/







Author: Сухарев А.Г.
Tags: вычислительная математика численный анализ математика анализ
ISBN: 5-02-013942-4
Year: 1989




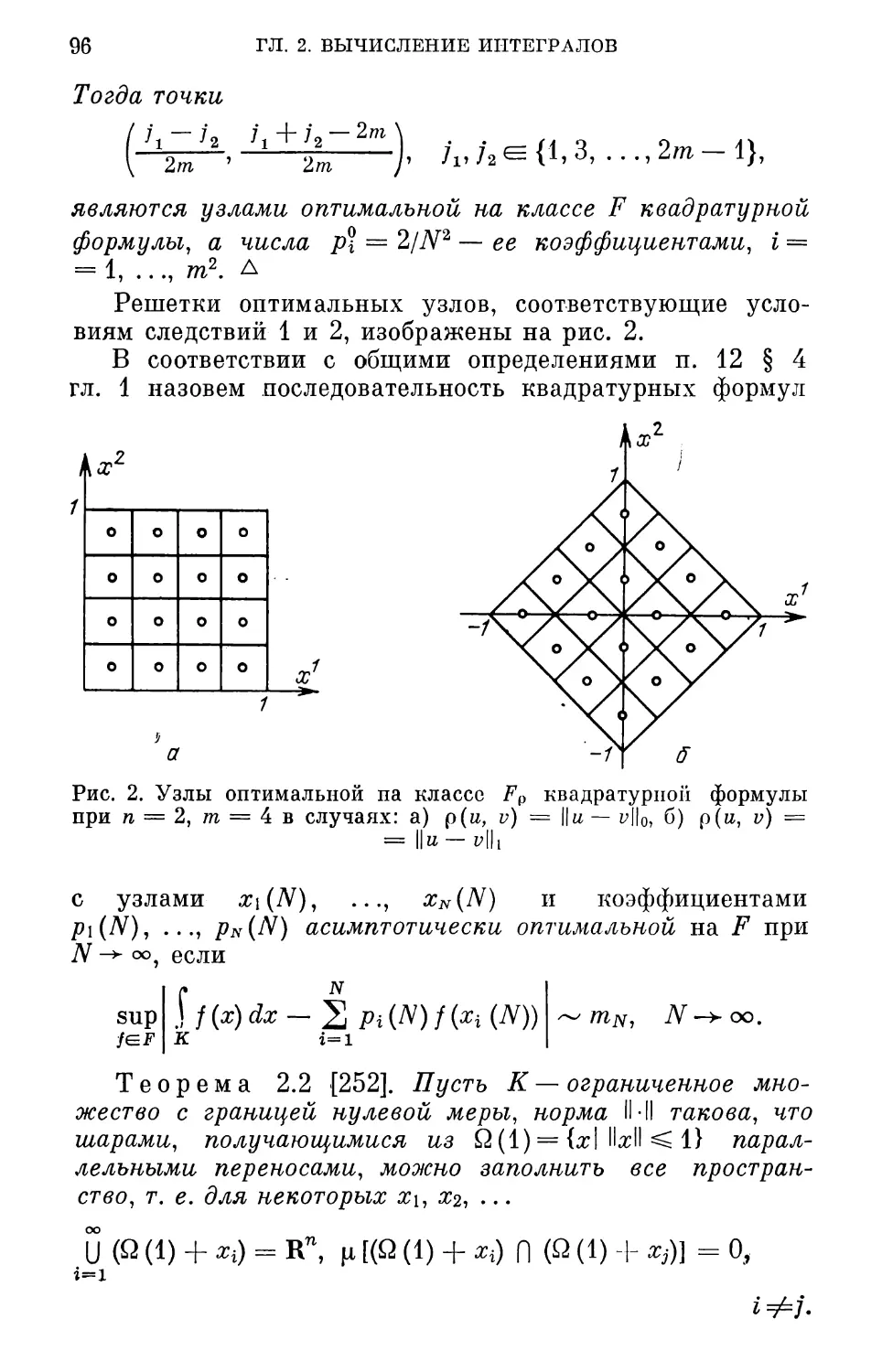
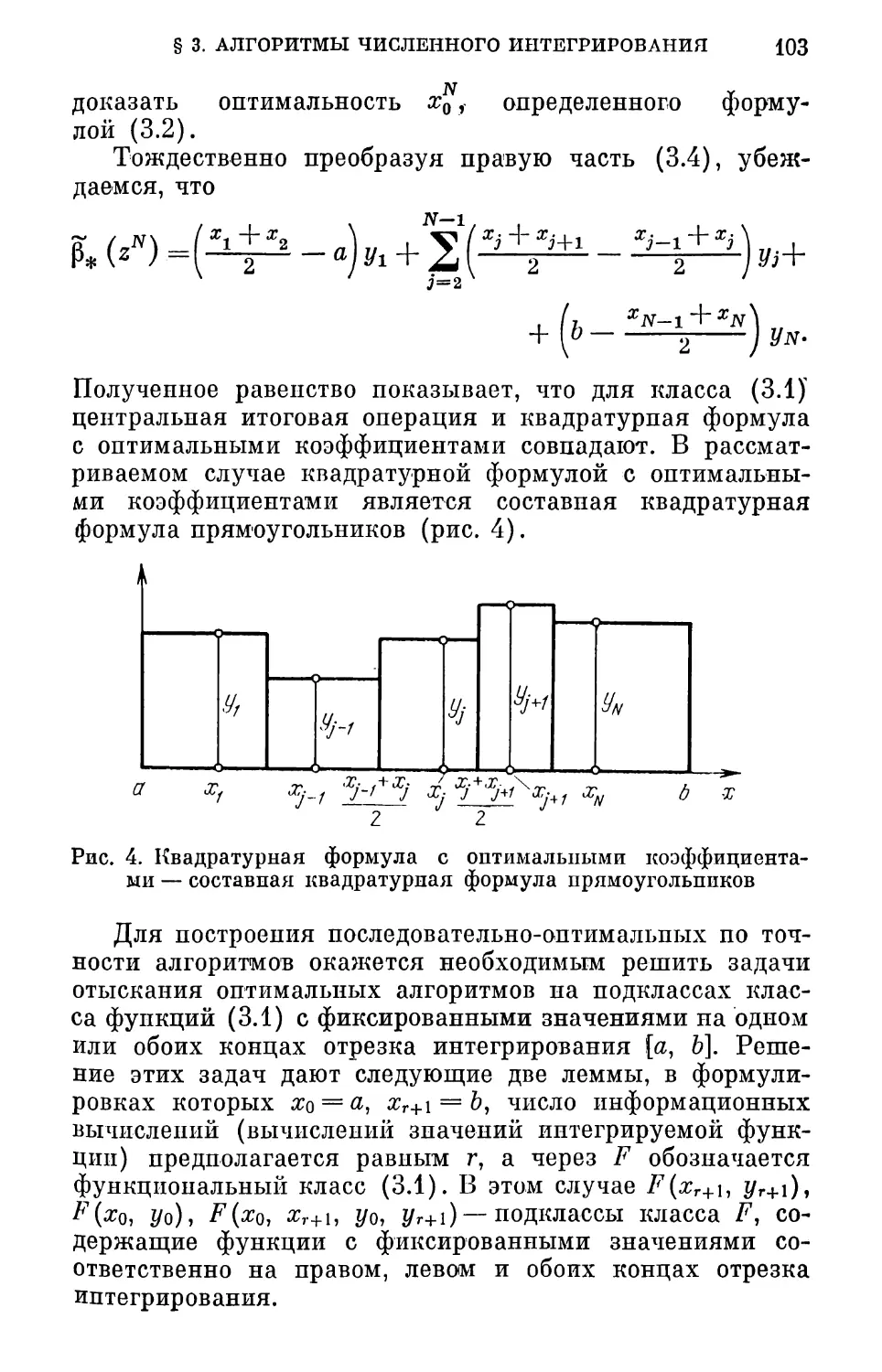
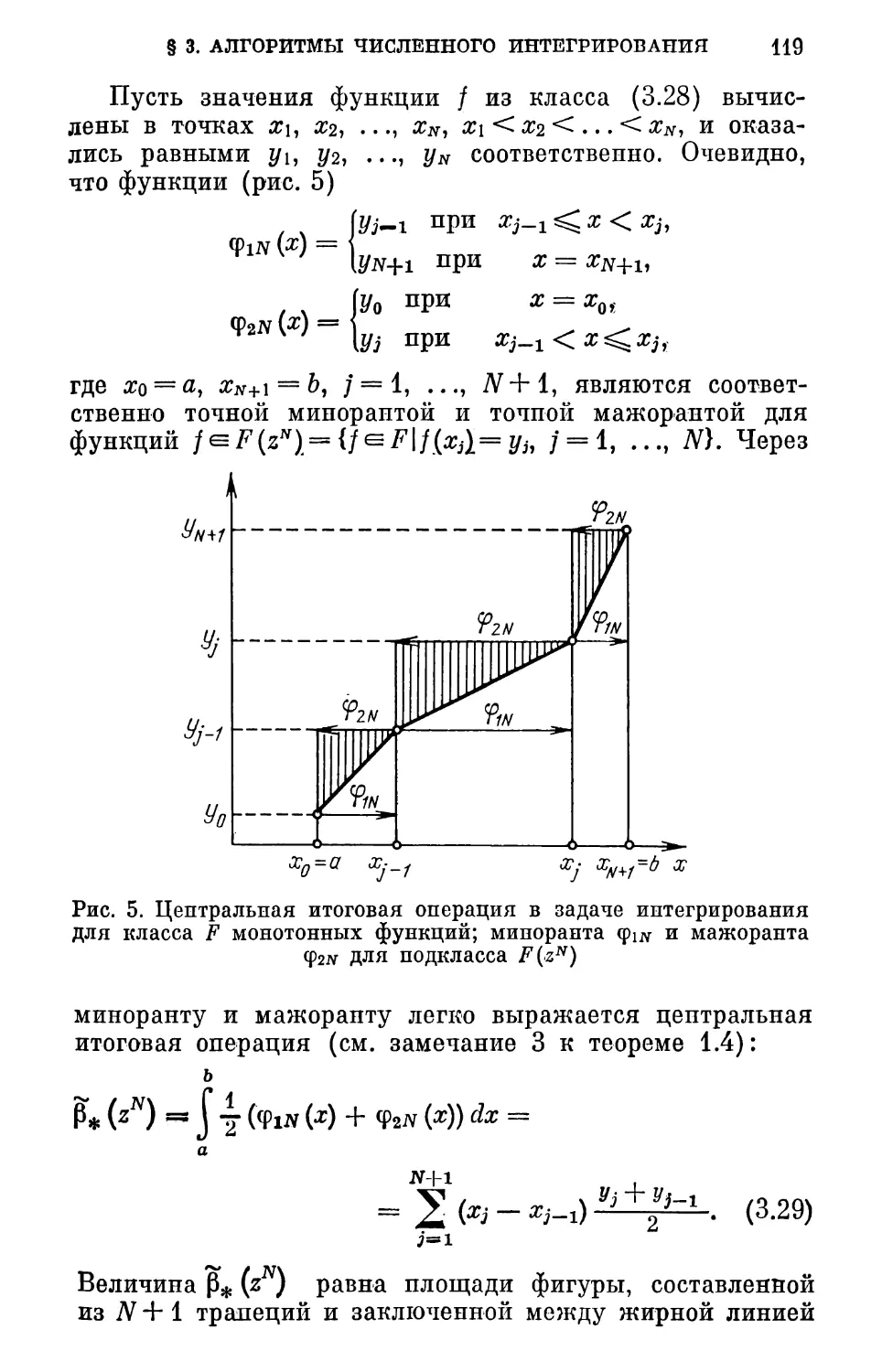
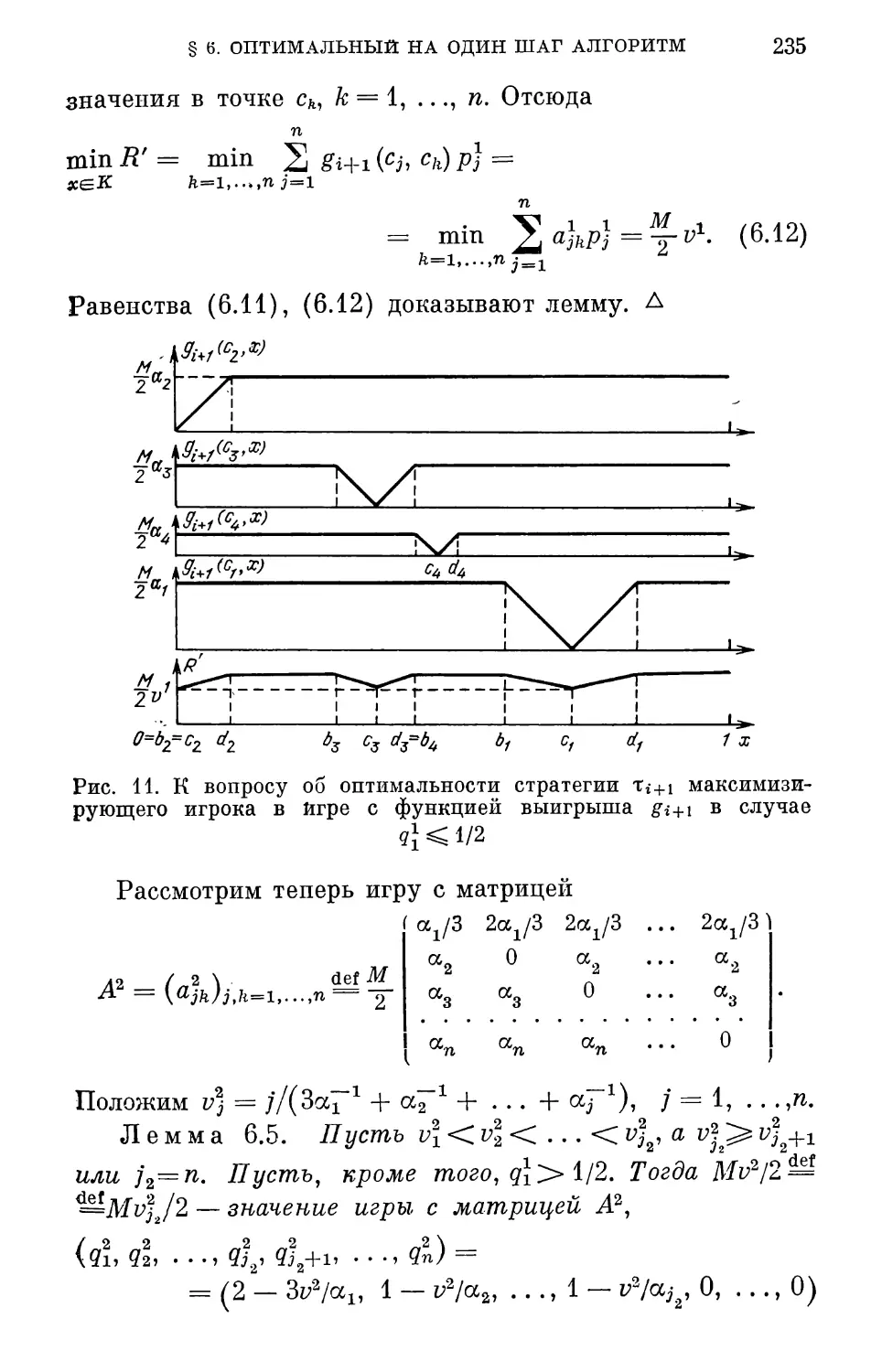
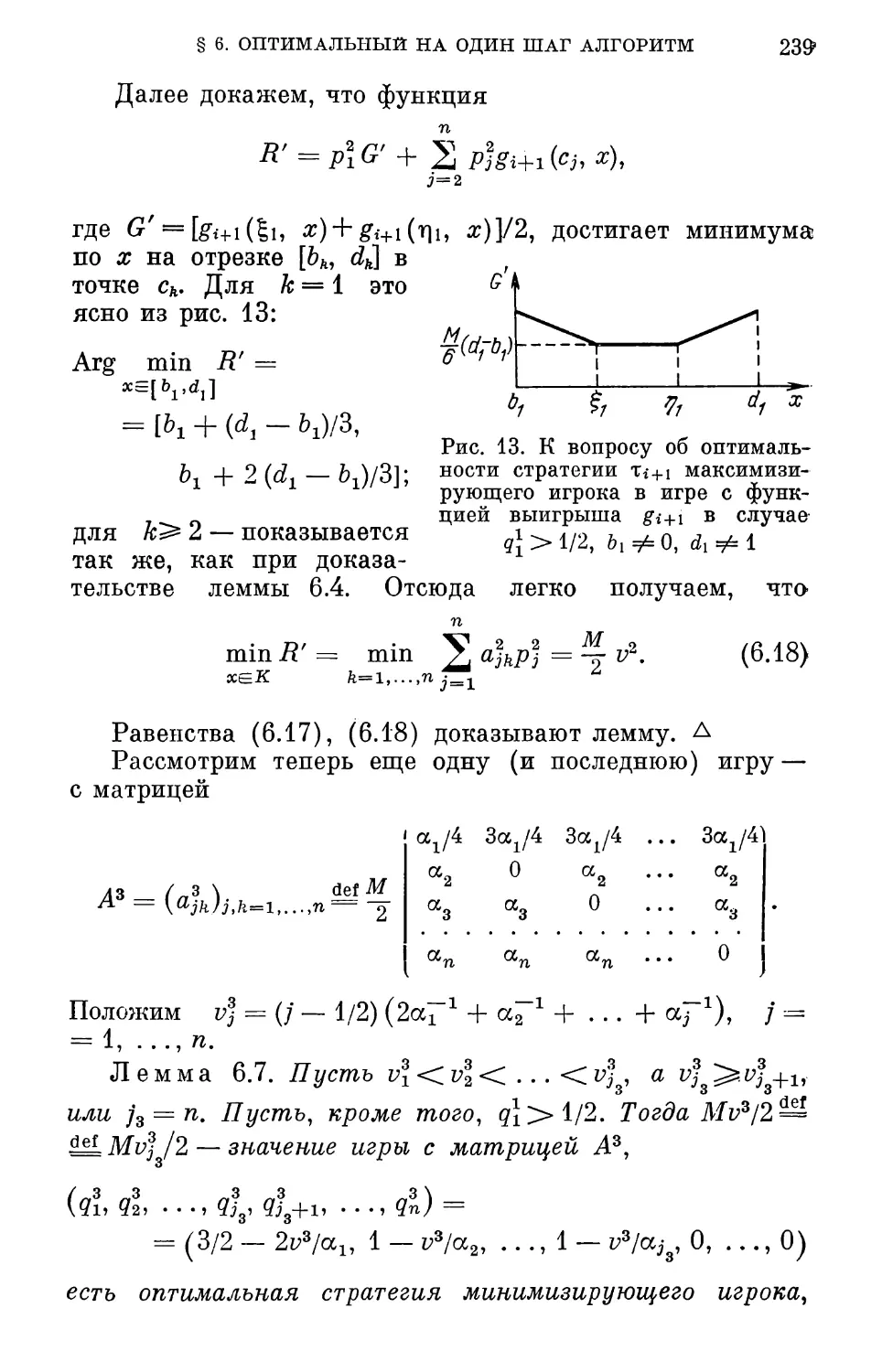
Text
ОПТИМИЗАЦИЯ И ИССЛЕДОВАНИЕ
ОПЕРАЦИЙ
А. Г. СУХАРЕВ
МИНИМАКСНЫЕ
АЛГОРИТМЫ
В ЗАДАЧАХ
ЧИСЛЕННОГО АНАЛИЗА
МОСКВА «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
1989
ББК 22.193
С91
УДК 519.6
ОПТИМИЗАЦИЯ И ИССЛЕДОВАНИЕ ОПЕРАЦИЙ
ВЫПУСК 22
Редактор серии Н. Н. МОИСЕЕВ
Сухарев А. Г. Минимаксные алгоритмы в задачах чис-
ленного анализа.— М.: Наука. Гл. ред. физ.-мат. лит., 1989.—
304 с — (Оптимизация и исследование операций/Ред. сер.
Н. Н. Моисеев).—ISBN 5-02-013942-4.
В монографии исследуются вопросы эффективности и опти-
мальности алгоритмов решения задач численного анализа. Рас-
смотрение ведется в рамках общей модели, в основу которой
положена минимаксная концепция оптимальности вычислитель-
ных алгоритмов. При построении оптимальных алгоритмов ши-
роко используются теоретико-игровые и другие методы исследо-
вания операций и системного анализа.
Для студентов, аспирантов и специалистов в области при-
кладной математики.
Табл. 5. Ил. 18. Библиогр. 468 назв.
Рецензент
доктор физико-математических наук В. И. Благодатских
1602120000—113 9Q QQ
053(02)-89
Издательство «Наука».
Г-топппгт Тротта т.-ттттсг
Издательство «Наука».
Главная редакция
физико-математической
литературы, 1989
ISBN 5-02-013942-4
ОГЛАВЛЕНИЕ
Предисловие
Список обозначений................. . . 8
Глава 1. Общая модель вычислений......................... 9
§ 1. Основные понятия................................. 9
§ 2. О рассматриваемых функциональных классах . . 12
§ 3. Классы детерминированных алгоритмов .... 21
§ 4. Минимаксная концепция оптимальности вычисли-
тельных алгоритмов и конкретные понятия опти-
мальности ...........................................28
§ 5. Сравнение наилучших гарантированных результатов
в классах пассивных и последовательных алгоритмов 49
§ 6. Последовательно-оптимальные алгоритмы ... 56
§ 7. Стохастические алгоритмы..................62
Глава 2. Вычисление интегралов....................73
§ 1. Оптимальные квадратуры для функциональных
классов, заданных квазиметриками...............73
§ 2. Построение и исследование оптимальных квадратур
для функциональных классов, заданных модулями
непрерывности...................................90
§ 3. Последовательно-оптимальные и оптимальные на
один шаг алгоритмы численного интегрирования 100
§ 4. Численный эксперимент......................424
§ 5. Оптимальное вычисление повторных интегралов . . 132
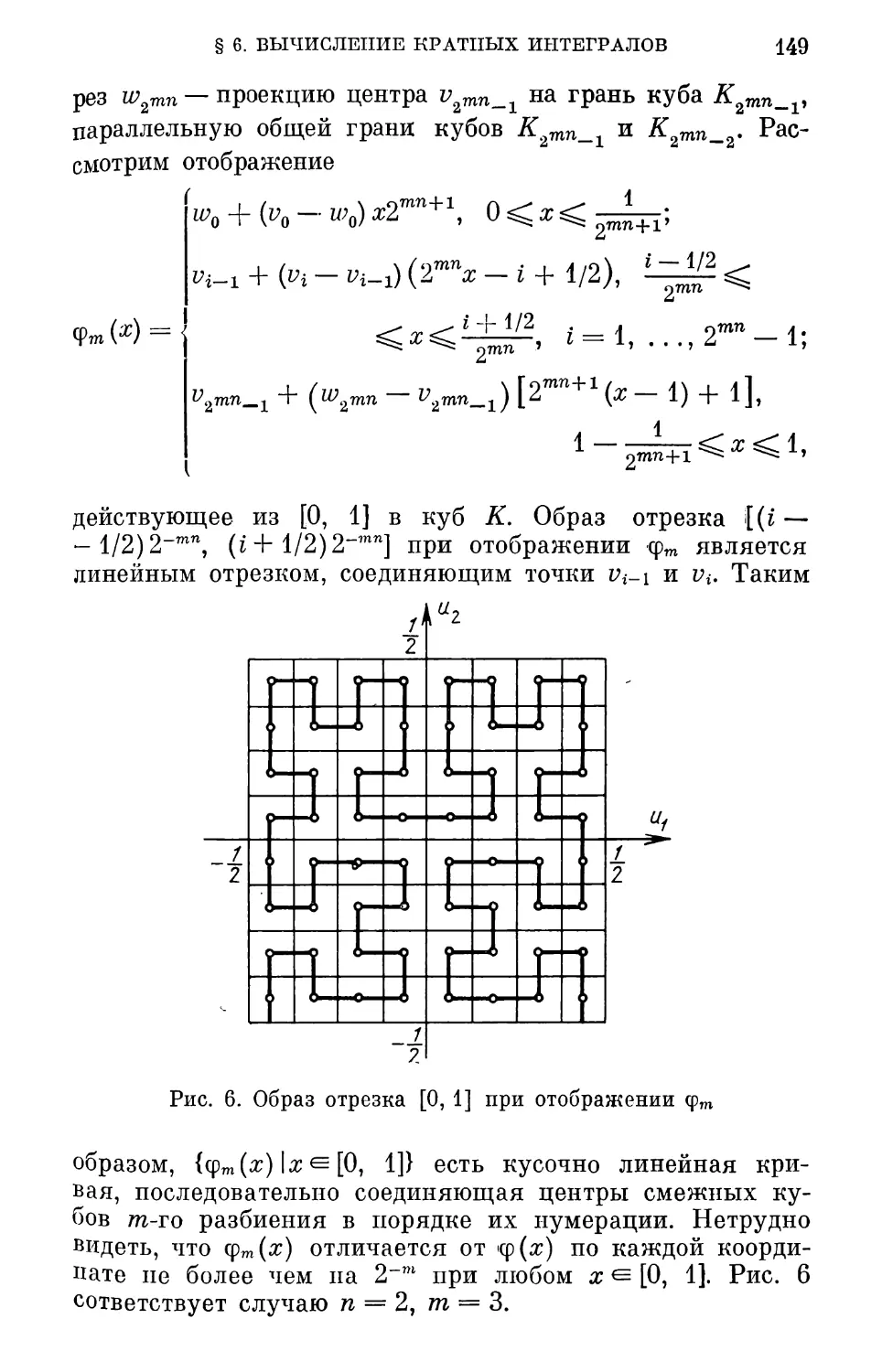
§ 6. Вычисление кратных интегралов с помощью развер-
ток типа кривой Пеано...............................147
Глава 3. Восстановление функций по их значениям . . 153
§ 1. Оптимальные пассивные алгоритмы.................153
§ 2. Последовательно-оптимальные и оптимальные на
один шаг алгоритмы восстановления функций . . 161
§ 3. Решение многошаговой антагонистической игры,
связанной с задачей оптимального восстановления 173
Глава 4. Поиск глобального экстремума...................191
§1.0 выборе начальных точек для методов локальной
оптимизации.........................................192
§ 2. Оптимальный пассивный поиск для функционально-
го класса, заданного квазиметрикой...................198
§ 3. Сведение задачи построения последовательно-опти-
мального алгоритма для функционального класса,
1*
4 ОГЛАВЛЕНИЕ
заданного квазиметрикой, к серии задач оптималь-
ного покрытия...................................205
§ 4. Конкретные вычислительные алгоритмы . . . . 212
§ 5. Учет погрешности вычислений....................222
§ 6. Оптимальный на один шаг стохастический алгоритм 228
Глава 5. Некоторые специальные классы экстремальных
задач.............................................244
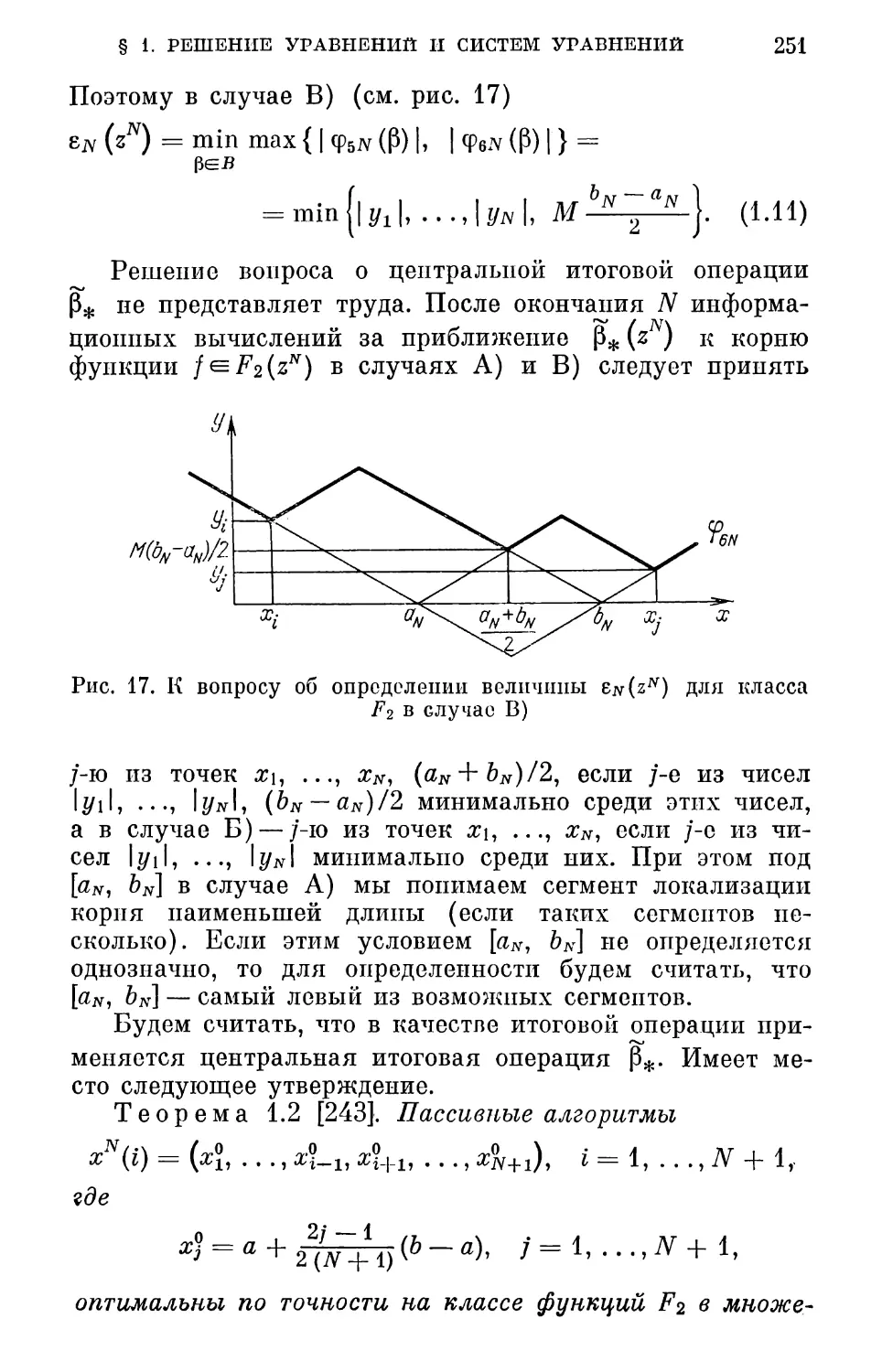
§ 1. Решение уравнений и систем уравнений . . . 244
§ 2. Отыскание максимума функции минимума при свя-
занных переменных...................................256
§ 3. Многокритериальные задачи оптимизации . . . 261
Список литературы......................................270
Предметный указатель...................................295
Посвящается
памяти моей матери
Александры Ильиничны Сухаревой
и моего отца
Григория Михайловича Сухарева
ПРЕДИСЛОВИЕ
Вопросы эффективности численных методов, выбора
наиболее эффективных методов для решения данной
задачи или данного класса задач всегда занимали важ-
ное место в численном анализе. И в настоящее время
оптимизация вычислительного процесса решения задач
на ЭВМ является актуальной проблемой вычислитель-
ной математики, проблемой, которая стимулирует поиск
новых численных методов и способов их реализации.
В предлагаемой книге для различных задач числен-
ного анализа изучаются способы оценки эффективности
вычислительных алгоритмов и вопросы их оптимально-
сти в рамках общей модели вычислений. Основными
элементами общей модели, определяющими конкретные
модели вычислений, являются: приближаемый функци-
онал или оператор, соответствующий решаемой задаче;
класс функций, с помощью которого описывается ин-
формация вычислителя о задаче; класс алгоритмов
решения задачи, находящихся в распоряжении вычис-
лителя; критерий оценки эффективности алгоритмов;
концепция оптимальности; и, наконец, конкретное поня-
тие оптимальности алгоритма в рамках принятой кон-
цепции. Использование общей модели вычислений по-
зволяет дать единую трактовку различных задач чис-
ленного анализа, ответить па ряд принципиальных ме-
тодологических вопросов и установить общие свойства
оптимальных алгоритмов.
В основу всех рассматриваемых в книге конкретных
реализаций общей модели вычислений положена мини-
максная концепция оптимальности, которую использо-
вал в задачах вычислительной математики еще
П. Л. Чебышев. Эта концепция отражает стремление
вычислителя к получению наилучшего гарантированно-
го результата (например, точности решения) относи-
тельно находящейся в распоряжении вычислителя ин-
формации о задаче.
6
ПРЕДИСЛОВИЕ
Оптимальным алгоритмам решения задач численного
анализа посвящена достаточно обширная журнальная
литература. Имеются также несколько монографий, где
наряду с рассмотрением конкретных задач закладыва-
ются основы общей теории оптимальных алгоритмов.
Тематика данной книги существенно отличается от
традиционной тематики оптимальных численных мето-
дов, что выражается прежде всего в углубленном вни-
мании к последовательным (адаптивным) вычислитель-
ным алгоритмам. При этом процесс вычислений
рассматривается как управляемый процесс, а сам алго-
ритм — как стратегия управления. Такой подход позво-
ляет при построении оптимальных алгоритмов широко
использовать теоретико-игровые и другие методы иссле-
дования операций и системного анализа. Использование
этих методов оказывается плодотворным и позволяет
получить целый ряд результатов, относящихся как к
традиционным, так и к новым понятиям оптималь-
ности.
Конечной целью исследования различных изучаемых
в книге моделей вычислений является построение кон-
кретного вычислительного алгоритма, допускающего про-
граммную реализацию. Центральное место занимает
понятие последовательно-оптимального алгоритма, отра-
жающее во многих случаях особенности организации ре-
альных вычислительных процессов полнее, чем традици-
онные понятия оптимальности. Разработана общая
схема построения последовательно-оптимальных алгорит-
мов. Сформулированы требования к модели вычислений,
обеспечивающие возможность применения этой схемы
для ряда задач численного анализа.
Книга состоит из пяти глав. Первая глава стоит
особняком от остальных четырех. В ней вводится необ-
ходимая терминология, строится общая модель вычисле-
ний, подробно обсуждаются возникающие при этом ме-
тодологические вопросы. Следует подчеркнуть, что отно-
сящуюся к оптимальным алгоритмам терминологию
нельзя считать полностью установившейся. Так, вводи-
мый в § 3 гл. 1 термин «итоговая операция алгоритма»
соответствует термину «алгоритм» монографии Дж. Тра-
уба, X. Вожьняковского (см. список литературы). Полу-
ченные в первой главе результаты неоднократно исполь-
зуются в дальнейшем. Она, таким образом, носит в из-
вестной степени вводный характер.
ПРЕДИСЛОВИЕ
7
Последующие главы посвящены построению опти-
мальных методов решения конкретных задач численного
анализа. В книге рассматриваются задачи вычисления
интегралов, восстановления функций по их значениям,
поиска глобального экстремума, решения уравнений и
систем уравнений, отыскания максимина и многокри-
териальные задачи оптимизации. Разумеется, каждая
задача исследуется в рамках конкретных, порою доволь-
но ограничительных, предположений о функциональных
классах и классах алгоритмов, о критериях оценки эф-
фективности алгоритмов и используемых понятиях оп-
тимальности, т. е. в рамках конкретной модели вычис-
лений. Выбор в книге конкретных моделей определяет-
ся желанием наиболее полно продемонстрировать воз-
можности, заложенные в общей модели, а также
стремлением полнее учесть особенности реальных задач.
Некоторые результаты, тесно связанные с тематикой
книги (например, результаты по оптимальному поиску
экстремума унимодальных функций), не вошли в нее
лишь потому, что они уже неоднократно излагались и в
монографиях, и в учебной литературе.
Список литературы достаточно обширен и включает
многие работы, на которые нет непосредственных ссы-
лок в тексте книги. В них либо изучаются те или иные
вопросы оптимальности или оценки эффективности чис-
ленных методов, либо эти работы тесно связаны с рас-
сматриваемыми в книге конкретными задачами числен-
ного анализа. В то же время в список литературы в
целях экономии места не вошел ряд имеющих непо-
средственное отношение к тематике книги работ из ан-
нотированной библиографии к монографии Дж. Трауба,
X. Вожьняковского.
Несколько слов о нумерации теорем, лемм и формул.
В пределах каждой главы принята двойная нумерация:
первое число указывает номер параграфа, второе — но-
мер соответствующей теоремы, леммы или формулы.
При ссылках в пределах данной главы указываются
только эти два номера. В противном случае к ним до-
бавляется номер главы, например: теорема 5.3 гл. 1,
формула (3.4) гл. 2.
Автор глубоко признателен всему коллективу кафед-
ры исследования операций факультета вычислительной ма-
тематики и кибернетики МГУ, творческая атмосфера ко-
торого имела огромное значение для создания этой книги.
СПИСОК ОБОЗНАЧЕНИЙ
Здесь даны лишь некоторые обозначения общего характера.
Не приводятся многие общеупотребительные обозначения, а так-
же специальные обозначения, вводимые в книге. Эти последние
либо используются непосредственно после того, как опи введены,
либо сопровождаются в необходимых местах соответствующими
ссылками.
= — равно по определению (при этом определяемая величи-
на может стоять как слева, так и справа от знака =)’»
=> — знак импликации: «из... следует...»;
-<=>- — знак эквивалентности;
А с: В — множество А содержится в множестве В (это не ис-
ключает случая А = В);
UJ — целая часть t, т. е. наибольшее целое число, меньшее
или равное t;
р] —наименьшее целое число, большее или равное i;
х : = а — оператор, присваивающий переменной х значение а;
А — символ конца доказательства, конца формулировки
утверждения, если оно следует из предшествующих рассуждений
или приводится без доказательства, а также конца формулировки
для выделенных соответствующими заголовками замечаний, при-
меров, определений и т. п.;
R — числовая прямая (множество вещественных чисел);
Rn — n-мерное координатное пространство;
Л-|-5 = {с|с = а4-&, ае А, Ъ е В}\
п
<а, by = 2 ajbj — скалярное произведение векторов а = (а1,...
j=i
..., ап) и b — (б1, ..., Ьп);
Ц а || = max | |;
2=1,. ..,П
Mi = 21а<1;
2=1 _______
И112 = U1)2;
Ипкр(б), limq)(6)—правосторонний и левосторонний преде-
б->а-|- 6-*а—
лы функции ср числового аргумента в точке а;
х* = arg шах / (х) — любая точка глобального максимума функ-
хеХ
ции / на множестве К: / (х*) = шах / (х), х* е К\
XEz К
Arg max f(x)—множество всех точек глобального максимума
х~к
функции / на множестве К.
ГЛАВА 1
ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
В данной главе обсуждаются основные элементы
всех дальнейших построений: приближаемый функцио-
нал или оператор, соответствующий решаемой задаче;
класс функций, с помощью которого описывается ин-
формация вычислителя о задаче; класс алгоритмов ре-
шения задачи, находящихся в распоряжении вычислите-
ля; критерий оценки эффективности алгоритмов; кон-
цепция оптимальности; и, наконец, конкретное понятие
оптимальности алгоритма в рамках принятой концеп-
ции. Совокупность этих элементов и определяет то, что
мы называем моделью вычислений. Получены некото-
рые общие результаты, позволяющие дать ответ на ряд
принципиальных методологических вопросов и неодно-
кратно используемые в дальнейших построениях.
§ 1. Основные понятия
В этом параграфе схематически описываются неко-
торые элементы общей модели вычислений. Показано,
как укладываются в данную схему некоторые конкрет-
ные задачи численного анализа. В последующих пара-
графах главы заканчивается описание общей модели и
дается необходимая конкретизация введенных понятий.
1. Схема общей модели вычислений. Пусть F — мно-
жество в некотором линейном пространстве над полем
вещественных чисел, S — отображение, действующее из
F в некоторое метрическое пространство В с метрикой
у. Перед вычислителем стоит задача построения «наи-
лучшего приближения» к элементу т. е. тако-
го приближения a(f)^B, что величина
е(а, /) =?(£(/), сс(/)) (1.1)
«минимальна» (точный смысл терминов, взятых в ка-
вычки, будет определен позднее).
Вычислителем мы здесь и далее именуем лицо, ко-
торое строит модель вычислений, организует проведение
10 гл. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
вычислений в рамках построенной модели и анализиру-
ет полученные результаты.
Величину 8 (а, /) будем называть погрешностью (илп
точностью) решения. Она выступает в дальнейшем в
роли критерия оценки эффективности алгоритмов (бу-
дут рассмотрены и другие, отличные от (1.1), критерии
оценки эффективности).
Априорная (выявленная в результате предваритель-
ного исследования до начала вычислений) информация
вычислителя о элементе f состоит в знании того факта,
что f е F. В процессе решения задачи с помощью алго-
ритма а вычислитель получает дополнительную инфор-
мацию, на основании которой строит приближение а(/)
(подробнее об этом — в § 3).
2. Примеры. Прежде чем приступить к уточнению
описанной схемы общей модели вычислений, поясним ее
на конкретных примерах.
Пусть F — класс вещественных скалярных или век-
торных функций, определенных на множестве К евкли-
дова пространства Rn. Этот случай, как правило, и рас-
сматривается в дальнейшем.
Задаче численного интегрирования (вычисления ин-
теграла) в нашей общей схеме соответствует
S(f) = \f{x)dx, В = R. (1.2)
К
Задаче восстановления функции / соответствует
*$(/)=/, {р|£: Я + R}. (1.3)
Задаче глобальной оптимизации (вычисления макси-
мума или верхней грани скалярной функции / на мно-
жестве К) —
S(/) = sup/(z), 5 = R, (1.4)
х=К
или же
£(/) = **, 5 = Rn,
где х* е К, / (я*) = max / (х) (при этом предполагает-
ся, что любая функция f g= F достигает своего макси-
мального значения в единственной точке).
Наконец, задаче решения системы уравнений
/(*)=0 (1.5)
§ 1. ОСНОВНЫЕ ПОНЯТИЯ
11
соответствует
£(/) = **, В = Rn, (1.6)
где х* — решение системы. При этом предполагается,
что F — класс таких n-мерных вектор-функций /, что
система (1.5) имеет единственное решение.
В дальнейшем мы уделим наибольшее внимание за-
дачам (1.2) —(1.4) и задаче решения системы (1.5) в
постановке, несколько отличающейся от (1.6). Следует,
однако, подчеркнуть, что определения гл. 1 и произво-
димые построения применимы и к другим задачам чис-
ленного анализа.
Отметим, что термин «задача» в соответствии со сло-
жившимися традициями используется нами для обозна-
чения разных объектов. Так, мы называем задачей ото-
бражение S (задача оптимизации, интегрирования
и т. д.), совокупность S и класса F, а также конкрет-
ный элемент / <= F (в последнем случае подразумевает-
ся, что речь идет о каком-то определенном S).
3. Априорная информация о /. Обсудим теперь под-
робнее методологические вопросы, связанные с целесо-
образностью фиксации в модели вычислений определен-
ного функционального класса F. Как правило, перед
вычислителем стоит одна задача или серия вполне кон-
кретных задач (здесь мы предполагаем, что S, В фик-
сированы, и задачами именуем конкретные функции /).
Тем самым, казалось бы, решен вопрос о выборе класса
F — он состоит из единственной функции или совокуп-
ности всех рассматриваемых функций.
Однако такое определение F не поможет в решении
вопроса о выборе вычислительного алгоритма. Даже ес-
ли вычислитель имеет дело с одной-единственной функ-
цией /, при выборе алгоритма он может руководство-
ваться лишь некоторыми известными ему и существен-
ными для него свойствами этой функции. Такими
свойствами могут быть непрерывность, гладкость, монотон-
ность, выпуклость, унимодальность (наличие единствен-
ного экстремума), ограниченность «скорости изменения»
самой функции или ее производных и т. д.
Подобные свойства можно выявить, например, изу-
чая физическую сущность явления при построении его
математической модели. Могут быть точно или прибли-
женно известны (или вычислены в результате предва-
рительного исследования) значения некоторых функци-
12
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
опальных характеристик. Может быть известно хорошее
начальное приближение, позволяющее получить реше-
ние с помощью некоторого итерационного процесса. Ин-
формация такого рода позволяет вычислителю отнести
рассматриваемую функцию или совокупность рассматри-
ваемых функций к тому или иному функциональному
классу.
Таким образом, фиксация функционального класса яв-
ляется завершением этапа предварительного исследова-
ния — этапа, где выявляются те свойства задачи, которые
будут использованы при выборе алгоритма ее решения.
Конечно, более тщательное предварительное иссле-
дование, быть может, позволило бы отнести функцию
к более узкому классу. Поэтому существует естествен-
ное противоречие между стремлением, с одной стороны,
получше описать задачу, учесть при выборе алгоритма
решения большее число свойств задачи (тем самым ус-
ложняя вопрос о выборе алгоритма решения), т. е.
стремлением выбрать достаточно узкий класс, и, с дру-
гой стороны, стремлением выбрать класс, для которого
удалось бы в приемлемое время решить задачу построе-
ния эффективного вычислительного алгоритма. Разум-
ный компромисс основывается лишь на квалификации,
опыте и интуиции исследователя.
Подчеркнем еще раз, что после фиксации класса F
вся используемая вычислителем при выборе алгоритма
решения информация о задаче состоит в знании того
факта, что / F.
§ 2. О рассматриваемых функциональных классах
Цель данного параграфа — дать пример важных, с
точки зрения теории и приложений, функциональных
классов, адекватно описывающих типичную для ряда
ситуаций априорную информацию исследователя о за-
даче. Таким примером являются функциональные клас-
сы, заданные квазиметриками. Эти классы фигурируют
во многих конкретных моделях вычислений, рассматри-
ваемых в книге. Здесь обосновывается целесообразность
использования функциональных классов, заданных ква-
зиметриками, и изучаются их важнейшие свойства.
1. Неформальное и формальное описание априорной
информации, типичной для ряда задач. В вычислитель-
ной практике встречается большое число задач с функ-
§ 2. О РАССМАТРИВАЕМЫХ ФУНКЦИОНАЛЬНЫХ КЛАССАХ 13
циями весьма сложной структуры. Для вычисления
каждой функциональной характеристики (например,
значения функции) может потребоваться постановка
дорогостоящего физического или численного экспе-
римента.
Многочисленные примеры такого рода дает проблема
автоматизации проектирования [140—144], где вычисле-
ние одного значения функции (скалярной или вектор-
ной), описывающей проектируемую систему, требует
полного расчета варианта системы. Функционирование
же сложной технической системы описывается целым
комплексом программ. Таким образом, при вычислении
одного значения функции приходится проводить слож-
ный и дорогостоящий счет. Достаточно точное вычисле-
ние производных функций зачастую невозможно, а мо-
жет случиться, что они и не существуют. Довольно
скудной, как правило, бывает и априорная информация
о таких функциях.
Однако обычно, анализируя свойства реальной сис-
темы, можно обосновать предположение об ограничен-
ности «скорости изменения» функции и охарактеризо-
вать эту ограниченность количественно.
Специфической особенностью функций, описываю-
щих качество работы технических объектов, является
многоэкстремальность. Это свойство отражает возмож-
ность принципиально различных конструктивных реше-
ний (компоновок объекта), каждое из которых с по-
мощью «доводки», т. е. небольшого уточнения парамет-
ров конструкции, может привести к локальному оптиму-
му эффективности объекта.
Приведенное неформальное описание априорной ин-
формации о функции f можно формально в весьма об-
щем виде представить с помощью неравенства
l/(w) — f(v) I p0(u, v), и, v^K, (2.1)
где po — некоторая фиксированная неотрицательная на
К2 = К X К функция, характеризующая ограниченность
«скорости изменения» функции /.
Класс всех функций /, удовлетворяющих неравенст-
ву (2.1), будем обозначать через FPq. Оказывается, что
рассмотрение даже такого общего класса приводит к со-
держательным результатам для различных задач чис-
ленного анализа. Кроме того, его конкретные реализа-
14
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
ции позволяют описывать особенности многих реальных
задач.
2. Представление данной априорной информации с
помощью класса функций, заданных квазиметрикой.
Покажем, что без ограничения общности можно счи-
тать, что функция в правой части (2.1) обладает неко-
торыми дополнительными свойствами, а именно свойст-
вами квазиметрики.
Говорят, что функция р, определенная на X2, обла-
дает свойствами квазиметрики (является квазиметри-
кой) [125], если
р (zz, и) = 0, (2.2)
р(р, p)+p(ip, р)>р(р, ^), (2.3)
р(р, ip)=p(ip, и), (2.4)
р(р, р)^0 (2.5)
для любых Р, Р, W е К.
Замечание. Как известно, свойства симметрично-
сти (2.4) и положительной полуопределенности (2.5)
можно получить как следствие свойств (2.2) и (2.3).
Действительно, из (2.3) при и = v и (2.2) получаем
p(zp, р)> р(р, w). В силу произвольности и, w справед-
ливо также обратное неравенство, а следовательно, и
равенство (2.4). Неравенство же (2.5) получается из
(2.2) и (2.3) при и = w. А
Теорема 2.1 [242]. Пусть некоторая неотрицатель-
ная на К2 функция ро задает с помощью неравенства
(2.1) класс FPq. Тогда существует определенная на К2
и обладающая свойствами квазиметрики функция р та-
кая, что Fp = FPq, где Fp — класс всех функций /, удов-
летворяющих неравенству
\f(u) — f(v) | р(р, р), и, v ^K. (2.6)
Доказательство. Определим на К2 последова-
тельность функций и функцию р следующим
образом:
рх (и, и) = О,
рг (и, v) = min {р0 (и, v), р0 (р, и)} при и=^щ
pi+1(u, p) = inf[pi(u, ip) + pj(ip, р)], i>l,
WEK
p (p, p) = inf p{ (p, p).
ie{o,i,2, ...}
§ 2. О РАССМАТРИВАЕМЫХ ФУНКЦИОНАЛЬНЫХ КЛАССАХ 15
Докажем сначала, что р обладает свойствами квази-
метрики. По индукции легко устанавливается, что
функции рг- при обладают свойствами (2.2), (2.4),
(2.5). Следовательно, теми же свойствами обладает и
функция р.
Покажем теперь, что последовательность {p{(zz, V)}™=Q
монотонна при любых u, v е К. Действительно,
Pl (zz, Р)=^ ро (и, v) и
pi+1 (и, v) = inf [pf (и, w) + pf (ш, р)] <
w~K
«С рг (и, и) + рг(и, v) = рг {и, v), i^-A.
Отсюда следует, что для любого е > 0 найдется такой
номер т, что
p(u, p) + p(w, 0>pm(u, p) + pm(w, v) — 8>
>inf[pra(u, v) 4- pm(p, u?)] — 8 =
DGK
= Ртп + 1(и, W) — 8^p(?Z, W) -- 8,
откуда, в силу произвольности 8 > 0, получаем (2.3).
Остается установить, что Fp = FPq. Поскольку р ро,
то из (2.6) следует (2.1), т. е. Fp cz Fp. Покажем те-
перь справедливость обратного включения. Пусть функ-
ция / удовлетворяет неравенству (2.1). Тогда очевидно,
что
— /(р) | pi(^, v), и, ре К,
Предположив, что
|/(р)— /(р) | рг(и, р), и, v^K (2.7)
получаем
!/(») — f(v) I < !/(«)—/(«’) I + f(y)\ <
С w)+p), w e K.
Следовательно,
|/(u) — /(v)|<inf [pz (u, w) + Pi(w, p)] = pi+1(u, v).
w&K
Таким образом, неравенство (2.7) доказано по индук-
ции для всех i > 0. Взяв нижнюю грань по /, получим
(2.6). Итак, Fp° cz Fp, и потому Fp° = Fp. д
3. Свойства функциональных классов, заданных ква-
зиметриками. Начнем с простого, но важного для даль-
нейшего факта.
16 ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
Лемма 2.1. Пусть р— произвольная квазиметрика,
Ьа(х) = —р(а, х), а^К. Тогда ±ha<=Fp.
Доказательство. Воспользовавшись свойствами
(2.3), (2.4), легко получим
\ha(u)— ha(v) I = |р(а, и) — р(а, v) I р(щ v). Д
Из доказанной леммы вытекает следующее утверж-
дение.
Лемма 2.2. Пусть р — произвольная квазиметрика.
Тогда
sup|/(u) — /(0| = p(u, 0.
f^Fp
Доказательство. Очевидно, что
sup |/(u) —/(0|<p(u, V).
feFp
С другой стороны,
sup \f(u) — f (0| > I hu (u) — hu (01 = p (iz, v). Д
Следствие. Невозможно определить класс Fp не-
равенством
\ ^p'(iz, и), и, v К,
где p' (и, v)<p(u, v) хотя бы для одного (и, v)^K2. А
С помощью различных квазиметрик можно описать
многие важные, с точки зрения теории и приложений,
функциональные классы. Прежде чем убедиться в этом,
установим следующий полезный факт.
Лемма 2.3. Пусть функции рг- обладают свойствами
квазиметрики, ki > 0, i = 1, ..., s. Тогда свойствами ква-
S
зиметрики обладают также функции max (/cfpf),
i=l, s i=l
Доказательство. Ограничимся проверкой свой-
ства (2.3) для функции max (A?fpf). Имеем
2=1, ..., 8
max (kiPi (и, v)) + max (kfPi (w, 0) >
i=l, .s i=l, s
max (kiPi(u, v) + kipt(w, v)) max (7cfpf (u, w)). д
i=l, .... s i=i, ..., s
С помощью леммы 2.3 легко проверить, что функции
р (и, v) = М max {кг | иг — 0|а*}, (2.8)
t=i, ..., п
р (и, v) = М X kt I и1 - vl |°« (2.9)
2 = 1
§ 2. О РАССМАТРИВАЕМЫХ ФУНКЦИОНАЛЬНЫХ КЛАССАХ 17
обладают свойствами квазиметрики при М > 0, k > 0?
О < а» 1, i = 1, ..., п; и = (и\ ..., ип), v=(vi, ..., vn).
Тем же свойством обладает, как известно, функция
р(и, v) = m(s («‘-р^Г (2.10)
\ 1=1 /
С помощью квазиметрик (2.8) — (2.10) можно задать
классы функций, удовлетворяющих различным вариан-
там условий Липшица и Гёльдера. Среди этих вариан-
тов выделим в следующей лемме один, для которого
возможность задания соответствующего класса функций
с помощью квазиметрики очевидна, быть может, не
сразу.
Лемма 2.4. Класс функций, определенных на ко-
ординатном параллелепипеде
К = {и = (и1, ..., ип) I ai С и* i = 1, ..., п}
и удовлетворяющих по i-й переменной условию Липши-
ца с константой ki, i = 1, ..., п, совпадает с классом FPr
заданным квазиметрикой (2.9) при М = 1, ai = ct2 = . . ►
. .. = an = 1.
Доказательство. Пусть / Fp, т. е.
I / (“) — / (у)| < 2 ki I иг — v11, и, v е К. (2.11)
1=1
Тогда для любых и\ и^[а\ wj^\a?, &j], / =# г,
\f(w\ ..и\ wi+l, ..., wn) —
—/(iz;1, ..., iz?1-1, v\ wi+1, ..., wn) I 1^ — z/|, (2.12)
т. e. функция f удовлетворяет по г-й переменной усло-
вию Липшица с константой i = 1, ..п.
Если же предположить справедливость (2.12) при
i = 1, ..., п, то легко видеть, что
I f(u)—/(р)| < I /(и1, и2,..., и”-1, и£)—/(р1, и2, Un~\ ип)\ +
4- | /(р1, и2,..., ип~х, ип) — /(р1, V2, ..., и”) | +
+......................................+
+ I /(р1, V2, ..., Vn~х, ип)—/(р1, Р2, ..., Vn~х, р”) |
^2 K\ui —
г=1
2 А. Г. Сухарев
18
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
т. е. справедливо неравенство (2.11), и, следовательно,
/ Fp. Д
Пусть функция со(6) определена при 6>0и оола-
дает свойствами модуля непрерывности, т. е. со непре-
рывна, не убывает, со(0)=0 и (0(61 + 62)^(0(61) +
+ <0(62)* В этом случае говорят, что класс функций
Ftt = {/I l/(u)-/(p)l^co(llu-pll), u, v^K} (2.13)
задан модулем непрерывности со (здесь II-II—некоторая
норма в тг-мерном координатном пространстве). Ясно,
что все функции из класса равномерно непрерывны
на области К, причем их модули непрерывности не пре-
восходят со. Рассмотрение функциональных классов, за-
данных модулями непрерывности, стало достаточно тра-
диционным в теории оптимальных квадратур [7, 8, 129,
164, 191, 314].
Покажем, что эти классы являются частными случа-
ями функциональных классов, заданных квазимет-
риками.
Лемма 2.5. Пусть функция со(6) определена при
§ > 0, не убывает, со(0)=0, со (61 + 62) < со (61) + (0(62),
а функция р обладает свойствами квазиметрики. Тогда
функция со(р) также обладает свойствами квази-
метрики.
Доказательство. Имеем
<o(p(u, р)) + co(p(tp, у) ) > со (р (1г, р) + р(гг, р))^
>®(p(w, и)),
и неравенство (2.3) для функции со(р), таким образом,
выполнено. Справедливость (2.2), (2.4), (2.5) оче-
видна. А
Так как функция p(z^, и)=\\и— pH, естественно, об-
ладает свойствами квазиметрики, то из леммы 2.5 сле-
дует, что классы (2.13) являются частными случаями
классов, заданных квазиметриками.
Функции со (Пи — pH), с помощью которых задаются
классы (2.13), очевидно, инвариантны как функции пе-
ременных и, v относительно сдвига. Произвольная ква-
зиметрика р таким свойством, вообще говоря, не облада-
ет, т. е. не обязательно p(u + ip, v + w) = p(u, v). Это
обстоятельство является существенным и позволяет за-
давать с помощью квазиметрик важные классы, которые
нельзя задать модулями непрерывности. Примерами мо-
гут служить классы функций, удовлетворяющих в раз-
§ 2. О РАССМАТРИВАЕМЫХ ФУНКЦИОНАЛЬНЫХ КЛАССАХ 19»
ных подобластях области определения условиям Лип-
шица или Гёльдера с разными константами, или задан-
ные в разных подобластях определения разными моду-
лями непрерывности. В некоторых случаях соответст-
вующую квазиметрику легко выписать в явном виде.
Приведем конкретный пример.
Лемма 2.6. Пусть К = [0, 1], 0 = <20 < а\ < .
... < ал < аз+\ = 1, кх > 0, ..., /cs+i >0. Тогда класс
функций /, удовлетворяющих на отрезке [аг-_b aj усло-
вию Липшица с константой кр
\f(u) — f(v) I ki\u — v\, и, v [аг_ь ail
i = 1, ..., s + 1, (2.14):
совпадает с классом Fp, заданным квазиметрикой
p (&, v) — p (r>, u) =
ki\u — z?|, если и, v^lai—^ aj,
J—i
= ’ k} (cii tz) + 2 km (am am—i)~\~kj(y aj—
m=i+l
если u^lai-^ aj, v^[aj—1T аД, Z</.
Доказательство. Легко проверить, что функция
р действительно обладает свойствами квазиметрики.
Если то неравенства (2.14), очевидно, выпол-
няются.
Предположим теперь, что функция f удовлетворяет
неравенствам (2.14), и е [«г-i, aj, ve[ahl) aj,
Тогда
|/(и)_/(У)|<|/(Ы)_/(а.)| +
J-l
+ S — /(«m-l)l + 1/(0 — /(«i-lKP(»> 01-
m=i+l
то есть f e Fp. A
Расширяет возможности представления различных
функциональных классов с помощью квазиметрик р и
то обстоятельство, что в определении квазиметрики нет
требования положительной определенности, а требуется
лишь, чтобы функция р была неотрицательно опре-
деленной.
Пусть функциональный класс задан условиями
|/(и)— /(р) I < ро(и, v), U,V ^K,
l/(w«) — /(v<) I < a.-, a; > 0, i e I.
2*
20
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
Как мы знаем из теоремы 2.1, такой класс можно пред-
ставить в виде Fp, где р — некоторая квазиметрика, при-
чем если функция ро сама обладает свойствами квази-
метрики, а множество I конечно, то построение р легко
осуществляется конструктивно. С помощью второй груп-
пы условий в (2.15), полагая аг = 0, можно описывать
равенство значений функций рассматриваемого клас-
са в некоторых фиксированных парах точек. С по-
мощью аналогичного приема описывается периодичность
функций.
Отметим, что классы Fp содержат разрывные функ-
ции, если функция р разрывна. Так, если
{0, и = 12,
л ,
1, U^V,
то разрывная функция ha(x)= — р(а, х), согласно лем-
ме 2.1, принадлежит классу Fp.
Как видим, возможности задания различных функ-
циональных классов квазиметриками довольно широки.
В такой общности изучение этих классов в теории чис-
ленных методов было начато в [240]. В некоторых слу-
чаях оказывается целесообразным рассмотреть еще бо-
лее слабые, чем (2.2) — (2.5), требования на функцию р.
Так, в [57] ряд результатов из [240] удалось перенести
на случай несимметричной функции р.
Отметим, что в последние годы довольно интенсивно
изучаются задачи оптимизации для классов функций,
удовлетворяющих разным формам условия Липшица
(такие классы, как отмечалось выше, являются частны-
ми случаями функционального класса, заданного произ-
вольной квазиметрикой). Для функций, удовлетворяю-
щих условию Липшица, введены различные обобщения
понятия градиента [329, 337], получены аналоги прави-
ла множителей Лагранжа [408], построены различные
численные методы оптимизации [9, 85, 88, 89, 92, 153,
155, 199, 201, 205, 240-242, 248, 250, 265, 281, 338,
352, 427, 428], рассматриваются вопросы продолжимости
и построения наилучших аппроксимаций [401].
В дальнейшем нам понадобятся следующие два ут-
верждения.
Лемма 2.7. Функциональный класс Fp, заданный
произвольной квазиметрикой р, замкнут относительно
операций взятия максимума и минимума.
§ 3. КЛАССЫ ДЕТЕРМИНИРОВАННЫХ АЛГОРИТМОВ
21
Доказательство. Пусть Д, /2еFp. Тогда
Jmax{/i(u), /2 (и)} — max /2(v))|
^max{|/i(u)—/i(p)I, 1/2(и) — /2<у)|} ^р(^, у)
для любых и, v е К, т. е. max {/1, /2}^FP. Таким же
рассуждением можно показать, что min{/i, /2}^FP. А
Лемма 2.8. Функциональный класс Fp, заданный
произвольной квазиметрикой р, есть выпуклое централь-
но-симметричное с центром 0 множество в линейном
пространстве функций, определенных на множестве К.
Доказательство. Пусть /1, /2 Fp, % е [0, 1],
и, v е К. Тогда
|%л(») + (! -X)/2(u)-Vi(v)-(l -М/2(У)1
1/1 (и) — /1(р)| +(1 — %) l/2(»)— h(v) \ ^р(», V),
откуда следует выпуклость jPp. Проверка свойства сим-
метрии тривиальна. А
4. Другие функциональные классы. Наряду с упо-
мянутыми мы в дальнейшем будем рассматривать и
другие функциональные классы, например, класс
Wroo ([a, b], М), состоящий из функций /, (г—1)-я про-
изводная которых абсолютно непрерывна на [а, Ь],
а норма г-й производной в ограничена константой М.
В частности, известно, что
. WL ([а, Ь], M)={/||/(u)-/(p)|<M|u-v|,u, ve=[a, &]},
(246)
т. е. класс совпадает с классом функций, удовлет-
воряющих на [а, &] условию Липшица с константой М.
Будут рассмотрены и функциональные классы совер-
шенно иной природы.
§ 3. Классы детерминированных алгоритмов
В этом параграфе вводится общее понятие детерми-
нированного алгоритма решения задачи приближения
S (/). Показано, каким образом особенности задачи, ха-
рактер поступления информации о ней, а также воз-
можности вычислителя по хранению и обработке этой
информации определяют выбор класса допустимых ал-
горитмов решения задачи.
1. Понятие детерминированного алгоритма. Начнем
€ описания детерминированных алгоритмов (методов,
22
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
стратегий) а решения задачи. Работа любого алгоритма
естественным образом разбивается на два этапа.
На первом этапе происходит сбор информации о кон-
кретной решаемой задаче /. Для этого вычисляются зна-
чения yi е Yi функционалов или операторов xt е Хг, где
Xi — заданное множество отображений (функционалов
или операторов), определенных на F и принимающих
значения из заданного множества Yi, i = 1, ..., N, При
этом N — заранее фиксированное число, определяемое
ресурсами вычислителя (в дальнейшем будет рассмот-
рен и случай, когда N определяется в ходе вычислений).
На втором этапе на основе полученной информации
строится приближение р = а(/)еВ к приближаемому
элементу 5 (/) В.
Формально детерминированный алгоритм а опреде-
ляется как совокупность отображений
а = {х\, ..., xN, £),
где
Xi =xi: F ->• Уь х\ е Xi,
Х2'. Х\ X У1 "->• Х23 х^\ F^-Y2,
х3: XlXX2XYlXY2-^X3^x3: FY3,
......................................... (3.1>
xN: XiX...X^-iXFiX...XFw_1-*Xns^: F-+YN„
₽: Xi X... X XN X Fi X ... X Yn -> В.
Наряду с ос мы будем называть алгоритмом также
отображение
...г,),
соответствующее первым i шагам a, i N.
Решение задачи состоит в последовательном вычис-
лении
г/i
Хч = Х2(Я1, Z/1), l/2 = ^2(/),
....................................... (3.2>
Xn — Хц (Х{, . . Хп—1, у\, . . Уп-\) , У я ~ XN (/) ,
Р = Р(Ж1, xN, у г, yN).
§ 3. КЛАССЫ ДЕТЕРМИНИРОВАННЫХ АЛГОРИТМОВ
23
При ЭТОМ
<*(/) = ₽.
Вычисление значения Xi(f) будем называть инфор-
мационным вычислением, i = 1, . .., N. Если в явном
виде не делается никаких предположений о точности
информационных вычислений, то предполагается, что
они выполняются без ошибки. Вычисление значения
..., Хг-i, у\, ..., Уг-i) будем называть алгоритми-
ческим вычислением, I = 2, ..., N. Вычисление значения
$(#1, ..xN, у\, ..., yN) будем называть итоговым вы-
числением или итоговой операцией алгоритма1). Таким
•образом, на первом этапе работы алгоритма проводятся
информационные и алгоритмические вычисления, на
втором — итоговое вычисление. Проведение информаци-
онного вычисления называют еще опытом, испытанием,
экспериментом, измерением и т. д. В дальнейшем мы
неоднократно будем пользоваться термином «шаг алго-
ритма» или «шаг вычислительного процесса» примени-
тельно к совокупности алгоритмического и соответству-
ющего ему информационного вычислений. Так, на f-м
таге алгоритма вычисляются величины Xi = Xi(x\, ...
Xi-i, У!, г/i-i), г/.= М/)-
2. Некоторые обозначения и термины. Введем не-
сколько широко используемых в дальнейшем обозначе-
ний и понятий. Для Xj Xj, у} е j = 1, ..., i, i^N,
положим
Х* = (Х1, х(), yi==(yi, у(), ^ = (х{, у*),
F(z‘) = {/ е F I xtf) = Уз, j=l, • • •, i}-
Вся информация вычислителя о задаче / после i шагов
вычислительного процесса состоит в знании того факта,
что / е F{z{).
Будем называть вектор z2’ ситуацией после i шагов
вычислительного процесса. Ситуацию z2’ назовем реа-
лизуемой, если 7?(z2)#=0. Будем говорить, что ситуация
хг=(хг, уг) реализуема при применении алгоритма а
.{алгоритма я2=(£1, ..., #<)), если ее компоненты
4Г1, yi, ..., х^ yi получаются в результате применения
!) Отметим, что в [275, 276] термин «алгоритм» используется
лишь применительно к операции вычисления значения P(zi, ...
Уь ...» Un)-
24
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
первых i формул (3.2) к некоторой функции f е= Fr
i^N. О векторе результатов yi в этом случае будем
также говорить, что он реализуем при применении алго-
ритма а (алгоритма хг).
Отметим, что в формулах (3.1) мы для упрощения
определили отображения х^ £ не на минимально воз-
можных, с точки зрения потребностей организации вы-
числительного процесса, множествах. Нетрудно видеть,,
что отображение Хг достаточно определить на множест-
ве ситуаций zi-1, реализуемых при применении алгорит-
ма а отображение £ — на множестве ситуаций
реализуемых при применении алгоритма xN. Там, где
это удобно, мы будем определять эти отображения на
более узких, чем в (3.1), множествах.
3. Примеры. Дадим теперь конкретные примеры
фигурирующих в (3.1), (3.2) отображений xit Чаще
всего отображению Хг соответствует вычисление тех или
иных характеристик функции / в точке Xi К, напри-
мер, значений функции:
МУ) =/(*<), (3.3)
или значений функции и ее производных до некоторого
порядка:
*.(/) = (Ж)> /'(^)- /(ri>(^)),
или субдифференциала (для выпуклых функций):
**(/) = 9/(^).
Можно рассматривать и другие случаи. Например,.
Xi(f) есть Z-й коэффициент в разложении функции / в.
ряд по заданной системе функции, или
xi (/) = J dx, Ki cz К,
Ki
или
xt (/) = max / (x), Kt с K.
x(=K}
Отметим, что в последнем случае функционал х{ нели-
неен. Случай нелинейной информации рассматривался в
некоторых работах [276, 391], хотя рассмотрение линей-
ной информации представляется наиболее естественным..
В соответствии с видом отображений хг определяется
множество Х{. Например, в случае (3.3) можно считать*
§ 3. КЛАССЫ ДЕТЕРМИНИРОВАННЫХ АЛГОРИТМОВ
25
что
Xi = Х2 = . .. = XN = К
«сть множество функционалов вида (3.3), соответствую-
щих множеству всех точек области определения К функ-
ций / из класса F.
Перейдем к описанию множеств (классов) допусти-
мых алгоритмов. Выбор класса А допустимых алгорит-
мов решения задачи — это один из основных моментов
построения модели вычислений. Этот выбор зависит от
особенностей задачи, характера поступления информа-
ции, а также возможностей вычислителя по хранению и
обработке этой информации.
4. Допустимые итоговые операции. Начнем с вопроса
о множестве BN допустимых итоговых операций. Преж-
де всего, BN есть некоторое подмножество множества
BN = [р|₽: Х,Х ••• XXNX Y,x ••• XYn-+B}
всех итоговых операций вида (3.1). Выделим две часто
встречающиеся ситуации:
а) допустима единственная итоговая операция р, т. е.
BN = {£}, ^BN; (3.4)
б) допустимы произвольные итоговые операции
вида (3.1), т. е.
В^ = BN. (3.5)
Первая ситуация возникает, например, в задаче по-
иска максимума, если наряду с приближенным значе-
нием максимума необходимо указать точку, в которой
максимизируемая функция / принимает это значение.
В этом случае при информации у\ = f(xi),..., i/n =
вычислитель в качестве приближения к максимальному
значению выберет величину / (^ ) = max
и укажет точку х^. Таким образом, допустима единст-
венная итоговая операция
0 (zN) = max yt. (3.6)
i = l,. ..,N
Co второй ситуацией мы встретимся при рассмотре-
нии в гл. 2, 3 задач численного интегрирования и опти-
мального восстановления функций.
26
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
Возможны и промежуточные ситуации, например,
( 0 | 0 (^15 • • XN, у±, yN) =
N
= Ро(^ • •-,*w)+ • • •, (3.7)
2=1
т. e. допустимые итоговые операции задаются функция-
ми [}, линейными по yN = (yi, ..., уя), при этом У1 = ...
... = yn = В = R.
5. Допустимые алгоритмические вычисления. Рас-
смотрим теперь вопрос о допустимых xN =(х\, .xN).
Здесь возможны два крайних случая.
Первый соответствует ситуации, когда при проведе-
нии любого информационного вычисления по тем или
иным причинам не может быть использована информа-
ция о /, полученная при предыдущих вычислениях. Та-
кая ситуация возникает, если, к примеру, у вычислите-
ля нет возможности для хранения информации в опера-
тивной памяти, или нет времени для обработки инфор-
мации, или же все вычисления должны быть проведены
одновременно. Последняя причина может встретиться,
например, в случае, когда возможности используемой
вычислительной системы позволяют одновременно про-
водить N вычислений или же имеется физическая или
экономическая необходимость проводить все экспери-
менты одновременно и т. д.
В этом случае
Xi = Xi^ Xh i = 1, ..N.
Алгоритмы (стратегии) (яд, ..., xN) называют пассив-
ными (неадаптивными). Множество всех таких алгорит-
мов будем обозначать через
N
(3.8)
2 = 1
(здесь и далее символ П используется для обозначения
декартова произведения множеств). Те же термины
(пассивные, неадаптивные) применяют и к алгоритмам
а = (^, ..., xN, 0) g= An XN х BN. (3.9)
Второй случай соответствует ситуации, когда вычис-
литель перед проведением любого информационного вы-
числения располагает информацией о результатах всех
§ 3. КЛАССЫ ДЕТЕРМИНИРОВАННЫХ АЛГОРИТМОВ
27
предшествующих вычислений, достаточной памятью для
хранения этих результатов и достаточным временем для
их обработки, т. е. для проведения соответствующего
алгоритмического вычисления.
В этом случае допустимы все алгоритмы, составлен-
ные из отображений вида (3.1). Множество всех таких
алгоритмов называют множеством всех последователь-
ных (адаптивных) алгоритмов, а его элементы — после-
довательными (адаптивными) алгоритмами. Будем обо-
значать множество всех отображений xi = xi, Х2, ...
..., Хк вида (3.1) соответственно через Xi = Xi, Х2, ...
..., XN, а множество всех последовательных алгорит-
мов — через
N
(3.10)
г=1
Те же термины (последовательные, адаптивные) приме-
няют и к алгоритмам
а = , xN, р) е A* SO* X В„. (3.11)
Так как пассивным алгоритмам соответствуют функ-
ции-константы из XN', то
XN с= X”, AN cz AN. (3.12)
Помимо алгоритмов из XN и XN рассматриваются ал-
горитмы и других, «промежуточных» типов, например,
«алгоритмы с ограниченным объемом памяти [274, 276],
алгоритмы с задержкой информации [316, 318], блочные
алгоритмы [311, 317, 369, 422, 423, 463] и т. д.
Пусть информация о результатах информационных вы-
числений поступает с задержкой т, т. е. перед проведе-
нием (i + 1) -го информационного вычисления вычисли-
телю становится известным результат информационного
вычисления с номером i — т, I > т + 1, и вычислитель
имеет достаточное время для обработки поступившей
информации. При проведении первых т + 1 вычислений
никакой информации не поступает.
В этом случае допустимы все алгоритмы xN е XN та-
кие, что
*^г+1 (z ) ^Гг+i (2 ), i т, (3.13)
для любых реализуемых ситуаций z\ х? и
Хг+1(гг) = Xi+1(F), г^т+1, (3.14)
28
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
для любых реализуемых ситуаций вида
Z = . ., Xi—т, Xi—т+1, • • •, #i, У\ч • • ч Уг—Хч У1—х+\ч • • *ч У^ F
2 (*^1? • • ч Xi—т, Xi—т+1, • • ч У 1ч • • ч У1~хч Уi--1с+1, • • ч Z/i) •
Опишем еще множество блочных алгоритмов. Инте-
рес к таким алгоритмам обусловлен развитием много-
процессорных вычислительных систем и теории парал-
лельных вычислений.
Пусть информационные вычисления распадаются на
к блоков, содержащих соответственно 2Vi, Nk вычис-
лений, N\ + . . . + Nk = TV, причем перед началом вычис-
лений (/+1)-го блока вычислителю становятся извест-
ными результаты вычислений /-го блока. Часто на прак-
тике, например для машины с г процессорами, N\ =...
... = Nk = r.
В этом случае допустимы все алгоритмы xN е Xя та-
кие, что
xi+i (z*) = xi+1 (?) (3.15>
для любых реализуемых ситуаций вида
~ (^i, • • •, . .+Nj4 ...+N j+l> • • •> ^z, У» • • •
... , У^1 + ...+^ч + . . ., У1)ъ
“ (^i, • • ., %N-l + .-.+Nj4 3'N1 + ...+Nj +1ч • • ., У1ч • • •
..., yN^.+Np У2У1 + ...+^+1, . . ., Z/f),
где
N{ + . .. + Nj<i<Ni + ... + Nj + Nj+l,
§ 4. Минимаксная концепция оптимальности
вычислительных алгоритмов
и конкретные понятия оптимальности
Здесь мы введем различные понятия оптимальности
вычислительных алгоритмов в рамках минимаксной
концепции оптимальности. Будет получен ряд результа-
тов, позволяющих прояснить структуру оптимальных
алгоритмов и дать ответ на некоторые важные методо-
логические вопросы.
1. Оптимальные по точности алгоритмы. По-видимо-
му, первые минимаксные задачи в теории численных
методов изучались П. Л. Чебышевым. Как отмечается в.
[190], задача построения минимаксных на классах функ-
§ 4. МИНИМАКСНАЯ КОНЦЕПЦИЯ ОПТИМАЛЬНОСТИ 29
ций квадратурных формул была поставлена А. Н. Кол-
могоровым. Ее изучение началось с работы [190]. Пер-
вая задача построения минимаксного последовательного
алгоритма вычислений рассмотрена, по-видимому,
в [371].
Рассмотрим поставленную в п. 1 § 1 задачу прибли-
жения оператора S на множестве F. Пусть
(см. (3.11)).
Величину
sup 8 (а, /)
будем называть результатом (точностью), гарантирован-
ным алгоритмом а на классе F, максимальной погреш-
ностью а на F или оценкой эффективности а на F.
Пусть AN = XN X BN cz Л* = XN X BN — некоторое мно-
жество алгоритмов с N информационными вычисления-
ми (множество A-шаговых алгоритмов). Алгоритм
ao^AN называется оптимальным по точности в на
классе F, если
sup 8 (сх0, /) = min sup s (а, /).
f^F w=an
Пусть 8>0!). Алгоритм ae^AN называется s-опти-
мальным по точности в AN на классе F, если
sup 8 (ае, /) inf sup 8 (а, /) + 8.
i^F <m=an^f
В условиях, когда вся априорная информация вычис-
лителя о задаче / состоит в знании того факта, что/^F,
минимаксная концепция оптимальности естественна и,,
пожалуй, наиболее оправданна с методологической точ-
ки зрения [62, 157, 235, гл. 3]. В § 6 мы обсудим выска-
зываемые иногда утверждения о «перестраховочности»
минимаксного подхода применительно к задачам органи-
зации вычислительных процессов.
2. Об учете комбинаторной сложности алгоритмов в
определении оптимального по точности алгоритма. Оста-
новимся еще на одном неформальном моменте в опреде-
лении оптимальных алгоритмов. Зафиксировав число
9 Употребление здесь той же самой буквы g, что и для обо-
значения критерия оценки эффективности, не приведет к каким-
либо неясностям.
30
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
информационных вычислений, или, другими словами,
информационную сложность рассматриваемых алгорит-
мов [186, 187, 276], мы назвали оптимальным алгоритм,
гарантирующий наилучшую точность. Ниже будут рас-
сматриваться и алгоритмы, оптимальные по числу ин-
формационных вычислений, т. е. зафиксировав необхо-
димую точность, мы назовем оптимальным алгоритм,
гарантирующий заданную точность при наименьшем чис-
ле информационных вычислений (наименьшей инфор-
мационной сложности).
В обоих случаях в определении оптимальности ни-
как не учитываются затраты ресурсов на «внутренние
потребности» самих алгоритмов — стоимость алгоритми-
ческих и итогового вычислений, или, другими словами,
комбинаторная сложность рассматриваемых алгорит-
мов [276].
На первый взгляд это недопустимо. Однако в вычис-
лительной практике, как уже отмечалось, встречается
множество сложных задач, для которых проведение од-
ного информационного вычисления требует многих се-
кунд и даже минут машинного времени. В таких зада-
чах пренебрежение затратами ресурсов на внутренние
потребности алгоритмов часто оказывается оправданным.
Даже если это не так, и такими затратами прене-
бречь нельзя, все равно отыскание оптимального в смыс-
ле данного выше определения и последовательно-опти-
мального (определение будет дано в § 6) методов реше-
ния задачи является весьма полезным, так как позво-
ляет выявить предельные возможности вычислителя.
На этой основе часто удается построить алгоритмы, в
том или ином смысле близкие к оптимальным и в то же
время обладающие приемлемой комбинаторной слож-
ностью. Их применение на практике дает во многих
случаях хорошие результаты. Примеры построения та-
кого рода алгоритмов встречаются во всех последующих
главах.
Конечно, в идеале при выборе концепции оптималь-
ности следовало бы учитывать как информационную,
так и комбинаторную сложность алгоритмов. Однако до
сих пор достаточно содержательных результатов в этом
направлении немного.
Хуже того, будучи до конца последовательными, на
этом пути мы едва ли сможем построить замкнутую мо-
дель вычислений. Действительно, учитывая в модели
§ 4. МИНИМАКСНАЯ КОНЦЕПЦИЯ ОПТИМАЛЬНОСТИ 31
комбинаторную сложность алгоритмов, т. е. стоимость
вычисления яД?-1), 2, ..N, р(^), необходима
ставить вопрос об оптимальном методе вычисления этих
величин. Например, чтобы найти хДя*-1), в некоторых
случаях, как мы увидим ниже, приходится решать зада-
чу целочисленной оптимизации. Значит, встает вопрос
об оптимальном методе решения таких задач и т. д.
В конце концов мы придем к трудным самостоятельным
проблемам оптимального вычисления значений элемен-
тарных функций, оптимального выполнения арифмети-
ческих операций и др., а также необходимости учета
специфики конкретной ЭВМ. Кроме того, совсем уж
трудно формализовать вопрос о стоимости исследова-
тельских усилий по построению оптимальных алго-
ритмов.
3. О вероятностных концепциях оптимальности. По-
мимо минимаксной, сформулированы и подвергаются
изучению и другие концепции оптимальности. Напри-
мер, если алгоритм предназначен для решения серии
однотипных задач, причем имеются априорные пред-
ставления о частотах появления этих задач, то можно
пытаться задать априорное вероятностное распределе-
ние на классе задач и строить оптимальные в среднем по
тому или иному критерию алгоритмы. Такой подход, на-
зываемый вероятностным, статистическим, информаци-
онно-статистическим, байесовским и т. п., развивается^
например, в работах [100—102, 184, 238, 265, 297, 306—
308, 319, 330, 342, 361, 376, 377, 399, 400, 450, 455, 456,
4.67, 468]. Большинство из перечисленных работ посвя-
щено задаче поиска экстремума функций одной и не-
скольких переменных. В настоящее время правомер-
ность использования статистических моделей многоэкст-
ремальных целевых функций в задачах глобальной
оптимизации обоснована аксиоматически на основе апри-
орной информации о целевых функциях, не включаю-
щей в себя информацию о вероятностном распределении
на классе рассматриваемых целевых функций [102].
4. Одно вспомогательное утверждение. В дальней-
шем нам понадобится следующая почти очевидная лем-
ма, которая близка к соответствующему утверждению иа
[62]. Пусть X, Y — множества произвольной природы,
g: X X Y -> R, Ф = {ф|ср: Y -> X}—множество всех ото-
бражений из Y в X. Определим функцию g на множест-
ве Ф X У формулой g(<p, z/)= g(<p(z/), у).
32
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
Лемма 4.1. Справедливо равенство
inf sup g (ф, у) = sup inf g (я, у).
Ф=ФуЕУ y^Y Х(=х
Если при этом существует функция фо Ф такая, что
g (Фо (у), у) = inf g (*, у), У Y,
х~Х
то
sup g (фо, у) = inf sup g (ф, у).
y*=Y ФеФуеУ
Доказательство. Для произвольных ф е ф и
J/Е У
g (ф, у) = g (ф (у), у) > inf g (х, у),
х=Х
откуда
sup g (ф, у) > sup inf g (х, у)
y^Y yi=Y xSX
И
inf sup g (ф, y) > sup inf g (x, y). (4.1)
ФЁФуеУ yGY xeX
Определим теперь для произвольного 8 > 0 функцию
фе: Y -> X так, чтобы для любого у Y выполнялись
неравенства
£ (фе, у) = g (фе (у), У) < inf g (х, у) + е,
х=Х
если inf g (х, у) > — оо,
х=Х
g (фе, у) = g (фе (у), УХ — 1/е, если inf g (х, у) = — оо.
х<=Х
В силу произвольности у е Y
sup g (фе, у) < max (sup inf g (x, у) + e, — 1/el
1/еУ 11/eY x^x J
и, следовательно,
inf sup g (ф, у) max /sup inf g (x, y) + 8,
Ф=Фу=у lysy xex
— 1/eJ.
Устремляя 8 к нулю, получаем
inf sup g (ф, у) < sup inf g (x, y). (4.2)
ФЕФуеУ y^Y x~X
Неравенства (4.1) и (4.2) доказывают первое утверждение
§ 4. МИНИМАКСНАЯ КОНЦЕПЦИЯ ОПТИМАЛЬНОСТИ
33
леммы. В силу определения фо имеем
sup g (ф0 (у), у) = sup inf g (х, у).
y^Y y=Y х^Х
Отсюда и из первого утверждения леммы следует вто-
рое утверждение. А
5. Центральная итоговая операция. В п. 1 мы назва-
ли алгоритм а0 = ( f}0) е AN = XN X реализую-
щий минимум по xN, р в выражении
min sup8((^N, р), /),
^F
оптимальным по точности в Л27 на классе F. Как не-
трудно понять, из оптимальности (х0, Ро), вообще гово-
ря, не следует, что Ро реализует минимум в выражении
min sups((zN, р),/) при xn=^Xq, даже если при не-
&=bn^f~
котором р алгоритм (xN, р) оптимален по точности в
В указанном смысле Ро не является универсально опти-
мальной итоговой операцией.
Пусть BN = BN, т. е. произвольные итоговые опера-
ции допустимы. В этом случае универсально оптималь-
ная (либо при любом 8 > 0 — универсально 8-оптималь-
ная) итоговая операция существует (точный смысл тер-
мина — в теореме 4.1). Построим ее.
Пусть информационные вычисления завершены и в
результате их проведения сложилась ситуация zN. Сле-
довательно, вся информация вычислителя о задаче f
после завершения информационных вычислений состоит
в знании того факта, что f^F(zN). В этом случае оче-
видно, что паилучшая гарантированная точность есть
gjv(zw)'=inf sup т(5(/), р). (4.3)
рев jgF(zN)
Предположим, что при любом реализуемом zN нижняя
грань в (4.3) достигается. Элемент множества В, на ко-
тором она достигается, будем обозначать через PH.(z2V)
(если таких элементов несколько, то фиксируется и обо-
значается через P^.(zN) любой из них). Таким образом,
при любом реализуемом zN
sup y(>S(/), р* (zN)) = inf sup Y(S(/),p). (4.4)
}GF(zn) f(=F(zN)
3 а. Г. Сухарев
34
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
Итоговую операцию Р* будем называть центральной
итоговой операцией1).
Аналогом попятил центральной итоговой операции в
случае, когда нижняя грань в (4.3) не достигается, слу-
жит понятие ^-центральной итоговой операции Р*, для
которой
sup -v(5(/),p*(zN))<inf sup p) + e
/ег(Л) ₽=By=F(2N)
при любом реализуемом zN.
Чтобы пояснить употребление термина «центральная
итоговая операция», напомним, что величина г =
= inf sup у (^, Р) называется чебышевским радиусом
множества 5, лежащего в метрическом пространстве В
с метрикой ц. Если существует точка р* такая, что
sup y(s, р*)= г, то она называется чебышевским цент-
s=S
ром множества S. Грубо говоря, г — радиус наименьше-
го шара, содержащего S, а Р* — центр этого шара. Отме-
тим, что точка Р* может определяться не единственным
образом.
Образ S(F(zN)) множества F(zN) при отображении
S является для вычислителя по окончании информаци-
онных вычислений «множеством неопределенности»: все
его элементы (и только элементы этого множества) мо-
гут оказаться (при информации f<^F(zN), имеющейся у
вычислителя) приближаемым элементом 8(f). Перепи-
сывая (4.3) в виде
&N (zN) = inf sup у (s, Р),
Ses(r(z^))
убеждаемся, что величина &n(zn) является чебышев-
ским радиусом множества S(F(zN)), а точка P*(zN) —
его чебышевским центром. Именно поэтому Р* называ-
ется центральной итоговой операцией.
Следующая теорема устанавливает свойство универ-
сальной оптимальности центральной итоговой операции.
9 Одно и то же обозначение Р* для центральной итоговой
операции в дальнейшем будет использоваться при различных N.
Это не приведет к недоразумениям, хотя индекс N в принятом
обозначении и отсутствует. Каждый раз из контекста будет ясно,
сколько аргументов у функции 0*.
§ 4, МИНИМАКСНАЯ КОНЦЕПЦИЯ ОПТИМАЛЬНОСТИ 35
Теорема 4.1. При любом xN е XN
min supe((.rN, p), /)=sup e ((xN, [3*), f),
где p* — центральная итоговая операция.
Доказательство. Зафиксируем произвольное
xN <= XN. Для доказательства теоремы достаточно обо-
сновать следующую цепочку равенств:
inf supe((xw, Р ),/) = inf sup у (S (/), Р (zN)) =
= inf sup sup y(S(f), P(zN)) =
z»S{z"}~N /gHz-'V)
= sup inf sup у (S (/), P) =
2JVS{zN}~n p5B feF(zN)
= sup sup y(S(f},P*(zN)) =
zNe{zN}^NfeF{zN}
= suPT(S(/),P*(zN)) = supe((^, fTJ,/).
/GF /SF
Через zN = (xi, ..., xN, y\, ..., yN) в правой части
первого равенства обозначен вектор, который получается
по формулам (3.2) при заданных xN и /, т. е. в этом
равенстве используется лишь определение (1.1) крите-
рия 8 с учетом определения а(/) по формулам (3.2).
Через {zAl~n мы обозначаем здесь множество всех
zjV, реализуемых при применении алгоритма xN (см.
и. 2 § 3). Следовательно, второе равенство обосновыва-
ется с помощью очевидного соотношения
F= U F(zN). (4.5)
Справедливость третьего равенства устанавливается лем-
мой 4.1, примененной к функции zN) =
sup ?(£(/), Р). Четвертое равенство следует из
/EF(z^
(4.4); пятое — из (4.5), при этом смысл вектора zN в
правой его части тот же, что и в правой части первого
равенства. Наконец, в шестом равенстве, как и в пер-
вом, используется лишь определение критерия 8. д
3*
36
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
Следствие. Если алгоритм ( , ро) оптимален по
точности в XN X BN на классе F, (3* — центральная ито-
говая операция, то алгоритм (#снР*) также оптимален
по точности в XN X BN на классе F.
Доказательство. В цепочке равенств
inf inf supe((2w, р),/) = supe((^, ро), /) =
lcN^xN (ГeBN
= inf supe((x^, ₽),/) = sup8((^, p*),/)
pe Bjv isF isF
первое и второе равенства выражают оптимальность ал-
горитма (х°, Ро), справедливость третьего следует из
теоремы 4.1, равенство же между крайними слева и
справа в цепочке выражениями доказывает утверждение
следствия. А
6. Оптимальность линейной итоговой операции.
Пусть S — функционал, у(5(/), р)=|5(/)—р|. Предпо-
ложим, что используется пассивный алгоритм xN =
= (#i, •.xN) е XN, где х\, ..., xN — фиксированные
функционалы. Тогда итоговую операцию можно рассмат-
ривать как функцию 0 переменных
yN = xN(f): 0(z/i, yN) =
= Р(Я1, ..., xN, y\, ..., z/N).
Оптимальной итоговой операцией при фиксированных
х\, ..., xN назовем такую итоговую операцию 0о, что
sup I S (/) — 0О (хг (/), . .., Хи (/)) I =
/GF
= min sup | S (/) — 6 (xr (/), .. ., xN (/)) I, (4.6)
9e© /eF
где 0 — множество всех числовых функций 0 пере-
менных
(г/1,
*={(*/1, l/w) 1^1= 21(f), yN=XN(f), f^Fi.
В силу теоремы 4.1 центральная итоговая операция
Р*(.Г1, . z/p рассматриваемая как функция
переменных z/i, ..., yN при фиксированных х\, ..., xN, оп-
тимальна в смысле данного определения. Однако опти-
мальная итоговая операция при фиксированных х\, ...
..., xN может быть не единственной. Поэтому возни-
§ 4. МИНИМАКСНАЯ КОНЦЕПЦИЯ ОПТИМАЛЬНОСТИ
37
кает вопрос о выборе среди оптимальных итоговых
операций функции 0О по возможности более простого
вида. Такой функцией является, в первую очередь, ли-
нейная функция. Оказывается, что для одного важного
класса задач оптимальная линейная итоговая операция
существует. Соответствующее утверждение формулирует-
ся в следующей теореме, являющейся обобщением ана-
логичного результата из [228] (см. также [20]).
Теорема 4.2 [445]. Пусть F — выпуклое множество
в линейном пространстве, функционалы S, Х\, ..., xN
линейны. Тогда среди оптимальных итоговых операций
при фиксированных х\, ..., xN найдется линейная функ-
ция 0o(z/i, ..., Ум) = ръ + р\У\ + . •. + pNyN- При этом если
множество F центрально-симметрично с центром 0, то
Ро = 0.
Доказательство. Положим
у = {г/=(г/0, i/i, ук) 1г/о = -5(/),
yi = xi(f), yK = xN(f), f<=Fi.
Выпуклость множества F и линейность функционалов
5, х\, ..., xN влекут за собой выпуклость множества
y<=R*+1. Для произвольной функции 0^0 имеем
sup 15 (/) — 0 (*1 (/), • • •, XN (/)) I =
/еР
= sup |z/0 — 0(z/i> •• ->^)l =
(уй<уг...W)eY
= sup sup |г/0 — 6(i/i, • • -,yN)\,
...........................vN)
где c(yi, yN) = {yo\(yo, Уi, z/n)s П — промежу-
ток с концами
a (Vi, • • •, Ул) = inf #o>
(У0,у1...VN)eY
b(ylt .. -,!/n)= sup y0,
(Vo'Vj...УП)<=Х
a n(F) = {(i/i, ук)\б(У1, Ум)^0} — проекция
множества У на подпространство переменных у\, ..., i/n.
Следовательно, с учетом леммы 4.1,
inf sup | S (/) — 0 (Xi (У), ..., xN (У)) | =
ese fsF
= inf sup sup | y0 — 0 (г/j, .. ., yN) I =
0=e (y1,...,vN)ert.Y')yQe<s(y1.yN)
38 гл. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
= sup inf sup | y0 — r | =
(i/15.--,?/2V)en(Y) reR yoea(z/r...,^)
= sup inf max{b(yl,. . .,yN)—r, r—a(yu .. .,г/Л')} =
(j/r...,2/2V)en(Y)rGR
= sup . .,yN) — a(yy, .. .,yN))^d. (4.7)
Если d = +oo, то любая функция 0^0 оптимальна.
Пусть d<+°o. В этом случае, для того чтобы убедиться
в существовании линейной оптимальной итоговой опера-
ции, достаточно указать функцию 0o(yi, ..1/n) = Po +
+ /?iz/i + ... + pNyN такую, что
sup | S (/) — 0О (Xi (/), ..., xN (/)) I < d
f<=F
или, иными словами,
IУо — (ро + Р1У1 + • • • + pNyK) I < d при всех
(Уо, У1, Уя)^ Y. (4.8)
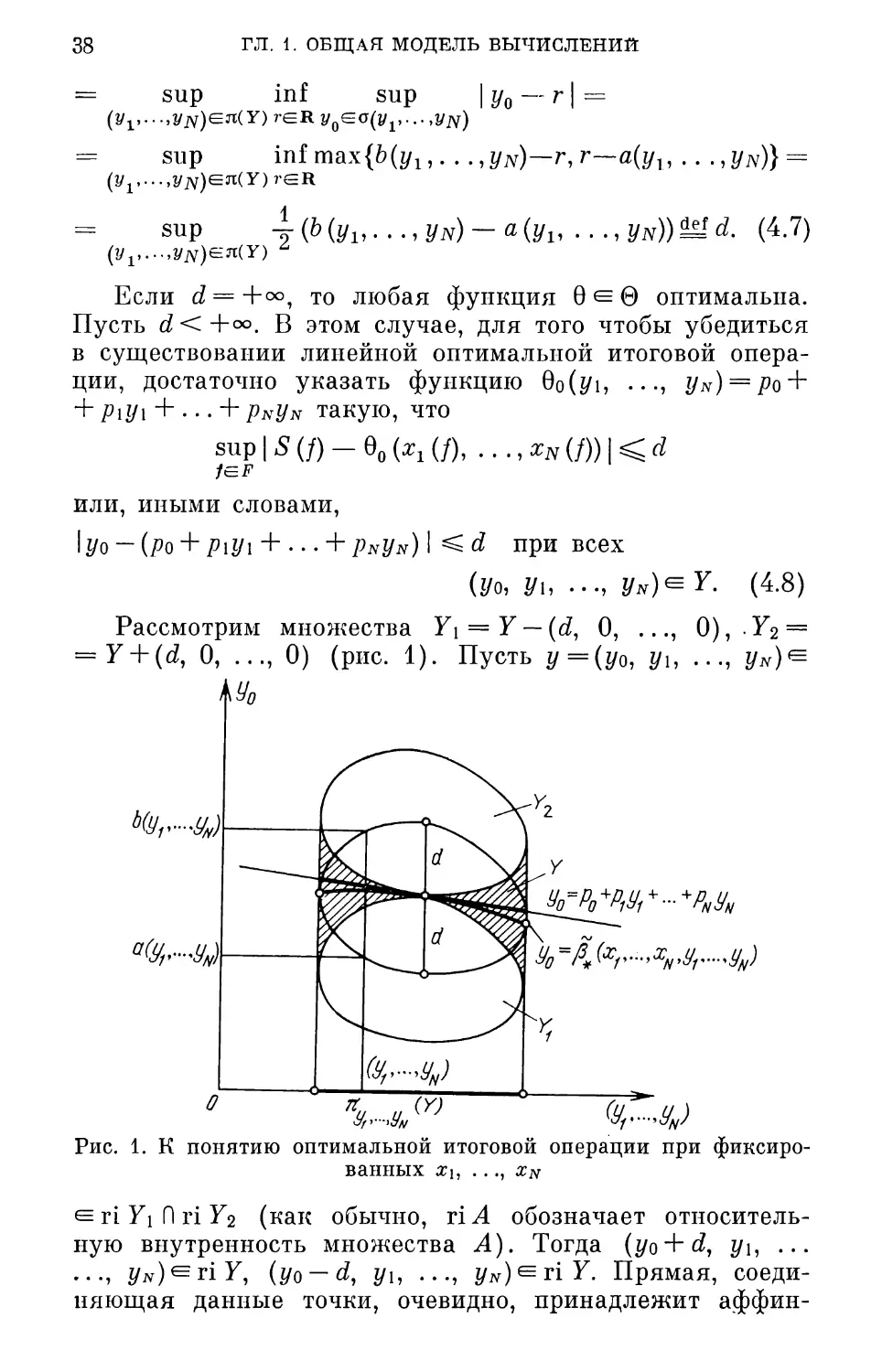
Рассмотрим множества У1 = У —(d, 0, ..., 0),.Уг =
= У + (й, 0, ..., 0) (рис. 1). Пусть у=(уо, У\, ..., !/м)е
..«J ____________
° "и..........,.т %...и„>
Рис. 1. К понятию оптимальной итоговой операции при фиксиро-
ванных Х\, . . ., XN
^г1У1ПпУ2 (как обычно, riA обозначает относитель-
ную внутренность множества Л). Тогда (yo + d, у^ ...
..., yN)^riY, (yo — d, yi, ..., г/к)еНУ. Прямая, соеди-
няющая данные точки, очевидно, принадлежит аффин-
§ 4. МИНИМАКСНАЯ КОНЦЕПЦИЯ ОПТИМАЛЬНОСТИ 39
ной оболочке множества Y. На этой же прямой лежат
и точки (z/o + d+e/2, z/b ..., yN), (yQ — d— s/2, z/b ...
..., z/N). Следовательно, при достаточно малом 8>0 они
являются элементами множества У, откуда
b(yi, Ум) — а(У1, ..., yN)>(y0 + d+ e/2)-
— (z/o — d — e/2) = 2d + 8,
что противоречит последнему равенству в (4.7). Итак,
ri У1 П ri У2 = 0.
По теореме отделимости (см., например, [255]) в этом
случае существует гиперплоскость <с, уУ = с = (со,
ci, ..., cN), разделяющая множества У1 и У2 в собствен-
ном смысле, т. е.
<с, у'У <с, у" У при всех /efi, у" ^Y2, (4.9)
<с, у'У < <с, у" У при некоторых у' Уц у " е У2. (4.10)
Пусть со = 0. Возьмем произвольный вектор у =
= (Уо, У1, • У1 и у" = (у'„ +2d,yi .. .,y'N)t= У2.
Имеем <с, у'У = <с, у"У. Следовательно, в силу (4.9)
<с, у'У = % при всех y'^Y\. Аналогично, <с, у" >=£
при всех z/" У2, а это противоречит (4.10). Получен-
ное противоречие показывает, что со =^= 0.
Пусть для определенности со > 0. Полагая р\ =
= —c\Icq. Pn = —cN/co, Pq = ^/cq и используя опреде-
ление множеств Уь У2, перепишем (4.9) в виде
N N
Уо — d—^j PiVi<Ро<Уо + d—'Si РгУ1
1=1 1=1
при всех у = (у0, уг, yN) е= Y,
что показывает справедливость (4.8).
Для завершения доказательства осталось убедиться,
что ро = 0 в случае центрально-симметричного множества
F с центром 0. В этом случае множество У также цент-
рально-симметрично с центром 0. Пусть (z/i, ..., г/л ) е
ел(У). Тогда точки (a(z/i, ..yN), yi, ., У^,_(Ъ(у\, ...
•••7 !/n), У\, - ч Ум) принадлежат замыканию У множе-
ства У. Нетрудно видеть, что множество У также цепт-
рально-симметрпчпо с центром 0. Следовательно,
(~~а(У1, • • •, Ум), —у\, ..—yN)^Y. Как_известно, вместе
с множеством У выпукло и множество У (см., например,
40
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
[255]), и потому
1 1
~2 Ф (Уи • • •’ Ум), У1, • • •, Уя) + ~2 (— а (Ун • • •, Ум}, — У1, . . .
...................................'^.О, ...,o)s У,
а в силу симметрии Y и
...................Ч о................oU
\...............................ш./
По определению функций а и Ъ
6(0, ...,0)-а(0,
ъ(Уу М~~а(У1> •••> Уту) а (УР• • • ’ М~6 (Уг• • • ’Уту)_
^2 2 “
= 6(у1т . . .,yjv) —а(ух, . . .,yN),
откуда, в силу данного в (4.7) определения величины d,
произвольности (yi, yN)^n(Y} и симметрии множе-
ства У, получаем последовательно, что 6(0, ..0) —
— а(0, 0) = 2d, 6(0, ..., 0) = —а(0, ..., 0) = d. •
При yi = ... = y№=0 неравенство (4.8) принимает
вид Iуо — Pol d при всех уо е(а(0, ..., 0), 6(0, ..., 0) ) =
= (—d, d), что возможно лишь при ро = 0. А
На рис. 1 жирными линиями выделены графики
функции у0 = р* (^, . . ., xN, ур . . ., yN), которая задает
центральную итоговую операцию (ал, ..., xN фиксирова-
ны) , а также функции уо = Ро + Р\У\ + ... + PnUn, которая
задает линейную оптимальную итоговую операцию при
фиксированных Xi, ..., xN. Очевидно, что любая функция
Уо = 0о(У1, . •У?г), график которой целиком лежит в за-
штрихованном на рис. 1 множестве, задает оптимальную
итоговую операцию при фиксированных ал, ..., xN, посколь-
ку lyo — 0о (yi, yN} \ ^d при всех (у0, уь ..., yN)^ У.
7. Замечание к понятию оптимальной итоговой опе-
рации. Данное в предыдущем пункте определение (4.6)
оптимальной итоговой операции при фиксированных
х\, ..., xN очевидным образом распространяется на слу-
чай произвольных xN = (x\, ..., xN}^XN. Именно, итого-
вую операцию popt такую, что при всех xN g= XN
supy(5(/), ₽opt(^n M/)> • • ч XN (/))) =
= min sup у (5 (/), P(x1? . .., xN, x± (f),..., M/)))> (4.11)
§ 4. МИНИМАКСНАЯ КОНЦЕПЦИЯ ОПТИМАЛЬНОСТИ
41
можно назвать итоговой операцией, оптимальной в мно-
жестве BN.
Однако данное определение целесообразно использо-
вать лишь в случае, когда применяются только пассив-
ные алгоритмы (xN, (см. (3.9)). Дело в том, что
определенная указанным способом оптимальная итоговая
операция не обладает свойством универсальной опти-
мальности, которым, в соответствии с п. 5, обладает цент-
ральная итоговая операция. Именно, как показывает
следующий пример, из оптимальности некоторого алго-
ритма , Ро) не вытекает, вообще говоря, оптималь-
ность алгоритма Popt) (ср. со следствием теоре-
мы 4.1).
Пример. Пусть F = {0, 2, 4, 6, 8, 10, 12, 14},
S(j) = f, В = R (напомним, что оператор S принимает
значения в метрическом пространстве В с метрикой 7),
2V = 2, Xi = Х2 = Ui, ..., а?}, где
(0, f<2i— 1,
ai(/) = |1, />2г—1,
г = 1,
Положим Popt(^4, Яб, 1, 0)=Popt(^6, «4, 0, 1)=10. При
всех остальных z2 = (#i, х2, у\, у2) положим PoptC^, #2»
Уп У2) = ₽*(^п Ун У2), гДе центральная итоговая
операция. Нетрудно проверить, что popt является опти-
мальной итоговой операцией в смысле определения (4.11).
В частности,
sup у (S (/), Popt(a4> «6> «4(f), аМ =
= min sup у (S (/), 0 (а4, ав, а4 (/), ав (f))) = 3,
причем верхняя грань в левой части последнего равен-
ства достигается при / = 0 и при / = 6.
Определим теперь последовательный алгоритм (х°, х%)
следующим образом: х° = а4, х2 (а4, 0) = а2, х2(а4, 1) = аб.
Ясно, что алгоритм |(я£, х2, р*) гарантирует точность 1
(см. п. 1) и оптимален по точности в А2 (см. (3.11)) на
классе F. В то же время алгоритм (<r?, х2, popt) гаранти-
рует худшую точность (максимальная погрешность этого
алгоритма равна 2, причем максимум достигается при
/ = 8) и, таким образом, не оптимален. А
42
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
В выражении для наилучшего гарантированного ал-
горитмами из AN результата (точности)
inf sup 8 (а, /) (4.12)
фигурирует операция взятия нижней грани по множе-
ству А\ Оно во многих случаях, например, когда =
= AN (см. (3.11)) или когда А2^ задается условиями
(3.13) и (3.14) или же (3.15), является множеством
сложной функциональной структуры.
Зададимся целью представить величину (4.12) в виде
кратного минимакса, точнее, в виде последовательности
операций вычисления нижних и верхних граней крите-
рия е по множествам, структура которых значительно
проще структуры множества А\ Решение этой задачи,
содержащееся в п.п. 8—11, основано па лемме 4.1. Оно
позволит прояснить в дальнейшем некоторые важные,
с точки зрения теории, вопросы.
8. Наилучшая гарантированная точность в классе
пассивных алгоритмов. Рассмотрим класс пассивных ал-
горитмов А* (см. (3.9)), считая произвольные итоговые
операции (J е BN допустимыми. Напомним, что величина
&n(zn) определена равенством (4.3).
Теорема 4.3. Справедливо равенство
inf sup 8 (a, f)= inf sup &N(zN) =
a(=AN p=F xNeXN yN^{yN\F(zN^0}
= inf sup inf sup y(5(/), 0).
Доказательство. Очевидно, что
inf sup 8 (a, f) =
aeATV /EF
= inf inf sup sup y(5(/), P(zN)).
xN^XN yN^{yN\F(zN)^0} JgF(zn)
Зафиксируем теперь xN^XN и применим лемму 4.1 к
функции
Ж /) = sup 4(S(j), Р(г*)).
/ег(Л)
Для завершения доказательства остается взять нижнюю
грань по xN е XN от обеих частей полученного равен-
ства. А
§ 4. МИНИМАКСНАЯ КОНЦЕПЦИЯ ОПТИМАЛЬНОСТИ 43
9. Наилучшая гарантированная точность в классе по-
следовательных алгоритмов. Рассмотрим класс всех по-
следовательных алгоритмов AN (см. (3.11)), считая про-
извольные итоговые операции [J е BN допустимыми. По-
ложим
e,N -- inf sup
X1<EX1 1/1g{z/1|f(z1)^0}
inf sup inf sup y(S (/), p) =
xN^XN y^(E[yN\F(zN)^0j ff=F(zN)
= inf sup ... inf sup cn(zn).
xie^l Z/1g{z/1|f(z1)t40J yN^{yN^F(zN)^0^ (4.13)
Теорема 4.4. Справедливо равенство
inf sup e (a, /) = 8;v.
aeA^
Доказательство. В доказательстве через хг+1(г/г)
буделМ обозначать вектор, получаемый по формулам (3.2):
£г+1(*/’) = Сг1, #2, • •., ^+1),
где х\ = xi — первая компонента xi+l, £2 = £2(^1, У\), ...
..., xi+i = xi+i (xi, ..., Xi, у 1, ..., yi), при этом у* предпо-
лагается реализуемым при применении алгоритма xi+i.
Выпишем теперь цепочку равенств, которые доказы-
вают теорему (пояснения ниже):
inf sup 8 (a, /) =
aeA^
= inf inf sup sup v (S (/), p ( xN (yN~x), yN\) =
'jj' yN f^F('xN(yN~1) ,yN)
= inf sup inf sup у (S (f), |3) =
x^ yN |3_В ,yN)
= inf inf sup sup inf sup y(5(/), ₽) =
^N—1 yN—1 yN PeB ^(=F(xN(yN—l) ,yN)
= inf sup inf sup inf sup y(S (/), p) =
1 yN—1 х]\[^Х]у ун PeB W—l(yN—2) ^N)
= • • • = &N-
В первом равенстве нижние грани берутся по множе-
ству XN XEn = An, а верхняя грань по множеству всех
векторов yN, реализуемых при применении алгоритма х\
Очевидно, F = U Р ((yN~r), yN), что оправдывает за-
yN
44
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
мену в первом равенстве операции взятия верхней гра-
ни по j^F двумя последовательными операциями взя-
тия верхних граней.
Для обоснования второго равенства в цепочке зафик-
сируем xN, применим лемму 4.1 к функции
g(fi,yN)= ~ sup yN))
f^F(xN(yN~1) ,yN)
и возьмем нижнюю грань по xN от обеих частей полу-
ченного равенства.
Последующие равенства обосновываются рассуждения-
ми того же типа. д
10. Случай фиксированной итоговой операции. Будем
считать, что итоговая операция р фиксирована и тем
самым выбор алгоритма а = (жлг, р) сводится к выбору
xN. Дело обстоит именно так в случае (3.4), когда до-
пустима единственная итоговая операция р. Кроме того,
в случае, когда допустимы произвольные итоговые опера-
ции (см. (3.5)) и при любом реализуемом zN нижняя
грань в (4.3) достигается, т. е. центральная итоговая
операция Р* существует, можно также зафиксировать
Р = Р* (если равенство (4.4) определяет центральную
итоговую операцию не единственным образом, то фикси-
руется любая из них). Как показывают результаты п. 5,
мы и в этом случае, фиксируя р указанным способом,
выбор оптимального алгоритма а сводим к выбору опти-
мального xN.
Так или иначе, пусть итоговая операция р фиксиро-
вана. В такой ситуации удобно критерий е, определенный
формулой (1.1) на множестве ANXF (см. (3.11)), опре-
делить также на множествах XNXF (см. (3.8)) и XN X
XF (см. (3.10)). Положим
е(^, /) = Y(5(/), P(zn, ^(/), *„(/))),
е(Ж", f) = e(zN, f), (4.14)
где во втором равенстве вектор xN определяется алгорит-
мом xN и функцией / по формулам (3.2).
Переформулируем теоремы 4.3, 4.4 таким образом,
чтобы наряду со случаем (3.5) они охватывали и случай
(3.4) единственной допустимой итоговой операции. Для
этого распространим на последний случай введенное
§ 4. МИНИМАКСНАЯ КОНЦЕПЦИЯ ОПТИМАЛЬНОСТИ
45
равенством (4.3) обозначение zN(zN). Именно, положим
£n(zN)= sup p(zN)), (4.15)
/= (^)
где p — зафиксированная нами итоговая операция. Если
в случае (3.5) центральная итоговая операция сущест-
вует, то (4.15) совпадает с (4.3), поскольку мы услови-
лись в этом случае в качестве [J фиксировать централь-
ную итоговую операцию |3*. Нетрудно видеть, что
&N(zN) = sup е(яЛ, /). (4.16)
/eF(z^)
С помощью введенных обозначений наилучшая гаран-
тированная точность в классе пассивных алгоритмов XN
(см. (3.8)) может быть записана как inf sup8(#N, /),
а теорема 4.3 принимает при этом следующий вид.
Теорема 4.5. Справедливо равенство
inf sup 8 (.rN, f) = inf sup eN(zN). A
xN^xN P=F xNeXN yNG{yN\F(zN)^0}
Аналогом же теоремы 4.4 выступает следующее ут-
верждение.
Теорема 4.6. Справедливо равенство
inf sup 8 ( xN. f) = sN.
xNeXN fEF
Доказательство. В случае (3.5) доказываемое
утверждение совпадает с теоремой 4.4, а в случае (3.4)
доказательство то же самое, отпадает только необходи-
мость взятия нижних граней по [}. А
11. Наилучшая гарантированная точность в классах
алгоритмов с задержкой информации и блочных алгорит-
мов. По аналогии с теоремой 4.4 доказываются следую-
щие две теоремы.
Теорема 4.7. Пусть XN — множество алгоритмов с
задержкой информации, определяемое условиями (3.13),
(3.14). Тогда
inf sup 8 ( xN. /) =
х^
= inf sup inf sup ... inf sup 8jy (zN)?
x-p... l Xf_|_2 ^2 XNVN-t>4i>VN
46 ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
где нижние и верхние грани берутся по таким множе-
ствам, что вектор zN реализуем. А
Теорема 4.8. Пусть XN — множество блочных ал-
горитмов, определяемое условием (3.15). Тогда
inf^ sup е ( xN, f) = inf sup
xNf=XN x1,...,xN^yv...,yN^
... inf sup 8jv (zN)i
yNi + ...+Nk_1+1^..,yN
где нижние и верхние грани берутся по таким множе-
ствам, что вектор zN реализуем. А
12. Модель вычислений с нефиксированным N.
В дальнейшем, наряду с рассматривавшейся до сих пор
моделью с фиксированным числом информационных вы-
числений N, будем рассматривать также ее модификацию
на случай нефиксированного N. Пусть
x=(^i, х%, xN, ...) (4.17)
— последовательность отображений вида (3.1). Множе-
ство всех таких последовательностей, которые будут те-
перь выступать в роли алгоритмов, обозначим через X.
Эффективность алгоритмов х X будем оценивать
критерием (4.14), предполагая, что он определен при
любом N. Таким образом, если произведено всего N ин-
формационных вычислений (N заранее не фиксируется),
то в качестве итоговой операции выбирается заранее за-
фиксированная при каждом N операция [J.
Будем говорить, что определенный равенством (4.17)
алгоритм х сходится на классе F, если
supe(a;2V, /)->0 при N -> оо;
/eF
асимптотически оптимален в X на классе F, если
supe(^N, /) ~ &N;
f^F
оптимален по порядку в X на классе F, если
sup &(xN, f) ж &N,
ff=F
где xN=(xi, ..., xN), a eJV определено равенствами
(4.13), (4.15).
§ 4. МИНИМАКСНАЯ КОНЦЕПЦИЯ ОПТИМАЛЬНОСТИ 47
Запись aN ~ bN означает, что две сходящиеся к пулю
при N °о последовательности {bN} эквивалентны,
т. е. lim ам/Ьм = 1 (при этом считаем, что 0/0=1).
N->OO
Запись aNX bN означает, что две сходящиеся к нулю
при N -+ оо последовательности {bN} имеют одина-
ковый порядок сходимости, т. е. существуют Nq, Ci > 0,
С2 > 0 такие, что при любом N > No
с 11 bn I I aN I С21 b^ I.
Пусть имеется последовательность алгоритмов {^(7V)},
x(N)^XN. Если
sup 8 (x(N), f) ~ 8tv ИЛИ sup 8 (x (N), f) X 8]V,
/EF f=F
то последовательность {£(7V)} называют асимптотически
оптимальной пли, соответственно, оптимальной по поряд-
ку. Следует, однако, подчеркнуть, что построение асимп-
тотически оптимального или оптимального по порядку
алгоритма вида (4.17) из элементов этой последователь-
ности может оказаться невозможным.
13. Оптимальные по числу информационных вычис-
лений алгоритмы. Зафиксируем теперь точность 8, кото-
рую необходимо обеспечить при решении задачи. По-
ложим
Ae = min{Ale^e}. (4.18)
Алгоритм czo называется оптимальным по числу ин-
формационных вычислений па классе F среди всех по-
следовательных алгоритмов, обеспечивающих заданную
точность 8, если
а0 е AN& и sup 8(а0,/)<;8. (4.19)
Уег
Замечание. Введенные понятия (асимптотически
оптимальный, оптимальный по порядку, оптимальный по
числу информационных вычислений алгоритмы) можно
формулировать не только применительно к множеству
всех последовательных алгоритмов, по и применительно
к произвольному подмножеству этого множества. д
14. Оптимальные на один шаг алгоритмы. Понятие
оптимального па один шаг алгоритма изучалось в рам-
ках минимаксной и иных концепций оптимальности, па-
пример, в работах [355] (см. также [26]) для задачи ре-
48
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИИ
шепия уравнений, в [100, 238, 292, 297] — для задачи
поиска экстремума.
Пусть алгоритм х задан равенством (4.17), а его эф-
фективность оценивается по критерию (4.14). Следует
задать еще правило остановки.
Остановка производится обычно или после заранее
заданного числа шагов 2V, или после гарантированного
достижения заданной точности 8, т. е. после j шагов,
где (см. (4.16))
8;-1(г;-1)> 8, 8j(zj)^8. (4.20)
Попятно, что фактическая точность решения задачи для
данной функции f может оказаться значительно лучше
гарантированной апостериорной точности.
Алгоритм х называется оптимальным на один шаг в
X па классе F, если
min sup 8 (х, f) =sup 8 (хх, /), (4.21)
xieX-l ii=F
где xi = xi, и для любой реализуемой ситуации z* = (х\ у'),
i > 1,
min sup 8 (x\ x, f) = sup 8 (x\ хг+\ f), (4.22)
где xi+i = xi+i(?).
Таким образом, оптимальный на один шаг алгоритм
гарантирует на каждом шаге максимальное улучшение
точности решения задачи.
Несмотря на интуитивную привлекательность поня-
тия и простоту определения оптимальных на один шаг
алгоритмов, их использование далеко не во всех случаях
может принести успех. Так, например, пусть при поиске
экстремума унимодальной функции ([277]) с помощью
алгоритмов, использующих лишь значения функции, точ-
ка экстремума после i шагов локализована в интервале
длины Z, причем значение функции уже вычислено в
точке, отстоящей на расстояние б от одного из концов
интервала.
Нетрудно видеть, что один из оптимальных на один
шаг алгоритмов заключается в том, чтобы на каждом
шаге вычислять значение функции в точке, расположен-
ной в интервале локализации экстремума симметрично
точке уже проведенного внутри интервала вычисления.
После (Z + n)-ro шага этого алгоритма длина интервала
§ 5. КЛАССЫ АЛГОРИТМОВ
49
локализации окажется равной I — т. е. улучшение
может быть сколь угодно малым при достаточно ма-
лом б. В то же время применение оптимального пассив-
ного [277, 423], а тем более оптимального последователь-
ного алгоритма [291, 347, 364, 371, 466] даст значительно
большее улучшение.
Тем не менее целый ряд обстоятельств привлекает
внимание к построению (в рамках различных моделей
вычислений) алгоритмов, обладающих свойством опти-
мальности на один шаг. Важным обстоятельством явля-
ется возможность перестройки модели вычислений в хо-
де вычислительного процесса. Например, в ходе вычис-
лений может происходить уточнение некоторых «гло-
бальных» параметров, определяющих функциональный
класс (см. п. 2 § 4 гл. 2).
Часто решение о числе информационных вычислений
и необходимой абсолютной точности решения задачи
приходится принимать в силу тех или иных обстоя-
тельств в ходе вычислений, что также является аргумен-
том в пользу применения оптимальных на один шаг
алгоритмов. Такими обстоятельствами могут быть от-
сутствие априорной информации о сложности вычисле-
ния значений оптимизируемой функции, что делает
невозможной заблаговременную оценку необходимых
вычислительных ресурсов, необходимость отыскания
экстремума с заданной относительной погрешностью и
др. Наконец, среди побудительных мотивов применения
оптимальных на один шаг алгоритмов следует отметить
относительную простоту их отыскания и реализации.
§ 5. Сравнение наилучших гарантированных
результатов в классах пассивных
и последовательных алгоритмов
В этом параграфе будут получены достаточные усло-
вия совпадения наилучших гарантированных результатов
в классах пассивных и всех последовательных алго-
ритмов.
1. Постановка задачи. Пусть итоговая операция р
фиксирована (см. п. 10 § 4). Поскольку множество пас-
сивных алгоритмов XN является подмножеством множе-
ства всех последовательных алгоритмов (см. (3.8),
(3.10), (3.12)), то наилучший гарантированный результат
А. Г. Сухарев
50
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
(точность) в XN не хуже, чем в XN, т. е.
inf sup е (х\ f) inf 8ире(^,/), (5.1)
xneXn /ег
где критерий е определен равенством (4.14).
Для некоторых задач в (5.1) имеет место строгое не-
равенство, причем левая часть значительно меньше пра-
вой. Так, например, в задаче отыскания корня строго
монотонной функции, принимающей па концах отрезка
[0, 1] значения разных знаков, или в задаче поиска экс-
тремума унимодальной на отрезке [0, 1] функции улуч-
шение зависит от N экспоненциально [276, 364, 371, 372].
В то же время для некоторых других задач в (5.1)
имеет место равенство, т. е.
inf supe(^7V, f) = inf supe(^N,/). (5.2)
/eF xNeXN f<=F
Таким образом, возможность использования не только
пассивных, ио и любых последовательных алгоритмов не
позволяет улучшить результат, гарантированный в клас-
се пассивных алгоритмов. Однако, как мы убедимся в
дальнейшем, это отнюдь не означает, что применение
последовательных алгоритмов нецелесообразно. Примене-
ние последовательных алгоритмов при решении конкрет-
ных задач может дать значительный эффект и в тех
случаях, когда справедливо соотношение (5.2). Этот те-
зис получит подробное развитие в § 6, где вводится по-
нятие последовательно-оптимального алгоритма, а также
в последующих главах, где строятся последовательно-
оптимальные алгоритмы для различных задач численно-
го анализа и обсуждаются результаты применения этих
алгоритмов. Сам факт справедливости равенства (5.2)
представляет не только теоретический интерес, по имеет
также и практическое значение, существенно упрощая в
ряде случаев построение последовательно-оптимальных
алгоритмов.
По-видимому, впервые такого рода результат был по-
лучен для задачи интегрирования монотонных функций
[372]. Дальнейшее развитие этот вопрос получил в ра-
ботах [20, 109, 202, 240, 350]. Так, в [20] найдены до-
статочные условия для выполнения (5.2) в случае, когда
S, х\ Х[, ..., xN <= XN — линейные функционалы. В [240]
справедливость (5.2) доказана впервые для некоторого
нелинейного функционала.
§ 5. КЛАССЫ АЛГОРИТМОВ
51
Здесь мы установим один факт общего характера
(теорема 5.1), имеющий полезные приложения, в част-
ности, позволяющий получить результат, аналогичный
[20], но при менее ограничительных предположениях
(теорема 5.2).
2. Основная теорема. Положим (см. (4.14) — (4.16))
hn(%N, f) = eN(xN, xN (f)) = sup e(xn, g), (5.3)
g^F(xN ,xN(J))
где xN(f) = (^i (/), ..xN(f)) и, в соответствии с введен-
ным в п. 2 § 3 обозначением, F(x\ xN(f))={g^
eF|^(g) = ^(/)}.
Теорема 5.1 [254]. Если функция Ъх(х\ j) имеет
на множестве XN X F обобщенную седловую точку, т. е.
inf sup ejv (xN, f) = sup inf &N(xN, /), (5.4)
xNeXN/eF 1^FXN-XN
то выполняется равенство (5.2), т. e. наилучшие гаран-
тированные результаты в классах пассивных и всех по-
следовательных алгоритмов совпадают.
Доказательство. Пусть справедливо равенство
(5.4) и v — общее значение его левой и правой частей.
В силу (5.3),
sup 8;v (xN, f) = sup 8 (xN, /),
/eF /f=F
поэтому
inf sup 8 (xN, f) = v. (5.5)
xX^xN
Далее, из (5.4) следует, что для любого б > 0 существу-
ет функция /б е F такая, что
inf 8jy (xN, — б,
откуда
sup 8 (xN, f) = 8jy (xN, /б) V — 6, XN^XN.
ft=F(xN,xN(f6))
(5.6)
Пусть xN XN — произвольный последовательный ал-
горитм, а вектор x$ e XN определяется алгоритмом xN
и функцией /б по формулам (3.2). Тогда, в силу
4*
52
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
определения (4.14) и формулы (5.6),
supe(x,N, /)> sup е(^,/)>р —б
/eF (/6))
(действительно, при любой функции /е ^(4\4\/б))
алгоритм xN определяет один и тот же вектор х§ ). По-
скольку xN XN и б > 0 произвольны, то
inf sup е ( xN, /) v. (Ь.7)
Справедливость равенства (5.2) следует из (5.1), (5.5),
(5.7). Д
Из доказанной теоремы легко выводится следующее
важное утверждение, впервые полученное в [350] при
более жестких ограничениях.
Следствие. Если существует такая функция fo^
^F, что
£n(xn, fo)^8N(xN, f), xN<=X\ f^F, (5.8)
то выполняется равенство (5.2), т. e. наилучшие гаран-
тированные результаты в классах пассивных и всех по-
следовательных алгоритмов совпадают.
Доказательство. В силу (5.8)
sup inf sN(xN, inf /0)^
P=FxNt=xN xngXn
inf sup 8jv f)-
XN^XN
Отсюда следует (5.4), поскольку, как известно,
sup inf zN(xN, /)<; inf sup 8tv (<^N,/)• A
3. Задача приближения линейного функционала на
выпуклом множестве по линейной информации. Пусть
S — функционал, В = R,
у(5(/), 0)= !5(/)-N (5.9)
и произвольные итоговые операции считаются допусти-
мыми. Предположим, что в качестве итоговой операции
зафиксирована определенная соотношением (4.4) цент-
ральная итоговая операция Р*, т. е. в формулах (4.14)
₽ = 0*. (5.10)
§ 5. КЛАССЫ АЛГОРИТМОВ
53
В этом случае в силу определений (5.3) и (4.3) имеем
6N (xN, f) = inf sup I 5 (g) — p I =
PeRg£F(xN,xN(/))
= i- ( sup S (g) — inf S (g)\ =
2 geF(xN,*N(f>) J
= i sup (S(gl)-S(g2)). (5.11)
gvg2eF(XW(f))
При решении вопроса о наличии у функции &N(xN,f)
седловой точки может оказаться полезным следующий
факт, установленный в [350] при более ограничительных
предположениях. В его формулировке подразумевается,
что У1, ..., Yn — линейные пространства.
Лемма 5.1. Если выполняются предположения
(5.9), (5.10), множество F выпукло, xp^Xi— линейные
операторы, г = 1, ..., N, S — линейный функционал, то
функция £n(xn, f) выпукла по f на F.
Доказательство. Пусть /i, jz^F. Тогда для лю-
бого 6 > 0, в силу (5.11), существуют такие А, А, что
е* « А )< у (5 (/") - S (Л)) + 6, i = 1, 2.
Замечая теперь, что вследствие линейности xN
xN (ifi + (i - Ю /Э = zN (lA + (i — В) /0 =
= Z(|/1 + (i-g)/2),
получаем при произвольном £ е [0, 1]
e2v(Z,Vi + (i-^)/2)>
> Р (£Л + (1 - - Р (Vi + (1 - 5) /а) =
= 4 В (S (Л) - S (/Э) + ±(1 - В) (S (/') - 5 (/0) >
&N (xN, л) + (1 — В) ejv (xN, ft) — 6,
откуда, в силу произвольности б > 0, вытекает утверж-
дение леммы. А
Получим теперь с помощью следствия из теоремы 5.1
основную теорему данного пункта.
54 ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
Теорема 5.2. Пусть выполняются предположения
(5.9), (5.10), F—выпуклое центрально-симметричное
множество с центром /о, множества Хг состоят из линей-
ных операторов, г = 1, ..., N, и функционал S также
линеен. Тогда выполняется равенство (5.2), т. е. наи-
лучшие гарантированные результаты в классах пассивных
и всех последовательных алгоритмов совпадают, и любой
оптимальный в XN алгоритм оптимален, таким образом,
и в XN.
Доказательство. Зафиксируем произвольные
f^F, xN^XN. Пусть
gi, gz^F(xN, xNtf}). (5.12)
Тогда 2fQ — F, 2fo~ g2^ F в силу симметрии множе-
ства F и
h Ш ± (gl + 2f0 - g2) e F, /2 1 (gi + 2/0 - gl) e F
в силу выпуклости F. Кроме того, xN(ji) = ж* (/2) = ж‘у(/0),
откуда, учитывая (5.11), получаем
ZN (Л /о) > 4 (S (Л) - -V (/2)) = 4 (5 (gl) - s (g2)).
Так как gi, g2 — любые функции, удовлетворяющие
(5.12), то в силу (5.11)
£n(zn, fo)>sN(xN, f).
Доказательство завершается теперь применением след-
ствия из теоремы 5.1. А
4. Задача глобальной оптимизации. Пусть рассматри-
вается задача глобальной оптимизации (1.4), т. е.
s (/) = sup/(ж).
х(=К
Вопрос о совпадении наилучших гарантированных резуль-
татов в классах пассивных и всех последовательных ал-
горитмов был, по-видимому впервые для такой задачи,
рассмотрен в [240]. В дальнейшем теми же методами дан-
ный вопрос решен в [109] для более общих функциональ-
ных классов (см. также [202]).
Здесь мы ограничимся одним простым результатом,
который устанавливается с помощью рассуждений, от-
личных от тех, что используются в [109, 240].
§ 5. КЛАССЫ АЛГОРИТМОВ 55
Пусть Xi(f) = Xi^K, i = l, ..N, и допустима
единственная итоговая операция (см. (3.6))
$(zN)= max yi.
i=i,...Л
В этом случае в силу (4.14)
^(xN, f) = sup f (х) — max j(xt). (5.13)
xeJf i=i,,..,N
Теорема 5.3. Пусть функциональный класс F со-
держит константы ceRu обладает свойствами
+ cc=F, ceR, (5.14)
/е max {/, 0} g= F. (5.15)
Тогда для задачи глобальной оптимизации с крите-
рием (5.13) выполняется равенство (5.2), т. е. наилуч-
шие гарантированные результаты в классах пассивных и
всех последовательных алгоритмов совпадают.
Доказательство. Пусть xN е XN = KN, g F,
тогда в силу (5.14), (5.15)
max g(^i)\ eF, /(g) = /(0) = 0
\ 1=1,...,-N / +
и (cm. (5.3))
e(^7 g)=e(^, g)^£N(xN, 0).
Зафиксировав произвольную функцию j^F и взяв в по-
лученном неравенстве верхнюю грань по g^F(xN, #*(/)),
получим, что &N(xN, f)^&N(xN, 0). Доказательство завер-
шается теперь применением следствия из теоремы 5.1. л
Следствие. Для задачи поиска глобального экстре-
мума функции из заданного произвольной квазиметрикой
р функционального класса Fp (см. § 2) наилучшие гаран-
тированные результаты в классах пассивных и всех по-
следовательных алгоритмов совпадают, т. е. справедливо
равенство (5.2), и любой оптимальный в XN алгоритм
оптимален, таким образом, и в XN.
Доказательство. Очевидно, что класс Fp содер-
жит константы, обладает свойством (5.14), а в силу
леммы 2.7 — и свойством (5.15). А
В заключение отметим, что доказательство теорем 5.2,
5.3 получено с помощью следствия из теоремы 5.1. Од-
нако в ряде случаев совпадение минимакса погрешности
в классах пассивных и последовательных алгоритмов
56 ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
удается доказать с помощью теоремы 5.1, в то время как
универсальной паихудшей функции /о не существует
(т. е. следствие из теоремы 5.1 не работает). Примером
может служить задача интегрирования в классах моно-
тонных функций и функций, удовлетворяющих условию
Липшица (в обоих случаях предполагается, что функции
заданы на отрезке числовой прямой, а их значения на
концах отрезка фиксированы и различны, см. [259]).
§ 6. Последовательно-оптимальные алгоритмы
В этом параграфе определяется и обсуждается цент-
ральное в книге понятие последовательно-оптимального
алгоритма.
1. Примеры, показывающие необходимость уточнения
понятия оптимальности. Начнем с того, что для различ-
ных задач численного анализа и различных функциональ-
ных классов приведем примеры таких ситуаций и таких
оптимальных алгоритмов, которые предписывают произ-
водить явно не наилучшие в данных ситуациях действия.
При этом мы вынуждены несколько забегать вперед,
используя устанавливаемый в последующих главах факт
оптимальности упомянутых алгоритмов (примеры 1—3).
Пример 1. Пусть F — класс функций, удовлетво-
ряющих на отрезке [0, 1] условию Липшица с заданной
константой М; каждое информационное вычисление
(в этом и в следующих трех примерах) — это вычисле-
ние значения функции в некоторой точке. В соответствии
с теоремой 2.1 и формулой (3.2) гл. 2 составная квадра-
турная формула прямоугольников с узлами 1/(22V),
3/(27V), ..., (2N—i)/(2N) оптимальна. В силу теоремы
1.3 гл. 2 эта квадратура является оптимальным по точ-
ности пассивным алгоритмом численного интегрирования.
Применяя этот алгоритм, за приближение к интегралу
1 N г • \
f(x)dx следует принять величину -тт- Л / I. Со-
о 1=1
гласно теореме 5.2 и лемме 2.8 данный алгоритм опти-
мален также в классе всех последовательных алгоритмов.
Поскольку порядок узлов не имеет значения, предполо-
жим, что значения функции / вычисляются последова-
тельно в узлах
1 2N — 1 3 5 27V —3
2№ 2N •’ 2N1 21Г 9 ’91 2N
§ 6. ПОСЛЕДОВАТЕЛЬНО-ОПТИМАЛЬНЫЕ АЛГОРИТМЫ
57
и на первых двух шагах получены результаты
у \27V/ iV1 27V’ '\ 2N j — iV1 27V *
Нетрудно видеть, что в этом случае f(x) = Mx при
e[l/(27V), (22V— 1)/(27V)]. Таким образом, оптимальный
алгоритм предписывает проводить оставшиеся N — 2 вы-
числения в точках, значения функции f в которых уже
известны вычислителю, что явно бессмысленно. А
Пример 2. Для того же, что и в примере 1, клас-
са функций рассмотрим задачу глобальной оптимизации.
Оптимальный пассивный алгоритм ее решения состоит в
переборе значений функции по сетке (6.1); этот же ал-
горитм оптимален в классе всех последовательных ал-
горитмов (см. замечания 2, 3 к теореме 2.1 гл. 4). Если
получены результаты (6.2), то, как и в предыдущем
примере, проводить оставшиеся N — 2 вычисления, ис-
пользуя данный алгоритм, бессмысленно. А
Пример 3. Пусть F — класс не убывающих па от-
резке [0, 1] функций с фиксированными на концах от-
резка значениями: /(0) = 0, /(1)=1. Как показано в
п. 6 § 3 гл. 2 (теорема 3.4), составная квадратурная
формула трапеций с узлами 0, !/(#+!), 2/(2V+l), ...
..., 2V/(W+1), 1 является оптимальным по точности
пассивным алгоритмом численного интегрирования. Там
же показано, что этот алгоритм оптимален в классе всех
последовательных алгоритмов. Пусть
/(тгп)-1- <6-3>
Очевидно, что в этом случае f(x)=l при х [1/(N + 1),
1] и проводить оставшиеся вычисления в точках
2/(7V+ 1), ..., 2V/(N+1) не имеет смысла. А
Прежде чем привести последний пример и провести
обсуждение, из которого будет следовать необходимость
уточнить понятие оптимальности, отметим, что примеры
1—3 позволяют сделать еще одно важное заключение.
Из их рассмотрения ясно, что в благоприятных ситуаци-
ях, в частности в ситуациях (6.2), (6.3), с помощью
последовательных алгоритмов можно обеспечить дости-
жение более высокой точности, чем с помощью пассив-
ных алгоритмов, даже если наилучшие гарантированные
результаты в классах пассивных и последовательных
алгоритмов совпадают, т. е. справедливо равенство (5.2).
58
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
Пример 4. Пусть рассматривается задача поиска
максимума унимодальной на отрезке [0, 1] функции. Как
известно, TV-шаговый 8-оптимальный по точности после-
довательности алгоритм [276, 277, 364, 371] при 7V = 4
заключается в вычислении значений функции / в точках
zi = 2/5, ^2 = 3/5,
1/5, если /(2/5) >/(3/5),
< 4/5, если / (2/5) < / (3/5),
1/5 или 4/5, если /(2/5) == / (3/5);
наконец, если, к примеру, /(3/5)</(2/5)</(1/5), то
л?4 = 1/5 + е. Этот алгоритм гарантирует точность 1/5 + е.
Однако если после двух шагов оказалось, что
/(2/5) = /(3/5), (6.4)
то можно гарантировать точность 1/10 +8,— достаточно
положить х3 = 1/2, = 1/2 + е.
Приведенные примеры показывают, что данное в § 4
определение оптимального алгоритма не отражает неко-
торых важных аспектов процесса организации вычисле-
ний. Гарантируя паилучшую возможную точность для
«паихудшей» функции из класса F, оптимальный по точ-
ности алгоритм, вообще говоря, никак не использует вы-
явленные в ходе решения задачи свойства функции, ока-
завшиеся благоприятными (не наихудшими) для вычис-
лителя. Так, явно не наихудшими (в действительности —
иаилучшими) являются в примерах 1—4 функции со
свойствами (6.2) — (6.4).
Такого рода примеры служат иногда основанием для
критики минимаксного подхода (принципа наилучшего
гарантированного результата [62]), утверждений о его
«перестраховочности», о том, что наименее благоприят-
ные условия, на учет которых ориентирован минимакс-
ный подход, редко встречаются на практике. Однако па
самом деле причиной того, что определенные в рамках
минимаксного подхода оптимальные алгоритмы не всегда
должным образом используют информацию о задаче, по-
лучаемую в ходе ее решения, является как раз неполное,
не до конца последовательное соблюдение принципа наи-
лучшего гарантированного результата при определении
оптимальных алгоритмов. Примеры 1—4 приводят к вы-
воду о необходимости уточнить сформулированное в § 4
понятие оптимальности. Ниже мы даем такое уточнение.
Оно заключается в выделении из множества всех опти-
§ 6. ПОСЛЕДОВАТЕЛЬНО-ОПТИМАЛЬНЫЕ АЛГОРИТМЫ
59
мальных алгоритмов важного подмножества последова-
тельно-оптимальных алгоритмов.
2. Понятие последовательно-оптимального алгоритма.
Последовательно руководствуясь стремлением к паилуч-
шим гарантированным результатам, следует стремиться
найти не произвольный оптимальный алгоритм, а тот из
них, который на каждом шаге1) наилучшим образом
(в целях достижения наивысшей возможной точности
при заданном числе шагов или в целях максимального
сокращения числа оставшихся шагов, необходимых для
достижения заданной точности) использует накопленную
на предыдущих шагах информацию о решаемой задаче
(независимо от того, является ли информация наихуд-
шей для вычислителя или нет). Такие алгоритмы мы
называем последовательно-оптимальными (формальные
определения даются ниже).
Понятие последовательно-оптимального алгоритма бы-
ло введено в [241] (в этой работе употребляется термин
«паилучшая стратегия»). Следует отметить, что для за-
дачи поиска экстремума последовательно-оптимальные
алгоритмы для некоторых классов функций были факти-
чески построены, папример, в работах [291, 466], хотя
в этих работах ставилась лишь цель построения опти-
мального в рамках минимаксной концепции алгоритма.
В идейном плане понятие последовательно-оптимального
алгоритма тесно связано со схемами последовательного
анализа [25, 26, 36, 37, 169], опирающимися на идеи
А. А. Маркова.
По-видимому, последовательно-оптимальные алгорит-
мы для задачи оптимального восстановления функций
были впервые построены в работах {244—246], а для
задачи численного интегрирования — в [441, 442].
Построение последовательно-оптимального алгорит-
ма — задача существенно более сложная, чем построение
просто оптимального алгоритма. Для ее решения, как
мы увидим ниже, приходится, по существу, на каждом
шаге решать задачу построения оптимального алгоритма
на подклассе исходного класса, определенном фиксацией
полученной к данному шагу информации.
Следует отметить, что не для всех задач практи-
ческим нуждам оптимизации вычислительного процесса
9 Напомним, что шагом алгоритма мы называем проведение
очередной пары алгоритмического и информационного вычисле-
ний (см. п. 1 § 3).
60
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
отвечает понятие только последовательно-оптимального,
а не просто оптимального алгоритма. Так, для задачи
поиска экстремума унимодальной функции единственным
случаем благоприятного для вычислителя поведения
функции является точное равенство между значением
функции, полученным при очередном вычислении, и од-
ним из ранее вычисленных значений. Случай такого ра-
венства — в некотором смысле исключительная ситуация.
3. Формальные определения. Будем считать, что ито-
говая операция 0 фиксирована ([3 — либо единственная
допустимая, либо центральная итоговая операция), т. е.
будем пользоваться критерием (4.14). Положим для 1
е(я\ x/+i, ..., xN, f) = s(x\ xi+i, ..., xN, f), (6.5)
где Xf+i, ..., xN определены при фиксированном х{ ото-
бражениями xi+i, . .., xN и функцией f по формулам
(3.2). Совокупность отображений (xi+i, ..., xN) мы бу-
дем так же, как и совокупность (xi, ..., xN), называть
алгоритмом. Напомним, что XN обозначает множество
всех последовательных алгоритмов.
Определение 1. Алгоритм Xq = ( х?, . . ., х^) е XN
называется последовательно-оптимальным по точности
на классе F, если он оптимален по точности в XN на
классе F и для любой реализуемой ситуации (см.
п. 2 § 3),
sup 8 (x\ zJ+i, . . ., Xn, f) =
= min sup &(x\ xi+1, . . ., xN, f), (6.6)
xi+v,..i'xN
где минимум берется по всевозможным наборам отобра-
жений (хг+1, ..., xN) вида (3.1). А
По аналогии и в полном соответствии с (4.13), (4.15)
и (4.16) введем обозначение
(У) = inf sup
хг+1еХг+1 Vi+1e{yi+11 F(zHl)^0}
... inf sup sup y(S(f),&(zN)) =
xN^^NyN^{yN\F(ZN)^0}f^F(ZN)
= inf sup
хг+1еХг+1 1 F(zi+1)^0}
... inf sup (6.7)
XN^^N j f(z^)^0 J
§ 6. ПОСЛЕДОВАТЕЛЬНО-ОПТИМАЛЬНЫЕ АЛГОРИТМЫ
61
Применяя теорему 4.6 к функциональному классу
F(zl) и критерию е(яг, хг+1, ..., xN, f), получим, что
inf sup 8 (a?, xN, f) = (6.8)
Сравнивая (6.6), (6.7) и (6.8), убеждаемся, что опреде-
ление 1 эквивалентно следующему определению.
Определение 2. Алгоритм^ = ( я?, . . ., XN
называется последовательно-оптимальным по точности
па классе F, если внешняя нижняя грань в выражении
(4.13) для &N достигается при хл = а внешняя ниж-
няя грань в выражении (6.7) для 8N(?) при любой
реализуемой ситуации 2г, 1, достигается при
яч+1 = z?+i(z9- д
Аналогично понятию 8-оптималыюго алгоритма мож-
но определить понятие 8-последователыю-оптимального
алгоритма.
Ясно, что последовательно-оптимальный алгоритм мо-
жет оказаться и, как мы убедимся в дальнейшем, в ре-
альных задачах часто оказывается не единственным.
В этом случае тот или иной последовательно-оптималь-
ный алгоритм целесообразно выбирать в каждой конкрет-
ной ситуации с учетом специфики решаемой задачи.
Сделанное замечание относится и к определяемым в сле-
дующем пункте алгоритмам, последовательно-оптималь-
ным по числу информационных вычислений.
4. Последовательно-оптимальные по числу информа-
ционных вычислений алгоритмы. Зафиксируем теперь
точность 8, которую необходимо обеспечить при решении
задачи. По аналогии с определенной формулой (4.18)
величиной Ае определим для произвольной реализуемой
ситуации £ величину Ае(гг) формулой
Ае (гг) = min {TV18i+N (2г) 8), (6.9)
где 8i+n(21) определено посредством (6.7).
Будем считать, что вычислитель использует правило
остановки (4.20), т. е. остановка производится после j ша-
шов в ситуации zj, если (см. (4.15), (4.16))
8j-l (?-1)> 8, 8;(ZJ)^ 8.
Пусть по-прежнему итоговая операция £ фиксирована
([} — либо единственная допустимая, либо центральная
итоговая операция).
62
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
Алгоритм х0 = (ж®, х%, . . .) называется последова-
тельно-оптимальным по числу информационных вычисле-
ний па классе F при фиксированной точности 8, если
он оптимален па классе F по числу информационных
вычислений, т. е.
Xq^X1^, sup 8(2*0,/) ^8, (6.10)
/еГ
и для любой реализуемой ситуации t > 1,
sup 8 (х\ 2?+1, . . . , Х^ (zi), f\ < 8. (6.11)
Очевидно, что если последовательность ситуаций {/}
получена при решении некоторой задачи с помощью по-
следовательно-оптимального алгоритма, то
Ае(?)^Ае-1, Ае(?+1)^Ае(зг)-1, i>l. (6.12)
В дальнейшем мы убедимся, что последовательно-оп-
тимальные алгоритмы оказываются часто значительно
эффективнее оптимальных (это предположение можно
сделать и на основе приведенных в начале параграфа
примеров 1—3). В таких случаях недостаточно ограни-
читься нахождением априорных оценок эффективности
алгоритмов на классах функций (подобные оценки могут
создать ложное представление о безнадежности задачи)
и построением па этой основе одного из оптимальных
алгоритмов. Тем более нельзя ограничиться построением
оптимальных по порядку или асимптотических оптималь-
ных алгоритмов.
§ 7. Стохастические алгоритмы
Стохастические (вероятностные, рандомизированные,
статистические) алгоритмы находят довольно широкое
применение при решении различных задач численного
анализа. Упомянем для примера задачи численного ин-
тегрирования [13, 14, 16, 22, 95, 232]; решения уравне-
ний [44]; оптимизации [103, 123, 186, 216—219, 260, 281,
283, 284, 294, 302, 305, 326, 351, 385, 443], в том числе
задачи планирования эксперимента [183, 285, 287], где
также рассматриваются рандомизированные процедуры.
Примыкают к стохастическим и алгоритмы типа [231,
233, 234, 404, 405, 435].
§ 7. СТОХАСТИЧЕСКИЕ АЛГОРИТМЫ
63
Значительно реже ставятся и решаются вопросы об
оценке эффективности стохастических алгоритмов и по-
строении оптимальных стохастических алгоритмов (см.,
например, работы [13, 14, 16, 22, 44, 186, 240, 248, 250,
278-284, 301-303, 350]).
Следует отметить, что применение стохастических
алгоритмов, сравнение их между собой по эффективности,
стремление к отысканию оптимальных стохастических
алгоритмов предполагает готовность вычислителя поль-
зоваться осредненными критериями оценки эффектив-
ности. Такая готовность проявляется чаще при необхо-
димости многократного использования процедуры рандо-
мизации в процессе вычислений.
В этом параграфе описаны различные классы стоха-
стических алгоритмов, дается ряд определений конкрет-
ных понятий оптимальности стохастических алгоритмов
в рамках минимаксной концепции оптимальности. Одна-
ко для того чтобы прояснить вопрос о целесообразности
использования стохастических алгоритмов, мы начнем с
обсуждения некоторых аспектов применения детермини-
рованных алгоритмов.
1. Процесс решения задачи как антагонистическая
игра. Опишем процесс решения задачи как многошаго-
вую антагонистическую игру вычислителя (минимизи-
рующий игрок) и природы (максимизирующий игрок).
Пусть для определенности рассматривается случай, когда
вычислитель может использовать любой алгоритм из AN
(см. (3.11)). В этом случае игра состоит в следующем.
На первом шаге минимизирующий игрок выбирает
а максимизирующий, зная х\, выбирает у{
{yi|B(zl) =И= 0}. На втором шаге минимизирующий иг-
рок, зная х\, выбирает хъ^Хъ, а максимизирующий
игрок, зная Xi, Х2, у\, выбирает у2 {yz\F(z2) ¥= 0} и так
N раз. Наконец, на (2V+1)-m шаге минимизирующий
игрок, зная zN, выбирает [3 В, а максимизирующий
игрок, зная zN, (J, выбирает f^F(zN). Выигрыш макси-
мизирующего (проигрыш минимизирующего) игрока ра-
вен y(S(/), (3). Схематически игру можно представить
очередностью выбора альтернатив игроками:
#1, Z/1, ^2, Z/2, yN, (3, /. (7.1)
Нетрудно видеть, что это — игра с полной информа-
цией. Однако у каждого из игроков в каждой позиции
имеется, вообще говоря, бесконечное (даже несчетное)
64
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
множество альтернатив. Поэтому непосредственно при-
менить известную в теории игр теорему Цермело о на-
личии в игре с полной информацией седловой точки
[149, 289] нельзя.
Все же, в предположении о достижимости всех ниж-
них и верхних граней в выражении (4.13) для кото-
рое при сделанном предположении можно записать в
виде
= min max
xleXl
... min max min max y(S (f), |3), (7.2)
XN^XN f(zN)^0] J^f(zn)
игра (7.1) имеет седловую точку.
Действительно, минимизирующий игрок обеспечивает,
согласно теореме 4.4, проигрыш не более применением
любой оптимальной стратегии (существование оптималь-
ной, более того, последовательно-оптимальной стратегии,
следует из предположения о достижимости минимумов
в (7.2)). С другой стороны, максимизирующий ' игрок
обеспечивает выигрыш не менее с помощью страте-
гии, в которой на каждом шаге выбор альтернативы реа-
лизует соответствующий максимум в (7.2).
В случае, когда в распоряжении вычислителя нахо-
дятся лишь пассивные алгоритмы, т. е. множеством стра-
тегий минимизирующего игрока является множество Л*
(см. (3.9)), игра представима следующей схемой очеред-
ности выбора альтернатив игроками:
< yN, Р, /• (7.3)
В предположении о достижимости минимумов и мак-
симумов в выражении (см. теорему 4.3)
min max min max у (S (f), |3) (7 4]
x^^xNyN^{yN\F(zN)¥;0}^B f-F(zN)
игра (7.3) имеет седловую точку (доказательство про-
водится так же, как и в случае (7.1)).
Если допустима единственная итоговая операция р
то в выражениях (7.2), (7.4) следует опустить минимум
по заменить у (£(/), р) на у(5(/), [}(zN)), а так
же опустить (} в (7.1), (7.3).
Аналогично можно было бы рассмотреть игры, соот
ветствующие случаям, когда вычислитель применяет ал
горитмы с задержкой информации и блочные алгоритмы
§ 7. СТОХАСТИЧЕСКИЕ АЛГОРИТМЫ 65
Использование наличия седловой точки в игре, описы-
вающей процесс решения задачи, помогает в ряде случаев
построить оптимальные и последовательно-оптимальные
детерминированные алгоритмы вычислений. Типичный
пример такого рода рассуждений имеется в § 2, 3 гл. 3.
В то же время, при рассмотрении стохастических ал-
горитмов вычислений трактовка процесса решения зада-
чи как игры с полной информацией может не отражать
адекватно реального положения вещей и привести к не-
верному выводу о нецелесообразности применения сто-
хастических алгоритмов.
Рассуждения, приводящие к такому выводу, сводятся
к следующему: игра с полной информацией имеет седло-
вую точку в чистых стратегиях и, следовательно, наи-
лучший гарантированный результат при применении сме-
шанных стратегий (стохастических алгоритмов) совпа-
дает с наилучшим гарантированным результатом при
применении чистых стратегий (детерминированных алго-
ритмов), а оптимальный детерминированный алгоритм
оптимален в классе всех стохастических алгоритмов.
Ошибочность этих рассуждений состоит в том, что
наилучший гарантированный при применении стохасти-
ческих алгоритмов результат вычислителя в исходной
задаче следует определять иначе, нежели паилучший
гарантированный в смешанных стратегиях результат в
соответствующей антагонистической игре.
Поясним сказанное простейшим примером. Пусть в
распоряжении вычислителя находятся лишь пассивные
алгоритмы xN е XN и предполагается, что фиксирована
некоторая итоговая операция [3. В этом случае соответ-
ствующая игра с полной информацией еще проще, чем
игра (7.3), и представима следующей схемой очеред-
ности выбора альтернатив игроками:
/. (7.5)
При этом функцией выигрыша служит определенный
формулой (4.14) критерий е(^, /).
Стохастические пассивные алгоритмы (смешанные
пассивные стратегии) задаются вероятностными мерами
a* <= где — множество всех вероятностных мер на
некоторой о-алгебре пространства элементарных собы-
тий XN. Применение стохастического пассивного алгорит-
ма состоит в выборе случайным образом в соответ-
ствии с вероятностным распределением oN некоторого
5 А. Г. Сухарев
66 ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
/ е Р’ и затем, так же как и в случае детерминиро-
ванных алгоритмов, вычислении yi—#i(/), ..., 1/n =
= £=]}(Я1, ...» У\, Ух}.
Наилучший гарантированный в смешанных страте-
гиях результат в игре (7.5) есть
inf С sup 8 (xN, f) oN = inf sup 8 (xN, f). (7.6)
GNe2lV^/eF
Однако в исходной задаче нет никаких оснований
считать, что «природа узнает» конкретную реализацию
случайного выбора вычислителя. Поэтому наилучшим
гарантированным при применении стохастических алго-
ритмов результатом вычислителя в исходной задаче сле-
дует считать величину
inf sup f z(xN[dxN], (7.7)
f^F
Отметим, что функции, стоящие под знаками интеграла
в (7.6) , (7.7) и в любой из последующих формул - дан-
ного параграфа, предполагаются интегрируемыми. Те-
перь мы можем перейти к определению различных по-
нятий оптимальности для стохастических алгоритмов.
2. Оптимальные по точности стохастические пассив-
ные алгоритмы. Алгоритмовназывается оптималь-
ным по точности в множестве стохастических пассивных
алгоритмов на классе Т7, если
sup f &(xN, f)Go = min sup f &(xN, f) {dxN].
(7.8)
В случае, когда допустимы произвольные итоговые
операции и вычислитель может рандомизировать выбор р,
стохастический пассивный алгоритм задается парой
(о", т), где о"^2",
т: {zN\F(zN)¥=0}-+T, (7.9)
Т — множество всех вероятностных мер на некоторой
о-алгебре пространства элементарных событий В. Мно-
жество всех отображений вида (7.9) обозначим через Т.
Применение стохастического пассивного алгоритма
(oN, т) S* X Т к некоторой функции / е F состоит в
§ 7S СТОХАСТИЧЕСКИЕ АЛГОРИТМЫ
67
выборе случайным образом в соответствии с вероятност-
ным распределением gn некоторого xN XN, вычислении
г/* = ^ (/) == (#1 (/), ..., xN(f)), определении т = %(zN)^T
и, наконец, выборе случайным образом в соответствии
с вероятностным распределением т некоторого £ е В.
Результат, гарантированный алгоритмом (оя, т) на
классе F, равен величине
sup J O"{dZ] jx(Z,.^(/)){^}Y(5(/)s₽).
i*=F XN B
Теперь естественно ввести следующее определение.
Алгоритм (о^, т0) е х Т называется оптималь-
ным по точности в множестве стохастических пассивных
алгоритмов XT на классе F, если
sup f 00 f To (Zx xN (/)) {dp} у (S (/), P) =
/ef xN В
= min sup J gn [dxw ] J т (x\ xN (/)) {dp} у (S (/), P).
(o®, t )esNxT >eF xN в
По аналогии с теоремой 4.3 можно показать, что для
наилучшего гарантированного при применении алгорит-
мов из 2?v X Т на классе F результата справедливо ра-
венство
Jnf ~ sup f 0N {dxN} f X (Л Z (/)) {dp} У (S P) =
= inf sup [ oN (da:w}
gn^Xn F%N
inf sup [ т {dp} у (S (/2)2 P). (7.10)
3. Оптимальные по точности стохастические последо-
вательные алгоритмы. Стохастический последовательный
алгоритм в случае фиксированной итоговой операции р
определяется как совокупность отображений
о* = ((51, 02, CFtf),
(7Л1)
где
OjsajeSj, о<+1: {г;|^(2г)¥=0}->21+1, г>1, (7.12)
5*
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
a Si есть множество всех вероятностных мер на некото-
рой о-алгебре пространства элементарных событий Xh
i > 1 (конечно, можно было бы, как и в случае детерми-
нированных алгоритмов (3.1), при каждом 1 задавать
отображение ог+1 на всем множестве XX... XXX
X Ki X ... X Yi). Множество всех алгоритмов oN вида
(7.11), (7.12) обозначим через 2я.
Применение стохастического последовательного алго-
ритма gn к некоторой функции / е F состоит в выборе
случайным образом, в соответствии с вероятностным рас-
пределением Qi, некоторого х\^Х\, вычислении у\ =
= #1(/), определении O2 = H2(z1), случайном выборе х%^
X в соответствии с 02 и т. д.
Результат, гарантированный алгоритмом ох на классе
F, равен величине
sup ох {dx^} оа (жх, хх (/)) {dx2} . ..
1^F Xjl Х2
... У On (xn~\ xn-1 (/)) {dxN} е (xN, f),
xN
где zN-I(/) = Czi(/), ..., а критерий z(xN, f)
определен формулой (4.14).
Алгоритм = ( о?, .. ., on) e называется опти-
мальным no точности в множестве стохастических после-
довательных алгоритмов на классе F, если
sup I о? {dxx} f о° (xlt xt (/)) {dx2} ...
... J О^(^-1,^-1(/))(^}8(Л/) =
= min sup J ox {dxy} J o2 (xx, жх (/)) {dx2} ...
... J gn(xn~1, xN~1(f)){dxN}&(xN,f).
xN
По аналогии с теоремой 4.6 можно показать, что для
наилучшего гарантированного при применении алгорит-
§ 7. СТОХАСТИЧЕСКИЕ АЛГОРИТМЫ
69
мов из 2* на классе F результата справедливо равенство
inf sup Oj {dx±} I a2 (rrt, rr1 (/)) {dx^ . . .
... [ oN(xN~\ xN~r (f)){dxN}&(xN,f) =
Xn
= inf sup о»! inf sup I cr2 {dx2) ...
x± <^2 /2eF(x1,x1(/1))
... inf sup f on {dx^} e fjv). (7.13)
GN^N fN^F(xN~1^N~1(fN-l)) XN
В случае, когда допустимы произвольные итоговые
операции и вычислитель может рандомизировать выбор
Р, стохастический последовательный алгоритм задается
парой (о*, t)^SnX77 (см. (7.9)), а гарантированный
этим алгоритмом результат равен величине
sup I Qi {ctej I o’2 (^1? X± (/)) {dx^. ..
• • • f Cn (Z"1, (/)) J т (/)) Ж У ММ
Ад- В
Для этого случая по аналогии с уже введенными поня-
тиями оптимальности можно ввести определение опти-
мального алгоритма и получить выражение для наилуч-
шего гарантированного при применении алгоритмов из
S* X Т на классе F результата.
Сделаем одно важное замечание к определению сто-
хастического последовательного алгоритма. В принятом
нами определении выбор возможных альтернатив рандо-
мизируется вычислителем локально, т. е. выбор одной
из возможных альтернатив производится случайным об-
разом в каждой реализуемой ситуации (в терминах тео-
рии игр — позиции) z\ Такие алгоритмы в теории игр
называются стратегиями поведения [149]. Можно предло-
жить другой — глобальный способ, когда рандомизирует-
ся выбор последовательных алгоритмов из множества
(или XN — в случае, если итоговая операция фикси-
рована) .
Как известно из теории игр [149], локальный и гло-
бальный способы рандомизации эквивалентны между со-
бой для игры с полной памятью и конечным множеством
70
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
альтернатив у каждого игрока в каждой позиции. Экви-
валентность понимается в том смысле, что для любой
пары стратегий игроков, построенных по одному из спо-
собов, существует пара стратегий, построенных по дру-
гому способу, позволяющая достичь тех же средних вы-
игрышей, что и при первом способе.
Естественно ожидать, что в нашей модели вычисле-
ний, несмотря на бесконечность множества альтернатив
в каждой ситуации, локальный и глобальный способы
рандомизации при выполнении надлежащих технических
предположений также эквивалентны, поскольку соответ-
ствующая игра является игрой с полной памятью. Такая
эквивалентность доказана применительно к задаче поис-
ка экстремума в [186, гл. 1, теорема 3.4].
4. Оптимальные на один шаг стохастические алгорит-
мы. Сформулируем понятие оптимального на один шаг
стохастического алгоритма, предполагая по-прежпему,
что все встречающиеся в данном параграфе операции ин-
тегрирования осуществимы. Пусть итоговая операция
фиксирована, а алгоритм
O=(oi, (J2, On, ...) (7.14)
является последовательностью отображений вида (7.12).
Множество всех таких алгоритмов обозначим через 2.
Их эффективность будем оценивать по критерию, являю-
щемуся осреднением критерия (4.14). При применении
алгоритма (7.14) остановка, как и в случае детермини-
рованных алгоритмов, производится или после заранее
заданного числа шагов N, или после гарантированного
достижения заданной точности е (см. (4.20)).
Алгоритм о называется оптимальным на один шаг в 2
на классе F, если
sup ) 8 (я, /) cTjl {dx} = min sup [ 8 (я, /) о {dx}, (7.15)
где Oi = Oi; и для любой реализуемой ситуации =
= (*\ Z/1), 1,
SUP J е (хг, х, /) ai+1 {dx} =
Zef(z’) :ri+1
= min sup j &(x\ x, f) п{йт}, (7.16)
ae2i+l /eF(z9
где (Ji+1 =0г+1СИ-
§ 7. СТОХАСТИЧЕСКИЕ АЛГОРИТМЫ
71
Заметим, что было бы неправильным определять опти-
мальный на один шаг стохастический алгоритм, поменяв
местами в равенствах (7.15) и (7.16) операции взятия
верхней грани и интегрирования. Такой подход означал
бы приписывание «природе», которая «выбирает» функ-
цию /, свойств разумного противника (именно, способ-
ность «узнать» конкретную реализацию случайной вели-
чины ггг+i) и немедленно привел бы к выводу об опти-
мальности на один шаг среди стохастических алгоритмов,
оптимального на один шаг детерминированного алго-
ритма.
Отметим еще, что наихудшая апостериорная точность
после (^+1)-го шага
sup sup е(жг+1,/)= sup е(яг+1,/)
| F(zHl)^0} уеГ(г^+1) /GF(z9
при любом oi+i е Si+i в среднем не лучше гарантирован-
ной в среднем априорной перед (£+1)-м шагом точ-
ности (последняя выражается общим значением левой и
правой частей (7.16)), ибо
sup j e(x1+1, /)ai+1{dari+1}<
/=F(z’) Xi+1
< J sup
А1/ег(г)
5. Стохастически последовательно-оптимальные алго-
ритмы. Определим, наконец, понятие стохастически по-
следовательно-оптимального по точности алгоритма, пред-
полагая итоговую операцию £ фиксированной, а все
фигурирующие ниже операции интегрирования — осуще-
ствимыми. Приводимое ниже определение аналогично
определению 2 из § 6. Можно было бы дать определе-
ние, аналогичное определению 1 из § 6, и, пользуясь
представлением (7.13) и соответствующими представле-
ниями для паилучших гарантированных результатов на
классах F(z*), доказать эквивалентность двух определе-
ний стохастически последовательно-оптимального по точ-
ности алгоритма.
Алгоритм Gq = ( о®, . . ., o°n) называется стоха-
стически последовательно-оптимальным по точности на
72
ГЛ. 1. ОБЩАЯ МОДЕЛЬ ВЫЧИСЛЕНИЙ
классе F, если внешняя нижняя грань в выражении
inf sup I {cfcj inf sup or2 {dx2} . . .
aiG2l *1 G2e22 /2еГ(Х1’Х1(Л)) X2
... inf sup f $N {dxN} & (xN,
°N^N XN
для наилучшего гарантированного на классе F результа-
та достигается при о»! = о?, а внешняя нижняя грань в
выражении
inf sup j oi+1 {d^+i} • • •
°i+ie2i+i /i+1er(z9 xi+1
... inf sup j* On {dxN} 8 (xN, fN)
oNE^NfNeF(xN-^xN-\fN_^ XN
для наилучшего гарантированного на классе F (zl) ре-
зультата при любой реализуемой ситуации z\ 1 i
=^2V— 1, достигается при oi+1 = о?+1(2г).
ГЛАВА 2
ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
В этой главе изучается задача численного интегри-
рования функций одной и нескольких переменных. По-
строены оптимальные квадратурные формулы, оптималь-
ные пассивные и последовательные алгоритмы вычисле-
ния интегралов, наконец, последовательно-оптимальнее
алгоритмы для различных функциональных классов. Рас-
смотрены вопросы учета погрешности вычислений и про-
граммной реализации предлагаемых методов.
§ 1. Оптимальные квадратуры для функциональных
классов, заданных квазиметриками
Получен ряд общих результатов об оптимальных ко-
эффициентах и оптимальных узлах квадратурных фор-
мул для функциональных классов, заданных квази-
метриками.
1. Постановка задачи. Пусть К—измеримое множе-
ство конечной лебеговой меры в n-мерном евклидовом
пространстве Rn, функция р(^, и) определена на К X К,
суммируема по и при любом фиксированном v и обла-
дает свойствами квазиметрики (2.2) — (2.5) гл. 1. Через
Fp будем обозначать в гл. 2 класс всех измеримых на К
функций, удовлетворяющих неравенству
\f(u) — f(v) I р(и, р), и, v е К,
т. е. дополнительно к предположениям п. 2 § 2 гл. 1 все
функции из класса Fp предполагаются измеримыми.
Предположим, что информация о функции /, полу-
чаемая в процессе вычислений, состоит из N значений
функции:
•ri(/) = /(^i), Xi^K, i = l, ..., А,
т. е. в формулах (3.1) гл. 1 можно полагать
Xi=^... = XN = K.
74 ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
Традиционным объектом математических исследова-
ний являются методы приближения интегралов J / (х) dx
суммами вида S ptf (^i). Соответствующие формулы
приближенного вычисления интегралов называют квад-
ратурными формулами или квадратурами. Иногда мы
будем и саму функцию 2 также называть квад-
ратурной формулой. Точки xi, ..., xN называют узлами,
а числа pi, ..., pN — коэффициентами или весами квадра-
турной формулы.
Оптимальными на классе F коэффициентами квадра-
турной формулы при фиксированных узлах х\, ...» xN
называют коэффициентыPx(xN), . . .,pn(xN), для которых
sup [ / (х) dx — pl (Z) / (х$
ir- Е1 Л — 1
УеГ К г=1
= min sup / (х) dx — (i.i)
i-1
где XN = (Xt, xN), р” = (Р1, Pn).
Оптимальными на классе F узлами называют узлы
xi, •.• , 4 К, для которых
min sup f f(x)dx — 2
,WeRW fef k i-l
min sup / (x) dx — £/>№), (1.2)
AT _ AT -t,— П ‘2- —
= min min sup
xNEKNpNERN fEF k
где KN обозначает N-ю декартову степень множества К.
Квадратурная формула с оптимальными узлами и ко-
эффициентами называется оптимальной. Задача построе-
ния оптимальных квадратурных формул интенсивно изу-
чалась во многих работах (см. библиографии в [97,
191, 276]).
Наша цель — для функционального класса F = Fp по-
лучить оценку эффективности заданной квадратурной
формулы, т. е. указать при заданных рн и xN способ
§ 1. ОПТИМАЛЬНЫЕ КВАДРАТУРЫ
75
вычисления величины
sup f f(x)dx — 3
J<=F к г=1
при заданных узлах xN найти оптимальные коэффициен-
ты и, наконец, указать способ отыска-
ния оптимальных узлов.
2. Вспомогательные утверждения. Установим некото-
рые результаты вспомогательного характера, на основе
которых будут решены поставленные задачи. До конца
данного параграфа будем считать, что F = Fp. В част-
ности,
F(?)= {/ s Fp\f(x}) = у}, j=i, i},
где, как и прежде, z* = (a:1’, уг). Для 1^г^А положим
<Pii(x)= max {yj—p(^,^)},cp2i(a:) = min {у, + p(x, x;)},
j=l,... ,г
(1.3)
Фх(?)= J <рн (ж) dx, Ф2 (z’) = f <p2i (x) dx,
к k
ч\(А/) =<p\ у'У-ф^), Т2(Л/) = ф2 (?) -(р\ у*}.
(1.4)
Подчеркнем, что zi = (x^ ..., ггг-, yi, ..., уг) не фигури-
рует явным образом среди аргументов и индексов функ-
ций ф1г(лг), ф2г(а?) лишь для упрощения обозначений;
о зависимости от / напоминает индекс I.
Начнем с доказательства трех простых лемм.
Лемма 1.1. Если 1уц— yv\ р(#ц, %v) для всех ц, v =
= то q^^)-
Доказательство. Из условия леммы следует, что
z/v - Р ((Гц, xv) Поэтому Ф1г max {yv — р (^,
С другой стороны, <pn (хр) > у» - р (rrg, яи) = Та-
ким образом, cpn(#n) = ц = 1, •.i. Так как qa^F в
силу лемм 2.1 и 2.7 гл. 1, то фн F^). Аналогично до-
казывается, что (p2ie^(zl). А
Лемма 1.2. Если то
f(x)^ ф2г(^) , х^К.
Доказательство. Так как f^F(zi), то
-p(«, X}'j^f(x)-f(xl) = f(x'j-yi^p(x, х}), J«l, t,
76
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
откуда
max {у} — р (х, х-)} </(z)< min {yj + p (x, x,)}. Д
Леммы 1.1 и 1.2 показывают, что функция фн слу-
жит точной минорантой для функций из F(zz), а функ-
ция ф2г — точной мажорантой.
Лемма 1.3. 1) Множество 1(хг) = {уг\Р(гг)=£0]
представимо в виде
1(х*) = {у*\ \уц-уч\ ^р(яи, xv), щ v = l, ..., i}.
2) Множество 1(х{) выпукло.
Доказательство. 1) Включение
Z(^)c= {^1 |уи- yv\ р(яц, xv), ц, v = 1, ..., i}
очевидно. Справедливость обратного включения вытекает
цз леммы 1.1. Тем самым первое утверждение леммы
доказано.
2) Пусть i? = (ui, ..., и^^Цх*), v* = (vi, ..., Vi)^
^l(xiy), O^X^l. Тогда при всех ц, v = l, ..., i имеем
I [Xug + (1 — X) pj — [Xzzv + (1 — %) pv] I <
С Uv\ +(1 - %) |ри— Pvl p(^n, Xv),
то есть W + (l — X)p2’^ Z(^). A
Пусть m принимает значения 1, 2. Обозначим через
Kmi(zN), i = i, ..., N, произвольный набор множеств, ко-
торые образуют разбиение К, т. е.
N
и Kmi(zN) = K, Kmi(zN) П Kmj(zN) = 0 при
г=1
и удовлетворяют условиям
Kmi(zN) измеримо, i = 1, ..., N,
(1.5)
Уг + ( — 1)ШР(^, ^г) = фтх(^) ПрИ X €= Kmi(zN) .
Заметим, что в рассматриваемом случае, когда р — квази-
метрика, такие разбиения так же, как и меры множеств,
образующих эти разбиения, могут быть не единственны-
ми. Лебегову меру множества А будем обозначать через
ц(Л). Определим множество
= ..., = ^ = 1, N},
m = 1, 2.
§ 1. ОПТИМАЛЬНЫЕ КВАДРАТУРЫ
77
Каждый элемент g этого множества, как видно из опре-
деления, соответствует некоторому разбиению (1.5), при-
чем компоненты вектора g являются лебеговыми мера-
ми множеств Kmi(zN), образующих разбиение (1.5).
Лемма 1.4. Множества Ai(zN), A2(z”) выпуклы и
замкнуты.
Доказательство. Считая zN фиксированным, не
будем явно указывать в ходе доказательства зависимость
от zN множеств Kmi, Am и множеств, определяемых ниже.
Положим для любых попарно различных ..., ih^
е{1, N} (l^k^N)
= {х (= КI yi — р (х, Xi) = ф^(ж) > yj — p(x,Xj),
*e{iv ..., ift), ye {1, . ..,2V}\0i, ..
Пусть a = (a', ..aw)e4, K^i — разбиение К, удов-
летворяющее условию (1.5) и такое, что сЧ = р (А“,),
1 = 1, ..., N. Положим для к > 2
в?...................<„ Ч......U-HS?........
i {&!, ... 1
Пусть р = (р1, ..., pN) е 0 % 1 и для Р использу-
ются те же обозначения, что и для а. Пусть =
= + (1 — %) Pip...,ife, Мы можем
разбить Bii ?? ik на множества Z?такие, что ц (... д)=
= ...,гф Легко видеть теперь, что
множества
АУ/=Й и и Bi, i = l,...,N,
удовлетворяют условию (1.5). Полагая уг = р(К?{),
Y=('f1, ..., у*), имеем уе.4|. Но при г = 1, ..., N
т'-сЧ!,)- S + и (в^ =
= 1 2 . (^г)1 +
+ (1-ЧГ 2 ...ik + p(Bi)
Таким образом, y = %a + (l — Л)ре41,
выпуклость Al.
= %а{+(1-%)₽*•
что доказывает
78
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
Докажем замкнутость. Пусть а (/) = (а1 {t), .. .,aN (f))e
eAj, при £->оо. Определим
е {г\, ..., г\), к^2, по аналогии с определением величин
в первой части доказательства. Выберем £г->оо
таким образом, что при г->оо для
всех допустимых i±, ..,bik,i,k. Пусть множества
образуют разбиение причем
{it, ..., ik}, k^2. Тогда разбиение К на множества
К^ = и C..4U5i, i=i,...,N,
соответствует а, т. е. [х(К?<) = а\ f=l, N. Для до-
казательства заметим, что
Н(^1г) = 2 =
= lim Г 2 (М + И(5г)1 =
г->оо J
= Ита{(гг) = а{, 1=1, ...,Л\
Следовательно, a^Ai, и, стало быть, Ai замкнуто. Ана-
логично доказывается выпуклость и замкнутость 42. А
Напомним, что множество
5вмФ(/) =
=J?e Rw| Ф (yN.+ &у) — Ф (yN) > <g, &У>
для любых Az/^Rn}
называется субдифференциалом в точке yN выпуклой
функции Ф: RN -> R, а множество
dvN4.(yNV=
= {g е RWJ ¥ (yN +;АУ) - Y (/) < <g, by)
для любых by e Rn }
— субдифференциалом в точке уя вогнутой функции
Т: RW-»BL
§ 1. ОПТИМАЛЬНЫЕ КВАДРАТУРЫ
79
Лемма 1.5. Функция Ф1(з*) выпукла по yN на R*,
функция Ф2(з*) вогнута по yN на R\ При этом
ду^ («")’=A (zN), ^Ф2 (zN) = А2 (zn).
Доказательство. Выпуклость Ф1 очевидна. Для
любых A’ii(z2V), Z = l, ..., N, образующих разбиение мно-
жества К вида (1.5), и для Ду = (Дг/1, ..., Д^) получаем:
Ф, («",/+Д»)-©,«/)-
= f| max {и + Ди — р(г,г;)} —
— max {yj — р (х2 ^)}1 dx =
J
N Г
= 2 J Г max {z/j + Ayj — p (x, x-)} —
If » If
— Уг + P (?, Si)] dx 2 J Ayidx — 2 Aw
J 1=1кн(г*) i=1
откуда
dy^1(zN)^A1(zN). (1.6)
Пусть
K11 (zN) = {x | yt — p (x, xj = Tin (x)},.
Ku (zN) = {x | yi — p (xt Zi)=<piN (x)} \ J* К°ц (zN)t
J=1
i = 2, ...XN.
Ясно, что множества Kii(zN)f i= 1, ..., N, образуют при
любом yN разбиение множества К, удовлетворяющее усло-
вию (1.5), и
^(К°и(хы,уы +6Ai/))->p(^(zN)) при 6->0 +
для любого Ау Rw. При этом множества K^i (zN), i =
«1, ..., TV, также образуют разбиение, удовлетворяющее
условию (1.5). Таким образом, для любых Ay^R^ б>0
'sup <g, 6Ai/> < Фх (xN, yN + 6Ay) — Фх (xN, yN) =
max {pj+6Apj—p(x2 zr,)}— max {г/j—p(^2
80
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
N С
= 2 J [уг + — р Xi) —
K^xN^N^y)1
N
— max {y~p(x, ^)}l<Zx<6 2^yi^(K°t(xN, pw+6Ay))=
J 2 = 1
N
-в2д»(х??(г)) +
2 = 1
N
+ 6 2 4S1[|.W.(/, / + 6&M - v.(KS(^))] =
2 = 1
nj
= 6 £ АугнМ 01+0(6).
*—1 ____________
Следовательно, для любого Ay e R27
sup <g, Az/> < (gAy, Аг/) + о (в)/д,
g^yN9i^N)
где g^(p(K%(ZN)), ...,p(KrN(zN)))^A^N), и no-
этому
sup <g, Ay>< sup <g, Ay>.
(zN) geA±(zN)
Поскольку, в силу (1.6), справедливо противоположное
неравенство, имеем для любого Ду е R1^
sup <g, Ау> = sup <g, Ay>.
^S02/JVO1(zn) gt=A±(zN)
Отсюда, согласно [213, лемма 1.1], следует, что dyW®! (^)=
= A1(zN), так как dy^±(zN) в силу [213, теорема 1.1],;
а А± (zN) в силу леммы 1.4 — выпуклые замкнутые
множества. Аналогично доказывается равенство dyN&2 (zN) =
= А2 (zn). д
3. Об оценке эффективности заданной квадратурной
формулы. Перейдем теперь непосредственно к первой из
поставленных выше задач — к задаче оценки эффектив-
ности квадратурной формулы с заданными узлами xN
и коэффициентами pN. Используя леммы 1.1 и 1.2 и
J / (x) dx — (pN, yN) =
К
tp1N(x)dx, (p2N(x)dx—(pN, =
§ 1. ОПТИМАЛЬНЫЕ КВАДРАТУРЫ 81
обозначения (1.3), (1.4), получаем
f N
max J f (я) dx — T Pif (#i) =
JK i=l
= max max
^GZ(x^) /SF(z^)
= max max (pN, yN)—
yNt=l(xN) \ k k j
= max f max (zN, pN), max Y2 (zN, pN)L (1.7)
[y^l(xN) yN^i(xN) J
Таким образом, задача сведена к решению двух задач
максимизации вогнутых функций на выпуклом в силу
леммы 1.3 множестве l(xN), т. е. к решению двух задач
выпуклого программирования. Следующая теорема дает
необходимые и достаточные условия экстремума для этих
задач.
Теорема 1.1 [251]. Для того чтобы вектор yN(m) =
= (г/1(тп), •••> Z/n(/Z1)) реализовывал максимум функции
Чгтп(^, yN, pN) на множестве l(xN) при фиксированных
xN, pN, необходимо и достаточно, чтобы существовали
множества Kmi(xN, yN(m)), i = l, ..., N, удовлетворяю-
щие условиям (1.5) при yN = yN(m) и числа j, k =
= 1, ..., N, такие, что
N
(- l)m [fl <Kmi(xN, yN(zn))) - Pi] = 2 ^g{\
j,k=l
Km (Уз (m) — yh (m) — p (x}, xh)) = 0, i, j, k = l, ..N,
где
dft =
1,
-1,
0
i = / #= kf
i — k j,
в других случаях.
Доказательство. Напомним, что Y (У) =
= max Т (Y') для выпуклого множества А и вогнутой
Y'eA
функции W, если и только если
Г(У)*П[-5ГТ(У)]#=0, (1.8)
где Г (У)* — конус, двойственный к конусу Г (У) допу-
стимых в точке У относительно множества А направле-
ний [213].
А. Г. Сухарев
82
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
Опишем конусы Г (г/*), Г(г/*)* при A = l(xN). По лем-
ме 1.3
Z(x") = {j/N = (^i, .... Ух)\У)-у^р(хь хк),
поэтому
Г(г/") ={Аг/ = (Дг/1, ..AyN) |\yj - Дук О,
если У)-ук = р{х^хк)}.
Применяя лемму Фаркаша, имеем
{N
- 2 | Vй (yj -yh-p (xjt xh)) = 0,
j,k=l
Vй >0, (1.9)
где g}k = (g{\ ...,g}N).
Поскольку функция Ф1 выпукла, а Фг вогнута по у\
то Ti, Тг —вогнутые по yN функции, и по лемме 1.5
= 1g = (£i, •• •, gw) I Si = (~ l)m [н(ят« (zN)) —pj,
i = (1.10)
Утверждение теоремы вытекает непосредственно из
(1.8) — (1.10). Д
Условия оптимальности, содержащиеся в теореме 1.1,
полезны при рассмотрении различных вопросов, связан-
ных с оценкой эффективности квадратурных формул,
в частности, вопросов построения оптимальных квадра-
турных формул, в том числе при заданных ограничениях
на коэффициенты. В то же время эти условия, как и
условия оптимальности в иных задачах, не приводят не-
посредственно к численному методу решения. Далее тео-
рема 1.1 не используется.
Доказательство теоремы 1.2, отвечающей на вопрос
об оптимальных коэффициентах квадратур, будет полу-
чено с помощью необходимого и достаточного условия
максимума в задаче безусловной оптимизации для вогну-
той функции Ч*, т. е. задаче отыскания ЧГ(У)=5
= шах Т (У'). Это условие, являющееся частным слу-
-
чаем (1.8) при A = RN’, имеет вид
ОедуЧЧУ). , Х1.Щ
§ 1. ОПТИМАЛЬНЫЕ КВАДРАТУРЫ 83
4. Об отыскании оптимальных коэффициентов и опти-
мальных узлов квадратурных формул. Следующая теоре-
ма дает ответ на вопрос об оптимальных коэффициентах
Pi(xN), • • Pn(xN) при заданных узлах xN квадратурной
формулы, а следствие из нее позволяет в ряде случаев
решить задачу об оптимальных узлах. При более огра-
ничительных предположениях некоторые близкие резуль-
таты получены в работах [7, 8, 129, 164, 314].
Пусть 02^ = (0, ..., 6), где 9GR — произвольное число.
Нетрудно видеть, что множество всех разбиений К вида
Kmi(xN, QN), i = l, ..N, не зависит ни от 0, ни от т.
Обозначим такое произвольное разбиение через Ki(xN),
Z=l, ..., N. Иными словами, K\(xN), ..., KN(xN)— про-
извольный набор измеримых, попарно не пересекающих-
ся множеств, объединение которых есть К, и таких, что
р (гг, хг) = min р (х, Xj) при х е Ki (xN), i = 1, . .., N.
j=i, ..,л
Назовем такие разбиения ^-разбиениями Вороного — Ди-
рихле. В рассматриваемом случае, когда р — квазимет-
рика, множества КДх1*), образующие разбиения Вороно-
го— Дирихле, и их меры р\КДхИ)) определяются, вооб-
ще говоря, неоднозначно.
Теорема 1.2 [251]. Квадратурная формула с коэф-
фициентами Pi(xN)= p,(Ki(xNy), f=l, ..., TV, опти-
мальна на классе Fp среди квадратурных формул с фик-
сированными узлами xi, ..., xN, а гарантированный ею
результат (максимальная погрешность) равен
min p(r, Xi)dx.
*=!,.».,1V
Отметим, что в силу неоднозначности определения
мер р.(К1(а:я)) оптимальные коэффициенты pl (xN) опре-
деляются также, вообще говоря, неоднозначно.
Доказательство. Для любого pN е Rw имеем
max \f(x)dx—^jPiffai) max (zw, pN)
feF JK i=i
N
(arwB 0wf pN) = 0 У pi — [ max {0 — p (x, ajj)} dx =
i-i к <—i.....................
6*
84
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
/ N \ Г
= 0 I 2 Рг — Н W ) + ) т*П Р Xi) dx
\г=1 / —1,..»Л
I min р(^, xi)dx, (1.12)
к г = 1,... Л
где первое неравенство справедливо в силу (1.7), второе
неравенство справедливо, так как ^l(xN), наконец,
третье неравенство справедливо, поскольку 0 R может
(n \
>0.
1=1 /
п- Л _ „о /jv\\
При у — 0 , р — Pq \Х ) — \Р1\% )> •.., Pn \ х ))
формула (1.10) принимает вид
е", ^(Z)) =
= (g = (gl, • • • ,gN) I gi = (- 1Г (Л (^)) - P"
i = 1, ..., N}, m= 1, 2.
Каждый элемент g данного множества соответствует не-
которому разбиению Вороного — Дирихле. В силу опре-
деления оптимальных коэффициентов для произвольного
набора оптимальных коэффициентов Pq (xn)условие опти-
мальности (1.11) выполнено для функций при yN =
= 0", pN = p*(xN\ т. е.
0 g= dyN4m(xN, 0\ р” (xN)), т = 1, 2.
Поэтому, учитывая, что QN ^l(xN), имеем
Тт(Л 0",^(Z))= max Тт(ЛЛ^(^)) =
= max (xN, yN, p% (xN)), m = l, 2. (1.13)
Поскольку
N N
SPi°(^)= 2и(^СО) = н(Я),
г = 1 1=1
N N / N\
получаем при p = pQ \x ) из равенств, содержащихся в
цепочке (1.12), что
(xN, Gn, Pq (xn)) = f min p (x, х$ dx.
§ 1. ОПТИМАЛЬНЫЕ КВАДРАТУРЫ
85
Аналогично,
Т2 (xN, 0N, Pq (xn)) = [ min p (<r, dx.
Следовательно, учитывая (1.7) и (1.13), имеем
г N
max \ f(x)dx — У р° (xN) f (х^) =
к 1=1
= f min p(x, Xi)dx. (1.14)
k i=l....N
Утверждение теоремы вытекает непосредственно из (1.12)
и (1.14). А
Доказанная теорема дает также способ отыскания
оптимальных узлов. Сформулируем его в виде следствия
из теоремы.
Следствие. Решение задачи отыскания узлов опти-
мальной квадратурной формулы сводится к отысканию в
К таких точек х®, . .., х%, что
min р(х, x°i) dx = min \ min р(я, Xi)dx. (1.15)
xNEKN'Ki=l,...,N
Наилучший на классе Fp в множестве всех квадратурных
формул результат равен
inf min р (х, х^ dx. A
xNEKN'Ki=l...,N
Теорема 1.3. Квадратурная формула с коэффици-
ентами pi(xN), j = l, ..N, является оптимальной итого-
вой операцией при фиксированных х\, ..., xN^K. Опти-
мальная квадратурная формула, т. е. квадратурная
формула с узлами х^ = (х{, . . ., х^), удовлетворяющими
условию (1.15), и коэффициентами Pi(xo), j=l, ..., N,
является оптимальным по точности на классе Fp алго-
ритмом в множестве всех пассивных алгоритмов при
этом наилучший гарантированный результат равен mN.
Доказательство. Для произвольных фиксирован-
ных Xi, ..., xN^ К
min sup ) f (х) dx — [3 (xr, . . ., xN, f (xj, . . ., / (%n)) =
= min sup f (x) dx — 0 (/ (^x), .. ., / (xN)) =
ее© /eF
86
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
г N
= sup \f (х) dx — 2 Pi (zN) f (ъ)
fSF JK i=l
min p (.r, xi) dx,
кг=1,...^
(1.16)
где En — множество всевозможных итоговых операций,
0 — множество всех числовых функций 0 переменных
(Уь Un) Ij/i = /(^i), У№/(жх),
fef}.
В левой и правой частях первого равенства (1.16)
стоит одна и та же величина, переписанная в разных
обозначениях. Справедливость второго равенства показы-
вают лемма 2.8 и теорема 4.2 гл. 1, а также теорема 1.2:
в силу леммы 2.8 гл. 1 функциональный класс F = Рр
является выпуклым центрально-симметричным множе-
ством с центром 0; поэтому, по теореме 4.2 гл. 1, среди
оптимальных итоговых операций при фиксированных
Х[, ..., xN существует квадратурная формула; наконец,
в силу теоремы 1.2 этой квадратурной формулой явля-
ется квадратура с коэффициентами р? (xN), i = l, ..Af.
Справедливость третьего равенства также следует из
теоремы 1.2. Второе равенство в (1.16) — это и есть пер-
вое из доказываемых утверждений. Для доказательства
второго утверждения достаточно проминимизировать по
х” = (х\, ..., xn)^Kn все соединенные в (1.16) знаками
равенства величйны. А
Задача (1.15) близка к задачам дискретной геомет-
рии. Так, если р — евклидова метрика, то задача (1.15)
тесно связана с задачей оптимального покрытия множе-
ствами К шарами равного радиуса и с задачей наименее
плотного покрытия n-мерного пространства единичными
шарами. Этот вопрос будет подробно рассмотрен в сле-
дующем параграфе.
Найти в явном виде решение задачи (1.15) удается
сравнительно редко (см. § 2). При необходимости мно-
гократного использования пассивного алгоритма с задан-
ным числом узлов N может оказаться целесообразным
решить задачу (1.15) численно.
При небольших значениях N и размерности прост-
ранства п удается приближенно найти решение, напри-
мер, при помощи следующего итерационного процесса.
Пусть
г
т] (XN) = min р (x,'xi) dx = 2 f p (x, xA dx,
я1"1............N
§ 1. ОПТИМАЛЬНЫЕ КВАДРАТУРЫ 87
Di (xN) = j p (x, x^ dx.
Ki(x^)
На (k + 1)-й итерации функция ц минимизируется по
векторной переменной xmW на отрезке lxm(h}(k), а(&)],
где вектор xN(k) = (xt(k), xN(k}) получен в резуль-
тате к-& итерации, номер т(к)&(1, N} определен
соотношением
DmW(xN(k)) = max Di(xN (к)\
наконец,
а (к) = arg max р (х, хт(л) (7с)).
х€=Кт(А)(х^(Ь))
В случае, когда п = 2, К — единичный квадрат, р —
евклидова метрика, описанный алгоритм дает следующие
приближенные значения для наилучшей гарантирован-
1 ("1/5
ной точности: m2 « 0.297 (на самом деле т2 = +
+ Ь ()) +я (- 4 1П (у4р-2)) - 0.2966 ...
тпз « 0.237, тп4 « 0.187, ms » 0.175.
Теорема 1.2 позволяет также производить по крите-
рию ц(яя) численное сравнение эффективности для за-
дачи интегрирования различных способов «равномерно-
го» в том или ином смысле расположения точек Xi, ...
..., xN в множестве К.
Сравним, например, три таких способа, считая по-
прежнему, что п = 2, К — единичный квадрат, р — евкли-
дова метрика.
Первый способ — выбор точек из решетки Г* (см.
замечание 6 к теореме 2.3 следующего параграфа). При
п = 2 основной репер этой решетки задается правиль-
ным треугольником. Длина его стороны выбирается так,
чтобы в единичный квадрат попало не менее N точек
решетки и чтобы при большей длине стороны в единич-
ный квадрат попадало менее N точек.
Второй способ — выбор точек из «кубической» решет-
ки, построенной в [301]. При N = тп (т — целое) эта
решетка совпадает с обычной кубической решеткой.
Наконец, третий способ — выбор точек из ЛПх-после-
довательности, построенной согласно [231, гл. 6, § 3].
88
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
Результаты вычислений представим в табл. 1, элемен-
тами которой являются приближенно вычисленные зна-
чения величины Ц (xN) = I min р (я, xt)dx. Таблица по-
называет, что, начиная с N = 7, наиболее эффективными
являются квадратурные формулы, построенные с по-
мощью решетки Г™. Для сравнения укажем, что при
Таблица 1
N 5 7 11 17
1 1 0.227 0.151 0.127 0.103
«Кубическая» ре- шетка 0.193 0.157 0.130 0.104
лпт 0.241 0.179 0.142 0.115
N = 7, например, осреднение по 50 испытаниям величи-
ны ц(^) в случае, если Xi, ..., xN— независимые, рав-
номерно распределенные на К случайные точки, дает
результат 0.211, при N= 17 — 0.128.
5. Центральная итоговая операция в задаче интегри-
рования. Получим выражение для наилучшей гарантиро-
ванной после завершения информационных вычислений
точности &n(zn) и установим вид центральной итоговой
операции Р* (см. (4.3), (4.4) гл. 1). При этом по-преж-
нему считаем, что F = Fp. Кроме того, S (/) = J / (х) dx
к
и B = R .(см. п. 1 § 1 гл. 1), т. е. расстояние между
элементами S(/i), S(/2) есть |S(/i) — £(/2) I.
Теорема 1.4. Функция
₽* (zN) = J4 + ФзН*)]dx
к
задает центральную итоговую операцию, при этом
(zN) = J 4" — dx‘
К
Доказательство. В силу лемм 1.1 и 1.2 задан-
ные формулами (1.3) функции (£2n являются соот-
ветственно точной минорантой и точной мажорантой для
функций из F^zN\. Поэтому образом множества F{zN)t
§ 1. ОПТИМАЛЬНЫЕ КВАДРАТУРЫ
89
при отображении 8 (/) = J / (х) dx является отрезок
к
S(F(Z*)) =
' <Pin (#) dx, ) cp27v (х) dx
к к
По определению (см. п. 5 § 4 гл. 1) точка $*(zN) явля-
ется центром этого отрезка, а величина &n(zn)— его ра-
диусом, т. е. половиной длины. А
Замечание 1. Квадратурная формула с оптималь-
ными коэффициентами p°i(xN), i = 1, .. ., N, не совпада-
ет, вообще говоря, с центральной итоговой операцией
Р* (^л). Действительно, пусть р (u, v) = max | и — i? I,
К - [и = (и1, .. ., ип) | 0и 1, i = 1, . . ., п], п = 2,
Аг = 4, хг = (1/4, 1/4), х2 — (3/4, 1/4), х3 = (3/4, 3/4), х4 =
= (1/4, 3/4), х* = (хг, х2, х3, х4). Тогда р? (х*) = . .. = р^4) =
= 1/4. Нетрудно убедиться, что при 0 у ^1/2 ситуа-
ция z4=(;r4, у, 0, 0, 0) реализуема (см. п. 2 § 3 гл. 1) и функ-
ция, задающая центральную итоговую операцию, прини-
мает вид р* (z4) = — 5у3/24 + Зу2/16 + у/4, тогда как
4
2 Pi Уг = У/4, где (г/р у2, у3, г/4) = (у, 0, 0, 0).
2 = 1
В то же время, как будет показано в п. 1 § 3, при
п = 1 и произвольных х\, ..., xN квадратурная формула
с оптимальными коэффициентами совпадает с централь-
ной итоговой операцией. А
Замечание 2. С помощью теоремы 1.4 легко дока-
зывается теорема 1.3. Действительно, для произвольных
фиксированных х\, ..., xN е К
min sup у (S (/), 0 (xL, f (хг), .. ., / (xN)) =
= sup
v”<=l(XX)
zN (zN) &N (xN, 0) = min p (x, x^ dx,
кг=1,...л
где первое равенство обосновано при доказательстве тео-
ремы 4.3 гл. 1, а неравенство справедливо, поскольку
O^Z(^). Таким образом, никакая итоговая операция
Р е BN не может гарантировать результат лучше, чем
f min р (х, х^ dx. С другой стороны, как показывает
X 2 — 1,... ,7V
теорема 1.2, такой результат гарантирует квадратурная
90 ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
формула с коэффициентами pi (xN), i = l, ..N. Следо-
вательно, эта квадратурная формула задает оптимальную
итоговую операцию при фиксированных xi, ..xN. А
Замечание 3. Теорема 1.4 справедлива, как видно
из ее доказательства, не только для F = FQ, но и для
произвольного функционального класса Т7, если только
<Р1я, ф2я — соответственно точная миноранта и точная ма-
жоранта для функций из подкласса F (zN) класса F. А
§ 2. Построение и исследование
оптимальных квадратур для функциональных классов,
заданных модулями непрерывности
В этом параграфе полученные в § 1 результаты кон-
кретизируются для функциональных классов, традици-
онно рассматриваемых в теории оптимальных квадратур-
ных формул. В одних случаях удается в явном виде по-
строить оптимальные или асимптотически оптимальные
формулы, в других — лишь получить оценки на коэффи-
циенты в выражениях для погрешности оптимальной
квадратуры.
Основой для последующих построений является полу-
ченное в § 1 (см. следствие к теореме 1.2) выражение для
погрешности mN оптимальной на классе Fp квадратуры:
mN = inf min . р(я, Xijdx (2.1)
xn^kn'k
(напомним, что фигурирующие в гл. 2 функции р(и, v)
предполагаются суммируемыми по и при любом фикси-
рованном v).
1. Вспомогательные утверждения. Введем необходи-
мые для дальнейшего обозначения и получим некоторые
вспомогательные результаты.
Для произвольной квазиметрики р будем называть
множество {idp(u, v)^R} р-шаром радиуса R с цент-
ром V.
Ясно, что р-шары радиуса sup min р (х, х^} с центра-
ми в точках х\, ..., xN покрывают К и никакие р-шары
меньшего радиуса с центрами в Xi, ..., xN не покрыва-
ют К. Назовем величину
R (XN) = sup min р (х, х$ (2.2)
яек л
§ 2. ПОСТРОЕНИЕ И ИССЛЕДОВАНИЕ КВАДРАТУР 91
радиусом покрытия, заданного центрами х\, ..., xN (век-
тором xN). Покрытие минимального радиуса назовем
оптимальным.
Таким образом, для отыскания оптимального покры-
тия надо найти величину
Rn = inf sup min p(x, x$), (2.3)
x=K
называемую радиусом оптимального покрытия, и точки
Х[, ..., Хх, при которых достигается значение, равное
нижней грани.
Пусть дальше в этом параграфе р(и, p)=Hu —vll, где
11-11 — произвольная норма в n-мерном координатном про-
странстве. Пусть V(R) — объем шара радиуса R, т. е.
множества Q(7?) = {х| 1Ы1 a rN определяется из
уравнения
МГ(гя) = И(Я), (2.4)
где p,(7Q по-прежнему обозначает лебегову меру мно-
жества К.
Лемма 2.1. Справедлива оценка
N J || х || dx mN ^TV J || х || dx.
Доказательство. Сравним лебеговы интеграль-
ные суммы для интегралов N J || х || dx и
й(г^)
с N Г N С
J min || х — Х{ || dx = 2 J IIх — xi II ^х = V J 11х II
21 лг 1=17.
г
где Xi произвольны, Ki = Ki(xN), т. е. множества Ki об-
разуют р-разбиение Вороного — Дирихле множества К
(см. п. 4 § 1), Кг = Ki — Xix i = 1, ..., TV.
Пусть целое число к произвольно, а /о таково, что
7 — 1 7*
г—r2v<sup min || z — Xi |]= max max || x || r
К x£Ki=l,...,N К
Пусть, далее,
Aj = {x| (j — l)rN/k 1Ы1 s? jrN/k}.
92
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
Тогда
fe N 'о
2 4" <л>)— 2 2 4г rjv^ (А> n к'^ =
j = l 1 = 13=1
N Г k h
=2 2т^1н(Л)-н(лп^)1- 2lr^GM^)
1=11J=1 j=k+l
N
rN 2
1=1
’ k
2 Гн(А) — П #•)]
Lj=i
N
= rN% [Fh)-|i$)] = r„
1=1
io
2
j=M-l
ц(Л-П^)
NV(rN)- 2 И (#i)
1=1
= 0,
N
поскольку NV (гн) = 2 и(Х1) = H W- Переходя в по-
i=i
лученном неравенстве к пределу при имеем
N J ||#||dx— [ min ||rr —
Q(rN) ’Ki=l,...,N
откуда в силу (2.1) и произвольности х\, ..xN выте-
кает левое неравенство в утверждении леммы.
Для доказательства правого зафиксируем произволь-
ное 8 > 0 и такие х\, ..., xN К, что sup min || х —Х{ ||
хек i=i,..?,n
Rn + 8. Тогда
j* min || х — хг || dx
1 = 1,. . .,1V
IV
mN
<2 J \\x-Xi\\dx = N j h||dr.
i=i |X| ||X_BN+g} Q(Hjv+e)
В силу произвольности 8 > 0 отсюда следует правое не-
равенство в утверждении леммы. А
Лемма 2.2. Справедлива оценка
J*
Й(1)
Доказательство. Правое неравенство непосред-
ственно следует из определения величин mN, RN. Для
доказательства левого достаточно заметить, что
[ |И|(£г = гп+1 У ||z||cZt, V(r) = rn7(l),
Й(Г) Q(l)
§ 2. ПОСТРОЕНИЕ И ИССЛЕДОВАНИЕ КВАДРАТУР 93
и воспользоваться левым неравенством в лемме 2.1 и оп-
ределением величины rN. А
Лемма 2.3. Пусть A^Q\R), где А — выпуклое те-
ло с кусочно-гладкой границей, содержащее начало ко-
ординат. Пусть Ы — одна из трех норм
1И|о = тах|а;’|,
где х = (х\ ..., хп). Тогда
A Й(К)
Доказательство. Пусть 1Ы1 = Ы2. Производя
сферическое преобразование координат
хх = г cos ai, xi = г sin он ... sin схг-_icos a<,
i = 2, ..., n — 1, xn = r sin ai... sin an-i
с якобианом r71"1 sinn-2ai sinn“3 a2... sin an-2 и учитывая,
что Ы2 = г, получаем
Jhll^ =
А
2 л 2л
= j dax ... J dan_x J rn sinn~2 ax. . . sin an—2dr=
0 0 0
2Л 2Л 2Л
= J dai • • • J dan_2 J [r (ax,. .. an_1)]n+1 sin"-2^.. .
0 0 0
.. . sin an-2dan-u (2.5)
где r = r(ai, . •., an-i) — уравнение границы тела A,
а пределы интегрирования выбраны для случая, когда
начало координат — внутренняя точка множества А.
Учитывая, что
ц(4) =
2Л 2Л 2Л
= J da1 . .. J dan—2 У [г (а1? ..., an—i)]n sinn—2 ах ...
о оо
.. . sin ап—(2.6)
94 ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
и производя в (2.5) оценку (r(ai, ..an-i)]n+1
^Zt[r((Zi, ..a„-i)]n, получаем требуемое неравенство.
В случае 4 =£2(7?), очевидно, г(ои, ..— П и дока-
зываемое равенство также немедленно следует из (2.5)
и (2.6).
Если Ы = Ыь то интеграл следует заменить суммой
2П интегралов по пересечениям А со всеми 2п ортантами
пространства Rn. И далее, в ортанте хх > 0, ..., хп > О,
например, следует произвести преобразование координат
по формулам
xx = r(i — Pi), х'• = гф1... Pi-i (1 — М, * = 2, п— 1,
= ...Рп-Ь
Якобиан этого преобразования равен 2,
1И11 =г-
Если же 1Ы1 = Ыо, то интеграл следует заменить сум-
мой 2п интегралов по пересечениям А с областями
UI Ыо = х*}, {#1 Ыо = — х*}, i=l, ..п. И далее, в об-
ласти {я| Ыо = я1}, например, следует произвести преоб-
разование координат по формулам
х1 = г, xi = Пг-i, 1 = 2, ..., п.
Якобиан этого преобразования равен г71"1, Ыо = г.
Ясно, что и в случае 1Ы1 = 1Ы11, и в случае Ы = 1Ы1о
доказательство утверждения леммы может быть теперь
проведено аналогично доказательству в случае Ня11 =
= 1Ы12. А
Лемма 2.4. Пусть Ы— одна из трех норм ПжИ»,
£ = 0, 1, 2, К—выпуклое тело с кусочно-гладкой грани-
цей, Тогда
(К) < mN < RNp (К).
Доказательство. Левое неравенство непосред-
ственно вытекает из лемм 2.1, 2.3. Для доказательства
правого заметим, что
mN min || х — х\ || dx
к г=1......N
при любых я?, .a/w, в том числе в случае, когда эти
точки являются центрами оптимального покрытия множе-
ства К. Для таких xi положим Ki = 1х 11| х — х\ || =
§ 2. ПОСТРОЕНИЕ И ИССЛЕДОВАНИЕ КВАДРАТУР
95
= min || х — х] ||) и заметим, что А? — х° cz Q
5^1,.„Л J
Применяя лемму 2.3, получим
N „
Г min || х — Xi || dx = 2 ) II # — AII =
#1=1,... Л i=1 о
N
= 2 J Д
2. Основные результаты. Перейдем к изложению ос-
новных результатов данного параграфа (теоремы 2.1—
2.3). В формулировках теорем F = F9 при p(iz, v) =
= \\и — pH.
N Г п
Теорема 2.1 [252]. Пусть К = J [Q (R^ + xi], причем
4=1
р, [(Q (Rn) + х?) П (Q (RN) + xj)] = 0 при i =£ j.
Тогда квадратурная формула с узлами x°i и коэффициен-
тами pl = V (Rn) = [i(K)/N оптимальна на классе А,
при этом mN — J II х || dx.
®(Rn)
Доказательство. Утверждение об узлах опти-
мальной квадратуры и величине гарантированного ею
результата немедленно следует из леммы 2.1, если
учесть, что в предположениях теоремы rN = RN. Утверж-
дение о коэффициентах следует из теоремы 1.2. А
Непосредственно из теоремы 2.1 получаем следующие
результаты.
Следствие 1. Пусть
А = ШО 1, i = l, ..., п}, Ы = IWIo, N = mn.
Тогда точки
(г™ ’ • • • ’ 2m~)’ 7'i’ • • • ’ /" е {!> 3, ..., 2пг — 1},
являются узлами оптимальной на классе F квадратурной
формулы, а числа pl = l/mn — ее коэффициентами, i =
= 1, ..., mn. A
Следствие 2. Пусть
п = 2, К = Lrl I#1! + \х2\ 1}, 1Ы1 = 1Ы11, N = m2.
96
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
Тогда точки
[Л - h h + h -2m'
\ 2m ' 2m t
7^/2^ {1,3, .. .,2m — 1},
являются узлами оптимальной на классе F квадратурной
формулы, а числа Pi = 2/N2, — ее коэффициентами, i =
= 1, ..., тп2. А
Решетки оптимальных узлов, соответствующие усло-
виям следствий 1 и 2, изображены на рис. 2.
В соответствии с общими определениями и. 12 § 4
гл. 1 назовем последовательность квадратурных формул
а
Рис. 2. Узлы оптимальной па классе F() квадратурной формулы
при п = 2, m = 4 в случаях: a) p(u, v) = ||и — р||0, б) р(н, и) =
с узлами Xn(N) и коэффициентами
pi(N), ..., Pn(N) асимптотически оптимальной на F при
N оо, если
sup .1 / (x) dx — S Pi (W) / (№))
/ег к i=i
N -> oo.
mN,
Теорема 2.2 [252]. Пусть К — ограниченное мно-
жество с границей нулевой меры, норма 11-11 такова, что
шарами, получающимися из Q (1) = {rd llrrll < 1} парал-
лельными переносами, можно заполнить все простран-
ство, т. е. для некоторых х\, Х2, ...
и (й (1) + Xi) = Rn, р [(□ (1) + Xi) п (Й (1) + *>)] = О,
i=l
i =#/.
§ 2. ПОСТРОЕНИЕ И ИССЛЕДОВАНИЕ КВАДРАТУР 97
Пусть R(N)— минимальное из чисел R таких, что
число шаров Q(R) + Rxi, имеющих с К пересечение по-
ложительной меры, не превосходит N, a R (7V) Х{. — цент-
ры этих шаров (/ = 1, ..., N\; Ni^N).
Тогда последовательность квадратурных формул с уз-
лами х\ (N), ..., xN (N), где = R (N) Х{. при j = 1, ...
..., М и Xj(N)—произвольные точки из К при j = N\ +
+ 1, ..., N, и коэффициентами
Pj(N)= р{х^ ^|||х — ^(7V)||= min || х — xv (N) ||),
7 = 1, ...,2V,-
асимптотически оптимальна на F, при этом
mN ~ [ || я || d# при N-+oo.
fi(-RW)
Доказательство. Так как граница К нульмерна,
то NV(R (N)) -> ц (К) = NV (rN) при N -+ <», и, стало быть,
R(N)~rN. Но tn^Rn^R(N) (см. (2.3)), следовательно,
rN ~ Rn, и по лемме 2.1 mN ~ N f ||;г|| dx. В силу тео-
WN))
ремы 1.2 результат, гарантированный формулой с узлами
Xj(N) и коэффициентами Pj(2V), / = 1, ..., N, равен
| min || х — Xi (/V) || dx. Очевидно, что
min ||x — Xi(N)\\dx^.N [|#||d;r.
кг~ Q(R(N))
С учетом уже доказанной эквивалентности левой и пра-
вой частей неравенства это завершает доказательство
теоремы. А
Доказанная теорема позволяет легко строить асимп-
тотически оптимальные квадратуры для классов, задан-
ных такими нормами, что все пространство может быть
заполнено транслятами выпуклого симметричного отно-
сительно начала координат тела Q(l) = Lrl 1Ы1 1} (его
называют индикатрисой длин для метрики llu —ull). Для
II-Но и Il-Hi при и = 2 такое построение было выполнено
в [8, 164].
Поскольку всякое симметричное относительно начала
координат выпуклое тело задает, как известно, норму,
встает вопрос, какие выпуклые тела обладают указан-
ным свойством (с помощью параллельных переносов
7 А. Г. Сухарев
98
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
заполняют пространство без пересечений ненулевой меры).
Этому вопросу посвящен ряд работ. Например, при п = 3
такие тела и, следовательно, соответствующие нормы
полностью перечислены в [331] для случая, когда центры
тел, заполняющих пространство, образуют решетку. О вы-
пуклых многогранниках, обладающих этим свойством
(параллелоэдрах) при п = 5, см. '[223].
Леммы 2.2 и 2.4 позволяют получить некоторые ре-
зультаты об оптимальных квадратурах и в случаях, ког-
да класс F функций, определенных на некотором множе-
стве n-мерного координатного пространства, задан с по-
мощью норм II Hi при п > 2 и H II2. Нетрудно видеть, что
в обоих случаях пространство не может быть заполнено
транслятами соответствующих выпуклых тел Q(l). Сфор-
мулируем эти результаты в виде следующей теоремы.
Теорема 2.3 [252]. Пусть К — ограниченное множе-
ство ненулевой меры с границей меры нуль. Тогда при
достаточно больших N
a(n)N~[/n mN С b(n)N~Un,
где
а (п) = (и (К))<п+1'>,п [ || х|| dxlty
£2(1)
Ъ (п) = (jx (Л))(п+1)/п>Лг In n + n In In n + 5n/(V (l))1/n,
при этом если К = {х\0^х*^1, Z = l, ..., п), 1Ы1 = НА,
то
а(п) ~Ъ (п)
при тг->оо;
если же К= {гг|О хг < 1, i = ..., п), 1Ы1 = II А, то
a(ri) ~ b (тг) ~ при п-^оо.
Доказательство. Пусть IWI— произвольная нор-
ма. Согласно [419], при п > 3 справедливо следующее не-
равенство для наименьшей плотности 0П (определение
см., например, в [220]) покрытия ^-мерного координат-
ного пространства транслятами выпуклого тела Q(l):
0n п In п + п In In п + Ъп. (2.7)
В силу [126, теорема 9]
0п= Нт^7(ВДИ(Я).
TV^oo
§ 2. ПОСТРОЕНИЕ И ИССЛЕДОВАНИЕ КВАДРАТУР
99
Учитывая, что 7(г) = гпУ(1), получаем, что при доста-
точно больших N
RnJ < (nIn п + п In Inn +»>(^)/(2V7l(1)).
Из определения величины rN следует, что величина
ги = \t(K)/(NV (1)). Из леммы 2.2 получаем теперь, что
при достаточно больших N
(и j Их||dr
< (р (ff))(n+1)/n In п 4- n In In n + ц-1/п /9 8}
Воспользовавшись выражением из леммы 2.3 для
J || я || d# и известными формулами
й(1)
9п 2тгп/2
У(1)= ^приИ = к111, v(!) = 7п^72) при И =
Г (n/2) ~ Yп/ V2е, у'п! ~ п/е при п -> оо,
убеждаемся в справедливости остальных утверждений
теоремы. А
Замечание 1. Пусть IWI— одна из трех норм 11л:11€,
Z = 0, 1, 2, К—выпуклое тело с кусочно гладкой грани-
цей. Тогда неравенство, аналогичное (2.8), имеет вид
(И (K)-fn^!n (7 (l))-1/nJV-1/re < mN <
< dpi (Н (tf))(n+1)/n (v (l))“1/n y^nN^/n.
Неравенство справедливо при достаточно больших N. Его
левая часть совпадает с левой частью (2.8), а правая
часть получена так же, как в (2.8), только вместо лем-
мы 2.2 использована лемма 2.4, а вместо оценки (2.7)
некоторая оценка 6П < 9п. д
Замечание 2. Если IW = 1Ы10, то 0П = 1. Ис-
пользуя предыдущее замечание, получаем в соответству-
ющих предположениях
т-^ 2(dj)^W)(”+,>/njV_1/n П₽И N^°°- Л
7*
100
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
Замечание 3. Основным содержанием теоремы 2.3
является не тот факт, что mNX N~y” при N -> °° (поря-
док погрешности при более общих предположениях най-
ден в [13]), а формулы для а(п) и Ь(п), позволяющие
получить асимптотику по размерности пространства ко-
эффициента при N~yn в выражении для погрешности mN
оптимальной квадратуры с N узлами. А
Замечание 4. Оценка погрешности c(n)N~[/n с
а(п)^ как видно из доказательства теоре-
мы, реализуется на формулах, узлы которых задают оп-
тимальное покрытие (связь решеток узлов оптимальных
формул численного интегрирования с оптимальными упа-
ковками была выявлена в [229]). Однако узлы оптималь-
ной квадратурной формулы не совпадают, вообще гово-
ря, ни с центрами оптимального покрытия, ни с центра-
ми оптимальной упаковки. В этом нетрудно убедиться
па примере
IWI = 1Ы1о, К = {х = (х1, х2) I 0 С х\ х2 С 1},
т2 <7V<(m + I)2,
где т — целое. А
Замечание 5. Доказательство (2.7) в [419], так
же как и вывод других известных оценок 0П < 0п, обла-
дающих нужным нам свойством у 07*~1при не-
конструктивны, т. е. не дают способов построения по-
крытий, на которых получаемые оценки реализуются. А
Замечание 6. При построении квадратурных фор-
мул для класса F с 1Ы1 = 11x11г при малых п может ока-
заться целесообразным, выбирая узлы интегрирования,
использовать так называемую главную решетку первого
типа Вороного Г™. Эта решетка задает наименее плот-
ное решетчатое покрытие пространства при п 5 [223]
й обладает другими экстремальными свойствами [56,
222]. Д
§ 3. Последовательно-оптимальные и оптимальные
на один шаг алгоритмы численного интегрирования
Наряду с изучением квадратурных формул и пассив-
ных алгоритмов численного интегрирования, немалое
внимание уделяется и построению последовательных
(адаптивных) алгоритмов (их называют еще квадратур-
ными процессами, алгоритмами с автоматическим выбо-
ром шага). Из работ в этом направлении упомянем [15—
§ 3. АЛГОРИТМЫ ЧИСЛЕННОГО ИНТЕГРИРОВАНИЯ
101
18, 22, 50, 67, 69, 74, 135-137, 332, 333, 339, 341, 356,
368, 379, 380, 382, 413-417, 421, 441, 442, 444]. В этом
параграфе изучается одномерный случай. В § 5, 6 полу-
ченные результаты применяются для вычисления инте-
гралов от функций, зависящих от нескольких перемен-
ных. Всюду в данном параграфе и до конца главы пред-
полагается, если явно не оговорено противное, что
S (/) = J / (я) dx и В = R (см. п. 1 § 1 гл. 1), т. е. рас-
к
стояние между элементами 5(/i), 5(/2) есть |5(/1) —
-5(/2)|.
1. Оптимальные по точности алгоритмы для классов
функций, удовлетворяющих условию Липшица. Рассмот-
рим функциональный класс
F = VI щ v^[a, Ь]}, (3.1)
предполагая, что информационными вычислениями явля-
ются вычисления значений интегрируемой функции. Этот
класс есть частный случай класса Fp при К = [а, Ь],
р(щ v) = Wu— pH =М\и — v\. Из теоремы 2.1 немедленно
получаем известный результат [22, 27], состоящий в том,
что составная квадратурная формула прямоугольников с
равноотстоящими узлами, т. е. формула, узлы и коэффи-
циенты которой составляют векторы
TV / f ~ I О Ъ CL /Q Д Т 1 \ I) d |
^0 = i й + 3 2уу •> + (2N 1) 2уу у,
N [Ь — а b — (3*2)
Ро = ~7Гр
оптимальна на классе (3.1), причем
(b—a)/(2N)
mN = N § M\x\dx = M (b~N a} . (3.3)
-(b-a)/(2JV)
С помощью теоремы 1.4 легко получить выражение
для центральной итоговой операции и наилучшей гаран-
тированной после завершения информационных вычисле-
ний точности. Для рассматриваемого класса имеем
«Pin = max {yj — М | х — х} | },
ф2х (л) = min {у} + М | х — Xj I },
; = .,N
102
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
₽* (zN) = J у [<jp1W (.г) + ф2м (*)] dx =
а
У- + У-_,
= (*1 — л) У1 + Z — ^-1) ~-~2 3----------------------— xn) yN, (3.4)
3=2
Ь
&n (zn) = J у — 4)114 dx =
a
N
= IT (*1 — a)2 + 4^ 2 K*7 - ^-i)2M2 - (% — l/j-1)2] +
3=2
+ ^-(b-xN)\ (3.5)
и
где предполагается, что а х\ < х% < ... < xN С Ъ.
Равенства (3.4), (3.5) иллюстрирует рис. 3, на кото-
ром наклонные отрезки прямых имеют угловые коэф-
фициенты ±М. Величина (3.4) равна площади фигуры,
Рис. 3. Центральная итоговая операция в задачах интегрирования
и восстановления функций для класса F функций, удовлетворяю-
щих условию Липшица; миноранта <р^ и мажоранта q)2N для
подкласса F(zN)
1
заключенной между графином функции -^(фцуЧ- Фг?/), ко-
торый выделен жирной линией, и осью абсцисс. Величи-
на (3.5) равна площади заштрихованной фигуры.
Вычисляя sup &n(zn) и минимизируя полученную
функцию по xNt легко непосредственно получить (3.3) и
§ 3. АЛГОРИТМЫ ЧИСЛЕННОГО ИНТЕГРИРОВАНИЯ
103
доказать оптимальность х0определенного форму-
лой (3.2).
Тождественно преобразуя правую часть (3.4), убеж-
даемся, что
Уя-
Полученное равенство показывает, что для класса (3.1)'
центральная итоговая операция и квадратурная формула
с оптимальными коэффициентами совпадают. В рассмат-
риваемом случае квадратурной формулой с оптимальны-
ми коэффициентами является составная квадратурная
формула прямоугольников (рис. 4).
Рис. 4. Квадратурная формула с оптимальными коэффициента-
ми — составная квадратурная формула прямоугольников
Для построения последовательно-оптимальных по точ-
ности алгоритмов окажется необходимым решить задачи
отыскания оптимальных алгоритмов на подклассах клас-
са функций (3.1) с фиксированными значениями на одном
или обоих концах отрезка интегрирования [а, Ь]. Реше-
ние этих задач дают следующие две леммы, в формули-
ровках которых хо = а, Zr+\ = b, число информационных
вычислений (вычислений значений интегрируемой функ-
ции) предполагается равным г, а через F обозначается
функциональный класс (3.1). В этом случае T^r+i, yr+i),
F(^o, Уо), F(#o, ^r+i, Z/o, Уг+\) — подклассы класса F, со-
держащие функции с фиксированными значениями со-
ответственно на правом, левом и обоих концах отрезка
интегрирования.
104
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
Лемма 3.1. Алгоритм(хгя, ft* хг+1, уг, у^))^ Аг,
где
„ [ . Ъ — а . гл b — d i/о л\ b & \
XR = [а + 2г + Г а + 3 2г + Г • • • ’ а + (2г — 2г Н- 1 /’
г+1 I
/Г Т \ / \ / \ У j I У j — 1
Р* (х , хг+1, у , Уг+1) = (xt — а)у1 + 2d w — ^-1)-----2----
— центральная итоговая операция, оптимален по точно-
сти на классе F (<rr+i, z/r+i) в множествах всех пассивных
алгоритмов Ат и всех последовательных алгоритмов Ат.
Алгоритм (xrL, [3* (^r0, xrL, у0, уг)) е Лг, где
xL =
9
Ъ — а
2г+1
, а + 4
Ъ — а
2г + Г
b — а \
2г + 1/,
., а 4- 2г
Р* (a, XL, у0, УГ) = 2 С*7 — ^-1) У,+23 1 + (& — Хт) у у
j=l
— центральная итоговая операция, оптимален по точно-
сти на классе F (хо, уо) в множествах всех пассивных ал-
горитмов Аг и всех последовательных алгоритмов Ат,
Наилучший гарантированный результат в обоих слу-
чаях равен ~~ __________
7 4 г 1/2
Доказательство. Рассмотрим функциональный
класс F(xr+i, Уг+i)- Ясно, что подкласс всех функций из
F(xr+\, Уг+\), принимающих в точках х\, ..хг значения
У\, ..., уг соответственно, совпадает с F(zr+1). Поскольку
центральная итоговая операция обладает свойством уни-
версальной оптимальности (см. теорему 4.1 гл. 1 и след-
ствие из нее), достаточно доказать оптимальность xrR.
Применяя к классу F(хт+\, Ут+\) теорему 4.3 гл. 1, полу-
чаем
inf sup 8 (а, /) =
KtAr -fe=F(xr-\-vyr-}-i)
= inf sup inf sup у (£ (/), ₽) =
xr^Xr yr(={yr | F(zr+1)^0}
= inf sup 8r+1(zr+1),
Xr(=xr j/rG{j/r I F(zr+1)7^0}
§ 3. АЛГОРИТМЫ ЧИСЛЕННОГО ИНТЕГРИРОВАНИЯ
105
Далее, согласно (3.5),
г4-1
ег+1 (/+1) = 4г (*i - а)2 + ЙЙ 2 Ito - ^-1)2М2 -
;=2
— (ю — 26-1)'] •
Нетрудно видеть, что
г 4-1
/ Г4~1\ М / \9 I М / \9
max er+1(z xoY + ~Г Zi ^-ih
yr^{yr\F(zr+1)^0} 7 = 2
причем максимум достигается при z/r = (z/r+i, ..., //г-н) .
Таким образом, для отыскания оптимального алгоритма
и наилучшего гарантированного результата остается ре-
шить задачу
г 4-1
М .2 . М ,2
—zi +—2to^min’
7 = 2
t\ + ... + fr+i = Ъ — a, t\ 0, ..., tr+\ 0,
где tj = Xj — Xj-i, / = 1, ..r+1. Решив ее, убеждаемся
в том, что алгоритм (xrR, (3* (ггд, ггг+1, у\ Ун-i)) оптимален
в 4Г, а наилучший гарантированный результат (т. е. зна-
чение минимума в рассматриваемой задаче на условный
х М (Ь — а)2 „
экстремум) равен —г . Оптимальность этого ал-
горитма в Аг следует из теоремы 5.2 гл. 1.
Точно так же доказываются утверждения леммы, от-
носящиеся к классу F(xQ, z/0). А
Лемма 3.2. Алгоритм (xrc, р* (;г0, хс, ^4-1, Уо, у\
Уг+1)) (= А*, где
Т ( . Ъ — а , о b — а , Ъ — а\
Хс = + 7ТТ, а + 2-^-рр .. .,а + г — j,
Р* (^0, хГ^ хг+1, Уо, УГ, Уг+1) = 2 to — xi-i) 3 2 7-1
3=1
— центральная итоговая операция, оптимален по точно-
сти на классе F(x0, хг+\, у о, yr+i) в множествах всех пас-
сивных алгоритмов Ат и всех последовательных алгорит-
мов Аг. Наилучший гарантированный результат равен
v defJ_ (6-°)2M2-(;/,.+1-yo)2
r==W г-1-1
106
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
Доказательство. Так же, как и при доказатель-
стве леммы 3.1, убеждаемся, что для отыскания резуль-
тата, гарантированного алгоритмом (х\ 0* (xQ, хг, хг^ъ у0,
уг1уг^.1)) на классе F (хо, xr+i, уоч Ут+\), необходимо мак-
симизировать по ут е {z/?|F(#o, хт, хт+\, уо, ут, Ут+1)^0}
функцию
ег_|_2 fa, х .» хг+1ч Уо> У > У г+1) =
г+1
= 1м 2 - ^-1)2М2 - (у} - г/,-1)2].
j=l
Легко видеть, что
max ег+2 (.г0, хт, хг+1, у0, уг, ут+1) <
2/r£{yr I f(xq ,хг,хг+1 ,yQ, yr,yr+ i)^ 0}
г+1
С max 2 Ifo — ^-i)3M2 — (уз — Уз-i)2] =
/ERr j=sl
r+1 , Ч2
= М.У(т--т. V 1 (Уг+1-Уо)
4 ' 3 3 1 ’ 4М г 4- 1
Подставляя в полученное неравенство хг = хс, выводим,
что алгоритм (хгс, В* fa, xrc, xr+1, у0, yr, yr+i)) гарантирует
результат не хуже vr.
Зафиксировав центральную итоговую операцию 0* fa,
хг, хг.±ъ У о, У , Ут+1), выберем произвольный алгоритм хт е
е Хт (см. (3.10) гл. 1). Покажем, что с его помощью
нельзя гарантировать результат лучше vr. Положим
^(^) = i/o + (z/r+i - Уо) (х-а)/(Ъ-а). Пусть xr = (xh ...
..., хг) есть вектор, получаемый по формулам (3.2) гл. 1
при применении алгоритма хг к функции g. Результат,
гарантированный алгоритмом (хг, 0*), не лучше, чем
Ег_|-2 (*^0» Я ^r+h Уоч g (^i)» • • • ч S (Хг)ч Уг+1) —
“ 4-и 2 [te - ^->)=«= - О
L ,
xj—i)2 —
Уг+1-УоН (Ь-Д)2 _ „
Ъ — а / I гЧ-1 т*
§ 3. АЛГОРИТМЫ ЧИСЛЕННОГО ИНТЕГРИРОВАНИЯ
107
Тем самым доказана оптимальность алгоритма (хгс, р* (т0,
хс, ^r+i, УОч УГч Ут+У) е Аг в множестве Аг, а следователь-
но, и в множестве Аг. А
Заметим, что при доказательстве леммы 3.2 нельзя,
как при доказательстве леммы 3.1, воспользоваться тео-
ремой 5.2 гл. 1, поскольку класс F(xq, xr+i, у о, yr+i) при
уо^=Ут+\ несимметричен. Однако лемму 3.2 можно было
бы доказать с помощью теоремы 5.1 гл. 1 (по не ее
следствия).
2. Последовательно-оптимальный по точности алго-
ритм для класса функций, удовлетворяющих условию
Липшица. Приступим к построению последовательно-оп-
тимального алгоритма. Для упрощения обозначений по-
ложим К = [0, 1]. Согласно определению последовательно-
оптимального алгоритма, на первом шаге выбор х\ мож-
но проводить в соответствии с любым оптимальным в
алгоритмом. В нашем случае, в силу (3.2) ,
х± е
1 3
2N' 2N'
2N — 11
2N J
(3.6)
причем любую из точек (3.6) можно выбирать в качест-
ве точки первого информационного вычисления.
Пусть i вычислений в точках х\, ..., Xi произведено,
#ii, ..., Хи — перестановка чисел xi, ..., х{ в порядке воз-
растания, у и = f(xu) ,7 = 1, ...,
Так как значения, которые может принимать инте-
грируемая функция f в точках произвольного из отрезков
—1, XjjJ (j = 1, ..., i 1, x-iq 0, Xi1)? не изме-
няют для рассматриваемого функционального класса
множеств допустимых значений интегрируемой функции
в точках остальных отрезков (эти множества ограничены
минорантой ф1г и мажорантой ф2г), т° Для отыскания
предписываемой последовательно-оптимальным алгорит-
мом точки xi+\ очередного вычисления достаточно опти-
мальным образом распределить оставшиеся N—i вычис-
лений по отрезкам \xit j-1, rrj, найти оптимальные пас-
сивные (они же оптимальные последовательные) алго-
ритмы для функциональных классов, соответствующих
этим отрезкам, и принять за xi+\ любую точку любого
из этих алгоритмов.
Пусть оставшиеся N — i информационных вычислений
распределены так, что на отрезке fe.j-i, х^] предписы-
вается провести Yij вычислений, / = 1, ..., i + 1, и на каж-
дом из отрезков применяется оптимальный алгоритм.
108
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
Наилучшие гарантированные результаты для классов с
фиксированным значением функции на одном из концов
О , м
отрезка находятся по лемме 3.1 и равны —£"п -|_|/2
для класса, соответствующего отрезку i[^o, Яд], и
М (1-^н)2
"4"п--1/2’ для класса> соответствующего отрезку
[хи, ^г>г+1]. Наилучшие гарантированные результаты для
классов с фиксированными значениями на обоих кон-
цах отрезка находятся по лемме
I (ха ~ хг,1-1Ум2 - {уа ~ . = 2
3.2 и равны
4М------------Гаранти-
рованный результат в ситуации / при заданных ni, ...
..., Пг+i равен, очевидно, сумме иаилучших гаранти-
рованных результатов для классов, соответствующих от-
резкам j-i, 7 = 1, ..., i + 1, т. е. равен
м xti , 1 v (xij ~ xij-i)2 м2 ~ (у» ~ ytj-i)2 ,
4 'их-|-1/2 «j + 1
М (1 ~ хц)2
+ 4 • ni+1 + l/2 *
Для оптимального распределения оставшихся N—i
вычислений необходимо найти набор nJ, ...,тг|+1, реали-
зующий минимум в задаче отыскания определенной ра-
венством (6.7) гл. 1 величины
En (гг) =
п
М
min -j-’----—77К-
.,^^^{0,1,2,...} L + 1/2
г+1
2 n7-=N-i
J=1
n> + 1 ^4*ni+1 + l/2
(3.7)
После того как решение п[, ..., найдено, за xi+1
можно принять любую из точек сетки, образованной
объединением определенных в леммах 3.1 и 3.2 оптималь-
ных наборов точек xrR при г = xG при г = п}г
§ 3. АЛГОРИТМЫ ЧИСЛЕННОГО ИНТЕГРИРОВАНИЯ
109
/ = 2, . .., г, при г — соответствующих отрезкам
[Xij-x, xij], j = 1, ..i + 1, т.е.
U [ U 1 +
V=2 I
{1 —
Хц + 2Zbj_L^-:-
+ 2n?+i + 1
%i = 1, ..n-+1|,
i = l, (3.8)
(если n} — 0, то предполагается, что соответствующий
набор пуст).
Леммы 3.1, 3.2 и последующие построения дают пол-
ное доказательство следующей теоремы.
Теорема 3.1 [441]. Алгоритм (3.6), (3.8) последова-
тельно-оптимален по точности на классе (3.1) с [а, &] =
= [0, 1]. А
Замечание. Все последовательно-оптимальные ал-
горитмы, в соответствии с определением, в любой ситуа-
ции наилучшим образом используют всю имеющуюся ин-
формацию о функции /, т. е. наилучшим образом «нака-
зывают» природу, в распоряжении которой находится
«выбор» /, за совершенные «ошибки»—выбор не наи-
худших для вычислителя возможностей. Однако последо-
вательно-оптимальные алгоритмы (3.6), (3.8) неравно-
ценны в том смысле, что создают разные возможности
для ошибок природы. Так, легко убедиться, что алгоритм
rri = l/(2^, x2 = 3/(2N), ..., xN = (2N — V) / (2N) после-
довательно-оптимален по точности. В то же время
этот алгоритм вообще не дает природе возможно-
стей совершать ошибки, которые можно было бы ис-
пользовать. Поэтому имеющимся в формулах (3.6), (3.8)
произволом желательно разумно распорядиться. Можно,
например, выбирать точку случайно равновероятно из
набора допустимых точек (3.6), (3.8). Другой способ
состоит в выборе из набора допустимых точек (3.6),
(3.8) точки, ближайшей к точке, указываемой оптималь-
ным на один шаг алгоритмом соответственно на первом
и (f+l)-M шаге. Точки xi, xi+\ при f>l, указываемые
оптимальным на один шаг алгоритмом, будут построены
в п. 4 (см. (3.14), (3.15)) . А
110
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
3. Решение вспомогательных задач целочисленной оп-
тимизации. Применяя последовательно-оптимальный ал-
горитм на каждом шаге, приходится решать нелинейную
задачу целочисленной оптимизации на отыскание 8n(z’).
Эти задачи имеют вид
Vi А-
У-’ '—> min ,- пг, ...,пот(= {0,1,2, ...},
2 Щ — р, (3.9)
J=1
где Aj > 0, aj = 1/2 или a, = 1. Разработанный в [354]
(см. также [224, гл. 4] и [255, гл. 7]) алгоритм решения
опирается на свойство выпуклости функций <рДп,) =
= Aj/ (п, + а^) и предназначен для решения задач вида
(3-10)
2 Tij = р, nj е {0,1, ..., р}, j = 1, ..., т,
где для всех к = 1, ..., р — 1, j = 1, ..., m,
^(к)-^(к-1)^^(к+^-^(к1 (3.11)
Очевидно, что условия (3.11) выполнены для выпуклых
на отрезке [0, р] функций <pi, ..., фт. Эти условия явля-
ются аналогом определения выпуклости для функций
целочисленного аргумента. Задача (3.9), следовательно,
является частным случаем задачи (3.10). Отметим, что
целочисленным задачам минимизации суммы выпуклых
функций посвящены, помимо [354], работы [398, 424,
453] и др.
Для обоснования алгоритма решения задачи (3.10)
нам потребуется произвести некоторые простые преобра-
зования. Учитывая, что
- Фд (^ - 2)) + ... + (фД 1) - ф, (0)) + фДО),
можем записать
2фД^)= 2 'Яан+С, (3.12)
j—1 KKm.njX)} Ь—1
§ 3. АЛГОРИТМЫ ЧИСЛЕННОГО ИНТЕГРИРОВАНИЯ
111
где
ajk = ф> (/г) — q>j (к — 1), 7 = 1, .. •, m, к = 1, ..., p,
m
C=£<Pj(O).
3=1
Итак, исходная задача (3.10) сводится к минимиза-
ции двойной суммы (3.10), содержащей р элементов
матрицы (ajh). Принимая во внимание неравенства (3.11),
которые можно переписать в виде
ап aj2 < ... ajp, j = i, ..., тп,
нетрудно видеть, что для решения задачи (3.10) доста-
ли ••• aip \
точно из матрицы I...........I выбрать р наименьших
\ат1 • • • ampJ
элементов. При этом, если в у-й строке выбрано щ эле-
ментов, / = 1, ..., тп, то (ni, ..., пт) — решение задачи
(3.10). Проведенное рассуждение, по существу, доказы-
вает следующее утверждение.
Лемма 3.3 (критерий Гросса [354]). Выполнение
условия
max [фу (Пу) — фу (пу — 1)]
< min [ф, (n; + 1) — q>; (n^)]
необходимо и достаточно для того, чтобы вектор (ni, ...
..., nm), удовлетворяющий ограничениям задачи (3.10),
(3.11), был ее решением.
Доказательство. Приведенное условие, с учетом
неравенств (3.11), показывает, что наибольший из выб-
ранных в матрице (а^) = (ф;(/с) —ф^(/с — 1)) элементов не
превышает наименьший из невыбранных элементов, т. е.
выбрано действительно р наименьших элементов. А
Запишем теперь, пользуясь оператором := (присво-
ить значение) следующий алгоритм.
Алгоритм 1.
Шаг 0: п, := 0, / = 1, ..., тп.
Шаг s (1 sр): ц: = arg min (фу (ny + 1) — фу (пу)),
п».- = ии + 1. Д
Учитывая (3.11), убеждаемся, что совершив р раз
шаг st выберем тем самым р наименьших элементов в
112
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
сумме (3.12) и, следовательно, получим решение зада-
чи (3.10).
Если известно хорошее начальное приближение ft?,.. .
т
.. ., n°mi иj = р,то может оказаться разумным исполь-
J=i
зовать несколько иной алгоритм.
Алгоритм 2.
Шаг 0: щ := ft®, / = 1, . .., т.
Шаг 1: pi : = arg min (cpj (ftj + 1) — cpj (ftj)),
v : = arg max (cpj (n}) — <p,- (n, — 1));
3={j |
если фДпц+1) —фи(пм)^ cpv(rcv) —(pv(nv—1), то СТОП,
в противном случае выполнить операторы ftg:= п^+1,
nv := nv — 1 и повторить шаг 1. А
Нетрудно видеть, что алгоритм 2 также позволяет
выбрать р наименьших элементов из матрицы (aj/t), т. е.
получить решение задачи (3.10). Начальное приближе-
ние для задачи (3.9) можно получить, используя, реше-
ние целочисленной задачи предыдущего шага или округ-
ляя до целочисленного решение задачи
(3.13)
• • • >
т
А = 2 /Aj.
3=1
что точное значение интеграла
которое нетрудно получить в явном виде:
* ]ЛХ (Р + а) .
=-----~а--------
где
т
а = 2
3 = 1
Равенство А = 0 означает,
1
j j(x)dx уже найдено и решать задачу (3.13) не нужно,
о
Нетрудно заметить, что при i = 1, т. е. при выборе
точки Х2, решение соответствующей задачи целочислен-
ной оптимизации тривиально и
(1 3 2N —11 ( .
%2 *= |2АГ’ 22V’ ’ • ‘ ’ 2N
§ 3. АЛГОРИТМЫ ЧИСЛЕННОГО ИНТЕГРИРОВАНИЯ
ИЗ
4. Оптимальный на один шаг алгоритм для класса
функций, удовлетворяющих условию Липшица. Получен-
ные результаты позволяют также без труда построить
алгоритм, обладающий свойством оптимальности на один
шаг. Для оптимального выбора точки х\ достаточно ре-
шить задачу минимизации гарантированного после пер-
вого шага результата (3.5):
ei (z’) = ^^1 + ^(1— ж1)3 min, е 1°> !]>
откуда
ху = 1/2.
(3.14)
Для отыскания точки xi+i при i^i необходимо ре-
шить задачу (3.7) для N— i = l. Иными словами, пам
следует решить задачи (3.9) при zn = i+l, р = 1, А1 =
= М^/4, cci = 1/2, Лг+1 = 7И(1 — ^г-)2/4, агЧ1 = 1/2, Л; =
= [(^-^(5-1)2#2-(^-z/f>J-i)2]/(47l/), а;=1, 7 = 2, ...
..., Z, или (3.10) с q)j(nj) = Д-/(п5 + <аД. Применяя для ее
решепия алгоритм 1, в соответствии с (3.8) получаем
хи
3 А
xi,k—l + xik
2
*ii + i(l—*«), если ----------7
если
если
АУ A
—------------J- =-- m,
+ ai %
----------=m, /c<={2, .. .,z},
+ a/t ak x *
Л-Li
zn,
(3.15)
где m = min {Л/(1 + a>) — Л/а4- Если формула
(3.15) определяет точку xi+\ не единственным образом, то
выбирается любая из возможных точек. Тем самым опти-
мальный на один шаг алгоритм построен.
Теорема 3.2. Алгоритм (3.14), (3.15) оптимален
на один шаг на классе (3.1) с [а, Ь] = [0, 1]. А
5. Последовательно-оптимальный по числу информа-
ционных вычислений алгоритм для класса функций, удов-
летворяющих условию Липшица. Пусть точность е фик-
сирована. Опишем вкратце процесс построения алгорит-
ма, последовательно-оптимального по числу информаци-
онных вычислений на классе (3.1) при [а, &] = [0, 1].
В силу теоремы 5.2 гл. 1 для рассматриваемого функ-
ционального класса наилучший гарантированный в мно-
жестве всех последовательных алгоритмов результат
8 А. Г. Сухарев
114
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
совпадает с наилучшим гарантированным в множестве
пассивных алгоритмов результатом mN, причем, согласно
(3.3), mN = М/ (iN). Поэтому
Ne = min {N | e} = min pV 7Г • (3-16)
В соответствии с определениями оптимального по числу
информационных вычислений алгоритма (см. п. 13 § 4
гл. 1) и последовательно-оптимального по числу инфор-
мационных вычислений алгоритма (см. п. 4 § 6 гл. 1)
выбор точки Xi последовательно-оптимальным алгорит-
мом определяется формулой (3.6) при N = Ne.
Если после i шагов (/>1) в ситуации z* критерий
остановки (4.20) гл. 1 не выполнен, то с помощью фор-
мулы (3.7) определяется число N^z*) (см. (6.9) гл. 1)
и далее по формуле (3.8) находится точка xi+i- При
этом есть решение задачи (3.7) при N =
= Ne(zi)+ i. Тем самым построение алгоритма завершено.
Пусть точность е по-прежнему фиксирована. Выде-
лим из множества последовательно-оптимальных по' чис-
лу информационных вычислений алгоритмов один алго-
ритм, которому соответствуют тривиально решаемые за-
дачи вида (3.9) и который, следовательно, отличается
простотой программной реализации.
Алгоритм определяется следующим условием. На каж-
дом шаге выбирается самая левая точка из множества
точек, допустимых для последовательно-оптимального по
числу информационных вычислений алгоритма.
Таким образом (см. (3.16)),
4 4
X1 = 2N~S = 2[М/(4е)] ' (3-17)
Для отыскания точки Х2 необходимо решить задачу ви-
да (3.7)
М *1
4 * пг + 1/2 +
«1, П2еЮ, 1, 2,
м (1 — xj)2
4 ’ п2 + 1/2
П1 + П2 = N,(zl).
Покажем, что (0, Ne(z')) — решение задачи. Для этого
достаточно, в силу леммы 3.3, проверить справедливость
неравенства
М ,
4 xi
3/2
М „ М ,, ,2 М ,, х2
4 Х1 4 С1 *1) 4 С1 ®i)
JVe (z1) _ 1/2 *
§ 3. АЛГОРИТМЫ ЧИСЛЕННОГО ИНТЕГРИРОВАНИЯ
115
Справедливость этого неравенства следует из (3.17) и
(6.12) гл. 1. Итак, в соответствии с (3.8) и условием,
определяющим алгоритм,
гь 1 ~ Я.
Хп = х\ + 2----------.
2 22Ve(z1) + l
(3.18)
(Можно убедиться, что N&(z}yj = Na— 1, и поэтому =
= 3/(22Ve).)
Предположим, что х\ < < ... < и решение за-
дачи вида (3.9):
М 4 , 1 V (^-Wm2-(^-^-i)2 ,
4 'п, + 1/2 + Ш п7. + 1
1 1 1 J = 2 3
п±, ..{0,1, 2, ..х),
;=i
имеет вид (0, ..., О, A^E(z!“1)). В этом случае, согласно
определению алгоритма,
1 — я 1—1
— ^г—1 4" 2
2М?-1) + 1
(3.19)
и в силу леммы 3.3
М n М 2 М „ х2 М ,,
4 *1 4 Х1 4 (1—Хг-1) 4 (1—Хг-1)
“3/2 17Г- + “ Njj-1)-!/! f <3-20)
i [to - ^-i)2^2 - to - ^--i)2 ]
2
4^ [to - ^-1)2л/2 - to - ^-i)2] if ~ *i-i)2
1 NR(zi~1) + 1/2
- 4/f , 7 = 2, ...ti- 1. (3.21)
ATe (z’-i) -1/2 ' 1 1 1 V ’
116
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
Докажем, что решение задачи
М_ _ , 1 V
4 ‘ гь + 1/2 4М п . 4- 1
1 j = 2 J
М_ (*~*г)2
+ 4 ' ni+1 + 1/2
min , (3.22)
ni...ni+i
i+1
.ni+1e {0,1, 2, ...}, Snj = JV£(z’),
J=1
имеет вид (0, ..., 0, A^e(z2)). При этом, естественно, пред-
полагается, что 2Ve(zz)^l (противное означает, что тре-
буемая точность 8 уже достигнута). Для доказательства
достаточно, в силу леммы 3.3, проверить справедливость
неравенств
3/2 1/2 ^лГе(?) + 1/2
ш [(^’ •b-i)2^7 ~ ^’-1)2 ]
2
С1-**)
; (и1) —1/2
4м1(х1 ^-i)2^ (yi *0-1)2]
1
>V(1-^)2 vQ-^)2 ,_2
^2Уе(?) + 1/2 ЛГе(аО —1/2’ 7
Перепишем (3.19) в виде
^(i-xi)2=4(i-^-i)2[
7Ve(zi-1)-l/2\2
^е(^-1) + 1/2/ ’
Отсюда, учитывая, что /V8(z" *)> /V8(z‘) + 1 > 2 (см. (6.12)
гл. 1), получаем
М / Л (z‘ 1/2\
М , М , VI ------С—_)
— (1 - — (1 ~ < О ,гг—1) (2-1)+1/2 ) <
JVe (?) + 1/2 (z{) - 1/2 ^(Ne (z1"1) - 1/2) (N& (z^1) - 3/2)^
§ 3. АЛГОРИТМЫ ЧИСЛЕННОГО ИНТЕГРИРОВАНИЯ Ц7
л/ м
- —(1-W — (1-*г-1)2
(N& (г1’1) - 1/2) (TVE (г4”1) + 1/2) Ne (z*-1) + 1/2
- 4 А г~Х (3.25)
(второе неравенство в цепочке проверяется непосред-
ственно). Теперь справедливость (3.24) при j = 2, ...
..., i— 1 и (3.23) следует из (3.21) и (3.20) соответст-
венно. Остается проверить (3.24) при j = i.
Имеем
Tt1 - xi)2 — (1 - *i)2 —г (! - xi-1)2 (^e(zi-1)-l/2) <
Ne (z*) + 1/2 ~ Ne (z{) - 1/2 (N&(z^+l^)2 (Ne (?-!)-3/2р'
M 9
^-“4 (1— xi-l) M , >2^,
~^2(lVe(zi-1)+l/2)2 “ 8
<— 8^7 [(*« — *i-i)2AP — {yi — Z/i-i)2] =
4> [(*» - Xi-1)271/2 - (!/ i - ^i-1)2 ]
— 2
4M [(*1 ~ ^i-l)2-^2 — (2/j ~ у г-1)2 ]
где первое неравенство совпадает с первым неравенством
в (3.25), второе неравенство проверяется непосредствен-
но, а справедливость первого равенства следует из (3.19).
Тем самым справедливость неравенств (3.23), (3.24)
установлена и, следовательно, доказано по индукции, что
для любого i такого, что Л^8(2г)>1, решение задачи
(3.22) имеет вид (0, ..., 0, 7Ve(z1)). Поэтому, в соответ-
ствии с формулой (3.8) и определением алгоритма,
“Ь 2
i~~Xi
2/Ve(?) + l
(3.26)
При этом, согласно формуле (6.9) гл. 1, число 2Уе(гг*)
118
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
определяется следующим образом:
7Уе (зг) = min N
Мх\
“2“
j=2
— (УЗ ~ Уз-iT.
м С1-*»)2 1
4 ' N + 1/2 ^ef
Нетрудно видеть, что
4 С1—*)2
6 _ X._^M2 _(y,_у._1)2J
j=2
2*
(3.27)
Таким образом, полностью доказана следующая
теорема.
Теорема 3.3. Алгоритм (3.17), (3.26), (3.27) по-
следовательно-оптимален по числу информационных вы-
числений на классе (3.1) с (а, Ь] = [0, 1]. А
Как отмечалось, преимущество построенного алгорит-
ма — простота программной реализации и малые затра-
ты машинного времени на «внутренние потребности» ал-
горитма. В то же время при использовании алгоритма
«природа» имеет меньше возможностей для «совершения
ошибок» по сравнению с возможностями, имеющимися
при использовании других последовательно-оптимальных
алгоритмов (см. по этому поводу замечание к теореме
3.1).
6. Оптимальные и последовательно-оптимальные алго-
ритмы для класса монотонных функций. Развитые мето-
ды позволяют решить задачу построения последователь-
но-оптимальных алгоритмов и для классов совершенно
иной, нежели класс (3.1), природы.
Рассмотрим класс
F = {f\f не убывает на [а, Ь], f(a) = #o, f(b)=yN+\} (3.28)
монотонных на отрезке [а, 6] функций с фиксированны-
ми значениями на концах отрезка, предполагая, что ин-
формационными вычислениями являются вычисления
значений интегрируемой функции. Заметим, что класс
(3.28) содержит не только негладкие функции, как класс
(3.1), но также и разрывные функции. Этот класс изу-
чался в работах [67, 372].
§ 3. АЛГОРИТМЫ ЧИСЛЕННОГО ИНТЕГРИРОВАНИЯ
119
Пусть значения функции / из класса (3.28) вычис-
лены в точках xi, xN, х\<Х2<.. .<xN, и оказа-
лись равными У1, у2, ..., yN соответственно. Очевидно,
что функции (рис. 5)
<p1W(rr) =
Уз-i
.yN+l
при
при
Xj-1 х < х$,
X —
Уо
1Уз
при
при
X^Xj,
T2N ОО —
1
где xq — a, xN+\ = b, / = 1, ..., 2V+1, являются соответ-
ственно точной минорантой и точпой мажорантой для
функций j^F(zN) = {f F\f{xj\= yh j = i, ..., N}. Через
Рис. 5. Центральная итоговая операция в задаче интегрирования
для класса F монотонных функций; миноранта ср^ и мажоранта
для подкласса F(zN)
миноранту и мажорапту легко выражается центральная
итоговая операция (см. замечание 3 к теореме 1.4):
ъ
₽* (zN) J у (fPlN (х) + <₽2N (ж)) dx =
а
N+1
= 2 - ^-1) у 2 ~г • <3-29>
Величина Р* (zN) равна площади фигуры, составленной
из 2V+1 трапеций и заключенной между жирной линией
120
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
на рис. 5 и осью абсцисс (такая же площадь заключена,
очевидно, между осью абсцисс и графиком функции
j (<Pin + Ф2Л7))- Таким образом, центральная итоговая опе-
рация совпадает с составной квадратурной формулой тра-
пеций с узлами xq = а, Х[, ..xN, xN+\ = b. Гарантиро-
ванная точность в ситуации zN выражается по формуле
(см. замечание 3 к теореме 1.4)
ъ
ZN (zN) = J 4 ~ ‘P1N dX =
а
Ат+1
- <3-30)
;=i z
Эта величина равна площади заштрихованной на рис. 5
фигуры.
Теорема 3.4. Алгоритм а0 = (х%, (3*) при Xq =
= (4, ...,Д),4 = а + j(b-a)/(N + 1), j = l, N
(т. е. составная квадратурная формула трапеций с рав-
ноотстоящими узлами Хц = а, х°, . .., х^, = b) опти-
мален по точности в множествах всех квадратурных фор-
мул с N узлами, всех пассивных алгоритмов AN и всех
последовательных алгоритмов AN. Наилучший гарантиро-
(yN+1 - Уо) (Ь - а)
ванный результат равен-----2 (дг i~j--•
Доказательство. Для произвольного последова-
тельного алгоритма a = (xN, Р)^^ (см. (3.11) гл. 1) и
произвольной реализуемой при применении алгоритма а
ситуации zN (см. п. 2 § 3 гл. 1) имеем
sup 8 (а,/)^ sup 8 («,/) = sup | S (f) — p (zN) |
/SF f(=F(zN) jf=F(zN)
> inf sup | S (/) — P | = 4 f sup 5 (/) — inf S (/)'] =
№fSp(zN) VeF(ziV) /eF(:K) J
= 4(S(4>2n)-S(<Pin))’ (3.31)
b
где, напомним, S (/) = J f(x)dx. Пусть xi, ..., xN — точки,
a
полученные при применении (см. (3.2) гл. 1) алгоритма
а к функции g(x) = уо + (z/n+i — Уо) (х — а)/(Ь — а). Что-
бы не усложнять обозначений, будем считать, что xi
§ 3. АЛГОРИТМЫ ЧИСЛЕННОГО ИНТЕГРИРОВАНИЯ 121
Х2 < .. • xN. Положим yj = g (xj), / = 1, ..N. Тогда
S (cp22v) — $ (<Pin) =
N+l 7V4-1
= 2 (jjj — Уз-1) (^—^3-1) = S (g (Xj)—g te-1)) (^—^-1) =
J=1 J=1
*^+1 - y0 V1 V2 (^+1 - y0) <6 - a)
- bTT-a Z w—X3-1) дЛИ >
;=i
где для проверки неравенства достаточно решить мето-
дом множителей Лагранжа следующую задачу на услов-
ный экстремум:
N+l N+1
2 («£; — ^j-i)2 —> min, (•£> — £j-i) = b — а.
3 = 1 3=1
Отсюда и из (3.31) получаем, что для произвольного
sup е (а, /) > (3<32)
Тем самым мы показали, что никакой алгоритм а AN
(^+i - уо)
не позволяет гарантировать точность лучше —9 , Д7 , 4 ч - X
Uv “г 1;
Х(Ь — а).
Остается показать, что алгоритм <%0 = 0*) гаран-
тирует эту точность. Действительно,
sup 8 (а0, /) = sup sup 8 (а0, /) =
= sup sup I 5 (/) — 0* (xo, yN) I = sup £jv (xq, yN) =
vN /еДхоЪ")
-sudVm-? }Уз~Уз-! . (VN+r-y^tb-a)
— Zd \хз XJ-1) 2 “ 2(7V + 1) ’
где верхняя грань по yN берется всюду по множеству
{yN | F (х^, yN) 0); первое равенство справедливо, так
как F = U F(xQ,yN), во втором равенстве использова-
ны определения критерия е(ао, /) и алгоритма ао, третье
основано на соотношениях (4.3) и (4.4) гл. 1, четвер-
тое— на формуле (3.30), наконец пятое — на определе-
нии точек Xq,, х^, ..., х^х xx+t. Из (3.32) и (3.33) еле-
122
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
дует, что алгоритм ао оптимален в множестве всех шн
следовательных алгоритмов AN, а значит, и в множествах
всех квадратурных формул с N узлами и всех пассивных
алгоритмов Наилучший гарантированный результат
в каждом из этих множеств алгоритмов равен результату
(Ъ-а)
----’ гаРантиРоваиномУ оптимальным алго-
ритмом ао. А
Отметим, что взамен только что изложенного можно
было бы дать доказательство, опирающееся на теоре-
мы 4.2 и 5.1 гл. 1.
Построение последовательно-оптимального алгоритма
происходит по той же схеме, что и для класса (3.1)
функций, удовлетворяющих условию Липшица. На пер-
вом шаге выбирается любая из N точек равномерной сет-
ки, определяющей в соответствии с теоремой 3.4 опти-
мальный алгоритм:
{. Ъ • (I . q b а । лг ® 1 /о о /\
а + ту 1’ а % 4" Й • • •»л уу 1(3.34)
Пусть I информационных вычислений в точках xi, ...
..., Xi произведено, хц, ..., Хц — перестановка чисел
#1, ..., Xi в порядке возрастания, уц = /(хц), / = 1, ..., i,
XiQ = a, xit i+i = Ъ, ум = т/о, Уi, i+i = */n+i- Пусть оставшиеся
N — i вычислений распределены так, что на отрезке
Xij] предписывается провести п5 вычислений, j —
= 1, ..., i +1, и на каждом из отрезков применяется оп-
тимальный алгоритм. Наилучший гарантированный ре-
зультат при фиксированном числе п, информациопных
вычислений для класса, соответствующего отрезку [xit j-i,
Хц], с фиксированными значениями на обоих концах от-
резка, согласно теореме 3.4, равен---9 , ,
\nj -> 1/
7 = 1, ..., Z+1. Гарантированный результат в ситуации
zi при заданных п\, ..., ni+\ равен, очевидно,
2 1+1 (УУ~Ум-1)(*у
2(п
7=1 '
дим о решить
. Для выбора точки xi+\ необхо-
задачу вида (3.9) отыскания величины
En (z1) =
n
min
i+l
2 nj=N—i
2=1
2(п. + 1)
§ 3. АЛГОРИТМЫ ЧИСЛЕННОГО ИНТЕГРИРОВАНИЯ
123
Задачу можно решить с помощью описанных в п. 3 ал-
горитмов. После того как решение п\, ..., пг^1 найдено,
за xi+\ можно принять любую из точек сетки, образован-
ной объединением определенных в теореме 3.4 оптималь-
ных наборов точек для классов, соответствующих отрез-
кам j-i, Xij], j = 1, ..., i + 1, т. e.
*+i (
a:i+1 g= и Uij-i + kj
3=1 I
kj = i,
i=l, — i (3.35)
(если nJ = 0, то предполагается, что соответствующий
набор пуст). Тем самым доказана следующая теорема.
Теорема 3.5. Алгоритм (3.34), (3.35) последова-
тельно-оптимален по точности на классе (3.28). А
Оптимальный на один шаг алгоритм строится по той
же схеме, что и для класса (3.1). Представим этот алго-
ритм в следующем виде:
^Ч-,= *><. (3'36>
м
где номер к определяется соотношением
(yik— max {(yij—yi,j-i)(xij—3t:ij^1)}.
Нетрудно построить также и алгоритмы, последова-
тельно-оптимальные по числу информационных вычис-
лений.
7. О требованиях к модели вычислений, обеспечиваю-
щих возможность построения по единой схеме последова-
тельно-оптимальных алгоритмов. Начнем с того, что ука-
жем еще два функциональных класса, для которых по-
следовательно-оптимальные алгоритмы можно построить
по той же схеме, что и для классов (3.1), (3.28).
В [67] с помощью этой схемы последовательно-опти-
мальный алгоритм построен для класса неубывающих на
отрезке [а, 6] функций, удовлетворяющих на этом отрез-
ке условию Липшица с константой М.
В [177] последовательно-оптимальный алгоритм по-
строен для класса функций, удовлетворяющих условию
—М\ (u — v)^ f(u) — f(v) ^M2(u — v),
где и, v е [а, &], и < р, Мi > 0, М2 > 0.
Все перечисленные классы в совокупности с рассмат-
риваемой в моделях вычислений информацией о функ-
ции обладают некоторыми общими особенностями. Это,
424
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
прежде всего, классы функций одной переменной. Ин-
формационные вычисления состоят в вычислении значе-
ний функции (и, быть может, ее производных) в точках
области определения. Определяющее свойство модели,
которое позволяет свести задачу построения последова-
тельно-оптимального алгоритма к совокупности задач по-
строения оптимальных алгоритмов, состоит в следующем.
Для любой реализуемой ситуации z\ любых /1,
eF(z'), Хц (ащ, ..., Ха — перестановка чисел х\,...
..., Хг в порядке возрастания) должно быть
(Л (х), X [Xi ?-_1, . ..
' ' „Л 4 , eFz’. (3.37)
У X K\[xitj^ Xij] 7
Иными словами, варьирование функции из F^z*), не вы-
водящее за пределы F^), па каждом из отрезков
Xij] можно производить независимо.
Сформулированное свойство позволяет построить при
заданных вычислительных ресурсах оптимальный алго-
ритм для каждого из классов, соответствующих отрезкам
fc.j-i, х^ а затем, решив задачу оптимального распреде-
ления вычислительных ресурсов, построить последова-
тельно-оптимальный алгоритм.
Условие (3.37) выполнено для многих моделей вы-
числений, список приведенных выше примеров можно
продолжить. Так, это условие выполнено, если F —
= b], М) (см. п. 4 § 2 гл. 1). и в модели принята
эрмитова информация порядка г, т. е. информационному
вычислению в точке х соответствует оператор
*(/) = (/(*), /'(*), ... (3.38)
Таким образом, задача построения последовательно-опти-
мальных алгоритмов сводится к задачам построения опти-
мальных алгоритмов для классов Wrx ([a, b], М) с фик-
сированной информацией (3.38) в одном или обоих кон-
цах отрезка интегрирования.
§ 4. Численный эксперимент
В данном параграфе, основанном на работах [72, 74],
мы опишем некоторые особенности реализации алгорит-
мов из § 3. Основное внимание будет уделено численным
экспериментам с алгоритмами и анализу полученных ре-
зультатов. Важная роль численного эксперимента обу-
§ 4. ЧИСЛЕННЫЙ ЭКСПЕРИМЕНТ 125
словлена тем обстоятельством, что зачастую на практике
алгоритм, оптимальный в том или ином смысле на неко-
тором функциональном классе F, приходится применять
к функции / F, о которой априори известно больше, чем
просто факт ее принадлежности к классу F. Например,
о функции / может быть известно, что она монотонна,
принимает заданные значения на концах отрезка, т. е.
принадлежит к классу (3.28), и, кроме того, является
кусочно-гладкой на данном отрезке. Теоретическое ис-
следование и использование возможностей, предоставля-
емых такой дополнительной информацией, часто затруд-
нены, так же как и теоретическая оценка эффективно-
сти алгоритмов, построенных для класса F, на определяе-
мом дополнительной информацией подклассе класса F.
Поэтому естественно прибегнуть к численному экспе-
рименту. Кроме того, алгоритм, полученный в рамках не-
которой модели вычислений, может быть модифицирован
па основе тех или иных эвристических соображений для
применения в условиях, не укладывающихся в исходную
модель. Здесь при исследовании эффективности модифи-
цированного алгоритма также не обойтись без численного
эксперимента.
1. О конкретных реализациях алгоритмов интегриро-
вания. Перечислим конкретные версии алгоритмов из § 3,
для которых будет проведен сравнительный анализ эф-
фективности.
Последовательно-оптимальные алгоритмы (ПОА), рас-
сматриваемые ниже, реализованы в варианте, когда па
каждом шаге из набора допустимых выбирается точка,
ближайшая к точке, указываемой оптимальным па один
шаг алгоритмом (ООША). Рассматриваются также
ООША и «приближенный» последовательно-оптимальный
алгоритм (ППОА). При выборе очередной точки 11ПОА
задача (3.9) заменяется задачей (3.13), решение которой
округляется до целочисленного. Перечисленные алгорит-
мы сравниваются с оптимальным пассивным алгоритмом,
который для изучаемых в § 3 функциональных классов
оптимален также и в множестве всех последовательных
алгоритмов и именуется ниже оптимальным алгоритмом
(ОА).
Все эти алгоритмы реализованы применительно к двум
функцональным классам: классу (3.1), обозначаемому
в этом параграфе через и классу (3.28), обозначаемо-
му через F %.
126
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
Далее, все алгоритмы реализованы в двух вариантах:
варианте с фиксированным числом информационных вы-
числений и варианте с фиксированной точностью.
Наконец, при интегрировании функций из класса
пользователь может не знать (или знать неточно) кон-
станту М. В модифицированных вариантах алгоритмов
(МПОА, МООША, МППОА) константа М адаптивно оце-
нивается в ходе вычислений способом, который будет опи-
сан ниже. Конечно, модификации уже не обладают свой-
ствами оптимальности исходных алгоритмов.
2. Способы оценки константы Липшица. Опишем при-
меняемый в модифицированных вариантах алгоритмов
способ оценки константы М (этот способ предложен в
[238]) и некоторые другие способы.
После i вычислений в точках #i, ..., Xi (г > 2) текущее
значение константы М в перечисленных в п. 1 модифи-
цированных вариантах алгоритмов интегрирования пола-
галось равным
Мг = о7?г, (4.1)
где
R. — max
Xj~Xk
j^k
— максимальная из абсолютных величин первых разде-
ленных разностей, а о — некоторый коэффициент «осто-
рожности». Пусть хи, ..., Хи — перестановка чисел х\, ...
..., Xi в порядке возрастания, xitj~\ < х^\ < xi5. Тогда
Afi+1 = max о f ,
[ xi+l “ xi,j—l
о I (4.2)
*i+l “ Xij J
и, таким образом, вычисление оценок для константы Лип-
шица ие приводит к большим затратам машинного вре-
мени. Именно так проводилась оценка константы в мо-
дифицированных алгоритмах.
Способ (4.1) оценивания константы Липшица приме-
ним также и в многомерном случае, надо только в выра-
жении для Ri заменить 1^ — xh\ на r(aj, xk), где г —
расстояние. При этом, однако, формулой (4.2) восполь-
зоваться уже нельзя, и на (£ + 1)-м шаге приходится
вычислять не две, a i первых разделенных разностей. Me-
§ 4. ЧИСЛЕННЫЙ ЭКСПЕРИМЕНТ
127
тод (4.1) можно дополнить процедурой уточнения, про-
водимой через s шагов, т. е. па (&+1)-м шаге при 1 =
= s, 2s, 3s,... Процедура состоит в том, что после i шагов
выбирается некоторая разделенная разность (/(х,) —
— /(^л))/г(^ь ^л), отрезок [xj, rrj разбивается па несколь-
ко равных частей точками щ, ..., um, вычисляются значе-
ния ..., f(um) и за оценку М принимается величина
Mi = о max [Ri,
г (Ur X.)
I/К)-Ж) I
г (М2, uj ’
| / (xfe) ~ / (М I '
r(umi “m-1) ’ r(xK’um)
Номера /, к целесообразно выбирать из условия макси-
мальности \j(Xj) —j(xk)\/r(xj, xh) среди модулей тех
разделенных разностей, для которых описанная процедура
уточнения еще не производилась.
Используя и иные эвристические приемы оценки кон-
станты М, применимые как в одномерном случае, так и
в случае нескольких переменных. Так, в [153] предложе-
но, наряду с величинами Ri, вычислять среднее прира-
щение разделенной разности за i шагов = — 7?г)/
/(£ —2) и за оценку константы М после i шагов прини-
мать в случае фиксированного N величину Mi = Ri
+ (N-i)\Ri.
Можно вместо среднего арифметического Д7?г прира-
щений Rj — Rj_h j = 3, ... i, вычислять их среднее геомет-
рическое 8Ri и за оценку М принимать после i шагов
величину Mi = XiRi^Ri)1^^, где ъ— некоторый поправоч-
ный коэффициент.
Еще один эвристический прием состоит в следующем.
После i шагов строится некоторая аппроксимирующая
функция 7?(г) такая, что R{i)(J)~Rj, j = 2, ..., i, и за
оценку М после i шагов принимается либо величина
o7?(i)(7V), либо, при соответствующем выборе R{i\— вели-
чина lim Я(г) (Z). Можно выбирать, например, R(z) (t) = ajt +
i->oo
+ bi, вычисляя коэффициенты сц <0, bi с помощью мето-
да наименьших квадратов, либо по последним т значе-
ниям ..., Ri \m — некоторое фиксированное чис-
ло), либо по значениям 2?li/rnj, ..., Ri. В этом слу-
чае за оценку константы М принимается величина bi.
Допустимы различные модификации и комбинации
описанных методов. Отметим лишь, что может оказаться
128 ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
целесообразным применять такого рода приемы лишь па
первой стадии вычислительного процесса — на первых
N\ шагах, не изменяя полученную оценку на последую-
щих шагах.
Наконец, возможно использование априорных оценок
константы М. Например, можно до начала информацион-
ных вычислений оценить норму градиента функции /.
Описанные приемы оценки константы Липшица при-
менимы не только для задачи интегрирования, но и для
других задач численного анализа.
3. О методике тестирования вычислительных алгорит-
мов. В настоящее время применяются различные мето-
дики тестирования вычислительных алгоритмов. Можно
использовать наборы тестовых функций, либо составлен-
ные на основе тех или иных прикладных задач [332, 339,
341, 368], либо содержащие функции, которые традицион-
но считаются «трудными» для интегрирования [333].
Наш подход близок к подходу, развиваемому в рабо-
тах [2, 11], где предлагается проводить тестирование на
случайных выборках функций из некоторого семейства
с последующим осреднением полученных результатов по
выборке. Хотя рассматриваемые нами тестовые семейства
функций не связаны непосредственно с конкретными
прикладными вопросами, при их выборе учитываются осо-
бенности задач, часто встречающиеся па практике.
Тестирование алгоритмов было направлено на дости-
жение следующих целей.
Во-первых, проверить работоспособность алгоритмов
на достаточно представительных семействах тестовых
функций.
Во-вторых, экспериментально исследовать эффектив-
ность алгоритмов на таких классах (тестовых семействах)
функций, для которых не удается провести теоретическое
исследование.
В-третьих, экспериментально проверить соответствие
концепции последовательной оптимальности требованиям
организации реальных вычислительных процессов. При
этом сравнивались результаты применения ПОА, ППОА,
ООША и ОА.
Перейдем к описанию случайного механизма построе-
ния непрерывных кусочно гладких (с т изломами) функ-
ций, из которых составлялись тестовые серии. Зафикси-
руем набор гладких функций ..., /р, заданных на отрез-
ках Zj, lv соответственно. Эти функции будем далее
§ 4. ЧИСЛЕННЫЙ ЭКСПЕРИМЕНТ
129
называть базовыми. Процесс построения каждой тестовой
функции разбивается на три этапа.
I. Внутри отрезка интегрирования [а, Ъ] = [0, 1] выби-
рается т случайных равновероятно распределенных то-
чек ^i, ..., tm, которые располагаются в порядке возраста-
ния координат: 0 = to < t\ < ... < tm < tm+\ = 1.
II. Для каждого i = 0, 1, ..., т равновероятно среди
чисел 1, ..., р выбирается номер базовой функции а
затем случайная точка в отрезке
III. Тестовая функция определяется следующим
образом:
/ (х) = di + fh. (& + х — ti) — Д. (g|), x g= [ti, Zi+1],
где i последовательно пробегает значения. О, 1, ...,
do = 0, di = j(ti') при Z>1. При этом случайный выбор
Zi е Ihi осуществляется с таким расчетом, чтобы точка
+ ti+\ — ti лежала в отрезке Z/4.
При построении тестовых функций из класса F\ в ка-
честве базовых функций были выбраны три начальных
отрезка ряда Фурье длины 4 со случайными коэффи-
циентами:
4
2 (aii cos кх + bh sin кх),
1=1
где ak, bk — независимые реализации равномерно распре-
деленных па отрезке [0, 1] случайных величин.
При построении тестовых функций из класса F% в ка-
честве базовых были выбраны пять возрастающих функ-
ций: ех на отрезке [—5, 2], In х на [0.3, 5], х2 на [0, 2],
—i/х на [0.5, 5], sin я на [—л/2, л/2].
4. Результаты численных экспериментов. Будем обоз-
начать оценочную точность (гарантированную после N
вычислений точность &N(zN), определяемую формулой
(4.15) гл. 1) через 8оа, Споа и т. д. в зависимости от того,
какой алгоритм используется.
В табл. 2 приводятся результаты численных экспери-
ментов для класса F%. Каждый результат получен осред-
нением соответствующей величины по 50 случайным ис-
пытаниям, т. е. по результатам применения соответству-
ющих алгоритмов к 50 функциям тестовой серии случай-
но генерируемым описанным в п. 3 методом.
Первый показатель таблицы — отношение 8Поа/соа;
второй — процент числа испытаний в серии, в которых
ПОА дал более высокую точность, чем ОА; третий — про-
9 А. Г. Сухарев
130
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
цент числа испытаний, в которых ПОА дал не менее вы-
сокую оценочную точность, чем ППОА; четвертый — от-
ношение 8поа/бооша; пятый — процент числа испытаний,
в которых 8пОА < 6ооша«
Отметим, что фактическая точность интегрирования
оказывается выше оценочной примерно па два порядка.
Таблица 2
Номер пока- зателя т N
1 1 15 31 51
1 .88 .87 .84 .80
2 3 80 90 100 98
3 98 86 76 68
4 .99 .98 .97 .97
5 50 70 94 90
1 .84 .76 .70 .63
2 8 92 100 100 100
1 3 80 70 66 68
4 1.01 .99 .98 .98
5 34 60 74 84
1 .85 .70 .63 .62
2 20 92 100 100 100
3 88 64 62 52
4 1.02 1.01 1.00 .99
5 34 38 46 74
При тестировании алгоритмов, гарантирующих задан-
ную точность, отмечены такие же тенденции, как и в слу-
чае фиксированного N. Эффект экономии числа узлов при
Таблица 3
е Класс
f2
0.02 13; 10; 0.77 18; 14; 0.82
0.01 25; 16; 0.62 36; 26; 0.74
0.005 50; 31; 0.61 72; 51; 0.73
2.5Х10"4 100; 59; 0.59 144; 97; 0.69
1.25Х10"4 200; 114; 0.57 288; 188; 0.67
6X10-5 416; 235; 0.56 584; 379; 0.65
фиксированном 8 от использования ПОА, ППОА по срав-
нению с ОА особенно нагляден. В табл. 3 приводятся
показатели, характеризующие эффективность ППОА и
ОА для различных значений 8 при применении этих
§ 4. ЧИСЛЕННЫЙ ЭКСПЕРИМЕНТ
131
алгоритмов к двум кусочно-гладким функциям (по одной
функции из классов A, Fz), случайно генерируемым опи-
санным в п. 3 методом. Для функции из Fi выбрано зна-
чение т = 3; для функции из Fz — значение т = 20.
В каждой клетке табл. 3 первое число — это коли-
чество информационных вычислений (узлов) О А, гаран-
тирующее достижение заданной точности; второе — число
вычислений, которое потребовалось ППОА для достиже-
ния той же точности; третье число равно отношению
второго к первому.
Более полные данные численных экспериментов мож-
но найти в [74].
5. Выводы. На основании проведенных численных
экспериментов, результаты которых частично приведены
и прокомментированы в п. 4, можно сделать следующие
общие выводы.
I. Все исследуемые алгоритмы зарекомендовали себя
как достаточно эффективные и надежные методы числен-
ного интегрирования. Важной особенностью немодифици-
рованных алгоритмов является способность установить
гарантированную оценку для погрешности вычисления
интеграла или вычислить интеграл с заданной погрешно-
стью при условии, что имеющаяся информация об инте-
грируемой функции позволяет безошибочно определить
принадлежность ее к одному из функциональных клас-
сов Fi, Fz и тем самым выбрать соответствующий алго-
ритм интегрирования.
II. Для алгоритмов с фиксированным числом инфор-
мационных вычислений (узлов) N с увеличением N про-
является и растет преимущество в точности ПОА над ОА
и ООША (табл. 2). Дополнительные исследования, ре-
зультаты которых не отражены в таблице, показали, что
при достаточно большом числе узлов такое преимущество
наблюдается в 100 % случаев. Та же тенденция четко
просматривается для алгоритмов, обеспечивающих задан-
ную точность 8. С уменьшением погрешности е ярко
проявляется, например, преимущество ППОА над ОА в
числе узлов (табл. 3).
III. При не слишком больших значениях N ясно про-
сматривается преимущество ПОА над ППОА (табл. 2).
С ростом N это преимущество постепенно сходит на нет,
что и понятно, так как решение целочисленной задачи
(3.9) все точнее приближается решением ее непрерывного
аналога (3.13).
9*
132
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
Выводы II и III, как нам представляется, достаточно
убедительно показывают на примере задачи численного ин-
тегрирования, что концепция последовательной оптималь-
ности правильно и достаточно полно отражает специфику
организации реальных вычислительных процессов. Так,
огрубление задачи (3.9), фигурирующей в процессе по-
строения ПОА, точнее, замена задачи (3.9) ее непрерыв-
ным аналогом (3.13) ведет к устойчивому возрастанию
погрешности интегрирования. Показательным является
также превосходство ПОА пад ООША, особенно если
вспомнить, что ПОА (так же, как и ППОА) реализованы
в варианте, когда на каждом шаге из набора допустимых
выбирается точка, ближайшая к точке, указываемой
ООША.
Для модифицированных алгоритмов наблюдаются те
же основные тенденции, что и для ^модифицированных,
но они выражены слабее. Оценочная точность модифици-
рованных алгоритмов на одних и тех же функциях
падает с увеличением коэффициента «осторожности» о,
что объясняется происходящим при этом завыше-
нием оценки для константы. Однако задание малого о
рискованно: так, в проведенных экспериментах при не-
большом (7 -ь 15) числе узлов, фактическая точность
МПОА при о = 1. 1 оказывалась хуже оценочной пример-
но в 10 % случаев, в то время как при о =1.5 — лишь
в 3 %.
Подчеркнем в заключение, что ПОА целесообразно
применять в первую очередь для интегрирования сложно-
вычислимых функций, поскольку комбинаторная слож-
ность (затраты на «внутренние потребности») ПОА су-
щественно больше, чем у ОА. Кроме того, если число
информационных вычислений N достаточно велико, то
следует использовать ППОА, а не ПОА, так как комби-
наторная сложность последнего выше.
§ 5. Оптимальное вычисление повторных интегралов
В этом параграфе, основанном па работе [442], рас-
сматривается задача вычисления повторных интегралов
от функций двух переменных, однако полученные резуль-
таты легко переносятся на случай произвольного числа
переменных.
§ 5. ОПТИМАЛЬНОЕ ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ 133
1. Задача повторного интегрирования. Рассмотрим
класс F' функций, зависящих от двух переменных и удо-
влетворяющих по каждой из них условию Липшица:
F' = {gl lg(^, и) — g(x', и) | < М\х — х'\,
!g(rr, и) — g(x, и) | Р\и — и'\, х, и, х\ и' €= [0, 1]}.
В силу леммы 2.4 гл. 1 этот класс можно задавать с по-
мощью некоторой квазиметрики. Если g<= F', то функция
1
f (х) = J g (я, й) du принадлежит классу
о
F={f\ ^М\х-х'\, х,х'^[0, 1]},
поскольку
1
I / (*) -- / &') К j* I g (*, ll) — g и) I du < МIX — х' |.
О
Если вся информация о функции g состоит в том, что
g Ff, то / е F — это вся информация о /. В самом деле,
любая функция из F представима в виде интеграла от
функции из Ff.
Наша цель — построить оптимальные алгоритмы вы-
числения двойного интеграла I <5 S (я, и) dx du как нов-
[0,1]2
торного, т. е. используя равенство
1
J J g (х, и) dx du = J / (х) dx,
[о,И2 0
Важная особенность задачи заключается в том, что
точное вычисление значений функции /, вообще говоря,
невозможно. Алгоритмы оптимального вычисления значе-
1
пий f(x) = У# (я, и) du с любой наперед заданной точ-
о
ностыо были построены в § 2, 3.
Отметим, что результаты данного параграфа примени-
1
мы не только в случае, когда f(x) = §g(x,u)du, но и в не-»
о
которых других случаях, когда необходимо найти интег-
рал от функции /, значения которой можно вычислить с
любой наперед заданной точностью, например, в случае
134
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
/ (х) = max g (х, и) (вопросы оптимального вычисления
и
значений таких функций рассматриваются в гл. 4).
Результаты данного параграфа непосредственно обоб-
щаются на тг-мериый случай. Действительно, построив ал-
горитм интегрирования функции двух переменных, мож-
но вычислить интеграл от функции трех переменных по
формуле
1
J J \ h(x,u, t) dx da dt = J / (<r) dx,
[o,ii3 °
где
f (x) = [ У h (x, u, t) du dt,
[o,U2
и T. Д.
2. Оптимальный пассивный алгоритм повторного ин-
тегрирования. Вопрос об оптимальном пассивном алгорит-
ме повторного интегрирования сводится к вопросу . об
оптимальном интегрировании функции, значения которой
вычисляются приближенно.
Пусть v — число точек, в которых вычисляются зна-
чения функции /; х\, ..., Ху — сами эти точки, 0 х\ <
< Х2 < ... < Ху 1; yi, ..., z/v — полученные приближен-
ные значения; 6j, ..., 6V— погрешности вычислений, т. е.
i = l, ...,v (5.1)
(в этом случае говорят о вычислениях с неопределенными
погрешностями). Используя (5.1) и условие Липшица,
получаем для произвольного х е [0, 1]
Уг — бг — М\х — Xi\ С /(#) Уг + 6i + М\х — Хг |, I = 1, . . ., V,
или, что то же самое,
<Prv (х) def max {yi — б| — М I X — Xi I / (я)<
min {г/i + б» + М | х — xi |} <p2v (#), яе[0,1].
Нетрудно убедиться, что ерь и q?2v являются соответствен-
но точной минорантой и точной мажорантой1) в ситуации
*) Использование для точной миноранты и точной мажоранты
тех же обозначений, что и в случае вычислений без погрешностей,
но приведет в дальнейшем к каким-либо неясностям.
§ 5. ОПТИМАЛЬНОЕ ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
135
W* def (xv, 6V, yV) C XV = (X\, Xv), yv = (yi, yv), 6V =
==(6i, ..6V), т. e. для функций из F, удовлетворяющих
условию (5.1).
По аналогии со случаем точных вычислений (см. (3.4))
функция
1
Р* («/) = j -у [<:P1V + <P2V dx =
о
= Х1У1 + Уг~-г+1 + (1 — Xv) yv (5.2)
1=2
определяет центральную итоговую операцию. Будем счи-
тать, что величина (5.2) принимается в ситуации wv за
приближенное значение интеграла. Максимальная воз-
можная погрешность в ситуации wv есть
V
&V (^) 2Й f [<p2V (*) — <P1V («)] ^.Х =
b
V Г 9
= 4 Ы + 26А+2 4J1-'
Cl Ci
-W (Si-W ,
2М 2М Т
1=2
+ (6j + e^-i) Zj 4" + 26vzv+1
где
zi = #i; Zi = Xi — Xi-\, 1 = 2, ..., v; zv+i = 1 — xv.
Пусть N — общее число информационных вычислений,
т. е. вычислений значений функции g; Пг — число значе-
ний g, используемых для вычисления приближенного зна-
чения уг функции / в точке х^ i = 1, ..., v. В силу (3.3)
6f=P/(4n<). Будем считать N, у фиксированными, а
..., nv, х\, ..., xv — переменными величинами, подле-
жащими определению. Заменяя ni, ..., nv, xi, ..xv на
6i, ..., 6V, 2i, ..., zv+i, ограничения на переменные можно
записать в виде
21/6г = с, 8i > 0, i = l,
i=l
v+l
X zi = 1, zl>0, 2v.|.i>0, (5.3)
1=1
|6j — 6i-i.l < Mzt, i = 2, ..., v.
136
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
В первом равенстве т. е. первое ограничение
v
есть попросту по-иному записанное условие 2 пг = N.
г=1
Последняя серия ограничений запрещает бесполезные вы-
числения, гарантируя, что каждое информационное вы-
числение дает новую информацию. Действительно, если,
скажем, 6г — 6г--1 ^Mzi для некоторого f^{2, ..., v), то
нетрудно видеть, что в наихудшем случае Уг-\ = Уг вычи-
сление значения функции / в точке не дает новой ин-
формации.
Отметим, что в ограничениях (5.3) и в последующих
построениях мы не учитываем целочисленности ..., nv.
Из неравенств (5.1) и того факта, что / F, следует,
что вектор yv должен удовлетворять ограничениям
li/i-z/i-il sSAfZi + fii-i + Si, i = 2, V. (5.4)
Следующее определение естественным образом рас-
пространяет определение оптимальности из п. 1 § 4 гл. 1
(см. также теорему 4.3 гл. 1) на случай приближенных
вычислений.
Вектор (ггр, 6о) (в совокупности с итоговой операцией
(5.2)) назовем оптимальным по точности на классе F'
пассивным алгоритмом повторного интегрирования при
фиксированных N, v, если
sup 8V (zg, 6q, yv) = min sup 8V (xv, 6V, yv),
yv yv
где x\ 6V, yv удовлетворяют условиям (5.3), (5.4).
В дальнейшем мы откажемся от предположения о
том, что v фиксировано, и найдем оптимальное значение vo.
Ясно, что
sup 8V (х\ 6V, yv) = 8V (x\ 6V, (0, ..., 0)) co (x\ 6V) =
yv
Mzi
~~2~
Mzi + 26-lHjl +
i=2
+ (6j + 6^—1) Zi
(6i-A-i)2
2M
+ +
и, таким образом, задача состоит в отыскании величины
• / V cV\ V eV
minco(^ ,6 а также xQ, о0, при которых минимум дости-
xV,6V
гается.
§ 5. ОПТИМАЛЬНОЕ ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
137
Отбросим временно ограничения
Z1 > 0, Zv+l>0, |бг — 6i-ll < MZi, i = 2, ..., v.
Легко видеть, что
min со (zv, 6V) = min \Mz\ + 26^ +
, V Г Mzi (fii'-fij-!)2 , ,s , я Ч/г1 я^2
+ ~~2 2M-----(*1 + $1-1) %i -|- Mzv+! +
1=2 L
+ 26vzv+1 =
где
{Iv^“1 1
, Zy-j-i) 2 zi = 11«
I 1-1 J
V \2 v
M + 2^6i -4v26? ,
1=1 J 1=1
причем минимум достигается при
Z« 1 I 6~61 z0 = A .
1 2v + M ’ 1 v "* M ’
Z°+1= 27 +
S-6V
M
6
1=1
Следовательно, min о (xv, 6V) достигается при =
x*v
i
= (x[,..., x®) c xi = 2 ZJ, i = 1,. • • • t v. Имеем
3 = 1
Г V "
min co (xv, 6V) = 7-Г7- min min (M + 2v6)2 — 4v V 62 ti
XV,6V &>v/c 6v.,.,8v>o L isl
(5-5)
где
V V
2 4"= c’ 2 fit=vfi
1=1 1=1
(ограничения zi > 0, zv+i > 0, 16« — Si-11 < Mz{, i = 2, ...
..., v, временно отброшены). Неравенство вклю-
чено в число ограничений по той причине, что для сов-
138
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
v
1
местимости ограничений > 0, ..., 6V > О и
*
V
2 6г = v6 необходимо и достаточно, чтобы выполнялось
г~1
неравенство
min
6 ,.;., &уЗ> о
V
2 1/б^с
г=1
Для отыскания (5.5) рассмотрим сначала задачу оты-
скания
max 2 $ ПРИ 2 т- = 2 = v®- (^.б)
г=1 г=1 * гя1
Выпишем для задачи (5.6) функцию Лагранжа и ее пер-
вые два дифференциала:
V V V
^ = 2б1-х2-г-н2бь
г=1 г=*1 * г«1
v . v .
dL = 2 I 26i + 4 - И) = 2 (2~ #)
Точка 6q = (б?, ..., б°), доставляющая максимум в (5.6),
должна быть решением системы
26? — jx6i = — %, i = 1, ..., v, 2 УТ = 2 Si = v6-
i=l i г=1
Уравнение 2я3 — [iz2 = — К имеет не более двух поло-
жительных корней а и 0, 0 < а 0. Пусть б? = ... —
= б£ = а, 6^4-! = ... = б° = 0. Чтобы установить, явля-
ется ли 6q точкой максимума, рассмотрим квадратичную
форму
k v
d?L=(2~ Д)2 w + f2-#! 2 w
\ а / i=l \ Р / i=k+l
§ 5. ОПТИМАЛЬНОЕ ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
139
при
-0.
Последние равенства могут выполняться лишь в случае,
если выполнено одно из двух условий
2 d$t = 0, а = |3;
i=i
2 = 0, 2 = 0, а < р.
i=l i=/i+l
(5.7)
Учитывая, что 0 < а р и ос, р — корни уравнения 2я3—
— [хх2 = — %, получаем
2а2р2 ? 2% = ? а (а + р) - 2р2
а + (3’ а3 а(а + Р)
9 2К _ 9 Р (а + Р) - 2а2 п
Р3 Р (а + р)
Поэтому для того, чтобы в точке 6о достигался макси-
мум, необходимо выполнение одного из двух условий:
а = р или ос <р, к = v — 1 (в противном случае квадра-
тичная форма d2L при соблюдении любого из условий
(5.7) была бы положительно определенной или неопреде-
ленной и, следовательно, точка 6^ не могла бы быть
точкой максимума). В обоих случаях необходимые усло-
вия максимума имеют вид
—= е, (v — 1) ос + Р = v6, 0 < сс < р.
Полагая а = б — у, p = 6+(v—1)у, 7 > 0, убеждаемся,
что
7(б) = 27(7=Т) [<v-2>(cS~ +
+ /(v - 2)2 (сб — v)2 + 4сб (v - 1) (сб - v)]
V — 1 ,
есть положительный корень уравнения _ у
+ б + (V — 1) V — °’
140
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
Таким образом, задача (5.5) сводится к вычислению
величины
. . /лч . М , M6-v(v-l) ?2(6)
min i|) (6), где гр (6) = +------м ’
d>v/c 40 1VJ
Нетрудно проверить, что т|/' (6)<0 при 6>v/c, поэтому
минимум достигается при 6 = v/c = a = {3 или б = °°.
В первом случае 6? = ... = 6° = б и
/ V cV\ М , V
min со (х , о ) = ---—.
4 ' 4v с
Во втором случае минимум функции co(#v, 6V) по rrv,
6V, удовлетворяющим условиям (5.3), достигается на гра-
нице множества (5.3), т. е. либо Z\ = 0, либо Mzi = 16$ —
— 6г-11 при некотором i е {2, ..., v), либо zv+i = 0. В п. 4
мы докажем, что в данном случае обязательно Mz^ =
= 16г — 6г- J при некотором i {2, ..., v). Это означает,
что соответствующее вычисление значения функции / не
является необходимым, так как оно в наихудшем случае
не дает новой информации. В этом случае, не меняя об-
щего числа информационных вычислений, будем счи-
тать, что число точек в которых вычисляются значения
/, не больше v. Формально можно считать, что в некото-
рых из этих v точек допустимы вычисления с бесконеч-
ной ошибкой. Тем самым мы несколько уточняем данное
выше определение оптимальности, допуская бесконечные
значения 61, ..., 6V.
Объединяя оба случая, получаем
min со ух , 6 } = шш 1-^г + — .
xvj6v \ 47 С /
Легко убедиться, что минимум в правой части достига-
ется при /=где
7 (v) = max {7 I 7 v, 7 (7 — 1) Me) к = NMfP}.
Заметим, что последнее неравенство эквивалентно нера-
венству
Ml (4/) + j/c М/[4 (7 - 1) ] + (7 - 1) 1с.
Заменяя в полученных ранее формулах для xvQ вели-
чины 6V на 6ф, а также заменяя v па получим, что
и / j(v) cj('V)\
оптимальный алгоритм Но >°о ) задается соотноше-
§ 5. ОПТИМАЛЬНОЕ ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
141
НИЯМИ
П _ 1 О _ з о _ 2/ (v) -1
X1 ~ 2j (v) ’ 1 ~ 2/ (v) ’ • • ’ ’ ~ 2j (v)
_ so _ j — 1 Р
— • • • — °j(V) — — — •
В самом деле, отбрасывание ограничений
zi >0, Zv+i^O, |бг — 6{-11 < Mzi, i = 2, v,
в исходной задаче не повлияло на результат, так как
полученная точка минимума удовлетворяет всем ограни-
чениям исходной задачи.
В построении алгоритма C4(v), 8qV)) и состоит основ-
ной результат данного параграфа.
Если фиксируя по-прежнему число N информацион-
ных вычислений, вообще отказаться от фиксации v, то
из проведенных построений следует, что оптимальное чи-
сло vo вычислений значений функции определяется со-
отношением
vo = max {vlv(v — 1)=^ NMjP}. (5.8)
В этом случае оптимальный алгоритм задан формулами
о 1 о д о
*1 = 2^ ^2 = 27;...,^о
ч-1
V V Р
Я° _ _ X» _ о _ о
Oi - • • • - % - с - 47у •
Еще раз обратим внимание на следующее. Во-первых,
говоря об оптимальных алгоритмах, мы имеем в виду
оптимальность в классе алгоритмов повторного интегри-
рования. Во-вторых, в определении оптимального алго-
ритма повторного интегрирования не учитывается дис-
кретность множеств возможных значений для Si, ..., 6V
(иными словами, целочисленность п\, ..., nv).
3. Аналог последовательно-оптмального алгоритма
для задачи повторного интегрирования. В этом пункте
мы покажем, как результаты § 3 по построению последо-
вательно-оптимальных алгоритмов переносятся на случай
вычисления повторных интегралов. При этом будем счи-
тать, что точность 8, которую нужно обеспечить в резуль-
тате вычислений фиксирована.
Найдем сначала число информационных вычислений
А7, гарантирующее при использовании оптимального пас-
142
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
сивного алгоритма повторного интегрирования (в случае
нефиксированного v) достижение точности 8. Учитывая
целочисленность у, следует исходить из (5.8). Мы, одна-
ко, пренебрежем целочисленностью у и N. Тогда опти-
мальное vo находится из условия
М , v . М , /
7------ — ПИП -7— + —
Ч е j>0'4' с
т. е. vo = (NM/P)i,2t a N — из условия
min (о (/о 5V«) = М_ , \ VMP =
Scvo,6vo Ч с 21/jV ’
т. е. N = MP/(&)2, vo = M/(2e). Следовательно, опти-'
мальной точностью, которую следует задавать при вы-
1
числении значений функции / (х) = g (х, и) du, является
о
So = vo/c = 8/2. Зафиксируем эту точность при вычисле-
нии всех значений функции f.
Перейдем непосредственно к построению аналога по-
следовательно-оптимального алгоритма из § 3. Первое
информационное вычисление производится в точке
|J_ 3
Ч’ Ч’
ч-1
ч
Пусть произведено i вычислений в точках х\,..., х^ пусть
ггг1, Хи — перестановка чисел х\, ..., хг в порядке воз-
растания, Уц — {(хц), = Обозначим через р ми-
нимальное число оставшихся вычислений значений функ-
ции /, при котором точность 8 еще может быть достигну-
та. Пусть П1 из р вычислений предстоит произвести на
[О, ям), 722 —на (я/ь #г2), • •72i —на (я^-ь пг+1 — на
(хи, 1], 3 пз = Р- Числа р, 721, . •T2i+i будут определены
М
позднее.
Рассмотрим произвольный из интервалов
7 = 2, ..., f. Мы хотим определить оптимальные точки
#1, . . . , tn., = Xitj~i <С <^2 < • • • < < Xtf =
в которых следует вычислить значения функции /, т. е.
§ 5. ОПТИМАЛЬНОЕ ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
143
точки, реализующие минимум в выражении
Q nyWft-4-i)2
min max 4 ш +
..VTlj /1=1 L
+ 60
(5.9)
где vh = f(tk), к = 0, 1, ..,, nj + 1, So = e/2 — заданная точ-
ность вычисления значений функции /. Функция под зна-
ком минимакса в (5.9) получается как частный случай
из выражения для ev(^v). Ограничения на переменные в
(5.9) выписываются по аналогии с (5.4):
\vh-vk_{\^Я(^-^-1) + 2бо, к = 1, ..., Wj+1.
Легко убедиться в том, что
Xij Xi,j—1
П + 1 £
th = xiJ—l + &
4(^ + 1)
_ (Уу ~ У».7-1)2
4М (п} + 1)
+ 6g 1)"
Рассматривая таким же образом промежутки [0, хц),
(хц, 1], приходим к заключению, что для отыскания оп-
тимальных Hi, ..., ni+\ необходимо решить ту же задачу
целочисленного программирования, что и в случае, когда
значения функции / вычисляются точно (см. (3.7), (3.9)).
Именно, следует найти ni, ..., nf+i, реализующие минимум
в выражении
Г м 41
ШШ -7-» , J/9 +
*+1
S п,®р
J=1 J
, J_ У (*у-Ч,--1)2м2-(Уу-Уи-1)2 ,
+ Ш П; + 1
J=2 3
М (i-^ii)2
4 *ni+1 + l/2
= (0 (р).
+ So
После того как решение найдено, за xi+\ следует принять
любую из точек ..., tn.^ реализующих минимум в одной
из задач (5.9), / = 2, ..., f, или любую из точек, реализу-
ющих минимум в аналогичных задачах для [0, £(+i),
144
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
{хц, 1]. При этом р — это минимальное целое число, для
которого со (р) е.
Подчеркнем, что мы зафиксировали одну и ту же точ-
ность 6о для всех вычислений значений функции /. Мож-
но было бы при определении xi+i рассматривать погреш-
ности вычисления значений как параметры, подлежащие
оптимизации (в пределах каждого из промежутков [0, #ii),
(#ii, Xi2), ..., (хц, 1], как нетрудно показать, все вычисле-
ния следует производить с одной и той же для данного
промежутка погрешностью). Без особого труда можно
было бы сформулировать задачи отыскания оптимальных
погрешностей. Решение этих задач, однако, сильно увели-
чило бы комбинаторную сложность алгоритма вычисле-
ния повторного интеграла, что сделало бы применение
такого алгоритма нецелесообразным. Изложенный подход
позволяет решать задачу многомерного интегрирования
фактически с помощью алгоритма интегрирования функ-
ций одной переменной.
4. Вспомогательное утверждение. В этом пункте мы
дадим доказательство вспомогательного утверждения, ис-
пользованного в построениях п. 2. Введем некоторые до-
полнительные обозначения (сохраняя при этом все обо-
значения п. 2). Зафиксировав произвольное 6V, удовлетво-
ряющее ограничениям
v
2-^- = с, 8i > 0, i = 1, ..., v,
г=1 г
положим
Z=(Z1, ..., Zv+1), со (z) = со 6V),
A = {z<= Sv+1\zi^ai, i = 1, ..., v + 1},
v-J-1
Ai = {zs A\Zi = aj, dA= (j Ait
i=l
где
= Ov+1 = 0, «i = 1 , i = 2, ..., v.
Сформулируем доказываемое утверждение в виде сле-
дующей леммы.
§ 5. ОПТИМАЛЬНОЕ ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
145
Лемма 5.1. Если
min со (z) = со (z*), z* е дА,
z(=A
ТО
Z*G U Л-
г=2
Доказательство. Как было показано в п. 2,
min со (z) = со (z°), где
z(=S-y-|-l
20_± + ^
Z1 — 2v М
z4
1 , 26 —6{ —6{—1
v + М
1 = 2, ..., V,
о _ J, 6~бУ
v+1 2v ф М ’
V
Очевидно,
zj >аг<^М + 2v6>2v61?
zl М + 2v6>2v max {S^-i, 6J, i =2, . .., v, (5.10)
2y+i > av+1 M + 2v6 > 2v6v.
Положив IQ = [i | z® Uf], покажем, что
z* e U A-
i^Io
Действительно, в противном случае
zl > аг при всех i е {i| zf = aj.
(5.11)
(5.12)
Далее, легко видеть, что в силу строгой выпуклости по z
функции со выпуклое множество А не должно иметь
внутренней относительно 5v+i точки, принадлежащей мно-
жеству
В = {z 5v+ilco (z) ^ со (z*)}.
Приходим к противоречию, поскольку z* + %(z° — z*)^B
при 0</Х1ив тоже время точка z* + A(z° — z*) при-
надлежит вследствие (5.12) относительной внутренности
множества А при достаточно малом X > 0. Тем самым
соотношение (5.11) доказано.
Рассматривая задачу вычисления
со (z) = min со (z), z = (0, z2, ..., zv+1) e Sv+li
zeSv+i,zJ.=o
10 А. Г. Сухарев
146
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
по аналогии с (5.10) имеем
Zi > аг •<=> М + 2у8 > (2v — l)max {6г—i, 6J + 6i, i = 2, ..., v,
(5.13)
?v+i > av+i M + 2v6 > (2v — 1) 6v + 6i.
Если z* e Ai, то тем же способом, что и для (5.11), мож-
но убедиться в справедливости соотношения
Z* £ U А,
i<=I
где Т = {i> Hz»С аг}.
/V+1
Предположим, чтои*^Л1\| (J Аг
\ 1=2
(5.14)
Тогда, в силу
(5.11), zj^a* и, в силу (5.10), Af + 2v6^2v6i. С другой
стороны, в этом случае z* = z и в соответствии с (5.13)
при 1 = 2 имеемЛ/+ 2v6 >2v6i. Полученное противоречие
/ V+1 \
показывает, что z*^Ht\ J А • Точно так же убеж-
\1=2 /
(V
U Аг
1=1
Рассматривая задачу вычисления
со (z) = min со (z), z = (0, "z2,
zeSv+i’zi=zv+ifc°
zv, 0) e 5v+u
по аналогии c (5.10), (5.13) имеем
Zi > a» <=> M + 2v6 > 2(v — l)max {6г— i, 6J+ 6i + 6V,
i = 2, v. (5.15 J
/ V \
Предположим, что z*e(A П A+i)\| J A ]. Тогда,
\1=2 /
в силу (5.14), zv+i^0v+i и, в силу (5.43), M+2v6^
C(2v -— l)6v + 6i. G другой стороны, в этом случае z* =
= z и в соответствии с (5.15) при i = у имеем М + 2v6 >
>(2v — l)6v + 6i. Полученное противоречие показывает,
/ V \
что г*^(Л1 Г| А+1)\ U А )• Итак, единственная остав-
\г=2 /
V
шаяся ВОЗМОЖНОСТЬ СОСТОИТ В ТОМ, ЧТО z* G U Al. Д
i=2
§ 6. ВЫЧИСЛЕНИЕ КРАТНЫХ ИНТЕГРАЛОВ
147
§ 6. Вычисление кратных интегралов
с помощью разверток типа кривой Пеано
Рассмотрим задачу вычисления интеграла от функ-
ции / по n-мерному единичному кубу
К = {и = (и\ ип) 1—1/2 < 1/2, f = 1, п}.
Пусть ср: [0, 1] -*• К—однозначное непрерывное отображе-
ние отрезка [0, 1] на К, Тогда при определенных условиях
на <р вычисление интеграла J / (u) du можно точно или
к
1
приближенно заменить вычислением интеграла J/(<P (^)) dx,
о
Такая идея в случае, когда ф — отображение Пеано (см.,
например, [156]), высказана в [51]. Аналогичный способ
редукции размерности при решении экстремальных задач
был применен в [238].
В данном параграфе будет построено отображение фт,
приближающее с точностью не хуже 2-тп по каждой ко-
ординате отображение Пеано ф, и показано, что при до-
1
статочно большом т величина
) / (u) du — J / (ф™ (я)) dx
к о
сколь угодно мала. Способ построения отображения ф?п
отличается от способа [238] лишь в деталях. Однако
структура отображения фт существенно используется при
доказательстве основной в данном параграфе теоремы
6.1, поэтому нам придется воспроизвести здесь некото-
рые из построений [238].
1. Определение отображений ф и <рт. На первом этапе
куб разделяется координатными плоскостями на 2П ку-
бов «первого разбиения» (с длиной ребра, равной 1/2).
Эти кубы нумеруются числами z\ от 0 до 2п — 1, причем
куб первого разбиения с номером z\ обозначается через
&(zi). Каждый из кубов первого разбиения в свою оче-
редь разделяется на 2п кубов второго разбиения (с дли-
ной ребра, равной 1/4) плоскостями, которые параллельны
координатным плоскостям и проходят через середины ре-
бер кубов первого разбиения. При этом кубы второго раз-
биения, входящие в куб A(zi), нумеруются числами z?
от 0 до 2п — 1, причем куб второго разбиения с номе-
ром Z2, входящий в K(zd), обозначается через K(z\,zz).
Продолжая этот процесс, строим кубы любого яг-го
разбиения с длиной ребра, равной 2~т, Будем обозначать
10*
148
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
кубы т-то разбиения через K(z\, ..., zm), при этом
K(Zi)^K(zh z2)=>...=>K(zh z2, zm), 0^z^2n-l,
7 = 1, ..., m.
Осуществим теперь деление отрезка [0, 1] на 2п рав-
ных частей, каждую из которых в свою очередь разделим
на 2П равных частей, и т. д., причем элементы каждого
разбиения нумеруются слева направо числами zj (j —
номер разбиения) от 0 до 2П — 1. При этом промежутки
771-го разбиения, по аналогии с предыдущим этапом, бу-
дем обозначать через k(zi, ..., zm)- Предполагается, что
промежуток k(z\, ..., zm) содержит свой левый конец; он
содержит также свой правый конец, если и только
если z\ = ... = zm = 2n — 1. Длина &(zi, ..., zm) равна,
очевидно, 2-wn.
Определим отображение <р следующим условием:
и = е k(z\, zm)=> K(zi, ..., zm), т > 1],
т. е. точка ср (я) принадлежит всем кубам X(zi, ...,• zm)
таким, что x^k(zi, ..., zm). Существование и единствен-
ность точки ф(я) следует из известного принципа вложен-
ных шаров [127]. В [238] указан способ нумерации кубов
каждого разбиения числами zi, z2, ..., обеспечивающий
непрерывность отображения ср. Будем считать, что в про-
веденном выше построении использован именно этот спо-
соб. Полученное отображение ср и есть отображение Пеа-
но, определяющее известную кривую Пеано.
Переходим к построению отображения фш. Ясно, что
2тп центров кубов ттг-го разбиения образуют равномер-
ную ортогональную сетку в К, причем шаг сетки по лю-
бой координате равен 2~т. Занумеруем узлы этой сетки,
а вместе с ними кубы ттг-го разбиения с помощью одного
индекса i. Для этого занумеруем сначала слева направо
номерами i — 0, 1, ..., 2?nn — 1 все промежутки, составляю-
щие ттг-е разбиение отрезка [О, 1]. Далее, обозначим через
К{ куб К (zi, ..., zm) и через Vi— его центр, если проме-
жуток /c(zi, ..., Zm) получил номер i. При этом, как пока-
зано в [238], кубы Ki и Ki+\ всегда являются смежными,
т. е. имеют общую грань.
Обозначим через точку пересечения отрезка, соеди-
няющего Vi-x и Vi с общей гранью кубов К^ и Kiy i =
= 1, . . ., 2тп — 1, через iv0 — проекцию центра v0 на грань
куба КQ, параллельную общей грани кубов KQ и К1У че-
§ 6. ВЫЧИСЛЕНИЕ КРАТНЫХ ИНТЕГРАЛОВ
149
рез ш2тп — проекцию центра на грань куба K2mn__v
параллельную общей грани кубов и К2тп_2. Рас-
смотрим отображение
^0 + (у0 - №о) *2mn+1, 0 < х <
pi_1 + (^-pi_1)(2’nn^-i +1/2),
фт (^)
v2mn—1 + (^2mn — P2’nn—1) [2тП+1 (x — 1) + 1],
2ТПП + 1 ^== ^=5 1 >
действующее из [0, 1] в куб К. Образ отрезка [(/ —
-l/2)2_mn, (i + l/2)2_?nn] при отображении <pm является
линейным отрезком, соединяющим точки Vi-\ и vit Таким
Рис. 6. Образ отрезка [0, 1] при отображении <рт
образом, {фт(я) Iх е [0, 1]} есть кусочно линейная кри-
вая, последовательно соединяющая центры смежных ку-
бов тп-го разбиения в порядке их нумерации. Нетрудно
видеть, что фт(^) отличается от <р(гг) по каждой коорди-
нате не более чем па 2~ш при любом х [0, 1]. Рис. 6
сответствует случаю п = 2, т = 3.
150
ГЛ. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
2. Основной результат.
Теорема 6.1 {73]. Пусть
\f(x) — f(x')\ М Их — х'И, х, х К, (6.1)
где II • II — евклидова норма. Тогда
Доказательство. Обозначим через р{ прообраз
точки а через qj — прообраз точки w, при отображе-
нии ср™; i = 0, 1, ..., 2mn-1; 7=0, 1, ..., 2mn. Зафиксируем
произвольное i е {0, 1, ..., 2ГПП“1}. Участок ломаной срт,
лежащей в кубе Кь определяется соотношением
_ fa + — — 2mn+1, х е [?», Pil»
фт (•*) - i . 2mn+^ х
9г+1
Сравним интегралы [ f (и) du и ( /(фт(^))^’- В силу
непрерывности f
f /(и)йи = /(^)н(^) = /(^)2"тп,
где у,(АГг) — объем куба К{, ^^К{. В свою очередь,’
Зг+1 Pi Яг+1
.[ / (фт (^)) dx = j f (фт (х)) dx + J /(<pm(z))^ =
= / (Т1г) (Pi - <7i) + /(€i) (gi+l - Pi) = 2-mn"1 [/(71i)+ /О,
где v[i^Ki, ^i^Ki. Отсюда, учитывая (6.1) и тот факт,
что диаметр куба Ki равен 2~m 1/N, получаем
Зг+1
J f(u)du— J / (срто (х)) dx =
«г
= г-”171-112/ (^) - / (ni) - / &) । < з-”1"-1 X
X (| f (?i) - / (т]г) I + | / (Si) - / (?i) I) < 2~mn~mM Vn.
Остается просуммировать полученные неравенства при
г = 0, 1, ..2тп~1. А
§ 6. ВЫЧИСЛЕНИЕ КРАТНЫХ ИНТЕГРАЛОВ
151
Замечание. Если в (6.1) фигурирует произвольная
(не обязательно евклидова) норма в n-мерном коорди-
натном пространстве, то теорема 6.1 останется справед-
ливой, если правую часть в (6.2) заменить на Mdm, где
dm — диаметр кубов тп-го разбиения (метрика, используе-
мая при вычислении диаметра, определяется нормой,
фигурирующей в (6.1)). А
3. Оптимальная квадратурная формула для класса
функций, удовлетворяющих условию Гёльдера. Рассмот-
рим вопрос об интегрировании функции g(^)=/(фт(^)).
В [238] показано, что функция g удовлетворяет на отрез-
ке [0, 1] условию Гёльдера с показателем 1/п:
|g(z)-g(Z) I ^М0|я-я'|1/п, я, я'^[0, 1], (6.3)
где Mq = кМИп. Используем результат §1 для построения
оптимальной на классе (6.3) квадратурной формулы.
Теорема 6.2 (73]. Оптимальная на классе (6.3) квад-
ратурная формула с N узлами задается узлами xf
= fe(2-1/n+ i - 1), i = 1, ..., N, где h = (N - 1 + 2l~l/n)
и коэффициентами Pi = рн = (2~1/n + 1/2) h, p® = . .,
... = Pn-i = ht а гарантированный ею результат равен
Mjp-i-iln ( N _ i + 2i—i/n2)
21/n (1 + 1/n) ’
Доказательство. В силу следствия из теоремы
1.2, наилучший гарантированный результат равен
1
Мо min f min | х — Xi |1/n dx, (6.4)
«!>!•..1] о
а оптимальные узлы находятся из условия реализации
внешнего минимума в (6.4). Положим zi = xi, zt = xi —
i = 2, .N, Zk+i = 1 — Xrt. Тогда
1 *l+z2/2
J min | x — Xi |1/n dx = f | x — x, |1/n dx +
0 xi~zi
N-ixi+xi+d2 “N+ZN+1
+ 2 f | 'x — Xi |1/n dx + J | x — xN |1/n dx =
1=2 Xi-Zi/2 xN-zN/2
N
2l/n2l+l/n+ 2 2i+i/n + 2l/nzl+l/n
“-----------
152 гл. 2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
Минимизируя методом множителей Лагранжа (6.5) при
2V+1
условиях 2 zi = 1 0, i = 1, ..., N + 1, находим опти-
2 = 1
мальные узлы и наилучший гарантированный результат.
Оптимальные коэффициенты, в силу теоремы 1.2, выра-
жаются формулами
^0 „о I Z2 _0 zi zi+l ,. 9 лг ZN , „О
Pi = zi + у, Рг =---g ’ 1=^ • • ">N, PN = ~2 + ^+1,
где zj, ..., Zn+i реализуют условный минимум в (6.5). А
4. Замечание о программной реализации алгоритмов
вычисления кратных интегралов. Можно предложить ряд
алгоритмов интегрирования функций многих переменных,
основанных на замене вычисления [ / (и) du вычислением
к
1
интеграла J / (фт (х)) dx и различающихся способами инте-
о
грировапия функций одной переменной. С точки зрения
простоты программной реализации среди них следует ,вы-
1
делить алгоритм, в котором интеграл J / (cpm (х)) dx нахо-
о
дится с помощью построенной в п. 3 оптимальной квад-
ратурной формулы.
Теорема 6.1 дает в качестве оценки неустранимой пог-
решности любого из указанных алгоритмов величину
МУп2~т. Эксперименты, проведенные на ЭВМ БЭСМ-6,
показали, что время, затрачиваемое на вычисление ср™ (гг)
при всевозможных значениях т и п, лежащих в преде-
лах 1 п 10, 4 С т С 20, составляет сотые доли се-
кунд. Однако выбор очень большого т с целью умень-
шить неустранимую погрешность может привести к тому,
что число 2mn выйдет из диапазона представимых в ЭВМ
чисел. При выборе т в каждом конкретном случае наря-
ду с особенностями задачи следует учитывать и это об-
стоятельство.
ГЛАВА 3
ВОССТАНОВЛЕНИЕ ФУНКЦИЙ
ПО ИХ ЗНАЧЕНИЯМ
В данной главе изучается задача восстановления
функции по ее значениям в конечном числе точек. По-
строены детерминированные оптимальные пассивные
алгоритмы. Показано, что применение последовательных
алгоритмов не позволяет улучшить результат, гарантиро-
ванный в классе всех пассивных алгоритмов. Для случая
функций одной переменной построен последовательно-
оптимальный алгоритм.
,§ 1. Оптимальные пассивные алгоритмы
Задачи оптимального восстановления функции по ин-
формации о ней в конечном числе точек рассматривают-
ся во многих работах. В основном, изучаются различные
классы дифференцируемых [29, 34, 114, 132, 276, 321,
322, 344—346, 392, 393] или аналитических [193, 194,
276, 353] функций. Рассматриваются случаи как точной,
так и приближенной [160, 161, 389] информации о функ-
ции. Вычислительные аспекты проблемы рассмотрены,
например, в [334].
В большинстве из перечисленных работ предполага-
ется, что точки, в которых вычисляются значения функ-
ции (или иная информация), фиксированы, т. е. необ-
ходимо выбрать лишь итоговую операцию (иными сло-
вами, необходимо проинтерполировать функцию по за-
данной информации). Мы рассмотрим такие постановки,
в которых основное внимание уделяется вопросу опти-
мального выбора точек информационных вычислений.
1. Постановка задачи. Задача восстановления функ-
ции по ее значениям естественно возникает в следующей
ситуации.
Пусть необходимо многократно (хотя бы приближен-
но) вычислять значения функции f е F в различных
точках множества К, заранее пе известно в каких. Ре-
сурсы вычислителя ограничены, вследствие чего число N
вычислений значений функции (информационных вычис-
154 ГЛ. 3. ВОССТАНОВЛЕНИЕ ФУНКЦИЙ ПО ИХ ЗНАЧЕНИЯМ
лений) фиксировано. Вычислитель выбирает xN = (xi, ...
..., xN), вычисляет yN = (yi, ...» yN), где £б = /(яД, 7 =
= 1, ..., N, и, имея информацию zN=(xN, yN), выбирает
функцию (}: Я -> R. В дальнейшем вычисление значений
функции / заменяется вычислением значений функции р.
Говорят, что функция р восстанавливает функцию f по
информации zN. При этом естественно считать погреш-
ностью величину sup I / (х) — р (х) |.
хе к
Описанная ситуация полностью соответствует общей
модели вычислений гл. 1, если положить
е (а, /) = у (5 (/), Р) = sup J / (х) - ₽ (х) |, (1.1)
хе К
где а = (^1, ..xN, р), а функция fi=$(zN)^ В находит-
ся по формулам (3.2) гл. 1. При этом Xj(f) = f(Xj), Х,=
= К, j = l, ..., N, и произвольные итоговые операции
считаются допустимыми.
Согласно теореме 4.3 гл. 1, задача построения опти-
мального по точности пассивного алгоритма сводится
к отысканию величины
def
vN = inf sup inf sup sup |/(a?) — P(^’)|,
yNG{yN\F(zN^0] PeB/eF(zN) хек
(1.2)
N
а также вектора х0, реализующего внешнюю нижнюю
грань, и центральной итоговой операции Р* (при фик-
сированном zN элемент P*(zN) реализует внутреннюю
нижнюю грань в (1.2)).
2. Сведение задачи построения оптимального пассив-
ного алгоритма к задаче оптимального покрытия множе-
ства К. Далее в этом параграфе будем предполагать,
что F = Fp, где Fp — функциональный класс, заданный
некоторой квазиметрикой р. Используемые ниже мино-
ранта 'cpuv- и мажоранта для функций из F(zN) опре-
делены формулами (1.3) гл. 2 при i = N (см. также
леммы 1.1 и 1.2 гл. 2), а понятия радиуса R(xN) покры-
тия, заданного центрами х\, xN, и радиуса RN опти-
мального покрытия определены формулами (2.2), (2.3)
гл. 2. Положим еще
W (х) = J (<Р17У {х) + cp2JV (ж)), х<=К. (1.3)
§ 1. ОПТИМАЛЬНЫЕ ПАССИВНЫЕ АЛГОРИТМЫ
155
График функции срк в одномерном случае при р(п, и) =
=^М\и — и\ изображен па рис. 3 (с. 102).
Теорема 1.1 [246]. Центральная итоговая опера-
ция в задаче восстановления функции из класса Fp по
ее значениям задается формулой
Р* (zw) = <₽w-
Результат, гарантированный пассивным алгоритмом
(xN, Р*), равен радиусу R(xN) покрытия, заданного
центрами х\, ..., xN. Наилучший гарантированный ре-
зультат vN равен радиусу оптимального покрытия RN.
Алгоритм (xq, pj оптимален по точности в множестве
всех пассивных алгоритмов тогда и только тогда, когда
вектор Xq задает оптимальное покрытие множества К.
Доказательство. Для отыскания центральной
итоговой операции воспользуемся тем, что
inf sup sup | / (я) — p (x) | =
ft=F(zN) x^K
= inf sup sup | f (x) — p (x) | =
[ЗеВ хек /ег(г^)
= sup inf sup | / (x) — r | =
xeK reR (ZAT)
= sup inf max {(p2N (#) — r, r — cpijv (я)} =
x^K reR
= sup -j- [ф22у (x) — <p12V (z)] (1.4)
(первое и четвертое равенства очевидны, второе обосно-
вывается леммой 4.1 гл. 1, третье — леммами 1.1 и 1.2
гл. 2), причем нижняя грань по г достигается для про-
извольного Х^К при r = (pjv(rr). Поэтому, в силу второго
утверждения леммы 4.1 гл. 1 и определения (см. (4.4)
гл. 1), центральная итоговая операция задается форму-
ЛОЙ (zN) = <pN.
Убедимся теперь, что
sup v [<p2w (ж) — <P1N (*)] = min P (^i, x). (1.5)
Z <=1................................"
Действительно,
sup у [<p2W (a-) — cp1N («)] =
= 4 sup Г min (y} + p (x, x-)) —
156 гл. 3. ВОССТАНОВЛЕНИЕ ФУНКЦИЙ ПО ИХ ЗНАЧЕНИЯМ
max (yj — р(х, х,))1<
1=1...N J
_1 sup min [(^ + р (г, х,)) —
2 yNe{yN\F(2N)^0} 1 = 1.N
— (Уз — Р (*, *1))] = min Р ^)-
j=l,...,N
С другой стороны, учитывая, что (0, ..., 0) е {yN\F(zN) ¥=
0}, имеем
j
sup v [<p2N (x) — <pljv (*)] >
VNe{yN\F(zN)*0}
-у Г min (0 + p (x, x,)) — max (0 — p (x, x;))l =
Ь = 1,-.Л j = l,...,N J
= min p (x, xj).
Тем самым (1.5) доказано.
Преобразуем выражение для результата, гарантиро-
ванного алгоритмом (х", р*). В силу (1.4), (1.5) имеем
sup inf sup sup | f (x) — (3 (x) | =
yN^{yN\F(z^0} ^fEF(zN)
= sup sup -y [<p2N (x) — ф12у (x)] =
yN^{y^F(zN)^0}^K Z
= sup sup -5- [<p2JV (x) — <p1JV (•£)] =
= sup min p (x-t, x) = R (xN).
xBK i =
Остальные утверждения теоремы теперь очевидны. А
3. О задаче оптимального покрытия. Рассмотрим не-
которые вопросы, связанные с оптимальным покрытием
множества К заданным числом р-шаров одинакового ра-
диуса. Начнем со следующего замечания.
Если К — компакт, а функция р непрерывна, то оп-
тимальное покрытие множества К заданным числом N
р-шаров одинакового радиуса существует.
Справедливость этого утверждения следует из того,
что функции min р(х^, х) и 7?(xJV)=max min p(xi? х)
х^К
непрерывны соответственно по х и по xN, следовательно,
минимум функции R(xN) достигается при некотором х^.
Приведем для конкретных р и К решение задачи по-
строения оптимального покрытия.
§ 1. ОПТИМАЛЬНЫЕ ПАССИВНЫЕ АЛГОРИТМЫ 157
Пусть u = (u1, un), М>0, >0, ..кп > 0,
К = [и\аг ^.иг i = 1, .. ., п},
p{u,v) = M max /q|ul — z?|. (1.6)
1=1,...,n
Тогда р-шаром {u|p(z, u)^r} радиуса г с центром в z
является, очевидно, координатный параллелепипед
Положим ci = bi — а\ & = 2/(Мк^, Z=l, ..., п.
Задача заключается в построении покрытия коорди-
натного параллелепипеда с ребрами с1, ..., сп такими N
координатными параллелепипедами с ребрами rd1, ...
..., rdn, что г минимально. Ясно, что минимальное зна-
чение г равно при этом радиусу оптимального покры-
тия Rn. Поэтому
(1.7)
Дадим теперь основанный на соотношении (1.7) ал-
горитм решения задачи (1.6). Пусть
Очевидно, что RN^r. Кроме того, из (1.7) следует, что
хотя бы одно из чисел с7 (Rn^) должно быть целым,
*=1, ..., п. Положив mi = [с7(гй^)], занумеруем в по-
рядке возрастания корни Ш\ + ... + тп уравнений
с1 с1
—7 = ТПЛ, --------7 = т, — 1
rd1 1 rd1 1
сп сп
^ = т^: 7^ = тп~1’
rd rd
—i=1
rd1
сп
^- = 1.
rdn
Получим mi + ... + тп чисел . .<rOTi+ ...+mn. Бу-
дем в порядке возрастания индекса j проверять выполне-
п
ние условия Ц [сг/(г;йг)] <1N. Если это условие впер-
i=i
вьте окажется выполненным при / = /о, то Rn = rjQ. Итак,
решение задачи в случае (1.6) найдено.
158 ГЛ. 3. ВОССТАНОВЛЕНИЕ ФУНКЦИЙ ПО ИХ ЗНАЧЕНИЯМ
Если К — координатный куб и в (1.6) к[ = ... = кп =
= 1, то решение задачи оптимального покрытия легко
находится в явном виде.
Теорема 1.2. Пусть
К = [и | 0 и1 1, i = 1, . .., п],
р (^, и) = М max | и — иг |.
1=1,...,п
Тогда RN = М/ (2тп), где m=\j/ Tvj, mn из центров х^, ...
..., xn оптимального покрытия совпадают с точками
(]\/(2ш), 7’1, ..., /ПМ1, 3, ..., 2m - 1),
остальные N — mn — произвольные точки.
Доказательство. Предположим сначала, что
N = тп, т — целое. Тогда, проводя гиперплоскости и* =
= j/m, i = 1, ..., п, / = 1, . . ., т — 1, получим разбиение
К на тп координатных кубов с длиной ребер 1/тп. Обо-
значим их центры через . .., х^. Очевидно, что вектор
х^ = (#?, • • • > xn) задает оптимальное покрытие, причем
HN = М/(2т) = м(2п/1у).
Пусть теперь тп < N < (т + 1)п, т — целое. Пока-
жем, что и в этом случае минимальная длина ребра
кубов покрытия равна 1/ттг. Для этого достаточно дока-
зать следующее: если К покрыт координатными кубами
с ребрами длины Z<l/m, то таких кубов не. менее
(т + 1)п.
Докажем это утверждение индукцией по размерности
пространства п. В одномерном случае оно очевидно.
Предположим, что это утверждение справедливо в про-
странстве Rn-1, и докажем его справедливость для Rn.
Проведем гиперплоскости
их '= I + 8, и1 = 2(1 + б), ..., щ = т(1 + е),
где 8 > 0 таково, что Z + 8 < i/т. Сечения куба К этими
гиперплоскостями обозначим через Т\, ..., Гт. Грань
с несущей гиперплоскостью l? = 0 обозначим через Го.
Пусть К покрыт координатными кубами с ребрами
длины Z< i/m. Тогда грань Го покрыта (п — 1)-мерными
кубами (сечениями или основаниями соответствующих
n-мерных кубов) с ребрами длины Z < i/m. Число таких
(дг —1)-мерных кубов по индукционному предположению
не меньше (m+l)/-1, причем пи один из соответствую-
§ 1. ОПТИМАЛЬНЫЕ ПАССИВНЫЕ АЛГОРИТМЫ 159
щих n-мерных кубов, очевидно, не пересекается с сече-
нием Т\. Повторяя рассуждения о покрытии То для се-
чений Т7!, ..., Тт, получим, что куб К покрыт не менее
чем (т + 1) (т + 1)п~1 = (т + 1)п координатными кубами
с ребрами длины I. А
Следствие. Если п = 1, К = [0, 1], p(u, v) =
= М\и — р|, то в задаче восстановления функции из
класса Fp по ее значениям vn = M/(2N), а алгоритм
(1/(27V), 3/(22V), (27V — 1)/(22V)) оптимален в мно-
жестве всех пассивных алгоритмов. А
Если р (u, v) = Ни — pH, К — ограниченное множество
с границей нулевой меры и известно наименее плотное
покрытие пространства Rn транслятами шара Q(l) =
то, применяя конструкцию, описанную
в теореме 2.2 гл. 2, легко построить асимптотически оп-
тимальную последовательность алгоритмов.
Оптимальные покрытия можно строить также, решая
задачу
R (xN) = sup min ’ р (Xj, а) -> min
aeKi=l,...,N xl,...,x1yGK
численно. Так, в [35] удалось построить оптимальное по-
крытие квадрата К в случае, когда р — евклидова метри-
ка, N 15.
4. Совпадение наилучших гарантированных результа-
тов в классах пассивных и последовательных алгоритмов.
В этом пункте мы покажем, что для задачи восстанов-
ления функций из Fp по их значениям наилучший га-
рантированный в классе пассивных алгоритмов резуль-
тат vN совпадает с наилучшим гарантированным в классе
всех последовательных алгоритмов результатом eN. Ряд
утверждений такого рода получен в § 5 гл. 1, где пред-
полагается, что S — функционал. Эти утверждения мож-
но перенести па рассматриваемый случай S(j) = f и тем
самым установить совпадение vN и &N. Мы установим
этот факт независимо с помощью рассуждений несколько
иного рода.
Считая, что в качестве итоговой операции применяет-
ся центральная итоговая операция Р* (zN) = (см. (1.3)
и теорему 1.1), будем рассматривать классы XN (см.
(3.8) гл. 1) — пассивных и XN (см. (3.10) гл. 1) — всех
последовательных алгоритмов. В пашем случае XN = KN.
Критерием оценки эффективности алгоритмов будет
160 гл. 3. ВОССТАНОВЛЕНИЕ ФУНКЦИЙ ПО ИХ ЗНАЧЕНИЯМ
служить критерий (4.14) гл. 1, т. е.
e(xN, f) = sup\f(x) — q>jv(x)|, e(xN, f) = e(xN, f), (1.8)
xsk
где в первом равенстве <pN = (cpiw + фгя)/2, У( = /(>л),
i = 1, ..N,
<puv (x) = max {yi — p (x, х{)},
i=l...........N
<p2w (z) = min {yi + p (x, Xi)},
i=l,...,7V
а во втором равенстве вектор xN определяется алгорит-
мом xN и функцией / по формулам (3.2) гл. 1.
Теорема 1.3. Для задачи восстановления функций
из Fp по их значениям наилучшие гарантированные ре-
зультаты в классах XN и XN совпадают, т. е.
inf sup & (xN, /) = inf sup s(xN, /), (1.9)
и любой оптимальный в XN алгоритм оптимален, таким
образом, и в XN.
Доказательство. Будем обозначать левую часть
(1.9) через 8Я, правую — через vN. Так как XN^XN, то
Рдг. Для завершения доказательства достаточно по-
казать, ЧТО 8N > VN.
Обозначим б-оптимальный в XN алгоритм через х& ,
6 > 0. Тогда
sup ъ(хъ, f) < 8N + б.
Пусть х& (0) = х& = (л^б, . . ., а'л'б\где 0 — функция, тож-
дественно равная нулю на К, а через х$ (0) обозначен
вектор, полученный по формулам (3.2) гл. 1 при xN =
— / = 0. В силу теоремы 1.1
vn = Rn= inf sup min р(^, x),
xN^KN xEKi=l,...,N
и, следовательно,
sup min p (xi&, x) vn.
xEKi=lt...,N
Поэтому существует такая точка а& К, что
min р (х^, а&) ^vN — б. (1.10)
гс=1,...Л
§ 2. АЛГОРИТМЫ ВОССТАНОВЛЕНИЯ ФУНКЦИЙ
161
Определим функцию
(fw — 6 — р (я, ав) при р(х, а6)^vN — 6,
gt, \х) = j о ПрИ р (я, йв) Vn — й.
Очевидно, что &(4 = тах{^-6 — р(ж, ав), 0}. На ос-
новании лемм 2.1 и 2.7 гл. 1 заключаем, что gb<^Fp.
Из (1.10) следует, что £в(Хй) = 0, г = 1, ..., N, и поэтому
х& (g&) — Х6 (0) = , где через х% (ge) обозначен вектор,
полученный по формулам (3.2) гл. 1 приз: = x^,j = g6.
Наконец, в силу (1.8),
eN> sup е(хо, f) — 6> e(z^, gs) — 6 = е(хв, ge) — б =
feFf,
= sup | g6(x) — <pw(x)| — 6 = sup g6(x) — 8 = vn — 26,
хек хек
где так как уг=£б(ягб) = 0, f = l, .N. Пере-
ходя к пределу при б -> 0, получаем, что > vN. A
§ 2. Последовательно-оптимальные и оптимальные
на один шаг алгоритмы восстановления функций
Пусть
F = {/| |/(^)-/(p)|O|^-i;|, и, [а, Ь]}. (2.1)
По-прежпему будем предполагать, что информационные
вычисления состоят в вычислении значений восстанавли-
ваемой функции в точках множества К = [а, Ь]. Теоре-
ма 1.1 устанавливает в рассматриваемом случае р(и, р) =
= М1и — р| вид центральной итоговой операции, а след-
ствие из теоремы 1.2 — вид оптимального по точности
пассивного алгоритма восстановления функций. Основная
задача этого параграфа — построить последовательно-оп-
тимальный по точности алгоритм для класса (2.1) функ-
ций одной переменной, удовлетворяющих условию Лип-
шица. Решив ее, мы без труда построим оптимальный
на один шаг алгоритм, а также алгоритм последователь-
но-оптимальный по числу информационных вычислений.
1. Оптимальные по точности алгоритмы для подклас-
сов функционального класса (2.1). При построении по-
следовательпо-оптимальных по точности алгоритмов, как
и в случае задачи численного иптегрировапия, необходи-
мо найти оптимальные алгоритмы на подклассах класса
(2.1) функций с фиксированными зпачепиями на одном
11 А. Г. Сухарев
162 ГЛ. 3. ВОССТАНОВЛЕНИЕ ФУНКЦИЙ ПО ИХ ЗНАЧЕНИЯМ
или обоих концах отрезка [а, Ь]. Решение этой задачи
дают леммы 2.1 и 2.2 (а также теорема 3.1), в форму-
лировках которых число информационных вычислении
предполагается равным п, = а, хп+\ = &, а через F
обозначается функциональный класс (2.1). В этом слу-
чае F(xn+\, Уп+\), F(xq, yQ), F{x0, хп+ь I/o, z/n+i) —под-
классы класса F, содержащие функции с фиксированны-
ми значениями соответственно па правом, левом и обоих
концах отрезка [а, Ь].
В формулировках лемм не указываются итоговые
операции. Во всех случаях в качестве итоговой операции
используется центральная итоговая операция, вид кото-
рой легко установить па основе теоремы 1.1, учитывая
имеющуюся априорную информацию о значениях функ-
ции на концах отрезка [а, Ь]. Именно,
Р* (*”, arn+i, Уп, Уп+1) =
= 4-( max {у}— М\х—Zjl} + min {у}-\-М\х -х,\ }V
Р* («0» Уо. Уп) =
= 4( max {у}; — М\х — Xj |} + min {//;+М|х—^|}V
Р* (х0, хп, хп+1, уа, у1, уп+1) =
= -i- ( max {yj — М | х — х, |} +
\j=o,l.......п+1
4- min {yj + М | х — х} | П
j = 0,l,..-,n+l J
— центральные итоговые операции соответственно для
классов F(xn+X, уп+\), F(xQ, yQ), F(xQ, хп+\, l/o, уп+\)-
Далее предполагается, что рассматриваются именно эти
итоговые операции и множества алгоритмов XN (см. (3.8)
гл. 1) и XN (см. (3.10) гл. 1).
Лемма 2.1. Алгоритм
f । Ъ d . о & ® 1 /н Л \ & & \ "Х/П
\а -г 2п + Г а + 3 2ге + 1 ’ • • • > а + G-n — Я 2n + 1 ] е Х
оптимален по точности на классе F(xn+\, уп+\) в множе-
ствах всех пассивных алгоритмов Хп и всех последова-
тельных алгоритмов Хп.
Алгоритм
(I b а . i Ъ d । г» Ъ d \ ‘v’n
а -4- 2 7?—г-г, Ч- о—j—г, . . .. а 4~ 2az тт—।—-т j X
' -4- Г 1 2.П +1' + 1 у
§ 2. АЛГОРИТМЫ ВОССТАНОВЛЕНИЯ ФУНКЦИЙ 163
оптимален по точности на классе Z'(^o, уо) в множестве
всех пассивных алгоритмов Хп и всех последовательных
алгоритмов Хп.
Наилучший гарантированный результат в обоих слу-
чаях равен М (b — а)/(2п + 1). А
Доказательство леммы легко получается теми же
рассуждениями, которые использованы при доказатель-
стве теорем 1.1 и 1.3. При этом следует иметь в виду,
что наихудшее для вычислителя «поведение природы»
состоит в том, что }(Хэ) = уп+1 для класса F(xn+i, yn+v) и
/(г>) = Уо для класса F(xo, уо), Xj — точки, в которых
вычисляются значения функции, j = 1, ..., п. Отметим
еще, что класс F(xn+i, уп+\) симметричен относительно
функции /(х) = уп+1, а класс F(xq, уо) симметричен отно-
сительно функции j(x) = yQ.
Итак, первое вычисление в соответствии с оптималь-
ным алгоритмом проводится в любой из точек
( , Ъ — а г = 1, 3, ..., 2п — 1 для класса F (Ь, уъ)Л
М ----- \ 7 V / 7 I
I 2n + 1 г = 2, 4, ..., 2п для класса F (а, уа) ]’
(2.2)
Гораздо сложнее обстоит дело для класса F(xo, xn+i,
Уо, Уп+1), который при уо ¥= yn+i свойством центральной
симметрии не обладает.
Используя ранее введенное обозначение 8n(z?) (см.
(6.7), (6.8) гл. 1) для наилучшего гарантированного ре-
зультата, будем обозначать наилучший гарантированный
на классе F(xq, хп+\, уо, Уп+\) в множестве всех после-
довательных алгоритмов с п информационными вычисле-
ниями результат через еп+2(^о, хп+\, у о, уп+\). Достаточно
рассмотреть случай хо = а = О, хп+\ = b = 1. Наилучший
гарантированный в ситуации 0, 1, уо, Уп+i результат за-
висит, очевидно, лишь от величины ly«+i — yol или свя-
занной с ней взаимно однозначным соответствием вели-
чины I = — |yn+i — уо\/М+ 1 (см. рис. 7). Значения кон-
станты Липшица М и число вычислений п считаются
при этом фиксированными. Обозначим паилучший гаран-
тированный результат через (MJ2) Wn(l). Иными слова-
ми, положим
9
Wn(l) = -^en+2(0, 1, у0, Уп+i).
Случай, когда значения функции известны на концах
отрезка [а, 6], заменой переменных х' = (х — а)/(Ь — а),
И*
164 ГЛ. 3. ВОССТАНОВЛЕНИЕ ФУНКЦИЙ ПО ИХ ЗНАЧЕНИЯМ
у' = у сводится к рассматриваемому случаю К = [0, 1].
Если функция f(x) удовлетворяет на [а, Ь] условию
Липшица с константой /I/, то функция f(a + x'(b — а))
Рис. 7. К вопросу об отыскании наилучшего гарантированного
результата в задаче восстановления функций с фиксированными
значениями на концах отрезка [0,1]
удовлетворяет, очевидно, по х' на [0, 1] условию Лип-
шица с константой М(Ъ — а). Поэтому
еп+2 (fl, Ъ, у0, уп+1) = ^-(b — a) Wn (Г), (2.3)
где
- I Уп+1 - Уо 1/М + Ь - а
Ъ — а
Лемма 2.2. Наилучший гарантированный на классе
1, Уо, Уп+1) в множестве всех последовательных ал-
горитмов результат удовлетворяет рекуррентному урав-
нению
( I1
Wn(l) = min max min maxUWM-y
o<t<l lvl2
^+1^1
(l-!)^-^)] (2.4)
при
WQ(l) = l. (2.5)
Первое вычисление в соответствии с оптимальным на
классе F(0, 1, уо, Уп+i) последовательным алгоритмом
§ 2. АЛГОРИТМЫ ВОССТАНОВЛЕНИЯ ФУНКЦИЙ 165
следует проводить в точке, реализующей внешний мини-
мум в правой части (2.4).
Доказательство. Пусть на первом шаге вычис-
литель выбирает точку t е [0, 1], причем
def
/ (t) = У е Л (i) = [ф12 («), ф22 (/)],
где <pi2(f) =maxtyo — Mid, yn+i — M\x — 1|}, <p22(<) =
= min {i/o + Mid, yn+i + М|ж — 1|} — соответственно мино-
ранта и мажоранта, построенные по информации 0, 1,
уо, Уп+1- Далее воспользуемся соображениями, изложен-
ными в п. 2 § 3 гл. 2. Именно, заметим, что для класса
(2.1) значения, которые может принимать функция f
в точках одного из интервалов (0, t), (t, 1), не изменяют
множеств допустимых значений функции / в точках
другого интервала (эти множества ограничены миноран-
той ф1з и мажорантой ф23, построенными по информации
О, 1, t, у о, у п+1, у)- Поэтому оптимальные действия вы-
числителя после первого шага состоят в том, чтобы оп-
тимальным образом выбрать число j {0, 1, п— 1}
вычислений, которые предстоит провести на интервале
(О, t) (па интервале (t, 1) будет проведено п — 1 — j вы-
числений), и на последующих шагах оптимально выби-
рать точки для оставшихся п — 1 вычислений.
Выражение для иаилучшего гарантированного резуль-
тата после первого шага можно записать в соответствии
с (2.3), в виде
е„+2 (0, 1, t, у0, уп+1, у) =
М f.w ( -р-^о1/М+Ч
= -у- mm max tWД —1---------------- ,
(1 - /) + (2 6)
Поскольку оптимальное поведение в многошаговом про-
цессе принятия решений складывается из оптимального
решения па первом шаге и оптимального поведения в по-
следующем, можно записать следующее уравнение для
иаилучшего гараитироваппого па классе F(0, 1, yQ, уп+1)
результата:
Prn(Z)=min max min maxfzW^ —У° —1
o<t<l 1 I \ I j
(1 - <) Wn_14 + (27)
1GG ГЛ. 3. ВОССТАНОВЛЕНИЕ ФУНКЦИЙ ПО ИХ ЗНАЧЕНИЯМ
При этом, как видно из рис. 7,
TF0(Z) = Z.
(2.8)
Полученное рекуррентное уравнение (2.7) выражает из-
вестный принцип оптимальности динамического програм-
мирования [25, 26].
Для доказательства леммы теперь достаточно убе-
диться, что уравнения (2.4) и (2.7) эквивалентны.
С этой целью покажем, что при произвольном п функ-
ция Wn(l) не убывает по I.
При п = 0 это следует из (2.8). Пусть Wj(l) не убы-
вает по I при /=1, ..., п — 1. Зафиксируем Z^(0, 1).
Предположим для определенности, что уо yn+i (в про-
тивном случае далее всюду отрезок [уо, yn+i] надо заме-
нить отрезком [уп+i, Уо]). Используя (2.6) и предположе-
ние о неубывании функций Wj, / = 1, ..., п — 1, имеем
en+2(0, 1, t, уо, yn+i, у)^
^en+2(0, 1, t, уо, уп+\, уо) при у^уо,
(2.9)
en+2(0, 1, t, уо, уп+i, у)^
8п+2(0, 1, t, Уо, Уп+\, Уп+\) при у > уп+1.
Поэтому
2
Wn (0 = ~м min max е«+2 (°’ Уо' Уп+ъ у\
11 0<t<l yS=N(t)
где N(t) = A(t} Л [уо, yn+J. Положим h = —\y — yo\/M + t,
h = — IУ — Уп+\\/М + 1 — t- Тогда при y^N(t) имеем
Zi + Z2 = Z. Если у пробегает множество N(t), то li при
этом пробегает отрезок [max {0, t — (1 — I)}, min {t, I}] (см.
рис. 7), a Z2 —отрезок [max{О, I — t}, min{l — t, Z}]. Лег-
ко видеть, что ограничения па l\, h при изменении у
в множестве N(t) можно записать следующим образом:
O^li^t, 0^Z2^l — t, Zi + Z2 = Z. Тем самым показана
эквивалентность уравнений (2.4) и (2.7). Однако при
доказательстве использованы неравенства (2.9), получен-
ные в предположении о неубывании функции Wj.
Таким образом, для завершения доказательства всей
леммы осталось завершить проводимое по индукции до-
казательство неубывания Wn(l) по Z. Но при любом
фиксированном t функция, стоящая в правой части (2.4)
под знаком внешнего минимума (а стало быть, и сама
функция Wn(l)), не убывает по Z. Последнее верно
§ 2. АЛГОРИТМЫ ВОССТАНОВЛЕНИЯ ФУНКЦИЙ
167
в силу неубывания функций Wh 7 = 0, 1, ..п — 1, что
имеет место согласно сделанному индукционному пред-
положению. А
Основная трудность, которую приходится преодолеть
при построении последовательно-оптимального алгорит-
ма,— это необходимость пайти в явном виде решение си-
стемы уравнений (2.4), (2.5). Последовательно-оптималь-
ный алгоритм, при реализации которого приходилось бы
на каждом шаге решать систему вида (2.4), (2.5) чис-
ленно, обладал бы непомерно высокой комбинаторной
сложностью. Решение системы (2.4), (2.5) в явном виде
будет найдено в § 3. Согласно теореме 3.1,
W„ (Z) =
l/k, ak(ri)^l^bk(n),
bh(n)/k, Ь/Дм)< Z<а/н-!(n),
к=Л, .. ., [n/2J + l,
где
/\ л /1 к
«!(«) = О, =
к = 2, + 1,
(j \mk(n)—1 jc
~2] k+i+Sk(n) ’
к = 1, ..[n/2J + 1;
mh(n) — частное, sk(n) — остаток от деления п па к. При
этом внешний минимум в (2.4) достигается при значе-
нии t, равном одному из значений
k + s^in) ПРИ < 1 < Ь'<
к = 2, .. ., [az/2J + 2,
любое число из [0,1] при 0^zl^zb1(n),
(2.10)
где &l?7/2j+2(rc)= 1, Г = 1, ..+ Sfc-J (п)— 1.
2. Последовательно-оптимальный по точности алго-
ритм. Для упрощения обозначений будем считать, что
К = [0, 1]. В силу определения последовательно-опти-
мального алгоритма, теоремы 1.3 и следствия из теоре-
мы 1.2,
Г 1 3 2N — П
]2N' 27V’ ’ * •’ 2N ]’
(2-11)
168 ГЛ. 3. ВОССТАНОВЛЕНИЕ ФУНКЦИЙ ПО ИХ ЗНАЧЕНИЯМ
причем любую из точек (2.11) можно выбирать в каче-
стве точки первого информационного вычисления.
Пусть i вычислений в точках х\, ..., Xi проведено,
хп < ... < хц, где ха, ..Хц — перестановка чисел х\, ...
..., Xi. Для построения последовательно-оптимального
алгоритма, так же как и в задаче численного интегри-
рования, достаточно оптимальным образом распределить
оставшиеся N — I вычислений по промежуткам
[О, <Ги), (Яг1, Яг2>, (#г, г-1, Хц), (Хц, 1], (2.12)
найти оптимальные последовательные алгоритмы для
функциональных классов, соответствующих этим проме-
жуткам, и принять за xi+\ точку первого информацион-
ного вычисления любого из этих алгоритмов.
Сказанное, согласно леммам 2.1, 2.2, приводит к не-
обходимости найти набор чисел nJ, ..., (/-е число
в наборе — число информационных вычислений па /*-м
из промежутков (2.12)), реализующих минимум в задаче
отыскания
/ i\ М . f ^хг1
&n(z ) = — min max - 7,
z n1,...,ni+ie{o,i,2,..j (^4-t1
г-f-l
2 nj~N— i
2(1 —x..))
(^i2 *^11) Wn2 (^12)» • • •» (%ii (^ii), n” । л p
i+l T 1 J
(2-13)
где
, _ - I > (Xij) ~ f (*i J-l) № + ~
После того как решение nJ, ..., найдено, за rri+i
можно принять любую точку из объединения наборов,
определяемых соотношениями (2.2), (2.10), т. е.
\ХИ
2/4 + 1
Г1 = 1, 3,
.,2nj —11 U
U ( U 1 + 1) Т г (lij) I rj —
\j^2 пГт1
= 1, + «л-i(«}) — !] U
U U + (1-Жн) —+ |ri+1= 2,4, ..., 2пЦ, (2.14)
( 2^i+i+l| J
§ 2. АЛГОРИТМЫ ВОССТАНОВЛЕНИЯ ФУНКЦИЙ 169
где i = l, N— 1; число к, согласно формуле (2.10),
определяется условием bk^.1 (п}) bk (nJ); наконец,
предполагается, что если некоторые из чисел п[, ..., п|+1
равны пулю, то соответствующие наборы пусты.
Леммы 2.1, 2.2 и последующие построения дают пол-
ное доказательство следующей теоремы.
Теорема 2.1 [246]. Алгоритм (2.11), (2.14) после-
довательно-оптимален по точности на классе (2.1)
с [а. 6] = [0, 1]. А
3. Решение вспомогательных задач целочисленной
оптимизации. Перейдем к вопросу о решении последова-
тельности задач (2.13). Вводя при фиксированных хц,
обозначения1)
2х-^
а1(^1) ~ 2п + 1~ (^V 1) Wnj (Zij), 2, . . ., Z,
2(1 — х. Д
аиИ^4-1) = -2^-1+гГ, (2.15)
перепишем задачу (2.13) в виде
max a/(nt)-> min . (2.16)
i+1
2 n^=N— i
3-1
Пусть nJ”1, ..., np1 —решение задачи отыскания
8j^(zl’“1), возникающей при построении точки xt, и для
определенности Xi^(Xi-itj-i, Xi-itj). Тогда xi-iii=xii, ...
• • •» j— 1 *^i, J—1, «Г» Xi— lf j Xjt J+l, . • ., Xi— Ц i— 1 = ХЦ.
В качестве начального приближения к решению nJ, ...
..., п|+! выберем набор целых чисел nJ0, ..., Пц_ь опре-
деляемый следующим образом:
„*0 _ „1—1 „го _____ „г—1 10 _ „1—1 „10 _ „1—1
П1 — П1 , . . ., П-j—i — П3—!, П; ^_2 — , . . ., ^i pi —
Числа п}°, п]\г определяются как минимальные цельте
числа, для которых
щ (^°) < eN «м-104+1) <77 8jv (zi-1)'
!) Копсчпо, функции ai, ..., а<+1 зависят от помора шага,
однако для упрощения обозначений мы дополнительный индекс
не вводим.
170 ГЛ. 3. ВОССТАНОВЛЕНИЕ ФУНКЦИЙ ПО ИХ ЗНАЧЕНИЯМ
Присвоим переменным ..., начальные значения
пх°, ..., Wi+i: nx := ..., ni+1: = п^. Положим Дмг =
= п}~1 — 1 — тг}° — nJ+i и выполним Дпг раз оператор
ns \ = ns + 1, где {1, ..., i + 1} — какой-либо (напри-
мер наименьший) из индексов, для которых а&(п3) =
= max at (nt).
Полученные значения ni, n<+i совпадают, как
нетрудно видеть, с искомым решением пх, ... ,
причем
ек(гг)=-^ max at(wt)- (2.17)
Отметим, что если i = N, то из (2.17) немедленно
получаем выражение для оценочной точности (апостери-
орного результата, гарантированного алгоритмом по
окончании информационных вычислений)
&n (zN) = шах а/ (0). (2.18).
4. Оптимальный на один шаг алгоритм. Для опти-
мального выбора точки Х[ достаточно решить задачу ми-
нимизации гарантированного после первого шага резуль-
тата (2.18):
£1 (z1) = max {Мх^ 71/(1 — rri)}-> min, х{ е [0, 1],
откуда
xi = 1/2. (2.19)
Решая задачу (2.16) для N —1 = 1, получаем из (2.14)
хц/3, если (0) = т,
xi+1 = (Хг,к-1 + ^л)/2, если ak (0) = т, к е= {2, .. ., г},
Хц + 2 (1 — ^н)/3, если т,
(2.20)
где т = max с^(0),а величины ссДО) определяются
t=l,...,i-hl
формулами (2.15). Тем самым доказана
Теорема 2.2. Алгоритм (2.19), (2.20) оптимален
на один шаг на классе (2.1) с [а, Ь] = [0, 1]. А
5. Алгоритм, последовательно-оптимальный по числу
информационных вычислений. Случай фиксированной
точности е проще случая фиксированного числа инфор-
мационных вычислений N в том смысле, что при по-
§ 2. АЛГОРИТМЫ ВОССТАНОВЛЕНИЯ ФУНКЦИЙ
171
строении последовательно-оптимального по числу инфор-
мационных вычислений алгоритма отпадает необходи-
мость в решении задач целочисленного программирова-
ния вида (2.16).
В силу теоремы 1.3 иаилучший гарантированный
в множестве всех последовательных алгоритмов резуль-
тат &n совпадает с паи лучшим гарантированным в мно-
жестве пассивных алгоритмов результатом vN, причем,
согласно следствию из теоремы 1.2, vN = М/ (2N).
Поэтому
2Ve = min {7V|8jv<e}=minpv| = ЦП.
I I I I
В соответствии с определениями оптимального по числу
информационных вычислений алгоритма (см. п. 13 § 4
гл. 1) и последовательно-оптимального по числу инфор-
мационных вычислений алгоритма (см. п. 4 § 6 гл. 1)
выбор точки х\ последовательно-оптимальным алгорит-
мом определяется формулой (2.11) при N = Ne.
После i шагов проверяется выполнение критерия ос-
тановки (4.20) гл. 1. В рассматриваемой задаче выпол-
нение критерия остановки в соответствии с (2.18) озна-
чает выполнение неравенства
(z2) = 4^- max at (0) 8.
Если критерий остановки не выполнен, то целые числа
nJ, ..., определяются условием Mat (nty/2 8, при-
чем либо п} = 0, либо Mat {п} — 1)/2 > 8, t = 1, ..., i +1,
после чего точка х^ выбирается по формуле (2.14).
6. О схеме построения и о реализации последователь-
но-оптимальных алгоритмов. Заметим, что последователь-
но-оптимальные алгоритмы для задачи восстановления
функций были построены по той же схеме, что и для
задачи интегрирования. Узловые моменты этой схемы
выделены в п. 7 § 3 гл. 2. Там же перечислены свойства
моделей вычислений, позволяющие применять разрабо-
танную схему. Высказанные применительно к задаче
интегрирования соображения применимы и к задаче вос-
становления функции по ее значениям. Однако в задаче
восстановления построение оптимальных алгоритмов для
функциональных классов, определяемых фиксированием
информации на концах отрезка, может оказаться значп-
172 ГЛ. 3. ВОССТАНОВЛЕНИЕ ФУНКЦИЙ ПО ИХ ЗНАЧЕНИЯМ
тельпо более трудным, чем в задаче численного инте-
грирования.
При реализации последователыю-оптимальных алго-
ритмов следует разумно распорядиться произволом, до-
пустимым в соответствии с формулами (2.11), (2.14)
при выборе точки очередного информационного вычис-
ления. Эту точку можно выбирать, папример, случайно
равновероятно из набора всех допустимых точек, можно
выбирать точку из допустимого набора, ближайшую
к точке, указываемой оптимальным на один шаг алго-
ритмом, и т. д.
Приведем результаты применения последовательно-
оптимального по точности алгоритма в варианте, когда
из допустимого набора (2.14) выбирается точка, ближай-
шая к точке, указываемой оптимальным на один шаг
алгоритмом, к одной из случайных функций тестового
семейства f(x) = cq + cix + c2.r2/2 + ... + cnxnJn\, где
e [a, 6] = [—2, 2], co, ci, ..., cn — случайные числа, рав-
номерно распределенные на отрезке [—3, 3], п = 4. При
этом константа Липшица М вычислялась алгоритмом по
формуле М= шах | /' (— 2 + у/40) |.
;е=0,1,...,160
В первой строке табл. 4 указано число информацион-
ных вычислений N. Во второй строке указана точность
Таблица 4
N 1 | 10 30 50 80
VN 0.6117 0.2039 0.1223 0.0765
eN(zN) 0.5942 0.1594 0.0967 0.0543
eN(zN)lvN 0.9715 0.7820 0.7904 0.7106
М(& — a)/(2N), гарантируемая оптимальным в мно-
жествах XN и XN алгоритмом
(, Ъ — а гъ Ь —~~ Л . /О ЛТ А \ \
а 2N~» a + 3 2N ' • • •, a + (2^ — 1) 2N )
(эта точность совпадает с апостериорной точностью, га-
рантируемой по окончании информационных вычисле-
ний); в третьей строке — вычисляемая по формуле (2.18)
апостериорпая точность, гарантируемая по окончании
информационных вычислений последовательно-оптималь-
ным по точности алгоритмом; в четвертой — отношения
§ 3. РЕШЕНИЕ МНОГОШАГОВОЙ АНТАГОНИСТИЧЕСКОЙ ИГРЫ 173
чисел из третьей строки к соответствующим числам из
второй.
Приведенные результаты показывают, что, как и в
задаче численного интегрирования, в задаче восстанов-
ления функции по ее значениям последовательно-опти-
мальный алгоритм обладает существенным преимуще-
ством по сравнению с оптимальным алгоритмом.
§ 3. Решение многошаговой антагонистической игры,
связанной с задачей оптимального восстановления
Применяя принцип оптимальности для многошагового
процесса принятия решения, в § 2 задачу построения
последовательно-оптимального алгоритма для задачи вос-
становления функции по ее значениям удалось свести
к решению системы рекуррентных уравнений (лемма 2,2)
Wn (Z) = min max min max (tWj
o<t<i zx,z2 j=o,i,i I \ J /
(3.1)
W0(T) = l. (3.2)
В данном параграфе решение системы (3.1), (3.2)
найдено в явном виде. Метод получения решения состоит
в сведении задачи к многошаговой антагонистической
игре с полной информацией и отыскании седловой точ-
ки игры.
Решение системы (3.1), (3.2) и соответствующей иг-
ры представляет также известный самостоятельный ин-
терес, поскольку достаточно развитая теория систем ре-
куррентных уравнений разработана лишь в линейном
случае (см., например, [196, 395]), примеры же решения
в явном виде нелинейных систем достаточно редки [25,
26, 291], так же как и примеры решения в явном виде
Многошаговых игр с полной информацией и континуу-
мами альтернатив у каждого из игроков [206].
1. Сведение задачи к антагонистической игре, форму-
лировка и обсуждение основной теоремы. Из вида урав-
нений (3.1), (3.2) следует, что величина Wn(l) является
значением следующей многошаговой антагонистической
Игры, которую мы будем называть игрой восстановления.
174 ГЛ. 3. ВОССТАНОВЛЕНИЕ ФУНКЦИЙ ПО ИХ ЗНАЧЕНИЯМ
На первом шаге минимизирующий игрок выбирает
точку х\ е(0, 1) (в обозначениях (3.1) — точку Z), раз-
бивая тем самым отрезок [0, 1] на отрезки [0, #i], [хц 1],
а максимизирующий игрок, зная х\, приписывает этим
отрезкам неотрицательные числа Zi, I2 соответственно,
при этом число, приписываемое отрезку, не должно пре-
восходить его длины и Zi + Z2 = Z, где I [0, 1] — заранее
фиксированное число, известное обоим игрокам.
На втором шаге минимизирующий игрок выбирает
точку Х2 ^(0, #1) U (#i, 1), разбивая тем самым один из
отрезков первого шага на два, а максимизирующий иг-
рок, зная xi, Х2, приписывает этим двум отрезкам неот-
рицательные числа, каждое из которых не превосходит
длины своего отрезка, а сумма равна числу, приписан-
ному объединению этих отрезков на первом шаге, и т. д.
После того как все п шагов сделаны, максимизиру-
ющий игрок получает от минимизирующего максималь-
ную из величин, приписанных к п + 1 отрезкам, на ко-
торые разбит отрезок [0, 1].
Решение сформулированной игры дает следующая
теорема, являющаяся основным результатом § 2, 3.
Теорема 3.1 [245]. Значение игры Wn(l) зависит
от п и I следующим образом'.
( l/к, ак (п) I Ьк (п),
Wn (0 — I b/i (и) aii (Х к=1, [п/2 J +1,
(3.3)
где
{ 1 хтп^—1(7г)—1 к
а1 (п) = 0, ак (п) = («Г»
к = 2,
, , . . 7 1 к
aLn/2j = 1; W = |д) A + l+sfe(n) >
к — 1, .
+*
I] + 1;
тпА(п)— частное, sk(n)—остаток от деления п на к.
Оптимальным выбором минимизирующего игрока на
первом шаге и соответственно реализацией внешнего
§ 3. РЕШЕНИЕ МНОГОШАГОВОЙ АНТАГОНИСТИЧЕСКОЙ ИГРЫ 175
минимума в (3.1) является любая из точек
Тп,г®
г
k+sk-l (п)
при (n)^.l^.bk (п), к=2,
+ 2,
любое число из [0,1] при 0 ^.1 ^.Ь1{п),
(3.4)
где 6in/2j+2(ra)= 1, r= 1, ..., к + sh_\(n)- 1.
Оптимальным выбором максимизирующего игрока на
первом шаге и соответственно реализацией максимума
по Zi, h в (3.1) являются величины Zi(^i), Z2(#i)1)? где
h(x\)=l - Zi(rri),
h (xi) =
0 в случае l^a2 (n), 1/2,
0 (3.6),
(£ — !)-£ в случае (3.6), (3.7), sA (n) к — t + 1,
—2 1 *вслучае (3.6), (3.7), t—1 четно, sk (n)^
в случае (3.6), (3.7), t четно, sk(n)^ ~ — I,
Z—Zx(l—zjeслучае ^1>1/2г
(3.5)
при этом условия (3.6), (3.7) состоят в следующем'.
ак(п) ^Л^аь+^п), к = 2£
2 + 1». (3-6)
t
k + l+sk W
!<»-!< +‘t>W-
f — 1
Прежде чем доказывать сформулированную теорему,
отметим следующее. Зная оптимальные выборы (3.4),
(3.5) игроков на первом шаге, легко индуктивно постро-
ить оптимальные стратегии игроков в игре восстановле-
ния, которые также последовательно-оптимальны, т. е. не
только гарантируют игрокам получение величины Wn(l),
9 Напомним, что в целях сохранения единства обозначений
при рассмотрении игры восстановления мы всюду заменяем обо-
значение t в (3.1) па Х[.
176 ГЛ. 3. ВОССТАНОВЛЕНИЕ ФУНКЦИЙ ПО ИХ ЗНАЧЕНИЯМ
но и осуществляют оптимальное наказание противника
за совершенные ошибки в случае, если противник при-
меняет неоптимальную стратегию.
Для построения таких стратегий достаточно в ситуа-
ции после i шагов уметь оптимальным образом распре-
делять число оставшихся п — i выборов минимизирую-
щего игрока по множествам (х^, Хц), (хн, Xi2), ...
• • •, i— 1, *Г«) » <+1) ? ГДе XjQ 0, X{t <4-1 1, £fl, . . .
..., %n — перестановка чисел x\, xt в порядке воз-
растания, xi, ..., Xi — точки, выбранные минимизирую-
щим игроком. Для распределения выборов минимизиру-
ющего игрока необходимо решить задачу отыскания
набора целых неотрицательных чисел ..., ni+i, реа-
лизующего
/ I.. \ >
min max (xi} — Xij^) Wn. ,
j»l,.*.,«+! \ ij ij-l / J
где lij — число, приписанное максимизирующим игроком
отрезку [xit j_i, Ху]. Алгоритм решения подобной задачи
приведен в п. 3 § 2. Если ..., решение задачи,
то минимизирующему игроку на (i + 1)-м шаге для того,
чтобы остаться в рамках последовательно-оптимальных
действий, достаточно в качестве xi+\ выбирать любую из
точек (xij — Xij_i) Т i — |» где значения
Г з\ Xij~~Xi,3-l /
Гу определяются формулой (3.4), a J«l, i+1 таково,
что п] > 0; максимизирующему же игроку достаточно
приписать отрезкам соответственно
числа
(•Tij ‘Ti.j—l)
Xi+1“~ Xi,j-1 \
ХЦ ~' Xi,j — 1 /
*i+l ~~ ^ij-l \
где при использовании (3.5) — (3.7) следует положить
/ = lij/ (%ij *^i, j— 1) •
Доказательство теоремы 3.1 содержится в пп. 2, 3.
В п. 2 мы покажем, что минимизирующий игрок может,
применяя па первом шаге указанную в теореме 3.1 стра-
тегиюл гарантировать себе при оптимальных действиях
§ 3. РЕШЕНИЕ МНОГОШАГОВОЙ АНТАГОНИСТИЧЕСКОЙ ИГРЫ 177
в последующем проигрыш не более Wn(l). В п. 3 мы
убедимся, что максимизирующий игрок может, применяя
на первом шаге указанную в теореме 3.1 стратегию, га-
рантировать себе при оптимальных действиях в после-
дующем выигрыш пе менее Wn(l). Тем самым теорема
будет доказана, поскольку в совокупности установленные
факты означают, что указанные в теореме 3.1 выборы иг-
роков на первом шаге оптимальны, а определенная фор-
мулой (3.3) величина Wn(l) является значением игры.
2. Доказательство теоремы 3.1 — гарантированный ре-
зультат минимизирующего игрока. В этом пункте дока-
жем, что, выбирая на первом шаге в игре восстановления
в качестве xi любую из точек (3.4), минимизирующий
игрок обеспечивает себе при оптимальных действиях в
последующем проигрыш пе более (3.3).
Для п = 1 доказываемое утверждение очевидио, так
как
P7X(Z) =
| I, 1^Л/2,
(1/2, 1/2,
любое число из [0,1], Z^l/2,
1/2, />1/2.
Пусть для 2, ..., (га — 1)-шаговых игр утверждение
справедливо. Докажем его для n-шаговой игры.
При I С bi (и) доказывать нечего. Пусть
aA(ra)CZ^&ft(ra), к = 2, ..., [n/2] + 1, (3.8)
или
2/ *+*л-1
1 - /1 Wn)-1
И^\2)
1
Л+1+sJn)*
А = 2,... , [п/2] + 1. (3.9)
Достаточно убедиться, что минимизирующий игрок,
выбирая на первом шаге хг =
г
Л + sk^ (п) ’
где г — произ-
вольное из чисел 1, ..., к + sh-\{n)— 1, может при любом
первом выборе 1\ максимизирующего игрока гарантиро-
вать себе проигрыш не более Wn(l) = l/k (последнее ра-
венство справедливо в силу (3.3), (3.8)).
Если то для обеспечения проигрыша пе бо-
лее l/к минимизирующему игроку следует все точки
#2, ..., хп выбрать в отрезке [#i, 1], и потому остается
Доказать, учитывая предположение индукции, что в этом
12 А. Г. Сухарев
178 ГЛ. 3. ВОССТАНОВЛЕНИЕ ФУНКЦИЙ ПО ИХ ЗНАЧЕНИЯМ
случае
\ А ™
Последнее неравенство будем доказывать в наихудшем
для минизирующего игрока случае h = Z, г=1; оно в
этом случае принимает вид
* + sft_l(ra) n-1 + sh_x (п) — 1J к ’
для чего необходимо и достаточно, чтобы
, k-±sh_x(n)
i т~\---А—i ^ak(n~ 1).
Последнее будет заведомо выполнено в силу (3.9), если
/1 W—k k-\-s k_x (n)
\2 / к + «л-i («) ’к + sk-i (n) —1""
•> (X\mh~ 1___________к
"у2/ * + 1(" — 1)*
или, что то же самое,
к + SA_X (П — 1) > 2’nA-l(n>-mA-l(n-1) + Sfe_x
(3.10)
На самом деле левая и правая части (3.10) всегда свя-
заны знаком равенства, ибо если тк-\(п) = шк_\(п — 1) +
+ 1, то sk-i(n — 1) = к — 2, 5A-i(n) = 0, если же znA-i(n) =
= тпА-1(п - 1), то $A-i(n) = sA_i(7i- 1) + 1.
Обратимся к случаю
(z-i)A<Z1<iJL z = 21...,к-i (3.11)
(случай t = к в силу равноправия концов отрезка [0, 1]
сводится к рассмотренному случаю Z=l). Минимизиру-
ющему игроку при этом для того, чтобы не проиграть
больше l/к при любом Zb удовлетворяющем (3.11), до-
статочно из оставшихся п — 1 выбрать п\ точек в интер-
вале (0, #i), где п\ определяется в соответствии с ин-
дукционным предположением соотношениями
§ 3. РЕШЕНИЕ МНОГОШАГОВОЙ АНТАГОНИСТИЧЕСКОЙ ИГРЫ 170
которые эквивалентны соответственно неравенствам
7 4
f ‘ .-L>a<(rei), (3,12)
4 I 1
*Т’~<Яг
(3.13)
Поскольку I — + 1 — t) достаточно убедиться,
что имеет место неравенство
/л \ ттт (к ~I- 1 — £ 7 \ I
(1 — Жх) Wn-!-^
или эквивалентное неравенство
Tic -J- 1 - t I Z . ч
Т-х -к > a'^-i (« - 1 - «х)
для чего в силу (3.9) достаточно проверить, что
1 - Х± ( 2 ) к + Sft_x (п) ал+1-< \п 1 п1)-
Подставляя сюда = х-?----------т-г- и выражение для
Л “Г —1 \п)
<ik+i-i(n — 1 — ni), получаем неравенство
к + („) _ г < з”»-'!”-1-".)-"»-1"' [4 + 1 _, +
+ s;,_i(n—1 — nJ], (3.14)
t
которое предстоит доказать.
Для доказательства воспользуемся следствием из не-
равенства (3.13), (3.9):
к + W
’ 1 \mt-l(ni-l)-l t
2/ t + st_x(n.
которое представим в виде
Предположим, что
1^7 — 1
2<~^
(3.15)
(3.16)
Тогда О^г ——3, и потому nJ =1+ (i—1)тА_1(тг) +
12*
180 ГЛ. 3. ВОССТАНОВЛЕНИЕ ФУНКЦИЙ ПО ИХ ЗНАЧЕНИЯМ
+г— t удовлетворяет уравнениям
= t + »,_,(»,-!)_ г,
а следовательно, и уравнению
2”>-Л-Ч ц + 1)1 = г2"*-и>.
Поскольку (3.15) является следствием (3.13) и левая
часть (3.15) возрастает по то Пц определяемое соот-
ношениями (3.12), (3.13), удовлетворяет неравенству
i)mh-i(n) + r — t. (3.17)
В силу (3.17)
п — п± — 1 п — (t — 1) mk^ (тг)'— г + t — i —
t— 1 , t— 1 . . , , .
= га —п + («) — г + Z — 1 =
- ' к-1~ + k=l (га) + «— г — 1 =
= (& — *) [иг*-! (п) + sft_i (n)+t — г — 1 =
= (k — t) mk_r (п) + sft_x (n) + t — r — 1,
откуда
n — n. — 1 Sh 1 (n) 4- t — r — 1
-^->тк-Лп) + ---- (3.18)
И
(n — n1 — 1) — mft_! (n) >
z3>19)
к — t
Учитывая, что, по определению х\ и sh-t (п — п\ — 1),
соответственно г к + sh_\(п) — 1 и sk_t (п — П\ — 1) к —
— t — 1, имеем из (3.19)
(п — — 1) — mk^ (п) >
sk_r (гг) — (/с — f — 1) + — г — 1 _ 9 1
к—t 'к — t
и, в силу целочисленности левой части, mk-t(n — п\ — 1) —
- тк-\(п')> -1.
Пусть
mk_t(n — щ — 1)— тк~\(п) = — 1; (3.20)
§ з. РЕШЕНИЕ МНОГОШАГОВОЙ АНТАГОНИСТИЧЕСКОЙ ИГРЫ 181
тогда из (3.19)
sh-i (п) — sh-t (п — пх — 1) + t — г — 1 t — к, (3.21)
а доказываемое неравенство (3.14) имеет вид
2[к + sk_i (п) — r]^k + l — t + sk_x (тг — 1 — п\). (3.22)
Заметим теперь, что в случае (3.20) из (3.18) следует,
что sh-i(n) + t — г— 1 < 0, т. е. (п) + t — г 0, и ис-
пользуем (3.21), тогда (3.22) очевидно, так как
2[к + sh_x(n)-r]- [к + 1 - t + sA_i(n - 1 - ni)]
s [$A_i(n)-sh-t(n - П\ - l)+£-г- 1] +fc + sA_i(n)-r
t — к + к + sA-i (п) — г = sk-i (тг) + t — г 0.
Пусть
mh-t(n — пх — 1) — mh_x(n)= 0, (3.23)
тогда, в силу (3.19), sh_x(n) — sh_t (n — пх — 1) + £ — г — 1
0, а это и есть в случае (3.23) доказываемое неравен-
ство (3.14).
Пусть, наконец,
mh-t (п - пх - 1) - mh_x (n)=q> 1. (3.24)
Тогда из (3.19) получаем
sA-i (n)— г 1 — t + sh-t(n — пх — 1)+ q(k — t).
Далее, q(k — t) (2q — 1)[& + 1 — t + sk_t (п — пх — 1)], так
как q 2q — 1 при q > 1, и потому
к + $k-i (п) — г С к + 1 — t + sh-t (п — пх — 1)+ q(k — t)^
2g[/b+ 1 — t + sh_t(n — nx — 1)].
Тем самым доказано неравенство (3.14) в предположе-
нии (3.24) и случай (3.16) полностью разобран.
Приступаем к рассмотрению случая
(£-1)/г^1/2 или (£-1)/г>1. (3.25)
Докажем сначала два вспомогательных неравенства.
Во-первых, в предположениях (3.25)
(i-l)log2l=l>f-r-l. (3.26)
доказательства положим (£—1)/г = т и рассмотрим
Функцию z(t) = т log2 т — т + 1. Надо доказать, что
2(т)^0 при 0<т<1/2 или т^1, но это очевидно, так
182 ГЛ. 3. ВОССТАНОВЛЕНИЕ ФУНКЦИЙ ПО ИХ ЗНАЧЕНИЯМ
как функция z(t) выпукла при т>0 и z(l/2) = z(l) = 0.
Во-вторых,
(£- l)log2(£ + a)-a>(£- l)log2(^ — 1)+ 1 97х
при 0 а t — 2.
Для доказательства рассмотрим вогнутую функцию
z(a,) = (t — l)log2(£ + a) — а и убедимся в том, что z(0)^
>z(£-2). Тогда min z (а) = z (t — 2) = (Z — 1) l°g2 (t—
2
—1) + 1 и неравенство (3.27) доказано. Остается прове-
рить, что z(O)>z(£ —2), т. е. (£—l)log2 [£/(£—1)] 1.
Положим [3 = 1/(£ — 1), тогда 0 [3 1 (так как, в силу
(3.11), £>2) и проверяемое неравенство принимает вид
log2 (1 + [3) — р > 0. Последнее при 0 (3 1 очевидно,
так как log2 (1 + [3) — [3 — вогнутая функция, принимаю-
щая нулевые значения при [3 = 0, [3 = 1.
Произведем теперь некоторые эквивалентные преоб-
разования над заданным нам неравенством (3.15). Имеем
- 1) + log2 [t + (ni - 1)] < тк_\(п) + log2r,
откуда
nt-l , —1) п 4-1^ ,
t — 1 + t — 1 <к — 1 к — 1 +
+ 10g2« + ^_1(ni-l)’
и после умножения обеих частей неравенства на t — 1,
вычитания из п и деления на к — t
(t - 1) 10g2 г_±^ф__о_ 5/_1(П1 _ 1} + («) - 2
+ k=t =_
(t-1) 10g2 _St_i(rai_i)+Sft_i(n)_2
= (n) + ------------------------------------------•
Воспользовавшись неравенствами (3.27) при a =
= $,-1(^1 —1) и (3.26), получаем
mh^t (n — ni — 1) —тп/г-л (n)>
(Z-l)log2 t+g<-i(rei *) - St_y{nr - 1) - - 2
>-----------------------k=l.--------------------+
§ з. РЕШЕНИЕ МНОГОШАГОВОЙ АНТАГОНИСТИЧЕСКОЙ ИГРЫ 183
к— t
(t - 1) log2 Lrl - 1 + s^n) - sk_t (n - - 1)
к — t
t-r^2 + sk_1(n)-sll_t(n-n1-i)
>----------------k~i-------------------• <3-28)
Продолжая (3.28), имеем
t—г—24-s/? Jn) — (k— t— 1)
ть-t (n - - 1) - (n) >---------=
f — r — 1 + S, - (n)
= -l +------------k-t * (3-29)
откуда, вспоминая, что г к + sk-i (п) — 1, получаем не-
равенство
mk-t (п — nY — 1) — 7ПЛ_! (п) > — 1 + = — 2. (3.30)
Пусть
mh_t(n — п\ — 1)— mh-\(ri) = — 1. (3.31)
Тогда в силу (3.28), — l>[t — r — 2 + sk-i(n) — sk-t(n--
~ П[ — 1)]/(Л — 0 или
к — г — 1 + sA-i (n) — sh_t (п — п\ — 1) 0, (3.32)
а в силу (3.29), — 1 > — 1 + (t — г — 1 + sk-i (дг) )/(fc — I)
или
t — г + s/t-i (п) 0. (3.33)
Складывая неравенства (3.32) и (3.33), получаем
2 [fc + sk-i (п) — г]^ к + 1 — t + sk_t (п — п\ — 1),
а это и есть в случае (3.31) доказываемое неравенство
(3.14).
Пусть
mk-t (п — П1 — 1) - тк_\(м) = 0. (3.34)
Тогда, в силу (3.28), 0 > t — г — 2 + sk_i (п) — sk_t (п — щ —
** 1), следовательно, к + sk-i (п) — г к + 1 — t + sk_t (п —
^l — ni), а это и есть в случае (3.34) доказываемое не-
равенство (3.14).
Пусть, наконец,
mk-t(n — nt - 1) — mft_i(n)= q > 1. (3.35)
184 ГЛ. 3. ВОССТАНОВЛЕНИЕ ФУНКЦИЙ НО ИХ ЗНАЧЕНИЯМ
Тогда из (3.28) следует, что
1 — г — 2 + W — sh-t (п ~ пг ~ *)
q> k^i ’
и, стало быть,
sA-i (п) — г 1 — t + sk-t (п — п\ — 1)+ q(k — t). (3.36)
Далее, поскольку q 2q — 1 при q > 1, то
q (к - t) (29 - 1) [к + 1 - t + sh-t (п - пх - 1)]. (3.37)
Имеем, используя (3.36) и (3.37),
к + sk-X (тг) — г к + 1 — t + sh-t (n — п\ — 1)+ q(k — t)^
2q[k + 1 — t + sk-t(n — n\ — 1)],
а это и есть в случае (3.35) доказываемое неравенство
(3.14).
Согласно (3.30) все возможности исчерпаны и рас-
смотрение случая (3.25) закончено, а вместе с тем за-
вершено рассмотрение случая (3.8).
Если же
6A(n)^Z^aA+i(n), 7f = l, ...,[n/2], (3.38)
то, выбирая на первом шаге Тп> г(1) = г/(к + 1 + sh(n)),
г = 1, ..., к + sh(n), минимизирующий игрок, как уже
доказано при Z = aA+i(n), может гарантировать себе про-
игрыш не более Wn(l) = Як+\(п)/(к + 1). При выполнении
(3.38) проигрыш тем более не превосходит Wn(l)^
= ^+i(n)/(/c + 1)= bh(n)/k.
Наконец, если
I > &in/2 j+i, (3.39)
то проигрыш пе более Wn (Z) = i = мииими~
зирующий игрок обеспечивает, выбирая на r-м шаге
точку Тп> г(1) = г/(п + 1), г = 1, ..., I п/2\ +1 +
+ 5[п/2 j+1 (п) = п, независимо от действий максимизиру-
ющего игрока.
Рассмотрением возможностей Z=^&i(tz), (3.8), (3.38)
и (3.39) доказательство сформулированного в начале п. 2
утверждения закопчено.
3. Доказательство теоремы 3.1 — гарантированный ре-
зультат максимизирующего игрока. В этом пункте до-
кажем, что, приписывая па первом шаге отрезкам [0, х\\,
[zi, 1] соответственно числа Zi(#i), Z —Zi(#i), где
§ 3. РЕШЕНИЕ МНОГОШАГОВОЙ АНТАГОНИСТИЧЕСКОЙ ИГРЫ 185
оПреДеляется формулой (3.5), максимизирующий игрок
обеспечивает себе при оптимальных действиях в после-
дующем выигрыш не менее (3.3).
Убедимся прежде всего, что (3.5) определяет стра-
тегию максимизирующего игрока на первом шаге пол-
ностью (не обязательно однозначно).
Пусть
к — t + 2 sk(n) ~ 1—1, t — 1 четно, (3.40)
т. е. Zi(^r) не определено. Из второго двойного неравен-
ства в (3.7) и левого —в (3.40) имеем 2t — sk(n) — 3<
< к t + sk(n) — 2, откуда t— 1^2$А(гс), что противо-
речит правому неравенству (3.40), т. е. (3.40) не-
возможно.
Пусть
к — t + 2 (/г) -4" — 2, t четно, (3.41)
Л
т. е. Zi(^i) не определено. Тогда по-прежпему t — 1С
^2sk(n), что противоречит правому неравенству (3.41),
т. е. (3.41) невозможно.
Таким образом, при всех Х\ С 1/2 функция Zi(^i) оп-
ределена первыми пятью строками (3.5), при х\ > 1/2
функция Zi(^i) определена шестой строкой (3.5).
Так же легко проверяются условия 0 С Л(^1)^ Х\,
0 I — (х\) С 1 — х\, которым должна удовлетворять
стратегия максимизирующего игрока.
Если I &i (п) = (1/2)™, то максимизирующий игрок
гарантирует выигрыш Wzn(Z) = Z, приписывая на каждом
шаге большему отрезку число Z, меньшему — 0. Макси-
мизирующий игрок, гарантируя выигрыш Ъ\(п) при Z —
^М^), тем более гарантирует bi(n) при Z>&i(n).
Первая строка в (3.5) этим полностью обоснована (за-
метим сразу, что шестая строка не требует дополнитель-
ного обоснования, если обоснованы предыдущие). Тем
самым для п = 1 доказано и утверждение п. 4.
Пусть утверждение доказано также для 2, ..., (n — 1)-
Н1аговых игр. Докажем его для п-шаговой игры.
Доказательство достаточно провести для случая
(3.8), ибо если оно проведено для этого случая и Ък(п)^
^^Яа+1(и), к = 2, ..., [п/2] +1, то максимизирую-
щий игрок, гарантируя выигрыш Ьк(п)/к при 1 = Ьк(п),
тем более гарантирует Ьк(п)/к при Z Ьк(п).
186 ГЛ. 3. ВОССТАНОВЛЕНИЕ ФУНКЦИЙ ПО ИХ ЗНАЧЕНИЯМ
Итак, предположим, что в условиях (3.8) х\ 1/(к +
+ 1 + sk(n)). Согласно индукционному предположению,
достаточно убедиться, что (1 — яд) Wn-i (1/(1 — #i))
> Wn(l) = l/к. Последнее неравенство, в свою очередь,
достаточно проверить в наихудшем для максимизирую-
щего игрока случае х\ = 1/(к + 1 + sk(n)):
к + sk (n) w /. 1 + sk (и-) \ I
k + l+sk (n) п~г к + sk (n) j к'
Выписанное неравенство равносильно в силу определения
функции Wn-i неравенству 1(к + 1 + sh(n) )/(к + sk(n))
^bh(n — 1), для доказательства которого достаточно
вследствие (3.8) показать, что Ьк(п) (к + 1 + sk(n))/(к +
+ sh(n)) < Ьк(п — 1), или, что то же самое, (к +
+ sk (п)) 2 } (к + 1 + sk (п — 1)) 2 \ Левая и пра-
вая части последнего соотношения связаны на самом де-
ле знаком равенства, ибо если mh(n) = тк(п — 1)+ 1, то
sk(n — 1) = к — 1, sft(n) = 0, если же тк(п) = mh(n — 1),
то sk(n) = sk(n — 1)+ 1. Вторая строка в (3.5) обос-
нована.
Далее предстоит в условиях (3.8) рассмотреть случай
(3.7). Мы покажем, что если
то
(1 - Wn-n-, > 4- <3-43>
Это, согласно индукционному предположению, означает
следующее: если минимизирующий игрок выберет па от-
резке [0, яд] такое число точек п\ из оставшихся п — 1
точек, что максимизирующий игрок пе может гарантиро-
вать себе на отрезке [0, яд] выигрыш Wn(l) = 1/к — (3.42),
то в этом случае максимизирующий игрок гарантирует
себе выигрыш не менее Wn(l) = 1/к па отрезке [яд, 1]-~
(3.43), а стало быть, и во всей игре. Этот факт и тре-
буется доказать.
Подставим в (3.42) l\ (xi) = (t — 1)1/к:
Полученное неравенство равносильно, в силу определения
§ з. РЕШЕНИЕ МНОГОШАГОВОЙ АНТАГОНИСТИЧЕСКОЙ ИГРЫ 187
I__j I
функции Wni, неравенству —-----^->^t_1(nJ, откуда,
0спользуя правую часть (3.9) и левую (3.7), имеем
/ 1 Wn)-i 1 к + 1 + sh (и)
А +1+ «/,(«) ’ t — 1 >
/ 1 \mt-1 t — i
>\2) * + «(_! (nJ-
После эквивалентных преобразований получаем после-
довательно
mt^ (nJ > mh (n) + log2
«i — st-i («J > (t - 1) mh(n)+(t-1) log2 у
Далее, замечая, что (t — l)/(i + st-\(ni))> 1/2, продол-
жаем:
— st-i (^i) > G — 1) mh (n) + (i — 1) log2 =
= (mh (n) — 1),
и, вспоминая смысл входящих в неравенство величин,
заключаем:
(3.44)
Неравенство (3.44) получено как следствие (3.42).
Подставляя в доказываемое неравенство (3.43) Zi(#i) =
= (£— 1)1/к и заменяя его на эквивалентное, имеем по-
следовательно
I \ I к —+ 1
к J к ’ 1 — х^ к
<bk_t+1 (n —nx — 1).
Усилим полученное неравенство, используя правые
неравенства (3.7), (3.9), вытекающее из (3.44) неравен-
ство п — т — 1 п — (t — l)7nft(n)— 1, а также убывание
Функции bk(n) по п. Получим
(к - t + 1) И ____________1______Л_________t_____
’\2) k + i + Sh(n) (/ Л+1+«А(п)У
С \т^~t+i(n—1)тй<п)—!)______________k—t + i___________
к 2 / k—t+2+sk_t+1(n—(t—i)mk(n)—l')
188 ГЛ. 3. ВОССТАНОВЛЕНИЕ ФУНКЦИЙ ПО ИХ ЗНАЧЕНИЯМ
ИЛИ
' 1 \mk(n>______1________f+1(n—(t—i)7nA(n)—1)
2) k~t+ i+sk(n) X
1
X A: — + 2 +sk_t+1 (n — (t — 1) mk (n) —1) * (* I * 3 Ч*45)
Докажем, что на самом деле при sk(n)<k — £+1 ле-
вая и правая части (3.45) связаны знаком равенства,
откуда следует справедливость (3.43) и обоснованность
третьей строки (3.5). Заметим, что
п — (t — 1) jnk (n) — 1 п — (t — 1) (п/к — Sk (n)/kj — 1 _
к — t -р 1 к — t 1
/г-n
п , (г } „ z х , Ч (") ,
= Т + k-t + t - mh^ + ~ПГ +
, (« —1 _ ,„4 , sh(re)~1
+ к (к — t + 1) к — t + 1 — mh W + к — t Н- 1 •
11 /Л 1
Если sA(n) = 0, то mA_(+i(n — (£ — 1)тпА(п)~ 1)= тк(п)
— 1, sA_(+i (n — (£ — l)mA(n) — 1) = к — t, если же 1
'Ssh(n)^ к — t + 1, то mh-t+i(n — (t — l)znA(n)— 1)
= mA(n), sA-t+i(n — (t— i)mk(n)— l) = sA(ra)— 1. Справед-
ливость равенства в (3.45) в том и другом случае оче-
видна.
Случаи, соответствующие четвертой и пятой строкам
(3.5), рассматриваются аналогично.
I__4 I
Подставим в (3.42) Z1(^r1) = —---В качестве след-
ствия полученного неравенства выводим
«1 > г [mh (n)+l] + ST (nJ + г log2 —
> rmk (ri) + sr (nJ,
где r = (t — l)/2, (£—1) четно, откуда ni > r[mk(n) + 1],
и, стало быть,n — тгх — ----—mh(n)-------. Заме-
пяем неравенство (3.43) в рассматриваемом случае
7 ( ч t — 1 I
Ч = —2 к~ на эквивалентное неравенство и уси-
ливаем его, используя последнее полученное неравенство
§ 3. РЕШЕНИЕ МНОГОШАГОВОЙ АНТАГОНИСТИЧЕСКОЙ ИГРЫ 189
и правые неравенства (3.7), (3.9). Тогда имеем
1 с/1) 2
2 ] к — t + 1 + sk (n) 2 )
Замечаем далее, что
t — 1 t + 1
n~—
-------------- = mk (n) +
к — о
t — 1
2
(3.46)
откуда выводим, что при четном £—1 и sk(n)>(t +1)/2
(п — уу тк (п) — = тк (п),
2 \ « I
s t-1 I п-----2~ тк (П)-----I = Sh («)-------у-.
2 \ /
Если же sk(n) = {t— 1)/2, то
/ t--------------------1 - z \ t -4- 1\ { V 1
т <-1 п--------тк (п)-------3- = тк (п) — 1Х
2 \ /
/ t 1 ( ч t -f- 1\ 1 t -|- 1
ShJ>=l « - — 7ПЛ (П)-------f- = к -
2 \ /
В обоих случаях левая и правая части (3.46) связаны
знаком равенства, чем обоснована четвертая строка (3.5).
Подставим, наконец, в (3.42) В каче-
стве следствия выводим
П i > г (тк (м) + 1) + Sr (nx) + г log2
где теперь г = t/2
г —1/2
r+l+^nj 2’
(f четно). Если sr(ni)Cr —2, то
и потому «1 — sr(ni)> гтк(п), откуда
п > r(mk(n)+ 1) при 5г(и1)^г—2. (3.47)
Если же sr(ni) = r— 1, то г log,—, г. , .—г =
4 ' ’ 62 г + 1 + «г(п1)
7* ~ 1/2
г 1°£2—— г — 1. Действительно, поделив обе ча-
190 ГЛ. 3. ВОССТАНОВЛЕНИЕ ФУНКЦИЙ ПО ИХ ЗНАЧЕНИЯМ
сти неравенства на г и положив a=l/(2r), z(a) = 2a +
+ log2(l — сс), перепишем неравенство в виде z(a)^0
при 0 a ^1/2. Но последнее справедливо, так как
z(0) = z(l/2) = 0 и функция z вогнута. Таким образом,
т/i > r(mk(n) + 1) — 2, откуда
п\ > г(тк(п) + 1)— 1 при $г(тг1) = г — 1. (3.48)
Объединяя (3.47) и (3.48), имеем п\ > г(тк(п) + 1)— 1
и, стало быть, п — п\ — 1 п — г(тк(п) + 1). Преобразуя
и усиливая теперь (3.43), получаем неравенство
/ j i / ! \mk_r(n—rmk(n)—r)
\"2 J А: + 1 — 2r + (n) ^\2j *
X к — r + i + sh_T(n — rmh(n) — r) (3.49)
Замечаем далее, что
n — rmk(n) — r sk(n) — r
- mh (n) 4 к_г ,
откуда выводим, что при четном t и sh(n) = r — 1
ттгк_г(тг — rmk(n) — r)= mk(n) — 1,
sk_T(n — rmk(n) — г) = к — г — 1,
а при sh(n) > г
тк-Т (n-rmh(n)-r) = mh (тг),
sk-T {п - гтк (тг) -r) = sk (тг) - г.
В обоих случаях, как нетрудно убедиться, левая и пра-
вая части (3.49) связаны знаком равенства, чем обосно-
вана пятая строка (3.5).
Тем самым сформулированное в начале п. 3 утверж-
дение доказано. Остается вернуться к последнему абзацу
перед началом п. 2, чтобы убедиться, что теорема 3.1
полностью доказана. А
ГЛАВА 4
ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
В этой главе рассмотрены вопросы оптимального по-
иска наибольшего значения функций одной и несколь-
ких переменных для классов функций, заданных квази-
метриками, построены оптимальные детерминированные
и стохастические пассивные алгоритмы, а также опти-
мальные па один шаг детерминированный и стохастиче-
ский алгоритмы и последовательно-оптимальный детер-
минированный алгоритм.
Начнем с краткой исторической справки.
Первые работы по оптимальным (в рамках минимакс-
ного подхода) алгоритмам поиска экстремума были по-
священы унимодальным функциям, т. е. функциям с
единственным максимумом. Ныне широко известна ра-
бота [371], где построен оптимальный последовательный
алгоритм поиска экстремума унимодальной функции. Тот
же результат получен в [364]. Последующими работами
па эту тему были [4, 5, 128, 221, 264, 276, 291, 310, 311,
316-318, 347, 369, 372, 406, 422, 423, 466] и др. Неко-
торые из полученных результатов перенесены па много-
мерный случай [348, 370, 373—375, 403, 440, 462—465].
Вопросы построения оптимальных методов максими-
зации вогнутых (минимизации выпуклых) функций од-
ной переменной обсуждаются в [4, 292, 436, 466]. Опти-
мальный последовательный алгоритм удалось построить
лишь в случае, когда критерием является точность опре-
деления положения точки максимума [466]. В случае,
когда критерием является точность определения макси-
мального значения функции, удается построить лишь
оптимальный на один шаг алгоритм [292].
Многие исследования посвящены оптимизации мето-
дов поиска максимума вогнутых (минимума выпуклых)
функций нескольких переменных. Показано, что мини-
мальное число информационных вычислений, позволяю-
щее обеспечить заданную точность е, равно по порядку
1п(1/е), как в случае, когда па каждом шаге вычисляется
лишь значение максимизируемой функции, так и в слу-
192
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
чае, когда дополнительно вычисляется градиент (субгра-
диент), причем нижняя по порядку оценка достигается,
папример, на методе центров тяжести [154] и па методе
эллипсоидов [186].
Оптимальные алгоритмы для классов дифференцируе-
мых функций изучаются в работах [57, 65, 109, 112, 119,
198, 295, 296] и др. В [112] показано, что наилучшая точ-
ность, достижимая при заданном числе информационных
вычислений N, равна по порядку N~{m+i)/n для класса т
раз дифференцируемых на Rn функций, удовлетворяю-
щих условию
dtm !«=«! dtm |i=<2|
где Hell — 1, а константа М не зависит от х, е. Этот ре-
зультат справедлив как в случае, когда на каждом шаге
вычисляются значения функции и всех ее частных про-
изводных до порядка тп, так и в случае, когда вычисля-
ются лишь значения самой функции. Ранее для классов
т раз дифференцируемых функций аналогичные оценки
были получены для других задач численного анализа
[13, 52, 126]. В [112] построены также оптимальные по
порядку алгоритмы для класса аналитических функций
и некоторых других функциональных классов.
§ 1. О выборе начальных точек
для методов локальной оптимизации
В вычислительной практике часто для отыскания гло-
бального максимума функции f используют многократно
тот или иной локальный метод. При этом начальные
точки выбирают или случайно в соответствии с заданным
вероятностным распределением, или детерминировапно,
чтобы они были в том или ином смысле равномерно рас-
пределены в К <= Rn — области, па которой максимизи-
руется функция /. Данный параграф посвящен вопросу
оптимального выбора начальных точек.
I. Определения оптимального детерминированного и
оптимального стохастического методов выбора начальных
точек. Пусть надлежит выбрать N начальных точек
#1, ..., xN. Естественно выбирать их так, чтобы миними-
зировать определенную формулой (2.2) гл. 2 величину
T?(^N) = sup min pfr, радиуса покрытия, за-
§1.0 ВЫБОРЕ НАЧАЛЬНЫХ ТОЧЕК
193
данного центрами х* = (х1, xN) (здесь р —некоторая
метрика). Такой выбор гарантирует, что расстояние от
произвольной точки х^К до ближайшей из начальных
точек не превосходит величины
Rn = inf sup min р(я, х{)
х^,^.,х^еК x=K
радиуса оптимального покрытия. Уменьшить это рас-
стояние одновременно для всех точек из К невозможно.
Набор начальных точек, реализующий минимум в вы-
ражении для 7?jv, назовем оптимальным детерминирован-
ным методом выбора (оптимальной детерминированной
конфигурацией} начальных точек. Таким образом, опти-
мальные детерминированные конфигурации совпадают с
наборами центров оптимального покрытия множества К
(по поводу оптимальных покрытий см. и. 1 § 2 гл. 2,
а также п. 3 § 1 гл. 3) .
Стохастические методы выбора начальных точек за-
даются вероятностными мерами о* е S*, где 2х — мно-
жество всех вероятностных мер па о-алгебре борелевских
подмножеств области KN. Применяя стохастический ме-
тод и*, конфигурацию начальных точек '(#1, •. #n) вы-
бирают случайно в соответствии с вероятностной ме-
и ЯГ
рои (Г.
Оптимальным стохастическим методом выбора началь-
ных точек назовем метод, заданный вероятностной мерой,
минимизирующей функцию
R (aN) = sup f min p (х'х$ vN (1.1)
Таким образом, при применении оптимального стоха-
стического метода расстояние в среднем от произвольной
точки х^К до ближайшей из начальных точек не пре-
восходит величины
R^ = inf R(<jn). (1.2)
Уменьшить это расстояние в среднем для всех точек из
К невозможно.
Сравнение стохастических и детерминированных ме-
тодов выбора начальных точек проводится, например,
в работах [301, 303], однако во всех рассмотренных слу-
чаях хотя бы один из сравниваемых методов пе является
оптимальным.
i3 а. г. Сухарев
194
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
2. Сравнение оптимальных стохастических и детер-
минированных методов выбора начальных точек. Прове-
дем сравнение для случая
К={и = (и\ .... ип) 10 С и* 1, Z = l, п).
(1 3^
р (м.? v) = max | и — v1|, N = рп. р — целое число. ' '
г=1,...,п
Теорема 1.1 [240]. В предположениях (1.3) спра-
ведливы неравенства
——; Rn Rn Rn. (1.4)
причем оценка снизу асимптотически точна, т. е.
п
____ D
Нт ге+1 (15)
Rpn
Доказательство. Справедливость правого из не-
равенств (1.4) очевидна, так как 5х содержит любую
вероятностную меру, сосредоточенную в единственной
точке множества KN.
Для доказательства левого неравенства воспользуемся
леммой 2.4 гл. 2. Учитывая, что в рассматриваемом слу-
чае RN = rN = 1/(2р), ц(К) = 1, имеем
inf I min p(x.Xi)dx = —Rn.
откуда
i min р(х. xi)dx^—t—tRn, xn (= KN. (1.6)
К
Интегрируя обе части (1.6) по произвольной вероятност-
ной мере oN Sv, получим неравенство
ff f min р(х. Xi)gn {dxN]\dx^—- Rn
J I J I n г 1
К \KN 1,1 J
(изменение порядка интегрирования законно вследствие
непрерывности подынтегральной функции), из которого
следует, что R (gn) Rn- Отсюда в силу произ-
вольности ох е 2х немедленно вытекает справедливость
левого из неравенств (1.4).
§1.0 ВЫБОРЕ НАЧАЛЬНЫХ ТОЧЕК
195
Приступим к доказательству соотношения (1.5). Для
этого введем в рассмотрение функцию
. . п2 + /зп2 + + 1 - 1 . о
Ф («) = „ , 2^ /----------- п = 1, 2, . . .
2 \п + 11)
Нетрудно проверить, что 1/2 < ср (ft) < 1/2 + 1/;[2 (п + 1)].
Отметим, что всюду дальше ср (ft) можно заменить на
1/2. При этом рассматриваемый ниже стохастический ме-
тод в* заменится на худший (доставляющий большее
значение функции R) метод, рассмотрение которого, од-
нако, также обеспечивает доказательство соотношения
(1.5). Усложнение конструкции вызвано желанием ука-
зать как можно более эффективный метод (оптимальный
стохастический метод выбора начальных точек при ft > 1
неизвестен).
Положим т = 1/ (р — 2 + 2ф (ft)) и рассмотрим куб
К (т) = \и = (и1, . .., ип)
А t РХ - 1 А 1
<1 + —---, I = 1, • • ft
с ребрами длины рт. Каждое из ребер ТЦт) разобьем па
р частей и проведем гиперплоскости, параллельные ко-
ординатным гиперплоскостям. Куб К(т) разобьется при
этом на N = рп кубов с ребрами длины т. Центры этих
кубов обозначим через £*, . .., Пусть х™ = (х*, .. .
...» хм)', 0 — случайный вектор, равномерно распределен-
ный в кубе Ко — {0 = (0\ ..0n) I 10’1 т/2, i = 1, ..., ft};
Xi (0) — проекция вектора х 4- 6 на куб К, i = 1, ..., N;
х* (9) = (х* (0), ...,4 (0)). Вероятностную меру, соответ-
ствующую случайному вектору ^(0), обозначим через о*.
Вычислим величину
(о^) = max ] min р (a, Xi) (\
ек £Ni=i,....
На рис. 8 изображен случай п = 2, р = 5; К—это квад-
рат, обведенный жирной линией, К(х) — больший
квадрат.
13*
196
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
Пусть а = х*, причем я* не является центром ни
одного из граничных кубов. Имеем
Г min р(х*, Х4)о” f р(х*,x*(Q))d9 =
к»1”1”"’" * Ко
= ±ур(о,е)л-^4. (1.7)
ко
Пусть теперь a = ai, причем координатный куб с реб-
рами длины т и центром а\ целиком лежит в К. Нетруд-
но видеть (см. рис. 8), что и в этом случае
J {_тт^р(ах, х4)о* =-^^-1. (1.8)
KN ~
Пусть, наконец, точка а = а,2 такова, что координат-
ный куб с ребрами длины т и центром а% не лежит
целиком в К. Достаточно рассмотреть случай, когда аг
лежит на границе К, причем все координаты аг, кроме
одной, больше 0 и меньше 1. Предположим без ограни-
чения общности, что а2 = х* + а', где а' = (0, ..., О,
т/2 — (1 — ф(п) )т). Такой случай изображен на рис. 8.
§1.0 ВЫБОРЕ НАЧАЛЬНЫХ ТОЧЕК
197
Имеем
I min р (а2, g* {dxN} =
<г=1,...Л
л
= J P(0>a')^d0 +
1е*|<т/2,г—1,...,л—1
—т/2-<Оп4:т/2+(1—Ф(п))т
+ (1 -<₽(«)) J р'(О,е')^0' = ;гтгу’ <1-9)
ко
где
К'о = {0' = (О1, ..., On-1)||0i|<T/2, г = 1, .п- 1],
р'(uz, р') = max | и’ — иг |, и'= (и1, ...,ип~х),
г=1,...,п—1
v' = (р1, . . ., г/1"1).
Теперь на основании равенств (1.7) — (1.9) мы можем
заключить, что
R (в*} = __2_. ------ 1 (1.10)
\ *7 п + 1 2(р — 2 + 2<р (п)) 4 7
Учитывая, что НрП = i/(2p), из (1.4) и (1.10) имеем
п п
4 и 4~ 1 рп Ч~ 1 рп __ Р — 2 4~ 2ф (/г) /л л л \
откуда непосредственно следует (1.5). А
Замечание 1. Нетрудно видеть, что
п —
Р — 2 -р 2<р (п) _ п + 1 Rpn Rpn ।
~г г К) "гф?)" '
рп
откуда следует, что стохастические методы о* гаранти-
руют при р -+ оо последовательность результатов, экви-
валентную оптимальной. А
Замечание 2. Теорема показывает, что в пред-
положениях (1.3) относительный выигрыш от использо-
вания стохастических методов выбора начальных точек
(по сравнению с детерминированными методами) неве-
лик и сходит па пет с увеличением размерности про-
странства. А
198
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
§ 2. Оптимальный пассивный поиск
для функционального класса, заданного
квазиметрикой
В данном параграфе рассматривается вопрос об опти-
мальных детерминированных и стохастических пассивных
алгоритмах для задачи поиска глобального экстремума
(задачи глобальной оптимизации) функции, принадлежа-
щей классу Fp, где р — произвольная квазиметрика. Здесь
и в последующих параграфах данной главы предпола-
гается, что S(f) = sup f(x), B = R, а также, если явно
хеК
не оговорено противное, что информационными вычисле-
ниями являются вычисления значений функции f и до-
пустима единственная итоговая операция , у ) =
= max yi (см. (3.6) гл. 1). При этом критерий (4.14)
гл. 1 принимает вид
&(xN, f) = sup f(x) — max /(^) (2.1)
x^K
(величина e(£y, /) определяется второй из формул (4.14)
гл. 1). Далее в этой главе мы будем вести речь о мно-
жествах алгоритмов XN (см. (3.8) гл. 1) и XN (см.
(3.10) гл. 1), не касаясь больше вопроса об итоговой
операции.
1. Сведение задачи построения оптимального детер-
минированного пассивного алгоритма к задаче оптималь-
ного покрытия множества К. Обозначим наилучший га-
рантированный в множестве алгоритмов XN результат
через vN:
vn — inf sup e (xN, /).
XN&XN
В формулировке следующей теоремы фигурируют вели-
чины R(xN) и RN, определенные соответственно форму-
лами (2.2) и (2.3) гл. 2.
Теорема 2.1 [240]. Результат, гарантированный ал-
горитмом xN на функциональном классе Fp, равен радиу-
су R(xN) покрытия, заданного центрами х\, ..., xN. Наи-
лучший гарантированный результат vN равен радиусу
оптимального покрытия RN. Алгоритм х$ оптимален по
точности на классе Fp в множестве XN тогда и только
тогда, когда вектор Xq задает оптимальное покрытие мно-
жества К.
§ 2. ОПТИМАЛЬНЫЙ ПАССИВНЫЙ поиск 199
Доказательство. Для функции ha, введенной в
лемме 2.1 гл. 1, имеем
е (xN, ha) = sup ha (x) — max ha (^) = min p (x., a).
xt=K г
(2.2)
Пусть f^Fp, 6>0, /(тб) sup f(x) — 6. Тогда
e hX6^ = min p (Xi, x6) = p (xi&, x6) >
>/(^>) — ~ max /(^)>
sup / (я) —- max f(xi) — 6 = s(xN, f) — 6. (2.3)
xeK
Следовательно, sup e (xN, ha) 8 , j) — 6. Учитывая
ciE:K
произвольность f^Fp и устремляя 6 к нулю, выводим
отсюда, что
sup е (xN, ha) sup е (xN, f).
а(=К f(=Fp
Справедливость противоположного неравенства вытекает
из леммы 2.1 гл. 1, поэтому с учетом (2.2) получаем
sup &(xN, /) = sup &(xN, ha) = sup min p(j?i, a)=R(xN).
f^Fp aEK aEKi=l,...,N
Остальные утверждения теоремы теперь очевидны. А
Замечание 1. Из-Доказательства теоремы видно,
что если F <= Fp и ha е F при всех а К, то алгоритм
, оптимальный па классе Fp, оптимален также и па
подклассе F класса Fp. Иаилучшие гарантированные ре-
зультаты на Fp и на F совпадают. А
Замечание 2. Оптимальные на классе Fp пассив-
ные детерминированные алгоритмы для задач восстанов-
ления функции и глобальной оптимизации совпадают.
В обоих случаях дело сводится к отысканию оптимально-
го покрытия множества К. Таким образом, так же, как
и в задаче восстановления функции из класса Fp по ее
значениям, в случае п=1, 7£ = .[0, 1], р(и, v) = M\u — v\
алгоритм (1/(27V), 3/(27V), ..., (2N-1)/(2N)) оптима-
лен в множестве всех пассивных алгоритмов, при этом
Vn = М/(2N) (см. следствие из теоремы 1.2 гл. 3). Как
мы убедимся ниже, оптимальные пассивные стохастиче-
200
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
ские алгоритмы и последовательно-оптимальные алгорит-
мы для задач восстановления функции и глобальной
оптимизации существенно различны. А
Замечание 3. Напомним, что для класса Fp оп-
тимальный пассивный алгоритм оптимален также в мно-
жестве всех последовательных алгоритмов (следствие из
теоремы 5.3 гл. 1). Этот факт можно доказать и иным
методом [240], аналогичным методу доказательства тео-
ремы 1.3 гл. 3. А
2. Сведение задачи построения оптимального стоха-
стического пассивного алгоритма к решению антагони-
стической игры. В силу определения (7.8) гл. 1, для
отыскания оптимального по точности стохастического ал-
горитма необходимо минимизировать по oN функцию
sup [ 8 (<rN, /) gn Здесь 2* — по-прежнему множе-
/е7?р kN
ство всех вероятностных мер па о-алгебре борелевских
подмножеств множества KN (предполагается, что К —
открытое множество, либо замыкание открытого множе-
ства).
Лемма 2.1. Пусть К —компакт, функция р обла-
дает свойствами^ квазиметрики и непрерывна на КУ. К.
Тогда для любого
sup [ 8 (xN, f) (jN [йяЛ] = sup f & (xN, ha) oN {dxN}—
&N a(=K kn
= sup I min p(xi, a)oN [dxN]-
a(=K £n i=l,...,N
Доказательство. Пусть В силу непрерыв-
ности р функция f также непрерывна. Следовательно,
существует точка xq^K такая, что f(xQ) = max / (х). Из
(2.3) вытекает, что для произвольного xN^KN имеем
& (a;77, f) е (xN, hx^. Отсюда
f f efa^Ma^da;77],
£n k °7
и потому
sup [ e (xN, /) o77 [da:77] sup f e (xN, ha) cN [da;77].
/e Fp
§ 2. ОПТИМАЛЬНЫЙ ПАССИВНЫЙ ПОЙСЙ 201
Противоположное неравенство очевидно, так как ha^Fp
при а^К. Тем самым справедливость первого равенства
утверждения леммы доказана. Справедливость второго
следует из (2.2). А
Следствие. Оптимальный по точности стохастиче-
ский пассивный алгоритм глобальной оптимизации сов-
падает с оптимальной смешанной стратегией минимизи-
рующего игрока в антагонистической игре с функцией
выигрыша min р (х^ а). Чистыми стратегиями миними-
i=l,...,N
зирующего игрока в этой игре являются векторы xN е
<=KN, чистыми стратегиями максимизирующего игрока —
точки а е К. Наилучший гарантированный в множестве
стохастических пассивных алгоритмов результат равен
значению игры.
3. Построение оптимального стохастического пассив-
ного алгоритма в одномерном случае. В одномерном слу-
чае удается получить полное решение задачи об опти-
мальном по точности стохастическом пассивном алгорит-
ме, который, оказывается, имеет весьма простой вид.
Теорема 2.2 [240]. Пусть п = 1, Z< = [0, 1], р(и, v)=*
= Mlu — vl. Тогда стохастический пассивный алгоритм
Gq, приписывающий вероятности 1/2 векторам
fa 2 27V — 2\ Nil 3 Л
1 ’ 2N — Г * ’ ’ ’ 2N — 12 “ \2N — Г 2N — Г ’ ’ Д
оптимален по точности на классе Fp; наилучший гаран-
тированный результат равен Ml (kN — 2).
Доказательство. В соответствии со следствием
из леммы 2.1 достаточно показать, что gp—оптимальная
смешанная стратегия минимизирующего игрока в игре с
функцией выигрыша
/ n \ •
т] (т , а) = min \xt — а|,
1=1..N
a sN = l/(47V —2) — ее значение. Покажем сначала,, что
стратегия Gq гарантирует минимизирующему игроку ре-
зультат sN.
Пусть a^Z< = [0, 1]. Тогда а = a + j/(2N — 1), /е
МО, 1, ..., 27V-1}, О^а' ^1/(2N-1) и
л а) = 4 л «) + 4 л ®) = 4а' +
,1/1 л
+ 2|2А'-1 a)~sNt
202
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
где
“/ N \ f / N \ N]i N\ N , v7V
т] (о , а) = J ц [х , а) о [dx |, о .
Таким образом, стратегия Oq действительно гарантирует
результат sN.
Пусть соо — смешанная стратегия максимизирующего
игрока, приписывающая 2N точкам О, 1/(22V—1),
2/(22V— 1), ..., (22V—1)/(22V—1)= 1 равные вероятно-
сти 1/(27V). Покажем, что со о гарантирует максимизи-
рующему игроку результат не хуже
Пусть xN = (х\, ..., х^ ..xn) ^Kn и jl(2N — 1)<яг-<
<(j + 1)/(27V — 1) для некоторого целого /. Тогда имеет
место хотя бы одно из двух неравенств
7
* * *’ 27V —1’
/ + 1
’ ’ 27V —Г
(2.4)
где
ц (xN, со) = [ ц (xN, а) со {da}, со е S,
к
S — множество всех вероятностных мер на о-алгебре бо-
релевых подмножеств множества К. Действительно,
27V—1
- / n \ 1 V ( tv а \
> <«>o) = 27V 2 Ф ’2TVTTT =
а=о ' '
27V—1
= 2N 2 “1П | — 27V — 11'
Положим
( 0 1
J27V — Г 27V — Г * * ’
т. е. M(i) — все те точки из множества
27V —11
..,, тгтг—тк для которых Xi — ближайшая точка из мно-
ZaIN 1 I
жества точек {rri, ..xN}. Тогда, если слева от Xi точек
§ 2. ОПТИМАЛЬНЫЙ ПАССИВНЫЙ ПОИСК 203
из M(i) больше, чем справа, то справедливо первое из
неравенств (2.4), в противном случае — второе. Если
слева и справа от хг точек из M(i) поровну, то справед-
ливы оба неравенства (2.4).
Проведя такие же рассуждения для всех 1 = 1, ..N,
получим неравенство
/7 7*1 Av \ \ — / N \
Л \\27V — Г ’ ’ ’ ’ 27V — 1/’ Woy Л \х 1 <«>оЛ
где /1, ..., jN {0, 1, ..., 2N — 1}. Наконец,
— /7 i A Av \ \
Г,Ц2ДГ— г • • ''2N — 1P ^oj —
2N-1 f • .
— J_V ’ 7P a 1 TV _
2N р=Т,1ПЛ I 2N ~ 1 2N~ 11^ 27V* 27V — 1 ~ Sn-
В силу произвольности xN e KN из последних двух нера-
венств следует, что стратегия (Оо гарантирует результат
не хуже sN. А
Замечание 1. Результат ТИ/(4ДГ —2), гарантиро-
ванный оптимальным по точности стохастическим пассив-
ным алгоритмом, почти в два раза лучше результата
M/(2TV), гарантированного оптимальным по точности де-
терминированным пассивным алгоритмом. А
Замена н и е 2. В задаче восстановления функции
n
по ее значениям стохастический пассивный алгоритм й0
не является оптимальным по точности. Чтобы убедиться
в этом, достаточно рассмотреть функцию /(.г) = min {я,
\х — 2/31} на отрезке Х = [0, 1] при W = 2. Как нетрудно
проверить, для нее [ 8 (xN, f) Gq {dx* ] = M/3 (здесь
KN
в(х\ f) определяется формулой (1.8) гл. 3), и, стало
быть, алгоритм Gq гарантирует результат не лучше М/3.
В то же время оптимальный по точности детерминиро-
ванный пассивный алгоритм Xq = (1/4, 3/4) гарантирует
результат М/4. А
4. Сравнение в многомерном случае паи лучших гаран-
тированных результатов в множествах детерминирован-
ных и стохастических пассивных алгоритмов.
Теорема 2.3. Пусть К = {и = (и\ ..., ип)\0^и{^
С 1, 1=1, ..., п), р(и, v) = М max \иг — v11, N = p\
7 = 1,...,?г
р — целое число. Тогда наилучшие гарантированные ре-
204
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
зультаты в множествах KN и
минированных пассивных и
алгоритмов — связаны между
шением:
— соответственно детер-
стохастических пассивных
собой следующим соотно-
п • ( N А
——г mm max е (х , /) <
min max &(xN, f) oN [dxN]^. min maxe(/,/),
fE=Fp xN<=KH
причем оценка снизу асимптотически точна, т. е.
—3-7 min max е {хрП, f)
Ит ra+1xPneKPn^FP___________________= t
р-^00 min max f e (х<рП, f) врП ldzp?1}
Доказательство. Учитывая, что функция р в
(1.3) и функция р, фигурирующая в формулировке до-
казываемой теоремы, различаются лишь постоянным мно-
жителем М, и принимая во внимание теорему 2.1 и лем-
му 2.1, видим, что наша теорема есть просто сформули-
рованная в иных терминах теорема 1.1. А
Замечание 1. Построенные при доказательстве
теоремы 1.1 стохастические пассивные алгоритмы (в тер-
. . у рп
минах теоремы 1.1 — стохастические методы) и* гаран-
тируют при р -+ °° последовательность результатов, эк-
вивалентную оптимальной (см. замечание 1 к теоре-
ме 1.1):
max f 8 (х,рП, f\ орП ~
~ min max f s[xp\ f} орП ldxpn\. A
opn(=zvn fGFP кРп
Замечание 2. Теорема 2.3 показывает, что в дан-
ной ситуации относительный выигрыш от использования
стохастических алгоритмов (по сравнению с детермини-
рованными алгоритмами) невелик. Ои выражается коэф-
фициентом тг/(тг+1), стремящимся к единице при стрем-
лении размерности пространства к бесконечности (ср.
с замечанием 2 к теореме 1.1). А
§ 3. СВЕДЕНИЕ К ЗАДАЧАМ ОПТИМАЛЬНОГО ПОКРЫТИЯ 205
§ 3. Сведение задачи построения
последовательно-оптимального алгоритма
для функционального класса, заданного
квазиметрикой, к серии задач оптимального покрытия
В этом параграфе мы выясняем структуру последова-
тельно-оптимальных алгоритмов. Именно, показано, что
построение последовательно-оптимального на классе Fp
алгоритма сводится к решению серии специального вида
задач оптимального покрытия. Рассматривая функцио-
нальный класс Fp, будем предполагать, что К — компакт
и квазиметрика р непрерывна на множестве К X X, не
упоминая это каждый раз в формулировках лемм. Если
не оговорено противное, считаем, что F = FP. В частности,
F(z{) = {/eFp|/(xi) = i/j, 7=1, i),
причем во всех последующих построениях ситуация z1
предполагается реализуемой, т. е. F(z*)¥=0.
1. Вспомогательные утверждения. Положим
у г = . max yj,
Х»(0 = {x|q>2i(a:X0 =
г г
= U {х I Уз + Р О = и 5 {х}, t — Уз),
5=1 5-1
hi{x) = min {ф2г Уг\
где мажоранта cp2t для функций класса F(z*) определена
формулой (1.3) гл. 2, a S(p, /?) = {п!р(п, v)^R} есть
р-шар радиуса R с центром v (если R < 0, то S(v, Д) =
= 0)1). Кроме того, будем пользоваться обозначениями:
СА=К\А для А<^К, А — замыкание множества А. Не-
трудно видеть, что
, , х (ф2г(Д X^ Ki(yt),
hi (я) = 1 - /- \
I У1, x^CK^yt). _____________
В силу леммы 2.7 гл. 1 Пусть а^С7^(уг + г)=И=
0, г > 0. Тогда
р(а, ^)>уг-у; + г, /=1, ..., f. (3.1)
9 Так же как и для ранее введенных функций срн, ф2г, среди
аргументов и индексов отображения Ki(t) для упрощения обозна-
чений пе фпгурттрует явным образом х* = (#1, ..xt, у\, ..yi).
О зависимости от х* напоминает индекс i. То же самое относится
К вводимым ниже функциям hi(x), gi(x)r Ri(xi+b •••» Rin.
206
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
Отметим, что в точках множества СКг(у{ + г) и только в
точках этого множества функции из F(zi) могут прини-
мать значения y^yi + r. Положим gi(x) = шах{^(я:),
у г. + г — р(а, х)}.
Лемма 3.1. Справедливы соотношения
f У г + г — р (а, х), р (а, х) г,
1 ht(x), р(а. х)^г,
gi(=F (?).
Доказательство. При р(а, х)^г имеем yi + r —
— р(а, х)^уг> hi(x), т. е. gi(x) = yi + r — р(а, х). Если
р(а, х)> г, то
Уг-(Уг + г-р(а, х))>0, (3.2)
4>2i (z) — (уг + r — p (а, х)) =
= min {yj 4- р(я, Xj)} — (уг + r — р(а, х)) =
= ys + р (Я, xs)—(yi + г — р (а, х)) ^ys — Уг—г+ р(а,х5)>0,
(3.3)
где последнее неравенство справедливо в силу (3.1),
а предпоследнее — в силу свойств квазиметрики (2.3),
(2.4) гл. 1. Из (3.2) и (3.3) следует, что hi(x)>yi + r —
-р(а, х^, т. е. gi (х) = hi (х).
Наконец, вследствие леммы 2.7 гл. 1, gi^F. Кроме
того, gi(xj) = hi(xj) = yj, так как р(а, ^)>r, j = 1, ..., i
(см. (3.1)). Таким образом, gi^F(zi). А
Положим
( N
Fi(xi+1, . . ,,xN) = minJr |г > 0, J
I J=i+1
S(xj, r)zDCKi(yi + r)\.
Убедиться в существовании числа Ri(xi+\, ..., xN) и за-
одно найти выражение для него можно следующим
образом:
(Xj^_i, . . . , X]\j) =
= min | г > 0, J S (xj,r) \J K(yi + г) К
I j=i+l
= min zr | r
N
>o, и
J=i+1
s (Xj, r) U
S(xj,yi—У, + г) =)ЛЧ =
= min {r | r
0, sup min Г min p (x, Xj),
x^k
§ 3. СВЕДЕНИЕ К ЗАДАЧАМ ОПТИМАЛЬНОГО ПОКРЫТИЯ 207
min (р (х, х}) — yi + у,) 0 =
= sup min f min р(я, #j), min (p (.r, Xj) — yi + yj)b
ХЕК Ъ’=г+1,...,лт j=a,..4,i I
(3.4)
Заметим, что последнее выражение неотрицательно, так
как для х = XiQ в силу реализуемости £ справедливы
неравенства р(я, х,) — уг + у^ 0, j = 1, i, где e
<= {1, ..., i} определяется из условия У10 = У г-
Докажем теперь следующий почти очевидный факт.
Лемма 3.2. Пусть вектор (#;+1, ..., xN) задает по-
крытие множества Л с К радиуса г, т. е.
sup min р (х, Xj) = г. (3.5)
хеА
Тогда существует такая точка а^А, что min р(^,а) = г.
Доказательство. Вейлу (3.5) для произвольного
целого положительного к существует такая точка Щ'^Л,
что min р (xj, ak)^>r — i/k. Последовательность ah
имеет предельную точку а^А. Для нее
р(х>, a)^p(xj, ak) — p(a, ак)> г-1/к - р(а, ак)~,
j = i+l, N,
откуда в силу произвольности к выводим, что
min p(#j, а) г. Справедливо и противоположное не-
J—i-pl,.., ,N
равенство, т^ к. радиус покрытия с центрами х\, ..., xN
множества Л, так же как и множества Л, равен г. А
Следующий результат является аналогом для класса
F^) результата теоремы 2.1, при этом эффективность
пассивных алгоритмов ..., xN) оценивается по кри-
терию е(ггг', xi+\, ..., xN, f).
Лемма 3.3. Результат, гарантированный пассивным
алгоритмом (х^\, ..., xN) на подклассе F(z2) класса Fp,
равен величине Ri(xi+\, ..., xN), т. е.
sup е (а:г, а:{+1, ..., xN, f) = Ri , xN).
jf=F(zi)
Доказательство. Пусть
/ e F (zl), max f(x) = f (x0), xQ(=K, r^Ri (a:i+1, ..., xN).
xeK
208
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
Если хо е + г), то Xq^ S(xh у» — J/j + г), 7 е {1, • • •» i),
и, следовательно, / (#о) / (^) + Р (^о, ^j) Уз + (yi ~ Уз +
+ г) = yi + г. Стало быть,
е(х\ xi+it ..., xN, /) = /(яо) —maxG/i, /(rri+i), ..., f(xN)}^
Если же xq СК{ (yi + г), то xq S (xh г), j е {i + 1, ...
..., TV}, и, следовательно,
&(х\ xi+i, ..., xN, /)^/(яо)-/(^)^р(яо, Xj}^r.
Итак, в любом случае &(х\ я<+1, ..., xN, f)^r. Исполь-
зуя произвольность функции fGF(zJ) и числа
..., xN), получаем, что
sup e(x\xi+ll...1xNj)^Ri(xi+ll... txN}. (3.6)
Пусть теперь r<Ri(xi+\, ..., xN)> Тогда радиус по-
крытия с центрами #i+i, ..., xN множества СК{(& + г)
больше г, и вследствие леммы 3.2 существует такая точ-
ка a^CKi(yi + г), что
min р (xj, а) >> г. (3.7)
3 = i+lt-f*tN
Для выбранных а и г рассмотрим функцию gh опреде-
ленную перед формулировкой леммы 3.1. В силу (3.7)
и леммы 3.1
ъ(х\ xi+i, ..., xN, gi) =
= gi(a)-max{yi,gi(xi+i'),...,gi(xN)}=yi + r-yi = r, (3.8)
откуда, учитывая произвольность r<Ri(xi+x1 ..., xN), по-
лучаем
sup e(xl, xi+1, .. .,xN,f)^ Ri(xi+1, .. .,xN). (3.9)
/erUO
Неравенства (3.6) и (3.9) доказывают лемму.
2. Последователыю-оптимальпый по точности алго-
ритм. Положим
RiN min Ri (.ri+1, ..., xN). (3.10)
Существование минимума в правой части (3.10) следует
из компактности множества К и непрерывности функции
Ri(xi+\i ..., xN) по совокупности переменных xi+i, ..., xN
§ 3. СВЕДЕНИЕ К ЗАДАЧАМ ОПТИМАЛЬНОГО ПОКРЫТИЯ 209
(непрерывность легко установить на основе равен-
ства (3.4)). Можно сказать, что RiN есть минимальное
из чисел г таких, что радиус оптимального покры-
тия с N—i центрами множества CKi(yi + r) не превос-
ходит г.
Теорема 3.1 [241]. Предположим, что К — компакт,
функция р обладает свойствами квазиметрики и непре-
рывна на множестве К\К. Пусть х± — произвольный из
центров оптимального покрытия с N центрами множе-
ства К, (и*)— произвольный из центров любого тако-
го покрытия с N—i центрами множества СКг(уг + RiN),
что радиус покрытия не превосходит RiN, i = 1, ..., N — 1
(иными словами, x^^z1)—одна из точек, реализующих
минимум в (3.10)).
Тогда алгоритм Xq = (х°, ..., х%) последовательно-оп-
тимален по точности на классе FQ и гарантирует после
i шагов в ситуации zi результат RiN.
Доказательство. Правомерность выбора последо-
_____________________________ 0 О
вателыю-оптимальным алгоритмом точки х1ч указанной
в формулировке теоремы, следует из того, что последова-
тельно-оптимальный алгоритм оптимален в XN (струк-
тура оптимального в XN алгоритма устанавливается тео-
ремой 2.1 и замечанием 3 к ней).
Но построению алгоритм xQ гарантирует после i ша-
гов в ситуации zl результат RiN. В соответствии с опре-
делением последовательно-оптимального алгоритма (см.
(6.6) гл. 1) для доказательства теоремы достаточно по-
казать, что
inf sup 8 (х\ ... jcN, f) = RiN. (3.11)
xi+1,.*f,xN f(=F(z')
Пусть xi+i, ..., xN — произвольные отображения вида
(3.1) гл. 1, r<RiN, а вектор (х\ xi+i, ..., xN) получается
при применении (см. формулы (3.2) гл. 1) алгоритма
(#г, xi+i, ..., xn) к функции определенной в начале
п. 1. Тогда г <Ri(xi+\, ..., xN)- Определим точку а и
Функцию gi так же, как в доказательстве леммы 3.3.
Заметим, что gi(xj) — hi(xj), j = 1, ..., N, поэтому при
применении алгоритма (х*, xi+i, ..., xN) к функции gi
Получается тот же вектор (х\ xi+i, ..., xN), что и при
применении к функции hi. Следовательно, с учетом (3.8),
£(Х{, Xi+i, . .., Xn, gi)=e(x{f Xi+1, ..., Xn, gi)=ra
А. г. Сухарев
210
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
откуда в силу произвольности Хг*+1, . . XN
inf sup 8 (x\ ^г+1» • • • , /) Г,
}(ЕР(гг)
а в силу произвольности г < RiN
inf sup 8 (х\ xi+1, . .., xN, /) RiN. (3.12)
Xi+V':.,XN ft=F(zi)
С другой стороны, из леммы 3.3 немедленно получаем
равенство
inf sup. 8 (х\ х^, ..., xN, f) = RiN. (3.13)
Далее, очевидно, что
inf sup 8 (яг, xi+1, ..., xN, /)
Ki+1,...,x2V /gf(z9
inf sup 8 (x\ Xi^, . . . , XN, f),
xi+1,...,xNeK /£F
откуда, учитывая (3.13), выводим неравенство, противо-
положное неравенству (3.12). Тем самым соотношение
(3.11) доказано. А
Замечание. Нетрудно убедиться, что при любом у\
точка ^(z1) является одним из N— 1 центров (отлич-
ных от центра х±) оптимального покрытия с N центрами
множества К. Кроме того, если уг+1=уг-, то точка
£°_|_2 (z2-1 х) является одним из N—i—1 центров (отлич-
ных от центра ^?+i(z2)) оптимального покрытия с N— i
центрами, построенного при отыскании точки x^+^z1)-
В этом случае наилучшие гарантированные результаты
после i шагов и после i +1 шагов совпадают. Можно
сказать, что случай уг+1=уг- есть случай наихудшего для
вычислителя «поведения» функции /на (i+ 1)-м шаге. А
Теорема 3.1 сводит задачу построения последова-
тельно-оптимального алгоритма к совокупности N специ-
ального вида задач оптимального покрытия. Решения этих
задач для некоторых частных случаев даны в § 4.
3. Последовательно-оптимальный по числу информа-
ционных вычислений алгоритм. Предположим теперь,
что фиксирована точность 8, которую необходимо обес-
печить при решении задачи. Построим последователь-
но-оптимальный по числу информационных вычислений
§ 3. СВЕДЕНИЕ К ЗАДАЧАМ ОПТИМАЛЬНОГО ПОКРЫТИЯ 211
алгоритм поиска глобального экстремума, проводя при
этом все необходимые доказательства.
За точку первого информационного вычисления сле-
дует принять произвольный центр любого покрытия К
минимальным числом р-шаров радиуса 8. Это — очевид-
ное следствие определения последовательно-оптималь-
ного алгоритма (см. (6.10) гл. 1).
Пусть i информационных вычислений произведено.
В силу (3.11)
inf~ sup 8 (x\ xi+1, . . ., /) =
Поэтому, учитывая (6.8) гл. 1 и (3.10), определенное
формулой (6.9) гл. 1 число N^z*) можно представить
в виде
7VC (гг) = min {51 Ri^s < &} =
= min {51 Ri (xi+1, . . ., x^s) 8
для некоторых ..., яц-н К} =
= min {s
и 5 (x}, e) CKi (yi + s)
j=i+l
для некоторых Xj+1, .. ., ^i+s e К
i+Ne(zi)
Если ..., xi+N таковы, что j S (xj, e) zd
e J = i+1
ZD CKi (yi + 8.), TO 8, И в силу
леммы 3.3
sup.) £ [х\ xi+1, . .., ^HNs(zi)f /) < e.
(3.14)
Итак, для отыскания точки (£+1)-го информацион-
ного вычисления достаточно построить множество
СК{(у{ + е) и найти минимальное s такое, что s р-шара-
ми радиуса 8 можно покрыть множество CKiilji-Y е).
Неравенство (3.14) показывает, что за точку (i+l)-ro
информационного вычисления можно принять произ-
вольный центр любого такого покрытия.
Если CKi(yt + е) = 0, то задача решена с требуемой
точностью 8 и вычисления следует прекратить.
14*
212
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
Заметим, что получившаяся задача проще, чем в
случае фиксированного N. В рассматриваемом случае
не нужно на (г+1)-м шаге решать оптимизационную
задачу на отыскание RiN. Роль этого числа играет при
всех i постоянная 8.
§ 4. Конкретные вычислительные алгоритмы
Здесь результаты предыдущего параграфа конкрети-
зируются применительно к одномерным задачам. Кроме
того, показано, как использовать в многомерном случае,
когда непосредственная реализация последовательно-
оптимального алгоритма затруднена, знание его струк-
туры.
1. Последовательно-оптимальный по точности алго-
ритм для класса функций одной переменной, удовлетво-
ряющих условию Липшица. Предположим, что число N
информационных вычислений фиксировано, п = 1, К =
= [0, 1], р(щ v) = M\u — р|. При этом S(x, r) = [x — r/M,
x + r/М] есть сегмент длины 2г)М. Согласно теореме. 3.1,
х е f_L А 2ЛГ-Д 41}
1 |2ЛГ’ 2N' • ' ’’ 2N J’ ' >
причем любая из точек (4.1) может быть выбрана по-
следовательно-оптимальным алгоритмом в качестве точ-
ки первого информационного вычисления.
Пусть произведено i вычислений в точках xi, ..., хс,
Уз = /(*;) ,7 = 1, • • •, zi = У*) 5 ^i, • • х„ — переста-
новка чисел xi, ..., х{ в порядке возрастания, =
= /(а^), и а;+1—соответственно меньший и больший
корни уравнения + М \ х — Хц1 = у^ т. е.
Q _ т______ х.. । Уг У^ 7—1 I
(см. рис. 9, где изображен случай j = 4). Тогда
CKiQi) = [О, U [ U ₽;)] U (tti+1, 1]
7^2
(это множество на рис. 9 выделено жирной линией),
CKi(yi + г) = Го, Р1 — и Г,U
U
§ 4. КОНКРЕТНЫЕ ВЫЧИСЛИТЕЛЬНЫЕ АЛГОРИТМЫ
213
При этом [О, 0)=0, если 00; (а, 0) = 0, если а^0;
(а, 1] = 0, если а^1. Введем еще обозначение Zj = 0j —
— / = 1, ..т.
Минимальное число сегментов длины 2г/М, которы-
ми можно покрыть множество [0, 01 — г/М) равно, оче-
видно, [max {(Рг — r/M)/(2r/M), 0}]. Аналогично, это
Рис. 9. К вопросу о построении последоватольпо-оптимальпого по
точности алгоритма
число равно [max {(Zj — 2г/М)/(2г/М), 0}] для множества
(a.i + r/M, fij — r/M) и [max{(l — ai+1 — г/М)/(2г/М),0}] —
для множества (<хг+1 + г/М, 1]. Поэтому неравенство г>
>RiN эквивалентно неравенству
— г/М
2г/М
+ max
у,Г (1-/2 —г/М
2 тах { г/М ’ °) +
j=2 '
(1 — , — r/M И
W--------(4.2)
и, следовательно,
о ( Г (Р,—г/М Г
niN = min < г I г > 0, max [~2г/М~1 0] +
1 — «<+1 ~ г/М
1^/2-г/М П Г
--------, 0 + max
3=2
г/М
2г/М
(4.3)
Алгоритм отыскания числа RiN основан на формуле
(4.3) и следующем соображении: хотя бы одно из чисел
Р, - г/М 12-г/М li/2-r/M l-ai+1-r/M
2г/М, / 7Гм ’ • • • ’ г/М ' 2г?М
при г — RM является целым неотрицательным. В про-
214
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
тивпом случае нашлось бы меньшее значение г > 0, при
котором неравенство (4.2) еще выполнялось бы. Алго-
ритм состоит из двух этапов.
1°. Находятся все такие г, при которых величины
(4.4) принимают целые значения N — I, N — i — 1, ...
..., 1, 0. Все найденные значения г нумеруются в по-
рядке возрастания: п < г2 < ... < г9, где s (г + 1) X
Х(А—i+1).
2°. В порядке возрастания индекса t проверяется
выполнение неравенства (4.2) при r = rt. Если это не-
равенство впервые окажется выполненным при t = £0,
то Rin = rtQ.
После того как RiN найдено, нетрудно указать воз-
можные в соответствии с теоремой 3.1 для последова-
тельно-оптимального алгоритма точки (Z+l)-ro инфор-
мационного вычисления (Z = 1, ..., N — 1):
xi+1 е {(2k, - 1) RiN/M | (2/сх - 1) RiN/M < PJ U
U Г U {aj + 2kjRiNlМ | czj + 2kjRiNlМ <Z Pj}
J = 2
u
U
{1 — (2fcj+1 — 1) Rin/M11 — (2ki+1 — 1) Rin/M > оч+i).
(4.5)
Числа k\, ..., ki+\ в формуле (4.5) принимают целые
положительные значения, причем любая точка из ука-
занного набора может быть выбрана последовательно-
оптимальным алгоритмом в качестве точки (i+l)-ro
информационного вычисления.
Может случиться, что множество (4.5) окажется пу-
стым. Это означает, что оставшимися N — I вычисления-
ми нельзя при наихудшем «поведении» функции улуч-
шить гарантированный результат, поэтому в качестве
Хг+\ можно выбирать любую точку из К = [0, 1]. Одна-
ко целесообразно этот выбор проводить в соответствии
с правилом
xi+1 е= {(2кг — 1) | (2^ — 1) RiN/M < PJ U
U
U {aJ + | aj + 2kjRi^lM р7}
j = 2
и
и (1 - (2/ri+1 - 1) RiN/M\ 1 - (2/ci+1 - 1) ai+1}.
(4.6)
Отметим, что способы покрытия множества
CKitjji + RiN) «слева направо», па котором основаны
§ 4. КОНКРЕТНЫЕ ВЫЧИСЛИТЕЛЬНЫЕ АЛГОРИТМЫ 215
первые две строки формулы (4.5), и «справа палево»,
на котором основана третья строка, не исчерпывают
множества способов, удовлетворяющих условиям теоре-
мы 3.1. Поэтому формула (4.5) задает, вообще говоря,
не все множество последовательно-оптимальных алго-
ритмов.
Можно, например, «симметризовать» способы покры-
тия, соответствующие формулам (4.5), (4.6), следую-
щим образом. Пусть
max {-Чгб—, О
I ^гх!М
шах
max
1 - ai+1 - RiN/M
2RiNtM
Нетрудно видеть, что алгоритм, для которого
^+1^
^г+1 — 1, • • •» п\+1 к (4.8)
последовательно-оптимален по точности (если п] = 0, то
предполагается, что соответствующий набор пуст).
2. Оптимальный на один шаг алгоритм для класса
функций одной переменной, удовлетворяющих условию
Липшица. В соответствии с (4.1) при TV = 1
= 1/2. (4.9)
Точку Хг+\ выберем в соответствии с вариантом (4.7),
(4.8) последовательно-оптимального алгоритма (при
этом в (4.3) следует полагать N — 1=1). Нетрудно ви-
деть, что
пгг=1\ nj = O, j¥=r, (4.10)
если максимальным среди чисел Pi, Zi/2, ..., ZJ2,
1 — czi+i является r-e число. Если максимальное число
не единственно, то п\ = ... = п-+1=0 (этот случай соот-
ветствует случаю, когда множество (4.5) пусто), и в ка-
честве xi+\ можно выбирать любую точку из К = [0, 1].
Тем не менее мы и в этом случае оставим в силе согла-
216
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
шеиие (4.10), предполагая, что г — любой, например,
наименьший из номеров максимальных чисел. Из ре-
зультатов предыдущего пункта непосредственно следу-
ет, что алгоритм (4.8) — (4.10) оптимален на один шаг.
Отметим, что формулу (4.8) в случае (4.10) можно за-
писать в виде
arg max (ж),
x=K
.Pi/3,
1 - (1 - ai+i)/3,
arg max cp2i Ф {0, 1}?
xeK
argmaxcp2i (x) = 0,
xeK
arg max cp2i (%) = 1,
x=K
где ф2г (-г) = min {yj + M | x — Xj | }. Отсюда ясно, что
оптимальный па один шаг алгоритм (4.8) — (4.10), начи-
ная с третьего шага, совпадает с алгоритмом
хл == 0, rri+1 = arg max ср2г (^), £^1, (4.11)
хеК
называемым иногда методом ломаных и изучавшимся
во многих работах [48, 88, 89, 153, 199, 201, 265, 427,
428] (при п > 1 оптимальный па один шаг алгоритм по
определяется условием = arg max <р2г (^)).
xsK
3. Последовательно-оптимальный по числу информа-
ционных вычислений алгоритм для класса функций од-
ной переменной, удовлетворяющих условию Липшица.
Пусть по-прежиему га=1, К = [0, 1], р(н, v) = M\u — р|,
по в отличие от и. 1 фиксирована точность е, которую
необходимо обеспечить, произведя минимальное число
информационных вычислений. Построим в соответствии
с п. 3 § 3 алгоритм, последователыю-оптимальпый по
числу ипформациопниых вычислений.
Точка х\ определяется формулой (4.1) при N = Ne =
— [М/(2е)] (при отыскании х\ можно исходить и из
других способов покрытия сегмепта [0, 1] минимальным
числом сегментов длины 2ё/М).
Пусть i информационных вычислений произведено.
Тогда
и (а»+1 + jp ij.
§ 4. КОНКРЕТНЫЕ ВЫЧИСЛИТЕЛЬНЫЕ АЛГОРИТМЫ
217
Если это множество пусто, то задача решена с требуе-
мой точностью и вычисления прекращаются. В против-
ном случае точку х^\ можно выбирать либо в соответ-
ствии с формулой (4.5) при RiN = 8, либо в соответст-
вии с формулами (4.7), (4.8) при RiN = &.
Результаты проведенных численных экспериментов
показывают, что чем выше требуемая точность решения
задачи, т. е. чем меньше 8, тем заметнее преимущество
последовательно-оптимального над оптимальным алго-
ритмом (правильнее говорить о модифицированных по-
следовательно-оптимальном и оптимальном алгоритмах,
поскольку вычисления производились с использованием
адаптивной оценки константы М по способу (4.1) гл. 2).
Так, для функции f(x) = 3 cos 2х — 2 sin rr, х К =
= [—1, 1], такой вывод можно сделать из табл. 5. В пей
Таблица 5
8 0.1 0.01 0.001
^8 15 82 269
N 66 980 9803
N/Ne 0.227 0.084 0.027
8факт 0.7X10-5 0.2Х10"7 0.4Х10"8
7Ve = [М(Ь — а)/(2с)] — число информационных вычис-
лений, при котором оптимальный алгоритм гарантирует
достижение точности 8 (при этом М — это оценка кон-
станты Липшица, полученная способом (4.1) гл. 2 по
окончании информационных вычислений); N — число
информационных вычислений, при котором последова-
тельно-оптимальный алгоритм обеспечивает достижение
той же точности 8; 8факт — истинная точность решения
задачи последовательно-оптимальным алгоритмом.
Как видим, преимущество последовательно-оптималь-
ного алгоритма над оптимальным в задаче глобальной
оптимизации выражено ярче, чем в задачах численного
интегрирования и восстановления функции. Это и по-
нятно, так как в задачах интегрирования и восстанов-
ления необходимо так или иначе исследовать поведение
Функции на всей области определения, в то время как
в задаче глобальной оптимизации поиск достаточно ве-
218
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
сти лишь в «перспективной», с точки зрения уже по-
лученной информации, области.
Обращает па себя внимание и то, что истинная точ-
ность решения задачи оказывается на несколько по-
рядков лучше заданной точности. Такое соотношение
характерно для многих задач. Оно связано с тем, что
для функции, которая хорошо «ведет себя» в окрестно-
сти экстремума, оценка константы Липшица для этой
окрестности оказывается сильно завышенной. Данное
обстоятельство следует учитывать при решении практи-
ческих задач.
Во всех тестах при достаточно малом 8 выявляется
также преимущество последовательно-оптимального над
оптимальным на один шаг алгоритмом (в качестве тес-
товых функций были выбраны начальные отрезки ряда
Фурье со случайно генерируемыми коэффициентами).
4. О возможности использования единой схемы по-
строения последовательно-оптимальных алгоритмов. Опи-
санная схема построения последовательно-оптимальных
алгоритмов поиска экстремума функций одной перемен-
ной применима не только для класса Fp в случае, когда
информация состоит в вычислении значений функции и
р(щ v) = М\и — р|, по и для других моделей вычисле-
ний. Как и в задаче численного интегрирования, эти
модели должны удовлетворять условию (3.37) гл. 2.
Еще раз зафиксируем основные моменты применимой в
этом случае схемы построения последовательно-опти-
мальных алгоритмов.
На (Z+1)-m шаге определяется перспективная для
дальнейшего поиска область {<г|ср2г(<£) > yj, где, как и
ранее, ф2г — мажоранта для функций из определяемого
информацией z* подкласса F (£) рассматриваемого функ-
ционального класса F. Пусть замыкание этой области
состоит из промежутков
[О, P1J, [а2, 02], •••, fai, м, (а<+1, I]. (4.12)
Далее отыскивается оптимальное распределение вычис-
лительных ресурсов по промежуткам (4.12) и при най-
денном распределении строятся оптимальные алгоритмы
для функциональных классов, соответствующих этим
промежуткам. За принимается точка первого ин-
формационного вычисления любого из построенных
алгоритмов. Таким образом, задача построения последо-
вательно-оптимального алгоритма оказывается сведен-
§ 4. КОЙКРЁТНЫЕ ВЫЧИСЛИТЕЛЬНЫЕ АЛГОРИТМЫ
219
ной к серии задач построения оптимальных алгорит-
мов и целочисленных задач распределения ресурсов.
Существенно проще задача отыскания оптимального
на один шаг алгоритма. В ряде случаев, решая ее, ока-
зывается возможным построить эффективный вычисли-
тельный алгоритм, в то время как задача отыскания
последовательно-оптимального алгоритма не поддается
решению. В качестве примера можно привести опти-
мальный па один шаг алгоритм минимизации выпуклых
функций [292]. Этим же способом построен эффективный
алгоритм максимизации функций с ограниченной па
отрезке вещественной прямой кусочно-непрерывной
второй производной в случае, когда информационными
вычислениями являются вычисления значений функции
и ее первой производной в точках отрезка [296].
5. Построение оптимального по числу информацион-
ных вычислений алгоритма в двумерном случае. Вер-
немся к рассмотрению класса F = Fp. Пусть п = 2, К =
= {(н1, и2) I О и1с\ 1 = 1, 2), p(zz, v) = М max {lu1 —
— vx I, I и2 — v21} и необходимо построить последова-
тельно-оптимальный по числу информационных вычис-
лений алгоритм, обеспечивающий точность 8. Положим
г=г!М, 1 = 2г. Множество С7<г(уг-+ е) получается вы-
брасыванием из К координатных квадратов со сторона-
ми длины не меньше I (р-шаров радиуса, не меньше 8).
В качестве точки (г+1)-го информационного вычисле-
ния последовательно-оптимальный алгоритм указывает
любой из центров какого-либо покрытия этого множест-
ва наименьшим числом координатных квадратов со сто-
ронами длины I.
Положим ГГ1 =(г, г), ^2 = (3г, г). Пусть вычисления
в точках х\, ..., Хг произведены, = 7 = 1, . • I-
Выберем такое натуральное s, что прямая и2 = с2 — si
имеет непустое пересечение с множеством СКг(уг + &),
а пересечение прямой u2 = c2 — (s + l)l с этим множест-
вом пусто. Осуществим покрытие одномерного мно-
жества
{и = (и1, и2) I и е CKiijji + е), и2 = с2 — si}
минимальным числом отрезков длины I. Рассмотрим ка-
кой-либо из координатных квадратов, для которых эти
отрезки являются «верхними» сторонами. Можно было
бы за xi+\ принять его центр. Однако мы условимся в
случае, если «левая» сторона этого квадрата целиком ле-
220
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
жит в множестве ХДуг + е), передвинуть его насколь-
ко можно «вправо», лишь бы «левая» сторона остава-
лась в Яг(уг + е), а затем, в случае, если «нижняя» сто-
рона лежит в КД^ + е), передвинуть квадрат насколь-
ко можно «вверх», лишь бы «нижняя» сторона остава-
лась в + Центр полученного квадрата примем
за
Чтобы попять, почему описанный алгоритм последо-
вательно-оптимален, достаточно заметить, что задача
покрытия построенного нами множества САДуг + 8) ми-
нимальным числом координатных квадратов со сторо-
ной I сводится к задачам покрытия полос
{и = (t?, и2) I и CK^yi + е), с2 — I < и2 с2},
{и = (^1, и2) I и СК^ут, + е), с2 — 21 и2 С с2 — Z), ...
минимальным числом таких квадратов. Каждая из этих
задач эквивалентна простой задаче покрытия минималь-
ным числом интервалов длины I соответствующих одно-
мерных множеств
{и = (u\ и2) \ и CKi(yi + е), и2 = с2},
{и = (и1, и2) I и е CKiOJi + 8), и2 = с2 — ZJ, ...
6. О многомерном случае. На основании проведенных
в предыдущем пункте построений можно сделать вывод,
что даже при п = 2, когда еще удается конструктивно
описать последовательно-оптимальный алгоритм, его ис-
пользование, как правило, нецелесообразно из-за высо-
кой комбинаторной сложности и непомерно больших
требований к объему памяти ЭВМ. Для п > 2 уже в на-
иболее простом случае
К= {и | 0 < 1, i = 1, ..., и},
p(u, v) = M max |иг —z?| (4-13)
1=1,....П
при решении задач оптимального покрытия множеств
CKi{yi + г) возникают существенные трудности.
Тем не менее, как отмечалось в п. 2 § 4 гл. 1, зна-
ние структуры последовательно-оптимального алгоритма
позволяет часто построить эффективные вычислитель-
ные методы, являющиеся в том или ином смысле при-
ближениями к последовательно-оптимальному алгорит-
му и обладающие приемлемой комбинарной слож-
ностью.
§ 4. КОНКРЕТНЫЕ ВЫЧИСЛИТЕЛЬНЫЕ АЛГОРИТМЫ 221
Опишем один из возможных подходов. Вначале сле-
дует зафиксировать сетку {щ, ..uN}, полпый перебор
узлов которой должен обеспечить, по оценке вычислите-
ля, решение задачи с нужной точностью (гарантировать
обеспечение заданной точности удается не всегда, так
как квазиметрика р, определяющая функциональный
класс, может быть известна неточно и уточняться в
процессе решения задачи). В случае (4.13), например,
целесообразно зафиксировать кубическую сетку
...» \jk = 1,3, ..., 2т — 1; к = 1, ..п\
[ \ 2т' ’ 2т) | / л ’ ’ ’ * ’ ’ )
с N = тп узлами. В случае неточно известной квазимет-
рики р может оказаться целесообразным использование
в качестве точек щ, ..., uN точки ЛПх-последовательно-
сти [231, 233, 234, 435], при этом число точек N можно
заранее не фиксировать.
Дальнейшее решение задачи состоит в переборе уз-
лов сетки {^i, ..., uN}. Если число ее узлов N сравни-
тельно невелико и возможен полпый перебор, то ника-
ких проблем не возникает (описанный алгоритм при
известном вычислителю, р есть приближение к опти-
мальному алгоритму). В противном случае можно ис-
пользовать следующий метод, основанный на тех же
идеях, что и последовательно-оптимальный алгоритм.
Первый шаг определяется соотношением
*= {щ, • •uN}. (4.14)
Пусть сделано i шагов, i > 1. Тогда
€= {Uj\l^j^N, ф2г(И;)> Z/J = Ul, • • UN} П C7<i(z/i).
(4.15)
Иными словами, из сетки {ид, ..., uN} следует выбросить
точки, в которых заведомо пе достигается максимальное
значение функции (предполагается, что квазиметрика р
известна точно, например известно, что р имеет вид
(4.13) и константа М оценена верно), и в качестве xi+i
выбрать одну из оставшихся точек. Конкретные способы
выбора точек из множеств (4.14), (4.15) могут быть,
как и для последовательно-оптимального алгоритма,
разными так же, как и способы программной реализации
алгоритма (4.14), (4.15). Можно предложить различ-
ные способы программной реализации, основанные па
различных методах организации структуры данных (под
222
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
структурой данных мы понимаем списки точек щ, зна-
чений функции, точек, в которых значения функции
уже вычислены, «выброшенных» точек и т. д.).
Описанный алгоритм можно трактовать как способ
выбора начальных точек для методов локальной опти-
мизации. При этом алгоритм следует дополнить блоком,
содержащим один или несколько локальных методов по-
иска максимума. Данный алгоритм, как и описанные в
пп. 1—3 алгоритмы одномерной оптимизации, можно
усовершенствовать для решения реальных задач и с по-
мощью иных эвристических приемов. Такими приемами
являются использование адаптивной оценки константы
Липшица (п. 2 § 4 гл. 2), чередование различных стра-
тегий глобального и локального поиска, применение бо-
лее реалистических условий остановки (см. по этому
поводу обсуждение в п. 3 соотношения между требуе-
мой и фактической точностью решения тестовых за-
дач) и др.
§ 5. Учет погрешности вычислений
В данном параграфе рассматривается вопрос об уче-
те погрешности информационных вычислений, т. е. вы-
числений значений функции /. При этом, как и ранее,
предполагается, что / е F = 7^р, К — компакт и квазимет-
рика р непрерывна на множестве К X К.
Часто ошибки вычислений считают случайными ве-
личинами с известными (обычно нормальными) или не
полностью известными законами распределения. К числу
таких подходов относится, например, метод стохастиче-
ской аппроксимации.
Мы будем рассматривать иной подход, предполагая,
как и в § 5 гл. 2, что ошибки являются не случайными,
а неопределенными величинами, т. е. могут принимать
любые значения из некоторого множества. В отличие от
§ 5 гл. 2, оптимизация по величинам Si, ..., 6N (макси-
мальным погрешностям информационных вычислений в
точках ГГ1, ..., xN) проводиться не будет. Предполагает-
ся, что все они не превосходят б, где 6 — известное вы-
числителю число. Задача состоит в отыскании последо-
вательно-оптимального (а не оптимального пассивного,
как в § 5 гл. 2) алгоритма.
1. Постановка задачи. Перейдем к строгим формули-
ровкам. Предположим, что число вычислений N фикси-
§ 5. УЧЕТ ПОГРЕШНОСТИ ВЫЧИСЛЕНИЙ
223
ровано и каждое вычисление в произвольной точке
не определяет точно значения y = f(x), а опреде-
ляет два таких числа y~ = f~(x), у+ = /+(<г), что
у+ —(5.1)
Данная постановка естественно возникает в различных
ситуациях, в частности, когда вычислитель находит
каждое значение функции f в результате численного
решения с заданной точностью 6 некоторой задачи, на-
пример, / (z) = ming(j;, и), f (х) = J g(x, и) du и т. и. Га-
ue. U 'и
рантированная апостериорная погрешность при решении
задачи вычисления значения ](х) может оказаться мень-
ше 6, что и отражено в предположениях (5.1).
После окончания информационных вычислений вычис-
N / х N def / —
лителю известны векторы х = \хг, . . ., х^), y_ = (yi,. ..
..У~Х), y+^(yt, ..г/iv). Положим = (xN, у^.), z± =
= (Л yN+),
F(xn, у”, y+) = {/e= F\yJ^f(x})^yt, j= 1, ..., N],
<pL(x; z?) = ф (ж; xN, у1!.) = max (i/f — p(x,
3 = 1,...,N
<p2 (z; 2+) = ф2 (x; xN, y+) = min {y+ + p (x, x,))
3 = 1 N
(необходимость ввести в явном виде z^, z^ в число ар-
гументов соответственно функций epi, ф2 станет ясна из
дальнейших построений). Нетрудно убедиться, что
F (xN, у-, у+) = xN, y-)^f(x)^
<<p2(a:; xN,y+)], (5.2)
т. e. — точная миноранта, a cp2 — точная мажоранта для
функций из класса F (xN, у1!, однако не обязательно
<Pi (xf, xN, у”) = уТ, ф2 (xf, xN, у+) = у+, j = 1, ..., N (ср.
с леммами 1.1 и 1.2 гл. 2).
Для рассматриваемой задачи нам придется заново
(хотя и в полном соответствии с ранее введенными по-
нятиями) определить критерий оценки эффективности
алгоритмов и понятие последовательно-оптимального
алгоритма, так как прежние определения сформулиро-
ваны в предположении, что значения функции / вычис-
ляются безошибочно.
224
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
Руководствуясь стремлением к гарантированным ро~
зультатам, за приближение к искомой величине max f (х\
х(=К
следует принять наименьшее возможное для функций
jj, (N N N\
из г ух , у_, у+) значение максимума, т. е. значение
max cpjL ух; z_) = max уг =yi-
x~K
При этом / (zio) > <р2 ^io; г) = у., где г0 e {1, N} on-
ределяется из условия у^о = yi.
За критерий, как и в случае точных вычислений,
примем погрешность определения максимального значе-
ния, равную
max/(.г)— max (xi) = max/(.г) — ум. (5.3)
хе К i=l,...,N х<=К
гт ,r « N N N
После N вычислении с результатами я , у_, у± макси-
мальная погрешность равна
max [max / (х) — ум] = max ф2 (х; z±) — ум (5,.4)
. N N N\[x=K J хе К
/еЦх ,у__,у+)'~ J
(равенство имеет место в силу (5.2)).
Ситуацию (ж, у”, у±) назовем реализуемой, если
0<^+-!/Г<2б, 7 = 1,. ..,N, Е(х”,у”,у^0.
Последователыю-оптимальпый по точности алгоритм
должен, в соответствии с § 6 гл. 1, выбором точки xi+i
очередного информационного вычисления в любой си-
туации, сложившейся в ходе решения задачи, миними-
зировать, в расчете на наихудшее в дальнейшем «пове-
дение» функции /, величину погрешности определения
максимального значения (погрешность задается крите-
рием (5.3)).
Точное определение аналогично определению 2 из
п. 3 § 6 гл. 1. Именно, назовем в рамках рассматривае-
мой постановки алгоритм последовательно-оптимальным
по точности, если точка (Z+l)-ro информационного
вычисления xi+i, j = 0, 1, ..., N— 1, выбирается этим
алгоритмом из условия реализации внешнего минимума
в выражении
min max .. . min max Гшах cp2 (x; z±) — ум $
Xit-t — + x/v — + xeK
1+1 Vi+l^i+1 - ‘N VN'VN l j
(5.5)
§ 5. УЧЕТ ПОГРЕШНОСТИ ВЫЧИСЛЕНИИ
225
где Xj, yj , у/, j = i + 1, .. ., N, таковы, что ситуация
(j:N, у", у+) реализуема.
2. Последовательно-оптимальный по точности алго-
ритм. Покажем, что, как и в случае вычислений без по-
грешности, для построения последовательно-оптималь-
ного алгоритма необходимо решить совокупность задач
оптимального покрытия. Положим
R* (я,, .. ., х^) = max min р (х, Xj),
XfEK j = l,...,N
R* (xi+1, .. ., xN) =
= max min f min [p(rr, Xj)— yt + yf— 26],
min p(#, i^l.
j=i+l,...,N j
Структура последовательно-оптимального алгоритма ста-
новится ясной из следующей теоремы (в ее формули-
ровке и доказательстве ситуация^ , i/_, у±) предполага-
ется реализуемой).
Теорема 5.1 [242]. При i = 0, 1, ..., N— 1 спра-
ведливо равенство
min max ... min max Гmax <p2 (я; z^) — у^
Ха । — -f* X лт ~— -f* I XG-K
2+1 Vi+1,Vi+1
= min R* (xi+1, . .., xN) + 26.
Доказательство. Преобразуем выражение (5.5).
Имеем
max Гшахф2(я; z^) — yN] =
Vn,Vn l j
= max | max (p2 (x; xN, yN + 26) — yN
(5.6)
/-* /NN N\
причем требование реализуемости ситуации (х , у~_, у±)
накладывает на у^ ограничения
Фх (xN; z*-1) — 26 уй < Ф2 (xN; z^-1). (5.7)
Найдем сначала величину (5.6), не учитывая огра-
ничений (5.7). Максимум в правой части (5.6) достига-
ется при yN = yN-i- Действительно, максимизируемая
а. Г. Сухарев
226 гл. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
функция, очевидно, не убывает по ум при ум ум-i.
Если же ум = ум-i + а, а > 0, то
max ф3 (х-, xN, у”"1, уй + 26) — yN =
х=К
= max <р2 (х; xN, у+~г, yN_± + а + 26) —
ХЕК
— max (у~, ук-1, yN-i + а} =
= max min {<р2 (ж; z^-1), г/л-i + а + 26 + р (х, rcjy)} —
— ул—i — а С max min {<р2 (х; z^-1), yN_x + 26 +
ХЕК
+ Р(я, ял)} — Ул-х = max<p2(ar; xN, у±~\ yN-i+28)—yN^1,
х^К
т. е. значение функции под знаком максимума по ум
в правой части (5.6) при ум^ум-^е превосходит зна-
чения этой функции при ум = Ум-i-
Покажем теперь, что учет ограничений (5.7) не меняет
найденное максимальное значение. Левое неравенство в (5.7)
при ум = Ум-li очевидно, выполняется. Нарушение же
правого при ум = Ум-i (т. е. выполнение неравенства
ум-i > Ф2 ^+~1)) не мешает значению максимума в
(5.6) при условии (5.7) совпадать со значением, которое
принимает функция под знаком максимума по ум при
ум = ум-i. Чтобы убедиться в этом, достаточно показать,
что при любом К функция <р2 (х\ xN, ум + 2б)
(а стало быть, и функция max ср2 yiv + 26))
хе К
постоянна по ум при ум Ф2 (-ЭД z+-1)— 26.
Для доказательства перепишем последнее неравенст-
во в виде
Ул> min {у* + р(ял, Я;)} —26=уМр(хл, Я; ) — 26,
j=l,...,N—l
где 1 С /о < N — 1. Отсюда
Ум + 26 + р (х, Xjf) > у^ + р (ял, я^о) + р (х, xN) >
^yt + рбя, Я;)> min {у/ + р(я, Xj)] =<р2(я;г+“х).
0X0 j=*l,...,N—1
§ 5. УЧЕТ ПОГРЕШНОСТИ ВЫЧИСЛЕНИЙ
227
Итак, при yN ср2 (xN; z± г) — 26 имеем
<р2 (х; xN, у+~\ ум + 26) = min (ф2 (х; z^-1), ум +
+ 26 + р (я, ЗД)1 = Ф2 (*; z+“1),
т. е. действительно функция ф2 (я; xN, у± \ yN + 26) пос-
тоянна по ум.
Точно так же показывается, что значение максиму-
ма по ум-!, #jv-i в (5.5), вычисленное с учетом соответ-
ствующих ограничений, совпадает со значением^ макси-
мизируемой функции при Ум-1 = yN—2, yN-l = yN-2+ 26
и т. д. Тем самым доказана справедливость первого ра-
венства из следующей цепочки (последующие — оче-
видны) :
min max . .. min max max cp2 (rr; z±) — ум \ =
+1 ^i+i-w+i VN'VN l j
= min max <p2 (x; xN, уг+, y^ + 26, . . ., yi + 26) — Уг =
= min max min (yf + p (x, яД ..yt + p (#, #i),
Xi+1»---’XIV X£K
У1 + 26 + p (x, xi+1), . . . , yi + 26 + p (x, xN)] — yt =
= min -й*(^г+1» .. %n) + 26. (5.8)
хг+1»- • •
В равенствах (5.8) предполагается, что i^l. Однако,
используя (5.8) при г = 1, легко получаем утверждение
теоремы и в случае г = 0. А
Заметим, что (см. (3.4))
R* (^<+1,
= mirJr
..., xN) =
U S (xj, yi — yf + 26 + r)
j=i
- N
U S(xj,r)
;=*+i
u
Таким образом, теорема 5.1 сводит задачу построения
последовательно-оптимального алгоритма и в случае,
когда учитываются погрешности информационных вы-
числений, к совокупности специального вида задач на
оптимальные покрытия. Сравнив выражения для
(^1+1, - .-,Хм) И Ri(xi+\, ..., xN) (см. (3.4)), видим,
что эти задачи в принципе не отличаются от соответст-
вующих задач на оптимальные покрытия в случае точ-
ных вычислений. В частности, если п = 1, p(u, v) =
15*
228
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
= М \и — v\, то, внося очевидные изменения в алгоритм
из п. 1 § 4, получим последовательно-оптимальный по
точности алгоритм для рассматриваемого случая при-
ближенных вычислений.
Отметим еще, что если после I информационных вы-
числений в ситуации х\ у'_, у\. гарантированная величи-
на погрешности (максимальная возможная ошибка) не
превосходит 26, то оставшимися вычислениями гаранти-
ровать уменьшение этой погрешности невозможно. Дей-
ствительно, пусть в ситуации хг, уг-, уг+ максимальная
возможная ошибка не превосходит 26. Это означает, что
max ф2 (я; z1) — Уг = max min [у/ 4- р (х, •£;)] — yi 26,
хеК хеК
откуда
max min [р (х, х$) — Уг + yt — 2б] 0.
хеК ;<=1,...,г
Тогда для произвольных xi+\, ..., xN^ К
R* (xi+1, xN) = max min [p (x, Xj) — yi + у? — 26],
x(=K
и минимальная погрешность min . ,зд) + 26,
которую можно гарантировать в ситуации хг, уг_, у\
оставшимися N — i информационными вычислениями,
совпадает с погрешностью, гарантированной первыми i
информационными вычислениями.
§ 6. Оптимальный на один шаг стохастический
алгоритм
Пусть К = [0, 1], p(u, v) = M |и — и|, F = FP, т. е.
F = {/I |/(и) — /(р) I М \и — v\, и, v е=[0, 1]}. (6.1)
Целью данного параграфа является построение опти-
мального на один шаг стохастического алгоритма в
смысле определения (7.15), (7.16) гл. 1 в предположе-
нии, что информационными вычислениями являются вы-
числения точных значений функции / в точках отрезка
К, т. е. Xi = К, St = S, i > 1, где S — множество всех
вероятностных мер на о-алгебре борелевских подмно-
жеств отрезка К.
§ 6. ОПТИМАЛЬНЫЙ НА ОДИН ШАГ АЛГОРИТМ 229
1. Сведение задачи построения оптимального на один
шаг стохастического алгоритма к решению совокупности
антагонистических игр на единичном квадрате. Сначала
напомним некоторые из ранее введенных и введем ряд
новых обозначений. Именно, для 1 положим1)
8 (хг, /) = max / (х) — max / (ггД,
хеК
Уг — max yh ф2гОО = min {yj + M\x — х^\},
Ьл(х) = — М\х — а\, ti1*1 (х) = max (cp2i(а) — М|х—а|,^},;
(а, х) = ha (а) — ha (х) = М | х — а |,
fi+1 (а, х) = 8 (хг, х, 1га+1) = max h^1 (я) —
ХЕК
- max [h[+1 (xj, . .., h^1 (х^, h?1 (я)} = Д1+1 (а) - h^1 (х).
Лемма 6.1. Пусть функциональный класс F опре-
делен формулой (6.1), Oj — оптимальная смешанная
стратегия минимизирующего игрока в игре на единич-
ном квадрате с функцией выигрыша gj. Тогда совокуп-
ность вероятностных мер определяет алгоритм,
оптимальный на один шаг на классе F, среди стохасти-
ческих последовательных алгоритмов, т. е. Oi удовлетво-
ряет равенству (7.5) гл. 1, a oi+i, г>1,— равенству
(7.16) гл. 1.
Доказательство. Пусть f F (z1), max / (х) =
хеК
= f(a), Для произвольного х е К, очевидно, /(z)>
> f(a) — М \х — а|, откуда
t (х\ х, f) = / (а) — max [f (х), уг] <
^/(а) — max {/(а) — М | х — а |, уЛ
< ЧЫ (а) — max {ЧМ («) — М | х — а уi} = ha+1 (а) —
— ^а+1 = е ha+1) = gi+1 (а, *)• (6.2)
Заметим, что для функции &а+1 (ж) = min (fea+1(x), q>2i(a:))
справедливо равенство е(хг, х, hlai'1)= х, и
е Р(гг). В силу неравенства (6.2) и произвольностих^К
J) Для упрощения обозначений не указывается в явном виде,
как и для ранее введенной функции <р2г, зависимость и gi+i
©т
230
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
для произвольной меры о S имеем
J 8 (я?, X, /) О {dx} 8 (хг, X, hla+1) О {dx} =
к к
= [ 8 (х\ х, &а+1) о {dx} max [ 8 (х\ х, к1^1) о {dx},
К а^к х
а в силу произвольности f е F (z*) —
max f 8 (х\ х, /) о {dx} max fe(?, х, ki)o{dx}.
ff=F(ziy) К a^K К
(Очевидно, что для функционального класса (6.1) все
максимальные значения, фигурирующие здесь и ниже,
достигаются.) Далее, поскольку кг+г F (z1) при всех
а е Л", то справедливо и противоположное неравенство.
Используя равенство 8 (х\ х, к^1) = gi+i (а, х), получаем
отсюда
шах 8 (хг, х, f) о {dx} = max f g^+i (я, я) o' {dx}. (6.3)
/er(z9 к a^K к
Пусть at-+i — оптимальная смешанная стратегия мини-
мизирующего игрока в игре на единичном квадрате с
функцией выигрыша gi+i. Это означает (см., например,
[122]), что
max f (а, х) o'i_p1 {dx} = min max (* gi+1 (a, x) a {dx}.
a$=K x qgeS af=K x
Используя то, что равенство (6.3) справедливо при всех
o^S, получаем отсюда равенство (7.16) гл. 1. Справед-
ливость равенства (7.15) гл. 1 следует из леммы 2.1. А
2. Решение антагонистических игр. Решение игры с
функцией выигрыша gi не представляет труда. Обозна-
чим через 1С вероятностную меру, сосредоточенную в
точке с.
Лемма 6.2. Стратегии Oi = Zi/2? Ti = 7о/2 + Л/2 —
оптимальные смешанные стратегии соответственно ми-
нимизирующего и максимизирунщего игроков, а вели-
чина М/2 — значение игры на единичном квадрате с
функцией выигрыша g\. А
Доказательство состоит в тривиальной проверке, ко-
торую мы опускаем. Заметим, что игра с функцией вы-
игрыша g\ является частным случаем игры, рассмотрен-
ной в доказательстве теоремы 2.2.
§ 6. ОПТИМАЛЬНЫЙ НА ОДИН ШАГ АЛГОРИТМ
231
Обратимся к решению игры на единичном квадрате
с функцией выигрыша gi+i при i > 1. Пусть множество
{#1ф2г(я) > уЛ состоит из п непересекающихся проме-
жутков, п i + 1. Обозначим через bh dj концы /-го про-
межутка. Тогда
Л = {я|ф2{(я)>У»1 = U [fy, dj].
j=l
Рис. 10. К вопросу
рующего игрока в
об оптимальности стратегии Oi+i минимизи-
игре с функцией выигрыша gi+i в случае
^<1/2
если bj — 0 или dj = 1. Будем считать, что промежутки
занумерованы таким образом, что
ai > а2 > ... > ап > 0. (6.4)
Положим, далее, Cj = arg шах ср2г(^)- Ясно, что
Cj = 0, если bj^=O; ц>=1, если dj = l; Cj = (bj + dj)/2 в
остальных случаях. На рис. 10, а изображен случай i =
= 5, п = 4.
232
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
Решение игры можно получить при помощи рассуж-
дений по следующей схеме. Сначала из соображений
доминирования получается, что точки спектров опти-
мальных стратегий для каждого из игроков достаточно
искать в множестве Р(гг). Далее показывается, что эти
спектры содержат на каждом из отрезков [6j, dj, j > 1,
не более одной точки, а именно Cj. На отрезке [6i, di] в
спектры оптимальных стратегий игроков, кроме точки
ci, могут входить также точки = — 6i)/3, r]i =
= bi + 2(di — bi)/3, если 6i#=0, di #= 1. Если же &i=0
или d\ = 1, то, кроме в спектры оптимальных страте-
гий может входить точка gi = (6i + d\)/2. Таким обра-
зом, спектры оптимальных стратегий содержат не более
п + 2 точек каждый. Это позволяет свести решение иг-
ры на единичном квадрате к решению матричных игр.
Доказательство утверждения о точках спектров оп-
тимальных стратегий, содержащихся в отрезках [6;,
7 > 1, не представляет особого труда. Для отыскания
дополнительных точек спектров на [6Ь необходимо
решить игру с функцией выигрыша gi+i на квадрате
[6i, di] X [6i, di]. На этом квадрате функция gi+i при
61=# 0, d\ ¥= 1 является бабочкообразной функцией выиг-
рыша [122]. Смешанная стратегия7^/2 + 7-^/2оптималь-
на для каждого из игроков. Мы не станем приводить
доказательства этих и других утверждений, необходи-
мых при естественном ходе отыскания решения игры.
Взамен дадим более короткую формальную схему со
всеми необходимыми доказательствами.
Рассмотрим игру с матрицей А1 = (a}k) = ck)),
j, к = 1, . . ., n. Используя формулу gi+x(a, х) = h^1 (а)—
- hi+1 (х), получаем
О ах ... ах 1)
а 0 а ... а
М 2 2 2
А = аз аз 0 • • • аз
ап ап ап ... О
Для решения игры с матрицей А1 при сделанном ранее
предположении (6.4) положим v) ~(j—l)/(aj-1+a2 *+ •••
+ . .. + af1), 7 = 1, п.
!) Для упрощения обозначений не указывается в явном виде
зависимость матрицы А1, определяемых ниже матриц Л2, Л3,
а также элементов этих трех матриц ни от ни от номера шага.
§ 6. ОПТИМАЛЬНЫЙ НА ОДИН ШАГ АЛГОРИТМ 233
Лемма 6.3. Пусть р* < . < v] , a
или ]\ = п. Тогда Ми1/} Mv}J2~3Ha4eHue игРЪ1 с мат-
рицей А1,
(<11, ?2, ?}1+1, ..., 9п) =
= (1 — v'/a^, 1 — Рг/а2, . .., 1 — vL/a.^, О, ..., 0).
— оптимальная стратегия минимизирующего игрока, а
(р1!, pl, • • • , pjx, Р}\+1, Рп) =
= (±.У— А._±_ о о\
^“1 Л-1 а2 /1-1 а;х 71-1’ ’•••’ /
— оптимальная стратегия максимизирующего игрока.
Доказательство. Для обозначения эквивалент-
ных неравенств будем пользоваться символом *=>. Непо-
средственно проверяется, что
7 = 1, 1,
(6.5)
2р} = 1, 7 = 1, 3^=1, (6.6)
3 = 1 fe=l
^a}hpj = ^v\ k^j\, (6.7)
3=1
2 a)hpj = p1’ + (2 * * * 6 *-8 *)'
j=i yi
2 аРЯь = т p1’ j < h (6.9)
h=l
Используя (6.4), (6.5) и условие получаем
n
2 1 1 M M -I . . 4 /n A
(4k4k = -2a3^~2 %+! < T V ’ 7 > Л + !• (6-10>
k=i
Выпишем, наконец, цепочку эквивалентных в силу (6.5)
неравенств, первое из которых справедливо по условию’
леммы:
< aj± v1 < a7i <=> > 0.
234
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
Отсюда в силу (6.4) получаем ^>0, fc = l, ..71, что
вместе с соотношениями (6.6) — (6.10) доказывает лем-
му. А
Лемма 6.4. Если (Zi^l/2, то
п п
O’i+l — 2 QjJcw Ti-f-1 — 2 Pjlcj
2=1 j=l
суть оптимальные смешанные стратегии соответственно
минимизирующего и максимизирующего игроков,
a Mvxl2 — значение игры на единичном квадрате с функ-
цией выигрыша giJr\.
Доказательство. Заметим, что gj 1/2, k = 1, ...
..., п, так как, по условию леммы и в силу (6.4), 1/2^
^2 . .. ^ Qn- Поэтому функция
R = f gi+i (а, х) ai+1 {dx} = 2 gi+i (а, ск) ql,
К 2 = 1
рассматриваемая как функция аргумента а, достигает
максимального на отрезке [bh dj] значения в точке Cj,
7 = 1, ..., п. Это ясно из рис. 10, б—е, на котором изо-
бражены графики функций gt+i(a, с;), 7 = 1, • • •, а так-
же график функции R (все они рассматриваются как
функции аргумента а) в случае, соответствующем
рис. 10, а. Таким образом,
п
max R = max S gi+i (c>, ск) qk =
a^K k=l
n
= max = (6.11)
>=i...n a=i z
Рассмотрим теперь
R' = f gi+i («, *) Ti+i W = 2 gi+i x) Pi
к >=i
как функцию аргумента x. Очевидно (см. рис. 11), что
эта функция достигает минимального на отрезке [bh, dh]
§ 6. ОПТИМАЛЬНЫЙ НА ОДИН ШАГ АЛГОРИТМ
235
значения в точке ch, к = 1, ..., п. Отсюда
п
min R' = min 2 gi+i (cj, c/0 p) =
jceK k=l,...,n j=l
n
= min (6.12)
Равенства (6.11), (6.12) доказывают лемму. A
Рис. И. К вопросу
рующего игрока в
об оптимальности стратегии тг+1 максимизи-
йгре с функцией выигрыша gi+i в случае
< 1/2
Рассмотрим теперь игру с матрицей
1 «1/3 2ах/3 0 2ах/3 .. ,. 2аг/31 ао
Л" = ,И* 2 аз аз 2 0 2 • аз
ап ап ап •• 0
Положим 1 + а2 1 + . .. + а,- х), j = 1, . . . ,м.
Лемма 6.5. Пусть < и% < . . . < vj2, а
или ]2=п- Пусть, кроме того, 1/2. Тогда Ми2/2 =
^Mvj2/2 — значение игры с матрицей А2,
(й.tl, </?,+• & =
= (2 — Зи2/^, 1 — v2/at, ..., 1 — и2/а^, 0, ..., 0)
236
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
есть оптимальная стратегия минимизирующего игрока,
при этом ql > 1/2, а
(2 2 2 2\
\Ph Р2ч • • Pj^ Pj2-\-14 • • ••> Рп) —
__ / 3 v2 1 v2 1 v2 g q\
есть оптимальная стратегия максимизирующего игрока.
Доказательство. Непосредственно проверяется^
что
v2<.v2+1ov2 <aj+i^pj+1<a;+i, 7 = 1, . .п— 1,
(6.13)
2 Pj = 1,
J=1
2^ = 1, A<72)
h=l j=i
У a\n2-y2 + 1.M 2 k . .
ajhPj — • ~2 v ^”2”^’ /2 ~r -*• т
j = l 2
n
2 2 M о • •
Z a]hqh = ~2-v2, 7 < 72.
fe=l
Используя (6.4), (6.13) и условие z^2 получаем
2^ a^h = —a;2+1<-^p2, 7>у2 + 1.
Далее, так же как при доказательстве леммы 6.3, убеж-
даемся, что ^>0, к = 2, ..., /г. Для завершения дока-
зательства остается убедиться, что q\> 1/2.
По условию, 1/2, откуда легко выводим эквива-
лентное неравенство
а2 1 + ... + (2/1 — 3) oti . (6.14)
Пусть 7i>/2- Тогда р}2<р)2+1, < v2^. В силу (6.5)
и (6.13) ^2<%+i <^?2. Имеем + . ..
.. . + <Z;21 > (2/2 — 3) 1 q± > 1/2.
§ 6. ОПТИМАЛЬНЫЙ НА ОДИН ШАГ АЛГОРИТМ
237
Если 71=72, то условие (6.14) дает как раз необхо-
димое неравенство >1/2.
Предположим, наконец, что j\ < /2. Тогда vfi < ^4-1»
1?^. В силу (6.4) и (6.13) < с^+1. Имеем
rj < <=> а^1 4- . . . + < (2/! — 3) а7~\ что противо-
речит неравенству (6.14). Неравенство Qi>1/2 и тем са-
мым лемма полностью доказаны. А
Напомним введенные ранее обозначения: gi = 61 +
+ (di — &i)/3, t]i = b\ + 2(di — &i)/3. Кроме того, положим
Й = iqt
Лемма 6.6. Если gl>l/2, &i=H=O, d\ 1, to
n
°t+i = ?1Л1 + (<7i — <?i) (y + 4 + 2
' ' k=2
n
^г+1 = Pi Ai + 4 + 2 p^Icj
\ / j=2
суть оптимальные смешанные стратегии соответствен-
но минимизирующего и максимизирующего игроков,
a Ми2/2 — значение игры на единичном квадрате с функ-
цией выигрыша gi±\.
Доказат е л ь с т в о. Отметим, что при q\ > 1/2, по
лемме 6.5, q\ > 1/2 и, следовательно, ^<1/2 и q\ — 2i>0.
Таким образом, Oi+1 и, очевидно, Т|+1 — смешанные стра-
тегии. Имеем
^ = <2 + G2i-?i)G,
Где
п
Q = («. <?i) + S ?2gi+i (а, Сй),
к=2
G = [gi+i (а, £х) + gi+1 (a, Tii)]/2.
Если а ^[61, di], то g<+i(«, Ci) = g<+i(a, £i) = gi+i(a, тц),
п
поэтому R = 2 Qkgi+i (a, и максимум по а на отрезке
^1.
Jbj, d3], 7 > 2, достигается в точке с3 (обоснование то же,
что в доказательстве леммы 6.4: достаточно заметить, что
238 ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
q* < 2 Qk, 7 2). Таким образом,
п
max R = \ gi+i(cj, x)oi+1{dx} = a2jkq2k, (6.15)
ae[bj,dj] к k=i
Из рис. 12 ясно, что
Arg max R = [&х + (dx — bJ/4, b± + 3 (dx — &J/4L
aepi.dj
Q
c1 d1 a b+(dj-bj)/4 b^kdj-b^/4 a
Рис. 12. К вопросу об оптимальности стратегии ог+1 минимизиру-
ющего игрока в игре с функцией выигрыша gi+i в случае >
>1/2, di=H= 1
откуда
max R = gi+1 (ср х) cri+1 {dx} =
ae[bl’dl] к
L h = 2
(„2 “1 , V „2 2°A _ У /г2 „2 Zfi 1RY
k=2 / k=l
П
Замечая, что R = 0 при U \bj, имеем, вследствие
(6.15), (6.16),
max R = max V v2. (6.17);
a=K
§ 6. ОПТИМАЛЬНЫЙ НА ОДИН ШАГ АЛГОРИТМ
239
Далее докажем, что функция
R' = pl G' + 2 pjgi+i (с,, х),
j=2
где G =[gt+i(Bi, х) + gt-+i(ц1, х)]/2, достигает минимума
по х на отрезке [bh, dft] в
точке ch. Для к = 1 это
ясно из рис. 13:
Arg min Rr =
= [&1 + __ Ь1)/3?
G\
i
________I_______I_______I__
I>1 7/ di x
Рис. 13. К вопросу об оптималь-
6 +2(^1 ____Ъ )/31; ности стратегии Ti+i максимизи-
1 ' 1 1 ’ рующего игрока в игре с функ-
_ _ дней выигрыша g1+i в случае
для 2 - показывается л > 1/2> ф 0, dt ф 4
так же, как при доказа-
тельстве леммы 6.4. Отсюда легко получаем, что
п
• D / • 2 2 М о
min R. = min Л CLjhPj = -т •
XfcK k=l,...,n j = 1
(6.18)
Равенства (6.17), (6.18) доказывают лемму. А
Рассмотрим теперь еще одну (и последнюю) игру —
с матрицей
def М
3«i/4 3“i/4 .. Заг/4
“2 0 а2 •• • а2
аз аз 0 • аз
ап ап «п •• 0
Положим и3 = (/ — 1/2) (2ах 1 + сс2 1 + • • • + 7 =
= 1, ..., п.
Лемма 6.7. Пусть р? < *4 < • • • < *4 » а +ъ
или ]3 = п. Пусть, кроме того, ^J>l/2. Тогда Mv3/2 =
^LMv3j2 — значение игры с матрицей А3,
\Qi, 0.2ч • • •» 7>34-ь • • •» Qn) —
= (3/2 — 2v3/a1, 1 — и3/а2, .. ., 1 — ^3/а>3, 0» ..., 0)
есть оптимальная стратегия минимизирующего игрока,
240
ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
при этом > 1/2, а
<р9, pL 4+i, ...,р9п) =
/ 2 i>® Ip3 1 vs n »\
- la/ j3- 1/2 ’ a2 ‘ у —1/2 ’ a; ’ j3 -1/2 ’ U’
у 1 о a о j з о j
есть оптимальная стратегия максимизирующего игрока. А
Доказательство леммы аналогично доказательству
леммы 6.5.
Напомним введенное ранее для случая Ъ\ = 0 или
d\ = 1 обозначение £1 =(&i + di)/2. Кроме того, положим
?! = 2 ?•
fe=2
Лемма 6.8. Если ^>1/2 и, кроме того. Ь1=0 или
d\ «= 1, то
п
aH-i = Qi^cr + (Qi — Qi) T 2
\ / k=2
Ti+1 = Pl (у + у + 2 ?^c3
4 3=2
суть оптимальные стратегии соответственно минимизи-
рующего и максимизирующего игроков, a Mv3/2 — зна-
чение игры на единичном квадрате с функцией выигры-
ша gi+x.
Доказательство. Отметим, что при д}> 1/2, по
лемме 6.7, q^> 1/2, и, следовательно, q*<Z 1/2 и qf — Qi>0.
Таким образом, о<+1 и, очевидно, ri+i — смешанные стра-
тегии. Имеем
R=Q' + (q3i-q3i)G\
где
Q' = Qigi+i {а, сх) + ?gi+i (а, сй),
G" = [gi+i (a, Ci) + gi+i (a, cx)]/2.
Если a&\bi, dj, to g;+i(a, ci) = g<+i(a, gi), а потому
п
Я = 2 dUi+i (fl, максимум по а на отрезке [£>,-, dj],
k=l
j 2, достигается в точке Cj. Обоснование то же, что в
§ 6. ОПТИМАЛЬНЫЙ НА ОДИН ШАГ АЛГОРИТМ
241
доказательстве леммы 6.4: достаточно заметить, что
2 dL 7 ^2. Таким образом,
С п
max R = gi+1 (с>, х) <ji+1 {dx} = S (6.19)
ae[bj,dj] к h=1
Рис. 14. К вопросу об оптимальности стратегии Oi+i минимизи-
рующего игрока в игре с функцией выигрыша gt+i в случае, ког-
да >1/2 и, кроме того, bi = 0 или d[= 1
Из рис. 14 ясно, что Arg max R = [£х, ej, откуда
aePl’dll
max R = f gi+1 (cn x) ai+1 {dx} =
aepi.dj 'K
L fe=2
=t^t+<«-2o>
\ fe=2 / k—1
П
Замечая, что 7? = 0 при а ф. J [&j, dj], имеем, вследствие
(6.19), (6.20),
п
max R = max 2 = V у3- (6-21)
а(=К
16 А. Г. Сухарев
242 ГЛ. 4. ПОИСК ГЛОБАЛЬНОГО ЭКСТРЕМУМА
Далее покажем, что функция
R' = p'fi"' + 2 Pjgin(cj>
j~2
где G"' = [g<+i(£i, x) + gi+i(ci, x)]/2, достигает минимума
по x на отрезке [bk, dj в точке ck. Для к = 1 это ясно из
рис. 15: Arg min R' = [£v сД; для к > 2 показывает-
ся так же, как при доказательстве леммы 6.4. Отсюда
легко получаем, что
п
min R’ = min 2 = vу3- (6.22)
хеК = j — i
Равенства (6.21), (6.22)
3. Оптимизационный алгоритм.
Рис. 15. К вопросу об оптималь-
ности стратегии Ti + i максимизи-
рующего игрока в игре с функ-
цией выигрыша gi + i в случае,
когда 7* > 1/2 и, кроме того,
bi = 0 или d\ = 1
доказывают лемму. А
Опишем в заключение
стохастический алгоритм
поиска максимума функ-
ции /, удовлетворяющей
на отрезке [0, 1] условию
Липшица с известной кон-
стантой 71/, т. е. принад-
лежащей функционально-
му классу (6.1).
На первом шаге пола-
гаем ГГ1 = 1/2 и вычисляем
У1=/(^1). Пусть сделано
i шагов: ] =
= 1, ..., i, f > 1.
На (i+l)-M шаге про-
изводим следующие дей-
ствия. По формулам п. 2
вычисляем величины п,
dj, ccjj Cj для / = 1, ..., п. Затем вычисляем г1, ...
. . ., Цп-
Если 71 1/2, то в качестве xi{.\ выбираем реализа-
цию случайной величины, принимающей значения ск с
вероятностями q)t, k=i, ..., п. Затем вычисляем
уг+1 = /(^i+i).
Если q} >1/2, b[ ¥= 0, d\ ¥= 1, то вычисляем величины
о 2 2 —2 1-»
Sb Ль Яъ ...,qn,q\- В качестве Хг±\ выбираем реализа-
цию случайной величины, принимающей значения Cj с
§ 6. ОПТИМАЛЬНЫЙ НА ОДИН ШАГ АЛГОРИТМ 243
вероятностями j = 2, ..., п, значение ci — с вероят-
—2 «.
ностыо q-L, значения gi, щ — каждое с вероятностью
(<7i —(Zi)/2. Затем вычисляем yi¥\ = f(xi+i).
Если гД> 1/2 и, кроме того, Ь± = 0 или dA = 1, то вы-
числяем величины 71, . . ., qh, q*. В качестве х^-! вы-
бираем реализацию случайной величины, принимающей
значения Cj с вероятностями q], j = 2, значение
сг — с вероятностью (qf + qi)/2, значение — с вероят-
ностью (qf — qi)/2. Затем вычисляем у^ = f(xi+1).
Правило остановки может задаваться по-разному, на-
пример, в виде (4.20) гл. 1.
Обозначим построенный алгоритм через А.
Теорема 6.1 [250]. Алгоритм А оптимален на один
шаг на функциональном классе (6.1) среди стохастиче-
ских последовательных алгоритмов поиска глобального
максимума. А
Доказательство теоремы дается леммами 6.1—6.8.
Отметим, что перед (£+1)-м шагом гарантированная
в среднем априорная точность равна Mv42 в случае
(71^1/2; МиЧ2 — в случае > 1/2, Ъ\ 0, di¥=l;
7Ир3/2 — в случае, когда q >1/2 и, кроме того, 61 = 0
или d[ = 1.
Результаты сравнения оптимального на один шаг
стохастического алгоритма (с правилом остановки (4.20)
гл. 1) и последовательно-оптимального по числу инфор-
мационных вычислений детерминированного алгоритма
9
(см. п. 3 § 4) па тестовых функциях вида r^cos +
k=i \
+ bh sin [0, 100], где bk— независимые слу-
чайные величины с равномерным законом распределе-
ния, показывают некоторое преимущество стохастического
алгоритма над детерминированным.
16*
ГЛАВА 5
НЕКОТОРЫЕ СПЕЦИАЛЬНЫЕ КЛАССЫ
ЭКСТРЕМАЛЬНЫХ ЗАДАЧ
В этой главе изучаются оптимальные методы реше-
ния нелинейных уравнений и систем уравнений, отыска-
ния максимума функции минимума при наличии связей
между переменными, а также оптимальные методы ре-
шения многокритериальных задач. Все эти задачи в
основном вкладываются в рамки модели вычислений гл. 1
и сводятся к различным экстремальным задачам спе-
циального вида.
§ 1. Решение уравнений и систем уравнений
Методы решения нелинейных уравнений вида f(x) = O
и систем уравнений вида /<(^) = 0, г = 1, ...» п, с доста-
точной полнотой изложены в учебной, справочной и мо-
нографической литературе [22, 27, 105, 116, 192, 196,
274, 276]. Во многих работах изучаются вопросы слож-
ности, эффективности и оптимальности в различных
классах алгоритмов, особенно в классе итерационных
алгоритмов. Исследования сложности итерационных ал-
горитмов были инициированы монографией [274], хоро-
ший обзор с аннотированной библиографией имеется в
[276]. Важнейшее значение в задачах решения уравнений
имеют вопросы устойчивости решения в зависимости от
исходных данных и вопросы регуляризации [79, 120, 178,
261, 268—271]. Среди работ, в которых рассматривается
решение уравнений и систем уравнений и которые наи-
более тесно связаны с общей моделью вычислений гл. 1,
отметим [26, 42-45, ИЗ, 146, 147, 158, 275, 276, 290,
323, 324, 340, 349, 355, 363, 372, 391, 429, 430, 436, 446].
1. Последовательно-оптимальный алгоритм поиска
корня функции, принимающей на концах отрезка значе-
ния разных знаков. Поставим задачу отыскания какого-
либо из корней функции /, удовлетворяющей на отрезке
К = [а, Ь] условию Липшица с известной вычислителю
константой М и принимающей в точках а, Ъ значения
§. 1. РЕШЕНИЕ УРАВНЕНИЙ И СИСТЕМ УРАВНЕНИЙ
245
разных знаков. Пусть для определенности
/ <= Fj Й? {/1 | / (и) — / (р) | < М | и — v |, и, v е= [а, Ь],
/(а)<0,/(&)>0}.
Очевидно, любая функция из класса F\ имеет па сегмен-
те [а, Ь] хотя бы один корень. Будем предполагать, что
информационными вычислениями являются вычисления
значений функции / и что В = К, S (f) = {х* е
е K\f(x*) = 0} (тем самым мы несколько расширяем пред-
положения § 1 гл. 1, допуская в качестве возможных
значений S(f) не только точки множества В, ио и под-
множества этого множества). Если считать, что 7(5(/), [})
есть расстояние от точки р, приближающей искомый ко-
рень, до множества £(/), то стандартными рассуждения-
ми (см., например, [276]) можно показать, что последо-
вательно-оптимальным алгоритмом является алгоритм
бисекции (алгоритм деления пополам па каждом шаге
интервала локализации корпя):
rri+1 = ^2i, г = 0,1,..., (1.1)
гДе
uq = а, Ьо = Ь,
I
a<+1 = U+1-yi+1/M,
pri+i —
z’i+1= b-
yi+1 > 0,
Уг+i <0,
i/i+i < 0;
если yi+i = 0, то вычисления прекращаются — корень
найден.
Мы рассмотрим далее иной критерий оценки эффек-
тивности, называемый иногда критерием невязки. Пусть
F — класс функций, имеющих на К хотя бы один корень.
Если р К выбирается в качестве приближения к кор-
ню функции /, то невязкой решения назовем величину
l/((J)l. Вычислитель стремится к минимизации невязки
и, следовательно, задача решения уравнения сводится к
экстремальной задаче специального вида — задаче мини-
мизации функции с известным (пулевым) значением.
Эффективность вычислительных алгоритмов будем
оценивать с помощью критерия
?(*(/), М = !/(!*)I, (1.2)
246 ГЛ. 5. СПЕЦИАЛЬНЫЕ КЛАССЫ .ЭКСТРЕМАЛЬНЫХ ЗАДАЧ
при ЭТОМ
(zN) = inf max |/(0)|, (1.3)
p=K/eF(2N)
а в качестве итоговой операции используется функция
Р*, определенная формулами (4.3), (4.4) гл. 1. Таким
образом, за корень функции f принимается точка P*(zN),
реализующая нижнюю грань в (1.3). Заметим, что в рас-
сматриваемой постановке введенная формулой (1.2)
функция у не является метрикой в 5, поэтому Р* (zN)
нельзя трактовать как чебышевский центр множества
неопределенности (ср. с п. 5 § 4 гл. 1). Несмотря па это,
мы будем по-прежпему называть р* центральной итого-
вой операцией.
Для произвольной функции f>l, наряду
с неравенством фц(я)^ ф2Д^), &], где
Фн = max {у$ — М | х — Xj | },
ф2г (х) = min {yj + м\х — Xj |},
выполняется также неравенство М (х — Ь) / (х)
М (х — а), х е [а, Ь] (в противном случае оказались бы
невыполненными условия /(а)^0, /(6)^0). Следова-
тельно, фзг(^)^ /(^)^ ф4г(#), х^\а, &], где
фзг(^) = тах{фн(^), М(х — Ь)},
ф41(я) = ппп{ф21(#), М(х — а)}.
Заметим также, что для произвольной реализуемой си-
туации через любую точку (rr, z/)^{(#, у)\а^х^Ъ,
Фзг (я) у < ф4г (х)} проходит график хотя бы одной
функции из Fi (гг). Поэтому max | / (Р) | = max { | ф3дт (Р) |,
/erjz^)
|ф41у(Р)|}, и выражение (1.3) принимает вид
(zN) = min max { | ф3]у (Р) |, | ф4ту (Р) |}. (1.4)
0е[а,Ь]
Оказывается, что и в рассматриваемом случае (1.2),
(1.3) алгоритм бисекции последовательно-оптимален по
точности па классе Fi.
Теорема 1.1 [243]. Алгоритм (1.1) последователь-
но-оптимален по точности на классе F\ при произволь-
ном заданном числе N информационных вычислений и
§ 1. РЕШЕНИЕ УРАВНЕНИЙ И СИСТЕМ УРАВНЕНИЙ 247
гарантирует результат M(b — a)yN, где yN = 1/(2*+2 — 2).
Центральная итоговая операция [3* определяется следую-
щим условием: если j-e из чисел lyj, ..1?/я1,
М(bN — aN)/2 минимально среди этих чисел, то Р* (zN) —
это j-я точка из множества {#1, ..xN, (aN+ bNy/2}.
Доказательство. Покажем, что алгоритм (1.1)
оптимален по точности в множестве всех последователь-
ных алгоритмов XN, а паилучший гарантированный ре-
зультат равен М(Ъ — a)^N.
Убедимся сначала, что алгоритм (1.1) гарантирует
результат пе хуже M(b — a)yN. Пусть f^Fi, точки х\, ...
..., xN получены способом (1.1), Уэ^Нъ), 7 = 1» ..., N.
Если |yj СM(b — a)yN хотя бы для одного /^{1, ...
..., N}, то lq)32v(^j) I = 1ф4Н^) I = lyj <M(b — a)%N, от-
куда в силу (1.4) &N(zN)^M(b-a)4N.
Пусть теперь
\уз\ > M(b — a)yN, /=1, ..,2V. (1.5)
Покажем, что в этом случае
6;-ai«b-1=1, .... N. (1.6)
Действительно, из (1.1) и (1.5) следует, что
< 2 (Ь — a) Yw =
= (Ъ - а) (у -
Предположим, что (1.6) выполняется для j = i — 1, i<N.
Тогда
ь „ \уг\^Ь~а( 1 2*-!-!^
°г «г — 2 М 2 I 2i—1 2i—2 }
(4 9^ 4 \
77---I,
и и /
и неравенство (1.6) доказано, таким образом, по индук-
ции. Из него, в частности, вытекает, что
MbN~aN- <М(Ъ- а) - 2 ~i Vn\ =M(b-a)vN.
248 ГЛ. 5. СПЕЦИАЛЬНЫЕ КЛАССЫ ЭКСТРЕМАЛЬНЫХ ЗАДАЧ
Отсюда, учитывая (1.4), получаем (см. рис. 16)
„„ (И < шах {| |, | <р,„ i} =
= М 1>N „ <М(Ь — а') у„.
Итак, мы убедились в том, что алгоритм (1.1) гаранти-
рует результат не хуже M(b — a)yN. Кроме того, нетруд-
но усмотреть (рис. 16), что минимум в (1.4) достигается
Рис. 16. К вопросу об определении величины &n(zn) для
класса F\
в одной из точек ач, ..., xNi (aN + bN)/2 и равен
ZN (zN) = min У11, ..., I yN I, M bN 2 Ojv j. (1.7)
За приближение P* (zN) к корню, следовательно, надо
принять у-ю из точек х\, ..., xN, (aN + bN)/2, если у-е из
чисел lyil, ..., \yN\, M(bN — aN)/2 минимально среди этих
чисел.
Убедимся теперь в том, что гарантировать результат
лучше М(Ъ — a)4N невозможно, т. е. для произвольного
последовательного алгоритма xN е XN существует такая
функция что &n(xn, yN)> М(b - a)yN, где вектор
xN получен по формулам (3.2) гл. 1 при применении
алгоритма xN к функции /, a yj = f(Xj), у = 1, ..., N. Для
этого достаточно рассмотреть функцию /, для которой
\у^\ = М (b — a)yN, 7 = 1, . •N, а знаки поочередно вы-
числяемых чисел i/i, ..., yN подчиняются следующей за-
кономерности. Если знаки значений функции / в бли-
жайшей к Xj слева и в ближайшей к Xj справа среди
§ 1. РЕШЕНИЕ УРАВНЕНИЙ И СИСТЕМ УРАВНЕНИЙ 249
точек a, хх, ..., rrj-i, b совпадают, то и знак у> такой же.
Если же эти знаки разные, т. е. х$ лежит в сегменте
локализации корпя (этот сегмент обозначим bj—1D»
то знак Уз таков, что длина следующего сегмента [ftj, Ь3]
локализации корпя определяется условием — а> =
==max {&j_iXj-a^x} - (b -a)yN. Легко видеть, что
такая функция f^F{ существует и для нее &N(xN, yN) =
==M(b — a)yN. Тем самым оптимальность алгоритма (1.1)
в множестве всех последовательных алгоритмов XN до-
казана. Докажем, что этот алгоритм последовательно-
оптимален по точности.
Пусть значения функции вычислены в точках
rri, ..., х^ i<N, и равны соответственно у\, ..., у^
[аг«, — сегмент локализации корня, и осталось вычис-
лить N—i значений функции /. Тогда, используя уже
доказанное, получаем, что наилучший гарантированный
результат в рассматриваемой ситуации z1 равен
min{iz/il, ..., lyd, M(bi — (1.8)
Ясно, что результат (1.8) можно гарантировать с по-
мощью алгоритма (1.1). Следовательно, алгоритм (1.1)
последовательно-оптимален. А
Замечание 1. Если min {lyj,..., lyd) < M (bi — аг) X
X то гарантировать улучшение результата остав-
шимися N — I вычислениями нельзя. Поэтому выбор точ-
ки Xi+\ произволен. Этот произвол можно использовать
для улучшения наилучшего гарантированного результата,
выбирая точку х^\ случайно, т. е. применяя стохастиче-
ские алгоритмы. Например, если Xi±\ [сц, Ьг] — случай-
ная величина с равномерным законом распределения, то
гарантированный в среднем результат лучше результата
min{|yil, ..., 1yd), который можно гарантировать детер-
минированными алгоритмами.
Замечание 2. Выбор точки очередного вычисле-
ния алгоритмом (1.1) не зависит от заданного числа вы-
числений N. Следовательно, алгоритм (1.1) последова-
тельно-оптимален по числу информационных вычислений
при любой заданной точности е. При этом вычисления
следует прекратить после N шагов, если
&n{zn) = min{|yil, ..., |yN|, M(bN~aN)/2} A
2. Оптимальные по точности на функциональном
классе F2 алгоритмы. Обозначим через F2 класс функций,
удовлетворяющих па сегменте [а, Ь] условию Липшица с
250 ГЛ. 5. СПЕЦИАЛЬНЫЕ КЛАССЫ ЭКСТРЕМАЛЬНЫХ ЗАДАЧ
известной вычислителю константой М и имеющих на
[а, Ь] хотя бы один корень. Нетрудно видеть, что F2 =>F\.
Построим оптимальные по точности алгоритмы, пред-
полагая, что критерием оценки эффективности служит
критерий невязки (1.3).
Пусть произведено N вычислений, У; = /(£,), 7 = 1, ...
..., N. Могут представиться следующие три случая:
А) знаки не всех чисел у i, ..., yN одинаковы;
Б) знаки всех чисел уь ..., yN одинаковы, множество
аг
[a, b] \ J (х} — | yj \/М, Xj + | yj \1М)
j=i
состоит не менее чем из двух иепересекающихся сегмен-
тов (только в точках этого множества функции /GF2(zN)
могут принимать нулевые значения; оно непусто, так
как любая функция f F2 имеет хотя бы один корень);
В) знаки всех чисел уь ..., yN одинаковы,
[а, Ь]\ U (хз — I Уз \/М, х} + | yj \/М) = [ajv, W
j=i
В случаях А) и Б) через любую точку
(#, y)\a^x^b, (piN(z)^y ^ф2Ня)}
проходит график хотя бы одной функции /еF2(zn),
поэтому
ejv(zN)= min max {| <p1N (0) |, | cp2JV (0) |}, (1.9)
₽S[a,b]
при этом в случае Б)
ejv(zN)= min | yj |. (1.10)
7=1,. ..,N
В случае В) любая функция имеет на
[aw, &N] корень и потому
min{—М(х — aN), М(х — bN)} С/(х)<
< max {М(х — aN), —M(x — bN)}.
Объединяя это неравенство с неравенством ф1я(а:)^
^/(х)<ф2и(ж), получим, что ф5л (х) j(х) С <p6w (х), где
Ф5я(#) = тах{ф1К(я:), min [—М(х — aN), М(х — &N)]},
фби(х) = min{ф2я(х), тах[М(х — aN), —M(x — bN)]}.
§ 1. РЕШЕНИЕ УРАВНЕНИЙ II СИСТЕМ УРАВНЕНИЙ 251
Поэтому в случае В) (см. рис. 17)
ejv (zW) = min max { | <p5N (P) |, | <pew (P) I } =
рев
= min [| t/i . •, | I, M 2 Л' j. (1.11)
Решение вопроса о центральной итоговой операции
0* не представляет труда. После окончания N информа-
ционных вычислений за приближение 0* (гЛ) к корню
функции f^F2(zN) в случаях А) и В) следует принять
Рис. 17. К вопросу об определении величины ^(ziV) для класса
F2 в случае В)
7*-ю из точек х\, ..., xN, (aN + bN)/2, если j-e из чисел
lz/11, ...» Ii/nI, (bN — aN)/2 минимально среди этих чисел,
а в случае Б) — /-ю из точек х\, ..., xN, если j-е из чи-
сел |z/il, ..., |yN| минимально среди них. При этом под
[aw, bN] в случае А) мы понимаем сегмент локализации
корпя наименьшей длины (если таких сегментов не-
сколько). Если этим условием не определяется
однозначно, то для определенности будем считать, что
— самый левый из возможных сегментов.
Будем считать, что в качестве итоговой операции при-
меняется центральная итоговая операция 0*. Имеет ме-
сто следующее утверждение.
Теорема 1.2 [243]. Пассивные алгоритмы
^(0 = (*ь • • •, ^i-1, , X°N+1), i = 1, .. ., N + 1,.
где
*” = я + (b — a), 7 = 1, ...,2V + 1,
оптимальны no точности на классе функций F2 в множе-
252 ГЛ. 5. СПЕЦИАЛЬНЫЕ КЛАССЫ ЭКСТРЕМАЛЬНЫХ ЗАДАЧ
стве XN всех последовательных алгоритмов и гарантиру-
ют результат М (b—а)/[2 (N + 1)].
Доказательство. Покажем, что алгоритм xN (/)
гарантирует результат и, i = 1, . .•., N + 1. Пусть у® =
= I / (^?) I > 7 = 1, .. ., i — 1, i + 1, . • ., N + 1, F2.
Тогда имеет место либо случай А), причем sign хХ
Xsign у?+1= — 1, либо случай В). В обоих случаях [а^, bN] =
= [4-i + lf/’-11/М, 4+i — |4+1|/м], и согласно (1.7),
(1.11)
e.v (zN) < М bN~aN < М [2(b-а) _ 2v_ 1 _
6jv \z > М 2 2 [ N + 1 m\~V'
где zN = (xN (i), y°i, 4+i, • • •, y°N+i)-
Для завершения доказательства теоремы достаточно
убедиться, что никакой алгоритм xN е XN не может га-
рантировать результат лучше и. Покажем, что для лю-
бого алгоритма XN существует такая функция /
^F2, что yN)=v, где вектор х” получен по фор-
мулам (3.2) гл. 1 при применении алгоритма xN к функ-
ции f, а у} = Цх>), у = 1, ..., TV.
Удостоверимся сначала, что для произвольного векто-
ра (#i, ..., xN) такого, что а Xi xN < &, либо вы-
полняются хотя бы два из N + 1 неравенств
*i-a>2(7YT7)’ X^~X>>N + V 7==1’
, . b — a, (1-12)
° Xn 2 (N + 1) ’
либо справедливо хотя бы одно из трех неравенств
— а > 2 (JV -р 1)» (1-13)
Xk+l_Xk>^^-, к N-1}, (1.14)
<1Л5>
Действительно, предположим, что выполняется не
более чем одно из перавенств (1.12). Это может быть в
трех случаях:
Ь — CL , . ду t 7 Ь ~~~ (1
Xj+1 Xj <Z д, р 7 = 1, • • •, 1, & xN <.
(1.16)
§ 1. РЕШЕНИЕ УРАВНЕНИЙ И СИСТЕМ УРАВНЕНИЙ
253
Ь — а Ъ — а
xi~~a< 2 (^ + 1)’ и ~ < ЛЧП’
/= 1, ...,k—i,k + 1,
k^{i,...,N-}}, (1.17)
х1~а< 2(Z+1)’ ^+1 - xi <yEp. j = !> • • • > N- (I-18)
В случае (1.16), сложив все N неравенств, получим
откуда следует (1.13). Аналогично, из (1.17) следует
(1.14), а из (1.18) — (1.15).
Рассмотрим теперь вектор xN = (xi, ..., xN), который
получается по формулам (3.2) гл. 1 для алгоритма xN
при у\ = ... = yN = v. Нетрудно видеть, что у\ = ... = у, = и
образуют реализуемую ситуацию при любых х^ ...,
поэтому значения xj+i(zj) определены, / = 2, ..., N — 1.
Без ограничения общности можно считать, что а < х\ < ...
.. .^xN^b. Положим f(x) = max {v—М\х—Xj\}.B си-
лу леммы 2.7 гл. 1, функция / удовлетворяет условию
Липшица с константой М. Опа имеет корень па тех из
А+1 промежутков [0, <ri), (яч, я2), .(^n-i, xn), (xn, Ь],
для которых соответствующие неравенства в (1.12) спра-
ведливы. Хотя бы один такой промежуток, вследствие
ранее доказанного, имеется. Таким образом, feF2. Не-
трудно видеть, что Уз = = и, 7 = 1, ..А, и, стало
быть, при применении алгоритма xN к функции / полу-
чается определенный выше вектор xN.
Если выполняются хотя бы два из неравенств (1.12),
то имеет место случай Б) и, в силу (1.10), &N(xN, yN) = v.
Если выполняется не более чем одно из неравенств
(1.12), то имеет место случай В). При этом, если выпол-
няется (1.13), то bN — aN = xi — а — и/М > (Ъ — a)/(N + 1);
если выполняется (1.14), то bN — aN = xh+i — xh — 2vfM >
>(& — a)/(A+1); если, наконец, выполняется (1.15), то
bN — aN = b — xN — v/M>(b — a)/(A + 1). Таким образом,
и в случае В) (см. (1.11)) yN) = mm{v, M(bN —
— aN)/2} = v. Итак, в обоих возможных случаях
*n(xn, yN) = v. Л
Отметим, что А-птаговый оптимальный алгоритм со-
стоит, согласно доказанной теореме, в вычислении значе-
254 ГЛ. 5. СПЕЦИАЛЬНЫЕ КЛАССЫ ЭКСТРЕМАЛЬНЫХ ЗАДАЧ
ний функции в N центрах оптимального покрытия сег-
мента [а, &] равными сегментами, число которых равно
А+1.
3. Последовательно-оптимальный по точности на
функциональном классе F2 алгоритм. Опишем вкратце
построение последовательно-оптимального по точности
алгоритма, предполагая по-прежнему, что критерием
оценки эффективности служит критерий невязки (1.2)
(обоснования, аналогичные проведенным при доказатель-
стве теоремы 1.2, опускаем).
Точкой первого информационного вычисления для по-
следовательно-оптимального алгоритма может служить
любая из точек, возможных для оптимальных алгорит-
мов, т. е.
*1^ (а + 2(2JV+1i)(b~a^ 7 = 1,...,^ + lj.
Пусть произведено i информационных вычислений,
i>l, sign у\ = ...= sign yit Положим rrti = min {I z/i I, ...
..., |z/J}. Обозначим через riN радиус оптимального по-
крытия N — i + 1 равными сегментами множества
[а, 6] \ U (%з — I Уз \/М, Xj + | (1.19)
J=1
Наилучший гарантированный в ситуации z* результат
равен min{Mr^, тпг}. Если MriN<.mi, то —любой из
центров оптимального покрытия множества (1.19). Если
же MriN > тпг, то гарантировать улучшение результата
оставшимися N — I вычислениями нельзя. Поэтому вы-
бор точки xi+i произволен.
Если же допустимо применение стохастических алго-
ритмов, то так же, как и для класса Fi в случае
min{|z/il, ..., Iz/J} С M(bi — сц)^N-i (ср. с замечанием 1
к теореме 1.1), наилучший гарантированный детермини-
рованными алгоритмами результат можно улучшить в
среднем, выбирая точку случайно.
Алгоритм отыскания числа riN описан в [242, 243], он
аналогичен алгоритму отыскания RiN (см. п. 1 §4, гл. 4).
Предположим теперь, что произведено i информа-
ционных вычислений, причем sign у\ = ... = sign yi-\ =/=
#= sign^. Пусть для определенности z/i, ..., уг—\ > О,
Уг < 0. Пусть точка — ближайшая из точек х\, ..., Xi-\
к точке хг слева, — справа (одна из точек xiv х^ мо-
жет не существовать, так как ац, ..х<.-\ могут лежать
§ 1. РЕШЕНИЕ УРАВНЕНИЙ И СИСТЕМ УРАВНЕНИЙ 255
по одну сторону от Xi). За |щ, принимается тот из
сегментов + У'^/М, #i + £/i/M], [Xi— yi/M, ^г2— Уг2/М],
длина которого меньше. Точка xi+i и последующие вы-
бираются в соответствии с алгоритмом (1.1).
4. Решение системы уравнений. Рассмотрим систему
уравнений
fa(x) = 0, i = l, ..., иг, (1.20)
предполагая, что fi^Fp, г=1, ..., тп (где р —некоторая
квазиметрика), и что хотя бы одно решение системы
(1.20) существует. Задача отыскания какого-либо реше-
ния системы (1.20) эквивалентна задаче минимизации
функции невязки max | ft (х) |, х е К, или, что то же
самое, задаче максимизации функции/(я) ==— max | fa w ,
на множестве К. В силу леммы 2.7 гл. 1 функция / при-
надлежит классу Fp, поэтому задачу можно приближен-
но решить с помощью алгоритмов, разработанных в § 3
гл. 4. При этом следует, однако, учесть, что максималь-
ное значение функции / известно и равно пулю. Это об-
стоятельство позволяет несколько модифицировать алго-
ритмы из § 3 гл. 4, что приводит к упрощению алгорит-
мов, повышая в то же время их эффективность.
Пусть фиксирована точность 8, которую следует обес-
печить при решении задачи максимизации функции /,
т. е. необходимо указать точку хъ такую, что /(^е)^—6.
Ясно, что это можно сделать при помощи модификации
алгоритма, описанного в п. 3 § 3 гл. 4. Модификация со-
стоит в замене во всех построениях множеств СКг{уг + г)
множествами C7£i(—е).
Алгоритм из п. 3 § 3 гл. 4 и предложенную его мо-
дификацию можно применять и в случае, когда система
(1.20) не предполагается совместной. При этом, если
после I шагов условие остановки СКг(уг + е) = 0 для не-
модифицированного алгоритма оказывается выполненным
и в то же время у; < — е, или же СКД—8)=0, у<<—8
для модифицированного алгоритма, то это означает, что
система (1.20) несовместна.
При п>2 даже в сравнительно простом случае (4.13)
гл. 4 непосредственная реализация описанных алгорит-
мов по причинам, упомянутым в п. 6 § 4 гл. 4, невоз-
можна. В этом случае решение задачи можно получить
с помощью алгоритма (4.14), (4.15) гл. 4. Модификация
этого алгоритма но тому же, что и выше, способу позво-
256 ГЛ. 5. СПЕЦИАЛЬНЫЕ КЛАССЫ ЭКСТРЕМАЛЬНЫХ ЗАДАЧ
лист упростить его и повысить эффективность. Выбор
точки (i+l)-ro информационного вычисления модифи-
цированный алгоритм производит по правилу (ср. с (4.15)
гл. 4)
^+1 е Ujll ^7 С N, ф2г(^)>—е}. (1-21)
Данный алгоритм целесообразно дополнить блоком
локального уточнения решения. В [46] блок локального
уточнения состоит в том, что решение, полученное с по-
мощью алгоритма (1.21), выбирается в качестве началь-
ной точки для одного из методов ньютоновского типа,
предложенного в [327, 328].
§ 2. Отыскание максимума функции минимума
при связанных переменных
Применение принципа наилучшего гарантированного
результата в исследовании операций и теории игр при-
водит к необходимости решения разнообразных мини-
максных и максиминных задач [62, 63]. Простейшей из
них является задача нахождения максимина с распада-
ющимися переменными [90, 286]
max min Q (хх v). (2.1)
х^Х vi=V
В этом параграфе мы рассмотрим более общую, чем
(2.1), максимипную задачу со связанными переменными:
/(^)Й1 min @ (я, р)sup, (2.2)
veB(x) хеК
где
В(х) = {и Н|фД#, р)^0, 7 = 1, • • •» х^Х,
и К = {х е X | 0}, V — метрическое пространство.
Задачи типа (2.2) распространены в теории иерархиче-
ских систем и игр с обменом информацией [63].
1. Об условиях принадлежности функции минимума
к функциональному классу, заданному квазиметрикой.
Легко построить примеры (см., например, [286]), когда
функция минимума вида (2.2) разрывна при гладких
<Рь ..фт. В таких условиях максимизация этой функции
затруднена. Наша цель — найти условия на Q, фц ..., ф™,
гарантирующие наличие у функции f свойств, позволяю-
щих строить алгоритмы отыскания ос глобального мак-
§ 2. ОТЫСКАНИЕ МАКСИМУМА ФУНКЦИЙ МИНИМУМА 257
симума. Так, если
1/(^1) — /(^2) I р(^1, #2), #1, х2^К, (2.3)
и р обладает свойствами квазиметрики, то задачу (2.2)
можно решать с помощью алгоритмов, разработанных
в гл. 4. В связи с этим нас будут интересовать условия,
при которых (2.3) выполнено, а функция р в (2.3) об-
ладает свойствами квазиметрики.
Начнем с установления некоторых важных свойств
функции минимума /, определенной формулой (2.2).
Предположим, что выполнены следующие условия:
IC(^i, ^)—(?(#2, ^) I a(^i, #2), ^i, х2^Х, v 7, (2.4)
где а — квазиметрика;
|(fj(^i, и) — и) I £ (ящ х2), Х\, х2 X, ре V,
/=!,..., 772, (2.5)
где р — квазиметрика;
|(?(я, Pi) — Q(x, v2) \ ^7(г(щ, р2) ), x^X, vi, v2^V, (2.6)
где функция у определена и не убывает на [0, °°), 7(0)==
= 0, г —расстояние в V;
min ср,- (я, р) — со (г (р, В (я))) при и^В(х), (2.7)
где функция со определена, непрерывна и возрастает па
[0, °°), со (0) = 0, lim со (г) = оо, г (р, А) = inf г (р, р) — рас-
r-^O° ф = А
стояние от точки р до множества А.
Теорема 2.1 [257]. Если выполнены условия
(2.4) —(2.7), то функция / вида (2.2) удовлетворяет соот-
ношению (2.3) с
p(xi, x2) = a(xi, xr2) +1 [<о-1 Я2))], (2.8)
где со*-1 — функция, обратная со.
Доказательство. В силу (2.5) и (2.7) при про-
извольных х\, х2^Х, v^B(x2) справедливы неравенства
min ср,- (rrx, р) min ср,- (х2, р) + Р (хп х2)
< — (0 (г (у, В (я2))) + 0 (хг, х2).
Если г (у, В(х2))> Ю-1(Р(Я!1, х2)), то min <рДж1,р)<0Л
и, следовательно, v&B(xi).
П А. Г. Сухарев
258 ГЛ. 5. СПЕЦИАЛЬНЫЕ КЛАССЫ ЭКСТРЕМАЛЬНЫХ ЗАДАЧ
Таким образом, множество B(xi) лежит в со-l(P(zi,
я2))— окрестности множества В(х2), т. е. для любой
точки v\^B(xi) найдется такая точка v2^B(x2), что
г (pi, р2) со-1 (Р (#1, х2)). Поэтому
Q (*2, v2) - Q(xh Pi) =
= [<?(*2, р2) — <2(^1, р2)] + [(2(^1, v2)-Q(xi, Pi)]^
^2)+7[(О“1(Р(^ь я2))] = р(^1, х2),
откуда следует, что f(x2)^Q(xi, Pi) + p(^i, х2) при про-
извольном Vi^B(Xi), И ПОТОМУ j(x2) /(#1) + p(#i, х2).
Аналогично устанавливается неравенство /(^1)^ /(#2) +
+ p(#i, х2), что завершает доказательство. Д
Предположим дополнительно, что V — линейное нор-
мированное пространство с нормой II-II,
r(Pi, р2)= Hpi — р2И, Pi, v2 е V, (2.9)
функция у обладает свойством
Т(П + г2)^ у(Г1)+7(r2), гь г2>0, (2.10)
а функция со непрерывна и обладает свойством
со(Г1+ г2)> со(г1)+со(г2), гь г2>0. (2.11)
Заметим, что выполнение свойства (2.11) для непре-
рывной возрастающей на [0, °°) функции со влечет за
собой выполнение свойства
co-1(coi + w2)C co-1(coi)+со-1 (cd2), (Di, со2 > 0. (2.12)
Теорема 2.2 [257]. Пусть выполнены условия
(2.4) —(2.7), (2.9) —(2.11). Тогда функция р, заданная
формулой (2.8), удовлетворяет свойствам квазиметрики
и оценка (2.3) для функций вида (2.2) точна.
Доказательство. Выполнение свойств квазимет-
рики для р непосредственно вытекает из сделанных пред-
положений и неравенства (2.12), являющегося следстви-
ем этих предположений.
Убедимся теперь, что оценка (2.3) точна. Для про-
извольных а <= К, Vo е V положим
<2(гг, р) = —а(а, х)— у(г(р, Ро)), (2.13)
срДя, р) = р(а, х)— со(г(р, Ро)), / = 1,..., тп, (2.14)
где а, р, у, со удовлетворяют всем наложенным в теореме
условиям. Тогда, как нетрудно проверить, (2.4) — (2.6)
выполнены. Проверим выполнение (2.7). Пусть v &
§ 2. ОТЫСКАНИЕ МАКСИМУМА ФУНКЦИИ МИНИМУМА 259
& В(х)= {v\r(v, vq)^ со-1(Р(а, я))}. Тогда (см. рис. 18)
г (у, Ро)= r(v, В(х)) + х)),
откуда, используя (2.11), получаем
<о(г(р, р0))= со [г(р, В(х))+ со-1 (р(а, я))] >
> со (г (р, В(х)))+ р(а, х).
а это и есть неравенство (2.7).
Вычислим теперь в случае (2.13), (2.14) функцию
вида (2.2):
min Q (х, v) = — а (а, х) — max у(г(^, ^0))~
veB(x) г(г,ро)^со 1О(а,г>с))}
= — а (а, х) — у [со-1 (Р (л, ^))] = — Р х)- (2.15)
Положив в формулах (2.13), (2.14) а — xi, для f(x) =
= min Q (х, и) в силу (2.15) имеем
veB(x)
1/(Я1)~/(Я2) I = Р(*1, Я2). Д
2. Оптимальные алгоритмы максимизации функции
минимума. Сформулируем теперь основной результат об
оптимальных методах решения задачи (2.2). Будем пред-
полагать, что условия (2.4) — (2.7), (2.9) — (2.11) выпол-
нены. Через F обозначим
класса Fp, содержащий все
функции вида (2.2). Через XN
и XN обозначаем, как обычно,
соответственно множества
пассивных и всех последова-
тельных алгоритмов с N ин-
формационными вычисле-
ниями.
подкласс функционального
Теорема 2.3 [257]. On- n 4Q т,
r l j Рис. к доказательству
тималъныи по точности в X теоремы 2.2
на классе Fp алгоритм оты-
скания глобального максимума оптимален по точности
в XN и в XN на подклассе F; наилучшие гарантированные
результаты на Fp и на F совпадают.
Доказательство. При доказательстве теоремы 2.2
было установлено, что все функции
ha(x}—-— р(а, ж), а^К,
(2.16)
принадлежат классу F. Теперь оптимальность в XN на
17*
260 ГЛ. 5. СПЕЦИАЛЬНЫЕ КЛАССЫ ЭКСТРЕМАЛЬНЫХ ЗАДАЧ
77 N __ -xrN гч
классе F алгоритма х0 е X , оптимального на гр, а также
совпадение паилучших гарантированных результатов в
XN па Fp и па F следуют из замечания 1 к теореме 2.1
гл. 4. _
Далее, нетрудно видеть, что класс F содержит все
константы и удовлетворяет требованиям (5.14), (5.15)
гл. 1. Выполнение, например, (5.15) гл. 1 следует из
того, что при любом К
/ (х) = min Q (х, v) =>max {/ (х), 0} = min max {(? (х, р), 0}.
veB(x) veB(x)
Поэтому, в силу теоремы 5J3 гл. 1, алгоритм Xq опти-
мален по точности в XN на F. д
Полученные результаты в принципе решают задачу
об оптимальном поиске максимума функций f вида (2.2).
Соответствующие алгоритмы построены в гл. 4. Однако
вопросы построения оптимальных покрытий множества
К, возникающие при реализации оптимальных алгорит-
мов, так же как и вопросы оптимального вычисления
значений f(x), остаются открытыми. Впрочем, в некото-
рых случаях, например, в случае В (х) — ТП'ФГ
(<r), j = l, ...,?} задачу удается решить до конца.
Пример решения конкретной задачи такого рода приве-
ден в [257].
3. Об условиях теорем 2.1—2.3. Сделаем несколько
замечаний по поводу условий теорем 2.1—2.3 и укажем
па некоторые практически важные частные случаи этих
условий.
Условиям (2.4), (2.5) удовлетворяют произвольные
ограниченные функции, условию (2.6) при выполнении
(2.9), (2.10) удовлетворяют, например, равномерно не-
прерывные функции с модулем непрерывности 7. Един-
ственным в известной мере ограничительным условием
является (2.7). Оно выполняется, например, с со(г) = 7?г,
R > 0 (условие регулярности) в следующих случаях [286]:
а) функции_(£;• (я, и) непрерывны па произведении
компактов X X V, где V V, причем V — конечное мно-
жество, / = 1, ..тп\
б) функции фДгг, v) линейны по v на многогранном
множестве V <= Rn, т. е. фДя, v) = р> + bj(x), j =
= 1, .. ., т;
в) функции фДгг, и) вогнуты по v на выпуклом ком-
пакте V <= Rn, непрерывны по (х, v) и удовлетворяют
§ 3. МНОГОКРИТЕРИАЛЬНЫЕ ЗАДАЧИ ОПТИМИЗАЦИИ 261
условию Слейтера, т. е. для любого х е X найдется такое
v е V, что cpj(х, v)> 0, / = 1, ..тп.
Пусть X — линейное нормированное пространство
с нормой 11-11, о^1. Положим a(#i, #2) = LWx\ —
P(^i, а?2) = Pll^i — 7(г) = ТИгст, (о=7?г. Тогда p(#i, я2) =
= (L +M(P/R}Q)\\x\ — х^а и условие (2.3), таким обра-
зом, является условием Гёльдера с константой
L + M(PJR)° и показателем степени о. При о = 1 оно
превращается в условие Липшица.
В заключение отметим, что результаты теоремы 2.1
можно распространить на задачу отыскания кратного
максимина со связанными переменными [258].
§ 3. Многокритериальные задачи оптимизации
В теории принятия решений часто рассматриваются
ситуации, в которых интересы лица, принимающего ре-
шения, состоят в стремлении к увеличению всех компо-
нент некоторого векторного критерия f(x) = (/1 (х), ...
. .., /Д#)), где х принадлежит некоторому множеству
К <= Rn. Разработано множество различных принципов
принятия решений в ситуациях такого рода [30, 62, 63,
124, 152, 171, 203, 204, 235]. В этом параграфе пас будет
интересовать один из наиболее традиционных принципов,
связанный с выделением из всего множества Y = {у =
= f(x) I х е К} множества пеулучшаемых или оптималь-
ных по Парето векторов.
1. Постановка задачи. Вектор у* = /(#*) называется
иеулучшаемым на множестве К, если не существует та-
кого вектора y^Y, что у >z/*, т. е. & = 1, •••,
и хотя бы для одного i неравенство строгое. Говорят
также, что г/* не домииируется векторами множества Y
или оптимален по Парето в У. Точка я* К называется
при этом эффективной точкой. Множество всех цеулуч-
шаемых па К векторов обозначим через У* и будем на-
зывать множеством Парето.
Во многих задачах решение (или его первая стадия)
состоит в отыскании множества эффективных точек (на
второй стадии может потребоваться максимизировать па
множестве эффективных точек некоторый дополнитель-
ный критерий). Типичным примером является задача
автоматизации проектирования сложных технических си-
стем [140—144].
262 ГЛ. 5. СПЕЦИАЛЬНЫЕ КЛАССЫ ЭКСТРЕМАЛЬНЫХ ЗАДАЧ
Пусть 81 > 0, ..., 8ft > О, 8 =(8i, ..8h). Наша цель
состоит в том, чтобы выбрав надлежащим образом точки
#1, ..xN^K и вычислив в них значения вектор-функ-
ции /, выделить во множестве УеЙЙ{/(^1), .. - под-
множество Ye, являющееся 8-аппроксимацией по Паре-
то множества У*.
Мы называем множество Y' s-аппроксимацией по Па-
рето множества У", если векторы множества У' попарно
несравнимы (т. е. в У' не существует таких двух векто-
ров и, р, что и > v) и
. Р У*! ~ У г А
sup inf max ----------=С1,
y"^Y" y'f=Yf г— ег
иными словами (в предположении, что нижняя грань
достигается), для любого у" е У" найдется такой век-
тор у' У', что у г у г — £г при всех г = 1, ..., к.
При этом число точек N должно быть минимальным
целым, при котором возможно гарантировать достижение
поставленной цели.
Как видим, рассматриваемая в данном параграфе поста-
новка близка к постановке задачи для общей модели
вычислений гл. 1 в случае фиксированной точности 8.
Отличие состоит, в частности, в том, что теперь 8 —
вектор.
Предположим, что для любых х, х К
\fdx)-Ъ(х')\^MiP(x, х'), f = l, ..., к, (3.1)
где Л/i, ..., Mk — известные константы, а р — функция,
обладающая свойствами квазиметрики. Кроме того, для
упрощения построений предположим, что
slt/ML = ... = sk/MkS^S. (3.2)
Рассмотрим вопрос о построении оптимальных алго-
ритмов решения многокритериальных задач. Любой алго-
ритм решения поставленной задачи состоит, как и в об-
щей модели вычислений гл. 1, из двух этапов.
На первом этапе, производя информационные вычис-
ления (в нашем случае информационное вычисление —
это вычисление значения вектор-функции f в точке мно-
жества К), получают информацию о задаче. Второй этап
состоит в построении па основе полученной информации
приближения к искомому решению (в нашем случае —
выделении из множества Уе подмножества Уе). На
§ 3. МНОГОКРИТЕРИАЛЬНЫЕ ЗАДАЧИ ОПТИМИЗАЦИИ 263
практике второй этап начинается не обязательно после
завершения первого. В случае, если применяется после-
довательный алгоритм, промежуточные результаты вто-
рого этапа могут использоваться па первом этапе при
выборе точек информационных вычислений.
В пашей задаче для всех рассматриваемых алгорит-
мов выделяемое па втором этапе из Уе подмножество
Уе будет состоять из всех векторов, неулучшаемых на
множестве Ae = {^i, Иными словами, Уе состоит
из всех тех векторов множества Уе, которые не домини-
руются векторами множества Уе. Эффективная организа-
ция вычислений второго этапа не вызывает принципиаль-
ных затруднений, поэтому в дальнейшем под алгоритмом
будем понимать лишь способ выбора точек #i, ..., xN.
Обозначим класс всех вектор-функций (задач) /, удов-
летворяющих условиям (3.1), через К Назовем алгоритм
оптимальным в данном классе алгоритмов, если он ре-
шает любую задачу из F не более чем за N шагов (про-
изведя не более N информационных вычислений) и не
существует алгоритма, принадлежащего тому же классу,
который решал бы любую задачу из F менее чем за
N шагов. При этом под решением задачи мы понимаем
построение е-аппроксимацип по Парето У* множе-
ства У*.
2. Оптимальные алгоритмы решения многокритериаль-
ных задач оптимизации. Следующие два утверждения
(и их доказательства) аналогичны соответствующим ут-
верждениям для обычных оптимизационных задач (см.
гл. 4). В формулировках предполагается, что число 6
задано формулой (3.2) и что в К существует конечная
б-сеть, т. е. множество А с= К, состоящее из конечного
числа элементов и такое, что U {% I р (<£, а) 6} zd К.
а^А
Теорема 3.1 [253]. Алгоритм, в качестве Къ выби-
рающий 8-сетъ с минимальным числом элементов, опти-
мален в классе пассивных алгоритмов.
Доказательство. Обозначим через т¥б минималь-
ное число элементов, из которых можно образовать б-сеть
в К. Очевидно, что векторы из множества У* пеулуч-
шаемых на Кг векторов попарно несравнимы. Пусть
у" = j(x")^Y*, х" е=К. В Къ найдется такой элемент
х, что $(х, х")^8. Согласно (3.1), | у* — где
y=f(x), i=l, к. Если у У*, то найдется вектор
264 Г Л. 5. СПЕЦИАЛЬНЫЕ КЛАССЫ ЭКСТРЕМАЛЬНЫХ ЗАДАН
i/'еУ* такой, что у' > у. Для него y'i>yt^yi — Еь
£=1, . . к. Тем самым показано, что рассматриваемый
алгоритм решает любую задачу из F за N6 шагов.
Пусть существует пассивный алгоритм (^?, . . . ^),
решающий любую задачу из F за v < N& шагов. По оп-
ределению числа N6 существует такая точка Ъ е К, что
Р (^i, > 6 + у, i = l, v, где у > 0. Положим
fi(x) = max {—М3р(х, Ь) +7l/j6 + Л/д, 0), / = 1, .к.
В силу лемм 2.1, 2.7 гл. 1 j^F. Нетрудно видеть, что
У* = {(е1+Мд, .., 8, + Мд)},
/(4) = 0, г=1, У* = {(0, ..., 0)}.
Очевидно, что У* не является 8-аппроксимацией У*.
Полученное противоречие завершает доказательство. А
Теорема 3.2 [253]. Не существует последователь-
ного алгоритма, который решал бы любую задачу из F
менее чем за N& шагов. Таким образом, любой пассивный
алгоритм оптимален в классе всех последовательных
алгоритмов.
Доказательство. Пусть существует последова-
тельный алгоритм xvQ, который решает любую задачу из
F менее чем за N6 шагов. Обозначим через х[, ...
..., Ху (v < N&) точки информационных вычислений при
применении алгоритма к вектор-фупкции, все компо-
ненты которой тождественно равны пулю. Ясно, что, приме-
няя xv0 к вектор-функции /, построенной при доказательстве
теоремы 3.1, получим те же самые точки информацион-
ных вычислений xi, . .., Ху и пулевые значения вектор-
фупкции / в этих точках. Таким образом, в данном слу-
чае алгоритм Xq не позволяет построить решение. Полу-
ченное противоречие завершает доказательство. А
Итак, применение последовательных алгоритмов не
позволяет уменьшить число информационных вычисле-
ний при решении наихудшей задачи из F. Однако суще-
ствуют алгоритмы, которые в благоприятных случаях
позволяют решить задачу значительно быстрее.
Построение последователыю-оптималыюго по числу
информационных вычислений алгоритма требует реше-
ния сложных вспомогательных задач, что делает нецеле-
сообразным его практическое применение. Ограничимся
поэтому построением одного из оптимальных алгоритмов,
§ 3. МНОГОКРИТЕРИАЛЬНЫЕ ЗАДАЧИ ОПТИМИЗАЦИИ 265
который, не являясь последовательно-оптимальным, все
же в благоприятных случаях значительно сокращает по
сравнению с оптимальным пассивным алгоритмом число
информационных вычислений и в то же время после не-
которой модификации допускает достаточно простую
программную реализацию. В силу определения оптималь-
ности, в неблагоприятных случаях число информацион-
ных вычислений для обоих алгоритмов — одно и то же.
На первом шаге в качестве точки первого информа-
ционного вычисления выбирается произвольная точка
6-сети с Ж элементами. В качестве х% выбирается любая
другая точка той же сети.
Пусть сделано i шагов, I > 2, xi = (x\, ..., Xi), f(xm) =
==Ут = (Ут}1 Z/mfc), 7П=1, . . j, ^=(^1, . . ., l/i) , =
= (#*, уг). Положим
ср2ц (я) = min {ymj + M;p (x, xm)}, 7 = 1, . . ., k.
m = ],, г
Вектор-функция <р2г = (ф2И, • • •, <₽2i/i) (ср. с обозначением
(1.3) гл. 2 для скалярного случая) является, как сле-
дует из лемм 1.1, 1.2 гл. 2, точной мажорантой для век-
тор-функций из F, принимающих в точках х^ ..., х^
соответственно значения у\ ,..., у г.
Положим
и {х I cp2j (х) < ут + 8} =
?н=1
г h
= и П {х I Фги (х) < ymj + £j} =
7П=1 j=l
г h k f ц . — и . )
= ^\ и П и \х\р(х,хр)^Ут>У” + 6 . (3.3)
7/2=1 j = l Р=1 ( 1Y1 j J
Если Ci = 0, то вычисления прекращаются. Если Ci 0,
то обозначим через 2Ve(z*) минимальное число элементов,
принадлежащих К (но не обязательно С<), из которых
можно образовать 6-сеть для Сг-. На (г + 1)-м шаге в ка-
честве xi+\ выбирается произвольная точка 6-сети для
Ci с N&(zi) элементами.
Определенный таким образом алгоритм обозначим че-
рез а.
Теорема 3.3 [253]. Алгоритм а оптимален.
Доказательство. Пусть|^|+1, ..., ^+Jv6(2?)}—5-сеть
для Ci и пусть у" = j(x" )^ У*, х" К. Если х"^С^
266 ГЛ. 5. СПЕЦИАЛЬНЫЕ КЛАССЫ ЭКСТРЕМАЛЬНЫХ ЗАДАЧ
то найдется такая точка х^ ..., X\+Nb(zi^ что
р (я, х") < 6, и, следовательно, | z/j — z/j | ^8j, где у =
7 = 1, . .., к. Если же х" то, по определению Сг,
найдется точка х^{х\, ..., xj такая, что q2i(x" f(x) +
+ 8. В этом случае у" у + 8, где у = /(я), так как ф2* —
мажоранта. Полученные неравенства доказывают,
выполнение оставшихся вычислений в точках
что
х^
’ i+ZV$(z*)
гарантирует отыскание решения
задачи.
Из (3.3) выводим
Ci <= Ci-i\{n;|p(^, Xi)<8}.
(3.4)
Отсюда следует, что
(3.5)
так как, по построению, Xi — одна из точек 6-сети для
G-i с N6(zi~1) элементами, а остальные N6(zt~1) — 1 точек
этой сети образуют, в силу (3.4), 6-сеть для Сг. Неравен-
ство (3.5) справедливо при любом i > 2, кроме того,
N6(z')^N6- 1, т. е.
N& (z’’) М (z1’-1) - 1 Nb (z^2) - 2 N6 - i.
Таким образом, для любого i точка #l+i выбирается так,
что отыскание решения гарантируется пе более чем за
7V6 — I шагов. Итак, общее число шагов не превышает
и, следовательно, алгоритм а оптимален. д
Отметим, что алгоритм а является аналогом алгорит-
ма из п. 3 § 3 гл. 4.
3. О программной реализации оптимального алгорит-
ма. Непосредственная программная реализация алгорит-
ма а для случая произвольных К и р практически невоз-
можна из-за необходимости построения па каждом шаге
6-сетей с минимальным числом элементов, что требует,
в свою очередь, решения сложных геометрических задач
построения оптимальных покрытий. Сделаем поэтому ряд
упрощающих предположений.
Пусть К является n-мерным координатным паралле-
лепипедом с ребрами длины 26mi, ..., 26mn, где mi, ...
..., тп — целые числа, p(u, v) = шах \иг — иг |. Разобьем
ребра К соответственно па mi, ..., mn равных частей и
проведем через точки разбиения гиперплоскости, парал-
лельные координатным гиперплоскостям. При этом К
разобьется на N = т\ •... • тп координатных кубов с реб-
§ 3. МНОГОКРИТЕРИАЛЬНЫЕ ЗАДАЧИ ОПТИМИЗАЦИИ 267
рами длины 26. Обозначим центры кубов через щ, ..uN.
Ясно, что множество U={u1, ..., и^} является для К
6-сетыо с минимальным числом элементов и, следователь-
но, N = N&.
Основное упрощение исходного алгоритма а осповаио
на той же идее, что и алгоритм (4.14), (4.15) гл. 4, и со-
стоит в том, что после i шагов в качестве 6-сети для
множества К выбирается 6-сеть, содержащая только точ-
ки множества U. Такой 6-сетыо, как нетрудно видеть,
является множество
U {« |<P2i(w)< ут}.
771—1
(3.6)
Очевидно, что в (3.6) достаточно брать объединение
только тех множеств, которые соответствуют векторам
ут, не доминируемым векторами yj, j = 1, ..., т, т + 1, ...
..., I. Принятые допущения позволяют построить доста-
точно простую программную реализацию алгоритма мно-
гокритериальной оптимизации, хотя при этом число эле-
ментов множества Ui может оказаться больше N6(z?).
Для организации работы алгоритма в памяти выделя-
ется массив из N элементов. Элемент, соответствующий
у-й точке (точке щ), находится на у-м месте в массиве
(необходимо иметь программу, устанавливающую взаим-
но однозначное соответствие между номерами и коорди-
натами точек) и содержит после i шагов следующие за-
писи: к компонент вектор-фупкции / для элементов оп-
ределяемого ниже списка 1, к компонент вектор-фупкции
ф2г для элементов списка 2, а также необходимые ука-
затели.
На первом шаге случайно равновероятно выбирается
/1 е {1? ..,, N), принимается xL — Uj^ вычисляется yi =
= и организуются два связных списка. В список 1
включается элемент, соответствующий точке xi, в спи-
сок 2 — остальные элементы. Для элементов списка 2
вычисляются значения ф2г.
Пусть сделано i шагов, вычислены векторы yi, ..., уг.
В списке 1 содержатся элементы, соответствующие тем
из вычисленных векторов, которые не доминируются
векторами множества {yi, ..., yj. Элементы, соответству-
ющие доминируемым векторам, находятся в числе исклю-
ченных элементов. Список 2 состоит из иеисключеиных
элементов.
268 ГЛ. 5. СПЕЦИАЛЬНЫЕ КЛАССЫ ЭКСТРЕМАЛЬНЫХ ЗАДАЧ
На (£+1)-м шаге случайно равновероятно выбирает-
ся элемент нз списка 2. Пусть выбран у-й элемент мас-
сива. Вектор сравнивается поочередно с вектора-
ми ут списка 1.
Если (р2г(^)^Утп для какого-то из них, то выбирается
элемент, соседний с у-м в списке 2, сам у-й элемент мас-
сива исключается, а вектор ср2г, соответствующий вновь
выбранному элементу, сравнивается поочередно с векто-
рами ут списка 1.
В противном случае принимается xi+\ = ujl вычисля-
ются г/г+1,
Ф2Лч1,рW = min{(p2ipW, yi+itp + Mpp(xi+i, щ)},
, р = 1, ..., к,
всех точек uh относящихся к элементам списка 2.
Вектор yi+\ сравнивается поочередно с векторами ут
списка 1. Если yi+\ у™ для какого-либо из них, то у-й
элемент массива (он соответствует вектору исклю-
чается. В противном случае из списка 1 исключаются
векторы, доминируемые вектором yi+\ (если таковые най-
дутся), а у-й элемент включается в список 1.
Вычисления прекращаются, если список 2 пуст. Век-
торы ут списка 1 дают искомое решение.
В заключение несколько замечаний по поводу воз-
можных модификаций исходной постановки задачи и ал-
горитма а.
На практике константы Мь ..., Mk часто неизвестны
или известны неточно. В этом случае алгоритм должен
начинаться с блока оценки констант. Такой блок можно
построить, исходя из рекомендаций п. 2 § 4 гл. 2. Ко-
нечно, алгоритмы с блоком оценки констант уже не га-
рантируют отыскание решения задачи и, тем более, не
обладают свойством оптимальности, по, как нетрудно по-
казать, в данных условиях гарантировать построение ре-
шения за N шагов невозможно ни при каком N.
В некоторых ситуациях бывает необходимо прибли-
женно найти не все множество неулучшаемых векторов
У*, а какое-то его подмножество, например, У*(ш) =
= {y\y^Y*, y^Wi, i = 1, .. ., к}. В этом случае па
(f-bl)-M шаге, выбрав из списка 2 у-й элемент массива,
следует сравнить вектор ф2г(^-) сначала с вектором
W — 8. ЕСЛИ ф2гз (^j) < хотя бы для одного s, то
у-й элемент исключается. Необходимо произвести также
и другие очевидные изменения в алгоритме.
§ 3. МНОГОКРИТЕРИАЛЬНЫЕ ЗАДАЛИ ОПТИМИЗАЦИИ 269
Отметим, что описанный в данном пункте алгоритм,
несмотря на его очевидные педостатки по сравнению
с оптимальным пассивным алгоритмом, т. е. методом пол-
ного перебора элементов множества U (большая память,
необходимость организации связных списков, вычисления
векторов ф2й сравнения их с векторами / и т. д.), спосо-
бен при высокой сложности информационных вычисле-
ний принести значительную экономию машинного
времени.
Заметим, наконец, что задача аппроксимации множе-
ства Парето является неустойчивой относительно по-
грешностей вычисления частных критериев /1, ..., fh и
может быть регуляризована методами, развиваемыми
в [175, 176, 210, 235, 271, 286].
СПИСОК ЛИТЕРАТУРЫ
1. А к и м о в а И. Я. Применение диаграмм Воропого в комбина-
торных задачах: Обзор // Изв. АН СССР. Сор. техн, киберп.—
1984.—№ 2.—С. 102—109.
2. А л ь п е р о в и ч Э. Е., Батищев Д. И., С т р о и г и п Р. Г.
Теоретические и прикладные аспекты тестирования алгорит-
мов поиска Ц Вопросы кибернетики. Проблемы случайного
поиска.— М.: Научи, совет АН СССР по компл. пробл. «Кибер-
нетика», 1973.— С. 53—56.
3. А н у ч и н а Н. Н., Б а б е н к о К. И., Г о д у и о в С. К. и др.
Теоретические основы конструирования численных алгоритмов
задач математической физики/Под ред. К. И. Бабенко.—М.:
Наука, 1979.— 296 с.
4. Афанасьев А. 10. О поиске минимума функции с ограни-
ченной второй производной Ц ЖВМиМФ.— 1974.— Т. 14, № 4.
С. 1018—1021.
5. А ф а и а с ь е в A. 10., И овиков В. А. О поиске минимума
функции с ограниченной третьей производной Ц ЖВМиМФ.—
1977.-Т. 17, № 4.—С. 1031-1034.
6. А х о А., Хон крофт Дж., Ульман Дж. Построение и
анализ вычислительных алгоритмов.— М.: Мир, 1979.— 536 с.
7. Б а б е и к о В. Ф. Асимптотически точная оценка остатка наи-
лучших для некоторых классов функций кубатурпых фор-
мул Ц Мат. заметки.— 1976.— Т. 19, вып. 3.—С. 313—322.
8. Бабенко В. Ф. Точная асимптотика остатков оптимальных
для некоторых классов функций весовых кубатурпых фор-
мул Ц Мат. заметки.— 1976.— Т. 20, вып. 4.— С. 589—595.
9. Б а б и й А. Н. Алгоритм нахождения значения глобального
экстремума функции нескольких переменных с заданной точ-
ностью Ц Кибернетика.— 1978.— № 5.— С. 52—56.
10. Баб и ч М. Д., Шевчук Л. Б. Об одном алгоритме при-
ближенного решения систем нелинейных уравнений Ц Кибер-
нетика.— 1982.— № 2.— С. 74—79.
И. Батищев Д. И. Поисковые методы оптимального проек-
тирования.— М.: Сов. радио, 1975.— 216 с.
12. Б а т у х т и п В. Д., М а й б о р о д а Л. А. Методы поиска эк-
стремума разрывных функций Ц Изв. АН СССР. Сер. техн,
киберп.— 1984.— № 4.— С. 192—202.
13. Бахвалов Н. С. О приближенном вычислении кратных
интегралов Ц Вестн. Моск, ун-та. Сер. мат., механ., астрой.,
физ., хим.— 1959.— № 4.— С. 3—18.
14. Б а х в а л о в Н. С. Оценка в среднем остаточного члена квад-
ратурных формул Ц ЖВМиМФ.— 1961.— Т. 1, № 1.— С. 64—77.
СПИСОК ЛИТЕРАТУРЫ
271
15. Б а х в а л о в Н. С. Об определении начального шага и оценке
главного члена погрешности при численном интегрировании с
автоматическим выбором шага Ц Вычислительные методы и
программирование, №1.—М.: Изд-во Моск, ун-та, 1962.—
С. 69—79.
16. Бахвалов И. С. Об оптимальных оценках скорости схо-
димости квадратурных процессов и методов интегрирования
типа Монте-Карло па классах функций Ц Численные методы
решения дифференциальных и интегральных уравнений и
квадратурные формулы.—М.: Паука, 1964.—С. 5—63.
17. Б а х в а л о в Н. С. О вычислении кратных интегралов с ав-
томатическим выбором шага Ц Вычислительные методы и
программирование, N;3.—М.: Изд-во Моск, ун-та, 1965.—
С. 237—240.
18. Б а х в а л о в И. С. Об алгоритмах выбора шага интегрирова-
ния Ц Вычислительные методы и программирование, № 5.—
М.: Изд-во Моск, ун-та, 1966.—С. 3—8.
19. Бахвалов Н. С. О свойствах оптимальных методов
решения задач математической физики Ц ЖВМиМФ.— 1970.—
Т. 10, № 3.— С. 555-568.
20. Б а х в а л о в И. С. Об оптимальности линейных методов при-
ближения операторов па выпуклых классах функций //
ЖВМиМФ.—Т. И, № 4.—С. 1014—1018.
21. Б а х в а л о в Н. С. Оценки снизу асимптотических характе-
ристик классов функций с доминирующей смешанной произ-
водной Ц Мат. заметки.— 1972.— Т. 12, № 6.— С. 655—664.
22. Бахвалов И. С. Численные методы.—М.: Наука, 1973.—
632 с.
23. Белая Н. И. Алгоритм построения оптимальной по точно-
сти производной функции в классе С2, l,n // Изв. вузов. Сер.
Математика.— 1978.— № 8.— С. 31—43.
24. Б е л а я Н. И., Иванов В. В. Об оптимальных по точности
алгоритмах восстановления производных функций некоторых
классов Ц ЖВМиМФ.— 1985.— Т. 25, № 3.— С. 456—461.
25. Боллман Р. Динамическое программирование.— М.: ИЛ,
I960.—400 с.
26. Б е л л м а и Р., Дрейфус С. Прикладные задачи динами-
ческого программирования.—М.: Наука, 1965.— 460 с.
27. Берез и и И. С., Жидков Н. П. Методы вычислений. Т. L—
М.: Наука, 1966.—632 с.
28. Б е р е з о в с к и й А. И., Д а и и л ь ч с н к о Л. С., Д у л ь-
с к а я В. А., Иванов В. В. Аппроксимация функций.—
Преприпт/Ин-т киберн.— Киев.— 1979.—79—48.— 40 с.
29. Б е р е з о в с к и й А. И., И в а н о в В. В. Об оптимальной по
точности равномерной сплайновой аппроксимации Ц Изв. ву-
зов. Сер. Математика.— 1977.— № 10.— С. 14—24.
30. Березовский Б. А., Борзенко В. И., Кемпер Л. М.
Бинарные отношения в многокритериальной оптимизации.—
М.: Наука, 1981.— 150 с.
31. Б о й к о в И. В. Оптимальные по точности алгоритмы при-
ближенного вычисления сингулярных интегралов.— Саратов:
Изд-во Сарат. ун-та, 1983.— 210 с.
32. Бойков И. В. Оптимальные методы вычислений в задачах
автоматического регулирования.— Пенза: Изд-во Пенз. поли-
техи. ин-та, 1983.— 96 с.
272
СПИСОК ЛИТЕРАТУРЫ
33. Б о я п о в Б. Д. Оптимальная скорость интегрирования и е-
энтропия одного класса аналитических функций Ц Мат. за-
метки.—1973.—Т. 14, № 1.—С. 3—10.
34. Б о я п о в Б. Д. Наилучшие методы интерполирования для
некоторых классов дифференцируемых функций Ц Мат. за-
метки.—1975.—Т. 17, № 4.—С. 511—524.
35. Брусов В. С., Пиявский С. А. Вычислительный алгоритм
оптимального покрытия областей плоскости Ц ЖВМиМФ.—
1971.—Т. И, № 2.-С. 304—312.
36. В а л ь д А. Последовательный анализ.— М.: Физматгиз, I960.—
328 с.
37. Вальд А. Статистические решающие функции. // Позицион-
ные игры.—М.: Наука, 1967.— С. 300—522.
38. В а с и л ь с в Н. С. К отысканию глобального минимума ква-
зивогпутой функции Ц ЖВМиМФ.— 1983.— Т. 23, № 2.—
С. 307—313.
39. В а с и л ь е в Н. С. Активный вычислительный метод поиска
глобального минимума вогнутой функции Ц ЖВМиМФ.—
1984.— Т. 24, № 1.— С. 152—156.
40. В а с и л ь е в Н. С. Поиск минимума в вогнутых задачах с
использованием достаточного условия глобального экстрему-
ма // ЖВМиМФ.- 1985.— Т. 25, № 2.- С. 190—199.
41. Васильев Н. С. Аппроксимация выпуклых множеств мно-
гогранниками и ее приложения к поиску глобального экстре-
мума // Техн, киберн.— 1986.— № 1.—С. 27—36.
42. В а с и л ь е в П. П. Оптимальный поиск пуля функции, вычи-
сляемой приближенно Ц Математические методы оптимиза-
ции и управления в сложных системах.— Калинин: Изд-во
КГУ, 1983.- С. 19-25.
43. В а с и л ь е в П. П. Оптимальный поиск корня функции, вычис-
ляемой приближенно.— Ден. в ВИНИТИ 28.06.83, № 3486—83.—
13 с.
44. В а с и л ь е в П. П. Об оптимальном на один шаг стохастиче-
ском поиске корпя функции, удовлетворяющей условию Лип-
шица.— Деп. в ВИНИТИ 10.02.84, № 827—84.— 37 с.
45. Васильев П. П. Об оптимальном пассивном поиске корня
монотонной функции Ц Вопросы кибернетики. Модели и мето-
ды глобальной оптимизации.— М.: Научи, совет АН СССР по
компл. пробл. «Кибернетика», 1985.—С. 98—111.
46. В а с и л ь е в П. П., Сухарев А. Г. Программа численного
решения системы нелинейных уравнений методом Брауна с
предварительным подбором начального приближения.—
ГосФАП, № П006441, 1983 (Аннотация в сб.: Алгоритмы и про-
граммы.— 1983.— № 5.— С. 20).
47. Васильев С. Б., Г а п ш и и Г. С. Последовательный алго-
ритм поиска наибольшего значения дважды дифференцируемой
функции Ц Мат. заметки.— 1982.— Т. 31, № 4.— С. 613—618.
48. В а с и л ь е в Ф. П. Численные методы решения экстремаль-
ных задач.— М.: Наука, 1980.— 520 с.
49. Васильев Ф. П. Методы решения экстремальных задач.—
М.: Наука, 1981.— 400 с.
50. В а с и л ь е в а Л. Г. и др. Процедуры численного интегрирова-
ния па языке АЛГОЛ.—М.: Изд-во Моск, ун-та, 1972.—81 с.
51. Винер Н. Интеграл Фурье и некоторые его применения.—
М.: Физматгиз, 1963.— 256 с.
СПИСОК ЛИТЕРАТУРЫ 273
52. Вит у ш к и п А. Г. Оценка сложности задач табулирования.—
М.: Физматгиз, 1959.— 228 с.
53. В о л к о в Е. А. О поиске максимума функции и приближен-
ном глобальном решении систем нелинейных уравнений Ц Тр.
МИАН СССР.— 1974.—Т. 131.—С. 64—80.
54. Высоцкая И. Н., С т р о н г и н Р. Г. Метод решения нели-
нейных уравнений, использующий априорные вероятностные
оценки корней // ЖВМиМФ.—1983.—Т. 23, № 1.—С. 3—12.
55. Г а б д у л х а е в Б. Г. Оптимальные аппроксимации решений
линейных задач.—Казань: Изд-во Каз. ун-та, 1980.—232 с.
56. Г а м е ц к и й А. Ф. Об оптимальности главной решетки пер-
вого типа Вороного среди решеток первого типа любого числа
измерений Ц ДАН СССР.— 1963.— Т. 151, № 3.— С. 482—484.
57. Ганшин Г. С. Вычисление наибольшего значения функ-
ций / ЖВМиМФ.— 1976.— Т. 16, № 1.— С. 30—39.
58. Ганшин Г. С. Оптимальные пассивные алгоритмы вычисле-
ния наибольшего значения функций на отрезке Ц ЖВМиМФ.—
1977.—Т. 17, № 3.—С. 562—571.
59. Г а и ш и и Г. С. Вычисление наибольшего значения функций
нескольких переменных Ц Кибернетика.— 1983.— № 2.—
С. 61—63.
60. Г а п о н е и к о Ю. Л. Об одном методе отыскания глобального
экстремума для нелинейного функционала Ц Кибернетика.—
1981.—№ 6.—С. 58-61.
61. Гермейер Ю. Б. Методологические и математические ос-
новы исследования операций и теории игр.— М.: Изд-во Моск,
ун-та, 1967.
62. Гермейер 10. Б. Введение в теорию исследования опера-
ций.— М.: Наука, 1971.— 384 с.
63. Г с р м е й е р Ю. Б. Игры с непротивоположиыми интереса-
ми.— М.: Наука, 1976.— 328 с.
64. Г е р м е й е р Ю. Б., К р ы л о в И. А. Поиск максиминов ме-
тодом «невязок» Ц ЖВМиМФ.— 1972.— Т. 12, №4.— С. 871—
881.
65. Г и р л и п С. К. Об оптимальных по точности интерполяции
и минимизации функций класса C2,Li,L2,...,Lm,N2Ц Изв. вузов.
Сер. Математика.— 1978.— № 10.— С. 95—98.
66. Г и р л и и С. К., Ганшин Г. С. Оптимальные алгоритмы
поиска наименьшего значения функции Ц Изв. вузов. Сер. Ма-
тематика.— 1983.— № 3.— С. 75—77.
67. Глинкин И. А. Об оптимальном интегрировании монотон-
ных функций Ц Математические методы в исследовании опе-
раций.— М.: Изд-во Моск, ун-та, 1981.— С. 37—46.
68. Глинкин И. А. Об оптимальном поиске экстремумов не-
скольких функций Ц Математические методы в исследовании
операций.— М.: Изд-во Моск, ун-та, 1981.— С. 46—54.
69. Глинкин И. А. Об оптимальных алгоритмах интегрирова-
ния выпуклых функций Ц ЖВМиМФ.—1983.— Т. 23, № 2.—
С. 267-277.
70. Глинкин И. А. О наилучшей квадратурной формуле на
классе выпуклых функций Ц Мат. заметки.—1984.— Т. 35,
№ 5.— С. 697—707.
71. Глинкин И. А. О поиске глобального экстремума функций,
представимых в виде интеграла по области переменной конфи-
гурации Ц Вопросы кибернетики. Модели и методы глобаль-
18 а. Г._ Сухарев
274
СПИСОК ЛИТЕРАТУРЫ
ной оптимизации.—М.: Научи, совет АН СССР по компл.
пробл. «Кибернетика», 1985.— С. 91—97.
72. Г л и и к и н И. А., Сухарев А. Г. Последовательно-опти-
мальный алгоритм вычисления интегралов.— ГосФАП,
№ П004578, 1980 (Аннотация в сб.: Алгоритмы и программы.—
1980.—№ 6, П004578).
73. Глинкин И. А., Сухарев А. Г. Вычисление кратных ин-
тегралов с помощью разверток типа кривой Пеано Ц
ЖВМиМФ.— 1984.— Т. 24, № 8.— С. 1259—1263.
74. Г л и п к и н И. А., Сухарев А. Г. Исследование эффек-
тивности некоторых алгоритмов численного интегрирования
и их применение для решения экстремальных задач // Вопро-
сы кибернетики. Модели и методы глобальной оптимизации.—
М.: Научн. совет АН СССР по компл. пробл. «Кибернетика»,
1985.— С. 23-37.
75. Г л у ш к о в В. М. О диалоговом методе решения оптимиза-
ционных задач Ц Кибернетика.— 1975.— № 4.— С. 2—6.
76. Г л у ш к о в В. М. О системной оптимизации Ц Кибернети-
ка.— 1980.— № 5.— С. 89—90.
77. Глушков В. М., Иванов В. В., Михалевич В. С.,
Сергиенко И. В., С т о г и и й А. А. Резервы оптимизации
вычислений.— Препринт/Ип-т кибери.— Киев, 1977.— 77—67.—
54 с.
78. Глушков В. М., Иванов В. В., Яненко В. М. Модели-
рование развивающихся систем.— М.: Наука, 1983.— 352 с.
79. Гончарский А. В., Леонов А. С., Я гол а А. Г. Обоб-
щенный принцип невязки Ц ЖВМиМФ.— 1973.— Т. 13, № 2.—
С. 294-302.
80. Городецкий С. Н., Неймарк Ю. И., Фадеев В. А.
Непараметрические адаптивные стохастические модели в за-
дачах поисковой глобальной оптимизации // Математическая
статистика и ее приложения, вып. 9.— Томск: Изд-во ТГУ,
1983.- С. 52-58.
81. Г р е б е п н и к о в А. И. Об оптимальном приближении не-
линейных операторов Ц ЖВМиМФ.— 1978.— Т. 18, № 3.—
С. 762—766.
82. Гребенников А. И. Метод сплайнов и решение некоррект-
ных задач теории приближений.— М.: Изд-во Моск, ун-та,
1983.—208 с.
83. Г р и ш а г и н В. А., С т р о н г и н Р. Г. Оптимизация много-
экстремалытых функций при монотонно унимодальных огра-
ничениях Ц Изв. АН СССР. Сер. техн, киберн,— 1984.— № 4.—
С. 203-208.
84. Г р о м е н к о В. М., Гурин Л. С. Об оптимальном алгорит-
ме поиска экстремума для полиномов, ограниченных по моду-
лю Ц Автоматика и вычисл. техн.— 1974.— № 2.— С. 49—56.
85. Г у п а л А. М. Стохастические методы решения негладких
экстремальных задач.— Киев: Наук, думка, 1979.— 152 с.
86. Г у р и н Л. С., Д ы м а р с к и й Я. С., Меркулов А. Д.
Задачи и методы оптимального распределения ресурсов.— М.:
Сов. радио, 1968.— 464 с.
87. Г э р и М., Д ж о и с о н Д. Вычислительные машины и труд-
норешаемые задачи.— М.: Мир, 1982.— 416 с.
88. Данилин 10. М. Оценка эффективности одного алгоритма
СПИСОК ЛИТЕРАТУРЫ 275
отыскания минимума Ц ЖВМиМФ.—1971.—Т. 11, №4.—
С. 1026—1031.
89. Д а н и л и н IO. М., П и я в с к и й С. А. Об одном алгоритме
отыскания абсолютного минимума Ц Семинар. Теория опти-
мальных решений, вып. 2.— Киев: Изд-во ИК АН УССР,
1967.— С. 25—37.
90. Д е м ь я н о в В. Ф., Малоземов В. Н. Введение в мини-
макс.—М.: Наука, 1972.— 368 с.
91. Д е м ь я н ов В. Ф., Васильев Л. В. Недифференцируе-
мая оптимизация.— М.: Наука, 1981.— 384 с.
92. Евтушенко Ю. Г. Численный метод поиска глобального
экстремума // ЖВМиМФ.—1971.—Т. 11, № 6.—С. 1390—1403.
93. Евтушенко Ю. Г. Методы поиска глобального экстрему-
ма Ц Исследование операций.—М.: ВЦ АН СССР, 1974.—
С. 39-68.
94. Евтушенко Ю. Г. Методы решения экстремальных задач
и их применение в системах оптимизации.— М.: Наука, 1982.—
432 с.
95. Е р м а к о в С. М. Метод Монте-Карло и смежные вопросы.—
М.: Наука, 1971.—328 с.
96. Е р м о л ь е в Ю. М. Методы стохастического программирова-
ния.— М.: Наука, 1978.— 240 с.
97. Ж е н с ы к б а е в А. А. Мопосплайны минимальной нормы и
наилучшие квадратурные формулы Ц УМН.—1981,— Т. 36,
вып. 4 (220).—С. 107—159.
98. Ж и д к о в Н. П. Линейные аппроксимации функционалов.—
М.: Изд-во Моск, ун-та, 1977.— 262 с.
99. Жилейкин Я. М., Кукаркин А. Б. Об оптимальном вы-
числении интегралов от быстроосциллирующих функций Ц
ЖВМиМФ.— 1978.— Т. 18, № 2.— С. 294—301.
100. Жили it с к а с А. Г. Одпошаговый байесовский метод поиска
экстремума функции одной переменной Ц Кибернетика.—
1975.- № 1.— С. 139-144.
101. Жилинскас А. Г. Метод одномерной миогоэкстремальной
минимизации // Изв. АН СССР. Сер. техн, киберн.—1976.—
№ 4.— С. 71—74.
102. Жилинскас А. Г. Глобальная оптимизация. Аксиоматика
статистических моделей, алгоритмы, применения.— Вильнюс:
Мокслас, 1986.— 168 с.
103. Жиглявский А. А. Математическая теория глобального
случайного поиска.— Л.: Изд-во Ленингр. ун-та, 1985.— 292 с.
104. Жиров В. С. Поиск глобального экстремума многочлена на
параллелепипеде Ц ЖВМиМФ.— 1985.— Т. 25, № 2.— С. 163—
180.
105. Загускин В. Л. Справочник по численным методам реше-
ния алгебраических и трансцендентных уравнений.— М.: Физ-
матгиз, 1960.— 216 с.
106. Задирака В. К. Теория вычисления преобразования
Фурье.— Киев: Наук, думка, 1983.— 215 с.
107. Задирака В. К., Иванов В. В. Вопросы оптимизации вы-
числений (численное интегрирование и дифференцирование).—
Киев: Об-во «Знание» УССР, 1979.— 44 с.
108. Задирака В. К., И г и с и н о в К. Анализ точности и эф-
фективности алгоритмов быстрого преобразования Фурье и
18*
276
СПИСОК ЛИТЕРАТУРЫ
некоторых его приложений Ц Кибернетика.—1973.— № 6.—
С. 57-61.
109. Зализняк Н. Ф., Л и г у н А. А. Об оптимальных страте-
гиях поиска глобального максимума функции Ц ЖВМиМФ.—
1978.— Т. 18, № 2.— С. 314-321.
110. Иванов В. В. Об оптимальных алгоритмах численного ре-
шения сингулярных интегральных уравнений Ц Механика
сплошной среды и родственные проблемы анализа.— М.: Нау-
ка, 1972 — С. 209—219.
111. Иванов В. В. Об оптимальных алгоритмах вычисления син-
гулярных интегралов Ц ДАН СССР.—1972.—Т. 204, № 1.—
С. 21-24.
112. Иванов В. В. Об оптимальных алгоритмах минимизации
функций некоторых классов Ц Кибернетика.— 1972.— № 4.—
С. 81-94.
ИЗ. И в а н о в В. В. Об оптимальных по точности алгоритмах при-
ближенного решения операторных уравнений 1-го рода Ц
ЖВМиМФ.—1975.—Т. 15, № 1.—С. 3—11.
114. Иванов В. В. Об оптимальных по точности алгоритмах при-
ближения функций некоторых классов // Теория приближе-
ния функций.— М.: Наука, 1977.— С. 195—200.
115. Иванов В. В. О минимизации числа операций для линей-
ных некорректных задач Ц Изв. вузов. Сер. Математика.—
1978.—№ 11.—С. 47-54.
116. Иванов В. В. Методы вычислений на ЭВМ. Справочное по-
собие.— Киев: Наук, думка, 1986.— 584 с.
117. Иванов В. В., 3 адирака В. К. Вопросы оптимизации
вычислений.— Киев: Об-во «Знание» УССР, 1979.— 36 с.
118. Иванов В. В., Коржова В. Н. Об оптимизации алгорит-
мов оценок некоторых вероятностных характеристик Ц Кибер-
нетика.— 1983.— № 3.— С. 94—102.
119. Иванов В. В., Людвиченко В. А., Михалевич В. С.,
Трубин В. А., Ш о р Н. 3. Вопросы повышения эффектив-
ности алгоритмов минимизации функций и математического
программирования.— Препринт/Ин-т киберн.— Киев, 1979.—
79—59.— 54 с.
120. Иванов В. К., Васин В. В., Т а н а н а В. П. Теория линей-
ных некорректных задач и ее приложения.— М.: Наука, 1978.—
206 с.
121. Калинин И. Н. К вопросу исследования и сравнения алго-
ритмов оптимизации / Кибернетика.— 1984.— № 1.— С. 77—80.
122. Карлин С. Математические методы в теории игр, програм-
мировании и экономике.— М.: Мир, 1964.— 840 с.
123. Карманов В. Г. Математическое программирование.—М.:
Наука, 1986.— 288 с.
124. Кини Р., Р а й ф а X. Принятие решений при многих кри-
териях: предпочтения и замещения.— М.: Радио и связь,
1981.— 560 с.
125. Коллатц Л. Функциональный анализ и вычислительная ма-
тематика.— М.: Мир, 1969.— 448 с.
126. Колмогоров А. Н., Тихомиров В. М. е-энтропия и е-
емкость множеств в функциональных пространствах Ц УМН.—
1959 — Т. 14, вып. 2 (86).— С. 3—80.
127. Колмогорова. Н., Фомин С. В. Элементы теории функ-
ций и функционального анализа.— М.: Наука, 1976.— 496 с.
СПИСОК ЛИТЕРАТУРЫ
277
128. Кононов В. А., Бирюкова Т. Л. Об одном методе поис-
ка экстремумов некоторого класса функций одной перемен-
ной Ц Вычислительная математика.— Киев: Ин-т киберн.,
1975.— С. 89-98.
129. Корнейчук Н. П. Наилучшие кубатуриые формулы для
некоторых классов функций многих переменных Ц Мат. за-
метки.— 1968.— Т. 3, вып. 5.— С. 565—576.
130. Корнейчук Н. П. Экстремальные задачи теории прибли-
жений.— М.: Наука, 1976.— 320 с.
131. Корнейчук Н. П. Сплайны в теории приближения.— М.:
Наука, 1984.— 352 с.
132. Корнейчук Н. П. Оптимальные методы кодирования и вос-
становления функций Ц Оптимални алгоритми.— София: БАН,
1986.— С. 157—171.
133. К о р о т ч е п к о А. Г. Об одном алгоритме поиска наиболь-
шего значения одномерных функций Ц ЖВМиМФ.— 1978.—
Т. 18, № 3.— С. 563-573.
134. К о р о т ч е п к о А. Г. О поиске минимумов нескольких уни-
модальных функций // ЖВМиМФ.—1979.— Т. 19, № 5.—
С. 1337—1340.
135. К о р ч а и о в С. В. Об оптимальных методах интегрирования
унимодальных функций Ц Вести. Моск, ун-та. Сер. вычисл.
матем. и киберн.— 1984.— № 3.— С. 38—43.
136. К о р ч а н о в С. В. Об оптимальных алгоритмах интегрирова-
ния функций, имеющих известное количество экстремумов Ц
Программное обеспечение и модели исследования операций.—
М.: Изд-во Моск, ун-та, 1986.— С. 177—185.
137. Корчанов С. В. Оптимальные па один шаг алгоритмы ин-
тегрирования дважды дифференцируемых функций.— Деп.
ВИНИТИ 02.10.86, № 6970—В86.—23 с.
138. К о р ч а н о в С. В. Об оптимальных в классах произведений
сеток алгоритмах восстановления повторного функционала Ц
Вести. Моск, ун-та. Сер. вычисл. матем. и киберн.—1986.—
№ 4.— С. 25—30.
139. К о р ч а н о в С. В. Об оптимальных алгоритмах восстановле-
ния повторного функционала.— Деп. ВИНИТИ 08.04.86,
№ 2489-В86.— 26 с.
140. Краснощеков П. С., Математические модели в исследо-
вании операций.—М.: Знание, 1984.—64 с.
141. Краснощёков П. С., Морозов В. В., Фёдоров В. В.
Декомпозиция в задачах проектирования Ц Изв. АН СССР.
Сер. техн, киберн.— 1979.— № 2.— С. 7—17.
142. Краснощёков И. С., Морозов В. В., Фёдоров В., В.
Последовательное агрегирование в задачах внутреннего проек-
тирования технических систем Ц Изв. АН СССР. Сер. техн,
киберн.— 1979.— № 5.— С. 5—12.
143. Краснощёков П. С., Петров А. А. Принципы построе-
ния моделей,—М.: Изд-во Моск, ун-та, 1983.—264 с.
144. Краснощёков П. С., Петров А. А., Фёдоров В. В.
Информатика и проектирование.—М.: Знание, 1986,—48 с.
145. Кротов В. Ф., Пиявский С. А. Достаточные условия оп-
тимальности в задачах об оптимальных покрытиях Ц Изв. АН
СССР. Сер. техн, киберн.— 1968.— № 2.— С. 10—17.
146. К р у г е р А. Я. Об оптимальном поиске корня функции Ц
Вести. Белор. ун-та. Сер. I.— 1975.— № 3.— С. 3—4.
278 СПИСОК ЛИТЕРАТУРЫ
147. К р у г с р А. Я. К задаче поиска корня функции Ц Вести.
Белор. ун-та. Сер. I.— 1976.—№ 1.—С. 3—6.
148. К у з о в к и и А. И., Т и х о м и р о в В. М. О количестве вы-
числений для нахождения минимума выпуклых функций Ц
Эконом, и мат. методы.— 1967.— Т. 3, № 1.— С. 95—103.
149. К у и Г. Позиционные игры и проблема информации Ц Пози-
ционные игры.—М.: Наука, 1967.—С. 13—40.
150. К у р ж а н с к и й А. Б. Управление и наблюдение в условиях
неопределенности.—М.: Наука, 1977.—392 с.
151. Курицкий А. М. Энергетика механических балансовых
спусковых регуляторов Ц Тр. НИИЧаспрома, вып. 8.— М.:
Изд-во НИИЧаспрома, 1971.— С. 66—81.
152. Ларичев О. И., Никифоров А. Д. Аналитический об-
зор процедур решения многокритериальных задач математиче-
ского программирования Ц Экономика и мат. методы.— 1986.—
Т. 22, № 3.— С. 508-523.
153. Лбов Г. С., Трупов А. А. Об одном алгоритме поиска
глобального экстремума функции Ц Вычислительные системы,
вып. 67.— Новосибирск: Наука, 1976.— С. 69—76.
154. Леви и А. Ю. Об одном алгоритме минимизации выпуклых
функций Ц ДАН СССР.— 1965.-Т. 160, № 6.—С. 1244-1247.
155. Леонов В. В. Метод покрытий для отыскания глобального
максимума функций от многих переменных Ц Исследования
по кибернетике.— М.: Сов. радио, 1970.— С. 41—52.
156. Лузин Н. Н. Теория функций действительного переменно-
го.— М.: Учпедгиз, 1948.— 318 с.
157. Л ью с Р., Райфа X. Игры и решения.— М.: ИЛ, 1961.—
642 с.
158. М а й с т р о в с к и й Г. Д. Об оптимальности метода Ньютона Ц
ДАН СССР.— 1972.—Т. 204, № 6.—С. 1313—1315.
159. Маркин Д. Л., С т р о п г и п Р. Г. Метод решения миогоэк-
стремальных задач с певыпуклыми ограничениями, использу-
ющий априорную информацию об оценках оптимума Ц
ЖВМиМФ.— 1987.—Т. 27, № 1.—С. 52—62.
160. Марчук А. Г. Оптимальные по точности методы решения
линейных задач восстановления.— Препринт/ВЦ СО АН
СССР.— Новосибирск, 1976.—29 с.
161. Марчук А. Г., Осипенко К. Ю. Наилучшее приближе-
ние функций, заданных с погрешностью в конечном числе то-
чек Ц Мат. заметки.— 1975.— Т. 17, № 3.— С. 359—368.
162. Марчук Г. И. Методы вычислительной математики.— М.:
Наука, 1980.— 536 с.
163i Марчук Г. И., Кузнецов Ю. А. К вопросу об оптималь-
ных итерационных процессах Ц ДАН СССР.—1968.— Т. 181,
№ 6.—С. 1331—1334.
164. М а у и г Ч ж о Н ь ю п, Ш а р ы г и н И. Ф. Оптимальные ку-
батурные формулы на классах D\'c и // Вопр. вычисли-
тельной и прйкл. математики.— Ташкент: Ин-т кибернетики
АН УзССР, 1971.—С. 22—27.
165. Маюрова И. В., Стронгин Р. Г. Минимизация много-
экстремальных функций, имеющих разрывы Ц ЖВМиМФ.—
1984.— Т. 24, № 12.— С. 1789—1798.
166. Михайлов Г. А. Дисперсия векторных алгоритмов метода
Монте-Карло Ц ДАН СССР — 1980.— Т. 253, № 5.— С. 1047—1050.
СПИСОК ЛИТЕРАТУРЫ
279
167. М и х а й л о в Г. А. Оптимизация векторных алгоритмов мето-
да Монте-Карло Ц ДАН СССР.— 1981.— Т. 260, № 1.— С. 26—
31.
168. Михайлов Г. А. Минимаксная теория весовых методов
Монте-Карло // ЖВМиМФ.— 1984.— Т. 24, № 9.— С. 1294—1302.
169. М и х а л е в и ч В. С. Последовательные алгоритмы оптими-
зации и их применение. I, II Ц Кибернетика.— 1965.— № 1.—
С. 45-56;-№ 2.—С. 85-88.
170. М и х а л е в и ч В. С., Кукса А. И. Методы последователь-
ной оптимизации.—М.: Наука, 1983.—208 с.
171. Многокритериальные задачи принятия решеиий/Под ред.
Д. М. Гвишиапи, С. В. Емельянова.— М.: Машиностроение,
1978.— 191 с.
172. Моисеев Н. Н. Элементы теории оптимальных систем.—
М.: Наука, 1975.— 528 с.
173. Моисеев Н. Н. Математические задачи системного анали-
за.— М.: Наука, 1981.—488 с.
174. Моисеев Н. Н., Иванилов Ю. П., С т о л я р о в а Е. М.
Методы оптимизации.— М.: Наука, 1978.— 351 с.
175. Молодцов Д. А. Регуляризация множества точек Паре-
то И ЖВМиМФ.— 1978.-Т. 18, № 3.—С. 597-602.
176. Молодцов Д. А. Устойчивость и регуляризация принци-
пов оптимальности Ц ЖВМиМФ.— 1980.— Т. 20, № 5.—
С. 1115-1129.
177. Молчанова Е. С. Построение оптимальных алгоритмов
численного интегрирования для одного класса функций.—
Ден. ВИНИТИ 03.01.86, № 104—В.— 10 с.
178. М о р о з о в В. А. О принципе оптимальности невязки при при-
ближенном решении уравнений с нелинейными операторами Ц
ЖВМиМФ.— 1974.— Т. 14, № 4.— С. 819—827.
179. Морозов В. А., Г р е б е п п и к о в А. И. Об оптимальном
приближении операторов Ц ДАН СССР.—1975.— Т. 223, № 6.—
С. 1307-1310.
180. Морозов В. В., Сухарев А. Г., Фёдоров В. В. Ис-
следование операций в задачах и упражнениях.— М.: Высшая
школа, 1986.— 288 с.
181. М о цк у с Й. Б. Мпогоэкстремальпые задачи в проектирова-
нии.— М.: Наука, 1967.— 215 с.
182. Моцкус Й. Б. О байесовых методах поиска экстремума Ц
Автоматика и вычисл. техн.— 1972.— № 3.— С. 53—62.
183. Налимов В. В., Чернова Н. А. Статистические методы
планирования экстремальных экспериментов.— М.: Наука,
1965.- 340 с.
184. Неймарк Ю. И., Стропгип Р. Г. Информационный под-
ход к задаче поиска экстремума функций Ц Изв. АН СССР.
Сер. техн, киберп.— 1966.— № 1.— С. 17—26.
185. Немировский А. С., Нестеров Ю. Е. Оптимальные
методы гладкой выпуклой минимизации // ЖВМиМФ.— 1985.—
Т. 25, № 3.— С. 356-369.
186. Немировский А. С., Юдин Д. Б. Сложность задач
и эффективность методов оптимизации.— М.: Наука, 1979.—
384 с.
187. Немировский А. С., 10 д и п Д. Б. Информационная слож-
ность математического программирования Ц Изв. АН СССР,
Сер. техн, киберн.— 1983.— № 1.— С, 88—117,
280
СПИСОК ЛИТЕРАТУРЫ
188. Нефёдов В. Н. Об аппроксимации множества Парето Ц
ЖВМиМФ.— 1984.— Т. 24, № 7.— С. 993—1007.
189. Нефёдов В. Н. Отыскание глобального максимума функ-
ции нескольких переменных па множестве, заданном ограни-
чениями типа неравенств Ц ЖВМиМФ.— 1987.— Т. 27, № 1.—
С. 35-51.
190. Никольский С. М. К вопросу об оценках приближений
квадратурными формулами // УМН.—1950.—Т. 5, вып. 2(36).—
С. 165—177.
191. Никольский С. М. Квадратурные формулы.— М.: Наука,
1979.— 256 с.
192. Ортега Дж., Р е й н б о л д т В. Итерационные методы ре-
шения нелинейных систем уравнений со многими неизвестны-
ми.— М.: Мир, 1975.— 560 с.
193. Осипенко К. Ю. Оптимальная интерполяция аналитиче-
ских функций Ц Мат. заметки.— 1972.— Т. 12, № 4.— С. 465—
476.
194. Осипенко К. Ю. Наилучшее приближение функций по ин-
формации об их значениях в конечном числе точек // Мат. за-
метки.— 1976.— Т. 19, № 1.— С. 29—40.
195. Остапенко О. С. Об оптимальных алгоритмах миними-
зации функций в классах ки-
бернетика.— 1983.— № 5.— С. 88—95.
196. Островский А. Решение уравнений и систем уравнений.—
М.: ИЛ, 1963.-219 с.
197. Пападимитриу X., Стайглиц К. Комбинаторная опти-
мизация. Алгоритмы и сложность,— М.: Мир, 1985.— 512 с.
198. П е в н ы й А. Б. Об оптимальных стратегиях поиска максиму-
ма функции с ограниченной старшей производной Ц
ЖВМиМФ.— 1982.—Т. 22, № 5.—С. 1061—1066.
199. Пиявский С. А. Алгоритмы отыскания абсолютного мини-
мума функций Ц Семинар. Теория оптимальных решений,
вып. 2.— Киев: Изд-во ИК АН УССР, 1967.— С. 13—24.
200. Пиявский С. А. Об оптимизации сетей Ц Изв. АН СССР.
Сер. техн, киберн.— 1968.— № 1.— С. 68—80.
201. Пиявский С. А. Один алгоритм отыскания абсолютного
экстремума функции // ЖВМиМФ.— 1972.— Т. 12, №4.—
С. 888-896.
202. Пласкота Л. Оптимальная линейная информация в за-
даче восстановления глобального максимума вещественной
функции Ц ЖВМиМФ.— 1986.— Т. 26, № 6.— С. 934—938.
203. ПодиновскийВ. В., Гаврилов В. М. Оптимизация по
последовательно применяемым критериям.— М.: Сов. радио,
1975.— 192 с.
204. Подиновский В. В., Ногин В. Д. Парето-оптимальные
методы решения многокритериальных задач.— М.: Наука,
1982.— 256 с.
205. Подобедов В. Е. Оптимальный алгоритм поиска экстре-
мума липшицевых функций при произвольной линейной ин-
формации Ц Системное программирование и вопросы опти-
мизации.— М.: Изд-во Моск, уп-та, 1987.— С. 180—187.
206. Позиционные игры/Под ред. И. Н. Воробьева, И. И. Врублев-
ской.—М.: Наука, 1967.—524 с.
207. Позняк А. С., Цыпкин Я. 3. Оптимальные на классе ал-
СПИСОК ЛИТЕРАТУРЫ
281
горитмы оптимизации при наличии коррелированных помех Ц
ЖВМиМФ.— 1984.— Т. 24, № 6,— С. 806—822.
208. Поляк Б. Т. Введение в оптимизацию.— М.: Наука, 1983.—
384 с.
209. Поляк Б. Т, Цыпкин Я. 3. Оптимальные псевдоградиент-
иые алгоритмы адаптации Ц Автоматика и телемехан.—
1980.— № 8.— С. 74—84.
210. Попов Н. М. Аппроксимация множества полуэффективных
точек при декомпозиции задач проектирования Ц Вести. Моск,
ун-та. Сер. вычисл. матем. и киберн.— 1980.— № 4.— С. 43—48.
211. Попов Н. М. Приближенное решение многокритериальных
задач с функциональными ограничениями Ц ЖВМиМФ.—
1986.— Т. 26, № 10.—С. 1468—1481.
212. Попов Н. М. Численные алгоритмы многокритериальной оп-
тимизации Ц Системное программирование и вопросы опти-
мизации.— М.: Изд-во Моск, ун-та, 1987.— С. 155—168.
213. П ш е н и ч п ы й Б. Н. Необходимые условия экстремума.—
М.: Наука, 1969.— 152 с.
214. Пшеничный Б. Н. Выпуклый анализ и экстремальные за-
дачи.—М.: Наука, 1980.—320 с.
215. Пшеничный Б. Н., Данилин Ю. М. Численные методы
в экстремальных задачах.— М.: Наука, 1975.— 320 с.
216. Р а с т р и г и II Л. А. Статистические методы поиска.— М.: Нау-
ка, 1968.— 376 с.
217. Р а с т р и г и н Л. А. Случайный поиск — проблемы, пути и
перспективы Ц Вопросы кибернетики. Проблемы случайного
поиска.— М.: Научи, совет АН СССР по компл. пробл. «Ки-
бернетика», 1973.— С. 3—17.
218. Растригин Л. А. Системы экстремального управления.—
М.: Наука, 1974.— 632 с.
219. Растригин Л. А. Случайный поиск — специфика, этапы
истории и предрассудки Ц Вопросы кибернетики. Проблемы
случайного поиска.— М.: Научи, совет АН СССР по компл.
пробл. «Кибернетика», 1978.— С. 3—17.
220. Роджерс К. Укладки и покрытия.—М.: Мир, 1968.—135 с.
221. Рубальский Г. Б. Поиск экстремума унимодальной функ-
ции одной переменной на неограниченном множестве Ц
ЖВМиМФ.— 1982.— Т. 22, № 1.— С. 10—16.
222. Р ы ш к о в С. С. Эффектизация одного метода Давенпорта в
теории покрытий // ДАН СССР.— 1967.— Т. 175, № 2.—С. 303—305.
223. Р ы ш к о в С. С., Барановский Е. П. С-типы п-мерных
решеток и пятимерные примитивные параллелоэдры (с при-
ложением к теории покрытий) Ц Тр. МИАН СССР.—1976.—
Т. 137 — 132 с.
224. С а а т и Т. Целочисленные методы оптимизации и связанные
с ними экстремальные проблемы.— М.: Мир, 1973.— 304 с.
225. Садовников 10. Ю. Операторный метод глобальной оп-
тимизации Ц Кибернетика.— 1986.— № 2.— С. 39—43.
226. Самарский А. А. Теория разностных схем.— М.: Наука,
1977.— 656 с.
227. Самарский А. А. Ввведепие в численные методы.—М.:
Наука, 1982.— 272 с.
228. Смоляк С. А. Об оптимальном восстановлении функций и
функционалов от них:— Дне. ... канд. физ.-мат. наук. М.: МГУ,
1965.
282 СПИСОК ЛИТЕРАТУРЫ
229. Соболев С. Л. Введение в теорию кубатурных формул.—
М.: Наука, 1974.— 808 с.
230. Соболев С. Л. Коэффициенты оптимальных квадратурных
формул Ц ДАН СССР.— 1977.— Т. 235, № 1.— С. 34-37.
231. Соболь И. М. Многомерные квадратурные формулы и функ-
ции Хаара.—М.: Наука, 1969.—288 с.
232. Соболь И. М. Численные методы Монте-Карло.—М.: Нау-
ка, 1973.— 312 с.
233. Соболь И. М. Об оценке точности простейшего многомер-
ного поиска Ц ДАН СССР.— 1982.— Т. 266, № 3.— С. 569—572.
234. Соболь И. М., Статников Р. Б. Выбор оптимальных
параметров в задачах со многими критериями.— М.: Наука,
1981.—110 с.
235. Современное состояние теории исследования операций/Под
ред. Н. Н. Моисеева.— М.: Наука, 1979.—464 с.
236. Сорокина Т. Г., Сорокин И. М. Минимизация много-
экстремальных функций Ц Математические методы оптими-
зации и управления в сложных системах.— Калинин: Изд-во
КГУ, 1981.— С. 60—68.
237. Стригуль О. И. Оптимальные алгоритмы поиска минимак-
са для функций некоторых классов Ц Кибернетика.— 1983.—
№ 5.— С. 126.
238. С т р о н г и н Р. Г. Численные методы в миогоэкстремальных
задачах.— М.: Наука, 1978.— 240 с.
239. С т р о н г и н Р. Г., Маркин Д. Л. Минимизация миого-
экстремальных функций при невыпуклых ограничениях Ц Ки-
бернетика.— 1986.— № 4.— С. 64—69.
240. Сухарев А. Г. Об оптимальных стратегиях поиска экст-
ремума Ц ЖВМиМФ.—1971.—Т. И, № 4.—С. 910-924.
241. Сухарев А. Г. Наилучшие стратегии последовательного
поиска экстремума Ц ЖВМиМФ.— 1972.— Т. 12, № 1.— С. 35—
50.
242. Сухарев А. Г. Оптимальный поиск экстремума.—М.: Изд-
во Моск, ун-та, 1975.— 100 с.
243. Сухарев А. Г. Оптимальный поиск корня функции, удов-
летворяющей условий Липшица Ц ЖВМиМФ.— 1976.— Т. 16,
№ 1.— С. 20—29.
244. Сухарев А. Г. Оптимальные пассивные и последовательно-
оптимальные алгоритмы построения наилучших аппроксима-
ций для функций, удовлетворяющих условию Липшица Ц ДАН
СССР.—1976.—Т. 231, № 4.—С. 814—817.
245. Сухарев А. Г. Решение многошаговой антагонистической
игры аппроксимации // Вести. Моск, ун-та. Сер. вычисл. ма-
тем. и киберн.— 1977.— № 2.— С. 43—57.
246. Сухарев А. Г. Оптимальный метод построения наилучших
равномерных приближений для функций некоторого класса Ц
ЖВМиМФ.— 1978.— Т. 18, № 2.— С. 302—313.
247. Сухарев А. Г. Оптимальные формулы численного интегри-
рования для некоторых классов функций многих перемен-
ных Ц ДАН СССР.— 1979.— Т. 246, № 2.— С. 282-285.
248. Сухарев А. Г. Глобальный экстремум и методы его отыс-
кания Ц Математические методы в исследовании операций.—
М.: Изд-во Моск, ун-та, 1981.— С. 4—37.
249. Сухарев А. Г. Оптимальные и последовательно-оптималь-
ные алгоритмы в задачах численного апализа Ц Математиче-
СПИСОК ЛИТЕРАТУРЫ
283,
скис методы в исследовании операций.— М.: Изд-во Моск, ун-
та, 1981.—С. 54—68.
250. Сухарев А. Г. Построение оптимального на один шаг сто-
хастического алгоритма поиска экстремума Ц ЖВМиМФ.—
1981.—Т. 21, № 6.—С. 1385—1401.
251. Сухарев А. Г. Об одном подходе к исследованию эффек-
тивности квадратурных формул Ц Кибернетика.— 1981.—
№ 6.- С. 75-80.
252. Сухарев А. Г. К вопросу о построении оптимальных квад-
ратур для функций многих переменных Ц Кибернетика.—
1982.—№ 1.—С. 7—11.
253. Сухарев А. Г. Об оптимальных методах решения много-
критериальных задач Ц Изв. АН СССР. Сер. техн, киберн.—
1982.— № 3.— С. 67—73.
254. Сухарев А. Г. К вопросу о совпадении погрешностей в
классах пассивных и последовательных алгоритмов Ц
ЖВМиМФ.- 1985.—Т. 25, № 2.-С. 295-298.
255. Сухарев А. Г., Тимохов А. В., Фёдоров В. В. Курс
методов оптимизации.— М.: Наука, 1986.— 328 с.
256. Сухарев А. Г., Фёдоров В. В. Минимаксные задачи и
минимаксные алгоритмы.— М.: Изд-во Моск, ун-та, 1979.—
50 с.
257. С у х а р е в А. Г., Фёдоров В. В. Об оптимальном отыскании
максимума функции минимума при связанных переменных //
Вести. Моск, ун-та. Сер. вычисл. матем. и киберн.—1981.—
№ 1.— С. 45-50.
258. Сухарев А. Г., Фёдоров В. В. Оптимальные алгорит-
мы глобального поиска в минимаксных задачах Ц Вопросы
кибернетики. Модели и методы глобальной оптимизации.— М.:
Научи, совет АН СССР по компл. пробл. «Кибернетика», 1985.—
С. 70-79.
259. Сухарев А. Г., Ч у я и О. Р. О применении достаточных
условий совпадения погрешностей в классах пассивных и по-
следовательных алгоритмов.— Деп. ВИНИТИ 31.05.84, № 3535—
84.- 10 с.
260. Сысоев В. В., Петров В. А. Разработка программы оп-
тимизации мпогоэкстремальпых функций методом ф-преобра-
зования Ц Эконом, и матем. методы.— 1976.— Т. 12, № 1.—
С. 178-184.
261. Танана В. П. Методы решения операторных уравнений.—
М.: Наука, 1981.- 156 с.
262. Тарасова В. П. Оптимальные стратегии поиска области
наибольших значений для некоторого класса функций //
ЖВМиМФ.— 1978.—Т. 18, № 4.—С. 886—896.
263. Тарасова В. П. Оптимальные алгоритмы поиска отрезка
наибольших значений для некоторого класса функций Ц
ЖВМиМФ.—1981.-Т. 21, № 5.—С. 1108—1115.
264. Тарасова В. П. Оптимальный поиск экстремума локально-
унимодальных функций Ц Кибернетика.— 1984.— № 1.— С. 65—
68.
265. Тимонов Л. Н. Алгоритм поиска глобального экстремума Ц
Изв. АН СССР. Сер. техн, киберн.— 1977.— A'j 3.— С. 53—60.
266. Т и х о м и р о в В. М. Наилучшие методы приближения и ин-
терполирования дифференцируемых функций в пространстве
С[-1, 1] Ц Мат. c6.- 1969.-T. 80 (122), № 2(10).-С. 290-304.
284
СПИСОК ЛИТЕРАТУРЫ
267. Тихомиров В. М. Некоторые вопросы теории приближе-
ний.— М.: Изд-во Моск, уп-та, 1976.— 304 с.
268. Тихонов А. Н. О решении некорректно поставленных за-
дач и методе регуляризации Ц ДАН СССР.— 1963.— Т. 151,
№ 3.—С. 501-504.
269. Тихонов А. Н. О регуляризации некорректно поставленных
задач Ц ДАН СССР.-1963.-Т. 153, № 1.-С. 49-52.
270. Тихонов А. Н. О нелинейных уравнениях первого рода Ц
ДАН СССР.— 1965.— Т. 161, № 5.— С. 1023—1026.
271. Тихонов А. Н., Арсенин В. Я. Методы решения не-
корректных задач.— М.: Наука, 1979.— 285 с.
272. Тихонов А. Н., Г а йс ар ян С. С. О выборе оптималь-
ных сеток при приближенном вычислении квадратур Ц
ЖВМиМФ.— 1969.—Т. 9, № 5.—С. 1170—1176.
273. Т о р о х т и й А. И. Об оптимальных на классах сеток мето-
дах вычисления квадратур Ц ЖВМиМФ.— 1983.— Т. 23, № 1.—
С. 29-38.
274. Трауб Дж. Итерационные методы решения уравнений.— М.:
Мир, 1985.- 264 с.
275. Трауб Дж., Васильковский Г., Вожьняков-
ский X. Информация, неопределенность, сложность.— М.:
Мир, 1988.— 184 с.
276. Трауб Дж., Вожьняковский X. Общая теория опти-
мальных алгоритмов.— М.: Мир, 1983.— 384 с.
277. Уайлд Д. Методы поиска экстремума.—М.: Наука, 1967.—
268 с.
278. Устюжанинов В. Г. О случайном поиске оптимальной си-
стемы признаков Ц Вычислительные системы, вып. 77. Авто-
матизация проектирования в микроэлектронике. Теория, мето-
ды, алгоритмы.— Новосибирск: Наука, 1978.— С. 42—52.
279. Устюжанинов В. Г. Предельные возможности алгоритмов
случайного поиска Ц Автоматика и вычисл. техн.—1980.—
№ 1.— С. 71—77.
280. У с т ю ж а н и н о в В. Г. Об эффективности случайного поис-
ка Ц Автоматика и вычисл. техн.— 1980.— № 3.— С. 70—74.
281. Устюжанинов В. Г. Поиск максимума функции с ог-
раничением Липшица // Проблемы случайного поиска.— Ри-
га: Зинатне, 1980, вып. 8.— С. 135—148.
282. Устюжанинов В. Г. О существовании и эффективности
оптимальных алгоритмов случайного поиска Ц Проблемы слу-
чайного поиска.— Рига: Зинатне, 1981, вып. 9.— С. 9—29.
283. Устюжанинов В. Г. Возможности случайного поиска в
решении дискретных экстремальных задач Ц Кибернетика.—
1983.- № 2.— С. 64—77.
284. Устюжанинов В. Г. Случайный поиск в непрерывных
задачах глобальной оптимизации Ц Вопросы кибернетики.
Модели и методы глобальной оптимизации.— М.: Научн. со-
вет АН СССР по компл. пробл. «Кибернетика», 1985,—
С. 37-45.
285. Фёдоров В. В. Теория оптимального эксперимента.— М.:
Наука, 1971.—312 с.
286. Фёдоров В. В. Численные методы максимина.— М.: Наука,
1979.— 280 с.
287. Финни Д. Введение в теорию планирования эксперимен-
тов.— М.: Наука, 1970.— 288 с.
СПИСОК ЛИТЕРАТУРЫ
285
288. Химмельблау Д. Прикладное нелинейное программиро-
вание.— М.: Мир, 1975.— 534 с.
289. Цермело Э. Об одном применении теории множеств к тео-
рии шахматной игры Ц Матричные игры.— М.: Физматгиз,
1961.— С. 167—172.
290. Черпоусько Ф. Л. Оптимальный алгоритм поиска корня
функции, вычисляемой приближенно Ц ЖВМиМФ.—1968.—
Т. 8, № 4.— С. 705—724.
291. Ч е р н о у с ь к о Ф. Л. Об оптимальном поиске экстремума
унимодальных функций Ц ЖВМиМФ.— 1970.— Т. 10, № 4.—
С. 922-933.
292. Черпоусько Ф. Л. Об оптимальном поиске минимума вы-
пуклых функций Ц ЖВМиМФ.— 1970.— Т. 10, № 6.— С. 1355—•
1366,
293. Ч е р н о у сь к о Ф. Л., М е л и к я н А. А. Игровые задачи уп-
равления и поиска.—М.: Наука, 1978.—270 с.
294. Чичинадзе В. К. Решение невыпуклых нелинейных задач
оптимизации.—М.: Наука, 1983.—256 с.
295. Чуян О. Р. Об оптимальных алгоритмах поиска экстремума
дифференцируемых функций Ц Вести. Моск, ун-та. Сер. вы-
числ. матем. и киберн.— 1984.— № 3.— С. 28—34.
296. Чуян О. Р. Оптимальный одношаговый алгоритм максими-
зации дважды дифференцируемых функций // ЖВМиМФ.—
1986.— Т. 26, № 3.— С. 383—397.
297. Ш а л т я н и с В. Р. Об одном методе многоэкстремальной оп-
тимизации Ц Автоматика и вычисл. техн.—1971.— № 3.—
С. 33-38.
298. Ш о к и н Ю. И. Интервальный анализ.— Новосибирск: Нау-
ка, 1981.— 112 с.
299. Шор Н. 3. Методы минимизации недифференцируемых функ-
ций и их приложения.— Киев: Наук, думка, 1979.— 119 с.
300. Юдин Д. Б. Вычислительные методы многокритериальной
оптимизации Ц Изв. АН СССР. Сер. техн, киберн.— 1983.—
№ 4.— С. 3-16.
301. Aird Т. J., Rice J. R. Systematic search in high dimen-
sional sets // SIAM£J. Numer. Anal.— 1977.— V. 14, № 2.—
P. 296—312.
302. And erssen R. S. Global optimization 11 Optimization.—
St. Lucia, Australia: Univ, of Queensland press, 1972.—
P. 26-48.
303. Anderssen R. S., Bloomfield P. Properties of the
random search in global optimization // J. Optimization Theory
and Appl.— 1975.— V. 16, № 5/6.— P. 383-398.
304. Archetti F., Betro B. Some remarks on dimensiona-
lity reduction techniques in global optimization problems.—•
Universita di Pisa, Pisa, Italy, Dipartimento di Ricerca Ope-
rativa e Scienze Statistiche, Report A—49, 1978.
305. Archetti F.,*Betro B. On the effectiveness of uniform
random sampling in global optimization problems.— Universita
di Pisa, Pisa, Italy, Dipartimento di Ricerca Operativa e Scien-
ze Statistiche, Report A—51, 1978.
306. AFr chetti F., Betro B. A stopping criterion for global
optimization algorithms.— Universita di Pisa,4 Pisa, Italy, Di-
partimento di Ricerca Operativa e Scienze Statistiche, Report
A—56, 1978.
286 СПИСОК ЛИТЕРАТУРЫ
307. Archetti F., Betro В. A probabilistic algorithm for
global optimization // Calcolo.— 1979.— V. 16, № 3.— P.
335-343.
308. Archetti F., Betro B. Stochastic models and optimi-
zation // Bolletino della Unione Matematica Italiana.— 1980.—
V. 5, № 17—A.— P. 225-301.
309. Archetti F., Szego G. P. Global optimization algo-
rithms // Nonlinear optimization, theory and algorithms.—
Boston: Birkhauser, 1980.— P. 429—469.
310. Avriel M.,Wilde D. J. Optimality proof for the symmet-
ric Fibonacci search technique // Fibonacci Quart.— 1966. —
V. 4, № 3.— P. 265-269.
311. Avriel M., Wilde D. J. Golden block search for the ma-
ximum of unimodal functions // Manage. Sci.— 1968.— V. 14,
№ 5.— P. 307—319.
312. В a b a N. Convergence of a random optimization method for
constrained optimization problems 11 J. Optimization Theory
and Appl.— 1981.— V. 33, № 4.— P. 451—461.
313. Baba N.A hybrid algorithm for finding a global minimum //
Int. J. Control.— 1983.—V. 37, № 5.-P. 929-942.
314. Babenko V. F. On the optimal error bound for cubature
formulae on certain classes of continuous functions // Analysis
Mathematica.— 1977.— V. 3, № 1.— P. 3—9.
315. Basso P. Iterative methods for the localization of the glo-
bal maximum // SIAM J. Numer. Anal.— 1982.— V. 19,-
№ 4.— P. 781—792.
316. Beamer J. H., Wilde D. J. Time delay in minimax opti-
mization of unimodal functions of one variable 11 Manage
Sci.— 1969.— V. 15, № 9.— P. 528-538.
317. Beamer J. H., Wilde D. J. Minimax optimization of
unimodal functions by variable block search // Manage.Sci.—
1970.—V. 16, № 9.-P. 529-541.
318. Beamer J. H., Wilde D. J. Minimax optimization of
a unimodal function by variable block derivative search
with time delay // J. Comb. Th.— 1971.—V. 10, № 2.— P. 160—
173.
319. В e t г о B. Bayesian testing of nonparametric hypotheses and
its application to global optimization 11 J. Optimization Theory
and Appl.— 1984.—V. 42, № 1.—P. 31—50.
320. Boender C. G. E., Rinnooy KanTA. H. G., Tim-
mer G. T., Stougie L. A stochastic method for global
optimization // Math. Programming.— 1982.—V. 22, № 2.—
P. 125—140.
321. Bojanov B. D. Comparision theorems in optimal recovery //
Optimal Algorithms.— Sofia: BAS, 1986.— P. 15—50.
322. Bojanov B. D., Chernogorov V. G. An optimal
interpolation formula // J. Approx. Theory.— 1977.— V. 20,
№ 3.—P. 264—274.
323. В о о t h R. S. Location of zeros of derivatives // SIAM J. Appl.
Math.— 1967.—V. 15, № 6.—P. 1496-1501.
324. Booth R. S. Location of zeros of derivatives, II // SIAM J.
Appl. Math.— 1969.— V. 17, № 2.— P. 409—415.^
325. B'oulti^T. Some examples and applications of information-
based complexity// Optimal Algorithms.— Sofia: BAS, 1986.—
P. 51—64.
СПИСОК ЛИТЕРАТУРЫ
287
326. Brooks S. Н. A discussion of random methods for seeking
maxima // Operations Res.— 1952.— V. 6, № 2.— P. 244—251.
327. Brown К. M. Solution of simultaneous nonlinear equa-
tions // Comm. Assoc. Gomput. Mach.— 1967.— V. 10, № 11.—
P. 728—729.
328. Brown К. M. A quadratically convergent Newton-like meth-
od based upon Gaussian elimination // SIAM J. Numer. Ana-
lysis.— 1969.— V. 6, № 4.— P. 560—569.
329. Clarke F. H. Optimization and nonsmooth analysis.— New
York: Wiley, 1983.— 308 p.
330. Converse A. 0. The use of uncertainty in a simultaneous
search // Operations Res.— 1967.— V. 15, № 6.— P. 1088—1095.
331. Goxeter H. The classification of zonohedra by means of
projective diagrams // Journal de mathematiques pures et appli-
quees.— 1962.— V. 41, № 2.—P. 137—156.
332. De Boor C. On writing an automatic integration algorithm //
Matematical software.— New York, London: Academic Press,
1971.— p. 201—209.
333. De Boor G. GARDE: An algorithm for numerical quadra-
ture // Mathematical software.— New York, London: Academic
Press, 1971.— P. 417—449.
334. De В о о r G. Computational aspects of optimal recovery //
Optimal estimation in approximation theory.— New York, Lon-
don: Plenum Press, 1977.— P. 69—91.
335. De Boor G., Rice J. R. An adaptive algorithm for mul-
tivariate approximation // J. Approx. Theory.— 1979.— V. 25,
№ 4.— P. 337—360.
336. Devroye L. Progressive global random search of conti-
nuous functions // Math. Programming.— 1978.— V. 15, № 3.—
P. 330—342.
337. Dixon L. G. W. Reflections on nondifferentiable optimiza-
tion. Part 1. Ball gradient 11 J. Optimization Theory and
AppL — 1980.- V. 32, № 2.— P. 123-133.
338. Dixon L. G. W., Gaviano M. Reflections on nondif-
ferentiable optimization. Part 2. Convergence // J. Optimization
Theory and AppL— 1980.— V. 32, № 3.— P. 259-276.
339. Dixon V. A. Numerical quadrature: A survey of,the availa-
ble algorithms // Software for numerical mathematics.— Lon-
don, New York: Academic Press, 1974.— P. 105—137.
340. Eichhorn В. H. On sequential search 11 Selected statisti-
cal papers. V. 1.— Amsterdam: Math. Centrum, 1968.—
P. 81-95.
341. Einarsson B. Testing and evaluation of some subroutines
for numerical quadrature // Software for numerical mathema-
tics.— London, New York: Academic Press, 1974.— P. 149—
157.
342. Fine T. Optimum search for the location of the maximum oi
a unimodal function // IEEE Trans, on Information Theory —-
1966.—V. 12, № 2.—P. 103—111.
343. Fisher S. D., Micchelli C. A. Optimal sampling of
holomorphic functions // Amer. J. Math.— 1984.— V. 106
№ 3.— P. 593—609.
344. Gaffney P. W. The range of possible values of f(x) 11 Com-
puter Science and Systems Division Rep., AERE, Harwell
Oxfordshire, 1977, *
288 СПИСОК ЛИТЕРАТУРЫ
345. Gaffney Р. W. То compute the optimal interpolation for-
mula // Math. Comp.- 1978.- V. 32, № 143.— P. 763-777.
346. Gaffney P. W., Powell M. J. D. Optimal interpola-
tion // Numerical analysis, Lecture Notes in Math., v. 506.—
Berlin, New York: Springer Verlag, 1976.— P. 90—100.
347. Gal S. Sequential minimax search for a maximum when prior
information is available 11 SIAM J. Appl. Math.— 1971.—
V. 21, № 4.—P. 590-595.
348. Gal S. Multidimensional minimax search for a maximum //
SIAM J. Appl. Math.- 1972.—V. 23, № 4.—P. 513-526.
349. Gal S. Optimal sequential and parallel search for finding
a root//J. Comb. Th. Ser. A.— 1977.—V. 23, № 1.—
P. 1—14.
350. Gal S., Micchelli G. A. Optimal sequential and non-
sequential procedures for evaluating a functional // Applicable
Analysis.— 1980.— V. 10, № 2.— P. 105-120.
351. Gaviano M. Some general results on the convergence of
random search algorithms in minimisation problems // Towards
global optimization.— Amsterdam: North-Holland, 1975.—
P. 149—157.
352. Goldstein A. A. Optimization of Lipschitz continuous
functions // Math. Programming.— 1977.— V. 13, № 1.—
P. 14—22.
353. Golomb M. Interpolation operators as optimal recovery
schemes for classes of analytic functions // Optimal estimation
in approximation theory.— New York, London: Plenum Press,
1977.— P. 93—138.
354. Gross O. A class of discrete type minimization problems //
Rand Corporation. Research Memorandum № 1644. —1956.
355. Gross O., Johnson S. Sequential minimax search for
a zero of a convex function // Math. Tables and Other Aids to
Computation.— 1959.— V. 13, № 65.— P. 44—51.
356. Haber S. Adaptive integration and improper integrals //
Math. Comp.— 1975.— V. 29, № 131.— P. 806—809.
357. Hansen E. R. Global optimization using interval analysis:
The one-dimensional case // J. Optimization Theory and
Appl.— 1979.— V. 29, № 3.— P. 331-344.
358. Hansen E. R. Global optimization using interval analysis:
The multi-dimensional case // Numer. Math.— 1980.— V. 34,
№ 3.— P. 247—270.
359. Hansen E. R. Global optimization with data perturba-
tions // Comput. and Oper. Res.— 1984.—V. 11, № 2.—
P. 97—104. 3
360. H e in d 1 G. Optimal quadrature of convex functions //
Numerical integration. International series of numerical ma-
thematics, v. 57.— Basel: Birkhauser Verlag, 1982. P. 138—
147.
361. Heyman M. Optimal simultaneous search for the maximum
by the principle of statistical information // Operations Res.—
1968.— V. 16, № 6.— P. 1194—1205.
362. Hof man K. L. A method for globally minimizing concave
functions over convex sets // Math. Programming.— 1981.—
V. 20, № 1.— P. 22—32.
363. H у a f i 1 L. Optimal search for the zero of the (n — l)st de-
rivative.— IRIA/LABORIA Rep. № 247e 1977.
СПИСОК ЛИТЕРАТУРЫ
289
364. Johnson S. J. Best exploration for maximum is Fibonac-
cian.— Rand Corporation Research [Memorandum, RM— 1590,
Santa-Monica, 1955.
365. Kacewicz B. Z. On the optimal error of algorithms for
solving a scalar autonomus ODE // BIT.— 1982.— V. 22, № 4.—
P. 503-518.
366. Kacewicz B. Z. Optimality of Euler-integral information
for solving a scalar autonomus ODE // BIT.— 1983.— V. 23,
№ 2.— P. 217—230.
367. Kacewicz B. Z. How to increase the order to get minimal-
error algorithms for systems of ODE // Num. Math.—1984.—
V. 45, № 1.— P. 93—104.
368. Kahaner D. K. Comparison of numerical quadrature for-
mulas // Mathematical software.— New York, London: Acade-
mic Press, 1971.— P. 229—259.
369. Karp R. M., M ir anker W. L. Parallel minimax search
for a maximum // J. Comb. Th.— 1968.— V. 4, № 1.— P. 19—
35.
370. Каире A. F. On optimal search techniques // Comm. Assoc.
Comput. Mach.— 1964.— V. 7, № 1.— P. 38.
371. Kiefer J. Sequential minimax search for a maximum //
Proc. Amer. Math. Soc.— 1953.— V. 4, № 3.— P. 502—
506.
372. Kiefer J. Optimum sequential search and approximation
methods under minimum regularity assumptions 11 J. Soc.
Indust. Appl. Math.— 1957.— V. 5, № 3.— P. 105—136.
373. Krolak P. D. A property of the Krolak-Cooper extension
of Fibonaccian search // SIAM Review.— 1966.— V. 8, № 4.—
P. 510-517.
374. Krolak P. D. Further extensions of Fibonaccian search to
nonlinear programming problems // SIAM J. Control.— 1968.—
V. 6, № 2.— P. 258—265.
375. Krolak P. D., Cooper L. An extension of Fibonaccian
search to several variables // Comm. Assoc. Comput. Mach.—
1963.—V. 6, № 10.—P. 639—641.
376. Kushner H. A versatile stochastic model of a function of
unknown and time varying form //J. Math. Anal, and Appl.—
1962.—V. 5, № 1.—P. 150—167.
377. Kushner H.A new method of locating the maximum point
of an arbitrary multipeak curve in the presence of noise 11 Trans.
ASME. Ser. D. J. Basic Eng.— 1964.— V. 86, № 1.— P. 97—
105.
378. Lootsma F. Comparative performance evaluation, experi-
mental design, and generation of test problems in nonlinear
optimization // Computational mathematical programming.—
Berlin: Springer-Verlag, 1985.— P. 249—260.
379. Lyness J. N. Notes on adaptive Simpson quadrature //
J. Assoc. Comput. Mach.— 1969.— V. 16, № 3.— P. 483—495.
380. Lyness J.N., Kaganove J. J. Comments on the na-
ture of automatic quadrature routines// ACM Trans. Math. Soft-
ware.—1976.—V. 2, № 1.—P. 65—81.
381. Madsen K. Minimax solution of non-linear equations with-
out calculating! derivatives // Nondifferentiable optimization,
Mathematical Programming Study, 3.— Amsterdam: North-
Holland, 1975,—P, 110-126.
19 лг Гг Сухарев
290 список литературы
382. Malcolm М. A., Simpson R. В. Local versus global
strategies for adaptive quadrature // ACM Trans. Math. Soft-
ware.—1975.—V. 1, № 2.—P. 129-146.
383. Mancini L.,Mc Cormick G. P. Bounding global mi-
nima // Math. Oper. Res.— 1976.— V. 1, № 1.— P. 50—53.
384. Mancini L., Me Cormick G. P. Bounding global
minima with interval arithmetic // Operations Research.—
1979.— V. 26, № 4.— P. 743-754.
385. Me Cormick G. P. Attempts to calculate global solutions
of problems that may have local minima 11 Numerical methods
for non-linear optimization.— London, New York: Academic
Press, 1972.—P. 209-221.
386. Me Cormick G. P. Locating an isolated global minimizer
of a constrained nonconvex programm // Math. Oper. Res.—
1980.— V. 5, № 3.— P. 435—443.
387. Me Cormick G. P. Nonlinear programming. Theory, al-
gorithms and applications.— New York: Wiley, 1983.—
461 p.
388. M e 1 k m a n A. A., M i с c h e 1 1 i C. A. Optimal estimation
of linear operators in Hilbert spaces from inaccurate data //
SIAM J. Numer. Anal.— 1979.—V. 16, № 1.—P. 87—105.
389. Micchelli C. A. Optimal estimation of smooth functions
from inaccurate data.— IBM Research Report 7024,Yorktown
Heights, New York, 1978.
390. Micchelli C. A. Orthogonal projections are optimal algo-
rithms // J. Approx. Theory.— 1984.— V. 40, № 2.— P. 101 —
110.
391. Micchelli С. A., M iranker W. L. High order search
methods for finding roots // J. Assoc. Comput. Mach.— 1975.—
V. 22, № 1.- P. 51-60.
392. Micchelli C. A., Rivlin T. J. A survey of optimal
recovery // Optimal estimation in approximation theory.—
New York, London: Plenum Press, 1977.— P. 1—54.
393. M i с c h e 1 1 i C. A., R i v 1 i n T. J., W i n о g r a d S.
The optimal recovery of smooth functions 11 Numer. Math.—
1976.—V. 260, № 2.—P. 191—200.
394. Milanese M.,Tempo R. Optimal algorithms theory for
robust estimation and prediction // IEEE Trans. Automat.
Contr.— 1985.— V. AC-30, № 8.—P. 730—738.
395. Milne-Thomson L. M. The calculas of finite differen-
ces.— London: Mac Millan, 1933.— 528 p.
396. Miranker W. L. Parallel methods of approximating the
root of a function // IBM J. of Research and Development.—
1969.— V. 13, № 3.— P. 297—301.
397. Miranker W. L. Parallel methods for solving equations.—
IBM T. J. Watson Research Center Rep. 6545, 1977.
398. Mjelde К. M. Methods of the allocation of limited resour-
ces.— New York: Wiley, 1983.— 96 p.
399. Mockus J. On Bayesian methods of seeking the extremum
and their applications // Information processing 77.— Amster-
dam: North-Holland, 1977.— P. 195—200.
400. Mockus J. The simple Bayesian algorithm for the multi-
dimensional global optimization // Numerical techniques for
stochastic systems.— Amsterdam: North-Holland, 1980.—
P. 369—377.
СПИСОК ЛИТЕРАТУРЫ
291
401. М ustata С. Best approximation and unique extension of
Lipschitz functions // J. Approx. Theory.— 1977.— V. 19,
№ 3.— P. 222-230.
402. Neuman P. An asymptotically optimal procedure for search-
ing a zero or an extremum of a function if a prior distribution
of its location is known // Proc, of a second Prague symposium
on asympt. statistics.— Prague: Academia, 1981. P. 291—302.
403. Newman D. J. Location of the maximum on unimodal sur-
faces // J. Assoc. Comput. Mach.— 1965.— V. 12, № 3.—
P. 395-398.
404. Niederreiter H., Me Curley K. Optimization of
functions by quasy-random search methods 11 Computing.—
1979,— V. 22, № 2.— P. 119—123.
405. Niederreiter H., Peart P. Localization of search in
quasi Monte-Carlo methods for global optimization 11 SIAM J.
Sci. Stat. Comput.— 1986.— V. 7, № 2.— P. 660—664.
406. Oliver L. T., Wilde D. J. Symmetric sequential mini-
max search for a maximum // Fibonacci Quart.— 1964.— V. 2,
№ 1.—P. 169—175.
407. Performance evaluation of numerical software/Ed. L. G. Fos-
dick.— Amsterdam: North-Holland, 1979.— 336 p.
408. Pourciau В. H. Analysis and optimization of Lipschitz
continuous mappings 11 J. Optimization Theory and AppL —
1977.— V. 22, № 3.— P. 311—351.
409. Renegar J. On the complexity of a piecewise linear algo-
rithms for approximating roots of complex polynomials 11 Math.
Programming.— 1985.— V. 32, № 3.— P. 301—318.
410. Renegar J. On the cost of approximating all roots of a
complex polynomial // Math. Programming.— 1985.— V. 32,
№ 3.— P. 319—336.
411. Renegar J. On the efficiency of Newton’s method in appro-
ximating all zeros of a system of complex polynomials.— Ber-
keley Mathematical Sciences Research Institute Report, MSRI
00318-86, 1985.
412. Renegar J. Rudiments of an average case complexity theo-
ry for piecewise-linear path following algorithms.— Berkeley
Mathematical Sciences Research Institute Report, MSRI
03418—86, 1986.
413. Rice J. R. Parallel algorithms for adaptive quadrature —
convergence // Proc. IFIP Congress 74, Stokholm.— Amsterdam:
North-Holland, 1974.— P. 600—604.
414. Rice J. R. A metalgorithm for adaptive quadrature 11 J.
Assoc. Comput. Mach.— 1975.— V. 22, № 1.— P. 61—82.
415. R i c e J. R. Parallel algorithms for adaptive quadrature II —
metalgorithm correctness // Acta Informatica.— 1976.— V. 5,
№ 4.— P. 273—275.
416. Rice J.R. Parallel algorithms for adaptive quadrature III —
programm correctness // ACM Trans. Math. Software.— 1976.—
V. 2, № 1.— P. 1—30.
417. R i c e J. R. Numerical methods, software and analysis.—
New York: Me Graw-Hill, 1983.— 671 p.
418. R i n n о о у Kan A. H. G., В о e n d e r C. G. E., T i m-
m e r G. T. A stochastic approach to global optimization //
Computational mathematical programming.— Berlin: Sprin-
ger-Verlag, 1985.— P. 281—305.
19*
292 СПИСОК ЛИТЕРАТУРЫ
419. Rogers С. A. A note on coverings // Mathematika. A Jour-
nal of Pure and Applied Mathematics.— 1957.— V. 4. Part. 1.
№ 7.—P. 1-6.
420. Sard A. Best approximate integration formulas: best appro-
ximation formulas // Amer. J. Math.— 1949.— V. 71, № 1.—
P. 80-91.
421. Shapiro H. D. Increasing robustness in global adaptive
quadrature through interval selection heuristics 11 ACM Trans.
Math. Software.— 1984.— V. 10, № 2.— P. 117—139.
422. Shapiro R. D., Wilde D. J. Optimal minimax search
with unequal block sizes.— Stanford University, Dept, of Ope-
rations Res., Technical Report 74—16, 1974.
423. Shapiro R. D., Wilde D. J. Variable block search stra-
tegies with prior information.— Stanford University, Dept, of
Operations Res., Technical Report 74—17, 1974.
424. Shih W. A new application of incremental analysis in re-
source allocations // Operational Research Quartely.— 1974.—
V. 25, № 4.— P. 587-597.
425. Shub M., Smale S. Computational complexity: on the
geometry of polynomials and a theory of cost. Part I // Ann.
scient. Ec. Norm. Sup. 4 ser.— 1985.— T. 18, № 1.— P. 107—
142; Part II П SIAM J. Comput.— 1986.— V. 15, № 1.—
P. 145—161.
426. Shub M., Smale S. On the existence of generally conver- •
gent algorithms// J. Complexity.— 1986.—V. 2, № 1.—
P. 2—11.
427. Shubert B. 0. A sequential method seeking the global ma-
ximum of a function // SIAM J. Numer. Anal.— 1972.— V. 9,
№ 3.— P. 379-388.
428. Shubert В. O. Sequential optimization of multimodal dis-
crete function with bounded rate of change // Manage. Sci.—
1972.—V. 18, № 11.—P. 687—693.
429. Sikorski K. Bisection is optimal // Numer. Math.—
1982.—V. 40, № l.-P. 111—117.
430. Sikorski K. Optimal solution of nonlinear equations sa-
tisfying a Lipschitz condition // Num. Math.— 1984.— V. 43,
№ 2.— P. 225-240.
431. Smale S. The fundamental theorem of algebra and com-
plexity theory 11 Bull. Amer. Math. Soc. (N. S.)— 1981.— V. 4,
№ 1,— P. 1—36.
432. Smale S. On the average number of steps in the simplex me-
thod of linear programming // Math. Programming.— 1983.—
V. 27, № 3.— P. 241-262.
433. Smale S. The problem of the average speed of the simplex
method // Mathematical programming. The state of the art.—
Berlin, New York: Springer-Verlag, 1983.— P. 530—539.
434. Smale S. On the efficiency of algorithms of analysis //
Bull. Amer. Math. Soc. (N. S.)— 1985.— V. 13, № 2.—
P. 87-121.
435. Sobol I.M. On the systematic search in a hypercube // SIAM
J. Numer. Anal.— 1979.—V. 16, № 5.—P. 790—793.
436. Sonnevend G. On optimization of algorithms for function
minimization И ЖВМ и МФ.— 1977.— T. 17, № 3.— С. 591 —
609.
СПИСОК ЛИТЕРАТУРЫ
293
437. SonnevcndG. On the optimization of adaptive algorithms //
Operations Research Verfahren, v. 31.— Athenaum, 1978.—
P. 581-595.
438. Sonnevend G. Optimal passive and sequential algorithms
for the approximation of convex functions in Lp([0, 1 ]s), p =
= 1, oo // Конструктивная теория функций 81.— София,
1983.— С. 535—542.
439. Sonnevend G. An optimal sequential algorithms for the
uniform approximation of convex functions on [0,1]2 // Applied
Mathematics and Optimization.— 1983.— V. 10, № 2.—
P. 127—142.
440. S u g i e N. An extension of Fibonaccian searching to multi-
dimensional cases // IEEE Trans, on Automatic Control.—
1964.— V. 9, № 1.— P. 105.
441. Sukharev A. G. A sequentially optimal algorithm for nu-
merical integration // J. Optimization Theory and Appl.—
1979.— V. 28, № 3.— P. 363—373.
442. Sukharev A. G. Optimal algorithms for iterated numeri-
cal integration // J. Optimization Theory and Appl.— 1979.—
V. 28, № 3.— P. 375-390.
443. Sukharev A. G. On optimal stochastic and determini-
stic search for global extremum 11 Internationale Tagung Ma-
thematische Optimierung — Theorie und Anwendungen.—
DDR, Ilmenau: Technische Hochschule, 1981.— P. 163—
166.
444. Sukharev A. G. On optimal methods in numerical analy-
sis П Computational mathematics, Banach Center Publications,
v. 13.— Warsaw: PWN. — Polish Scientific Publishers, 1984.—
P. 575-587.
445. Sukharev A. G. On the existence of optimal affine methods
for approximating linear functionals 11 J. Complexity.—
1986.—V. 2, № 4.—P. 317—322.
446. Todd M. J. Optimal dissection of simplices.— Cornell Uni-
versity, Dept, of Operations Res. Report, 1976.
447. Towards global optimization, I/Eds. L. G. W. Dixon, G. P. Sze-
go.— Amsterdam: North-Holland, 1975.— 472 p.
448. Towards global optimization, II /Eds. L. C. W. Dixon,
G. P. Szego.— Amsterdam: North-Holland, 1978.— 363 p.
449. Traub J. F. Complexity of approximately solved problems //
J. Complexity.— 1985.— V. 1, № 1.— P. 3—10.
450. Traub J. F., Wasilkowski G. W., Wozniakow-
s k i H. Average case optimality for linear problems // Theo-
ret. Comp. Sci.— 1984.— V. 29, № 1.— P. 1—25.
451. Traub J. F., Wozniakowski H. Information and
computation // Advances in computers, v. 23.— New York,
London: Academic Press, 1984.— P. 35—92.
452. Traub J. F., Wozniakowski H. On the optimal
solution of large linear systems 11 J. Assoc. Comput. Mach.—
1984.—V. 31, № 3.-P. 545-559.
453. Veinott A. F. Production planning with convex costs:
a parametric study // Manage. Sci.— 1966.— V. 12, № 11.—
P. 745-777.
454. Wasilkowski G. W. Some nonlinear problems are as
easy as the approximation problem // Comp, and Maths, with
Appls.— 1984.— V. 10, № 4/5.— P. 351—363.
294 СПИСОК ЛИТЕРАТУРЫ
455. W asilko wski G. W. Average case optimality // J. Com-
plexity.—1985.—V. 1, № 1.—P. 107-117.
456. Wasilkowski G. W., Wozniak owski H. Can
adaptation help on the average? 11 Num. Math.— 1984.— V. 44,
№ 2.— P. 169—190.
457. Werschulz A. G. Optimal order for approximation of
derivatives H J. Comp. Syst. Sci.— 1979.— V. 18, № 3.—
P. 213-217.
458. Werschulz A. G. Computational complexity of one-step
methods for systems of differential equations // Math. Comp.—
1980.— V. 34, № 149.— P. 155-174.
459. Werschulz A. G. On maximal order for local and global
problems // J. Comp. Syst. Sci.— 1981.— V. 23, № 1.—
P. 38-48.
460. Werschulz A. G. Does increased regularity lower comple-
xity? // Math. Comp.— 1984.— V. 42, № 165.— P. 69—93.
461. Werschulz A. G. Optimal algorithms for a problem of
optimal control // Optimal algorithms.— Sofia: BAS, 1986.—
P. 228-234.
462. Wilde D. J. A multivariable dichotomous optimum-seeking
method // IEEE Trans, on Automatic Control.— 1965.— V. 10,
№ 1.—P. 85—87.
463. Wilde D. J., Beightler C. S. Foundations of optimi-
zation.— Englewood Cliffs, New Jersey: Prentice-Hall, 1967.—
480 p.
464. Wilde D. J., Sanchez-Anton J. M. Discrete opti-
mization on a multivariable Boolean lattice П Math. Program-
ming.— 1971.— V. 1, № 3.— P. 301—306.
465. Wilde D. J., Sanchez-Anton J. M. Multivariable
monotonic optimization over multivalued logics and rectangu-
lar design lattices // Discrete Maths.— 1971.— V. 1, № 3.—
P. 277—294.
466. Witzgall C. Fibonacci search with arbitrary first evalua-
tion // Fibonacci Quart.— 1972.— V. 10, № 2.— P. 113—134.
467. Wozniakowski H. A survey of information-based com-
plexity // J. Complexity.— 1985.— V. 1, № 1.— P. 11—44.
468. Wozniakowski H. Complexity of integration in dif-
ferent settings // Optimal algorithms.— Sofia: BAS, 1986.—
P. 235-240.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Автоматизация проектирова-
ния 13, 261
Алгоритм 10, 22, 46, 60
— адаптивный 6, 27, 100
— асимптотически оптималь-
ный 46, 47, 62
— бисекции 245, 246
— блочный 27, 28, 64
— вероятностный 62
— детерминированный 21, 22,
63, 65, 153, 249
— допустимый 25
— модифицированный 126, 132
— неадаптивный 26
— оптимальный 6, 30, 44, 54,
55, 58, 103, 133, 192, 201,
259, 263, 264, 265
• —, — в среднем 31
—, — детерминированный 64
—, — на один шаг 47, 48, 70,
100, 113, 123, 161, 170, 191,
215, 228, 243
—, — по порядку 46, 47, 62
—, — по точности 28, 29, 36,
66, 67, 68, 85, 101, 104, 105,
136, 155, 161, 162, 163, 249,
251, 259
—, — по числу информацион-
ных вычислений 30, 47, 114
— пассивный 26, 64, 65
— повторного интегрирования
134
— последовательно - оптималь-
ный 6, 30, 50, 56, 59, 100, 141,
161, 244
—, — по точности 61, 107, 109,
123, 167, 169, 208, 212, 219,
224, 225, 246, 254
—, — по числу информацион-
ных вычислений 61, 62, 113,
118, 123, 170, 210, 216, 219
последовательный 6, 27, 50,
57, 69, 100
Алгоритм приближенный 125
— рандомизированный 62
— с автоматическим выбором
шага 100
— с задержкой информации
27, 64
— с ограниченным объемом
памяти 27
— статистический 62
— стохастически последова-
тельно-оптимальный 71
— стохастический 62, 249
----пассивный 65, 66, 200,
201
— — последовательный 67, 68
— сходящийся 46
— , 8-оптимальный по точности
29, 58
—, е-последовательно-оптималь-
ный 61
Анализ последовательный 59
Вектор неулучшаемый 261
— результатов реализуемый
24
Внутренность множества отно-
сительная 37, 145
Вычисление алгоритмическое
23
— — допустимое 26
— информационное 23
— итоговое 23
Вычислитель 9
6-сеть 263
Задача И
— автоматизации проектирова-
ния 261
296
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Задача восстановления функции
7, 10, 25, 59, 102, 153
— выпуклого программирова-
ния 81
— глобальной оптимизации 10,
31, 54, 55, 57, 191, 198
— дискретной геометрии 86
— максиминная с распадаю-
щимися переменными 256
----со связанными перемен-
ными 256
— минимаксная 28, 256
— минимизации функции с из-
вестным значением 245
— многокритериальная 7, 244,
261
— на условный экстремум 105,
121
— наименее плотного покры-
тия 86
— нелинейная 110
— оптимального покрытия 86,
154, 156, 158, 198, 205, 210,
225, 227, 254, 266
— оптимизации 62
— отыскания корня монотон-
ной функции 50
— планирования эксперимен-
тов 62
— повторного интегрирования
133
— поиска максимума 25
— поиска экстремума 31, 48,
59, 191, 198
----унимодальной функции
48, 58, 60, 191
— приближения линейного
функционала 52
— приближения оператора 29
— распределения вычисли-
тельных ресурсов 124, 219
— решения системы уравне-
ний 10, 244, 245
— решения уравнения 47, 48,
50, 62, 244
— целочисленного программи-
рования 143, 171
— целочисленной оптимизации
31, 110, 112, 169
— численного анализа 6, 7, 9,
10, 13, 56, 62
----интегрирования 10, 25,
59, 62, 73, 132
-------монотонной функ-
ции 50, 56, 118
Игра антагонистическая 63, 65,
200, 201
----многошаговая 63, 173
— восстановления 173
— матричная 232, 235, 239
— на единичном квадрате 229,
234
— с обменом информацией 256
— с полной информацией 63,
64, 65, 173
— с полной памятью 69, 70
Измерение 23
Индикатриса длин 97
Интеграл повторный 132
Интервал локализации экстре-
мума 48
Информация априорная 10, И,
12, 13, 29, 31, 49
— вычислителя 10, 29
— линейная 24, 52
— нелинейная 24
— с задержкой 27
— эрмитова 124
Испытание 23
Квадратура 74
— оптимальная 95, 98
Квазиметрика 14, 16, 18, 73, 83,
200, 209, 257, 258, 262
Класс алгоритмов блочных 45
----допустимых 21, 25
— — пассивных 26, 51, 52, 54,
55, 263
----последовательных 27, 51,
52, 54, 55
----с задержкой информации
45
— функций, заданный квази-
метрикой 12, 14, 15, 17, 19,
20, 21, 55, 73, 133, 191, 198,
205, 256
—, — модулем непрерывности
18, 19
—, — нормой 98
----монотонных 118, 119
Концепция оптимальности 5, 30
— — байесовская 31
---- вероятностная 31
----информационно-статисти-
ческая 31
— — минимаксная 5, 28, 29, 47,
59, 63
---- статистическая 31
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
297
Коэффициент квадратурной
формулы 74, 80
--------оптимальный 74, 75,
82, 83, 89, 103, 152
Критерий Гросса 111
— невязки 245, 254
— осредненный 63
— оценки эффективности 5,
9, 10, 23
Лемма Фаркаша 82
ЛПг-последователыюсть 87, 221
Мажоранта 76, 88, 90, 102, 119,
134, 154, 165, 205, 265
Метод выбора начальных то-
чек 222
— — — — детерминирован-
ный 193
----------стохастический 193,
194
— ломаных 216
— множителей Лагранжа 121,
152
Миноранта 76, 88, 90, 102, 119,
134, 154, 165
Многогранник выпуклый 98
Множество алгоритмов блоч-
ных 28, 46
----допустимых 25
— — пассивных 49, 104, 105,
120
----последовательных 27, 49,
60, 104, 105, 120
— выпуклое 21, 37, 39, 52, 53,
54, 76, 77, 80, 81, 86, 145
— итоговых операций всевоз-
можных 25, 86
—------допустимых 25
— неопределенности 34
— Парето 261
— центрально-симметричное 21,
37, 39, 54, 86
Модель вычислений 9, 49, 70,
123, 124
— — общая 5, 6, 154, 262
— многоэкстремальной целевой
функции статистическая 31
— с нефиксированным N 46
Модуль непрерывности 18
Направление допустимое 81
Невязка решения 245
Оболочка аффинная 38, 39
Оператор линейный 53, 54
— приближаемый 5
Операция итоговая 6, 23, 153
'--допустимая 25
----линейная 36, 37, 38, 40
----оптимальная 41
—------при фиксированных
#1, ..., Xn 36
----универсально оптималь-
ная 33, 34, 41, 104
----универсально е-опти-
мальная 33
— — фиксированная 44
----центральная 33, 34, 88,
104, 105, 119, 135, 155, 162,
246, 251
---- 8-центральная 34
Оптимальность по Парето 261
Опыт 23
Отображение Пеано 147, 148
Оценка эффективности 29, 63
— — априорная 62
----квадратурной формулы
80, 82
Параллелоэдр 98
Периодичность функции 20
Плотность покрытия 98
Погрешность вычислений 134,
222, 227
----неопределенная 134, 222
---- случайная 222
— решения 10
----максимальная на классе
29
— — относительная 49
Подход минимаксный 58
Покрытие оптимальное 91, 94,
100, 154, 155, 156, 198, 199,
260
— решетчатое 100
Понятие оптимальности 5, 9,
28, 56, 58, 63, 66
Последовательность алгорит-
мов асимптотически опти-
мальная 47
298
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Последовательность алгоритмов,
оптимальная по порядку 47
— квадратурных формул
асимптотически оптимальная
96, 97
Правило множителей Лагран-
жа 20
— остановки 48, 61
Приближение наилучшее 9
Принцип вложенных шаров
148
— наилучшего гарантирован-
ного результата 58, 256
— оптимальности 166
Пространство линейное 9, 21,
37, 53
— метрическое 9, 34, 41, 256
Процесс вычислений 6
— квадратурный 100
— принятия решений много-
шаговый 165
— управляемый 6
Радиус множества чебышев-
ский 34
— покрытия 91, 154, 198
---оптимального 91, 154,
155, 157, 198, 254
Развертка типа кривой Пеано
147
Разность разделенная 126, 127
Рандомизация 62
— локальная 69, 70
— глобальная 69, 70
Результат, гарантированный
алгоритмом 29
, — квадратурной формулой
83
— наилучший гарантирован-
ный 42, 65, 66, 85, 104, 105,
108, 155, 163, 164, 165, 247,
254, 259
Решетка главная первого типа
Вороного 100
р-разбиение Вороного — Ди-
рихле 83, 84, 91
р-шар 90
Ряд Фурье 129
Семейство тестовое 128
Ситуация 23
— реализуемая 23, 224
Сложность информационная 29
— комбинаторная 29, 30, 31,
132, 144, 220
Совпадение налучших гаранти-
рованных результатов 49,
159, 199
Спектр оптимальной стратегии
232
Стратегия 26
— наилучшая 59
— оптимальная 64
---смешанная 229, 233, 234,
236, 237, 239, 240
— поведения 69
— последовательно-оптималь-
ная 64
— смешанная 65, 201
— управления 6
— чистая 65
Субдифференциал 24, 78
Схема общей модели вычисле-
ний 9
— построения последователь-
но-оптимального алгоритма
123, 171, 218
Тело выпуклое 93, 94, 98, 99
Теорема отделимости 39
— Цермело 64
Теория игр 69, 256
— иерархических систем 256
Тестирование алгоритмов 128,
130
Точка седловая 53, 64, 65
---обобщенная 51
— эффективная 261
Точность абсолютная 49
— апостериорная 48, 49, 71
— априорная 71
— решения 10
— —, гарантированная алго-
ритмом 29
---наилучшая гарантиро-
ванная 33, 42, 43, 45
— фактическая 130
Узел квадратурной формулы
74
— оптимальный 74, 83,
96, 152
Упаковка оптимальная 100
Уравнение нелинейное 244
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
2 99
Уравнение рекуррентное 166,173
Условие Гёльдера 17, 19, 151,
261
— Липшица 17, 19, 20, 21, 101,
102, 107, ИЗ, 122, 123, 133,
134, 161, 164, 212, 215, 216,
242, 249, 261
— Слейтера 261
— экстремума 81
Формула квадратурная 29, 74
----оптимальная 73, 85, 95,
96, 151
— — прямоугольников 56, 101,
103
----трапеций 57, 120
Функционал линейный 37, 50,
52, 53, 54
— нелинейный 50
— приближаемый 5
Функция вогнутая 78, 79, 81,
82, 182, 191
— выпуклая 24, 53, 78, 79, 82,
110, 182, 191
— Лагранжа 138
Функция линейная 37
— мпогоэкстремальпая 13, 31
— тестовая 128, 129
— универсальная наихудшая
56
— унимодальная 7, 50, 191
— целевая 31
Центр оптимального покрытия
100, 158, 209, 210
— оптимальной упаковки 100
— чебышевский 34
Шаг алгоритма 23, 59
— вычислительного процесса 23
Эксперимент 23, 26
— численный 124, 129, 131, 217
Элемент приближаемый 9, 34
е-аппроксимацйя по Парето
262
Научное издание
СУХАРЕВ Алексей Григорьевич
МИНИМАКСНЫЕ АЛГОРИТМЫ
В ЗАДАЧАХ ЧИСЛЕННОГО АНАЛИЗА
Серия «Оптимизация и исследование операций»
выпуск 22
Заведующий редакцией А. П. Баева
Редактор Н. И. Воронина
Художественный редактор Т. Н. Кольченко
Технический редактор И. М. Аксельрод
Корректоры Т. Г. Егорова, О. М. Березина
ИБ № 32655
Сдано в набор 12.08.88. Подписано к печати 15.08.89.
Формат 84X108/32. Бумага книжно-журнальная.
Гарнитура обыкновенная. Печать высокая. Усл.
печ. л. 15,96. Усл. кр.-отт. 15,96. Уч.-изд. л. 17,53.
Тираж 4350 экз. Заказ № 311. Цена 3 р. 70 к.
Ордена Трудового Красного Знамени
издательство «Наука»
Главная редакция
физико-математической литературы
117071 Москва В-71, Ленинский проспект, 15
Четвертая типография издательства «Наука»
630077 г. Новосибирск-77, Станиславского, 25
MINIMAX ALGORITHMS IN PROBLEMS
OF NUMERICAL ANALYSIS
1. AUTHOR
Aleksei G. Sukharev. Doctor of Science, Professor of Ope-
rations Research, Faculty of Computational Mathematics and
Cybernetics, Moscow State University
A. Sukharev is a well-known specialist in Operations Re-
search, Optimization and Complexity. His “Optiml Search for
an Extremum” (Moscow University, 1975) is a valued research
monograph while “Problems in Operations Research” (Moscow
University, 1979, with coauthors), “Optimization Methods”
(Nauka, 1986, with coauthors), “Operations Research, Problems
and Drills” (Vysshaia Shkola, 1986, with coauthors) are among
major university texts.
2. ABSTRACT
The subject of the book is complexity and optimality of
algorithms in numerical analysis. Problems and algorithms are
treated within a general framework based on the worst-case
(minimax) concept of optimality. The book differs considerably
from traditional works on optimal numerical methods. Atten-
tion to adaptive algorithms and their implementation as well
as games-theoretic methods used for constructing optimal algo-
rithms are distinctive characteristics of the book. The central
role of sequentially-optimal algorithms results from the fact
that the notion of sequential optimality suits a number of real
computational processes better than traditional notions. Issues
of program implementation, applications and numerical tests
are discussed.
3. CONTENTS
Preface ... 5
Glossary ... 8
Chapter 1. General model of computation . 9
§ 1. Basic concepts.................................. 9
§ 2. On functional classes under consideration 12
§ 3. Classes of deterministic algorithms .... 21
§ 4. Minimax concept of optimality and specific no-
tions of optimality...................................28
§ 5. Comparison of the best guaranteed results for
adaptive and nonadaptive algorithms ... 49
§ 6. Sequentially-optimal algorithms................56
§ 7. Stochastic algorithms..........................62
Chapter 2. Numerical integration......................73
§ 1. Optimal quadratures for functional classes de-
fined by quasimetrics............................73
§ 2. Optimal quadratures for functional classes defi-
ned by continuity modules........................90
§ 3. Sequentially-optimal and one-step optimal algo-
rithms for numerical integration 100
§ 4. Numerical tests...........................124
§ 5. Optimal iterated numerical integration . . . 132
§ 6. Integration of multivariable functions using
Peano curve..........................................147
Chapter 3. Recovery of functions using their values 153
§ 1. Optimal nonadaptive algorithms................153
§ 2. Sequentially-optimal and one-step optimal algo-
rithms for recovery of functions.....................161
§ 3. Solution of a multistep antagonistic game rela-
ted to the problem of optimal recovery . . . 173
Chapter 4. Search for a global extremum .... 191
§ 1. On the choice of starting points for local optimi-
zation methods.......................................192
§ 2. Optimal nonadaptive search for a functional
class defined by a quasimetric.......................198
§ 3. Reduction of the problem of constructing a se-
quentialy-optimal algorithm for a functional
class defined by a quasimetric to the series of
problems of optimal covering.........................205
§ 4. Specific computational algorithms .... 212
§ 5. Case of approximate information................222
§ 6. One-step optimal stochastic algorithm . . . 228
Chapter 5. Some special classes of extremal problems 244
§ 1. Solution of equations and systems of equations 244
§ 2. Maximization of a minimum function with con-
strained variables..................................256
§ 3. Optimization with several criteria .... 261
Bibliography.............................................270
Tables 5, figures 18, bibliography — 468.
СЕРИЯ «ОПТИМИЗАЦИЯ И ИССЛЕДОВАНИЕ ОПЕРАЦИЙ»
Вып. 1. А. Н. Ширяев. Статистический последовательный ана-
лиз. Оптимальные правила остановки, 1969.
Вып. 2. Б. Н. Пшеничный. Необходимые условия экстрему-
ма, 1969.
Вып. 3. Н. Н. Красовский. Игровые задачи о встрече дви-
жений, 1970.
Вып. 4. 10. Б. Г е р м е й е р. Введение в теорию исследования
операций, 1971.
Вып. 5. Н. Н. Моисеев. Численные методы в теории опти-
мальных систем, 1971.
Вып. 6. В. Ф. Демьянов, В. Н. М а л о з е м о в. Введение в
минимакс, 1972.
Вып. 7. А. И. П р о п о й. Элементы теории оптимальных дискрет-
ных процессов, 1973.
Вып. 8. Н. Н. Моисеев. Элементы теории оптимальных сис-
тем, 1975.
Вып. 9. Б. Н. П ш е и и ч и ы й, 10. М. Д а п и л и н. Численные
методы в экстремальных задачах, 1975.
Вып. 10. 10. М. Е р м о л ь е в. Методы стохастического програм-
мирования, 1976.
Вып. И. 10. Б. Г е р м с й е р. Игры с пепротивоположпымц инте-
ресами, 1976.
Вып. 12. А. М. Т е р - К р и к о р о в. Оптимальное управление и
математическая экономика, 1977.
Вып. 13. Р. Г. Стронги и. Численные методы в мпогоэкстре-
мальпых задачах (информационно-статистические алго-
ритмы), 1978.
Вып. 14. Современное состояние исследования операций (сбор^
ник), 1979.
Вып. 15. В. В. Федоров. Численные методы максимина, 1979.
Вып. 16. В. Ф. Демьянов, Л. В. Вас и л ь е в. Недиффорепци-
руемая оптимизация, 1981.
Вып. 17. С. А. Орловский. Проблемы принятия решений при
нечеткой исходной информации, 1981.
Вып. 18. Б. Н. Пшеничный. Необходимые условия экстре-
мума, изд. 2-е, 1982.
Вып. 19. Ю. Г. Евтушенко. Методы решения экстремальных
задач и их применение в системах оптимизации, 1982.
Вып. 20. О. Хеллман. Введение в теорию оптимального поиска,
1985.
Вып. 21. Д. А. Молодцов. Устойчивость принципов оптималь-
ности, 1987.