/
























































































































Author: Фролов Л.Б.
Tags: измерение геометрических и механических величин измерительные приборы методы и единицы измерений физика
Year: 1967




Text
БИБЛИОТЕКА ПО АВТОМАТИКЕ
Выпуск 228
Л. Б. ФРОЛОВ
ИЗМЕРЕНИЕ
КРУТЯЩЕГО
МОМЕНТА
«ЭНЕРГИЯ»
МОСКВА 1967
531.7
Ф 91
УДК 53(1.78
РЕДАКЦИОННАЯ КОЛЛЕГИЯ:
И. В. Антик, А. И. Бертинов, С. Н. Вешеневский, А. А. Воронов,
Д. А. Жучков, Н. Е. Кобринский, В. С. Малов, В. Э. Низе,
О. В. Слежановский, Б. С. Сотсков, Ф. Е. Темников, А. С. Шаталов
Фролов Л. Б.
Ф 91 Измерение крутящего момента. М., «Энер-
гия», 1967.
120 с. с илл. (Б-ка по автоматике. Вып. 228), 8 ООО экз.
31 к.
В книге рассматриваются методы измерения крутящего момен-
та, используемые в современных приборах. Приводится материал по
их проектированию и расчету.
Книга предназначена для инженерно-технических работников,
занимающихся разработкой измерительной и регулирующей аппара-
туры, предназначенной для исследования и эксплуатации различ-
ных двигательных установок.
3-3-13
294-66
Фролов Лев Борисович
Измерение крутящего момента,
Редактор А. В. Лебедев
Техн. редактор Т. Г. Усачева
Художественный редактор Д. И. Чернышев
Корректор А. Д. Халанская
Сдано в набор 2/XII 1966 г. Подписано к печати 14/11 1967 г.
Формат 84ХЮ878, Бумага типографская № 2 Т-00514
Усл. печ. л.-в,3 Уч.-изд. л. .6.27
Тираж 8 000 экз. Цена 31 коп. Заказ 2751
Издательство «Энергия". Москва, Ж-114, Шлюзовая наб., 10.
Московская типография № 10 Главполиграфпрома
Комитета по печати при Совете Министров СССР.
Шлюзовая наб., 1Q.
ВВЕДЕНИЕ
Задача измерения усилий, передаваемых вращаю-
щимся валом, была поставлена более двух столетий тому
назад, еще до изобретения паровой машины. Тем не ме-
нее она не потеряла своей актуальности и в настоящее
время [Л. 1, 2 и 3]. Это объясняется широким развитием
и разнообразием типов двигателей и силовых установок,
специфические условия работы которых требуют приме-
нения разнообразного арсенала измерительных средств.
Совершенствование двигателей и энергетических уста-
новок — улучшение конструкции, увеличение надежности,
уменьшение тепловых, механических, электрических и
другого вида потерь — повышение к. п. д., в свою очередь
требует создания более совершенной измерительной ап-
паратуры.
Одно из основных применений устройств для измере-
ния крутящего (вращающего) момента вызвано -необхо-
димостью измерения мощности, передаваемой вращаю-*
щимся валом. Повышение точности измерения эффектив-
ной мощности на валу позволяет более точно определять
к. п. д. установок, улучшает качество эксперимента и
тем самым позволяет выявлять влияние малозаметных
факторов на экономичность силовых установок [Л. 4].
Особое значение приобретает измерение мощности на
высокоскоростных двигательных установках, где в ряде
случаев обычные системы измерения либо непригодны,
либо имеют невысокую точность. Между тем широкое
применение высокоскоростных турбомашин в авиации,
на транспорте и в ракетной технике вызывает настоя-
тельную потребность в разработке высококачественных
измерительных приборов для их исследований и эксплуа-
тации.
Задача измерения крутящего момента часто возни-
кает при проведении прочностных испытаний.
3
Обеспечение устойчивой и продолжительной работы
в некоторых механизмах требует поддержания их на-
грузки на заданном уровне. В системах автоматического
регулирования для определения нагрузки применяются
торсиометрические приборы.
Применение приборов для измерения крутящего мо-
мента на судовых двигательных установках [Л. б] по-
зволяет определять наиболее экономичный режим рабо-
ты при изменении окружающих условий (течение, ветер,
волнение и т. п.).
Простейшие интегрирующие устройства, например
в виде механического счетчика, включенные на выходе
торсиометров, позволяют измерить произведенную двига-
телем работу. Такие устройства применяются для учета
наработки ресурса двигателей или для подсчета стоимо-
сти произведенной работы.
С помощью измерителя крутящего момента произво-
дится определение потерь в шинах при качении. На осно-
вании экспериментальных исследований потерь при раз-
личных скоростях движения, температуре, профиле
дороги разрабатываются меры по повышению долговечно-
сти шин и экономичности автотраспортных средств.
Краткий перечень задач, решаемых приборами для
измерения крутящего момента, показывает, что сфера
их применения достаточно широка, а предъявляемые
к ним требования весьма разнообразны.
Этим в значительной степени объясняется разнообра-
зие существующих установок для измерения момента.
В книге рассматривается лишь один класс уст-
ройств— торсионные приборы, в которых измерение
момента производится по углу закручивания либо по
местной деформации упругого элемента, размещаемого
в цепи передачи момента от двигателя к нагрузке. Наи-
более подробно .рассмотрены бесконтактные торсиомет-
ры, получившие в последние годы значительное распро-
странение.
Автор выражает глубокую признательность А. В. Ле-
бедеву и Б. И. Фролову за большую помощь в написа-
нии и редактировании рукописи.
ГЛАВА ПЕРВАЯ
МЕТОДЫ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА
1. КЛАССИФИКАЦИЯ И ОБЩАЯ ХАРАКТЕРИСТИКА
УСТРОЙСТВ ДЛЯ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА
Применяемые в настоящее время устройства для из-
мерения крутящего момента по принципу работы можно
разделить на четыре класса: балансирные динамометры,
торсионные приборы, трансмиссионные динамометры и
преобразовательные установки для измерения крутящего
момента по вторичным параметрам. На рис. 1 дана
классификация устройств для измерения крутящего мо-
мента.
К наиболее ранним устройствам для измерения кру-
тящего момента относятся трансмиссионные динамомет-
ры. Определение момента в этих установках производит-
ся по величине касательного усилия, развиваемого вра-
щающимся валом в различного рода трансмиссиях.
Получили распространение две группы трансмиссион-
ных динамометров — с гибким приводом и с подвижной
шестерней. Прототипом современных динамометров
с гибким приводом является гравитационная машина
Джона Смиттона (1759 г.), предназначенная для изме-
рения мощности, развиваемой ветряными мельницами.
На рис. 2 исследуемое ветровое колесо 4 помещается на
штангу 3 и уравновешивается грузом /. Штанга приво-
дится во вращение через шкив с канатом и в зависимо-
сти от тяги каната создается различный скоростной на-
пор воздуха. Момент, развиваемый ветровым колесом,
определяется по весу поднятого груза 2, мощность — по
времени его поднятия на заданную высоту. В более
поздних динамометрах гибкая передача становится за-
мкнутой (непрерывной), а касательное усилие измеряет-
ся по степени натяжения гибкой связи.
5
6
Изобретателем первого трансмиссионного^ динамомет-
ра с подвижной шестерней считают Гашетта. Динамомет-
рические весы Гашетта показаны на рис. 3. При переда-
че момента от колеса 1 к колесу 2 на ось шестерни 3
действует сила Q, по величине которой и определяется
передаваемый крутящий момент.
Важным достоинством трансмиссионных динамомет-
ров является простота их конструкции. В настоящее вре-
Рис. 2. Гравитационный динамо- Рис. 3. Динамометрические ве-
метр Смиттона. сы Гашетта.
Однако из-за трудно определяемых потерь в передачах
их точность оказывается невысокой.
Несколько позднее (в начале XIX в.) появляются
и находят применение балансирные динамометры. Отли-
чительной особенностью балансирных динамометров
является наличие подвижного («балансирного») статора,
связанного с силоизмерительным устройством, с по-
мощью которого определяется реактивный крутящий мо-
мент [Л. 2].
Применяются балансирные динамометры двух ти-
пов— тормозные и приводные. Наибольшее распростра-
нение получили тормозные (абсорбционные) динамомет-
ры, в которых измерение момента сопровождается по-
глощением мощности, подводимой к динамометру, за
счет возникающих в нем сил сопротивления: трения
(в механическом тормозе), гидравлического сопротивле-
ния (гидротормоза), аэродинамического сопротивления
(вентиляторы, компрессоры) или сил электромагнитного
эзаимодействия (электрические тормоза).
7
Вначале появились механические тормозные динамо-
метры. Первой практической машиной такого типа
является колодочный динамометр Прони (рис. 4). Не-
сколько позднее нашел применение тормоз Томпсона
Рис. 4. Механический тормоз Рис. 5. Фрикционный тормоз
Прони. Томпсона.
(рис. 5). Нестабильный тормозной момент, малые мощ-
ности, быстрая изнашиваемость, затрудненный отвод
тепла —все эти недостатки значительно ограничили
Рис. 6. Гидравлический динамометр Фруда.
область применения механических динамометров и в на-
стоящее время они практически вышли из употребления.
На смену механическим пришли гидравлические ди-
намометры. Первый гидравлический тормоз был сделан
в 1858 г. Виллиамом Фрудом. На рис. 6 показан более
8
поздний динамометр Фруда (1877 г.). С небольшими из-
менениями этот динамометр находит применение для из-
мерения момента более 80 лет. Гидравлические динамо-
метры сравнительно просты, не требуют квалифициро-
ванного обслуживания, иедороги, используются для
измерения момента при больших мощностях,,так как обла-
дают хорошим отводом тепла. Недостатком гидравличе-
ских динамометров является неустойчивая их работа при
высоких скоростях вращения, особенно лри измерении
малых моментов.
С появлением электрических машин стали применять-
ся электрические тормозные и приводные динамометры.
По сравнению с гидротормозами электрические динамо-
метры позволяют создать более стабильный момент, а за
счет этого обеспечить достаточно высокую точность изме-
рения. Кроме того, они прзволяют использовать погло-
щаемую мощность. К недостаткам следует отнести
меньшую мощность и более высокую стоимость.
Аэродинамические динамометры используются для
измерения малых крутящих моментов, а также при спе-
циальных исследованиях, например при испытании авиа-
ционных двигателей, для которых они позволяют создать
естественные условия работы.
В отличие от тормозных (абсорбционных) динамо-
метров, в которых измерение момента сопровождается
преобразованием механической энергии в тепловую или
электрическую, в приводных динамометрических уста-
новках осуществляется обратное преобразование тепло-'
вой или электрической энергии в механическую. Поэто-
му в противоположность тормозным динамометрам,
предназначенным для определения момента двигатель-
ных устройств, приводные используются для испытания
потребляющих энергию установок (насосов, компрессо-
ров, генераторов и т. д.). Одни и те же электрические
двигатели в балансирном исполнении (с подвижным ста-
тором), используя свойство обратимости, могут приме-
няться и в качестве тормозных, и в качестве приводных
динамометров.
Наиболее широко балансирные динамометры исполь-
зуются при экспериментальных исследованиях двигатель-
ных установок. При некоторых условиях — отсутствие
вибраций, применение специальных подшипников, высо-
кая стабильность скорости вращения и при измерении
постоянного по величине крутящего момента — балансир-
йЫе динамометры позволяют проЁодйть измерений
с весьма высокой точностью (свыше 0,1%).
Недостатком балансирных динамометров является их
высокая стоимость, особенно для прецизионных устано-
вок. Точность измерения момента балансирными динамо-
метрами резко снижается при вибрациях и колебаниях
момента. В связи с необходимостью постановки корпуса
на подвижные опоры и из-за применения специальных
подводящих устройств конструкция оказывается доста-
точно сложной. Балансирные динамометры подробно
рассмотрены в работе С. М. Каца [Л. 2], в соответствие
с которой и построена приведенная на рис. 1 классифи-
кация этих динамометров.
В преобразовательных установках для измерения
крутящего момента используются известные зависимости
между моментом на валу и некоторыми вторичными па-
раметрами. В качестве вторичных параметров могут
быть использованы, например, величина активного тока
ротора в электрических преобразовательных установках,
расход и перепад давлений на входе и выходе компрес-
сорной установки, тяга, развиваемая гребным винтом,
и т. п. Подобно балансирным динамометрам используют-
ся преобразовательные установки двух типов — тормоз-
ные и приводные, соответственно для двигательных и
потребляющих энергию установок.
На практике преобразовательные установки чаще ис-
пользуются для определения мощности, передаваемой
вращающимся валом. Примером может служить изме-
рение мощности больших энергетических агрегатов
(гидравлических, паровых и газовых турбин) по разви-
ваемой мощности соединенных с ними электрических ге-
нераторов. Определение мощности маломощных двига-
тельных установок нередко производится по количеству
перекачиваемой насосами жидкости, соединенными
с ними, и т. п.
Общим недостатком преобразовательных установок
является влияние на точность измерения собственных по-
терь '(механических, электрических и т. п.), причем ве-
личина потерь и соответственно к. п. д. установки зави-
сят от многих факторов и изменяются на различных
режимах. Так как относительная величина потерь умень-
шается с увеличением мощности преобразовательной
установки (электрического типа), такие устройства наш-
ли широкое применение для измерения момента .на агре-
10
гатах большой мощности. Совмещение основных функ-
ций преобразовательных установок (преобразование
вида энергии) с измерительными очень удобно в ряде
устройств, и при умеренных требованиях к точности они
находят применение главным образом при эксплуатаци-
онных измерениях.
Торсионные приборы относятся к более поздним
устройствам для измерения крутящего момента. Широ-
кое развитие их стало возможным лишь с появлением и
развитием техники измерений неэлектрических величин
электрическими методами. В отличие от рассмотренных
выше динамометров измерение момента торсионными
приборами не связано ни с преобразованием вида энер-
гии (как в балансирных и преобразовательных уста-
новках), ни с отбором мощности на другой вал (как
в трансмиссионных динамометрах). В торсионных прибо-
рах измерение крутящего момента сводится к определе-
нию величины деформации упругого элемента, располо-
женного в цепи передачи момента. В зависимости от спо-
соба измерения деформации торсионные приборы можно
разделить на два подкласса — тензометрические прибо-
ры, в которых производится местное измерение деформа-
ции на ограниченном участке упругого элемента, и кру-
тильные торсиометры, в которых измеряется угол закру-
чивания упругого элемента между двумя выбранными
его сечениями.
По типу используемых преобразователей для изме-
рения угла закручивания крутильные торсиометры удоб-
но разделить на электрические, оптические, механические
и гидравлические. Из них самая многочисленная груп-
па— электрические преобразователи крутящего момента.
С точки зрения конструкции, влияния центробежных
сил, окружающей среды и особенно с точки зрения пе-
редачи измерительной информации весьма существенно
место установки датчиков (преобразователей деформа-
ции или перемещения в электрический сигнал) — на ва-
лу или вне вращающегося вала. В соответствии с этим
электрические торсиометры целесообразно разделить на
две подгруппы: с датчиками на валу и вне вала. Прибо-
ры второй подгруппы часто называют бесконтактными
торсиометрами, поскольку измерение момента произво-
дится здесь без прямого контакта с вращающимся ва-
лом. Приборы первой подгруппы также иногда выпол-
няются в бесконтактном варианте: при использовании
11
специальных бесконтактных токосъемников для передачи
измерительной информации с вращающегося вала на не-
подвижный прибор.
Дальнейшее разделение торсиометров производится по
виду применяемых преобразователей (индуктивные, ем-
костные, струнные и т. д.).
2. МЕХАНИЧЕСКИЕ ПРИБОРЫ ДЛЯ ИЗМЕРЕНИЯ
КРУТЯЩЕГО МОМЕНТА
Механические торсиометры отличаются большим раз-
нообразием используемых конструкций. Тем не менее
можно отчетливо различить два типа приборов — с диф-
ференциальным механизмом, обеспечивающим передачу
Момент
Рис. 7. Схема работомера с дифференциальным механизмом для из-
мерения угла закручивания.
показании на неподвижный индикатор, и с индикацией
угла закручивания упругого вала непосредственно на
вращающемся валу. Снятие показаний в торсиометрах
последнего типа осуществляется с применением стробо-
скопического эффекта.
Схема работомера, использующего для измерения
угла закручивания вала дифференциальный механизм,
показана на рис. 7 [Л. 6].
12
Закручивание вала / под действием нагрузки изме-
няет взаимное положение шестерен 2 и 3. Посредством
системы шестерен угол закручивания увеличивается и
через дифференциальный механизм преобразуется в угол
поворота прямозубого колеса 4 и в линейное перемеще-
ние связанной с ним рейки 5. Перемещение оси-диффе-
ренциала, пропорциональное углу закручивания, дает
возможность снятия показаний с вращающегося вала на
неподвижное измеритель-
ное устройство. Движе-
ние рейки 5 изменяет вза-
имное положение непо-
движного контакта 7 и
барабана 6, а так как
контактные пластины ба-
рабана 6 имеют различ-
ную длину, то число вклю-
чений счетчика за обо-
рот барабана пропорцио-
нально углу закручива-
ния вала, т. е. крутящему
моменту.
Барабан через редук-
тор связан с валом /, и
его скорость вращения
пропорциональна скоро-
сти вращения двигатель-
ной установки. Таким образом, общее число включений
счетчика 8 в единицу времени пропорционально произ-
ведению величин крутящего момента и скорости враще-
ния, т. е. передаваемой мощности. Интегрирование мощ-
ности во времени, проводимое счетчиком 5, позволяет
определить произведенную двигателем работу. Кроме
того, в измерительном устройстве 9 фиксируется общее
число оборотов двигателя (путь), а по шкале отсчиты-
вается передаваемый валом крутящий момент (усилие).
На рис. 8 показана пространственная схема прибора
с дифференциальным механизмом; для измерения пере-
мещения оси дифференциала здесь используется стрелоч-
ный индикатор перемещения.
Приборы с дифференциальным механизмом приме-
няются обычно для измерения небольших крутящих мо-
ментов 0—500 н-м при рабочих скоростях вращения от
0 до 12 000 об/мин.
13
Рис. 8. Схема конструкции меха-
нического торсиометра с диффе-
ренциальным механизмом.
Конструкция механических торсиометров значительно
упрощается, если используется прямое считывание по-
казаний непосредственно с вращающегося вала. Это реа-
лизуется в стробоскопических приборах для измерения
момента. Так же, как и в торсиометрах с дифференциаль-
ным механизмом, в этих приборах используется упругий
элемент с большим углом закручивания (до 5° и выше).
На одном конце упругого элемента располагается диск
со шкалой, на другом — стрелка-указатель. Для снятия
показаний используется импульсный стробоскоп, под-
свечивающий шкалу. Для синхронизации подсветки шка-
лы стробоскоп управляется импульсами от датчика, уста-
новленного на этом же валу.
Достоинством стробоскопического метода является
крайне простой съем информации с вращающегося вала,
не требующий никаких механических приспособлений,
что дает возможность применять этот метод при прове-
дении измерений в широком диапазоне скоростей вра-
щения от 0 до 60 ООО об/мин [Л. 7].
Измерение на повышенных скоростях предъявляет
жесткие требования к импульсному стробоскопу: дли-
тельность светового импульса должна быть порядка
1 мксек при частоте следования 1 ООО гц, нестабильность
вспышки — менее 0,2 мксек.
Недостатком стробоскопического метода является
необходимость применения упругих элементов с боль-
шим углом закручивания, что вызывает некоторые за-
труднения при измерении больших крутящих моментов.
В то же время стробоскопические приборы успешно при-
меняются при измерении малых моментов.
Описан преобразователь [Л. 8] для измерения сверх-
малых моментов в диапазоне 5-Ю"5—1 • 10—2 н*м при
скоростях вращения от 0 до 10 000 об/мин. Упругий эле-
мент здесь выполнен в виде спиральной пружины, при-
чем для компенсации изменения ее длины при закручи-
вании участок пружины имеет противоположное направ-
ление навивки.
Индикаторные устройства в стробоскопических при-
борах выполняются различными способами. Обычно
шкала и указатель размещаются на периферии вращаю-
щихся дисков. В других торсиометрах отсчетное уст-
ройство выполнено в виде двух цилиндров, вставленных
один в другой (рис. 9). Каждый из цилиндров жестко
связан с одним концом упругого элемента. На обоих ци-
14
Лиядрах сделаны прорези под углом друг к другу, при-
чем вдоль прорези внешнего цилиндра нанесена шкала.
При закручивании упругого элемента место пересечения
Рис. 9. Отсчетное устройство стробоскопического тор-
симометра щелевого типа.
прорезей перемещается от одного конца вала к другому
вдоль шкалы и служит указателем хмомента.
Импульсное подсвечивание шкалы может осуще-
ствляться без внешнего стробоскопа с помощью щели
Рис. 10. Конструкция стробоскопического торсиографа
фирмы «Амслер».
в диске, установленном на вращающемся валу, как это
сделано в стробоскопическом торсиометре фирмы
«Амслер», показанном на рис. 10. Лампочка 2, установ-
ленная на неподвижном кожухе 3, освещает два диска
15
4 и 5 с нанесенными по их периферии шкалами: основ-
ная шкала на диске 5 и вспомогательная шкала, имею-
щая десять делений, соответствующих одному делению
диска 5, расположена по кромке 4. Каждый из дисков
жестко связан с одним из концов торсионного валика /.
С диском 4 жестко связан диск б с радиальной прорезью,
при прохождении которой в поле видимости окуляра 7
через щель наблюдается шкала.
Сменные торсионные валики позволяют производить
измерение момента в широком диапазоне от 10 до
10 000 Н'М. С увеличением момента уменьшается допу-
стимая скорость вращения от 30 000 до 6 500 об/мин. На
точность измерения, которая по данным фирмы состав-
ляет 1%, значительно влияет центровка валов.
Достоинствами стробоскопических приборов являют-
ся простая измерительная схема3 прямое снятие показа-
ний без контакта с вращающимся валом.
Основные недостатки стробоскопических торсиомет-
ров: невозможность визуального снятия показаний при
колебаниях крутящего момента, для проведения измере-
ний необходимо участие оператора, затруднена передача
показаний на расстояние и автоматическая регистрация.
3. ГИДРАВЛИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ УГЛА
ЗАКРУЧИВАНИЯ ВАЛА
Гидравлические устройства обычно используются для
преобразования угла закручивания в осевое переме-
щение.
В приборе, показанном на рис. 11, при закручивании
вала 1 в результате изменения объемов полости 2
жидкость переходит в измерительный цилиндр 3 и пере-
Рис. 11. Гидравлический преобразователь угла закручивания вала.
16
мещает поршень 4. Достаточно большая величина пере-
мещения #=20 лш соответствует углу закручивания
в 1,5°. Прибор прост в обращении, не требует ухода и
может быть использован для измерения переменных кру-
тящих моментов. Основной «недостаток прибора — слож-
ная передача на регистрирующее устройство и низкая
точность измерения.
4. ОПТИЧЕСКИЕ ТОРСИОМЕТРЫ
Оптические торсиометры применяются, как правило,
при испытании двигателей в лабораторных условиях. При
малом уровне вибрации и стабильной нагрузке они позво-
ляют достигнуть весьма высокой точности измерения мо-
мента.
Рис. 12. Схема оптического торсиографа.
Принцип работы оптических торсиометров можно
рассмотреть на примере прибора, выпускаемого фирмой
«Торкмитерс», схема которого приведена на рис. 12.
Упругий элемент здесь выполнен в виде полого ци-
линдра 1, внутри которого расположен консольный уча-
сток свободного вала 2 с зеркалом на конце 3. Другое
зеркало установлено на внутренней поверхности упру-
гого элемента 4. С одной стороны вращающегося преоб-
разователя неподвижно устанавливаются подсвечивае-
мые шкалы 5иколлиматорные линзы 6, дающие изобра-
жение шкал в бесконечности. Через окно в полом упругом
элементе верхняя шкала с мелкими делениями наблю-
дается в окуляр телескопического устройства 7, поме-
щенного по другую сторону преобразователя. Нижняя
шкала с крупными делениями проектируется на отражаю-
щую поверхность зеркала, установленного на сплошном
консольном валу, и, отражаясь по Z-образной траектории
2—2751 17
Of efoporo зеркала, также попадает 6 поле зрения теле-
скопа. В зависимости от приложенного момента изме-
няется угол закручивания упругого элемента, взаимно
смещаются на такой же угол плоскости отражающих
зеркал 3 и 4 и в результате перемещается изображение
нижней шкалы. В поле зрения телескопа 8 происходит
наложение изображений двух шкал, причем по мере уве-
личения угла закручивания изображение нижней шкалы
перемещается вверх. Отсчет показаний производится
против деления крупной шкалы, совмещенного с мелкой
шкалой. Система двух шкал позволяет увеличить точ-
ность отсчета до 0,1%.
Угол, на который отклоняется отражаемое зеркалами
изображение, не зависит от изменения положения систе-
мы зеркал относительно линии наблюдения. Это дает
возможность получать неподвижное изображение шкал
в пределах до 15° угла поворота вала. При вращении по-
следнего изображение в окуляре вследствии инерции
восприятия наблюдается как непрерывное.
Максимальный угол закручивания упругого элемента
не превышает 2°, при этом одному делению шкалы соот-
ветствует угол закручивания 7".
Нормальный отсчет показаний возможен лишь при
измерении постоянного по величине крутящего момента.
Поэтому оптические преобразователи снабжаются жидко-
стными демпферами, предотвращающими быстрые
взаимные перемещения двух зеркал, при этом крутиль-
ные колебания воспринимаются тонким внутренним пе-
редаточным валиком.
Высокая точность измерения оптическими приборами
(0,25% по данным фирмы «Торкмитерс») может быть
достигнута при весьма высококачественном исполнении
и при благоприятных условиях эксплуатации (отсутствие
вибрации и т. д.). К недостаткам оптических приборов
следует отнести ручное снятие показаний, невозмож-
ность передачи результатов измерения на расстояние.
5. ИЗМЕРЕНИЕ УГЛА ЗАКРУЧИВАНИЯ ТОРСИОННОГО ВАЛА
И 30Т0 П Н ЫМИ П Р ЕОБР АЗО В AT ЕЛ Я МИ
Изотопные установки для измерения крутящего мо-
мента применяются сравнительно редко. Это обусловлено
тем, что применение радиоактивных материалов вызы-
вает опасность радиоактивного заражения обслуживаю-
18
щего персонала, кроме того, радиоактивному воздейст-
вию подвергается окружающая среда (пары, масло
и т. д.). Изменение свойств радиоактивных материалов
во времени требует проведение периодических калибро-
вок установки либо применения специальных корректи-
рующих устройств.
В то же время применение радиоактивных изотопов
в преобразователях крутящего момента имеет ряд преи-
муществ— источник излучения не требует специального
питания, на интенсивность излучения не влияют давле-
ние, температура и скорость вращения вала. Достоинст-
вом таких преобразова-
менение (J-лучей по-
зволяет лучше сфокусировать ионизирующий поток.
Следует иметь в виду, что ионизирующая способность
|3-лучей значительно ниже, чем а-лучей. Сфокусирован-
ный поток р-лучей направлен на чувствительный эле-
мент — ионизационную камеру 3. При отсутствии нагруз-
ки на валу чувствительный элемент перекрывается по-
глощающим лучи штырем 2, диаметр которого равен
диаметру сфокусированного пучка |3-лучей.
При закручивании вала под действием крутящего мо-
мента перекрытие пучка лучей становится неполным и
изменяется степень воздействия лучей на ионизационную
камеру. Для передачи сигнала от ионизационной камеры
на неподвижный измерительный прибор необходимо ис-
пользование токосъемников.
Применение в качестве детектора излучения иониза-
ционной камеры предпочтительно в торсиометрах, пред-
назначенных для измерения быстропеременных момен-
тов. Инерционность специальных ионизационных камер
с положительном электродом в качестве коллектора
ионов не превышает нескольких микросекунд. В этом от-
ношении им значительно уступают счетчики Гейгера —
2* 19
На рис. 13 показана
схема установки с изо-
топным преобразовате-
лем [Л. 9]. В качестве
источника излучения
здесь используется
^-излучатель /. При-
телеи является возмож-
ность калибровки в не-
подвижном положении.
Рис. 13. Схема радиоизогопного пре-
образователя угла закручивания.
Мюллера, которые также используются в качестве де-
текторов излучения в торсиометрах. Сигнал с выходов
счетчиков снимается в виде импульсов, средняя частота
следования которых является мерой интенсивности из-
лучения. Значительное время восстановления счетчиков
Гейгера — Мюллера ограничивает максимальную часто-
ту следования импульсов (/макс<0,5 кгц). Частота сле-
дования измеряется путем подсчета импульсов за фикси-
рованный интервал времени, и для получения достаточной
разрешающей способности приходится этот интервал
увеличивать. В результате ухудшаются динамические
характеристики торсиометра. По этой причине счет-
чики Гейгера— Мюллера используются обычно в тор-
сиометрах, предназначенных для измерения постоянного
момента.
С другой стороны, применение в торсиометрах счет-
чиков позволяет значительно упростить и удешевить ап-
паратуру. В частности, отпадает необходимость в гро-
моздкой схеме стабилизированного источника питания.
Выходной сигнал в виде импульсов позволяет просто и
с небольшими потерями в точности осуществить бескон-
тактную передачу информации с вращающегося вала на
неподвижный измерительный прибор.
Сцинтилляционные (люминесцентные) счетчики зна-
чительно превосходят счетчики Гейгера — Мюллера по
. своим динамическим свойствам. Излучение, воздейст-
вующее на люминесцентный состав, вызывает вспышки,
частота появления которых тем выше, чем больше интен-
сивность излучения.
Световые импульсы фиксируются фотоэлектронным
умножителем. Недостатком детекторов на сцинтилляци-
овных счетчиках является значительная чувствитель-
ность такого детектора к уизлучению. Вторичное у-из-
лучение имеет место при попадании р-лучей на перекры-
вающий штырь и соседние участки, воздействие уизлу-
чения приводит к нелинейности выходной характеристи-
ки прибора [Л. 10]. Для уменьшения влияния вторичного
излучения перекрывающий штырь выполняется из мате-
риала с малым атомным весом и используются новые
типы сцинтилляционных счетчиков с малой чувствитель-
ностью к Y-излучению.
В качестве источника fS-излучения в изотопных пре-
образователях, использующих счетчики, применяется,
например, стронций-90, имеющий период полураспада
20
20 лет. Защита от излучения при этом может быть обес-
печена органическим стеклом толщиной более 6 мм.
В тех случаях, когда периодическая калибровка при-
бора затруднена, в качестве источника излучения приме-
няют технеций-99 с периодом полураспада 2-Ю5 лет.
©. СТРУННЫЕ ПРЕОБРАЗОВАТЕЛИ ДЛЯ ИЗМЕРЕНИЯ
УСИЛИЙ НА ВРАЩАЮЩЕМСЯ ВАЛУ
Струнные преобразователи для измерения силы полу-
чают в последние годы все большее распространение
Высокая добротность колебательной системы таких пре-
образователей, возможность использования цифровой
техники для регистрации показаний — все это обуслови-
ло высокую точность измерения усилий.
При использовании струнных преобразователей для
измерения крутящего момента значительно упрощаются
требования к устройствам связи с вращающимся валом
из-за высокой помехоустойчивости (особенно к помехам
мультипликативного типа), устройств с частотной моду-
ляцией.
В простейшем динамометре со струнным преобразова-
телем [Л. 11] на валу при помощи хомутов укрепляются
два кронштейна, между которыми поперек вала натяги-
вается стальная струна. При появлении деформации под
действием приложенного момента кронштейны с хомута-
ми перемещаются и изменяют натяжение струны. При
изменения натяжения струны изменяется ее частота,
собственных колебаний, воспринимаемая электромагнит-
ным датчиком. Передача электрических сигналов на из-
мерительную схему производится с помощью бесконтакт-
ного трансформаторного токосъемника. Для возбужде-
ния колебаний струны сигнал после усиления через кон-
тактное кольцо проходит на электромагнитный возбуди-
тель. Такого типа прибор использовался, например, для
измерения мощности на гидроагрегате Дзорагэс при ско-
ростях вращения до 500 об/мин и крутящем моменте
150 ООО н -м.
Иногда струнный генератор применяется в сочетании
с системой радиопередачи. При этом на вращающемся
валу размещают высокочастотный генератор. Частота
этого генератора модулируется колебаниями струны. Ча-
стотно-модулированный сигнал принимается неподвижно
установленным приемником, соединенным с частотомер-
ным устройством.
21
Разрабатываемые в настоящее время преобразователи
имеют значительно более сложную конструкцию «стру-
ны». Предложены способы компенсации центробежных
сил, влияние которых является основным недостатком
струнных торсиометров. Применение струнных преобра-
зователей позволяет получить достаточно жесткую кон-
струкцию упругого звена, максимальный угол закручи-
вания которого не превосходит 0,5—0,3°.
7. РЕЗОНАТОРНЫЕ ПРЕОБРАЗОВАТЕЛИ ДЛЯ ИЗМЕРЕНИЯ
КРУТЯЩЕГО МОМЕНТА
Одна из конструкций резонаторного преобразователя
[Л. 54] показана на рис. 14. На скручиваемый участок
полого вала / посажены две зубчатые втулки 2 и 5, об-
разующие резонансную полость 4. Резонансная полость
соединена с высокочастотным генератором (/ген =
= 2 500 Мгц), в ней расположен полупроводниковый де-
тектор, с выхода которого сигнал, подается на микроам-
перметр, а также на электроннолучевой и светолучевой
осциллографы.
Рис. 14. Объемный резонатор для измерения крутящего
момента.
Под воздействием приложенного момента при закру-
чивании вала изменяется зазор 5 между стенками
зубьев, в результате чего изменяется резонансная харак-
теристика полости (рис. 15). Это вызывает изменение
сигнала на выходе детектора. Для увеличения чувстви-
22
1ельностй резонайсногб
преобразователя частота
генератора выбирается
таким образом, чтобы ра-
бочая точка (а) находи-
лась на крутой части ре-
зонансной кривой.
Резонаторные преоб-
разователи не получили
широкого распростране- р^ ^ зависимость выходного
за сложности оборудова-
ния, некомпенсируемой
высокой точностью измерения. Тем не менее их примене-
ние в некоторых специфических случаях, например для
регистрации крутильных колебаний высоких частот, мо-
жет оказаться целесообразным.
8. ПРИБОРЫ ИНДУКТИВНОГО И ЕМКОСТНОГО МЕТОДОВ
ИЗМЕРЕНИЯ МОМЕНТА
В индуктивных преобразователях, применяемых для
измерения момента, в результате закручивания упругого
элемента происходит изменение зазора в магнитной си-
стеме. Это приводит к изменению индуктивности. В боль-
шей части приборов, использующих этот метод для связи
с вращающимся валом, применяются контактные токо-
съемники.
Типичным прибором, использующим индуктивный
преобразователь, является прибор фирмы Сименс
(ФРГ) [Л. 12], применяемый для измерения мощности
силовых установок на судах морского флота [Л. 13].
Особенностью прибора является применение в ком-
пенсационной схеме двух аналогичных индуктивных пре-
образователей (рис. 16). Один из них установлен непо-
средственно на вращающемся валу 1. Он крепится
к двум массивным фланцам 2 и 3. На одном устанавли-
вается сердечник с катушками 4, на другом — якорь 5.
При нагружении вал / скручивается и, зазоры между
якорем и обоими сердечниками индукционного преобра-
збвателя изменяются в противоположных направлениях.
Другой преобразователь 6 установлен неподвижно. Де-
формация упругого вала здесь имитируется перемеще-
нием якоря с помощью микрометрического винта 7,
снабженного отсчетным лимбом 8. Связь с установлен-
ния главным образом из-
тока от частоты резонатора.
23
ным на валу преобразователем осуществляется через
контактные токосъемники, выполненные в виде медно-
графических щеток 9, скользящих по латунным коль-
цам 10.
Компенсационная схема включения преобразователей
позволяет исключить влияние изменений напряжения пи-
6
Рис. 16. Схема индуктивного торсиометра с контактным
токосъемником.
тания. Для измерения переменных составляющих крутя-
щего момента в измерительную цепь может быть вклю-
чен осциллографический гальванометр либо перьевой
самописец.
Испытания индуктивного торсиометра на судовых ди-
зельных установках показали, что погрешность измере-
ния не превышает 2—3% при измерении постоянного
момента и 3—4%1 при измерении переменных моментов
в диапазоне частот 0—50 гц [Л. 14].
Использование контактных токосъемных устройств
затрудняет эксплуатацию преобразователей и снижает
точность измерения. Поэтому в ряде устройств предпоч-
тительнее использование бесконтактных индуктивных
преобразователей крутящего момента.
24
Принцип действия таких преобразователей можно
видеть на схеме, показанной на рис. 17. В трех сечениях
упругого вала У, подвергаемого скручиванию, закрепле-
ны три стальных кольца 2—4 с зубцами, образующими
между собой рабочие зазоры, через которые проходит
магнитный поток катушек 5 и 6.
При скручивании вала один из зазоров уменьшается,
другой увеличивается, что вызывает уменьшение индук-
тивного сопротивления
одной катушки и увеличе-
ние — другой.
Практика конструиро-
вания бесконтактных ин-
дуктивных преобразовате-
лей показала, что доста-
точно удовлетворитель-
ная точность может быть
достигнута только при
тщательном механиче-
ском исполнении прибора,
при котором полностью
исключен взаимный люфт
деталей [Л. 55 и 58].
Для измерения и запи-
си постоянного момента
в этих преобразователях
удобно использовать
автоматические мосты, для динамических измерений
применяются схемы неравновесного моста с включением
в измерительную цепь осциллографического гальвано-
метра.
Бесконтактные индуктивные преобразователи рас-
смотренного выше типа используются в широком диапа-
зоне крутящих моментов и могут применяться для изме-
рений на высокоскоростных установках.
Широкое распространение в последние годы получи-
ли индуктивные преобразователи, работающие со спе-
циальным бесконтактным трансформаторным токосъем-
ником. На рис. 18,а приведены конструкция и схема та-
кого прибора «Виброметр типа ТГ», предназначенного
для измерения постоянного и переменного моментов.
Вал /, через который передается крутящий момент, име-
ет участок с уменьшенным диаметром. Закручивание
этого участка вала под действием момента приводит
25
Рис. 17. Схема индуктивного бес-
контактного преобразователя угла
закручивания вала.
26
к Взаимному перемещению двух плеч 2, на которых
укреплены дифференциальные индуктивные датчики пе-
ремещения 3. Установка двух пар индуктивных датчиков
с двух сторон вала под углом 180° позволяет исключить
влияние изгибающих усилий. Симметричная конструк-
ция и малая чувствительность индуктивных датчиков
к поперечным перемещениям сердечников позволяет зна-
чительно ослабить действие центробежных сил и исполь-
зовать такие конструкции на повышенных скоростях
вращения.
Измерительная схема приведена на рис. 18,6. Для
получения нулевого выходного сигнала при отсутствии
нагрузки применяются дополнительные индуктивные
датчики 4, размещенные в том же корпусе. В приборе
применяются два бесконтактных индуктивных токо-
съемника: для подачи питания на мост — катушки W\
и w2 (несущая частота 8 кгц) и для снятия сигнала —
обмотки Доз и до4, причем для устранения взаимного
влияния токосъемники расположены по разным сторо-
нам от датчиков.
Приборы с индуктивным преобразователем анало-
гичной конструкции применяются в весьма широком ин-
тервале скоростей вращения от 0 до 60 ООО об/мин (на-
пример, прибор фирмы «Стейгер Моухил») при окру-
жающих температурах—40° до +100° С, погрешность
измерений по данным фирмы не превосходит 1%.
Общим преимуществом индуктивных торсиометров
является малое выходное сопротивление, а следователь-,
но, и невысокий уровень помех, весьма высокая чувстви-
тельность, возможность применения мостовых измери-
тельных схем, устойчивость к воздействию окружающей
среды (загрязненности, влажности, замасленности
и т. д.), сравнительно простая вторичная аппаратура.
В отличие от индуктивных емкостные преобразовате-
ли для измерения крутящего момента получили меньшее
распространение, так как они более подвержены действию
помех и наводок и различных внешних факторов, таких,
как изменение температуры и особенно влажности среды,
ее запыленности и т. д.
Однако в некоторых случаях, особенно при использо-
вании на высокоскоростных установках, емкостные тор-
сиометры имеют более простую конструкцию, которая
легко поддается балансировке и устойчива к действию
центробежных сил.
27
Один из таких преобразователей [Л. 15], предназна-
ченный для работы на сверхвысоких скоростях вращения
до 100 000 об/мин, показан на рис. 19. На скручиваемом
валу устанавливаются три диска 2—4, изолированных
от вала. Выступы на среднем диске и приливы на край-
них образуют обкладки конденсаторов, которые вклю-
чены в схему моста.
В приборе применен бесконтактный емкостный токо-
съемник, в котором связь с каждым из дисков осуществ-
Рис. 19. Схема емкостного преобразователя угла
закручивания.
ляется с помощью двух тонких колец, охватывающих
диск с двух сторон (на рис. 19 они показаны условно 5—
7). Конструкция токосъемника при этом решена так,
что любое небольшое взаимное перемещение диска и ко-
лец производит взаимно компенсированные изменения
в двух параллельно включенных конденсаторах, поэто-
му общая емкость конденсатора связи изменяется незна-
чительно.
Общим преимуществом, индуктивных и емкостных
приборов является то, что они пригодны для измерения
и при вращении вала, и в неподвижном состоянии. По-
следнее особенно важно для проведения точной калиб-
ровки преобразователей.
Индуктивные и емкостные торсиометры удобны так-
же тем, что в них сравнительно просто осуществляется
бесконтактная индуктивная либо емкостная связь с вра-
щающимся валом, что дает возможность использовать
эти приборы на быстроходных установках.
28
9. ПРЕОБРАЗОВАТЕЛИ КРУТЯЩЕГО МОМЕНТА
С ТЕНЗОМЕТРАМИ СОПРОТИВЛЕНИЯ
Тензометры сопротивления хорошо известны, доста-
точно освоены и широко применяются для измерения
деформаций, в том числе в преобразователях для изме-
рения крутящего момента.
Обычно для измерения крутящего момента исполь-
зуется мостовая схема с четырьмя тензодатчиками, кото-
рые наклеиваются на вал под углом 45° к оси. Приме-
нение мостовой схемы увеличивает чувствительность,
улучшает линейность характеристики и, что наиболее
важно, позволяет снизить чувствительность преобразова-
теля к изгибным деформациям, а также напряжениям,
возникающим при сжатии или растяжении вала.
Мостовая схема позволяет значительно уменьшить
влияние температуры на величину выходного сигнала,
изменение модуля упругости, вызванное изменением
температуры, компенсируется с помощью термокомпенса-
ционного сопротивления, включенного последовательно
с мостовой схемой.
Преимущества тензометрических преобразователей
очевидны — малые размеры, отсутствие сложных механи-
ческих конструкций, небольшая база измерений и т. п.
Основным недостатком тензометрических преобразо-
вателей для измерения момента является необходимость
применения токосъемников для передачи показаний
с вращающегося вала на неподвижный измерительный
прибор, хотя в принципе возможно применение токо-
съемников бесконтактного типа (см. гл. III).
С помощью тензометрических преобразователей срав-
нительно просто решается задача измерения мощности
двигателей. В этом случае для питания моста исполь-
зуется напряжение от тахогенератора, соединенного
с валом. Выходной сигнал будет пропорционален произ-
ведению скорости вращения и крутящего момента, т. е.
мощности. Такая система (рис. 20) использовалась для
измерения энергии, потребляемой ирригационным насо-
сом [Л. 16]. Установка предназначена для непрерывной
работы в течение нескольких месяцев в пустыне без обслу-
живания. Потребляемая насосом энергия указывается
на счетчике за интегратором; точность измерения 1,5%!.
Недостатком тензометрических преобразователей
является влияние изгибных деформаций вала, полной
компенсации которых мостовая схема не обеспечивает.
29
Для уменьшения влияния побочных деформаций реко-
мендуется применять специальные упругие элементы
в виде беличьей клетки [Л. 16], показанной на. рис. 21.
Тахогенератор
Двигатель
Мощность
Датчик
момента
Насос
Интегратор
Энергия^
Рис. 20. Блок-схема прибора для измерения энергии, по-
требляемой масосом.
Крутящий момент в такой конструкции вызывает изгиб
(и кручение) четырех балочек, закрепленных с обоих
концов, на боковые стороны которых и наклеиваются
тензодатчики. Такой упругий элемент по сравнению
Тензометры*
Рис. 21. Упругий преобразователь типа «беличьей клетки»
тензометрического торсиометра.
с торсионным валом имеет более высокую чувствитель-
ность к крутящему моменту и вследствие большей жест-
кости на изгиб менее чувствителен к изгибным деформа-
циям.
Упругие элементы в виде беличьей клетки применяют-
ся для измерения малых крутящих моментов до 100—
200 н • ж.
30
10. МАГНИТОУПРУГИЕ ТОРСИОМЕТРЫ
В магнитоупругих преобразователях используется из-
мерение магнитной проницаемости ферромагнитных тел
в зависимости от механических напряжений, возникаю-
щих под действием приложенных сил. В качестве чувст-
вительного элемента для измерения крутящего момента
используется участок вала, выполненного из обычной
мягкой стали.
При скручивании вала магнитная проницаемость
увеличивается в направлении 45° к оси и уменьшается
в перпендикулярном направлении, пропорционально при-
Рис. 22. Схема магнитоупругого динамометра пере-
крестного типа.
ложенному моменту. Это связано с появлением растяги-
вающих (ор) и сжимающих (ас) усилий, направленных
по этим осям.
В простейшем из применяемых магнитоупругих пре-
образователей— торсиометре перекрестного типа, схема
которого приведена на рис. 22, две обмотки с сердечни-
ками U-образной формы расположены перпендикулярно
друг другу и помещаются вблизи поверхности вала с за-
зором 2—3 мм. Одна из катушек включена в сеть пере-
менного тока, причем поле, создаваемое этой катушкой,
при отсутствии нагрузки симметрично относительно сер-
дечника второй катушки. С появлением крутящего мо-
мента симметрия поля нарушается. В результате этого
через сердечник второй катушки проходит магнитный по-
ток и на ее обмотке появляется напряжение до 1 в при
сопротивлении нагрузки 50 ком, пропорциональное вели-
чине крутящего момента [Л. 17]. Магнитные сопротивления
участков поверхности вала, сердечников и воздуш-
ных зазоров как бы включены по мостовой схеме, изо-
м
\1
31
браженной на рис. 23, где А, В, С и D — магнитные со-
противления участков вала; Р\, Р2, Si и S2—^сопротив-
ления воздушных зазоров.
Большим недостатком перекрестных торсиометров
является зависимость чувствительности от величины воз-
душных зазоров. На результат измерения будут влиять
также напряжение на обмотке подмагничивания, а при
малых скоростях вращения внутренняя неоднородность
Рис. 23. Эквивалентная схема магнитных сопротивлений
участков вала.
материала вала, которая вызвана местными внутренни-
ми напряжениями, различной кристаллографической
ориентацией и т. п.
Скорость вращения вала при использовании магни-
тоупругого торсиометра ограничена также сверху. Это
вызывается, с одной стороны возрастающим влиянием
вихревых токов, создающих поперечное поле, воздейст-
вующее на измерительную катушку при несимметрии
сердечников. С другой стороны, сказывается воздействие
остаточной намагниченности вала. При небольших ско-
ростях вращения остаточное намагничивание непрерывно
устраняется, так как подмагничивающий ток изменяется
с частотой 50 гц, и на каждом участке происходит не-
сколько циклов перемагничивания с постепенно умень-
шающейся амплитудой. С повышением скорости враще-
ния остаточная намагниченность будет частично сохра-
32
няться, причем при скорости вращения кратной частоте
подмагничивания перемагничивания на участке вообще
не происходит, магнитные узоры накладываются друг
на друга. Неоднородность поверхности вала при этом
приводит к тому, что выходной сигнал может изменяться
в значительной степени при одной и той же величине
момента.
Указанное обстоятельство значительно затрудняет ис-
пользование перекрестных терсиометров на высокоско-
ростных установках.
Несмотря на указанные недостатки, применение пере-
крестных торсиометров оправдывается крайней простотой
конструкции, возможностью работы без контакта с ва-
лом, в загрязненной и взрывоопасной среде.
Дальнейшее развитие магнитоупругие приборы полу-
чили в виде кольцевых торсиометров, предложенных
О. Дахлем [Л. 56]. Магнитоупругий преобразователь
кольцевого типа, показанный на рис. 24, состоит из трех
колец: на среднем расположены обмотки, создающие
магнитный поток, на крайних — измерительные обмотки.
Среднее кольцо наполовину шага сдвинуто по отноше-
нию к крайним.
В ненагруженном положении поле, создаваемое дву-
мя соседними полюсами 5 и N, симметрично и суммар-
ный поток, наводимый в катушках А и В крайних колец,
равен нулю. При нагружении вала магнитная проводи-
мость его участков в различных направлениях изменяет-
ся, симметрия нарушается, магнитное сопротивление
участков AS и BN увеличивается, в то время как сопро-
тивление участков AN и BS уменьшается. Эффект полу-
чается такой же, как если бы все полюсы А перемести-
лись по направлению kJV, а полюсы В стали ближе к 5,
т. е. крайние кольца сместились бы тангенциально в двух
противоположных направлениях. В результате на выход-
ных концах, соединенных последовательно измеритель*
ных катушек, появляется сигнал достаточной величины
до 10 в (1 ма) для непосредственного измерения стре-
лочным прибором [Л. 18].
У кольцевого торсиометра пульсации выходного на-
пряжения при медленном вращении вала, вызванные
его анизотропией, могут быть сделаны менее 0,5%, в то
время как у перекрестного торсиометра величина пуль-
саций достигает 50%. Это объясняется тем, чго у коль-
цевого торсиометра измерение механического напряжения
3—2751 33
проводится одновременно по всей окружности вала, в то
время как у перекрестных торсиометров производятся по-
следовательные измерения «а участках окружности. По-
следнее делает возможным калибровку кольцевых тор-
сиометров на неподвижном валу. Показания кольцевых
торсиометров значительно меньше изменяются при по-
вышении скорости вращения вала. Одним из средств даль-
х-х
•б *б
X
+6 -б
№ Ш
|f^j ^ 1 х Щ Ш Ш Ш Щ
TZ3 си
б)
т
Рис. 24. Расположение полюсов в магнитоупругом тор-
сиометре кольцевого типа.
нейшего уменьшения влияния скорости вращения явля-
ется повышение частоты намагничивающего тока.
Кольцевые торсиометры находят в последнее время
весьма широкое применение на морских судах, прокат-
ных станах, бурильных установках. В последнем случае
преобразователи работают в весьма неблагоприятных
условиях сильных вибраций, в широком интервале
окружающих температур, в загрязненной среде. Для ра-
боты в этих условиях в ЦКБ НО и СА разработаны маг-
нитоупругие торсиометры серии ДМ, предназначенные
для измерения крутящего момента с верхним пределом
от 250 до 7 500 н -м. Питание магнитоупругих преобра-
зователей осуществляется от сети 36 в, 50 гц. Точность
измерения не менее 1,5%' [Л. 19].
34
Основные преимущества кольцевых магнитоупругих
приборов — простота постановки на свободные участки
вала без дополнительных переделок, небольшая измери-
тельная база, отсутствие скользящих контактов, значи-
тельная мощность выходного сигнала при малом внут-
реннем сопротивлении, что облегчает проблему защиты
от помех и наводок силового оборудования и дает воз-
можность снятия показаний без дополнительного усиле-
ния.
Основы расчета магнитоупругих динамометров приве-
дены в [Л. 19].
11. ФОТОУПРУГИЕ ПРЕОБРАЗОВАТЕЛИ КРУТЯЩЕГО
МОМЕНТА
В фотоупругих преобразователях используется зави-
симость двойного лучепреломления 'некоторых изотроп-
ных веществ, например синтетических смол, от их дефор-
мации, вызванной внешними силами.
Тонкие пленки таких смол хорошо сцепляются с ме-
таллом и деформация их, таким образом соответствует
деформации поверхностного слоя металлической детали.
В приборах для измерения крутящего момента тон-
кий слой вещества с двойным лучепреломлением нано-
сится на упругий вал в виде кольца постоянной толщи-
ны. Измерение деформации, пропорциональной прило-
женному моменту, производится по изменению
прошедшего через вещество и отраженного от поверхно--
сти упругого вала светового потока, направленного
в виде узкого луча на поверхность кольца. Схема уста-
новки приведена на рис. 25 [Л. 20]. Световой поток от
источника 3 поляризуется элементом 4, проходит через
светофильтр 5 и, отражаясь от поверхности 8, направ-
ляется на кольцо 2, нанесенное на упругий вал /. Отра-
женный световой поток попадает на анализатор 6 и да-
лее на фотоэлемент 7; по изменению тока фотоэлемента
производится измерение деформации участка вала.
Поляризованный световой поток распадается при
прохождении через слой вещества с двойным лучепре-
ломлением на два потока, направленные по осям двояко-
го преломления. Эти два потока проходят в веществе
по-разному. Разность хода лучей б в общем случае
равна:
3* 35
3
4
8
Рис. 25. Схема прибора с фотоупругим преобразова-
телем.
где ei и 82 — относительные деформации поверхности
вала в двух взаимно перпендикулярных
направлениях;
k \\ Сг — постоянные коэффициенты, определяемые
свойствами среды и длиной волны источ-
ника К.
Поскольку световой поток проходит через смолу
дважды, отражаясь от поверхности вала, а каждый эле-
мент поверхности при кручении подвергается действию
сжимающих и растягивающих усилий, причем ei =—82, то
разность хода б будет равна:
8 = 4/гСее.
36
Два отраженных луча, разность хода которых 6, бу-
дут смещены по фазе на угол <р, равный:
2nd
*=!-•
где К — длина волны светового источника.
После прохождения анализатора световые лучи сво-
дятся в одну плоскость и интерферируют.
Ток фотоэлемента пропорционален интенсивности
суммарного излучения и таким образом зависит от раз-
ности фаз (разности хода) компонентов отраженного
светового потока:
/ = /0 sin2-|-,
где / — максимальный ток фотоэлемента.
Длина волны X и напряжение поверхности упругого
элемента рассчитаны так, чтобы использовать линей-
ный участок приведенной выше зависимости.
Измерения чувствительности в статическом режиме
показали возможность наблюдения деформации круче-
ния с поверхностными деформациями ei = 6 • Ю-10; при
этом приращение тока в фотоэлементе составляло
Ю-3 мка [Л. 20].
Прибор испытывался в диапазоне крутящих момен-
тов 25—90 н-м при скоростях вращения до 7 ООО об/мин.
При использовании малоинерционных регистрирующих
приборов можно измерять переменные составляющие
крутящего момента с частотами до нескольких килогерц.
К недостаткам следует отнести невысокую точность
и сложность конструкции установки.
12. ФОТОЭЛЕКТРИЧЕСКИЕ ПРИБОРЫ ДЛЯ ИЗМЕРЕНИЯ
КРУТЯЩЕГО МОМЕНТА
Большинство современных фотоэлектрических прибо-
ров используют метод преобразования, предложенный
И. И. Ивановым (Л. 21]. На валу, подвергаемом скручи-
ванию, устанавливаются на некотором расстоянии два
диска с прорезями. По одну сторону дисков распола-
гается источник света, по другую — фотоэлемент. Изме-
нение угла закручивания вала приводит к изменению
размеров светового окна, образуемого прорезями обоих
37
дисков, и, следовательно, светового потока, попадающе-
го на фотоэлемент. Величина тока на выходе фотоэле-
мента служит, таким образом, мерой приложенного
момента. Вместо одного фотоэлемента и одного источ-
ника в более поздних конструкциях для устранения
пульсаций выходного сигнала при вращении устанав-
ливаются группа источников и группа фотоэлементов
Рис. 26. Схема конструкции фотоэлектрического дина-
мометра.
На рис. 26 показана конструкция фотоэлектрическо-
го торсиометра, разработанного лабораторией автома-
тики и приборов ВНИИстройдормаша [Л. 23 и 24].
На валу У, который подвергается скручиванию,
укрепляются с помощью болтов две цилиндрические
втулки 2 с растровыми дисками 3. Каждый диск имеет
по периферии 160 радиальных прорезей. Для устранения
вредного влияния полутеней, которое вызывает сужение
линейного участка преобразования и ухудшает точность
прибора, растровые диски располагаются на возможно
более близком расстоянии один от другого. Источниками
света служат восемь автомобильных лам'почек 5, закры-
тых матовым стеклом 6. С другой стороны дисков рас-
положены восемь фигурных селеновых фотоэлементов
38
7, образующих сплошное кольцо. Источники света и фо-
тоэлемента размещены внутри неподвижного кожуха 4.
Прибор имеет следующие характеристики: макси-
мальное закручивание вала 0,75°, максимальная ско-
рость вращения 6 000 об/мин, погрешность измерения
3—5%' [Л. 23].
Дальнейшей модификацией такого типа приборов
является динамометр ВИМ, в котором растровые диски
выполнены в виде соосных втулок, а вал является отра-
жающей поверхностью [Л. 25].
Рис. 27. Фотоэлектрический торсиометр с отражаю-
щей втулкой.
Один из вариантов таких динамометров показан на
рис. 27 [Л. 26 и 27]. Здесь наружная втулка 1 выполне-
на так же, как и в предыдущем приборе, а внутренняя
2 имеет полированную поверхность с зачерненными ка-
навками. За счет уменьшения зазора между втулками
уменьшается влияние полутеней, расширяется линейный-
диапазон прибора и уменьшается начальный ток, со-
ставляющий обычно 50%' максимального тока.
Рассмотренные приборы имеют простую схему, по-
зволяют проводить измерение момента на неразрезных
валах без контакта с вращающимся валом. Возможны
измерения как в неподвижном состоянии, так и при
вращении. Приборы применяются для определения как
постоянного момента, так и переменных его составляю-
щих с частотами до 50 гц.
К недостаткам описанных фотоэлектрических тор-
сиометров следует отнести невысокую точность изме-
рения, сложную конструкцию, нелинейность шкалы.
Рассмотренные приборы получили распространение
для измерения момента на транспортных и сельскохо-
зяйственных машинах, они применялись при исследова-
нии процессов резания древесины и т. п.
В
I2za
39
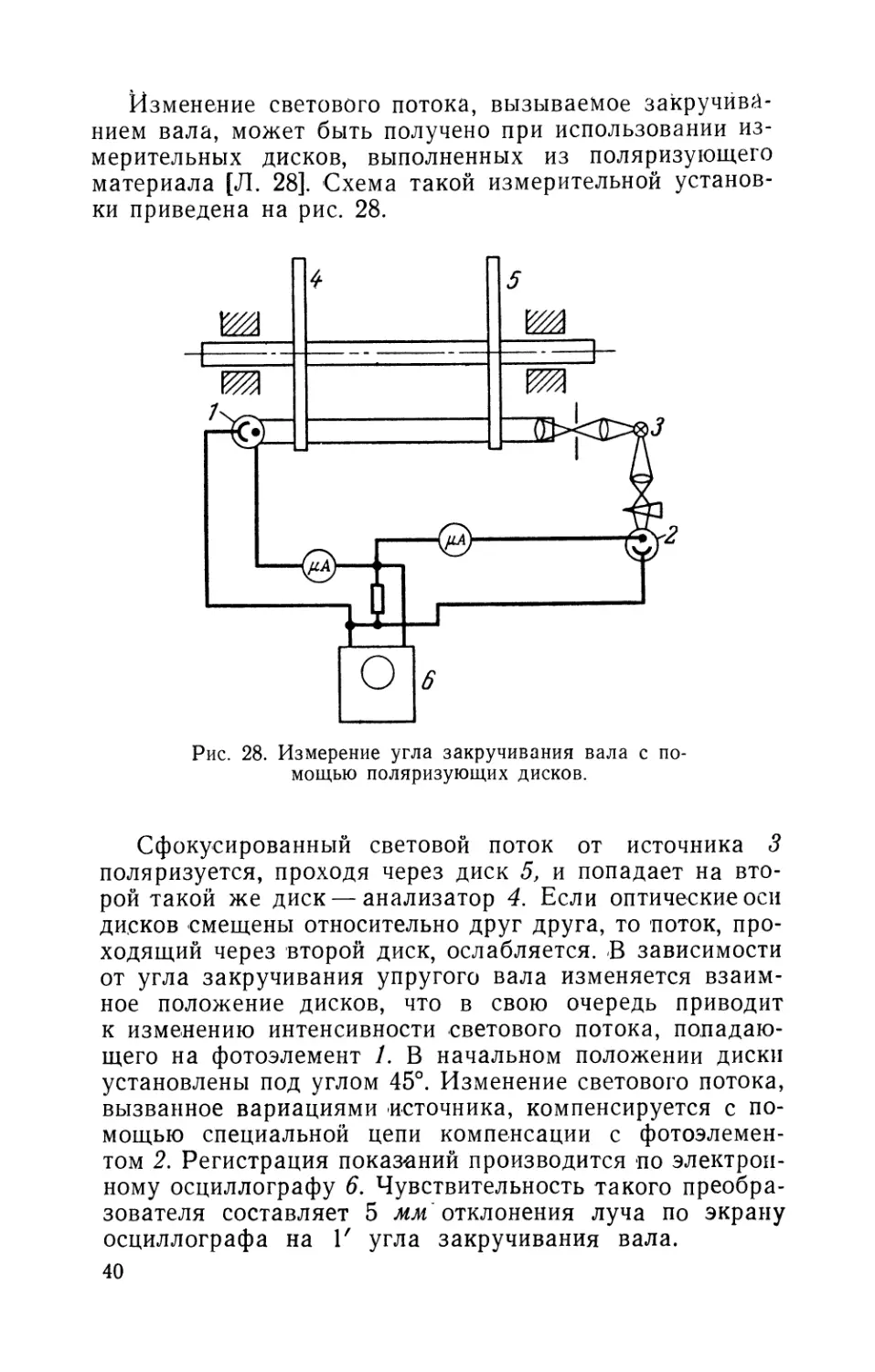
Изменение светового потока, вызываемое закручива-
нием вала, может быть получено при использовании из-
мерительных дисков, выполненных из поляризующего
материала [Л. 28]. Схема такой измерительной установ-
ки приведена на рис. 28.
Рис. 28. Измерение угла закручивания вала с по-
мощью поляризующих дисков.
Сфокусированный световой поток от источника 3
поляризуется, проходя через диск 5, и попадает на вто-
рой такой же диск — анализатор 4. Если оптические оси
дисков смещены относительно друг друга, то поток, про-
ходящий через второй диск, ослабляется. В зависимости
от угла закручивания упругого вала изменяется взаим-
ное положение дисков, что в свою очередь приводит
к изменению интенсивности светового потока, попадаю-
щего на фотоэлемент 1. В начальном положении диски
установлены под углом 45°. Изменение светового потока,
вызванное вариациями источника, компенсируется с по-
мощью специальной цепи компенсации с фотоэлемен-
том 2. Регистрация показаний производится по электрон-
ному осциллографу 6. Чувствительность такого преобра-
зователя составляет 5 отклонения луча по экрану
осциллографа на V угла закручивания вала.
40
Значительные трудности при работе преобразовате-
ля с поляризующими дисками вызваны влиянием ин-
фракрасных лучей, которые не подвергаются поляриза-
ции, но действуют на фотоэлемент так же, как и свето-
вые лучи. Применение специальных фильтров позволяет
исключить до 90%' теплового излучения. Другим недо-
статком преобразователя является то, что из-за нерав-
номерной структуры материала дисков выходная вели-
чина изменяется в такт оборотам вала. Это затрудняет
динамические измерения момента.
Конструкция с внешним расположением дисков, схе-
ма которой показана на рис. 28, неудобна для практи-
ческого применения. Поэтому в одном из вариантов при-
бора поляризованные диски помещаются внутри полого
вала [Л. 28].
Изменение чувствительности фотоэлементов и коэф-
фициентов усиления измерительного тракта является
одним из .основных факторов, значительно снижающих
точность измерения момента с помощью рассмотренных
динамометров.
В силу того, что приборы фотоэлектрического метода
позволяют вести измерения без контакта с вращающим-
ся валом, их можно использовать при больших скоро-
стях вращения, например приборы фирмы Потформ ра-
ботают при скоростях вращения до 66 ООО об/мин.
13. НОНИУСНЫЕ И РАЗНОСТНЫЕ ПРЕОБРАЗОВАТЕЛИ
УГЛА ЗАКРУЧИВАНИЯ
В настоящее время ведутся разработки методов из-
мерения крутящего момента, использующих цифровую
технику. Одним из таких методов является способ из-
мерения угла закручивания с помощью нониусных ди-
сков. Метод нониусных шкал хорошо известен и широко
применяется для повышения разрешающей способности
при линейных измерениях. Для измерения угла закру-
чивания на одном измерительном диске равномерно
располагаются по окружности т меток с шагом уь на
другом диске также равномерно располагаются т+1
метка с шагом у2 = 1. На полностью разгруженном
валу диски устанавливаются относительно датчиков та-
ким образом, чтобы совпадали начальные метки.
При скручивании упругого элемента происходят по-
следовательные совпадения 2-й, 3-й, ..,? УУ-й 'меток на
41
дисках. Угол закручивания определяется по номеру сов-
падающей метки (числу меток до момента совпадения);
о 360° N
т т 9
где N — число импульсов до совпадения меток.
Отсчет показаний производится по счетчику импуль-
сов, управляемому схемами совпадения. Необходимо
отметить, что практическая реализация этого метода
для небольших углов закручивания (1—2°) сложна;
требуется тщательное изготовление дисков с минималь-
ной погрешностью размещения меток по шагу, на точ-
ность измерения оказывает влияние биения дисков и
характер вращения вала в подшипниках (см. гл. III).
К недостаткам следует отнести и то обстоятельство,
что измерение угла закручивания производится 1 раз
за полный оборот дисков (только в момент совпадения
меток), что значительно затрудняет измерения на пере-
ходных режимах и при наличии переменных составляю-
щих момента. Кроме того, при малых углах закручива-
ния сказываются вибрации.
Достоинства метода измерения с применением нони-
усных дисков очевидны — простая конструкция упруго-
го преобразователя, возможность проведения прямой
калибровки на неподвижной установке.
При разностном методе измерения угла закручива-
ния определяется разность угловых перемещений двух
сечений упругого элемента. Для измерения углового
перемещения могут быть использованы кодовые диски,
применяемые для преобразования углового перемеще-
ния в код. Для устранения ошибки считывания, вызы-
ваемой неопределенностью при снятии показаний на
границах кодовых участков, кодирование дисков про-
изводится специальными кодами, например кодом Грея.
Недостатками таких преобразователей являются слож-
ность оборудования, необходимость применения большо-
го количества датчиков, которые должны устанавли-
ваться весьма точно против соответствующих кодовых
дорожек.
Конструкция преобразователя и измерительная аппа-
ратура упрощаются, если для преобразования угла по-
ворота в код используется метод последовательного сче-
та [Л. 29].
42
На боковые поверхности измерительных дисков на-
носится тонкий слой ферромагнитного материала, на
котором с помощью магнитных головок записываются
с большой плотностью метки. При вращении дисков
метки считываются магнитными головками, при этом
электрические импульсы подаются на вход реверсивно-
го счетчика: от диска, расположенного ближе к двига-
тельной установке, — на суммирующий вход, а от ди-
ска, установленного со стороны тормозной машины, —
на вычитающий вход. При закручивании упругого эле-
мента за счет пространственного смещения (запаздыва-
ния) второго диска на счетчике будет записано число
импульсов, пропорциональное углу закручивания упру-
гого элемента.
Применение указанного метода возможно лишь на
специальных установках, так как для получения высо-
кой плотности записи необходимы малые зазрры между
головкой и поверхностью дисков, что практически труд-
но осуществить на обычных двигательных установках.
14. ВРЕМЕННЫЕ МЕТОДЫ ИЗМЕРЕНИЯ КРУТЯЩЕГО
МОМЕНТА
Развитию приборов временного и фазового методов
измерения крутящего момента ,в значительной мере спо-
собствовал прогресс электронной и полупроводниковой
импульсной техники.
Установки для измерения крутящего момента вре:
менным методом работают следующим образом. В цепи
передачи момента устанавливается упругий элемент, на
концах которого расположены измерительные диски
с соответствующими метками, равномерно распределен-
ными по периферии дисков. Рядом с дисками устанав-
ливаются неподвижно индуктивные, емкостные, фото-
электрические или другие бесконтактные датчики. При
вращении дисков происходит считывание меток датчи-
ками. На выходе последних появляются электрические
сигналы. Временное соотношение между последователь-
ностью сигналов одного датчика относительно сигналов
второго зависит от угла закручивания упругого элемен-
та и скорости вращения.
На рис. 29 показана блок-схема одного из приборов
временного метода [Л. 30, 31].
Сигналы, снимаемые с индукционных датчиков, уси-
ливаются и поступают на вход устройств с управляемой
43
задержкой. При появлении сигналов на выходах схем
задержки генерируются очень короткие импульсы, по-
даваемые далее на схему совпадения, снабженную аку-
стической и визуальной индикацией.
Первоначально датчики устанавливаются таким об-
разом, чтобы при отсутствии нагрузки на валу и ми-
нимальной установленной задержке в обоих трактах
имело место совпадение импульсов. При появлении мо-
мента и закручивании вала временное запаздывание
Индукцион-
ный
датчик
Импульсные
\усилители
щепь регули-
руемой.
'задержки
Генератор
коротких
импульров
Индукцион-
ный
датчик
Импульсные
усилители
Цепь регули-
руемой,
задержки
Генератор
коротких
\импульсо6
Схема
\Акустичес-
п км ,
индикациях
Визу ал ь -
Ч нал
{индикация
Рис. 29. Блок-схема прибора временного метода измерения момента.
импульсов от одного датчика компенсируется введением
задержки в соседний тракт. По величине задержки и
известной скорости вращения вала определяется угол
закручивания вала и, следовательно, величина момента.
В описываемой установке углу закручивания 0,1° отри
скорости 15 000 об/мин соответствует задержка 1,1 мксек.
Для точного задания небольших временных интервалов
требуются весьма качественные устройства задержки.
Предъявляемым требованиям удовлетворяют устройства
задержки на санатронах, нестабильность которых со-
ставляет менее 0,004 мксек для временного интервала
40 мксек. Разрешающая способность схемы совпадения
0,002 мксек.
При испытании прибора и калибровке имитация за-
кручивания вала производится перемещением одного
из датчиков с помощью микровинта.
Недостатком описанной установки является то, что
на показания влияет величина биения вала (см. гл. III).
Кроме того, относительная погрешность измерения вре-
менного интервала быстро возрастает с увеличением
скорости вращения вала.
В другой модификации временной метод измерения
крутящего момента реализован в приборе фирмы «Доу
44
инструменте». Временное запаздывание здесь измеряет-
ся путем заполнения временного промежутка импульса-
ми высокостабильного генератора частотой 1 Мгц и
дальнейшим подсчетом их числа счетчиком. В отли-
чие от предыдущей установки на каждом измеритель-
ном диске здесь размещено 20 меток, что значительно
снижает погрешность, вносимую биением вала и эксцен-
тричностью измерительных дисков. Для дальнейшего
снижения погрешности исключение влияния неравно-
мерности расположения меток по окружности, а также
для уменьшения погрешности дискретности производится
измерение среднего времени запаздывания за 1, 2, 4
или 8 полных оборотов вала. В качестве датчиков в при-
боре используются малогабаритные фотоголовки, метки
выполнены в виде радиальных прорезей по периферии
дисков. Для использования в широком диапазоне изме-
ряемых моментов 1—3 000 н-м преобразователи выпол-
няются со сменными упругими валами различной жест-
кости. Диапазон скорости вращения 50—5 ООО об/лшн
(цифровой вариант), точность 0,25%'. Модель с анало-
говым выходом (на стрелочный прибор) применяется
на более высоких скоростях — до 15 000 об/мин, погреш-
ность измерения 2%!. Одновременно с величиной времен-
ного запаздывания измеряется период вращения вала.
Величина крутящего момента и передаваемая двига-
тельной установкой мощность определяются по этим по-
казаниям путем простых вычислений.
Преимуществами прибором временного метода явля-
ются простая конструкция преобразователя, нечувстви-
тельность показаний к изгибным и сжимающим усилиям
в упругом элементе, возможность применения цифровой
регистрации.
К недостаткам следует отнести непрямое показание
крутящего момента, трудность измерений в переходных
режимах, невозможность прямой калибровки измери-
тельной установки при неподвижном положении вала.
15. ПРИБОРЫ ФАЗОВОГО МЕТОДА ИЗМЕРЕНИЯ
КРУТЯЩЕГО МОМЕНТА
Фазовый метод измерения крутящего момента весьма
сходен с временным способом, он отличается тем, что
здесь измеряется не временное запаздывание, завися-
щее от скорости вращения вала, а отношение временно-
45
го сдвига к периоду вфащения, которое зависит лишь
от угла закручивания/упругого элемента.
Как и в приборах временного способа, между двига-
телем и нагрузкой располагается упругий элемент, на
концах которого установлены измерительные диски
с метками. При вращении вала производится считывание
меток неподвижно установленными датчиками. Времен-
ной сдвиг между импульсами одного датчика и импуль-
сами другого — пропорционален углу закручивания
упругого элемента а и периоду вращения вала Г0б'
f_J^_T «° 60 _ а°
360° об~ 360° п ~ 6/2'
где п — скорость вращения вала, об!мин.
Период следования импульсов каждого датчика Т=-
= 60/я£, где z — число .меток на измерительном диске.
Отношение временного сдвига к периоду следования
импульсов определяет величину крутящего момента
г/г
где k — коэффициент пропорциональности.
В ранних установках фазового метода измерительные
диски выполнялись в виде сплошных зубчатых шестерен,
а индукционные датчики изготавливались таким обра-
зом, чтобы форма напряжения на них была близка к си-
нусоидальной. Выходы датчиков соединялись последо-
вательно, а установка их производилась таким образом,
чтобы в начальном положении сигналы на датчиках бы-
ли в противофазе. Так как амплитуды сигналов датчиков
одинаковы, суммарное напряжение на выходе в этом
случае равно нулю.
При закручивании упругого элемента на угол а
под действием крутящего момента суммарное напряже-
ние на выходе датчиков равно:
At/ = 2£sin~|-~£<p,
где <р=га— фазовый сдвиг;
Е — амплитуда напряжения.
46
Преобразование можно считать линейным лишь при
небольшом изменении угла сдвигачфаз ср.
Так как амплитуда сигналов датчиков линейно зави-
сит от скорости вращения (E = k\ti), тр описанным выше
методом для малых углов закручивания можно непо-
средственно измерить передаваемую мощность Р:
= £ф= k{nk2M = сР,
так как y=za=k2M.
Основной недостаток описанного способа — низкая
точность измерения в основном из-за влияния высших
гармоник, содержащихся в сигналах датчиков.
Для повышения точности предложена компенсацион-
ная схема измерения [Л. 32]. Сигналы с обоих датчиков
подаются на фазовый детектор, напряжение на выходе
которого усиливается и управляет работой двигателя,
перемещающего один из датчиков до устранения фазо-
вого запаздывания. Отсчет производится по величине
смещения датчика. Иногда, особенно при динамических
испытаниях, ведется одновременная запись двух сиг-
налов, а измерение фазового запаздывания произво-
дится при обработке записи.
В преобразователях угла закручивания фазового ме-
тода находят применение сельсины (Л. 33], поворотные
синусно-косинусные трансформаторы [Л. 34], которые
позволяют получать синусоидальный сигнал с очень ма-
лым содержанием гармонических составляющих и спе-
циальные измерительные генераторы, питаемые от трех-
фазного преобразователя частоты, смонтированного на
том же валу [Л. 35].
В последнем случае скорость вращения возбуждаю-
щего поля относительно статора остается постоянной,
что обеспечивает неизменные амплитуду и частоту на
выходе генераторов при изменении скорости вращения
вала.
Существует большое число модификаций фазового
метода, однако наибольшее распространение получила
схема измерения, показанная в блочном виде на рис. 30.
Сигналы с датчиков усиливаются и ограничиваются
с целью более точного определения моментов перехода
сигналов через нуль. Напряжения прямоугольной формы
на выходе ограничителей дифференцируются и остроко-
нечные импульсы управляют работой измерительного
47
устройства, обычно триггера. Разность фаз в измеритель-
ном устройстве преобразуется в среднее значение тока.
Один из первых приборов, использующий такой спо-
соб измерения, бы.^"разработан для раздельного опреде-
ления к. п. д. турбины и компрессора на газотурбинной
установке [Л. 36].
Для измерения достаточно большого угла закручи-
вания (а= 10°) в установке применены две пары изме-
рительных дисков: основные, по периферии которых
равномерно просверлены 120 сквозных отверстий, и
Дат-
Усилитель
Ограничитель
Дифференци-
чик
рующая цепь
Дат-
чик
Усилитель
Ограничитель
рующаяцепь
if
устройстбо
J L
Рис. 30. Блок-схема прибора для измерения сдвига фаз по моментам
переходов напряжений через нуль.
вспомогательные, имеющие форму шестерен с 12 зубья-
ми, предназначенные для грубого отсчета.
Применение вспомогательных дисков связано с устра-
нением неоднозначности отсчета, имеющего место при
измерении на основных дисках, поскольку фазовый сдвиг
сигналов здесь превышает 360°.
Сигналы снимаются с фотоэлектрических датчиков,
которые содержат световые головки, фотоэлектронные
умножители и согласующие каскады для работы на
длинный кабель.
В дальнейшем фазовый метод получает развитие
большей частью на судовых установках, где его приме-
нение наиболее эффективно (небольшие скорости вра-
щения, малые диапазоны изменения скорости и т. д.).
Низкие скорости вращения обусловливают невысо-
кие частоты периодических сигналов датчиков, что поз-
воляет весьма просто применить цифровые методы из-
мерения фазового сдвига.
С этой целью в прибор вводится дополнительный
генератор высокочастотных сигналов и пересчетцые
48
устройства. Чтобы исключить влияние нестабильности
частоты v опорного генератора, применяются схемы с по-
стоянным измерителем времени (рис. 31).
Число импульсов от опорного генератора, прошедших
через схему совпадения № 1 за один период изменения
ВпП-i
Дат-
Усилитель -
чик
ограиичи/лель
"at
Счетчик и
устройство
запуска и сброса
Схема
совпадения
Ns2
Триггер
Рис. 31. Блок-схема цифрового фазового торсиометра с постоянным
измерителем времени.
сигналов (Гс = 1//), пропорционально частоте этого ге-
нератора v и сдвигу фаз ф°:
1 збо°г
В отсчетном устройстве (счетчике) фиксируется чи-
сло импульсов, прошедших через схему совпадения №2,
которая открыта на время jT = m/v, где т — коэффициент
пересчета делителя частоты. Число пачек импульсов,
прошедших через схему совпадения № 2, пропор-
ционально частоте периодических сигналов / (при усло-
вии синхронности начала времени измерения Т с мо-
ментом поступления пачки импульсов N') и промежутку
времени Г.
Таким образом, общее число импульсов N, попадаю-
щих в отсчетное устройство за время Т, пропорциональ-
но сдвигу фаз сигналов
N — N'fT — ^f—=£^ — c<?0
где c = m/360° — постоянное число.
4-2751
49
В приведенных выше роотношениях не учитываются
два вида погрешностей,^имеющих место в реальных ци-
фровых устройствах,-/погрешность дискретности, вы-
званная конечной разрешающей способностью измерения
интервала №> и погрешность, обусловленная несинхрон-
ностью поступления пачек N' и началом измерительного
времени Т.
Погрешность дискретности 8<]>v зависит от частоты
опорного генератора, .которая ограничивается допусти-
мой скоростью счета пересчетных устройств. Ее величина
определяется также частотой сигналов датчиков f, за-
висящей от скорости вращения установки:
Увеличение этой погрешности при возрастании ча-
стоты сигналов / вызывает основные трудности приме-
нения цифровых устройств на высокоскоростных уста-
новках. Следует заметить, что приведенная оценка по-
грешности дискретности относится к одному измерению
интервала Д/, одному периоду сигнала. Так как при
данном способе измерения определяется средний сдвиг
фаз за несколько периодов изменения сигнала (число
этих периодов равно / Г), то погрешность дискретности,
отнесенная к одному_периоду сигнала, снижается в пре-
дельном случае в ]/"/Траз.
Погрешность, вызванная влиянием несинхронности
начала (и конца) измерительного времени и моментом
поступления (и окончания) пачек, обратно пропорцио-
нальна частоте сигналов датчиков /, величине измери-
тельного времени Г и зависит от сдвига фаз сигналов
ф. Наибольшая величина ее может быть оценена по
формуле [Л. 57]
8ф° _90:=90^
ТГмакс fT fm *
Она увеличивается при уменьшении частоты сигнала
(малых скоростях вращения), но может быть снижена
увеличением коэффициента пересчета т.
Обе погрешности могут быть снижены до заданных
пределов увеличением частоты опорного генератора v
и коэффициента пересчета т. Однако первое сопровож-
дается усложнением и удорожанием пересчетных
устройств, а второе ухудшает динамические характерц-
50
Cf ики прибора, поскольку увеличивает время измерения
сдвига фаз.
В некоторых применениях торсиометров, например
на судовых установках, вместо крутящего момента це-
лесообразно вести измерение мощности, передаваемой'
вращающимся валом. С этой целью в цифровых фазо-
вых приборах вместо опорного генератора используется
дополнительный датчик, считывающий метки со специ-
альной шестерни, связанной с валом через мультиплика-
тор и вращающейся с повышенной скоростью.
Частота следования импульсов с этого датчика V
равна:
, sn
V == —
60'
где 5 — передаточное число мультипликатора;
п —скорость вращения вала, об/мин.
Измерительный интервал выбирается в этом случае
постоянным Т = const (делитель частоты отсутствует).
Общее число импульсов, зарегистрированное счет-
чиком на выходе схемы совпадения № 2, будет равно:
jj — pjffT — T°v' f-р _ V°sn -г — c's мп — up
v/ 360°/' 360°.60 360°.60 '
где P — мощность на валу;
М — крутящий момент;
k, с' постоянные коэффициенты.
По такой схеме выполнен прибор фирмы «Мюрхэд»,
блок-схема которого приведена «а рис. 32. На разгру-
женном валу импульсы от индукционных датчиков А
и В совпадают во времени. При закручивании вала им-
пульсом с датчика А канал счета открывается, импуль-
сом с датчика В — закрывается. Импульсы высокой
частоты v7, поступающие на счетчик мощности, генери-
руются датчиком С, установленным у шестерни мульти-
пликатора.
Первоначально прибор был установлен на двухвин-
товом пассажирском лайнере «Ориана» (42 000 л. с,
крутящий момент 1 830 000 н-м при 157 об/мин). В ка-
честве упругого элемента использовался гребной вал
диаметром 635 мм, на длине 29,3 м которого угол за-
кручивания достигает 2°. По периферии измерительных
дисков установлены десять цилиндрических полюсов из
мягкой стали диаметрам 0,4 мм и длиной 25 мм. Ин-
дукционные датчики имеют сердечник, выполненный из
4* 51
Постоянного магнита с полюсными наконечниками спе-
циальной формы [Л. 5].
Измерительное оборудование фирмы «Сфиндекс» по-
зволяет не только определять крутящий момент, ско-
рость вращения и мощность двигательной установки,
но специально для судов измерять силу тяги, развивае-
Мультипликатор
I
1 | с I Формирователь
_i —I
АгАг
А
С
W
Делитель на 8
■Генератор _
установки 0 Электромагнитный
у счетчик энергии
Делитель на W0
в
Усилитель-
ограничитель
1-Я схема Делитель на W
совпадения
2-я схема
совпадения
Схема задания t,
мен н ого интервала Т
Усилитель-
ограничитель
мим
Счетчик
мощности
Счетчик числа
оборотов
Делитель числа
оборотов
Рис. 32. Блок-схема цифрового прибора для измерения мощности,
мой гребным винтом, и скорость судна. Измерение ука-
занных параметров и выполнение простейших вычисли-
тельных операций, которые производятся автоматически
в измерительном блоке, позволяют вычислить к. п. д.
судна.
Определение к. п. д. дает возможность найти наибо-
лее экономичный режим движения при изменении окру-
жающих условий и своевременно определять влияние
обрастания подводной части судов.
Особенностью конструкции преобразователя фирмы
«Сфиндекс» является установка большого числа индук-
тивных датчиков на каждом измерительном диске, что
позволяет в значительной степени компенсировать влия-
ние перемещения оси вращения вала на показания при-
бора, улучшить и стабилизировать форму напряжения
на выходе датчиков и увеличить величину снимаемого
с них сигнала.
Для того чтобы исключить влияние изгибных дефор-
маций гребного вала, равно как и перемещение оси, оба
диска устанавливаются рядом. Передача угла закручи-
вания осуществляется при этом через внешнюю нена-
груженную трубу.
52
Для калибровки участка гребного вала предусмотре-
на возможность вращения датчиков вокруг измеритель-
ных дисков.
Кроме судовых измерительных установок, выпуска-
ются приборы фирмы «Сфиндекс» для измерения крутя-
щего момента в двигателях, трансмиссиях и т. д.
В последние годы приборы фазового метода измере-
ния крутящего момента нашли применение и на высоко-
скоростных установках
[Л. 38, 39 и 40].
Например, прибор
МЭИ предназначен для
измерения крутящего мо-
мента на маломощных
установках (в диапазоне
5—400 н-м) при скоро-
стях вращения 3 000—
40 000 об/мин. Упругий
элемент здесь выполнен
в виде крестовины (рис.
33) или беличьей клетки
типа (рис. 34), максимальный
угол закручивания 3°.
53
Рис. 34. Упругий элемент
«беличьей клетки».
Электронный вариант схемы прибора йриведёй на
рис. 35. Она содержит два идентичных канала усилите-
лей »и формирователей, измерительное устройство и блок
калибровки. Линейные усилители сигналов датчиков
выполнены на лампах Ли Л3, Л2, Л4. Ступенчатое изме-
нение коэффициента усиления за счет изменения отри-
цательной обратной связи необходимо для устранения
нелинейных искажений сигналов при изменении скоро-
сти вращения. С выходов усилителей сигнал подается
на блок формирователей Л5, Л7, Лд (Ль, Ль, Л8). На-
значение формирующей схемы — ограничение и усиле-
ние сигналов с целью возможно более точной фиксации
моментов переходов сигналов датчиков через нуль. Пря-
моугольные импульсы на выходе формирователя диф-
ференцируются цепочкой RC и через диоды Л\0 управ-
ляют работой измерительной схемы на триггере (Ли,
Л\2). Триггер преобразует разность фаз двух серий им-
пульсов в средний ток, для чего через фиксирующие
диоды Л13 к анодам триггера подключается сравниваю-
щая цепочка. Средний ток, проходящий по этой цепоч-
ке, измеряется стрелочным прибором, установленным на
передней панели прибора, а падение напряжения, созда-
ваемое этим током на сопротивлении шунта реги-
стрируется автоматическим потенциометром ЗПП-09.
Для повышения точности измерения в прибор встроен
блок калибровки Л15, состоящий из двух блокинг-гене-
раторов, один из которых работает в автоколебательном
режиме, а другой синхронизируется каждым четвертым
импульсом первого.
Если на запускающие цепи триггера подаются им-
пульсы от одного блокинг-генератора (что осуществляет-
ся переключателем), это эквивалентно сдвигу фаз сиг-
налов датчиков на 180°. При подаче на запускающие
цепи импульсов от двух блокинг-генераторов получает-
ся фазовый сдвиг на 90 или 270°. Испытания прибора
показали, что погрешность не превышает 0,5—1%'.
Широкое применение приборов фазового метода в по-
следние годы вызвано рядом его преимуществ перед
другими методами измерения, а именно:
а) простая конструкция упругого элемента, он легко
поддается балансировке;
б) на показание приборов практически не влияют
побочные осевые и изгибные усилия в упругом эле-
менте;
54
в) измерение проводится без прямого контакта
с вращающимся валом;
г) пороговая чувствительность приборов весьма вы-
сока (доли секунды по углу закручивания);
д) возможность дистанционных измерений.
К недостаткам приборов фазового метода следует
отнести:
а) невозможность прямой калибровки измерительной
установки в неподвижном состоянии;
б) наличие упругой связи в системе двигатель — на-
грузка;
в) относительная сложность измерительной схемы.
16. ТОРСИОГРАФЫ
Торсиографы представляют собой самостоятельный
класс приборов для измерения крутильных колебаний
вращающихся валов и относятся к группе вибрацион-
ных приборов,
Основным элементом конструкции торсиографа яв-
ляется маховая масса, свободно сидящая на оси вала и
связанная с ним упругой .пружиной. Система регистрации
прибора фиксирует во времени угловое перемещение
маховой массы относительно вала.
Характерными приборами этого типа являются тор-
сиографы фирм «Дженерал Моторс» и «Аскания».
На рис. 36 показан торсиограф фирмы «Дженерал
Моторс». Вал 1 приводит во вращение массу 2 и сту-
пицу 3 с диском 4 и листом бумаги 5. Относительное
перемещение массы 2 передаётся перу 6 через пружи-
ны 7 и рычажную систему 5, увеличивающую угловое
перемещение.
Частотный диапазон прибора 20—350 гц при ампли-
туде от 0,05 до 5°, /собств = 8 гц. Недостаток прибора —
регистрируются колебания только за один-два оборота.
Торсиограф фирмы «Аскания», схема которого пока-
зана на рис, 37, позволяет производить непрерывную
регистрацию угловых колебаний, но не дает возможно-
сти увеличивать регистрируемые-величины. Маховик /
здесь связан с валом 2 посредством двух спиральных
пружин, перо 3 соединено с маховиком. Для регистра-
ции следует вручную затормозить барабан 4, при этом
червяк и планетарные механизм вызовут подачу ленты.
Недостатками рассмотренных выше торсиографов
являются невысокая точность и некачественная реги-
56
57
страция. Поэтому в них часто применяют электрические
преобразователи, подобные рассмотренным выше преоб-
разователям угла закручивания, а регистрация произво-
дится неподвижными устройствами.
При необходимости измерения высокочастотных со-
ставляющих крутильных колебаний применяются индук-
тивные и пьезоэлектрические преобразователи.
/*>
'С
1
1
1
1
: id
Рис. 38. Выходная характеристика высокочастотного
преобразователя для измерения угла закручивания.
На рис. 38 показана схема индуктивного преобразо-
вателя. Принцип действия его состоит в следующем.
Высокочастотный генератор питает две цилиндрические
катушки 1 и 2, включенные встречно.
Измерительная катушка 3 расположена в середине
между ними и перемещается пропорционально углу за-
кручивания упругого элемента. (При смещении катушки
на ее выходе возникает электрическое напряжение, ам-
плитуда которого зависит от перемещения, как пока-
зано на рис. 38 (участок awb). Обычно устанавливается
некоторое постоянное смещение катушки ао для того,
чтобы использовать линейную часть характеристики.
В описанной конструкции используется несущая ча-
стота 500 кгц, что позволяет проводить измерение меха-
нических процессов в диапазоне частот 0—20 кгц. К до-
стоинствам указанного прибора следует отнести приме-
58
нение бесконтактного токосъемника трансформаторного
типа. Максимальный угол закручивания упругого элемен-
та торсиографа 6°, диапазон изменения скорости враще-
ния 0—12 000 обIмин.
Схема конструкции пьезоэлектрического торсиографа
показана на рис. 39. Пьезоэлектрический датчик / на-
Рис. 39. Схема пьезоэлектрического преобразователя.
клеивается на стальную пластину 2, которая запрес-
совывается одним концом в массивный диск 3, располо-
женный соосно с вращающимся валом. На вал наде-
вается хомут 4 со специальным выступом 5, упирающим-
ся в пластину. Пьезодатчик преобразует изгибные де-
тормации стальной пластины в электрический сигнал,
снимаемый через контактный токосъемник 6. Применение
пьезоэлектрических преобразователей удобно для ис-
следования колебаний высоких частот порядка 40—
50 кгцу чувствительность их иа низких частотах (менее
100 гц) значительно меньше.
Торсиографы применяются и для измерения высоко-
частотных составляющих крутящего 'момента. В этом
случае сигнал на выходе торсиографов подвергается
двойному дифференцированию, что позволяет найти
угловое ускорение вала, а следовательно, и крутящий
момент.
59
ГЛАВА ВТОРАЯ
УПРУГИЕ ЭЛЕМЕНТЫ ПРИБОРОВ
ДЛЯ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА
Среди различного рода преобразующих звеньев
в измерительной цепи торсиометров упругим элементам
отводится особое место, что вызвано рядом причин:
а) упругий элемент работает в более тяжелых усло-
виях, нежели другие преобразователи, он устанавлива-
ется непосредственно на вращающейся установке и
подвергается действию побочных усилий (изгибающих,
сжимающих, центробежных) и изменению окружающих
условий (температуры, влажности и т. д.);
б) калибровка упругого элемента в ряде случаев
вызывает существенные затруднения (например, при
длительной непрерывной работе установки);
в) упругий элемент существенным образом влияет
на характер переходных процессов, критические скоро-
сти вращения и прочностные характеристики механиче-
ской системы двигатель—нагрузка.
17. КОНСТРУКЦИИ УПРУГИХ ЭЛЕМЕНТОВ. ПОНЯТИЕ
О КРИТИЧЕСКОЙ СКОРОСТИ ВРАЩЕНИЯ
Согласно приведенной выше классификации (см.
рис. 1) различаются две группы торсиометров. К первой
группе относятся крутильные торсиометры, в которых
момент измеряется по углу закручивания упругого
элемента. Вторую группу составляют тензометрические
устройства, здесь измерение момента производится по
величине местной деформации на участках упругого
элемента.
Общее сравнение преобразователей первой и второй
групп показывает, что основным преимуществом уста-
новок, использующих измерение деформации, является
малая измерительная база, а следовательно, более
компактная конструкция и повышенная жесткость упру-
гого элемента. Недостатком этих преобразователей
является то, что на результат измерения влияют побоч-
ные усилия (сжатие, растяжение, изгиб, центробежные
силы). При измерении угла закручивания упругого
элемента указанные побочные факторы сказываются
в значительно меньшей мере.
Наиболее распространенным упругим элементом
в торсиометрах второй группы является сплошной круг-
60
лый вал. Измерение крутящего момента производится
по величине касательных напряжений t в наружных
слоях
_ 16jW
Т"
где d — диаметр вала; М — крутящий момент.
В тех случаях, когда на упругий элемент действуют
значительные изгибающие усилия, их рекомендуется
выполнять в виде беличьей клетки (см. рис. 21). Вслед-
ствие большой жесткости на изгиб преобразователь
с упругим элементом в виде беличьей клетки менее
чувствителен к действию изгибающих усилий. В то же
время его чувствительность к крутящему моменту по-
вышается.
В крутильных торсиометрах к конструкции упругих
элементов ставятся несколько иные требования. Точ-
ность измерения в этих преобразователях тем выше, чем
больше угол закручивания. Поэтому обычно одним из
основных требований к упругим элементам является
уменьшение его жесткости на кручение при ограничен-
ных максимальных механических напряжениях и не-
больших осевых размерах преобразователя. Исключение
составляют установки для измерения переменных мо-
ментов, здесь расчет допустимой жесткости может
вестись, исходя из требований минимального искажения
переходных процессов (§ 18).
Ограничение осевого размера имеет существенное
значение. С одной стороны, оно вызвано обычными
требованиями к компактности преобразователя. Однако
главным является то обстоятельство, что увеличение
осевого размера снижает изгибную жесткость упругого
элемента, а вместе с этим уменьшается критическая
скорость вращения установки.
Для вращающихся установок, работающих в докри-
тической области, упругий элемент должен быть спроек-
тирован таким образом, чтобы при минимальной воз-
можной жесткости на кручение критическая скорость
вращения была выше рабочего диапазона.
Рассмотрим подробнее критический режим работы
установки. При увеличении скорости вращения на вра-
щающейся установке наблюдается ряд резонансных
состояний, при которых вибрация машины резко возра-
стает и установка может выйти из строя. Эти вибрации
обусловлены значительным возрастанием прогиба вала
61
на резонансных частотах. Скорости вращения, при кото-
рых наблюдается это явление, называются критически-
ми, продолжительная работа в этом режиме недопу-
стима.
Для наглядности представим »вал
в виде бесконечно тонкого стерж-
ня, в середине которого закреплен
некоторый груз, равный весу вала
(рис. 40). За счет неточной балан-
сировки центр тяжести не совпада-
ет с его осью. При вращении центр
тяжести движется по окружности
радиуса е + гу где е — расстояние
центра тяжести от оси вала, а г-
прогиб вала под действием центро-
бежной силы. При этом величина
центробежной силы
Fn = ma2(e + r),
где m — масса «вала; со — угловая
скорость вращения.
Кроме центробежной силы, дей-
ствует сила упругости вала
G
Ц.Т.
>
tr- Г -J
\ е
F = -
Рис. 40. Прогиб гиб-
кого стержня под дей-
ствием центробежной
силы.
где бл-
прогиб вала в среднем се-
чении под действием еди-
ничной силы.
Согласно принципу Даламбера центробежная сила
равма по величине силе упругости, т. е.
ты2 (е + г) = у-.
Из этого выражения находится величина прогиба
1
-1 +
1
Величина 1/пЛи представляет собой квадрат круговой
частоты свободных колебаний вала
(32
Таким образом,
1-со2/с^ '
Зависимость прогиба г от отношения частот Wcoo
показана на рис. 41. Прогиб увеличивается при измене-
нии Wcoo от 0 до 1, и для рассматриваемого случая (без
учета демпфирующих сил (i=0) его величина возрастает
до бесконечности при <cd =
г
е
К
\ 1
1
\ 1
Мл 1
\\ 1
п
_ й>
Рис. 41. Зависимость прогиба упру-
гого вала от скорости вращения.
Действие демпфирую-
щих сил — сопротивление
окружающей среды, тре-
ние в подшипниках
и т. д. уменьшает вели-
чину прогиба вала —
коэффициент, учитываю-
щий демпфирование).
При увеличении угловой
скорости сверх критиче-
ской величина прогиба,
как это видно на рис. 41,
уменьшается. Это связа-
но с тем, что если в до-
критической области центробежная сила и прогиб вала
направлены в одну сторону, то в закритической они
имеют разные знаки. Дальнейшее повышение скорости
вращения сопровождается самоцентрированием вращаю-
щегося вала, при котором центр тяжести стремится
совпасть с осью, проходящей через центр подшипников.
Рабочая скорость вращения установки может быть
выше или ниже критической; в (первом случае вращаю-
щиеся валы называют гибкими, при разгоне они прохо-
дят через критическую зону. Для уменьшения прогиба
вала при переходе через критическую зону принимается
ряд мер: тщательное уравновешивание вала, переход
через критическую зону со значительным угловым уско-
рением и применение демпфирующих устройств (демп-
фирующие усилия, в частности, возникают в масляном
слое подшипников скольжения).
Большинство вращающихся установок проектируется
таким образом, чтобы критическая скорость вращения
находилось выше рабочего диапазона. Так как критиче-
63
ские скорости вала сооТЁететвуют частотам его свобод-
ных колебаний, для определения последних можно
использовать известные методы вычисления частот
свободных колебаний стержня при изгибе.
Критическая скорость вращения для тонкого стерж-
ня, масса которого расположена посредине:
п _30со0=30,/~Т~
Умножая числитель и знаменатель подкоренного
выражения на ускорение свободного падения g и учи-
тывая, что Ye — 31,3, a mg=G — вес вала, получим:
"kp = 299|/^,
где размерности величин следующие: [п] — в об/мин;
[бц] — в см/кг; [G] — в кг.
Реальные валы являются системами с распределен-
ной массой и поэтому имеют большое число степеней
свободы, что приводит к бесконечному множеству кри-
тических скоростей. Каждой критической скорости вра-
щения соответствует своя форма изогнутой оси вала.
Первой критической скорости соответствует форма
прогиба, аналогичная показанной на рис. 40. Соответст-
венно первая критическая скорость вращения находится
по формуле, выведенной для тонкого стержня с сосредо-
точенной массой посредине.
В зависимости от числа полуволн, образованных
осью вала (при различных формах колебаний), разли-
чают 1-ю, 2-ю, 3-ю и так далее критические скорости
вращения, которые относятся между собой как 1 :22:32.
Критическая скорость вращения зависит от способа
закрепления опорных концов вала. При расчетах это
учитывается с помощью специального коэффициента |Зг-.
Значения (3* обычно приводятся в виде таблицы.
Характер закрепления концов вала
Р,
Р*
Рз
Шарнирные концы
Один конец жесткий, другой шарнир-
ный
Жесткие концы
9,87
15,42
22,37
39,48
49,97
61,67
88,86
104,2
120,9
64
С учетом характера опор критическая скорость вра-
щения вала определяется по формуле
где Е — модуль упругости материала, кГ/см2;
J — момент инерции сечения вала, смА\
G — вес вала, кГ\
I — его длина, см.
Подшипники обычно рассматриваются как шарнир-
ные опоры вала с опорной реакцией, приложенной
в центре подшипника. Сами опоры предполагаются
абсолютно жесткими. Податливость опор, подшипников
и фундамента не удается рассчитать с удовлетворитель-
ной точностью, что в свою очередь снижает точность
расчета критических скоростей. Поэтому рекомендуется
иметь некоторый запас по критической скорости.
При работе вала в докритической области должно
выполняться соотношение
/7^^(1,20-5-1,25) Лмакс,
где ttiKp — первая критическая скорость вращения;
Гсмакс — максимальная рабочая скорость вращения.
Для гибких валов рабочая скорость вращения долж-
на подчиняться неравенству
1,4Л1Кр</1<0,7П2кр.
Для повышения критической скорости ^вращения, как
следует из приведенных выше формою, необходимо
уменьшить прогиб вала под действием единичной силы
бц, т. е. увеличить поперечную жесткость. Для круглого
вала это можно достигнуть лишь за счет увеличения его
диаметра, что одновременно уменьшит угол закручива-
ния вала и поэтому является нежелательным. По этой
причине находят применение конструкции упругих эле-
ментов, имеющие повышенную поперечную жесткость
в сочетании с малой жесткостью на кручение. К ним
относятся упругие элементы, выполненные в виде кре-
стовины, беличьей "клетки и полого вала.
Упругие элементы в виде крестовины и беличьей
клетки практически удобно использовать при измерении
небольших крутящих моментов на высокоскоростных
установках.
5—2751 65
Полый вал удобнее использовать при средних вели-
чинах крутящего момента. При больших моментах
обычно используется сплошной круглый вал.
Другим распространенным методом увеличения кри-
тической скорости вращения является применение про-
межуточных опор, позволяющих как бы разделить
длинный вал на ряд секций, так как критическая ско-
рость вращения nKV = kh3/2 зависит от длины вала /.
Наиболее оригинальное решение конструкции такого
упругого элемента описано в |[Л. 41]. Большого диамет-
ра валы мощных турбомашин имеют ничтожное скручи-
вание под действием развиваемого момента. Для полу-
чения заметного угла закручивания необходимо иметь
упругий элемент значительной длины, при этом крити-
ческая скорость вращения должна быть выше рабочего
диапазона. Для решения указанной задачи в [Л. 41]
основной вал сверлится по всей длине и внутри него
помещается упругий элемент в виде длинного вала
небольшого диаметра. По длине торсионного вала уста-
новлены подшипниковые опоры. Длина секций между
опорами выбрана таким образом, чтобы критическая
скорость вращения упругого элемента находилась выше
рабочей скорости. За счет высоких напряжений в упру-
гом элементе (тт = 6 000 кГ/см2) и большой его длины
удается получить угол закручивания до 70°, скорость
вращения испытательной установки 15 000 об/мин,
мощность 350 кет.
Применение тех или иных конструкций упругих эле-
ментов зависит от диапазона рабочих скоростей, вели-
чины крутящих моментов, типов двигательных и тормоз-
ных установок, требований к динамическим характери-
стикам преобразователей. Специальные более сложные
конструкции упругих элементов применяются в струнных
торсиометрах.
18. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ УПРУГИХ
ЭЛЕМЕНТОВ
Для измерения высокочастотных составляющих кру-
тящего момента широко применяются торсиографы —
приборы, регистрирующие крутильные колебания вала
[Л. 42]. Рассмотрим динамические характеристики тор-
сиографов. Общим в конструкциях торсиографов явля-
ется маховая масса 2, соединенная мягкой пружиной 7
с валом исследуемого объекта (см. рис. 36). Маховик
G6
вращается со средней скоростью и неравномерность
вращения вала вызывает перемещение стрелки, соеди-
ненной с маховиком, относительно шкалы, устанавли-
ваемой на валу. Обозначим р — разность между углом
поворота испытываемого вала у и маховика
P=-v—S-
Обозначая далре момент инерции маховика /, жест-
кость пружины с, уравнение подвижной системы торсио-
графа можно записать следующим образом:
Л + ср = 0.
С учетом демпфирования, пропорционального скоро-
сти поворота маховика относительно вала ftp, где h —
коэффициент успокоения, уравнение движения примет
вид:
Л+лр + *р=о
или
Обычно применяются обозначения h/J = 2e и c//=ico2o,
где е — половина приведенного коэффициента демпфи-
рования;
соо — частота собственных колебаний системы.
С учетом этих обозначений уравнение движения'
подвижной части торсиографа записывается в виде
где р — соответствует показаниям стрелки (пера) тор-
сиографа;
у — угловое перемещение испытываемого вала.
Частота собственных колебаний со0 подвижной систе-
мы торсиографов обычно невелика.
В первом приближении, если пренебречь частотой
собственных колебаний системы соо~ 0 и считать, что
демпфирование очень мало е —*0, написанное выше
уравнение вырождается в следующее:
Р=-т.
Решение этого уравнения с учетом начальных условий
имеет вид: -
P(/)=Y(0-Yo(0,
5* 67
где Yo — 2я/20/60, а До —средняя скорость вращения вала,
об/мин.
Таким образом, торсиограф будет регистрировать
неравномерность вращения испытываемого вала, т. е.
амплитуду крутильных колебаний.
В действительности из-за влияния частоты собст-
венных колебаний подвижной системы перемещения
указателя торсиографа отличаются от соответствующих
перемещений вала. Ошибка в общем случае зависит как
от параметров подвижной системы, так и характера
движения.
Предположим, что испытываемый вал перемещается
по закону:
y = yot + F(t).
Дифференциальное уравнение движения чувствитель-
ного элемента примет в этом случае вид:
ИЛИ
В общем виде решение этого уравнения можно записать
следующим образом:
p = ATrfsin(6/ + a) +
+ Je«/(x)sine(/-T) dx,
О
где А и a — некоторые постоянные;
б = У v? — s2 — частота собственных колебаний системы
с учетом демпфирования.
Первый член выражения характеризует свободные коле-
бания подвижной системы торсиографа. По истечении
некоторого времени он почти не влияет на характер
движения указателя и можно считать, что последнее
определяется только вторым членом. Функция F(t)
может быть представлена в виде гармонического ряда
п
68
Функция ДО в этом случае примет вид:
/ (0 = = £ Ъ°* sin (с it + =
* = 1
П
=уsin (со^
/=1
ГДе Нг = Ч{<»2..
Используя свойство суперпозиции линейных функций
для каждой гармоники ряда, можно получить решение
в виде
р< = А{е-* sin (6/ + а,) + N{ sin (corf + ф< + А*),
где
Я,
Vr(»S-«)?)»+4e»co?
2e(Oi
Ai^arctg-
СО; — G>5
Эти выражения целесообразно записать в иной
форме; используя соотношения:
<7г='Юо/ВД Яг==Уг^2г; &пер = А/Ууъ е = (0()А
где D = /i//iKP — степень демпфирования подвижной си-
стемы;
/iKP — коэффициент демпфирования, соответст-
вующий критическому режиму (критиче-
ский режим рассматривается при свобод-
ных колебаниях подвижной системы и
имеет место, когда движение от колеба-
тельного переходит к апериодическому).
Коэффициент передачи подвижной системы в устано-
вившемся движении можно записать в следующем виде:
&пер := "
/(??-1)*+4#>*
Фазовый сдвиг каждой гармоники
2qtD
Aj = arctg * .
1-9?
6ff
Эти соотношения и характеризуют амплитудные и фа-
зовые искажения прибора. Построенные по ним харак-
теристики приведены на рис. 42 и 43. Как видно из при-
веденных выше формул и построенных по ним зависи-
мостей, если исследуемые частоты колебаний много
больше собственной частоты прибора о); > *>0, то Яг—^
и подвижная система торсиографа практически не будет
вносить никаких искажений при 78q0
регистрации амплитуды и фазы
колебаний вала.
кпер
D=0,1"
D=G2
\ //
D=0,3
=0,5
1=0,7
В-2,С
135k
90
45
B=0/
D=OJ
D=0,5-
>
B=0/-
B=2^
-D=0,3
-B=OJ
>D=0
9
05
15
0,5
If 2
Рис. 42. Амплитудные характери-
стики торсиографа.
Рис. 43. Фазовые характе-
ристики торсиографа.
Таким образом, высокие частоты торсиограф будет
воспроизводить с высокой точностью; наибольшие иска-
жения возможны при записи колебаний иизких частот.
До сих пор мы рассматривали установившееся дви-
жение подвижной системы. В общем случае на характер
движения подвижной системы будут влиять ее собст-
венные затухающие колебания. Пусть движение вала
происходит по синусоидальному закону
F(t) =у sin <*>/.
Вместо ожидаемой кривой, характеризующей движение
объекта
70
£W=Ysino>/,
указатель торсиографа запишет следующую кривую:
р = Ae~6t sin (8* -f а) + /V sin (со* + Я).
Погрешность показаний торсиографа можно выразить сле-
дующим образом:
Д£ = рид — р = у gin со* _ Ae~st sin (6* -f a) — N sin (* * + Я).
Это выражение можно записать в ином виде:
др = у sin со* — N sin Я cos со* — N cos Я sin со* —
— Аё~гЬ sin (8* + a) = (у — N cos Я) sin с * —
— iV sin Я cos ш* — Ле~~8' sin (6* -f- a)«
Производя замену:
у—N cos X = В cosp;
NsinX^B sinp,
можно записать:
Др = 5 sin (u>* — р) — ,4e>~£'sin (б* -f a).
Полученное выражение для динамической ошибки
торсиографа состоит из двух членов, один из которых
изменяется с частотой движения объекта, а другой
описывает ошибку, вызванную собственными колебания-
ми подвижной системы торсиографа. Погрешность пока-
заний торсиографа удобно представить в виде суммы
двух погрешностей:
др=др1+др2,
где APi = Bsin(co*—р) —погрешность, вызванная ам-
плитудными и фазовыми искажениями торсиографа;
ДР2 = — Ae~~etsin (6*+а)—погрешность, вызванная соб-
ственными колебаниями подвижной системы прибора.
Рассмотрим каждую из записанных погрешностей.
Определим амплитуду первой погрешности В:
В* = (у—N cos К)2+W* sin2 X=<y2—2у NcosX+N2.
71
Подставляя из приведенных выше формул значения
N и А,, получим:
£2 = Т2_2Т TCP2 1 --{-
J/ l + (co2-<*2)2
^_ Y2co* _2 2Y2to2(co2-co0°) ,
(со2 —со2)2 + 4е2со2 1 ((02_C02)2+4s2c02
Y2o>4 y2
(to2 —co2)2 + 4e2co2
со4 — 2conco2
1 0
(to2 — co2)2 + 4e2co2
Учитывая, что g^too/co, e = G)oD, амплитуду первой по-
грешности можно записать в следующем виде:
1 — 2q2
(Я2 — 1)2+ 4?2D2
Наибольшая величина относительной ошибки, вы-
званной амплитудными и фазовыми искажениями
прибора,
Др,7. = f 100 = 100 |/l - (q,_1~i^1D1 •
Рассмотрим погрешность, вызванную собственными
колебаниями подвижной системы торсиографа ЛРг.
Значения Л и а в выражении для этой погрешности
находятся при определенных начальных условиях. По-
лагая, например, что при / = 0 р=0 и р = 0, напишем:
р=0=Л sina + N sin А,,
откуда
sin a
Ошибка, вызванная собственными колебаниями по-
движной системы торсиографа, примет в этом случае
вид:
Изменение этой ошибки во времени показано на рис. 14.
Переходной процесс продолжается несколько периодов
исследуемых колебаний,
72
Рис. 44. Влияние собственных ко-
лебаний подвижной системы тор-
сиографа при регистрации высо-
кочастотных колебаний.
Таким образом, при регистрации непериодических
процессов или в тех случаях, когда необходимо записать
начальный момент движения, следует учитывать ошиб-
ку, вносимую собственными, колебаниями подвижной
системы торсиографа.
Очевидно, что погрешность торсиографа существен-
ным образом зависит от характера движения вала. Тем
не менее для каждого вида движения можно, пользуясь
приведенной выше методикой, оценить погрешность за-
регистрированных показаний, используя при этом основ-
ные характеристики тор-
сиографа (жесткость
упругого элемента, мо-
мент инерции маховика,
коэффициент успокое-
ния).
Сложнее обстоит дело
с торсиометрами. Боль-
шое разнообразие дви-
гательных и тормозных
установок, различный ха-
рактер демпфирующих
сил и разные моменты инерции роторов — все это не
позволяет рассматривать динамические характеристики
упругих элементов приборов для измерения крутящего
момента в общем виде.
Изменение жесткости упругого элемента не влияет
на инерционность измерения момента, однако это изме-
нение может существенным образом повлиять на харак-
тер переходных процессов в механической системе дви-
гатель—нагрузка.
В качестве иллюстрации рассмотрим простой пример.
Пусть двигатель и тормозная установка имеют одина-
ковые моменты инерции роторов (/i=/2 = /).h одинако-
вый характер демпфирующих сил, пропорциональных
скорости, причем коэффициенты успокоения также рав-
ны между собой hi=h2 = h. Двигательная установка
создает на poTqpe постоянный момент — М0. На тормоз-
ной установке момент торможения изменяется по сину-
соидальному закону
MT(t) =MQ—Мт sin о*.
Оба ротора связаны между собой упругим элементом
жесткостью с, по кодорому и процзврдится измерение
крутящего момента,
73
Ставится задача выяснить, как влияет жесткость
упругого элемента на измерение переменного тормоз-
ного момента.
Перемещение ротора двигателя обозначим у, ротора
тормозной установки g. Для ротора двигательной уста-
новки можно записать:
Аналогично для ротора тормозной установки
с (Т — 6) + Л + hi = М0 — Мт sin <Л.
Вычитая из первого уравнения второе и обозначая
а=у—~1 — угол закручивания упругого элемента, полу-
чим:
Уа -f- hoi -f- col — MT sin Ы.
Это уравнение совпадает по форме с рассмотренным
ранее уравнением, описывающим движение подвижной
системы торсиографа. Соответственно решение этого
уравнения можно также записать в виде
а = Ye~Bt sin (Ы + *)) + ат sin (со/ + ф)э
где
/^(со2 —со2)2 + 4е2а
ф = arctg
Как и в предыдущем случае, здесь приняты обозначе-
ния:
(s>Q = ]/"c/J — собственная частота колебаний системы;
8 = h/2J — приведенный коэффициент демпфирования.
Первый член выражения, как известно, описывает
свободные колебания упругого элемента и по истечении
некоторого промежутка времени не будет оказывать
влияния на характер измеряемого момента.
При отсутствии искажений угол закручивания упру-
гого элемента должен изменяться таким же образом,
как и момент на тормозной установке:
мг . j мТ . .
аи„ = sin Ы = —тг sin со? = а0 sin со/,
с /со*
74
где
a0 = MT/J<o2Q
Подставляя значение ao в выражение для ат и при-
меняя обозначения e = o)oD; D = ft/AKP; g=Wcoo, получим
выражение для амплитуды и фазы изменения угла
закручивания во времени
«о /(i-.gi)»+4DV
Фазовый сдвиг
2gD
ф == arctg
Эти выражения почти совпадают с соотношениями, опи-
сывающими амплитудные и фазовые характеристики
торсиографа. Однако здесь g*=Wo)o, в то же время как
с7 = со0/о). Соответственно упругий элемент прибора не
будет вносить искажений лишь в том случае, если
g—>0 и, следовательно, <о0>а>. В противном случае
будут иметь место как амплитудные, так и фазовые
искажения, которые можно определить по приведенным
выше формулам.
При значениях D< 1 и при g"<0,3 амплитудную по-
грешность можно с точностью до 1 % вычислить по фор-
муле
Aa%=100(2D2— \)g2.
Например, при D=l, g*=0,l, Aa°/o = l%. Для уменьше-
ния динамической ошибки необходимо увеличивать
частоту собственных колебаний системы. Это можно
сделать лишь за счет увеличения жесткости упругого
элемента: со2о = с//.
Увеличение жесткости вызывает уменьшение угла
закручивания упругого элемента (а = сМкр), что приво-
дит при прочих равных условиях к уменьшению точно-
сти измерения крутящего момента.
Значительные массы роторов в большинстве двига-
тельных установок не позволяют на практике получить
высокую частоту собственных колебаний механических
систем. Поэтому для измерения достаточно высокоча-
стотных составляющих крутящих моментов следует при-
менять торсиографы. Двойное дифференцирование пока-
заний обычных торсиографов позволяет найти угловое
ускорение вала и, следовательно, крутящий момент.
75
18. ПОГРЕШНОСТИ УПРУГИХ ЭЛЕМЕНТОВ
Общей тенденцией совершенствования измерительной
аппаратуры является повышение ее точности. Значи-
тельная часть общей погрешности торсиометров прихо-
дится на долю упругого элемента. Повышение точности
торсиометров требует, таким образом, совершенствова-
ния упругого элемента. Основные причины, вызывающие
погрешность упругого элемента, следующие: несовер-
шенная упругость материала, проявляющаяся в упругом
последействии и упругом гистерезисе, зависимость мо-
дуля упругости материала от температуры, трение
в неподвижных соединениях упругого элемента, трение
в опорах, сопротивление среды.
Влияние упругого последействия и зависимости
модуля упругости от температуры в конечном итоге
сводится к изменению первоначальной деформации и
изменению жесткости упругого элемента. При малых
напряжениях в материале и при умеренных изменениях
температуры изменения жесткости могут быть учтены
при измерениях, в какой-то степени возможна компен-
сация этого изменения во вторичной аппаратуре либо
oiHo может, быть выведено периодической калибровкой
упругого звена. В диапазоне умеренных температур и
небольших напряжениях сравнительно медленно изме-
няется и величина упругого последействия.
Влияние других факторов проявляется в неоднознач-
ной зависимости деформации от нагружения упругого
элемента. Таким образом, для их точного учета необхо-
димо знать предысторию нагружения. Для устранения
влияния внешнего трения (трение в неподвижных сочле-
нениях, сопротивление среды) рекомендуется изготов-
ление упругого элемента в виде одной детали без меха-
нических сочленений, а для измерения малых момен-
тов— обтекаемой формы. Сложнее учесть влияние
внутреннего трения. Такая оценка необходима в тех
случаях, когда в качестве упругих элементов использу-
ются участки валов, выполненных из некачественной
стали, или другие элементы конструкции двигательных
установок, например соединительные муфты.
Приближенно такую- оценку можно сделать по
опытным коэффициентам, характеризующим петлю
упругого гистерезиса, либо по декрементам затухания
колебаний в различных материалах. Исследование
явлений упругого гистерезиса проводилось в основном
76
для определения затухания колебаний в связи с внут-
ренним рассеянием энергии. При этом исследователей
интересовала не столько форма петли гистерезиса,
сколько ее площадь. Следует признать, что пока еще нет
надежных теоретических и экспериментальных данных,
которые бы позволили достоверно описать форму петли
гистерезиса. В рассматриваемом случае и не ставится
вопрос о форме петли, а определяется только ее макси-
мальная ширина, поскольку погрешность измерения мы
будем определять как отношение
где ео—максимальная деформация;
£д — деформация, соответствующая наибольшей
ширине петли гистерезиса.
Для оценки ширины петли 2ед используем зависи-
мость напряжения от деформации, предложенную
Н. Н. Давиденковым:
где а — механическое напряжение;
Е — модуль упругости;
п и у\ — опытные коэффициенты.
Полагая а = 0, находим:
Поскольку рассматриваются материалы с малой шири-
ной петли е0 ^> ед, ограничимся двумя членами разложения
выражения (е0 — ед)п и, произведя простые вычисления,
найдем:
e«-l(2«-i-l)
А1иСТ —
Максимально допустимая деформация, при которой по-
грешность от гистерезиса не превышает заданной ДГИст
77
Таким образом, на основании опытных коэффициен-
тов п и ц можно найти предельно допустимую дефор-
мацию и, следовательно, предельно допустимые напря-
жения в материале.
Для определения ко-
эффициентов пит] суще-
ствует несколько спосо-
бов, описанных, напри-
мер, в [Л. 43]. Так как
непосредственное опреде-
ление коэффициентов с
достаточной для практи-
ки точностью сопряжено
со значительными труд-
ностями, для этой цели
применяются энергетиче-
ские методы, «в частности
по (рассеянию энергии
в материале на вибро-
стенде. Используя полу-
ченные таким образом
зависимости декрементов затухания от амплитуды на-
пряжений либо коэффициентов поглощений t|) = 2S, мож-
но определить значение п: .
0.Щ
aof
9
ст.25.
0
ст.З'
б
500 /ООО /300 ШкГ/см>
Рис 45. Зависимость коэффициен-
тов поглощений для различных
сталей от амплитуды напряжений.
In
In
02
Величина погрешности от
в этом случае по формуле
(2n-i
Дгист — + 1 (п_
гистерезиса определяется
■1)(л+1)
\) — дп(п + \)'
Вычисляя по этой формуле допустимый декремент зату-
хания по исходным зависимостям 1|>=26=|f (кг) (рис. 45),
определяем максимальные напряжения в материале, при
которых ошибка от гистерезиса не будет превышать
Дгист. Если для достижения необходимой чувствительно-
сти требуется иметь большую деформацию ео, выбирают
материал с меньшим декрементом затухания. Следует
иметь в виду, что на ширину петли гистерезиса сущест-
венно влияет термическая обработка и состояние вну-
тренней структуры материала.
78
Приведенные зависимости, как уже указывалось,
можно использовать лишь для определения погрешности
от гистерезиса для упругих элементов, выполненных из
низкосортных сталей, что может иметь место при исполь-
зовании в этой роли, например соединительного вала.
В тех случаях, когда упругие элементы выполняются
в виде самостоятельных конструкций, их рекомендуется
выполнять из высокосортных пружинных материалов ти-
па сталей 35ХГСА, 40Х, 60С2А, 65Г и т. д. Специальная
обработка' упругих элементов из этих сталей описана,
например, в [Л. 44].
ГЛАВА ТРЕТЬЯ
ПЕРЕДАЧА ИНФОРМАЦИИ С ВРАЩАЮЩЕГОСЯ
ВАЛА
Измерения веса, давления, напряжения в механиче-
ских конструкциях, не находящихся во вращательном
движении, с помощью различных электрических преоб-
разователей .проводятся в настоящее время достаточно
надежно и с удовлетворительной точностью (0,5—0,1%).
Однако применение тех же преобразователей для изме-
рений на вращающемся валу вызывает существенные за-
труднения. Требования к измерительным преобразовате-
лям и системам передачи, применяемым для измерения
крутящего момента на обычных двигательных установ-
ках, сцодятся к следующим:
а) широкий диапазон скоростей вращения и в связи
с этим значительное действие центробежных сил требуют
применения преобразователей и систем передачи малых
размеров, симметричных конструкций, удовлетворяющих
повышенным требованиям прочности;
б) токосъемные устройства должны обеспечить по-
стоянный коэффициент передачи в условиях осевых пе-
ремещений вала относительно неподвижных опор, а так-
же при изменении зазоров между неподвижной и вра-
щающейся частями;
в) преобразователи и токосъемные устройства долж-
ны быть мало чувствительны к изменению температуры,
влажности и действию помех от силового оборудования;
г) преобразователи и системы передачи не должны
нарушать естественный режим работы двигательных
установок, в частности в ряде случаев недопустимо огра-
ничение осевого люфта, нежелательно применение упру-
79
гих -соединений из-за уменьшения (критических скоростей
вращения.
Применяемые в настоящее время преобразователи и
системы передачи лишь частично удовлетворяют пере-
численным выше требованиям.
2G. ТОКОСЪЕМНИКИ
Для передачи сигналов <с вращающегося вала широ-
ко применяются токосъемники со скользящими контак-
тами [Л. 3]. Достоинством их является невысокая стои-
мость, простая конструкция. Основные недостатки — ма-
лый ресурс работы и невысокая надежность из-за
колебаний сопротивления трущегося контакта, увеличи-
вающихся с ростом окружных скоростей, загрязнение
контактных поверхностей, воздействие вибраций, вызы-
вающих нарушение контакта, появление дополнительной
э. д. с. на щитках и т. д. Существует много приемов и
разработано большое число конструкций, в которых в не-
которой степени эти недостатки преодолены.
Так, например, для уменьшения влияния переходного
сопротивления и повышения надежности коммутации,
особенно при повышенных скоростях вращения, целесо-
образно на каждое кольцо устанавливать по две и бо-
лее контактные щетки, причем в случае заметного уров-
ня биений или эллиптичности колец токосъемника щетки
следует устанавливать под углом 90°.
Для уменьшения шумов, вносимых токосъемным
устройством, применяются схемы с источником тока
в цепи питания датчика и измерительным усилителем
с высокоомным входом [Л. 45]. Режим неизменяющегося
тока резко снижает уровень шумов при работе токосъем-
ника. Иногда ток дополнительно стабилизируется с по-
мощью схем с обратной связью.
В качестве входного устройства применяются каска-
ды с .высоким входным сопротивлением (катодные или
эмиттерные повторители). При этом через токосъемник
проходит весьма малый ток.
Особые трудности применения токосъемников возни-
кают на высокоскоростных установках. При повышенных
скоростях относительное движение щетки и кольца ста-
новится неустойчивым. Кроме того, значительно увели-
чивается нагрев щеток, появляется проблема надежного
теплоотвода. Все это приводит к тому, что токосъемники
со скользящими контактами редко применяются на усга-
80
новках, работающих на скоростях выше 10 ООО—
12 ООО обIмин.
При более высоких скоростях вращения (до
20000 об/мин), особенно при испытании авиационных
двигательных установок, применяются ртутные токосъем-
ники. Вследствие капиллярного эффекта при неподвиж-
ном роторе и под воздей- н усилителю
ствием центробежных сил
при (вращении ртуть удер-
живается в зазоре между
вращающейся и непо-
движной частями токо-
съемника и образует та-
ким образом переходный
контакт.
Детали ртутного то-
косъемника изготавлива-
ются по весьма высокому
классу точности, ради*
альный зазор в конструк-
ции составляет порядка
0,02 мм.
Уровень шумового со-
противления при работе
такого токосъемника име-
ет величину примерно
5-Ю-2 ом (Л. 45] и со-
храняется в течение 40 ч
работы.
При длительной экс-
плуатации под влиянием высоких температур и скоро-
стей вращения происходит амальгамирование ртути, ко-
торое и определяет межремонтное время эксплуатации
ртутных токосьемников.
Применение их на более высоких скоростях (отдель-
ные конструкции успешно испытывались при скоростях
вращения до 40000 об/мин) резко снижает рабочий ре-
сурс токосъемников.
Из-за высокой стоимости .и сложности конструкции
применение ртутных токосъемников весьма ограничено.
Для передачи сигналов переменного тока в послед-
ние годы находят применение бесконтактные токосъем-
ники трансформаторного типа. Конструкция одного из
простейших бесконтактных токосъемников показана на
6—2751 81
1Ктензодатчикам
Рис. 46. Бесконтактный токосъем-,
ник трансформаторного типа.
рис. 46. Токосъемник имеет магнитонровод .в виде Ш-об-
разного сердечника -и две катушки, из которых одна не-
подвижная, а другая — вращается. Использование обще-
го магнитного сердечника дает возможность значительно
снизить влияние взаимного перемещения катушек при
вращении. Указывается [Л. 46], что помехи при враще-
нии не превосходят 0,5%, а передаточная характеристи-
ка имеет плоский участок в диапазоне 50—150 гц.
Для улучшения частотной характеристики и повыше-
ния жесткости конструкции в этих токосъемниках широ-
ко применяются ферритовые сердечники. Бесконтактные
трансформаторные токосъемники эффективно применя-
ются в торсиометрах с индуктивными преобразователя-
ми (см. § 8).
Значительно реже применяются бесконтактные емко-
стные токосъемники. Они имеют более простую конст-
рукцию, но из-за более высокого сопротивления в боль-
шей степени подвержены действию помех, коэффициент
передачи у них менее стабилен вследствие воздействия
загрязненности среды и изменения зазоров между вра-
щающимися и неподвижными деталями.
Для снятия информации с вращающегося вала на-
ходят применение системы радиосвязи с различного ви-
да модуляцией.
Амплитудная модуляция .применяется, например, при
использовании тензометрического преобразователя
[Л. 47]. Питание моста здесь осуществляется напряже-
нием с частотой 20 кгц. Выходной сигнал модулирует
несущую (50 Мгц). Недостаток систем с амплитудной
модуляцией — влияние на точность коэффициента пере-
дачи. Для уменьшения ошибки, вызываемой изменением
коэффициента передачи, в этих системах применяется
периодическая калибровка. Так, в рассмотренном выше
устройстве калибровка осуществляется переключением
входа передатчика с измеряемого напряжения на эта-
лонное. Команда подается световым сигналом, воздейст-
вующим на фототриод, установленный на валу.
В современных системах измерения широко приме-
няются передатчики с частотной модуляцией, которая
дает возможность исключить влияние нестабильности ко-
эффициента передачи на точность измерения.
Применение систем радиосвязи особенно эффективно
при работе с преобразователями, имеющими частотный
иыход, например со струнными.
82
В установках для измерения крутящего момента при-
менение любого типа токосъемных устройств сопряжено
с усложнением конструкции преобразователя, поэтому
в последние годы большое распространение получили
бесконтактные методы измерения крутящего момента.
21. ОСОБЕННОСТИ РАБОТЫ БЕСКОНТАКТНЫХ
КРУТИЛЬНЫХ ТОРСИОМЕТРОВ
К бесконтактным приборам, работающим без токо-
съемных устройств из крутильных динамометров, отно-
сятся приборы временного и фазового метода, нониус-
ные, разностные и фотоэлектрические торсиометры. Во
всех преобразователях, реализующих эти методы, тре-
буется определение с высокой точностью (0,25—1%)
углового положения того или иного сечения вала отно-
сительно базового сечения, причем угол закручивания
в существующих установках составляет всего 1—3°.
Поэтому разрешающая способность измерительных
устройств должна быть порядка 0,01°.
Для измерения угла закручивания в этих приборах
используются бесконтактные датчики, считывающие ин-
формацию о положении измерительных дисков.
Задача точного измерения перемещения измеритель-
ного диска достаточна сложна. В существующих уста-
новках диаметр измерительных дисков D не превышает
100—(200 мм. Перемещение меток Д на измерительных
дисках при закручивании упругого элемента на угол а
можно оценить по формуле
Практически Д=1—3 мм. Для обеспечения точности из-
мерения угла закручивания 0,25—1% необходимо про-
изводить измерение перемещения дисков с погреш-
ностью, не превышающей 5—10 мк. При этом скорость
перемещения меток на высокоскоростных установках до-
стигает 100—200 м/свк.
Указанная точность измерения должна быть обеспе-
чена при работе в условиях вибраций, биений дисков,
осевых перемещений дисков относительно датчиков и при
достаточно больших зазорах между дисками и датчика-
ми (0,5—1,0 мм).
Ниже рассматриваются различного рода типа бескон-
тактные датчики, применяемые в бесконтактных кру-
тильных торсиометрах,
6* 83
Трансформаторные датчики. Схема конструкции
трансформаторного датчика показана на рис. 47. Датчик
состоит из двух сердечников П-образной формы, выпол-
ненных из ферромагнитного материала, на которых на-
мотаны две катушки. В одну из катушек подается на-
Рис. 47. Схема трансформаторного ков применяются мате;
стью типа пермаллоя, либо немагнитные материа-
лы с высокой электрической проводимостью, такие
как алюминий, дюралюминий и т. in. Применение послед-
них более предпочтительно из-за меньшего веса и, сле-
довательно, меньшего действия центробежных сил и от-
сутствия паразитной модуляции от биения дисков. Прак-
тически достаточная толщина дисков из алюминия
0,5 мм. При зазоре между сердечниками 1,5 мм и шири-
не .впадины на измерительном диске 2,5 мм глубина мо-
дуляции достигает 1,5, что вполне достаточно для на-
дежного измерения. Период изменения амплитуды .вы-
ходного сигнала датчика соответствует таким образом
Ъ-мм перемещению кромки измерительного диска. Для
измерения небольшою угла закручивания требуется, как
было показано выше, определять положение измеритель-
ного диска с точностью до 5—10 мк. Эта задача ре-
шается путем фиксации прохождения «особой точки»
диска. В {преобразователях с трансформаторными дат-
чиками этой точке соответствует наибольшее изменение
амплитуды сигнала на выходе датчика.
пряжение несущей часто-
ты. Работа трансформа-
торного преобразователя
основана на изменении
магнитной связи между
сердечниками, которая
осуществляется перфори-
рованной кромкой изме-
рительного диска. Со вто-
рой обмотки датчика сни-
мается амплитудно-моду-
лированный сигнал, кото-
рый ограничивается и
формируется электронной
схемой. Для изготовле-
ния измерительных дис-
датчика.
риалы либо с высокой
магнитной проницаемо-
84
При синусоидальном изменении выходного сигнала
положение «особой точки» будет соответствовать моменту
прохождения синусоиды через нуль. Такое положение
особой точки облегчает задачу ее фиксации примене-
нием специальных схем типа нуль-органов. Кроме того,
в отличие от всех других точек синусоиды ее характери-
стики не изменяются при общем изменении амплитуды
выходного сигнала, вызванном, например, изменением
зазоров, режима работы генератора и т. д.
Выходной сигнал датчиков детектируется, а синусои-
дальный сигнал на выходе детектор подвергается мно-
гократному усилению и симметричному ограничению
с Целью более точного определения момента перехода
синусоидального напряжения через нуль.
Необходимый общий коэффициент ограничения
(k0TV>=UBX/UBblx) находится из условия допустимой по-
грешности (.временной пли фазовой) определения мо-
мента перехода через нуль.
Так, если А<р допустимая погрешность измерения фа-
зы, то общий коэффициент ограничения может быть
определен по формуле
^ тАу *
где т — угловая крутизна сигнала в момент перехода
через нуль, определяемая следующим образом:
т
du
dot
о>Ь=0,2тс ...
U макс
:^макс — амплитуда сигнала.
Недостатками трансформаторных датчиков, приме-
няемых для измерения крутящего .момента, являются:
а) невысокая разрешающая способность (минималь-
ная угловая крутизна т =0,017 l/град), что вызывает
повышенные требования как к форме выходного сигна-
ла, так и к измерительной аппаратуре (стабильный по-
рог ограничения, минимальная нелинейность усилите-
лей и т. д.);
б) сложная конструкция и схема датчика, необходи-
мость устранения фазовых сдвигов напряжений несущей
частоты в двух датчиках.
Ь5
бj-ширина луча
ивыл
"выл
А
Независимость амплитуды выходных сигналов от ско-
рости вращения, низкое выходное сопротивление, а сле-
довательно, и небольшой уровень помех являются до-
стоинствами трансформаторных датчиков.
Фотоэлектрические считывающие устройства состоят
из двух частей: осветительного элемента, формирующего
световой поток, и фотоголовки, преобразующей величи-
ну светового потока в напряжение. Перемещение изме-
п 0 рительных дисков вызывает
Осевая линия • _
~У( луча изменение светового потока,
измеритель- проходящего к фотоголовке,
ныа аисА *
либо путем перекрытия его,
либо за счет изменения ин-
тенсивности отраженного
светового пучка.
Одним из основных до-
стоинств фотоэлектрических
датчиков является 'возмож-
ность получения сигналов
с высокой крутизной фрон-
тов, что достигается форми-
рованием узкого пучка
света.
На ;рис. 48 показано,
как изменяется форма вы-
ходного сигнала в зави-
симости от ширины луча
б при работе фотодатчика «на просвет».
Применяемые в настоящее время устройства для
фиксации моментов перехода напряжений через нуль
(каскады усилителей и симметричных ограничителей)
при минимальной угловой крутизне сигналов (синусои-
де) позволяют фиксировать нулевую точку с погреш-
ностью по фазе не выше 0,2—0,5°. Повышение угловой
крутизны всего в 3—5 раз позволяет решить задачу вы-
деления момента перехода через нуль с точностью выше
0,1°, что удовлетворяет весьма точным установкам для
измерения крутящего момента.
Получение более крутых фронтов выходного сигнала
требует лучшей фокусировки, что вызывает усложнение
оптической системы и, следовательно, всей конструкции
фотодатчика.
Практическое распространение в приборах .временно-
го и фазового метода измерения получили фотодатчики
86
Рис. 48. Изменение выходного
сигнала фотоэлектрического '
датчика в зависимости от шири-
ны луча считывания.
с простои оптической системой; диаметр светового пят-
на у них составляет 1—3 мм.
Более высокие требования предъявляются к фотодат-
чикам, используемым "в установках с нониусными диска-
ми. Ширина луча в последних должна соответствовать
ширине щели, которая в зависимости от диаметра ди-
сков и разрешающей способности установки выбирается
в пределах 5—20 мк. Весьма перспективно применение
в фотодатчиках волокон-
ной оптики.
В качестве источников
света в фотодатчиках
применяются главным об-
разом лампы накалива-
ния, спектр излучения ко-
торых соответствует спек-
тральным кривым чувст-
вительности обычно при-
меняемых фотоэлемен-
тов. Недостатками их яв-
ляются сравнительно не-
высокая интенсивность
излучения и небольшой
срок службы.
Чувствительные эле-
менты фотодатчиков
должны обладать мини-
мальной инерционностью, небольшими габаритами, до-
статочно высокой чувствительностью и должны нормаль-
но работать при изменении температуры и влажности
окружающей среды.
Малая инерционность является одним из важных
требований к фотодатчикам.
Определим граничные частоты полосы пропускания
фотодатчиков. На рис. 49 показана форма напряжения
на выходе фотодатчика при освещении датчика световым
потоком в виде идеального прямоугольного импульса.
Запаздывание по фазе фв, вносимое инерционностью фо-
тодатчика, определяется по формуле
Рис. 49. Форма напряжения на вы-
ходе фотодатчиков при подаче на
вход прямоугольных (а) и трапе-
цеидальных (б) световых импуль-
сов.
360°
\ЛТ
где /ф — время фронта импульса;
Т — период следования импульсов.
87
Времени фронта импульса t$ соответствует частота
верхнего среза FB.C, определяемая соотношением:
р _0,35
Подставляя в предыдущую формулу, получаем:
° /макс58° г, fMai с58°
<РВ = Б И tB.C = 5 ,
где /макс — частота первой гармоники при максимальной
скорости вращения. Она определяется по со-
отношению
с Zfluai- с
/макс = gQ ,
где z — число меток;
^макс — (Максимальная скорость вращения, об/мин.
Наибольшая фазовая погрешность имеет место на
максимальной скорости /гМако По этой же формуле оп-
ределяется верхняя частота среза для сигнала синусои-
дальной формы.
Фазовое запаздывание, вносимое спадом импульсов
А при условии, что спад небольшой, как видно .из рис. 49,
может быть оценено следующим образом:
_ А
<?н~" 2т'
Она пропорциональна .величине спада А, но зависит
и от угловой крутизны сигналов т. Чем выше угловая
крутизна, тем менее жесткие требования предъявляются
к полосе пропускания на низших частотах.
Для сигналов синусоидальной формы нижняя частота
среза для вносимого фазового сдвига фй находится для
малых фц из соотношения
ГнС ~~ 58° Гн*
Фазовая погрешность будет наибольшей на минимальной
скорости.
При проектировании датчиков для измерения крутя-
щего момента наибольшие трудности вызывает обеспе-
чение верхнего предела полосы пропускания. При этом
следует иметь в виду, что величина фазового сдвига од-
ного датчика ф°д еще не дает представления о погреш-
ности измерения фазы двух сигналов, так как при изме-
88
рении крутящего момента с помощью двух датчиков фа-
зовые сдвиги частично компенсируются.
Разностная фазовая погрешность датчиков Дфд опре-
деляется неидентичностью их изготовления, т. е. разли-
чием фазовых (частотных) характеристик ,6Д %:
100
При проектировании приборов фазового метода измере-
ния момента обычно задаются относительной фазовой
погрешностью
Д?д7о=^-юо,
где фд=га — фазовый сдвиг сигналов, соответствующий
максимальному закручиванию вала а.
Частота верхнего среза определяется по приведенным
выше соотношениям и для малых ф°д находится по фор-
муле
'58°
/макс £qo ^макс ^д°/<>
Например, верхняя частота среза для фотоэлектриче-
ских датчиков, работающих на установке nM8iKC =
= 40 000 об/мин, при разбросе фазовых характеристик
датчиков не более il0% и максимальном угле закручи-
вания упругого элемента 3° составляет:
Р _W Зд°/о _ 4-10*. 10 _g 0
^в.с — а° Д?дО/в— 3°-0,2 — °/U КгЦ'
Индукционные датчики применяются в приборах для
измерения крутящего момента наиболее широко. Эти
датчики просты и надежны, устойчиво работают в за-
грязненной, замасленной и влажной среде, в условиях
значительных вибраций.
Высокие требования к полосе пропускания датчиков,
иллюстрированные выше, делают целесообразным ис-
пользование для магнитопроводов ферритовых мате-
риалов.
В качестве сердечников успешно могут быть исполь-
зованы обработанные специальным образом феррито-
вые магнитные головки с рабочим зазором 0,5—1,5 мм.
Конструкция индукционного датчика для высокооборот-
ных установок показана на рис. 50.
7—2751 89
На измерительном диске размещаются феррито-вые
вставки прямоугольной или цилиндрической формы.
Испытания показали, что датчики указанной конструк-
ции имеют разностную фазовую погрешность менее 0,2°
в диапазоне изменения скорости вращения от 3 000 до
25000 об/мин [Л. 40].
Г** А А^А
Рис. 50. Конструкция индукционного датчика с фер-
ритовым сердечником.
; — корпус; 2 — ферритовый сердечник; 3 — пермаллоевый
экран; 4 — крышка; 5 — колодка; 6 — изолятор; 7 — лепесток;
8 — обмотка; 9 — гетинаксовые прокладки.
Одним из основных недостатков индукционных датчи-
ков является зависимость амплитуды и формы сигнала
от зазора между датчиком и диском. Особенно важным
является сохранение формы кривой сигнала при изме-
нении зазора.
Так показано [Л. 48], что если представить напряже-
ния датчиков U\(t) и u2(t) рядом Фурье
л
их (0 = X А'к sin («а/ — A<?'k);
k=i
ut (/) = £ Л"" sin "л— ?ft),
k=i
90
то погрешность при измерении разности фаз, определяе-
мая по моментам перехода сигналов через нуль и обу-
словленная влиянием высших гармоник, может быть
оценена по формуле
где Ек=Лк/А\ — отношение амплитуды ik-и гармоники
к -первой. В предельном случае фазовый сдвиг 6фи мо-
жет достигать 1,2° на каждый процент высших гармоник.
Если форма кривой остается постоянной в процессе
работы, то фазовый сдвиг, вызванный высшими гармо-
никами, учитывается при калибровке и в дальнейшем не
сказывается при измерении угла сдвига фаз, .вызванного
закручиванием упругого элемента. Однако изменение
первоначального зазора, взаимное смещение дисков и
датчиков, биения — изменяют вид функций U\(t) и u2{t).
Это вызывает перераспределение высших гармоник и мо-
жет внести фазовые искажения.
В приведенной выше формуле бф-=0 в том случае,
если A(fk, = -^- =0, т. е. коэффициенты при косинусах
(аи) в разложении функции u(t) в ряды Фурье равны
нулю. (Ряд Фурье для u(\t) можно записать также,
в форме
Функция u(t) в этом случае представлена рядом сину-
сов и каждая гармоника синфазна первой гармонике.
Так как напряжение на датчике u(t) является произ-
водной от магнитного потока Ф, т. е.
то это условие удовлетворяется, если функция изменения
магнитного потока во времени представлена рядом коси-
нусов, т. е. является четной функцией. (Последнее не-
трудно выполнить, если сделать и датчики, и метки зер-
кально симметричными.
п
J] [«"* sin +Д?*>
s 'ft sin Д<рЛ],
91
Выполнение симметрии устраняет .влияние высших
гармоник !(i6<p°=0) и дает возможность проводить изме-
рение сдвига фаз независимо от вида функций т. е.
независимо от изменения зазоров, биений дисков и т. п.
Угловая крутизна сигналов индукционных датчиков
зависит от зазора между датчиком и измерительным
диском. Единственная возможность ее увеличения в ин-
дукционных датчиках — уменьшение зазора между дат-
чиком и диском и тем самым локализация магнитного
поля, уменьшение влияния /рассеяния. С увеличением
зазора угловая 'крутизна уменьшается и приближается
к своему минимальному значению #гмин = 0,017 1/град
(для синусоидального сигнала) и при дальнейшем уве-
личении зазора не изменяется. Обычно величина рабо-
чего зазора выбирается в пределах 1,0—0,5 мм. Даль-
нейшее его уменьшение сопряжено с повышенными тре-
бованиями к механической установке, усложняет конст-
рукцию преобразователя и ограничивает возможность
применения таких датчиков на .обычных двигателях.
Индукционные датчики имеют небольшое внутреннее
сопротивление (порядка единиц ом) при сравнительно
большом выходном сигнале. Следствием этого является
значительная величина отношения сигнала к шуму, опре-
деляющая разрешающую способность. Реально дости-
жимая разрешающая способность для индукционных
датчиков может составлять по перемещению доли микро-
на, что соответствует углу закручивания упругого эле-
мента менее 0,001°.
Значительное число работ, например [Л. 48 и 50], по-
священо разработке приборов, использующих в качестве
устройств для измерения угла закручивания технику
магнитной записи. При этом используются как синусои-
дальные сигналы, так и импульсные [Л. 29, 50]. Метод
магнитной записи достаточно полно освещен в литера-
туре.
Недостатки, присущие магнитной записи, обусловили
ее применение в торсиометрах, предназначенных для
работы в лабораторных условиях. В первую очередь не-
обходимо отметить значительные технические трудности,
связанные с обеспечением небольшого зазора (порядка
десятков микрон) между головкой и вращающимся ди-
ском. Кроме того, малый уровень выходного сигнала
усложняет измерительную аппаратуру и понижает ее
помехоустойчивость.
92
В бесконтактных крутильных динамометрах прост-
ранственное положение кромок измерительных дисков
определяется с точностью до 3—5 мк. Аналогичную за-
дачу— определение углового перемещения вращающего-
ся .вала решают преобразователи угол — код. Отличие
состоит в том, что в торсиометрах число измерений за
оборот (число фиксированных точек) определяется чи-
слом .меток на дисках и находится в пределах 10—200,
в то время «как в преобразователях угол — код оно опре-
деляется шагом младшего разряда и достигает 210—218
различных состояний. Это значительно облегчает прак-
тическое исполнение датчиков и измерительных дисков
торсиометров. В то же время преобразователи крутя-
щего момента должны "работать в более сложных усло-
виях: на самых различных двигательных установках, при
значительных биениях вала, изменении зазоров между
дисками и датчиками, в загрязненной замасленной и
влажной атмосфере, в широком интервале окружающих
температур. При этом требования -к точности определе-
ния положения дисков весьма высокие: при диаметрах
диска 100—200 мм и разрешающей способности 3—5 мк
измерение положения* диска происходит с ошибкой, не
превышающей 1/217 оборота, что соответствует 17-раз-
рядному преобразователю угол — код.
Точное измерение перемещения дисков еще не решает
задачу измерения углового закручивания упругого эле-
мента. Основной причиной тому явлйется перемещение
осей вращения измерительных дисков. На двигательных,
установках, особенно высокоскоростных, упругий элемент
устанавливается, как правило, непосредственно на валах
двигателя и потребляющей энергию установки без само-
стоятельных опорных подшипников. Это упрощает кон-
струкцию устройства и снижает погрешность из-за по-
терь в подшипниках, что существенно для маломощных
установок. Движение каждого измерительного диска
здесь определяется поведением вала той установки, на
которой диск установлен.
Характер движения вала зависит от многих факто-
ров, таких как тип подшипника и расстояние до него,
величины дисбаланса, отношения скорости вращения
к критической и т. п. Практически роторы высокоскоро-
стных двигательных установок не могут быть точно сба-
лансированы. Причинами этого могут быть, например,
кратковременное увеличение числа оборотов выше допу-
93
стимого предела. Неодинаковая скорость охлаждения
металла в отливке рабочих колес приводит к различным
микроструктурам, которые имеют разные механические
свойства; размеры сечений лопаток часто колеблются.
По этим причинам даже первоначально хорошо сбалан-
сированное рабочее колесо при работе не сохранит пер-
воначального баланса. Этому же способствует окисле-
ние и эрозия турбинных колес (особенно при высокой
температуре выхлопных газов).
При малой массе ротора дисбаланс вызывает его
круговые колебания в пределах люфтов подшипников.
Амплитуда перемещения оси вала, вызванного дисба-
лансом Л2ь зависит от скорости вращения и определяет-
ся конструктивными параметрами. В ряде случаев ре-
акция подшипника неодинакова в различных направле-
ниях, поэтому движение оси носит более сложный ха-
рактер, чем круговое. Его можно описать (рядом с гар-
моническими составляющими, кратными основной часто-
те вращения. Амплитуды этих составляющих обозначим
^2ь, где к — номер гармоники.
Кроме круговых колебаний вала в подшипниках, на-
блюдается постоянное смещение оси |До — отклонение
центра вала от центра подшипника, изменяющееся на
различных режимах.
Наконец, как показали исследования подшипников
скольжения, на высоких скоростях вращения имеет ме-
сто так называемая получастотная вибрация вала с ча-
стотой, .вдвое меньшей частоты вращения. Ее возникно-
вение вызвано особенностями гидродинамики масляной
пленки. Частота и амплитуда А\ этого перемещения не-
постоянны.
В общем виде проекцию перемещения оси диска на
вертикальную ось А можно представить выражением
п
Д = Д0 + Д8т f^ + p\+^A2ksm(kQt + n).
k=\
Смещение оси вращения вала вызывает погрешность
измерения угла закручивания, что показано на рис. 51,а.
Если перемещение вала происходит в плоскости, пер-
пендикулярно той, где находятся датчики, это эквива-
лентно дополнительному углу закручивания упругого
элемента
94
где D — диаметр измерительных дисков.
Если считать, что реакция подшипников одинакова
во всех направлениях, то при наличии дисбаланса про-
екция перемещения оси Д изменяется по синусоидально-
му закону
Д = Л21 sin Q{t.
Измерение угла закручивания производится -столько
раз за оборот, сколько на диске расположено меток г.
В некоторых установках это измерение производится по
одной метке [Л. 30]. Не-
трудно видеть, что в этом
случае может появиться
систематическая ошибка
в измерении угла закру-
чивания, которая будет
зависеть от степени неба-
ланса, режима работы,
угла между вектором не-
баланса и (вектором мет-
ки на диске. В этом от-
ношении в неблагоприят-
ных условиях находятся
приборы, использующие
нониусные диски. Так 'Л""}"*
как в последних измере-
ние производится - лишь
по той метке, которая
совпадает с меткой на
другом диске, то, есте-
Рис. 51. Взаимное положение дат-
чиков и измерительных дисков.
ственно, с изменением нагрузки угол между вектором
дисбаланса и вектором измерительной метки непрерыв-
но изменяется.
Это вызывает ошибку даже при стабильном режиме
вращения, которая равна:
2i4aisin + gg0
D
где угол .между вектором небаланса и вектором
совпадающей метки;
А2\ — амплитуда перемещения оси вала, вызванная
небалансом;
D — диаметр дисков.
95
Суммарная погрешность за оборот диска будет равйа
нулю в том случае, если на нем диаметрально располо-
жены две метки.
Когда перемещение, вызванное дисбалансом, описы-
вается первой и второй гармоническими составляющими,
для компенсации погрешности от смещения оси за пол-
ный оборот требуются четыре метки, равномерно распо-
ложенные по окружности. В том случае, если присутст-
вует третья гармоника, необходимо иметь на диске
шесть меток и т. д. Таким образом, если движение оси
вала в вертикальной пло-
В'
2\
й
il-
ia
Рис. 52. Расположение четырех
датчиков в преобразователях кру-
тящего момента.
скости описывается п
гармоническими состав-
ляющими, то для ком-
пенсации погрешности
следует использовать 2п
меток на дирке.
Если кроме дисбалан-
са присутствует и полу-
частотная вибрация, то
погрешность, вызванная
последней, будет отлич-
на от нуля за один обо-
рот вала, но равна нулю
за два полных оборота.
Увеличение числа меток дает возможность компенси-
ровать погрешность от переменных составляющих пере-
мещения оси, но не устраняет ошибки от постоянного
смещения Ао. Для компенсации этой ошибки следует ста-
вить по два датчика на каждый измерительный диск,
причем так, чтобы они были расположены .в плоскости,
проходящей через ось вала (рис. 51,6). В этом случае
перемещение оси вызывает в обоих датчиках одинаковую
по величине, но разную по знаку ошибку. Для одного
датчика сигнал будет запаздывать, для другого — опе-
режать по времени аналогичный сигнал, который имел
бы место при неизменном положении оси вращения.
Практическое осуществление компенсации ошибки
возможно при использовании рассмотренных ниже спо-
собов включения датчиков.
Самый простой способ компенсации — измерение
крутящего момента дважды, по датчикам /—2 и 3—4,
что показано на рис. 52. В этом случае смещение, на-
пример, левого диска вызывает отставание сигнала дат-
96
чика 1 и соответственно опережение сигнала датчика 4
(рис. 53).
При использовании фазового метода измерения мо-
мента это приводит к увеличению измеряемой разности
фаз при работе от датчиков /—2 и уменьшению на ту
же величину выходного сигнала при включении датчи-
Напряжение на датчиках
Рис. 53. Временные диаграммы сигналов датчи-
ков (а) и напряжений в измерительном устройст-
ве (б) при смещении оси диска.-
ков 3—4. Если суммировать показания прибора, то по-
грешность, (вызванная перемещением диска, будет
исключена.
Описанный способ компенсации ошибки наиболее
прост, он дает возможность попользовать ту же аппара-
туру, что и для измерения *с двумя датчиками. Недоста-
ток этого метода заключается в том, что он не позво-
ляет проводить компенсацию автоматически и требует
97
выполнения дополнительный вычислений. Кромб того,
первое и второе измерения разнесены во времени, что
не дает возможности использовать этот способ при из-
мерении на переходных режимах.
Другой метод компенсации погрешности от переме-
щения осей заключается в том, что на каждый канал
прибора подаются сигналы одновременно от двух дат-
Напряжение на датчиках
;-4 Напряжение на дифференцирующей цепочке t
« 1
SI
1
\ :l 1: 1
1
Напряже
п
ние)
saSt
1/хрд
1 1 1
}е измерительной схемы
П П ГМ
и
U U U 1
гииъп-гш'
Рис. 54. Компенсация влияния смещения диска при
сигналах импульсной формы.
чиков, установленных на одном измерительном диске.
Этот способ применим лишь в том случае, если сигналы
датчиков имеют импульсную форму (рис. 54). В каждом
канале импульсы от датчиков чередуются. При смещении
оси импульсы от одного датчика получают некоторое
опережение по фазе, импульсы другого — отставание на
ту же величину.
Погрешность, вносимую перемещением оси, можно
оценить :в этом случае по формуле
о$~2£ {2Asin£cos(^+p-£) +
П
+ 2 £ Aih sin -g- cos (иу + fk - g.) j.
98
С увеличением числа меток
составляющая погрешности
в 10 -раз)
чается.
z снижается переменная
(при 2 = 60 примерно
Влияние постоянной составляющей исклю-
7Ц
Усилители
Ограничители
Дифференциру-
ющие цепочки
Однобибраторы
—LHJ—
Суммирующая цепь
Рис. 55. Блок-схема прибора, работающего одновре-
менно от четырех датчиков.
Этот способ компенсации погрешности от смещения
оси также достаточно прост, позволяет использовать ту
же аппаратуру, но требует применения датчиков с сиг-
налами импульсной формы, которые должны работать
с меньшими зазорами, чем датчики с синусоидальными
сигналами.
Наконец, возможно применение прибора, .выполнен-
ного по блок-схеме, показанной на рис. 55. В этом при-
99
боре применены четыре идентичных усилителя и четыре
формирователя. В качестве измерительного устройства
используются два одновибратора. Первый одновибратор
запускается импульсом с датчика / и возвращается
-
у
V/
'//У/УУУУ
У/
/////////
УЛ
'////////
1
\
////////////
У//У/УУУЛ>/
L_
////////£ у,
Рис. 56. Временные диаграммы, показывающие ра-
боту прибора с четырьмя датчиками.
в исходное положение импульсом с датчика 2, второй
одновибратор работает от импульсов датчиков 3 и 4.
Сравнивающая цепочка подключается к выходам обоих
одновибраторов.
Если произошло, например, смещение левого диска,
то, как это показано на рис. 56, импульс первого одно-
100
вибратора увеличится по ширине; на ту же величину
увеличится ширина импульса второго одновибратора за
счет опережения сигнала с датчика 4. Выходное напря-
жение при этом остается неизменным.
Если датчики установлены симметрично относительно
оси вращения, то максимально возможная погрешность,
вносимая перемещением оси, в этом случае изменяется
по такому закону:
*д ~ 2 ТГ sin 25" cos (-¥+Р ~ 25-)+
П
+ 2 4efcsin-^cos^£V — <pfe — ^JJ.
Переменная составляющая ошибки в этом случае еще
более снижается, причем она не зависит от числа меток
на дисках.
Последний способ компенсации требует применения
более сложной аппаратуры, однако могут быть исполь-
зованы датчики с сигналами любой формы. Два послед-
них способа компенсации рекомендуется применять при
измерении на переменных режимах работы, так как они
позволяют значительно снизить влияние переменных со-
ставляющих погрешности.
Очень важно то обстоятельство, что приведенные вы-
ше формулы позволяют оценить погрешность, вызванную
вибрациями станины, на которой расположены датчики.
Величиной А выше была обозначена проекция взаимно-
го перемещения оси вращения и плоскости, на которой
установлены датчики. При этом безразлично, находятся
ли в движении датчики, а ось вращения диска непо-
движна, либо неподвижны датчики, а ось вращения пе-
ремещается, либо, наконец, и датчики и ось вращения
находятся в движении. Во всех случаях взаимное пере-
мещение можно представить приведенной выше общей
формулой и оценивать погрешность так, как это было по-
казано.
22. ГРАДУИРОВКА БЕСКОНТАКТНЫХ ТОРСИОМЕТРОВ
При использовании бесконтактных приборов,-основан-
ных на временном и фазовом методах измерения, воз-
никают трудности в осуществлении градуировки Так
101
как при вращении не удается с высокой точностью кон-
тролировать значение крутящего момента на входе пре-
образователя, градуировка этих приборов обычно про-
изводится в несколько этапов:
1. Градуировка упругого элемента в неподвижном
положении, определение зависимости a=/i(MKp). Про-
ведение такой операции несложно, измерение угла за-
кручивания а .производится с необходимой точностью
с помощью оптических либо .механических приспособле-
ний.
2. Градуировка измерительного прибора. В этой ста-
дии на вход прибора подаются калиброванный интер-
вал времени либо сигналы с заданным фазовым сдви-
гом. Поскольку угол закручивания вала связан опреде-
ленной зависимостью с углом сдвига фаз (q>0=2a°) и
промежутком времени i(«i = a7/z-60), то это дает возмож-
ность построить зависимость показаний прибора Л от
угла закручивания вала а:
3. Совмещение полученных зависимостей, установка
нуля прибора. На этом этапе определяется начальный
фазовый сдвиг сигналов датчиков фо или начальный
временной промежуток 4о, соответствующий нулевому
крутящему моменту. Начальные величины щ или to за-
висят от установки датчиков и соответствующей регули-
ровкой могут быть сведены к нулю.
Определение жесткости упругого элемента произво-
дится обычно непосредственно на измеряемом объекте.
Вал с одной стороны затормаживается, с другой сторо-
ны от упругого элемента на вал надевается рычаг, на
известной длине которого расположена каретка с ка-
либрованными грузами. К измерительным дискам кре-
пятся два измерительных рычага, длина которых 1\ и /г.
По взаимному перемещению концов этих рычагов (Ai и
Д2) измеряется угол закручивания упругого элемента.
Жесткость упругого элемента можно вычислить по
формуле
, PL cos a
arctg-^-arctg-^
где Р —вес груза;
L — длина рычага, на котором устанавливается
груз;
а — угол закручивания.
102
Точность измерения жесткости упругого элемента
при таком способе градуировки ограничивается погреш-
ностью измерения перемещений Ai и A2, погрешностью
взвешивания калиброванных грузов АР и погрешностью
измерения длин рычагов L, /ь /2.
Тщательно проведенная градуировка позволяет опре-
делить жесткость упругого элемента с погрешностью
менее 0,1%'.
Второй этап включает в себя градуировку измери-
тельного прибора с помощью различного (рода вспомога-
тельных устройств.
Для градуировки приборов фазового метода в этих
устройствах обычно применяются фазосдвигающие цепи
[Л. 38 и 63]. Фаза сдвинутого сигнала на выходе цепи
изменяется с помощью переменного сопротивления, при-
чем амплитуда выходного напряжения постоянна.
Несложное фазосдвигающее устройство может обес-
печивать линейное изменение сдвига фаз с погрешностью
до 0,01% в пределах 0—180°. Недостатком такой гра-
дуировки является необходимость жесткой стабилизации
частоты и значительное влияние высших гармоник.
Анализ типовой измерительной схемы приборов фа-
зового метода показал, что основные погрешности изме-
рения вызваны нестабильностью порогов ограничения,
нелинейными искажениями усилителей, нестабильностью
элементов и напряжений в измерительном устройстве.*
На основании этого целесообразно производить раз-
дельную градуировку отдельных участков схемы.
Градуировка измерительного устройства на триггере
(см. рис. 35) может быть произведена, например, с по-
мощью простейшей схемы, содержащей два блокинг-
генератора. Один из них работает в автоколебательном
режиме и синхронизирует второй блокинг-генератор, за-
торможенный, он запускается, например, каждым чет-
вертым импульсом первого блокинг-генератора. При по-
даче на запускающие цепи измерительного устройства
импульсов от одного блокинг-генератора имитируется
сдвиг фаз входных сигналов 180° (рис. 57). В этом поло-
жении при изменении частоты следования импульсов
в *рабочем диапазоне частот производится проверка сим-
метричной работы измерительного устройства с учетом
переходных процессов.
Если на каждую запускающую цепь подавать им-
пульсы от различных блокинг-генераторов, это позво-
103
ляет задать 90-градусный или 270-градусный фазовый
сдвиг в зависимости от того, к какому входу подключен
каждый блокинг-генератор и при условии синхрониза-
ции .второго (блокинг-генератора четвертым импульсом
первого блокинг-генератора.
1-й блокинг*
. генератор
2-й блокинг-
генератор
Напряжение на выходе измерительного устройства
Установка нуля-
сдвиг фаз 180°
>
V/////A
'//
//////А
V/'
Установка верхнего 0
пределд*сдвиг фаз SO
Рис. 57. Диаграммы, поясняющие работу калибровоч-
ного устройства на блокинг-генераторах.
Проверка изменения уровня ограничения, вызванная
нестабильностью .порога ограничения и нелинейными
искажениями, так же как и предыдущая калибровка,
может быть произведена в процессе работы прибора на
объекте.
В этом случае на один из входов измерительного
устройства подаются импульсы, соответствующие пере-
ходу кривой сигнала через нуль снизу вверх, на дру-
гой — импульсы, отмечающие переход сверху вниз.
Это позволяет с высокой точностью измерить суммарное
фазовое соотношение передних и задних фронтов сигна-
ла для каждого канала усиления и формирования, каж-
дого датчика и измерительного диска.
В процессе работы возможна подстройка и компенса-
ция изменения уровня. Точность такой калибровки опре-
деляется 'чувствительностью измерительного устройства
и составляет 0,2—0,1°.
Введение (калибровочного устройства в прибор мало
усложняет его схему, так как добавляется всего четыре
усилительных элемента. При условии высокой линейно-
сти измерительного устройства описанная выше кали-
бровочная схема позволяет проводить измерение разно-
сти фаз с точностью 0,3—0,5°.
104
Для градуировки всей измерительной схемы иногда
применяется следующий простой прием [Л. 30]. Один из
датчиков микрометрическим винтом смещается в плоско-
сти вращения диска. Это смещение через шаг меток пе-
ресчитывается в угол закручивания вала
a^arctg-^-,
где L0 — расстояние датчика от оси вращения;
А— перемещение датчика.
Совмещение градуировок прибора Л=/2(ф) либо
A=f2(t) и упругого элемента a = /i(MKp) (определение
начального фазового фо или временного сдвига t0) ре-
комендуется проводить только на вращающейся уста-
новке, что позволяет учесть неравномерность располо-
жения меток на измерительных дисках.
Обычно это производится при работе на полностью
разгруженной установке, но при этом не всегда можно
получить заданную точность. На маломощных установ-
ках необходимо учитывать момент трения в подшипни-
ках, кроме того, иногда следует нагрузить упругий эле-
мент, чтобы выбрать зазоры. В этих случаях можно при-
менить метод «консервации момента». С этой целью уп-
ругий элемент в неподвижном положении нагружается
определенным моментом и зажимается специальным при-
способлением повышенной жесткости. Проводя измере-
ние при вращении «жесткого» упругого элемента с за-
ранее установленным моментом получается совмещение
указанных зависимостей путем определения начального
угла закручивания ао.
В некоторых приборах фазового метода измерения
момента применяется метод калибровки на неподвиж-
ном валу. При этом датчики устанавливаются на спе-
циальных кольцах, вращающихся вокруг измерительных
дисков [Л. 36 и 49]. Такие установки имеют сложную
конструкцию и требуют применения специальных
устройств для съема данных с вращающихся колец.
23. ВЛИЯНИЕ ПОМЕХ В ПРИБОРАХ ФАЗОВОГО МЕТОДА
ИЗМЕРЕНИЯ МОМЕНТА
Предельная точность, которая может быть достигну-
та в измерительных установках, ограничивается дейст-
вием помех. Поэтому оценка влияния помех в измери-
тельной аппаратуре является необходимым условием
8-2751 105
повышения ее чувствительности и точности. Ниже рас-
смотрено действие .помех в приборах фазового метода
намерения крутящего «момента.
Влияние флуктуационных помех при фазовых изме-
рениях рассмотрено для радионавигационных фазовых
систем [Л. 51] и для фазометров, работающих на несу-
щей частоте [Л. 52].
Флуктуационное напряжение можно представить
в виде независимых случайных величин Е и Ф:
Um=E cosd).
Для определения влияния флуктуационных фазовых .по-
мех можно воспользоваться векторными диаграммами,
показанными на рис. 58.
Фазовый шум определяется утлом Афш между .векто-
ром сигнала Uc и равнодействующей векторов £/с и Е.
Мгновенное значение этого угла
A?m = arctg
Я sin 9
ис + Е cos 9 U{
-sm\
для низкого уровня помех Е <£/с;
6—угол между векторами сигнала и помехи.
Так как все значения 0 равновероятны, то можно за-
менить в последнем выражении б на 6 + я/2. Таким об-
разом:
А Е cos 9 Um
Следовательно, распределение слу-
чайной величины Афш совпадает с рас-
пределением величины иш.
При амплитудных измерениях по-
роговая чувствительность определяет-
ся действующим значением флуктуа-
ционного напряжения при фа-
зовых измерениях пороговая чувстви-
тельность будет определяться величи-
ной
Рис. 58. Векторные
диаграммы сигна-
ла и помехи.
Д<Рш:
где а — некоторый коэффициент.
Если на входе фазометрического устройства дейст-
106
вует флуктуационное напряжение с равномерным ча-
стотным спектром,то
где ишо — действующее значение флуктуационного на-
пряжения, отнесенное к единичному спек-
тральному интервалу;
Д|/ — полоса пропускания измерительного устрой-
ства.
Из рассмотренного очевидны следующие важные
свойства фазовых измерений:
1. В фазовых измерениях пороговая чувствительность
может быть повышена увеличением отношения сиг-
нал/шум, в то время как при амплитудных измерениях
пороговая 'чувствительность ограничивается уровнем
флуктуационных помех и может быть повышена только
снижением этого уровня.
, 2. Пороговая чувствительность в приборах фазового
метода при действии помех с равномерным частотным
спектром зависит от полосы пропускания. Увеличением
инерционности измерительного устройства (сужением по-
лосы пропускания) можно увеличить пороговую чувст-
вительность.
Рассмотрим действие помехи определенной частоты
на двухканальную фазовую систему измерения, показан-
ную на рис. 30.
Аналогично рассмотренному выше случаю по вектор-
ной диаграмме |(рис. 58) находим фазовые искажения
в каждом из каналов при малом уровне помех:
для UCl > Ет и UC2 > Ettt,
где Uс — амплитуда сигнала;
Еи— амплитуда помехи;
6 = (шс —<оп)/;
wc шп — частоты сигнала и помехи;
<р — измеряемый сдвиг фаз.
Ошибка при измерении разности фаз сигналов, вызы-
ваемая помехой, может быть определена по соотношению
8* 107
A<p^2^-cos |^(Wc_WB)*_-ljsin-?._
-Wsin [(«с-«п)*--£-],
где
Из формулы следует, что ошибка при действии поме-
хи определенной частоты зависит от разности фаз сиг-
налов и достигает максимума при q>= 180°.
Кроме того, если измерение разности фаз произво-
дится непрерывно, ошибка Aq> изменяется с частотой,
равной разности частот сигнала и ломехи /с — /п.
Последнее обстоятельство примечательно. Дело в том,
что спектр оконечного измерительного устройства в ря-
де случаев ограничивается сравнительно невысокой ча-
стотой fB.
При непрерывном измерении разности фаз на выход
измерительного устройства пройдут лишь такие помехи,
спектр которых находится в интервале /с — /п, в то вре-
мя как низкочастотные помехи, в том числе сильные
50-гц наводки могут быть отфильтрованы.
Иной результат получается при дискретном измере-
нии разности фаз по моментам перехода напряжений
через нуль. В этом случае при малом уровне помех фа-
зовая погрешность в каждом канале в момент перехода
напряжений через нуль будет определяться выраже-
ниями:
дт\ ~ fp-sin К — <*K)tK;
A,, ~ sin [(.„-«J +
где 4 = 2я&Аос, k= 1, 2, ..., я.
Погрешность измерения разности фаз, вызванная влия-
нием помехи одной частоты при дискретном характере
измерения, определяется соотношением
108
Считая, что промежуток времени между двумя отсче-
тами равен 2я/сос, можно определить период изменения
ошибки Гд?:
т 2гс_ 1_
Д? ~ С0П — tп *
Таким образом, при дискретном способе измерения
разности фаз в отличие от непрерывного измерения низ-
кочастотные помехи будут проходить на выход прибора.
Величина ошибки, как видно из формулы, зависит от
соотношения частот соп/сос и уменьшается с увеличением
частоты сигнала. Для уменьшения низкочастотных по-
мех следует увеличивать рабочую частоту сигнала, что
достигается увеличением числа меток на измерительных
дисках.
ГЛАВА ЧЕТВЕРТАЯ
МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО РАСЧЕТУ
И ПРОЕКТИРОВАНИЮ ПРИБОРОВ
ДЛЯ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА
Проектирование установки для измерения крутящего
момента при заданных требованиях к точности измере-
ния сводится к расчету упругого элемента, выбору си-
стемы передачи с вращающегося вала и проектированию
измерительной схемы.
Большая часть электрических преобразователей, ис-
пользуемых в установках для измерения момента, ши-
роко применяется в различных устройствах, они доста-
точно полно разработаны и расчет их не представляет
существенных трудностей. К числу таких преобразовате-
лей можно отнести -проволочные тензометрические, ин-
дуктивные, емкостные, радиационные, магнитоупругие
и др. Проектирование измерительной аппаратуры для
этих преобразователей при заданных входных величинах
и требованиях к точности измерения приводится .в спе-
циальной литературе, например [Л. 1].
Проектирование установки для измерения момента
обычно начинается с выбора метода измерения и типа
109
упругого элемента. При этом заданными являются ве-
личина измеряемого крутящего момента, диапазон -изме-
нения скоростей вращения установки, характер измере-
ний (постоянный или переменный момент), а также фак-
торы, характеризующие окружающие условия (темпера-
туру, влажность и т. п.).
В зависимости от типа .применяемых преобразовате-
лей упругий элемент должен обеспечить либо необходи-
мую величину механического напряжения на измеритель-
ном участке (в магнитоупругих, фотоупругих и прово-
лочных тензометрических преобразователях), либо за-
данный угол закручивания.
Наиболее распространенной конструкцией упругого
элемента для преобразователей первой группы является
сплошной круглый вал. Для заданной величины механи-
ческих напряжений диаметр измерительного участка ва-
ла находится по формуле
где Тмакс — максимальное касательное напряжение;
Ломаке — максимальный крутящий момент.
Выбор величины максимального напряжения опреде-
ляется рядом факторов: чувствительностью преобразова-
теля, заданной точностью измерения, степенью влияния
посторонних воздействий, погрешностью системы пере-
дачи с вращающегося .вала.
Предельная величина механического напряжения ог-
раничивается ошибкой, вызываемой гистерезисом упру-
гою элемента, иногда—прочностью вала, а в некото-
рых случаях — допустимой жесткостью.
В приборах, измеряющих крутящий момент по углу
закручивания упругого элемента, характеристикой, опре-
деляющей точность и чувствительность, является макси-
мальный угол закручивания. Особенностью этих прибо-
ров является то, 'что верхний предел для увеличения угла
закручивания упругого элемента здесь не определен так
однозначно, как максимальное напряжение в приборах,
измеряющих местную деформацию, и поэтому он мо-
жет изменяться в широких пределах в зависимости от
требований, предъявляемых к измерительной установке.
Основные ограничения при этом следующие:
ПО
1. Критическая скорость вращения. Увеличение угла
закручивания при постоянной .величине максимального
напряжения сопровождается увеличением осевого раз-
мера упругого элемента, что приводит к уменьшению
жесткости его на изгиб и тем самым уменьшает крити-
ческую скорость вращения.
Рассмотрим круглый вал. Угол закручивания вала
пропорционален его длине
° гоо 32ММаус /
амакс~00 '
где / — длина вала;
d — диаметр;
G — модуль упругости второго рода;
Ломаке—максимальный крутящий момент.
Критическая скорость вращения вала также зависит
от его длины
/гкр= 299.р \f ~jj2 9
где р — коэффициент, учитывающий характер опор;
Е — модуль упругости первого рода.
Максимальное значение касательных напряжений ог-
раничивает диаметр вала. Таким образом, увеличение
длины упругого элемента с целью увеличения угла за-
кручивания возможно лишь до тех пор, пока критическая
скорость вращения будет вне рабочего диапазона.
Для повышения критической скорости вращения ре-
комендуется применять конструкции упругих элементов
с повышенной поперечной жесткостью в сочетании с ма-
лой жесткостью на кручение. К ним относятся упругие
элементы в виде крестовины, беличьей клетки и полого
вала (см. рис. 33 и 34).
В некоторых конструкциях упругих элементов для по-
вышения критической скорости вращения устанавлива-
ются дополнительные опоры, разделяющие упругое звено
на ряд секций. Это может привести к нежелательным
последствиям. Если опоры неподвижны, то потери в них
при высоких окружных скоростях валов и малой величи-
не передаваемых моментов могут внести заметные иска-
жения. В том (случае, если опоры вращаются вместе
с валом [Л. 52], необходимо, чтобы момент трения в них
был значительно меньше, чем измеряемый момент.
Ш
В противном случае появляется неоднозначная зависи-
мость угла закручивания от приложенного момента (пет-
ля гистерезиса).
2. Допустимый угол закручивания может быть огра-
ничен заданной величиной жесткости упругого элемента
на кручение. Такие ограничения могут иметь место
в двух случаях: для устранения возможности появления
крутильных колебаний в механической системе передачи
мощности либо при измерении момента в переходных
режимах, так как понижение4 жесткости может внести
искажения в характер переходных процессов в системе.
В крутильных торсиометрах угол закручивания упру-
гого элемента измеряется по величине перемещений. Это
взаимное перемещение пластин конденсаторов в емкост-
ных преобразователях, изменение зазора сердечников
в индуктивных торсиометрах, изменение ширины свето-
вого окна в фотоэлектрических приборах и т. п.
Величина перемещения зависит от расстояния места
установки преобразователей до оси вращения и может
быть оценено по 'соотношению
а —360° '
где Л — величина перемещения;
D — диаметр окружности, на которой установлены
преобразователи;
a — угол закручивания упругого элемента.
Стремление увеличить диаметр D ограничивается до-
пустимыми габаритами установки, действием на преоб-
разователи центробежных сил, а на высокоскоростных
установках — прочностью. Величина перемещения преоб-
разуется в изменение того или иного электрического па-
раметра.
Чем больше величина перемещения, тем большая точ-
ность измерения момента может быть достигнута. При
этом влияние посторонних факторов — температуры,
центробежных сил, изгибных деформаций может быть
оценено суммарной ошибкой измерения перемещения 6Л,
которая обычно слабо зависит от диапазона изменения
перемещений ДМакс При этом относительная ошибка из-
мерения перемещений может быть определена как отно-
шение 6А/Д,макс = ^п.
Механическая (конструкция крутильного торсиометра
должна быть решена таким образом, чтобы относитель-
112
ная погрешность перемещения ап была в заданных пре-
делах.
За эскизной проработкой конструкции следует рас-
чет преобразователя перемещения в электрическую ве-
личину. Основы расчета индуктивных, емкостных, радио-
метрических, фотоэлектрических и других преобразова-
телей изложены, например, в [Л. 1].
Выбор системы передачи информации с вращающе-
гося нала производится в зависимости от заданной по-
грешности, условий постановки на объект измерения,
продолжительности безостановочной работы, окружаю-
щих условий и т. п. Погрешность, вносимую системой
связи, также удобно оценивать приведенной погрешно-
стью, которая находится как отношение ошибки, вноси-
мой системой, к диапазону измерения.
Проектирование измерительной схемы заключает раз-
работку торсиометрической установки. Обычно использу-
ются типовые измерительные схемы, предназначенные
для работы с теми или иными преобразователями пере-
мещения. Они также описаны в [Л. 1].
В отличие от других крутильных динамометров в при-
борах .временного и фазового методов измерения момен-
та применяются преобразователи перемещения, не ис-
пользуемые на других измерительных установках. Рас-
смотрим особенности расчета этих преобразователей.
Максимальный угол закручивания в установках вре-
менного и фазового методов измерения момента может
определяться как необходимой величиной перемещения-
меток на измерительных дисках, так и максимальной
скоростью вращения установки.
Рассмотрим влияние скоростей вращения в торсиомет-
рах временного метода. Точность измерения временного
промежутка в этих приборах определяется инерционно-
стью датчиков, полосой пропускания тракта усиления и
формирования сигналов в двухканальной системе, ста-
бильностью элементов, влияющих на полосу пропуска-
ния, идентичностью датчиков. В современных торсиомет-
рах погрешность измерения временного промежутка б/
составляет 10—100 нсек. Задавая относительную точ-
ность измерения временного запаздывания at = 6t/i\ мож-
но определить необходимый угол закручивания упругого
элемента по максимальной скорости вращения:
бА2Макс &t
амакс ~ э
ИЗ
где яМакс — 'максимальная скорость вращения, об/мин;
Ы — погрешность измерения временного запазды-
вания;
at — относительная погрешность измерения вре-
менного промежутка.
Например, при 6t=lQ-8 сек, яМакс=50 000 об/мин и
аь=10~3 (0,1%) необходимый угол закручивания состав-
ляет:
_6.5.104.10-8_оО
амакс— jq_з ■— — ^ •
Измерение временного промежутка с ошибкой
Ш нсек при усилении сигналов порядка нескольких со-
тен тысяч требует создания достаточно совершенной
аппаратуры.
Для приборов фазового метода измерения крутящего
момента величина наибольшего угла закручивания упру-
гого элемента определяется максимальной скоростью
вращения установки и относительной фазовой погреш-
ностью прибора #ф:
Величина Яф находится как отношение ошибки измере-
ния разности фаз к диапазону изменения фаз. Коэффи-
циент k зависит от полосы пропускания усилителей и
датчиков, разности и стабильности их фазовых харак-
теристик и в конечном итоге определяется качеством дат-
чиков и усилителей. Например, для прибора МЭИ, схе-
ма которого приведена на рис. 35, при лмакс =
=20000 об/мин, аМакс=3° разностная фазовая погреш-
ность усилителей и датчиков менее 0,2%. Вычисляя по
этим данным, находим: k = 3- Ю-7.
Как следует из приведенных формул, недостатком
временного и фазового методов измерения является то,
что при увеличении скоростей вращения повышаются
требования к полосе пропускания измерительной аппа-
ратуры.
Выбор необходимого угла закручивания может опре-
деляться (особенно на низкоскоростных установках)
необходимой величиной взаимного перемещения меток
на измерительных дисках Д.
В зависимости от требуемой точности измерения пе-
ремещения, абсолютной ошибки измерения перемещения
U4
6А необходимая величина Л может быть получена либо
за счет увеличения угла закручивания упругого элемен-
та <х, либо за счет увеличения диаметра измерительных
дисков D.
Погрешность измерения перемещения 6Л возникает
из-за смещения оси вращения дисков, биений их и т. д.
Она детально рассмотрена в § 21. Эта погрешность мо-
жет быть значительно снижена постановкой четырех дат-
чиков вместо двух и в этом случае она определяется
лишь чувствительностью датчиков к радиальному пере-
мещению их относительно измерительных дисков. Ра-
диальные перемещения неизбежны при увеличении чисел
оборотов за счет увеличения диаметров дисков под дей-
ствием центробежных сил на высокоскоростных установ-
ках, они возникают -при температурных расширениях и
биениях дисков.
В конструкциях с симметричным расположением ме-
ток и датчиков чувствительность последних к радиаль-
ным перемещениям определяется тщательностью изго-
товления дисков и датчиков и в* конечном итоге техно-
логией. По известной ошибке измерения перемещения
йД!, допустимой относительной погрешности ад можно
определить необходимый угол закручивания упругого
элемента
Q 360° ЗА
пи ад
Если, например, ошибка измерения перемещения не пре-
восходит <йЛ=5 мку то задаваясь aA = 10~3 (0,1%), для
D= 150 мм находим а° = 4°.
По найденной .величине угла закручивания проекти-
руется упругий элемент. Его конструкция и размеры вы-
бираются так, чтобы максимальные напряжения не пре-
высили допустимые (для ограничения ошибки, вызван-
ной гистерезисом). Кроме того, критическая скорость
вращения должна быть вне рабочего диапазона (см.§ 17
и 18).
Измерительная схема и датчики проектируются так,
чтобы фазовые (временные) искажения, а также погреш-
ности ограничения, нелинейности, дискретности и т. п.
были в заданных пределах. Оценка величин этих по-
грешностей приведена в § 15, 21, 22 и 23.
ЛИТЕРАТУРА
1. Тури чин А. М., Электрические измерения неэлектрических
величин, изд-во «Энергия», 1966.
2. К а ц С. М., Балансирные динамометры для измерения вра-
щающего момента, Госэнергоиздат, 1962.
3. Волчок Л. Методы измерений в двигателях внутрен-
него сгорания, Машгиз, 1955.
4. Д е й ч М. Е., 3 а р я н 'к и н А. Е., Михненков Л. В.,
Фролов Л. Б., Влияние перекрыши на работу радиально-осевой
турбины, Известия ВУЗ, «Энергетика», 1963, № 12.
5. В е 11 J., Digital technique measures ship's horsepower, Elec-
tronics, 1961, v. 34, Mb 46.
6. Пи ска рев A. H., Торсионный работомер, Авт. свид. СССР,
№ 95158, Бюлл. изобр., 1953, № 2.
7. Р a t г a i к о J., Transistorized strobe measures shaft torque,
Electronics, 1*957, v. 30, № 6.
8. Soderholm L. G., Acrylic housing permits direct measu-
rement of rotating torque, Design News, 1961, v. 16, № 8.
9. Большаков В. Ф., Радиометрический измеритель крутяще-
го момента, Авт. свид. СССР, № 136085, Бюлл. изобр., 1961, № 4.
10. Bishop G. В., Brothers В. G., The development of dy-
namic torquemeter using radio isotopes, Prod. Design Engn., 1964,
v. 7.
11. Хагиян M. Г., Струнный динамометр для измерения кру-
тящего момента, Известия АН Арм. ССР, серия технических наук,
1958, т. XI, № 5.
12. Алферов Н. В., Измерение крутящего момента индуктив-
ными торсиометрами, «Измерительная техника», 1960, № 2.
13. 'Smith «Н. Н., N о с о 1 s о n J. F., Shaft torque measurement.
The latest type of electric torsionmeter for marine and industrial use,
AEJ Engng Rev., I960, v. 4', № 4.
14. R i d 1 e г A. V., Torsionmeter to record transient torque,
Engineer, 1963, v. 216, № 5618.
16. Nightingale R. A., Improvements in or relating to
torque meters, Брит, патент № 830699, 1960.
16. Lochery H. E., Applying the strain-gauge torque transdu-
cer, ISA Journal, 1961, v. 8, № 3.
17. Dahle O., The pressductor — a high-output load-cell for
heavy industry, ASEA Journal, 1059, v. 32, № 9.
18. Dahle O., The ring torductor-torque-gauge with out slip
rings, for industrial measurement and control, ASEA Journal, 1960,
v. 33, № 3.
116
19. Майоров М. М, Бесконтактный датчик крутящего мо-
мента, Тематический научно-техн. сб. ГОСИНТИ, «Измерительная
аппаратура и средства автоматизации процессов бурения», 1962.
20. В о n v а 1 е t М., Le torsiographe photoelastique, Journal de
la soaiete des ingenieurs de l'automobile, 1956, v. XXIX, № 10.
21. Иванов И. И., Способ производства отсчетов в динамо-
метрах для намерения вращающего момента, Авт. свид. СССР,
№ 41228, Вестник комитета по изобретательству, 1935, № 1 (123).
22. Стрелков С. Л., Фотоэлектрический прибор для опреде-
ления крутящего момента валов. Авт. свид. СССР, № 95158, Бюлл.
изобр., 1953, № 2.
23. Г и л е в И. К, Фотоэлектрический датчик для измерения
крутящего момента, «Заводская лаборатория», 1959, т. 25, № 1.
24. Коновалов М. Л., Рихтер В. А., Таранин В. Н.,
Фотоэлектрический прибор для измерения крутящих моментов, «Из-
мерительная техника», 1959, № 2.
25. Л у ч и н с к и й Н. Н., Фотоэлектрические вращательные ди-
намометры. «Механизация и 'Электрификация социалистического
сельского хозяйства», 1957, № 5.
26. Л у чи.н с к и й Н. Н., Стрелков С. Л., Дубров-
ский А. А., О днор астровый отражательный фотоэлектрический
датчик Крутящего момента, Авт. свид. СССР, № 111752, Бюлл.
изобр., 1958, № 3.
27. Л у ч и н с к и й Н. Н., Исследование фотоэлектрических ди-
намометров для знакопеременных крутящих моментов, Диссертация
ВИМ, 1958.
28. В а г 11 е у A. J., The use of polarized light for the measure-
ment of small angular displacement, Journal of Scientific Instruments,
1956, v. 33, № 1.
29. F e 1 d e г )H. В., Torque measurement apparatus, патент США,
№ 2978902, 1901, кл. 73—136.
30. R a k s h i t H., M u k h e r j e e S. C, Measurement of small
time-intervals in an electronic torquemeter, Electronic Engineering,
1958, v. 30, № 367.
31. Mukherjee S., Rakshit H., A remote control electronic
torquemeter, Indian J. Phys., 1963, v. 37, № 10.
32. V a n D e g r i f t Т. C, Torquemeter, патент США, № 2675700,
1954, кл. 73—136.
33. Юровецкий Е. Б., Черноруцкий Г. С, Прибор для
измерения угла закручивания, Авт. свид. СССР, № 102332, Бюлл.
изобр., 1956, № 1. '
34. М о о г е С. R., Transmission dynamometer, патент США,
№ 2582145, 1952.
35. Панафидин А. П., Левин Г. Н., Ефремов Н. Н.,
Виноградов Н. Н., Электрический измеритель крутящего мо-
мента, Авт. свид. СССР, № 94780, кл. 42, Бюлл. изобр., 1961, № 24.
36. Field J. F., Towns D. H., A torquemeter for testing gas
turbine components, Electronic Engineering, 1954, v. 26, 321.
37. Fischer S., Torzni dynamometr na mereni velkych otacek
a vykony, Strojirenstvi, Г962, t. ;Г2, № 5.
38. Тимоков Г. В., Смык С. П., Электрический измеритель
крутящега момента на валу быстроходной турбины, «Известия
ВУЗ, Приборостроение», 1961, № 1.
39. Fitch М. Е., Overspeed-overtorque detection by pulse timing,
Electrical Manufacturing, 1959, № 6.
117
40. Фролов Л. Б., Электронный торсиометр для измерения
крутящего момента быстроходных двигателей, сб. ГОСИНТИ, 1964,
2-64-1105/23.
41. Integrating power meter, The Engineer, 1960, v. 209, № 5434.
42. Иориш Ю. И., Измерение вибраций, Машгиз, 1956.
43. П и с а р е н к о Г. С, Колебания упругих систем с учетом
рассеяния энергии в материале. Изд-во АН УССР, 1955.
44. Г о р л и н Г. Е., С т е ф а н с к и й В. М., Некоторые особен-
ности технологии изготовления упругих динамометров, «Приборо-
строение», 1962, № 8.
45. Drew Denis A., Slip rings-contacting types, Strain Gage
Reading, 1963, v. 6, № 4.
46. 'К о p о т e н к о Б. E., Гриднева И. А., Мамон-
тов В. Ф., Применение индукционного токосъема при измерении
механических величин, «Приборы и техника эксперимента», 1958,
N° 3.
47. Eiine Torsionsmesseinrichtung fur lange, rotierende Wellen mit
transistorbestucktem AM-FM-Sender, Elektronik, 1958, № 6.
48. Поляков H. П., Влияние формы кривой напряжений на
показания электронных фазометров, «Приборы и техника экспери-
мента», 1959, № 2.
49. В г е n d е s Н., Ein neues Drehmoment-Messgerat, Zeitschrift
fur Instrumentenkunde, 1Ю58, Bd 66, № 4.
50. Горский Ю. M., Тихомиров В. К., Магнитоимпульс-
ный метод регистрации крутящего момента на валу электрических
и других машин, «Вестник электропромышленности», 1959, № 9.
51. Цветков В. В., Фазовые корреляционные свойства сигна-
лов и гауссовых помех в функциональных фазовых системах, «Ра-
диотехника», 1958, № 4.
52. Б о н ч - Б р у е в и ч А. М., Широков В. И., Некоторые
вопросы фазовых измерений. Журнал технической физики, 1955,
т. XXV, вып. 10.
53. Мей ер А. А., Солдатов Е. А., Фазовращатель с по-
стоянной амплитудой выходного сигнала, «Приборы и техника экс-
перимента», 1962, № 3.
54. В и н о г р а д о в а Н. Н., Осциллографический метод записи
скручивающих моментов с применением резонаторов сантиметрового
диапазона, Тр. Моск. ин-та инженеров ж/д транспорта, 1960,
вып. 127.
55. Левшина Е. С, Новицкий П. В., Туричин А. М.,
Индуктивные бесконтактные торсиометры, «Измерительная техни-
ка», 1959, № 2.
5бГ Dahle О., Means for measuring a torsional stress in a shaft
of magnetostrictive material, патент США, № 3011340, 1961,
кл. 73—136.
57. Поляков Н. П., Методические погрешности цифровых фа-
зометров с постоянным измерительным временем, «Приборы и тех-
ника эксперимента», 1959, № 3.
58. Левшина Е. С, Новицкий П. В., Туричин А. М.,
ский информационный бюлл. Ленингр, политехнического ин-та, «Из-
мерительная техника», 1959, № 3.
Конструкции и схемы индуктивных
ОГЛАВЛЕНИЕ
Введение . 3
Глава первая. Методы измерения крутящего момента
1. Классификация и общая характеристика устройств
для измерения крутящего момента *>
2. Механические приборы для измерения крутящего
момента • 12
3. Гидравлические преобразователи угла закручива-
ния вала 16
4. Оптические торсиометры 17
5. Измерение угла закручивания торсионного вала
изотропными преобразователями 18
6. Струнные преобразователи для измерения усилий
на вращающемся валу 21
7. Резонаторные преобразователи для измерения кру-
тящего момента 22
8. Приборы индуктивного и емкостного методов из-
мерения момента 23
9. Преобразователи крутящего момента с тензометра-
ми сопротивления 29
10. Магнитоупругие торсиометры 31
11. Фотоупругие преобразователи крутящего момента 35
12. Фотоэлектрические приборы для измерения крутя-
щего момента 37
13. Нониусные и разностные преобразователи угла
закручивания 41
14. Временные методы измерения крутящего момента 43.
15. Приборы фазового метода измерения крутящего
момента 45
16. Торсиографы .......... 56
'Глава вторая. Упругие элементы приборов для измере-
ния крутящего момента 60
17. Конструкции упругих элементов. Понятие о крити-
ческой скорости вращения 60
18. Динамические характеристики упругих элементов 66
19. Погрешности упругих элементов 76
Глава третья. Передача информации с вращающегося
вала , 79
20. Токосъемники 80
21. Особенности работы бесконтактных крутильных тор-
сиометров 83
22. Градуировка бесконтактных торсиометров . . 101
23. Влияние помех в приборах фазового метода изме-
рения момента 105
Глава четвертая. Методические указания по расчету
и проектированию приборов для измерения крутя-
щего момента 109
Литература , .... 116
119
«БИБЛИОТЕКА ПО АВТОМАТИКЕ»
ГОТОВЯТСЯ К ПЕЧАТИ
Абакумов В. Г. и Петренко А. И., Устройства на видиконе для
ввода графиков в электронные вычислительные машины.
Андреев Г. И. и Найдис В. А., Системы постоянного тока
с кремниевыми выпрямителями (Электроприводы с полупроводни-
ковым управлением).
А ранний Г. А., Жемеров Г. Г., Эпштейн И. И., Тиристорные
преобразователи частоты для регулируемых электроприводов.
Бамдас А. М. и др., Ферромагнитные делители частоты.
Бессонов А. А. и Сиваков В. А., Автоматические индикаторы
отказов.
Бруоз П., Язык АЛГОЛ и его применение к задачам исследо-
вания операций (перевод с французского).
Бруфман С. С, Цифровые элементы сравнения.
Видинеев Ю. Д., Автоматическое непрерывное дозирование
жидкостей.
Гинзбург С. А., Математическая непрерывная логика и изобра-
жение функций.
Гринберг Л. С, Многообмоточные потенциометры.
Давидов П. Д., Аналитический расчет импульсных тепловых ре-
жимов полупроводниковых приборов.
Долкарт В. М. и др., Метод монтажа навивкой.
Дубровский А. X., Кочетова Л. И., Бесконтактные логические
элементы серии ЭЛМ.
Исмаилов Ш. Ю., Автоматические приборы с шаговыми двига-
телями.
Коган В. Г., Кочубиевский Ф. Д., Шугрин В. М., Нелинейные
системы с тиристорами.
Карибский В. В., Пархоменко П. П. и Согомонян Е. С, Техни-
ческая диагностика объектов контроля.
Карпов В. И., Полупроводниковые устройства стабилизации на-
пряжения и тока.
Касаткин А. С. и Кузьмин И. В., Оценка эффективности авто-
матических систем контроля.
Клюев А. С, Двухпозиционные автоматические регуляторы и их
настройка.
Комолое В. П. и др., Параметроны в цифровых устройствах.
Кондюкова Е. Н. и Редькин Б. Е., Аналого-цифровые преобра-
зователи систем автоматического контроля.
Куликовский К. Л., Электрометрические преобразователи на-
пряжения.
Куликовский Л. Ф., Лихтциндер Б. Я. и Бровкин Л. А., Авто-
матические приборы с бесконтактными компенсирующими преобра-
, зователями.
Лебедев М. Д., Состояние и развитие автоматических систем
контроля.
Лемберг М. Д., Релейные системы пневмоавтоматики.
Маграчев 3. В., Вольтметры одиночных импульсов.
Мясникова Е. П., Объективное распознавание речи.
Нетребенко К. А., Компенсационные схемы амплитудных вольт-
метров и указателей экстремума.
120