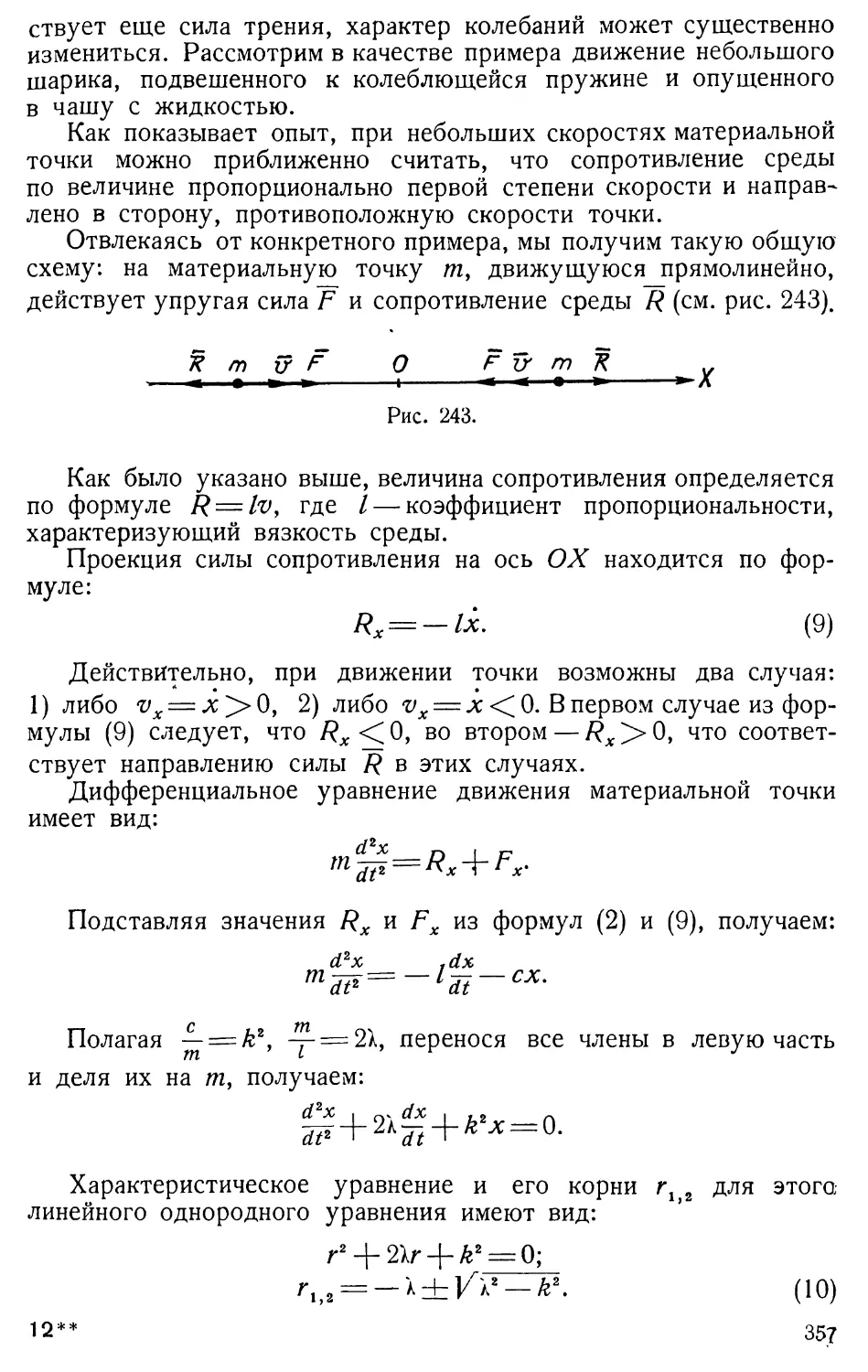
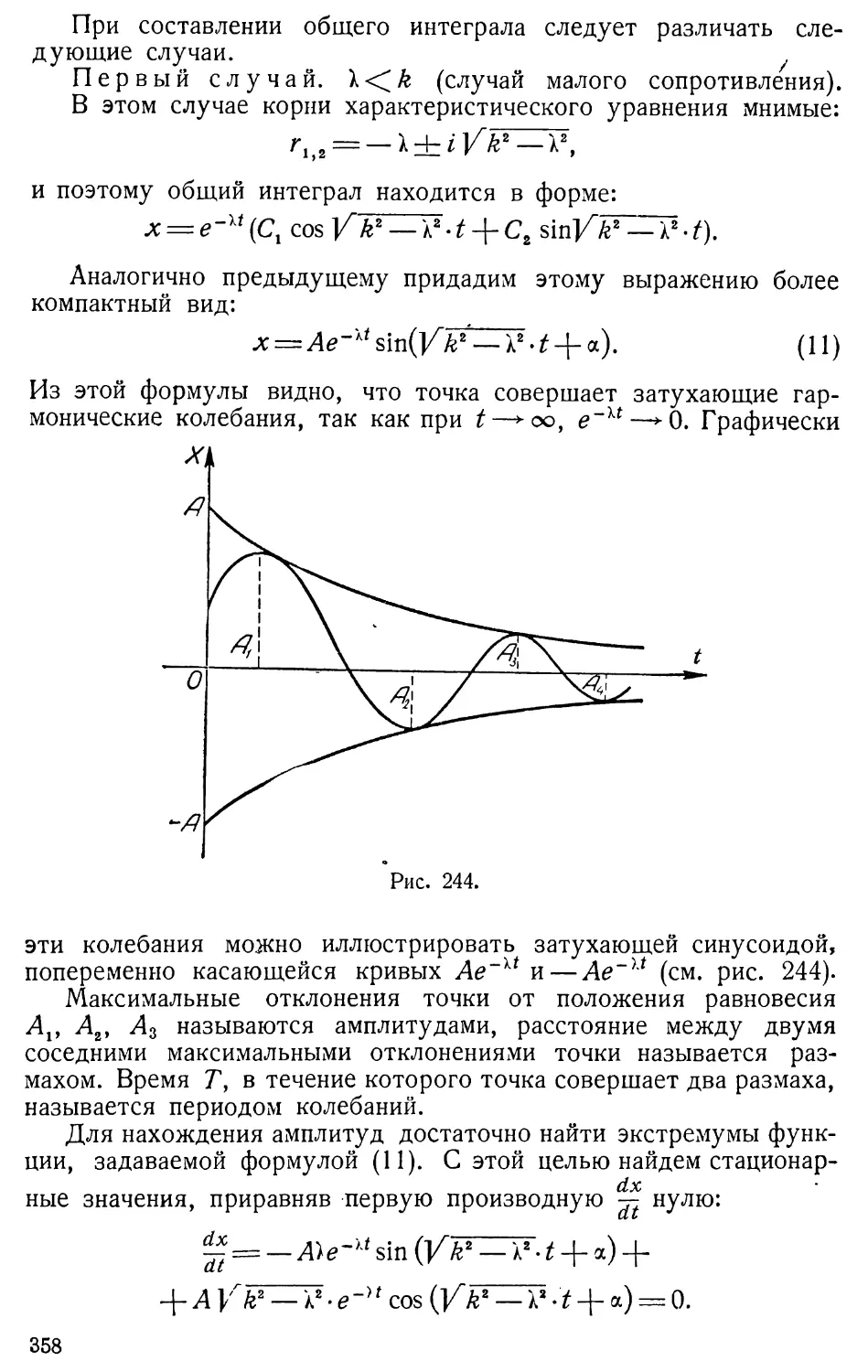
/
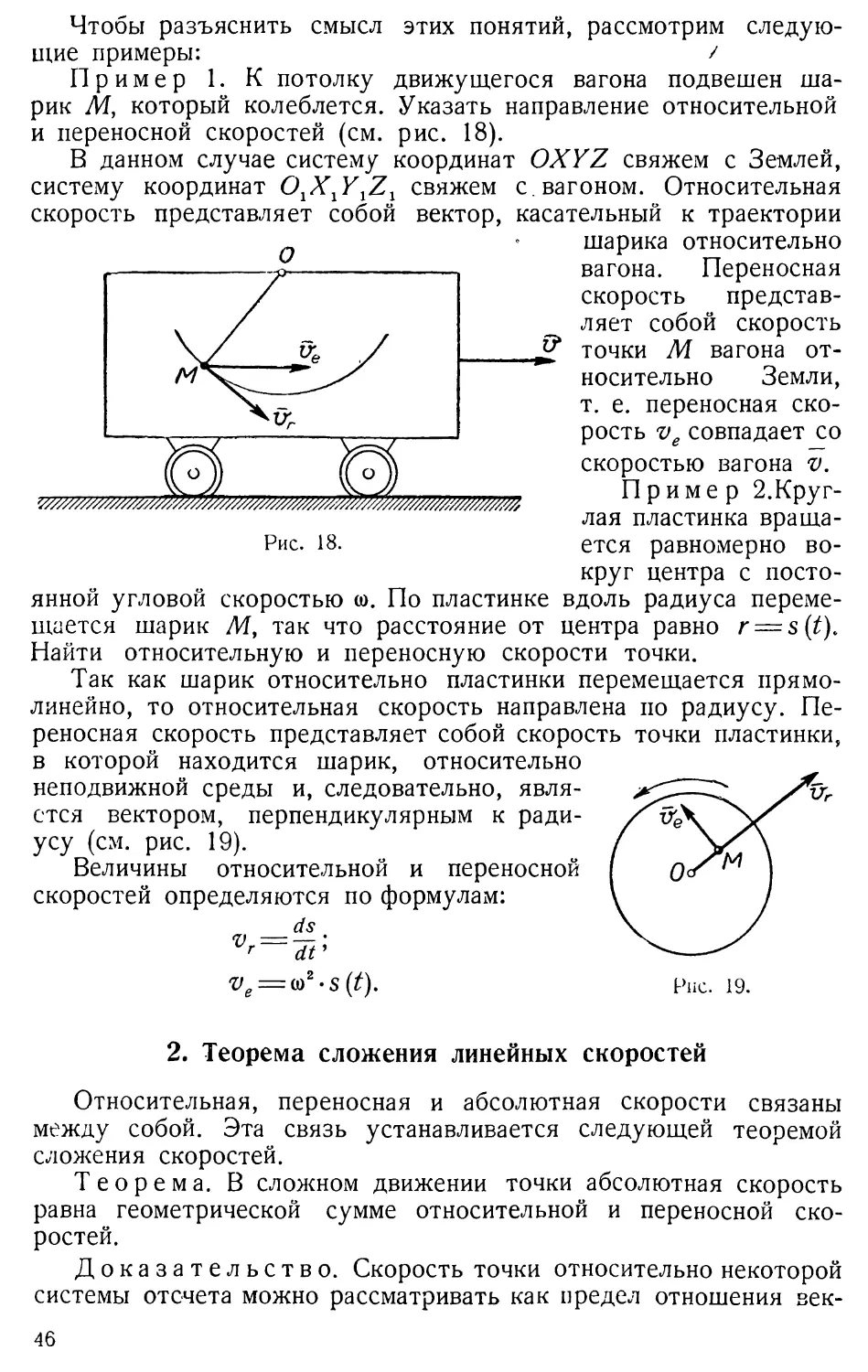
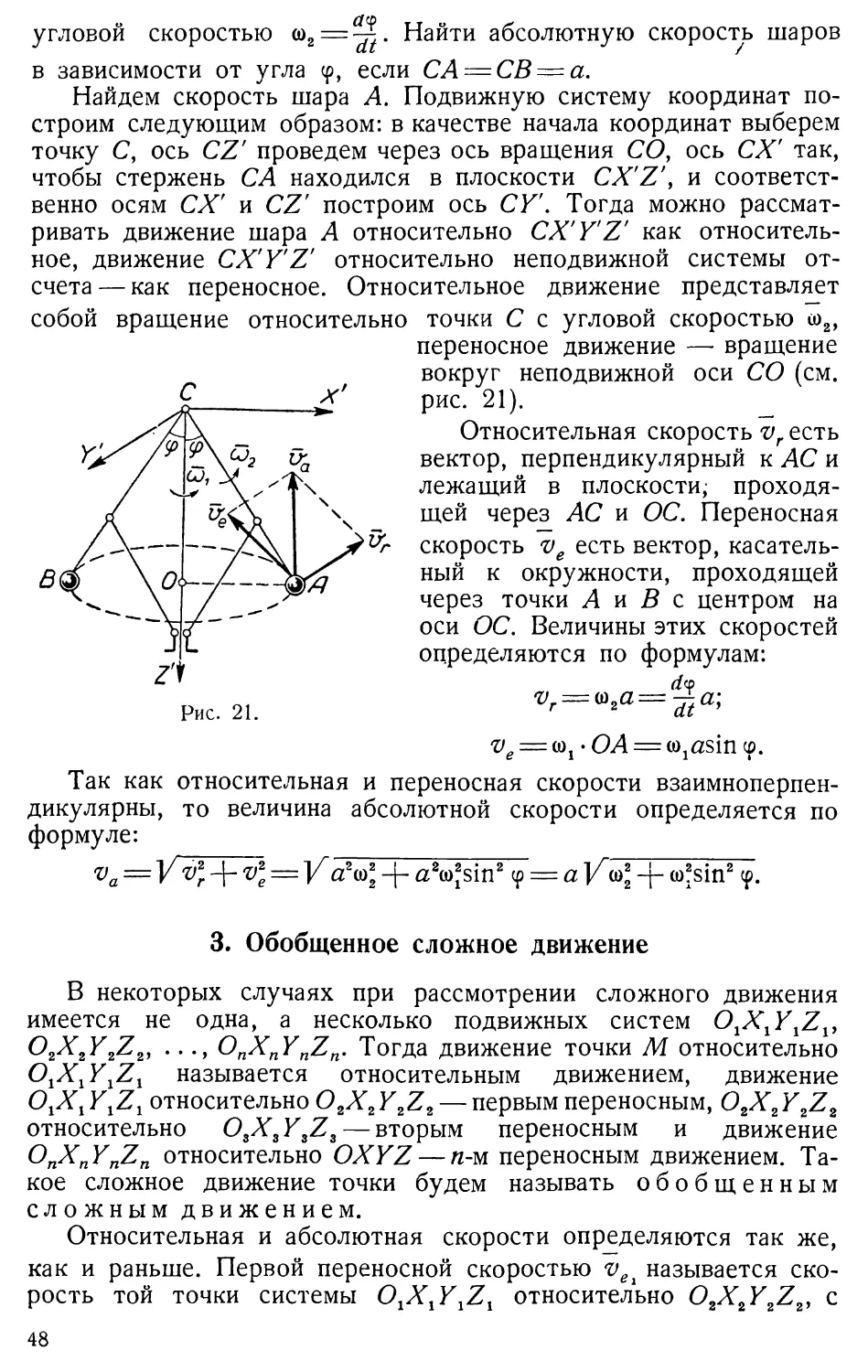






Text
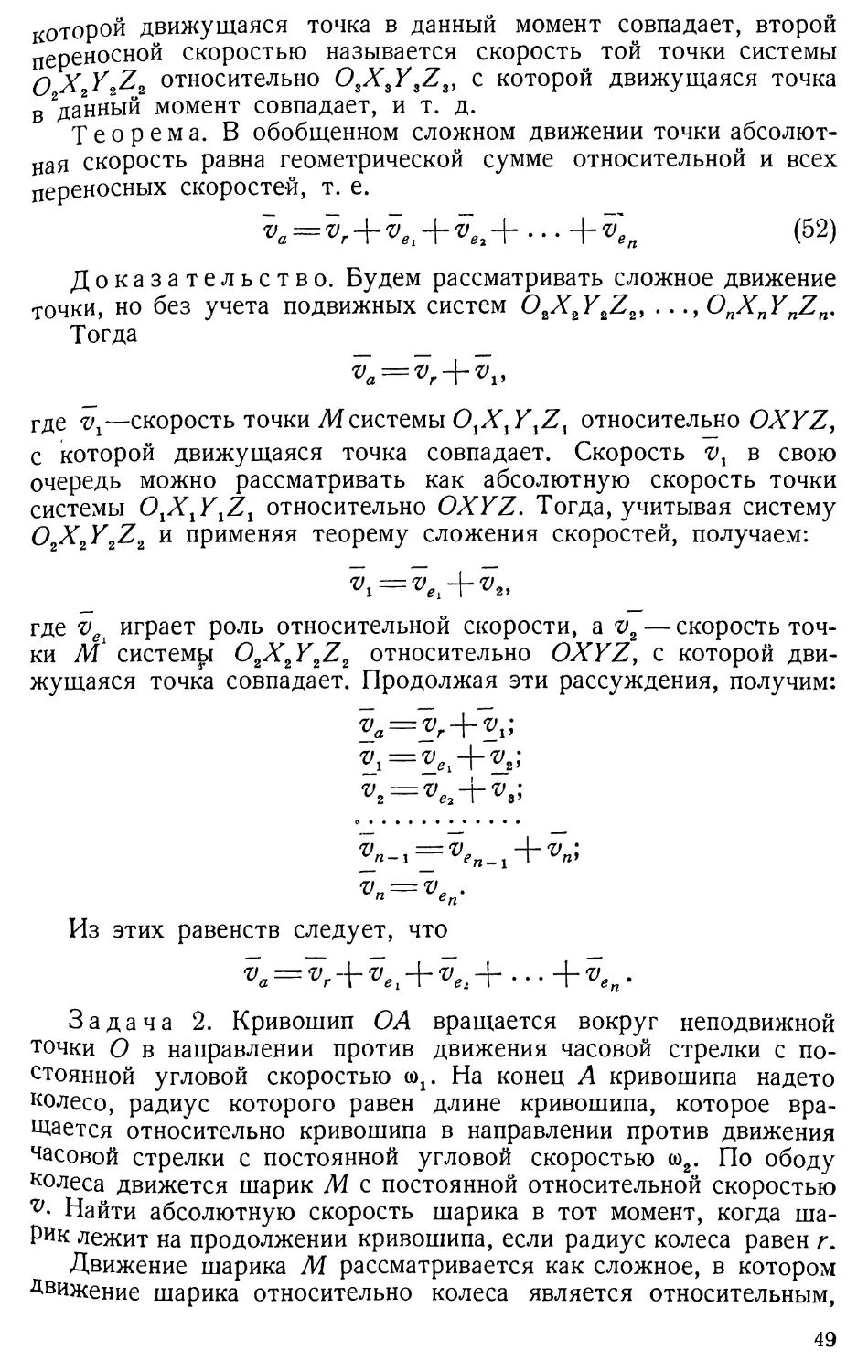
Г. М. ФИНКЕЛЬШТЕЙН
КУРС
ТЕОРЕТИЧЕСКОЙ
МЕХАНИКИ
УЧЕБНОЕ ПОСОБИЕ
ДЛЯ СТУДЕНТОВ
ПЕДАГОГИЧЕСКИХ ИНСТИТУТОВ
Утверждено
Министерством просвещения РСФСР
ГОСУДАРСТВЕННОЕ
УЧЕБНО-ПЕДАГОГИЧЕСКОЕ ИЗДАТЕЛЬСТВО
МИНИСТЕРСТВА ПРОСВЕЩЕНИЯ РСФСР
МОСКВА—1959
ОГЛАВЛЕНИЕ
Введение ' .' II
§ 1. Предмет теоретической механики —
§ 2. Метод теоретической механики —
§ 3. Краткий исторический обзор 14
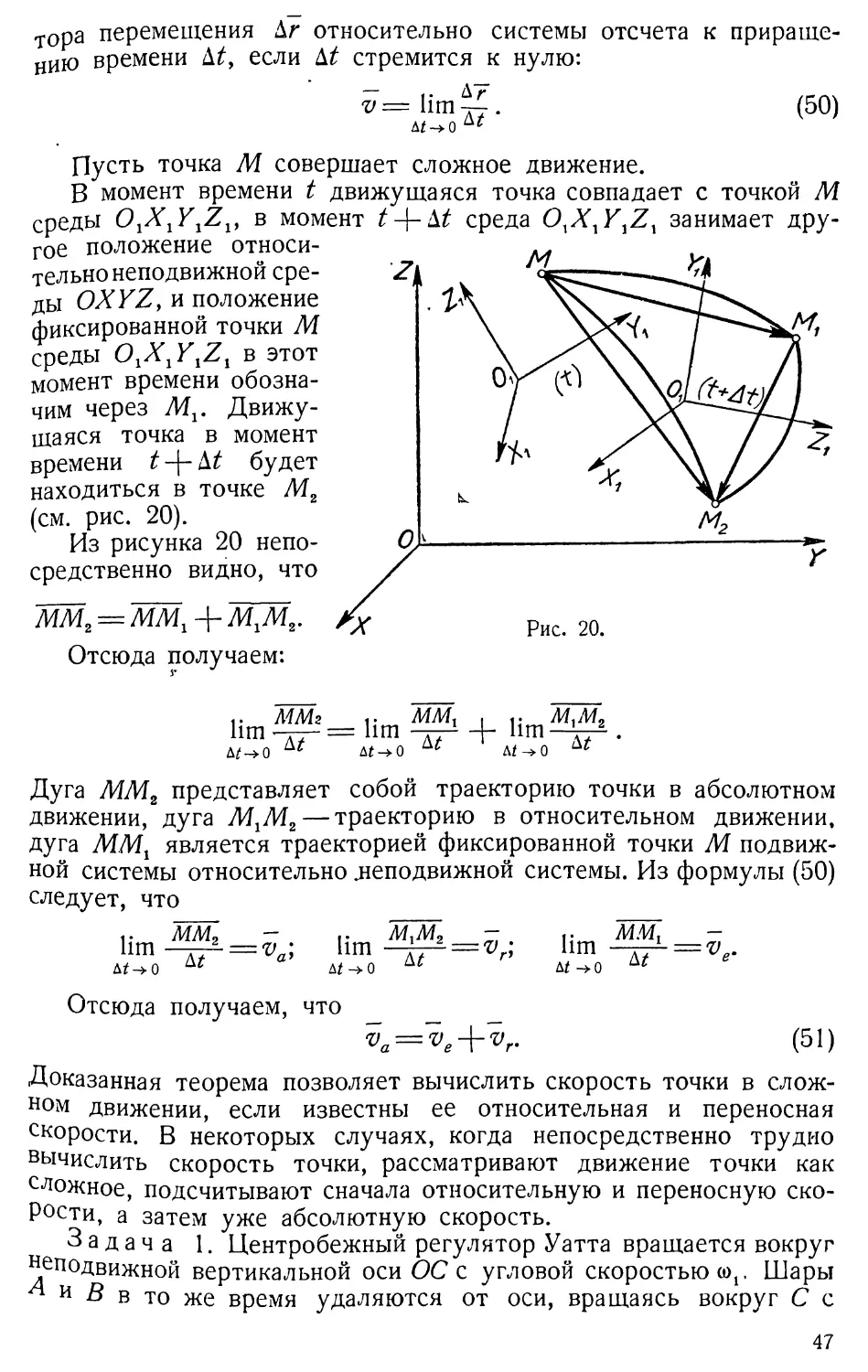
§ 4. Роль русских и советских ученых в развитии механики 16
§ 5. Пространство и время в механике 18
ЧАСТЬ ПЕРВАЯ
КИНЕМАТИКА
Введение. Основные понятия, основная задача кинематики ... 21
Глава I. Кинематика точки 23
§ 1. Способы задания движения точки —
1. Координатный способ 24
2. Естественный способ 25
3. Векторный способ 26
§ 2. Скорость движущейся точки 27
1. Определение скорости —
2. Формулы для вычисления скорости 31
3. Секториальная скорость 32
4. Метод полярных координат 33
§ 3. Ускорение движущейся точки • • • 35
1. Определение ускорения —
2. Основная формула для ускорения 36
3. Формулы для вычисления ускорения 39
4. Метод полярных координат . 40
5. Частные случаи движений 41
§ 4. Сложное движение точки 45
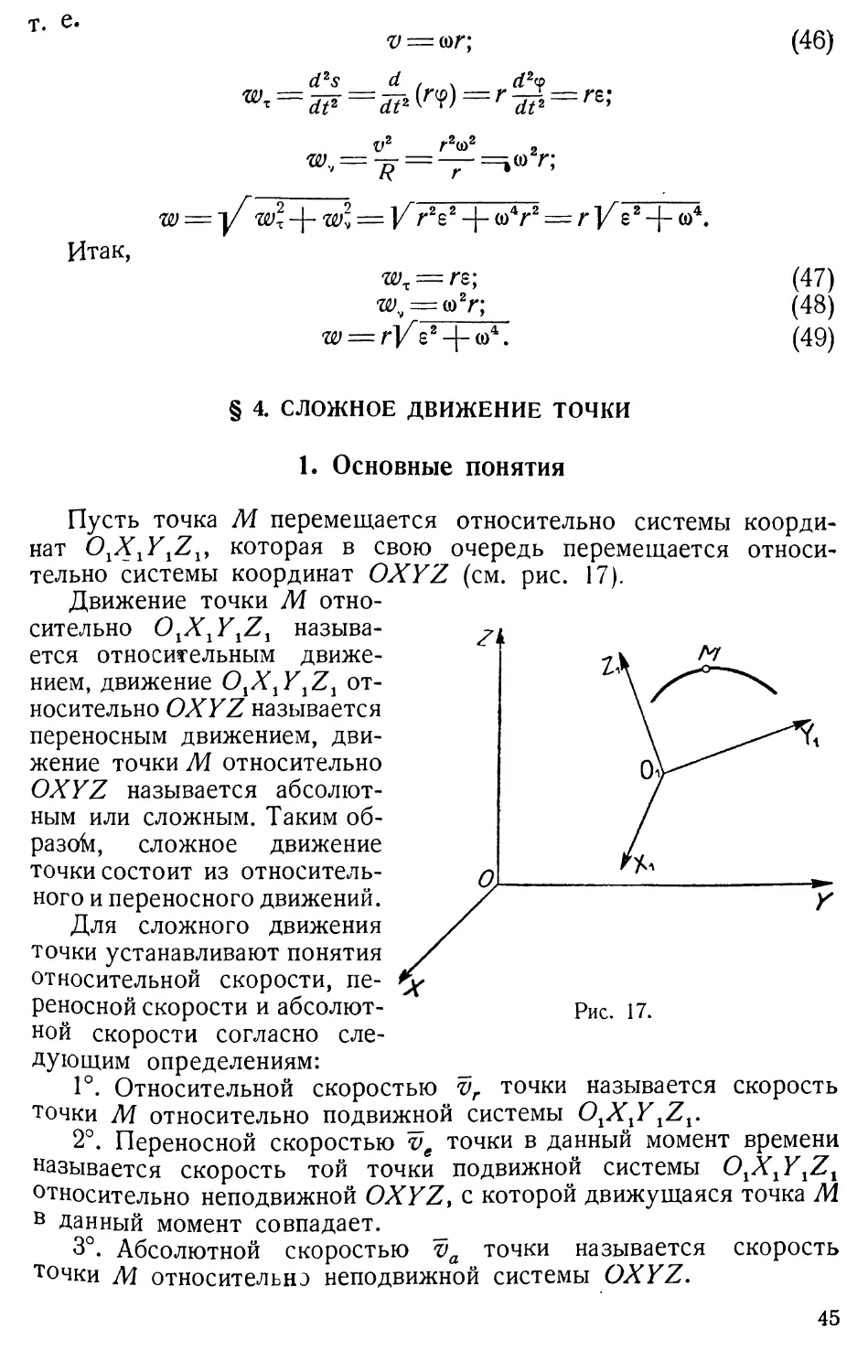
1. Основные понятия —
2. Теорема сложения линейных скоростей 46
3. Обобщенное сложное движение 4S
Глава II. Кинематика твердого тела 50
§1. Введение —
1. Основные понятия, основная задача —
2. Задание движения тела. Обобщенные координаты 51
§ 2. Поступательное движение 52
1. Задание движения. Траектории точек —
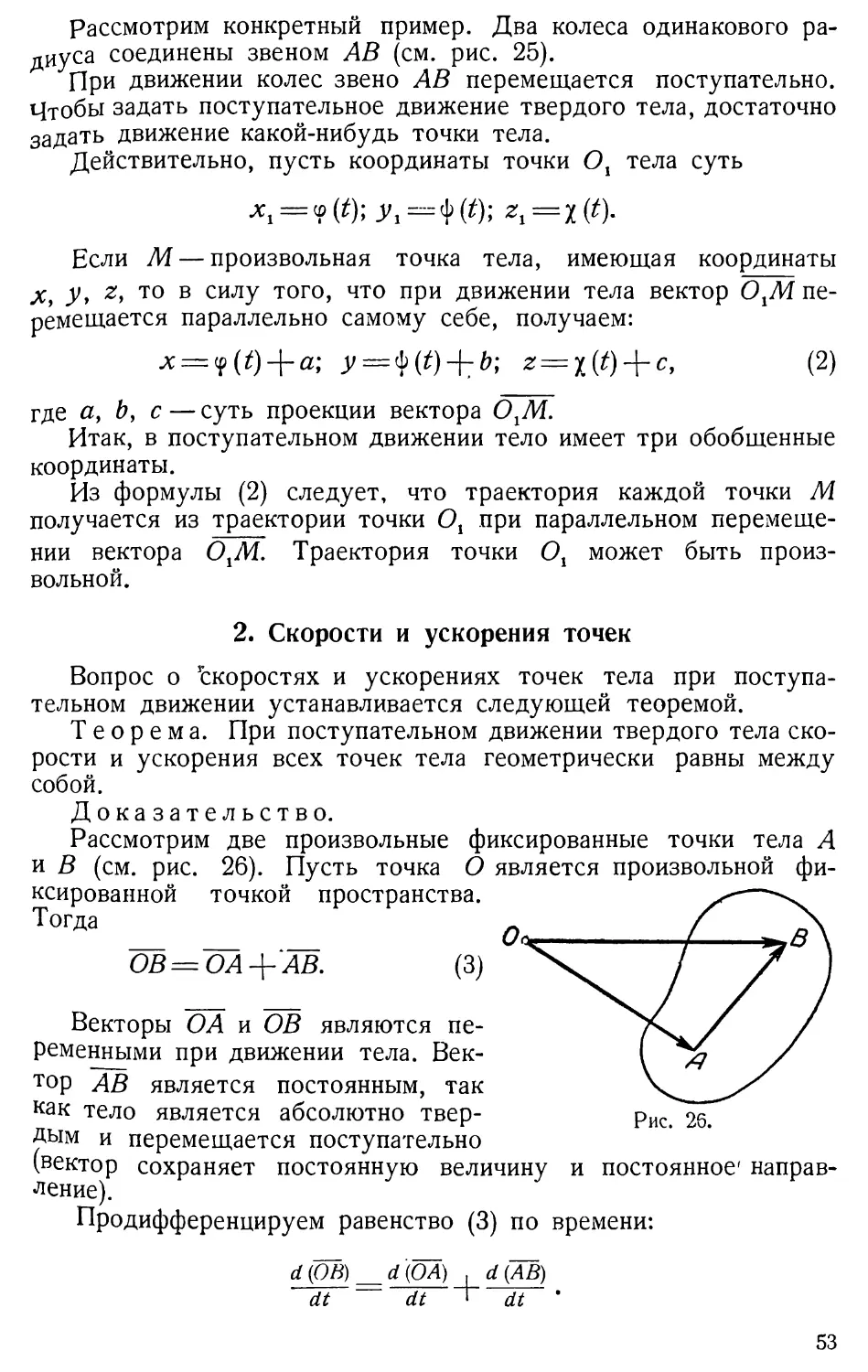
2. Скорости и ускорения точек 5$
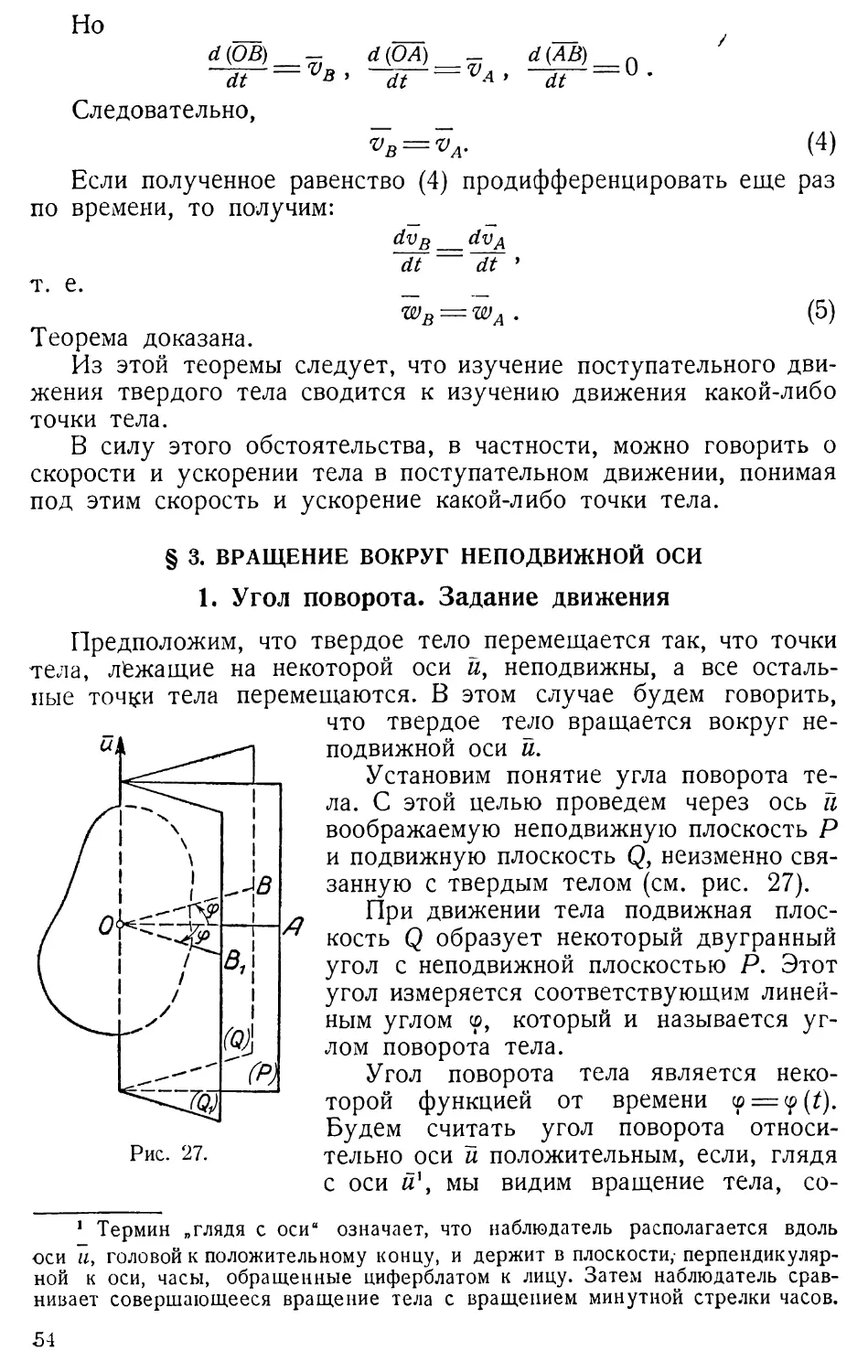
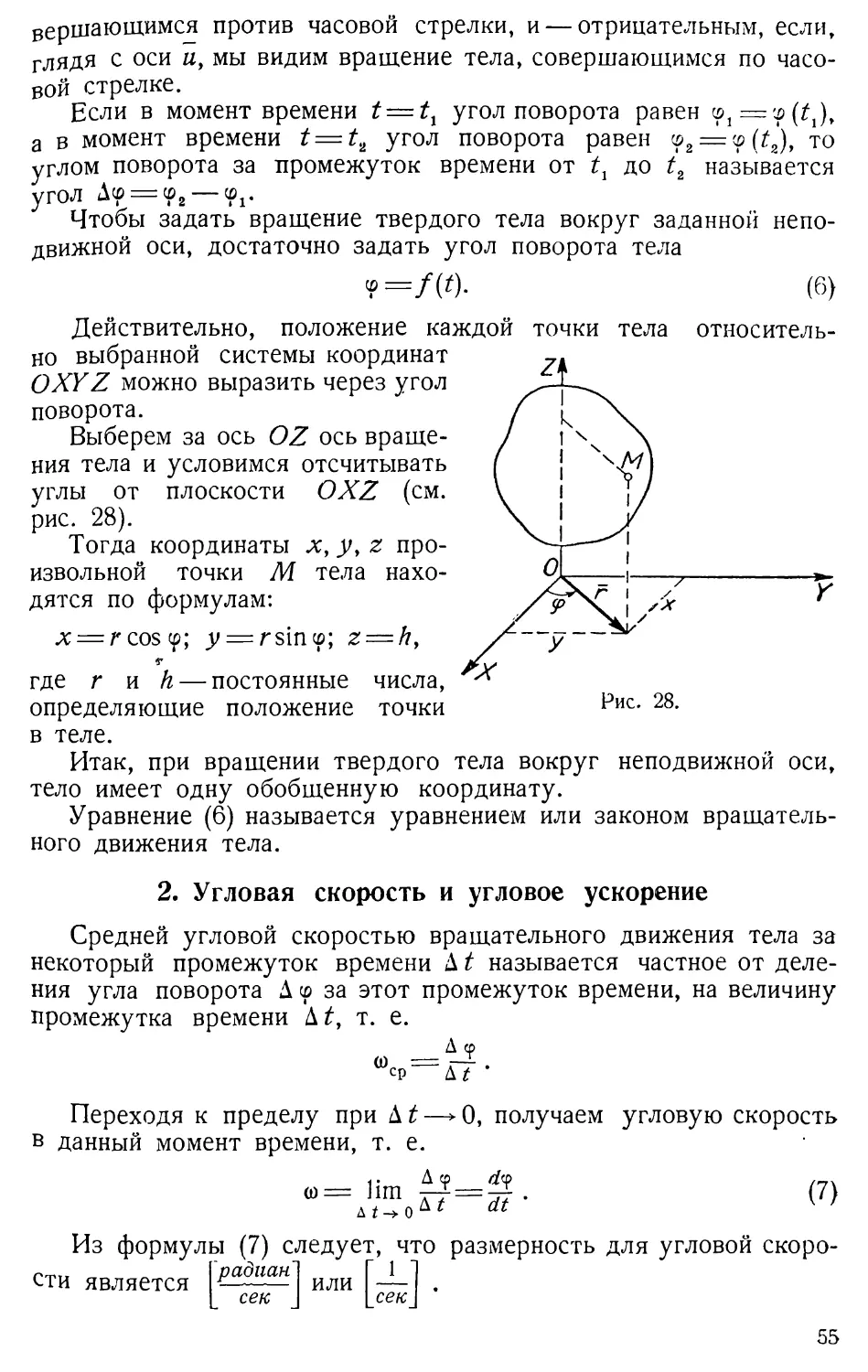
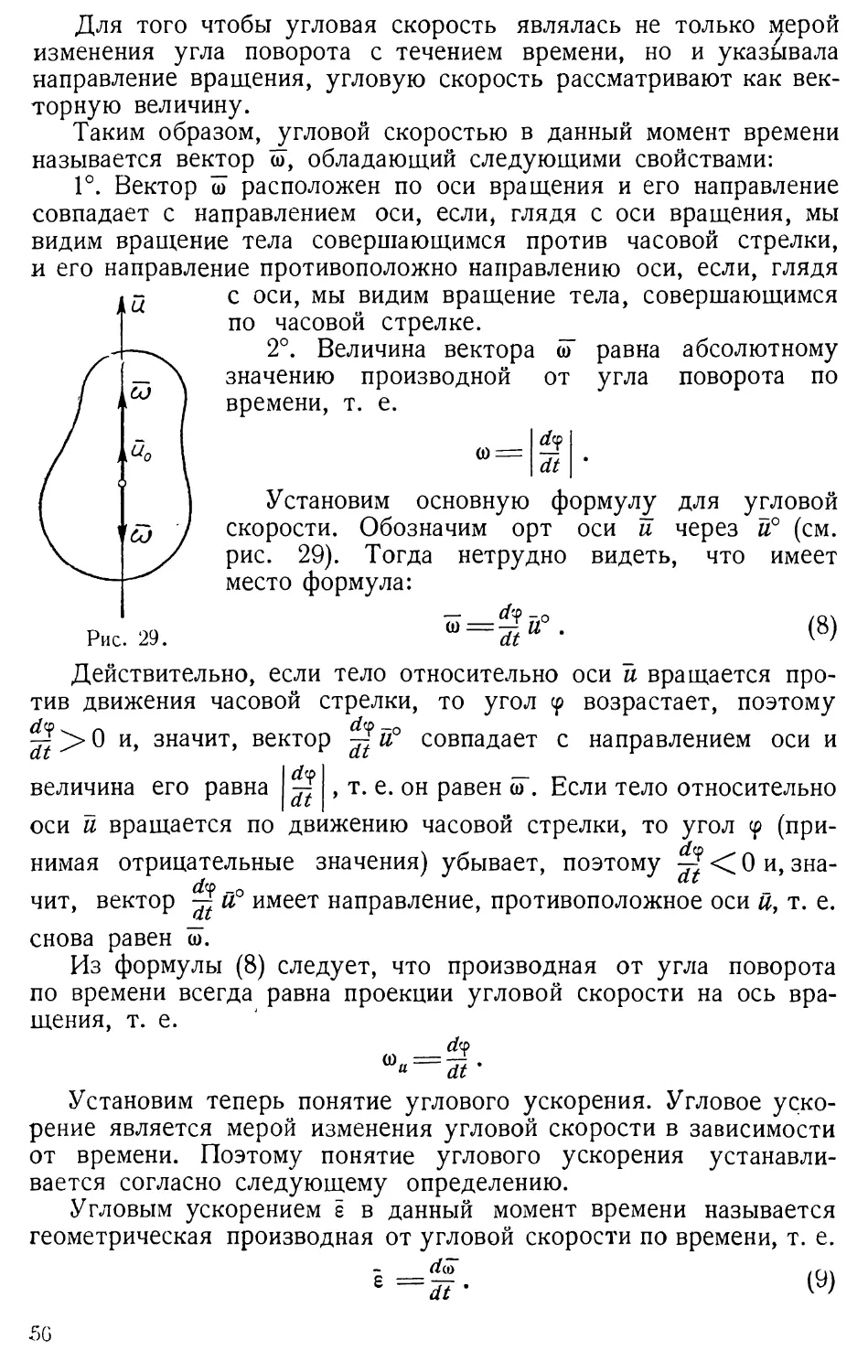
§ 3. Вращение вокруг неподвижной оси 54
1. Угол поворота. Задание движения —
1* а
2. Угловая скорость и угловое ускорение 55
3. Формулы для линейных скоростей и ускорений ..../.... 57
4. Частные случаи вращения 59
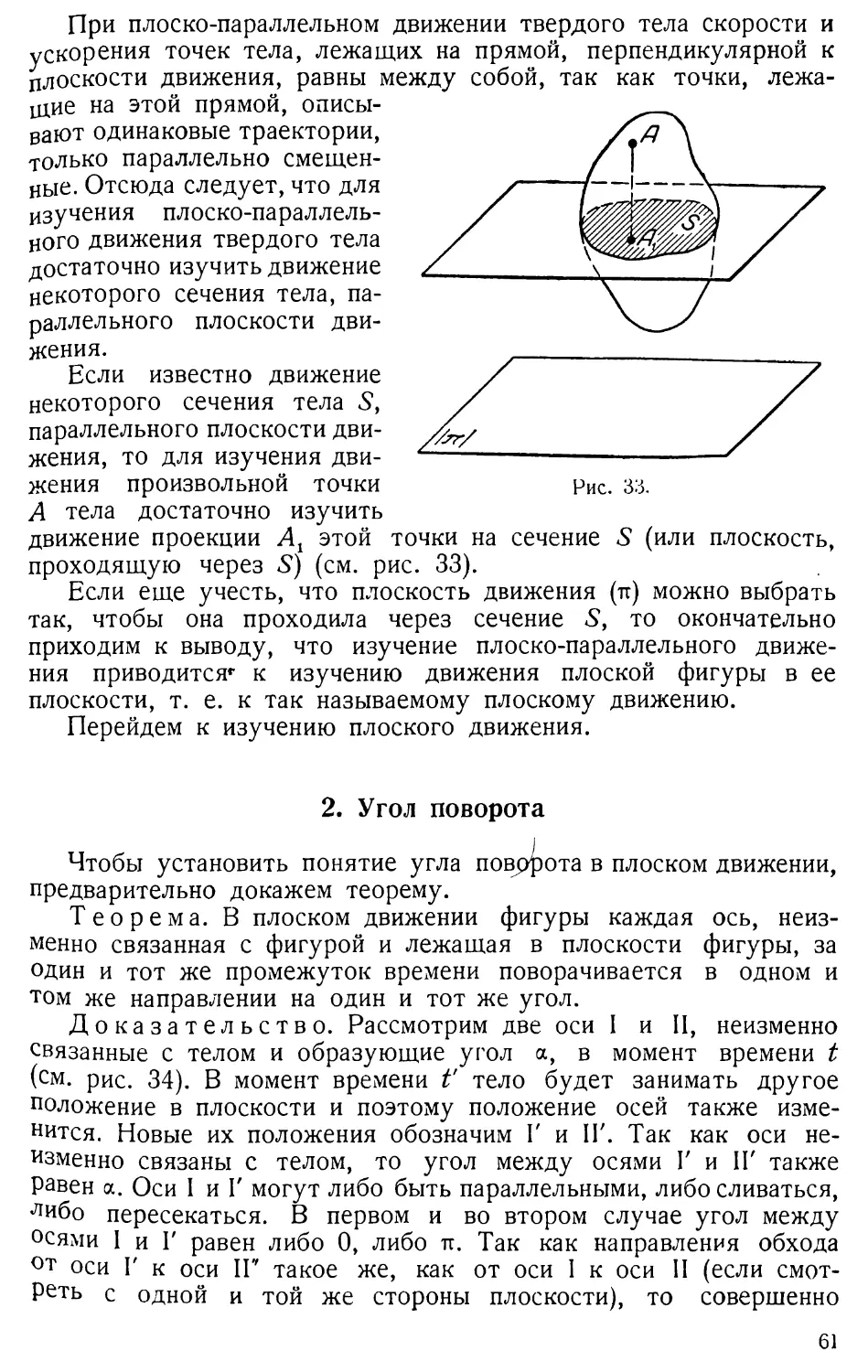
§ 4. Плоско-параллельное движение 60
1. Основные понятия —
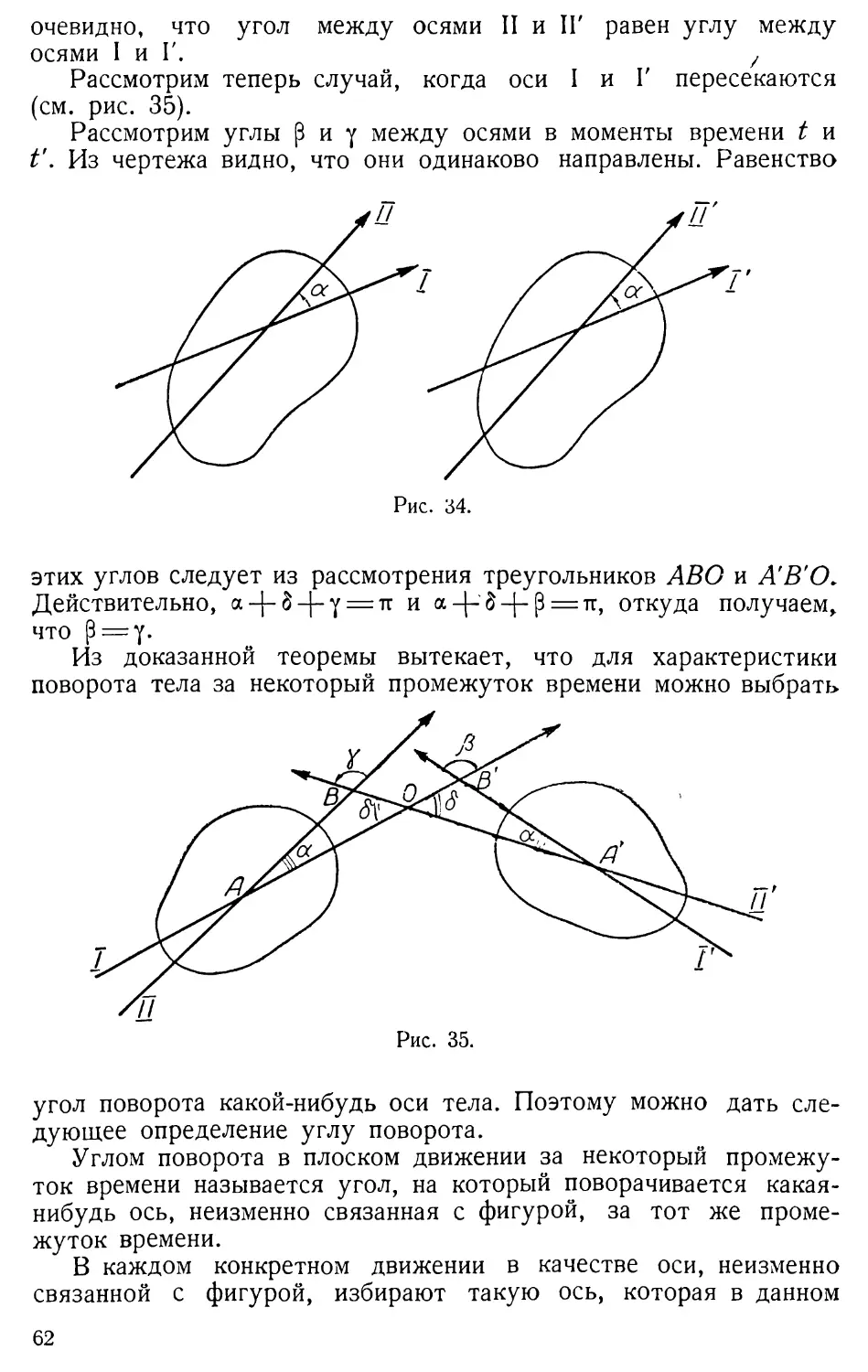
2. Угол поворота 61
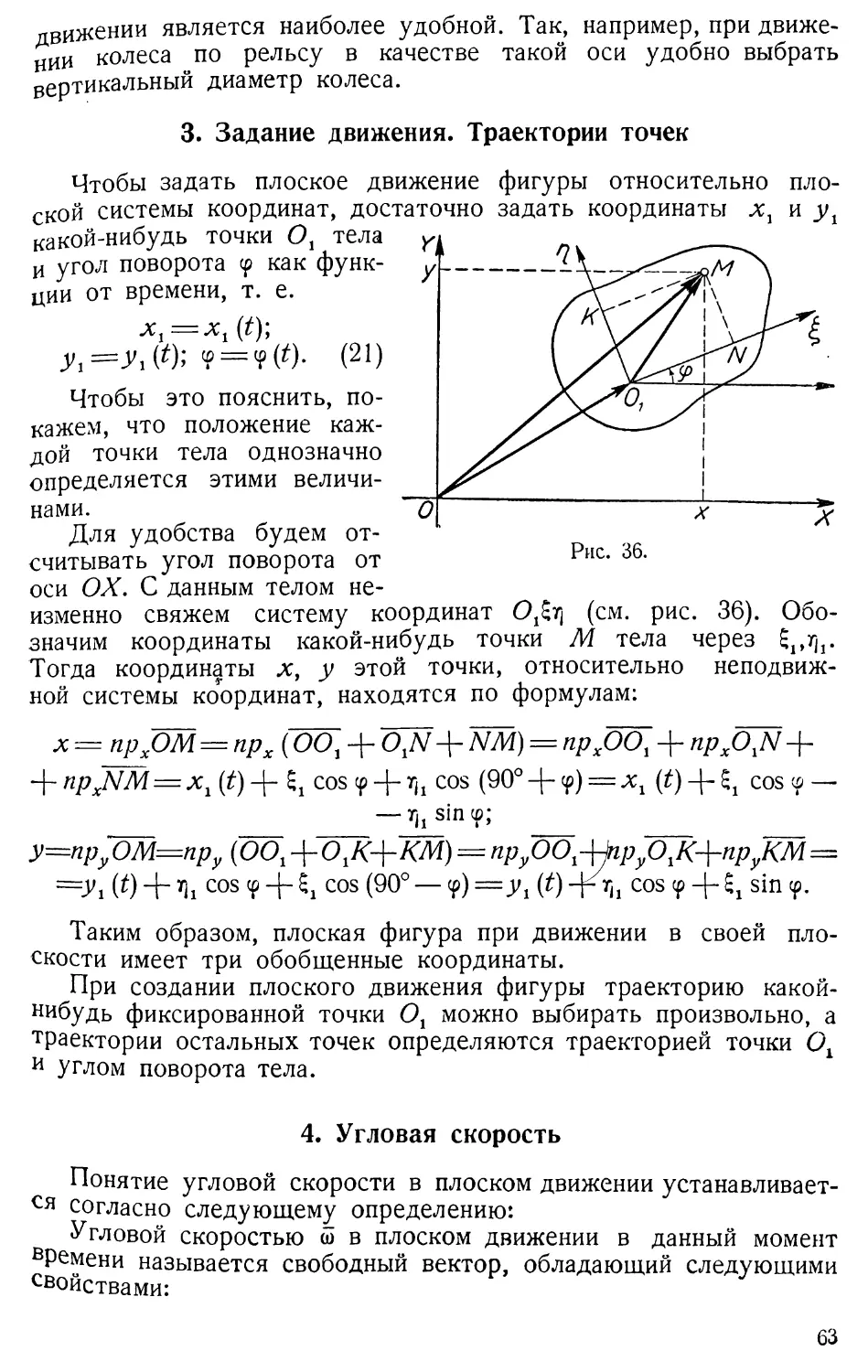
3. Задание движения. Траектории точек 63
4. Угловая скорость —
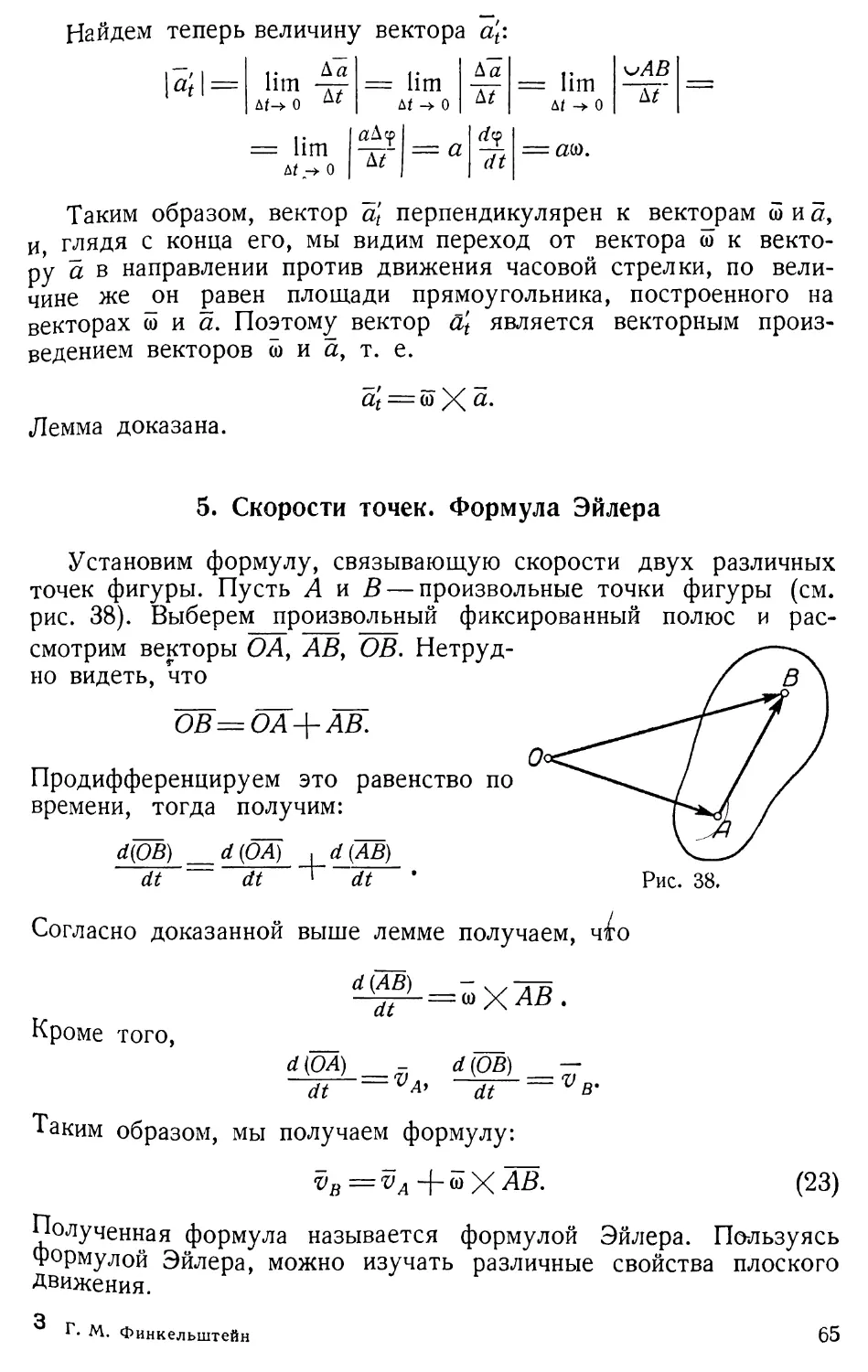
5. Скорости точек. Формула Эйлера 65
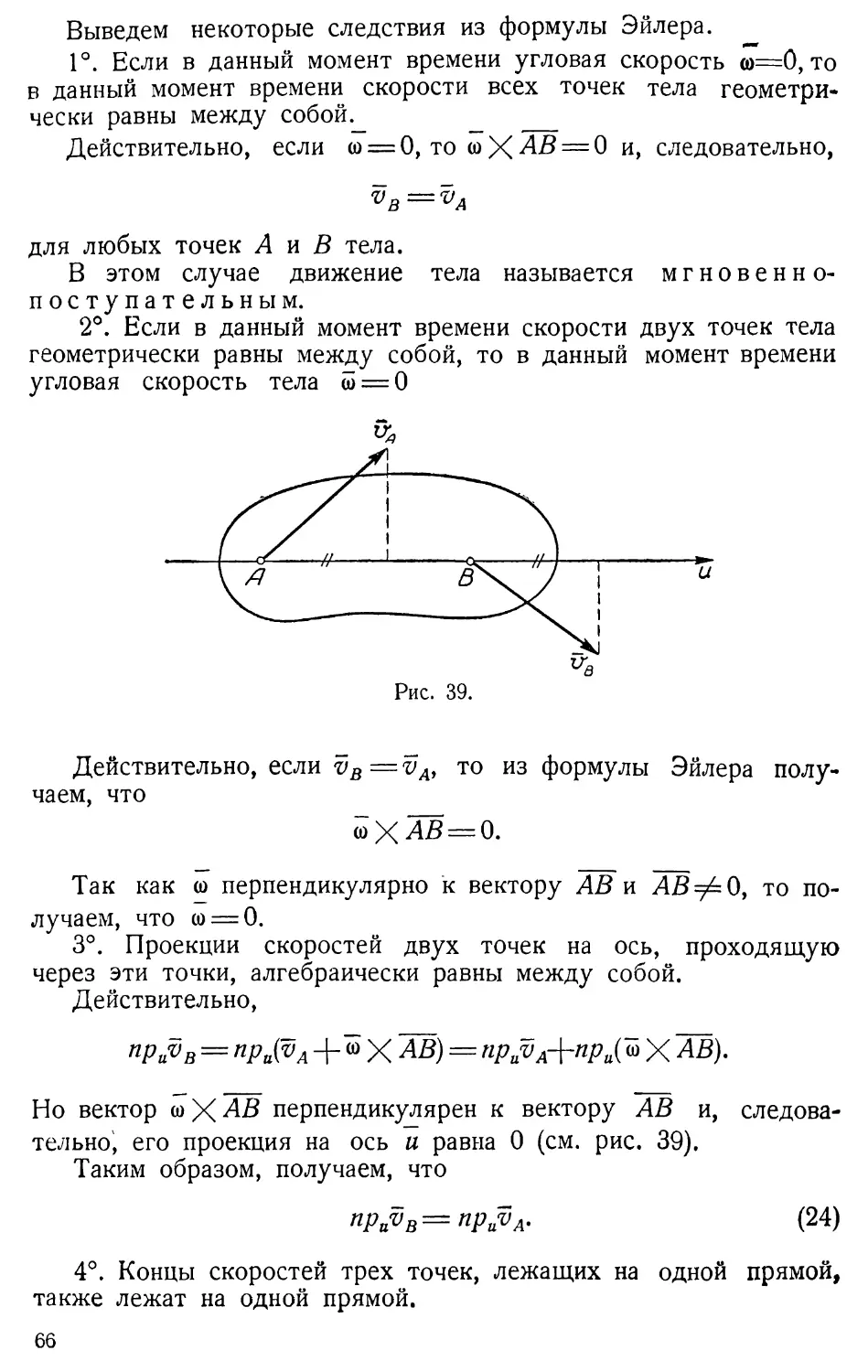
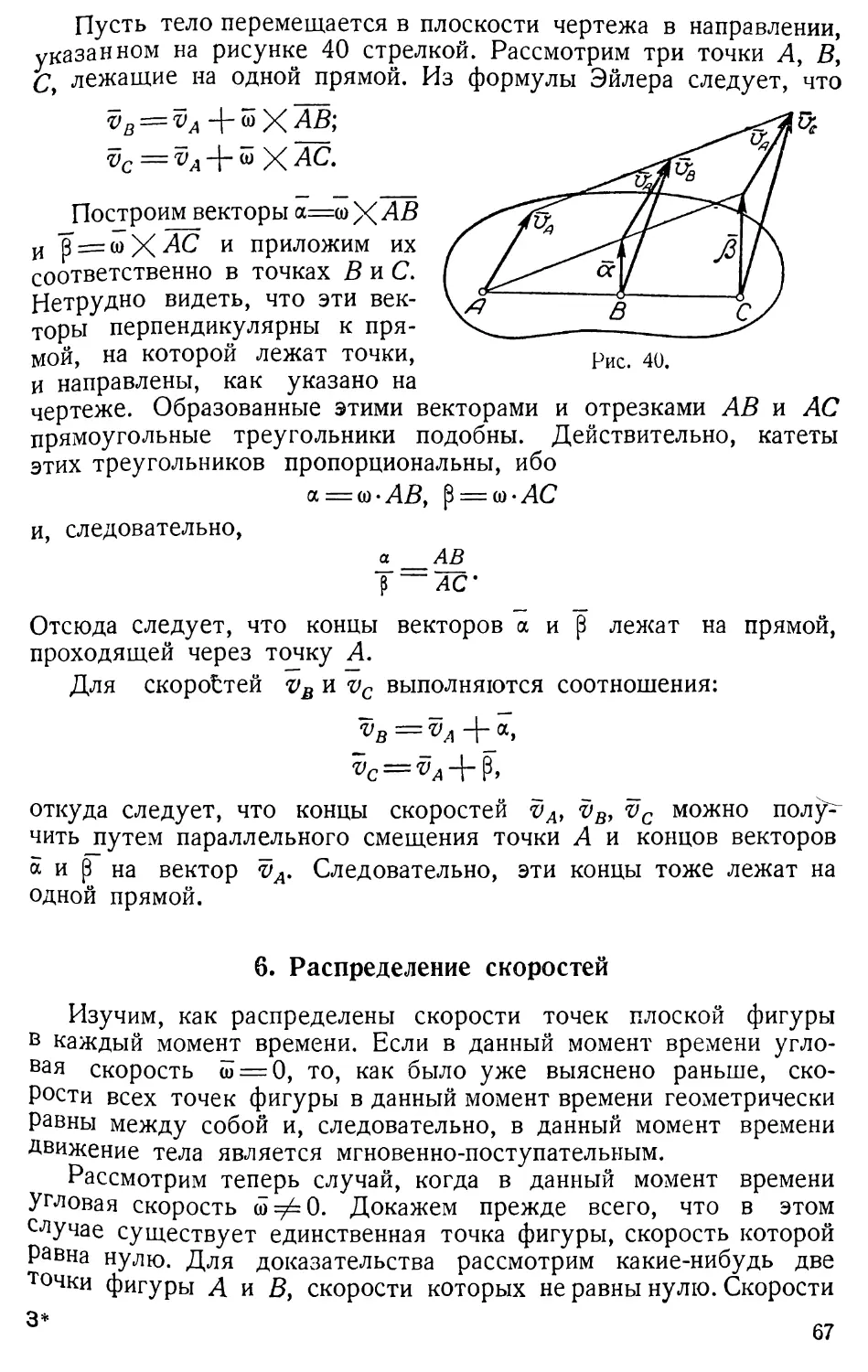
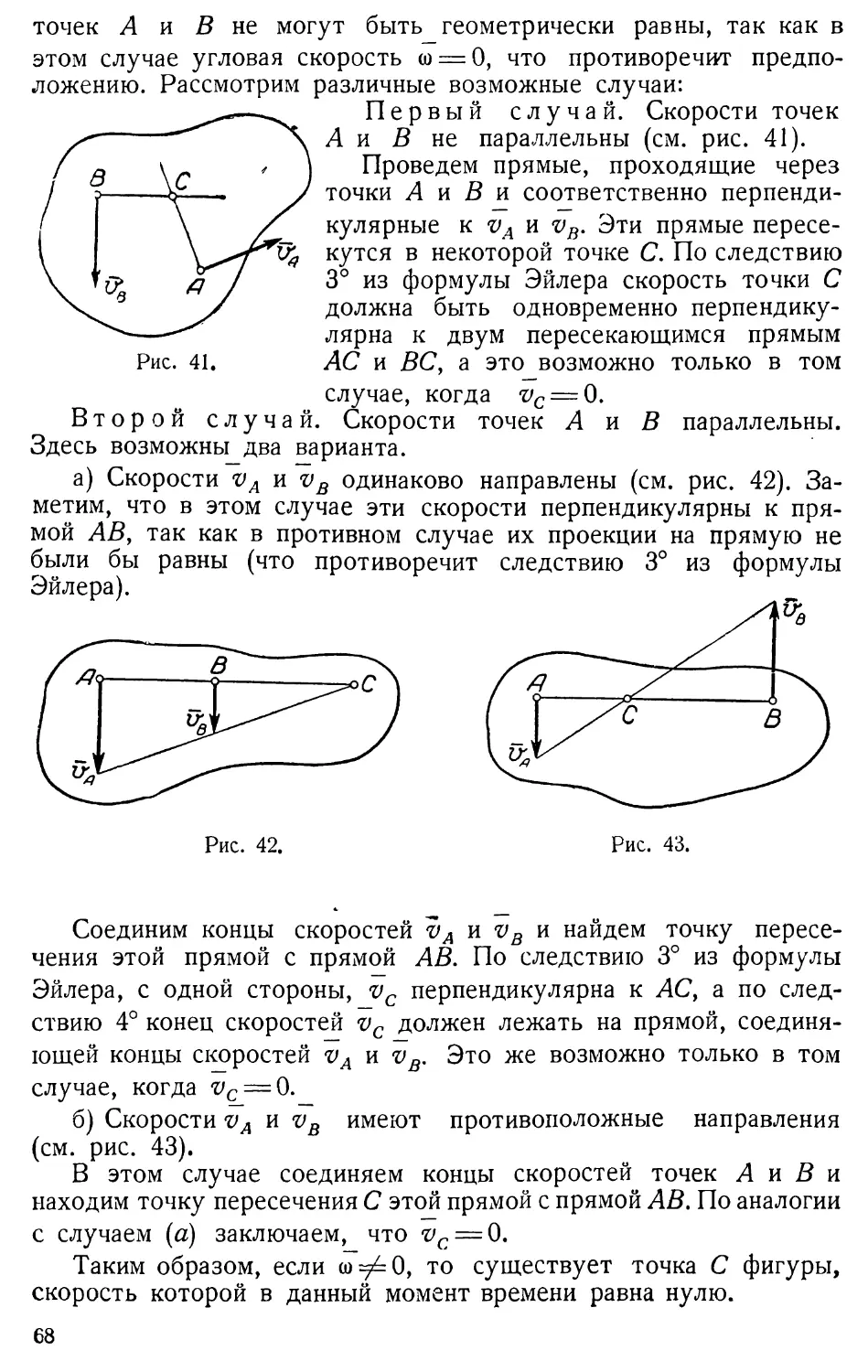
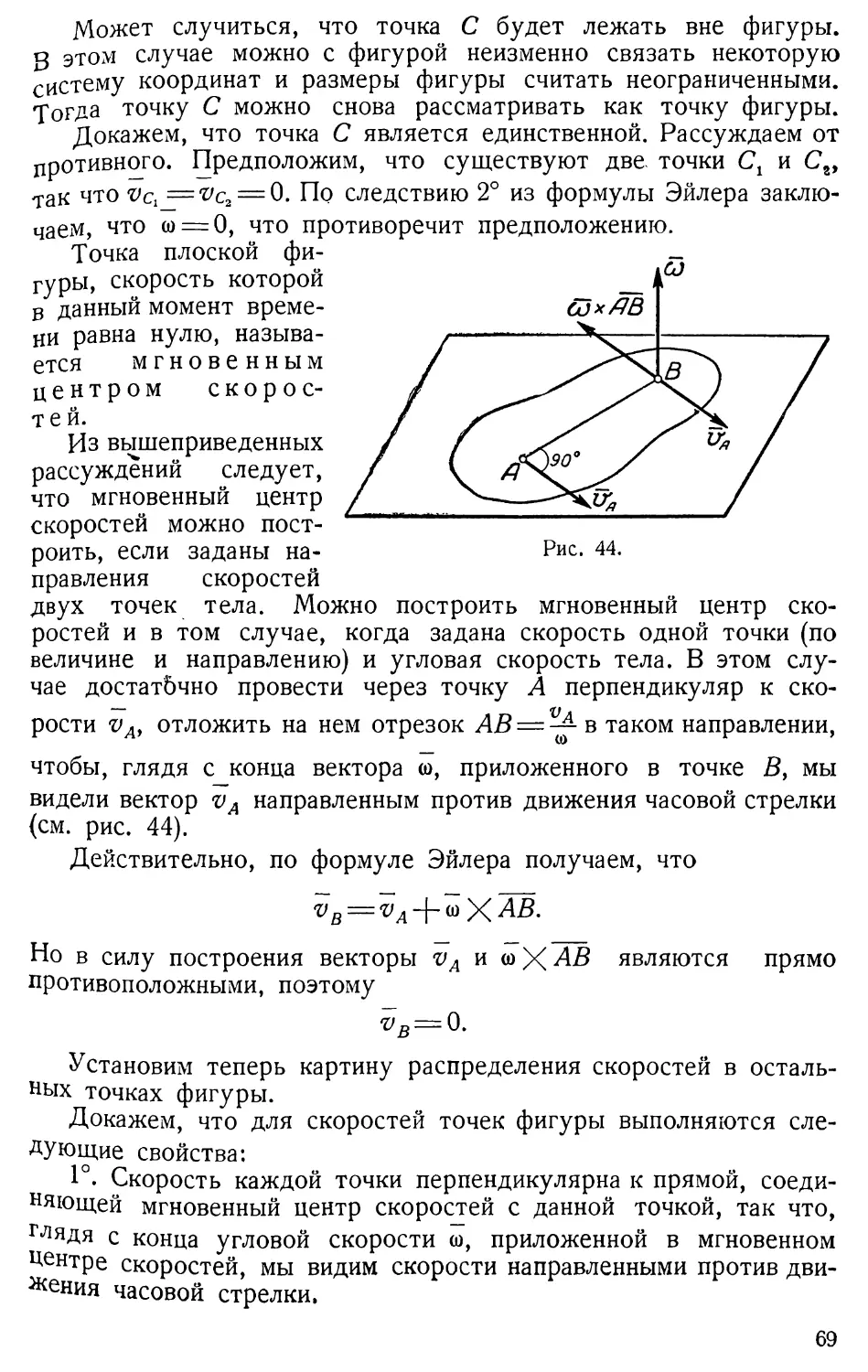
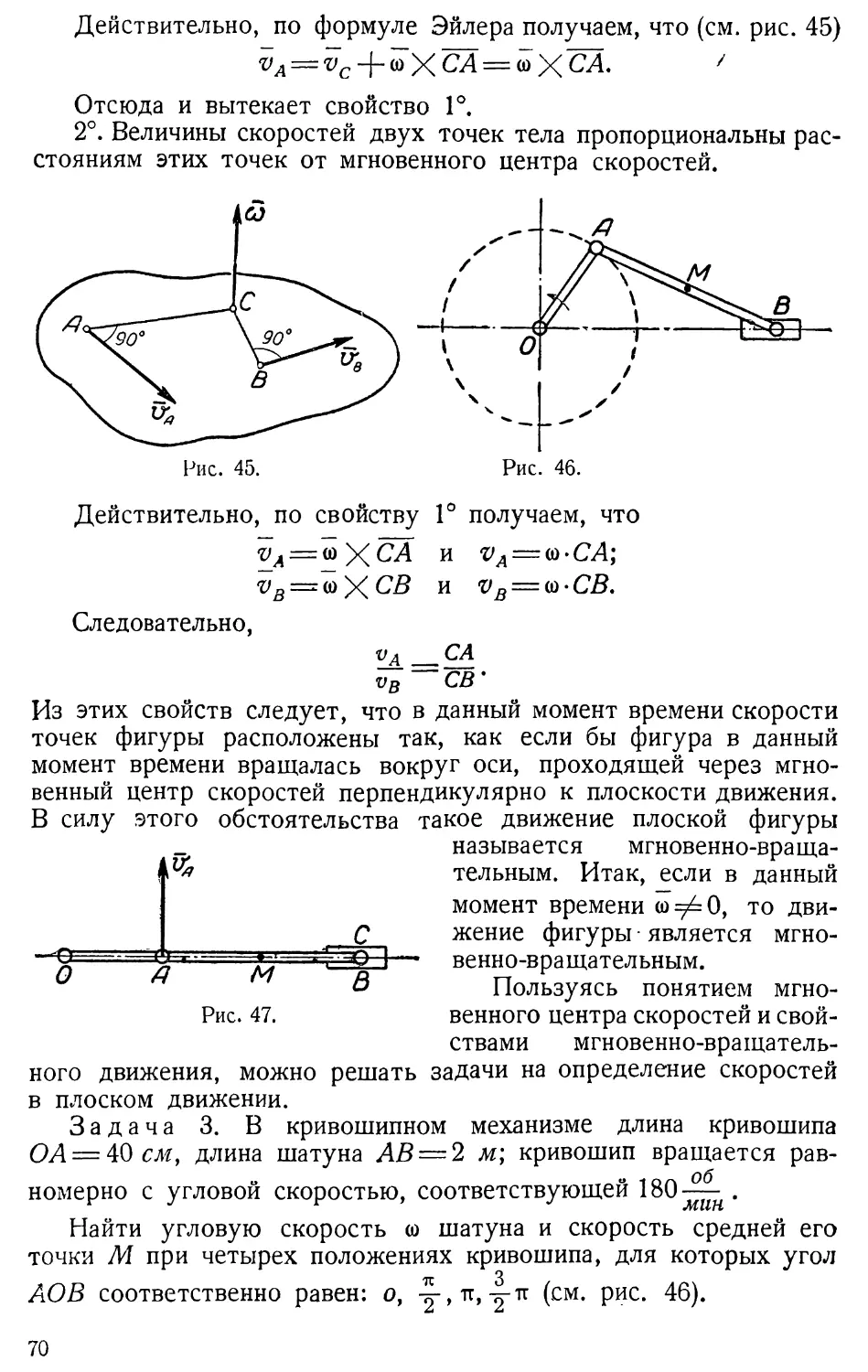
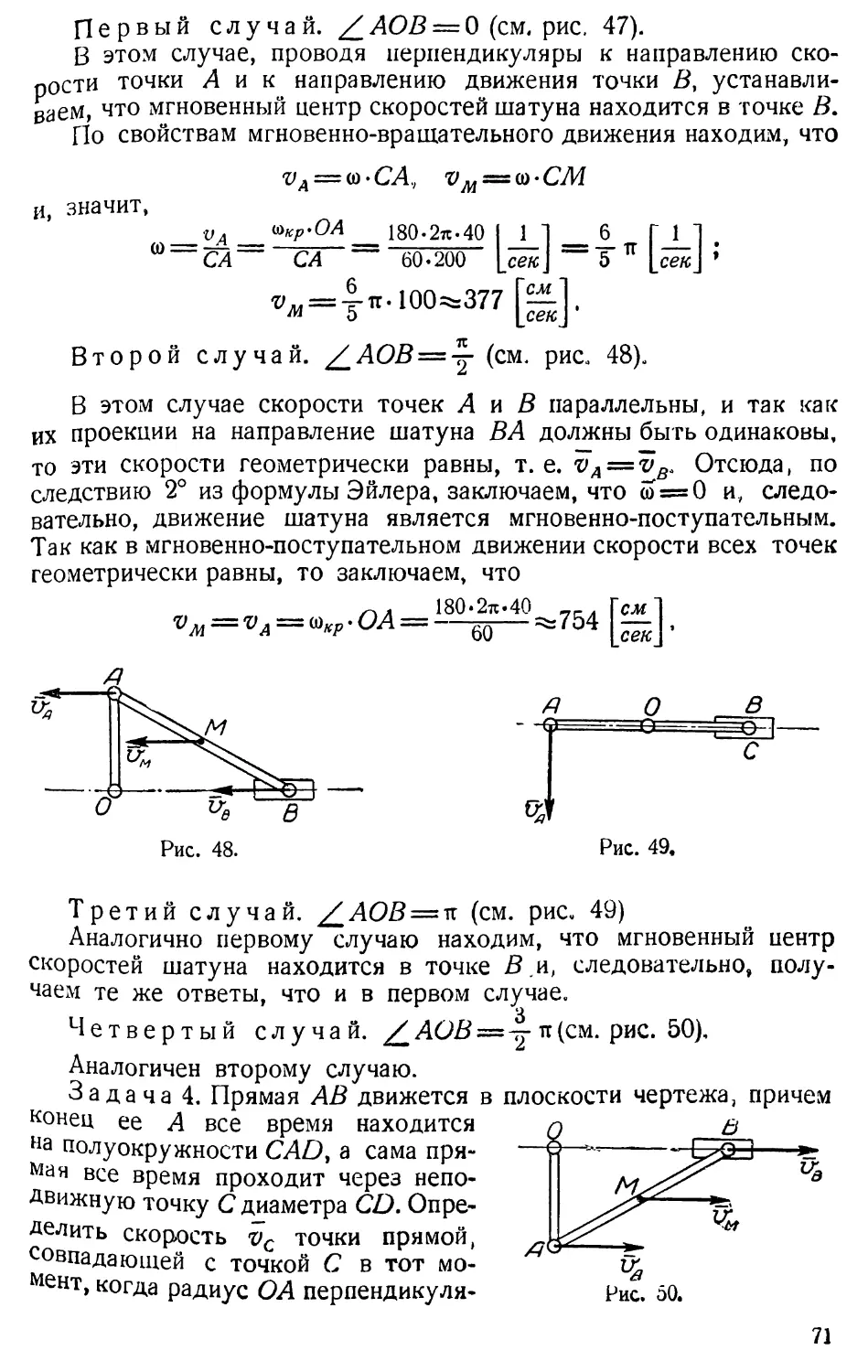
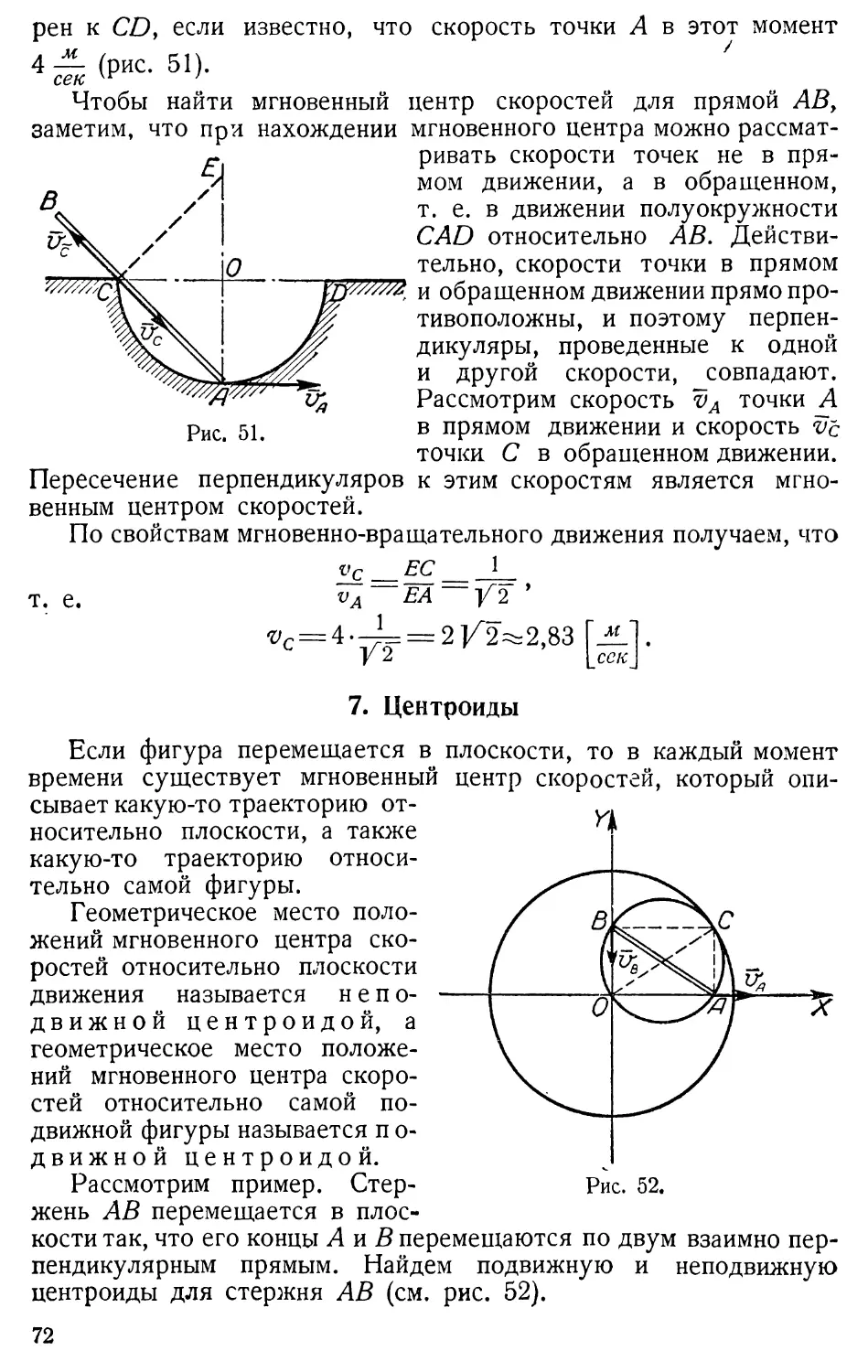
6. Распределение скоростей 67
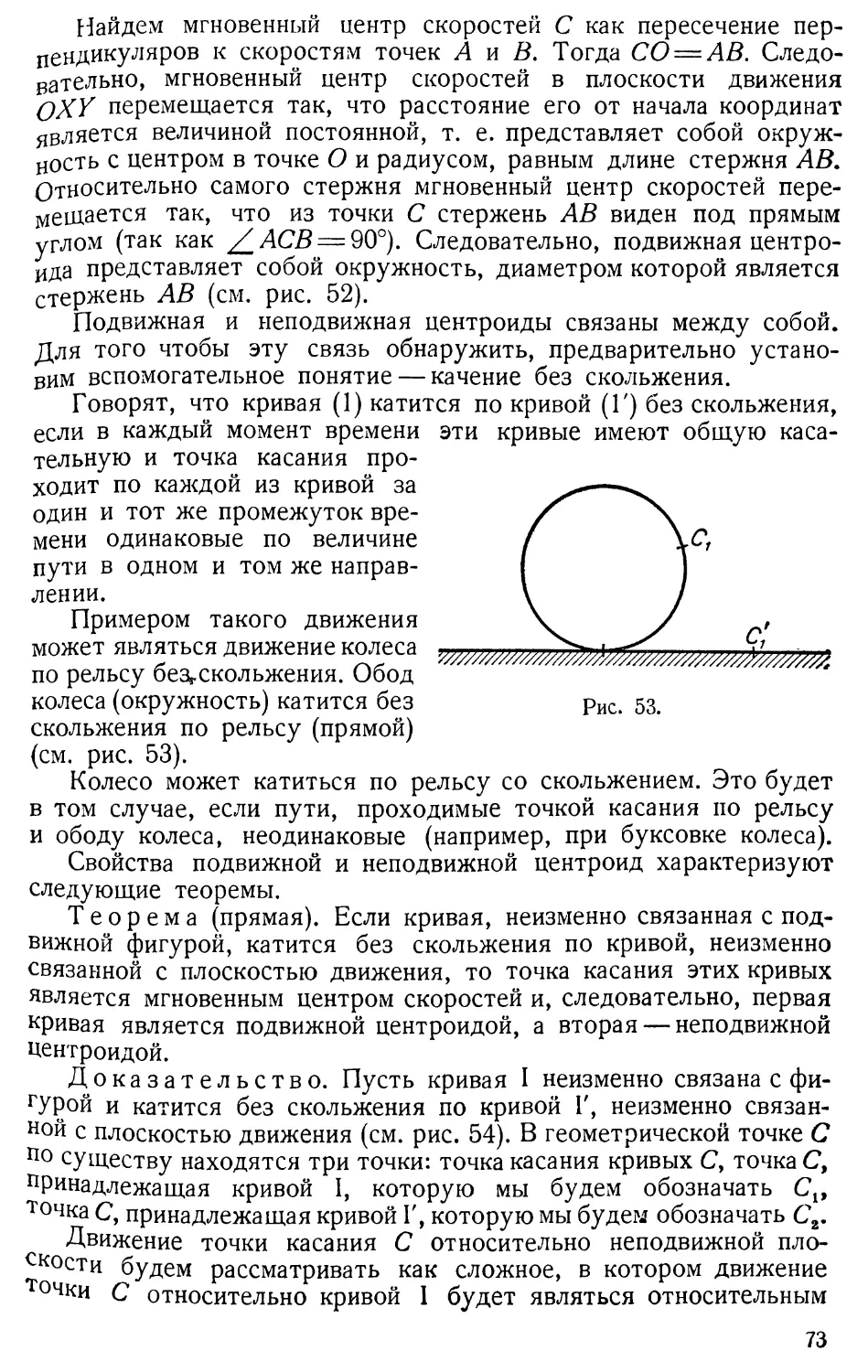
7. Центроиды 72
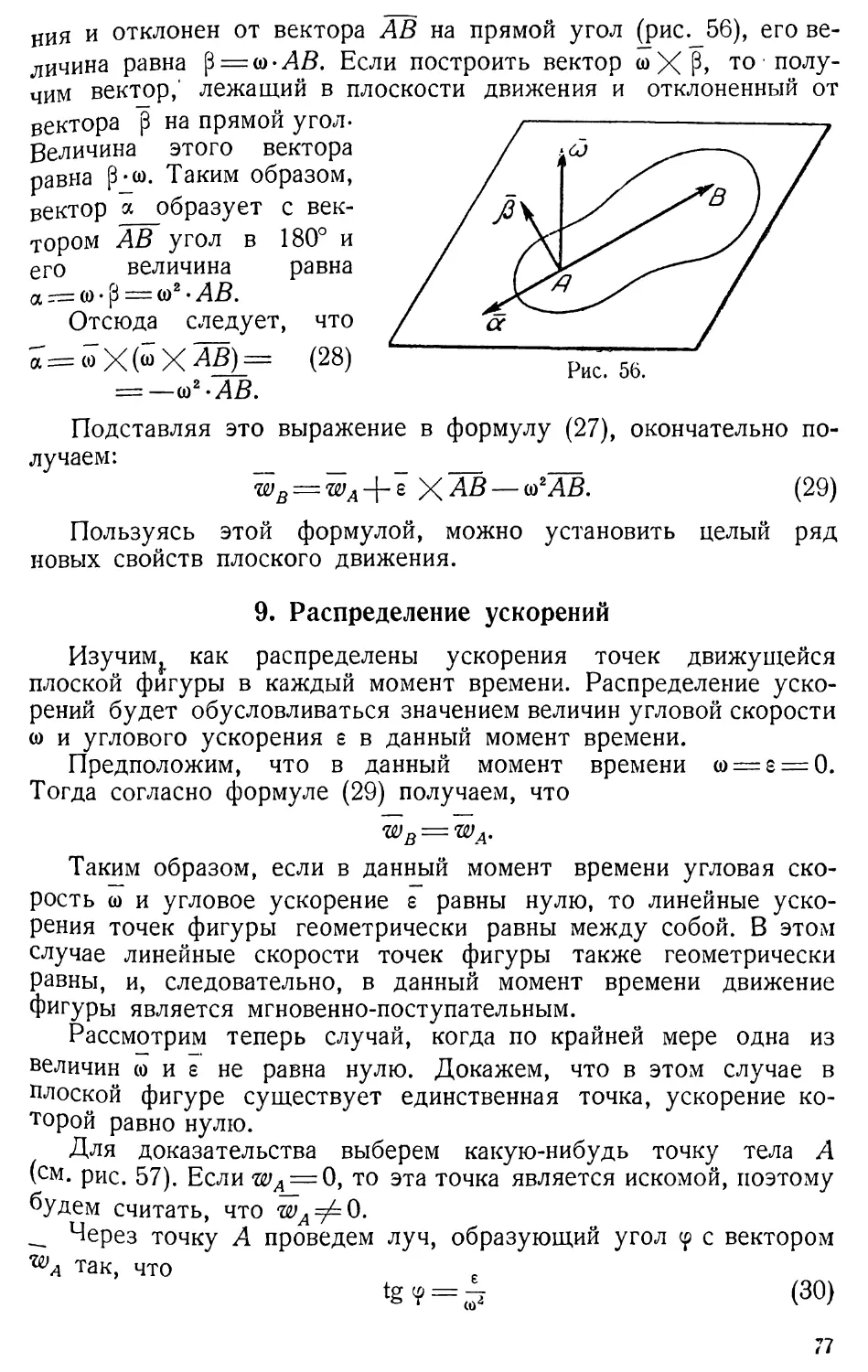
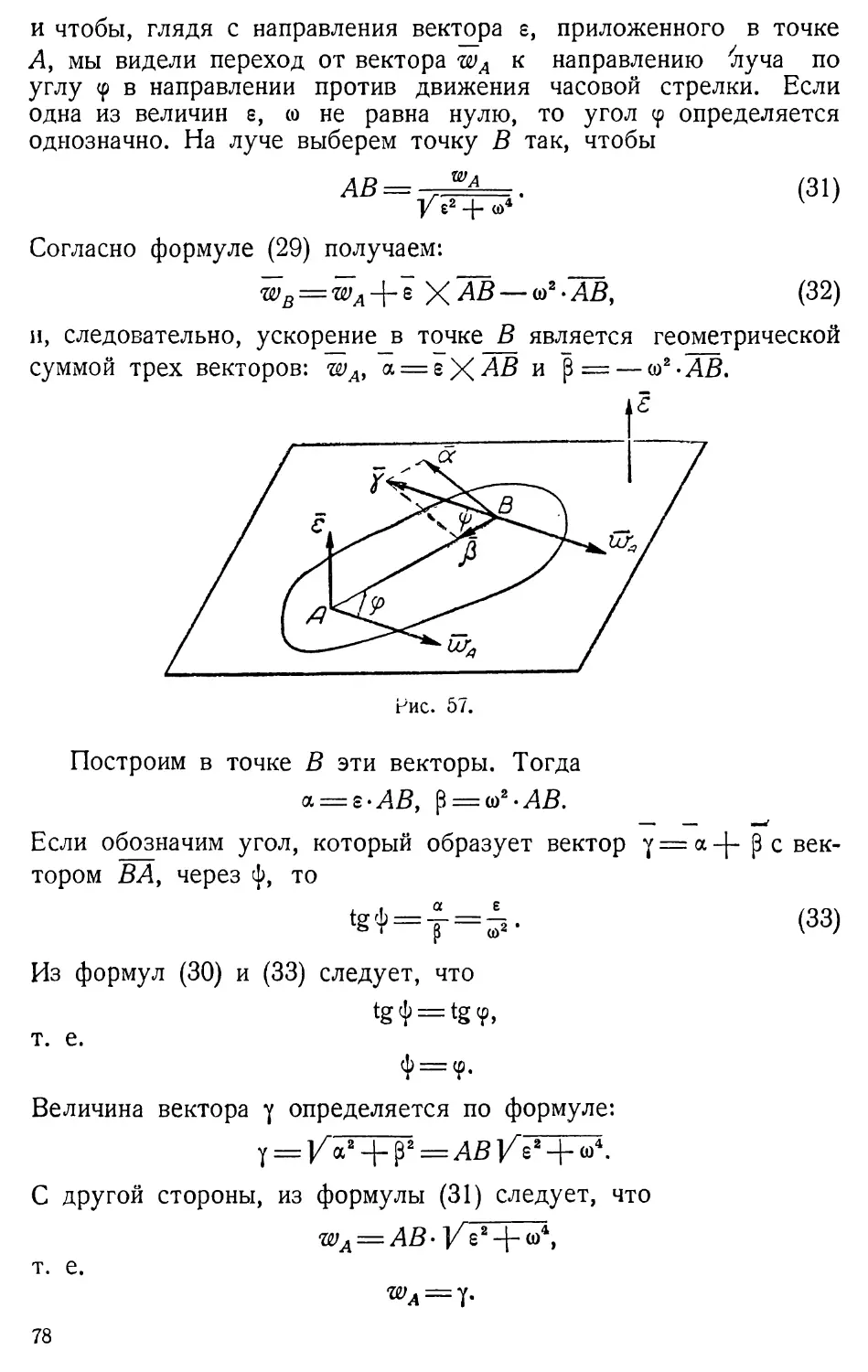
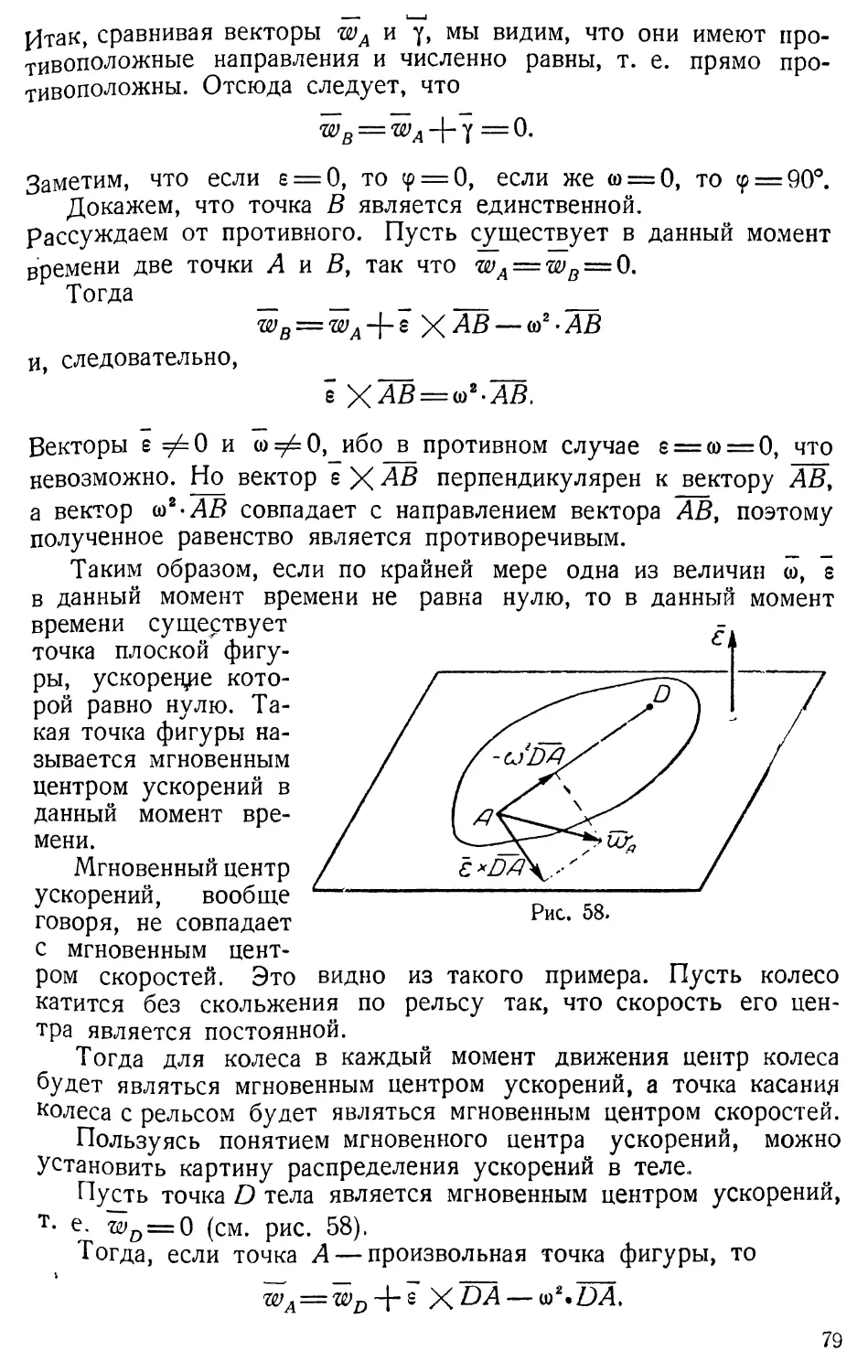
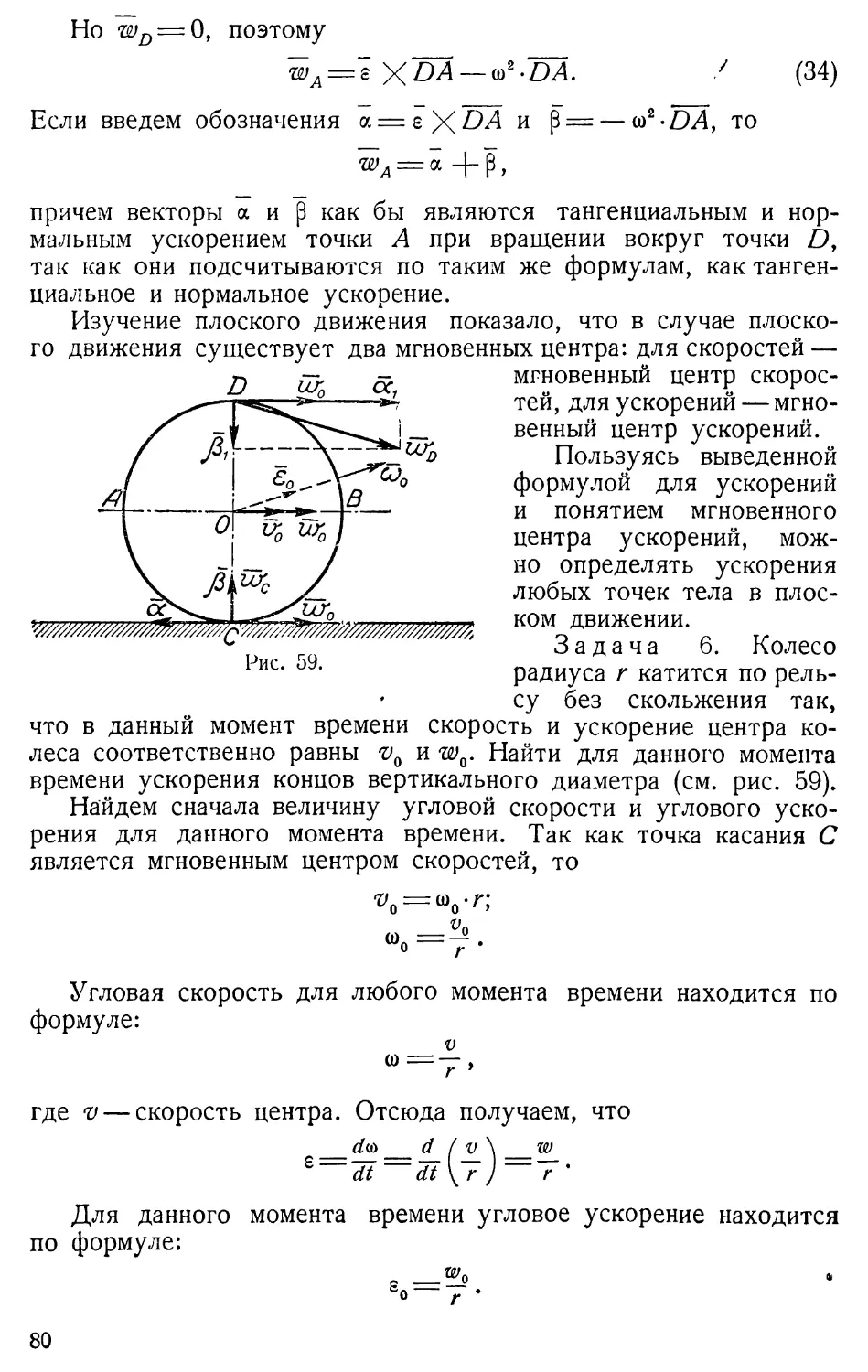
8. Ускорение в плоском движении 76
9. Распределение ускорений 77
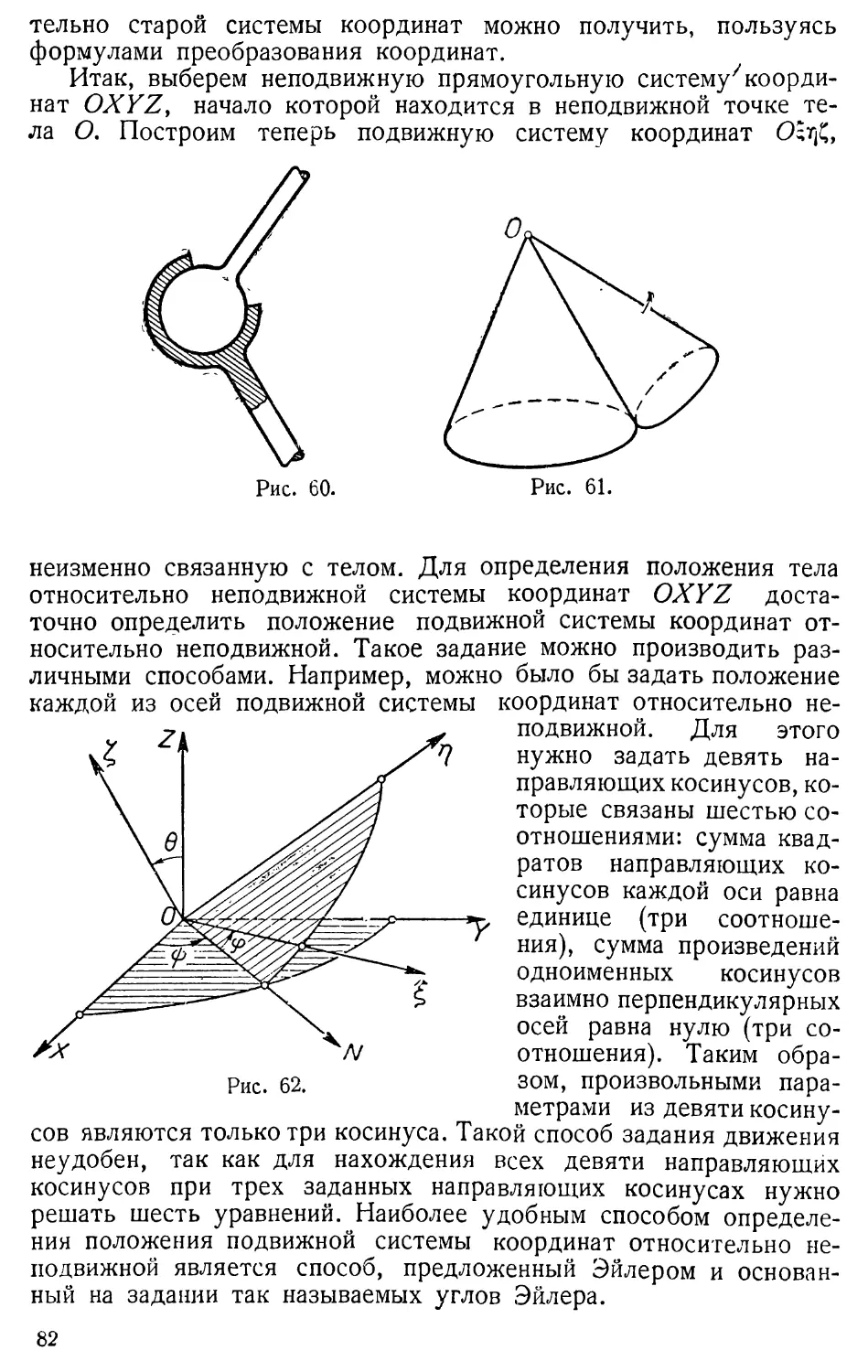
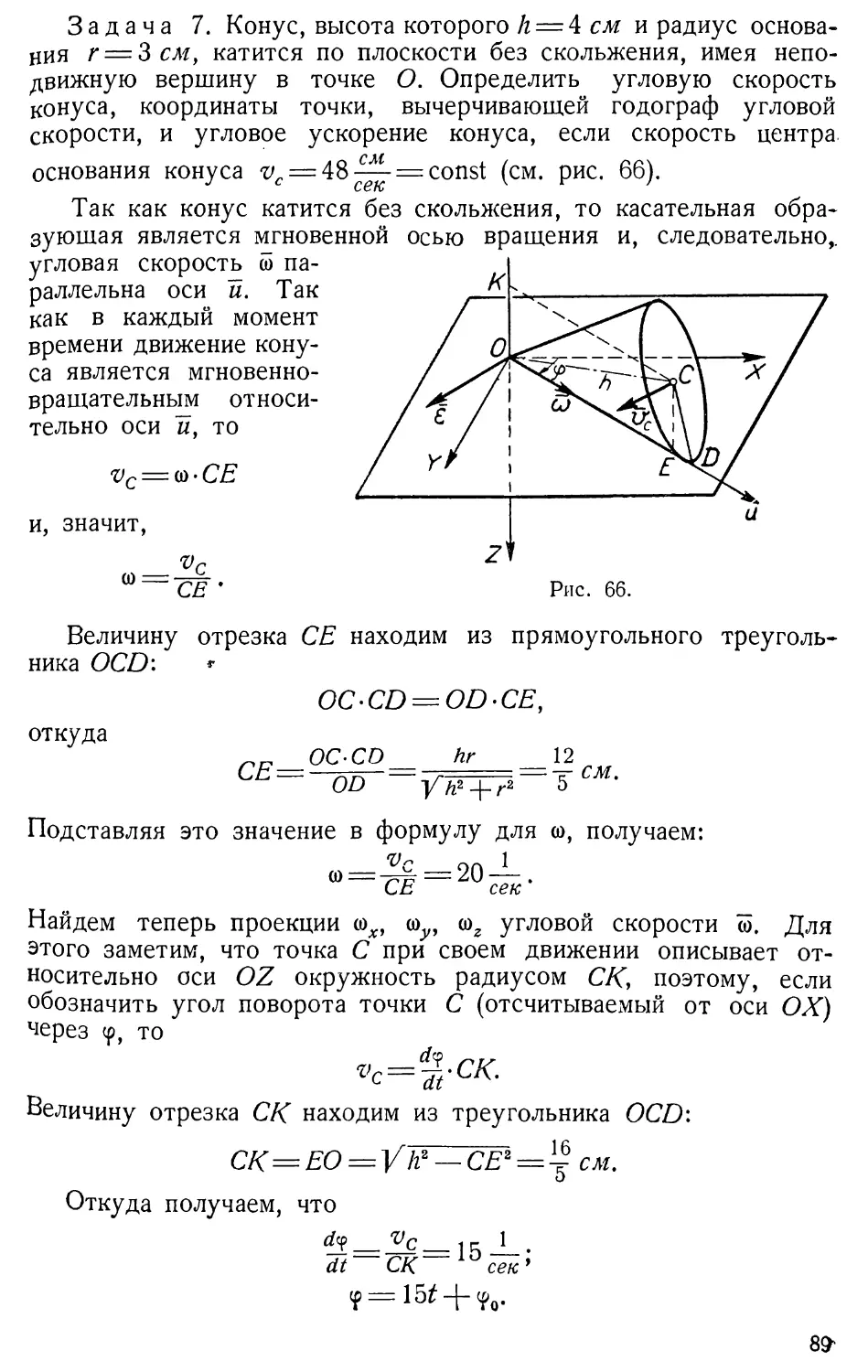
§ 5. Движение твердого тела вокруг неподвижной точки ...... 81
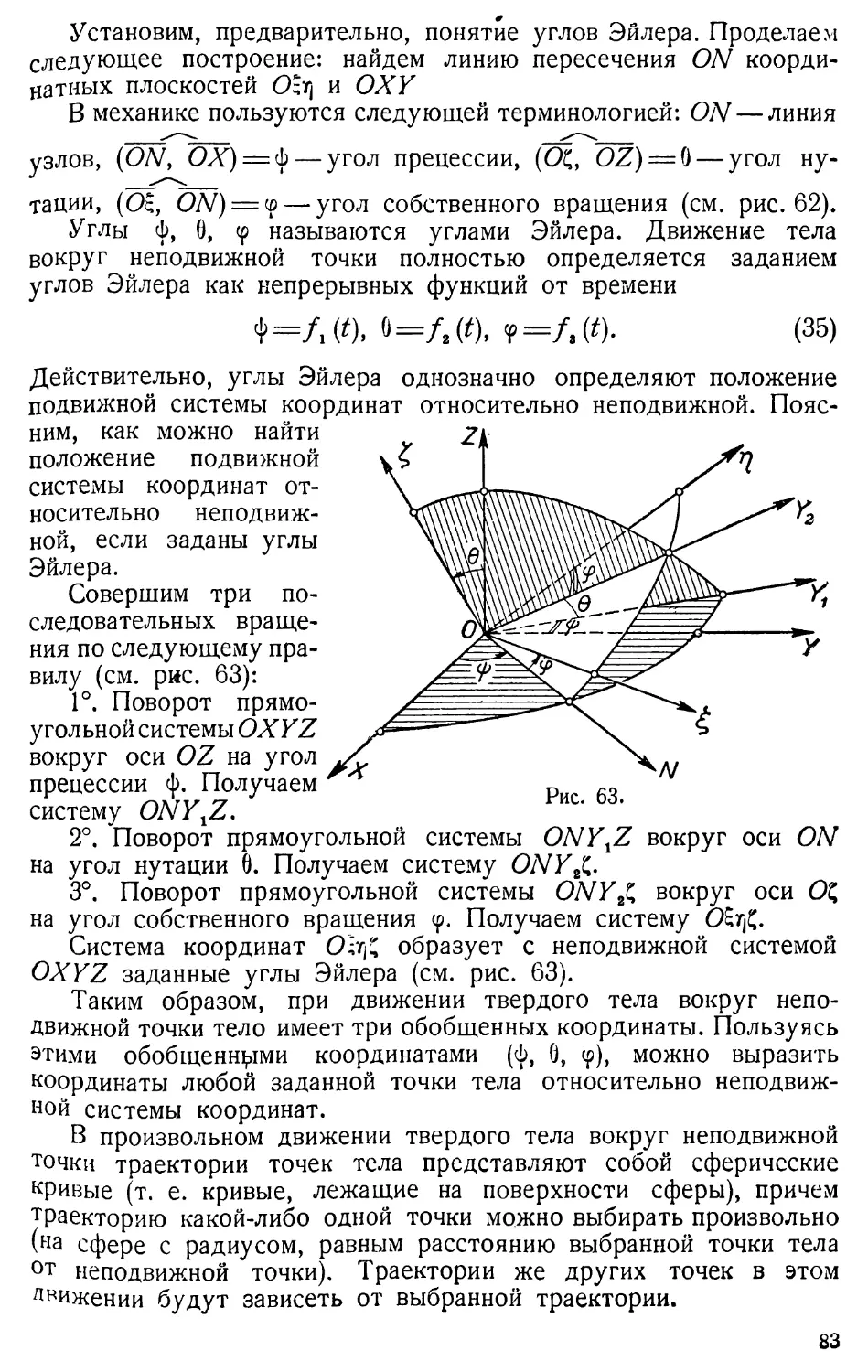
1. Задание движения. Углы Эйлера.
Траектории точек —
2. Линейные скорости. Угловая скорость и угловое ускорение.
Линейные ускорения 84
3. Распределение скоростей 88
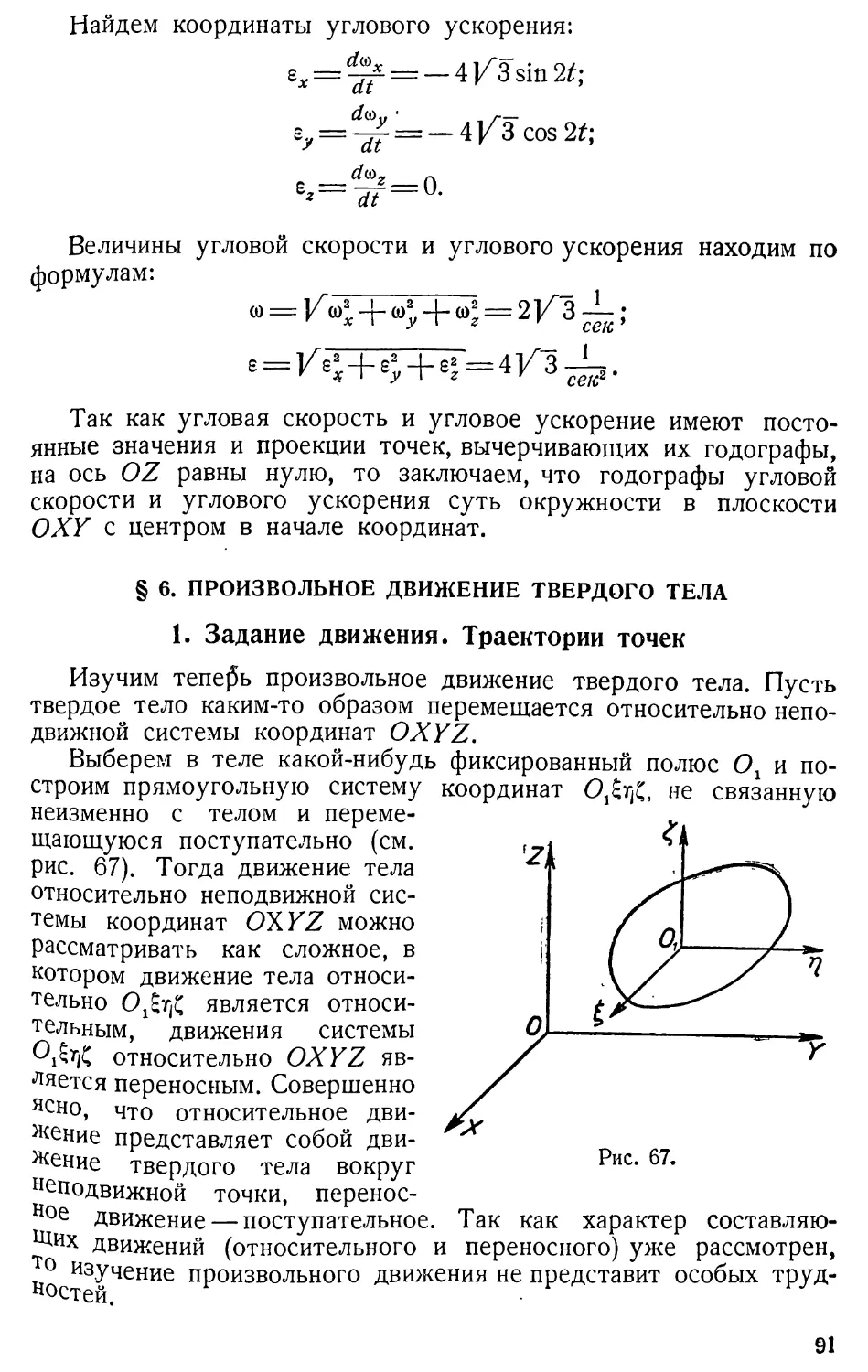
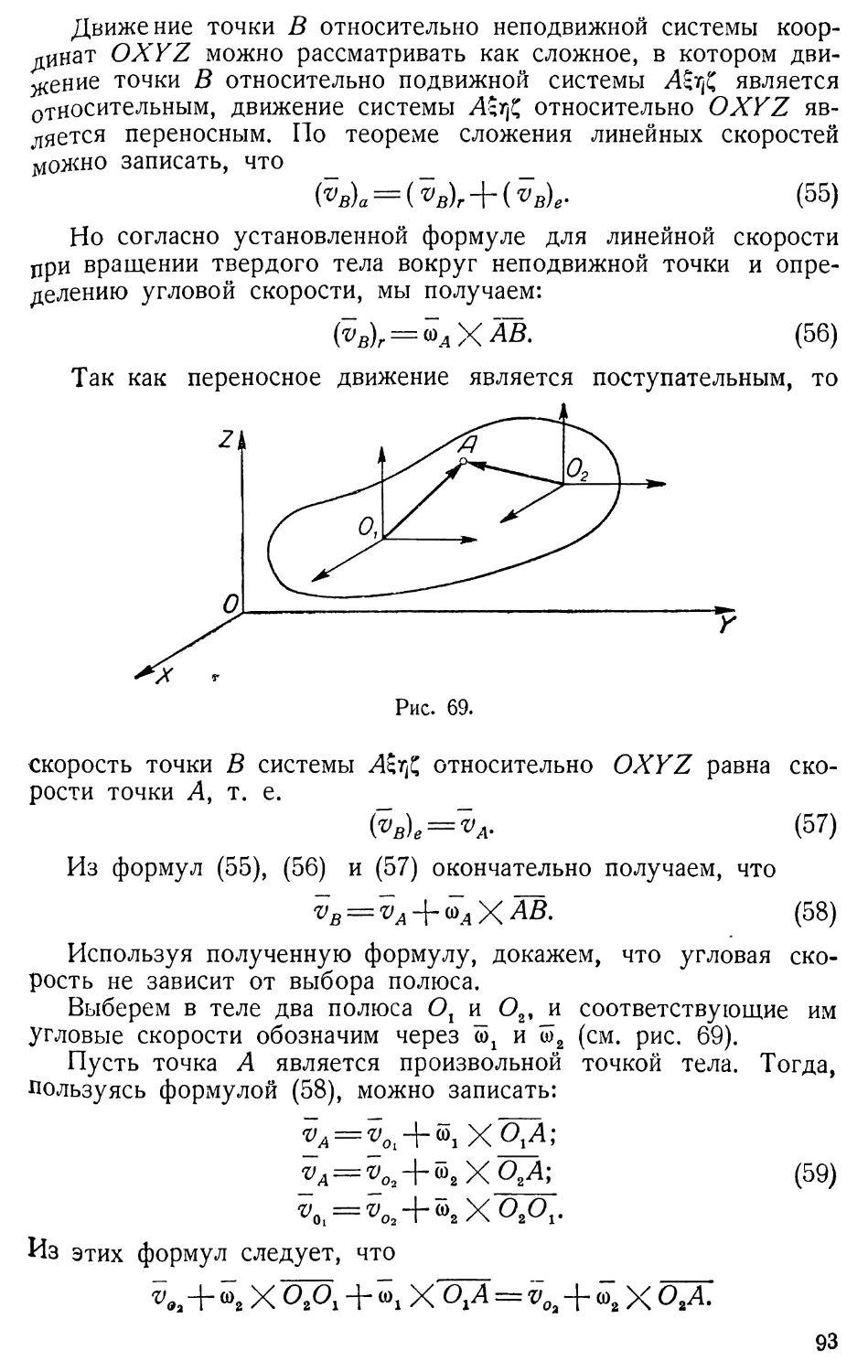
§ 6. Произвольное движение твердого тела 91
1. Задание движения. Траектории точек —
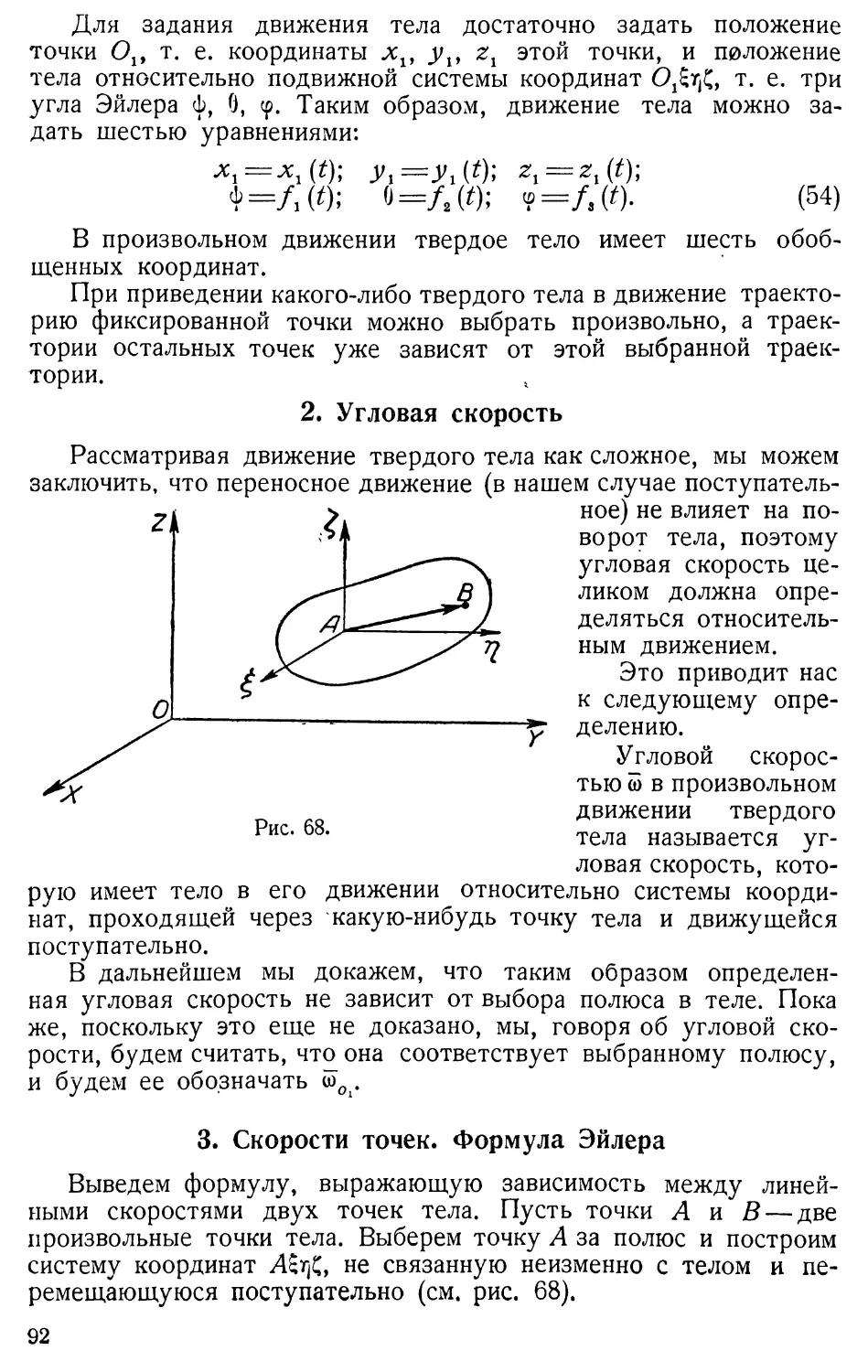
2. Угловая скорость 92
3. Скорости точек. Формула Эйлера —
4. Винтовое движение 95
5. Распределение скоростей 96
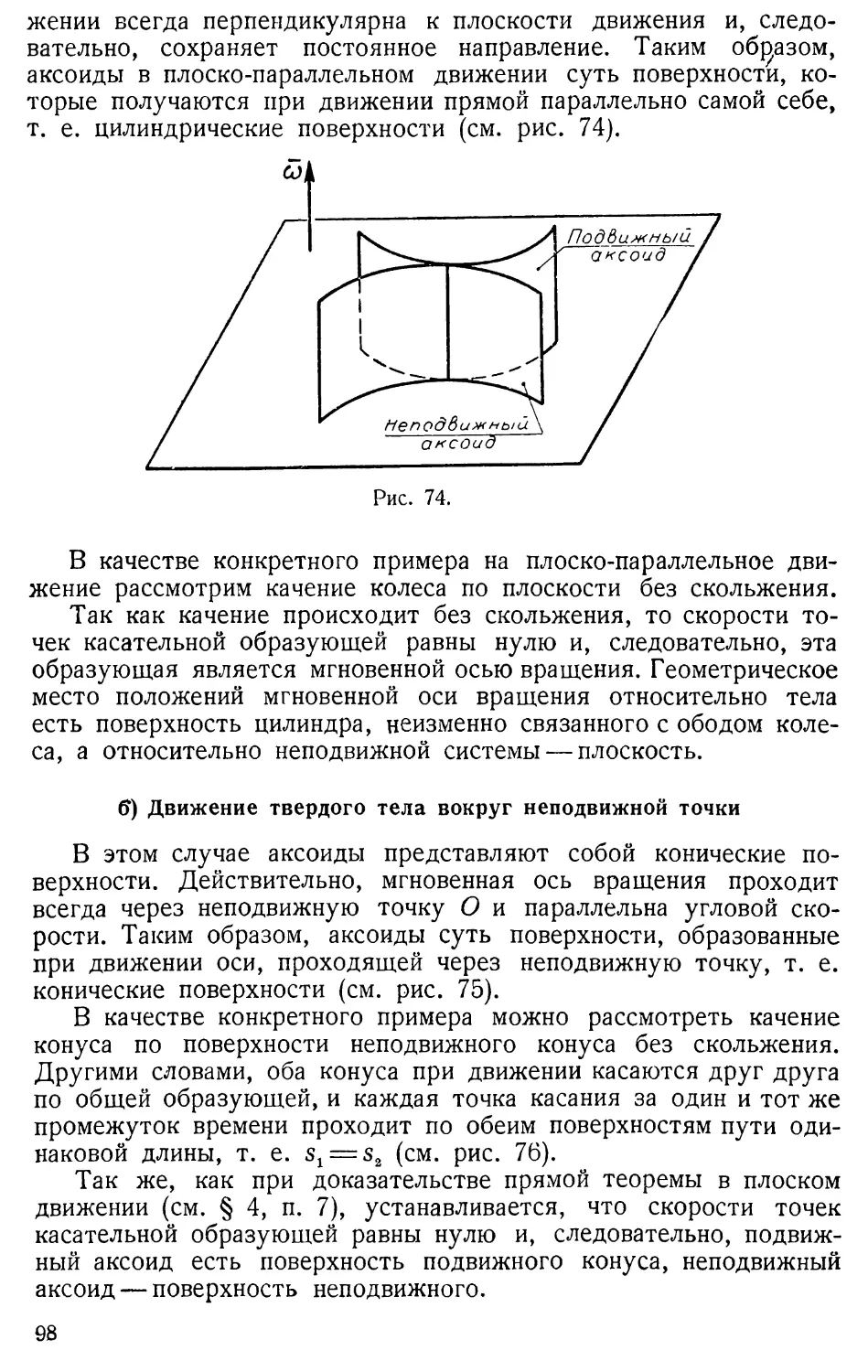
6. Аксоиды 97
7. Ускорения в произвольном движении 100
§ 7. Ускорение точки в сложном движении точки 102
1. Основные понятия —
2. Локальная производная —
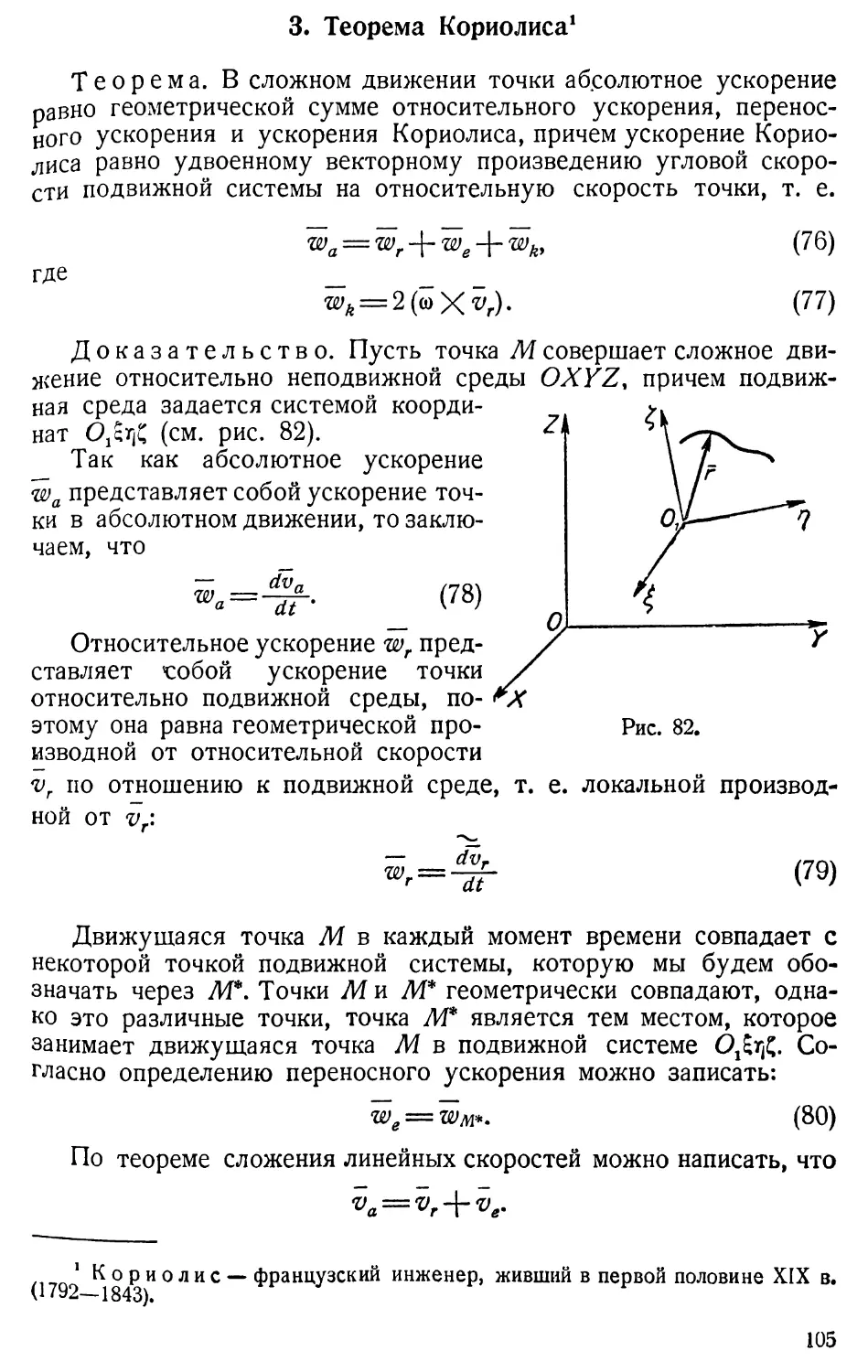
3. Теорема Кориолиса 105
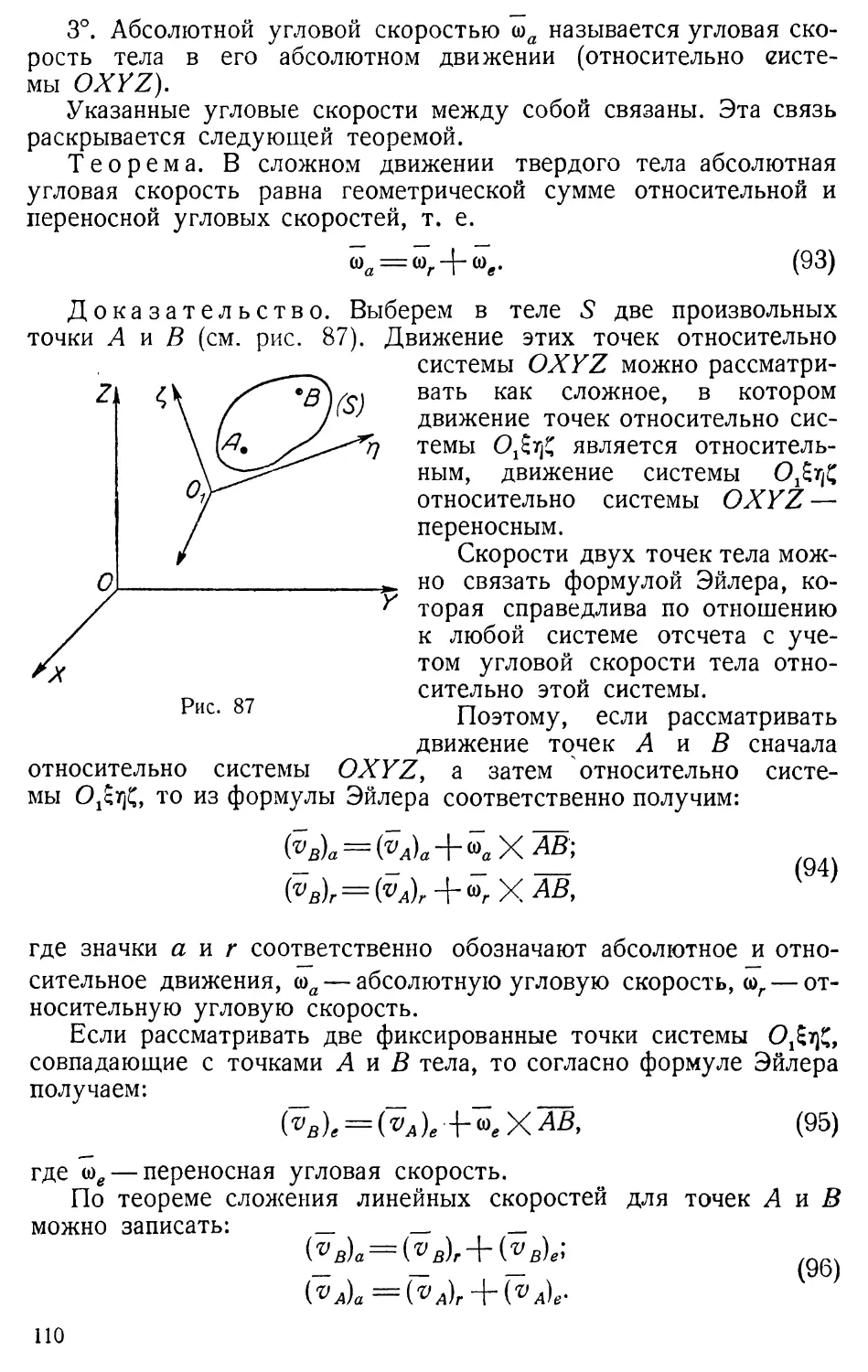
§ 8. Сложное движение твердого тела 109
1. Сложение угловых скоростей —
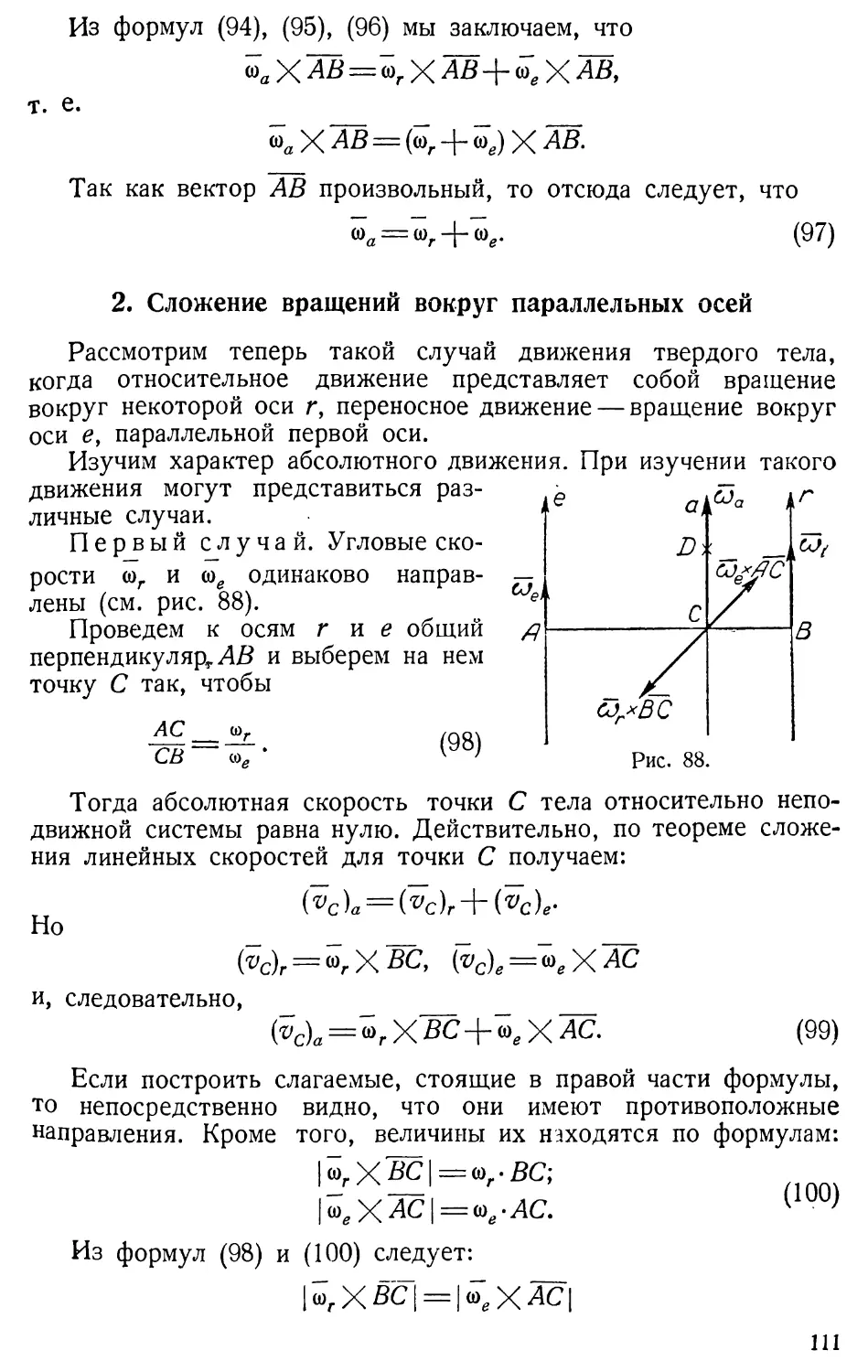
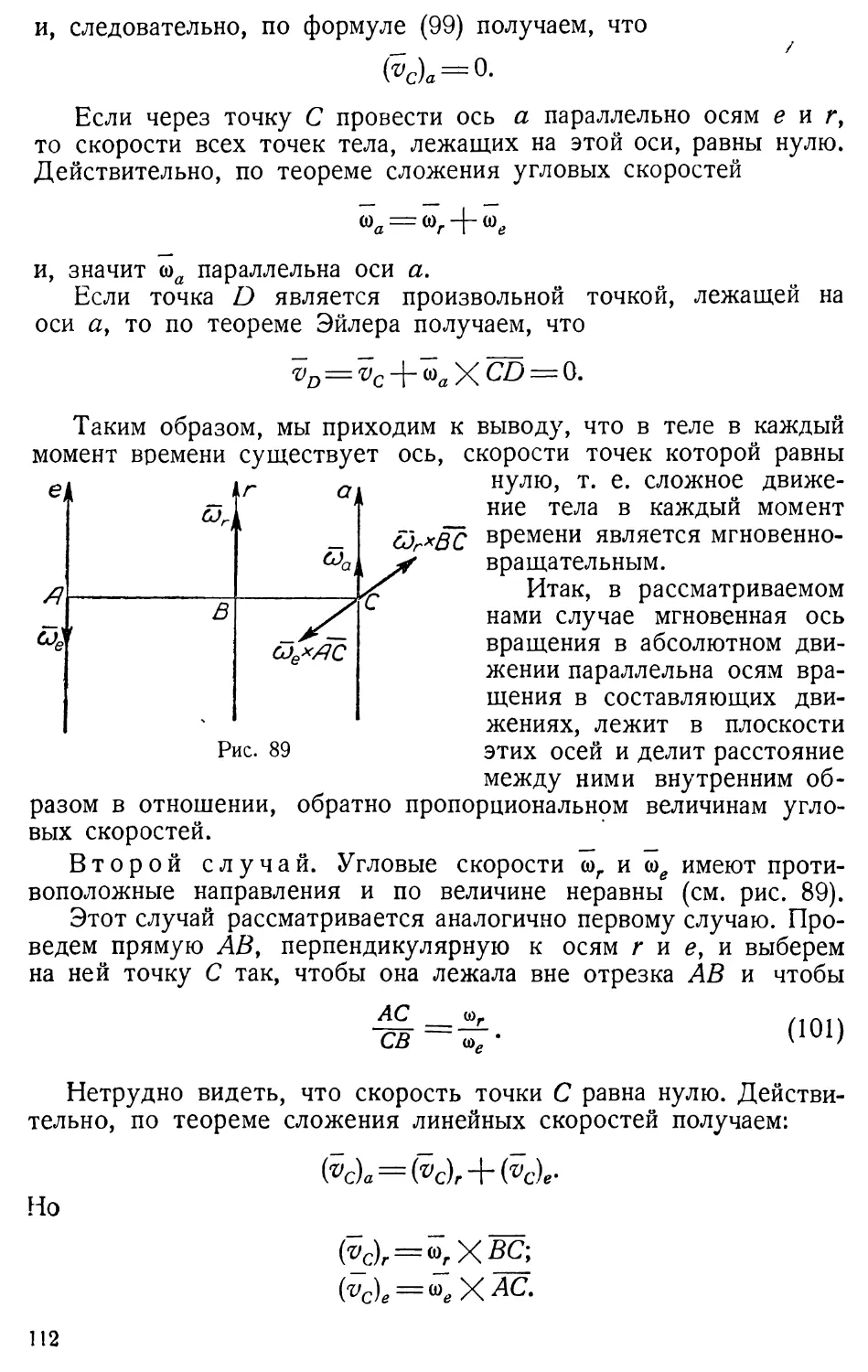
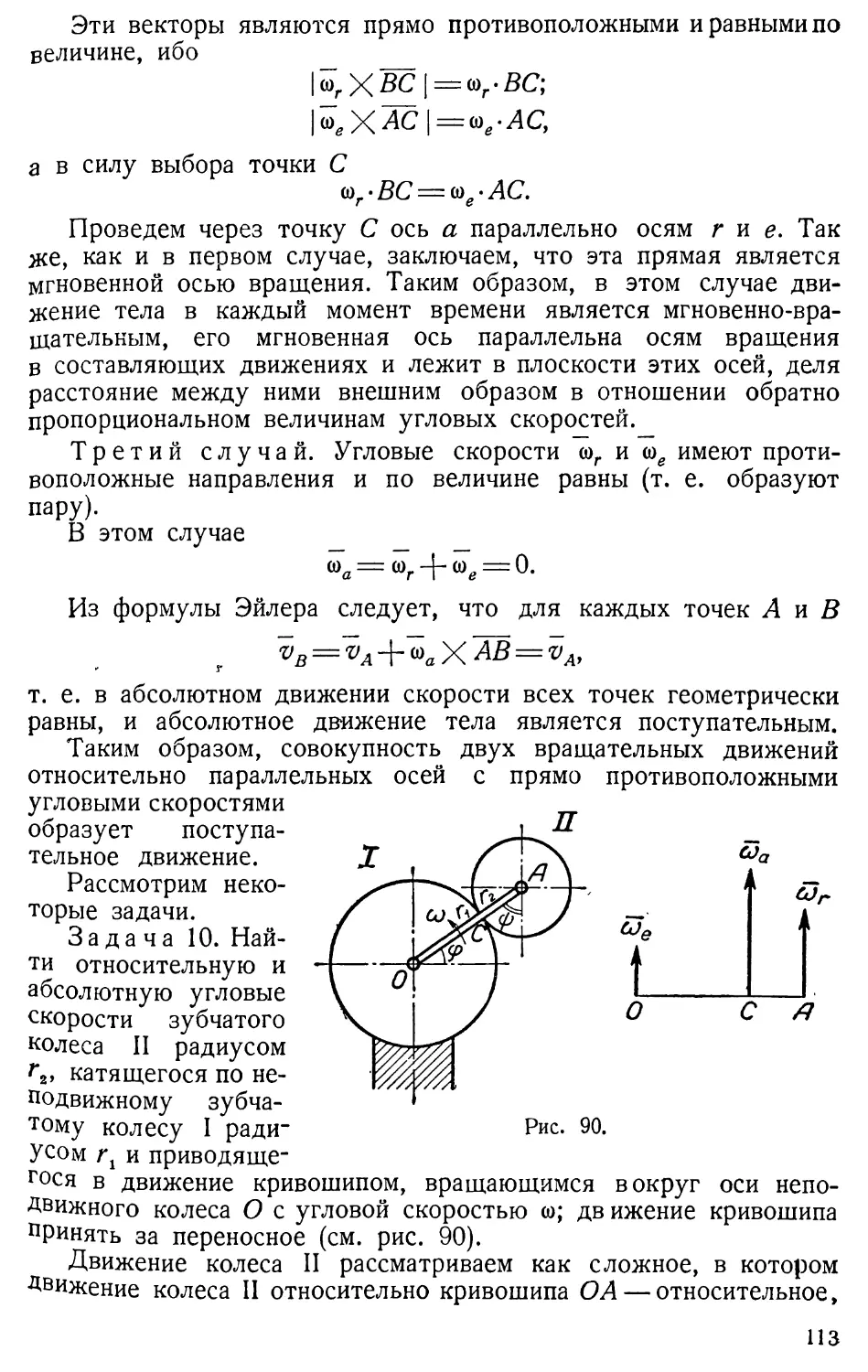
2. Сложение вращений вокруг параллельных осей 111
3. Сложение вращений вокруг пересекающихся осей 115
4. Сложение поступательных движений 117
5. Сложение поступательного и вращательного движений .... —
6. Сложение угловых скоростей в обобщенном сложном движении —
ЧАСТЬ ВТОРАЯ
КИНЕТИКА
Введение 119
1. Механические системы —
2. Свободное и несвободное движения 120
3. Сила и масса 121
4. Основные законы динамики 125
5. Единицы измерения силы и массы 130
6. Основная задача кинетики 131
Раздел /. статика
§ 1. Основные понятия 132
1. Абсолютно твердое тело. Система сил —
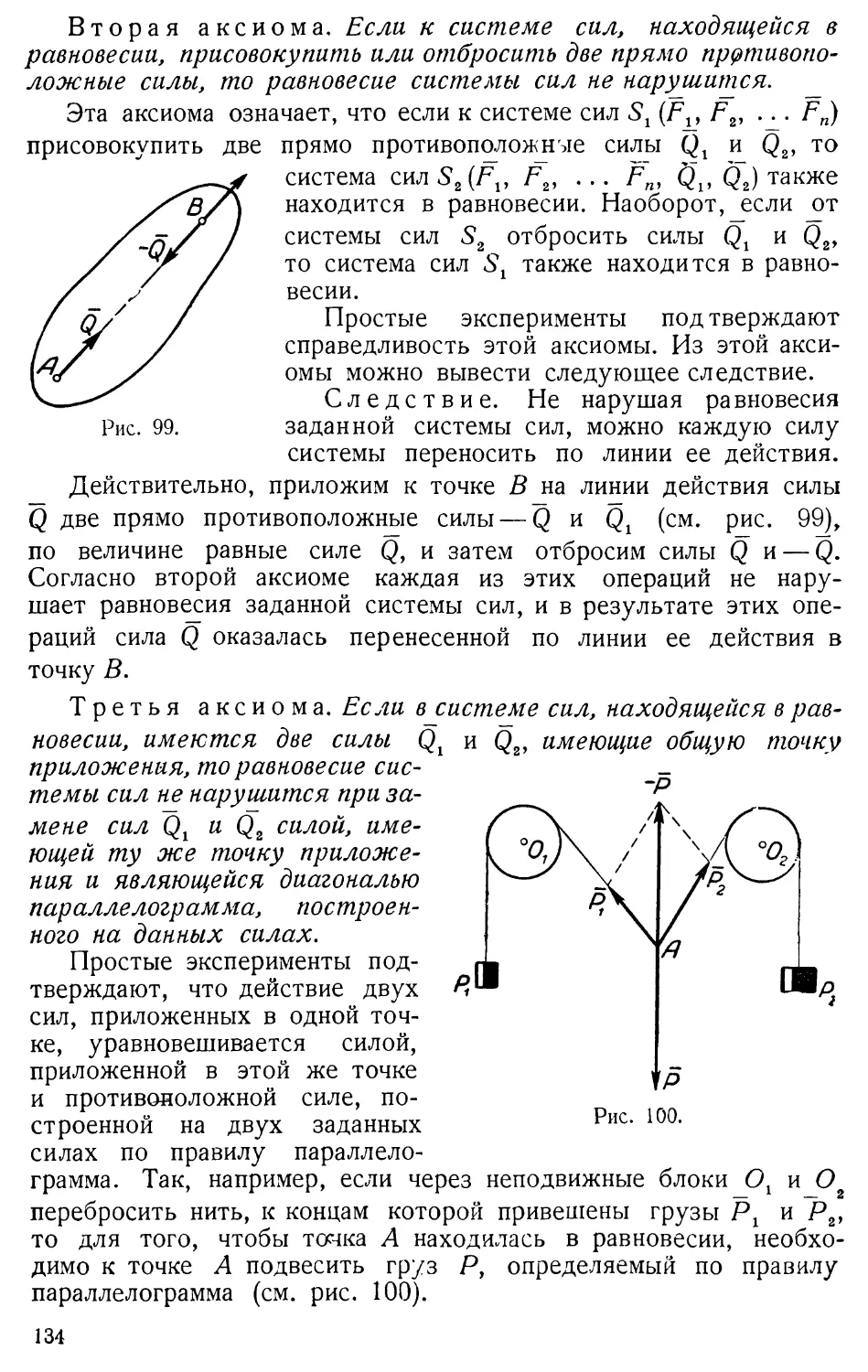
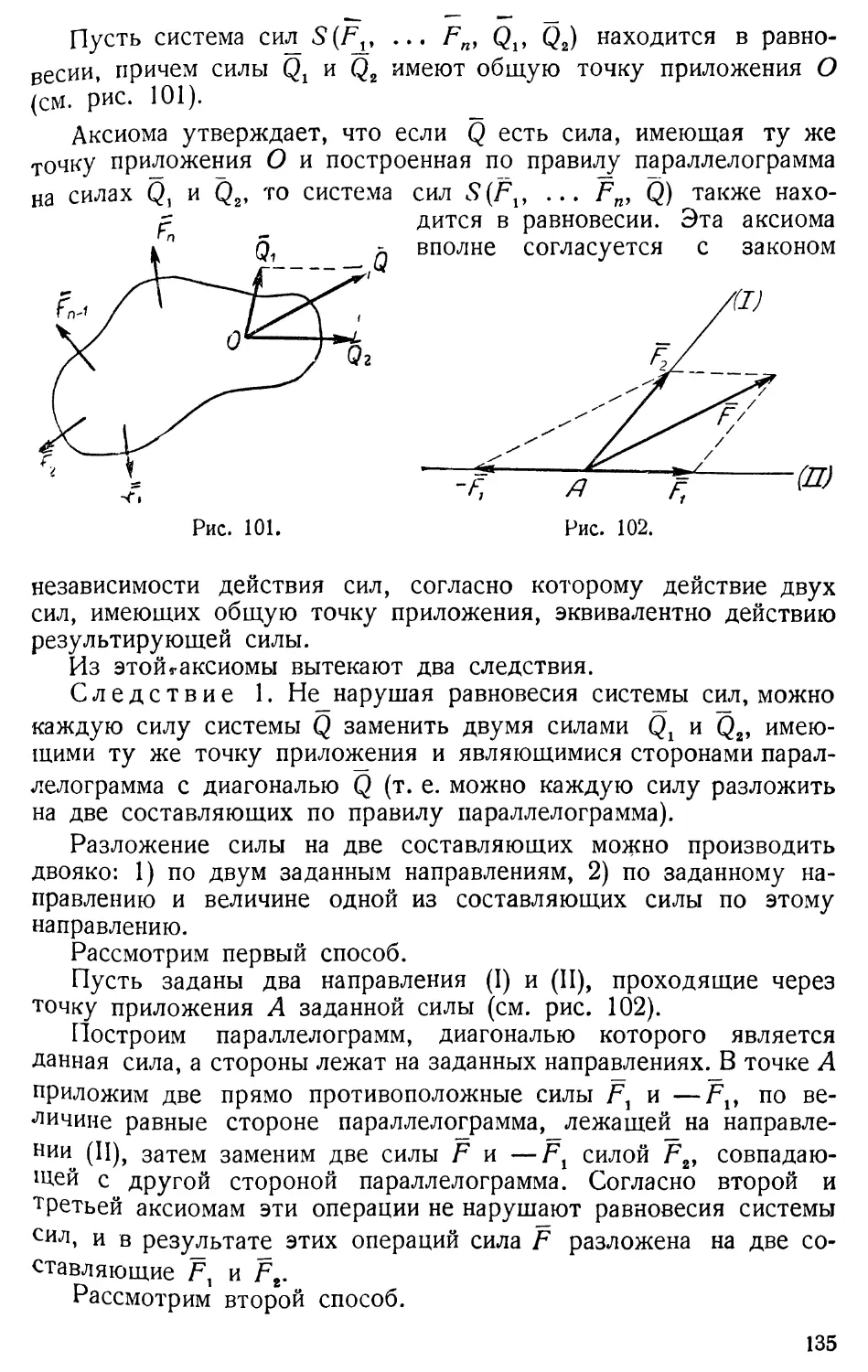
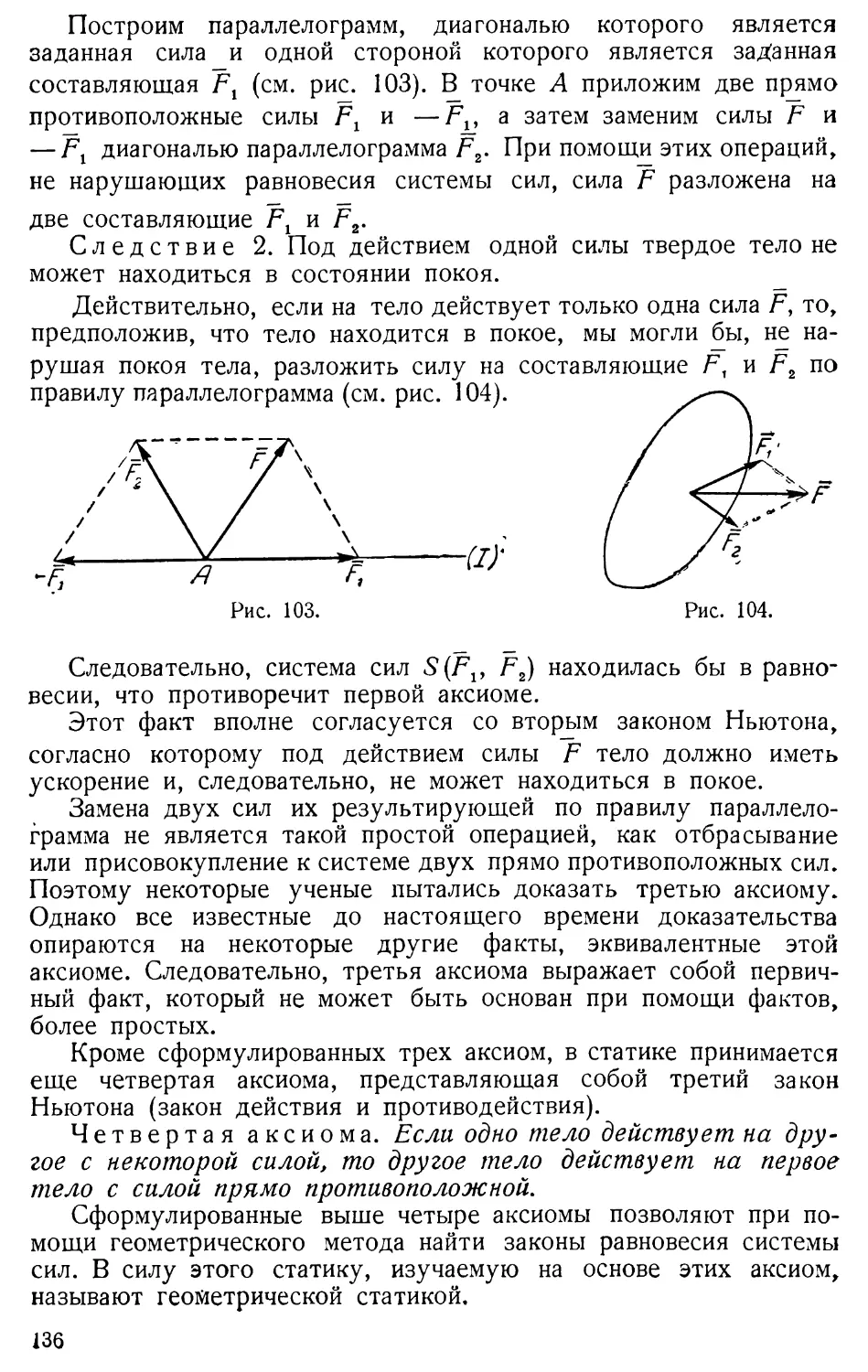
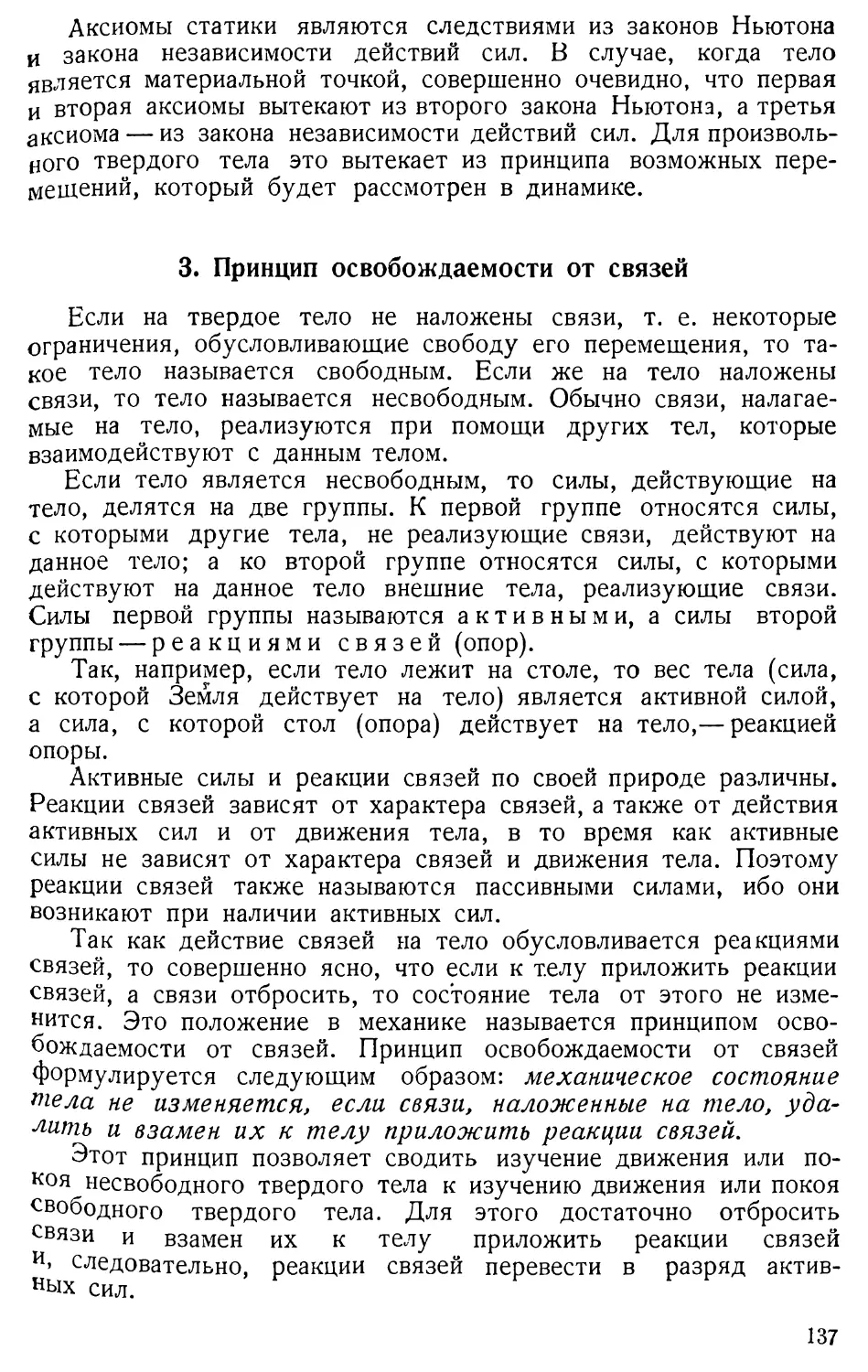
2. Аксиомы статики 133
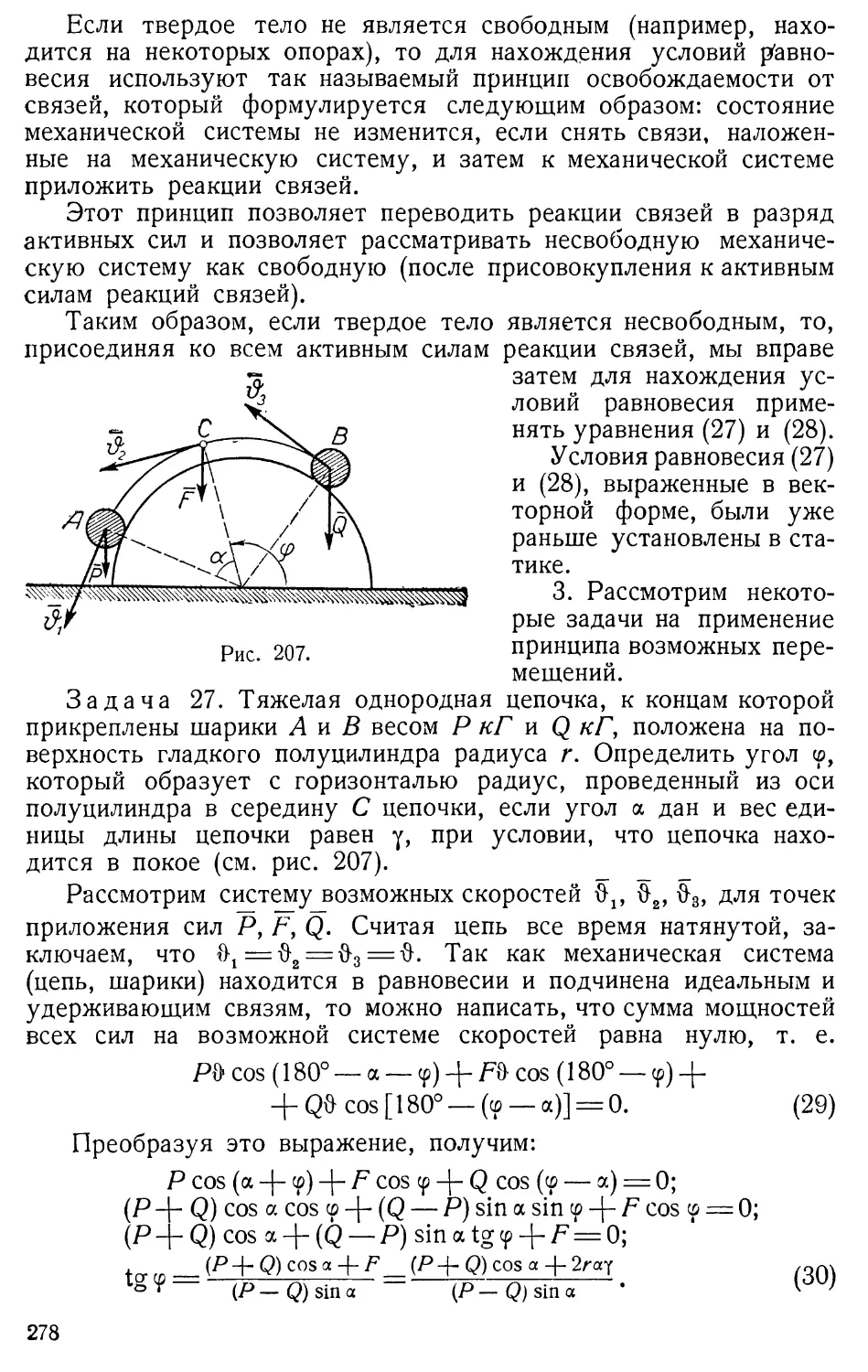
3. Принцип освобождаемости от связей 137
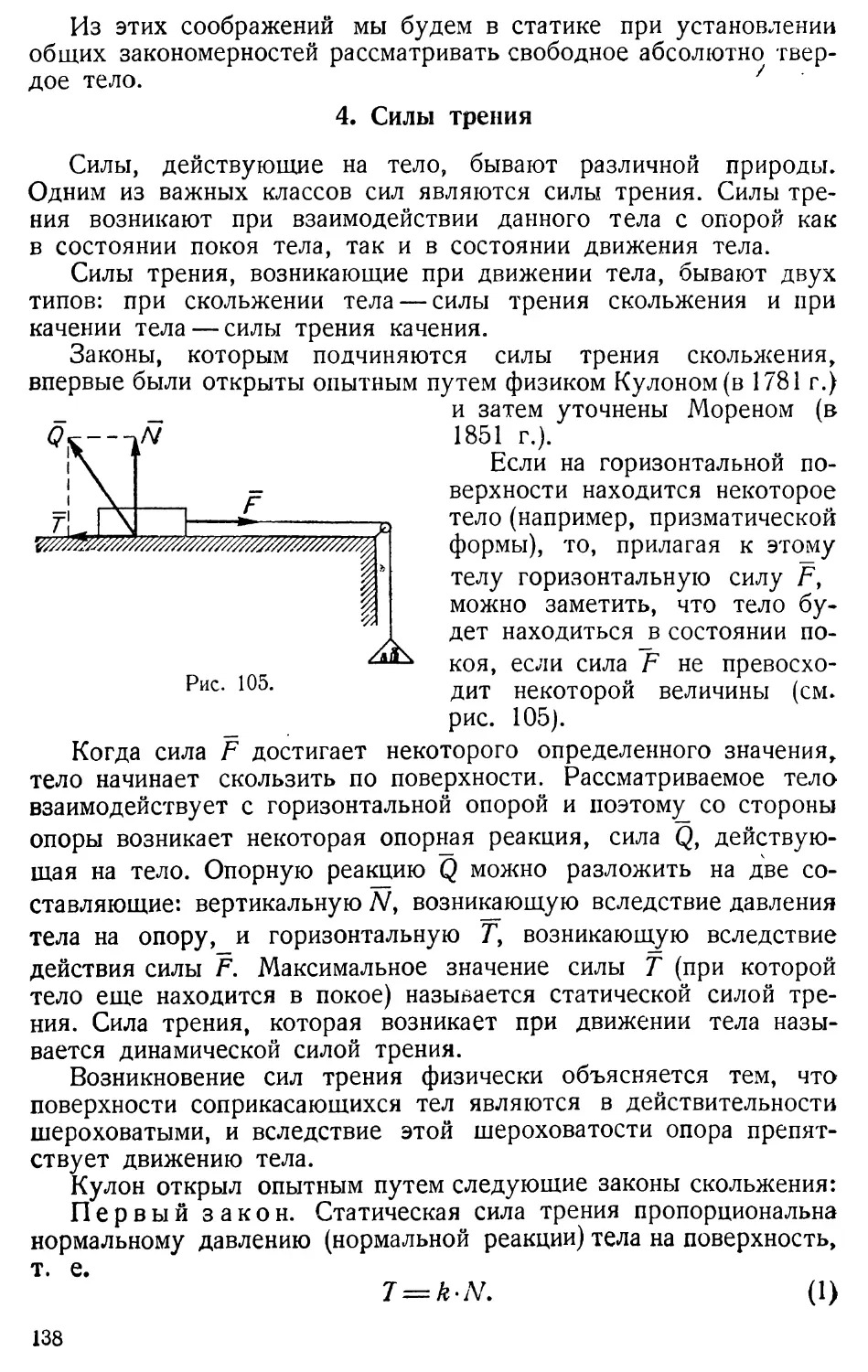
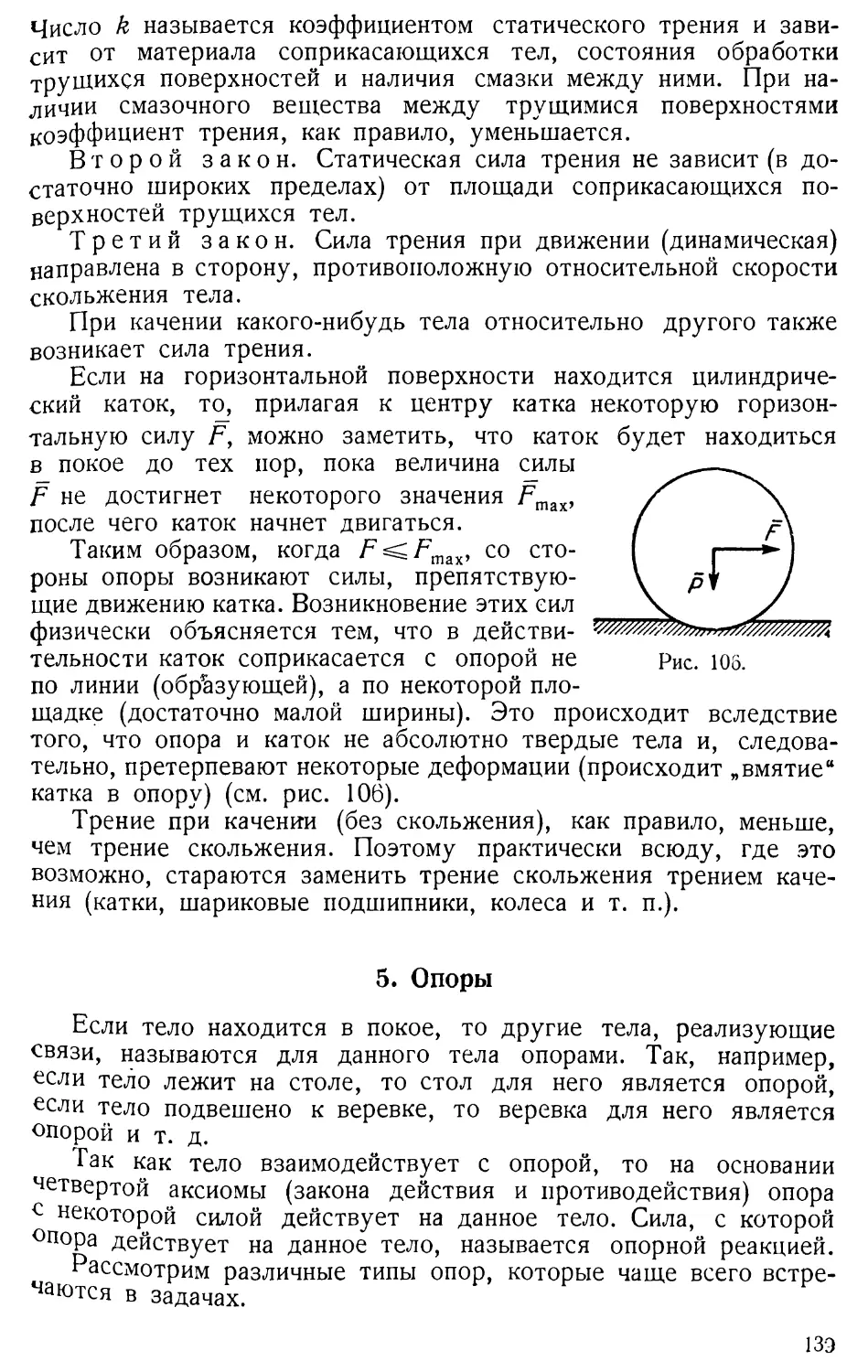
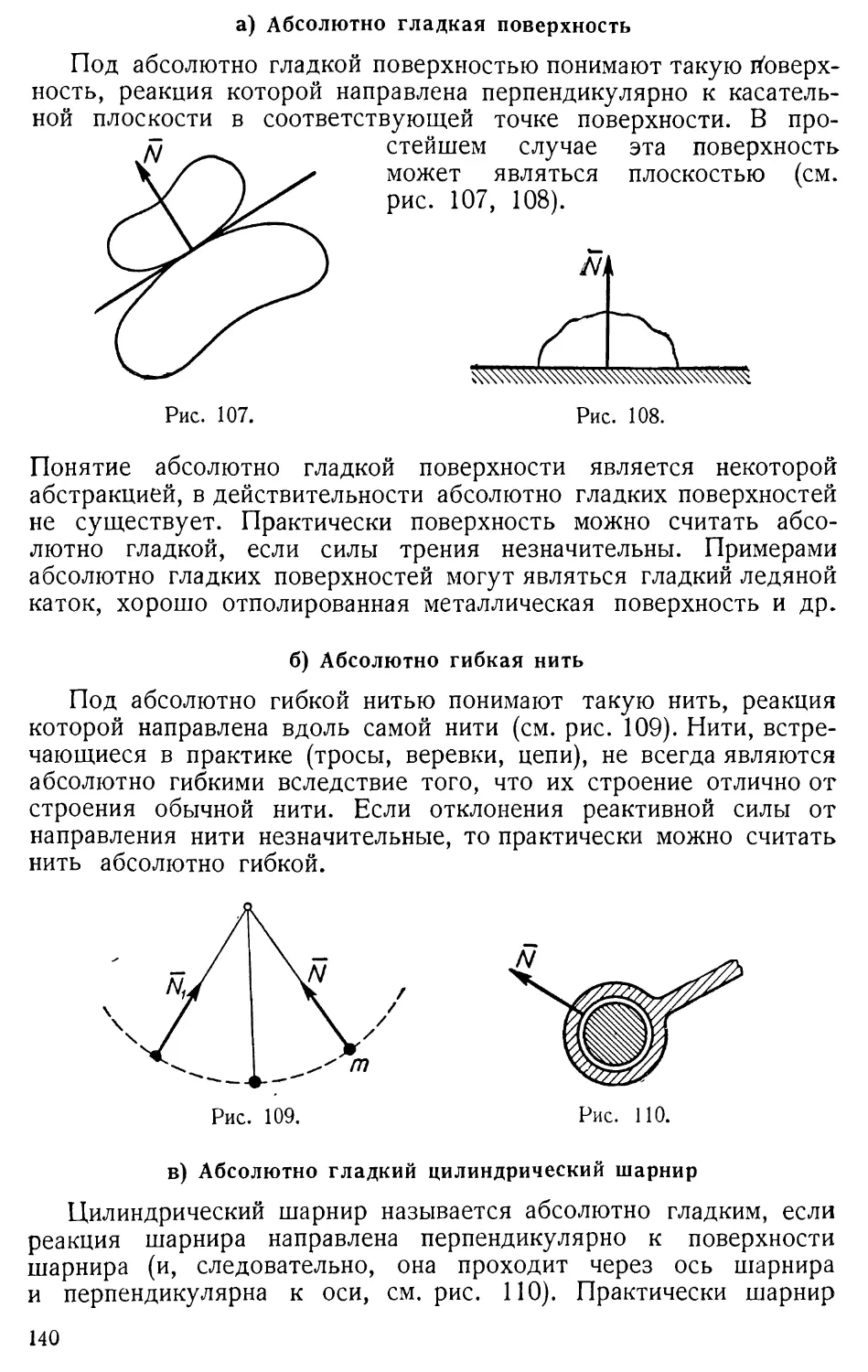
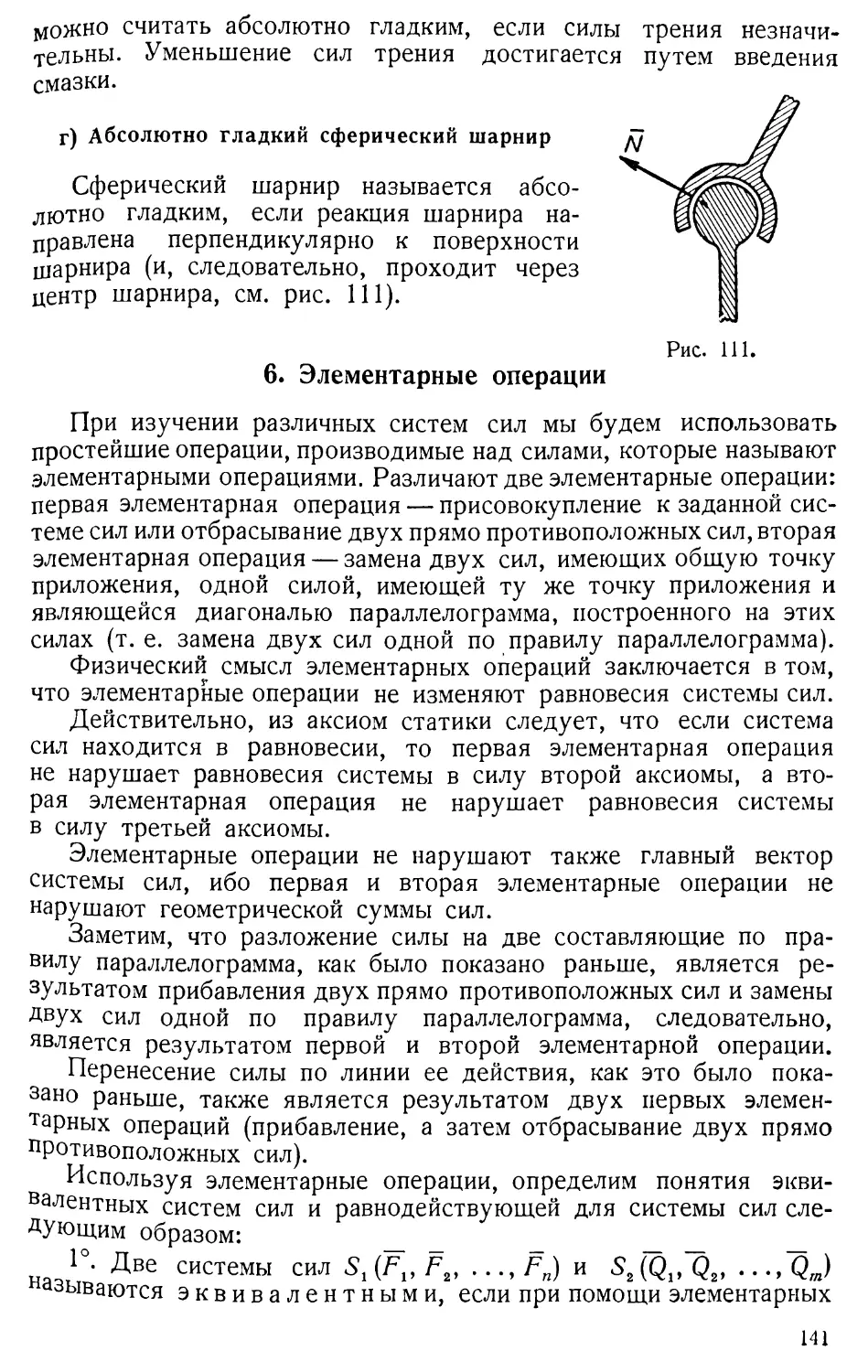
4. Силы трения 138
5. Опоры 139
6. Элементарные операции . 141
7. Основные задачи статики 142
4
§ 2. Равнодействующая системы сил
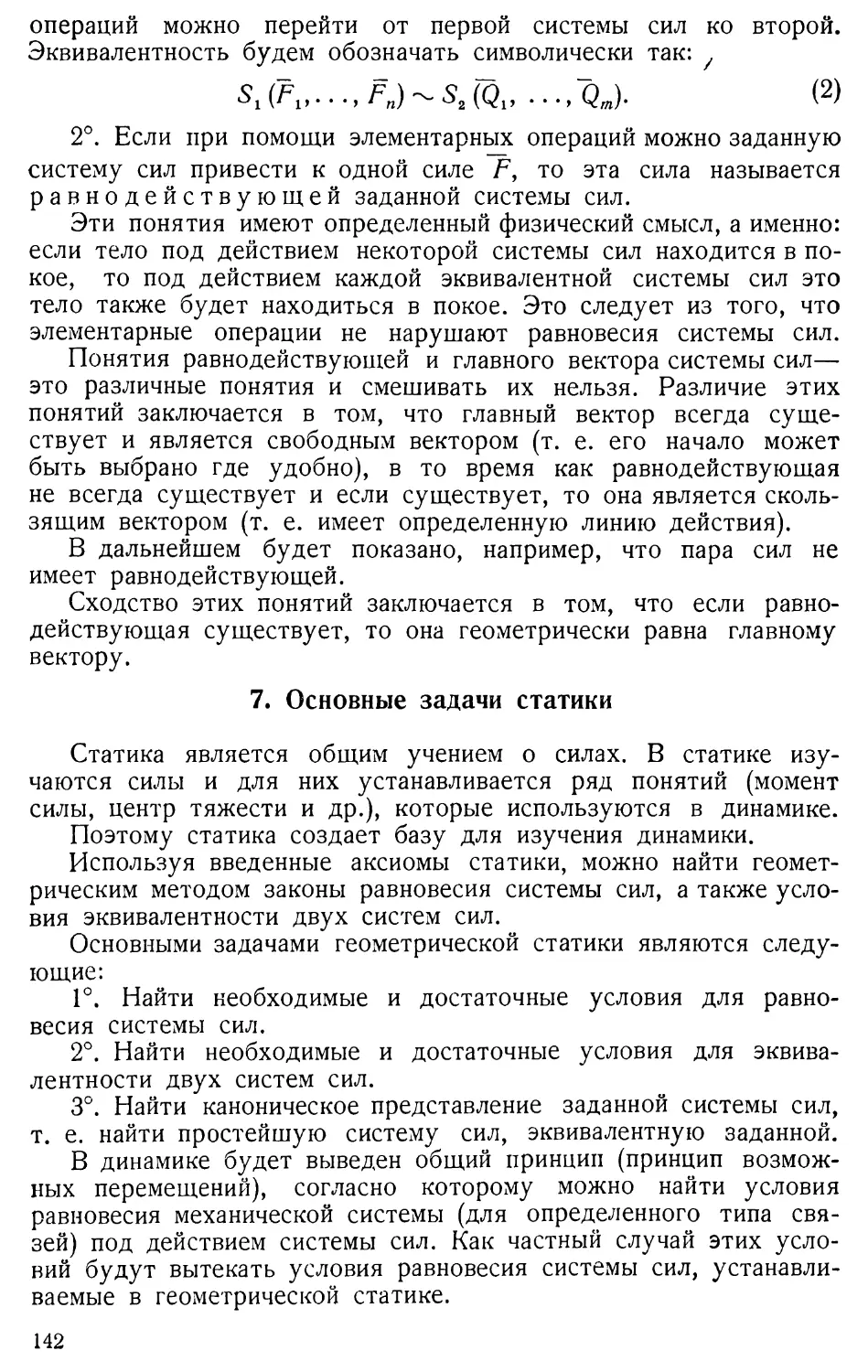
1. Сходящиеся силы
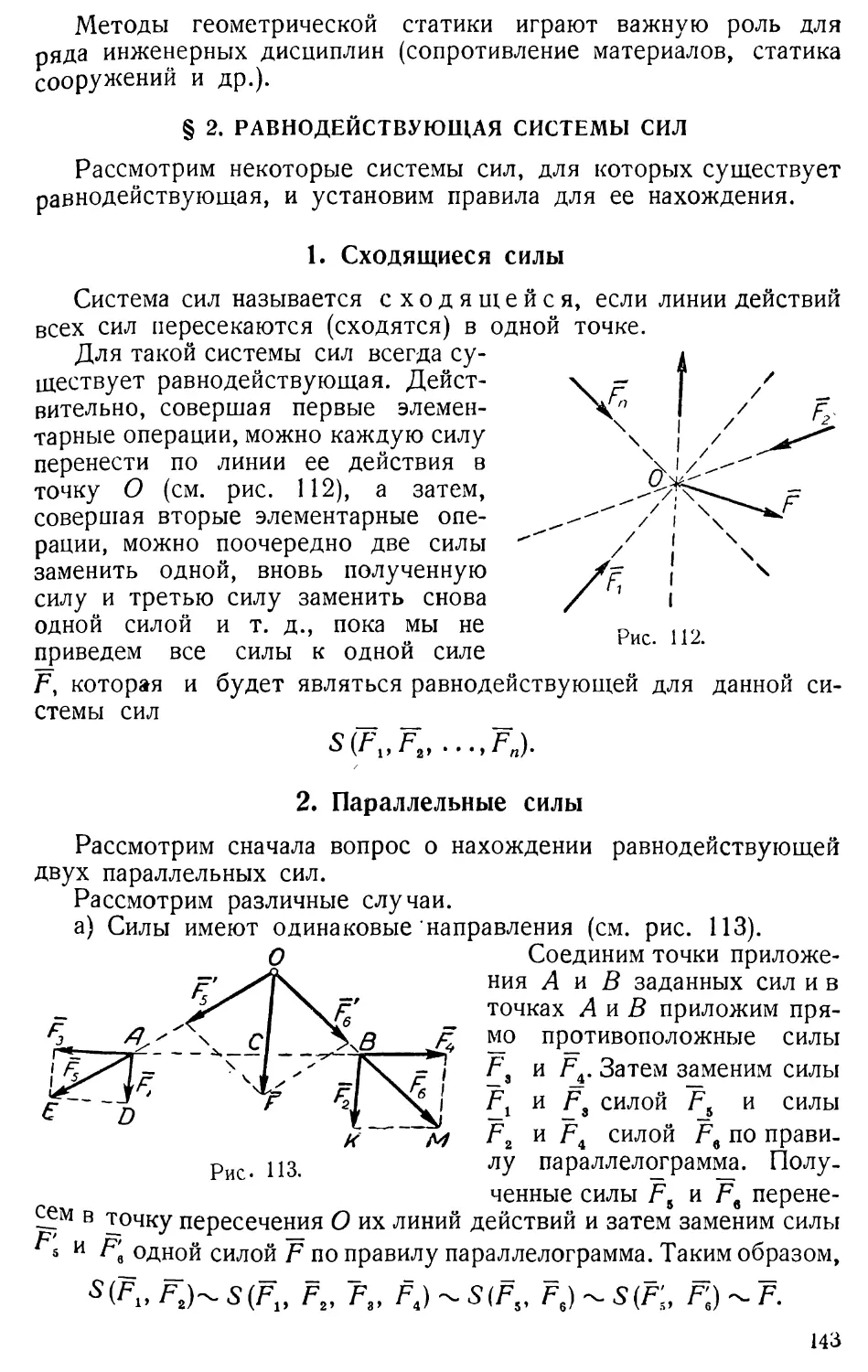
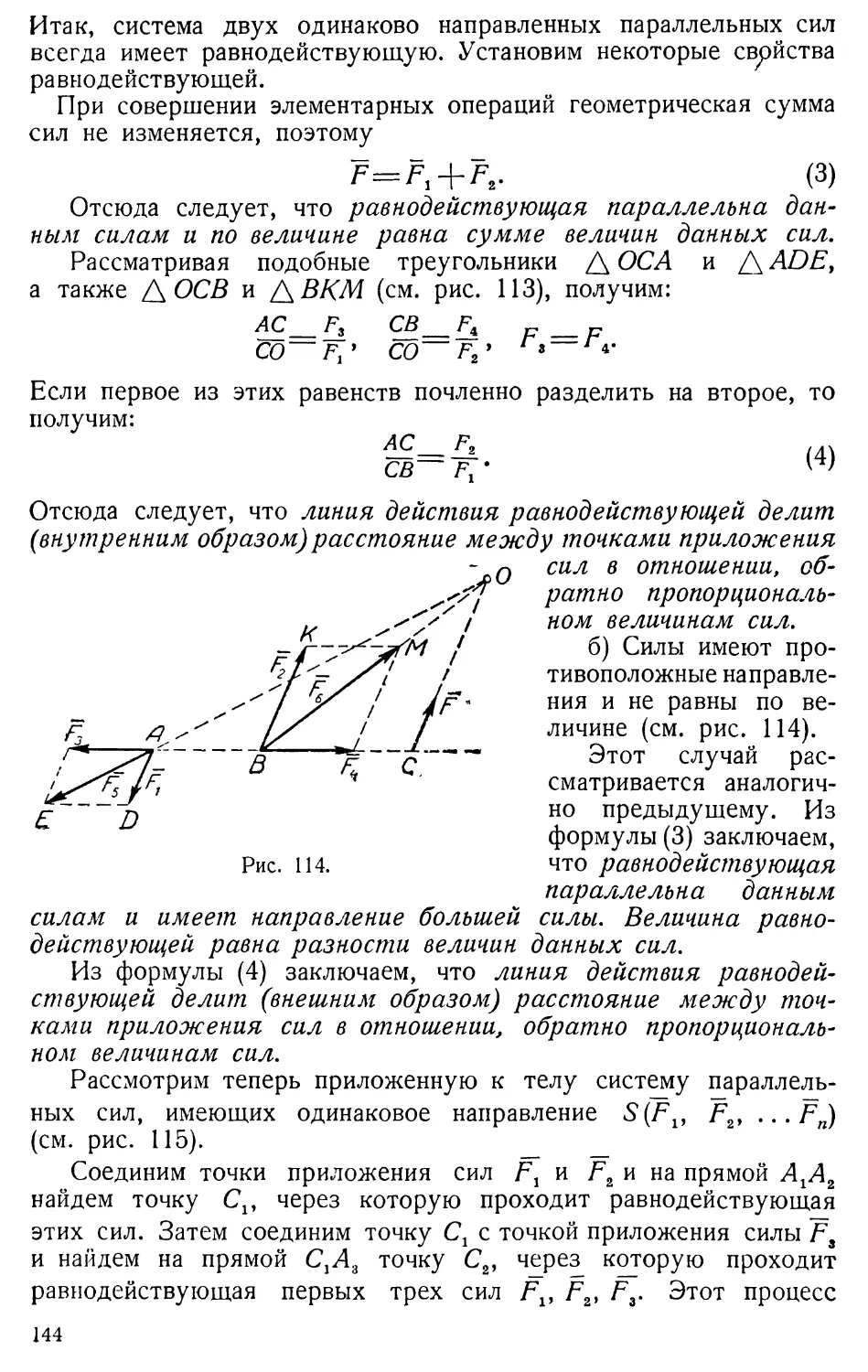
2. Параллельные силы —
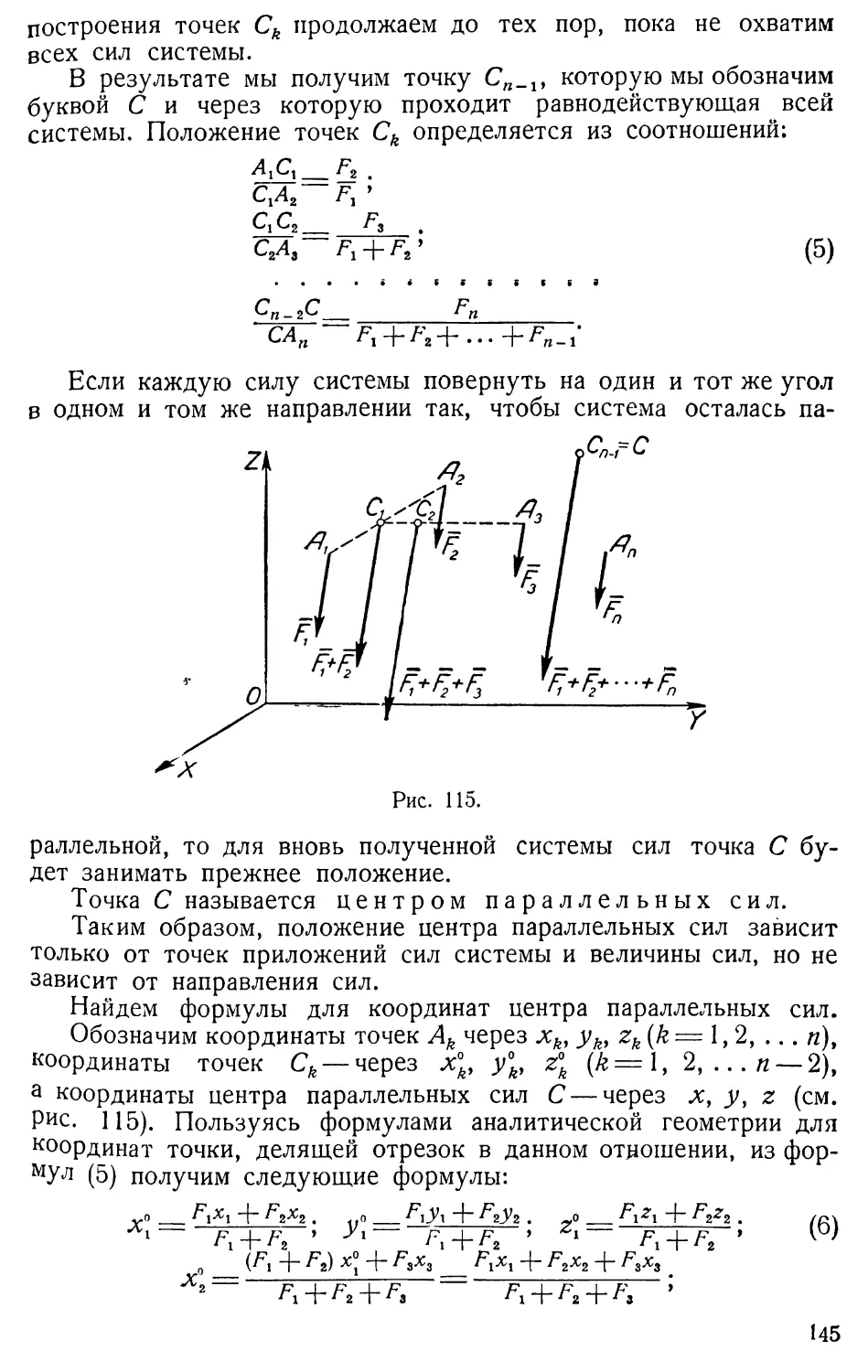
§ 3. Центр тяжести и центр инерции (масс) 146
1. Центр тяжести —
2. Центр инерции (масс) 147
3. Методы нахождения центра тяжести и центра инерции .... 151
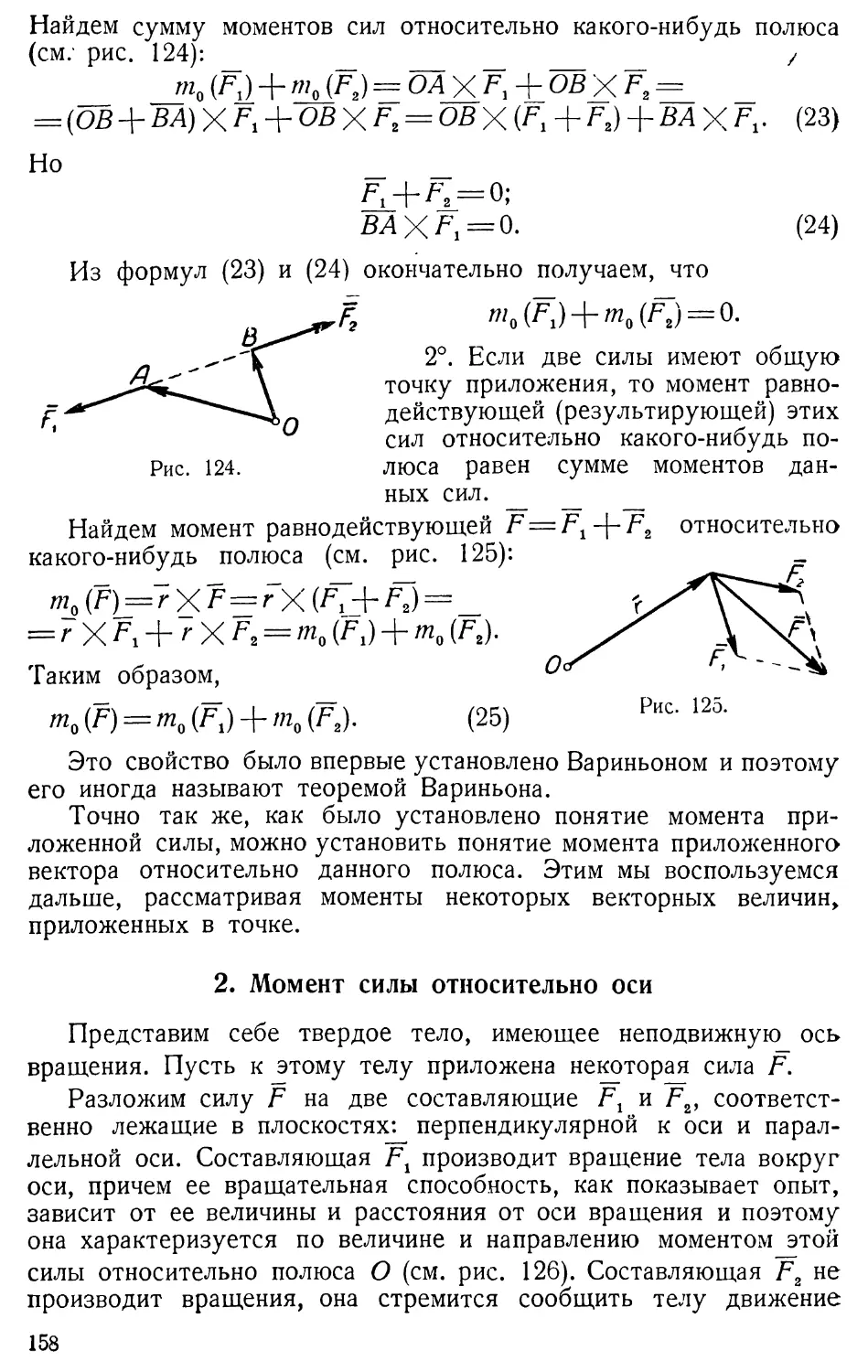
§ 4. Момент силы 156
1. Момент силы относительно полюса —
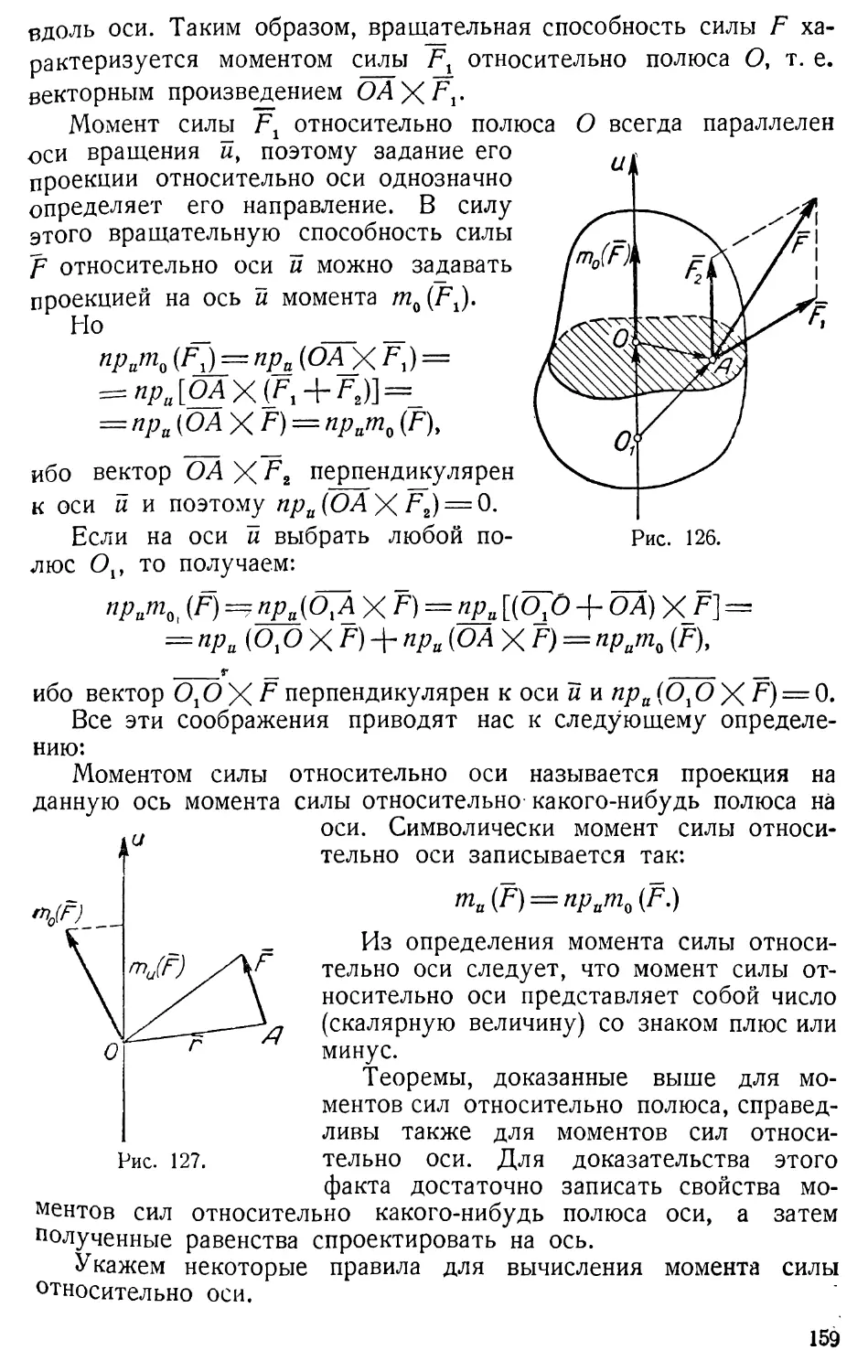
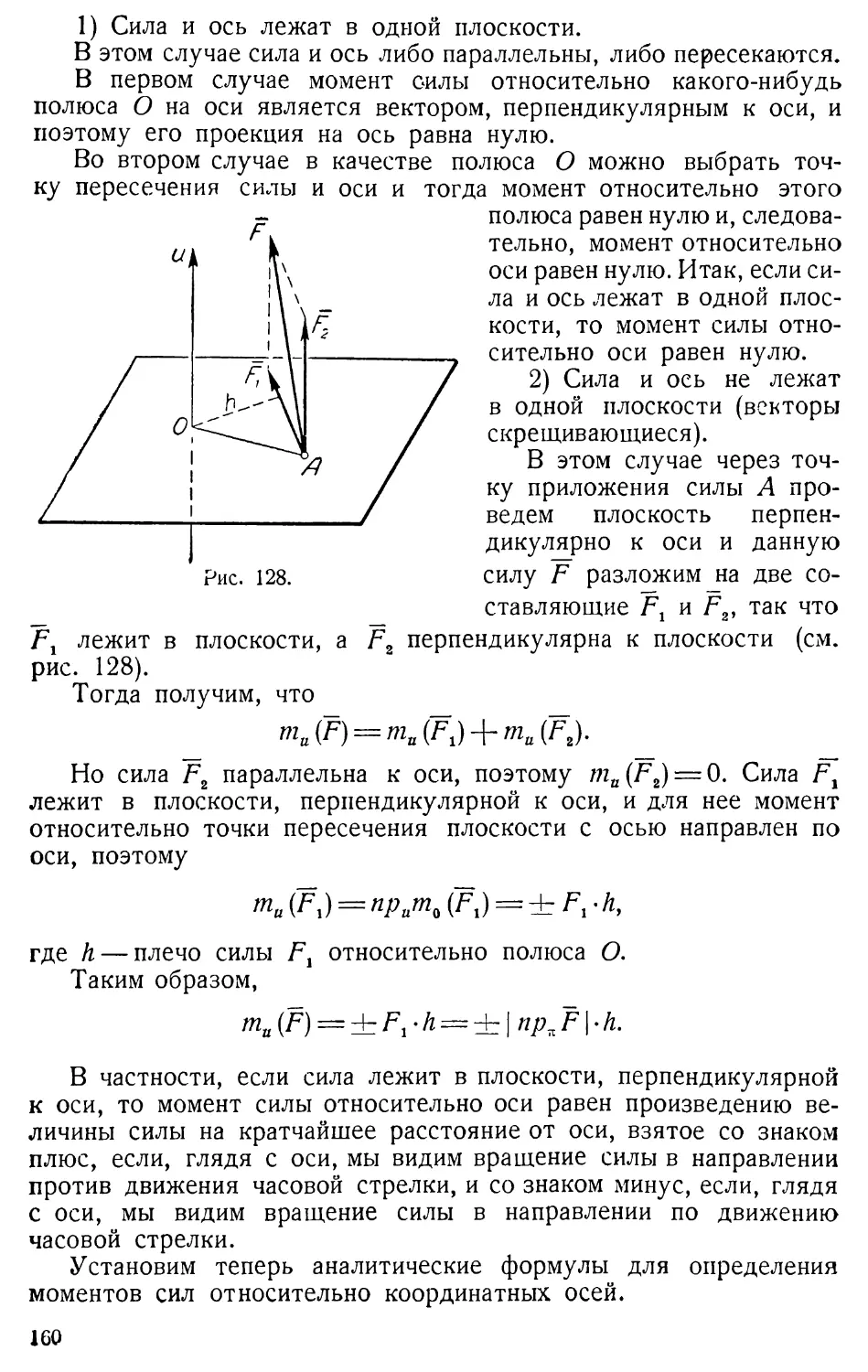
2. Момент силы относительно оси 158
3. Главный момент 161
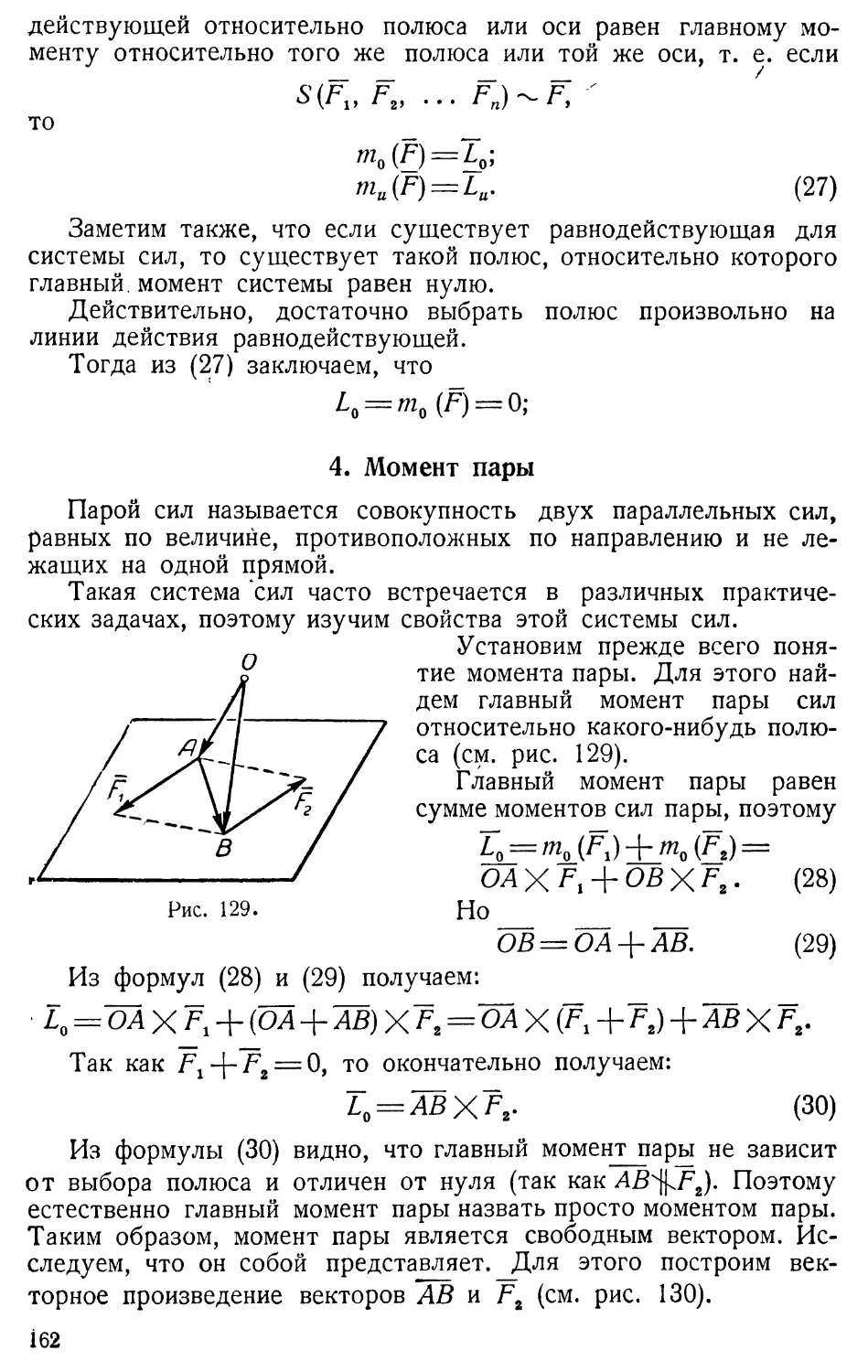
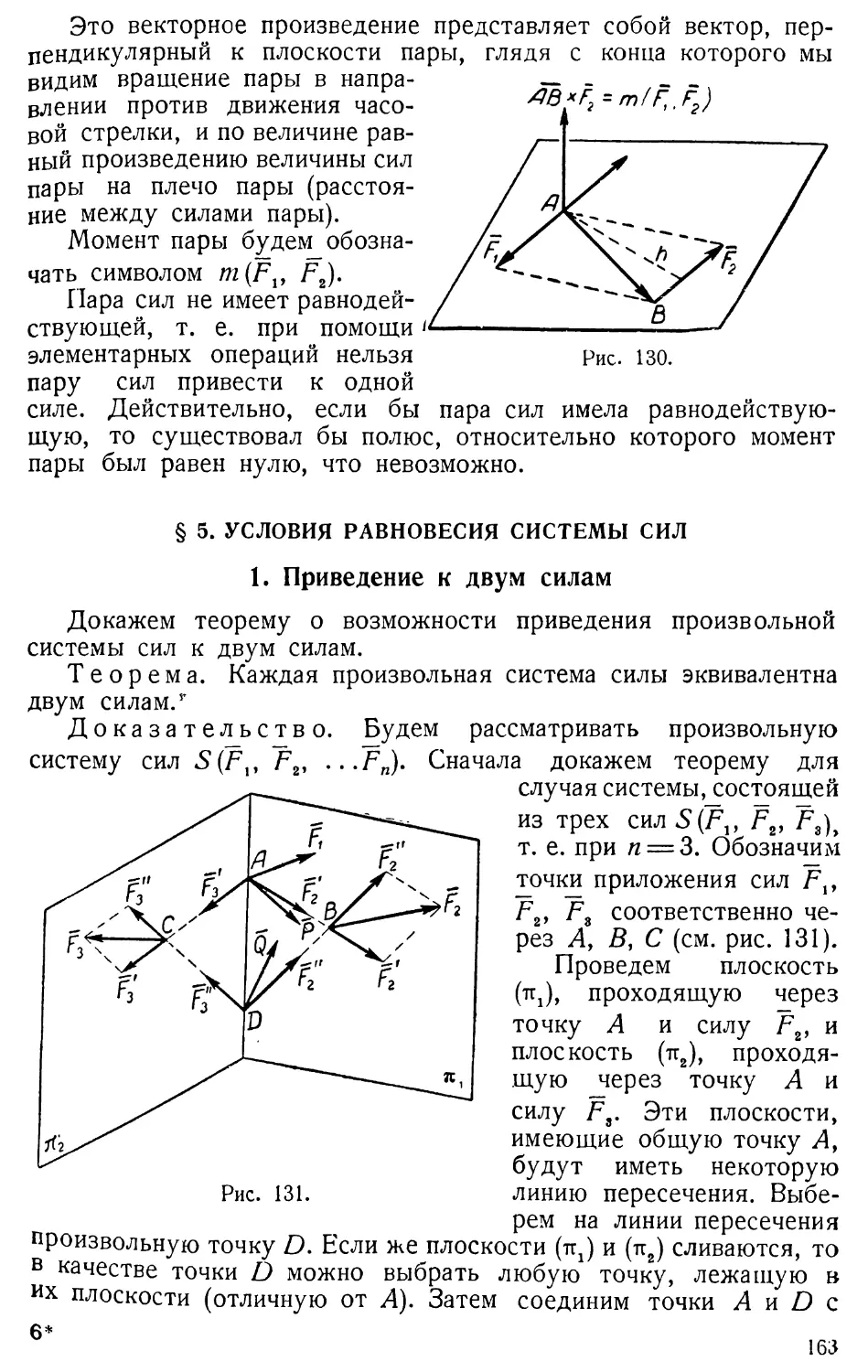
4. Момент пары 162
§ 5. Условия равновесия системы сил 163
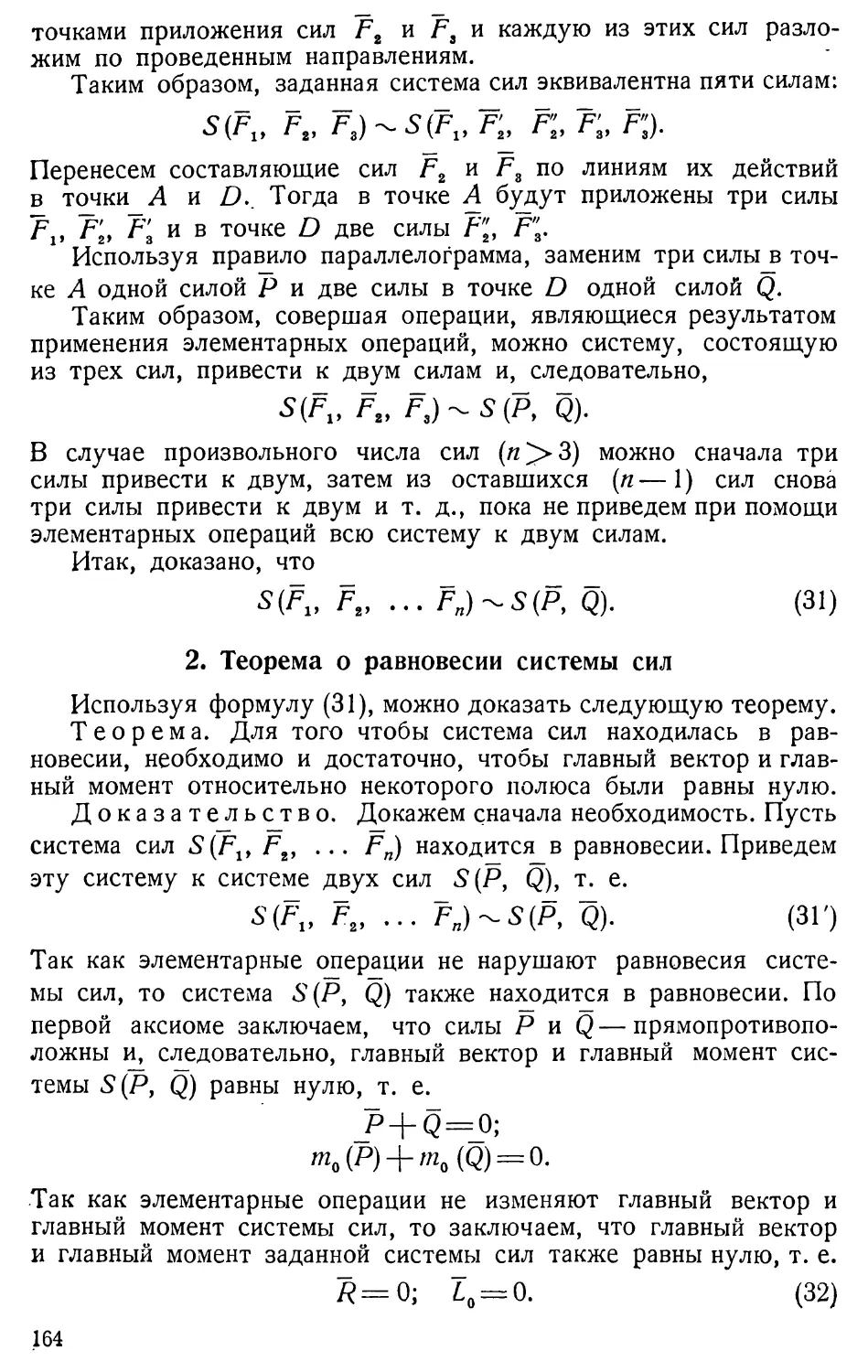
1. Приведение к двум силам —
2. Теорема о равновесии системы сил 164
3. Основные уравнения статики твердого тела 165
4. Частные случаи системы сил 166
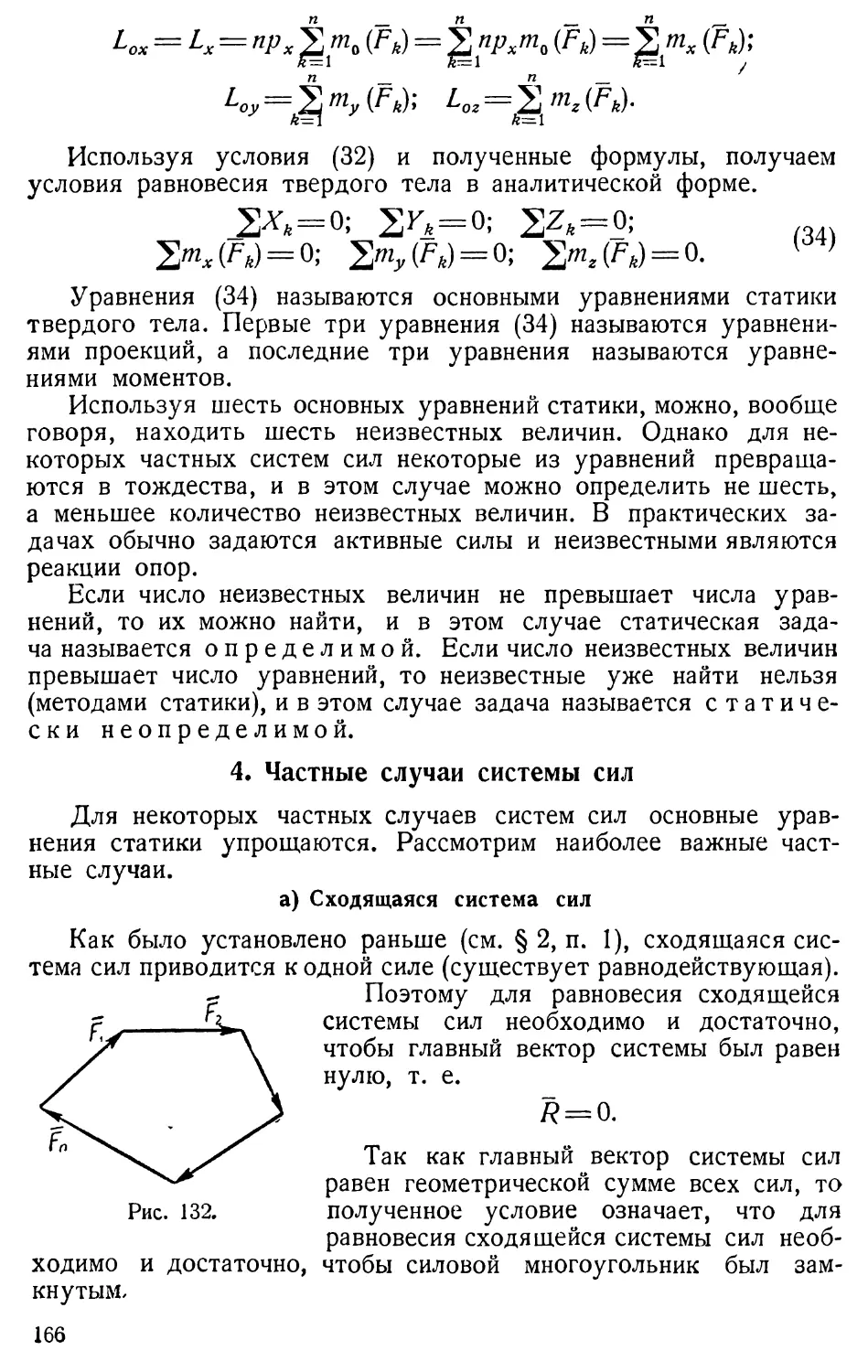
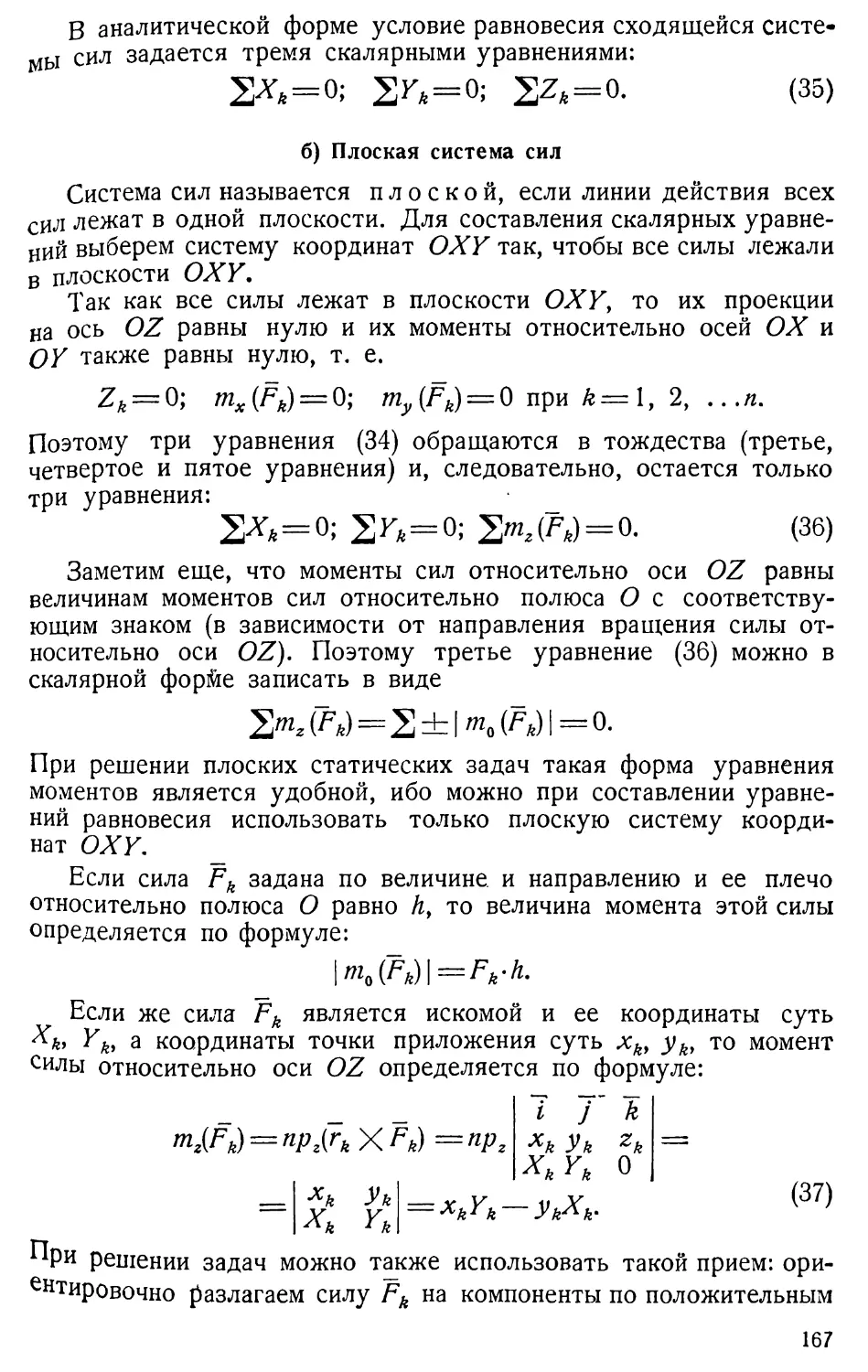
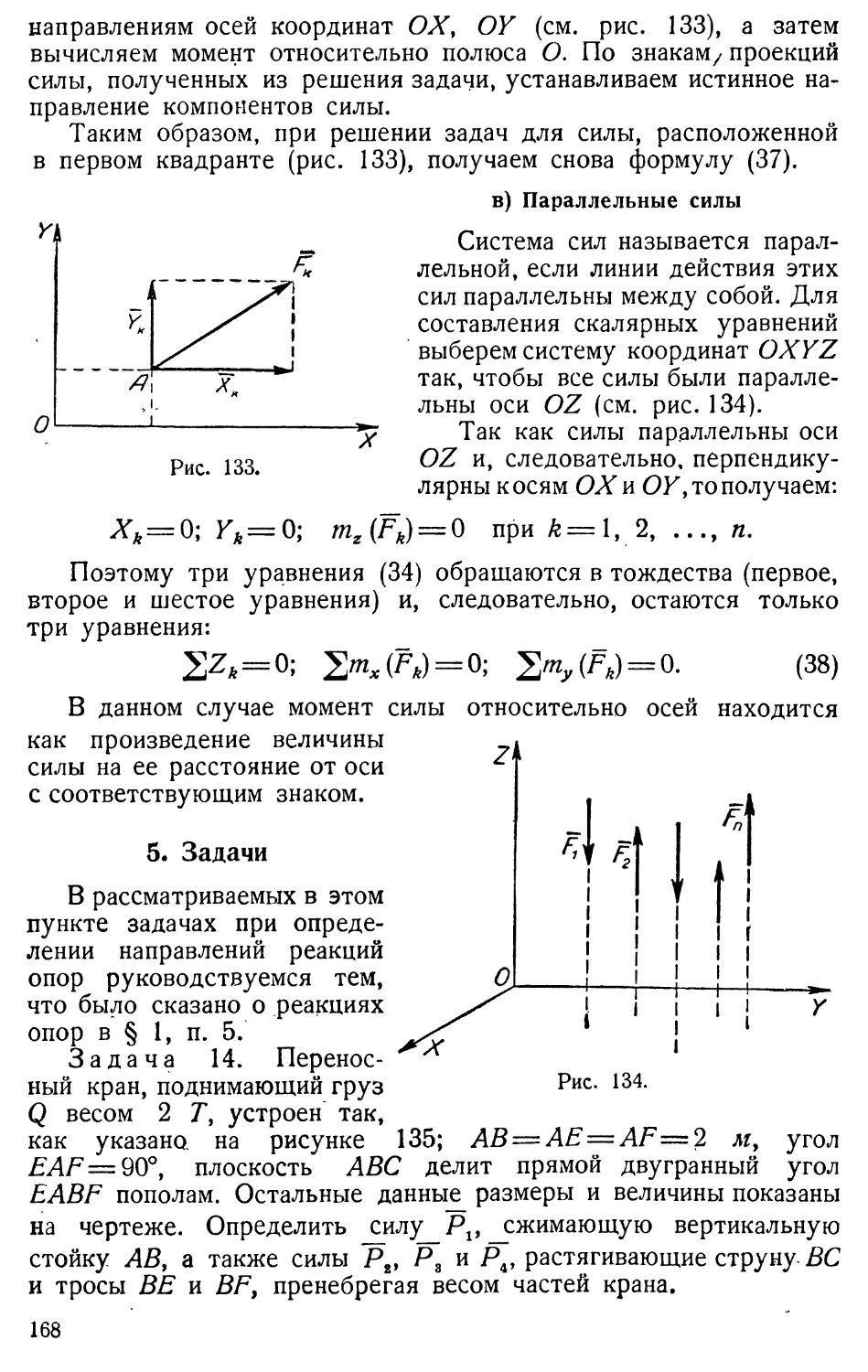
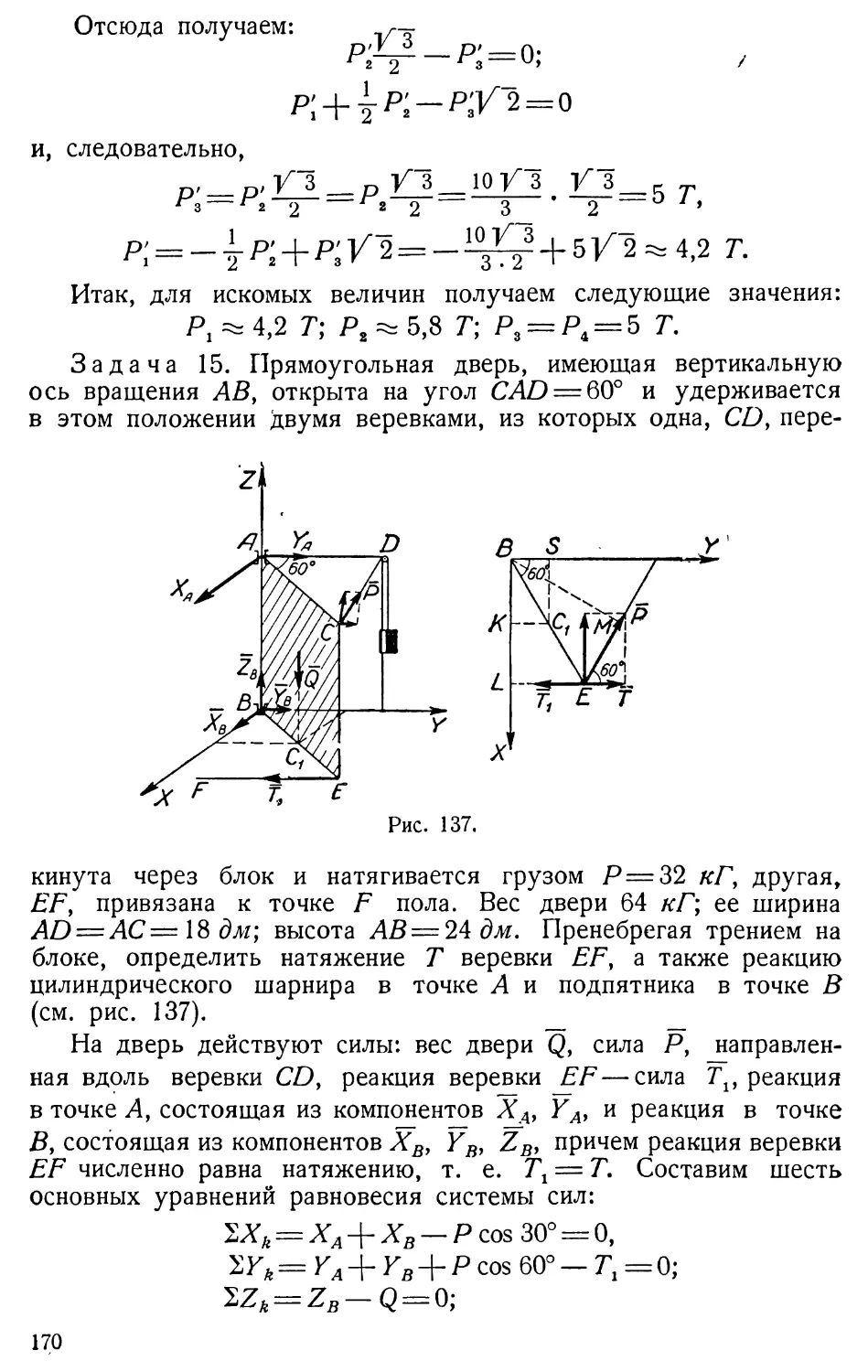
5. Задачи 168
§ 6. Эквивалентные системы сил 171
1. Условия эквивалентности двух систем сил —
2. Теория пар 172
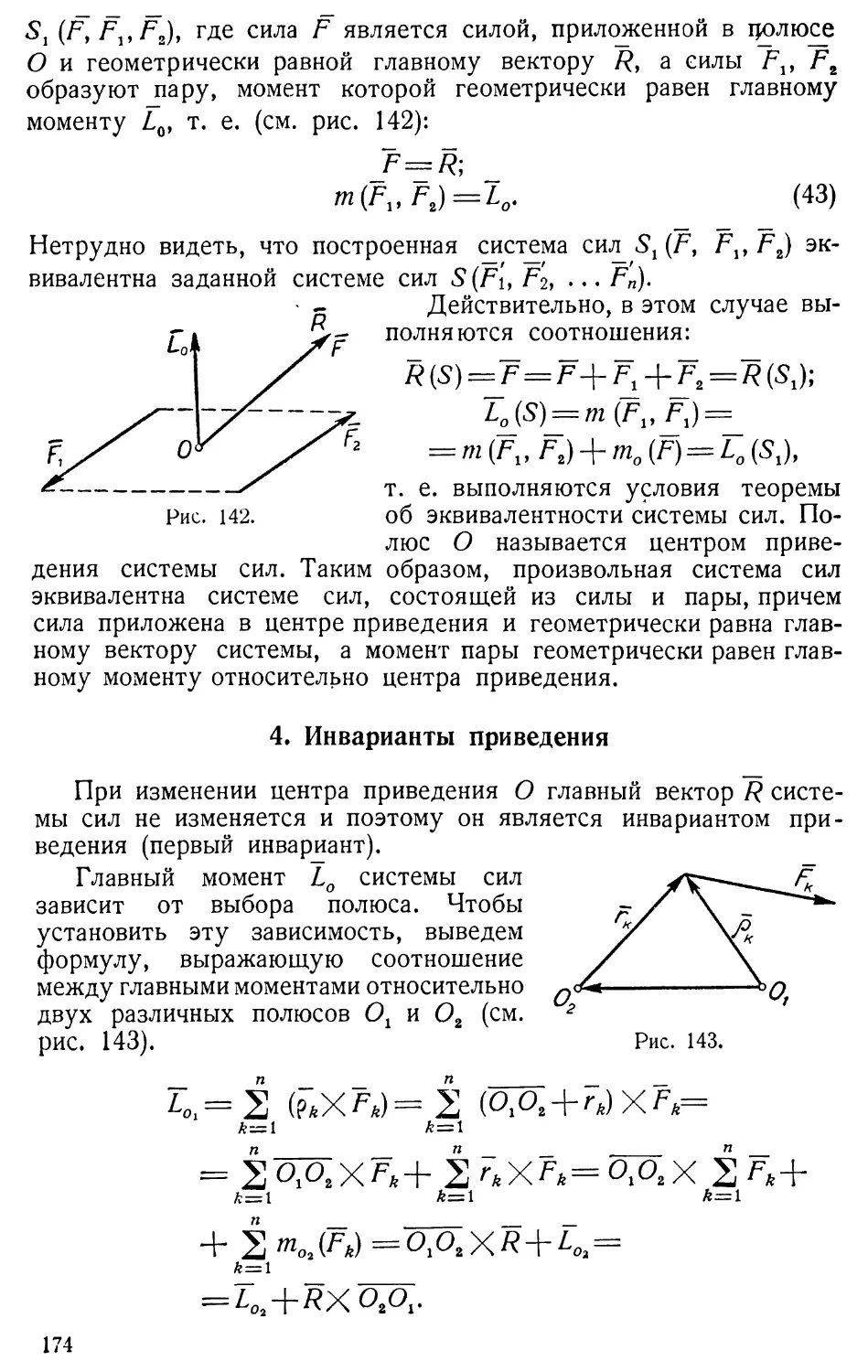
3. Приведение произвольной системы сил 173
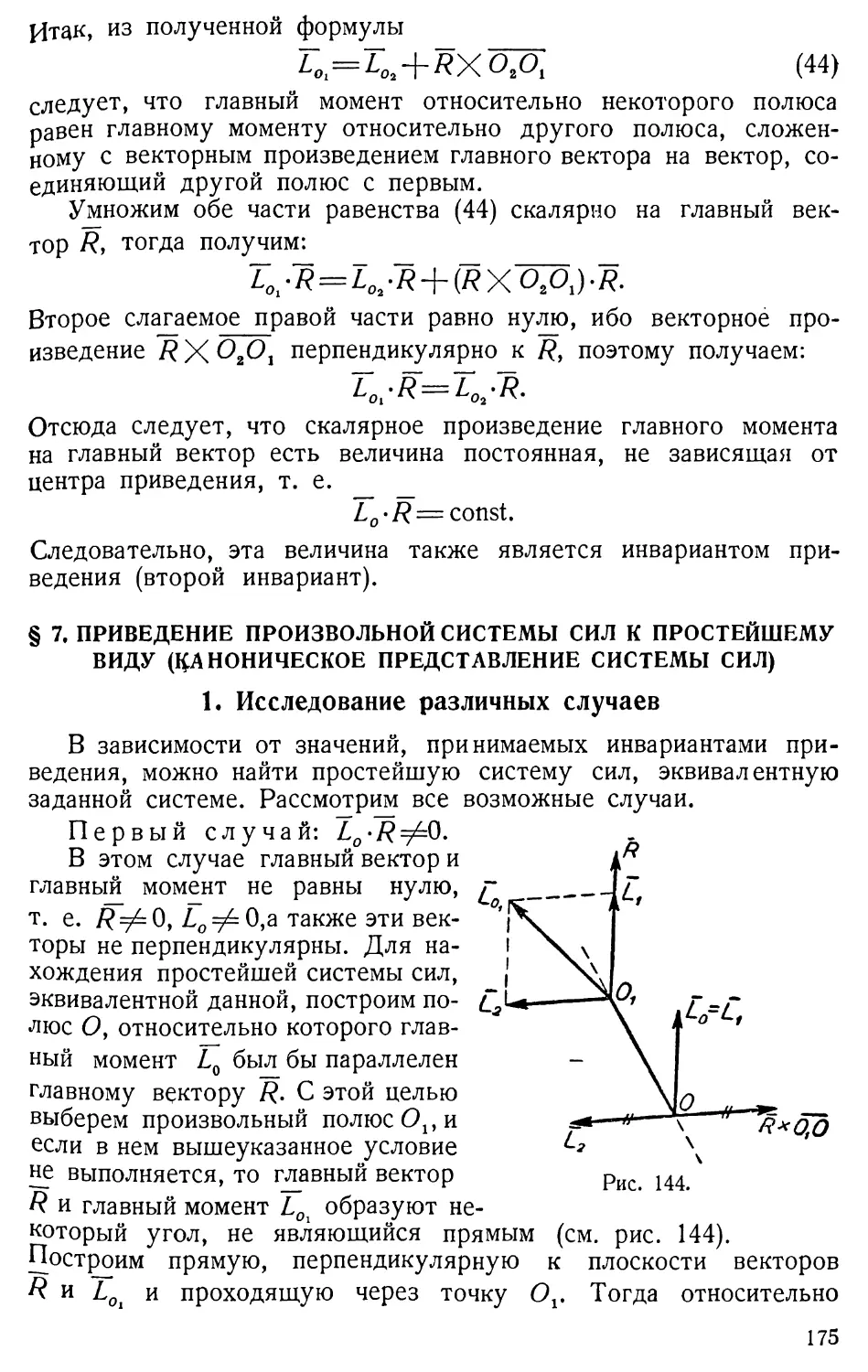
4. Инварианты приведения 174
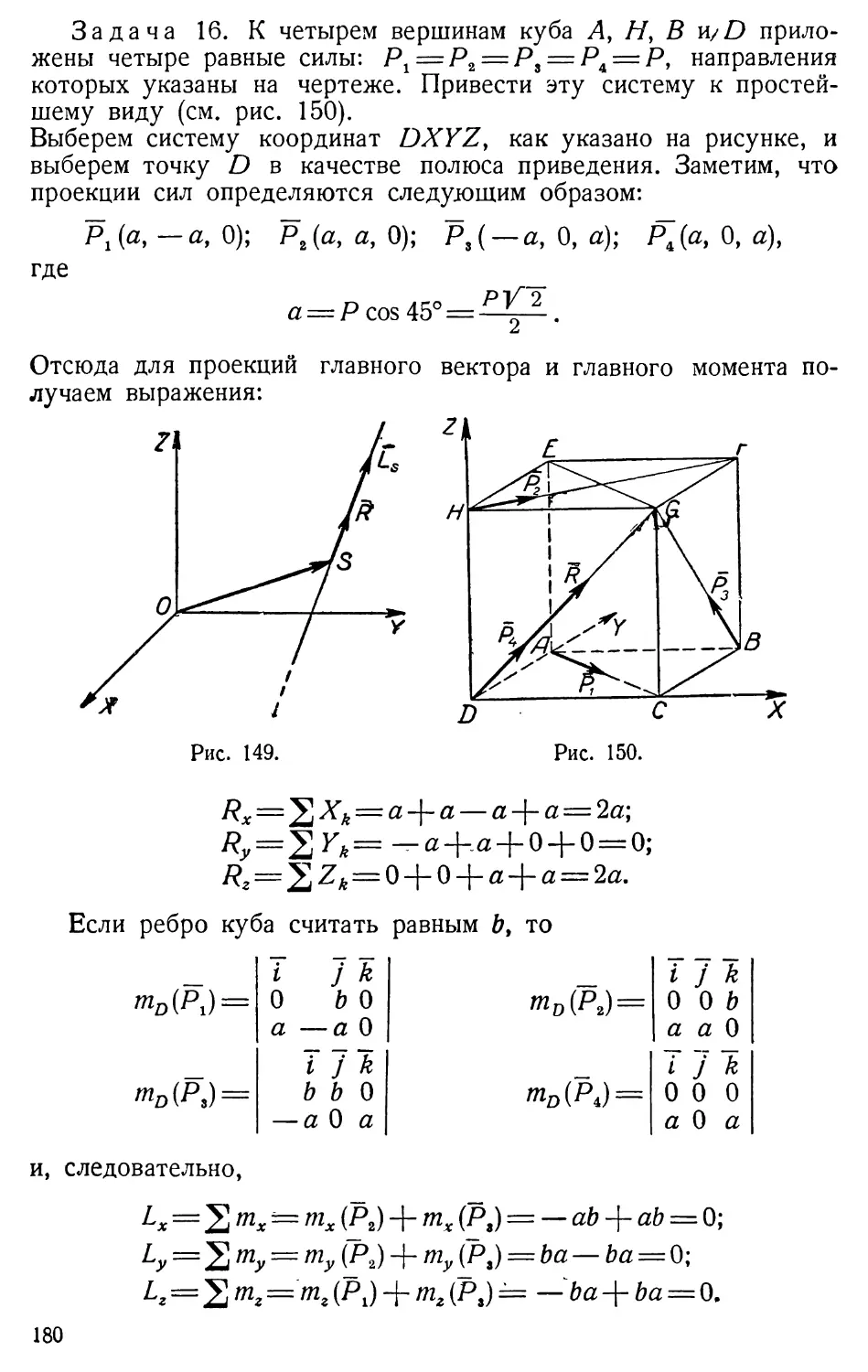
§ 7. Приведение произвольной системы сил к простейшему виду
(каноническое представление системы сил) 175
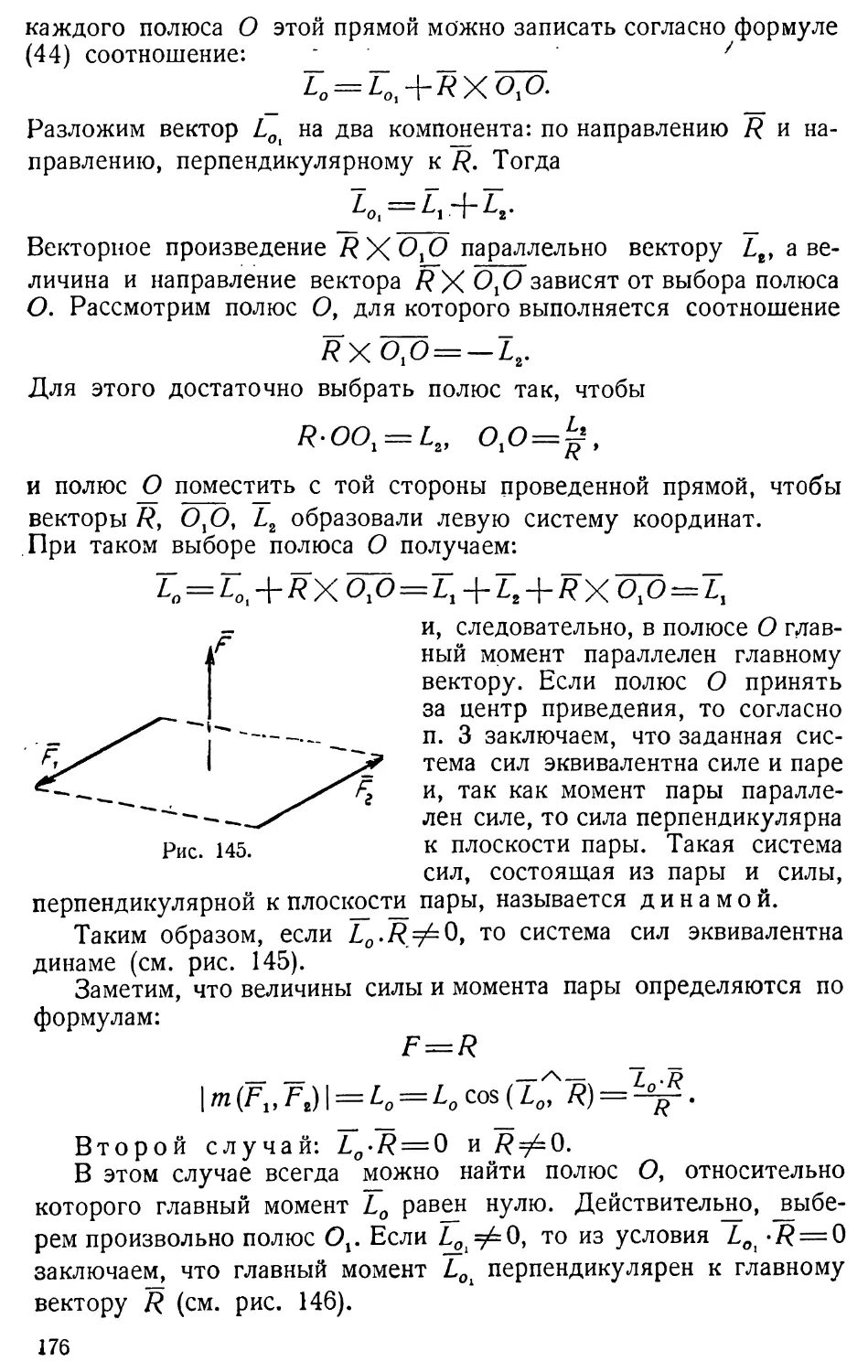
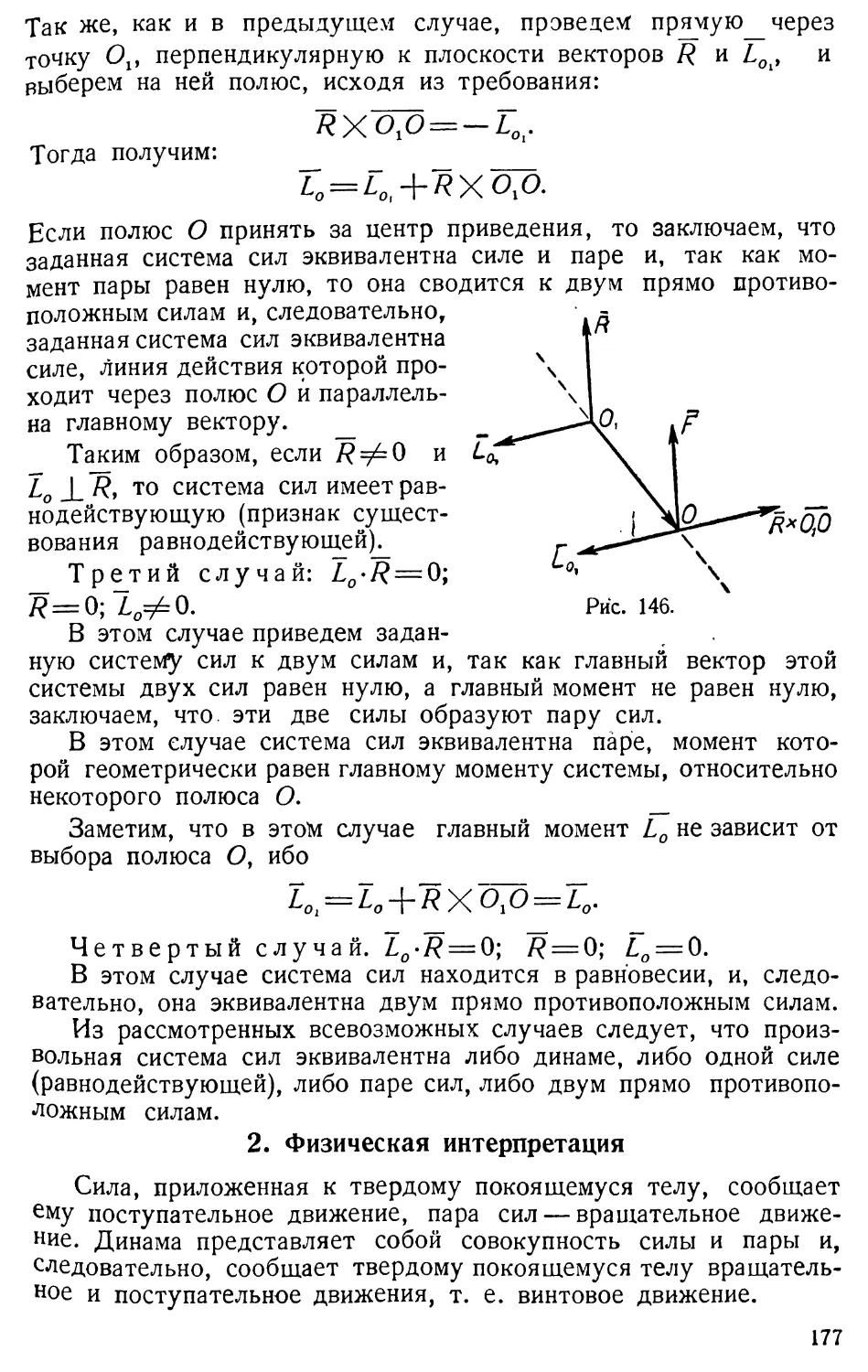
1. Исследование различных случаев —
2. Физическая интерпретация 177
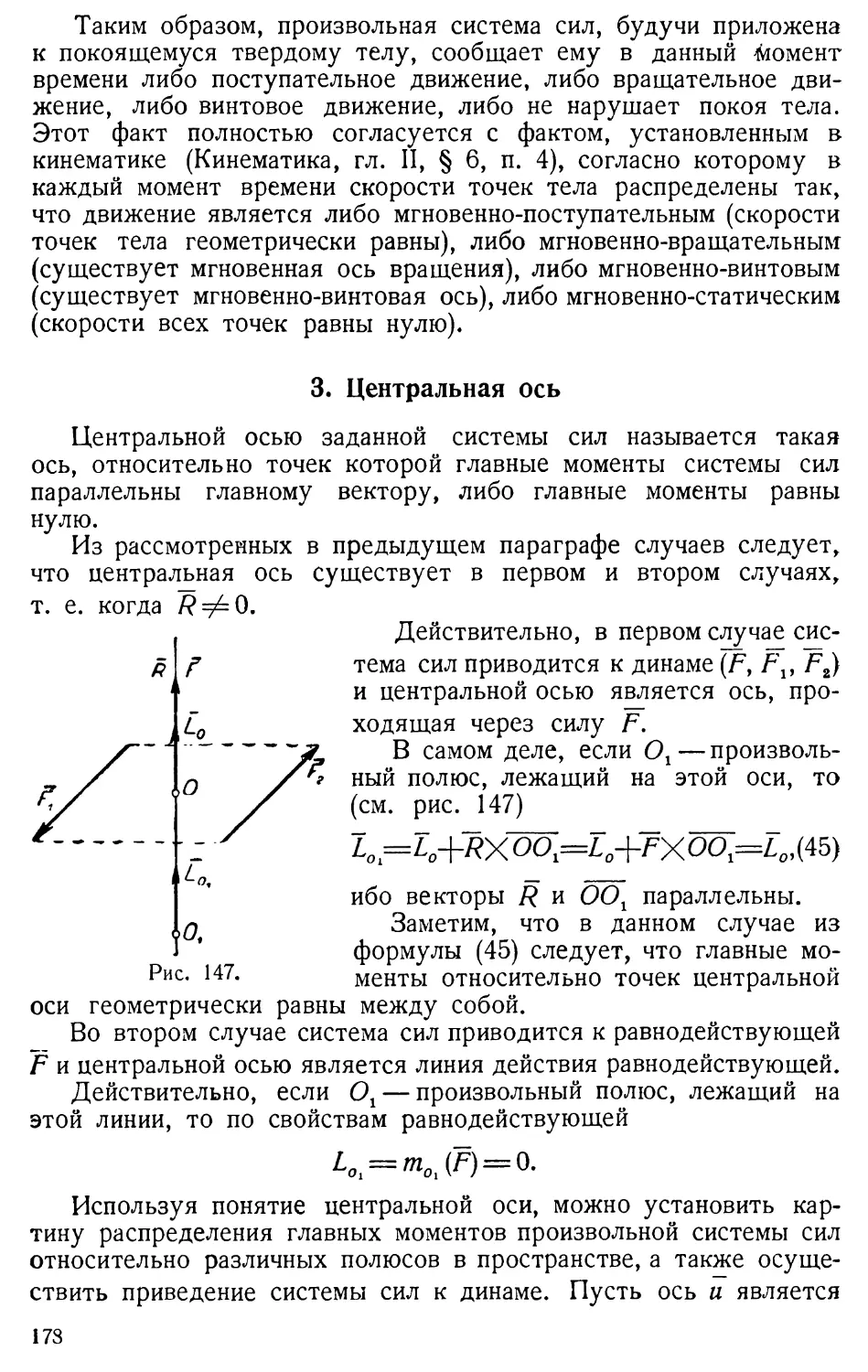
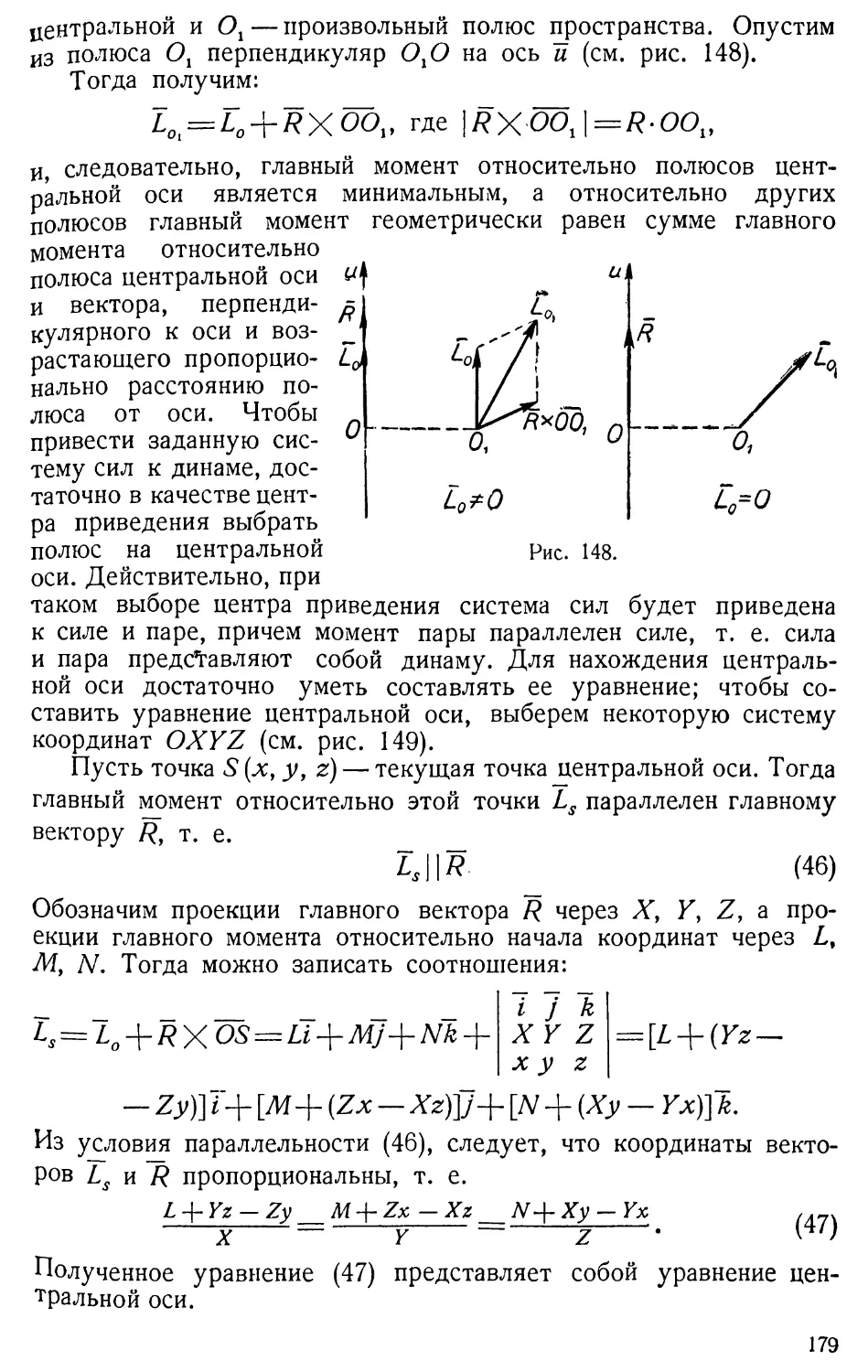
3. Центральная ось •. 178
Раздел II. динамика
Глава I. Дифференциальные уравнения движения материальной
точки 181
1. Уравнения свободного движения точки —
2. Интегралы уравнений движения 183
3. Начальные условия 185
4. Прямолинейное движение —
5. Примеры прямолинейных движений 188
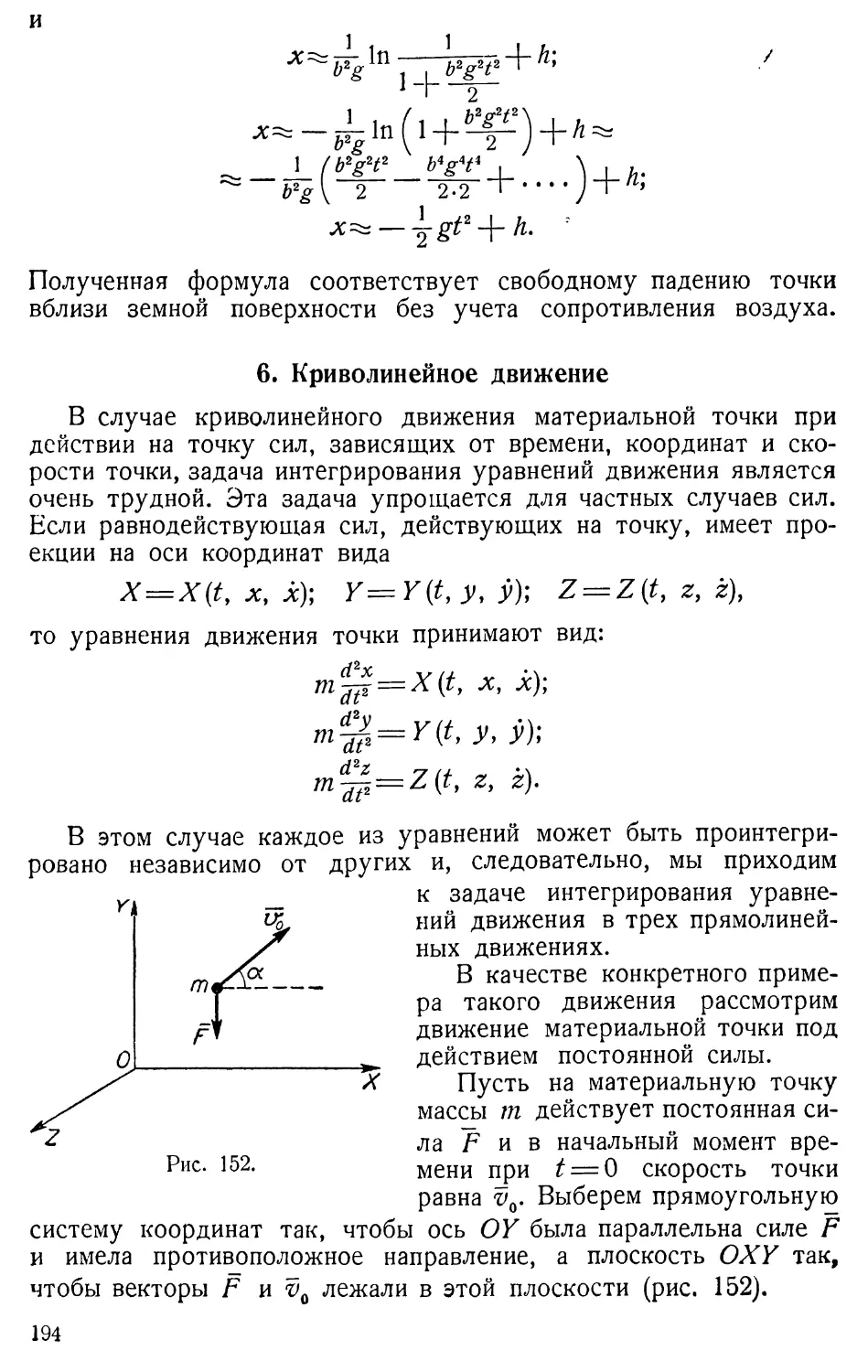
6. Криволинейное движение 194
7. Несвободное движение 198
Глава II. Основные теоремы динамики 202
§ 1. Количество движения 203
1. Понятие о количестве движения —
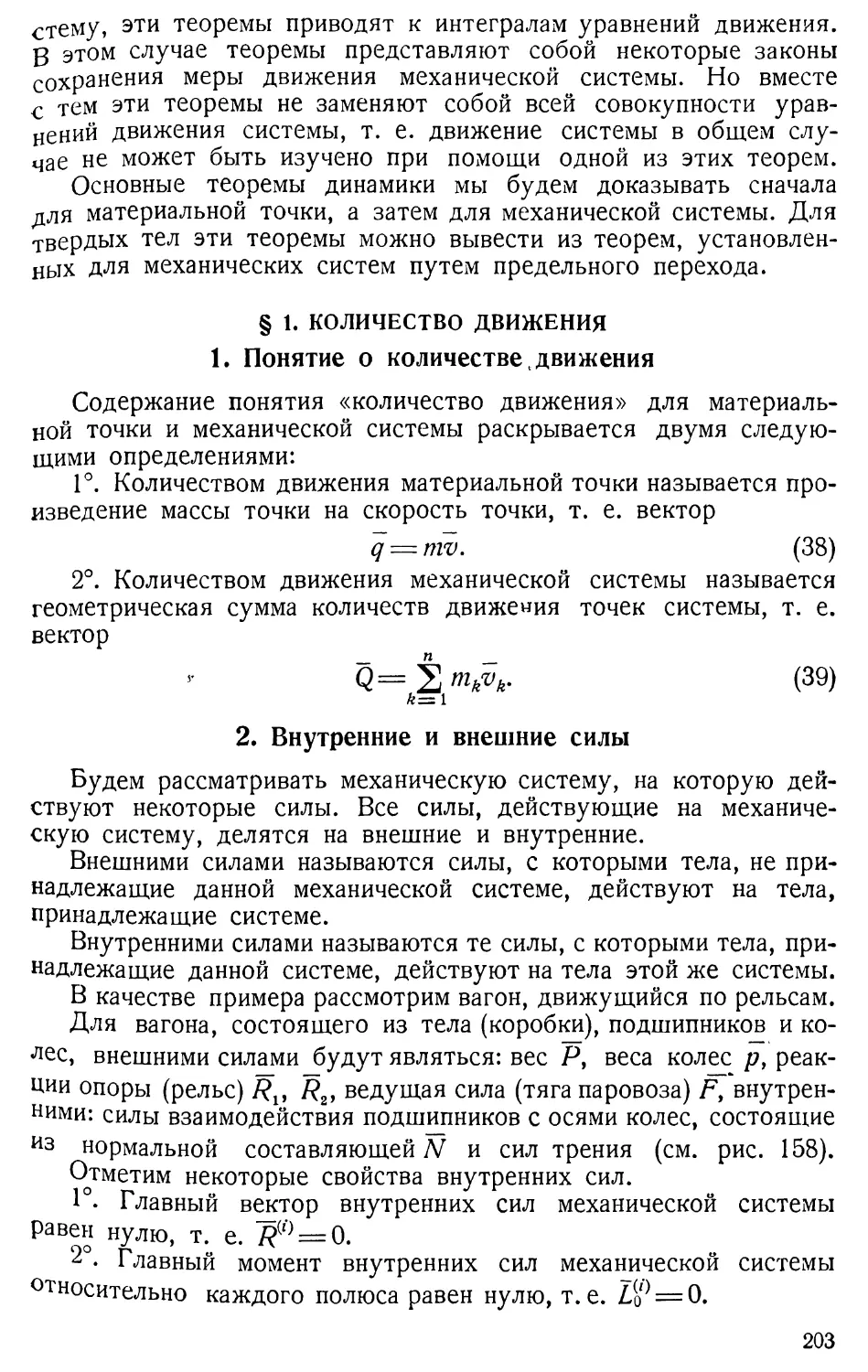
2. Внутренние и внешние силы —
3. Теоремы о количестве движения 204
§ 2. Импульс силы 207
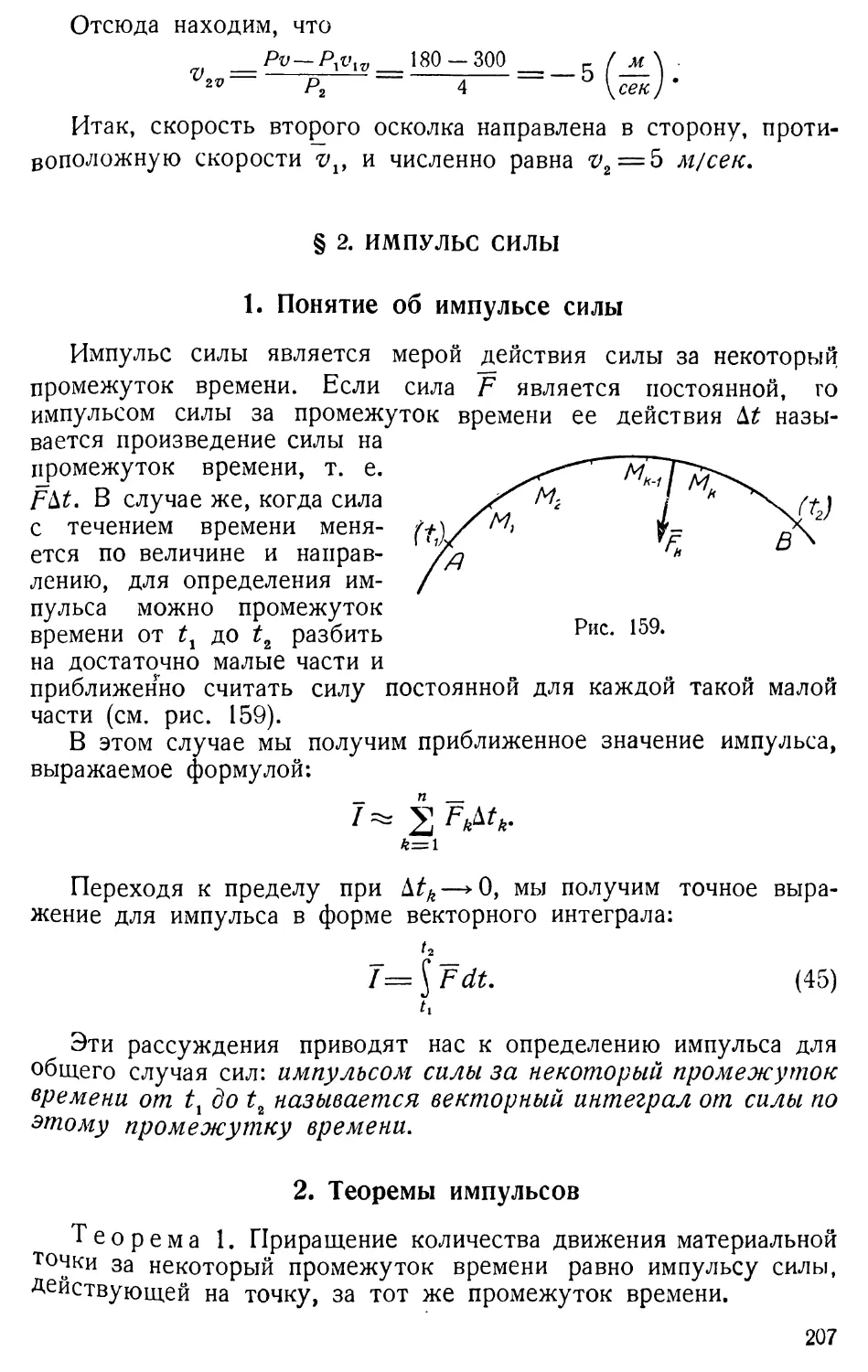
1. Понятие об импульсе силы
2. Теоремы импульсов ,
§ 3. Движение центра инерции 209
§ 4. Кинетический момент 215
1. Понятие о кинетическом моменте —
2. Теоремы о кинетическом моменте 216
3. Кинетический момент для тела вращения 219
4. Некоторые приложения:
а) Дифференциальное уравнение вращения твердого тела . . . 220
б) Математический маятник 221
в) Физический маятник 223
§ 5. Работа силы и кинетическая энергия
1. Понятие о работе силы ^ . . . 228
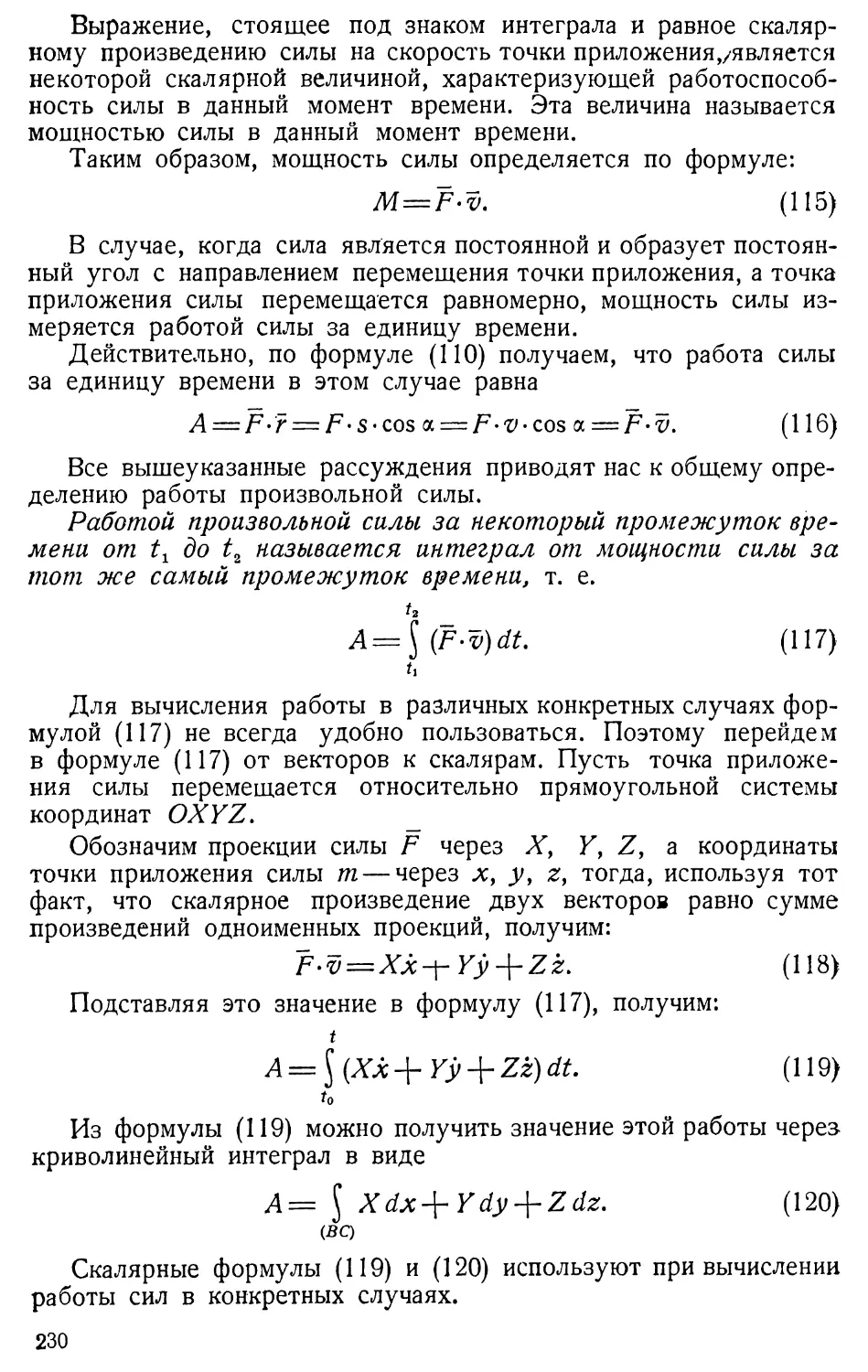
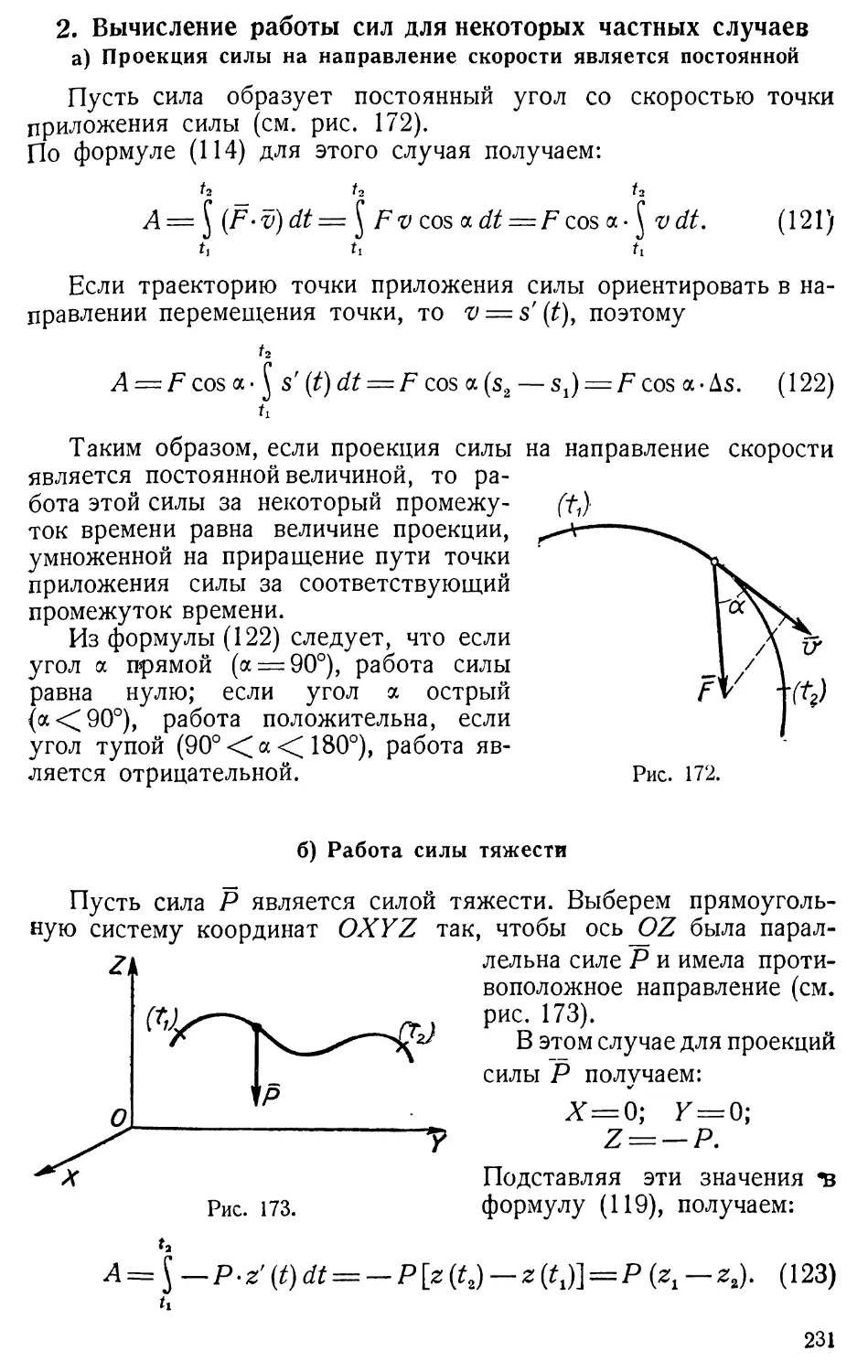
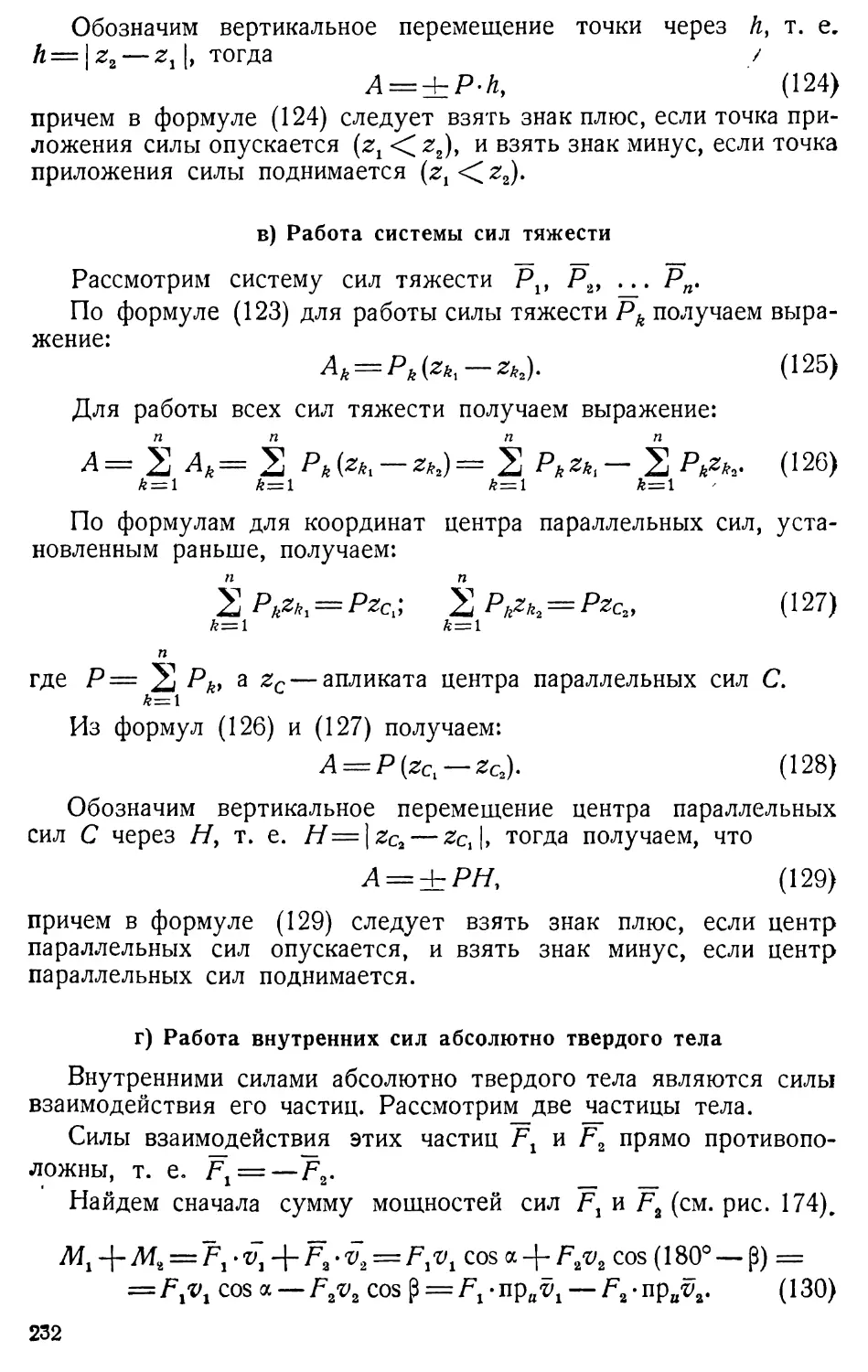
2. Вычисление работы сил для некоторых частных случаев . . . 230
3. Понятие о кинетической энергии 235
4. Теорема о кинетической энергии 239
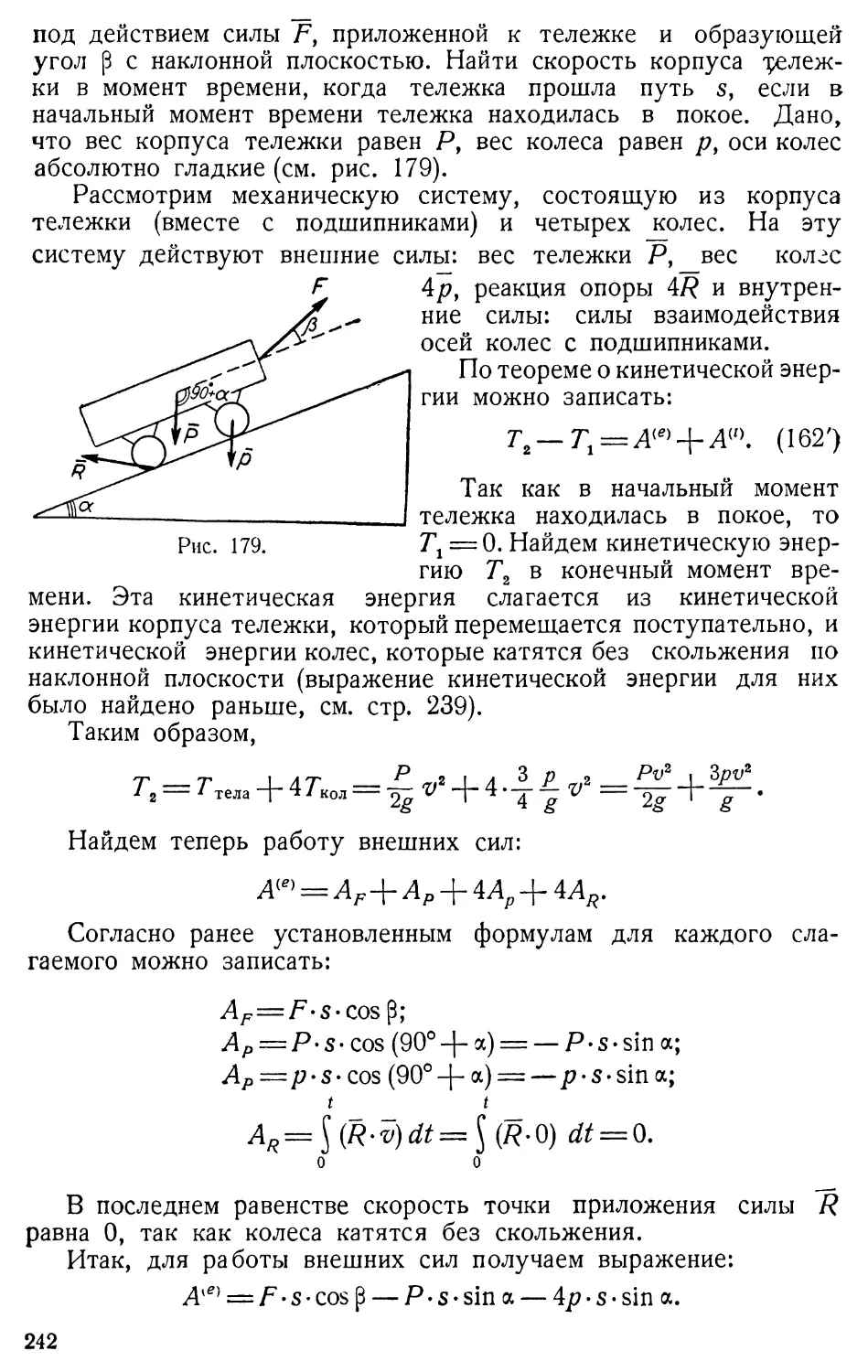
§ 6. Полная механическая энергия 243
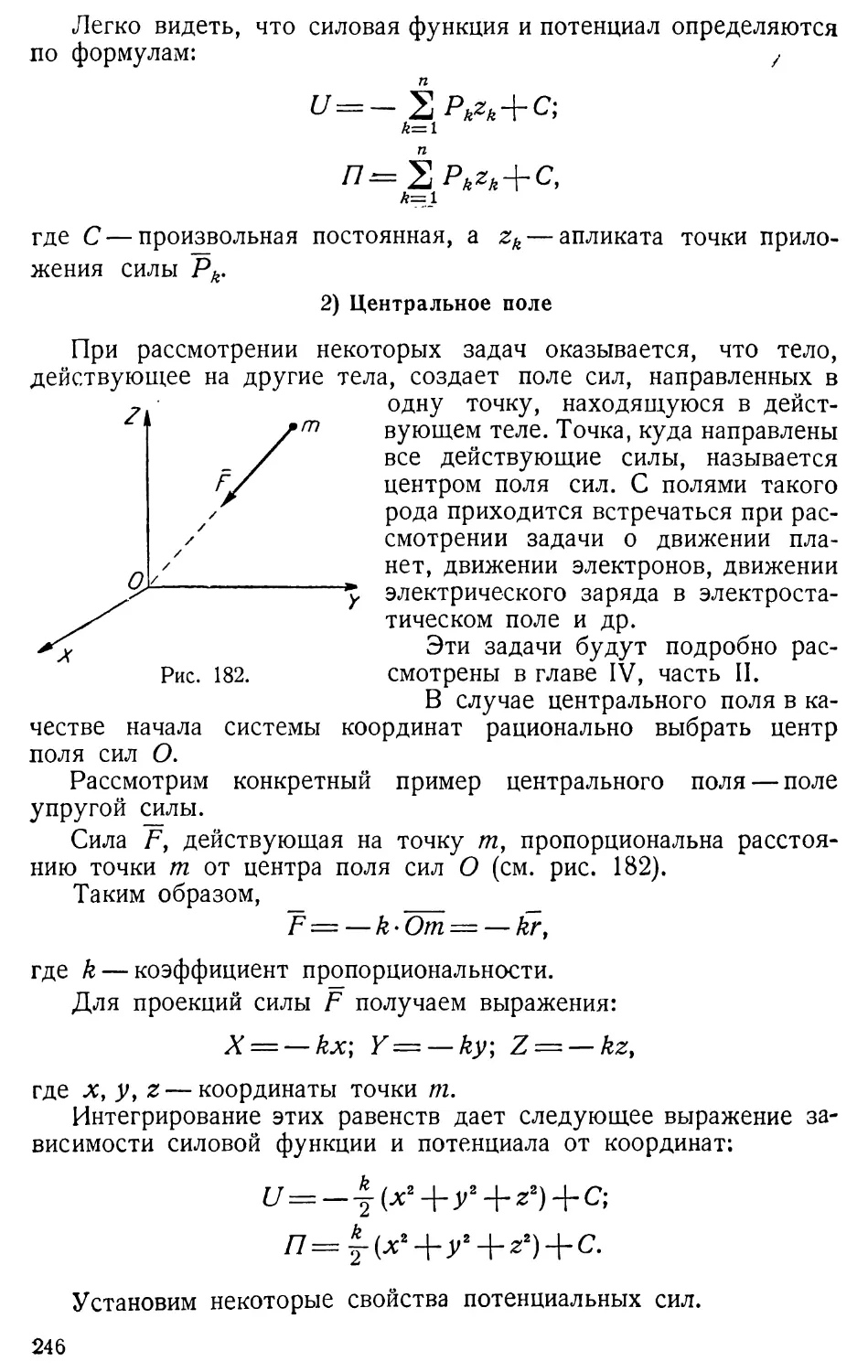
1. Силовое поле —
2. Понятие о полной механической энергии 248
3. Теорема о сохранении механической энергии 249
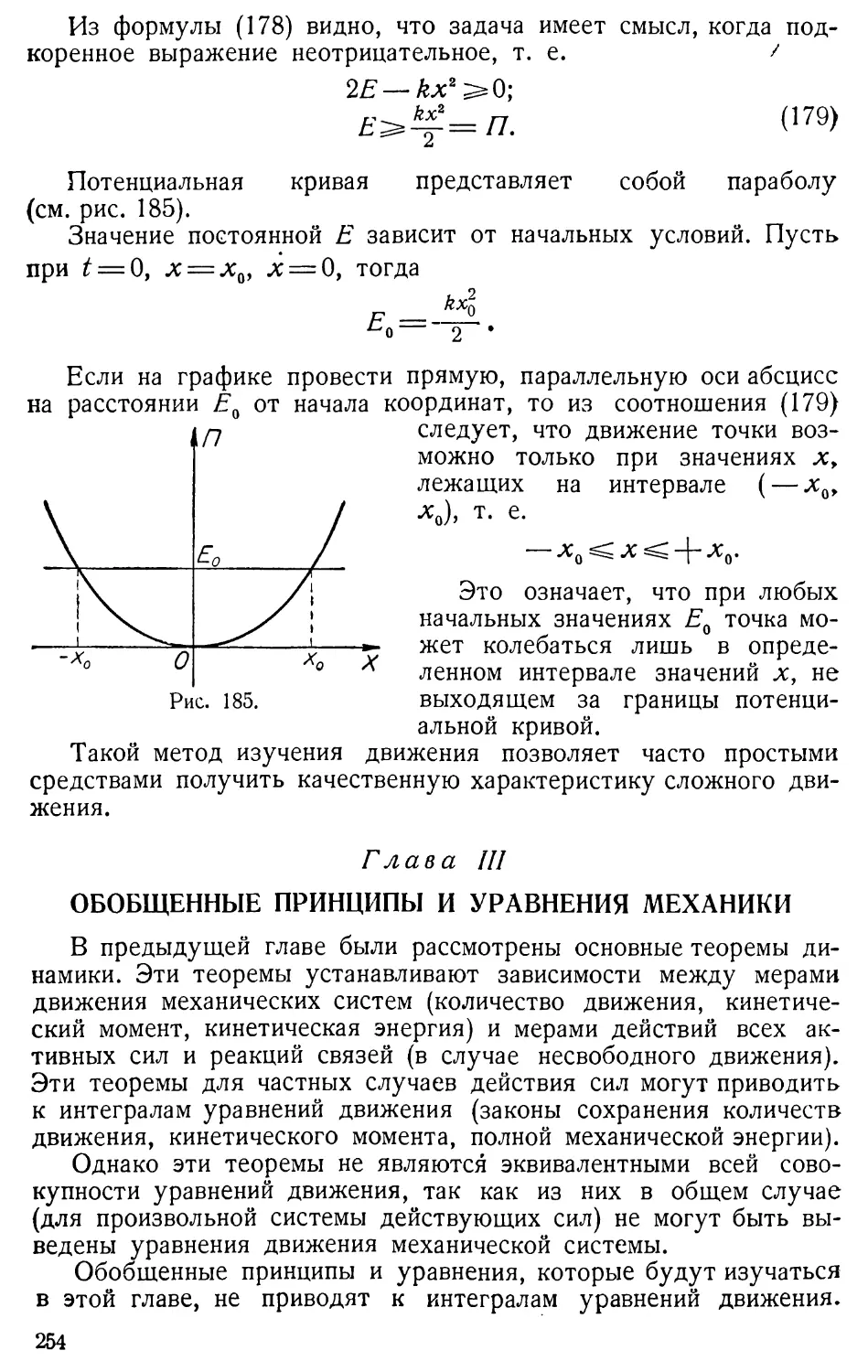
4. Потенциальное силовое поле 250
Глава III. Обобщенные принципы и уравнения механики 254
§ 1. Классификация связей 255
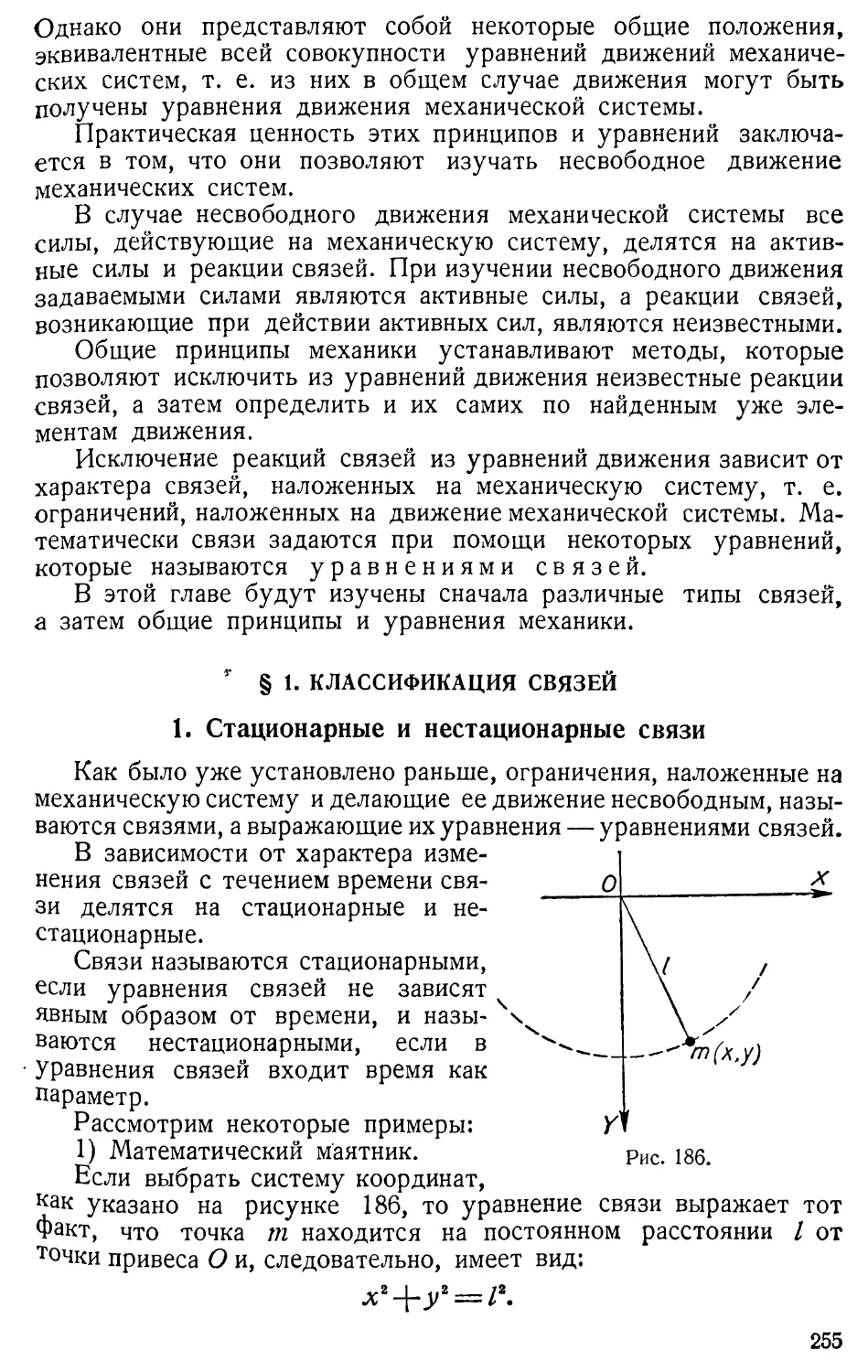
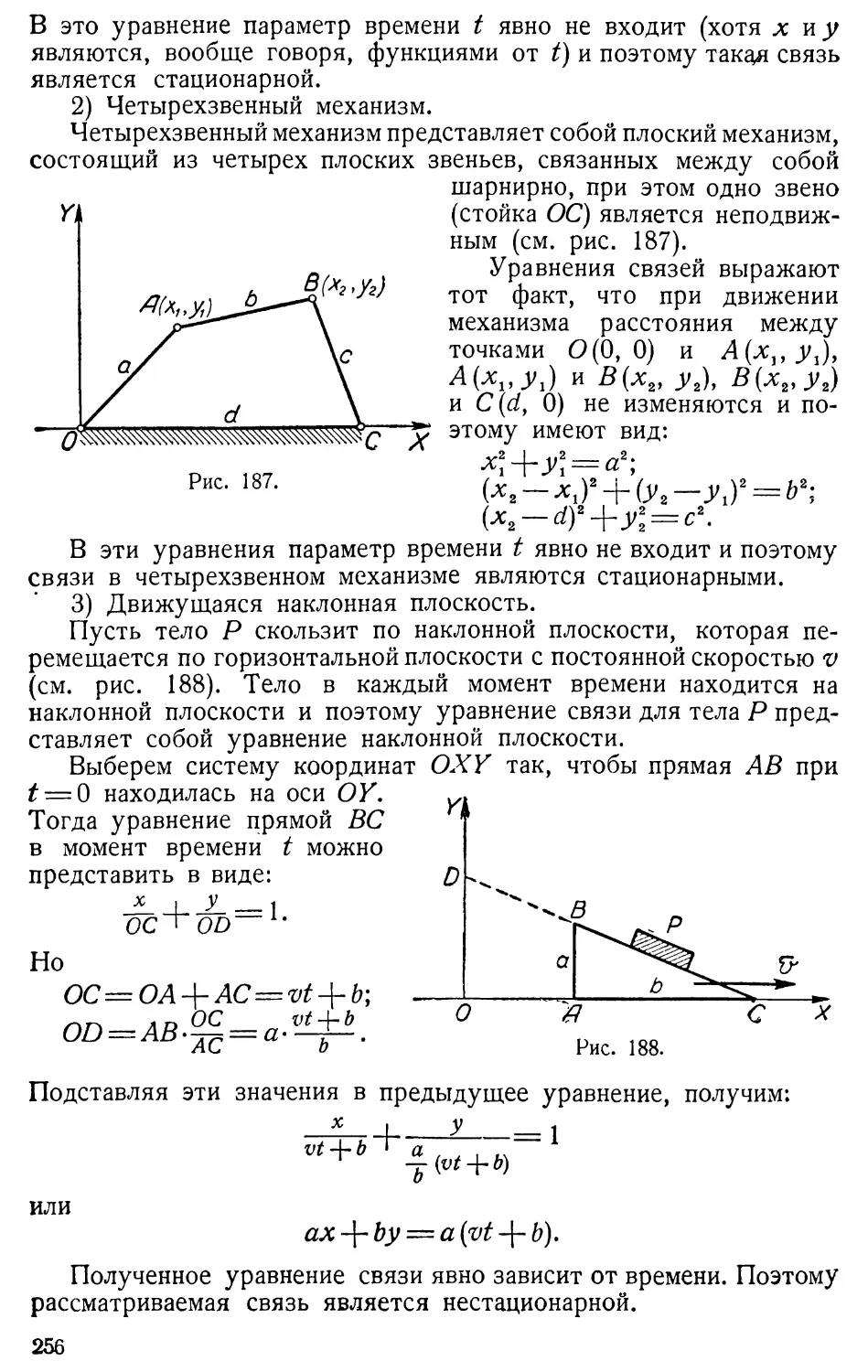
1. Стационарные и нестационарные связи —
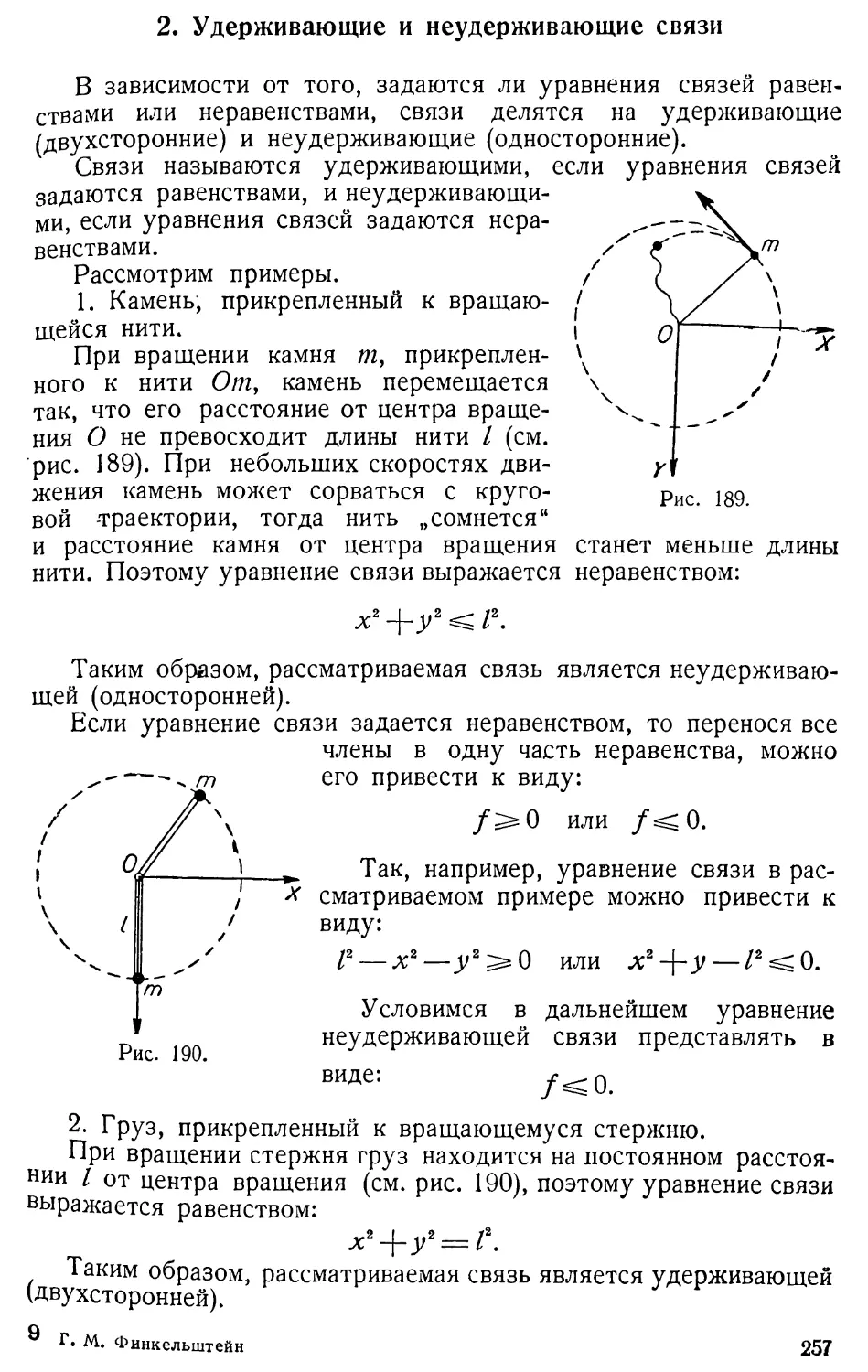
2. Удерживающие и неудерживающие связи 257
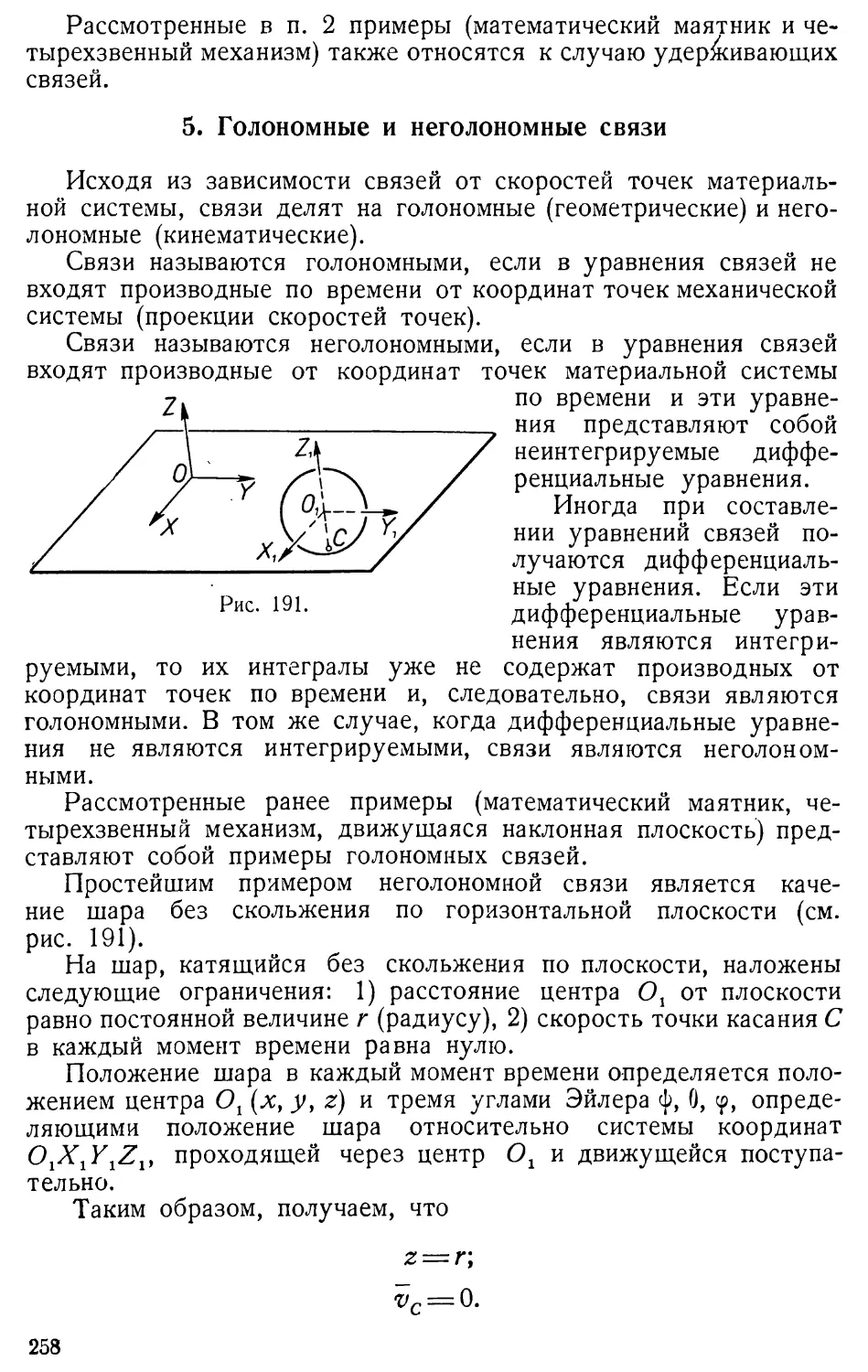
3. Голономные и неголономные связи 258
4. Уравнения связей произвольной механической системы .... 261
§ 2. Обобщенные координаты и обобщенные силы 262
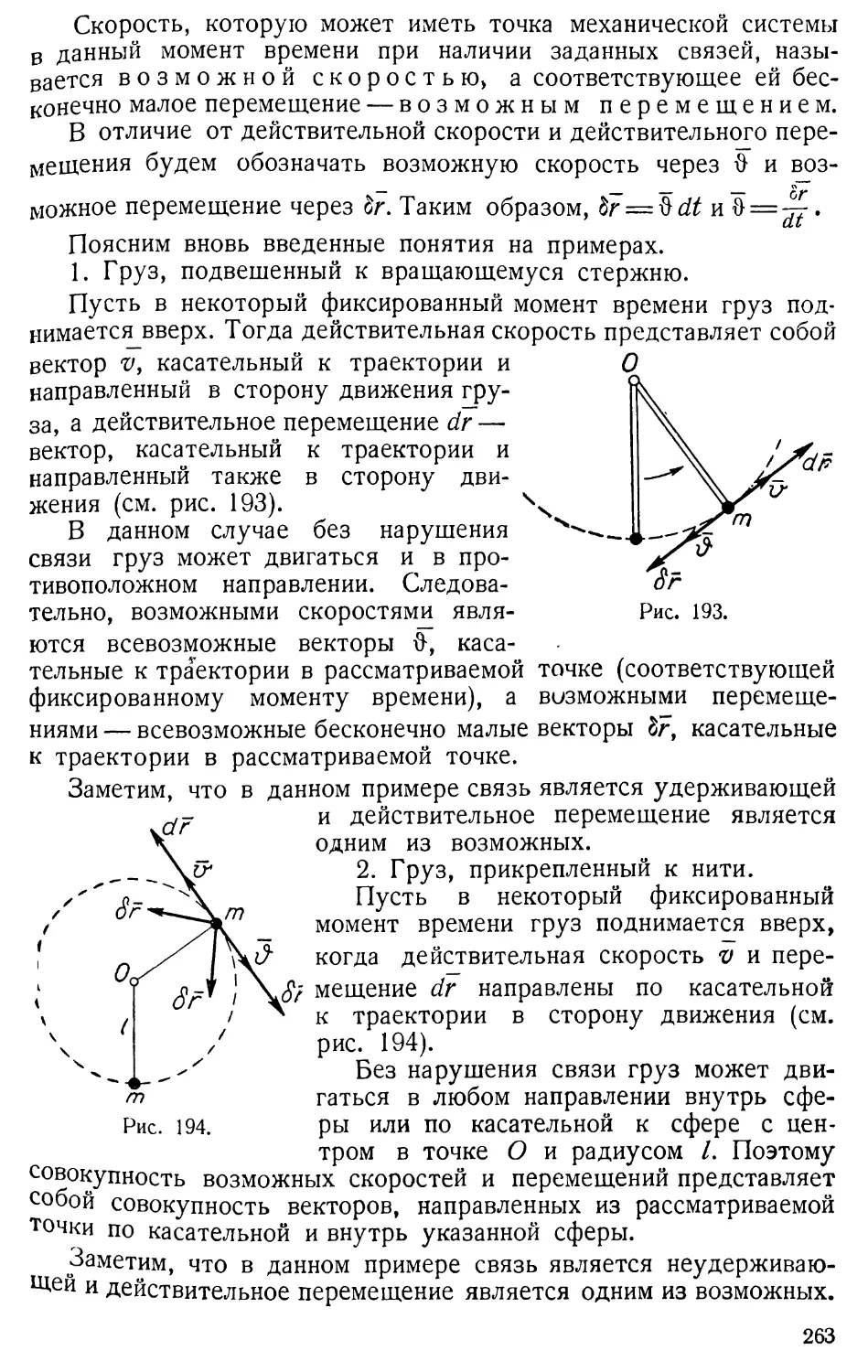
1. Возможные и действительные перемещения —
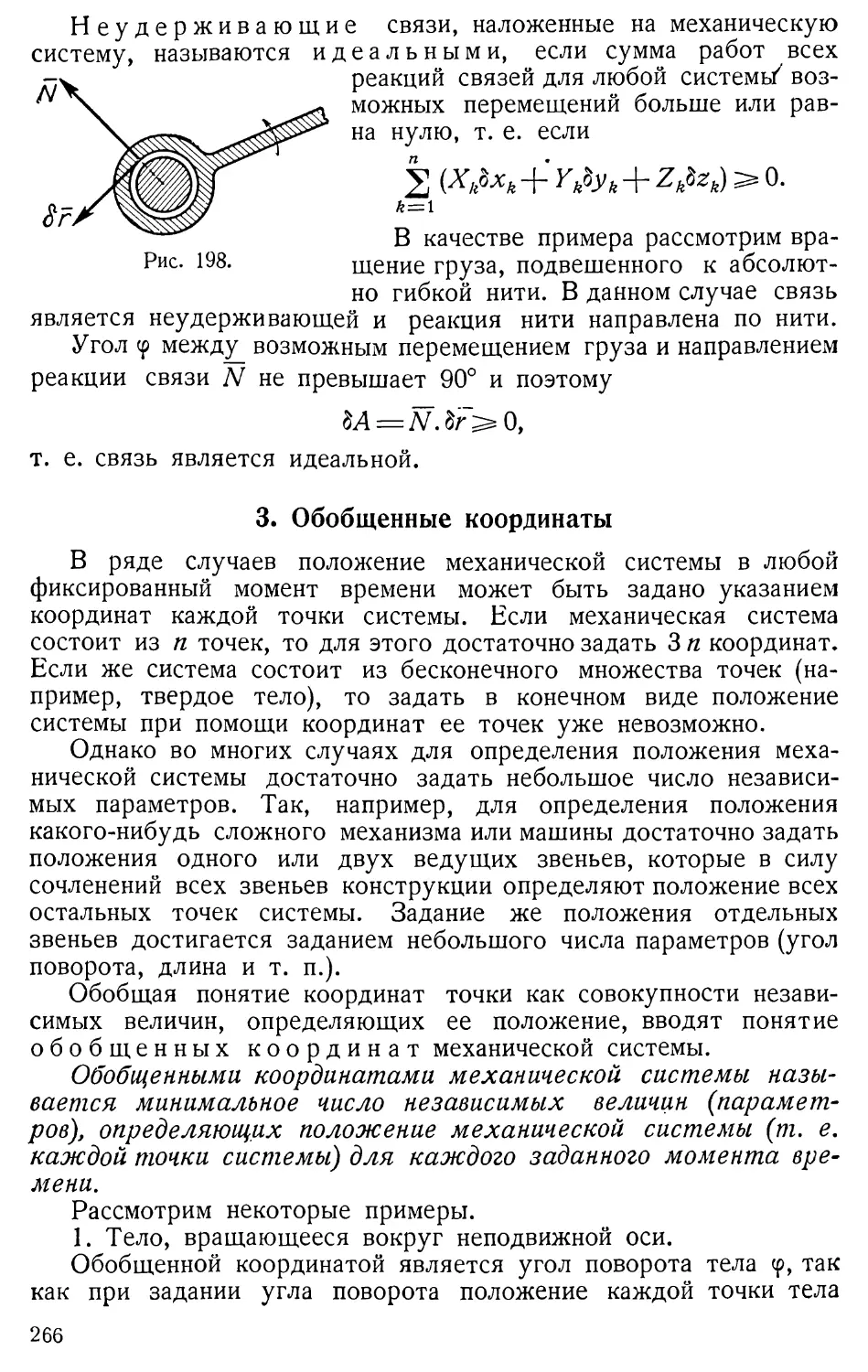
2. Идеальные связи 264
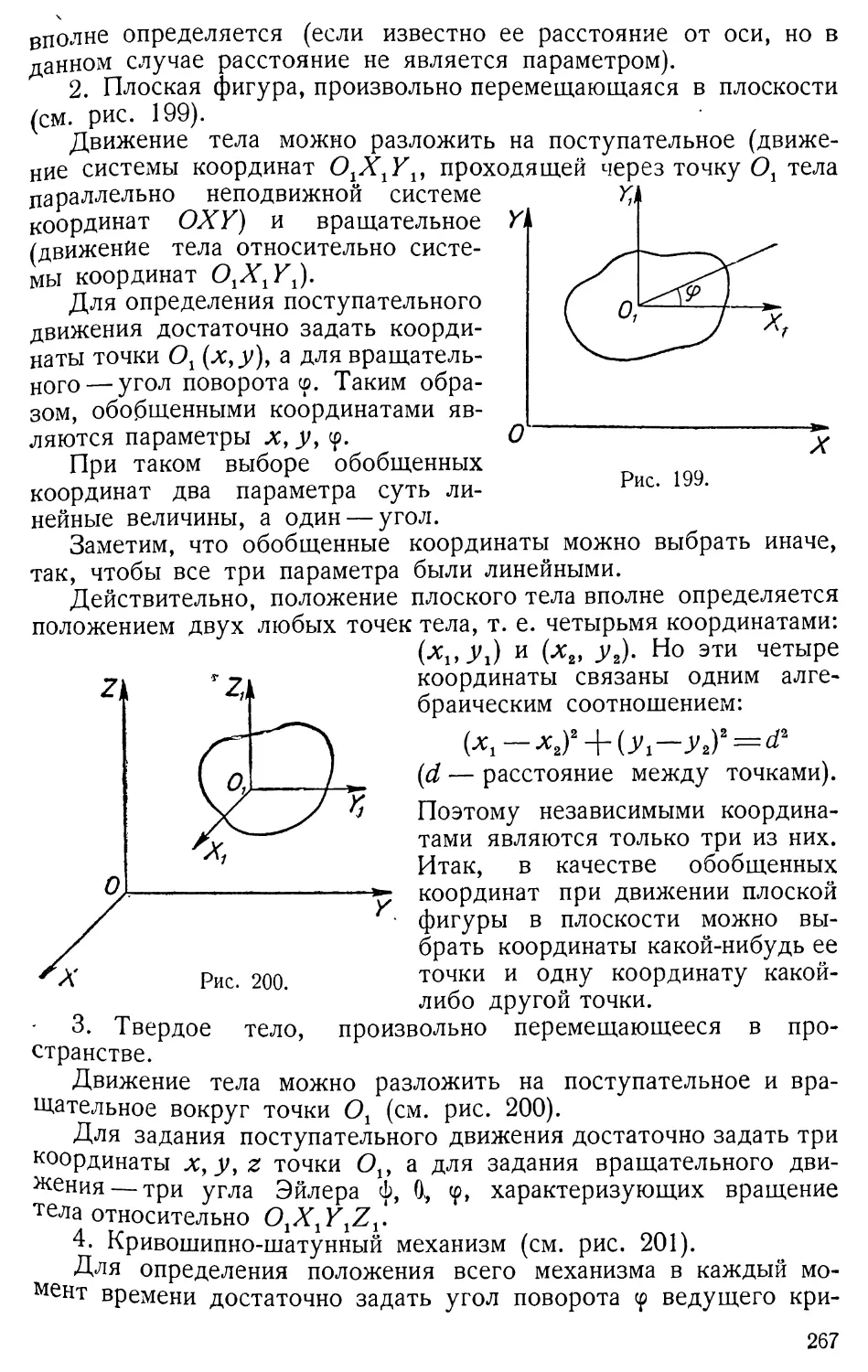
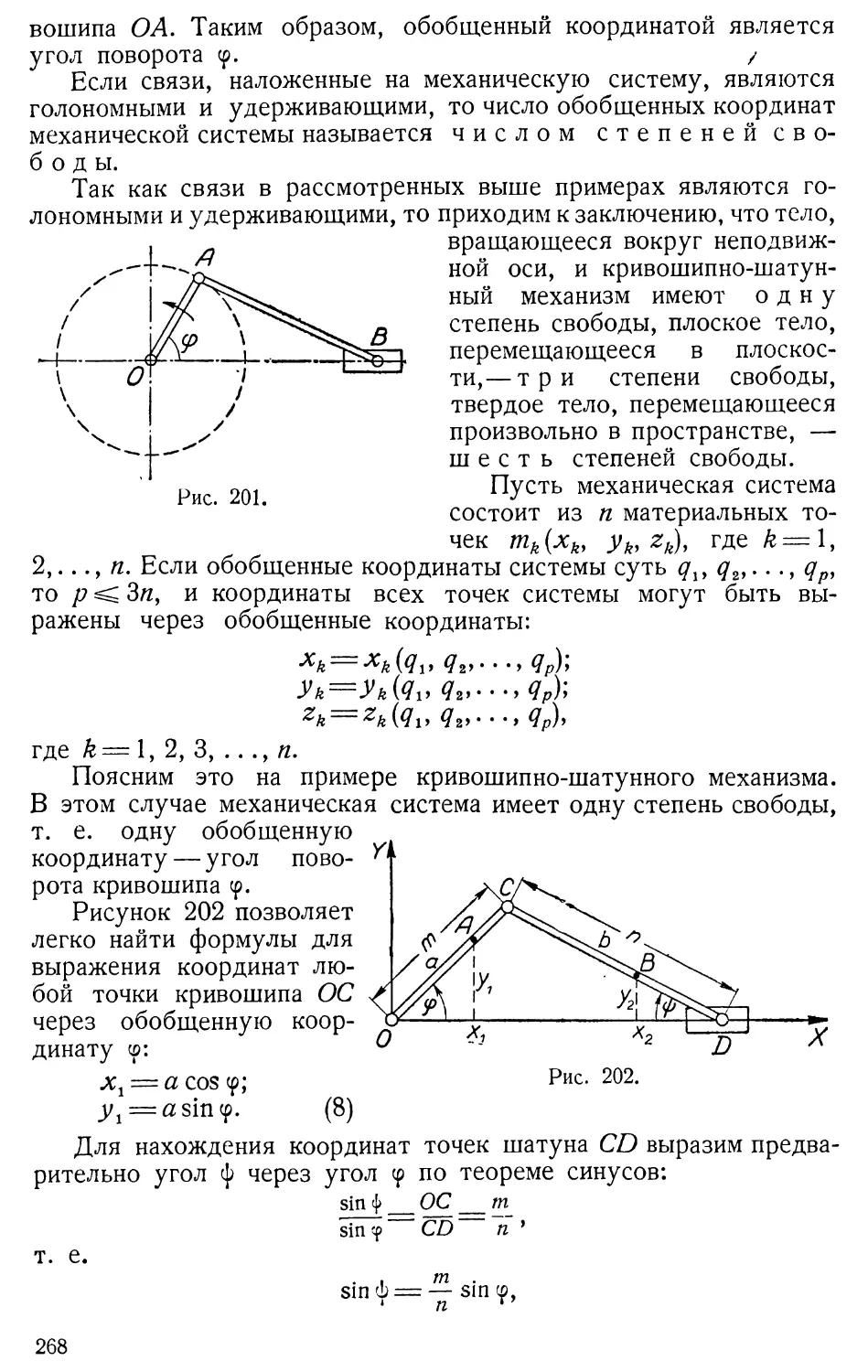
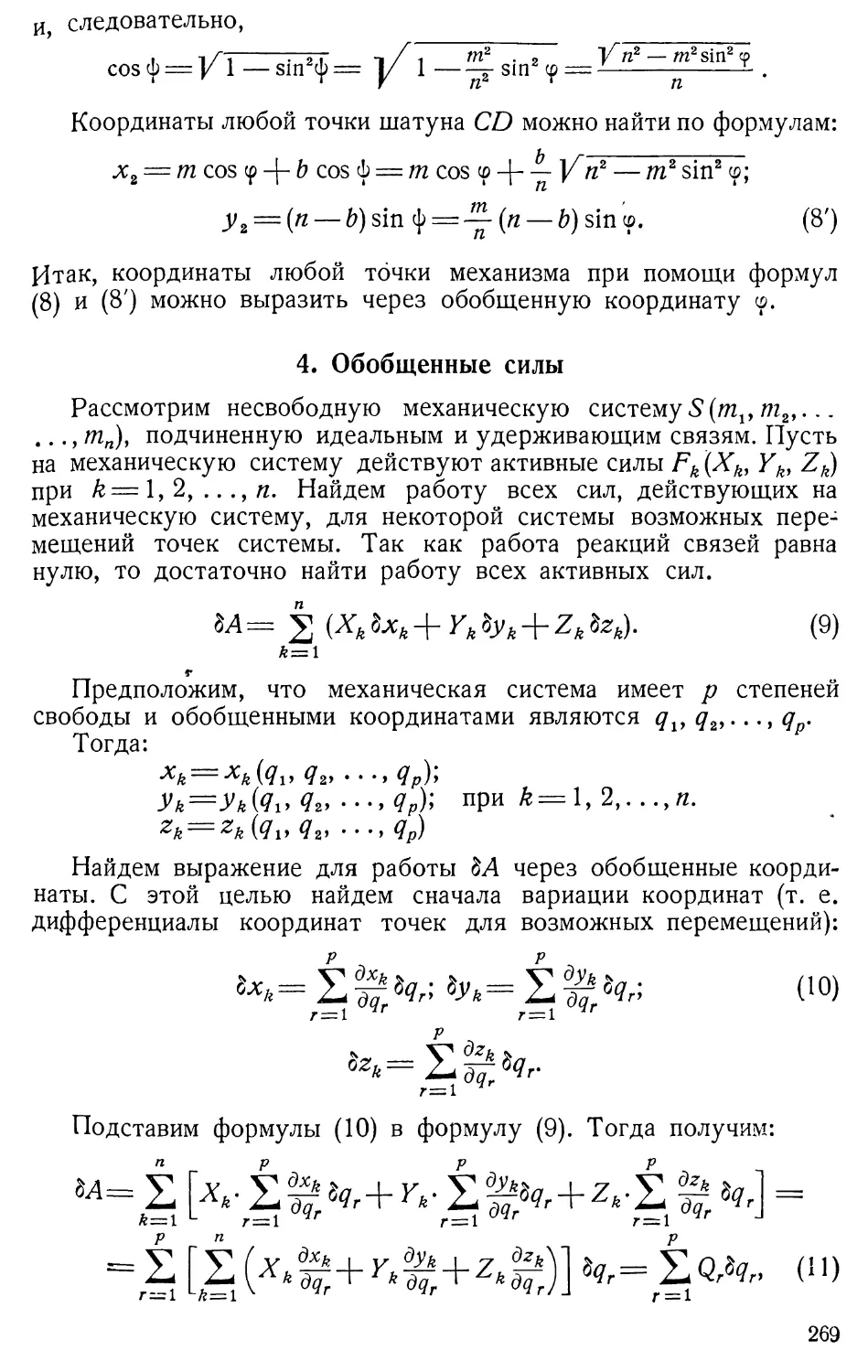
3. Обобщенные координаты * 266
4. Обобщенные силы 269
§ 3. Принцип возможных перемещений 272
1. Основные теоремы —
2. Равновесие абсолютно твердого тела 276
§ 4. Принцип Даламбера 279
1. Силы инерции —
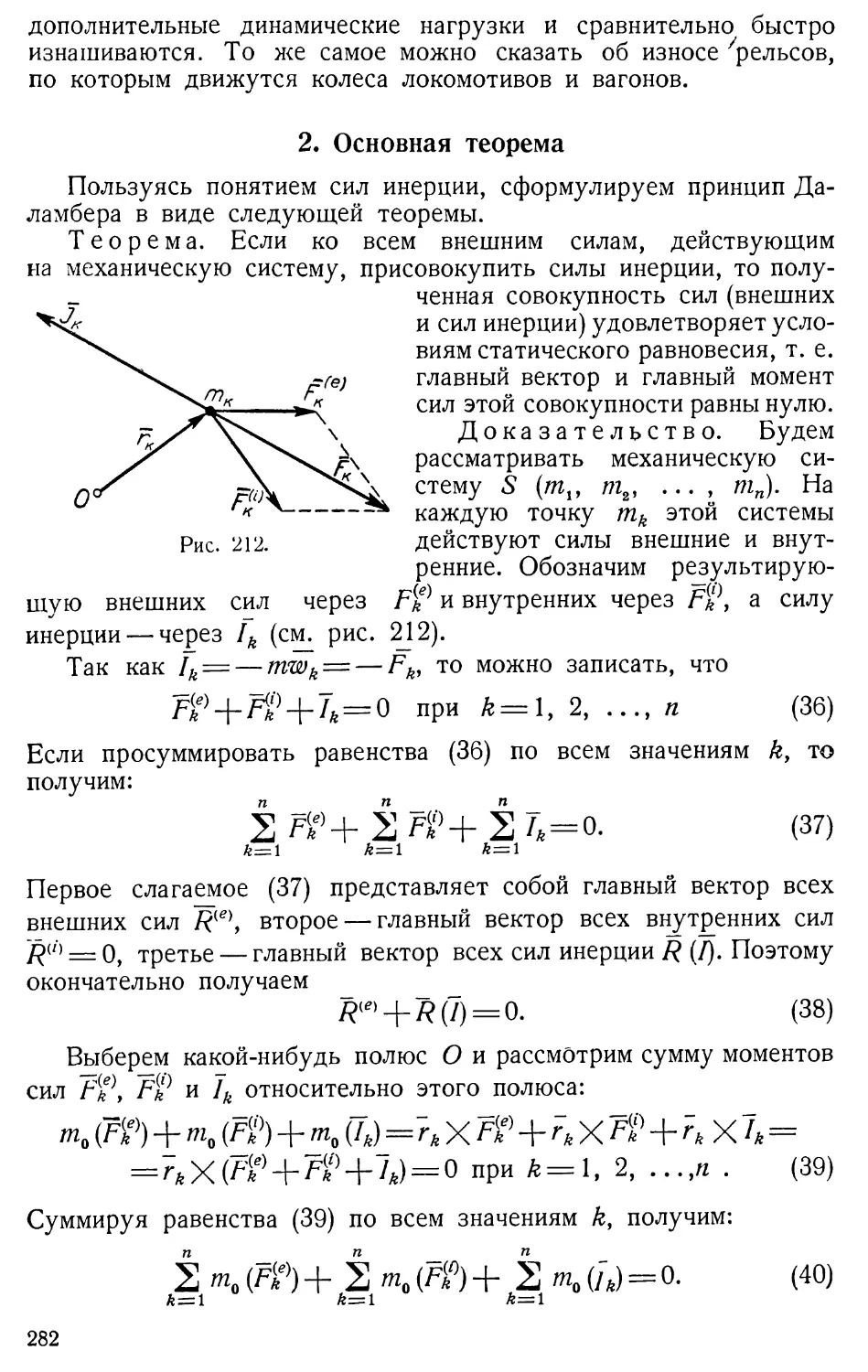
2. Основная теорема 282
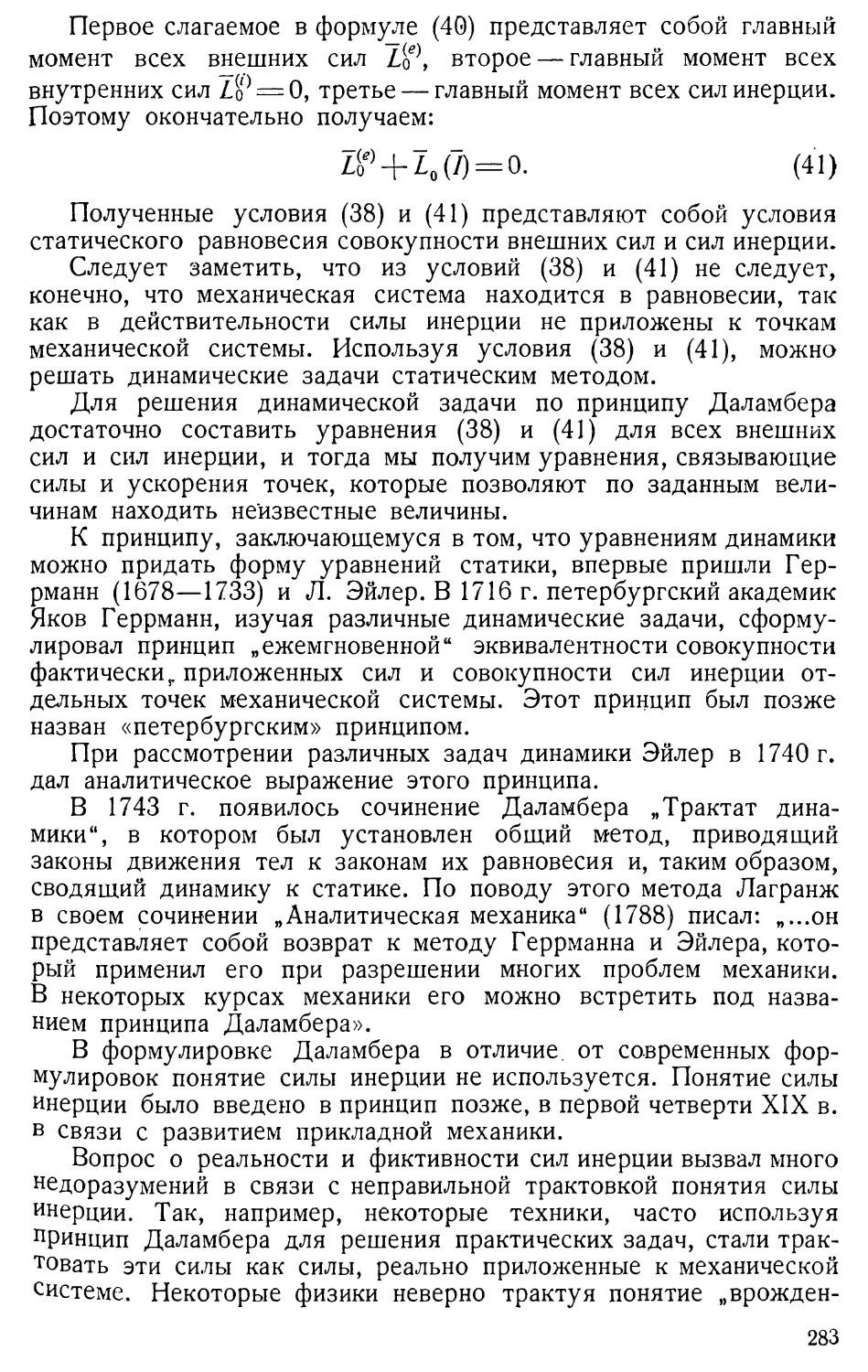
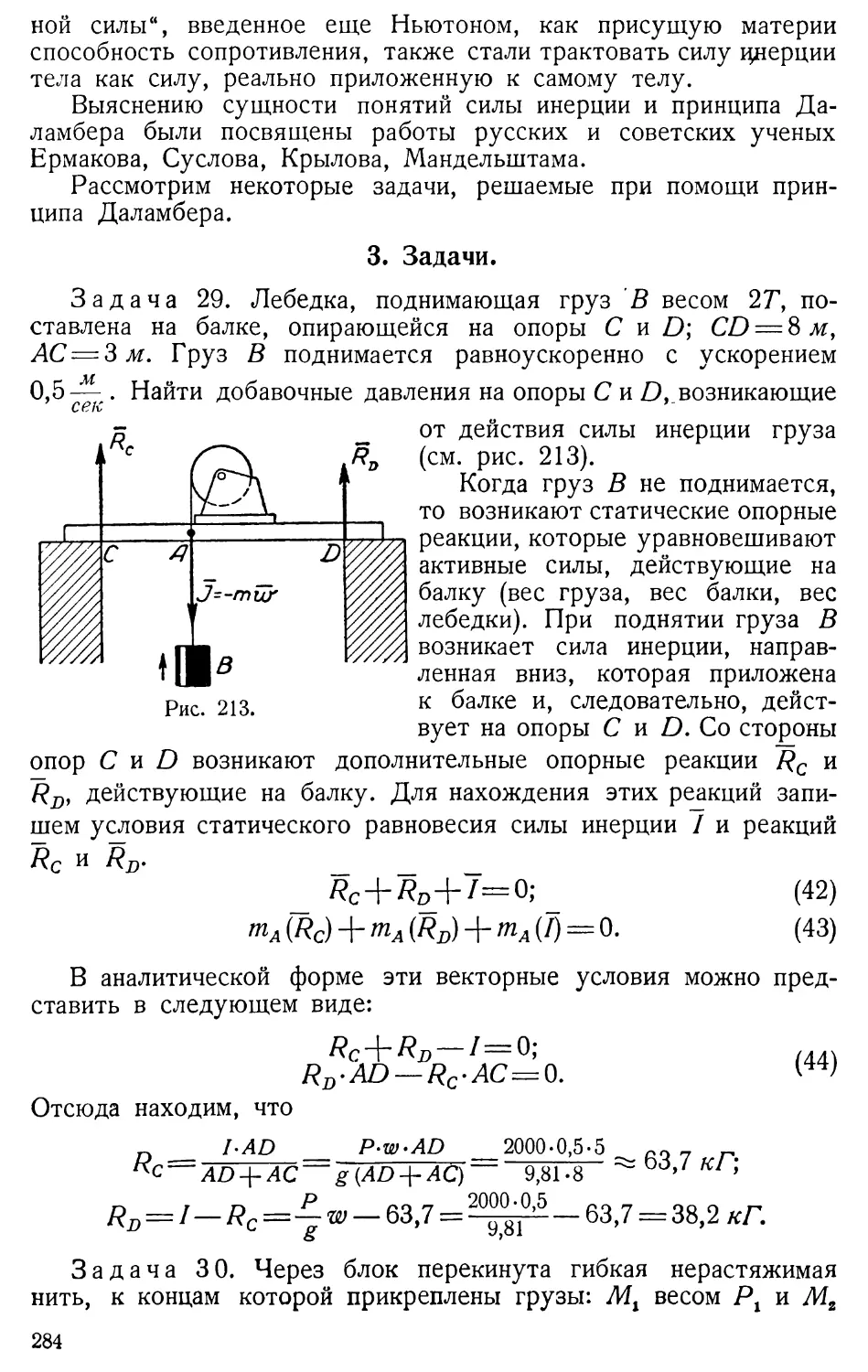
3. Задачи 284
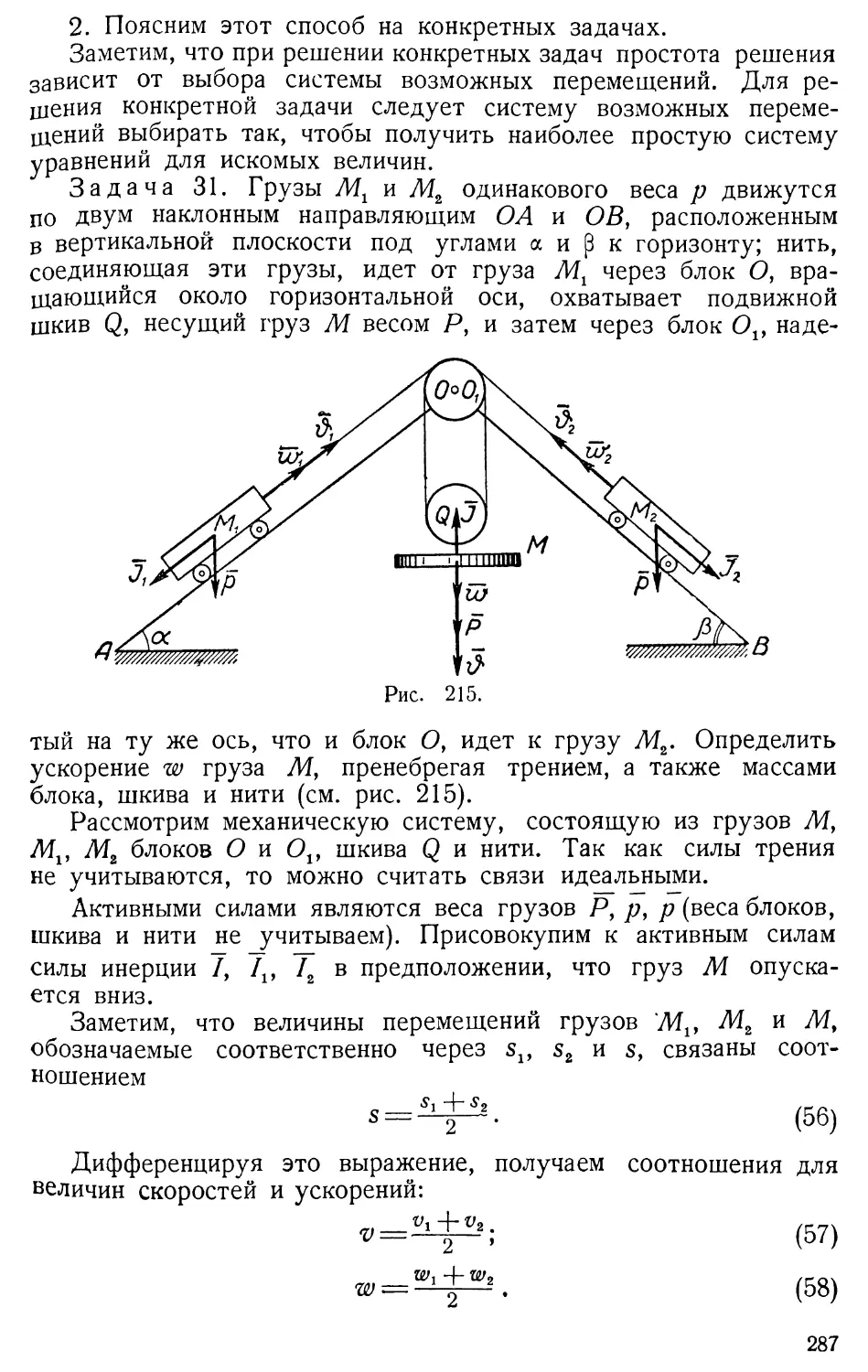
§ 5. Общее уравнение динамики 285
§ 6. Уравнения Лагранжа 288
1. Уравнения Лагранжа первого рода —
2. Уравнения Лагранжа .второго рода 290
3. Циклические координаты и обобщенные импульсы 294
4. Задачи 295
§ 7. Канонические уравнения механики 298
1. Вывод канонических уравнений —
2. Задачи 301
§ 8. Вариационные принципы механики 304
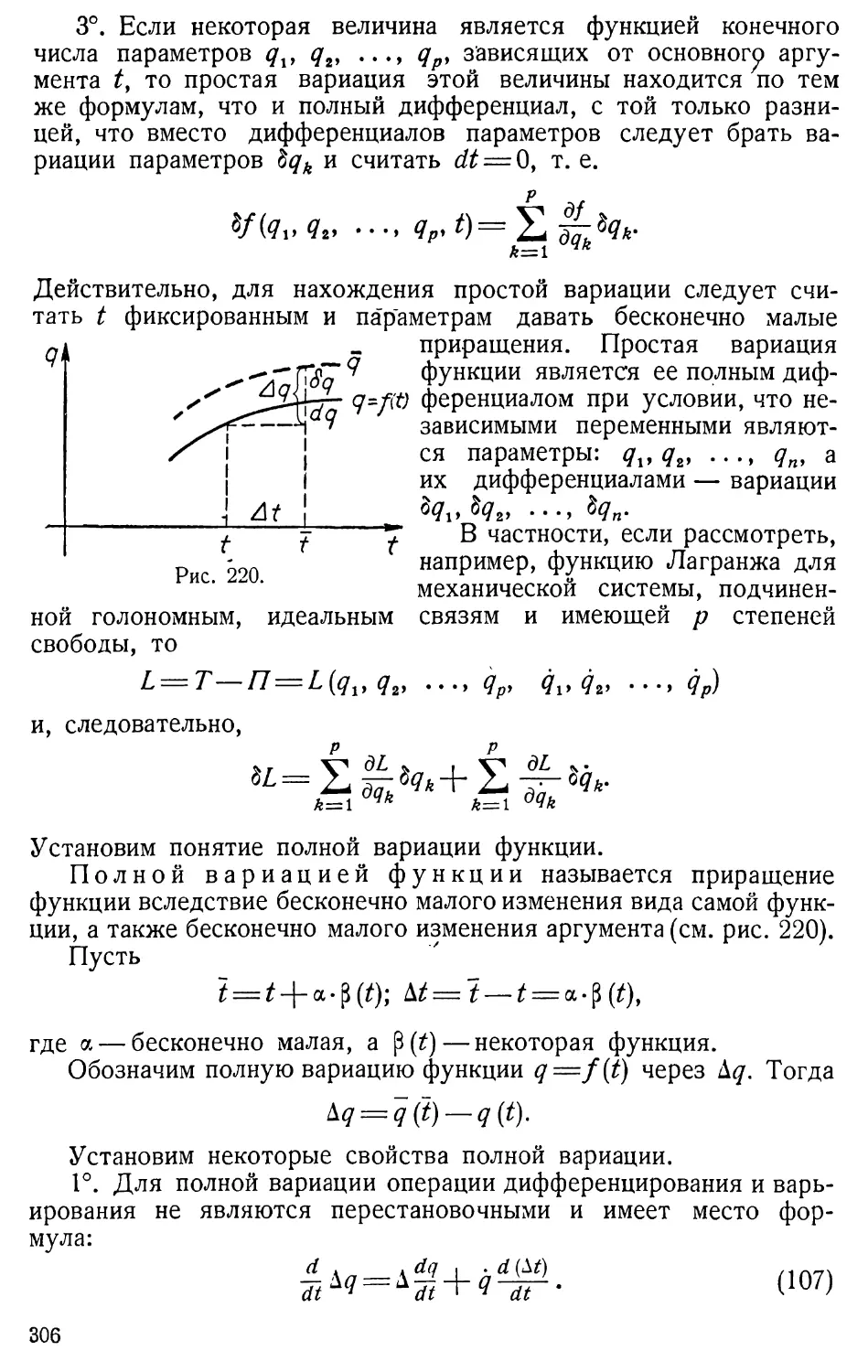
1. Варьирование функции 305
2. Принцип Остроградского—Гамильтона 308
3. Принцип наименьшего действия Мопертюи—Лагранжа . . . .311
Раздел III. специальные задачи динамики
Глава IV. Относительное движение 315
§ 1. Относительное движение материальной точки и механической
системы —
1. Инерциальные и неинерциальные системы —
2. Относительное движение материальной точки 317
3. Относительное движение механической системы 319
§ 2. Основные теоремы динамики, сохраняющиеся в относительном
движении 322
1. Теорема о кинетическом моменте 323
2. Теорема о кинетической энергии 325
§ 3. Некоторые приложения 327
1. Маятник Фуко —
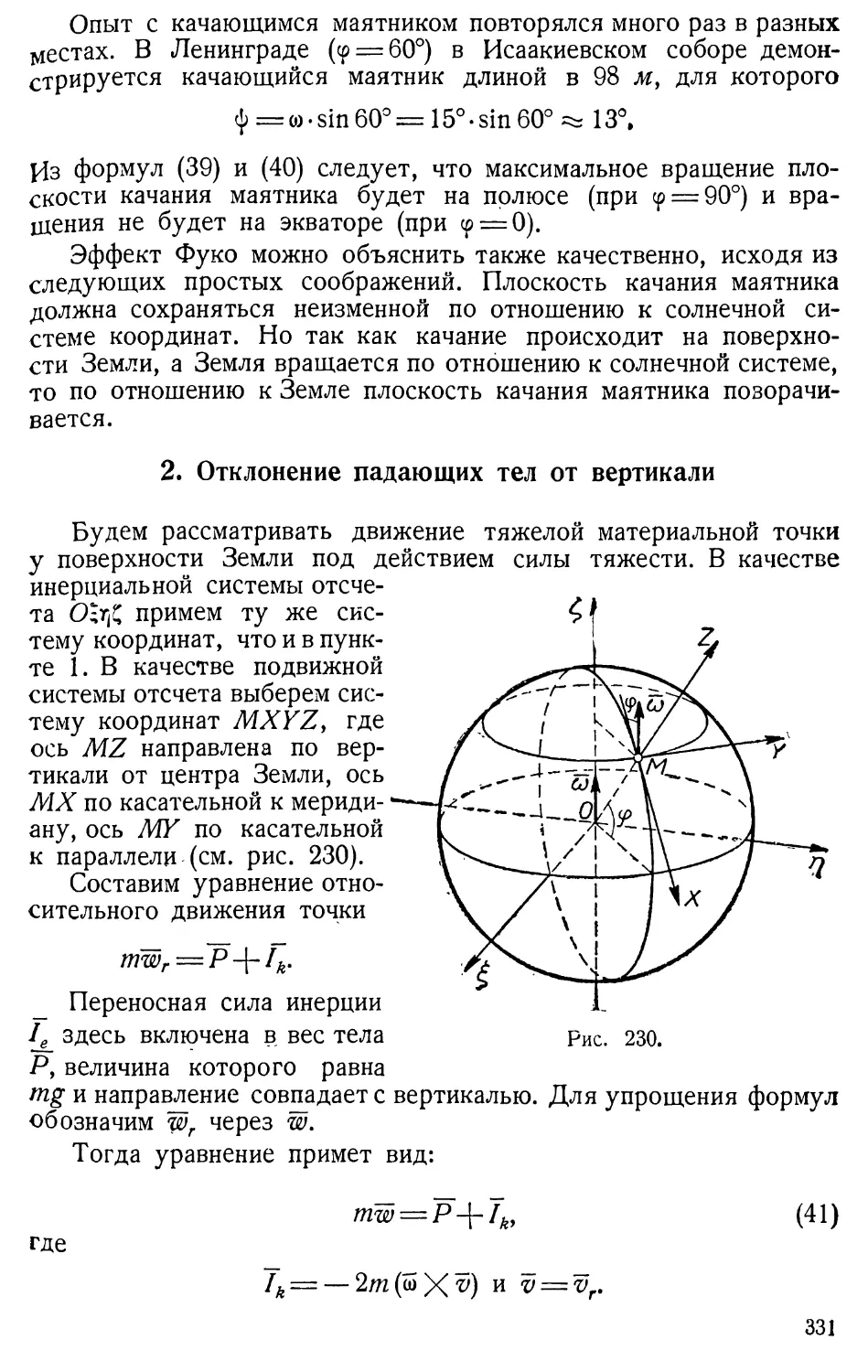
2. Отклонение падающих тел от вертикали 331
6
Глава V. Движение в центральном иоде 333
1. Кеплерова задача ........... —
2. Движение, свободной материальной точки в центральном поле —
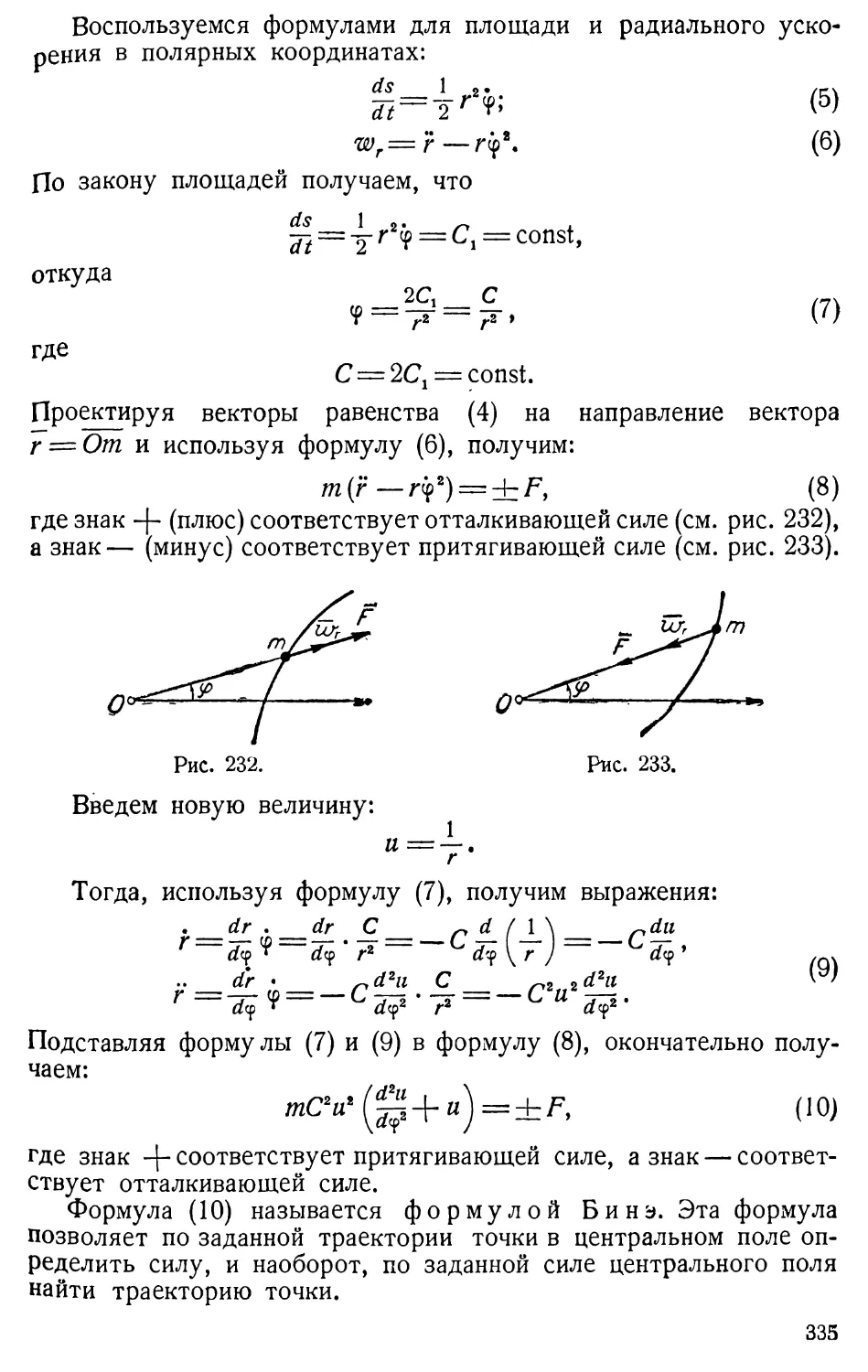
3. Формула Бинэ 334
4. Движение планет 336
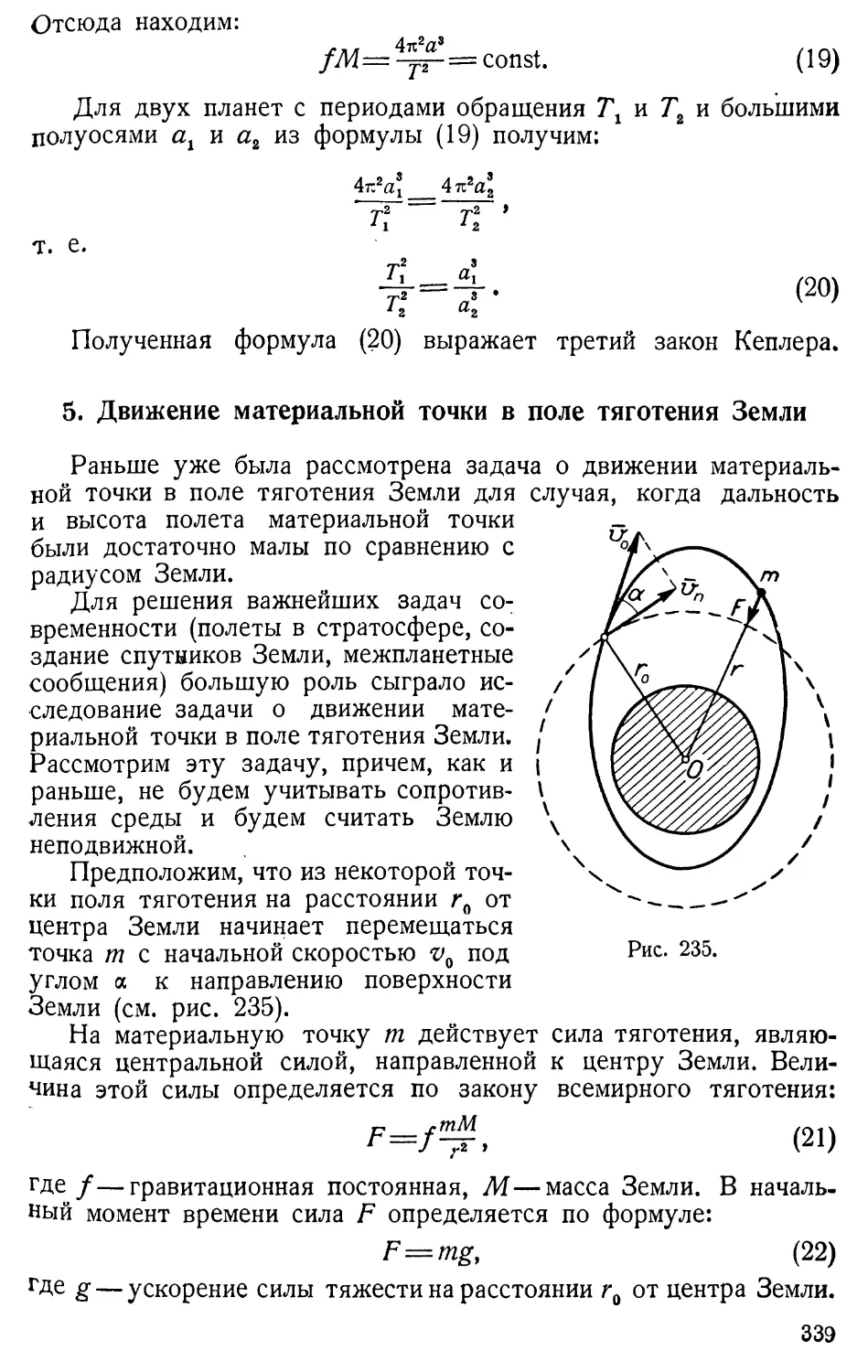
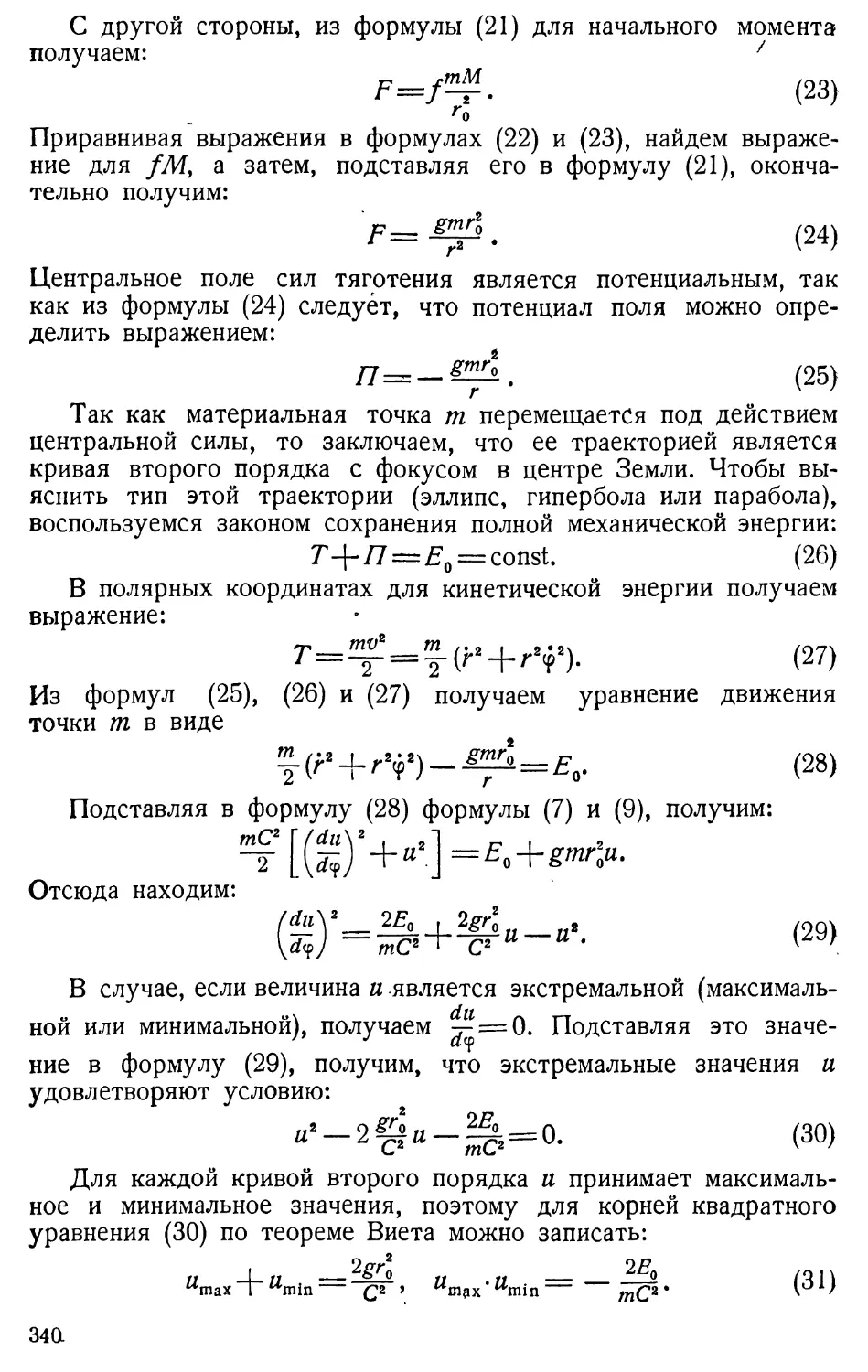
5. Движение материальной точки в поле тяготения Земли .... 339
6. Движение электронов 346
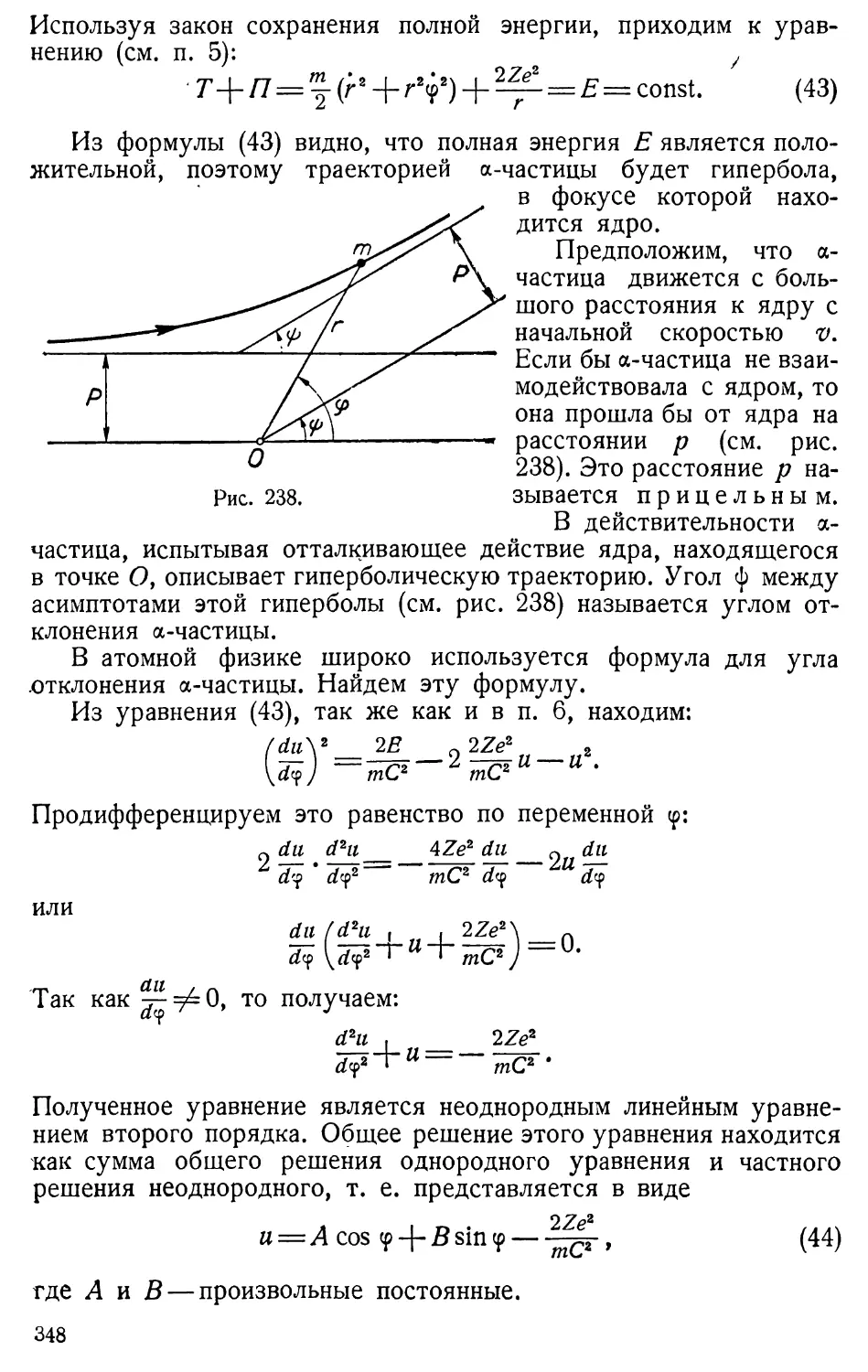
7. Движение а-частиц 347
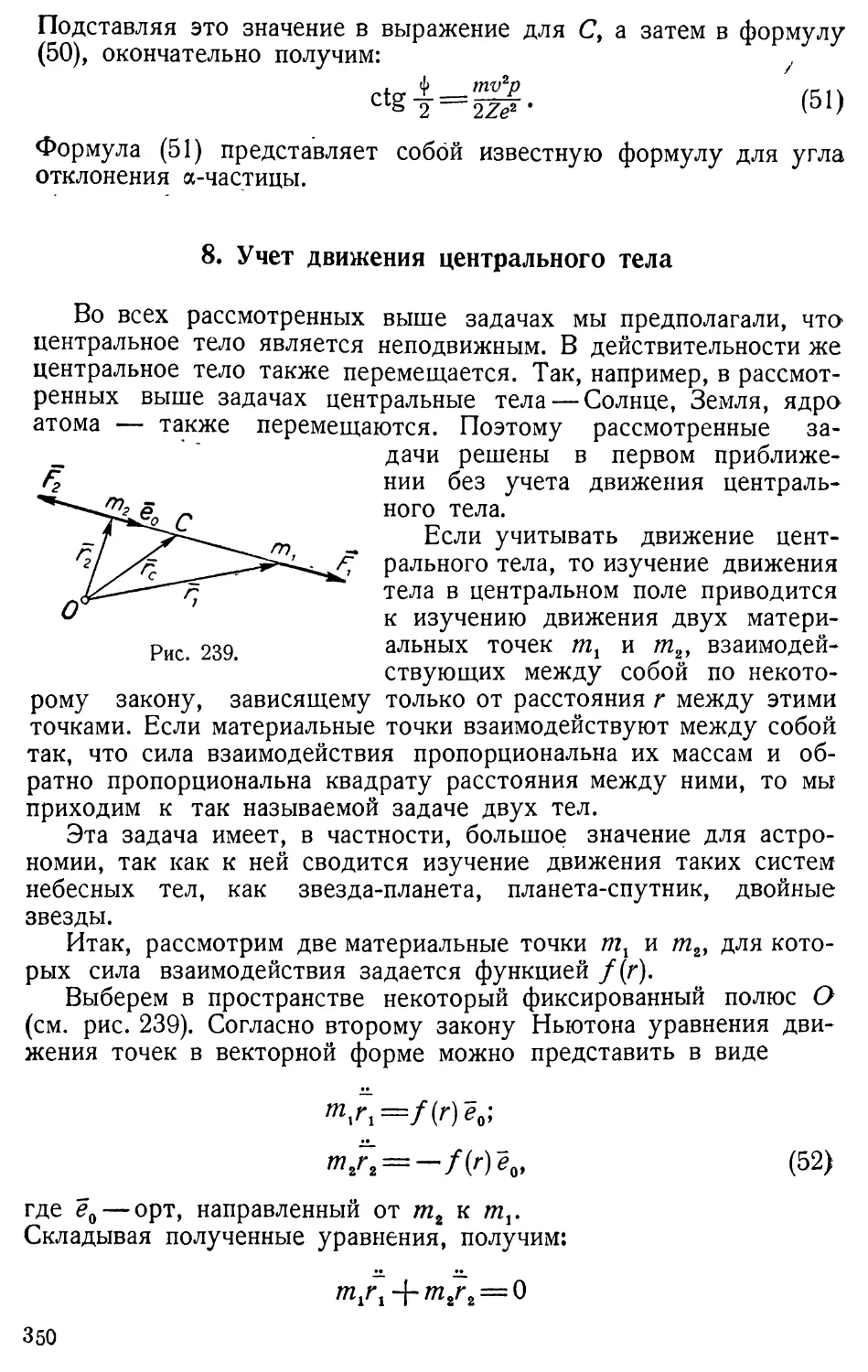
8. Учет движения центрального тела 350
9. Уточненные законы Кеплера 352
Глава VI. Колебание механических систем 353
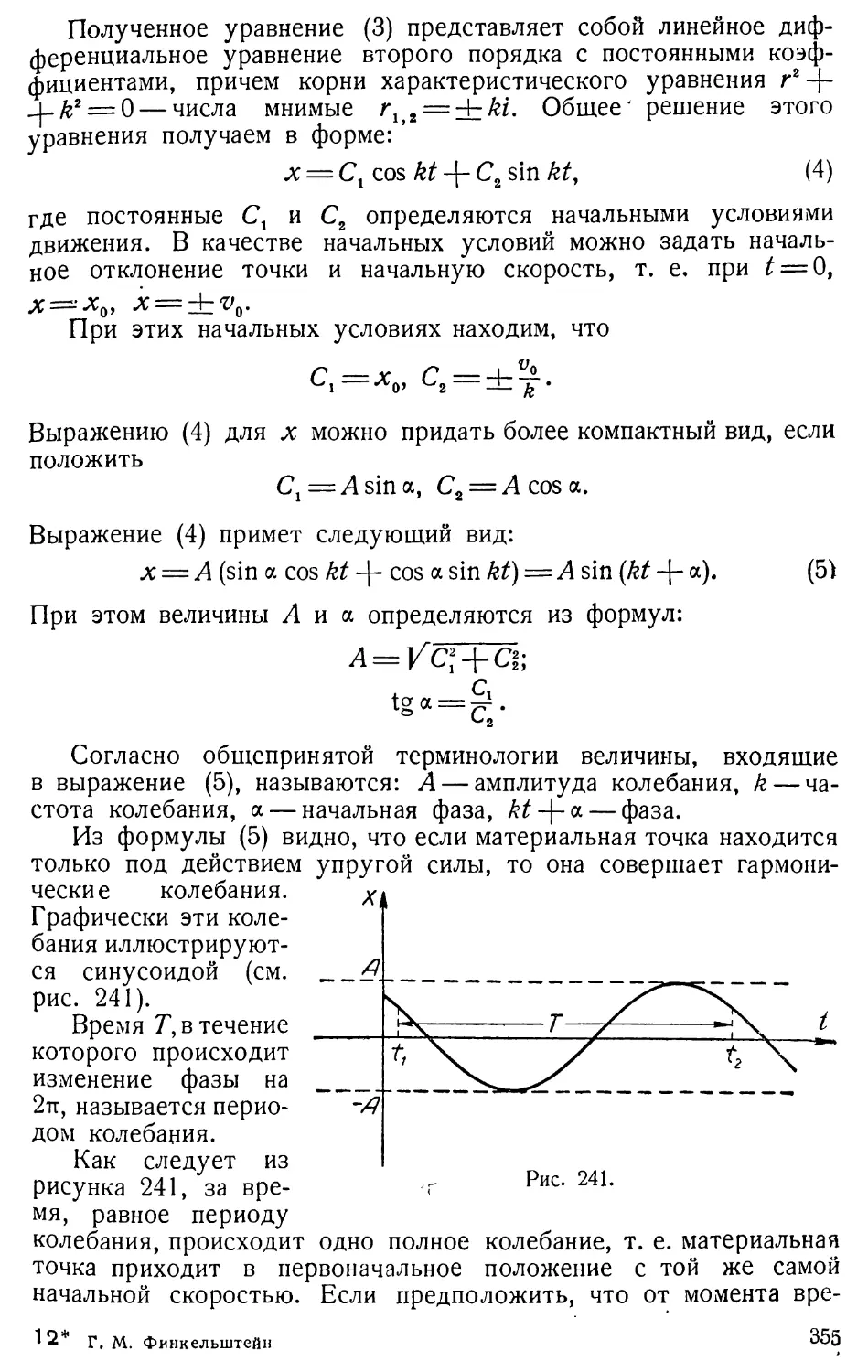
§ 1. Колебания материальной точки ' 354
1. Свободные колебания —
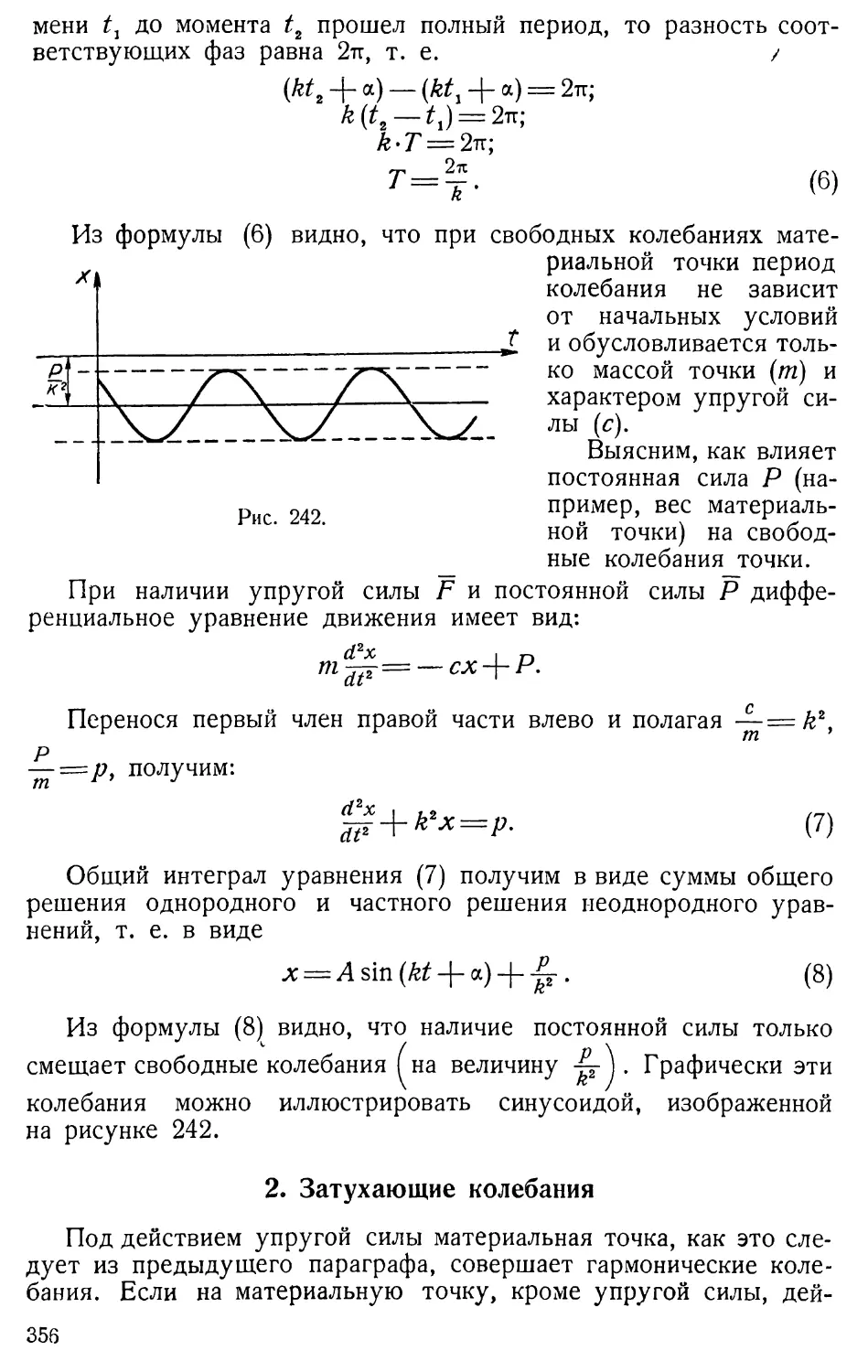
2. Затухающие колебания 356
3. Вынужденные колебания 361
§ 2. Устойчивость равновесия механической системы 363
1. Малые колебания системы. Устойчивое и неустойчивое
равновесия системы —
2. Критерий устойчивости системы 364
3. Формулы для кинетической и потенциальной энергии системы
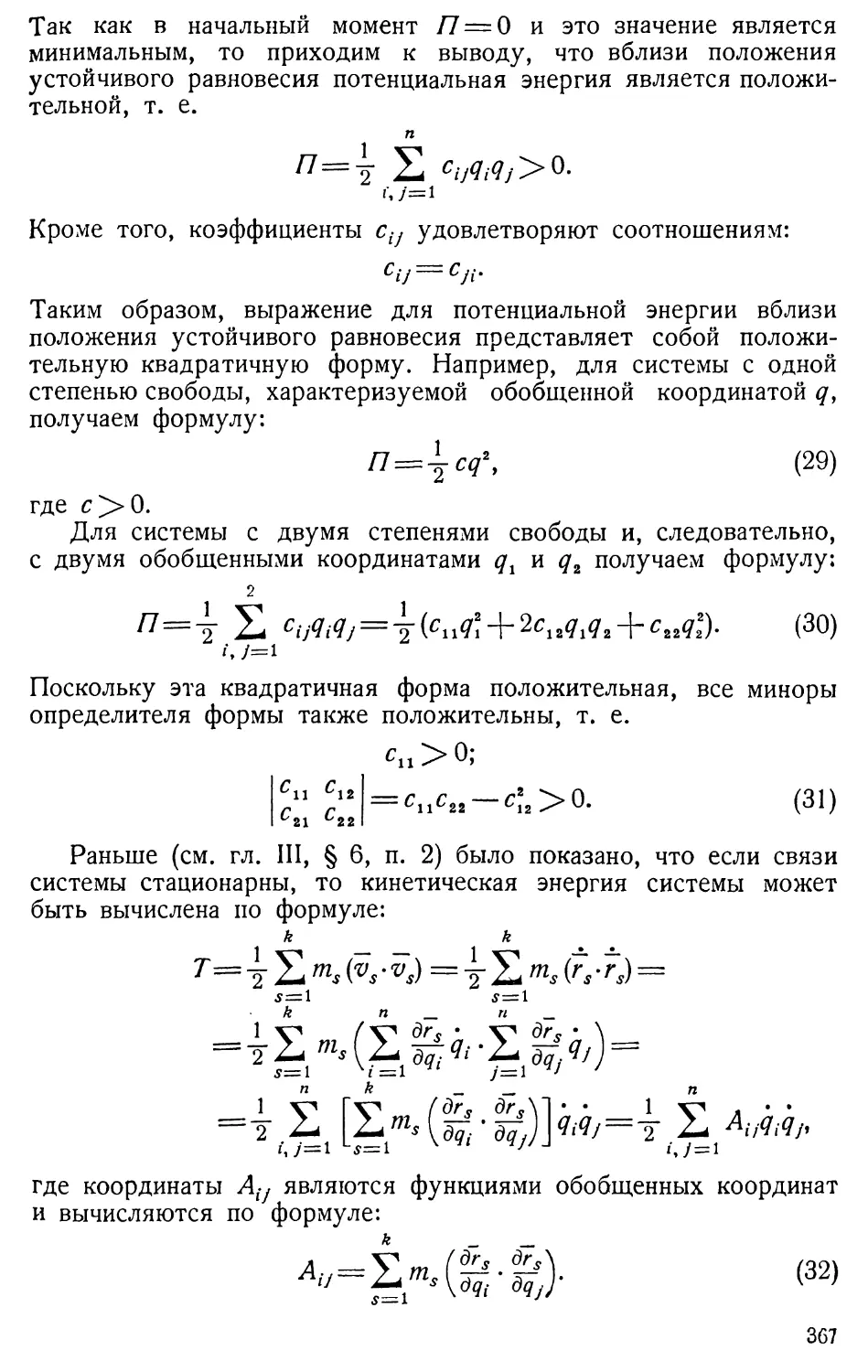
вблизи устойчивого равновесия 366
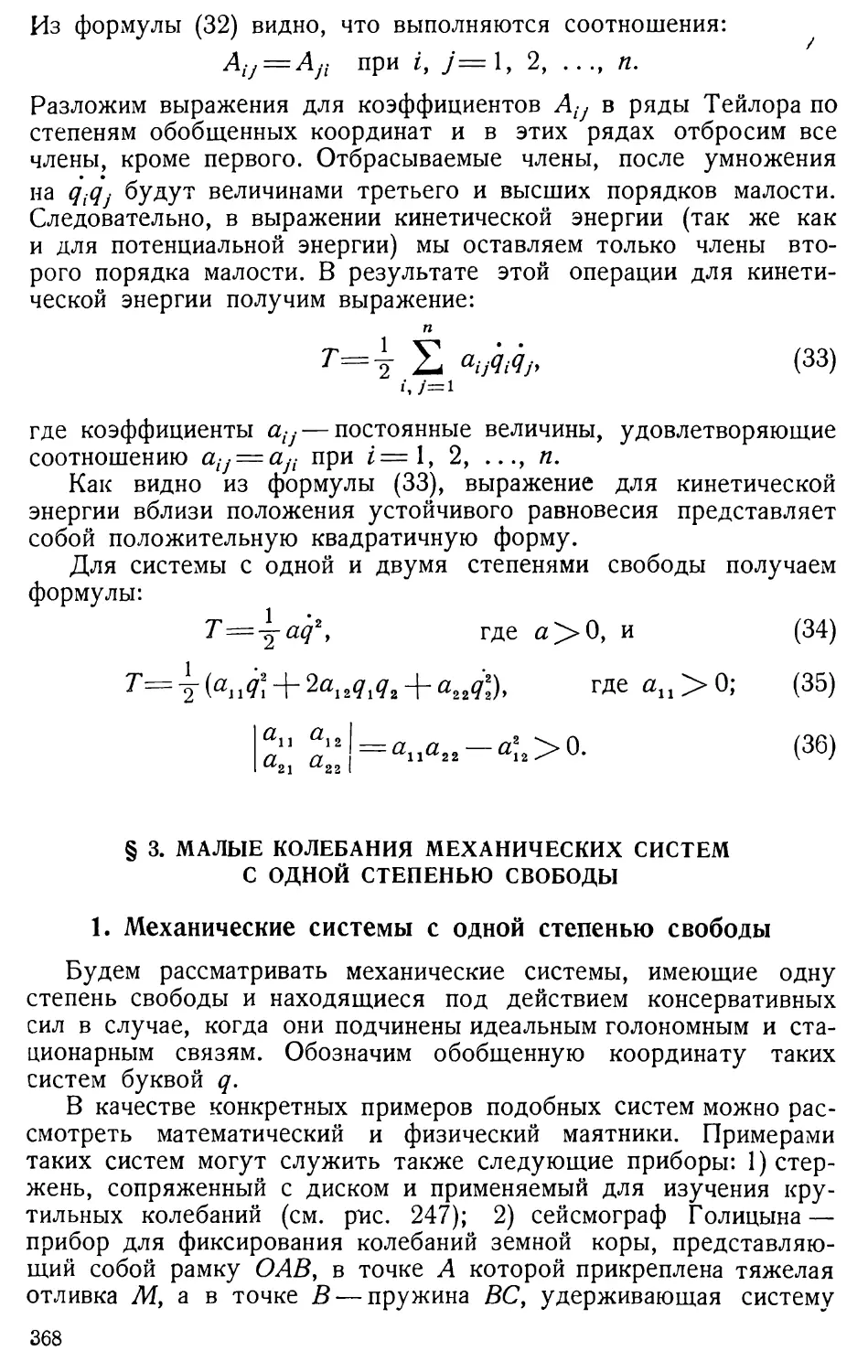
§ 3. Малые колебания системы с одной степенью свободы 368
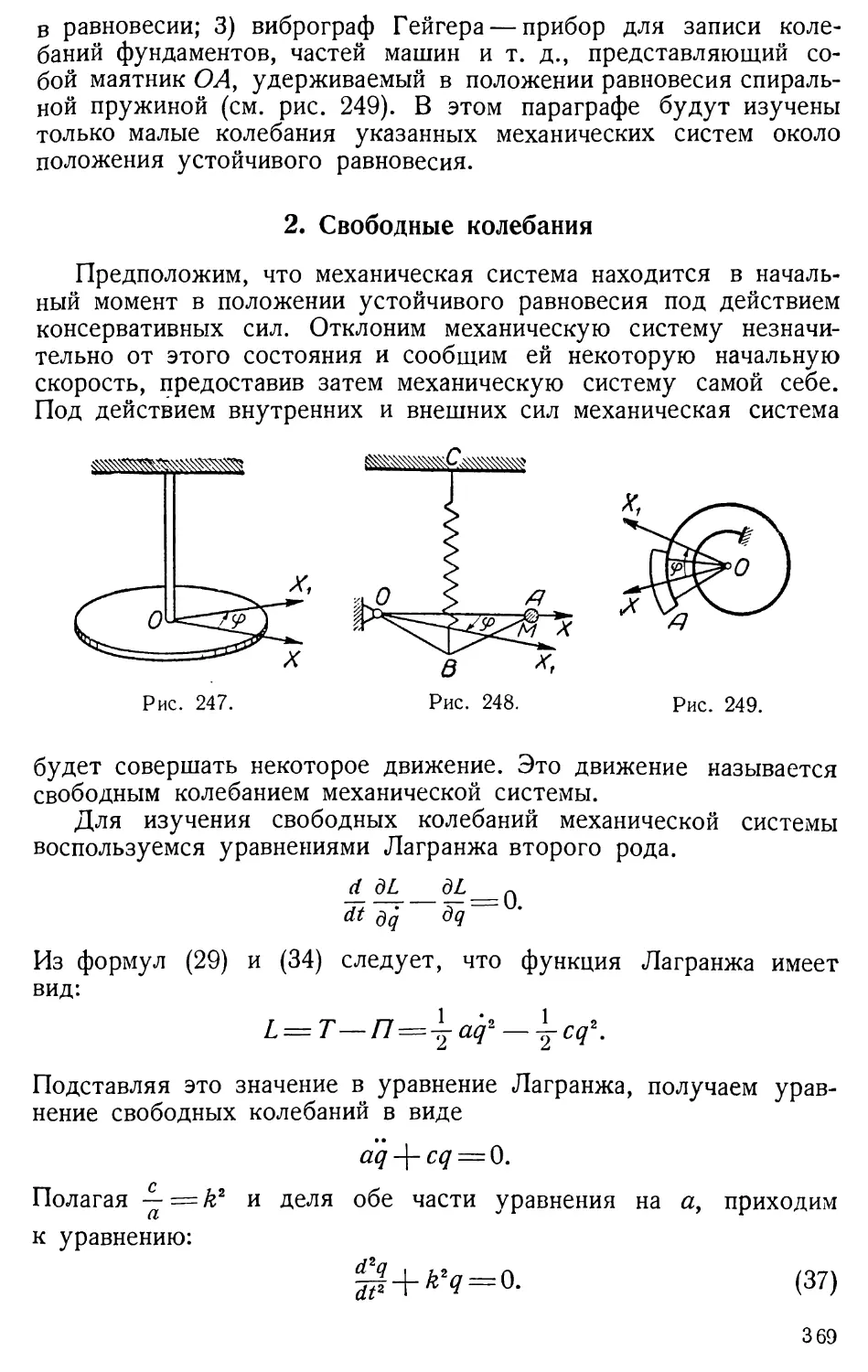
1. Механические системы с одной степенью свободы —
2. Свободные колебания 369
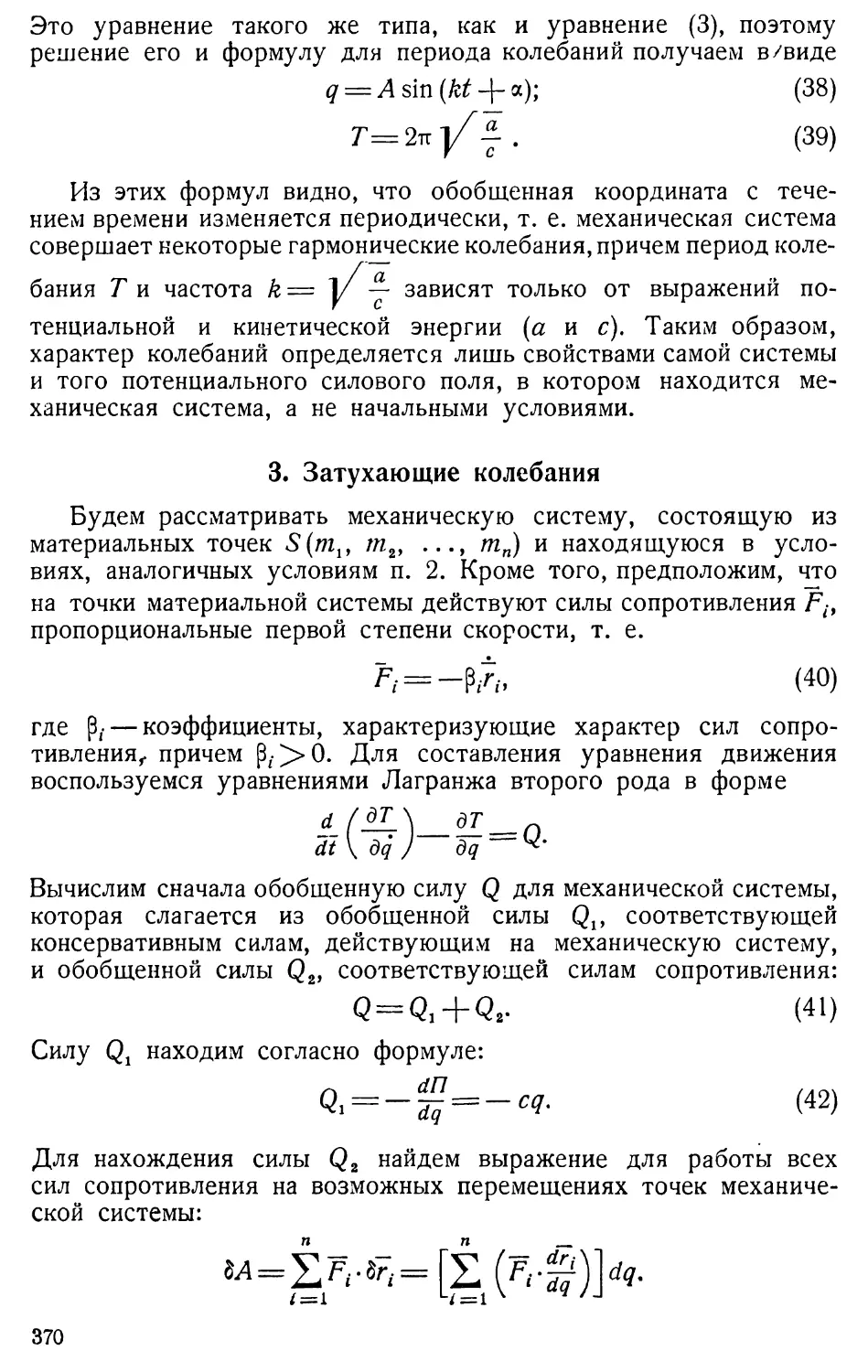
3. Затухающие колебания 370
4. Вынужденные колебания 372
§ 4. Малые колебания системы с конечным числом степеней свободы 373
1. Дифференциальные уравнения свободных колебаний системы
с п степенями свободы —
2. Свободные колебания системы с двумя степенями свободы . . 374
3. Главные координаты 379
4. Вынужденные колебания системы с двумя степенями свободы 381
5. Задачи 382
Глава VII. Динамика твердого тела 386
§ 1. Моменты инерции —
1. Моменты инерции относительно полюса, оси и плоскости ... —
2. Моменты инерции относительно пучка лучей 389
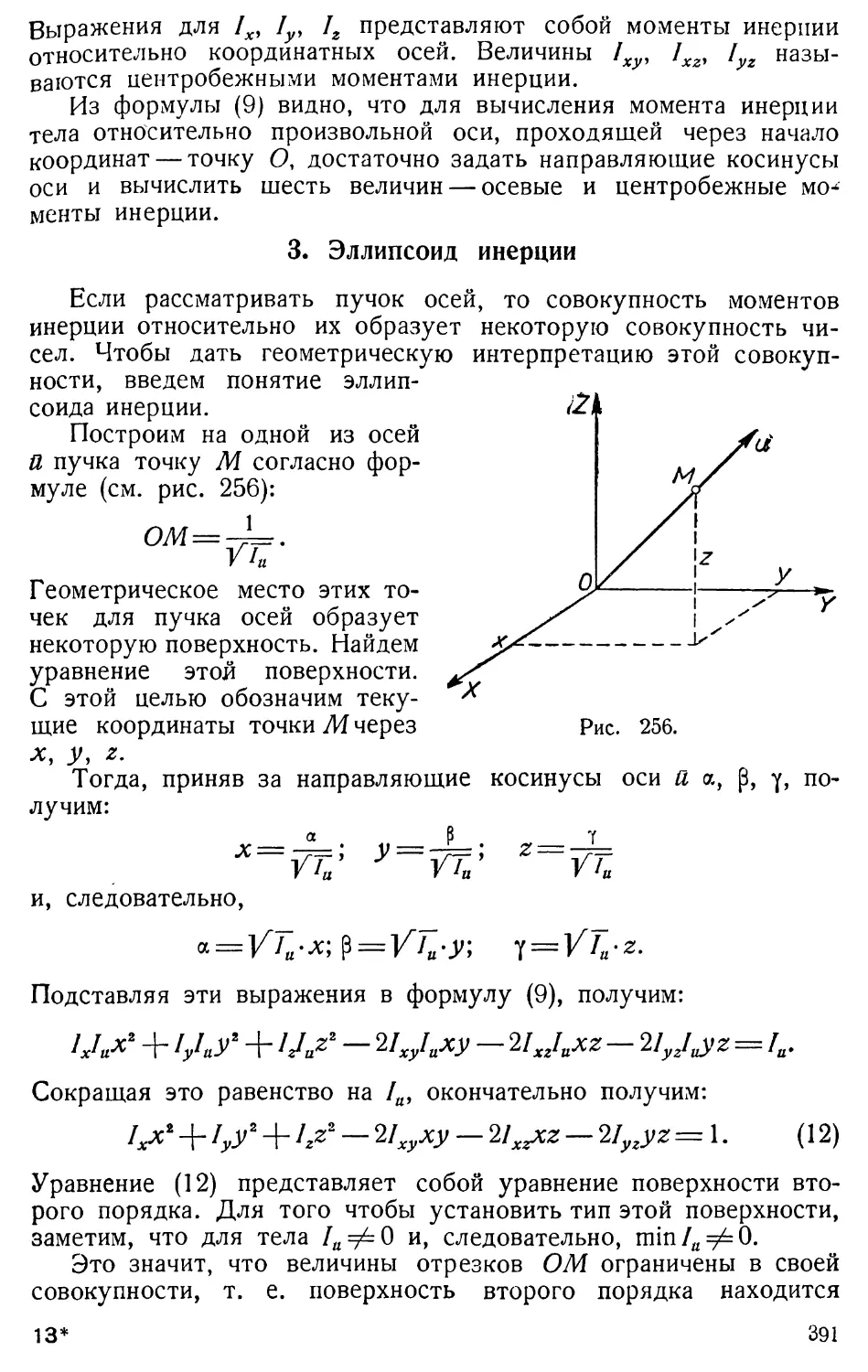
3. Эллипсоид инерции 391
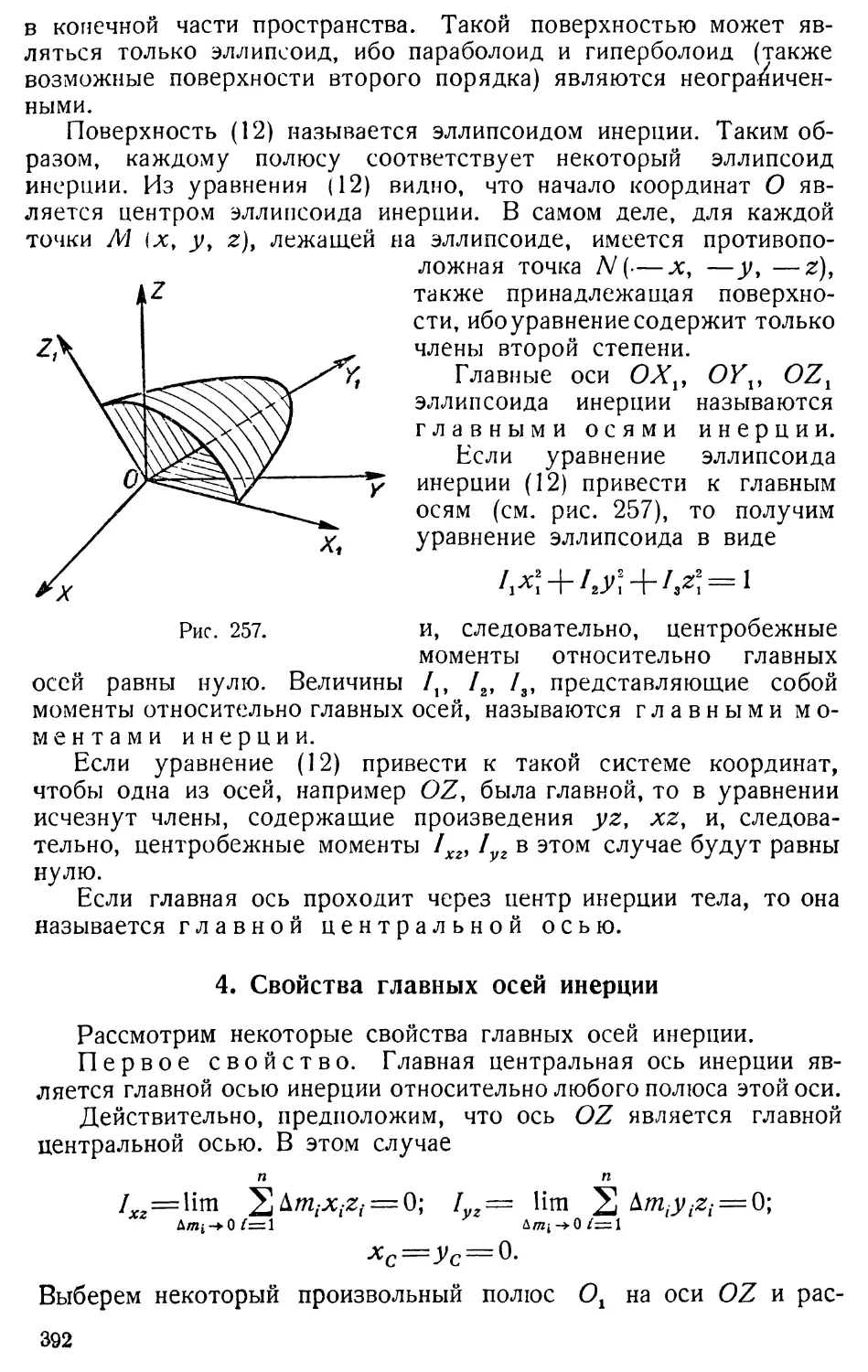
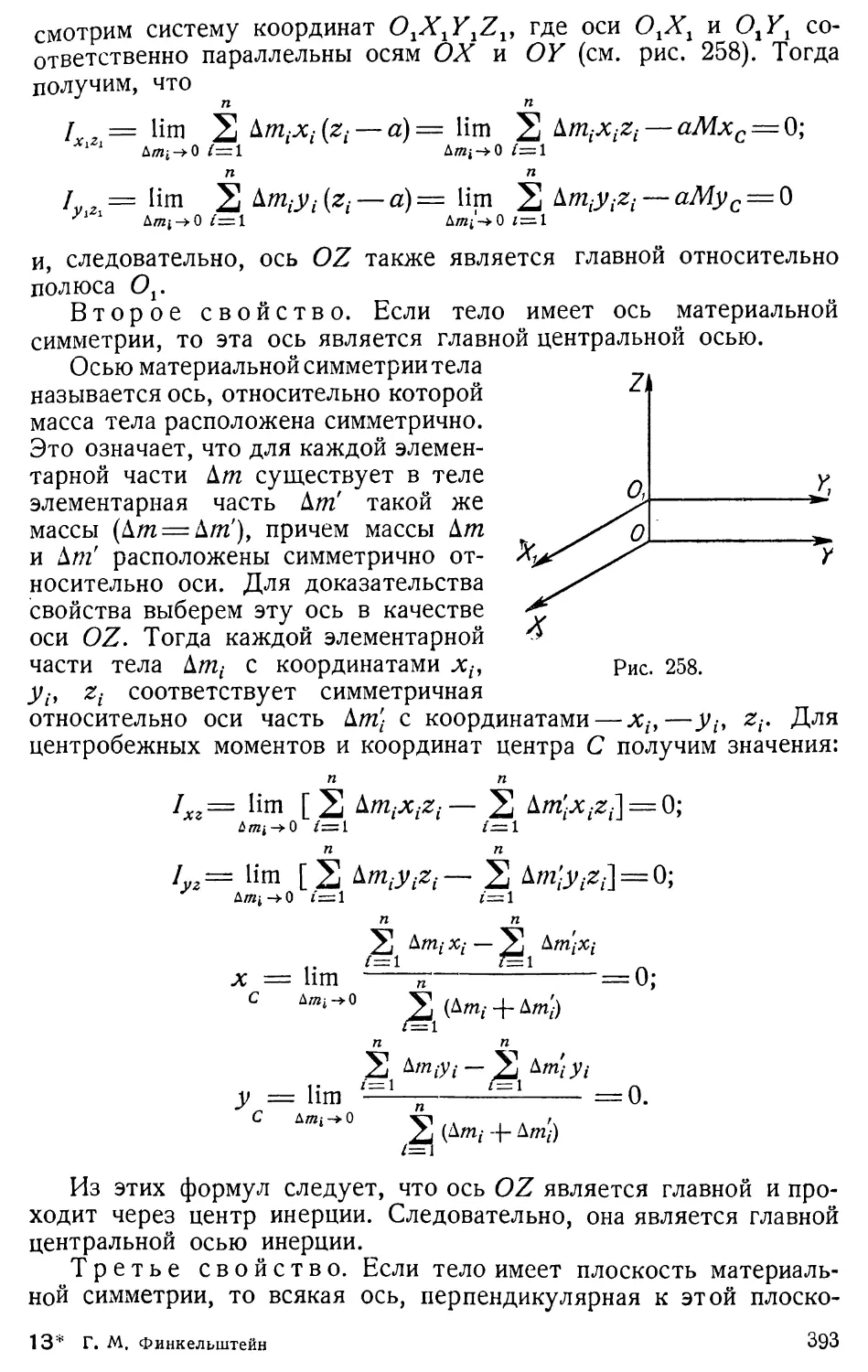
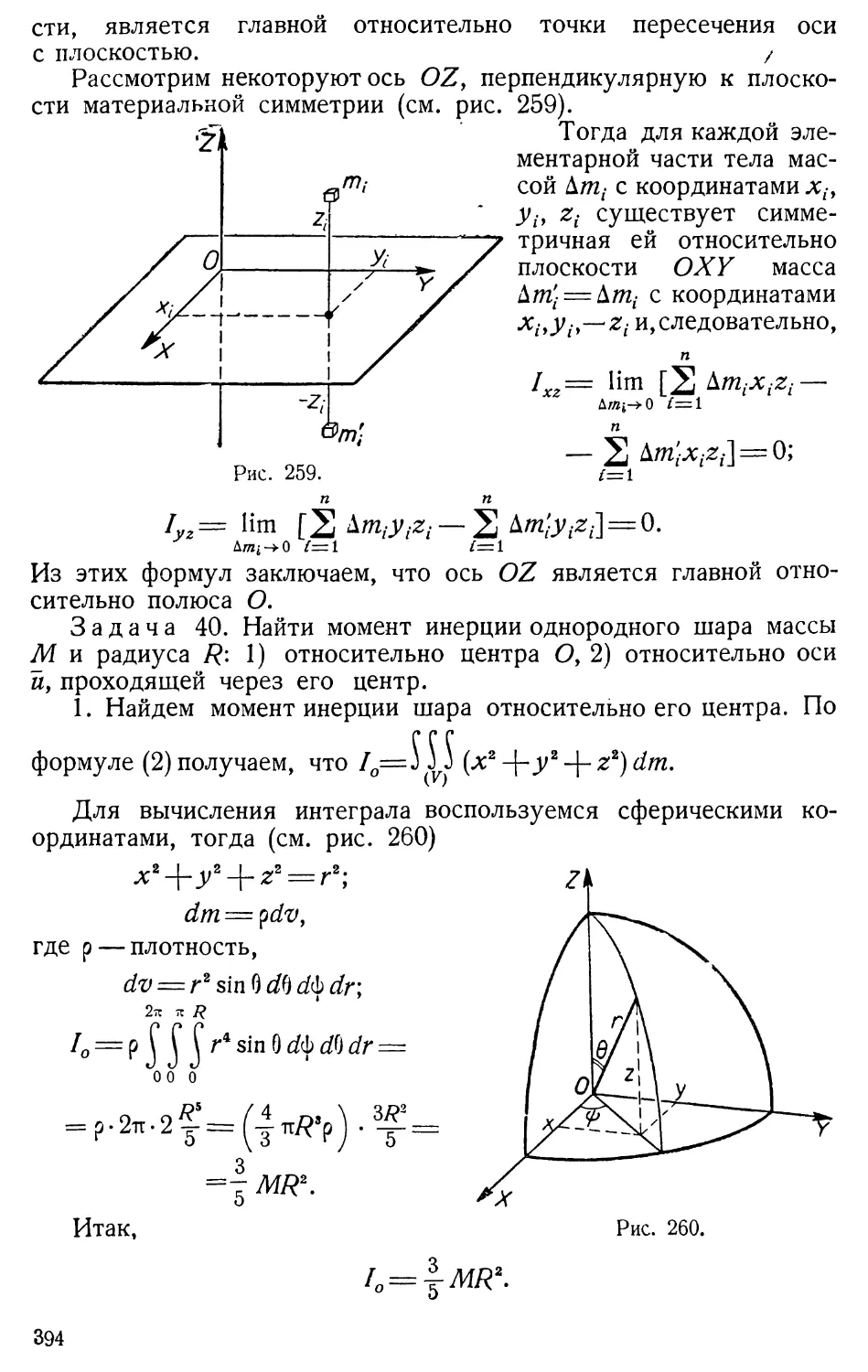
4. Свойства главных осей инерции 392
§ 2. Поступательное и вращательное движения 395
1. Поступательное движение твердого тела —
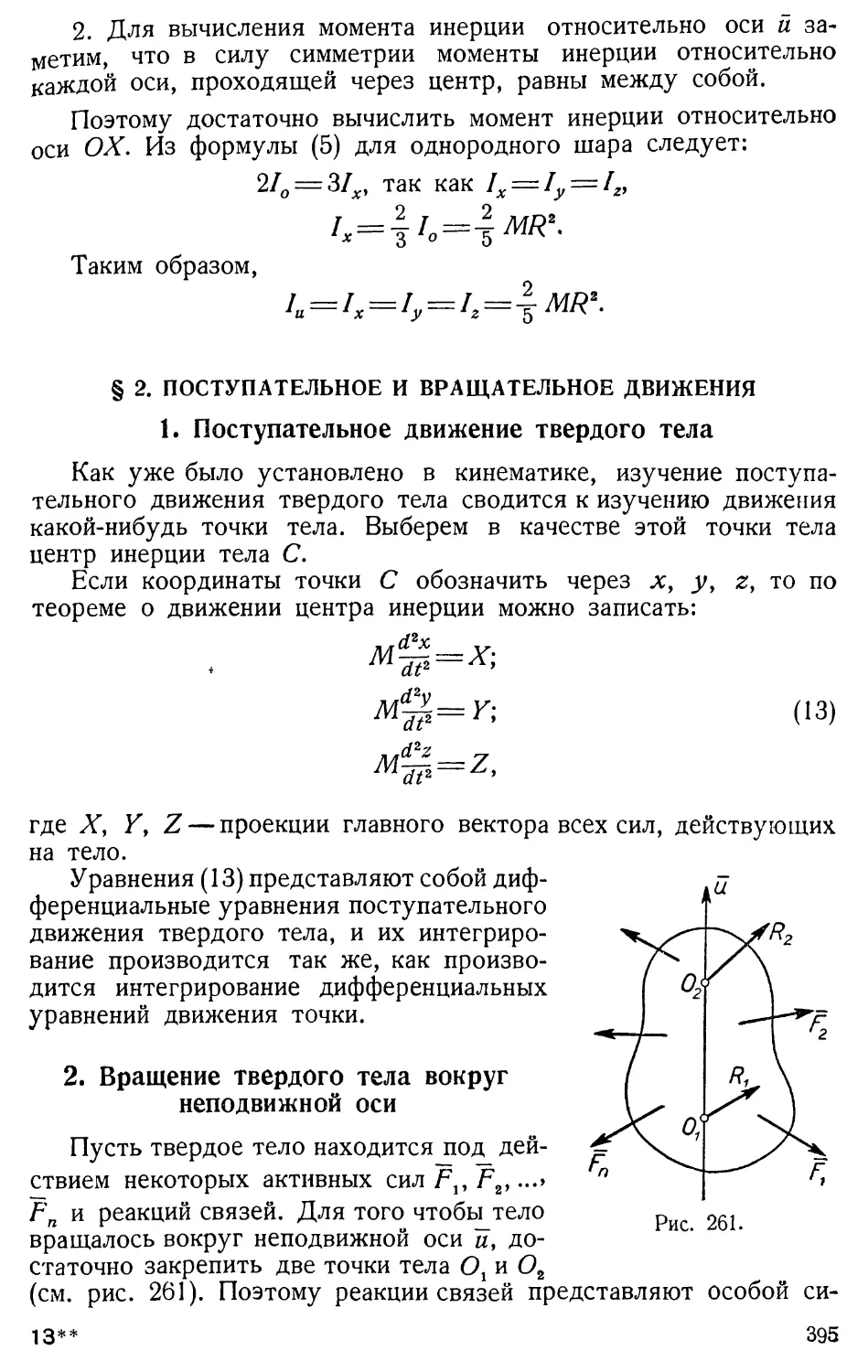
2. Вращение твердого тела вокруг неподвижной оси 396
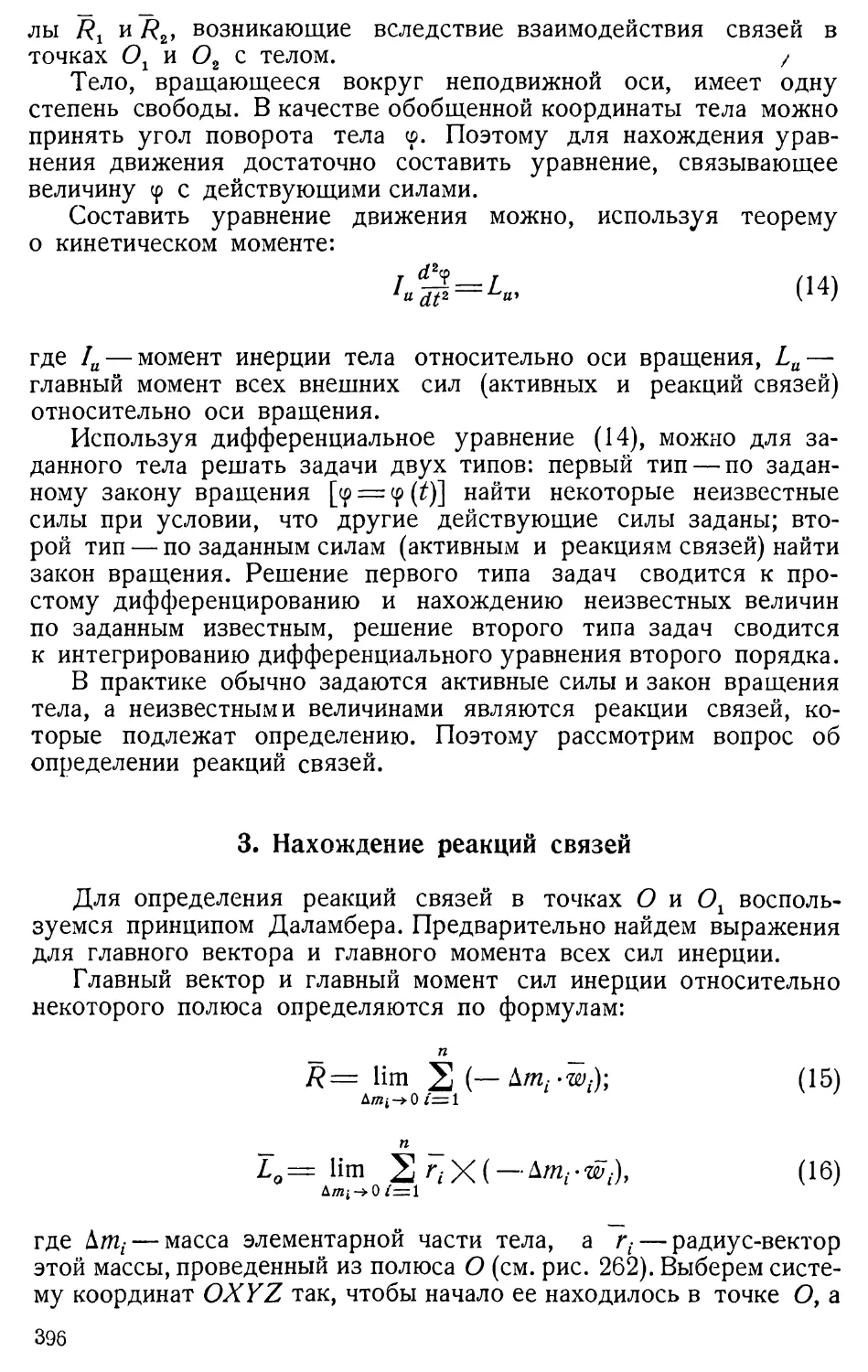
3. Нахождение реакций связей —
§ 3. Плоско-параллельное движение твердого тела 401
§ 4. Движение твердого тела вокруг неподвижной точки ... , . . 403
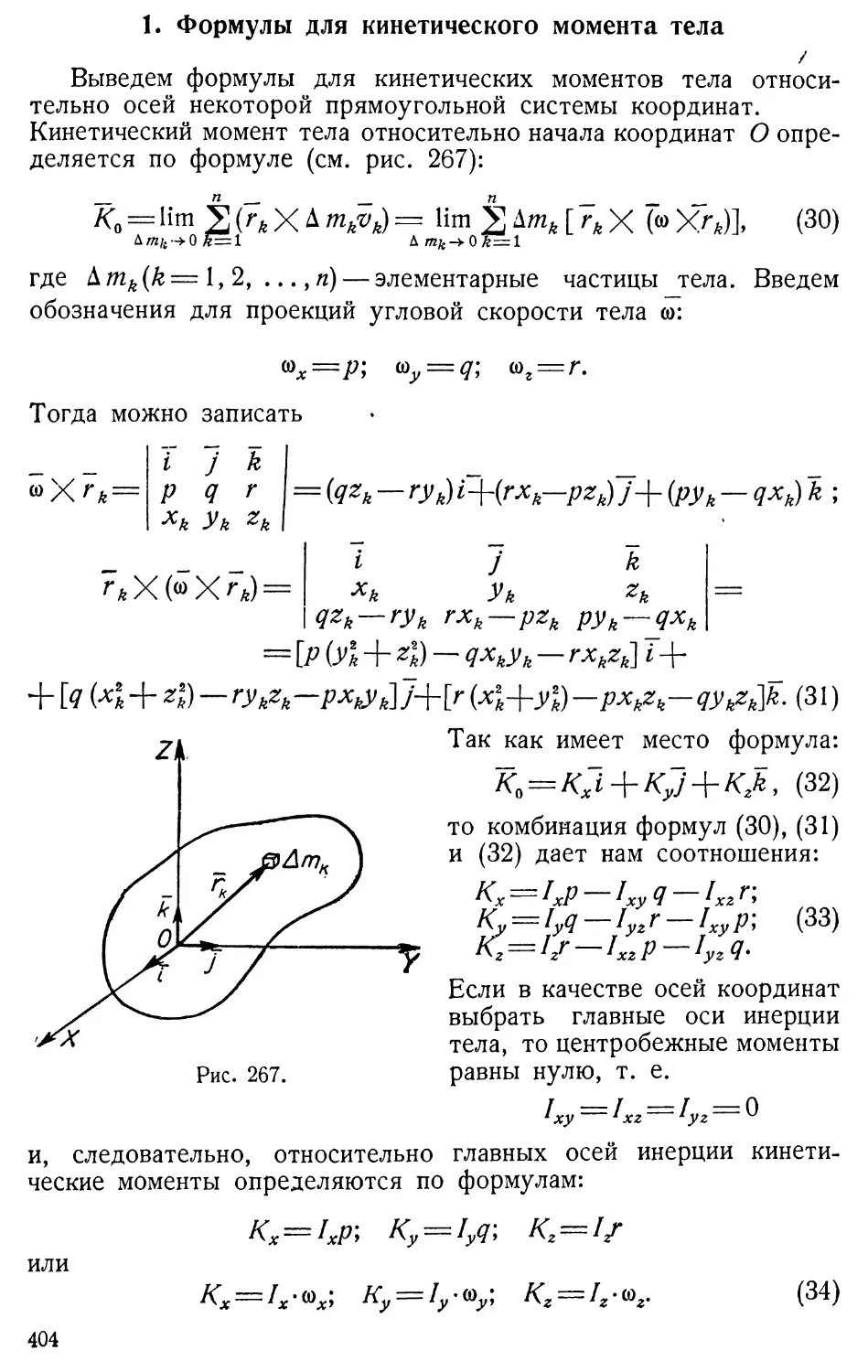
1. Формулы для кинетического момента тела 404
2. Динамические уравнения Эйлера 405
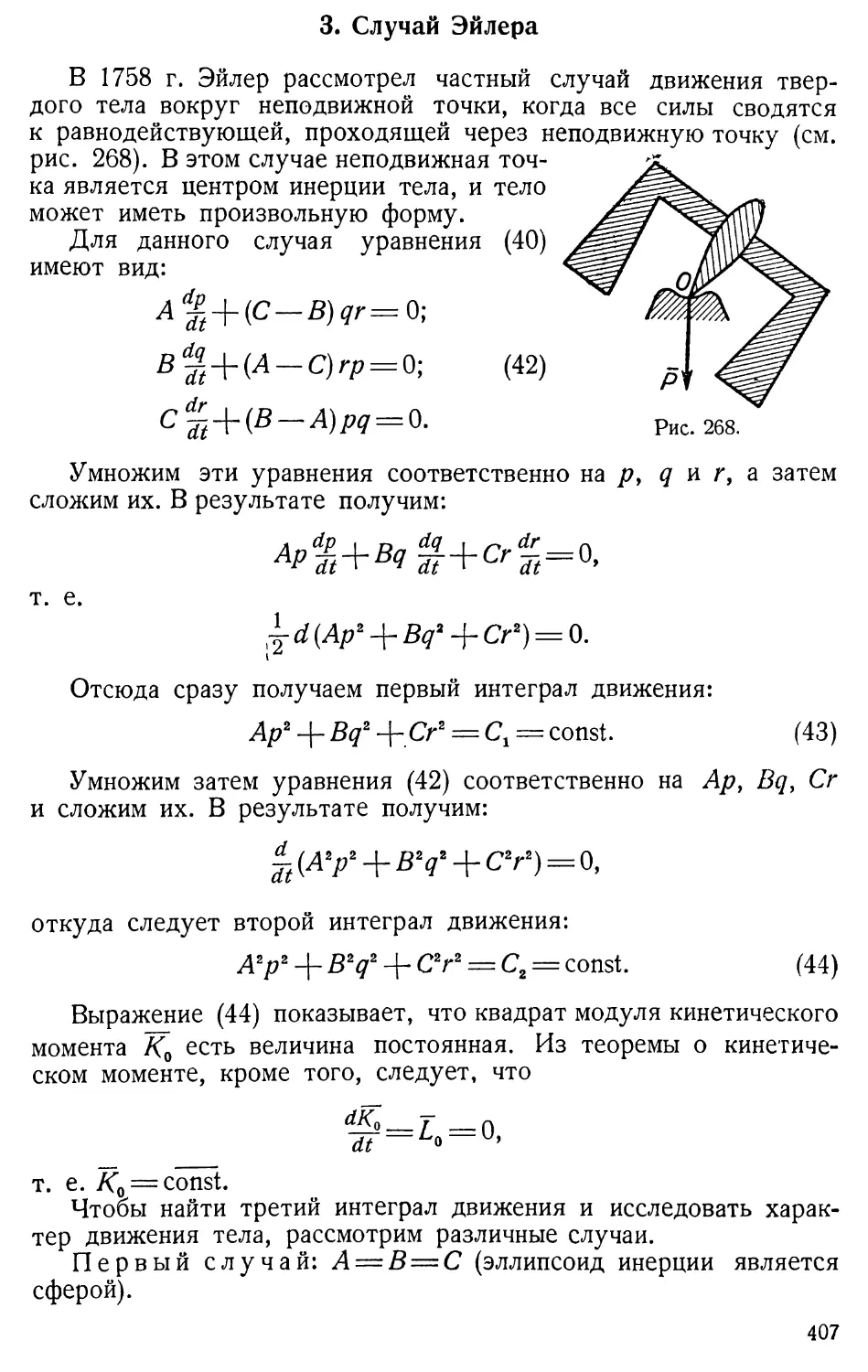
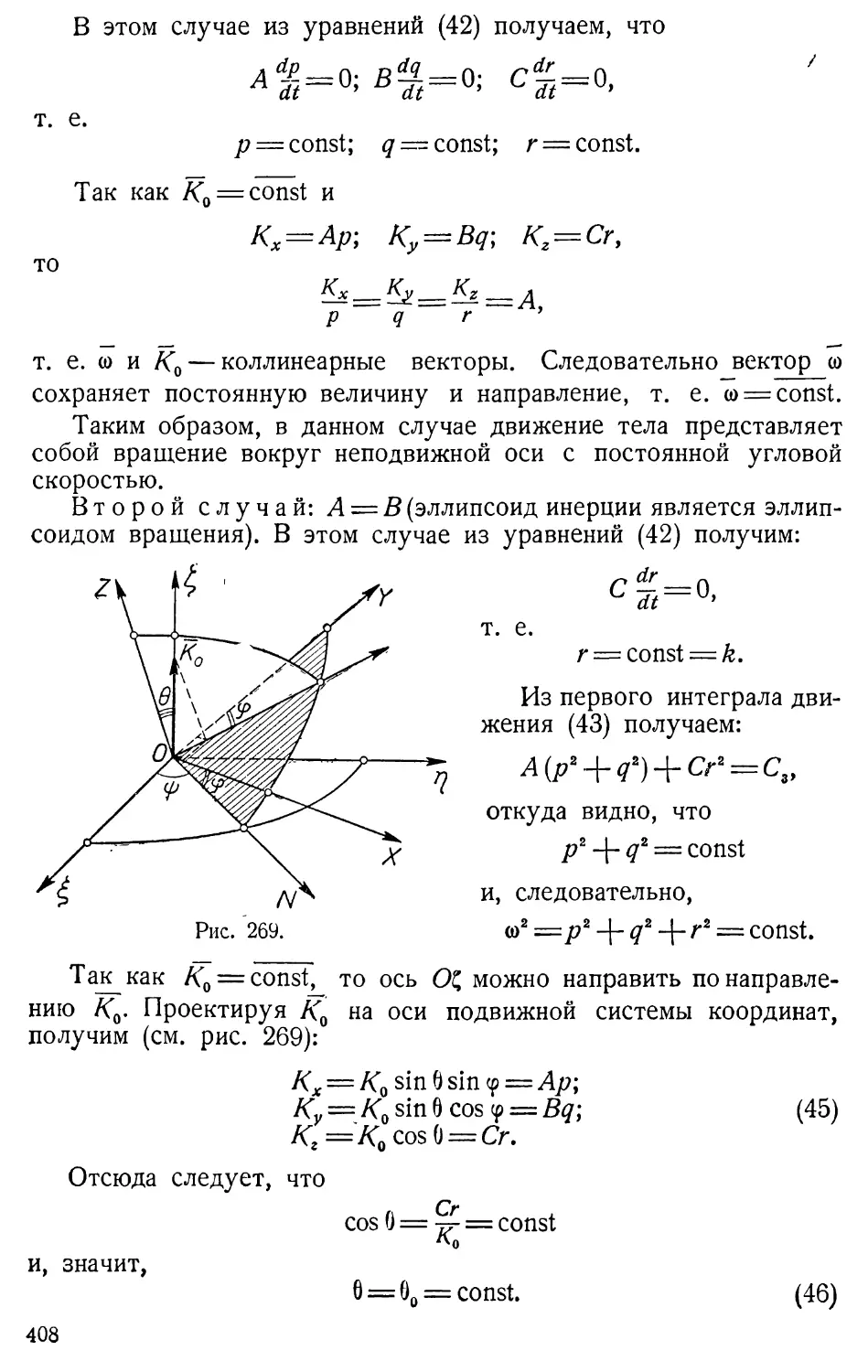
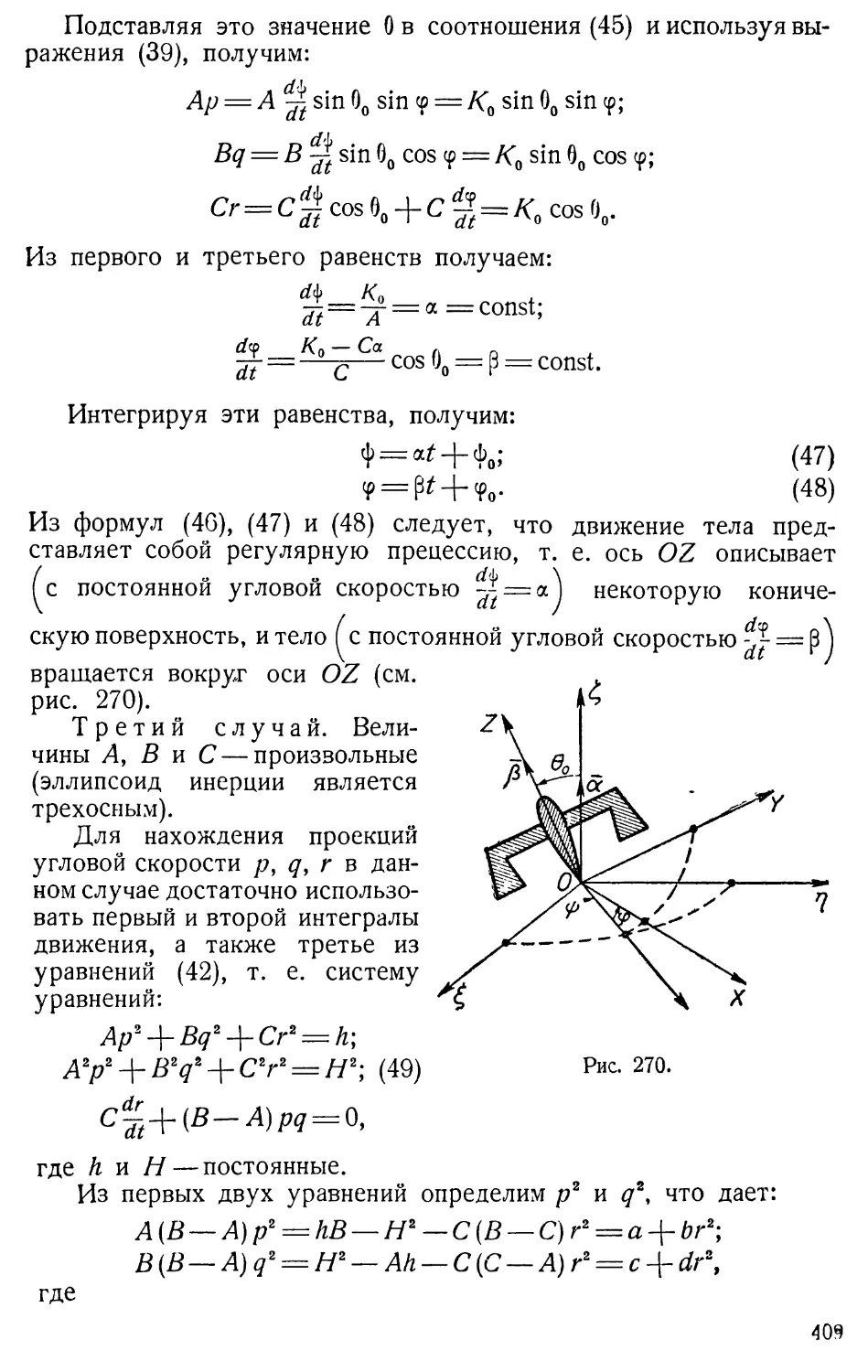
3. Случай Эйлера 407
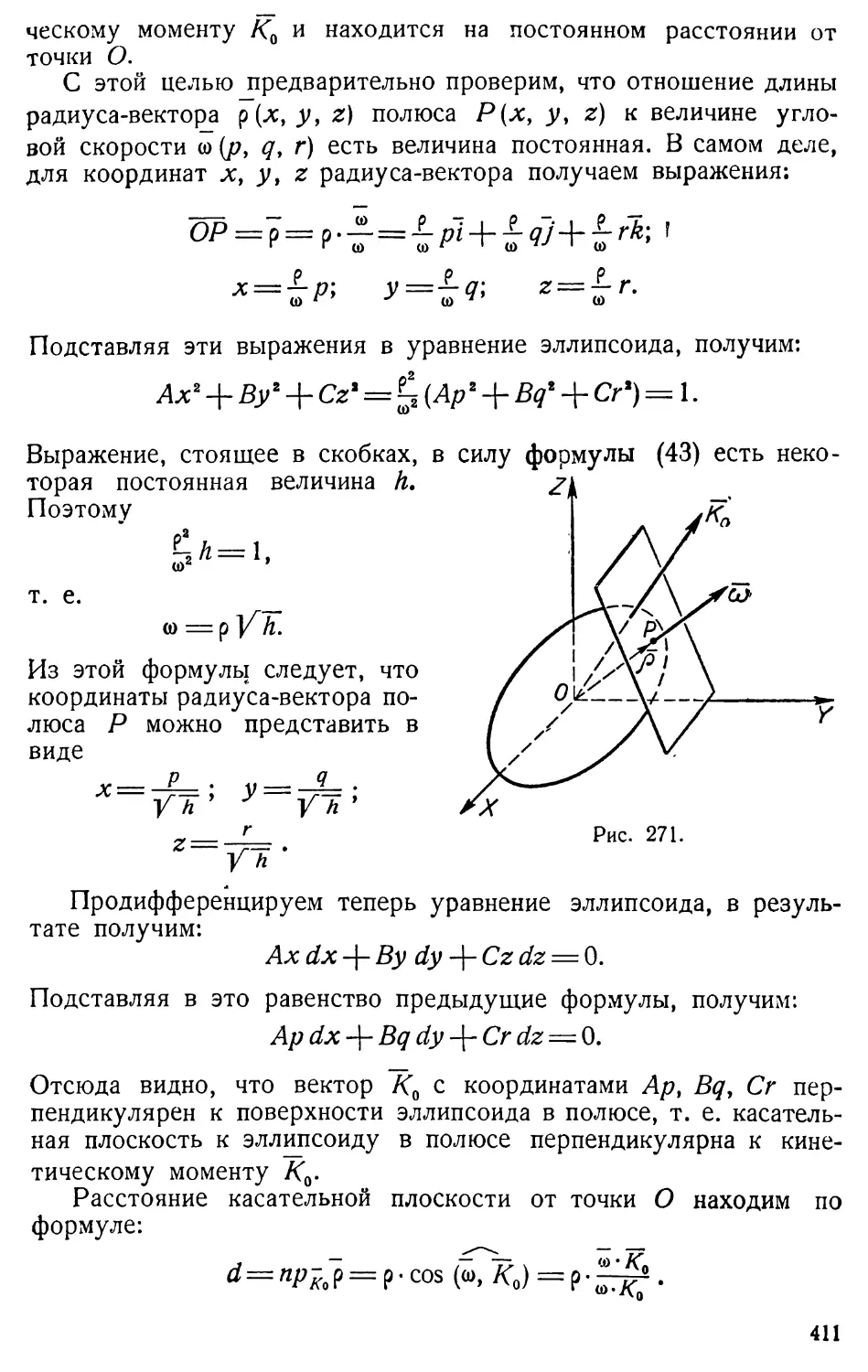
4. Геометрическая интерпретация Пуансо случая Эйлера . . . .410
5. Другие частные случаи движения 412
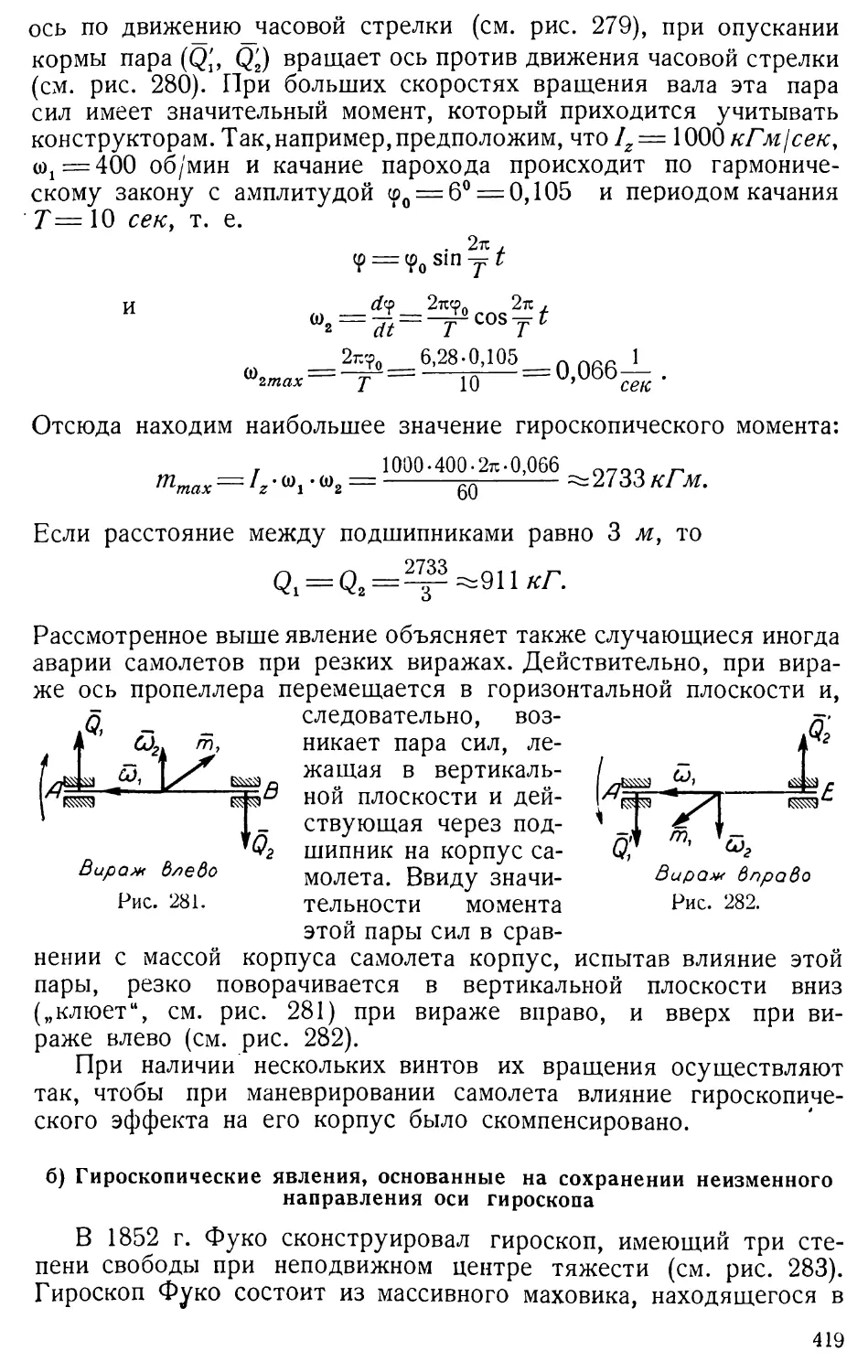
§ о. Элементарная теория гироскопа 413
1. Уравнение движения гироскопа —
2. Некоторые приложения 417
§ Ь. Произвольное движение твердого тела 421
7
Глава VIII. Явление удара
422
§ 1. Основные понятия • —
1. Понятие удара . —
2. Ударные силы 423
3. Перемещение системы за время удара 424
§ 2. Удар материальной точки о неподвижную поверхность 425
1. Упругий и неупругий удары —
2. Коэффициент восстановления и его определение 426
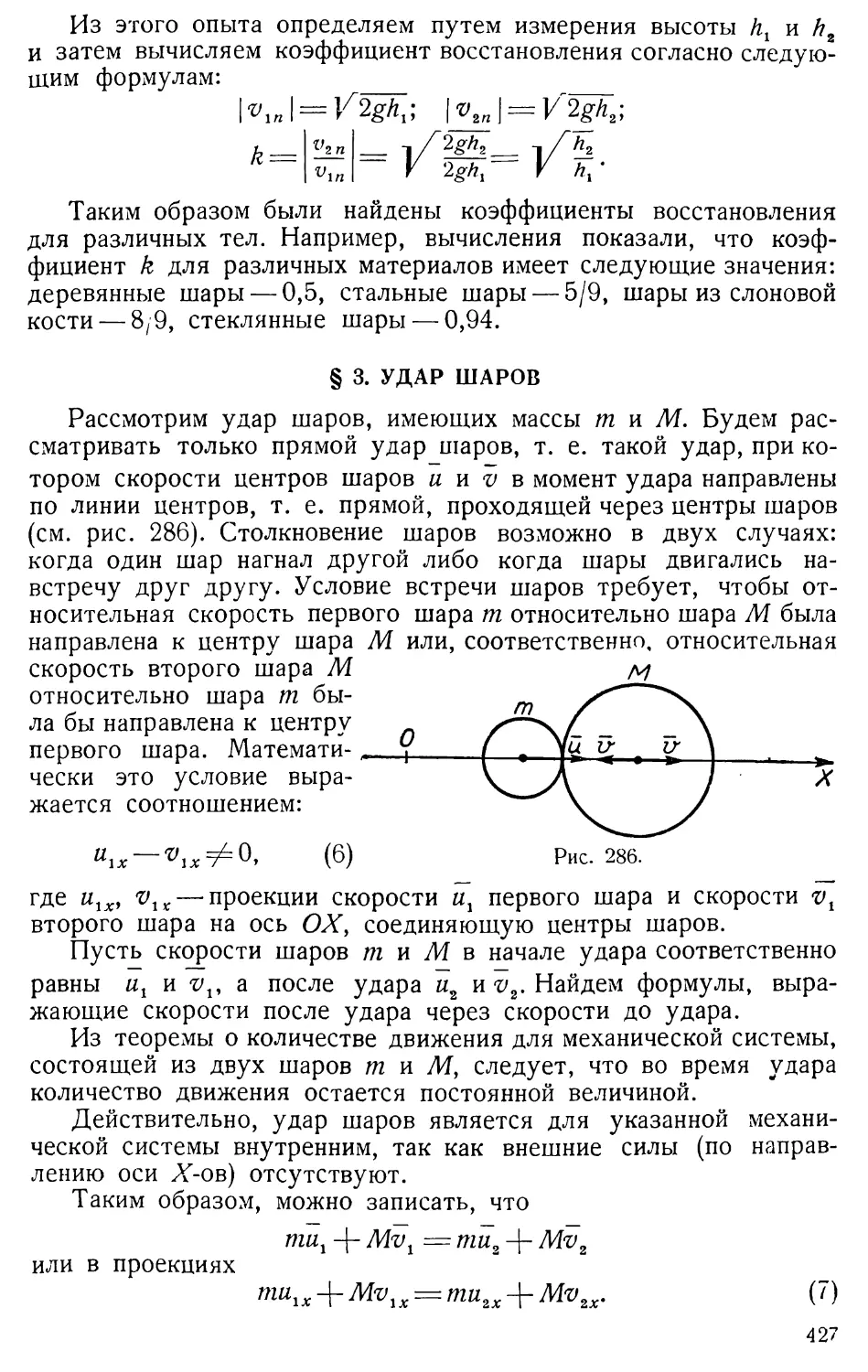
§ 3. Удар шаров 427
Глава IX. Механика тел переменной массы 429
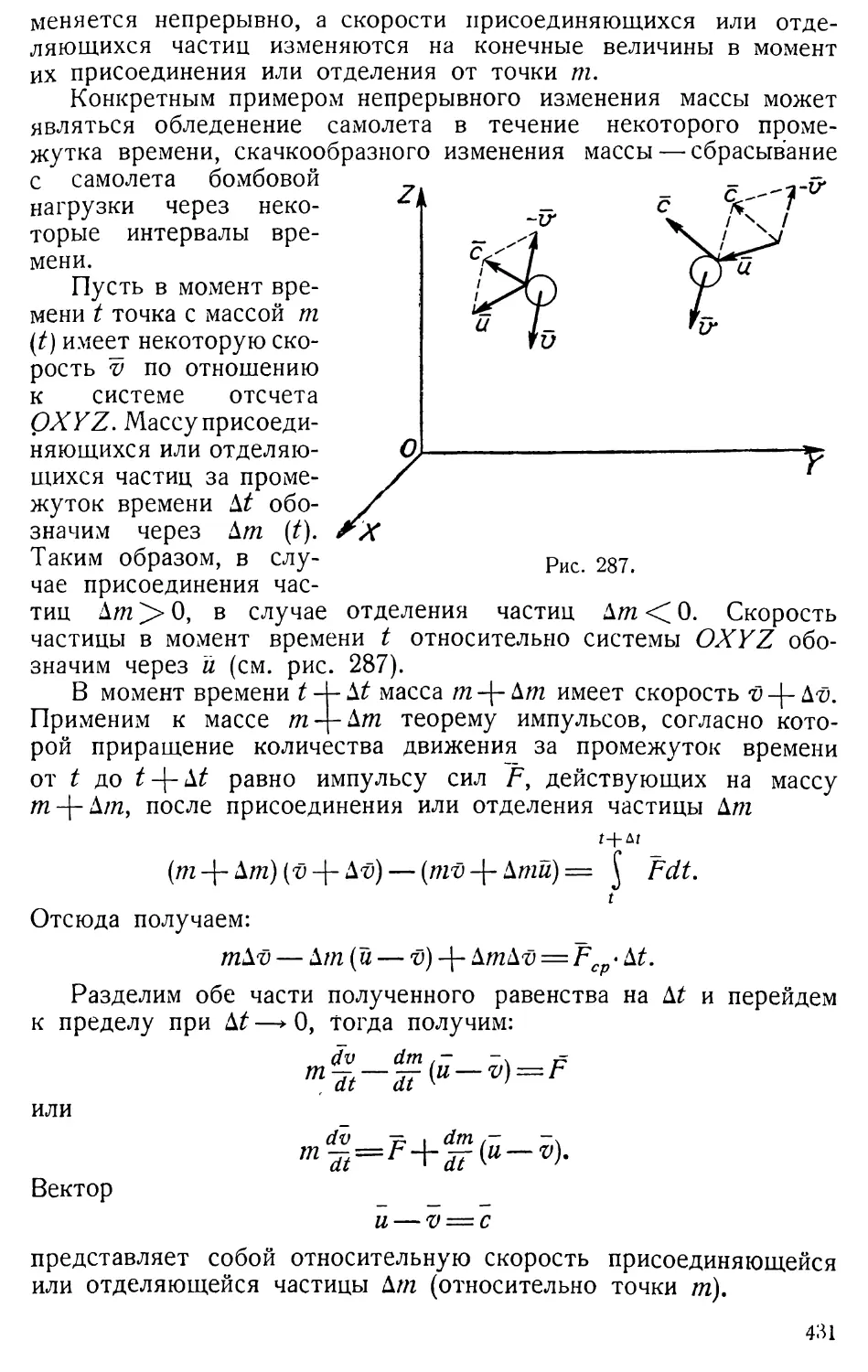
§ 1. Основное уравнение Мещерского в случае присоединения или
отделения частиц 430
§ 2. Некоторые приложения 433
§ 3. Основные уравнения Мещерского в общем случае 436
§ 4. Некоторые приложения; реактивное судно, падение цепи .... 438
ПРЕДИСЛОВИЕ
Учебная литератур'а по теоретической механике, изданная в нашей стране
в последние годы, в основном предназначена для технических высших
учебных заведений. Эта литература может быть лишь частично использована
в педагогических институтах, так как курс теоретической механики,
читаемый в педагогических институтах, обладает рядом специфических
особенностей, которые не находят отражения в учебной литературе, предназначенной
для технических высших учебных заведений.
Уже то обстоятельство, что в педагогических вузах предмет излагается
на старших курсах, позволяет строить курс механики на основе логической
последовательности материала с широким использованием математического
аппарата.
Большая сеть педагогических высших учебных заведений не имеет в
настоящее время учебного пособия, соответствующего современной программе
педагогических институтов.
Предлагаемая читателю книга представляет собой курс теоретической
механики в объеме современных программ для физико-математических
факультетов педагогических институтов по специальностям „физика" и „математика".
Книга рассчитана на студентов физической и математической специальности.
Курс состоит из двух частей: часть первая — кинематика, часть вторая —
кинетика. Наиболее важная часть курса — кинетика — состоит из трех
разделов: раздел I — статика, раздел II — динамика, раздел III — специальные
задачи динамики. Содержание каждой части и раздела разбито на главы,
каждая из которых в свою очередь разбита на параграфы, содержащие отдельные
пункты.
Курс строится как изложение методов, позволяющих изучать простейший
ВИД движения материальных тел — механическое перемещение.
Автор не является сторонником изложения курса механики как совокуп-
ости физических задач, решаемых методами механики, что имеет
распространив в различных физических курсах. Такой способ изложения не достигает
и> так как не создает представления о механике как о научном методе
ледования. Изучение же механики как совокупности методов создает
пределе ние о механике как о науке и позволяет охватить все наиболее важ-
ные задачи.
^ курсе уделяется особое внимание выяснению идейного содержания ме-
Д°в механики. С целью выяснения эффективности изучаемых методов для
9
решения задач практики все главы снабжены типичными задачами,
преимущественно прикладного характера. /
Наличие значительного количества подробно решаемых задач поможет,
как нам кажется, студентам, в частности студентам-заочникам, научиться
самостоятельно решать задачи.
Все вводимые в курсе понятия формируются по схеме: конкретная
задача — установление характеристики механического явления — логическое
обобщение этой характеристики, приводящее к общему определению
понятия—использование этого понятия для изучения механического движения.
Математический аппарат использован как инструмент исследования
механических явлений, и он подчинен основным задачам механики.
Значительное внимание уделено выяснению и правильному пониманию
основных понятий механики (масса, сила, пространство, время, силовое поле
и др.).
Правильное понимание этих понятий особенно важно для будущих
учителей физики.
Уделяется также внимание историческому освещению излагаемого
материала.
Подготовленный читатель обратит внимание на некоторые методические
новшества в изложении материала.
Так, например, при изложении кинематики не используются теоремы Бер-
нулли—Шаля и Даламбера.
Статика излагается методом, отличным от метода пар Пуансо. В основу
изложения статики кладется теорема о возможности приведения произвольной
системы сил к двум силам.
Предлагаемые приемы упрощают изложение и, как я имел возможность
убедиться, приводят к хорошим результатам в преподавании.
С моей точки зрения, эти приемы создают большие методические
возможности при изложении курса механики.
Считаю своим приятным долгом выразить глубокую благодарность проф.
Голубевой О. В. (Москва), внимательно прорецензировавшей рукопись, ценные
указания которой были мной использованы для улучшения рукописи.
Искренне благодарю проф. Воронкова И. М. (Москва), внимательно
прорецензировавшего рукопись и сделавшего ряд полезных замечаний.
Выражаю также свою признательность доцентам Плоткину И. Р.
(Ленинград) и Турину А.. И. (Москва) за ряд замечаний, которые были мной
использованы при окончательной доработке рукописи.
1 Автор
1958 г.
ВВЕДЕНИЕ
§ 1. ПРЕДМЕТ ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ
Механика есть наука о простейшем виде движения
материальных тел. В механике изучается механическое перемещение
тел, т. е. перемещение одних тел относительно других.
В зависимости от изучаемого объекта механика делится на
механику точки, механику системы, механику твердого тела.
Перемещение одних тел относительно других является
результатом механического взаимодействия тел. Установление
количественной меры механического взаимодействия тел привело
к понятию силы.
Таким образом, перемещение одних тел относительно других
обусловливается силами взаимодействия.
Механика делится на кинематику и кинетику. В кинематике
изучается движение тел независимо от сил, обусловливающих их
движение. В кинетике изучается движение тел в связи с силами,
обусловливающими движение рассматриваемого объекта. Кинетика
в свою очередь распадается на динамику и статику. Динамика
изучает законы движения механических систем (с учетом
действующих сил).
Статика является учением о силах, в ней изучаются законы
равновесия механических систем, находящихся под действием
заданной системы сил.
Наиболее важной частью механики является кинетика, так
как в ней решается общая задача механики: по заданным силам
найти движение и, наоборот, по заданному движению найти силы,
действующие на механическую систему. Кинематика же играет
вспомогательную роль, она используется в кинетике при
изучении общей задачи механики.
§ 2. МЕТОД ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ
Механическая форма движения является простейшей формой
Движения материальных тел.
^ханика~наУка выделяет эту форму движения из многообра-
я ооъективно существующих форм движения и, используя ряд
1ически обоснованных абстрактных понятий, изучает с их
noil
мощью закономерности движения материальных тел. Метод
абстракций в механике, как и в каждой науке, ведет не Лс отрыву
от действительности, а к более углубленному познанию
окружающего нЗТГмира.
При рассмотрении отдельных явлений наука сознательно
отвлекается от связи с другими явлениями, если это диктуется
характером рассматриваемой задачи. При изучении какого-нибудь
явления,- зависящего от многих факторов, следует учитывать
наиболее важные факторы и, рассматривая явление в первом
приближении, отбрасывать те факторы, которые влияют на него
незначительно. При таком способе исследования явления удается
свести к минимуму число параметров, определяющих явление, и
облегчить его количественное изучение.
Законы механики были открыты в результате обобщения
человеческого опыта, и правильность их подтверждается на
практике верностью полученных из них выводов, т. е. совпадением
выводов теории с данными поставленных опытов.
Так, например, опыты над падающими телами привели
Галилея к открытию законов падения тел в пустоте; опыты над
качающимися маятниками из различных материалов привели Ньютона
к открытию закона, устанавливающего, что ускорения всех тел
в поле тяжести одинаковы. Различные закономерности
механического движения тел, полученные теоретически на основе
законов, установленных Галилеем и Ньютоном, подтверждаются
данными опыта. В частности, произведенные на основе законов
Ньютона расчеты движения небесных тел подтверждаются
астрономическими наблюдениями.
Законы и понятия механики на каждом данном этапе ее
развития обусловливаются совокупностью данных опыта и
результатов изучения ранее открытых законов механического движения
тел.
Так, например, в конце XVII и в начале XVIII в. в механике
были созданы понятия материальной точки, механической системы,
абсолютно твердого тела, массы, силы, скорости, ускорения, были
открыты основные законы механического движения — законы
Ньютона: закон инерции, закон зависимости силы и ускорения, закон
действия и противодействия, подтверждающиеся данными опытов
над макротелами (т. е. телами достаточно больших размеров)
вблизи Земли.
Механика, базирующаяся на законах Ньютона, называется
классической механикой.
В начале XX в. была создана релятивистская механика,
основанная на данных физического исследования электромагнитных
полей и тождестве скорости света со скоростью распространения
электромагнитных колебаний.
На основе изучения движения микрочастиц и их свойств,
ставшего доступным также лишь в XX в., была создана механика
микромира — квантовая механика.
12
Законы и понятия механики, не теряя своей применимости
определенной области, в процессе развития науки в XX в.
поручают дальнейшее углубление и обобщение.
Так, например, понятие о массе тела, установленное в
классической механике, получило свое дальнейшее развитие в
релятивистской и квантовой механике. В классической механике масса
тела считалась постоянной величиной, не зависящей от скорости
тела в то время как релятивистской механикой было
установлено', что масса тела не является постоянной и зависит от
скорости тела.
В механике исследуются общие закономерности, связывающие
механические движения тел и взаимодействия между ними. При
этом механика широко опирается на законы, полученные и
обоснованные физикой.
В механике рассматривается главным образом количественная
сторона взаимодействия движущихся материальных тел и не
рассматривается вопрос о физической природе механических
взаимодействий.
Предпосылкой для установления количественных соотношений
является метод сравнения изучаемых величин с различными
эталонами, позволяющий дать величинам численную
характеристику.
Все основные величины механики могут быть численно
выражены в физических системах единиц (в теоретических или
практической).
На этой арифметизации механических величин, т. е.
выражения различных механических величин числами, основана
применимость математики в механике.
Механика как наука, изучающая объективно существующую
механическую форму движения материальных тел, не может
успешно развиваться в отрыве от человеческой практики. Только
человеческая практика обогащает и развивает наши
представления о мире, и только она способствует развитию механики как
науки, отражающей в нашем сознании все более точно
реальный мир, объективно существующий независимо от нашего
сознания.
Данные практики приводят к развитию науки, которая в свою
очередь на основании теоретических выводов может предсказать
различные закономерности и явления, справедливость которых
проверяется практикой.
Методы теоретической механики используются в каждой
прикладной дисциплине, изучающей процесс движения тел. Поэтому
теоретическая механика является основой целого ряда
прикладных и технических дисциплин.
В данном курсе рассматриваются проблемы лишь классической
13
§ 3. КРАТКИЙ ИСТОРИЧЕСКИЙ ОБЗОР
/
Механика является древней наукой, она насчитывает свыше
двух тысяч лет своего развития.
Возникновение и развитие механики было обусловлено
развитием производительных сил общества. Энгельс по этому поводу
писал: „...на известной ступени развития земледелия и в
известных странах (поднимание воды для орошения в Египте), а в
особенности вместе с возникновением городов, крупных построек и
развитием ремесла развивалась и механика. Вскоре она
становится необходимой также для судоходства и военного дела.—
Она также нуждается в помощи математики и таким образом
способствует ее развитию. Итак, уже с самого начала
возникновение и развитие наук обусловлено производством (Энгельс,
Диалектика природы, Госполитиздат, 1955, стр. 145).
Механика стала наукой тогда, когда были сформулированы ее
общие законы, явившиеся обобщением наблюдаемых явлений.
В истории развития механики можно указать следующие ос-
новые этапы: 1) механика древности, 2) механика средних веков,
3) классическая механика, 4) релятивистская и квантовая механика.
Механика древности охватывает период с IV в. до н. э. по
II в. н. э. Наиболее выдающимися представителями этого
периода являются Аристотель (384—322), Архимед (287—212), Герон
(II в. до н. э.), Гиппарх (II в. до н. э.), Птолемей (II в. н. э.).
В этот период получает развитие та часть механики, которую
сейчас называют статикой, т. е. изучаются законы равновесия
тел. Это объясняется тем, что механика этого периода
развивалась в связи со строительством различного рода сооружений, при
котором приходилось использовать различные вспомогательные
приспособления: блоки, рычаги, полиспасты и др. Появилась
необходимость изучения общих законов действия этих механизмов.
Среди ученых этого периода следует особо выделить Архимеда
и Птолемея.
Архимед открыл условия равновесия рычага, развил теорию
центра тяжести, нашел условия равновесия тел, плавающих в
жидкости. Архимед установил основные принципы геометрической
статики.
Птолемей создал так называемую „геоцентрическую" систему
мира, в которой движение всех небесных тел объяснялось в
предположении, что Земля является неподвижной. Эта система
господствовала в науке в течение 12 веков, пока Коперник не
доказал несостоятельность ее основных положений и не заложил
основы научно-правильной, гелиоцентрической системы мира
(солнечной системы).
Механика средних веков охватывает период с XV по XVII в.
В силу целого ряда исторических причин механика в период с III
по XIV в. не развивалась. Развитие механики снова начинается
лишь с XV века. Наиболее выдающимися представителями этого
14
пеоиода являются Леонардо да Винчи (1452—1519), Коперник
П473—1543), Стевин (1548—1620), Кеплер (1571—1630), Галилей
/j564 1642), Гюйгенс (1629—1695). Среди этих ученых следует
особо выделить Галилея, который заложил основы динамики.
Галилей открыл правильные законы падения тел и опровергнул
ошибочные утверждения Аристотеля, которые держались в науке
свыше полутора тысяч лет. Ему также принадлежит заслуга в
открытии закона инерции. Работы Галилея были продолжены
Гюйгенсом.
Этот период развития механики отличается от первого
периода тем, что изучается движение (а не только покой) тел и
начинает развиваться та часть механики, которая в настоящее время
называется динамикой.
Создание так называемой классической механики относится к
периоду, охватывающему конец XVII в., XVIII и XIX вв.
В конце XVII в. Ньютон в своем знаменитом сочинении
„Математические начала натуральной философии" (появившемся в
1686 г.) подвел итог работ предшествующего периода и,
пользуясь синтетическим методом древних греков в геометрической
форме, систематически изложил основные вопросы механики
свободной материальной системы. Со времени Ньютона механика
становится точной наукой, которая зиждется на некоторых
основных законах (так называемых законах Ньютона).
Заслуга Ньютона заключается в том, что он систематизировал
весь накопленный до него материал и придал механике характер
науки, пользующейся для установления различных
закономерностей небольшим числом основных законов движения.
В связи с бурным ростом математических наук в XVIII и
XIX вв. начинают совершенствоваться методы механики, получает
развитие так называемая аналитическая механика, в которой
различные вопросы механики решаются методами математического
анализа. Решение механической задачи приводится к решению
некоторой системы дифференциальных уравнений.
В этот период создаются методы для исследования
несвободных материальных систем, т. е. таких материальных систем,
движения которых подчинены некоторым ограничениям. Развитие
учения о движении несвободной материальной системы было
обусловлено развитием машинн'ой техники.
Наиболее крупными представителями этого периода развития
Еанж M^n^Z{n™-lm)> ДаЛамбеР (1717-1783)>
пягк^ftiJ; V"lJl83)' 0стРоградский 1801-1862), Гамильтон
УЯНЦ788 г' появилось сочинение Лагранжа „Аналитическая ме-
tenZl: В К0Т°Р°М вся ме*аника была изложена без единого
чертежа, на основе аналитического метода
лиН^п?' ИЗУЧЗЯ движение твердого тела,' вывел так называемые
Дифференциальные уравнения движения твердого тела
15
Даламбер установил принцип, позволяющий изучать
динамические задачи методами статики (основной метод
кинетостатики).
Остроградский и независимо от него Гамильтон установили
принцип, позволяющий сводить изучение движения механических
систем к некоторой экстремальной задаче.
С, Ковалевская значительно продвинула вперед вопрос об
изучении движения твердого тела вокруг неподвижной точки. Ее
работами был произведен сдвиг в решении одной из труднейших
проблем механики, над которой в течение продолжительного
времени работали многие крупнейшие ученые.
Наряду с аналитическими методами в XIX в. получают также
развитие и геометрические методы, главным образом в работах
французского геометра Пуансо и русского ученого Н. Е.
Жуковского.
Развитие науки в XX в. показало, что основных законов
Ньютона недостаточно для изучения масс, достаточно малых по
величине и обладающих достаточно большими скоростями
(близких к скорости света). Была создана более общая теория, так
называемая теория относительности, в которой движение
материальных систем изучается с более общей точки зрения, чем в
классической механике, и изучается движение масс, скорости
которых достаточно велики.
На основе изучения движения достаточно малых масс была
создана квантовая механика.
§ 4. РОЛЬ РУССКИХ И СОВЕТСКИХ УЧЕНЫХ
В РАЗВИТИИ МЕХАНИКИ
Русские и советские ученые сыграли большую роль в
развитии механики. Им принадлежит решение весьма важных проблем
и вопросов. Русские ученые проложили новые пути в механике.
Им принадлежит открытие совершенно новых разделов механики:
теории устойчивости движения (Ляпунов), аэромеханики
(Жуковский), механики тел переменной массы (Мещерский). Многие из
этих работ остались неизвестными широким кругам Запада и
затем были „переоткрыты" другими учеными.
Наиболее выдающимися русскими и советскими учеными,
оказавшими влияние на развитие механики, являются: Эйлер
(1703—1783), Остроградский (1801—1862), Ковалевская (1850 —
1891), Жуковский (1847—1921), Ляпунов (1857—1918),
Мещерский (1859—1935), Крылов А. Н. (1863—1945), Чаплыгин
(1869—1942), Циолковский (1857—1935).
Эйлеру, который большую часть своей жизни провел в
Российской Академии наук (31 год), принадлежит развитие
кинематики твердого тела, установление динамических уравнений
движения твердого тела, установление закона моментов (площадей).
16
Ему также принадлежит первое крупное сочинение, излагающее
механику при помощи анализа бесконечно-малых („Механика",
изд. 1736 г.).
Остроградскии занимался различными вопросами аналитической
небесной механики. Он установил очень важный вариационный
принцип, так называемый принцип наименьшего действия. Наряду
с общими проблемами механики он дал решение многих частных
механических задач в области гидростатики, гидродинамики,
теории упругости, теории притяжения и баллистики.
Ковалевская глубоко исследовала вопрос о вращении
твердого тела вокруг неподвижной точки и дала полное решение
этого вопроса для одного важного случая движения.
работа Ковалевской в этом направлении была награждена
премией Парижской Академии наук (1888) и принесла ей всемирную
известность.
Жуковский, пользуясь методами механики, решил целый ряд
вопросов технического характера, небесной механики,
аэромеханики. Самой важной заслугой Жуковского является создание
аэромеханики, которая лежит в основе авиационной техники. По
выражению В. И. Ленина, Жуковский является „ отцома русской
авиации.
Ляпунов получил наиболее важные результаты в теории
устойчивости движения, практическое значение которых в технике очень
велико. Задачу об устойчивости приходится решать, например,
когда требуется определить конструкцию инженерного
сооружения или машины, при построении самолетов, артиллерийских
орудий, при исследовании полета снарядов, мин и т. д.
Мещерский является создателем механики тел переменной
массы. Частной задачей этой механики является теория движения
реактивных аппаратов. Область практического применения
механики тел переменной массы не ограничивается только
реактивными аппаратами и реактивной техникой. Случаи движения тел
с переменной массой можно указать в различных областях
промышленности, а также естествознания. Таковы, например,
вращающаяся лебедка, на которую наматывается трос,
вращающееся веретено, на которое наматывается нить, плавающая льдина,
масса небесных тел, изменяющихся вследствие различных причин
(падение метеоритов), и др.
В этом же направлении проводил исследования выдающийся
ученый и изобретатель Циолковский, которому принадлежат
фундаментальные работы о воздухоплавании и межпланетных
сообщениях. Циолковский является основоположником ракетной тех-
ики, и бурное ее развитие в наше время во многом ему обязано,
аучное наследство Циолковского было творчески развито
сотскими учеными. Благодаря большим достижениям советских
балНЫХ В °^ласти ракетной техники стало возможным создание
осут1ИСТИЧеСКИХ Ракет и запУск искусственных спутников Земли,
Уществленный впервые в Советском Союзе.
17
Крылов использовал методы механики для развития теории
корабля. В этом его главная заслуга. Наряду с этим ему
принадлежит много различных статей методического характера,
благодаря которым преподавание механики в России было поднято на
высокую ступень.
Чаплыгин, пользуясь методами механики, развил аэромеханику,
решил труднейшие вопросы аналитической механики,
аэромеханики. Чаплыгин выступил как создатель новых оригинальных
методов исследований. Исключительную роль сыграла созданная им
теория газовых струй в переходе авиации через звуковой барьер.
§ 5. ПРОСТРАНСТВО И ВРЕМЯ В МЕХАНИКЕ
Движения материальных систем, изучаемые в теоретической
механике, происходят в пространстве и во времени.
Представления о пространстве и времени на каждом этапе развития науки
основываются на конкретной физической трактовке общих свойств
материи.
В классической механике Ньютона постулируется
существование абсолютного пространства и абсолютного времени.
Абсолютное пространство мыслится как беспредельная пустота, лишенная
вещественности, как неподвижное, непрерывное, однородное и
делимое на произвольные части целое. Абсолютное пространство
рассматривается как трехмерное евклидово пространство,
являющееся объективно существующим вместилищем для тел.
Абсолютное время мыслится как „чистая длительность",
текущая равномерно и непрерывно в одном направлении, независимо
от каких бы то ни было процессов.
Таким образом, в классической механике пространство и время
мыслятся как такие формы всего существующего, которые не
зависят друг от друга, от материи и ее движений.
Эти представления классической механики Ньютона были в
своей основе материалистическими, так как пространство и время
признавались объективно существующими. Но понятия
пространства и времени устанавливались метафизически, поскольку
пространство и время отрывались от движущейся материи и
противопоставлялись ей в качестве самостоятельных субстанций.
Эти представления классической механики о пространстве и
времени держались в науке на протяжении полутора веков (с
конца XVIII до середины XIX). Метафизическая философия
утверждала, что представления Ньютона о пространстве и времени
не могут быть поколеблены, что они являются вечными. Так,
например, Кант утверждал, что представления Ньютона о
пространстве и времени являются врожденными, априорными и не
могут быть доказаны или опровергнуты опытом.
Критика этих представлений о пространстве была дана
впервые великим русским математиком Н. И. Лобачевским.
Лобачевский выдвинул идею неразрывной связи свойств про-
18
панства и материи, обусловленности свойств пространства свой-
С вами движущейся материи. Лобачевский построил новую, так
сТоываемую неевклидову геометрию, без которой невозможно
Тгло создать релятивистскую механику, в которой
рассматривается движение тел не в абсолютном пространстве и времени,
В рассматривается движение тел лишь в отношении других тел,
также находящихся в движении. В релятивистской механике была
вскрыта тесная связь пространства и времени.
Критика метафизических представлений о пространстве и
времени с позиций материалистической философии была дана
Энгельсом. Энгельс отмечал, что пространство и время являются
формами существования материи и, следовательно, понятия
пространства и времени неотделимы от материи.
По этому поводу он писал: ,,... обе эти формы существования
материи без материи ничто, пустые представления, абстракции,
существующие только в нашей голове" (Энгельс, Диалектика
природы, Госполитиздат, 1952, стр. 187).
Метафизики отрывают пространство от материи, а время — от
реальных процессов и затем их абсолютизируют. Однако понятия
пространства и времени не могли бы быть созданы, если не
существовало реально движущейся материи, которая порождает
эти понятия. Пространство и время не существуют вне материи
и материальных процессов.
В каждой материальной системе взаимосвязанных тел имеются
специфические^ для данной системы закономерности. Поэтому
можно говорить о пространственных и временных отношениях для
данной материальной системы.
Итак, в основах классической механики имеются противоречия,
обусловленные метафизическим характером построения основных
понятий пространства и времени.
Однако отсюда не следует делать вывода, что классическую
механику нужно отбросить. Классическую механику следует
рассматривать как приближение по пути познания объективной истины,
по пути более полного отражения в нашем сознании
окружающего нас мира.
Формулы классической механики проще формул
релятивистской механики, и они дают верные результаты для многих задач
техники и естествознания. Формулы классической механики дают
достаточно хорошие результаты при изучении движения тел,
скорости которых невелики по сравнению со скоростью света
^оООООО— j. В большинстве задач современной техники это
условие соблюдается. Так, например, наибольшая скорость сна-
РяДа из орудия не превышает 2 — , наибольшая скорость самолета
превышает 0,8 —, орбитальная скорость первых двух искус-
Венных спутников Земли равна около 8-
КМ
сек'
19
Методы классической механики дают достаточно хорошие
результаты для многих задач небесной механики. /
Поэтому методы классической механики всегда будут
использовать для решения многих задач техники и естествознания. Эти
методы не утрачивают своей актуальности при наличии более
точных теорий, из которых классическая механика вытекает как
частный случай.
Основные законы Ньютона классической механики
выполняются с той или иной степенью точности относительно различных
систем отсчета. Система отсчета, относительно которой
выполняются законы Ньютона, называется основной или абсолютной.
Выбор основной системы отсчета для изучения движения тел
зависит от характера рассматриваемой задачи.
При изучении астрономических задач в качестве основной
системы отсчета выбирают систему координат, оси которой
проходят через неподвижные звезды, а начало координат находится
либо в центре масс солнечной системы, либо в центре Солнца.
При изучении технических задач (например, движения машины)
в качестве основной системы отсчета выбирают систему
координат, жестко связанную с Землей.
В указанных системах отсчета получаемые результаты
исследований хорошо согласуются с данными наблюдений.
Время в классической механике можно измерять при помощи
каких-нибудь периодических процессов, которые могут
повторяться много раз подряд. Для этой цели используют
периодические астрономические явления, существующие в природе:
вращение Земли вокруг своей оси (звездное время), видимое движение
Солнца вокруг Земли (солнечное время). Для измерения времени
используют также искусственно создаваемые периодические
процессы: колебания маятника под действием силы тяжести
(маятниковые часы), колебания балансира под действием упругой силы
пружины (хронометры), различные физические процессы,
связанные с колебаниями постоянного периода.
Различные системы часов, служащие для измерения времени,
отображают периодические процессы, встречающиеся в природе,
и проверяются по этим явлениям природы.
ЧАСТЬ ПЕРВАЯ
КИНЕМАТИКА
ВВЕДЕНИЕ
ОСНОВНЫЕ ПОНЯТИЯ, ОСНОВНАЯ ЗАДАЧА КИНЕМАТИКИ
Кинематика изучает движения материальных систем независимо
от причин, обусловливающих движение этих систем.
При этом способе изучения движения тел не учитывается
материальная природа движущихся тел (масса), а также физические
процессы, сопровождающие движения тел (взаимодействие
движущихся тел с другими телами).
В кинематике, таким образом, изучается только изменение
движения тела с течением времени, геометрия движения.
Изучение движения тел с учетом материальной природы тел
и взаимодействий движущегося тела с другими телами,
обусловливающими его движение, 'проводится в кинетике.
Простейшими материальными системами являются
материальная точка и абсолютно твердое тело. Материальной точкой
называют тело природы, рассматриваемое как геометрическая точка
и имеющее конечную массу. Абсолютно твердым телом называют
такое материальное тело, у которого расстояние между каждыми
двумя точками не изменяется при воздействии на него в
состоянии покоя или движения других тел.
Понятия материальной точки и абсолютно твердого тела суть
некоторые абстракции, таких тел в действительности не
существует. Эти понятия представляют собой только мыслимые
геометрические образы. Практически материальную точку можно
рассматривать как тело достаточно малых размеров по сравнению
с пространственными расстояниями в рассматриваемой задаче, так
что движения различных точек этого тела мало отличаются друг
0т Друга. Абсолютно твердое тело можно рассматривать как
такое материальное тело, которое претерпевает незначительные
^формации при воздействии на него других тел.
В зависимости от изучаемого объекта кинематика делится на
инематику точки и кинематику абсолютно твердого тела.
Под движением материальной системы (некоторой совокупно-
и материальных точек) понимают изменение положения этой
Стемы относительно некоторых других тел.
21
Для изучения движения материальных систем необходимо
выбрать некоторую среду (совокупность тел), относительно ксдорой
заданная материальная система движется. Математически это
осуществляется путем выбора системы координат, неизменно
связанной с данной средой, т. е. не изменяющей своего положения
относительно данной среды. Так, например, изучая движения тел
на поверхности Земли, выбирают систему координат, связанную
с Землей, изучая движения планет относительно Солнца,
выбирают систему координат, связанную с Солнцем, и т. д.
Итак, в кинематике изучается движение точки и тела
относительно некоторой пространственной системы координат, выбор
системы координат зависит от характера конкретной задачи.
Далее, совокупности положений материальной системы в
некоторой системе координат сопоставляют совокупность моментов
времени, им соответствующих, и, таким образом, устанавливается
взаимно однозначное соответствие между положением
материальной системы и некоторой совокупностью действительных чисел,
измеряющих время. Измерение времени осуществляется при
помощи какого-либо периодического процесса, т. е. процесса
повторяющегося через равные промежутки времени. ^
Для измерения времени используются периодические процессы,
данные природой (вращение Земли вокруг своей оси, вращение
Земли вокруг Солнца, вращение Луны вокруг Земли), либо
периодические процессы, искусственно создаваемые (колебания
маятника в маятниковых часах, колебания балансира в
хронометрах, движение песка в песочных часах- и др.).
Отсчет времени ведется от некоторого начального момента, и
момент времени считается положительным, если он следует за
начальным, и отрицательным, если он предшествует начальному.
Таким образом, совокупность моментов времени представляет
собой числовую совокупность, которую можно изобразить точками
действительной оси. Действительная ось, служащая для
изображения времени, называется осью времени.
Совокупность всех моментов времени от tx до t2 называется
промежутком времени от tt до t2.
Чтобы иметь возможность выражать кинематические
пространственные соотношения числами, выбирают некоторые единицы
измерения длины и времени.
В теоретической механике выбирают единицы измерения длины
и времени такие же, как и в физике; в абсолютной системе —■
один сантиметр, одна секунда, в практической системе — один
метр, одна секунда.
Изучение движения точки в кинематике осуществляется путем
нахождения уравнений, характеризующих перемещение точки
относительно выбранной системы координат. Эти уравнения
называются уравнениями движения точки. В зависимости от способа
нахождения уравнений получают ту или иную форму этих
уравнений. Уравнения движения точки задают положение движущейся
22
очки для каждого момента времени относительно выбранной
системы координат.
Основными понятиями кинематики являются: траектория,
скорость и ускорение точки.
Траекторией точки называют геометрическое место положений
точки при ее движении относительно выбранной системы
координат. Скорость есть понятие, характеризующее изменение пути
с течением времени, а также направление движения; ускорение
характеризует изменение скорости в зависимости от времени,
изучить кинематически движение материальной системы — это
значит определить траекторию каждой точки за данный
промежуток времени, а также скорость и ускорение каждой точки
системы в каждый данный момент времени.
Как будет показано дальше, по уравнениям движения точки
можно найти траекторию, скорость и ускорение точки.
Вследствие этого кинематическое изучение движения точки приводится
к нахождению уравнений движения точки по наперед заданнЫхМ
геометрическим свойствам движения точки и определению всех
кинематических характеристик по найденным уравнениям, либо
к нахождению кинематических характеристик по наперед
заданным уравнениям движения, либо, наконец, к нахождению одних
кинематических характеристик по заданным другим.
Кинематическое изучение движения материальной системы
приводится к нахождению некоторых уравнений, позволяющих
составлять уравнения движения каждой точки материальной системы
по наперед заданным геометрическим свойствам движения, либо
нахождению кинематических характеристик точек системы по
наперед заданным уравнениям движения, либо, наконец, к
нахождению кинематических характеристик одних точек системы по
заданным кинематическим характеристикам других точек.
Глава I
КИНЕМАТИКА ТОЧКИ
§ 1. СПОСОБЫ ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ
Задать движение точки — это значит указать такой способ,
пРи помощи которого можно определить положение точки в
каждый данный момент времени относительно выбранной системы
координат. Существуют три наиболее распространенных способа
задания движения точки: координатный, естественный,
векторный. Первые два способа (координатный и естественный)
употребляются преимущественно при решении различных практических
3аДач, векторный способ применяется главным образом при изу-
Чении теоретических вопросов.
23
1. Координатный способ
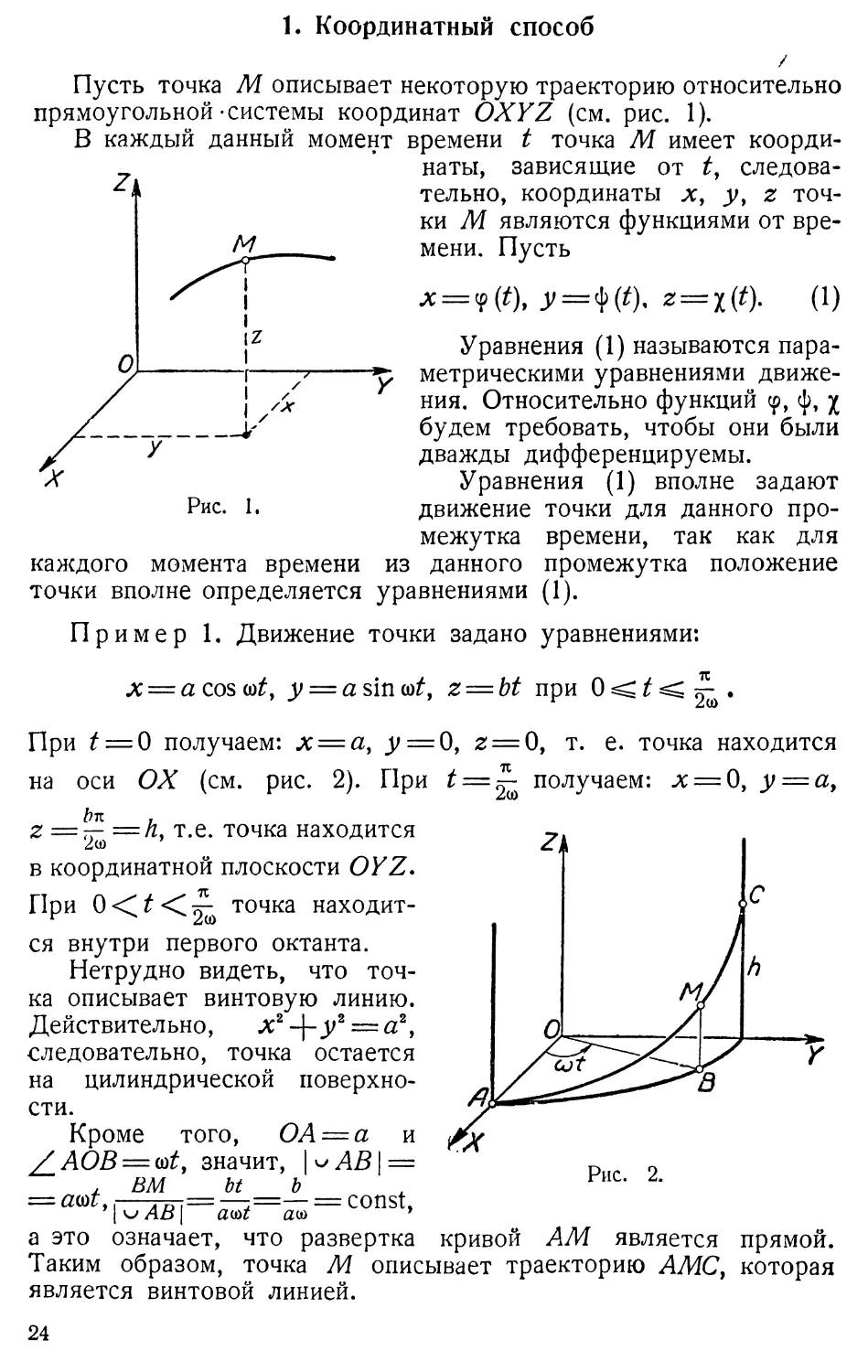
Пусть точка М описывает некоторую траекторию относительно
прямоугольной-системы координат OXYZ (см. рис. 1).
В каждый данный момент времени t точка М имеет
координаты, зависящие от t,
следовательно, координаты х, уу z
точки М являются функциями от
времени. Пусть
а
/
Рис. 1.
*=¥('). у=Ш *=*(')• 0)
Уравнения (1) называются пара-
' ^ метрическими уравнениями
движения. Относительно функций ср, ф, i
будем требовать, чтобы они были
дважды дифференцируемы.
Уравнения (1) вполне задают
движение точки для данного
промежутка времени, так как для
каждого момента времени из данного промежутка положение
точки вполне определяется уравнениями (1).
Пример 1. Движение точки задано уравнениями:
х = a cos (о£, у = a sin со£, z = bt при 0 ^ t ^ ^ .
При £ = 0 получаем: х = а, у = 0, 2 = 0, т. е. точка находится
на оси ОХ (см. рис. 2). При t = ^) получаем: х = 0, у = а,
z —7г =h, т.е. точка находится
2(0
в координатной плоскости OYZ.
При О^^^^ точка
находится внутри первого октанта.
Нетрудно видеть, что
точка описывает винтовую линию.
Действительно, х2 -\-у2 = а2,
следовательно, точка остается
на цилиндрической
поверхности.
Кроме того, ОА = а и
^/АОВ = ^, значит, \^АВ\ =
вм
Ы
Рис. 2.
=— = const,
' | v./ AS | a&t aw
а это означает, что развертка кривой AM является прямой.
Таким образом, точка М описывает траекторию АМС, которая
является винтовой линией.
24
2. Естественный способ
Установим сначала метод, который позволяет определить
положение каждой точки кривой.
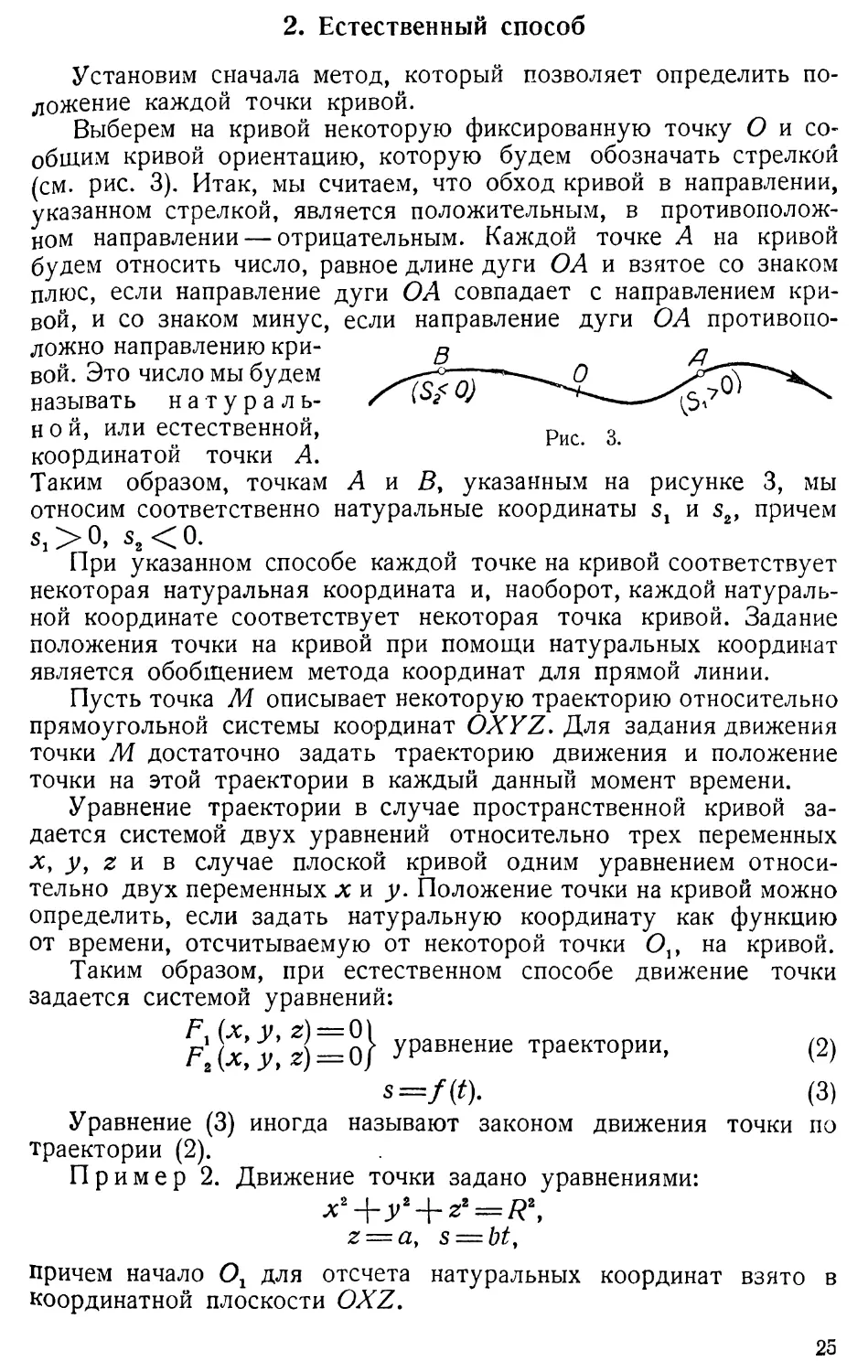
Выберем на кривой некоторую фиксированную точку О и
сообщим кривой ориентацию, которую будем обозначать стрелкой
(см. рис. 3). Итак, мы считаем, что обход кривой в направлении,
указанном стрелкой, является положительным, в
противоположном направлении — отрицательным. Каждой точке А на кривой
будем относить число, равное длине дуги ОА и взятое со знаком
плюс, если направление дуги ОА совпадает с направлением
кривой, и со знаком минус, если направление дуги ОА
противоположно направлению
кривой. Это число мы будем
называть
натуральной, или естественной,
координатой точки А.
Таким образом, точкам Л и В, указанным на рисунке 3, мы
относим соответственно натуральные координаты sx и s2, причем
s,>0, 52<0.
При указанном способе каждой точке на кривой соответствует
некоторая натуральная координата и, наоборот, каждой
натуральной координате соответствует некоторая точка кривой. Задание
положения точки на кривой при помощи натуральных координат
является обобщением метода координат для прямой линии.
Пусть точка М описывает некоторую траекторию относительно
прямоугольной системы координат OXYZ. Для задания движения
точки М достаточно задать траекторию движения и положение
точки на этой траектории в каждый данный момент времени.
Уравнение траектории в случае пространственной кривой
задается системой двух уравнений относительно трех переменных
лу у, z и в случае плоской кривой одним уравнением
относительно двух переменных х и у. Положение точки на кривой можно
определить, если задать натуральную координату как функцию
от времени, отсчитываемую от некоторой точки О,, на кривой.
Таким образом, при естественном способе движение точки
задается системой уравнений:
рх j*j J| 2 = о/ УРавнение траектории, (2)
s=f(t). (3)
Уравнение (3) иногда называют законом движения точки по
траектории (2).
Пример 2. Движение точки задано уравнениями:
x2+y2 + z2 = R\
z = ay s = bt,
причем начало Ог для отсчета натуральных координат взято в
координатной плоскости OXZ.
25
Траектория представляет собой линию пересечения сферы и
плоскости, т. е. окружность.
Для определения положения точки на траектории в момент
времени t = tQ нужно в функцию s=f(t) подставить значение
t = t0, т. е. найти s0—f(t0), и от точки Oj по траектории
отложить в соответствующем направлении дугу ОхМу длина которой
равна | s01.
3. Векторный способ
Будем рассматривать движение точки М относительно
прямоугольной системы координат.
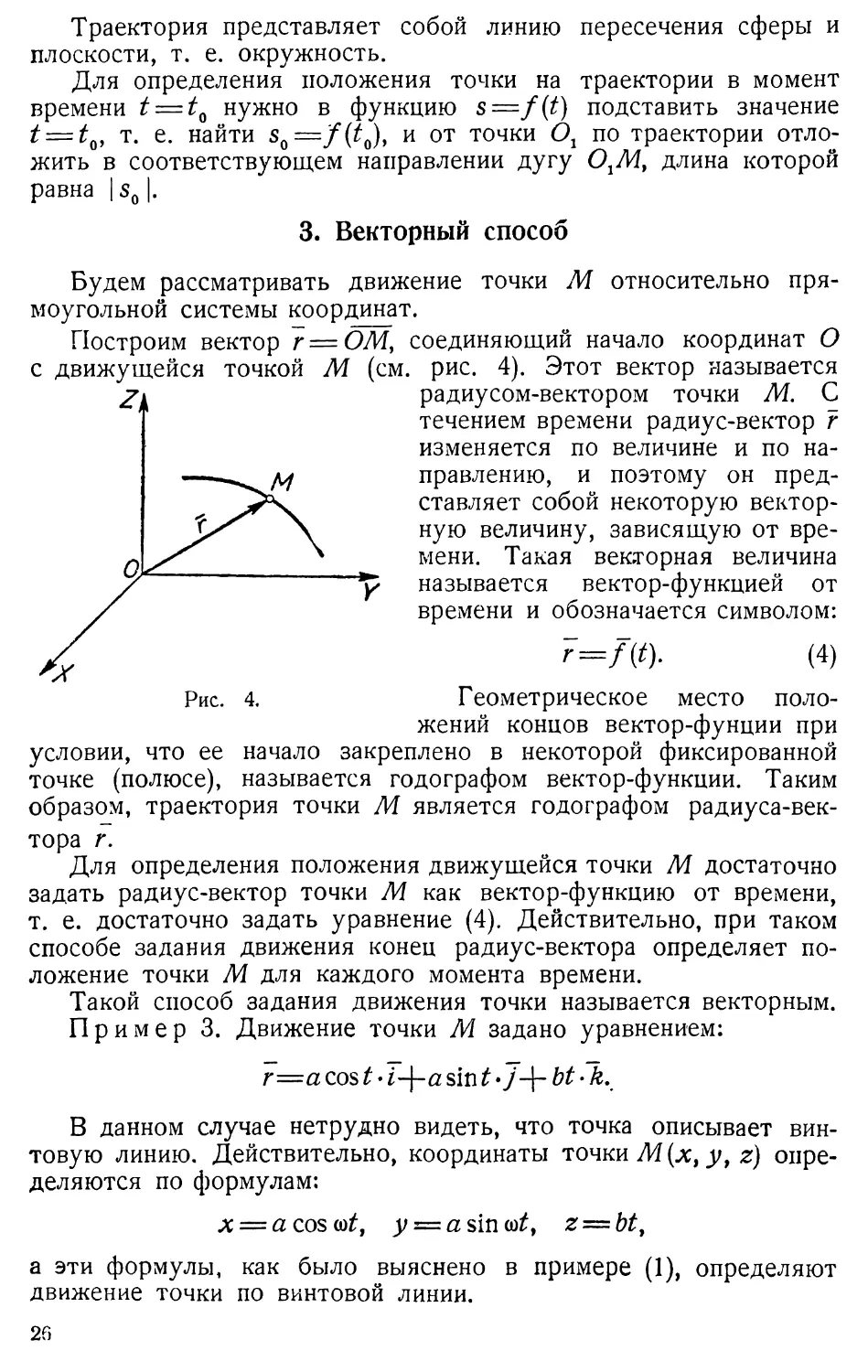
Построим вектор г = ОМ, соединяющий начало координат О
с движущейся точкой М (см. рис. 4). Этот вектор называется
радиусом-вектором точки М. С
течением времени радиус-вектор г
изменяется по величине и по
направлению, и поэтому он
представляет собой некоторую
векторную величину, зависящую от
времени. Такая векторная величина
называется вектор-функцией от
времени и обозначается символом:
г=т (4)
Геометрическое место
положений концов вектор-фунции при
условии, что ее начало закреплено в некоторой фиксированной
точке (полюсе), называется годографом вектор-функции. Таким
образом, траектория точки М является годографом
радиуса-вектора г.
Для определения положения движущейся точки М достаточно
задать радиус-вектор точки М как вектор-функцию от времени,
т. е. достаточно задать уравнение (4). Действительно, при таком
способе задания движения конец радиус-вектора определяет
положение точки М для каждого момента времени.
Такой способ задания движения точки называется векторным.
Пример 3. Движение точки М задано уравнением:
r=a cos t • i-\-a sin t >j-\- bt • A.
В данном случае нетрудно видеть, что точка описывает
винтовую линию. Действительно, координаты точки М(х,у, z)
определяются по формулам:
х = a cos (ot, y = asin<t)t9 z = bt,
а эти формулы, как было выяснено в примере (1), определяют
движение точки по винтовой линии.
Рис. 4.
26
§ 2. СКОРОСТЬ ДВИЖУЩЕЙСЯ точки
1. Определение скорости
Если точка движется, то за данный промежуток времени она
проходит определенный путь.
Чтобы охарактеризовать зависимость величины пройденного
пути от времени, устанавливают понятие скорости. Сначала
устанавливают понятие средней скорости, а затем скорости в данный
момент времени.
Чтобы дать определение скорости в наиболее общей форме,
проведем сначала вспомогательные рассуждения.
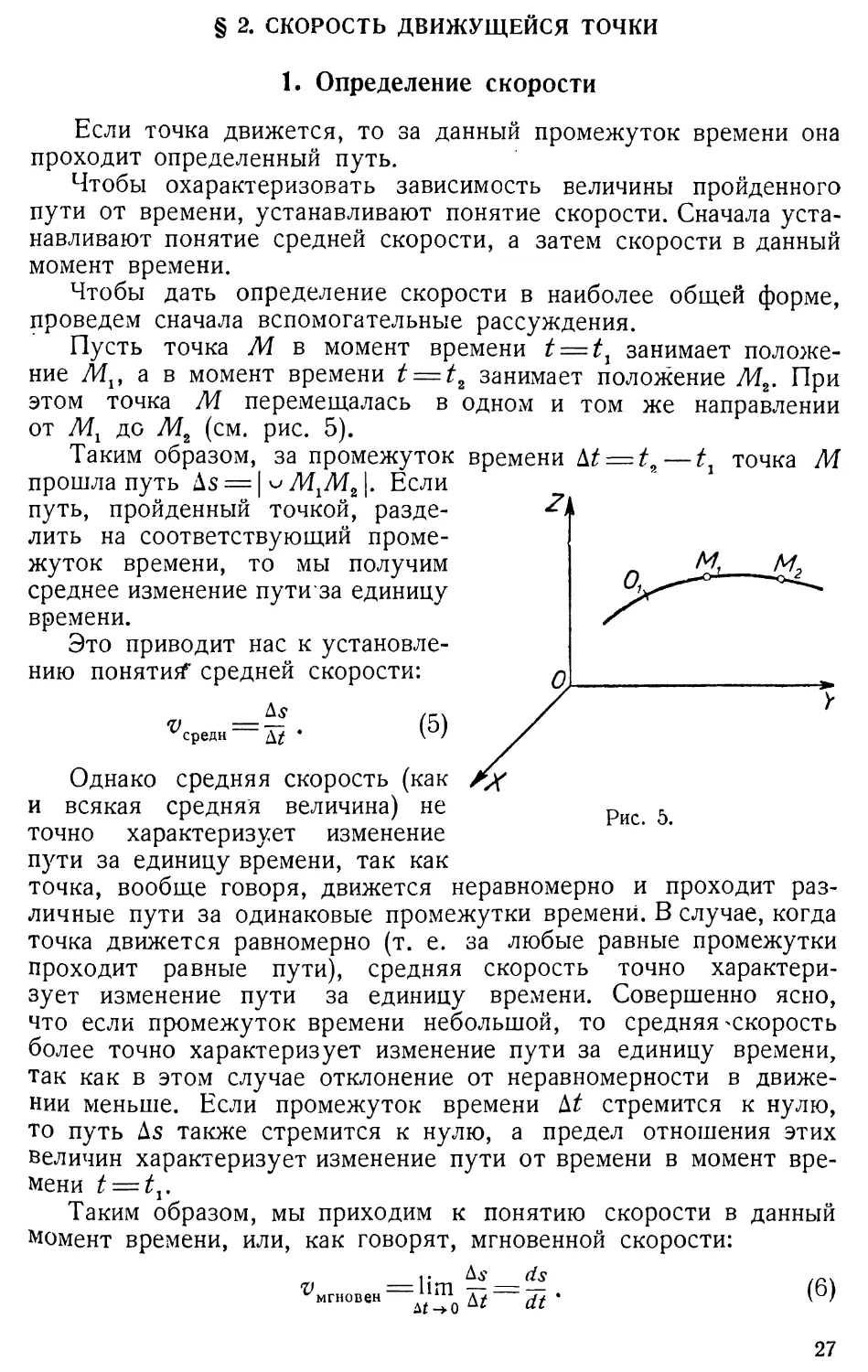
Пусть точка М в момент времени t = t1 занимает
положение М1У а в момент времени t = t2 занимает положение М2. При
этом точка М перемещалась в одном и том же направлении
от М1 до М2 (см. рис. 5).
Таким образом, за промежуток времени kt = t9 — tl точка М
прошла путь As = | ^yWjMJ. Если
путь, пройденный точкой,
разделить на соответствующий
промежуток времени, то мы получим
среднее изменение путиза единицу
времени.
Это приводит нас к
установлению понятие средней скорости:
а
V,
среди
As
(5)
Рис. 5.
Однако средняя скорость (как /х
и всякая средняя величина) не
точно характеризует изменение
пути за единицу времени, так как
точка, вообще говоря, движется неравномерно и проходит
различные пути за одинаковые промежутки времени. В случае, когда
точка движется равномерно (т. е. за любые равные промежутки
проходит равные пути), средняя скорость точно
характеризует изменение пути за единицу времени. Совершенно ясно,
что если промежуток времени небольшой, то средняя ^скорость
более точно характеризует изменение пути за единицу времени,
так как в этом случае отклонение от неравномерности в
движении меньше. Если промежуток времени Ы стремится к нулю,
то путь As также стремится к нулю, а предел отношения этих
величин характеризует изменение пути от времени в момент
времени t = tx.
Таким образом, мы приходим к понятию скорости в данный
момент времени, или, как говорят, мгновенной скорости:
(6)
27
Мгновенную скорость можно также выразить через
натуральную координату. Действительно, если на траектории отсчитывать
натуральную координату от некоторой точки 0J9 то точка М1
будет иметь натуральную координату s,, точка М2 —
натуральную координату s2 и \^M1M2\ = \s2 — s1\.
Следовательно,
"■™=й, £=й>
А^
lim
s2 — sx
Итак, скорость точки в данный момент времени равна
абсолютному значению производной от натуральной координаты по
времени.
Так как натуральная координата в различных системах
измеряется в сантиметрах либо в метрах,, а время — в секундах, то
М
%t(At<0)
£fttt>oj
Рис. 6.
см
сек
либо
1-1'
получаем, что размерностью скорости является
s ,- -, [длина1
а в общем случае [z/J = | -, .
Движение точки происходит в определенном направлении,
поэтому понятие скорости должно отражать и это качество
движения.
Чтобы учесть направление перемещения точки, будем
рассматривать перемещения точки как векторы, направленные в сторону
движения точки. В случае прямолинейного движения точки
вектор, характеризующий перемещение, находится на линии
движения, а в случае криволинейного движения перемещение точки по
кривой можно для достаточно малого промежутка времени М
заменить приближенно перемещением по хорде, ибо величины
этих перемещений при М —> 0 являются бесконечно малыми одного
порядка.
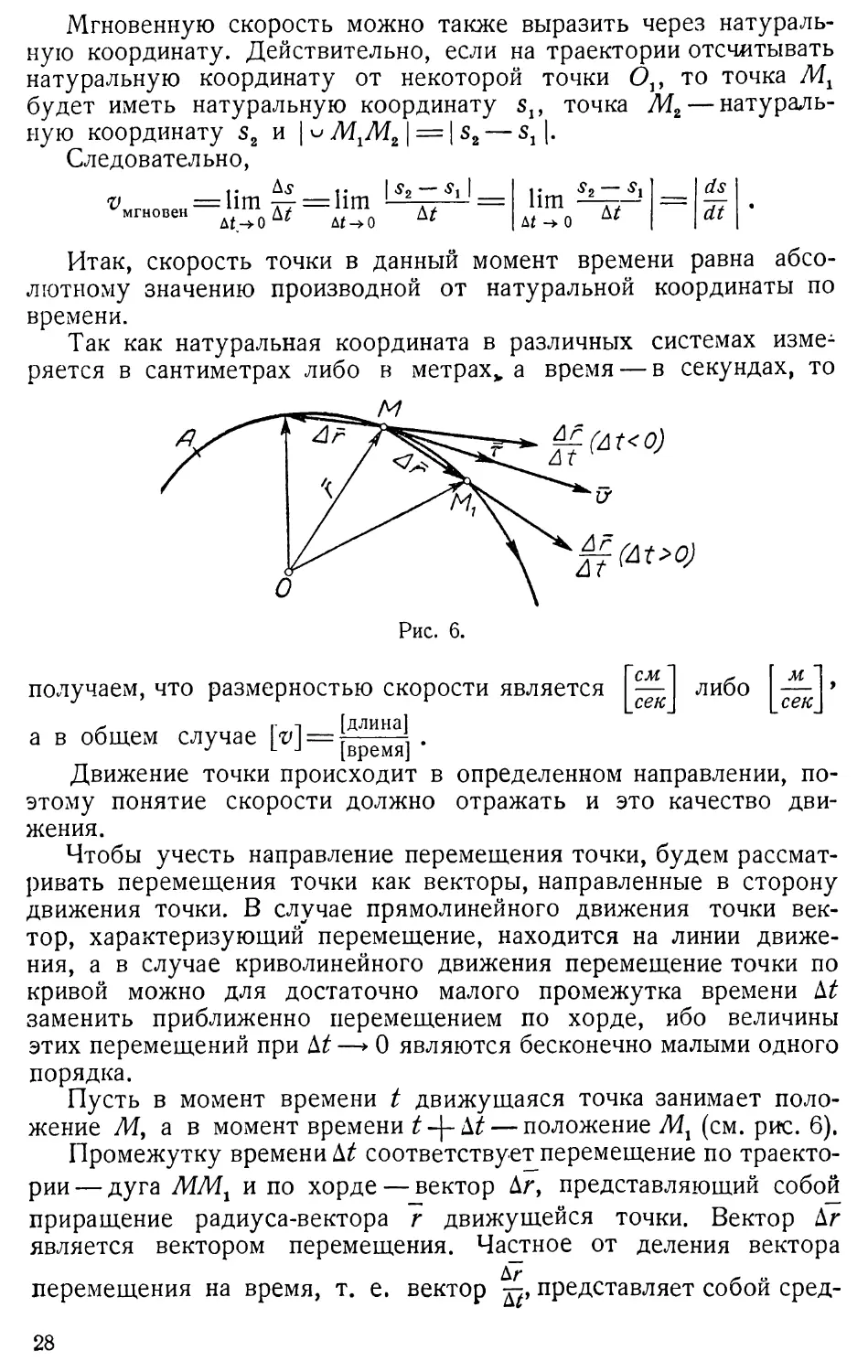
Пусть в момент времени t движущаяся точка занимает
положение Му а в момент времени t-\-bt — положение Мх (см. рис. 6).
Промежутку времени № соответствует перемещение по
траектории— дуга ММХ и по хорде — вектор Ar, представляющий собой
приращение радиуса-вектора г движущейся точки. Вектор Дг
является вектором перемещения. Частное от деления вектора
перемещения на время, т. е. вектор дъ представляет собой сред-
28
нее изменение вектора перемещения за единицу времени в
течение промежутка №. Переходя к пределу при №—► (), мы
получим векторную характеристику изменения перемещения точки
в зависимости от времени в форме:
,. Дг dr
lim —r= — •
д*->од* dt
Вектор -£-, являющийся предельным положением секущих
векторов, проходящих через точку М, представляет собой
вектор, касательный к траектории в точке М и направленный в
сторону движения точки.
Последнее обстоятельство очевидно при Д£>0. В случае,
когда Д£<<0, вектор Дг направлен в сторону, противоположную
Д7
движению, однако вектор -гт снова направлен в сторону
движения и в пределе даст снова вектор, направленный в сторону
движения (см. рис. 6).
Из аналогичных рассуждений вытекает, что геометрическая
производная от каждой вектор-функции направлена в сторону,
соответствующую направлению возрастания аргумента.
Чтобы найти величину вектора —, выберем на траектории
начальную точку А и сообщим траектории ориентацию.
Тогда движущейся точке соответствует натуральная
координата s, являющаяся функцией от времени s = s(t). Радиус-вектор г
можно рассматривать как сложную функцию от времени, а именно:
r= r(s), где s = s(t). Так как все правила дифференцирования
для вектор-функций такие же, как и для скалярных функций, то
по правилу дифференцирования сложной функции получаем:
dr dr_ ds_
It ds'Tf
Вектор jj касается траектории и направлен в сторону
возрастания аргумента, т. е. в направлении возрастания натуральной
координаты. Кроме того, его величина равна единице, ибо
lim^
= lim
dT
=1.
Отсюда следует, что вектор ^ представляет собой
единичный вектор, касательный к траектории и направленный в сторону
возрастания натуральной координаты. Такой вектор называется
тангенциальным ортом, и мы его будем обозначать буквой
«j dr_
ds
29
Таким образом, мы получаем формулу:
dr_
dt
ds_
'dt
dr
Из этой формулы видно, что величина вектора -г- равна
абсолютному значению производной от натуральной координаты по
\ds\
времени к-I, т. е. величине скорости v.
Все вышеуказанные рассуждения приводят нас к общему
определению понятия скорости: скоростью движущейся точки в дан-
д. ный момент времени называется
геометрическая производная от радиуса-
вектора по времени, т. е.
dr
v = dF-
Из этого определения
непосредственно вытекает следующая формула:
- ds -
v = dt'x>
(7)
где s — натуральная координата, а т — тангенциальный орт.
Формула (7) называется основной формулой для скорости.
К вышеуказанному сделаем два замечания:
1°. Производная от радиуса-вектора по времени не зависит от
выбора полюса.
Действительно, если рассмотреть радиусы-векторы движущейся
точки относительно двух различных полюсов О и Ох (см. рис. 7),
то получим г=001-\-г1 и вектор 001= const при движении
точки. Дифференцируя это равенство по времени, получаем:
dr _d(00\)
dt
dt
drx
"dt
и так как
d(OOx)
dt
:0, то окончательно получим:
dr_
dt
drx
'"dt
2°. Из формулы (7) следует, что производная от натуральной
координаты по времени представляет собой проекцию скорости
на тангенциальный орт, т. е.
ds
*> =
dt
Скорость v есть вектор, всегда направленный в сторону
движения точки, а его проекция vT на направление тангенциального
орта зависит от выбора ориентации траектории. Если траекторию
ds
ориентировать по направлению движения точки, то v1. = -r-^> О
30
проекция vT совпадает с величиной скорости, которая в этом
случае определяется по формуле:
ds
v=m-
Если траекторию ориентировать в направлении,
противоположном движению точки, то натуральная координата убывает и
//о
у -=zz-<^Qi а величина скорости в этом случае определяется по
формуле:
ds
2. Формулы для вычисления скорости
При нахождении формул для вычисления скорости следует
рассмотреть два случая: 1) когда движение задано в
параметрической форме, 2) когда движение задано при помощи
натуральных координат.
Рассмотрим первый случай. Пусть движение точки задано
уравнениями:
x = <f(t), У = №, z = l(t).
На основании определения скорости можно вычислить
скорость по формуле:
*-%• (Ч
где г—радиус-вектор движущейся точки, проведенный из начала
координат. Координаты радиуса-вектора г соответственно равны
координатам точки Му поэтому
?=x(t)i+y(t)7+z(t)k9
где г, /, k — орты координатных осей.
Отсюда, дифференцируя и учитывая, что орты /, у, k —
постоянные векторы, получаем:
d?_dxj , dj- , dz -г
dt~ dr^dtJ^Tt**
т. е.
— dx-т , dy -. , dz -г
Из этого выражения получаем формулы для проекций скорости
На оси координат, ее величины и направления:
dx dy dz /ЛЧ
"' = л ■ 't'»' v-=TO <9>
*-■/&)'+ &)' + {%)'> 0°>
31
COS К Q^ = b = l.g;
003(^07)^ = 1.^;
cos(^rOZ) = ^=i.§. (11)
Итак, проекции скорости на оси координат равны
производным от соответствующих координат движущейся точки по
времени. Величина скорости равна корню квадратному из сум-
мы квадратов проекций скорости на оси координат.
Рассмотрим второй случай. Пусть движение точки задано при
помощи натуральных координат:
Г,(ху уу z) = 0
s=f(t) — закон движения.
Величина скорости находится, как уже известно, по формуле:
Для определения направления скорости нужно воспользоваться
формулами дифференциальной геометрии для определения
касательной к траектории и определения углов между этой
касательной и осями координат.
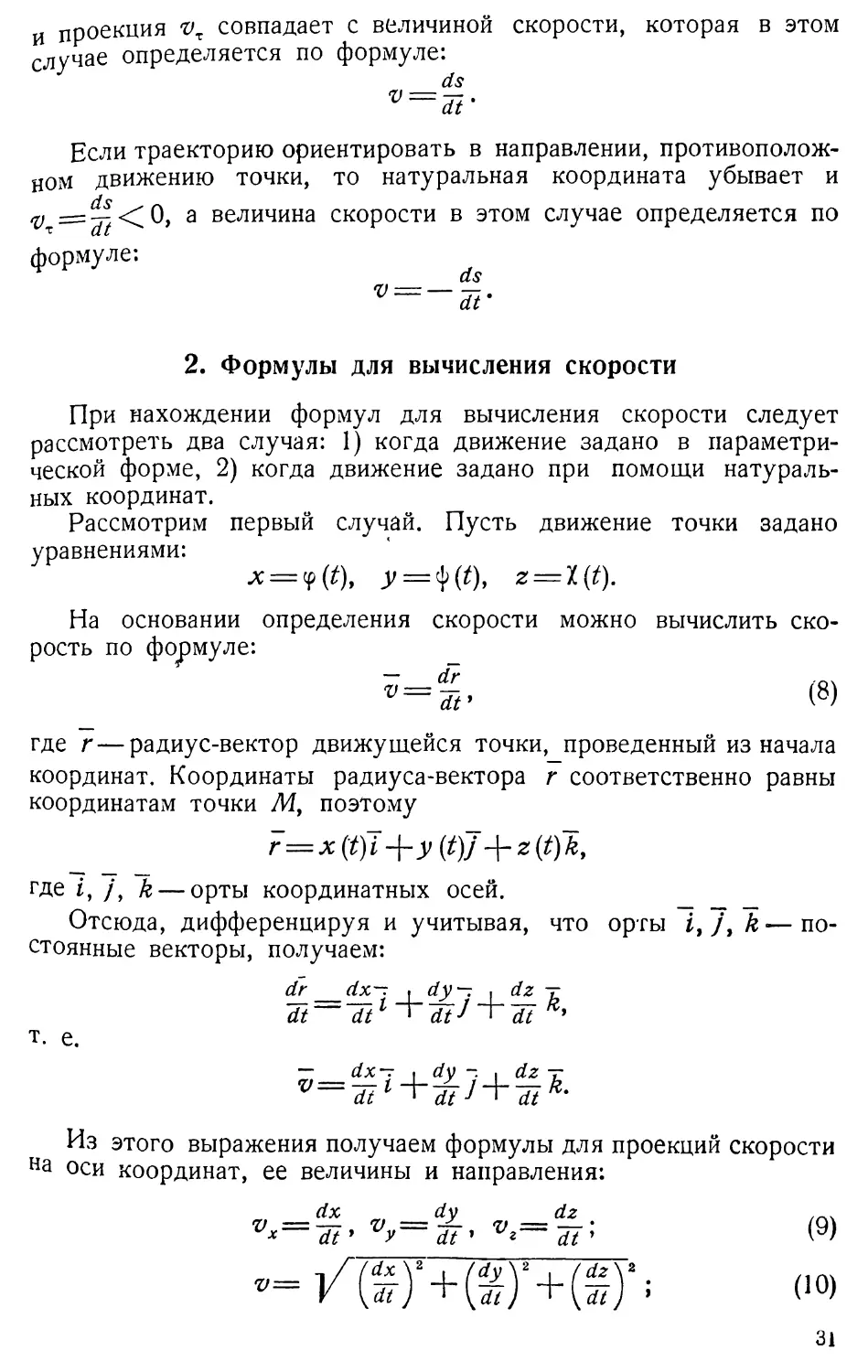
3. Секториальная скорость
Если точка описывает плоскую траекторию, то радиус-вектор
этой точки затушевывает некоторую часть плоскости (сектор).
Для измерения быстроты изменения площади затушевываемой
части плоскости вводят
понятие секториальной
скорости.
Пусть в момент
времени t движущаяся
точка находится в точке
Л, в момент времени
t-\-M — в точке В
(рис. 8). За промежуток
времени М
радиус-вектор г из положения ОА
перешел в положение
ОВ и затушевал часть плоскости ОАВ. Если площадь сектора ОАВ
обозначить через &S, то за единицу времени площадь в среднем
изменится на величину ^-. Для нахождения быстроты изменения
площади в данный момент времени t переходим к пределу при
32
— уравнение траектории,
д^ __+ 0. Для того чтобы охарактеризовать не только быстроту
изменения площади, но и направление перемещения
радиуса-вектора, следует определить секториальную скорость как вектор.
Таким образом, мы приходим к следующему определению.
Секториальной скоростью точки, движущейся в
плоскости, в данный момент времени называется вектор а,
перпендикулярный к плоскости движения и направленный так, что, глядя
с конца этого вектора, мы видим движение точки в направлении
против движения часовой стрелки. По величине вектор
секториальной скорости равен производной по времени от площади,
затушевываемой радиусом-вектором:
Установленное таким образом определение является несколько
громоздким и не всегда удобно. Нетрудно выразить секториальную
скорость в более простой форме при помощи' одной векторной
формулы. С этой целью докажем, что секториальная скорость
точки в данный момент времени равна половине векторного
произведения радиуса-вектора точки на линейную скорость точки, т. е.
»=4(0<«).
Для доказательства подсчитаем величину секториальной
скорости:
,. AS .. пл. ОЛВ
а= lim хг= 11т —Х7—•
Площадь сектора ОАВ с точностью до бесконечно малых
высшего порядка равна площади ДОЛЯ, т. е.
пл. ОЛВ^пл. ЮАВ = ^ОА-АВ$т(ОА, AB) = y r-\br | • sin а.
Отсюда получаем:
a=Hm (_r~ sin a ] =-~r lim —lim sin a =
1 _,._ „nno nx 1
1 /-v
= ~ rv sin (180° — p) = у rv sin p = U- (r X v) .
Направление секториальной скорости совпадает с направлением
вектора у (г X ^)- Отсюда мы окончательно заключаем, что:
a = ^(7Xv). (13)
4. Метод полярных координат
Рассмотрим теперь движение точки в плоскости и для задания
ее движения используем полярные координаты. В этом случае,
как известно, положение точки в плоскости определяется двумя
о
Г. м. Финкельштейн 33
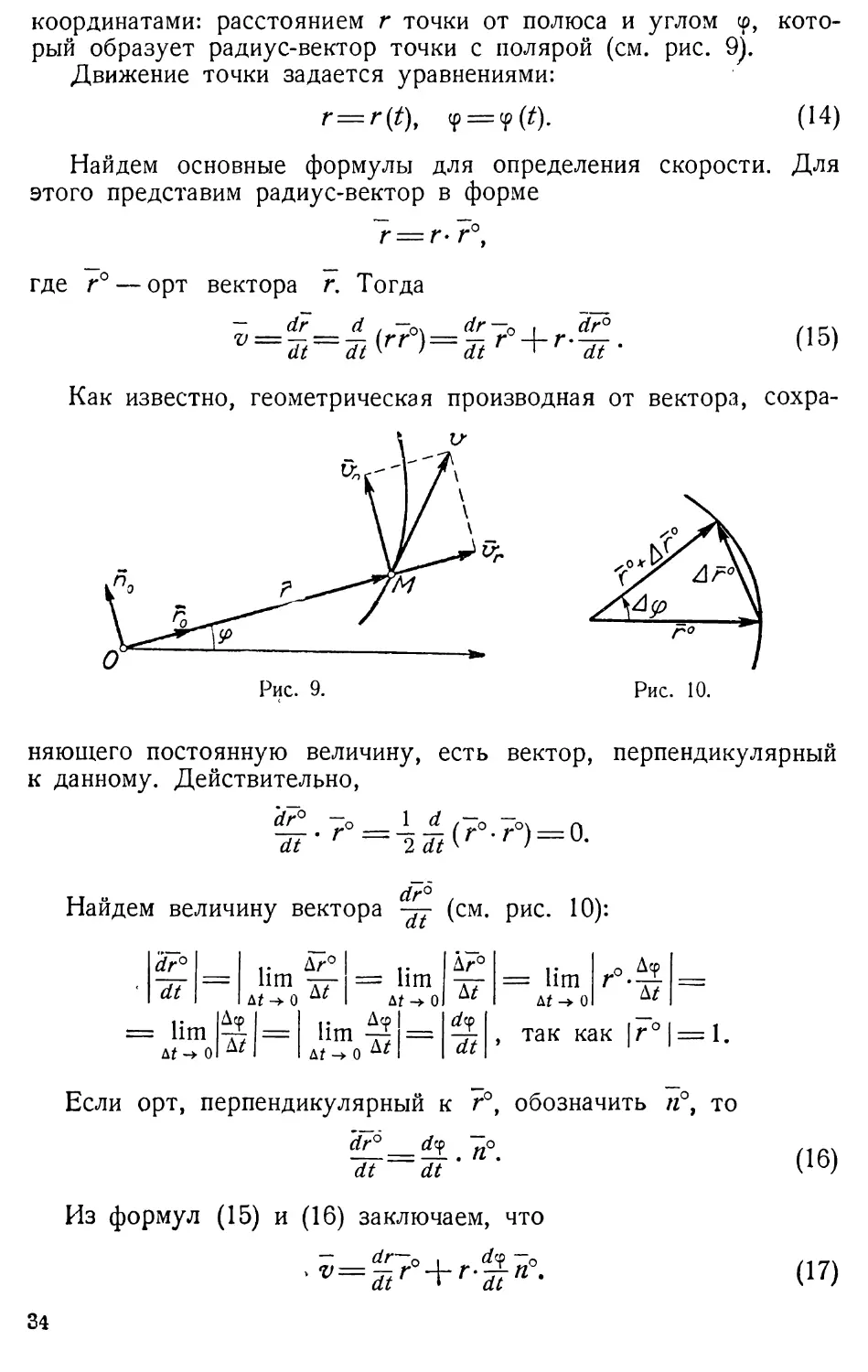
координатами: расстоянием г точки от полюса и углом ср,
который образует радиус-вектор точки с полярой (см. рис. 9).
Движение точки задается уравнениями:
r = r{t), <р = <р(*).
(14)
Найдем основные формулы для определения скорости. Для
этого представим радиус-вектор в форме
= г. гу
где г° — орт вектора г. Тогда
— dr d . —оч dr—0 , dr°
(15)
dt dt v ' dt ' dt
Как известно, геометрическая производная от вектора, сохра-
Рис. 9.
Рис. 10.
няющего постоянную величину, есть вектор, перпендикулярный
к данному. Действительно,
dt
Г»=±*<Г».?) =
dr°
= 0.
Найдем величину вектора ~гг (см. рис. 10):
dr°
dt
lim
^ lim 1*1
At-
Hm ^ =
U-
M
Д/-°
дГ
lim^
dt
= lim
Af-*0
Дг^
Д*
dy
~dt
Дер
"д7
= lim
Д* -► 0
так как \r° 1 = 1.
Если орт, перпендикулярный к г°, обозначить /г°, то
dt
Из формул (15) и (16) заключаем, что
dtr *r dt
— dr—Q , ^ф —0
(16)
(17)
34
Из этой основной формулы видно, что скорость является
геометрической суммой двух слагаемых:
*г=%--г°, *„ = Г-£.*. (18)
Первое из этих слагаемых называется радиальной
скоростью, второе — трансверсальной скоростью. Эти
составляющие полной скорости взаимно перпендикулярны, поэтому
полная скорость определяется по формуле:
v=y
drYjufr d^z
Найдем теперь формулу для секториальной скорости:
Но первое слагаемое равно нулю, а
Поэтому получаем окончательную формулу:
-°=ir>%*. (20)
Из этой фррмулы следует, что величина секториальной
скорости определяется по формуле:
1 2
2 Г
(21)
§ 3. УСКОРЕНИЕ ДВИЖУЩЕЙСЯ ТОЧКИ
1. Определение ускорения
Ускорение движущейся точки является понятием,
характеризующим меру изменения скорости с течением времени. Скорость»
как было установлено выше, является векторной величиной,
поэтому с течением времени она изменяется по величине и по
направлению.
Найдем меру изменения скорости как вектора. Пусть моменту
времени t соответствует скорость v, а моменту t-\-M
соответствует скорость v-{-kv. Вектор -^ характеризует изменение
вектора скорости за единицу времени в среднем. Для нахождения
значения ускорения в рассматриваемый момент времени
совершаем предельный переход при Ы—*0, в результате чего
получаем векторную величину:
2* 35
характеризующую изменение вектора скорости в данный момент
времени t и называемую ускорением точки в данный
момент.
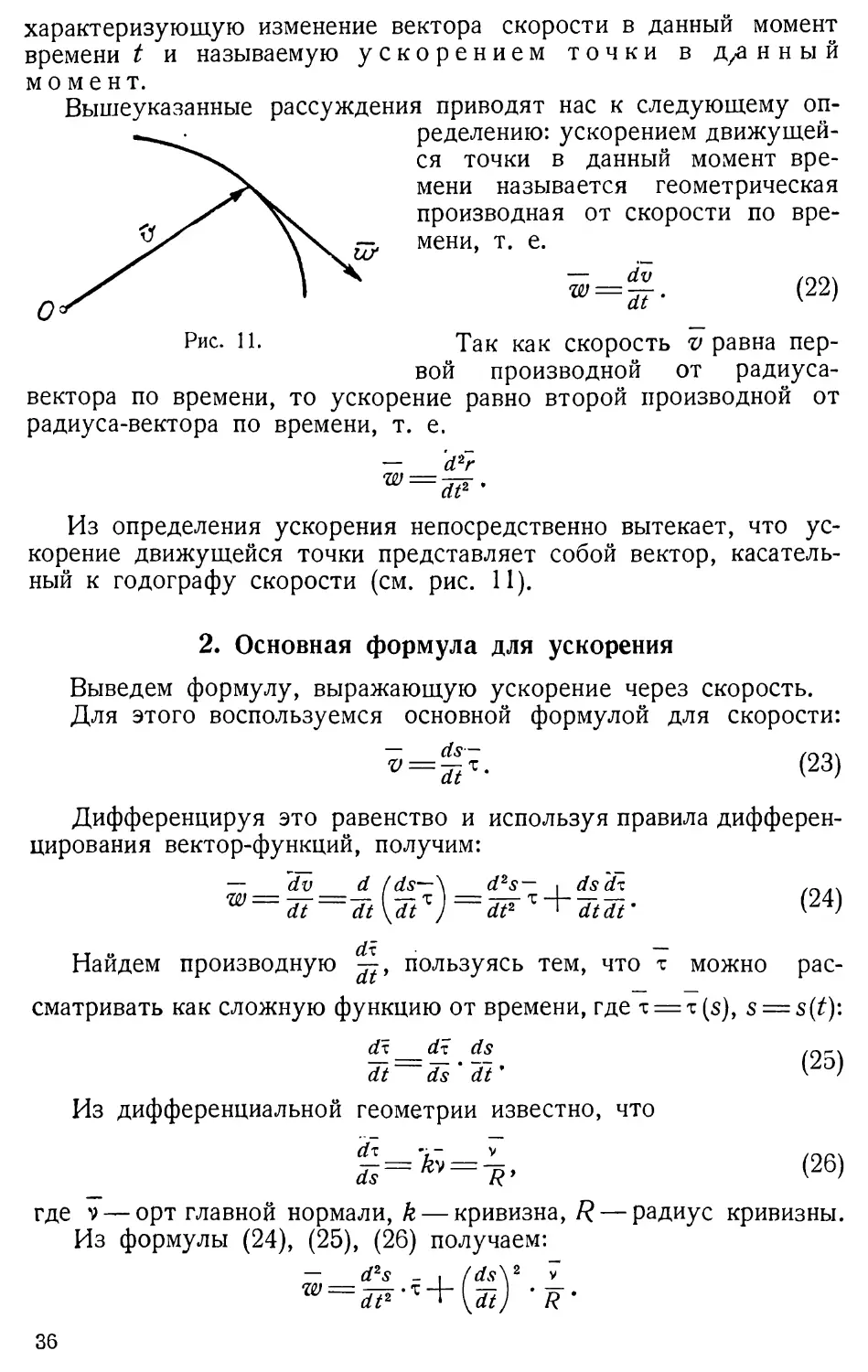
Вышеуказанные рассуждения приводят нас к следующему
определению: ускорением
движущейся точки в данный момент
времени называется геометрическая
производная от скорости по
времени, т. е.
* = §. (22)
Рис. 11. Так как скорость нравна
первой производной от радиуса-
вектора по времени, то ускорение равно второй производной от
радиуса-вектора по времени, т. е.
— 'dfr
w = d?'
Из определения ускорения непосредственно вытекает, что
ускорение движущейся точки представляет собой вектор,
касательный к годографу скорости (см. рис. 11).
2. Основная формула для ускорения
Выведем формулу, выражающую ускорение через скорость.
Для этого воспользуемся основной формулой для скорости:
* = Р. (23)
Дифференцируя это равенство и используя правила
дифференцирования вектор-функций, получим:
— dv d (ds—\ d2s— , dscfz /слл.
W:=dt=Tt\Ttz)=dFz + TtTf (24)
Найдем производную -^, пользуясь тем, что т можно
рассматривать как сложную функцию от времени, где x = t(s), s = s(t):
dx d.4. ds (Г)г~\
Tt~dsrdi' V°>
Из дифференциальной геометрии известно, что
S = '* = Ti' (26)
где v — орт главной нормали, k — кривизна, R — радиус кривизны.
Из формулы (24), (25), (26) получаем:
- d2s _ , fds\2 7
w=dF'x+[Tt) 'R-
36
Если траекторию ориентировать по направлению движения
точки, то 5 = ^ поэтому
dt'
— dv —
W
2 __
av — , v* —
3TT+*V-
(27)
Формулу (27) будем называть основной формулой для
ускорения.
Из формулы видно, что полное ускорение является
геометрической суммой двух векторов:
wr
dv —
'dt Т'
W,=^V,
т. е.
w = wr-\-w^
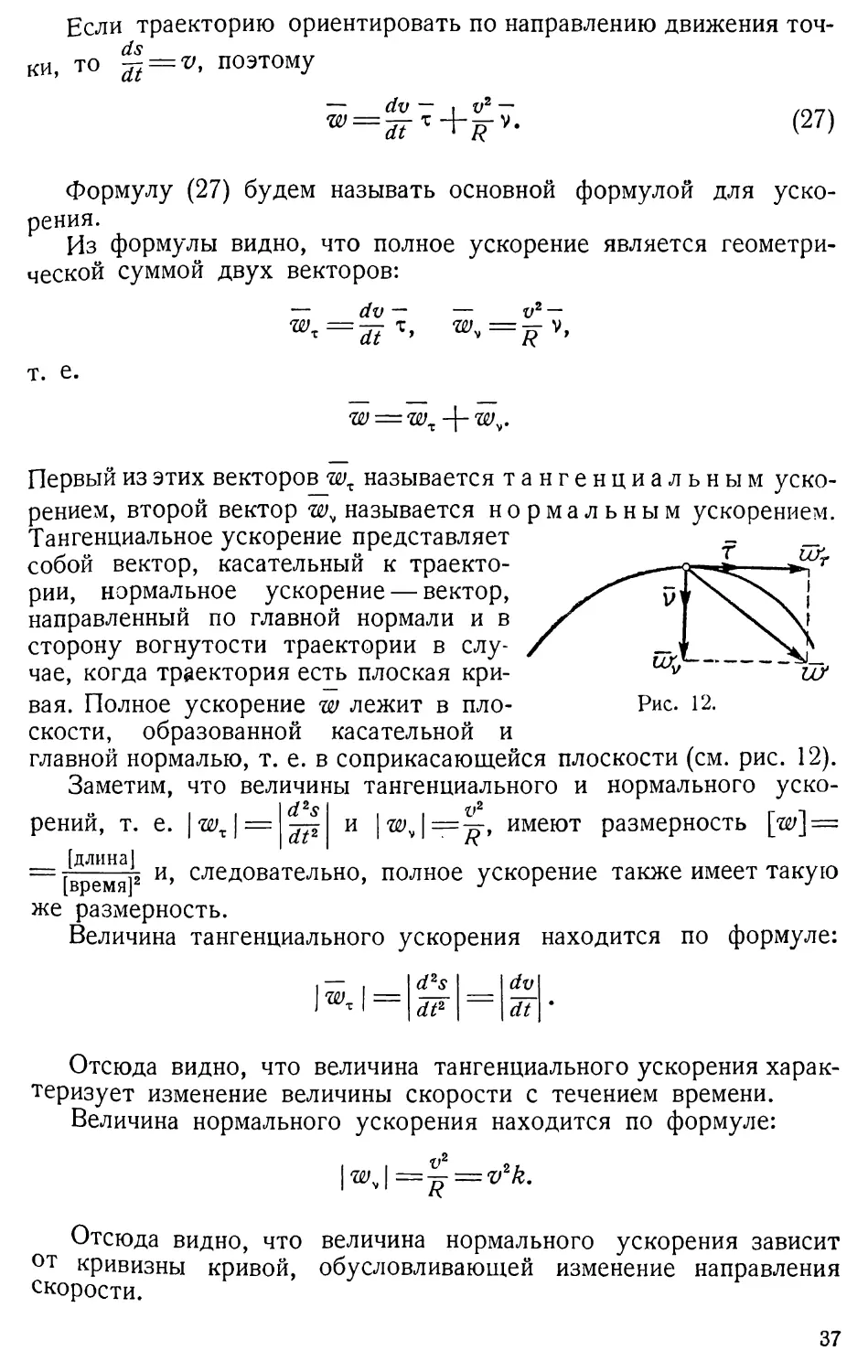
Первый из этих векторов wr называется тангенциальным
ускорением, второй вектор ^называется нормальным ускорением.
Тангенциальное ускорение представляет
собой вектор, касательный к
траектории, нормальное ускорение — вектор,
направленный по главной нормали и в
сторону вогнутости траектории в
случае, когда траектория есть плоская
кривая. Полное ускорение w лежит в пло- Рис. 12.
скости, образованной касательной и
главной нормалью, т. е. в соприкасающейся плоскости (см. рис. 12).
Заметим, что величины тангенциального и нормального
ускорений, т. е. | wr | = \-п| и | w^ | =it, имеют размерность [w] =
= f р и, следовательно, полное ускорение также имеет такую
же размерность.
Величина тангенциального ускорения находится по формуле:
Шг
d2s
dt2
Отсюда видно, что величина тангенциального ускорения
характеризует изменение величины скорости с течением времени.
Величина нормального ускорения находится по формуле:
га>„
!=£ = *■*.
Отсюда видно, что величина нормального ускорения зависит
°т кривизны кривой, обусловливающей изменение направления
скорости.
37
Следовательно, нормальное ускорение является составляющей
ускорения, характеризующей изменение скорости v П9
направлению.
Из формулы (27) следует, что вторая производная от
натуральной координаты по времени представляет собой проекцию
тангенциального ускорения на тангенциальный орт, т. е.
'dt2
W. = -гг; -
Проведем теперь исследование основной формулы. При этом
следует различать четыре возможных случая.
Первый случай: wT = 0, wv = 0.
d2s
В этом случае ^ = 0 и vzk = 0. Отсюда мы получаем, что
~v = const и k = 0 (так как при движении v=^=0). Если при
движении точки скорость является величиной постоянной, то такое
движение точки называется равномерным. В противном случае,
т. е. когда v=^= const, движение точки называется
неравномерным.
Следовательно, движение точки в этом случае является
прямолинейным и равномерным.
Второй случай: <№хф0у ^v = 0.
d2s
В этом случае ^-^=0 и v2k = 0. Отсюда мы получаем, что
ds
di
= v Ф const и k = 0. Следовательно, движение точки является
прямолинейным и неравномерным.
Третий случай: wT = 0, w^O.
d2s
В этом случае ^- = 0 и v2k=^=0. Отсюда мы получаем, что
ds\
dt\
= v — const и 4^0. Следовательно, движение точки является
криволинейным и равномерным.
Четвертый случай: wT=^=0f юыф0.
d2s
В этом случае ^27^0 и v2k^Q. Отсюда мы получаем, что
Ids I
— =г>=^= const и kj£=0. Следовательно, движение точки
является криволинейным и неравномерным.
Все эти результаты можно свести в таблицу:
случаи
1
2
3
4
и\
0
9*0
0
5*0
w4
0
0
9*0
5*0
Характер движения
Прямолинейное и равномерное
Прямолинейное и неравномерное
Криволинейное и равномерное
Криволинейное и неравномерное
38
3. Формулы для вычисления ускорения
рассмотрим сначала случай, когда движение точки задано
в параметрической форме.
Выберем полюс в начале координат, тогда координаты радиуса-
еектора движущейся точки совпадут с координатами точки.
Для вычисления ускорения воспользуемся тем, что
_ d27
w = dt2'
Представим радиус-вектор точки через координаты точки и
орты координатных осей.
7=x(t)l+y(t)j + z(t)k.
Дифференцируя дважды ? по времени и учитывая, что орты —
постоянные векторы, получим:
d^_dH- , d*y-:j.d>z-r
dt2 ~ dt*l\ dt2j ' dt2 K"
Отсюда получаем формулы для проекций ускорения на оси
координат:
d2x d2y d2z /Qm
w* = !Fm> wy = dt2; w* = df2* (30)
Из формул (30) получаем формулы для величины и направления
ускорения в виде:
•— /т+№'+№)'■■ <з1>
cos(w, OX) = -* = ~*;
cos(w,/NOr)=^=^-';
/\_
cos(w, OZ) = ^=^. (32)
Таким образом, проекции ускорения движущейся точки на
оси координат равны вторым производным от
соответствующих координат точки по времени.
Величина полного ускорения равна корню квадратному из
суммы квадратов проекций ускорения на оси координат.
Рассмотрим теперь случай, когда движение точки задано при
помощи натуральных координат,
В этом случае для вычисления полного ускорения можно
воспользоваться основной формулой:
— dv - , v2 -
из этой формулы непосредственно получаем (см. рис. 12), что
39
I ds I
Все члены, стоящие под корнем, можно вычислить, так v= \л\
и R — радиус кривизны траектории — можно вычислить
подданному уравнению траектории методами дифференциальной
геометрии.
Заметим, что, пользуясь формулой (33), можно указать способ
для вычисления радиуса кривизны кривой, если ускорение
кривой задано в параметрической форме. Действительно, из
формулы (33) получаем:
■=(5У+Й; (34)
W
dt
R =
/;
(35)
где v и w можно вычислить по формулам (10) и (31).
Определение радиуса кривизны R по формуле (35) является
кинематическим способом определения радиуса кривизны кривой.
4. Метод полярных координат
Выведем формулы для полного ускорения в случае, когда
движение точки в плоскости задано уравнениями в полярной
0. системе координат (см. рис. 13).
Раньше была установлена формула
(17) для скорости
- dr-
V-
Ап°.
Рис. 13.
Продифференцируем выражение
*» для скорости по времени. Тогда
получим:
w =
dv
~dt~
'dt*r ^dt dt ^dtdtn ^r dt*n ^rdt df ^
Но как было показано раньше (16),
dr° __dy -о
dt dtu
Так как при движении точки М векторы 7° и п°
поворачиваются на один и тот же угол, то аналогично формуле (16)
устанавливается формула:
dn
dt
d9-o
' dtr '
(37)
40
Из формул (36), (16), (37) получаем:
™ _ а*г -zo , dr dy -о , dr dy -0 , d2y _ с
^ ——гг +T*Ttn -TTtTtn -гг*г*п
dt2
dtdt
cPr_ (dj
dt2 r { dt
r[ dt
r =
где
-+№+•■
dldi
(38)
(39)
(40)
(41)
Вектор ^г называется радиальным ускорением, вектор
й>„ — трансверсальным ускорением.
Так как векторы wr и wn взаимно перпендикулярны, то
величина полного ускорения может быть найдена по формуле:
w
= Vw2r +
w:
5. Частные случаи движений
а) Равномерное движение
Как уже было установлено раньше (п. 2), движение точки
называется равномерным в течение некоторого промежутка времени,
если в течение этого промежутка времени величина скорости
является постоянной, т. е.
В этом случае
= v = const.
ds
dt'
■V.
Если проинтегрировать это равенство, то получим:
t2 t2
^s't-dt = ± \v-dt
т. е.
■tj,
Таким образом, приращение натуральной координаты (пути)
пропорционально времени.
Положив tl=0, tt = t (тогда путь s = ±:ks)t получаем
формулу для пути:
s = vt. (43)
41
б) Равнопеременное движение точки
Движение точки называется равнопеременным в течение
некоторого промежутка времени, если величина тангенциального
ускорения в течение этого промежутка времени является
постоянной, т. е.
wr = const.
Установим основные формулы для равнопеременного движения.
Пусть
wx = zba, где а>0.
Нетрудно видеть, что если ориентация траектории совпадает
с направлением движения, то знак плюс соответствует
равноускоренному движению, а знак минус — равнозамедленному.
Действительно, в этом случае s = s(t) монотонно
возрастающая функция и, следовательно, ^>0 и v = -£. Если wT =
d^s ds d^s
= ^->0, то скорость v = ^j возрастает, если же ^т = — < О,
то скорость v = -r. убывает.
d2s
Если равенство -^2 = 4: я проинтегрировать, то получим:
t t
I s" (t) dt = [ ± adt;
о 0
s'(t) — s'(0) = ±at.
Ho s'(t) = v и s' (0) = vQ — начальная скорость, и мы получаем
формулу:
v = v0zbat. (44)
Если равенство (44) еще раз проинтегрировать, то получим:
t t
$ s' (t)dt = l(v0±at)dt;
о о
s(t)-s(0) = vot±'£.
Если начало для отсчета натуральных координат выбрать
в начальном положении точки при £ = 0, то s(0) = 0, и мы
получим:
5 = V±T- (45)
Формулы (44) и (45) связывают пять величин; если три из
них задать, то можно найти остальные две величины. К этому
обычно сводятся задачи на равнопеременное движение.
42
в) Ускоренное и замедленное движения
Движение точки называется ускоренным или замедленным
в течение некоторого промежутка времени, если в течение этого
промежутка времени величина скорости соответственно возрастает
или убывает.
Построим годограф скорости при ускоренном и замедленном
движениях. Для большей ясности предположим, что точка
движется в плоскости. При ускоренном движении расстояние
годографа от полюса постепенно возрастает, при замедленном
расстояние убывает; в результате мы получим кривые,
изображенные на рисунке 14.
тл — dv
так как ?# = —, то ускорение есть вектор, касательный
к годографу скорости. Совершенно ясно (из геометрических сооб-
а) Ус/коренное движение 5) Замедленное движение
Рис. 15.
ражений), что в случае ускоренного движения угол между
скоростью и ускорением является острым (а<-|-)' а в случае
замедленного движения угол является тупым (а>^г)-
В общем случае движения это также вытекает из того, что
ПРИ ускоренном движении направления тангенциального
ускорения хе;т и скорости v совпадают, а в замедленном движении они
пРотивоположны.
43
Действительно, это следует из соотношения:
d / о\ d
dt
dt
yds ч_±
— Z dt' ^2
dt2'
В случае ускоренного движения величина v2 возрастает и
поэтому производная от нее положительна, в случае замедленного
движения она убывает и производная — отрицательна. Отсюда
следует, что проекции скорости и тангенциального ускорения на
ds d^s
направление тангенциального орта, т. е. vx = -r- и wx = -^-2 для
ускоренного движения одинаковых знаков, а для замедленного
противоположных знаков (см. рис. 15).
г) Движение точки по окружности
Выберем за начало отсчета натуральных координат правый
конец горизонтального диаметра и ориентируем кривую в
направлении движения точки (см. рис. 16).
При движении точки М по окружности подвижный радиус ОМ
образует с неподвижным радиусом 001
угол ср, который называется углом поворота
радиуса ОМ.
Мера изменения этого угла с течением
времени приводит к понятию угловой
скорости радиуса, определяющего положение
ит точки, а мера изменения угловой скорости с
течением времени — к понятию углового
ускорения. Эти понятия устанавливаются
согласно следующим определениям:
Г. Угловой скоростью со радиуса ОМ в
данный момент времени называется
производная от угла поворота по времени, т. е.
d<D
Рис. 16.
2°. Угловым ускорением е радиуса ОМ в данный момент
времени называется производная от угловой скорости по времени,
т. е.
flfco d2y
8 — dt ~~ 1Г2'
Заметим, что при выбранной ориентации траектории угловая
скорость со положительна, а угловое ускорение е может быть
положительным и отрицательным в зависимости от того, возрастает
или убывает угловая скорость со.
Из формул, установленных для скорости и ускорения,
получаем следующие формулы:
ds d , ч
44
т. е.
i/ = (or;
d2s d t . d2<?
(46)
' dt2 dt2
dt2
V /* 0Г
Wv=^- = —=i»*r;
W-
Итак,
w\ -J- w\ = KrV + <oV2 = r ]/e2 -f со4.
twT = re;
w = rVV-|-w4.
(47)
(48)
(49)
§ 4. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
1. Основные понятия
Пусть точка М перемещается относительно системы
координат OxXxYxZx, которая в свою очередь перемещается
относительно системы координат OXYZ (см. рис. 17).
Движение точки М
относительно 01X1Y1Z1 называ- ^к
ется относительным
движением, движение 01X1Y1Z1
относительно OXYZ называется
переносным движением,
движение точки М относительно
OXYZ называется
абсолютным или сложным. Таким
образок, сложное движение
точки состоит из
относительного и переносного движений.
Для сложного движения
точки устанавливают понятия
относительной скорости,
переносной скорости и абсолют- " рис. 17.
ной скорости согласно
следующим определениям: __
1°. Относительной скоростью vr точки называется скорость
точки М относительно подвижной системы OxXxY\ZX.
2°. Переносной скоростью ve точки в данный момент времени
называется скорость той точки подвижной системы 01X1Y1Z1
относительно неподвижной OXYZ, с которой движущаяся точка М
в данный момент совпадает. __
3°. Абсолютной скоростью va точки называется скорость
точки М относительно неподвижной системы OXYZ.
О,
45
Чтобы разъяснить смысл этих понятий, рассмотрим
следующие примеры: /
Пример 1. К потолку движущегося вагона подвешен
шарик М, который колеблется. Указать направление относительной
и переносной скоростей (см. рис. 18).
В данном случае систему координат OXYZ свяжем с Землей,
систему координат OlXlY1Z1 свяжем с. вагоном. Относительная
скорость представляет собой вектор, касательный к траектории
шарика относительно
вагона. Переносная
скорость
представляет собой скорость
точки М вагона
относительно Земли,
т. е. переносная
скорость ve совпадает со
скоростью вагона v.
Пример
2.Круглая пластинка
вращается равномерно
вокруг центра с
постоянной угловой скоростью со. По пластинке вдоль радиуса
перемещается шарик М, так что расстояние от центра равно r = s(t).
Найти относительную и переносную скорости точки.
Так как шарик относительно пластинки перемещается
прямолинейно, то относительная скорость направлена по радиусу.
Переносная скорость представляет собой скорость точки пластинки,
в которой находится шарик, относительно
неподвижной среды и, следовательно, явля- ^pZZZ^ Svr
стся вектором, перпендикулярным к
радиусу (см. рис. 19).
Величины относительной и переносной
скоростей определяются по формулам:
ds
v0
•s(t).
Рис. 19.
2. Теорема сложения линейных скоростей
Относительная, переносная и абсолютная скорости связаны
между собой. Эта связь устанавливается следующей теоремой
сложения скоростей.
Теорема. В сложном движении точки абсолютная скорость
равна геометрической сумме относительной и переносной
скоростей.
Доказательство. Скорость точки относительно некоторой
системы отсчета можно рассматривать как предел отношения век-
46
тора перемещения Дг относительно системы отсчета к
приращению времени М, если М стремится к нулю:
(50)
- г Д7
v= lim-r-.
Пусть точка М совершает сложное движение.
В момент времени t движущаяся точка совпадает с точкой М
среды OxXxYxZx, в момент t-\-M среда ОлХлУ^х занимает
другое положение
относительно неподвижной
среды OXYZ, и положение
фиксированной точки М
среды 01X1Y1Z1 в этот
момент времени
обозначим через Мх.
Движущаяся точка в момент
времени t -f- bd будет
находиться в точке М2
(см. рис. 20).
Из рисунка 20
непосредственно видно, что
Г
мм2=мм1+м1м2.
Отсюда получаем:
*Х
Рис. 20.
Игл
Д^->0
ММг
,. ММ, , ,. м,м2
lim -тт1 -f- lim ! 2
Д*->0
Д*
Л*-* о
М
Дуга ММ2 представляет собой траекторию точки в абсолютном
движении, дуга МХМ2 — траекторию в относительном движении,
дуга ММ1 является траекторией фиксированной точки М
подвижной системы относительно .неподвижной системы. Из формулы (50)
следует, что
~~ lim т
lim
Д*->0
ММ2
-V*
lim —r-r± = v„
м->о
М
Д*
-v„
Отсюда получаем, что _ __
va = ve + vr. (51)
Доказанная теорема позволяет вычислить скорость точки в
сложном движении, если известны ее относительная и переносная
скорости. В некоторых случаях, когда непосредственно трудно
вычислить скорость точки, рассматривают движение точки как
сложное, подсчитывают сначала относительную и переносную
скорости, а затем уже абсолютную скорость.
Задача 1. Центробежный регулятор Уатта вращается вокруг
неподвижной вертикальной оси ОС с угловой скоростью сог Шары
л и В в то же время удаляются от оси, вращаясь вокруг С с
47
угловой скоростью о)2 = -^. Найти абсолютную скорость шаров
в зависимости от угла ср, если СА = СВ = а.
Найдем скорость шара А. Подвижную систему координат
построим следующим образом: в качестве начала координат выберем
точку С, ось CZ' проведем через ось вращения СО, ось СХ' так,
чтобы стержень СА находился в плоскости CX'Z', и
соответственно осям СХ' и CZ' построим ось CY'. Тогда можно
рассматривать движение шара А относительно CX'Y'Z' как
относительное, движение CX'Y'Z' относительно неподвижной системы
отсчета — как переносное. Относительное движение представляет
собой вращение относительно точки С с угловой скоростью <о2,
переносное движение — вращение
вокруг неподвижной оси СО (см.
рис. 21).
Относительная скорость vr есть
вектор, перпендикулярный к АС и
лежащий в плоскости,
проходящей через АС и ОС. Переносная
скорость ve есть вектор,
касательный к окружности, проходящей
через точки А и В с центром на
оси ОС. Величины этих скоростей
определяются по формулам:
Рис. 21.
vr = (u2a = fta;
ve = ®1- О А = cousin <р.
Так как относительная и переносная скорости взаимноперпен-
дикулярны, то величина абсолютной скорости определяется по
формуле:
va = Vvl + v] = VaW2 + a2co2sin2 ср = a К"
■ cousin2 ср.
3. Обобщенное сложное движение
В некоторых случаях при рассмотрении сложного движения
имеется не одна, а несколько подвижных систем OxXxYxZiy
02X2Y2Z2, ..., OnXnYnZn. Тогда движение точки М относительно
01X1Y1Z1 называется относительным движением, движение
01X1Y1Z1 относительно 02X2Y2Z2 — первым переносным, 02X2Y2Z2
относительно 03X3Y3Z3 — вторым переносным и движение
OnXnYnZn относительно OXYZ — п-ы переносным движением.
Такое сложное движение точки будем называть обобщенным
сложным движением.
Относительная и абсолютная скорости определяются так же,
как и раньше. Первой переносной скоростью vei называется
скорость той точки системы 01X1Y1Zl относительно OzX2Y2Z2t с
48
которой движущаяся точка в данный момент совпадает, второй
переносной скоростью называется скорость той точки системы
О X Y2Z2 относительно 03XzY3Z3i с которой движущаяся точка
в данный момент совпадает, и т. д.
Теорема. В обобщенном сложном движении точки
абсолютная скорость равна геометрической сумме относительной и всех
переносных скоростей, т. е.
^ = ^ + ^ + ^,+ •■•+^4, (52)
Доказательство. Будем рассматривать сложное движение
точки, но без учета подвижных систем 02X2Y2Z2i ..., OnXnYnZn.
Тогда
где v1—скорость точки М системы 01X1Y1Z1 относительно OXYZ,
с которой движущаяся точка совпадает. Скорость vx в свою
очередь можно рассматривать как абсолютную скорость точки
системы 01X1Y1Z1 относительно OXYZ. Тогда, учитывая систему
02X2Y2Z2 и применяя теорему сложения скоростей, получаем:
где vei играет роль относительной скорости, a v2 — скорость
точки /kf1 системы 02X2Y2Z2 относительно OXYZ, с которой
движущаяся точка совпадает. Продолжая эти рассуждения, получим:
v2 = ve2 + v3;
v =v .
Из этих равенств следует, что
^^r + ^ + ^+.'.+^V
Задача 2. Кривошип О А вращается вокруг неподвижной
точки О в направлении против движения часовой стрелки с
постоянной угловой скоростью Oj. На конец А кривошипа надето
колесо, радиус которого равен длине кривошипа, которое
вращается относительно кривошипа в направлении против движения
часовой стрелки с постоянной угловой скоростью о2. По ободу
колеса движется шарик М с постоянной относительной скоростью
v- Найти абсолютную скорость шарика в тот момент, когда ша-
Рик лежит на продолжении кривошипа, если радиус колеса равен г.
Движение шарика М рассматривается как сложное, в котором
Движение шарика относительно колеса является относительным,
49
движением колеса относительно кривошипа — первым переносным,
движение кривошипа относительно неподвижной системы
отсчета — вторым переносным (см. рис. 22).
По формуле (52) получаем, что
^=^r + ^ + *V
Но скорости vn vei и ve2 в данной
задаче одинаково направлены и, кроме того,
vei = (о2г;
< = 2<о/.
Поэтому получаем, что абсолютная
скорость va шарика М является
вектором, касательным к ободу колеса,
величина которого определяется по формуле:
va = v + 2©/ + <V = v + (2(0i + ^t)r-
Рис. 22.
Глава II
КИНЕМАТИКА ТВЕРДОГО ТЕЛА
§ 1. ВВЕДЕНИЕ
1. Основные понятия, основная задача
В кинематике твердого тела изучается движение абсолютно
твердого тела относительно выбранной системы координат.
Все тела, рассматриваемые в кинематике, считаются абсолютно
твердыми, т. е. расстояние между каждыми двумя точками тела
не изменяется при движении тела.
В дальнейшем, простоты ради, мы будем тела называть
твердыми (либо просто называть — тела), понимая под этим абсолютно
твердые тела.
Размеры тел, рассматриваемых в кинематике, являются
конечными. Однако в некоторых случаях придется рассматривать
точки, лежащие вне данного тела, но связанные с данным телом.
Поэтому мы мысленно с каждым телом будем связывать
некоторую систему координат, и тогда размеры тела можно считать
неограниченными.
Изучить движение твердого тела для некоторого промежутка
времени это значит:
1 °. Найти положение тела относительно выбранной системы
координат для каждого момента времени этого промежутка.
2°. Найти траектории каждой точки тела для этого
промежутка времени.
3°. Найти скорости каждой точки тела для каждого момента
времени этого промежутка.
50
4°. Найти ускорения каждой точки тела для каждого момента
времени этого промежутка.
Общей задачей кинематики твердого тела является изучение
произвольного движения тела. Но прежде чем перейти к
изучению этой общей задачи, сначала изучают простые, частные
случаи движения, которые позволяют затем перейти к общему
случаю движения. Эти частные случаи движения сами по себе также
представляют интерес, так как часто встречаются в различных
конкретных задачах.
2. Задание движения тела. Обобщенные координаты
Задать движение тела — это значит указать способ, при помощи
которого можно йайти для каждого момента времени положение
тела относительно выбранной системы координат.
Каждое тело состоит из бесчисленного множества точек и
определение положения тела относительно системы координат
сводится к определению положения каждой точки этого тела.
Однако для определения положения тела для каждого момента
времени достаточно задать небольшое число независимых величин,
однозначно зависящих от
времени. Минимальное число этих
величин зависит от характера
движения тела и их можно по-
разному выбирать для одного и
того же движения. Эти
величины целесообразно выбирать так,
чтобы в условиях
рассматриваемой задачи они наиболее
простым способом описывали
движение тела.
По аналогии с понятием
„координаты точки"
устанавливается понятие обобщенных
координат тела. Обобщенными координатами тела
называется минимальное число независимых параметров,
определяющих положение тела относительно некоторой системы
координат для каждого момента времени.
Если обобщенные координаты заданы как некоторые
однозначные функции времени, то эти функции представляют собой
уравнения движения тела, определяющие закон движения.
В общем случае движения — произвольном движении — тело
имеет шесть обобщенных координат.
Действительно, положение тела в пространстве будет задано,
ес«ли задать три точки тела, не лежащие на одной прямой (см.
Рис.23).
Поэтому достаточно задать девять координат трех точек:
А («*i. J\, zj; В (л2, у2У zt); С(л„ j/,, zt).
Рис. 23.
51
Эти девять координат связаны тремя уравнениями:
(■*! — -«,)2 + (Л— УгТ+{2,
(V
(V
Поэтому независимыми из них являются только шесть
координат. Если задать шесть координат трех точек, а затем из
уравнений (1) найти остальные три, то можно определить положение
любой точки этого тела.
Рис. 24.
Рис. 25.
Действительно, произвольная точка D тела задана, если заданы
ее расстояния от точек Л, В и С, поэтому координаты х, у> z
точки D определяются из системы уравнений:
(*-*,)*
(х-
(х-
(У-УгГ
*,)* + 1У-Л)
■{z — zif = DA
■*1), + 0'-Л), + (2-2,),=№
(z-zsy = DC
(1)
Итак, чтобы задать движение твердого тела в пространстве,
достаточно задать шесть величин как функции от времени. В
качестве этих величин можно выбрать шесть координат некоторых
трех точек тела.
Такой способ задания движения твердого тела является
сложным, так как приходится решать систему уравнений (1). Дальше,
при изучении произвольного движения, будет указан более
простой способ задания движения.
В частных случаях движения твердого тела число обобщенных
координат, вообще говоря, меньше шести.
§ 2. ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ
1. Задание движения. Траектории точек
Движение твердого тела называется поступательным, если
любая прямая, неизменно связанная с телом, остается
параллельной самой себе при движении тела.
Таким образом, если тело перемещается поступательно, то
каждая прямая АВ, неизменно связанная с телом, перемещается
параллельно самой себе (см. рис. 24).
52
рассмотрим конкретный пример. Два колеса одинакового
радиуса соединены звеном АВ (см. рис. 25).
При движении колес звено АВ перемещается поступательно.
Чтобы задать поступательное движение твердого тела, достаточно
задать движение какой-нибудь точки тела.
Действительно, пусть координаты точки 01 тела суть
«*! = ?(*); У1= Ф(*); *i=X(')-
Если М — произвольная точка тела, имеющая координаты
^ j;, 0, то в силу того, что при движении тела вектор ОхМ
перемещается параллельно самому себе, получаем:
x = <f(t) + a; y = b(t) + b, z = x(t) + c, (2)
где a, by с — суть проекции вектора ОгМ.
Итак, в поступательном движении тело имеет три обобщенные
координаты.
Из формулы (2) следует, что траектория каждой точки М
получается из траектории точки 01 при параллельном
перемещении вектора OxNl. Траектория точки 01 может быть
произвольной.
2. Скорости и ускорения точек
Вопрос о 'скоростях и ускорениях точек тела при
поступательном движении устанавливается следующей теоремой.
Теорема. При поступательном движении твердого тела
скорости и ускорения всех точек тела геометрически равны между
собой.
Доказательство.
Рассмотрим две произвольные фиксированные точки тела А
и В (см. рис. 26). Пусть точка О является произвольной
фиксированной точкой пространства.
Тогда
ОВ=~ОА + АВ. (3)
Векторы ОА и ОВ являются
переменными при движении тела.
Вектор АВ является постоянным, так
как тело является абсолютно
твердым и перемещается поступательно
(вектор сохраняет постоянную величину и постоянное'
направление).
Продифференцируем равенство (3) по времени:
d(OB) _ d(OA) , d{AB)
dt dt i~ dt *
53
ж)
Но _
d(OB)
dt '
Следовательно,
- ^iPA)_ d(AB)_
Vb> dt ~VA> -~dt~-
vB = vA. (4)
Если полученное равенство (4) продифференцировать еще раз
по времени, то получим:
dvB dvj[
~dt ~Ж '
т. е. _ _
wB = wA. (5)
Теорема доказана.
Из этой теоремы следует, что изучение поступательного
движения твердого тела сводится к изучению движения какой-либо
точки тела.
В силу этого обстоятельства, в частности, можно говорить о
скорости и ускорении тела в поступательном движении, понимая
под этим скорость и ускорение какой-либо точки тела.
§ 3. ВРАЩЕНИЕ ВОКРУГ НЕПОДВИЖНОЙ ОСИ
1. Угол поворота. Задание движения
Предположим, что твердое тело перемещается так, что точки
тела, лежащие на некоторой оси йу неподвижны, а все
остальные точ^и тела перемещаются. В этом случае будем говорить,
что твердое тело вращается вокруг
неподвижной оси а.
Установим понятие угла поворота
тела. С этой целью проведем через ось U
воображаемую неподвижную плоскость Р
и подвижную плоскость Q, неизменно
связанную с твердым телом (см. рис. 27).
При движении тела подвижная
плоскость Q образует некоторый двугранный
угол с неподвижной плоскостью Р. Этот
угол измеряется соответствующим
линейным углом ср, который и называется
углом поворота тела.
Угол поворота тела является
некоторой функцией от времени <р = <р(£).
Будем считать угол поворота
относительно оси и положительным, если, глядя
мы видим вращение тела, со-
Рис. 27.
1 Термин „глядя с оси" означает, что наблюдатель располагается вдоль
оси и, головой к положительному концу, и держит в плоскости,-
перпендикулярной к оси, часы, обращенные циферблатом к лицу. Затем наблюдатель
сравнивает совершающееся вращение тела с вращением минутной стрелки часов.
54
вершающимся против часовой стрелки, и — отрицательным, если,
глядя с оси и, мы видим вращение тела, совершающимся по
часовой стрелке.
Если в момент времени t = tx угол поворота равен y1=y(tl)t
а в момент времени t = t2 угол поворота равен <р2 = <р(£2'), то
углом поворота за промежуток времени от tt до t2 называется
угол Д? = ?2 — <р1#
Чтобы задать вращение твердого тела вокруг заданной
неподвижной оси, достаточно задать угол поворота тела
*=/(')-
(б)
Действительно, положение каждой точки тела
относительно выбранной системы координат
OXYZ можно выразить через угол
поворота.
Выберем за ось OZ ось
вращения тела и условимся отсчитывать
углы от плоскости OXZ (см.
рис. 28).
Тогда координаты х, у> z
произвольной точки М тела
находятся по формулам:
x = rcosv\ j; = rsincp; z = hy
где г и h — постоянные числа,
определяющие положение точки
в теле.
Итак, при вращении твердого тела вокруг неподвижной оси,
тело имеет одну обобщенную координату.
Уравнение (6) называется уравнением или законом
вращательного движения тела.
2. Угловая скорость и угловое ускорение
Средней угловой скоростью вращательного движения тела за
некоторый промежуток времени М называется частное от
деления угла поворота Д ср за этот промежуток времени, на величину
промежутка времени Д£, т. е.
Д ср
Рис. 28.
ю,
ср
' м
Переходя к пределу при М-
в данный момент времени, т. е.
•О, получаем угловую скорость
1. А ср /аГср
(0= lim —!- = -!
д*->од' dt
(7)
Из формулы (7) следует, что размерность для угловой
скорости является
раоиан
сек
или
Г-1
\^сек\
55
Для того чтобы угловая скорость являлась не только мерой
изменения угла поворота с течением времени, но и указывала
направление вращения, угловую скорость рассматривают как
векторную величину.
Таким образом, угловой скоростью в данный момент времени
называется вектор (о, обладающий следующими свойствами:
1°. Вектор (о расположен по оси вращения и его направление
совпадает с направлением оси, если, глядя с оси вращения, мы
видим вращение тела совершающимся против часовой стрелки,
и его направление противоположно направлению оси, если, глядя
с оси, мы видим вращение тела, совершающимся
по часовой стрелке.
2°. Величина вектора аГ равна абсолютному
значению производной от угла поворота по
времени, т. е.
\dt\'
Установим основную формулу для угловой
скорости. Обозначим орт оси а через й° (см.
рис. 29). Тогда нетрудно видеть, что имеет
место формула:
Рис. 29.
dt
(8)
Действительно, если тело относительно оси и вращается
против движения часовой стрелки, то угол ср возрастает, поэтому
-т|>0 и, значит, вектор ^й° совпадает с направлением оси и
величина его равна UJ , т. е. он равен со". Если тело относительно
оси а вращается по движению часовой стрелки, то угол ср
(принимая отрицательные значения) убывает, поэтому -£ < 0 и,
значит, вектор ~ й° имеет направление, противоположное оси йу т. е.
снова равен со.
Из формулы (8) следует, что производная от угла поворота
по времени всегда равна проекции угловой скорости на ось
вращения, т. е.
d<$
Установим теперь понятие углового ускорения. Угловое
ускорение является мерой изменения угловой скорости в зависимости
от времени. Поэтому понятие углового ускорения
устанавливается согласно следующему определению.
Угловым ускорением ё в данный момент времени называется
геометрическая производная от угловой скорости по времени, т. е.
Из определения углового ускорения следует, что его
размерностью является l^-J .
Выясним теперь, что собой представляет угловое ускорение.
Из формулы (8) при дифференцировании получаем:
- dK d2y -о | dy dii0
£ — ~dt—deU \~dt"~dt '
Но -^7=^0» так как й°— постоянный вектор и, следовательно,
*=%*. (10)
Из полученной формулы (10) следует, что угловое ускорение
е~ есть вектор, параллельный оси вращения, по величине равный
абсолютному значению второй производной от угла поворота по
времени. Вторая производная от угла поворота по времени
представляет собой проекцию углового ускорения на ось
вращения, т. е.
<£у
ea~~~dt2 •
Из формул для проекций угловой скорости ои и углового
ускорения еи можно заключить, что угловое ускорение и
угловая скорость одинаково направлены, если вращение ускоренное,
и их направления противоположны, если вращение замедленное.
Действительно, найдем производную от квадрата угловой
скорости:
йЛ* )~"dt \\dt) \—zdtdtz*
При ускоренном вращении величина о>2 возрастает и,
следовательно, производная положительна, откуда следует, что знаки
проекции G)tt = -rJ и su=--| одинаковы.
При замедленном вращении величина со2 убывает и,
следовательно, производная отрицательна, а знаки проекций ши и
£и противоположны.
3. Формулы для линейных скоростей и ускорений
Траекторией каждой точки вращающегося вокруг неподвижной
оси тела является^ окружность, и фиксированный радиус этой
окружности вращаемся с угловой скоростью ю. Поэтому для
нахождения линейных скоростей и ускорений точки можно
использовать полученные в кинематике точки формулы (46), (47), (48)
Наряду с этими формулами рассмотрим векторные формулы
Для скорости и ускорения точки.
С этой целью заметим, что если в качестве неподвижного
полюса принять центр окружности, описываемой данной точкой,
57
и обозначить через г радиус-вектор данной точки, то, как было
установлено в кинематике точки (см. рис. 30), /
— d7
v=df
Вектор v перпендикулярен к векторам г и со и по величине
равен v = o)-r. Направление этого вектора совпадает с
направлением векторного произведения векторов со и г. Отсюда мы
непосредственно заключаем, что v является
векторным произведением векторов со и г,
так как это векторное произведение является
вектором, который по величине и
направлению совпадает с v. Таким образом,
линейная скорость точки во вращательном
движении определяется формулой:
v=~H>Xr. (И)
Если на оси вращения выбрать
произвольный полюс О, и построить радиус-
вектор р, соединяющий полюс 01 с данной
точкой тела М (см. рис. 30), то легко
видеть, что
Отсюда следует, что
v=^X_Z= ©X (р — 0^0) =й X Р — » X 0& = ю X Р,
так как со X ОхО = 0.
Рис. 30.
й)Ускоренное вращение 0)3<э<«ъ4/'е""<>* вращение
Рис. 31.
Итак, получаем формулу:
ti = coX7.
(12)
58
Следовательно, линейная скорость точки вращающегося тела
равна векторному произведению угловой скорости на радиус-
вектор, соединяющий любой полюс на оси с данной точкой.
Если теперь продифференцировать равенство (11), то получим:
— dv dio ч/~~| - ч , dr 7-w — 1 — ч / —
(13)
Слагаемые в полученной формуле (13) представляют собой
тангенциальное и нормальное ускорения. Действительно,
векторное произведение е X г есть вектор,
касательный к траектории точки, имеющий
направление тангенциального ускорения и
по величине равный ег, т. е. равный
величине тангенциального ускорения (см.
рис. 31).
Таким образом,
wT = s X г.
(14)
Векторное произведение со X v есть
вектор, направленный по радиусу
вращения к центру вращения и по
величине равный (о^ = (о2г, т. е. по величине
и направлению Ьн совпадает с
нормальным ускорением (см. рис. 32).
Таким образом,
w^ = (О X V.
Рис. 32.
(15)
4. Частные случаи вращения
Рассмотрим некоторые частные случаи вращения.
а) Вращение твердого тела называется равномерным в
течение некоторого промежутка времени, если в течение этого
промежутка времени величина угловой скорости постоянна, т. е.
со = const.
Таким образом, для равномерного вращения имеем:
-2 = со = const.
dt
Отсюда, при интегрировании, получаем:
<р = (at -\- С,
где С — постоянная интегрирования. Величину С находим из
начального условия. Если при £ = 0, <р(0) = ср0, то С = ср0.
Окончательно получаем формулу:
<Р = »* + <Ро- (16)
59
Так как отсчет угла поворота зависит от наблюдателя, то
всегда можно считать, что при t = 0, <р0 = 0 и тогда /
<p = arf. (17)
б) Вращение твердого тела называется равнопеременным
в течение некоторого промежутка времени, если в течение этого
промежутка времени величина углового ускорения е постоянна.
Таким образом, при равнопеременном вращении
3 = ±s = const. (18)
Нетрудно видеть, что если направления оси вращения и
угловой скорости совпадают, то знак плюс соответствует
равноускоренному вращению, а знак минус соответствует равнозамедлен-
ному вращению. При интегрировании равенства (18) получаем*.
* = ±« + С,
где постоянная интегрирования С находится из начальных
условий. Если при £ = 0, -^ = со0, то С = со0.
Окончательно получаем формулу:
a> = ±^ + <*v (19)
Если равенство (19) проинтегрировать, то получим:
Если положить при £ = 0, <р = 0, то найдем, что Сх = 0. Тогда
окончательно формула примет вид:
V = ±!? + »*t. (20)
§ 4. ПЛОСКО-ПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ
1. Основные понятия
Движение твердого тела называется плоско-параллельным,
если каждая точка тела описывает траекторию, лежащую в
плоскости, параллельной к некоторой неподвижной плоскости.
Если твердое тело совершает плоско-параллельное движение,
то это означает, что каждая точка А тела описывает траекторию,
лежащую в плоскости, параллельной некоторой неподвижной
плоскости (тт). Плоскость (тс) будем называть плоскостью
движения (см. рис. 33).
В различных задачах практики плоско-параллельное движение
встречается часто. Примерами такого движения могут являться:
движение колеса по рельсу, движение плоского механизма
(например, кривошипно-шатунного).
60
При плоско-параллельном движении твердого тела скорости и
ускорения точек тела, лежащих на прямой, перпендикулярной к
плоскости движения, равны между собой, так как точки,
лежащие на этой прямой,
описывают одинаковые траектории,
только параллельно
смещенные. Отсюда следует, что для
изучения
плоско-параллельного движения твердого тела
достаточно изучить движение
некоторого сечения тела,
параллельного плоскости
движения.
Если известно движение
некоторого сечения тела S,
параллельного плоскости
движения, то для изучения
движения произвольной точки
А тела достаточно изучить
движение проекции А1 этой точки на сечение «S (или плоскость,
проходящую через S) (см. рис. 33).
Если еще учесть, что плоскость движения (тт) можно выбрать
так, чтобы она проходила через сечение 5, то окончательно
приходим к выводу, что изучение плоско-параллельного
движения приводится*- к изучению движения плоской фигуры в ее
плоскости, т. е. к так называемому плоскому движению.
Перейдем к изучению плоского движения.
Рис. зз.
2. Угол поворота
Чтобы установить понятие угла поворота в плоском движении,
предварительно докажем теорему.
Теорема. В плоском движении фигуры каждая ось,
неизменно связанная с фигурой и лежащая в плоскости фигуры, за
один и тот же промежуток времени поворачивается в одном и
том же направлении на один и тот же угол.
Доказательство. Рассмотрим две оси I и II, неизменно
связанные с телом и образующие угол а, в момент времени t
(см. рис. 34). В момент времени f тело будет занимать другое
положение в плоскости и поэтому положение осей также
изменится. Новые их положения обозначим Г и 1Г. Так как оси
неизменно связаны с телом, то угол между осями Г и 1Г также
Равен а. Оси I и Г могут либо быть параллельными, либо сливаться,
либо пересекаться. В первом и во втором случае угол между
осями I и Г равен либо 0, либо тт. Так как направления обхода
от оси Г к оси 1Г такое же, как от оси I к оси II (если
смотреть с одной и той же стороны плоскости), то совершенно
61
очевидно, что угол между осями II и 1Г равен углу между
осями I и Г. /
Рассмотрим теперь случай, когда оси I и Г пересекаются
(см. рис. 35).
Рассмотрим углы р и у между осями в моменты времени t и
t'. Из чертежа видно, что они одинаково направлены. Равенство
Рис. 34.
этих углов следует из рассмотрения треугольников АВО и А'В'О.
Действительно, а-{-§-|-у = тг и a-[-'8-|-р = тт, откуда получаем,
что p = Y-
Из доказанной теоремы вытекает, что для характеристики
поворота тела за некоторый промежуток времени можно выбрать
Рис. 35.
угол поворота какой-нибудь оси тела. Поэтому можно дать
следующее определение углу поворота.
Углом поворота в плоском движении за некоторый
промежуток времени называется угол, на который поворачивается какая-
нибудь ось, неизменно связанная с фигурой, за тот же
промежуток времени.
В каждом конкретном движении в качестве оси, неизменно
связанной с фигурой, избирают такую ось, которая в данном
62
у
*м
движении является наиболее удобной. Так, например, при
движении колеса по рельсу в качестве такой оси удобно выбрать
вертикальный диаметр колеса.
3. Задание движения. Траектории точек
Чтобы задать плоское движение фигуры относительно
плоской системы координат, достаточно задать координаты л, и у1
какой-нибудь точки 01 тела Yi
и угол поворота ср как
функции от времени, т. е.
■*i=*i(*);
уг=Уг (t)l <? = <?{*)• (21)
Чтобы это пояснить,
покажем, что положение
каждой точки тела однозначно
определяется этими
величинами.
Для удобства будем
отсчитывать угол поворота от
оси ОХ. С данным телом
неизменно свяжем систему координат О^ (см. рис. 36).
Обозначим координаты какой-нибудь точки М тела через £1,ril.
Тогда координаты х9 у этой точки, относительно
неподвижной системы координат, находятся по формулам:
( к\/
/><°L
'/ \ /
/ | \ L
-1^1 У
^
X
Рис. 36.
х = прхОМ = npx(00J + OxN + NM) = npxOOY + npxOxN +
+ npxNM = xl {t) + 52 cos cp + rh cos (90° + <p) = xl {t) + ^ cos <p —
— 4isin<P; __
y=npyOM=npy (OO.+O.K+KM) = npyOOx-\jtipyOxK-\-npyKM =
=У1 (*) + 4i cos cp + Si cos (90° — ?) =Уг (О -Гти cos <P + Si sin <P-
Таким образом, плоская фигура при движении в своей
плоскости имеет три обобщенные координаты.
При создании плоского движения фигуры траекторию какой-
нибудь фиксированной точки 01 можно выбирать произвольно, а
траектории остальных точек определяются траекторией точки Ох
и углом поворота тела.
4. Угловая скорость
Понятие угловой скорости в плоском движении
устанавливается согласно следующему определению:
Угловой скоростью со в плоском движении в данный момент
вРемени называется свободный вектор, обладающий следующими
свойствами:
63
1°. а) перпендикулярен к плоскости движения и направлен
так, что, глядя с конца этого вектора, мы видим движение тела
в данный момент времени в направлении против движения
часовой стрелки.
2°. Величина вектора со равна абсолютному значению
производной от угла поворота по времени в данный момент времени,
т. е.
Таким образом, определенная угловая скорость в данный
момент времени является мерой изменения угла поворота по
величине и направлению в зависимости от времени.
Рис. 37.
Докажем вспомогательную теорему (лемму).
Лемма. Геометрическая производная по времени от вектора,
неизменно связанного с фигурой и сохраняющего постоянную
величину, равна векторному произведению угловой скорости на
данный вектор, т. е.
at = (о X а.
Доказательство. Рассмотрим положение вектора а в
моменты времени t и tA^Lt (см. рис. 37).
Так как
at = hm -гт ,
то непосредственно из чертежа мы видим направление вектора
#J. Поскольку вектор а сохраняет постоянную величину,
(а. а) = а2 = const и, следовательно,
(а • а)[ = а[ • а -\- а - a't = 2а[ • а = О,
64
Найдем теперь величину вектора at:
141 =
lim
м-> о
= lim
д* -* о
= lim
м-> о
аДср
Да
д;
= а
Д*
(1у
~dt
: Urn
Д* -» О
= аоо.
Ч^ЛВ
Д*
Таким образом, вектор а,' перпендикулярен к векторам w и а,
и глядя с конца его, мы видим переход от вектора ш к
вектору а в направлении против движения часовой стрелки, по
величине же он равен площади прямоугольника, построенного на
векторах со и а. Поэтому вектор а[ является векторным
произведением векторов (о и а, т. е.
Лемма доказана.
d% = со X а-
5. Скорости точек. Формула Эйлера
Установим формулу, связывающую скорости двух различных
точек фигуры. Пусть А и В — произвольные точки фигуры (см.
рис. 38). Выберем произвольный фиксированный полюс и
рассмотрим векторы ОА, АВУ ОВ.
Нетрудно видеть, что / В
ОВ = бА + АВ.
Продифференцируем это равенство по
времени, тогда получим:
d(pB) d(OA) xd(AB)
dt dt ' dt Рис. 38.
Согласно доказанной выше лемме получаем, что
djjB)
d
Кроме того,
diOA\
■-V,
- = (оХАВ.
dt
м»
dJQBl-
dt ~VB-
Таким образом, мы получаем формулу:
Vb=Va+®XAB.
(23)
Полученная формула называется формулой Эйлера. Пользуясь
формулой Эйлера, можно изучать различные свойства плоского
Движения.
о
г- М. Финкельштейн 65
Выведем некоторые следствия из формулы Эйлера.
1°. Если в данный момент времени угловая скорость оГ=0, то
в данный момент времени скорости всех точек тела
геометрически равны между собой._ _
Действительно, если <о = 0, то юУ(АВ = 0 и, следовательно,
Vb=Va
для любых точек А и В тела.
В этом случае движение тела называется мгновенно-
поступательным.
2°. Если в данный момент времени скорости двух точек тела
геометрически равны между собой, то в данный момент времени
угловая скорость тела 5 = 0
Рис. 39.
Действительно, если vB = vA, то из формулы Эйлера
получаем, что
wX^45 = 0.
Так как со перпендикулярно к вектору АВ и AS^O, то
получаем, что со = 0.
3°. Проекции скоростей двух точек на ось, проходящую
через эти точки, алгебраически равны между собой.
Действительно,
npuvB = npu{vA + ю X АВ) = npjiA+npu(u X АВ).
Но вектор со X АВ перпендикулярен к вектору АВ и,
следовательно, его проекция на ось и равна 0 (см. рис. 39).
Таким образом, получаем, что
npavB=npuvA.
(24)
4°. Концы скоростей трех точек, лежащих на одной прямой,
также лежат на одной прямой.
66
Пусть тело перемещается в плоскости чертежа в направлении,
указанном на рисунке 40 стрелкой. Рассмотрим три точки Л, В>
Су лежащие на одной прямой. Из формулы Эйлера следует, что
vc=vA + uXAC.
Построим векторы а=соХ АВ
й "р"=а)Х^С и приложим их
соответственно в точках В и С.
Нетрудно видеть, что эти
векторы перпендикулярны к
прямой, на которой лежат точки, рИСф 4о,
и направлены, как указано на
чертеже. Образованные этими векторами и отрезками АВ и АС
прямоугольные треугольники подобны. Действительно, катеты
этих треугольников пропорциональны, ибо
а = (о.ЛД j3 = a).ЛС
и, следовательно,
oL_AB_
р ~ АС
Отсюда следует, что концы векторов аир лежат на прямой,
проходящей через точку Л.
Для CKopotTefi vB и vc выполняются соотношения:
откуда следует, что концы скоростей vA, vB> vc можно
полечить путем параллельного смещения точки Л и концов векторов
а и р на вектор vA. Следовательно, эти концы тоже лежат на
одной прямой.
6. Распределение скоростей
Изучим, как распределены скорости точек плоской фигуры
в каждый момент времени. Если в данный момент времени
угловая скорость w = 0, то, как было уже выяснено раньше,
скорости всех точек фигуры в данный момент времени геометрически
равны между собой и, следовательно, в данный момент времени
Движение тела является мгновенно-поступательным.
Рассмотрим теперь случай, когда в данный момент времени
Угловая скорость (0=^=0. Докажем прежде всего, что в этом
случае существует единственная точка фигуры, скорость которой
равна нулю. Для доказательства рассмотрим какие-нибудь две
точки фигуры Л и б, скорости которых не равны нулю. Скорости
3*
° 67
точек А и В не могут быть геометрически равны, так как в
этом случае угловая скорость со = 0, что противоречит
предположению. Рассмотрим различные возможные случаи:
Первый случай. Скорости точек
Л и В не параллельны (см. рис. 41).
Проведем прямые, проходящие через
точки А и В и соответственно
перпендикулярные к vA и vB. Эти прямые
пересекутся в некоторой точке С. По следствию
3° из формулы Эйлера скорость точки С
должна быть одновременно
перпендикулярна к двум пересекающимся прямым
АС и ВС, а это возможно только в том
случае, когда vc = 0.
Скорости точек А и В параллельны.
Рис. 41.
Второй случай.
Здесь возможны два варианта.
а) Скорости vA и vв одинаково направлены (см. рис. 42).
Заметим, что в этом случае эти скорости перпендикулярны к
прямой АВ, так как в противном случае их проекции на прямую не
были бы равны (что противоречит следствию 3° из формулы
Эйлера).
Рис. 42.
Рис. 43.
Соединим концы скоростей vA и vв и найдем точку
пересечения этой прямой с прямой АВ. По следствию 3° из формулы
Эйлера, с одной стороны, vc перпендикулярна к АС, а по
следствию 4° конец скоростей vc должен лежать на прямой,
соединяющей концы скоростей vA и vB. Это же возможно только в том
случае, когда vc = 0.
б) Скорости vA и vB имеют противоположные направления
(см. рис. 43).
В этом случае соединяем концы скоростей точек А и В и
находим точку пересечения С этой прямой с прямой АВ. По аналогии
с случаем (а) заключаем, что vc = 0.
Таким образом, если со=^=0, то существует точка С фигуры,
скорость которой в данный момент времени равна нулю.
68
Может случиться, что точка С будет лежать вне фигуры.
53 этом случае можно с фигурой неизменно связать некоторую
систему координат и размеры фигуры считать неограниченными.
Тогда точку С можно снова рассматривать как точку фигуры.
Докажем, что точка С является единственной. Рассуждаем от
противного. Предположим, что существуют две. точки С1 и Сг,
так что Vq =Vc2 = 0. По следствию 2° из формулы Эйлера
заключаем, что со = 0, что противоречит предположению.
Точка плоской фи- -
гуры, скорость которой А^
в данный момент време- €д*ДВ \
ни равна нулю,
называется мгновенным
центром
скоростей.
Из вышеприведенных
рассуждений следует,
что мгновенный центр
скоростей можно
построить, если заданы на- Рис 44.
правления скоростей
двух точек тела. Можно построить мгновенный центр
скоростей и в том случае, когда задана скорость одной точки (по
величине и направлению) и угловая скорость тела. В этом
случае достатбчно провести через точку А перпендикуляр к
скорости vA, отложить на нем отрезок АВ = — в таком направлении,
чтобы, глядя с конца вектора о>, приложенного в точке 5, мы
видели вектор vA направленным против движения часовой стрелки
(см. рис. 44).
Действительно, по формуле Эйлера получаем, что
vB = vA + uXAB.
Но в силу построения векторы vA и со X ЛВ являются прямо
противоположными, поэтому
vB = 0.
Установим теперь картину распределения скоростей в
остальных точках фигуры.
Докажем, что для скоростей точек фигуры выполняются
следующие свойства:
1°. Скорость каждой точки перпендикулярна к прямой,
соединяющей мгновенный центр скоростей с данной точкой, так что,
глядя с конца угловой скорости со, приложенной в мгновенном
Центре скоростей, мы видим скорости направленными против
движения часовой стрелки.
69
Действительно, по формуле Эйлера получаем, что (см. рис. 45)
vA = vc + ®XCA = ®XCA. /
Отсюда и вытекает свойство 1°.
2°. Величины скоростей двух точек тела пропорциональны
расстояниям этих точек от мгновенного центра скоростей.
Рис. 45.
Рис. 46.
Действительно, по свойству 1° получаем, что
vA = ®XCA и vA = ®-CA]
vB = u>XCB и vB = b>-CB.
Следовательно,
vA СА
Из этих свойств следует, что в данный момент времени скорости
точек фигуры расположены так, как если бы фигура в данный
момент времени вращалась вокруг оси, проходящей через
мгновенный центр скоростей перпендикулярно к плоскости движения.
В силу этого обстоятельства такое движение плоской фигуры
называется мгновенно-враща-
№ тельным. Итак, если в данный
момент времени со^О, то
движение фигуры • является
мгновенно-вращательным.
Пользуясь понятием
мгновенного центра скоростей и
свойствами
мгновенно-вращательного движения, можно решать задачи на определение скоростей
в плоском движении.
Задача 3. В кривошипном механизме длина кривошипа
ОА = 40см, длина шатуна АВ = 2 м; кривошип вращается
равномерно с угловой скоростью, соответствующей 180-^^.
Найти угловую скорость со шатуна и скорость средней его
точки М при четырех положениях кривошипа, для которых угол
АО В соответственно равен: о, у,тг, у^ (см. рис. 46).
--е=
О
м
Рис. 47.
В
70
Первый случай. ^/АОВ — 0 (см. рис, 47).
В этом случае, проводя перпендикуляры к направлению
скорости точки Лик направлению движения точки В,
устанавливаем, что мгновенный центр скоростей шатуна находится в точке В.
По свойствам мгновенно-вращательного движения находим, что
vA = o)-CA, v
и, значит,
М'
*Ю-СМ
0):
VA и>кр»ил
ОА 180-2и.40
'СА~
СА
60-200
*Ж = -5-«-Ю0:
1-1=14-1;
7 И.
\сек\
Второй случай. ^/Л0£ = у (см. рис, 48).
В этом случае скорости точек А и В параллельны, и так как
их проекции на направление шатуна ВА должны быть одинаковы,
то эти скорости геометрически равны, т.е. vA = vB. Отсюда, по
следствию 2° из формулы Эйлера, заключаем, что со = 0 и,
следовательно, движение шатуна является мгновенно-поступательным.
Так как в мгновенно-поступательном движении скорости всех точек
геометрически равны, то заключаем, что
180-271.40 ... \смЛ
:~6Г-^754И*
»кр
ОА:
гв В
Рис. 48.
Рис. 49,
Третий случай. ^/ЛО£ = тт (см. рис 49)
Аналогично первому случаю находим, что мгновенный центр
скоростей шатуна находится в точке В,и, следовательно,
получаем те же ответы, что и в первом случае.
Четвертый случай. ^/ Л ОВ = у я (см. рис. 50),
Аналогичен второму случаю.
Задача 4. Прямая АВ движется в плоскости чертежа, причем
конец ее Л все время находится
на полуокружности CAD, а сама
прямая все время проходит через
неподвижную точку С диаметра CD.
Определить скорость vc точки прямой,
совпадающей с точкой С в тот мо-
мент> когАа радиус ОА перпендикуля- Рис. 50.
71
рен к CD, если известно, что скорость точки А в этот момент
4— (рис. 51). /
сек v^ '
Чтобы найти мгновенный центр скоростей для прямой АВ,
заметим, что при нахождении мгновенного центра можно рассмат-
г ривать скорости точек не в
прямом движении, а в обращенном,
т. е. в движении полуокружности
CAD относительно АВ. Действи-
тельно, скорости точки в прямом
22Z22 и обращенном движении прямо
противоположны, и поэтому
перпендикуляры, проведенные к одной
и другой скорости, совпадают.
Рассмотрим скорость vA точки А
в прямом движении и скорость Vc
точки С в обращенном движении.
Пересечение перпендикуляров к этим скоростям является
мгновенным центром скоростей.
По свойствам мгновенно-вращательного движения получаем, что
т. е. vA~EA— V2 '
^с = 4~ = 21/2^2,83
Гм 1
[сел: J
7. Центроиды
Если фигура перемещается в плоскости, то в каждый момент
времени существует мгновенный центр скоростей, который
описывает какую-то траекторию
относительно плоскости, а также
какую-то траекторию
относительно самой фигуры.
Геометрическое место
положений мгновенного центра
скоростей относительно плоскости
движения называется
неподвижной центроидой, а
геометрическое место
положений мгновенного центра
скоростей относительно самой
подвижной фигуры называется п о-
движной центроидой.
Рассмотрим пример.
Стержень АВ перемещается в
плоскости так, что его концы А и В перемещаются по двум взаимно
перпендикулярным прямым. Найдем подвижную и неподвижную
центроиды для стержня АВ (см. рис. 52).
Рис. 52.
72
Найдем мгновенный центр скоростей С как пересечение
перпендикуляров к скоростям точек А и В. Тогда СО — АВ.
Следовательно, мгновенный центр скоростей в плоскости движения
ОХУ перемещается так, что расстояние его от начала координат
является величиной постоянной, т. е. представляет собой
окружность с центром в точке О и радиусом, равным длине стержня АВ.
Относительно самого стержня мгновенный центр скоростей
перемешается так, что из точки С стержень АВ виден под прямым
углом (так как ^/АСВ = 90°). Следовательно, подвижная
центроида представляет собой окружность, диаметром которой является
стержень АВ (см. рис. 52).
Подвижная и неподвижная центроиды связаны между собой.
Для того чтобы эту связь обнаружить, предварительно
установим вспомогательное понятие — качение без скольжения.
Говорят, что кривая (1) катится по кривой (Г) без скольжения,
если в каждый момент времени эти кривые имеют общую
касательную и точка касания
проходит по каждой из кривой за
один и тот же промежуток
времени одинаковые по величине
пути в одном и том же
направлении.
Примером такого движения
может являться движение колеса
по рельсу беЗрСкольжения. Обод
колеса (окружность) катится без Рис. 53.
скольжения по рельсу (прямой)
(см. рис. 53).
Колесо может катиться по рельсу со скольжением. Это будет
в том случае, если пути, проходимые точкой касания по рельсу
и ободу колеса, неодинаковые (например, при буксовке колеса).
Свойства подвижной и неподвижной центроид характеризуют
следующие теоремы.
Теорема (прямая). Если кривая, неизменно связанная с
подвижной фигурой, катится без скольжения по кривой, неизменно
связанной с плоскостью движения, то точка касания этих кривых
является мгновенным центром скоростей и, следовательно, первая
кривая является подвижной центроидой, а вторая — неподвижной
Центроидой.
Доказательство. Пусть кривая I неизменно связана с
фигурой и катится без скольжения по кривой Г, неизменно
связанной с плоскостью движения (см. рис. 54). В геометрической точке С
по существу находятся три точки: точка касания кривых С, точка С,
принадлежащая кривой I, которую мы будем обозначать С19
точка С, принадлежащая кривой Г, которую мы будем обозначать С2.
Движение точки касания С относительно неподвижной
плоскости будем рассматривать как сложное, в котором движение
т°чки С относительно кривой I будет являться относительным
w^/wyy/Ж^
73
движением, движение кривой I (а следовательно, и фигуры)
относительно неподвижной плоскости — переносным движением. По
теореме сложения линейных скоростей в сложном движении
можно записать, что
(5с)в = (5с)г + (5"с)#.
Так как скорости точек направлены по касательным к их
траекториям, то получаем, что абсолютная и относительная
скорости точки С направлены соответственно по касательным к
кривой I и Г, и в силу того, что кривые I и Г имеют общую
касательную, заключаем, что скорости (vc)a и (vc)r одинаково
направлены.
Кроме того, пути s, и s2) проходимые точкой касания С по
кривым I и Г, одинаковы, поэтому величины абсолютной и
относительной скорости равны, ибо
Таким образом, (vc)a = (vc)r и, следовательно, (vc)e = 0.
Но переносная скорость (vc)e представляет собой скорость той
точки подвижной фигуры относительно неподвижной плоскости,
с которой точка С
совпадает, т. е, скорость точки
С,. Значит, ^с, = 0, а это
означает, что точка С
кривой I является мгновенным
центром скоростей.
Мгновенный центр
скоростей относительно под-
Рис. 54. вижной фигуры описывает
кривую I, относительно
неподвижной плоскости—кривую Г, поэтому кривая I является
подвижной центроидой, а кривая Г— неподвижной. Теорема
доказана,
Теорема (обратная), В плоском движении фигуры подвижная
центроида катится без скольжения по неподвижной.
Доказательство, Пусть кривая I является подвижной
иентроидой, а кривая Г— неподвижной. В каждый момент
времени эти кривые имеют общую точку С9 причем точка С кривой
I является мгновенным центром скоростей. Так же, как и в
прямой теореме, движение точки касания С будем рассматривать
как сложное, Тогда
Так как точка С является мгновенным центром скоростей, то
(^с)* = ° и> следовательно, (vc)a = (vc)r
74
f-[o скорость (vc)a является касательной к кривой Г, а
скорость {vc)r — касательной к кривой I и, значит, кривые I и Г
имеют общую касательную.
Кроме того, (vc)a—-£, (vc)r = ^ и, значит,
ds1
ds2
' dt
Итак, кривые I и Г в
W
каждый
dt
Следовательно, s1 = sa + const. Но при £ = 0, s1 = s2 = 0 и
окончательно получаем, что s1 = sz.
момент времени имеют
общую касательную и,
кроме того, пути, проходимые
точкой касания,
одинаковые, т. е. кривая I
катится по кривой Г без
скольжения. Теорема доказана.
Задача 5. Найти
уравнения неподвижной и
подвижной центроид
стержня АВ, который,
опираясь на окружность радиуса
а, концом А скользит
вдоль прямой ОХ>
проходящей через центр этой окружности; оси координат указаны на
чертеже (см. рис. 55).
Рассмотрим скорость точки А стержня и точки касания стержня В
в обращенном движении. Пересечение перпендикуляров к этим
скоростям является мгновенным центром скоростей С. Обозначим
координаты точки С относительно неподвижной системы
координат через х, уу относительно подвижной — через 5, 7j.
Тогда
Рис. 55.
BC=OC — OB = VOA2-\-AC2 — OB = Vx2-\-y2 — a;
АВ2 = ОВ-ВС;
АВ2
--х' — аА
значит, х2— a2 = a{Vx2-\-y2-
Отсюда получаем, что
а).
ха = ау ха-{-у2;
л* — а2х2 — а2у2 = 0;
х2(х2 — а2) — а2у2
= 0.
(25)
Уравнение (25) является уравнением неподвижной центроиды,
сравнение подвижной центроиды находим из отношения:
АВ2 = ОВ-ВС.
Отсюда получаем уравнение подвижной центроиды в виде
ъ2 = с&.
75
8. Ускорение в плоском движении
Прежде всего введем понятие углового ускорения согласно
следующему определению: угловым ускорением з называется
геометрическая производная от угловой скорости по времени, т. е.
s = -f . (20)
Обозначим через со° постоянный орт, перпендикулярный к
плоскости движения, и будем отсчитывать угол поворота фигуры
относительно этого орта. Так же, как и в случае вращения
твердого тела вокруг неподвижной оси, приходим к формуле (см.
§ 3, п. 2):
Отсюда следует, что
- du_d_ fdy-o ^_?*V-oi *Р ^1
fc— dt ~~ dt \dt J ~dt2 ш i dt dt '
Так как -^- = 0, то получаем, что
- <*2? "о
* = №*'
Таким образом, угловое ускорение представляет собой вектор,
перпендикулярный к плоскости движения, имеющий либо такое
же направление, как и ш°, либо противоположное.
Установим формулу, связывающую линейные ускорения двух
точек плоской фигуры. Пусть А и В — две произвольные точки
фигуры. По формуле Эйлера можно написать, что
vB = vA + aXAB.
Продифференцируем это равенство по времени, тогда получим:
dvB_dvA,dZ v ip \_~\,<*(Щ
Как известно,
dvд — dv л — dio — d (AB) — ч , -jrjz
Поэтому мы получаем формулу:
wB = wA+lXAB + ^X&XAB)1 _ (27)
Введем обозначение для последнего слагаемого со X(w X АВ)=а
и придадим ему более простую форму.
Построим вектор а последовательно, сначала построив
р =(оХ^£> а затем со X [*• Вектор р лежит в плоскости движе-
76
Рис. 56.
ния и отклонен от вектора АВ на прямой угол (рис.__5б), его
величина равна р = о)-Л5. Если построить вектор а>ХР> то ■
получим вектор,' лежащий в плоскости движения и отклоненный от
вектора ~р на прямой угол.
Величина этого вектора
равна (З-о). Таким образом,
вектор а образует с
вектором AS" угол в 180° и
еГо величина равна
Отсюда следует, что
а=соХ(^Х^В)= (28)
= —<о*.АВ.
Подставляя это выражение в формулу (27), окончательно
получаем: _
wB = wA + б X АВ — со2АВ. (29)
Пользуясь этой формулой, можно установить целый ряд
новых свойств плоского движения.
9. Распределение ускорений
Изучим как распределены ускорения точек движущейся
плоской фигуры в каждый момент времени. Распределение
ускорений будет обусловливаться значением величин угловой скорости
о и углового ускорения е в данный момент времени.
Предположим, что в данный момент времени © = е = 0.
Тогда согласно формуле (29) получаем, что
wB = wA.
Таким образом, если в данный момент времени угловая
скорость со и угловое ускорение е равны нулю, то линейные
ускорения точек фигуры геометрически равны между собой. В этом
случае линейные скорости точек фигуры также геометрически
равны, и, следовательно, в данный момент времени движение
фигуры является мгновенно-поступательным.
Рассмотрим теперь случай, когда по крайней мере одна из
величин со и s не равна нулю. Докажем, что в этом случае в
плоской фигуре существует единственная точка, ускорение
которой равно нулю.
Для доказательства выберем какую-нибудь точку тела А
(см. рис. 57). Если ^л = 0, то эта точка является искомой, поэтому
будем считать, что wA=^=0.
_ Через точку А проведем луч, образующий угол ср с вектором
wa так, что е (Ш
tg<f = -r (JU)
11
и чтобы, глядя с направления вектора е, приложенного в точке
Л, мы видели переход от вектора wA к направлению ^луча по
углу <р в направлении против движения часовой стрелки. Если
одна из величин е, со не равна нулю, то угол <р определяется
однозначно. На луче выберем точку В так, чтобы
wA
АВ =
(31)
Согласно формуле (29) получаем:
^* = ^д + 8 ХЛВ — со2-AS, (32)
и, следовательно, ускорение_в точке В является геометрической
суммой трех векторов: wA, a = eXAS и р= — со2.Л£.
*2
(33)
Рис. 57.
Построим в точке В эти векторы. Тогда
ol = S'AB, р = <о2.Л£.
Если обозначим угол, который образует вектор у = a + (Те век
тором ВЛ, через ф, то
Из формул (30) и (33) следует, что
tg<j) = tg<p,
т. е.
Величина вектора у определяется по формуле:
С другой стороны, из формулы (31) следует, что
т. е.
78
wA = AB-Ve*-\-<i>\
Итак, сравнивая векторы wA и у» мы видим, что они имеют
противоположные направления и численно равны, т. е. прямо
противоположны. Отсюда следует, что
Заметим, что если е = 0, то <р = 0, если же со = 0, то <р = 90°.
Докажем, что точка В является единственной,
рассуждаем от противного. Пусть существует в данный момент
времени две точки Л и Б, так что wA = wB = 0.
Тогда __ __
wB = wA-{-e ХАВ — «>2-АВ
и, следовательно,
в ХАВ = «>2'АВ.
Векторы е^Ои <о=^=0, ибо в противном случае s = a> = 0, что
невозможно. Но вектор е X АВ перпендикулярен к вектору AS,
а вектор ®2-АВ совпадает с направлением вектора АВ, поэтому
полученное равенство является противоречивым.
Таким образом, если по крайней мере одна из величин со, s
в данный момент времени не равна нулю, то в данный момент
времени существует
точка плоской
фигуры, ускорение
которой равно нулю.
Такая точка фигуры
называется мгновенным
центром ускорений в
данный момент
времени.
Мгновенный центр
ускорений, вообще
говоря, не совпадает
с мгновенным
центром скоростей. Это видно из такого примера. Пусть колесо
катится без скольжения по рельсу так, что скорость его
центра является постоянной.
Тогда для колеса в каждый момент движения центр колеса
будет являться мгновенным центром ускорений, а точка касания
колеса с рельсом будет являться мгновенным центром скоростей.
Пользуясь понятием мгновенного центра ускорений, можно
установить картину распределения ускорений в теле.
Пусть точка D тела является мгновенным центром ускорений,
т- е. ^D = 0 (см. рис. 58).
Тогда, если точка А — произвольная точка фигуры, то
wA = wD + s XDA — аЛ-Ш.
79
Ho wD = 0, поэтому
wA=l XDA — ^2:DA'
Если введем обозначения а = е X DA и р"= ■
(34)
(о2-ДД то
ШШШШЖ^ШЙШШШШ'
Рис. 59.
причем векторы аир как бы являются тангенциальным и
нормальным ускорением точки А при вращении вокруг точки D,
так как они подсчитываются по таким же формулам, как
тангенциальное и нормальное ускорение.
Изучение плоского движения показало, что в случае
плоского движения существует два мгновенных центра: для скоростей —
мгновенный центр
скоростей, для ускорений —
мгновенный центр ускорений.
Пользуясь выведенной
формулой для ускорений
и понятием мгновенного
центра ускорений,
можно определять ускорения
любых точек тела в
плоском движении.
Задача 6. Колесо
радиуса г катится по
рельсу без скольжения так,
что в данный момент времени скорость и ускорение центра
колеса соответственно равны v0 и w0. Найти для данного момента
времени ускорения концов вертикального диаметра (см. рис. 59).
Найдем сначала величину угловой скорости и углового
ускорения для данного момента времени. Так как точка касания С
является мгновенным центром скоростей, то
о г
Угловая скорость для любого момента времени находится по
формуле:
v
где v — скорость центра. Отсюда получаем, что
dm d ( v\ w
e~~"dt~dt\TJ~T'
Для данного момента времени угловое ускорение находится
по формуле:
Wo
80
Так как скорость и ускорение центра v0 и wQ одинаково
направлены, то движение колеса в данный момент времени является
ускоренным и угловая скорость и угловое ускорение одинаково
направлены.
Найдем ускорение точки С по формуле:
где
v2 v2
R = СО • ОС = ОТ • Г = -г • Г = .
Построив в точке С векторы wQ, а и р и найдя их
геометрическую сумму, получим, что
«I
Аналогично находим ускорение точки D:
wD = w0 + eeXQO-w;-QD==w0+a1 + p;,
где
wn
ах = е0 • OD = е0 • г = — • г =w{
\ = a>l.OD=®l.r-.
»d=V< + *\ + K=\
Wn=ywJ + a: + B? = l/ 2^!+^2
§ 5. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
1. Задание движения. Углы Эйлера. Траектории точек
Будем рассматривать движение твердого тела, при котором
одна точка тела неподвижна, а все остальные как-то
перемещаются. Конкретными примерами такого движения могут являться:
движение стержня, к концу которого прикреплен шар,
охватываемый сферическим шарниром (см. рис. 60), движение конуса
по поверхности конуса, так что вершины конусов скреплены
сферическим шарниром (см. рис. 61), и др.
Для задания движения тела вокруг неподвижной точки
относительно некоторой системы координат достаточно задать
движение тела относительно системы координат, начало которой
находится в неподвижной точке.
Действительно, если будет известно положение тела
относительно новой системы координат, то положение тела относи-
п
тельно старой системы координат можно получить, пользуясь
формулами преобразования координат.
Итак, выберем неподвижную прямоугольную систему7
координат OXYZy начало которой находится в неподвижной точке
тела О. Построим теперь подвижную систему координат Olrfc,
Рис. 60.
Рис. 61.
неизменно связанную с телом. Для определения положения тела
относительно неподвижной системы координат OXYZ
достаточно определить положение подвижной системы координат
относительно неподвижной. Такое задание можно производить
различными способами. Например, можно было бы задать положение
каждой из осей подвижной системы координат относительно
неподвижной. Для этого
нужно задать девять
направляющих косинусов,
которые связаны шестью
соотношениями: сумма
квадратов направляющих
косинусов каждой оси равна
единице (три
соотношения), сумма произведений
одноименных косинусов
взаимно перпендикулярных
осей равна нулю (три
соотношения). Таким
образом, произвольными
параметрами из девяти
косинусов являются только три косинуса. Такой способ задания движения
неудобен, так как для нахождения всех девяти направляющих
косинусов при трех заданных направляющих косинусах нужно
решать шесть уравнений. Наиболее удобным способом
определения положения подвижной системы координат относительно
неподвижной является способ, предложенный Эйлером и
основанный на задании так называемых углов Эйлера.
Рис. 62.
82
Установим, предварительно, понятие углов Эйлера. Проделаем
следующее построение: найдем линию пересечения ON
координатных плоскостей 01г\ и OXY
В механике пользуются следующей терминологией: ON— линия
узлов, {ON, ОХ) = <Ь— угол прецессии, (0£, OZ) = 0 — угол
нутации, (0£, ON) = v— угол собственного вращения (см. рис.62).
Углы ф, 6, ср называются углами Эйлера. Движение тела
вокруг неподвижной точки полностью определяется заданием
углов Эйлера как непрерывных функций от времени
Ф=ЛС). о =/,(*), ?=/,(').
(35)
Рис. 63.
Действительно, углы Эйлера однозначно определяют положение
подвижной системы координат относительно неподвижной.
Поясним, как можно найти Zi
положение подвижной \%
системы координат
относительно
неподвижной, если заданы углы
Эйлера.
Совершим три
последовательных вра ще-
ния по следующему
правилу (см. рис. 63):
1°. Поворот
прямоугольной системы OXYZ
вокруг оси OZ на угол
прецессии ф. Получаем
систему ONYxZ.
2°. Поворот прямоугольной системы ONY^Z вокруг оси ON
на угол нутации 6. Получаем систему ONY&.
3°. Поворот прямоугольной системы ONY£ вокруг оси 0£
на угол собственного вращения (р. Получаем систему Oirfc.
Система координат Olrfc образует с неподвижной системой
OXYZ заданные углы Эйлера (см. рис. 63).
Таким образом, при движении твердого тела вокруг
неподвижной точки тело имеет три обобщенных координаты. Пользуясь
этими обобщенными координатами (ф, 0, ср), можно выразить
координаты любой заданной точки тела относительно
неподвижной системы координат.
В произвольном движении твердого тела вокруг неподвижной
точки траектории точек тела представляют собой сферические
кривые (т. е. кривые, лежащие на поверхности сферы), причем
траекторию какой-либо одной точки можно выбирать произвольно
(на сфере с радиусом, равным расстоянию выбранной точки тела
°т неподвижной точки). Траектории же других точек в этом
Движении будут зависеть от выбранной траектории.
83
2. Линейные скорости. Угловая скорость и угловое ускорение.
Линейные ускорения /
Чтобы найти выражение для линейной скорости, выясним
прежде всего характер движения тела вокруг неподвижной
точки. Это устанавливается следующей теоремой.
Теорема. Движение твердого тела вокруг неподвижной
точки представляет собой совокупность трех вращений вокруг
некоторых неподвижных осей.
Доказательство. Предположим, что в начальный момент
времени подвижная система координат ОЪ^ неизменно связанная
с телом, совпадает с неподвижной OXYZ. Рассмотрим
действительное перемещение подвижной системы координат относительно
неподвижной.
Построим две вспомогательные системы координат ONY XZ и
ONY£ следующим образом (см. рис. 63.): ось ON выберем так,
чтобы она была перпендикулярна к осям OZ и 0£ (и,
следовательно, она будет лежать в плоскости OXY)y оси OYx и OY2
выберем так, чтобы системы ONY\Z и ONY2Z соответственно были
прямоугольными. При движении подвижной системы координат
Otrfc, построенные вспомогательные системы перемещаются.
Движение подвижной системы OZrfc относительно неподвижной OXYZ
можно рассматривать как сложное, в котором составляющие
движения суть следующие: движение ОЪ[ относительно ONY£ —
относительное, движение ONY£ относительно ONYxZ— первое
переносное, движение ONYxZ относительно OXYZ — второе
переносное.
Относительное движение представляет собой вращение вокруг
оси <3£ на угол собственного вращения <р, первое переносное —
вращение вокруг оси ON на угол нутации 0, второе переносное —
вращение вокруг оси OZ на угол прецессии ф. Таким образом,
движение подвижной системы координат представляет собой
совокупность последовательных вращений вокруг трех осей, но
оси 0£ и ON подвижные.
Пользуясь этой теоремой и теоремой о сложении линейных
скоростей в обобщенном сложном движении, найдем выражение
для линейной скорости произвольной точки тела.
Пусть точка А — произвольная точка тела. Свяжем с данным
телом неизменно систему координат Ощ{„ тогда точка А
представляет некоторую фиксированную точку в этой системе
координат.
Как уже было доказано выше, движение подвижной системы
0<г£ относительно неподвижной OXYZ можно рассматривать как
обобщенное сложное и, следовательно, движение фиксированной
(относительно Ощ£) точки А также можно рассматривать как
обобщенное сложное движение. В этом обобщенном сложном
движении точки А составляющие суть следующие (см. рис. 63):
движение точки А относительно системы ONY& — относительное,
84
движение системы ONY£ относительно системы ONYxZ — первое
переносное, движение системы ONYxZ относительно OXYZ —
второе переносное.
Так как каждое из этих движений представляет собой
вращение вокруг неподвижной оси, причем все оси вращений
пересекаются в точке О, то, используя формулу (12) главы II, получаем:
Ъг=\ХОА\ vex=vbXOA\ ve=%XOA. (36)
По теореме сложения линейных скоростей получаем:
Va = Vr + Vei+Ve2. (37)
Из формул (36) и (37) следует, что
^=^х^+^Х^+%Х^ = К + % + ^)ХОЛ.
Итак,
va = *Xn (38).
где _
со = (о9 + со9 + соф.
Из формулы (38) видно, что вектор со, представляющий собой
сумму угловых скоростей в составляющих вращательных
движениях, играет такую же роль, какую играет вектор угловой
скорости при вращении твердого тела вокруг неподвижной оси.
Действительно, «для определения линейной скорости в рассматри-
ваемОхМ случае движения мы получили формулу, аналогичную
формуле для скорости при вращении твердого тела вокруг
неподвижной оси. Кроме того, нетрудно видеть, что вектор со
определяется однозначно. В самом деле, если предположить, что
существует вектор coj^w, так что для каждой точки тела линейная
скорость v определяется по формуле:
V = b)1 Хл
v = uXr = ulXr,
(5 —51)Х/; = 0,
и в силу произвольности вектора г заключаем, что со = aij.
Вышеуказанные свойства вектора со позволяют вектор со
принять в качестве. вектора угловой скорости при движении твердого
тела вокруг неподвижной точки.
Итак, мы приходим к следующему определению: при
вращении твердого тела вокруг неподвижной точки угловая скорость
тела есть свободный вектор со, определяемый по формуле:
ю = ю9 + йв + 5ф. (39)
Установим аналитические формулы для определения угловой
скорости, если заданы углы Эйлера как функции от времени.
8S
то получим:
т. е.
Для определения угловой скорости достаточно найти проекции
угловой скорости на оси неподвижной системы координат либо на
оси подвижной системы координат.
Найдем сначала проекции угловой скорости на оси
неподвижной системы координат. Из формулы (39) получаем:
®у = °Ч + щу + % ! (40)
Из определения составляющих угловых скоростей (о9, coQ и 5^
получаем, что
Для нахождения проекций ау предварительно спроектируем этот
вектор на ось OYx, а затем на оси ОХ и ОК, при этом вектор со^
образует с осью OY1 угол 90°+ 6 и лежит в плоскости £ОГг
Из рисунка (64) и из формулы (41) непосредственно находим:
со^ = g cos (90° — 0) cos (90° — ф) = g sin 6 sin ф;
co9y = — J cos (90° — 0) cos ф = — ^ sin 0 cos ф; (42)
шв.= лС08Ф;
% = 2со5(90°-ф) = |-^тф; (43)
(о0г=О.
(офа; = 0;
°ч=о; (44)
Подставляя формулы (42), (43), (44) в (40), получаем:
шу = — § sin 6 costb + % si» Ф; (45)
o), = gcosO + g;
Найдем теперь проекции угловой скорости на оси подвижной
системы координат.
Из формулы (40) получаем:
u)e = (0^ + u)oe + ^
°Ч = %, + % + <%,»• (46)
«t = »* +«* + »*•
86
Из рисунка 64 непосредственно находим
= 0, <оф =0,
<Dfn
*С"
dy .
~"dt>
db
(D^=^C0Scp;
°v=й cos (90°+»)= — msin w
(47)
(48)
Для нахождения проекций вектора 5ф спроектируем этот
вектор сначала на ось ОУ2У а затем на оси 01 и Oi\.
Из рисунка 64 находим:
со,
(о,
= ^ cos (90° - 8) cos (90 - <р) = d± sin 0 sin ср;
: *jl cos (90° — 6) cos cp = g sin 0 cos cp;
« — dt
Ф'О"
(49)
Из формул (46), (47), (48), (49) получаем:
d§ i db . Л .
«ч = — ^ sin ср -J- ^ sin в cos ср;
_ dy | d$
(50)
<#
+ 777 cos!
Полученные формулы (45) и (50) позволяют определять
величину и направление угловой скорости. Формулы (50) используются
в динамике при выводе
уравнений движения те- v %
ла вокруг неподвижной
точки.
Угловое ускорение
определяется как
обычно, а именно: угловым
ускорением при
движении твердого тела
вокруг неподвижной точки
называется
геометрическая производная от
угловой скорости по
времени, т. е.
i = f. (51)
Так как проекции геометрической производной соответственно
равны производным от проекций вектор-функции, то,
дифференцируя формулы (45) по времени, можно выразить координаты
углового ускорения через углы Эйлера,
Рис. 64,
87
Чтобы получить основную формулу для линейного ускорения,
достаточно продифференцировать обе части формулы (38).,
Таким образом, для ускорения произвольной точки получаем
формулу:
^ = £Xr+wX^ (52)
3. Распределение скоростей
Если в некоторый момент времени w = 0, то из формулы (38)
следует, что в данный момент времени скорости всех точек тела
равны нулю. Предположим, что со^О.
В этом случае, в теле существует такая ось, скорости точек
которой равны нулю.
Действительно, если через неподвижную точку тела провести
прямую, параллельную угловой
скорости, то для любой точки этой оси
получаем:
как векторное произведение двух
каллинеарных векторов.
Ось тела, скорости точек
которой в данный момент времени равны
Рис* б5* нулю, называется мгновенной осью
вращения.
Пользуясь понятием мгновенной оси вращения, можно
установить картину распределения скоростей. Пусть ось й является
мгновенной осью вращения и А — произвольная точка тела (см.
рис. 65).
Тогда скорость точки А может быть найдена по формуле:
vA = uXOA.
Но
OA = OOl + OlA
и, следовательно,
vA = S X (00, + О, А) = ш X Щ + © X Ой=й X Ой (53)
Отсюда следует, что скорость каждой точки тела расположена
так, как если бы тело в данный момент времени вращалось вокруг
оси й.
Итак, в каждый момент времени движение тела вокруг
неподвижной точки является мгновенно-вращательным (вокруг
мгновенной оси вращения).
88
Задача 7. Конус, высота которого /г = 4 см и радиус
основания г = 3см, катится по плоскости без скольжения, имея
неподвижную вершину в точке О. Определить угловую скорость
конуса, координаты точки, вычерчивающей годограф угловой
скорости, и угловое ускорение конуса, если скорость центра.
основания конуса vc = 48 — = const (см. рис. 66).
Так как конус катится без скольжения, то касательная
образующая является мгновенной осью вращения и, следовательно,,
угловая скорость ш
параллельна оси и. Так
как в каждый момент
времени движение
конуса является мгновенно-
вращательным
относительно оси и, то
и, значит,
(0 =
СЕ •
Рис. 66.
Величину отрезка СЕ находим из прямоугольного
треугольника OCD: г
откуда
СЕ--
OC-CD = OD-CE,
ОС-CD hr
OD
~Vh* + ,
12
= -f- CM.
Подставляя это значение в формулу для со, получаем:
(О:
Lb сек
Найдем теперь проекции соЛ, ®Г со2 угловой скорости w. Для
этого заметим, что точка С при своем движении описывает
относительно оси OZ окружность радиусом СК, поэтому, если
обозначить угол поворота точки С (отсчитываемый от оси ОХ)
через ср, то
vr
dy
ск.
Величину отрезка СК находим из треугольника OCD:
СК=ЕО = Vtf — CE* = j см.
Откуда получаем, что
*1 — 2с_-,г 1 .
dt~ СК~ 10~-'
сек'
?=15* + ?0.
89-
Предполагаем, что в начальный момент времени <р0 = 0, то/да
Заметим, что угол поворота точки С в ее круговом движении
совпадает с углом поворота касательной образующей, поэтому из
рисунка 66 устанавливаем, что
со =o)-cos 15^ = 20 cos 15£ — :
х сек'
(ov = (o-sin 15^ = 20 sin \Ы — ;
У сек'
"г~
Полученные формулы являются координатами точки,
вычерчивающей годограф угловой скорости.
Чтобы найти угловое ускорение, предварительно найдем
координаты углового ускорения:
., = ^ = -300 811115*^;
ег = 0.
Так как вектор со сохраняет постоянную величину и
перемещается в плоскости OXY, то вектор ё перпендикулярен к
вектору w и лежит в той же плоскости.
Величину углового ускорения находим по формуле:
s = j/"e: + e2y + e: = 300
сект
Задача 8. Движение тела вокруг неподвижной точки задано
углами Эйлера:
Определить координаты точки, вычерчивающей годограф угловой
скорости, угловую скорость и угловое ускорение тела
относительно неподвижных осей Л\ К, Z.
Для решения задачи заметим, что координаты точки,
вычерчивающей годограф, представляют собой проекции угловой
скорости на неподвижные оси (при условии, что полюс выбран в
неподвижной точке).
Проекции угловой скорости находим по формулам (45):
ах = J? sin 6 sin ф -f" sicos Ф = 4 s*n IT s*n ( Т — ^ ) =^ К3cos 2t;
(oy = — ^sin6cos<j>4"^sh1(!;==— 4sin-^- cosfy— 2t J =
= _2 ]/! sin 2^;
«t = gcose + 2 = 4coeJ + (-2)==a
90
Найдем координаты углового ускорения:
~dt
' dt
5 = 0.
Величины угловой скорости и углового ускорения находим по
формулам:
» = Vr»i + < + < = 2Vr3;1
се/с'
f ■* • у 1 г г сел;2
Так как угловая скорость и угловое ускорение имеют
постоянные значения и проекции точек, вычерчивающих их годографы,
на ось OZ равны нулю, то заключаем, что годографы угловой
скорости и углового ускорения суть окружности в плоскости
OXY с центром в начале координат.
§ 6. ПРОИЗВОЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
1. Задание движения. Траектории точек
Изучим теперь произвольное движение твердого тела. Пусть
твердое тело каким-то образом перемещается относительно
неподвижной системы координат OXYZ.
Выберем в теле какой-нибудь фиксированный полюс 01 и
построим прямоугольную систему координат Ofirfc, не связанную
неизменно с телом и
перемещающуюся поступательно (см.
рис. 67). Тогда движение тела
относительно неподвижной
системы координат OXYZ можно
рассматривать как сложное, в
котором движение тела
относительно Ofirfc является
относительным, движения системы
^lfrjC относительно OXYZ
является переносным. Совершенно
ясно, что относительное
движение представляет собой
движение твердого тела вокруг
неподвижной точки, перенос-
Ное движение — поступательное. Так как характер
составляющих движений (относительного и переносного) уже рассмотрен,
то изучение произвольного движения не представит особых
трудностей.
ГХ
Рис. 67.
91
Для задания движения тела достаточно задать положение
точки 019 т. е. координаты л1У у1У z1 этой точки, и пяложение
тела относительно подвижной системы координат Ofirfc, т. е. три
угла Эйлера ф, 0, ср. Таким образом, движение тела можно за-
дать шестью уравнениями:
■*1=-М*); У1=УЛ*У> *1 = *Л*У>
Ф=ЛС); »=/.('); ?=/.('). (54)
В произвольном движении твердое тело имеет шесть
обобщенных координат.
При приведении какого-либо твердого тела в движение
траекторию фиксированной точки можно выбрать произвольно, а
траектории остальных точек уже зависят от этой выбранной
траектории.
2. Угловая скорость
Рассматривая движение твердого тела как сложное, мы можем
заключить, что переносное движение (в нашем случае поступатель-
-i s ное) не влияет на по-
* -^ ворот тела, поэтому
угловая скорость
целиком должна
определяться
относительным движением.
Это приводит нас
к следующему опре-
* делению.
Угловой скорос-
*гу тью со в произвольном
движении твердого
Рис< б8, тела называется
угловая скорость,
которую имеет тело в его движении относительно системы
координат, проходящей через какую-нибудь точку тела и движущейся
поступательно.
В дальнейшем мы докажем, что таким образом
определенная угловая скорость не зависит от выбора полюса в теле. Пока
же, поскольку это еще не доказано, мы, говоря об угловой
скорости, будем считать, что она соответствует выбранному полюсу,
и будем ее обозначать w0i.
3. Скорости точек. Формула Эйлера
Выведем формулу, выражающую зависимость между
линейными скоростями двух точек тела. Пусть точки А и В — две
произвольные точки тела. Выберем точку А за полюс и построим
систему координат А&£, не связанную неизменно с телом и
перемещающуюся поступательно (см. рис. 68).
92
Движение точки В относительно неподвижной системы
координат OXYZ можно рассматривать как сложное, в котором
движение точки В относительно подвижной системы Л$г£ является
относительным, движение системы А£г£ относительно OXYZ
является переносным. По теореме сложения линейных скоростей
доожно записать, что _
&в)а = (*в)г + (*в)е- (55)
Но согласно установленной формуле для линейной скорости
при вращении твердого тела вокруг неподвижной точки и
определению угловой скорости, мы получаем:
&в)г = »лХАВ. (56)
Так как переносное движение является поступательным, то
скорость точки В системы Л£г£ относительно OXYZ равна
скорости точки А, т. е.
&в)е = *л- (57)
Из формул (55), (56) и (57) окончательно получаем, что
*b = Va + "aXAB. (58)
Используя полученную формулу, докажем, что угловая
скорость не зависит от выбора полюса.
Выберем в теле два полюса 01 и 02, и соответствующие им
угловые скорости обозначим через юг и w2 (см. рис. 69).
Пусть точка А является произвольной точкой тела. Тогда,
пользуясь формулой (58), можно записать:
^д = ^о2 + й2Хад_ (59)
*в1 = *о, + 51Х0.01.
Из этих формул следует, что
93
Отбрасывая одинаковые слагаемые в обеих частях равенства
и перенося второе слагаемое левой части вправо, получим:
«о, X О,А = - (о2 X ОА + (о2 X 02А.
Так как 02Oi = — Ol02J то получаем:
ю1хой=«.хоД+«.хои=
или
=и.Х(ОА + ои)=<о,хоА
К~ю,)Х01л=о.
Из произвольности выбора точки А следует, что вектор ОхА
в общем случае не равен нулю и не коллинеарен вектору ь)г — со2
(если предположить, что g)j—со2т^О), поэтому
со1 —w2 = 0,
т. е.
5, = ю2. (60)
Итак, мы доказали, что угловая скорость в произвольном
движении не зависит от выбора полюса в теле. В силу этого
обстоятельства установленную формулу для скоростей двух
точек тела можно окончательно записать так:
*в = ЪА + аХАВ. (61)
Эта формула называется формулой Эйлера.
Рассмотрим некоторые следствия из формулы Эйлера.
Г. Если в данный момент времени угловая скорость равна
и нулю, то в этот момент
времени скорости всех точек
геометрически равны
(мгновенно-поступательное движение).
Действительно, если со = 0, то из
формулы Эйлера следует, что для
двух любых точек А и В
vA = vB.
2°. Если в данный момент времени
скорости всех точек геометрически
равны между собой, то в данный
момент времени угловая скорость
тела равна нулю.
Действительно, если для каждых двух точек тела vB = vAf то
из формулы Эйлера получаем, что
uXAB = 0.
Вектор АВ является произвольным, поэтому со = 0.
3°. Проекции скоростей двух точек на ось, проходящую через
эти точки, алгебраически равны между собой (см. рис. 70).
94
Рис. 70.
Действительно,
пр^ = пр>л + (оХ^) = прц^л + прй(соХА8).
Но вектор со X АВ перпендикулярен к вектору АВ, и,
следовательно, он перпендикулярен к оси и, поэтому его проекция на
ось й равна нулю. Окончательно получаем, что
пря^д = прв5д. (62)
Формула Эйлера (21), выведенная раньше для плоского
движения (см. § 4, п. 5), является частным случаем формулы (61).
В силу этого полученные следствия Г—3° идентичны ранее
полученным следствиям из формулы (23).
4. Винтовое движение
Движение твердого тела называется винтовым в течение
некоторого промежутка времени, если в течение этого
промежутка времени угловая скорость тела не
равна нулю и существует в теле ось,
скорости точек которой геометрически
равны между собой и направлены вдоль
оси. Эта ось называется винтовой осью.
Примером такого движения может яв- ^А
ляться движение винта при его враще- I
нии. Укажем некоторые свойства такого
движения, характеризующие распределе- |
ние скоростей точек тела при винтовом
движении.
Г. Винтовая ось тела параллельна
угловой скорости. Действительно, пусть Рис. 71.
точки А и В какие-нибудь точки,
лежащие на винтовой оси, тогда vA = vB (см. рис. 71).
По формуле Эйлера получаем, что
*>в = *А + ®ХАВ.
Следовательно,
йХАВ = 0.
Так как ш^Ои ABj^=Of то
заключаем, что эти векторы
параллельны.
2°. Винтовое движение твердого
тела представляет собой
совокупность двух движений:
поступательного вдоль винтовой оси и
вращательного вокруг винтовой оси.
ъ точка В — произвольная точка тела (см. рис. 72).
слхДВ
Рис. 72.
95
Опустим из точки В перпендикуляр ВА на винтовую ось.
Тогда по формуле Эйлера получаем, что
Из этой формулы следует, что скорость каждой точки В тела
является геометрической суммой двух скоростей: постоянной
скорости, геометрически равной vAl параллельной винтовой оси,
и скорости, равной ®У(АВ, являющейся скоростью вращения
данной точки В вокруг винтовой оси с угловой скоростью со.
5. Распределение скоростей
Выясним, как распределены скорости точек тела в
произвольном движении. Если в данный момент времени угловая скорость
тела равна нулю, т. е. со = 0, то, как было выяснено раньше,
скорости всех точек тела геометрически
равны и, следовательно, движение тела
является в этом случае
мгновенно-поступательным.
Рассмотрим случай, когда угловая
скорость тела й не равна нулю.
Докажем, что в этом случае в данный
момент времени существует мгновеннс-
винтовая ось или мгновенная ось
вращения.
Действительно, если в теле
существует точка, скорость которой в
данный момент времени равна нулю, то,
как было выяснено раньше, движение
тела является мгновенно-вращательным и в теле существует
мгновенная ось вращения. Поэтому предположим, что скорости
всех точек тела отличны от нуля. Пусть точка В является
произвольной точкой тела.
Проведем через точку В прямую, перпендикулярную к
векторам со и ' vB. Разложим вектор vB на две составляющие: по
направлению вектора со и направлению, перпендикулярному к со
(см. рис. 73).
Тогда vB = Vi + v*- (63)
На построенной прямой выберем точку А так, чтобы
АВ = % (64)
и чтобы вектор а)\ВА имел направление, противоположное
вектору v2. Тогда по формуле Эйлера и формуле (63), получаем:
vA = vB + aX^=Vi + Vt + uXBA.
96
Рис. 73.
Но векторы v2 и со X В А являются прямо противоположными,
так как они имеют противоположные направления и их величины
равны, ибо из формулы (64) следует, что
v2 = ®-BA.
Поэтому
v2 + uXBA = 0
и, следовательно, получаем, что
vA = vt.
Проведем через точку А ось, параллельную угловой скорости
со. Эта ось будет являться мгновенно-винтовой.
Действительно, если на этой оси выбрать произвольную
точку С, то по формуле Эйлера получаем, что
vc = vA + uXAC=vA,
т. е. скорости всех точек этой оси геометрически равны между
собой.
Итак, в данный момент времени в теле существует мгновенно-
винтовая ось. Движение тела для данного момента времени
называется мгновенно-винтовым.
Таким образом, если в данный момент времени угловая
скорость тела не равна нулю, т. е. со Ф 0, то в этот момент времени
движение тела является либо мгновенно-вращательным, либо
мгновенно-винтовым.
6. Аксоиды
Для изучения различных свойств движения тела вводят
понятия подвижного и неподвижного аксоидов.
Геометрическое место положений мгновенно-винтовых осей либо
мгновенных осей вращения относительно неподвижной системы
отсчета называется неподвижным аксоидом.
Геометрическое место положений мгновенно-винтовых осей либо
мгновенных осей вращения относительно подвижной системы отсчета,
неизменно связанной с движущимся телом, называется
подвижным аксоидом.
Из этого определения следует, что аксоиды суть поверхности,
которые получаются при движении прямой в пространстве, т. е.
некоторые линейчатые поверхности.
Рассмотрим некоторые примеры:
а) Плоско-параллельное движение
В случае плоско-параллельного движения тела аксоиды суть
Цилиндрические поверхности. Действительно, винтовая ось всегда
параллельна угловой скорости, а угловая скорость в плоском дви-
^ Г. М. Финкельштейн 97
жении всегда перпендикулярна к плоскости движения и,
следовательно, сохраняет постоянное направление. Таким образом,
аксоиды в плоско-параллельном движении суть поверхности,
которые получаются при движении прямой параллельно самой себе,
т. е. цилиндрические поверхности (см. рис. 74).
Рис. 74.
В качестве конкретного примера на плоско-параллельное
движение рассмотрим качение колеса по плоскости без скольжения.
Так как качение происходит без скольжения, то скорости
точек касательной образующей равны нулю и, следовательно, эта
образующая является мгновенной осью вращения. Геометрическое
место положений мгновенной оси вращения относительно тела
есть поверхность цилиндра, неизменно связанного с ободом
колеса, а относительно неподвижной системы — плоскость.
б) Движение твердого тела вокруг неподвижной точки
В этом случае аксоиды представляют собой конические
поверхности. Действительно, мгновенная ось вращения проходит
всегда через неподвижную точку О и параллельна угловой
скорости. Таким образом, аксоиды суть поверхности, образованные
при движении оси, проходящей через неподвижную точку, т. е.
конические поверхности (см. рис. 75).
В качестве конкретного примера можно рассмотреть качение
конуса по поверхности неподвижного конуса без скольжения.
Другими^словами, оба конуса при движении касаются друг друга
по общей образующей, и каждая точка касания за один и тот же
промежуток времени проходит по обеим поверхностям пути
одинаковой длины, т. е. s1 = s2 (см. рис. 76).
Так же, как при доказательстве прямой теоремы в плоском
движении (см. § 4, п. 7), устанавливается, что скорости точек
касательной образующей равны нулю и, следовательно,
подвижный аксоид есть поверхность подвижного конуса, неподвижный
аксоид — поверхность неподвижного.
98
В рассмотренных примерах движений тел аксоиды образованы
мгновенными осями вращений и подвижный аксоид катится по
неподвижному без скольжения.
В общем случае движения твердого тела аксоиды образуются
мгновенно-винтовыми осями и являются линейчатыми
поверхностями. Относительно
двух таких аксоидов
говорят, что один
катится но другому,
если в каждый момент
времени они касаются
по общей образующей
(т. е. через
образующую можно провести
общую касательную
плоскость). Если еще
при этом каждая
точка касания за один и
тот же промежуток
времени проходит по
обоим аксоидам пути
одинаковой длины, то
говорят, что качение
происходит без
скольжения.
Связь между подвижным и неподвижным аксоидами
раскрывается следующей теоремой.
Теорема. В произвольном движении твердого тела
подвижный аксоид катится по неподвижному, и в случае, когда аксоиды
образованы мгновенными ося-
Поддижмый_ ми вращений, происходит ка-
аксоид чение без скольжения.
Доказательство.
Рассмотрим в какой-то момент
времени подвижный аксоид
Р и неподвижный аксоид Q.
Согласно определению эти
поверхности имеют общую
прямую, которая является
мгновенно-винтовой осью тела
либо мгновенной осью
вращения (см. рис. 77).
Рассмотрим какую-нибудь
точку А, лежащую на мгновенно-винтовой оси. Движение этой
точки относительно неподвижной системы отсчета будем
рассматривать как сложное, в котором движение точки А
относительно подвижной системы отсчета и, следовательно, поверхности
Р является относительным, движение поверхности Р относи-
Ьеподбижныи
аксоид
Мгновенная
ось вращения
Рис. 76.
99
тельно неподвижной системы и, следовательно, поверхности Q
является переносным. Скорость точки А складывается рз
относительной скорости vr и переносной скорости ve:
vA = vr + ve.
Но скорость vr является вектором, касательным к траектории,
лежащей на поверхности Р; ve является скоростью точки А тела
в его движении относительно неподвижной системы, и так как
точка А лежит на мгновенно-винтовой оси либо на мгновенной
оси вращения, то скорость ve направлена вдоль этой оси либо
равна нулю. В свою очередь скорость vA является вектором,
касательным к траектории, лежащей на
поверхности Q. Проведем две плоскости,
проходящие соответственно через
мгновенно-винтовую ось, либо мгновенную ось вращения,
и векторы vr и г/д.Эти плоскости являются
касательными к поверхностям Р и Q, так
как каждая из них проходит через две
прямые, касательные к поверхности. Но вектор
vA лежит в плоскости, проходящей через
ve и vn поэтому эти плоскости сливаются.
Итак, доказано, что через образующую аксо-
идов можно провести общую касательную
плоскость, т. е. подвижный аксоид катится по
неподвижному.
Рис. 77. Так как точки подвижного тела, лежащие
на мгновенно-винтовой оси, имеют
скорости, направленные вдоль этой оси, то в общем случае
подвижный аксоид скользит по неподвижному вдоль общей образующей.
В случае, когда аксоиды образуются мгновенными осями
вращений, скорости точек общей образующей равны нулю. Так же,
как в ранее доказанной теореме (см. § 4, п. 7) устанавливается,
что каждая точка касания за один и тот же промежуток
времени проходит по обоим аксоидам пути одинаковой длины, т. е.
происходит качение без скольжения.
7. Ускорения в произвольном движении
Угловое ускорение является векторной мерой изменения
угловой скорости с течением времени, поэтому это понятие
устанавливается согласно следующему определению.
Угловым ускорением ~ё в произвольном движении твердого тела
называется геометрическая производная от угловой скорости по
времени, т. е.
100
Выведем формулу, раскрывающую зависимость между
линейными ускорениями двух точек тела.
Пусть точки А и В — две произвольные точки тела (см. рис. 78).
По формуле Эйлера можно записать, что
Ъв=Ъа+Ъхав. (б1'}
Продифференцируем это равенство по времени, тогда получим:
dvF
dvi
du
dt dt
Как уже известно,
f^X^ + coX
^^sd(AB)
dt
(66)
dvB —
dvA
dt
— d& -
™a> ltt=wb -di = e'
Для нахождения вектора d построим векторы О А, АВ, ОВ.
Совершенно очевидно, что
ОВ=~ОА-\-АВ.
Продифференцируем это
равенство по времени, тогда
получим:
djpB) __йЩ) d(AB)
dt dt *~ dt '
Но раньше было
установлено, что
d (ОВ)
-V,
d(OA) _-
dt "*' dt
Следовательно,
^л
Рис. 78.
Vb — Va-Г dt •
(67)
что
Сравнивая равенство (67) с формулой Эйлера (6Г), заключаем,
а-%Р- = *ХАВ.
(68)
Из формул (66) и (68) окончательно получаем формулу:
wB = wA+lXAB + uX(vXAB)- (69)
Из этой формулы следует, что если заданы линейное
ускорение какой-нибудь одной точки тела, ее угловая скорость и угловое
ускорение, то можно найти линейное ускорение любой точки тела.
101
§ 7, УСКОРЕНИЕ ТОЧКИ В СЛОЖНОМ ДВИЖЕНИИ ТОЧКИ
1. Основные понятия
Раньше уже было рассмотрено сложное движение точки и
установлена теорема сложения линейных скоростей в сложном
движении. Пользуясь понятием угловой скорости тела в
произвольном движении, можно изучить вопрос об ускорении точки в
сложном движении в случае, когда переносное движение является
произвольным.
Итак, будем рассматривать сложное движение точки. Так же
как и для скоростей, вводим понятия относительного, переносного
и абсолютного ускорений согласно следующим определениям:
1°. Абсолютным ускорением wa называется ускорение точки
относительно неподвижной системы отсчета.
2°. Относительным ускорением wr называется ускорение точки
относительно подвижной системы отсчета.
3°. Переносным ускорением точки we называется ускорение
той точки подвижной системы относительно неподвижной, с
которой движущаяся точка в данный момент времени совпадает.
Наша задача заключается в установлении зависимости между
относительным, переносным и абсолютным ускорениями.
Предварительно установим вспомогательное понятие —
локальной производной.
2. Локальная производная
Будем рассматривать неподвижную систему координат OXYZ
и подвижную систему координат Ofirfc (см. рис. 79).
Пусть дана некоторая вектор-функция r=f(t). Если мы будем
строить годограф этой вектор-функции относительно подвижной
Z\ ^ и неподвижной систем
координат, принимая в
качестве полюса
соответственно полюсы Ох и О, то,
вообще говоря, мы
получим различные кривые и
7_ , различный характер изме-
/f(t) *£ нения вектор-функции от-
*У носительно подвижной и
неподвижной систем.
Поэтому геометрическая
производная от г=/(^)отно-
Рис. 79. сительно подвижной и
неподвижной систем, вообще
говоря, различны. Геометрическую производную от
вектор-функции г =f{t) относительно неподвижной системы будем обозначать
а
102
► солютнои
относительно
и называть локаль-
так же, как и раньше ~л > и будем называть а
производной, а геометрическую производную
подвижной системы будем обозначать -^
ной производной.
Рассмотрим конкретный пример. Пусть неподвижная система
координат OXY неизменно связана с плоскостью, а подвижная
связана с минутной стрелкой часов (см. рис. 80).
Пусть вектор-функция представляет собой вектор постоянной
величины, параллельный оси OY: r = a = const. Годографом
заданной вектор-функции
относительно неподвижной
системы координат OXY
является точка Л, а
относительно подвижной
системы координат —
окружность с центром в точке
О и радиусом, равным а.
Найдем абсолютную и
локальную производные.
Совершенно очевидно, что
Локальная производная представляет собой скорость конца
вектора а относительно подвижной системы координат, который
вращается с угловой скоростью — со, поэтому
п\
%
г\
\ i
/7
а ^^У
^а^Сд
*^**-
^
О
Рис.
X
80.
dr
™=-*Хг^0.
Отсюда видно, что
dt
dr , dr
В этом примере мы получаем, что
dr dr . — ч у -
Эта формула не случайна. Вообще имеет место следующее
свойство.
Абсолютная производная от вектор-функции равна сумме
локальной производной и векторного произведения угловой скорости
подвижной системы относительно неподвижной на вектор-функцию.
Докажем это свойство. Пусть дана вектор-функция r=f(t).
Ьудем строить годограф вектор-функции относительно
подвижной системы координат (см. рис. 81).
103
Тогда _
ОМ =00, +r. '
Продифференцируем это равенство по времени, тогда получим:
d(QM)_d{00^) . dr
Так как
dt
*Ш-(„)
dt ~ dt4
d<m-
dt
Vn
TO
/- ч — , dr
K*)a = *4 +
dt0
(70)
По теореме сложения линейных скоростей для точки М можно
записать, что __ _ _
Ыа = ЫгЛ-Ые- (71)
С другой стороны,
относительная скорость точки М
(относительно подвижной системы
координат) равна геометрической
производной от радиус-вектора точки
М относительно подвижной среды,
поэтому
{vMV-
dr
: dt
(72)
Кроме того, переносная
скорость точки М представляет собой
Рис. 81. скорость точки М подвижной среды
относительно неподвижной.
На основании формулы Эйлера можно записать, что
(^ = ^ + 5Хг. (73)
Подставляя найденные значения для относительной и
переносной скоростей в формулу (71), получаем:
— dr — _ —
Из формул (70) и (74) следует, что
(74)
— I dr
dr
dt—dJ + ^ + ^^r.
Отбрасывая от обеих частей равенства одинаковые слагаемые,
окончательно получим:
dr dr , — ч , —
-dt=W + <°Xr'
(75)
Теорема доказана.
104
3. Теорема Кориолиса1
Теорема. В сложном движении точки абсолютное ускорение
равно геометрической сумме относительного ускорения,
переносного ускорения и ускорения Кориолиса, причем ускорение
Кориолиса равно удвоенному векторному произведению угловой
скорости подвижной системы на относительную скорость точки, т. е.
где
wa = wr + we + wk9
(76)
(77)
Доказательство. Пусть точка Мсовершает сложное
движение относительно неподвижной среды OXYZ, причем
подвижная среда задается системой
координат Ofirfc (см. рис. 82).
Так как абсолютное ускорение
wa представляет собой ускорение
точки в абсолютном движении, то
заключаем, что
Относительное ускорение wr
представляет собой ускорение точки
относительно подвижной среды,
поэтому она равна геометрической
производной от относительной скорости
vr по отношению к подвижной среде,
ной от vr:
— dvr
w =——
Шг dt
Zi
Рис. 82.
т. е. локальной произвол-
(79)
Движущаяся точка М в каждый момент времени совпадает с
некоторой точкой подвижной системы, которую мы будем
обозначать через М*. Точки М и М* геометрически совпадают,
однако это различные точки, точка М* является тем местом, которое
занимает движущаяся точка М в подвижной системе Ofirfc.
Согласно определению переносного ускорения можно записать:
we = wM*. (80)
По теореме сложения линейных скоростей можно написать, что
va = vr + vg.
/,™ ' Кориолис — французский инженер, живший в первой половине XIX в.
(1792—1843).
105
Продифференцируем это равенство по времени относительно
неподвижной системы, тогда получим: /
dva dvr | dve
dt dt ' dt #
(81)
По свойству локальной производной получаем, что
^T=-W- + ^Xvr = wr^Xvr (82)
Скорость точки М* системы Ofirfc относительно OXYZ по
формуле Эйлера можно представить в виде:
Vm* = v6 = ^ + «Х OlM = v0i + to X г.
Продифференцируем это равенство по времени относительно
неподвижной системы, тогда получим:
Но
dve
dt ~
dv0l
dt
dv0l
dt
l ^Y;i-y dr
г dt Ar + WA dt
— du> —
(83)
W = W+u,Xr=^ + (oXr, (84)
Из формул (83) и (84) следует, что
= К + ёХг+©Х(^Хг)] + шХ^ (85)
Выражение, стоящее в квадратных скобках, представляет
собой согласно ранее выведенной формуле (69) ускорение
точки Ж* системы Ofirfc относительно неподвижной системы, т. е.
wm* = w0i+7X У+*Х(и Х~г)- (86)
Из формул (85), (86) и (80) следует, что
i^ = 5?f+«x*r- (87>
Из формул (81), (82) и (87) окончательно получаем:
^ = Ч + ^ + 2(шХ^). (88)
Теорема доказана.
С физической точки зрения появление кориолисового
ускорения объясняется взаимным влиянием переносного и
относительного движений.
Рассмотрим некоторые частные случаи.
106
(91)
получаем для величины
1°. Пусть о) = 0. В этом случае ускорение Кориолиса wk = 0
и из формулы (88) получаем, что
wa = wr + we. (89)
Таким образом, если переносное движение является
поступательным, то абсолютное ускорение равно геометрической сумме
относительного и переносного ускорения. __
2°. Пусть со || vr. В этом случае ускорение Кориолиса wk = 0
и из формулы (88) получаем, что
wa = wr~\-we. (90)
3°. Пусть со J_ vr. В этом случае получаем для величины
ускорения Кориолиса формулу:
wk = 2®vr.
_/\
4°. Пусть (о, vr) = a.. В этом случае
ускорения Кориолиса формулу:
wk = 2(.ovr sin а. (92)
Задача 9. Полое колесо
радиуса г жестко соединено с
валом АВ и притом так, что
ось вала расположена в
плоскости оси кольца. Кольцо
заполнено жидкостью,
движущейся в нем в направлении стрелки
с постоянной относительной
скоростью и. Вал АВ вращается по
направлению движения стрелки
часов, если смотреть по оси
вращения от А к В. Угловая
скорость вала постоянная.
Определить величины абсолютных
ускорений частиц жидкости,
расположенных в точках 1, 2, 3 и
4 (см. рис. 83).
Движение частицы М воды будем рассматривать как сложное,
в котором движение частицы относительно кольца является
относительным, движение кольца относительно оси АВ является
переносным. По теореме Кориолиса для абсолютного ускорения
частицы получаем:
wa = wr + we-\-2(pXu).
Так как относительное движение равномерное, то
относительное ускорение wr направлено к центру кольца и его величина
находится по формуле:
Рис. 83.
wr
_
г
107
Так как переносное движение является равномерным
вращением, то переносное ускорение we есть вектор, направленный по
радиусу вращения точки М относительно оси АВ, и величина его
определяется по формуле:
we = «)2-MC.
Ускорение Кориолиса есть вектор, перпендикулярный к
плоскости кольца, и его величина зависит от выбора частицы жидкости.
Рассмотрим различные
точки кольца.
Точка 1 (см. рис. 84).
Щ
CJ
В
4
1
1
\3
2
щ
Г
CJ
■ " ■ '■—>»-
1
Рис. 84.
Рис. 85.
_ В этом случае (о || и и, следовательно, ускорение Кориолиса
wk = 0. Для абсолютного ускорения получаем формулу:
г\Ъ
Г
wl = \we-\-wr\ = \we — wr
0)V
W0
+ ;
Точка 2 и 4 (см. рис. 85).
В этом случае ускорения wn
we и wk взаимно
перпендикулярны, поэтому
wt
'a=Vw*r + W'e +
wi
CJ
Но
В
Рис. 86.
wr = -jr , we = 2no\
wk = 2ш.
Окончательно получаем для абсолютного ускорения формулу
wt
pe= j/£ + 4rV + 4©V
Точка 3 (см. рис. 86)
Аналогично точке 1 в этом случае получаем:
IV
Wa = \WrJr<We\ = wr-\-we
+ 3coV.
108
§ & СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Раньше уже было рассмотрено сложное движение точки. Если
размеры тела невелики, так что траектории его точек мало
отличаются друг от друга, то в первом приближении сложное
движение тела можно изучать как сложное движение точки.
Если же размеры тела достаточно велики (по сравнению с
другими размерами в рассматриваемой задаче), то приходится
учитывать различие траекторий, скоростей и ускорений точек тела,
и вследствие этого возникает необходимость в изучении
сложного движения тела. Если в рассматриваемой задаче можно найти
скорости и ускорения точек в составляющих движениях, то
согласно доказанным раньше теоремам (теореме сложения
скоростей и теореме Кориолиса) скорости и ускорения точек тела
в его сложном движении могут быть определены (для
определения ускорений еще необходимо знать угловую скорость
подвижной системы).
Однако в некоторых конкретных задачах этот способ может
оказаться сложным и непригодным. Другой путь состоит в том,
что если легко определяются скорость и ускорение одной точки
тела в сложном движении, то для определения скоростей и
ускорений всех других точек тела достаточно уметь найти угловую
скорость и угловое ускорение в сложном движении.
Поэтому, возникает задача об определении угловой скорости
и углового ускорения в сложном движении тела. Так как
понятия угловой скорости и углового ускорения являются
кинематическими характеристиками движения тела, то изучение этого
вопроса приведет нас к выяснению кинематической
характеристики сложного движения тела. Займемся изучением этого вопроса.
1. Сложение угловых скоростей
Предположим, что твердое тело 5 перемещается относительно
системы координат 0£т£у которая в свою очередь также
перемещается относительно неподвижной системы координат OXYZ
(см. рис. 87).
Движение тела 5 относительно системы Ofirfc называется
относительным, движение системы Ofirfc относительно OXYZ—
переносным, движение тела 5 относительно неподвижной
системы OXYZ— сложным или абсолютным.
В сложном движении тела устанавливаются понятия
относительной, переносной и абсолютной угловой скоростей согласно
следующим определениям:
1°. Относительной угловой скоростью (ог называется угловая
скорость тела в его относительном движении (относительно
системы 0£т£).
2°. Переносной угловой скоростью ®е называется угловая
скорость системы 0£т£ относительно OXYZ.
109
3°. Абсолютной угловой скоростью <йа называется угловая
скорость тела в его абсолютном движении (относительно
системы OXVZ).
Указанные угловые скорости между собой связаны. Эта связь
раскрывается следующей теоремой.
Теорема. В сложнОхМ движении твердого тела абсолютная
угловая скорость равна геометрической сумме относительной и
переносной угловых скоростей, т. е.
®а = <»г + «>в-
(93)
Доказательство. Выберем в теле 5 две произвольных
точки А и В (см. рис. 87). Движение этих точек относительно
системы OXYZ можно
рассматривать как сложное, в котором
движение точек относительно
системы Ofirfc является
относительным, движение системы Ofirfc
относительно системы OXYZ —
переносным.
Скорости двух точек тела
можно связать формулой Эйлера,
которая справедлива по отношению
к любой системе отсчета с
учетом угловой скорости тела
относительно этой системы.
Поэтому, если рассматривать
движение точек А и В сначала
относительно системы OXYZ, а затем относительно систе-
Z,
О
\ \Г
\L
/""
^(S)
^
fc
Y
Рис. 87
мы O^rfc, то из формулы Эйлера соответственно получим:
@в)г = Ыг+»гХАВ,
(94)
где значки а и г соответственно обозначают абсолютное и
относительное движения, (да — абсолютную угловую скорость, о)г —
относительную угловую скорость.
Если рассматривать две фиксированные точки системы Ofirfc,
совпадающие с точками А и В тела, то согласно формуле Эйлера
получаем:
(*в)е = (*л)е + ».ХАВ, (95)
где <ов— переносная угловая скорость.
По теореме сложения линейных скоростей для точек А и В
можно записать: _ __ __
_ _ _ (96)
ПО
Из формул (94), (95), (96) мы заключаем, что
т. е.
ааХАВ = (юг + ав)ХАВ.
Так как вектор АВ произвольный, то отсюда следует, что
юв = ©, + «>,• (97)
2. Сложение вращений вокруг параллельных осей
Рассмотрим теперь такой случай движения твердого тела,
когда относительное движение представляет собой вращение
вокруг некоторой оси г, переносное движение — вращение вокруг
оси е> параллельной первой оси.
Изучим характер абсолютного движения. При изучении такого
движения могут представиться
различные случаи.
Первый случай. Угловые
скорости (ог и ь)е одинаково
направлены (см. рис. 88).
Проведем к осям г и е общий
перпендикуляра АВ и выберем на нем
точку С так, чтобы
АС
С В'
(98)
<^
сог*ВС
Рис. 88.
^а
с[
GJxtfC
Г
В
Тогда абсолютная скорость точки С тела относительно
неподвижной системы равна нулю. Действительно, по теореме
сложения линейных скоростей для точки С получаем:
Но
(Vc)a = (Vc)r+(VC)e-
и, следовательно,
(vc)a = i»rXBC + %XAC.
(99)
Если построить слагаемые, стоящие в правой части формулы,
то непосредственно видно, что они имеют противоположные
направления. Кроме того, величины их находятся по формулам:
\югХВС\=ь>г.ВС;
\ixAc\=:,Ac. (10°)
Из формул (98) и (100) следует:
\»гХВС\ = \йехЩ
ш
и, следовательно, по формуле (99) получаем, что
Если через точку С провести ось а параллельно осям е и г,
то скорости всех точек тела, лежащих на этой оси, равны нулю.
Действительно, по теореме сложения угловых скоростей
®а = ®г + *е
и, значит (оа параллельна оси а.
Если точка D является произвольной точкой, лежащей на
оси а, то по теореме Эйлера получаем, что
*о = *с + *аХСВ = 0.
Таким образом, мы приходим к выводу, что в теле в каждый
момент времени существует ось, скорости точек которой равны
нулю, т. е. сложное
движение тела
сЭг*ВС
ek
ЧТ
кг
"г,
В
CJe*/JC
—ж
в каждый момент
времени является мгновенно-
вращательным.
Итак, в рассматриваемом
нами случае мгновенная ось
вращения в абсолютном
движении параллельна осям
вращения в составляющих
движениях, лежит в плоскости
этих осей и делит расстояние
между ними внутренним
образом в отношении, обратно пропорциональном величинам
угловых скоростей.
Второй случай. Угловые скорости (ог и со^ имеют
противоположные направления и по величине неравны (см. рис. 89).
Этот случай рассматривается аналогично первому случаю.
Проведем прямую АВУ перпендикулярную к осям г и е> и выберем
на ней точку С так, чтобы она лежала вне отрезка АВ и чтобы
Рис. 89
АС
СВ
(101)
Нетрудно видеть, что скорость точки С равна нулю.
Действительно, по теореме сложения линейных скоростей получаем:
Но
(vc)t = utXAC.
112
Эти векторы являются прямо противоположными и равными по
величине, ибо __
|югХЯё| = юг.£С;
\авХАС\=ав-АС,
а в силу выбора точки С
(ог-ВС = ь>е-АС.
Проведем через точку С ось а параллельно осям г и е. Так
же, как и в первом случае, заключаем, что эта прямая является
мгновенной осью вращения. Таким образом, в этом случае
движение тела в каждый момент времени является
мгновенно-вращательным, его мгновенная ось параллельна осям вращения
в составляющих движениях и лежит в плоскости этих осей, леля
расстояние между ними внешним образом в отношении обратно
пропорциональном величинам угловых скоростей.
Третий случай. Угловые скорости сог и о>е имеют
противоположные направления и по величине равны (т. е. образуют
пару).
В этом случае
юв=юг + ю, = 0.
Из формулы Эйлера следует, что для каждых точек А и В
vB = vA+~^aXAB = vA,
т. е. в абсолютном движении скорости всех точек геометрически
равны, и абсолютное движение тела является поступательным.
Таким образом, совокупность двух вращательных движений
относительно параллельных осей с прямо противоположными
угловыми скоростями
образует
поступательное движение.
Рассмотрим
некоторые задачи.
Задача 10.
Найти относительную и
абсолютную угловые
скорости зубчатого
колеса II радиусом
гг, катящегося по
неподвижному
зубчатому колесу I
радиусом г1 и
приводящееся в движение кривошипом, вращающимся вокруг оси
неподвижного колеса О с угловой скоростью а>; дв ижение кривошипа
принять за переносное (см. рис. 90).
Движение колеса II рассматриваем как сложное, в котором
Движение колеса II относительно кривошипа О А — относительное,
СОп
k п
ы~
о
с я
Рис. 90.
на
движение кривошипа О А относительно колеса I — переносное,
движение колеса II относительно колеса I —
абсолютное/Относительное и переносное движения представляют собой вращения
вокруг параллельных осей, причем угловые скорости в этих
движениях имеют одинаковые направления. Так как колесо II катится
по колесу I без скольжения, то скорость точки касания С равна
нулю и поэтому мгновенная ось вращения колеса II проходит
через точку С и параллельна осям вращения кривошипа и
колеса II.
По теореме сложения угловых скоростей получаем, что
и, следовательно,
«>а = «>г + <»е-
По условию (о^ = (о, кроме того, углы поворота колеса II,
относительно кривошипа и самого кривошипа связаны
соотношением
так как пути, проходимые точкой касания по колесу I и II,
одинаковы.
Отсюда, получаем:
fldt А2 dt9
т. е.
(0,. = —-(0.
г гг
Для абсолютной угловой скорости получаем выражения:
а г2 ' г2
Задача 11. Центры подвижного и неподвижного шкивов
одинакового радиуса соединены кривошипом ОА, который
вращается вокруг центра О неподвижного шкива. Шкивы соединены
бесконечным ремнем, натянутым так, что при движении системы
скольжение ремня по ободам шкивов отсутствует. Найти
абсолютную угловую скорость подвижного шкива (рис. 91).
Будем рассматривать движение подвижного шкива
относительно неподвижного как сложное, в котором движение
подвижного шкива относительно кривошипа является относительным,
движение кривошипа относительно неподвижного шкива является
переносным. Так как ремень не скользит по ободам шкивов, то
при вращении кривошипа в направлении против движения
часовой стрелки точка касания ремня и неподвижного шкива С
перемещается в том же направлении. Расстояние между точками
касания CD не изменяется (равно длине кривошипа), поэтому
114
подвижный шкив относительно кривошипа ОА перемещается
в направлении по движению часовой стрелки, причем | u Cfi | =
J о DjD |. Отсюда получаем:
Г(р = ri)y
т. е.
rdt~rdV
юв- = юг.
Итак, относительное и переносное движения подвижного шкива
представляют собой вращения вокруг параллельных осей, причем
со„
Рис. 91.
относительная и переносная угловые скорости образуют пару. •
Отсюда получаем, что абсолютная угловая скорость ма = 0 и,
следовательно, движение подвижного шкива является
поступательным.
3. Сложение вращений вокруг пересекающихся осей
Будем предполагать, что относительное движение
представляет собой вращение вокруг оси г, переносное — вращение
вокруг оси е, причем оси г и е пересекаются (рис. 92).
Изучим характер
абсолютного движения тела.
Рассмотрим точку О
пересечения осей г и е. Скорость
этой точки равна нулю, так как
по теореме сложения линейных
скоростей получаем:
Абсолютная угловая скорость по теореме сложения угловых
скоростей определяется по формуле:
<^ = йг + ^.
Рассмотрим ось тела а, проходящую через точку О параллельно
абсолютной угловой скорости <оа. Скорости всех точек этой оси
115
Рис. 92.
равны 'нулю. Действительно, если D произвольная точка этой
оси, то /
vD=vQ + uaXOD = 0.
Таким образом, в теле существует ось, скорости точек
которой равны нулю, и, значит, абсолютное движение тела
представляет собой вращение вокруг оси а.
Задача 12. Коническое зубчатое колесо, ось которого
пересекается с геометрической осью плоской опорной шестерни
в центре последней, обегает пять раз в минуту опорную
шестерню. Определить угловую скорость сог вращения колеса вокруг
его оси и угловую скорость соа вращения вокруг мгновенной оси,
если радиус опорной
шестерни вдвое больше
радиуса колеса: R = 2r (см.
рис. 93).
Будем рассматривать
движение конического
зубчатого колеса как
сложное, в котором движение
зубчатого колеса
относительно своей оси является
относительным, движение
оси конического зубчатого
колеса относительно оси
шестерни является
переносным. Относительное и переносное движения представляют собой
вращения вокруг осей, которые пересекаются в точке О. Если
зубчатое колесо обегает шестерню в направлении против
движения часовой стрелки, то относительно своей оси зубчатое колесо
вращается в направлении по движению часовой стрелки.
Так как скорость точки касания колеса и шестерни равна
нулю, то мгновенная ось вращения колеса проходит через точку С.
По теореме сложения угловых скоростей получаем:
®а = ®г + ®*-
Из условия задачи находим величину переносной угловой
скорости:
_2tu:5/J_\ = _^/J_
^ 60 [сек) 6 \сек,
Рис. 93.
Из рисунка 93 находим:
<йа = феС{8(Х = (0г
Vr* - г2
<Уъ
°>907(i);
•f = /=TR= /£ + Я = Т - 1.047 (
сек)
116
4. Сложение поступательных движений
Будем предполагать, что относительное движение тела
является поступательным и переносное также является
поступательным. В этом случае (ог=Ои ше = 0. Согласно теореме
сложения угловых скоростей получаем:
юв=©г+5,=о.
Отсюда следует, что абсолютное движение также является
поступательным. Как следует из теоремы сложения скоростей
и теоремы Кориолиса, в этом случае скорости и ускорения
точек тела в сложном движении соответственно равны
геометрическим суммам скоростей и ускорений точек в составляющих
движениях, т. е. для каждой точки тела:
wa = wr + we.
5. Сложение поступательного и вращательного движений
Будем предполагать, что относительное движение
представляет собой вращение вокруг оси с постоянной угловой
скоростью со, а переносное — поступательное с постоянной скоростью
v, параллельной вектору со
(см. рис. 94). В этом
случае (ог = со, 0)^ = 0 и,
следовательно, (»а = со ф 0.
Кроме того, скорости
точек оси вращения в
относительном движении равны
нулю, а в переносном они
равны, поэтому скорости
всех точек оси в
абсолютном движении
геометрически равны между собой
и, следовательно, абсолют- Рис. 94.
ное движение твердого
тела является винтовым. Таким образом, винтовое движение
является совокупностью двух движений:
вращательного—вокруг неподвижной оси и поступательного — вдоль оси.
6. Сложение угловых скоростей в обобщенном
сложном движении
Пусть тело S совершает обобщенное сложное движение,
причем имеется п — 1 подвижных систем отсчета, т. е. тело 5
перемещается относительно системы O^XxYxZx, система O^KjZ,
117
перемещается относительно 02X2Y2Z2 и т. д. Обозначим
угловые скорости: тела 5 относительно 01X1Y1Z1 через й>1У системы
01X1Y1Zl относительно 02Х2Y2Z2 через оТ2 и^ т. д., системы
On_1Xn_1Yn_1Zn_1 относительно OXYZ через wnt тела S
относительно OXYZ через со.
Движение тела S относительно неподвижной системы OXYZ
можно рассматривать как обыкновенное сложное движение, в
котором движение тела S относительно системы 01X1Y1Z1 является
относительным, движение системы 01X1Y1Z1 относительно OXYZ
переносным.
Тогда согласно теореме сложения угловых скоростей
заключаем, что
ш = ^ + ^,
где со* — угловая скорость системы 01X1Y1Z1 относительно OXYZ.
Если рассматривать движение системы 01X1Y1Z1 как сложное,
с учетом одного переносного движения 02X2Y2Z2J то аналогично
заключаем, что
—* — . —*
Продолжая эти рассуждения дальше, мы получим соотношения:
—* — . —*
w, = (o2-t-co2;
«£ = <°a + «U
Из этих соотношений получаем выражение для угловой
скорости со в обобщенном сложном движении в виде:
ю = ю1 + Л;1+...+юя.
Таким образом, угловая скорость тела в обобщенном сложном
движении равна геометрической сумме угловых скоростей в
составляющих движениях.
ЧАСТЬ ВТОРАЯ
КИНЕТИКА
ВВЕДЕНИЕ
1. Механические системы
В механике изучаются движения различных тел. Простейшим
случаем движения тела является движение поступательное, при
котором все точки тела описывают подобные траектории и имеют
равные скорости и ускорения для каждого момента времени.
Каждое непоступательное движение тела, как было выяснено
в кинематике, слагается из совокупности поступательного и
вращательного движения.
При изучении различных движений тел иногда вращательная
составляющая движения незначительно влияет на движение тела
и с большой степенью точности для практики можно считать
движение поступательным. Это обычно бывает тогда, когда
размеры движущегося тела невелики по сравнению с расстояниями
в рассматриваемой задаче и с кривизной траектории тела. Такое
тело принято называть в механике материальной точкой.
Так, например, изучая движение Земли относительно Солнца,
мы считаем Землю материальной точкой, изучая движение звезд
в небесной механике, мы их рассматриваем как материальные
точки, изучая движение небольшого груза, подвешенного к нити,
мы считаем груз материальной точкой.
Итак, материальной точкой мы называем тело природы,
которое в отношении кинематических свойств (положение, траектория,
скорость, ускорение) можно рассматривать как точку.
Идеализируя это понятие, мы говорим, что материальной
точкой называется точечное тело (геометрическая точка), имеющее
конечную массу. В дальнейшем материальную точку будем
обозначать буквой ту понимая под буквой т одновременно данную
материальную точку и массу этой точки.
Совокупность конечного числа материальных точек,
обладающих тем свойством, что движение каждой материальной точки
этой совокупности зависит от движения всех остальных точек
совокупности, называется механической системой.
Так, например, при изучении движения Земли и Луны
относительно Солнца совокупность Земли и Луны является
механической системой, состоящей из двух материальных точек, при
разрыве снаряда на осколки мы рассматриваем осколки как ме-
119
ханическую систему. Если механическая система состоит из
конечного числа точек т1У т2, ..., тпУ то будем ее обозначать
символом S(miy т2, ... тп).
Если расстояния между точками механической системы не
изменяются при движении или покое системы, то такая
механическая система называется неизменяемой.
Понятие неизменяемой механической системы позволяет
изучать динамически произвольное движение твердых тел. При этом
твердым телом мы будем называть такое материальное тело,
у которого расстояния между каждыми двумя точками не
изменяется при движении или покое тела. Каждое твердое тело можно
мысленно разбить на достаточно большое число достаточно
малых частей, совокупность которых можно приближенно
рассматривать как механическую систему. Поэтому изучение таких
механических систем с некоторым приближением позволяет
установить ряд свойств твердых тел. Так как твердое тело образует
непрерывную протяженность, то для установления его точных
(а не приближенных) свойств необходимо совершить предельный
переход, предельное дробление тела, когда размеры
рассматриваемых частей тела одновременно стремятся к нулю.
Таким образом, знание законов движения механических систем
позволяет изучать законы произвольных движений твердых тел.
С точки зрения установленных выше понятий изучение
движения тел природы следует производить в следующем порядке:
материальная точка, механическая система, твердое тело.
2. Свободное и несвободное движения
Движение материальной точки или механической системы
может быть свободным или несвободным.
Движение материальной точки или механической системы
называется свободным, если на движение не наложены никакие
ограничения и движение зависит только от начальных условий
и сил, действующих на систему.
Движение материальной точки или механической системы
называется несвободным, если на движение наложены некоторые
ограничения, не зависящие от начальных условий и сил,
действующих на систему.
Ограничения, наложенные на движение механической системы,
называются связями.
Можно считать находящимися в свободном движении снаряды,
пули, кометы, траектории которых зависят только от начальных
условий и действующих сил и не подчинены каким-либо
геометрическим ограничениям.
Примерами несвободного движения могут являться: движение
тела по наклонной плоскости, движение груза, подвешенного
к вращающемуся стержню, движение какой-нибудь машины и др.
120
Следует отметить, что в различных технических приложениях
встречается преимущественно несвободное движение, так как
каждая машина, прибор, механизм представляет собой, как
правило, совокупность сочлененных звеньев и движение каждого
звена подчинено некоторым наперед заданным геометрическим
ограничениям.
3. Сила и масса
Природа образует систему тел, взаимодействующих между
собой. Одним из проявлений взаимодействия тел является
механическое взаимодействие, которое приводит к движению одних
тел относительно других, либо к относительному покою тел, при
котором одно тело сохраняет неизменное положение относительно
других тел, либо к деформации тел, при котором происходит
смещение одних частей тела относительно других его частей.
Так, например, благодаря взаимодействию Земли и Солнца мы
наблюдаем движение Земли относительно Солнца; тело, лежащее
на столе, благодаря взаимодействию с Землей и столом находится
в покое относительно Земли; деталь благодаря взаимодействию
с молотом, ее обрабатывающим, деформируется, т. е.
происходит смещение одних частей детали относительно других.
Механическое взаимодействие тел может осуществляться либо
путем притягивания (притяжение к Земле), либо путем
отталкивания (удар шаров) на расстоянии (Земля и Солнце), или путем
контакта (удар, давление, напор).
Установление меры механического взаимодействия тел привела
к понятию силы.
Каждое материальное тело имеет некоторое количество
вещества, которое обусловливает его свойства при механическом
взаимодействии с другими телами.
Установление меры количества вещества привело к понятию
массы.
Понятия силы и массы возникли не сразу, они сложились в
результате обобщения различных механических явлений,
наблюдаемых в природе.
Еще в глубокой древности понятие силы связывалось с
представлением о давлении или натяжении, которые производятся при
помощи мускульных усилий человека. Величина этих усилий
сравнивалась с весом некоторых грузов цутем их взаимного
уравновешивания. Сама же сила изображалась в виде груза,
подвешенного к веревке, перекинутой через блок и удерживаемой
в равновесии рукой человека.
Общее понятие о силе было подготовлено работами Галилея и
Гюйгенса. Галилей, изучая движение тел по наклонной
плоскости, открыл закон инерции тела, из которого следует, что
причиной изменения скорости тела может являться только внешнее
воздействие на тело. Однако Галилей еще не ввел общего поня-
121
тия силы и ограничивался только кинематическим изучением
отдельно взятого тела (законы падения в пустоте, движение
брошенного тела).
Гюйгенс, исследуя движения тел по окружности, нашел
количественное выражение центростремительной силы через
кинематические элементы движения (радиус кривизны и скорость тела),
а также произвел сравнение натяжения нити, вызванного
центробежной силой, с натяжением нити, вызванным подвешенным к
ней грузом. Этим самым Гюйгенс уже достиг понимания о
возможности измерения силы статическим способом (груз,
подвешенный к веревке) и динамическим способом (движение по
окружности тела, прикрепленного к веревке).
Общее понятие силы как меры механического взаимодействия
тел было дано Ньютоном. Заслуга Ньютона заключается в том,
что он нашел меру для измерения си^ы в открытых им законах
движения материальной точки.
Механическое взаимодействие материальной точки т с
другим телом характеризуется не только численной величиной, но
и направлением. Так, например, сила, с которой Земля действует
на тело (рассматриваемое как материальная точка), находящееся
на поверхности Земли, направлено к центру Земли; сила с
которой Солнце действует на Землю, направлено к центру Солнца.
Поэтому сила, действующая на материальную точку, является
векторной величиной и характеризуется точкой приложения,
направлением и величиной. В силу этого обстоятельства
мы будем силы обозначать некоторыми векторами F, т. е.
некоторыми геометрическими образами, характеризующими действие сил.
Сила возникает только в результате взаимодействия тел.
Поэтому нельзя рассматривать силу как нечто, существующее само
по себе, независимо от тела, являющегося ее источником, и
тела, испытывающего ее действие. Такой отрыв сил от тел
возможен только при их математическом изучении, приводящем
к количественным соотношениям для конкретно действующих сил.
Нельзя рассматривать силу как внематериальный фактор,
возникающий в самом теле без воздействия на него другого тела.
В результате действия одного тела на другое либо происходит
изменение движения другого тела, и в этом случае говорят о
динамическом проявлении силы, либо не происходит изменения
движения другого тела (благодаря взаимодействию первого тела еще
с другими телами), и тогда говорят о статическом проявлении
силы. Так, например, в брошенном камне благодаря
взаимодействию его с Землей происходит изменение движения, и,
следовательно, мы наблюдаем динамическое проявление силы тяжести
(т. е. силы притяжения камня к Земле).
Если же камень лежит на столе, то сила тяжести не
вызывает изменения движения камня (в данном случае состояния
покоя) благодаря взаимодействию камня с опорой (столом), и в
этом случае мы наблюдаем статическое проявление силы тяжести.
122
Понятие силы в механике имеет научную ценность потому,
что в механике силу можно измерять.
Измерение силы в механике основано на сравнении сил.
Измерение силы — динамическое или статическое — можно произвести,
если сравнить динамическое или статическое проявление
измеряемой силы с проявлением силы, принятой за единицу
измерения. При этом две сравниваемые силы мы считаем равными,
если их действия на тело в одних и тех же условиях одинаковы.
Статическое измерение силы можно практически производить
при помощи пружинных весов (динамометров), которые
позволяют сравнить измеряемую силу с силой, принятой за единицу
измерения (весом единицы массы).
Динамическое измерение силы, тесно связанное с понятием
массы тела, основано на втором законе Ньютона.
Масса является мерой количества вещества тела. С такой точки
зрения это понятие было установлено Ньютоном, который исходил
из допущения, что все тела состоят из одинаковых по своей
природе частиц (атомов) и частицы различных тел отличаются
друг от друга только величиной и формой. Масса каждой такой
элементарной частицы принимается пропорциональной ее объему.
Отсюда Ньютон сделал вывод, что масса тела определяется
количеством частиц в теле. Под плотностью тела Ньютон
понимал количество частиц в единице объема.
Эти представления позволили Ньютону сформулировать
следующее определение массы: „Количество материи (масса) есть
мера таковой, устанавливаемая пропорционально плотности и
объему ее. Воздуха двойной плотности в двойном объеме
вчетверо больше, в тройном — вшестеро. То же относится к снегу
или порошкам, когда они уплотняются от сжатия или таяния...
Определяется масса по весу тела, ибо она пропорциональна
весу, что мною найдено опытами над маятниками,
произведенными точнейшим образом"1.
Итак, Ньютон определял массу тела как количество вещества
тела, которое может быть измерено путем взвешивания.
Это понятие массы, установленное Ньютоном, подвергалось
резкой критике со стороны ученых, стоящих на позициях
идеалистической философии.
Различные ученые этого направления (Мах, Кирхгоф и др.)
пытались заменить определение Ньютона другим, чисто
формальным, сводя понятие массы к некоторому математическому
понятию, лишенному реального физического смысла.
Представления Ньютона о природе массы были
ограниченными. В дальнейшем, в релятивистской механике, выяснилось,
что масса тела не является постоянной, как это принимается
в классической механике, а является величиной переменной,
зависящей от скорости тела.
Ньютон, Математические начала натуральной философии, 1686.
123
Различные свойства тел, обусловливаемые количеством
содержащегося в них вещества, а именно: вес тел и способность тел
под воздействием сил получать различные ускорения, привели
к различным методам количественного определения массы тел.
Еще Галилей путем наблюдений установил, что все
материальные тела падают в пустоте в данном месте земного шара
с одинаковым ускорением g. В различных местах земной
поверхности и на различных высотах это ускорение g различно,
различным также является и вес тела р (сила притяжения тела
к Земле).
Однако отношение веса тела р (измеренного, например,
динамометром) к величине ускорения g есть величина постоянная,
т. е. — не зависит от места на земной поверхности и состояния
тела (его скорости).
Величина — является постоянной для данного тела. Для
однородных тел вес пропорционален объему и поэтому для
таких тел величина — пропорциональна объему. В силу этих
соображений величина — может быть принята за количественную
меру массы тела.
Величина ~у определяемая путем взвешивания тела,
называется тяжелой массой. Тяжелая масса является мерой
притяжения тел к Земле.
Различные экспериментальные данные устанавливают, что
отношение величины силы, действующей на материальную точку,
к величине ускорения точки есть величина постоянная для
данной точки при воздействии на нее различных сил.
Этот факт был впервые установлен Галилеем для сил
тяжести на опытах с падением различных тел в пустоте.
Ньютон также проверял этот факт на опытах с качанием
маятников из различных материалов. Эта закономерность также
подтверждается и другими опытами. Так, например, если
наблюдать движение тела, подвешенного к пружине, то
наблюдения показывают, что отношение величины упругой силы пружины
к ускорению тела является постоянной величиной (для
различных пружин и одного и того же тела). Считая эту
закономерность общим законом природы, Ньютон пришел к основному
закону динамики точки (второй закон Ньютона), о котором мы
будем говорить дальше.
Отношение величины силы к величине ускорения — не
зависит от внешних сил воздействия на это тело (т. е. силы), ибо
различные внешние воздействия приводят к одному и тому же
F F
отношению —. Следовательно, постоянство отношения — обус-
124
ловливается самим телом, т. е. его количеством вещества. По-
этому величина — может быть принята за количественную
характеристику массы тела. Масса тела, определенная как
отношение величины силы, действующей на тело, к величине ускорения,
называется инертной массой тела.
Как будет выяснено дальше, при рассмотрении второго закона
Ньютона, инертная масса тела является мерой инертности тела,
заключающейся в том, что если с одной и той же силой
воздействовать на тела различной массы, то тело с большей массой
приобретает меньшее ускорение.
Экспериментальные наблюдения подтверждают равенство
тяжелой и инертной масс, если вес тела и другие силы,
действующие на тело, измерять в одних и тех же единицах,
4. Основные законы динамики
Понятия массы и силы являются основными понятиями
механики. Эти понятия являются первичными, и их нельзя логически
определить при помощи более простых понятий. Сущность
этих понятий и их взаимосвязь раскрывается в основных законах
динамики, которые являются обобщением наблюдаемых в природе
механических явлений и различных экспериментальных фактов.
Первый закон динамики — закон инерции — был открыт
Галилеем при изучении движений тел по наклонной плоскости.
Все основные законы динамики были впервые сформулированы
Ньютоном в 1686 г. в его знаменитом сочинении
„Математические начала натуральной философии".
Ньютон сформулировал эти законы для тел, подразумевая
под телами то, что в настоящее время называют материальной
точкой.
Разберем эти законы, придерживаясь современной
терминологии.
Первый закон. Если материальная точка является
изолированной, то она находится в состоянии покоя или рае-
номерно-прямолинейного движения.
Смысл этого закона заключается в том, что устанавливается
факт естественного состояния материальной точки, изолированной
от воздействия на нее других тел (сил). Таким естественным
состоянием является либо покой, либо равномерно-прямолинейное
движение. Следовательно, если материальная точка не находится
в состоянии покоя или равномерно-прямолинейного движения, то
она находится под действием некоторых сил, являющихся
причиной этого состояния материальной точки. Закон утверждает,
что материальная точка сама по себе без воздействия на нее
других тел (сил) не может изменить своего естественного состояния,
и это выражают утверждением, что материя сама по себе инертна.
Изменение этого естественного состояния возможно только при
125
воздействии на точку некоторых сил. Это свойство материальных
точек сохранять состояние покоя или равномерно-прямолинейного
движения называется инерцией точки. Поэтому первый закон
динамики называется законом инерции.
До Галилея считали, что для того, чтобы поддержать скорость
движущегося тела, к телу необходимо приложить некоторую
силу и что при исчезновении этой силы тело останавливается
и естественным состоянием тела при отсутствии сил является
покой. Только Галилей впервые открыл закон, характеризующий
скорость изолированного тела. В своих знаменитых „ Беседах %
вышедших в свет в 1638 г. он писал: „Когда тело движется по
горизонтальной плоскости, не встречая никакого сопротивления
движению, то движение его является равномерным и
продолжалось бы бесконечно, если бы плоскость простиралась в
пространстве без конца"1.
„Степень скорости, обнаруживаемая телом, ненарушимо лежит
в самой его природе, в то время как причины ускорения или
замедления являются внешними; это можно заметить лишь на
горизонтальной плоскости, ибо при движении по наклонной плоскости
вниз наблюдается ускорение, а при движении вверх — замедление.
Отсюда следует, что движение по горизонтали является
неизменным, ибо если оно остается всегда себе равным, то оно ничем не
ослабляется, не замедляется и не ускоряется"2.
Используя закон инерции и законы падения тел, Галилей
изучил движение брошенного (под углом к горизонту) тела. При
этом он рассматривал движение брошенного тела как сложное,,
состоящее из движения по инерции по прямой с начальной
скоростью и движения под действием силы тяжести. Таким способом
Галилей впервые доказал, что траекторией брошенного тела
является парабола.
Второй закон. Если материальная точка находится под
действием силы, то произведение массы точки на ускорение
равно силе, действующей на точку, т. е.
mw=F. (1)
Еще Галилей, установив законы падения тел в пустоте,
объяснял постоянство ускорения тел тем, что на тела действует
постоянная сила тяжести. Ньютон, обработав опыты Галилея и
поставив целый ряд опытов над падающими телами, качающимися
маятниками и др., пришел к выводу, что отношение силы,
действующей на тело, к ускорению этого тела является постоянной
величиной. Этот закон Ньютон распространил не только на тела,
находящиеся на поверхности Земли (весомые тела), но и на всякие
тела природы. На основе этого закона, а также закона всемирного
тяготения, открытого им, Ньютон производил вычисления движе-
1 Г. Галилей, Сочинения, т. I, М. — Л., 1935, стр. 417—418.
2 Там же, стр. 372.
126
ний небесных тел, и эти вычисления были подтверждены
астрономическими наблюдениями.
Все это привело Ньютона к открытию основного закона
механического движения тел, математически выражаемого уравнением (1).
В качестве меры движения точки Ньютон принимал величину
trw, которую он назвал количеством движения. При отсутствии сил
количество движения точки является величиной постоянной, как
это следует из закона инерции.
Следовательно, изменение количества движения
обусловливается действующей силой. Это привело Ньютона к следующей
формулировке второго закона: изменение количества движения
пропорционально приложенной движущей силе и происходит
по направлению той прямой, по которой эта сила действует.
Так как изменение количества движения характеризуется
производной от количества движения по времени, то в
математической форме формулировку Ньютона можно представить в виде:
При постоянной массе тела т мы получаем уравнение:
dv — -р,
mTt=mw = F,
совпадающее с уравнением (1).
Уравнение (1.) называется основным уравнением динамики, ибо
оно устанавливает количественную зависимость между силой,
действующей на точку, и мерой движения этой точки.
Если одну и ту же силу приложить к различным массам т1
и т2, то согласно второму закону сила сообщит этим массам
различные ускорения w1 и w2, причем
m1w1 = m2w2 = F.
Отсюда следует, что выполняются скалярные соотношения:
mlw1 = m2w2
и
wx m2
w2 ml'
Таким образом, под действием одной и той же силы
различные массы приобретают ускорения, обратно пропорциональные
величинам масс. Следовательно, тело с большей массой при
воздействии одной и той же силы приобретает меньшее ускорение
и поэтому меньше отклоняется от состояния инерции. Таким
образом, масса является мерой инертности тела.
Если на материальную точку действует не одна, а несколько
сил, то учет действия всех этих сил устанавливается на основе
закона независимости действий сил, который формулируется
следующим образом:
127
Если на материальную точку действует несколько сил, то
действие каждой силы не зависит от действия других сил, т. е.
ускорение тела равно сумме ускорений, которые приобрела бы
материальная точка при действии каждой из сил в отдельности.
Частным случаем этого закона является закон параллелограмма
сил, заключающийся в том, что действие двух сил, приложенных
к материальной точке, равно действию силы, направленной по
диагонали параллелограмма, построенного на этих силах (резуль-
s ч тирующая сил). Закон независимости
/ К _ /~Ч действия сил означает, что резуль-
/ у/6 Ъ/ \ тат совместного действия несколь-
I / ( J ких сил определяется простым на-
\^у ч—У ложением действий отдельных сил.
/7-1 Iffi Этот факт был уже известен
Галилею, который, изучая движение
Рис.95, снаряда, считал, что это движение
слагается из двух движений:
равномерного прямолинейного вдоль направления ствола пушки,
совершаемого по инерции, и вертикального ускоренного падения
под действием силы тяжести.
_ Если на материальную точку т действуют силы F19F29...
Fn9 сумма которых равна /?, т. е.
то из второго закона Ньютона и закона независимости действия
сил следует, что если материальная точка т под действием всех
сил приобретает ускорение w9 то
mw = R. (2)
Таким образом, произведение массы точки на ее ускорение
равно геометрической сумме всех сил, действующих на точку.
Третий закон динамики относится уже не только к
материальным точкам, но и к любым телам.
Третий закон. Если одно тело действует на другое с
некоторой силой, то другое тело действует на первое с силой
прямо противоположной (т. е. линии действий сил совпадают,
силы численно равны и имеют противоположные направления)
(см. рис. 95).
Различные явления природы подтверждают, что нет действия
без противодействия и измерения этих сил показывает, что они
численно равны.
Этот закон является очевидным при равновесии тела. Так,
например, если груз подвешен к веревке, то он действует на нее
с силой, равной весу тела.
Веревка действует на тело с силой прямо противоположной,
ибо в противном случае согласно второму закону тело имело бы
ускорение, что невозможно.
128
Для случая движущихся тел этот закон был установлен
Ньютоном на основе различных опытов (наблюдение над
изменением количеств движения при ударе и др.).
Силы действия и противодействия не уравновешивают друг
друга, так как эти силы приложены к различным телам.
Третий закон устанавливает характер взаимодействия двух
тел. В частности, из этого закона следует, что если движение
тела является несвободным, то возникает взаимодействие между
телом и опорой (называемой связью). Сила, с которой опора
(связь) действует на тело, называется реакцией опоры
(связи), и в случае, если тело находится в покое, называется опорной
реакцией. Так, например, если груз подвешен к нити, то при
движении груз натягивает нить, т. е. действует с некоторой силой
на нить, следовательно, нить действует на груз с силой прямо про-
./V
Рис. 96.
Рис. 97.
тивоположной (см. рис. 96, сила N). Если тело лежит на столе, то
оно давит на стол, т. е. действует с некоторой силой на стол, и,
следовательно, стол действует на тело с силой прямо
противоположной (см. рис. 97, сила N).
Второй закон позволяет построить механику свободного
движения, в соединении же с третьим законом он позволяет построить
механику несвободного движения.
Сформулированные три основных закона выполняются для
некоторой среды, которая была названа Ньютоном абсолютной
системой отсчета (абсолютным пространством).
Следовательно, под абсолютной или основной системой отсчета
в динамике понимается каждая среда, в которой выполняются
три основных закона Ньютона.
Как было указано раньше во введении, в качестве основной
системы отсчета можно практически принять астрономическую
систему, т. е. систему координат с началом в центре массы
солнечной системы и с осями, проходящими через неподвижные звезды.
С меньшей степенью точности соблюдения законов Ньютона в
качестве основной системы отсчета можно принять систему
координат с началом координат в центре Солнца и осями координат,
проходящими через неподвижные звезды, и еще с меньшей
степенью точности — систему координат, жестко связанную с Землей.
5 Г. М. Финкельштейн 129
Если в некоторой системе отсчета в условиях рассматриваемой
задачи отклонения от закономерностей движения в ясновной
системе являются незначительными, то практически данную
систему отсчета можно считать основной.
Так, например, при изучении движения некоторой машины
можно считать основной системой отсчета Землю, так как
основные законы динамики в этом случае дают практически достаточно
точное описание движения.
5. Единицы измерения силы и массы
Связь между силой и массой устанавливает второй закон
Ньютона. Поэтому если выбрать единицу измерения силы, то
единица измерения массы будет являться производной единицей,
и наоборот, если выбрать единицу измерения для массы, то
единица измерения силы будет производной единицей.
В динамике для измерения всех встречающихся величин
необходимо выбрать единицы измерения времени, длины и либо массы,
либо силы. Обычно используют две системы единиц: 1) абсолютную
(физическую) и 2) практическую.
В абсолютной системе единиц принимают: за единицу времени —
1 сек, за единицу длины — 1 см, за единицу массы—1 грамм
массы.
В этой системе единиц за единицу измерения силы принимают
дину, т. е. силу, которая при действии на 1 грамм массы
сообщает ему ускорение 1 -^-. На основании второго закона
динамики размерность этой единицы определяется по формуле:
, л у см л г-си
1 дина = 1 г • 1 —о = 1 —г •
сек2 сек2,
В практической системе единиц принимают за единицу
времени 1 секу за единицу длины — 1 ж, за единицу силы — 1 кГ.
В этой системе единиц за единицу измерения массы принимают
массу тела, которая обладает тем свойством, что сила в 1 кГ%
действуя на это тело, сообщает ему ускорение в 1 —-2. По
второму закону динамики получаем, что размерность этой единицы
определяется по формуле:
, 1 кг . кг-сек2
1 ед. массы = — = * —-—•
л м м -
сек2
Определение основных единиц измерения первоначально хотели
связать с величинами, встречающимися в природе, чтобы их всегда
можно было проверить и воспроизвести. В соответствии с этим
требованием были определены единицы измерения следующим
образом: 1 м — одна десятимиллионная доля четверти земного
меридиана, 1 килограмм (силы либомассы) — вес либо масса одного
130
кубического дециметра воды при 4° С и барометрическом давлении
760 мм рт. ст., 1 сек = я£Ш\ средних солнечных суток.
Были изготовлены эталоны измерений длины и массы, а именно:
для измерения длины — метр (в виде платино-иридиевой
линейки), для измерения массы — килограмм (в Еиде платино-иридиевого
цилиндра). С повышением точности измерительной техники было
обнаружено некоторое расхождение между естественными
прототипами единиц и изготовленными эталонами.
В 1956 г. Международный комитет мер и весов принял новую
международную систему единиц. В этой системе в качестве
единиц измерения длины и массы выбраны 1 метр (м) и 1 килограмм
массы (кг), определяемые изготовленными эталонами длины и
массы, международные прототипы которых храняться в
Международном бюро мер и весов в Севре (Франция). Национальные
прототипы мер, являющиеся точными копиями международных,
эталонов, хранятся в СССР и других странах, принявших у себя
метрическую систему единиц измерений.
В международной системе единица времени 1 секунда (сек)
определена как 1/31556925, 9747-я часть тропического года для
1900 г. Продолжительность секунды, принятой в международной
системе единиц, равна средней продолжительности секунды,
выведенной из вращения Земли за три последних столетия. Эталон
для измерения времени в международной системе единиц
определен со значительно большей точностью, чем прежний. В
дальнейшем предлагается провести работы для создания еще более
совершенного эталона времени на базе использования колебаний
атомов и молекул.
Стандарты, принятые в Советском Союзе, берут в основу
международную систему единиц. Одновременно допускается для
измерения механических величин применение единиц абсолютной
и практической систем.
6. Основная задача кинетики
В кинематике изучалось движение тела независимо от причин,
обусловливающих движение тел. Таким образом, в кинематике
движение тела считалось наперед заданным и изучались его
особенности.
Кинетика изучает движение или покой материальных систем
в связи с причинами (силами), обусловливающими это движение.
Кинетика делится на динамику и статику. В динамике
изучается движение механических систем, в статике частный случай
Движения — покой механических систем.
В динамике ставятся две основные задачи:
Задача 1. Заданы силы, действующие на механическую
систему, найти движение системы (прямая задача).
Задача 2. Задано движение механической системы, найти
силы, действующие на механическую систему (обратная задача).
5*
131
Основная задача статики заключается в установлении
необходимых и достаточных условий для того, чтобы мехадаческая
система под действием сил находилась в равновесии.
Второй основной закон динамики позволяет решить обе
задачи динамики для одной материальной точки, ибо по заданной
силе можно определить ускорение, и наоборот, по заданному
ускорению найти силу.
Для того чтобы решить, эти задачи для произвольных
механических систем, в динамике используют следующий общий метод:
применяют второй закон к каждой точке механической системы
и затем из полученных для всех точек уравнений делают общие
выводы, позволяющие судить о движении механической системы.
Таким путем устанавливают основные теоремы динамики и
основные принципы механики. Первые позволяют исследовать
движения механических систем в некоторых частных случаях, а
вторые позволяют применять общие методы для изучения
произвольного движения механической системы.
РАЗДЕЛ I
СТАТИКА
§ 1. ОСНОВНЫЕ понятия
1. Абсолютно твердое тело. Система сил
В статике мы будем рассматривать абсолютно твердое тело.
Под абсолютно твердым телом мы будем понимать материальное
тело, у которого расстояние между каждыми двумя точками не
изменяется при воздействии сил на это тело. Понятие абсолютно
твердого тела является некоторой абстракцией. В
действительности, каждое тело под действием сил деформируется, т. е.
происходит смещение одних частиц тела относительно других.
Однако в ряде случаев деформация тел бывает незначительной
и ею пренебрегают. В этих случаях тела можно считать абсолютно
твердыми. Так, например, кусок железа, дерева при воздействии
на них сил тяжести можно считать телами твердыми.
Итак, в статике не учитываются деформации тела под
воздействием сил и все рассматриваемые тела считаются абсолютно
твердыми. Деформации, происходящие в теле, учитываются
в других прикладных дисциплинах (сопротивление материалов,
теория упругости).
В статике мы будем рассматривать различные конечные
совокупности сил, приложенные к абсолютно твердому телу. Такую
совокупность сил мы будем называть системой сил и эту систему
сил будем обозначать символом S(Flf F2, ... Fn). Если система
сил состоит из двух сил, лежащих на одной прямой, равных по
величине и имеющих противоположные направления, то такие
132
силы мы будем называть прямо противоположными. Если
система сил состоит из двух сил, лежащих на параллельных прямых,
равных по величине и имеющих противоположные направления,
то такую систему сил будем называть парой сил. Геометрическую
сумму всех сил системы S(Fiy F2, ... Fn) будем называть г л а в-
ным вектором и будем его обозначать символом R, т. е.
Система сил, действуя на тело, либо вызывает некоторое
перемещение тела относительно системы отсчета, либо не вызывает
такого перемещения.
Если тело не перемещается, то говорят, что оно находится
в покое. Будем говорить, что система сил S(F19 F2, ... Fn)
Рис. 98.
•г
находится в равновесии, если она обладает тем свойством, что,
будучи приложена к абсолютно твердому покоящемуся телу, не
нарушает его покоя.
2. Аксиомы статики
В основу статики кладутся некоторые простые положения,
являющиеся обобщением наблюдаемых физических явлений. Эти
положения называются аксиомами статики. С точки зрения
логической строгости необходимо, чтобы число аксиом было
минимальным, чтобы они были непротиворечивыми и независимыми.
Сформулируем эти аксиомы.
Первая аксиома. Система двух сил находится в
равновесии тогда и только тогда, когда эти силы прямо
противоположны.
Простые опыты подтверждают справедливость этой аксиомы.
Если две силы Fiy F2 прямо противоположны, то, будучи
приложены к твердому покоящемуся телу, они не нарушают его покоя.
t> самом деле, если покоящееся твердое тело растягивать или
сжимать противоположными силами, то его покой не нарушается.
Наоборот, если тело находится только под действием двух
сил и при этом находится в покое, то эти силы прямо
противоположны (см. рис. 98).
133
Рис. 99.
Вторая аксиома. Если к системе сил, находящейся в
равновесии, присовокупить или отбросить две прямо
противоположные силы, то равновесие системы сил не нарушится.
Эта аксиома означает, что если к системе сил Sx (F19 F2, ... Fn)
присовокупить две прямо противоположные силы Qx и Q2, то
система сил52(/71, F2, ... Fn9 Qp Q2) также
находится в равновесии. Наоборот, если от
системы сил S2 отбросить силы Ql и Q2,
то система сил 5Х также находится в
равновесии.
Простые эксперименты под тверждают
справедливость этой аксиомы. Из этой
аксиомы можно вывести следующее следствие.
Следствие. Не нарушая равновесия
заданной системы сил, можно каждую силу
системы переносить по линии ее действия.
Действительно, приложим к точке В на линии действия силы
Q две прямо противоположные силы — Q и Qx (см. рис. 99),
по величине равные силе Q, и затем отбросим силы Q и — Q.
Согласно второй аксиоме каждая из этих операций не
нарушает равновесия заданной системы сил, и в результате этих
операций сила Q оказалась перенесенной по линии ее действия в
точку В.
Третья аксиома. Ее ли в_системе сил, находящейся в
равновесии, имеются две силы Qx и Q2, имеющие общую точку
приложения, то равновесие
системы сил не нарушится при
замене сил Qj и Q2 силой,
имеющей ту же точку
приложения и являющейся диагональю
параллелограмма,
построенного на данных силах.
Простые эксперименты
подтверждают, что действие двух
сил, приложенных в одной
точке, уравновешивается силой,
приложенной в этой же точке
и противоположной силе,
построенной на двух заданных
силах по правилу
параллелограмма. Так, например, если через неподвижные блоки Ol и О
перебросить нить, к концам которой привешены грузы Рх и Р2,
то для того, чтобы точка А находилась в равновесии,
необходимо к точке А подвесить груз Р, определяемый по правилу
параллелограмма (см. рис. 100).
134
Пусть система сил S{Flt ... Fn, Qiy Q2) находится в
равновесии, причем силы Qj и Q2 имеют общую точку приложения О
(см. рис. 101).
Аксиома утверждает, что если Q есть сила, имеющая ту же
точку приложения О и построенная по правилу параллелограмма
на силах Q, и Q2, то система сил S(Fif ... Fn, Q) также
находится в равновесии. Эта аксиома
вполне согласуется с законом
Рис. 101.
независимости действия сил, согласно которому действие двух
сил, имеющих общую точку приложения, эквивалентно действию
результирующей силы.
Из этой^аксиомы вытекают два следствия.
Следствие l.He нарушая равновесия системы сил, можно
каждую силу системы Q заменить двумя силами Qx и Q2,
имеющими ту же точку приложения и являющимися сторонами
параллелограмма с диагональю Q (т. е. можно каждую силу разложить
на две составляющих по правилу параллелограмма).
Разложение силы на две составляющих можно производить
двояко: 1) по двум заданным направлениям, 2) по заданному
направлению и величине одной из составляющих силы по этому
направлению.
Рассмотрим первый способ.
Пусть заданы два направления (I) и (II), проходящие через
точку приложения А заданной силы (см. рис. 102).
Построим параллелограмм, диагональю которого является
Данная сила, а стороны лежат на заданных направлениях. В точке А
приложим две прямо противоположные силы Z7, и —Fiy по
величине равные стороне параллелограмма, лежащей на
направлении (II), затем заменим две силы F и —FY силой F2,
совпадающей с другой стороной параллелограмма. Согласно второй и
третьей аксиомам эти операции не нарушают равновесия системы
сил, и в результате этих операций сила F разложена на две
составляющие F, и Ft.
Рассмотрим второй способ.
135
Построим параллелограмм, диагональю которого является
заданная сила и одной стороной которого является заданная
составляющая Fx (см. рис. 103). В точке А приложим две прямо
противоположные силы Fl и —Fl9 а затем заменим силы F и
— Fx диагональю параллелограмма F2. При помощи этих операций,
не нарушающих равновесия системы сил, сила F разложена на
две составляющие F1 и Ft.
Следствие 2. Под действием одной силы твердое тело не
может находиться в состоянии покоя.
Действительно, если на тело действует только одна сила F> то,
предположив, что тело находится в покое, мы могли бы, не
нарушая покоя тела, разложить силу на составляющие F, и F2 по
правилу параллелограмма (см. рис. 104).
-ь
Л
г,
-НУ
^F
Рис. 103.
Рис. 104.
Следовательно, система сил S(F19 F2) находилась бы в
равновесии, что противоречит первой аксиоме.
Этот факт вполне согласуется со вторым законом Ньютона,
согласно которому под действием силы F тело должно иметь
ускорение и, следовательно, не может находиться в покое.
Замена двух сил их результирующей по правилу
параллелограмма не является такой простой операцией, как отбрасывание
или присовокупление к системе двух прямо противоположных сил.
Поэтому некоторые ученые пытались доказать третью аксиому.
Однако все известные до настоящего времени доказательства
опираются на некоторые другие факты, эквивалентные этой
аксиоме. Следовательно, третья аксиома выражает собой
первичный факт, который не может быть основан при помощи фактов,
более простых.
Кроме сформулированных трех аксиом, в статике принимается
еще четвертая аксиома, представляющая собой третий закон
Ньютона (закон действия и противодействия).
Четвертая аксиома. Если одно тело действует на
другое с некоторой силой, то другое тело действует на первое
тело с силой прямо противоположной.
Сформулированные выше четыре аксиомы позволяют при
помощи геометрического метода найти законы равновесия системы
сил. В силу этого статику, изучаемую на основе этих аксиом,
называют геометрической статикой.
136
Аксиомы статики являются следствиями из законов Ньютона
и закона независимости действий сил. В случае, когда тело
является материальной точкой, совершенно очевидно, что первая
и вторая аксиомы вытекают из второго закона Ньютона, а третья
аксиома — из закона независимости действий сил. Для
произвольного твердого тела это вытекает из принципа возможных
перемещений, который будет рассмотрен в динамике.
3. Принцип освобождаемое™ от связей
Если на твердое тело не наложены связи, т. е. некоторые
ограничения, обусловливающие свободу его перемещения, то
такое тело называется свободным. Если же на тело наложены
связи, то тело называется несвободным. Обычно связи,
налагаемые на тело, реализуются при помощи других тел, которые
взаимодействуют с данным телом.
Если тело является несвободным, то силы, действующие на
тело, делятся на две группы. К первой группе относятся силы,
с которыми другие тела, не реализующие связи, действуют на
данное тело; а ко второй группе относятся силы, с которыми
действуют на данное тело внешние тела, реализующие связи.
Силы первой группы называются активными, а силы второй
группы — реакциями связей (опор).
Так, например, если тело лежит на столе, то вес тела (сила,
с которой Земля действует на тело) является активной силой,
а сила, с которой стол (опора) действует на тело,— реакцией
опоры.
Активные силы и реакции связей по своей природе различны.
Реакции связей зависят от характера связей, а также от действия
активных сил и от движения тела, в то время как активные
силы не зависят от характера связей и движения тела. Поэтму
реакции связей также называются пассивными силами, ибо они
возникают при наличии активных сил.
Так как действие связей на тело обусловливается реакциями
связей, то совершенно ясно, что если к телу приложить реакции
связей, а связи отбросить, то состояние тела от этого не
изменится. Это положение в механике называется принципом
освобождаемое™ от связей. Принцип освобождаемости от связей
формулируется следующим образом: механическое состояние
тела не изменяется, если связи, наложенные на тело,
удалить и взамен их к телу приложить реакции связей.
Этот принцип позволяет сводить изучение движения или
покоя несвободного твердого тела к изучению движения или покоя
свободного твердого тела. Для этого достаточно отбросить
связи и взамен их к телу приложить реакции связей
и> следовательно, реакции связей перевести в разряд
активных сил.
137
^тш^^^^^^^^^щ
i
Из этих соображений мы будем в статике при установлении
общих закономерностей рассматривать свободное абсолютно
твердое тело. /
4. Силы трения
Силы, действующие на тело, бывают различной природы.
Одним из важных классов сил являются силы трения. Силы
трения возникают при взаимодействии данного тела с опорой как
в состоянии покоя тела, так и в состоянии движения тела.
Силы трения, возникающие при движении тела, бывают двух
типов: при скольжении тела — силы трения скольжения и при
качении тела — силы трения качения.
Законы, которым подчиняются силы трения скольжения,
впервые были открыты опытным путем физиком Кулоном (в 1781 г.)
_ и затем уточнены Мореном (в
Qs.-~-\N 1851 г-).
Если на горизонтальной по-
F верхности находится некоторое
тело (например, призматической
формы), то, прилагая к этому
телу горизонтальную силу F,
можно заметить, что тело
будет находиться в состоянии
покоя, если сила F не превосхо-
Рис- 105- дит некоторой величины (см*
рис. 105).
Когда сила F достигает некоторого определенного значения,
тело начинает скользить по поверхности. Рассматриваемое тело
взаимодействует с горизонтальной опорой и поэтому со стороны
опоры возникает некоторая опорная реакция, сила Q,
действующая на тело. Опорную реакцию Q можно разложить на две
составляющие: вертикальную N, возникающую вследствие давления
тела на опору, и горизонтальную Т9 возникающую вследствие
действия силы F. Максимальное значение силы Т (при которой
тело еще находится в покое) называется статической силой
трения. Сила трения, которая возникает при движении тела
называется динамической силой трения.
Возникновение сил трения физически объясняется тем, что
поверхности соприкасающихся тел являются в действительности
шероховатыми, и вследствие этой шероховатости опора
препятствует движению тела.
Кулон открыл опытным путем следующие законы скольжения:
Первый закон. Статическая сила трения пропорциональна
нормальному давлению (нормальной реакции) тела на поверхность,
т е
T = k-N. (1)
Л,
138
Число k называется коэффициентом статического трения и
зависит от материала соприкасающихся тел, состояния обработки
трущихся поверхностей и наличия смазки между ними. При
наличии смазочного вещества между трущимися поверхностями
коэффициент трения, как правило, уменьшается.
Второй закон. Статическая сила трения не зависит (в
достаточно широких пределах) от площади соприкасающихся
поверхностей трущихся тел.
Третий закон. Сила трения при движении (динамическая)
направлена в сторону, противоположную относительной скорости
скольжения тела.
При качении какого-нибудь тела относительно другого также
возникает сила трения.
Если на горизонтальной поверхности находится
цилиндрический каток, то, прилагая к центру катка некоторую
горизонтальную силу F, можно заметить, что каток будет находиться
в покое до тех пор, пока величина силы ^—^^
F не достигнет некоторого значения Fm2LX, / >v
после чего каток начнет двигаться. / А
Таким образом, когда F^Fmax> со сто- I i ► ]
роны опоры возникают силы, препятствую- V рт /
щие движению катка. Возникновение этих сил V у
физически объясняется тем, что в действи- ШШ^шъятгттгшШШЬ
тельности каток соприкасается с опорой не рИс. 106.
по линии (образующей), а по некоторой
площадке (достаточно малой ширины). Это происходит вследствие
того, что опора и каток не абсолютно твердые тела и,
следовательно, претерпевают некоторые деформации (происходит „вмятое"
катка в опору) (см. рис. 106).
Трение при качении (без скольжения), как правило, меньше,
чем трение скольжения. Поэтому практически всюду, где это
возможно, стараются заменить трение скольжения трением
качения (катки, шариковые подшипники, колеса и т. п.).
5. Опоры
Если тело находится в покое, то другие тела, реализующие
связи, называются для данного тела опорами. Так, например,
если тело лежит на столе, то стол для него является опорой,
если тело подвешено к веревке, то веревка для него является
опорой и т. д.
Так как тело взаимодействует с опорой, то на основании
четвертой аксиомы (закона действия и противодействия) опора
с некоторой силой действует на данное тело. Сила, с которой
°пора действует на данное тело, называется опорной реакцией.
Рассмотрим различные типы опор, которые чаще всего
встречаются в задачах.
139
а) Абсолютно гладкая поверхность
Под абсолютно гладкой поверхностью понимают такую
Поверхность, реакция которой направлена перпендикулярно к
касательной плоскости в соответствующей точке поверхности. В про-
fij стейшем случае эта поверхность
V /^\ ^s может являться плоскостью (см.
У. Jy^ рис. 107, 108).
Рис. 107. Рис. 108.
Понятие абсолютно гладкой поверхности является некоторой
абстракцией, в действительности абсолютно гладких поверхностей
не существует. Практически поверхность можно считать
абсолютно гладкой, если силы трения незначительны. Примерами
абсолютно гладких поверхностей могут являться гладкий ледяной
каток, хорошо отполированная металлическая поверхность и др.
б) Абсолютно гибкая нить
Под абсолютно гибкой нитью понимают такую нить, реакция
которой направлена вдоль самой нити (см. рис. 109). Нити,
встречающиеся в практике (тросы, веревки, цепи), не всегда являются
абсолютно гибкими вследствие того, что их строение отлично от
строения обычной нити. Если отклонения реактивной силы от
направления нити незначительные, то практически можно считать
нить абсолютно гибкой.
Рис. 109. Рис. 110.
в) Абсолютно гладкий цилиндрический шарнир
Цилиндрический шарнир называется абсолютно гладким, если
реакция шарнира направлена перпендикулярно к поверхности
шарнира (и, следовательно, она проходит через ось шарнира
и перпендикулярна к оси, см. рис. 110). Практически шарнир
140
можно считать абсолютно гладким, если силы трения
незначительны. Уменьшение сил трения достигается путем введения
смазки.
г) Абсолютно гладкий сферический шарнир
Сферический шарнир называется
абсолютно гладким, если реакция шарнира
направлена перпендикулярно к поверхности
шарнира (и, следовательно, проходит через
центр шарнира, см. рис. 111).
Рис. ill.
6. Элементарные операции
При изучении различных систем сил мы будем использовать
простейшие операции, производимые над силами, которые называют
элементарными операциями. Различают две элементарные операции:
первая элементарная операция — присовокупление к заданной
системе сил или отбрасывание двух прямо противоположных сил, вторая
элементарная операция — замена двух сил, имеющих общую точку
приложения, одной силой, имеющей ту же точку приложения и
являющейся диагональю параллелограмма, построенного на этих
силах (т. е. замена двух сил одной по правилу параллелограмма).
Физический смысл элементарных операций заключается в том,
что элементарные операции не изменяют равновесия системы сил.
Действительно, из аксиом статики следует, что если система
сил находится в равновесии, то первая элементарная операция
не нарушает равновесия системы в силу второй аксиомы, а
вторая элементарная операция не нарушает равновесия системы
в силу третьей аксиомы.
Элементарные операции не нарушают также главный вектор
системы сил, ибо первая и вторая элементарные операции не
нарушают геометрической суммы сил.
Заметим, что разложение силы на две составляющие по
правилу параллелограмма, как было показано раньше, является
результатом прибавления двух прямо противоположных сил и замены
Двух сил одной по правилу параллелограмма, следовательно,
является результатом первой и второй элементарной операции.
Перенесение силы по линии ее действия, как это было
показано раньше, также является результатом двух первых
элементарных операций (прибавление, а затем отбрасывание двух пряхмо
противоположных сил).
Используя элементарные операции, определим понятия
эквивалентных систем сил и равнодействующей для системы сил
следующим образом:
ня^0, Две системы сил sAKf*> •••>Л.) и S2(Qi>~Q2> --y~QrJ
взываются эквивалентными, если при помощи элементарных
141
операций можно перейти от первой системы сил ко второй.
Эквивалентность будем обозначать символически так: /
^...../д-Ш, ...,qj. (2)
2°. Если при помощи элементарных операций можно заданную
систему сил привести к одной силе F, то эта сила называется
равнодействующей заданной системы сил.
Эти понятия имеют определенный физический смысл, а именно:
если тело под действием некоторой системы сил находится в
покое, то под действием каждой эквивалентной системы сил это
тело также будет находиться в покое. Это следует из того, что
элементарные операции не нарушают равновесия системы сил.
Понятия равнодействующей и главного вектора системы сил—
это различные понятия и смешивать их нельзя. Различие этих
понятий заключается в том, что главный вектор всегда
существует и является свободным вектором (т. е. его начало может
быть выбрано где удобно), в то время как равнодействующая
не всегда существует и если существует, то она является
скользящим вектором (т. е. имеет определенную линию действия).
В дальнейшем будет показано, например, что пара сил не
имеет равнодействующей.
Сходство этих понятий заключается в том, что если
равнодействующая существует, то она геометрически равна главному
вектору.
7. Основные задачи статики
Статика является общим учением о силах. В статике
изучаются силы и для них устанавливается ряд понятий (момент
силы, центр тяжести и др.), которые используются в динамике.
Поэтому статика создает базу для изучения динамики.
Используя введенные аксиомы статики, можно найти
геометрическим методом законы равновесия системы сил, а также
условия эквивалентности двух систем сил.
Основными задачами геометрической статики являются
следующие:
Г. Найти необходимые и достаточные условия для
равновесия системы сил.
2°. Найти необходимые и достаточные условия для
эквивалентности двух систем сил.
3°. Найти каноническое представление заданной системы сил,
т. е. найти простейшую систему сил, эквивалентную заданной.
В динамике будет выведен общий принцип (принцип
возможных перемещений), согласно которому можно найти условия
равновесия механической системы (для определенного типа
связей) под действием системы сил. Как частный случай этих
условий будут вытекать условия равновесия системы сил,
устанавливаемые в геометрической статике.
142
Методы геометрической статики играют важную роль для
ряда инженерных дисциплин (сопротивление материалов, статика
сооружений и др.).
§ 2. РАВНОДЕЙСТВУЮЩАЯ СИСТЕМЫ СИЛ
Рассмотрим некоторые системы сил, для которых существует
равнодействующая, и установим правила для ее нахождения.
1. Сходящиеся силы
Система сил называется сходящейся, если линии действий
всех сил пересекаются (сходятся) в одной точке.
Для такой системы сил всегда
существует равнодействующая.
Действительно, совершая первые
элементарные операции, можно каждую силу
перенести по линии ее действия в
точку О (см. рис. 112), а затехМ,
совершая вторые элементарные
операции, можно поочередно две силы •""
заменить одной, вновь полученную
силу и третью силу заменить снова
одной силой и т. д., пока мы не р 112
приведем все силы к одной силе
F, которая и будет являться равнодействующей для данной
системы сил
S(7l9F„...9Fa).
2. Параллельные силы
Рассмотрим сначала вопрос о нахождении равнодействующей
двух параллельных сил.
Рассмотрим различные случаи.
а) Силы имеют одинаковые направления (см. рис. ИЗ).
О Соединим точки приложе-
F'^s'fK ния А я В заданных сил и в
*r I Nj^' точках А и В приложим пря-
^ Д,'' \ A >4fl Л м° противоположные силы
\К/^Тг N ч I , ' '^Гч р\ F9 и /74. Затем заменим силы
£р - --* ' F F2l >£| ?! и F3 силой Fb и силы
к м Рг и ?4 силой Fb по прави-
рис§ цз, лу параллелограмма.
Полученные силы F% и F9 перене-
£?м в точку пересечения О их линий действий и затем заменим силы
s и F'a одной силой F по правилу параллелограмма. Таким образом,
S(Flt Ft)^s(Flt F„ ?„ Ft) - s(F„ Fe) -s(F:, Fj - f.
143
Итак, система двух одинаково направленных параллельных сил
всегда имеет равнодействующую. Установим некоторые сврйства
равнодействующей.
При совершении элементарных операций геометрическая сумма
сил не изменяется, поэтому
F=F1+Fi. (3)
Отсюда следует, что равнодействующая параллельна дан-
ним силам и по величине равна сумме величин данных сил.
Рассматривая подобные треугольники /\ОСА и /\ADE,
а также /\ОСВ и /\ВКМ (см. рис. 113), получим:
A£_F1 CB_F± p_F
СО~ /V СО~~ F2> r* — rv
Если первое из этих равенств почленно разделить на второе, то
получим:
АС £г. (Л\
СВ~ F, # v }
Отсюда следует, что линия действия равнодействующей делит
(внутренним образом) расстояние между точками приложения
- q сил в отношении, об-
<f ратно
пропорциональном величинам сил.
б) Силы имеют
противоположные
направления и не равны по ве-
fi Д^^' // I I личине (см. рис. 114).
Этот случай рас-
7l lFt " '** "' сматривается аналогич-
q но предыдущему. Из
w формулы (3) заключаем,
Рис. 114. что равнодействующая
параллельна данным
силам и имеет направление большей силы. Величина равно-
действующей равна разности величин данных сил.
Из формулы (4) заключаем, что линия действия
равнодействующей делит (внешним образом) расстояние между
точками приложения сил в отношении, обратно
пропорциональном величинам сил.
Рассмотрим теперь приложенную к телу систему
параллельных сил, имеющих одинаковое направление S(Fl9 F2, ... Fn)
(см. рис. 115). _
Соединим точки приложения сил F1 и F2 и на прямой АхАг
найдем точку С19 через которую проходит равнодействующая
этих сил. Затем соединим точку Сх с точкой приложения силы F3
и найдем на прямой СхАг точку С2, через которую проходит
равнодействующая первых трех сил F19 F2, F3. Этот процесс
144
построения точек Ck продолжаем до тех пор, пока не охватим
всех сил системы.
В результате мы получим точку Cn_lf которую мы обозначим
буквой С и через которую проходит равнодействующая всей
системы. Положение точек Ck определяется из соотношений;
С А- Л ;
(5)
СИ.- Fx + F*'
S S Ш I I С 9
сли -
'Fi+F,+ .-+Fn-i
Если каждую силу системы повернуть на один и тот же угол
в одном и том же направлении так, чтобы система осталась па-
C^fJ &
ZL
w-i
F+F2+F3 fF+F2+••• + £,
Г
'X
Рис. 115.
раллельной, то для вновь полученной системы сил точка С
будет занимать прежнее положение.
Точка С называется центром параллельных сил.
Таким образом, положение центра параллельных сил зависит
только от точек приложений сил системы и величины сил, но не
зависит от направления сил.
Найдем формулы для координат центра параллельных сил.
Обозначим координаты точек Ак через хк> yk, zk (k = 1, 2, ... я),
координаты точек Ck — через х\, j/°, z\ (k=l, 2, ... п — 2),
а координаты центра параллельных сил С — через х,-у, z (см.
рис. 115). Пользуясь формулами аналитической геометрии для
координат точки, делящей отрезок в данном отношении, из
формул (5) получим следующие формулы:
г0 Г\Х\ Т '2^2 . ..О '\У\ ~Т~ *\Уг . ~0 *\Z\ ~Т~ Л2^2 . /0\
Fl + F2 ' У'~ F,+F2 ' Z>— F, + F2 ' W
„ (Ft+F2)x'l+F3x3_Fix1+F2x2 + F3x!l
х:
F. + F. + F,
F, + Ft+F,
145
(Л + ^) У\ + ^зУз _ЪУ* + Р*Уш + ^з Уз
Л*1 + ^2*2 + Л*«
(7)
Совершенно аналогично в конце концов получим формулы:
. _ Fxxx -f ^2*2 + • • - + Fn*n _ s^fe**
— /7+^ + .,
, _ Л^1 + Р*Уг +
Fx+F2+...+Fn
VFt
(8)
§ 2. ЦЕНТР ТЯЖЕСТИ И ЦЕНТР ИНЕРЦИИ (МАСС)
1. Центр тяжести
Рассмотрим твердое тело. Как известно, каждая частица тела
притягивается к Земле с некоторой силой, называемой силой
тяжести. Разобьем тело на конечное число элементарных масс
&т19 кт2У ..., Д/72„ (например, на маленькие кубики). Тогда на
каждую элементарную массу действует сила тяжести и к телу
приложена система сил тяжести Р19 Р2, ... Рп (см. рис. 116).
Если размеры тела малы по сравнению с размерами Земли,
то эти силы можно считать параллельными (так как они все
направлены к центру Земли).
Каждую из сил Pk приближенно приложим в геометрическом
центре элементарной массы. Тогда мы получим систему п
приложенных параллельных сил, имеющих одинаковое направление.
Эта система сил имеет центр параллельных сил СПУ который
называется приближенным центром тяжести тела. Переходя к
пределу при Lmk—>0 (k= 1, 2, ... л), мы получим
некоторое предельное положение С для
приближенных центров тяжести. Точка С называется
центром тяжести тела.
На основании свойства центра параллельных
сил можно заключить, что центр тяжести тела
обладает тем свойством, что через него проходит
линия действия равнодействующей всех
элементарных сил тяжестей, приложенных к телу, независимо
от расположения тела в пространстве.
Действительно, при изменении положения тела происходит
поворот относительно тела всех сил тяжестей на
один и тот же угол в одном и том же направлении, а при этом,
как было раньше выяснено, положение центра параллельных сил
относительно тела не меняется.
Рис. 116.
146
Это свойство центра тяжести позволяет практически
определять центр тяжести тела согласно следующему правилу:
достаточно подвесить тело к нити в некоторой точке и построить
продолжение нити в теле, затем подвесить тело к нити в
некоторой другой точке и также
построить продолжение нити в теле,
тогда пересечение построенных
линий в теле определяет центр
тяжести тела.
Действительно, построенные
линии представляют собой линии
действий равнодействующих сил
тяжестей и поэтому их
пересечение определяет центр тяжести.
Установим аналитические
формулы для нахождения координат Рис- 117-
центра тяжести тела.
Обозначим координаты приближенного центра тяжести через
х°, у°п, z°n, а координаты центра элементарной массы kmk — через
xk, yky zk, тогда на основании формул (8) получаем:
,*Pkxk , „о_ЪРкУк. „о _ЪРк?к
п _ *rkXk , .,о_ЪПгУк. „о _ *Ofe*fe /Q4
Лп— ЪРЬ ' Уп— %р > *п— zp • [?)
Переходя в этих формулах к пределу при Lmk—>0, получим
формулы дляг центра тяжести тела в виде:
т«р и№р ш*р
(V) (V) (V)
где интегрирование распространяется по объему V данного тела.
Если рассхматривается произвольная механическая система,
состоящая из точек т19 т2, ..., тп, имеющих веса Р19 Р2, ..., РпУ
то центром тяжести этой системы называется центр параллельных
сил Р19 Р2, ..., Рп. Следовательно, координаты центра тяжести
в этом случае находятся согласно формулам (8), т. е.
у _Hipk4. -, _ИркУк. „ _Hpk4
ХС- 2рА > УС- ^Pk ' Zc—^Pk •
2. Центр инерции (масс)
С понятием центра тяжести тесно связано понятие центра
инерции (масс), которое используется во многих вопросах
динамики. Определим это понятие.
Рассмотрим механическую систему, состоящую из конечного
числа точек S(mly т2У ..., тп). Выберем в пространстве
произвольный фиксированный полюс О и построим из этого полюса
147
радиусы-векторы точек, входящих в систему: г19 г2,
(см. рис. 117).
Построим вектор гс по формуле:
~ ГП\Гх + Щ^2 + • • • + тпГП .
гс -
Жт^к
Щ+1П2+ •'•+тп
(11)
mk
и приложим этот вектор в полюсе О. Конец этого вектора,
точка С, займет некоторое положение в пространстве. Положение
точки С в пространстве не зависит от выбора полюса, т. е. если
в пространстве выбрать другой полюс 019 соответственно
построить радиусы-векторы точек системы р1? р2, ..., рп, а затем
вектор pCi по формуле:
Per
— , — , — 2 mk?k
. *ttiPi + m»P2+ ... +тпрп k=i
Щ + т2 + • • ' +
J.™*
(11')
то конец вектора pCi, точка — С1 совпадает с точкой С.
Действительно, совершенно очевидно, что
Подставляя это значение pk в формулу (1Г), получаем:
•Щ^О + Гь)
0,0 2 m* S тъГк
k = 1 I /г г — 1
Из этой формулы и формулы (11) вытекает, что
Из полученной формулы следует, что точки Сх и С совпадают.
Таким образом, точка С, построенная по формуле (11), не
зависит от выбора полюса и, следовательно, зависит только от
взаимного расположения масс и их
величин. Это обстоятельство позволяет
установить следующее определение:
центром инерции (масс) материальной
системы, состоящей из конечного числа
точек S(ml9 т2, ...,тп), называется
точка С, построенная по формуле (11).
Для твердого тела понятие центра
инерции (масс) устанавливается общим
Рис. 118. методом предельного перехода.
148
Пусть дано твердое тело, масса которого равна N1.
Разобьем данное тело на конечное число более мелких
(элементарных) частей кт19 кт2, . ..,Дяги. Каждую из этих частей
можно приближенно рассматривать как материальную точку.
Построим радиусы-векторы г19 г2, ..., гю соединяющие полюс
с некоторой внутренней точкой этих частей, и построим радиус-
вектор гс по формуле:
п
Этот вектор приложим в выбранном полюсе О, тогда его
конец Сп можно рассматривать как приближенный центр инерции
(масс) данного тела. Переходя к пределу, когда размеры
элементарных частей стремятся к нулю и, следовательно, их массы
стремятся к нулю, мы получим, что переменный вектор гс будет
иметь своим пределом некоторый вектор гс, определяемый по
формуле:
\ г • dm
&)
где интегрирование распространяется по объему данного тела.
Так как радиус-вектор г, соединяющий полюс О с переменной
точкой тела, является непрерывной вектор-функцией от точки,
то интеграл j г-dm существует.
(V)
Точка С, определяемая по формуле (12), называется центром
инерции (масс) данного тела.
Если тело является однородным, то его плотность (масса
единицы объема) является постоянной. Выражая массу
элементарного объема через плотность и объем, т. е. dm = p-dvy и
сокращая на плотность дробь в формуле (8), получаем для центра
инерции формулу:
[У dv J7 dv
rc = (V"==-—• (12')
с \dv V v ;
&)
Если дано геометрически правильное тело (например, шар, ко-
нУс и т. д.), то можно аналогично установить понятие
геометрического центра инерции. Для этого достаточно рассматривать
Данное геометрическое тело как однородное физическое тело и
определить для него центр инерции по формуле (12').
Из установленных для центра инерции векторных формул
(*Ч> (12) и (12') можно получить аналитические формулы, которые
149
используются при нахождении центра инерции конкретных
механических систем, либо геометрических тел. /
Рассмотрим положение механической системы относительно
некоторой прямоугольной системы координат.
Обозначим координаты центра инерции С через х, у> z, а
координаты точки mk — через xk, yk> zk (k= 1, 2, ..., n). В качестве
полюса выберем начало координат О. Проектируя обе части
равенства (11) на координатные оси, получим:
2m^_2m*Wfr
(13)
. е.
[, аналогично,
пУх' с — п1
п
2'
Ж
J* 2m* 2m*
п
2 щч
х = —п ,
п
ЩУк 2 mkzk
z — 5=1
Формулы (13) представляют собой координаты центра
инерции механической системы, состоящей из конечного числа точек.
В случае твердого тела из формулы (13) получаем для
координат приближенного центра инерции Сп (х°п, у°пУ zQn) выражения:
Г0_2_^Л. л.а_И^ПкУк. „п_2Д"^
п~ 2*-* ' Уп~ 2^к ' п~ 2^* '
Переходя в этих формулах к пределу при Lmk —► 0, окончательно
получим формулы для координат центра инерции тела в виде:
Ш**" - ШУа,п IISzdm
Х — Л1 • v — jn • Z — Jn С14ч
я/*»' у~ш**' я;-»' ( '
(Ю (V) (V)
Для координат геометрического центра инерции получим
формулы:
Ш"* Шу«" ш^-
х = ^у-; У=^г-; г = ^т-. (14')
Полученные формулы (13) и (14) сходны с формулами (8) и (10),
полученными для центра тяжести.
Если в формулах для центра тяжести выразить веса через
массы согласно второму закону Ньютона, т. е.
Pk = mi£k> dP = dm-g,
150
то, подставляя эти значения в формулы (8) и (10), мы получим
формулы (13) и (14).
Отсюда следует, что центр тяжести механической системы
совпадает с центром инерции (масс) этой системы.
Это, однако, не означает, что понятия центра инерции и центра
тяжести идентичны. Понятие центра инерции (масс) применимо
к любым механическим системам, в то время как понятие центра
тяжести применимо только к механическим системам, находящимся
под действием сил тяжести (т. е. притяжения к Земле). Так,
например, в небесной механике при рассмотрении задачи о
движении двух тел вселенной, например Земли и Луны, можно
рассматривать центр инерции этой системы, но нельзя рассматривать
центр тяжести.
Таким образом, понятие центра инерции (масс) более
широкое, чем понятие центра тяжести.
В динамике при изучении законов движения произвольных
механических систем естественно используют понятие центра
инерции (масс). В технических приложениях, где обычно
рассматриваются тела, находящиеся под действием сил тяжести,
используют понятие центра тяжести.
3. Методы нахождения центра тяжести и центра инерции
Общим методом нахождения центра тяжести либо центра
инерции (масс) является использование общих формул,
полученных выше. Однако в некоторых частных случаях можно их
находить более простыми методами. Рассмотрим эти методы. Будем
считать, что для механических систем существует центр тяжести,
1) Метод симметрии
Пусть механическая система имеет материальную плоскость
(либо ось) симметрии.
В этом случае центр тяжести лежит в этой плоскости (либо
на оси). Действительно, если материальная система имеет
плоскость симметрии (тг), то каждой массе mk соответствует такая
же масса m'k, симметричная с mk относительно плоскости (оси),
так что mk = m'k.
Построим систему координат так, чтобы начало координат
лежало в плоскости симметрии (на оси симметрии) и ось OZ
лежала в этой плоскости (совпадала с осью). Тогда из формул (13)
следует, что у = 0, так как числитель в выражении для у
содержит парные слагаемые с противоположными знаками (а в
с^учае оси симметрии также х = 0).
2) Способ сложения масс
Будем считать, что известны центры тяжести отдельных
частей механической системы.
/
151
р
2 тьхь
2 mkxk
_k=P+\
м2
р р
2 т*Уь 2 т*гь
к=\ . о А=1
2 т*У* 2 mk*k
_к=р+\ . ^о k=p+l
М2 > ~2— м2
Предположим, что заданную механическую систему S(ml9 .. .тп)
можно рассматривать как совокупность двух систем S\ (т19 .. .тр)
и S2(mp+1,.. .тп), центры тяжести которых Cl (х[, j/f, z\) и
Сг(х\* у1> К) известны.
Тогда из формул (13) следует, что
(15)
(15')
-.-z ..-z -..-2
где
р п
Мх= 2 /яЛ; ЛГ2 = 2 mk.
k—i k=p+\
Из формул (15) и (15') получаем соотношения:
п
МХ + Му^Ът^б (16)
Сравнивая формулы (16) с формулами (13), получим:
Mxx\ + Mtx\ = Mxc\
МУх+М2у\ = Му6
Mlz\-\-M2zl=MzCy
где
М= 2 тк.
к = \
Отсюда окончательно получаем:
_М1х°1 + М2х°2
Лг1 — ■
Ус = М+^й. (17)
м
„ Mxz\ 4- Мгг\
Формулы (17) могут быть обобщены для случая, когда
механическая система представлена в виде совокупности нескольких
механических систем. Совершая предельный переход, можно эти
формулы обобщить на случай, когда механической системой
является твердое тело.
152
3) Метод отрицательных масс
Будем рассматривать однородное твердое тело, имеющее
некоторое незаполненное отверстие.
Мысленно заполним отверстие массой такой же плотности,
как заданное тело. Пусть масса данного тела равна М, а
заполненного М19 координаты центров тяжести данного тела,
заполненного отверстия и данного
тела вместе с заполненным
отверстием соответственно обозначим
через С{х, у, г), Сг(х1У у19 zx)
и С2(х2, у2У z2). Из формул (17)
следует, что
Мх-{-Мхх1щ Му-\-Мхух,
Mz + M,z,
М + М1
(18)
Рис. 119.
Если массу данного тела
вместе с заполненным
отверстием обозначим через М2 =
= М-\-М19 то из формул (18) окончательно получим:
М2х2 — Мххл #
М2 - м, ;
М2у2 - М,ух и
z =
M2z2 — Mizl
М2-Мх
(19)
Таким образом, для нахождения центра тяжести однородного
тела с отверстием можно мысленно заполнить отверстие массой
такой же плотности, считать ее условно отрицательной и затем
находить центр тяжести по способу сложения масс.
Эти рассуждения справедливы и для неоднородного тела и в
этом случае массу М1 можно выбрать произвольно.
Задача 13. Найти геометрический центр инерции для
полушара, конуса и дуги окружности.
а) Полу шар (см. рис. 119)
По формулам для координат геометрического центра инерции С
получим выражения:
f f ( xdxdydz
xt
_ т
h«*
Ус-
Г \ [ ydx dy dz
2 >
[ \ ( zdx dy dz
, (V)
hR3
Для вычисления интегралов воспользуемся сферическими
координатами, тогда:
x = r sin 0 cos сЬ;
j; = г sin 0 sin ф;
z = г COS 6.
dxdy dz = г2 sin ftdrdbdb;
15а
R 2 2tt
$ ^ 5 -Kd* dj; d2 = 55 5 r* sin 2° cos ¥гс1Щ = °J
(V) 0 0 0
ТГ
R~2 2n
J J J j/d* dy dz = J J J r8 sin2 0 sin МгсИЩ = 0;
V) 0 0 0
/?Т2тг
J J J zdx dy dz = J J 5 r3 cos 6 sin QdrdOdi =
(V)
(V)
7T
T
0 0 0
=7^{^°2'№h=^H^]>=?
Следовательно,
^c=0; ^c=°; *с=тг#'
(20)
6) Aohj/c
Найдем геометрический центр инерции конуса (см. рис. 120).
Используя формулы для определения координат
геометрического центра инерции С, в
случае конуса получим
выражения:
$ f J xdxdydz
(V)
Ус'-
Рис. 120.
1 nR2h
3
Г Г Г ydxdydz
. (V) ,
}_izR2h 1
3
Г [Г zdxdydz
.Jn
1 nR2h
3
Для вычисления интегралов воспользуемся цилиндрическими
координатами, тогда:
* = rcos^; y=rsincb;
dxdydz = rdrdzdty;
R-r m
AB = h
h{R~r)
2n R R
J 5 j xdxdydz =) ) j r2 cos <j;dc{>drd2 = 0;
0 0 0
154
h(R-r)
2* R г
J ] ] ydxdydz = j j j r2 sin ЫЫгйх = 0;
(V) 0 0 0
h(R-r)
2тг R R
j j j zdxdydz = j \ j zrdrbdrdz =
(V) 0 0 0
2тг tf
^2 ГД2,.2 2/fr' Г4'
: R2 [ 2 3+4
ti/z2/?4 ti/z2/?2
12#2
12
Следовательно,
•*c = 0> ^c = 0» *с = т-
(21)
в) Дуга окружности
Найдем геометрический центр инерции дуги окружности (см»
рис. 121).
По формулам для приближенного центра инерции Сп получим
формулы:
Переходя к пределу,
получим координаты центра
инерции С {х, у):
*r
kjAB
; j>c=
wv4B
где s — длина дуги AB.
Для вычисления интегралов воспользуемся полярными
координатами, тогда:
x = /?sincp; y = Rcosv; ds = Rdq;
-[-ос
С xds = \ R2 sin yd<? = R2[—cosy] _*^ = 0;
kjAB -a
f ydx=\ R2 cosifdu = R2[smy]_^ = 2R2sm<x.
kjAB
Кроме того, s = 2/?a, следовательно,
xc=0;
n sin a
155
Для полуокружности а = тг. В этом случае:
2R 2 п
§ 4. МОМЕНТ СИЛЫ
Понятие о моменте силы возникло в связи с определением
вращательной способности силы, приложенной к телу, имеющему
неподвижную точку или неподвижную ось вращения. Еще
Архимед в III в. до н. э., установив правило рычага, нашел меру
вращательной способности силы, однако понятием момента силы он
еще не пользовался. Это понятие было сформулировано
значительно позже в работах Леонардо да Винчи (1452—1519), Гвидо
Убальди (1545—1607), Вариньона (1654—1722).
1. Момент силы относительно полюса
Представим себе твердое тело, имеющее сферическую
шарнирную опору в некоторой точке тела. Чтобы устранить влияние
силы тяжести тела, поместим шарнирную опору в центр тяжести
тела О (см. рис. 122). _
Если к телу приложить некоторую силу F, то тело начнет
вращаться вокруг точки О. Чтобы оценить вращательную
способность этой силы, найдем силу Q, которая, будучи приложена
^ .^^ к этому телу совместно с силой F9
/^~/ Х4^ будет сохранять состояние покоя рас-
/ A/ fb^\ \ сматриваемого тела. Естественно счи-
( / ^^£^^^^ \ j тать, что вращательные способности
\/ d^$ V/-. сил F я Q одинаковы, ибо
вращает/С^ лл ^**\F тельное действие одной силы уничто-
ч' "^ ^ жает вращательное действие другой.
Рис. 122. Опыты показывают, что в качестве
такой силы можно выбрать каждую
силу Q, лежащую в плоскости силы F и точки О, вращающую
тело в направлении, противоположном направлению вращения тела
силой F и так, чтобы произведение величин сил на их
расстояния от полюса были одинаковыми (при условии, что силы и
расстояния измеряются в одних и тех же единицах), т. е,
F-h = Q.l.
Если же эти произведения не равны, то будет происходить
вращение тела в направлении действия той силы, которой
соответствует большее произведение. Это положение было уже
известно Архимеду, который, изучая равновесие рычага (жесткого
несгибаемого стержня), сформулировал условие равновесия
рычага в форме:„Соизмеримые величины (грузы) находятся в равновесии,
156
если расстояния их точек приложения от точки опоры обратно
пропорциональны".
Таким образом, вращательная способность силы зависит от
величины силы и ее расстояния от неподвижной точки тела и,
следовательно, произведение силы на расстояние ее от
неподвижной точки является мерой вращательной способности силы.
Произведение силы на плечо было названо моментом силы
относительно точки О. Чтобы определение этого понятия было
более полным, необходимо сформулировать его так, чтобы из
определения вытекала не только численная величина
вращательной способности, но и было видно направление вращения
тела под действием силы. Это требование приводит к тому, что
момент нужно определять как векторную
величину. Если вместо плеча
рассматривать вектор /г, проведенный из
неподвижной точки перпендикулярно к силе F и
лежащий в плоскости, проходящей через
силу и точку (см. рис^123), то
векторное произведение hXF будет являться
вектором, перпендикулярным к плоскости, Рис. 123.
проходящей через силу F и точку О,
и если его приложить в точке О, то, глядя с конца этого
вектора, мы будем видеть вращение тела под действием силы
F в направлении против часовой стрелки.
Таким образом построенный вектор характеризует направление
вращения тела под действием силы F. Численно он равен F-h,
и, следовательно, этот вектор определяет момент силы F
относительно центра О. Заметим еще, что если построить вектор г,
соединяющий точку О с точкой приложения А силы Z7, то
выполняется соотношение:
_hXF=(7+AB)XF=?XF + ABXF = 7XF,
ибо АВХ^ = 0.
Если отвлечься от тела и рассматривать только силу и
полюс (точку), то все вышеуказанные рассуждения приводят нас
к определению:
Моментом приложенной силы относительно данного полюса
называется векторное произведение радиуса-вектора,
соединяющего полюс с точкой приложения силы, на данную силу.
Момент силы относительно полюса обозначается символом:
m0(F)=7XF. (22)
Рассмотрим некоторые свойства моментов сил.
1°. Сумма моментов двух прямо противоположных сил
относительно какого-нибудь полюса равна нулю.
157
Найдем сумму моментов сил относительно какого-нибудь полюса
(см; рис. 124): __ /
_ _гс0 (Л) + WolFj = ЩХ/г + ОВХ F*=T_
= (OB + BA)XF1 + OBXF2 = OBX(F1JrF2) + BAXFv (23)
Но _ _
BAXF\=0. (24)
Из формул (23) и (24) окончательно получаем, что
rF9 ^o(Fi) + m0(F'2) = 0.
2°. Если две силы имеют общую
точку приложения, то момент
равнодействующей (результирующей) этих
сил относительно какого-нибудь по-
Рис. 124. люса равен сумме моментов
данных сил. _ __ __
Найдем момент равнодействующей F = F1-\-F2 относительно
какого-нибудь полюса (см. рис. 125):
= rX/7i + rX/7. = w.(/71) + /«o(f.)-
Таким образом, ^d
т0 (F) = т0 (FJ + /я, (F,). (25) Рис" 125'
Это свойство было впервые установлено Вариньоном и поэтому
его иногда называют теоремой Вариньона.
Точно так же, как было установлено понятие момента
приложенной силы, можно установить понятие момента приложенного
вектора относительно данного полюса. Этим мы воспользуемся
дальше, рассматривая моменты некоторых векторных величин>
приложенных в точке.
2. Момент силы относительно оси
Представим себе твердое тело, имеющее неподвижную ось
вращения. Пусть к этому телу приложена некоторая сила F.
Разложим силу F на две составляющие F1 и F2,
соответственно лежащие в плоскостях^ перпендикулярной к оси и
параллельной оси. Составляющая Fx производит вращение тела вокруг
оси, причем ее вращательная способность, как показывает опыт,
зависит от ее величины и расстояния от оси вращения и поэтому
она характеризуется по величине и направлению моментом этой
силы относительно полюса О (см. рис. 126). Составляющая F2 не
производит вращения, она стремится сообщить телу движение
158
вдоль оси. Таким образом, вращательная способность силы F
характеризуется моментом силы Fx относительно полюса О, т. е.
векторным произведением OAXFv
Момент силы Ft относительно полюса О всегда параллелен
оси вращения ZZ, поэтому задание его
проекции относительно оси однозначно
определяет его направление. В силу
этого вращательную способность силы
F относительно оси и можно задавать
проекцией на ось и момента m^(F^.
Но __ _
"Рит* (^\1_= *Ри (ОАХ Л) =
^npa[OAX(f>-\-F2)]=_
= пра (ОАХП = прат0 (Z7),
ибо вектор О А X F2 перпендикулярен
к оси й и поэтому при(ОА XF2) = 0.
Если на оси и выбрать любой по- Рис. 126.
л юс Ор то получаем:
прит,х (F) -пр^ОГА ХП = пр_и ЩО + ОА) Xf] =
= при (ОхО X F) + при (ОА ХП = прйт0 (F),
Щ1П\
ибо вектор О,О X F перпендикулярен к оси и и при (OlOXF) = 0.
Все эти соображения приводят нас к следующему
определению:
Моментом силы относительно оси называется проекция на
данную ось момента силы относительно какого-нибудь полюса на
оси. Символически момент силы
относительно оси записывается так:
mu{F) = npumQ{F.)
Из определения момента силы
относительно оси следует, что момент силы
относительно оси представляет собой число
(скалярную величину) со знаком плюс или
минус.
Теоремы, доказанные выше для
моментов сил относительно полюса,
справедливы также для моментов сил
относительно оси. Для доказательства этого
факта достаточно записать свойства мо^
ментов сил относительно какого-нибудь полюса оси, а затем
полученные равенства спроектировать на ось.
Укажем некоторые правила для вычисления момента силы
относительно оси.
159
1) Сила и ось лежат в одной плоскости.
В этом случае сила и ось либо параллельны, либо пересекаются.
В первом случае момент силы относительно какого-нибудь
полюса О на оси является вектором, перпендикулярным к оси, и
поэтому его проекция на ось равна нулю.
Во втором случае в качестве полюса О можно выбрать
точку пересечения силы и оси и тогда момент относительно этого
- полюса равен нулю и, следова-
ui I тельно, момент относительно
Т i\\ оси равен нулю. Итак, если си-
! \ n ла и ось лежат в одной плос-
i \ \г2 кости, то момент силы
относительно оси равен нулю.
2) Сила и ось не лежат
в одной плоскости (векторы
скрещивающиеся).
В этом случае через
точку приложения силы А
проведем плоскость
перпендикулярно к оси и данную
' рис. 128. силу F разложим на две
составляющие F1 и F29 так что
Fx лежит в плоскости, a F2 перпендикулярна к плоскости (см.
рис. 128).
Тогда получим, что
mu(F) = mu(F1) + mu{F2).
Но сила F2 параллельна к оси, поэтому mu(F2)==0. Сила Ft
лежит в плоскости, перпендикулярной к оси, и для нее момент
относительно точки пересечения плоскости с осью направлен по
оси, поэтому
mu (Fl) = npnm0 (Fl) = ±Fl -h,
где h — плечо силы Fi относительно полюса О.
Таким образом,
mu{F) = ±F,-h = ±\npJlh.
В частности, если сила лежит в плоскости, перпендикулярной
к оси, то момент силы относительно оси равен произведению
величины силы на кратчайшее расстояние от оси, взятое со знаком
плюс, если, глядя с оси, мы видим вращение силы в направлении
против движения часовой стрелки, и со знаком минус, если, глядя
с оси, мы видим вращение силы в направлении по движению
часовой стрелки.
Установим теперь аналитические формулы для определения
моментов сил относительно координатных осей.
160
Пусть координаты точки приложения силы А суть ху уу zy а
проекции силы F суть Ху Y, Z. Тогда, как известно из векторной
алгебры, можно записать:
_ U 7 ~а |
m0(F) = rXF=\x у г L
\XYZ\
Раскрывая значение определителя по элементам первой
горизонтали, получаем:
m0(F) = (yZ — zY)i+(zX — xZ)j+{xY—yX)k.
Так как, с другой стороны,
т0 (?) = тх (?) Г + ту (?) J + тг (?) \
то отсюда окончательно получаем формулы:
mx(F)=yZ-zY=\i
my(F) = zX — xZ = \ у *\; (26)
Шг(р) = ху— уХ--
3. Главный момент
Будем- рассматривать некоторую систему сил S(Fl9 F2>.. .,Fn).
Главным моментом этой системы сил относительно полюса или
оси называется сумма соответствующих моментов всех сил системы
относительно того же полюса или той же оси.
Для главных моментов введем обозначения:
У
z
Y Z |
1 z
X
\z х\
\х
\х
у\
у\
£. = »*e(/7i) + me(/y+.
La = та (Ft) + та (Ft) + ... + mtt (Fn) = £ ma (Fk).
ft = l
Главные моменты относительно полюса и оси инвариантны по
отношению к элементарным операциям, т. е. не изменяются при
выполнении над силами системы элементарных операций.
Действительно, первая элементарная операция не изменяет
главного момента, так как сумма моментов двух прямо
противоположных сил относительно полюса равна нулю (а также,
следовательно, и относительно оси). Вторая элементарная олерация не
изменяет главного момента, так как момент результирующей
Двух сил равен сумме моментов составляющих сил относительно
полюса (а следовательно, и оси).
Из инвариантности главного момента следует, что если для
системы сил существует равнодействующая ?, то момент равнсь
6
Г. М. Финкельштейн
161
действующей относительно полюса или оси равен главному
моменту относительно того же полюса или той же оси, т. е. если
S(Flt Ft, ... F„)^F, '
то
™0(F)=I„;
mu(F) = Lu. (27)
Заметим также, что если существует равнодействующая для
системы сил, то существует такой полюс, относительно которого
главный, момент системы равен нулю.
Действительно, достаточно выбрать полюс произвольно на
линии действия равнодействующей.
Тогда из (27) заключаем, что
L0 = mQ(F) = 0;
4. Момент пары
Парой сил называется совокупность двух параллельных сил,
равных по величине, противоположных по направлению и не
лежащих на одной прямой.
Такая система сил часто встречается в различных
практических задачах, поэтому изучим свойства этой системы сил.
Установим прежде всего
понятие момента пары. Для этого
найдем главный момент пары сил
относительно какого-нибудь
полюса (см. рис. 129).
Главный момент пары равен
сумме моментов сил пары, поэтому
5>f= тЛК) ±_то @ =
OAXF1 + OBXF2. (28)
Рис. 129. НО
ОВ = ОА + Ш (29)
Из формул (28) и (29) получаем:
Так как F1-{-Ft = 0, то окончательно получаем:
Z0 = ABXF2. (30)
Из формулы (30) видно, что главный момент пары не зависит
от выбора полюса и отличен от нуля (так как AB%F2). Поэтому
естественно главный момент пары назвать просто моментом пары.
Таким образом, момент пары является свободным вектором.
Исследуем, что он собой представляет. Для этого построим
векторное произведение векторов АВ и F2 (см. рис. 130).
162
Это векторное произведение представляет собой вектор,
перпендикулярный к плоскости пары, глядя с конца которого мы
видим вращение пары в напра- —- = /г г)
влении против движения часо- ^ г* mft*-t2/
вой стрелки, и по величине
равный произведению величины сил
пары на плечо пары
(расстояние между силами пары).
Момент пары будем_
обозначать символом m(Fv F2).
Пара сил не имеет
равнодействующей, т. е. при помощи t*
элементарных операций нельзя
пару сил привести к одной
силе. Действительно, если бы пара сил имела
равнодействующую, то существовал бы полюс, относительно которого момент
пары был равен нулю, что невозможно.
Рис. 130.
§ 5. УСЛОВИЯ РАВНОВЕСИЯ СИСТЕМЫ СИЛ
1. Приведение к двум силам
Докажем теорему о возможности приведения произвольной
системы сил к двум силам.
Теорема. Каждая произвольная система силы эквивалентна
двум силам.
Будем рассматривать произвольную
,Fn). Сначала докажем теорему для
случая системы, состоящей
Доказательство,
систему сил S(Fl9 F2, .
из трех cmS(F19 Ft9 F3)y
т. е. при /2 = 3. Обозначим
точки приложения сил Т7,,
F2> F3 соответственно
через Л, В, С (см. рис. 131).
Проведем плоскость
(irj, проходящую через
точку А и силу F2J и
плоскость (тг2),
проходящую через точку А и
силу Fz. Эти плоскости,
имеющие общую точку Ау
будут иметь некоторую
линию пересечения.
Выберем на линии пересечения
произвольную точку D. Если же плоскости (ttJ и (тт2) сливаются, то
в качестве точки D можно выбрать любую точку, лежащую в
их плоскости (отличную от А). Затем соединим точки А и D с
Рис. 131.
6*
163
точками приложения сил F2 и Fs и каждую из этих сил
разложим по проведенным направлениям.
Таким образом, заданная система сил эквивалентна пяти силам:
S{Flt Ft, F.) - S(FV F„ F', ?;, F",).
Перенесем составляющие сил F2 и Fs по линиям их действий
в точки А и D.. Тогда в точке А будут приложены три силы
Fi9 F'2> F's и в т°чке D две силы F"t, F\.
Используя правило параллелограмма, заменим три силы в
точке А одной силой Р и две силы в точке D одной силой Q.
Таким образом, совершая операции, являющиеся результатом
применения элементарных операций, можно систему, состоящую
из трех сил, привести к двум силам и, следовательно,
S(Flt F„ F,)- 5 (Р, Q).
В случае произвольного числа сил (#>3) можно сначала три
силы привести к двум, затем из оставшихся (п—1) сил снова
три силы привести к двум и т. д., пока не приведем при помощи
элементарных операций всю систему к двум силам.
Итак, доказано, что
S(Fl9 F2, ... Fn)^S(P, Q). (31)
2. Теорема о равновесии системы сил
Используя формулу (31), можно доказать следующую теорему.
Теорема. Для того чтобы система сил находилась в
равновесии, необходимо и достаточно, чтобы главный вектор и
главный момент относительно некоторого полюса были равны нулю.
Доказательство. Докажем сначала необходимость. Пусть
система сил S(FU F2, ... Fn) находится в равновесии. Приведем
эту систему к системе двух сил S(P, Q), т. е.
S(Flt Ft, ... Fn)^S(P, Q). (31')
Так как элементарные операции не нарушают равновесия
системы сил, то система S(P, Q) также находится в равновесии. По
первой аксиоме заключаем, что силы Р и Q — прямопротивопо-
ложны и, следовательно, главный вектор и главный момент
системы S(P, Q) равны нулю, т. е.
_P+Q=_0;
mQ(P) + mQ(Q) = 0.
Так как элементарные операции не изменяют главный вектор и
главный момент системы сил, то заключаем, что главный вектор
и главный момент заданной системы сил также равны нулю, т. е.
£=0; Zo = 0. (32)
164
Докажем теперь достаточность.
Пусть для заданной системы сил выполняются условия (32).
- Приведем заданную систему сил к двум силам Р и Q. Так как
элементарные операции не нарушают главный вектор и главный
момент, то заключаем, что
Lo = m,(P) + m,(Q) = 0. (™}
Из первого равенства (33) следует, что силы Р и Q равны по
величине и противоположны по направлению, из второго
равенства следует, что силы Р и Q не могут образовать пары, ибо
момент пары не равен нулю.
Таким образом, силы Р и Q прямо противоположны и,
следовательно, по первой аксиоме находятся в равновесии.
Совершая обратные элементарные операции, можно от сил Р и Q
перейти к заданной системе сил, и так как элементарные операции
не нарушают равновесия системы сил, то заключаем, что
заданная система сил также находится в равновесии.
3. Основные уравнения статики твердого тела
Будем рассматривать твердое тело, находящееся под
действием системы сил S(F19 F2, ... Fn). Если тело является
несвободным, та часть сил являются активными, а часть — реакциями
связей. ЕГ случае свободного тела, лишенного связей, все силы
являются активными. Для того чтобы тело под действием
системы сил S находилось в покое, необходимо, чтобы система сил
находилась в равновесии и, следовательно, чтобы выполнялись
условия (32).
Таким образом, условия (32) представляют собой векторные
уравнения равновесия системы сил или покоя тела.
Если мы будем рассматривать тело относительно некоторой
неподвижной системы отсчета OXYZ, то, проектируя уравнения
(32) на оси координат, получим шесть скалярных уравнений.
Пусть на твердое тело, находящееся в равновесии,
действуют силы (активные и реакции опор).
Тогда
Д=2?*; I.=2mu{Fk).
Если эти векторные равенства спроектировать на оси
координат, то получим:
R* = npx%Fk = £ npxFk = ±Xk;
Ry — zj**» "*=2*^ь>
165
п п п 1_^
Lox = LX = прх^тй (Fk) = g яр,/и0 (Fk) =£тх {Fk);
Loy=^my{Fk); L0Z=^m,(Fk).
Используя условия (32) и полученные формулы, получаем
условия равновесия твердого тела в аналитической форме.
2mx(Fk) = 0; ^my(Fk) = 0; 2X(/=*) = 0. [ '
Уравнения (34) называются основными уравнениями статики
твердого тела. Первые три уравнения (34) называются
уравнениями проекций, а последние три уравнения называются
уравнениями моментов.
Используя шесть основных уравнений статики, можно, вообще
говоря, находить шесть неизвестных величин. Однако для
некоторых частных систем сил некоторые из уравнений
превращаются в тождества, и в этом случае можно определить не шесть,
а меньшее количество неизвестных величин. В практических
задачах обычно задаются активные силы и неизвестными являются
реакции опор.
Если число неизвестных величин не превышает числа
уравнений, то их можно найти, и в этом случае статическая
задача называется определимой. Если число неизвестных величин
превышает число уравнений, то неизвестные уже найти нельзя
(методами статики), и в этом случае задача называется
статически неопределимой.
4. Частные случаи системы сил
Для некоторых частных случаев систем сил основные
уравнения статики упрощаются. Рассмотрим наиболее важные
частные случаи.
а) Сходящаяся система сил
Как было установлено раньше (см. § 2, п. 1), сходящаяся
система сил приводится к одной силе (существует равнодействующая).
Поэтому для равновесия сходящейся
системы сил необходимо и достаточно,
чтобы главный вектор системы был равен
нулю, т. е.
/? = 0.
Так как главный вектор системы сил
равен геометрической сумме всех сил, то
Рис. 132. полученное условие означает, что для
равновесия сходящейся системы сил
необходимо и достаточно, чтобы силовой многоугольник был
замкнутым,
166
В аналитической форме условие равновесия сходящейся
системы сил задается тремя скалярными уравнениями:
2**=0; 2П=о; %гк=о. (35)
б) Плоская система сил
Система сил называется плоской, если линии действия всех
сил лежат в одной плоскости. Для составления скалярных
уравнений выберем систему координат OXY так, чтобы все силы лежали
в плоскости OXY.
Так как все силы лежат в плоскости OXY, то их проекции
на ось OZ равны нулю и их моменты относительно осей ОХ и
QY также равны нулю, т. е.
Zk = 0; mx(Fk) = 0; my(Fk) = 0 при A=l, 2, ...п.
Поэтому три уравнения (34) обращаются в тождества (третье,
четвертое и пятое уравнения) и, следовательно, остается только
три уравнения:
2**=0; 2П=0; 2Х(?*) = 0. (36)
Заметим еще, что моменты сил относительно оси OZ равны
величинам моментов сил относительно полюса О с
соответствующим знаком (в зависимости от направления вращения силы
относительно оси OZ). Поэтому третье уравнение (36) можно в
скалярной форйе записать в виде
2>МЛ)==2±1>Ио(^)1=о.
При решении плоских статических задач такая форма уравнения
моментов является удобной, ибо можно при составлении
уравнений равновесия использовать только плоскую систему
координат OXY.
Если сила Fk задана по величине, и направлению и ее плечо
относительно полюса О равно Л, то величина момента этой силы
определяется по формуле:
|Mofo)l=/VA-
Если же сила Fk является искомой и ее координаты суть
Xk, Yki а координаты точки приложения суть хь yk, то момент
силы относительно оси OZ определяется по формуле:
m2(Fk) = np2{rk XFk) ="Рг
i j k
XkYk 0
= xkYk-ykXk. <37)
При
решении задач можно также использовать такой прием:
ориентировочно разлагаем силу Fk на компоненты по положительным
167
направлениям осей координат OX, OY (см. рис. 133), а затем
вычисляем момент относительно полюса О. По знакам/проекций
силы, полученных из решения задачи, устанавливаем истинное
направление компонентов силы.
Таким образом, при решении задач для силы, расположенной
в первом квадранте (рис. 133), получаем снова формулу (37).
в) Параллельные силы
Система сил называется
параллельной, если линии действия этих
сил параллельны между собой. Для
составления скалярных уравнений
выберем систему координат OXYZ
так, чтобы все силы были
параллельны оси OZ (см. рис. 134).
Так как силы параллельны оси
OZ и, следовательно,
перпендикулярны к осям ОХ и OF, то получаем:
:0 при k=\% 2,
Рис.
Хк = 0; Ук=0;
п.
mz{Fk) = U ПРИ
Поэтому три уравнения (34) обращаются в тождества (первое,
второе и шестое уравнения) и, следовательно, остаются только
три уравнения:
2Z* = 0; 2mx(Fk) = 0; ^my(Fk) = 0. (38)
В данном случае момент силы относительно осей находится
как произведение величины
силы на ее расстояние от оси
с соответствующим знаком.
5. Задачи
Z\
i 11 ,i
Ос
В рассматриваемых в этом
пункте задачах при
определении направлений реакций
опор руководствуемся тем,
что было сказано о реакциях
опор в § 1, п. 5.
Задача 14.
Переносный кран, поднимающий груз
Q весом 2 Т, устроен так,
как указана на рисунке 135; AB = AE = AF=2 м, угол
EAF = 90°, плоскость ABC делит прямой двугранный угол
EABF пополам. Остальные данные^ размеры и величины показаны
на чертеже. Определить силу "Р19 сжимающую вертикальную
стойку АВ, а также силы Р2, Р8 и Р4, растягивающие струну ВС
и тросы BE и BF, пренебрегая весом частей крана.
Рис. 134.
168
Для определения силы Р4 рассмотрим силы, действующие на
точку С. На точку С действуют силы Р2, Q и реакция стрелы N.
Эти силы находятся в равновесии, ибо.точка С находится в
покое. Поэтому геометрическая сумма этих сил равна нулю и,
следовательно, многоугольник этих сил является замкнутым (см,
рис. 136). ,
Треугольник сил подобен треугольнику ABC и, следовательно,
_5_ —А.
АВ~ ВС9
п _Q-bc
АВ
Величину стороны ВС находим из треугольника ABC:
10У"3
р^>_ 5 10 _
D^ о;« АПО , /"тг "
'sin 60°
У*.
Отсюда получаем:
Для определения остальных сил рассмотрим силы, приложенные
в точке В. В этой точке приложены реакция стойки АВ —
сила Р;, реакция
струны Р'2 и реакции
тросов Р'ъ и Р[у причем
Р' =—Р Р' = —Р
Р' = — Р Р' = —Р
и в силу симметрии
Так как точка В
находится в покое,
то силы,
действующие на нее,
находятся в равновесии.
Выберем систему
координат BXYZ так,
чтобы ось BZ была вертикальной, ось BY лежала в плоскости,
проходящей через стойку и стрелу. Составим уравнения
равновесия сходящейся системы сил,
приложенных в точке В. Так как силы Р[ и ~Р'г
лежат в_плоскости BYZ и сумма проекций
Р'г и Р'4 на ось ВХ равна нулю, то
первое уравнение превращается в тождество.
Рис. 136. Остальные два уравнения получаем в форме
2 Yk = Р'г cos 30° — Р; cos 45° cos 45° — Р\ cos 45° cos 45° = 0;
2Z* = P[-\-P'2 cos 60° — P; cos 45° — P; cos 45° = 0.
•Рис. 135.
169
Отсюда получаем: /-—
Р'1^-Р> = Ъ;
и, следовательно,
^з — ^2 ~2~ —** 2 3 ' 2 '
Итак, для искомых величин получаем следующие значения:
Рх^4,2 Т; Р2^5,8 Т; Р3 = Р4 = 5 Т.
Задача 15. Прямоугольная дверь, имеющая вертикальную
ось вращения АВ, открыта на угол CAD = 60° и удерживается
в этом положении двумя веревками, из которых одна, CD, пере-
Рис. 137.
кинута через блок и натягивается грузом Р = 32 кГ, другая,
EF, привязана к точке F пола. Вес двери 64 кГ\ ее ширина
AD = АС =18 дм; высота АВ = 24 дм. Пренебрегая трением на
блоке, определить натяжение Т веревки EF, а также реакцию
цилиндрического шарнира в точке А и подпятника в точке В
(см. рис. 137).
На дверь действуют силы: вес двери Q, сила Р,
направленная вдоль веревки CD, реакция веревки EF — сила 7\, реакция
в точке А, состоящая из компонентов ХАу Ул, и реакция в точке
J5, состоящая из компонентов Хв, YB, ZB, причем реакция веревки
EF численно равна натяжению, т. е. 7\ = Т. Составим шесть
основных уравнений равновесия системы сил:
lXk = XA + XB — Pcos30° = 0,
2П=Гл+Гв + Рсо8бО°-7\ = 0;
lZk = ZB-Q = 0;
170
2тх = — АВ-УД — АВ-Р cos60° — KCrQ = 0;
lmy = AB-XA —AB-Pcos 30°+ C1S-Q = 0;
lm2 = BM^P — BZ'T1=0.
Подставляя в эти уравнения значения данных величин, получим:
ХА + ХВ—16\ГЗ = 0;
УА+Уя+16-Т=0;
ZB — 64 =0;
— 24 КЛ —24-16 —9-у-64 = 0;
24^ — 24-16-1/3+ 9 ^-64 = 0г
18-^.32—18^Г=0.
Из этих уравнений находим:
Т=32кГ; ХА^6,9кГ; Уд = — 28кГ;
Хв = 20,8 кГ\ Ув = 44 кГ\ ZB = 64 кГ.
§ 6. ЭКВИВАЛЕНТНЫЕ СИСТЕМЫ СИЛ
1. Условия эквивалентности двух систем сил
Две системы сил Sl(F1J ... Fn) и S2(Qiy ... Qm) называются
эквивалентными, если при помощи элементарных операций можно
от одной системы сил перейти к другой. Докажем теорему,
устанавливающую необходимые и достаточные условия
эквивалентности двух систем сил.
Теорема. Для того чтобы две системы сил S(F11... Fn)n
^(Qj, -•- Qm) были эквивалентны, необходимо и достаточно,
чтобы главные векторы и главные моменты этих сил относительно
некоторого полюса были равны, т. е.
R(St) = R(St);
L0(St) = L0{St).
(39)
Доказательство. Необходимость следует из того, что
если две системы сил эквивалентны, то, совершая элементарные
операции, можно перейти от первой системы S^^ ко второй S2.
Элементарные операции, как было установлено раньше, не
изменяют главный вектор и главный момент системы, и поэтому
выполняются условия (39).
Докажем достаточность. Пусть выполняются условия (39).
Построим систему сил, состоящую из сил, противоположных
силам системы S\, и назовем ее — 5Х.
Рассмотрим систему сил S, состоящую из систем сил —St и 52
(см. рис. 138).
171
В силу построения системы — S, заключаем, что главные
векторы и главные моменты систем S, и — S1 прямо противоположны,
т. е.
R( — SJ = — В (^i)' (40)
L0(-Sl) = -L0(S1). '
Из формул (40) следует, что главный вектор и главный момент
системы S равен нулю, ибо
_R(S)=R(S1)-\-R(-S1)^R(S1)-RJS1) = 0;
Lo(S) = L0(Sl) + Lo(-S1) = Lo(S1)-Lo(S1) = 0.
Рис. 138.
Отсюда на основании теоремы о равновесии системы сил
заключаем, что система сил 5 находится в равновесии и, следовательно,
она эквивалентна двум прямо противоположным силам:
S-v.(F,—?). (41)
Если к эквивалентным системам (41) присовокупить одну и ту
же систему сил S„ то эквивалентность не нарушается и
символически это можно записать так:
S + S^iF, -F)_+Su
St + (~ St) + S, - (F, -F) -f St. (42)
При помощи элементарных операций можно от эквивалентных
систем сил (42) отбросить соответственно системы сил (—£,)-{-
-j-Sj и (F, —F); в результате получим эквивалентные системы
сил. Таким образом, получаем:
что и требовалось доказать.
2. Теория пар
Из теоремы об эквивалентности двух систем сил можно
вывести условие эквивалентности двух пар. Так как главный вектор
пары всегда равен нулю, то получаем, что две пары эквивалентны
тогда и только тогда, когда их моменты геометрически равны
172
(т. е. равны по величине и одинаково направлены). Из этого
условия эквивалентности пар можно сделать следующие выводы:
1°. Не нарушая эквивалентности пары, можно пару
перемещать в ее плоскости, изменяя при этом величину сил и плечо
так, чтобы не изменялся ее момент (см. рис. 139).
2°. Не нарушая эквивалентности пары, можно пару
перемещать в параллельную плоскость, изменяя при этом величину сил
и плечо так, чтобы
ее момент (см. рис.
не изменялся
140).
/77
<S7
1-Е
Рис. 140.
3°. Если дано несколько пар, то их можно заменить одной
эквивалентной парой. Для этого достаточно построить пару,
момент которей был бы геометрически равен сумме моментов
заданных пар (сложение пар, см. рис. 141).
/77,
(Ш) Лтэ
&—7+Е+Ш
Рис. 141.
3. Приведение произвольной системы сил
Используя теорему об эквивалентности двух систем сил,
можно произвольную систему сил S(F[, ...F'n) привести к более
простому виду по отношению к выбранному наперед полюсу О.
Построим главный вектор R и главный момент Г0 относительно
полюса для заданной системы сил, а затем построим систему сил
173
S, (FyFiyF2), где сила F является силой, приложенной в цолюсе
О и геометрически равной главному вектору R, а силы Fiy F2
образуют пару, момент которой геометрически равен главному
моменту LQ, т. е. (см. рис. 142):
~р 5.
m{F„Ft)=L0. (43)
Нетрудно видеть, что построенная система сил Sx (Ft Flt F2)
эквивалентна заданной системе сил S(F[, Fi, ... Fn).
Действительно, в этом случае
выполняются соотношения:
R(S)==F=F+F1-\-F2 = R(Siy,
= m(Fl,Ft) + m0(F) = t>o(Sl),
т. е. выполняются условия теоремы
Рис. 142. об эквивалентности системы сил.
Полюс О называется центром
приведения системы сил. Таким образом, произвольная система сил
эквивалентна системе сил, состоящей из силы и пары, причем
сила приложена в центре приведения и геометрически равна
главному вектору системы, а момент пары геометрически равен
главному моменту относительно центра приведения.
4. Инварианты приведения
При изменении центра приведения О главный вектор R
системы сил не изменяется и поэтому он является инвариантом
приведения (первый инвариант).
Главный момент L0 системы сил "
зависит от выбора полюса. Чтобы
установить эту зависимость, выведем
формулу, выражающую соотношение
между главными моментами относительно
двух различных полюсов Ох и 02 (см.
рис. 143).
Рис. 143.
^=2 (Р*Х/7Л)=2 (OA + rJX/V
А=1 А=1
= 2 ОА ХП+ 2 rhXFk= oto2х 2 Fk+
+ 2>o,(/?*)=OAXfl + V
= I0s + /?XOA-
174
Итак, из полученной формулы
г0=г0,+£хад (44)
следует, что главный момент относительно некоторого полюса
равен главному моменту относительно другого полюса,
сложенному с векторным произведением главного вектора на вектор,
соединяющий другой полюс с первым.
Умножим обе части равенства (44) скалярно на главный
вектор R, тогда получим:
Второе слагаемое правой части равно нулю, ибо векторное
произведение R X 0201 перпендикулярно к R, поэтому получаем:
r0l./?=v7?.
Отсюда следует, что скалярное произведение главного момента
на главный вектор есть величина постоянная, не зависящая от
центра приведения, т. е.
L0-R= const.
Следовательно, эта величина также является инвариантом
приведения (второй инвариант).
§ 7, ПРИВЕДЕНИЕ ПРОИЗВОЛЬНОЙ СИСТЕМЫ СИЛ К ПРОСТЕЙШЕМУ
ВИДУ (КАНОНИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ СИСТЕМЫ СИЛ)
1. Исследование различных случаев
В зависимости от значений, принимаемых инвариантами
приведения, можно найти простейшую систему сил, эквивалентную
заданной системе. Рассмотрим все возможные случаи.
Первый случай: Lo-R=£0.
В этом случае главный вектор и
главный момент не равны нулю,
т. е. R=^=0} Lo=^=0,a также эти
векторы не перпендикулярны. Для
нахождения простейшей системы сил,
эквивалентной данной, построим
полюс О, относительно которого
главный момент L0 был бы параллелен
главному вектору R. С этой целью
выберем произвольный полюс 019 и
если в нем вышеуказанное условие
не выполняется, то главный вектор
R и главный момент L0x образуют
некоторый угол, не являющийся прямым
Построим прямую, перпендикулярную
R*0,0
(см. рис. 144).
к плоскости векторов
R и L0i и проходящую через точку Ог. Тогда относительно
175
каждого полюса О этой прямой можно записать согласно формуле
(44) соотношение: - ■ /
Г0 = Г01+7?хсГа
Разложим вектор L0i на два компонента: по направлению R и
направлению, перпендикулярному к R. Тогда
z„=z;,+z;.
Векторное произведение Ry^OxO параллельно вектору Z,g, а
величина и направление вектора /?Х 010 зависят от выбора полюса
О. Рассмотрим полюс О, для которого выполняется соотношение
RXOlO = — Lv
Для этого достаточно выбрать полюс так, чтобы
и полюс О поместить с той стороны проведенной прямой, чтобы
векторы R, О^О, L2 образовали левую систему координат.
При таком выборе полюса О получаем:
L0 = L0i + RX010 = L1 + L2 + RX010 = L1
- и, следовательно, в полюсе О глав-
к ный момент параллелен главному
вектору. Если полюс О принять
I за центр приведения, то согласно
"J"*- __ п. 3 заключаем, что заданная
система сил эквивалентна силе и паре
и, так как момент пары
параллелен силе, то сила перпендикулярна
рис. 145. к плоскости пары. Такая система
сил, состоящая из пары и силы,
перпендикулярной к плоскости пары, называется дин а мой.
Таким образом, если T0.R=£§t то система сил эквивалентна
динаме (см. рис. 145).
Заметим, что величины силы и момента пары определяются по
формулам:
F = R
\m(F11F2)\ = L0 = L0cos(T^R) = 1^.
Второй случай: Lo-R = 0 и R=£0.
В этом случае всегда можно найти полюс О, относительно
которого главный момент L0 равен нулю. Действительно, _выбе-
рем произвольно полюс Ох. Если £^=^=0, то из условия LOi-R = 0
заключаем, что главный момент L0i перпендикулярен к главному
вектору R (см. рис. 146).
176
Так же, как и в предыдущем случае, проведем прямую через
точку 019 перпендикулярную к плоскости векторов R и LQi, и
выберем на ней полюс, исходя из требования:
RXOlO = -L0
Тогда получим:
l0=l0i + rxo1o.
Если полюс О принять за центр приведения, то заключаем, что
заданная система сил эквивалентна силе и паре и, так как
момент пары равен нулю, то она сводится к двум прямо
противоположным силам и, следовательно,
заданная система сил эквивалентна
силе, линия действия которой
проходит через полюс О и
параллельна главному вектору. __
Таким образом, если /?=^=0 и
£0 _L R* то система сил имеет
равнодействующую (признак сущест- j \[0._^-—^ЪхОО
вования равнодействующей). -—^ '
Третий случай: Lo-R = 0;
R = 0;lo=£0. Рис. 146.
В этом случае приведем
заданную систему сил к двум силам и, так как главный вектор этой
системы двух сил равен нулю, а главный момент не равен нулю,
заключаем, что. эти две силы образуют пару сил.
В этом случае система сил эквивалентна паре, момент
которой геометрически равен главному моменту системы, относительно
некоторого полюса О.
Заметим, что в этом случае главный момент L0 не зависит от
выбора полюса О, ибо
L0=L0 + RX010 = L0.
Четвертый случай. Lo-R = 0; R = 0; Lo = 0.
В этом случае система сил находится в равновесии, и,
следовательно, она эквивалентна двум прямо противоположным силам.
Из рассмотренных всевозможных случаев следует, что
произвольная система сил эквивалентна либо динаме, либо одной силе
(равнодействующей), либо паре сил, либо двум прямо
противоположным силам.
2. Физическая интерпретация
Сила, приложенная к твердому покоящемуся телу, сообщает
ему поступательное движение, пара сил — вращательное
движение. Динама представляет собой совокупность силы и пары и,
следовательно, сообщает твердому покоящемуся телу
вращательное и поступательное движения, т. е. винтовое движение.
177
Таким образом, произвольная система сил, будучи приложена
к покоящемуся твердому телу, сообщает ему в данный момент
времени либо поступательное движение, либо вращательное
движение, либо винтовое движение, либо не нарушает покоя тела.
Этот факт полностью согласуется с фактом, установленным в
кинематике (Кинематика, гл. II, § 6, п. 4), согласно которому в
каждый момент времени скорости точек тела распределены так,
что движение является либо мгновенно-поступательным (скорости
точек тела геометрически равны), либо мгновенно-вращательным
(существует мгновенная ось вращения), либо мгновенно-винтовым
(существует мгновенно-винтовая ось), либо мгновенно-статическим
(скорости всех точек равны нулю).
3. Центральная ось
Центральной осью заданной системы сил называется такая
ось, относительно точек которой главные моменты системы сил
параллельны главному вектору, либо главные моменты равны
нулю.
Из рассмотренных в предыдущем параграфе случаев следует,
что центральная ось существует в первом и втором случаях,
т. е. когда R=^=0.
Действительно, в первом случае
система сил приводится к динаме (Z7, F\, F2)
и центральной осью является ось,
проходящая через силу F.
В самом деле, если
Ot—произвольный полюс, лежащий на этой оси, то
(см. рис. 147)
I0=I0+/?X001=I0+FX001=I0,(45)
ибо векторы R и ООх параллельны.
Заметим, что в данном случае из
формулы (45) следует, что главные
моменты относительно точек центральной
оси геометрически равны между собой.
Во втором случае система сил приводится к равнодействующей
F и центральной осью является линия действия равнодействующей.
Действительно, если 01 — произвольный полюс, лежащий на
этой линии, то по свойствам равнодействующей
Lo=mo>(F) = 0.
Используя понятие центральной оси, можно установить
картину распределения главных моментов произвольной системы сил
относительно различных полюсов в пространстве, а также
осуществить приведение системы сил к динаме. Пусть ось и является
173
центральной и 01—произвольный полюс пространства. Опустим
Из полюса 01 перпендикуляр ОхО на ось а (см. рис. 148).
Тогда получим:
I0l = ro + /?XOOi. где \RXOOA=R-OOiy
и, следовательно, главный момент относительно полюсов
центральной оси является минимальным, а относительно других
полюсов главный момент геометрически равен сумме главного
момента относительно
и\
ц
о
I*
RxOO,
Рис. 148.
О,
L0=O
полюса центральной оси
и вектора,
перпендикулярного к оси и
возрастающего
пропорционально расстоянию
полюса от оси. Чтобы
привести заданную
систему сил к динаме,
достаточно в качестве
центра приведения выбрать
полюс на центральной
оси. Действительно, при
таком выборе центра приведения система сил будет приведена
к силе и паре, причем момент пары параллелен силе, т. е. сила
и пара представляют собой динаму. Для нахождения
центральной оси достаточно уметь составлять ее уравнение; чтобы
составить уравнение центральной оси, выберем некоторую систему
координат OXYZ (см. рис. 149).
Пусть точка S(x, у, z)— текущая точка центральной оси. Тогда
главный момент относительно этой точки Ls параллелен главному
вектору /?, т. е.
LS\\R. (46)
Обозначим проекции главного вектора R через X, Y, Z, а
проекции главного момента относительно начала координат через L%
Му N. Тогда можно записать соотношения:
Ls=L0 + RXOS = Li + Mj+Nk-\-
i j k
XY Z
x у
z
= [L + (Vz-
— Zy)]7+[M+(Zx — Xz)y-\-[N + (Xy — Vx)]k.
Из условия параллельности (46), следует, что координаты
векторов Ls и R пропорциональны, т. е.
L + Yz - Zy _ ЛТ + Zx - Xz _ N+ Xy - Yx ..-.
X ~~ Y — Z l4/J
Полученное уравнение (47) представляет собой уравнение
центральной оси.
179
Задача 16. К четырем вершинам куба Л, //, В и/D
приложены четыре равные силы: Р1 = Р2 = Р3 = РА = Р, направления
которых указаны на чертеже. Привести эту систему к
простейшему виду (см. рис. 150).
Выберем систему координат DXYZ, как указано на рисунке, и
выберем точку D в качестве полюса приведения. Заметим, что
проекции сил определяются следующим образом:
РЛ*>
где
■0,0); Р,(а,а,0); Р,( —а, 0, a); PJa, 0, а),
а = Р cos 45° = ££Х
Отсюда для проекций главного вектора и главного момента
получаем выражения:
ч
1 1 >*
L^v^
V
г
в
9»
Рис. 149.
Рис. 150.
Rx = ^Xk = a-\-a — а-\-а = 2а;
/?2 = 2Z* = 0 + 0-|-a + a = 2a.
Если ребро куба считать равным Ь9 то
mD(Pl) =
Щ(Р9) =
i j k
О b О
а —а О
i J k
b b 0
— a 0 a
»*D(P2)=
«D(p4)=
i j k
006
a a 0
i j k\
0 0 0
a 0 a
и, следовательно,
180
= ffl, (P2) + /я, (P.) = - ab + aft = 0;
= my (Pt) + my(Pt) = ba — ba = 0;
:-тг (PJ -f тг (PJ = — ba -\- ba == 0.
Из этих формул находим:
/? = ]//?i + ^ + ^ = /8?=2flK2 = 2^p-V~2 = 2P;
LD = 0.
Таким образом, в данной задаче имеет место второй случай
и, следовательно, система сил приводится к равнодействующей,
и, как видно из ее проекций (Rx = 2a,- Ry = 0, Rz = 2a), она
направлена по диагонали DG и по величине равна 2Р.
РАЗДЕЛ II
ДИНАМИКА
Простейшей механической системой является материальная
точка. Если твердое тело движется поступательно, то изучение его
движения приводится к изучению движения какой-нибудь точки
этого тела, в которой сосредоточена вся масса тела, т. е.
приводится к изучению движения материальной точки. В том случае,
когда движение твердого тела является непоступательным, но
траектории его различных точек мало отличаются друг от друга
(например, для брошенного тела небольших размеров), его можно
в первом приближении рассматривать как материальную точку и
изучать его движение как движение материальной точки. Мы
начнем изучение движений механических систем с уравнений
движения материальной точки.
Глава I
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
МАТЕРИАЛЬНОЙ ТОЧКИ
1. Уравнения свободного движения точки
Будем рассматривать свободное движение материальной точки
массы т в основной системе отсчета OXYZ, в которой
выполняются законы Ньютона.
Обозначим координаты точки через х, у, z. При движении
точки ее координаты х, у> z изменяются и они являются
некоторыми функциями времени t, т. е.
x = x(t); y=y(t); z = z(t).
Результирующую всех сил, действующих на точку т,
обозначим через F и ее проекции на оси координат обозначим через
X, Y, Z.
По второму закону Ньютона можно записать:
mw = F. (1)
181
Проектируя это векторное равенство на оси координат,
получим три скалярных равенства: /
mwx = X; mwy=Y\ mw2 = Z. (2)
В кинематике точки было установлено, что
d2x d2y d2z /оч
*>х = Ж» wy = lt" W* = W2- (3)
Подставляя формулы (3) в формулы (2), окончательно получаем:
d2x.
mg=K; (4)
d2z „
mW2 = Z.
Полученные уравнения (4) называются дифференциальными
уравнениями движения материальной точки. Эти уравнения
представляют собой систему трех дифференциальных уравнений
второго порядка. Правые части уравнений могут быть функциями
ряда переменных, вид функций определяется конкретной
рассматриваемой задачей. В зависимости от характера этих функций
решается вопрос о способе интегрирования дифференциальных
уравнений движения точки.
Характер выражений Ху Y, Z обусловливается типом сил,
действующих на материальную точку.
При рассмотрении различных конкретных задач могут
представиться следующие типы сил:
1. Сила F является постоянной (по величине и направлению).
Примерами таких сил могут служить силы тяжести вблизи
поверхности Земли, сила трения для тела, скользящего по
шероховатой поверхности.
В этом случае величины X, Y, Z являются постоянными.
2. Сила F зависит только от времени.
Примером такой силы может служить периодическая сила,
действующая на тело, которое вращается вокруг неподвижной
оси, и возникающая вследствие неточного центрирования тела,
В этом случае выражения Ху Y, Z являются некоторыми
функциями от времени, т. е.
X=X(t); Y=Y{t); Z = Z(t).
3. Сила F зависит только от координат движущейся точки.
Примерами таких сил могут служить сила притяжения тела к
Земле при значительном расстоянии от поверхности Земли; сила
упругости пружины, пропорциональная отклонению подвешенного
к ней шарика от равновесного положения.
182
В этом случае выражения Х9 Y9 Z являются функциями
координат точки, т. е.
Х=Х(х, у9 г); Y=Y{x9 у, z); Z = Z(x9 у, г).
4. Сила F зависит только от скорости движущейся точки.
Примерами таких сил могут являться силы сопротивления среды.
В этом случае выражения X, Y9 Z являются функциями от
проекций скорости х9 у, z\ т. е.
Х=Х(х, у, z); Y=Y{k9y9z)\ Z = Z{x9y9z).
В общем случае сила F может зависеть от всех этих величин,
и тогда выражения Х9 Y, Z будут являться функциями от
времени, координат точки и проекций скорости точки, т. е.
X=X{t9 jc9 у, z9 х9 у9 z); Y=Y(t9 х9у9 z9 х9 у9 z);
Z = Z(t9 х9у9 z9 х9 у9 z).
Дальше будут рассмотрены конкретные задачи,
иллюстрирующие указанные типы сил.
Уравнения (4) позволяют решать две основных задачи:
1. По заданным силам, действующим на материальную точку,
найти движение точки.
2. По заданному движению точки найти результирующую
всех сил, действующих на точку, либо некоторые из
действующих «-сил, если все остальные силы заданы.
При решении задачи 1 нам заданы правые части Х9 Y9 Z
уравнений (4) и решение задачи сводится к интегрированию
системы дифференциальных уравнений.
При решении задачи 2 по заданным координатам точки путем
дифференцирования легко находятся левые части уравнений и,
следовательно, можно найти проекции результирующей всех сил,
либо некоторые из действующих сил, если остальные силы
известны.
2. Интегралы уравнений движения
Если материальная точка находится под действием сил общего
типа, то дифференциальные уравнения движения представляются
в следующем виде
d2x
m-gp = X(t9 х9 у9 z9 х9 у9 z);
mj?z== yv> х> у> z> *> у* *); i5)
m^2 = Z{t9 х9 у9 z9 х9 у9 z).
Эта система уравнений представляет собой систему трех
дифференциальных уравнений второго порядка относительно трех
1 Точка над выражением обозначает в механике производную по времени.
183
неизвестных функций X, Y, Z, где независимым аргументом
является время t. Решение этой системы производится путем
интегрирования.
Представляя вторые производные как первые производные от
первых производных путем преобразования всех трех уравнений,
в некоторых случаях (которые устанавливаются в теории
дифференциальных уравнений) можно эту систему привести к
равносильной системе в виде:
и/Л*, х9'у9 *, ху у, z) = 0t
aifi (t> х9 У> z> *> У> *) = 0;
iif%{t, х9у9 z9 х9 у, z) = 0.
Отсюда следует, что выполняются соотношения:
f[(t9 х9 у, z, х, у, г) = Сх\
/.(*, х, У, z, х9у9 z) = C2; (6)
/.(*, х9у9 *> х9у9 *) = СШ.
Соотношения (6), связывающие время t9 координаты точки
xt у у z, производные первого порядка от координат точки
Ху у у z и произвольную постоянную, называются первыми
интегралами уравнений движения точки.
Если уравнения (6) можно путем преобразований всех трех
уравнений представить в виде
di'ViV* х>у> z> Ci> С*> сз) = 0^
ЯЪ$,х,У,г,С19С„ С,) = 0;
ЪЧшУ, х. У, г,С19 СШ9 СЛ) = 0Г
то будут справедливы соотношения:
yx(t9 x9y9z9Cl9 Ct9 СЛ) = С^
<(Л*,ХуУу ZyCiyC2yC9) = C5; (7)
<t9{t, ХуУу Zy С19С29С,) = С6.
Соотношения (7), связывающие время ty координаты точки ху yf z
и произвольные' постоянные С19 С%9 С%9 С4, С5, Св, называются
вторыми интегралами уравнений движения.
Если уравнения (7) можно разрешить относительно координат
точки ху у9 z9 т. е. представить в эквивалентной форме:
x = x(tf Cj, С2, с,, С4, с5, Cfj;
y=y(t,C1,Ct,C„Ci,Cl,Q; (8)
Z = Z(ty Cj, C2, Ct, C4, C,, Ce),
то уравнения (8) называются общими решениями системы
дифференциальных уравнений (4).
184
3. Начальные условия
Общие решения (8) представляют собой совокупность
решений уравнений (4), зависящих от шести произвольных
параметров. Чтобы найти определенное решение, соответствующее
конкретной рассматриваемой задаче, необходимо задать шесть
условий для определения шести параметров Clf С2, С„ С4, С5, Св.
В качестве таких условий можно задать для некоторого
момента времени t = t0 значения координат точки и значения
проекций скорости точки, т. е.
Условия (9), называются начальными условиями.
Подставляя начальные условия в первые интегралы (6), найдем значения
постоянных С19 Сж, С, по формулам:
J1 ■ Imp "^о» Уо> ^о> **о» Уо> 20J = Ci;
У 2 1^0' ■*<>» У о* ZQ, XQy 3V ^0/==^'2»
/8 (*0> -^0» У0* ^0» "*0» -Уо» ^0/==^3*
Подставляя начальные условия и найденные значения С,°, С®, С?
во вторые интегралы, получим значения постоянных С4, С5, Св
по формулам:
<Pi ('о. *о. Л> ^С?. С!, Сз°) = С4°;
<Р,('о> *0. П>*о> С, С2°, С1) = СЪ
<ft(t0,x0fyQyzQ9ClC°2tCl) = Cl
Подставляя все найденные значения произвольных постоянных
в общие решения (8), получим решения системы уравнений (4),.
соответствующие начальным условиям (9) в виде
v v/f Г>0 /^0 S*>0 /^0 /"Ю /^о\.
Л Л\Ц L»i, L>2| ^3» ^4) ^б> ^б/>
У==У(*9 ^1> С2, С3, С4, С5, C6jj
-у ~ (+ г° г° г° г*° г*° г*°\
^ ^ \L, t>i, 02Э ^3» ^4» ^5> ^в/«
4. Прямолинейное движение
Будем предполагать, что материальная точка под действием
силы F перемещается по прямой. Такое движение точки
называется прямолинейным.
Если прямую, по которой происходит движение точки,
принять за ось ОХ, то для координат у и z получаем значения
У = 0, 2=0.
Из дифференциальных уравнений движения (4) в этом случае
получаем:
т^ = Х; V = 0; Z = 0.
185
Отсюда следует, что в случае прямолинейного движения сила
F параллельна прямолинейной траектории. /
Интегрируя второе и третье уравнения движения
■О- — = 0
dt2 ~ и' dt2
получим:
В начальный момент времени t = 0 имеем:
у=у0 = 0; у=у0; z=zQ = 0; z=z0.
Из этих начальных условий находим постоянные интегрирования:
Сг = У01 С2 = 0; C3 = zQ; С4 = 0.
Таким образом,
y = yj; z=zQt.
Так как движение является прямолинейным, то y = z = 0 и,
следовательно, у0 = z0 = 0.
Итак, в случае прямолинейного движения материальной точки
сила, действующая на точку, и начальная скорость параллельны
траектории точки.
Для прямолинейного движения точки, таким образом,
получаем уравнение движения:
d2x „
с начальными условиями:
Это уравнение для указанных раньше типов сил можно
разрешить в квадратурах.
Рассмотрим возможные случаи.
а) Сила F = const.
В этом случае Ar=a = const и, следовательно,
d2x
т
d2x а
тж*=*;
Л = — = В = const.
dt2 т г
Интегрируя это уравнение, получим:
X = ^$t + C1)dt = ^ + C1t + C2.
Из начальных условий получаем:
C2 = xQi C1=xQ
186
и, следовательно,
б) Сила F зависит только от времени.
В этом случае X=f(t) и, следовательно,
d2x г,..
mW2=f(t);
(Рх_Ш
dt2~ т '
Интегрируя это уравнение получим:
£=;Н/('>*+*.;
t t
x=^tff(t)dt]dt + xl)t+x(>.
в) Сила F зависит только от координаты точки.
В этом случае X=f{x) и, следовательно,
d2x ~ , v
Для интегрирования этого уравнения умножим это уравнение
почленно на dx = xdt:
d2x
m-77ixdt=f (х) dx,
или
l-md(x2)=f(x)dx;
| m j d(x2) = J/(x) dx=<p (л) -f С;
i mi2 = ?(*) +С;
'Ч£У=Ч£+£«ф<*>+*..-
at J m
I
T^W + C,
Постоянные Ct и Ca можно определить из начальных условий,
г) Сила F зависит только от скорости точки.
В этом случае Х=/(х) и, следовательно,
m~dF =/(•*)»
187
или
dt
ma-P =/(*)..
Введем новую переменную v = x, тогда уравнение примет вид:
dv
~1Г
dv г( ч
или
Полученное выражение представляет собой первый интеграл.
Если из него можно найти v, т. е. выразить v через t и Сх:
то интегрируя это уравнение еще раз, получим окончательный
результат:
to
5. Примеры прямолинейных движений
Рассмотрим некоторые конкретные примеры прямолинейных
движений.
а) Свободное падение вблизи земной поверхности без учета
сопротивления воздуха
Направим ось Л'-ов по вертикали вверх с началом на
поверхности Земли. На тело действует постоянная вертикальная сила
тяжести P = mg, поэтому Х = — mg.
Выберем начальные условия: при £ = 0, x = h> Jc = v = 0.
Уравнение движения имеет вид:
d2x
т
или
I
Интегрируя
это
тШ
d2x
dt2
уравнение,
dx
It "
= — mg,
=—«Г-
получим:
-it+c»
х = ^~Т&г + с>* + С*
188
Используя начальные условия, найдем значения постоянных
интегрирования: С1 = 01 С2 = Л, Окончательно получаем:
x = -±gt* + h.
Из этой формулы нетрудно вывести формулу для скорости
падения на поверхность Земли. Полагая х = 09 находим время
падения тела с высоты А:
Но
Итак,
=gt=g -/Ц=УЩ.
v=
dx
Ж
v = V%gfi.
б) Свободное падение с большой высоты без учета
сопротивления воздуха
Выберем ось Х-ов вдоль линии падения материальной точки
с началом в центре Земли (см. рис. 151). В этом случае сила F,
действующая на эту точку, уже не является постоянной и
определяется согласно закону всемирного тяготения
Ньютона:
где т — масса падающей материальной точки,
М — масса Земли, k — гравитационная постоянная
и х— расстояние точки т от центра Земли.
Уравнение движения имеет вид:
т
или
<Рх
dt2
<Рх
dt2 ~~
, тМ
— г-к--^г,
х2 '
Рис. 151.
На поверхности Земли при x — R сила тяжести P=mg
удовлетворяет условию:
т. е.
kM=gR\
Подставляя это выражение в уравнение движения, получаем:
d*x
dt<
= — g
189
В данном случае сила, действующая на точку, зависит только
от координаты точки, поэтому интегрирование уравнения
производим методом, указанным в пункте „в". /
-d(x*) = — g-^rdx;
Так как \x\ = v, то получаем:
±v*-i*l . с
2 v — х +Ci'
Если считать, что в начальный момент времени точка
находится на высоте Л, т. е. при £ = 0, x = R-\-h, и что начальная
скорость точки равна нулю, т. е. при x = R-\-h, v = 0f то
получаем:
т. е.
И
° ~~ х R + h'
При x = R получаем скорость падения точки на Землю по
формуле:
v2 = 2pR— 2gR2
и *&* R + h9
т. е.
*=/2£/?-fg.
+ '
Рассмотрим некоторые частные случаи.
Пусть Л=оо, т. е. точка падает с бесконечной высоты. В этом
случае получаем:
Если сравнить эту формулу с формулой скорости при
свободном падении, то получаем, что при свободном падении на
Землю с бесконечной высоты под действием силы тяготения
точка приобрела бы такую же скорость, как при свободном
падении с высоты h = R при постоянном ускорении силы тяжести g".
190
Пусть h<^R, т. е. точка падает с высоты, не превосходящей
радиуса Земли. В этом случае получаем:
Так как Л</?, то выражение -г можно рассматривать как
!+£
сумму геометрической прогрессии со знаменателем ^<1 и,
следовательно,
1
'+«
Л='-1+(Я-(1)'+-+<-')"(Я+--
Подставляя это выражение в формулу для скорости, получаем:
,=/5is(4-i+i:-i+....f=
=vW!0-i+!-#+...f=
■^0-4+*-*+-) •
Полученная формула дает нам поправку для скорости
падения на Землю с высоты, сравнимой с радиусом Земли. В
частности, при отбрасывании членов высших порядков получаем такую
приближенную формулу:
^K2^(l-|) ^V2gh{\-±
Для нахождения координаты х представим выражение для
скорости в виде
г. е.
dt J х R +
191
в) Свободное падение вблизи земной поверхности при учете
сопротивления воздуха
При падении тел в пустоте скорость тела
v=^^пропорциональна времени, как это еще было установлено Галилеем. Если же
учитывать сопротивление воздуха, то этот закон неверен, ибо
движение тела обусловливается не только силой тяжести P = mg>
но и сопротивлением среды F. Как показывают опыты, при
небольших скоростях (меньше 0,1 — ] с достаточной степенью
точности можно считать сопротивление пропорциональным первой
степени скорости, а при больших скоростях, пропорциональным
квадрату скорости.
Рассмотрим случай, когда
F=av2,
где а зависит от плотности воздуха, формы тела и для данного
тела является постоянной величиной.
На точку т будут действовать две силы: сила тяжести
p = mg, направленная по вертикали вниз, и сопротивление
воздуха F = av*y направленное по вертикали вверх. Выбирая ось
ЛГ-ов по вертикали вверх с началом на поверхности Земли,
получаем уравнение движения в форме:
d2x
2
тщ*=— mg-\-av
Выберем начальные условия при £ = 0, x = h, v = 0.
В данном случае сила, действующая на точку, зависит только
от скорости, поэтому проинтегрируем его по методу, указанному
в пункте „ги.
Учитывая, что зт = —f, представим уравнение в виде
dv 12
— m — = — mg+av2;
dv а .
dt & m
Полагая — = b2, получаем:
&=*(1-&V);
dv =sdt-
1 < I A-bit'. j. \ jry
Постоянную С, находим из начальных условий. При t = 0,
v = 0 и, следовательно, 6^ = 0.
192
Итак,
1 . 1 + bv ,
т. е.
\-bv~& *
Отсюда находим, что
— _ ± . 1 - elhgt
Чтобы найти выражение для координаты х, представим
выражение для скорости в виде
dx__ _ 1 t 1 -егЪ& 1 < e-bg\Lebgt
dt~ V~ b ' \-\-e2W = b ' *-'** + еь& '
Отсюда, интегрируя, получаем:
х-
b J e-bgt + ggi b2g к "Г / i a
Постоянную C2 находим из начальных условий. При £ = 0,
я = Л и, следовательно,
Окончательно получаем:
Если сопротивление среды небольшое и расстояние точки от
Земли невелико, то движение точки близко к свободному падению.
Действительно, если воспользоваться разложением в ряды
то пренебрегая членами порядка выше второго, получаем:
Г, М. Финкельштейн 193
х^тг In
b2g
1+
b2g'
q-2 + A;
2-2
: _'^2+Л.
Полученная формула соответствует свободному падению точки
вблизи земной поверхности без учета сопротивления воздуха.
6. Криволинейное движение
В случае криволинейного движения материальной точки при
действии на точку сил, зависящих от времени, координат и
скорости точки, задача интегрирования уравнений движения является
очень трудной. Эта задача упрощается для частных случаев сил.
Если равнодействующая сил, действующих на точку, имеет
проекции на оси координат вида
X = X(t9 х, х); Y=V(t,y,y); Z = Z{t, z, z),
то уравнения движения точки принимают вид:
mj£ = X(t, х, х);
m%£ = V(t,y,y);
dt
dh
dt2
m-r^ = Z{t, z, z).
Yk
В этом случае каждое из уравнений может быть
проинтегрировано независимо от других и, следовательно, мы приходим
к задаче интегрирования
уравнений движения в трех
прямолинейных движениях.
В качестве конкретного
примера такого движения рассмотрим
движение материальной точки под
^ действием постоянной силы.
X Пусть на материальную точку
массы m действует постоянная
сила F и в начальный момент
времени при £ = 0 скорость точки
равна v0. Выберем прямоугольную
систему координат так, чтобы ось OY была параллельна силе F
и имела противоположное направление, а плоскость OXY так,
чтобы векторы F и vQ лежали в этой плоскости (рис. 152).
Рис. 152.
194
Зададим еще координаты х0, у0 точки т для начального
момента времени и угол а, образованный вектором v0 с осью ОХ.
Тогда мы имеем шесть начальных условий:
при £ = 0; х = х0; y=yQ; z = 0;
при £ = 0; ^- = ^0cosa; .^ = ^osina; ^f = 0. (10)
Составим дифференциальные уравнения движения;
d2x n
Разделим обе части каждого из уравнений на т, тогда
получим:
dt* U' <ft2~ m ' dt*~V' [il}
Уравнения (11) представляют собой систему трех линейных
дифференциальных уравнений второго порядка с постоянными
коэффициентами. Проинтегрируем их по известному правилу,
тогда получим решения в виде:
Используя начальные условия (10), найдем, что
£'2:==-*о» ^4==.Vo» ^6z=:v',
С, = t/0 cos a; C3 = i>0sina; C5 = 0.
Подставляя значения произвольных постоянных в формулы (12),
получим для решений окончательные формулы:
x = vQcosoL-t-{-xQ;
z = 0.
Из этих формул видно, что точка перемещается в плоскости
OXY, Траекторией точки является парабола. Действительно,
если связать хну путем исключения параметра ty то получим
Уравнение параболы. Простоты ради предположим, что х0 =у0 = 0,
т- е. что точка в начальный момент времени при t = 0 находится
в начале координат. Тогда получим параметрические уравнения
Движения точки в плоскости OXY в следующем виде:
x = v0 cos я-t;
7*
195
Исключая параметр t, получаем:
F
У=-
2mvo cos2 а
X*-{-tgOL-X.
(14)
Это уравнение является уравнением параболы, вогнутой вниз,
ось которой параллельна оси OY (см. рис. 153).
Рассмотрим конкретную интерпретацию этой задачи, так
называемую артиллерийскую задачу. Эта задача формулируется
следующим образом: из ствола орудия, наклоненного к горизонту
под углом а,
вылетает снаряд.
Пренебрегая сопротивлением
воздуха и размерами
снаряда, найти
уравнение его движения,
дальность и высоту
полета.
Для решения этой
'X задачи достаточно
считать снаряд
материальной точкой, на
которую действует только сила тяжести Р (см. рис. 153).
Так как P = mgy где g— ускорение земного тяготения, то,
подставляя в формулы (14) и (13) вместо F значение P = mgf
,получим:
У = -^тМ-Т-х* + Ъ*-х- (15)
В параметрической форме траектория движения задана
уравнениями:
x=v0 cos <x-t;
У = —-§- ^2 + ^osina*^ (16)
Найдем формулы для дальности полета L = OA и высоты
полета H=CD (максимального отклонения от горизонта).
Для нахождения дальности полета L найдем точки
пересечения кривой (15) с осью ОХ из уравнения:
x2-\-tga.-x = 0.
2vn cos2 а
Отсюда получаем:
х1 = 0; х2
2t;0 cos2 a tg a
VQ sin 2a
g
Ho L = x2 и, следовательно,
vQ sin 2a
~~g '
(17)
196
Из формулы (17) следует, что
2
L =!*■
^max а
и максимальная дальность полета будет при а = 45°.
Для нахождения высоты полета Н найдем максимум функции
y(t), исходя из формулы (1-6).
j Vn sin a
.У max"
^2
. g_ v0 sin2 a ■ Vq sin2 a v\ sin2 a
Г
g
4
Итак,
lj_vo Sin* a
2g
H мах\
(18)
Lmqx
Рис. 154.
Из этой формулы следует, что высота полета будет
максимальной при а = 90° и
(19)
Н =-^
''max 2g '
Если углу а придавать всевозможные значения от 0 до 90°,
то получим некоторое семейство парабол, зависящих от
параметра а. Найдем огибающую этого семейства, используя
известное правило: для нахождения огибающей семейства Ф(х, уу а) = 0
Достаточно исключить параметр из системы уравнений:
Ф{*> У, «) = 0;
Ф'а(х, у, а) = 0. (20)
Из формулы (15) получаем, что
Ф*(х, У, а)
gx2 • 2 cos a sin a
2vQ cos4 a
\ vQ J cosa а '
197
т. е.
tgoi = A / (21)
Подставляя значения (21) в формулу (15), получим:
у = gx* (g2*2 + v°) 1 v"° — v2° g Y2
У 2v\ g2*2 ^ g 2g 2v\ •
Таким образом, уравнение огибающей семейства парабол имеет
вид:
у=ё-%;*' (22)
Полученная кривая (22) называется параболой безопасности.
Парабола безопасности представляет собой параболу, осью
которой является ось Г-ов.
Координаты точек пересечения этой параболы с осями Л'-ов
и К-ов соответственно равны максимальной дальности полета и
максимальной высоте полета (см. рис. 154).
7. Несвободное движение
Движения материальной точки, рассмотренные раньше,
представляли собой примеры свободного движения, когда на точку не
наложены никакие ограничения. Если же на движение точки
наложены некоторые ограничения, то движение является
несвободным. В этом случае, кроме активных сил, возникают еще силы
реакций связей. Налагаемыми на движение точки ограничениями
могут явиться требования, чтобы точка двигалась либо по
наперед заданной кривой, либо по наперед заданной поверхности.
Рассмотрим только случай, когда точка перемещается по гладкой
кривой. В силу гладкости кривой сила трения, направленная в
сторону, противоположную скорости точки v, отсутствует и,
следовательно, реакция связи (кривой) перпендикулярна касательной
к кривой.
В этом случае к трем уравнениям движения точки следует
еще присовокупить систему двух уравнений, задающую кривую
(как пересечение двух поверхностей):
Если активные силы заданы, то неизвестными величинами
являются три координаты точки х, у> z и две составляющих
реакции jVv, /Vp (по направлениям нормали и бинормали).
Для определения этих пяти неизвестных величин имеются
пять уравнений: три уравнения движения и два уравнения кривой*
-198
Уравнения движения можно упростить, если их записать
относительно подвижной системы координат mxvp (см. рис. 155),
образованной осями естественного трехгранника.
Пусть на точку действует сила F, и реакция связи есть
сила N.
По второму закону Ньютона получаем:
mw = F + N. (24)
Для удобства исследования этого уравнения спроектируем его
на оси естественного
трехгранника, тогда получим:
mwx = Fx-\-Nx;
mw, = F4 + N,; (25)
mWi = Fi-\-Np
Так как кривая гладкая, то
д^т z= 0. Кроме того, по
формулам, установленным в
кинематике точки,
Zi
w^
dv
Vй
'' dt' w* ~ R ;
(26)
Рис. 155.
Подставляя значения (26) в формулы (25), окончательно
получаем:
dv —
0 = F9 + N9. (27)
Интегрируя первое уравнение, можно найти закон движения,
т. е. путь s как функцию от t, а из второго и третьего уравнений
можно найти составляющие ре-
^^ акции N„ и Afp.
X Задача 17. Определить
движение тяжелой
материальной точки массой т граммов,
притягиваемой к неподвижному
IP центру силой, прямо
пропорциональной расстоянию.
Движение происходит в пустоте;
]Г сила притяжения на единице
рис> 156. * расстояния равна k2m дин; в мо-
_^ " мент£ = 0: л = а; у = 0; z = 0;
°~~г0> причем ось OY направлена по вертикали вниз (см. рис. 156).
Для решения задачи составим дифференциальные уравнения
Ижения точки. На точку действуют две силы: сила тяжести
199
Р и сила притяжения F к неподвижному центру О (началу
координат). /
По условию задачи F = l-Om, где I — коэффициент
пропорциональности. При Om=l9 F = k2mf поэтому \ = k2m и,
следовательно, F = k2m-Om. Обозначим координаты точки т через
ху у, z, тогда получим:
Fx = — k2mx; Fy = — k2my\ F2 = —k2mz. (28)
Дифференциальные уравнения движения можно представить в
виде:
mjp = — k шх\
т 0 = — k2my + mg; (29)
После
Интегр
d2z ,2
772^2= — k mz.
упрощения получаем уравнения:
d2V i *2
■ЯР + к'у = &
>ируя эти уравнения, получим:
х = Сх cos kt -j- С2 sin jW;
(30)
j/ = С8 cos /tf + С4 sin kt + |>; (31)
z = C5 cos ££ -\- C6 sin /W.
Для нахождения постоянных интегрирования используем
начальные условия:
г л = а; у = 0; 2 = 0;
при £ = 0 <^^с п<у п <** п
Из первых трех начальных условий получаем:
С^а; С, = -£; С5 = 0.
Используя вторые три начальных условия, получаем:
g = — Qft sin Л* + С2 A cos Л*;
^ = — C,k sin Atf + С4£ cos kt; (32
dt
200
~ = — Cbk sin ft* 4- Ceft cos kt,
т. е.
Итак,
х = a cos &£;
.V = — |- cos М +1 = & (1 _ cos kt);
2 = 0.
(33)
Таким образом, точка перемещается в плоскости &YK.
Исключая параметр t в этих уравнениях, получаем, что траекторией
точки является прямая:
У = ¥{1-т)' (34)
Из уравнений движения точки следует, что — а^х^а и,
значит, траектория точки есть отрезок прямой, для которого
| х | < а.
Задача 18. Самолет летит над землей на высоте h с
горизонтальной скоростью vv Из орудия произведен выстрел по
самолету в тот момент, когда
самолет находится на одной
вертикали с орудием. Найти:
1) какому условию должна
удовлетворять начальная
скорость v0 снаряда для того,
чтобы он «-мог попасть в
самолет, и 2) под каким углом а
к горизонту должен быть
сделан выстрел. Сопротивлением
воздуха пренебрегаем (см. рис.
157).
Для попадания снаряда в
самолет достаточно, чтобы
произошла встреча самолета со снарядом в некоторой точке М.
Условия встречи заключаются в следующем:
01M=ON; h^H (см. задачу на стр. 196).
Из первого условия получаем, что
Рис. 157.
т. е.
v1t = vQ cos а-£,
cos а = -—.
Из второго условия получаем, что
2(l_cos'a) = ^ 1-5
2g 2g^ ~" -i 2g
Отсюда после упрощений получим:
v\^2gh-{-v\.
(35)
201
Глава II
ОСНОВНЫЕ ТЕОРЕМЫ ДИНАМИКИ
Если механическая система S(miy т2, ... тп) состоит из
имеющих массу точек, то для каждой точки системы на основе
второго закона Ньютона можно составить уравнение, связывающее
движение этой точки с силами, действующими на точку. В
результате мы получим п уравнений движения точек механической
системы:
mkwk = Rk при k=\, 2, ... п. (36)
В этих уравнениях Rk является результирующей всех сил,
действующих на точку mk. Если движение механической системы
является свободным, то силы, действующие на точки, являются
активными, если же движение является несвободным, то на точки
системы действуют силы активные и реакции связей. Если
уравнения движения механической системы спроектировать на оси
координат системы отсчета OXYZ, то мы получим Зп скалярных
уравнений второго порядка:
т d24_y
k ~dt*' — k
mir$=Yk \ при k=l9 2, ... n, (37)
d2zk 7 |
где xky yky zk суть координаты точки mk9 a Xk) Yk9 Zk проекции
результирующей силы Rk. При интегрировании этой системы
уравнений получается 6п произвольных постоянных
интегрирования, которые находятся из 6/г начальных условий.
Для изучения движения механических систем устанавливаются
некоторые величины, являющиеся мерами движения механической
системы и мерами действий сил. Основными мерами движения
материальной точки т являются: векторная мера — количество
движения, равное произведению массы точки на ее скорость mv,
и скалярная мера — кинетическая энергия, равная половине
произведения массы точки на квадрат величины ее скорости-^- mv2.
Для механических систем устанавливаются аналогичные меры
движения как сумма этих мер движения для всех точек системы.
Основными мерами действия силы за некоторый промежуток
времени являются: векторная мера — импульс силы, равный
произведению силы на время ее действия, и скалярная мера —
работа, равная скалярному произведению силы на перемещение.
Основные теоремы динамики устанавливают некоторые
зависимости между мерами движения механической системы и мерами
сил, действующих на эти системы.
Для частных случаев сил, действующих на механическую си-
202
стему, эти теоремы приводят к интегралам уравнений движения.
g этом случае теоремы представляют собой некоторые законы
сохранения меры движения механической системы. Но вместе
€ тем эти теоремы не заменяют собой всей совокупности
уравнений движения системы, т. е. движение системы в общем
случае не может быть изучено при помощи одной из этих теорем.
Основные теоремы динамики мы будем доказывать сначала
для материальной точки, а затем для механической системы. Для
твердых тел эти теоремы можно вывести из теорем,
установленных для механических систем путем предельного перехода.
§ 1. КОЛИЧЕСТВО ДВИЖЕНИЯ
1. Понятие о количестве движения
Содержание понятия «количество движения» для
материальной точки и механической системы раскрывается двумя
следующими определениями:
Г. Количеством движения материальной точки называется
произведение массы точки на скорость точки, т. е. вектор
q = mv. (38)
2°. Количеством движения механической системы называется
геометрическая сумма количеств движения точек системы, т. е.
вектор
Q=S*Wk- (39)
£= 1
2. Внутренние и внешние силы
Будем рассматривать механическую систему, на которую
действуют некоторые силы. Все силы, действующие на
механическую систему, делятся на внешние и внутренние.
Внешними силами называются силы, с которыми тела, не
принадлежащие данной механической системе, действуют на тела,
принадлежащие системе.
Внутренними силами называются те силы, с которыми тела,
принадлежащие данной системе, действуют на тела этой же системы.
В качестве примера рассмотрим вагон, движущийся по рельсам.
Для вагона, состоящего из тела (коробки), подшипников и
колес, внешними силами будут являться: вес Р, веса колес ру
реакции опоры (рельс) /?1Э /?2, ведущая сила (тяга паровоза) F,
внутренними: силы взаимодействия подшипников с осями колес, состоящие
из нормальной составляющей N и сил трения (см. рис. 158).
Отметим некоторые свойства внутренних сил.
1°. Главный вектор внутренних сил механической системы
Равен нулю, т. е. R{1) = 0.
2°. Главный момент внутренних сил механической системы
°тносительно каждого полюса равен нулю, т.е. Zo) = 0.
203
Для доказательства этих свойств заметим, что так как
внутренние силы суть силы взаимодействия масс, входящих в систему,
то по третьему закону Ньютона для каждой внутренней силы
имеется прямо противоположная внутренняя сила и, следовательно,
внутренние силы образуют некоторое множество попарно проти-
шшжршшшшшшщ
п&)
рт
Рис. 158.
воположных сил. Но геометрическая сумма двух прямо
противоположных сил равна нулю, поэтому R{1) = 0. Геометрическая сумма
моментов двух прямо противоположных сил равна нулю, поэтому
3. Теоремы о количестве движения
Из второго закона Ньютона следует, что
— d
mw-
(plv)=F.
dt
Таким образом, производная по времени от количества
движения материальной точки равна результирующей всех сил,
действующих на точку. _
Если результирующая всех сил равна нулю, т. е. /7 = 0, то
получаем первый интеграл движения, т. е. точка движется по
инерции с постоянной скоростью:
v = const.
В случае механической системы имеет место следующая
теорема.
Теорема. Производная по времени от количества движения
механической системы равна главному вектору всех внешних
сил, т. е.
d
dt
Л = 1
204
Доказательство. Согласно уравнениям движения
механической системы можно записать:
mkwk=Rk при k = 1, 2, ... п.
Силы, действующие на каждую точку ть распадаются на два
класса: силы, с которыми тела, не принадлежащие
механической системе, действуют на точку ткУ т. е. внешние силы,
имеющие результирующую Fke\ и силы, с которыми другие точки
механической системы действуют на точку mk, т. е. внутренние
силы с результирующей ~Fkl\
Если еще учесть, что ускорение точки mk является
геометрической производной от скорости vky то уравнения движения
можно представить в форхме
тк *%- = ]%>+ W при k= 1, 2, ... п.
Суммируя эти равенства, получаем:
k=l k=i k=\
или (масса точек mk постоянна)
где R(e) и R(l) — соответственно главные векторы внешних и
внутренних сил. Так как /?(/) = 0, то окончательно получаем:
Рассмотрим частный случай, когда главный вектор внешних
сил равен нулю, т. е. R(e) = 0.
В этом случае, получаем:
2 mkvk = const. (41)
k=\
Таким образом, если главный вектор внешних сил равен нулю,
то количество движения механической системы является
постоянной величиной. Этот факт называется законом сохранения
количества движения.
Из закона сохранения количества движения следует, что если
геометрическая сумма сил, действующих на механическую систему,
равна нулю, то при движении механической системы количество
движения может переноситься с одних точек на другие, но
количество движения всей механической системы является
неизменным. Такое явление наблюдается, например, при соударении
частиц, которое будет подробно изучено дальше.
205
Первые формулировки закона сохранения количества движения
принадлежат Декарту (1596—1650), который на основу этого
закона изучал различные движения тел (падение тел, удар тел)
без учета действий сил.
Если проектировать равенства (40) и (41) на оси координат
системы отсчета, то получим теорему количества движения
в общем и частном случаях в аналитической форме:
-£(5>л)=*">; i(t^) = r-
k=l k=i
п
■Я" (2>Л )=*"; (42)
п п п
2 ткх„ = С1; 2 т*Уь = Сг; 2 mkzk = C3. (43)
k=l k=\ k=l
Уравнения (43), выражающие в аналитической форме закон
сохранения количества движения, представляют собой первые
интегралы уравнений движения для случая, когда главный
вектор внешних сил равен нулю.
Из уравнений (43) следует, что если проекция всех внешних
сил на некоторую координатную ось равна нулю, то количество
движения механической системы относительно этой оси является
величиной постоянной. Действительно, если например, X{e) — Qt то
2 mkxk = const.
k=i
Задача 19. Снаряд весом 12 кГу летевший со скоростью
15 м\сек, разорвался в воздухе на две части. Скорость осколка
весом 8 кГ возросла в направлении движения до 25 м/сек.
Определить скорость второго осколка.
Так как до и после разрыва снаряда главный вектор внешних
сил один и тот же (ибо сумма весов осколков равна весу
снаряда), то количество движения до и после разрыва одно и то же.
Обозначим скорость снаряда до разрыва и скорости осколков
соответственно через v, v19 v«y тогда
Mv = m1v1-\-m2vz. (44)
Так как скорости v и vx по условию имеют одинаковые
направления, то из уравнения (44) получаем, что скорость v2 также
параллельна скоростям v и vv Проектируя векторы
уравнения (44) на направление скорости v, мы получим:
Mv = m1vlv + m2v2v;
Mgv = mlgvlv-\-mtgvtv;
206
Отсюда находим, что
_Pv—P<vlv_ 180- 300 _ *(м\-
Итак, скорость второго осколка направлена в сторону,
противоположную скорости vlf и численно равна г>2 = 5 м/сек.
§ 2. ИМПУЛЬС СИЛЫ
1. Понятие об импульсе силы
Импульс силы является мерой действия силы за некоторый
промежуток времени. Если сила F является постоянной, то
импульсом силы за промежуток времени ее действия Д£
называется произведение силы на
промежуток времени, т. е.
FM. В случае же, когда сила
с течением времени
меняется по величине и
направлению, для определения
импульса можно промежуток
времени от t1 до t2 разбить
на достаточно малые части и
приближенно считать силу постоянной для каждой такой малой
части (см. рис. 159).
В этом случае мы получим приближенное значение импульса,
выражаемое формулой:
Переходя к пределу при Mk—>0, мы получим точное
выражение для импульса в форме векторного интеграла:
и
7= J Fdt. (45)
tx
Эти рассуждения приводят нас к определению импульса для
общего случая сил: импульсом силы за некоторый промежуток
времени от tx до t2 называется векторный интеграл от силы по
этому промежутку времени.
2. Теоремы импульсов
Теорема 1. Приращение количества движения материальной
точки за некоторый промежуток времени равно импульсу силы,
Действующей на точку, за тот же промежуток времени.
207
Доказательство. Если на материальную точку массы т
действует сила F, то по второму закону Ньютона уожно
записать:
mw = F9
или
dv -ft
jL{mv)=F.
Интегрируя это равенство в промежутке времени от tx до t2
и используя свойства векторного интеграла, получим:
l(mv)\dt==[Tdt\ (46)
_ _ /. __
mv (*a) — ^ (*i) =\Fdt.
tx
Вводя новые обозначения: v(t1) = vl, v(t2) = v2, и учитывая,
что в правой части формулы (46) находится импульс силы F,
окончательно получаем теорему импульсов:
mv% — mv1=I. (47)
Теорема 2. Приращение количества движения механической
системы за некоторый промежуток времени равно импульсу
главного вектора всех внешних сил, действующих на механическую
систему, за тот же промежуток времени.
Доказательство. По теореме о количестве движения
можно записать, что
dQ
=4(2>л)=^-
dt ... .
Если проинтегрировать это уравнение в промежутке времени
от tx до t2i то получим:
t2 h
\Q'tdt=lR(e)dt
tx tx
или
Q>-Q>= (J! вд)2-(Jt™Я)> = 7<e). (48)
к n
где Q,= (2tfWfc)i и Q2=(S mkvkj2—соответственно
количества движения механической системы в моменты времени
11 и t2J а 1{е) — главный вектор импульсов внешних сил,
действующих на механическую систему,
208
Теоремы импульсов представляют собой по существу теоремы
0 количестве движения в интегральной форме. Эти теоремы
используются в конкретных задачах, если можно вычислить
импульс главного вектора всех внешних сил, действующих на
механическую систему.
§ 3. ДВИЖЕНИЕ ЦЕНТРА ИНЕРЦИИ
Теорема о движении центра инерции характеризует
зависимость движения центра инерции механической системы от
действующих на систему сил.
Теорема. Произведение массы механической системы на
ускорение центра инерции системы равно главному вектору всех
внешних сил, действующих на механическую систему:
Mwc = R{e).
Доказательство. Согласно теореме о количестве
движения получаем:
Продифференцировав сумму в левой части, получим:
п
2 mkwk=W\ (49)
k=i
Раньше (см. разд. I, § 3, п. 2) было установлено, что центр
инерции определяется из формулы:
у -
гс~
Мгс
^Щгк
= М '
п
= 2 /»Л«
т. е.
Дифференцируя это равенство дважды по времени и приняв
во внимание, что вторая производная по времени от радиуса-
вектора представляет собой ускорение точки, получим:
п
Mwc= 2 mkwk. (50)
Из формул (49) и (50) заключаем, что
Mwc = R{e\ (51)
209
Из формулы (51) видно, что центр инерции механической
системы при движении системы перемещается так, ка^ если бы
в нем была сосредоточена вся масса системы и приложены все
внешние силы системы.
Теорему о движении центра инерции можно выразить в
аналитической форме. Для этого достаточно векторы формулы (51)
спроектировать на координатные оси.
Пусть на механическую систему действуют силы
Fk(k=l, 2, ...Я).
Обозначим проекции силы Fk через Xk, Yki Zk (k= 1, 2, ... ri)y
а координаты центра инерции С — через х> у, z, тогда при
проектировании векторов формулы (51) на координатные оси получим:
^4£=^=Ё/* (52)
Формулы (51) и (52) выражают теорему о движении центра
инерции в векторной и аналитической формах.
Отметим некоторые частные случаи:
1) Проекция всех внешних сил на некоторую координатную
п
ось равна нулю (например, 2 ^ = 0J*
В этом случае, проекция скорости центра инерции на
соответствующую координатную ось есть величина постоянная.
п
Действительно, если, например, 2^ = 0> то из первого
dx
уравнения (52) получаем, что vx = — == const.
2) Проекция всех внешних сил на некоторую координатную
ось равна нулю, и в начальный момент система находится в покое.
В этом случае центр инерции перемещается в плоскости,
перпендикулярной к соответствующей оси.
п
Действительно, если, например, 2 Xk = 0 и vx = 0 при t = О
dx
то из первого уравнения (52) заключаем, что vx = -^ = 0y т. е.
х = const. Это означает, что центр инерции перемещается в
плоскости, перпендикулярной к оси ОХ.
Используя понятие центра инерции, можно найти простое
выражение для количества движения механической системы. Дей-
210
сТвительно, центр инерции С механической системы определяется
из векторного равенства:
п
Mrc= ^]_mkrk.
/?=i
Если это равенство продифференцировать по времени, то
получим:
М
dr(
ть
drk
или
dt —JLU'-Lk dt
Mvc= S mkvk
(53)
Таким образом, количество движения механической системы
равно произведению массы всей системы на скорость его центра
инерции. Это правило позволяет весьма просто в некоторых
случаях определять количество движения механической системы.
Так, например, количество движения однородного маховика,
шкива, блока равно нулю,
ибо их центры инерции у\
находятся на оси
вращения и, следовательно,
имеют скорость, равную нулю.
Используя формулу (53)
для количества движения,
можно теорему о
количестве движения представить
в следующей форме:
dt
(Mvc) = R(l
^^ш^^^^^^^^^^^^^^^^^
Рис. 160.
В такой форме теорема
о количестве движения
часто используется в том
случае, когда движение
центра инерции определяет
движение механической
системы в целом (например, поезд или тело, движущиеся
возвратно-поступательно).
3) Пользуясь теоремой о движении центра инерции, можно
решать целый ряд задач. Рассмотрим некоторые задачи.
Задача 20. По саням, находящимся на льду, передвигается
человек, переходя от одного конца саней А в другой конец В.
Дано: Р — вес человека, р — вес саней, / — длина саней. Найти
величину перемещения d саней и скорость саней в тот момент,
когда человек остановится, при условии, что в начальный момент
вРемени система находится в покое (см. рис. 160).
211
В качестве механической системы рассмотрим совокупность
тел: сани, человек. Внешними силами, действующими
на/механическую систему, являются: Р — вес человека, р — вес саней,
N — реакция опоры (льда). Мы предполагаем, что лед
представляет собой хорошо залитый каток, поэтому силы трения
незначительны и мы можем считать реакцию опоры направленной
перпендикулярно к опоре.
Проекция всех внешних сил на ось >Y-ob равна нулю, поэтому
центр инерции может перемещаться лишь по линии,
перпендикулярной к оси Х-ов, во всяком случае хс = const.
Вычислим абсциссу центра инерции. По способу сложения
масс находим, что
хс = ' 1\ 2 2 = ' * \ ' ' = const.
Из этой формулы видно, что если человек переходит из
А в В, то х1 возрастает. Поэтому х2 должно убывать, а это
возможно, если сани будут перемещаться влево.
Предположим, что сани переместились влево на d.
Рассмотрим два момента времени — начальный £0 = 0 и конечный t = t1 —
и найдем абсциссу центра инерции для этих моментов:
i
р"2
xc=-pj-f, ПРИ ^ = °; (54)
P(i-d)+p(~d\
хс= я+7 L при f-^. (55)
Из формул (54) и (55) заключаем, что
p*=P(i-d)+p(!r-d
Отсюда находим, что
(56)
Из найденной формулы видно, что величина перемещения
саней не превосходит ее длины / и тем больше, чем больше вес
человека. Это становится ясным, если формулу (56) представить
в виде:
d=——<1.
р ^
При возрастании Р знаменатель убывает и, следовательно,
d возрастает.
Найдем скорость саней при остановке человека.
Так как проекция всех внешних сил на ось Х-ов равна нулю
и в начальный момент времени количество движения равно нулю,
212
то по теореме о сохранении количества движения относительно
оси Х-ов получаем:
™^1Х-{-т^2х = 0.
Если человек остановится, то его скорость vlx относительно
оси Х-ов будет совпадать со скоростью саней, т. е. vlx = viX9
поэтому получаем:
(ml+m%)vtx = О,
и, значит, скорость саней v2X = 0.
Задача 21. Электрический мотор весом Р установлен без
креплений на гладком горизонтальном фундаменте; на валу
мотора под прямым углом закреплен одним концом однородный
стержень длиной 2/ и весом р, на другой конец стержня
насажен точечный груз Q; угловая скорость вала равна со.
Определить: 1) горизонтальное движение мотора; 2)
наибольшее горизонтальное усилие /?, действующее на болты, если ими
будет закреплен кожух электромотора на фундаменте; 3)
угловую скорость со вала электромотора, при которой электромотор
будет подпрыгивать над фундаментом, не будучи к нему
прикреплен болтами (см. рис. 161).
В качестве механической системы рассмотрим совокупность
тел, состоящую из мотора, стержня, груза. Внешними силами,
действующими на механическую систему, являются: Р — вес
мотора, р— вес стержня, Q — вес груза, NVN2— реакции
фундамента. Так как фундамент по условию гладкий, то опорные
реакции направлены
перпендикулярно к опоре. *
Выберем систему
координат так, чтобы ось OY
проходила через
начальное —вертикальное
—положение стержня.
В силу симметрии
системы в начальный момент
времени центр инерции
находится на оси О К, т. е.
*с — 0, и так как проекция :щ^ч^ч^^^ *»
всех внешних сил на ось ^ л
®К равна нулю, то хс = 0 Рис. 161.
в каждый момент времени.
Отсюда ясно, что если груз перемещается вправо (абсцисса
ЕРУза,>>0), то мотор перемещается влево (абсцисса центра <0).
Афи вращении груза Q мотор совершает возвратно-поступа-
тельное движение, перемещаясь то влево, то вправо. Поэтому
Для ^изучения движения мотора достаточно изучить движение
какой-нибудь точки мотора.
213
Удобства ради изучим движение центра мотора Ог
Обозначим абсциссу центра 01 через xlf тогда абсцисса центра инерции
находится по формуле:
Pxl+px2 + Qxz Рхх +р (I sin со; -f- *i) + Q i21 sin <»t + xj ,r7^
c~~ p+p + Q ~ p+p + Q m{ >
Так как xc = 0, то из формулы (57) получаем:
Рх1 -\-р (I sin d)t + х,) + Q (2/ sin ut 4~ xx) = 0.
Отсюда находим, что
г (р + 2<?) sin со;
1— p+p + Q '
Из этой формулы следует, что центр мотора совершает
гармоническое движение с амплитудой, равной р^ Т А.
Решим теперь третий вопрос. С этой целью запишем теорему
о движении центра инерции относительно оси OY.
Mi$=-p-p-Q+Nl+Nt. (58)
Введем обозначение для суммарной опорной реакции
NA-\-N2 = N, кроме того, М= +/? + (^) а ус находим по
формулам:
РУг+РУг + Яу* Ра +Р (а +1 cos Ы) + Q (а + 21 cos Ы)
Ус P+p + Q — P+P + Q
<£yc = _l(p + 2Q)^
dt* p + p + Q C0Sa)f-
Подставляя все найденные значения в формулу (58), получим:
\ит v;—C0S(i>t = —P — p—Q + N.
Отсюда находим значение опорной реакции:
N = P+p + Q-lip+g2Q)u>2 cosvt
Таким образом, опорная реакция есть величина переменная,
причем наименьшее значение ее определяется по формуле:
AU =P+p+Q-1-^±^ ш2. (59)
Если Nmin^>09 то это физически означает, что опора давит
на мотор и, следовательно, по третьему закону Ньютона мотор
давит с силой, прямо противоположной на опору, т. е.
прижимается к опоре. Если же Nmin = 0y то это означает, что мотор
не прижимается к опоре и в этот момент возможен отрыв
мотора от фундамента. При угловой скорости о, превышающей
угловую скорость со0, соответствующую условию A/min = 0, мотор
будет подпрыгивать.
214
Из формулы (59) находим, что
l(p + 2Q) •
Таким образом, мотор будет подпрыгивать.при
>> у<£±р+т*
l(p + 2Q) '
Решим теперь второй вопрос. С этой целью закрепим
мотор к фундаменту болтами и выберем систему координат, как
указано на рисунке 162.
В данном случае на
механическую систему, кроме
сил, указанных раньше,
действуют еще реакции
болтов, численно равные
горизонтальным усилиям,
которые испытывают
болты. Обозначим суммарную
реакцию болтов через
Т= 7\-f-78. Запишем
уравнение движения центра
инерции относительно оси
ОХ:
?щ$Щ$5^^$$Щ0^^шшщ$$ж^—J3
Рис. 162.
М
d2xc
dt2 '
Т .
(60)
Абсциссу центра инерции находим по формуле:
Рх} + px2-\-Qxz pi simot+Q-21 sin Ы I (р + 2Q)
хс— P+p + Q — P + p + Q ~P + P + Q
Подставляя эти значения в формулу (60), получим:
sinatf.
P+P + Q l(p + 2Q)^
g
P+P + Q
sinco^= Tv.
Таким образом,
ho2(p + 2Q) . ,
g
yi{p + 2Q)
g
§ 4. КИНЕТИЧЕСКИЙ МОМЕНТ
1. Понятие о кинетическом моменте
При рассмотрении вращательных движений механических си-
стем используют в качестве меры движения векторную меру —
момент количества движения, который иначе
называется кинетическим моментом.
21S
Понятия кинетического момента для материальной точки и
механической системы вводятся согласно следующим
(Определениям:
1°. Кинетическим моментом материальной точки относительно
полюса (оси) называется момент количества движения точки
относительно полюса (оси).
2°. Кинетическим моментом механической системы
относительно полюса (оси) называется главный момент количеств
движений всех точек
системы относительно по-
тхх люса (оси).
Таким образом,
кинетические моменты точ-
/7? ки относительно полюса
и оси определяются по
формулам (см. рис. 163):
K0 = rXjnv; (61)
Ки = приК0 =
р */77f/_ I
Рис. 163. , w _,
=пРи (Р X mv).
Кинетические моменты механической системы S(m19m2i
относительно полюса и оси находятся по формулам:
Ко= 2 Ко, = 2 (rpXmpvp);
ки= 2 Kt
Р=\
up
EnPa(?pXmpvp).
p-i
(62)
(63) •
(64)
V
Из формул (63) и (64) можно выразить кинетический момент
системы относительно оси через кинетический момент
относительно полюса. Действительно,
Ки = 2 при (р X mpv) = пра 2 (рр X mvp) = праК0,
p=i p=i
т. е.
Ки = приК0.
(65)
2. Теоремы о кинетическом моменте
Докажем теоремы о кинетическом моменте сначала для
материальной точки, а затем для механической системы.
Теорема 1. Производная по времени от кинетического
момента материальной точки относительно полюса или оси равна
соответственно моменту силы, действующей на материальную
точку относительно того же полюса или той же оси.
Доказательство. Рассмотрим сначала случай полюса.
216
Согласно второму закону Ньютона получаем:
Умножим это равенство векторно на радиус-вектор г,
соединяющий полюс с точкой, тогда получим:
гх£(т*) = ?ХР- (66)
Левую часть равенства (66) можно представить в виде:
fX^(mv) = ?Xjt(mv)+vXmv=rX^t{mv)^tXmv =
= £(-rXmv)t (67)
ибо векторное произведение vXm^ равно нулю.
Из соотношений (66) и (67) окончательно получим:
т. е.
dR0
:m0(F). (68)
dt
Рассмотрим случай оси. Выберем на оси произвольный полюс и
воспользуемся формулой (68).
Спроектируем векторы равенства (68) на ось и, тогда
пРи§^ = прат0(П. (69)
Известно, что проекция производной от вектор-функции равна
производной от проекции, т. е.
nPu% = j-t{npnr). (70)
Действительно, если представить вектор-функцию ? = F(t)
в прямоугольной системе координат, то
Отсюда следует, что
d? _ drxl , dry у , drz -г
W = Гх npj+ ГУ nPJ+ Гг ПРиЬ
L (nPaF) = dSf приГ+ -^ npj+ -^ npj. (72)
Из формул (71) и (72) следует формула (70).
21?
Из формулы (69) получаем:
nP»d-W-=Tt(»PJ<o) = d-§. (73)
Кроме того,
npum0(F) = ma(F). (74)
Из формул (69), (73) и (74) окончательно получаем:
~u = mu{F). (75)
Теорема 2. Производная по времени от кинетического
момента механической системы относительно полюса или оси равна
соответственно главному моменту всех внешних сил относительно
того же полюса или той же оси.
Доказательство. Будем рассматривать механическую
систему S(m19 т2, ..., тп). Сначала рассмотрим случай полюса.
Силы, действующие на материальную точку тр, делятся на
внутренние Fpl) и внешние Fpe\ Используя формулу (68) и тот
факт, что момент суммы сил, приложенных в одной точке, равен
сумме моментов сил, для точки тр, получим:
^ = m0(F?) + m0(7f) при/;=!, 2, ..., я.
Складывая почленно все п равенств, получим:
2^=2т0(?¥) + 2т0^% (76)
p=zl UV р = \ р = \
Левую часть равенства (76) можно представить в виде:
$*Kop_d Л- _dK0
Так как суммы, стоящие в правой части равенства (76),
соответственно содержат моменты всех внешних и внутренних сил, то
они представляют собой главные моменты внешних и внутренних
сил и, следовательно, с учетом равенства (77) получим:
dI<o Т(е) I TV)
Но раньше было доказано, что главный момент внутренних сил
равен нулю, поэтому окончательно получаем:
dt
218
dt —L°* \'о)
Рассмотрим случай оси. Выберем на оси произвольный
полюс О и затем векторы формулы (78) спроектируем на ось, в
результате получим:
npud-^- = nplV. (79)
Но
по ЁКо = ±прк =*К». (80)
npeLl? = npu 2 m0(Ff)= 2 npum0(ff) =
p=l p=\
= ima(F(;))=L<£). (81).
/7=1
Из формул (79), (80) и (81) окончательно получаем:
*£ = №. (82)
Теорема доказана.
При решении задач приходится главным образом использовать
формулу (82). Рассмотрим некоторые частные случаи:
а) 1^ = 0, в этом случае Ки = const.
Таким образом, если главный момент всех внешних сил отно-
сительно оси вращения равен нулю, то кинетический момент
механической системы относительно оси вращения постоянен. Этот
факт называется законом сохранения кинетического момента
относительно оси вращения.
Математическое выражение этого закона Ки = const
представляет собой первый интеграл уравнений движения для случая,.
когда Lu) = 0.
6)1^ = 0 и в начальный момент времени материальная
система находится в покое.
В этом случае в начальный момент времени кинетический
момент системы равен нулю, и так как он постоянный, то Ки = 0.
Этот частный случай особенно часто встречается при решении
задач.
3. Кинетический момент для тела вращения
Будем рассматривать твердое тело, вращающееся вокруг
неподвижной оси U с угловой скоростью со (см. рис. 164).
Разобьем тело на элементарные части Ьтр(р = 1, 2, ..., п).
Кинетический момент для элементарной части массой ктр
относительно оси вращения можно вычислить по формуле:
Kpu = ±r£mpvp (см. рис. 164).
Выражая линейную скорость v через угловую скорость со,
получим:
Кри = ±rp\mpwp = ± со • Дшр • г*.
219
В этой формуле величина Ч^ю (независимо от направления
вращения тела) всегда равна проекции угловой скорости на ось/вра-
щения сои, поэтому получаем:
Кп
-•®аЛтрг* при /7=1, 2,
ури wa ~'"р> р
Для кинетического момента тела относительно оси вращения
получаем выражение:
п п
Ки= Нт 2 Кри= Нт 2 ©вАт/! = ©в-/и>
Рис. 164.
где
/ = Нт 2 А/я -г!.
(83)
Выражение /я называется моментом инерции
тела относительно оси и.
Итак, для кинетического момента тела
относительно неподвижной оси вращения мы
окончательно получили формулу:
Кл
:/А-
(84)
4. Некоторые приложения
а) Дифференциальное уравнение вращения, твердого тела
Найдем дифференциальное уравнение вращения твердого тела.
Пусть на тело действуют силы F13 F2,....9 Fn. Тогда по теореме
о кинетическом моменте относительно оси можно записать:
dKu_r(e)
4f—La •
Из формул (84) и (85) получаем:
'* dt —Lu •
Но а>я = -¥ поэтому окончательно получаем:
(85)
(86)
Главный момент внешних сил l}? может, вообще говоря,
являться функцией времени t, угла поворота ср и производной от
угла поворота ср.
Полученное уравнение (86) представляет собой
дифференциальное уравнение вращения твердого тела. Если силы,
действующие на тело, заданы, то можно найти La\ затем
проинтегрировать уравнение и найти угол поворота (р. Зная угол поворота
как функцию от времени, можно определять скорости и
ускорения точек тела для каждого момента времени.
220
Дифференциальное уравнение вращения твердого тела
является аналогом теоремы о движении центра инерции
механической системы. При этой аналогии понятиям массы механической
системы М, ускорению центра инерции wc и главному вектору
R(e) в теореме о движении центра инерции соответствуют
понятия момента инерции относительно оси вращения 1аУ углового
ускорения -tj-2 и главного момента всех внешних сил относительно
оси вращения IX
г И
б) Математический маятник
Математическим маятником называется тяжелое точечное
тело, подвешенное к нерастяжимой невесомой нити,
закрепленной в некоторой точке. Если
маятник отклонить от равновесного
положения (когда нить расположена
по вертикали) и затем
предоставить самому себе (т. е. не сообщать
ему начальной скорости), то он
начнет двигаться, оставаясь на
одинаковом расстоянии от точки
закрепления нити.
Выберем оси ОХ и OY так,
чтобы в начальны^ момент времени
маятник находился в плоскости
(ЭХУ, а ось OZ была
направлена так, чтобы система координат OXYZ была правой (см.
рис. 165). На материальную точку т (маятник) действуют две
силы: сила тяжести Р, направленная по вертикали, реакция
нити N, направленная по нити.
Таким образом, движение точки т определяется действием
двух сил Р и Ny и по закону независимости действия сил оно
является результатом действия каждой силы в отдельности.
Под действием постоянной силы Р, как было выяснено раньше,
точка перемещается в плоскости OXY. Под действием силы Л/
точка также перемещается в плоскости OXY'. Действительно,
по теореме о кинетическом моменте движение точки под
действием силы N удовлетворяет соотношению:
и> следовательно, К0 = const. Из определения кинетического
момента следует, что К0 = От X v = const и, следовательно,
плоскость, образованная векторами От и я, является неизменной,
т- е. точка т под действием силы 7V перемещается в плоскости
221
= — ml
Но в этом случае угол ср убывает, поэтому
OXY. Итак, маятник перемещается в плоскости OXY (плоский
маятник). /
Составим дифференциальное уравнение движения маятника.
По теореме о кинетическом моменте относительно оси OZ можно
записать:
^ = mt(P) + mJN)- (87)
Так как линия действия силы N проходит через ось OZ> то
mz(N) = 09 а тг(Р) = — Ph= — Plsin ср, где / — длина нити.
Если точка т имеет скорость v, направленную относительно
оси OZ против движения часовой стрелки, то Кг = mvl = тЫ2 =.
==m^~dt' ^сли же ск°рость v относительно оси OZ направлена
по движению часовой стрелки, то Кг = — mvl= — m<ol2 —
\dt I
^|<0 и, значит, U| = — -j у таким образом, и в этом случае
Из уравнения (87) при подстановке найденных значений
получаем:
dt2— l'
Если перенести все члены в левую часть, разделить на mlz
Р
и учесть, что — = g, то окончательно получим:
$+fsin? = 0. (88)
Полученное уравнение представляет собой дифференциальное
уравнение движения математического маятника. Это уравнение
не является линейным, поэтому интегрирование этого уравнения
представляет некоторую трудность.
Если рассматривать только малые колебания, т. е. колебания
маятника, при которых угол ср невелик, то можно приближенно
считать sin ср =^ ср, тогда уравнение (88) примет вид:
S + f •*=<>. (89)
Это выражение представляет собой приближенное уравнение
малых колебаний математического маятника. Для малых значений
угла ср это уравнение достаточно точно описывает движение
математического маятника.
Уравнение (89) представляет собой линейное уравнение с
постоянными коэффициентами. При интегрировании этого уравнения
получим общий интеграл в форме:
ср = С1 cos }/lL.t + Ct sin ]/f • t. (90)
222
Постоянные С1 и С2 могут быть найдены из начальных
условий (значений угла <р и угловой скорости -^ в начальный
момент времени). Можно получить значение угла <р в более простой
форме, чем (90), если вместо С1 и С2 ввести две новые
постоянные Л и а согласно формулам:
Cj=Asina, C2 = ^cosa, (91)
т. е.
и2
Из формул (90) и (91) следует, что
?=а(sina-cos J/ у-- ^4"cosa#sin ]/ y-M=4sin( г "f'^aJ >
т. е.
<р = Л sin (]/*■£-* +a). (92)
Из этой формулы видно, что точка m совершает
гармонические колебания (так как ср является периодической функцией).
Из формулы (92) можно найти период полного колебания
маятника, т. е. промежуток времени, в течение которого значение угла
у ^-t-\-a (фазы) изменяется на 2тг.
Если промежуток времени от tx до t2 равен периоду, т. е.
i2-t1 = T, то
]/f ^2 + a)-(/f *> + *)=**,
>/"f(^-*1)=l^f-74=2it
т. е.
и, значит,
Т
= 2*}Л. (93)
Формула (93) представляет собой формулу для периода
колебания, которая при малых колебаниях является достаточно
точной. При больших же колебаниях эта формула может дать боль-
шую погрешность.
в) Физический маятник
Физическим маятником называется тяжелое твердое тело, ко-
т°рое может вращаться вокруг неподвижной горизонтальной оси,
Не проходящей через центр тяжести тела.
•^та горизонтальная ось называется осью привеса.
223
Выберем горизонтальную ось привеса за ось OZ и угол,
образуемый перпендикуляром СО, опущенным из центра тяжести на
ось OZ, с вертикальной осью ОХ через ср (см. рис. 166).
На тело действуют две силы: сила тяжести Р, приложенная
в центре тяжести С, и реакция оси привеса N, которую мы
считаем направленной перпендикулярно к оси OZ, так как силы
трения в оси привеса не учитываем.
По теореме о кинетическом моменте механической системы
относительно оси OZ, можно записать:
Но
d^ = m2(P) + m2(N).
mz(N) = 0:
тг(Р) = — P-s-sincp;
(94)
(95)
Рис. 166.
Подставляя формулы (95) в формулу
(94), получим:
/г.^| == — P-s-sincp.
Перенося все члены влево и деля на Izf окончательно получим
(96)
rf2? , Ps ~
_s+ sin?=o.
Полученное уравнение (96) является точным
дифференциальным уравнением движения физического маятника. При малых
колебаниях, полагая sin у =^ <р, получим приближенное уравнение
малых колебаний физического маятника:
d2cf.Ps
и Т I ^ л
(97)
Интегрируя это уравнение аналогично тому, как это было
сделано для математического маятника, получим:
«р = Л sin ( у T-t-\-a) ;
(98)
(99)
Итак, характер колебаний физического маятника такой же,
как и математического.
Длина математического маятника, который имеет такой же
период колебания, как и данный физический маятник, называется
приведенной длиной данного физического маятника.
224
Из формул (93) и (99) следует, что
^привел. Iz
g ~P-s>
т. е.
'привед. = jy^ = J^ . (100)
Выразим момент инерции 1г через момент инерции относительно
оси, проходящей через центр тяжести С, параллельно оси OZ
(см. рис. 166):
/,= ит s^/;- (loi)
Ьтр -► 0
По теореме косинусов получаем:
r? = pJ + 5i-2ppscosap==p« + si-2(C07P). (Ю2)
Подставляя это выражение в формулу (101) для 1гУ получим
выражение:
[2= lim 2*"V£+ 1Jm 2A^s«-2(C6- lim 2^рРР) =
= Ic + Ms'-2(CO- lim 2^р).
Из формул для центра тяжести (см. разд. I, § 3, п. 1) следует, что
lim 2 Д/Ярр- = ЛГрс = 0,
ибо рс = 0.
Таким образом, окончательно получаем формулу:
Iz = Ic + M-s2=MR2-\-Ms\ (103)
где R — радиус инерции тела.
Из формул (100) и (103) получаем:
j _MR* + Ms*_R* + s* nn4.
'привел. Jfo ^ • l1U47
Из этой формулы видно, что /привел. > s. Если на продолжении
отрезка ОС построить точку 01 на расстоянии OOj =/прИвед. и через
точку Oj провести ось параллельно оси OZ, то эта ось
называется осью качания физического маятника.
Из формулы (104) следует, что если ось качания сделать осью
привеса, то ось привеса станет осью качания.
Действительно, из формулы (104) получаем:
s2 —/пр.5 + /?2 = 0. (105)
Уравнение (105) имеет два вещественных корня sx и s2 причем
$1 "Г ^2 == /привел.» $i' S2 == " •
** Г. М. Финкельштейн 225
Из этой формулы следует, что
При замене осей привеса и качания для приведенной длины
получаем ту же формулу (102), поэтому приведенная длина
такого маятника находится по формуле:
* привед. •
_R* + s\
R2 +
R*
R' + sl
= /,
привел.»
Задача 22. Найти момент инерции для однородного прямого
цилиндра относительно его оси.
Рассмотрим прямой цилиндр, радиус
основания которого равен /?, а масса М.
Разобьем цилиндр на элементарные
массы kmk при помощи концентрических
цилиндрических поверхностей с
радиусами оснований rk (см. рис. 167).
Если толщины колец, являющихся
основанием масс А/?гЛ, невелики, то
приближенно момент инерции цилиндра
относительно оси находится по формуле:
рис. 167. Если плотность цилиндра обозначим
через р, а высоту через Л, то получим;
Lmk = тт (rk + \rk)2 Ар — тгг|/гр = 2ттАргАДгд + "Ар (ДгА)2.
С точностью до бесконечно-малых второго порядка получим:
4^2ттАр. £г*к-Ьгк.
Переходя к пределу при Д/иЛ-
окончательно:
-0, т. е. Lrk—>0, получим
L = 2ттАр • lim 2 г\ • Lrk = 2ттАр f гЧг = 2тгАр ^ =
Итак,
= uR2h9
h =
R2
2
MR2
~~ 2
•
MR2
2
(106)
Задача 23. Круглая горизонтальная платформа может
вращаться без трения вокруг вертикальной оси OZ, проходящей через
226
ее центр О; по платформе на неизменном расстоянии от оси OZ,
равном г, идет с постоянной относительной скоростью а человек,
рее которого равен р. С какой угловой скоростью будет при этом
вращаться платформа вокруг оси, если вес ее можно считать
равномерно распределенным по площади круга радиусом R, а в
начальный момент платформа и человек имели скорость, равную
нулю (см, рис. 168).
Рассмотрим механическую систему, состоящую из платформы
и человека. Внешними силами являются: вес платформы Р, вес
человека р, реакция подпятника N и подшипника Q, Все эти
силы либо параллельны оси UZ, либо
проходят через ось OZ и поэтому
их моменты относительно этой оси
равны нулю.
По теореме о кинетическом
менте относительно оси можно
писать:
мо-
за-
т. е.
df<z т(е) _п
К* = const.
Так как в начальный момент
времени система находится в покое, то
Кинетический момент системы Kz слагается из кинетического
момента платформы Кх и кинетического момента человека /С2,
поэтому
Кг + Кш = 0. (107)
Для определенности рассуждений предположим, что платформа
вращается по движению часовой стрелки.
Кинетический момент /С, будет отрицательным; кинетический
момент /С2, как это следует из (107), будет положительным.
Как было установлено раньше (см. задачу 22, форм. 106),
к1=1/лг=—1^=—Щ-(о.
K> = ^va.r =j(u-ve)r=^(u-«>r)r.
Подставляя эти формулы в (107), получим:
— ^-2(о + ^(й —сог)г = 0.
Отсюда находим значение угловой скорости:
2рг
'PR2 + 2pr
U.
227
Из полученной формулы можно найти зависимость изменения
угловой скорости платформы от изменения радиуса г траектории
движения человека, совершающегося с постоянной относительной
скоростью и.
Вводя обозначения: 2ри = а, PR* = b> 2р = с, получаем:
аг
b -f- cr2
Отсюда находим:
da a (b -f- с г2) — Icr '<zr ab — acr2
dr (b + cr2)2 (b + cr1)2 #
Из этой формулы следует, что ^ возрастает при аЪ—#сг2>0
и убывает при аЪ — асг2 < 0. Подставляя вместо а, Ъ и с их
значения, получаем, что со возрастает при увеличении г в пределах
и о убывает при увеличении г в пределах
*<r<Yw'
Например, если вес платформы равен весу человека, т. е. Р=р9
то при возрастании г от 0 до —===—у-^ 0,7/? угловая
скорость платформы убывает, а при возрастании г от -^= =^= 0,7/?
до R угловая скорость платформы возрастает.
§ 5. РАБОТА СИЛЫ И КИНЕТИЧЕСКАЯ ЭНЕРГИЯ
1. Понятие о работе силы
Работа силы является скалярной мерой действия силы на
материальную точку на протяжении некоторого пути.
Из физики известны правила
sk
^шша^
f , F
-*.
fS^^S^S^^^
Ws
^^^^
для вычисления работы
постоянной силы в случае, когда линии
действия силы и перемещения
точки ее приложения лежат на
одной прямой и в случае, ког-
рис. 169. да они образуют постоянный
; угол.
В первом случае (см. рис. 169) работа вычисляется по формуле:
A = F-s=F-7. (108)
228.
Во втором случае (см. рис. 170) работа вычисляется по
формуле:
A = F-s-cosa. = F-r. (109)
Как видно из формул (108) и (109), в каждом из этих случаев
работа постоянной силы F вычисляется по одной и той же
формуле: _ _
A = F-r. (ПО)
Рассмотрим произвольный ,,-
случай, когда сила является j£ F
произвольной и точка приложе- xg^ ^^(ос
ния силы описывает произволь- ^ч^ччччч^ччччччччч^
ную траекторию (см. рис. 171).
Чтобы найти работу силы,
■£ *■
разобьем траекторию точки при-
ложения силы —- ВС на достаточ- ис*
но малые дуги ksiy As2, ... i±sn.
Тогда можно приближенно найти работу силы Fk на пути bsk,
считая, что траектория является прямолинейной (дуга &sk
заменяется хордой Дгл) и сила является постоянной (сила на пути
&sk заменяется некоторой средней силой Fk), и пользуясь
формулой (ПО). В результате получим:
Ak^Fk^?k. (Ill)
Погрешность, которая допускается при этом, тем меньше, чем
меньше участок пути &sk.
Работу силы на пути — АВ можно рассматривать как сумму
работ на составляющих пути &ski т. е.
А^ 2^=2Р*.ДгА. (112)
k = l k=l
Переходя к пределу, при ksk—*0, получаем точное значение
величины работы:
А^ Jim J£Fk-brk= S F-dr. (ИЗ)
Если в полученной формуле (113) сделать замену переменной
и выразить интеграл через параметр времени, учтя при этом, что
dr = f\dt = vdt, точке В
соответствует момент
времени t = tQt а точке С —
момент времени t = tlt то
получим формулу:
t
Рис. 171. А=\ (F-v)-dt. (114)
и
229
Выражение, стоящее под знаком интеграла и равное
скалярному произведению силы на скорость точки приложения,/является
некоторой скалярной величиной, характеризующей
работоспособность силы в данный момент времени. Эта величина называется
мощностью силы в данный момент времени.
Таким образом, мощность силы определяется по формуле:
M=F-v. (115)
В случае, когда сила является постоянной и образует
постоянный угол с направлением перемещения точки приложения, а точка
приложения силы перемещается равномерно, мощность силы
измеряется работой силы за единицу времени.
Действительно, по формуле (ПО) получаем, что работа силы
за единицу времени в этом случае равна
A = F-? = F-s-cos ol = F-v-cos a = F-v. (116)
Все вышеуказанные рассуждения приводят нас к общему
определению работы произвольной силы.
Работой произвольной силы за некоторый промежуток
времени от t1 до t2 называется интеграл от мощности силы за
тот же самый промежуток времени, т. е.
и
А=\ (F-v)dt. (117)
и
Для вычисления работы в различных конкретных случаях
формулой (117) не всегда удобно пользоваться. Поэтому перейдем
в формуле (117) от векторов к скалярам. Пусть точка
приложения силы перемещается относительно прямоугольной системы
координат OXYZ. _
Обозначим проекции силы F через X, Y, Z, а координаты
точки приложения силы т — через ху у, z, тогда, используя тот
факт, что скалярное произведение двух векторов равно сумме
произведений одноименных проекций, получим:
F.v = Xx-\-Vy + Zz. (118)
Подставляя это значение в формулу (117), получим:
t
A=\(Xx-\-Yy-\-Zz)dt. (119)
Из формулы (119) можно получить значение этой работы через
криволинейный интеграл в виде
А= J Xdx+Vdy + Zdz. (120)
(ВС)
Скалярные формулы (119) и (120) используют при вычислении
работы сил в конкретных случаях.
230
2. Вычисление работы сил для некоторых частных случаев
а) Проекция силы на направление скорости является постоянной
Пусть сила образует постоянный угол со скоростью точки
приложения силы (см. рис. 172).
По формуле (114) для этого случая получаем:
и и и
A=l(F-v)dt=^Fvcos*dt = Fcos*-lvdt. (121)
и и и
Если траекторию точки приложения силы ориентировать в
направлении перемещения точки, то v = s' (t), поэтому
и
А = Fcos *• ^ s'(t)dt = F cos <x(s2 — s1) = Fcos х-ks. (122)
и
Таким образом, если проекция силы на направление скорости
является постоянной величиной, то
работа этой силы за некоторый промежу- (fj
ток времени равна величине проекции,
умноженной на приращение пути точки
приложения силы за соответствующий
промежуток времени.
Из формулы (122) следует, что если
угол а прямой (а = 90°), работа силы
равна нулю; если угол а острый
(а<;90°), работа положительна, если
угол тупой (90°<а< 180°), работа
является отрицательной. Рис. 172.
б) Работа силы тяжести
Пусть сила Р является силой тяжести. Выберем
прямоугольную систему координат OXYZ так, чтобы ось OZ была парал-
Zk
а
Рис. 173.
т
лельна силе Р и имела
противоположное направление (см.
рис. 173).
В этом случае для проекций
силы Р получаем:
^ = 0; Г = 0;
Z = — P.
Подставляя эти значения «в
формулу (119), получаем:
A = l-P.z'{t)dt = -P[z{tj-z(tl)] = P(zl-zJ. (123)
и
231
Обозначим вертикальное перемещение точки через Л, т. е.
h=\z2— *,[, тогда /
A = ±P-h9 (124)
причем в формуле (124) следует взять знак плюс, если точка
приложения силы опускается (zx < z2)y и взять знак минус, если точка
приложения силы поднимается (zl<^z2).
в) Работа системы сил тяжести
Рассмотрим систему сил тяжести Р19 Р2, ... Рп.
По формуле (123) для работы силы тяжести Pk получаем
выражение:
Ak = Pk{zk-zki). (125)
Для работы всех сил тяжести получаем выражение:
А= 2 Ak= 2 Р*(2*.-2*,)= 2 Рн*ь- 2 ^- (126)
По формулам для координат центра параллельных сил,
установленным раньше, получаем:
п п
2 Pkzkl = PzCl; 2 P^k, = Pzc» (127)
k=i k=l
n
где P= ^ Pk> & ?c — апликата центра параллельных сил С.
Из формул (126) и (127) получаем:
A = P(zc— zc2). (128)
Обозначим вертикальное перемещение центра параллельных
сил С через Н> т. е. H = \zc2 — £с,|, тогда получаем, что
А = ±РН, (129)
причем в формуле (129) следует взять знак плюс, если центр
параллельных сил опускается, и взять знак минус, если центр
параллельных сил поднимается.
г) Работа внутренних сил абсолютно твердого тела
Внутренними силами абсолютно твердого тела являются силы
взаимодействия его частиц. Рассмотрим две частицы тела.
Силы взаимодействия этих частиц Fx и F2 прямо
противоположны, т. е. Fl = —T2. _ __
Найдем сначала сумму мощностей сил Fx и Ft (см. рис. 174),
M1 + M, = F1-vj + F2-v2 = F1v1cosol + F2v2cos(№° — $) =
= Fjzvcos a — F2v2 cos p = Fx • np^ — F2 • npBzv (130)
232
В кинематике было установлено, что npuv1 = npav2, кроме того,
f = F2, поэтому из (130) следует, что
Ml + Mt = Fl(upuvl — upuv%) = 0. (131)
Мы получили, что сумма работ сил Fx и F2 равна нулю. Но
работа всех внутренних сил слагается из работ таких прямо
противоположных сил, поэтому заключаем, что работа внутренних
сил равна нулю.
Итак, работа внутренних сил абсолютно твердого тела равна
нулю.
д) Работа произвольной системы сил, приложенной
к абсолютно твердому телу
Пусть к абсолютно твердому телу приложена некоторая система
сил Fv Fv ..
Рис. 174. Рис. 175.
Сначала найдем мощность силы Fk.
Mk = Fk-vk при k=l, 2, .../z. (132)
Выберем в теле фиксированный полюс О. Тогда по формуле
Эйлера, установленной в кинематике, можно записать:
vk = vQ-\-uXrk ПРИ k=lf 2, ... п. (133)
Из формул (132) и (133) получаем:
По свойствам скалярно-векторного произведения можно
записать, что
Подставляя это выражение в формулу для Mk> получаем:
Mk=Tyv^m,(F)^.
Найдем теперь работу силы Fk:
Ак= J Mkdt= I (Fk.vQ)dt+ j[mQ(Fk)^]dt
233
Работу всех сил, приложенных к телу, находим по формуле
Но
А= ± Ak= % Н (Fk-v0) dt+l[m0(Fk)-u]dt\J
= l{jbFk-4)dt+l [2и0Й.й]й. (134)
2 Fk = R, Sw,(/7*) = Ie, (135)
где R — главный вектор, LQ — главный момент системы сил.
Из формул (134) и (135) окончательно получаем, что
и и
А=\ (#Л)^ + $ {L^)dt. (136)
и и
Рассмотрим некоторые частные случаи движения тела.
1°. Тело движется поступательно.
В этом случае со=0 и скорости всех точек геометрически равны v.
Из формулы (136) следует, что
и
А=\ (R-v)dt. (137)
и
JL0' 2°. Тело вращается вокруг неподвижного
полюса.
\о/ \ ' Выберем в качестве точки О неподвижный
полюс, тогда г/0 = 0 и работа вычисляется по
формуле:
и
*Л= j (L0-U)dt. (138)
и
Рис. 176. Из частных случаев Г и 2° следует, что если
движение тела разложить на поступательное,
задаваемое системой координат с началом в точке О, и
вращательное относительно этой системы координат, то работа
произвольной системы сил, приложенной к твердому телу, слагается
из работы этой системы сил в поступательном движении и во
вращательном движении.
3°. Тело вращается вокруг неподвижной оси (см. рис. 176).
В этом случае можно полюс О выбрать на неподвижной оси,
тогда vQ = 0. Из формулы (137) получим, что
fa U U
Л = $ (LQ-M)dt= J L0со cos a dt= J Lu со dt. (139)
и и и
234
Если предположить, что вращающий момент сил относительно
неподвижной оси й постоянен, т. е. Lu = const, то из формулы
(139) получим:
и
л=1Л?'(')л=4[?(У-фЛ)1=^(?.-?1)=^-а?.
и
Итак, если вращающий момент сил, приложенных к телу,
является постоянным, то работа сил равна произведению
вращающего момента на приращение угла поворота, т. е.
Л = 1д.Д<р. (140)
3. Понятие о кинетической энергии
Кинетическая энергия является скалярной мерой движения.
Для материальной точки и механической системы эти понятия
определяются следующим образом:
1°. Кинетической энергией материальной точки называется
половина произведения массы точки на квадрат величины скорости
точки, т. е.
T=Lmv\ (141)
2°. Кинетической энергией механической системы называется
сумма кинетических энергий всех точек системы, т. е.
T=^^mkvl (142)
Заметим, что кинетическая энергия есть некоторая скалярная
величина. Однако ее можно выразить и в векторной форме:
T=±m(v.v); (143)
T=^\m*k{vk.vk). (144)
Выведем формулы для вычисления кинетической энергии в
некоторых частных случаях движения.
а) Поступательное движение
Пусть неизменяемая механическая система 5 (т19 т2У... т„)
совершает поступательное.движение. В этом случае скорости всех
точек системы в каждый момент времени геометрически равны, т. е.
v\ = v2 = • •. = vn = v. Поэтому кинетическая энергия можеть быть
вычислена по формуле:
Т= S \mkv\= S ±my = ^v* 2 тк = ± Mv\ (145)
235
Итак, если неизменяемая механическая система совершает
поступательное движение, то кинетическая энергия систему равна
половине произведения массы всей системы на квадрат величины
скорости какой-либо точки системы.
б) Вращение вокруг неподвижной оси
Пусть неизменяемая механическая система S(m19m2,.-..mn)
совершает вращательное движение вокруг неподвижной оси а,
В этом случае каждая точка системы вращается вокруг оси
с одинаковой угловой скоростью со.
Величина линейной скорости каждой точки определяется по
формуле:
Поэтому для величины кинетической энергии получаем
выражение:
п п п
k = l k = l k = l
Но сумма, полученная в этой формуле, представляет собой
момент инерции механической системы относительно оси
вращения, т. е.
п
k = 1
Поэтому окончательно получаем:
Т=±1У. (146)
Итак, если неизменяемая механическая система совершает
вращательное движение вокруг неподвижной оси, то
кинетическая энергия системы равна половине произведения момента
инерции системы относительно of и вращения на квадрат величины
угловой скорости.
в) Произвольное движение
Рассмотрим механическую систему S(m19 т2, ... тп),
совершающую произвольное движение. Пусть точка С является
центром инерции этой системы. Найдем формулу для нахождения
кинетической энергии системы при ее движении относительно
некоторой неподвижной системы координат OXYZ.
Введем в рассмотрение вспомогательную систему координат
CSrjC, имеющую начало в точке С, не связанную с данной
механической системой и перемещающуюся поступательно (см. рис. 177).
Движение материальной системы S (т1У т2, ... ?пп)
относительно неподвижной системы координат OXYZ можно
рассматривать как сложное, в котором движение системы S(m19*... тп)
236
относительно подвижной системы координат С£г£ является
относительным движением, движение системы CZrfc относительно
OXYZ— переносным и движение системы 5 (т1У ...
/^относительно OXYZ—абсолютным.
По теореме сложения линейных скоростей в сложном
движении абсолютная скорость точки mk определяется по формуле:
Vka=Vkr + V
ke-
(147)
Подставляя формулу (147) в формулу (144), мы для
кинетической энергии в абсолютном движении получаем выражение:
п п
Т= £ \ т* &ka' Vka) = S Т mk (Vkr + Vke) • {Vkr + Vke) =
k = l
fc = l
= S i^(^.%)+2 \rnkiPke^ke)-\r H ^k{vkrVke). (148)
; = 1
k~ 1
Заметим, что переносная скорость точки mk представляет
собой скорость той точки подвижной системы Clrfc относительно
неподвижной OXYZ, с которой
движущаяся точка mk совпадает.
Так как подвижная система
С$7]£ перемещается
поступательно, то скорости всех точек
этой систему геометрически
равны и, следовательно,
переносная скорость точки mk
совпадает со скоростью начала
подвижной системы С относительно
OXYZ, т. е.
v,
при k=l, 2,
ke'
. п.
(149)
*х
Рис. 177.
Первое слагаемое в формуле
(148) представляет собой кинетическую энергию в относительном
движении, которую мы обозначим через Тг, т. е.
7\=Е im*v*'-
(150)
k = \
Подставляя формулу (149) во второе и в третье слагаемое*
получим:
п п п
S {rnk(v^vke)= 2 т7Я*^с'^с) = т^-' Е mh=\Mvl (151)
ft=i
k = i
k = i
fc2 mk {vkr • vke) = 2 Щ (vkr -vc)=( 2 mkvkr) • vc. (152)
237
A=l
A=l
Первый множитель 2 mkvkr в полученной формуле пред-
ставляет собой количество движения материальной системы в
относительном движении. По правилу нахождения количества
движения можно его вычислить как произведение массы всей
системы на относительную скорость центра инерции, т. е.
п
2 mhvkr = Mvcr. (153)
Но относительная скорость центра инерции равна нулю, т. е.
vcr = 09 поэтому из формул (152) и (153) заключаем, что
J/**Kr'^) = 0. (154)
Из формул (148), (150), (151) и (154) окончательно получаем,
что
T=Tr + ±Mvl (155)
Итак, кинетическая энергия механической системы в
произвольном движении равна кинетической энергии механической
системы в ее относительном
движении по отношению к системе
координат, имеющей своим
началом центр инерции системы и
перемещающейся поступательно,
плюс половина произведения массы
всей системы на квадрат скорости
центра инерции.
Полученная формула (155)
позволяет сводить вычисление кине-
Рис. 178. тической энергии в абсолютном
движении к вычислению
кинетической энергии в относительном движении. Так как
относительное движение по своему характеру проще абсолютного, то,
пользуясь формулой (155), можно во многих случаях найти
кинетическую энергию в абсолютном движении.
Проиллюстрируем это на конкретном примере.
Задача 24. По наклонной плоскости катится без скольжения
однородный диск радиуса R и веса Р так, что скорость его
центра равна v (см. рис. 178). Найти кинетическую энергию
диска.
Так как диск однородный, то центр инерции его (который
совпадает с центром тяжести) находится в геометрическом
центре. Выберем подвижную систему координат Сщу оси которой
238
перемещаются поступательно так, что ось CZ все время
параллельна наклонной плоскости. Из формулы (155) получаем:
где Тг есть кинетическая энергия диска в его вращательном
движении относительно системы координат Съц. По формуле
(146) получаем, что
Момент инерции диска относительно его центра определяется
по формуле:
Для нахождения угловой скорости сог воспользуемся тем, что
скорость точки касания D диска с наклонной плоскостью равна
нулю. С другой стороны, рассматривая движение точки как
сложное, можно записать, что
vD=vDr-{-vDe = 0.
Отсюда следует, что
\vDr\ = \vDe\.
Но
\vDr\ = o>rR; \vDJ = v,
поэтому
или
V
Итак, окончательно получаем:
J~2 gV + 2 2 gH '/?— 4 gV'
4. Теорема о кинетической энергии
Теоремы о кинетической энергии устанавливают зависимость
между кинетической энергией механической системы, являющейся
мерой движения, и работой сил, действующих на систему,
являющейся мерой действия сил.
Сформулируем сначала теорему для материальной точки, а
затем для механической системы.
Теорема 1. Приращение кинетической энергии материальной
точки за некоторый промежуток времени равно работе силы,
Действующей на материальную точку, за тот же промежуток
времени.
239
, Доказательство. Пусть на материальную точку с массой
т действует сила F. Согласно второму закону Ньютона получаем:
mw = F.
Умножим обе части этого равенства скалярно на скорость
точки v:
mw-v= F -v. (156)
Левую часть равенства (156) можно представить в виде:
*«•«=«#■* = ;£ [|* С-*) ]=g. (157)
Из формул (156) и (157) окончательно получаем:
%=?-Ъ. (158)
Итак, производная от кинетической энергии по времени
равна мощности силы, действующей на точку.
Проинтегрируем равенство (158) в промежутке времени от tx
до t2, тогда получим:
*. и
\T(t)dt=\ (F'V)dt
или, находя значение интеграла, стоящего слева, получим:
и
T(t2)-T(t1)=\(F^)dt
ti
Интеграл, стоящий справа, представляет собой работу силы
за промежуток времени от t1 до t2; теорема доказана:
Т%—Т1 = А. (159)
Теорема 2. Приращение кинетической энергии механической
системы за некоторый промежуток времени равно работе всех
внешних и внутренних сил, действующих на механическую
систему, за тот же промежуток времени.
Доказательство. Рассмотрим механическую систему,
состоящую из конечного числа материальных точек S(miy m2J..., mn).
Силы, действующие на каждую точку системы, распадаются на
внешние и внутренние. Обозначим результирующую всех
внешних сил через Fp и результирующую всех внутренних сил
через F^, а их работы обозначим соответственно через А%} и
Л^. По формуле (159) можно записать, что
240
Tk— Tkl = A? + A$ при k=l, 2, ..., n. (160)
Просуммируем равенство (160), тогда получим:
S Ъ, - S 7*. = 2 ^Г + 2 Ар. (161)
fc=l ft=l k=l * = 1
Суммы, стоящие в левой части формулы (161), представляют
собой суммы кинетических энергий всех точек системы
соответственно в моменты времени t2 и tl9 т. е. кинетическую энергию
всей системы в моменты времени t2 и tv Введем для них
обозначения:
п п
2 Tk2 = T2; 2 7*i = ?V
Суммы, стоящие в правой части формулы (161), представляют
собой суммы работ соответственно всех внешних сил и всех
внутренних сил. Введем для них обозначения:
2 А^=А{е)) 2 А$ = А{1\
Таким образом, окончательно получаем:
Тж — Т1=А{е) + А{{). (162)
Теорема доказана.
Из этой теоремы в качестве следствия получаем теорему о
кинетической энергии для абсолютно твердого
тела.
Приращение кинетической энергии абсолютно твердого тела
за некоторый промежуток времени равно работе всех внешних
сил, действующих на тело, за тот же промежуток времени.
Действительно, как было установлено раньше, работа всех
внутренних сил абсолютно твердого тела равна нулю, поэтому
для абсолютно твердого тела получаем:
Т2 — Т1=А{е). (163)
Из теоремы о кинетической энергии видно, что введенная
мера движения — кинетическая энергия — связана не только с
внешними, но и с внутренними силами. Это обстоятельство
говорит о принципиальном различии мер движения: кинетической
энергии и количества движения.
Вследствие этого использование меры движения — кинетической
энергии — позволяет более глубоко изучать природу
механического движения, связывая его тесно с физическими процессами в
теле, которые при данном механическом движении возникают.
Задача 25. Корпус тележки при помощи подшипников
насажен на оси колес. Тележка находится на негладкой
плоскости, образующей с горизонтом угол а и катится без скольжения
241
под действием силы F, приложенной к тележке и образующей
угол р с наклонной плоскостью. Найти скорость корпуса трележ-
ки в момент времени, когда тележка прошла путь s, если в
начальный момент времени тележка находилась в покое. Дано,
что вес корпуса тележки равен Р, вес колеса равен р, оси колес
абсолютно гладкие (см. рис. 179).
Рассмотрим механическую систему, состоящую из корпуса
тележки (вместе с подшипниками) и четырех колес. На эту
систему действуют внешние силы: вес тележки Р, вес колгс
F 4/7, реакция опоры 4/? и
внутренние силы: силы взаимодействия
осей колес с подшипниками.
По теореме о кинетической
энергии можно записать:
T2—T1=A{e) + Ail). (162')
Так как в начальный момент
тележка находилась в покое, то
Рис. 179. 7\ = 0. Найдем кинетическую
энергию Т2 в конечный момент
времени. Эта кинетическая энергия слагается из кинетической
энергии корпуса тележки, который перемещается поступательно, и
кинетической энергии колес, которые катятся без скольжения по
наклонной плоскости (выражение кинетической энергии для них
было найдено раньше, см. стр. 239).
Таким образом,
J 2 — ' тела-Г*/кол— 2^ v Т* J^ — %g * g #
Найдем теперь работу внешних сил:
A^ = AF+Ap + 4Ap + 4AR.
Согласно ранее установленным формулам для каждого
слагаемого можно записать:
AF=F-s-cos$;
Ар = Р>s-cos (90°-\-z) = — P.s-sin a;
Ap = p • 5 • cos (90° -j- a) = — p • s • sin a;
t t
AR=\(R-v)dt=\(R.O) dt = 0.
о 0
В последнем равенстве скорость точки приложения силы R
равна 0, так как колеса катятся без скольжения.
Итак, для работы внешних сил получаем выражение:
Ае) = F • s • cos р — Р - s • sin a — Ар • s • sin a.
242
Найдем теперь работу внутренних сил.
Так как оси колес по условию задачи абсолютно гладкие,
то силы взаимодействия оси колеса и подшипника
перпендикулярны к касательной плоскости в точках соприкосновения, т. е.
перпендикулярны к оси колеса и проходят через ось колеса
(см. рис. 180).
Рассмотрим две внутренние силы п и —п. Скорости точек
приложения этих сил различные. Скорость точки приложения
силы п (силы, с которой ось действует на подшипник) равна
скорости тела тележки v (так как подшипник неизменно связан с
телом). Скорость точки приложения силы —п (силы, с которой
подшипник действует на ось) слагается из относительной
скорости vx вращения оси и переносной скорости v, т. е. равна v-\-vx.
Найдем мощность этих сил.
= (n-v) —(n-v) — (n-v1) = 0.
Последнее слагаемое равно нулю, так
как п\ух. Отсюда следует, что мощность
всех внутренних сил равна нулю и,
следовательно, их работа А{1) = 0. Заметим,
что если бы оси колес не являлись
абсолютно гладкими, то работа внутренних сил не была бы равна
нулю (так как скалярное произведение силы трения на v1 не
равно нулю).
Подставляя все найденные значения в формулу (162'), получим:
(о-Нт— ) v* = F-S'COS р — P-s- sin а — 4/;-s-sina.
Отсюда находим скорость
Рис. 180.
-i/^2g (F-s-cos ji — P-s- sin a — 4p-s-sin a)
Если вес колес значительно меньше веса корпуса тележки, то,
полагая jt? = 0, получаем приближенную формулу:
^ -. /~2g(F-s-zos jl — P-s-sin a)
§ 7. ПОЛНАЯ МЕХАНИЧЕСКАЯ ЭНЕРГИЯ
1. Силовое поле
Изучение механического взаимодействия тел природы наряду
с понятием силы привело также к понятию поля. Это понятие
сформировалось в результате борьбы различных взглядов на
природу сил, действующих между телами.
243
В первой половине XVII в. Р. Декартом была создана теория
близкодействия, согласно которой всякое взаимодействие тел
может осуществляться либо при прямом контакте, либо через
промежуточную среду, которую позже назвали эфиром.
В конце XVII и в начале. XVIII в. Ньютон развил теорию
дальнодействия, которая утверждала, что способность тел взаимно
притягиваться есть первичное свойство, такое же, как инерция
или протяженность.
По Ньютону тело мгновенно „чувствует" действие силы
(другого тела) независимо от их взаимного расстояния.
Теория Ньютона позволила дать количественное объяснение
ряду наблюдаемых явлений, в связи с чем она утвердилась в науке
и была господствующей в XVIII и XIX вв.
В связи с развитием физики в XIX и XX вв. возникло
понятие о поле как о материальном объекте, взаимодействующем с
телами. Согласно этим воззрениям механическое воздействие
одного тела на другое осуществляется полем, создаваемым
воздействующим телом. Так, например, воздействие Земли на некоторое
тело, находящееся на ее поверхности, осуществляется полем,
созданным Землей, так называемым полем тяготения.
В теоретической механике рассматриваются действия сил
только с количественной стороны, физическая природа полей,
осуществляющих воздействие одного тела на другое, не исследуется.
Если с телом, создающим силовое поле, связать некоторую
систему координат OXYZ, то каждая точка поля задается
координатами х, у, z. Сила, действующая на материальную точку ту
помещенную в поле, вообще говоря, зависит от координат точки
ту времени t и характера движения точки.
Среди всевозможных силовых полей можно выделить такие
поля, для которых сила, действующая на материальную точку
т(х,у, z)y зависит только от координат ху у, z точки т.
Примерами таких полей могут являться поле силы тяжести,
электростатическое поле и др.
В дальнейшем будем рассматривать только такие поля.
Итак, мы будем считать, что сила F(X, Y, Z), действующая
на материальную точку т(ху у, z)y зависит только от координат
ху у, z. В силу этого проекции силы Ху Y, Z являются
однозначными функциями координат точки ху у, z9 т. е.
X=f1(xyyyz); Y=fu(x,y,*)i Z=fz{xyyyz). (164)
Для сил силового поля вводится ^понятие силовой функции.
1. Силовой функцией силы F(Xy Yy Z), действующей на
материальную точку m(xyyyz)y называется функция U(xyyyz)
координат точки ту частные производные по координатам которой
равны соответствующим проекциям силы, т. е,
й = * %=* 5F = Z- (1б5>
244
2. Силовой функцией системы сил/^ (Xk, Yk> Zk) (A=l, 2,... п\
действующих на механическую систему mk (xky yky zk) (k = 1, 2,... n)
называется функция координат точек механической системы
U(*i> У» zi> • • • > хп Уп Zn)> удовлетворяющая условиям:
dU лт dU л, dU гу и л с\ /inn\
d7k = X» Wk=Yk' 55i = Z*nPH k=X>2> •••>"• (l66)
3. Если существует силовая функция, то силовое поле
называется потенциальным, силы поля — потенциальными, а
выражение силовой функции со знаком минус, т. е.
П=— U\
называется потенциалом поля.
Из этих определений следует, что если поле задано, т. е.
известны проекции сил, то силовая функция (а следовательно, и
потенциал) является решением системы дифференциальных
уравнений в частных производных, и поэтому она определяется с
точностью до некоторых постоянных.
Рассмотрим некоторые примеры потенциальных полей.
1) Поле силы тяжести
а) Материальная точка
■у
Выберем в поле силы тяжести прямоугольную систему
координат OXYZ так, чтобы ось OZ была параллельна силе тяжести
(была вертикальной, см. рис. 181).
Тогда сила тяжести имеет
проекции: I f/77
Х = 0; V = 0; Z = — P.
Легко видеть, что силовая
функция и потенциал определяются по
формулам:
U= — Pz + C;
П = Рг + С,
где С — произвольная постоянная.
G
?Р
Рис. 181.
б) Механическая система
Рассмотрим систему сил тяжести Р19 Р2, ..., Рп. Если
выбрать в поле силы тяжести прямоугольную систему координат
так же, как и в примере „а", то получаем, что проекции сил
тяжести определяют по формулам:
*а = 0; П = 0; Zk = -Pk при £=1,2, ...,//.
24S
а
Легко видеть, что силовая функция и потенциал определяются
по формулам: /
k=l
n=i,Pkzk + C,
где С — произвольная постоянная, a zk— апликата точки
приложения силы Pk.
2) Центральное поле
При рассмотрении некоторых задач оказывается, что тело,
действующее на другие тела, создает поле сил, направленных в
-, одну точку, находящуюся в дейст-
* лт вующем теле. Точка, куда направлены
все действующие силы, называется
центром поля сил. С полями такого
рода приходится встречаться при рас-
/' смотрении задачи о движении пла-
/ нет, движении электронов, движении
' *у электрического заряда в
электростатическом поле и др.
Эти задачи будут подробно рас-
Рис. 182. смотрены в главе IV, часть II.
В случае центрального поля в
качестве начала системы координат рационально выбрать центр
поля сил О.
Рассмотрим конкретный пример центрального поля — поле
упругой силы.
Сила F, действующая на точку т, пропорциональна
расстоянию точки т от центра поля сил О (см. рис. 182).
Таким образом,
F=—k- От = — krt
где k — коэффициент пропорциональности.
Для проекций силы F получаем выражения:
Х = — kx\ Y= — ky; Z = — kzt
где х, у у z — координаты точки т.
Интегрирование этих равенств дает следующее выражение
зависимости силовой функции и потенциала от координат:
£/ = --|(.х2+у2 + г2) + С;
/7=|-(лг + У + г2) + С.
Установим некоторые свойства потенциальных сил.
246
Г. Для того чтобы сила F(Xy Y, Z) была потенциальной, не-
обходимо и достаточно, чтобы выражение
Xdx+Ydy + Zdz (167)
являлось полным дифференциалом.
Докажем сначала необходимость. Пусть сила F(X, Y> Z)
является потенциальной, тогда существует силовая функция
U (х, у у z), для которой выполняются соотношения:
^=Х> W=Y' 57 = Z- (165)
Используя формулы (165'), можно выражение (167)
представить в виде:
Xdx+Vdy + Zdz = d£dx^dy + d£dz = dU,
т. е. выражение (167) является полным дифференциалом.
Докажем достаточность. Пусть выражение (167) является полным
дифференциалом, т. е. существует функция U(x,y, z),
удовлетворяющая соотношению
dU = Xdx+Ydy + Zdz. (168)
С другой стороны,
'*U=§<b + %dy + §dz. <1б0>
Из формул (168) и (169) заключаем, что
Xdx+Vdy + Zdz=§dx + d£dy + §dz.
Так как дифференциалы dx, dy, dz независимы, то полагая
dy = dz = 0, dx=j£=0, заключаем, что Х = ^-; аналогично
устанавливаем, что Y=^> z = ^-
Итак, существует функция U(x,y,z), для которой
дх ~Л' Ъу~Гу dz ~~^'
т- е. функция U (х,уу z) является силовой для силы F(X, Y, Z).
Это значит, что сила F является потенциальной силой.
2°. Работа потенциальной силы за некоторый промежуток
времени не зависит от формы траектории точки приложения силы,
а зависит только от ее начального и конечного положения.
Для доказательства вычислим работу потенциальной силы за
Некоторый промежуток времени от tl до t2, за который точка ее
247
приложения переместилась из положения Мх в положение Жа.
Согласно формуле (119) можно записать: /
A=\{Xx+Yy+Zz)dt = J Xdx+Vdy + Zdz.
U WiM2)
Так как сила является потенциальной, то существует силовая
функция U(x,y,z), причем на основании предыдущей теоремы
можно записать, что
dU = Xdx-\-Vdy-{-Zdz.
Подставляя в формулу для работы выражения dU, находим, что
А= J dU = U(M%) — U(Ml). (170)
Из этой формулы видно, что работа силы при перемещении
точки приложения силы из положения Мх в положение М2 равна
разности значений силовой функции в точках М2 и Мх и,
следовательно, не зависит от формы траектории.
2. Понятие о полной механической энергии
Если материальная точка т находится в силовом поле, то при
перемещении ее из одного положения в другое силы поля,
действующие на точку,, совершают некоторую работу. Предположим,
что сила F, действующая на точку, является потенциальной, а ее
силовой функцией-является функция U (х, у> z). Вычислим работу,
которую выполнит сила F при перемещении точки из любого
положения М(х, у, z) в некоторое фиксированное положение
М0 (а, Ьу с). Согласно формуле для вычисления работы
потенциальной силы получаем:
A = U(a,b,c) — U (ху у, г).
Так как силовая функция определяется с точностью до
произвольной постоянной, то можно за счет выбора произвольной
постоянной принять U(MQ) = 0, тогда получим:
A = — U(Af) = —U(x,y,z). (171)
Полученное выражение характеризует величину работы,
которую могла бы выполнить сила, действующая на точку, при
перемещении точки из заданного положения в то положение, где
значение силовой функции равно нулю. С другой стороны, по теореме
о кинетической энергии работа силы равна изменению
кинетической энергии и, следовательно, величина (171) характеризует
запас энергии точки т в заданном ее положении.
Вследствие этого величина (171) называется потенциальной
энергией точки т.
248
Итак, если материальная точка находится под действием
потенциальной силы, то потенциальной энергией точки называется
выражение силовой функции со знаком минус, т. е.
n{x,y,z) = — U(x,y9z). (172)
Для механической системы S(m19 т29 ... тп)9 находящейся под
действием потенциальных сил, понятие потенциальной энергии
устанавливается совершенно аналогично. Если силовая функция
для механической системы задается выражением U(x19y19z19 ...,
..., хп9 уп9 zn), то потенциальная энергия определяется по
формуле:
П(х19 у19 z19 ..., xn9 yn9 zn) = — U(x19y19 zl9...9 xn9yn9 zn).
Из определения потенциальной энергии видно, что
потенциальная энергия материальной точки или механической системы зависит
только от положения этой системы (координат точки) и не
зависит от их состояния (скоростей точек). Это обстоятельство в
дальнейшем изложении будет играть существенную роль.
В каждый момент времени материальная точка или
механическая система, находящаяся в потенциальном силовом поле, имеет
некоторую кинетическую энергию Т и потенциальную энергию 77.
Сумма этих энергий, т. е. выражение Т-\- 77, называется полной
механической энергией материальной точки или
механической системы.
Введение понятия энергии механической системы позволяет
установить связь механики с другими областями физики, ибо
механическая энергия, являющаяся мерой движения, позволяет
изучать количественную сторону процессов перехода механического>
движения в другие формы движения.
3. Теорема о сохранении механической энергии
Полная механическая энергия механической системы
подчиняется некоторой закономерности. Эта закономерность
устанавливается следующей теоремой.
Теорема. Если материальная точка перемещается в
потенциальном силовом поле, то полная механическая энергия материальной
точки является постоянной, т. е.
T-f 77 = const. (173)
Доказательство. Для доказательства теоремы достаточна
показать, что для двух произвольных моментов времени tx и t%
полная механическая энергия точки имеет одно и то же
значение, т. е.
7\ + ^ = 7; + 772.
249
Рассмотрим работу силы, действующей на точку, за
промежуток времени от t1 до t2. Согласно формулам (170) и (172)/можно
записать, что
А = иг — и1= — П% + П1. (174)
С другой стороны, по теореме о кинетической энергии можно
записать, что
A = Ti-T1. (175)
Из формул (174) и (175) заключаем, что
_яя+я1 = 7; — т,
или
г.+л^г.+л,,
что и требовалось доказать.
Доказанная теорема является частным случаем более общего
закона сохранения энергии, согласно которому сумма всех видов
энергии для изолированной системы есть величина постоянная.
Уравнение (173) можно рассматривать как первый интеграл
уравнения движения точки. Действительно, уравнение (173)
связывает координаты точки (потенциальная энергия выражается
через координаты) и производные от координат точки (скорость в
формуле кинетической энергии выражается через производные от
координат по времени).
Совершенно аналогично формулируется и доказывается
теорема о сохранении механической энергии для механической системы.
Механическая система, для которой выполняется закон
сохранения механической энергии, называется консервативной, а
силы, действующие на систему,---консервативными.
Таким образом, потенциальные силы являются
консервативными силами.
4. Потенциальное силовое поле
Для потенциальных силовых полей устанавливается ряд
понятий, широко используемых в различных задачах механики.
Рассмотрим эти понятия.
Геометрическое место точек потенциального силового поля,
имеющих одинаковый потенциал, называется
эквипотенциальной поверхностью цля поверхностью уровня. Следовательно,
уравнение эквипотенциальной поверхности можно записать в виде:
П(х,у, z) = C—const,
где С — постоянная величина.
Так, например, в поле силы тяжести уравнения
эквипотенциальных поверхностей суть
— Pz = C,
т. е.
z = const;
250
и, следовательно, эквипотенциальные поверхности представляют
собой плоскости, перпендикулярные к оси OZ.
В поле упругой силы уравнения эквипотенциальных
поверхностей суть
*2+J>2 + z2 = q,
и, следовательно,, эквипотенциальные поверхности представляют
собой сферические поверхности с центром в начале координат.
Геометрическое место точек силового поля, образующих линию,
в каждой точке которой касательная совпадает с направлением
линии действия силы на материальную
точку, называется силовой линией.
Так, например, в поле силы тяжести
силовыми линиями являются прямые
линии, параллельные оси OZ, в поле
упругой силы — прямые линии,
проходящие через начало координат.
Заметим, что в указанных примерах
силовые линии перпендикулярны к
эквипотенциальным поверхностям. Это не
случайно. Так, для каждого силового Рии 183.
поля имеет место свойство: силовая
линия перпендикулярна к каждой эквипотенциальной поверхности,
ее пересекающей.
Действительно, рассмотрим эквипотенциальную поверхность и
пересекающую ее силовую линию.
Через точку пересечения В силовой линии и
эквипотенциальной поверхности проведем какую-нибудь кривую ВС, лежащую
на эквипотенциальной поверхности.
Если в точку В поместить материальную точку, то на нее
будет действовать сила F, касательная к силовой линии, если
эту точку перемещать по кривой ВСУ то работа силы F
находится по формуле:
AF=\ (F-v)dt = U(t) — U(Q) = Ot
о
так как силовая функция для всех точек эквипотенциальной
поверхности имеет одно и то же значение.
Отсюда можно заключить, что в точке В
F-v = 0, (176)
ибо в противном случае, в силу непрерывного изменения F и
v> скалярное произведение F- v Ф О для достаточно малого иро-
251
межутка времени от 0 до t и, следовательно,
АР =
J (F-v)dt=£0.
Из формулы (176) следует, что касательная к силовой линии
в точке В перпендикулярна к любой кривой, лежащей в
эквипотенциальной поверхности и проходящей через точку В, т. е. г
силовая линия перпендикулярна к эквипотенциальной поверхности.
Из доказанного свойства непосредственно вытекает, что сила,
действующая на материальную точку, перпендикулярна к
эквипотенциальной поверхности.
Исходя из определения силовой линии, можно найти ее
уравнение.
Если рассмотреть дифференциал дуги силовой линии в точке
В (х, у> z), то этот дифференциал эквивалентен дифференциалу,
рассматриваемому по касательной drt который коллинеарен силе
F (см. рис. 184), следовательно,
Fx—F—F9*
Так как
F ——• F — — - F — —
1х дх '. ty ду ' г dz 9
то для уравнения силовой линии окончательно получаем
дифференциальные уравнения:
dx dy dz i\ii\
дх ду dz
Сила F(X, Y> Z) потенциального силового поля может быть
представлена в виде:
F = Xi-\-Yj-\-Zk-.
dU т . dU т , dU -г
дх
dz
Из этой формулы следует, что
F=gradU=— grid Я.
Как известно, градиент функции является вектором, имеющим
> направление наиболее быстрого
возрастания функции, причем величина
градиента равна производной от
функции по направлению градиента.
Учитывая, что силы
потенциального поля перпендикулярны к
соответствующим эквипотенциаль-
Рис. 184.
ным поверхностям, заключаем
/=liSd"H|i£| =
где п — направление, перпендикулярное к эквипотенциальной
поверхности.
dU
дп
=
дП
дп
252
К этому можно еще добавить, что сила направлена в сторону
убывания потенциальной энергии.
Действительно, если рассмотреть приращение dr0 радиуса-
вектора некоторой точки В0 поля по направлению нормали к
эквипотенциальной поверхности в сторону убывания потенциальной
энергии, то получим:
дП , , дП , . дП
dn=^dx+^dy+^dz = gT*dn.dr0 = -F.dru<0.
Так как векторы F и dr0 коллинеарны, то заключаем, что они
имеют одинаковое направление.
Итак, в потенциальном прле сила направлена перпендикулярно
к эквипотенциальной поверхности в сторону убывания
потенциальной энергии, и величина силы определяется по формуле:
F=-™.
дп
Указанное свойство сил можно наблюдать на примерах поля
силы тяжести и поля упругой силы.
Для механической системы из п точек потенциальная энергия
представляет собой функцию Зп координат.
В простейшем случае, когда одна материальная точка
совершает прямолинейное движение, потенциальная энергия является
функцией одной переменной и ее зависимость от координаты
может быть графически изображена в виде кривой на плоскости.
Эта кривая называется потенциальной кривой.
Используя понятие потенциальной кривой, можно качественно
изучить движение материальной точки в потенциальном поле без
использования аналитических методов (без интегрирования
дифференциального уравнения).
Поясним это на примере прямолинейного движения точки в поле
упругой силы. В этом случае потенциальная энергия определяется
по формуле:
П(х) = Щ-.
Из теоремы сохранения энергии получаем:
1 'о | kX2
1 • kx2
-о- тх2-{- ^r- = E = const.
и, следовательно,
dx -. f'lE— kx21
~dt~ V m '
dt= ^ _-=•; (178)
У —(2E-kx2)
■to
(2E - kx2)
253
Из формулы (178) видно, что задача имеет смысл, когда
подкоренное выражение неотрицательное, т. е. /
2Е — kx2s?0;
Е>%=П. <179>
Потенциальная кривая представляет собой параболу
(см. рис. 185).
Значение постоянной Е зависит от начальных условий. Пусть
при £ = 0, х = х^ л = 0, тогда
*о = -
кХъ
Если на графике провести прямую, параллельную оси абсцисс
на расстоянии £0 от начала координат, то из соотношения (179)
следует, что движение точки
возможно только при значениях х>
лежащих на интервале (— xQ>
х0), т. е.
Это означает, что при любых
начальных значениях Е0 точка
может колебаться лишь в
определенном интервале значений х, не
выходящем за границы
потенциальной кривой.
Такой метод изучения движения позволяет часто простыми
средствами получить качественную характеристику сложного
движения.
Глава III
ОБОБЩЕННЫЕ ПРИНЦИПЫ И УРАВНЕНИЯ МЕХАНИКИ
В предыдущей главе были рассмотрены основные теоремы
динамики. Эти теоремы устанавливают зависимости между мерами
движения механических систем (количество движения,
кинетический момент, кинетическая энергия) и мерами действий всех
активных сил и реакций связей (в случае несвободного движения).
Эти теоремы для частных случаев действия сил могут приводить
к интегралам уравнений движения (законы сохранения количеств
движения, кинетического момента, полной механической энергии).
Однако эти теоремы не являются эквивалентными всей
совокупности уравнений движения, так как из них в общем случае
(для произвольной системы действующих сил) не могут быть
выведены уравнения движения механической системы.
Обобщенные принципы и уравнения, которые будут изучаться
в этой главе, не приводят к интегралам уравнений движения.
254
Однако они представляют собой некоторые общие положения,
эквивалентные всей совокупности уравнений движений
механических систем, т. е. из них в общем случае движения могут быть
получены уравнения движения механической системы.
Практическая ценность этих принципов и уравнений
заключается в том, что они позволяют изучать несвободное движение
механических систем.
В случае несвободного движения механической системы все
силы, действующие на механическую систему, делятся на
активные силы и реакции связей. При изучении несвободного движения
задаваемыми силами являются активные силы, а реакции связей,
возникающие при действии активных сил, являются неизвестными.
Общие принципы механики устанавливают методы, которые
позволяют исключить из уравнений движения неизвестные реакции
связей, а затем определить и их самих по найденным уже
элементам движения.
Исключение реакций связей из уравнений движения зависит от
характера связей, наложенных на механическую систему, т. е.
ограничений, наложенных на движение механической системы.
Математически связи задаются при помощи некоторых уравнений,
которые называются уравнениями связей.
В этой главе будут изучены сначала различные типы связей,
а затем общие принципы и уравнения механики.
г § 1. КЛАССИФИКАЦИЯ СВЯЗЕЙ
1. Стационарные и нестационарные связи
Как было уже установлено раньше, ограничения, наложенные на
механическую систему и делающие ее движение несвободным,
называются связями, а выражающие их уравнения — уравнениями связей.
В зависимости от характера
изменения связей с течением времени
связи делятся на стационарные и
нестационарные.
Связи называются стационарными,
если уравнения связей не зависят
явным образом от времени, и назы- ч
ваются нестационарными, если в ^^ \—~"*т(х у)
• Уравнения связей входит время как ~"
параметр.
Рассмотрим некоторые примеры:
1) Математический маятник. рис. ise.
Если выбрать систему координат,
как указано на рисунке 186, то уравнение связи выражает тот
факт, что точка т находится на постоянном расстоянии / от
точки привеса О и, следовательно, имеет вид:
255
в(*2*Уг)
В это уравнение параметр времени t явно не входит (хотя х иу
являются, вообще говоря, функциями от t) и поэтому так^я связь
является стационарной.
2) Четырехзвенный механизм.
Четырехзвенный механизм представляет собой плоский механизм,
состоящий из четырех плоских звеньев, связанных между собой
шарнирно, при этом одно звено
(стойка ОС) является
неподвижным (см. рис. 187).
Уравнения связей выражают
тот факт, что при движении
механизма расстояния между
точками 0(0,0) и А(х}, j/J,
А(хг,уг) и В(х2У j/2), В(х2,у2)
и C(d, 0) не изменяются и
поэтому имеют вид:
(x2-dy+yl = c\
В эти уравнения параметр времени t явно не входит и поэтому
связи в четырехзвенном механизме являются стационарными.
3) Движущаяся наклонная плоскость.
Пусть тело Р скользит по наклонной плоскости, которая
перемещается по горизонтальной плоскости с постоянной скоростью v
(см. рис. 188). Тело в каждый момент времени находится на
наклонной плоскости и поэтому уравнение связи для тела Р
представляет собой уравнение наклонной плоскости.
Выберем систему координат OXY так, чтобы прямая АВ при
t = 0 находилась на оси OY.
Рис. 187.
Тогда уравнение прямой ВС
в момент времени t можно
представить в виде:
ОС^ОО
Ц
Но
OC=OA-\-AC=vt + b;
/->п> ли ОС vt + b
J3
* Р
V-
а
Рис. 188.
Подставляя эти значения в предыдущее уравнение, получим:
х , у
vt + b
^(vt + b)
1
или
ax-\-by = a (vt -|- Ь).
Полученное уравнение связи явно зависит от времени. Поэтому
рассматриваемая связь является нестационарной.
256
2. Удерживающие и неудерживающие связи
В зависимости от того, задаются ли уравнения связей
равенствами или неравенствами, связи делятся на удерживающие
(двухсторонние) и неудерживающие (односторонние).
Связи называются удерживающими, если уравнения связей
задаются равенствами, и неудерживающи-
ми, если уравнения связей задаются
неравенствами. /
Рассмотрим примеры. /
1. Камень, прикрепленный к вращаю- {
щейся нити» I
При вращении камня т9 прикреплен- v
ного к нити 0/72, камень перемещается \
так, что его расстояние от центра враще- ч\
ния О не превосходит длины нити / (см.
рис. 189). При небольших скоростях
движения камень может сорваться с
круговой -траектории, тогда нить „сомнется"
и расстояние камня от центра вращения станет меньше длины
нити. Поэтому уравнение связи выражается неравенством:
Таким образом, рассматриваемая связь является неудерживаю-
щей (односторонней).
Если уравнение связи задается неравенством, то перенося все
члены в одну часть неравенства, можно
его привести к виду:
/ Х\ /^0 или /<0.
Так, например, уравнение связи в
рассматриваемом примере можно привести к
виду:
/2 — х2 —у2 ^ 0 или л2 +у — 12<: 0.
Условимся в дальнейшем уравнение
неудерживающей связи представлять в
виде: /<а
2- Груз, прикрепленный к вращающемуся стержню.
При вращении стержня груз находится на постоянном
расстоянии / от центра вращения (см. рис. 190), поэтому уравнение связи
выражается равенством:
.*■+/ = Л
Таким образом, рассматриваемая связь является удерживающей
(двухсторонней).
Q
Г. М. Финкельштейн 257
Рис. 190.
Рис. 191.
Рассмотренные в п. 2 примеры (математический маятник и че-
тырехзвенный механизм) также относятся к случаю удерживающих
связей.
5. Голономные и неголономные связи
Исходя из зависимости связей от скоростей точек
материальной системы, связи делят на голономные (геометрические) и
неголономные (кинематические).
Связи называются голономными, если в уравнения связей не
входят производные по времени от координат точек механической
системы (проекции скоростей точек).
Связи называются неголономными, если в уравнения связей
входят производные от координат точек материальной системы
по времени и эти
уравнения представляют собой
неинтегрируемые
дифференциальные уравнения.
Иногда при
составлении уравнений связей
получаются
дифференциальные уравнения. Если эти
дифференциальные
уравнения являются
интегрируемыми, то их интегралы уже не содержат производных от
координат точек по времени и, следовательно, связи являются
голономными. В том же случае, когда дифференциальные
уравнения не являются интегрируемыми, связи являются
неголономными.
Рассмотренные ранее примеры (математический маятник, че-
тырехзвенный механизм, движущаяся наклонная плоскость)
представляют собой примеры голономных связей.
Простейшим примером неголономной связи является
качение шара без скольжения по горизонтальной плоскости (см.
рис. 191).
На шар, катящийся без скольжения по плоскости, наложены
следующие ограничения: 1) расстояние центра 01 от плоскости
равно постоянной величине г (радиусу), 2) скорость точки касания С
в каждый момент времени равна нулю.
Положение шара в каждый момент времени определяется
положением центра Ох (х, у, z) и тремя углами Эйлера сЬ, 0, <р,
определяющими положение шара относительно системы координат
O^^Y^Z^ проходящей через центр Ох и движущейся
поступательно.
Таким образом, получаем, что
z = r;
258
По формуле Эйлера можно записать:
«с = 'о, + »ХО1С = 0. (1)
Если учесть, что
Vq,x = ^ %fiy=y; v0,z='z;
юх = юх = <р sin 0 sin ф -f- 0 cos ф;
(o;/ = coy= — ср sinO cosd>-j-*^ sin Ф»
w2 == co2i = cp cos 0 -f- ф,
то векторное уравнение (1) можно представить при помощи
координат в следующем виде:
xi -\~yj -\-zk-{-
т < 7 ъ \
i sin 0 sin ф -f- 0 cos ф — ср sin 0 cos ф -f- 6 sin ф ср cos 0 -f- Ф
+
О 0 —г
= 0.
Отсюда следует, что выражения, являющиеся множителями
при ортах i, у, ky равны нулю, т. е.
л: + г(ср sin 0 cos ф — О8тф) = 0;
г У + r (<Р sin fj s*n Ф + 0 cos ф) = 0;
z = 0. (2)
Полученные уравнения (2) являются аналитическим
представлением условия (1). Первые два уравнения (2) представляют собой
неинтегрируемые дифференциальные уравнения.
Действительно, если предположить, что эти уравнения
интегрируемые, то общий интеграл будет представлять собой
уравнение, связывающее переменные ху у, ф, 0, ср, т. е. иметь вид:
Ф(х,у, ф, 0, ср, 0 = 0. (3)
Это уравнение содержит по крайней мере либо переменную х,
либо у. Действительно, если предположить, что это уравнение
не содержит ни х ни у, т. е. имеет вид:
ф(ф, 0, ср, 0 = 0,
то> дифференцируя его по времени, получим:
дФ : , дФ / , дФ ■ , дФ ~
т^+ж'^^ + ж^0-
Последнее уравнение указывает, что при сделанном допущении
угловые скорости ф, 0, ср будут зависимыми, что в общем случае
неверно.
9*
259
Из уравнения (3), таким образом, следует, что либо х> либо у
является функцией остальных переменных. у
Пусть
y=f(x> ф, 0, <Р> t).
Продифференцируем это выражение по времени:
<У • I df \ , а/д , в/ • , а/ ,,,
^=й*+д?ф+38в+з^ + зг- (4)
Из уравнений (2) следует, что л; и j/ не зависят от ф, поэтому,
продифференцировав (4) по ф, получим:
т. е. функция / не зависит от переменной ф.
Итак,
у=/(х, 9, <р, *); (5)
Из уравнений (5) получаем:
ф) df_ _дх
дф ^х дф
Из уравнений (2) следует, что
— = г ('6 cos ф -j- <9 sm ^ sm Ф)5
-^- = г (в sin ф — ср sin 6 cos ф).
Подставив эти выражения в предыдущее равенство, получим:
г (О sin ф — ф sin G cos ф) = -^ г (6 cos ф + <р sin 6 sin ф)
6 Гвтф — ^- cos ф j —ф sin 6 Г cos ф-|--^-sin ф ] =0.
В силу независимости угловых скоростей 6 и <р заключаем, что
выражения, стоящие в скобках, равны нулю, т. е.
sin ф — ^ cos ф = 0;
cos ф -f- j- sin ф = 0.
Полученная система равенств является противоречивой, ибо
из них приходим к противоречивым соотношениям:
§^ = tg^ = —ctgc|>.
260
ИЛИ
Итак, уравнения (2) являются неинтегрируемыми
дифференциальными уравнениями, откуда следует, что в рассматриваемом
случае связи являются неголономными.
В качестве второго примера рассмотрим колесо, катящееся по
рельсу без скольжения (см. рис. 192).
На движение колеса наложены ограничения:
01С = г;
По формуле Эйлера
Кроме того,
(6)
(7)
определяется
Положение колеса в каждый момент времени
положением центра 01 (л, у) и к»
углом поворота колеса <р
относительно этого центра.
Проектируя равенство (6) на оси
координат и используя формулу
(7), получаем, что
х — лр = 0;
Полученные дифференциальные уравнения являются
интегрируемыми, и при интегрировании их получаем:
при условии, что при t = 0; <р = 0; у = г.
Таким образом, уравнения не содержат производных от
координат по времени и, следовательно, связи являются голономными.
В дальнейшем изложении будут рассмотрены только голоном-
ные связи.
4. Уравнения связей произвольной механической системы
Будем рассматривать механическую систему, состоящую из п
материальных точек S (т1У т2, ... тп). Уравнения связей для этой
механической системы представляют собой некоторые уравнения,
связывающие Зя координат точек этой системы. Совершенно ясно,
что число этих уравнений р не может превышать число
координат 3/г.
Различным видам уравнений связей можно дать следующую
классификацию:
1. Стационарные связи (удерживающие, голономные):
/Л*1^ *!»• ••!■*»,.У». *я) = 0, где 1=1, 2, ...,/?<3/г.
261
2. Нестационарные связи (удерживающие, голономные):
f,(t9x19y19 z19 ...9xn9yn9zn) = 09 где i=\9 2,...,р<£п.
3. Неудерживающие связи (стационарные, голономные):
//(Wi»"' >*п>Уп> z„)<0, где i=l, 2,...,/?<Зл.
4. Неудерживающие связи (нестационарные, голономные):
fi(t9xl9y1 z^...9xn9yn9 2гя)<0^ где * = 1, 2,. ..,/?< 3/i.
5. Неголономные (стационарные, удерживающие):
где i = 1, 2, ... ,/?^ Зя.
6. Неголономные (нестационарные, удерживающие):
у i \}> я19 у19 z19... , л:я, _yw, zn9 xl9 у19 z19 ..» , л„, _у„, £я) = О,
где /= 1, 2,. .., р^Зп.
7. Неголономные (стационарные, неудерживающие):
У/ (-^1» У\У Zl> * • • » -^Л» J'w» ^Л> -^1» J'l» ^1> • • • > -^Я> .Ул> ^я) ^ О,
где *= 1, 2, ... , /?< Зя.
8. Неголономные (нестационарные, неудерживающие):
// 1^> *^i» -Vi> ^1> • • • » ■*/!» .У«> ^л> -*i> J^i> ^i> • • • 1 -*л> .Уп> %п) ^ ^»
где * = 1, 2, ... , /?<3я
§ 2. ОБОБЩЕННЫЕ КООРДИНАТЫ И ОБОБЩЕННЫЕ СИЛЫ
1. Возможные и действительные перемещения
Рассмотрим механическую систему, на которую наложены
некоторые стационарные связи. Выберем одну из точек системы т
и зафиксируем некоторый момент времени t. Тогда точка т в
данный момент времени имеет некоторую скорость v, и если
рассмотреть бесконечно малый элемент времени dt, то ему
соответствует бесконечно малое перемещение точки dr = vdt.
Скорость v, которую имеет точка в данный момент времени,
называется действительной скоростью, а
соответствующее ей бесконечно малое перемещение dr — действительным
перемещением.
Представим себе, что мы сохраняем связи, наложенные на
точку т9 и рассматриваем некоторые воображаемые движения,
возможные при наличии данных связей.
Тогда точка т в этих воображаемых движениях будет иметь
некоторые скорости, допускаемые связями (совместимые со
связями). В этом случае бесконечно малому элементу времени dt
также соответствуют некоторые воображаемые перемещения.
262
Скорость, которую может иметь точка механической системы
в данный момент времени при наличии заданных связей,
называется возможной скоростью) а соответствующее ей
бесконечно малое перемещение — возможным перемещением.
В отличие от действительной скорости и действительного
перемещения будем обозначать возможную скорость через ■& и
возможное перемещение через ir. Таким образом, br = bdt и д = -^.
Поясним вновь введенные понятия на примерах.
1. Груз, подвешенный к вращающемуся стержню.
Пусть в некоторый фиксированный момент времени груз под-
нимается_вверх. Тогда действительная скорость представляет собой
вектор vy касательный к траектории и О
направленный в сторону движения
груза, а действительное перемещение dr—
вектор, касательный к траектории и
направленный также в сторону
движения (см. рис. 193). чч
В данном случае без нарушения v^^
связи груз может двигаться и в
противоположном направлении.
Следовательно, возможными скоростями
являются всевозможные векторы fr,
касательные к траектории в рассматриваемой точке (соответствующей
фиксированному моменту времени), а визможными
перемещениями— всевозможные бесконечно малые векторы Ьг, касательные
к траектории в рассматриваемой точке.
Заметим, что в данном примере связь является удерживающей
и действительное перемещение является
одним из возможных.
2. Груз, прикрепленный к нити.
Пусть в некоторый фиксированный
момент времени груз поднимается вверх,
когда действительная скорость v и пере-
J)i мещение dr направлены по касательной
к траектории в сторону движения (см.
рис. 194).
Без нарушения связи груз может
двигаться в любом направлении внутрь
сферы или по касательной к сфере с
центром в точке О и радиусом /. Поэтому
совокупность возможных скоростей и перемещений представляет
собой совокупность векторов, направленных из рассматриваемой
точки по касательной и внутрь указанной сферы.
Заметим, что в данном примере связь является неудерживаю-
*Деи и действительное перемещение является одним из возможных.
263
Рис. 195.
В случае стационарных связей всегда действительное
перемещение является одним из возможных, но не каждое возможное
перемещение является действительным.
Рассмотрим нестационарные связи.
В этом случае определение понятий действительной скорости
и действительного перемещения осуществляется так же, как и
для стационарных связей.
Для определения возможной скорости и возможного
перемещения в данный момент времени поступают следующим образом:
фиксируют положение механической системы для рассматриваемого
момента времени и находят
возможные скорости и
перемещения по мгновенно
остановившимся связям.
Таким образом, в случае
нестационарных связей
возможной скоростью и возможным
перемещением точки в данный
момент времени называется
соответственно возможная
скорость и возможное перемещение по мгновенно остановившейся
связи для данного момента времени.
Поясним это на примере. Пусть груз перемещается по
движущейся наклонной плоскости (см. рис. 195).
Рассмотрим какую-нибудь точку груза А и зафиксируем момент
времени t. Тогда груз может перемещаться по всевозможным
направлениям в наклонной плоскости (при условии сохранения связи)
и, следовательно, совокупность всевозможных скоростей и
перемещений точки А представляет собой совокупность векторов,
лежащих в плоскости, параллельной к наклонной. Действительная
скорость v в данном случае равна геометрической сумме
относительной и переносной скоростей, и поэтому она не совпадает ни
с одной из возможных скоростей.
Таким образом, в случае нестационарных связей
действительная скорость может не являться возможной.
2. Идеальные связи
Рассмотрим несвободную механическую систему. Силы,
действующие на механическую систему, можно разбить на два класса:
активные и реакции связей. К реакциям связей относятся те силы,
с которыми связи действуют на механическую систему, а к
активным силам — все остальные. Например, если тело перемещается
по горизонтальной плоскости, то сила, с которой плоскость
действует на тело, является реакцией связи, а сила тяжести — силой
активной.
Удерживающие связи, наложенные на механическую
систему, называются идеальными, если сумма работ всех реак-
264
цйй связей для любой системы возможных перемещений равна
нулю (или если сумма мощностей всех реакций связей для
любой системы возможных перемещений равна нулю).
Если механическая система содержит п точек т19 т2, ... ,тп
и реакции связей суть Nly N2f..., Nn> то работа силы Nk (Xkf Yk, Zk)
Ha возможном перемещении
brk {oxk> Ьь ^а) точки
приложения mk(xk,yk, zk) находится
по формуле:
= Xkbxk + Ykbyk + Zkbzk.
Sr
N
^F
^\\\\^ш^Шш
Рис. 196.
Сумма работ всех реакций связей находится по формуле:
ЬА= I ЬАк= I (Xhbxk+Ykbyk + Zkbzk).
Итак, чтобы связи были идеальными, необходимо выполнение
равенства:
Рассмотрим некоторые примеры идеальных связей.
1. Абсолютно гладкая плоскость (см. рис. 196).
В этом случае N J_ Sr и, следовательно,
bA = N-br = 0.
2. Неподвижная точка.
Пусть тело перемещается так, что одна его точка остается
неподвижной. Примером такого
тела может являться гироскоп
(волчок) (см. рис. 197).
В этом случае Ьг = 0 и,
следовательно,
Рис. 197.
3. Абсолютно твердое тело.
В абсолютно твердом теле на
точки наложены связи —
расстояние между каждыми двумя
точками тела является постоянным. Реакции связей в данном
случае— это силы взаимодействия точек системы, т. е. внутренние
силы. Но раньше было доказано, что работа внутренних сил для
любого перемещения тела равна нулю, поэтому §Л(О = 0.
4. Абсолютно гладкий шарнир (см. рис. 198).
В этом случае A^S/7 и поэтому bA = N-br = 0.
265
Неудерживающие связи, наложенные на механическую
систему, называются идеальными, если сумма работ всех
реакций связей для любой системы'
возможных перемещений больше или
равна нулю, т. е. если
2 (Xhbxk +' Ykbyk + Zhbzk) ^ 0.
k = l
В качестве примера рассмотрим
вращение груза, подвешенного к
абсолютно гибкой нити. В данном случае связь
является неудерживающей и реакция нити направлена по нити.
Угол <р между_ возможным перемещением груза и направлением
реакции связи N не превышает 90° и поэтому
т. е. связь является идеальной.
3. Обобщенные координаты
В ряде случаев положение механической системы в любой
фиксированный момент времени может быть задано указанием
координат каждой точки системы. Если механическая система
состоит из п точек, то для этого достаточно задать 3 п координат.
Если же система состоит из бесконечного множества точек
(например, твердое тело), то задать в конечном виде положение
системы при помощи координат ее точек уже невозможно.
Однако во многих случаях для определения положения
механической системы достаточно задать небольшое число
независимых параметров. Так, например, для определения положения
какого-нибудь сложного механизма или машины достаточно задать
положения одного или двух ведущих звеньев, которые в силу
сочленений всех звеньев конструкции определяют положение всех
остальных точек системы. Задание же положения отдельных
звеньев достигается заданием небольшого числа параметров (угол
поворота, длина и т. п.).
Обобщая понятие координат точки как совокупности
независимых величин, определяющих ее положение, вводят понятие
обобщенных координат механической системы.
Обобщенными координатами механической системы
называется минимальное число независимых величин
(параметров), определяющих положение механической системы (т. е.
каждой точки системы) для каждого заданного момента
времени.
Рассмотрим некоторые примеры.
1. Тело, вращающееся вокруг неподвижной оси.
Обобщенной координатой является угол поворота тела <р, так
как при задании угла поворота положение каждой точки тела
266
Рис. 199.
вполне определяется (если известно ее расстояние от оси, но в
данном случае расстояние не является параметром).
2. Плоская фигура, произвольно перемещающаяся в плоскости
(см. рис. 199).
Движение тела можно разложить на поступательное
(движение системы координат ОгХхУ19 проходящей через точку Ох тела
параллельно неподвижной системе
координат OXY) и вращательное Yk
(движение тела относительно
системы координат OjA'jKJ.
Для определения поступательного
движения достаточно задать
координаты точки Ох (х9у)9 а для
вращательного— угол поворота у. Таким
образом, обобщенными координатами
являются параметры лу у, ср.
При таком выборе обобщенных
координат два параметра суть
линейные величины, а один — угол.
Заметим, что обобщенные координаты можно выбрать иначе,
так, чтобы все три параметра были линейными.
Действительно, положение плоского тела вполне определяется
положением двух любых точек тела, т. е. четырьмя координатами:
(хХ9ух) и (хШ9 уш). Но эти четыре
координаты связаны одним
алгебраическим соотношением:
(x1-xty + (y1-yty = d^
(d — расстояние между точками).
Поэтому независимыми
координатами являются только три из них.
Итак, в качестве обобщенных
координат при движении плоской
фигуры в плоскости можно
выбрать координаты какой-нибудь ее
УХ Рис. 200. точки и одну координату какой-
либо другой точки.
3. Твердое тело, произвольно перемещающееся в
пространстве.
Движение тела можно разложить на поступательное и
вращательное вокруг точки Ох (см. рис. 200).
Для задания поступательного движения достаточно задать три
координаты х,уу z точки 019 а для задания вращательного
движения— три угла Эйлера ф, ft, ср, характеризующих вращение
тела относительно O.X.Y.Z^
4. Кривошипно-шатунный механизм (см. рис. 201).
Для определения положения всего механизма в каждый
момент времени достаточно задать угол поворота ср ведущего кри-
0
Y
267
вошипа ОА. Таким образом, обобщенный координатой является
угол поворота ср. /
Если связи, наложенные на механическую систему, являются
голономными и удерживающими, то число обобщенных координат
механической системы называется числом степеней
свободы.
Так как связи в рассмотренных выше примерах являются
голономными и удерживающими, то приходим к заключению, что тело,
вращающееся вокруг
неподвижной оси, и кривошипно-шатун-
ный механизм имеют одну
степень свободы, плоское тело,
перемещающееся в
плоскости,— три степени свободы,
твердое тело, перемещающееся
произвольно в пространстве, —
шесть степеней свободы.
Пусть механическая система
состоит из п материальных то-
Рис. 201.
чек mk(xk, yk,zh), где
Л = 1,
Яру
2,..., п. Если обобщенные координаты системы суть q19 q21.
то р< 3/7, и координаты всех точек системы могут быть
выражены через обобщенные координаты:
Ук=Ук(Я» Я»--->Яр)\
Zk = *k(<?l> Я*>---> ЯР)>
где k= 1, 2, 3, ..., п.
Поясним это на примере кривошипно-шатуиного механизма.
В этом случае механическая система имеет одну степень свободы,
т. е. одну обобщенную
координату — угол
поворота кривошипа ср.
Рисунок 202 позволяет
легко найти формулы для
выражения координат
любой точки кривошипа ОС
через обобщенную
координату ср:
.*1 = acos<p;
j/i=r<2sincf>. (8)
Для нахождения координат точек шатуна CD выразим
предварительно угол ф через угол <р по теореме синусов:
sin ф ОС^ т_
sin ср CD п '
т. е.
sin 6 = — sin ср,
1 п I'
268
И) следовательно,
С08ф = 1Л-з1П'ф= |/l-gsin>^^2-fSin8<P .
Координаты любой точки шатуна CD можно найти по формулам:
х2 = т cos ср -\- b cos cb = т cos ср-|— Уп2 — т2 sin2 ср;
.Уя = (л— ft) sin ф = —(я — ft) sin ср. (8')
Итак, координаты любой точки механизма при помощи формул
(8) и (8') можно выразить через обобщенную координату ср.
4. Обобщенные силы
Рассмотрим несвободную механическую систему 5 (т1У т2,...
.. ,,тп), подчиненную идеальным и удерживающим связям. Пусть
на механическую систему действуют активные силы Fk (Xk, Yk, Zk)
при k= 1, 2, ..., п. Найдем работу всех сил, действующих на
механическую систему, для некоторой системы возможных
перемещений точек системы. Так как работа реакций связей равна
нулю, то достаточно найти работу всех активных сил.
Ы= 2 (*****+ Ykbyk + Zkbzk). (9)
Предположим, что механическая система имеет р степеней
свободы и обобщенными координатами являются q19 q2,..., qp.
Тогда:
•xk=='xk\Qi> Я*> • • •> Ярп
Ук=Ук{Й1>Чг> •••>?,); при Л=1, 2, — ,л.
*к = *ЛЯ1>Чг> •••> Яр)
Найдем выражение для работы ЬА через обобщенные
координаты. С этой целью найдем сначала вариации координат (т. е.
дифференциалы координат точек для возможных перемещений):
^=£^>-**=£з?л; (10)
Подставим формулы (10) в формулу (9). Тогда получим:
269
где
Итак,
Ог=Ъ(х&+г& + г&). (12)
iA=$Qrbqr (11')
r = \
Множители Qr(/-=1,2, ...,/?), стоящие при вариациях
обобщенных координат, в формуле (11'), называются
обобщенными силами.
Из определения обобщенных сил следует, что если выражение
ЬА представлено в виде линейной формы от вариаций
обобщенных координат, то коэффициенты при этих вариациях являются
обобщенными силами.
Таким образом, если механическая система, подчиненная
идеальным и удерживающим связям, имеет р степеней свободы, то ей
соответствует р обобщенных сил, определяемых по формуле (12).
Обобщенные силы имеют определенный физический смысл.
Если в формуле (1Г) положить eqt = bq2= ... =eqr_1 = bqr+l=
= ... =$qp = 0, a bqr^0, то получим:
Таким образом, обобщенная сила Qn соответствующая
координате qn представляет собой частное от работы всех активных
сил на возможное изменение координаты qr при условии, что все
остальные координаты (кроме qr) зафиксированы. Отсюда следует,
что размерность обобщенной силы равна
гг> г. -, [размерность работы]
[Размерность О Л = —v— -—т—■.
L r ^rj [размерность qr]
Если обобщенная координата qr является линейной величиной
(длина), то размерность Qr совпадает с размерностью силы и,
следовательно, обобщенная сила представляет собой некоторую
силу. Если же обобщенная координата qr представляет собой
угол (и, значит, измеряется в радианах — безразмерных единицах),
то размерность Qr совпадает с размерностью момента силы и,
следовательно, обобщенная сила представляет собой некоторый
момент сил.
Поясним понятие обобщенной силы на примере.
Задача 26. К тяжелому однородному стержню весом р
прикреплен груз весом Р. Стержень при помощи цилиндрического
шарнира закреплен в точке О и может свободно вращаться.
Найти обобщенную силу для стержня и груза, если шарнир
является абсолютно гладким (см. рис. 203).
Механическая система имеет одну степень свободы и
подчинена идеальным и удерживающим связям. Найдем обобщенную
силу при двух различных предположениях:
270
1. Обобщенная координата есть ордината у центра стержня С.
Найдем работу всех активных сил S(py Р) на возможном
перемещении Ьу. Тогда (см. рис. 204):
ЬА=рЬу + Р-2Ьу = {р-\-2Р)Ьуу
и, следовательно, обобщенная сила Q представляет собой' сумму
веса стержня и удвоенного веса груза, т. е.
Q=/? + 2P.
2. Обобщенная координата есть угол поворота стержня ср.
Найдем работу всех активных сил на возможном изменении Sep.
Используя формулу (138') главы II, § 5,
п. 2, получаем:
t t t
т. е.
*A = L0iVt
и, следовательно, обобщенная сила Q
представляет собой главный момент всех сил
относительно оси вращения:
Q = L0.
Рис. 203.
Заметим, что полученные выражения для обобщенных сил
можно было также получить, используя формулу для выражения
обобщенной силы (12).
В случае 1 получаем:
Q = 2L Г*%* = Г1 + 2Гш=Р + 2Р-
*У
г8у
\ / ^^
\ /
\ /
\ s
\
Рис. 204.
А = 1
ду
В случае 2 получаем:
k=\
Q=Z ^t=^-+p--^--
: —pi sin cp — 2PI sin cp =
\т0{р)\ + \та('Р)\ = ^.
При решении конкретных задач для определения обобщенных
сил преимущественно используют формулу (1Г), т. е. выражают
работу всех активных сил на возможных перемещениях через
обобщенные координаты и затем в качестве обобщенных сил
выбирают множители при дифференциалах обобщенных координат.
Рассмотрим теперь случай, когда система активных сил,
приложенных к механической системе, является консервативной.
271
В этом случае существует потенциальная энергия
П = Щх19 у19 z19 ...,xn9 yn9 zn)9 причем координаты сиу]
выражаются через потенциальную энергию по формулам:
у _ 0/7. у _ дЛ . 7 — аЯ ПЧ1
(й=1, 2,..., л).
Подставляя формулы (13) в формулу (11), получаем:
Q,=E
ft=l
~~ ^ Vd*fc <tyr"* fyb д<!г"*"^^ <tyJ ~~ д/>*
Итак, окончательно получаем формулы:
Ъг = -Щг при г=1,2,...,/>. (14)
Следовательно, в случае когда к механической системе
приложена консервативная система сил, обобщенные силы равны
частным производным от потенциальной энергии по соответствующим
обобщенным координатам со знаком минус.
Из формул (14) непосредственно можно получить выражение
работы всех сил, действующих на механическую систему, на
возможных перемещениях (виртуальную работу) через
потенциальную энергию:
М=£ Qrbqr= £-d"bqr = -m. (15)
г=1 г=1 Чг
§ 3. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
1. Основные теоремы
Принцип возможных перемещений выражает наиболее общее
условие равновесия механической системы. Впервые он был
открыт для частного случая блоков и полиспастов в конце XVI в.
Стевином и его современником Гвидо Убальди. Галилей и
Торичелли дополнили исследования Стевина и перенесли его на случай
более общих механических систем (правило рычага, золотое
правило механики).
В начале XVIII в. этот принцип начинает приобретать свою
общность. Иоганн Бернулли (1767—1848) дал формулировку
принципа, близкую к современной, но без доказательства.
Первое доказательство принципа принадлежит Лагранжу,
который в своем сочинении „Аналитическая механика" установил
принцип в виде общего приема решения всех задач статики.
272
Русским ученым принадлежит заслуга в обобщении и
развитии этого принципа. М. В. Остроградский обобщил принцип на
случай неудерживающих связей. Н. Е. Жуковский установил важную
для технических применений теорему, сводящую рассмотрение
равновесия плоского механизма к равновесию рычага.
Мы рассмотрим этот принцип для механических систем,
подчиненных идеальным и удерживающим связям. Заметим, что
принцип приобрел простую формулировку только тогда, когда было
введено понятие идеальных связей в начале XIX в. (Ампер).
До введения этого понятия формулировка и доказательство
принципа имели более сложный характер.
Мы будем говорить, что механическая система находится в
данный момент времени в равновесии, если скорости и ускорения
всех точек системы в данный момент времени равны нулю.
Если в данный момент времени только скорость точки равна
нулю, то точка не находится в равновесии. Конкретным примером
такого состояния точки может являться положение вертикально
брошенного вверх камня при его максимальном удалении от Земли.
Скорость камня в таком положении равна нулю, а ускорение
равно g, и положение камня не является равновесным.
Принцип возможных перемещений формулируется при помощи
следующих теорем.
Теорема 1. Для равновесия механической системы,
подчиненной идеальным и удерживающим связям, необходимо, чтобы
сумма раб^т всех активных сил для любой системы возможных
перемещений была равна нулю.
Доказательство. Пусть механическая система S (т1
т2,..., тп) находится в равновесии. Это означает, что каждая'
точка mk этой системы находится в равновесии. Если на точку mk
действует некоторая активная сила Fk и реакция связи Nk, то
согласно второму закону Ньютона получим:
mkwk = Fk-{-Nk = Q при £=1,2,..., п. (16)
Из равенства (16) следует, что
(Fk + NJ-brk = Q при £ = 1,2,..., п, (17)
где 5 fk возможное перемещение точки mk.
Суммируя полученные равенства (17), получим:
2 (П+лд-§гА=о.
Но
Так
*=i
2 (Fk + NJ.brk=% /v*r*+2 N*'*rk = 0. (18)
как связи идеальные и удерживающие, то
±Nk-brk = 0. (19)
А=1
273
Из формул (18) и (19) окончательно получаем, что
± Fk-brk = 0. / (20)
Итак, сумма работ всех активных сил для любой системы
возможных перемещений равна нулю.
Теорема 2. Если механическая система подчинена
идеальным, удерживающим и стационарным связям и в некоторый момент
времени скорости точек системы равны нулю, то для равновесия
механической системы в данный момент времени достаточно, чтобы
сумма работ всех активных сил для любой системы возможных
перемещений из данного положения была равна нулю.
Доказательство. Пусть дано, что сумма работ всех
активных сил для любой системы возможных перемещений равна
нулю, т. е.
%7к-Ъгк = Ъ. (21)
«=1
Рассуждаем от противного. Предположим, что механическая
система не находится в равновесии. При действии активных сил
Fk благодаря наличию связей возникают реакции связей А^ и на
точки системы mk действуют силы Fk-\-Nk (k=l, 2,..., п). Так
как начальные скорости точек vk равны нулю и по сделанному
предположению механическая система не находится в равновесии,
то заключаем, что ускорение wk по крайней мере одной из точек
mk в данный момент времени не равна нулю. По второму закону
Ньютона получаем:
mwk = Fk + Nk = Rk=£0. (22)
Кроме того, направление перемещения точки mk в данный момент
времени совпадает с направлением ускорения wk.
Действительно, из формулы Тейлора следует:
но fk(t) = vk = 0, fk(t) = wk=^0 и поэтому
&k=wk if-' + p,
где р — бесконечно малая величина третьего или более высокого
порядка.
Из этой формулы видно, что главная часть приращения радиуса-
вектора rk совпадает с направлением ускорения wk, т. е. drk имеет
направление wk. Так как связи являются стационарными, то
действительное перемещение также является возможным и,
следовательно, можно выбрать brk = drk.
274
р;
г
I
ZF\
Выберем возможные перемещения точек brk = bk dt так, чтобы
{^ = 0 и ЬТk имели направления drk, а следовательно, ийА. Из
формулы (22) заключаем, что 5?ft и /?Л имеют одинаковые
направления и поэтому
В силу идеальности связей получаем:
±Nh-*Fk=o,
и, следовательно, для выбранной системы возможных перемещений
±Fk.bFk>0,
что противоречит условию (21). Из полученного противоречия
вытекает недопустимость предположения о том, что система не
находится в равновесии. Теорема доказана.
При доказательстве тео- гт
ремы 2 условие равенства к
скоростей нулю является су- -f
щественным. Это видно из
такого примера. Пусть тяжелое
тело, расположенное на
абсолютно гладкой плоскости,
находится под действием
двух прямо противополож- рис. 205.
ных сил (рис. 205).
Сообщим телу некоторую начальную скорость vQ, тогда тело
будет перемещаться с постоянной скоростью v0 и не будет находиться
в равновесии. Вместе с тем сумма работ всех активных сил на
любых возможных перемещениях равна нулю.
Доказанную теорему можно сформулировать иначе.
Теорема. Для того чтобы механическая система,
подчиненная идеальным, удерживающим и стадиона р-
н ы м связям, находилась в равновесии, необходимо и, если в
данный момент скорости точек системы равны нулю, достаточно,
чтобы сумма мощностей всех активных сил для любой системы
возможных скоростей была равна нулю.
Это следует из того, что
ЬА= ±Fk-bFk = ±Fk-\dt = (±Fk-\)dt.
Отсюда следует, что ЪА — 0 тогда и только тогда, когда
шш^
шшшшшш^г
ш
1
/е=1
(23)
275
В такой форме принцип возможных перемещений удобно
использовать при решении конкретных задач, так как направление
возможных скоростей легко устанавливается по характеру
наложенных связей и условие (23) устанавливает некоторую
зависимость между активными силами не в дифференциальной форме,
а в конечном виде.
Если механическая система имеет р степеней свободы, то,
используя понятие обобщенных сил, можно сформулировать
принцип возможных перемещений в следующей форме.
Теорема. Для того чтобы механическая система,
подчиненная идеальным удерживающим связям, находилась в равновесии,
необходимо и в случае, если связи стационарные и скорости
точек системы в данный момент равны нулю, достаточно, чтобы
обобщенные силы механической системы были равны нулю.
Действительно, раньше было установлено, что
k=\ r=l
Поэтому необходимое и достаточное условие для равновесия
механической системы можно представить в форме:
2Qrtyr=o.
Так как bqr можно выбирать произвольно (при условии, что они
удовлетворяют наложенным связям), то, выбрав
*Y = ^2=...=4-i = ^r+1=...=^ = 0, а ЬЯгф09
получим, что
Qr = 0 (при г=1, 2,..., р). (24)
Доказанный выше принцип возможных перемещений позволяет
практически решать статические задачи динамическим методом
(т. е. путем вычисления работы или мощности). Ценность
принципа заключается в том, что при установлении условий равновесия
механической системы учитываются только активные силы, число
которых обычно бывает небольшим.
В случае абсолютно твердого тела принцип возможных
перемещений позволяет найти условия равновесия твердого тела
только по системе сил, действующих на тело, и получить так
называемые статические условия равновесия.
2. Равновесие абсолютно твердого тела
Предположим сначала, что абсолютно твердое тело является
свободным, т. е. на него не наложены связи (за исключением
постоянства расстояний между точками), и оно находится под
действием системы сил F„ F2,.. ,tFn (см. рис. 206).
276
В данном случае активными силами являются силы Fly F2i... 9Fn9
реакциями связей — внутренние силы и, следовательно, абсолютно
твердое тело подчинено идеальным, удерживающим и
стационарным связям.
Возможными перемещениями точек тела являются
произвольные перемещения в пространстве.
Раньше (гл. II, § 5, п. 2) было доказано, что работа системы
сил, приложенных к телу, находится по формуле:
A=\{R.v)dt+\(LQ.u)dt, (25)
о о
где Ч) — скорость некоторой точки тела О, R — главный вектор всех
сил, L0 — главный момент всех сил относительно полюса О.
Из формулы (25) следует, что работа
всех сил на возможных перемещениях
находится по формуле:
tA = (R-$)dt-\-(L0'u)dt =
где Sep == v-dt.
Для равновесия тела необходимо и
достаточно, чтобы
£.$г+ Г0.8^р = 0. (26) Рис. 206.
Так как Sr и Sep можно выбирать произвольно, то, выбрав Scp = 0,
8г=£0 и считая, что тело движется поступательно в направлении,
не перпендикулярном к главному вектору, получаем:
R-fr=0
и, следовательно,
R = 0. (27)
Выбрав Sp = 0, Sep =т^= 0 и считая, что тело имеет чисто
вращательное движение относительно оси, проходящей через точку О и
не перпендикулярной к главному моменту Z,0, получаем:
и, следовательно,
Г0 = 0. (28)
Итак, для равновесия свободного абсолютно твердого тела
необходимо и достаточно, чтобы главный вектор всех сил и главный
момент относительно какого-нибудь полюса были равны нулю.
277
Если твердое тело не является свободным (например,
находится на некоторых опорах), то для нахождения условий
равновесия используют так называемый принцип освобождаемости от
связей, который формулируется следующим образом: состояние
механической системы не изменится, если снять связи,
наложенные на механическую систему, и затем к механической системе
приложить реакции связей.
Этот принцип позволяет переводить реакции связей в разряд
активных сил и позволяет рассматривать несвободную
механическую систему как свободную (после присовокупления к активным
силам реакций связей).
Таким образом, если твердое тело является несвободным, то,
присоединяя ко всем активным силам реакции связей, мы вправе
затем для нахождения
условий равновесия
применять уравнения (27) и (28).
Условия равновесия (27)
и (28), выраженные в
векторной форме, были уже
раньше установлены в
статике.
3. Рассмотрим
некоторые задачи на применение
принципа возможных
перемещений.
Задача 27. Тяжелая однородная цепочка, к концам которой
прикреплены шарики А и В весом Р кГ и Q кГ, положена на
поверхность гладкого полуцилиндра радиуса г. Определить угол <р,
который образует с горизонталью радиус, проведенный из оси
полуцилиндра в середину С цепочки, если угол а дан и вес
единицы длины цепочки равен у, ПРИ условии, что цепочка
находится в покое (см. рис. 207).
Рассмотрим систему возможных скоростей Ь19 ft2, ft3, для точек
приложения сил Р, F, Q. Считая цепь все время натянутой,
заключаем, что ft1=ft2 = ft3 = ft. Так как механическая система
(цепь, шарики) находится в равновесии и подчинена идеальным и
удерживающим связям, то можно написать, что сумма мощностей
всех сил на возможной системе скоростей равна нулю, т. е.
P»cos(180° —a —cp) + /7&cos(180° —ср) +
+ Qft cos [ 180° — (<р — а)] = 0. (29)
Преобразуя это выражение, получим:
Р cos (а -\- ср) -f- F cos ср -f- Q cos (ср — а) = 0;
(Р -f~ Q) cos а cos <р -\- (Q — Р) sin а sin ср -|- F cos ср = 0;
'" f Q)cosa + (Q — P)sinatgcp + /7 = 0;
(P+Q)cosa + F _ (P+Q)cosa-f2rar ,oq\
(P
tg<P
(P—Q)sina
(P — Q) sin a
278
Рис. 208.
В частности, если P = Q, то tgcp = oo и ср = 90°, т. е. цепочка
расположена симметрично относительно вертикальной оси.
Задача 28. Равносторонний невесомый шарнирный
шестиугольник, основание которого закреплено неподвижно, находится
под действием сил Р и Q
в равновесии, как показано
на чертеже. Найти силу Q,
если даны сила Р и угол
а (см. рис. 208).
Предполагаем, что все
шарниры являются
абсолютно гладкими, тогда
механическая система
подчинена идеальным и
удерживающим связям. Сообщим
механизму возможное
перемещение, заставляя верхнее звено перемещаться параллельно
вниз. В этом случае можно записать, что сумма мощностей всех
активных сил равна нулю, т. е.
Q-fr1 + 2(P-»1) = 0;
Q.&2 + 2P.-&lCos(90o + a) = 0.
Кроме того, из кинематики известно, что проекции скоростей
$! и й2 на прямую, проходящую через их точки приложения
(звено механизма), равны между собой, т. е.
{>, cos (90° — 2а) = \ cos (90° — а);
■&1sin2a = »2sina; (32)
«, = 2»! cos а.
Подставляя значение $2 из (32) в (31), получим:
2Q$1 cos a — 2Р^ sin a = 0;
Q = Ptga.
(31)
(33)
§ 4. ПРИНЦИП ДАЛАМБЕРА
Принцип Даламбера в отличие от принципа возможных
перемещений позволяет решать динамические задачи на основе
статического метода, т. е. использования основных уравнений
статики (27) и (28).
Поэтому принцип Даламбера называют еще основным
принципом кинетостатики.
Введем предварительно понятие о силах инерции.
1. Силы инерции
Рассмотрим свободную материальную точку т, движущуюся
ПОД действием силы F. Движущаяся точка имеет некоторое
ускорение w, причем по второму закону Ньютона
p=mw. (34)
279
Отсюда согласно третьему закону Ньютона следует, что точка т
взаимодействует с другими телами (ибо нет действия без
противодействия). В простейшем случае это может быть
взаимодействием точки с одним телом М. Например, при движении
брошенного камня можно рассматривать только взаимодействие камня
с Землей (пренебрегая сопротивлением воздуха и взаимодействием
камня с остальными телами пространства). Точка т действует
на тело, вызывающее ее ускорение, с силой прямо
противоположной— F = — rriw, причем эта сила приложена к телу М
(см. рис. 209).
Если движение точки является несвободным, то сила,
действующая на точку /л, является результирующей сил, с которыми
действуют на эту точку тела, не ограничивающие ее свободы
перемещения, и реакции связей. Согласно третьему закону
Ньютона точка т в этом случае взаимодействует с телами, не
ограничивающими ее свободы перемещения, и со связями.
Поясним это на примере. Пусть, например, тяжелая
материальная точка (тело небольших размеров) под действием силы
тяжести перемещается по гладкой наклонной плоскости (см.
рис. 210). __
На материальную точку т действуют сила тяжести Р (сила,
с которой Земля притягивает точку) и реакция опоры TV (сила,
с которой наклонная плоскость действует на точку).
Результирующая этих сил определяется по формуле F = mw и,
следовательно, направлена по наклонной плоскости. По третьему закону
Ньютона точка т действует на Землю с силой — Р и на наклонную
плоскость с силой — N и результирующая этих двух сил есть
сила — F= — mw.
Итак, если материальная точка (свободная или несвободная)
находится под действием силы F, то эта материальная точка
действует на некоторые другие тела с силой — F. В том случае,
280
когда точка является свободной, сила —F представляет собой
результирующую сил, с которой точка действует на
взаимодействующие с ней тела. В том случае, когда точка является
несвободной, сила — F представляет собой результирующую
не только тех сил, с которыми точка действует на тела,
взаимодействующие с ней, но и сил, с которыми точка действует
на связи.
Под силой инерции материальной точки т, имеющей
ускорение w, обычно понимают силу 7= — mw, и в
геометрическом (а не в физическом) смысле приложенную в данной точке
(см. рис. 211).
Из этого определения силы инерции материальной точки
следует, что сила инерции 7 представляет собой силу,
противоположную силе F = mw, действующей J=-muf
на данную точку, т. е.
T= — F= — mw. (35)
Приведенные выше рассуждения
показывают, что в действительности
не существует силы — F, приложенной к данной точке,
однако такая сила — F всегда существует, но она приложена
не к данной точке, а к телам, взаимодействующим с данной
точкой, и к связям.
В связи с этим часто говорят о „фиктивности" и „реальности"
силы инерции.
Итак, сила инерции, рассматриваемая как сила
приложения в данной точке, является „фиктивной", однако сила
7= — mw реально существует, но приложена не к данной
точке, а к телам, взаимодействующим с точкой, и к связям.
Определение силы инерции как силы в геометрическом смысле,
приложенной в данной точке, позволило открыть общий принцип
механики, так называемый принцип Даламбера, и поэтому
введение такого понятия является вполне целесообразным.
Если механическая система состоит из конечного числа точек
т1У т2, ... , тю то под силами инерции механической системы
понимают совокупность сил инерции точек механической системы.
Таким образом, силы инерции механической системы представляют
собой некоторую совокупность приложенных сил.
Заметим, что если движение механической системы является
несвободным, то силы инерции, как было выяснено выше, целиком
или частично приложены к связям (опорам).
Вследствие этого в различных технических задачах мы
встречаемся с явлением, когда при работе машины на опоры действуют
некоторые дополнительные, так называемые динамические
нагрузки, которые, как правило, приводят к износу опор. Например,
при вращении маховика его опоры (подшипники) испытывают
281
т
дополнительные динамические нагрузки и сравнительно быстро
изнашиваются. То же самое можно сказать об износе 'рельсов,
по которым движутся колеса локомотивов и вагонов.
2. Основная теорема
Пользуясь понятием сил инерции, сформулируем принцип Да-
ламбера в виде следующей теоремы.
Теорема. Если ко всем внешним силам, действующим
на механическую систему, присовокупить силы инерции, то
полученная совокупность сил (внешних
и сил инерции) удовлетворяет
условиям статического равновесия, т. е.
главный вектор и главный момент
сил этой совокупности равны нулю.
Доказательство. Будем
рассматривать механическую
систему 5 (т1У /722, ... , тп). На
каждую точку mk этой системы
Рис. 212. действуют силы внешние и
внутренние. Обозначим
результирующую внешних сил через F^ и внутренних через Fl\ а силу
инерции — через 1к (см. рис. 212).
Так как Ik = — mwk = — Fk, то можно записать, что
Й') + Я) + 7* = 0 при к=\ш 2, ..., п (36)
Если просуммировать равенства (36) по всем значениям к, то
получим:
2Яв)+2Я)+21/*=о. (37)
k=l k=l k=l
Первое слагаемое (37) представляет собой главный вектор всех
внешних сил R{e)f второе — главный вектор всех внутренних сил
7?(/) = 0, третье — главный вектор всех сил инерции /?(/). Поэтому
окончательно получаем
R{e) + R(l) = 0. (38)
Выберем какой-нибудь полюс О и рассмотрим сумму моментов
сил Fk\ FV и Jk относительно этого полюса:
тй (Ff) + /и, (Н>) + т0 (7k)_=l-k X W + rk X П + гл X 7* =
=^»X(^ + /f + /») = 0 при k = \, 2 п . (39)
Суммируя равенства (39) по всем значениям k, получим:
£ т9 (Яв)) + £ т. (Л°) + £ т0 (/,) = 0. (40)
282
Первое слагаемое в формуле (40) представляет собой главный
момент всех внешних сил Lq\ второе — главный момент всех
внутренних сил /.(0° = 0, третье — главный момент всех сил инерции.
Поэтому окончательно получаем:
Z?)+Z.W = o. (41)
Полученные условия (38) и (41) представляют собой условия
статического равновесия совокупности внешних сил и сил инерции.
Следует заметить, что из условий (38) и (41) не следует,
конечно, что механическая система находится в равновесии, так
как в действительности силы инерции не приложены к точкам
механической системы. Используя условия (38) и (41), можно
решать динамические задачи статическим методом.
Для решения динамической задачи по принципу Даламбера
достаточно составить уравнения (38) и (41) для всех внешних
сил и сил инерции, и тогда мы получим уравнения, связывающие
силы и ускорения точек, которые позволяют по заданным
величинам находить неизвестные величины.
К принципу, заключающемуся в том, что уравнениям динамики
можно придать форму уравнений статики, впервые пришли Гер-
рманн (1678—1733) и Л. Эйлер. В 1716 г. петербургский академик
Яков Геррманн, изучая различные динамические задачи,
сформулировал принцип „ежемгновенной" эквивалентности совокупности
фактически,, приложенных сил и совокупности сил инерции
отдельных точек механической системы. Этот принцип был позже
назван «петербургским» принципом.
При рассмотрении различных задач динамики Эйлер в 1740 г.
дал аналитическое выражение этого принципа.
В 1743 г. появилось сочинение Даламбера „Трактат
динамики", в котором был установлен общий метод, приводящий
законы движения тел к законам их равновесия и, таким образом,
сводящий динамику к статике. По поводу этого метода Лагранж
в своем сочинении „Аналитическая механика" (1788) писал: „...он
представляет собой возврат к методу Геррманна и Эйлера,
который применил его при разрешении многих проблем механики.
В некоторых курсах механики его можно встретить под
названием принципа Даламбера».
В формулировке Даламбера в отличие, от современных
формулировок понятие силы инерции не используется. Понятие силы
инерции было введено в принцип позже, в первой четверти XIX в.
в связи с развитием прикладной механики.
Вопрос о реальности и фиктивности сил инерции вызвал много
недоразумений в связи с неправильной трактовкой понятия силы
инерции. Так, например, некоторые техники, часто используя
принцип Даламбера для решения практических задач, стали
трактовать эти силы как силы, реально приложенные к механической
системе. Некоторые физики неверно трактуя понятие „врожден-
283
ной силы", введенное еще Ньютоном, как присущую материи
способность сопротивления, также стали трактовать силу цнерции
тела как силу, реально приложенную к самому телу.
Выяснению сущности понятий силы инерции и принципа Да-
ламбера были посвящены работы русских и советских ученых
Ермакова, Суслова, Крылова, Мандельштама.
Рассмотрим некоторые задачи, решаемые при помощи
принципа Даламбера.
3. Задачи.
Задача 29. Лебедка, поднимающая груз В весом 2Г,
поставлена на балке, опирающейся на опоры С и D; CD = 8 м,
ЛС = Зл£. Груз В поднимается равноускоренно с ускорением
0,5 ~сёк' Найти Добавочные давления на опоры С и D,_ возникающие
от действия силы инерции груза
(см. рис. 213).
Когда груз В не поднимается,
то возникают статические опорные
реакции, которые уравновешивают
активные силы, действующие на
балку (вес груза, вес балки, вес
лебедки). При поднятии груза В
syyyfy возникает сила инерции,
направленная вниз, которая приложена
к балке и, следовательно,
действует на опоры С и D. Со стороны
опор С и D возникают дополнительные опорные реакции 7?с и
RD, действующие на балку. Для нахождения этих реакций
запишем условия статического равновесия силы инерции 7 и реакций
Re и #п-
__ Яс + До+/=0; _ (42)
тА (Rc) + тА (RD) + тА (/) = 0. (43)
В аналитической форме эти векторные условия можно
представить в следующем виде:
Рис. 213.
Отсюда находим, что
I-AD
RD-AD — Rc.AC=0.
(44)
Rr=
P-w-AD
2000.0,5-5
c~AD + AC~~g(AD + AC):
9,8Ь8
: 63,7 кГ\
RD = I-Rc=-jw-63t7:
_ 2000-0,5
9,81
-63,7 = 38,2 кГ.
Задача 3 0. Через блок перекинута гибкая нерастяжимая
нить, к концам которой прикреплены грузы: Мх весом Р1 и М2
284
весом Р2, причем P2^>PV Найти величину w ускорения грузов
и натяжение Т нити, пренебрегая массой блока и нити (см. рис. 214).
Рассмотрим механическую систему, состоящую из грузов,
нити, блока. Так как не учитываются веса блока и нити, то
внешними силами являются веса грузов Р1 и Р2 и реакция оси
блока N. По принципу Даламбера можно записать, что
т* (Рг) + Щ (Рг) + т9 (/,) + т0 (/,) + т0 (N) = 0.
(45)
Если учесть, что ускорения всех точек нити одинаковы и
mo(iV) = 0, то аналитически это равенство можно представить
в следующем виде (г — радиус блока):
PS-P2r + ^-wr + ^wr = 0,
^\\\^\Nps\^N\\^\v\\\\\^\\\v\^^
т. е.
Р —Р
* 1 Г2
--1-1—2w = 0t
g
и, следовательно,
(46)
Рис. 214.
Для нахождения натяжения Т нити
отсечем от механической системы часть,
состоящую из груза Мх. К этой части
приложены сила Рх и реакция нити 7\, численно
равная натяжению (и прямо противоположная
ей). По принципу Даламбера можно
записать, что
Аналитически это равенство можно записать в следующем виде:
P1-T1 + ^w = 0> (48)
откуда получаем, что
T = Tl = Pl+^rw = Pl+i
(47)
А™-* 1 Л(Я2-Л)_ 2РА
g
Р1+Р2 ~ Рг+Рш'
(49)
§ 5. ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
Будем рассматривать механическую систему, состоящую из
конечного числа материальных точек S(mlt /я2,..., тп) и
подчиненную идеальным голономным и удерживающим связям.
Согласно принципу Даламбера, примененному к точке m.ki
главный вектор активной силы Fk, реакции связи Nk и силы
инерции— mkwk равен нулю, т. е.
Fk + Nk — mkwk = 0 при *=1, 2,..., п. (50)
285
Умножая это равенство на возможное перемещение точки mkJ
получаем:
(Fk + Nk — mkwk).b?k = 0 при k = l, 2,..., п. (51)
Суммируя полученные равенства, окончательно получаем:
%(Fk + Nk-mkwk)-b?k = Q. (52)
Так как связи являются идеальными и удерживающими, то
2 77*.г7А=о. (53)
Поэтому уравнение (52) принимает вид:
S(F*-/H*w*)-87ft=0. (54)
В аналитической форме это уравнение имеет следующий вид:
п
2 [(Хк - mkxk) bxk + (Vk - mkyh) byk + (Zk - mkz k) bzk] = 0. (55)
Уравнение (55) называется общим уравнением динамики.
Это название оправдывается тем, что уравнение (55)
связывает координаты всех точек механической системы и проекции
всех сил, действующих на механическую систему и, следовательно,
устанавливает зависимость между силами, действующими на
механическую систему, и движением точек этой системы.
Общее уравнение динамики эквивалентно совокупности всех
уравнений движения механической системы (для случая идеальных
связей). Действительно, из уравнений движения механической
системы mkwk = Fk-\-Nk (&=1, 2, ..., я), как было показано
выше, вытекает общее уравнение динамики. Наоборот, из общего
уравнения динамики вытекают уравнения движения (при 8rk^=0
и 8гх = 8г2 = ... = Ьгк_х = SrA+1 = ... = §rw=0). Таким образом,
для случая идеальных связей общее уравнение динамики является
синтезом всей совокупности уравнений движения механической
системы.
Указанный выше способ для составления общего уравнения
динамики позволяет решать не только статические, но и
динамические задачи на основе принципа возможных перемещений.
Для этого достаточно к механической системе, подчиненной
идеальным и удерживающим связям, присовокупить силы инерции,
а затем применить принцип возможных перемещений к системе
сил, состоящих из активных сил и сил инерции.
286
2. Поясним этот способ на конкретных задачах.
Заметим, что при решении конкретных задач простота решения
зависит от выбора системы возможных перемещений. Для
решения конкретной задачи следует систему возможных
перемещений выбирать так, чтобы получить наиболее простую систему
уравнений для искомых величин.
Задача 31. Грузы М1 и М2 одинакового веса р движутся
по двум наклонным направляющим ОА и ОВ, расположенным
в вертикальной плоскости под углами а и (В к горизонту; нить,
соединяющая эти грузы, идет от груза М1 через блок О,
вращающийся около горизонтальной оси, охватывает подвижной
шкив Q, несущий груз М весом Р, и затем через блок Ог, наде-
тшшАшЗ
тый на ту же ось, что и блок О, идет к грузу М2. Определить
ускорение w груза М, пренебрегая трением, а также массами
блока, шкива и нити (см. рис. 215).
Рассмотрим механическую систему, состоящую из грузов М,
Мх, М2 блоков О и Ор шкива Q и нити. Так как силы трения
не учитываются, то можно считать связи идеальными.
Активными силами являются веса грузов Р, р, р (веса блоков,
шкива и нити не учитываем). Присовокупим к активным силам
силы инерции /, 119 12 в предположении, что груз М
опускается вниз.
Заметим, что величины перемещений грузов 'М19 М2 и Му
обозначаемые соответственно через slf s2 и s, связаны
соотношением
Si+^. (56)
s = -
Дифференцируя это выражение, получаем соотношения для
величин скоростей и ускорений:
v = v-^; (57)
тю = Щ^. (58)
287
В качестве возможных скоростей выберем такие скорости,
чтобы й1=й2 = -&, тогда v = $. /
По принципу возможных перемещений можно записать, что
(Р1^1)+(А-&1)+(Р2Л) + (4-^) + (?•«") + (7.ё)=о. (59)
Учитывая выбор возможных скоростей, представим полученное
равенство в скалярной форме:
p-vcos(90° + a)—-w1-v+p-^cos(90° + p)-T-^-w1-^ +
о о
+ Р.<г/ -w-v = 0. (60)
Отсюда получаем:
Р — ^(sina + sinp)==|(w1 + wJ + jW = ^-2^ + ^w==
— ^^ -та;, (61)
£
т. е.
«^'ЛУ11' (62)
§ 6. УРАВНЕНИЯ ЛАГРАНЖА
1. Уравнения Лагранжа первого рода
Будем рассматривать механическую систему, состоящую из
п материальных точек S(miy т2, ..., тп)> подчиненную
идеальным, голономным и стационарным связям. Пусть уравнения
связей заданы в форме
//(-*!> Ун *v-> Хп, Упу z»), = 0, где i=l9 2,..., k. (63)
Находя полные дифференциалы равенств (63), соответствующие
возможным изменениям независимых переменных, получим:
i(t^+l^+t^)=o'где i=i- 2-->*• (°4)
г=\
Равенства (64) можно рассматривать как k уравнений
относительно 3/2 возможных дифференциалов независимых переменных
Ьхп Ьуп bzr (г=1, 2, ..., п). Выразим из уравнений (64) k
дифференциалов через (Зп — к) остальных дифференциалов, которые
будем считать произвольными, и найденные значения
дифференциалов подставим в общее уравнение динамики (55). Тогда общее
уравнение динамики будет содержать (Зп— k) произвольных и
независимых дифференциалов, и поэтому множители при этих
дифференциалах можно приравнять нулю. Проделав это, мы
получим (Зп — k) уравнений, связывающих Зп координат точек
механической системы. Если присовокупить к этой системе
(Зп — k) уравнений еще k уравнений связей (63), то получим
3/2 уравнений, связывающих Зп координат точек механической
288
системы. Решая полученную систему Злг дифференциальных
уравнений с 3/г неизвестными, можно найти координаты точек
Х& Ук> zk (*=!» 2, ..., п) как некоторые функции от времени
nf следовательно, найти движение механической системы.
Однако указанный способ практически является неудобным
и поэтому для нахождения координат точек пользуются методом
неопределенных множителей Лагранжа.
Умножим каждое из уравнений (64) на неопределенный
множитель \.(i=lf 2, ..., k) и затем умноженные уравнения
сложим с общим уравнением динамики (55). В результате этого
сложения получим уравнение:
г=1 *= 1 « = 1
+ (z,-mA + J>||)ter] =0. (65)
£=1
Так как множители \ являются неопределенными, то их можно
подобрать так, чтобы коэффициенты при k независимых
дифференциалах были равны нулю (они, следовательно, определяются
из системы уравнений с k неизвестными). Подобрав, таким
образом, множители),/ (/=1, 2, ..., k), мы из уравнения (65) можем
заключить, что (3/г —А) коэффициентов при независимых
дифференциала^ равны нулю.
Итак, получаем систему уравнений:
Хг-тгхг + ^\%=Ь
i= 1
у,- *л+|л£-* т
i= 1
Если к этим уравнениям еще присовокупить k уравнений связей
(63), то окончательно получим систему уравнений:
k л/ (67)
m£r = Zr + ^*% {r=l> 2.---.«).
ft(xu ylt г,,..., xn, yn, 2„) = 0 (i=l, 2, ...,£).
u Г. M. Финкелыитейн 289
mr
mr
Эта система уравнений (67) представляет собой систему (3n-{-k)
дифференциальных уравнений относительно (3/z-f-£) неизвестных
лп уп zn \. Решая эту систему уравнений, получим координаты
точек механической системы (и k вспомогательных множителей \).
Уравнения системы (67)называются уравнениями Лагранжа
первого рода.
2. Уравнения Лагранжа второго рода
Пусть механическая система, состоящая из п материальных
точек S(mlf т2> ..., тп)у подчинена идеальным, голономным
связям и имеет р обобщенных координат q19 q2, ..., qp.
Преобразуем общее уравнение динамики (54) так, чтобы оно
зависело от дифференциалов обобщенных координат.
Общее уравнение динамики можно представить в следующем
виде:
^{Fk-mkwh)b?k = 0 (68)
ИЛИ
2 Fk • &k - 2 mkwk ■ Ь?к = 0. (69)
k= 1 £_= 1
Первое слагаемое в формуле (69) представляет собой работу
активных сил на возможных перемещениях и, как было показано
выше, его можно представить при помощи обобщенных
координат в форме
2^.^=£<гл,- (70)
Представим теперь второе слагаемое формулы (69) через
обобщенные координаты. Учитывая, что радиус-вектор rk есть функция
обобщенных координат, представим общий член суммы в виде
р _
Подставляя это выражение во второе слагаемое формулы (69),
получим:
*=1 *=1 г=1 Чг
-t(t»^-^)^ (71)
/■=1 к=\ ЧГ
Й90
Цз формул (69), (70) и (71) получаем:
Hi
dqr
E[Qr-i>A-isK=o-
В силу произвольности дифференциалов bqr заключаем, что
± дг
4r — Zumr
или
Qr — Х™А-хг=0 при г=1> 2> •••> ^
*=1 *г
(74)
(75)
I>A4?=Q' при г=1, 2, ..., р. (72)
Общий член суммы, стоящий в левой части формулы (72),
преобразуем к следующему виду:
Докажем, что выполняются следующие соотношения:
dqr Jqr dqr
d ( drk )= dVk
dt \ dqr J dqr •
Действительно,
~Гк=гн (я» Яг> • ••. ?,);
rk=2L^re^—5^-^ + • • • +"^7^+ • • • +-5^-^- (7b)
Так как множители -p- (r=l, 2,..., p) зависят только от
обобщенных координат (и не зависят от производных обобщенных
координат — обобщенных скоростей), то из (76) заключаем, что
&- = £*-. (74')
dqr dqr V '
Так как выражение -J^- зависит только от обобщенных коорди-
aqr
нат, то находим:
Tt\d-q';)==Yudq~s\dt)' q*=Y*dq7dqSqs' ^
С другой стороны,
__ i р
vi. г. V1
5=1
10* 291
и, следовательно,
dqr
''Hdq.ldql^J — ^
s=l
s=l
dqs dqr
(78)
dqr
д
-m
Из формул (77) и (78) заключаем, что выполняется (75).
Подставляя формулы (74) и (75) в формулу (73), получаем:
d /- dvk \ (- dvk \
= ±дТ*__д]± (ПриЛ = 1, 2,-..., л),
dt dqr dqr
где Tk — кинетическая энергия точки щк.
Подставляя формулу (79) в формулу (72), получаем:
(79)
k=l
ИЛИ
dt dqr dqr r
при Г=1, 2,
(80)
где 7"= 2 7* есть кинетическая энергия механической системы.
Уравнения (80) называются уравнениями Лагранжа
второго рода. Заметим, что кинетическая энергия
механической системы есть функция обобщенных координат qr и
обобщенных скоростей qr.
Если предположить, что связи являются стационарными, то
кинетическая энергия является квадратичной формой
обобщенных скоростей. Действительно, выражая кинетическую энергию
Т через обобщенные координаты, получим:
п
п
n / p ~~ p " \
4l(S^-|)^s=i Ёл
r,S=l 4A = 1
Яг 9s
(81)
Г, S=l
где коэффициенты ars есть некоторые функции обобщенных
координат, удовлетворяющие условию ars = asr.
Если в уравнения Лагранжа (80) ввести выражение
кинетической энергии через обобщенные координаты (81), то будет
292
видно, что уравнения Лагранжа (80) представляют собой систему
р дифференциальных уравнений второго порядка относительно
обобщенных координат.
Если эти уравнения проинтегрировать, то найдем обобщенные
координаты как некоторые функции от времени и,
следовательно, найдем движение механической системы.
В практических задачах число обобщенных координат
невелико (в машинах, например, как правило, одна или две
обобщенные координаты). Поэтому при помощи уравнений Лагранжа
второго рода можно составить небольшое число дифференциальных
уравнений, которые описывают движение механической системы.
Практическая ценность уравнений Лагранжа второго рода
заключается в том, что они представляют собой минимальное
количество полностью характеризующих движение уравнений, не
содержащих неизвестных реакций связей.
Рассмотрим теперь случай, когда система сил, действующих
на механическую систему, является консервативной.
В этом случае существует потенциальная энергия, которая
является функцией только обобщенных координат.
Действительно,
П = П(хг> ylt zlt ..., xky ykJ zk, ..., xni yn, zn)t
причем
У#=Ук{Ч» Я*, •••> qp)\
*k = zk(9i> Ягу •••> ЯР) при k =1, 2, ..., p.
Поэтому
n = n{ql9 qzr ..., qp).
Составим выражение, равное разности кинетической и
потенциальной энергий:
L=T—П.
Если L выражено через обобщенные координаты, то оно
называется функцией Лагранжа.
Тогда можно записать, что
ы от ал ет (82)
dqr dqr dqr dq/
JL__dT_ _дП_ = дТ
д^ — Щ.~~да-— да. + Qr (83)
Из формул (82), (83) и уравнений Лагранжа (80) получаем
Уравнения:
lf-t=° fr-U%...p. (84)
Полученные уравнения (84) являются уравнениями Лагранжа
второго рода для случая консервативной системы сил.
293
3. Циклические координаты и обобщенные импульсы
При рассмотрении конкретных задач иногда в функцию
Лагранжа L не входят явно некоторые обобщенные координаты.
Обобщенные координаты, не входящие явно в выражение
функции Лагранжа L, называются циклическими координатами
механической системы. Если, например, рассмотреть тяжелую
материальную точку т, перемещающуюся в пространстве при
отсутствии сопротивления среды, и в качестве обобщенных
координат точки выбрать прямоугольные декартовые координаты,
то функция Лагранжа будет иметь вид:
L=T — Я=у (x2-\-y2-\-z2)— mgz.
Следовательно, координаты х и у не входят явно в L,
и поэтому они являются циклическими.
Допустим, что среди п обобщенных координат q1% q2J ..., qn
первые г координат являются циклическими, тогда получим:
^ = 0 при i=l, 2, ..., г.
Из уравнений Лагранжа (84) в этом случае получим:
л(й)=0при'=1,2'-'л
т. е.
-^- = Q = const при 1=1, 2, ..., г. (85)
oqi
Полученные равенства (85) представляют собой уравнения,
связывающие обобщенные координаты, обобщенные скорости и
постоянные интегрирования и, следовательно, они представляют
собой первые интегралы уравнений Лагранжа. Эти первые
интегралы называются циклическими интегралами.
Обобщенными импульсами механической системы
называются производные от функции Лагранжа L по обобщенным
скоростям, т. е. выражения
dL дТ • 1 о
—r = -rr = pi при 1=1, 2, ..., п.
dqt dqt
Так, например, рассматривая движение материальной точки
в декартовых координатах, для обобщенных импульсов получаем
выражения:
ру = ту; p2 = mzy
т. е. обобщенные импульсы являются проекциями
количества движения.
294
При рассмотрении движения материальной точки в полярных
координатах для обобщенных импульсов получаем:
дТ д Г тп /% | 9 • 9\ 1 2 е
р*=-^= 4" Ь {r +rV)J =™-°<р;
Как видно из этих формул, обобщенный импульс р^ является
моментом количества движения точки
относительно полюса.
Из формул (85) следует, что
Pi = Ct при /=1, 2, ..., г.
импульсы (т.
обобщенные
N
Рис. 216.
которой задано, а проекции
Таким образом, циклические импульсы (т. е.
импульсы, соответствующие
циклическим координатам)
сохраняют постоянную величину.
4. Задачи
Задача 32. Тяжелая
материальная точка, имеющая вес/7,
перемещается по гладкой
плоскости, задаваемой уравнением
ах -f- by + cz + d = 0. Найти
уравнения движения точки, а
также реакцию связи (см. рис. 216).
Движение точки является
несвободным, причем связью
является плоскость, уравнение
активной силы р суть Х=0, К = 0, Z = —р.
Составим уравнение Лагранжа первого рода:
. df s df .. . . uj
f(xy у, z) — ax-\-by-\-cz-\-d = Q.
В данном случае получаем систему четырех уравнений с
четырьмя неизвестными л, у, z, X, которые можно представить
в виде
mx = la; ту —lb; mz = —p-\-lc;
ax-\-by-\-cz-\-d = 0.
Найдем сначала X. С этой целью дважды продифференцируем
по времени уравнение связи, тогда получим:
ax-\-by -{-£2 = 0.
Умножим это уравнение на т и затем воспользуемся первыми
тремя уравнениями:
атх + bmy -f- crriz = 0.
la2+lb2-\-lc2 — pc = 0.
df
295
Отсюда находим значение I по формуле:
^ = 2 i Ри2 i—2 = ^n = const.
а + & + с
Подставим это значение \ в первые три уравнения:
тх=\а\ my-\-\b\ mz = —p-\-^Qc.
Интегрируя эти уравнения, получим:
z=^±V'2+c5'+ce.
Так как движение точки т является несвободным, то
произвольные постоянные связаны между собой. Соотношение
между ними можно найти, если подставить выражение для х>
у, z в уравнение связи
aJC + by + CZ + d = ^(l^+l^ _pc + luC*)t* +
+ (aCl + bC9 + cC9)t + (C% + CA + C. + d) = 0.
Из полученного уравнения следует, что коэффициенты при t
и свободный член равны нулю, т. е.
C2 + C4 + Ce + d = 0.
Таким образом, произвольными являются четыре постоянных,
которые можно найти, задав четыре начальных условия: две
координаты точки, лежащей на плоскости (л:0, j/0), и значения
производных (Л:0, у0). _
Чтобы найти реакцию связи N, составим основные уравнения
движения точки, согласно которым
mx=px-\-Nx\ my=py-\-Ny; viz=pz-\rNz.
В данном случае, учитывая, что
тх = \а; my = \b; тЪ = —р-{-\с'>
Рх = Ъ Ру = 0; р2 = —Р>
получаем:
Nx = \a; Ny = \b; N2 = \c.
Задача 33. Маховик I, вращающийся вокруг вертикальной
оси 01 под действием прилагаемого к нему постоянного момента
М, несет ось вращения 02 шестерни II. Шестерня II находится
в зацеплении с шестерней III, которая может вращаться вокруг
оси независимо от маховика. Вращению шестерни III
препятствует не показанная на рисунке спиральная пружина, реактивный
296
момент которой —сф пропорционален углу поворота ф
шестерни III. Составить уравнение движения системы, принимая
шестерни за однородные диски с одинаковыми радиусами
а и массой т и считая момент инерции маховика относительно
оси 01 равным 20 та2 (рис. 217).
Рассмотрим механическую систему, состоящую из маховика I
и шестерен II и III. В качестве обобщенных координат можно
выбрать углы поворота маховика <р и шестерни III— ф. Для
определенности будем считать, что шестерня III, так же как
и маховик, вращается в
направлении против
движения часовой стрелки.
Предполагается, что силы
трения (в осях) невелики
и, следовательно, связи
можно считать идеальными.
На механическую
систему действуют активные
силы: веса маховика и
шестерен, а также
вращающий момент М и
реактивный момент —сф. Силы тяжести в данном случае работы не
производят, поэтому для работы активных сил получаем
выражение: v
ЪА = МЬу—сЩ.
Отсюда для обобщенных сил получаем выражение:
Q1=M; Q2 = -cb. (86)
Кинетическая энергия механической системы слагается из
кинетической энергии маховика 7\, кинетической энергии шестерни
II — Т2 и кинетической энергии шестерни 111 — Тг:
т=т1 + тш + т9.
Согласно установленным ранее правилам находим:
71==Y 20/72Я2 у2 = \0ma2f;
Рис. 217.
7=1™!ф»
уз 2 2^
Кинетическую энергию Т2 определяем по формуле:
т 1 2 I т- I /о • \2 I 1 та 2\
7г = ттг/02 + 7, = тт(2йкр)2-Ь^ —(о ).
Величину угловой скорости ш можно найти, используя формулу
Эйлера для точек А и 02:
Но
V0i=2ab «4 = 4.
297
поэтому _
\a>XA6t\ = ®a =\2a<f — лф| '
и, следовательно,
(o = | 2<p —ф|.
Подставляя это значение о> в выражение для Ti9 получим:
Тг = 2та2у2 + - та2 (2<р —ф)2 = 2та2у2 + та2?2 —
— та2у ф + ^ #ш2ф2 = Зта2ср2 — /яа2ср ф + -^ та2ф2.
Отсюда для кинетической энергии всей системы получаем:
Т= 13/лаУ — та2у ф + -J- /тш2ф2. (87)
Уравнения Лагранжа для рассматриваемой механической системы
можно записать в виде
d дТ ^Г_о .
dt дер дер *'
jf_ar ^_q
л 4 д<|> — v2.
Подставляя формулы (86) и (87) в эти уравнения Лагранжа,
получим уравнения движения системы:
26/гш2 <р — та2 ф = М;
та26 — та2 ср = — сф.
Полученная система уравнений представляет собой систему
двух линейных дифференциальных уравнений второго порядка
с двумя неизвестными функциями ср и ф.
§ 7. КАНОНИЧЕСКИЕ УРАВНЕНИЯ МЕХАНИКИ
1. Вывод канонических уравнений
Если механическая система, подчиненная голономным,
идеальным, удерживающим связям и находящаяся под действием
консервативной системы сил, имеет п степеней свободы, то
движение этой механической системы можно изучить при помощи
уравнений Лагранжа второго рода, которые представляют
собой п дифференциальных уравнений второго порядка.
Эти уравнения можно путем введения некоторых новых
переменных преобразовать к дифференциальным уравнениям
первого порядка. Для получения этих уравнений рассмотрим
функцию Лагранжа, которая зависит от обобщенных координат
и обобщенных скоростей:
L = T—n=T(q1, q2,...,qn, q19 q2>... /qn)~
— n{qiy q2, .., qn) = L{qiy q„...9 qn, ql9 <72, .. •, <7„).
298
Найдем полный дифференциал от этой функции по возможным
изменениям обобщенных координат:
1=1 *' 1 = 1 0(*1
Нетрудно видеть, что
Из формул (88) и (89) следует:
"-££*<+• (§!«0-ЕЙ!)-
Отсюда получаем:
Выражение, стоящее в скобках в левой части, является
некоторой функцией обобщенных координат и обобщенных скоростей.
Введем для него обозначение:
— L+ 2 -^-qi = H1{qlt q2t ..., qn% q19 q%, ..., qn). (91)
i=\ dqt
Рассмотри^ обобщенные импульсы pt (г=1, 2, ..., /г),
определяемые по формуле
dL
Pi = -^: (*=L 2, ..., n) (92)
Переменные qhpt (/=1, 2, ..., n) называются каноническими
переменными механической системы.
Пространство 2/г измерений, соответствующее каноническим
переменным q19 q2i ..., qn, р19 p2i ..., рп, называется фазовым
пространством. Каждому состоянию механической системы
соответствует некоторая фазовая точка (q\, q\,..., q°ntp% р°2, ...,/?„°).
При движении механической системы фазовая точка описывает
фазовую линию в пространстве 2/г измерений. Понятие фазового
пространства используется для геометрической иллюстрации ряда
закономерностей механики.
Уравнения (92) связывают переменные ph qt и q{.
Предположим, что из этой системы уравнений можно выразить q{ через
Pi и qi% Тогда, выразив q{ через р( и qt и подставив их в
выражение (91), получим тождество:
иЛЯн -. Яп> Ян •••> Яп) = Н{Ян •••> Яг» Рх> —. Рп\
т. е.
п ^.
— £+2 жА1 = Н{цх q„ plt ..., ра). (93)
299
Функция И называется функцией Гамильтона. Подставляя
значения qt в функцию Лагранжа, мы выразим функцию Лагранжа
через обобщенные координаты qt и обобщенные импульсы рь т. е.
L = L(q1, q2, ..., qn9 plf p29 ..., pn).
Из равенства (90) и (92) получаем:
8Я=",|Д^'+Ж^'- (94)
При помощи введенных новых переменных (92) уравнения
Лагранжа второго рода
d (ы\ dL л • , о
гж-ж:=0 ПРИ t=l> 2> - *
можно записать в форме
S = lr при/=1,2. ...,«. (95)
Подставляя формулы (95) в (94), получим:
»"=-Sp^rbiU/*A. (96)
1=1 /'=1
С другой стороны, из выражения (93) получаем:
Ш=±ДЬЯ! + ^Р, (97)
Из формул (96) и (97) следует, что
-ж^+жу^жШ^+жЛ1"-
В силу произвольности дифференциалов bqt и Ър{ заключаем, что
дН л
i
при i=l, 2, ..., п
или
~~~
dqi
dt
dpi
dt
Pi
97
dqi
_dH
~ dpi
dH
:dPi ;
_dH
dqi
при*=1, 2, ..., п. (98)
Уравнения (98) называются каноническими уравнениями
механики, или уравнениями Гамильтона1.
Эти уравнения представляют собой систему 2п
дифференциальных уравнений первого порядка.
1 Гамильтон У. И. — английский математик, живший в XIX в.
(1805—1865).
300
В теории дифференциальных уравнений доказывается, что
интегрирование системы дифференциальных уравнений (98)
приводится к интегрированию некоторого дифференциального
уравнения первого порядка в частных производных, причем нахождение
полного интеграла этого уравнения требует выполнения только п
интегрирований. Вследствие этого трудность интегрирования
уравнений (98) уменьшается.
Функция Гамильтона имеет определенный физический смысл.
Действительно, выражение для функции Гамильтона можно
представить в виде
i=l°4i i=\ dqi
= П-Т+±%-ъ. (99)
Так как кинетическая энергия Т в случае стационарных
связей является квадратичной функцией, т. е. однородной функцией
второй степени относительно обобщенных скоростей qh то по
теореме Эйлера об однородных функциях можно записать:
2Г=2^<7/. (ЮО)
/=l dqt
Из формул (99) и (100) получаем:
Н=Т-\-П.
Итак, если механическая система подчинена
стационарным связям, то функция Гамильтона является полной
механической энергией механической системы.
Канонические уравнения механики были выведены
Гамильтоном в 1834 г. для случая стационарных Связей. В дальнейшем
Остроградский указал способ их вывода для случая,
включающего также и нестационарные связи.
2. Задачи
Задача 34. Составить уравнения Гамильтона для
материальной* точки, перемещающейся в силовом поле с потенциалом
П = -и(х,у, z).
Составим функцию Гамильтона:
H=T+n = ±mv* — U(x,y, г) =
= Lm(x*+y + z*)-U(x,y,z).
Обобщенными координатами в данном случае являются
координаты точки xf у, z. Обобщенными импульсами являются
выражения:
dL dL dL
^ = mx=,px; ^ = шу=Ру; -^ = mz=pz,
301
Уравнения Гамильтона имеют вид:
dx dH т
dt dpx '
dy dH u
dt dpу '
dz _dH #
dt dpz '
x = —; y-
dpx dH
dt dx
dp у _ dH
ЧГ~ дУ
dPz_ dH
dt dz
=PJL; z=p-±
m m
Так как
то для функции Гамильтона получаем выражение:
Поэтому уравнение Гамильтона можно представить в виде
dx рх .
dt т '
аУ=Ру .
dt т
dz _Pz .
dt т '
dpx_dU t
dt dx '
dpy_dU .
W~ fy '
dpz dU
dt ~dz '
Рассмотрим частные случаи:
1. Силовое поле является полем силы тяжести:
U(xfy9z) = — mgz.
В этом случае уравнения Гамильтона принимают вид:
px = Cl = const;
ру = С2 = const;
Ps = — mgt + C*- (101)
Интегрируя уравнения (101), получаем уравнения движения точки
в поле силы тяжести:
т 1 4'
y = 9*t+c.\
J т ' 5'
Эти уравнения задают в параметрической форме уравнение
параболической траектории, лежащей в некоторой плоскости,
параллельной оси OZ.
2. Силовое поле является полем упругой силы:
L4*,.V, *) = -!(*■+y-t-2i).
302
g этом случае уравнения Гамильтона принимают вид:
dt т' di—lk9 dt~m* I102)
^ — — kr- dpy и dPz_ ъ„ /1ПОЧ
dt— **> 4t=~k^ ~di— — kz- (ЮЗ)
Дифференцируя уравнения (102), получим:
dH = }_dpjc^ d?y_±dP; dH_\dp2 пгш
dt* m dt ' dt*~ m dt > dt2 — m~dt # l1U4'
Из уравнений (103) и (104) получаем:
d2x , Л Л
dt2 { т 9
d2z , k Л
Т7ЙП 2 = 0.
Полученные уравнения (105) представляют собой обыкновенные
дифференциальные уравнения движения материальной точки
(Ньютона).
Интегрируя их, получаем решение в форме периодических
функций:
x = C*<xsyr±-t + Ctsinyr±.t==Asin(-)/r±.t + a);
y=C,cos |/A.^ + C4sin j/-|^ = Bsin ( j/~* + p) ;
2 = C,coe|/A.f + c,sin|/l^ = Csin(yr|.i + Y).
Задача 35. Составить уравнения Гамильтона для
материальной точки т, находящейся под действием центральной силы б
некотором силовом поле с
потенциалом П(г) (см. рис. 218).
В качестве обобщенных координат
в данном случае можно выбрать
величины г и <р (см. рис. 218).
Составим сначала функцию
Гамильтона: - .. ^
H = T + n = ±mv2 + n(r)= ^'
= |(Р + гУ) + Я(г). "^ —
Рис. 218.
Обобщенными импульсами являются выражения:
Ы 6L 2.
дг Уп d? Y ^
303
Уравнения Гамильтона имеют вид:
rfr дН т dpr _<№_, /
dt дрг ' dt дг '
dt др9' dt d-f '
Так как
pr • Pv
r=— и <p = —^ >
то для функции Гамильтона получаем выражение:
Используя это выражение для функции Гамильтона, можно
уравнения Гамильтона представить в следующем виде:
^_£г • *Рг — _п'(г\ Рср
(106)
— п
rf* тгг ' dt
dy Ру_ dpy 0
В частности, из последнего уравнения (106) следует, что
Ру = mr2ip = const.
§ 8. ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
Вариационные принципы механики представляют собой
некоторые общие положения, эквивалентные совокупности уравнений
движения механической системы. Эти принципы, так же как и
общее уравнение динамики, являются синтезом всех уравнений
движения в одном условии, которое выражает некоторые
экстремальные свойства функционала, постоянного для заданной
механической системы. Из этих принципов в общем случае нельзя
найти интегралов движения.
Ценность этих принципов заключается в том, что они
позволяют изучать движение механических систем, не связанных
с определенной системой координат. Вследствие этого они
находят широкое применение в математической физике (теории
упругости, гидродинамике, теории электричества и магнетизма),
исследующей различные физические явления математическими
методами.
Эти принципы выражают в математической форме общие
физические закономерности для механических систем.
В этом параграфе мы рассмотрим два наиболее важных
вариационных принципа: Остроградского—Гамильтона и Мопертюи—
Лагранжа.
304
9=f(t)
rfCO
1. Варьирование функции
Будем рассматривать некоторую функцию от времени q=f(t).
Простой вариацией функции f(t) называется приращение
функции вследствие бесконечно малого изменения вида самой
функции (см. рис. 219). Простая вариация обозначается символом bq.
Таким образом, если .
функция q=f(t) яв- ^*
ляется некоторой
функцией, бесконечно
близкой к q=f(t), то
iq = q — q = a^(t)9
где а — бесконечно
малая, а р(£) — некоторая
функция.
Нахождение
вариации заданной функции
называется операцией
варьирования.
Для простой вариации функции
свойства:
Г. Операции дифференцирования
перестановочны, т. е.
Действительно, пусть
q(t) = q(t) + *-№>
где а — бесконечно малая.
Тогда
bq = q — q = a-$(t);
±(bq) = q-q = ^4it) = bq = b
2°. Если определенный интеграл является функцией параметра,
зависящего от переменной интегрирования, то операции
варьирования по параметру и интегрирования перестановочны, т. е.
Рис. 219.
выполняются следующие
и варьирования функции
i-2 ~л
b[f{q>t)dt=\bf{q,t)dt
Действительно,
b\f(q, t) dt=\f$,t)dt-\f (q, t) dt =
*, и и
t, 12
= S U(Я, t)-f(q, t)]dt=] bf(q, t)dt.
305
3°. Если некоторая величина является функцией конечного
числа параметров q19 q2y ..., qpy зависящих от основного
аргумента ty то простая вариация этой величины находится по тем
же формулам, что и полный дифференциал, с той только
разницей, что вместо дифференциалов параметров следует брать
вариации параметров bqk и считать dt = 0, т. е.
Действительно, для нахождения простой вариации следует
считать t фиксированным и параметрам давать бесконечно малые
рк « приращения. Простая вариация
^/Tf^Q^ функции является ее полным диф-
^?iL-r- 7=/('# ференциалом при условии, что не-
1 ? зависимыми переменными
являются параметры: qlf q2, ..., qn, а
I I их дифференциалами — вариации
\ At \ tylftylf •••> ьЯп-
^ j Т В частности, если рассмотреть,
р - например, функцию Лагранжа для
механической системы,
подчиненной голономным, идеальным связям и имеющей р степеней
свободы, то
L = T—n = L(qltq2, ..., qp, ql9 q2, ..., qp)
и, следовательно,
Установим понятие полной вариации функции.
Полной вариацией функции называется приращение
функции вследствие бесконечно малого изменения вида самой
функции, а также бесконечно малого изменения аргумента (см. рис. 220).
Пусть
где а — бесконечно малая, a $(t) — некоторая функция.
Обозначим полную вариацию функции q=f(t) через kq. Тогда
bq = q(t)-q{t).
Установим некоторые свойства полной вариации.
1°. Для полной вариации операции дифференцирования и
варьирования не являются перестановочными и имеет место
формула:
306
Действительно, из чертежа (220) непосредственно видно, что
с точностью до бесконечно малых второго порядка имеет место
соотношение:
^q (t) = dq (t) + bq (i) = qLt + bq [t). (108)
Дифференцируя это равенство, получим:
^q{t)=pq(t) + 'q(t)M + q(t) ^ . (109)
Из формулы (108) следует:
Lq(t) = q(t)M + tq®,
откуда получаем:
q{t)U = bq(t) — bq(t). (ПО)
Из формул (109) и (ПО) получаем:
^bq{t) = ±bq{t) + Lq(t)-bq{t) + q{t)d-^ . (Ill)
Согласно свойству 1° для простой вариации
£iq(t) = bq(t),
поэтому из (111) окончательно получаем:
£tbqW = Lq(t) + q(f)tp-. (107')
2°. Имеет место формула:
d(U) = b(dt). (112)
Действительно,
2 = * + а.р(*);
bt = t — t = d^{t)\
dt = dt + *-$(t)dt.
d(btj = a.$(t)dt;
b(dt) = dt — dt = a.$(t)dt,
откуда следует (112).
3°. Если определенный интеграл является функцией параметра,
зависящего от переменной интегрирования, то операции полного
варьирования по параметру и интегрирования перестановочны,
т. е. '
b\f(qyt)dt = \bf{q,t)dt.
и и
Доказывается аналогично свойству 2° для простой вариации.
4°. Если некоторая величина является функцией конечного
числа параметров ql9 q2, ..., qpi зависящих от основного аргу-
307
Отсюда находим:
мента t, то полная вариация этой величины находится по тем же
формулам, что и полный дифференциал с той только разницей,
что вместо дифференциалов параметров и аргумента следует
брать полные вариации kqk и Ы.
Это свойство поясняется, так же как и свойство 3°, для
простой вариации.
2. Принцип Остроградского — Гамильтона
Будем рассматривать механическую систему, подчиненную
голономным, идеальным и удерживающим связям, находящуюся
под действием консервативной системы сил и имеющей р
степеней свободы.
Пусть обобщенные координаты системы суть qJ9 q29 ...9qp.
Положение системы для некоторого момента времени будем
называть конфигурацией системы для этого момента времени и
сокращенно обозначать одной буквой А. Таким образом,
конфигурация системы для каждого момента времени определяется
совокупностью значений обобщенных координат для этого момента
времени (т. е. некоторой точкой /7-мерного пространства).
Рассмотрим две конфигурации системы А и В9
соответствующие моменты времени tx и t2. За промежуток времени от t1 до t2
механическая система переходит из конфигурации А в
конфигурацию В9 совершая некоторое движение (действительное
движение), определяемое' р параметрическими уравнениями:
Rk=fk(t)> гДе *,<*<*,
при &= 1, 2, . . .,/7.
Наряду с действительным движением механической системы
между двумя конфигурациями А и В можно рассматривать
кинематически допустимые движения между этими
конфигурациями, т. е. движения, совместимые со связями, а также бесконечно
близкие к действительному и совершаемые за тот же самый
промежуток времени от t1 до tz. Такие движения мы будем
называть „окольными". Так как „окольные" движения совершаются
за один и тот же промежуток времени, то совершенно ясно, что
„окольные" движения можно получить из действительного при про.-
стом варьировании обобщенных координат (так как аргумент t
не изменяется), т. е. они могут быть заданы системой р
параметрических уравнений:
Як = 9к + *9к=/Л*) + *к№), где *,<*<*,
(k=l9 2, ...,р),
где ал— бесконечно малые, a $k(f) — некоторые функции. При этом
должны соблюдаться граничные условия:
?*21!==Л!9(А=1.2,...,«).
308
Из того, что для всевозможных окольных движений значения
параметров qk при t = t1 и t = t2 являются постоянными,
следует, что их вариации для указанных моментов времени равны
нулю, т. е.
7k{Q = 9k(tt) — qk{tt) = 0
(£=1,2, ...,л). (113)
Рис. 221.
Поясним вышеизложенное на конкретном примере. Рассмотрим
груз т, прикрепленный к стержню, конец которого закреплен
при помощи сферического шарнира О, трением пренебрегаем
(см. рис. 221).
Груз т вместе со стержнем представляет собой механическую
систему, удовлетворяющую всем поставленным выше требованиям
и имеющую три
обобщенные координаты
(углы Эйлера).
Рассмотрим два положения
груза А и В. Как было
установлено раньше, для
математического
маятника действительным
движением будет
движение груза в
плоскости, проходящей через
точки А, В, й О, при
этом сам груз
описывает траекторию по дуге окружности АВ.
В качестве окольных движений можно выбрать движения
груза т по сферической поверхности радиуса От (АСВ или ADB),
достаточно близкие к действительному движению. Начальные и
конечные точки окольных движений должны совпадать с
начальной и конечной точками в действительном движении (А и В).
Рассмотрим теперь понятие действия по Остроградскому —
Гамильтону. Если механическая система удовлетворяет всем
поставленным выше требованиям, то для нее существует функция
Лагранжа Z,, причем
L=T—n = L(q„ q2, ...,?„, q19 q2> •••>?„)•
Действием по Остроградскому — Гамильтону за некоторый
промежуток времени от tx до t2 называется выражение:
и
S=[Ldt. (114)
Принцип Остроградского — Гамильтона представляет
собой критерий, который позволяет среди всех кинематически
возможных движений между двумя конфигурациями указать
действительное движение.
309
Он формулируется следующим образом:
Действительное движение механической системы между двумя
заданными конфигурациями отличается от кинематически
возможных движений, совершаемых между теми же конфигурациями за
тот же самый промежуток времени тем, что для действительного
движения вариация (простая) действия равна нулю, т. е.
'2
В вариационном исчислении функция, для которой вариация
равна нулю, называется стационарной. Там же доказывается,
что необходимым условием минимума значения функции для
заданного класса функций является условие стационарности функции.
Таким образом, из принципа Остроградского — Гамильтона
следует, что действие по Остроградскому — Гамильтону для
действительного движения механической системы имеет стационарное
значение. Проведем доказательство принципа Остроградского —
Гамильтона.
Воспользуемся уравнениями Лагранжа второго рода для
механической системы:
d ( dL \ dL ~ ». t г»
• = 0 при #=1, 2, ...,/;.
= 0. (115)
dt V dqk J dqk
Умножим каждое из этих уравнений на bqk и затем их
просуммируем:
k=l L
Выражение, стоящее под знаком суммы, преобразуем следующим
образом:
dt \dgkJ 4k dgk Hk dt \dqk 4k)
dL d ъ , dL
*.+:£»».)
dqk dt dqk
Используя свойство 1° простой вариации, можно это выражение
представить в следующем виде:
dt \dqk) Hk dqk 4k dt Ufo Hh)
Из формул (115) и (116) заключаем:
310
так как
L = L(ql9 q2, ...9qp, ql9 qz, ...,qp).
Интегрируя это равенство, получаем:
I L=iV<% Ли
Используя свойство 2° для простой вариации, а также условия
(113), заключаем, что
и
т- е' 85 = 0. (117)
Рассмотренный выше принцип был сформулирован в 1834—
1835 гг. Гамильтоном для случая стационарных связей.
Остроградский в 1848 г., не налагая этих ограничений на связи,
получил этот же принцип как весьма частный случай решения более
общей механической задачи.
3. Принцип наименьшего действия Мопертюи — Лагранжа
Будем рассматривать механическую систему, подчиненную
голономным, идеальным, удерживающим и стационарным связям.
Принцип наименьшего действия Мопертюи — Лагранжа, так же
как и принцип Остроградского—Гамильтона, позволяет среди
кинематически возможных движений механической системы найти
ее действительное движение. Однако метод отбора
действительного движения здесь иной, чем в принципе Остроградского —
Гамильтона.
В принципе Остроградского — Гамильтона сравниваются между
собой кинематически возможные движения между двумя
конфигурациями, совершаемые за один и тот же промежуток
времени. В принципе Мопертюи — Лагранжа сравниваются
возможные движения между двумя конфигурациями,
совершаемые с одной и той же полной механической
энергией.
Если наряду с действительным движением механической
системы между двумя заданными конфигурациями рассматривать
бесконечно близкие допустимые движения (окольные движения),
совершаемые с той же самой полной механической энергией, то
переход механической системы из одной конфигурации в другую
совершается за различные промежутки времени, зависящие от
траекторий точек механической системы. Поэтому переход от
действительного движения к допустимому бесконечно близкому
в этом случае совершается при помощи полного варьирования
обобщенных координат (ибо меняется аргумент t и вид самой
Функции q(t)).
311
Для того чтобы сформулировать принцип, рассмотрим
предварительно понятие действия по Лагранжу. /
Действием по Лагранжу за некоторый промежуток времени
от tx до tz называется выражение:
и
W= J 2Tdt,
и
где Т—кинетическая энергия механической системы.
Принцип наименьшего действия Мопертюи — Лагранжа
формулируется следующим образом.
Действительное движение механической системы между двумя
заданными конфигурациями отличается от кинематически
возможных движений, совершаемых между теми же конфигурациями
с той же самой полной механической энергией, тем, что для
действительного движения полная вариация действия по Лагранжу
равна нулю, т. е
kW=£i J 2Tdt = 0
и
(т. е. для действительного движения действие по Лагранжу имеет
стационарное значение).
Для вывода принципа воспользуемся уравнениями Лагранжа
второго рода:
dt \ dqk J dqk
Умножим эти равенства на Lqk и почленно их сложим, тогда
получим:
Рассмотрим общий член, стоящий под знаком первой суммы
в формуле (118), и представим его в следующем виде:
Л V ддк ) 4k dt \ dqk 4kJ dqk dt V Hk> У >
Но по формуле (107) можно записать:
£(Д?*) = Л** + **^. (120)
Из формул (118), (119) и (120) следует:
312
Отсюда получаем:
+ bJk-iik*m. (121)
Но
|(l;4^^)=4i- (|22)
Кроме того,
Н# = ^.У4^ (123)
Заметим, что
6L д (т_Пу дТ дП дТ
Так как связи, наложенные на механическую систему, являются
стационарными, то кинетическая энергия представляет собой
квадратичную функцию, т. е. однородную функцию второй
степени относительно обобщенных скоростей qk.
По теореме Эйлера об однородных функциях заключаем, что
Y^-qk=Y -*Lqk = 2T. (124)
Из формул (121), (122), (123) и (124) окончательно получаем:
По предположению
T-\-Fl=h = const.
Отсюда следует, что
L=T—n=T+(T—h) = 2T—h;
Д/, = Д(2Г) — ДЛ = Д(2Г), (126)
ибо
ДЛ = 0.
Из формул (125) и (126) получаем:
Ау-^-Д^ =д(2Г) + 2Г-^. (127)
313
Проинтегрируем полученное равенство (127) от t1 до t2:
t2 и р '
£д(27>Л + $2П*(Д*)=[;£-|^Д^|\ (128)
На основании свойства 2° для полной вариации можно записать:
d{Lt) = Hdty
и, следовательно, с учетом свойства 4° для полной вариации
получаем:
t-i t<i ti t2
^(2T)dt + ^2Td{M)=\ b(2T)-dt-\-[2T-b{dt) =
и и и
t2 и
= ^b{2T.dt) = b^2Tdt = bW. (129)
Из формул (128) и (129) окончательно получаем:
bW=
(130)
Так как рассматриваются возможные движения механической
системы между двумя фиксированными конфигурациями А и В,
соответствующими моментам времени t1 и t2, то
Ш*>) = ШЦ- (131)
Из формул (130) и (131) следует, что
£±W=0. (132)
В вариационном исчислении доказывается, что условие (132)
является необходимым условием существования экстремума.
Действие по Лагранжу представляет собой неотрицательное
выражение (как интеграл от неотрицательной величины —
кинетической энергии) и поэтому совокупность этих значений ограничена
снизу и имеет минимум. Следовательно, принцип наименьшего
действия Мопертюи—Лагранжа означает, что для действительного
движения механической системы между двумя заданными
конфигурациями действие по Лагранжу является наименьшим.
Принцип наименьшего действия впервые был сформулирован
в 1744 г. президентом Берлинской Академии наук Мопертюи
без какого-либо доказательства в следующей форме: „В
действительном движении точки действие mvs (т. е. произведение массы
точки на ее скорость и пройденный путь) минимально". Из этого
принципа Мопертюи делал реакционные теологические выводы.
Эйлер (в 1744 г.) придал этому принципу точную
математическую формулировку.
314
Он называл действием величину:
W= J rnvds,
(АВ)
где v — скорость, определяемая из уравнения „живых сил".
Эйлер доказал, что вариация этого интеграла равна нулю при
переходе траектории к бесконечно близкой кривой, проходящей
через те же точки А и В.
В 1760—1761 гг. Лагранж обобщил формулировку Эйлера на
случай механической системы. Метод, которым пользовался
Лагранж, был в дальнейшем подвергнут критике Остроградским.
В работах русских ученых (Остроградский, Слудский
и др.) было выяснено, что вариации, используемые в принципах
Остроградского — Гамильтона и Мопертюи — Лагранжа, различные.
В первом принципе вариация является простой, во втором —
полной.
Русские ученые (Остроградский, Слудский, Сомов,
Соколов, Ермаков, Суслов, Бобылев) уделяли много
внимания вариационным принципам, так как они понимали, что
эти принципы, не связанные ни с какой координатной системой,
окажутся весьма полезными. Современная физика при
исследовании движения элементарных частиц широко использует эти
принципы.
г РАЗДЕЛ III
СПЕЦИАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ
Глава IV
ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
§ 1. Относительное движение материальной точки
и механической системы
1. Инерциальные и неинерциальные системы
Система отсчета называется инерциальной, если в ней
выполняется закон инерции. Таким образом, в инерциальной системе
отсчета изолированная материальная точка движется равномерно
и прямолинейно либо находится в состоянии покоя.
Каждая изолированная механическая система определяет
некоторую инерциальную систему отсчета. Действительно, для
изолированной механической системы можно пренебречь
воздействием на нее внешних сил и поэтому можно считать главный
вектор всех внешних сил равным нулю. Из.теоремы о движении
Центра инерции следует, что центр инерции С изолированной
механической системы имеет постоянную скорость, т. е. движется
Равномерно и прямолинейно, либо находится в состоянии покоя.
*°гда инерциальной системой отсчета является система коорди-
315
нат С$г£ с началом в точке Сие неизменными направлениями
координатных осей. Это вытекает из теоремы сложения скоростей.
Пусть OXYZ— основная (абсолютная) система отсчета, тогда
система отсчета C&fc перемещается равномерно и прямолинейно
относительно основной системы OXYZ.
Движение изолированной материальной точки т относительно
системы CZrfc является сложным, и согласно теореме сложения
скоростей
4z = *V + ^>
где va — скорость точки т относительно OXYZ, vr — скорость
точки т относительно CZrfc, ve — скорость системы С&£
относительно OXYZ. Из закона инерции следует, что va = const,
кроме того, ve = vc = const и, следовательно, vr = const. Таким
образом, изолированная материальная точка т движется в
системе CZrfc равномерно и прямолинейно, либо находится в
состоянии покоя, т. е. система С£г£ является инерциальной.
Таким же образом, используя теорему сложения скоростей,
выводят, что каждая система отсчета, перемещающаяся
равномерно и прямолинейно относительно основной системы отсчета,
является инерциальной, и обратно, что каждая инерциальная
система отсчета движется равномерно и прямолинейно
относительно основной. Отсюда следует, что инерциальных систем
существует бесчисленное множество и все они перемещаются
относительно друг друга равномерно и прямолинейно.
В природе не существует изолированных механических систем.
Поэтому понятие инерциальной системы является некоторой
абстракцией.
В конкретных задачах в качестве инерциальных систем отсчета
выбирают системы, которые в условиях данной задачи можно
считать изолированными. Так, например, при изучении движения
планет с учетом их взаимодействия солнечная система считается
изолированной, ибо не учитываются воздействия на солнечную
систему далеких звезд. В качестве инерциальной системы в этом
случае мы рассматриваем систему отсчета с началом в центре
масс солнечной системы и осями, проходящими через
неподвижные звезды (астрономическая система отсчета).
При изучении движения планеты с учетом взаимодействия ее
только с Солнцем само Солнце считается изолированным телом,
ибо не учитывается его взаимодействие с другими планетами и
далекими звездами. Инерциальной системой в этом случае
является система отсчета с началом в центре Солнца и с неизменными
направлениями координатных осей (солнечная система отсчета).
При изучении движения машин, приборов, механизмов у
поверхности Земли с учетом воздействия на них только Земли
сама Земля считается изолированным телом, ибо не учитывается
влияние солнечной системы. Инерциальной системой в этом
случае является система отсчета с началом в центре Земли и с не-
316
изменными направлениями координатных осей (земная система
отсчета).
Система отсчета, относительно которой не выполняется закон
инерции, называется неинерциальной. Неинерциальные системы
отсчета определяются неизолированными механическими
системами, т. е. находящимися под. действием сил, не обусловленных
телами данной механической системы.
В инерциальных системах отсчета в силу их изолированности
каждое механическое движение протекает в „чистом виде". В не-
инерциальных системах благодаря действию сил, не
обусловленных системой отсчета, характер механического движения
изменяется.
Много различных задач механики приводят к изучению
движения в неинерциальных системах.
Поэтому возникает необходимость изучения общих
закономерностей движения относительно неинерциальных систем отсчета.
2. Относительное движение материальной точки
Будем рассматривать основную систему отсчета OXYZ,
в которой выполняются законы Ньютона.
Предположим, что относительно системы OXYZ перемещается
некоторая другая система Ofirfc, относительно которой в свою
очередь перемещается точка т (см. рис. 222).
Движение точки т относительно OXYZ можно рассматривать
как сложное, в котором движение точки т относительно ОхЬ&
является относительным,
движение системы Ofirfc относительно
OXYZ — переносным. Z\
Абсолютное ускорение точки т
в системе OXYZ можно
представить в виде:
wa = w,-\-we + wk9
(1)
где
О
wb
Рис. 222.
: 2 (со X vr) (теорема
Кориолиса).
Уравнение движения точки т
относительно основной системы
отсчета в векторной форме имеет вид:
mwa = F.
Подставляя формулу (1) в уравнение (2), получим:
mwr -j- mwe -f- mwk = F
или
(2)
mwr = F-
mwa
■mwh
(3)
317
Введем обозначения:
I_e = — mwe;
lk = — mwk.
(4)
-if-
We^^/И
Величины 7e, Ikf представляющие со-бой произведения массы на
ускорения со знаком минус, можно рассматривать как силы
инерции. Они соответственно называются переносной (1е) и кориоли-
совой (поворотной) (7^)—силами инерции.
Из формул (3) и (4) получаем:
mwr = F+le-\-Tk. (5)
Полученное уравнение (5) представляет собой основное
уравнение относительного движения точки в векторной форме, так
как оно связывает ускорение
в относительном движении с
^ силами, действующими на
материальную точку.
Таким образом, чтобы
получить основное уравнение
относительного движения то-
чки, достаточно к силам, дей-
Y ствующим на точку,
присовокупить переносную и кори-
олисову силы инерции и
затем с учетом этих сил
записать второй закон
Ньютона.
Рассмотрим некоторые частные случаи.
Первый улучай. Система 0£rfc перемещается
поступательно, т. е. (о = 0. В этом случае получаем:
1Л = — mwg = — mwn
/* = -
и, следовательно,
О*
Рис. 223.
'OS
• mwk = — 2т (со X vr) — 0
mwr
■mwn
(6)
Второй случай. Система Ofirfc вращается равномерно
вокруг неподвижной оси.
Не ограничивая общности, в качестве оси вращения можно
принять ось О^ и считать ее параллельной оси OZ (см. рис. 223).
В этом случае переносная сила инерции равна
1е = пт*г
и направлена по радиусу в сторону выпуклости траектории. Сила
1е представляет собой то, что обычно называют в физике
центробежной силой.
318
Третий случай. Система Ofirfc перемещается
прямолинейно и равномерно, т. е. v0i = const.
В этом случае, со = 0 и wOi = 0 и, следовательно, 1е = 0, 7Л = 0,
значит, _
mwr = F. (7)
Уравнение (7) ничем не отличается от уравнения движения
точки относительно системы OXYZ, и, значит, точка т
перемещается совершенно одинаково (с одинаковыми ускорениями
в каждый момент времени) относительно систем OXYZ и 0£г£.
Это положение называется принципом относительности
классической механики.
Так как все инерциальные системы перемещаются
относительно основной равномерно и прямолинейно, то мы приходим
к следующей формулировке принципа относительности
классической механики: Механические процессы при одинаковых
начальных условиях протекают совершенно одинаково во всех
инерциалъных системах.
Установим теперь условие относительного равновесия точки.
При относительном равновесии точки скорость и ускорение точки
относительно подвижной системы Ofirfc равны нулю т. е.
vr = 0; wr = 0. (8)
Отсюда следует, что
■г
mwr = 0;
7k=—2m(aXvr) = 0,
и, следовательно, из уравнения (5) получаем:
/Ч-7.=о. (9)
Таким образом, при относительном равновесии точки
геометрическая сумма сил, действующих на точку, и переносных сил
инерции равна нулю.
3. Относительное движение механической системы
Ранее были установлены основные теоремы и принципы,
используемые для изучения движения механической системы
относительно основной системы отсчета.
Математически эти теоремы и принципы были получены
путем применения второго закона Ньютона к каждой точке
системы.
Из уравнения относительного движения (5) следует, что
второй закон Ньютона для относительного движения также
выполняется, если только к силам, действующим на точку,
присовокупить переносную и кориолисову силы инерции. Поэтому, если
319
к силам, действующим на точки механической системы,
присовокупить переносные и кориолисовы силы инерции, то все
теоремы и принципы, установленные ранее, будут справедливы также
и для относительного движения.
Итак, для изучения относительного движения механической
системы можно пользоваться следующим правилом: к силам,
действующим на механическую систему, следует
присовокупить переносные и кориолисовы силы инерции всех точек
системы, а затем к полученной совокупности сил применять
теоремы и принципы, установленные для движения
механической системы относительно инерциальнои системы отсчета.
Задача 36. Точка привеса математического маятника Ох
движется произвольно в вертикальной плоскости. Найти
уравнение движения маятника относи-
о_
И
тельно системы координат,
движущейся поступательно вместе с
точкой привеса (см. рис. 224).
Для составления уравнения
движения маятника относительно
подвижной системы ОхЬ\
присовокупим к силе тяжести Р и
реакции нити N еще переносную силу
инерции Ie — — mw0i. Если
координаты точки Oj суть x1=x1(t),
yt =yl (t)y то проекции силы
инерции 1е определяем по формулам:
Рис. 224.
Iei=—mx1; 1вч=—тух.
Воспользуемся теперь теоремой
о кинетическом моменте относительно оси 0£
(перпендикулярной К 0^7]).
dKr
~df
= щ(Р) + щш(Ы) + пк(7в).
(10)
Для слагаемых правой части находим выражения
т^ (Р) = PI sin ср;
I / sin ср / cos <р
| — т'хх —ту1
mtt(Ie) = npi(OlmXIe) =
Кроме того,
= — /я/(у, sin ср —
— хх COSCf).
d?
dt
(знак минус берется потому, что^<0, a /CL> 0 для случая,
указанного на чертеже).
320
Подставляя все найденные значения в формулу (10), получим:
— т^ Ht* = ^ sin * "Ь т^ ^» sin * — ^ cos ^*
Перенесем все члены в левую часть и разделим их на —ml2,
тогда получим окончательное уравнение:
^ + f.sincp + y(^1coscp—j/1sincp)-=0. (И)
Чтобы исследовать характер движения маятника, рассмотрим
частный случай, когда точка привеса перемещается по вертикали
вниз с постоянным ускорением wQ. В этом случае
Уравнение движения маятника (11) принимает вид:
g+«^8in<p = 0. (12)
Такой случай движения конкретно может представиться при
рассмотрении движения маятника, подвешенного к потолку
опускающегося лифта, либо находящегося в некотором летательном
аппарате, перемещающемся по вертикали.
Рассмотрим различные варианты этого случая:
Уравнение малых колебаний маятника можно записать в виде
dt2 ' I •
и, следовательно, для периода малых колебаний находим формулу:
В этом случае период колебаний, следовательно, увеличивается.
2. w0=g.
Выберем начальные условия при £ = 0, <р = а, ср = 0. Из
уравнения (12) в данном случае следует, что ср= 0 и, следовательно,
Используя начальные условия, находим, что Сх=0, С2 = а, т. е.
.¥ = а.
Таким образом, угол отклонения маятника <р является
постоянным, и маятник находится в состоянии относительного
равновесия. Конкретно это означает, что маятник, отклоненный от
положения равновесия под углом а, находящийся в свободно
падающем аппарате (если сопротивление воздуха невелико), не
будет колебаться.
Заметим, что равновесие маятника в данном случае вытекает
также из того, что соблюдается условие относительного
равновесия, а именно:
F-\-7e = P^mwQ.= mg—mg=0.
Г. М. Финкельштейн 321
3. w0>g.
Для исследования движения преобразуем уравнение (^,2),
умножив обе части его на ф:
ф • Ф + ^"7—2 sin ср • ф = О,
*(¥)+ьР'я(«»)=«-
Отсюда следует, что
|+Hip£cos(p = C.
Выберем начальные условия при £ = Q, <р = а, ф=0. Подставляя
в предыдущее уравнение начальные условия, получим:
^f^cosa = C.
Из того же уравнения найдем выражение для ф:
ф = Y2[W*~g) (cos ср — cos a).
Выражение для ф имеет смысл только тогда, когда подкоренное
выражение неотрицательно, поэтому
2(Y^'(cos a — cos ср) > 0.
Отсюда следует, что
cos a — cos ср ^ 0;
coscp^ cos a.
Из этого соотношения получаем
значения для угла ср:
а^ ср^ 2тс — а.
Таким образом, если маятник подве-
Рис. 225. шен в некоторой точке Ох
летательного аппарата, опускающегося с
ускорением, большим g, то маятник описывает дугу BCD (см. рис. 225).
Рассмотренная задача показывает, что в относительном
движении (случаи 2 и 3) движения тел происходят не так, как
обычно. Эти „аномалии", которые можно наблюдать, находясь в
перемещающейся среде, указывают наблюдателю на то, что
перемещающаяся среда не является инерциальной.
§ 2. Основные теоремы динамики, сохраняющиеся
в относительном движении
Как было установлено выше, при использовании основных
теорем динамики для исследования относительного
движения следует, помимо действующих сил, рассматривать еще
с
1 -'* *"""*■*
1 У
{ '
1 *
КУ
D
1/
Л
X
NN
\
1
V
в
322
силы инерции. Однако если в качестве подвижной системы отсчета
рассматривать специальную систему координат, имеющую
своим началом центр инерции механической системы и
перемещающуюся поступательно (относительно основной системы), то
теоремы о кинетическом моменте и кинетической энергии
сохраняются, т. е. по отношению к этой подвижной системе они
формулируются так же, как и по отношению к неподвижной
(основной).
Теоремы о движении центра инерции и количестве движения
по отношению к указанной системе отсчета утрачивают смысл,
так как по отношению к этой системе ускорение и скорость
центра инерции равны нулю.
1. Теорема о кинетическом моменте
Будем рассматривать механическую систему, состоящую из п
материальных точек S(miy т2У ... , тп). Центр инерции этой
системы обозначим буквой С. Основную систему отсчета
обозначим OXYZy систему координат, связанную с центром инерции и
перемещающуюся поступательно, — через С£г£ (см. рис. 226).
Выведем формулу, выражающую зависимость кинетического
момента относительно центра инерции.
Как известно, кинетический момент относительно
неподвижного полюсу О определяется по
формуле:
Но
#о=2 (rkXmkvk). (13)
k=z\
rk = rc+pk. (14)
Будем рассматривать
движение механической системы
как сложное, в котором
движение S(miy ... , тп) относитель- Рис. 226.
но системы C$7j£ является
относительным, движение системы С$г£ относительно OXYZ —
переносным. По теореме сложения скоростей можно записать:
Vk = V*e + Vkr = Vc + Vkr
Подставляя формулы (14) и (15) в формулу (13), получим:
^о= 2 t(>c+ Ра)X Щ&с+\г)] = (ГсХ\)-Ъ<Щ +
(15)
k=\
k=i
+ (2 mkpJX.vc+rcX 2 вд*г+ 2 (p*X"v*r)-
л=1 А=1 ft = l
11*
(16)
323
Введем обозначения:
2 щ?ь=м?с=о;
2 §kXm&kr) = K!P. (17)
Из формул (16) и (17) окончательно получаем:
£0 = FcXAfoc + *£). (18)
Таким образом, кинетический момент механической системы
относительно некоторого неподвижного полюса равен
кинетическому моменту относительно этого полюса массы всей
механической системы, сосредоточенной в центре инерции, сложенному
с кинетическим моментом системы относительно центра инерции —
начала подвижной системы координат, перемещающейся
поступательно.
Выведем теперь формулу, устанавливающую связь между
главными моментами сил, действующих на механическую систему,
относительно полюсов О и С:
£0 = S ftxF*)=S (гс+рд)х?*=гсх 2 F*+
+J1P*X/5*=rcx7?+Ic. (19)
Таким образом, главный момент относительно неподвижного
полюса равен главному моменту относительно центра инерции
(или вообще относительно другого полюса), сложенному с
векторным произведением вектора, соединяющего первый полюс со
вторым на главный вектор системы сил.
Продифференцируем обе части равенства (18) по времени
и воспользуемся теоремой о кинетическом моменте:
§L=*(rcx^B)+i§^=z?>
Используя формулу (19), получим:
dFr dvr , dKir) _ -(0.
-£-ХШс + ?сХМ-^+-£- = гсХФе) + №. (20)
Так как __
drc
dt XMvc=vcXMvc = 0;
fc X M^f-=rc X Mwc = rc XRie\
324
то из формулы (20) следует, что
ЖР ре)
Так как система CZrfc перемещается поступательно, то
абсолютная производная (относительна OXYZ) совпадает с локальной
(относительно СЬ$ и, следовательно, можно записать, что
-ir—Lc- W
Таким образом, мы пришли к следующей теореме:
геометрическая производная по времени от кинетического момента
механической системы относительно центра инерции, являющегося
началом подвижной системы координат, движущейся поступательно,
равна главному моменту всех внешних сил относительно центра
инерции.
Так же, как и для инерциальной системы, проектируя векторы
равенства (21) на ось, можно получить теорему о кинетическом
моменте относительно оси для случая относительного движения.
2. Теорема о кинетической энергии
Будем рассматривать ту же механическую систему и те же
системы отсчета, что и в предыдущем пункте.
Раньше уже была установлена формула, связывающая
кинетическую энергию в абсолютном и относительном движениях,
в силу которой 1
T=±Mv*c-\-Tr (22)
По теореме о кинетической энергии для механической системы
можно записать для моментов времени t1 и t2, что
Т2 — T1=A(e) + A(i). (23)
Сумму работ внешних и внутренних сил в векторной форме
можно записать в следующем виде:
= 2 S П -drc+± lW-d-9k= J ??".drc+ S $ He)-<% (24)
ft=l о «=i о 0 A = 1 0
Ali> = 2 AV= 2 \'FV-dfk= 2 $НЧ#с + <*Р*) =
= t№-d?c+t \Ff'd-H=\R<)-drc +
k—10 *=i0 0
+ | \Ff.djh=% \~Ff-d-9k. (25)
k=ig k=\{
325
Подставляя формулы (24) и (25) в равенство (23) и используя
формулу (21), получим:
+ Тп-Тп =
(т^),-(>
(26)
Так как центр инерции движется как точка, в которой
сосредоточена вся масса и все внешние силы, то для нее можно
применить теорему о кинетической энергии для материальной точки и,
следовательно,
t
^Mv£) - (jMv*) = J R^-drc. (27)
0
Из формул (26) и (27) окончательно получаем:
Тп-Тп=± J/^-rffr+i $^PA = 4e) + 4°. (28)
k=l
k=\
Таким образом, мы приходим к теореме: приращение
кинетической энергии механической системы относительно системы координат
с началом в центре инерции и перемещающейся поступательна
равно сумме работ всех внешних
и внутренних сил, действующих
на механическую систему
относительно той же подвижной системы
координат.
Решение многих задач
значительно упрощается, если
использовать доказанные выше теоремы
для относительного движения.
Поясним это примером.
Задача 37. В
эпициклическом механизме длина кривошипа
ООг = / см, радиус бегающей
шестеренки равен г сму ее масса
равна m кг и угол поворота
кривошипа y = at2 рад. Определить
окружное усилие 5, возникающее в точке касания шестеренок:
(см. рис. 227). _
На бегающую шестеренку действуют силы: Р — сила тяжести,
N— нормальная реакция неподвижной шестеренки, 5—окружное
усилие, возникающее вследствие взаимодействия зубьев
подвижной и неподвижной шестеренок.
Рассмотрим подвижную систему координат О^ц с началом
в центре бегающей шестеренки и перемещающуюся поступательно.
Рис. 227.
326
По теореме о кинетическом моменте относительно оси и,
проходящей через центр Ov в относительном движении можно
записать:
Известно, что
гАг)_т d$
где ф— угол поворота шестерни относительно подвижной
системы Oxir\. Кроме того,
mu(P) = 0; mu(N) = 0; ma(S) = rS; /и = ~.
Поэтому получаем:
т. е.
2L d3—r?
2g * dt2 ~~~ ГО>
2g dt2 *
Угол поворота ф находим из соотношения:
ф = с?4-а,
причем
аг = ср(/ — г);
/*
<р g — Г) <р* _ gtf «
и, следовательно,
Ф = (?-
Отсюда находим:
dt2~ г '
с Я/- 2al Pal г „-.
§ 3. НЕКОТОРЫЕ ПРИЛОЖЕНИЯ
Пользуясь теорией относительного движения, можно объяснить
ряд явлений, наблюдаемых в природе. Так, например, замечено,
что плоскость качания свободного маятника с течением времени
меняется; при свободном падении тел с большой высоты их
траектория отклоняется от вертикали. Объясним эти явления.
1. Маятник Фуко
Будем рассматривать маятник т с длиной нити /, колеблю-
Щийся у поверхности Земли. В качестве инерциальной системы
отсчета примем солнечную систему. Введем прямоугольную си-
327
стему координат 0$7jC, где ОС ось Земли, а оси От{ и OS не
меняют положения относительно ОС. За небольшой промежуток
времени эта система координат незначительно поворачивается
относительно солнечной системы, поэтому приближенно ее
движение относительно солнечной системы можно считать
поступательным и равномерным и,
следовательно, систему Olrfc
можно также считать инерци-
альной.
В качестве подвижной
системы отсчета выберем
систему координат MXYZ, где
ось MZ направлена по
радиусу Земли к центру, оси MX
и MY— по касательным
соответственно к параллели и
меридиану (см. рис. 228).
Обозначим широту точки
М через <р, тогда нетрудно
видеть, что угловая скорость
вращения Земли вокруг своей
оси w лежит в плоскости MYZ
и образует с осью MY угол (180° — ш)ис осью MZ угол (90° + ff)
(см. рис. 229).
Движение маятника m относительно системы MXYZ является
относительным, движение системы MXYZ относительно системы
OZrfc— переносным.
относительного движения маятника.
<5
Составим уравнение
При этом переносную
силу инерции 1е
включим в вес маятника Р,
который равен mg и
направлен по вертикали.
Поэтому мы получим
уравнение движения в
виде
mwr = P + N + Tk, (29)
где кориолисова сила
инерции
■2m(<oysvr).
дан
/*=■
Ум
S /
J
/
zx
W<?- ~т~
v< -''
\ ^v '
\ ^^ ^
r\ - I
\n \ /
\ • • '
\ 1 /
Xi '
S
rm
iP
Рис. 229.
Для упрощения формул введем обозначения:
wr = w; vr = v.
Тогда уравнение (29) примет вид:
mw=~P-\-N-\-7k.
(30)
328
Найдем уравнения движения в проекциях. С этой целью
заметим, что если координаты точки т суть ху уу zy то имеют место
соотношения:
Рх = 0; Ру = 0; Pz = mg;
Tk = — 2m (со X v) = — 2m
Nv
■-N-
(31)
\i j k
0 — со cos <p — (o sin <p
\x у z
= — 2m [со (y sin у — z cos <p) i — ®xj-\- а>х cos <p&].
Из формул (30) и (31) получаем:
тх =— N -г-\~^т® cos У'* — 2/тго) sin cp-j/J
ту-
(32)
-N у -\- 2т® sin ср. х;
mz = — N-j-\-mg — 2/72(0 cos cp-Jc.
Эту систему дифференциальных уравнений трудно
проинтегрировать, поэтому воспользуемся методом приближенного
интегрирования. Будем рассматривать только малые колебания маятника,
т. е. предположим, что величины х и у малы по сравнению с /.
Так как
x2+y2 + z2 = l2;
то
Z =^ /.
Кроме того, величина угловой скорости о> весьма мала!
2тг
'24-3600
^ 0,00007
[сек]
Полагая в третьем из уравнений (32) z = l, со = 0, получим:
N = mg.
Подставляя это значение N в первые два уравнения и учитывая,
что z = ly получим:
тх = — mg^- — 2/ш sin <р • у;
, 0 . <33)
my = — mg у + 2/жо sin у»х.
Сокращая эти уравнения на ту а затем помножив первое на —у9
а второе — на х и сложив их, получим:
ху —ух = 2(0 sin ср {хх-\-уу)у
т. е.
^(xy-yx) = 2<osm<fT.^
dt
(34)
329
Рассмотрим радиус-вектор р, соединяющий точку М с проекцией
маятника т на плоскость МХУ и угол 0, который он обр'азует
с осью MX (см. рис 229).
Тогда легко видеть, что
ху—ух = $ cos 6 (р sin 0-[-р cos 6-6) —
— р sin 0 (р cos 0 — р sin 6. 0) = р2.6. (35)
Кроме того,
х2+У2 = ?2. (36)
Из формул (34), (35) и (36) получаем:
i(p2-^) = 2(0Sincpi№.
Интегрируя полученное уравнение, получим:
p'.g = a>sin<p.P2 + C (37)
Так как в начальный момент времени маятник находится в
равновесии, то при t = 09 р = 0 и, следовательно, С=0. Поэтому из
(37) окончательно получаем:
^■=«>sin<p, (38)
т. е.
6 = (osincp.^ + 0o. (39)
Угол 9 представляет собой угол, который образует плоскость
качания маятника с плоскостью MXZ. Из полученной формулы
(39) следует, что плоскость качания маятника поворачивается
в сторону положительного направления отсчета угла 6, т. е. от
востока через юг, на запад (см. рис. 228, 229). Это явление
называется эффектом Фуко. Угловая скорость вращения
плоскости качания маятника находится по формуле (38). Из этой
формулы следует, что плоскость качания вращается равномерно
с периодом
Т = -^—. (40)
<о sin ср v /
Опыт с качающимся маятником с длиной нити в 67 м был
впервые произведен Фуко в Париже в 1851 г. Так как Париж
находится на широте <р = 49°, то в этом случае
ъ 2к
'со. sin 49°
За один час плоскость качания маятника Фуко в Париже
поворачивается на угол:
i 2* • л по 369°. sin 49° 1СО • „по но
$=y = (o.sin49° = 24 = 15 'Sin49°=5s 11 .
330
Опыт с качающимся маятником повторялся много раз в разных
местах. В Ленинграде (ср = 60°) в Исаакиевском соборе
демонстрируется качающийся маятник длиной в 98 м> для которого
ф = о^.sin60° =15°.sin 60° ^r 13°.
Из формул (39) и (40) следует, что максимальное вращение
плоскости качания маятника будет на полюсе (при <р = 90°) и
вращения не будет на экваторе (при <р = 0).
Эффект Фуко можно объяснить также качественно, исходя из
следующих простых соображений. Плоскость качания маятника
должна сохраняться неизменной по отношению к солнечной
системе координат. Но так как качание происходит на
поверхности Земли, а Земля вращается по отношению к солнечной системе,
то по отношению к Земле плоскость качания маятника
поворачивается.
2. Отклонение падающих тел от вертикали
Будем рассматривать движение тяжелой материальной точки
у поверхности Земли под действием силы тяжести. В качестве
инерциальной системы
отсчета Olrfc примем ту же
систему координат, что и в
пункте 1. В качестве подвижной
системы отсчета выберем
систему координат MXYZ, где
ось MZ направлена по
вертикали от центра Земли, ось
MX по касательной к
меридиану, ось MY по касательной
к параллели (см. рис. 230).
Составим уравнение
относительного движения точки
_ Переносная сила инерции
/g_ здесь включена в вес тела Рис. 230.
Р, величина которого равна
mg и направление совпадает с вертикалью. Для упрощения формул
обозначим wr через w.
Тогда уравнение примет вид:
где
mw = P + /kf
Ik = — 2m(uX>v) и v = vr
(41)
331
Так как
I I 7 k
wk == 2 (со X v)— — w cos <P О со sin cp I
I x у z
= —j/ со sin cp -i-\-(x<us'm<f -(- zco cos cp)y—j/co cos cp.£,
то уравнение (41) в проекциях можно записать в следующем виде:
тх = 2т(й sin у -у;
ту = — 2/жо (cos <р z -|- sin ср.х); (42)
mi = — mg -|- 2//2СО cos <р • j/.
Сокращая эти уравнения на т, интегрируя их и учитывая
начальные условия
при£ = 0, x=y = z = 0; x=y = z=0,
получим:
ic = 2cosincp-<y;
у =— 2co(cos cp-z-f-sin у-х)\ (43)
z = — gt-{-2® cos <p• j/.
Проинтегрируем систему уравнений (43) методом
последовательных приближений, так как обычными методами их интегрировать
трудно. В качестве первого приближения рассмотрим систему
уравнений (43) в предположении со = 0:
х = 0; у = 0; z = — gtf
и ее решения
х = 0; у = 0; z = -\gt\ (44)
Подставим найденные решения (44) в уравнение (43).
Тогда получим систему уравнений:
л = 0; j/=cocoscp.gf2; z= — gt.
Интегрируя эти уравнения, получим в качестве второго
приближения решения:
х = 0; у = -з<о cos ср.gt9; z = — -^gt\ (45)
Из формул (44) уже видно, что тяжелая точка при падении
отклоняется от вертикали к востоку согласно закону;
у =-g® cos <?-gt*.
При нахождении третьего и последующих приближений можно
установить также, что точка отклоняется от вертикали к югу
(х=£0).
332
Глава V
ДВИЖЕНИЕ В ЦЕНТРАЛЬНОМ ПОЛЕ
1. Кеплерова задача
При рассмотрении ряда задач на движение материальной
точки в некотором силовом поле оказывается, что силы,
действующие на материальную точку, обладают тем свойством, что
в каждый момент времени линия их действия проходит через
одну и ту же неподвижную точку пространства О (точка
схождения сил). Если, кроме того, величина действующих сил
является функцией только расстояния г от этой точки О, то
силовое поле называется центральным, а силы называются
центральными.
Много важных задач приводят к центральным силам,
величина которых изменяется обратно пропорционально квадрату
расстояния г. С силами такого рода приходится встречаться при
рассмотрении различных задач небесной механики (движение
планет, движение тела в поле тяготения Земли), электростатики
(электростатические силы в поле Кулона), атомной физики
(движение электронов и а-частиц).
Задача о движении материальной точки в центральном поле
сил при условии, что величина силы изменяется обратно
пропорционально квадрату расстояния от точки схождения
центральных сил, называется задачей Кеплера.
2. Движение свободной материальной
точки в центральном поле
Установим некоторые свойства движения свободной материала
ной точки под действием центральной силы.
1°. Под действием центральной силы материальная точка
описывает плоскую траекторию.
Пусть на материальную точку т
действует центральная сила F> линия
действия которой проходит через
полюс О (см. рис. 231).
По теореме о кинетическом моменте
относительно полюса получаем, что
f£ = „,(/>) = О, рис.231>
т. е.
К0 = г X ^г> = const. (1)
Итак, при движении материальной точки кинетический момент
точки есть постоянный вектор. Из формулы (1) видно, что кине-
333
тический момент перпендикулярен^ плоскости, проходящей
через радиус-вектор г и скорость v, поэтому точка т
перемещается в постоянной плоскости, перпендикулярной к вектору /С0.
Этим свойством можно объяснить тот факт, что планеты,
двигающиеся вокруг Солнца под действием силы притяжения
к Солнцу (центральной силы), описывают плоские орбиты.
2°. Если точка находится под действием центральной силы,
то площадь, описываемая радиусом-вектором, соединяющим
полюс с точкой, пропорциональна времени.
Из формулы (1) следует, что
K0 = r\mv = 2ma = const, (2)
где а — секторная скорость, определяемая по формуле:
Из формулы (2) следует, что
g = Const
и, следовательно,
a=^ = C = const.
Отсюда путем интегрирования получаем, что
S = Ct + o0.
В момент времени t-\-№, площадь 5 определяется по фор*
муле:
S + bS = C{t + M)-\-o0
и> следовательно,
kS = CM. (3)
Таким образом, приращение площади, описываемой радиусом-
вектором, пропорционально времени.
Это свойство иногда называется законом площадей.
3, Формула Бинэ
Силы центрального поля, действующие на материальную
точку, могут быть либо притягивающими, либо отталкивающими.
В первом случае силы направлены к одной и той же точке О,
во втором случае силы направлены от одной и той же точки О.
Установим формулу, выражающую величину силы F через
расстояние г движущейся точки т от точки О.
Согласно второму закону Ньютона можно записать, что
mwr=K (4)
334
Воспользуемся формулами для площади и радиального
ускорения в полярных координатах:
Й=4^ (5)
wr=r— гу\ (6)
По закону площадей получаем, что
откуда
где
~ = yr2$> = C1 = const,
_2Ci_£
¥ r2 rZ >
(!)
С = 2^ = const.
Проектируя векторы равенства (4) на направление вектора
г = От и используя формулу (6), получим:
m{r— r(?2) = ±F, (8)
где знак -f- (плюс) соответствует отталкивающей силе (см. рис. 232),
а знак— (минус) соответствует притягивающей силе (см. рис. 233).
Рис. 232.
Введем новую величину:
Рис. 233.
и=Т.
Тогда, используя формулу (7), получим выражения:
. dr. dr £ rd(\\ rdu
r—d^—T^ r* —~^wAt)—~^
rfcp'
.. dr • rd2n С
r — -ЩУ — ~ L df'7* —'
Г2п2^11
'u " d<? •
(9)
Подставляя формулы (7) и (9) в формулу (8), окончательно
получаем:
mCV
№
где знак -f- соответствует притягивающей силе, а знак —
соответствует отталкивающей силе.
Формула (10) называется формулой Бинэ. Эта формула
позволяет по заданной траектории точки в центральном поле
определить силу, и наоборот, по заданной силе центрального поля
найти траекторию точки.
335
4. Движение планет
Движения тел в небесной механике описываются законами
Кеплера. Эти законы Кеплер открыл на основе наблюдений
астронома Тихо Браге над движением планет. Законы Кеплера
формулируются следующим образом:
I. Орбиты всех планет (и комет) суть конические сечения,
в одном из фокусов которых находится Солнце.
II. Каждая планета (и комета) движется в плоскости,
проходящей через центр Солнца, следуя закону площадей.
III. Квадраты звездных времен обращения планет вокруг
Солнца пропорциональны кубам больших полуосей их орбит.
Открытия Кеплера и Галилея позволили Ньютону
сформулировать общие законы механики материального мира. Согласие
выводов из законов Ньютона с законами Кеплера, установленными
эмпирически, было первой проверкой справедливости
классической механики.
Если принять закон всемирного тяготения Ньютона, согласно
которому каждые два тела притягиваются друг к другу с силой,
прямо пропорциональной их массам и обратно пропорциональной
квадрату расстояния между ними, т. е. с силой, определяемой
по формуле:
F=f^, (11)
где /—гравитационная постоянная, приближенно равная
6,7 -10"8 в системе CGS, то, используя его, можно математически
вывести законы Кеплера.
Для вывода законов Кеплера из законов Ньютона заметим
прежде всего, что все тела вселенной (звезды, Солнце, планеты)
взаимодействуют между собой. Поэтому каждая планета
находится под действием сил притяжения к Солнцу, к звездам и
к другим: планетам. Однако звезды находятся на очень большом
расстоянии от Земли (ближайшая звезда отстоит от Солнца
примерно в 300000 раз дальше Земли), поэтому действие сил
притяжения планеты к звездам по сравнению с притяжением к Солнцу
незначительно и этими силами можно пренебречь. В результате
приходится учитывать только силы взаимодействия между
телами планетной системы. Но возможно и дальнейшее упрощение
задачи, поскольку масса Солнца значительно превосходит массы
других планет (например, масса Солнца в 333 000 раз больше
массы Земли).
Это позволяет в первом приближении учитывать действие на
планету только силы притяжения к Солнцу.
Итак, при рассмотрении задачи о движении планеты вокруг
Солнца мы можем считать Солнце и планету изолированной
механической системой, состоящей из двух точек,
взаимодействующих между собой согласно третьему закону Ньютона. Под
336
действием сил взаимодействия (которые по величине равны)
планета и Солнце приобретают ускорения (по отношению к звездам),
величины которых обратно пропорциональны массам планеты
и Солнца. Ускорение, приобретаемое Солнцем от силы
притяжения к планете, очень мало по сравнению с ускорением
планеты, приобретаемым от силы притяжения ее к Солнцу,
поэтому можно пренебречь ускорением Солнца и считать его
неподвижной точкой или точкой, совершающей
равномерно-прямолинейное движение относительно звездной системы отсчета»
Итак, считая законы Ньютона справедливыми для звездной
системы отсчета, задачу о движении планеты вокруг Солнца
в первом приближении можно свести к задаче о движении
материальной точки (планеты) под действием центральной силы
(направленной к неподвижной точке — Солнцу).
Второй закон Кеплера следует из того, что каждая планета
движется под действием центральной силы—силы притяжения
к Солнцу.
Если массу Солнца обозначить через М, а массу планеты —
через т, то величина силы притяжения планеты к Солнцу
определится по формуле:
F=f-f, (12)
где/—гравитационная постоянная.
По формуле Бинэ (10) для этого случая получим:
mCV (0+ ") =fmMu\
откуда следует, что
— ^и—-^. (13)
Введем обозначение:
тогда уравнение (13) можно представить в виде
dhi ,1 /1ГЧ
Уравнение (15) представляет собой линейное неоднородное
уравнение относительно и с постоянными коэффициентами.
Общее решение этого уравнения можно представить в виде
Полагая
получим:
С1=А cos а, С2 = А sin а,
y = j + 4cos(cp — а).
337
Введем новые обозначения:
Ар = е, ср — а = ф,
„_ р .
тогда получим:
(16)
1 + е cos ф "
Уравнение (16) есть уравнение конического сечения в
полярных координатах.
Так как планеты движутся по замкнутым траекториям, то
уравнение (16) представляет
собой эллипс с фокусом в начале
координат М (см. рис. 234).
Таким образом, орбитой
планеты является эллипс, в фокусе
которого находится Солнце,
у т. е. выполняется первый
закон Кеплера.
Выведем третий закон
Кеплера.
Из уравнения (16) следует,
что
(при ф=180°),
где с = ОМ.
Из этих формул получаем:
Р = {а + с)(1—е);
р = {а-с){\ + е).
Почленно отнимая эти равенства, получим:
с
е = -
p = (a + c)(l-^
а' —с'
Ь*
(17)
Если период обращения планеты обозначим через Г, то из
закона площадей получим, что
*§ Г 5 ПаЬ /1Q4
di — bl— Т—~Т > I10'
где S — площадь, а — большая полуось и Ь — малая полуось
эллипса.
Из формул (14), (18), (17) и учитывая соотношение С = 2С1У
получаем;
_ С2 4C\_4n2a2b2__b%
Р ~~ JM~~ fM ~~~ T*fM ~ а ш
338
Отсюда находим:
/М= -jt-= const.
(19)
Для двух планет с периодами обращения 7\ и Т2 и большими
полуосями ах и а2 из формулы (19) получим;
4т? а\ 4А'
п
т. е.
Полученная формула (20) выражает третий закон Кеплера.
5. Движение материальной точки в поле тяготения Земли
Раньше уже была рассмотрена задача о движении
материальной точки в поле тяготения Земли для случая, когда дальность
и высота полета материальной точки
были достаточно малы по сравнению с
радиусом Земли.
Для решения важнейших задач
современности (полеты в стратосфере,
создание спутников Земли, межпланетные
сообщения) большую роль сыграло
исследование задачи о движении
материальной точки в поле тяготения Земли.
Рассмотрим эту задачу, причем, как и i
раньше, не будем учитывать сопротив- \
ления среды и будем считать Землю
неподвижной.
Предположим, что из некоторой
точки поля тяготения на расстоянии г0 от
центра Земли начинает перемещаться
точка m с начальной скоростью v0 под
углом а к направлению поверхности
Земли (см. рис. 235).
На материальную точку m действует сила тяготения,
являющаяся центральной силой, направленной к центру Земли.
Величина этой силы определяется по закону всемирного тяготения:
Рис. 235.
~ гГпМ
(21)
где/—гравитационная постоянная, М—масса Земли. В
начальный момент времени сила F определяется по формуле:
F=mg, (22)
где g — ускорение силы тяжести на расстоянии г0 от центра Земли.
339
С другой стороны, из формулы (21) для начального момента
получаем: /
F=f^. (23)
Приравнивая выражения в формулах (22) и (23), найдем
выражение для /М, а затем, подставляя его в формулу (21),
окончательно получим:
F= Мр . (24)
Центральное поле сил тяготения является потенциальным, так
как из формулы (24) следует, что потенциал поля можно
определить выражением:
Я=-». (25)
Так как материальная точка пг перемещается под действием
центральной силы, то заключаем, что ее траекторией является
кривая второго порядка с фокусом в центре Земли. Чтобы
выяснить тип этой траектории (эллипс, гипербола или парабола),
воспользуемся законом сохранения полной механической энергии:
Г+Л = £0 = соп81. (26)
В полярных координатах для кинетической энергии получаем
выражение:
Г = ^ = ^(г2 + /-У)- (27)
Из формул (25), (26) и (27) получаем уравнение движения
точки т в виде
5-(г2 + Лрг)-« = £0. (28)
Подставляя в формулу (28) формулы (7) и (9), получим:
Отсюда находим:
В случае, если величина «является экстремальной
(максимальной или минимальной), получаем j"'=0. Подставляя это
значение в формулу (29), получим, что экстремальные значения а
удовлетворяют условию:
"г-2§а-Ц = 0. (30)
Для каждой кривой второго порядка а принимает
максимальное и минимальное значения, поэтому для корней квадратного
уравнения (30) по теореме Виета можно записать:
340.
\\з этих формул получаем:
»max-«mi„>0 при
"max-«min<0 ПРИ
Mmax-"min=° ПРИ
£„<0,
^о>0,
£0 = 0.
Если Е0<С0, то получаем положительные значения для
максимума и минимумам (и, значит, для г = — \ и траектория в этом
случае является эллипсом. Если Е0 >> 0, то экстремальные
значения для г имеют различные знаки, что соответствует двум
различным ветвям гиперболы. Если £^ = 0, то траектория является
параболой, ибо umin = -—=0, итах = -—=-#, т. е. макси-
'max 'min *-
мальное значение г является бесконечным, а минимальные —
конечным.
Найдем теперь, как зависит траектория от начальной
скорости. Полная энергия Е0 определяется по формуле:
Еа =
mvn
»=^W-2^0).
(32)
Находя значения vQ из условий Е0 < 0, Е = 0, Е > 0, мы
получим, что
при *tf0<yr2gr0 траектория точки — эллипс,
при v0 = V%grQ траектория точки — парабола,
при vQ^>]^2gr0 траектория точки — гипербола.
Если эллиптическая траектория точки т охватывает поверхность
Земли, то точка т превращается в спутника Земли. Таким
образом, для того чтобы точка т стала
спутником Земли, необходимо
выполнение условий:
R, vl<2gr, (33)
rmin :
Vo<\f2g?Q
где R — радиус Земли (см. рис. 235).
Если эллиптическая траектория
пересекает поверхность Земли, то
точка т в некоторый момент
времени упадет на Землю. При
выполнении условия v0^V 2grQ
траекторией точки будет бесконечно
удаляющаяся кривая (парабола или
гипербола) и, следовательно, точка т
будет уходить из поля тяготения
Земли (см. рис. 236).
Найдем теперь, при каких значениях угла а точка т при
движении по эллиптической траектории становится спутником Земли.
Рис. 236.
341
Из уравнения (30) для экстремальных значений величины и
находим: /
Отсюда для экстремальных значений величины г = — получаем:
1 с2
• mi'ti 71 "
Г г* (34)
'max п . "
^-)Л^ + 2#с«
Из формулы (7) следует, что постоянная С определяется по
формуле:
C=r2<p = const.
Выразим величину С через начальную скорость vQ\
С = [г2- й,=0 = r0vn = r0v0 cos а. (35)
Пусть точка т является спутником Земли, т. е. выполняются
условия (33). Из первого условия (33) вытекает неравенство:
г2
/ >/?.
gri + yrt+^c
Упрощая это неравенство, получим:
С2 - Rgt* > R Y?i\ + тг С2;
С* - 2C*Rgr\+RYK ^ RY'o+R* ^ С2;
C*-2Rgrl^Ri2-§.
Подставим в полученное неравенство выражения для С и £0 из
формул (35) и (32), тогда получим:
tivl cos2 а - 2Rgr% > R2 {v\ — 2gr0);
r\v\ cos2 а 3* R2V\ + 2Rgr0 (r0 - R); m)
Используя второе условие (33) и формулу (36), мы получим:
гп~. *п ^ R2 \2RZ (Г° -R)^RZ I 2RS (^o-ffl —
CUb «, ^== 2 —p 2 s=^ 2 -p 2
= 2g/y + 2flgr0- 2gg»_g
342
Отсюда следует, что _
I cos а | ^ YtI* (37>
Из формулы (37), в частности, следует, что когда точка т
находится вблизи поверхности Земли, т. е. rQ=*=R, то а = 0. Таким
образом, при ^0<^г0 и угле а, удовлетворяющему
условию (37), точка т является спутником Земли.
Предположим, что для точки т, описывающей эллиптическую
траекторию (^0<уЛ2^г0), угол а является заданным. Найдем
условия, которым должна удовлетворять начальная скорость vQ>.
чтобы точка т стала спутником Земли.
Из формулы (36) находим:
rf — 2RZ (r°"" R) — 2Rgr° (r° ~ R)
rQ f cos2 a * Л°
или
(r0 cos a -\- R) (r0 cos a — R) '
Итак, при заданном угле а точка т станет спутником Землиг
если ее начальная скорость v0 удовлетворяет условию:
(r0cosa+^)(r0cosa-/?) ^Vl< 2^о* (38)
Рассмотрим частный случай при а = 0. Из формулы (38) получим:
т. е.
где
*, =VWo • VjJh> ". = V^«- (39)
Таким образом, границами значений для начальной скорости vQy
при которой точка т становится спутником Земли, являются
величины vl и v2, причем минимальная начальная скорость равна vx+
Из формул (21) и (22) следует, что g=*—. Подставляя эта
выражение для g в формулы (39), для границ vx и v2 получшм;
= Sr^imr = угт
V> У r0(r0 + R)> v* У г0 •
Отсюда видно, что при удалении точки т от поверхности Земли
(г0 возрастает), границы vx и vt для начальной скорости убывают.
Из этого следует, что при увеличении начального расстояния от
поверхности Земли необходимая для запуска спутника начальная
скорость уменьшается.
Границы для начальной скорости vl и v2 достигают
наибольших значений на поверхности Земли при rQ = R. В этом случае
34а
из формул (39) следует, что начальная скорость удовлетворяет
условиям: /
VgR^v0<V2gR.
Исследуем максимальное и минимальное расстояние спутника от
центра Земли при а = 0.
Из формул (34), (35) и (32) при а = 0 получим:
2 2 2
. roVo r0Vo
' min
grl + Vg2ri + (vl - 2gr0) r\ vl gr0 + V{gr^ - vlf ,щ
rlvl r0vl*
grl — Vgzri + (vl — 2gr0) rl vl gr0 — У (grQ — vlf j'
Рассмотрим частные случаи:
В этом случае из формул (40) получим:
г —г —rJ&—&l — r
mIn m*x~grQ~gr0—ro*
Таким образом, точка т описывает окружность, имеющую центр
в центре Земли и радиус г0 (см. рис. 237).
Скорость v0 = |^£70называется круговой скоростью. Круговая
Скорость достигает наибольшего значения на поверхности Земли
при (rQ = R). Окружность, описываемая спутником вблизи
поверхности Земли (при rQ = R), должна пересекать
экваториальную плоскость, поэтому ее радиус не может быть меньшим
радиуса экватора (наибольшего значения радиуса Земли).
Принимая в качестве радиуса Земли его наибольшее значение
R ^ 6378245 м и g = 9,8 -^т, мы получим для круговой скорости
у поверхности Земли значение vk = YgR ^ 7912 —.
Круговую скорость в любой точке поля тяготения Земли
можно вычислить по формуле:
V г0 [сек] '
rl
т. е.
^^7912-
где R и г0 заданы в метрах.
Следующая таблица характеризует изменение круговой
скорости с изменением высоты \
1 Приведенные данные заимствованы из книги А. Штернфельда
„Искусственные спутники Земли", 1956, стр. 17.
344
Высота полета
в километрах
Круговая скорость
в метрах в
секунду
200
7791
300
7732
400
7675
500
7619
1000
7356
2000
6903
3000
6525
4000
6203
5000
5924
6000.
5679
6378
5595
При запуске спутника с поверхности Земли круговая скорость
#.^=7912— является нижней границей для начальных скоростей.
Верхняя граница определяется значением ]/2g7?=^ll 186-^-. При
начальной скорости z>0;
поля тяготения Земли.
м
11186— точка т будет уходить иа
сек
Из формул (40) получим:
'-v0<Vgr0
r0vb
gr0 + {gfo ~
r0vl
vl)
gr0 - (grQ - v2o)
-=гл.
■vb
Итак, начальное положение точки т является апогеем орбиты
спутника (наиболее удаленная от Земли точка орбиты (см. рис. 237)-
з°. vw*<**<vw;- й
Из формул (40) получим:
rnvn
' min"
• = гл
grQ+{Vo—grQ,
Спу*юй 2
Случай 19
Случаи 3°
Рис. 237.
"ШХ gr-{v,-gr,) 2^r0-t;o
Таким образом, начальное
положение точки т является
перигеем орбиты спутника
(ближайшая от Земли точка орбиты)
(см. рис. 237).
Искусственный спутник Земли впервые в мире был запущен в
Советском Союзе. Этот спутник был выведен на орбиту,
отдаленную от поверхности Земли на несколько сот километров. При
разгоне его по орбите параллельно поверхности Земли (а = 0) он
получил начальную скорость v0^8000^. Максимальная высота орбиты
спутника над поверхностью Земли была порядка 950 км.
Начальная скорость этого спутника превышала круговую и поэтому
345
его начальное положение являлось перигеем его эллиптической
орбиты. Первый искусственный спутник Земли просуществовал
как космическое тело 92 суток, совершив около 1400
оборотов вокруг Земли и пролетев около 50 млн. км. Вследствие
влияния сопротивления атмосферы и других факторов (в частности,
вращения Земли) его орбита постепенно отклонялась от начальной,
а затем он вошел в плотные слои атмосферы и прекратил свое
существование.
6. Движение электронов
Рассмотрим движение электрона, имеющего массу ти заряд — е
и обращающегося около ядра, масса которого значительно
превышает массу электрона. Движением ядра можно пренебречь, и
поэтому будем считать его неподвижным.
Как известно, заряд ядра равен кратному заряду электрона еу
т. е. равен -f-Ze, где Z — порядковый номер химического
элемента в таблице Менделеева.
Между электроном и ядром возникают электрические силы
взаимодействия, величина которых определяется по закону Кулона:
F=^r, (41)
где г — расстояние электрона до ядра.
Электрические силы образуют центральное поле сил, и
поэтому движение электрона представляет собой кеплерову задачу,
аналогичную рассмотренной выше задаче о движении материальной
точки в поле тяготения.
Как следует из (41), потенциал электростатического поля
точечного заряда определяется по формуле:
Zp2
П = — — .
г
Траектория движения электрона вокруг ядра в классической
трактовке представляет собой замкнутую кривую. Как уже было
выяснено, эта замкнутая траектория является эллипсом и,
следовательно, £"<0. Используя закон сохранения полной энергии
и переходя к полярным координатам, получаем:
7+/7 = y(;2 + /-Y) — ^ = £ = const.
Формула Бинэ приводит к соотношению:
тС2
2
du\2 ___2Е , "2Ze2
а — и
Kdy) тС2~ тС2
Экстремальные значения величины а удовлетворяют уравнению:
346
Отсюда получаем, что
Wmax~rttmin тС2 ' Wmax'ttmin тС2 '
0з этих формул следует:
_J_ , J__9Z^ _1 !___ 2Е_
'min 'max тУ- мшп Лтах m^
При почленном делении первого из этих равенств на второе
получим:
. Ze2
'max l~ ' min £~ •
Совершенно очевидно (см. рис. 234, п. 4), что для
эллиптической орбиты электрона выполняется соотношение
Лпах ~t~ Лтп = 2#,
где а — большая полуось орбиты.
Таким образом, мы приходим к соотношению:
Ze2
Отсюда йолучаем:
Из формулы (42) видно, что энергия электрона при данном
заряде зависит только от большой полуоси его орбиты.
7. Движение а-частиц
Рассмотрим движение а-частицы в электрическом поле ядра,,
масса которого значительно больше массы а-частицы. Как и раньше,
будем считать ядро неподвижным. Пусть заряд ядра равен -f- Ze,
где Z — натуральное число и е — заряд электрона. Заряд а-частицы,
как известно, равен+ 2^. В атомной физике доказывается, что
а-частица взаимодействует с ядром по закону Кулона. Таким
образом, а-частица, находясь в поле ядра, испытывает действие
отталкивающей центральной силы, величина которой определяется
по формуле:
F=-jr-,
где г — расстояние между а-частицей и ядром (а-частицу и ядро
считаем массивными точками).
Так как центральная сила является отталкивающей, то
потенциал силы определяется по формуле:
347
Используя закон сохранения полной энергии, приходим к
уравнению (см. п. 5): у
T+^=y(r2 + rY) + ^ = £=const. (43)
Из формулы (43) видно, что полная энергия Е является
положительной, поэтому траекторией а-частицы будет гипербола,
в фокусе которой
находится ядро.
Предположим, что а-
частица движется с
большого расстояния к ядру с
начальной скоростью г>.
Если бы а-частица не
взаимодействовала с ядром, то
она прошла бы от ядра на
расстоянии р (см. рис.
238). Это расстояние р
называется прицельным.
В действительности а-
частица, испытывая отталкивающее действие ядра, находящегося
в точке О, описывает гиперболическую траекторию. Угол ф между
асимптотами этой гиперболы (см. рис. 238) называется углом
отклонения а-частицы.
В атомной физике широко используется формула для угла
.отклонения а-частицы. Найдем эту формулу.
Из уравнения (43), так же как и в п. 6, находим:
'du\2 W
'тС2
о 2^2 2
Продифференцируем это равенство по переменной <р:
~ du dhi _
dy * tfcp2"
AZe2 du
или
du
dy
<£u
d<?2'
mC2 dy
2Zel
■2a
du
dy
mC2
= 0.
а и
Так как — =^= 0, то получаем:
d2u ,
2Ze2
mC2
Полученное уравнение является неоднородным линейным
уравнением второго порядка. Общее решение этого уравнения находится
как сумма общего решения однородного уравнения и частного
решения неоднородного, т. е. представляется в виде
u = Acos-tf + Bslntf — —rr9 (44)
где А и В — произвольные постоянные.
348
Для нахождения постоянных А и В используем начальные
условия. При ср = тт, очевидно, что г = оо, поэтому и = — = 0.
Отсюда получаем:
Л = -^2. (45)
Второе условие мы получим при переходе от полярных
координат к прямоугольным:
j; = rsin ср;
1 Х а (46)
у г sin ср sin ср
Из формул (44), (45) и (46) получаем:
l_===A(cos<? + l) + .+
у sin ср i ь 2 i V '
Совершенно очевидно, что при ср = тт ордината у=р9 поэтому из
(47) получаем:
j=Actg^ + B = B,
т. е. (48)
В=~.
Р
Из формул (46), (47) и (48) получаем:
sin ср
u = A (cos ср + 1) + ^Х. (49)
При ср = ф очевидно, что г=оо и, следовательно, н = — = 0.
Подставляя эти значения в формулу (49), получим:
Отсюда получаем:
Л(СО8ф+1)+^=0.
rto. ± 1 + cos ф 1_
^ 2 sin ф — Ар*
Подставляя в это выражение значение для Д из формулы (45),
получим:
. ф тС2 /г.п\
cisi=mrp. (50)
Постоянная С, входящая в формулу (50), определяется по формуле
C = r2i = 2^ = 2a = ^,
т dt т *
где К0 — величина кинетического момента a-частицы относительно
полюса О. В начальный момент времени величина кинетического
момента К0 находится по формуле:
/С0 = mvp.
349
Подставляя это значение в выражение для С, а затем в формулу
(50), окончательно получим:
(51)
с £ 2 2Ze2
Формула (51) представляет собой известную формулу для угла
отклонения а-частицы.
8. Учет движения центрального тела
Во всех рассмотренных выше задачах мы предполагали, что
центральное тело является неподвижным. В действительности же
центральное тело также перемещается. Так, например, в
рассмотренных выше задачах центральные тела — Солнце, Земля, ядро
атома — также перемещаются. Поэтому рассмотренные
задачи решены в первом
приближении без учета движения
центрального тела.
Если учитывать движение
центрального тела, то изучение движения
тела в центральном поле приводится
к изучению движения двух
материальных точек т1 и т2,
взаимодействующих между собой по
некоторому закону, зависящему только от расстояния г между этими
точками. Если материальные точки взаимодействуют между собой
так, что сила взаимодействия пропорциональна их массам и
обратно пропорциональна квадрату расстояния между ними, то мы
приходим к так называемой задаче двух тел.
Эта задача имеет, в частности, большое значение для
астрономии, так как к ней сводится изучение движения таких систем
небесных тел, как звезда-планета, планета-спутник, двойные
звезды.
Итак, рассмотрим две материальные точки т1 и т2У для
которых сила взаимодействия задается функцией /(г).
Выберем в пространстве некоторый фиксированный полюс О
(см. рис. 239). Согласно второму закону Ньютона уравнения
движения точек в векторной форме можно представить в виде
Рис. 239.
>Vi =/(>-) ё0;
™f2 =—f(r)eQ,
где е0 — орт, направленный от т2 к mv
Складывая полученные уравнения, получим:
(52)
т1г1-\-т2г2 = 0
350
или
^=J^f=^'' <63>
где г с — радиус-вектор центра инерции.
Цз соотношения 53 следует, что
vc = const,
т. е., что центр инерции двух материальных точек под действием
сил взаимодействия, зависящих только от расстояния между ними,
движется равномерно и прямолинейно или находится в покое.
Выберем систему координат CXYZ с началом в центре инерции
и перемещающуюся поступательно. Эта система координат
перемещается равномерно и прямолинейно по отношению к
первоначальной, и по принципу относительности классической механики
движение точек относительно системы CXYZ происходит так же,
как и по отношению к первоначальной системе отсчета.
Покажем, что изучение движения двух точек т1 и т2 можно
заменить изучением движения некоторой фиктивной точки
относительно системы координат CXYZ. Действительно, из уравнений
(52) получаем:
'i + ^j/W^o
±4--=-
т=—т-*-- (54)
т, + т2 v '
Введем обозначение:
где
Кроме того,
где г — вектор, соединяющий точки т2 и тг Таким образом, мы
приходим к соотношению:
mF=f(r)e0. (55)
Из уравнения (55) следует, что движение системы двух точек
т1 и т2 приводится к изучению движения фиктивной точки массы
т= mi'm2 9 расположенной относительно центра инерции С в
системе отсчета CXYZ на расстоянии, равном расстоянию точек
между собой. Масса т, приписываемая фиктивной точке,
называется приведенной массой.
Из уравнения (55) следует, что при учете движения
центрального тела все предыдущие выводы сохраняются, если только в
Уравнении движения заменить массу движущейся точки
приведенной массой двух точек. Если масса движущейся точки т1
значительно меньше массы точки mz> создающей центральное поле,
351
то приведенная масса незначительно отклоняется от массы т1. Дей*
ствительно, это следует из формулы: /
ибо ——очень малая величина.
В этом случае погрешности, полученные вследствие
допущения неподвижности центрального тела, являются незначительными.
9. Уточненные законы Кеплера
Законы Кеплера для движения планет, рассмотренные выше,
являются приближенньши, так как раньше мы не учитывали
движения Солнца. Введем теперь поправки к законам Кеплера,
связанные с учетом движения Солнца.
Как уже было установлено выше, изучение движения планеты
т относительно Солнца М можно свести к изучению движения
фиктивной материальной точки с приведенной массой планеты и
Солнца 1Г\М относительно системы координат CXYZ, связанной
с центром инерции С, перемещающимся поступательно.
Так как теорема о кинетическом моменте в относительном
движении по отношению системы CXYZ сохраняется, то первый
закон Кеплера по отношению к этой системе отсчета сохраняется.
Уравнение движения относительно системы отсчета CXYZ
имеет вид:
тМ г Mm
т + М
или
wr=f—^-. (56)
Если не учитывать движения Солнца, то уравнение движения
планеты можно представить в виде
г Mm
mwr=f-pr
или
«V=/£. (57)
Сравнивая (56) и (57), мы видим, что для установления
уточненных законов Кеплера достаточно в ранее полученных формулах
заменить величину М на величину т-\-М.
При рассмотрении второго закона Кеплера с учетом сделанной
поправки мы также приходим к эллиптической траектории.
352
При рассмотрении третьего закона Кеплера взамен формулы
(19) мы получим:
№+m) = tg..
Для двух различных планет т1 и т2 отсюда получаем:
'2
к2а\
п2а*
2
Почленное деление этих выражений дает соотношение,
отличающееся от (20):
М + щ *ХТ\
М + щ о?Т2
12 2 1
или
M-\-ml Т2 aj
1 2 2 2
Полученная формула (58) выражает уточненный третий закон
Кеплера, учитывающий и движение Солнца.
Так как величины т1 и т2 невелики по сравнению с Ж, то
дробь MT_mi близка к единице. Во времена Кеплера точность
наблюдений не позволяла обнаружить отклонение величины
М -f /и,
jj-j-—х- от единицы.
Глава VI
КОЛЕБАНИЯ МЕХАНИЧЕСКИХ СИСТЕМ
Колебательные процессы широко встречаются в природе
и изучение их совершенно необходимо для решения ряда
конкретных задач механики, физики и техники.
Вибрация различных сооружений, машин, фундаментов,
электромагнитные колебания в радиотехнике и оптике, звуковые и
ультразвуковые колебания и другие колебательные процессы
объединяются в общем учении о колебаниях.
В настоящее время учение о колебательных процессах
представляет собой самостоятельную научную дисциплину.
В этой главе мы изучим колебания материальной точки,
а также малые колебания механических систем, которые можно
изучить методом линеаризации, т. е. приведением
дифференциальных уравнений движений механических систем к линейным
уравнениям.
Изучение колебаний систем, не относящихся к малым
колебаниям, проводится методами так называемой нелинейной механики.
12 Г. М. Финкельштейи ^53
/77
Jf < О
О
Х>0
/77 f-
XI
Г
<[
§ 1. КОЛЕБАНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ
1. Свободные колебания /
Предположим, что на материальную точку действует сила,
обладающая следующими свойствами: в каждый момент времени
линия действия силы проходит через один и тот же
неподвижный полюс О, сила направлена к полюсу О, величина силы
пропорциональна отклонению точки от полюса О. Такая сила
называется упругой силой. Рассмотрим тело небольшой массы—
бусинку или маленький шарик,— подвешенное к пружине.
Если пружину, к которой подвешено тело, растянуть, а
затем отпустить, то пружина и тело начнут колебаться. При этом
зшщкш^^ на тел0 Действует упругая сила пружины,
■ обладающая вышеуказанными свойствами
(весом тела ввиду его малости можно
f < пренебречь (см. рис. 240).
Можно указать и другие аналогичные
примеры, когда движение материальной
F точки обусловливается только действием
> упругой силы (например, шарик, лежащий
на изогнутой колеблющейся балке).
т Если отвлечься от конкретных
примеров, то мы приходим к такой общей
схеме: на материальную точку /тг, движу-
Рис. 240. щуюся прямолинейно по оси ОХ,
действует упругая сила F (см. рис. 240).
Прямолинейное движение материальной точки под действием
упругой силы называется свободным колебанием точки.
Для изучения свободного колебания составим
дифференциальное уравнение движения точки, которое в данном случае имеет
™£? = /v (0
Величина упругой силы пропорциональна отклонению х от
начальной точки О и всегда направлена к полюсу О, поэтому она
определяется по формуле:
Fx = -cx. (2)
Действительно, если лс>0, то Fx<C0 и, следовательно,
формула (2) справедлива, если же л<0, то Ь'*>0 и формула (2)
вновь оказывается справедливой.
Из формул (1) и (2) следует:
d2x
т^=-сх.
Если перенести все члены уравнения в левую часть и разделить
их на т, положив — = k2, то окончательно получим:
g£+*'* = 0. (3)
354
Полученное уравнение (3) представляет собой линейное
дифференциальное уравнение второго порядка с постоянными
коэффициентами, причем корни характеристического уравнения г2 -\-
_|-&2 = 0 — числа мнимые rljl = ±£f. Общее' решение этого
уравнения получаем в форме: '
х = Сх cos kt + С2 sin kt, (4)
где постоянные Сх и С2 определяются начальными условиями
движения. В качестве начальных условий можно задать
начальное отклонение точки и начальную скорость, т. е, при £ = 0,
При этих начальных условиях находим, что
Выражению (4) для х можно придать более компактный вид, если
положить
С, = A sin a, C2 = i4cosa.
Выражение (4) примет следующий вид:
х = A (sin a cos kt + cos a sin kt) = A sin (kt -f- a). (5)
При этом величины Л и a определяются из формул:
A=VcTFci;
Согласно общепринятой терминологии величины, входящие
в выражение (5), называются: А — амплитуда колебания, k —
частота колебания, a — начальная фаза, kt-{-<x— фаза.
Из формулы (5) видно, что если материальная точка находится
только под действием упругой силы, то она совершает
гармонические колебания.
Графически эти
колебания
иллюстрируются синусоидой (см. £\
рис. 241).
Время Г, в течение
которого происходит
изменение фазы на
2тт, называется
периодом колебания.
Как следует из
рисунка 241, за
время, равное периоду
колебания, происходит одно полное колебание, т. е. материальная
точка приходит в первоначальное положение с той же самой
начальной скоростью. Если предположить, что от момента вре-
12*
**
Рис. 241.
Г, М. Фннкельштсйн
355
мени t1 до момента tt прошел полный период, то разность
соответствующих фаз равна 2тт, т. е. /
(kt, + a)-(kt1 + a) = 2i:;
k-T=2ix;
т=т- (6)
Из формулы (6) видно, что при свободных колебаниях мате-
х. риальной точки период
колебания не зависит
от начальных условий
и обусловливается
только массой точки (т) и
характером упругой
силы (с).
Выясним, как влияет
постоянная сила Р
(например, вес
материальной точки) на свобод-
__ ные колебания точки.
При наличии упругой силы F и постоянной силы Р
дифференциальное уравнение движения имеет вид:
d2x
Рис. 242.
т
dt
'-= — сх-{-Р.
Перенося первый член правой части влево и полагая — = k2
т *
-—р, получим:
g?+*\* = p.
(7)
Общий интеграл уравнения (7) получим в виде суммы общего
решения однородного и частного решения неоднородного
уравнений, т. е. в виде
* = 4sin(^ + a) + |r. (8)
Из формулы (8| видно, что наличие постоянной силы только
смещает свободные колебания (на величину -^-V Графически эти
колебания можно иллюстрировать синусоидой, изображенной
на рисунке 242.
2. Затухающие колебания
Под действием упругой силы материальная точка, как это
следует из предыдущего параграфа, совершает гармонические
колебания. Если на материальную точку, кроме упругой силы, дей-
356
ствует еще сила трения, характер колебаний может существенно
измениться. Рассмотрим в качестве примера движение небольшого
шарика, подвешенного к колеблющейся пружине и опущенного
в чашу с жидкостью.
Как показывает опыт, при небольших скоростях материальной
точки можно приближенно считать, что сопротивление среды
по величине пропорционально первой степени скорости и
направлено в сторону, противоположную скорости точки.
Отвлекаясь от конкретного примера, мы получим такую общую
схему: на материальную точку т, движущуюся прямолинейно,
действует упругая сила F и сопротивление среды R (см. рис. 243).
f т г/ F О F ТУ гп Я
+ Ш W ш I ^—■« • — » Л
Рис. 243.
Как было указано выше, величина сопротивления определяется
по формуле R = lvy где / — коэффициент пропорциональности,
характеризующий вязкость среды.
Проекция силы сопротивления на ось ОХ находится по
формуле:
/?, = -/*. (9)
Действительно, при движении точки возможны два случая:
1) либо vx = x^>0y 2) либо vx = х < 0. В первом случае из
формулы (9) следует, что Rx < 0, во втором — Rx > 0, что
соответствует направлению силы R в этих случаях.
Дифференциальное уравнение движения материальной точки
имеет вид:
Подставляя значения Rx и Fх из формул (2) и (9), получаем:
d2x . dx
mdF—~~ldt~~cx'
с ,_2 m
m
и деля их на /тг, получаем:
Полагая — = к2, — = 2Х, перенося все члены в левую часть
g+2kg + A'* = 0.
Характеристическое уравнение и его корни rx 2 для этого
линейного однородного уравнения имеют вид:
r^x = — \±V\x — kx. (10)
12** 357
При составлении общего интеграла следует различать
следующие случаи.
Первый случай. l<^k (случай малого сопротивления).
В этом случае корни характеристического уравнения мнимые:
rlfl = — l±iVk2 — Л2,
и поэтому общий интеграл находится в форме:
x = e-xt(Cl cos Vk2 — l2-t + C2 s'mW^.t).
Аналогично предыдущему придадим этому выражению более
компактный вид:
x = Ae-usm(Vk* — Х2.£ + а). (11)
Из этой формулы видно, что точка совершает затухающие
гармонические колебания, так как при t—+ooy e~u-—*0. Графически
Рис. 244.
эти колебания можно иллюстрировать затухающей синусоидой,
попеременно касающейся кривых Ае'и и — Ае~и (см. рис. 244).
Максимальные отклонения точки от положения равновесия
А1У Л2, Л3 называются амплитудами, расстояние между двумя
соседними максимальными отклонениями точки называется
размахом. Время Ту в течение которого точка совершает два размаха,
называется периодом колебаний.
Для нахождения амплитуд достаточно найти экстремумы
функции, задаваемой формулой (11). С этой целью найдем
стационарные значения, приравняв первую производную -£ нулю:
^ = — Ale~usm(Vk* — А«-* + а) +
+ AVW^-e-)tcos(Vk2~^T2-t-{-*) = Q.
358
Отсюда находим:
tg(VW-?.t + a)=^*;
Yk* — l2.t + oi = arctg Yk* ~ V. (12)
Из формулы (12) следует, что аргументы tk и tk+1 двух
соседних стационарных значений связаны соотношениями:
(|/"F^-^+1 + а) - (KF=T^ft+а) =п,
т. е.
Так как tk+1 — tk представляет собой время одного размаха и
является при малом сопротивлении величиной постоянной, то для
периода колебаний получаем формулу:
Из этой формулы видно, что при наличии сопротивления период
колебания увеличивается.
Для амплитуд получаем формулы:
Ai = Ae'ltism(Vk^^l2^ti-^oi) при /=1, 2, ... , ft, ... (13)
Из этой формулы находим, что
IT
1Л*+1' =g-*ttH-t-tt> = g"> (14)
I Ak\
ибо абсолютные значения синусов углов, отличающихся на тт,
одинаковы.
Из формулы (14) следует, что величины амплитуд образуют
геометрическую прогрессию.
Абсолютное значение логарифма знаменателя q = e 2 этой
\т
прогрессии, т. е. число | In q \ = -у, называется
логарифмическим декрементом затухания.
Второй случай. Х> k (случай большого сопротивления).
Корни характеристического уравнения
rlit = -\±VF=P
в этом случае являются вещественными и отрицательными. Общий
интеграл находится по формуле:
х = Схег*-\-Сгег*К (15)
Исследуем, что собой представляет график этой функции.
Из формулы (15) следует, что при t—>оо, х—*0, так как г19
г2<0.
359
Найдем экстремумы этой функции:
dx
S = Q'V>''' + <VV?r't = 0;
dt
t=-
■ln
~Cxrx
Со-Го
1
21/T
£2
.In
CxrJ
Из этой формулы видно, что если Сх и С2 имеют
противоположные знаки, то существует один экстремум, если одинаковые
знаки, то нет экстремума.
Таким образом, графики этой функции могут быть изображены
кривыми, представленными на рисунке 245.
Ц
\fiem экстремума | ^-^ | Один минимум
Рис. 245.
В этом случае движение точки не является гармоническим
(периодическим), и оно называется апериодическим.
Третий случай. l = k (предельный случай).
В этом случае корни характеристического уравнения
'1,1 = — *
являются вещественными и кратными. Общий интеграл находится
по формуле:
х = е-иШ + С,). (16)
Исследуем, что собой представляет график этой функции:
lim х= lim
с^ + с2—ь-т _Q —
Jt
lim г^=0,
dx
~di
t ->co
le}>
= -le-»(Clt + Ct) + Cle-" = 0;
Q - XC2
= 0;
t = -
XQ
Отсюда видно, что при t—*оо, х—► () и функция x(t) имеет
либо один экстремум (если £>0), либо ни одного экстремума
(если t<i0). Таким образом, в этом случае движение точки
360
не может являться периодическим (ибо существовало бесчисленное
множество экстремумов) и, следовательно, оно является
апериодическим (см. рис. 245).
3, Вынужденные колебания.
Будем рассматривать материальную точку, находящуюся под
действием упругой силы, а также силы, периодически
изменяющейся. Эта периодически изменяющаяся сила называется
возмущающей. Предположим, что проекция возмущающей силы на ось
ОХ определяется по формуле:
Qx = Н sin (pt + $). (17)
Дифференциальное уравнение движения материальной точки в этом
случае можно записать так:
Подставляя значение Fx и Qx из формул (2) и (17), получим:
d2x
m^j = —ex -\- Н sin (pt -J- p).
с H
Положим — = k2, — = h, перенесем первый член правой части
влево и разделим все члены уравнения на //г, тогда получим:
g + *'* = Asin(p* + p). (18)
Уравнение (18) является неоднородным линейным
дифференциальным уравнением. Общий интеграл этого уравнения равен сумме
общего интеграла хг однородного уравнения и частного решения
х2 неоднородного уравнения. xt характеризует движение точки,
обусловленное действием упругой силы, х2 характеризует
движение, обусловленное действием возмущающей силы. Поэтому х1
называется интегралом свободных колебаний, /а х2 — интегралом
вынужденных колебаний. Как было раньше установлено,
x1==Asin(kt-\-(x).
При нахождении частного решения х2 следует различать два
случая:
Первый случай. p=/=k, т. е. частота свободных
(собственных) колебаний не совпадает с частотой возмущающей силы.
В этом случае частное решение будем искать в форме:
■xt = Bsin(/rf + p).
Для нахождения В подставим значение х2 в уравнение (18):
^ + k%-x% = — Bp2sm{pt + $) + k2.Bsm(pt-{-$) = hsm(pt+$).
361
Отсюда находим:
S=;
dt'
k2 - p2'
Таким образом, общий интеграл неоднородного
дифференциального уравнения имеет вид:
х = хх-\- х2— Asm (kt -f- а) -(- В sin (pt -\- р).
Движение материальной точки в этом случае представляет собой
наложение (суперпозицию) двух гармонических колебаний с
конечными амплитудами.
Второй случай. p = k, т. е. частота свободных колебаний
совпадает с частотой возмущающей силы.
В этом случае частное решение будем искать в форме:
x2 = Bt sin (pt + h), (19)
где В и 8 — искомые величины. Для нахождения величин В и §
подставим значение х2 в выражение (18):
dH* + k2x2 = 2Вр cos {pt + Ъ) — ВрЧ sin (pt + i) +
+ BkH sin (pt + 8) = A sin (p* + p),
2£/> cos (pt -\-b) = h sin (/?* + p);
2Bp sin (V + 5 4- -J) = A sin (pt + p).
,^ Отсюда следует, что
2Bp =h\
*=р—J.
Общий интеграл
имеет следующий вид:
х = хг-\-х2 —
= Л sin (А*+.<*) +
+ fifein(/;^ + *)- (20)
Интеграл свободных
колебаний хг представ-
т. е.
-flf
Рис. 246.
с постоянной амплитудой,
представляет собой гармо-
ляет собой гармоническое колебание
Интеграл вынужденных колебаний х2
ническое колебание с неограниченно возрастающими амплитудами
и иллюстрируется возрастающей синусоидой, попеременно
касающейся прямых Bt и — Bt (см. рис. 246).
В результате наложения свободных колебаний и вынужденных
колебаний получается колебание с неограниченно возрастающими
амплитудами. Такое явление называется резонансом.
362.
На практике в случаях вибрации фундаментов, опор,
сооружений резонанс приводит к образованию колебаний с большими
амплитудами, при которых возникают силы деформации
(напряжения), превышающие иногда допустимые, и, следовательно,
приводит к авариям. Поэтому задача инженеров и конструкторов
заключается в этом случае в устранении причин резонанса.
§ 2. УСТОЙЧИВОСТЬ РАВНОВЕСИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ
1. Малые колебания системы
Устойчивое и неустойчивое равновесия системы
Будем рассматривать механическую систему, подчиненную
идеальным, голономным связям и имеющую п степеней свободы.
Обозначим обобщенные координаты системы буквами qiyq2, ..., qn.
Много конкретных задач приводят к рассмотрению колебаний
с малой амплитудой около равновесного положения. Иногда
колебания даже настолько малы, что их можно обнаружить только
специальными чувствительными приборами. Примерами такого
рода колебаний могут являться: вибрация машинных
фундаментов, вибрация самолетов, колебания вибрографа, записывающего
колебания земной коры, и т. д.
При малых колебаниях механическая система незначительно
отклоняется от начального равновесного положения. Если принять
равновесное положение за начало отсчета обобщенных
координат, то малые отклонения от положения равновесия
характеризуются малыми значениями величин ql9 q2, ..., qn. Это
обстоятельство позволяет при изучении малых колебаний систем
пренебречь высшими степенями обобщенных координат и
упростить выражения для кинетической и потенциальной энергии
таким образом, что дифференциальные уравнения движения
окажутся линейными.
Последнее имеет большое значение при изучении колебания
механических систем около положения равновесия. Отметим, что
равновесное положение системы может быть устойчивым и
неустойчивым. Равновесное положение системы называется
устойчивым, если после нарушения равновесия путем сообщения
точкам системы весьма малых начальных отклонений и весьма
малых начальных скоростей система в своем последующем
движении проявляет тенденцию к уменьшению отклонения от
начального равновесного положения. В противном случае,
когда при указанном выше малом отклонении система будет
стремиться к дальнейшему увеличению отклонения от положения
равновесия, равновесное положение системы называется
неустойчивым.
Положение устойчивого равновесия можно более точно
определить следующим образом: для каждого наперед заданного
363
положительного числа е^>0 можно указать два положительных
числа 8 и 8j, зависящие от е, так что из соотношений /
Ы<»(е)> IfcKM*) при t = 0
следует, что
IfcWKe 0=1, 2, .... я)
для каждого момента времени £.
Примерами устойчивого равновесия могут служить физический
маятник в наинизшем вертикальном положении, шарик, лежащий
на дне чаши, неустойчивого равновесия — физический маятник
в наивысшем вертикальном положении, шарик, лежащий на
вершине купола.
Совершенно ясно, что в случае неустойчивого начального
равновесного положения колебания системы могут и не являться
малыми.
Поэтому при изучении малых колебаний системы мы будем
считать, что начальное равновесие является устойчивым.
2. Критерий устойчивости системы
В положении равновесия системы, как было выяснено при
изучении принципа возможных перемещений, обобщенные силы
системы равны нулю.
Будем рассматривать только такие механические системы,
которые находятся под действием консервативных сил. В этом
случае система обладает потенциальной энергией, причем
обобщенные силы выражаются через потенциальную энергию по
формулам (см. гл. III, § 2, п. 4):
Qi = — -щ. при *=1, 2, ..., п.
Для начального, равновесного, положения получаем:
^=:0 при r=l, 2, ..., я,
т. е. потенциальная энергия П удовлетворяет необходимым
условиям экстремальности.
Лагранж установил достаточное условие устойчивости
равновесия. Точное доказательство этого условия дал позже Дирихле.
Эта теорема Лагранжа—Дирихле формулируется следующим
образом:
Равновесное положение системы, подчиненной идеальным
голономным связям и находящейся под действием
консервативных сил, является устойчивым, если потенциальная
энергия имеет минимум.
Докажем эту теорему.
Обозначим минимальное значение потенциальной энергии в
положении равновесия через Пх.
364
Выберем область значений обобщенных координат вблизи
положения равновесия
|<7,|<е при /=1, 2, ..., п
так, чтобы внутри и на границах этой области выполнялось
условие:
П>П1 при |^|<е-
Выбранная область значений q. называется областью минимума
функции.
Рассмотрим значения потенциальной энергии Я, когда одна
из координат qi находится на границе области минимума, т. е.
?/ = ±е (*=1, 2, ..., п).
Наименьшее среди этих значений больше, чем /7,. Обозначим
это наименьшее значение /7j4-a> где а>0. Таким образом, если
хотя бы одна из обобщенных координат находится на границе
области минимума, то
/7^/7,+а. "(21)
Выведем систему из начального положения равновесия,
сообщив точкам системы достаточно малые отклонения, которым
соответствуют обобщенные координаты qt из области минимума
и достаточно малые скорости.
Так как система находится под действием консервативной
системы сил, то к ней применим закон сохранения полной
механической энергии:
Т+Л=Т0 + Пй, (22)
где TQ и /70 — кинетическая и потенциальная энергия для
начального момента времени £ = 0.
Кинетическая энергия Т является величиной неотрицательной,
поэтому из равенства (22) следует:
П<ТЛ + П0. (23)
Выберем начальные отклонения и начальные скорости и
соответствующие им значения обобщенных координат qt и обобщенных
скоростей qt настолько малыми, чтобы
/7в</71+-|;
(24)
Это всегда возможно в силу того, что потенциальная энергия
является непрерывной функцией обобщенных координат qb а
кинетическая энергия Т непрерывной функцией обобщенных
координат q( и обобщенных скоростей qt.
365
Из соотношений (23) и (24) следует, что
/7<Я1 + а / (25)
для каждого момента времени t.
Полученное выражение (25) показывает, что при выбранных
отклонениях и начальных скоростях точек системы обобщенные
координаты q{ остаются внутри области минимума (| qt \ < е),
т. е. система не стремится к дальнейшему увеличению
отклонения от положения равновесия. Действительно, в противном
случае некоторые из обобщенных координат попадали бы на границу
области минимума и в этом случае выполнялось соотношение (21),
противоречащее соотношению (25).
Таким образом, начальное равновесное положение системы
является устойчивым.
3. Формулы для кинетической и потенциальной энергии системы
вблизи устойчивого равновесия
Если начальное равновесное положение системы является
устойчивым, то потенциальная энергия системы в начальный
момент £ = 0 является минимальной и выполняются соотношения:
(з?/)о = 0 ПРИ *=lf 2' ••" Пш (26)
Известно, что потенциальная энергия определяется с точностью
до произвольной постоянной. Поэтому минимальное ее значение
можно без ограничения общности принять за исходное в отсчете
и считать, что для начального момента £ = 0
Л0 = 0. (27)
Разлагая выражение для потенциальной энергии в ряд Тэй-
лора, получим:
Сохраняя в этом выражении только члены второго порядка
малости и учитывая соотношения (26) и (27), получим:
п^ЪЩг\™>-
Введем обозначения:
/ д2П \ _
тогда окончательно получим:
п
1
л=4 Е w/- (28>
366
Так как в начальный момент /7 = 0 и это значение является
минимальным, то приходим к выводу, что вблизи положения
устойчивого равновесия потенциальная энергия является
положительной, т. е.
п=2 £ cu«i9j>Q-
Кроме того, коэффициенты с^ удовлетворяют соотношениям:
ciJ — cJi-
Таким образом, выражение для потенциальной энергии вблизи
положения устойчивого равновесия представляет собой
положительную квадратичную форму. Например, для системы с одной
степенью свободы, характеризуемой обобщенной координатой q,
получаем формулу:
/7=4 cq\ (29)
где с>0.
Для системы с двумя степенями свободы и, следовательно,
с двумя обобщенными координатами qx и q2 получаем формулу:
2
П=Т Z cifii4j = ^ (clxq\ + 2c12qxq2 + c22q22). (30)
Поскольку эта квадратичная форма положительная, все миноры
определителя формы также положительны, т. е.
*н>0;
15" H='iA.-':,>o. (31)
1^21 °22l
Раньше (см. гл. III, § б, п. 2) было показано, что если связи
системы стационарны, то кинетическая энергия системы может
быть вычислена по формуле:
k k
k
s=\
=iI^(S£?/-IS?/)=
j=i
k
£fr9'
— 2 Z+ \Zums[dq. dqj
dr. dr.
9ib = T S Aiflikj*
где координаты A{j являются функциями обобщенных координат
и вычисляются по формуле:
k __
(32)
д,=5Л(|-|).
367
Из формулы (32) видно, что выполняются соотношения:
Аи = Ап при U У'=1, 2, ..., п.
Разложим выражения для коэффициентов Аи в ряды Тейлора по
степеням обобщенных координат и в этих рядах отбросим все
члены, кроме первого. Отбрасываемые члены, после умножения
на qflj будут величинами третьего и высших порядков малости.
Следовательно, в выражении кинетической энергии (так же как
и для потенциальной энергии) мы оставляем только члены
второго порядка малости. В результате этой операции для
кинетической энергии получим выражение:
п
Т=\ 2 aijki4p (33)
где коэффициенты a(j — постоянные величины, удовлетворяющие
соотношению а/у. = ау7 при j=l, 2, ..., п.
Как видно из формулы (33), выражение для кинетической
энергии вблизи положения устойчивого равновесия представляет
собой положительную квадратичную форму.
Для системы с одной и двумя степенями свободы получаем
формулы:
T=-^-aq2, где я>0, и (34)
^1К1?! + 2й12?,?2 + м!). гДе 0ц>О; (35)
\а" ?'| = *1А.-*;.>0. (36)
I "-21 ""22 I
§ 3. МАЛЫЕ КОЛЕБАНИЯ МЕХАНИЧЕСКИХ СИСТЕМ
С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
1. Механические системы с одной степенью свободы
Будем рассматривать механические системы, имеющие одну
степень свободы и находящиеся под действием консервативных
сил в случае, когда они подчинены идеальным голономным и
стационарным связям. Обозначим обобщенную координату таких
систем буквой q.
В качестве конкретных примеров подобных систем можно
рассмотреть математический и физический маятники. Примерами
таких систем могут служить также следующие приборы: 1)
стержень, сопряженный с диском и применяемый для изучения
крутильных колебаний (см. pine. 247); 2) сейсмограф Голицына —
прибор для фиксирования колебаний земной коры,
представляющий собой рамку ОАВ, в точке А которой прикреплена тяжелая
отливка Mt а в точке В — пружина ВС, удерживающая систему
368
в равновесии; 3) виброграф Гейгера — прибор для записи
колебаний фундаментов, частей машин и т. д., представляющий
собой маятник ОА, удерживаемый в положении равновесия
спиральной пружиной (см. рис. 249). В этом параграфе будут изучены
только малые колебания указанных механических систем около
положения устойчивого равновесия.
2. Свободные колебания
Предположим, что механическая система находится в
начальный момент в положении устойчивого равновесия под действием
консервативных сил. Отклоним механическую систему
незначительно от этого состояния и сообщим ей некоторую начальную
скорость, предоставив затем механическую систему самой себе.
Под действием внутренних и внешних сил механическая система
ЖШ^ШШШ
Рис. 247.
Рис. 249.
будет совершать некоторое движение. Это движение называется
свободным колебанием механической системы.
Для изучения свободных колебаний механической системы
воспользуемся уравнениями Лагранжа второго рода.
dt dq
dL
'dq
= 0.
Из формул (29) и (34) следует, что функция Лагранжа имеет
вид:
L=T—n = 4raq2
cq2
Подставляя это значение в уравнение Лагранжа, получаем
уравнение свободных колебаний в виде
aq-{-cq = 0.
Полагая — = &2 и деля обе части уравнения на а, приходим
к уравнению:
3? + *^ = 0. (37)
369
Это уравнение такого же типа, как и уравнение (3), поэтому
решение его и формулу для периода колебаний получаем в/виде
q = Asm(kt-\-a); (38)
Г=2тг]/у. (39)
Из этих формул видно, что обобщенная координата с
течением времени изменяется периодически, т. е. механическая система
совершает некоторые гармонические колебания, причем период
колебания Т и частота k = 1/ — зависят только от выражений
потенциальной и кинетической энергии {а и с). Таким образом,
характер колебаний определяется лишь свойствами самой системы
и того потенциального силового поля, в котором находится
механическая система, а не начальными условиями.
3. Затухающие колебания
Будем рассматривать механическую систему, состоящую из
материальных точек S(miy mzy ..., mn) и находящуюся в
условиях, аналогичных условиям п. 2. Кроме того, предположим, что
на точки материальной системы действуют силы сопротивления Fh
пропорциональные первой степени скорости, т. е.
h = -&, (40)
где р,-— коэффициенты, характеризующие характер сил сопро-
тивленияг причем р,->0. Для составления уравнения движения
воспользуемся уравнениями Лагранжа второго рода в форме
a (*L)_dT_n
dt \ дд ) dq~4'
Вычислим сначала обобщенную силу Q для механической системы,
которая слагается из обобщенной силы Qn соответствующей
консервативным силам, действующим на механическую систему,
и обобщенной силы Q2, соответствующей силам сопротивления:
Q=Q,+Q>- (41)
Силу Q1 находим согласно формуле:
Qt = -d£=-cq. (42)
Для нахождения силы Q2 найдем выражение для работы всех
сил сопротивления на возможных перемещениях точек
механической системы:
мф,*н£(?,.Ё)И
370
Отсюда следует, что
dq
ft-Zfr-g
t = \
Найдем выражение для обобщенной силы Q2 через обобщенную
координату q. С этой целью проделаем следующие
преобразования.
- dr;
Отсюда следует, что
Введем обозначение:
Ф=±ЫЬ£. т
i =1
Преобразуем это выражение следующим образом:
-4«ф(£-§)-4РМ-Л (45)
где
m-ib (|'-|)
Из формулы (44) следует, что Ф>0, поэтому из формулы (45)
получаем, что р(<?)>0. Разложим функцию р(^) в ряд Тэйлора:
В силу малости парометра q можно приближенно принять:
$(q)^(0) = b>0.
Тогда из формулы (45) получим, что
<p=U<i\
37]
а из формулы (43) получим выражение для Q2 в форме
Qt = -bq. ' (46)
Для обобщенной силы механической системы из формул (41),
(42) и (46) окончательно получим:
Q = — cq—bq. (47)
Подставляя формулу (47) в уравнение Лагранжа, получим
уравнение движения механической системы в виде
aq = — cq — bq.
Перенесем все члены уравнения в левую часть, разделим их на а,
и положив— = &2, — г=2Х, окончательно получим:
а ' а
J2
y + 2*g + AV = 0. (48)
Уравнение (48) относится к тому же типу, что и уравнение
затухающих колебаний для материальной точки. Поэтому при
нахождении решений следует так же, как и раньше, различать три
случая: 1) l<^k (малое сопротивление), 2) \^>k (большое
сопротивление), 3) \ = k (предельный случай). В первом случае
получаем, что механическая система совершает гармонические
затухающие колебания, во втором и в третьем случаях — апериодические
колебания.
4. Вынужденные колебания
Рассмотрим механическую систему, которая находится в
условиях, совпадающих с условиями пунктов 2 и 3. Кроме того,
предположим, что на механическую систему действуют
возмущающие силы, для которых обобщенная сила определяется
формулой:
Q2 = tfsin(/tf + S).
Движение механической системы под действием возмущающих
сил называется вынужденным.
Для составления уравнения движения механической системы
воспользуемся уравнениями Лагранжа второго рода в форме
dt $q dq **'
Обобщенная сила Q слагается из обобщенной силы Qt для
системы консервативных сил, действующих на механическую
систему, и силы Q2.
Таким образом,
Q = Ql + Qt = -cq + Hsin(pt + b). (49)
372
Подставляя формулу (49) в уравнение Лагранжа, получим:
aq = — cq-\-H sin (pt -f- 5).
Перенесем первое слагаемое правой части влево и разделим
с Н
обе части уравнения на а, вводя обозначения — = А2, — —h,
получим:
§+*V = *sin (/* + «). (50)
Тип полученного уравнения движения механической системы (50)
аналогичен типу уравнения (18). Поэтому при нахождении
общего решения следует, как и раньше, рассмотреть два случая:
1) рфк, 2) p = k.
В первом случае общее решение представляет собой сумму
двух гармонических колебаний с постоянными конечными
амплитудами, во втором случае получаем сумму гармонического
колебания с постоянной конечной амплитудой и гармонического
колебания с возрастающими амплитудами.
Рассмотренные выше малые колебания механических систем
с одной степенью свободы показывают, что их изучение
приводится по существу к изучению колебания материальной точки,
так как дифференциальные уравнения, описывающие движение
точки и механической системы, одни и те же.
§ 4. МАЛЫЕ КОЛЕБАНИЯ СИСТЕМЫ С КОНЕЧНЫМ ЧИСЛОМ
СТЕПЕНЕЙ СВОБОДЫ
1. Дифференциальные уравнения свободных колебаний
системы с п степенями свободы
Рассмотрим механическую систему, подчиненную идеальным,
голономным, стационарным связям, находящуюся под действием
консервативной системы сил и имеющую п степеней свободы.
Будем исследовать малые колебания системы вблизи ее
устойчивого равновесного положения.
Составим уравнения малых колебаний в обобщенных
координатах ql9 q2, ..., qnt используя уравнения Лагранжа.
d дТ дТ _ дП ,
dtdg dq2— dq2> V[>
L ^1- — Л I- — _ ЛИ
dt dqn дЯп ~~ дЯп '
При нахождении кинетической и потенциальной энергии можно
использовать формулы (28) и (33).
373
Из этих формул получим:
дТ • , • , /
-|J = 0; при i=\y 2, ...,//. (52)
дП . i .
Подставляя формулы. (52) в уравнения (51), получим:
Яц#1 +Д,2?2+ • • • +Ят^ + £ц?1 + £12<72+ • •. +clnqn = 0;
«21^1 + ^22^2+ •••+«1»§ГЯ+ ^11^1 +^21^1+ •••+^2^ = 0; (53)
^i^i +««2?2+ ••• +^^« + ^i^i + СщЯг+ ••• +^«9/1
дополученная система уравнений (53) описывает малые колебания
механической системы с п степенями свободы. Каждое из п
уравнений системы является линейным однородным уравнением
второго порядка с постоянными коэффициентами относительно п
обобщенных координат q19 q2, ...,<7n.
Мы не будем исследовать этой системы уравнений в общем
случае и ограничимся исследованием только частного случая
при п = 2. Исследование общего случая производится
аналогичным методом.
2. Свободные колебания системы с двумя
степенями свободы
Будем рассматривать механическую систему, имеющую две
обобщенные координаты qiy q2. В этом случае уравнения малых
колебаний будут иметь вид:
а11Я1 + а12Я2 + сиЯ1 + СцЯ2 = Ъ (54)
*Il5l + а2*Я2 + Ml + *..?. = 0»
где al2 = atl, с12 = с21.
Будем искать частные решения уравнений (54) в форме
q1=Alsin(kt+a); „
q% = Agsm(kt + a), <55'
где величины А1У Л2, к, а являются искомыми. Для нахождения
этих величин подставим выражения (55) в уравнения (54). После
сокращения на s'm(kt-{-a) получим:
Al(cn — k1all)ArA%(clt — ktalt) = 0; ,вд*
А (с21 - k>a21) 4- А2 (с22 - k*a12) = 0. <5b>
Полученная система двух линейных однородных уравнений (56)
имеет нетривальные решения для неизвестных Л,, А2 только
тогда, когда определитель системы равен нулю, т. е.
cn k #n cl2 k а12
\с21 k а12 с22 к а22
Д(**) =
= 0
374
или
А(А>) = (с11-ЛЧ.)(с..-*Ч.)-(с1,-АЧ.)1 = 0. (57)
Из уравнения (57) можно найти возможные значения частот,
поэтому оно называется уравнением частот. Уравнение частот
представляет собой квадратное уравнение относительно к2. Это
уравнение, как известно, имеет действительные корни, если
выражение Д(£2) либо принимает значения разных знаков (корни лежат
между значениями А2, для которых Д(&2) имеет противоположные
знаки), либо является полным квадратом.
Нетрудно убедиться, что уравнение частот имеет два
действительных положительных корня k\ и k\.
Дадим в выражении ^(k2) величине к2 различные значения
(сначала 0 и оо). Получаем:
МО) = *„*„-*:,><>;
Д(±оо)=+оо,
ибо при неограниченном возрастании k2 знак к (к2) совпадает со
знаком старшего коэффициента при А2, т. е. со знаком выражения
апа22 — а22>0.
Кроме того,
с^
Mr =-K.-S-o,. «°;
*&)=-(«..-ы<* (58'
Возможны два случая: либо одно из выражений Д( —) и Д( —)
\аП/ \а22/
не равно нулю, либо Д ( — J =Д( — ) =0. В первом случае
существуют два действительных различных корня. Если, например,
Д (— J < 0, то из (58) следует, что действительные различные
корни к\ и к\ удовлетворяют соотношениям:
Во втором случае получим соотношения:
r=cf=cf> (59)'
ип игг ai2
и корни являются кратными. Действительно, из (59) следует, что
уравнение (57) в этом случае приводится к полному квадрату.
Таким образом, в этом случае
иг __. иг __ £п ___ £22 ___ ^2
1 2 «11 «22 «12*
Рассмотрим подробней эти случаи:
375.
1°. Уравнение частот имеет различные корни.
Извлекая квадратные корни из чисел k\ и k\y найдей два
действительных и положительных значения: k = kl и k = k2, при
которых система (56) имеет соответственно решения Лп, Л12 и
21' 22» *
Ai(c„ —АЮ + Ai (с» —А?а„) = 0;
Аналогичные соотношения имеем для k = kv
Из соотношений (60) следует:
(60)
А ь2
—Li С12 #1^12 Q
Ап— с _и*„ —V*
и, следовательно,
4i =АХ (с12 — k\al2\ А12 = — Ах (си — k\alx)9
где Ах—произвольное число.
Совершенно аналогично для k = k2 получим:
Ац ==А2 (с12 - к2а12), Аи = А2 (cn &2aii)>
где А2 — произвольное число, причем
^21 g12 ^2^12 Q
Ci 1 ~"~~ 2 11
(61)
(62)
Таким образом, для частных решений системы дифференциальных
уравнений (54) получаем выражения:
Чи = А (с„ —*!<*„) sin (Л,*+ <*i);
q12 = — Ai(cli — k]ali)sia(kJt-Jrai); (63)
Чхх = Л2 (ci2—*1«»)sin (М+а2);
?22 = — Л (*П — Afol) Sil1 (V + «2)- (64)
Из формулы (61) и (62) следует:
9,u = Pi^ii; ?« = Р^м- (65)
Итак, в рассматриваемом случае различным частотам А, и k2
соответствуют два гармонических колебательных движения
(63) и (64).
Эти два колебательных движения называются главными, а
частоты £j и кг — собственными частотами.
Система дифференциальных уравнений (54) является линейной,
поэтому суммы найденных решений также являются решениями:
0.=0i, + 0i.==(c„ —A;a„M,sin(V + ai) +
+ (*„-А1Ч.) Л, sin (*,* + «.) (66)
Ял = ?„ + ?22 = - (с,, — *;«„) Л, sin (Л,* -f a,) —
— (с„— Л^.М, sin (*,* + *»)•
376
В силу соотношений (61) и (62) эту систему можно представить
в ином виде:
ft = — Pi (ci 1 — klai i) Ai sin (V + ai) —
?. = —(*ц—*foi) A sin(V + ai)— l j
— (*» — AfoJ Л2 sin (£2£ + a2).
Пара решений (66) содержит четыре произвольных постоянных:
А19 А2, а19 а2, и поэтому она представляет собой общее
решение системы (54). Отсюда мы приходим к принципу наложения
малых колебаний, заключающемуся в том, что общее
колебательное движение системы является результатом наложения
главных колебаний.
Для нахождения произвольных постоянных в решении (55)
используют начальные условия. Для этого достаточно задать
значения обобщенных координат д1У д2 и обобщенных скоростей
q19 д2 для начального момента £ = 0. Для определения
произвольных постоянных удобно использовать формулы (67) и новые
постоянные, определяемые по формулам:
— (си — Каи)А\ sina1=M; —(сп—k\alx) Al cosz1=N;
— fan— к2гап)А^таг = Я; —(cll — k\all)A2cosa2=S.
Тогда систему (67) можно представить в виде
qi = ^Мcos kxt-\- pjiVsinkxt-\-$2 R cos k2t-\- p8Ssink2t; ,fi7,v
qt = M cos kj-{-Nsin kxt-{rR cos k%t-{-Ssmktt ^D/ '
Используя заданные начальные условия, легко определить
постоянные М, N, /?, 5.
Выясним картину главного колебательного движения системы.
С этой целью в уравнениях главных колебаний заменим
обобщенные координаты прямоугольными координатами.
Обозначим декартовые координаты точки системы через хь
уь zh координаты этой точки в равновесном положении — через
Разложим декартовые координаты по обобщенным
координатам в ряды Тэйлора и отбросим члены малости выше первой,
эти операции приведут к линейным выражениям:
Xi = xf + *u<Ii + *itqil
*i = *! + Vi9i+li2<If (68)
Подставив в формулы (68) значения д1 и д2 из формул (63)
(либо из формул (64), получим значения отклонений точки от
положения равновесия:
xt — Xf = К (clt — k\alt) — a/2(^u—^u)]^! sin (A^+aJ;
Vi— ^? = [P«i(ci. —*!fli.) — Pi. (^11— kXi)] A sin^^ + aj;
^ — ^ = [Y«i(ci. — K^xt) — Ъг(с1Х— *!«„)]i4s sin(A^ + aJ,
377
Исключая из этих уравнений время £, получим:
«п (ci2 — М») — ai2 (Си — Мп) ?л (ci2 - Mis) — Р/2 (сп — Мп)
2-. 2?
Tii (ci2 — я, а12) у/2 (С,, &i#u )•
Отсюда видно, что если система совершает главное колебание,
то каждая точка системы совершает движение по прямой,
проходящей через ее равновесное положение.
2°. Уравнение частот имеет равные корни.
В этом случае частоты k1 и k2 удовлетворяют соотношениям
k\ = k\ = ^- = ^ = ^-. (69)
1 2 ап а22 al2 v '
Подставляя значения k\ и k\ из (69) в уравнения (56), мы
видим, что уравнения (56) имеют произвольные решения для Ах и
Л2. Для нахождения частных линейно независимых решений
выберем:
A21=zv'9 А22=А2,
где А1 и А2 — произвольные постоянные. Этим значениям
соответствуют частные решения:
qll=Alsin(klt + al); д12 = 0;
д21=0; (J2i = A2sm{k2t-\-^).
Сумма этих решений также дает решения:
9i = gn + 9it=Alsm(klt + al);
Я 2 = Я 21 + Я 22 = К s}n (ktt + а2)-
(70)
Полученная пара решений содержит четыре произвольных
постоянных: А19 А2, ах, а2, и поэтому она представляет собой
общее решение системы (54).
Чтобы выяснить характер главного колебательного движения
в этом случае, подставим значения д1 и д2 из формул (70)
в уравнения (68):
х( — xf — Да,, sin fkxt -|- aj -|- Д2а/2 sin (k2t -f- a2);
Vi — У? = A&i sin (V + aj + Др,2 sin (*t* + a2);
*/ — *F = Ay,., sin (V + eg -f Л2у/2 sin (fttf -f a2).
Исключая из этих уравнений время £, получим:
= 0.
■*/
У/
2/
— •«? «/,
-У? Р/,
—Z? Тм
a,s
fc.
Y/.
(71)
378
Полученное уравнение представляет собой уравнение плоскости,
проходящей через точку (xf, yf, zf). Таким образом, в
рассматриваемом случае каждая точка системы в главном колебатель-
ном движении перемещается в плоскости, проходящей через
равновесное положение точки.
Нетрудно показать, что траекторией каждой точки будет
являться эллипс.
3. Главные координаты
В § 2, п. 3, были найдены выражения для кинетической и
потенциальной энергии механической системы с двумя степенями
свободы:
Т= -§■ (axlq\ + 2altqxqt -f a„q\);
п = \ (^пЯг + 2c12q,q2 + c22q\).
Из формул (72) видно, что выражения для кинетической и
потенциальной энергии зависят от выбора обобщенных координат.
Для изучения малых колебаний механических систем бывает
полезным упрощать выражения для кинетической и потенциальной
энергии за счет выбора новых обобщенных координат 6Х и 62 так,
чтобы эти выражения имели вид:
T=±(aji\ + att); n = ±(cfi\ + c№. (73)
Обобщенные координаты Ьх и 02, для которых кинетическая и
потенциальная энергия выражается в виде (73), называются
главными или нормальными координатами.
Таким образом, главные координаты отличаются тем
свойством, что кинетическая энергия в этих координатах выражается
суммой квадратов соответствующих обобщенных скоростей с
постоянными коэффициентами, а потенциальная энергия — суммой
квадратов координат с постоянными коэффициентами. Выясним
вопрос о существовании главных координат.
Потенциальная и кинетическая энергия вблизи положения
устойчивого равновесия, как было показано, представляет собой
положительные квадратичные формы. Из высшей алгебры
известно, что при помощи линейных преобразований переменных
можно две заданные квадратичные формы привести к сумме
квадратов, т. е. к виду (73).
Используя геометрические методы, эти преобразования можно
пояснить следующим образом.
Приведем сначала кинетическую энергию к сумме квадратов
согласно преобразованиям:
Т= у (axxq\ + 2axtqxqt -f a22q22) =
= iKan*i + ai2<72)2 + KAi — о\г) Я\] = -J (-*' +Я> (74)
379-
где
* = Ki?i+tfi2?2):^='' y = -^=Va^att — ^ql (75)
У an У дп
Выражая ^, и #2 из формул (75) через х и у и подставляя
найденные значения в выражение потенциальной энергии (30),
получим выражение вида:
П=±(п*пх* + 2п1,ху + п1У), (76)
где /in, я12, п22 — некоторые числа.
Уравнение
П = \ (п\,хг + 2п12ху + п1У) = const
представляет собой уравнение эллипса в плоскости X, Y. Путем
поворота осей координат на угол а вокруг центра приведем
уравнение эллипса к канонической форме:
n = ±(kyi + klbl) = consty
где
X = 6j cos а — 02 sin а; .__.
j/ = 6j sin а-|- G2 cos а. I ''
Подставляя формулы (77) в выражение кинетической энергии (35),
получим:
7-=l(^+j;*) = l(6; + l)J). (78)
Таким образом, в координатах 6j и 62 окончательно получаем:
Т-*<* + * (79)
л=|(ед+ед.
Из вышеприведенных рассуждений видно, что обобщенные
координаты qx, q2 и главные координаты 02 и 02 связаны
линейным преобразованием, т. е.
При нахождении коэффициентов преобразования alf а2, f^, [32
без ограничения общности можно положить рд = (J2 = 1.
Действительно, если ввести новые переменные Ь'1=$1-Ь1 и 62=р2-02,
то это не приведет к появлению в выражениях Т и П
произведений переменных 6^ и 02, а также Ьа и 62. Коэффициенты
преобразования о^ и а2 можно определить, если выражения
подставить в выражения 7 и /7 и затем коэффициенты при
произведениях переменных Ьх и 62 приравнять к нулю.
380
В главных координатах уравнения малых колебаний системы
имеют вид:
Отсюда в качестве решений получаем:
62 = ^2sin(^ + a2). W
Из полученных формул (80) видно, что при рассмотрении
малых колебаний в главных координатах главные колебания
системы таковы, что одно из главных колебаний для собственной
частоты равно нулю.
Таким образом, главные колебания задаются формулами:
eu=i411sin(V + a1); 612 = 0;
О21 = 0; 622 = ,42sin(£2£ + a2).
Действительно, для случая разных частот (k1=^=k2) это
вытекает из формулы (67), а для случая одинаковых частот из
формул (70).
4. Вынужденные колебания системы с двумя
степенями свободы
Предположим, что на механическую систему, кроме упругих
сил, действуют еще возмущающие силы. Если обобщенные
возмущающие силы обозначить через Qx (t) и Q2 (t)y то уравнения
малых колебаний будут иметь вид:
*11?1 + ^гхЧг + ^21^1 + ^22?2 = Q2 (*)•
В простейшем случае возмущающие силы Qx и Q2 изменяются
по синусоидальному закону, т. е.
Ql = H1sin(pt+i); Qt = HEsm(pt-i\-b).
В этом случае частные решения системы (81) можно искать
в виде
ql = h1sm(pt + b); q2 = h2sm(pt + t) (82)
Для определения величин hx и А2 подставим выражения (82)
в уравнения (81), тогда получим:
{cll—p2a11)h1 + (cl2—p2al2)h2 = H1;
(с21 —р2а21) hx + {с22 —р2а22) h2 = Ht.
Если определитель этой системы Д(/>2) не равен нулю, то
можно найти hx и h2.
Если же определитель к(р2) равен нулю, то его корнями
являются частоты главных колебаний, ибо Д(р2) = 0 совпадает с
381
уравнением частот. Этот случай, как можно показать,
соответствует резонансу, т. е. приводит к неограниченному возрастанию
амплитуд с течением времени.
5. Задачи
Задача 38. В вибрографе, предназначенном для записи
колебаний фундаментов, частей машин и т. п., маятник веса Q
удерживается под углом а к вертикали при помощи спиральной
пружины жесткости с; момент инерции маятника относительно оси
вращения О равен /; расстояние центра тяжести маятника от
оси вращения s. Определить период свободных колебаний
вибрографа (см. рис. 250).
Маятник совершает малые колебания около положения
устойчивого равновесия, находясь под действием силы тяжести Q и
упругих сил пружины. Период
свободных колебаний маятника определяется по
формуле: Г=2тт у у, где а и Ъ —
коэффициенты, определяемые из выражений
для кинетической и потенциальной
энергии. В качестве обобщенной координаты
можно принять угол поворота маятника ср,
отсчитываемый от положения равновесия.
Кинетическая энергия определяется по
формуле Т= у/?2 и, следовательно, a=L
Для нахождения формулы
потенциальной энергии вычислим работу (А),
совершаемую силой тяжести (AJ и упругой
силой пружины (Л2) при перемещении
маятника из некоторого положения, характеризуемого углом cp-f-a
(к вертикали), в положение равновесия:
А ==А1 -\- А2у
Al = Qs [cos a — cos (cp -f- a) ]=Qs (cos a — cos cp cos a -f- sin cp sin a) =
= Qs [cos a (1 — coscp) -[- sin cp sin a] =
= Qs(2 sin2 у cos a -J- sin cp sin a j^Qs fy cosa-{-<psina J ,
ИОО
sincp
(маятник совершает малые колебания).
Момент упругих сил, приложенных к маятнику,
пропорционален углу поворота маятника относительно положения
недеформированной пружины и определяется по формуле: £0 = с (ср—а0),
где а0 — угол, соответствующий положению недеформированной
пружины. Поэтому для работы упругих сил получим выражение:
t t cp
382
Таким образом, полная работа определяется по формуле:
А= Qs ( ^-cosa + ysina) -\-Ц- — ca0<f>.
Заметим, что в положении устойчивого равновесия момент силы
тяжести равен моменту упругих сил пружины, поэтому
Qs -sin a = ca0
и, следовательно, для потенциальной энергии получим формулу:
n=-^(Qs cos л-{-с) 'f2.
Это выражение позволяет найти коэффициент Ь\
b == Qs • cos a -[- с.
Итак, для периода свободных колебаний маятника получаем
формулу:
Г=27т]/^ /__ .
У (?.? cos a -j- с
Задача 39. Двойной маятник, состоящий из двух
одинаковых стержней, шарнирно скрепленных между собой, совершает
малые колебания около поло-
жения устойчивого равнове- °iQ
сия. Найти уравнения
движения маятника, если вес
каждого стержня равен р,
длина— 2/ и начальные угловые
скорости движения стержней
из вертикального положения
равновесия соответственно
равны (ох и (о2 (см. рис. 251).
В качестве обобщенных
координат выберем углы,
образуемые стержнями с
вертикалью, т. е. q1 — ср1Э q2 = <р2.
Вычислим кинетическую
энергию
т= т, + г2,
где Тх и Т2 — соответственно кинетические энергии первого и
второго стержней.
Используя правила вычисления кинетической энергии во
вращательном и произвольном движении и формулы для моментов
инерции стержня относительно его конца и середины, получим:
Рис. 251.
7V
1 . . 2 1 Ш2 .2 2pl2 .2
7,. = Hvc + T/c«
lg ис ~ 2 \2g *2 2р- с i 6# ^2*
"2*
2^
б£
383
Согласно формуле Эйлера для скоростей получим:
Вектор Vo2 перпендикулярен к первому стержню, a vt
перпендикулярен ко второму, поэтому угол между ними равен ух — <р2
(см. рис. 251). Величины этих векторов находим по формулам:
Vo2=2ly1; v1 = fa = l<(1.
По теореме косинусов находим:
Vc = Vo2 + v[ + ^v0%vx cos (ср4 — cp2).
Для малых колебаний приближенно принимаем cos (срх — <р2)^1,
поэтому
и для кинетической энергии окончательно получим:
г=г1 + г2=2^(р:+2^(4/2*:+/2Ф22+4/2ф1<р2)+^^
т. е.
Потенциальная энергия системы находится по формуле:
/7=М1+р(А, + Л,) = р(Л1 + А. + А,),
где
Al = /(l_coe<p1) = /(-|-ff+...)*4^
A2 = /(l-cos<p2) = /(fl-|+-.
А, = 2А, =*=/<?!•
Окончательно для выражения потенциальной энергии находим:
Составим дифференциальные уравнения движения, используя
уравнения Лагранжа:
£ 11- — II— — <Ш-.
dt д ф, дух дер,
if. J[ZL —dJL— _^Z
*# а ф2 dcp2 а?2
Используя выражения для кинетической и потенциальной
энергии, получим:
дТ pi2 /16. , 0. \ дГ п ая Q ,
d ср, £ \ 3 / dcp, дер,
384
Окончательно уравнения Лагранжа принимают вид:
f (4?. + 2<Р.) +/>/<Р, = 0.
После упрощений получим:
16/Ь,+6/^ + 9^ = 0;
6/^ + 4/^ + 3^ = 0.
Используя обозначения и формулы п. 2 § 4, получим:
ап = \Ы; а12 = Ы; а22 = 41;
^и=9^; с12 = 0; c22 = 3g.
Уравнение частот в этом случае имеет вид:
А(*') = ('и -*4i)(с2г -k2a22)-(с1Ш-к2а12)2 =
= (9g — 16/A2)(3g- — 41 k2) — 36l2k4 = 0
или
28/2&4 — S4lgk2 + 27g2 = 0.
Отсюда находим собственные частоты:
k2 = 42gl± Vl7Mg2l2 — 75Qg2l2^ 42gl±32gly
т. e.
kl^lOgl; kx ^ УЩ1-
k\ ъ Ugl\ К ^ V74gL
Для составления уравнений движения используем
уравнения (67'):
?1 = ^М Cos k,t-\- p,7Vsin kxt + p2# cos k2t + p2Ssin £2£;
(p8 = M cos V + TV sin kj + /? cos k2t -f- 5 sin £/, (83)
где
= c12-fe2a12= 60^2 = 60Z2 .
Pl cn— k\au 9g- \60gl2 9 - 160?'
g = с1а-^д1>= 444gl2 _ 4441"
cu — k\au 9^-1184^2 9— 1184^
При t = 0 из уравнений (83) получим:
p1M+pi/? = 0;
M+R = 0.
Отсюда получаем:
M=R = 0.
Дифференцируя уравнения (83) и подставляя £ = 0, получим:
*iPi^ + *,P,S = idi;
385
откуда получаем:
to, k2$2
ю2 k2
~kJ7kJ~2
«, «2
M« - «>i
to, — w2p2 t
~ ^(Pl-Pl)'
N
" — К (Pi - M'
где величины &x, &2, ф19 р2 ранее определены.
Уравнения движения задаются в виде
уг = j^yv sin А^ -f- p2S sin £2£;
ср2 = N sin kj + 5 sin £,£.
Глава VII
ДИНАМИКА ТВЕРДОГО ТЕЛА
При решении различных задач науки и техники приходится
часто встречаться с движением твердых тел. Поэтому изучение
движения твердого тела является одной из важных проблем
механики.
В этой главе будет изучено движение твердого тела сначала
в частных случаях, а затем и в общем случае.
Предварительно изучим вспомогательный вопрос о моментах
инерции.
§ 1. МОМЕНТЫ ИНЕРЦИИ
1. Моменты инерции относительно полюса, оси и плоскости
В ряде задач механики приходится пользоваться величинами,
представляющими собой сумму произведений масс точек
механической системы на квадраты их расстояний от полюса, оси или
плоскости. Эти величины называются моментами инерции. С
величинами такого рода мы уже встречались при вычислении
кинетического момента тела, вращающегося вокруг неподвижной
оси (глава II, § 4, п. 3).
Итак, если задана механическая система S(m19 т2,...,тп) и
некоторый полюс О, ось и или плоскость тг, причем расстояние
точек mk от полюса, оси и плоскости соответственно равны rk,
pk и dk (см. рис. 252), то для моментов инерции механической
системы относительно полюса, оси и плоскости получаем
формулы:
/0= 2 rnf\\ Ia= 2 Щ9%\ /.= 2 mkd\
k = \ k — \ kz=z\
(1)
Из определения моментов инерции следует, что размерностью
моментов инерции является [г-см2].
386-
Если механическая система является твердым телом, то для
нахождения момента инерции сначала разбиваем тело на
конечное число элементарных частей, находим приближенный момент
инерции по формулам (1), а затем, переходя к пределу при
условии, что элементарные массы стремятся к нулю, получаем
для истинных моментов инерции некоторые интегралы.
Выведем формулы для
нахождения моментов инерции
твердого тела.
Рис. 252.
Рис. 253.
Пусть координаты центра элементарной части тела,
обладающей массой kmk суть xk, yk> zk (см. рис. 253), тогда для
моментов инерции получаем приближенные формулы:
/.* 2 a«W= 2 LmM+yl+zQ;
k — l
k=l
/, * 2 A«* (У1 + z\)\ Iy =* 2 А/яЛ(2* + x\);
k=l
k = l
%bmh{xl + yl);
k = l
n
n
... .. yoz^ 2 A»****; Ixoy^= 2 Аад
k — 1 & = 1 &=1
W^ 2A/«*j;J; /
k — 1
Переходя к пределу при Дяг^^О, получаем:
(V)
1*=[[№ + Zt)dm> Iy=]\\ (** + **) dm;
,2
(V)
(У)
(2)
(3)
lxoz~
]^y2dm;
(V)
lYOZ
= \\\x2dm\
1хоу=[[[*Чт. (4)
(V)
387
Из формул (2), (3) и (4) следует^ что
/, + /„ + /, = 2/,; •' (5)
Если тело является однородным и его плотность равна р, то
dm = pdv. Можно условно положить р = 1, и тогда величины,
получаемые из формул (2), (3), (4), называются геометрическими
моментами инерции тела. Для геометрических моментов инерции
получаем формулы:
(V)
(io (V) (3')
Iz = №(x2+y2)dv;
(V)
^xoz=S5^2^; IY0Z=mx*dv; IXOy=\\\z4v. (4')
(V) (V) (V)
Если тело является плоским или линейным, то эти интегралы
соответственно переходят в двойные либо в линейные.
Для механических систем устанавливается также понятие
радиуса инерции согласно следующему определению:
Радиусом инерции механической системы относительно
полюса, оси или плоскости называется расстояние, на квадрат
которого надо умножить массу системы, чтобы получить
соответственно моменты инерции относительно полюса, оси или
плоскости.
Таким образом, радиус инерции R механической системы
определяется из формул:
MRl = IQ; MRl = la\ MRl = L,
т. е.
Ro=/h K»=Yb *»=У\- <6>
При рассмотрении многих вопросов приходится выражать
момент инерции относительно некоторой оси через момент инерции
относительно оси, параллельной к данной.
Эта замена осуществляется на основе следующей теоремы:
Момент инерции относительно некоторой оси равен моменту
инерции относительно оси, проходящей через центр инерции и
параллельной к данной, сложенному с произведением массы
системы на квадрат расстояния между осями.
Для доказательства этого свойства предположим, что точка
С является центром инерции системы, а ось а является
произвольной.
.588
Построим прямоугольную систему координат OXYZ так,
чтобы ось OZ проходила через точку С и была параллельной
оси и. Найдем точку пересечения А оси а с плоскостью OXY
и из произвольной точки mk системы опустим перпендикуляры
на плоскость OXY, ось и и ось OZ (см. рис. 254).
Рис. 254. Рис. 255.
Обозначим расстояние между осями через d и координаты
точки А через а, Ь. Тогда из рисунка 254 получаем, что
/«= 2 гпА= £ тк[{хк-аУ + {ук-ЬГ] =
п п л
= 2 'M-*!+J'*)+ 2 тА(^2 + Ь2)— 2а 2 rnkxk —
4=1
Но
и из формул для координат центра инерции получаем, что
п п
2 ткхк = Мх = 0; 2 w^ = Afy =0.
Подставляя найденные величины в выражение для 1и ,
окончательно получим:
/n=It + Md\ (7)
2. Моменты инерции относительно пучка лучей
Возьмем некоторое твердое тело.
Выберем в нем некоторый фиксированный полюс О и
проведем через полюс О произвольно ось и (см. рис. 255). Найдем
формулу для момента инерции тела относительно оси и. С этой
целью примем полюс О за начало прямоугольной системы
координат.
13 Г. М. Финкельштейн 389
Как известно, момент инерции 1и определяется по формуле:
п /
1Л =lim 2 Am,AJ, (8)
Д/Л; -* О Л= 1
где Д/тг,- (/=1, 2,..., я) — массы элементарных частей тела.
Обозначим координаты элементарной массы km,; через х1% у h
zi9 направляющие косинусы оси а через а, р, у и орт оси й
через е.
Тогда имеют место формулы:
h} = r] — (rioxn<t)% = r) — {rre)t =
= W+Л1 + *?) - (-*/« + ЛР + */Y)f =
= л?(1-а-)+у|(1-Р1) + «?(1-Т1)-
— 2ap^j/, — 2аулЛ — 2р?Л*/.
Так как
то полученную формулу можно записать в следующем виде:
— 2<фу>, — 2аух,2:, — 2ftj>,z, =
= (У* + *?) *" + (*? + г?) р2 + (*? +J>2) Y2 -
— 2apjy>, — 2а^,г, — 2fa.y,2,.
Подставляя это выражение в формулу (8), окончательно
получаем:
где
/,= litn 2 Д/и,Су? + 2?)= (Гf(у*+ 2»)Ли; (10)
/, = «га S Дот, (2,? + л?) = f f f (z! + л2) rfm;
/^ = Нт 2 ^т{х{у{ = \ \\ *>y dm;
n
Ixz = lim 2 ^mixizi= \ \ \ xzdm\
A/Bi-*0 i=z\ (V\
n
l9t = \\m 2 ^miyizi=\\\yzdm. nn
Аяц- -(V)-
890
Выражения для Ix, Iyy Iz представляют собой моменты инериии
относительно координатных осей. Величины / , /хг,
1уг
называются центробежными моментами инерции
Из формулы (9) видно, что для вычисления момента инерции
тела относительно произвольной оси, проходящей через начало
координат — точку О, достаточно задать направляющие косинусы
оси и вычислить шесть величин — осевые и центробежные мо^
менты инерции.
3. Эллипсоид инерции
Если рассматривать пучок осей, то совокупность моментов
инерции относительно их образует некоторую совокупность
чисел. Чтобы дать геометрическую интерпретацию этой
совокупности, введем понятие
эллипсоида инерции.
Построим на одной из осей
а пучка точку М согласно
формуле (см. рис. 256):
Via
Геометрическое место этих
точек для пучка осей образует
некоторую поверхность. Найдем
уравнение этой поверхности.
С этой целью обозначим
текущие координаты точки М через
ху у, г.
Тогда, приняв за направляющие косинусы оси а а, р, у,
получим:
Рис. 256.
х =
Vlu
vv y~vru
и, следовательно,
а = УТи.х; $ = УГи-у; 4 = VTa.z.
Подставляя эти выражения в формулу (9), получим:
ljux* + /yIay2 + IJuz2 — 2IxyIuxy — 2IX2Iaxz — 2IyJ„yz = Iu.
Сокращая это равенство на /й, окончательно получим:
Ixx2 + Iyy2 + I2z2 - 21хуху - 2lxzxz - 2Iy2yz = 1. (12)
Уравнение (12) представляет собой уравнение поверхности
второго порядка. Для того чтобы установить тип этой поверхности,
заметим, что для тела 1а=/=0 и, следовательно, min/a=^0-
Это значит, что величины отрезков ОМ ограничены в своей
совокупности, т. е. поверхность второго порядка находится
13*
391
в конечной части пространства. Такой поверхностью может
являться только эллипсоид, ибо параболоид и гиперболоид (также
возможные поверхности второго порядка) являются
неограниченными.
Поверхность (12) называется эллипсоидом инерции. Таким
образом, каждому полюсу соответствует некоторый эллипсоид
инерции. Из уравнения (12) видно, что начало координат О
является центром эллипсоида инерции. В самом деле, для каждой
точки М ix, уу z), лежащей на эллипсоиде, имеется
противоположная точка N (•—ху —уу —z)y
также принадлежащая
поверхности, ибоуравнениесодержит только
члены второй степени.
Главные оси ОХ1У ОУг, OZl
эллипсоида инерции называются
главными осями инерции.
Если уравнение эллипсоида
инерции (12) привести к главным
осям (см. рис. 257), то получим
уравнение эллипсоида в виде
л*:+/*/;+/ж=i
и, следовательно, центробежные
моменты относительно главных
осей равны нулю. Величины /,, /2, /3, представляющие собой
моменты относительно главных осей, называются главными
моментами инерции.
Если уравнение (12) привести к такой системе координат,
чтобы одна из осей, например OZy была главной, то в уравнении
исчезнут члены, содержащие произведения yzy xzy и,
следовательно, центробежные моменты 1хгУ Iyz в этом случае будут равны
нулю.
Если главная ось проходит через центр инерции тела, то она
называется главной центральной осью.
4. Свойства главных осей инерции
Рассмотрим некоторые свойства главных осей инерции.
Первое свойство. Главная центральная ось инерции
является главной осью инерции относительно любого полюса этой оси.
Действительно, предположим, что ось OZ является главной
центральной осью. В этом случае
п п
/ =lim ^b,mixizi = Q\ Ivz= 'im 2 ^miyizi = 0;
Хс=Ус = °-
Выберем некоторый произвольный полюс Ох на оси OZ и рас-
392
смотрим систему координат O^X^Y^Z^ где оси 01Х1 и 01Y1
соответственно параллельны осям ОХ и OY (см. рис. 258). Тогда
получим, что
п п
I = lim 2 ^mixiizi — а)= ^m 2 ^rnixizi — aMxc = 0;
1 ' Д/тг;-»0 /=1 Д/я»-»0 /=1
/ = lim 2 ДВД- (г, — а)= lim 2 ДлДО, — аМус = О
'* Д/тг4->0 (=1 Д/я4.->0 г = 1
и, следовательно, ось OZ также является главной относительно
полюса Ог
Второе свойство. Если тело имеет ось материальной
симметрии, то эта ось является главной центральной осью.
Осью материальной симметрии тела
называется ось, относительно которой
масса тела расположена симметрично.
Это означает, что для каждой
элементарной части Lm существует в теле
элементарная часть Д#г' такой же
массы (Д/гг = Д//г'), причем массы Д/тг
и Д/?г' расположены симметрично
относительно оси. Для доказательства
свойства выберем эту ось в качестве
оси OZ. Тогда каждой элементарной
части тела д^т( с координатами xh Рис. 258.
yi9 zt соответствует симметричная
относительно оси часть Дт- с координатами — хь—yt, z{. Для
центробежных моментов и координат центра С получим значения:
У,
1хг= lim [2 Д/п^-г,— 2 Щх(г(] = 0;
^/72i —>- 0 /=1
1=1
I = lim [2 Д/ад-Z/— 2 Д<Уй.] = 0;
Д/я4 -* О i = l i= 1
п п
2 д/и/ л,- — 2 дw/x/
л = lim ——г — = 0;
С д,Л^о ^2(Am/ + K)
j/ = lim
2 ДЛ2/УГ
/=1
Дт/jv/
Jj(^/ +
Am,-)
Из этих формул следует, что ось OZ является главной и
проходит через центр инерции. Следовательно, она является главной
центральной осью инерции.
Третье свойство. Если тело имеет плоскость
материальной симметрии, то всякая ось, перпендикулярная к этой плоско-
13* Г. М, Финкелыитейн
393
сти, является главной относительно точки пересечения оси
с плоскостью. /
Рассмотрим некоторуют ось OZ, перпендикулярную к
плоскости материальной симметрии (см. рис. 259).
Тогда для каждой
элементарной части тела
массой кт{ с координатами xh
уь г{ существует
симметричная ей относительно
плоскости OXY масса
krrt—krrii с координатами
xhyh—Zi и, следовательно,
п
п
о ocq — Saw;^/] = o;
Рис. 259. /=i
1уг=\\т [2 ^miyizi — 2 Д^^.] = 0.
Из этих формул заключаем, что ось OZ является главной
относительно полюса О.
Задача 40. Найти момент инерции однородного шара массы
М и радиуса R: 1) относительно центра О, 2) относительно оси
и, проходящей через его центр.
1. Найдем момент инерции шара относительно его центра. По
формуле (2) получаем, что /0 (x2+y2 + z2)dm.
Для вычисления интеграла воспользуемся сферическими
координатами, тогда (см. рис. 260)
dm = pdv,
где р — плотность,
dv = r2sinQdbd<bdr;
/0 = р J jjr4sin6dcW0tfr =
00 о
= ?-2^2f=(4^P
3tf_2
5 "
= 5 М/?2.
Итак,
Рис. 260.
/0 = |-ЛГЯ2.
394
2. Для вычисления момента инерции относительно оси и
заметим, что в силу симметрии моменты инерции относительно
каждой оси, проходящей через центр, равны между собой.
Поэтому достаточно вычислить момент инерции относительно
оси ОХ. Из формулы (5) для однородного шара следует:
так как
2/0 = 3/„
/
Таким образом,
3 °
*и * х *у ~~
1Х 1 у lZ,
:/z = ^MR*.
§ 2. ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЯ
1. Поступательное движение твердого тела
Как уже было установлено в кинематике, изучение
поступательного движения твердого тела сводится к изучению движения
какой-нибудь точки тела. Выберем в качестве этой точки тела
центр инерции тела С.
Если координаты точки С обозначить через ху уу г, то по
теореме о движении центра инерции можно записать:
Md£2 = X;
dt
mdt*
У;
(13)
M— = z
где X, Y, Z — проекции главного вектора всех сил, действующих
на тело.
Уравнения (13) представляют собой
дифференциальные уравнения поступательного
движения твердого тела, и их
интегрирование производится так же, как
производится интегрирование дифференциальных
уравнений движения точки.
2. Вращение твердого тела вокруг
неподвижной оси
Пусть твердое тело находится под
действием некоторых активных сил Fiy /\>, ...»
Fn и реакций связей. Для того чтобы тело
вращалось вокруг неподвижной оси й,
достаточно закрепить две точки тела 01 и 02
(см. рис. 261). Поэтому реакции связей представляют особой си-
Рис. 261.
13*
395
лы R1 и R2i возникающие вследствие взаимодействия связей в
точках Oj и 02 с телом. /
Тело, вращающееся вокруг неподвижной оси, имеет одну
степень свободы. В качестве обобщенной координаты тела можно
принять угол поворота тела (р. Поэтому для нахождения
уравнения движения достаточно составить уравнение, связывающее
величину <р с действующими силами.
Составить уравнение движения можно, используя теорему
о кинетическом моменте:
/ d-^ = L (14)
и dt2— а' * '
где 4 — момент инерции тела относительно оси вращения, La —
главный момент всех внешних сил (активных и реакций связей)
относительно оси вращения.
Используя дифференциальное уравнение (14), можно для
заданного тела решать задачи двух типов: первый тип — по
заданному закону вращения [<р = <р (t)] найти некоторые неизвестные
силы при условии, что другие действующие силы заданы;
второй тип — по заданным силам (активным и реакциям связей) найти
закон вращения. Решение первого типа задач сводится к
простому дифференцированию и нахождению неизвестных величин
по заданным известным, решение второго типа задач сводится
к интегрированию дифференциального уравнения второго порядка.
В практике обычно задаются активные силы и закон вращения
тела, а неизвестными величинами являются реакции связей,
которые подлежат определению. Поэтому рассмотрим вопрос об
определении реакций связей.
3. Нахождение реакций связей
Для определения реакций связей в точках О и Ох
воспользуемся принципом Даламбера. Предварительно найдем выражения
для главного вектора и главного момента всех сил инерции.
Главный вектор и главный момент сил инерции относительно
некоторого полюса определяются по формулам:
п
#= lim 2 (—Щ-щ); (15)
Д/72 j -> 0 {== 1
П
Г0 = lim 2 ПX (— Д/и,-• wt), (16)
где Д/и£- — масса элементарной части тела, a rt — радиус-вектор
этой массы, проведенный из полюса О (см. рис. 262). Выберем
систему координат OXYZ так, чтобы начало ее находилось в точке О, а
396
ось OZ была направлена по оси вращения й. Центр инерции
тела обозначим буквой С Тогда можно
записать следующее соотношение:
Mrc-= Iim 2 Д/?У/.
Дифференцируя это равенство
дважды, получим:
А/2у
Mwc= lim 2 ^miwi-= — Iy
Д/я$--»0 (=1
т. е.
I=—Mwc. (17)
Используя полученную в
кинематике формулу зависимости ускорений
двух точек тела, можно записать:
Рис. 262.
W:
= ^o+eXr/ + coX(«>X^) = 8Xr/ + a)X(©X''i).
или в прямоугольной системе координат OXYZ, при условии,
что OZ — ось вращения:
wt=
i j k
OO вг
х{У{ Z[
+MX
= — **yJ+**xJ+
i j k I
О О сог
■*/ Л 2,
i j k
О 0 Q)2
—»J
;,(оЛ О
= — W + zzXiJ—<opCii — <У,/=_
= — (е,У/ + <*/) i + (s2^. — mly,) J.
Используя полученную формулу, представим выражение rt \w
в прямоугольной системе координат в виде
_ I i j k
ПХЩ=\ Х{ j/, Z;
I — (е«Л + K*i) (еЛ — ®1Уд °
= (- e^Zt + <y,2,) г — (ezy,z,- + ©»*/z,)./+ гг (x) +У,) k. (18)
Проектируя векторы равенства (16) на оси координат и
используя формулу (18), получим:
(19)
397
Следует различать реакции в точках О и Ох в состоянии
покоя тела и в состоянии движения. Реакции, которые возникает
в состоянии покоя тела, так называемые статические
реакции, уравновешиваются активными силами и их можно найти,
используя условия равновесия твердого тела (шесть основных
уравнений статики). В состоянии движения тела благодаря наличию сил
инерции возникают дополнительные реакции, так называемые
динамические добавки. Реакции в состоянии движения называются
динамическими. Из принципа Даламбера следует, что
динамические добавки уравновешиваются силами инерции.
Действительно, если мы обозначим статические реакции через
Qj и Q2, динамические — через Nx иМ2, а главный вектор и
главный момент активных сил через R0 и SQ, то согласно принципу
Даламбера получим:
т, (Q.) + тй (Q2) + т0 (Nt) + т0 (N2) + S0 + L0 = 0.
Вследствие того, что статические реакции уравновешиваются
активными силами, из условий равновесия получаем:
Qi + Q. + #o = 0;
we(Q1) + /ne(Qi) + 50 = 0
и, следовательно,
Мх±М2 + Г=0;
/я0(^1) + 'я,(^,) + 1. = 0. (20)
Проектируя векторы равенства (20), на оси координат
получаем:
Niy + Nty + fy = 0; (20')
Niz + N„ + I=0;
И
m№) + mx(Nt) + Lx = 0;
myQQ + my(Nt) + Ly = Q;
m^NJ + m^NJ + L^O; _ (21)
Так_как силы Nx и N2 проходят через ось OZ, то mz(N1) = 0
и mz(N2) = 0. Из третьего уравнения (21) заключаем, что Lz = 0.
Таким образом, из уравнений (20') и (21) остаются только
четыре, которые хможно представить в следующем виде:
Nlx + N„ — MwCx = Q;
Niy + N2y-MwCy = 0; (22)
hNtx + Ly = 0, (23)
где к = ООх.
398
Из уравнений (23) и формул (19) получим:
Ntx = - ^Ly = - 1 (/,А + «); (24)
Из формул (22) и (24) получаем:
М1Х = Mwcx +1 (/, А + /^х);
Л/,, - MweJ, -1 (/„е, - /^)- (25)
Рассмотрим некоторые частные случаи.
Первый случай. Ось вращения является главной
центральной осью. В этом случае
хс=Ус = Ъ /„ = /„ = 0.
Из формул (24) и (25) следует, что
Таким образом, если ось вращения тела является главной
центральной осью инерции, то динамические реакции ничем не
отличаются от статических.
Второй случай. Центр инерции лежит на оси вращения,
но ось вращения не является главной.
В этом случае
Хс=Ус = °>
и из формул (24) и (25) следует, что
т. е. динамические добавки образуют пару, момент которой
определяется по формуле:
Третий случай. Тело имеет плоскость материальной
симметрии, перпендикулярную оси вращения, и центр инерции не
лежит на оси вращения.
Точку пересечения оси вращения с плоскостью материальной
симметрии О выберем за начало системы OXYZ так, чтобы
плоскость лежала в плоскости материальной симметрии (см. рис.
263). В этом случае центр инерции лежит в плоскости
материальной симметрии OXY и ось OZ является главной осью
относительно точки О (третье свойство главной оси). Следовательно,
1хг = 1у2 = 0.
Отсюда и из формул (19) следует, что
Lx = 0, Ly = Q.
399
Подставляя эти значения в уравнения моментов (21) и вычисляя
моменты, получим: /
bN2x — aMlx = 0;
-bN2y + aNly = 0,
т. е.
N2X_N2y _ а
Nlx Nly Ь *
Из этих соотношений вытекает, что силы Л^ и N2 параллельны
и уравновешиваются главным вектором сил инерции / = —Mwc.
Задача 41. Стержень АВ длиной 2/, на концах которого
находятся грузы равного веса Р, вращается равномерно с
угловой скоростью со вокруг
вертикальной оси OZ, проходящей че-
Рис. 263.
Рис. 264.
рез середину О длины стержня. Расстояние точки О от подшипника
С равно а, от подпятника D равно Ь. Угол между стержнем АВ и
осью О сохраняет постоянную величину а. Пренебрегая весом
стержня и размерами грузов, определить проекции давлений на
подшипник С и подпятник D в тот момент, когда стержень
находится в плоскости OYZ (см. рис. 264).
Задача, как видно из ее условия, соответствует второму случаю.
Найдем сначала динамические добавки, которые определяются
согласно формулам (24) и (25).
Так как при указанном в задаче расположении шаров силы
инерции расположены в плоскости OYZy то динамические добавки,
образующие пару, также лежат в этой плоскости и, следовательно,
Nix=N^
:0.
Кроме того, в данном случае точка О является центром инерции
и стержень АВ вращается равномерно, поэтому
400
Для проекций динамических добавок на ось OY получаем
выражения:
1 _ 1 2PJsina.Zcosct.a>2 Pl2u>2 sin 2а
N.
iy
= + i'>
yzK
'a + b
N,
гу
Т!Уг^ =
Pl2(u2sin 2a
g(a + b)
Чтобы найти динамические реакции подпятника D и подшипника С,
достаточно к динамическим добавкам присовокупить статическую
реакцию в подпятнике, равную весу тела 2Р и направленную по
вертикали вверх. Окончательно для проекций динамических
реакций получаем формулы:
Р12и2 sin 2а
Хс = 0; Yc
XD = 0; YD
g(a + b)
Plh*z sin 2a a
g(a + b) ;
Zc = 0;
zD=-
•2P.
§ 3. ПЛОСКО-ПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Как было уже установлено в кинематике, изучение
плоскопараллельного движения приводится к изучению плоского
движения. Поэтому будем рассматривать плоское движение тела под
действием сил, лежащих в
плоскости движения. В плоском
движении тело имеет три степени
свободы. В качестве обобщенных
координат можно принять
координаты ху у некоторой
фиксированной точки С и угол поворота ср
во вращении тела относительно
системы координат Сет),
перемещающейся поступательно
относительно неподвижной системы
координат OXY (см. рис. 265). Таким
образом, для изучения движения достаточно составить уравнения,
связывающие величины х, уу ср с заданными силами.
Чтобы получить уравнения в более простом виде, будем
считать, что точка С является центром инерции системы. Тогда из
теоремы о движении центра инерции следует, что
У,
О
1
W
7/
С
—'ъ
4
3?
Рис. 265.
М— — Х-
М
cfy_
dt2
У,
(26)
где х, J/— координаты центра инерции С, а X, Y — проекции
внешних сил на оси координат.
По теореме о кинетическом моменте для относительного
движения можно записать, что
dt
=L
■с»
(27)
401
где К{с — кинетический момент и Lc — момент сил относительно
оси, перпендикулярной к плоскости движения и проходящей через
точку С. Но кинетический момент в относительном движении,
как было уже установлено раньше, находится по формуле:
шАг) г <*<?
(28)
Подставляя формулу (28) в уравнение (27), получим:
(29)
Уравнения (26) и (29) в своей совокупности определяют
плоскопараллельное движение.
Задача 42. Груз А весом Р (см. рис. 266), опускаясь вниз
на невесомой, нерастяжимои нити,
ПШ
Рис. 266.
переброшенной через
неподвижный блок D и
намотанной на
барабан В, заставляет
колесо С катиться без
^ скольжения по
горизонтальному рельсу.
Барабан В радиуса г
жестко связан с ко-
/7 лесом С радиуса R;
их общий вес равен
Q, а радиус инерции
относительно
горизонтальной оси О
равен р. Найти
ускорение груза Л.
Твердое тело, состоящее из колеса С и барабана 5, совершает
плоское движение и находится под действием сил: Q — веса, N —
реакции рельса, Т—силы трения, Р±—силы, приложенной к
барабану В и равной натяжению нити.
Перемещение груза А происходит вследствие разматывания нити
с барабана В и перемещения центра барабана. Поэтому путь s,
проходимый грузом А, равен сумме длины размотанной нити sx
и длины пути центра барабана s2, т. е.
Если обозначить угол поворота барабана в некоторый момент
времени t через ср и учесть, что колесо катится без скольжения,
то получим:
&х=гг> s2=R>i
и, следовательно,
* = (г+■/?)*.
Искомое ускорение груза А определим по формуле:
W-
402
Составим дифференциальные уравнения движения колеса с
барабаном. Обозначим абсциссу центра колеса через л. Тогда из
уравнений (26) и (29) получим:
Q_dH_
Силу Рг можно определить, используя принцип Даламбера
(см. задачу 30), для ее величины получим выражение:
Pt=P — -w.
1 g
Таким образом, мы получили четыре уравнения, содержащие
четыре неизвестных величины w, ср, Р19 Т.
Найдем из выражения для w величину -^Л и подставим ее в
дифференциальные уравнения движения. Тогда получим:
Q R® р _т.
gr+R — ^t J'
Qjb^Pj+TR.
gr+R i l
Разрешая эту систему уравнений относительно Р1У получим:
Р
Подставив это выражение в уравнение Р1 = Р — — w9
получим:
g (R + r)2 g
Отсюда находим искомое ускорение:
Pg(r + R)2
g
w-
Q(?2 + R2) + P(r + R)2'
§ 4. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
В этом параграфе мы изучим движение твердого тела,
имеющего только одну неподвижную точку.
Как было уже выяснено в кинематике, к этому типу
движения можно свести произвольное движение твердого тела.
Поэтому изучение движения такого типа является особо важным.
Тело, вращающееся вокруг неподвижной точки, имеет три степени
свободы, причем в качестве обобщенных координат можно
выбрать углы Эйлера ф, 0, ср. Поэтому для изучения указанного типа
движения достаточно составить уравнения, связывающие эти углы
с силами, действующими на тело.
403
1. Формулы для кинетического момента тела
Выведем формулы для кинетических моментов тела
относительно осей некоторой прямоугольной системы координат.
Кинетический момент тела относительно начала координат О
определяется по формуле (см. рис. 267):
К* = Hm SfaX Amkvk) = lim jgbmk [ FA X Г»Xrk)\ (30)
где Д m^ (& = 1, 2, ..., n) — элементарные частицы тела. Введем
обозначения для проекций угловой скорости тела со:
-г.
Тогда можно записать
i j k
р q г
Xk Ук Zk
<»Xrk =
rkX(«>Xrk)
■■ {q*k — ryk)i+(rxk-pZk) J+ (pyk — q*k)k ;
i j k
xk Уи zk
q*k — ryk rxk—pzk pyk — qxk
= [P (У1 + 4) — Я*иУк — rxkzk] i +
+ [Я (xl + 4) — rykzk-px^k]J+[r(xl+yl)^pxkzk-qykzk]k. (31)
Так как имеет место формула:
K0 = Kxl+KyJ + Kzk, (32)
то комбинация формул (30), (31)
и (32) дает нам соотношения:
Kx = lxp — Ixyq — Ixzn
Ky = Iyq-Iy2r-Ixyp; (33)
Kz = Izr — Ixzp — Iyzq.
Если в качестве осей координат
выбрать главные оси инерции
тела, то центробежные моменты
Рис. 267. равны нулю, т. е.
'ху z== ' xz *уг ^
и, следовательно, относительно главных осей инерции
кинетические моменты определяются по формулам:
или
404
Kx = Ixp; Ky = lyq\ Kz = Ijr
Кх = 1х-<дх; Ку = 1у-шу; KZ = IZ-®Z
(34)
2. Динамические уравнения Эйлера
Для составления уравнений движения тела можно
воспользоваться теоремой о кинетическом моменте, согласно которой
dK0_J
dt ~ Lv
где О — неподвижная точка, LQ — главный момент всех внешних
сил относительно этой точки.
Проектируя это уравнение на оси системы отсчета, мы
получим три скалярных уравнения.
Для того чтобы получить скалярные уравнения в наиболее
простом виде, Эйлер предложил проектировать это уравнение
на оси подвижной системы координат OXYZ, образованной
главными осями инерции и неизменно связанной с телом.
Начало неподвижной системы координат выберем в точке О и
обозначим ее через 0£г£.
На основании формулы о связи между абсолютной (по
отношению к 0$7)С) и локальной (по отношению к OXYZ) производной,
установленной в кинематике, можно записать, что
Поэтому получаем векторное уравнение:
f+^X^^i, (35)
dR
Так как локальная производная —^ рассматривается по
отношению к подвижной системе OXYZ, то при проектировании
уравнения (35) на оси подвижной системы можно знак локальной
производной опустить.
Поэтому в результате проектирования получим уравнения:
d-§f+^XK0)y=Ly] (36)
Так как проекции кинетического момента на главные оси
инерции определяются по формулам (34), то
»х/с.=
i j k
р q г
I IxP tyl 7/
= (/, - ly) qr ij- (Ix - lz)prj +
+ (Iy-/x)pqk, (37)
405
Отсюда следует, что
(«X *.), = (/,-/,)?r; '
(*ХК,)у = {1х-/г)рг;
("XKe)t = (Iy-Ix)pq.
Из формул (36) и (37) получим уравнения движения твердого
тела относительно подвижной системы координат, образованной
главными осями инерции, в форме:
/y£t + (Ix-flpr = Lyi (38)
Izjt+Vy—ix)pq=Lt.
Уравнения (38) были получены Эйлером в 1758 г., они
называются динамическими уравнениями Эйлера.
Воспользуемся формулами для проекции угловой скорости
(о на оси подвижной системы координат, установленными в
кинематике:
db . d<b . n .
u)*==^cos<p+-^sm6sin(f);
^=-Ssin(p+8-sln0cos(p; (39>
(o2=^-cos6 + g.
Введем также обозначения:
IX = A; Iy = B; I2 = C.
Для составления уравнений движения тела, т. е. таких
уравнений, которые связывают углы Эйлера <Ь, 6, ср с силами,
действующими на тело, достаточно к уравнениям (38) присовокупить
уравнения (39). Итак, движение твердого тела вокруг
неподвижной точки описывается шестью уравнениями:
A% + (C-B)qr = Lx;
Bd£ + (A-C)rp = Ly; (40)
C% + (B-A)pq = Lj
d6 . ft . , db
P = Wsmbsm(f + diC0S{f;
# = -^-sin6cos cp— ^smcp; (41)
r=-S+wcos0
406
3. Случай Эйлера
В 1758 г. Эйлер рассмотрел частный случай движения
твердого тела вокруг неподвижной точки, когда все силы сводятся
к равнодействующей, проходящей через неподвижную точку (см.
рис. 268). В этом случае неподвижная
точка является центром инерции тела, и тело
может иметь произвольную форму.
Для данного случая уравнения (40)
имеют вид:
A% + {C-B)qr=0;
,dr
■С)гр = 0;
C% + (B-A)pq = 0.
Умножим эти уравнения соответственно на р, q и г, а затем
сложим их. В результате получим:
4eS+* 1+»*
dt
= 0,
т. е.
-Ld(Ap> + Bq2 + Cr2) = 0.
Отсюда сразу получаем первый интеграл движения:
Ар2 + Bq2 + Cr2 = СХ = const.
(43)
Умножим затем уравнения (42) соответственно на Ар, Bq, Cr
и сложим их. В результате получим:
%-t(A2p2 + B2q2-\-C2r2) = 0,
откуда следует второй интеграл движения:
А2р2 + B2q2 + CV = С2 = const.
(44)
Выражение (44) показывает, что квадрат модуля кинетического
момента К0 есть величина постоянная. Из теоремы о
кинетическом моменте, кроме того, следует, что
dKo
dt
= ^о = 0,
т. е. АГ0 = const.
Чтобы найти третий интеграл движения и исследовать
характер движения тела, рассмотрим различные случаи.
Первый случай: А = В = С (эллипсоид инерции является
сферой).
407
т. е
то
В этом случае из уравнений (42) получаем, что
Ad£ — C\.R*1 — C). г- — О
jt; = const; ^ = const; г = const.
Так как /С0 = const и
/С^ Kg Кг ^
р q г
т. е. со и /С0— коллинеарные векторы. Следовательно вектор со
сохраняет постоянную величину и направление, т. е. w = const.
Таким образом, в данном случае движение тела представляет
собой вращение вокруг неподвижной оси с постоянной угловой
скоростью.
Второй случай: Л = В(эллипсоид инерции является
эллипсоидом вращения). В этом случае из уравнений (42) получим:
С-— О
т. е.
: COnSt:
Из первого интеграла
движения (43) получаем:
Л(р' + ?») + С/-« = С„
откуда видно, что
р2 + q2 = const
и, следовательно,
о)2 = р2 + q2 + г2 = const.
Так^как /С0 = const, то ось 0£ можно направить по
направлению /С0. Проектируя /С0 на оси подвижной системы координат,
получим (см. рис. 269):
Кх = /С0 sin 0 sin <р = Л/?;
/Су = /С0 sin 6 cos <р = Bq;
AT2=/CncosO = Cr.
(45)
Отсюда следует, что
и, значит,
408
cos 0 = -£■ = const
An
) = 0о = const.
(46)
Подставляя это значение 0 в соотношения (45) и используя
выражения (39), получим:
Ap = A-j-t sin 0о sin <р =
Bq = B -jt sin G0 cos <p
AT0sin60sincp;
= /C0sin60coscp;
Cr = C§cos0o + cg = /CocosOo.
Из первого и третьего равенств получаем:
d± = K,
dt А
dy К о — Са.
■ cos 0П
const;
= р = const.
dt С
Интегрируя эти равенства, получим:
Из формул (46), (47) и (48) следует, что движение тела
представляет собой регулярную прецессию, т. е. ось OZ описывает
(47)
(48)
с постоянной угловой скоростью -™ = al некоторую
коническую поверхность, и тело ( с постоянной угловой скоростью -,- = р )
вращается вокруг оси OZ (см.
рис. 270).
Третий случай.
Величины Л, В и С — произвольные
(эллипсоид инерции является
трехосным).
Для нахождения проекций
угловой скорости р, #, г в
данном случае достаточно
использовать первый и второй интегралы
движения, а также третье из
уравнений (42), т. е. систему
уравнений:
Ap2 + Bq2 + Cr2 = h;
A2p2JrB2q*-{-C2r2 = H2; (49)
Рис. 270.
Сй+(*-
•A)pq = 09
dt
где h и Н — постоянные.
Из первых двух уравнений определим р2 и q2y что дает:
А(В — A)p2 = hB — Н2— С {В — C)r2 = a-{-br2;
B{B — A)q2 = H2 — Ah — C(C — A)r2 = c-\-dr2%
где
409
a = hB — H%\ b = —C(B — C); c = H2—Ah\ d= — C(C—A).
Отсюда, перемножая полученные равенства и извлекая затеем
корень, получим:
VАВ (В — A)pq = V{a + br2) (c + dr2),
т. е.
(B-A)pq = ± V{a + br2){c + dr2). (50)
Подставляя формулу (50) в третье уравнение (49), получим:
откуда
или
C£ + j-V(a + br>)(c + dr>) = 0,
%+{cV(a + br*)(c + dr*) = 0
dr dt
I
V(a + br2)(c-\-dr2) kiC
dr
Y{a-\-br2){c + dr2) kxC
= — ^ + const. (51)
Из формул (51) время t выражается при помощи
эллиптического интеграла через г (ибо под корнем стоит многочлен
четвертой степени). Отсюда, вообще говоря, можно выразить г
через t при помощи эллиптической функции. Тогда по формулам
(49) можно выразить р и q также эллиптическими функциями от t.
Из уравнений, связывающих р, q, г с углами Эйлера, можно
затем найти выражение для углов ф, 6, ср. Все эти довольно
сложные вычисления были проведены до конца русским ученым
О. И. Сомовым.
4. Геометрическая интерпретация Пуансо случая Эйлера
В 1834 г. Пуансо дал геометрическую интерпретацию случая
Эйлера. Ценность этой интерпретации заключается в том, что
выясняется простая геометрическая картина движения тела вокруг
неподвижной точки.
Рассмотрим эллипсоид инерции тела относительно
неподвижной точки О тела. В системе координат, образованной главными
осями инерции, уравнение эллипсоида инерции имеет вид:
Ax2 + By2-\-Cz2 = \9
где Л, В, С—главные моменты инерции.
Точку пересечения Р мгновенной оси вращения с эллипсоидом
инерции будем называть полюсом (см. рис. 271).
Как было выяснено раньше, в случае Эйлера кинетический
момент Л'0 есть постоянный вектор. Докажем, что плоскость,
касательная к эллипсоиду в полюсе Р, перпендикулярна к кинети-
410
ческому моменту К0 и находится на постоянном расстоянии от
точки О.
С этой целью предварительно проверим, что отношение длины
радиуса-вектора р(х, у, z) полюса Р(х> у> г) к величине
угловой скорости со (/?, q, г) есть величина постоянная. В самом деле,
для координат х> у, z радиуса-вектора получаем выражения:
' » (О (О ^ • (О ^ ■ <0
х = — р;
У=1я>
z = — r.
Подставляя эти выражения в уравнение эллипсоида, получим:
Ак* + ЯУ + Сг* = £ир* + £?* + Сг*)=1.
Выражение, стоящее в скобках, в силу формулы (43) есть
некоторая постоянная величина h.
Поэтому
т. е.
(О
= 9Vh.
Из этой формулы следует, что
координаты радиуса-вектора
полюса Р можно представить в
виде
z =
У =
vn%
Рис. 271.
ут
Продифференцируем теперь уравнение эллипсоида, в
результате получим:
Ах dx + By dy + Cz dz = 0.
Подставляя в это равенство предыдущие формулы, получим:
Ар dx-\-Bqdy-{-Crdz = 0.
Отсюда видно, что вектор К0 с координатами Ар, Bqy Сг
перпендикулярен к поверхности эллипсоида в полюсе, т. е.
касательная плоскость к эллипсоиду в полюсе перпендикулярна к
кинетическому моменту /С0.
Расстояние касательной плоскости от точки О находим по
формуле:
^ = w^oP = P-cosK^0)=p.^.
411
Но
a.K0 = ux-f(x + ®y-f(y + <*t-K, = p-Ap-\-q.Bq + r-Cr= ,
= Ap2 + Bq2 + Cr2 = h
и, следовательно,
i p-h со-/г h У~Н ,
d=J—rr = -7= = —=— =-£—- = const.
Из доказанного свойства касательной плоскости следует, что
касательная плоскость является неизменной в системе координат
OXYZ, и в каждый момент времени эллипсоид инерции касается
в полюсе этой плоскости. Так как полюс лежит на мгновенной
оси вращения, то скорость полюса Р равна нулю и, следовательно,
при движении твердого тела эллипсоид инерции относительно
неподвижной точки катится без скольжения по некоторой
неподвижной плоскости.
Итак, если в случае Эйлера с твердым телом неизменно связать
эллипсоид инерции относительно неподвижной точки, то
существует некоторая неизменная плоскость, по которой эллипсоид
инерции катится без скольжения.
5. Другие частные случаи движения
Кроме случая Эйлера, были исследованы еще два важных
случая, называемые случаями Лагранжа — Пуассона и С. В.
Ковалевской.
Случай Лагранжа — Пуассона
В 1788 г. Лагранж и независимо от него Пуассон в 1855 г.
исследовали новый случай движения твердого тела,
заключающийся в том, что
А = В; х0 = у0 = 0,
т. е. эллипсоид инерции является эллипсоидом вращения и центр
инерции тела лежит на оси OZ (называемой осью кинетической
инерции).
Под этот случай подходит гироскоп, т. е. тяжелое тело,
вращающееся вокруг оси симметрии.
В этом случае из последнего уравнения (42) находим:
^ = 0
т. е.
G)2 = r=C0nst.
Лагранж и Пуассон показали, что решение в данном случае
приводится к квадратурам, и результат снова выражается в
эллиптических функциях. Все вычисления до конца были проведены
О. И. Сомовым.
412
Случай С. В. Ковалевской
В 1888 г. С. В. Ковалевская исследовала новый случай,
заключающийся в том, что
А = В = 2С; z0 = 0,
т. е. эллипсоид инерции для неподвижной точки есть вытянутый
эллипсоид вращения и центр инерции лежит в экваториальной
плоскости эллипсоида инерции.
Случай С. В. Ковалевской можно конкретно
проиллюстрировать на модели, представляющей собой открытую коробочку в
форме прямоугольного параллелепипеда с соответствующими
размерами (см. рис. 272).
В этом случае С. В. Ковалевская нашла общий интеграл
уравнений движения, выразив углы Эйлера ф, ср, 6 при помощи
квадратур через время и шесть
произвольных постоянных. Метод С. В.
Ковалевской основан на применении
аппарата теории функций
комплексного переменного. Рис. 272.
Работы С. В. Ковалевской вызвали
большой интерес к задаче о движении твердого тела вокруг
неподвижной точки и послужили стимулом к появлению различных
исследований в этом направлении, главным образом в России.
Дальнейшему развитию этого вопроса были посвящены работы
русских ученых Жуковского, Чаплыгина, Стеклова, Бобылева,
Горячева, Аппельрота и др.
§ 5. ЭЛЕМЕНТАРНАЯ ТЕОРИЯ ГИРОСКОПА
Симметрическим гироскопом называется тяжелое твердое тело,
быстро вращающееся вокруг оси материальной симметрии. Такие
быстро вращающиеся тела встречаются часто в технике
(пропеллер самолета, вал турбины и др.). Поэтому изучение свойств
гироскопа представляет большой практический интерес.
Если одна точка оси вращения закреплена (например, волчок),
то изучение движения гироскопа приводится к изучению движения
твердого тела вокруг неподвижной точки, что является нелегкой
задачей. Поэтому, чтобы облегчить изучение движения гироскопа,
вводят ряд допущений, упрощающих изучение вопроса, но
приводящих к результатам, достаточным для целей практики.
1. Уравнение движения гироскопа
Рассмотрим сначала гироскоп, который вращается вокруг
вертикальной оси симметрии, закрепленной в одной точке (см. рис. 273).
Так как ось материальной симметрии является главной осью от-'
носительно неподвижной точки и угловая скорость направлена
14 Г. М. Финкельштейн
413
по оси вращения, то кинетический момент гироскопа находится
по формуле: /
По теореме о кинетическом моменте получаем:
-g* = /.e = /n0(P)-fm0(W) = 0,
(52)
т. е.
K0 = IZ'U) = const.
Отсюда, в частности, следует, что гироскоп вращается с
постоянной угловой скоростью со. В действительности скорость о> убы-
Рис. 273.
Рис. 274.
вает, так как в уравнении (52) не учтены сопротивление воздуха
и силы трения в точке опоры.
Итак, если ось гироскопа является вертикальной, то
соблюдаются условия: Г. Кинетический_момент К0 постоянен. 2°.
Направления кинетического момента К0 и угловой скорости со
совпадают. 3°. Кинетический момент относительно неподвижной
точки определяется по формуле: К0 = 12«>-
Рассмотрим теперь случай, когда ось гироскопа наклонена и
одна точка оси закреплена (см. рис. 274).
В этом случае, как показывает опыт, ось вращения гироскопа
прецессирует с небольшой угловой скоростью и, следовательно,
движение гироскопа слагается из вращения вокруг оси OZ с
большой угловой скоростью o)j и вращения оси _OZ относительно
вертикальной оси с небольшой (относительно coj угловой
скоростью av Как известно, угловая скорость гироскопа относительно
неподвижной среды определяется по формуле:
(0 = (01+(02,
и линейные скорости точек гироскопа слагаются из скоростей во
вращательном движении вокруг оси OZ (относительное движение)
и вращении оси OZ относительно вертикали (переносное движе-
414
ние). Поэтому_в данном случае угловая скорость © и
кинетический момент К0 не направлены по оси вращения OZ. Однако
так как со2 невелико по сравнению с соп т. е. вращение оси OZ
относительно вертикальной оси невелико по сравнению с
вращением гироскопа относительно оси OZ, то отклонения векторов w
и К0 относительно OZ незначительны. Кроме того, так как
скорость во вращении вокруг вертикальной оси незначительна по*
отношению к скорости во вращении вокруг оси OZ, то при
определении приближенного значения кинетического момента 7<Г
скоростью во вращении вокруг вертикальной оси пренебрегают.
В силу этих соображений в элементарной теории гироскопа
исходят из следующих предположений:
1°. Кинетический момент К0 направлен по оси вращения.
2°. Кинетический момент К0 определяется по формуле К0 =
= /,©,.
Предположим, что (ох = const, тогда
и конец А вектора К0 представляет собой фиксированную точку
гироскопа с радиусом-вектором /С0.
Поэтому
^=i§-- (53)
С другой стороны, по формуле кинематики для скорости при
движении тела вокруг неподвижной точки получаем:
ЪА = тлхК- (54)
Используя теорему о кинетическом моменте, а также формулы
(53) и (54), заключаем, что
^L=5,X/f,=/,KX»l)=i;-
Итак, получаем соотношение:
/>.X©,) = V (55)
Полученная формула является основной формулой элементарной
теории гироскопа. Эта формула связывает угловые скорости со1
и w2 с главным моментом сил, действующих на гироскоп.
Согласно принципу Даламбера можно записать, что
т. е. главный момент инерционных сил определяется по формуле:
ц (7) = - IV =-/г к X »,)• (56)
14* 415
Так как силы инерции действуют на связи, то формула (56)
определяет главный момент сил, действующих на связи. Величина,
определяемая формулой (56), т. е.
ZV=-rtfcX»*),
называется гироскопическим моментом.
Используя основную формулу (55) элементарной теории
гироскопа, можно объяснить различные свойства симметрического
гироскопа. Рассмотрим некоторые из них.
Свойство 1. Если к оси гироскопа приложить силу,
перпендикулярную к оси, то гироскоп отклонится в направлении,
перпендикулярном к линии действия силы.
В случае, если к оси OZ приложена сила F, направленная
перпендикулярно к оси, то главный момент L0 направлен
перпендикулярно к плоскости, проходящей
через ось OZ и силу F (см. рис. 275).
В силу основной формулы (55)
угловая скорость со2 лежит в
плоскости, перпендикулярной к L0 и про-
Рис. 275.
Рис. 276.
ходящей через о^. Поскольку со2 является угловой скоростью
оси OZy то последняя перемещается в направлении,
перпендикулярном к со2 и, следовательно, перпендикулярном к силе.
Свойство 2. Если ось гироскопа отклонена от вертикали,
то эта ось совершает регулярную прецессию.
Гироскоп находится под действием силы тяжести Р и реакции
опоры. Главный момент сил LQ перпендикулярен к плоскости,
проходящей через силу Р и точку О (см. рис. 276).
Угловая скорость со2 гироскопа в каждый момент времени
лежит в плоскости, перпендикулярной к LQ и проходящей через со1в
Составляющая силы Р, перпендикулярная к оси гироскопа, в
силу свойства 1 создает движение оси в направлении,
перпендикулярном к этой составляющей. Следовательно, ось гироскопа
вращается вокруг вертикальной оси и, значит, совершает
регулярную прецессию.
416
Установим зависимость угловой скорости прецессии <о2 от
характера вращения гироскопа. С этой целью используем
основную формулу (55), из которой следует, что
|/.KX»i)l = |Гв|,
/^со, sin 0 = Я- ОС-sin 0.
Отсюда получаем:
_Р-ОС
Из этой формулы следует, что угловая скорость со2 обратно
пропорциональна ю19 т. е. чем быстрее вращается гироскоп, тем
медленнее он прецессирует, и наоборот, чем медленнее
вращается гироскоп, тем быстрее он прецессирует.
Свойство 3. Если центр тяжести гироскопа находится в
точке опоры,то ось гироскопа сохраняет
постоянное направление (см. рис. 277).
Действительно, в этом случае
и, следовательно,
"Ko^Ig' ю = const,
т. е.
со = const.
Этот результат является
приближенным. В частности, этот результат
является точным, когда эллипсоид
инерции является сферой (А = В = С). Это
было установлено раньше при
рассмотрении случая Эйлера (см. п. 3). В других случаях ось гироскопа
может незначительно отклоняться от своего положения (ось
„дрожит").
2. Некоторые приложения
а) Гироскопический эффект при вращении тела
вокруг закрепленной оси
Рассмотрим вращение твердого тела вокруг закрепленной оси
материальной симметрии. Примером такого движения может
являться паровая турбина, приводящая в движение гребной винт
парохода; быстро вращающийся маховик; пропеллер самолета и др.
Предположим, что ось вращающегося тела поворачивается с
угловой скоростью со2, перпендикулярной к ю1 (см. рис, 278). При
этом возникает некоторый гироскопический момент, вследствие
взаимодействия оси и связей (подшипников), который
определяется по формуле:
^ = -/,KX«J. (57')
Рис. 277.
417
Из формулы (57') следует, что со стороны подшипников на ось
тела действует пара сил с моментом /
т = 1г К X ©,) = т (FiyF2).
Итак, если ось тела повернуть в некоторой плоскости с
угловой скоростью (о2, то возникнет действующая на ось пара сил с
моментом т, причем эта пара лежит в плоскости,
перпендикулярной плоскости вращения, и направлена так, что векторы со2,
кт
ЬА
Ог
0)ол
ESI
шя
Рис. 278.
©j, т образуют правую систему координат. На опоры оси
(подшипники^ будет действовать в этом случае пара сил с моментом
т1 = — т> причем векторы ю19 со2, т1 образуют правую систему
координат.
Итак, вследствие вращения оси тела, ось и подшипники
испытывают действие пары сил, момент которой численно
определяется по формуле:
Этим явлением объясняется, например, тот факт, что при киле
вой качке парохода подшипники оси быстро вращающегося вала,
v
в
6Vll
к
Т Q:
&ш
Ш$\
%'
<?;
Рис. 279.
соь
Рис. 280.
расположенного вдоль корпуса парохода, испытывают
значительные дополнительные нагрузки.
Если ось вала расположена вдоль корпуса АВ и вращается
против часовой стрелки по отношению к наблюдателю, смотрящему
с кормы В на нос А парохода, то при килевой качке возникает
пара сил, действующая на подшипники и лежащая в
горизонтальной плоскости. При поднятии кормы эта пара (Q1? Q2) вращает
418
ось по движению часовой стрелки (см. рис. 279), при опускании
кормы пара (Q[, Q'2) вращает ось против движения часовой стрелки
(см. рис. 280). При больших скоростях вращения вала эта пара
сил имеет значительный момент, который приходится учитывать
конструкторам. Так, например, предположим, что 4= 1000 кГж\сек,
0^ = 400 об/мин и качание парохода происходит по
гармоническому закону с амплитудой ср0 = 6° = 0,105 и периодом качания
Т— Ю сек, т. е.
. 2тг,
<P = <PosinT^
(o2 — dt— т cos Ti
2ъЪ 6,28.0,105 1
со _—=^ = r^ = 0,066— .
2max J 10 » cefC
Отсюда находим наибольшее значение гироскопического момента:
j 1000.400.271-0,066 0700 п
"W = 4'<VW2 = 60 ^2733 КГМ'
Если расстояние между подшипниками равно 3 м, то
Q, = Q2=^ =911 «г.
Рассмотренное выше явление объясняет также случающиеся иногда
аварии самолетов при резких виражах. Действительно, при
вираже ось пропеллера перемещается в горизонтальной плоскости и,
q следовательно, воз- я-
А ' &L т, никает пара сил, ле- №
Ы» рЛУ" ш»я жа.щая в ^ртикаль- / Д, ±
Гш * Ж^ ной плоскости и деи- piir"*~7T S^
' 1_ ствующая через под- * 1 ^ {__
*Ф? шипник на корпус са- Q? ' ^
Вирам д/?ебо молета. Ввиду значи- Вираж вправо
Рис. 281. тельности момента Рис. 282.
этой пары сил в
сравнении с массой корпуса самолета корпус, испытав влияние этой
пары, резко поворачивается в вертикальной плоскости вниз
(„клюет", см. рис. 281) при вираже вправо, и вверх при
вираже влево (см. рис. 282).
При наличии нескольких винтов их вращения осуществляют
так, чтобы при маневрировании самолета влияние
гироскопического эффекта на его корпус было скомпенсировано.
б) Гироскопические явления, основанные на сохранении неизменного
направления оси гироскопа
В 1852 г. Фуко сконструировал гироскоп, имеющий три
степени свободы при неподвижном центре тяжести (см. рис. 283).
Гироскоп Фуко состоит из массивного маховика, находящегося в
419
кардановом подвесе. Карданов подвес состоит из рамы АВ,
которая может вращаться вокруг горизонтальной оси АХ. Рама GD,
несущая подшипники рамы АВ, в свою очередь может
вращаться вокруг вертикальной оси QP. Три оси MN, KL и QP
пересекаются в центре тяжести маховика. Трение в подшипниках и
сопротивление воздуха сведены к минимуму, масса колец (рам)
незначительна по сравнению с массой маховика. Маховику
сообщается большая угловая скорость. Используя уравнения движе-
Рис. 283.
ния твердого тела вокруг неподвижной точки, можно доказать,
что ось маховика при большой угловой скорости с точностью до
очень мелкого дрожания будет сохранять постоянное направление
(свойство 3 гироскопа).
Этот принцип был применен Фуко для доказательства
вращения Земли. Действительно, поскольку ось гироскопа не меняет
своего положения относительно звезд, а наблюдатель,
вращающийся вместе с Землей, изменяет свое положение по отношению
к звездам, то перемещение оси гироскопа относительно Земли
будет доказывать ее вращение.
420
Если внешнюю раму CD отклонить, то в силу того, что
направление оси маховика остается неизменным, внутренние рамы
будут перемещаться. На этом принципе основаны различные
применения гироскопа в технике.
Так, например, гироскоп используется для создания
устойчивости траектории мины. Внутренние рамы связаны с рулями
управления и при всяком отклонении мины от своего курса внешняя
рама, отклоняясь вместе с миной, создает такое движение рулей
управления, которые возвращают ее к первоначальному курсу.
Гироскопы также применяются в качестве успокоителей
качки на кораблях, для создания однорельсовых вагонов, в
приборах дл^ записи качания корабля на волнении, в гирокомпасах и т. д.
§ 6. ПРОИЗВОЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Рассмотрим произвольное движение твердого тела. Как уже
было выяснено в кинематике, произвольное движение можно
разложить на движение вокруг неподвижной точки по отношению к
системе координат Ofirfc, движущейся поступательно и
проходящей через некоторую точку тела Ох и поступательное движение
этой подвижной системы координат Q^C относительно
неподвижной системы OXYZ.
Выберем в качестве точки Ог центр инерции тела С.
В произвольном движении твердое тело имеет шесть степеней
свободы, и в качестве обобщенных координат можно выбрать
три координаты х, у, z центра инерции С и три угла Эйлера ф,
6, <р, характеризующих движение системы координат СХХУ^19
неизменно связанной с телом и состоящей из главных осей
инерции, относительно системы координат С£г£.
Согласно теореме о движении центра инерции координаты
центра инерции С удовлетворяют системе уравнений.
MS=X' MS=y-> M5=z> <58>
где М — масса тела и Х> Y> Z — проекции главного вектора
всех сил, действующих на тело.
Как было показано раньше, теорема о кинетическом моменте
сохраняется в относительном движении по отношению к системе
координат С&£, проходящей через центр инерции. Поскольку на
применении этой теоремы основан вывод уравнений движения
тела при движении около неподвижной точки, то для углов
Эйлера ф, 6, ср, которые образуют оси системы координат CXlY1Zl с
системой координат CZrfc, получаем систему шести уравнений:
Ad£ + (C-B)qr = LXi;
B% + (A-Qrp = Lyi;
421
C% + (B-A)pq = Lti;
P = dt Sm ° Sin * + TtC0S C?; ^
di . л йГв .
#=^sm0cos'P—^sincP>'
r=£f+^cosG-
Совокупность уравнений (58) и (59), представляющих собой
систему девяти дифференциальных уравнений, определяет
произвольное движение твердого тела.
Глава VIII
ЯВЛЕНИЕ УДАРА
§ 1. ОСНОВНЫЕ понятия
1. Понятие удара
В некоторых случаях движения материальная точка или точки
механической системы перемещаются так, что за достаточно
малый промежуток времени у рассматриваемых систем происходит
конечное приращение количества движения. Такое движение
называется ударом. Так, например, при падении металлического
шарика на металлическую плиту, как показывает опыт, время от
соприкосновения шарика с плитой до отрыва шарика от плиты
измеряется тысячными долями секунды, но за это время
происходит конечное изменение количества движения шарика (так как
скорости падения и отражения шарика неодинаковы). То же явление
наблюдается при разрыве снаряда, при ударе молота по
обрабатываемой детали, при мгновенном соприкосновении плохо
подогнанных частей машин при их движении, при соприкосновении
обрабатываемой детали с резцом, при движении поезда со
сцепленными вагонами, при стрельбе из орудий и др. Это явление
также имеет место в различных ударных машинах. Таким
образом, явление удара является весьма распространенным в
технике, и изучение этого явления представляет практический
интерес.
Ввиду того, что понятие достаточно малого промежутка
времени является несколько неопределенным, ибо в этом понятии
не указаны границы малости, то некоторые явления могут
рассматриваться как явление удара только приближенно.
Итак, ударом механической системы называется такое
механическое явление, при котором за достаточно малый промежуток
времени происходит конечное изменение количества движения
системы.
422
2. Ударные силы
При ударе возникают силы, действующие на механическую
систему, которые за достаточно малый промежуток времени
имеют конечный импульс.
В самом деле, при ударе на механическую систему
действуют, во-первых, конечные силы, которые действовали и до удара,
но, кроме их, действуют также новь!е силы, возникающие
вследствие наложения дополнительных связей на механическую
систему. Так, например, при ударе металлического шарика о
металлическую плиту на шарик действует сила тяжести,
являющаяся конечной, а также реакция . плиты. Если на
механическую систему действуют конечные силы Fiy F2, ..., Fn и
некоторые новые силы Qx, Q2, ..., Qm, то по теореме импульсов
можно записать:
— — п п — т о —
(Mvc)t-(Mv^=^ {Fkdt+ 2 !Qhdt. (1)
£=! М k=l tt
Интеграл J Fk dt от конечного вектора за достаточно малый про-
межуток времени по теореме о среднем значении вычисляется
по формуле:
!Fkdt = Fkcp.M
и, следовательно, является достаточно малым.
Так как при ударе приращение количества движения
механической системы является конечным, то из формулы (1) следует,
что импульс сил Qj, Q2, ..., Qm является конечной величиной.
Сила, для которой импульс в течение достаточно малого
промежутка времени является конечным, называется ударной
или мгновенной.
Из приведенного выше рассуждения следует, что при ударе
возникают ударные (мгновенные) силы.
Для ударных сил характерным является то обстоятельство,
что они достигают достаточно больших значений.
Действительно, если Q — ударная сила, то она в течение промежутка \t
имеет конечный импульс i и по теореме о среднем значении
можно записать:
l = fQdt = Qcptt.
Отсюда следует, что
т. е. среднее значение ударной силы достаточно велико.
Достижение ударными силами больших значений объясняется
возникновением при ударе больших замедлений и затем ускорений точек
механической системы, т. е. обусловливается величиной сил
упругости.
423
Поясним на примере характер ударных сил. Пусть стальной
шарик весом Р=100Г падает на стальную плиту с выроты
h = 6 м и время соударения равно Д^ = 0,001 сек. Из опыта
известно, что отношение величин скорости падения v1 и скорости
отражения v2 равно k = — =-^(см. рис. 284). Рассчитаем среднее
значение ударной силы. Теорема импульсов дает нам
соотношение:
mv2 — mv1 = i.
Проектируя это равенство на вертикальную ось «, получим:
и к ал/ mvt + mvl = i>
* т. е.
i = m{vl-\-vt) = ^(vt + v%).
iv*2 Скорости v1 и v2 находим по формулам:
шДшш— vl = VWl ^V% -9,81 -6 ^= 11 -^-;
сек J
о „ м
2 Q 1 грк:
9 1 сек '
v* Для импульса i находим значение:
Рис. 284. . 0,1 П1 , а, а 17 у-
г = ^-(Ц -|-6) =^= 0,17 кГ-сек.
Для среднего значения ударной силы Q получаем значение
гл * 0,17
^Р М 0,001"
170 кГ.
Итак, шарик весом в 100 Г действует при ударе на плиту
с силой, средняя величина которой равна 170 кГ. Так как эта
сила не постоянная и она принимает меньшие и большие значения,
то максимальное значение этой силы превосходит 170 кГ.
3. Перемещение системы за время удара
Выясним, как перемещаются точки механической системы за
время удара. Пусть т — некоторая точка механической системы»
Эта точка находится под действием конечных и ударных сил,
импульс которых является конечным. Пусть удар происходит
в течение промежутка времени td = tl —10. По теореме
импульсов можно записать:
шох— mvb = i1.
Если через v обозначить скорость точки в момент времени t,
где t^^t^t^ и через г—радиус-вектор точки, то
mv — mv0 = i,
424
откуда следует, что
dr — — , /
dt ° ' т >
t
т. е.
^* = J(5.+i)tf.
br=(vQ+^)(t-tQ).
(2)
Из формулы (2) видно, что приращение Дг является достаточно
малым. Действительно, первый множитель является величиной
конечной, а второй — достаточно малой.
Таким образом, при ударе точки механической системы
перемещаются достаточно мало.
Из формулы (2) видно, что приращение радиуса-вектора Дг
за время удара Lt = t1 —10 является величиной такого же
порядка, что и W, и в силу малости М можно ею пренебречь.
Поэтому можно считать, что при ударе радиусы-векторы
точек механической системы являются постоянными.
§ 2. УДАР МАТЕРИАЛЬНОЙ ТОЧКИ О НЕПОДВИЖНУЮ ПОВЕРХНОСТЬ
1. Упругий и неупругий удары
Будем рассматривать движение материальной точки т, при
котором точка встречает на своем пути некоторую преграду,
представляющую собой абсолютно гладкую поверхность.
Вследствие наложения на точку т мгновенной связи возникает удар.
Так как связь является
идеальной, то реакция связи
направлена перпендикулярно к
поверхности и, следовательно,
ударный импульс Q также
направлен перпендикулярно к
поверхности (см. рис..285).
Обозначим скорость падения
(до удара) материальной точки
viy скорость отражения (после
удара) через v2. Тогда по
теореме импульсов можно записать:
mv2 — mv1 = Q.
(3)
Рис. 285.
Проектируя равенство (3) на направление касательной От к
поверхности в точке соприкосновения и учитывая, что сила Q
перпендикулярна к поверхности, получим:
mvzz — mvlx = 0,
425
т. е.
Относительно нормальных составляющих скоростей v1 и v2
возможны следующие случаи:
1°. v2n = 0. В этом случае удар материальной точки называют
абсолютно неупругим и связь называют абсолютно неупругой.
2°. v2n =— vln. В этом случае удар материальной точки
называют абсолютно упругим и связь называют абсолютно упругой.
3°. v2n = — kvln9 Где 0<&<1. В этом случае удар
материальной точки называют не вполне упругим и связь — не вполне
упругой.
Все эти случаи объединяются одним соотношением:
(при абсолютно неупругом ударе k = 0,
v2n = — йг/^при абсолютно упругом ударе k=l,
(при не вполне упругом ударе 0<&<1.
2. Коэффициент восстановления и его определение
Число ky фигурирующее в предыдущих соотношениях,
называется коэффициентом восстановления. Ньютон, впервые вводя
это число, постулировал, что коэффициент восстановления есть
постоянная величина, не зависящая от скорости соударения и
размеров тел и зависящая только от материала соударяющихся тел.
Данные опыта подтверждают эту гипотезу. Таким образом, число k
лредставляет собой отношение величин нормальных составляющих
скоростей падения и отражения и характеризует меру
восстановления нормальной составляющей после удара, т. е.
k =
(4)
Если через аир соответственно обозначить углы падения и
отражения, то из рисунка 285 заключаем, что
и, следовательно,
tg£[_
«к Г
= k. (5)
Таким образом, коэффициент восстановления равен отношению
тангенсов углов падения и отражения. Коэффициент
восстановления можно определить для различных тел, используя
следующий опыт: упругий шарик падает с некоторой высоты h^ на
упругую горизонтальную неподвижную плоскость и, ударившись
о плоскость, подскакивает на высоту Л2.
426
Из этого опыта определяем путем измерения высоты hx и h2
и затем вычисляем коэффициент восстановления согласно
следующим формулам:
k=
«i»l У чк У v
Таким образом были найдены коэффициенты восстановления
для различных тел. Например, вычисления показали, что
коэффициент k для различных материалов имеет следующие значения:
деревянные шары — 0,5, стальные шары — 5/9, шары из слоновой
кости — 8/9, стеклянные шары — 0,94.
§ 3. УДАР ШАРОВ
Рассмотрим удар шаров, имеющих массы т и М. Будем
рассматривать только прямой удар шаров, т. е. такой удар, при
котором скорости центров шаров а и v в момент удара направлены
по линии центров, т. е. прямой, проходящей через центры шаров
(см. рис. 286). Столкновение шаров возможно в двух случаях:
когда один шар нагнал другой либо когда шары двигались
навстречу друг другу. Условие встречи шаров требует, чтобы
относительная скорость первого шара т относительно шара М была
направлена к центру шара М или, соответственно, относительная
скорость второго шара М j^
относительно шара т бы-
ла бы направлена к центру
первого шара.
Математически это условие выра- \^ J{ } X
жается соотношением:
ихх — vix¥=®> (6) Рис.286.
где ulxJ v1K — проекции скорости а1 первого шара и скорости vx
второго шара на ось ОХ, соединяющую центры шаров.
Пусть скорости шаров т и М в начале удара соответственно
равны их и v1% а после удара и2 и v2. Найдем формулы,
выражающие скорости после удара через скорости до удара.
Из теоремы о количестве движения для механической системы,
состоящей из двух шаров т и Му следует, что во время удара
количество движения остается постоянной величиной.
Действительно, удар шаров является для указанной
механической системы внутренним, так как внешние силы (по
направлению оси А'-ов) отсутствуют.
Таким образом, можно записать, что
ти1 -f- Mvl = mu2 -\- Mv2
или в проекциях
mulx + Mvlx = ти2х + Mv2x. (7)
427
Чтобы определить величины и2х и v2X> запишем еще одно
уравнение, используя коэффициент восстановления k как отношение
относительных скоростей шаров после удара и до удара, т. е.
k = Vix"u^. (8)
ulx vlx
Из уравнений (7) и (8) находим скорости шаров после удара
через скорости до удара и коэффициент восстановления.
Уравнения (7) и (8) можно записать в виде
mttEX-\-Mvtx = muix-\rAtolx;
— U2x + v2X = kulx — kvlxt
откуда следует, что
(т — Mk)ulx + М(\ + k) vlx
««- м + т >'
_m(l+k)ulx + {M-mk)vlx ' ^
"«*- М + т
Отметим некоторые частные случаи:
1°. k — l. В этом случае удар шаров называется абсолютно
упругим.
Из формул (9) в этом случае получаем:
_(т — M)ulx + 2Mvlx ,
2mulx + (M-m)vlx У1К)>
v*x— М+т
В частности, если массы шаров одинаковы, т. е. М=т, то из
формул (10) следует, что
т. е. в этом случае шары обменяются скоростями.
При столкновениях молекул в жидкостях и газах именно
таким путем происходит перенос движения: обмениваясь
количеством движения при ударе, молекулы как бы проникают друг
сквозь друга.
2°. & = 0. В этом случае удар называется абсолютно
неупругим. Из формул (9) в этом случае получаем:
В., = Р„= м + т > (»)
т. е. после удара шары двигаются вместе с одинаковой скоростью.
Используя формулы (9), можно найти величину импульса ударной
силы. Применяя теорему импульсов к первому шару, получаем:
ти2 — тих = i
или в проекциях:
ix = тигх — ти1х. (12)
428
Подставляя в полученную формулу (12) формулы (9), получим:
. т(т — Mk) и1х + тМ (1 + k) улх — т (М-\-т) и1Х
l* ~~ М + т ~
^_ -тМ (k + \)ulx + mM(\+k)vlx
М+т
При абсолютно упругом (k=\) ударе шаров для импульса
получаем выражение:
В частности, если массы шаров одинаковы, т. е. т = М, то
ix = m(Vix — ttix)-
При абсолютно неупругом ударе шаров k = 0 для импульса
получаем выражение:
. тМ , ч
1х — м + т (Vix~ U^h
т. е. импульс в два раза меньше, чем при абсолютно упругом
ударе.
Г лае а IX
МЕХАНИКА ТЕЛ ПЕРЕМЕННОЙ МАССЫ
Многие задачи естествознания и техники приводят к
рассмотрению механических систем с переменной массой. Из области
естествознания можно, например, указать следующие задачи:
возрастание массы Земли вследствие падения метеоритов,
убывание массы движущегося в атмосфере метеорита вследствие
отрыва и сгорания его частиц; возрастание или убывание массы
плавающей льдины в результате замерзания воды или таяния
льда; возрастание или убывание массы тела, находящегося
в жидкости, при оседании на его поверхности некоторых частиц
из жидкости или растворении тела жидкостью. Много задач
такого же типа содержит техника. В качестве примеров можно
указать: убывание массы летящей ракеты вследствие сгорания
топлива в двигателе, возрастание или убывание массы летящего
самолета при его обледенении или при сбрасывании бомбовой
нагрузки, увеличение массы вращающегося веретена при
наматывании нити, уменьшение массы вращающегося рулона бумаги
при его разматывании, убывание массы аэростата при
сбрасывании балласта и т. д.
В ракетодинамике, являющейся основой современной
реактивной техники, приходится рассматривать механические системы
переменной массы.
429
Не только ракетная техника, но и другие важнейшие области
в значительной мере связаны с теорией движения тел
переменной массы. Поэтому механика тел переменной массы является
в настоящее время актуальной и важной как для техники, так
и естествознания (в частности, астрономии).
Основоположником этого важного раздела механики является
русский ученый И. В. Мещерский (1859—1935).
До работ Мещерского различными учеными было рассмотрено
несколько частных задач о движении тел переменной массы.
В 1857 г. Кейли рассмотрел задачу о движении тяжелой цепи,
одна часть которой лежит на столе, а другая часть свешивается
вниз и движется. Резаль рассмотрел задачу о движении нити,
перекинутой через блок и нагруженной с одной стороны
грузом, а с другой — цепью, частично лежащей на столе. В
небесной механике рассматривался различными учеными (Дюфур,
Опольцер, Гюльден) вопрос о влиянии изменения массы планет
(Земли и Луны) вследствие падения метеоритов на их движение.
Исследования И. В. Мещерского по теории движения тел
переменной массы начинаются с 1893 г. В своих исследованиях он
создал общую теорию движения тел переменной массы и
рассмотрел ее различные применения к задачам техники и небесной
механики (астрономии). Работы Мещерского намного опередили
современную ему технику и значительно опередили работы
зарубежных ученых в этом же направлении.
Исследования Мещерского были в дальнейшем развиты и
продолжены русскими и советскими учеными. Среди них следует
особо выделить К. Э. Циолковского, который разработал теорию
ракетных приборов и научно обосновал возможность полета
в межпланетное пространство.
§1. ОСНОВНОЕ УРАВНЕНИЕ МЕЩЕРСКОГО В СЛУЧАЕ
ПРИСОЕДИНЕНИЯ ИЛИ ОТДЕЛЕНИЯ ЧАСТИЦ
Под материальной точкой мы будем понимать, как и раньше,
тело, размерами которого можно пренебречь при описании его
движения.
Массу точки т будем считать переменной величиной,
являющейся непрерывной и дифференцируемой функцией времени t.
Таким образом, мы будем рассматривать непрерывный процесс
изменения массы и исключать случай, когда масса изменяется
скачкообразно, конечными порциями. Этот последний случай
можно рассматривать как результат ряда ударов, совершаемых
по точке в некоторые моменты времени, и он может быть
изучен методами, развитыми в теории удара.
Случай непрерывного изменения массы можно
интерпретировать, как процесс непрерывных ударов, в результате которых
к материальной точке непрерывно присоединяются или от нее
отделяются бесконечно малые массы, при этом скорость точки т
430
меняется непрерывно, а скорости присоединяющихся или
отделяющихся частиц изменяются на конечные величины в момент
их присоединения или отделения от точки т.
Конкретным примером непрерывного изменения массы может
являться обледенение самолета в течение некоторого
промежутка времени, скачкообразного изменения массы — сбрасывание
с самолета бомбовой
Zi
~v
£--Г
Рис. 287.
нагрузки через
некоторые интервалы
времени.
Пусть в момент
времени t точка с массой т
(t) имеет некоторую
скорость v по отношению
к системе отсчета
OXYZ. Массу
присоединяющихся или
отделяющихся частиц за
промежуток времени М
обозначим через Am (t).
Таким образом, в
случае присоединения
частиц Дт > 0, в случае отделения частиц \т < 0. Скорость
частицы в момент времени t относительно системы OXYZ
обозначим через и (см. рис. 287).
В момент времени £4-Д£ масса т-\-кт имеет скорость v-\-bv.
Прихменим к массе т-\-кт теорему импульсов, согласно
которой приращение количества движения за промежуток времени
от t до t-\-\t равно импульсу сил F, действующих на массу
т-\-кт, после присоединения или отделения частицы Д//г
(т -(- Д/?г) (v -{- Дг)) — (mv -f- кти) = ^ Fdt.
t
Отсюда получаем:
m\v — Д/тг (и — v) -\- ^m^v = F • Д£.
Разделим обе части полученного равенства на Ы и перейдем
к пределу при М —* 0, тогда получим:
dv dm,- -v ~
или
dt dt
dv -£ , dm ,-
Вектор
■v = c
V).
представляет собой относительную скорость присоединяющейся
или отделяющейся частицы Да/2 (относительно точки т).
431
Величина ^ определяет скорость изменения массы (расход
или приход массы за единицу времени в случае ее равномерного
изменения).
Величина
ж dm —
ф==аТс
называется реактивной или добавочной силой.
Таким образом, полученное выше уравнение можно записать
окончательно в следующем виде:
Уравнение (1) называется основным уравнением динамики точки
переменной массы (уравнением Мещерского).
Из уравнения (1) следует, что закон движения точки перег
менной массы можно сформулировать следующим образом:
Для каждого момента времени произведение массы тонки
на ее ускорение равно геометрической сумме действующих на
точку внешней силы и силы реактивной.
В случае, когда скорость присоединяющейся или
отделяющейся частицы равна нулю, т. е. й = 0, получаем:
dv с- dm-
Ttimv) = F. (2)
В том_ же случае, когда относительная скорость равна нулю,
т. е. с — й — v = Q, получаем:
m§=F. (3)
Полученные векторные уравнения (1), (2) и (3) можно
представить в аналитической форме. Для этого достаточно каждое из
этих уравнений спроектировать на оси координат системы
отсчета OXYZ.
В общем случае получаем уравнения:
т% = ?у + Фг (4)
d22 с | W4
В случае, когда скорость й = 0, получаем:
d ( dx\ с,
di[mTt)=F*->
432
ИЛИ
d I dz\ c
Tt\mTt)=F>-
Если относительная скорость c = 0, получаем:
m dtz tx'y
d2y
m^2 = Fy; (6)
§ 2. НЕКОТОРЫЕ ПРИЛОЖЕНИЯ
Рассмотрим некоторые задачи, впервые решенные Мещерскимг
и Циолковским.
а) Восходящее движение ракеты (задача Мещерского)
Ракета массы т летит вверх по вертикали, испытывая
сопротивление воздуха, пропорциональное скорости ракеты,
постоянное давление вытекающих газов р, причем относительная
скорость сгорающих частиц в момент их отделения с является
постоянной величиной. Определить движение ракеты.
Ракету можно принять за материальную точку и для
составления уравнения движения использовать уравнения (4).
Направляя ось ОХ по вертикали вверх, получим:
d2x . ~ dm
тж*=-т&+р-к-1йс>
где R — сопротивление воздуха.
Так как сопротивление пропорционально скорости ракеты, та
Предположим, что сгорание в ракете происходит равномерно»
тогда масса ракеты определяется по формуле:
m = m0(l —at),
где а — постоянная величина, mQ — масса ракеты в начальный
момент.
Подставляя значение R и т в уравнение движения, получим;
т-£= — mg+p — bx-\- mQac
или после деления на т:
— 4- — к = — р* 4- ■£ 4- ^5^-
43Я
Полученное уравнение является линейным относительно х.
Интегрируя его, получим выражение для х> а при повторном
интегрировании найдем выражение для х.
б) Вертикальное движение аэростата (задача Мещерского)
Привязной аэростат поднимается вверх по вертикали. Найти
закон движения аэростата, считая сопротивление воздуха
пропорциональным квадрату скорости, вес вытесненного объема
воздуха— постоянным и увеличение массы (вследствие увеличения
длины прикрепленного к нему каната), пропорциональным высоте.
Аэростат можно рассматривать как материальную точку.
Направим ось ОХ по вертикали вверх. Масса т и сопротивление
воздуха R определяются по формулам:
т = т0(1 -\-olx), где а— постоянная,
/? = &jc2, где k — постоянная.
Вследствие того, что вытесненный аэростатом объем воздуха
постоянен, на аэростат действует постоянная сила р,
направленная по вертикали вверх.
В данной задаче относительная скорость с присоединяющейся
массы равна нулю, поэтому можно использовать уравнения (6).
Уравнение движения аэростата имеет вид:
(XX I / • о
таГ2 = — mg-\-p — kx\
Разделив обе части равенства на т = т0(\ -\-olx), получим:
d2x р р k .2
dt2 *~i~ т0(\ + ax) т0(\+ах)'Л '
Для интегрирования этого уравнения воспользуемся подстановкой:
x = z.
Отсюда следует:
d2x dz dz . dz
dt2 dt dx dx
Подставляя эти выражения в дифференциальное уравнение,
получим:
dz . р k 2
^:z=—s
dx s * m0 (1 + <xx) m0 (1 + ax)
Положим теперь
тогда
^=2z —
dx dx '
Подставляя эти выражения в предыдущее уравнение, запишем
его в виде
*У-\ 2А v=_2oJ 2±
dx~m0 (1 + <хх)у * ~ т0 (1 + ах)
434
Таким образом, решение задачи приводится к интегрированию
линейного дифференциального уравнения относительно у.
в) Движение ракеты в межпланетном пространстве
(задача Циолковского)
Ракета движется в межпланетном пространстве так, что
относительная скорость сгорающих частиц постоянна по величине и
направлена коллинеарно вектору скорости v ракеты, в сторону,
противоположную движению. Сопротивлением среды и действием
внешних сил пренебрегаем (ввиду их малости). Определить
скорость ракеты и закон изменения расстояния от начала отсчета.
Составим уравнение движения ракеты, используя
уравнение (1): _
dv dm —
dt dt
Проектируя это равенство на направление вектора скорости v
получим:
или
Интегрируя это уравнение, получим:
v = — с\пт-{-С1У
где С1— постоянная интегрирования.
Пусть масса ракеты изменяется по закону:
m = mj(t), где /(0)=1,
и начальная скорость при £ = 0, v = v0.
Тогда при £ = 0 находим:
^о = — cln/Wo + Q;
Cl=vQ-\-c\nmQ.
Подставляя это значение в выражение для скорости v, получим:
0 I in
dv
dv
с
dm.
dm
m
С
Эта формула была впервые получена Циолковским.
Из формулы Циолковского следует, что конечная скорость
ракеты не зависит от закона расхода массы (т. е. режима работы
двигателя). Действительно, —2= j-r и независимо от того, как
происходило сгорание горючего (быстро или медленно), в конце
процесса, при сгорании массы горючего т0 — т> ракета будет
иметь вполне определенную скорость.
435
Найдем закон изменения пути. Формулу Циолковского для
скорости можно записать в виде
ds = vQdt -\- с In — dt = vQdt — с In/- dt.
Интегрируя это равенство, получим:
t
s = vQt — с J In/- dt -f- s0.
0
Если c = 0, т. е. относительная скорость сгорания частиц
равна нулю (двигатель выключен), то:
s = v0t + Sr
§ 3. ОСНОВНЫЕ УРАВНЕНИЯ МЕЩЕРСКОГО В ОБЩЕМ СЛУЧАЕ
Раньше б^1л рассмотрен случай, когда к материальной точке
присоединяются частицы либо от нее отделяются частицы.
Теперь рассмотрим более общий случай, когда происходит
одновременный процесс присоединения и отделения частиц. Примером
такого изменения массы может служить вращающийся вал, на
который наматывается одна цепь и сматывается другая цепь;
водометное судно, через одно отверстие которого вода
засасывается, а через другое выталкивается; движение самолета, при
котором происходит обледенение и сгорание горючего; цистерна,
из которой выливается и в которую одновременно вливается
жидкость; аэростат, с которого одновременно с вытягиванием
троса сбрасывается балласт, и т. п.
Пусть масса материальной точки будет m(t)y масса
присоединяющейся частицы т1 (t), масса отделяющейся частицы т2 (t).
Предполагаем, что эти массы являются непрерывными и
дифференцируемыми функциями от t.
Обозначим скорости этих масс в момент времени tt для т
через v, для т1 в момент присоединения через й1У для т2 в
момент отделения через й2.
В момент времени t-\-M материальная точка будет иметь
массу т -f- Lmx — Д//г2 и скорость v -\- Lv. В момент времени t
количество движения системы, состоящей из данной точки,
присоединяющихся и отделяющихся частиц находится по формуле:
/от + ДшД. (7)
В момент времени t-\~kt количество движений этой системы
находится по формуле (с точностью до бесконечно малых второго
порядка):
(/72 +Д/я, — Дт2Н^+А^) + Д/я2.йа. (8)
436
Если через F обозначить главный вектор внешних сил,
действующих на указанную систему, то по теореме импульсов и на
основании формул (7) и (8) можно записать:
(т^кт^— Д//г2) • (г/ -f- Дг>) -|- Д/гг2 • «2 — (mv-{-^mlul) = ^ Fdt.
t
Отсюда следует:
mkv + krnx (v — 5J -f- Д^2 (йг — Щ — ко (\т1 — Д/тг2) = F • М.
Разделив обе части равенства на М и переходя к пределу при.
\t—-*0, получим:
dv | dmx /— - \ i dm* (~ —\ ~е>
mTt+4f(v-u^+-df^-^=F
или +
Векторы
dv j=. . dm-, (- — ч dm2,- — ч
mTt=F+-df^-^—df^-v^
-ux — v\
являются относительными скоростями (по отношению к точке т)
соответственно присоединяющихся и отделяющихся частиц.
Векторы
-г- dm, - -гт drrio -
Ф =—-с Ф =—-с
^1 dt Ч> ^2 ^ Ч
называются, как и раньше, реактивными силами.
Таким образом, в общем случае основное уравнение
Мещерского движения точки переменной массы записывается в форме:
wf=F + 01 + 0r (9)
Из уравнения (9) следует, что закон движения точки
переменной массы в общем случае можно сформулировать
следующим образом: для каждого момента времена произведение
массы точки на ее ускорение равно геометрической сумме
действующих на точку внешней силы и сил реактивных,
обусловленных присоединением и отделением частиц.
Проектируя уравнение (9) на оси координат системы OXYZ,
получим уравнения движения в скалярной форме:
d2x '
mW^ = Fz-\-<t>izJr^z-
437
Заметим, что все вышеуказанные рассуждения и выводы
справедливы также для тела переменной массы, движущегося
поступательно. В уравнении (9) т будет тогда массой тела, v—_ско-
ростью тела, F — результирующей внешних сил, Ф1 и Ф2—
реактивными силами присоединяющихся и отделяющихся частей
его.
4. Некоторые приложения
В качестве иллюстрации метода применения основного
уравнения Мещерского рассмотрим некоторые задачи, впервые
решенные Мещерским.
а) Реактивное водометное судно
В корпусе судна имеется горизонтальный кана./?; вода
поступает в этот канал с той стороны, куда судно движется, и затем
при помощи центробежного насоса выбрасывается в сторону,
противоположную движению
судна. Изучим движение
судна (см. рис. 288). Обозначим
относительные скорости во-
Рис. 288. ды, когда она поступает в
судно и выбрасывается,
соответственно через с1 и с2.
В данном случае количества воды, поступающей в канал, и
воды, выбрасываемой из канала, одинаковы, и поэтому масса судна
и воды, помещающейся в канале ту является постоянной
величиной. Обозначим через р массу воды, проходящей через
входное отверстие при скорости 1 см/сек в единицу времени, и
через п — отношение площадей входного и выходного отверстий.
Тогда количества воды, входящей и выходящей за промежуток
времени А£, определяются по формулам:
Ш1=рс1М; Ш2=р-^ .
Так как
то заключаем, что
с2=пс1.
Предположим, что сопротивление воды пропорционально квадрату
скорости судна и, следовательно, определяется по формуле:
T=k2-v2 = k2x2.
Направляя ось ОХ по горизонтали, на основании первого
уравнения (10) получим уравнение движения судна в форме
d2x ,2 -2 &т\ | dm2
т~йГ2 — ~вл ~~dTCi\~~dtCv
438
Но
dmx
~dt'
dm9
-Pc-i
pc» dt —-it=pci-
Поэтому уравнение движения можно представить в виде
mv = — k2v2 —рс\ Jrpc1c2 = — k2-v2 -\-pc\ (n — l)
mv = q2c\ — k2v2y
q*=p(n-\).
или
где
(И)
Заметим, что для того чтобы скорость судна не уменьшалась,
необходимо, чтобы площадь входного отверстия была больше
скорости выходного, т. е. я> 1.
Для интегрирования уравнения (11) представим его в
следующем виде:
= 1
или
(qcx -{- kv) (qcx — kv)
1 , 1
2qcx \qcx-\-kv ' qcx — kv
Преобразуем уравнение (11) еще раз:
т f kv , kv
= 1.
= 1.
2qkcx \qcx -f- kv ' qcx — kv
Интегрируя полученное выражение, получим:
2qkc1
J qcx + kv J qcx — kv J '
т. e.
Lo
^ _ m j (qcx + kv) (qcx — kv0)
2qkcx (qcx — kv) (qcx -{- kvQ)
где v0 — начальная скорость судна.
Если v0 = 0, то
т ■ In qCl ~^~kv
2qkcx qcx — kv
Время tiy которое потребуется, чтобы сообщить судну скорость
с19 находится по формуле:
1 2qkc
т. е. время tJ9 необходимое для придания судну скорости, равной
относительной скорости засасывания воды сх, обратно
пропорционально величине скорости с1#
439
б) Падение цепи
Тяжелая однородная цепь висит, спускаясь по вертикали с
верхней горизонтальной площадки Р на нижнюю горизонтальную
ллощадку Q, расстояние между которыми равно /г; при этом у
края верхней площадки лежит сложенная часть цепи, площадки Q
цепь либо касается своим нижним концом, либо здесь также
лежит часть цепи; в некоторый момент приспособление,
удерживающее цепь в покое, устраняется, тогда цепь будет переходить
-с верхней площадки на нижнюю. Определить движение цепи
(см. рис. 289).
Цепь представляет собой
однородную гибкую
нерастяжимую нить. Движущаяся часть
цепи имеет постоянную длину
h до того момента tl9 когда
длина части цепи, сложенной на
7 верхней площадке, сделается
равной нулю. В течение
промежутка времени, следующего
за этим моментом, длина
движущейся части цепи
уменьшается и становится равной нулю,
Рис. 28У. когда верхний конец цепи
достигает нижней площадки.
Рассмотрим движение цепи в различные промежутки времени.
Первый случай. 0^t^tl.
В этом случае к движущейся части цепи OOl присоединяются
со скоростью с1 = 0 частицы цепи, лежащие на верхней
площадке, и отделяются частицы, ложащиеся на нижнюю площадку
со скоростью с2, равной скорости точек цепи. Рассмотрим
движение той точки М цепи, которая при t = 0 находится на краю
верхней площадки. Примем точку О за начало координат и
направим ось ОХ по вертикали вниз.
В некоторый момент времени t массы, присоединившиеся
к движущейся части цепи и отделившиеся от нее, одинаковы и
находятся по формуле:
тх = тг = рх,
где р—плотность цепи (масса единицы длины).
Кроме того,
с1 = 0; с2 = — х\ 'm = hp.
Согласно первому уравнению (10) уравнение движения
движущейся части цепи можно представить в виде
440
или после сокращения на р и деления на А:
d2x
dt*
=ё-т*2- (13>
Из полученного уравнения (13) следует, что скорость
движущейся цепи в некоторый момент t<^tx равна скорости в этот
момент тяжелой точки, падающей без начальной скорости в среде,
сопротивление которой пропорционально квадрату скорости.
Для интегрирования уравнения (13) воспользуемся
подстановкой
Jc = z.
Тогда уравнение (13) можно представить в виде
dz 1 2
или
dz л*.
1—= dt;
1 .9
S-7T*2
dz
Но при t=0, z = x = 0, поэтому C = 0.
Из полученной формулы следует:
- - i/I
(Ум+луУ f ,
\Vhg-z)
Vhg-z
Отсюда находим величину z:
е'У »+1 е У *+е У *
441
Из этой формулы определяется скорость движущейся цепи.
Интегрируя полученное равенство (14), получим:
О Л
= УГё[^Ще^+е-'^Ь] =
/|"4.в-'/^-1
= /z-[ln(<? У h +е У *) —1п2]
,'/S-o..-'Vl
= А-1п* + *
Итак, закон движения точки движущейся части цепи
определяется согласно формуле:
> гл.. 7 а
л=аш" +.* г :• (15>
е
2^
Второй случай. t^>tt.
Рассмотрим движение крайней верхней точки цепи.
В этом случае в момент времени t масса движущейся части
цепи уменьшается и массы, входящие в формулу (10), находятся
из соотношений:
/72 = (А — х)р; т2 = хр; т1=0,
где х — расстояние верхнего конца цепи от верхней площадки,
причем с2 = 0.
Поэтому уравнение движения рассматриваемой части цепи
имеет вид:
(Л — x)p^={h — x)pg
и, следовательно,
Из уравнения (16) следует, что движение цепи после момента
tx будет равномерно-ускоренным с ускорением g.
В рассматриваемой задаче может представиться еще один
случай, когда конец цепи свешивается с верхней площадки, не
достигнув нижней площадки. Этот случай был еще рассмотрен
Кэйли в 1857 г. Используя основное уравнение Мещерского (1),
легко составить уравнение движения цепи и в этом случае.
Действительно, если принять, что при t = 0, х = 0, то в
некоторый момент t\ т = хр, т1 = рху т2 = 0, где х — расстояние
442
нижнего конца цепи от верхней площадки, причем с1 = — х.
Поэтому уравнение движения цепи имеет вид:
или
d2x
=*-4- м
Для интегрирования полученного уравнения (17) воспользуемся
подстановкой:
z = x\
Тогда
.. dx dx . 1 d , . ч 2 \ dz
X — ~dt—dx~tX-~~2dxW —~2dx-
Уравнение
или
(17)
можно
представить в виде
1 dz z
2 ' dx & х
dx ' x ь
Полученное уравнение является линейным. Интегрируя его,
найдем:
z = x*=1? + Tgx.
Так как при £ = 0, х = 0, д: = 0, то С = 0, и из предыдущей
формулы получаем:
• 2 2
x2 = Tgx.
Преобразуем это выражение к виду, удобному для
интегрирования:
dx t f~2
Ш=У -gX;
dx
Ух~
Интегрирование дает следующее уравнение движения:
Полученное уравнение похоже на уравнение свободного падения
тела без начальной скорости x = -^-gt2t но числовой
коэффициент здесь в три раза меньше.
г* /~2
Григорий Маркович Финкелъштейft
КУРС ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ
Редактор Ю. Н. Дрожжин
Переплёт худож. В. С. Резникова
Худож. редактор П. В. Любарский
Техн. редактор Н. Я. Цирулъницкий
Корректор //. Я. Багаева
* * *
Сдано в набор 8/IX 1958 г. Подписано
к печати 15/ХИ 1958 г. 60Х921/!,. 273/4 и. л.
Уч.-изд. л. 24,91. Тираж 20 тыс. экз. А010580-
* * *
Учпедгиз. Москва, 3-й проезд Марьиной
рощи, 41. Заказ № 2249
Первая Образцовая типография имени
А. А. Жданова Московского городского-
Совнархоза. Москва, Ж-54, Валовая, 28>
Цена без переплёта 7 руб. 45 коп.,
переплёт 1 р. 50 к.