулю и противопо-
противоположны по знаку (q и —q). Обкладки могут быть плоской, сферической и ци-
цилиндрической формы. На рис. 1 показан плоский воздушный конденсатор.
+ q
V Е_
Рис. 1.
Между обкладками заряженного конденсатора образуется напряжение U.
Заряд прямо пропорционален напряжению между обкладками:
q = CU,
где С —коэффициент пропорциональности, называемый емкостью кон-
конденсатора.
Переходные процессы в конденсаторе
107
Найдем выражение для емкости плоского воздушного конденсатора.
По принципу суперпозиции (рис. 1)
Е = Е+ + Е^.
Так как заряды пластин одинаковы по модулю, одинакова и поверхност-
поверхностная плотность зарядов пластин а = —. Известно, что Е+ = Е- = —.
S ¦¦ + 2е0
Тогда поле вне конденсатора отсутствует, а внутри конденсатора определя-
определяется выражением
По определению напряжения
?0
отсюда
A)
р _ q _ aS _ e0S
U U d
Если пространство между обкладками заполнено диэлектриком с диэлек-
h
С
Рис. 2.
трической проницаемостью г, поле внутри конденсатора уменьшается в е
раз, поэтому емкость такого конденсатора
с =
B)
Рассмотрим схему с переключателем (рис. 2).
При замкнутом ключе К ток идет по цепи: «плюс» источника, R±,
i?2, тА. «минус» источника. Его установившееся значение /п =
R1 + R2
(сопротивлением амперметра можно пренебречь). Напряжение на конден-
конденсаторе в этом случае
Uc = ? - IqRi =51-
R1 + R2
108
Переходные процессы в конденсаторе
До этого напряжения конденсатор заряжается так, как показано на рис. 3 а.
При размыкании ключа конденсатор разряжается через i?2 по цепи
(рис. 3 6): «плюс» конденсатора, Й2, гпА, «минус» конденсатора. Можно
показать, что зарядка и разрядка конденсатора происходят по экспоненте,
в частности разрядка описывается формулами
Q =
C)
где г = RC — постоянная времени цепочки разряда, qm и Uq — макси-
максимальные значения заряда и напряжения конденсатора.
Процессы зарядки и разрядки конденсатора называются переходными
процессами.
и
Рис. 3.
Экспериментальная часть
Наглядно увидеть процессы зарядки и разрядки конденсатора можно на
осциллографа, собрав схему (рис. 4).
В качестве i?2 должно быть выбрано очень большое сопротивление
- 1 МО.
Генератор вырабатывает прямоугольные импульсы напряжения и ими-
имитируют работу ключа.
На I канале двухканального осциллографа наблюдают изменение напря-
напряжения на генераторе. Это изображение используется только для наглядного
представления переходного процесса «по этапам».
На II канале осциллографа наблюдают изменение напряжения на кон-
конденсаторе и делают измерения.
Диод «пропускает» только положительные импульсы напряжения. В это
время конденсатор заряжается через сопротивление R\.
Переходные процессы в конденсаторе
109
Рис. 4.
При отрицательном импульсе напряжение «отключается» от конденса-
конденсатора, и он разряжается через Д2. На экране двухдучевого осциллографа
можно наблюдать следующую картину (рис. 5).
Рис. 5.
В промежутке времени Ati = ?3 ~ h конденсатор заряжается, в проме-
промежутке Д^2 = t^ — ts — разряжается.
На экране осциллографа выбирают интервал времени разрядки, напри-
например At = ?2 — t\ (желательно, чтобы он занимал целое число клеток по
горизонтали).
110 Переходные процессы в конденсаторе
По двум значениям напряжения, интервал времени между которыми At
(см. рис. 3 б), получаем:
U{h) = l/oe"tl/r, U2 = U(h + At) = Uoe^+At^\ ^ = eM'\
U2
In — = —, r = = RC,
U2 t In U1/U2
C= ^ . D)
(In U1/U2)R
Так вычисляется емкость конденсатора по графику разрядки на осцил-
осциллографе. .
Порядок проведения эксперимента.
1. Поворотом ручки выбора входного напряжения на осциллографе
устанавливают уровень «О» (положение X). Его совмещают с центральной
горизонтальной линией сетки шкалы. Напряжение измеряют по количеству
вертикальных клеток шкалы, умножая затем это количество на цену деле-
деления одной клетки (положение ручки «В/дел» соответствующего канала).
2. Длительность сигнала измеряют по количеству горизонтальных кле-
клеток, умножая это количество на цену деления одной клетки (положение
ручки «время/дел» соответствующего канала).
Обработка результатов измерений
Среднее значение С = — .
(In Ui/U2)R
Измерения U\ и 172 и At на экране осциллографа проводятся с точно™
стыо не менее 15%.
Сопротивление R выбирается равным ~ 1 МО. Относительная погреш-
погрешность е(!?приб) определяется паспортными данными.
Погрешности косвенных измерений С вычисляются по формулам
(см. таблицу 2 на стр. 13):
e(C)=e(R)+e(At)+eQn иг/и2) =
= e(R) + e(At) + "н^, AC = e(C)C.
Переходные процессы в конденсаторе 111
Окончательный результат:
С = С±АС, е(С) = ...%.
Контрольные вопросы
Вывести формулу для емкости плоского конденсатора с диэлект™
риком.
Что такое переходные процессы?
Вывести формулу для емкости воздушного сферического конден-
конденсатора.
Как рассчитать заряд по графику I{t)l
Почему выбирается достаточно большим сопротивление, через кото-
которое конденсатор разряжается?
Нарисовать изменение напряжения на конденсаторе при подаче с те»
нератора импульсного прямоугольного напряжения. Объяснить, что
происходит в различные промежутки времени.
Что такое постоянная времени зарядки и разрядки конденсатора?
Вывести формулу для вычисления емкости, используемую в экспери-
экспериментальной работе.
ПРАКТИЧЕСКАЯ РАБОТА 17
ОПРЕДЕЛЕНИЕ НАПРЯЖЕННОСТИ
ЭЛЕКТРИЧЕСКОГО ПОЛЯ
В ЦИЛИНДРИЧЕСКОМ ПРОВОДНИКЕ
С ТОКОМ
Целью работы является проверка законов постоянного тока, определе-
ние напряженности электрического поля в цилиндрическом проводнике с
током, оценка скорости упорядоченного движения электронов.
Теоретическое введение
В теоретическом введении мы ограничимся только выводом формулы
для скорости упорядоченного движения электронов в однородном провод-
пике цилиндрической формы, поскольку вопросы протекания тока в про-
проводниках подробно изложены в работах по определению удельного сопро-
сопротивления (стр. 95) и измерению сопротивления компенсационным методом
(стр. 101).
Связь плотности тока и напряженности электрического поля внутри
однородного изотропного проводника устанавливает закон Ома в диффе-
дифференциальной форме:
j = —E. A)
Руд
С другой стороны, исходя из определения j следует, что
j = епч. B)
Здесь е — заряд носителя тока, п — концентрация носителей тока, v —
скорость упорядоченного движения.
Зная рУд, можно рассчитать напряженность в цилиндрическом провод-
проводнике. Так как для изотропного проводника j = — = — Е9
S /}уд
Я=^ш. C)
Поскольку в металле носителями тока являются электроны, направления
тока и упорядоченного движения электронов противоположны (рис. 1).
За промежуток времени At через поперечное сечение проводника S
пройдут электроны, находящиеся в объеме цилиндра сечением S и высотой
vAt. Их количество
N = nvSAt.
Напряженность в проводнике с током
113
= vAt
Через сечение S за это время будет перенесен заряд
q = \e\nvSAt.
По определению силы тока
j _ q _ \e\nvSAt
At
At
Отсюда получим формулу для определения скорости упорядоченного дви-
движения электронов:
v =
\e\nS
Используя A) и B) можно переписать ее в виде
Е
V = .
D)
E)
Вычислим концентрацию п. Количество молей материала проводника
можно определить как т/М, где т — масса проводника, М — молярная
масса, и как N/N&, где N — количество атомов в проводнике
т _ N
М ~ NA
N =
mNA
_ N _ mNA _ zpNA
it — Z— — Z
М V MV М
где z — валентность, р — массовая плотность, 7?д — число Авогадро.
114
Напряженность в проводнике с током,
Экспериментальная часть
Схема установки приведена на рис. 2.
ыихромовая проволока
К
Рис. 2.
1. Измеряя микрометром диаметр нихромовой проволоки, вычисляют
площадь ее поперечного сечения S (см. стр. 97).
Окончательный результат записывают в виде
2. Собирают электрическую схему эксперимента.
3. Изменяя сопротивление R, измеряют семь значений тока в цепи.
Измерения проводят равномерно по всему диапазону изменения R. Резуль-
Результаты помещают в таблицу экспериментальных данных.
Различные R
Е{, В/м
1
2
3
4
5
6
7
4. Для каждого значения 1{ вычисляют Et из C), а затем погрешности:
е(Е) = e(S)
фуд) = ^
Руд
5 АЕ = е(Е)Ег.
Относительная погрешность измерения тока определена в паспорте прибо™
ра. Для удельного сопротивления нихрома рУД = A,10 ± 0,05) • 10~6 Ом-м.
Напряженность в проводнике с током 115
По окончательным результатам делают выводы об экспериментальной
зависимости Е от I и о порядках величин Е{ при различных токах.
5. Используя значения 1^, по формуле D) вычисляют скорости Vi упо-
упорядоченного движения электронов в проводнике при протекании в нем
электрического тока и погрешности:
ф) = e(Ii) + e(S) = e(Ii) + ^, Av = e(v)Vi.
Расчет концентрации п по формуле F) делают с учетом того, что нихром
двухвалентен.
6. Делают выводы о величине скорости упорядоченного движения, о
зависимости скорости от напряженности Е в проводнике.
Контрольные вопросы
• Вывести формулу закона Ома в дифференциальной форме.
• Как связана плотность тока и скорость упорядоченного движения
носителей тока?
• Почему скорость упорядоченного движения носителей тока невелика,
а ток возникает мгновенно после включения ключа К?
• Почему при вычислении погрешностей мы пренебрегаем погрешно-
погрешностями измерений е?
• Как рассчитать погрешность вычислений Е, vl
ПРАКТИЧЕСКАЯ РАБОТА 18
ИССЛЕДОВАНИЕ РАБОТЫ ИСТОЧНИКА
В ЦЕПИ ПОСТОЯННОГО ТОКА
Целью работы является изучение работы источника тока в цепи посто-
постоянного тока, определение его Э Д С и внутреннего сопротивления, полезной
мощности, коэффициента полезного действия.
Теоретическое введение
1. Источник тока. Постоянный ток течет по замкнутой цепи, схема
которой изображена на рис. 1; здесь 1-2— полюса источника, г —внут-
реннее сопротивление (сопротивление среды внутри источника).
Поскольку за направление тока принимается упорядоченное движение
положительных зарядов, ясно, что во
внешней цепи их движение осуществ-
осуществляет электрическое поле. Действи-
Действительно, положительные заряды оттал-
отталкиваются от положительного полюса
источника и притягиваются к отри-
отрицательному. По определению работа
электрических сил по переносу заря-
заряда +1 кулон между двумя точками
электрической цепи это разность по-
потенциалов (напряжение) между этими
точками.
На участке 2-1 внутри источни-
источника электрические силы не могут пере-
переместить положительные заряды. Это
делают силы неэлектрического проис-
происхождения (сторонние), возникающие, например, в результате химических
реакций.
По определению, работа сторонних сил по переносу заряда +1 Киот 2
к 1 — электродвижущая сила источника ?.
Отсюда следует, что
U±2 = (fi — (f2 = ? — IR4 U12 — ?•> если / = 0.
Цепи постоянного тока всегда замкнуты и содержат как потребители
(лампы, бытовые приборы), так и источники.
Иногда возникает необходимость соединять источники в батареи и ис-
использовать эти батареи как эквивалентные источники тока. Расчет батареи
источников можно произвести с помощью законов Кирхгофа.
Рис.
Исследование работы источника в цепи постоянного тока
117
2. Соединения источников в батареи. При последовательном соеди-
соединении (левая часть рис. 2 а)
I = — .
г\ + г2
Здесь учтено, что ЭДС &2 имеет положительное значение, а ЭДС Е\ —
отрицательное при данном выборе направления тока / .
Для эквивалентного источника <?Экв (правая часть рис. 2 а):
т ^экв
Гэкв
ОтСЮДа ПОЛуЧИМ ?экв = <?2 — ? 1 , ^*экв = Т\ + Г2 .
При параллельном соединении (левая часть рис. 2 б)
i2 = ?\ +
, С/12 = ^<^2 + i2^2, i2 =
Г\ Г2
По первому закону Кирхгофа I = 1\ + /2 , и
11
fl Г2 / 7"! Г2
Для эквивалентного источника <?экв (правая часть рис. 2 б):
1 >\ , ^экв
= /.
Таким образом получим
1 _ 1 1
'экв Г\ Г2
Г1
Is ЭКВ
Рис. 2.
Знаки ЭДС выбраны в соответствии с направлением тока I.
118 Исследование работы источника в цепи постоянного тока
3. Полезная мощность, КПД источника. Ток в цепи нашей схемы
(рис. 1) вычисляется по формуле
i= ?
R + r
По закону Джоуля^ Ленца на сопротивлении при протекании по нему элек-
электрического тока выделяется тепло.
Полезная мощность выделяется на потребителе (внешнем сопротив-
сопротивлении).
= I2R= gR . A)
(R + rJ
Исследуем поведение P(R), преобразовав A):
e2r г2
Р =
При R —>• оо, Р —»¦ 0 . При R = О, Р = 0 . Где-то график должен иметь
максимум (рис. 3 а). Это легко вычислить, взяв производную от Р по R
или преобразовав A) следующим образом:
Это выражение будет максимальным, когда знаменатель будет мини-
минимальным.
г2 (/— г \2
Преобразуем знаменатель: R — 2г + — + 4г = л/R — —— + 4г .
R V >/Д/
Это выражение минимально, когда выражение в скобках равно 05 то есть
при R = г.
Итак, максимум полезной мощности достигается, когда внутреннее со-
сопротивление равно сопротивлению потребителя.
Потерянная мощность Рп выделяется на внутреннем сопротивлении.
Избежать этих потерь невозможно, т. к. внутреннее сопротивление — ха-
характеристика источника.
Коэффициент полезного действия источника определяется как отноше-
отношение Р к полной выделяемой источником мощности Pq = SI:
^ = ^. B)
1
+
R
При R = 0 г) = 0; при R —> оо »j —»¦ 1; при R = г ц = 0, 5 (рис. 3 б).
Исследование работы источника в цепи постоянного тока
119
0,5
R= r
R=r
Рис. 3.
Экспериментальная часть
В работе определяются ^ иг источника тока (батарейка для карман-
карманного фонарика). С целью получения устойчивых результатов, внутреннее
сопротивление батарейки увеличено присоединением к ней достаточно
большого сопротивления ДДОб- Рабочая схема представлена на рис. 4.
+ ?
К
Рис. 4.
тЛ
Изменяя сопротивление R, измеряют семь значений напряжения на
источнике и тока в цепи. Измерения проводят равномерно по всему диапа-
диапазону изменения R . Результаты помещают в таблицу экспериментальных
данных.
120
Исследование работы источника в цепи постоянного тока
Обработка результатов измерений
1. Для двух значений U (лучше для максимального и минимального)
получаем
иг=?- Дг, U2 = ?- I2r, U±-U2 = (h ~~ Д)г,
Г =
? =
/2-/1
/2 " /l
C)
D)
т
i.
2
3.
4.
5.
6.
7.
и, в
/,мА
2. Погрешности для г, вычисляемого по формуле C):
Погрешности прямых измерений s(U) и
на соответствующие приборы.
Окончательный результат
указаны в документации
г = г ± Дг, г(г) = ...%.
Исследование работы источника в цепи постоянного тока 121
3. Погрешности для ЭДС ? , вычисляемой по формуле D):
А/2 + А/1
=
ттт\
hu2)
h - h) =
+
A/2 + A/i =
/2-/1
A/2 + A/i _
A/2 + A/i
Окончательный результат
4. Для построения графиков полезной мощности Р(Д) и коэффици-
коэффициента полезного действия rj(R) для каждой точки нужно записать значения
R, P(R) и rj(R), а также погрешности ДД5 AF и А?], предварительно
рассчитав их:
Д = - , e(R) = e(U) + еA), АД = е
Р = g2R , е(Р) = 2е{?) + е(Д) + 2e(R + г) =
(Д + гJ
= 2е{?) + е(Д) + 2(АД + Аг), АР =
Д + г
, е(т))= e(R) + e(R + r)=e(R)+ ^±^ , А (г,) =
R +
R + г R + г
Запись для каждой точки графика должна выглядеть как
Д=...Ом, ДД = ..., e(R) = ...%,
Р = ...Вт, ДР = ..., е(Р) = ...%,
f]= ..., Дг/ = ..., ф) = ...%.
122 Исследование работы источника в цепи постоянного тока
5. Графики Р , rj(R) необходимо построить на миллиметровой бумаге
по точкам с изображением «прямоугольников ошибок» .
6. Необходимо сделать выводы о согласовании графиков с теорией.
Контрольные вопросы
• Что такое электрическое напряжение между двумя точками цепи?
• Что такое Э Д С, как связаны Э Д С и напряжение между двумя точ-
точками?
• Чему равно напряжение на полюсах источника?
• Что такое полезная, потерянная и полная мощность, выделяемая в
цепи?
• При каком значении внешнего сопротивления достигается макси-
максимальная полезная мощность? Вывести формулу максимальной по-
полезной мощности.
• Вывести формулу для определения rj источника.
• Как рассчитать погрешности определения Р , rj(R) ?
ПРАКТИЧЕСКАЯ РАБОТА 19
ИЗУЧЕНИЕ ЗАКОНОВ
ОТРАЖЕНИЯ И ПРЕЛОМЛЕНИЯ СВЕТА
Целью работы является проверка основных законов геометрической
оптики. Определяется угол полного внутреннего отражения и абсолютный
показатель преломления стекла.
Теоретическое введение
Длины воспринимаемых глазом световых волн очень малы (по-
(порядка 10 ~7 м). Поэтому распространение видимого света можно в пер-
первом приближении рассматривать, отвлекаясь от его волновой природы и
полагая, что свет распространяется вдоль некоторых линий, называемых
лучами. Под лучом в физическом смысле этого слова понимают достаточно
узкий световой пучок.
Когда луч света достигает плоской границы раздела двух прозрачных
сред (рис. 1), он частично проходит во вторую среду (преломляется), ча-
частично возвращается обратно (отражается).
1. Закон отражении света. Этот закон был известен еще грекам и упо-
упоминается в сочинении Евклида (III век до н. э.) Установление его связано с
применением полированных металлических поверхностей (зеркал), извест-
известных уже в очень отдаленную эпоху. Этот закон утверждает, что падающий
луч АО и отраженный луч О А; лежат в одной плоскости с нормалью MN,
проведенной к границе раздела сред через точку О падения луча (эта плос-
плоскость называется плоскостью падения), причем угол отражения /3 равен
углу падения а (рис. 1 а):
/3 = а. A)
А
v
\
пх
п2
N
0
М
п
/
\
л
\
/
X
А «1
у
Рис. 1.
124 Отражение и преломление света
2. Закон преломления света. Закон был установлен эксперименталь-
экспериментально в 1621 г. голландским ученым Снеллиусом A580-1626) и опубликован
только после его смерти. Согласно закону преломления, преломленный луч
ОА/; (рис. 1 а) лежит в плоскости падения, причем отношение синуса угла
падения а к синусу угла преломления j для рассматриваемых сред зави-
зависит только от относительного показателя преломления и не зависит от угла
падения:
sin а , /(_ч
= 7l2i = Const. B)
sin 7
Постоянная величина 7&2i называется относительным показателем пре-
преломления второй среды относительно первой. Показатель преломления сре-
среды относительно вакуума называют абсолютным показателем преломления
этой среды. Для абсолютного показателя преломления среды п волновая
теория дает: п = c/v, где с и 3 • 108 м/с — скорость света в вакууме,
п v — скорость света в среде. Относительный показатель преломления
7i2i выражается через показатели преломления сред щ и п2 соотноше»
нием
поэтому закон Снеллиуса можно записать как
ni sin а = П2 sin 7- C)
3. Полное внутреннее отражение света. Если луч АО падает из более
оптически плотной среды на границу раздела с менее плотной (п2 > п\),
преломление происходит обычным образом (падающий луч АО, прелом-
преломленный луч ОА/; (рис. 1 б)).
При угле падения «о таком, что j = тг/2 , преломленный луч сколь-
скользит по поверхности раздела сред (падающий луч A iO, преломленный луч
ОА'/).
Если угол падения становится больше угла «о э луч не проникает в
менее плотную среду, происходит явление полного внутреннего отражения
(падающий луч А 2О, отраженный луч ОА 2 ).
Угол падения а0 , при котором оно возникает, называется предельным
углом полного внутреннего отражения, причем
7i2 sin «о = Tii sin7r/2, sin «о = ~-^ =^12- D)
П2
Величина «о называется предельным углом полного отражения.
В настоящей работе экспериментально проверяются соотношения A),
B) — законы отражения и преломления света, а также наблюдается явление
полного отражения D).
Отражение и преломление света 125
Экспериментальная часть
Для изучения законов отражения и преломления света в работе исполь-
используется стеклянный полуцилиндр с матовой нижней поверхностью. Полуци-
Полуцилиндр помещают на горизонтальный оптический столик, имеющий форму
диска так, чтобы середина плоской поверхности полуцилиндра совпала с
центром диска (рис. 2). Узкий пучок света (луч лазера) направляют на бо-
боковую поверхность полуцилиндра перпендикулярно его поверхности. На
плоской поверхности луч частично преломляется и частично отражается.
Оптический столик настраивают так, чтобы луч лазера скользил по
его поверхности. В эксперименте измеряют углы отражения C и пре-
преломления 7 • Изменение угла падения а осуществляется путем поворота
лазер
Рис. 2.
столика вокруг вертикальной оси, перпендикулярной его поверхности. Для
измерения углов на диске нанесены деления (цена деления 1°) .
Измеренные значения углов а и /3 сравнивают, и тем самым проверяют
соотношение B) — закон преломления света. По измеренным значениям
углов а и 7 вычисляют отношение sin a/ sin 7. Если эти отношения
одинаковы при различных значениях угла падения, то закон преломления
B) подтверждается.
В данном эксперименте можно наблюдать явление полного отражения.
Увеличивая угол падения а можно заметить, что яркость отраженного
луча растет, в то время как яркость преломленного луча падает. Начиная с
некоторого угла падения «о преломленный луч исчезает.
1. Включите лазер и отрегулируйте оптический столик так, чтобы луч
лазера скользил по его поверхности.
2. Поместите на оптический столик стеклянный полуцилиндр так, как
это описано выше. Поворачивая столик вокруг вертикальной оси, измерьте
углы отражения /3 и преломления 7 ПРИ разных углах падения а Резуль-
Результаты измерений занесите в таблицу.
126
Отражение и преломление света
№
а;
А-
и
sin а/ sin 7
1.
2.
3.
4.
5.
6.
7.
3. Определите показатель преломления стекла и оцените погрешности
полученного результата. Оцените скорость распространения света в стекле.
4. Экспериментально определите угол «о полного отражения на грани-
границе раздела «стекло-воздух». Полученное значение а0 сравните с рассчи™
тайным по формуле D).
Обработка результатов измерений
Показатель преломления воздуха можно принять равным единице, по-
поэтому для экспериментального расчета показателя преломления получим
(см. таблицу 2 на стр. 13)
п =
, е(п) = e(sinao) =
, Да = 1°, An = е(п)п.
Показатель преломления стекла п = 1,30 ± 0,05 . В пределах погреш™
ности вычисленное значение п должно с ним совпадать.
Контрольные вопросы и задачи
Что такое «геометрическая оптика»? Сформулируйте основные зако-
законы геометрической оптики.
В чем состоит явление полного внутреннего отражения? При каких
условиях оно возникает?
Под каким углом /3 к горизонту следует расположить плоское зерка-
зеркало, чтобы солнечными лучами осветить дно вертикального колодца?
Высота солнца над горизонтом составляет угол а = 30°.
Плоское зеркало наклонено под углом а = 45° к горизонтальной
поверхности стола, на котором лежит книга. В какой плоскости нахо-
находится изображение книги?
Отражение и преломление света 127
Какова должна быть минимальная высота плоского зеркала, висящего
вертикально на стене, чтобы человек высотой 180 см мог видеть свое
изображение в полный рост?
Почему палка, частично погруженная в воду кажется изломанной в
том месте, где она входит в воду?
Под каким углом световой луч падает на плоскую поверхность стек-
стекла, если отраженный и преломленный лучи образуют между собой
прямой угол? Скорость света в стекле v = 2 • 108 м/с.
В дно озера вбита свая высотой Н = 4 м, выступающая из воды
на h = 1 м. Найти длину L тени сваи на дне озера, если лучи
Солнца падают на поверхность воды под углом а = 45°. Показатель
преломления воды п = 1,33 .
Пловец, нырнувший с открытыми глазами, рассматривает из-под во-
воды светящийся предмет, находящийся над его головой на расстоянии
h = 75 см от поверхности воды. Каково будет кажущееся расстоя-
расстояние Н от поверхности воды до предмета?
На дне водоема глубиной h = 2 м находится точечный источник
света. На поверхности воды плавает деревянный диск так, что центр
диска находится над источником света. При каком минимальном ра-
радиусе диска ни один луч не выйдет через поверхность воды?
ПРАКТИЧЕСКАЯ РАБОТА 20
ОПРЕДЕЛЕНИЕ ФОКУСНЫХ РАССТОЯНИЙ
СОБИРАЮЩЕЙ И РАССЕИВАЮЩЕЙ ЛИНЗ
Теоретическое введение
В большинстве реальных оптических систем содержится несколько пре-
преломляющих, сферических поверхностей. Оптическую систему называют
центрированной, если центры всех поверхностей лежат на одной прямой,
которую называют главной оптической осью системы.
Простейшей центрированной оптической системой является линза. Она
представляет собой прозрачное, обычно стеклянное тело, ограниченное
двумя сферическими поверхностями. В частном случае одна из поверхно-
поверхностей может быть плоской (рис. 1).
Точки пересечения поверхностей линзы с ее главной оптической осью
/I
\
f\\\ V7 /I W
У U
А
V
о
о
о\
я
тз
р
5
I
и
я
я
линзы различной формы
\/
§ х
О CD
о\ Ж,
р Н
81
А
Рис. 1.
называются вершинами преломляющих поверхностей. Расстояние между
вершинами именуется толщиной линзы. Если толщиной линзы можно пре-
пренебречь по сравнению с меньшим из радиусов кривизны, ограничивающих
линзу поверхностей, линза называется тонкой. Рассмотрением тонких линз
мы и ограничимся.
Собирающая и рассеивающая линзы
129
В тонкой линзе вершины преломляющих поверхностей можно считать
совпадающими в одной точке О (рис. 2), которую называют оптическим
центром линзы. Прямая, проходящая через оптический центр и не СОВПада-
R2
Рис. 2.
ющая с главной оптической осью, называется побочной или вспомогатель-
вспомогательной оптической осью.
Различают два типа линз: собирающие и рассеивающие. Параллельные
лучи, идущие через собирающую линзу, отклоняются к ее главной опти-
оптической оси, а через рассеивающую линзу — в сторону от оси. В воздухе
линзы имеющие большую толщину в середине, чем по краям, являются
собирающими, а более толстые у краев, чем в середине, — рассеивающи-
рассеивающими. (Линзу можно представить как совокупность большого числа призм, а
каждая призма отклоняет лучи к своему основанию).
Точка F, в которой пересекаются после преломления лучи, падающие
на линзу параллельно ее главной оптической оси, называется фокусом, а
плоскость, проходящая через фокус и перпендикулярная главной оптиче-
оптической оси—фокальной плоскостью. В случае собирающей линзы фокус дей-
действительный (рис. 3 а), для рассеивающей линзы фокус мнимый (рис. 3 б),
так как в точке F пересекаются не сами лучи, а их продолжения.
Если линза находится в однородной среде, то у нее имеются два фокуса
по разные стороны линзы, расстояния до которых от оптического центра
линзы (фокусные расстояния) одинаковы. Фокусные расстояния часто обо-
обозначают той же буквой F, что и фокусы. Фокусное расстояние тонкой линзы,
как показывают расчеты, определяется соотношением
1 п — по
F по
R-2
A)
где п — абсолютный показатель преломления вещества линзы, п щ —
показатель преломления среды, в которой линза находится. (Если линза
130
Собирающая и рассеивающая линзы
находится в воздухе, то щ « 1). При этом знаки перед членами, содержа-
содержащими радиусы кривизны R\ и Й2, берутся положительными для выпуклых
поверхностей, отрицательными — для вогнутых. Линза, изображенная на
рис. За, — собирающая, для этой линзы (в воздухе)
F \Ri R2
а линза на рис. 3 6 — рассеивающая. Для нее
! = (га-1) (-— - —
F к \ Ri R2
Двояковыпуклая линза, помещенная в оптически более плотную сре-
ДУ (^о > п), как показывает формула A), становится рассеивающей, и,
наоборот, двояковогнутая линза превращается в собирающую.
4v
О
У
V
а
О
Л
Рис. 3.
Величину, обратную фокусному расстоянию, называют оптической си-
силой линзы. Ее обозначают буквой D:
D=1-.
F
Оптическую силу D выражают в диоптриях (Дптр). Оптической силой
в 1 Дптр обладает линза с фокусным расстоянием в 1 м. Для собирающих,
линз D > 0, для рассеивающих линз D < 0.
Если известно положение линзы и ее фокусов, изображение А; предме-
предмета А может быть найдено путем простых геометрических построений.
Чтобы построить изображение светящейся точки в линзе, нужно из нее
провести два луча, падающие на линзу. Изображение точки лежит на пере-
пересечении этих лучей (или их продолжений) после прохождения линзы.
Обычно проводят лучи через оптический центр линзы (они не прелом-
преломляются) и параллельно главной оптической оси (они после преломления в
линзе пересекают фокус). Рис. 4 иллюстрирует эти построения для собира™
ющих и рассеивающих линз.
Собирающая и рассеивающая линзы
131
Если определять положение предмета и изображения по их расстояниям
d и /, соответственно, от линзы, то легко установить соотношение между
этими расстояниями и фокусным расстоянием линзы. Это соотношение
называется формулой тонкой линзы и имеет вид
d f
B)
причем величины d, / и F могут быть как положительными, так и отрица-
отрицательными. Для собирающей линзы F > О, для рассеивающей линзы F < 0.
Рис. 4.
Если изображение действительное, то / > 0, если мнимое, то / = —1/| <
< 0. Наконец, d > 0 в случае действительного предметашё = —\d\ < 0 —
в случае мнимого предмета, т. е. когда на линзу падает сходящийся пучок
лучей.
Измеряя расстояния |d| и |/| и применяя формулу тонкой линзы B)
можно экспериментально определить фокусное расстояние \F\ линзы.
Определению фокусных расстояний собирающей и рассеивающей тонких
линз и посвящена настоящая экспериментальная работа.
132
Собирающая и рассеивающая линзы
Экспериментальная часть
Экспериментальная установка состоит из оптической скамьи с набором
рейтеров и приспособлений, собирающей и рассеивающей линз, экрана,
осветителя с матовым стеклом, рисунок на котором при измерениях играет
роль предмета.
1. Определение фокусного расстояния собирающей линзы. На од-
одном конце оптической скамьи устанавливают осветитель с матовым стек-
стеклом, а на другом — экран. Между экраном и предметом помещают иссле™
дуемую линзу с неизвестным фокусным расстоянием F. Если расстояние
между предметом и экраном превышает 4F, то всегда найдутся два таких
положения линзы, при которых на экране получаются отчетливые изобра-
изображения предмета, в одном случае уменьшенное S", в другом — увеличен-
увеличенное S" (рис. 5).
Для первого и второго положений линзы имеем
1,1 1
— + — — —>
d! Г F
т
= L;
d! -d = l.
Из первых четырех уравнений следует, что d и /, так же как d' ш f
являются корнями уравнения х2 — Lx + LF = 0, т. е.
^LF.
Собирающая и рассеивающая линзы
133
Второе положение линзы является обратным первому. Следовательно
B)
F =
4L
C)
Для определения фокусного расстояния собирающей линзы достаточ-
достаточно, таким образом, измерить расстояние L между предметом и экраном
и расстояние I между двумя положениями линзы, при которых на экране
получаются четкие изображения.
Отметим, что фокусное расстояние линзы можно рассчитать и непо-
непосредственно по формуле B) по измеренным значениям d и /. В этом случае
оказывается существенным, чтобы указатель на рейтере линзы был распо-
расположен против ее середины. В описанном выше методе измерений положе-
положение указателя не сказывается на результате измерений.
2. Определение фокусного расстояния рассеивающей линзы затруд-
затрудняется тем, что изображение предмета получается мнимым при действи-
действительном источнике (рис. 4 в) и поэтому не может наблюдаться на экране.
Эту трудность легко обойти, используя вспомогательную собирающую
линзу.
В начале опыта на оптической скамье помещают одну только собираю-
собирающую линзу и получают на экране действительное изображение предмета.
По линейке, расположенной на оптической скамье, отмечают положение Si
этого изображения (рис. 6). Затем на пути лучей, выходящих, из собираю-
собирающей линзы, располагают исследуемую рассеивающую линзу. На нее падает
Рис. 6.
пучок сходящихся лучей. Точка Si пересечения лучей играет по отношению
к рассеивающей линзе роль мнимого источника.
Действительное изображение источника S переместится теперь в точку
5г. Передвигая экран и отмечая по линейке положение S2 и координату
134
Собирающая и рассеивающая линзы
рассеивающей линзы, определяют расстояния d и /, и вычисляют фокусное
расстояние F в соответствии с формулой B):
F =
df
d-f'
D)
Порядок выполнения и обработка результатов измерений
1. Ознакомьтесь с устройством экспериментальной установки и назна-
назначением приспособлений.
2. Включите осветитель. Поместите исследуемую собирающую линзу в
держатель и получите на экране четкое изображение предмета. Убедитесь,
что изображение на экране получается при двух положениях линзы. Про-
Проведите необходимые измерения при различных значениях L. Результаты
измерений и расчетов занесите в таблицу, определите фокусное расстояние
линзы для различных L и оцените погрешность.
Собирающая линза
№
Li, мм
/г, ММ
Fi,M
AF,,m
1.
2
3.
Погрешности Fi из C) можно рассчитать следующим образом:
e{Ft) = e(L?-Z?)+e(L0 = 2L'Af + fA4 —, AF< = e(F<) = е(^)^.
Приборные погрешности AL = AI = 1 мм.
Вычисляют среднее значение как i71 = J^
. Для окончательного
результата вычисляют AF = ta
Собирающая и рассеивающая линзы
135
Окончательный результат:
F = F±AF, e(F) = ...%.
3. Расположите экран от предмета на минимальном расстоянии, при
котором еще получается изображение при помощи собирающей линзы, ис-
используемой как вспомогательной для определения фокусного расстояния
рассеивающей линзы. Поместите исследуемую рассеивающую линзу меж-
между собирающей и экраном. Удаляя экран от предмета снова получите четкое
изображение. Проведите необходимые измерения, результаты измерений
занесите в таблицу, определите фокусное расстояние линзы и оцените по-
погрешность при трех различных положениях собирающей линзы.
Расссеивающая линза
№
d{, мм
/г, ММ
F,,m
AF,,m
1.
2.
3.
Погрешности F из D) можно рассчитать следующим образом:
e{di) + e{fi) + e{dlfi) +
Щ Ji
Приборные погрешности Ad = A/ = 1 мм.
Вычисляют среднее значение как F =
результата вычисляют AF = ta
Окончательный результат:
F = F±
, e(F) =
— Ji
. Для окончательного
%.
13 6 Собирающая и рассеивающая линзы
Контрольные вопросы
• Что такое линза? Какую линзу называют тонкой?
• Что называют главным фокусом линзы? Выведите формулу для фо-
фокусного расстояния тонкой линзы.
• Выведите формулу тонкой линзы.
• Что называют оптической силой линзы? Оцените оптические силы
собирающей и рассеивающей линз, исследованных в работе.
• Может ли двояковыпуклая линза иметь отрицательную оптическую
силу, а двояковогнутая — положительную?
• Точечный источник света находится на главной оптической оси соби-
собирающей линзы. Построить его изображение.
• Точечный источник света находится в главном фокусе рассеивающей
линзы. Построить его изображение.
• На каком расстоянии от собирающей линзы надо поместить предмет,
чтобы расстояние между предметом и его действительным изображе-
изображением было минимальным? Оптическая сила линзы D = +2 дптр.
Тонкая собирающая линза создает прямое изображение предмета вы-
высотой h = 0, 5 см. Найдите высоту Н изображения, если известно,
что оно находится в фокальной плоскости линзы.
• Докажите, что оптическая сила системы двух тонких линз, вплотную
прижатых друг к другу, равна сумме оптических сил этих линз.
ПРАКТИЧЕСКАЯ РАБОТА 21
ЯВЛЕНИЕ ЭЛЕКТРОМАГНИТНОЙ
ИНДУКЦИИ.
ИССЛЕДОВАНИЕ МАГНИТНОГО ПОЛЯ
СОЛЕНОИДА
Целью работы является изучение законов электромагнитной индукции
на конкретном примере образования и изменения магнитного поля внутри
и вне соленоида.
Теоретическое введение
1. Поток вектора В через поверхность. Для графического изобра-
изображения магнитного поля используют магнитные линии. Эти линии могут
быть проведены через каждую точку пространства, в котором существу™
ет магнитное поле, при этом вектор магнитной индукции В направлен по
касательной к магнитной линии в любой ее точке.
Договорились проводить линии гуще там, где поле сильнее, т. е. В боль-
больше. Если принять густоту (количество линий, пересекающих поверхность
площадью 1 м2 перпендикулярно к ней) равной модулю вектора В, то мож-
можно определить численно поток вектора В через любую поверхность как
количество линий пересекающих эту поверхность.
На рис. 1 магнитные линии пересекают две плоские площадки S± и S,
угол между которыми равен а (этот угол образуется также между норма-
нормалью п и вектором В). Пусть эти площадки пересекает одинаковое количе-
количество магнитных линий.
Поток через поверхность Sj_ равен численно Ф = N = 3 = BS±. Поток
через поверхность S равен Ф = N = 3 = BS cos а (рис. 1 а). На рис. 1 б
изображен вид со стороны магнитных линий.
S , , S, S^.
Рис. 1.
138
Явление электромагнитной индукции
2. Электромагнитная индукция. Закон Фарадея. В 1831 г. М. Фара»
дей впервые обнаружил, что при изменении потока магнитной индукции
через поверхность, ограниченную проводящим контуром, в нем возникает
электрический ток. Это явление называют электромагнитной индукцией,
а ток — индукционным.
.Явление электромагнитной индукции свидетельствует о том, что при
изменении магнитного потока в контуре возникает ЭДС индукции Е^ при-
причем она не зависит от способа изменения магнитного потока (изменение В,
изменение S, поворот контура).
Закон Фарадея имеет вид
dt
A)
Знак «—» учитывает, что индукционный ток всегда направлен так, чтобы
создаваемое им магнитное поле препятствовало изменению потока через
поверхность контура {правило Ленца).
Для вычисления Ei необходимо знать конкретный вид зависимости В (t).
Для вычисления В можно воспользоваться законом Био — Савара—Лапласа.
Для отдельных случаев специальной симметрии удобнее пользоваться тео-
теоремой о циркуляции вектора В.
Циркуляция В определяется как интеграл по контуру от скалярного
произведение вектора В в произвольной точке и бесконечно малого пере-
перемещения d[ от этой точки и обозначается как § В dl.
г
3. Теорема о циркуляции вектора В (для магнитного поля постоян-
постоянных токов в вакууме). Циркуляция вектора В по замкнутому контуру Г
равна произведению /ло на алгебраическую сумму токов, пересекаюгцих по-
поверхность контура Г.
В dl =
B)
Причем токи берутся со знаком «+», если их направления связаны с на-
направлением обхода по контуру правилом правого винта и со знаком «—»5
если имеют противоположное направление (рис. 2).
Рис. 2.
Явление электромагнитной индукции
139
4. Поле прямого тока. Используя теорему о циркуляции, вычислим
поле прямого тока на расстоянии г от него.
Магнитные линии поля прямого тока представляют собой окружности в
плоскости перпендикулярной проводу
с током (рис 3). Поэтому в точках на
этих окружностях поле одинаково по
величине. Для контура, совпадающего
с магнитной линией имеем: В .
2ттг
5. Поле соленоида. Используя Рис. 3.
теорему о циркуляции, вычислим поле
внутри соленоида. «Разрез соленоида» изображен на рис. 4. Из симметрии
ясно, что поле внутри бесконечного (или тонкого по сравнению с длиной)
соленоида однородно, а поле вне соленоида равно нулю. Взяв прямоуголь-
прямоугольный контур со сторонами I и а, охватывающий области внутри и вне соле-
соленоида, напишем для него теорему о циркуляции
г
ф В Л = В1 + Ва cos тг/2 + 0 • I + Ва cos Зтг/2 = fionll,
В =
Здесь п — число витков на единице длины.
3
(ХХХПНХЮООССООООО
Рис. 4.
140
Явление электромагнитной индукции
Экспериментальная часть
1. Схема экспериментальной установки. Схема позволяет с помо-
помощью коммутатора подключить один из трех витков, находящихся на тор-
торцевой поверхности тубуса, помещаемого внутрь соленоида и один из трех
внешних, витков, смонтированных на круглой пластинке, надеваемой на
соленоид. Генератор вырабатывает синусоидальное напряжение, поэтому
через соленоид протекает синусоидальный ток. Возникает переменное маг-
магнитное поле, создающее переменный поток через виток. В витке возникает
переменный ток индукции, который создает переменное напряжение на ре-
резисторе R. Это напряжение (равное ЭДС индукции) подается на вход «Y»
осциллографа (см. рис. 5,6). Таким образом можно исследовать поле внутри
и вне соленоида.
тубус с внутренними
витками
Рис. 5.
соленоид
Рис. 6.
Явление электромагнитной индукции 141
Пусть ток в катушке I(t) = Im cos out, тогда поток через виток Ф =
= /JLoInSBJiTKai = fionnrflm cos out. (Здесь Г{ — радиус витка.) Возникаю-
щая в витке ЭДС индукции в любой момент времени имеет вид
? = —fionnri иIm sin ut, C)
где ?т = fion7rr^oulm — амплитудное значение ЭДС индукции. Очевидно
амплитудное значение ЭДС индукции, возникающей во внутреннем витке
прямо пропорциональна квадрату радиуса витка.
На экране осциллографа амплитуда напряжения на R возрастает с пере-
переходом на витки большего радиуса. Это является доказательством однород-
однородности магнитного поля внутри соленоида в любой момент времени.
Для внешних витков весь поток (так же, как и все его изменения) нахо-
находится только внутри соленоида т. к. поле вне соленоида равно нулю. Поэто-
Поэтому ЭДС индукции во внешнем витке не должна зависеть от радиуса. Это
хорошо видно на экране осциллографа при коммутации внешних витков.
Измерения и обработка результатов измерений
Измеряют непосредственно диаметры трех внутренних витков с точ-
точностью Ad = 1 мм и амплитуды ЭДС для внутренних витков на экране
осциллографа с точностью, указанной в документации на прибор.
Согласно C) отношение квадратов радиусов витков при одинаковой
частоте равно отношению соответствующих ЭДС:
т\ 82
r\ _ 82
r\ 82,
Вычисление отношения квадратов радиусов:
Среднее значение: ^ = [ -±- ,
г2 /V2\ f г2
Окончательный результат: -^ = ( — 1 ± Д ( —
Г2 \Г2/ \Г2
142 Явление электромагнитной индукции
Точно так же вычисляются экспериментальные результаты для г|/г|.
Среднее значение: ( — 1 = ( ^- ) ,
Е (Е \ ( ? \ I ? \
Окончательный результат: — = ( =М ± Д ( — 1 , е [ — ) = ...%.
^ \S2J \82J \82J
Так же вычисляются экспериментальные результаты для ^/<?з-
Экспериментальным доказательством однородности поля внутри соле-
соленоида является пересечение интервалов экспериментальных данных для
соответствующих отношений квадратов радиусов внутренних витков и ам-
амплитуд ЭДС индукции в них (см. стр. 14).
Контрольные вопросы
• Что такое густота магнитных линий?
• Что такое поток вектора через поверхность (геометрическая интер™
претация)?
• Что такое циркуляция вектора по контуру?
• Вывести уравнение для магнитной индукции поля прямого тока.
• Вывести уравнение для магнитной индукции поля соленоида.
• Как записать уравнение для потока через виток внутри соленоида?
• Как записать уравнение для потока через виток вне соленоида?
• Как проверить однородность поля в любой момент времени внутри
соленоида?
• Почему поток вектора В вне соленоида не зависит от площади внеш-
внешнего витка?
ПРАКТИЧЕСКАЯ РАБОТА 22
ИССЛЕДОВАНИЕ ЗАТУХАЮЩИХ
КОЛЕБАНИЙ
Цель работы — исследование затухающих колебаний в колебательном
контуре с активным сопротивлением, определение характеристик затухаю-
затухающих колебаний.
Теоретическое введение
1. Незатухающие колебания в идеальном колебательном контуре.
Если заряженный конденсатор С соединить с катушкой индуктивности L,
то в образовавшемся колебательном контуре
(рис. 1) возникнут электрические колебания тока
в цепи и напряжения на конденсаторе. (Конден-
(Конденсатор перезаряжается через индуктивность.) При
отсутствии сопротивления проводов эти колеба-
колебания будут незатухающими.
Найдем уравнение колебаний напряжения на
конденсаторе. В любой момент в контуре по за-
закону Кирхгофа
С
Uc = -Ld-L.
dt
A)
Рис. 1.
Так как
q = UCC, q = I =
Подставив все это в A), получим
dl
q = I= — = UCG.
dt
Uc + LCUc = 0, или Uc + — = 0.
Обозначив — = cjq (частота Томсона), приведем это уравнение к виду
Это уравнение свободных колебаний напряжения на конденсаторе. Та-
Такое же уравнение можно получить для колебаний тока.
Общее решение уравнения B) представим в виде
Uc = A cos ujt + В sin cut,
где А и В — постоянные, зависящие от начальных условий.
C)
144
Исследование затухающих колебаний
Продифференцировав C) по времени, получим
Uc = ^Аш sin out + Buj cos out,
I = q = UcC = - AouC sin cut + BouC cos wt. D)
Уравнения (З) и D) описывают значения Uc и I в контуре в любой
момент времени.
Покажем как найти значения А и В при различных начальных условиях
колебаний.
Пусть в начальный момент на конденсаторе максимальное напряжение
и тока в контуре нет, т. е. при t = 0 Uc = Um, Iq = 0.
Из C) получим Um = А • 1 + 0 = А. Из D) получим 0 = Вы ^ В = 0.
Тогда
Uc = Um cos outj I = —UmujC sin out = I7tocjCcos fa;t + — J .
(Заряжающий ток опережает напряжение на конденсаторе на тг/2.)
Пусть в начальный момент времени конденсатор разряжен, а ток в ко-
туре максимален, т. е при t = 0 I = Im,Uc = 0.
Из C) получим А = 0, из D) получим 1т = ВиС и В = —.
Тогда
Uc = — sinujt = blL Cos (ut--), I = Im cosut.
шС ujC V 2/
(Заряжающий ток отстает напряжения на конденсаторе на тг/2.)
Постоянные А и В определяются начальными условиями колебаний.
2. Затухающие колебания в колебательном контуре. В реальном
колебательном контуре всегда есть активное со™
противление R (рис. 2). В любой момент времени
по закону Кирхгофа имеем
R
С
Рис. 2.
dt
Uc + UcCR + LCUC = 0,
fj Л.ТТ R Uc — Q
° G L LC
E)
Если положить ujq = — (это, как мы видели, частота свободных коле-
D
баний), 2/5 = — , то уравнение E) примет вид
uc i лрис i ^o^c :=: и.
F)
Исследование затухающих колебаний
145
Это уравнение затухающих колебаний напряжения на конденсаторе в
реальном контуре. Можно показать, что такому же уравнению удовлетво-
удовлетворяет и ток I в контуре.
Непосредственной подстановкой в F) можно проверить, что его реше-
решением является
Uс = UCoe^m cos (out + a), G)
где
Очевидно, что и < uq и при увеличении активного сопротивления
контура R, ш уменьшается, т. е. период колебаний увеличивается.
Уравнение G) можно представлять как колебание с убывающей по экс-
экспоненте амплитудой.
о
3. Характеристики затухания. Очевидно, величина /3 = — увели-
ZJu
чивается с ростом активного сопротивления R контура. Она называется
коэффициентом затухания.
Изменение напряжения на конденсаторе в реальном контуре изображено
на рис. 3.
Найдем отношение амплитуд колебаний «отстающих» друг от друга на
период Г = —:
U(t) =
U(t + Г) =
U(t + Т)
(8)
Рис. 3.
146
Исследование затухающих колебаний
Величину Л называют логарифмическим декрементом затухания. Фи-
Физический смысл этой величины нетрудно выяснить, введя величину Ne —
количество колебаний, за которое амплитуда убывает в е раз и т — время,
за которое это происходит (за время т совершается Ne = — колебаний).
U(t)
= e/3r = е,
Таким образом логарифмический декремент затухания обратно пропор-
пропорционален количеству колебаний Ne, за которое амплитуда убывает в е раз.
Еще одна характеристика реального колебательного контура—доброт-
контура—добротность — определяется как
Q = l=7rNe.
А
Ясно, что большей добротностью обладает контур с меньшим активным
сопротивлением.
Экспериментальная часть
Схема установки приведена на рис. 4.
Генератор вырабатывает прямоугольные импульсы напряжения, отри-
отрицательные значения которых «срезаются» диодом V\. При положительных
осциллограф
Рис. 4.
значениях происходит заряд конденсатора С через диод V\ и сопротив-
сопротивление R\. При нулевых значениях происходят затухающие колебания в
колебательном контуре С R, L, i?2. На первом канале осциллографа можно
увидеть, как изменяется напряжение на Й2 (а значит и ток в контуре) На
втором канале изображаются колебания напряжения на конденсаторе С.
Исследование затухающих колебаний
147
Напряжения на различных элементах цепи могут выглядеть как на
рис. 5:
j i итси
A
у \ А
1 V/
1
А п
/ч
г
\/
Л- .
Рис. 5.
Порядок выполнения и обработка результатов измерений
1. Собирают схему (рис. 4).
2. На экране осциллографа получают устойчивую картину затухающих
колебаний (например график напряжения Uc на участке от t\ до i2 (рис. 5)).
Изменяя R, по графику на экране выясняют пределы его значений для
самого сильного и слабого затухания. В этих пределах будут производится
измерения.
3. Для семи различных значений R (они не измеряются) по графику на
экране осциллографа измеряют две соседние амплитуды колебаний, соот™
ветствующие периоды, частоты и записывают в таблицу.
148
Исследование затухающих колебаний
Различные R
1.
2
3.
4.
5.
6.
7.
U(t),E
Т?с
i/, Гц
4. Вычисляют логарифмический декремент затухания для каждого R.
5. Делают рисунки с экрана осциллографа для сильного и слабого за-
затухания при наибольшем и наименьшем значениях R в эксперименте.
6. Оценивают погрешности измерений логарифмического декремента
затухания.
7. Делают выводы о совпадении экспериментальных результатов с тео-
теорией.
О том, как измерять амплитуды напряжения и периоды на осцилло-
осциллографе, подробно описано в работе, посвященной изучению осциллографа
(см. стр. 81).
Вычисление погрешностей измерений логарифмического декремента
затухания производится по данным прямых измерений двух амплитуд за-
затухающих колебаний из (8):
ДЛ=
U [t)
u(t) \ u(t) =
= e
U(t) \U(t + T)J U(t + T)
{U [t + 1 )) = +
U(t)
U(t + T)
Погрешности прямых измерений зависят от конкретного прибора и ука-
указаны в его документации.
Для каждого из семи измерений записывают окончательный результат
А*.
Делают выводы о соответствии полученных экспериментальных дан-
данных Ai, периодов и частот для различных сопротивлений контура с теорией.
Исследование затухающих колебаний 149
Контрольные вопросы
Вывести уравнение колебаний напряжения на конденсаторе в иде-
идеальном контуре. Какое общее решение имеет это уравнение? От чего
зависят конкретные решения? Привести примеры.
Вывести уравнение колебаний для контура с активным сопротивле-
сопротивлением.
Как меняется амплитуда затухающих колебаний со временем? Как
зависит частота колебаний от величины активного сопротивления?
Как определяется коэффициент затухания в колебательном контуре?
Как меняется коэффициент затухания при изменении L?
Что такое логарифмический декремент затухания? Каков его физиче-
физический смысл?
Что такое добротность? Как она зависит от активного сопротивления
и индуктивности контура?
Нарисовать картину изменения напряжения на конденсаторе в схеме
эксперимента. В какие моменты происходит заряд конденсатора от
источника питания?
Как вычислить логарифмический декремент затухания, измеряя ам-
амплитуды, отстоящие на несколько периодов друг от друга?
ПРАКТИЧЕСКАЯ РАБОТА 23
ИЗУЧЕНИЕ ЯВЛЕНИЯ РЕЗОНАНСА В ЦЕПИ
ПЕРЕМЕННОГО ТОКА
Целью работы является изучение вынужденных колебаний в колеба-
колебательном контуре, исследование явления «резонанса напряжений», измере-
измерение индуктивности L.
Теоретическое введение
Физические процессы, происходящие в цепях переменного гармониче-
гармонического тока, представляют собой вынужденные колебания, полный анализ
которых очень сложен.
Однако наиболее важный для применений установившийся режим коле-
колебаний, когда собственные колебания в цепи уже прекратились, может быть
исследован с помощью достаточно простых методов.
Любой реальный контур наряду с реактивными элементами С и L (ем-
(емкость и индуктивность) содержит также и активное сопротивление R. За-
Зависимость тока в этих элементах от напряжения вынуждающего источника
можно легко получить.
1. Сопротивление в цепи переменного тока. Схема включения изоб-
изображена на рис. 1 а. В любой момент времени U(t) = I(t)R. Если U =
= Um cos cut, то / = —^. Амплитуда тока 1т = -^ т. е. R = —^. Колеба-
R R 1т
ния тока и напряжения находятся в одной фазе.
2. Емкость в цепи переменного тока. Схема включения изображена
на рис. 1 б. В любой момент времени
Uc(t) = ^ = U(t) , q(t) = U(t)C, / = q = UC,
где q, U — производные по времени.
U = Um cos cut, U = —Um си sin out,
I = —Um С и sin cut = Um С и cos (out + —),
TJ 1
— = "т; = Xc'
где Xc — емкостное сопротивление, Im = UmC uu — амплитуда тока.
Ток опережает по фазе напряжение на конденсаторе на -. Действительно,
для того, чтобы на конденсаторе возникло напряжение, необходимо его
зарядить, а это делает ток заряда.
Изучение явления резонанса в цепи переменного тока
151
3. Индуктивность в цепи переменного тока. Схема включения изоб-
изображена на рис. 1 в. В любой момент времени в цепи
= UL, UL = ^
= L- = Ы,
dt
Um cos out = +L— , dl = —^ cos out dt,
dt L
i
I = I Чи. cos ujidt = Чи. Sln out = Чи. cos (out - -),
J L Lou Luj 2
индуктивное сопротивление. Ток отстает по фазе
о
где — = Lou =
Irn
на ~~ от напряжения. Это понятно, т. к. прежде, чем в катушке пойдет ток,
на ней по правилу Ленца должно возникнуть напряжение.
R
Рис. 1.
4. Последовательный колебательный контур. Элементы соединены
последовательно, поэтому ток в любой момент одинаков в каж-
каждом элементе (рис. 2).
В любой момент времени
Поэтому для того, чтобы вычис-
вычислить U в любой момент времени,
необходимо решить достаточно слож-
сложное уравнение:
Рис„2„
UmL cos Lot - -J + Umc cos (out + - J + UmR cos out = U(t). A)
Сложности аналитического решения очевидны.
152
Изучение явления резонанса в цепи переменного тока
5. Метод векторных диаграмм. Мгновенное значение изменяющей-
изменяющейся по гармоническому закону величины можно представить как проекцию
вектора на некоторое заранее выбранное направление х. Сам вектор вра-
вращается с угловой скоростью и, его модуль равен амплитудному значению
величины, начальная фаза равна углу вектора с направлением х (рис. 3 а).
В любой момент времени
х = A cos ср , <р(фаза) = out + cpo ,
т. е. х = A cos (out + Lpo).
Вычислим сумму A) методом векторных диаграмм. Выбранное направле-
направление х совместим с вектором тока. Перепишем A) в виде
U = In. cos
шС
\ujt — — j + Im^L cos ((jjt+—) + ImR cos (out)
и изобразим каждое слагаемое как вектор на векторной диаграмме (рис. 3 б.)
направление проектирования
а
Рис. 3.
Сложим векторы, изображенные на диаграмме в начальный момент вре-
времени, по правилу геометрического сложения векторов (для определенности
считаем Ul > Uc)- Результирующее напряжение равно напряжению источ-
источника, поэтому
U(t) = Um cos ut + arctg
Изучение явления резонанса в цепи переменного тока
153
Экспериментальная часть
Цепь включает в себя генератор, емкость С, два сопротивления R\ и Й2
(рис. 4). Генератор вырабатывает синусоидальное (гармоническое) напря»
жение. Процессы наблюдаются на экране осциллографа, первый канал ко-
которого показывает напряжение на Й2, второй — напряжение на генераторе,
частота которого может плавно меняться.
Рис. 4.
В любой момент времени для мгновенных значений
U = URl + Uc + UL + UR2 .
/ одинаков во всей цепи. Векторная диаграмма приведена на рис. 5.
Uc
R\
и
1
^^
UL
—>
X
Рис. 5.
Существует сдвиг по фазе <р между током I и напряжением U.
154 Изучение явления резонанса в цепи переменного тока
Если амплитуда Ul меньше амплитуды Uc, сдвиг фаз отрицательный,
т. е. ток, а значит и напряжение на R2, опережает по фазе напряжение
на генераторе. Общее сопротивление цепи преимущественно емкостное.
(Напомним, что сопротивление конденсатора переменному току Z = —,
шС
сопротивление катушки Z = ujL, и при изменении частоты они изменя-
изменяются).
Из векторных диаграмм:
и = V(uRl + Щ2 + (ис - uLy =
I х/(Rl + R2J + (-L
( 1 ч2
(Ri +Д2J+ шЬ
V шС
Видно, что амплитудное значение тока 1т достигается при
— ^ ujL = 0, т. е. при томсоновской частоте
1
UJ =
y/LC '
В этом случае
i и
Ri + R2
и сопротивление цепи чисто активное
Как видно из векторной диаграммы рис. 6 а, напряжение U находится
в фазе с током (это означает отсутствие реактивных компонент в сопро-
сопротивлении цепи). Амплитуда напряжения на Й2 при этом рассчитывается
как
UmR2 = IB* = ^^ . B)
Ri +R2
Это резонанс напряжений.
Если увеличивать частоту ш генератора, то амплитуда Ul становится
больше Uс и, как видно из векторной диаграммы на рис. 6 б, напряжение
опережает по фазе ток на угол ip , т. е. сопротивление в цепи преимуще-
преимущественно индуктивное.
Изучение явления резонанса в цепи переменного тока
155
Uc
I
uRl
X
UL
Рис. 6.
Порядок выполнения и обработка результатов
1. Собрать схему, установив переменное сопротивление в таком поло-
положении, что амплитуды исследуемых напряжений были достаточно
велики B-2,5 деления по вертикали).
2. Измерить цифровым измерителем сопротивления R± и R2. Записать
результат. Принять точность измерения e(R) = 5 % (паспортные
данные).
3. Установить переключатель множителя частоты на генераторе в по-
положение «102».
4. Изменяя частоту сигнала генератора от mm до max в этом диапа-
диапазоне, определить частоту резонанса й;рез по резкому возрастанию
амплитуды колебаний.
5. Записать положение переключателей «В/дел» на 1 и 2 каналах
осциллографа.
6. Зарисовать три картинки с экрана при ш < шрез, ш = шрез, ш > шрез.
7. Вычислить амплитуду напряжения при резонансе по формуле B)
и по зарисованным картинкам. Сравнить, объяснить возможные
расхождения.
8. Вычислить индуктивность контура, зная его резонансную частоту
и значение емкости С контура
рез
LC
и2 С
156 Изучение явления резонанса в цепи переменного тока
9. Оценить погрешность измерения, считая погрешности по форму-
формулам
e(L) = 2е(ш) + е(С), AL = Le(L),
Погрешность измерения емкости е(С) = 10%, приборная по™
грешность измерения частоты зависит от генератора и указана в
его документации.
10. Записать окончательный результат, как
L = Lm3M±AL, e(L) = ...%.
Контрольные вопросы
• Какие сдвиги фаз в цепи переменного тока между напряжением и
током на активном сопротивлении, на индуктивности, на емкости?
• Что изображается на векторных диаграммах?
• Сложить с помощью векторных диаграмм два колебания х\ =
= 5 cos out и Х2 =4 sin out.
• Что такое резонанс напряжений в последовательном колебательном
контуре?
• Каким становится сдвиг фаз между током и напряжением при
и < шрез, ио = а;рез, ои > шрез в последовательном колебательном
контуре?
• Как можно вычислить индуктивность контура при резонансе на-
напряжений?
• Как измерить частоту и период колебаний непосредственно на ос™
циллографе?
ПРАКТИЧЕСКАЯ РАБОТА 24
ДИФРАКЦИЯ ФРАУНГОФЕРА НА ЩЕЛИ.
ИЗМЕРЕНИЕ ШИРИНЫ ЩЕЛИ
«ВОЛНОВЫМ МЕТОДОМ»
Целью работы является изучение волновых явлений света, методов опи-
описания явления дифракции, измерение ширины узкой щели с помощью ди-
дифракции лазерного излучения.
Теоретическое введение
1. Уравнение волны. Как известно, волной называется процесс рас™
пространения колебаний в пространстве. Независимо от природы волн
(механические, электромагнитные,
гравитационнные) математическое
описание их одинаково.
Получим уравнение волны на
простом примере волн на воде и
выясним смысл ее характеристик
(рис.1). Пусть источник S (по-
(поплавок) колеблется гармонически
в неподвижной воде. Рассматривая
волны в небольшой области про-
пространства (несколько длин волны),
пренебрежем затуханием.
Введем систему координат с на-
началом в точке, где находится попла-
поплавок. Ось у направлена «на нас» пер-
впадины
горбы
Рис. 1.
пендикулярно плоскости чертежа.
Колебания распространяются
вдоль оси х со скоростью v. Каж-
Каждая частица поверхности воды колеблется вдоль оси у. Пусть колебания
поплавка в точке О гармонические:
у = ут cos ui.
В произвольной точке N колебания будут точно такими же, как колеба-
колебания в точке О в более ранний момент времени I' = ? — т, т. е. фаза колебаний
UJX
отстает на величину иг = —, где г — время распространения волны от
v
точки О до точки N. Поэтому
ух = у(х, t) = уш cos [ut- — 1 .
158 Дифракция Фраунгофера на щели. Измерение ширины щели
Преобразуем это уравнение к более удобному виду. Так как и = 2тп/ =
2тг 2
= Y = ~л"'
У = Ут COS [UJt - — J = ут COS (cjt - kx). A)
Эта функция от t и х пазыва.етсяуравнением гармонической волны. Здесь
ш = циклическая (круговая) частота колебаний, к = — волновое
число. Оно определяется длиной волны.
Выясним физический смысл ш и к.
1. Пусть х = const (наблюдатель находится в определенной точке про-
Т
странства), и в данный момент в этой точке «горб» волны. За время At = —
A 27rT -а
фаза изменяется на А(р = — — = тг, т. е. за это время в этой точке «горб»
JL Л
сменится «впадиной».
2. Пусть t = const (мгновенный снимок волновой картины), и пусть
в какой-то точке х пространства находится «горб» волны. Пройдя вдоль х
X , г м Л 2тг Л
расстояние Ах = —, получим изменение фазы колебании на А(р = — — =
2 Л 2
= тг, т. е. «горб» сменится «впадиной».
Отсюда понятно, что
2тг
ш = — — скорость изменения фазы со временем,
2тг
к = — — скорость изменения фазы в пространстве.
А
2. Принцип Гюйгенса -Френеля. Каждая точка (бесконечно малый
элемент) ^ волнового фронта является воображаемым источником вто-
вторичных волн. Интенсивность колебаний в произвольной точке N —резуль-
—результат сложения этих вторичных волн от всех источников, расположенных
на волновом фронте.
Все элементы волновой поверхности колеблются в одинаковой фазе,
но расстояния от элементов поверхности до N различны (рис. 2, а), поэтому
колебания от элементов поверхности в точке N будут иметь различные фазы.
Интенсивность колебаний зависит от того, будут колебания усиливать или
гасить друг друга. Если волновые поверхности сферические, то говорят
о дифракции Френеля, если волна плоская — о дифракции Фраунгофера.
> В пределах элемента расстояния от любой его точки до N можно считать оди-
одинаковыми.
Дифракция Фраунгофера на щели. Измерение ширины щели 159
Рис. 2.
3. Дифракция на щели. Пусть на щель шириной Ь падает плоская
волна. Волновой фронт, совпадающий с плоскостью щели, разбиваем
на большое количество бесконечно малых полосок (элементы волновой
поверхности или зоны Френе-
Френеля.) Параллельные лучи, рас-
распространяющиеся под углом а
к вертикали, собираются лин-
линзой в фокальной плоскости
(точка N). Экран совпадает с
этой плоскостью (рис. 2,6).
Разность хода между соседни-
соседними зонами S одинакова для всех
соседних зон. Разность хода
между крайними зонами А =
= J2^i — сумма всех раз-
разностей хода от соседних зон.
А = bsina, А(р = —bsina.
А
B)
Воспользуемся методом век-
векторных диаграмм для получе-
ния результирующего колеба-
колебания в точке N (рис. 3).
а). При а = 0 разность фаз
колебаний от соседних зон рав-
равна нулю. Если А — амплитуда
колебаний от каждой зоны (ам-
(амплитуды для всех зон почти одинаковы при малых а), Аре
Рис. 3.
= Aq = N А,
где N — количество зон. Это центральный максимум (рис. 3 а).
160
Дифракция Фраунгофера на щели. Измерение ширины щели
б). При А = bsina = — и А(р = тг — колебания от крайних зон
находятся в ттротивофазе. Общая длина всех А приблизительно равна Ао.
Поэтому Арез = меньше, чем в первом случае (рис. 3 б).
б). Если А = Л, то колебания от крайних зон отличаются по фазе
на 2тг — векторы А образуют замкнутую фигуру I — = 2тг I, -Арез = 0.
V ^ У
Это первый минимум (рис. 3 в).
г). Следующий максимум будет, когда векторы, «обернутся» полтора
2А0
раза (рис. 3 г). Арез = ——.
Как известно, интенсивность / пропорциональна А^ез, поэтому распре-
распределение интенсивности будет иметь вид, такой как на (рис. 4).
sin a
Рис. 4.
Из всего сказанного ясно, что при значениях а, удовлетворяющих, ус-
условию
А =
(т = 1, 2, 3, ...)
C)
амплитуда обращается в нуль. Таким образом, условие C) определяет по™
ложение минимумов интенсивности на экране.
Отметим, что А представляет собой разность хода от краев щели.
Дифракция Фраунгофера на щели. Измерение ширины щели
161
Экспериментальная часть
Экспериментальная установка состоит из оптической скамьи с набором
рейтеров и приспособлений, источника монохроматического излучения (ла-
(лазера), калиброванной щели и экрана. Схема установки изображена на рис. 5.
лазер
^ч
т = 3
т = 2
т=\
О
Рис. 5.
При условии L ^> Ь (что соответствует условиям эксперимента),
Т
sin a « tg а = —^~, где жт — расстояние до m-то минимума. Подстав-
Подставляя в C), получим формулу для вычисления ширины щели в виде
L
b = т\ ¦
(ш = 1,2,3, ...)
D)
Изменяя расстояние L три-четыре раза, измеряют значения хт для
одинакового т. Заполняют таблицу.
№
1.
2.
3.
4.
Li, м
жт,м
т
162 Дифракция Фраунгофера на щели. Измерение ширины щели
Обработка результатов измерений
По полученным из D) значениям Ь{ вычисляют среднее значение Ь:
N
Для каждого вычисленного значения Ь{ оцениваются погрешности:
= е(А) + e(Li) + е{хт) = ^В- + —
A L
В + +
A Li хШ{
При оценке погрешностей считать, что AL = 1 мм, А(хт) = 1 мм.
Длина волны лазерного излучения Л = F30 ± 30) нм.
Для окончательного результата вычисляют Ab = ta — как по-
N
грешность прямых измерений.
Окончательный результат записывается в виде:
Ъ = Ь±АЪ; е(Ъ) = ...%.
Контрольные вопросы
• Какие волны называются когерентными?
• Написать уравнение волны. Физический смысл и и kl
• Принцип Гюйгенса-Френеля в объяснении явления дифракции.
• Получить с помощью метода векторных диаграмм распределение ин-
интенсивности от щели.
• Как зависит количество интерференционных полос от ширины щели,
от длины волны падающего излучения?
ПРАКТИЧЕСКАЯ РАБОТА 25
ДИФРАКЦИЯ ФРАУНГОФЕРА.
ДИФРАКЦИОННАЯ РЕШЕТКА КАК
ОПТИЧЕСКИЙ ПРИБОР
Целью работы является изучение волновых явлений света, методов опи-
описания явления дифракции, измерение длины волны монохроматического
излучения с помощью дифракционной решетки.
Теоретическое введение
1. Когерентные волны. Интерференция. Рассмотрим явление интер-
интерференции на примере волн в неподвижной воде. Пусть два источника Si
и S2 (два поплавка) колеблются гармонически с одинаковой частотой ш.
От каждого из них пойдут круговые волны с одной и той же скоростью. Дли-
Длины этих волн также будут одинаковы. Такие волны называются
когерентными.
Более наглядной картина сложения колебаний в любой точке становит-
становится при одинаковой амплитуде колебаний источников (пренебрегаем зату-
затуханием колебаний). На рис. 1, представляющем собой мгновенный сни-
снимок волн, видно, что в точках К и N «впадина» от одной волны сов-
совпадает с «впадиной» от другой волны. В этих точках вода опуститься в
два раза ниже, чем от одной волны. Поскольку каждая точка колеблет-
колеблется так же, как источник, через период колебаний в этих точках окажутся
горб впадина
Рис. 1.
164
Дифракционная решетка как оптический прибор
«горбы» волн. В них происходит усиление колебаний. Такая же картина
будет наблюдаться в точке М.
В точке L горб от одной волны совпадает с впадиной от другой вол-
волны, поэтому вода вообще находится в невозмущенном состоянии {полное
ослабление колебаний). Если волны когерентны, то разность фаз не будет
меняться со временем, картина сложения колебаний будет иметь устойчи-
устойчивый характер.
Это явление называется интерференцией. Картина интерференции на™
блюдается для когерентных волн любого характера.
Уравнение гармонической волны имеет вид
= Ут COS
2жх\
- ) =
)
A /
ут COS (ut - kx).
(i)
.Ясно, что условие постоянства разности фаз сводится к равенству для таких
волн циклических частот колебаний ш и волновых чисел к.
2. Дифракционная решетка. Дифракционная решетка - набор N ще-
щелей. Суммарная величина щели и промежутка между щелями — посто-
постоянная или период решетки d. Обычно решетки «на просвет» с достаточно
большим количеством периодов изготавливаются фотоспособом. В каче-
качестве фронта волны будем рассматривать волновую поверхность плоской
волны, совпадающей в данный момент с плоскостью решетки. Так как ще-
щели очень узкие, можно каждую щель считать зоной Френеля, на которые
разбивается волновая поверхность (см. стр. 158).
Экран находится в фокальной плоскости линзы. Параллельные лучи от
каждого зоны (щели) под углом а к вертикали собираются в точке N на
экране (рис. 3).
экран
N
Рис. 3.
Дифракционная решетка как оптический прибор
165
Максимумы интенсивности будут наблюдаться там, где
dsina = ±Am m = 0, 1, 2, ...
B)
3. Интенсивность главных максимумов. Каждая щель в данном на-
направлении а дает амплитуду А\, и колебания от соседних щелей сдвинуты
л 27Г
по фазе на Аср = А • —.
Л
Для произвольного угла а имеем векторную диаграмму (рис. 4). Общий
сдвиг по фазе от первой до последней щели
= N— dsina,
, At =2RSm (*?
Отсюда
/NA(p\
sin
V 2 /
Как известно, интенсивность колебаний пропорциональна квадрату
амплитуды колебаний
/(интенсивность) ~ А\
• 2
sin2
2 V 2 /
C)
Из C) видно, что интенсивность колеба-
колебаний от одной щели А\ модулирует функцию
sin
V 2
sin
(практически модулирует только
Рис. 4.
интенсивность главного максимума от одной ще-
щели.) В отсутствии такой модуляции все главные
максимумы были бы одинаковы по интенсивно-
интенсивности. Реальная картина распределения интенсивности от дифракционной ре-
решетки такая, как на рис. 5. На практике поэтому наблюдается всего несколь-
несколько видных максимумов (максимально 4 — 5). Поэтому очень критично надо
относится к задачам, предлагаемым в некоторых задачниках, в которых
определяют максимальный порядок видимого максимума т, считая, что он
«виден» под углом а = —. Там реально ничего нельзя увидеть.
166
Дифракционная решетка как оптический прибор
т=-\ /
\ т=\
т=-2
/и=0
Рис. 5.
т=2
Sin OL
Экспериментальная часть
Принципиальная схема эксперимента изображена на рис. 6. Углы а
очень небольшие, поэтому sin a « tg а и а, где угол а измеряется в ради-
х
анах. Из рисунка видно, что tg а = у и т. к. d sin a = т\
лазер
dx Л
— = тл.
L
т = 2
т=\
т = 0
Рис. 6.
Отсюда следует, что
А =
dx
Lm
D)
Дифракционная решетка как оптический прибор
167
Обработка результатов измерений
Для семи различных значений L измеряют значения хт для т = 2
или 3, результаты заносят в таблицу.
№
1.
2.
3.
4.
5.
6.
7.
т
жт,м
Лг,М
АЛ{,м
Вычисляют среднее значение А как
Очевидно, легче сначала подсчитать относительную погрешность
формулы D), а затем абсолютную:
^ из
= e{d) + е{х) + e(L) = ^ + ^ + ^, ДА, =
d L
Разумно, учитывая способ измерения длин линейкой, принять AL = 1 мм,
Ах = 1 мм. В данной работе используется решетка с постоянной
d = F3 ±1) -10 м.
168 Дифракционная решетка как оптический прибор
Для окончательного результата вычисляют АЛ = ta — как по-
N
грешность прямых измерений.
Окончательный результат записывают как
Л = Л±АЛ; е(Х) = ...%.
Контрольные вопросы
• Какие условия должны быть выполнены для того, чтобы картина ин-
интерференции двух волн была устойчивой.
• С помощью векторных диаграмм получить распределение интенсив-
интенсивности для дифракционной решетки.
• Почему на дифракционной картинке видны только несколько макси-
максимумов интенсивности?
• Как наиболее точно измерить расстояние х на экране?
ПРАКТИЧЕСКАЯ РАБОТА 26
ОПРЕДЕЛЕНИЕ ПОКАЗАТЕЛЯ
ПРЕЛОМЛЕНИЯ СТЕКЛА
«ВОЛНОВЫМ» МЕТОДОМ
Целью работы является изучение волновых свойств света на примере
схемы получения двух когерентных волн из одного светового пучка (би-
(бипризма Френеля) и их интерференции, картина которой позволяет измерить
показатель преломления вещества бипризмы.
Теоретическое введение
Известно, что свет представляет собой сложное явление: с одной сто-
стороны он ведет себя как электромагнитная волна, но при излучении и погло-
поглощении веществом — как поток частиц (фотонов). Волновые свойства света
наиболее наглядно проявляются в явлениях интерференции и дифракции.
Отличие между ними весьма условно. При сложении двух когерентных
волн говорят об интерференции, при сложении большого количества коге-
когерентных волн — о дифракции. Известно, что две волны когерентны, если
разность их фаз в любой точке остается постоянной, а т. к. фаза определяет-
ся величинами ш и к = —, то когерентными будут волны с одинаковыми и
А
и к. Проблемами получения таких волн занимались физики Юнг и Фре-
Френель. Схемы получения двух когерентных волн из одного светового пучка
рассматриваются в настоящей работе.
Почти точного равенства длин волн от двух источников добиться нетруд-
нетрудно. Для этого достаточно использовать хорошие светофильтры, пропускаю-
пропускающие свет в очень узком интервале длин волн. Но невозможно осуществить
постоянство разности фаз от двух независимых источников. Атомы источ-
источников излучают свет независимо друг от друга отдельными «обрывками»
(цугами) синусоидальных волн протяженностью около двух метров. И та-
такие цуги волн от обоих источников накладываются друг на друга. В резуль-
тате амплитуда колебаний в любой точке пространства хаотически меняет-
меняется со временем в зависимости от того, как в данный момент цуги волн от
различных источников сдвинуты друг относительно друга по фазе.
Волны от различных источников некогерентны из-за того, что разность
фаз волн не остается постоянной. (Исключение составляют квантовые ис-
источники света — лазеры, созданные в 1960 г). Никакой устойчивой картины
с определенным распределением максимумов и минимумов освещенности
для некогерентных волн не наблюдается.
1. Интерференционная схема Юнга. Если две очень узкие све-
светящиеся щели излучают когерентные волны, на экране должна наблю-
наблюдаться характерная интерференционная картина. Рассчитаем положения
170 Определение показателя преломления стекла «волновым» методом,
максимумов и минимумов интенсивности на экране, расстояния между со-
соседними максимумами и соседними минимумами (рис. 1).
Пусть Si и S2 — когерентные источники (светящиеся щели),
А = х\ — Х2 — разность хода двух лучей. Очевидно, что А = 2т ~~
для максимума интенсивности в произвольной точке N, поэтому разность
фаз А(р = = 2тгт, где т = 0, =Ы, ±2, .... Для минимума интен-
Л
Л
сивности необходимо: А = Bт + 1) -. Если луч распространяется не в
вакууме, то А = п(х2 — х\), где п — показатель преломления среды.
Рис. 1.
Расстояние между щелями d очень мало по сравнению с расстоянием от
щелей до экрана d <C L, поэтому sin a « a5 tg а и а (в радианах). Поэтому
А = dslna и da, tga = —
Положение максимумов на экране:
dxm
= mA,
Хот. —
mXL
dx
L '
Расстояние между соседними максимумами интенсивности (ширина поло-
полосы интерференции)
Л AmXL Л XL / Л
Ахт = , Ахт = —, (Аш =
а а
A)
Расстояние между соседними минимумами оказывается таким же.
2. Бипризма Френеля. Изготовленные из одного куска стекла две приз™
мы с малым преломляющим углом /? имеют одну общую грань (рис. 2).
Параллельно этой грани на расстоянии а от нее располагается источник
света S.
Определение показателя преломления стекла «волновым» методом
111
Можно показать, что в случае малого угла преломления /3, все лучи от-
отклоняются на одинаковый угол равный а = (п — 1)/3, где п — показатель
преломления стекла, из которого изготовлена призма. В установке, исполь-
используемой в работе /3 и 10;. Из сравнения рис. 1 и рис. 2 видно, что L = а + Ь,
d = a2a,
д _
А(а
2аа
2а(п -
В случае плоской волны нужно положить а —
B)
оо и Ах = —. Ширина
2а
Рис. 2.
лазер
Рис. 3.
зоны интерференции 2аЪ. Максимальное число интерференционных полос
пт х 4а2 аЪ
Ах Л(а + 6)
Из B) имеем
C)
172 Определение показателя преломления стекла «волновым» методом,
Экспериментальная часть
хт = хт/т
Схема установки приведена на рис. 3. Собирающая линза с фокусным
расстоянием F = 20 мм фокусирует параллельный пу-
пучок лучей лазера в фокусе, «образуя» точечный источ™
ник света S. Для увеличения точности измеряют рас-
расстояние не между соседними максимумами (миниму-
(минимумами), а ширину области, включающей в себя несколь-
несколько интерференционных максимумов; далее, деля ее на
количество полос, получают ширину одной интерфе-
интерференционной полосы (рис. 4).
Измерения делают для пяти различных значений а,
хт
Рис. 4.
->I
результаты заносят в таблицу.
№
1.
2.
3.
4.
5.
а, м
Ажт, м
а + Ь, м
Обработка результатов измерений
Для каждого а вычисляют погрешности (см. C)):
_ с (\(а + Ъ)
Ап = А
2аАхC J \ 2aAxC J \ 2аАхC
= [е(Х) + е(а + Ъ) + ф) + е(Ах) +
а + Ь
— +е{Ах)
а
Л(а + Ь)
Определение показателя преломления стекла «волновым» методом 173
Так как бипризма Френеля изготовлена прецизионно точно, погрешно-
погрешностью /3 можно пренебречь.
— V п-
Для всех измеренных п вычисляют среднее значение как п = г.
5
Для окончательного результата вычисляют An = ta
— д^
Окончательный результат: п = п ± An, е(п) = ^ = ... %.
Контрольные вопросы
• В чем состоит явление интерференции волн?
• Почему не наблюдается интерференция световых волн, излучаемых
двумя электрическими лампочками накаливания?
• При каких условиях наблюдается интерференция световых волн от
двух источников? Что такое когерентность?
• Выведите формулы для положения максимумов и минимумов на ин-
интерференционной картине в схеме Юнга.
• Какую роль играет бипризма Френеля в получении интерференцион-
интерференционной картины?
• Выведите формулу для ширины интерференционной полосы в схеме
Френеля.
ПРАКТИЧЕСКАЯ РАБОТА 27
ОПРЕДЕЛЕНИЕ РАДИУСА КРИВИЗНЫ
ЛИНЗЫ В ЭКСПЕРИМЕНТЕ С КОЛЬЦАМИ
НЬЮТОНА
В работе изучается явление интерференции в опыте с кольцами Нью-
Ньютона, определяется радиус кривизны плоско-выпуклой собирающей линзы,
являющейся частью установки для получения интерференционных колец.
Теоретическое введение
При падении световой волны на тонкую прозрачную пластину (или
пленку) происходит отражение от обеих поверхностей пластинки. В резуль-
результате возникают две когерентные световые волны, которые при известных
условиях могут интерферировать.
В интерференционном опыте Ньютона роль тонкой пленки, от поверх-
поверхности которой отражаются когерентные волны, играет воздушный зазор
между соприкасающимися друг с другом плоскопараллельной толстой стек-
стеклянной пластиной и плоско-выпуклой линзой с большим (порядка 20 см)
радиусом кривизны (рис.1).
п
i
2
/
/ l
\
\
\
>-
¦"¦--¦— _
R
\
\
2
h
Рис. 1.
При нормальном падении света интерференционная картина, наблю-
наблюдаемая в отраженном свете, представляет собой систему концентрических
Кольца Ньютона 175
светлых и темных колец, получивших название колец Ньютона. Центры
колец находятся в точке касания выпуклой поверхности линзы с плоско-
плоскопараллельной пластиной, причем в центре интерференционной картины
наблюдается темное пятно (рис. 2).
Найдем радиусы г колец Ньютона в случае падения света по норма-
нормали к плоской поверхности линзы и пластинке. В этом случае оптическая
разность хода Ао отраженных волн 1 и 2 равна удвоенной толщине h воз-
воздушного зазора (рис. 1).
R2 = (R - hJ + r2 ^R2 - 2Rh + r2. A)
Здесь R — радиус кривизны линзы, г — радиус окружности, всем точкам
которой соответствует одинаковый зазор h.
Ввиду малости h мы пренебрегли величиной
h2 по сравнению с величиной 2Rh. В соот-
соответствии с A) h = r2 /2R.
Чтобы учесть возникающее при отраже-
отражении от пластины изменение фазы на тг при
вычислении разности хода А, надо к вели- |
чине Ад = 2/i прибавить А/2. В результате
получится:
R 2
В точках, для которых А = тХ, возникают рис 2
максимумы, а в точках, для которых А =
= (т — 1/2)Л, возникают минимумы интен-
интенсивности света. С учетом этого и формулы A) для радиусов светлых гт и
темных г'т интерференционных колец получим
= \l\rn-
2
-) АД, B)
г'т = у/(т ^ 1)АД, C)
где m = 1, 2, 3, ... — порядковый номер кольца.
Соотношения B) и C) позволяют в эксперименте определить радиус
кривизны R линзы по измеренным значениям радиусов светлых и темных
колец при известной длине волны Л света.
Экспериментальная часть
Экспериментальная установка состоит из бинокулярного микроскопа
МБС-10, осветителя со светофильтром, оправки с закрепленными в ней
плоскопараллельной пластиной и исследуемой плоско-выпуклой линзой,
прижатых друг к другу.
176
Кольца Ньютона
Один из окуляров микроскопа вывернут и на его месте стоит насад-
насадка с осветителем и светофильтром. Таким образом, включая осветитель,
мы освещаем рабочий столик микроскопа квазимонохроматическим све-
светом перпендикулярно его поверхности. Источником света служит лампочка
накаливания. Используемый красный светофильтр пропускает свет, длина
волны которого Л = 630 ±10 нм. Оправка с пластиной и линзой помеща-
помещается на рабочем столике микроскопа под его объективом. Перемещая по
столику оправку и настраивая микроскоп, добиваются наблюдения четкой
интерференционной картины. Измерение радиусов светлых и темных ко-
колец производится при помощи измерительной шкалы, цена деления которой
зависит от установленного увеличения микроскопа.
По измеренным значениям радиусов гт и г'т и известному значению
длины волны Л рассчитывается радиус кривизны линзы. В соответствии
с соотношениями B) и C) для радиуса кривизны R получаем расчетные
формулы:
R =
(т-1/2)Л
R =
(m-
D)
Порядок выполнения и обработка результатов измерений
1. Ознакомьтесь с устройством микроскопа и его настройкой.
2. Поместите на столик микроскопа оправку с пластиной и линзой.
3. Включите осветитель.
4. Настройте микроскоп и добейтесь наблюдения четкой интерферен-
интерференционной картины. Перемещая оправку с пластиной и линзой совместите
центр измерительной шкалы с центром интерференционной картины.
5. Проведите измерения радиусов светлых (или темных) интерферен-
интерференционных колец. Для каждого измеренного значения радиуса гт рассчитайте
по формулам D) значение Rm радиуса кривизны линзы. Результаты изме-
измерений и расчетов занесите в таблицу.
т
гга, мм
ДГО,ММ
1
2
3
4
5
6. Рассчитайте среднее значение радиуса кривизны линзы R = —
N
Кольца Ньютона 111
7. Для каждого вычисленного по D) значения Щ оценивают погреш-
погрешности:
е(Щ) = 2е{гт) + е(А) = ^=0 + ^, ДД. = ?{Щ)Щ.
При оценке погрешностей считать, что Д(гт) = 1 мм.
\[тлщ
Для окончательного результата вычисляют AR = ta — как по-
N
грешность прямых измерений.
Окончательный результат запишите в виде: R = R ± AR .
Контрольные вопросы
• В чем состоит явление интерференции волн?
• Какую роль играет воздушный зазор между выпуклой поверхностью
линзы и стеклянной пластиной в проделанном эксперименте?
• Как возникают кольца Ньютона?
• Почему в центре исследованной Вами интерференциоонной картины
наблюдается темное пятно ?
• При каких предположениях выведены формулы B) и C)? Вывести
эти формулы.
ПРАКТИЧЕСКАЯ РАБОТА 28
ИССЛЕДОВАНИЕ ПОЛЯРИЗОВАННОГО
СВЕТА
Целью работы является исследование поперечной поляризации свето-
световых волн, экспериментальное подтверждение закона Малюса.
Теоретическое введение
Как известно, плоская электромагнитная световая волна является попе-
поперечной и представляет собой распространение взаимно перпендикулярных
колебаний: вектора напряженности электрического поля Е и вектора индук-
индукции магнитного поля В. Колебания векторов Е и В происходят в плоскости,
перпендикулярной направлению распространения света, которое задается
волновым вектором к (рис. 1 а). Вектор Е называется световым вектором,
и все рассуждения мы ограничим рассмотрением этого вектора. Наличие
вектора В подразумевается.
Е
Рис. 1.
Световой пучок, в котором различные направления вектора Е в попереч-
поперечной к направлению распространения световой волны плоскости равнове-
равновероятны, называется естественным или неполяризованным. В естественном
свете колебания различных направлений быстро и беспорядочно сменяют
друг друга (рис. 1 б).
Свет, в котором направления колебаний вектора Е упорядочены каким-
либо образом и подчиняются некоторой закономерности, называется поля-
поляризованным.
Если колебания вектора Е могут совершаться лишь в одном определен-
определенном направлении е, то свет называется плоскополяризованным (рис. 1 в).
Плоскостью поляризации называется плоскость, проходящая через вектор
поляризации е и волновой вектор к.
Обычные источники излучают неполяризованный свет, который мо-
может быть преобразован в поляризованный при взаимодействии с веще-
веществом. Оптические устройства, служащие для получения поляризованно-
поляризованного света, называются поляризаторами. Принцип действия поляризаторов
Исследование поляризованного света
179
может быть основан на явлениях отражения, преломления или поглоще-
поглощения света. Например, у некоторых кристаллов коэффициенты поглощения
для двух взаимно перпендикулярно поляризованных волн отличаются на-
настолько сильно, что даже при небольшой толщине кристалла одна из волн
практически полностью поглощается. В результате из кристалла выходит
плоскополяризованный свет. Зависимость величины поглощения света от
его поляризации носит название дихроизма. Пластинки из таких кристал-
кристаллов используются для изготовления поляризаторов специального вида —
поляроидов.
Через поляроид проходит почти без поглощения только тот свет, у кото-
которого плоскость поляризации совпадает с плоскостью пропускания колеба-
колебаний вектора Е для данного поляроида.
Если на поляроид падает свет, плоскость поляризации которого поверну™
та относительно разрешенной плоскости колебаний на угол а, то вектор Е
падающего света можно разложить на две составляющие Ei и Е2:
Здесь вектор Ei лежит в разрешенной плоскости колебаний, а вектор Ег
перпендикулярен этой плоскости (рис. 2).
разрешенная плоскость
пропускания поляризатора
Рис. 2.
Компонента падающего света, описываемая вектором Ег, практиче-
практически полностью поглотится в поляроиде. Поляроид пропустит компоненту
180
Исследование поляризованного света
падающего света, которая описывается вектором Ei. Принимая во внима-
внимание, что
для интенсивности I света, прошедшего через поляроид получим
/ = /0 cos2 a. A)
Здесь /о — интенсивность падающего на поляроид света. (Интенсивность
света пропорциональна квадрату амплитуды колебаний светового вектора).
Соотношение A) носит название закона Малюса. Экспериментальной
проверке закона Малюса и посвящается настоящая практическая работа.
Экспериментальная часть
Экспериментальная установка состоит из оптической скамьи с набором
рейтеров и приспособлений, источника монохроматического излучения (ла-
(лазера), двух поляроидов в оправах, фотометрического датчика и цифрового
микроамперметра.
Принципиальная оптическая схема установки представлена на рис. 3.
Световой пучок, излучаемый лазером Л, проходит через поляризатор ГЦ,
становится плосмшоляризованным и падает на поляризатор Щ. При помо-
помощи поляризатора П2 исследуется падающий на него поляризованный свет.
(Используемый для исследования поляризованного света поляризатор на-
называют анализатором.) Свет, прошедший через два поляризатора падает на
Л
MICA
Рис. 3.
фотометрический датчик Ф. При помощи микроамперметра измеряется фо-
тоток /, являющийся пропорциональным интенсивности света, падающего
на фотометрический датчик.
В экспериментальной работе измеряется фототок I в зависимости от
угла а между разрешенными плоскостями колебаний поляроидов. Резуль-
Результаты измерений изображаются на графике зависимости /(cos2 а). Если в
Исследование поляризованного света
пределах погрешности экспериментальные результаты ложатся на прямую
(рис. 4), то можно сделать вывод об экспериментальном подтверждении
закона Малюса.
Измерения. Обработка результатов измерений
Соберите на оптической скамье установку по схеме, показанной на
рис. 3.
1. Включите лазер и, регулируя положения поляризаторов и фотодат™
чика, добейтесь попадания светового пучка на фотодатчик.
А
«/
/
-с
/
/
/
/
/"
/
i/
COS
0,25
0,5
Рис. 4.
0,75
1,0
2. Включите микроамперметр и, вращая поляризаторы, убедитесь, что
микроамперметр реагирует на эти вращения. (Сила тока пропорциональна
интенсивности света.)
3. Установите анализатор (поляризатор ГЬ, на оправе которого нане-
нанесена шкала с ценой деления в 1°) в положение «90» и, вращая поляриза-
поляризатор III, добейтесь полного непрохождения светового пучка через анали-
анализатор. (Визуально видно, что при некотором положении поляризатора Щ
освещенность фотодатчика практически пропадает. Показание микроам-
микроамперметра при этом обращается в нуль.) В соответствии с законом Малюса
A), этому взаимному расположению поляризаторов соответствует значение
угла а равное 90°.
182
Исследование поляризованного света
4. Установите анализатор в положение «О» и, вращая его, снимите зави-
зависимость 1(а). Измерения проведите в диапазоне изменения а от 0° до 240°.
Диапазон 0° < а < 30° исследуйте более подробно. Результаты измерений
и расчетов занесите в таблицу.
№
а
I, мкА
cos a
х = cos2 a
1
0°
1.0
1.0
18°
0.95
0.90
30°
0.87
0.75
4
42°
0.74
0.55
S
54°
0.59
0.35
6
60°
0.50
0.25
7
72°
0.31
0.10
К
90°
0.0
0.0
9
120°
10
150°
11
180°
V
210°
11
240°
5. Оцените погрешности измерений. Погрешности измерений / —
приборные и указаны в документации на прибор, погрешность измерения
Аа = 1°.
6. По результатам эксперимента на миллиметровой бумаге постройте
график зависимости /(cos2 a).
Сделайте соответствующие выводы.
Контрольные вопросы
• Что такое поляризованный свет?
• Что такое естественный свет?
• Какие вещества могут являться поляризаторами?
• В чем состоит закон Малюса?
• Объяснить, как может быть устроен фотодатчик.
ЛИТЕРАТУРА
1. Бутиков Е. И., Кондратьев А. С. Физика. Кн. 1. Механика. —М.: Физматлит.
2000. 352 с.
2. Бутиков Е. К, Кондратьев А. С. Физика. Кн. 2. Электродинамика. Оптика.
— М.: Физматлит, 2000. 336 с.
3. Бутиков Е. И., Кондратьев А. С, Уздин В. М. Физика. Кн. 3. Строение и
свойства вещества. —М.: Физматлит, 2000. 336 с.
4. Иродов И. Е. Основные законы механики. —М.: Высшая школа, 1978. 240 с.
5. Иродов И. Е. Волновые процессы. Основные законы. —М.: Лаборатория
базовых знаний, 1999. 256 с.
6. Иродов И. Е. Электромагнетизм. Основные законы. —М.: Лаборатория ба-
базовых знаний, 2000. 352 с.
7. Иродов И. Е. Физика макросистем. Основные законы. —М.: Лаборатория
базовых знаний, 2001. 200 с.
8. Калашников С. Г. Электричество. —М.: Наука, 1983. 608 с.
9. Кикоин А. К, Кикоин И. К. Молекулярная физика. —М.: Наука, 1979. 448 с.
10. Крауфорд Ф. Волны. — М.: Наука, 1976. 528 с.
11. Парселл Э. Электричество и магнетизм. —М.: Наука, 1975. 440 с.
12. Рейф Ф. Статистическая физика. —М.: Наука, 1975. 440 с.
13. Сивухин Д. В. Общий курс физики. Т. I. Механика. —М.: Наука, 1979. 560 с.
14. Сивухин Д. В. Общий курс физики. Т. II. Термодинамика и молекулярная
физика. — М.: Наука, 1979. 560 с.
15. Сивухин Д. В. Общий курс физики. Т. IV. Оптика. —М.: Наука, 1980. 752 с.
16. Тамм И. Е. Основы теории электричества. —М.: Наука, 1961. 326 с.
Учебное издание
ШУТОВ Владимир Иванович
СУХОВ Вячеслав Григорьевич
ПОДЛЕСНЫЙ Дмитрий Владимирович
ЭКСПЕРИМЕНТ В ФИЗИКЕ.
ФИЗИЧЕСКИЙ ПРАКТИКУМ
Редактор Т.Е. Варышева
Оригинал-макет автора
Подписано в печать 29.06.05. Формат 60x90/16. Бумага офсетная.
Печать офсетная. Усл. печ. л. 11,5. Уч.-изд. л. 12,7. Заказ №
Издательская фирма «Физико-математическая литература»
МАИК «Наука/Интерпериодика»
117997, Москва, ул. Профсоюзная, 90
E-mail: fizmat@maik.ru, fmlsale@maik.ru;
http://www.fml.ru
Отпечатано с готовых диапозитивов
в ФГУП «Производственно-издательский комбинат ВИНИТИ»
140010, г. Люберцы, Московская обл., Октябрьский пр-т, 403
ISBN 5-9221-0632-5
9 78592206320