/




































































































































































































































































































































































































Author: Космодемьянский А.А.
Tags: механика теоретическая механика учебное пособие классическая механика кинетика механика тел переменной массы
Year: 1966



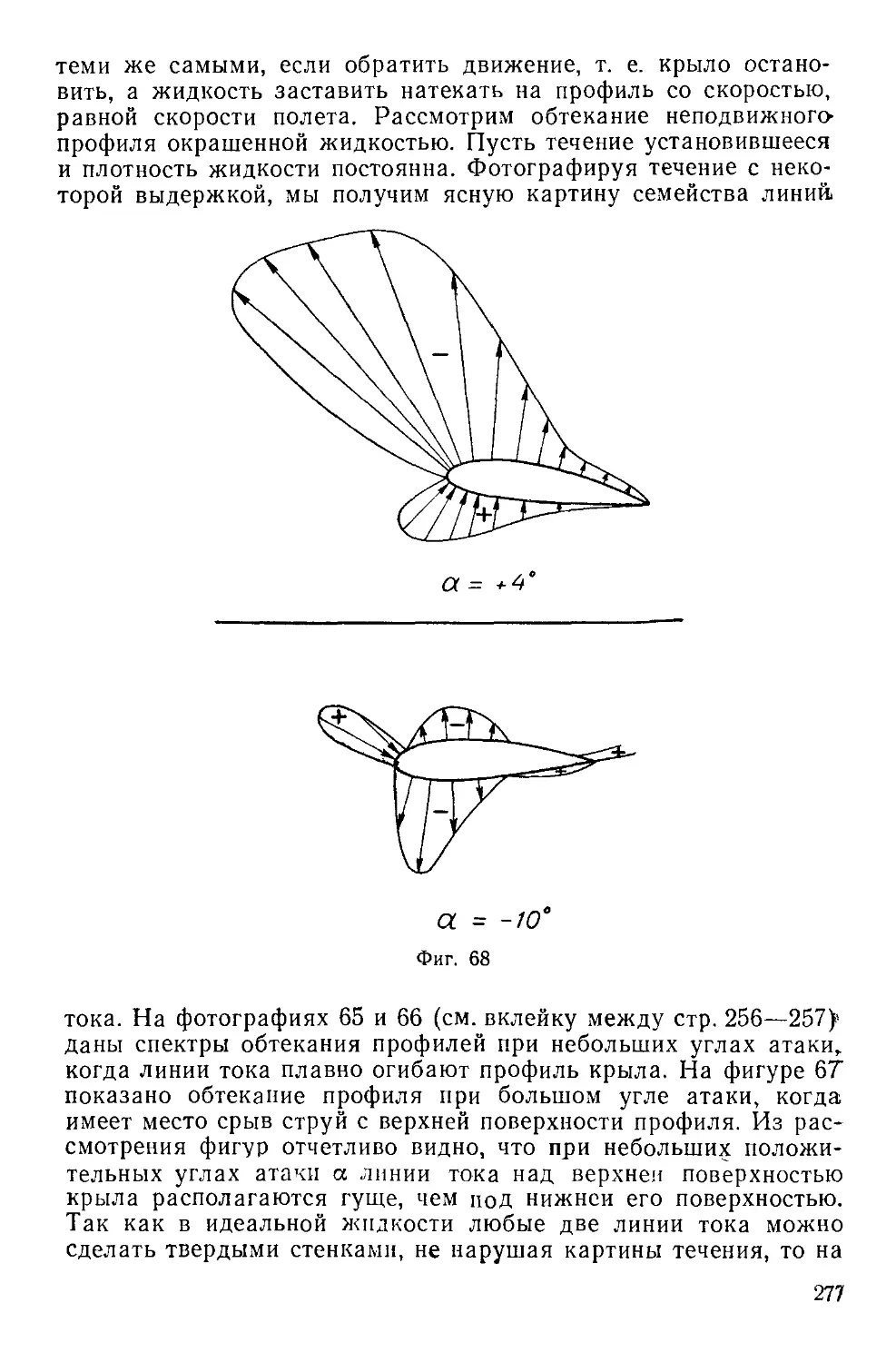
Text
А. А. КОСМОДЕМЬЯНСКИЙ
КУРС
ТЕОРЕТИЧЕСКОЙ
МЕХАНИКИ
ИЗДАНИЕ ТРЕТЬЕ,
ПЕРЕРАБОТАННОЕ
И ДОПОЛНЕННОЕ
ЧАСТЬ И
ИЗДАТЕЛЬСТВО
„ПРОСВЕЩЕНИЕ-
МОСКВА 1966
2-4-2
«¦В научном мышлении всегда
присутствует элемент поэзии».
А. Э й н ш т е й H.t
ПРЕДИСЛОВИЕ
Настоящая часть Курса теоретической механики, предназ-
предназначенного для студентов педагогических институтов и универ-
университетов, является естественным продолжением вышедшей в
1965 г. первой части курса. Вторая часть посвящена изложе-
изложению следующих разделов и проблем:
Механика тел переменной массы (динамика точки пере-
переменной массы, общие теоремы, уравнения типа Лагранжа и
Гамильтона).
Вариационные принципы классической механики (принцип
Гамильтона и принцип наименьшего действия).
Вариационные задачи динамики точки переменной массы.
Введение в аэрогидромеханику.
Автор надеется, что рассмотренные в этой части курса об-
общие вопросы теории механического движения и приводимые
решения конкретных частных задач динамики будут способство-
способствовать прогрессивной модернизации традиционного курса теоре-
теоретической механики, сформировавшегося в советскую эпоху рус-
русской высшей школы.
Необходимость модернизации курса классической механики
неоднократно высказывалась многими учеными нашей страны,
и мы пытались осветить в этой книге новые проблемы механики
и дать решения некоторых актуальных задач современной раке-
тодинамики, которые можно внедрять в преподавание, учитывая,
конечно, специфику местных условий и возможностей.
Вариационные задачи динамики точки переменной массы с
приложениями к ракетодинамике и динамике полета самолетов
представлены в данном курсе в самом простом изложении, при-
причем детально изучены только необходимые условия оптимально-
оптимальности. В перечне рекомендуемой литературы, приводимом в конце
книги, указаны работы, в которых подвергаются тщательному
1* 3
анализу достаточные условия экстремума в аналогичных проб-
проблемах и задачах.
Целый ряд вариационных задач, приведенных в IV разделе,
только сформулирован, и намечены лишь первые шаги после-
последующего детального анализа. Автор надеется, что учащиеся и
преподаватели найдут в этих эскизах благодарный и актуаль-
актуальный материал для самостоятельных размышлений. Мы хотели
бы обратить внимание читателей на большой класс изопериме-
трических задач динамики точки переменной массы, которые
имеют практическое значение при решении проблемы перехвата
(проблемы «рандеву») для воздушных и космических кораблей.
Наш опыт преподавания в Московском университете показы-
показывает, что современное студенчество охотно занимается исследо-
исследованиями вариационных задач механики и выбирает эту пробле-
проблематику как для своих дипломных сочинений, так и в качестве
тем докладов в научных семинарах и кружках. Я уверен, что это
вызывается идеальными мотивами, а не серыми разновидностя-
разновидностями неопрагматизма.
Настоящая часть курса посвящена специальным вопросам
теоретической механики и, по-видимому, будет иметь самостоя-
самостоятельное значение для студентов и преподавателей независимо от
материала первой части. Поэтому связь с первой частью курса
осуществлена лишь в нумерации разделов (счет страниц, фи-
фигур, а также указатели даны независимо). Раздел «Введение в
аэрогидромеханику» дополнен теориями сопротивления давле-
давления и современными данными об атмосфере планеты Земля.
Эта книга выходит в свет как исполнение заветного желания
автора систематизировать ранее проведенные исследования по
механике тел переменной массы и теоретической ракетодина-
мике. Работа была выполнена лишь благодаря вниманию моих
отзывчивых друзей и учеников, которые своей теплотой и чело-
человечностью сохраняли в моем сердце искорки оптимизма и на-
надежды в трудные для меня месяцы 1965 года. Русское им бла-
благодарствуем.
А. Космодемьянский
Москва, ноябрь 1965 г.
РАЗДЕЛ ТРЕТИЙ
МЕХАНИКА ТЕЛ ПЕРЕМЕННОЙ МАССЫ
(теория реактивного движения)
ВВЕДЕНИЕ
«...Весьма вероятно, что многие, выслушав-
выслушавшие меня, не будут достаточно убеждены.
Не запирайте книгу в шкаф, а передайте
ее другому; пусть она попутешествует. Мо-
Может быть, со временем она встретит лю-
людей, которые поймут ее иначе».
К. Э. Циолковский,
1. Механика тел переменной массы — новая широкая об-
область исследований в современной теоретической механике.
Главной задачей этого направления развития механики является
изучение движения и равновесия тел, масса которых изменяется
во время движения. Зарождение идей об изучении движения тел
переменной массы относится к концу XIX столетия, когда раз-
развитие ракетной техники, наблюдательной астрономии и электро-
электродинамики привело к рассмотрению нового класса задач меха-
механики, задач, в которых масса движущегося тела является или
функцией времени (ракетная техника, небесная механика), или
функцией скорости (специальная теория относительности).
Имея в виду необычайно быстрое развитие в XX в. новых от-
отраслей промышленности: ракетостроения и ядерной энергетики,
для которых теория реактивного движения и теория относи-
относительности имеют фундаментальное значение, можно утверждать,
что прогресс теоретической механики в XX столетии обусловлен
в значительной степени совершенствованием методов механики
тел переменной массы.
Классическая механика имеет в своей основе законы движе-
движения материальной точки, строго сформулированные И. Ньюто-
Ньютоном. Почти все расчетные формулы, рекомендуемые в клас-
классической механике для характеристики движений различных
объектов, имеют в качестве исходного положения второй закон
Ньютона, устанавливающий простое соотношение между уско-
ускорением материальной точки, ее массой и действующими силами.
Однако второй закон Ньютона справедлив, вообще говоря,
только для движений материальной точки постоянной массы *.
Если во время движения масса точки изменяется, то основной
закон движения следует формулировать в новой, более общей
форме, учитывая характеристики процесса изменения массы точ-
точки при определении ее ускорения.
В различных отраслях промышленности можно указать при-
примеры движущихся тел, масса которых заметно изменяется во
время движения. Так, вращающееся веретено, на которое нави-
навивается нить, изменяет свою массу и моменты инерции в процессе
движения. Рулон газетной бумаги, который разматывается на
валу печатной машины, дает нам пример тела, масса которого
уменьшается с течением времени.
Управляемые ракеты различных конструкций, реактивные
снаряды, реактивные мины и торпеды суть тела, масса которых
существенно изменяется во время движения. Реактивные само-
самолеты с воздушно-реактивными двигателями дают нам примеры
движущихся тел переменной массы, когда имеет место одно-
одновременное присоединение и отделение частиц. Масса реактив-
реактивного самолета увеличивается за счет частиц воздуха, засасы-
засасываемых в двигатель, и уменьшается вследствие процесса отбра-
отбрасывания частиц —продуктов горения топлива.
Случаи движения тел, масса которых изменяется с течением
времени, можно видеть во многих явлениях природы. Так, на-
например, масса Земли возрастает вследствие падения на нее ме-
метеоритов и метеорной пыли. Масса падающего метеорита, дви-
движущегося в атмосфере, убывает вследствие того, что частицы
метеорита отрываются благодаря воздействию воздуха или сго-
сгорают. Масса Солнца возрастает от присоединения «космической
пыли» и уменьшается от излучения.
Механика тел переменной массы имеет большое значение для
правильного описания движения планет, и особенно Луны. Во-
Вопрос о более точном (по сравнению с решением Л. Эйлера) изу-
изучении движения Луны был поставлен в астрономической литера-
литературе в 1866 г.**, когда возникла необходимость объяснить рас-
расхождение данных наблюдений и вычислений векового ускорения
долготы Луны. Вековое ускорение долготы Луны, представляю-
представляющее характерную особенность ее видимого движения, было от-
открыто в конце XVII в. Эдмундом Галлеем (Англия). Сравнивая
собственные наблюдения Луны и наблюдения своих современни-
современников с более ранними, Галлей обнаружил уменьшение периода
* Второй закон Ньютона, как будет показано далее, может быть исполь-
использован для изучения движения точки переменной массы при частных пред-
предположениях о процессе отделения частиц, изменяющем массу основной
точки.
** См ¦ С h. D u f u r, Sur I'acceleration seculair du mouvement de la lune,
Comptes Rendus, Paris, t. LXH, 1866.
6
обращения Луны вокруг Земли. Уменьшение периода обраще-
обращения Луны, т. е. увеличение средней скорости ее движения по ор-
орбите, численно характеризуется наличием тангенциального уско-
ускорения. Влияние тангенциального ускорения при движении Луны
на положение ее относительно неподвижных звезд пропорцио-
пропорционально квадрату времени, и, таким образом, его можно сравни-
сравнительно легко обнаружить по истечении больших промежутков
времени.
Величина соответствующего коэффициента векового ускоре-
ускорения долготы Луны определялась по данным наблюдательной
астрономии в 10—12 сек дуги. Частично, как показал Лаплас,
величина векового ускорения может быть объяснена уменьше-
уменьшением эксцентриситета земной орбиты. Вторая часть векового
ускорения (около 6 сек) зависит от изменения массы Земли и
Луны вследствие падения на них метеоритов. Оказывается, что
согласие наблюдений и вычислений получается хорошим, если
допустить, что средний радиус Земли возрастает от массы па-
падающих метеоритов и метеорной пыли на полмиллиметра в сто-
столетие.
2. Основной закон динамики точки переменной массы был
открыт русским ученым профессором Ленинградского политех-
политехнического института И. В. Мещерским в 1897 г. в его маги-
магистерской диссертации. Для развития теоретической механики и
особенно ее приложений в задачах динамики ракет (ракетодина-
мике) установление исходного уравнения имеет весьма большое,
принципиальное значение.
Если ограничиться рассмотрением движения точки перемен-
переменной массы, то можно указать два основных фактора, влияющих
на структуру уравнений движения этой точки и отличающих ее
уравнения движения от уравнения Ньютона, — это переменность
массы точки и принятая гипотеза отделения частиц, определяю-
определяющая добавочную, или реактивную, силу. Если относительная ско-
скорость отделяющихся частиц равна нулю, то добавочная сила,
обусловленная процессом отделения частиц, также равна нулю.
Естественно поэтому было начать разработку теории с такого
частного случая, когда реактивная сила не входит в расчеты.
Результаты исследования движения точки переменной массы
при этом простом предположении были доложены И. В. Ме-
Мещерским Петербургскому математическому обществу еще в
1893 г.
Последующие работы по вопросам теории движения тел пе-
переменной массы привели И. В. Мещерского к созданию строго
обоснованной динамики точки переменной массы*.
* И. В. Мещерский, Динамика точки переменной массы, Спб., 1897.
См. также: И. В. Мещерский, Работы по механике тел переменной
массы, изд. 2, Гостехиздат, М., 1952.
Полученное И. В. Мещерским основное уравнение движения
точки переменной массы дало возможность установить количе-
количественные закономерности для различных частных задач. Мы не
можем в настоящее время указать новых работ, которые по глу-
глубине идей и богатству методов стояли бы на одном уровне с
этой «старой» работой И. В. Мещерского. Следует только под-
подчеркнуть, что одной из существенных гипотез, лежащих в основе
метода Мещерского, является гипотеза близкодействия (кон-
(контактного взаимодействия тела и отбрасываемых частиц). Допу-
Допускается, что в момент отделения частицы от тела или точки про-
происходит явление, аналогичное удару: частица за очень малый
промежуток времени получает конечную относительную ско-
скорость и дальнейшее взаимодействие частицы и основного тела
прекращается. Второй закон Ньютона получается из уравнения
Мещерского как частный случай.
В 1904 г. И. В. Мещерский опубликовал большую работу, по-
посвященную изучению движения точки переменной массы с одно-
одновременным присоединением и отделением частиц*. В этой ра-
работе по существу содержится теория поступательного движения
реактивных аппаратов с воздушно-реактивными двигателями,
хотя рассмотренные Мещерским частные задачи относились к
динамике нити и движению реактивного судна.
Ценный вклад в механику тел переменной массы внес вы-
выдающийся русский ученый К- Э. Циолковский. В 1903 г. он
опубликовал работу «Исследование мировых пространств реак-
реактивными приборами»**, в которой весьма обстоятельно иссле-
исследован ряд интересных случаев прямолинейных движений тел
переменной массы (ракет). Простейшая задача, решенная и ис-
исследованная Циолковским, касается возможностей самого прин-
принципа реактивного движения. Изучая движение точки в среде без
внешних сил, Циолковский показал, что при достаточно больших
скорости отбрасывания частиц и величине отношения начальной
массы точки к массе конечной можно получить весьма большие
(космические) скорости. Выведенная им формула, устанавли-
устанавливающая связь между скоростью ракеты и ее массой, получила
* И. В. Мещерский, Уравнения движения точки переменной массы
в общем случае, «Известия С.-Петербургского политехнического института
за 1904 г.», т. I, вып. 1—2, стр. 77—118.
Следует отметить, что первое научное сообщение об уравнениях движе-
движения точки переменной массы в общем случае было сделано И. В. Мещер-
Мещерским 24 августа 1898 г. в г. Киеве на X съезде русских естествоиспытате-
естествоиспытателей и врачей. См. дневник X съезда, стр. 139—140. В 1949 г. работы
И. В. Мещерского по механике тел переменной массы были изданы Госу-
Государственным издательством технико-теоретической литературы. См.: И. В. Ме-
Мещере к и й, Работы по механике тел переменной массы, Гостехиздат, М.,
1952.
** Работы К. Э. Циолковского по ракетной технике вошли во
II том его Собрания сочинений, изд. АН СССР, 1954.
8
мировую известность и широко используется для предваритель-
предварительных расчетов в практике работ конструкторских бюро. Циолков-
Циолковский первый в научной литературе дал оценку эффективности
процессов отбрасывания частиц и. определил коэффициент по-
полезного действия ракет, указав на выгодность реактивных дви-
двигателей при больших скоростях движения. В своих последую-
последующих работах A911—1914) он подробно изучил вопрос о запасах
массы, необходимых для преодоления ракетой поля тяготения
Земли, и предложил высококалорийные топлива, обеспечиваю-
обеспечивающие большие скорости отбрасывания (истечения) частиц. Циол-
Циолковский выдвинул много новых идей в области конструирования
реактивных аппаратов для межпланетных сообщений, и его по
праву считают изобретателем жидкостных реактивных двига-
двигателей, ракет дальнего действия и основоположником теории
межпланетных сообщений.
В механике тел переменной массы Циолковскому принадле-
принадлежит идея изучения таких движений точки переменной массы,
когда на некоторых интервалах времени масса точки изменяется
непрерывно, а в некоторые моменты — скачком (так называемые
многоступенчатые ракеты или поезда ракет). В задачах этого
типа он первый открыл оптимальное соотношение весов ступе-
ступеней поезда ракет при некоторых частных предположениях. Циол-
Циолковский провел большие исследования по оценке влияния сил
сопротивления среды на скорость ракеты, пробивающей слой ат-
атмосферы, однако здесь его расчеты имеют только приближенный
характер, так как развитие знаний по аэродинамике больших
скоростей происходило главным образом в последние двадцать
пять лет. Замечательные работы И. В. Мещерского и К- Э. Ци-
Циолковского гармонично дополняют друг друга. Конкретные за-
задачи ракетной техники, рассмотренные Циолковским, показали
не только богатство практических приложений механики тел пе-
переменной массы, но и способствовали росту самой теории благо-
благодаря постановке совершенно новых оригинальных проблем.
3. Из ранних работ иностранных авторов существенное зна-
значение имеют работы * ГоддараA), ОбертаB), Гоман-
на C) иЛеви-ЧивитаD). Теоретические исследования Год-
дара привели его к постановке весьма интересной и важной
практически вариационной задачи о выборе режима изменения
массы ракеты, набирающей высоту в поле тяготения Земли при
учете сил сопротивления воздуха. Эту задачу можно формулиро-
* 1) R. God da г d, A Method of Reaching Extreme Altitudes, Second Edi-
Edition, 1946.
2) H. Obert, Die Rakete zu den Planetenraumen, 1 Aufl., 1923.
3) W. Hohmann, Die Erreichbarkeit der Himmelskorper, 1925.
4) T. Levi-Civita, Sul moto di un corpo di massa variabile, Rendi-
conti della Reale Academiae Nationale dei Liiicei, 1928, pp. 329—333, 621—622.
вать так каков должен быть минимальный запас топлива в ра-
ракете, чтобы поднять данную массу {полезный груз) на данную
высоту? Секундные расходы массы предполагаются перемен-
переменными Методы решения этой задачи, предложенные Годдаром в
1919 г, были малообоснованными и по существу заменяли ва-
вариационную задачу другой, более простой, предполагая ускоре-
ускорение движения ракеты на отдельных участках постоянным Та-
Таким образом, Годдар решал не поставленную им вариационную
задачу, а некоторую, по современной терминологии, обратную
задачу об определении секундных расходов массы, когда закон
движения ракеты задан
Однако следует отметить, что Годдар привел убедительные
качественные доводы о существовании наивыгоднейшего (опти-
(оптимального) режима при наборе высоты Он писал « если на ка-
какой-нибудь промежуточной высоте скорость подъема чрезмерно
велика, то сопротивление воздуха, зависящее от квадрата скоро-
скорости, также будет очень велико С другой стороны, если скорость
подъема очень мала, тогда реактивная сила должна преодоле-
преодолевать притяжение Земли слишком долго В обоих случаях потреб-
потребный для подъема на данную высоту запас топлива получается
чрезмерно большим Очевидно, что оптимальная скорость
подъема должна иметь значение, соответствующее каждому ме-
месту по высоте»
Строгое математическое решение задачи Годдара, без рас-
рассмотрения каких-либо конкретных примеров, было намечено
в небольшой заметке Га мел я* A) Позднее задачу Годдара
весьма детально исследовали Тзян и Эванс B), а также
Л ейт м а н C)
Другое, более простое решение задачи Годдара дали совет-
советские ученые ** Космодемьянский D) и Охоцимский
E) Мы изложим эти решения с соответствующими историче-
историческими справками в IV разделе этой книги
В большой работе Оберта «Ракета" в космическое простран-
пространство» (первое издание 1923 г) наибольший интерес представ-
представляет его попытка решить задачу об определении оптимального
режима набора высоты ракетой, исходя из некоторого экстре-
* 1) G H a m е 1, Ober erne mit dem Probleme der Rakete zusammenhan
gende Aufgabe der Vanationsrechnung, ZAMM Bd 7 1927, s 451—452
2) H S Ты en and R С Evans, Optimum Thrust Programming for
a Sounding Rocket, Journ of the American Rocket Society, vol 21 Sept 1951,
pp 99—107
3) G L e 11 m a n n, A Calculus of Variations Solution of Goddard's
Problem, Astronautica Acta, vol II, fasc 2 1956, pp 55—62
**4)A А Космодемьянский, Механика тел переменной массы
(теория реактивного движения), ч I, изд ВВИА им Жуковского 1947,
стр 67—88
5) Д Е Охоцимский, К теории движения ракет. Прикладная мате-
математика и механика, т. X, вып 2, 1946
10
мального принципа, который не вытекает из уравнений движе-
движения и не был доказан автором Кратко принцип Оберта можно
формулировать следующим образом Пусть сумма сил тяжести
и лобового сопротивления в данный момент будет R Наивыгод-
Наивыгоднейший режим подъема, по Оберту, будет тот, при котором си-
сила, препятствующая движению, рассчитанная на единицу п>ти
в единицу времени, будет наименьшей Математически это усло-
условие можно записать в виде
i- (-) - о-
dv \ v )
Отметим, что в последние десять лет за рубежом появилось
большое число работ по исследованию оптимальных режимов
движения ракет методами вариационного исчисления Такой
путь мы считаем наиболее прогрессивным и адекватным физи-
физической сущности проблемы Наиболее интересными являются ис-
исследования * Гиббса A), Лаудена B), Чикола и Мие-
л я C) и ряда других авторов Полученные в этих исследованиях
результаты были найдены в СССР на 7—10 лет раньше Космо-
Космодемьянским, Охоцимским, Соркиным, Эльясбергом, Энеевым,
Воробьевым, Зенкиным, Рабиновичем, Каменомостским и дру-
другими, но опубликованы в различных подписных изданиях и от-
отчетах По-видимому, приоритетные споры следует отнести на бо-
более поздние и спокойные времена
4. Работы Леви-Чивита посвящены выводу основного уравне-
уравнения движения точки переменной массы при предположении, что
абсолютная скорость отбрасываемых (или присоединяющихся)
частиц равна нулю В этом случае основное уравнение движения
точки переменной массы будет иметь вид-
где М — масса точки, v — ее скорость, F— равнодействующая
внешних сил, приложенных к точке Указанное уравнение по-
послужило началом большого цикла исследований итальянских
*l)A R Hibbs Optimum Burning Programm for Horizontal Flight,
Joarn of the Amer Rock Soc vol 22, July —August, 1952, pp 206—212
2) D F Law den, Optimal Programming of Rocket Thrust Direction,
Astronautica Acta, vol I, fasc 1, 1955, pp 41—56 «Optimal Transfer Between
Circular Orbits Abaut Two Planets» Astronautica Acta, vol I fasc 2, 1955,
pp 89—99 В этих работах дана подробная библиография работ D F Law-
den по оптимальным режимам движения
3) Р Cicola and A Miele, Generalized Theory of the Optimum
Thrust Programming for the Level Flight of a Rocket Powered Aircraft, Jet-
Propulsion, vol 26, № 6, 1956 В этой статье имеется библиография основ-
основных работ Р Cicola и A Miele no применению методов вариационного
исчисления к исследованию оптимальных режимов движения самолетов и
ракет
11
ученых и в итальянской научной литературе обычно называется
уравнением Леви-Чивита. Объективности ради заметим, что ре-
результаты Леви-Чивита полностью содержатся в указанной выше
работе Мещерского 1897 г.
Создание теории движения тел переменной массы, фор-
формулировка основных теорем, вывод уравнений движения в об-
обобщенных координатах и решение ряда частных задач
были выполнены в работах А. А. Космодемьянского,
Р. Е. Соркина, Л. П. Смирнова, Ф. Р. Гантмахера|
и Л. М. Левина, В. Ф. Котов а, А. И. Зенки на В. А. С а*'
паи других советских ученых *. За рубежом вопросам дина-
динамики тел переменной массы посвящены работы ** А г о с т и-
нелли A), Россера, Ньютона и Гросса B), Рэнки-
на C) и ряда других авторов.
Следует отметить, что ряд ценных мыслей об основных ура-
уравнениях движения тела переменной массы содержится в главе I
диссертации И. В. Мещерского «Динамика точки переменной
массы», 1897 г.
5. Механика тел переменной массы — наука XX столетия.
В течение первых трех десятилетий XX в. этот отдел механики
разрабатывался главным образом астрономами и инженерами-
ракетчиками. Идея межпланетных путешествий была тем твор-
творческим стимулом, который вдохновлял многих исследователей,
начиная с Циолковского. Благодаря трудам Циолковского, Эс-
но-Пельтри, Годдарда, Оберта, Гоманна, Цандера, Валье, Вет-
чинкина, Зенгера, Тихонравова было поставлено много интерес-
интересных задач о движении тел переменной массы. Эти задачи и опыт
применения реактивного оружия во второй мировой войне яви-
явились тем фактическим материалом, на котором строится в наши
дни более совершенная и более строгая теория. Связь тео-
теоретических изысканий в области механики тел переменной
массы с ракетной техникой очевидна. Надежной теоретиче-
теоретической базой дальнейших обобщений являются работы И. В. Ме-
Мещерского, к сожалению, все еще не получившие мирового при-
признания.
Ракетная техника становится сейчас одной из ведущих от-
отраслей промышленности. Теория реактивного движения является
основным содержанием механики тел переменной массы. В наши
дни развитие этого нового раздела теоретической механики в
* См. библиографию в конце книги.
**1) С. Agostinelli, Sui sistemi dinamici di massa variabili, «Atti
della Reale Academia delle Scienze di Torino», 1935, pp. 254—272.
2) D. B. Rosser, R. R. Newton, G. L. Gross, «Mathematical Theory
of Rocket Flight», 1947, New-York (есть русский перевод 1950 г.).
3) R. A. Rankin, The Mathematical Theory of the Motion of Rotated
and Unrotated Rockets, London, 1949 (есть русский перевод 1951 г.),
12
значительной степени определяет дальнейший прогресс методов
классической механики.
Механика тел постоянной массы возникла как наука, изу-
изучающая движение тел по отношению к Земле, но, только полу-
получив неопровержимые доказательства на небе, она начала с
триумфом внедряться в промышленность и смежные области
знания, став орудием великих технических преобразований.
Классическая механика — научная основа многих разделов со-
современной техники.
Механика тел переменной массы начала интенсивно разви-
развиваться под влиянием фантастических проектов о межпланетных
путешествиях, но, только получив реальные применения на Зем-
Земле, она становится сейчас научной базой триумфальных полетов
в космосе. В последние 15 лет XX в. A950—1965) были созданы
межконтинентальные и глобальные ракеты, зенитные управляе-
управляемые ракеты, реактивные сверхзвуковые самолеты. 4 октября
1957 г. в Советском Союзе был выведен на эллиптическую ор-
орбиту первый в мире искусственный спутник Земли, получена
первая космическая скорость и реально сделан «первый вели-
великий шаг человечества» * в овладении тайнами космического про-
пространства. Ракетостроители нашей страны первыми получили
вторую космическую скорость и осуществили 2 января 1959 г.
успешный пуск космической ракеты в сторону Луны. Советский
гражданин летчик-космонавт Ю. А. Гагарин первым в мире со-
совершил полет в космическом пространстве. К настоящему вре-
времени (июнь 1966 года) уже одиннадцать советских летчиков-
космонавтов выполнили успешные полеты в космосе.
Успехи ракетостроения и космонавтики столь многообещаю-
многообещающи и значительны, что даже люди моего поколения будут при->
нимать участие в создании космических кораблей, летящих с
пилотами-космонавтами к ближайшим планетам солнечной си-
системы — Венере и Марсу.
Автор этой книги надеется, что излагаемые в III и IV разде*
лах материалы будут полезны учащимся и ученым при реше-
решении актуальных современных проблем динамики полета ракет-
ракетных аппаратов и будут содействовать новым исследованиям по
теоретической механике.
* Слова К. Э. Циолковского, который писал в 1926 г.: «...первый вели-
великий шаг человечества состоит в том, чтобы вылететь за атмосферу и сде-
сделаться спутником Земли» (Собрание сочинений, т. И, 1954, стр. 208).
ГЛАВА I
ПРОСТЕЙШИЕ ЗАДАЧИ ДИНАМИКИ
ТОЧКИ ПЕРЕМЕННОЙ МАССЫ
§ 1. Основное уравнение динамики точки переменной массы
1. Закон сохранения количества движения.
Динамика точки переменной массы представляет собой новый
раздел теоретической механики. При формулировании основных
законов для точки переменной массы мы будем широко пользо-
пользоваться законами механики тел постоянной массы.
Первым фундаментальным законом, на котором строится ди-
динамика точки переменной массы, является закон неуничтожи-
неуничтожимое™ (сохранения) механического движения. Мерой механиче-
механического движения, когда оно сохраняется как механическое дви-
движение, является вектор количества движения. Закон сохране-
сохранения количества движения в элементарной (скалярной) форме
был открыт еще Декартом A596—1650), который впервые
указал на весьма большое значение этого закона для изучения
механических движений. При доказательстве закона сохранения
количества движения Декарт исходил из простейших явлений
абсолютно упругого удара и закона инерции; в последующем
развитии теоретической механики этот закон часто рассматри-
рассматривался как аксиома и был основой для кинетического построения
механики в отличие от динамической (ньютонианской) концеп-
концепции. Мы формулируем закон сохранения количества движения
в следующем виде: при любых механических процессах, проте-
протекающих в замкнутой механической системе точек (без действия
внешних сил), суммарное количество движения остается по-
постоянным.
Замкнутой механической системой точек мы называем такую
систему, в которой движение частиц обусловлено только силами
взаимодействия, или внутренними силами. Закон сохранения ко-
количества движения можно доказать, исходя из теоремы о коли-
количестве движения для системы точек постоянной массы. В самом
деле, теорема об изменении количества движения механической
системы точек утверждает, что производная по времени от век-
вектора количества движения системы точек равна результирующей
14
всех внешних действующих на систему сил, т. е.
dQ t.(e,
В соотношении A)
Q = 2 mvvv
есть сумма количеств движения точек, составляющих систему, а
есть результирующая всех внешних действующих на систему
сил. Если механическая система замкнутая, то результирующая
внешних сил /?<e> = 0, и мы будем иметь из A), что
Q = const = Q0,
->¦
где Qo — начальное количество движения системы.
Точку переменной массы M = M(t) и систему отбрасываемых
ею частиц с массами [xi, [Х2, ¦ ¦ ¦ , Hn-i можно в совокупности рас-
рассматривать как систему п точек постоянной массы. Обозначим
вектор количества движения совокупной системы в некоторый
начальный момент времени через Qo; при отсутствии внешних
->
сил вектор Q остается постоянным во все время движения. Вну-
Внутренние силы, как известно, не могут изменить вектора количе-
количества движения механической системы.
Точку переменной массы М мы будем представлять как центр
тяжести достаточно малого тела, масса которого изменяется с
течением времени, причем процесс изменения массы происходит
таким образом, что относительные смещения центра масс М по
отношению к осям координат, связанным с движущимся телом,
столь малы, что их можно не учитывать. С математической точ-
точки зрения точка переменной массы — это геометрическая точка
с некоторой конечной массой, изменяющейся во время движе-
движения.
Предполагая делимость точки М и включая отбрасываемые
частицы (xi, (х2, . .., (х„_1 в единую механическую систему, мы
приходим к известному из классической механики представле-
представлению механической системы точек постоянной массы. Зная дви-
движение одной части такой механической системы, т. е. движение
частиц (xi, (X2, • • •, [Xn-i, мы можем определить движение излу-
излучающей центральной точки. Такой метод изучения движения
точки переменной массы хотя принципиально и возможен, но
практически неосуществим, ибо он требует решения проблемы
небесной механики о движении п тел. Хорошо известно, что да-
даже при п = Ъ (проблема трех тел) решение такой проблемы
15
наталкивается в общем случае (при произвольных начальных
условиях) на непреодолимые математические трудности.
При дальнейшем изложении мы не будем рассматривать фи-
физико-химические процессы, которые обусловливают отбрасыва-
отбрасывание частиц от центральной точки М; все наше внимание будет
сосредоточено на изучении механического движения этого излу-
излучающего центра в предположении, что процесс отбрасывания ча-
частиц нам известен.
2. Закон независимого действия сил. Если точ-
точка переменной массы находится в некотором силовом поле, об-
обусловленном массами, не принадлежащими к системе частиц М,
\х,\, Ц2, • • •, рьп-i, то изменение скорости излучающего центра бу-
будет определяться не только движением отброшенных частиц
Hi, (X2, • • •, (in-i, но и действием внешних сил. Изменение ско-
скорости основной точки М, обусловленное процессом отбрасывания
частиц, отображает действие некоторой силы, внутренней по от-
отношению к рассматриваемой системе частиц. Как известно из
классической механики, изменение движения некоторой мате-
материальной точки за какой-либо промежуток времени под дей-
действием нескольких сил происходит так, как если бы каждая из
сил действовала независимо от других в течение того же проме-
промежутка времени. Силы в механике не индуцируют одна другую.
Следствием закона независимого действия сил является за-
закон параллелограмма сил и закон параллелограмма ускорений.
Если приращение скорости, обусловленное процессом отбрасы-
отбрасывания частиц, равно dvu а приращение скорости, обусловленное
действием поля внешних сил, равно dv2, то суммарное прираще-
приращение скорости определится по следующей векторной формуле:
dv = dvl -f- dv2. B)
Разделив обе части B) на dt, получим:.
w = Wi ~f- w-x. C)
Формула C) выражает математически закон независимого дей-
действия сил.
Принципиальным упрощающим предположением, которое бу-
будет принято в дальнейшем, является предположение близкодей-
ствия (контактного взаимодействия) при отбрасывании частиц
от основной точки М. Мы будем считать, что отбрасываемая от
точки М частица \ih изменяет ее количество движения только в
момент непосредственного контакта М и \ih; как только частица
(ik получает относительную скорость по отношению к точке М,
ее воздействие на точку М прекращается. Элементарная реак-
реактивная сила, возникающая по закону действия и противодей-
противодействия в момент отделения частицы щ{, аналогична силе удара,
возникающей при внезапном нарушении связей в задачах клас-
16
-V
сической механики. Гипотеза близкодействия позволяет полу-
получить дифференциальные уравнения движения точки переменной
массы. Если учитывать влияние всей совокупности отброшен-
отброшенных частиц на движение основной точки М, то при непрерывном
процессе отбрасывания мы приходим к интегродифференциаль-
ным уравнениям движения.
При выводе основных уравнений движения ограничимся слу-
случаями, когда процесс изменения массы излучающего центра М
происходит непрерывно. Для обширного класса задач, когда из-
изменение массы происходит скачкообразно (отделяются порции
материи конечной массы), решения можно получить непосред-
непосредственным применением
общих теорем класси-
классической механики тел
постоянной массы. Кро-
Кроме того, мы будем до-
допускать, что первая
производная от массы
точки по времени ос-
остается ограниченной во
время движения, за
исключением, может
быть, конечного числа
отдельных моментов х Фиг. 1
времени.
3. Уравнение Мещерского. Рассмотрим некоторую
точку, масса которой изменяется с течением времени. Пусть в
момент t масса этой точки равна М. Будем изучать движение
данной точки относительно некоторой неподвижной системы
осей координат Oxyz (фиг. 1). Пусть абсолютная скорость точ-
точки М в момент t равна и, и, следовательно, ее количество дви-
движения:
D-> ->
Q0 — Mv. D)
Пусть за время dt точка М отбросила от себя частицу массы
(—dM), и пусть абсолютная скорость этой частицы (скорость
по отношению к системе Oxyz) равна и. Количество движения
всей системы (точка плюс отброшенная частица) в момент
t + dt будет равно:
-> -> ->¦ ->
где через dvi обозначено приращениехкорости рассматриваемой
точки (излучающего центра), обусловленное процессом отбра-
отбрасывания частиц.
2 А. А. Космодемьянский
17
На основании закона сохранения количества движения
•> ->
имеем: Q = Qo, т. е.
>
Пренебрегая в F) членом (dM dvi) второго порядка малости,
мы находим, что
-> ->
Формула G) позволяет определить приращение скорости основ-
основной точки массы М, вызванное отбрасыванием частицы массы
(—dM) *.
Если на точку М действуют внешние силы, равнодействую-
равнодействующая которых равна F, то приращение скорости точки, обуслов-
обусловленное действием силы F, на основании второго закона Нью-
Ньютона с точностью до малых второго порядка будет равно:
~
(8)
На основании закона независимого действия сил полное из-
изменение скорости точки переменной массы равно:
,-> ,-> . ,-> dM ,->¦ -> , 1
Из (9) после умножения на М и деления на dt получим основ-
основное уравнение движения точки переменной массы в следующем
виде:
.. dv * , dM .-> ->.
Уравнение A0) было получено несколько другим приемом про-
профессором И. В. Мещерским в 1897 г.**
Это уравнение является исходным для большого класса
практических задач, в которых исследуются различные случаи
движения точки переменной массы. Уравнение A0) мы будем
в дальнейшем называть уравнением Мещерского.
Легко видеть, что (и — v) = V есть относительная скорость
dM
излучаемых частиц, а
dt
— секундный расход массы излучаю-
излучающего центра. Поэтому
^-{и-^^У = Ф A1)
* Имея в виду практические приложения к задачам ракетодинамики, мы
считаем приращение (dM) отрицательным.
** И. В. Мещерский, Динамика точки переменной массы, Спб., 1897.
18
есть добавочная, или реактивная, сила, обусловленная истече-
истечением частиц.
Таким образом, уравнение A0) можно написать в виде:
и сформулировать следующий дифференциальный закон дви-
движения точки переменной массы: для любого момента времени
произведение массы излучающего центра на его ускорение рав-
равно геометрической сумме равнодействующей приложенных к не-
нему внешних сил и силы реактивной.
„ ( dM -п
Ьхли слагаемое I If10) перенести в левую часть уравне-
уравнения, то (!0) можно представить в виде:
w(Mv) = F-\--w--u. A2)
В частном случае, если абсолютная скорость излучаемых ча-
частиц равна нулю, то уравнение A2) принимает вид:
A-(Mv) = F, A3)
т. е. если абсолютная скорость излучаемых (отбрасываемых)
частиц равна нулю, то производная по времени от количества
движения точки переменной массы равна равнодействующей
приложенных к ней внешних сил.
Векторное уравнение движения в форме A3) было достаточ-
достаточно подробно изучено в работе И. В. Мещерского A897). Ме-
Мещерский исследовал целый ряд задач небесной механики, исходя
из гипотезы о том, что абсолютная скорость отделяющихся или
присоединяющихся к небесному телу частиц равна нулю.
Уравнение A3) было позднее A928) опубликовано итальян-
итальянским профессором механики Леви-Чивита *. В иностранной, осо-
особенно итальянской, литературе уравнение A3) называют ура-
уравнением Леви-Чивита. Сравнение опубликованных работ пока-
показывает, что результаты Леви-Чивита не являются оригиналь-
оригинальными.
В случае, когда относительная скорость излучаемых частиц
обращается в нуль, из A0) мы получим:
т. е. если относительная скорость отбрасываемых частиц равна
нулю, то уравнение движения точки переменной массы записы-
записывается формально так же, как и уравнение движения точки
* Т. L e v i - С i v i t a, Sul moto di un corpo di massa variabile, Rendi-
i della Reale Academiae dei Lincei, 1928, pp. 329—333, 621-622.
19
постоянной массы. Следует только помнить, что в уравнении
A4) масса М есть функция времени t.
Для большого класса задач, относящихся к современной
ракетной технике, допустимо считать относительную скорость
излучаемых частиц постоянной и направленной по касательной
к траектории излучающего центра *. Тогда
(Z — v) = ~V-t°= %vx°,
->
где V=const, X=K(t), а т° — единичный вектор касательной к
траектории, направленной в сторону движения, т. е. по вектору
скорости.
Основное уравнение A0) примет в этом случае вид:
или
dM ¦*
v
Весьма интересный вид уравнения A5) получится, если рав-
равнодействующая внешних приложенных сил пропорциональна
массе движущейся точки, т. е. F — Ma. В этом случае, полагая,
что M—Moflt), мы получим из A5):
_ a
dt
или
4
Функция i|j = ln/ имеет большое значение при рассмотрении
частных задач движения точки переменной массы. Введя эту
функцию, A7) можно записать в виде:
4 = Z-V%*. A8)
4. Скалярные уравнения движения. Рассмотрим
некоторые из полученных уравнений движения точки переменной
массы в проекциях на оси координат. Если выбрать неподвиж-
неподвижную систему осей Oxyz, то в общем случае проекции основного
уравнения движения представятся так:
A9)
* Гипотеза К. Э. Циолковского.
20
Здесь X, Y, Z суть проекции равнодействующей внешних дей-
действующих сил, х, ij, z—проекции ускорения точки, а Фх, Фу,
Фг — проекции добавочной (реактивной) силы, обусловленной
отбрасыванием частиц. В самом общем случае правые части
уравнений A9) зависят от координат движущейся точки, скоро-
скорости ее движения и времени. Задавая вид правых частей некото-
некоторыми простейшими функциями, можно исследовать ряд инте-
интегрируемых задач. С этой точки зрения было бы возможно
построить некоторую, логически допустимую динамику точки
переменной массы, предоставив практикам-инженерам выбирать
для своих целей то, что им потребуется. Мы, как правило, не
будем следовать этой ясной, но чисто математической концеп-
концепции. Во всех задачах будем стремиться прежде всего уяснить
механическую суть дела, пользуясь указаниями опытов, испы-
испытаний реальных объектов и предшествующих теоретических ис-
исследований. Будем искать закономерности реальных явлений,
а не обследовать теоретически допустимые схемы.
Для случая, когда абсолютная скорость излучаемых частиц
равна нулю, уравнения движения точки переменной массы в
проекциях на оси Ох, Оу и Oz можно записать в виде:
d i и/л \r \ ("9(Yl
d_
где x, у, z суть проекции скорости на оси координат. Уравнения
типа B0) гораздо проще уравнений A9), так как при их со-
составлении принят некоторый гипотетический закон излучения
частиц. В теории движения ракет гипотеза и = 0 не выполняется,
но в задачах небесной механики уравнения B0) могут иметь
широкие и плодотворные применения.
Для случая, когда относительная скорость излучаемых ча-
частиц равна нулю, уравнения движения точки переменной массы
совпадают по форме с обычными уравнениями движения точки
постоянной массы. Из A4) имеем:
Мх = Х, My — Y, Mz = Z. B1)'
На первый взгляд может показаться, что гипотеза V =
¦•*¦ •>
~ (и—у) =0 весьма искусственна и практического значения не
Имеет. Можно привести ряд случаев движения тел переменной
массы, когда отделение частиц происходит без возникновения
реактивной силы (с относительной скоростью V = 0). Рассмо-
Рассмотрим, например, случай вращения вала (блока), с которого'
21
сматывается нить (или цепь). Скорость точки А вала (фиг. 2)
будет vA = a-R, где <о — угловая скорость вала, a R— радиус.
Скорость элемента нити dM, отделяющего от вала, будет, оче-
очевидно, также равна toR. Поэтому относительная скорость отде-
отделяющейся массы dM будет в данном случае равна нулю.
Для целого ряда задач внешней баллистики точки перемен-
переменной массы можно сделать ряд дополнительных упрощающих
предположений. Предположим, что направление реактивной си-
силы совпадает с касательной к траектории, поле силы тяжести
однородно и Земля плоская. Силу сопротивления среды будем
О
Фиг. 2
Фиг 3
считать направленной по касательной к траектории точки в сто-
сторону, прямо противоположную вектору скорости у, и допустим,
что величина этой силы может быть записана в виде:
S ¦
где Сх—коэффициент лобового сопротивления, р и ро — значе-
значения плотности воздуха на данной высоте гиу поверхности Зем-
Земли соответственно, 5 — характерная площадь объекта, движение
которого описывается уравнениями A9).
Для общности рассуждений допустим, что СХ — СЛН(z) и за-
запишем силу сопротивления в виде:
QX=~C'X (г») Н (z) • Ро -f Stf = kh (z) Ф (г>),
где
//Л 1 1 f \ № f ^ С~*
Сделанные допущения о действующих силах позволяют ут-
утверждать, что траекторией точки переменной массы будет пло-
плоская кривая и, следовательно, уравнения движения в проек-
22
циях на оси Ох и Oz можно записать в следующем виде
(фиг. 3):
Мх = — \kh (z) Ф (г») + ^- V] cos 0
Mz = — Mg — \kh (z) ф (г») + ~ V] sin 0
Так как cos 0 = -^-, sin 0 = —, то уравнения B2) можно пред-
представить еще в следующей форме:
Если основное векторное уравнение Мещерского при сделан-
сделанных допущениях спроектировать на касательную и нормаль к_
траектории, то мы будем иметь:
При выбранном направлении отсчета углов 0 (фиг. 3):
1 ___ _ _rf9_ __ _ _rf9_ dt__ 9_
~р ds dt ' ds v '
Следовательно, основные уравнения движения можно записать-
в виде:
-о9+g cos 0 = 0.
Присоединяя к этим уравнениям два кинематических соот-
соотношения, получим следующую систему дифференциальных
уравнений движения точки переменной массы, в которых неза-
независимым переменным является время t:
}¦ B4>
x—vcos 0 = 0, z— z;sin0 = O j
23.
Для некоторых частных случаев целесообразно преобразо-
преобразовать написанную систему уравнений к независимому перемен-
лому 0 *.
После очевидных вычислений будем иметь:
du и Г., , , , . . dM
dt
Ж ~ ~ g cos2 9 '
dx u2 dz
U~~ V C0S
B5)
Системы уравнений типа B4) и B5) широко применяются
*в курсах внешней баллистики артиллерийских снарядов.
§ 2. Две зацачи Циолковского. Законы изменения массы
1. Первая задача Циолковского. Формула
Циолковского. Для иллюстрации методов решения частных
задач динамики точки переменной массы рассмотрим некоторые
простейшие случаи прямолинейного движения.
Пусть точка переменной массы движется в безвоздушном
пространстве без действия внешних сил, и пусть относительная
скорость истечения частиц постоянна по величине и направлена
коллинеарно вектору скорости v в сторону, противоположную
движению основной точки. Определим скорость точки и закон
ее движения.
Будем пользоваться уравнением A5). При сделанных допу'
щениях получим:
или
Пусть M = Mof(t), где f(t) — функция, определяющая закон
изменения массы, такая, что /@) = 1. Из уравнения B7) после
интегрирования получим:
г> = — Vlnf-hCt.
Пусть при / = 0 f—\, v — v<s, тогда C\ — vu и, следовательно,
л.-г
B8)
* Б. Н. О к у н е в, Основы баллистики, т. I, Воениздат, 1943.
24
Формула B8) была впервые исследована К. Э. Циолков-
Циолковским * и носит название формулы Циолковского.
Из B8) ясно, что скорость движения точки переменной мас-
массы зависит от отношения начальной массьЛк массе остающейся.
Если обозначить массу точки в конце процесса отбрасывания
через МЕ, а отброшенную массу (массу топлива) — через т, то
для скорости V\, которую приобретает точка в конце процесса
горения, при У0 = 0 мы получим из B8) следующее соотношение:
М,
.^2,3-I/lg 1 +
B9)
'E \ "'El
Для современных конструкций пороховых ракет можно счи-
считать V=2000 MJcen. В таблице 1 мь1 приводим значения скоро-
скоростей точки в зависимости от отношения масс.
Таблица 1
V = 2000 м/сек, v0 = 0.
МЕ
м0
1,000
0,900
0,800
0,700
0,600
0,500
0,400
0,300
0,200
0,100
z- т
me
0,000
0,111
0,250
0,429
0,667-
1,000
1,500
2,333
4,000
9,000
0
210,5
446,3
713,8
1022
1386
1832
2408
3218
4605
I
,и„
0,090
0,080
0,070
0,060
0,050
0,030
0,010
0,001
0,0001
0,0000
z 4L.
мЕ
10,111
11,500
13,286
15,667
19,000
32,333
99,000
999
9999
со
v^ {м сек)
4817
5052
5318
5626
5 991
7 013
9210
13815
18 420
со
В нашей отечественной литературе отношение -tj- = Z на-
ме
зывают числом Циолковского.
Из формулы Циолковского B9) вытекают следующие основ-
основные выводы.
а) Скорость точки переменной массы в конце процесса от-
отбрасывания частиц (в конце активного участка) тем больше, чем
больше относительная скорость отбрасывания частиц. Если от-
относительная скорость отбрасывания удваивается, то и скорость
точки возрастает в два раза.
б) Скорость точки переменной массы в конце активного уча-
участка возрастает при увеличении отношения начальной массы
* См.: К. Э. Циолковский, Исследование мировых пространств ре-
реактивными приборами, «Научное обозрение», май 1903 г. Перепечатана во
II томе Собрания сочинений К- Э. Циолковского, изданного Академией
наук СССР в 1954 г.
25
точки к ее массе в конце процесса отбрасывания частиц, или,
иначе говоря, скорость в конце активного участка тем больше,
чем больше число Циолковского.
в) Скорость точки переменной массы в конце активного уча-
участка не зависит от закона изменения массы (режима работы
двигателя). Заданному числу Циолковского в конце процесса
отбрасывания соответствует вполне определенная скорость дви-
движения точки независимо от того, быстро или медленно происхо-
происходило отбрасывание (сжигание) имеющегося запаса массы.
Логарифмический закон B9) был сформулирован К. Э. Ци-
Циолковским в 1914 г. * в виде следующей теоремы:
Когда масса ракеты плюс масса взрывчатых веществ, имею-
имеющихся в реактивном приборе, возрастает в геометрической про-
прогрессии, скорость ракеты увеличивается в прогрессии арифме-
арифметической.
В самом деле, формулу B9) можно написать в виде:
-?—1"^-, C0)
и, следовательно, если отношение ¦—- будет последовательно
МЕ
принимать, например, значения 2, 4, 8, 16, 32, . . . , то отношение
скоростей Vt/V будет принимать значения а = 1п 2, 2а, За, ....
Из формулы Циолковского следует весьма важный практиче-
практический результат: для получения возможно больших скоростей
точки переменной массы в конце активного участка гораздо вы-
выгоднее идти по пути увеличения относительных скоростей отбра-
отбрасывания частиц, чем по пути увеличения относительного запаса
топлива.
Рассмотрим частные гипотезы излучения. Пусть абсолютная
¦скорость излучаемых частиц равна нулю. Если f = 0, то из урав*
нения A3) мы получим:
-> -> ->
Mv = const = Muv0,
откуда
-> м0 ->
Таким образом, если абсолютная скорость отбрасываемых
частиц равна нулю и внешние силы не действуют, то скорость
излучающего центра увеличивается обратно пропорционально
его массе.
* К. Э. Циолковский, Исследование мировых пространств реактив-
реактивными приборами (дополнение к I и 11 части труда того же названия), Ка
луга, 1914.
26
Если относительная скорость излучаемых частиц равна нулю,
то из уравнения A4) при F = 0 следует, что
v = const = v0,
т. е. если относительная скорость излучения частиц равна нулю,
то без действия внешних сил точка переменной массы будет
двигаться прямолинейно и равномерно.
Определим теперь закон изменения расстояния излучающега
центра от выбранного начала координат. Из уравнения B8)
имеем:
ds = щ dt — V In / ¦ dt.
Интегрируя, получим:
t
s = so + vot— V J Inf(t) -dt. C1)
0
Если абсолютная скорость излучаемых частиц равна нулю, то
Наконец, если относительная скорость излучаемых частиц
равна нулю, то
s = so-\-vot. C3)
Как видно из C1) и C2), определение закона расстояний
(закона движения) требует некоторых гипотез о законе измене-
изменения массы, т. е. задания вида функции f(t).
2. Законы изменения массы. Практически закон
изменения массы того или иного объекта определяется режи-
режимом работы реактивного двигателя, т. е. его секундными расхо-
расходами массы. В современных теоретических работах наибольшее
применение получили два закона изменения массы:
1) д/) = A — at) — так называемый линейный закон изме-
изменения массы;
2) f(t) = e~at—так называемый показательный закон
изменения массы.
В законах A) и B) а есть величина постоянная. Эти законы
имеют то преимущество перед другими законами изменения
массы, что допускают ясную механическую интерпретацию.
В самом деле, если
M = M0(l—at),
27
то секундный расход массы равен;
2J- = аЛ40 = const,
т. е. линейный закон изменения массы соответствует постоян-
постоянному секундному расходу отделяющихся частиц. Так как реак-
реактивная сила:
то при выполнении гипотезы Циолковского о постоянстве относи-
относительной скорости отбрасывания частиц реактивная сила:
Ф = const.
Таким образом, при соблюдении гипотезы Циолковского
можно утверждать, что линейный закон изменения массы соот-
соответствует постоянной ре-
реактивной силе.
На фигуре 4 приведе-
приведены две диаграммы реак-
4-00 \
тивной силы как функции
времени, полученные при
1
200
видно, основная часть
диаграммы весьма близ-
-1сек
10 20 JO 4-0 кая к прямой, параллель-
параллельной оси времени t.r. еТна
Фиг 4
основном режиме данные
реактивные двигатели
развивают постоянную реактивную силу (тягу). В промежутки
времени, соответствующие началу и концу работы двигателя,
реактивная тяга является более сложной функцией времени.
Если обозначить секундный расход ( ^-] через q, то, оче-
очевидно,
Следовательно, параметр а, входящий в формулу линейного за-
закона изменения массы, представляет секундный расход массы,
отнесенный к начальной массе точки. Мы будем называть а
удельным секундным расходом массы.
Ускорение движущейся точки, обусловленное постоянной ре-
реактивной силой, будет величиной переменной, так как масса
точки уменьшается с течением времени. Обозначая ускорение,
28
обусловленное реактивной силой, через аг, будем иметь, что при
линейном законе изменения массы:
п фаМаУ aV
г М M0(\—at) I —at
При показательном законе изменения массы и соблюдении ги-
гипотезы Циолковского реактивная сила будет пропорциональна
массе точки в данный момент времени. В самом деле,
Ф = — .^L V = аМое~а1 V = aMV.
Ускорение, обусловленное реактивной силой, будет:
ar = -^- = aV = const. C6)
Таким образом, если относительная скорость отбрасываемых
частиц постоянна, то показательный закон изменения массы со-
соответствует постоянному ускорению, сообщаемому реактивной
силой.
Отношение ускорения, сообщаемого реактивной силой, к ус-
ускорению силы тяжести мы называем перегрузкой, обусловливае-
обусловливаемой реактивной силой. Очевидно, при показательном законе из-
изменения массы перегрузка:
« = — = — = const. C7)
Так как при показательном законе изменения массы секунд-
секундный расход q=aM, то
/ dM \
а-— _А I— — "
__
м ~ м
характеризует отношение секундного расхода к массе точки в
данный момент времени.
Исходя из формулы C1), мы можем найти закон движения
точки переменной массы в конечном виде как функцию времени.
В самом деле, если
то
s = su + vut+\vVP. C8)
Если
f=\-at,
ТО
t
S=so + vot — V j\n{\—at)dt =
о
•= s0 + vtt + -^ [A — at) In A — at) + a*]. C9)
29
3. Вторая задача Циолковского. Пусть точка пе-
переменной массы движется по вертикали вверх в однородном по-
поле силы тяжести и начальная скорость точки равна и0. Требуется
определить закон изменения скорости и расстояния (высоты) в-
функции времени при различных законах изменения массы и
найти максимальную высоту подъема точки. Относительная ско-
скорость излучаемых частиц постоянна по величине:
и направлена по вертикали вниз.
Пусть прямая, по которой движется точка М,
есть ось Oz (фиг. 5). Проектируя A5) на ось Oz,
получим:
ivi —rr- — -trig v —77—, ^и;
ИЛИ
dt
D1)
Так как согласно гипотезе Циолковского
= const, то уравнение D1) удобно записать
так:
D2)
Интегрируя D2), получим:
D3)
или, принимая во внимание начальные условия, при ?=0, и =
/=1, будем иметь:
¦¦vn
¦ gt-
V\nMa
М
D4)
Для того чтобы найти закон движения, проинтегрируем
еще раз D4). Будем иметь (при so = O);
t
Inf{t)dt. D5)
Из D5) находим, что
если
e~al, и
D6)
D7)
если f(t) = l — at. Определим максимальную высоту подъема
точки для случая, когда f(t)=e-at. При 2 = 2тах = Я о = 0 и, сле-
следовательно,
^о — gt + aVt = 0,
30
¦откуда
t = —~у • D8)
Если масса точки может убывать до нуля, то конечная вы-
высота подъема будет иметь место при условии, что g>aV, или
при а <-у-. Чтобы понять смысл требования а < -у-, рассмо-
рассмотрим случай относительного равновесия точки переменной мас-
массы в поле силы тяжести. Будем иметь:
=_M_Vt D9)
-откуда
-f-'
Таким образом, случаю относительного равновесия точки соот-
ОТ Р"
ветствует а = ~ . Если а > -у-, то реактивная сила больше
силы тяжести; если же а < -у-, то реактивная сила меньше си-
силы тяжести. Из формулы D6) ясно, что при aV<g точка будет
совершать движение в однородном поле тяготения с ускорением,
равным (g — aV).
Подставляя время t из формулы D8) в D6), находим мак-
максимальную высоту подъема (мы предполагаем, что процесс го-
горения происходит на всей траектории полета до точки, где у = 0):
Формулы D6) и E0) аналогичны хорошо известным в ме-
механике формулам для равнопеременного движения, если поло-
положить ускорение точки равным:
При линейном законе изменения массы имеем:
v = vQ — gt — Vln(l —at).
Если на всем участке полета до о = 0 ускорение, обусловленное
реактивной силой, меньше ускорения силы тяжести, тогда вре-
время движения определится из уравнения:
vo — gt-V\n(l - at) = 0,
а максимальную высоту подъема можно найти при помощи фор-
формулы D7).
31
§ 3, Оптимальные режимы движения в задачах Циолковского
Рассмотренные в § 2 простейшие случаи прямолинейного
движения точки переменной массы позволяют сделать новую
постановку одного класса задач, которые мы будем называть
задачами на отыскание оптимальных режимов движения. Как
видно из формул C1), D4) и D5), основные интегральные ха-
характеристики движения точки [v = v{t), s=s(t)\ зависят от вида
функции /(/), характеризующей закон изменения массы движу-
движущейся точки. При различных законах изменения массы законы
изменения скорости о и расстояния s будут, вообще говоря, раз-
различными. Возможность влиять на характеристики движения
точки изменением вида функции f является принципиально но-
новым фактором теории движения тел переменной массы. Если
класс функций f(t) задан с точностью до параметра а, как это
имеет место в простейших законах:
М = Мй(\ — at)
M = MQe-al,
тогда характеристики движения точки будут изменяться в зави-.
симости от изменения параметра а.
Пусть нам задан запас массы (запас топлива)
т — Мо — МЕ,
где МЕ — масса точки без топлива (так называемая масса пу-
пустой ракеты, включающая массу корпуса, массу двигателя, мас-
массу приборов управления и массу полезной нагрузки). Участок
полета при наличии изменения массы будем называть активным,
участок полета при постоянной массе — пассивным. Из решения
первой задачи Циолковского мы можем найти следующую фор-
формулу для скорости в конце активного участка полета:
v^vo + V\n^- = v0-V\nfE. E1)
Е
Из E1) следует, что скорость Vi не зависит от вида функции
f{t), а зависит только от количества отброшенной массы m (или
конечного значения относительной массы fE). Этот результат
можно было предвидеть из качественных соображений, так как
в пространстве без действия внешних сил («свободном про-
пространстве», по Циолковскому) при V=const количество движе-
движения, получаемое массой МЕ, не зависит от закона расходования
имеющегося запаса массы. В частности,.скорость у4 не изменит-
изменится, если весь запас массы m отбросить одновременно в момент
t=0. Случай мгновенного отброса имеющегося запаса массы бу-
будем называть мгновенным сжиганием топлива. Явление мгно-
мгновенного сжигания данного запаса массы аналогично явлению
32
удара в задачах классической механики. Роль ударной силы для
точки переменной массы при мгновенном сжигании играет реак-
реакция, возникающая при отбросе массы в момент контактного
взаимодействия излучающего центра и отбрасываемой* частицы.
Длина активного участка в первой задаче Циолковского бу-
будет зависеть от принятого закона изменения массы. При мгно-
мгновенном сжигании имеющегося запаса массы длина активного
участка будет, очевидно, равна нулю. При показательном законе
изменения массы будем иметь из C1):
t2
Пусть в конце активного участка при t = tx s = Si, ME = Moe~at>
и fE = e~ati, тогда
Si = so-f~ г)о^1 + -9'И^А- E2)
Так как \Е задано, то
In [-г-\ — atx = const = р,
и, следовательно,
*!=?• E3)
Исключая tx из E2), получим:
h = 5о + -?- + -а" • E4)
Случай мгновенного сгорания соответствует ^i = 0, т. е. а = оо.
Тогда из E4) получим Si = s0. Если в E4) считать, что а—«-О,
что будет соответствовать бесконечно малым секундным расхо-
расходам топлива, то Si —»• оо. Скорость Vi в конце активного участка
не зависит от а и на основании E1) и .E3) будет определяться
формулой:
г*1 = г*0-+-|1У. E5)
Определим максимальную высоту подъема точки переменной
массы, движущейся по вертикали вверх в однородном поле силы
тяжести. Пусть для наглядности рассуждений.
М — MQe~at.
Если запас массы задан, то, используя D6) и E3), получим
следующую формулу для длины активного участка полета:
Sa~ а 2а2 "+" 2а '
Длина пассивного участка определится по формуле:
_ _ h.-g'i+^i8 h>+"y->-ir]a
sp—2g Tg —- Tg •
3 А. А. Космодемьянский 33
Таким образом, полная высота подъема Н будет:
При заданной начальной скорости Vq, заданном запасе горю-
горючего т=М0 — Ms (т. е. заданном ц) и скорости V высота подъ-
подъема является функцией удельного расхода массы а.
Определим, при каком значении а высота подъема точки бу-
будет максимальной. Режим изменения массы, при котором обес-
обеспечивается достижение максимальной высоты подъема, будем
называть оптимальным. Для определения характеристик опти-
оптимального режима исследуем функцию Н — Н(а). Дифференци-
Дифференцируя Я по а и приравнивая производную нулю, получим:
Приводя подобные члены, легко найдем, что значение а, соот-
соответствующее экстремальному значению Н, определится из ура-
уравнения:
Так как
da2
из соотношения E8) следует, что максимальная высота подъ-
подъема Н будет при а=оо. Значение а=оо соответствует мгновен-
мгновенному сгоранию имеющегося запаса топлива. Максимальная вы-
высота подъема будет в этом случае:
__(уо + »У? _ У\
п max — 2g — 2g ' \°>
где Vz — скорость по формуле Циолковского.
Таким образом, в однородном поле силы тяжести в тех слу-
случаях, когда силами сопротивления можно пренебречь, для до-
достижения максимальных высот подъема выгодно как можно бы-
быстрее сжигать заданный запас топлива.
В некоторых случаях может, однако, потребоваться относи-
относительно малый удельный расход горючего, для того чтобы точка
не имела больших перегрузок (ускорений), обусловленных реак-
реактивной силой. Для этих случаев мы поставим несколько видоиз-
видоизмененную экстремальную задачу: найти, при каких значениях а
активный участок sa будет наибольшим.
Из формулы E6) мы имеем sa в функции а. Дифференци-
Дифференцируя sa по а и приравнивая производную нулю, получим:
34
откуда
В частном случае при vo = O
a = ^-. F1)
Легко проверить, вычисляя вторую производную sa no a, что
при а, определяемо^ формулой F1), соответствующий активный
участок будет максимальным.
Интересно отметить, что оптимальный режим при vo = O реа-
реализуется тогда, когда ускорение, сообщаемое реактивной силой,
ровно в два раза больше ускорения силы тяжести. Скорость в
конце активного участка определяется по формуле:
Подставляя в нее значение а, вычисленное по формуле F1), по-
получим:
Щ=Щ-- F2)
Теперь можно подсчитать полную высоту подъема Н при
движении, обеспечивающем максимальный активный участок.
Длина активного участка sa при а, определяемом формулой
F1), равна:
Bvo-\-[iVJ
Так как
то высота подъема будет равна:
H = sa-\-sp= щ %^ bJ^r-. F3)
В частном случае, когда ^0 = О,
"=^r=-4- F4)
Сравнивая F4) и E9), мы видим, что при мгновенном отбрасы-
отбрасывании данного запаса массы высота подъема в два раза боль-
больше, чем при медленном горении, когда мы желаем получить
максимальный активный участок.
Интересно выяснить, насколько велика будет потеря в вы-
высоте подъема АН при изменении удельных расходов массы.
3* 35
Пусть t»o = 0; найдем Н в функции а, считая ц и V заданными.
Имеем:
v1=(aV—g)t1.
Так как
то, полагая
где п— перегрузка, обусловленная реактивной силой, получим:
2g n •
При п=\ имеет место относительное равновесие; при п=2 уско-
ускорение, сообщаемое реактивной силой, будет равно 2g и т. д.;
значение п=оо соответствует мгновенному отбрасыванию имею-
имеющегося запаса массы.
Таким образом,
или
Из формулы F6) следует, что при п = 4 потеря высоты равна
25%, а при п = 50 — всего 2%.
Очевидно, что с увеличением п уменьшается время горения
заданного запаса массы (Мо — М8)."Из формулы E9) получим:
t — Ji — JiH
1 ~ а — ng ¦
Если ввести в рассмотрение время Т горения при относитель-
относительном равновесии, то
/ Т
что и дает закон изменения времени горения в функции пере-
перегрузки, обусловленной реактивной силой. Аналогичные выводы
можно получить и для линейного закона изменения массы, ког-
когда f{t) = \-at.
Что же касается оптимального режима, обеспечивающего при
заданном запасе массы максимальную скорость точки в конце
36
активного участка, то из общемеханических соображений можно
утверждать, что это будет при мгновенном сжиганий имеюще-
имеющегося запаса массы. В самом деле, при мгновенном сжигании
(мгновенном отбросе массы) реактивная сила аналогична силе
удара и за время действия этой силы влиянием конечных сил
(например, силы тяжести) можно пренебречь. Иначе говоря, за
бесконечно малый промежуток времени уменьшение скорости,
обусловливаемое действием силы тяжести, будет также беско-
бесконечно мало.
§ 4. Движение точки переменной массы
в сопротивляющейся среде при квадратическом законе
сопротивления
Пусть точка переменной массы движется прямолинейно в со-
сопротивляющейся среде; силу сопротивления будем считать про-
пропорциональной квадрату скорости, а закон изменения массы —
линейным. Задача, поставлен-
поставленная таким образом, будет да-
рать нам описание движения | Q / dMv\
точки переменной массы по аб- ' \"dl )
солютно гладкой горизонталь-
горизонтальной плоскости, когда вес точ- Фиг- 6
ки уравновешивается нормаль-
нормальной реакцией плоскости. Решение, полученное для рассматри-
рассматриваемого случая, будет иметь некоторое значение для изучения
неустановившегося горизонтального полета реактивного само-
самолета с жидкостным реактивным двигателем.
• Пусть прямая, по которой движется точка, есть ось Os
(фиг. 6). Уравнение движения в этом случае будет иметь вид:
M^ = -Ql(v)-^-Vr. F7)
Но при сделанных предположениях:
Полагая
— — k
получим из F7):
(l_aO-|p = aV,-to». F8)
Разделяя переменные и интегрируя, будем иметь:
: v
F9)
37
где С\ — произвольная постоянная интегрирования. Будем
считать, что при ^ = 0, v = 0, тогда ^ = 0.
Разрешая F9) относительно v, получим, что
где Д = т/ —-. Для практически интересных случаев п>10г
М
а A —а^) = -дт правильная дробь. Поэтому начиная с некото-
некоторого значения t=t*, когда
A—аО"<е,
где е — малая величина по сравнению с единицей, скорость
точки с точностью до 2е будет равна постоянной величине:
G1)
где Ро— начальный вес точки в момент ^=0, g—ускорение си-
силы тяжести.
Сравнивая силу сопротивления Q1 = fe1o2 с ее обычным выра-
выражением в экспериментальной аэродинамике, где обычно пола-
полагают:
Q
мы заключаем, что
kx = ^Cx9S. G2)
В формуле G2) Сх — аэродинамический коэффициент сопротив-
сопротивления, р — плотность воздуха, равная при нормальных условиях
в технической системе единиц 0,125——А— и 5 — характерная
площадь (часто площадь миделя, для самолета — площадь кры-
крыла и т. п.).
Пользуясь G2), предельную скорость можно записать в виде:
G3)
Например, если Р0 = 3000 кГ, Vr=2000 ж]сек, S=6 м2, Сж=
1 кГ • сек2 1
=0,005, p=g- -4—, g=10 м/сек2, а = 1г1^г- (значение а мы
выбрали, исходя из следующих соображений: горение продол-
продолжается 1200 сек, и за это время выгорает 1800 кГ топлива)„
то
¦о. = 400 м/сек,
38
или, иначе говоря, тело будет иметь предельную скорость, рав-
равную 1440 км/ч.
Вычислим время t*, по истечении которого точка переменной
массы достигнет предельной скорости у,. Примем точность опре-
определения vt равной 4%; тогда из формулы F0) следует, что
1 f" — о Qfi
I I in — и,эи.
Разрешая это уравнение относительно f", получим:
Для рассмотренного нами частного примера:
2aP0
а следовательно,
10 ,
откуда
Таким образом, если прибор, измеряющий скорость, имеет точ-
точность 4%, то приблизительно через 644 сек он будет показывать
постоянную скорость движения.
Исходя из формулы F0), можно найти закон изменения рас-
расстояния. В самом деле,
_rfs____ds_ d\___ I —f"
dt ~ df ' dt ~V* 1-f-f" '
Откуда
или
i
a " ' ' a J 1
Как известно, при любом п:
Г df
f
не может быть вычислен через известные функции. Мы вычис-
вычислим этот интеграл приближенно, "заменив подинтегральную
функцию более простой.
39
Положим, что
L_ I „I
14- {" — 2
В интервале изменения f от 0 до 1 и практически интересных
значений п такая интерполяция подинтегральнои функции впол^
не допустима. О степени точности интерполяции можно полу-
получить некоторое представление из таблицы 2.
Таблица 2
/
1
1+/"
1
0,500
0,500
0,9
0,629
0,672
0,8
0,752
0,795
0,6
0,928
0,935
0,4
0,990
0,990
0,2
0,999
0,999
0
1,00
1,00
n= 10
/
1
1+/"
1 — -^f
1
0,500
0,500
0,9
0,742
0,806
0,8
0,903
0,933
0,6
0,994
0,995
0,4
1,000
1,000
0,2
1,000
1,000
0
1,000
1,000
, = 20
f
1
1+/"
1
0,500
0,500
0,9
0,892
0,932
0,8
0,989
0,994
0,6
1,000
1,000
0,4
1,000
1,000
0,2
1,000
1,000
0
1,000
1,000
40
Таким образом, приближенное значение искомого интеграла
будет равно.
Если для рассматриваемой задачи значения п таковы, что
предлагаемая интерполяция обеспечивает достаточную точность,
тогда расстояние, проходимое точкой, можно записать в виде:
^^0-/)-^A-П- G5)
Пусть запас массы известен, тогда в конце активного
участка f = fE — const; кроме того,
у,
па
2a
Следовательно, можно представить s как функцию пара-
параметра а в следующем виде:
Так как для случаев, когда масса убывает, /в<1, то величина:
может изменяться в пределах от 0 до -^ > когда удельный се-
секундный расход изменяется от оо до 0 Величина (s+s0) моно-
монотонно убывает с увеличением а, стремясь к нулю при а->оо.
Можно показать, что s = s(a) будет также монотонно убы-
убывать с увеличением а. В самом деле, возьмем производную ots
по а. Будем иметь:
ds :
da
Или
Чтобы доказать, что производная -^ отрицательна для лю-
любого значения а в интервале от 0 до оо, достаточно убедиться
в том, что выражение, стоящее в квадратных скобках, положи-
положительно.
По условиям задачи fE — правильная дробь. Положим fE = -,
где t/>l; показатель п может изменяться от 0 до оо, если удель-
удельный секундный расход изменяется от оо до 0. Введя новые обо-
обозначения, получим:
Легко понять, что
[(у1Iпу]>0,
так как
1п</<(у —1), или г/<<?»-'. G7)
Неравенство G7) всегда имеет место, следовательно,
(случай равенства соответствует а = 0), а потому -з— < 0; этим
доказано, что s = s(a) —монотонно убывающая функция. Мак-
Максимум s достигается на границе интервала при <х = 0.
Из формулы G6) следует, что при a—*0 s —* оо.
Таким образом, если прямолинейное движение точки пере-
переменной массы происходит под действием только двух сил: ре-
реактивной и сопротивления среды, то наивыгоднейший удельный
расход должен быть бесконечно малым.
Этот несколько парадоксальный результат можно разъяс-
разъяснить следующим простым примером из динамики точки постоян-
постоянной массы. Рассмотрим такую задачу: «Пусть точка движется
по абсолютно гладкой плоскости прямолинейно в среде, сопро-
сопротивление которой пропорционально квадрату скорости, и пусть
начальная скорость точки равна v0. Требуется найти путь, кото-
который пройдет точка до полной остановки».
Уравнение движения точки, масса которой равна Мо, на ос-
основании второго закона Ньютона можно написать в виде:
или
% = -kdt, G8)
где
42
Интегрируя G8) один раз и полагая, что при ?=0 v = v0, будем
иметь:
v = —; .
Интегрируя второй раз, получим расстояние как функцию вре-
времени:
Постоянную С2 определим из условия, что при ? = 0 5 = 0; тогда
будем иметь:
Легко видеть из полученных формул для v и s, что при
^->оо у-> 0, 5->оо. Следовательно, если силы сопротивления
среды убывают с уменьшением скорости достаточно быстро, то
начального запаса кинетической энергии То = у Mov\ доста-
достаточно для того, чтобы точка прошла бесконечно большой путь.
Проводя аналогию с законом движения точки переменной
массы, определяемым формулой G6), мы можем сказать, что
роль начальной кинетической энергии Го для точки переменной
массы играет энергия имеющегося запаса топлива, так как
<x,U — конечная величина и относительная скорость отбрасывае-
отбрасываемых частиц — не равна нулю.
С практической точки зрения полученный результат показы-
показывает, что, чем большее значение в общем балансе внешних сил
имеют силы сопротивления среды., тем меньше оптимальный
расход горючего, обеспечивающий максимальный путь прямо-
прямолинейного движения.
§ 5. Движение точки переменной массы
в сопротивляющейся среде при линейном
законе сопротивления
Как известно из обработки большого числа опытов, прове-
проведенных при сверхзвуковых скоростях с артиллерийскими сна-
снарядами, существует некоторый интервал скоростей, в котором
сила сопротивления среды достаточно точно интерполируется ли-
линейным законом вида:
Qi
где
а>0,
Этот закон сопротивления известен в баллистике артиллерий-
артиллерийских снарядов как закон С и а ч ч и.
43
Пусть точка переменной массы движется прямолинейно по
горизонтальной абсолютно гладкой плоскости, причем масса
точки изменяется по линейному закону. Пусть закон изменения
силы сопротивления среды имеет вид: Q = k2v. Некоторое видо-
видоизменение закона Сиаччи мы делаем для того, чтобы иметь воз-
возможность исследовать более широкую область изменения скоро-
скоростей, так как для закона Сиаччи при v > -г интерполяцион-
интерполяционная формула дает не силу сопротивления, а тягу.
Исследуем движение точки переменной массы в этом случае.
Уравнение движения будет иметь вид:
М V
Полагая М = Мй\ и обозначив ~if- = k> будем иметь:
ж+т*+ту'=°- G9)
Уравнение G9) есть обыкновенное линейное неоднородное
дифференциальное уравнение первого порядка, и его интеграл
имеет вид:
\C-Vr\l-e] f dt\.
где С — постоянная интегрирования. Если / = 1—at, то
к
Полагая, что при t = 0 скорость v = vQ и f = l, находим:
C = v aVr
Таким образом, закон изменения скорости точки будет;
L-atfT + f^. (80)
Интегрируя (80), получим закон изменения расстояния в функ-
функции времени:
Для определения произвольной постоянной С2 положим, что
при t = Q s = 0; тогда
aVr'
44
и, следовательно закон изменения расстояния будет иметь
следующий вид:
Пусть задана масса ракеты без топлива, равная МЕ, и пусть
fE = -jM-. Тогда
A—at1) = fE и а^ = const.
В этом случае можно поставить экстремальную задачу об оты-
отыскании удельного наивыгоднейшего расхода горючего а, при
котором активный участок будет наибольшим. Расстояние s
можно записать в виде:
¦=УЛ1г!е) + ' и,.: '\\-гв ai- (82)
k
Можно показать рассуждениями, аналогичными приведен-
приведенным для квадратичного закона сопротивления, что расстояние J?,
рассматриваемое как функция секундного расхода, будет моно-
монотонно убывающей функцией и максимум 5 достигается при а = 0.
В самом деле,
ds
(82')
Выражение, заключенное в первой квадратной скобке, будет от-
отрицательно, так как 1 ^> fE и 1п/Е-С0. Выражение во второй
квадратной скобке при &>0 и a > 0 всегда положительно. Это
очевидно, так как, полагая
1 —
k = 7 и ^ +Т = У^
где г/ > 0 и #i>-l, можно вторую квадратную скобку пре-
преобразовать следующим образом:
Но, учитывая G7), легко понять, что
и, следовательно, -^ <0 при всех а>0.
45
Максимальное значение расстояния s легко найти из фор-
формулы (82). Полагая в ней а = 0, получим:
Sm. = ^f^+1. .83)
Интересно отметить, что при законе сопротивления Q1 = fe1o2
°°, а при Qi = k,2V 5raax будет величиной конечной. Неко-
Некоторое разъяснение этого результата можно получить, если рас-
рассмотреть задачу о движении точки постоянной массы в сопро-
сопротивляющейся среде. В самом деле, при линейном законе
сопротивления среды дифференциальное уравнение движения
точки постоянной массы будет:
dv .
Интегралы этого уравнения имеют следующий вид:'
v = v<fi-&, s = ^-(\~ е-**).
Легко видеть, что при i —* оо пройденный точкой путь остает-
остается конечным. Таким образом, если в среде с линейным законом
сопротивления точка постоянной массы получает некоторую ко-
конечную кинетическую энергию, то она проходит вполне опреде-
определенный конечный путь.
§ 6. Движение точки переменной массы в однородном поле
силы тяжести при линейном законе сопротивления среды
Пусть точка переменной массы движется по вертикали вверх
в однородном поле силы тяжести и в однородной среде, оказы-
оказывающей сопротивление движению силой, пропорциональной пер-
первой степени скорости. Силу сопротивления будем записывать в
виде: Qi = k\V, где ?i'=const. Примем, что масса точки на актив-
активном участке полета изменяется по линейному закону, т. е. М =
= М0A — at). При сделанных предположениях дифференциаль-
дифференциальное уравнение движения получится проектированием векторного
уравнения Мещерского на вертикаль в виде:
% *§-Vr. (84)
Так как М = М0(\—с^), -^f = — аМ0, то, обозначая -j±-=i
мы получим из (84):
A — at) -%т = — A — at) g —
ИЛИ
46
Полагая для сокращения дальнейших вычислений:
можно уравнение (85) записать в виде:
*L + pv + q = Q. (86)
Таким образом, дифференциальное уравнение движения точки
переменной массы в однородном поле силы тяжести и однород-
однородной атмосфере (g не зависит от s) есть линейное дифференци-
дифференциальное уравнение первого порядка и его интеграл можно запи-
записать в виде:
Так как
/ kdt
J l-at =
= e J l-at
то первый интеграл уравнения движения можно записать сле-
следующим образом:
v = C1(\-atr+1^rw(l-at) + ^. (87)
Для определения постоянной интегрирования С1 положим, что
при t = 0 v = v0, тогда
g aVr
—j±t f
Таким образом, закон изменения скорости на активном участке
траектории будет:
Интегрируя (88) еще раз, получим:
/ s aV,'
47
Для определения постоянной интегрирования С2 положим,
что при * = 0 должно быть s = 0, тогда
v К 2Zl
г _ ° а-к к g
2~ a + k 2a (А — а) '
Следовательно, закон движения точки переменной массы на
актиЕнэм участке траектории будет:
2а (ft —о) [l U arH
L e «
Для того чтобы исследовать полную высоту подъема точки,
необходимо получить формулы, определяющие скорость и закон
движения на пассивном участке траектории.
Дифференциальное уравнение, описывающее движение точки
постоянной массы на пассивном участке траектории, будет:
где МЕ — масса точки в конце активного участка, а ky считаем
тем же, что и на активном участке полета.
Разделив обе части этого уравнения на Мо, получим;
? + ¦?•* + * = <>. (до,
Уравнение (90) есть линейное дифференциальное уравнение пер-
первого порядка с постоянными коэффициентами, и его первый ин-
интеграл имеет вид:
—Г~* ef
С' J?
ze E
5s-.
Для определения С3 воспользуемся условиями в конце активного
участка. Пусть момент t=ti соответствует концу процесса от-
отбрасывания частиц (окончанию работы двигателя), и пусть в
этот момент скорость точки равна viy тогда
Следовательно, закон изменения скорости на пассивном участке
траектории будет:
в 'в* ''-Ik. (91)
Интегрируя (91) еще раз, получим:
Постоянную интегрирования С4 определим кз условия, что при
t = tx s = sa, где sa—длина активного участка траектории.
Очевидно,
и, следовательно, закон движения на пассивном участке
траектории (s^sa, t^t^j будет:
1Г у1 *!/• yyz>
Для того чтобы найти высоту подъема точки Я, нужно опреде-
определить время подъема. Это время складывается из времени полета
на активном участке траектории, равном U, и времени полета на
пассивном участке. Найденные нами закономерности движения
на пассивном участке траектории (формулы 91—92) позволяют
выразить суммарное время полета Т и высоту подъема Я через
tt И Vi.
В самом деле, когда s = H=sa + sp, тогда t=T и у = 0. Из
формулы (91), полагая v — О, получим:
/c. gjf
откуда
и, следовательно,
r = fi4-%ln(l+-^V (93)
* V gfE) v
где
так как
Если Vq, Vr, g, k, fE, а заданы, то определение полной высоты
подъема можно провести следующим образом. Зная, что fE =
= 1 — atlt находим tu затем по формуле (93) вычисляем Т и,
наконец, по формуле (92) находим: H=sa+sp, где sp — длина
пассивного участка траектории.
4 А. А. Космодемьянский 49
Найденные законы изменения скорости v и расстояния s
позволяют определить оптимальный удельный секундный расход
массы (найти закон программирования тяги реактивного дви-
двигателя на активном участке полета), при котором полная вы-
высота подъема будет максимальной. Зная fE, исключим из фор-
формул для Т, Vi, H время ^ и выразим эти величины в функции па-
параметра а.
Полагая A—/я)=ц, имеем: tx — ¦?• , и расчетные формулы
будут иметь вид:
-Щт-t). m
Совокупность формул (95—98) при заданных fE, №, Vr, k, var
g определяет полную высоту подъема H — sa + sp как функцию
удельного секундного расхода а. Формула (97) дает длину
активного участка sa как функцию а. Легко убедиться, что при
а —> оо длина sa —¦ 0, что легко понять физически из теорем
классической механики об импульсивных силах.
Ниже следуют таблицы и графики функций:
Vi = г», (а), Т=Т (а), sa = sa (а), Н = Н (а),
полученные при следующих допущениях:
^=^ = 0,5, V, = 2000 м/сек, щ — 0, g= 10 м/сек, ? = 0,0L
50
1600-
шоо
woo
600-
100
0
la.
10'
T
160
80-
00? 00b OOS 0,08 0.Ю
Фиг. 7
0.0? O.Oh 006
Фиг. 8
0,08 0,10
60-
50-
40
30
го
00? ООЬ 006 003
Фиг. 9.
Расчетная формула:
О 0.02 ООЬ 006 008 ОЮ <*
Фиг. 10
Таблица 3
. = 200000а (l - 0,5Ц + 1000H'5~°f " > =
а
У\
а
0,000
0,005
0,010
0,025
0,050
0,100
0,500
1,000
оо
а
Т
0
0,5
1,0
2,5
5,0
10,0
50,0
100,0
оо
k
МТ
0
0,25
0,5
0,758
0,870
0,933
0,9875
0,9932
1,0000
0
750
1000
1210
1300
1340
1350
1360
1386
Уг
—500 *
-500
0-
-172
—92
—48
—10
—5
0
—500
+250
1000
1138
1208
1292
1340
1355
1386
4*
51
Таблица 4
Расчетная формула:
а
0,000
0,005
0,010
0,025
0,050
0,100
0,500
1,0
оо
0,5
а
100
50
20
10
5
1
0,5
0
501пA+ш)
19,25
54,87
56,18
61,12
65,11
65,20
65,5
66,0
Т
119,25
104,87
76,18
71,12
70,11
66,20
66,0
66,0
Таблица 5
Расчетная формула:
= 105-f-
375
105
\1— 0,51+а
0,51
51+а)
•тИ —1
а
0
0,005
0,010
0,025
0,050
0,10
0,50
1,00
оо
а
Т
0
0,5
1
2,5
5,0
10
50
100
оо
Sa
8 333
25000
9 700
6000
2 881
3045
0
Таблица &•
Расчетная формула:
Н = sa + E0х», + 25 000) [1 — e-2*(r—5r)J __ 500 (Т_ 05 ) .
а
0
0,005
0,010
0,025
0,050
О.Ю
оо
г
119,25
104,87
76,18
71,12
70,11
66,00
—500
+250
1000
1038
1208
1292
1386
Sa
+8 333
25000
9 700
6 000
2 881
0 000
н
10 700
37 000
33 400
18 000
17 881
17 700
Как видно из фигуры 10, оптимальное значение а=0,015. Ес-
Если подвергнуть подробному аналитическому изучению функцию-
Н(а) методами, аналогичными примененным при исследовании
функции 5 (а) в § 4—5, то можно убедиться, что Н(а) на интер-
интервале 0 -С а -«С оо имеет только один максимум, а следовательно,,
найденное оптимальное значение а будет единственным.
§ 7. Горизонтальное прямолинейное движение самолета
с жидкостным реактивным двигателем. Оптимальные
секундные расходы топлива
Движение центра масс реактивного самолета можно в неко-
некоторых частных случаях рассматривать как движение точки пе-
переменной массы. Основные упрощающие допущения можно фор-
формулировать в следующем виде:
а) При выгорании имеющегося запаса топлива центр масс
самолета не смещается по отношению к системе осей координат,
неизменно связанных с фюзеляжем самолета; иначе говоря, баки
с топливом расположены так, что на активном участке полета
положение центра масс фиксировано относительно твердой обо-
оболочки самолета.
б) Движение самолета будем считать поступательным; от-
относительную скорость отброса частиц Vr — постоянной.
в) Силу лобового сопротивления и подъемную силу будем
считать пропорциональными квадрату скорости.
г) Будем изучать движение реактивного самолета с жид-
жидкостным реактивным двигателем, т. е. рассмотрим тот частный
случай, когда самолет представляет ракету с крыльями, а изме-
изменение массы обусловлено только отбрасыванием частиц. Заме-
Заметим здесь, что движение самолета с воздушно-реактивными дви-
двигателями не определяется уравнением Мещерского вида A0).
5а
При сделанных допущениях уравнение движения центра масс
самолета в проекции на прямую, по которой происходит движе-
движение, имеет вид (см. фиг. 11):
где Qx = ~2 CxpSv2—сила лобового сопротивления, обусловлен-
обусловленная атмосферой, а М — масса самолета. Так как при горизон-
горизонтальном движении самолета в
Р\
О
Q,
любой момент движения вес
самолета равен подъемной си-
' ._ s ле, то мы имеем дополнитель-
dMTr \ ное условие:
dTVr j
My Mg^^CypSv2, A00)
Фиг- и где Су — коэффициент подъем-
подъемной силы.
Определяя из A00) р2 и подставляя в (99), получаем диффе-
дифференциальное уравнение движения в следующем виде:
где K = -q аэродинамическое качество, или просто качество,
самолета.
Для дальнейших вычислений допустим, что масса изменяется
по линейному закону, т. е. М=М0(\ —at), и, следовательно,
гШ
dt
= — аМ0.
Разделив обе части уравнения A01) на М и подставив зна-
значение секундного расхода, получим:
— — — g I aVr
dt~ Ж^ I—at •
Для того чтобы проинтегрировать уравнение A02), нужно знать,
как будет изменяться качество самолета, соответствующее вы-
выбранному режиму полета. Изменение качества достигается прак-
практически изменением угла атаки.
В аэродинамике доказывается, что качество самолета будет
изменяться также с изменением отношения скорости движения
самолета к скорости звука (т. е. с изменением числа Ма). В на-
настоящее время мы располагаем ограниченными материалами о
том, как изменяется качество в зависимости от числа Ма. Из
чисто теоретических соображений можно утверждать, что в об-
области квадратичного закона сопротивления качество К есть ве-
54
личина, зависящая от угла атаки, но не зависящая от числа Ма.
Квадратичный закон сопротивления имеет место при скоростях
до 240—250 м/сек и при скоростях, больших 1500—1600 м/сек.
Качество очень сильно падает в области трансзвуковых и сверх-
сверхзвуковых скоростей, так как опытами установлено, что в этой
области коэффициент лобового сопротивления сильно возра-
возрастает, а коэффициент подъемной силы заметно падает.
Мы рассмотрим решение уравнения A02) в самом простом
предположении i( = const. Это соответствует полету при постоян-
постоянном угле атаки. Интегрируя A02) один раз, получаем:
Произвольную постоянную интегрирования С4 определим из ус-
условия, что при ^=0 v = v0, тогда Ci = v0. Следовательно, при еде-'
ланных допущениях закон изменения скорости будет иметь вид:
v = x,0 — j*.-Vrln{\-af). A03)
Для того чтобы получить закон изменения расстояния, про-
проинтегрируем уравнение A03) еще раз. Получаем:
Но
J In A — at) dt = 1=^- — -i A — at) In A — at) + C2,
и, следовательно,
Положим, что при ^ = 0 5 = 0, тогда С2 = —?- и
,)t-j? + ^(\-a()ln(\-at). A04)
Формула A04) определяет закон движения самолета на актив-
активном участке полета.
Решим, исходя из уравнения A04), следующую экстремаль-
экстремальную задачу. Пусть задан относительный запас массы, т. е.
М„
-др = A—o.ti) = const, A05)
требуется определить значение удельного секундного расхода
так, чтобы пройденное расстояние sa достигало максимума.
Из условия A05) имеем:
с^, = 1 т~ = const = и,,
м, следовательно, время движения на активном участке полета
будет:
Подставив в A04) вместо t значение ti=^-> мы получим sa
в функции только одного параметра а:
Обозначая
и
можно записать выражение для sa в более простом виде:
Для того чтобы найти экстремальное значение а, исследуем
выражение A06). Имеем:
dsa __ А . 2В
da ~ а2 ~Т~ а3 ~ U)
или
Если —^ = 0, то а->оо, и мы получим случай мгновенного
сгорания имеющегося запаса топлива, и, следовательно,
sa = minimum. Максимум активного участка получится, если
т. е.
2В
А /С [hi (»о + VV) + VV О-14) in A-ш)] "
Таким образом, оптимальное значение секундного расхода а,
при котором sa достигает максимума, можно записать в виде:
Л 7 м г-
A07)
Для дозвуковых скоростей полета отношение \-у-\ мало по срав-
сравнению с единицей. Для такого типа задач оптимальное значение
-56
а будет определяться по более простой формуле:
^A08)
, [l - (l-_) In A-,*,)]
Из соотношения A08) следует интересный практический вы-
вывод. Для того чтобы при заданном запасе топлива самолет имел
максимальный активный участок, удельные секундные расходы
должны увеличиваться с уменьшением качества и уменьшаться
с увеличением относительной скорости отбрасываемых частиц.
Таким образом, и в этом примере мы убеждаемся в большом
значении проблемы увеличения относительной скорости отбрасы-
отбрасывания частиц. Для самых разнообразных реактивных аппаратов
увеличение Vr приводит к улучшению летных характеристик этих
аппаратов. Увеличение качества К также весьма полезно, но,
как известно из аэродинамики, значительное увеличение ка-
качества самолетов при крейсерских режимах едва ли возможно.
Зная аорг, можно найти величину активного участка полета
sa (т. е. дальность полета без участка планирования). Подстав-
Подставляя aopt = —т" в формулу A06), получим:
А2 К fjij (vQ -|
а~ 4В
Если 4?--*0, то
v г
Из формулы A09) следует, что дальность активного полета
(полета с работающим двигателем) растет прямо пропорцио-
пропорционально качеству самолета и квадрату относительной скорости
отбрасываемых частиц.
Чтобы характеризовать влияние относительного запаса топ-
топлива, приведем два примера.
Пусть fB = 0,5, К = 6, Уг = 2500 м/сек, g=10 м/сек, -|г- -> 0г
тогда
sa^ 176 км.
Если fE будет равно 0,1, тогда sa=1031 км. Более полное
рассмотрение этой задачи методами вариационного исчисления
будет дано в разделе IV, § 4.
ГЛАВА II
ОБОБЩЕННОЕ УРАВНЕНИЕ МЕЩЕРСКОГО. ОБРАТНЫЕ
ЗАДАЧИ ДИНАМИКИ ТОЧКИ ПЕРЕМЕННОЙ МАССЫ
«У научного изучения предметов два
основания или две конечные цели: предви-
предвидение и польза».
Д. И. Менделеев.
§ 1. Обобщенное уравнение Мещерского
Дифференциальное уравнение Мещерского, исследованием
которого для различных частных случаев мы занимались в гла-
главе I данного раздела, позволяет изучать движения точки пере-
переменной массы для случая отделения частиц. В настоящее время
можно указать большой класс задач, когда в процессе движе-
движения тела происходит не только отделение (отбрасывание) ча-
частиц, но и присоединение их. Так, например, при полете само-
самолета с прямоточным воздушно-реактивным двигателем частицы
воздуха присоединяются к движущемуся самолету из атмосферы
и затем выбрасываются вместе с продуктами горения. Газотур-
Газотурбинные реактивные двигатели, получившие весьма широкое рас-
распространение в современной авиации, точно так же всасывают
частицы воздуха из атмосферы (частицы воздуха присоеди-
присоединяются к самолету, увеличивая его массу), а затем отбрасывают
их с большой скоростью вместе с газообразными продуктами
горения. При подъеме привязного аэростата, в случае если од-
одновременно с вытягиванием каната непрерывно высыпается пе-
песок из запаса балласта, происходят также два процесса: уве-
увеличение массы за счет поднимающихся с земли частей каната и
уменьшение массы за счет отделения частиц запасенного бал-
балласта (песка).
Если на вращающийся цилиндрический вал наматывается
цепь, то масса вала увеличивается; при сматывании цепи с вала
его масса уменьшается; если оба процесса происходят одновре-
58
менно, то имеет место общий случай вращения тела переменной
массы. Присоединение и отделение частиц будет иметь место в
конструкциях, называемых эжекторами.
В динамике гибкой нерастяжимой нити можно указать боль-
большой класс движений, когда кривая, форму которой имеет нить,
перемещается в пространстве поступательно, не меняя своей
конфигурации, а сама нить движется вдоль этой кривой; иначе
говоря, нить как бы движется в жесткой гладкой нематериаль-
нематериальной трубочке, которая перемещается поступательно в простран-
пространстве. Если поступательного перемещения нет, то нить, скользя
продольно, остается как бы в состоянии покоя (кажущийся по-
покой). Ряд задач по динамике таких «стационарных» движений
гибкой нерастяжимой нити можно исследовать с точки зрения
динамики тел переменной массы, учитывая одновременно про-
происходящие процессы отделения и присоединения частиц.
Задачи механики, связанные с изучением движения тел, мас-
масса которых изменяется в результате одновременно происходя-
происходящих процессов присоединения и отделения частиц, для весьма
большого числа случаев можно охватить единой теорией, осно-
основания которой формулируются с той же степенью точности, как
и законы движения тел постоянной массы.
Исторически первые задачи такого рода исследовались при
помощи основных теорем механики системы материальных то-
точек постоянной массы. Каждая новая задача требовала при та-
таком подходе своеобразных и достаточно сложных рассуждений.
Отсутствие единого мощного метода всегда требует от исследо-
исследователя особой проницательности и остроумия при изучении даже
простых частных задач. Выделение из механической системы од-
одного тела, движение которого требуется изучить, правильный
учет взаимодействий (ударов), обусловленных процессами при-
присоединения и отбрасывания, позволяют составить векторное диф-
дифференциальное уравнение, выражающее обобщенный закон ди-
динамики тел переменной массы.
Задачу о движении тел переменной массы с одновременным
присоединением и отбрасыванием частиц в ряде случаев можно
свести к задаче динамики точки переменной массы. Как будет
доказано *, изучение движения тела переменной массы сводится
к изучению движения точки, если тело переменной массы дви-
движется поступательно или если в процессе изменения массы тела
его центр масс, определяемый конфигурацией частиц, принадле-
принадлежащих телу в каждый данный момент времени, остается непо-
неподвижным относительно осей координат, неизменно связанных с
движущимся телом.
Пользуясь аксиомой неуничтожаемости механического дви-
движения и аксиомой независимого действия сил, можно получить
См. главу IV этого раздела курса,
59
¦векторное дифференциальное уравнение движения точки, являю-
являющееся обобщенным уравнением Мещерского.
Если относительные скорости присоединяющихся и отбрасыг
ваемых частиц не равны нулю, то присоединение и отделение
частиц эквивалентно некоторым ударам (импульсивным силам),
и вполне возможно получить исходное дифференциальное урав-
Фиг. 12
¦нение движения, пользуясь методами теории импульсивных сил,
хорошо развитыми в механике тел постоянной массы.
При выводе основного уравнения движения точки перемен-
переменной массы с одновременным присоединением и отбрасыванием
частиц мы будем следовать методам главы I этого раздела.
Пусть M = M(t) —масса точки, движение которой изучается
¦по отношению к некоторой неподвижной системе осей координат
Юхуг (фиг. 12). Пусть скорость этой точки в момент t равна v
-> ->
и, следовательно, количество движения Q=Mv. За время dt точ-
точка излучает частицу (—сШ4), абсолютная скорость которой рав-
равна «1. Количество движения системы (точка плюс излученная ча-
частица) в момент t+dt будет равно:
A)
где dvi есть приращение скорости точки (излучающего центра),
вызванное отделением частицы dMi. На основании аксиомы со-
.хранения количества движения имеем:
¦или
Mv = (Af-f dM{) (w
B)
Пренебрегая в B) членами второго порядка малости и раз-
разрешая относительно dvu получим:
,+ dM, ,-> ¦>
Ускорение основной точки( излучающего центра), обусловленное
излучением частиц, будет равно:
¦> dvt I dM + ¦>. ..v
Если одновременно с процессом отделения (излучения ча-
частиц) происходит процесс их присоединения (поглощения), то
мы можем аналогично предыдущему найти изменение скорости
dv2 основной точки, обусловленное присоединением частиц.
В самом деле, если до присоединения частицы ( + dM2) ско-
рость основной точки была равна v и количество движения Mv,
то после присоединения частицы скорость изменится на dv2 и
количество движения основной точки в момент {t+dt) будет
равно:
Q2 = (М + dM2) (гГ+ dv2).
До присоединения частица dM2 имела абсолютную скорость
«2, и, следовательно, система, состоящая из точки массы М и
частицы с массой dM2, имела количество движения:
-*• -> ¦>
Qo= Mv-\-dM2u2-
На основании аксиомы о сохранении количества движения
имеем:
(Ж+ dM2) {v + dv2) = Mv + dM2u2,
откуда с точностью до малых второго порядка находим:
dv2=±-.dM2.(u2 — v). E)
Замедление основной точки (поглощающего центра), обус-
обусловленное присоединением частиц, будет равно:
¦> dv2 I dM2 •> ¦>
Если основная точка движется в некотором силовом поле, то
изменение скорости dv3, обусловленное действием внешних сил,
61
будет с точностью до малых второго порядка вычисляться по
формуле:
где F—равнодействующая приложенных к точке внешних сил.
Ускорение (замедление), вызываемое равнодействующей си-
силой, будет равно:
На основании аксиомы независимого действия сил полное
ускорение точки равно геометрической сумме ускорений, обус-
обусловленных действующими силами, т. е.
-*¦ ¦> , ¦>• , ¦>• 1 Г dMi ,-*¦ ¦*. , dM2 .->
откуда
Мта = Л1-^- = ЯН—^L(Ul — v)-\--1f(u2~v). (8)
Уравнение (8) мы будем называть обобщенным уравнением
->¦->¦-»¦
Мещерского. Легко видеть, что («i—o) = Fi есть относительная
->¦->¦->
скорость отделяющихся частиц, а (и2 — v) — V2—* относительная
скорость присоединяющихся (налипающих) частиц, причем для
подавляющего большинства задач, выдвигаемых современной
-> -> ->
техникой, Vi и V2 коллинеарны вектору v и направлены в сто-
сторону, противоположную движению основной точки. В дальней-
дальнейшем мы будем предполагать, что условие коллинеарности векто-
¦> ¦> ¦>
ров v, Vi и V2 всегда имеет место.
Вводя относительные скорости отделяющихся и присоеди-
присоединяющихся частиц, мы можем записать- (8) в виде:
Произведение у—тг- V Л = Щ представляет собой реактив-
реактивную силу, обусловленную отделением частиц, а \-yf- V2\ = Ф2
есть тормозящая сила, обусловленная присоединением частиц.
В этих обозначениях уравнение (9) будет иметь вид:
В целом ряде технических вопросов ер! и Ф2 известны как
функции времени из экспериментов. Для изучения такого рода
62
задач уравнение A0) удобно записать так:
(И)
Массу движущейся точки М для любого момента времени
можно представить в следующем виде:
t t
где \Mi\ —масса частиц, отделившихся за время t, а М2—мас-
М2—масса частиц, присоединившихся к основной точке за тот же про-
промежуток времени.
Если проекции скорости основной точки обозначить х, у, z,
а проекции абсолютных скоростей отделяющихся и присоеди-
присоединяющихся частиц «1 и «2 обозначить через ось Pi, Yi. «2, fb, Y2 со-
соответственно, то, проектируя (8) на оси декартовых координат
Oxyz, мы получим:
Mz=Fz
A2)
Уравнения A2) были опубликованы в известной статье
И. В. Мещерского в 1904 г.*. Если производные —gf-t -jf
и проекции скоростей Hi и щ изменяются непрерывно с течением
времени, то уравнения A2) представляют собой совокупные диф-
дифференциальные уравнения второго порядка. Эти уравнения по-
позволяют изучать движение точки переменной массы в течение
такого промежутка времени, в продолжение которого масса М
не обращается в нуль и все величины, входящие в уравнение
A2), имеют определенные конечные значения.
Если траекторией точки является плоская кривая, то удобно
изучать уравнение (9) в проекциях на оси естественного трех-
трехгранника (касательную, нормаль). Будем иметь в проекциях на
* См.: И. В. Мещерский, Уравнения движения точки переменной
массы в общем случае, «Известия С.-Петербургского политехнического инсти-
института», т. I, вып. 1—2, 1904, стр. 77—118.
Следует отметить, что первое научное сообщение об уравнениях движе-
движения точки переменной массы в общем случае было сделано И. В Мещерским
24 августа 1898 г. в Киеве на X съезде русских естествоиспытателей и врачей,
См. Дневник X съезда, стр. 139—140
63
эти оси два следующих уравнения:
A3)
где р — радиус кривизны траектории (мы считаем V\ = — V^x0
и V2 = — V2^).
Рассмотрим важнейшие частные случаи уравнения (8). Если
/Wi = 0, то мы получим задачу о движении точки с возрастаю-
возрастающей массой. Будем иметь из (8):
.. dv й- . <Ш2 .¦> ¦>
или
M% = F+^P2. A4)
Если М2 = 0, то из уравнения (8) вытекает уравнение Ме-
Мещерского, подробно изученное в главе I этого раздела.
,.. „ dM, dMa
Очень важный частный случаи получается при Ж~~~Ш~'
т. е. когда секундная масса присоединяющихся к основной точ-
точке частиц равна секундной массе отбрасываемых частиц. В этом
случае из (8) имеем:
-dT = F+-dT^i — «2), A5)
или в проекциях на оси координат:
My = Fy+ ^{h-р2), A6)
Если проекции абсолютных скоростей присоединяющихся и
отбрасываемых частиц равны между собой, т. е. oci = a2, Pi = P2,
'Vi = Y2, To уравнения движения A6) будут по форме совпадать
с уравнениями движения точки постоянной массы.
Уравнение (8) можно преобразовать так, что в правой части
будут только слагаемые, обусловленные абсолютными скоро-
скоростями налипающих и отбрасываемых частиц. В самом деле,
64
поэтому (8) можно записать в следующем виде:
A7)
Если абсолютные скорости отделяющихся и присоединяю-
присоединяющихся частиц равны нулю, мы. получим:
±{Mv) = F. A8)
Когда точка переменной массы находится в покое, v = 0 и
->
~^г = 0, тогда уравнения A2) преобразуются в следующие ура-
уравнения относительного равновесия:
A9)
При изучении поступательного движения реактивного само-
самолета в спокойной атмосфере можно считать, что абсолютные ско-
скорости налипающих частиц равны нулю, и для этих случаев ура-
уравнение (8) удобно записать в виде:
или, учитывая A7),
B0)
B1)
§ 2. Движение реактивного судна
В качестве первой задачи* на применение уравнения (8)
рассмотрим прямолинейное движение реактивного судна.
Пусть мы имеем некоторое судно (фиг. 13), движение кото-
которого обусловлено работой насоса, засасывающего воду в носо-
носовой части судна и затем выбрасывающего эту воду за кормой в
сторону, противоположную движению судна. Судно такого типа
представляет пример движения тела, масса которого остается
постоянной, так как количество втекающей воды равно количе-
количеству вытекающей. Рассмотрим простейший случай, когда канал
* См.: И. В. Мещерский, Уравнения движения точки переменной
массы в общем случае, Снб., 1904,
5 А. А. Космодемьянский
65
в корпусе судна расположен вдоль горизонтальной прямой.
Пусть V2 есть относительная скорость частиц воды, входящих
в канал, а V, — относительная скорость отбрасываемых частиц.
Предположим, что в момент ^ = 0 скорость судна vo<V2 (ско-
(скорость V2 определяется работой насоса). Исследуем движение
судна в течение промежутка времени, когда скорость возрастает
от v0 до V2-
Если т — масса воды, которая всасывается в канал насо-
насосом в единицу времени через сечение, площадь которого равна
(У л
единице при У2=1, а а = —
представляет собой отношение
площади входного отверстия
к площади выходного, то, оче-
очевидно,
Фиг' 13 W = °iVV«*, B2)
так как количество втекающей жидкости равно количеству вы-
вытекающей. Сокращая обе части равенства B2) на mt, будем
иметь:
B3)
Пусть сила сопротивления воды движению судна растет про-
пропорционально квадрату скорости; тогда, считая движение про-
происходящим вдоль оси Ах (фиг. 13), получим на основании пер-
первого из уравнений A2) следующее дифференциальное уравне-
уравнение движения судна:
= кУ + mV\ox mV\av B4)
или
где для сокращения положено:
В рассматриваемой задаче /W = const и обозначает массу суд-
судна и воды, находящейся в канале. Из уравнения B5) видно, что,
для того чтобы скорость судна не уменьшалась, необходимо,
чтобы выполнялось условие <7>0, или а>\, т. е. площадь вход-
входного сечения канала должна быть больше площади выходного.
Интегрируя B5), получим закон изменения скорости в виде:
ш ^7ЙР = ~2 V**v* +1п
VqV + Vb
66
где
У
Соотношению B6) можно придать более удобный для вычис-
вычислений вид, разрешив его относительно v. Будем иметь после
простых вычислений:
«L у I~C|g __ . B8)
Если начальная скорость судна равна нулю, то Ci=l и
Пользуясь соотношением B6), можно найти время Т, по ис-
истечении которого скорость судна будет равна М%. Разрешая ура-
уравнение B6) относительно t, будем иметь:
т= 1_ 1 1п (Уд + Ук)(Уя_У2-Уку0) C0)
2Vqk V2 {V^Vk){VqV + Vkv)' K '
Если vo = O, то
§ 3. Падение тяжелой нити
В современных проблемах динамики нити весьма интересный
класс задач представляют стационарные движения гибкой не-
нерастяжимой нити. Если нить, скользя продольно, все время со-
сохраняет форму некоторой неподвижной кривой, то движение ни-
нити называют* кажущимся покоем. Этот случай стационарного
движения нити есть в то же время пример движения тела пере-
переменной массы с одновременным присоединением и отделением
частиц, если только мы фиксируем какой-либо участок кривой
для рассмотрения его движения.
Мы рассмотрим здесь в качестве примера применения урав-
уравнения (8) задачу о падении тяжелой нити. Пусть тяжелая одно-
однородная нить спускается по вертикали с верхней горизонтальной
площадки m (фиг. 14) на нижнюю горизонтальную площадку
Яг; расстояние между площадками пусть равно h. Нить будем
предполагать нерастяжимой, гибкой и движущейся все время по
* См. прекрасную монографию А. П. Минакова «Основы механики
нити», опубликованную в «Трудах Московского текстильного института» в
1941 г., т. IX.
67
одной и той же вертикальной прямой. Сопротивлениями, возни-
возникающими при разматывании нити на верхней площадке, будем
пренебрегать.
Движущаяся часть нити имеет постоянную длину h до того
момента U, когда длина части нити, сложенной на верхней пло-
площадке, сделается равной нулю. Обозначим через а длину той
части нити, которая в начальный момент лежит на верхней пло-
площадке; массу единицы длины
будем считать равной единице.
Движение нити разобьем на
два интервала: от момента
^ = 0 до t=tu и от момента t = t0
до момента, когда вся нить пе-
перейдет на нижнюю площадку.
а) Движение нити от
<=0 до t=t0. Рассмотрим дви-
движение точки М нити, которая
в момент ^=0 находилась на
краю верхней площадки в точ-
точке А. Расстояние точки М от
точки А в момент t обозна-
обозначим через х и допустим, что a~>h. Движение будет полностью
характеризоваться первым из уравнений A2). Мы должны при-
принять:
M = /z = const, \Mi\=M2=x, Fx = hg, u2 = 0, ai = u.
Таким образом, уравнение движения нити будет иметь вид:
Фиг. 14
ИЛИ
dv
dt
C1)
Если рассматривать х и х как скорость и ускорение нити, то
уравнение C1) будет справедливо для любого t<t0, a x будет
в этом случае обозначать длину той части нити, которая сошла
с верхней площадки.
Уравнение C1) совпадает по форме с уравнением движения
точки постоянной массы М = \, падающей в сопротивляющейся
среде, причем сила сопротивления Q = -r-i>2.
Разделяя переменные в уравнении C1), легко получить:
— v* ~ h *'
откуда
In
/gh—v
68
Так как при / = 0 v — О, то С2 = 0, и мы будем иметь:
. C2)
2 у *t
l+e V h
Интегрируя C2) по времени, легко находим:
x = h\ne * Y . C3)
Если C1) написать в виде:
dv I 9
dx ° h
то интегрированием можно установить зависимость между х и v
в следующей форме:
—-,/ IE
= 1/>А |/ 1 — е h .
C4)
Формулы C2), C3) и C4) аналогичны формулам для тяже-
тяжелой точки постоянной массы, падающей в сопротивляющейся
среде. Мы можем поэтому сделать следующие заключения:
1) Скорость движущейся нити в какой-либо момент t^.t0
равна скорости тяжелой точки, которая начинает свое движение
одновременно с нитью и падает без начальной скорости в среде,
сопротивление которой пропорционально квадрату скорости.
Сила сопротивления, отнесенная к единице массы, при и=1
равна -?¦> гДе ^ — Длина куска нити (расстояние между пло-
плоскостями Я1 и яг) •
2) Длина той части нити, которая сходит за время t0 с в'ерх-
ней площадки, равна высоте падения за это время тяжелой точ-
точки в сопротивляющейся среде.
Из формулы C4) следует, что, после того как с верхней пло-
площадки сойдет часть нити, длина которой равна 2/г, движение
нити будет весьма близко к движению равномерному со ско-
скоростью vt=Vgh; отклонение v от и* будет меньше 1%.
Рассмотрим движение нити после момента t0. Пусть х есть
расстояние верхнего конца нити от верхней площадки в момент
t>to. Масса движущейся нити в этот момент будет равна (h—л:).
Так как отделяющаяся масса имеет относительную скорость,
равную нулю, а присоединения частиц не происходит, то уравне-
уравнение движения напишется в виде:
69
или
и, следовательно, движение нити после момента t>t0 будет рав-
равноускоренным с ускорением g при начальной скорости Vq, кото-
которую можно найти из C2), если положить t = U-
§ 4. Обратные задачи для прямолинейного движения
До сих пор мы решали два основных типа задач динамики
точки переменной массы': а) по заданным внешним силам и за-
заданному закону изменения массы определяли все основные гео-
геометрические, кинематические и динамические характеристики
движения и б) при заданных внешних силах находили такой за-
закон изменения массы, при котором характеристики движения
становились наилучшими (оптимальными).
Рассмотрим так называемые обратные задачи динамики точ-
точки переменной массы, в которых по заданным внешним силам
и заданному закону движения определяется закон изменения
массы, обеспечивающий заданное движение.
Как будет показано дальше, обратные задачи динамики точ-
точки переменной массы для многих случаев прямолинейных и кри-
криволинейных движений сводятся к исследованию линейного диф-
дифференциального уравнения первого порядка и, следовательно,
всегда разрешаются в квадратурах.
Постановка обратных задач в динамике точки переменной
массы принадлежит И. В. Мещерскому*, который первым фор-
формулировал этот класс задач и показал несколько простых слу-
случаев их решений.
Рассмотрим вначале общую задачу прямолинейного движе-
движения точки, когда принимаются во внимание все основные силы.
Дифференциальное уравнение движения точки в проекции на
прямую, по которой происходит движение, будет иметь вид:
^ Q1~^-Vr. C5)
Полагая, как и раньше, M = Mof(t), Qf = M0Qt и выставляя все
переменные на вид, будем иметь из C5):
S(s)f(t)Q(^s)—^Vr. C6)
Принимая гипотезу Циолковского, относительную скорость
отбрасывания частиц будем считать постоянной.
Так как по условию задачи закон движения точки нам из-
известен, то уравнение C6) содержит только одну неизвестную
* См.: И. В. Мещерский, Динамика точки переменной массы, гл. V,
1897.
70
функцию f(t). В самом деле, если s = s(t), то мы дифференциро-
дифференцированием находим v(t) и —jT — a(t); если известны s(t) и и@> то
функции g(s) и Q(s, о) будут, очевидно, известными функциями
времени t
Разрешая уравнение C6) относительно -^ и перенося все
слагаемые в левую часть, мы получим:
§ 7 + ? = 0. C7)
Обозначая для краткости письма:
p(t) = ±(a + g), ?@ = -?. C8)
мы можем записать уравнение C7) в следующей форме:
§ + pf + q = 0. C9)
Общий интеграл уравнения C9) можно написать в виде:
f = <Г* ""[С—JV* ""'<//]. D0)
Формула D0) решает обратные задачи для прямолинейных
движений точки в самом общем виде. Задавая силы, закон дви-
движения и вычисляя р и q как функции времени, мы можем на
основании D0) найти f как функцию времени, т. е. определить
закон изменения массы.
Рассмотрим несколько простых примеров.
Пусть требуется определить закон изменения массы точки,
при котором в однородном поле силы тяжести точка поднимает-
поднимается по вертикали вверх с постоянной скоростью. Сила сопроти-
сопротивления среды предполагается равной нулю. В этом случае -тг =
= а = 0, Q = 0, v — Vq, g = coust=go и, следовательно,
Подставляя р и q в основную формулу D0), легко находим, что
Полагая, что при ^=0 /=1, получаем: С=1 и, следовательно,
М = Мое V D1)
Таким образом, для того чтобы точка переменной массы
двигалась в однородном поле силы тяжести при отсутствии силы
71
сопротивления с постоянной скоростью, необходимо, чтобы мас-
масса точки изменялась по показательному закону D1).
Найдем далее закон изменения массы, при котором точка бу-
будет двигаться равноускоренно с ускорением a = const = «o, пред-
предполагая g=ga и Q = 0.
В этом случае, очевидно,
л—?о+?» п — о
Р——у > <7 — U,
и, следовательно, по формуле D0) имеем:
Так как при t = 0 /= 1, то С= 1 и закон изменения массы, при
котором в поле силы тяжести точка движется равноускоренно,
будет иметь вид:
D2)
Рассмотрим задачу об определении закона изменения массы
в сопротивляющейся среде. Пусть точка переменной массы дви-
движется по вертикали вверх в однородном поле силы тяжести и
однородной атмосфере с постоянной скоростью Vp. В этом слу-
случае, очевидно, Q = const = Q0 и, следовательно,
Подставляя значение р и q в формулу D0), получим:
got
или
_g?
f = Ce ^-ff- D3)
Так как при ^ = 0 f=l, то С=1 + — и, следовательно,
So
v}] D4)
§ 5. Обратные задачи для криволинейного движения
При решении обратных задач для криволинейных движений
точки переменной массы целесообразнее пользоваться исходны-
исходными уравнениями, написанными в проекциях на оси естественного
72
трехгранника. Пусть уравнение траектории нам известно и закон
движения задан в виде s = s(t).
Ограничимся рассмотрением плоской траектории. Векторное
уравнение движения точки переменной массы будет иметь вид:
D5)
В уравнении D5) Ni обозначает силу нормальной реакции;
если точка переменной массы движется по заданной траектории
в свободном движении, то Ni = 0.
Спроектируем D5) на касатель- ?—1
ную и главную нормаль к заданной At
траектории (фиг. 15). Будем иметь:
dl
Фиг. 15
Положим, как и ранее, M=Mof и разделим правую и левую
части уравнений D6) на М0- Тогда, полагая ради краткости за-
записи,
получим:
D7)
Для дальнейшего исследования удобнее написать уравнения
D7) в следующей форме:
dt
dQ , „
v^f — fgcosQ.
-5—о
D8)
D9)
Уравнение D9) получится из второго уравнения D7), если
иметь в виду, что
V2 V2 ^л
= — V-
dt '
73
Если известно уравнение траектории и закон движения точки
по этой траектории, то угол 0 будет также известной функцией
времени. В самом деле, если уравнение траектории есть
У = (р(х), то
ter в = -—- = ф (х).
° dx ~r \ r
Кроме того,
х = v cos 8 — — I / j-y^-.
Так как s = s{t), то
s' dt = dx |/г1-)-(ф^J, E0)
и, следовательно, интегрируя E0), находим x=x(t). Зная
x = x(t) и ф'(х), можно определить:
8 = 0@-
Таким образом, уравнение D8) при заданной плоской траек-
траектории и заданном законе движения точки можно рассматривать
как линейное неоднородное дифференциальное уравнение отно-
относительно функции /, характеризующей закон изменения массы
точки в функции времени.
Интеграл уравнения D8) можно записать в виде:
[Г (s + g sin 6)
1 (s + g sin 6) dt f _ ( ("i + gsln 6) dt
E1)
Определив квадратурой f=f(t), мы можем из уравнения D9)
найти нормальную реакцию кривой.
Рассмотрим в качестве примера следующую задачу:
Каков должен быть закон изменения массы точки и нормаль-
нормальная реакция кривой N, если точка движется с постоянной ско-
скоростью по параболе, уравнение которой дано в виде:
у — ил — ил , iO^I
причем а и 6 — заданные постоянные числа? Из внешних сил
будем учитывать только силу тяжести, а ускорение g будем
считать постоянным.
Из уравнения E0) имеем:
v0 dt ==
и, следовательно,
74
Кроме того,
V l+У1 V 1+(«26хJ
Так как но условию задачи Q = 0 и s = 0, то закон изменения
массы можно записать в следующем виде:
Г
— |
г
U ^
f = Ce
зная из E3) x = x(t), мы можем найти f—f(t), т. е. определить
закон изменения массы точки. Нормальная реакция кривой бу-
будет определяться тогда на основании D9) по следующей фор-
формуле:
ГЛАВА III
ОСНОВНЫЕ ТЕОРЕМЫ ДИНАМИКИ ТОЧКИ
ПЕРЕМЕННОЙ МАССЫ
§ 1. Теорема об изменении количества движения
(теорема импульсов)
Если рассматривать излучающий центр и систему отброшен-
отброшенных частиц как единую механическую систему, то основные тео-
теоремы динамики для точки переменной массы не будут отличать-
отличаться от соответствующих теорем динамики системы материальных
точек постоянной массы. При такой постановке задачи для изу-
изучения движения излучающего центра необходимо знать законы
движения (историю движения) всех отброшенных частиц. Рас-
Рассмотрения подобного рода чрезвычайно сложны в теоретическом
отношении и мало интересны для практики. Достаточно указать,
что классическая задача небесной механики, так называемая
«задача трех тел», при произвольных начальных условиях до
настоящего времени не решена.
Мы будем формулировать все основные теоремы динамики
для излучающего центра, считая его массу функцией времени.
Наша цель при выводе основных теорем динамики заклю-
заключается в том, чтобы выполнить такие преобразования основных
уравнений движения, при которых характеристические свойства
некоторых классов движений обнаруживаются проще и нагляд-
нагляднее, чем при непосредственном интегрировании исходных урав-
уравнений. Характеристические свойства механических движений
особенно наглядно выявляются и раскрываются в так называе-
называемых законах сохранения кинетических величин: количества дви-
движения, кинетического момента и кинетической энергии. Для
изучения движения точки переменной массы важно установить
некоторые аналогии с движением точки постоянной массы.
Количеством движения точки переменной массы в данный
момент времени t будем называть вектор q, равный произведе-
произведению массы точки на вектор ее скорости, т. е.
q=Mv. A)
76
Основное уравнение движения точки переменной массы удоб-
удобно записать в виде:
d , ,,\ ? , dM ->
lf ir B)
Умножая B) на dt, получим:
d (Mv) = Fdt + dMu. C)
Вектор Fdt есть элементарный импульс равнодействующей
всех внешних сил, приложенных к излучающему центру, a dMu
есть количество движения частиц, отброшенных за время dt, по
отношению к неподвижной системе осей координат.
Таким образом, дифференциал количества движения точки
переменной массы равен элементарному импульсу равнодей-
равнодействующей всех приложенных к точке сил плюс «абсолютное»
количество движения частиц, отброшенных за время dt.
Так как \—тг и) есть сила,-обусловленная абсолютным дви-
движением отброшенных в единицу времени частиц, то, обозначив
эту силу через Ra, мы получим из B):
d(Mv) = Fdt-\-Radt, D)
т. е. дифференциал количества движения точки переменной мас-
массы равен элементарному импульсу равнодействующей всех
внешних приложенных к точке сил плюс элементарный импульс
«реактивной» силы, обусловленной абсолютным движением из-
излучаемых частиц.
Если струя отбрасываемых точкой частиц неподвижна по от-
отношению к выбранной системе осей координат, то и=0, и мы
будем иметь из D):
E)
откуда, интегрируя, получим:
t
Mv — Movo = J Fdt. F)
'о
Таким образом, при условии, что абсолютная скорость от-
отбрасываемых частиц равна нулю, теорема об изменении количе-
количества движения формулируется так же, как и для точки постоян-
постоянной массы, т. е. изменение количества движения точки перемен-
переменной массы за какой-либо промежуток времени (t — ^0) равно
импульсу равнодействующей всех приложенных к точке внеш-
внешних сил за тот же промежуток времени.
77
Если F = 0, то
при
F = const = uQ,
откуда
-> —»• ¦>
Если м = const = tto> то из C) следует:
t
to — M) = j Fdt, (9)
t
F
'о
или
М(м0 — ?0) — М(Ti0 —%) = J /л.
Но
«о — vo = (Vr)o, uo — v = Vr,
и, следовательно, (9) можно написать так:
MVT — (MVT\ = — | Fdt. A0)
Таким образом, если абсолютная скорость излучаемых ча-
частиц постоянна по»величине и направлению, то импульс равно-
равнодействующей всех приложенных к точке внешних сил, взятый со
знаком минус, равен изменению количества движения точки в
предположении, что переносная скорость точки v заменена отно-
относительной скоростью Vr-
-у -*¦
Рассмотрим еще случай u = v (относительная скорость от-
отбрасываемых частиц равна нулю).
В этом частном случае уравнение Мещерского будет иметь
вид:
., dv иг
так как реактивная сила будет равняться нулю. Добавляя сла-
¦> dM
гаемое v—jf~ справа и слева, получим:
U 1 Я Ж \ Г* . (I 111
{Mv) F+v
78
откуда следует:
t t
Mv — Movo = j Fdt -4- jv dM. A1)
Таким образом, если относительная скорость отбрасываемых
частиц равна нулю, то изменение количества движения точки
равно импульсу равнодействующей всех приложенных к точке
внешних сил плюс количество движения излученных (отделив-
(отделившихся) частиц, обусловленное их переносным движением. Если
-> fly -> ->
допустить, что F = 0, тогда М—тт- = 0 и, следовательно, v = v0, т.е.
в этих условиях точка переменной массы будет двигаться с по-
постоянной (по величине и направлению) скоростью.
§ 2. Теорема об изменении кинетического момента
Кинетическим моментом, или моментом количества движения
точки переменной массы, мы будем называть вектор:
%=?XMv, A2)
->
где г — радиус-вектор, проведенный из начала неподвижной си-
системы осей координат к данному излучающему центру массы М.
Для вывода теоремы об изменении кинетического момента
точки М напишем основное уравнение движения в виде:
w(Mv) = F + -jra. A3)
Умножим A3) векторно слева на г, тогда получим:
rXJL{Mv) = rXF+rX
или
A4)
Соотношение A4) представляет собой теорему об изменении
кинетического момента для точки переменной массы. Эту тео-
теорему можно сформулировать так: производная по времени от
кинетического момента точки, вычисленного относительно неко-
некоторого центра, равна моменту равнодействующей всех прило-
приложенных к точке внешних сил плюс момент «абсолютного» коли-
количества движения частиц, излученных в единицу времени, отно-
относительно того же центра.
Если абсолютная скорость излученных частиц равна нулю,
то A4) принимает вид:
§ rXF. A5)
79
В этом частном случае производная по времени от кинети-
кинетического момента точки, вычисленного относительно некоторого
центра,, равна моменту равнодействующих всех приложенных к
точке внешних сил относительно того же центра.
Рассмотрим частный случай, когда
^ + ^« = 0. A5')
Из уравнения A4) получаем, что
г X Ми = const = С. / A6)
Умножая A6) скалярно на радиус-вектор г, получим:
Сг = 0. A6')
->
Если проекции С на оси координат обозначить а, Ь, с, а про-
->
екции г обозначить через х, у, г, то A6') можно записать в виде:
0. A7)
Соотношение A7) показывает, что траекторией точки будет
плоская кривая. Однако теорема площадей в этом частном слу-
случае не будет иметь места. В самом деле,
Л1(гХ;и) = ^. A8)
"*" da da
г? *\, * о da da
Но, как известно, ry<,v = 2-^r, где -^ есть секториальная
скорость точки.
Проектируя A8) на направление постоянного вектора С,
получим:
откуда
1
Из A9) ясно, что при изменении М секториальная скорость
радиуса-вектора, следящего за точкой, изменяется.
Выясним смысл условия A5')- Для определенности положим,
что F=Ma, т. е. действующая внешняя сила пропорциональна
массе точки (таковы, например, сила тяжести и сила ньютони-
анского тяготения). Будем иметь:
Ма-\-~и = 0. B0)
-> ->
Таким образом, и = Ка, где Я — некоторый коэффициент.
80
Если закон изменения массы известен, т. е. известна функ-
ция / —3f~> то из B0) следует:
Соотношение B1) при заданной внешней силе F (т. е. задан-
заданном а) определяет закон излучения частиц.
Если имеет место случай, когда и = 0 и действующая сила
центральна, то мы также получим соотношение A9).
Если относительная скорость излучаемых частиц равна нулю
и действующая внешняя сила центральна, то будет иметь место
теорема площадей.
В самом деле, теорему об изменении кинетического момента
в этом случае можно записать в виде:
или
откуда непосредственно вытекает, что
->
da —*¦ ¦*• ¦*¦
2-jf — const = r0X v0.
Теорема площадей будет иметь место еще в трех частных
случаях:
а) Если относительная скорость излучаемых частиц колли-
неарна радиусу-вектору г и сила F центральна.
б) Если в любой момент времени реактивная сила уравно-
уравновешивается равнодействующей всех внешних сил.
в) Если равнодействующая реактивной силы и силы F кол-
линеарна радиусу-вектору г.
Рассмотрим движение точки переменной массы в поле цен-
центральной силы при условии, что вектор абсолютной скорости из-
излучаемых частиц коллинеарен вектору переносной скорости,
т. е. положим:
Теорема об изменении кинетического момента в этом случае
дает:
6 А-. А.. Космодемьянский 81
или
J? ^r(l-A.i)(rx?) = O. B2)
^> > >
Обозначим rXv = V, и разделим обе части равенства B2)
на М, тогда получим: (
V (Л 1) dM rf _0
dVs (Л, — 1) dM
или
B3)
(Я.1 1) бШ т. /
где Ф —^~м ^7 есть функция времени. Из соотношения .(
следует, что траектория точки есть плоская кривая. В самом
деле, производная от вектора Vs коллинеарна дифференцируе-
дифференцируемому вектору в том случае, когда вектор Vs изменяется только
по величине; следовательно, из формулы B2) вытекает постоян-
ство направления вектора Vs в пространстве. Так как V,= {rXv),
то легко понять, что положение плоскости, определяемое векто-
вектору ->
рами г и у, также остается неизменным в пространстве.
Проектируя B3) на направление единичного вектора W
мы получим:
откуда, переходя к полярным координатам, будем иметь:
^ = Ce^dt = cJ^-l)^, B4)
где С — постоянная интегрирования, а 8 — полярный угол.
§ 3. Простейшие случаи движения точки переменной массы
под действием центральных сил*
Если масса точки известна как функция времени, то для изу-
изучения движения точки под действием центральных сил удобно
сделать замену переменных и свести задачу о движении точки
переменной массы к задаче о движении точки постоянной массы.
Пусть новые переменные |, г|, ?,, т связаны со старыми х, у,
z, t при помощи следующих уравнений:
* См.: И. В. Мещерский, Динамика точки переменной массы, 1897,
стр. 141 — 150.
82
где /i и ф1 — некоторые функции времени, связь которых с функ-
„ г М
циеи i =-J7-, определяющей закон изменения массы точки, мы
установим позднее.
Дифференцируя | по времени т, мы получим:
dz 1
rft2 dfi (jij rft
dx ф,
'w I Фщ* л I 4 f
4-
B6)
формулы, аналогичные B5) и B6), имеют место и для произ-
производных от переменных г| и ? по т.
Зная связь новых переменных со старыми и составив диффе-
дифференциальное уравнение движения точки в проекции на Ох, мы
dx d2x
можем выразить х, —^- и -^- через новые переменные и их
первые производные по т; подставив эти значения в B6), мы по-
получим дифференциальное уравнение движения точки в новых неп-
непременных. Аналогичный прием можно применить для составле-
составления дифференциальных уравнений для г| и g.
Применим указанное преобразование переменных к решению
следующей задачи: определить движение точки переменной мас-
массы, притягиваемой к началу координат по закону Ньютона, пред-
предполагая, что масса точки изменяется (увеличивается) по закону:
и абсолютная скорость присоединяющихся частиц равна нулю.
Векторное уравнение движения точки можно написать в виде:
т dt ~~ r* dt
Так как траекторией точки будет в этом случае плоская кри-
кривая, то, предполагая, что плоскость, в которой расположена
траектория, есть координатная плоскость хОу, мы получим из
B7) проектированием на оси Ох и Оу следующие два уравне-
уравнения:
ОР-х kx a dx
dt2 ~ r3 l—atdt
d*y ky !L_f[fL
~W rl \—v.tdt
где
и
Введем новые переменные, положив:
t~ Ц= A —а^J ' dT=
t (I — atJ ' Ц= A —а^J ' dT= (I—atK '
Тогда в новых переменных уравнения B8) примут следую-
следующий вид:
d2r\ _ kx\
dx* — р3
где
Уравнения C0) описывают в пространстве A,ц) движение
точки постоянной массы под действием центральной силы, под-
подчиняющейся закону Ньютона. Будем называть точку постоян-
постоянной массы в пространстве (|, г|) изображающей для точки пере-
переменной массы, движущейся в пространстве (х, у).
Найдем интегралы уравнений движения точки переменной
массы. Из уравнения B4) имеем при Я4 = 0:
Л) 1 —at ,1 ...
c U ath
2 Л)
r ~dJ —
ма — ciU —ath
или в декартовых коорди-натах:
x-%—y^f = cAl-at)- C1)
Умножая уравнения C0) на -~ и -^- и складывая, легко
получим второй интеграл, который является интегралом кине*
тической энергии для изображающей точки. Его можно запи-
записать в виде:
где h — постоянная интегрирования.
Подставляя вместо ~^-> -^- и р их значения, получим:
=2h. C3)
Пользуясь интегралами C1) и C3), мы можем получить пред-
представление о движении точки переменной массы в пространстве
(х, у).
84
Установим зависимость между т а /. Так как
dt
— atK
то, интегрируя, находим:
2а (I — atJ
Для определения Ct положим, что при ^=0 т = 0; тогда-.
= -h—, и мы будем окончательно иметь:
Будем рассматривать движение точки переменной массы от
= — оо до t = —, тогда соответствующие значения т изме-
няются от т = —
1
до т = оо,
причем т возрастает вместе с
возрастанием t. В момент ?=0 точка переменной массы и изо-
изображающая точка совпадают. Из формул
B9) следует, что точка переменной мас-
массы в момент t и изображающая точка в у ^
соответствующий момент т находятся на
одной прямой, проведенной из притяги-
притягивающего центра. Отношение расстояния
г к р будет убывать с течением времени,
так как
ф . ,
Изображающая точка в пространстве
(|, г|) описывает эллипс, параболу или
гиперболу в зависимости от значения h,
входящего в уравнение C3). Если положить, что при ^ = 0 г=г0,
-> ->
v = vu и угол между г0 и и0 равен |5, то из C3) имеем, что
~
C5)
Если изображающая точка описывает эллипс, то точка пере-
переменной массы будет описывать около притягивающего центра
спиралеобразную кривую, постепенно приближаясь к этому цент-
центру (фиг. 16), что следует непосредственно из соотношения ме-
между г и р. Возьмем какой-нибудь радиус-вектор, проведенный из
притягивающего центра к точке переменной массы. Пусть этот
радиус-вектор будет ОМ0, где Мй означает положение точки пе-
переменной массы в момент ^=0. Время, в течение которого точка
М снова попадает на радиус-вектор ОМ0, например в точку Mi,
85.
есть продолжительность одного полного оборота точки перемен-
переменной массы вокруг притягивающего центра. Пусть то — время об-
обращения изображающей точки по эллипсу (изображенному
пунктиром на фиг. 16), тогда из C4) следует, что время одного
оборота точки переменной массы, следующего за моментом
/=0, равно:
11 '
а аУ1+2ат0
Продолжительность второго оборота равна tt — tu где
2 a a У 1 + 4ат„ '
и, следовательно,
1 1
а У 1 + 2ат0 а/14-4ат0
Вообще продолжительность я-го оборота равна:
1 1
tn tn-l = —Г/
Из формулы C6) следует, что продолжительность последо-
последовательных оборотов точки переменной массы с течением вре-
времени уменьшается.
Если гп — длина радиуса-вектора точки переменной массы
после п оборотов, то на основании формул C4) и C4'):
Подсчитаем уменьшение длины радиуса-вектора г за время
одного оборота. Будем иметь:
гл-1 — гп = г0 [ A _|_ 2апХа) [Т +°2а (п _ 1} Tj J. C7)
В формуле C7) числитель — величина постоянная, а знаме-
знаменатель растет вместе с увеличением п; таким образом, величина,
на которую уменьшается длина радиуса-вектора точки за время
одного оборота, уменьшается с течением времени.
Аналогичным приемом можно исследовать движение точки
переменной массы в случае, когда траектория изображающей
точки (в пространстве |, г|) есть парабола или гипербола*.
* См. детали вычислений и ^формы получающихся траекторий в книге
И. В. Мещерского «Динамика точки переменной массы», стр. 147—148.
«6
§ 4. Теорема об изменении-кинетической энергии
Кинетической энергией точки переменной массы будем назы-
называть скалярную величину Т, равную половине произведения мас-
массы этой точки в данный момент времени на квадрат ее скорости.
Таким образом, по определению, совпадающему с определением
кинетической энергии точки постоянной массы, будем иметь, что
Г = -1а^2 = -1аЬ2. C8)
Для вывода теоремы об изменении кинетической энергии точ-
точки переменной массы напишем основное уравнение Мещерского
в виде:
., dv , -> dM g . dM +
M + v F+u
Умножая скалярно на vdt все члены, кроме силы F, кото-
которую умножим на равную величину dr, получим:
d
Mv dv + v2 dM = Fdr-{- dM (av),
или
v). C9>
Если абсолютная скорость излучаемых частиц равна нулю,
то из C9) имеем:
{^ ^ D0)
Соотношение D0) можно сформулировать так: дифферен-
дифференциал кинетической энергии точки плюс кинетическац энергия
элементарного количества отброшенных частиц, обусловленная
их переносной скоростью, равняется элементарной работе рав-
равнодействующей всех внешних сил, приложенных к данной точке.
Если относительная скорость излучаемых частиц равна нулю,
-> ->
то u = v, и мы получим из C9):
7 D1)
т. е. дифференциал кинетической энергии точки переменной мас-
массы минус кинетическая энергия элементарного количества отбро-
отброшенных частиц, обусловленная их переносной скоростью, рав-
равняется элементарной работе равнодействующей всех внешних
сил, приложенных к данной точке.
->
Если абсолютная скорость и излучаемых частиц перпен-
перпендикулярна к скорости v, то (ии)=0 и теорема об изменении
87
кинетической энергии точки в этом частном случае формули-
формулируется так же, как и при выполнении условия ы = 0.
В самом общем случае слагаемое dM(uv) можно трактовать
как элементарную работу реактивной силы, обусловленной аб-
абсолютным движением излучаемых частиц, а следовательно, тео-
теорему об изменении кинетической энергии точки переменной мас-
массы C9) можно сформулировать так: дифференциал кинетиче-
кинетической энергии точки переменной массы плюс кинетическая энер-
энергия элементарного количества отброшенных за время dt частиц
равняется элементарной работе равнодействующей всех при-
приложенных к точке внешних сил плюс элементарная работа ре-
реактивной силы, обусловленной абсолютным движением излу-
излучаемых частиц.
Если уравнение движения точки переменной массы написать
в виде:
А\ ^- = F-\- Ф, D2)
где Ф — реактивная сила, обусловленная относительным движе-
(dM -г, \
нием излучаемых частиц и равная \—тт- Vr , то, умножая левую
-> ->¦
часть D2) на vdt, а правую на dr, получим:
,"*¦"*¦ -> -> ± •>
M-v dv — Fdr-^-Ф dr,
или 2
D3)
Уравнение D3) показывает, что дифференциал кинетической
энергии точки переменной массы равняется элементарной работе
приложенных внешних и реактивных сил плюс кинетическая
энергия элементарного количества отброшенных частиц, обус-
обусловленная их переносной скоростью.
ГЛАВА IV
ОСНОВНЫЕ ТЕОРЕМЫ ДИНАМИКИ ТЕЛА
ПЕРЕМЕННОЙ МАССЫ
«Тысячу раз не выходит, а тысячу пер-
первый — выйдет».
Врубель.
§ 1. Введение и постановка задачи
Построение общей теории движения тел переменной массы
можно выполнить при помощи основных теорем механики: тео-
теоремы об изменении количества движения, теоремы об изменении
кинетического момента и теоремы об изменении кинетической
энергии. Такой путь изучения движения тел переменной массы
является наиболее простым и естественным. К формулировкам
основных теорем механики для тел, масса которых изменяется
с течением времени, можно идти различными путями. Мы будем
следовать методу, широко применяемому в механике тел по-
постоянной массы, рассматривая тело переменной массы как сово-
совокупность точек переменной массы, движение которых опреде-
определяется уравнением Мещерского. Зная уравнения движения точки
переменной массы и рассматривая тело как совокупность точек,
можно получить простые формулы, выражающие основные тео-
теоремы динамики для тела переменной массы. Ограничимся в этой
главе рассмотрением таких тел переменной массы, для которых
излучение (отбрасывание) частиц происходит с некоторой ча-
части поверхности тела, причем частицы, не имеющие относитель-
относительной скорости по отношению к системе осей координат, связанной
с телом, считаются принадлежащими телу, а частицы, имеющие
относительную скорость, телу не принадлежат и никакого влия-
влияния на его движение не оказывают. Реактивные силы и моменты
понимаются во всем дальнейшем как результат контактного
взаимодействия отбрасываемых частиц и тела в момент их от-
отделения от основного тела.
89>
Основные кинетические величины: количество движения Q,
кинетический момент К и кинетическую энергию Т — будем оп-
определять по формулам динамики системы точек постоянной мас-
массы, распространяя суммирование только на те точки тел, кото-
которые не имеют относительной скорости. Предположение о том,
что взаимодействие отделяющихся частиц с основным телом
происходит только в мо-
момент отделения (приобре-
(приобретение какой-либо частицей
относительной скорости эк-
эквивалентно приложению к
основному телу местной им-
импульсивной силы), позво-
позволяет получить закономерно-
закономерности, не зависящие от процес-
процесса излучения частиц, пред-
предшествующего моменту отде-
отделения, т. е. не зависящие от
«истории» движения струи
отброшенных частиц до рас-
Фиг, 17 сматриваемого момента вре-
времени t. В рамках принимае-
принимаемой гипотезы частицы струи воздействуют на тело по поверх-
поверхности контакта, отделяющей в данный момент частицы струи от
частиц основного тела.
Если массы частиц, принадлежащих телу в данный момент
времени, т. е. не имеющих относительных скоростей по отноше-
отношению к основному телу переменной массы, движение которого мы
изучаем, обозначить через mv, а их скорости относительно неко-
некоторой неподвижной системы через vv, то по определению основ-
основные кинетические величины можно записать в виде:
Q = 2j mvvv,
v=l
К =
v-l
т=\Ъ
B)
C)
Радиус-вектор центра масс тела будем определять по формуле:
D)
г„ = ¦
2
v-l
м
где М — масса тела в рассматриваемый момент времени.
90
Так как в процессе излучения (отбрасывания) частиц поло-
положение центра масс остающихся частиц тела изменяется, то для
всех дальнейших рассуждений удобно выбрать систему осей ко-
координат, связанную с движущимся телом, и поместить начало
этих осей в некоторой точке этого тела. Пусть (фиг. 17) радиус-
вектор какой-либо точки относительно неподвижной системы
Oi?ti? равен rv, а радиус-вектор той же точки относительно по-
подвижной системы Oxyz, неизменно связанной с основным телом,
равен pv; тогда, если положение подвижного начала координат
определяется радиусом-вектором г0, мы будем иметь очевидное
геометрическое соотношение:
Дифференцируя равенство E) один раз по времени, будем
иметь:
X pv). F)
Вектор y0 характеризует движение основной точки (начала
подвижной системы осей координат); векторное произведение
o)Xpv дает составляющую скорости точки mv, обусловленную
вращением. Дифференцируя F) по времени, получим:
w =w -4-ty^ -A-aYiaxt) G)
где е—вектор мгновенного углового ускорения тела (системы
Oxyz). Хорошо известно (см. раздел «Кинематика», стр. 138),
что
где hv — расстояние от линии действия вектора мгновенной уг-
угловой скорости со до рассматриваемой точки mv. Таким образом,
wv = w0H-eX^ — «2ЛУ. (8)
Если абсолютную скорость отбрасываемой частицы обозна-
обозначить через uv, то очевидно, что
>
где Vrv — относительная скорость отбрасываемой частицы. Ско-
Скорость точки тела (подвижного пространства), с которой в дан-
данный момент совпадает центр масс, равна:
91
Если скорость центра масс относительно системы Oxyz обо-
обозначить через <7с, то абсолютная скорость центра масс будет
равна:
Для тел постоянной массы qc = 0. Относительное смещение
центра масс для тел переменной массы обусловлено тем обстоя-
обстоятельством, что вследствие процесса отбрасывания частиц в кон-
конфигурации остающихся масс положение центра масс относитель-
относительно системы Oxyz изменяется. В дальнейшем мы будем называть
v{^ переносной скоростью центра масс, a qc — относительной
скоростью центра масс.
§ 2. Теорема об изменении количества движения
Укажем прежде всего способ вычисления вектора количества
движения для тела переменной массы. По определению имеем,
что
v-i v v
Так как
«,= «о + йХр„
то
v-l v=l v=l
Из основных определений следует, что
v-l
тде М — масса тела в данный момент времени, а
V-1
где рс — радиус-вектор центра масс тела в данный момент вре-
времени относительно системы осей Oxyz.
Таким образом, окончательно имеем:
¦*¦ "*¦ -*¦ "* -> -> > ->
Q = Mv0 -f- со X Мр = М го0 -)- со X р ) = Мт)(е>. (9)
Следовательно, количество движения тела переменной мас-
массы равняется массе тела в данный момент времени, умножен-
92
ной на скорость той точки подвижного пространства, с которой
в данный момент совпадает центр масс тела.
Так как
то
Q = Mvc
Mqc,
A0)
т. е. количество движения тела переменной массы равно массе
тела в данный момент времени, умноженной на абсолютную
скорость центра масс минус произведение массы тела на отно-
относительную скорость центра масс.
Если, например, излучающее тело закреплено, то Q = 0 и, сле-
следовательно, vc = qc, т. е. в этом частном случае абсолютная ско-
скорость центра масс равна его относительной скорости.
Для того чтобы получить теорему об изменении количества
движения, напишем уравнения Мещерского для каждой точки
тела. Будем иметь тогда:
dt
dmn
dt
(П)
В уравнениях A1) F\' есть равнодействующая всех внутренних
сил, приложенных к точке mv, F^ — равнодействующая всех
внешних сил, приложенных к той же точке, uv — абсолютная
скорость частиц, излучаемых точкой mv. Складывая уравнения
A1), получим:
п п
dmv ¦*
a,,.
v-l
dt "v
v-l
v-l v-l
Мы знаем, что на основании третьего закона Ньютона
A2)
93
и, следовательно, A2) можно записать в виде:
-> п
dQ __ g(e) , у dmv ->
v-l
->
где /?<<"> — результирующая всех внешних сил.
Соотношение A3) показывает нам, что производная по вре-
времени от количества движения тела переменной массы равна ре-
результирующей всех действующих на тело внешних сил плюс аб-
абсолютное количество движения частиц, отбрасываемых с по-
поверхности тела в единицу времени.
Соотношению A3) можно придать другую форму, если
вспомнить, что
dt
v-l
.=&
где Фг есть результирующая всех реактивных сил. Заменяя uv
-> ->
в A3) суммой vv + Vrv, получим:
Легко видеть, что
dt
есть количество движения отбрасываемых в единицу времени ча-
частиц в их переносном движении. Таким образом, из A4) следует,
что производная по времени от количества движения тела пе-
переменной массы равна результирующей всех действующих на
тело внешних и реактивных сил плюс количество движения ча-
частиц, отбрасываемых телом в единицу времени, в их переносном
движении
Если абсолютная скорость излучаемых частиц равна нулю,
то из соотношения A3) будем иметь:
4 = /?W. A5)
т. е. в этом частном случае теорема об изменении количества
движения тела переменной массы формулируется так же, как и
для тела постоянной массы.
94
§ 3. Теорема о движении центра масс
Напишем уравнения Мещерского для каждой точки тела
переменной массы. Будем иметь:
Сложим написанные уравнения почленно. Зная, что
%F(? = Rie\ iA'> = 0; 2<3v=%,
v-l v-1 \-l
где BSe) — результирующая всех внешних действующих на тело
сил, а Фг—результирующая реактивных сил, мы получим:
v-l
A6)
В уравнении A6) wv обозначает ускорение точки mv тела пере-
переменной массы в данный момент времени. Как известно из (8),
wv = w0 -+- е X Pv —
и, следовательно,
•v-l v-l
V-1
Так как по основным определениям
п
2 т
V-1
ТО
Ускорение
я
2^
V-1
" -> ->
и, 2 '«vPv = Мр
\-i
¦* -> ->
w0 -\- е X 9С — w2'
, + еХ2'
V-1
• v t
v=l
-> ->
У. 9с — ЮЧ
h =w^e
С С
7ivpv — a? 2j т-Лу
есть ускорение той точки подвижного пространства, с которой
в данный момент времени совпадает центр масс рассматривае-
95
мого тела переменной массы. Таким образом,
2 vv [
Подставляя вычисленное значение суммы в уравнение A6), мо-
можно написать его в виде:
Mwie) = R'e) + К A7)
Уравнение A7) выражает закон движения центра масс для тела
переменной массы, и мы можем сформулировать его в следую-
следующем виде: произведение массы тела на ускорение той точки по-
подвижного пространства, с которой в данный момент времени
совпадает центр масс тела, равно результирующей всех внеш-
внешних и реактивных сил, действующих на тело переменной массы.
Или, иначе говоря, произведение массы тела на переносное ус-
ускорение его центра масс равно результирующей всех внешних
и реактивных сил, действующих на тело переменной массы.
Уравнению A7), которое характеризует переносное движение
центра масс, можно придать более удобную форму *.
Сосредоточим свое внимание на изучении движения какой-
либо характерной точки тела, например на изучении движения
подвижного начала координат (точки О). Тогда, зная связь
«;<f> с w0, мы получим из A7):
Мщ = R(e) + Фг — % X Мрв + Mtfhc. A8)
•> ->
Если тело движется поступательно, то со = О и е = 0 и соотноше-
соотношение A8) дает следующее простое уравнение:
MwQ = Rle>-\-®r, A9)
т. е. при поступательном движении тела переменной массы про-
произведение массы тела на ускорение какой-либо точки, принад-
принадлежащей телу в течение всего процесса движения, равно ре-
результирующей всех действующих на тело внешних и реактив-
реактивных сил.
Если в процессе отбрасывания частиц положение центра
масс тела (центра масс остающихся частиц) не изменяется, то
переносное ускорение центра масс равно его абсолютному уско-
ускорению по отношению к выбранной неподвижной системе осей.
В этом частном случае уравнение A7) переходит в следующее:
Mwe = R(e) -f- Фг B0)
* В уравнении A7) wce' есть ускорение той точки подвижного простран-
пространства, с которой совпадает центр масс тела в данный момент времени. При
отбрасывании частиц центр масс изменяет свое положение относительно тех
точек, которые принадлежат телу в течение всего движения.
96
Таким образом, если в процессе изменения массы тела центр
масс остающихся частиц не имеет движения относительно си-
системы подвижных осей Oxyz, то уравнение движения центра
масс тела имеет такой же вид, что и уравнение движения точки
переменной массы. В этом частном случае полностью имеет ме-
место формальная аналогия между соотношениями классической
механики твердого тела постоянной массы и соотношениями ме-
механики тела переменной массы. В общем случае вследствие про-
процесса отбрасывания частиц центр масс имеет движение относи-
относительно системы осей, неизменно связан-
связанных с телом переменной массы (относи-
(относительно системы Oxyz). Это движение не
обусловлено действующими внешними
или реактивными силами, а целиком
определяется геометрической конфигура-
конфигурацией частиц, которые мы считаем при-
принадлежащими телу в данный момент вре-
времени. Чтобы пояснить это утверждение,
рассмотрим один простейший случаи. q "ЗГ
Пусть тело, имеющее форму цилин-
дра, лежит на горизонтальной плоскости иг'
(фиг. 18). Пусть отделение частиц проис-
происходит непрерывно бесконечно тонкими круглыми пластинками с
относительной скоростью, равной нулю. Пусть перемещение гра-
границы acti, отделяющей частицы, принадлежащие телу в данный
момент времени, от частиц, уже «отброшенных», происходит со
скоростью v. Легко показать, что скорость центра масс относи-
относительно системы Oxyz будет в этом частном случае равна -к-;
однако эта скорость зависит только от того, какие частицы на-
нашей механической системы точек мы считаем в данный момент
времени принадлежащими телу переменной массы и какие ча-
частицы считаем уже отделившимися.
Относительное смещение центра масс, обусловленное отбра-
отбрасыванием частиц, является принципиально новым процессом в
задачах механики тела переменной массы. Этот новый специ-
специфический процесс движения обусловлен гипотезой близкодей-
ствия (контактного взаимодействия), которую мы приняли в
первой главе этого раздела.
Уравнение движения центра масс в общем случае мы полу-
получим, если примем во внимание, что
^И = *(е) _|_ ?<р _j- 2w X qe,
где w^ — абсолютное ускорение центра масс, a w{p — относи-
относительное ускорение центра масс, откуда имеем:
7 А. А. Космодемьянский 97
Подставляя значение переносного ускорения центра масс в
формулу A7), будем иметь:
Mwf = R{e) + ФЛ +
2М (а X qc).
B1)
Таким образом, центр масс тела движется как точка, масса
которой равна массе всего тела в данный момент времени, к ко-
которой приложены результирующая всех внешних действующих
на тело сил, результирующая всех реактивных сил и силы,
обусловленные относительным и кориолисовым ускорением
центра масс.
Если тело переменной массы движется поступательно, то
ш = 0 и уравнение B1) принимает более простой вид:
B2)
В большинстве практических задач относительное ускорение
и ускорение Кориолиса центра масс движущихся объектов малы
по сравнению с абсолютным ускорением. В этих случаях целе-
целесообразно уравнение центра масс тела переменной массы пи-
писать так же, как и уравнение движения точки переменной массы.
§ 4. Кинетический момент тела переменной массы
Укажем прежде всего способ вычисления кинетического мо-
момента тела относительно неподвижных осей координат и уста-
установим его связь с кинетиче-
кинетическим моментом тела относи-
относительно подвижных осей, нача-
начало которых совпадает с точ-
точкой О и которые движутся па-
параллельно осям неподвижной
системы Oi?ti?. В дальнейшем
будем рассматривать три си-
системы осей координат: систе-
систему неподвижную O^t,, систе-
систему Oxyz, неизменно связанную
с телом переменной массы, и
систему OxiyiZi, движущую-
движущуюся поступательно относитель-
относительно неподвижной системы
О,?т|Б (фиг. 19).
Определим кинетический момент тела переменной массы от-
относительно системы Oigr|g (неподвижного центра О4) как век-
векторную сумму кинетических моментов точек, составляющих тело
Фиг. 19
98
в данный момент времени, т. е.
К = 2 (*v X отД,), B3)
V-1
->
где rv—радиус-вектор точки mv относительно неподвижной си-
системы координат Oib,Tf]t,, a vv — скорость той же точки.
Для общности выводов будем предполагать, что начало по-
подвижной системы координат не совпадает с центром масс тела.
Из треугольника OiOmv (фиг. 19) имеем:
rv — г0 + Pv
Дифференцируя это соотношение по времени, получим:
Подставляя значения rv и vv в формулу B3), будем иметь:
= 2j (rv X mvvv)= 2j (ro + Pv) X mv[v0-\-(ii X Pv] =
v=l v=l
= 2 r0 X tnvv0-f- 2 Pv X tnvv0-\- 2 r0 X tnv(со X Pv) +
v=l v—1 v=l
v=l
Полагая, как и pattee, что
v-l
v-l
мы можем преобразовать полученные суммы к виду:
¦> •> -> •>
v-l
п
2 г0 X wtv^o = г0 X ЛТг»0,
;-1
2j pv X ffivi»0 = рс X Л1гH, -
1>-1
д. •> •> •> •> -> ->
^-J 'о A. "lv \ A. fJV/ — 'ОЛШЛ ¦'"Рс'
"л-> -> -> ¦>
1j pv X mv (со X pv) — KQ,
v-1
где /Cq есть кинетический момент тела переменной массы отно-
относительно точки О системы Ох^у^.
7* 99
Таким образом, кинетический момент тела относительно точ-
точки Ot неподвижной системы О^ц?, можно представить в виде:
К = Ко-\- г0 X и X Щс-\~ г0 X ЛЬ0 + рс X ЛГхГ0. B4)
Формулу B4) удобно для дальнейшего записать в несколько
иной форме. В самом деле, мы знаем, что переносная скорость
центра масс равна:
а, следовательно,
г0 X (« X Мрс)+70 X Mvo = ?Q X M(vo + ® X Ре)="г0 X
J X Af?0 = Р, X ft + (« Х"рс) - (© X Ре)] Af =
= рс X Af ??>-ptXM(aX pc).
Легко видеть, что
70 X Af^W + рс X Af^W — рс X М (© X рс) =
= гс X Af^w — рс X Af (© X рс).
Таким образом,
Й7 М%> — рс X М(© X
К Й+7 М%> М( ) B5)
Формула B5) показывает, что кинетический момент тела пере-
переменной массы относительно неподвижных осей координат равен
кинетическому моменту тела в его движении относительно по-
поступательно перемещающихся осей OxiyiZi плюс кинетический
момент центра масс в его переносном движении (в предположе-
предположении, что в нем сосредоточена масса всего тела), минус кинети-
кинетический момент центра масс в его переносном движении относи-
относительно системы Oxii/iZi.
В частном случае, когда начало подвижной системы совпа-
->
дает с центром масс, рс = 0 и
B6)
т. е. если начало подвижной системы координат совпадает с
центром масс тела, то кинетический момент тела относительно
неподвижного центра равен кинетическому моменту центра
масс тела плюс кинетический момент центра масс в его пере-
переносном движении при условии, что в нем сосредоточена масса
всего тела.
100
В частном случае, когда тело переменной массы вращается
около неподвижной оси Ozi с угловой скоростью со, легко найти
->
проекцию вектора кинетического момента К на эту ось.
Из формулы B3) имеем:
v-l
Полагая xv = hvcos(p, yv = Avsinq), где hv—расстояние
точки mv от оси Огъ получим:
н
п п
z v=l v=l
где 1гг есть момент инерции тела в данный момент времени от-
относительно оси Ozi.
Если твердое тело переменной массы движется так, что точ-
точка О тела остается во все время движения неподвижной, то, сле-
следуя методу Эйлера, можно найти проекции вектора кинетиче-
кинетического момента на подвижные оси Ox, Oy, Oz, неизменно связан-
связанные с твердым телом.
Так как при движении твердого тела, имеющего одну не-
неподвижную точку, для вычисления распределения скоростей
можно пользоваться формулой Эйлера, согласно которой
vv = (о X Pv,
то выражение для вектора кинетического момента B3) можно
записать в виде:
^o=2pvXfflv(fflX pv);
v-l
раскрывая двойное векторное произведение, получим:
^ V "*2 v ¦*¦/*"*¦ \
v=l v—I
Обозначая проекции вектора мгновенной угловой скорости
на подвижные оси Oxyz через р, q, r и имея в виду, что осевые
и центробежные моменты инерции тела определяются форму-
101
лами:
V=I V=I V-1
можно написать выражения для проекций вектора кинетиче-
кинетического момента на оси Ox, Oy, Oz в следующем виде:
Кох — Лог/? — /xi/<7 — /дггГ
Коу = — ixyP + 1ууЯ — Iуг
Koz = — IxrP — 1уг
B8)
В формулах B8) осевые и центробежные моменты в общем
случае являются функциями времени.
§ 5. Теорема об изменении кинетического момента
Напишем уравнение движения какой-либо точки массы tnv
в следующей форме
^ Л Р А" + ^ «v, B9)
-*¦
где иу — абсолютная скорость частиц, отбрасываемых точкой
mv, /"v' — равнодействующая всех внешних сил, приложенных
-t.it)
к точке тх, а г, —равнодействующая всех внутренних сил, при-
приложенных к той же точке. Умножим уравнение B9) векторно
слева на rv и просуммируем по индексу v от 1 до п, где п — чис-
число точек тела. Будем иметь:
v=l v=l
n
S^vX-^«v, C0)
v-1
На основании третьего закона Ньютона
102
Кроме того, очевидно, что
п
v-l v-1
a
2 (rv X #?) = i mom0, Д?> -
v=1 v=l
представляет собой результирующий момент всех внешних дей-
действующих на тело сил. Таким образом, соотношение C0) мож-
можно записать в следующем виде:
I X ^-v «v. C1)
v=l v=l
Соотношение C1) выражает теорему об изменении кинети-
кинетического момента тела в его движении относительно неподвиж-
неподвижных осей. Эту теорему можно сформулировать так: производная
по времени от кинетического момента тела переменной массы
равна сумме моментов всех внешних действующих на тело сил
плюс сумма моментов абсолютных количеств движения частиц,
отбрасываемых телом в единицу времени.
Соотношению C1) можно придать другой вид, если вспом-
вспомнить, что
v-1
есть результирующий момент реактивных сил относительно не-
неподвижного начала координат. Очевидно, что
v-1 v-1
и, следовательно, C1) можно записать в виде:
-> п
dK _— ПРИ | Щ _1_V? \/ dmv t. (qm
at I" /• i^^j'v^ ^ yv< (.°^;
V=I
т. е. производная по времени от кинетического момента тела
переменной массы равна сумме моментов всех внешних и реак-
реактивных действующих на тело сил плюс сумма моментов коли-
количеств движения частиц, отброшенных в единицу времени, в их
переносном движении.
103
Если абсолютные скорости отбрасываемых частиц равны
нулю, то C1) принимает наиболее простую форму:
dt
C3)
Таким образом, если абсолютные скорости отбрасываемых
телом частиц равны нулю, то производная по времени от кине-
кинетического момента тела равняется сумме
моментов внешних действующих сил. Сле-
Следовательно, при выполнении гипотезы «v = 0
->
(v= I, 2,..., п) теорема об изменении кине-
кинетического момента формулируется так же,
как и для тела постоянной массы.
В качестве примера применения урав-
уравнения C2) рассмотрим вращательное дви-
движение тела около неподвижной оси Oz\ с
угловой скоростью со. В этом частном слу-
-> ->
чае i\, = (oXpv. Проектируя обе части урав-
уравнения C2) на ось Oz\, получим:
Фиг. 20
dKz
dt
dmv ,2
dt
C4)
v-l
где (фиг. 20) hv — расстояние точки массы mv от оси вращения.
Так как по формуле B7):
a
dmv
d
v=l v—1
то соотношение C4) можно написать в виде:
dlzz
)~аТ'
-@-
dt
ИЛИ
C5)
Таким образом, произведение момента инерции тела, вра-
вращающегося около неподвижной оси, на его угловое ускорение
равно сумме моментов всех действующих на тело внешних и ре-
реактивных сил относительно оси вращения.
Если относительная скорость отбрасываемых телом частиц
равна нулю (частицы отделяются от вращающегося тела без
104
ударов), то 9йГ2 = 0 и уравнение C5) примет вид:
тгН C6)
Таким образом, важные для техники случаи вращения ва-
валов, веретен и т. п., когда отделяющиеся от тела частицы имеют
скорости соответствующих точек тела, характеризуются уравне-
уравнением вращения C6), которое формально ничем не отличается
от хорошо известного уравнения вращения тела постоянной мас-
массы. Следует только иметь в виду, что /2z = /zz@-
Если абсолютная скорость излучаемых частиц равна нулю,
то из уравнения C3) в проекции на ось Ozi получаем:
^-(/„©^atfA C7)
->¦
Таким образом, если выполняется гипотеза «v = 0, то в урав-
уравнение вращения момент инерции тела входит под знаком произ-
производной.
В целом ряде задач динамики механизмов и машин прихо-
приходится иметь дело с уравнением вращения, в котором момент
инерции является величиной переменной, хотя механическая си-
система представляет собой систему тел постоянной массы. Для
составления уравнения вращения в этом случае выбирают у ма-
машины или механизма одно какое-либо ведущее звено и отмечают
на нем центр приведения. Зная движущие силы и силы сопроти-
сопротивления, можно методами динамики привести их к выбранному
центру приведения и найти результирующую приведенную силу
и результирующий приведенный момент, равный разности мо-
момента движущих сил и момента сил сопротивления. Приводя к
ведущему звену все массы звеньев, мы можем определить при-
приведенный момент инерции механизма /пр™. Для большого класса
задач динамики механизмов и машин приведенный момент инер-
инерции /"гИВ. который мы в дальнейшем будем обозначать просто/,
является функцией угла поворота ведущего звена машины, т. е.
Для такого типа задач с переменным моментом инерции
можно составить уравнение вращения при помощи уравнений
Лагранжа в обобщенных координатах. Для механической си-
системы точек с одной степенью свободы и постоянной массой
уравнение Лагранжа имеет вид:
?_д]__ дТ __п
dt Оф дф Y
105
где Т — приведенная кинетическая энергия ведущего звена, рав-
равная -<т/ф2, а Q<j> = 2^z есть разность моментов движущих сил и
сил сопротивления на звене приведения.
Заметив, что
^- (/ее) = -^- (/со) а>,
и подставляя Т и <2ф в уравнение Лагранжа, мы получим:
1
2
о dl , , rfffl 1 9 rf/
со2 -j \- /со -т тг «2 -т— =
ИЛИ
7!+ih2w=^- C8>
На важность уравнения C8) для практических задач динамики
машин обратил внимание профессор В. В. Добровольский *.
На основании теоремы об изменении кинетического момента
в форме C2) можно получить динамические уравнения движе-
движения для тела переменной массы, имеющего одну неподвижную
точку. Эти уравнения будут естественным обобщением уравне-
уравнений Эйлера, хорошо известных в динамике твердого тела по-
постоянной массы. Если твердое тело имеет одну закрепленную
точку, то fv = (oXpv- Производная по времени относительно не-
неподвижных осей, имеющих начало в неподвижной точке, связана
с производной относительно осей Oxyz простым соотношением.
Для производной —ц- будем иметь (см. раздел II, стр. 411):
d*
где -^ есть знак производной относительно подвижных осей.
Теорема об изменении кинетического момента относительно
осей Oxyz будет иметь вид:
d*Ka , ">. . is sm(<?) i jm(o I V1 dmv ¦*¦ .-*¦ ¦*•. ,.n,
——r, 1- (o X ^o = -"to —r~ -) ~r 7j j/ pv X (w X Pv)> DU)
v-i
где
->-?¦-»¦ ¦> ->
v-l
Обозначим проекции мгновенной угловой скорости со на по-
подвижные оси Oxyz через р, q, r, а осевые и центробежные мо-
* В. В. Добровольский, Об одной распространенной ошибке, «Вест-
«Вестник инженеров и техников», 1939, Ms 2, стр. 116.
106
менты инерции тела — через Ixx, lyy, /zz, Iyz, I1X, Ixy. Спроекти-
Спроектируем D0) на подвижные оси, неизменно связанные с телом;
тогда, приняв во внимание уравнения B8), получим:
4т \IxxP — Ixyq — 1хгГ] + (qKoz —
ИЛИ
г (- 1хвр + lyyq - 1угг)] = Ш + ЗЯЙ. D2-)
Если в процессе отбрасывания частиц оси Ox, Oy, Oz остают-
остаются главными осями инерции, то из D2) мы получим динамиче-
динамические уравнения в очень простой (эйлеровской) форме:
1уУ ¦§¦
§¦+(/« - и) rP - m(sI+a»g|,
D3)
Таким образом, если твердое тело переменной массы имеет
одну закрепленную точку и оси Oxyz во все время движения
остаются главными осями инерции тела, то движение этого тела
будет описываться такими же дифференциальными уравнения-
уравнениями, как и для тела постоянной массы, только в правых частях
динамических уравнений, кроме моментов внешних сил, нужно
прибавить еще моменты сил реактивных. Осевые моменты инер-
инерции тела будут функциями времени.
§ 6. Теорема об изменении кинетического момента
относительно поступательно движущихся осей
Рассмотрим теорему об изменении кинетического момента от-
относительно подвижных осей, имеющих начало в произвольной
точке тела О, причем направление осей Охи Оуи Oz\ выбрано
так, что они коллииеарны осям основной, неподвижной системы
И\т& (фиг. 21).
107
В дальнейших преобразованиях будем пользоваться следую-
следующими соотношениями:
г„ = rn
dtp
~~~di~
~dT
v-l
Как известно, кинетический момент тела переменной массы
относительно неподвижных осей (неподвижного центра) имеет
вид:
7 & X Mv0.
Л/
Фиг. 21
Для того чтобы получить теорему об изменении кинетиче-
кинетического момента относительно поступательно движущихся осей,
мы воспользуемся ранее полученной теоремой C2). Рассчитаем
правую и левую части соотношения C2).
Дифференцируя D4) по времени, получим:
X ре) X
/fM > * Hit
X ~ vQ-\-Pc X М Щ±:
dt
qc X Mv0
-> им ->
c X -jT Щ
X
D5)
108
Преобразуем теперь правую часть уравнения C2). Будем
иметь:
D6)
v=l
Подставляя вычисленные значения производной от кинети-
кинетического момента и преобразованную согласно D6) правую часть
в соотношение C2), будем иметь после очевидных сокращений:
> > > >
Ч- г0 X Мчв'р + Рс X Mw0 =
^ ivX-^^XpJ. D7)
Так как на основании теоремы о движении центра масс мы
можем написать следующее равенство:
>
где а — любой вектор, то очевидно, что
г0 X Mw[e) = г0 X Rte) + г0 X Фг. D8)
Принимая во внимание соотношение D8), теорему об изме-
изменении кинетического момента относительно системы осей О
можно записать в виде:
- ., —и -г ~"и -г /j ^v X —jt- (w X Pv) — 9с X Mw0. D9)
tit тшш tit-
Если начало поступательно движущихся осей координат сов-
->¦
падает с центром масс тела, то рс = 0 и выражение теоремы D9)
принимает более простую форму:
dmv .-> •*¦ . ,_«.
V-1
где (oXpv = ^v есть скорость точки mv относительно поступа-
поступательно движущихся осей.
109
Таким образом, производная по времени от кинетического
момента, вычисленного относительно центра масс, равна сум-
сумме моментов всех внешних и реактивных сил плюс сумма мо-
моментов количеств движения частиц, отброшенных телом в еди-
единицу времени, в их движении относительно поступательно пере-
перемещающихся осей.
Из выражения теоремы E0) следует, что при гипотезе кон-
контактного взаимодействия отбрасываемых частиц и тела, соглас-
согласно которой частицы, получившие относительную скорость, уже
не принадлежат к телу переменной массы и на него никак не
действуют, математическое выражение теоремы для неподвиж-
неподвижных осей и осей, имеющих начало в центре масс и движущихся
поступательно относительно основной системы отсчета, совер-
совершенно одинаково.
Если принять гипотезу контактного взаимодействия (или
близкодействия), то для подвижных и неподвижных осей коор-
координат проекции разностей:
->
dK
->
dK0 V dmv
¦ $v X vv)
dt
на координатные оси дают в левых частях уравнений слагаемые
dt jU dt v^v ^ ^v'
dK dK0
того же вида, какие получаются при проектировании ~^т и -т^-
на те же оси при постоянной массе тела. Это утверждение мы
проверили для частных случаев движения тела; его легко дока-
доказать и в общем случае.
Введем в рассмотрение систему осей Oxyz (фиг. 19), неиз-
неизменно связанную с движущимся телом; тогда
d* „ „ ^
где -тг есть знак производной относительно осей uxyz.
Пусть подвижные оси координат суть главные оси инерции
тела для точки О, и пусть для упрощения выкладок точка О со-
совпадает с центром масс; тогда проекции вектора кинетического
момента на эти оси будут равны:
TS Г
СХ ~~~ ХХ
E2)
Уравнение C2) для подвижных осей примет вид:
dt ^ \Kv /N dt
v-l
E3)
L v-i J
110
Так как
i
У
p q r
IxxP Iyyq hz
то проекции этого слагаемого в уравнении E3) на оси Ох, Оу,
Oz найти очень просто. Найдем проекцию на ось Ох вектора:
V-1
будем иметь при сделанных упрощающих предположениях:
__ dKcx
Lv-l
dq
dr
Аналогично легко найти, что Ау — 1УУ ~ , Az = Izz-^j¦ Таким
образом, проектируя E1) на подвижные оси, получим:
dt
I««
-g" + (/« -г /„) rp = Ж?у + Tt
¦су
-Ж + Vyy - Ixx) pq =
E4)
Уравнения E4) являются динамическими уравнениями типа
Эйлера для тела переменной массы.
Если абсолютные скорости отбрасываемых частиц равны ну-
нулю, то
v-l
)J = г» X [MqL -\—агРе\- E5)
v-1
Предполагая, что начало системы Oxyz совпадает с центром
масс тела и относительная скорость центра масс qc — 0, мы полу-
получим следующее векторное уравнение движения тела переменной
массы около неподвижной точки:
->
О-Кс ™ (е)
dt ~Жс '
Ill
В проекциях на оси, связанные с телом, будем иметь:
E6)
§ 7. *Георема об изменении кинетической энергии тела
переменной массы
Мы определили кинетическую энергию тела переменной мас-
массы как сумму кинетических энергий точек, принадлежащих телу
в данный момент времени, т. е.
Установим связь между кинетической энергией тела Т, вы-
вычисленной относительно N?,K\t,, и его кинетической энергией в
движении относительно системы осей Oxii/iZi, движущихся по-
поступательно относительно неподвижных осей координат N^t,.
Так как > ^ >
то
Легко видеть, что
>,2 „
есть кинетическая энергия тела переменной массы относительно
системы OxiyiZi, a
2j<
Следовательно,
T=TQ+\Mv\ + ?0(о X Мрс). E7)
Если начало подвижной системы Ох^^ совпадает с цен-
-> -> ->
тром масс тела, то vo = i%, pc.==0, тогда
T=Te+±M{v?f, E8)
112
т. е. кинетическая энергия тела переменной массы равна кине-
кинетической энергии центра масс в его переносном движении и в
предположении, что в нем сосредоточена масса всего тела, плюс
кинетическая энергия тела в его движении относительно осей
постоянного направления, имеющих начало в центре масс.
Соотношение E8) будет совпадать с теоремой Кёнига, если
относительная скорость центра масс qc = Q.
Сформулируем теорему об изменении кинетической энергии
относительно неподвижных осей координат. Напишем для этого
уравнение движения какой-либо точки mv. Будем иметь:
^{m;vv) = ^ + F^ + ^tv, E9)
tie)
где /V — равнодействующая всех внешних сил, приложенных к
точке mv, rv —равнодействующая всех внутренних сил, прило-
приложенных к той же точке, uv — абсолютная скорость отбрасывае-
отбрасываемых частиц.
->
Умножим левую часть уравнения E9) на vvdt, а правую
->
часть — на равную величину drv и просуммируем по всем точкам
тела переменной массы, принадлежащим ему в данный момент
времени. Будем иметь:
S vvd (/пЛ) = i Л#) dr. + ? Д" ctrv + 2 ^ щ, d\. F0)
V=I V—1 V—I V=l
Так как
ТО
n
vvd (mvvv) = d
V=I V-I V=I
Кроме того, суммы элементарных работ внешних и внутрен-
внутренних сил запишем сокращенно следующим образом:
v-l
Pv = ЬА{е\ 2 Р? drv = 6А(".
Последнюю сумму в соотношении F0) можно записать в виде:
v=I v=l v=l v=I
8 А. А. Космодемьянский
n
Очевидно, что *2i$irvdrv = bAw есть элементарная работа
реактивных сил.
Подставляя преобразованные значения отдельных слагае-
слагаемых в соотношение F0), получим:
v=I
Следовательно, дифференциал кинетической энергии тела пе-
переменной массы равен сумме элементарных работ всех внешних,
внутренних и реактивных сил, приложенных к данному телу,
плюс кинетическая энергия частиц, отбрасываемых телом за
время dt, обусловленная их переносным движением.
Если абсолютная скорость отбрасываемых частиц равна ну-
нулю, то из соотношения F0) получаем:
p F2)
V-I
т. е. дифференциал кинетической энергии тела переменной мас-
массы плюс кинетическая энергия частиц, отбрасываемых телом
за время dt, в их переносном движении равен сумме элементар-
элементарных работ всех внешних и внутренних сил, действующих на дан-
данное тело.
Наконец, если тело переменной массы абсолютно твердое и
относительные скорости отбрасываемых частиц равны нулю, то
из F1) имеем: ^
^ = 6^>+2^, F3)
V-1
т. е. дифференциал кинетической энергии тела переменной мас-
массы равен сумме элементарных работ всех внешних сил плюс
кинетическая энергия частиц, отброшенных телом за время dt, в
их переносном движении.
§ 8. Уравнения движения тела переменной массы
в обобщенных координатах
Пусть положение механической системы (тела переменной
массы) определяется s независимыми параметрами <7ь q2, .. ¦ , qs,
которые выберем за обобщенные (криволинейные) координаты
тела.
Пусть
'v^M^i. <?2. •••. qs, *)¦ F4)
114
Напишем дифференциальные уравнения Мещерского для то-
точек тела переменной массы в следующем виде:
dm2 "*"
F5)
Умножим первое из уравнений F5) на бг4, второе на Ьгч и
т. д., последнее на Ьгп и сложим все полученные таким образом
соотношения. Будем иметь:
F6)
¦v=I v=I v = I v=I
Во всем дальнейшем будем предполагать, что
. = 0. F7)
V=I
Соотношение F7) вполне согласуется с гипотезой излучения
частиц с поверхности тела и означает, что частицы, которые при-
принадлежат телу, не смещаются друг относительно друга, а части-
частицы, получившие относительную скорость Vrv, считаются не при-
принадлежащими телу.
Так как
0 = 1
то F6) можно написать в виде:
0=1
ИЛИ
f
0=1Lv=i
п s
dmv -*¦
^4o. F8)
v-l
0 = 1
o-I Lv=l
s г в
o=lLv-l
F9)
115
Для дальнейших преобразований F9) нужно воспользовать-
воспользоваться двумя следующими соотношениями (см. главу X раздела
«Кинетика» стр. 492—493):
drv dvv
dqa dqa
-*¦ ->
d I orv \ovv
)
G0)
Из главы VI раздела «Кинетика» (стр. 336) нам известно, что
v ~^z —
v-1
есть обобщенная сила, отнесенная к координате qa. Кроме того,
v-l
-*• ч дгч d V ¦*" drv V "* d I drv
v-1
V-I
n -*¦
v-1 4v
n
V-1
V-1
V-1
d дТ дТ
dt dqa dga '
где Г—кинетическая энергия системы. При выводе G1) мы
предполагали, что mv зависит только от времени t.
Обозначая
dmv ¦*¦ drv VI dmv -> dvv p
LiSruv dqa — 2л dt "v dqa ~ 0>
уравнение F9) можно записать в виде:
o-i
G2)
116
Так как по предположению криволинейные координаты не-
независимы, то из G2) следует, что
dt
dt dq2
dq2
а "' о' п in
d дТ (ЗТ
dt dqs dqs
Уравнения G3) суть уравнения Лагранжа второго рода для те-
тела переменной массы. Число этих уравнений равно числу степе-
степеней свободы тела переменной массы и, в наших предположе-
предположениях, числу независимых криволинейных координат.
Интересный частный случай уравнений G3) будет иметь ме-
место при условии uv = kv(t)vv. В этом случае
dmv "*• dvv V^ л dm» ¦*• di\, д
v-l
v=l
dmv
dt
dmv vv
~dT~
Введем в рассмотрение функцию:
v=i
которая характеризует приток энергии к телу переменной, массы
вследствие процесса отбрасывания частиц, тогда
Р — ш
и уравнения G3) можно записать в виде:
dt -dq{
A.J11.—UL — O дп
dt dqs dqs s dqs
G4)
Если абсолютные скорости отбрасываемых частиц равны нулю,
то уравнения G3) можно записать так:
d дТ дТ _о
dt dq, dq, '
dt dqs
dqs
G5)
117
т. е. при выполнении гипотезы uv — 0 уравнения Лагранжа 2-го
рода для тела переменной массы имеют точно такую же форму,
что и для тела постоянной массы. Следует, однако, отметить, что
при стадионарных связях и консервативных силах уравнения
G5) не приводят к классическому интегралу энергии, если рас-
рассматривается случай тела переменной массы.
§ 9. Канонические уравнения для тела переменной массы
Приведем систему уравнений Лагранжа G3) к канониче-
каноническому виду. Вместо лагранжевых переменных qu q2, ..., q и об-
обобщенных скоростей <7ь <72> • • • , <7s введем в рассмотрение новые,
так называемые канонические переменные qu q2, ..., q, pi,
p2, ..., ps- Переменные pi, p2, ¦ ¦ ¦, ps называются обобщенными
импульсами и определяются из соотношений вида:
л
дТ
dq2
дТ
G6)
Для того чтобы можно было выразить обобщенные скорости
<7ь q2. .. ¦, qs через обобщенные импульсы из системы линейных
алгебраических уравнений. G6) *, необходимо, чтобы функцио-
функциональный определитель:
Ф 0. G7)
д2Т
Так как Т — положительная квадратическая функция, то для
динамических задач условие G7) выполняется. Возьмем вариа-
вариацию функции Т, выраженной в переменных qi, ..., qs, qu ..., qs.
Будем иметь:
0=1
0-1
* Легко проверить, что кинетическая энергия 7* является квадратической
функцией обобщенных скоростей и, следовательно, частные производные ——
суть линейные функции обобщенных скоростей q\ qs.
118
или
б
Введем в рассмотрение новую функцию:
0=1
и выразим ее как функцию канонических переменных. Вариация
этой новой функции равна:
O-I 0=1
дТ
причем -;— вычислено в предположении, что
T=T{q, ..., qs, pu ..., ps, t).
Но из уравнений G6):
и, следовательно,
S 7оРо - S (>о - Р. - Qo) ^„. G8)
0=1 0=1
Вычислим вариацию функции Я, предполагая, что эта функ-
функция выражена в канонических переменных <7ь ..., qs, pu ..., ps
и времени t. Будем иметь:
Р- Ьра. G9)
О Ра
а=1 " а=1
Сравнивая правые части соотношений G8) и G9), получим
вследствие независимости вариаций переменных следующую си-
систему дифференциальных уравнений:
• _ дН
(80)
Если внешние действующие силы имеют потенциал и абсо-
абсолютная скорость отбрасываемых частиц равна нулю, то функ-
119
иию Я можно определить в виде:
где L—функция Лагранжа, равная T+U. Потенциальная функ-
функция U(qit ..., qs) такова, что
Ш
-Ш- о -ди
В рассматриваемом частном случае уравнения Лагранжа
принимают весьма простую форму:
d dL dL _„
dt dqa dqa
(o=l, 2, ...,s)
и соотношение G8) будет иметь следующий простой вид:
0=1
0=1
причем для систем с консервативными внешними силами обоб-
обобщенные импульсы определяются из соотношений:
_ dL _ dL _ dL
dqi dq? dqs
При, сделанных предположениях канонические уравнения
(80) принимают следующий простой вид:
dH I
д_Н_
dqa
(81)
(о=1, 2, ..., s).
Таким образом, если внешние силы, действующие на тело
переменной массы, имеют потенциал и абсолютные скорости
отбрасываемых телом частиц равны нулю, то канонические
уравнения принимают форму уравнений Гамильтона для меха-
механической системы точек постоянной массы.
Существенно отметить здесь, что функция Н для случая ста-
стационарных связей является явной функцией времени и поэтому
классические результаты о первых интегралах системы канони-
канонических уравнений имеют в задачах динамики тела переменной
массы другой смысл.
РАЗДЕЛ ЧЕТВЕРТЫЙ
ВАРИАЦИОННЫЕ ПРИНЦИПЫ КЛАССИЧЕСКОЙ
МЕХАНИКИ И ВАРИАЦИОННЫЕ ЗАДАЧИ
ДИНАМИКИ ТОЧКИ ПЕРЕМЕННОЙ МАССЫ
ГЛАВА I
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
КЛАССИЧЕСКОЙ МЕХАНИКИ
«... Мысль объединить все пестрое разно-
разнообразие физических явлений в одну систе-
систему или даже, если возможно, в одну-един-
ственную формулу была конечной, самой
высокой целью естествознания с незапа-
незапамятных времен».
М. П л а н к.
§ 1. Введение
Принципом в механике называют достаточно общую и ши-
широкую количественную закономерность механического движения,
записанную в виде математического соотношения. Чем проще
математическая формулировка принципа и чем большее число
различных классов механических движений он охватывает, тем
плодотворнее принцип и тем содержательнее его жизнь в совре-
современной науке, где методы теоретической механики получили
широкое распространение. Можно отметить, что в наши дни поня-
понятие «закон механики» укоренилось за математическими форму-
формулировками, характеризующими некоторые свойства сравнитель-
сравнительно узких классов механических движений. Понятие «принцип ме-
механики» является более широким, в идеале охватывающим в
единой формуле всю классическую механику. В процессе истори-
исторического развития механики первооткрыватели ее основных коли-
количественных закономерностей часто называли принципами соот-
соотношения, за которыми теперь осталось название законов. Так, в
современных курсах механики мы не называем принципом за-
закон сохранения количества движения или закон сохранения ме-
механической энергии для консервативных систем, хотя при откры-
121
тии этих законов они именовались принципами. Некоторые
ученые физики при формулировке закона сохранения энергии
для сложных «изолированных» систем (а не отдельных объектов,
как в механике), в которых имеют место переходы от одной фор-
формы движения к другой, часто говорят о принципе сохранения
энергии, как важнейшей количественной характеристике движе-
движения материи *.
Существенной особенностью принципов классической меха-
механики, их общей методологической чертой является логический
прием выявления главных свойств истинного движения путем
сравнения его с некоторыми допустимыми, возможными движе-
движениями того же механического объекта, в тех же силовых полях.
Выбор реального движения из некоторой серии возможных, есте-
естественное желание познающего разума выявить особенности реа-
реализации механических движений в природе (узнать, как творит
движения сама природа) в сопоставлении с близкими движе-
движениями, которые могли бы быть, но фактически не происходят,
есть отличительная и, по-видимому, главная особенность прин-
принципа механики.
Если отбор истинного движения из некоторой серии множе-
множества возможных происходит в малой области пространства,
когда мы рассматриваем мгновенное состояние системы и не-
небольшие дозволяемые наложенными связями изменения этого
состояния, то мы приходим к дифференциальным принципам
механики. Важнейшим и наиболее общим дифференциальным
принципом в классической механике является принцип возмож-
возможных перемещений, изложенный в главе VI первой части нашего
курса.
Если отбор истинного движения из серии возможных (допу-
(допустимых, дозволяемых природой движения) происходит для ко-
конечных перемещений за конечный промежуток времени, то мы
приходим к интегральным принципам механики. Важнейшими
интегральными принципами классической механики являются
принцип Гамильтона и принцип наименьшего действия.
Существенной особенностью названных интегральных прин-
принципов механики является их связь с экстремальными свойствами
реальных движений. Чтобы сравнивать истинное и возможные
движения, нужно установить достаточно общий признак (меру\)
механического движения. Прослеживая изменение меры меха-
механического движения для серии (множества) возможных движе-
движений, удается раскрыть характеристические свойства истинного
движения. Оказывается, что если выбрать в качестве меры ме-
* См, например. М. П л а н к, Единство физической картины мира, Лек-
Лекция, прочитанная в Лейдене 9 декабря 1908 г.
122
ханического движения величины:
= \2Tdt — называемой действием по Лагранжу,
5Я= Г LdT —называемой действием по Гамильтону*,
h
то для истинного движения величина соответствующего дей-
действия принимает экстремальное значение и, следовательно, пер-
первые вариации от SL и SH будут обращаться в нуль.
Как известно, на заре развития механики предлагались в ка-
качестве меры механического движения для материальной точки:
количество движения mv (Декарт) и удвоенная кинетическая
энергия mv2 (Лейбниц), но эти меры движения являются менее
совершенными и менее универсальными, чем величины SL и SH.
Для дальнейшего оказывается весьма полезной следующая
геометрическая интерпретация движения системы. Пусть меха-
механическая система точек (или твердое тело) имеет s степеней сво-
свободы и ее положение относительно системы отсчета (материаль-
(материального базиса) определяется обобщенными координатами (qu q2,
qz, . . ., qs). При движении системы обобщенные координаты бу-
будут изменяться, т. е. будут некоторыми функциями времени t.
Будем рассматривать совокупность обобщенных координат
(<7i, . . ., qs) для каждого момента времени как координаты
точки в пространстве s-измерений. Тогда каждой конфигурации
(положению в пространстве) механической системы будет соот-
соответствовать точка в s-мерном пространстве. Так как по природе
реального механического движения обобщенные координаты
(<7ь ¦ ¦ ¦, qs) являются непрерывными функциями времени, то ка-
каждому конечному перемещению системы с s степенями свободы
в трехмерном евклидовом пространстве будет соответствовать
некоторая кривая в s-мерном пространстве. Мы будем называть
такое s-мерное пространство пространством конфигураций, а
кривую в этом s-мерном пространстве, соответствующую реаль-
реальному движению системы, — траекторией механической системы
(соответственно твердого тела) в пространстве конфигураций.
Каждая точка такой траектории в пространстве конфигураций
однозначно соответствует некоторому положению в евклидовом
пространстве реальной механической системы. Пользуясь вве-
введенной терминологией, можно сказать, что для реально осуще-
осуществляющихся механических движений на истинной траектории в
пространстве конфигураций меры движения SL и SH принимают
* Мы следуем обозначениям первой части нашего курса 2T = 2T(q, q, t) —
удвоенная кинетическая энергия системы, L—T+U = L(q, q, t)—функция Ла-
гранжа (или кинетический потенциал).
123
экстремальные значения. Открытие мер движения, для которых
истинная траектория в пространстве конфигураций обладает
экстремальными свойствами, нам представляется наиболее круп-
крупным достижением всей многовековой истории развития теорети-
теоретической механики. Эти открытия были широко использованы в
термодинамике, квантовой механике и общей теории поля *. По
математической природе меры движения SL и SH являются
функционалами (функциями от функций) и исследование экс-
экстремальных свойств таких объектов составляет основную за-
задачу вариационного исчисления. Размерность действия в техни-
технической системе будет:
l-Si,]=[SH]= (энергия) • (время) =кГ • м • сек.
§ 2. Принцип Гамильтона
1. Мерой механического движения в принципе Гамильтона
является функционал S#, называемый действием по Гамиль-
Гамильтону. Чтобы выявить экстремальные свойства действия Sh для
реально происходящих движений, нужно выбрать пучок (мно-
(множество) близких траекторий в пространстве конфигураций и
произвести для них вычисления функционала SH. Выбор пучка
траекторий сравнения играет важную роль для понимания сути
принципа Гамильтона. Рассмотрим сначала понятие вариации
функции.
Пусть q = q(t) есть некоторая непрерывная функция времени.
Бесконечно малое приращение q, полученное вследствие измене-
изменения независимого переменного t на величину dt, называется
дифференциалом функции q(t). Как известно из курса матема-
математического анализа:
dq — q dt.
Геометрически dq есть отрезок ае на фигуре 22, но с точностью
до бесконечно малых высшего порядка dq равен отрезку ас.
Предположим, что мы изменили вид функции q(t) и полу-
получили новую функцию qi(t), мало отличающуюся от первона-
первоначальной. Пусть
@
где е — бесконечно малая величина, x\(t)—произвольная диф-
дифференцируемая функция. Приращение функции dq вследствие
* Мы рекомендуем для более глубокого изучения приложений вариа-
вариационных методов в современной науке сборник статей «Вариационные прин-
принципы механики» (ред. Л. С. Пола к), Физматгиз, М., 1959, где на стр. 571 —
22 имеются статьи Планка, Гильберта, Эйнштейна, Нетер, Де-
Бройля, Шредингера и Дирака, раскрывающие эвристику вариа-
вариационных принципов механики.
124
малого изменения вида самой функции при фиксированном зна-
значении независимого переменного t называется вариацией данной
функции. Вариация функции q(t) представлена на фигуре 22
отрезком a\Ci. Из определения вариации следует, что
Можно доказать, что операции варьирования и дифференци-
дифференцирования, последовательно применяемые (последовательно «дей-
«действующие») к некоторой функции q(t), дают одинаковый ре-
результат, независимый от порядка этих операций, т. е. варьирова-
варьирование и дифференцирование
независимы друг от дру-
друга. Покажем, например,'
что
В самом деле, по опре-
определению:
и, следовательно,
A. (bq) = ql — q
Фиг. 22
Вычислим теперь hq. По определению вариации функции:
Таким образом, из B) следует, что операции дифференцирова-
дифференцирования и варьирования переместительны. Символически часто за-
записывают это в виде:
Существенно отметить, что в ходе доказательства принято во
внимание, что независимое переменное t не варьируется. Анало-
Аналогичным образом можно доказать, что
6 j<Z>(t)dt= j ЬФ-dt.
'о to
В самом деле, исходя из определения вариации, мы должны
взять определенный интеграл для измененной (проварьирован-
125
ной) функции Ф и вычесть интеграл от неизмененной функции,
т. е.
6 (ФеИ= J (Ф+6Ф)Л— jq>dt= jbOdt. C)
Таким образом, вариация определенного интеграла с постоян-
постоянными пределами интегрирования равна определенному интегралу
от вариации подинтегральной функции. Операция варьирова-
варьирования, определенная нами и геометрически (фиг. 22), и аналити-
аналитически, обычно называется синхронным варьированием. Легко по-
понять, что проекции виртуального перемещения точки 6х, by, bz
представляют собой синхронные вариации координат этой точки.
2. Выведем теперь принцип Гамильтона из универсального
уравнения механики, которое для системы п материальных точек
можно записать в следующем виде:
2 [(/\, - «А) <Ч+(F,y - «Я) К+(^ - ™ А) Ч]=°.
v=ll
ИЛИ
v-l V
Будем предполагать поле действующих сил потенциальным,
тогда
л
Zi Fv6rv= 2jgxadUvbr =6U, E)
v-l v-l
где
v-l
Преобразуем теперь слагаемые из соотношения D), содержащие
силы инерции. Будем иметь:
v=l v—1 v=l v=l
2
V=l V = l V-=l
Как известно,
л
V-1
126
есть кинетическая энергия механической системы. Поэтому
V-1
Via основании соотношений E) и F) универсальное уравнение
механики D) можно записать в следующем виде:
v-1
или, полагая T + U—L, будем иметь:
FL) • dt = d \ S mvvv firJ . G)
Проинтегрируем соотношение G) в пределах от t0 до tv тогда
получим:
-V-1
или, меняя порядок интегриривания и варьирования (см. фор-
формулу 3), получим:
J L ¦ dt =
л
-> -у
tnvvv (
Lv-1
(8)
Наложим дополнительные ограничения на варации 6rv. Чтобы
представить геометрически эти ограничения, рассмотрим дви-
движение системы в s-мерном пространстве конфигураций. Дей-
Действительному движению системы соответствует некоторая линия
(«траектория системы»), проходящая через две заданные точки
А и Е. Точка А соответствует конфигурации системы в момент
t0, точка Е — конфигурации системы в момент t\. Метод син-
синхронного варьирования, разъясненный нами выше, есть не что
иное, как строго определенная процедура проб. Мы слегка из-
изменяем истинную траекторию системы в пространстве конфи-
конфигураций и сравниваем величины действия, по Гамильтону, на
истинной и варьированной траектории. Мы будем считать далее,
что действительная и варьированная траектории («трубка»
траекторий сравнения) проходят через заданные начальную А и
конечную Е точки в пространстве конфигураций и, следователь-
следовательно, время движения системы от А до Е для всего пучка (множе-
(множества) траекторий сравнения остается одним и тем же. Фикса-
Фиксация точек А и Е в пространстве конфигураций означает также,
что вариации координат системы, в положениях А и Е равны
127
нулю, т. е. для моментов t = t0 и t=tL все 6rv = 0 и, следовательно.
Из соотношения (8) будем тогда иметь:
f Ldt = bSH = O.
(9)
Фиг. 23
Формула (9) дает математическую запись принципа Гамиль-
Гамильтона. Учитывая предыдущее, мы можем формулировать этот
принцип в следующем виде: из всех
возможных дозволяемых наложен-
наложенными связями движений консерва-
консервативной механической системы точек,
переводящих в течение определен-
определенного времени систему из данной
начальной конфигурации в другую
данную конфигурацию, действитель-
действительно реализуемым заданными силами
и реакциями связей будет такое
движение, для которого функция
действия, по Гамильтону, имеет
экстремальное значение. Часто го-
говорят, что действие, по Гамиль-
Гамильтону, SH имеет стационарное зна-
значение, если б5я = 0. Поэтому принцип Гамильтона можно
высказать еще в следующей форме: при реальном дви-
движении механической системы действие, по Гамильтону, SH
имеет стационарное значение по сравнению со всеми достаточно
близкими дозволяемыми связями движениями, при которых си-
система в течение заданного промежутка времени перемещается
из того же начального положения в то же. самое конечное по-
положение, как и для действительного движения *.
Для пояснения способа выбора траекторий сравнения при
синхронном варьировании рассмотрим случай одной материаль-
материальной точки, движущейся по идеально гладкой, стационарной не-
освобождающей поверхности. В этом случае и действительная
траектория и варьированные траектории будут лежать на задан-
заданной поверхности (фиг. 23) и точка должна пробегать соответ-
соответствующие дуги на истинной траектории и траекториях сравне-
сравнения за одно и то же время. Множество всех трактерий срав-
* См.: Р. Курант и Д. Гильберт, Методы математической физики,
т. I, ГТТИ, М. 1934, стр. 234.
128
нения образует пучок кривых, достаточно близких к реальной
траектории (на фиг. 23 выделены 1-я и п-я траектории).
В курсах вариационного исчисления доказывается, что в
случае принципа Гамильтона при достаточно малых промежут-
промежутках времени (^ — г'о) действие SH не только принимает стацио-
стационарное значение, но будет иметь место только минимум *.
Гельмгольц заметил, что при (tt— ^0)=const среднее значе-
значение интеграла
Ldt — i-сред * (h ^o) — (^сред ''сред)
отличается от разности средних значений кинетической и потен-
потенциальной энергий только на постоянный множитель (^ — г'о).
Следовательно, принцип Гамильтона можно записать в виде:
или, сокращая на множитель (tx — ^0), получим:
Ксред) = 0, A0)
т. е. при действительном перемещении системы, из конфигура-
конфигурации А в конфигурацию Е среднее значение кинетического по-
потенциала имеет экстремальное значение по сравнению с близ-
близкими (варьированными) перемещениями, которые переводят си-
систему в то же время из того же начального в то же конечное
положение.
Вариационная формулировка основного принципа механики
имеет еще следующие преимущества:
а) независимость от выбора системы координат;
б) возможность обобщений («эвристическая» ценность прин-
принципа).
В тех задачах механики и физики, для которых сравнительно
просто находится кинетический потенциал (или некоторые ана-
аналоги кинетического потенциала), принцип Гамильтона позво-
позволяет получать уравнения движения системы.
3. Выведем из принципа Гамильтона уравнения Лагранжа
в обобщенных координатах. Пусть
..., qs, qv ..., qs, t).
* Доказательство, что Sh есть минимум, имеется также в книге
А. И. Лурье, Аналитическая механика, Физматгиз, М., 1961, стр. 649—660.
9 А. А. Космодемьянский 129
Вариация функции SH будет:
bJLdt=j {Ы) dt =
dL
dL
или короче:
Исключим из A1) вариацию обобщенной скорости 6^0. Легко
проследить справедливость следующих преобразований:
t, S
U о = 1
o-l
La-i
г VI Д 0L
J Zu dt dqn
/. <o a-1
Учитывая, что все вариации обобщенных координат при t =
и t = t1 обращаются в нуль, будем иметь:
Так как вариация действия, по Гамильтону, для истинного дви-
движения равна нулю, то, учитывая (И) и A2), мы можем напи-
написать:
или
Го 0 —
A4)
Уравнение A4) удовлетворяется только в том случае, когда
подинтегральная функция равна нулю. В самом деле, допустим,
что величина, стоящая под знаком интеграла, положительна;
тогда в силу непрерывности функции L и ее производных можно
130
выбрать U и ti так, чтобы во всем промежутке интегрирования
подинтегральная функция не меняла знака. Но в таком случае
интеграл не может быть равен нулю. Поэтому предположение
о том, что подинтегральная функция положительна, неверно.
Аналогичными рассуждениями можно показать, что подинте-
подинтегральная функция не может быть и отрицательной.
Следовательно, из A4) следует, что
A5)
Вследствие независимости вариаций bqa из A5) будем иметь:
d
dt
d
dt
dL
dqi
dL
dL
dqx
dL
dqs
= 0
— 0
A6)
Уравнения A6) есть уравнения Лагранжа в обобщенных ко-
координатах для голономных систем, имеющих силовую функцию.
Таким образом, вариационный принцип Гамильтона в компакт-
компактной математической форме (9) потенциально содержит в себе
всю механику систем, имеющих потенциал, с голономными, иде-
идеальными, удерживающими связями. Мы можем, следовательно,
положить принцип Гамильтона в основу механики голономных
систем, причем основной (второй) закон движения Ньютона для
свободной материальной точки будет вытекать из принципа
Гамильтона как весьма частный случай.
4. Принципом Гамильтона можно воспользоваться также для
непосредственного вывода канонических уравнений механики —
уравнений Гамильтона. Выразим кинетический потенциал L че-
через функцию Гамильтона Н. Как было показано в I части курса
(стр. 512), функция Гамильтона
и, следовательно,
и.
A8)
Функция действия, по Гамильтону, запишется теперь в виде
(, Г s
dt,
131
а принцип Гамильтона дает нам следующее соотношение:
A9)
\
Обобщенные скорости $„ и обобщенные импульсы р0 в ка-
канонических уравнениях являются независимыми переменными.
Вычислим синхронную вариацию интегралов, входящих в фор-
формулу A9). Будем иметь (учитывая, что bq= — bq и при
t—to, t=ti все 6<7„=О):
ог-1
Г V ' Г / V1
J ut mm J ля*
t, s
U a=i
4 <?=¦!
t0 0Г-1
o^o—>a*«e)^. B0)
'о 0
так как
Кроме того,
a=l
'о 0 = 1
Имея B0) и B1), мы можем A9) представить в следующем
виде:
B2)
Lor-l
Так как вариации 6р0 и bqa являются независимыми, то инте-
интеграл B2) может обращаться в нуль только тогда, когда обра-
обращаются в нуль коэффициенты при этих независимых вариациях.
Следовательно, из B2) вытекает, что
дН
дН
B3)
где а=1, 2, ..., s.
Уравнения B3) есть канонические уравнения Гамильтона.
132
Следует еще раз подчеркнуть, что при выводе B3) мы счи-
считали обобщенные импульсы ра такими же независимыми пере-
переменными, как и обобщенные координаты, зная, что р„ связаны
с qa и t только уравнениями движения (уравнениями Лагранжа
2-го рода), а не какими-либо заранее заданными соотноше-
соотношениями ¦
§ 3. Принцип наименьшего действия
1. Мерой механического движения в вариационном принципе
наименьшего действия является функционал SL, называемый
действием по Лагранжу. Чтобы выявить экстремальные свойства
действия SL для реальных движений механических систем, нуж-
нужно установить процедуру выбора пучка близких траекторий в
пространстве конфигураций и произвести для них вычисление
функционала SL, Мы будем предполагать, что рассматриваемые
механические системы консервативны и для них имеет место
интеграл энергии, т. е.
T—U=T+V = const, B4)
где Т — кинетическая, а V—потенциальная энергия системы.
Пучок траекторий сравнения будем выбирать так, чтобы на
всех траекториях интеграл энергии B4) сохранялся. Траекто-
Траектории сравнения, удовлетво-
удовлетворяющие условию B4),
будем называть изоэнер-
гетическими. Требование
изоэнергетичности несо-
несовместимо в общем случае
с требованием синхронно-
синхронности вариаций, и мы дол-
должны для построения пуч-
пучка траекторий в простран-
пространстве конфигураций рас-
расширить понятие вариации о1 t
функции. Введем поня-
понятие полной (асинхронной)
вариации функции q=
— q{t) и будем ее обозначать Aq. Изменение q(t) за счет изме-
изменения вида функции дает синхронную вариацию bq (отрезок ае
на фиг. 24), изменение q(t) за счет изменения времени t будет
вычисляться аналогично вычислению дифференциала функции
q(t), т. е. будет равняться (qAt). На фигуре 24 с точностью до
малых высшего порядка отрезок qAt представлен отрезком ей.
q-q(t)
Фиг. 24
* См. интересный вариант вывода уравнений Гамильтона в книге
Г. Гольдстейн, Классическая механика, ГТТИ, М. 1957, стр. 246—249.
133
Полную вариацию функции q{t) определим как сумму отрезков
(ae + ed), т. е.
B5)
Из определения следует, что
Aq = 6q + qAt, B6)
i t
A jodt — b J Q>dt + (OMY0. B7)
и о
Легко понять, что при полной вариации закон переместитель-
.ности операций дифференцирования и полного варьирования,
так же как и операции интегрирования и полного варьирования,
не будет иметь места.
В самом деле, продифференцируем B5) по времени /, тогда
получим:
Учитывая B6), будем иметь:
±- (Aq) = 6q + (Aq -6q) + q'-^ (At),
и, следовательно,
^ ± B8)
Получим еще формулу для полной вариации от определен-
определенного интеграла, нижний предел которого положим равным
нулю. Так как
то
J (ДФ) dt = J FФ) dt + J (Ф At) dt.
и о о
Последний интеграл можно записать в следующем виде, вы-
выполнив интегрирование по частям:
t t t
J Ф Д* • dt= J d<b ¦ At={<DAtyj — J Ф -^-(At) ¦ dt.
oo о
Тогда
i t t
J ДФ • dt = J 6ФЛ— J Ф-^-(Д0^ + (ФЩ. B9)
о oo
134
Вычтем из B7) соотношение B9), будем иметь:
/ 1 i
Ф^ — J ДФ fl^ = J Ф -^ (АО dt, C0)
так как
Таким образом, полную вариацию от интеграла можно запи-
записать в виде:
= J (ЛФ+Ф-^-
C1)
2. Докажем теперь принцип наименьшего действия, исходя
из уравнений Лагранжа в обобщенных координатах. Заметим,
что если Т — U = const = h, то
r = 2T-h. C2)
Напишем уравнения Лагранжа в следующем виде:
d dL dL __,
dt dq, dqt
d dL dL —Q
dt dqs dqs
C3)
Умножим первое из уравнений C3) на Aqx, второе на Д<72, ...
и последнее на &qs и сложим. Будем иметь тогда:
dL
a=l
dL
C4)
Ho
s
f±x\dt dqc
Учитывая,
что
d
d
dt
¦ s
1
....
dL д
dqa °.
*ia g°\
S
135
а по теореме Эйлера об однородных функциях:
мы можем результат преобразований записать в виде:
Кроме того,
0-1
C5)
C6)
Приняв во внимание C5) и C6), можно соотношение C4) пред-
представить так:
C7>
Умножим теперь обе части C7) на dt и проинтегрируем от- О
до Л будем иметь:
t t
= J ГдBT)-ir2T~ (At)} dt. C8)
о
На основании формулы C1):
t t
и, следовательно,
C9)
Допустим, что на концах траекторий сравнения в пространстве
конфигураций полные вариации от обобщенных координат рав-
равны нулю. Тогда из C9) следует, что
D0)
где SL есть действие но Лагранжу.
136
Исходя из D0), принцип наименьшего действия можно фор-
формулировать в следующем виде: среди пучка изоэнергетических
траекторий механической системы в пространстве конфигура-
конфигураций, соединяющих два фиксированных положения системы,
только для действительной траектории (для реального движе-
движения) полная вариация действия, по Лагранжу, равна нулю
Если принять принцип наименьшего действия как основной
постулат механики, то, исходя из D0), можно построить всю ме-
механику консервативных систем и, в частности, можно получить
дифференциальные уравнения движения в форме уравнений Ла-
гранжа 2-го рода.
3. Сделаем еще несколько сопоставлений вариационного
принципа Гамильтона FS# = 0) и принципа наименьшего дей-
действия D0). Хотя в нашем изложении оба принципа относятся
к механическим системам, имеющим потенциал, но пучки траекто-
траекторий сравнения, охватывающие истинную траекторию в простран-
пространстве конфигураций, выбираются различным образом. Синхрон-
Синхронная или 6-вариация соответствует виртуальным (возможным)
перемещениям системы, т е. таким перемещениям, которые си-
система может иметь в данный момент (t — фиксировано), не нару-
нарушая связей (дозволяемых связями). Если наложенные на си-
систему связи явно зависят от времени, то действительное беско-
бесконечно малое перемещение не принадлежит к числу виртуальных
и, следовательно, могут быть такие траектории сравнения в про-
пространстве конфигураций, на которых (Т+ V) =полной энергии
системы не будет постоянным. Соответственные точки действи-
действительной траектории системы и траекторий сравнения проходятся
в одинаковые моменты времени, но полные энергии в этих точ-
точках в общем случае не равны между собой.
При осуществлении полной вариации, когда учитывается из-
изменение времени t, можно всегда требовать, чтобы движения по
истинной траектории и траектории сравнения выполнялись при
T+l/=const, т. е пучок траекторий сравнения можно физически
реализовать. Время движения вдоль изоэнергетических траек-
траекторий между соответственно выбранными конфигурациями мо-
может и не сохраняться, так как требование изоэнергетичности мо-
может в ряде случаев приводить к ускорению или замедлению дви-
движения по траекториям сравнения в пространстве конфигураций
(координаты действительной и варьированных траекторий раз-
различны, следовательно, в общем случае будут различны и
скорости). При полной вариации или Д-вариации время варь-
варьируется и на концах траекторий сравнения (т. е. МФО
при t=tA, t = tE), но полные вариации обобщенных коорди-
координат в конечных точках пучка траекторий сравнения равны
нулю.
137
4. Рассмотрим некоторые частные видоизменения принципа
наименьшего действия. Пусть наложенные на систему связи
идеальны и стационарны, а активные силы на систему не дей-
действуют. В этом случае из теоремы об изменении кинетической
энергии механической системы следует, что
Т—const,
а из формулы D0) мы будем иметь:
t
А j 2Tdt=:A(t) = 0, D1)
о
т. е. истинная траектория системы в пространстве конфигураций
обладает тем свойством, что время движения по этой траекто-
траектории является наименьшим (минимальным).
В форме D1) принцип наименьшего действия аналогичен
принципу Ферма в геометрической оптике, согласно которому
луч света движется от фиксированной точки А до фиксирован-
фиксированной точки Е так, что время движения луча будет наименьшим
(минимальным).
Якоби указал, что трудности, связанные с полным варьиро-
варьированием, можно исключить, если воспользоваться более широко
интегралом энергии. В самом деле, если
+—const = й,
то
T = h — V = h-\-U. D2)
Для случая стационарных связей кинетическая энергия системы
является положительной однородной квадратической формой
обобщенных скоростей и, следовательно
„ # * V V
а 12
t-l J-l t-l
из D3) следует, что
2T
D4)
Если в s-мерном пространстве конфигураций рассмотреть эле-
элемент дуги dp, то если криволинейные обобщенные координаты
ортогональны, то
2 i
/-1 j-i
138
и мы можем D4) записать в виде:
? D5)
Учитывая D5), можно действие, по Лагранжу, представить
в виде:
t t (?)
Si= \2Tdt= \2(h+U)dt= f 2(h + U)-2§=r, D6)
где «О» соответствует начальной конфигурации системы, а «?»—
конечной конфигурации. Если на длину дуги наложить условие,
чтобы в начальной и конечной точках траектория не варьирова-
варьировалась (концы траектории закреплены), тогда полная вариация от
интеграла D6) не будет отличаться от 6-вариации того же ин-
интеграла, так как время t в интеграл D6) явно не входит. Сле-
Следовательно, в данном случае принцип наименьшего действия
можно записать в виде:
(Б)
^l D7)
В частном случае, когда на систему не действуют активные си-
силы, U и Г будут постоянными и из D7) следует:
(Е)
О, D8)
т. е. длина дуги И = ОЕ, соединяющая начальную и конечную
точку траектории системы в пространстве конфигураций, дол-
должна быть наименьшей. Если, например, мы имеем одну мате-
материальную точку, движущуюся по идеальной стационарной
неосвобождающей поверхности, то кратчайшая линия, соединяю-
соединяющая два ее положения, будет геодезической линией поверхно-
поверхности. Для шара такими геодезическими линиями будут дуги
большого круга (кратчайшее расстояние между двумя точками
на сфере будет дуга большого круга). Для плоскости геодези-
геодезической линией, соединяющей две точки, будет прямая. Соотно-
Соотношение D8) часто называют принципом прямейшего пути. Этот
принцип был положен Г. Герцем в основу его «безсиловой» ме-
механики.
ГЛ ABA II
ВАРИАЦИОННЫЕ ЗАДАЧИ ДИНАМИКИ ТОЧКИ
ПЕРЕМЕННОЙ МАССЫ
«•... Если, как Вы утверждаете, тех-
техника в значительной степени зависит от
состояния науки, то в гораздо большей
мере наука зависит от состояния и по-
потребностей техники. Если у общества по-
появляется техническая потребность, то она
продвигает науку вперед больше, чем деся-
десяток университетов» *.
Ф. Энгельс
§ 1. Введение
Общие методы теоретической механики открывались и фор-
формировались в значительной степени под влиянием запросов
вновь нарождающихся и развивающихся областей техники. Пре-
Прелесть новизны является одним из существенных стимулов и
научного образования, и научного исследования. Наше время
(сороковые — шестидесятые годы XX в.) отмечено величайшей
научно-технической революцией. Овладение процессами высво-
высвобождения ядерной энергии, уверенные полеты со сверхзвуко-
сверхзвуковыми и космическими скоростями, создание многоступенчатых
ракет с прецизионными системами автономного управления дви-
движением, все прогрессирующее развитие электронных вычисли-
вычислительных машин необычайно ускорили мировой научно-техниче-
научно-технический прогресс. Пробуждены и организованы такие силы
промышленности и науки, о которых даже и не мечтали в пред-
предшествующие периоды истории человеческого общества. Прогрес-
Прогрессивное революционизирующее воздействие новых областей тех-
техники выкристаллизовывается в беге времени все отчетливее и в
классической механике. Ракетная техника оказала и оказывает
особенно плодотворное влияние на содержание и методы класси-
* Из письма Ф. Энгельса Рейнцу Штаркег.бургу от 25/1 1894 г. См.:
К. Маркс иФ. Энгельс, Сочинения, т. XXIX, Госполитиздат, М., 1946,
стр 283.
140
ческой механики. Уравнения Мещерского, полученные в дина-
динамике точки переменной массы, оказались тем фундаментом, на
котором строится новый, практически важный, раздел теорети-
теоретической механики.
Изучая движение материальных тел под действием сил, мож-
можно выделить интересный класс задач динамики, характерных
тем, что некоторые из действующих сил могут быть запрограм-
запрограммированы и реализованы на движущихся объектах человеком-
пилотом (или автопилотом). Часть сил, приложенных к движу-
движущемуся объекту, конечно, определена (детерминирована) приро-
природой, а часть может изменяться в широких пределах по некото-
некоторым законам, заложенным в конструкцию летательного аппарата.
Так, при изучении движения ракеты в поле тяготения Земли гра-
гравитационная сила вполне детерминирована (она подчиняется за-
закону тяготения Ньютона), а реактивная сила может изменяться
и регулироваться как по величине, так и по направлению. Ка-
Каждому закону регулирования реактивной силы будет соответ-
соответствовать некоторый закон движения ракеты. В современной ра-
кетодинамике и динамике самолета такие задачи часто назы-
называют задачами с управляющими (или свободными) функциями.
Если управляющие функции все заданы и, следовательно, сде-
сделаны определенными все действующие силы, тогда мы будем
иметь дело с обычной задачей теоретической механики: найти
закон движения объекта, если действующие на него силы
известны. Но выбор (задание) свободных функций можно подчи-
подчинить некоторым, достаточно общим и широким, условиям опти-
оптимальности (экстремальности) и производить определение дина-
динамических характеристик для этих классов оптимальных движе-
движений. Метод проб или сравнений, лежащий в основе классических
вариационных принципов, применим и здесь, но варьируется вы-
выбор управляющих функций, а не траекторий в пространстве кон-
конфигураций. (Каждому выбору свободных функций можно при-
привести в соответствие «траекторию» системы в фазовом простран-
пространстве.) Задачи такого рода имеют большой практический интерес
в динамике полета ракет и самолетов, а также в теории авто-
автоматического регулирования.
Для исследования оптимальных движений механических си-
систем со свободными (или управляющими, регулируемыми) функ-
функциями имеются мощные математические методы, составляющие
в наши дни основу вариационного исчисления, или, более ши-
широко, функционального анализа. Создание реальной конструкции
(ракеты, самолета, автопилота или других объектов) тесно свя-
связано с изучением экстремальных свойств функций многих пере-
переменных и функционалов. Мудрый Леонард Эйлер писал в одной
из своих работ: «...Так как все явления природы следуют ка-
какому-нибудь закону максимума или минимума, то нет никакого
сомнения, что и для кривых линий, которые описывают брошен-
141
ные тела, если на них действуют какие-нибудь силы, имеет ме-
место какое-то свойство максимума или минимума» *. Анализ со-
содержания научных статей по динамике полета, опубликованных
за последние 20—25 лет, убеждает нас в том, что методы ва-
вариационного исчисления не только позволяют выделить из бес-
бесконечного разнообразия возможных движений, определяемых
дифференциальными уравнениями механики, более узкие классы
движений, для которых некоторые (обычно интегральные) ха-
характеристики будут оптимальными, но в ряде случаев дают воз-
возможность детального аналитического исследования, так как для
экстремальных режимов уравнения движения интегрируются в
конечном виде. «Опорные» аналитические решения для опти-
оптимальных движений можно находить и в тех случаях, когда си-
системы исходных уравнений являются нелинейными. Как эмпи-
эмпирический факт можно отметить, что для классов оптимальных
движений нелинейные дифференциальные уравнения становятся
более податливыми и в большом числе задач допускают инте-
интеграцию в квадратурах. Семейства аналитических решений не-
нелинейных уравнений механики в конечном виде, по-видимому,
тесно связаны с условиями оптимальности и играют в задачах
динамики ракет и самолетов роль невозмущенных движений,
аналогичных кеплеровым движениям в задачах небесной меха-
механики.
В этой главе книги исследуется методами вариационного ис-
исчисления ряд задач динамики полета ракет и самолетов с ракет-
ракетными двигателями, причем выделяемые классы оптимальных
движений допускают простые аналитические решения. Влияние
малых изменений основных параметров обследуется в линейной
постановке аналогично линейной теории рассеивания эллиптиче-
эллиптических траекторий баллистических ракет (ч. I, гл. III, стр. 265).
Учитывая, что для многих преподавателей классической меха-
механики излагаемые здесь научные результаты могут представить
интерес для самостоятельных исследований, мы даем достаточно
ссылок на основные журнальные статьи и монографии. Мы убе-
убеждены, что в процессе развития науки и техники вычислитель-
вычислительные машины будут решать все более сложные системы диффе-
дифференциальных уравнений и метод проб, метод сравнения семейств
решений можно будет применять к любому числу свободных
функций. Однако в вузовском преподавании в стадии формиро-
формирования интеллекта будущих исследователей и создателей реаль-
реальных конструкций аналитические решения нельзя заменить чис-
численными методами.
* Л. Эйлер, Метод нахождения кривых линий, обладающих свойства-
свойствами максимума либо минимума, М., 1934, стр. 573—574. Первое издание этой
работы появилось в 1744 г. в Женеве.
142
.При исследовании закономерностей динамических процессов
в ходе обучения частые ссылки на результаты машинных вычис-
вычислений очень редко приводят к «творческому самочувствию» сту-
студента и, по моим наблюдениям, весьма основательно вытрав-
вытравляют любознательность и интерес к познанию механизма («фи-
(«физики») явлений. Как знание элементарной алгебры необходимо
для изучения высшей математики, так и овладение аналитиче-
аналитическими методами механики есть обязательное условие эффек-
эффективного применения электронных вычислительных машин при
исследовании динамических процессов. Это верно как в научных
исканиях по динамике полета, так и в реальном проектировании
новых объектов.
Практическая ценность теоретически найденных оптимальных
режимов (т. е. экстремальных программ изменения свободных
функций) движения объектов состоит в выявлении таких идеаль-
идеальных параметров конструкций, при которых имеющиеся запасы
топлива (запасы энергии) реализуются наилучшим образом.
§ 2. Вариационные задачи о вертикальном подъеме ракеты
в гравитационном поле и атмосфере Земли.
1. Как мы указывали в III разделе, задача об оптимальном
режиме вертикального подъема ракеты в гравитационном поле
и атмосфере Земли была первой из задач ракетодинамики, при
исследовании которой начали широко применяться классические
методы вариационного исчисления.
При рассмотрении теоремы импульсов для тела переменной
массы было доказано, что уравнение поступательного движения
ракеты (как тела переменной массы) не будет отличаться от
уравнения Мещерского. Проектируя векторное уравнение Ме-
Мещерского на вертикаль, можно написать уравнение вертикаль-
вертикального подъема ракеты в гравитационном поле Земли с учетом
силы лобового сопротивления в следующем виде:
§ Qi(v.z)-^Vr(z). A)
В уравнении A) М есть масса ракеты в момент t на вы-
высоте z (фиг. 25), Qi — сила лобового сопротивления ракеты, за-
зависящая от скорости полета v и высоты z, Vr — эффективная от-
относительная скорость истечения продуктов горения из сопла
реактивного двигателя и
R2
g(z) g
где R — радиус Земли, a go — гравитационное ускорение на по-
поверхности Земли (при z=0).
на
Дифференциальное уравнение A) нелинейно, и его можно
проинтегрировать приближенно численными методами. Следует,
однако, указать, что анализ динамических закономерностей пря-
прямолинейного вертикального движения ракеты методами числен-
численного интегрирования достаточно громоздок, особенно в тех слу-
случаях, когда на стадии эскизного проектирования нужно выяснить
влияние изменений различных параметров (компоновочных, ат-
атмосферных, параметров двигательной установки и др.) на изме-
изменение летных характеристик ракеты. Количество необходимых
расчетов столь велико, что только применение
электронных быстродействующих вычисли-
вычислительных машин позволяет их выполнять в
ограниченные промежутки времени. Как мы
уже указывали, на стадии формирования ин-
интеллекта, в процессе овладения методами на-
научного искания, если хотите, при формирова-
формировании в человеческом мозге методологии науч-
научных открытий, счетная машина — плохой по-
помощник.
Мы предпримем здесь попытку аналитиче-
аналитического исследования решений уравнения A) ме-
методами вариационного исчисления, изложив
кратко историю последовательных попыток
ученых и инженеров добыть хорошее анали-
аналитическое решение этой важной практической
задачи.
О
\aft
I
о,
Чд
Фиг. 25
2. Идеи Годдарда*. При исследовании
уравнения A)Р.Годдард делает следующие
упрощающие предположения. Ускорение силы
тяжести g полагается постоянным и равным
его значению на поверхности Земли; относительная эффективная
скорость Vr также считается постоянной. В последующих вычис-
вычислениях мы положим M = Mof{t), где Мо — начальная масса, а
f(t) —функция, определяющая режим работы реактивного дви-
двигателя, или, так как Vr=const, то программу изменения реак-
реактивной силы. При ^=0, М = Мо, /=1; в конце активного участка
при t = tE, М = МЕ и f=fE, где МЕ есть масса ракеты без топ-
топлива. Полагая -~ = Q, можно написать уравнение A) в виде:
B)
* См.: R. Goddard, A Method of Reaching Extreme Altitudes, Smith-
Smithsonian Institute Miscellaneous Collection, Vol 71, № 2, Washington, 1919.
144
Характеристические свойства движения ракеты, определяе-
определяемого уравнением B), будут зависеть не только от внешних сил,
но и от закона изменения массы, т. е. от вида функции f{t), оп-
определяющей режим работы реактивного двигателя. Если бы
было возможно для достаточно широкого класса внешних сил
проинтегрировать уравнение B), тогда скорость v и пройденное
расстояние L были бы определены в зависимости от коэффи-
коэффициентов уравнения B), т. е. в общем виде:
v = v(t, f, f, С,),
L = L(t, f, f, d, C2),
где Сi, C2 —¦ произвольные постоянные интеграции.
Таким образом, v и L суть функционалы. Естественно поэто-
поэтому для изучения оптимальных режимов движения ракеты, при
которых некоторые характеристики движения (как, например,
пройденное расстояние, время подъема на заданную высоту, ра-
работа сил сопротивления и т. п.) становятся экстремальными, при-
применить хорошо разработанный математический аппарат вариа-
вариационного исчисления. Физическая природа формулированной за-
задачи дает нам достаточно оснований для применения именно ва-
вариационных методов.
История развития научных методов изучения прямолинейных
движений реактивных аппаратов показывает на естественность
применения методов вариационного исчисления, наиболее аде-
адекватных механической сущности изучаемой задачи.
При исследовании уравнения B) Годдард имел целью найти
минимум массы, необходимой для того, чтобы поднять на задан-
заданную высоту определенный полезный груз. Доказательство, что
такой минимум массы существует, вытекает из следующих физи-
физических соображений: «...если на какой-нибудь промежуточной
высоте скорость подъема чрезмерно велика, то сопротивление
воздуха, зависящее от квадрата скорости, также будет очень
велико. С другой стороны, если скорость подъема будет очень
мала, то потребная реактивная тяга должна преодолевать при-
притяжение Земли слишком долго. В обоих случаях необходимая
масса топлива получается чрезмерно большой». «Очевидно, —
пишет Годдард, —¦ что скорость подъема должна иметь значе-
значение, соответствующее каждому месту по высоте». Следователь-
Следовательно, задача состоит в том, чтобы неизвестную функцию v = v{L)
определить так, чтобы потребный для подъема на данную вы-
высоту запас массы был минимален. Годдард полагал, что форму-
формулированная им задача не может быть решена точно, и предло-
предложил весьма грубый способ ее приближенного решения.
Годдард первый отметил, что с математической точки зрения
поставленная задача может быть формулирована как задача
10 А. А. Космодемьянский 145
вариационного исчисления, но он ошибочно утверждал, что та-
такого рода вариационная задача будет неразрешима. Идея при-
приближенного метода Годдарда состояла в следующем: полную
высоту подъема ракеты он разделил на п частей и полагал, что
на каждом участке можно считать силу сопротивления среды
постоянной, ускорение земного притяжения g постоянным и
ускорение движущейся точки также постоянным.
Разделив обе части уравнения B) на Vr — const и положив
dv
-jr — Q-i мы получим:
Уравнение C) есть обыкновенное линейное дифференциальное
уравнение первого порядка относительно функции /, и его об-
общее решение можно записать в следующей форме:
(a+g) dt Г г (a + g)dt ]
JtJ vr dt\. D)
Выполняя интегрирование, получим:
(a+g)l Г
! = =е r \c-
Для определения произвольной постоянной интеграции поло-
положим, что при /=0 М=М0 и /= 1 и, следовательно,
Введем в рассмотрение массу т, израсходованную к данному
моменту. Очевидно,
Подставляя значения Ct и / в соотношение E), получим:
(a+g)f*
откуда
Соотношение F) имеет место для любого участка пути, на
котором выполняются сделанные предположения:
a = const, g = const, Vr=const, Q=const.
Годдард далее выбирает начальную массу таким образом,
чтобы конечная поднятая масса равнялась единице. В этом слу-
146
чае Мо — m=l, и,зная, 4toQ-=-^-, мы будем из формулы F)
иметь:
M0 = e~V^+T^I(e vr _i). (8)
Если Qi = O и g = O, то из (8) имеем:
at
Ml = evr. (9)
Отношение масс, определенное по уравнениям (8) и (9), ха-
характеризует увеличение массы благодаря влиянию сил тяжести
и сопротивления среды. Если отношение
мв . .
v = minimum,
Мо
тогда и Мо будет минимум для рассматриваемого интервала.
Полная начальная масса, необходимая для подъема массы, рав-
равной единице, на заданную высоту, получится как результат сло-
сложения минимальных масс Мо, полученных для каждого интер-
интервала.
Порядок вычислений целесообразен следующий. В начале
какого-либо интервала мы имеем некоторую скорость полета,
приобретенную ракетой на предыдущих участках пути. Обозна-
Обозначим эту скорость vq. Если конечную скорость на интервале обо-
обозначить Vi, то при a = const:
Величина t определяется из уравнения:
Сила сопротивления Qi определяется из продувок в аэродинами-
аэродинамической трубе или из теоретических расчетов. Давая различные
значения t и определяя для каждого заданного интервала вре-
времени величину отношения Мо/Мо, находим, какому значению
времени полета на данном интервале соответствует минимум
отношения масс.
Интересно отметить, что, несмотря на такой грубо прибли-
приближенный метод расчета, Годдарду удалось обнаружить увеличе-
увеличение перегрузки, обусловленной реактивной силой при оптималь-
оптимальном режиме движения ракеты, если плотность воздуха значи-
значительно уменьшается.
Ограничения, налагаемые Годдардом на характеристики дви-
движения в каждом отдельном интервале, слишком жесткие, и по-
поэтому при современном уровне наших знаний мы не будем
Ю* 147
приводить детали расчетов. Предложение Годдарда о введении
новой переменной в исходное дифференциальное уравнение це-
целесообразно, а его чисто качественные соображения о существо-
существовании минимума запаса массы для подъема заданного груза на
заданную высоту совершенно правильны и логически достаточно
убедительны.
3. Метод Г. Оберта. Более плодотворная попытка реше-
решения задачи об определении оптимального режима вертикального
подъема точки переменной массы была сделана Г. Обертом*.
В своей книге «Ракета в межпланетное пространство» он
дает один простой метод для нахождения оптимального режима,
и, как мы покажем далее, этот метод будет достаточно точен,
если отношение скорости движущейся ракеты к относительной
скорости отбрасываемых частиц достаточно мало по сравнению
с единицей.
Для дальнейших вычислений обозначим сумму сил, препят-
препятствующих вертикальному подъему ракеты, через R, т. е. поло-
положим:
ire Qi — сила лобового сопротивления, a Mg— вес ракеты. Тог-
Тогда основное уравнение движения ракеты можно записать в виде:
т dt — к dt v'- \W)
Вводя вместо переменного t новое переменное z, будем иметь:
dv_ dv_ dM_ dM
dt dz ' dt dz
Следовательно, уравнение A0) будет:
Пусть ракета на высоте г над поверхностью Земли проходит
слой малой толщины dz = const, и допустим, что за время прохож-
прохождения этого слоя можно считать плотность воздуха постоян-
постоянной и величину Mdv также постоянной. При этих предположе-
предположениях определим оптимальный закон движения ракеты из усло-
условия, что расход топлива (расход массы) будет минимальным.
Дифференцируя A1) по скорости v и замечая, что по усло-
dM A
вию минимума расхода массы —т— = \), получим:
_д_
dv
* См.: Н. Obert, Die Rakete zu den Planetenraumen, 3 Aufl, Berlin,
1929.
148
Принимая во внимание условия постоянства Mdv и dz, мы полу-
получим следующее условие оптимальности режима движения по>
Оберту:
а ,я_\ а /
Условие A3) имеет совершенно ясный механический смысл.
В самом деле, R есть результирующая сила, препятствующая
движению, а отношение I—I характеризует величину сопротив-
сопротивления движению на единицу пути в единицу времени. Таким об-
образом, наивыгоднейшая или оптимальная скорость подъема ра-
ракеты характеризуется тем, что только при этой скорости удель-
удельные потери от сил, препятствующих подъему, будут минималь-
минимальными.
Полагая, как принято в аэромеханике, что
и допуская в пределах слоя dz массу М = const, будем иметь из-
A3):
откуда уравнение для определения оптимальной скорости можно
написать в виде:
В частном случае квадратического закона сопротивления Сх —
= const и оптимальная скорость определяется по следующей про-
простой формуле:
Из формулы A5) следует, что в среде с квадратическим законом
сопротивления в любой момент движения:
т. е. вес ракеты в точности равен силе сопротивления среды.
Таким образом, оптимальная скорость ракеты в среде с дан-
данной плотностью и квадратическим законом сопротивления в точ-
точности равна той предельной скорости, которую приобрела бы ра-
ракета веса Mg, падая свободно в однородной атмосфере задан-
заданной плотности. Предельная скорость падения хорошо обтекае-
обтекаемых тел достаточно велика, и ее значение сильно возрастает с
149
уменьшением плотности среды. Эти соображения полезны для
оценки оптимальности режима движения реактивных аппаратов.
Оптимальные режимы движения, определяемые условиями
A4) или A5), обладают еще тем замечательным свойством, что
для этих режимов все кинематические и динамические характе-
характеристики могут быть найдены в квадратурах. Покажем здесь ме-
метод решения такого рода вопросов для случ-ая квадратического
закона сопротивления, т. е. для случая Cx = const.
Для оптимального закона движения мы будем иметь следую-
следующие исходные уравнения:
A6)
Кроме того, допустим, что плотность атмосферы убывает по по-
показательному закону:
Р = Рое-р2, A7)
где z—высота точки над поверхностью Земли, р0 — плотность
на уровне моря в нормальных условиях и р — некоторый число-
числовой коэффициент, который выбирается из условия наилучшей ин-
интерполяции экспериментальных данных (или данных междуна-
международной стандартной атмосферы) в исследуемом диапазоне вы-
высот
Из уравнения A7) следует, что
-f- = -p<fe- A8)
Исходя из A6), получим сначала скорость v в функции t и
z. Это легко сделать для оптимального режима. В самом деле,
первое из уравнений A6) при условии, что сила веса равна силе
сопротивления, можно написать в виде:
ИЛИ
dv = -2gdt-Vr<?.. A9)
Интегрируя A9) при g = const и Vr = const, получим:
v = — 2gt — VT In M + Cv B0)
Постоянную интеграции С\ находим из условия, что при ^ = 0
<u = v0 и М = М0; тогда, очевидно,
Ci = vQ-\-VrlnMQ. B1)
i50
Подставляя найденное значение постоянной в B0), будем иметь:
rln^-. B2)
Но для оптимального режима движения:
О. _?
М
-i Cx9Sv*
и, следовательно,
Так как отношение плотностей известно из A7), то имеем
окончательно:
Формула B4) дает первое соотношение между v, z и t. Пре-
Преобразуем далее первое из уравнений A6) к новой независимой
переменной z, для чего запишем его в следующем виде:
dv * Vr dM
dt = M dt
Так как
М = * pv2,
то
1 dM _ It , 2 ЧГ
М dt p ~т~ v *
Переходя к переменной z, уравнение B5) можно записать,
в виде:
dp dv_
dv o 17 dz ¦,, dz
V -т- = — 2g — V, V. ,
dz 6 p v '
или
(г»4-IVT)dv = — 2gdz — vVr^-.
Учитывая A8), получим:
{¦v + 2VT)dv = — Bg — $vVr)dz. B7)
Разделяя переменные, будем иметь:
. _ (v + 2Vr)dv
az— $vVr-2g '
151
или
:=*\dv +
Интегрируя B8), получим:
dv
(-№
B8)
где Cj — постоянная интеграции.
Полагая, что при z = 0, v — vQ, мы легко находим, что
Подставляя найденное значение Си получим высоту подъема ра-
ракеты в функции скорости:
z = ¦
B9)
Если воспользоваться соотношением B9) и заменить z через v
ч формуле B4), то будем иметь:
Z*L + V,ln%.=gt. C0)
Формула C0) дает скорость движущейся ракеты в виде неяв-
неявной функции времени.
Зная v = v(t), можно из формулы B2) легко найти закон из-
изменения массы в функции времени. Этот закон будет иметь вид:
vt-v-2gt
C1)
При помощи формул B4), C0) и C1) можно определить все
геометрические, кинематические и динамические характеристики
изучаемого оптимального движения ракеты.
Вычислим здесь величину ускорения движущейся ракеты и,
в частности, найдем его для начального момента времени ^=0.
Дифференцируя C0) по / и разрешая полученное соотношение
относительно \-jr), получим:
dt
J
VT
C2)
152
Для небольших высот атмосферу можно считать однород-
однородной и, следовательно, при вычислении начального значения
ускорения вполне допустимо считать р = 0. Из C2) будем иметь:
dv __ Vr
dt ~~ J_
VT ~*~
откуда
tdv\ __ 2g
Зная [^п-\ > можно из уравнений A6) найти отношение началь-
\ "« /о
ной тяги к начальному весу. Очевидно, будем иметь:
g
ИЛИ
Фр 2
Величина начальной скорости точки легко определяется из-
условия:
АЛ 1 ^ С О
Mog =-^ С^bVo,
откуда
Принимая для ракеты -^^- таким же, как у авиабомбы, будем
иметь -Уо^ёЗОО — 400 м/сек.
Полагая о0=300 м/сек, Уг=3000 м/сек, легко находим по^
C4):
;i,9.
0"
Фо _ 2
Так как равнодействующая сил, препятствующих подъему, бу-
будет равна Ro=Mog+ (Qi)o, то, очевидно, в первые моменты вре-
времени, когда изменение плотности не будет сказываться сущест-
существенно, оптимальное движение будет происходить с потерей ско-
скорости. Этот результат следует также из формулы C3), которая
показывает (при Р = 0), что вблизи Земли ускорение точки при
оптимальном режиме отрицательно.
15а
Исследования Оберта выявляют ряд существенно новых
свойств оптимальных движений ракет. Следует, однако, иметь
в виду, что с математической точки зрения рассуждения и 'вы-
'выводы Оберта имеют не строгий, приближенный характер. Мы
покажем далее, что можно методами вариационного исчисления
получить точное решение задачи об оптимальном режиме движе-
движения ракеты, при котором достигается максимальная высота при
данном запасе топлива. Из точного решения задачи следует, что
решение Оберта будет справедливо только для малых значений
отношения 1тг~I т. е. при сравнительно малых скоростях дви-
движения ракеты.
4. Оптимальный режим движения, обеспечи-
обеспечивающий максимальную высоту подъема ракеты.
Метод Годдарда и метод Оберта суть приближенные методы ре-
решения задачи о программировании изменения реактивной силы,
при котором достигается максимальная высота вертикального
подъема ракеты в однородном поле тяготения. Годдард верно
формулировал проблему, но не дал ее решения; Оберт ис-
исходил в своих рассуждениях из некоторого минимального прин-
принципа, не вытекающего из законов механического движения. Как
мы уже указывали, наиболее естественными и адекватными ме-
механической сущности проблемы определения оптимальных ре-
режимов движения ракет будут методы вариационного исчисления.
Этими методами количественные характеристики оптимальных
движений, в том или ином смысле, определяются достаточно
просто и математически вполне строго.
Формулируем задачу об определении количественных харак-
характеристик оптимального режима прямолинейного движения цен-
центра масс ракеты в следующем виде
Найти закон изменения массы ракеты (закон программиро-
программирования реактивной силы), при котором пройденный путь
l т
L= | dL= \vdt C6)
о о
будет максимальным. В формуле C6) Т — время движения ра-
ракеты на пути L.
Скорость v, входящая под знак интеграла C6), должна удо-
удовлетворять на активном участке полета дифференциальному
уравнению Мещерского:
а на пассивном участке — дифференциальному уравнению дви-
движения точки постоянной массы МЕ=М0—Мт (Мо — начальная
154
масса ракеты, Мт — масса отброшенных за время Т частиц):
dv
МЕ--тг — — MEg — Q1 (v, z). C7)
Если разделить обе части уравнения C7) на Мо, тогда на
пассивном участке траектории полета должно иметь место сле-
следующее дифференциальное уравнение:
Таким образом, задача определения характеристических
свойств оптимального режима прямолинейного вертикального по-
поступательного движения ракеты сводится к изучению экстрему-
экстремума интеграла C6) при выполнении дополнительных требований
B), C8), налагаемых на функцию v на участках интегрирова-
интегрирования. Эти дополнительные дифференциальные соотношения назы-
называют уравнениями неголономных связей. Следовательно, задача
о нахождении максимальной высоты подъема ракеты Lmax экви-
эквивалентна математической задаче об экстремуме интеграла при
дополнительных неголономных связях. Класс задач такого рода
известен в вариационном исчислении под названием задач на
условный экстремум интегралов, когда за семейство допустимых
линий принимаются кривые, удовлетворяющие в промежутке ин-
интегрирования некоторой системе дифференциальных уравнений.
Метод решения таких задач устанавливается следующей теоре-
теоремой Лагранжа: «Для нахождения функций, дающих экстремум
интегралу:
J F(x, yv yv ..., уп, y'v y'2, ..., y'n)dx
при условиях
о= 1, 2, ..., s; s <n
составляют вспомогательную функцию:
О-1
C9)
Искомые функции yv(x) вместе с %„{х) должны удовлетво-
удовлетворять уравнениям Эйлера для функции F*:
dx oyv oyv
v=l, 2, ..., л»*.
•
Смирнов В. И, Крылов В И, Канторович Л. В., Вариа-
Вариационное исчисление, ОНТИ, М, 1933, стр, 44—46.
155
Система п дифференциальных уравнений D0) содержит
(n + s) неизвестных функций уи у% ..., у„, Я1( %2, ..., %s. При-
Присоединяя к ним s уравнений неголономных связей, получим си-
систему {n+s) дифференциальных уравнений с (n+s) неизвест-
неизвестными функциями.
Для решения поставленной задачи ракетодинамики можно
несколько упростить вычисления, исходя из следующих сообра-
соображений. Будем считать, что на всем пути L, проходимом ракетой,
происходит изменение массы, но секундный расход Массы на ак-
активном участке будет величиной конечной, а на пассивном участ-
участке— величиной бесконечно малой. Иначе говоря, функция (-зт).
которая в реальных задачах есть функция разрывная, на ин-
интервале 0 -С t К- Т заменяется достаточно близкой непрерывной
функцией. Можно построить последовательность непрерывных
функций, такую, что предел этой последовательности будет как
угодно близко подходить к данной разрывной функции и экс-
экстремум интеграла C6), найденный для предельной функции
последовательности, не будет отличаться от экстремума при раз-
разрывной функции *. С точки зрения свойств экстремального дви-
движения это означает, что дифференциальное уравнения C8) не
будет налагать на функцию каких-либо неприемлемых (особых)
условий. Пассивный участок траектории ракеты может иметь
вначале любую скорость и любое конечное значение функции
fE>0. Эти соображения позволяют уменьшить число дифферен-
дифференциальных связей и изучать экстремум интеграла только при не-
неголономных связях вида B). Уравнение связи B) целесообразно
преобразовать к новой независимой переменной г. Тогда, зная,
что
dv dv .
будем иметь:
VJ' = O. D1)
Так как в рассматриваемой задаче верхний предел инте-
интеграла C6) переменный, то, кроме вариации вспомогательной
функции F*, которая будет в данной задаче иметь вид:
r = \ + l{z)[fvv' + fg+Q + vVrf'], D2)
нужно учесть дополнительные слагаемые, получающиеся при
вычислении полной вариации для интеграла с переменным верх-
верхним пределом.
* Эта идея была развита впервые в работе Т. М. Энее в а.
156
Зная функцию F* = F*(v,vfyf,f',l,z), напишем необходимые
условия экстремума в форме Эйлера D0). Будем иметь:
й dF^_dF^__a
dz ' dv' dv ~
dz ' df df
или, выполняя дифференцирование D2), получим:
dF*
OF*
dF*
dv
Подставляя D4) в уравнения Эйлера D3), будем иметь:
ИЛИ
D4)
D5)
Присоединяя к D5) уравнение связи' D1), мы получим три
уравнения относительно трех неизвестных функций X, v, f.
Умножая первое из уравнений D5) на Vп а второе на f и вы-
вычитая, получим:
)f -Vr^ = fVrv' - fvv' - fg,
или
dQ
f(,-Vr,—f-^(l-^)-^.. D6,
Из уравнения связи D1) имеем:
f \fvVr ^ VT ^ vVr
Подставляя D7) в D6), легко находим:
dQ
(v — V \ Q I dv — ^
^ ^^ [vVr ^ t "~T
157
Откуда
dQ
_ g
Wt
v
ИЛИ
vQ-V,Q + vV,-^-
—¦ D8)
Полагая Q1=-^CxpSv'2, где Сх есть функция скорости v,
а плотность р есть функция z, мы можем преобразовать соот-
соотношение D8) к следующему виду:
или
г м
I— Ма~ 2MogVr •
Соотношение D9) показывает нам, что между массой ра-
ракеты, ее положением на траектории и скоростью движения су-
существует вполне определенная зависимость, если режим движе-
движения является оптимальным.
Если пренебречь изменением ускорения силы тяжести
с высотой, то g = gOj fMn — M, и D9) можно написать в виде;
Для частного случая квадратического закона сопротивления
имеем:
^[] E1)
Сравнивая полученный результат E1) с формулой Оберта
A5), мы видим, что учет изменения массы и плотности среды
приводит к поправке, величина которой зависит от отношения
скорости полета ракеты к относительной скорости отбрасывае-
отбрасываемых частиц. Если скорости движения малы по сравнению со ско-
скоростью истекающих частиц, тогда в области, где имеет место
квадратический закон сопротивления, можно пользоваться фор-
формулой Оберта A5).
158
Для линейного закона сопротивления, т. е. для случая, когда
= kv, непосредственно из основной формулы D8) получаем*:
kv2
E2)
Таким образом, исследование уравнений Эйлера D3) пока-
показывает, что если для ракеты известен закон сопротивления сре-
среды, то при оптимальном режи-
режиме ее движения каждой высоте —
соответствует определенная °
скорость полета, удовлетво- 7-°
ряющая соотношению E0). На °>8
фигуре 26 даны кривые, опре- Ц6
деляющие зависимость между о,и
f и v для случая однородной о,2
атмосферы при линейном и
квадратическом законах сопро-
сопротивления.
При построении кривых f =
=f(v) мы преобразовали фор-
формулы E1) и E2) следующим образом. Полагая k- const, g —
= const и Vr=const, имеем из E2):
f = —гг- • v2 = const • v2.
0 0,2
0,4- 0,6 0,8
Фиг. 26
1,0 f
При v = v0, f=\ и, следовательно, const = —j. Таким образом,
vo
при линейном законе сопротивления:
..2 •
Формула Оберта для случая квадратического закона сопротив-
сопротивления дает аналогичный результат.
Точное решение для квадратического закона сопротивления
E1) при C* = const, g = const, p = const можно преобразовать так:
f = const • v2 ¦ 1 Ч--;?-
Зная, что при f=l, v = v0, находим:
1
const = •
т * См нашу работу «Экстремальные задачи для точки переменной мас-
массы», опубликованную в «Докладах Академии наук СССР», т. LIII вып I,
1946.
159
и расчетная формула будет:
где Ф = -р^.
(Мы приняли о0 = 600 м/сек, Vr = 2400 м]сек).
5. Простейшая вариационная задача для од-
однородной атмосферы. Покажем, что определение опти-
оптимального режима для движения центра масс ракеты в однород-
однородном поле тяготения и в однородной атмосфере можно свести к
простейшей задаче вариационного исчисления. В самом деле,
путь L, проходимый центром масс ракеты по заданной прямо-
прямолинейной траектории, будет записываться в виде следующего
интеграла:
о
L— J vdt. E3)
щ
Уравнение Мещерского A) для случая однородной атмосфе-
атмосферы и однородного поля тяготения будет:
flH-te-QW—§ Vr. E4)
Преобразуем уравнение E4), считая скорость v за новую
независимую переменную *, тогда E4) можно записать в виде:
откуда
Пользуясь соотношением E5), путь L, проходимый ракетой
до полной остановки, будет выражаться следующим функцио-
функционалом:
Г- ?
о !g + Q
* В декабре 1944 г. на научной конференции Московского университета,
посвященной современным проблемам науки, автор этой книги выступил
с докладом «Основные проблемы динамики точки переменной массы». В пре-
прениях по докладу проф. А. Ю. Ишлинский указал на целесообразность
введения переменной v вместо t при изучении экстремальных задач прямоли-
прямолинейных движений. Такой же вывод следует из результатов Германа
О б е р т а.
160
Функция f(v), дающая экстремум функционалу E6), должна
удовлетворять уравнению Эйлера:
___ dF dF — о
dv ' df df ~u>
где
F —________
fg + Q '
Простые вычисления дают здесь:
dF ___ vVT dF ___ v (fg + Q) — gv (f + f'Vr)
df fg + Q ' df ~ (fg + QJ
d dF _ Vr^f
dv df — (fg + QJ
Таким образом, условие экстремума функционала E6) мож-
можно записать в виде:
f'g + ~^-)~ [v(fg + Q) — gv (f \-f'vr)]
______ =0.
Так как (fg-\-Qf фО, то необходимое условие экстремума
интеграла E6), после очевидных сокращений, можно записать
так:
откуда
^". E7)
Соотношение E7) * совпадает с формулой D8) и, очевидно,
является частным случаем этой формулы, если положить в ней
g=const и Q = Q{v).
Зная закон изменения массы f—f(v) из соотношения E7),
мы можем проинтегрировать уравнение E5). Будем иметь:
0 'Vr)vdv .
(v) • E8)
V
Из соотношения E8) мы найдем t = t(v). Два параметриче-
параметрических уравнения
f=f(v) и t=t(v) E9)
определяют нам закон изменения массы ракеты в функции вре-
времени или закон программирования тяги реактивного двигателя.
* Этот результат опубликован нами в «Докладах Академии наук СССР»,
т. LIII, вып. I. 1946.
11 А. А Космодемьянский 161
6. Геометрическое исследование оптималь-
оптимальных режимов. Исследуем более подробно условия, которые
должны удовлетворяться на концах активного участка полета.
Геометрическое исследование этого вопроса и классификацию
возможных движений ракеты дал Д. Е. Охоцимский*.
Рассмотрим плоскость "переменных / и V. Каждому моменту
движения соответствует вполне определенная точка плоскости
(f, v). Эта точка будет лежать в
некоторой области а, границы
которой устанавливаются сле-
следующим образом: при ?=0, /=1,
а при t — tE, когда М = МЕ, !=(е-
Следовательно, область а огра-
IT
Щ
10
0,8
Ц6
0,4
0,2
/
1
В ^.
С Jmr^*
^^
, Е
О 0,2
0,6 0,8 1,0 /
Фиг. 27
О 0,2 0,k 0,3 0,6 1,0/
Фиг. 28
ничена осью и = 0, прямой f=l и прямой /=/е- Верхняя граница
области а устанавливается из условия движения центра масс
ракеты при отсутствии внешних сил (силы тяжести и силы со-
сопротивления). Тогда зависимость между f я v дается формулой
Циолковского, согласно которой
Вид области а изображен на фигуре 27
Нанося на эту область экстремали по уравнению E7), мы
будем иметь следующие возможные случаи оптимальных дви-
движений ракеты.
I) Начальная скорость точки подобрана так, что при /=1
мы попадаем на экстремаль в точку А (фиг. 27). Дальнейшее
движение должно происходить при выполнении условия E7) до
тех пор, пока масса точки не достигнет величины М=МЕ (точка
В экстремали). Дальнейшее движение определяется основным
уравнением динамики точки постоянной массы.
* См. Д. Е. Охоцимский, К теории движения ракет, журн. «Приклад-
«Прикладная математика и механика», т. X, вып. 2, 1946.
162
2) Начальная скорость точки равна нулю. Чтобы скорее по-
попасть на экстремаль, нужно идти по границе области а вдоль ли-
линии АВ (фиг. 28). В реальных условиях это можно выполнить,
если мгновенно сжечь часть запаса массы и увеличить скорость
от 0 до значения Vi в точке В. Движение от В до С (фиг. 28)
происходит при выполнении условия E7). Движение после
достижения точки С происходит по законам движения точки по-
постоянной массы.
3) Если начальная скорость меньше значения, определяемого
соотношением E7) при /=1, тогда график зависимости между
го
to
'Э/fcmf
1емаль
, E
i
Ш
Шт
8
п
f
О 02 0,1, 0,6 08 10 /
Фиг. 30
/ и v будет для оптимального режима иметь вид, изображен-
изображенный на фигуре 29. Участок АВ соответствует мгновенному сго-
сгоранию части массы, участок ВС соответствует движению при
выполнении условия E7). Движение от точки С до точки Е про-
происходит по законам движения точки постоянной массы.
4) Начальная скорость очень велика, и точка А, соответст-
соответствующая /=1, v = va, лежит выше экстремали. Тогда некоторое
время ракета должна подниматься как -точка постоянной массы
до тех пор, пока значение скорости не уменьшится до значения,
определяемого формулой E7) при f = 1 (фиг. 30). Движение от
точки В до точки С происходит по экстремали, т. е. при соблю-
соблюдении условия E7). Движение от точки С до точки Е опреде-
определяется законами движения точки постоянной массы.
5) Начальная скорость ракеты пусть равна нулю. Запас мас-
массы горючего относительно мал. Аэродинамический коэффициент
сопротивления также достаточно мал и вследствие этого экс-
экстремаль располагается «высоко» над осью f (фиг. 31). В этом
случае экстремаль лежит вне области о и оптимальный режим
11*
163
движения для ракеты неосуществим. Наивыгоднейших скоростей
движения в этом частном случае ракета не достигает.
Увеличение начальных скоростей приводит к тому, что об-
область а приближается к экстремали; при некотором значении
начальной скорости область о достигает экстремали только в
одной точке В, а при дальней-
дальнейшем увеличении скоростей мы
будем иметь случай, изображен-
изображенный на фигуре 29.
7. Аналитическое ис-
исследование оптималь-
оптимальных движений ракеты в
однородной атмосфере.
Исследуем более подробно основ-
основные характеристики оптималь-
оптимальных движений ракеты в однород-
однородной атмосфере, пользуясь дока-
доказанными выше результатами. Для того чтобы наиболее полно
уяснить все особенности метода и не перегружать изложение
громоздкими вычислениями, мы ограничим себя случаями ли-
линейного и квадратического законов сопротивления
Для линейного закона сопротивления, когда Q\ — kiV, уравне-
уравнение экстремали будет:
0,6 0,8
Фиг 31
??
F0)
где
Подставляя F0) в основное уравнение движения, будем
иметь:
kv2 dv kv2 , 2kv dv_
gVr dt Vr gVr dt '
откуда
dv __ (v-\- Vr) g
dt ~
F1)
Разделяя переменные и интегрируя, получим:
F2)
Уравнения F0) и F2) определяют закон изменения массы
ракеты, т. е. режим работы реактивного двигателя. Необходимая
начальная скорость ракеты, при которой движение будет опти-
164
мальным, начиная с момента t=0, определится из уравнения:
1= **"
откуда
Полагая, что g=10 м/сек, Vr = 2560 м/сек и & = 0,04, мы легко
находим:
v0 = У 25 • 10 • 2 • 560 = 800 м/сек.
На активном участке полета движение точки будет замедлен-
замедленным, причем на основании F1) замедление определяется фор-
формулой
F3)
V2
Учитывая, что при линейном законе сопротивления f=-s-
Щ
и, следовательно, v = voyf, можно на основании F2) получить
зависимость f от t в следующем виде:
или
„. _1_ \Т
-• F4)
Чтобы найти закон движения точки, преобразуем уравнение
Мешерского к переменной z и найдем сначала расстояние L в
функции скорости v.
Будем иметь из уравнения Мещерского D1)
., _ vfdv + vVrdf
а fg + Q '
или, так как
,„ 2kv dv г\ и
df = -^r . a Q = kv,
TO
Интегрируя F5), получим закон изменения расстояния L
в функции скорости v в следующем виде (мы считаем, что при
165
L = j [V, (v0 -v)+L(vl- v2) - V2r In 2$fc. F6)
Соотношения F6) и F2) определяют в параметрическом ви-
виде закон оптимального движения ракеты в однородной атмосфе-
атмосфере. Для вычислений L — L{t) удобно в F6) исключить слагаемое
с логарифмом. Из F2) имеем:
= Vr In —Tv-r '67)
и, следовательно,
L==T[^r--gVA F8)
Из соотношения F0) можно получить еще одно заключе-
заключение, весьма полезное для понимания свойств оптимального дви-
движения. В самом деле, F0) можно записать в виде:
или
MS _ Л__
Q, ~ Vr-
Таким образом, отношение силы тяжести (веса) ракеты к
силе сопротивления среды при оптимальном режиме имеет впол-
вполне определенное значение, зависящее от отношения скорости
движения ракеты к скорости истечения частиц.
Для квадратического закона сопротивления уравнение экс-
экстремали будет иметь вид:
^-~{v + Vr). G0)
Движение на активном участке траектории будет замедлен-
замедленным, причем
dv = g(v^ + 2vVT)
dt ' v2 + 4vrV + 2V2r ' ( '
Разделяя в G1) переменные и интегрируя, найдем закон из-
изменения скорости в функции времени:
Уравнения G0) и G2) определяют закон изменения массы
на активном участке полета в функции времени t.
Для того чтобы движение ракеты было оптимальным с мо-
момента ^=0, необходимо подобрать начальную скорость так, что-
166
бы удовлетворялось уравнение:
Так как для квадратического закона сопротивления можно
силу сопротивления представить в виде:
Qi = -2 CxPSv2,
где Сх — постоянный коэффициент, зависящий от формы тела,
р — плотность среды, S — характерная площадь, то, очевидно,
Следовательно, начальная скорость точки будет определяться
уравнением:
cxPos ¦
Для приближенных расчетов при vo<^Vr можно пренебрегать
величиной (тг~) по сравнению с единицей, и тогда необходимая
начальная скорость будет вычисляться по формуле:
<75>
Формула G5) совпадает с формулой Оберта.
Формула G4) и приближенная формула G5) убеждают нас
в том, что при хороших аэродинамических формах ракеты необ-
необходимые оптимальные начальные скорости очень велики. Пусть,
например,
кГ, p = Vs, S = 2 м2, Сх = 0,39, Уг=3000 м/сек,
тогда из G4) имеем:
^640 м/сек.
Из формулы G0) легко найти отношение силы веса к силе
сопротивления среды на активном участке оптимальной траек-
траектории. Будем иметь:
Mg — 1 J_ v пел
Формула G6) показывает, что отношение силы веса к силе
сопротивления среды для оптимального режима зависит от ско-
скорости полета. При малых скоростях можно с достаточной для
практики точностью считать, что при оптимальном режиме сила
сопротивления равна силе веса, т. е. пользоваться формулой
Оберта. Но в тех задачах техники, когда скорости движения
167
ракеты будут приближаться к скорости отбрасывания частиц
(или превосходить их), формула Оберта будет давать значи-
значительную ошибку и в этих случаях выявляются все преимущества
более строгого решения.
Определим на основании полученных формул отношение на-
начального значения реактивной тяги к начальному весу. Будем
иметь:
Определяя (-JM из формулы G0) и подставляя {-?¦) из G1),
получим:
Фо = M0Vr 1 . .р° ; 5г— . G7)
° ° Т gV(v2 + 4vV + 2V*)
Кроме того, из формулы G0) при v = v0 и f = l следует, что
kvn 1
gVr
и, следовательно, из G7) будем иметь:
Vr) {vl + 4v0Vr
ИЛИ
_
Если начальная скорость достаточно мала по сравнению со
скоростью истечения V„ тогда, пренебрегая \-тт-\ по сравне-
сравнению с единицей, мы получим из G8), что
— 2.
При увеличении начальной скорости отношение начальной
реактивной силы к начальному весу уменьшается и при vo= Vr:
Фо _ 15
Mag ~ 14 •
Чтобы найти закон движения ракеты, определим высоту L
в функции скорости. Так как -jf — v~j-> T0 из G1) будем
168
иметь:
ИЛИ
dL = ± [v dv + 2Vr dv - 2V\ -jTq—] . G9)
Интегрируя G9), легко находим:
L = - -L [-? + 2У,г> - 21/' In (г» -f- 2Vr)] + G,
где Cj — постоянная интегрирования. Будем считать, что при
? —О и г) = г»0» тогда
С, = -1 [^ + 21/г^о - 21/? In (^ + 2Vr)] ¦
Таким образом,
^§f-]. (80)
Соотношение (80) вместе с формулой G2) определяют закон
оптимального движения центра масс ракеты на активном
участке траектории.
Если положить Qi =-гг С,р5?>2 и считать Сх функцией ско-
скорости, тогда из уравнения экстремали будем иметь:
откуда
8. Оптимальные режимы в неоднородной ат-
атмосфере. Для движения в неоднородной атмосфере (g будем
считать постоянным) вычисления усложняются, однако опреде-
определение всех элементов движения можно свести к квадратурам,
если принять достаточно простой закон убывания плотности воз-
воздуха с высотой. В задачах современной баллистики и в теории
реактивного движения наибольшее распространение (и надо от-
отметить— наилучшее согласие с наблюдениями) имеют два за-
закона изменения плотности воздуха в функции высоты: степенной
и показательный. Мы запишем показательный закон в виде:
Р = Ро*-рг. (82)
причем р будем считать величиной постоянной.
169
Показательный закон (82) дает точные значения изменения
плотности по высоте, если температура воздуха не изменяется
с высотой.
По данным современных метеорологических наблюдений,
можно считать в диапазоне высот от 11 до 25 км температуру
воздуха постоянной, равной —56,5° С. В тропосфере и на высо;
тах, больших 25 км, температура воздуха существенно меняется
с высотой. Поэтому вычисления, проводимые ниже, имеют при-
приближенный характер, так как формула (82) может интерполи-
интерполировать реальные значения плотности с хорошей точностью толь-
только в ограниченном интервале изменений высоты полета.
Итак, проведем исследование вертикального подъема ракеты
в неоднородной атмосфере при следующих упрощающих пред-
предположениях:
р = ро<?-Рг; р = const; Vr = const; Cx = const; g= const.
Из решения вариационной задачи при сделанных предположе-
предположениях имеем:
f = С**~^ (v +- Vr) = ke-fv* (v + V,), (83)
где
* = ¦?{*? = const. (84)
Подставляя (83) в уравнение Мещерского B), мы легко на-
находим величину ускорения центра масс ракеты:
откуда
J
t = J +
Соотношения (83) и (86) определяют нам характеристику
режима изменения массы при оптимальном движении. Так как
dv __ dv
4f'~v~dL '
то, очевидно,
/_ f
^— J
Соотношения (86) и (87) определяют закон движения цен-
центра масс ракеты на активном участке траектории.
Интересно отметить, что в среде с переменной плотностью
движение ракеты при оптимальном режиме может быть уско-
170
ренным или замедленным, в зависимости от знака числителя
формулы (85), в то время как в среде с постоянной плотностью
ускорение движения по экстремали было всегда отрицательным.
Этот результат можно понять из полученных основных законо-
закономерностей. В самом деле, если плотность среды постоянна, то
с уменьшением массы ракеты удельный вес силы сопротивле-
сопротивления среды все время возрастает, а это должно приводить к по-
постепенному уменьшению секундных расходов массы. Если же
плотность среды переменна и убывает с набором высоты, тогда
вполне возможны такие режимы движения, при которых роль
силы сопротивления среды в общем балансе сил будет умень-
уменьшаться, а, следовательно, для этих типов движений секундные
расходы массы будут возрастать (стремясь к бесконечности при
р—»-0) и оптимальное движение ракеты будет ускоренным*.
§ 3. Изопериметрические задачи динамики точки
переменной массы
Для класса прямолинейных движений уравнение И. В. Ме-
Мещерского содержит одну свободную (управляющую) функцию —
закон изменения массы точки. Если принять дополнительную
гипотезу о постоянстве относительной скорости отбрасываемых
частиц (гипотеза Циолковского), тогда закон изменения массы
точки однозначно определяет программу изменения тяги реак-
реактивного двигателя. Задача определения законов изменения мас-
массы точки-, при которых некоторые интегральные характеристики
движения становятся оптимальными, есть по существу задача
оптимального программирования величины тяги двигателя. Как
было показано в § 2 этой главы, задачи программирования тяги
ракетного двигателя, обеспечивающего Ятах, сводятся или к
простейшей задаче вариационного исчисления, или к вариа-
вариационным задачам на условный экстремум.
Современная техническая практика выдвигает еще один
класс задач динамики, в котором отыскание оптимального про-
программирования тяги подчиняется дополнительным интегральным
соотношениям. В ряде случаев эти задачи можно свести к изо-
периметрическим задачам вариационного исчисления. Мы про-
проведем исследование прямолинейных и криволинейных изопери-
метрических движений точки-переменной массы, предполагая,
однако, траекторию известной (заданной).
Уравнение Мещерского будет характеризовать движение
реального объекта с ракетным двигателем, если допустить, что
* Детали вычислений см. в статье: Алексеев Б. А., Оптимальное про-
программирование тяги реактивного двигателя при движении летательного ап-
аппарата по заданной траектории. «Труды ВВИА имени Жуковского», № 961,
1962.
171
центр масс объекта при выгорании топлива не смещается отно-
относительно его корпуса, а скорость отбрасывания частиц при из-
изменении тяги двигателя остается постоянной.
1. Изопериметрическая задача для класса
прямолинейных движений по абсолютно глад-
гладкой плоскости. Пусть точка переменной массы движется
прямолинейно. Дифференциальное уравнение Мещерского мож-
можно написать в следующем виде:
dt
A)
где v — вектор скорости точки, Q — сила сопротивления среды,
отнесенная к начальной массе, равной Mo, g— ускорение силы
тяжести, Vr — вектор эф-
эффективной относительной
скорости отбрасываемых ча-
частиц, направленный по ка-
касательной к траектории про-
противоположно вектору v.
. , М
Функция / = ~гг- представ-
представляет отношение массы точки
в данный момент времени к
начальной массе.
Рассмотрим сначала слу-
случай прямолинейного движе-
движения в однородной атмосфере. Ускорение силы тяжести g при-
примем также постоянным. Пусть прямая, по которой происходит
движение, наклонена под углом 0 к горизонту. Проектируя век-
векМд
Фиг. 32
торное уравнение
лучим (фиг. 32):
A) на направление вектора скорости и, по-
поdv
B)
Будем рассматривать f как функцию v, тогда
df df dv „ dv
dt
и из уравнения B) следует, что
dv
dt
C)
172
Так как -?¦ — v -^~, то соотношение C) можно записать
в виде:
dv __ festn 6+ <?(«)
ds v{f + f'Vr) ¦ w
Пусть объект (точка) переменной массы должен пролететь рас-
расстояние АЕ (фиг. 32); положим, что в точке А скорость будет
v0, а в точке Е скорость будет vE-
На основании соотношения C) время движения точки на
участке АЕ прямолинейной траектории можно записать в виде:
— J
'Vr)dv
vE
Путь L = AE, проходимый точкой за это время, также можно
представить в виде интеграла, пользуясь соотношением D) :
~ J
vE
Определим закон изменения массы точки, т. е. вид функции f (v),
так, чтобы точка переменной массы попадала из А в Е в крат-
кратчайшее время. Решение этой задачи определит программу изме-
изменения тяги реактивного двигателя, так как мы полагаем Vr~
= const. По условию задачи расстояние между точками А и Е
известно, т. е. интеграл F) имеет заданную постоянную вели-
величину, и мы можем дать следующую математическую формули-
формулировку поставленной задаче.
Среди класса функций f=f(v), характеризующих закон изме-
изменения массы объекта (движущейся точки), найти такую, кото-
которая дает минимум интегралу:
¦-J
'Vr)dv
fg sin
VE
и, кроме того, удовлетворяет дополнительному интегральному
условию *:
'Vr)vdv F)
fg sinB+ Q(v)
vE
* Мы предполагаем, конечно, что класс искомых функций удовлетворяет
всем ограничениям, которые формулируются в курсах вариационного исчис-
исчисления для семейства кривых f=f(v) при выводе уравнений Эйлера для изо-
периметрических задач. См. анализ класса допустимых кривых изопериметри-
ческих задач в книге «Вариационное исчисление» В. И. Смирнова и др.,
ОНТИ, М., 1933, стр. 47—50,
173
Искомая функция (экстремаль) f=f(v) должна еще удо-
удовлетворять следующим краевым условиям (условиям на концах
траектории АЕ).
При у = и0 f=l; при v = vE f=fE
fE.
Таким образом, формулированная задача принадлежит к числу
изопериметрических.
Решение поставленной изопериметрической задачи опреде-
определяется следующей теоремой: дифференциальное уравнение для
нахождения закона изменения массы f — f{v) получится, если
ввести вспомогательную функцию:
F -.
fgsinB + Q^^ fgsin
(где X — неопределенный постоянный множитель Лагранжа) и
написать для нее уравнение Эйлера:
dv df df ~u< w
В общем случае уравнение (8) для определения закона измене-
изменения массы f=f(v) является обыкновенным дифференциальным
уравнением второго порядка и, следовательно, общий интеграл
этого уравнения должен содержать две произвольные постоян-
постоянные интеграции. Соотношение F) может быть использовано для
определения неизвестного постоянного множителя Я,. Произволь-
Произвольные постоянные интеграции для найденного решения уравне-
уравнения (8) можно определить, удовлетворяя краевым условиям.
Но формулированная нами изопериметрическая задача имеет
ряд существенных особенностей. В самом деле, вычислим част-
частные производные от вспомогательной функции F (v, f, /'). Будем
иметь:
dF _
df ~
dF _ Vr(\-{-Xv)
д{ ~ (fgsinQ + Q)
Очевидно,
~dvW~ (fgsine + QJ
Будем предполагать, что 0 < 9 < л, тогда (fg sin 0 -f- Q) Ф О,
и уравнение (8) принимает следующий вид:
A + ?^Hfg sine+ Q)-g sin 9A +W)(f + ТО-
174
или после сокращений:
WVS? liiQ. (9)
Таким образом, класс искомых функций f=f(v) определяется
в нашем случае следующим алгебраическим (недифференциаль-
(недифференциальным!) соотношением:
и уравнение экстремалей A0) не содержит произвольных по-
постоянных.
Для линейного закона сопротивления, когда Q = kiV, урав-
уравнение A0) можно записать в виде:
XgVrsin& "
Для квадратического закона сопротивления, когда Q = kv2, класс
экстремалей (допустимых функций) данной изопериметрической
задачи определяется уравнением:
f
l~~ XgVrsmB ¦
Наконец, если сила сопротивления представлена в виде:
Уравнение, определяющее класс допустимых функций, можно
записать в виде:
f XgVrs\nQ •
Как видно из соотношений A1—13), уравнения класса до-
допустимых функций во всех практически интересных случаях со-
содержат только один неопределенный множитель Я, и не содер-
содержат других произвольных постоянных, поэтому особые трудно-
трудности будут возникать при удовлетворении краевым условиям в
точках А и Е траектории.
Если в формуле A0) перейти к пределу, полагая Я-*оо,
тогда
' gVrsm8
Полученный результат совпадает с решением вариационной
задачи о программировании реактивной силы, обеспечивающей
максимальный пройденный путь (см. § 2 этой главы).
175
Согласно общей теории множитель X будем находить, ис-
используя интеграл F).
Так как
' == XgVrsinQ
/
ТО
~ J teslne + O J
vE vE
dQ . ,. ^Q'
Соотношение A4) показывает, что при заданной величине L
будет существовать вполне определенная зависимость между
начальной скоростью v0 и скоростью vE в точке Е, Интересно
отметить, что в соотношение A4) множитель К не входит, в то
время как в общей теории изопериметрических задач соотноше-
соотношение, получаемое из интегрального условия F), обычно исполь-
используется для определения Д-.
Таким образом, в исследуемой задаче экстремаль A0) не бу-
будет, вообще говоря, проходить через точки, определяемые усло-
условиями на концах траектории АЕ. Рассмотрим более подробно,
как можно удовлетворить условиям на концах А и Е заданной
прямолинейной траектории.
Для определенности и наглядности рассуждений ограничим-
ограничимся случаем квадратического закона сопротивления. Семейство
экстремалей на основании A2) можно представить в виде:
' ~ xg sin e
или, полагая gsin6 = g, и -^- = f,, найдем:
Будем давать параметру X различные положительные значения;
тогда в плоскости (Д, v) мы получим семейство кривых (семей-
(семейство экстремалей), представленных на фигуре 33.
176
Соотношение A4) для случая квадратического закона со-
сопротивления можно записать в конечном виде:
или сокращенно:
= L(v0, vE),
A6)
так как 9 и Vr — заданные постоянные величины.
Семейство экстремалей A5) и соотношение A6) нужно рас-
рассмотреть совместно для того, чтобы удовлетворить формулиро-
формулированным краевым условиям. Анализ проведем геометрически.
V км/сек
6
5
3
2
1
Vr = 3 км/сен е
/У/
1/
II/
50 100 /,
Фиг 33
Исследуем три наиболее важных случая:
1. Пусть заданы расстояние L (т. е. высота точки Е над по-
поверхностью Земли) и скорость vE в точке Е. Из соотношения
A6) мы находим v0. Так как при v = v0 f—l, a f, = -y-, то
среди семейства экстремалей, представленных на фигуре 34,
мы определяем экстремаль данной задачи, т. е. находим значе-
значение множителя X*. Зная X* и vE, находим точку е на фигуре 34,
соответствующую точке Е траектории, и затем легко определяем
значение относительной массы fE, с которой движущаяся точка
достигает конца Е. Следует иметь в виду, что в однородной
атмосфере всегда vu~>vE и можно при заданных L и vE получить
столь большую начальную скорость v0, которую нельзя реали-
реализовать при заданном запасе топлива даже при мгновенном
12 А. А. Космодемьянский
177
сгорании Если относительный запас массы неограничен, реше-
решение всегда существует.
2 Пусть заданы L и tv, тогда из условия, что при v~va f=\,
ft = ~^-, определяется параметр ЯЛ т е из семейства экстре-
@0
Фиг 34
малей (фиг. 34) находится экстремаль данной задачи Из соот-
соотношения A6) при известных L, v0 и Я* находим vE Зная vE и Я,,
легко найти значение отно-
относительной массы точки (е,
достигающей конца Е, а сле-
следовательно, определить не-
необходимый запас топлива
3. Можно задать произ-
произвольно Я* и по точке пере-
пересечения выбранной экстре-
экстремали с прямой ft = -Ф-най-
ти вполне определенное зна-
значение начальной скорости
va Зададим еще значение
Фиг 35 относительной массы точки
fE, достигающей конца Е;
тогда пересечение выбранной экстремали с прямой ft ——\—
ft
определит точку е на плоскости (ft, и), по которой мы легко
найдем значение скорости vE Подставляя найденные значения
178
скоростей Vq и ve в соотношение A6), мы определим путь L, ко-
который будет пройден в этом случае за минимальное время
Проведенное исследование позволяет сделать следующий
вывод: при прямолинейном движении точки переменной массы
в однородной атмосфере существуют такие режимы изменения
массы, при которых точка проходит заданное расстояние (под-
(поднимается на заданную высоту) в минимальное время. Скорости
Vo и vE не могут быть произвольными, а должны удовлетворять
соотношениям A5) и A6)
2. Изопериметрическая задача для дуги
окружности Метод, рассмотренный в п 1, легко обобщить
на случай, когда заданная траектория является дугой окруж-
окружности радиуса R В самом деле, напишем уравнения движения
точки в проекциях на касательную и нормаль к траектории
(фиг. 35):
¦ Я (lV ¦ (l-M v т
jyl — VVlP" sin Э Oi (fv>) **"" * v
dt dt
v, _ • A7*)
R °
Разделив первое из уравнений A7) на Мо и обозначив
f =—-, -~f- — Q, мы получим:
f-5 = -fgsin9-QH—%Vn A8)
^- = gcose. A9)
Преобразовав A8) методами п. 1, мы получим время полета по
траектории в виде интеграла.
B0)
fg sine + Q(v) '•
а длину дуги Ц траектории можно записать в виде:
г _ ? (f + f'VT)vdv ,2n
^"~ J fgsmQ + Q{v) • W
VE
Отличие соотношений B0) и B1) от E) и F) состоит в том,
что в B0) и B1) угол наклона касательной к траектории пере-
переменный. Для случая, когда радиус кривизны траектории R
* Мы здесь считаем, что дуга окружности есть траектория свободного
движения точки переменной массы, в частности, например, это может быть
траектория искусственного спутника Земли.
12* 179
постоянен, мы можем выразить sin 0 через скорость v в очень
простой форме, используя уравнение A9).
В самом деле, из A9) имеем:
cos В —¦
и, следовательно,
Изопериметрическую задачу для дуги окружности можно фор-
формулировать следующим образом: среди класса функций f=f(v),
характеризующих закон изменения массы движущейся точки,
найти такую функцию, которая дает минимум интегралу:
— Г
и, кроме того, удовлетворяет дополнительному интегральному
условию:
f <f + fj)«dv , B3)
Искомая функция (экстремаль) f=f(v) должна удовлетворять
следующим условиям на концах траектории:
1) в точке А при у = Уо /=1,
2) в точке Е при v = vE /=/я-
Для того чтобы написать уравнения Эйлера для данной за-
задачи, мы должны ввести вспомогательную функцию F\, которая
в данном случае будет иметь следующий вид:
, B4)
Необходимое условие экстремума B2) при выполнении ин-
интегрального соотношения B3) будет:
d dFj dFx _п
dv df df ~~
Вычисляя производные от функции Fu получим:
df'
где Р = -
A. dPx
dv ' df
180
где vp = yi — рг>4,
dFt _ A + Я.Р) (Q + fgt) - g^ A + Я.Р) (f + f'
Так как
то, проводя очевидные упрощения, мы получим следующее
алгебраическое уравнение для функции /:
/oc,
gVTV№\W\ K f
Если
TO
f_
gVr
Давая % различные значения, мы получим в плоскости (/, v) се-
семейство экстремалей, аналогичное семейству экстремалей пре-
предыдущей задачи. Однако в данном случае каждому значению
р будет соответствовать свое семейство экстремалей и, следо-
следовательно, для дуг различных радиусов мы будем получать раз-
различные семейства решений.
Наши попытки определить К при помощи соотношений B6)
и B3) не привели к положительному результату из-за громозд-
громоздкости промежуточных вычислений. Поэтому в последующем мы
рассмотрим некоторые частные случаи движения, имея в виду,
что при К-*оо и р—>0 мы получаем оптимальный режим вер-
вертикального подъема ракеты (или ракетоплана), при котором
реализуется требование
L1 = maximum.
Будем изучать полет по траекториям, близким к прямолиней-
прямолинейным, или полет по окружностям, когда множитель р достаточно
мал. Кроме того, допустим, что Я,1 = '/л, также величина поряд-
порядка р. В уравнении экстремали B6) удержим слагаемые с пер-
первыми степенями р и A,i, проведя разложение правой части
формулы B6) по этим малым параметрам, будем иметь (при
Я,р->0):
[ ± ] B7)
Если Х\~»0 и Р—»0, то из B7) получаем хорошо известное ре-
решение для оптимального вертикального набора высоты (см. § 2
этой главы, стр. 158),
181
Соотношение B7) для дальнейшего запишем в виде:
j'°)> B8)
где
Для определения К\ воспользуемся интегральным соотноше-
соотношением B3), причем подинтегральную функцию разложим в ряд
по малым параметрам C и К\, удерживая слагаемые только с
первыми степенями этих параметров.
Легко видеть, что
B9)
Полагая
разложим B9) в ряд по степеням Я, и р. Линейная часть раз-
разложения будет иметь следующий вид:
¦Is
и, следовательно
А—— с^-Л 1 /Ли.ф2_РфЛ
4- Vr (Ф; + Я1Ф^ -1 р<^ j ^ = [0: (г») + W2 (v) -f pO3 (v)] dv. C0)
¦Функции Qi(v), Q2(v) и бз^) являются рациональными функ-
функциями переменной v; проведя алгебраические преобразования,
эти функции можно записать так:
182
va Г Ф, (ф, + V>i) 3
Таким образом, параметр /Ц нельзя определить из инте-
интегрального условия B3). Если обозначить
J gQx dv = Л (г»0, ©?) и J g63 dv = F3(Vo, vE),
vE vE
то из интегрального условия B3) получим:
г'о. vE) = Ll. C1)
Соотношение C1) аналогично A6) и накладывает дополнитель-
дополнительное ограничение на скорости vq и ve (при заданном р), услож-
усложняя удовлетворение формулированным краевым условиям.
Для того чтобы удовлетворять краевым условиям в точках
А и Е траектории, нужно рассмотреть совместно уравнение се-
семейства экстремалей B7) и дополнительное соотношение C1).
Анализ различных вариантов проводится аналогично п. 1. Мы
приведем здесь рассуждение для одного из этих вариантов.
Пусть заданы L\ и скорость vE в конце траектории (т. е. в
точке Е). Кроме того, мы предполагаем известными р, Vr и
k==-^CxpS. Из соотношения C1) находим v0; так как при
v = v0, /=1, то из B8) следует:
|рфзЫ, C2)
откуда
« +-^ Рфз Ы — Ф1(*>о)
C3)
и, следовательно, мы находим из семейства B7) нужную экс-
экстремаль. Зная Xi и 1>В) легко определить значение относительной
массы fE, с которой движущаяся точка достигает конца Е.
§ 4. Об оптимальном разбеге самолета
1. Одним из участков взлетной дистанции самолета является
участок разбега по поверхности аэродрома (по взлетной -во-
-волосе), начиная от скорости, равной нулю, до скорости отрыва.
Скорость в момент отрыва от поверхности аэродрома должна
быть такой, чтобы подъемная сила самолета уравновешивала
его полетный вес
183-
Рассмотрим задачу о разбеге самолета с турбореактивным
двигателем. Эта задача при упрощающих предположениях ча-
часто решается студентами на практических занятиях по теорети-
теоретической механике. Мы исследуем эту задачу более строго мето-
методами вариационного исчисления и покажем существенные пре-
преимущества такого подхода к этой старой задаче динамики само-
самолета.
При исследовании разбега массу самолета будем считать по-
постоянной, так как секундные расходы топлива у турбореактив-
турбореактивных двигателей относительно невелики, а время разбега мало.
Вначале допустим также постоянство тяги реактивного дви-
тателя и постоянство коэффициента трения. В простейшем слу-
случае будем считать, как это делают многие исследователи, что
на всем участке разбега самолет движется так, что сила тяги
двигателя направлена горизонтально. Уравнения движения цен-
центра масс самолета в проекциях на оси Ох (горизонталь) и Оу
(вертикаль) можно записать в следующем виде (фиг. 36):
• -к CxpSv2 ¦
0-1
A)
B)
где М — масса самолета, Ф — сила тяги двигателя, /—коэф-
/—коэффициент трения, N— нормальная реакция грунта (взлетной по-
полосы), р — плотность воздуха, S — площадь крыла, v — ско-
скорость центра масс самолета, Сх и Су — аэродинамические коэф-
коэффициенты лобового сопротивления и подъемной силы.
Определим нормальную реакцию N из уравнения B) и под-
подставим в A). Будем иметь:
м чг=ф - i
дС„
Положим Сх = а + Ьа2 и Cy = ka, где ? = :^ =
C)
¦'xOt
Ьа1 = CXi — соответственно коэффициенты профильного и индук-
184
тивного сопротивления, а — угол атаки. Легко доказать, что-
угол а, соответствующий максимальному качеству, будет равеа
у
-г • В самом деле, полагая Z = -^-, вычисляя производ-
г
dZ У
ную -*— и приравнивая ее нулю, находим:
откуда
aopt = у j •
d2Z
Так как вторая производная -g-j- при a = aopt положительна,.
— ^,
.„ „г„ .. г -г величина Z достигает минимума, а-^ = К—
максимума. Следовательно, aopt = aHanB- Учитывая, что -^- =
:=v-^- = vv', мы можем уравнение C) записать в виде:
F = \Mvv' — Ф +1 (а + Ь2) pSiJ + / [Mg — 1 йар5гJ)] = 0. D)
Будем искать такие режимы разбега самолета, при кото-
которых дистанция разбега L минимальна, т. е.
L
L= Г ds — minimum. E)
Для интеграла E) дифференциальное уравнение D), в кото-
котором v, v', a суть неизвестные функции переменной s, можно рас-
рассматривать как уравнение неголономной (дифференциальной)
связи. Следовательно, нам нужно найти такие законы изменения
функций a(s) и v(s), при которых интеграл E) принимает ми-
минимальное значение и одновременно удовлетворяется уравнение
связи D) (т. е. удовлетворяются уравнения движения). Форму,-
лированная вариационная задача является задачей на Условный
экстремум. Ее решение можно получить, написав вспомогатель-
вспомогательную функцию
<р = 1 -j- IF = 1 + Я [AW — Ф + y (a + ba?) pSv2 -f
185
для которой необходимые условия экстремума выражаются и
форме уравнения Эйлера, а именно'
ds dv' dv ~ ' ( >
причем K = %(s) есть неизвестный переменный множитель Ла-
гранжа.
Напишем сначала уравнение G). Так как в функцию <р вхо-
дит только а 1-^р-==01, то мы должны приравнять нулю -^-.
Будем иметь после элементарных вычислений:
bapSv2 — j
откуда
да2
Следовательно, оптимальный разбег самолета будет иметь место
при постоянном угле атаки Учитывая, что (а2)при к=к —тт.
можно для оптимального угла разбега получить следующую
формулу:
«разбега __ f fn . max
"opt — 2 ' b ~~ ' наив 2Cra
но при максимальном качестве 2CxQ — (Cx) K_K , и, следова-
следовательно,
" при л=лто„ ,_
Таким образом, для оптимального угла атаки при разбеге
имеет место следующее соотношение:
„разбега _ f . ^^ . а^ (9)
Из (9) ясно, что оптимальный угол атаки при разбеге дол-
должен быть тем больше, чем больше коэффициент трения, чем
больше максимальное качество самолета и чем больше наивы-
наивыгоднейший угол атаки. Для хороших аэродромов и современных
самолетов //Стах<1 и, следовательно, аР^бега < анаив; для гРУн-
товых аэродромов в ряде случаев может быть f/Cmax>l и тогда
лпазбега *->, п
opt ^ инаив'
186
Для оптимального движения разбега уравнение C) может
быть проинтегрировано. В самом деле, разделим обе части ура-
уравнения (в) на М и сгруппируем слагаемые, зависящие от ква-
квадрата скорости. Будем иметь тогда
Полагая
можно записать A0) в компактной форме:
$L = al-blrf. (И)
Практически всегда а1 > 0; мы будем предполагать также»
что Ьх > 0 (это означает, что максимальное качество самолета
находится в таких пределах, что произведение f/f|pt36era < 1;
кроме того, согласно доказанному соотношению (9) коэффи-
коэффициент bi = const. Уравнение A1) при al = const, bl = const инте-
интегрируется.
В самом деле, из A1)
Г- 1 ,-—|—,- 1 Г- ]dv
и, следовательно,
^ + ГЬ? V A2)
где С — постоянная интеграции. Так как при ^ = 0 v = 0, то
С = 0.
Разрешая A2) относительно v, легко находим:
?- . е _~1 , A3)
или, полагая для краткости:
У^А = /A - fe) Й- (с* - /ед..^ = р.
получим:
Зная A4), можно найти закон движения самолета при разбеге,
т. е. L=-L(t). В самом деле, так как
dL~vdt,
187
то
и, следовательно,
Так как при ^ = 0 L = 0, то С,=0, и закон движения будет
иметь вид:
A5)
v i
Так как
- - - i/i —
а,
Г а.
то формулу A5) можно представить в виде:
1 ... Г 1
а,
^ = хЧ-т=Ч= I. A6)
1 I i/i_iL.
или
^2=?L(i _e-2*,i). A7)
Формулы A6) и A7) устанавливают связь между скоростью
движения самолета при разбеге с пройденным расстоянием.
Если скорость отрыва задана, то из A6) легко найти полную
дистанцию разбега.
Для некоторых классов современных самолетов р — малая
величина. В самом деле, мы можем записать р2 в виде:
A8)
где q = —J^- есть удельная нагрузка на квадратный метр пло-
площади крыла. Для установления порядка малости р примем:
f = 0,05; Cx{a0pt) =0,064; K{aOT>t)=8; p = V8; g=H> м/сек2;
9 = 360 кг1м\ -щ = 0,%Ь.
Подставляя эти числовые значения в A8), находим, что
Р2 = 0,0004 и, следовательно, р = 0,02.
Если допустить, что fit -С 0,4, т. е. время разбега не превышает
20 секунд, то, разлагая tghyp(ftf) в ряд по степеням (fit) и
188
удерживая только первые степени (fit), мы получим
Формула A9) показывает, что если р — достаточно малая
величина, то можно считать разбег равноускоренным, причем
величина ускорения в первом приближении не зависит от аэро-
аэродинамических характеристик самолета, так как
B0)
Учитывая, что для хороших аэродромов коэффициент трения
меняется в сравнительно узких пределах, из формулы B0) сле-
следует, что важнейшим эффективным средством для уменьшения
времени и длины разбега является увеличение тяго вооруженно-
вооруженности самолета, т. е. увеличение отношения Ф/Mg.
Пусть скорость отрыва самолета от земли будет равна
100 м/сек, тогда на основании приближенной формулы A9) мы
легко находим время разбега:
/ * - 10° - Ш -16 5 сек
¦-разбега — „ — / <Т) \ == 1и>" *-сп"
U)
Длина оптимального разбега определится по формуле:
1 2
^-разбега — ~К ^1 fразбега — Oil M.
Более точное решение получится, если в разложении tghyp(pO
удержать слагаемое с (ftf3). В этом случае:
Если принять, как и ранее, ^„^=100 м/сек, тогда
'разбег. = 17,2 СеК,
¦^-разбега =: "' " М-
Для очень плохих аэродромов (большие значения коэффи-
коэффициента трения /), когда
* Как известно, tghyp (Р0 = р^ — -i (РО3 + -Те (РО5— -.-и область схо-
о 1О
димости будет при |р^| < -=-; для нашего числового примера при (Р^) =0,4
мы, пользуясь A9), пренебрегаем величиной 4/75 по сравнению с единицей.
189
будем иметь:
и тогда A4) можно записать в виде:
Так как
то, интегрируя, будем иметь:
B1)
Учитывая, что при / = 0 Z = 0, находим С2 = 0 и, следова-
следовательно,
J-
B2)
2. Предлагаемый метод анализа оптимального разбега са-
самолета позволяет легко учесть влияние отклонений вектора си-
Ф
лы тяги Ф от горизонта на характеристики разбега. Допустим,
что угол отклонения силы Ф от горизонта равен (х и может из-
изменяться в широких пределах*. Уравнения движения центра
масс самолета в проекциях на ось Ох (горизонталь) и ось Оу
* В современных конструкциях опытных самолетов изменение угла ц в
широких пределах (от 0 до 90°) достигается или поворотом двигателей
вместе с крьпом, или поворотом струи газов, выходящих из сопла реактив-
реактивного двигателя
190
(вертикаль) будут иметь вид (фиг. 37):
Mv ~ = Ф cos |i — \ (а Ч- ba2) pSv2 — (N, B3)
l B4)
Определив реакцию грунта (взлетной полосы) из B4) и под-
подставив найденное значение N в B3), мы получим следующее
уравнение движения центра масс самолета:
Mv — — Ф cos ц. -f- "о" (а ~Ь ba2) pSv2 -f-
-j-f /Wg — Фет (А — -ту kapSv2 = 0. B5)
Будем искать такие режимы разбега, т. е такие функции v (s),
a(s) и n(s), которые при заданной по величине тяге Ф и вполне
определенных физических и геометрических параметрах /, р, S,
М, g, k, a, b обеспечивают минимальную дистанцию разбега, т. е.
L
L= | ds =
¦- minimum.
Как было указано в п. 1, этот класс задач относится к ва-
вариационным задачам на условный экстремум. Вспомогательная
функция, для которой имеют место необходимые условия экстре-
экстремума в форме уравнений Эйлера, будет:
Ф= 1 —{— Л, \Mvv' — Ф(cos ц.-4- f sin ц.) —
— | pSv* (a + ba' — kfa) + fMg] . B6)
Так как в B6) производные от функций a(s) и \i(s) не входят,
то уравнения Эйлера для этих функций будут иметь следую-
следующий вид:
Q = b±pSv42ba-kf] = 0, B7)
|? = ЬФ(—siniH-fcosii) = 0. B8)
Из уравнения B7) имеем'
„разбега =-g. = COnst, B9)
или, выполняя преобразования правой части B9), так же как
и в п. 1, получим:
- C0)
191
Из уравнения B8) следует:
т. е. тангенс оптимального угла отклонения вектора силы тяги
от горизонта равняется коэффициенту трения. Как известно (см.
ч. I, стр. 289—291), если ввести в рассмотрение угол трения т,
т. е. предельный угол между полной^реакцией взлетной полосы
и ее нормальной реакцией, To.tgx = f и, следовательно,
Таким образом, оптимальный угол вектора силы тяги с го-
горизонтом, при котором обеспечивается минимальная длина раз-
разбега самолета, равен углу трения взлетной полосы (грунта).
Допуская, как это обычно делают, что коэффициент трения
постоянен вдоль всего пути разбега самолета, мы приходим к
выводу, что
Hopt = const. C3)
Учитывая B9) и C3), уравнение разбега B5) можно проин-
проинтегрировать. Здесь мы снова убеждаемся в том, что методы ва-
вариационного исчисления позволяют простейшим способом вы-
выявлять опорные аналитические решения нелинейных задач ме-
механики. В самом деле, полагая
dv dv
v~d7~~df '
ж (cos ц -+- / sin \i) — fg = a2 = const,
Ш (Cr - /C,)e_Bopi = pSCffi*} [1 - fK(aopt)} = h = const,
уравнение B5) запишем в виде:
¦§-=Яа-М2. C4)
Полагая, как и при интеграциии A1), что а2 > 0 и bt > О,
легко находим:
C6)
где
Так как tgfi = /> то
cos ц + / sin ц = /
192
и, следовательно,
Если величина $t мала, то C5) можно записать в виде пер-
первого члена разложения tghyp(p^), и мы будем иметь:
v ^ a2t, C8)
L = \ a2t2, C9)
где
а„=?>
Сравнивая D0) и A7), мы заключаем, что отклонение век-
вектора силы тяги на угол х от горизонта увеличивает ускорение
разбега и, следовательно, при заданной скорости отрыва умень-
уменьшает длину разбега.
Для малых f, удерживая в D0) слагаемые со степенями не
выше р, будем иметь:
[^(i)] D1)
Если CxKfCy, т. е. fA^ciopt) > 1, тогда исходное уравнение
движения C4) целесообразно записать в виде:
^- = а2 + М2. D2)
где
Дифференциальное уравнение D2) легко интегрируется. В са-
самом деле,
или
dv , ,,
c4v2 "" °2 ty
и, следовательно,
arctg
где С4 — постоянная интеграции. Так как при ^ = 0 ^ = 0, то
С4 = 0 и
13 А. А. Космодемьянский 193
откуда»
ъ = Ут;^(У~ъьЛ D3)
Интегрируя D3) еще раз и зная, что при / = 0 Z. = 0, будем
иметь:
L = ~ In / \ ч . D4)
b2 cos (Va2b2t) v '
Формулы D3) и D4) можно получить из C5) и C6), зная
соотношения между тригонометрическими и гиперболическими
функциями при замене Ь\ через (—Ь2) и ~\fbx через i\fb^ анало-
аналогично приему, примененному при выводе формул B1) и B2)
Если коэффициент трения взлетной полосы мал, то можно
считать U2 = ai и, следовательно, при взлете с хорошего аэро-
аэродрома выгодно почти всю силу тяги употребить на увеличение
скорости, так как уменьшение нормальной реакции за счет про-
проекции силы тяги на вертикаль играет в этом случае второсте-
второстепенное значение.
3. В рассмотренных в пп. 1—2 случаях оптимального разбега
самолета мы считали силу тяги реактивного двигателя постоян-
постоянной и равной ее значению при v = 0 Для турбореактивных дви-
двигателей, особенно при больших скоростях отрыва, целесообраз-
целесообразно учесть некоторое уменьшение силы Ф с увеличением скорости
движения самолета. Рассмотрение характеристик современных
турбореактивных двигателей показывает, что в диапазоне ско-
скоростей 0—120 м/сек при Я = 0 тяга двигателя убывает по ли-
линейному закону, т. е. можно полагать:
Ф = Ф0A—ег>), D5)
где Фо есть статическая тяга двигателя (при о = 0). Величина е
для существующих двигателей достаточно мала. Так, напри-
например*, если при f 1 = 120 м/сек,
то
2000 '
Дифференциальное уравнение оптимального разбега можно,
учитывая D5), записать в виде*
!i] D7)
• См . А А Лебедев и Л С Чернобровки н, Динамика полета,
Оборонгиз, М., 1962, стр 94—95,
194
Интеграцию D7) выполним методом разложения искомой
функции v в ряд по малому параметру е. Так как величина е2
для современных двигателей будет порядка 10~6, то с достаточ-
достаточной степенью точности можно положить:
v2(t). D8)
Подставляя D8) в D7) и пренебрегая членами с е2, получим:
Дифференциальное уравнение для определения i>i@ получим,
полагая в D9) е = 0 Будем иметь:
E0)
Дифференциальное уравнение для определения v2 получим
из D9), приравнивая слагаемые (справа и слева) при первой
степени е. Легко находим:
dt
Дифференциальное уравнение E0) не отличается от C4) и, сле-
следовательно,
где
Полагая
Ф° M+f2 = const = w, E3)
можно E1) представить в форме:
dv2 ,.
и, следовательно,
In (w H- 2biV2) = — 2bi J v1 dt. E4)
Так как
f v1 dt = -7— In [coshyp (p^)l, E5)
то, учитывая E5), можно E4) записать в виде:
\xv(w-\-2byV2) = — In [coshyp2(p^)] — In C,
13* 195
или
Из начальных условий (при ^ =
довательно,
находим С= — и, сле-
слеE6)
Таким образом, решение уравнения D7) с точностью до е можно
записать так:
или
ttghyp № - жtghyp2
E7)
E8)
Для самолетов с хорошей тяговооруженностью при взлете с
классных аэродромов произведение (fit) мало и можно считать
w = a2. Разлагая tghyp(p^) и tghyp2(p/) в ряды и удерживая
слагаемые до (Р2/2) включительно, мы получим из E8):
или, подставляя значение р, найдем:
E9)
F0)
Если, например, а2^=100 м/сек, то учет падения тяги с увели-
увеличением скорости дает уменьшение скорости за тот же промежу-
промежуток времени:
-и =100— 4Шо=97,5 м/сек. F1)
Из F1) ясно, что влияние уменьшения тяги реактивного двига-
двигателя с возрастанием скорости разбега будет практически несу-
несущественным и приближенные формулы A4) и A6) можно реко-
рекомендовать для использования. Если в разложении в ряд
tghyp(p?) удерживать слагаемые с (Р03> то Для многих классов
современных самолетов получаемые результаты почти не отли-
отличаются от расчетов по формулам A4) и A6). Следовательно,
если под рукой нет таблиц соответствующих функций, можно
характеристики разбега исследовать по формулам:
F2)
196
F3)
4. Исследуем влияние малых изменений некоторых пара-
параметров на характеристики разбега. Чтобы не усложнять вычис-
вычисления, ограничимся случаем малых (fit), т. е. простейшим ва-
вариантом, когда движение разбега будет равноускоренным. Так
как в этом случае
то
¦у2 = 2atL. F4)
Если скорость отрыва (скорость в конце разбега) обозначить
через Vi, а длину пути разбега через Lp, то
F5)
Отношение тяги к весу (тяговооруженность самолета) обозна-
обозначим через п, и практически всегда п>/. Пусть v, n, f, Lp полу-
получили малые приращения 6i>i, бя, б/, 6LP, тогда из F5) в пред-
предположении, что квадратами и произведениями малых прираще-
приращений можно пренебречь, следует:
2г», 6г>, = 2g [Lp F« - б/) + Щ (« - Л],
откуда легко находим, что
">— g(n-f)^ n-f n-f •
Из формулы F6) видно, что для современных классных аэро-
аэродромов влияние изменений скорости отрыва и тяговооруженно-
сти более существенно, нежели изменение коэффициента трения.
Полагая
OL, = —И -rr , F7)
g (л — f)
bL2 = -^=T> F8)
Z-рби
подсчитаем соответствующие изменения пути разбега, если
t>i = 100 м/сек, Lp = 820 м, п = 0,65, /=0,05,
6vx — 20 м/сек, бй = — 0,13, б/= 0,01.
Легко находим:
и, 6Z2 = 13,7 м, 6Z.3Sl78 л.
197
Как видно, при одинаковом относительном изменении vy, f, n
увеличение длины разбега от увеличения коэффициента трения
пренебрежимо мало.
§ 5. О максимальной продолжительности и максимальной
дальности горизонтального полета самолета
с ракетным двигателем
Методы вариационного исчисления позволяют корректно ис-
исследовать ряд нестационарных задач динамики самолета. В на-
настоящее время для некоторых классов самолетов нашли при-
применение ракетные двигатели. Характерными особенностями по-
полета таких самолетов являются: а) существенное изменение
массы объекта во время работы ракетного двигателя; б) изме-
изменение скорости полета в широких пределах при конечных (не
малых!) значениях касательного ускорения. Дифференциальные
уравнения центра масс самолета будут нелинейными, и мы по-
покажем, что для оптимальных режимов полета эти уравнения
легко проинтегрировать в конечном виде через элементарные
функции.
Знание аналитического решения позволяет весьма просто об-
обследовать влияние изменений основных параметров самолета и
двигателя, а также изменений внешних условий на летные ха-
характеристики самолета.
Варьируемой, или свободной, функцией будет закон измене-
изменения массы самолета или, при выполнении гипотезы Циолков-
Циолковского о постоянстве относительной скорости отбрасываемых ча-
частиц, закон программирования тяги ракетного двигателя. До-
Достаточно большое число обследованных нами нелинейных задач
механики методами оптимизации свободных функций дают нам
право для следующего, чисто эмпирического утверждения: если
система нелинейных уравнений механики не содержит свобод-
свободных функций, то целесообразно такие функции ввести тем или
иным приемом, учитывая физические особенности задачи. Ко-
Конечно, введение новых функций обычно повышает порядок си-
системы, но возможность замкнуть систему при помощи условий
оптимальности дает хороший способ получения аналитических
решений *.
1. Характеристика основных сил и допуще-
допущений.
Рассмотрим горизонтальный полет самолета с ракетным
(жидкостным или твердотопливным) двигателем. Основные си-
* К сожалению, приведенные выше суждения справедливы не всегда. Мы
думаем, что это обусловливается неудачным (физически или геометрически}
выбором варьируемых свободных функций,
198
лы, определяющие движение центра масс, будут: гравитацион-
гравитационная сила, сила тяги двигателя, подъемная сила и сила лобового
сопротивления. Ускорение, обусловленное гравитационной си-
силой, будем считать постоянным и равным g = 9,81 м/сек2. Пред-
Предположим также, что при выгорании топлива центр масс само-
самолета не смещается относительно корпуса фюзеляжа и, следова-
следовательно, векторное дифференциальное уравнение движения цен-
центра масс не будет отличаться от уравнения движения точки
переменной массы, т. е. уравнения И. В. Мещерского.
При горизонтальном полете реактивная сила может быть за-
записана в виде:
^ A)
где M(t)—масса объекта в данный момент времени, т — се-
секундный расход массы топлива, Vr — эффективная относитель-
относительная скорость истечения продуктов горения из сопла реактивного л
двигателя, причем W = const.
Аэродинамические силы (подъемную У и лобового сопротив-
сопротивления Q) будем записывать в общепринятом виде:
Y = ±CypSv\ B)
Q = \cx9Sv\ C)
где Су, Сх — коэффициенты подъемной силы и лобового сопро-
сопротивления, р — плотность воздуха на данной высоте, S — харак-
характерная площадь объекта, v — скорость центра масс. Для ши-
широкой области скоростей полета от дозвуковых до околокосмиче-
околокосмических аэродинамические коэффициенты Су, Сх будут зависеть от
угла атаки объекта, скорости полета (числа Маха) и числа Рей-
нольдса. Если из указанной широкой области скоростей выде-
выделить более узкие диапазоны, то в ряде случаев Су и Сх можно
считать функциями только угла атаки и зависимость СХ = СХ(СУ),
т. е. уравнение поляры объекта, записать в виде:
Сх = Сх0 + ЬС"у, D)
где Схо, Ь, п суть некоторые постоянные, определяемые в данном
диапазоне скоростей из продувок в аэродинамических трубах.
Если п = 2, то D) дает уравнение параболической поляры, хо-
хорошо интерполирующей реальную поляру в дозвуковом диапа-
диапазоне скоростей полета (число Маха полета Ма^.6,7—0,8). Если
п=3/2, то D) интерполирует реальную поляру для Ма>6. Как
иг СУ
известно, величина K~-pf- называется качеством самолета.
Важнейшее значение для летных характеристик самолета имеет
величина Ктж- -Определим /(max, пользуясь D).
199
Легко понять, что
Условие экстремума Z = Z(Cy) будет:
dZ сх0 , «-/-_1)с;-2==о.
и, следовательно, для экстремального режима.
ЬСу = -?&j. E)
Так как вторая производная ( 2 ] при условии E) положи-
\ dCv)
тельна, то при выполнении E) Z имеет минимум, а качество
самолета K = -j — максимум.
Будем иметь:
Схо п п ,с.
,7V
где Суяаив = (Су)пряКа1<т^. В частном случае, при п = 2 будем
иметь:
Л\1
дС
На фигуре 38 даны графики Сх0, п, -~ , /Стах в функции
числа Маха. Как видно в дозвуковой области и при 7Иа>5,5—6,
дС
можно считать Сх0, п, -^-, /Стах постоянными *.
2. Исследование режима максимальной про-
продолжительности горизонтального полета.
Учитывая приведенные в п. 1 характеристики действующих
сил, мы можем дифференциальные уравнения движения центра
масс самолета в проекциях на касательную и нормаль к траек-
* Графики заимствованы из книги А М i e I e, Theory of Flight, New-
York, 1963, стр. 89
200
тории записать в виде:
.. dv dM
M
dv dM ,r 1 /п , ипп\ с
-jf = 2FVr ~ 1 \Сх0 + bCy)pSv
cx0:
0,06
0,04
002
¦ ¦ 1 U
Из уравнения A1) находим Су:
г — 2Ms
^ 'j^
A0)
(П)
A2)
Положим M = Mof, тогда ^- = Mo -^ ¦ ^ = Mf % и, при-
приняв во внимание A2), можно основное уравнение движения A0)
201
записать в виде:
Mof ^ ч- Movrf ^= — \ (
или
где
Из A3) легко находим, что
Пусть в начальный момент (в точке выхода самолета на пря-
прямолинейную траекторию) М = М0, /=1, v = v0, а в конце актив-
активного участка полета, т. е. в конце работы двигателя, М = МЕ,
f = fE<h v~vE- Время (продолжительность) полета при рабо-
работающем двигателе и пройденный за это время путь можно на
основании A4) и A5) записать в виде интегралов:
VE
Из A6) и A7) следует, что Т и L суть функционалы. Сформули-
Сформулируем первую вариационную задачу, исходя из A6).
Определить закон программирования тяги ракетного двига-
двигателя ф = ф(^) так, чтобы время полета самолета при работаю-
работающем двигателе было максимальным. Математически эта задача
сводится к определению класса функций /=/(и) таких, чтобы
Т = Ттах. Из аналитической структуры A6) легко понять, что
определение f=f(v) является простейшей задачей вариацион-
вариационного исчисления.
Вводя функцию
202
мы можем написать необходимое условие экстремума A6)
в форме известного уравнения Эйлера:
Простые
d dF
dv df
вычисления
Bл — 2) Vrv2'
dF y2n-2(.
df
дают:
dF
df
Av2n -\- В
1
tlt
(Av2n
'fn) — nt
(Av2n +
-2
— у -JO \2.t\Ai) ' \~ t\tj\ f }
+ Bf"J
Bjnf
Подставляя найденные значения производных в уравнение A8),
мы получим после сокращений алгебраическое уравнение
относительно f. Решение этого уравнения является весьма
простым, а именно:
откуда
Так как при v — v0 f=l, то из B0) имеем:
i
Разделив почленно B0) и B1)', получим:
Соотношение B2) дает нам искомый класс оптимальных функ-
функций /=/(и) и, как будет показано, позволяет определить в этом
случае летные характеристики самолета простыми аналитиче-
аналитическими зависимостями.
Пользуясь A4) и B2), легко находим:
-* = ?•¦*
Но из A9)
А „Лп
л—1 v
и, следовательно,
dt = -O—1. * (l+^W B3)
л Av% \ v I
203
Интегрируя B3), получим:
,= "^1 * I A+^)Л, B4)
или
1 1 Г „. 1
B5)
Из формулы B1) следует, что
1 1
Так как
Av2 JLzL ± '
0 А п 1(п-1)В]"
л CxoPS R_ bgnBM0)n-x
1 Cy
Av\ g C
X
Учитывая F) и G), находим:
п AvzQ g
и, следовательно, из B5) и B6) окончательно имеем:
t = -^-A{v,~v) + 2Vr\n^\. B7)
Формула B7) устанавливает закон изменения скорости само-
самолета в функции времени. Весьма примечательно, что полученный
закон t — t (v) не зависит от п, что позволяет использовать фор-
формулу B7) в различных диапазонах скоростей полета.
Так как из формулы B2) следует, что
то B7) можно записать в следующем виде:
t = ?jm..\Vo{\ — YJ)^rVr\n\]. B8)
g V 11
Полагая фо = -^- и вынося Vr за квадратные скобки, получим:
Как известно из теории реактивных двигателей, величина
204
есть удельный импульс. Введем в рассмотрение величину
fо — ^niax ' Л» C0)
которую будем называть коэффициентом совершенства лета-
летательного аппарата. Тогда B9) можно записать так:
<=*o[%0-/D-'inf]. C1)
В дозвуковом диапазоне скоростей полета фО<О,1, и тогда,
начиная с некоторого значения /,
<po(i-v7)<:inf.
Для этого диапазона скоростей формулу C1) можно заменить
ее приближением, пренебрегая слагаемым ф0 0—Vf) по срав-
сравнению с (—1п/). В этом частном случае мы получаем, что опти-
оптимальный режим полета реализуется при показательном законе
изменения массы в виде:
или
t
М = Мое"^*. C2)
Если запас топлива задан, т. е. мы знаем, что в конце го-
горения при v = vE f=fs, тогда максимальная продолжительность
полета получается из C1) в виде:
Тти = Ко [%A - УТЕ) - In fE]. C3)
Пусть /<max = 20, /s = 350 сек, % = -^-, /я = 0,49, yfB = OJ, тог-
тогда из C3) следует, что максимальная продолжительность по-
полета с работающим двигателем будет:
Т^ах = 7000 ¦ [JL -|- In J^ ] =s 5160 сек = 86 мин.
Это время кажется неправдоподобно большим, что указы-
указывает на практическую значимость полетов с оптимальным регу-
регулированием тяги ракетного двигателя. На фигуре 39 даны гра-
графики безразмерного максимального времени полета "ах в
функции 1е для различных значении фо.
* Для -р- <<с^ 1 показательный закон C2) можно заменить линейным
вида / = 1 it--t с постоянным секундным расходом т^=-~.
Kg Ло
205
Определим теперь длину активного участка полета, т. е. путь,
проходимый самолетом за время работы двигателя. При опти-
оптимальном движении, когда реализуется максимальная продолжи-
0 0,2 0U 0,6 0,8 1.0 f?
Фиг. 39
тельность полета, из B3) имеем:
я—1 1
п Avl
Следовательно,
dL = vdt = — ~—- .-Ц- '{v + 2VT)dv.
п Avq
Интегрируя C4), легко находим:
п Avi J
Учитывая B6), получаем:
C4)
или, заменяя vE через
1при Гтах =
206
?. будем иметь:
1-//1) + 0,25фьA-М]. Г35)
Вводя коэффициент совершенства летательного аппарата Ка,
можно C5) представить в виде:
1пР« ^тах = 2V^ К1 — VTe) + 0,25ф0 A — fB)]. C6)
Если /(„ = 7000, ^ = 292 м/сек, f? = 0,49, YJE = 0,7, q>0 = -L ,
тогда
?при imax= 14000 ¦ 292 [0,3 + (~ 0,01)] s 1267 км.
Найденные аналитические решения для режима, реализую-
реализующего максимальную продолжительность горизонтального полета,
позволяют выявить ряд существенных динамических характе-
характеристик самолета при оптимальном движении. Докажем, прежде
всего, что оптимальное движение самолета, при котором реали-
реализуется Г=7'тах, есть движение замедленное. В самом деле, про-
продифференцируем B7) по времени t, тогда получим:
п — к 17 dv\ 2vr(dv\]
S Aniax Ц at j V \ dt )\ '
откуда
Убывание скорости полета при оптимальном движении сле-
следует также из уравнения экстремали B2).
Определим отношение начальной тяги ракетного двигателя
к начальному весу самолета.
Будем иметь:
10 Mog — Mog
Но из B2) следует, что
а из C7) легко определим:
и, следовательно,
C8)
Из C8) находим, что начальная потребная тяга горизонталь-
горизонтального оптимального полета реализующего Г = Гтах будет: "
C9)
207
Хороаю известно, что
Mog листай)
*\max
гдеФостац) — стационарное значение потребной тяги горизонталь-
горизонтального полета, если пренебречь изменением массы самолета и ско-
скорость считать постоянной и равной v0.
Таким образом, наличие отрицательного ускорения при оп-
оптимальном движении уменьшает величину потребной тяги для
горизонтального полета.
Расчетную формулу для потребной тяги при любой скорости
vо ^ v ^ vE можно записать в виде:
Как мы указывали [см. формулу C2)], при малых фо закон
изменения массы, а следовательно, и закон программирования
тяги ракетного двигателя определяется показательной функцией
и зависит только от коэффициента Ка — совершенства самолета.
При произвольных значениях ф0 закон изменения массы опреде-
определяется проще всего графически. Зная, что при оптимальном дви-
движении
легко найти графически f=f(t). В самом деле, вычисляя значе-
значения функций f=f(v) и t=t(v) для одинаковых v, мы будем на-
находить соответствующие пары значений / и t.
Исходя из формул C3) и C6), можно записать Ттах и
LnpH r=7-max = Z.j в виде функций нескольких (основных) перемен-
переменных:
max ' maxima* Фо> Ie)i
L\ = Lx (v0, Ko, fE),
Если основные переменные получают приращения 6Ка бфо,
б^о, 6/е, тогда приращения бГтах, б/,4 можно, ограничиваясь ли-
линейными слагаемыми, записать в виде:
dJma3.6ф _j_i^« 6jF
Соответствующие значения частных производных позволяют
оценить степень влияния малых изменении основных параметров
на б7\пах и bLi. Мы приведем здесь таблицу этих частных про-
208
изводных:
дТ„
f( Г Фо | L
D1)
0,25ф0
D2)
Для иллюстрации порядка вычислений применим формулы
D1) и D2), оценив изменение бГтах и 6Lt, если bfE = — -щ
(т. е. запас топлива увеличился на 2%), а 6/Сд=0 и 6фо=О. Ис-
Исходные данные те же, что на стр. 207. Простые вычисления дают:
W = 294 сек
дЦ
Вычислим еще бГтах при 6f? — — -gg- для начала полета,
т. е. считая /е=1. Будем иметь:
б^тах = 7000 [-^ + l] ¦ за = 146 сек.
Сравнение результатов показывает весьма существенное
влияние на продолжительность полета последних процентов
имеющегося запаса топлива. Следует также обратить внимание
на значительное изменение всех частных производных при уве-
увеличении относительного запаса топлива.
На фигурах 40, 41, 42 даны:
дК ' К дт '
о о и
в функции fE при фиксированных значениях фо. Как видно, на-
например, значения частных производных при /Е = 0,81 (запас топ-
топлива 19%) и/Е = 0,09 (запас топлива 91%) отличаются пример-
примерно в 10 раз.
14 А А. К»смодемьяиский
209
Заметим, что значение начальной скорости v0 можно опреде-
определить или, пользуясь формулой B1), или из условия, что в любой
момент горизонтального полета подъемная сила должна быть
о
о о,г о,ь о,б о,е
Фиг, 40
ю
ОН
0.6
ОА
0,2
п
1 aL
*й Э9'о
i
\
1
\
N
П 02 01- 0,6 ОЬ 1,01,
Фиг. 41
I?
10,0
so
60
ь.О
го
о
\
?с-г
\
\
\
-—
-
—
0 02 0.t 0,6 ОЬ
Фиг. 42
равна весу самолета. Напишем, что при о = и0 /=1 и СУ = СУ наив
(Су при К = Ктах) подъемная сила равна весу самолета. Будем
иметь:
210
откуда
Г Mog /
Cya*«BP0S УР/РО
Обозначив
получим:
иаив
Vo=~7T" ^44)
Из D4) следует, что всегда можно найти такую высоту по-
полета (такое значение Л), на которой начальная скорость будет
принимать заданную величину.
3. Исследование режима максимальной даль-
дальности горизонтального полета.
Функционал, определяющий дальность горизонтального по-
полета, дается формулой A7) в виде:
Av2n + Bfn
Сформулируем вариационную задачу об определении режима
максимальной дальности горизонтального полета. Среди класса
функций f=f{v) требуется определить такую, чтобы она давала
максимальное значение интегралу A7). Из аналитической струк-
структуры A7) ясно, что нахождение f=f(v) является простейшей за-
задачей вариационного исчисления.
Вводя функцию
можно записать необходимое условие экстремума A7) в форме
уравнения Эйлера:
dv df df ~u>
Простые вычисления дают:
d
dv
14*
Bn— l)-v2'
df
df
"-2-Vr(Av2n
(>
\v2n-\-Bf
V)-Vr:
n) + nBjn
rvr)
2
Подставив найденные значения производных в D6), произведя
очевидные сокращения, мы получим следующее алгебраическое
уравнение для определения fn:
f« _ Av«4v+Vr)
1 — В[Bп— l)Vr + (n—l)v] '
откуда
f - (AV. vi . \ v+v'
Положим, как и ранее, -^- = ф, тогда D8) при ф<0,5 можно
представить в виде:
f
Если Ф<^С1, то D9) можно приближенно записать так:
Исходя из E0), найдем сначала зависимость времени полета от
скорости v при режиме, обеспечивающем максимальную даль-
дальность горизонтального полета. Учитывая A4) и E0), будем
иметь:
J
Av2n + Bf
B* - 1)
пА
пА
*('+4^)
- E1)
Если Ф<^1, то, пренебрегая ф2 и более высокими степенями,
получим из E1):
Выполняя интегрирование и переходя к переменной
будем иметь:
212
Подставляя значения А и В, можно коэффициент перед фигур
ными скобками записать так:
'[Bп—\)В\ g\ п Сха }\ п—1 I
и, следовательно, E3) представить в виде:
2л — 1 ч ' —
is t 9и 1 \1 Г 9/т -4- 1 7»
J. ^ГПЗХ I " ~~^ \ "I 1^ / гг\\ ! \/ \ 0 /СчСч\
Аналогичными вычислениями можно найти из формул A5) и
E0) зависимость L от v:
,_1
В частном случае при п = 2, когда предположение о малости ф
наиболее оправдано, можно из формул E5) и E6) получить бо-
более простые:
- Щ , E7>
E8)
или
При написании формул E7—59) мы сделали добавочное пред-
предположение для упрощения формулы E0), положив, что1^>-дфа
и, следовательно, v — vQ Yf ¦
Если запас топлива известен, то известно значение / в конце
работы двигателя (в конце активного участка полета). Поло-
Положим, что после израсходования топлива )=!е- Тогда
4nax = VCjy3(l - У77)Н-О,72фоA —fE)] F1)
и
F2)
Рассмотрим частный случай, полагая v0— 1,щ 1АУ
/s = 400 сек, /(max = 5, /Е = 0,49. При указанных данных коэффи-
коэффициент совершенства самолета /(„ = 2000 сек и, следовательно,
Lm.M = 1210 км,
7"i = 1450 сек.
Введем безразмерную максимальную дальность:
гогда формулу F1) можно представить в виде:
-V7D4-O,72cpo(l-f?).
F1')
На фигуре 43 даны графики безразмерной дальности L* в функ-
функции fE при различных значениях фо<1.
Отметим некоторые характеристические свойства оптималь-
оптимального режима полета на максимальную дальность. Исследование
проведем для ф<1. Так как со-
согласно E0):
06
+ 2л-
а при v = vQ f=\, то с точ-
точностью до ф2 имеем:
F3)
2л-
Легко понять из предыдущего,
что
Ф — 8>
2л —1
и, следовательно,
На основании A2) имеем:
pSv2
F4)
F5)
Таким образом, при оптимальном режиме полета на макси-
максимальную дальность коэффициент подъемной силы должен оста-
оставаться постоянным. Для дозвуковой области Cy = k<x, и, следова-
следовательно, оптимальный режим полета реализуется при постоянном
угле атаки.
Начальная оптимальная скорость, при которой реализуется
выход на экстремаль, будет при L = LmaiX больше, чем при ре-
режиме Г = Гтах.
В самом деле, если коэффициенты А и В одинаковы, т. е. ве-
весовая и аэродинамические характеристики самолетов одинаковы,
214
то из B6) имеем:
(
а из E0) при -2^гг
7 /
-У
2я—
и, следовательно,
(*о)при L.Lmax = (vо)при r=w • (^fJ" • F8)
Так как, по современным данным, 1,5<я<2, то
В частном случае, если п — 2, то
Ыь =(Ч -/3^1,32ЫГ . F9)
max max max
Пользуясь формулами F5) и F9), легко показать (для области,
где Cy = ka, k = const):
Таким образом, из формул F9) и G0) следует, что качест-
качественные соотношения между скоростями и углами атаки, при
которых реализуются оптимальные нестационарные движения
самолета на максимальную дальность и максимальную продол-
продолжительность, аналогичны известным соотношениям стационар-
стационарного движения при полетах на наивыгоднейшем и экономич-
экономичном углах атаки.
Определим далее отношение начальной тяги ракетного дви-
двигателя к начальному весу самолета. Будем иметь:
10
— Mog
Но из F4) и E5) следует, что
(ЯЛ —A. l—^L\ =
\dv H — Va ' \ dtk
'К \
т тах|^
поэтому
я —1 V п
2
215
В частном случае, при я = 2
5 v0
G2)
Исходя из уравнения A0), найдем стационарное (мгновен-
(мгновенное) значение реактивной силы, полагая инерционную силу рав-
равной нулю. Обозначая в этом случае! -п- Vr| = Ф^стац), будем
иметь:
Ь Г
n~2 L
При я = 2
и, следовательно, G2) можно представить в виде:
ф(«ац)
G4)
Таким образом, при замедленном оптимальном движении не-
нестационарное значение потребной тяги для горизонтального по-
полета меньше, чем при стационарном движении. Соотношение
G4) сохраняется для любой скорости движения (для любого
момента движения на активном участке).
Исследуем влияние малых изменений основных параметров
на Lmax. Если масса самолета в конце активного участка будет
/е, то из формулы F1) следует:
6Zmax = ^ ЬКа + ^ 6f?+ ^ 6^0, G5)
где
дКа
1-у].
^+0,72ф0] ,
1,44ФоA-у].
G6)
G7)
G8)
На фигурах 44, 45 и 46 даны значения частных производных,
приведенных к безразмерной форме, т. е. значения величин;
1
1 dLn
дКа
216
в функции /е для различных значений фо<1. Аналогичные соот-
соотношения МОЖНО ПОЛуЧИТЬ ДЛЯ ЬТ При L = L
to
ов
06
0.2
-Ъ-
02 04 0,6 06 tO f?
Фиг. 44
О 02 04 0.6 06 10
Фиг. 45
10
Фиг. 46
Из приведенных графиков видно, что значения частных пра-
изводных растут с уменьшением fE, т. е. с увеличением относи-
относительного запаса топлива, равного A—fE). Это указывает на
существенное изменение летных характеристик самолета за счет
работы двигателя в «последние» секунды полета.
21?
Наконец, сделаем замечания о достаточности условий B2) и
D7). Здесь можно следовать методу вычисления первой вариа-
вариации, впервые примененному Д. Е. Охоцимским *. Если началь-
начальная скорость самолета v0 будет меньше оптимальной, тогда ну-
нужно мгновенно сжечь некоторый запас топлива и выйти на экс-
экстремаль. Если начальная скорость будет больше оптимальной,
тогда ракетный двигатель нужно включить с некоторым запоз-
запозданием, дождавшись, когда под влиянием силы лобового сопро-
сопротивления v достигнет оптимали.
§ 6. Оптимальное нестационарное планирование
Методы вариационного исчисления позволяют решить ряд
задач динамики полета при учете изменения плотности с высо-
Фиг. 47
той. Пусть самолет планирует с работающим ракетным двигате-
двигателем с некоторой высоты Н, где z=0, над поверхностью Земли.
Примем, как и в ряде рассмотренных задач, что Vr=const, g=
= const и угол планирования 0 = const (фиг. 47). Допустим, что
при выгорании топлива центр масс самолета не смещается от-
относительно его корпуса, и, следовательно, уравнения движения
центра масс самолета не будет отличаться от уравнения дви-
движения точки переменной массы, т. е. уравнения И. В. Мещер-
Мещерского. Учитывая сказанное, уравнения движения центра масс
самолета в проекциях на касательную и нормаль к траектории
будут иметь следующий вид:
MJp cos 9 = -я- CnpSv2
* См.: Д. Е. Охоцимский, К теории движения ракет, журн. «При-
«Прикладная математика и механика», т. X, вып. 2, 1946.
218
Ограничимся случаем параболической поляры. Примем
где a, b, k — постоянные, а — угол атаки. Обозначая g'sin0=g'T,
gcos0 = gn, можно уравнения A) записать так:
I dt ~>gx r dt 2M0 v 2Moav ' \z>
2Mofgn = kapSv*. C)
Определим а из уравнения (З) и подставим в B). Будем иметь:
f я V -f У г V Т + ^4+ Bf2 — kxv<2 = 0. D)
где
_/ dv ., df_ . apS R 2Mobgn
V —~dT' I ~ dt ' Л ~ 2M0 ' ° — ~kW~ •
Время полета (планирования) Т от некоторой точки О B = 0),
где /=1 и v = v0, до точки Е, где z = zE, v = vE и / = /я,
можно записать в виде интеграла:
т
T=\dt. E)
о
Будем искать такие режимы планирования (законы программи-
программирования тяги), для которых время активного планирования
Т—Ттах при заданном запасе топлива (т. е. заданном значе-
значении /Е). Математически задача сводится к исследованию экс-
экстремума (максимума) интеграла E) при дополнительном не-
интегрируемом (неголономном) условии D). Таким образом, мы
должны найти такую функцию f=f(t), которая удовлетворяет
уравнению D) и дает максимум интегралу E). Это вариацион-
вариационная задача на условный экстремум. Для того чтобы записать
необходимое условие экстремума E) при неголономном соотно*
шении D), мы введем вспомогательную функцию ф в виде:
<р = 1 +1 @ \fv4' + Vyi' + Av* + Bf - fgy\,
и тогда необходимые условия экстремума в форме Эйлера мож-
можно записать так:
d dtp dtp „
d дц йф „ ..
~dt df ~df~V% W
Присоединяя к уравнениям F) условие D), мы получим три
уравнения для определения трех функций v(t), f(t) и X(t), ха-
характеризующих оптимальное планирование с работающим дви-
двигателем.
219
Вычисления дают здесь:
= 2kfw' + 2W,f'v
Подставляя найденные значения производных в F), находим
необходимые условия экстремума в виде:
?xfv = Ot G)
dX
dt
УУ -f 2AVr?>t/ — 2lBf — %v4' + Xgy = 0. (8)
Умножая G), на Vr, a (8) на f и вычитая, получим после
•сокращения на X:
r _ 1) = 25/2 - gxfv* + V^ffV +
/2/'t) _ 4Л1/Гг»з. (9)
Найдем fv2v' из D), подставим в (9) и произведем очевид-
очевидные сокращения. Будем иметь:
или _
f = "/4"°2- 0°)
Так как
где
С = const = —г
то A0) можно записать в виде:
(П)
Учитывая, что при /=1, 2 = 0, р = р0, v = v0, то
1 = CpQv2Q, A2)
220
и, разделив почленно A1) на A2), получим:
Г Р^ /1Q\
/= Г- A3)
Ро^о
Формула A3) показывает, что при оптимальном режиме полета,
ьогда реализуется максимальное время активного (т. е. с рабо-
работающим ракетным двигателем) планирования, безразмерная
масса самолета в любой момент движения равняется отношению
скоростных напоров.
Исследуем далее случай показательного закона изменения
плотности р. Полагая
где г отсчитывается от уровня г = 0 вниз (фиг. 47) и на высо-
высоте Я, где z=0, мы полагаем р = р0. Согласно A4) плотность уве-
увеличивается с увеличением z. Дифференцируя A4) по времени t
dz . п
и зная, что —тг = v sin о, получим:
f ^ ^ A5)
Дифференцируя по t A1), легко находим:
Обратимся теперь к основному дифференциальному уравнению
движения. Для оптимального режима его можно проинтегриро-
проинтегрировать. В самом деле, подставляя значения / и /' в D), будем
иметь:
(-J-) + vWT (Cfrw3 sin 0 + 2Cpv -^pj + 2Лг>4 — Cgjv* = 0.
Сокращая на CpzK, получим:
v^+~-gxv + №VrsmQ + 2Vr^- = 0. A7)
Так как
— — 2 Vah Ms-
Ср —I у at? k ,
то A7) можно представить в следующем виде:
4г (* + 2VT) = gxv - Щ±- gnv - №Vr sin 9,
или
^{v + 2Vr) = ^v- Q2v\ A8)
221
где
Переменные в A8) разделяются, и мы можем написать:
r\v + 2Vr)dv
Учитывая, что
dv dv
можно найти 2 как функцию v из следующего соотношения:
Рассмотрим частный случай, когда ctg0=A'max, в этом слу-
случае 0, = О и формулы A9) и B0) принимают очень простой
вид, а именно:
— Х ?(dv_
— ~Т2 J \ v
Выполняя интегрирование и подставляя значение 92, легко
находим:
B4)
Присоединяя к B3) и B4) уравнение экстремали A3), мы полу-
получаем возможность найти все геометрические, кинематические
и динамические характеристики движения.
§ 7. Оптимальный правильный вираж самолета
1. Движение самолета, при котором его центр масс описы-
описывает окружность, лежащую в горизонтальной плоскости, назы-
называют обычно виражом. Если скорость центра масс самолета по-
постоянна по величине и угол крена также сохраняется постоян-
222
ным, то вираж называют стационарным или установившимся.
Для того чтобы траектория центра масс при вираже лежала в
горизонтальной плоскости, у самолета должно отсутствовать
скольжение. Мы будем называть вираж без скольжения при по-
постоянном радиусе разворота правильным виражом.
Обычно в курсах динамики самолета подробно рассматри-
рассматриваются стационарные правильные виражи, причем масса само-
самолета при выполнении виража считается постоянной.
Развитие современной авиации указывает на возможность со-
создания самолетов с большими сверхзвуковыми скоростями (ги-
(гиперзвуковая авиация), когда радиусы правильных виражей до-
достигают нескольких сотен километров и разворот самолета над
целью на 180° требует столь больших расходов топлива, что
гипотеза о постоянстве массы самолета становится некоррект-
некорректной. Если написать уравнения правильного виража, считая
массу самолета, его скорость и угол крена переменными, то
полученная нелинейная система дифференциальных уравнений
движения центра масс самолета оказывается недоступной для
аналитических методов исследования и обычно такие задачи
изучаются методами численного интегрирования.
Мы покажем, что если на рассматриваемое нестационарное
движение правильного виража наложить дополнительные усло-
условия оптимальности некоторых интегральных характеристик дви-
движения, то задача интегрирования исходных уравнений центра
масс самолета существенно упрощается и в ряде случаев можно
выполнить аналитическое исследование процесса движения. Мы
увидим далее, что для оптимального правильного виража его
основные параметры находятся в квадратурах.
При исследовании этой классической задачи динамики само-
самолета мы опять убеждаемся в том, что методы вариационного
исчисления позволяют выделять интегрируемые классы движе-
движений в достаточно сложных задачах современной нелинейной
механики.
2. Рассмотрим движение реактивного самолета с жидкост-
жидкостным или твердотопливным реактивным двигателем. Силу тяги
двигателя будем считать направленной по касательной к траек-
траектории центра масс самолета, т. е. по касательной к окружности
радиуса R (где R — радиус виража), лежащей в горизонталь-
горизонтальной плоскости. Перемещениями центра масс самолета относи-
относительно корпуса фюзеляжа при выгорании топлива будем прене-
пренебрегать. Движение крена, характеризуемое угловой скоростью
крена, — движение медленное, и можно при исследовании огра-
ограничиться только рассмотрением уравнений движения центра
масс, т. е. уравнениями И. В. Мещерского. Инерционные свой-
свойства самолета по отношению к осям, связанным с корпусом
самолета, мы здесь изучать не будем.
223
Уравнения движения центра масс самолета при сделанных
допущениях в проекциях на оси естественного трехгранника
можно представить в виде (фиг. 48):
— dM 1/ У
Mg = Y cos
0)
B)
C)
где М — масса самолета в данный момент времени, v — скорость
/ dM ,, \ ,
центра масс, I -^- ¦ Vr} — реактивная сила (относительную
7poe*<rnopuft центра г>асс
самолете
Фиг. 48
эффективную скорость истечения Vr будем считать постоянной),
X, Y — лобовое сопротивление и подъемная сила, g — ускорение
силы тяжести, у — угол крена. Мы будем предполагать, что
где Cx = a + ba2, a = const, ? = const, a — угол атаки, р — плот-
плотность воздуха, 5 — площадь крыла самолета, а
где Cy=ka, k = ~2— = const.
Сделанные предположения об аэродинамических коэффициентах
означают, что поляра самолета апроксимируется параболой. Так
как движение происходит на заданной постоянной высоте, то
, М
p = const, и относительную массу самолета j=-jr- можно рас-
224
сматривать как функцию скорости полета и. Легко видеть, что
если
то
*tL.y —MV *l.— = MnVf'~
dt V r — mQVrdv dt —mOvrl dt >
и целесообразно уравнения A—3) представить в виде:
^ \ E)
Mofg = у kapSv2 cos у. F)
Если разделить соответственно правые и левые части урав-
уравнений E) и F) друг на друга, го мы получим:
G)
Легко видеть, что
tg V V2
sinY= г = , ir\
* Г + ^2Я2
Из уравнения E) н-айдем угол атаки а как функцию угла
крена Y- Будем иметь:
или, учитывая (8) и для удобства записи полагая 2рг =Р»
получим:
kpS ' v2 • ^>
Используя (9), исключим угол а из уравнения D). Легко най-
найдем:
Полагая
aPS _ . 2Mobg* _
будем иметь:
-vi(f + f'Vr)^ = Av*-\-BP(\+$v*). A0)
15 А. А. Космодемьянский 225
Из уравнения A0) определим dt и элемент дуги траектории
центра масс самолета dL = vdt. Будем иметь:
al—
-f Bf2 A + Pi»4) '
Пусть в начальный момент при ^ = 0, когда самолет начинает
вираж (точка D траектории на фиг. 48), M = MQ, f=\ и
v = v0, а в произвольной точке Е масса М=МЕ, f=JE, v = vE. Вре-
Время движения самолета от точки D до точки Е (разворот на
угол фЕ, фиг. 48) и длину дуги DE можно, учитывая A1) и A2),
записать в виде следующих интегралов:
v* + ВР A
Т — Г
~ J
VE
J
VE
Из формул A3) и A4) видно, что время полета Т и пройденный
за это время путь L = DE являются функционалами.
Мы можем, исходя из A3) и'A4), формулировать различные
вариационные задачи, относящиеся к исследованию динамиче-
динамических характеристик правильного виража. Так, например, можно
искать законы изменения тяги реактивного двигателя («програм-
(«программирование» тяги), при которых время полета от точки D до точ-
точки Е будет экстремальным. Можно искать законы программиро-
программирования тяги, обеспечивающие максимальный путь L при задан-
заданном расходе топлива. Можно формулировать две изопериметри-
ческие задачи, а именно: 1) найти закон программирования тяги
реактивного двигателя, при котором T — Textr, а длина пройден-
пройденного пути L = L0, и 2) найти закон программирования тяги реак-
реактивного двигателя, при котором L = i,max, а время полета фикси-
фиксировано, т. е. Т=Т0. Математически указанные выше вариацион-
вариационные задачи сводятся к определению функции f=f(v), так как,
зная f=f(v), мы можем из A3) найти t = Fi(v), а затем, исклю-
исключая v, определить f=f(t). Реактивная сила определяется тогда
соотношением:
и, следовательно, зная / = f@> мы находим Ф = Ф(^), т. е. опре-
определяем программу изменения тяги для заданных условий опти-
оптимальности.
226
Пользуясь теоремой о взаимности решений (одинаковости
экстремалей) вариационных изопериметрических задач, целе-
целесообразно, исходя из интегральных формул A3) и A4), ввести
в рассмотрение вспомогательную функцию F, для которой имеет
место необходимое условие экстремума в форме уравнения Эй-
Эйлера.
Умножая подинтегральную функцию A3) на %{, а подинте-
гральную функцию A4) на А2, можно вспомогательную функ-
функцию F представить в виде:
где К\ и Я2 — постоянные множители Лагранжа и для краткости
положено:
¦ф=1+ри4.
Необходимое условие экстремума будет:
d dF dF n
0
Вычисления дают здесь:
dF _ Vr
df ~ Аь
d dF __
dv df ~
Vr BXlV + 3\2v>) (Av< + Bfhp) - Vr
(Avi -
dF (M2 + ^v3) № + Bf4] ~ 25H? (XjV2 + \2v3) (f + f'Vr)
df ~ (A
Так как {AvA -\-Bf2ty) Ф 0, а -^|- = 4Р'У3, то, подставляя вычис-
вычисленные значения производных в уравнение A6), выполнив оче-
очевидные сокращения и разрешая A6) относительно функции /,
мы получим алгебраическое уравнение семейства экстремалей в
виде:
Исходя из A7), можно написать уравнения экстремалей для
следующих оптимальных движений при правильном вираже:
а) Определить закон программирования тяги реактивного
двигателя, т. е. функцию f=f(v) так, чтобы при заданном запа-
запасе топлива пройденный путь L был максимальным. На продол-
продолжительность полета Т никаких ограничений не накладывается.
15* 227
В этом случае в формуле A7) нужно положить ?ч = 0, множи-
множитель Х2 из уравнения A7) также выпадает, и мы получаем сле-
следующее уравнение экстремали:
Так как при v = v0 /=1, то из A8) находим уравнение для опре-
определения оптимальной начальной скорости, с которой и нужно
начинать вираж, а именно:
-• A9)
Если радиус виража R—*oo, тогда E—+0, и из A8) мы получим
решение для оптимального прямолинейного горизонтального по-
полета, известное в современной литературе как решение Гиббса *.
б) Определить закон программирования тяги реактивного
двигателя, т. е. вид функции f=f(v) так, чтобы продолжитель-
продолжительность полета при работающем двигателе и заданном запасе топ-
топлива была наибольшей Г=Гтах; на дальность полета ограниче-
ограничений не накладывается. В этой задаче Аг = О множитель Х{ из
уравнения A7) выпадает, и мы получаем следующее уравнение
экстремали для виража максимальной продолжительности:
В V V („ + 2Vr) + Pf;«(» —2V,) •
°V («o + 2^) + Po3(»o-2^) kpS у а'
Оптимальная начальная скорость будет определяться из усло-
условия, что при v = v0 /=1. Это дает следующее соотношение:
у а К '
где Mog — вес самолета в точке D траектории.
в) Определить закон программирования тяги реактивного
двигателя или вид функции /(и) так, чтобы пройденный путь L
при заданном запасе топлива был максимальным (L = Lmax) при
фиксированном времени полета Т=Т0.
В этой изопериметрической задаче можно, не нарушая общ-
общности решения, положить ta=l, и исходя из A7), написать
уравнение экстремали в виде:
B2)
х/
[К + 3vVr) + pi/» [v - VT)\ + h [(v + 2VT) + ?v< (v - 2Vr)] •
* См.: H i b b s A. R., Optimum Burning Programm for Horizontal Flight,
Journ. of Amerie. Rock. Society, № 4, 1952.
228
Если в A7) положить %i=\, то мы получим уравнение экстре-
экстремали, реализующей T=TextT при заданном L = LQ. Это уравнение
будет:
f = /1^
чу-,/ (у + 2Уг) + ^2^2+уУг) /9о\
Х V [(.v + 2Vr) + №(v-2Vr)]+l2[(v' + 3vVr) + §vHv-Vr)}- W
Если в B2) Xi мало, то мы имеем оптимальный режим, близкий
к режиму максимальной дальности; если в B3) Я2"мало, то реа-
реализуется режим, близкий к режиму максимальной продолжи-
продолжительности. Во всех рассмотренных случаях определение основ-
основных характеристик виража сводится к квадратурам.
3. Из рассмотренных выше оптимальных режимов правиль-
правильного виража нам кажется наиболее интересным режим полета,
при котором достигается L = Lmax без ограничений на время по-
полета. Исследуем геометрические, кинематические и динамиче-
динамические характеристики движения центра масс самолета в этом
случае. Уравнение экстремали A8) преобразуем следующим
образом. Пусть
где [х — коэффициент пропорциональности, а -^-==ф, тогда
Следовательно,
f -лГ* у7 i/ (V+Vr) =
I— V В v V (V
г. т ^=Г> • B4)
Полагая
можно написать уравнение экстремали в безразмерной форме:
Если скорость полета v мала по сравнению с относительной
скоростью отбрасывания частиц Vr, тогда <р мало и ц2ф4(ф—1)
будет мало по отношению к ф и приближенно B5) можно за-
записать в виде:
А = Ф2'/Щ- B6)
Решение B6) совпадает в A8) при р—*0.
229
Расчеты, которые мы приводили для различных ц, исходя из
формул B5) и A4), привели нас к весьма простому и физически
ясному приближенному приему определения динамических ха-
характеристик нестационарного виража.
Рассмотрим формулу (9) для угла атаки. Величина
где п — перегрузка, обусловленная центробежной силой. Если
ограничиться виражами с относительно небольшими углами раз-
разворота, тогда изменения / будут также небольшими и, следова-
следовательно, будут малыми изменения скорости v и перегрузки п.
ПОЛОЖИМ rt = Псред = Const, ТОГДЭ
gu B7)
где gi есть результирующее ускорение, обусловленное ускоре-
ускорением силы тяжести и центробежным ускорением. При выполне-
выполнении условия пСред = сопз1, gi = const формулу (9) для угла атаки
мы можем записать в виде:
згщ;^^ B9)
Полагая, как и ранее,
Уравнение D) после исключения а будет:
dv
2М0
получим:
^tf. C0)
Из уравнения C0) легко найти dL = vdt. Будем иметь:
Соотношение C2) показывает, что при сделанном допущении об
осреднении перегрузки, обусловленной центробежной силой, и
введении результирующего ускорения g{ задача об оптимальном
вираже аналогична задаче об оптимальном прямолинейном дви-
движении в однородном силовом поле с ускорением g\ (вместо g
для прямолинейного движения).
230
Необходимое условие экстремума C2) будет:
Л д rd + f'VJv1] д ГЦ + ГУг)р»1 _п
dv ' df L Avi + Bj* J df L Av*-\-BJ* J '
Простые вычисления приводят к следующему алгебраическому
уравнению для функции /:
или
Г Л п п /~ 1 I m
C4)
Рассмотрим сравнительно небольшие сверхзвуковые ско-
скорости полета. Так как Vr = 2500—4000 м/сек, то возьмем
<р < -=- и тогда с хорошей точностью:
и, следовательно,
Определим t = t(v) и L = L(v), исходя из интегральных фор-
формул:
7 f'Vr)v*dv
7 (f + f'Vr)v*dv
— ) Av* + Bif» '
V
L==7 + W
^ J
и формулы C5). Будем иметь:
~~ J AViqP+Bif2 ~~
vr с (б+бф+ФгНФ
Подинтегральная функция с точностью до ф3 может быть пред-
представлена следующей интерполирующей функцией:
6 + бФ + Ф2 ^1>5ч.1>25ф>
-J ф + g- ф"
231
и, следовательно,
i ~] . C9)
или
1 Г _ _ _ я. 1
D0)
Легко доказать, что если
Сх — а -\- ba? nCy — ka,
то
*- = (?) =т^т- D1)
\ ^х /max ^ r "t'
Кроме того,
7Ж"?,^т—^Г D2)
Учитывая D2), мы можем формулу D0) записать в более удоб-
удобном для расчетов виде:
=-^ [2,5 К - я) + ЗУ, In-^], D3)
или
git~Kma[\M(vo-v) + \,73Vrln^]. D4)
Аналогичные вычисления позволяют найти L = L(v). В самом
деле, мы имеем из C9):
и
Следовательно,
(ф2-Ф2). D5)
Учитывая D2), мы можем D5) записать в следующем виде:
ft Z. = Ктах ¦ [0,72 (vl -v2) + \ ,73Vr К - v)]. D6)
* См. аналогичные вычисления на стр. 212—213 этой книги.
232
Используя формулы C5), D4) и D6), можно исследовать все
основные динамические характеристики оптимального виража.
Мы отметим только некоторые из них:
а) Докажем, что оптимальное движение есть движение за-
замедленное. В самом деле, продифференцируем D4) по времени.
Будем иметь:
й=—^-^».ж [1.44+1.73-^],
откуда
^L — _ _gi 1 ^ о 1\1\
что и требовалось доказать.
б) Выполнение виража даже при относительно небольших
перегрузках существенно уменьшает дальность полета. Сравним
формулы для L в случае виража (формула 46) и для горизон-
горизонтального полета на максимальную дальность, которая запи-
запишется в виде *:
gLrop = ЛГтах [0,72 {vl- z>2)+ IJSV, (vQ - v)]. D8)
Легко понять, что отношение длин дуг траекторий при заданном
запасе топлива будет:
gi
Так, если псвея — У~3, что соответствует виражу с углом крена
•у = 60°, то получим:
г—±г
L* 2 ГОР'
в) Если задан запас массы для выполнения заданного вира-
виража, то из уравнения экстремали можно найти скорость полета
в точке Е. Пройденный путь DE = LmRX будет определяться по
формуле:
^ ^-^)]. D9)
Зная D9), легко проанализировать влияние малых изменений
Ктах, gi, vQ, ve, Vr на Lmax. Если ограничиться линейными чле-
членами разложения, то
где значения частных производных берутся для выбранных фик-
фиксированных значений /Cmax, gu ¦. •. Vr- Покажем, например, как
* См. стр. 214 этой книги.
233
изменится Lmax при изменении Vr на 10%. Пусть Vr=2500 м/сек,
уо=ЗОО м/сек, уЕ = 250 м/сек, Ктах~ Ю, gi = 2 g. В этом случае
_ 1,73(«,0-Рд)Хта
а увеличение дальности будет:
^г^ 10 812 м.
Аналогичным приемом можно определить влияние изменений
других параметров, характерных для правильного виража.
§ 8. Оптимальные режимы полета орбитальных самолетов
Характерной особенностью развития современных летатель-
летательных аппаратов является стремление обеспечить продолжитель-
продолжительные стационарные полеты человека (пилота) во всех областях
атмосферы и космического пространства. Как известно, серий-
серийные самолеты эпохи шестидесятых годов XX в. уже надежно
освоили полеты до высот 20—25 км; космические корабли-спут-
корабли-спутники могут обеспечить многодневные полеты на высотах более
170—190 км. С уменьшением высоты круговой орбиты до
170 км время существования спутника резко уменьшается. Вы-
Вычисления и наблюдения показывают, что при реально осуще-
осуществимой поперечной нагрузке (Mg/S), где Mg — вес спутника,
a S — площадь его миделя, искусственный спутник Земли на
высотах, меньших 170 км, не может пролететь без двигателя
даже один виток и входит в более плотные слои атмосферы.
Стационарные длительные полеты самолетов на высотах 30—
35 км возможны для современных аэродинамических компоно-
компоновок самолетов лишь при скоростях, превышающих 800—
1000 м/сек. При таких скоростях полета температуры поверх-
поверхности самолета становятся значительными (более 350—450° С),
что усложняет создание надежно работающих конструкций.
С увеличением скоростей (более 1000 м/сек) и высот полета
(более 35 км) имеют место следующие взаимосвязанные физи-
физические процессы, которые нужно учитывать при создании лета-
летательных аппаратов: плотность атмосферы сильно уменьшается,
охлаждение поверхности самолета улучшается за счет лучеис-
лучеиспускания; равновесные температуры поверхности определяются
рг/2 ,
величиной скоростного напора ^к— (V — скорость полета, р —
плотность атмосферы на данной высоте); величина скоростного
напора определяет величину аэродинамических сил;чем меньше
скоростной напор, тем меньше сила лобового сопротивления и,
следовательно, тем меньше потребная тяга, обеспечивающая ста-
стационарный полет; увеличение скорости полета по дуге большого
234
круга на заданной высоте приводит к увеличению центробежной
силы, и необходимая для стационарного полета аэродинамиче-
аэродинамическая подъемная сила может быть меньше веса самолета.
Для современного уровня развития летательных аппаратов
можно, на основании сказанного, определить целесообразное со-
сочетание высот и скоростей полета, при которых температуры по-
поверхности будут допустимыми.
Хорошо известна область реально возможных высот и скоро-
скоростей («коридор» допустимых значений высот и скоростей) по-
полета *. Завоевание диапазона высот и скоростей (от 20—25 км
до 170—190 км) осуществляется в современной технике и «сни-
«снизу» созданием самолетов гиперзвуковой авиации и «сверху»
созданием орбитальных самолетов, выводимых на стационарную
круговую орбиту при помощи ракет-носителей или самолетов-
носителей. Области высот от 95—ПО км до 170—190 км будут,
по-видимому, освоены летательными аппаратами типа сателлои-
дов Эрике (это корабли-спутники, снабженные реактивными
двигателями, которые обеспечивают устойчивость корабля и раз-
развивают тягу, равную силе лобового сопротивления).
1. Вариационные задачи для случая около-
околокосмических скоростей п о л е т а. Рассмотрим движение
самолета с жидкостным реактивным двигателем по круговой ор-
орбите радиуса Ri=R + H, где R есть радиус земного сфероида,
Н — высота полета над поверхностью Земли. Будем предпола-
предполагать, что высота полета Н лежит в пределах 60—110 км и влия-
влияние аэродинамических сил на движение орбитального самолета
является существенным. Скорость полета uOi, где г\ = Vg\R\
R2
есть местная первая космическая скорость, gi = go~7tf"— мест-
местное ускорение, обусловленное гравитационным полем Земли, а
go — гравитационное ускорение на поверхности Земли. Будем
предполагать, что скорость полета по орбите и>3 км/сек. Для
таких скоростей полета подъемную силу и лобовое сопротивле-
сопротивление можно вычислять на основании теории Ньютона, которая
при и>3 км/сек достаточно правильно отражает физическую
сущность явлений обтекания.
Аэродинамические коэффициенты Сх и Су мы запишем в
виде **:
Су =
где a, b, k — постоянные, зависящие от компоновки орбиталь-
орбитального самолета, а — угол атаки.
* Handbook of Astronautical Engineering, New-York, 1961, стр. 22—96
** См , например: А. П. Мельников, Аэродинамика больших скоростей,
Воениздат, М., 1961, стр. 398—412.
235
Рассмотрим величину:
'
Су ~ ka* ^ Аа~~ /С"'
где К — качество самолета. Исследуем экстремальные значения
функции Z = Z(a). Будем иметь:
и, следовательно,
аз =_??L п\
opt I) V /
Так как 1-^гг) > 0> т0 ПРИ aopt, определяемом форму-
\ 'aeaOpt
лой A), мы будем иметь минимум Z и максимум К. Будем
называть угол aopt, определяемый по формуле A), наивыгод-
наивыгоднейшим углом атаки. При а = анаив:
и, следовательно,
а=анаив
Величина -Ц—S0.53, и поэтому
Силу лобового сопротивления и подъемную силу можно за-
записать в следующем виде:
X=j CxpSv2 = \
У = -г, CypSv2 = -j ka2pSv2,
где р есть плотность атмосферы на высоте Н, S — площадь кры-
крыла самолета или вообще характерная площадь объекта.
Реактивную силу Ф будем считать коллинеарной вектору
скорости центра масс самолета и допустим, что
236
где Vr есть эффективная относительная скорость истечения про-
I dM \
дуктов горения из сопла реактивного двигателя, а I -тт-1 есть
секундный расход массы (масса самолета М есть убывающая
функция времени t). Для упрощения исходных уравнений мы
допустим, что при выгорании топ-
топлива центр масс не смещается
относительно корпуса (фюзеля-
(фюзеляжа) самолета.
При сделанных предположе-
предположениях уравнения движения центра
масс орбитального самолета в
проекциях на касательную и нор-
нормаль к траектории можно запи-
записать в виде (фиг. 49):
dt
C)
2 "¦"• r^v • D)
Из уравнения D) определим угол атаки а. Будем иметь:
Фиг. 49
2
kpSv2
Учитывая, что gx = g0 —j, g1R1 = v\, и полагая M = MQf,
"\
где Мо есть масса самолета в момент его выхода на орбиту,
можем записать угол атаки в виде:
1 и —
1 1
E)
Рассматривая f как функцию скорости v, будем иметь:
df df dv ,f dv
~dt ~~dv' ~dt = ' "If
Заменяя а по формуле E), мы можем записать уравне-
уравнение C) в форме:
dt
F)
237
где Ф = A —ДИ . Полагая
2М0
можно записать формулу F) в следующем виде:
— (/ + f'Vr) ' v ' ~7f ==: ¦^гK + В\%Щ1г. G)
Из формулы G) легко находим:
Будем исследовать движение самолета от некоторой точки О
на орбите, где скорость полета равна vQ, до точки Е, где ско-
скорость полета v = vE. Время полета по дуге ОЕ и длину дуги
OE=L можно записать в виде интегралов:
Г— [
- J
.
_ p
J
Из формул (8) и (9) видно, что время полета Т и пройден-
пройденный за это время путь L являются функционалами. Исходя из
формул (8) и (9), можно формулировать различные задачи ди-
динамики орбитального самолета. Так, например, можно искать
класс функций f=f(v), таких, чтобы при заданном времени по-
полета пройденный путь был максимальным; можно искать такие
законы изменения массы f=f(v) (т. е. законы программирова-
программирования тяги двигателя), при которых время движения по орбите
при заданном запасе топлива будет наибольшим, и т. д.
Пользуясь теоремой о взаимности решений (одинаковости
экстремалей) вариационных изопериметрических задач, целесо-
целесообразно ввести некоторую вспомогательную функцию F, для ко-
которой имеет место необходимое условие экстремума в форме
уравнения Эйлера.
Умножая подинтегральную функцию (8) на Xi, а подинте-
гральную функцию (9) на %г, можем F записать в виде:
где A,j и ^2 суть постоянные множители Лагранжа.
238
d
Необходимое условие экстремума будет:
d dp dF„
°
Вычисления дают нам:
дР
r + 2X2vVr) {Av3 + BfW') -
- V, (M + X2v2)
"Л? 'W^ (At? + Bf'l'tfbf
(Av3 + Bf'V1) - | BfH"' (t + f'Vr)
Так как (Av3-\-Bf'2ty'/2f =?= 0, то условие A0) после очевид-
очевидных сокращений можно записать в виде'
Av* [lx (v + 2Vr) +12 (v2 + vV,)] =
4 biv
2 T J 1 '
Учитывая, что
мы получим следующее алгебраическое уравнение для функ-
функции f:
п f/,Jh 2^г;3 [*,, (о + 2КГ) + Х2 (у* + vVr)] .
Пользуясь формулой A1), напишем уравнение экстремалей
для следующих вариационных задач динамики орбитального
самолета:
а) Определить закон изменения массы орбитального само-
самолета так, чтобы активный участок полета по орбите был макси-
максимальным (? = ?тах); на время полета никаких ограничений
не накладывается. В этом случае ?,i = 0, %2 из уравнения экстре-
экстремали выпадает, и мы получим из формулы A1) следующее
уравнение:
239
Так как при f=l (в точке выхода самолета на круговую орби-
орбиту) v = vQ, to из формулы A2) легко находим уравнение для
определения оптимальной скорости выхода:
В 2$
A I J,?\3/2 , „VqV
НИ
При Vi -> oo (случай горизонтального полета над плоской
Землей) из A2) следует более простая формула, удобная для
анализа при относительно небольших скоростях полета:
„.%_ 2AvHv+Vr)
в) Определить закон изменения массы орбитального само-
самолета f=f(v) так, чтобы продолжительность полета при работаю-
работающем двигателе и данном запасе топлива была максимальной
(Г=Гтах); на дальность полета ограничений не накладывается.
В этом случае ta = 0, A,i из уравнения экстремали выпадает, и мы
получаем из формулы A1):
Г
Оптимальная начальная скорость будет определяться из
уравнения:
1 _
При i>i—>¦ оо из формулы A3) следует весьма простое соот-
соотношение, которое мы используем в дальнейшем. Его можно, на-
например, записать в виде
с) Определить закон изменения массы орбитального само-
самолета f=f(v) так, чтобы активный участок полета был макси-
максимальным (L = LmRX) при фиксированном времени полета Т=Т0.
Не нарушая общности решения, можем в этом случае положить
^2=1, и уравнение экстремали изопериметрическои задачи будет:
6vV 1 Г
+ f^} + *•>[<» + ^ +
Если и будет уменьшаться, стремясь к нулю( режим, близ-
близкий к режиму максимальной дальности), то A4) перейдет в
240
A2), т. е. в уравнение экстремали, реализующей максимум даль-
дальности полета без ограничений на время полета.
d) Определить экстремальное время полета {T = Textr) при
фиксированном значении дальности полета и заданном запасе
топлива. В этом случае, не нарушая общности решения, можем
положить ?ц=1, и тогда из формулы A1) следует:
Если Х2—*0, то из A5) получим A3), т. е. уравнение экстре-
экстремали, реализующей максимальную продолжительность полета
при заданном запасе топлива.
Приятной особенностью экстремалей A2) и A3) является
возможность найти время полета и пройденный путь в форме,
когда аэродинамические коэффициенты самолета не входят под
знак интеграла и для различных частных задач интегралы могут
быть представлены в виде семейств кривых, зависящих от двух
параметров.
2. Вариационные задачи для параболической
поляры. Аналогичные вариационные задачи можно сформули-
сформулировать и исследовать для случая, когда аэродинамические ко-
коэффициенты Сх и Су представлены в виде:
Сх^а + Ьа2, Cv=ka,
где a, b, k—¦постоянные, а — угол атаки.
Уравнения движения центра масс орбитального самолета в
этом случае будут иметь вид:
Clt (XZ ?.
M^- = Mgl к kapSv2. A7)
Определив а из уравнения A7) и полагая
dt dv dt v\'
apS
^2M,'' B =
можно записать уравнение A6) в следующей форме:
16 А. А. Космодемьянский 241
откуда
d! vdt (f+f'Vr)v3dv
aL — vat — A
Будем исследовать движение орбитального самолета от не-
некоторой точки О, где скорость центра масс самолета равна vo>
до точки Е, где скорость центра масс самолета равна vE. Время
полета и пройденный путь можно записать в виде следующих
интег ралов:
— ?
— J
VE
Из интегральных формул B0) и B1) видно, что время поле-
полета Г и пройденный (за это время) путь L являются функцио-
функционалами.
Мы можем, исходя из B0) и B1), формулировать вариаци-
вариационные задачи динамики орбитального самолета, аналогичные
задачам в случае ньютоновой аэродинамики.
Пользуясь теоремой о взаимности решений (одинаковости
экстремалей) вариационных изопериметрических задач, целесо-
целесообразно ввести вспомогательную функцию F, для которой имеет
место необходимое условие экстремума в форме уравнения Эй-
Эйлера.
Умножая подинтегральную функцию B0) на Ки а подинте-
гральную функцию B1) на Х2, можно F записать в виде:
где %i и Хг суть постоянные множители Лагранжа.
Необходимое условие экстремума будет:
А. Е- _ EL — о
dv df df ~
Вычисления дают нам:
BXivVr + 3X2v2Vr) (Av* + Bf2^2) —
_d_ j)?__ — VT (XjV2 + K2v3) [AAv3 + 2B$*ff + 2Bf
dv ' df ~ (Av^ + Bf2^I
dF _ (Х^ + Х2у3)(,Ау* + ВЩ2)
df (Av*
242
Так как
{Avi + Д/2^) ф О,
то условие B3) после очевидных сокращений можно записать
в виде:
А-а* [К (v + 2Vr) +12 (v* -+- vVr)\ =
( , - *^)] . B4)
Учитывая, что ip =^ • j", мы получим следующее алге-
v\
браическое уравнение для функции f:
B5)
Пользуясь B5), легко написать уравнения экстремалей для
следующих вариационных задач динамики орбитального само-
самолета:
а) Определить закон изменения массы орбитального само-
самолета так, чтобы активный участок полета по орбите был макси-
максимальным L = Lmax; на время полета никаких ограничений не на-
накладывается. В этом случае ki = 0, K2 из уравнения экстремали
выпадает, и мы получим из B5) следующее уравнение:
Г А_ v> Г
I/ R ' / «2\ I/
f — i / ~r • i 7*v' i / : гт7гъг~ '• B6)
Так как при v = v0 (в точке выхода самолета на круговую орби-
ТУ) f—^г то из B6) легко находим уравнение для определения
оптимальной скорости выхода, а именно:
rl—I
/
(vO+Vr)
~\ A~ kpSrf у b '
B7)
При Vi—> оо (случай горизонтального полета над плоской
емлей) из B7) следует хорошо известное решение Гиббса
16* 243
(ранее полученное в СССР Б. И. Рабиновичем)
Ь) Определить закон изменения массы орбитального само-
самолета f=f(v) так, чтобы продолжительность полета при работаю-
работающем двигателе и данном запасе топлива была максимальной
(Г = Гтах); на дальность полета ограничений не накладывается.
В этом случае Я2 = 0, Xi из уравнения экстремали выпадает, и мы
из B5) получаем:
— ГА. v* Г
B9)
Оптимальная начальная скорость будет определяться из
уравнения:
C0)
v2 Г (v + 2V )
1 «!\" 1/ 4t/2yr
1 ? Г t>04-2^r+ , „
V Л) Г vl-vo
При Ui—»• oo из B9) следует весьма простое соотношение, ко-
которое мы исследовали в ряде наших работ. Его можно, напри-
например, записать в виде: f=— (см. § 5 этой главы).
V.
с) Определить закон изменения массы орбитального само-
самолета f=f(v) так, чтобы активный участок полета был макси-
максимальным (L = Lmax) при фиксированном времени полета Т — Та.
Не нарушая общности решения, можно в этом случае положить
Я2=1, и уравнение экстремали изопериметрической задачи будет:
г- .Га
I —1 / ~R
/1 у*
Если Xi будет уменьшаться, стремясь к нулю (режимы, близ-
близкие к режиму максимальной дальности), тогда C1) переходит
в B6), т. е. в уравнение экстремали, реализующей максимум
дальности полета без ограничений на время полета.
* См.: Hibbs A. R., Optimum Burning Programm for Horizontal Flight,
Journ. of the Americ. Rock. Society, № 4, 1952.
244
d) Определить экстремальное время полета (T=TextT) при
фиксированном значении дальности полета и заданном запасе
топлива. В этом случае, не нарушая общности решения, можно
положить Я,1=1, и тогда из B5) следует:
Г~А v2
Г А «'
У в (-¦?
У V(v + 2Vr) + \2(v* + vVr)
Если %2-*0, то из C2) получим B9), т. е. уравнение экстре-
экстремали, реализующей максимальную продолжительность полета
при заданном запасе топлива. Из уравнений C1) и C2) ясно
видна взаимность этих двух изопериметрических задач.
3. Приближенный метод исследования опти-
оптимального режима, обеспечивающего максималь-
максимальную продолжительность полета по орбите. При
движении орбитального самолета по круговой орбите радиуса
Ri = R + H в любой момент движения подъемная сила уравнове-
уравновешивается разностью сил тяжести и центробежной. Для наблю-
наблюдателя (летчика), находящегося в кабине орбитального само-
самолета, центробежная сила будет уменьшать силу тяготения. Учи-
Учитывая, что относительные запасы топлива в ряде обсуждаемых
конструкций орбитальных самолетов сравнительно невелики, а
следовательно, будут небольшими и изменения скорости полета
по орбите, можно осреднить разность ускорений, обусловленных
силой тяжести и центробежной силой. Мы можем формулу E)
представить в виде:
\kpS )
Полагая
сред \ /оо\
~j=?a> \дд)
будем иметь:
a()
а — \ kpS ) v •
Уравнение C) после несложных преобразований можно напи-
написать в виде:
-(f + fVr) .v.^- = Av3+Bf>\ C5)
где
2Ма' °~ /('/•. (pS)'A •
245
Пользуясь уравнением C5), продолжительность полета
можно представить в виде следующего интеграла:
Как видно из C6), определение максимальной продолжи-
продолжительности полета орбитального самолета при сделанном осред-
осреднении C3) сводится к простейшей задаче вариационного ис-
исчисления. Полагая
F — M+1ZA1L
можно необходимое условие экстремума интеграла C6) запи-
записать в виде:
Так как
d dF dF __n
-v (AV* + Bfb) + j Bfl> (vf + vVrj')
v; (av* + Bf1*) - wT (sav2 +1 Bfi'r
dv df {Av3 + Bf^J
то необходимое условие экстремума будет:
Av*(v + 2Vr) = Bf4±v + Vr),
или
C7)
Так как при v = v0 f=\, то необходимая начальная ско-
скорость будет определяться по формуле:
C8)
р
v3Q В — b \2MogJ
Максимальное время полета и пройденный за это время
путь будут определяться следующими соотношениями (см.
246
формулу C6) и соотношение dL = vdt):
Т™ = Ж Ы J ~V^ • d<0> C9)
^0
D0)
Учитывая B), находим.
1 [2A\V,_l 2Ч>
Выполняя интегрирование, получим следующие расчетные
формулы:
^[^ D2)
Ц К - 4
r (Bo - vE)]. D3)
Из формул C7) и C8) следует, что закон изменения массы
можно записать в виде / = —> тогда vE — v0 VfE, где fE есть
относительная масса орбитального самолета без топлива. Зная
MF
fE= -гг-> можно D2) и D3) записать в еще более удобном
для расчетов виде:
A - VJ7) + Vr In jj] > D4)
D5)
Для иллюстрации рассмотрим следующий пример. Пусть
/я = 0,91 (т. е. орбитальный самолет имеет 9% топлива), Kmax =
= 2,65, Vr = 4000 м/сек, ио = 77ОО M/ceK,vE = vQ VTe^ 7346
среднюю скорость определим по формуле:
^сред = -J (V0 + ¦Z'fi) = 7523
= 9,6(l -|^)~0,
Таким образом,
Гтах = -|^-[7700 A — 0,954)+ 8000 In A,048)] ^49 мин 12 сек.
247
За это время орбитальный самолет пролетит расстояние
?^4[-Щ^A — 0,91) + 8000 -7700A — 0,954)] ^22 000 км.
Формулы D4) и D5) позволяют весьма просто в рамках
линейной теории определить влияние малых изменений Ктах, ga>
v0, Vr, /в на Ттах и L (при Т = Ттах).
Применение формул D4) и D5) в случае больших относи-
относительных запасов топлива дает значительные ошибки, и в таких
задачах целесообразно исходить из точных формул A3) и.(8).
Зная, что f = ~, а зависимость текущего времени полета
от скорости можно записать в виде:
%] D6)
мы можем найти отношение начальной тяги к начальному весу
орбитального самолета. В самом деле
¦df
_ Фо
Очевидно,
Дифференцируя D6) по времени, получим:
откуда
(~ ИГ) о ~ ~
Таким образом,
В рассмотренном ранее примере -^-=0,96, а ~ = 0,0676,
и, следовательно,
0,0676
ТЬ= 2,65-1,96
Если, например, начальный вес орбитального самолета на по-
поверхности Земли составлял 10 000 кГ, то на орбите при опти-
оптимальном движении реактивный двигатель должен развить на-
начальную тягу 130 кГ.
РАЗДЕЛ ПЯТЫЙ
ВВЕДЕНИЕ В АЭРОГИДРОМЕХАНИКУ
«Легче узнать законы движения светил
небесных, чем познать законы движения
воды в ручейке».
Г. Галилей.
§ 1. Основные понятия
и определения
В предыдущих разделах курса мы изучали главным образом
законы механического движения таких систем материальных
точек, для которых расстояния между любыми двумя точками
оставались постоянными во все время движения. При изучении
движения произвольных механических систем нам приходилось
ограничиваться системами с конечным числом точек.
В настоящем разделе мы рассмотрим основные методы изу-
изучения движения жидких и газообразных тел, т. е. изменяемых
механических систем с бесконечно большим числом частиц. Раз-
Раздел теоретической механики, в котором изучаются законы меха-
механического движения и равновесия жидкостей и газов, называет-
называется аэрогидромеханикой.
При изучении законов движения жидкостей и газов следует
иметь в виду, что капельные жидкости (например, вода, бензин)
отличаются от газообразных тел только относительно малой
сжимаемостью при значительных изменениях внешнего давления.
Жидкости практически несжимаемы. Газы могут значительно
изменять объем даже при сравнительно небольших изменениях
внешнего давления. Имеется большое число случаев механиче-
механических движений газов, для которых изменение давления очень
мало; для таких случаев влиянием сжимаемости на законы дви-
движения газов можно пренебречь.
Классы движения жидкостей и газов при пренебрежении сжи-
сжимаемостью можно охватить единой теорией, причем конкретные
жидкости и газы буд^т отличаться друг от друга в полученных
249
достаточно общих уравнениях движения только постоянными ко-
коэффициентами, зависящими от физических свойств соответствую-
соответствующих жидкостей или газов.
В дальнейшем изложении мы будем пользоваться термином
«жидкость» в широком смысле слова, имея в виду и газы в тех
случаях механических движений, когда влияние сжимаемости
газа на формы движения несущественно.
Основным признаком жидкости является малое сцепление
между ее частицами. Жидкости не оказывают сопротивления
медленному изменению их формы (деформации), оказывая со-
сопротивление только сжимающим силам. Все жидкости, с кото-
которыми приходится иметь дело в технике, разделяются на жидкости
с большой вязкостью и жидкости маловязкие. Переход от вязких
жидкостей к твердым телам происходит постепенно, и часто мы
не можем сказать, к какой группе отнести рассматриваемое тело.
Так, например, смола при обычной температуре течет, как жид-
жидкость, хотя мы и говорим о «куске смолы» как о твердом теле.
К жидкостям с большой вязкостью мы относим малоподвижные
жидкости, оказывающие большое сопротивление движению в них
твердых тел. Примером таких жидкостей могут служить неко-
некоторые сорта смазочных масел, мазут, глицерин, патока. К мало-
маловязким жидкостям относятся вода, бензин, спирт. Сопротивление,
которое оказывают жидкие тела изменению их формы, зависит
от скорости деформации. При одной и той же величине скорости
деформации сопротивление, оказываемое сильно вязкими жидко-
жидкостями, больше, чем у маловязких жидкостей.
Выясним теперь, какими методами можно будет описать дви-
движения несжимаемых жидкостей. Введем сначала определение
плотности жидкости. Выделим некоторую часть пространства,
заполненного жидкостью. Пусть масса частиц жидкости, запол-
заполняющих данный объем т, равна М; отношение
М ,
называют средней плотностью жидкости в рассматриваемом
объеме.
Если жидкость неоднородна, то ее плотность в различных
точках объема т будет различной. Выделим достаточно малый
объем Ат, охватывающий некоторую точку А; пусть масса вы-
выделенного объема равна ДМ; истинной плотностью в данной
точке А называют предел отношения массы элементарного
объема к величине объема при условии, что Дт стремится к
нулю, т. е.
..ДМ ,1Ч
р=Ит-т—. 1)
Дт->0 Лт
Для того чтобы определение A) имело смысл, необходимо
сделать предположение о том, что жидкость заполняет рассмат-
250
риваемый объем непрерывно, т. е. представляет собой сплошную
среду. Это допущение не противоречит физическим представле-
представлениям о молекулярной структуре жидких тел, так как средние
расстояния между молекулами ничтожно малы по сравнению с
размером тех областей, в которых мы будем рассматривать дви-
движение жидкости. Достаточно указать, что кубик воздуха с реб-
ребром в 0,001 мм содержит в нормальных условиях около
2,7 • 107 молекул *.
Плотность жидкости сравнивают обычно с плотностью воды
при температуре в 4°С. Плотность воды при 4° С условно при-
Фиг 50
нимают за единицу. Вообще плотность жидкостей зависит от
температуры и давления, но влияние этих факторов незначи-
незначительно. Так, относительная плотность воды при 0°С и нормаль-
нормальном атмосферном давлении равна 0,99987, а при 25° С равна
0,99712. В дальнейшем мы будем рассматривать жидкости с по-
постоянной плотностью.
Рассмотрим скольжение одного слоя жидкости по другому.
Для того чтобы поддержать это скольжение, нужно, как пока-
показывает опыт, преодолевать некоторую силу сопротивления, ве-
величина которой зависит от физических свойств жидкости. Свой-
Свойство жидкости оказывать сопротивление относительному сколь-
скольжению одного слоя по другому называют вязкостью. Если силу
трения между слоями на единицу площади обозначить через
ъХу, то (гипотеза Ньютона)
ц называют абсолютным коэффициентом вязкости, -г— характе-
характеризует изменение скорости частиц жидкости по нормали к рас-
рассматриваемому слою (ss) (фиг. 50). Величина -т— называется
градиентом скорости по нормали к слою. Абсолютный коэффи-
коэффициент вязкости ц мало изменяется с изменением давления. Для
маловязких жидкостей, как, например, вода, спирт, бензин,
* Более точные данные содержатся в таблице 3 на стр 381.
251
абсолютный коэффициент вязкости очень мал. Так, в физической
системе единиц (системе CGS) коэффициент вязкости \и
для воды при 20° С равен 0,01
для бензина при 20°С равен 0,006
см ¦ сек
г
см ¦ сек
для воздуха при 20° С и атмосферном давлении
760 мм рт. ст. равен 0,00018 гсек .
Для большей ясности и последовательности изложения мы
рассмотрим сначала наиболее простые случаи движения жидко-
жидкостей, когда при относительном скольжении одного слоя жидко-
жидкости по другому не возникает сил трения, т. е. [х = 0.
Жидкости, для которых абсолютный коэффициент вязкости
ц = 0, называются идеальными. При движении идеальной жид-
жидкости могут развиваться только нормальные давления, местные
силы трения хху обращаются в нуль.
§ 2. Классификация сил, действующих на жидкость
Выделим в пространстве, заполненном идеальной несжимае-
несжимаемой жидкостью, некоторый произвольный объем т с ограничи-
ограничивающей его поверхностью а. Силы, действующие на выделенный
объем жидкости, можно разделить на два класса:
1) Силы объемные, или массовые, т. е. такие, которые дей-
действуют на каждый элемент объема или массы жидкости. В боль-
большинстве случаев массовыми силами являются веса отдельных
частиц жидкости. Мы будем обозначать силу, отнесенную к еди-
единице массы, через F; тогда сила, действующая на массу в объ-
объеме dx, будет равна Fpdx, где р — плотность жидкости.
2) Силы поверхностные, т. е. такие, которые действуют на
поверхность о выделенного объема жидкости и пропорциональ-
пропорциональны величине поверхности. Эти силы направлены по нормалям к
поверхности а. Выделим на поверхности о некоторую элементар-
элементарную площадку Да, охватывающую точку В; пусть равнодейст-
равнодействующая поверхностных сил, действующих на данную площадку,
равна ДР;
lim -?- = /> B0
называют гидродинамическим давлением в точке В. Следова-
Следовательно, гидродинамическое давление представляет собой поверх-
поверхностную силу, отнесенную к единице площади.
Докажем, что гидродинамическое давление в идеальной жид-
жидкости не зависит от ориентации площадки До, содержащей точ-
точку В. Для доказательства выделим в жидкости элементарный
252
объем в форме тетраэдра, ребра которого ОА, ОС и OD совпа-
совпадают с осями прямоугольной системы осей Oxyz. Пусть ориен-
ориентация наклонной грани ACD те-
тетраэдра задается единичным век-
тором внешней нормали п°; ко-
косинусы углов этой нормали с
осями координат обозначим через
а, р, Y- Площадь AACD обозна-
Ла
чим
Силы гидродинамического да-
давления, перпендикулярные к гра-
граням тетраэдра OACD, обозна-
обозначим через рх, ру, pz и р
(фиг. 51).
Сила рх есть гидродинамиче-
гидродинамическое давление на единицу площа-
площади грани OCD. Полная сила давления на эту грань равна
У
Фиг. 51
Полная сила давления на грань OAD равна -r py Az Ax; на
грань ОЛС—(-^ pzAxAy\ и на грань ACD — (-^рАоу. Массо-
Массовые силы, действующие на выделенный объем жидкости, рассма-
рассматривать не будем, так как при переходе к пределу при Ах—*0,
Ay—*0, Az—*0 величины массовых сил будут малыми более вы-
высокого порядка (третьего) и никакого влияния на результат не
окажут. Имея в виду этот переход к пределу, не будем также
вычислять подробно силы инерции, пропорциональные массе
тетраэдра.
На основании принципа Даламбера система сил поверхност-
поверхностных, массовых и инерционных, приложенных к рассматривае-
рассматриваемому тетраэдру, будет уравновешенной системой сил для любо-
любого момента времени, т. е.
•i px
7 ^ Az
+ члены третьего порядка малости = 0. C)
Проектируя C) на оси координат, будем иметь:
-j px Ay Az — -^ р Ааа + ^ = 0,
jPyAzAx — ^/?Лор + 82 = 0, D)
~ р2 Ах Ау — ^ р Аоу + е3 = 0,
где через ei, ег, е3 обозначены члены третьего порядка малости.
253
Из фигуры 51 ясно, что Аоа = Ау Az, Дсф = Д;гДл;, Аоу — АхАу*
Подставляя эти значения в уравнения D), деля первое урав-
уравнение на Ay Az, второе — на Az Ах, третье — на Ах Ау и пере-
переходя затем к пределу, получим:
т. е. px=Py=Pz=p, что показывает независимость гидродина-
гидродинамического давления в точке О от ориентации площадки.
§ 3. Деформация частицы жидкости
Возьмем в пространстве, заполненном жидкостью, некоторую
точку О (фиг. 52). Пусть ее координаты по отношению к непо-
неподвижной системе Ofer\Z, бу-
Ц. дут go, Ло, &)• Начало подвиж-
г* ^-""г^^. ных осей Ox, Oy, Oz, парал-
' лельных осям неподвижной
системы, поместим в точке О
и исследуем картину рас-
распределения скоростей ча-
частиц жидкости в данный мо-
момент времени в достаточно
малой области, окружающей
точку О. Вычислим скорость
точки М с координатами х,
у, z (величины х, у, z счи-
считаем малыми настолько,
что квадратами и произве-
произведениями их можно прене-
пренебречь). Предполагая, что в
рассматриваемой области компоненты скорости являются регу-
регулярными функциями точки, будем иметь:
ди . ди ^^
Фиг. 52
ди
члены высшего порядка малости,
dv
дх
~ х + -^ у
дг
-s—z + члены высшего порядка малости,
dw
члены высшего порядка малости.
254
Ограничиваясь рассмотрением малой области около точки О,
можно пренебречь членами высшего порядка малости; тогда для
проекций скорости точки М получим:
du
dv
~d~x
dw
x
du
dv
dw
"dy
du
dv_ ,
dw
~d~F
E)
Первые слагаемые в формулах E) дают скорость подвиж-
подвижного начала координат; если все дополнительные слагаемые
обращаются в нуль, то частица жидкости движется поступа-
поступательно, как абсолютно твердое тело, со скоростью и0, проекции
которой равны «о, v0, w0. Выясним физическое значение допол-
дополнительных слагаемых, которые удобно записать в несколько
ином виде. Введем обозначения:
dv dw
е =*L
хх дх
dw
^=?Ь7 + Х7 • ezx=-<
дг
1 / dw , ди
2 \ dx
= I(*L_u4^:
I dw dv \ 1 / ди dw \ 1 / dv
\~ду IF)' 0>^ — 1,г ~ЫГ)' ф*~~~2\дх~~
du
Непосредственной проверкой можно установить справедли-
справедливость следующих тождеств:
du , du , ди
dv
dx
dw
Х
dv
dy
dw
Z = вухХ
dw
вгуУ
F)
Тогда формулы E) примут вид:
и — и0 + еххх + ехуу + exzz
ezy
ezzz + axy
G)
Слагаемые формул G), содержащие проекции со, предста-
представляют собой проекции на оси координат вектора:
v1=&X*. (8)
Если мы допустим, что рассматриваемая частица жидкости
вращается как твердое тело вокруг мгновенной оси с угловой
255
скоростью:
¦*¦ ¦?¦ "^ ¦*" 1 "*" 1 "*"
zk = -g- (V X v) = 21 rot -у,
то распределение скоростей будет определяться формулой (8).
Вектор со называется в гидродинамике вектором вихря.
Таким образом,
где vQ — скорость поступательного движения частицы жидкости
как твердого тела, Vi— скорость вращения этой частицы как
-»¦ ->
твердого тела с мгновенной угловой скоростью со и и2 — скорость
деформации частицы жидкости, причем проекции скорости де-
деформации на оси координат равны:
(9)
= еххх + ехуу + exzz
= euxx + еууу + eyzz
= ezxx -f- ezyy + ezzz
Для того чтобы более наглядно представить скорость дефор-
деформации частицы жидкости, допустим, что еххФ0 и, для опреде-
определенности, ежх>0, а все остальные коэффициенты еуу, eZ7, eyz,
?zx, exy равны нулю.
Тогда из формулы (9) следует:
v2x = exxx, v2y ~ 0, viz = 0.
В этом случае отдельные точки объема жидкости при ехх>0
будут получать скорости, параллельные оси Ох, причем скоро-
скорости точек, лежащих в плоскости х = const, будут одинаковы. На
фигуре 53 дана картина распределения скоростей в этом част-
частном случае. Следовательно, ехх характеризует скорость расши-
расширения (или сжатия, если еосх<0) частицы жидкости в направле-
направлении оси Ох. Аналогичным образом можно показать, что еуу, ezz
характеризуют скорости расширения (сжатия) вдоль осей Оу и
Oz соответственно. Предположим далее, что еху>0, а все осталь-
остальные коэффициенты ехх, еуу, ezz, eyz, exz равны нулю. Тогда
V2X = exyy, V2y = exyx, v22 = 0.
Точки, лежащие на оси Ох (у=0), получают скорости, па-
параллельные оси Оу, тем большие, чем дальше рассматриваемая
точка находится от оси Оу (фиг., 54). Точки, лежащие на оси
Оу (х=0), получают скорости, параллельные оси Ох. Следова-
Следовательно, коэффициент еху характеризует скорость скошения пря-
прямого угла хОу, или скорость сдвига. Аналогично коэффициенты
256
eyz, ezx характеризуют скорости скошения прямых углов в пло-
плоскостях yOz и zOx. Легко заметить, что проекции скорости де-
деформации v2 являются частными производными от одной и той
н
1.1 *-'«
Фиг. 53
Фиг. 54
же функции Ф (х, у, z), определяемой выражением:
2Ф(л:, г/, 2:) = ^^л:24-^г/У2 + е
В самом деле,
V2x = еххх + ехуу
дФ
eyyy + eyzZ = -
A0)
Функция, частные производные от которой по координатам
равны проекциям скорости на соответствующие оси, называется
потенциальной функцией или потенциалом скорости.
Из предыдущего рассмотрения следует, что
м = «0-f-(q^z-—г -л '
W =
— ФуХ) -f- -gj
(П)
Формулы A1) представляют собой математическое выраже-
выражение теоремы Гельмгольца о поле скоростей жидкой частицы,
а именно: движение достаточно малой частицы жидкости в
окрестности некоторой точки О можно рассматривать как сум-
сумму трех движений: поступательного движения частицы как
17 А. А. Космодемьянский
257
абсолютно твердого тела со скоростью v0, вращательного дви-
движения частицы как абсолютно твердого тела с мгновенной угло-
угловой скоростью со = -к- rot v и деформационного движения части-
частицы с потенциалом скоростей Ф.
В векторной форме формулы A1) можно представить в виде:
в = о0+о)Х г -bgrad<J>,
или
^ = Щ 4- (д rot г>) X г-+- grad Ф.
Для того чтобы более наглядно представить чисто деформа-
деформационное движение, допустим, что скорости поступательного и
вращательного движений частицы жидкости равны нулю. Най-
Найдем при этом предположении, на какой поверхности будут нахо-
находиться точки («молекулы») частицы жидкости по истечении вре-
времени dt, если в начальный момент они находились на сфере ра-
радиуса R. Пусть координаты какой-либо точки на сфере будут х,
у, z; тогда через промежуток времени dt координаты этой точки
будут равны:
хх — х-\- v2x dt,
A2)
z1 = z + v2z dt,
или
xi = x A 4- exx dt) 4- exyy dt -\- exzz dt
У i = eyxx dt 4- у A4- eyy dt)-\- eyzz dt
zx = ezxx dt 4- ezyy dt 4- z A 4- ezz dt)
Так как хь yu zx отличаются от х, у, z на величины бесконеч-
бесконечно малые первого порядка, то можно считать с точностью до
бесконечно малых второго порядка, что Xidt — xdt, yYdt=ydt,
zxdt=zdt, и записать формулы A2) в следующем виде:
хх — х 4- ехххх dt 4- ехуух dt +exzz1 dt
Ух = у + еуххх dt 4- еууух dt 4- eyzzx dt
гх = z 4- etxxi dt 4- ezyyx dt 4- ezzzx dt
откуда
x = A — exx dt) xx — exyyx dt — exzzx dt
у = — eyxxx dt 4- A — eyy dt) yx — eyzzxdt
z = — ezxxx dt — ezyyx dt + (\—ezz dt) zx
Из формул A4) ясно видно, что точки, лежащие на поверх-
поверхности сферы x2 + y2 + z2 — R2, переместятся после деформации
258
A3)
(И)
на поверхность эллипсоида, уравнение которого с точностью до
малых второго порядка имеет вид:
- 2ехх dt) х\ + A - 2ечу dt)y\ + {\- 2ezz dz) z\ -
= R2. A5)
Эллипсоид A5) называют эллипсоидом деформации, а глав-
главные оси этого эллипсоида — главными осями деформации.
§ 4. Уравнения движения идеальной жидкости в форме Эйлера
Изучение движения непрерывной жидкой среды можно про-
проводить двумя способами. Оба способа были развиты Л Эйле-
Эйлером. Объектом изучения в первом способе Эйлера является бес-
бесконечно малая частица жидкости, рассматриваемая как мате-
материальная точка Зная траектории, скорости и ускорения раз-
различных частиц жидкости, можно составить представление о
движении конечных объемов жидкости. Математически задачу
можно поставить следующим образом. Пусть в некоторый мо-
момент времени t=t0 положение материальных точек, непрерывно
заполняющих некоторую часть пространства, определяется их
декартовыми координатами а, Ь, с. Задание определенных зна-
значений а, Ь, с выделяет из множества точек какую-либо одну.
Текущие декартовы координаты выбранной точки в момент вре-
времени t>t0 будут функциями а, Ь, с и времени t, т. е.
х = х(а, Ь, с, t)
у=у(а, b^c, t) . A6)
z = z(a, b, с, t)
Проекции скоростей и ускорений этой точки будут определяться
формулами:
_ дх _дЬс_
u — ~dF' Wx ~~ dt2 '
ду д2у
v ~~~dF ' Wy~~~dF '
dz d2z
Следовательно, в первом способе Эйлера задача изучения
движения жидкости сводится к составлению уравнений A6)
Второй способ изучения движения был также разработан
Эйлером. Основная идея этого способа заключается в том, что
в фиксированной геометрической точке пространства изучаются
скорости и ускорения различных частиц жидкости, попадающих
в данную точку с течением времени. Математически задачу мо-
можно сформулировать так: выберем в пространстве, заполненном
17* 259
жидкостью, определенную геометрическую точку М с коор-
координатами х, у, z В момент t = t0 в эту точку приходит частица
жидкости, имеющая определенную скорость и, проекции которой
на оси координат пусть равны и, v, w. Если время t задано, то
вектор скорости v определен в каждой точке пространства, за-
заполненного жидкостью. Следовательно, и, v, w являются функ-
функциями х, у, z.
Если фиксировать внимание на выбранной геометрической
точке М (x,y,z), то легко понять, что с течением времени через
точку М будут проходить различные физические частицы, при-
причем скорости этих частиц будут, вообще говоря, изменяться с
течением времени. Таким образом, проекции скорости и, v, w
в данной точке зависят от четырех независимых переменных х,
у, z и t, т. е.
а = и{х, у, z, t) ]
v = v(x, у, z, t) \. A7)
w = w(x, у, z, t) )
Для того чтобы найти проекции ускорения физической ча-
частицы, которая в момент времени / проходит через точку М,
нужно проследить за движением этой физической частицы в те-
течение некоторого малого промежутка времени dt. Тогда коор-
координаты х, у, z будут текущими координатами частицы, и мы по-
получим:
du dv dw
ИЛИ
ди . du du . du
x dt ' dx *~ dj/ dz
dv . dv , dv , dv i
Wy --= —3T- + II -^r -\- V -д77 -)- W -^- }
За»
~dl
__ dw . dw , dw . dw
так как
dx dy dz
~dJ~U' ~dT~V' ~d7~~W'
В дальнешем при изучении движения жидкости мы будем
придерживаться только второго способа Эйлера.
Составим теперь дифференциальные уравнения движения не-
несжимаемой идеальной жидкости. Выделим в движущейся жид-
жидкости некоторый малый объем в форме параллелепипеда, ребра
которого параллельны неподвижным осям координат Ох, Оу и
Oz. Пусть длины ребер равны Дх, At/, Az, а центр параллелепи-
параллелепипеда имеет координаты х, у, z (фиг. 55). Давление в центре
260
параллелепипеда обозначим через р(х, у, z, t). На выделенный
объем жидкости будут действовать поверхностные силы, направ-
направленные по нормалям к соответствующим плоскостям, и массо-
вая сила, равная pFAxAyAz.
Уравнения движения выделенного объема жидкости напи-
напишем на основании 2-го закона Ньютона. В проекциях на оси ко-
координат будем иметь:
z^ = pFxAxAyAz +
+проекции поверхностных сил на ось Ох
р Ал: Aw Az -?- = pFy Ax Ay Az -\-
* ^ . A9)
-\- проекции поверхностных сил на ось Оу
р Ах Ay Az ~^т- = pFz Ax Ay Az -\-
+проекции поверхностных сил нз ось Oz
Определим величины проекций поверхностных сил на оси ко-
координат. На ось Ох будут давать проекции только силы давле-
давления на площадки, параллель- г.
ные плоскости yOz, т. е. силы,
действующие на площадки
ABCD и AiBiCiDi (фиг. 55).
Если давление в центре
куба равно р (х, у, z, t), то
давление в середине площад-
площадки ABCD будет равно:
~, у, z, t). A9')
Разлагая A9' )в ряд Тей-
Тейлора и удерживая слагаемые
первого порядка малости, мы
получим:
У, z, t) =
Давление в центре площадки
будет равно:
— -^Т> У' z< *) =
Считая давления на площадки ABCD и A^B^CJ)i распреде-
распределенными равномерно и равными давлениям в серединах этих
площадок, мы получим следующее выражение для проекции
261
поверхностных сил на ось Ох:
(x-4r, у, z, t) — p[x + ^-t у, 2,
= — -Л- Ах At/ Az + члены высшего порядка малости.
Аналогично найдем проекции поверхностных сил на оси Оу
и Oz:
\р[х, У — ^г> z> *)—р(х,
==—^р-АлгЛуЛг + члены высшего порядка малости,
\р(х, у, z — -?-t t) — р\х, у, Z-+--4-, А\АхАу =
= —-?- Ах At/ Аг-|-члены высшего порядка малости.
Подставляя вычисленные значения проекций поверхностных
сил в уравнения A9), получим:
им г
+члены высшего порядка малости
~ = 9F ^
-f-члены высшего порядка малости
р Ал- At/ Аг— = pFz Ал; At/ Az -^ Ах Ay Az-\-
+члены высшего порядка малости
Разделив каждое из уравнений B0) на AxAyAz и переходя к
пределу при А*—*•(), Ау —>О, Az—>О, мы получим:
dt
dv
dw
dp
ду
dp
7
B1)
Заменяя производные от проекций по времени их выраже-
выражениями по формулам A8) и деля на плотность р, окончательно
получим следующие дифференциальные уравнения движения
262
идеальной жидкости:
да . ди. . да . ди р 1 др
dv . dv , dv . du с- 1_ d/> ,„^
d? Л* dy "^ дг " р ду * ^ '
dw . dw . dw , dw *-. I dp
dt dx dy dz г р dz
Уравнения B2) называются гидродинамическими уравнения-
уравнениями в форме Эйлера. Уравнения Эйлера устанавливают связь ме-
между четырьмя неизвестными функциями: и, v, w и р. Так как из
трех уравнений B2) определить четыре неизвестных функции
нельзя, то необходимо вывести еще одно соотношение, связы-
связывающее искомые функции. Это соотношение можно получить из
условия неразрывности жидкости при ее движении, т. е. невоз-
невозможности образования в движущейся жидкости пустот (разры-
(разрывов сплошности). Рассмотрим опять параллелепипед с ребрами
Ах, Ay, Az и подсчитаем, какое количество жидкости втекает
в этот параллелепипед за время А^ и какое количество выте-
вытекает из параллелепипеда за тот же промежуток времени. Так
как мы рассматриваем несжимаемую жидкость, то очевидно,
что количество вытекающей жидкости должно быть равно ко-
количеству втекающей жидкости. Пусть в центре параллелепи-
параллелепипеда проекции вектора скорости будут и, v, w. Подсчитаем ко-
количество жидкости, втекающей через площадку /41BiC1Di
(фиг. 55). Проекция скорости на ось Ох в центре этой площадки
равна:
/ /S.x Л / л\ &а Л* i
иIх 2~> "• zi *1 — и(х, у, z, I) 5х~~2—г •••
Количество жидкости, втекающей через площадку
за время Д^, равно:
ри(*--^, у, z,
Количество жидкости, вытекающей через площадку ABCD
за время At, равно:
pM(x + 4f , у, z,
Произведя аналогичные вычисления для других площадок,
мы получим, что в рассматриваемый параллелепипед за проме-
промежуток времени А^ втекает количество (масса) жидкости, равное:
263
а вытекает за тот же промежуток времени At количество жид-
жидкости, равное:
+(•+?¦?)***]+ •¦•
Из условия несжимаемости и неразрывности движущейся
жидкости следует, что количество втекающей жидкости должно
быть равно количеству вытекающей, т. е.
или
члены высших порядков малости = О
Приводя подобные члены, деля на AxAyAzAt и переходя к
пределу, получим:
дх ^ ду ^ дг ~~ и< W
Уравнение B3) называется уравнением неразрывности и
представляет собой четвертое соотношение между искомыми
функциями и, v, w, р.
Мы можем теперь сформулировать основную задачу гидро-
гидродинамики в следующем виде: найти в конечном виде общие
выражения для гидродинамического давления р и проекций ско-
скорости и, v, w в функции координат х, у, z и времени t, удовлетво-
удовлетворяющие четырем дифференциальным уравнениям в частных про-
производных B2) и B3). Искомые функции и, v, w и р, кроме того,
должны удовлетворять граничным и начальным условиям. Гра-
Граничные условия, как показывает само название, дают нам зна-
значения проекций скоростей и гидродинамического давления на
границах рассматриваемого течения жидкости. Решение кон-
конкретной гидродинамической задачи должно быть таким, чтобы
граничные условия, определяемые физической сущностью зада-
задачи, удовлетворялись в любой момент времени. Начальные усло-
условия определяют значение искомых функций и, v, w для некото-
некоторого заданного момента времени t = ta во всех точках простран-
264
ства, занятого жидкостью, т. е.
и(х, у, z, to) = fi,
v(x, у, z, to) — h,
w(x, у, z, to) = fit
где fi, f2, /з — известные функции координат х, у, z.
В такой общей постановке задача интегрирования уравнений
B2) и B3) очень трудна. Мы рассмотрим в следующих парагра-
параграфах только некоторые, наиболее простые задачи, где процесс
интегрирования выполняется сравнительно легко.
§ 5. Установившееся движение жидкости. Уравнения Громеко.
Интеграл Бернулли
При изучении движения жидкости методом Эйлера мы пред-
предполагали, что гидродинамическое давление р и проекции ско-
скорости и, v, w зависят от координат рассматриваемой точки про-
пространства и времени t. Каждой точке пространства, заполненно-
заполненного движущейся жидкостью, в каждый данный момент времени t
соответствует вполне определенный вектор скорости той физи-
физической частицы, которая находится в рассматриваемый момент
времени в данной точке. Совокупность векторов скорости точек
данной части пространства в любой момент времени t образует
векторное поле скоростей. Совокупность гидродинамических дав-
давлений р образует для заданной части пространства некоторое
скалярное поле давлений. Векторное поле скоростей и скаляр-
скалярное поле гидродинамических давлений изменяются с течением
времени.
Движение жидкости с переменными полями скоростей и дав-
давлений называется неустановившимся или нестационарным.
Если поле скоростей и поле давлений не изменяются с тече-
течением времени, то движение жидкости называется установив-
установившимся или стационарным. Для стационарных движений
4=° ¦*=«••
da да . да , да
dv dv , dv , dv
dt dx ' dy dz
dw dw , dw , dw
¦W = u-dx- + v^y- + w-dF>
т. е. поле скоростей и поле давлений являются функциями толь-
только координат рассматриваемой точки пространства. Простейшим
примером стационарного движения жидкости является течение
265
в трубе или канале в том случае, если расход (количество про-
протекающей жидкости) сохраняется постоянным для любых рав-
равных промежутков времени.
Для наглядности представлений о различных формах тече-
течений жидкости полезно рассмотреть два семейства линий. Если
в нестационарном поле ско-
скоростей зафиксировать для
момента времени t = ti вели-
величины и направления векто-
векторов скоростей частиц жид-
жидкости, а затем провести кри-
кривые, касательные к которым
в каждой точке совпадают
с векторами скорости для
данного момента времени,
то мы получим семейство
линий тока. Линии тока
дают нам наглядное пред-
представление о направлении
скорости в каждой точке
пространства. Уравнение се-
семейства линий тока можно
получить из условия колли-
коллинеарности бесконечно мало-
Фиг. 56 го элемента дуги линии то-
тока и вектора скорости. В са-
самом деле, по определению dr = Kv, где dr— элемент дуги линии
тока, а К — некоторое число, откуда dx=Ku, dy=Xv, dz=Xw, или:
Уравнение траектории какой-либо частицы жидкости в мето-
методе Эйлера можно получить, если проследить за физической ча-
частицей в течение времени dt. Тогда уравнения
dx
dt
¦ U,
dy_
dt
= v,
dz
dt
¦¦ w
B5)
будут определять семейство траекторий частиц жидкости. Урав-
Уравнения B5) для фиксированного момента времени t — ti не отли-
отличаются от уравнений B4) для того же момента времени, т. е. в
момент времени t=ti траектория физической частицы касается
соответствующей кривой семейства линий тока в той точке про-
пространства, в которой в этот момент находится частица жидкости.
Если поле скоростей стационарно, то траектории частиц жидко-
жидкости совпадают с линиями тока. Возьмем в пространстве, запол-
заполненном движущейся жидкостью, некоторую замкнутую кривую о
(фиг. 56) и проведем через каждую точку этой кривой
266
линии тока. Семейство линий тока, проходящих через контур а,
выделит в пространстве трубку, которую мы будем называть
трубкой тока. Если течение стационарно, то трубка тока будет не-
неподвижной в пространстве. Так как касательные к любой линии
тока всюду имеют направление скоростей, то трубка тока ведет
себя так же, как трубка с жесткими стенками, внутри которой
течет жидкость. Если поперечное сечение трубки тока умень-
уменьшается, то скорости частиц жидкости увеличиваются, и наоборот.
Преобразуем теперь уравнения движения в форме Эйлера к
новому виду, более удобному для интегрирования при некоторых
частных предположениях. Введем в уравнения движения проек-
проекции вектора вихря со, равные:
f I I dw dv \ 1 / да dw
~~ ^ ~ 2 [ dx ду)'
Первое из уравнений Эйлера имеет вид:
ди ди . ди . ди с 1 dp
Прибавим и вычтем из левой части этого уравнения следую-
следующие слагаемые:
, I dv . dw\ I dv . dw\
1 \ dx ' dxj \ dx ' dx /
Тогда будем иметь:
да , ди , dv . dw I dv ди \ .
— P—llL
— Гх p dx •
Так как квадрат модуля скорости равен:
то
ди . dv , dw д Г 1 , , , , , 9Ч1 д
Следовательно, уравнение B6) можно записать в виде:
B7)
Произведя аналогичные преобразования в двух других урав-
уравнениях Эйлера, получим:
dt ^^fe UfB) — fu p ду ду\ 2 )'
dw o, f4 _ 1 dp д I V*
267
Уравнения B7) и B8) называются уравнениями гидроди-
гидродинамики в форме Громеко*. Так как мы рассматриваем не-
несжимаемую жидкость, то р = const и уравнения B7) и B8) удоб-
удобно записать в виде:
B9)
Проинтегрируем уравнения B9) при следующих допущениях:
а) Действующие массовые силы имеют потенциал, т. е.
p —dU. p —Ш- p —
x dx ' y dy ' z
dU
dz '
где U — силовая функция
б) Течение жидкости стационарно, т. е.
dt
dt
dt
При этих допущениях уравнения B9) можно записать в сле-
следующей форме:
C0)
Умножим первое из уравнений C0) на dx, второе на dyt
третье на dz и сложим. Тогда будем иметь:
dx dy dz
C1)
— 2
и v
С
или
d{U — jV2 —
C1')
где для сокращения записи положено:
dx dy dz
D— it v w
l n i
* И. С. Громеко A851—1889) — профессор Казанского
268
Пусть dx, dy, dz представляют собой проекции элементарного
перемещения частицы вдоль линии тока на неподвижные оси
координат. Из уравнений B4) следует, что первая и вторая
строки в определителе D будут в этом случае пропорциональны
и, следовательно, определитель обращается в нуль. Из C1) по-
получаем:
или
— -Ь-y- — ?/ = const = C. C2)
Здесь необходимо отметить, что постоянная С сохраняет одно
и то же значение только для рассматриваемой линии тока. Для
другой линии тока постоянная С может иметь другое значение.
Уравнение C2) называется уравнением Бернулли (или интегра-
интегралом Бернулли).
Легко видеть, что определитель D обращается в нуль, когда
| = 0, т] = 0, ? = 0, т. е. для безвихревого движения жидкости.
В этом случае dx, dy, dz могут быть совершенно произвольными,
и мы будем иметь:
А + .? _?/ = <;„ C3)
где Ci — постоянная, сохраняющая одно и то же значение для
всего пространства, заполненного движущейся жидкостью.
Наконец, D = 0, если
¦> ¦>
или в векторном виде: u = feco, т. е. вектор вихря коллинеарен
вектору скорости. В этом случае dx, dy, dz также могут быть
произвольными, и уравнение Бернулли будет иметь вид:
.?- + -?-?/= С2. C4)
где С2 — постоянная, сохраняющая одно и то же значение для
всего пространства, занятого движущейся жидкостью. Постоян-
Постоянные Ci и С2 будем называть универсальными.
Рассмотрим более подробно уравнение C2) и допустим, что
массовая сила, действующая на единицу массы, есть сила тяже-
тяжести. Тогда
где z—расстояние рассматриваемой физической частицы от
плоскости 2=0. Уравнение Бернулли C2) принимает вид:
269
Разделим C5) на g и положим pg=y, где у — вес единицы
объема, тогда получим:
z + iT-Ч- — = С. C6)
Уравнение Бернулли в форме C6) допускает наглядное гео-
геометрическое толкование. В самом деле, z имеет размерность дли-
длины (высота рассматриваемой точки над плоскостью 2 = 0), а по-
поэтому и остальные слагаемые должны иметь размерность длины.
V2
Слагаемое zv = -x— представляет собой высоту, с которой дол-
должно упасть тело, чтобы при сво-
свободном падении приобрести ско-
скорость V; эта высота называется
скоростной высотой. Слагаемое
zp — —представляет собой высо-
высоту столба жидкости, производя-
производящего своим весом давление р;эта
высота называется пьезометри-
пьезометрической высотой или высотой да-
давления. Таким образом, уравне-
уравнение Бернулли в форме C6) по-
показывает, что при стационарном
движении идеальной несжимае-
несжимаемой тяжелой жидкости сумма
трех высот: скоростной, геометрической и пьезометрической —
остается постоянной в каждой точке рассматриваемой линии
тока (фиг. 57).
Уравнение Бернулли в форме C5) допускает простое энерге-
энергетическое истолкование. Представим себе, что в точке А рассмат-
рассматриваемой линии тока находится частица жидкости с массой,
равной единице. Выясним, каким запасом энергии обладает эта
частица. Находясь на высоте z над плоскостью нулевой потен-
потенциальной энергии (плоскостью 2=0), частица обладает потен-
потенциальной энергией, равной gz. Силой гидродинамического дав-
давления р эта частица могла бы быть поднята на высоту —, сле-
следовательно, находясь на высоте z (фиг. 57), она обладает до-
дополнительным запасом потенциальной энергии, равным g — = — ¦
Кроме того, частица, имея скорость V, обладает кинетической
энергией, равной -к V2. На основании уравнения Бернулли C5)
сумма потенциальной энергии, энергии давления и кинетической
энергии частицы жидкости есть величина постоянная (на всем
протяжении линии тока), но, вообще говоря, различная для раз-
разных линий тока.
Фиг 57
270
Для безвихревых движений идеальной несжимаемой жидко-
жидкости, а также для частного случая вихревого движения, когда
вектор вихря коллинеарен вектору скорости, все физические вы-
выводы остаются прежними, но постоянная С будет универсаль-
универсальной для всех кривых семейства линий тока.
Если мы рассмотрим трубку тока достаточно малого попе-
поперечного сечения, то выводы, полученные для линии тока, можно
приближенно перенести на течение жидкости в этой трубке. Так
как, не изменяя картины течения внутри трубки, границы труб-
трубки тока можно сделать твердыми стенками, то интеграл Бер-
Бернулли дает простой способ расчета трубопроводов и водопро-
водопроводов.
Если семейство линий тока таково, что для каждой линии
тока можно положить z=const, то уравнение C5) примет сле-
следующий вид:
—-i-—— cons — 0,
или
^Г — *~*0 о ' \ /
Уравнением C7) особенно часто приходится пользоваться в
различных задачах аэромеханики.
§ 6. Некоторые практический применения
интеграла Бернулли
Интеграл Бернулли позволяет получить простые расчетные
формулы для ряда важных задач практического характера. Рас-
Рассмотрим некоторые из этих за-
задач.
а) Истечение жидко-
жидкости из достаточно боль-
большого сосуда через ма-
малое отверстие под дей-
действием собственного
веса.
Будем предполагать, что
выходное отверстие сосуда
плавно закруглено (фиг. 58),
так что поперечное сечение вы-
выходящей струи равно попереч-
поперечному сечению отверстия (нет
поджатия струи). Пусть пло-
площадь свободной поверхности жидкости в сосуде равна а, а пло-
площадь выходного отверстия равна s. Скорость опускания уровня
свободной поверхности обозначим через ш, а скорость истече-
истечения — через V. Допуская, что во всех точках поперечных сечений
Фиг. 58
271
о и s скорости частиц жидкости направлены по нормали к се-
сечениям, мы можем на основании уравнения сохранения массы
для несжимаемой жидкости написать:
Предполагая, что движение жидкости стационарное и безвих-
безвихревое, и обозначая через z4 и z2 высоту сечений а и s, на основа-
основании интеграла Бернулли будем иметь:
~2~ + р +^1=~Г+ р +Sz2- C8)
Частица жидкости на свободной поверхности а находится
под атмосферным давлением ри частица жидкости в свободной
струе также находится под атмосферным давлением p2 = pi, так
как весом столба воздуха (z2 — z4) можно пренебречь. Поэтому
из уравнения C8) следует, что
V2 = w2 + 2g (г, — z2) = w2 + 2gh,
или
откуда легко находим, что
и, следовательно,
4r. C9)
Из уравнения неразрывности имеем:
Y- — ?
"аГ а'
а поэтому формулу для определения скорости истечения жид-
жидкости можно записать так:
Г
V
Если площадь свободной поверхности а велика по сравнению
с площадью выходного отверстия s, то величиной 1 — 1 можно
пренебречь по сравнению с единицей, и мы получим:
V = V2fh- D0)
Формула D0) называется формулой Торичелли. Из формулы
D0) следует, что скорость истечения жидкости через отверстие s
имеет такую же величину, какую она имела бы, если бы частицы
жидкости свободно падали с высоты h. Опытное подтверждение
272
справедливости формулы Торичелли можно получить, измеряя
дальность полета вытекающей струи. Каждая отдельная частица
этой струи находится под действием силы тяжести и поэтому
движется по кривой, близкой к параболе. Отклонения этой кри-
кривой от параболы, вызванные сопротивлением воздуха, для глад-
гладкой струи очень малы. Если струя выходит из отверстия горизон-
горизонтально, то в горизонтальном направлении она проходит путь
по вертикали она падает и за время t проходит путь
Исключая из этих двух уравнений время t, получим:
У ? у2 '
или
Так как на основании формулы D0)
то окончательно получим:
Для практического осуществления этого опыта удобно пользо-
пользоваться так называемым сосудом Мариотта (фиг. 59). В горло
бутылки через просверленную пробку пропущена открытая
сверху и снизу стеклянная трубка, так что воздух, который дол-
должен входить в сосуд на место вытекающей воды, может попасть
туда лишь в точке А. Поэтому давление в воде в точке А всегда
равно атмосферному давлению, так что высота истечения h, не-
независимо от уровня жидкости в сосуде, равна разности высот
точек О и А, пока свободная поверхность воды в сосуде стоит
выше точки А. Передвигая трубку, можно изменять расстояние
между точками О и А, т. е. изменять разность высот h. Резуль-
Результаты экспериментов, при помощи сосуда Мариотта, удовлетво-
удовлетворительно подтверждают формулу D0). Заметим, что при про-
произвольной форме отверстия поперечное сечение струи не совпа-
совпадает с сечением выходного отверстия. Так, например, струя,
вытекающая из круглого отверстия в тонкой стенке, имеет по-
поперечное сечение, лежащее в пределах от 0,51 до 0,64 сечения
отверстия. Это число называется коэффициентом сжатия струи,
а само явление — сжатием струи.
18 А А. Космодемьянский 273
б) Скорость истечения жидкости из напор-
напорного колпака (фиг. 60). Пусть в сосуде имеется жидкость
под давлением р4; вне сосуда давление р0 равнтэ атмосферному.
Для горизонтальной линии тока z=const. На основании интег-
интеграла Бернулли будем иметь:
Будем считать поперечное сечение выходного отверстия до-
достаточно малым, а сосуд достаточно большим, тогда можно при-
Фиг 60
Фиг 59
Фиг 61
нять ш = 0, и мы получим для скорости истечения следующую
формулу:
v =
(Pi — Ро)
D1)
Пьезометрическая высота, соответствующая разности давле-
давлений (pi — ро), равна:
lj Р\ — Ра
Подставляя это значение НР в формулу D1), получим ско-
скорость истечения в виде
V = VWU- D2)
274
в) Горизонтальная струя жидкости, направ-
направленная на осесимметричное тело, ось которого
параллельна направлению струи (фиг. 61). Если
поток жидкости, движущейся со скоростью V, встречает осесим-
осесимметричное препятствие (например, шар), то из соображений
симметрии следует, что частицы жидкости, находящиеся на ли-
линии тока, совпадающей с осью симметрии тела, при подходе к
поверхности шара должны остановиться. Соседние линии тока
будут плавно обтекать тело, разделяясь во все стороны. В точ-
точке пересечения оси симметрии потока с поверхностью шара ско-
скорость течения равна нулю. Эта точка называется критической
точкой потока. Применяя интеграл Бернулли в форме C7) для
линии тока, совпадающей с осью симметрии набегающего пото-
потока (фиг. 61), будем иметь.
Pi РО , Vl
где pi — давление в критической точке, р0, Vo — давление и ско-
скорость в некоторой точке, достаточно удаленной от шара.
Из уравнения D3) следует, что
Приращение давления (pi— ро) называют динамическим
давлением или скоростным напором. Если сконструировать при-
прибор, который позволял бы измерять динамическое давление, то
этим прибором можно было бы измерять и скорость движущей-
движущейся жидкости. Давление р0 в невозмущенном потоке называют ста-
статическим давлением. Это есть та сила на единицу поверхности,
с которой в рассматриваемой точке движущейся жидкости при-
прижимаются друг к другу пограничные поверхности двух находя-
находящихся рядом частиц жидкости. Для измерения статического
давления пользуются прибором, который движется вместе с части-
частицами жидкости (или помещают в движущуюся жидкость изме-
измерительный зонд так, чтобы в месте измерения скорость была
равна Vo)- Для определения давления pi достаточно в рассма-
рассматриваемом осесимметричном теле просверлить отверстие так,
чтобы сквозь него давление pi могло быть подведено к измери-
измерительному прибору. Если (pi — ро) известно, то
2(pi—
Прибор, при помощи которого производят измерения раз-
разности давлений (pi — ро) в технике, называется трубкой Пито.
Схема этой трубки вместе с манометром показана на фигуре 62.
Отверстия для замера статического давления ро выбраны так,
18* 275
чтобы в этих точках скорость частиц жидкости, обтекающих
трубку, была равна Vo.
г) Рассмотрим течение в трубе переменного
поперечного сечения (фиг. 63). На основании интеграла
Бернулли в форме C7) мы полу-
^ чим:
Ра_
Р
Л О~ == Т. I 9~
Ръ_
р
Va — давление и скорость б
сечении, рь, Уь — в широ-
где ра,
узком
ком.
Так как на основании уравнения
неразрывности при стационарном
движении несжимаемой жидкости
скорость будет больше в узком се-
сечении (Л), то ра < рь. В этом лег-
легко убедиться, если в сечениях А и
В поставить вертикальные стеклян-
стеклянные трубки. В трубке Аа жидкость
поднимается гораздо меньше, чем в
трубке ВЬ (фиг. 63).
д) Возникновение подъ-
подъемной силы у профиля кры-
крыла самолета. Крылья современ-
н rj ных самолетов имеют плоскую
\^^у нижнюю поверхность и изогнутую
верхнюю поверхность. На фигу-
фигуре 64 изображено поперечное сече-
сечение крыла самолета, так называе-
называемый профиль крыла. Передняя часть
профиля, его передняя кромка N, закруглена, задняя кромка М
заострена. Угол а между линией MNi и направлением полета
называется углом атаки. Если профиль крыла движется поступа-
Фиг. 62
Фиг. 63
Фиг. 64
тельно, прямолинейно и равномерно, то, на основании принципов
относительности Галилея — Ньютона (гл. III — «Кинетика»), си-
силовые воздействия жидкости (воздуха) на этот профиль будут
276
теми же самыми, если обратить движение, т. е. крыло остано-
остановить, а жидкость заставить натекать на профиль со скоростью,
равной скорости полета. Рассмотрим обтекание неподвижного-
профиля окрашенной жидкостью. Пусть течение установившееся
и плотность жидкости постоянна. Фотографируя течение с неко-
некоторой выдержкой, мы получим ясную картину семейства линий
а=
а = -ю"
Фиг. 68
тока. На фотографиях 65 и 66 (см. вклейку между стр. 256—257)
даны спектры обтекания профилей при небольших углах атаки,,
когда линии тока плавно огибают профиль крыла. На фигуре 67
показано обтекание профиля при большом угле атаки, когда
имеет место срыв струй с верхней поверхности профиля. Из рас-
рассмотрения фигур отчетливо видно, что при небольших положи-
положительных углах атаки а линии тока над верхней поверхностью
крыла располагаются гуще, чем под нижней его поверхностью.
Так как в идеальной жидкости любые две линии тока можно
сделать твердыми стенками, не нарушая картины течения, то на
277
«сновании уравнения неразрывности мы заключаем, что на верх-
верхней поверхности профиля крыла скорости больше скорости не-
невозмущенного потока Vo, а на нижней его поверхности скорости
несколько меньше скорости VQ. Вследствие этого из уравнения
Бернулли в форме C7) следует, что давление на верхней поверх-
поверхности крыла меньше давления невозмущенного потока ро, а на
нижней поверхности больше давления ро- Иначе говоря, на верх-
верхней поверхности крыла имеется некоторое разрежение по
¦сравнению с р0, на нижней поверхности — увеличение давления.
Разность давлений на верхней и нижней поверхностях крыла бу-
будет направлена вверх. Эта разность давлений и обусловливает
подъемную силу крыла самолета. Если плавность обтекания
профиля крыла нарушается, что имеет место при больших углах
атаки (а>15°), то скорости на верхней поверхности крыла
уменьшаются, давление возрастает и подъемная сила крыла рез-
резко уменьшается. Поэтому самолеты летают при небольших углах
атаки. На фигуре 68 приведено распределение давлений по про-
профилю крыла при различных углах атаки. Как видно из фигу-
фигуры 68, при малых углах атаки большая доля подъемной силы
образуется за счет разрежения на верхней поверхности крыла
(подсасывающих сил). Поэтому с точки зрения аэродинамики
будет неверным утверждение, что при горизонтальном полете
самолет опирается крыльями на воздух; правильнее говорить,
что основная часть поддерживающей силы обусловлена разре-
разрежением на верхней поверхности крыла. Строгую математиче-
математическую теорию подъемной силы крыла самолета создал великий
русский механик профессор Московского университета Н. Е. Жу-
Жуковский.
§ 7. Потенциальные движения несжимаемой
идеальной жидкости
Если во время движения в каждой точке поля скоростей дви-
движущейся жидкости проекции вектора вихря равны нулю, то дви-
движение называется безвихревым. В этом случае проекции ско-
скорости и, v, w будут частными производными от некоторой функ-
функции ср(х, у, z, t) по соответствующим координатам, т. е.
«-?.—?.—?¦ <44>
В самом деле, если проекции вектора вихря равны нулю, то
имеют место следующие равенства:
dw dv п да dw n dv да ,~| ,. -,
~5Г~!Г —и> ~д1"~д7==^ 17 17 W
Если поле скоростей имеет потенциал, то выполняются усло-
условия D4). Для того чтобы получить необходимые и достаточные
578
условия существования потенциала , исключим перекрестным
дифференцированием функцию ф из уравнений D4). Будем
иметь:
да.
ду
dv
дх '
ди
дг
dw
~дх~
dv
~дТ
dw
D6)
Но соотношения D6) совпадают с соотношениями D5), а по-
поэтому равенство нулю проекции вектора вихря является необ-
необходимым и достаточным условием существования функции ф.
Функция ф называется потенциалом скоростей, а соответствую-
соответствующее движение жидкости — потенциальным движением.
Предположение о безвихревом движении означает весьма
существенное математическое упрощение вычислений, так как
вместо трех функций (проекций скорости и, v, w) приходится
определять только одну функцию ф. Уравнения в форме Громеко
B9) для потенциального течения можно написать в следующем
виде:
д{\дх)~Гх дх [J ~t" 2 v J
D7)
Допустим, что внешние массовые силы имеют потенциал U;
тогда
F —— F —JOL F — ди
х~ дх ' ty~ ду ' г~ дг '
При сделанных допущениях уравнения D7) можно записать-
так:
_Ё_ (J*L\ — J_ I it _ ? _ IL\
dx\dt)~dx\u p 2 )
JL (Us.) — A. (n — ? - Il\
dy[dtj—dy[u p 2 )
~дГ\~зг)—дг[и~-р—т) I
D8)
Умножая первое из уравнений D8) на dx, второе на dy»
третье на dz и складывая, получим:
* Сравните доказательство существования потенциала скоростей с дока-
доказательством существования потенциала силового поля (ч. 1, раздел «Кине-
«Кинетика», глава II, стр. 223).
279*
¦откуда
•*_?/+? + -у—СМ. D9)
Левая часть уравнения D9) для данного момента времени
постоянна для всей жидкости, но эта постоянная будет меняться
с течением времени, поэтому мы обозначили ее C(t).
Уравнение D9) называется интегралом Лагранжа. Функция
C(t) должна быть определена из начальных условий. Если по-
потенциальное течение жидкости стационарно, то ~Jr = O> С (О
•обратится в постоянную, и мы будем иметь:
-?/+f + J?-= const. E0)
Так как при выводе интеграла D9) на dx, dy, dz мы не на-
налагали ограничений, то постоянная в уравнении E0) будет уни-
универсальной. Интеграл Лагранжа в форме E0) будет совпадать
с интегралом Бернулли C3), полученным для безвихревого ста-
стационарного движения идеальной жидкости. Интеграл Бернул-
Бернулли C2), полученный интегрированием уравнений Эйлера вдоль
линии тока, отличается от интеграла Лагранжа, так как посто-
постоянная в интеграле C2) может быть различной для разных линий
тока. Движение жидкости, при котором постоянная в интеграле
Бернулли универсальна для всех линий тока, есть потенциальное
движение. Пользуясь уравнениями D8), можно доказать очень
важную теорему Лагранжа: если для движущейся жидкости
при действии сил, имеющих потенциальную функцию, в какой-
нибудь момент времени существует потенциал скоростей, то те-
течение будет потенциальным во все время движения. В самом
деле, уравнения D8) можно записать в следующей форме:
E1)
где
du
dt
dH
dx
И
dv
' dt
dH
dy
P_
P
V2
~2
dw
dt
- .
dH
dz
Разложим теперь проекции скорости и, v, w для фиксирован-
фиксированной точки в ряд Тейлора по времени:
,ч du , 1 ,, ,ч9 д2и .
. ,, ,. dw . 1 ,, ,,, d2w
Wl = w+{tl--t)w-Jrj{tl—tf-jF
580
Для достаточно малого промежутка времени (^ — t) можно
положить:
\/1 i\ ди . i. ,ч dv
Щ = *> + (*1-*)^г- E2)-
Формулы E1) показывают, что поле локальных производных
ди dv dw , , ,
~Ж ' ИГ ' ~5Г в момент времени t будет безвихревым, так
как эти производные равны частным производным от одной и
той же функции Н по соответствующим координатам. Если поле
скоростей и, v, w в момент времени t потенциально, то из фор-
формул E1) и E2) следует, что поле скоростей щ, vu до4 будет также
потенциальным. Применяя формулу E2) для промежутка вре-
времени t2 — t\, а затем t3 — t2 и т. д., мы приходим к выводу, что
потенциальному движению идеальной несжимаемой жидкости
нельзя сообщить вихревых движений действием внешних потен-
потенциальных сил, и, следовательно, если поле скоростей движущей-
движущейся жидкости (при потенциальном силовом поле) в некоторый
момент времени свободно от вихрей, то оно останется безвихре-
безвихревым и во все время движения.
Для потенциальных движений жидкости уравнение неразрыв-
неразрывности имеет вид:
^i + ^ + ll^O. E3>
дх2 ' ду2 ' dz2 v '
Уравнение неразрывности в форме E3) содержит только
одну неизвестную функцию ф (х, у, z, t), и в этом случае задача
гидродинамики значительно упрощается. Зная ф, мы можем
определить поле скоростей. Интеграл Лагранжа при известной
функции ф служит для определения гидродинамического давле-
давления р. Уравнение E3) в задачах математики и математической
физики называется уравнением Лапласа. Это уравнение линей-
линейно относительно искомой функции ф.
Таким образом, задача изучения потенциальных течений иде-
идеальной несжимаемой жидкости разделяется на две части: во-
первых, решая уравнение Лапласа при заданных граничных
условиях, нужно определить кинематические характеристики
потока, т. е. найти поле скоростей. Во-вторых, пользуясь инте-
интегралом Лагранжа нужно найти динамические элементы, т. е.
давление р в любой точке движущейся жидкости. Произвольная
функция C(t), входящая в правую часть уравнения D9), опре-
определится из начальных условий задачи. Линейность уравнения
Лапласа позволяет строить сложные потенциальные течения1
жидкости путем суперпозиции (наложения) более простых потен-
потенциальных течений, так как любая линейная комбинация частных
28L
решений линейного уравнения является также решением этого
уравнения.
Рассмотрим некоторые простейшие потенциальные движения.
а) Пусть
1 + &1/2 + сг2). E4)
Выполняя дифференцирование, легко находим, что
Функция E4) является решением уравнения Лапласа только
в том случае, если а + Ь + с = 0. Этому условию можно удовле-
удовлетворить различными способами. Положим, например,
Ь = — а, с = 0,
тогда
<р=-?.(*а-^). E4')
Так как ф не зависит от z, то потенциальное течение E4') бу-
будет плоскопараллельным, т. е. состояние течения во всех пло-
плоскостях, параллельных плоскости z=0, будет одинаковым. Диф-
Дифференцируя E4') по соответствующим координатам, находим
проекции скорости в виде:
Уравнение линий тока будет иметь вид:
dx dy dx и х ¦
и v ' dy ~~ v у '
откуда, разделяя переменные и интегрируя, получим:
\пу = 1п С — In jc,
где С — постоянная интегрирования.
Потенцируя, получим уравнение семейства линий тока в виде:
ху = С. E5)
Из уравнения E5) видно, что линиями тока являются равно-
равносторонние гиперболы, имеющие асимптотами оси Ох и Оу.
Полученные линии тока можно рассматривать как картину
плоскопараллельного течения около стенки (фиг. 69). В точке
jc = y = O скорость обращается в нуль. Эта точка называется
критической точкой потока. Распределение гидродинамического
давления можно найти из интеграла Лагранжа. Будем считать
движение установившимся, а потенциал внешних сил постоян-
постоянным. Тогда, из уравнения E0) будем иметь:
т K2+f = т- (*2+y2)+f =const* E5')
282
Обозначая давление в критической точке через pi, получим?
для этой точки ~- = const, следовательно, E5') можно запи-
сать так:
\
Кривыми равного давления являются концентрические окруж-
окружности.
б) Функция
будет удовлетворять уравнению Лапласа, если
а = Ь и с — — 2а.
В этом случае
E6>
проекции вектора скорости будут равны:
Уравнения линий тока будут иметь вид:
dx dy dz
ЯЛИ
dy_
dx
y_
x
dz
dx
2z_
x
откуда получим уравнение проекций линий тока на плоскость
хОу:
т. е. проекции линий тока на плоскость хОу представляют со-
собой прямые, проходящие через начало координат. Проекции ли-
линий тока на плоскость xOz определяются уравнением:
или
Следовательно, проекции линий тока на плоскость xOz пред-
представляют собой семейство кубических гипербол с осями Ох и
Oz в качестве асимптот.
На фигуре
тока, даваемая
ния находится
рассматривать
мой жидкости.
284
Фиг. 70
70 приведена пространственная картина линий
потенциалом E6). Критическая точка этого тече-
в начале координат. Полученный поток можно
как осесимметричное течение идеальной невесо-
Жидкость натекает здесь на плоскость хОу, ко-
торую можно заменить твердой стенкой, так как в любой точке
этой плоскости проекция скорости (v)z = w равна нулю.
Для стационарных движений из интеграла Лагранжа полу-
получаем распределение гидродинамического давления в виде:
f = -^(*2 + i/2-f422). E6')
Из E6) следует, что поверхностями равного давления будут
эллипсоиды.
§ 8. Плоскопараллельные потенциальные течения
Движение жидкости называют плоскопараллельным, если все
•частицы жидкости будут иметь траектории, параллельные неко-
некоторой неподвижной плоскости. Движение частиц во всех пло-
плоскостях, параллельных неподвижной плоскости, будет одинако-
одинаковым. При изучении таких движений достаточно рассмотреть дви-
движение только в одной плоскости, которую для определенности
мы будем обозначать хОу. В чистом виде плоскопараллельные
течения можно наблюдать очень редко, однако многие области
течений можно рассматривать с достаточной для практики точ-
точностью как плоскопараллельные. Выяснение основных свойств
плоскопараллельных течений с математической стороны гораздо
проще изучения движения жидкости в общем случае, так как
для потенциальных течений решение задачи тесно связано с тео-
теорией функций комплексного переменного, хорошо разработанной
в современной математике.
Уравнение неразрывности для плоскопараллельного движе-
движения несжимаемой жидкости можно написать в виде:
да , dv__Q
или
Дифференциальное уравнение линий тока будет иметь вид:
dx dy
и ~~ v '
ИЛИ
udy — vdx = 0. E7')
Уравнение неразрывности E7) показывает, что левая часть
уравнения E7') представляет собой полный дифференциал не-
некоторой функции ip(x, у), так что
«-?¦ •—¦Й- («)
285
Функция ty(x, у) носит название функции тока, так как на
каждой линии тока она сохраняет постоянное значение.
Выясним гидродинамический смысл функции тока и найдем
уравнение, которому должна удовлетворять функция тока
\р{х, у) при плоскопараллельном движении. Вычислим количе-
количество жидкости, протекающей через кривую АВ. Пусть координаты
точки А будут хи yi, а точки В—хг, у%- Количество жидкости,
протекающей через АВ в единицу времени, будет равно
(фиг. 71):
Q = Г [« cos (п°, х) -f- v cos) (п°, у)} ds — f (v dx — и dy) =
AS AS
AS
Таким образом, поток жидкости через кривую АВ не зависит
от формы этой кривой и определяется значениями функции тока
в точках А и В. Выразим проекции вектора вихря со через функ-
функцию тока. Будем иметь:
•Л) j
OW
ду
да
дг
dv
дг
dw
дх
дх2 ^ ду2 ) '
Если движение жидкости потенциально, то Z, также обра-
обращается в нуль и
т. е. функция тока для плоскопараллельных потенциальных те-
течений идеальной несжимаемой жидкости удовлетворяет уравне-
уравнению Лапласа. Кроме того, мы уже знаем, что потенциал скоро-
скоростей ф(я, у) также удовлетворяет уравнению Лапласа.
Семейство линий тока определяется уравнением ty = const, где
постоянная принимает различные значения на различных ли-
линиях тока. Семейство линий равного потенциала определяется
уравнением cp = const. Докажем, что линии тока и линии равного
286
потенциала пересекаются ортогонально. В самом деле, по опре-
определению:
с другой стороны,
поэтому
" "" ду ' v — дх
cfy di|> . дф дт|> «
или
gradфgrad^[^ = O. E9)
Из уравнения E9) следует, что нормали к кривым семейства
Ф = const и \р = const взаимно перпендикулярны, а, следователь-
следовательно, семейства этих кривых пересекаются ортогонально.
Вследствие ортогональности кривых ф = const и ty = const
с геометрической точки зрения совершенно безразлично, какие
из них считать линиями тока и какие — линиями равного потен-
потенциала. Поэтому для решения задачи о плоскопараллельном дви-
движении идеальной жидкости достаточно определить только одну
из этих функций, так как вторая функция может быть найдена
из условий E7') и E8').
Покажем теперь, что действительная и мнимая части анали-
аналитической функции комплексного переменного удовлетворяют
уравнению Лапласа.
В самом деле, пусть
w (z) = w (x -(- iy)
есть аналитическая функция аргумента
Такую функцию всегда можно разложить на действительную и
мнимую части:
г, у),
где ф и \р — действительные функции от л; и у.
Так как
dz _ 1 dz _ • d2z _ л d*z n
dx~l> ~dy~~'" 'дхт~ И lp"~U'
TO
d2w d2w I dz у d2w d2w d2w t dz \2 d2w
дх2 ~ dz2 \dx) ~~ dz2 ' ду2 ~ dz2 \ду ) ~~~ Iz2 '
Следовательно,
d2w . d2w j-.
~dx2~l~~~dyr~V'
287
или
(Ъ:2 "^ д</2 ~г" \
откуда
д2Ф д2ф __ п
т. е. действительная и мнимая части любой аналитической функ-
функции комплексного переменного удовлетворяют уравнению Ла-
Лапласа.
Кроме того, мы легко можем убедиться в справедливости
следующей формулы:
?" = '?. <60)
так
На
как
dw
~ду~ =
основании
dw dz
~ dz dy
формулы
. dw
l4z~
F0)
dw
' ~dx~
имеем:
. / dw ,
\ dx '
dw
~dz
dz
дх ~
dw
~dz
ИЛИ
откуда, приравнивая нулю действительную и мнимую части, по-
получим:
ду ~ дх дх ~ ду -
Соотношения F1) называются дифференциальными уравне-
уравнениями Коши — Римана; с геометрической точки зрения эти
уравнения эквивалентны уравнению E9). Таким образом, мы
можем положить действительную часть аналитической функции
комплексного переменного равной потенциалу скоростей; тогда
мнимая часть этой функции будет представлять собой функцию
тока. Функцию
(){ )i{, у)
будем называть характеристической функцией или комплексным
потенциалом.
Установленное гидродинамическое толкование действитель-
действительной и мнимой частей аналитической функции w{z) дает возмож-
возможность решать задачи о плоскопараллельных потенциальных те-
течениях так называемым обратным методом. Этот метод основан
на том, что в аналитической функции w{z) всегда можно выде-
выделить действительную и мнимую части (р(х, у) и ty(x,y). Пола-
Полагая cp = const, получим семейство эквипотенциальных линий, а
288
полагая ф = const, получим семейство линий тока. Так как по оп-
определению любую линию тока можно заменить твердой стенкой,
не нарушая картины течения, то при надлежащем выборе w(z)
можно получить течения около различных препятствий. Так, на-
например, для изучения течения около профиля крыла самолета
нужно задать такую характеристическую функцию w(z), у кото-
которой среди семейства линий тока \j) = const имеется одна линия
тока, совпадающая с контуром профиля крыла. Следовательно,
задание функции w(z) дает решение некоторой краевой задачи
для уравнения Лапласа, т. е. решение некоторой задачи плоско-
параллельного движения жидкости.
Контур, на котором выполняются краевые условия о сколь-
скольжении частиц и равенстве нулю нормальной составляющей век-
вектора скорости, получается, однако, зависящим от выбора функ-
функции w(z).
Вычислим производную -~. Так как
3
= (и — iv) dx 4- (v -\- iu) dy — (и — iv) dx -\-i(u — iv) dy =
то =(u — iv)dz,
dw
— = u-iv,
т. е. производная от характеристической функции -j^- равна век-
вектору скорости, зеркально отраженному относительно действи-
действительной оси. Мы будем называть (и — iv) комплексной ско-
скоростью.
Таким образом, задание функции w(z) дает полную геоме-
геометрическую и кинематическую характеристику некоторого пло-
плоскопараллельного движения идеальной жидкости. Распределе-
Распределение гидродинамического давления можно находить из уравнения
Лагранжа.
Примеры простейших плоскопараллельных
течений.
1. Пусть
w(z) =az,
где а — действительная и положительная величина. Разделяя
действительную и мнимую части, легко находим:
Ф = ах, ф = ау.
Следовательно, линиями тока xf> = const являются прямые, па-
параллельные оси Ох, эквипотенциальными линиями ф = const —
прямые, параллельные оси Оу.
19 А. А. Космодемьянский 289
Комплексная скорость равна:
dw
откуда
Следовательно, движение жидкости происходит параллельно
оси Ох слева направо (фиг. 72) со скоростью, равной а.
Фиг. 72
Фиг. 73
Если а — комплексное число вида а + ф, то
Ф Н- /ф = (а + /р) (х + /у),
откуда
Линии тока и линии равного потенциала являются также пря-
прямыми линиями, причем линии тока \b = const наклонены к оси
Ох под углом 8, тангенс которого равен — —.
Комплексная скорость
и — iv — а = а -(- /р,
откуда
„ _. _, о л/ ___ ~\Гг*1 I q2
^ =rz (jjj 7/ === — Р) V ^=== у (X ~j— р .
Семейство линий тока рассматриваемого течения представ-
представлено на фигуре 73. Если на линии тока взять отрезок прямой,
то стороны отрезка будут являться линиями тока. Таким обра-
образом, характеристическая функция w(z)=az будет давать обте-
обтекание тонкой пластинки, поставленной параллельно потоку.
2. Рассмотрим характеристическую функцию
\ ) g »
290
где М — действительная и положительная величина. Разделяя
действительную и мнимую части, получим:
откуда
Уравнение линий тока можно написать в виде: 2_f 2
или после очевидных преобразований:
. Л1 \2 / М \2
Семейство линий тока представляет собой семейство окруж-
окружностей, касающихся оси Ох, центры которых лежат на оси Оу
(фиг. 74).
Комплексная скорость
dw . М_ М (х— iyJ
dz —U IV— z2 — — (jj-2 _|_ j,2J >
откуда
М (х2 — у2) 2Мху
М(ху)
(^2 + i/2J '
Из формул F3') видно, что при х = 0, ц = — , i) = 0, т. е.
на оси Оу скорости точек направлены параллельно оси Ох, а в
силу непрерывности движения скорости других точек будут на-
направлены согласно стрелкам, указанным на фигуре 74. Линиями
равного потенциала являются также окружности, центры кото-
которых расположены на оси Ох (фиг. 74).
Все линии тока выходят из точки z=0 и к ней же приходят.
Эта точка называется диполем. Постоянная М называется мо-
моментом диполя.
3. Рассмотрим течение, определяемое комплексным потен-
потенциалом вида:
w(z) = -^-\nz, F4)
где Г>0. Для определения линий тока и линий равного потен-
потенциала положим ку = ф + г'Ц; и z=reie.
Будем иметь тогда:
w = Ф + ?ф = ~ In (ге») = 1L (in г + /6). F40
Приравнивая в F4') действительные и мнимые части, найдем:
19* 291
Легко понять, что уравнение семейства линий тока t(! =
при заданном постоянном значении Г представляет семейство
окружностей r = const. Семейство эквипотенциальных линий
Фиг 74
6 = const есть семейство прямых (пучок прямых), проходящих
через начало координат.
Для определения скорости частиц жидкости продифференци-
продифференцируем комплексный потенциал по z. Легка находим, чтэ
dw . JT__L -i
dz ~ и — iv — 2л z — 2
откуда
Yx
F5)
W(x2
292
Величина вектора скорости равна:
\/ — 1/ и? —1— чР1 —
2яг
F6)
где г—радиус соответствующей линии тока.
На фигуре 75 представлена картина течения жидкости, опре-
определяемая комплексным потенциалом F4). В аэрогидромеханике
полученное течение жидкости называют циркуляционным дви-
движением вокруг точечного вихря, расположенного в начале ко-
координат. Если Г>0, то циркуляционное течение происходит в
направлении движения часовой стрелки; если Г<0, то циркуля-
циркуляционное течение происходит в противоположном направлении.
Для выяснения физического смы-
смысла постоянной Г подсчитаем ра- У,
боту вектора скорости по какой-
либо линии тока (окружности)
радиуса г. Эту величину назы-
называют циркуляцией вектора ско-
скорости. Будем иметь: циркуляция
вектора v равна:
1 JQ П
— г dv = 1.
пг
и Фиг. 75
Из формул F6) и F7) сле-
следует, что Г определяет поле
скоростей частиц жидкости (величину работы вектора скорости
по какой-либо линии тока). Мы будем называть Г циркуляцией
точечного вихря, помещенного в начале координат (при рассмо-
рассмотрении пространственного потока лучше говорить, что Г есть
циркуляция вихря, совпадающего с осью Oz). Из формулы F6)
мы заключаем, что при г->0 V—>оо. Следовательно, начало ко-
координат (точка О), где расположен точечный вихрь, является
особой точкой поля скоростей.
4. Интересный пример течения идеальной жидкости мы по-
получим, если сложим характеристические функции течения от ди-
диполя и поступательного потока.
Будем иметь:
}(г) = у + Щ = А
,
где А = const.
Разделяя действительную и мнимую части, получим:
F8)
293
Уравнение семейства линий тока примет вид:
= С, или y(x2 + y2)_y = C(x2-f-J/2). F9)
Это кривые третьего порядка. Линия тока, соответствующая
С—0, распадается на прямую у = 0 и окружность х2+у2—1
(фиг. 76). Для более наглядного представления кривых семей-
семейства F9) перейдем к полярным координатам, положив
x — rcosQ, у = г sin 9.
Уравнение F9) примет вид:
Разрешая это уравнение относительно г, будем иметь:
Г~ 2 sin 0
откуда получим два значения для г:
С —
Пусть С>0, тогда из уравнений G1) следует, что п>1 и
г2<1, т. е. одна линия тока идет вне окружности радиуса г=1,
а другая внутри этой окружности. При изменении 8 от 0 до л, г4
/
изменяется от оо до —!—^—— и затем снова до оо; г2 изме-
няется от 0 до ^——и снова до 0. Семейство линии тока
показано на фигуре 76. Если заменить линию тока г— 1 твердой
стенкой, то условия течения не изменятся. Следовательно, ха-
характеристическая функция w{z) — A (z -\—j дает течение жид-
жидкости около цилиндра радиуса, равного единице.
Для того чтобы выяснить гидродинамическое значение по-
постоянной А, продифференцируем по z комплексный потенциал
течения. Будем иметь:
S-.-ta-^l-J,). G1')
При z=oo получим (-пг| =А; следовательно, А равно
V az 1z — oo
комплексной скорости на бесконечности. Будем считать, что ско-
скорость на бесконечности направлена параллельно оси Ох и равна
по модулю Vco, тогда А = УХ.
Чтобы найти распределение скоростей по контуру цилиндра,
нужно вместо z в формулу G1') подставить его значение на
294
окружости г=1, т. р. положить z=eie. Из G1') получим:
и— iv=Voa(l — e-m),
откуда
и = 1/^A —cos 26), v = Voosin20.-
Модуль скорости на контуре цилиндра определяется форму-
формулой:
Распределение давлений можно подсчитать на основании ин-
интеграла Лагранжа, полагая потенциал внешних сил постоянным.
Будем иметь:
? = С — —
Постоянную С определим из условия движения на бесконеч-
бесконечности, где р = ро при V=Uoo; очевидно,
Г Ро _|_ 1 I/2
Подставляя значение С, легко найдем, что
Р-Ро _i (V \2=:1_4sin26.
На фигуре 77 представлено графически распределение давле-
р — Ра
нии по контуру цилиндра, причем величины -г—— отложены по
соответствующим радиусам цилиндра. В области от 0 до 30° и
от 150 до 180° на верхней половине цилиндра мы имеем положи-
положительные давления, т. е. р>ра, в области от 30 до 150° на контуре
цилиндра будет иметь место понижение давления, т. е. разре-
разрежение.
§ 9. Формулы С. А. Чаплыгина
Зная распределение местных сил нормальных давлений по
контуру обтекаемого тела, мы можем определить результирую-
результирующую силу воздействия потока на тело. В самом деле, примем
некоторую точку плоскости за центр приведения системы сил
нормальных давлений и перенесем все силы параллельно самим
себе в эту точку. Определив методами статики твердого тела
геометрическую сумму этих сил, мы и получим результирующую
сил воздействия потока на обтекаемое тело. Пусть скорость по-
потока на бесконечности равна 1^,. В современной аэрогидромеха-
аэрогидромеханике принята следующая терминология. Проекция результирую-
295
9-г'с
s
е-
щей сил воздействия потока на направление вектора скорости
течения в бесконечности называется лобовым сопротивлением
тела. Проекция результирующей сил воздействия потока на на-
направление, перпендикулярное скорости течения в бесконечности,
называется подъемной силой.
Если рассматривать тело, движущееся, например, в спокой-
спокойной атмосфере поступательно, прямолинейно и равномерно, то
на основании принципа относительности Галилея — Ньютона
проекция результирующей сил воздействия воздуха на направ-
> о
о
pds
Фиг. 77
Фиг. 78
ление скорости движения будет лобовым сопротивлением, а про-
проекция той же результирующей на направление, перпендикуляр-
перпендикулярное к скорости движения, будет подъемной силой.
Для определения подъемной силы и лобового сопротивления
можно рекомендовать следующий порядок расчетов. Во-первых,
нужно найти распределение местных сил нормальных давлений
по контуру обтекаемого тела. Затем, вычисляя проекции этих
местных сил на известные направления вектора Vx и перпенди-
перпендикуляра к Voo и интегрируя по всему контуру, можно найти подъ-
подъемную силу и лобовое сопротивление тела.
Для потенциальных течений идеальной жидкости можно по-
получить простые формулы для определения результирующей
силы, воспользовавшись некоторыми свойствами комплексного по-
потенциала и его производных. Такие формулы были впервые по-
получены крупнейшим русским ученым академиком С. А. Чап-
Чаплыгиным. Основная идея метода С. А. Чаплыгина состоит в
том, чтобы, зная комплексный потенциал течения, выразить ре-
результирующую силу через некоторый интеграл по контуру обте-
обтекаемого тела от квадрата производной этого потенциала.
297
Рассмотрим плоскопараллельное течение идеальной жидко-
жидкости. Пусть поток обтекает без срыва струй контур (С), располо-
расположенный в плоскости хОу. Определим результирующую силу
воздействия потока на рассматриваемый контур. Рассмотрим эле-
элемент контура ds. Сила воздействия потока на этот элемент рав-
равна pds. Проведем касательную к контуру в точке А; пусть углы
этой касательной с осями координат будут аир. Проекции эле-
элементарной силы воздействия потока на оси Ох и Оу будут рав-
равны (см. фиг. 78):
dX = — pds cos p,
dY = pds cos a.
Но косинусы углов касательной с осями координат можно
определить по формулам:
dx dy
cosa = -dT> С0^ = 1Ш-
Таким образом,
= — pdy, G2)
dV = p dx. G3)
Умножим G2) на l = Y—1 и сложим с G3). Будем иметь:
G4)
(Величина dz называется комплексной сопряженной dz=dx +
+ idy.)
Интегрируя G4) по контуру (С) обтекаемого тела, получим
следующее выражение для результирующей силы:
G5)
где ф означает, что интегрирование происходит по замкнутому
контуру (С).
Между давлением р и скоростью V при отсутствии внешних
сил существует соотношение C7), являющееся частным случаем
интеграла Бернулли. Это соотношение дает:
р — с 2 v ,
р
откуда
Подставляя р в формулу G5) и замечая, что
298
так как после обхода по контуру (С) х и у возвращаются к на-
начальным значениям, мы получим:
§2dz. G6)
Мы знаем, что если w(z) есть комплексный потенциал тече-
течения, то
При плавном обтекании контура (С) его граница будет сов-
совпадать с одной из линий тока и, следовательно, на контуре
¦ф = const. Легко понять, что
dw — dq>-\- id ф
будет на контуре величиной действительной, так как на контуре
Принимая во внимание это утверждение, будем иметь на кон-
контуре (С):
! dw \ dw
\~dzlc ~~ dz '
а, следовательно, на контуре (С):
,/9 .— dw dw .- dw dw .— dw ,
V1 dz = dz = — dz = dw.
dz dz dz dz dz
Таким образом, формулу G6) можно представить в виде:
или
r + * — iffc)'*. G7)
Формула G7) называется первой формулой С. А. Чаплы-
Чаплыгина. При помощи этой формулы можно, зная комплексный по-
потенциал течения, найти проекции результирующей силы Бездей-
Бездействия потока на оси Ох и Оу.
Из главы VI раздела «Кинетика» нам известно, что если для
произвольной плоской системы сил результирующая не равна
нулю, то данная система имеет равнодействующую.
Равнодействующая равна результирующей по модулю, имеет
то же направление, но линии действия результирующей и равно-
равнодействующей не совпадают. Если мы хотим найти равнодей-
равнодействующую сил воздействия потока на контур (С), то нам нужно
при известных X и У найти только линию действия равнодей-
равнодействующей. Линия действия равнодействующей будет определена,
если известен момент равнодействующей относительно некоторой
299
точки, например, начала координат О на фигуре 78. Так как
момент равнодействующей относительно точки О равен сумме
моментов сил составляющих относительно той же точки, то, оче-
очевидно, для определения линии действия равнодействующей до-
достаточно найти сумму моментов элементарных сил воздействия
потока относительно точки О. Поэтому найдем сумму моментов
элементарных сил pds относительно точки О.
Момент силы pds относительно точки О можно представить
в виде:
0 (p)
где k — единичный вектор оси, перпендикулярной к плоскости
хОу,
или
i j k
x у О
k = xdY — ydX, G8)
dX dY 0
Напишем следующее тождество:
[dY-\- i dX) (x-f «/) = xdY —ydX-\-i(xdX + ydY).
Очевидно, что
(xdY—уdX) = действительной части (dY-j-idX) (x~\-iy).
а, следовательно,
dM0 = действительной части (dY+idX) (x + iy) =z(dY+idX).
Интегрируя по контуру (С), находим, что
УИ0 = действительной части <b z(dY ~\-i dX). G9)
Но из формулы G7) мы имеем, что
«к+, « — $(?)'*.
Таким образом,
Мо = действительной части —~ ф \-jf) zdz\. (80)
Формула (80) называется второй формулой С. А. Чаплы-
Чаплыгина.
Если комплексный потенциал течения нам известен, то вычис-
вычисление величины равнодействующей местных сил воздействия по-
потока и нахождение линии ее действия сводится к вычислению
интегралов от вполне определенных функций комплексного пере-
переменного. Так как на основании теоремы Коши о вычетах вычис-
вычисление интегралов вида G7) и (80) сводится к определению ко-
300
эффициентов подинтегральных функций при множителе I —I, то
естественно исследовать комплексный потенциал, определяющий
течение около контуров достаточно общего вида. Среди возмож-
возможных контуров нас в первую очередь будут интересовать контуры
профилей крыльев аэроплана.
§ 10. Теорема Н. Е. Жуковского
Для того чтобы при плавном обтекании данного контура по-
получилась некоторая, отличная от нуля, результирующая сила
воздействия потока, необходима несимметрия в распределении
местных сил нормальных давлений по отношению к осям Ох и
Оу.
Если для каждой положительной проекции местной силы
нормального давления pds на ось Ох найдется такая же отрица-
отрицательная проекция, то, очевидно, что проекция результирующей
силы на эту ось окажется равной нулю. Это утверждение легко
проверить, вычисляя интеграл G7) для комплексного потен-
потенциала
который дает течение около цилиндра радиуса г=\, причем,
как видно из фигуры 77, распределение местных сил нормальных
давлений симметрично по отношению к осям Ох и Оу.
В данном случае
dz V\1
и, следовательно,
По теореме Коши о вычетах:
так как подинтегральная функция не содержит слагаемых вида
const
Z
Таким образом, для рассматриваемого случая
а следовательно,
Г = 0 и Х = 0.
Для получения подъемной силы нам необходимо рассма-
рассматривать только такие комплексные потенциалы, которые дают
301
несимметричное относительно оси Ох распределение давлений (и
скоростей) по контуру обтекаемого тела. Мерой неравномерно-
неравномерности распределения скоростей является циркуляция вектора ско-
скорости по контуру обтекаемого тела Г, измеряемая работой век-
вектора скорости по контуру, т. е.
Если циркуляция Г=0, то существует симметрия в распреде-
распределении скоростей (и давлений) по контуру относительно оси Ох,
и подъемная сила будет равна нулю. Если ТФО, то и подъемная
сила будет отличной от нуля.
Связь величины подъемной силы с циркуляцией скорости бы-
была впервые установлена Н. Е. Жуковским, и полученная им тео-
теорема о подъемной силе называется теоремой Жуковского.
Если комплексный потенциал течения известен, то
$? (81)
В самом деле,
где ф — потенциал скоростей.
Но на контуре i|j = const и, следовательно, dqs=dw, а поэтому
f Г f Г dw ,
д?<р = ф dw = (b -jj- dz.
Общий вид комплексного потенциала течения около произ-
произвольного контура будет следующим:
!!L + ^+^+ ..., (82)
где Voo — скорость потока на бесконечности, а — угол вектора
скорости Voo с осью Ох (так называемый угол атаки), Аа, Аи
А2, ... — комплексные постоянные. Эти постоянные определяют
точное значение потенциала скоростей течения вокруг контура и
различны для различных профилей и разных углов атаки.
Вычислим циркуляцию скорости по контуру для комплекс-
комплексного потенциала, задаваемого формулой (82). Будем иметь:
По теореме Коши о вычетах
ir, , <Т 1 А 2Л2
V°°e +^7--^ W
302
следовательно, постоянная Г в формуле (82) равна с точностью
до знака циркуляции вектора скорости по заданному контуру.
Для больших значении z слагаемыми -—- , —f-, ... можно
пренебречь, и поле скоростей вдали от обтекаемого контура по-
получается таким, как если бы на поступательный поток со ско-
скоростью Voo был наложен поток от вихря с циркуляцией Г, по-
помещенного в начале координат. Этот неподвижный в потоке
вихрь с циркуляцией Г называют несущим или присоединенным
вихрем Жуковского.
Для доказательства теоремы Жуковского воспользуемся пер-
первой формулой Чаплыгина. Вычислим сначала производную от
комплексного потенциала, определяемого формулой (82). Будем
иметь:
d . . ,г ,„ , гТ 1 А,
— w(z) = Vme-l° + -^--^-- ....
Подставляя вычисленное значение (-^—) в формулу G7), по-
получим:
По теореме Коши о вычетах имеем:
так как коэффициент при 1—1 получится только в удвоенном про-
произведении первого слагаемого на второе.
Таким образом,
Y + iX = pri/OTe-ta = pIV^ (cos a — i sin a),
откуда получаем:
X =
Величина результирующей силы воздействия потока будет
равна:
P=VX*+Y* = &Vm. (83)
Формула (83) показывает, что результирующая сила воздей-
воздействия потока на плавно обтекаемый контур с циркуляцией Г
равна по величине произведению плотности жидкости на цирку-
циркуляцию Г и на скорость потока в бесконечности.
Зная выражение производной от комплексного потенциала,
мы можем найти комплексную скорость на бесконечности.
303
В самом деле,
откуда
и — V^ cos a \
v = Vm sin a j ' v ^ '
Формулы (84) ноказывают, что модуль скорости потока на
бесконечности равен Уоо, а направление вектора Vx, образует
угол а с осью Ох.
Направление течения от присоединенного вихря мы получим,
если исследуем функцию
Щ(*) = ^г. (85)
Вычислим производную от а>1 по z. Будем иметь:
/,. — dw' _ rT ! _ гТ (х — 'У) _ Г (y + ix)
Ul — lVl _-—._ — -__— х2 + у2 ___ ^ + ^2 .
Из (86) следует, что
Ту Гл: „_.
Ul ~ 2л (х2 + у2) ' V — ~ 2л (х2 -f У2) ' ( ^
Таким образом, зная, что Г>0, мы видим, что течение, обус-
обусловленное присоединенным вихрем, происходит в направлении
движения часовой стрелки.
Возвращаясь к формулам для X и У, мы замечаем, что век-
вектор результирующей силы направлен перпендикулярно к скоро-
скорости потока на бесконечности, и, следовательно, результирующая
сила Р есть по определению подъемная сила.
Итак, если потенциальный поток идеальной жидкости, имею-
имеющий скорость на бесконечности, равную Vw, плавно обтекает
некоторый контур, причем циркуляция скорости вокруг этого
контура равна Г, то подъемная сила контура равна по величине
произведению плотности жидкости на циркуляцию и на ско-
скорость потока в бесконечности. Чтобы определить направление
подъемной силы, достаточно повернуть вектор скорости потока
в бесконечнсти на 90° против направления течения, обусловлен-
обусловленного присоединенным вихрем.
Сформулированный выше результат был впервые получен в
1906 г. Н. Е. Жуковским и называется теоремой Н. Е. Жу-
Жуковского. Формула (83) называется формулой Жуковского для
величины подъемной силы.
Можно привести второй способ доказательства теоремы
Н. Е. Жуковского, основанный на методе конформных отображе-
отображений в теории функций комплексного переменного.
304
Рассмотрим две плоскости комплексного переменного: z и ?.
Конформная связь между этими плоскостями пусть дается функ-
функцией ? = ?(z). Пусть в плоскости z расположен цилиндр радиуса
г—\, плавно обтекаемый потенциальным потоком под углом
атаки а; циркуляция скорости вокруг цилиндра пусть равна Г.
В этом случае комплексный потенциал течения будет иметь
вид:
(88)
Общий вид функции ?(z), дающей конформное отображение
контура цилиндра, расположенного в плоскости z, на произволь-
произвольный контур в плоскости ?, будет следующим:
l = z + aQ + ^ + ^+ .... (89)
Комплексная скорость в плоскости ? будет определяться по
формуле:
(dw_
dw dw dz \ dz
7ЖГ '
\dz)
,<-.,-,,.
Первая формула Чаплыгина для контура в плоскости ? при-
примет вид:
.dz
Так как
dw
~~dz
а
dz z2 гг (dZ,^2
ТО
Г^ а у 2а2 1
L Z Z J
По теореме Коши о вычетах имеем:
откуда
20 А. А. Космодемьянский 305
Величина результирующей силы равна:
а ее направление, как видно из фигуры 79, перпендикулярно к
вектору скорости потока на бесконечности. Чтобы получить на-
правление подъемной силы, достаточно повернуть вектор F
на
Фиг 79
90° против направления течения, обусловленного присоединен-
нь м вихрем. Следовательно, теорема Н. Е. Жуковского дока-
доказана.
§ 11. Гипотеза Н. Е. Жуковского
Для того чтобы на основании формулы (83) можно было оп-
определить подъемную силу заданного контура, необходимо знать
циркуляцию Г. Теоретически мы можем построить бесчисленное
множество комплексных потенциалов течения около данного
контура, задаваясь различными значениями Г. Но очевидно, что
в реальных условиях при обтекании данного контура существует
вполне определенное и единственное значение циркуляции Г,
причем величина Г зависит от геометрических параметров кон-
контура. Естественно возникает вопрос: как найти циркуляцию Г,
если геометрические характеристики обтекаемого контура из-
известны?
Чтобы выяснить ответ на этот вопрос, вернемся еще раз к
рассмотрению фотографий течений около профиля крыла само-
самолета при небольших углах атаки (фиг. 65 и 66), когда поток
плавно обтекает контур крыла.
На указанных фотографиях мы видим, что частицы жидко-
жидкости плавно сходят с задней острой кромки профиля крыла. Из-
306
мерения показывают, что частицы жидкости (или воздуха) у
задней кромки профиля имеют конечные скорости
Н. Е. Жуковский высказал гипотезу, согласно которой только
те теоретические потоки около профиля крыла имеют практиче-
практическое значение, для которых скорость у задней острой кромки
профиля имеет конечную величину. Определим комплексную
скорость в точке, совпадающей с задней кромкой профиля кры-
крыла, расположенного в плоскости комплексного переменного ?. На
основании формулы (90) будем иметь:
idw \
I dw\ \ dz
тде Zk есть координата точки, совпадающей с задней кромкой
профиля в плоскости ?, a zh есть координата соответствующей
•ей точки на цилиндре в плоскости z.
Если ограничиться рассмотрением профилей с острой задней
кромкой, то в этой точке (-Ф-) будет обращаться в нуль и,
\azlz=zh
¦следовательно, вообще говоря, I—?=-) будет стремиться к бес-
конечности. Для того чтобы комплексная скорость была конеч-
конечной, необходимо потребовать выполнения следующего условия:
.-°- <92>
Условие (92) есть математическое выражение гипотезы
Н. Е. Жуковского. Условие (92) позволяет найти для течений,
имеющих картину распределения скоростей, близкую к реаль-
реальной, одно-единственное значение циркуляции Г.
Указание метода подсчета циркуляции имеет первостепенное
практическое значение, так как, зная Г, мы можем определить
величину подъемной силы профиля крыла теоретическим путем.
Таким образом, теорема Жуковского и гипотеза Жуковского
являются основными положениями современного учения о
подъемной силе крыловых профилей.
§ 12. Симметричные профили Н. Е. Жуковского
Изучение аэродинамических характеристик профилей
крыльев методом конформных отображений получило в работах
Н. Е. Жуковского и С. А. Чаплыгина всестороннее обоснование
и развитие. По существу современная теория профилей крыльев
целиком основана на исследованиях Жуковского и Чаплыгина
20* 307
и созданной ими школы советских аэродинамиков. Общую по-
постановку и метод решения задачи об определении подъемной си-
силы и линии ее действия можно пояснить следующим образом.
Возьмем в плоскости комплексного переменного z цилиндр
радиуса г=\. Комплексный потенциал течения с циркуляцией Г
вокруг цилиндра можно представить в виде:
§\nz. (93)
Пусть в плоскости комплексного переменного ? расположен
профиль крыла, аэродинамические характеристики которого мы
желаем изучить; пусть функцией, дающей конформное отобра-
отображение контура цилиндра на контур профиля крыла, будет:
5 = S(z). (94)
Тогда для определения подъемной силы профиля можно вос-
воспользоваться теоремой Н. Е. Жуковского, согласно которой
Р = РГКЮ, (95)
а циркуляцию Г можно определить на основании гипотезы Жу-
Жуковского, т. е. из условия, что
= 0, (96)
й* -и
где Zk есть координата точки на цилиндре, в которую при кон-
конформном отображении переходит острая кромка профиля.
Линию действия подъемной силы для выбранного профиля
крыла можно найти при помощи второй формулы С. А. Чаплы-
Чаплыгина, согласно которой
—Мо = действительной части I — -| ф ц-^р) (Щ =
— действительной части Г — -|-ф \-jp\ i at \ dz •
Распределение местных скоростей и давлений по контуру
профиля крыла также легко определить. В самом деле, комп-
комплексная скорость в плоскости ? определяется формулой:
I dw\
\~dz)
dw
\~dz
308
Квадрат модуля скорости равен:
dw \ / dw
dw \
^' (98>
~dz
) \dz
где черта означает, что берется комплексно сопряженная функ-
функция.
Легко видеть, что
dw dw .
~dz~~~dz~ ~ (U '
где со есть некоторая действительная величина, характеризую-
характеризующая геометрическую «деформацию» цилиндра по сравнению с
профилем и определяемая, очевидно, заданием функции ?(z),
устанавливающей конформную связь областей z и ?.
Таким образом,
Ut = lT- (99)
Распределение давлений по контуру профиля крыла на осно-
основании интеграла Лагранжа можно определить по формуле:
Формулы (93) — A00) полностью решают задачу об опреде-
определении основных аэродинамических характеристик профиля
крыла.
Как видно из изложенного выше, оснсвной принципиальной
трудностью указанного метода является определение функции
? = Ё;(,г), устанавливающей конформную связь областей z и ?.
Н. Е. Жуковский расширил возможности этого метода, ука-
указав прием «округления» контуров, получаемых при помощи са-
самых простых функций ? = ?(z). Этим приемом Жуковский полу-
получил три семейства теоретических профилей, называемых в совре-
современной аэродинамике профилями Н. Е. Жуковского или сокра-
сокращенно «профилями НЕЖ».
Рассмотрим, для пояснения сказанного, семейство симме-
симметричных профилей Жуковского, называемых часто рулями Жу-
Жуковского.
Возьмем в плоскости комплексного переменного окружность
радиуса A—е), где е — правильная дробь, и отобразим ее
зоа
конформно на плоскость ? при помощи функции
A01)
Так как на окружности z = (l—г)ею, то
откуда
= 2A— e)cosl
= 2A—e)cos0,
A02)
Из формул A02) следует, что контуру окружности радиуса
г=A — е) в плоскости (z) соответствует в плоскости (?) отре-
отрезок прямой, длина которого равна (фиг. 80):
Проведем в плоскости (z) вторую окружность радиуса R=l,
касающуюся первой окружности в точке А, и найдем профиль,
Фиг. 80
на который отобразится эта окружность в плоскости (?). Как
показывают вычисления, окружность R=\ перейдет в плоско-
плоскости (Z) в каплеобразный симметричный профиль (фиг. 80), на-
называемый рулем Жуковского или кратко «рулем НЕЖ».
Чтобы определить контур профиля руля НЕЖ, в который
функция A01) преобразует окружность R=\, перенесем начало
координат в плоскости (z) в центр второй окружности. Тогда
310
формула A01) примет вид:
На окружности г=\ в плоскости (z) комплексное переменное
= e'e, а следовательно,
/ q \ i • • q i A — eJ [(cos 8 — e) — г sin 0]
= (COS 0 E) -4- г Sin 0 -f- r- ^ 1 I . j^r-r: —n ; -. ?тт •
v ' ' ' [(cos 8—e) + « sinG] [(cos 0 — e) — i sin 8]
Разделяя в A04) действительную и мнимую части, получим:
A05)
Уравнения A05) являются параметрическими уравнениями
профиля руля НЕЖ. Так как т|@) = —г|(—0), а |@) =|(—0), то
профиль будет симметричным относительно оси О\. Давая углу
0 различные значения от 0 до п, мы можем построить по точкам
контур руля НЕЖ. Параметр е, входящий в уравнение A05),
характеризует толщину профиля.
Как видно из фигуры 80, хорда профиля (отрезок АВ) равна:
= 2A -е) + Ц±р- = т±- . (Ю6)
Для определения подъемной силы профиля воспользуемся
формулой Жуковского, согласно которой
а циркуляцию Г определим на основании гипотезы Жуковского
из условия (96):
При нашем выборе функции A01) точка, соответствующая
задней кромке профиля, переходит в точку zh=l и, следова-
следовательно,
?¦ = 0,
откуда
Г = 4^ sin а. A07)
311
Таким образом, подъемная сила профиля руля НЕЖ будет
равна:
ls\na. A08)
В экспериментальной аэродинамике и в практике расчетов
в конструкторских бюро формулу для определения подъемной
•силы крыла представляют в следующем виде:
1
A09)
где Су — безразмерный коэффициент подъемной силы, a S
площадь крыла.
В нашем случае S = Ь • 1 = . . и, следовательно,
2
Р =
|
Vсо.
(ПО)
Сравнивая формулы A08) и A10), легко находим теорети-
теоретическое значение коэффициента подъемной силы для руля Жу-
Жуковского в виде:
e)sina. (Ill)
На фигуре 81 проведено уравнение теоретически найденного
значения коэффициента нодъемнои силы с определен-ным из экс-
эксперимента. Как видно из фи-
фигуры 81, до углов атаки а—>
= ± 15° теория и опыт дают до-
достаточно близкие значения Су.
При углах атаки а>15° плав-
плавность обтекания профиля НЕЖ
нарушается и возникает от-
отрыв струй от поверхности кры-
крыла, гипотеза Жуковского ста-
ловится неверной, и поэтому
теоретическая кривая Су=
=Су(ос) весьма сильно откло-
отклоняется от экспериментальной.
Следует заметить, что в совре-
современной авиации углы атаки
крыла (или оперения) при лет-
летных режимах очень малы и не
превосходят 6—8°.
Если в формулах A01) — (Ш) положить е = 0, то мы полу-
получим профиль крыла в виде плоской пластинки. Формула (Ш)
показывает, что коэффициент подъемной силы руля НЕЖ боль-
больше коэффициента подъемной силы плоской пластинки.
Фиг. 81
.312
На заре развития авиации конструкторы и изобретатели при-
применяли для крыльев самолетов профили в виде плоской пла-
пластинки. Работы Н. Е. Жуковского показали, что утолщение про-
профиля и округление его передней кромки весьма полезны и улуч-
улучшают его аэродинамические характеристики.
Для сокращения вычислений линию действия подъемной си-
силы определим для случая е = 0, т. е. для плоской пластинки.
В этом случае
i=,+i
mom0 Я=УИ0=действительной части
Но, как известно из (93),
dw , г
и, следовательно,
= действительной части
Легко видеть, что
Г+ г)
"ВЫ Ь
\1~
ir l
¦dz
а поэтому,
Л10 = действительной части —^ 0)| Уте~'а\\ —
^
По теореме Коши о вычетах:
Поэтому
Мо = — -^
= 2я/Г—•?(—А-
L 2 \ 4я2
sin 2а = —
sin а cos а.
313
Плечо подъемной силы относительно середины пластинки
(точки О на фиг. 82) равно:
sin a cos а
, sin а
¦ = cos а.
A13)
Так как направление подъемной силы перпендикулярно к
скорости потока на бесконечности, а длина пластинки Ь — А, то
при изменении угла атаки а линия действия подъемной силы бу-
будет всегда пересекать пластинку в точке С, причем ОС=\, а
h = ОС cos ос = cos a.
Точка пересечения линии действия подъемной силы с пла-
пластинкой (точка С на фиг. 82) называется центром давления
Фиг. 82
или центром парусности данного профиля. Так как для пластин-
пластинки положение точки С не изменяется с изменением угла атаки а,
то очевидно, что пластинка обладает постоянным центром давле-
давления, расположенным на расстоянии -г хорды от передней кром-
кромки пластинки. Если в точке С установить ось вращения пла-
пластинки, то по теореме Вариньона сумма моментов местных сил
воздействия потока относительно точки С будет равна нулю, так
->-
как momc P = 0.
Аналогичными вычислениями можно доказать, что для ма-
малых е (тонкие рули НЕЖ) симметричные профили НЕЖ также
имеют постоянный центр давления на расстоянии -^ хорды от
передней кромки профиля.
314
§ 13. Дифференциальные уравнения движения вязкой
несжимаемой жидкости
«Мы должны начинать с опыта и через
него восходить к общим принципам».
Леонардо да Винчи
При исследовании вопросов теории подъемной силы можно
было исходить из уравнений движения идеальной жидкости. Для
профилей крыльев существенные отклонения теоретических дан-
данных от эксперимента имеют место только при больших углах
атаки, когда плавность обтекания нарушается и за крылом воз-
возникают вихревые движения жидкости. Нарушение плавности об-
обтекания крыльев при больших углах атаки обусловлено влия-
влиянием вязкости жидкости. Мы видели, что нарушение симметрии
течения, обусловленное наличием присоединенного вихря (нали-
(наличием циркуляции), приводит к возникновению силы, перпенди-
перпендикулярной к скорости потока на бесконечности, т. е. к возникно-
возникновению подъемной силы. Возникновение силы лобового сопроти-
сопротивления обусловлено влиянием вязкости жидкости. Это влияние
может проявляться или непосредственно благодаря возникнове-
возникновению местных касательных сил, проекция результирующей кото-
которых на направление скорости потока в бесконечности дает силу
сопротивления трения, или в таком коренном изменении картины
обтекания тела, обусловливающем нарушение симметрии тече-
течения по отношению к прямой, перпендикулярной к скорости по-
потока на бесконечности, при котором проекция результирующей
местных нормальных сил на направление вектора V^ оказы-
оказывается уже не равной нулю и дает так называемое сопротивле-
сопротивление давления.
Для построения теории сопротивления трения необходимо
вывести уравнения движения вязкой жидкости; при этом мы
ограничимся рассмотрением таких течений жидкостей и газов,
когда влиянием сжимаемости можно пренебречь.
Выделим в жидкости произвольный конечный объем т, огра-
ограниченный поверхностью а. На каждый элемент dx этого объема,
плотность которого равна р, действует элементарная массовая
сила Fpdx; следовательно, результирующая массовых сил, дей-
действующих на объем т, равна:
На каждый элемент поверхности da действует некоторая по-
поверхностная сила Pda; следовательно, результирующая поверх-
315
ностных сил, действующих на всю поверхность а, равна:
#2= J Pda.
о
Если ускорение объема d% есть —^ , то элементарная сила
инерции будет равна! — Pf^T)' следовательно, результирую-
результирующая инерционных сил для масс, заключенных в объеме т, будет
равна:
На основании принципа Даламбера система действующих
сил (массовых и поверхностных) и сил инерции является урав-
новешенной системой для любого момента времени, а следова-
следовательно,
j j J-^-tfT = O. A14)
Выясним более подробно характеристики поверхностной си-
силы Р. Выделим в жидкости элементарный объем Дт в форме те-
тетраэдра. Ребра тетраэдра пусть будут равны Ах, Ay, Az. Пусть
ориентация наклонной грани тетраэдра задана единичным век-
вектором нормали п°, проекции которого на оси Ox, Oy, Oz мы обо-
обозначим через а, р, у соответственно. Очевидно, что а, р, у суть
направляющие косинусы вектора п°. Площадь наклонной грани
ABC обозначим через As. Считая площадку ABC, ориентация
которой задана вектором внешней (но отношению к объему
Дт) нормали, положительной, будем иметь:
-s Дг/ Az — — a As
1дгДд; = —рДх } A15)
Нормалями к площадкам (AyAz), (AzAx), (AxAy) будут еди-
единичные векторы /, /, к, направленные внутрь объема Дт; следо-
следовательно, указанные площадки отрицательны.
Если Ах, Ау и Az малы, то величины поверхностных сил, дей-
действующих на грани тетраэдра, будут малыми второго порядка.
Величины массовых и инерционных сил будут малыми третьего
316
порядка. Напишем векторное уравнение движения выделенного
тетраэдра.
Будем иметь:
Р As + p~x\ Ay Az + ~py ^ Az Ах + р~г± Ах Ау +
4-члены третьего порядка малости = 0, A16)
¦>->-*¦
где рх, pv, рг — поверхностные силы, действующие на грани те-
тетраэдра (фиг. 83).
Фиг. 83
Принимая во внимание формулы A15), уравнение A16) мо-
можно написать в виде:
-> ¦> -> ->
Я As — рх a As — n p As — ргу As -f-
-f- члены третьего порядка малости = 0. A17)
Если в уравнении A17) разделить все слагаемые на As и пе-
перейти к пределу при Дл: —>¦ 0, Ау —>¦ 0 и Az —>¦ 0, то мы получим:
¦> ¦> ¦> ¦>
или
A18)
Таким образом, напряжение Р на наклонной площадке мож-
можно выразить через напряжения на элементарных площадках,
317
совпадающих с координатными плоскостями, и направляющие
косинусы нормали к наклонной площадке.
Спроектируем A18) на оси координат. Будем иметь:
(U9)
Введем следующие общепринятые обозначения:
Рхх
Рху
р
х'
ху'
= Xyz>
р —
Рух =
Р zx
V
\х'
Xzx'
Pzz
Pzy
Pxz
— OZS
~Х*У
= Xxz
По определению ах, ау, аг являются нормальными напряже*
ниями, a xxv, туг, ..., tj-z—касательными напряжениями. В но-
новых обозначениях формулы A19) примут вид:
A20)
Формулы A20) показывают, что если задана ориентация на-
наклонной площадки направляющими косинусами а, р, у и извест-
известна таблица (матрица) из девяти величин:
AXxy
\Xxz
\x
°y
Xyz
Xzx
Xzy
°z
го мы будем знать Рх, Рх, Яу,а следовательно, и вектор напря-
напряжения Р на заданной площадке. Формулы A20) можно напи-
написать сокращенно в виде:
Я = E)л°. A21)
Способ раскрытия произведения матрицы (S) на вектор п"
дают по определению формулы A20).
Подставляя Р из формулы A18) в уравнение A14), получим:
j (ж) $ (xy z) = 0. A22)
X О
318
Преобразуем интеграл по поверхности в интеграл по объему,
воспользовавшись формулой Остроградского. Будем иметь:
a t
Таким образом, уравнение A22) можно написать в виде:
Так как объем т совершенно произволен, то интеграл может
быть равен нулю только в том случае, если подинтегральное вы-
выражение равно нулю, т. е.
dv
или
Уравнение A23) называется дифференциальным уравнением
движения вязкой жидкости в напряжениях. Если уравнение
A23) спроектировать на оси координат, то при заданной плот-
плотности р три полученных дифференциальных уравнения будут
связывать двенадцать неизвестных величин: и, v, w и девять
компонентов матрицы (S).
Докажем теперь симметричность матрицы (S) относительно
тлавной диагонали. Напишем для уравновешенной системы мас-
массовых, поверхностных и инерционных сил, приложенных к объ-
объему т, векторное уравнение моментов. Будем иметь:
jCrX p?)dT — j pXp4r)+ J(rXP)tfa = O. A24)
x x a
В уравнении A24) первый интеграл представляет собой ре-
результирующий момент массовых сил, второй интеграл — резуль-
результирующий момент инерционных сил и третий интеграл — резуль-
результирующий момент поверхностных сил.
Преобразуем третий интеграл I (rX.P)da в интеграл по
a
319
объему т, пользуясь формулой Остроградского:
J (? X Я)^а= J [г X (pxa+P,p + PtV)]do=j (г X px)ado
а а о
+ / Сг Х Я)М°
X
дх
Подставляя полученное выражение в уравнение A24), будем
иметь:
Л
. -v дрх dp
+j Ш
+
г.)+(| х г,)] л-
На основании дифференциального уравнения движения A23)
первый интеграл в A25) равен нулю. Так как объем т совершен-
совершенно произволен, то подинтегральное выражение у второго инте-
интеграла A25) также равно нулю, т. е.
Так как
A26)
t дТ t dr -f dt
, то 37 = /, -зт=7, ^7 =
Следовательно,
?Х ?,L-(/X ?,L-(^Х Я) = О-
Напишем последнее уравнение в развернутом виде:
* "*" t
I J k
1 0 0
4-
0 1 0
4-
/ i - k
0 0 1
=-0.
820
Если вектор равен нулю, то должны быть равны нулю его
проекции на оси координат. Проектируя последнее уравнение на
оси Ox, Oy, Oz, получим:
откуда
lzy'
гх хг1
П"Са,р,р
Следовательно, имеет место закон парности касательных на-
напряжений, т. е. матрица (S) симметрична относительно главной
диагонали. Таким образом, для определения напряжения Р на
любой площадке достаточно знать шесть
ВеЛИЧИН Ох, ву, Oz, tyz, tzx, Txj/, ЯВЛЯЮ-
ЯВЛЯЮЩИХСЯ компонентами матрицы напряже-
напряжений.
Рассмотрим некоторую площадку,
проходящую через произвольную точку
жидкости (фиг. 84). Нормальное напря-
напряжение Рп для рассматриваемой площад-
площадки равно:
Фиг 84
Будем откладывать на направлении нормали к площадке отре-
отрезок длины /?— -_. , рассматривая всевозможные площадки,
У *п
проходящие через точку О. Найдем геометрическое место кон-
концов отрезков R.
Так как
х а— У „ _ f
а —
R
то имеем:
V2
R
2 V2 +
'Я'
= 1. A27)
Следовательно, геометрическим местом концов отрезков R
является поверхность второго порядка. В задачах гидроаэроме-
гидроаэромеханики эта поверхность представляет собой эллипсоид или
сферу (для идеальной жидкости).
Эллипсоид напряжений, построенный для некоторой точки
жидкости, дает возможность определить вектор напряжения на
любой площадке, проходящей через данную точку.
21 А. А. Космодемьянский
321
Если оси координат направить вдоль осей эллипсоида на-
напряжений, то уравнение A27) примет следующий вид:
Величины сгь а2 и а3 носят название главных нормальных на-
напряжений, а оси Охи Оуи Ozi — главных осей напряжений.
На площадки, перпендикулярные к главным осям, действуют
только нормальные напряжения.
Для главных осей матрица напряжений имеет вид:
О (Ь
Сумма трех нормальных напряжений инвариантна по отно-
отношению к преобразованию координат, т. е.
Выразим компоненты тензора напряжений ах, оу, ог, хуг, хгх,
хХу через главные напряжения. Составим таблицу косинусов
углов между произвольными осями координат Ох, Оу, Oz и
главными осями Охи Оуи Ozi.
Так как pJC=E1)jc°, то
У\
X
а,
о2
о3
У
Р.
Р2
Рз
Z
Yi
Y2
Аналогично получим:
у° =
ху2 == z° E,) у0 =
¦Tzx = x° (S^ z° =
cr2p2v2 + cr3p3Y3
a2Y2a2 + °зУзаз
A28)
322
Спроектируем векторное уравнение A23) на оси координат.
Будем иметь:
du
dw
р dt —
да г
дху
dxxz
]Г
У*
дхГ7
хг
дх
дх
у
ду
да,
-
дг
A29)
Гри уравнения A29) связывают девять неизвестных величин:
и, v, w и шесть компонентов симметричной матрицы (S).
Чтобы замкнуть задачу, мы должны получить еще шесть до-
дополнительных соотношений. Эти соотношения можно получить,
устанавливая связь касательных и нормальных напряжений со
скоростями деформаций. Мы установим эту связь сначала для
главных направлений.
Пусть главные нормальные напряжения будут c?i, с?2, аз, а
скорости деформации вдоль этих осей — еь е2, е3 соответственно.
Если скорости деформаций равны нулю, то Oi = O2 = o3 = p,
где'р — давление. Будем считать добавки к давлению, обуслов-
обусловленными наличием скоростей деформаций, пропорциональными
скоростям деформаций, причем жидкость будем считать одно-
однородной и ее свойства одинаковыми во всех направлениях. В этом
случае:
A30)
где 2(х — коэффициент пропорциональности.
Имея соотношения A30), мы по формулам A28) легко на-
находим, что
= °а
И =
а2
Приняв во внимание, что с^ + а2,+а?; = 1. и учитывая, что
скорости деформации ехх, еуу, ezz, eyz, ezx, exy связаны со скоро-
скоростями деформации для главных осей формулами, аналогичными
A28), мы получим:
и аналогично:
21*
323
Подсчитаем касательное напряжение хуг. По формулам A28)
имеем:
*уг = — Р (Mi + P2Y2 + P3Y3) + 2ц (И
так как в силу ортогональности осей Оу и Oz:
PiYi + P2Y2 + P3Y3 = O.
Аналогично:
dw , ди
дг + -дг
ди . dv
Подставляя найденные значения компонентов матрицы E)
в уравнения A29), получим:
nd™ п дР
A31)
где оператор Ass -^ -\--^-\- -^—2 есть так называемый оператор
Лапласа. Присоединяя к уравнениям A31) уравнение сохране-
сохранения массы (уравнение неразрывности)
ди ,dv dw n
мы получим четыре дифференциальных уравнения для опреде-
определения четырех неизвестных и, v, w, p.
Все реальные жидкости и газы обладают определенной вяз-
вязкостью, которая проявляется в виде сил трения при деформа-
деформациях. Коэффициент вязкости \i зависит от физических свойств
жидкости или газа, внешнего давления и температуры. Подроб-
Подробные данные о значениях коэффициентов вязкости можно найти
в специальных справочниках.
Теоретическое изучение движения вязких жидкостей и газов,
а также изучение движения тел в этих средах сопряжено с
весьма большими математическими трудностями, так как урав-
уравнения A31) и A32) представляют собой систему нелинейных
дифференциальных уравнений в частных производных.
До настоящего времени достаточно подробно исследованы
только предельные случаи движения жидкостей и газов, а имен-
именно случаи движения жидкостей с очень большой вязкостью
324
(медленные, ползущие движения) и очень малой вязкостью
(теория пограничного слоя).
Из известных жидкостей и газов наиболее распространены
в природе вода и воздух. И для воды, и для воздуха абсолют-
абсолютный коэффициент вязкости \i очень мал. Поэтому для практи-
практических приложений широкое распространение получила теория
пограничного слоя. Мы рассмотрим элементы этой теории в сле-
следующем параграфе.
Для иллюстрации решения уравнений A31) и A32) в случае,
когда силы вязкости преобладают над силами инерции, мы рас-
рассмотрим установившееся течение жидкости с брльшой вязкостью
в прямой круглой трубе радиуса R—a.
Направим ось Oz по оси трубы и предположим, что внешние
силы отсутствуют, а линии тока в рассматриваемом движении
жидкости направлены параллельно оси трубы. В этом случае
течение называется ламинарным; очевидно, что при нашем вы-
выборе осей координат
и = 0, v = 0, a w ф 0.
Из уравнения A32) следует тогда, что
дг '
а следовательно,
dw dw . dw . dw „
dt dx ~*~ dy ' dz '
Система уравнений A31) принимает следующую простую
форму:
A33)
^L = JL (
дг р \ дх2 ~Т~ ду2
Так как первые два уравнения A33) означают, что p = p(z),
то поставленная задача сводится к решению одного уравнения
вида:
При установившемся движении скорость w зависит только
от а; и у, а давление р есть функция только г. Таким образом,
левая часть уравнения A34) есть функция только 2, а правая
часть —функция х и у. В силу независимости координат х, у, z
равенство A34) возможно лишь в случае постоянства левой и
325
правой части. Таким образом,
Ар
d2w , d'w Ар
Tx2"^ dyf ~ jxT
где Ар — падение давления на участке трубы длины /.
Для определения w имеем уравнение:
d2w Ар
ду2 ~ \il #
A35)
дх2
A36)
Как показывают точные эксперименты, при течении жидко-
жидкости вдоль неподвижной стенки частицы жидкости, прилегающие
непосредственно к стенке, имеют скорость, равную нулю. Мы
Фиг. 85
должны поэтому найти такое решение уравнения A36), при ко-
котором на стенках трубы w = 0.
Уравнение сечения трубы имеет вид:
A37)
где а — радиус трубы (фиг. 85).
Будем искать решение уравнения A36) в виде:
w=A(\ —
где т есть расстояние рассматриваемой частицы жидкости от ос»
трубы (г^-а).
Подставляя A37) в уравнение A36), получим:
АА
откуда А —
а2 Ар
4ц./
Таким образом, закон распределения скоростей по какому-
либо меридиональному сечению трубы будет иметь вид:
<138>
326
Уравнение A38) есть уравнение параболы. Следовательно,
при стационарном течении вязкой жидкости в прямой круглой
трубе скорости в любом меридиональном сечении распределены
по параболическому закону A38).
На оси трубы ш = штах, а г=0, и мы получаем:
A39)
Найдем количество жидкости Qb протекающей через трубу
в единицу времени (секундный расход). Для этого достаточно
проинтегрировать выражения для элементарных расходов по
кольцевым сечениям. Будем иметь:
я Ар Г
~~ 4ц/ L
я Ар Г(д*-г*)
2
Формула A40) выражает закон Пуазейля, согласно которо-
которому при ламинарном течении вязкой несжимаемой жидкости в
прямой круглой трубе секундный расход пропорционален пере-
перепаду давления на единицу длины трубы и четвертой степени ее
радиуса и обратно пропорционален коэффициенту вязкости.
Средняя по сечению скорость будет равна:
Величина —f- характеризует сопротивление трубы на участ-
участке длины /. При установившемся движении перепад давления
Ар уравновешивается силами сопротивления трения, направ-
направленными против движения жидкости. В гидравлике является
общепринятым следующее выражение для сопротивления трубы
через скоростной напор, рассчитанный по средней скорости:
где X—коэффициент сопротивления.
Но из A39) и A41) имеем:
и, следовательно,
32v
Л = -
где v = -r • Величина v называется кинематическим коэффи-
коэффициентом вязкости. В системе CGS значения v измеряются
327
в см21сек. При /° = 0°С для воды v = 0,018 см^/сек, а для воздуха
v = 0,133 см21сек.
Введем в рассмотрение безразмерную величину
называемую числом Рейнольдса. Тогда
» 32
l
Таким образом, при ламинарном течении в прямой круглой
трубе коэффициент сопротивления трубы обратно пропорциона-
пропорционален числу Рейнольдса.
§ 14. Элементы теории пограничного слоя
Непосредственные наблюдения над движением маловязких
жидкостей и газов показывают, что при обтекании твердого тела
П
I - пограничный слой
' И - 8»ешний поте
III - кильватерная зона
Фиг. 86
всю область течения можно разделить на три существенно раз-
различные зоны. Рассмотрим обтекание контура (профиля крыла)
потоком маловязкой жидкости (фиг. 86). За контуром легко
выделить визуальными методами зону интенсивных вихреобразо-
ваний, которую мы будем называть кильватерной зоной. Чем
хуже обтекается контур, тем шире кильватерная зона. Исследо-
Исследование поля скоростей непосредственно около самого контура
показывает, что частицы, прилегающие к стенке, имеют скорости,
равные нулю, а в тонком переходном или пограничном слое про-
происходит резкое возрастание скорости от нуля на стенке до неко-
некоторого значения, порядка скорости набегающего потока, на
внешней границе этого слоя. Пограничный слой есть зона боль-
больших градиентов скорости по направлению нормали к стенке.
Так как на основании формулы Ньютона B) выражение для
силы трения, обусловленной вязкостью жидкости, можно на-
328
писать в виде:
где ось п совпадает с направлением нормали к стенке, то оче-
очевидно, что в пограничном слое, вследствие больших значений
(-г-) ) касательные силы будут конечными даже при малых
значениях коэффициента вязкости. Поэтому в пограничном слое
влиянием вязкости пренебрегать нельзя даже в случае очень
малых значений коэффициента \л.
В третьей зоне градиенты скорости конечны или малы, а по-
поэтому при малых ц малы и касательные напряжения, обуслов-
обусловленные вязкостью, и ими можно пренебречь. Эту зону обычно
называют внешним потоком; для описания движения жидкости
в ней можно пользоваться уравнениями идеальной жидкости в
форме Эйлера. Мы будем в дальнейшем считать внешний поток
потенциальным.
Наблюдения и измерения показывают, что пограничный слой
тем тоньше, чем меньше коэффициент вязкости \х. Благодаря
этому оказывается возможным для течений маловязких жидко-
жидкостей и газов, оценив порядок слагаемых в уравнениях A31),
сделать существенные упрощения в этих уравнениях.
Рассмотрим плоскопараллельное течение маловязкой жид-
жидкости около плоской стенки. Массовыми силами будем пре-
пренебрегать. Развертывая подробно полные производные от ком-
компонентов скорости по времени и полагая да = 0, получим из A31):
ди . ди 1 др . ц I д2и . д2и
дх ' ду р дх р удх2 ' ду2
ду , dv 1
дх "+" v ду ~ р ду "+" р \дх2 "+" ду*)
Будем считать толщину пограничного слоя б величиной ма-
малой первого порядка, а течение в пограничном слое — лами-
ламинарным. Составляющая скорости по оси Ох внутри слоя будет
величиной конечной. Все конечные величины условно будем счи-
считать величинами порядка единицы. Следовательно, и есть вели-
величина порядка единицы.
Из тождества
б
следует, что градиент скорости по направлению, перпендикуляр-
перпендикулярному к стенке, будет порядка у . В самом деле, введем внутри
329
слоя новую переменную г\ = у (г\ — величина порядка едини-
единицы); тогда будем иметь:
ди 1 ди
ду б дт\
Так как -j- имеет внутри пограничного слоя порядок едини-
ди М \ д
цы, то очевидно, что -т— имеет порядок l-r-l . Аналогично дока-
докажи , У „ 1
зывается, что -г-у будет величиной порядка ту .
В пограничном слое -j— имеет порядок единицы, а следова-
dv ,
тельно, из уравнения сохранения массы вытекает, что -т- будет
б
также величиной порядка единицы. Из тождества v= Г -s— dy
о
следует, что в пограничном слое v имеет порядок б.
Напишем первое из уравнений A44) с указанием порядка
слагаемых. Будем иметь:
ди . ди 1 dp . \
1 1 6 | 1 б2 ( 1 -i
О \ и
В правой части уравнения A45) можно пренебречь производ-
„ д2и д2и „
нои -g-у по сравнению с -г-у . 1 ак как внутри пограничного слоя
силы инерции и силы вязкости будут конечными величинами
(имеют одинаковый порядок малости), то мы должны считать
[j, величиной порядка б2. Таким образом, первое из уравнений
A44) после сделанных упрощений будет иметь вид:
и дх "+" ^ ду ~ р дх^ р дуг ¦
Напишем второе из уравнений A44) с указанием порядка
величин отдельных слагаемых:
dv . йу 1 др . ц /<j2t/ _. <?2f \
16 6 1 б2 ( 6
Пренебрегая в правой части уравнения слагаемым -г-у по
d2v
сравнению с уу , мы замечаем, что все остальные слагаемые
330
имеют порядок 6. Таким образом, уравнение A46) по существу
сводится к утверждению, что перепад давления по нормали к
стенке в пределах пограничного слоя мал и имеет порядок б.
Следовательно, мы можем написать, что
Интегрируя это соотношение в пределах пограничного слоя,
получим:
а
р — po = B&
где В — некоторый коэффициент пропорциональности (конечная
величина).
Таким образом, разность давлений в пределах слоя прене-
пренебрежимо мала, и мы можем считать, что р не зависит от у,
т. е. р=р(х).
Так как уравнение сохранения массы остается неизменным,
то полная система уравнений движения жидкости в погранич-
пограничном слое примет вид:
да . ди 1 dp . (i дги
ди . ди ^
Решения уравнений A47) должны удовлетворять следующим
граничным условиям:
1. При у = 0 (на стенке) и = 0 и v = 0.
2. При у = 6 (на внешней границе слоя).
Условие -г-=0 вытекает из предположения о том, что на
границе слоя можно считать т = 0. Система уравнений A47)
была получена немецким ученым Л. Прандтлем в 1905 г. и
часто называется системой уравнений Прандтля.
Для построения приближенных решений задач пограничного
слоя большое распространение получил метод интегральных со-
соотношений.
331
Умножим каждое слагаемое первого из уравнений A47) на
dy и проинтегрируем в пределах от 0 до 6. Будем иметь:
ди , Г д ( и2\ , д С и*
dy)[)dy \
оо о
6 й 6 6
ди , , чб С dv , , т С dv , . г ди
-wdy = {avH- \ uwdy = U \ ^dy^ ju-^
0 0 0
ди , . д Г и2 , U2 db ,, д
U2 db ,, д Г
6
д Г и2 U2
о
6
J p ду2 p \ ду H p [ dy j0 p *
Собирая результаты интегрирования отдельных слагаемых,
получим:
Уравнение A481 называется интегральным соотношением
Кармана. Для получения приближенных решений интегральное
соотношение удобнее, чем уравнения A47).
Так как в интегральное соотношение A48) составляющая
скорости по оси Оу не входит, то граничные условия следует
формулировать только для и = и(х, у). Выясним, какое ограни-
ограничение налагает на составляющую скорости и условие v = 0. По-
Положим в первом из уравнений A47) и = 0 и и = 0. Будем иметь:
— г др
Р \ ду* )у=0 р дх '
или
1д2и \ _ 1 др
\ ду2 )у=0 ц дх '
332
Таким образом, граничные условия для составляющей и —
= и(х,у), входящей в интегральное соотношение, можно пред-
представить в виде:
1) при у —О и = 0,
3) при у = б и —U,
4) при г/=б -J-— — 0.
Исходя из интегрального соотношения Кармана, можно ре-
рекомендовать следующий порядок решения частных задач.
Задаем функцию, определяющую распределение скоростей
в пограничном слое в виде и = и(у, 6), так, чтобы эта функция
удовлетворяла граничным условиям задачи. Толщину погранич-
пограничного слоя б следует подобрать так, чтобы интегральное соотно-
соотношение Кармана удовлетворялось. Это достигается тем, что мы
подставляем и = и(у, б) в интегральное соотношение и получаем
обыкновенное дифференциальное уравнение относительно иско-
искомой величины б. Интегрируя полученное дифференциальное
уравнение, находим Ь{х). Подставляя б = б(х) в и(у, б), нахо-
находим закон распределения скоростей в пограничном слое в виде
и = и(х, у), что и решает задачу. Зная и = и(х, у), по формуле
Ньютона B) определяем касательное напряжение на стенке:
-) • A49)
У/у-О
Если то известно, то интегрированием по поверхности контура
можно найти сопротивление трения всего контура.
Для решения конкретных задач теории ламинарного погра-
пограничного слоя необходимо знать еще величину (-г-) ¦ Если кон-
контур, на котором изучается пограничный слой, хорошо обтекае-
обтекаемый, то можно считать, что распределение давлений на внешней
границе пограничного слоя будет таким же, как на самом
контуре при плавном обтекании его потоком идеальной жидко-
жидкости. Таким образом, для решения уравнений пограничного слоя
для какого-либо контура необходимо знать решение уравнений
движения идеальной жидкости для этого контура. Если обо-
обозначить скорость на контуре, найденную из решения уравнения
движения идеальной жидкости, через U, то из интеграла Бер-
нулли будем иметь:
¦?- = С—?-. A50)
Дифференцируя A50) по х, получим:
333
Для плоской пластинки при угле атаки а=Ъ° {/=const=VM
dp A
и, следовательно, -^г =и.
Для плохообтекаемых контуров -=—} определяется экспе-
риментально.
Исследуем пограничный слой на плоской пластинке, исходя
из интегрального соотношения Кармана.
Зададим распределение скоростей и = и(у, 6) в виде:
и = Asm {by). A52)
„ „ д2и \ dp г. п
Граничные условия и = 0 h-j~2=—^- = 0 при y=\J удовле-
удовлетворяются. Из условий: при у = 6 u = Voa и \~7г\ — ^ будем
иметь:
V = Asmbb )
О53)
Из второго уравнения A53) следует, что ЬЪ=-к > откуда
Из первого уравнения A53) при найденном значении b полу-
получаем:
Таким образом, распределение скоростей, удовлетворяющее
граничным условиям, можно написать в виде:
A54)
Для определения закона нарастания толщины пограничного
слоя подставим A54) в интегральное соотношение Кармана
A48), имея в виду, что для плоской пластинки-g— = 0, а U~
Будем
с
-V
То
р
иметь:
lju'di
0
?¦ [udi
>х J
О
1 J
р 1
6
0
6
О
^/</_О Р 26 со^СО.
rfv = -
' 2 б]„
() / б \
V2 д
-0
25
334
Таким образом,
или
db |
db
'2
.я
1\ _
я
V °
V
я
26 '
l_i
2
055)
Интегрируя A55), находим:
где Ci — постоянная интегрирования.
Будем считать, что при х = 0 6 = 0. Тогда Ct = 0, и мы по-
получим закон нарастания толщины пограничного слоя на пло-
Ко
0,9
0,7
0,5
0,3
O,t
Теория
Эксперим\
no, опытов Ганзена
точки
5,0
Фиг. 87
ской пластинке в виде:
Ч—з
или
=4,8/
A56)
335
Из формулы A56) следует, что при заданных v и Ум толщи-
толщина пограничного слоя увеличивается с удалением от передней
кромки пластинки по параболическому закону.
Подставляя найденное значение б в A54), получим закон
распределения скоростей в пограничном слое пластинки в виде:
и
VZ
L!L ==sin1^. . (i57)
9,6 Vv.\Tx 9,6 V v Y^c K '
Сравнение теоретических значений, вычисленных по формуле
A57), с экспериментальными данными проведено на фигуре 87*.
Касательное напряжение т0 на стенке будет равно:
A58)
dx
Подсчитаем силу трения на одной стороне пластинки, пло-
площадь которой S = bl (фиг. 88). Элементарная сила трения на эле-
элементе пластинки bdx равна:
dQx = хф dx.
Полная сила трения:
i /
Qx= J robdx = ^
или
Фиг. 88
A59)
Из формулы A59) следует, что сила сопротивления трения
при ламинарном пограничном слое растет пропорционально V^ .
В экспериментальной аэродинамике силу сопротивления тре-
трения определяют по формуле:
1 •> ™,2 A60)
где Схх — коэффициент сопротивления трения, S = bl—пло-
bl—площадь пластинки. Приравнивая правые части формул A59) и
A60), легко находим:
A61)
Схх —
VJL
где Re= °° есть число Рейнольдса.
V
Таким образом, коэффициент сопротивления ламинарного
трения изменяется обратно пропорционально корню квадратно-
квадратному из числа Рейнольдса.
* См.: А. А. Космодемьянский, К теории лобового сопротивления.
«Труды НАГИ», вып. 215, 1935.
336
Определим по формуле A56) максимальную толщину погра-
пограничного слоя на плоской пластинке, обтекаемой потоком воды,
Пусть длина пластинки, измеряемая вдоль потока, /= 100 см,
а скорость потока Voo —900 см/сек. Кинематический коэффиц-иент
вязкости для воды при f=\b°C равен v = 0,01. Подставляя эти
значения в формулу A56), получим:
л а а -. f v*~ л Q-. /,01-100 4,8 , _
6 = 4,8 у — = 4,8 у -^-щ— = 15" см = * 'б
При непосредственном наблюдении течений воды около стен-
стенки, вследствие малой толщины пограничного слоя, нам кажется,
что вода скользит по стенке. В действительности, в очень тон-
тонком пограничном слое благодаря влиянию вязкости происхо-
Пограничный
IC/IOU
Фиг. 89
дит торможение скорости, и на поверхности неподвижного обте-
обтекаемого контура частицы воды имеют скорость, равную нулю
(прилипают к стенке).
Особо важное значение пограничного слоя состоит еще в том,
что при определенных условиях в этом слое может возникнуть
возвратное движение жидкости (движение жидкости в сторону,
противоположную внешнему потоку), приводящее к отрыву
струй от поверхности обтекаемого контура. Явление отрыва
струй сопровождается образованием дискретных вихрей в киле:-
ватерной зоне.
Рассмотрим для примера течение в пограничном слое на
круглом цилиндре. Пусть в некоторый момент времени t=t0
круглый цилиндр получил скорость Vx и начал двигаться с этой
скоростью в направлении, указанном стрелкой на фигуре 89.
Как показывает фотография (фиг. 90), в первые моменты
времени после, начала движения линии тока (а следовательно,
и распределение скоростей вне пограничного слоя) близки к по-
полученным теоретически из уравнений движения идеальной жид-
жидкости. Рассмотрим частицу жидкости пограничного слоя в зоне
22 А. А. Космодемьянский
337
возрастания скорости внешнего потока (области падения дав-
давления). В этой зоне внутри пограничного слоя не могут возник-
возникнуть возвратные течения частиц жидкости, так как если вслед-
вследствие влияния вязкости частица потеряет скорость, то благодаря
существованию градиента давления она все же будет вынужде-
вынуждена продолжать движение по направлению скорости внешнего
потока. Совершенно другая картина будет иметь место в зоне
уменьшения скорости внешнего потока (области возрастания
давления). Если частица жидкости, находящаяся в пограничном
слое в зоне падения скорости внешнего потока, вследствие влия-
влияния вязкости потеряет скорость, то перепад давления будет со-
сообщать частице движение в направлении, противоположном ско-
скорости внешнего потока. В пограничном слое возникает возврат-
возвратное течение жидкости и плавное обтекание цилиндра нарушается.
Будет иметь место обтекание цилиндра с отрывом струй.
На фигуре 93 дано распределение скоростей в пограничном
слое при различных градиентах давления. Место отрыва струй
естественно определить как точку, в которой)-^-) =0, или
как точку, в которой то=О. Последовательное развитие вихрей
в кильватерной зоне за цилиндром показано на фотографиях
91 и 92 (см. вклейку между стр. 320 и 321).
§ 15. О сопротивлении давления
Потенциальный поток идеальной жидкости, плавно обтекаю-
обтекающий какое-либо тело, обусловливает такое распределение мест-
местных нормальных давлений по поверхности тела, что результи-
результирующая этих давлений не дает составляющей в направлении век-
вектора скорости Коо. Для случая плоскопараллельных течений это
утверждение было доказано, исходя из первой формулы Ча-
Чаплыгина, в §0. В общем случае потенциальных пространствен-
пространственных безотрывных течений этот парадоксальный результат был
впервые доказан Л. Эйлером, и мы будем его называть пара-
парадоксом Эйлера *. Парадокс Эйлера противоречит повседневному
опыту, указывая одновременно, что гипотеза о потенциальности
и безотрывности обтекания не учитывает важных явлений при
течениях реальной жидкости.
Из интеграла Бернулли (при пренебрежении силой тяжести)
мы получили простое соотношение между скоростью и давле-
давлением, которое можно записать в форме C7). Из этого соотноше-
соотношения следует, что при возрастании местной скорости V давле-
давление р может становиться отрицательным, что также не согла-
* Во многих руководствах по гидроаэромеханике парадокс Эйлера
обычно называют парадоксом Даламбера, что исторически неверно.
338
суется с опытом (жидкости и газы не могут выдерживать
растягивающих усилий).
В идеальной жидкости при плавном (безотрывном) обтека-
обтекании каждой положительной проекции местной силы давления
->
на направление Voo всегда найдется равная, противоположно на-
направленная, т. е. имеет место своеобразная симметрия в распре-
распределении местных нормальных давлений относительно плоскости,
->
перпендикулярной к Voo (см., например, распределение давлений
на поверхности цилиндра на фиг. 77). В теории подъемной силы
Н. Е. Жуковского нарушение симметрии в распределении мест-
местных нормальных давлений относительно плоскости, параллель-
параллельной вектору Voo (оси Ох на фиг. 77), было достигнуто введением
присоединенного вихря с циркуляцией Г. Поэтому с динамиче-
динамической точки зрения циркуляция Г есть мера несимметрии в рас-
распределении местных нормальных давлений относительно плоско-
плоскости, параллельной вектору V^-
Для получения силы лобового сопротивления давления не-
необходимо нарушить симметрию в распределении местных нор-
нормальных давлений относительно плоскости, перпендикулярной
-*.
Voo (проекции нормальных давлений на переднюю часть контура
должны быть больше проекций сил давления в кормовой, киль-
кильватерной, части).
л
Фиг. 93
Это нарушение симметрии можно сделать, исходя из указа-
указаний опыта, т. е. путем введения некоторой физической гипотезы,
учитывающей специфику реальных течений маловязкой жидко-
жидкости. Мы рассмотрим два приема нарушения симметрии в распре-
распределении местных нормальных давлений (две гипотезы), которые
приводят при последующем математическом оформлении к
струйной теории сопротивления и вихревой теории сопротивле-
сопротивления соответственно.
1. Струйная теория сопротивления. Рассмотрим
плоскопараллельное потенциальное течение идеальной жидко-
22*
339
сти. Из формулы (90) следует, что при плавном обтекании
острых углов (где т^=Ч местная скорость частиц жидкости
стремится к бесконечности и, следовательно, гидродинамическое
давление р становится отри-
Q цательным. Чтобы избежать
такого противоречия с опытом
(жидкость или газ не рабо-
работают на «растяжение»), Гельм-
гольц предложил в областях
течения жидкости, всюду, где
получаются отрицательные да-
давления, вводить линии {по-
{поверхности) раздела, по нормали
к которым величина вектора
скорости претерпевает разрыв.
Оказывается, что при введении
линий разрыва скоростей решел
ния уравнений гидродинамики
дают всюду конечные скорости,
а распределение местных дав-
давлений получается несимметрич-
несимметричным и таким, что возникает со-
сопротивление давления (причем
всюду р>0).
Рассмотрим, например, об-
обтекание плоской пластины, по-
поставленной перпендикулярно к
-»
Voo при наличии линий раз-
разрыва скоростей (фиг. 94). По-
Поток, набегая на пластину, раз-
разделяется в точке О и сры-
срывается в виде струй (линий
разрыва скоростей) в точках
А и Л4. За пластиной образуется застойная (кильватерная)
область с относительно малыми скоростями, и в методах
струйной теории (для упрощения расчетов) эти скорости пола-
полагаются равными нулю. Струи АВ и Афх че смыкаются за пла-
пластиной, а простираются в бесконечность. Местные давления на
пластину со стороны покоящейся жидкости будут меньше, чем
со стороны набегающего потока, и, следовательно, пластина бу-
будет испытывать силу сопротивления давления.
Для определения силы лобового сопротивления пластины мы
будем следовать методу Г. Кирхгофа*. Основная идея этого
Фиг. 94
* См.: Г. Кирхгоф, Механика, лекция 22, изд. АН СССР, М., 1962.
340
метода состоит в следующем. Будем рассматривать область те-
течения на фигуре 94 как плоскость комплексного переменного-
z=x + iy; в этой области плоскопараллельный потенциальный по-
поток жидкости определяется некоторым комплексным потенциа-
потенциалом:
w(z) =
Имеет место соответствие областей функций w и z, т. е. мы мо-
можем рассматривать z как функцию w, полагая
z = h(w). A62)
Введем в рассмотрение новую функцию комплексного пере-
переменного (функцию Кирхгофа), которую запишем в виде:
Легко понять (зная, что-р = и — iv = Vcosa—iVsina = Ve~la),
что в формуле A62') V есть модуль местной скорости в точке г,
а о — угол, который образует вектор скорости V с осью Ох. Так
как на свободных струях АВ и A\Bi давление постоянно р — ро
(определяется давлением в области покоящейся жидкости), то
из интеграла Бернулли следует, что на свободных струях и ско-
скорость V будет постоянной и равной Vx. Вдоль пластины ско-
скорость частиц жидкости не меняется по направлению (скользит
по пластине), но изменяется по величине. В точке О скорость
равна нулю, в точках А и Л4 скорость равна Vx.
Таким образом, на твердой границе (на пластине) a=const
(т. е. постоянен аргумент функции ?), а на свободных струях
~тт = тт—= const (т. е. постоянен модуль функции ?). Если
удается установить конформную связь областей w и ?, т. е.
найти ?=/(до), тогда
dz = f (w) dw
= jf(w)dw. A63)
Формула A63) определяет комплексный потенциал течения,
зная который можно найти все геометрические, кинематические
и динамические характеристики струйного течения.
Целесообразно придерживаться следующего порядка рассу-
рассуждений при установлении конформной связи областей комплекс-
комплексного потенциала
и функции Кирхгофа:
¦ 1 - = 1-е<
—-
u — iv V
341
а) Область течения жидкости изображается на плоскости
комплексного потенциала да = ф + 1г|з. Очевидно, линии тока гр =
= const будут прямые параллельные оси ф, а поэтому точкам
пластины (отрезкам ОА и ОЛ4) и свободным струям АВ и A{Bi
будут соответствовать отрезки прямых на плоскости w.
б) Строится область функции Кирхгофа ?, соответствующая
области течения. Так как на свободных струях V=const = У„» а
а изменяется, то свободной струе будет соответствовать дуга
круга радиуса (—); на пластине а=const и в плоскости С твер-
твердой стенке AiOA будут соответствовать отрезки прямых (радиу-
(радиусов) (если положить на
О А сг=О°, то на OAi
о=п).
в) Находится кон-
конформное отображение об-
области да (границы которой
прямые и отрезки пря-
_В мых) на область ?, грани-
=7 "Z цы которой—дуги окруж-
' ности и отрезки прямых.
В курсах теории функ-
функций комплексного пере-
переменного доказывается, что
конформное отображение
областей w и ? при указанной форме границ можно определить
с помощью формул Шварца — Кристоффеля*.
Для случая обтекания пластины процесс определения ?=
—f(w) реализуется достаточно просто.
Построим сначала область комплексного потенциала w —
= Ф + п|э- Так как потенциал скоростей ф и функция тока г|з опре-
определяются с точностью до произвольной постоянной, то можно
считать, что в точке О (середина пластины) ф = 0 и гр = 0. Учи-
'illlli
WUlHIll
Фиг. 95
>
тывая, что вектор скорости o = grac^, будем иметь, что скорость
направлена в сторону возрастания потенциала и, следовательно,
в области течения потенциальная функция изменяется от
Ф =—оо (точка С на фиг. 94) до ф= + оо (точки S и Si на
фиг. 94). Функция тока г|з растет вправо от прямой ОС и убы-
убывает влево от нее. Значения потенциала скоростей <р в точках А
и Ai будут вследствие симметрии течения равны между собой;
мы обозначим
•См. о применениях формул Ш в а р ц а — К р и с т о ф ф е л я гл. II,
$ 3, в книге: М. А. Лаврентьев и Б. В. Шабат, Методы теории функ-
функций комплексного переменного, изд. «Наука», М., 1965.
342
Область комплексного потенциала ш = ф-И'гр, соответствую-
соответствующая области течения z с указанием характерных точек, приве-
приведена на фигуре 95. Как видно, область w есть вся плоскость
(ф, гр) с разрезом вдоль действительной полуоси (Оф).
У,
в,
Фиг. 96
Отобразим теперь плоскость ш = ф + /гр на верхнюю полупло-
полуплоскость Zi = Xi + iYi при помощи функции:
A64)
Полагая
и учитывая A64), легко находим, что
и, следовательно, расположение характерных точек можно пред-
представить на фигуре 96.
Таким образом, область комплексного потенциала переведена
(отображена конформно) в верхнюю полуплоскость перемен-
переменной Z4.
Построим далее область функции Кирхгофа ? = ё-Ит). соот-
соответствующую области течения на плоскости z. Части пластины
ОА соответствует на плоскости ? (фиг. 97) полупрямая АОУ
а части OAi — полупрямая Л4О (точке О соответствует беско-
бесконечно удаленная точка плоскости ?). Свободным струям АВ и
AiBi соответствуют дуги радиуса -гг-I образующие на плоско-
сти ? полуокружность AiBiBA (фиг. 97).
Легко проверить, что точка, соответствующая М, будет на-
находиться на мнимой полуоси внизу и, следовательно, области те-
течения в плоскости z соответствует нижняя полуплоскость пере-
переменной ? (заштрихованная на фиг. 97). Отобразим конформно
343
¦область ? на верхнюю полуплоскость новой переменной Zt-
Х Т при помощи соотношения:
A65)
Контрольные точки указаны на фигуре 98. Для того чтобы уста-
установить конформную связь ? и w, достаточно отобразить полу-
полуплоскость Z4 на полуплоскость Z2. Как известно, такое конформ-
конформное отображение осуществляется при помощи дробно-линейной
•функции. Будем иметь:
A66)
о
Фиг. 98
где постоянные а, Ъ, с, d можно найти из условия совмещения
трех соответствующих точек областей переменных w и ? (неза-
(независимых постоянных в дробно-линейном преобразовании только
.344
(a\ (b\ ld\
ТРИ It)' It)' IT) и соответствие трех точек позволяет одно-
однозначно установить вид конформной связи областей ? и w)*.
Рассмотрим точку О. Будем приближаться к ней от точки А.
Тогда при ?->оо до-»0 и, следовательно, d=0. Соотношение
A66) можно записать в виде:
Рассмотрим соответствие точек Вх на плоскости Z2 и w. Легко
видеть, что при w —*¦ оо Z2 —>0 и, следовательно, #i = 0.
Для определения постоянной й4 рассмотрим соответствие то-
точек А на плоскостях ? и ш. ЯсноГ что, когда w = Yq> 2
и, следовательно, &1 =
' с»
Таким образом, конформную связь областей ? и до можно
записать в виде:
Разрешая A67) относительно Wm, получим:
^ = ^+/^-1, A68)
У w ' w
так как ф0 > 0 и при да->0 С-^ + с^- Зная, -что С = -^-, будем
иметь:
Выполняя интегрирование** и определяя постоянную интегри-
интегрирования из условия, что при 2 — 0 w = Q, получим:
-. A70)
ф
* Основная теорема об однозначности конформных отображений одно-
связны.х областей принадлежит Б. Р и м а н у. См. доказательство этой
теоремы и требования, вытекающие из нее для дробно-линейных функций
в книге: Лаврентьев М. А. и Шабат Б. В., Методы теории функций
комплексного переменного, изд. «Наука», М., 1965, стр. 112—139.
** Второй интеграл берется при помощи подстановки
w = фо sin2 p,
где E — новая переменная.
345
Значение потенциала скоростей ф0 в точке А можно выразить
через длину пластинки. В самом деле, при ia = %, z = OA = -^ ,
где / — длина пластинки и, следовательно, из формулы A70)
будем иметь:
откуда
Определим теперь лобовое сопротивление пластины. На эле-
элемент пластины длины dz сила лобового сопротивления будет:
dQ — {p — р0) dz,
где р— давление сверху, а ро — давление в застойной зоне.
Вследствие симметрии течения полную силу лобового сопротив-
сопротивления можно записать в виде:
Q =2 J (/>-/>„)<&. A73)
о
Из интеграла Бернулли имеем:
Поэтому
т
A74)
о
Вычислим интеграл, входящий в A74). На пластинке f = 0 и
Следовательно
Р
346
т
Г I/2 dz = р
0
>
С dw
dz
Фо
Подстановкой ¦w=%s'm'2f> интеграл сводится к элементарному,
и мы получим после несложных преобразований:
dw
I/Шл J
У w ¦ dw
Я/2
f A — cos p) cos p df> = 2рф01/со A — -XI •
Таким образом,
Подставляя значение ф0 из формулы A72), "получим:
A75)
удет:
A76)
Полученное значение коэффициента лобового сопротивления
меньше опытного значения примерно в 2,2 раза, что указывает
откуда коэффициент лобового (струйного) сопротивления будет:
Г Q 2п —поо
г (приемная сипа}
Фиг. 99
(с нашей точки зрения) на малое соответствие принятой схемы
течения с реальными течениями маловязкой жидкости (воды,
воздуха) около пластины, поставленной перпендикулярно к век-
вектору скорости потока Vac.
Несколько позднее исследований Кирхгофа английским уче-
ученым Рейли (Rayleigh) была решена задача об определении силы
давления R потока жидкости на пластину, поставленную под
347
углом атаки а к вектору скорости Vx (фиг. 99). Формула Рейли
имеет вид *:
np^sina
4 -f- л sin a v '
Исходя из формулы A77), найдем подъемную силу плоской пла-
пластины на единицу размаха (площадь «крыла» = площади пла-
пластины^-1), имея в виду, что подъемная сила есть проекция
вектора R на направление, перпендикулярное вектору Voo
(фиг. 99). Будем иметь:
. п п Jtp^sinacosa
' P==/?cosa = ¦;-: ; . 0'°)
4-[-itsina v '
При малых углах атаки sin a ~ a, cosa = l, 4 + nsina~4, и
в этом случае подъемная сила пластины, подсчитанная исходя
из схемы струйной теории, будет:
= -?- • р/1/оо • а,
а коэффициент подъемной силы Су определится по формуле:
Сравним значение Су, полученное из формулы Рейли, с резуль-
результатом, полученным Н. Е. Жуковским, исходя из циркуляционной
теории обтекания. Если в формуле A11) положить е = 0, то мы
получим Су для пластины по циркуляционной теории Н. Е. Жу-
Жуковского. Полагая sin a=Ea, находим из A11):
A80)
Отношение коэффициентов будет:
( У/неж ^
СУ
Мы уже указывали, что для малых углов атаки формула Жу-
Жуковского дает значение коэффициента подъемной силы, очень
близкое к опытным данным; следовательно, формула A79), по-
полученная математической обработкой физической гипотезы
струйного обтекания (гипотезы, впервые формулированной
Гельмгольцем), дает при малых углах атаки ошибку в 4 раза
(преуменьшает подъемную силу пластины в 4 раза\). На заре
* Детальное рассмотрение задачи Рейли можно найти в книге профес-
профессора В. В. Голубева «Лекции по теории крыла», Гостехиздат, М., 1949.
348
развития авиационной техники формулой A79) пользовались
противники развития летательных аппаратов тяжелее воздуха,
доказывая невозможность создания конструкций, способных раз-
развить в полете достаточную подъемную силу. Только циркуля-
циркуляционная теория подъемной силы Н. Е. Жуковского дала в руки
инженеров-конструкторов надежную основу определения подъ-
подъемной силы крыла аэропланов *. Методы изучения струйных те-
течений продолжают развиваться до настоящего времени, однако
область практических приложений этих методов находится не
в аэродинамике, а в задачах обтекания тел жидкостью при на-
наличии кавитации **.
Для теоретического решения задачи о величине лобового со-
сопротивления более прогрессивной является теория вихревого со-
сопротивления, развитая в работах Кармана (Th. v. Karman), Ру-
Рубаха (Н. Rubach) и автора этой книги.
2. Вихревая теория сопротивления. Принци-
Принципиальный вопрос, который прежде всего должна решить любая
теория сопротивления давления, строящаяся на уравнениях
идеальной жидкости, есть вопрос о физической схеме течения.
Именно, необходимо решить вопрос о способе (или физической
гипотезе), которым будет эта теория пользоваться для наруше-
нарушения симметрии потока. Если физическая гипотеза правильно
схватывает основные особенности процесса обтекания тел реаль-
реальной маловязкой жидкостью (или воздухом), тогда из уравнений
идеальной жидкости можно получать результаты, хорошо под-
подтверждающиеся опытом. Ярким примером плодотворной гипо-
гипотезы является гипотеза Н. Е. Жуковского в теории подъемной
силы профиля крыла. Гипотеза Гельмгольца о полном покое
частиц жидкости в кильватерной зоне обтекаемого тела, по-ви-
по-видимому, не отражает суть происходящих процессов. В самом
деле, если мы поместим в потоке реальной маловязкой жидкости
плохообтекаемое тело (например, цилиндр, пластину, паралле-
параллелепипед и др.), то процесс течения, как показывает опыт, будет
развиваться во времени следующим образом:
а) Очень быстро за цилиндром образуется пара симметрич-
симметрично расположенных вихрей, как показано на фотографиях фи-
фигур 92 и 93. Центры вихрей постепенно удаляются от поверх-
поверхности цилиндра, а циркуляция вихрей растет. Экспериментами
* Частые ссылки в научно-популярной литературе на аналогию физи-
физических причин образования подъемной силы у профиля крыла и воздуш-
воздушного змея являются несостоятельными. Правильное научное объяснение
подъемной силы крыла при небольших углах атаки дает только циркуля-
циркуляционная теория Н. Е. Жуковского.
** См монографию: Л. И. Седов, Плоские задачи гидродинамики и
аэродинамики, Гестехиздат, М., 1950, стр. 221—230.
349
Рубаха * и Глики ** было установлено, что скорости центров
вихрей по направлению Vx монотонно увеличиваются, стремясь
к некоторому пределу, равному «max-
б) Пара симметрично расположенных вихрей неустойчива.
Один из вихрей при «=иШах отрывается от цилиндра и уносится
11 У
Фиг. 100
внешним потоком. Далее процесс отрыва вихрей происходит по-
поочередно. При заданной скорости потока на бесконечности — Vx
(или заданной скорости цилиндра в покоящейся жидкости), ка-
каждый новый вихрь отрывается (отходит) от цилиндра через
вполне определенный промежуток времени, имея некоторую, так-
также вполне определенную, циркуляцию. Мы допустим далее, что
все поочередно отходящие вихри имеют одинаковую величину
циркуляции.
в) Как показывают многочисленные опыты и наблюдения,
система вихрей за цилиндром располагается в определенном по-
* См.: Н. R u b а с h, «Uber die Entstehung und Fortbewegung des Wir-
belpaars bei zylindrische Korpern», Vorschungsheft VDJ № 185, 1916.
** См.: Глики Л. В, Определение подъемной силы профиля крыла
при больших углах атаки. «Труды ВВИА имени Н. Е. Жуковского»,
вып. 486, 1953.
350
рядке, который называют «шахматным», «асимметричным» и
т. п. На фигуре 100 приведена фотография реальной вихревой
системы («вихревой дорожки») за эллиптическим цилиндром
при ламинарном режиме внешнего потока *.
Первая попытка построить вихревую теорию сопротивления
давления принадлежит Th. v. Karman'y **, который предложил
следующую схему течения (фиг. 101). Набегающий потенциаль-
потенциальный поток идеальной жидкости плавно обтекает переднюю (ло-
(лобовую) часть контура (на фиг. 101 обтекаемым контуром яв-
является круглый цилиндр). В кильватерной зоне образуется бес-
конечная шахматная система вихрей. Распределение местных да-
давлений по контуру цилиндра будет несимметричным относитель-
относительно прямой, перпендикулярной к вектору !/«=, и мы получим ло-
лобовое сопротивление давления.
Для того чтобы последующие вычисления были ясными и по-
понятными, мы должны установить некоторые вспомогательные со-
соотношения, относящиеся к системам вихрей.
а) Неустойчивость вихревой цепочки. Рассмо-
Рассмотрим бесконечную систему вихрей с циркуляцией Г, расположен-
расположенных на горизонтальной прямой AiOA, причем расстояния между
центрами вихрей примем одинаковыми, равными / (фиг. 102).
Такая система будет находиться в равновесии. Легко показать,
что положение равновесия будет неустойчивым.
Комплексный потенциал от &-го вихря, расположенного в точ-
точке Л с координатой z=kl, можно записать в виде:
Wk(z) = 4- \i\(z—kl),
* См.: Richards Q., An Experimental Investigation of the Wake
Behind an Elliptic Cylinder, Reports and Memoranda N1590, London, 1934.
** См.: К а г m a n Th v., Ober den Mechanismus des Wiederstandes, Got-
tingen Nachrichten, 1911, стр. 489—505.
351
а от вихря, расположенного в точке Ai(z = —kl), — в виде:
Если число вихрей бесконечно, то комплексный потенциал
будет:
W (Z) — ¦
где П (z2 — k2l2) = (z2 — Р) (z2 — 4Р) ...(z2 — k42)... есть бес-
конечное произведение.
Из курса анализа известно, что
и, следовательно,
гГ , . nz
1==2^lnSlnT'
A81)
Зная комплексный потенциал A81), мы можем рассчитать ско-
скорость в любой точке плоскости г. Для доказательства неустой-
Г
-1 0 12 3
Фиг. 102
чнвости системы вихрей достаточно найти хотя бы одно малое
смещение какого-либо вихря, при котором центр смещенного
вихря не будет с течением времени возвращаться в положение
относительного равновесия. Возьмем вихрь в точке О (z=0) и
сместим его в точку М (z=x + iy), где х и у малы настолько, что
их квадратами и произведениями (так же как и более высокими
степенями) можно пренебречь. Подсчитаем скорость, которую
сообщают вихри цепочки центру смещенного («нулевого») вих-
вихря. Вихрь номера k сообщит смещенному вихрю комплексную
скорость, определяемую формулой:
: — Wk = (¦
dz
2л
352
Разделяя действительную и мнимую части, будем иметь:
и —Л- у is — Л (« —*)
*~~ 2я ' (л: —Н2) + У2 ' *~ 2я "(л: — Н
От всех вихрей цепочки нулевой вихрь, смещенный в точку
z=x + iy, получит скорость (и — iv), компоненты которой можно
рассчитать по следующим формулам:
4-со
V
(х — klJ+y2' u
—со —со
причем суммирование не распространяется на индекс k = 0, так
как смещенный вихрь сам себе скорости не сообщает. Если в
формуле A82) удержать только линейные члены с у и х, то
+ со + со
. 2*
)
оо
_ 2Ту у \ _Тп
2
1
+ CO
г y kl + -* _
^Jl .4ЯН /v i ^JLt ШШШ n Ut
-co 1
так как
-4-nn CO
1 V 1 я2
-гг=0 (л = 0 выпадает!), а 7,-гз- = -с-.
-co I
Дифференциальные уравнения движения смещенного вихря
можно записать в виде:
dx Тп dy Гя
ИЛИ
d2x d2ti
_j- = №х, -^ = ^2t/, A85)
где
А, = -g^- = const >0.
Решения уравнений A85) будут иметь вид;
23 А. А. Космодемьянский 353
При произвольных начальных условиях Ci и С3 не равны нулю
и, следовательно, при возрастании t координаты центра смещен-
смещенного вихря также возрастают, что и доказывает неустойчивость
Фиг. 103
вихревой цепочки (она «рассыплется» при малом смещении да-
даже одного нулевого вихря).
Легко понять, что две вихревые цепочки, расположенные сим-
симметрично (фиг. 103), также будут неустойчивы. В самом деле,
если сместить один из вихрей верхней цепочки по оси Оу, то
i
h
4-
r
T
i
у
/
ш
/
-r
®
/
/
-if
t t I
Фиг. 104
нижняя цепочка сообщит ему скорость по оси Ох и не будет
приводить в положение относительного равновесия. Вихри же
верхней цепочки, как было показано, будут удалять смещенный
вихрь так, что при ?->оо у->оо.
Если рассмотреть две вихревые цепочки, образующие «шах-
«шахматную» систему вихрей (фиг. 104), то такая система будет
354
устойчивой. Условие устойчивости было найдено Карманом *.
Оказалось, что устойчивыми будут только такие шахматные си-
системы вихрей, для которых
tghyp — = -y=r , или — = 0,28. A86)
Многочисленные эксперименты, проведенные в ряде аэрогидро-
аэрогидродинамических лабораторий, достаточно хорошо подтверждают
условие устойчивости A86). На фигуре 100 мы приводим фото-
фотографию шахматной вихревой дорожки за эллиптическим цилин-
цилиндром, полученную Рихардсом в Англии **.
б) Комплексный потенциал шахматной вих-
вихревой дорожки. Найдем комплексный потенциал течения от
бесконечной шахматной системы вихрей. Начало координат рас-
расположим так, как указано на фигуре 104. Комплексный потен-
потенциал для верхней цепочки будет:
Wi(z)= ^--\n(z — z0) + ¦ . . + -n— In [z
••• +^-Щг — (z0 —
A87)
Комплексный потенциал для нижней цепочки будет:
^ . — -^- In \z — (kl — zo)\ — ...
= - -|L In I (z + г,,) If \{z + zof - кЩ , A88)
так как циркуляция вихрей нижней цепочки имеет противо-
противоположный знак.
* См : Th. v. К а г m a n und H. R u b а с h, Uber den Mechanismus des
Fliissigkeits- und Luftwiderstandes, Physikalische Zeitschrift, Bd. 13, 1912,
стр. 48—59, а также Th. v. Rarman, tJber den Mechanismus des Wider-
standes, Gottingen Nachrichten, 1911, стр. 489—505.
** Достаточно подробный обзор экспериментов по шахматным вихре-
вихревым системам за плохообтекаемыми телами имеется в работе: Космо-
Космодемьянский А. А, Вихревое сопротивление теоретических профилей.
«Труды ЦАГИ», вып. 317, М., 1937, стр. 6—7.
23* 355
Комплексный потенциал от шахматной системы вихрей
будет:
w (z) — wx (z) -+- w2 (z),
или
w{z) = S-ln ± . A89)
Учитывая, что
i
можно A89) представить в виде:
._ sin -r- (z — z0)
w(z)=±ln i . A90)
sin— (¦* + *<>)
Из геометрического рассмотрения шахматной системы ясно,
что если взять, например, вихрь z0, то вихри верхней цепочки не
сообщают ему какой-либо'скорости, а вихри нижней цепочки со-
сообщают скорость по оси Ох. Вследствие бесконечности вихре-
вихревых цепочек аналогичные рассуждения приложимы к любому
вихрю как верхней, так и нижней цепочки. Таким образом, шах-
шахматная система вихрей движется благодаря взаимодействию по-
полей скоростей отдельных вихрей поступательно как твердая си-
система.
Для того чтобы определить эту поступательную скорость
шахматной системы вихрей, достаточно подсчитать скорость цен-
центра вихря z0. Так как вихри верхней цепочки вихрю z0 скорости
не сообщают, то при определении скорости вихря z0 достаточно
учесть комплексный потенциал от вихрей нижней цепочки. Обо-
Обозначая комплексную скорость вихря z0 через и* — iv*, будем
иметь:
U* — W*— \~r-(W — Wx)\ = туг Ctg -г BZO).
т, Лх=х°
1 ак как
_ I ,. h
zo — " + l ~2 '
TO
и, следовательно,
в*—/г)* = —tg^'^-j. A91)
356
Но для устойчивой шахматной вихревой системы:
nh I
поэтому
и* — iv* = ?=- = —
2/2/
Таким образом, если у = 0,28, то
г
A92)
A93)
Если на поле скоростей, обусловленное шахматной вихревой си-
системой, наложить поступательный поток, параллельный оси Ох
и имеющий скорость на бесконечности, равную V^ > |#*|, тогда
У
Фиг. 105
система вихрей будет смещаться в положительную сторону оси
Ох со скоростью (Voo — |u*|) как твердое тело.
в) Количество движения, сообщаемое парой
вихрей. Определим далее количество движения, сообщаемое
безграничной жидкости двумя вихрями, расположенными на
расстоянии Н друг от друга. Циркуляции вихрей равны по вели-,
чине, но противоположны по знаку (фиг. 105).
Количество движения, которое сообщает вихрь с циркуля-
циркуляцией Г бесконечной полоске жидкости (фиг. 105), будет:
Tpdy
2л
357
Из формулы A94) следует, что количество движения, сообщае-
сообщаемое вихрем Г бесконечной полоске шириной dy, не зависит от у,
т. е. не зависит от расстояния полоски до центра вихря.
Легко понять, что для всей жидкости, расположенной вне по-
полосы шириною Н, количества движения от вихрей Г и —Г бу-
будут равны, но противоположны по знаку, а для полосы Н коли-
количества движения, сообщаемые вихрями Г и —Г, будут склады-
складываться.
Таким образом,
A95)
Знак минус в формуле A95) показывает, что от пары вихрей
Г и —Г частицы жидкости движутся в сторону, противополож-
противоположную оси Ох (справа налево).
г) Формула вихревого сопротивления Кар-
Кармана. Рассмотрим обтекание какого-либо тела, например ци-
Vco В
Фиг. 106
линдра, при наличии шахматной вихревой системы в кильватер-
кильватерной зоне. Циркуляцию всех вихрей будем считать одинаковой по
величине. Направления полей скоростей от вихрей указаны на
фигуре 106. Скорость набегающего потока на бесконечности
равна Vac- Картина распределения скоростей по контуру ци-
цилиндра будет в реальных условиях обтекания повторяться пе-
периодически, через промежутки времени Т, за каждый из кото-
358
рых за цилиндром возникает пара новых вихрей (один в верх-
верхней цепочке и один в нижней). Течение с образованием вихрей
будет установившимся в «среднем». Для вычисления среднего
значения силы сопротивления за период времени Т мы восполь-
воспользуемся теоремой импульсов, выбрав контрольную поверхность
так, как показано на фигуре 106. Линия АВ расположена до-
достаточно далеко от обтекаемого контура, и скорости потока в
точках л-инии АВ можно считать равными У™; линия CD вы-
выбрана также достаточно далеко от обтекаемого контура, с тем
чтобы дополнительное поле скоростей, обусловленное вихревыми
цепочками, можно было рассчитать, пользуясь комплексным по-
потенциалом A90). Линии ВС и AD удалены от оси Ох столь да-
далеко, что скорости в любых точках этих линий можно считать
равными Voo.
Если вихри внутри контрольной поверхности (контрольного
контура ABCD) считать неподвижными, то течение будет ста-
стационарным и ему будет соответствовать некоторое распреде-
распределение нормальных давлений по обтекаемому контуру, причем
распределение несимметричное относительно прямой, перпенди-
перпендикулярной к оси Ох.
Пусть X будет среднее значение силы лобового сопротивле-
сопротивления для данного обтекаемого тела, пусть Q будет сила сопро-
сопротивления в предположении стационарности движения, тогда на
основании теоремы импульсов в проекции на ось Ох (на напра-
направление вектора Voo) будем иметь:
(X — Q) ¦ Т — изменению количества движения вследствие об-
образования пары новых вихрей = Кх-
Если расстояние между цепочками вихрей будет h (фиг. 106),
а расстояние между вихрями пары, вынесенными потоком за ли-
линию CD, равно Н, тогда, учитывая A95), можно записать:
К*х = рГЯ cos р = рГЛ. A96)
Зная комплексный потенциал для бесконечной шахматной си-
системы вихрей и учитывая, что вместо интегрирования по кон-
контуру тела можно провести интегрирование по прямоугольнику
ABCD, которое сводится к интегрированию по линии CD, a
именно:
D
Q — мнимой части -^ 1-^") dz.
с
Так как w(z) определяется формулой A90), то простые вы-
вычисления дают нам"
359
Возводя A97) в квадрат, подставляя под интеграл и удаляя
точги С и D в (—tea) и (-f-ioo), будем иметь:
D +1оо
р г / dw \2 , р (* / cto \2 , . Г2 Гч 2яг0 , 2я^
J \dF) az==zl J WTJ rf2:=:;'^nTL T"ctS-T
С ¦ -ioo
где
; . ih
zo — -4 -г -§- •
Так как
._. 2яг0 _._/я , 1"яА\ . ,_, яЛ /
и, учитывая, что
мы можем написать:
+ 1ОО
(
+
Q = мнимой части ? J (^Jrfz = (~ — -^- и*) р. A98)
— /со '
Таким образом,
^ (^^j^ A99)
Но за время Т вихри шахматной системы передвинутся на рас-
расстояние / со средней скоростью (V<x, — и*) и поэтому
Т=у-^- B00)
Учитывая B00), формулу для среднего значения силы вихре-
вихревого сопротивления можно записать в виде:
X = XEmp=9T±{Voo~2u*) + ^l. B01)
Заменяя Г через и* и / и зная, что для устойчивых систем
-j-= 0,28, легко находим, что
Хвихр = plVl [0,794 ?- — 0,314 (-^J]. B02)
Формула B02) была впервые получена Th. v. Karman в 1911 г.,
мы будем называть ее формулой вихревого сопротивления Кар-
Кармана.
* См. детали вычислений в книге- В. В. Голубев, Теория крыла
аэроплана конечного размаха, «Труды ЦАГИ», вып. 108, М, 1931, стр. 133—•
135.
360
Сравнивая формулу B02) с обычной эмпирической формулой
для силы лобового сопротивления:
у п Р ст/2
Л вихр — ^х вихр 2 °°'
будем иметь расчетную формулу для коэффициента вихревого
сопротивления в виде:
С, вихр = [ 1,588 (-?) - 0,628 (^-J] 4-, B03)
так как в условиях плоскопараллельного течения S = dA, где
d — характеристический размер тела (например, диаметр ци-
цилиндра и т. п.).
Для того чтобы иметь возможность применять формулу B03)
для данного контура (данного тела), нужно знать величины к*
и /, или, что совершенно эквивалентно, Г и h.
Ширина шахматной вихревой системы (дорожки) h и цирку-
циркуляция вихрей Г, поочередно срывающихся с обтекаемого тела,
фундаментально связаны с геометрическими очертаниями тела.
Отыскание связи величин h и Г с геометрическими параметрами
обтекаемого тела является важнейшей проблемой теории вихре-
вихревого сопротивления. Мы думаем, что решение этой проблемы
можно достаточно точно осуществить в рамках теории идеальной
жидкости, если, обобщая данные опытов в реальных маловяз-
маловязких жидкостях, ввести дополнительные физические гипотезы, от-
отражающие главные особенности течений около плохообтекаемых
тел при наличии вихревых шахматных систем.
Если в формулу B03) подставить / и и*, определенные из экс-
эксперимента, тогда вычисленные значения Сх ВИХр хорошо согла-
согласуются со значениями Сх вихр, определенными непосредственны-
непосредственными замерами сил лобового сопротивления на аэродинамических
весах. Следовательно, формула Кармана B03) «схватывает»
правильно суть явления, но нуждается в дополнительных соот-
соотношениях, устанавливающих связь геометрических параметров
контура с кинематическими и геометрическими параметрами шах-
шахматной системы вихрей. Пользуясь аналогией, можно сказать,
что формула Кармана B03) играет в теории лобового со-
сопротивления (построенной в рамках представлений идеальной
жидкости) ту же роль, что и формула Н. Е. Жуковского в тео-
теории подъемной силы. Мы указывали, что практическое значение
формула Жуковского обрела лишь тогда, когда был указан
прием определения циркуляции присоединенного вихря, т. е.
формулирована «гипотеза Жуковского» о конечности скорости
частиц жидкости у задней острой кромки профиля крыла. По-
Построение соответствующих физических гипотез, позволяющих при-
прилагать теорию вихревого сопротивления к решению конкретных
361
практических задач, было дано в докторской диссертации авто-
автора этой книги *.
д) Вихревое сопротивление круглого ци-
цилиндра. Построение комплексного потенциала течения около
данного контура при наличии достаточно большого числа шах-
матно расположенных вихрей приводит к трудоемким и громозд-
громоздким вычислениям. Чтобы сосредоточить внимание на существе
дела, мы сделаем еще одно упрощающее предположение. Мы
указывали (и это подтверждается опытами), что если по-
поместить цилиндр в поток маловязкой жидкости, то сначала в
кильватерной зоне образуется пара симметрично расположен-
расположенных вихрей. При увеличении циркуляции вихрей до их предель-
предельного (максимального) значения один из вихрей отрывается от
цилиндра и уносится внешним потоком по прямой, параллель-
параллельной вектору ]/«>; этот вихрь закладывает основу для будущей
вихревой шахматной системы. Мы допустим, что циркуляция
первого оторвавшегося от цилиндра вихря и определит собой, в
случае стационарного движения в «среднем», циркуляцию лю-
любого вихря шахматной системы. Следовательно, если мы найдем
способ определения циркуляции пары симметрично расположен-
расположенных вихрей непосредственно перед отрывом одного из них, то
этим самым будет определена циркуляция любого вихря шах-
шахматной системы.
Рассмотрим обтекание цилиндра радиуса г=\ с двумя
симметрично расположенными вихрями потенциальным потоком
идеальной жидкости. Центры симметрично расположенных вих-
вихрей возьмем в том положении, когда небольшое изменение цир-
циркуляции ведет к отрыву одного из вихрей. Циркуляцию каждого
из вихрей будем считать равной циркуляции любого из вихрей
установившейся в среднем шахматной вихревой системы.
Пусть плоскостью течения будет плоскость комплексного пе-
переменного г; положение центров вихрей определяется коорди-
координатами Zi—X\-\-iyi и z\—X\—itj\. Полярные координаты центров
пары вихрей пусть будут р и ±т|з (фиг. 107), так что
zx=peU]l, z1=pe~1^. Чтобы написать комплексный потенциал
течения и получить среди линий тока окружность г—1, необхо-
необходимо внутрь цилиндра поместить еще два вихря, являющих-
являющихся «зеркальными» отображениями первых двух относительно
окружности. Координаты этих внутренних вихрей будут -— и
-=г- . Если скорость потока на бесконечности принять равной
Z
* См.: Космодемьянский А. А., Докторская диссертация, Мо-
Московский университет, 1939.
** Космодемьянский А А., Некоторые вопросы аэродинамической
теории сопротивления, «Ученые записки МГУ», вып. 46, 1940.
362
c, тогда комплексный потенциал течения * будет:
где Г — величина циркуляции любого из четырех вихрей; на-
направление циркуляции указано на фигуре 107.
Фиг. 107
Дифференцируя B04) по 2, мы получим скорость в любой
точке плоскости (г):
dw
17
¦ = U— IV =
L
1
L
_
B05)
* Построение комплексного потенциала течения около цилиндра при
наличии двух симметрично расположенных вихрей дано, по-видимому, впер-
впервые в работе: Foppl L., Wirbelbewegung hinter einem Kreiszylinder, Sit-
zungsberichte der Bayrischen Akademie der Wissenschaft, Bd. I, 1913,
стр. 1—17,
363
Мы можем, пользуясь формулой B05), найти скорость внешнего
вихревого центра, например Z\\ для этого нужно в B05) вместо
произвольного z подставить 2i и отбросить слагаемое с бесконеч-
/ l \
, так как сам вихрь 2i себе никакой скорости
не сообщает. Обозначая комплексную скорость вихревого цен-
центра через Ui — ivi, будем иметь из B05):
ностыо
г
»¦-'¦"¦ -"-"--?)+?
Z\ —
г, j
. B06)
Опуская индекс у координат центра вихря и разделяя действи-
действительную и мнимую части, найдем компоненты скорости и.\ и t>i
в виде:
1 «Ч
Р4
Гу Г р^+1 1 L1
2я Li+P4~2(a:2— у2) р2 — 1 2j/2J'
Справедливость формул B07) и B08) легко проверить, если
учесть, что
11_ 1 72 _ 1 х2 — у2 — 2ixy
1 1 ^
9—9
z z~
х — iy
Z_L. p2-1 ~ p2-1 '
z(z2-\)
— z
z
p2 (x — iy)
Зная комплексную скорость B05), можно легко найти распре-
распределение скоростей по контуру цилиндра (по окружности г= 1,
где z = e'f), для этого в формуле B05) нужно положить z — e'f.
Будем иметь тогда:
— Z\
. B09)
364
Разделяя в B09) действительную и мнимую части, получим:
11 = ^A—cos 2ф) —Л sin ф, B10)
v — Уш sin 2ф — A cos ф, B11)
где
. 2rpsini|)-sincp(p2 — 1)
/?2 = 1 -j- р2 -+- 2р cos (ф — ф).
Угол ф мы отсчитываем от передней критической точки ци-
цилиндра. Модуль скорости по окружности г=1 обозначим через
U = Yu2-\- v2. Проводя вычисления, получим закон распределе-
распределения скоростей по контуру цилиндра г=\ в виде:
ГР(Р2 — 1) Sini|7-
Можно показать, что Ri представляет квадрат расстояния ка-
какой-либо точки цилиндра, положение которой задано углом ф,
до вихревого центра Z\, a R2 есть квадрат расстояния от той же
точки z = ei(f до вихревого центра zi.
Если бы переменные р, \J>, Г были нам известны для момента
времени непосредственно перед отрывом одного из вихрей, то
мы знали бы h и Г, а следовательно, / и и*, а по формуле A93)
могли бы подсчитать вихревое сопротивление круглого цилин-
цилиндра. Будем рассматривать математически «сконструированное»
течение идеальной жидкости около цилиндра, как течение, ко-
которое реализует поле скоростей в области точки z=zit соответ-
соответствующее полю скоростей реальной маловязкой жидкости, в тот
момент времени, когда бесконечно малое изменение циркуляции
Г приводит к отрыву вихря 2i и он уносится внешним потоком.
Формулируем следующие гипотезы, характеризующие дви-
движение вихря Zy в области непосредственно перед отрывом от ци-
цилиндра.
1. Ширина вихревой шахматной системы, об-
образующейся за круглым цилиндром и опреде-
определяемая расстоянием между вихрями zt и zi, бу-
будет равна диаметру цилиндра. Из фигуры 107 ясно,
что
h
и, следовательно,
или
B13)
365
Формула B13) дает первое необходимое соотношение между
тремя искомыми величинами р, т|э и Г.
Для качественных пояснений справедливости гипотезы B13)
приведем следующие соображения. Как показывают многочис-
многочисленные эксперименты в аэродинамических лабораториях, вели-
величина вихревого сопротивления быстро возрастает с увеличением
ширины вихревой системы, образующейся в кильватерной зоне.
Как показывают наблюдения, для тел разной формы отношение
скоростей -у— < 0,35, а поэтому формулу Кармана-для вихре-
вихревого сопротивления можно приближенно записать в виде:
Хтп = 1.588р/ (-=?-) = const h\
где -rr-= const, если р и L заданы.
Ширина вихревой дорожки характеризует обтекаемость тела.
Теория пограничного слоя позволяет найти положение точки
срыва струй. Поэтому в общем случае произвольного контура
более точно утверждать, что ширина вихревой дорожки будет
пропорциональна расстоянию между точками срыва струй. Для
круглого цилиндра при ламинарном внешнем потоке положение
точек срыва близко к ф = 90°, а поэтому принимаемая нами ги-
гипотеза A) приближенно выполняется для реальных течений
маловязкой жидкости.
2. В положении непосредственно перед от-
отрывом от цилиндра скорость вихря направ-
направлена по оси Ох, т. е. в положении перед отрывом
проекция вектора скорости на ось Оу, или t»i = 0.
Из формулы B08) имеем:
Г 2у
р _
р (р2 —1 1+Р4 —2(-ж2 —у2)
Но так как
л; = р cos ф, (/ = р sin ф, A = 2psini|),
то
Г _ (р» -!)(!+ Р4-2р2 cos 2ф) _ а
2лУ^ Ар4 ftp4 '
Учитывая, что по гипотезе A) ширина вихревой дорожки
h = 2, будем иметь:
где
— 2p2COS
Формула B15) дает второе соотношение между переменными
р, ф, Г.
366
3. В момент отрыва вихря z\ от цилиндра-
его относительная скорость достигает макси-
максимального значения. Для случая круглого цилиндра эта
гипотеза проверена экспериментами Н. Rubach'a и Л. В. Глики,
на которые мы ссылались (см. стр. 350). В общем случае шах-
шахматная вихревая система за период Т смещается на расстояние
/, двигаясь со средней скоростью (V^, — и*); за то же время
вновь образовавшийся вихрь проходит расстояние /i</, как это
можно видеть из фотографий реальных течений. В момент заро-
зарождения вихря его циркуляции и переносная скорость малы (в
случае тел с двумя критическими точками Г и к* близки к ну-
нулю). Если движение стационарно, то в момент отрыва вихря от
цилиндра его скорость должна быть равна скорости вихрей всей
шахматной системы, как целого, и поэтому относительная ско-
скорость центра вихря должна возрастать начиная с щ = 0. Ско-
Скорость центра вихря возрастает в реальных течениях еще и по-
потому, что при увеличении циркуляции Г центр вихря переходит
из областей меньших «переносных» скоростей в область боль-
больших.
Относительная безразмерная скорость центра вихря zt будет:
Ц|
_ /1 _ cos Щ , Гр sin \р Г р2— 1 1 1 ]
~\ Р2 ) 231^ Ll+P4 — 2p2cos 2ф р2— 1 2р2 sin2 ф J "
Учитывая гипотезы A) и B), выражаемые формулами B13) и
B15), можно безразмерную скорость записать в виде:
vm
Согласно гипотезе C):
d
rfp [V^)— dp \ p<
Вычисления дают здесь:
/г2р2 + Зр2 (р2 — 1 f = 2/г2 (р2 — 1) + (р2 — 1 ?.
Проведя очевидные упрощения, получим:
или
(р-1J(р2 + 2) = Л2 = 4. B17}
Таким образом, определение р сводится согласно B17) к
решению следующего кубического уравнения:
Яз— 7й. + 2 = 0,_ B18)
где
Я = р2.
Так как нас интересует положительный корень урав-
уравнения B18), больший единицы, то легко найти (например,
367
графически), что искомое значение Я = 2,5 и, следовательно,
Р=П,58. B19)
Величину циркуляции Г определим по формуле B15), где
положим sinф = y|Tg-. Простые вычисления дают следующую
величину циркуляции вихря Zy,
1^4,71/^ B20)
Зная А и Г, находим:
и, следовательно, теоретическое значение коэффициента вихре-
вихревого сопротивления будет:
)(^J]4-=1,18. B21)
На фигуре 108 дана экспериментальная кривая коэффициента
лобового сопротивления круглого цилиндра для широкой обла-
области чисел Рейнольдса.
Теория
O.I I Ю Iff W' Ю* 10' 10s
Фиг. 108
Для ламинарной области течения, когда гипотеза /г=с?=2
вполне приемлема, найденное теоретически Схвихр близко сов-
совпадает с опытными значениями Сх. Заметим, что роль сопро-
сопротивления трения при обтекании круглого цилиндра весьма мала
(порядка 3—4%) и СХ=СЖ вихр.
Распространение метода определения циркуляции вихрей
вихревых шахматных систем на более сложные задачи (эллип-
.368
тические цилиндры, профили симметричных крыльев Н. Е. Жу-
Жуковского и С. А. Чаплыгина) было выполнено в работах
А. А. Космодемьянского*. Решение аналогичным при-
приемом вопроса об определении максимальной подъемной силы
профиля крыла было дано в работах О. В. Голубевой** и
Л. В. Гл ики***.
Построение комплексного потенциала течения около круглого
цилиндра при наличии шахматной системы, состоящей из п пар
вихрей, принципиальных трудностей не вызывает, хотя и гро-
громоздко по написанию. Применяя те же три гипотезы, которые мы
рассмотрели выше, можно определить циркуляцию отходящего
от цилиндра вихря в поле скоростей, более близком к действи-
действительности; вычисления показывают, что величина циркуляции Г
в этом более сложном случае незначительно отличается от ра-
I и
нее вычисленного значения ^ = 4,831/^, -^—= 0,24 и СХВИхр =
= 1,23)****.
§ 16. Основные уравнения гидростатики.
Давление на плоскую стенку
Основные уравнения гидродинамики в форме Эйлера для по-
покоящейся жидкости принимают следующий вид:
Гх ~~ р дх
F =1^р_
и Р ду
F —LEL.
г~~ р дг
B22)
Для того чтобы получить эти уравнения, достаточно в общих
уравнениях гидродинамики положить и = 0, v = 0 и ш = 0.
Уравнения B22) называются дифференциальными уравне-
уравнениями равновесия жидкости или уравнениями равновесия в фор-
форме Эйлера.
Для того чтобы некоторый конечный объем жидкости нахо-
находился в равновесии, необходимо, чтобы находился в равновесии
* См.: Космодемьянский А. А., Вихревое сопротивление теоре-
теоретических профилей. «Труды ЦАГИ», вып. 317, М., 1937.
** См.: Голубе в а О. В., Определение подъемной силы крылового
профиля при ламинарном срыве потока с его поверхности. «Доклады АН
СССР», т. 46, № 3, 1945.
*** См.: Г л ики Л. В., Определение подъемной силы профиля крыла
при больших углах атаки. «Труды ВВИА имени Н. Е. Жуковского»,
вып. 486, 1953.
**** См.: Космодемьянский А. А., Некоторые вопросы аэродина-
аэродинамической теории сопротивления. «Ученые записки МГУ», вып. 46, 1940.
24 А. А. Космодемьянский 369
каждый элемент этого объема. Вследствие этого уравнения рав-
равновесия B22) должны удовлетворяться для любой точки про-
пространства, занимаемого покоящейся жидкостью. Если жидкость
находится в равновесии, то давление в каждой ее точке имеет
строго определенную величину, а сама жидкость принимает не-
некоторую вполне определенную форму.
Основные задачи при изучении равновесия жидкостей (основ-
(основные задачи гидростатики) можно сформулировать следующим
образом:
а) Задано поле массовых сил, нужно найти закон распреде-
распределения гидростатического давления р.
б) Задано поле массовых сил, нужно найти форму, прини-
принимаемую жидким телом в положении равновесия; иначе говоря,
нужно найти уравнения поверхностей, ограничивающих покоя-
покоящуюся жидкость
Если массовые силы не действуют на рассматриваемый объем
жидкости, то уравнения равновесия имеют вид:
дР —п дР — п др — п
~д!~~и> ду —и> Ж ~и'
откуда следует, что в этом случае гидростатическое давление
одинаково во всех точках жидкости.
Уравнения равновесия B22) налагают некоторые ограниче-
ограничения на поле массовых сил, которое сохраняет равновесие дан-
данного объема жидкости. Чтобы найти эти условия, умножим пер-
первое из уравнений B22) на dx, второе на dy, третье на dz и сло-
сложим. Будем иметь:
z = ^(^dx+^dy+^dz). B23)
Правая часть уравнения B23) представляет собой полный
дифференциал, поэтому и левая часть должна быть полным
дифференциалом, т. е. проекции массовых сил Fx, Fy, Fz должны
быть частными производными от некоторой функции U(x,y,z),
которую мы назовем силовой функцией или потенциалом:
Следовательно, для того чтобы равновесие жидкости было
возможно, приложенные к ней массовые силы должны иметь
потенциал.
Если функция U существует, то уравнение B23) можно за-
записать в виде:
370
Интегрируя, будем иметь:
где С — произвольная постоянная интегрирования.
Для определения этой постоянной необходимо задать давле-
давление р в какой-нибудь точке жидкости. Пусть в точке х0, Уо, z0
давления р = Ро, а потенциал U=U0, тогда C = po + pUo. Подстав-
Подставляя это значение С, находим:
P = Po + P{U— Uо)- B25)
Соотношение B25) определяет гидростатическое давление
как функцию координат. Из B25) вытекает следующий закон
Паскаля: давление на покоящуюся жидкость, производимое ка-
какими-либо внешними силами, передается равномерно во все
точки пространства, занимаемого жидкостью. В самом деле
p(U— Uo) определяется полем действующих сил и не зависит от
р0; поэтому если давление р0 в точке х0, у0, z0 увеличить каким-
либо образом на величину Др0, не нарушая равновесия жидко-
жидкости, то на такую же величину Лро увеличится и давление р в лю-
любой точке жидкости.
Пусть поле массовых сил есть однородное поле силы тяже-
тяжести. Если ось Oz направить вертикально вниз, а плоскость хОу
принять за плоскость нулевого потенциала, то
p(U~U0) = pgz, B26)
где г-г глубина погружения точки под поверхностью (плоско-
(плоскостью нулевого потенциала). В этом случае давление в точке х,
у, z согласно формулам B25) и B26) будет равно:
Р = Ро + Рёг = Ро + Уг, B27)
где у — вес единицы массы, а р0 — давление в любой точке пло-
плоскости г=0. Это давление р0 на плоскости 2=0 можно считать,
например, атмосферным давлением на свободной поверхности
покоящейся тяжелой жидкости.
Вычислим суммарное гидростатическое воздействие на неко-
некоторую поверхность S, погруженную в жидкость. Давление на
площадку da, центр которой имеет координаты х, у, z, согласно
B27) равно:
pdo = poda-\- yz da.
Система элементарных сил pda, направленных по соответ-
соответствующим нормалям к поверхности S, в общем случае приво-
приводится для произвольного центра приведения к результирующей
силе R и результирующей паре с моментом Ш. Если косинусы
углов нормали к поверхностей в точке М(х, у, z) с осями
24* 371
координат обозначить через а, (J, 9, то
Rx= J apda= J apoda-{-y J гаrfa
s s s
Ry = J № do= J pA tfa + v J zprfa
s s s
#г = J Qp da= J Qp0 rfa + v J
B28)
а проекции результирующего вектора-момента на координатные
оси можно написать в виде:
. B29)
pQ(za
—xQ)zda
= [p{x$—ya)do =
s
Как видно из формул B28) и B29), проекции результирующего
давления и проекции вектора-момента результирующей пары
сил относительно начала координат составляются из суммы двух
интегралов. Интегралы, имеющие множитель р0, определяют воз-
воздействие на поверхность S равномерно распределенного давле-
давления ро, передающегося со свободной поверхности 2=0. Инте-
Интегралы, имеющие множитель у, определяют воздействие на по-
поверхность S давления, создаваемого весом жидкости.
Для того чтобы система местных сил гидростатического да-
давления на поверхность S приводилась к одной равнодействую-
равнодействующей, необходимо, чтобы
т. е. чтобы для выбранного центра приведения RA-Ш.
Если поверхность 5 представляет собой часть плоскости
•(плоская стенка), то гидростатические давления представляют
собой систему параллельных сил, направленных в одну сторону
и перпендикулярных к плоскости стенки. Такая система сил при-
приводится к одной равнодействующей, равной арифметической
сумме всех сил и приложенной в центре параллельных сил. Най-
Найдем величину и точку приложения равнодействующей сил давле-
давления на плоскую стенку. Пусть свободная поверхность есть пло-
плоскость хОу, угол между нормалью к стенке и осью От 7усть ра-
872
вен %, тогда
R = j pda = | pode + y J zda,
s s
или
R = PoS + Y^o = S (p0 + v«o). B30)
где z0 — глубина погружения центра тяжести площадки.
Из формулы B30) следует, что давление жидкости на пло-
плоскую стенку не зависит от угла ее наклона и равно произведе-
произведению площади поверхности стенки на величину гидростатиче-
гидростатического давления в ее центре тяжести.
Давление на площадку S, создаваемое весом жидкости, рав-
равно (ySz0), т. е. равно весу цилиндрического столба жидкости, по-
поперечным сечением которого является площадка S и высота ко-
которого равна глубине погружения центра тяжести этой пло-
площадки.
Чтобы найти точку пространства, через которую проходит ли-
линия действия равнодействующей R, мы воспользуемся форму-
формулами, определяющими координаты центра параллельных сил
l(cm. главу VII раздела «Кинетика»),
Будем иметь:
Rxo= | pxda= | (pQ-\-yz)xda
s s
Ry0 = { РУ do = | (po+ yz) у da
s
B31)
= I pzda — I (po-\- yz)zda
J J
s s
Координаты центра параллельных сил в системе осей x'y'z',
повернутых относительно неподвижных осей xyz на угол к, будут
равны:
0 cos Я. ' уо уо* о
Подставляя эти значения в формулы A71), получим:
/л
(Ро -f- yz) x da I i
-~ J
Ло —'
l
?
B32)
373
Формулы B32) позволяют найти положение центра давления
на плоскую стенку в системе осей, связанных с положением этой
стенки.
Пример. Полусфера радиуса Ro с вертикальной осью на-
наполнена до краев тяжелой жидкостью. Определить давление
жидкости на четверть полусферы abc, отсекаемую двумя верти-
вертикальными взаимно перпендикулярными плоскостями. Давление
на поверхности жидкости равно нулю. Вес единицы объема ра-
равен у.
Так как давление в каждой точке поверхности направлено
по радиусу сферы, то элементарные силы гидростатических да-
давлений будут проходить через точку О — центр сферы. Если на-
начало координат выбрать в этой точке, то
Шх = О, ЗЯ„ = 0, Шг = 0
и система местных сил давления приводится к одной силе —
равнодействующей. Так как по предположению ро=О, а
а — — В —-^- 6— z
— р ' Р— р ' — р '
Ко "о "о
ТО
п Г j г xzda п г иг da п Г z2 do
s s s s
Для интегрирования перейдем к сферическим координатам.
Полагая
^; = /?osin 0j coscp, (/ = A'oSin91 sincp, z = R0 cos Qlt
будем иметь, что
2
Формулы, определяющие проекции равнодействующей, с ука-
указанием пределов интегрирования можно представить в виде:
л _я_
Rx = yRl j J sin2 Bj cos в! cos ф dy cfB, = ~ ,
о о
л_ _я
~ 2 d3
d3
ru = yRl j J sin2 Bj cos Q: sin ф dy dQ2 = ^ ,
о о
— —
T 2
Rz = yR30 J J COS2 0J Sin
о о
Следовательно, величина равнодействующей сил давления
равна:
374
Направляющие косинусы равнодействующей определяются по
известным формулам:
COS I
R У я2 + 8
cos
Пересечение линии действия равнодействующей с поверх-
поверхностью сферы определяет центр давления жидкости на рассма-
рассматриваемый кусок сферической поверхности.
§ 17. Атмосфера Земли
Уравнения гидростатики являются одновременно и уравне-
уравнениями аэростатики. Эти уравнения можно использовать для по-
построения теории земной атмосферы. Плотность атмосферы р
существенно изменяется с высотой. Оказывается, что если опре-
определить экспериментально закон изменения температуры по вы-
высоте, то можно достаточно просто найти законы изменения дав-
давления и плотности в функции высоты. За последние 20 лет наши
знания о верхних слоях атмосферы существенно расширились, и
мы дадим сначала краткую сводку современных (на 1965 г.)
представлений о строении земной атмосферы.
Слой воздуха, покрывающий поверхность Земли и оказываю-
оказывающий заметное влияние на законы движения летательных аппа-
аппаратов, относительно невелик. Метеоры, влетающие в атмосферу
Земли со скоростями 12—72 км/сек, встречают заметное сопро-
сопротивление воздуха лишь начиная с высот 120—100 км.
По измерениям, выполненным при помощи ракет-зондов,
плотность атмосферы на высоте 95 км примерно в миллион раз
меньше плотности у поверхности Земли.
Давление столба атмосферы Земли от поверхности до бес-
бесконечности немногим более 1 кГ/см2 и, следовательно, эквива-
эквивалентно давлению столба воды высотой 10 м.
Однако слой воздуха, одевающий Землю, имеет весьма важ-
важное значение для живых существ, растений и человека. Атмо-
Атмосфера действует как хорошее одеяло, не давая дневной темпе-
температуре подниматься слишком высоко, а ночной температуре па-
падать слишком низко. Достаточно сказать, что на Луне, где нет
сколь-нибудь заметной атмосферы, температура поверхности,
освещенной Солнцем, около +130° С, а ночью температура па-
падает до —150° С.
375
Атмосфера сохраняет все живое от падающих метеоров. По
современным данным (см. таблицу 1), в атмосферу нашей
планеты влетает следующее число метеоров:
Экстра-
Экстраполяция
Данные
наблюдений
Данные
наблюдений
Экстра-
Экстраполяция
Суточный
приток
звездная величина
метеора
ОТ
ОТ
ОТ
от
от
от
от
от
от
от
от
—10
— 7
— 5
— 3
0
+ 2
+ 5
+ 7
+10
+13
+21
ДО
до
до
до
до
до
до
до
до
до
до
— 8
— 6
4
— 1
+1
+ 4
+ 6
+ 9
+12
+20
+30
Всего за
м&теоров
ОТ
ОТ
ОТ
ОТ
ОТ
от
от
от
от
от
от
год
Та
в атмосферу Земли *
ласса отдельного
метеора
500
100
10
1
100
10
1
0,1
0,01
10
ю-7
до 100 г
до 10 г
до 1 г
г до 100 мг
до 10 мг
до 1 мг
до 0,1 мг
до 0,01 мг
до 0,001 мг
до 10 мг
до 10"" мг
число за
сутки
300
2500
1,8 -10*
4-105
~10«
3,6 • 10?
1,9 - 10s
3,3 • 109
6,5 • 10">
~1014
~1018
3,6 -1020
блица 1
масса за
сутки (кг)
60
40
40
60
40
60
40
60
60
160
160
485-103
Масса, поступающая в атмосферу в течение года от основных
метеорных ливней
Число
активных
дней
Полная
масса за
год (кг)
Спора-
дичес-
дические
метеоры
365
485 • 103
?-Персеи-
ды и
Ариэтнды
16
41,5-Ю3
Р-Тау-
риды
11
5,1 ¦ 103
Квадран-
тиды
2
13,3-Ю3
Персеиды
9
11,9-Юз
Геминиды
6
28,7 -103
Осталь-
Остальные
ЛИВНИ
23
29,9 ¦ 103
* Так называемые спорадические метеоры (без учета метеорных лнвней).
См. статью Дж. Гринхау и А. Ловелла, Верхняя атмосфера и метеоры,
в книге «Физика верхней атмосферы», Физматги?. М., 1963, стр. 468—469.
376
Как видно из приведенной таблицы, большинство метеоров
имеют микроскопические размеры, но метеорная частица весом
в 0,001 г при попадании в живую ткань окажет такое же дей-
действие, как прямой выстрел из крупнокалиберного револьвера.
В течение тысячелетий достигают поверхности Земли, не сгорая
в атмосфере, только единичные крупные метеоры, которые назы-
называются метеоритами. В нашей стране наиболее крупный метео-
метеорит упал в Сибири в 1908 г., и его обычно' называют большим
тунгусским метеоритом.
Атмосфера защищает нас от мощного ультрафиолетового из-
излучения Солнца. Озон, образующийся под действием солнечного
света, поглощает наиболее вредную для организмов часть уль-
ультрафиолетового спектра (максимум поглощения при длине вол-
волны 2600 ангстрем).
Кислород, азот и другие газы поглощают более длинные уль-
ультрафиолетовые волны, лежащие за пределом поглощения озона.
Если бы все ультрафиолетовые лучи достигали поверхности
Земли, то существование каких-либо живых существ было бы
весьма сомнительным. Атмосфера задерживает потоки и других
космических излучений, которые также вредны для человека.
Состояние атмосферы Земли определяется потоком солнеч-
солнечной энергии, падающей на поверхность нашей планеты. Доля
солнечного излучения, отраженного облаками и поверхностью
обратно в космос (альбедо) *, составляет для Земли 39%. При-
Примерно 61% солнечного излучения, приходящегося в основном на
видимую часть спектра, поглощается поверхностными слоями
Земли, которые нагреваются и в свою очередь становятся излу-
излучателями (в далекой инфракрасной области спектра). Большая
часть излученной энергии от поверхности Земли поглощается
молекулами СО2 (углекислого газа) и Н2О (паров воды), имею-
имеющимися в нижних слоях атмосферы. Часть этой энергии снова
возвращается к поверхности Земли, повышая ее температуру.
Этот дополнительный нагрев поверхности Земли за счет инфра-
инфракрасного излучения, возвращенного нижней атмосферой, назы-
называют «парниковым эффектом».
Нижние слои атмосферы Земли (до высоты 11 км) назы-
называются тропосферой (фиг. 109), и в этих слоях температура воз-
воздуха падает по линейному закону в среднем на 6,5° на каждый
километр высоты. Верхняя граница тропосферы (слой толщиной
* Приведем точное определение альбедо. Пусть на какой-нибудь уча-
участок поверхности падает световой поток Д/.; часть этого потока ДЬП погло-
поглощается поверхностью, а часть Д/.Отр отражается. Величина А — °тр на-
зывается коэффициентом диффузного отражения или альбедо данной по-
поверхности. Для идеальной абсолютно белой поверхности А = \ (альбедо —
степень белизны поверхности, происходит от латинского слова albus — бе-
белый).
377
около 1 км) называют тропопаузой. Обычно принимают (между-
(международная стандартная атмосфера) температуру слоя атмосферы
около поверхности Земли равной +15° С (или +288° К) и по-
поэтому на высоте 11 км будет —56,5° С.
Выше тропосферы атмосфера находится в радиативном
равновесии (малое значение конвекции) и благодаря низким
температурам содержит весьма мало водяных паров. Следова-
Следовательно, инфракрасное излучение здесь почти не задерживается
200
100
Фиг. 109
и температура от 11 км до 25 км остается практически посто-
постоянной.
В слоях атмосферы выше 25 км заметно увеличивается со-
содержание озона (О3), который поглощает ультрафиолетовое из-
излучение Солнца. Благодаря этому температура атмосферы повы-
повышается, и эта область положительных градиентов температуры
простирается до высоты 50 км. Слой атмосферы от 11 до 50 км—
между тропопаузой и вторым максимумом температуры — назы-
называется стратосферой. На высоте 50 км содержание озона в ат-
атмосфере уже очень мало, максимум содержания озона (до
3- 10~4%) обнаруживается в области от 25 до 30 км.
Слой атмосферы от 50 до 80 км называют мезосферой; в
этом слое температура снова понижается до значений примерно
—93° С.
От высоты 80 км температура атмосферы начинает снова по-
повышаться. Выше 100 км находится область сильного нагрева,
обусловленного фотодиссоциацией молекулярного кислорода Ог
в атомарный (О) и фотоионизацией молекулярного азота N2
378
под действием далекого ультрафиолетового излучения Солнца *.
Область атмосферы от 80 до 600—700 км называют термосфе-
термосферой. У ъерхней границы термосферы температура достигает весь-
весьма высоких значений (до 1400° К) (фиг. 109). В термосфере
благодаря значительному уменьшению числа частиц в 1 куб. см
существенно возрастает расстояние между последовательными
соударениями частиц (свободный пробег). Термосфера включает
в себя две области (Е и F) ионосферы.
. Область атмосферы от 600—700 км до 5000 км называется
экзосферой. В этой области температура считается постоянной,
плотность и вероятность соударений частиц столь малы, что ка-
каждая частица движется как свободная под влиянием тех сило-
силовых полей, в которых она находится. На нижнем крае экзо-
сферы (h ^ 700 км) плотность будет порядка ~10б частиц на
1 еж3, и на этой высоте частица, удаляющаяся от Земли по вер-
вертикали вверх, будет испытывать только одно соударение. На
верхней границе экзосферы (h S 5000 км) плотность атмосферы
падает до ~102 частиц на 1 см3, что, по современным данным,
соответствует средней плотности межпланетной среды. Высоту
5000 км можно рассматривать как предельную для нейтральной
атмосферы Земли.
Области, содержащие главным образом заряженные части-
частицы, захваченные магнитным полем Земли, располагаются выше
5000 км до высот /г = 5/?^31 890 км (R — радиус Земли). Эта
область называется магнитосферой. В этой области распола-
располагаются наиболее удаленные радиационные пояса Земли.
Состав атмосферы изменяется с высотой; однако до высоты
100 км состав можно считать постоянным. Как мы уже указы-
указывали, вследствие низкой температуры в низких слоях страто-
стратосферы A1—25 км) почти весь водяной пар заключен в слоях
тропосферы. Весьма малые количества водяных паров, соответ-
соответствующие упругости насыщающего пара при 200° К (—173° С),
будут 'проникать и в более высокие слои атмосферы и там дис-
диссоциировать. По данным 1963 г., совпадающим сданными аме-
американского справочника — Handbook of Astronautical Enginee-
Engineering, 1961 г., наблюдаемый состав земной атмосферы на уров-
уровне моря дается таблицей 2.
Как видно из таблицы 2, азот, кислород и аргон составляют
более чем 99,9% земной атмосферы. Согласно последним дан-
данным, весьма существенное значение в потеплении климата на
Земле имеет содержание в атмосфере углекислого газа. Средний
молекулярный вес атмосферного воздуха на уровне моря равен
* Условно ход реакции абсорбции (поглощения) можно записать в виде:
О2 + Av -> О + О, N2 + fiv н- N2+ + е,
где ft — постоянная Планка, v — частота световой волны.
379
Таблица 2
Состав атмосферы на уровне моря
Компонента
Азот
Кислород
Аргон
Углекислый газ
Неон
Гелий
Криптон
Водород
Ксенон
Метан
Озон . . .*
Водяной пар
% по объему
78,09
20,95
0,93
0,03
1,8-10~3
5,24-10
1,0-10~4
5-Ю'5
8-10'6
5-Ю'6
от 0 до 7-10~6
В тропосфере от 0 до 2,00
Молекулярный вес *
28,016
32,000
39,944
44,010
20,183
4,003
83,7
2,016
131,3
16,035
48,000
18,016
28,97. Состав, приведенный в таблице 2, можно считать неиз-
неизменным до высоты 100 км, за исключением содержания Н2О и
озона. Давление у поверхности Земли (на уровне моря в нор-
нормальных условиях, т. е. при 760 мм рт. ст.) составляет
106 - 1,103 дн/см2 A дина= 1,0197-10 кГ), а плотность при тех
же условиях составляет 1,225 - 10~3 г/см3. В таблицахЗ и 4 пред-
представлены основные характеристики атмосферы до высот 140 км,
по американским данным, и принятые в СССР.
На высотах, больших 120 км, азот и кислород являются ос-
основными составляющими атмосферы. На высоте 120 км преоб-
преобладает азот (N2) в отношении 4:1; на высоте 300 км уже пре-
преобладает кислород в отношении 3 : 1. Причина состоит в том, что
О2 диссоциирует под действием ультрафиолетового излучения
Солнца в атомарный кислород с вдвое меньшим молекулярным
весом. Более тяжелый азот (N2) как бы оседает в более низкие
слои атмосферы. По этой причине на высотах более 200 км ато-
атомарный кислород становится основной составляющей атмо-
атмосферы. На высоте 1800—1900 км количество кислорода сравни-
сравнивается с количеством водорода, а на высотах более 2000 км во-
водород преобладает.
Рассмотрим теперь количественные соотношения между аб-
абсолютной температурой, молекулярным весом, плотностью, да-
давлением и гравитационным ускорением в земной атмосфере. Ис-
* Молекулярный вес атомарного атмосферного кислорода О принят
равным 16.
380
Таблица 3*
Высота,
км
0
5,0
10,0
15,0
20,0
25,0
30,0
35,0
40,0
45,0
50,0
55,0
60,0
65,0
70,0
75,0
80,0
85,0
90,0
95,0
100,0
105,0
110
115
120
125
130
135
140
Температура,
"К
288
253
218
218
218
218
229,5
241,0
252,5
264,0
264,0
264,0
251,7
239,4
227,1
214,8
202,5
190,2
190,2
200,1
210,0
246,2
282,5
318,7
355,0
391,2
427,5
463,7
500,0
Основные характеристики атмосферы от 0 до
Давление,
дн/см2
1,103-106
5,391-Ю5
2,614-105
1,199-105
5,509-104
2,534-10*
1,190-Ю4
5,805-103
2,932-103
1,528-103
8,085-Ю2
4,283-102
2,237-102
1,132-Ю2
5,531-101
2,600-101
1,171-Ю1
5,020
2,098
8,975-10"'
4,005-10"'
1,964-10"'
1,088-10"'
6,616-10" 2
4,324-10" 2
2,974-10" 2
2,119-Ю
1,555-10
1,170-Ю
Плотность,
г/см'
1,225-Ю
7,421-10" 4
4,176-Ю
1,916-Ю
8,801-10 ~5
4,048-10" 5
1,806-10" 5
8,390-10
4,004-10" 6
2,016 10 ~6
1,067-Ю
5,630-10
3,095-10~7
1,646-Ю
8,482-10" 8
4,216-Ю"8
2.013-17"8
9,193-Ю"9
3,842-Ю"9
1,562-10" 9
6,642-Ю0
2,675-10" 10
1,242-10" 10
6,425-10""
3,613-10""
2,245-10""
1,457-10""
9,815-10"'2
6,818-102
Число молекул
Nj в 1 см3
1,967-1019
1,192-1019
6,705-1018
3,076-1018
1,413-1018
6,500-1017
3,899-1017
1,347-10'7
6,493-ю'6
3,237-Ю16
1,713-Ю16
9,072.1015
4,969-Ю15
2,643-1015
1,362-1015
6,769-Ю14
3,232-Ю14
1,476-ю'4
6,169-ю'3
2,508-Ю13
1,066-1013
4,403- Ю12
2,045. Ю12
1,057-1012
5,946-ю"
3,695. ю"
2,397 • ю''
1,615.10"
1,122.ю"
Число молекул
Ог в 1 см3
5,276-Ю18
3,197-1018
1,798-1018
8,251-10'7
3,790- Ю17
1,743-Ю17
7,776-1016
3,613-1016
1,741-Ю16
8,683- Ю15
4,595-1015
2,433-Ю15
1,332-Ю16
7,089-Ю14
3,653-10й
1,815-Ю'4
8,669-Ю13
3,959-10!s
1,654-10!3
6,727-1012
2,859-Ш12
9,8777-10И
3.510-10й
1,212-10"
3,127-Ю10
1,693-Ю10
9,414-109
5,248-1О9
2,88Ы09
140 КМ
Число частиц
О 1 см3
—
—
—
_
_
—
_
—
_
—
_
_
_
—
_
_
_
—
—
3,869-10"
3,959-10"
3,249-10"
2,565-Ю"
1,643-10"
1,098-10"
7,615-Ю10
5,444-Ю10
Число частиц
Н в 1 м>
—
—
—
—
—
_
—
—
—
—
_
_
—
—
_
_
_
_
~
6,653-104
5,674-104
4,934 -104
4,356-104
3,892-104
3,513-Ю4
3,197-Ю4
2,931-104
Молекуляр-
Молекулярный вес
28,97
28,97
28,97
28,97
28,97
28,97
28,97
28,97
28,97
28,97
28,97
28,97
28,97
28,97
28,97
28,97
28,97
28,97
28,97
28,97
2-8,97
27,89
26,82
25,75
24,67
24,56
24,45
24,33
24,23
* По американским данным, приведенным в Handbook of Astronautlcal Engineering, New York, 1961, стр 2—9.
Таблица 4*
Временная стандартная атмосфера СССР
(ВСА-1960)
¦*. ¦
Высота,
км
0
1
2
3
4
5
6
7
8
9
20
12
14
16
18
20
24
28
32
36
40
50
60
80
100
120
140
Давление,
мм рт-ст
760,00
674,12
596,28
525,98
462,46
405,37
354,13
308,26
267,38
230,95
298,70
145,44
106,24
77,62
56,72
41,46
22,158
11,959
6,6401
3,7924
2,2191
6,3441 • 10
1,8092-10
8,3564 ¦ 10
2,4310-10
2,5778 • 10
7,8749 • 10
Температура,
"К
288,16
281,56
275,14
268,64
262,13
255,63
249,13
242,63
236,14
229,64
223,15
216,66
216,66
216,66
216,66
216,66
216,66
224,87
235,82
246,74
257,66
274,00
253,40
185,00
209,22
449,23
826,28
Плотность,
кГ-сек*1м>
1,2492-10"'
1,1336-10"'
1,0265-10"'
9,2734-10 2
8,3558 • 10 2
7,5106- 10
6,7324- 10~2
6,0174 • 10 2
5,3628 -10
4,7633 -10~2
4,2172- 10 2
3,1795-10
2,3225-10
1,6968-10
1,2399-1 (Г2
9,0623 • 10 3
4,8438-10
2,5188- 10~3
1,3336-10
7,2796- 10 ~4
4,0792- 10
1,0966-10
3,3816-10"*
2,1393-10 6
5,5058-10"8
2,3745 • 10 9
4,4709-10 10
Скорость
звука,
м/сек
340,28
336,43
332,52
328,56
324,56
320,51
316,41
312,25
¦ 308,05
303,78
295,07
295,07
295,07
295,07
295,07
295,07
295,07
300,61
307,84 .
314,89
321,78
331,82
319,11
272,66
—
* По данным, приведенным в книге Алтухова В. А. и Шумя ц-
к о г о Б. Я., Основы аэродинамики летательных аппаратов, М.., 1962,
стр. 9—10.
382
ходными зависимостями являются уравнение аэростатики (гид-
(гидростатики) в проекции на вертикаль и уравнение состояния
идеального газа. Уравнение аэростатики в проекции на ось Oz
(вертикаль) имеет вид:
где р — плотность, р— давление, g — гравитационное земное
ускорение. Уравнение состояния идеального газа будет:
f = f. B34)
где fe = const — универсальная газовая постоянная, [i — средний
молекулярный вес атмосферы на данной высоте z, T— абсолют-
абсолютная температура в градусах Кельвина. Исключая из уравнений
B33) и B34), плотность р легко находим:
р — kT az'
откуда, интегрируя от г0 до z (причем на высоте z0 давление
Ро, а на высоте z — р), находим:
Отметим наиболее простые случаи, когда интеграл в правой
части уравнения B35) вычисляется через известные функции.
а) Тропосфера. В пределах 0—11 км можно считать
g = const, [j, = const (см. таблицу 3), а Т уменьшается по линей-
линейному закону с градиентом — 6,5° на километр высоты. Следова-
Следовательно, Г=288°—6,5° = 7'о—б,5°г, где z берется в километрах.
В этом случае:
Формула B25) дает в этом случае:
T \ 6,5ft
Pa \ Ta ) \T0
383
и, следовательно, полагая-^- = Я, получим:
Так к§к универсальная газовая постоянная k =
ODD
= 8314л*2/г^ад'^ж2, ц = 28,97, # = 981 см/сек\ а 4^т = 44,308,
то А = 5,255 и формулу B36) можно записать в удобном для
расчетов виде:
Р - (ЛM'255 - A _ г" \5'255
~р7~~\П) ~V 44 308/ '
Где zM нужно брать в метрах.
Из уравнения B34) следует:
Г ц f
И
-^ ——-о
откуда
I T \5,255
1 _ [17}
To) \T0)
Po Pa
ИЛИ
По формулам B37) и B38) составлены таблицы междуна-
международной стандартной атмосферы (МСА) до высоты 11 км. Таб-
Таблицы МСА приводятся почти во всех учебниках по аэродинамике
и динамике полета.
б) Изотермическая атмосфера. Как было указано
(см. также таблицу 3), в интервале высот от 11 до 25 км мож-
можно считать температуру атмосферы (стратосферы) постоянной.
В этом частном случае атмосфера называется изотермической.
Интеграл в правой части B35) легко вычисляется (g=const,
ц = const), и мы будем иметь:
г
ш — — — -jjr j dz -^уЧг—2ц),
где 2 = 11 км.
384
kT
Полагая — = H, где Я —градиент высоты (т. е. увеличение
высоты, необходимое для снижения давления в — = „ 1Я раз),
получим:
и
где # = 6318, а давление рн взято на высоте 11 км.
При постоянной температуре:
p
Рп
Рп
и, следовательно,
B39)
B40)
По формулам B39) и B40) рассчитаны таблицы междуна-
международной стандартной атмосферы от 11 до 25 км *.
Мы видели в разделе IV, что формулы B39) и B40) позво-
позволяют существенно упростить аналитическое исследование ряда
экстремальных задач динамики полета. Это наводит на мысль о
43 72 96 120
Фиг. ПО
* Иногда расчеты по B39) и B40) распространяются на область от
11 до 30 км
25 А. А. Космодемьянский
385
целесообразности расширения сферы действия формул изотер-
изотермической атмосферы. Если для данного интервала высот по-
подобрать величины ро и Н так, чтобы значения, получаемые по
формулам B39) и B40), возможно меньше отклонялись от ис-
истинных (реально наблюдаемых) значений, и оценить возникаю-
возникающие ошибки, то в ряде случаев оказывается вполне допустимым
применять такие интерполяционные формулы в весьма широ-
широком диапазоне высот. На фигуре 110 приведено сравнение зна-
значений плотности, подсчитанной по формуле:
аналогичной B30), и значений, рекомендуемых проектами таб-
таблиц новой международной атмосферы. Из фигуры A10) ясно,
что до высот 120—150 км, где аэродинамические силы еще ока-
оказывают в ряде случаев влияние на динамические характеристики
летательных аппаратов, можно для целей исследования поль-
пользоваться формулами изотермической атмосферы, как интерпо-
интерполяционными.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
Данный указатель не претендует на полноту и отражает в какой-то мерс
«кредо» московской школы механиков. Мы включили в указатель только те
курсы, монографии или статьи по теоретической механике и философии, ко-
которые оказали влияние на формирование научных, педагогических и методо-
методологических воззрений автора. Многие из приводимых здесь произведений ре-
рекомендовались студентам и аспирантам-механикам в тридцатых и сороко-
сороковых годах XX века моими учителями, профессорами Московского универси-
университета Н. Н. Бухгольцем. А. П. Минаковым и А. И. Некрасовым. Для
компактности указателя большинство работ приводится только один раз
в каком-нибудь из наиболее подходящих разделов, хотя значение многих про-
произведений распространяется, как правило, на курс в целом.
ЛИТЕРАТУРА К РАЗДЕЛУ I
А. Классики механики, история развития механики,
некоторые вопросы философии
1. Бернулли Д., Гидродинамика, или Записки о силах и движениях
жидкостей, изд. АН СССР, М., 1959.
2. Бернулли И., Избранные сочинения по механике, ОНТИ, М., 1937.
3 «Вариационные принципы механики». Сборник статей, под ред.
Л. С. П о л а к а, Физматгиз, М., 1959.
4. Гегель Г. В. Ф., Сочинения, т. I, М., 1930, т. II, М., 1934.
5. Галилей Г., Сочинения, т. I, ОНТИ, М., 1934.
6. Ге л ьвеци й К., Об уме, Соцэкгиз, М„ 1938.
7. Гнеденко Б. В., Михаил Васильевич Остроградский (Очерк жизни,
научного творчества и педагогической деятельности), ГИТТЛ, М., 1952.
8. Григорьян А. Т., Очерки истории механики в России, изд.
АН СССР, М., 1961. (В этой работе дана достаточно подробная библиогра-
библиография и персоналии крупных русских ученых-механиков )
9. Гюйгенс X., Три мемуара по механике, изд. АН СССР, М„ 1951.
10. Д а л а м б е р Ж., Динамика, ГИТТЛ, М„ 1950.
11. Дидро Д., Собрание сочинений, тт. I и II. Философия, изд. «Acade-
mia», M., 1935. (Мы особо рекомендуем: «Мысли об объяснении природы»,
т. I, стр. 299—357, и «Систематическое опровержение книги Гельвеция «Че-
«Человек», т. II, стр. 119—337.)
12. Жуковский Н. Е., Собрание сочинений, т. IX, Главная редакция
авиационной литературы, М., 1937.
13. Коперник Н., Сборник статей к 400-летию со дня смерти, изд. АН
СССР, М„ 1947.
14. К у Д р я в ц е в П. С, История физики, т. I, Учпедгиз, М„ 1948.
15. Лагранж Ж. Л., Аналитическая механика, тт. I и II, изд. 2,
ГИТТЛ, М., 1950.
16. Ленин В. И., Материализм и эмпириокритицизм. Сочинения, изд. 4,
т. 14.
17. Л е н и н В. И., Философские тетради. Сочинения, изд. 4, т. 38.
18. Ляпунов А. М., Общая зада,ча об устойчивости движения, ОНТИ,
Л„ 1935.
25* 387
19 Мах Э, Механика (историко-критический очерк ее развития), Спб,
1909
20 Моисеев Н Д, Лекции по истории механики, читанные для сту-
студентов механико-математического факультета МГУ в 1948/49 учебном году
(машинописный экземпляр, правленный и визированный автором)
21 Ньютон И, Математические начала натуральной философии, пере-
перевод с латинского Собрание сочинений А Н Крылова, т VII, изд АН
СССР, М , 1936
22 Остроградский М В, Избранные труды, изд АН СССР, М,
1958
23 Фейербах Л, Избранные философские произведения, тт I и II,
ГосПолитиздат, М, 1955
24 Чаплыгин С А, Полное собрание сочинений, т I, изд АН СССР,
Л, 1933
25 Эйлер Л, Основы динамики точки, ОНТИ, М, 1938
26 Эйнштейн А, Инфельд Л, Эволюция физики, изд «Наука»,
М, 1965 *>
27 Энгельс Ф, Диалектика природы, ГосПолитиздат, М, 1950
Б. Кинематика
1 Аппель II, Теоретическая механика, т I, Физматгиз, М, 1960
2 Бобылев Д, К>рс аналитической механики (теоретической меха-
механики), т I Часть кинематическая, Спб, 1904
3 БухгольцН И, Основной курс теоретической механики, ч 1, Гос-
техиздат М, 1939
4 ЛойцянскийЛ Г и Л)рье А И , К>рс теоретической механики,
т 1, ГИТТЛ, М , 1954
5 МерцаловН И, Кинематика механизмов Курс лекций, читанных
в Московском техническом училище, М , 1916
6 МинаковА П, Лекции по теоретической механике, читанные в
МГУ (записки слушателей студентов)
7 Некрасов А И, К>рс теоретической механики, т I, ГИТТЛ, М,
1945
8 Николаи Е Л, Теоретическая механика, ч I, ГИТТЛ, М, 1950.
9 Розе Н В (соавтор и редактор), Теоретическая механика, ч I и II,
ГТТИ, М, 1932 и 1933
10 Сомов П О, Основания теоретическои механики, Спб, 1904.
И С} слов Г К. Теоретическая механика, ГИТГЛ, М, 1944
12 Шефер К, Теоретическая физика, т I, ч 1 Общая механика Ме-
Механика твердого тела Гостехиздат, М 1934
13 GarnierR, Cours de Cmematique, t I, Pans, 1954
14 «Handbuch der Ph>sik», Bd V, Berlin, 1927 Статья Alt H, Geometrie
der Beuegungen (стр 178—232)
15 Hein K, Lehrbuch der Mechanik, 1 Teil Kinematik, Leipzig, 1906.
16 К о п l g s G , Lecons de Cinematique, Pans, 1897
17 Marcolongo K, Theoretische Mechanik, Bd I Kinematik und Sta-
tik, Leipzig, 1911
18 Resal H, Traite de Cinematique pure, Pans, 1862
ЛИТЕРАТУРА К РАЗДЕЛУ II
Кинетика
1 А и г е л ь П, Теоретическая механика, тт I и II, Физматгиз, М.,
1960
2 Бобылев Д, Курс аналитической механики (теоретической меха-
механики), т II. Часть кинетическая, Спб, 1909
388
3 Булгаков Б В, Прикладная теория гироскопа, ГИТТЛ, М, 1934.
4 БухгольцН Н, Основной курс теоретической механики, q 1 и 2,
ГИТТЛ, М, 1939
5 Голубев В В, Лекции по интегрированию уравнений движения
тяжелого твердого тела около неподвижной точки, Гостехиздат, М, 1953
6 Граммель Р, Гироскоп, его теория и применение, тт I и II, Изд.
иностр лит , М , 1952
7 Жуковский Н Н, Полное собрание сочинений
Лекции, вып 3 Теоретическая механика (куре
Высшего технического училища), Оборонгиз, М,.
1939
Лекции, вып 4 Аналитическая механика, Обо-
Оборонгиз, М, 1939
Лекции, вып 5 Кинематика Статика Дина-
Динамика точки (курс Московского университета),
Оборонгиз, М , 1939
Лекции, вып 6 Механика системы Динамика
твердого тела, Оборонгиз, М, 1939
8 Ишлинский А Ю, Механика гироскопических систем, изч АН
СССР, М, 1963
9 КирпичевВ Л, Беседы о механике, Гостехиздат, М, 1950
10 Кирхгоф Г, Механика (лекции по математической физике), изд
АН СССР, М, 1962
11 Крылов А Н иКрутковЮ А, Общая теория гироскопов и
некоторых технических их применений, изд АН СССР, Л , 1932
12 Лэмб Г, Теоретическая механика, т II Динамика, т III Более
сложные вопросы, ОНТИ, М, 1935—1936
13 Леви-Чивита Т и Амальди У Курс теоретической механики,
т 1,ч 1 и 2, Изд иностр лит, М, 1952, т II, ч 1 и 2, М, 1951.
14 ЛойцянскийЛ Г, Лурье А И, Курс теоретической механики,
т II, ГИТТЛ, М, 1954
15 Минаков А П, Лекции по теоретической механике, читанные в
МГУ (записки слушателей-студентов)
16 Некрасов А И, Курс теоретической механики, т II, Гостехиздат,
М, 1953
17 Николаи Е Л, Теоретическая механика, ч II, Гостехиздат, М, 1950.
18 Николаи Е Л, Теория гироскопов, Гостехиздат, Л, 1948
19 П л а н к М , Введение в общую механику, перевод с немецкого, ГИЗ,
М, 1927
20 Поль Р В, Введение в механику и акустику, ГТТИ, М, 1933
21 ПуансоЛ, Начала статики, Пг, 1920
22 Скарборо Д Б, Гироскоп — теория и применения, Изд иностр.
лит, М, 1961
23 Т а р г С М, Краткий курс теоретической механики, изд «Наука»,
М, 1963
24 Уиттекер Е Т, Аналитическая динамика, ОНТИ, М, 1937
25 Chazy J, Cours de Mecamque Rationnelle, t I Dynamique du point
materiel, Pans, 1947, t II Dynamique de Systeme materiel, Pans 1948
26 С r a n z С , Lehrbuch der Balhstik, Berlin, 1925
27. F о p p 1 A , VoTlesungen uber Technische Mechanik, Bd I. Einfiihrung
in die Mechanik, Leipzig, 1921; Bd IV Dynamik, Leipzig, 1923, Bd. VI. Die-
Wichtigsten Lehren der Hoheren Dynamik, Leipzig, 1921
28 HamelG, Elementare Mechanik, Berlin, 1922
29 HamelG, Theoretische Mechanik, Berlin, 1949.
30 «Handbuch der Physik», Bd V, Berlin, 1927
31. Marcolongo K, Theoretische Mechanik, Bd II Dynamik, Leipzig,
1912
32 Painleve P, Cours de Mecamque (Cours de L'ecole politechmque),
t. I, Paris, 1930; t. II, Pans, 1936.
38$
33 Peres T, Mecanique Generate, Pans, 1953
34 Routh E T, Die Dynamik der Systeme Starter Korpern, перевод с
английского Bd I Die Elemente, Leipzig, 1898, Bd II Die Hohere Dynamik,
Leipzig, 1898
35 Smart E H, Advanced Dynamics, \ol I Dynamics of a particle.
London, 1951, \ol II Dynamics of a solid body, London, )951
36 SyngeT L and Griffith В А, Principles of Mechanics, New York,
1959
ЛИТЕРАТУРА К РАЗДЕЛУ 111
Механика тел переменной массы
1 ВетчинкинВ П, Вертикальное движение ракет Избранные труды,
т I, изд АН СССР, М, 1956, стр 351—366
2 Воробьев Л М Теория движения многоступенчатых ракет Док-
Докторская диссертация, М, 1962
3 ГантмахерФ Р и Левин Л М, Теория полета неуправляемых
ракет, Физматгиз, М, 1959
4 Гурин А И, Основы механики тел переменной массы и ракетоди-
намики, ч I, изд МГПИ им Ленина М, 1960
5 ИшлинскийА Ю, Два замечания к теории движения ракет «До-
«Доклады АН СССР», т LIII, вып 7, 1948
6 Карагодин В М, Теоретические основы механики тела перемен-
переменного состава, Оборонгиз, М, 1963 (В этой монографии дана достаточно
подробная библиография работ советских ученых по различным аспектам ме-
механики тел переменной массы )
7 Котов В Ф, Основы аналитической механики для систем пере-
переменной массы «Ученые записки Горьковского университета», т XXVIII, 1955
8 Мещерский И В, Работы по механике тел переменной массы,
ГИТТЛ, М , 1952
9 Ми еле А, Механика полета, перевод с английского, т I, изд «Нау-
«Наука», М, 1965
10 Новоселов В С, Некоторые вопросы механики переменных масс
с учетом внутреннего движения частиц «Вестник Ленинградского универ-
университета», 19, вып 4, 1956, и № 1, вып 1, 1957
11 Оберт Г, Пути осуществления космических полетов, Оборонгиз, М,
1948
12 Ренкин Р А, Математическая теория движения неуправляемых
ракет, перевод с английского, Изд иностр лит, М, 1951
13 Россер Д, Ньютон Р и Гросс Г, Математическая теория по-
полета неуправляемых ракет, перевод с английского, Изд иностр лит, М,
1950
14 Рынин Н А, Межпланетные сообщения, вып 5 Теория реактивного
движения, Л , 1929
15 ТихонравовМ К, Формула Циолковского Сб «Реактивное дви-
движение», № 2, М, 1936
16 Циолковский К Э, Собрание сочинений, т II Реактивные лета-
летательные аппараты, изд АН СССР, М, 1954
17 ШтернфельдА А, Введение в космонавтику, Гостехиздат, М,
1937
18 Eh ricke К, Space Flight, vol II Dynamics, Princeton, USA, 1962,
стр 512—610
ЛИТЕРАТУРА К РАЗДЕЛУ IV
А Вариационные принципы классической механики
1 ГольдстейнГ, Классическая механика, ГИТТЛ, М, 1957
2 ЛурьеА И, Аналитическая механика, изд «Наука», М, 1962.
-390
3 ПолакЛ С (ред), «Вариационные принципы механики». Сборник
статей под ред Л С П о л а к а, Физматгиз, М , 1959
4 Смирнов В И, Курс высшей математики, т IV, ГИТТЛ, М, 1953.
5 Boltzmann L Vorlesungen uber die Prmzipe der Mechamk, Bd I,
Bd II, Leipzig, 1897, 1904
6 В о 1 z а О, Lectures on the Calculus of Variations, New York, 1946
7 Caratheodory C, Variationsrechnung und Differentialgleichungen
erster Ordnung, Leipzig, 1935
8 «Handbuch der Physik», Bd V, Berlin 1927 Статья L Nordheim,
Die Prmzipe der Dynamik, стр 43—90
9 LanczosC, The Vanational Principles of Mechanics, Toronto, 1960.
Б. Вариационные задачи динамики точки переменной массы
1 БеллманР, Динамическое программирование, Изд иностр лит, М,
1960
2 Васильев А Я, О необходимых и достаточных условиях оптималь-
оптимальности регулируемых систем «Автоматика и телемеханика», т XXV, № 10,
М, 1964
3 ДубовицкийА Я и Милютин А А, Некоторые оптимальные
задачи для линейных систем «Автоматика и телемеханика», т XXIV, № 12,
М, 1963
4 Егоров В А, О решении одной вырожденной вариационной задачи
и оптимальном подъеме космической ракеты «Прикладная математика и ме-
механика» т XXII, вып 1, М, 1958
5 Иванов Ю Н, Токарев В В, Шалаев Ю В, Оптимальные
траектории и оптимальные параметры космических аппаратов с двигателями
ограниченной мощности «Космические исследования», т II вып 3 М, 1964
6 ИсаевВ К, О некоторых особенностях вариационной задачи Майе-
ра в ракетодинамике «Автоматика и телемеханика», т XXVI, № 7, М, 1965
7 ИсаевВ К, Принцип максимума Л С Понтрягина и оптимальное
программировавшие тяги ракет «Автоматика и телемеханика», т XX, № 8, М,
1961, и т XXIII, вып. 1, М, 1962
8 «Исследование оптимальных режимов движения ракет» Сборник ста-
статей иностранных авторов (Гиббса Лоудена, Миеле, Тзяна, Чикала, Эванса
и др), Оборонгиз, М, 1959 (В этой книге имеется достаточно подробная
библиография работ иностранных авторов, вышедших до 1958 г )
9 Кротов В Ф, Некоторые новые методы вариационного исчисления
и их приложение к чинамике полета Докторская диссертация, МАИ им
Орджоникидзе, М, 1963
10 Кротот В Ф, Методы решения вариационных задач на основе
достаточных \словий абсолютного минимума «Автоматика и телемеханика»,
т XXIII, № 12, М, 1962, т XXIV, № 5, М., 1963
11 Кротов В Ф,Об оптимальном режиме горизонтального полета са-
самолета «Сборник трудов МВТУ им Баумана», № 104, Оборонгиз, М, 1961
12 Майер В, Вариационное исчисление «Успехи математических наук»,
т IX, М, 1941
13 «Оптимальные режимы движения летательных аппаратов» Обзор № 40,
БНИ ЦАГИ, 1961 (подписное издание) (В обзоре имеется достаточно под-
подробная библиография работ иностранных авторов до 1960 г)
14 Остославский И В и Стражева И В, Динамика полета
(Траектории летательных аппаратов), Оборонгиз, М, 1963
15 Охоцимский Д Е, К теории движения ракет «Прикладная ма-
математика и механика», т X, вып 2, М, 1946
16 Охоцимский Д Е и Энеев Т М, Некоторые вариационные за-
задачи, связанные с запуском искусственных спутников Земли «Успехи фичиче-
ских наук», т LXIII, вып 1, сентябрь, М, 1957
391
17. Понтрягин Л. С, Болтянский В. Г., Гамкрелидзе В. В.,
Мищенко Е. Ф., Математическая теория оптимальных процессов, Физмат-
гиз, М., 1961.
18. Thomson W. Т., Introduction to Space Dynamics, New York, 1961,
«стр. 240—261.
ЛИТЕРАТУРА К РАЗДЕЛУ V
Введение в аэрогидромеханику
1. «Аэродинамика», т. III под ред. Дюрэнда, перевод с английского,
Оборонгиз, М., 1939.
2. Вилла А., Теория вихрей, ОНТИ, 1936.
3. Г л a v э р т Г., Основы теории крыльев и винта, перевод с английского
ГТТИ, М., 1931.
4. Голубев В. В., Теория крыла аэроплана в плоско-параллельном
потоке. «Труды ЦАГИ», вып. 29, М., 1927.
5. Голубев В. В Теория крыла аэроплана конечного размаха. «Труды
ЦАГИ», вып. 108, М., 1931.
6. Голубев В. В., Теория крыла аэроплана в плоско-параллельном по-
потоке, изд. 2, перераб., Гостехиздат, М., 1938.
7. Жуковский Н. Е., Полное собрание сочинений, т. V. Вихри. Теория
крыла. Авиация, Главная, редакция авиационной литературы, М., 1937.
8. Жуковский Н. Е., Полное собрание сочинений. Лекции, вып. 1,
Теоретические основы воздухоплавания, ч. 1, Главная редакция авиационной
литературы, М„ 1938.
9. К о ч и н Н. Е., К и б е л ь И. А., Розе Н. В., Теоретическая гидроме-
гидромеханика, ч. I, ГИТТЛ, Л., 1941; ч. II, Л., 1937.
!0. Л э м б Г., Гидродинамика, Гостехиздат, М., 1947.
11. Лойцянскин Л. Г., Аэродинамика пограничного слоя, ГИТТЛ, Л.,
1941.
12. Л о йц я некий Л. Г., Механика жидкости и газа, ГИТТЛ, М., 1950.
13. Некрасов А. И., Лекции по гидродинамике, прочитанные в 1929/30
¦учебном году в Московском университете (студенческие записки).
14. Прандтль Л., Титьенс О., Гидро- и аэромеханика т. I ГТТИ,
М., 1932; т. II, ОНТИ, М., 1935.
15. Прандтль Л., Гидроаэромеханика, Изд. иностр. лит., М., 1949.
16. Привалов И. И., Теория функций комплексного переменного, Гос-
Гостехиздат, М., 1949.
17. Седов Л. И., Плоские задачи гидродинамики и аэродинамики,
ГИТТЛ, М., 1950.
18 Чаплыгин С. А„ Полное собрание сочинений, т. II, изд. АН СССР,
Л., 1933.
19. Carafoli E., Aerodynamique des ailes d'avion, Paris, 1928.
20. «Handbook of Astronautical Engineering», Editor KoelleH., New
York, 1961, стр. B—2) —B—13).
21. Milne-Thomson L. M., Theoretical Aerodynamics, London, 1952.
22. M п 11 e г W., Mathematische Stromungslehre, Berlin, 1928.
23. M ii 11 e r W., Theorie der zahen Fliissigkeiten, Leipzig, 1932.
24. Prandtl L., Abriss der Stromungslehre, Braunschweig, 1931.
25. Schlichting H., Gren-zschicht Theorie, dritte Auflage, Karlsruhe,
1958.
26. S ch m i d t H., Aerodynamik des Fluges, Berlin, 1929.
27. V i 11 a t H., Lecons sur L'Hydrodinamique, Paris, 1929.
ПРЕДМЕТНЫЙ И ИМЕННОЙ УКАЗАТЕЛЬ
(Имена, приведенные в указателе литературы, в данный
указатель не включены)
Абсолютный коэффициент вязкости
251
Агостинелли 12
Активный участок полета 32, 55
Алексеев 171
Альбедо 377
Аналитическое исследование опти-
оптимальных движений ракеты 164
Атмосфера Земли 375
Бронль 124
В
Валье 12
Вариации функции синхронная 125
полная 133, 134
Вариация обобщенной скорости 130
Варьированная траектория 128
Ветчинкин 12
Вихревая теория сопротивления 349
Вихрь (точечный) 293
Воробьев 11
Временная стандартная атмосфера
СССР 382
Врубель 89
Галилей 249
Галлей 6
Гагарин 000
Гамель 10
Гамильтон 3, 120
Гантмахер 12
Гельмгольц 129, 349
Геометрическое исследование опти-
оптимальных режимов 162
Герц 139
Гиббс 11
Гидродинамический смысл функциа,
тока 286
Гильберт 124, 128
Глики 350, 369
Годдард 9, 10, 12, 144, 145—147
Голубев 348, 360
Голубева 369
Гольдстейн 133
Гоманн 9, 12
Д
Давление на плоскую стенку 369
Действие по Гамильтону 123
Действие по Лагранжу 123
Декарт 14, 123
Динамические уравнения в форме-
Эйлера 107, 111
Диполь 291
Дирак 124
Дифференциальные принципы меха-
механики 122
Дробно-линейная функция 344
Ж
Жуковский 278, 302
Жуковского гипотеза 306. 349, 361
— профили крыла 307
— теорема о подъемной силе 303—•
304
Задача Циолковского первая 24—
27
вторая 30—32
393-
Закон независимого действия сил
16, 59, 62
— парности касательных напряжений
321
— Паскаля 371
— Пуазейля 327
— сохранения количества движения
14, 59, 60
Зенкин 11, 12
И
Изображающая точка в методе Ме-
Мещерского 84
Изопериметрические задачи для пря-
прямолинейного движения 172
— — для дуги окружности 179
— — для орбитального самолета 241
Изотермическая атмосфера 384
Изоэнергетические траектории сра-
сравнения 133
Интеграл Бернулли 269, 275, 346
Интеграл Лагранжа 280
Интегральное соотношение Кармана
332, 334
Интегральные принципы механики
122
Ишлинский 160
К
Каменомостсюий 11
Канонические переменные 119
Канонические уравнения 119, 132
Карман 332, 355
Касательные напряжения 318
Качество самолета 54, 57, 199
Квадратичный закон сопротивления
37, 55, 166
Кильватерная зона 328
Кинетический момент системы 90
тела переменной массы 99
— — точки 79
Количество движения пары вихрей
^57
— — системы 90
— — точки 76
Комплексный потенциал 288
Комплексный потенциал вихревой до-
дорожки 355
Котов 12
Коэффициент совершенства летатель-
летательного аппарата 205
— сопротивления трения 336
Курант 128
Л
Лаврентьев 342, 345
Лагранж 3, 117, 118, 280
Лауден 11
Лебедев 194
Левин 12
Леви-Чивита 9, 11, 19
Лейбниц 123
Леонардо да Винчи 315
Линейный закон изменения массы 28,
37, 44, 46, 54
Линейный закон сопротивления 43
Лурье 129
М
Магнитосфера 379
Максимальная дальность полета 211
— продолжительность полета 205
Маркс 140
Массовые силы 252
Международная стандартная атмо-
атмосфера 384, 385
Мельников 235
Менделеев 58
Меры движения 124
Метеориты 377
Метеоры 376
Метод Оберта 148—153
Мещерский 7, 8, 9, 12, 19, 63, 82, 86,
93
Миеле 11
Минаков 67
Н
Нестационарное планирование 218
Нетер 124
Неустойчивость вихревой цепочки 351
Нормальные напряжения 318
Ньютон 5, 6, 7, 261
О
Оберт 9, 10, 12, 160, 167
Обобщенные импульсы 118
Обратные задачи криволинейного дви-
движения 72—75
прямолинейного движения 70—
72
Оптимальный вираж 222
Оптимальный режим в неоднородной
атмосфере 169—171
при вертикальном подъеме ра-
ракеты 154—158
— — при движении в сопротивляю-
сопротивляющейся среде 42
при движении самолета с ЖРД
53
при мгновенном сгорании 34
орбитальных самолетов 234
- ¦- при разбеге самолета ШЗ
.394
Оптимальная скорость 214
Отношение тяги к весу 168 207, 215
Охоцимский 10, 11, 162, 218
Стратосфера 378
Струйная теория сопротивления 3391
П
Парадокс Эйлера 339
Перегрузка, обусловленная реактив-
реактивной силой 29, 36
Планк 121, 122, 124
Плотность жидкости 250
Поверхностные силы 252, 317, 318
Пограничный слой 328
Подъемная сила рулей НЕЖ 312
Показательный закон изменения мас-
массы 29, 205
Полак 124
Поляра самолета 199, 224
Потенциал скоростей 279
Погребная тяга при нестационарном
режиме 216
Прандтль 331
Принцип Гамильтона 128
•— наименьшего действия 133
— прямейшего пути 139
Программирование тяги ракетного
двигателя 202—205
Пространство конфигураций 123
Профиль крыла 276
Пьезометрическая высота 270, 274
Рабинович 11, 244
Разложение по малому параметру
195
Риман 345
Россер 12
Рубах 349, 350
Руль Жуковского 310
Рэнкии 12
Gana 12
Сателлоид Эрике 235
Свободные струи 340
Седов 349
Сжатие струи 273
Сиаччи 43
Скорость расширения 256
— сдвига 256
Смирнов В И. 155, 173
Смирнов Л. П. 12
Сопротивление давления 315, 338
— трения 315
Соркин 11, 12
Состав атмосферы Земли 380
Теорема Лаграижа 155
— о движении центра масс 96
— площадей 81
— Циолковского 26
Теорема импульсов для системы 94
для точки 76—79
Теорема об изменении кинетического
момента тела переменной массы
102, 103
— — — — — точки 79
Теорема об изменении кинетической
энергии тела переменной массы
114
точки 87, 88
Термосфера 379
Тзян 10
Траектория механической системы
123
Тропопауза 378
Тропосфера 377
Тяга, потребная при стационарном
режиме, 208
Удельный импульс 205
Уравнение Лапласа 281
— Мещерского 17, 18, 46, 54, 141,
143, 165, 199, 218, 223
— Мещерского обобщенное 58—65
— неразрывности 264, 285
— Эйлера 161, 180, 186, 191, 203, 211,
219, 238
Уравнения гидродинамики 260, 369
— Громеко 267
— Коши—Рнмана 288
— Лагранжа 105, 117
— пограничного слоя 331
Условие отрыва струй 338
Условный экстремум 155, 219
Ферма 138
Формула вихревого
360, 366
— Рейли 348
— Торичелли 272
— Чаплыгина 299, 300
Функционал 124, 226
Функция КирхгосЬа 341, 343
Функция тока 286
сопротивления
39&
Ц э
Цандер 12 ^ If|
Центр давления 314 !?ванс }" 0 „Q
Циолковский 5, 8, 9, 12, 13 11леР 'Я-,14.2'339
Эйнштейн 3, 124
Экзосфера 379
" Экстремали изопериметрической
Чернобровкин 194 дачи G6-178
Чикола 11 Эллипсоид деформации 259
Число Маха 199 ~ напряжений 321
— Рейнольдса 328, 336 Эльясберг 11
— Циолковского 25 2НГеЛ1\14,Aс
Энеев 11, 156
Ш
Шабат 342, 345 я
Шахматная система вихрей 351
Шрещингер 124 Якоби 138
ОГЛАВЛЕНИЕ
Предисловие
Раздел третий
МЕХАНИКА ТЕЛ ПЕРЕМЕННОЙ МАССЫ
Введение 5
Глава I. Простейшие задачи динамики точки переменной массы
§ 1. Основное уравнение динамики точки переменной массы 14
§ 2. Две задачи Циолковского. Законы изменения массы 24
§ 3. Оптимальные режимы движения в задачах Циолковского 32
§ 4. Движение точки переменной массы в сопротивляющейся среде при
квадратичном законе сопротивления 37
§ 5. Движение точки переменной массы в сопротивляющейся среде при
линейном законе сопротивления ... 43
§ 6. Движение точки переменной массы в однородном поле силы тяжести
при линейном законе сопротивления среды 46
§ 7. Горизонтальное прямолинейное движение самолета с ЖРД. Опти-
Оптимальные секундные расходы топлива . ..... .... 53
Глава //. Обобщенное уравнение Мещерского.
Обратные задачи динамики точки переменной массы
§ 1. Обобщенное уравнение Мещерского 58
§ 2. Движение реактивного судна 65
§ 3. Падение тяжелой нити 67
§ 4. Обратные задачи для прямолинейного движения 70
§ 5. Обратные задачи для криволинейного движения 72
Глава III. Основные теоремы динамики точки переменной массы
§ 1. Теорема об изменении количества движения (теорема импульсов) . 7ft
§ 2. Теорема об изменении кинетического момента 79
§ 3. Простейшие случаи движения точки переменной массы под дей-
действием центральных сил 82<
§ 4. Теорема об изменении кинетической энергии Ш
Глава IV. Основные теоремы динамики тела переменной массы
§ 1. Введение и постановка задачи 89
§ 2. Теорема об изменении количества движения 92
§ 3. Теорема о движении центра масс 95
§ 4. Кинетический момент тела переменной массы 98
§ 5. Теорема об изменении кинетического момента ......... 102
397
§ 6 Теорема об изменении кинетического момента относительно поступа-
поступательно движущихся осей 107
§ 7 Теорема об изменении кинетической энергии тела переменной массы 112
§ 8 Уравнения движения тела переменной массы в обобщенных коорди-
координатах 114
§ 9 Канонические уравнения для тела переменной массы . 118
Раздел четвертый
ВАРИАЦИОННЫЕ ПРИНЦИПЫ КЛАССИЧЕСКОЙ МЕХАНИКИ
И ВАРИАЦИОННЫЕ ЗАДАЧИ ДИНАМИКИ ТОЧКИ
ПЕРЕМЕННОЙ МАССЫ
Глава I Вариационные принципы классической механики
§ 1 Введение !21
§ 2 Принцип Гамильтона 124
§ 3 Принцип наименьшего действия 133
Глава II. Вариационные задачи динамики точки переменной массы
§ 1 Введение 140
§ 2 Вариационные задачи о вертикальном подъеме ракеты в гравитаци-
гравитационном поле и атмосфере Земли !43
§ 3 Изопериметрические задачи динамики точки переменной массы 171
§ 4 Об оптимальном разбеге самолета 183
§ 5 О максимальной продолжительности и максимальной дальности го-
горизонтального полета самолета с ракетным двигателем .... 198
§ 6 Оптимальное нестационарное планирование ..... 218
§ 7 Оптимальный правильный вираж самолета . . 4 . . . 222
§ 8 Оптимальные режимы полета орбитальных самолетов 234
Раздел пятый
ВВЕДЕНИЕ В АЭРОГИДРОМЕХАНИКУ
§ 1 Основные понятия и определения .... 249
§ 2 Классификация сил, действующих на жидкость .... 252
§ 3 Деформация частицы жидкости 254
§ 4 Уравнения движения идеальной жидкости в форме Эйлера 259
§ 5 Установившееся движение жидкости Уравнения Громеко Интеграл
Бернулли . 265
§ 6 Некоторые практические применения интеграла Бернулли . . 271
§ 7 Потенциальные движения несжимаемой идеальной жидкости . . . 278
§ 8 Плоскопараллельные потенциальные течения . ... 285
§ 9 Формулы С А Чаплыгина 295
§ 10. Теорема Н Е Жуковского 301
§ 11 Гипотеза Н Е Жуковского 306
§ 12 Симметричные профили Н Е Жуковского . . 307
§ 13 Дифференциальные уравнения движения вязкой несжимаемой жид-
жидкости 315
§ 14 Элементы теории пограничного слоя 328
§ 15 О сопротивлении давления 338
§ 16 Основные уравнения гидростатики Давление на плоскую стенку 369
§ 17 Атмосфера Земли . 375
Указатель литературы . . . . . 387
Предметный и именной указатель 393
Аркадий Александрович
Космодемьянский
КУРС ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ
Часть II
Редактор 7" В. Махагкевич
Переплет художника Л. П. Ромасенко
Художественный редактор А В Сафонов
Технический редактор М. И. Смирнова
Корректор В. Г. Соловьева
Сдано в набор 25/Ш 1966 г. Подписано
к печати 10/Х 1966 г. 60x907,6. Печ. л. 25 +
+ вкл. 0,25. Уч.-изд. л. 18,43+вкл. 0,0»
Тираж 32 тыс. экз. (Тем. пл. 1966 г. № 28>
А 13981
Издательство «Просвещение» Комитета no-
печати при Совете Министров РСФСР.
Москва, 3-й проезд Марьиной роши, 41
Ленинградская типография № 2 имени
Евгении Соколовой Главполнграфпрома
Комитета по печати прн Совете Министров
СССР. Измайловский проспект, 29.
Заказ № 191
Цена без переплета 52 коп.
переплет 19 коп.
Фиг, 65
Фиг. fifi
Фн(. 67
Фиг. 90
Фиг. 91
Фиг.