







Author: Варфоломеев В.И. Копытов М.И.
Tags: оружие вооружение артиллерийско-техническое имущество бронированные машины и специальные средства транспорта стрелковое оружие личное оружие боеприпасы и боевые отравляющие вещества управляемые и неуправляемые ракеты и реактивные снаряды ракетная техника
Year: 1970




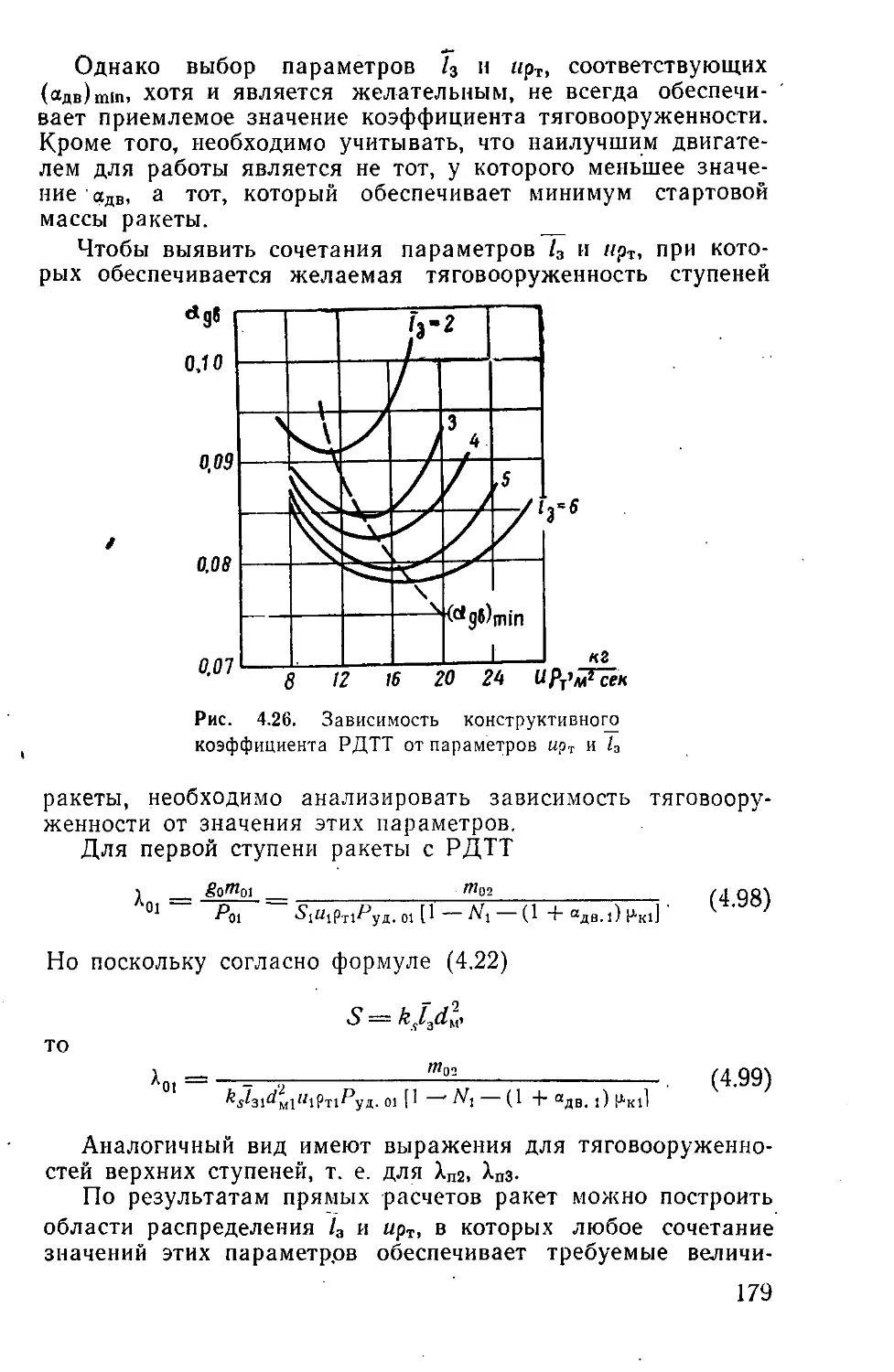
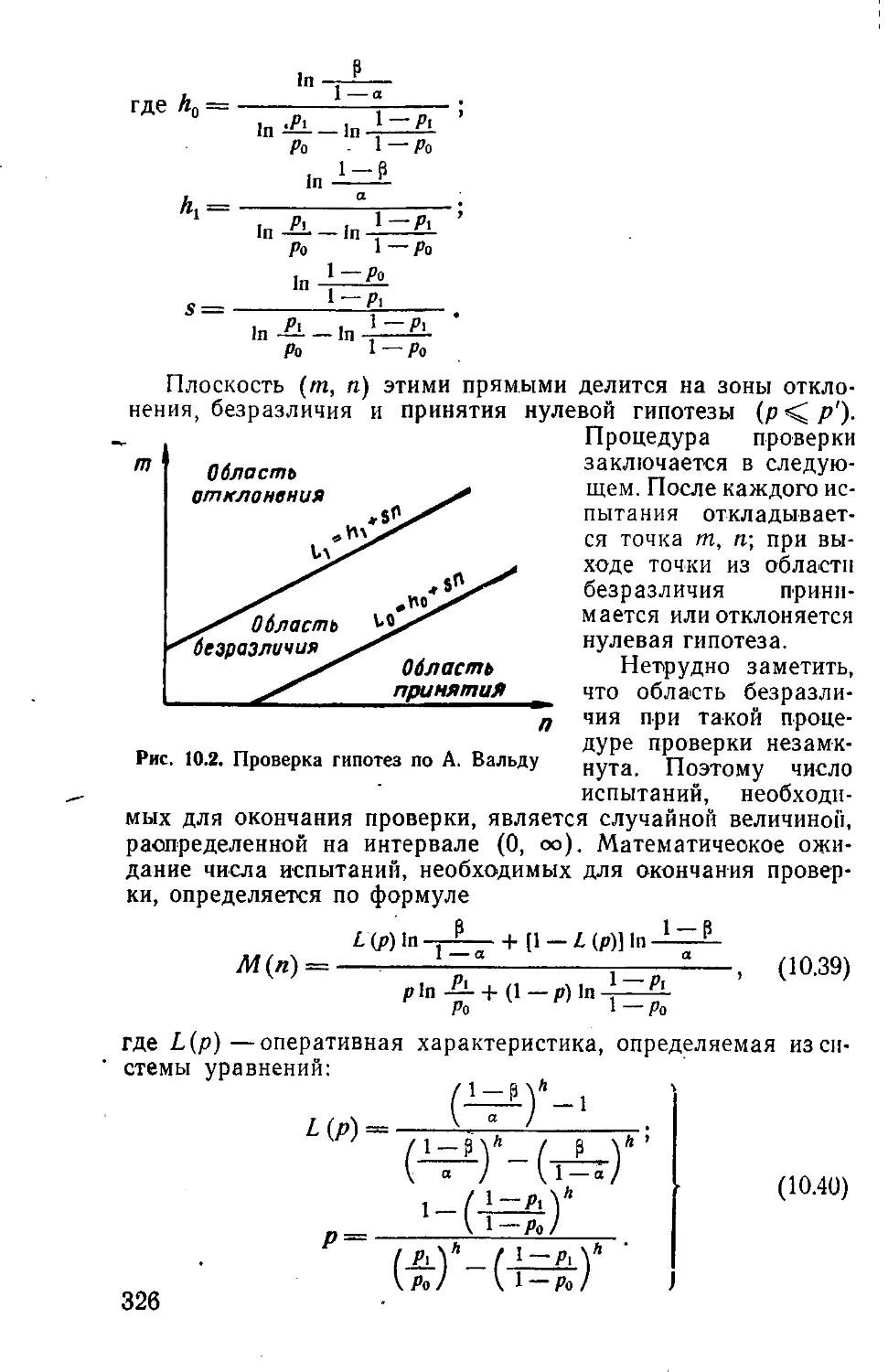
f *И ИСПЫТАНИЕБАЛЛИСТИЧЕСКИХРАКЕТ
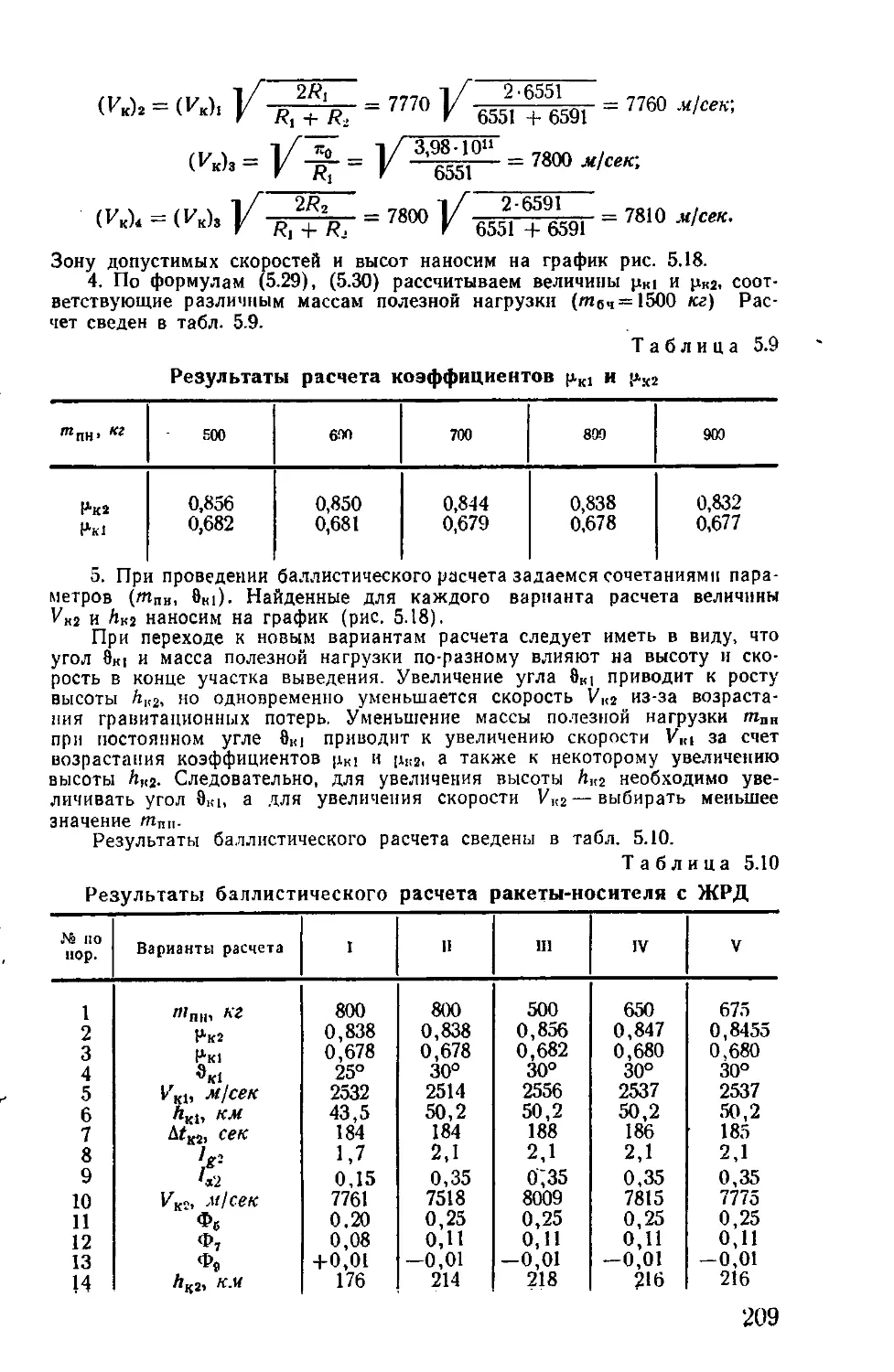
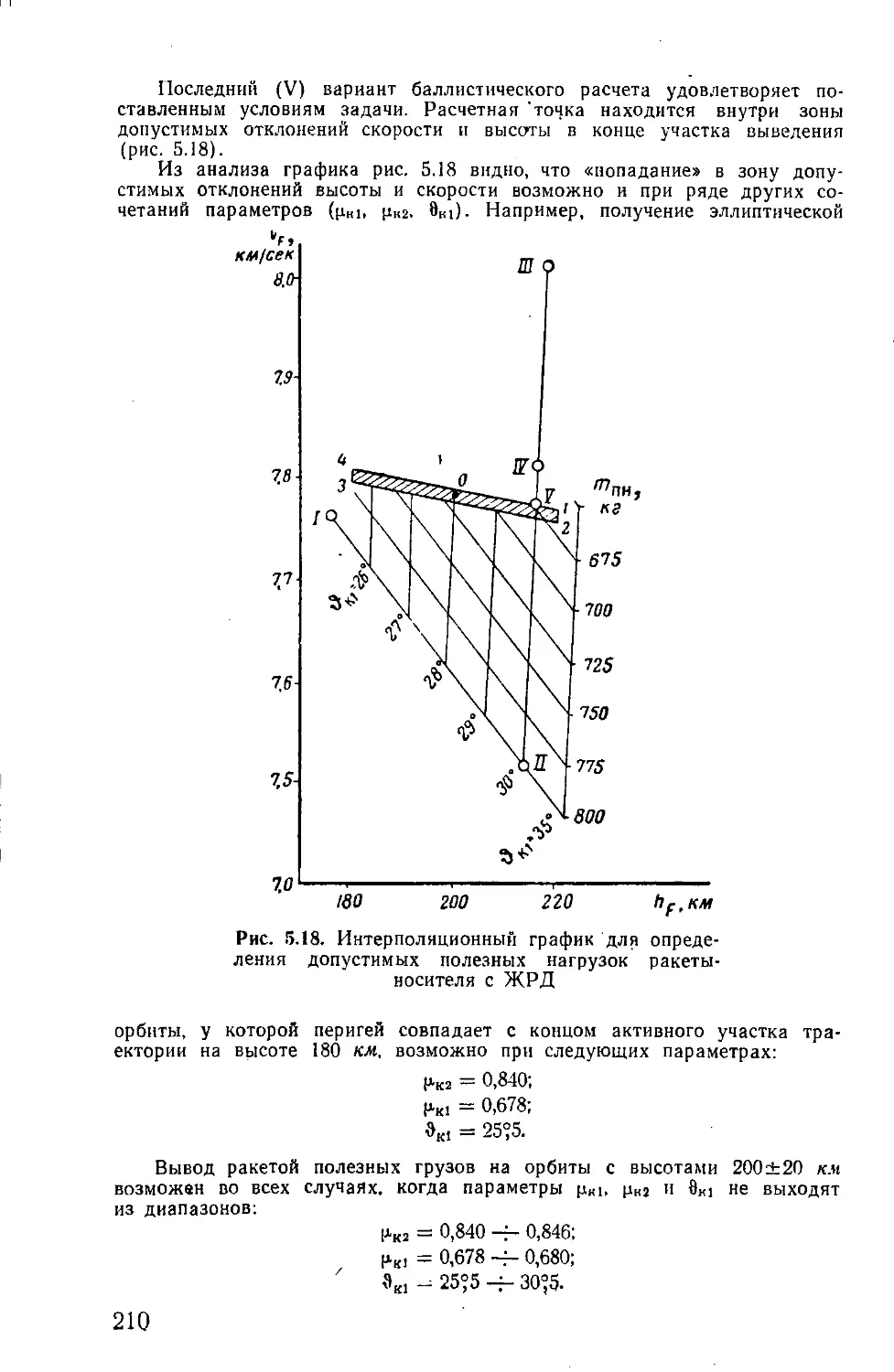
ПРОЕКТИРОВАНИЕ
И ИСПЫТАНИЯ
БАЛЛИСТИЧЕСКИХ
РАКЕТПод р I* д п к ц и е IIВ. И. lliiji(|iu.'ioMcc‘iiii н М. И. КоиытоваОрдена Трудового Красного Знамени
ВОЕННОЕ ИЗДАТЕЛЬСТВО
МИНИСТЕРСТВА ОБОРОНЫ СССРМОСКВА — 1970
355.71П79УДК 623.451.81179 Проектирование и испытания баллистических ракет. М.,
Воениздат, 1970.392 с. 6400 экз. 1 р. 27 к.В книге рассматриваются методы приближенного проектирования балли¬
стических ракет, используемые при разработке тактико-технических требоиа-
milt к ракетам, при предэскизном проектировании, а также при проведении
поископых исследовании с целью сравнительной оценки свойств различных
ракетных систем. Излагаются методы обработки-результатов испытаний ракет
н их лгрсгатоп, проводимые в период опытной отработки ракетных комплек¬
сов; методы оптимизации основных характеристик ракетного комплекса (тип
гтлргп, диапазон дальностей, пуска, параметры боевой части и системы
урриплсннн, жсплуптационная надежность ракет, боеготовность ракетного
комплекса в т. п.). При «том используются аппарат теории игр и сетевые
графикиКнига рассчитана на специалистов, работающих и области ракетной тех¬
ники, я также на слушателей высших учебных заведений.1-12-4&82-ВВ355.71
ПРЕДИСЛОВИЕ11есмотря на выдающиеся достижения в области разви-
1114 ракетной техники, Советский Союз последовательно вы-
мунает за всеобщее полное разоружение, за мир во всем
мире.Офицеры и генералы Вооруженных Сил СССР должны
iifпрерывно совершенствовать свои знания в области ракет¬
ного оружия. Настоящая книга поможет изучающим ракет¬
ную технику освоить теоретические основы проектирования
и ш'пытаний ракет и ракетных комплексов.Главы и параграфы книги написаны кандидатами техни¬
ческих паук М. Л. Буровым (§§ 1.5, 2.1 и 2.4), В. И. Вар¬
фоломеевым (Введение, §§ 1.2, 1.3, 2.5, 3.1, 3.3, 5.1, 5.3 и 5.6),
ликторами технических наук Л. И. Волковым (§ 2.6 и главы 10,
И, 12), М. И. Копытовым (глава 4), А. И. Силантьевым
($§ 1.4, 3.2, 5.2 и 5.4), А. М. Синюковым (§§ 2.2 и 2.3), кан¬
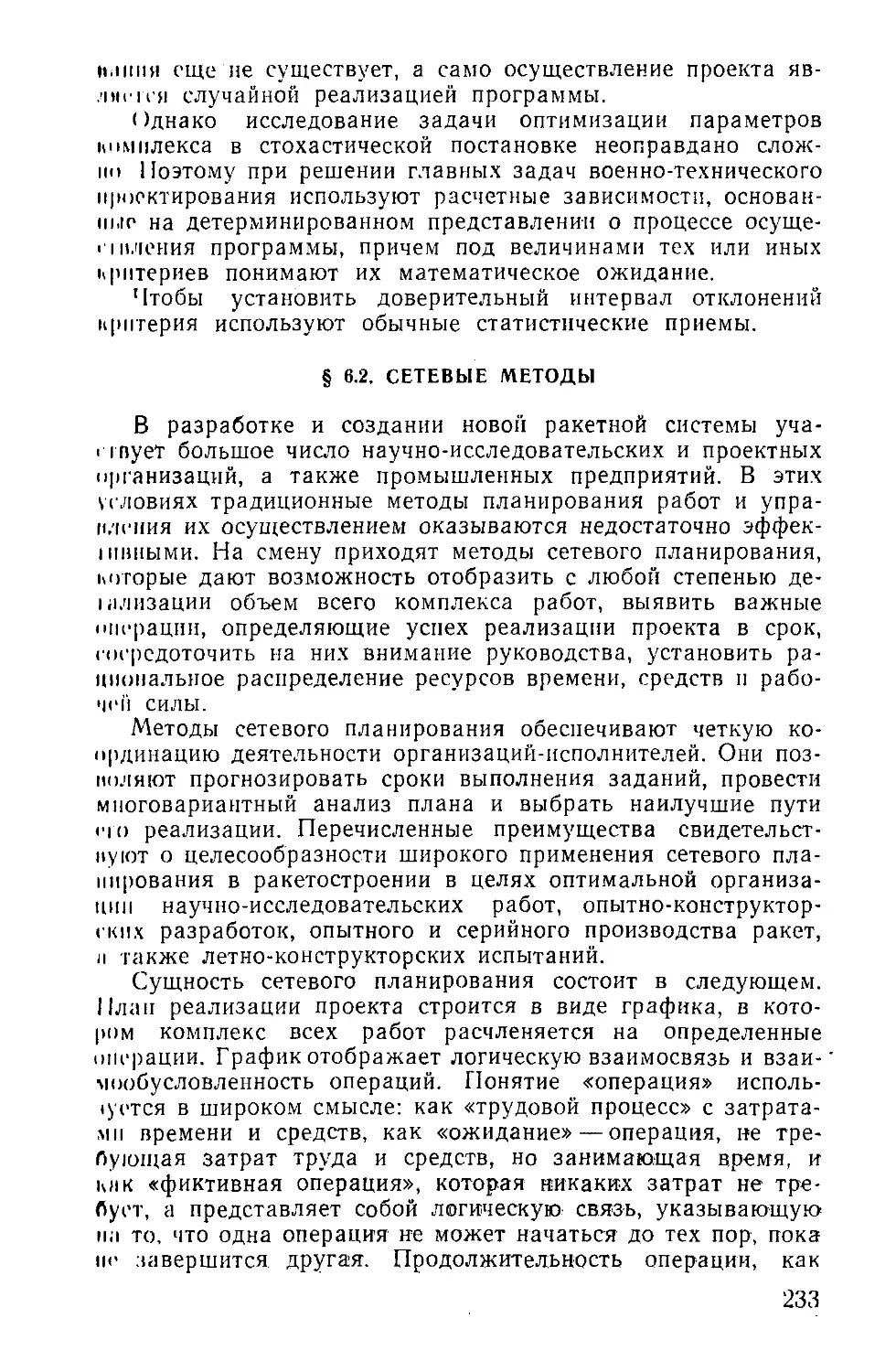
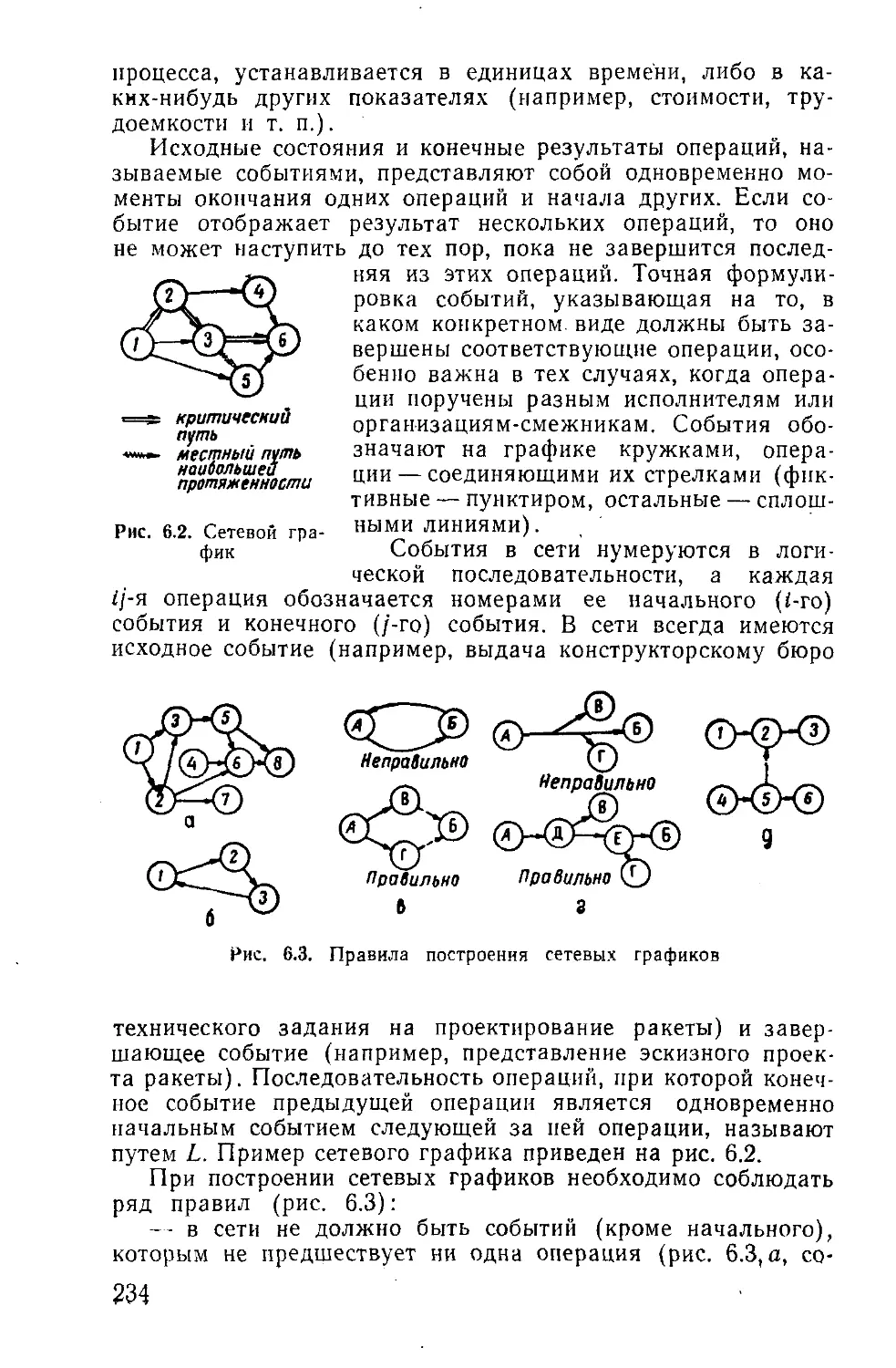
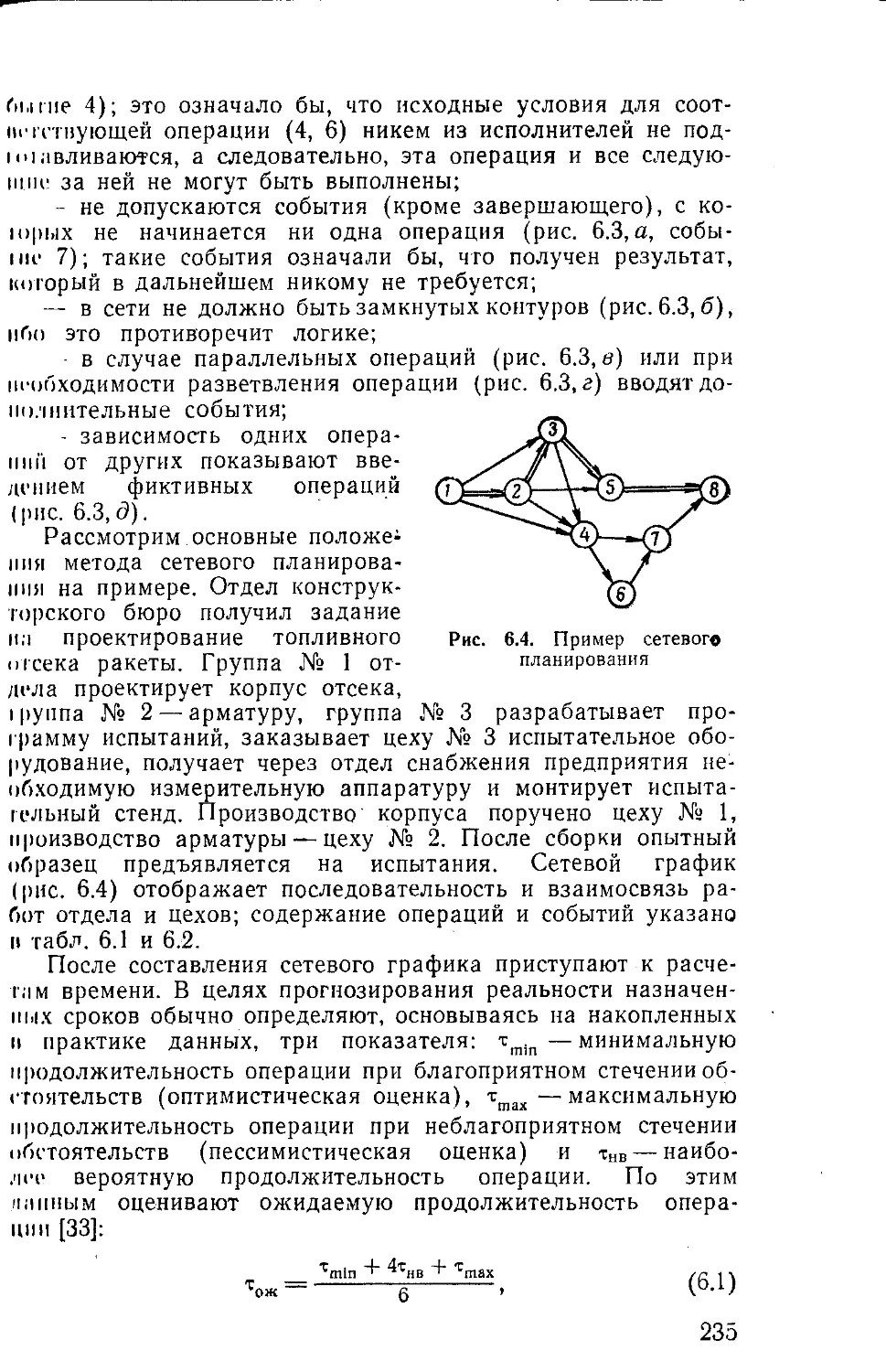
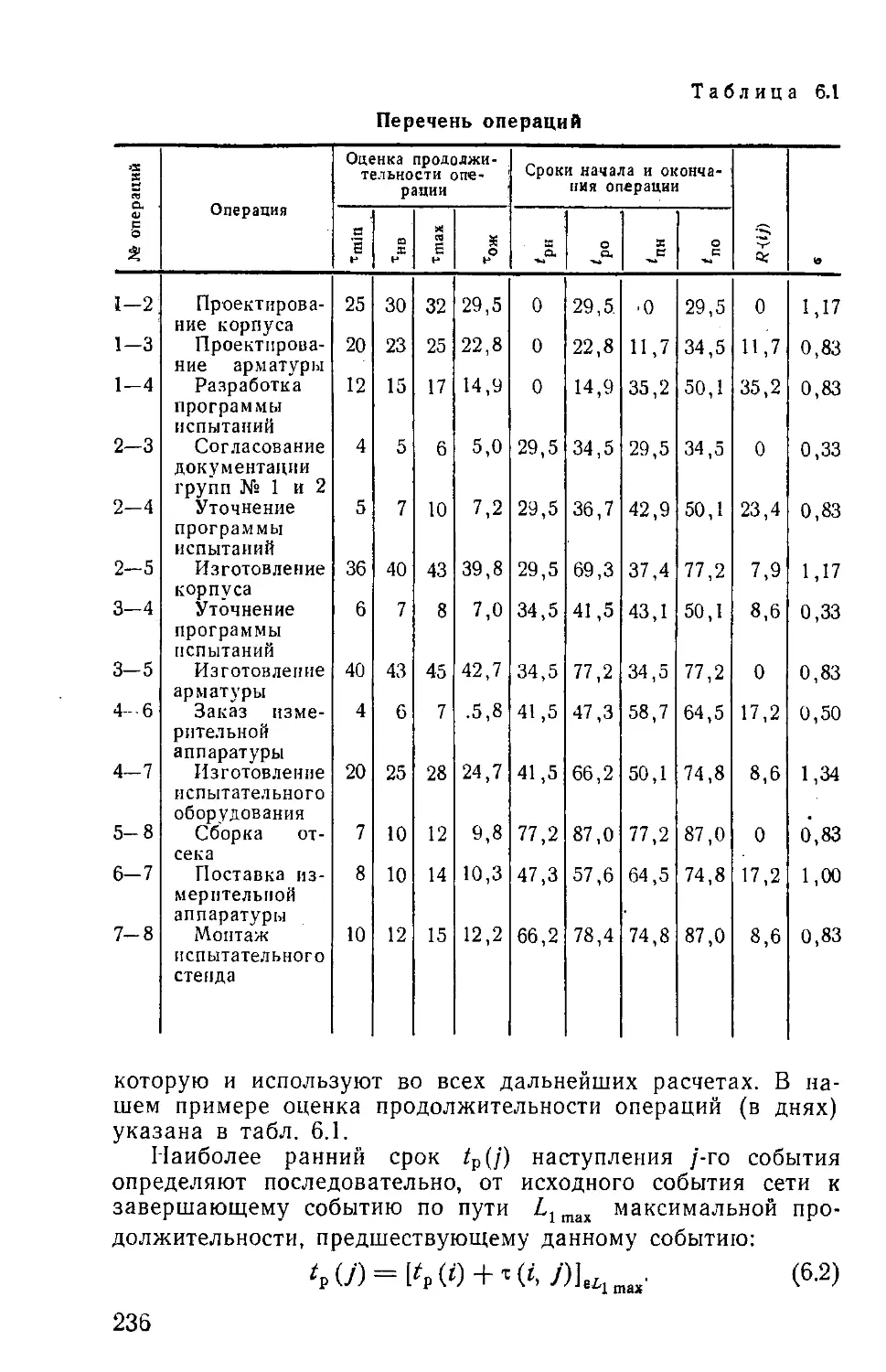
дидатом технических наук А. М. Шишкевичем (§§ 6.2, 6.3
и D.2) и доктором технических наук Д. Н. Щеверовым (§§ 1.1,
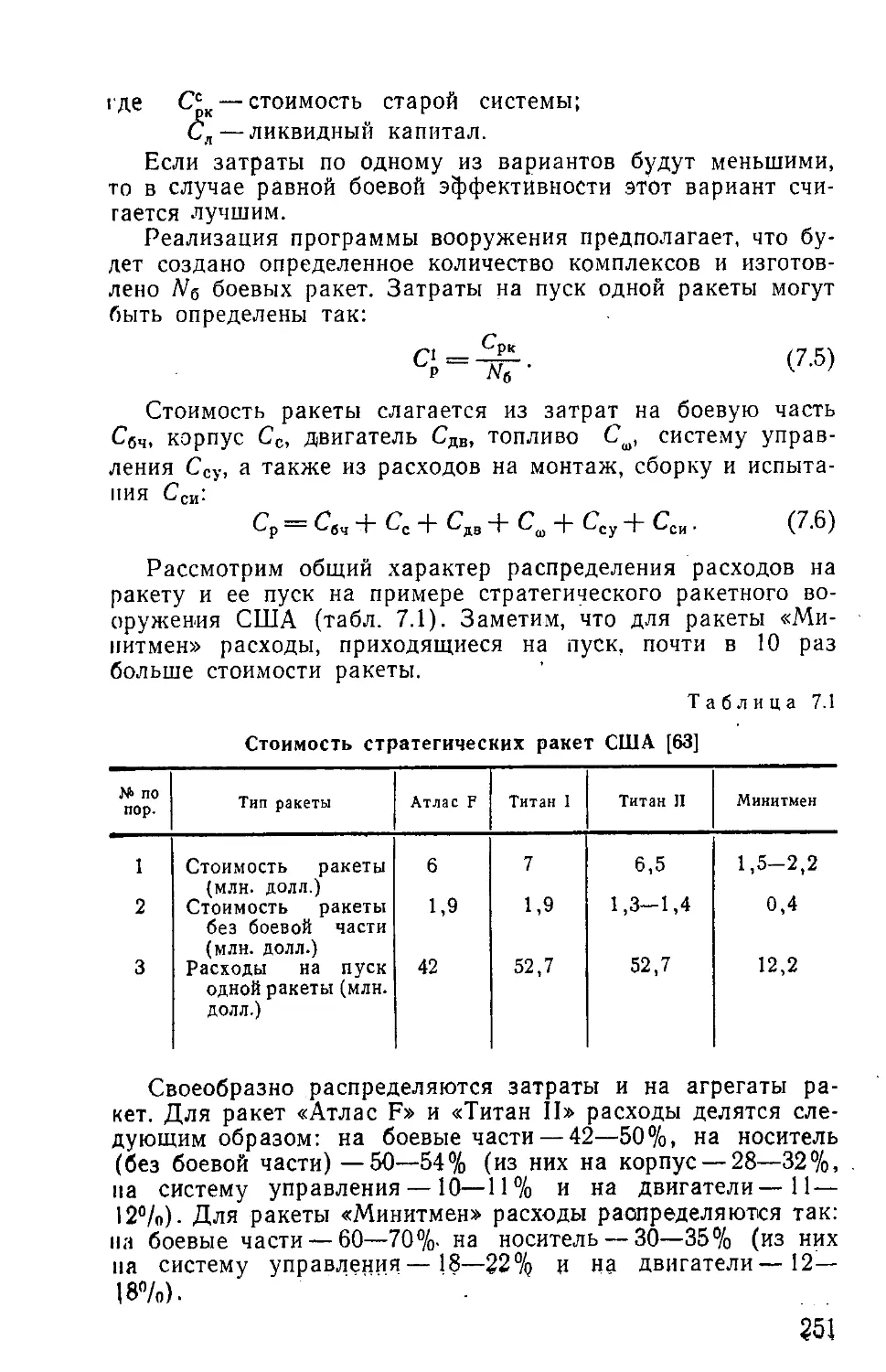
Г..Г), 6.1, 9.1 и главы 7 и 8).1
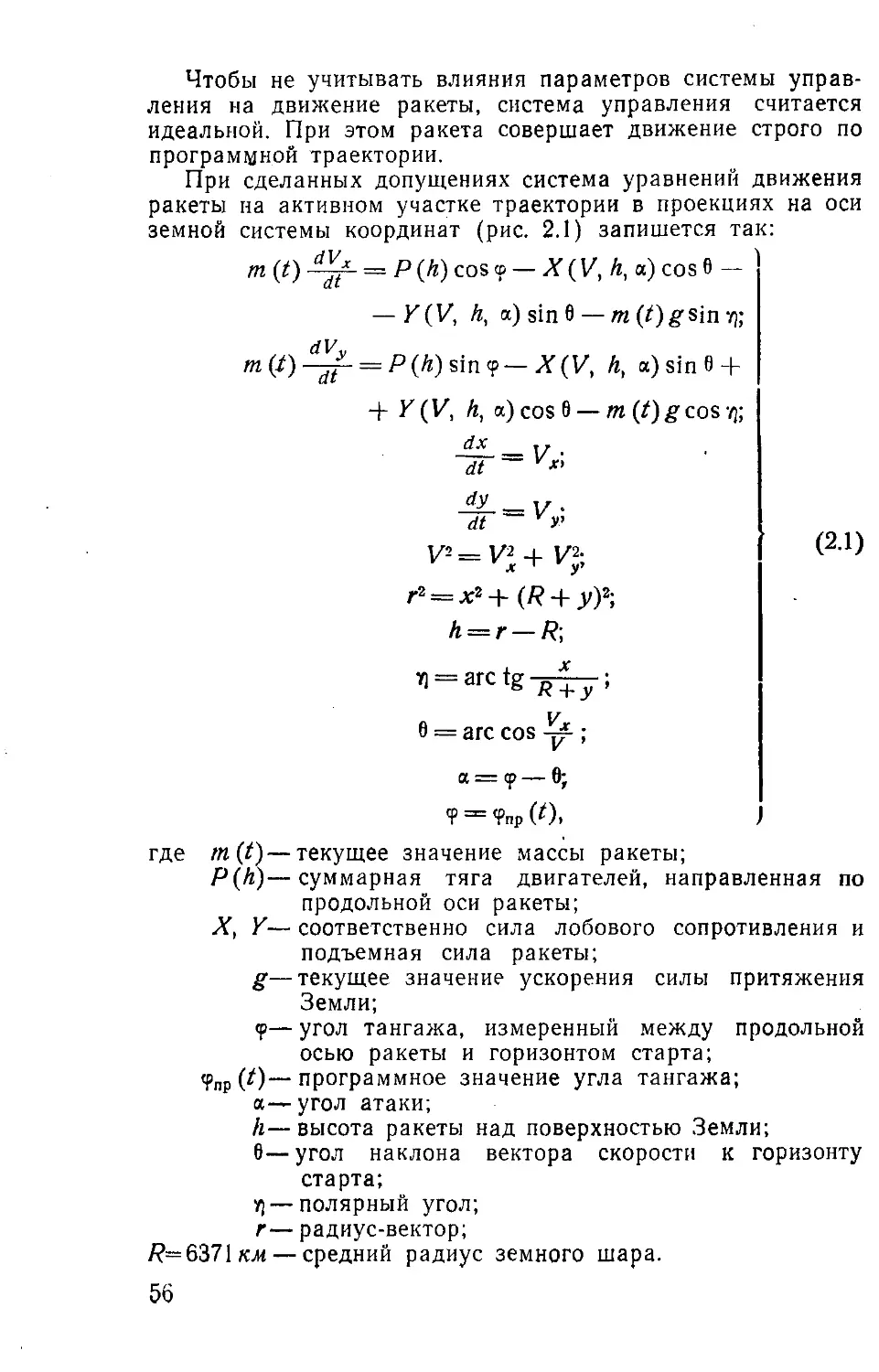
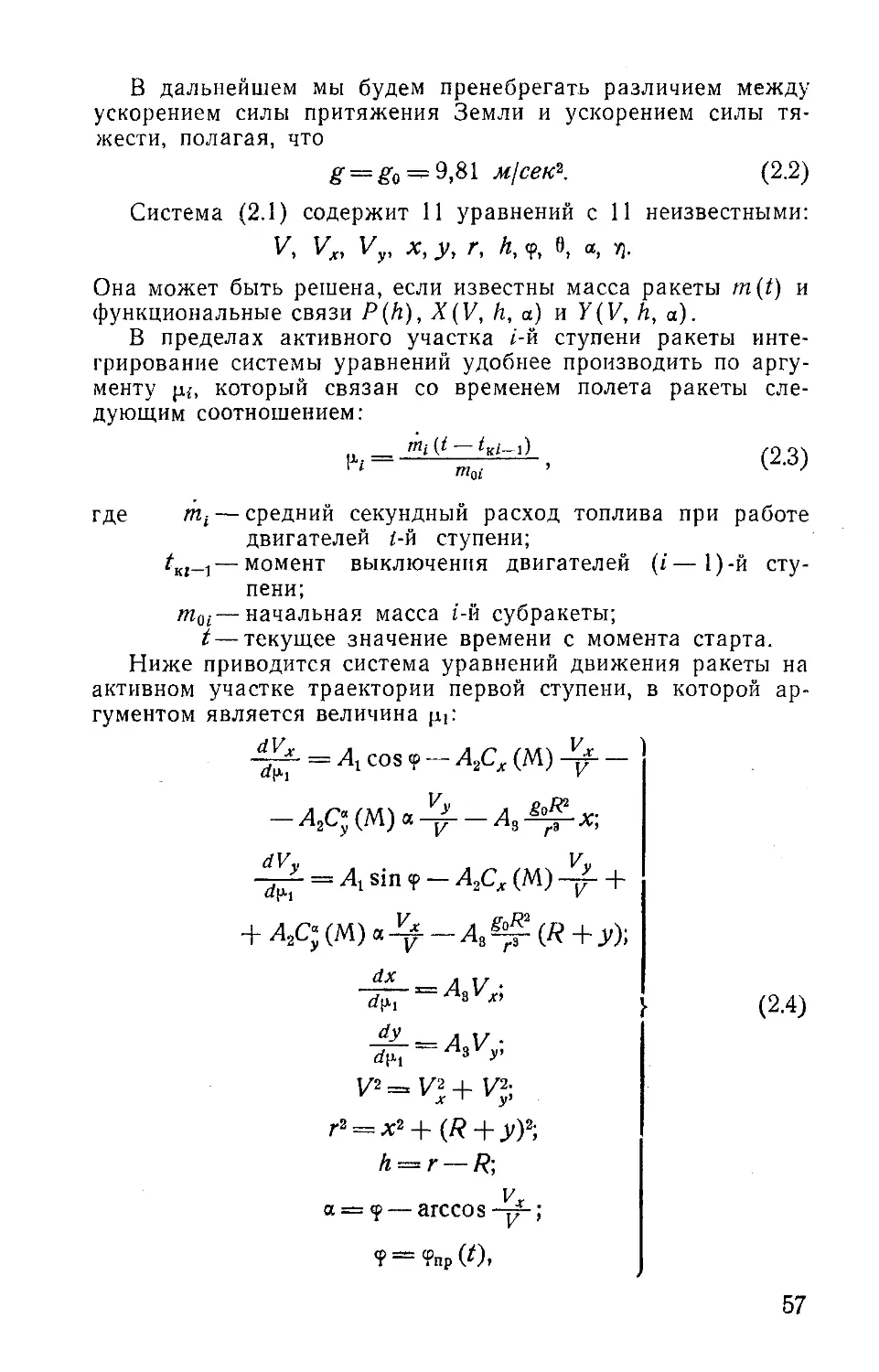
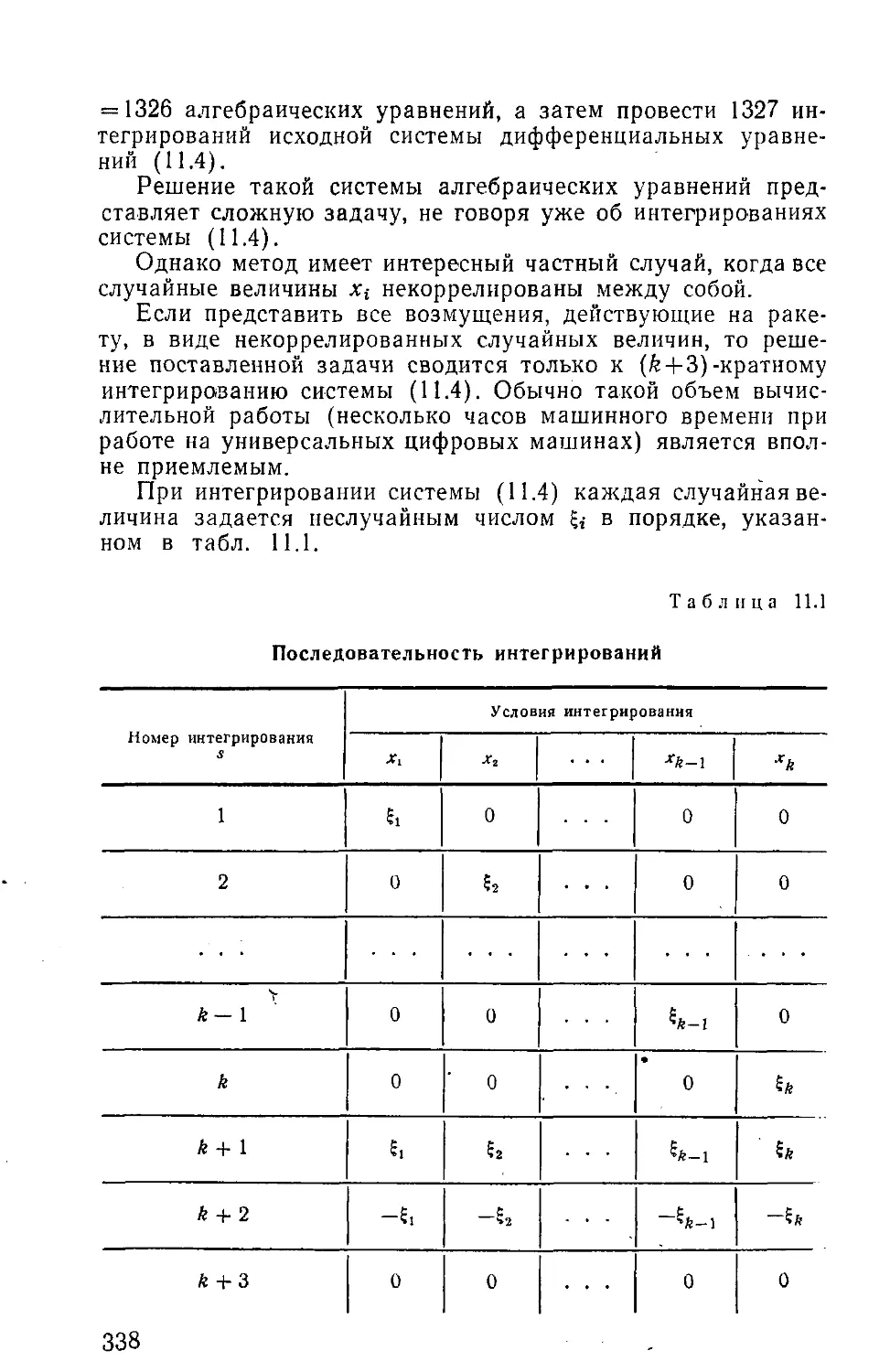
ВВЕДЕНИЕУправляемые ракеты, состоящие на вооружении совре¬
менных армии, нрииято делить на четыре класса:I) управляемые баллистические ракеты (УБР) или раке-
11.1 h.iiHVH «1емли к'мля», запускаемые с поверхности зем¬
ли н hi мори н предназначенные для поражения наземных и
мирных целей;ичнппые управляемые ракеты или ракеты класса «зем-
|н но мух» и противоракеты, запускаемые с поверхности зем-
III или мори н предназначенные для поражения целей на раз¬
личных высотах (н том числе боевых частей УБР);:1) 1iHi1111111111m1.1i' управляемые ракеты или ракеты класса• но 1,1 у\ и'млн», шиускнемые с самолетов и предназначенные
;i.'tн 1 н>|in /isс 1111 и ini tt-Min.ix и морских целей;■I) 11H11 ;i 1 ui(>1111 ыс управляемые ракеты или ракеты класса
«жпдух жмдух», запускаемые в воздухе и предназначенные
л ли поражения воздушных целей.Управляемые баллистические ракеты в свою очередьпод-
|>н щеляются па тактические, оперативно-тактические и стра-
ич ические.И настоящей Книге рассматриваются вопросы проектиро¬
вании и испытаний управляемых баллистических ракет, кото¬
рые могут быть с успехом использованы при проектировании
и испытаниях стратегических, оперативно-тактических и так-
шчеоких ракет.Управляемая баллистическая ракета является составной
чпетыо ракетного комплекса *, который представляет собой
еонокупность ракет, агрегатов наземного оборудования, пу¬
сковых установок, стартовых сооружений, линий связи и
средств управления. Все ракетные комплексы одного типа
об недипяются в ракетную систему.* Термин «ракетный комплекс» был введен в работе [29] примени¬
тельно к зенитным ракетным системам-. В данной книге он используется
для баллистических ракет.5
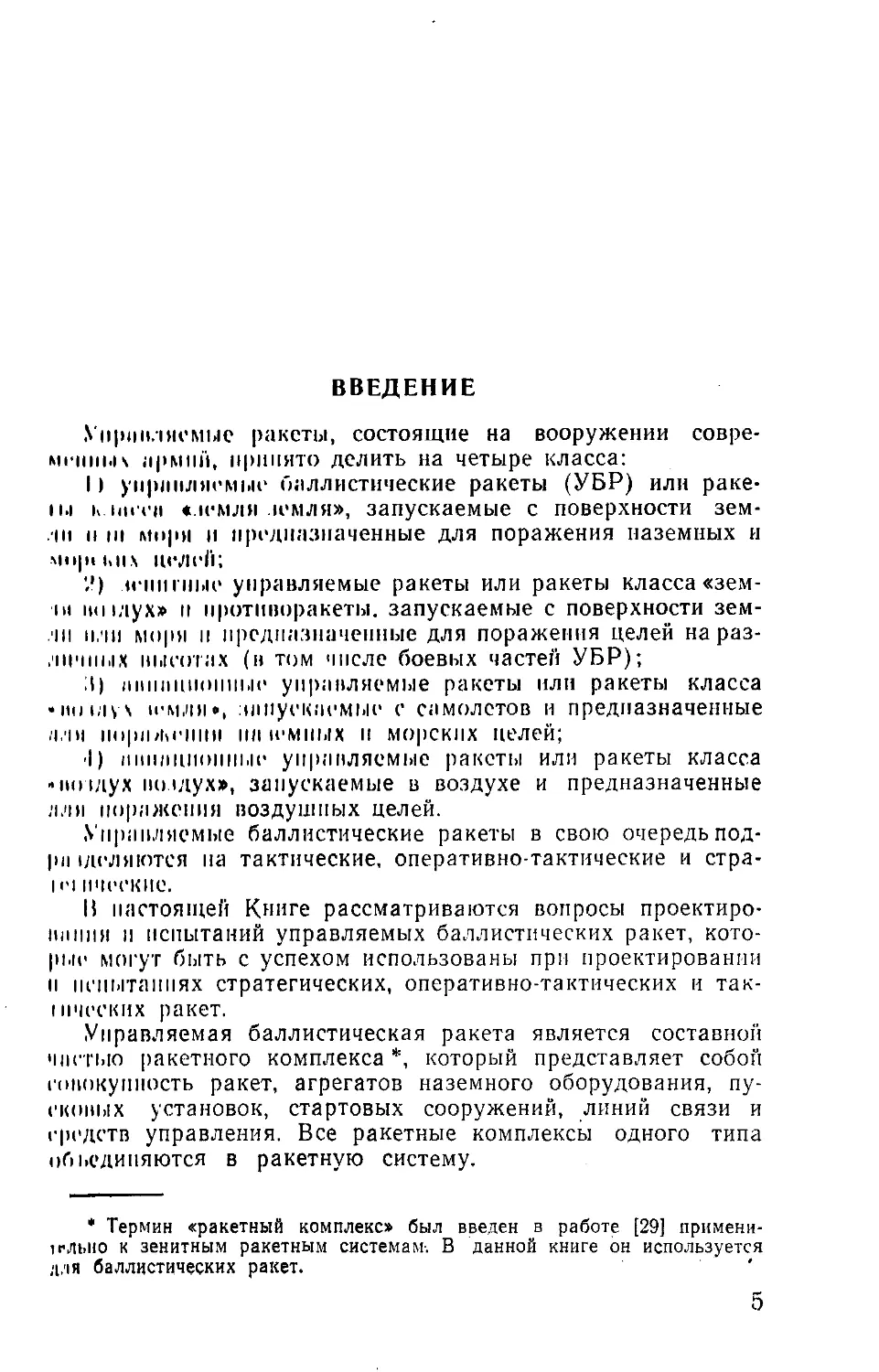
Процесс разработки и создания новой ракетной системы
состоит из нескольких этапов. Например, программы созда¬
ния баллистических ракет стратегического назначения в США
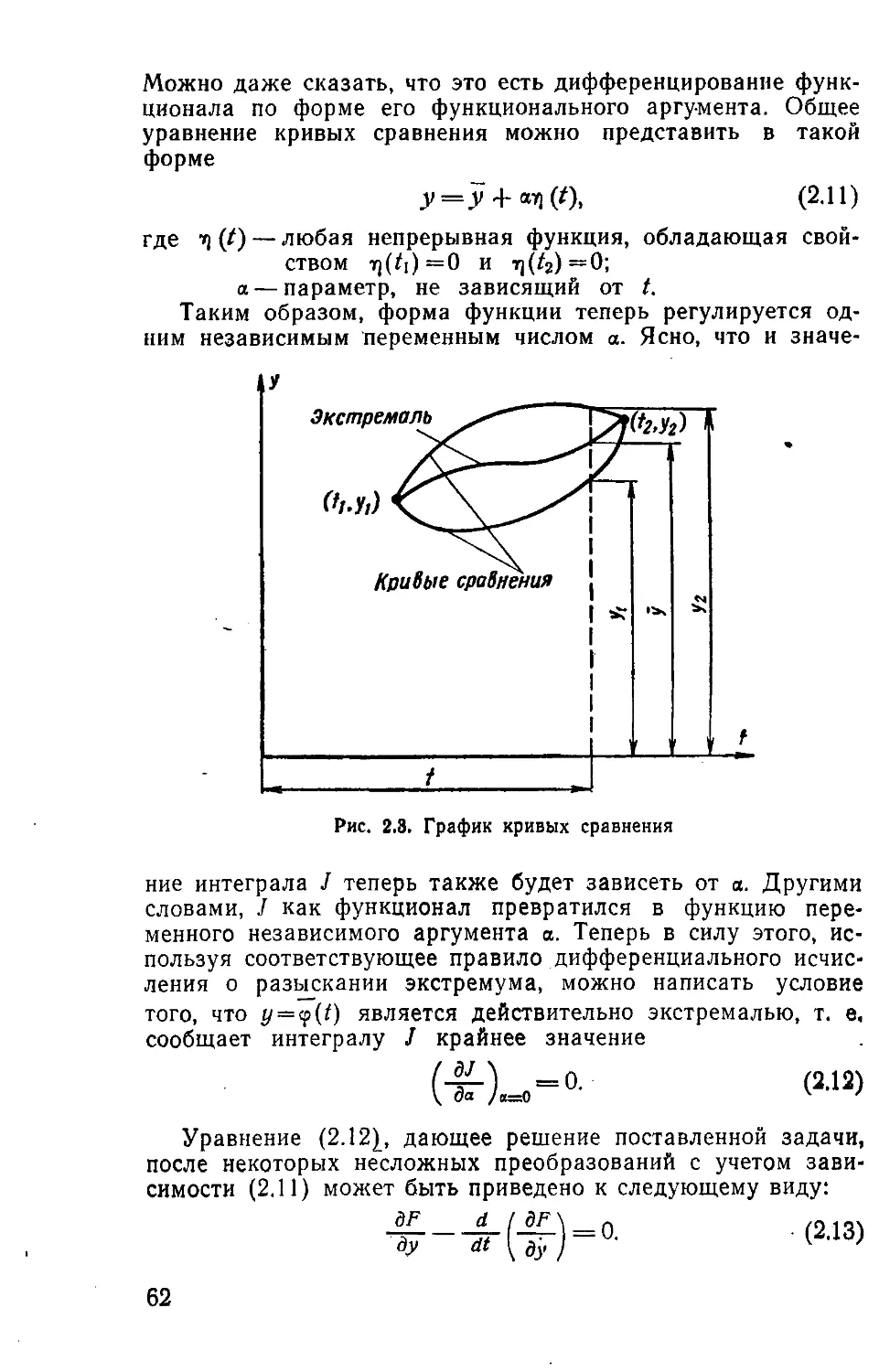
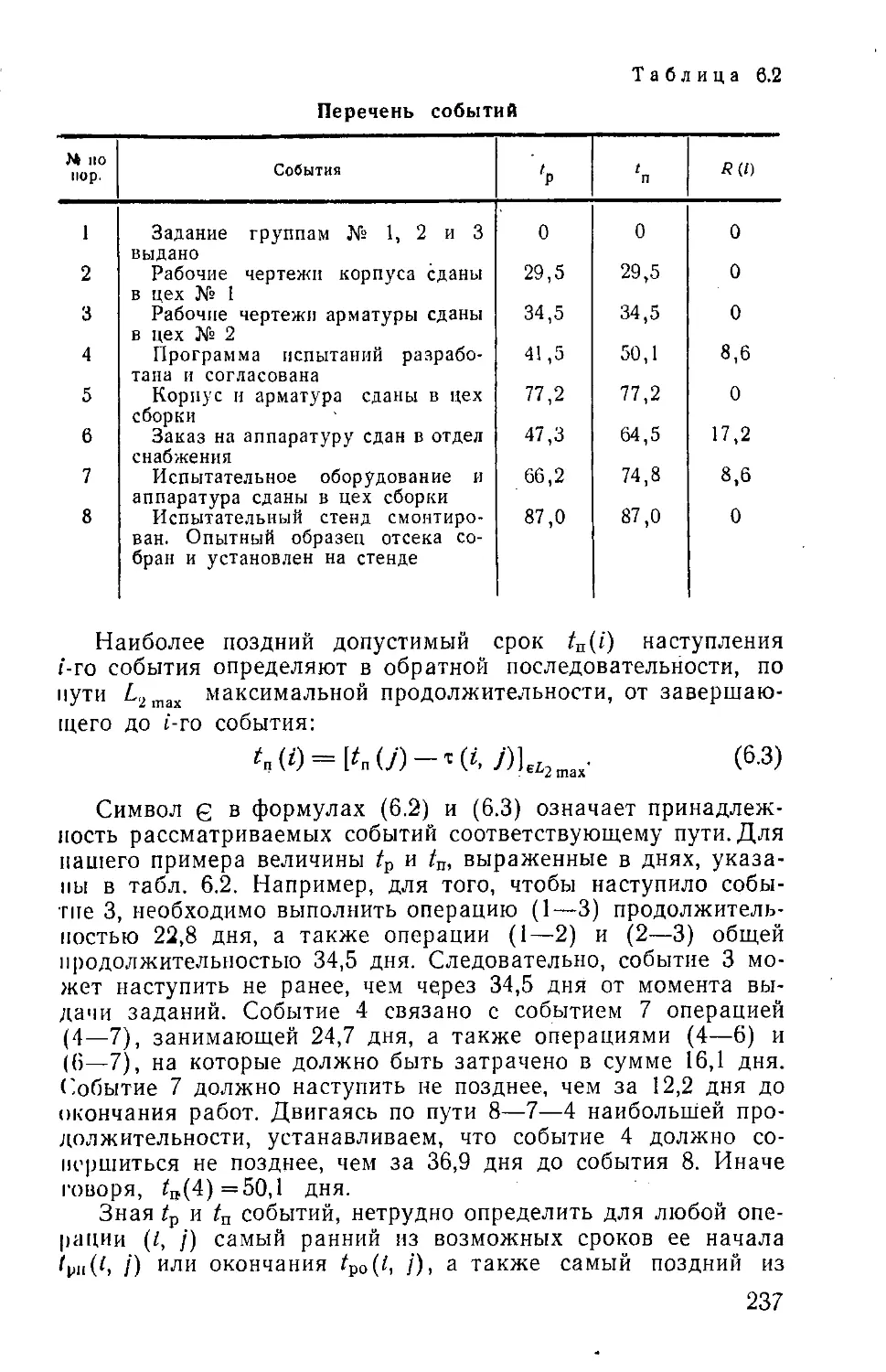
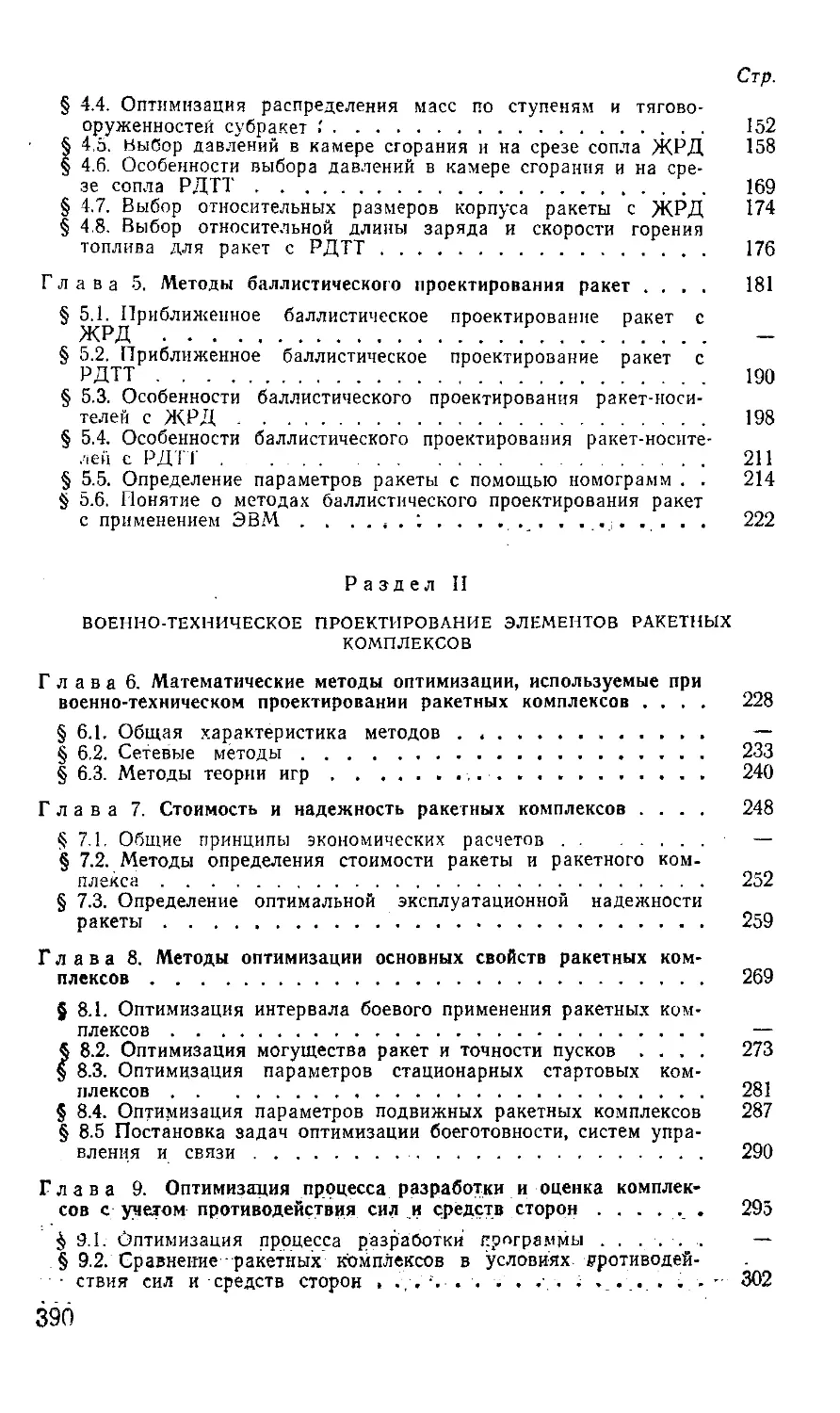
[24] предусматривают следующие этапы работ (рис. 1):1) установление потребности в новой ракетной системе и
разработку тактико-технических требований к ней (пред-
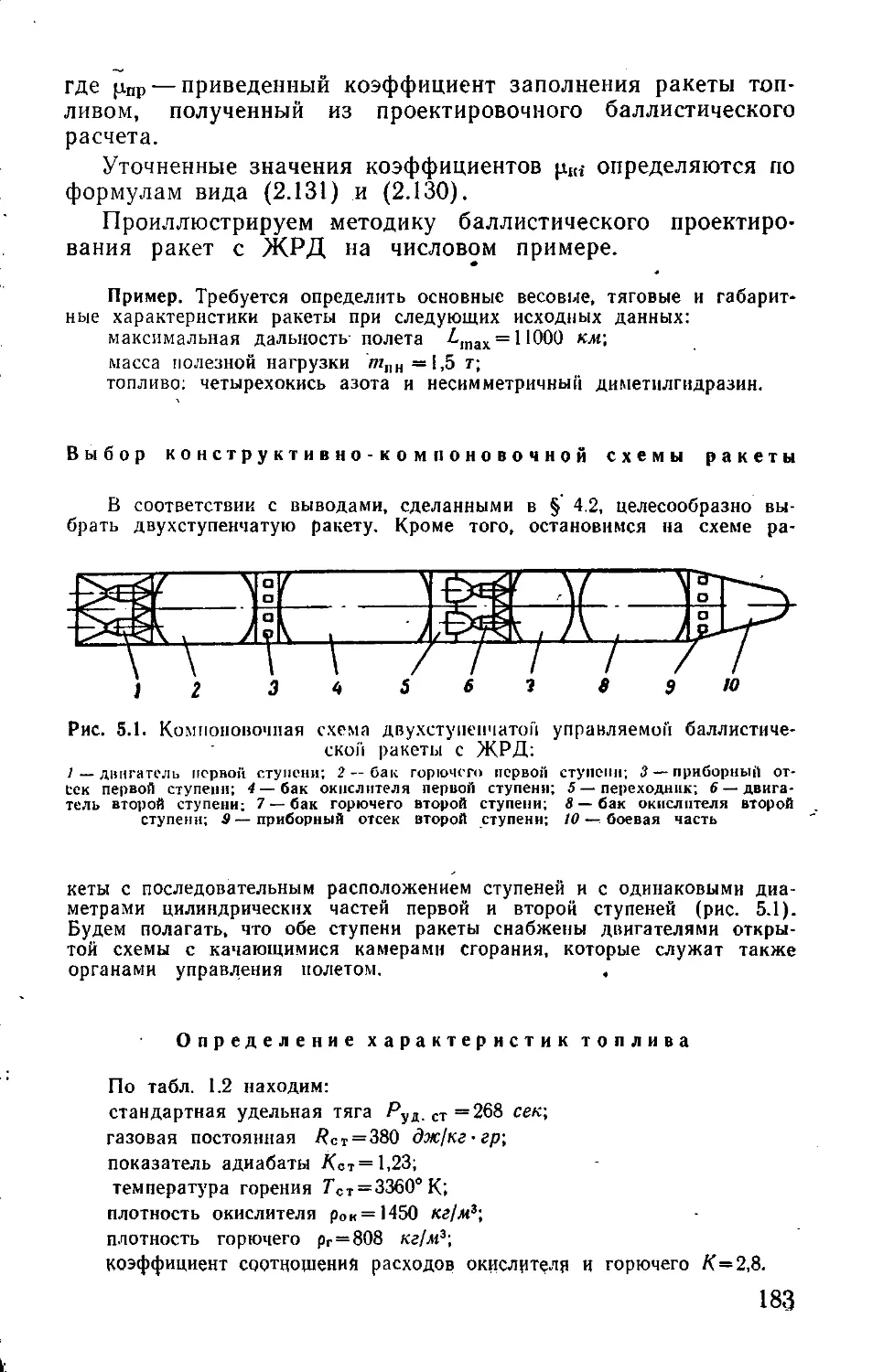
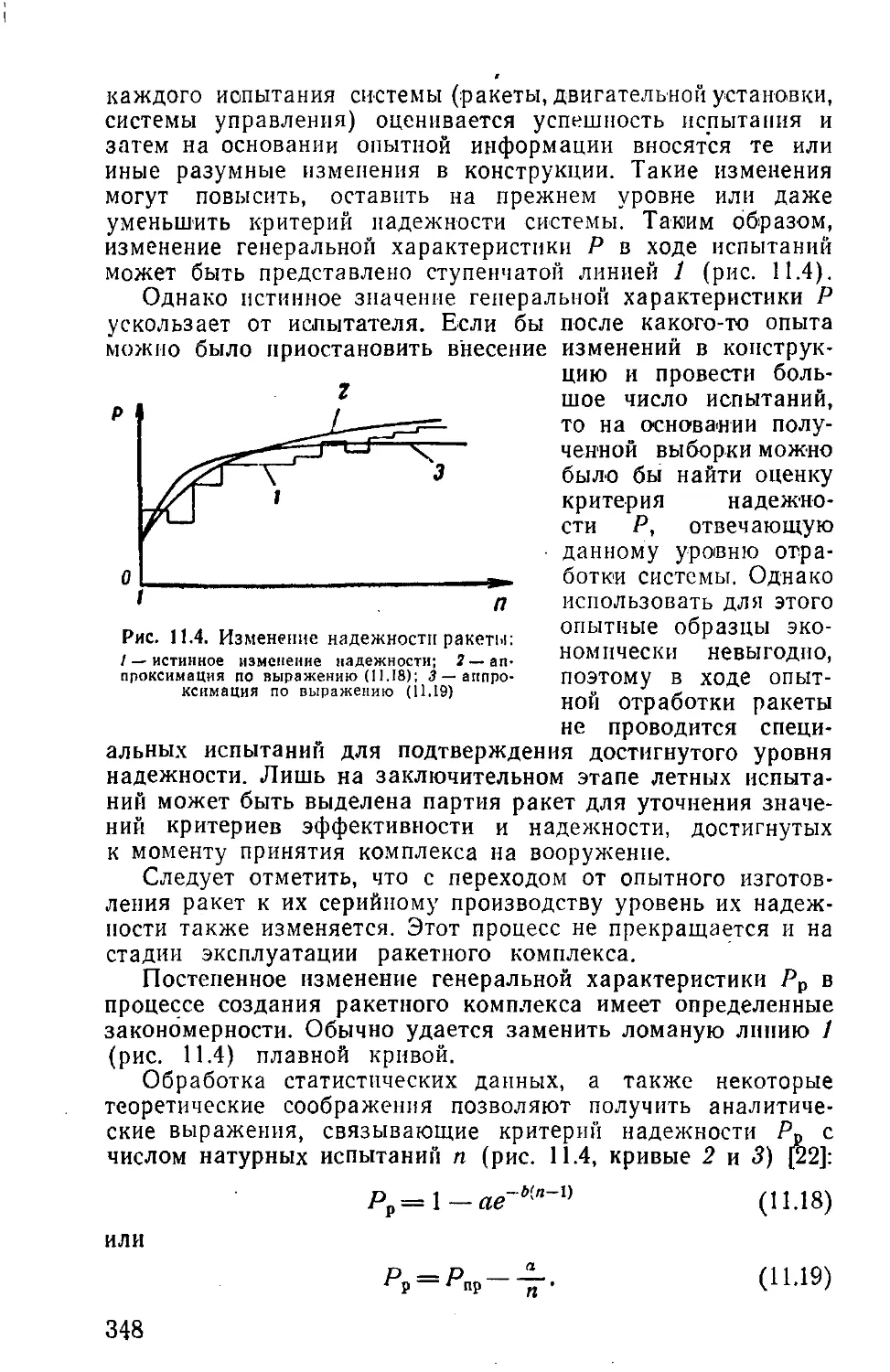
эскизное проектирование);Времяt u гоЗ2- и год3-и год4-и годСсрераэксплуатацииj2)Ссрера постановки
на вооружение'Я'Ссрерапроизбодстбаf(т{ГСфераиспытанийЛАиз)УСфероконструированияр \©\ ('I2'ГСферапроектированияо—■<3и(Ь ©Рис. 1. Основные этапы и сферы управления в процессе создания балли¬
стических ракет:/ — установление потребности в новой ракетной системе и разработка тактико-тех¬
нических требований к ней; 2 — разработка эскизных проектов основных элементов
ракетного комплекса; 3 — изготовление опытной партии ракет и агрегатов наземного
оборудования; 4 — испытания опытных образцов; 5 — уточнение проектов по дан¬
ным испытаний; 6 — внесение необходимых изменений в образцы ракет и агрегатов
наземного оборудования; 7 — проведение повторных испытаний и подготовка к се¬
рийному производству; ^—производство первой партии серийных образцов ракет и
агрегатов наземного оборудования: 9 — постановка на вооружение серийных образ¬
цов; /0 — начало эксплуатации новой ракетной системы; II — внесение не реализо¬
ванных ранее изменений в проект; 12 — модификация образцов ракет и наземного
оборудования; /3 — испытания модифицированных образцов; 14 — развертывание се¬
рийного производства модифицированных образцов; 15 — постановка на вооружение
модифицированной ракетной системы2) разработку эскизных проектов основных элементов ра¬
кетного комплекса;3) изготовление опытной партии ракет и агрегатов назем¬
ного оборудования;4) испытания опытных образцов;5) уточнение проектов по данным испытаний;6) внесение необходимых изменений в образцы ракет и
агрегатов наземного оборудования;7) проведение повторных испытаний и подготовку к се¬
рийному производству;
M| ii|iiiii Ш0ДС1 но первой партии серийных образцов ракет
и hi ри л юн наземного оборудования;'») постановку па вооружение серийных образцов;III) начало эксплуатации новой ракетной системы.Чтбы in' нарушать сроки принятия на вооружение проек-• м|<\«-Moil ракетной системы, можно ограничить число измене¬
ний. вносимых в проект по результатам испытаний опытных* к i| ki шин. Тогда изменения, оставшиеся за чертой ограниче¬
нии. исшш.ауют при создании улучшенных (модифицирован¬
иях) образцов ракет и агрегатов наземного оборудо-
ii.iiiiiii.Па рис. 1 пунктиром показан дополнительный цикл эта-
п«>п работы, включающий:внесение не реализованных ранее изменений в проект;
испытания модифицированных образцов;
развертывание серийного производства модифициро¬
ванных образцов;постановку на вооружение модифицированной ракет¬
ной системы.Нее перечисленные выше этапы взаимно связаны и пере¬
ход от одного к другому возможен только при успешном осу¬
ществлении всех предшествующих этапов.Кроме этапов создания новой ракетной системы, разли¬
чают сферы деятельности лиц, участвующих в этом процессе.
l.iKiiMH сферами являются: проектирование, конструирова¬
ние, испытания и опытная отработка, серийное производство,
оснащение воинских частей элементами новой ракетной си¬
стемы, использование или эксплуатация системы. Как видно
h i рис. 1, на первых этапах создания ракетной системы пе¬
реход от сферы проектирования к сфере испытаний происхо¬
дит дважды. Кроме того, в случае неблагоприятных резуль¬
татов повторных испытаний вносят новые изменения в проект
и проводят дополнительные испытания. Переход к сфере се¬
рийного производства происходит только после успешного
мапершения всех этапов проектирования и испытаний ра¬
кетной системы. В то же время необходимо добиться
юга, чтобы все этапы работ выполнялись в заданные
(роки.В настоящей книге рассматриваются методы военно-тех¬
нического проектирования (определения общих характери-
ешк) управляемых баллистических ракет и основных эле¬
ментов ракетных комплексов. Излагаемые методы проектиро-
имния можно использовать при разработке тактико-техниче-
| mix требований к новой ракетной системе, частично при
<|кизном проектировании, при проведении поисковых иссле¬
дований, которые обычно предшествуют первым этапам про¬
ектирования новой ракетной системы, а также при проведе¬
нии опытной отработки ракет.7
Обычно в этот период производятся наибольшие затраты
сил и средств, а длительность его в основном определяет сро¬
ки создания нового образца.В ходе опытной отработки ракеты за счет постепенных
изменений в конструкции обеспечивается ее работоспособ¬
ность и требуемые свойства, важнейшим из которых являет¬
ся надежность.Основные свойства ракеты как оружия выражаются коли¬
чественными показателями. В книге рассматриваются методы
оценки этих показателей по ограниченному статистическому
материалу в условиях их постоянного изменения, происходя¬
щего при доработке конструкции.Среди предлагаемых и уже известных методов, изложен¬
ных в настоящей Книге, большое место отводится вопросам
статистической оценки эффективности ракетного комплекса,
надежности ракеты и испытаниям ее отдельных систем.Книга состоит из трех разделов. В I разделе рассматри¬
ваются методы приближенного проектирования управляемых
баллистических ракет. Во II разделе рассматриваются прин¬
ципы определения общих характеристик ракетного комплек¬
са с учетом условии его боевого применения. В III разделе
рассматривается сущность испытаний и опытной отработки
ракет.Ограниченный объем книги не позволяет иллюстрировать
все теоретические положения достаточным количеством чис¬
ловых примеров, особенно во II и III разделах книги. Но те.м
не менее авторы надеются, что читатель сможет получить
представление о содержании и методах проектирования и ис¬
пытаний баллистических ракет.Все цифровые и фактические материалы книги приведены
по данным открытой иностранной и отечественной литера¬
туры.
РАЗДЕЛ IБАЛЛИСТИЧЕСКОЕ ПРОЕКТИРОВАНИЕ
РАКЕТГлава 1ЗАДАЧИ ПРОЕКТИРОВАНИЯ РАКЕТ§ 1.1. ЗАДАЧИ ВОЕННО-ТЕХНИЧЕСКОГО ПРОЕКТИРОВАНИЯ
РАКЕТНЫХ КОМПЛЕКСОВНаучной основой процесса создания ракетных систем яв-
шртся теория проектирования ракетного вооружения, состав¬
ной частью которой является военно-техническое (перспектив¬
ное) проектирование ракет и ракетных комплексов.Термин «военно-техническое проектирование» по своей
е\ щности близок понятию «военное проектирование», упо¬
добляемому в американских работах [24], или термину «пер¬
спективное проектирование», используемому в отечественной
литературе [I], [59].Математический аппарат военно-технического проектиро-
иапия представляет собой сочетание методов исследования
операций и системотехники (теории проектирования систем
оолыиого масштаба). Использование этих методов позволяет
иырабатывать объективные данные для принятия необходи¬
мых решений в ходе разработки и создания нового ракетного
комплекса (ракетной системы).Как и во всякую системотехническую задачу ([14], [9].
|'.м1|), в задачу военно-технического проектирования ракетных
комплексов входит установление оптимальных параметров
перспективных образцов объектов, в данном случае ракет, их
монологического оборудования, сооружений, систем связи и
управления, т. е. всех элементов ракетных комплексов.Методы военно-технического проектирования ракетных
|>пмилексов используются в основном на этапе поисковых ис-
ие.чований и разработки тактико-технических требованийI I ГГ) к ракетному комплексу. На этих этапах можно решать
следующие задачи [29]:обоснование интервала дальности полета ракеты, мощ-,
поп и боевого заряда и точности стрельбы;9
— выбор для ракеты типа двигателя, числа ступеней, си¬
стемы управления;-- определение массы, размеров и тяговых характеристик
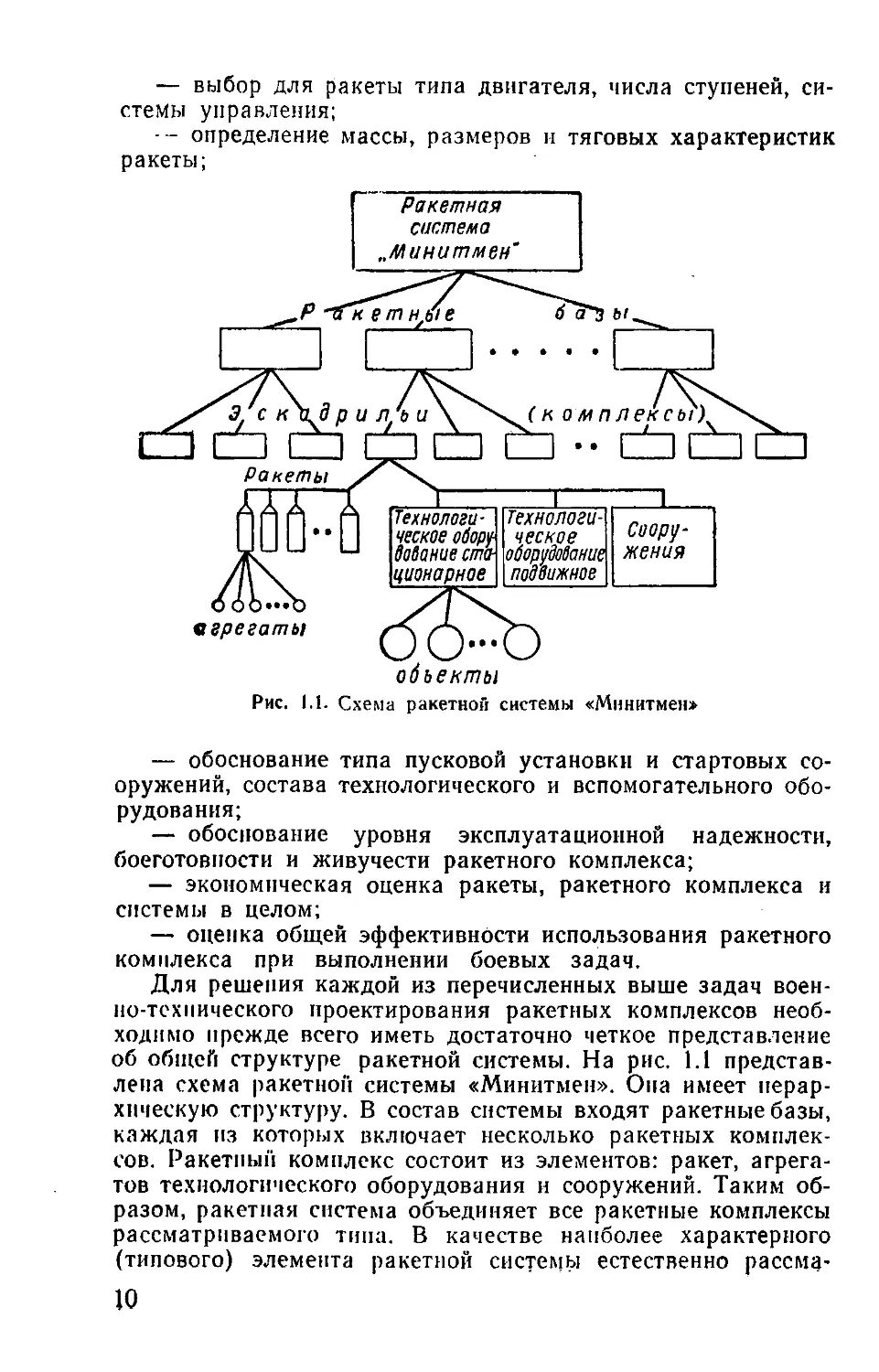
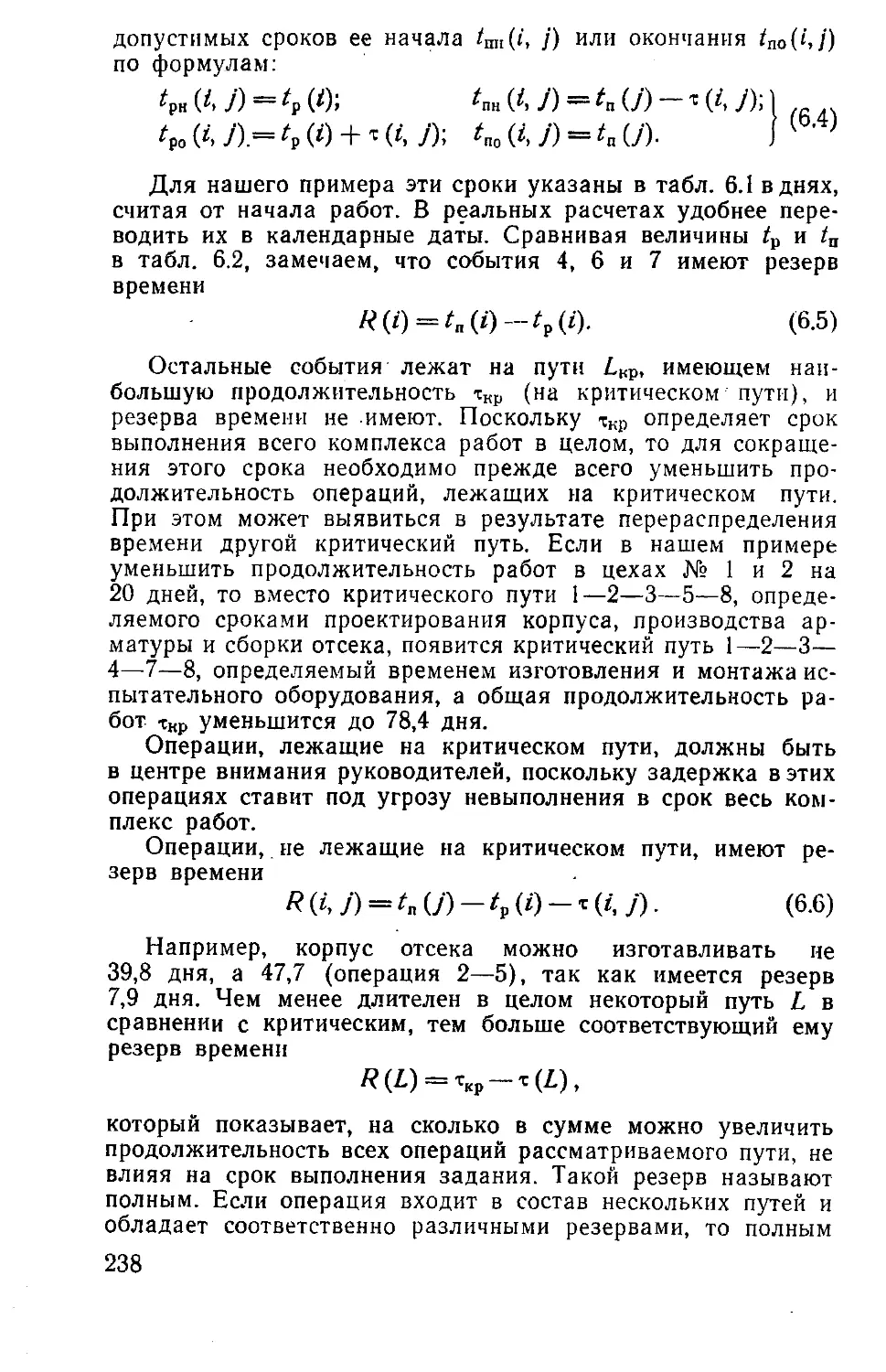
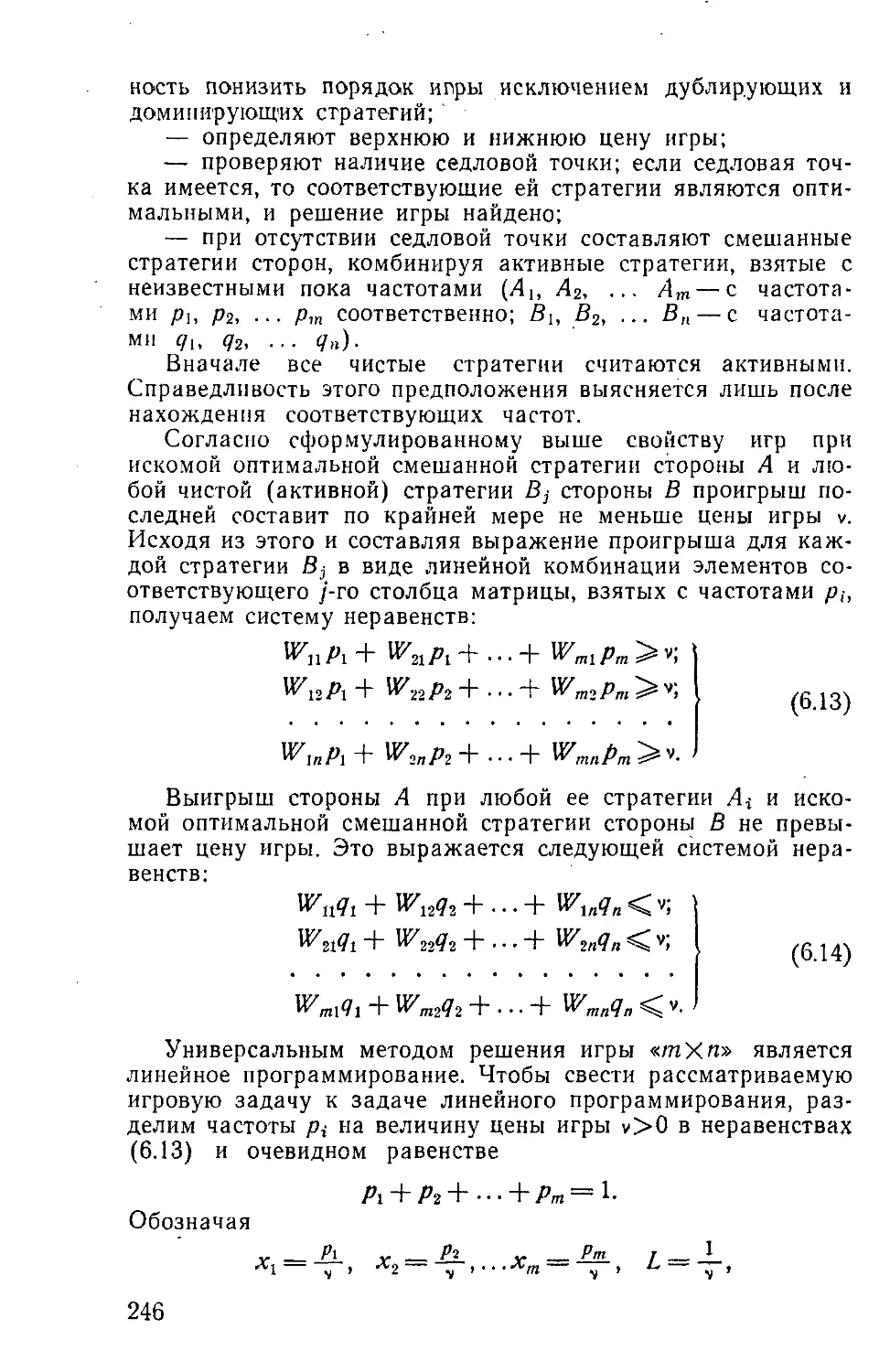
ракеты;Рис. 1.1. Схема ракетной системы «Минитмен»— обоснование типа пусковой установки и стартовых со¬
оружений, состава технологического и вспомогательного обо¬
рудования;— обоснование уровня эксплуатационной надежности,
боеготовности и живучести ракетного комплекса;— экономическая оценка ракеты, ракетного комплекса и
системы в целом;— оценка общей эффективности использования ракетного
комплекса при выполнении боевых задач.Для решения каждой из перечисленных выше задач воен¬
но-технического проектирования ракетных комплексов необ¬
ходимо прежде всего иметь достаточно четкое представление
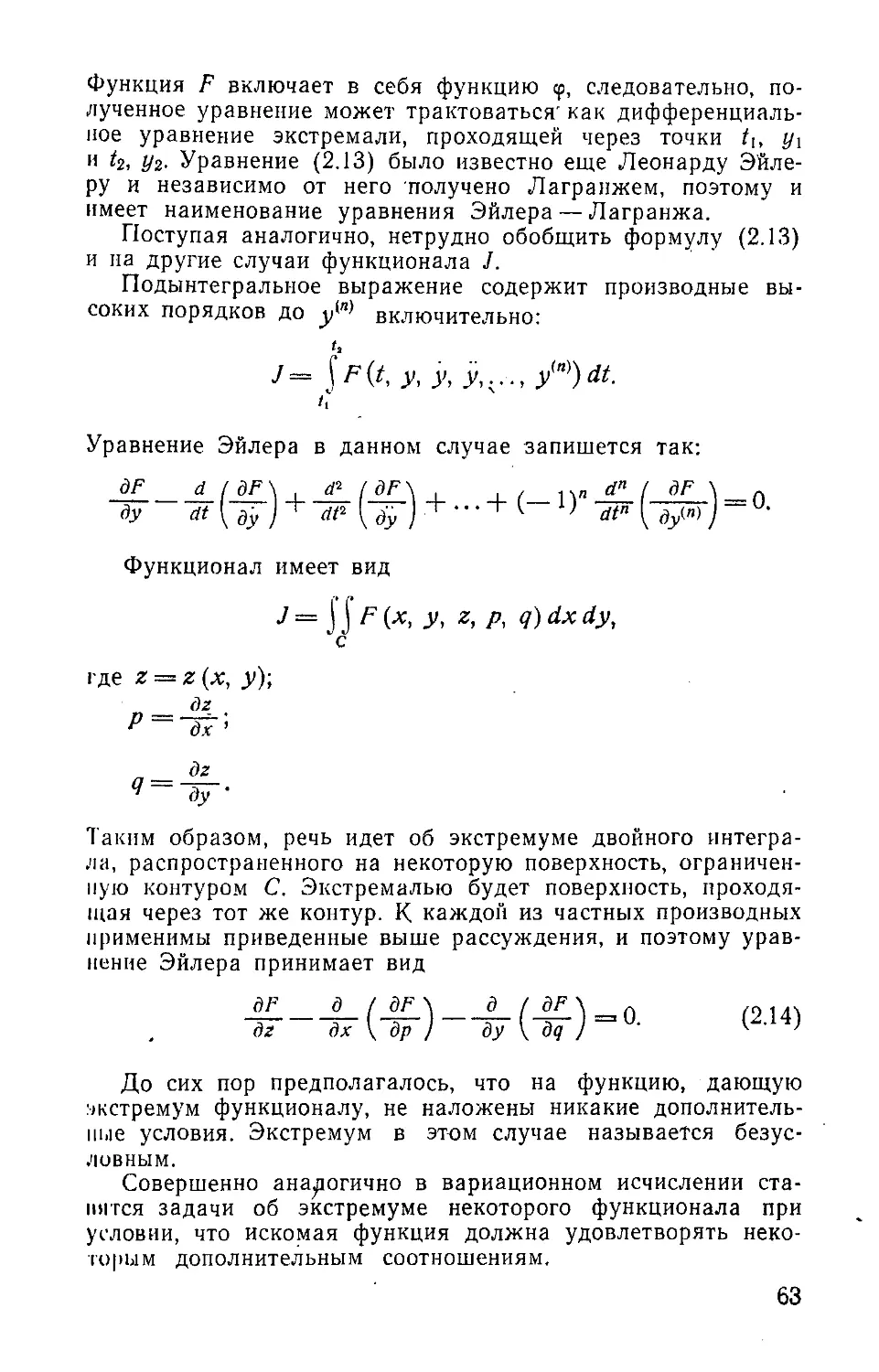
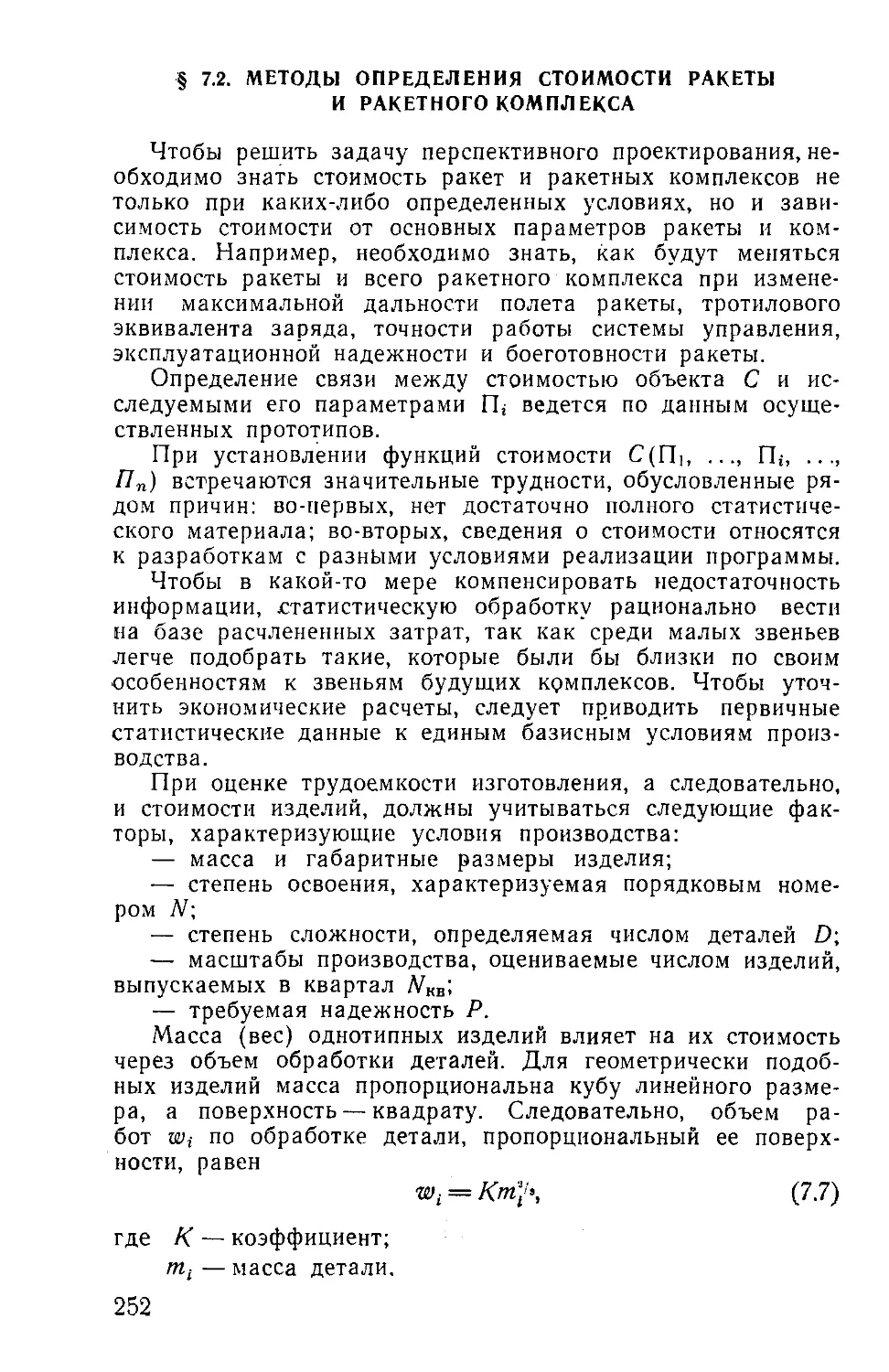
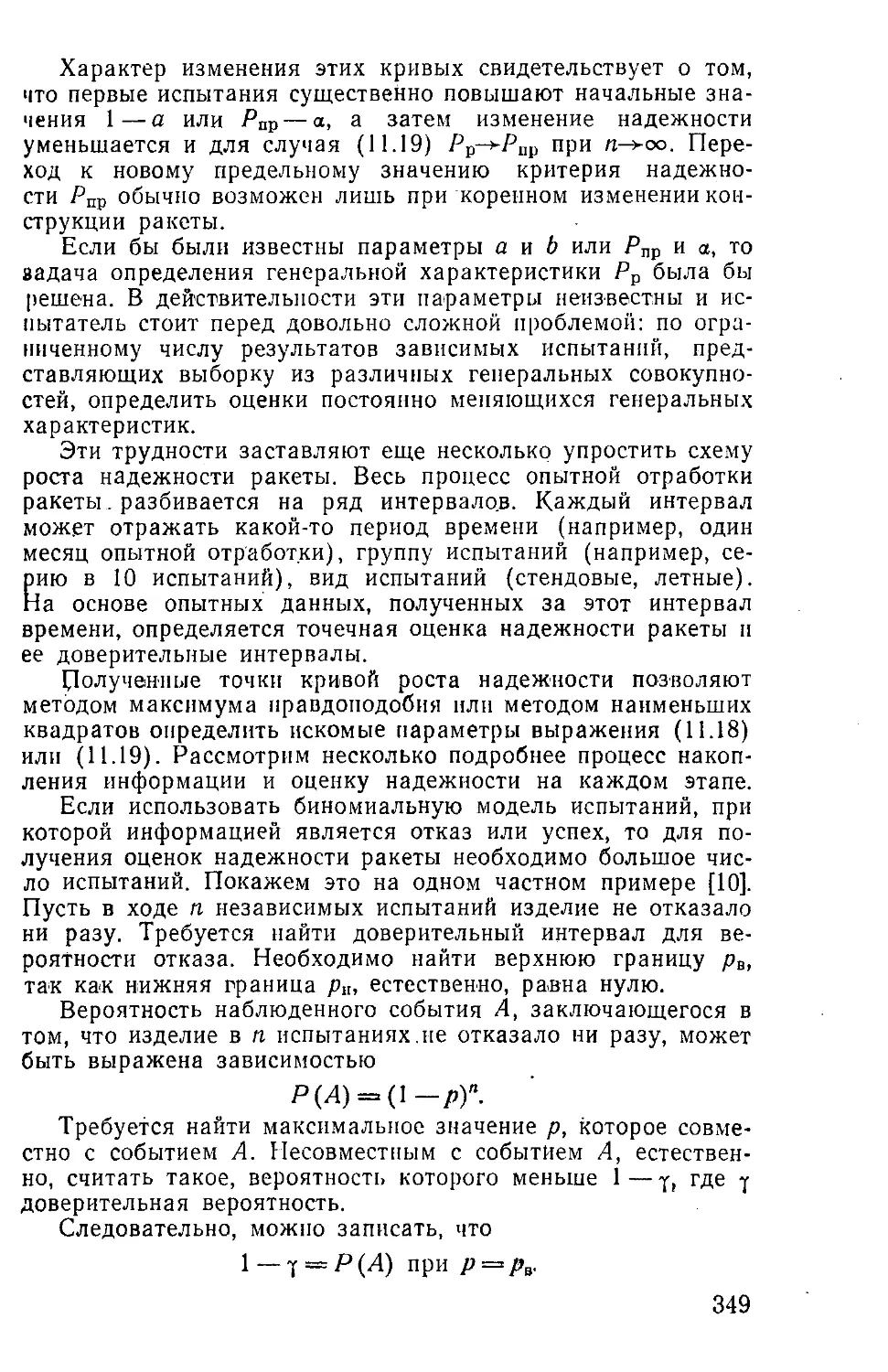
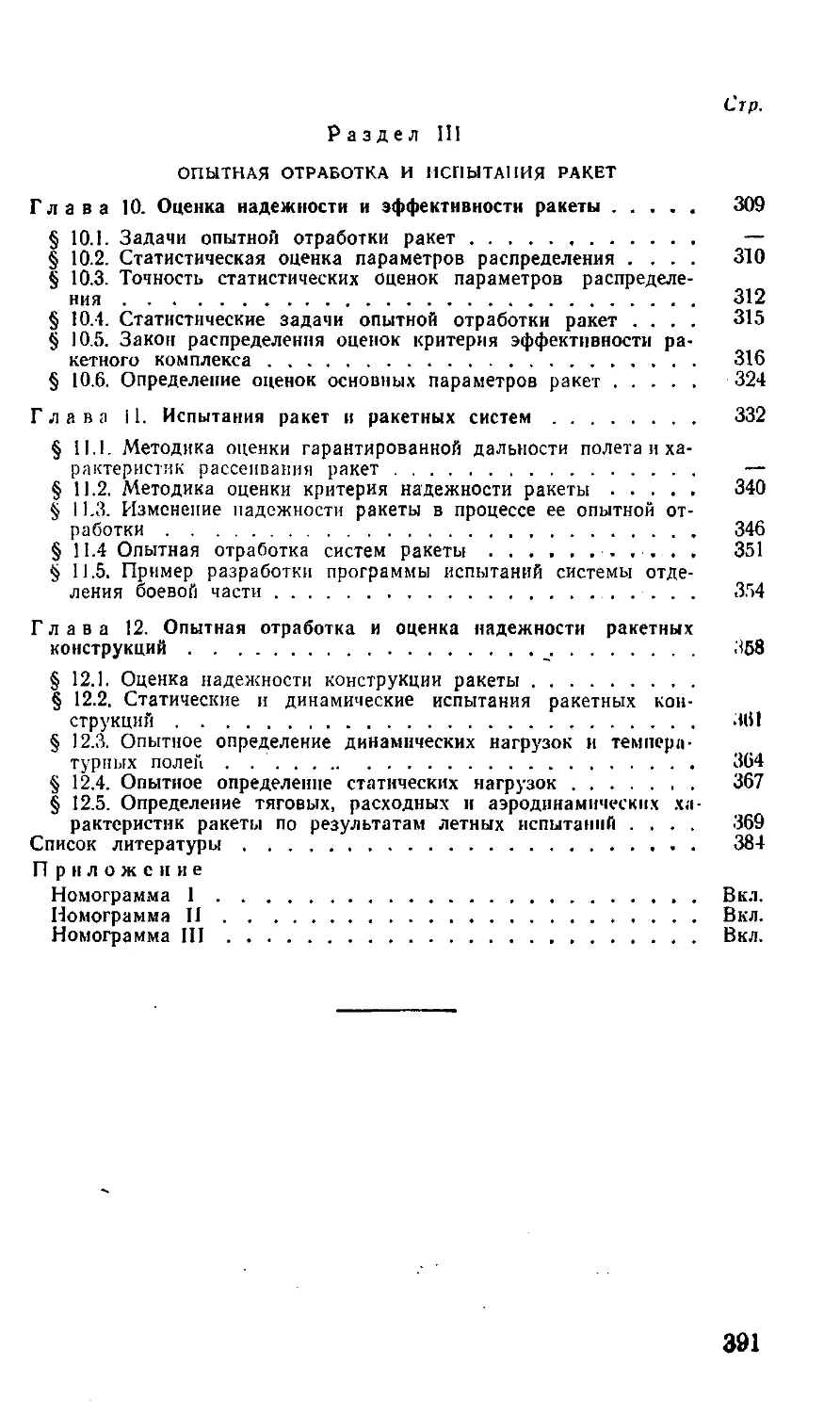
об общей структуре ракетной системы. На рис. 1.1 представ¬
лена схема ракетной системы «Минитмен». Она имеет иерар¬
хическую структуру. В состав системы входят ракетные базы,
каждая из которых включает несколько ракетных комплек¬
сов. Ракетный комплекс состоит из элементов: ракет, агрега¬
тов технологического оборудования и сооружений. Таким об¬
разом, ракетная система объединяет все ракетные комплексы
рассматриваемого типа. В качестве наиболее характерного
(типового) элемента ракетной системы естественно рассма-10
11>1111;i n> ракетный комплекс [29]. Как правило, качество pa¬
in- того комплекса определяет качество ракетной системы вЦГ.’ШМ.Формулировка основной задачи военно-технического про-
<чи нровапия ракетного комплекса зависит от ассигнований
ни создание новой ракетной системы. При ассигнованиях без
ограничений задача формулируется так: требуется устано-
мии. параметры ракетного комплекса, обеспечивающие пора-
темпе всех намеченных целей при минимально возможных
||щи,-1псовых затратах на ракетную систему и при условии, что
ракетные комплексы поступают на вооружение в заданные
сроки.Исли выделенные финансовые средства ограничены, целе¬
сообразно изменить формулировку основной задачи следую¬
щим образом: требуется найти параметры ракетного ком¬
плекса, обеспечивающие нанесение противнику максималь¬
ного ущерба при заданных ассигнованиях на создание ракет-
поп системы.В обоих случаях предполагается, что боевое применение
ноной ракетной системы будет производиться в условиях,
когда противник использует все свои средства и возможно¬
сти для противодействия.Методика решения основной задачи военно-технического
проектирования предусматривает [29]:— выделение группы главных задач и расчленение глав¬
ных задач на частные;— разработку логических схем исследования главных и
частных задач;— выбор критериев оптимизации для решения главных и
частных задач;— установление математических моделей и алгоритмов
решения частных и главных задач.Особое значение при решении задач военно-технического
проектирования уделяется составлению логических схем.Логические схемы должны быть простыми и гибкими, но
и то же время достаточно полно отражать влияние варьируе¬
мых параметров на результаты решения основной, главных и
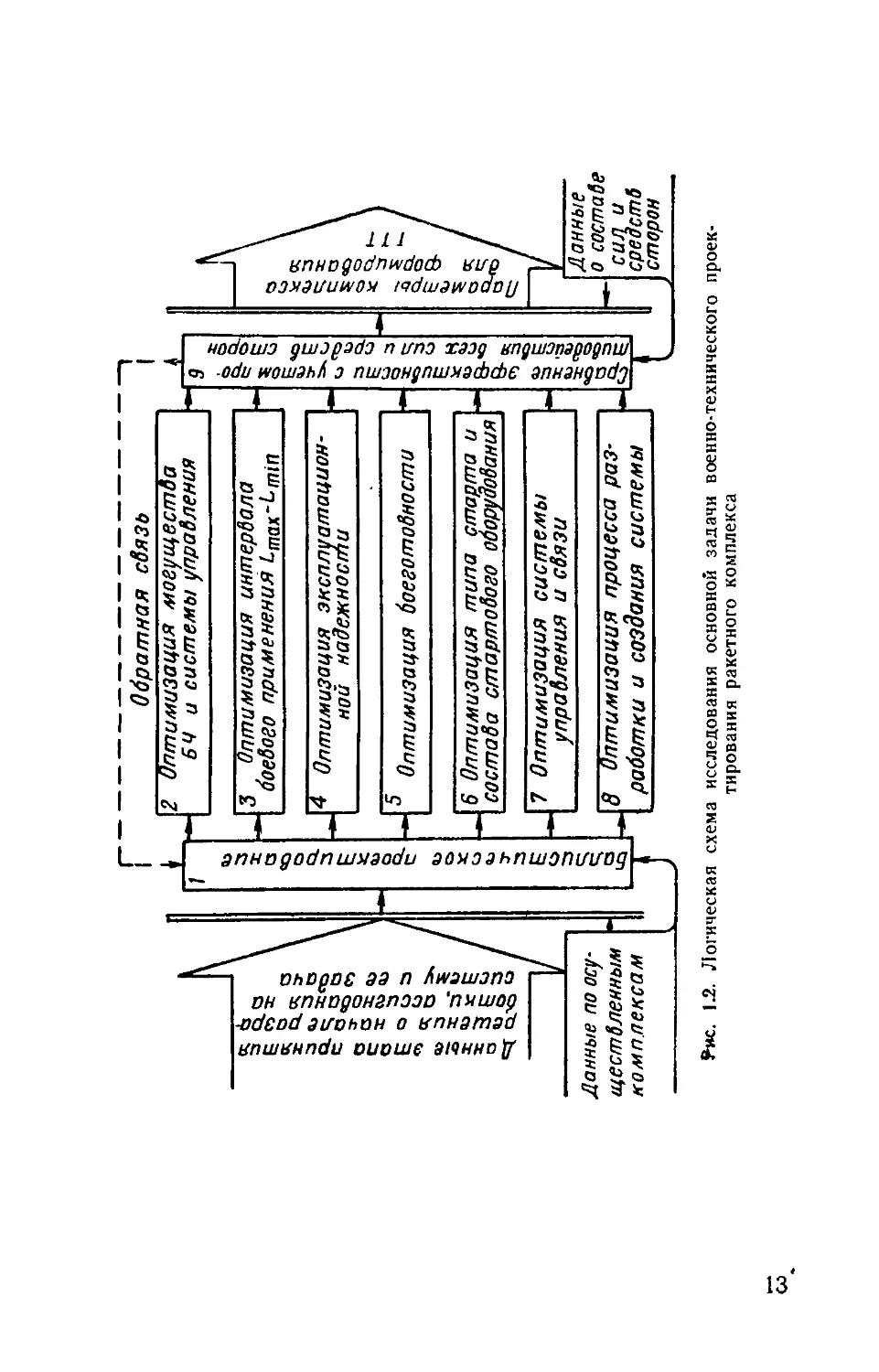
ч,четных задач. Одна из возможных логических схем иссле-
лоиания основной задачи военно-технического проектирова¬
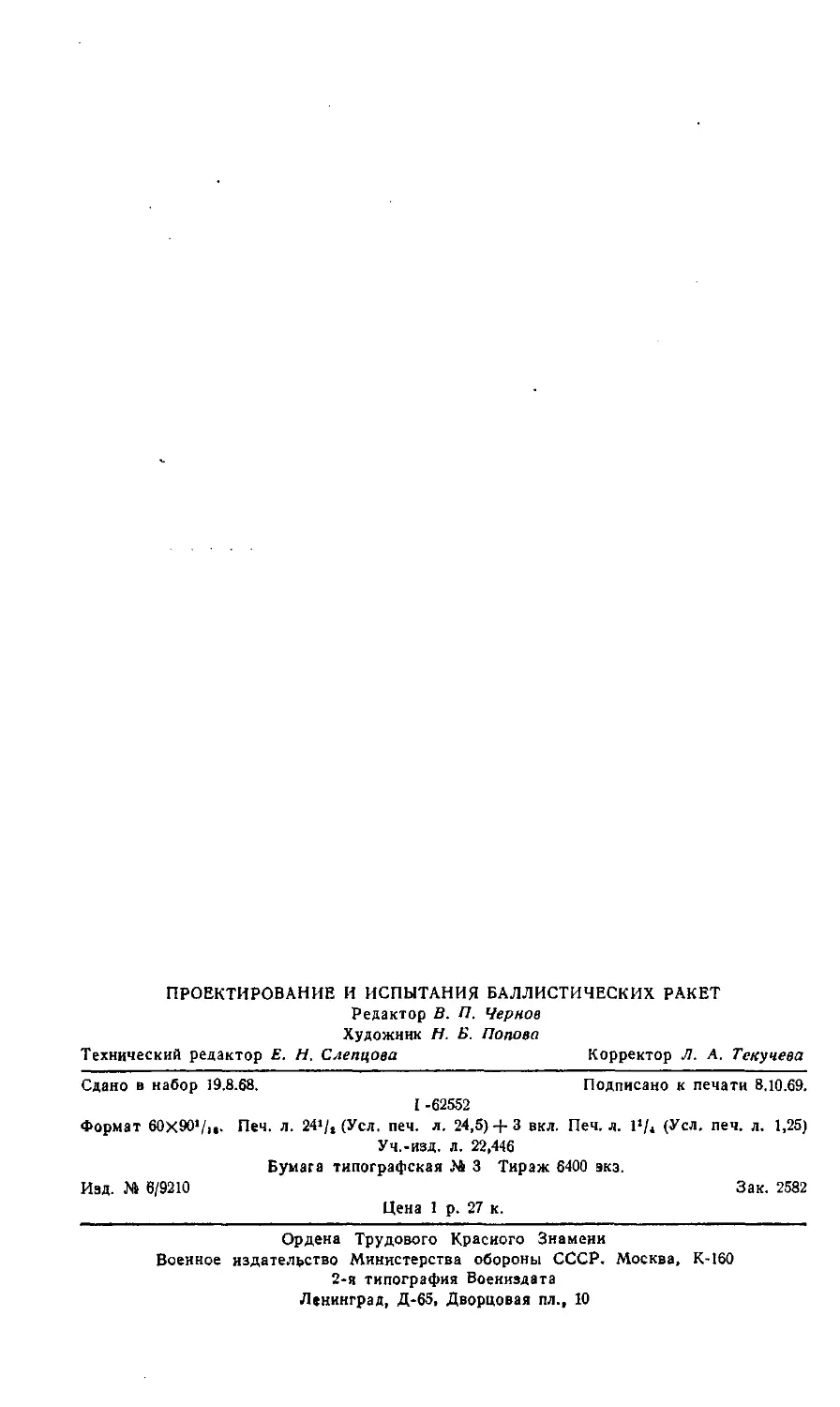
нии ракетного комплекса показана на рис. 1.2. Приведенная
схема предполагает, что решение основной задачи распадает-
с*| па девять главных задач:определение параметров ракеты (баллистическое про¬
ектирование ракеты);•- оптимизацию могущества боевого заряда и точности
пусков ракет;оптимизацию интервала боевого применения ракетного
комплекса;11
— оптимизацию эксплуатационной надежности ракетного
комплекса;— оптимизацию боеготовности ракетного комплекса;— оптимизацию типа старта, состава и параметров стар¬
тового оборудования;— оптимизацию системы связи и управления вой¬
сками;— оптимизацию процесса разработки ракетного комплек¬
са и ракетной системы;— оценку эффективности ракетного комплекса в усло¬
виях противодействия сил и средств сторон.Решение основной задачи ведется итеративным методом в
такой последовательности:— приближенно определяют параметры ракеты при опре¬
деленных исходных данных (приближенное баллистическое
проектирование ракеты);— последовательно решают семь главных задач (бло¬
ки 2—8 на рис. 1.2);— уточняют параметры ракеты, учитывая результаты ре¬
шения других главных задач;— уточняют параметры всех остальных элементов ракет¬
ного комплекса;— оценивают эффективности ракетного комплекса в усло¬
виях игровой задачи с участием противоборствующих
сторон;— окончательно определяют оптимальные параметры ра¬
кеты и ракетного комплекса, удовлетворяющие условиям по¬
ставленной задачи.Исходными данными при решении основной задачи воен¬
но-технического проектирования являются ассигнования на
создание ракетной системы и сроки поступления ее па воору¬
жение. Кроме того, используются данные по уже созданным
ракетным комплексам, однотипным с проектируемым. При
этом прогнозировать характеристики ракет и основные эле¬
менты стартового комплекса необходимо с учетом прогресса
науки и техники.При решении частной задачи оценки эффективности ракет¬
ного комплекса в условиях противодействия сил и средств
сторон должны учитываться данные о составе стратегических
средств нападения и защиты.Таким образом, определение параметров ракеты (балли¬
стическое проектирование) является центральной задачей
военно-технического проектирования. Решают ее в ходе реше¬
ния основной задачи дважды: вначале приближенно, а затем
(в конце исследования основной задачи перспективного проек¬
тирования) точно, каждая главная задача решается само¬
стоятельно с использованием предварительных результатов
исследования смежных главных задач.12
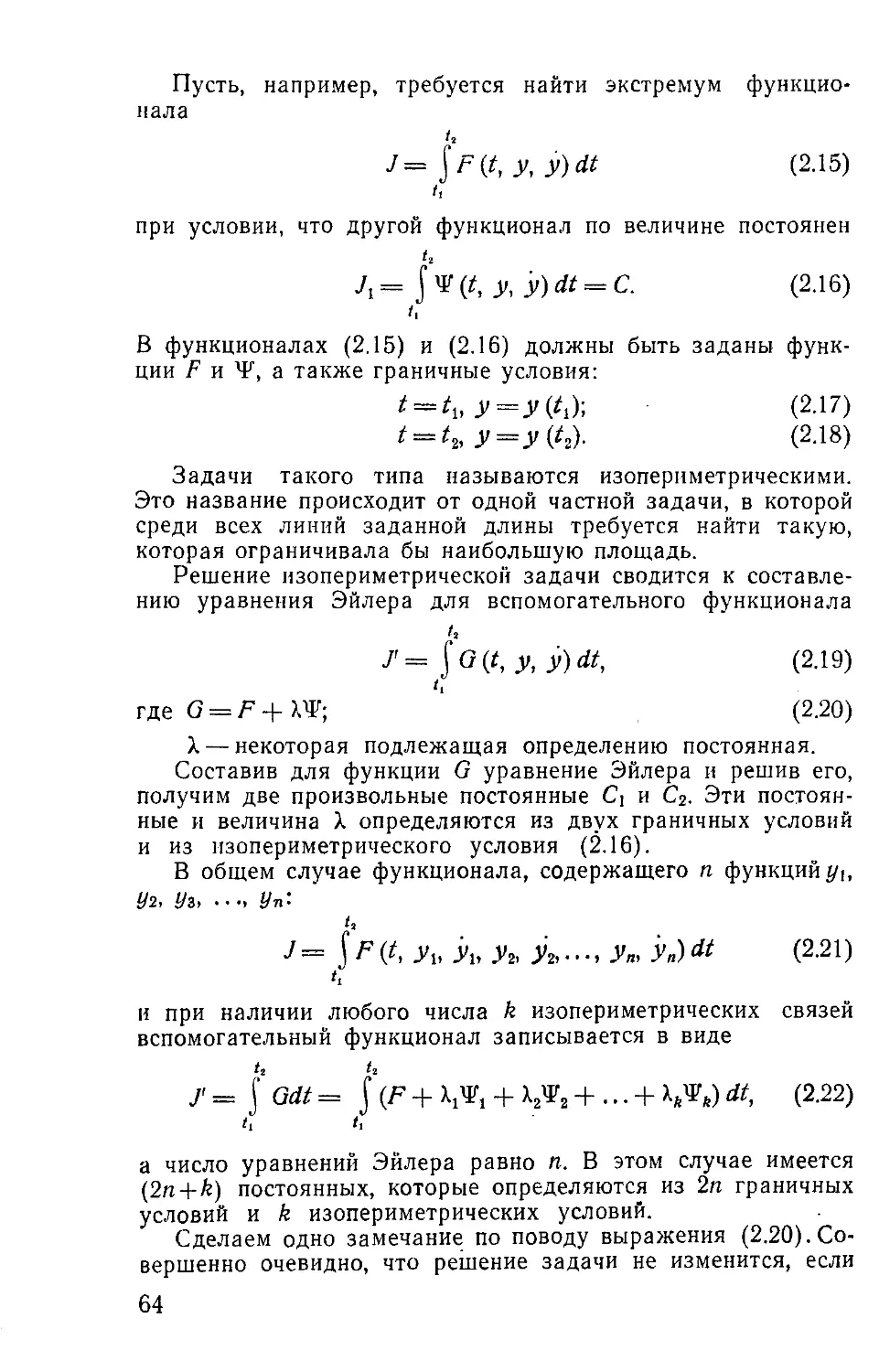
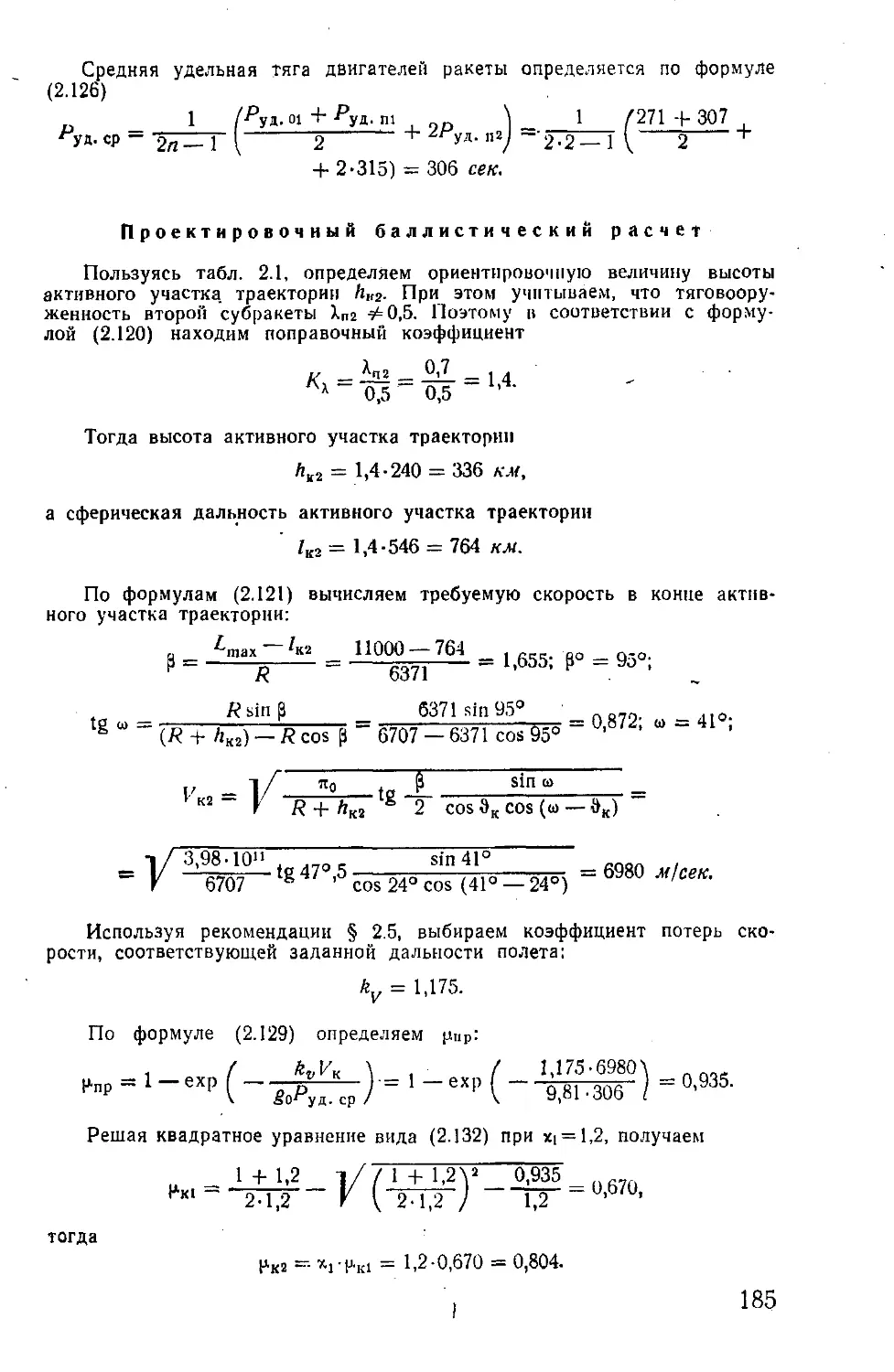
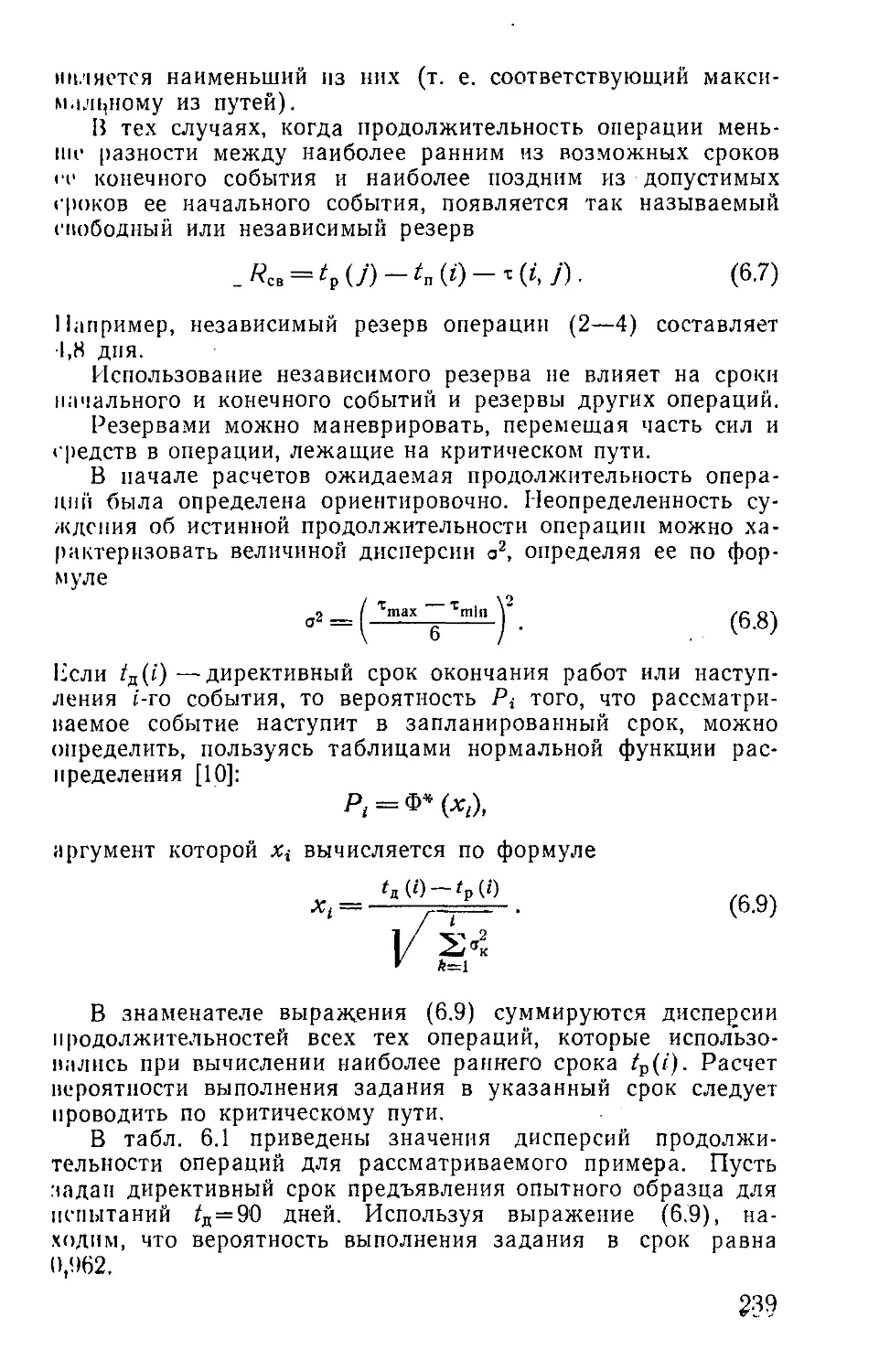
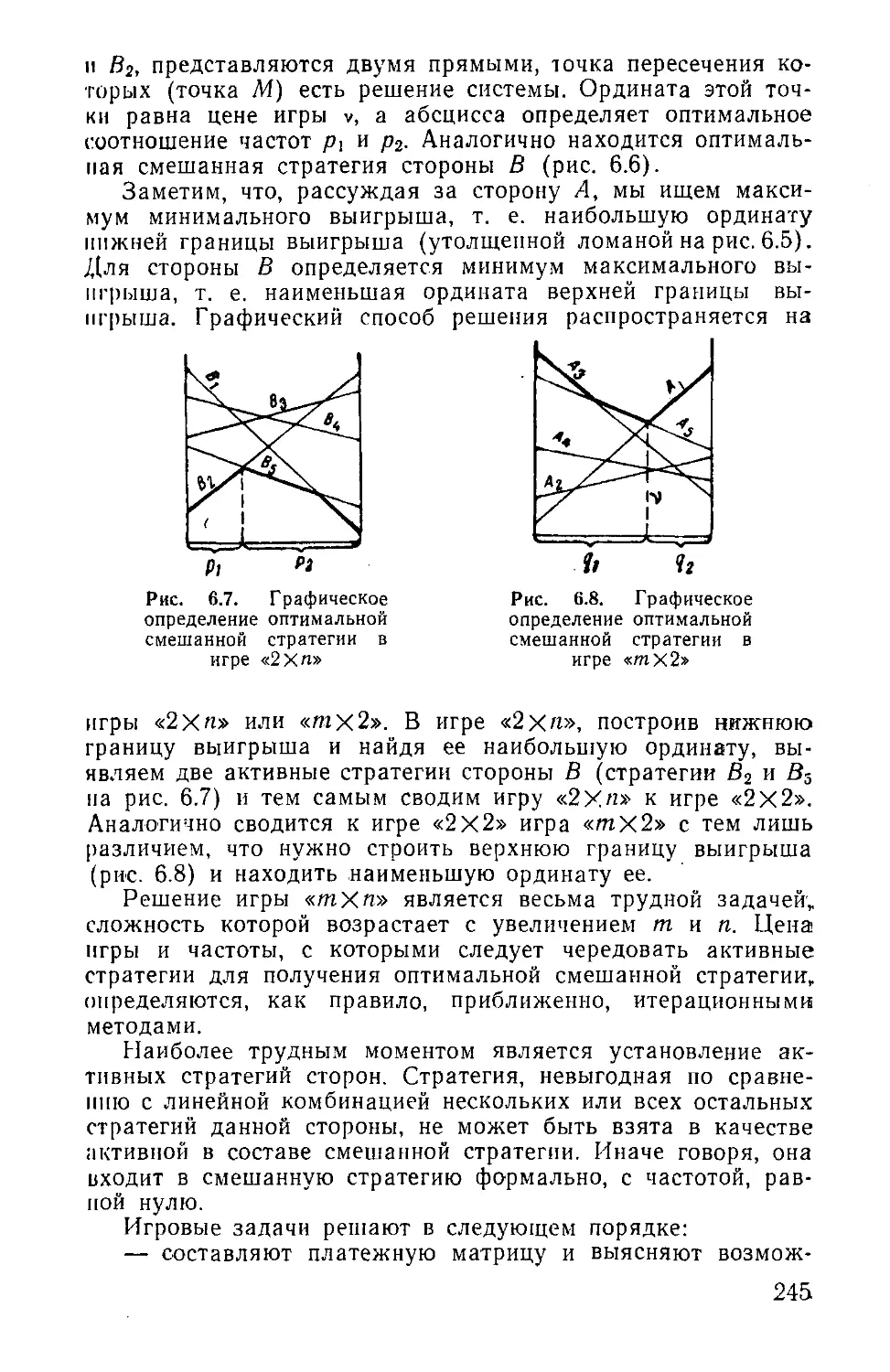
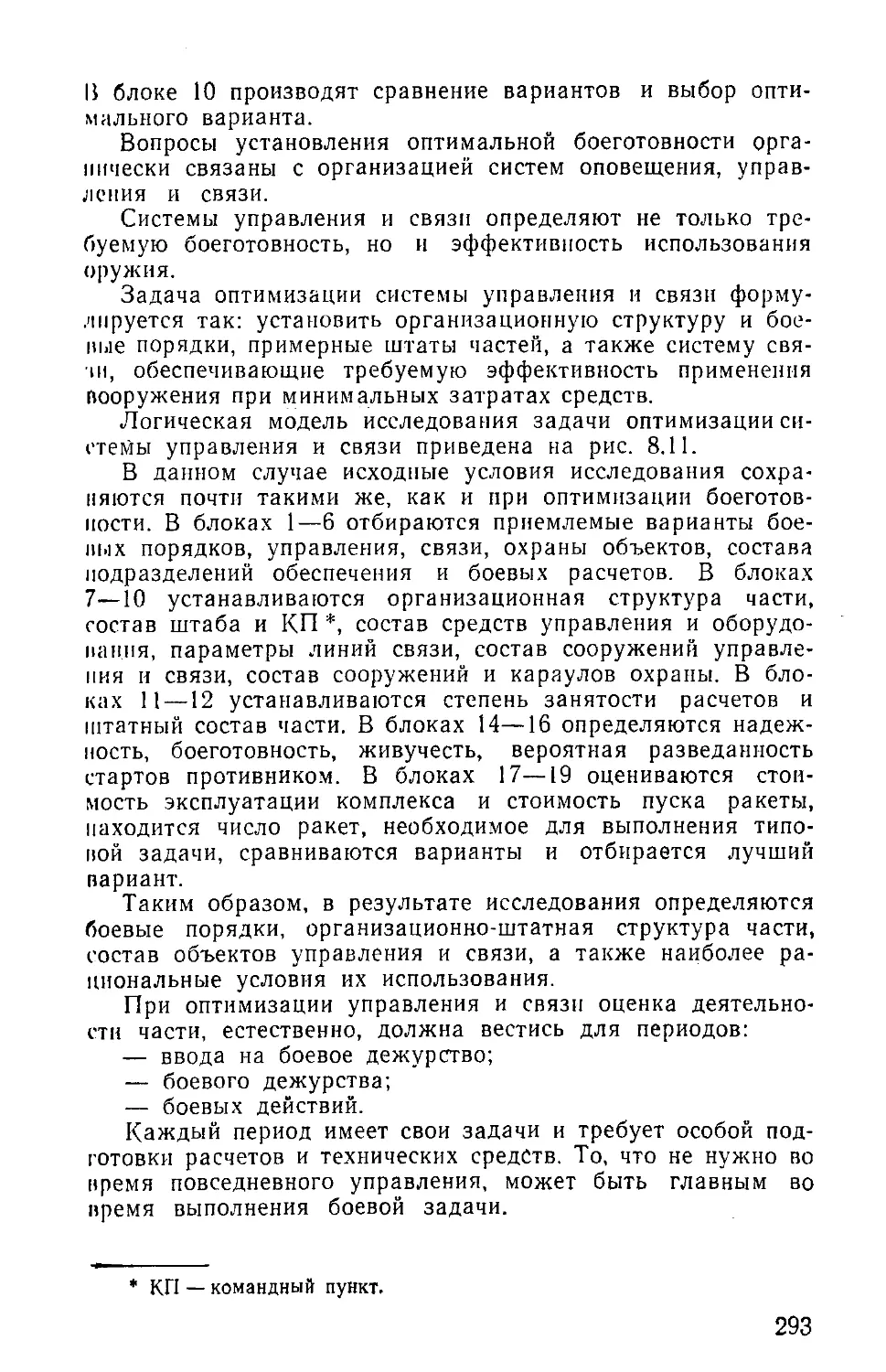
13'1.2. Логическая схема исследования основной задачи военно-технического проек¬
тирования ракетного комплекса
Чтобы решить главную задачу, необходимо расчленить ее
на ряд частных задач и составить логическую схему иссле¬
дования, которая, кроме частных задач, включает блоки при¬
ближенного решения смежных главных задач.На основе логических схем исследования главных и част¬
ных задач устанавливаются математические модели и алго¬
ритмы решения частных и главных задач на ЭВМ. В связи
с трудностями математического описания связен между глав¬
ными задачами отыскание общего решения основной задачи
военно-технического проектирования в настоящее время не
представляется рациональным. Решение находят на основе
анализа результатов исследования расчлененных главных за¬
дач. В будущем для решения основной задачи, по-видимому,
могут быть использованы информационные системы управле¬
ния [7]. Такие системы могут быть применены для управле¬
ния не только процессом разработки, но и ходом производ¬
ства и эксплуатации стратегического ракетного вооружения.Заметим, что приведенная выше методика решения основ¬
ной задачи военно-технического проектирования ракетной си¬
стемы носит общий характер и может быть использована для
исследования других технических систем.В I разделе книги рассматриваются методы решения ча¬
стных задач, входящих в задачу баллистического проектиро¬
вания ракеты, а также приближенные методы решения этой
задачи в целом. Во II разделе описаны способы решения
остальных главных задач военно-технического проектиро¬
вания.§ 1.2. ЭФФЕКТИВНОСТЬ РАКЕТНОГО КОМПЛЕКСА
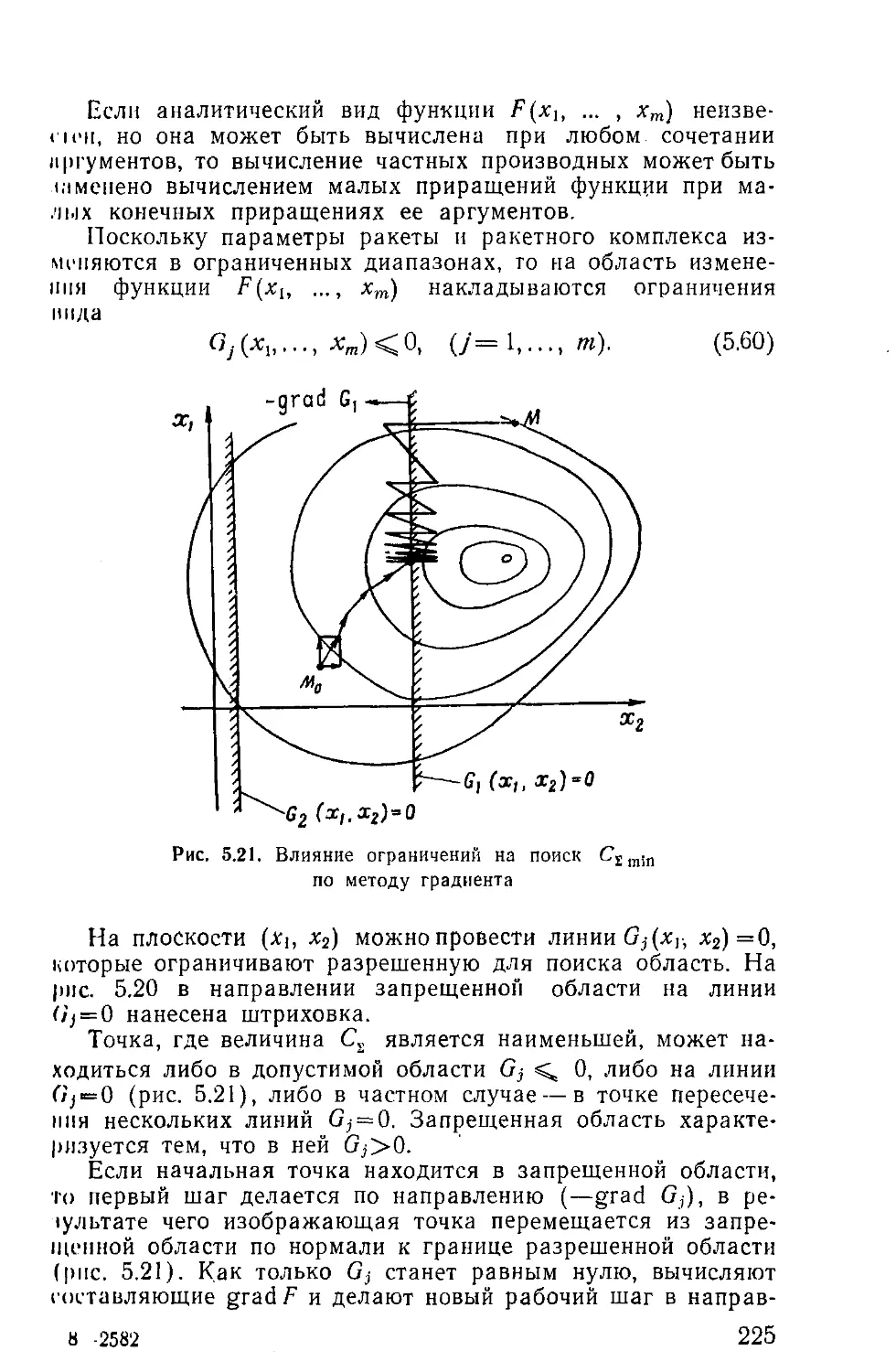
И КРИТЕРИИ ЕЕ ОЦЕНКИПод эффективностью ракетного комплекса понимают сте¬
пень его пригодности для использования по назначению [9].Величина эффективности определяется, с одной стороны,
качеством ракетного комплекса, с другой стороны,— условия¬
ми его боевого использования. Это значит, что одна и та же
ракетная система в различных условиях применения может
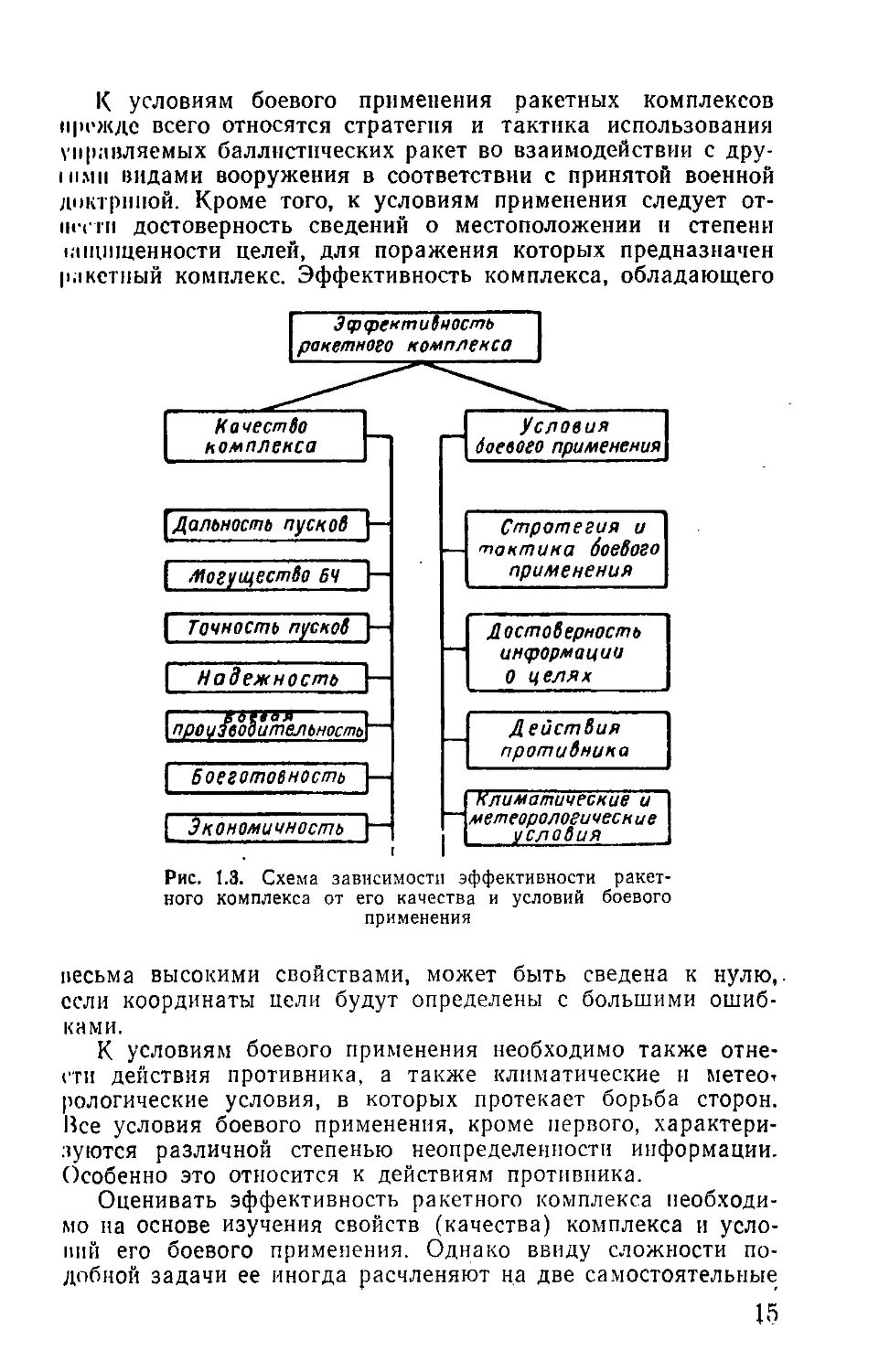
иметь различные показатели эффективности.Качество ракетного комплекса характеризуется следую¬
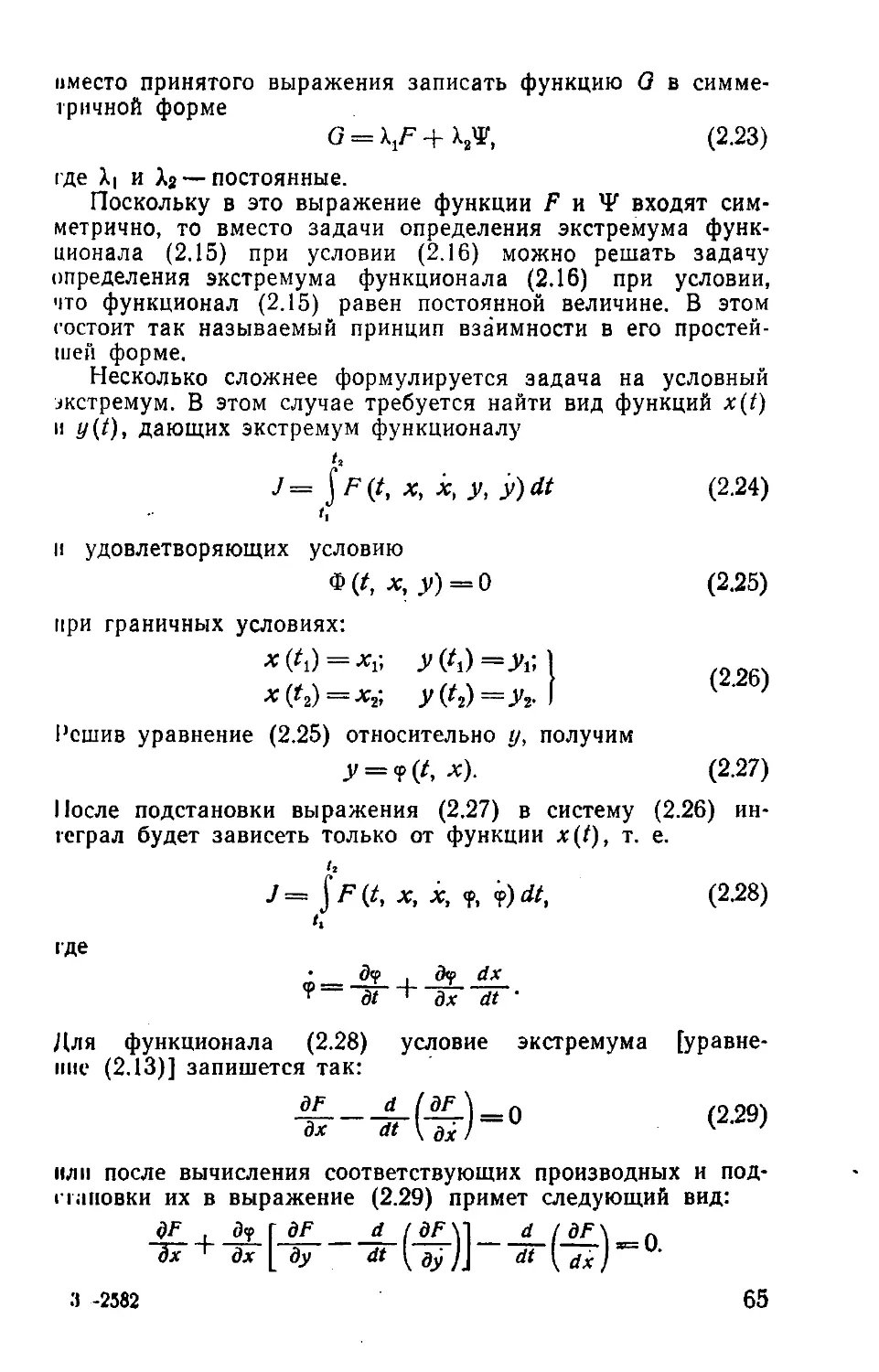
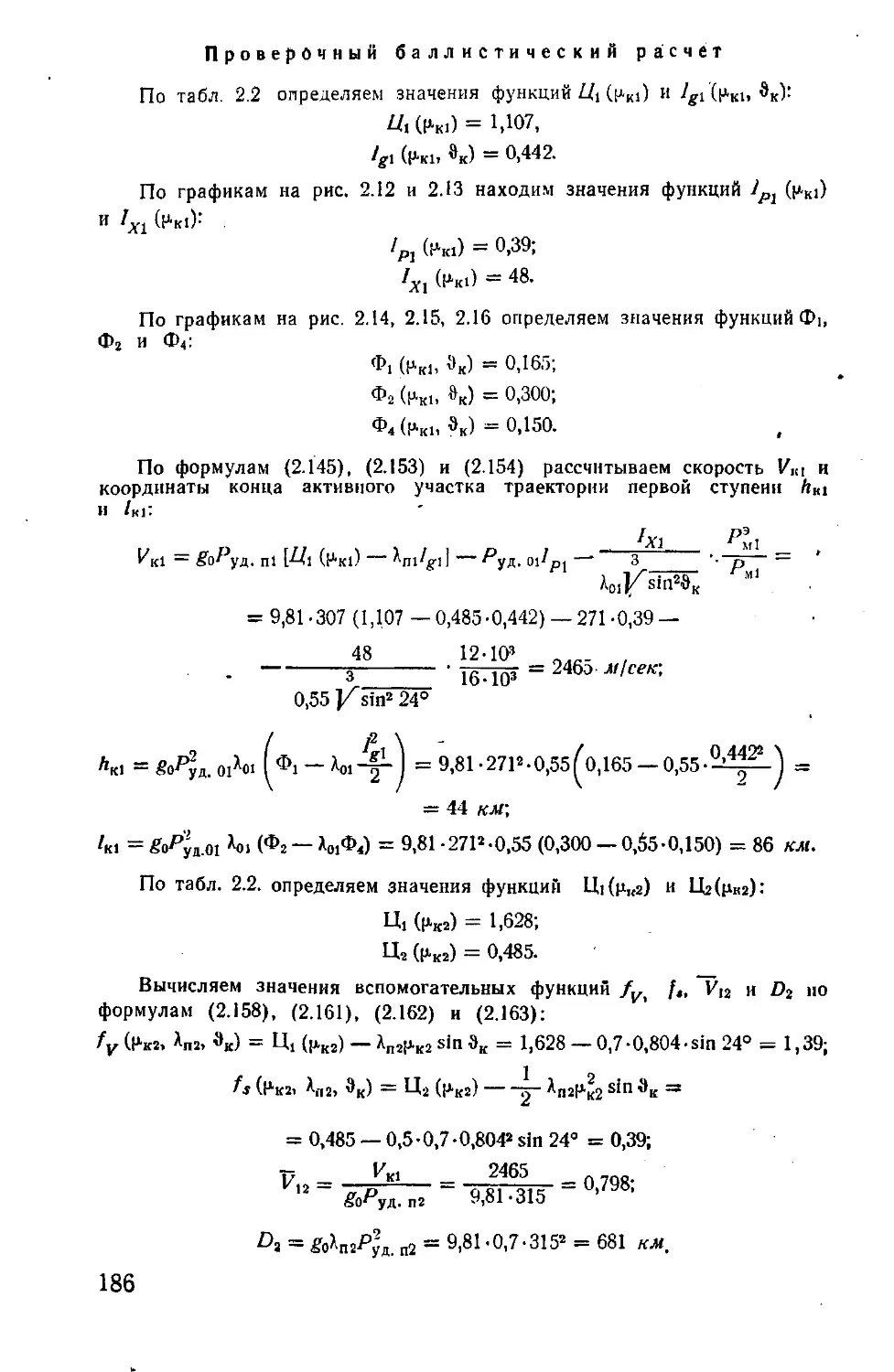
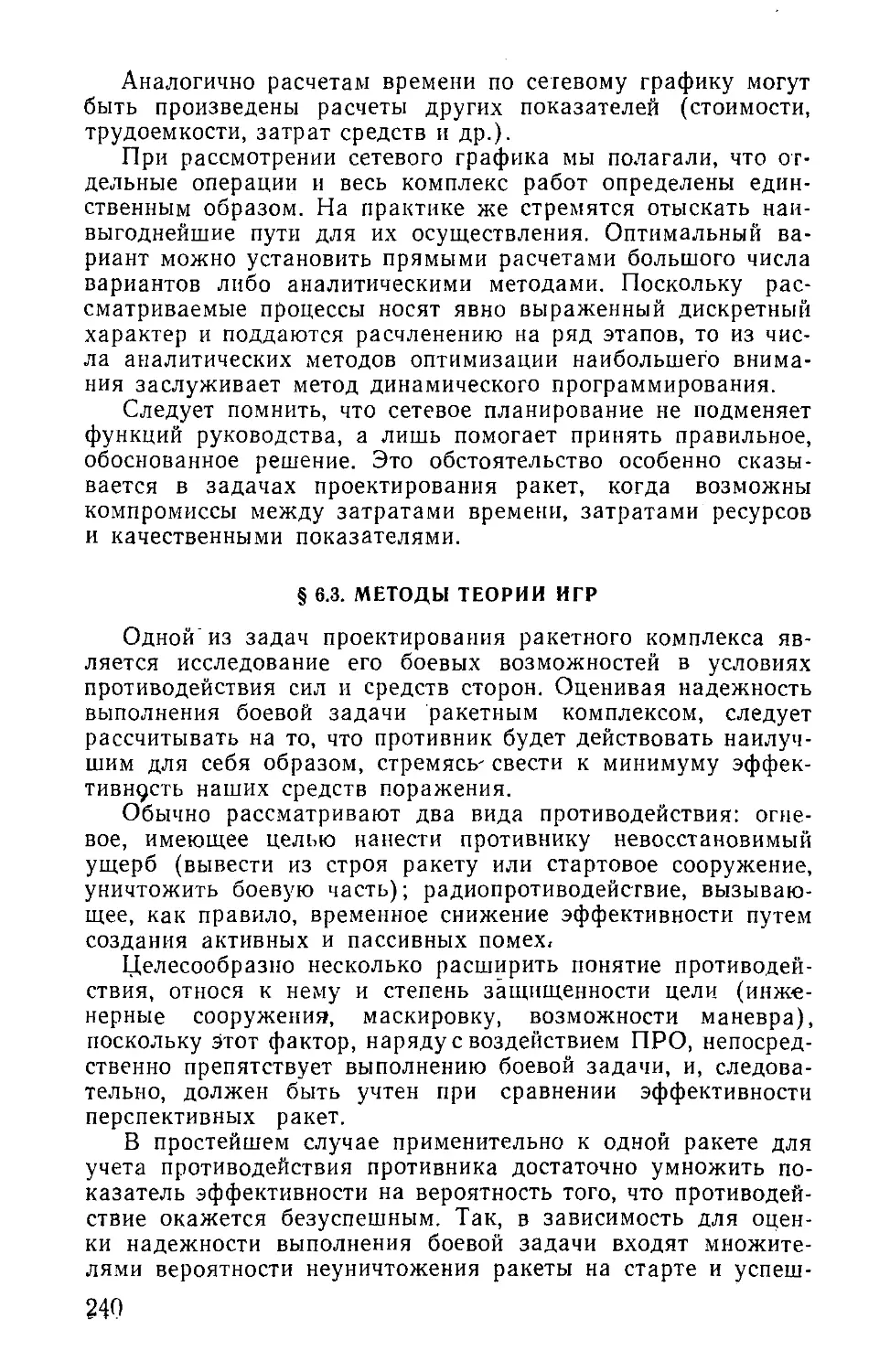
щими основными свойствами (рис. 1.3): диапазоном дально¬
стей полета ракет; могуществом действия боевого заряда;
точностью пусков; надежностью и живучестью комплекса;
боевой производительностью; временем на подготовку к пу¬
ску (боеготовностью); затратами средств и времени с начала
разработки до оснащения воинских частей ракетными ком¬
плексами нового образца (экономичностью); трудоемкостью
производства и эксплуатации; эксплуатационными расхода¬
ми; временем старения образца и т. п.14
К условиям боевого применения ракетных комплексов
прежде всего относятся стратегия и тактика использования
управляемых баллистических ракет во взаимодействии с дру-
IMMN видами вооружения в соответствии с принятой военной
доктриной. Кроме того, к условиям применения следует от-
1ИЧ1И достоверность сведений о местоположении и степени
|;ицнщенности целей, для поражения которых предназначен
р.||<стный комплекс. Эффективность комплекса, обладающегоЭффективность
ракетного комплекса\Дальность пускоЬ~ —| могущество вч| Точность пусков( Надежность —про UBbttbBfeodtитемьность[Боеготовность1 ЭкономичностьСтратегия и
тактина боевого
примененияДостоверность
информации
О целяхД ейстВия
противникаклиматические и
метеорологическ и е
условия Рис. 1.3. Схема зависимости эффективности ракет¬
ного комплекса от его качества и условий боевого
применениявесьма высокими свойствами, может быть сведена к нулю,,
если координаты цели будут определены с большими ошиб¬
ками.К условиям боевого применения необходимо также отне¬
сти действия противника, а также климатические и метео--
рологические условия, в которых протекает борьба сторон.
Ike условия боевого применения, кроме первого, характери¬
зуются различной степенью неопределенности информации.
Особенно это относится к действиям противника.Оценивать эффективность ракетного комплекса необходи¬
мо на основе изучения свойств (качества) комплекса и усло-
ипй его боевого применения. Однако ввиду сложности по¬
добной задачи ее иногда расчленяют на две самостоятельные15
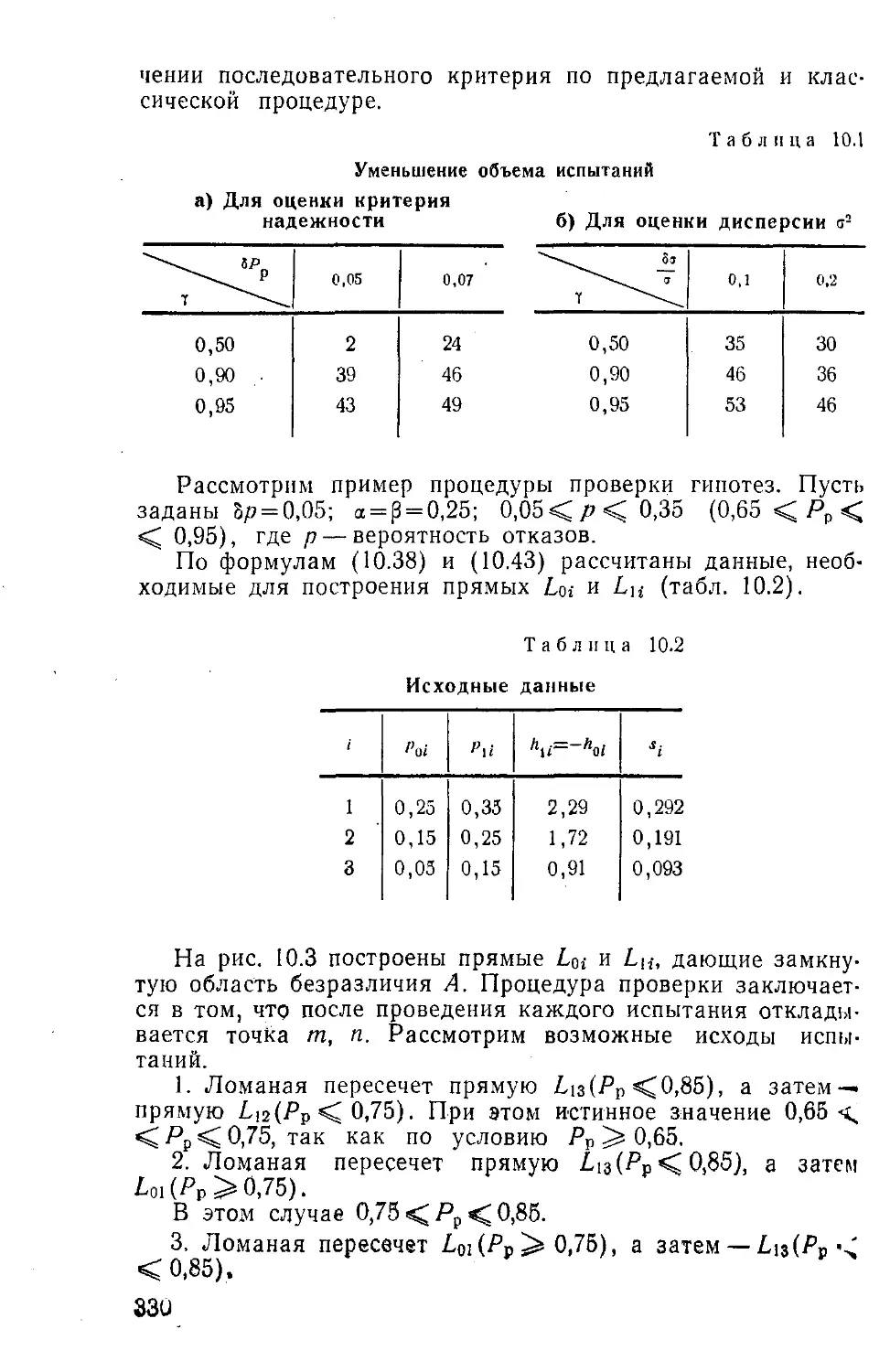
задачи. При определении параметров ракетного комплекса
условия боевого применения считаются фиксированными. За¬
тем решается задача по оценке эффективности выбранного
ракетного комплекса в различных условиях боевого приме¬
нения с учетом противодействия сторон. В результате реше¬
ния последней задачи выявляются оптимальные способы ве¬
дения боевых действий с использованием данного ракетного
комплекса, а также обнаруживаются недостатки комплекса,
которые можно устранить, изменив некоторые его параметры.Свойства ракетного комплекса, определяющие его каче¬
ство, характеризуются определенными параметрами.Диапазон дальностей полета характеризуется максималь¬
ной Lmax и минимальной Lm(n дальностями полета ракет. Мо¬
гущество комплекса оценивается тротиловым эквивалентом
ядерного заряда, которым снаряжены боевые части ракет.
Точность пусков можно характеризовать величиной средин¬
ного кругового рассеивания или среднеквадратическим от¬
клонением точек падения боевых частей.Надежность ракетного комплекса можно выразить вероят¬
ностью того, что ракеты и пусковые установки сохранят свои
боевые свойства в любых условиях эксплуатации, пуск раке¬
ты произойдет нормально, боевая часть будет доставлена в
район цели и взрывательное устройство вызовет нормальный
подрыв боевого заряда. Живучесть комплекса характеризует¬
ся вероятностью того, что пусковые установки и ракеты со¬
хранят свои боевые свойства при всех видах воздействия на
них противника. Если цель защищена системой противора¬
кетной обороны, то в характеристику надежности должна
входить дополнительно вероятность преодоления боевыми ча¬
стями системы ПРО.Боеготовность комплекса оценивается временем подготов¬
ки ракеты к пуску, а боевая производительность — числом
ракет, которые могут быть выпущены с пусковых установок
ракетного комплекса в течение определенного промежутка
времени.Экономичность ракетного комплекса характеризуется за¬
тратами на разработку проекта, производство и эксплуата¬
цию всех элементов комплекса.Условия боевого применения ракетных комплексов также
необходимо оценивать количественными характеристиками
или параметрами, хотя это сделать значительно труднее, чем
рационально выбрать параметры качества комплекса. Кроме
того, следует учитывать, что условия боевого применения ока¬
зывают влияние на параметры комплекса. Например, уязви¬
мость ракетного комплекса зависит от характера действий
противника.Для оценки эффективности системы вооружения применя¬
ются критерии эффективности. Это обычно числовые харак-16
м'рнстики, отражающие степень соответствия вооружения
смосму назначению при определенных условиях боевого при¬
менения. Критерий эффективности должен отражать назна¬
чение системы вооружения. Поскольку ракетный комплекс
предназначен для поражения целей, то критерий эффектив¬
ности должен содержать меру наносимого ущерба или дру¬
гих результатов действия боевых частей ракет. Как числовая
характеристика он должен являться функцией параметров,
характеризующих свойства вооружения и условия его при¬
менения. Чем больше параметров входит в критерий, тем он
полнее. Однако при выборе функциональной связи критерия
эффективности с параметрами качества и условий примене¬
ния системы вооружения необходимо учитывать не одинако-
иую значимость отдельных свойств и условий применения.
В качестве критериев целесообразно выбирать величины,
имеющие определенный физический смысл.В связи с разнообразием задач, которые решаются раз¬
личными системами вооружения, установить единый, универ¬
сальный критерий эффективности, по-видимому, нельзя. При
выборе критерия для ракетной системы следует учитывать
се специфические особенности.Боевое применение ракет сопровождается большим чис¬
лом случайных факторов, основными из которых являются:
рассеивание точек падения боевых частей относительно точ¬
ки прицеливания, вызываемое случайными ошибками работы
системы управления, подготовки данных для пусков, раз¬
бросом конструктивных параметров ракет и метеорологи¬
ческих условий их полета; разброс характеристик уязвимо¬
сти элементов целей из-за их неоднородности; отклонение
действительной мощности ядерного взрыва от номиналь¬
ной из-за случайных различий в протекании ядерных
реакций.Поэтому результаты действия ракетных комплексов по це¬
лям должны рассматриваться как функции случайных вели¬
чин, а критерии эффективности обычно представляют собой
вероятностные характеристики. Чаще всего используются ве¬
роятности различных событий и математические ожидания
случайных величин.Если результатом пусков ракет по цели может быть толь¬
ко ее поражение или непоражение, то за критерий эффектив¬
ности можно принять вероятность поражения цели. Однако
цели такого типа встречаются очень редко. Это в основном
цели малых размеров, требующие для своего полного уни¬
чтожения подрыва одной боевой части на достаточно близ¬
ком расстоянии.Если пуски ракет производятся по нескольким целям, то
ла критерий эффективности следует принять математическое
ожидание числа пораженных целей.17
Результатом пусков ракет по крупным целям может быть
полное или частичное разрушение элементов цели, а для
функционирующих целей — то или иное изменение способно¬
сти к функционированию; к числу подобных целей относятся
ракетные, авиационные и военно-морские базы, военно-про¬
мышленные объекты и т. п.; в этих случаях за критерий эф¬
фективности можно принять:1) вероятность поражения не менее заданной части цели;2) математическое ожидание числа пораженных эле¬
ментов;3) математическое ожидание пораженной части площади
цели;4) математическое ожидание величины нанесенного ущер¬
ба и т. п.Следует отметить, что вероятностные критерии эффектив¬
ности не позволяют предсказывать результаты отдельных пу¬
сков ракет. Лишь при достаточно большом числе случаев
боевого применения ракетных комплексов в аналогичных
условиях средний результат будет близок к найденному с по¬
мощью вероятностных критериев.Чтобы определить величины критериев эффективности,
применяют аналитические методы и методы статистического
моделирования.Статистическое моделирование состоит в многократном
воспроизведении математической модели условий боевого
применения и определении критериев эффективности как
функций средних статистических характеристик.Аналитические методы определения критериев эффектив¬
ности заключаются в установлении связей между параметра¬
ми свойств системы вооружения и критериями эффективно¬
сти в определенных условиях боевого применения.Рассмотрим методы определения эффективности ракет¬
ного комплекса, предназначенного для поражения ряда типо¬
вых целей малых размеров или «точечных» целей.Под малой целью понимают цель, размеры которой не
превышают 0,2 радиуса зоны поражения боевой части.Будем полагать, что прочностные характеристики цели та¬
ковы, что для ее уничтожения достаточно подрыва в районе
цели одной боевой части ракеты. В этом случае вероятность
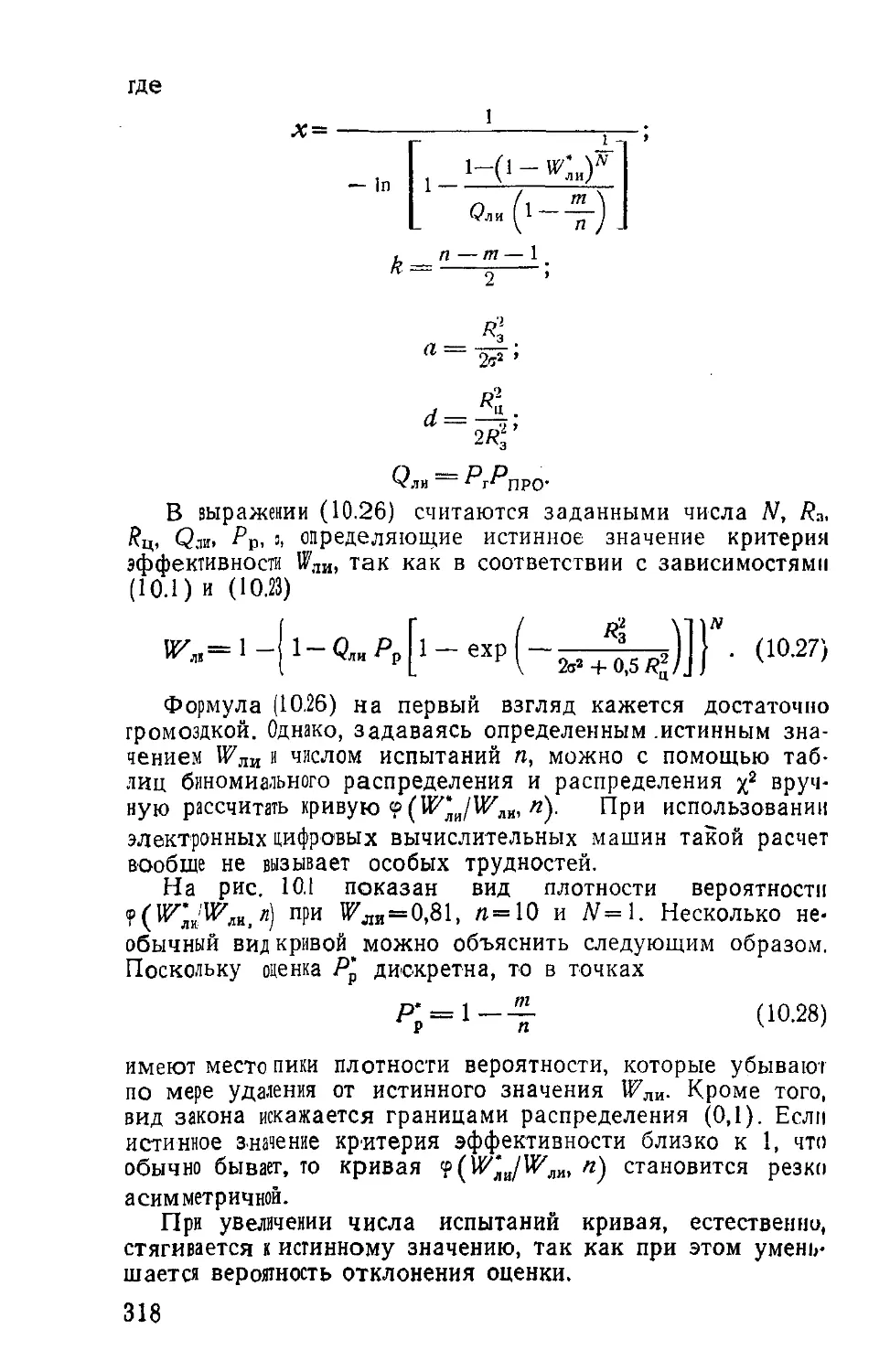
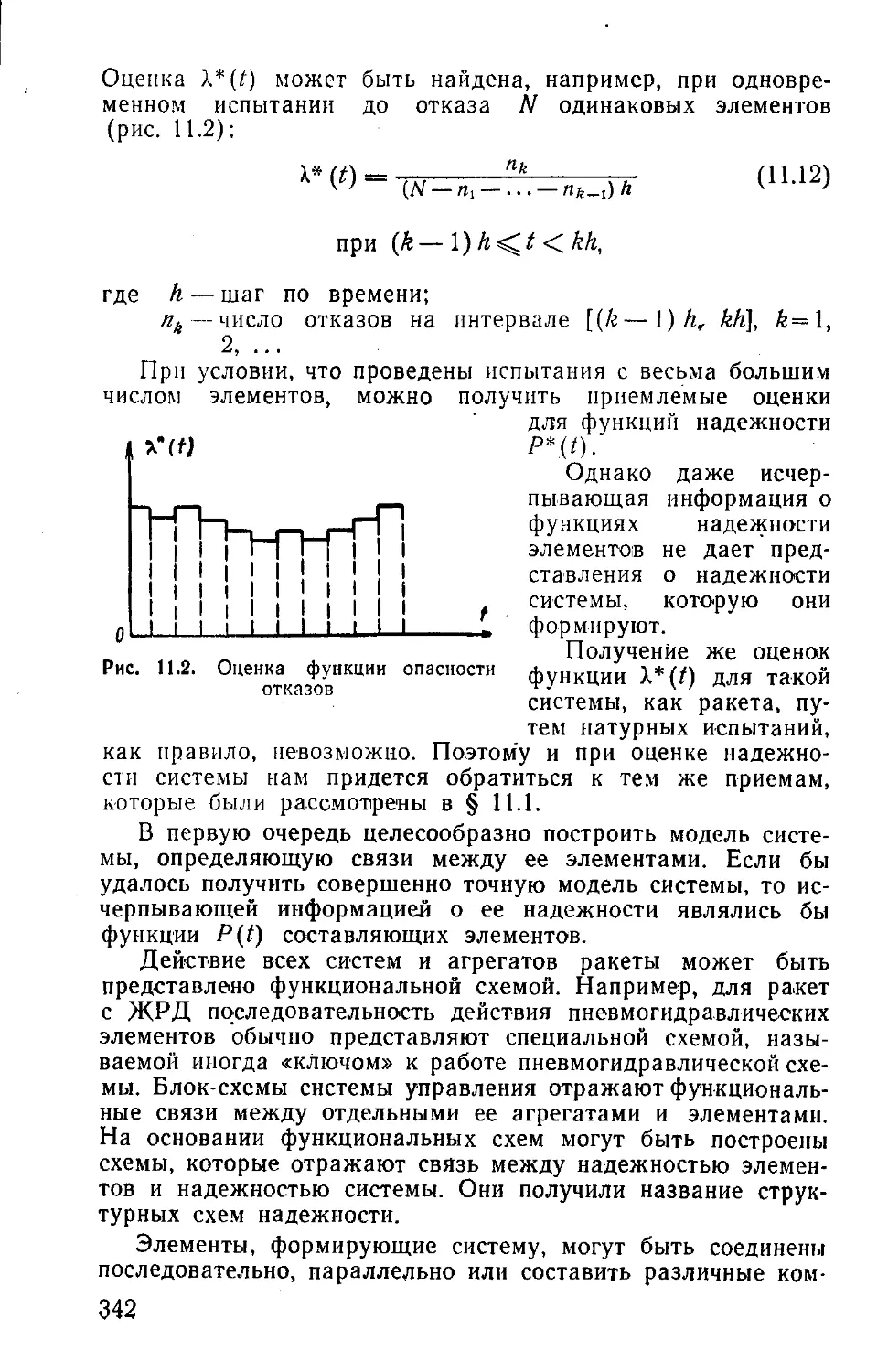
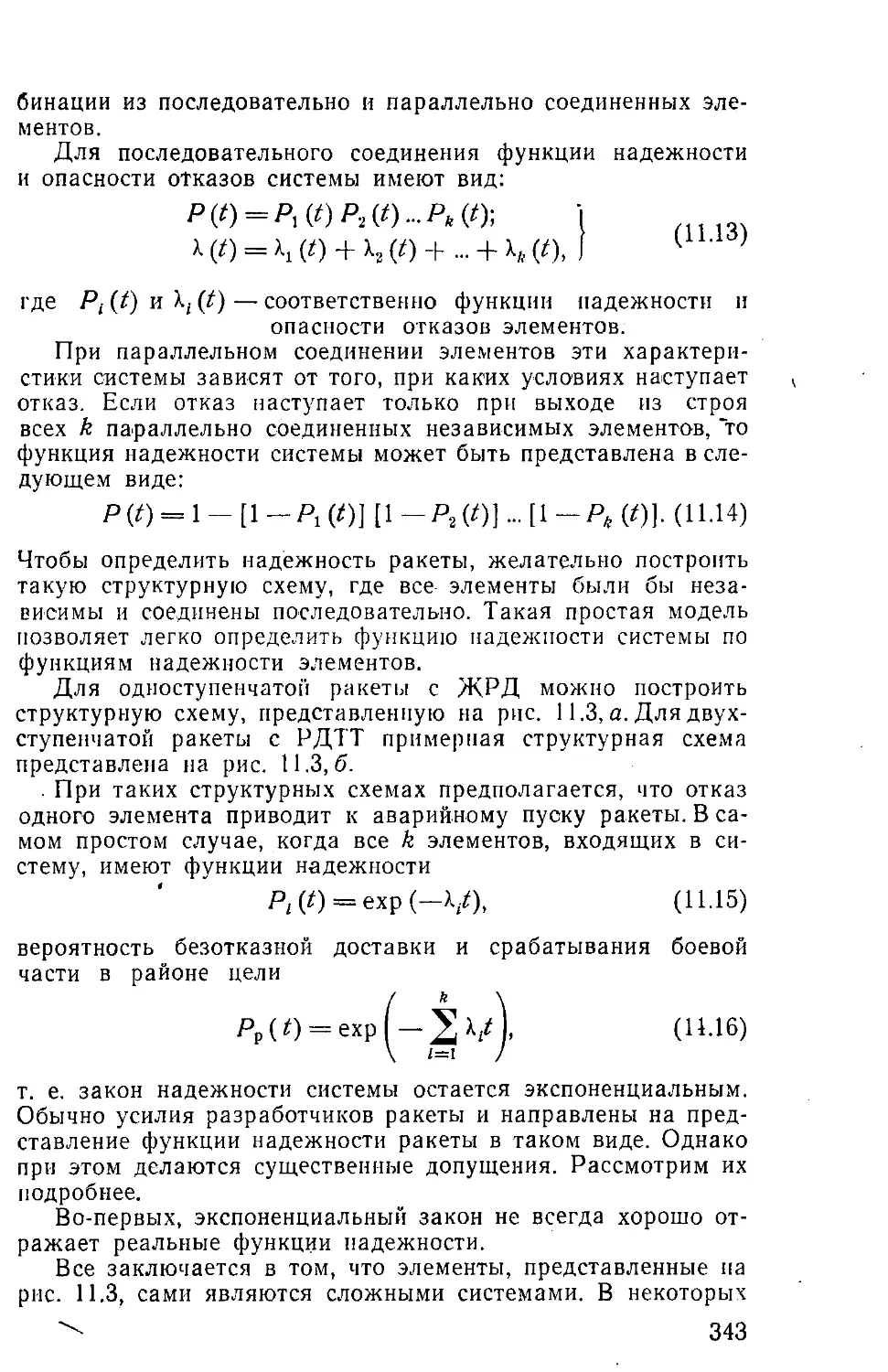
поражения цели одной ракетой [10]где /?3 — радиус зоны поражения боевого заряда;а„ — среднеквадратическое отклонение точек падения,
вызванное рассеиванием и ошибками подготовки
данных для пусков.(1.1)18
Радиус зоны поражения можно связать с мощностью
боевого заряда зависимостью [26]R3 = K*Vq, (1.2)где Кц — коэффициент, зависящий от требуемой интенсив¬
ности поражающих факторов ядерного взрыва
(живучести цели);
q — тротиловый эквивалент ядерного заряда.
Выражение (1.1) справедливо при условии, что вероят¬
ность пуска ракеты и преодоления боевой частью расстояния
до цели равна единице. Поэтому более полной характеристи¬
кой эффективности пуска одной ракеты будет величина пол¬
ной вероятности поражения цели при одном пуске:Р = РгРрРпроР1, (1.3)ПРОгде Рг — вероятность того, что за установленное время с
момента подачи команды ракетный комплекс бу¬
дет подготовлен к пуску ракет и не будет пора¬
жен противником;Яр — условная вероятность того, что боевая часть ра¬
кеты будет доставлена в район цели с допусти¬
мым рассеиванием и произойдет взрыв ядерного
заряда при Яг=1;■условная вероятность прохождения боевой частью
системы противоракетной обороны противника при
ЯГЯР=1.Величину Рр обычно называют критерием надежности ра¬
кеты. Если по одной и той же цели производится N незави¬
симых пусков ракет в одних и тех же условиях, то за крите¬
рий эффективности может быть выбрана вероятность хотя бы
одного эффективного попадания в цель [10]:W=l— (1— P)N =W''1ехр(1.4)Если пуски ракет производятся по различным однотипным
целям при одинаковых условиях, то в качестве критерия эф¬
фективности удобно принять математическое ожидание числа
целей, поражаемых ракетной системой [9], [10]:W = NPX = NPrPpPnp01 — expKlq1'
2 в*(1.5)где N— число пусков или число целей, по каждой из кото¬
рой выпущена одна ракета.19
Критерий, описываемый выражением (1.4), отражает три
свойства ракетного комплекса: могущество, точность пусков
и надежность. Условия боевого применения характеризуются
вероятностью преодоления системы ПРО.При увеличении дальности полета возрастают характери¬
стики рассеивания, продолжительность работы двигателей, а
также может увеличиваться число ступеней ракеты, что обыч¬
но уменьшает эксплуатационную надежность ракеты. Следо¬
вательно, величины Рр и оп связаны с дальностью полета ра¬
кеты.Если цель имеет значительные размеры по сравнению с
радиусом зоны поражения боевого заряда, то за критерий
эффективности следует принять математическое ожидание
числа пораженных элементов цели или пораженной части
площади цели. Эта величина зависит от закона распределе¬
ния элементов цели и закона рассеивания точек падения бое¬
вых частей.Наиболее простое выражение критерия эффективности по¬
лучается в том случае, когда элементы цели распределены
равномерно, а рассеивание мало отличается от кругового рас¬
пределения. Последнее справедливо, еслигде од — среднеквадратическое отклонение точек падения по
дальности;оГ) — среднеквадратическое отклонение точек падения в
боковом направлении.В'этом случае можно ввести приведенное среднеквадрати¬
ческое отклонение кругового рассеиванияТогда критерий эффективности поражения цели крупных
размеров [9]где /?„ — радиус цели.В частном случае, когда радиус цели мал по сравнению
с величиной оп или радиусом зоны поражения, критерий
эффективности поражения целей крупных и малых раз¬
меров может рассчитываться по одной и той же фор¬
муле (1.6).а =-j- (ад + аб)-(1.6)20
Наиболее полно отражает качество ракетной системы и
условия ее применения следующий критерий эффективности:W= —j—— Ри (1.7)~р~ СПу + Сргде W—математическое ожидание числа целей, поражае¬
мых ракетной системой;Cj, — ассигнования на создание ракетной системы;Спу — стоимость одной пусковой установки;Ср — стоимость одной ракеты;
г— число ракет, приходящееся на одну пусковую
установку;РА—вероятность поражения типовой цели при одном
пуске.Однако сложные критерии, подобные выражению (1.7),
используются только для оценки результатов решения основ¬
ной задачи военно-технического проектирования в целом.
При решении частных и главных задач применяются более
простые критерии.Если считать вероятность поражения цели при одном пу¬
ске постоянной, то за критерий эффективности ракетной си¬
стемы можно принять величину—р- Спу -Ь СрЕсли дополнительно предположить, что стоимость пуско¬
вой установки мало зависит от изменения стоимости ракеты,
то критерием эффективности ракетного комплекса при задан¬
ных ассигнованиях на создание ракетной системы может слу¬
жить стоимость ракетыW = CP. (1.8)В тех случаях, когда стоимость ракеты может считаться
пропорциональной стартовой массе ракеты, критерий эффек¬
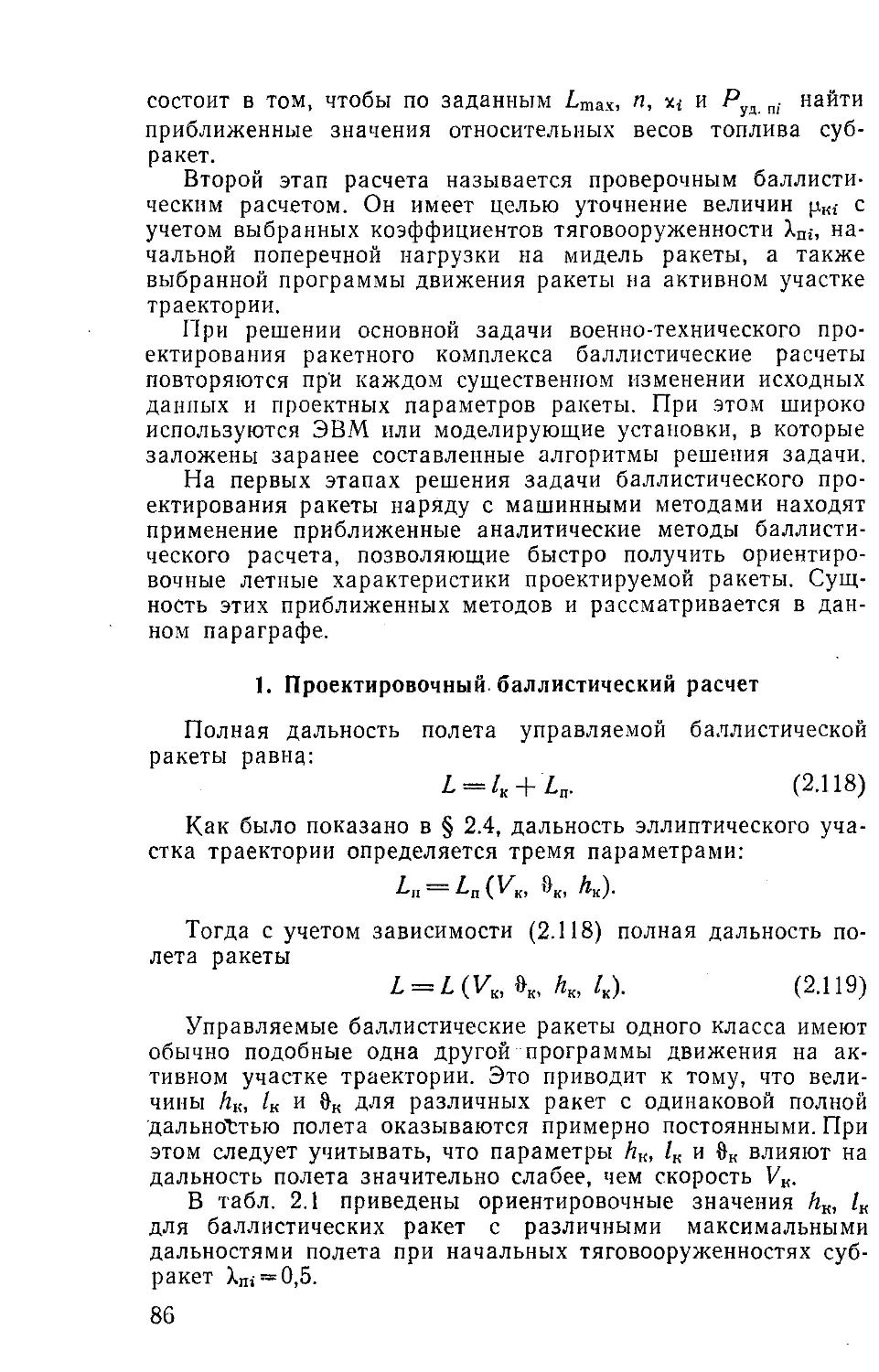
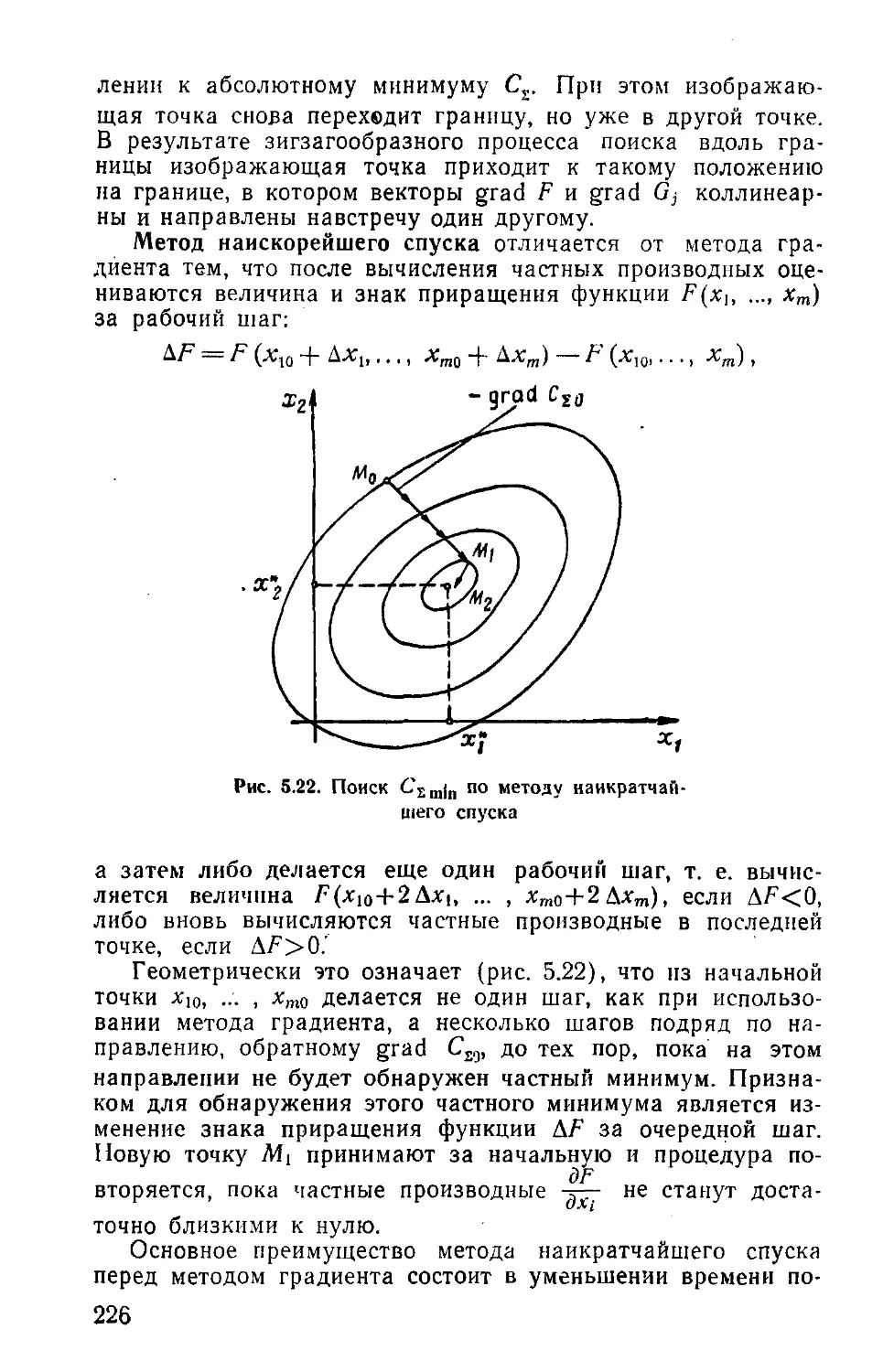
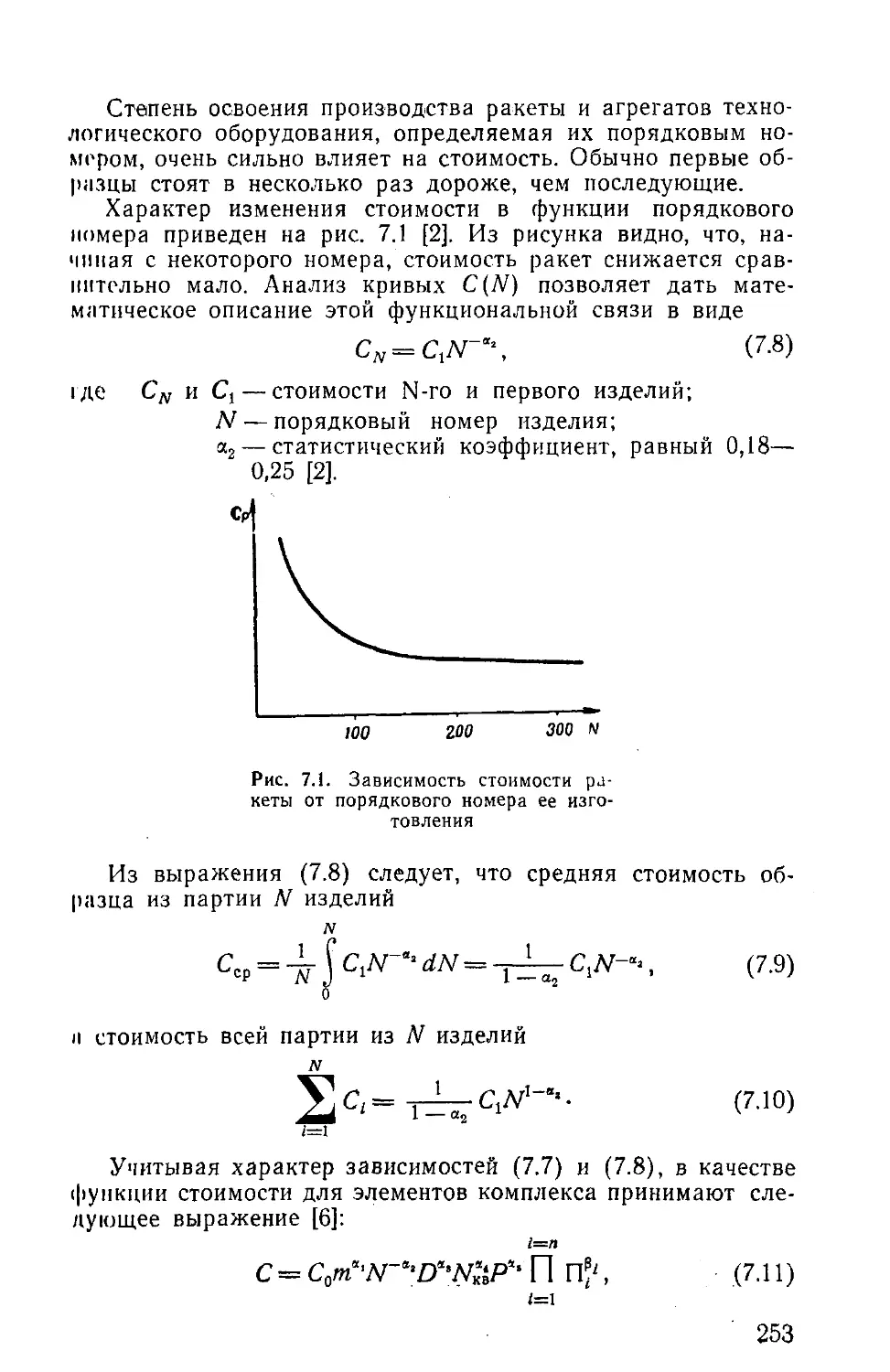
тивностиW — т0, (1.9)где tn0— стартовая (начальная) масса ракеты.§ 1.3. ЗАДАЧИ БАЛЛИСТИЧЕСКОГО ПРОЕКТИРОВАНИЯРАКЕТПрямая задача баллистического проектирования в общем
случае формулируется так: при заданных максимальной
дальности полета ракеты Lmax и массе полезной нагрузки тпп
требуется определить характеристики ракеты, обеспечиваю¬21
щие минимальные затраты средств на поражение типовой
цели [28], [55].Обратная задача может быть сформулирована следую¬
щим образом: при заданных ассигнованиях на создание но¬
вого ракетного комплекса и заданной массе полезной нагруз¬
ки твп требуется установить параметры ракеты, обеспечи¬
вающие нанесение максимального ущерба определенной груп¬
пе целей.Часто вместо затрат на создание ракеты рассматривается
стартовая масса ракеты т0 как величина, пропорциональная
затратам при определенных допущениях.При решении прямой и обратной задач баллистиче¬
ского проектирования используются четыре типа зависи¬
мостей:— весовые уравнения, отражающие тип ракеты, число
ступеней, вид топлива и особенности конструктивной схемы
ракеты;— баллистические уравнения, описывающие условия по¬
лета управляемой ракеты;— стоимостные уравнения, служащие для экономической
оценки ракетного комплекса;— надежностные зависимости, позволяющие определить
эффективность использования рассматриваемого комплекса
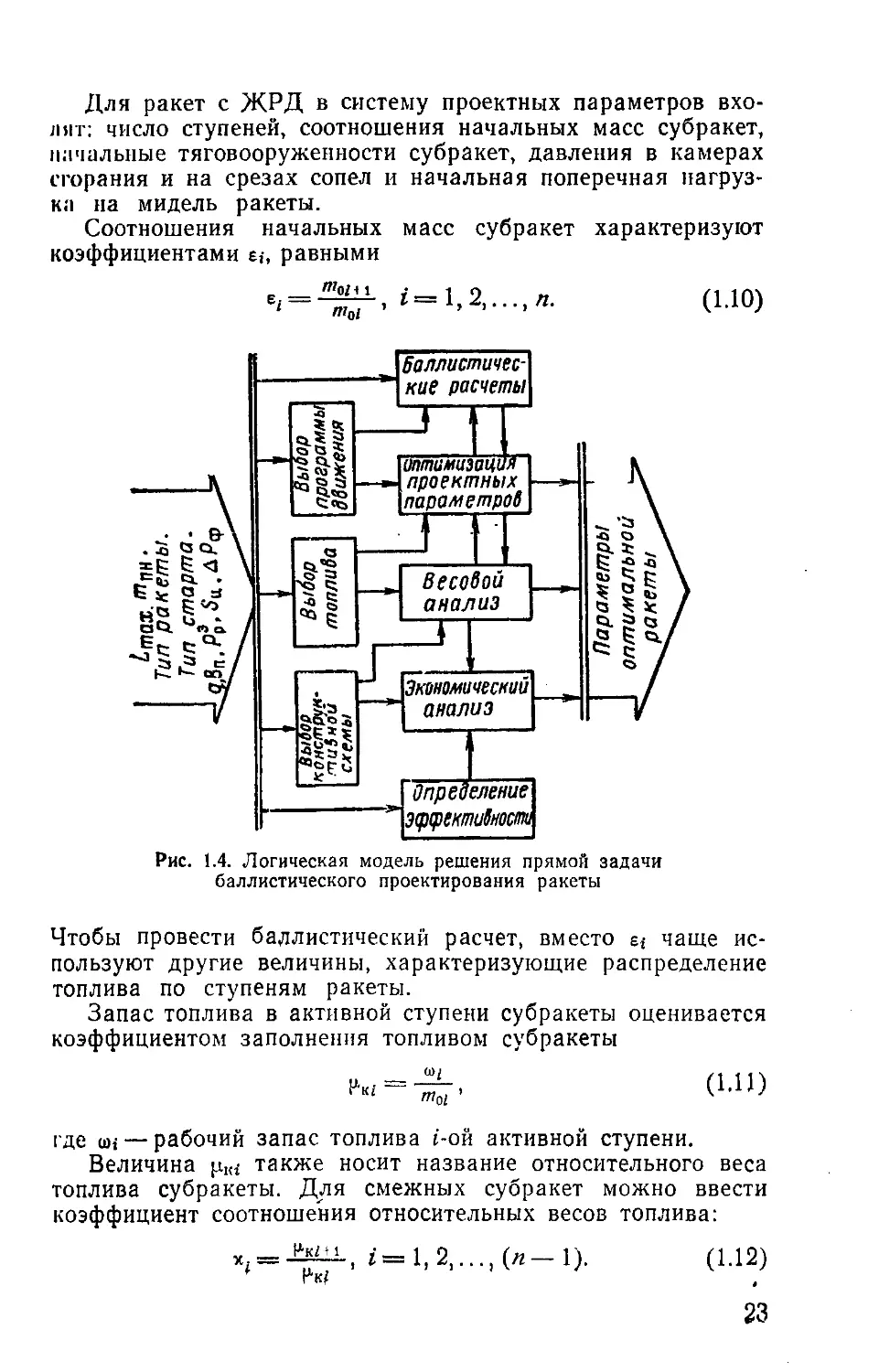
для поражения целей.Логическая модель исследования прямой задачи балли¬
стического проектирования ракет приведена на рис. 1.4. Вход¬
ными данными являются: максимальная дальность поле¬
та Z-max, масса полезной нагрузки тшь тип ракеты, тип стар¬
та, состав наземного оборудования, тротиловый эквивалент
боевого заряда q, характеристика точности работы системы
управления — среднеквадратичное отклонение точек падения
боевых частей ош эксплуатационная надежность ракетного
комплекса Рэ, характеристики типовой цели (площадь
цели S1( и требуемое давление во фронте ударной вол¬
ны Арф).Последовательность решения прямой задачи баллистиче¬
ского проектирования такова. Вначале выбирают программу
движения ракеты на активном участке траектории, вид топ¬
лива и конструктивно-компоновочную схему ракеты. Затем в
результате весового анализа определяют конструктивные
коэффициенты ракеты, которые используют для оптимиза¬
ции проектных параметров ракеты.Проектными параметрами ракеты называют совокупность
исходных величин, которые позволяют при заданных Lma3[
и тт, а также при выбранных топливе и конструкционных
материалах для изготовления ракеты однозначно определить
основные весовые, тяговые и геометрические характеристики
ракеты.22
Для ракет с ЖРД в систему проектных параметров вхо-
лит: число ступеней, соотношения начальных масс субракет,
начальные тяговооруженности субракет, давления в камерах
сгорания и на срезах сопел и начальная поперечная нагруз¬
ка на мидель ракеты.Соотношения начальных масс субракет характеризуют
коэффициентами е,-, равными«от j_ j 2
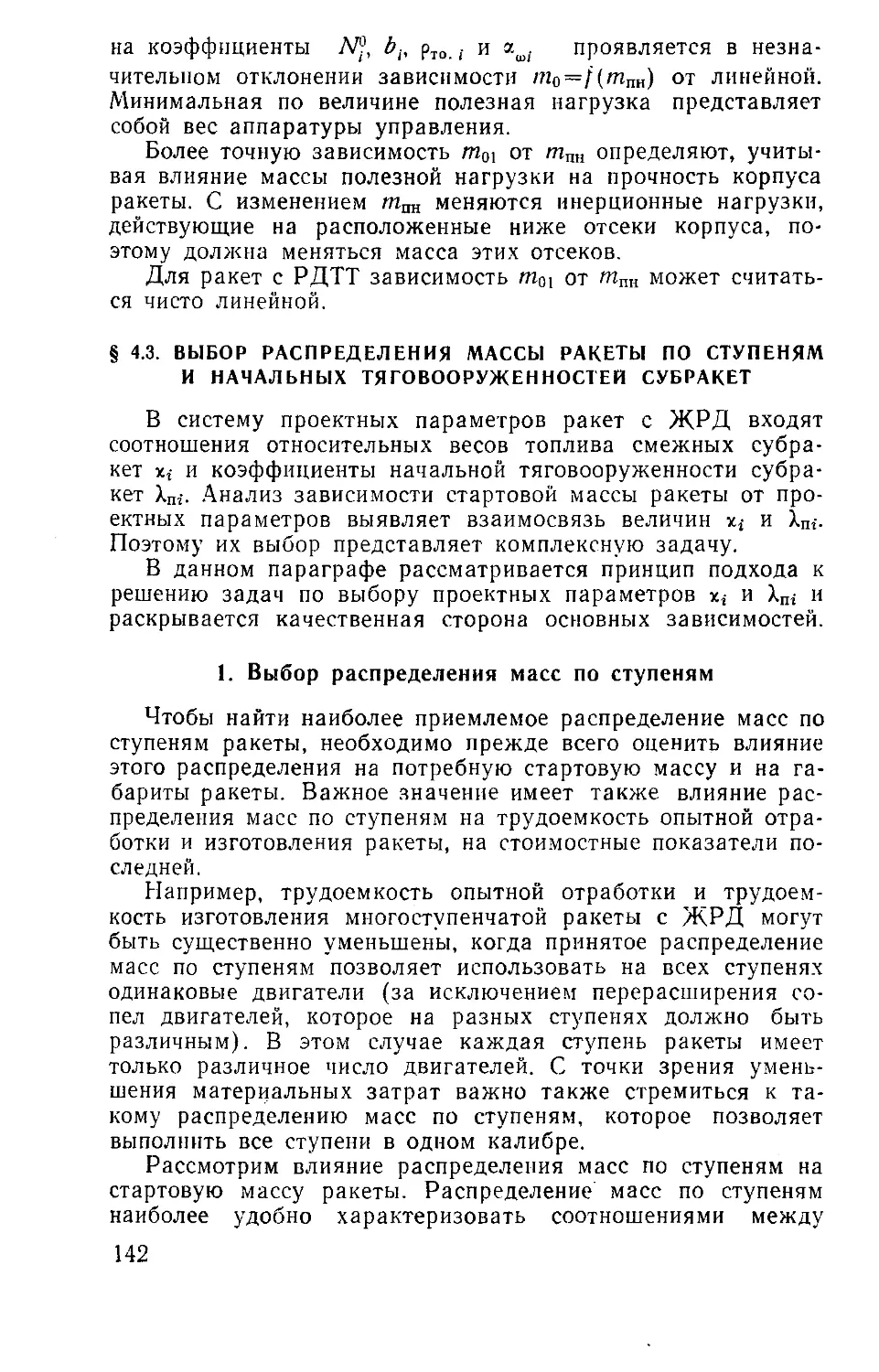
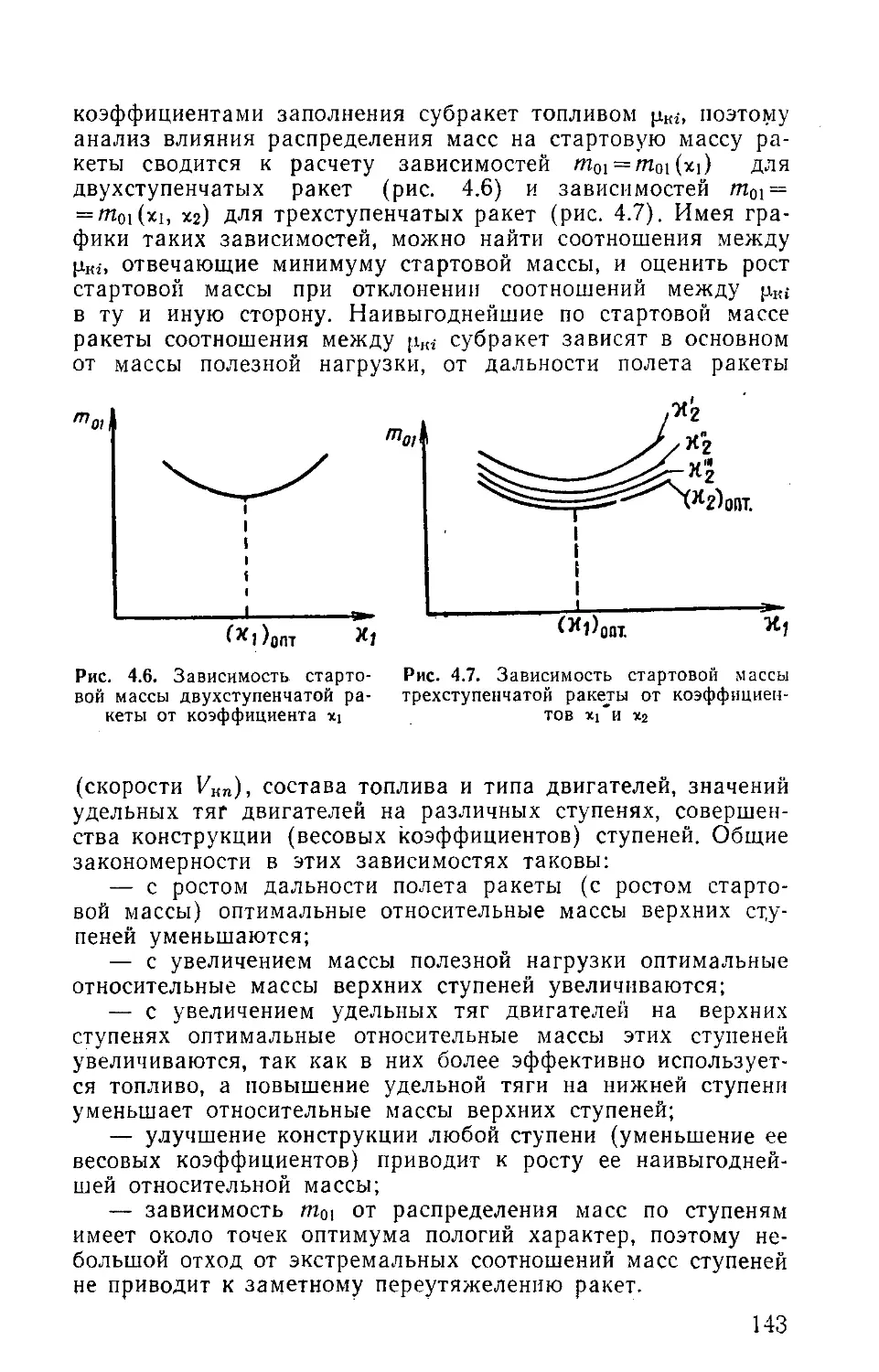
It'ol ’ ’ ’(1.10)Рис. 1.4. Логическая модель решения прямой задачи
баллистического проектирования ракетыЧтобы провести баллистический расчет, вместо s* чаще ис¬
пользуют другие величины, характеризующие распределение
топлива по ступеням ракеты.Запас топлива в активной ступени субракеты оценивается
коэффициентом заполнения топливом субракеты<*>iЩ i ’(1Л1)где ал — рабочий запас топлива i-ой активной ступени.Величина [iKj также носит название относительного веса
топлива субракеты. Для смежных субракет можно ввести
коэффициент соотношения относительных весов топлива:/=1,2,..., (л-1).Рк?(1.12)*23
Коэффициенты х,- используются в качестве проектных пара¬
метров ракеты.Тяговооруженности субракет характеризуют коэффициен¬
тами тяговооруженности, определяемыми по формулам:go™oi(1.13)где X0i — коэффициент начальной тяговооруженности i-ой
субракеты на земле;— коэффициент начальной тяговооруженности t-ой
субракеты в пустоте;—9,81 м/сек2 — ускорение силы тяжести на поверх¬
ности земного шара;
m0i — начальная масса г-ой субракеты;P0i—тяга двигателей t-ой ступени на Земле;Рщ—тяга двигателей t'-ой ступени в пустоте.
Начальная поперечная нагрузка на мидель ракетыЛ„ = ^, (1.14)1 Mlгде тт — стартовая масса ракеты;FMImi — “4— — площадь миделева сечения корпуса ра¬
кеты;dM, — диаметр цилиндрической части корпуса
1-й ступени ракеты.Вместо начальной поперечной нагрузки на мидель раке¬
ты Рм1 в систему проектных параметров можно включать от¬
носительное удлинение ракеты /р, связанное с параметром Рм
соотношением'•-v (1',ягде /рV "Ml/р — полная длина ракеты;Рср — средняя плотность ракеты, заправленной топ¬
ливом.Для ракет с РДТТ используется практически та же систе¬
ма проектных параметров, но вместо коэффициентов X, и ве¬
личины /р вводятся относительные длины зарядов в ступенях
ракеты l3i и скорости горения ракетных топлив исполь¬
зуемых в двигателях ракеты.24
Подробнее проектные параметры для ракет с ЖРД и
РДТТ рассматриваются в гл. 4.Оптимизация проектных параметров позволяет найти та¬
кую совокупность значений каждого из них, которая обеспе¬
чивает при прочих равных условиях получение ракеты мини¬
мальной стоимости (иногда — минимальной стартовой
массы).Далее производится баллистический расчет для определе¬
ния запасов топлива в ступенях ракеты, которые обеспечи¬
вают достижение заданной максимальной дальности полета.
Иозвращаясь к весовым уравнениям, определяют массы сту¬
пеней и стартовую массу всей ракеты,Затем может быть произведен экономический анализ, ко¬
торый позволяет оценить затраты средств на создание ра¬
кеты.Наконец, можно оценить эффективность действия боевой
части по типовой цели, определить потребный расход ракет
п оценить затраты на поражение цели.Проведя подобные расчеты для различных сочетаний
проектных параметров, а также для различных видов ракет¬
ного топлива, можно определить параметры оптимальной ра¬
кеты, обеспечивающей минимальные затраты средств на по¬
ражение типовой цели.При решении обратной задачи баллистического проекти¬
рования исходными данными являются: ассигнования на соз¬
дание нового ракетного комплекса, тип ракеты, вид ракет¬
ного топлива, конструктивная схема ракеты, тип старта, со¬
став наземного оборудования, характеристики типовой цели
пли состав и характеристики группы целей.В ходе решения обратной задачи баллистического проек¬
тирования выбирают вид топлива, конструктивную схему ра¬
кеты, программу ее движения и интервал дальностей полета
ракеты. Далее производится оптимизация проектных пара¬
метров. Затем выбираются параметры боевой части (q) и си¬
стемы управления (Вп) и назначается показатель эксплуата¬
ционной надежности ракеты (Ра). После баллистического рас¬
чета становятся известными запасы топлива в ступенях ра¬
кеты. В результате весового анализа определяются массы
ступеней и стартовая масса ракеты. Далее проводится эко¬
номический анализ для определения числа ракет, которые
могут быть изготовлены при заданных ассигнованиях. Учи¬
тывая характеристики целей, можно определить число целей,
которое может быть поражено ракетами исследуемого типа.
Наконец, можно оценить в стоимостных единицах величину
ущерба, наносимого противнику.Проведя аналогичные расчеты для различных интервалов
дальностей, различных параметров боевых частей и систем
управления, а также при различных проектных параметрах25
ракеты, можно найти параметры оптимальной ракеты, нано¬
сящей максимальный ущерб типовой цели при заданных
ассигнованиях.Из сказанного выше следует, что прямая и обратная за¬
дачи баллистического проектирования ракет включают ряд
частных задач, а именно: выбор топлива, выбор модели ра¬
кеты, выбор программы движения на активном участке тра¬
ектории, оптимизацию проектных параметров ракеты, весо¬
вой анализ, экономический анализ, баллистический расчет,
оценку эффективности ракеты, оценку стоимости поражения
цели (наносимого ущерба). Методы решения частных задач
баллистического проектирования будут рассмотрены ниже.
При приближенных расчетах решение частных задач произ¬
водится расчлененно. Например, оптимальное значение каж¬
дого из проектных параметров определяется по условному
экстремуму (при постоянстве остальных проектных параме¬
тров). Точное решение задач баллистического проектирова¬
ния возможно только с помощью ЭВМ или моделирующих
установок.В книге рассматриваются лишь приближенные методы
решения задач баллистического проектирования, которые мо¬
гут использоваться па стадии предэскизного проектирования
ракет и разработки тактико-технических требований к ним.
Достоинствами этих методов по сравнению с точными явля¬
ются малая трудоемкость и наглядность.При приближенном проектировании логическая модель
решения задачи упрощается. В число исходных данных вклю¬
чаются Lmax и тШ1 (при решении прямой задачи) или mQi
и тш (при решении обратной задачи). Выходными данными
являются соответственно m0i или Lmax- Экономический ана¬
лиз и оценка эффективности могут не проводиться, так как
критерием сравнения вариантов ракет служат стартовая
масса или максимально возможная дальность полета.§ 1.4. ВЫБОР ТОПЛИВ И ОПРЕДЕЛЕНИЕ ИХ ХАРАКТЕРИСТИК
ПРИ БАЛЛИСТИЧЕСКОМ ПРОЕКТИРОВАНИИ РАКЕТСреди немногих источников энергии, которые использу¬
ются для реактивного движения, химические молекулярные
топлива имеют в настоящее время самое широкое приме¬
нение.В стратегических ракетах используются жидкие и твер¬
дые ракетные топлива.Выбор топлива при проектировании ракет имеет особое
значение, так как природа топлива, физико-химические свой¬
ства компонентов и условия их эксплуатации практически
полностью определяют тип двигателя, систему проектных па-26
|>а метров, массу, габариты и баллистические возможности
ракет.Следует также иметь в виду, что 80—95% стартовой мас¬
сы ракет приходится на долю топлива.Наконец, структура, состав, надежность и боеготовность
ракетного комплекса зависят от эксплуатационных свойств
топлива.При проектировании ракет принципиально возможна по¬
становка двух различных задач:1) определение требуемых характеристик оптимального
кшлива, обеспечивающего максимальную эффективность ра¬
кетного комплекса;2) подбор оптимальной композиции из имеющихся компо¬
нентов топлив.Современный уровень развития химии ракетных топлив и
специфические связи между их характеристиками не позво¬
ляют решить первую из упомянутых задач. Поэтому выбор
топлива сводится к решению второй задачи.При решении второй задачи для сравнения различных
топлив используются критерии, к которым относятся:— стандартная удельная тяга Руд. ст;— термодинамические параметры продуктов сгорания
топлива (температура Т, газовая постоянная R, показатель
адиабаты k или показатель изэнтропического процесса пиз);— средняя плотность топлива рт;— скорость горения и (для твердых) или время пребы-
нания продуктов сгорания в камере т (для жидких топлив);— характеристики механической прочности твердых топ¬
лив с учетом их реологических свойств;— характеристики стоимости компонентов топлив.Кроме того, при проектировании необходимо учитыватьэксплуатационные характеристики топлив: возможности по¬
дачи компонентов в камеры сгорания, использования их для
охлаждения, изготовления зарядов из твердых топлив, усло-
ния снабжения, транспортировки, хранения и т. п.Наконец, при выборе форм зарядов твердого топлива не¬
обходимо учитывать возможности их изготовления. Рассмо¬
трим подробнее критерии сравнения ракетных топлив.Стандартная удельная тяга Руд. ст является ха¬
рактеристикой энергетических возможностей топлива. За
стандартную принимается теоретическая удельная тяга при
равновесном истечении продуктов сгорания и при давлениях
м камере сгорания рк—40 бар и на срезе сопла pa = 1 бар.
Кроме того, предполагается, что сопло работает на расчет¬
ном режиме.Значения удельных тяг для различных топлив получают
п результате термодинамических расчетов, затем сводят в
таблицы и энтропийные диаграммы. Чтобы учесть потери в27
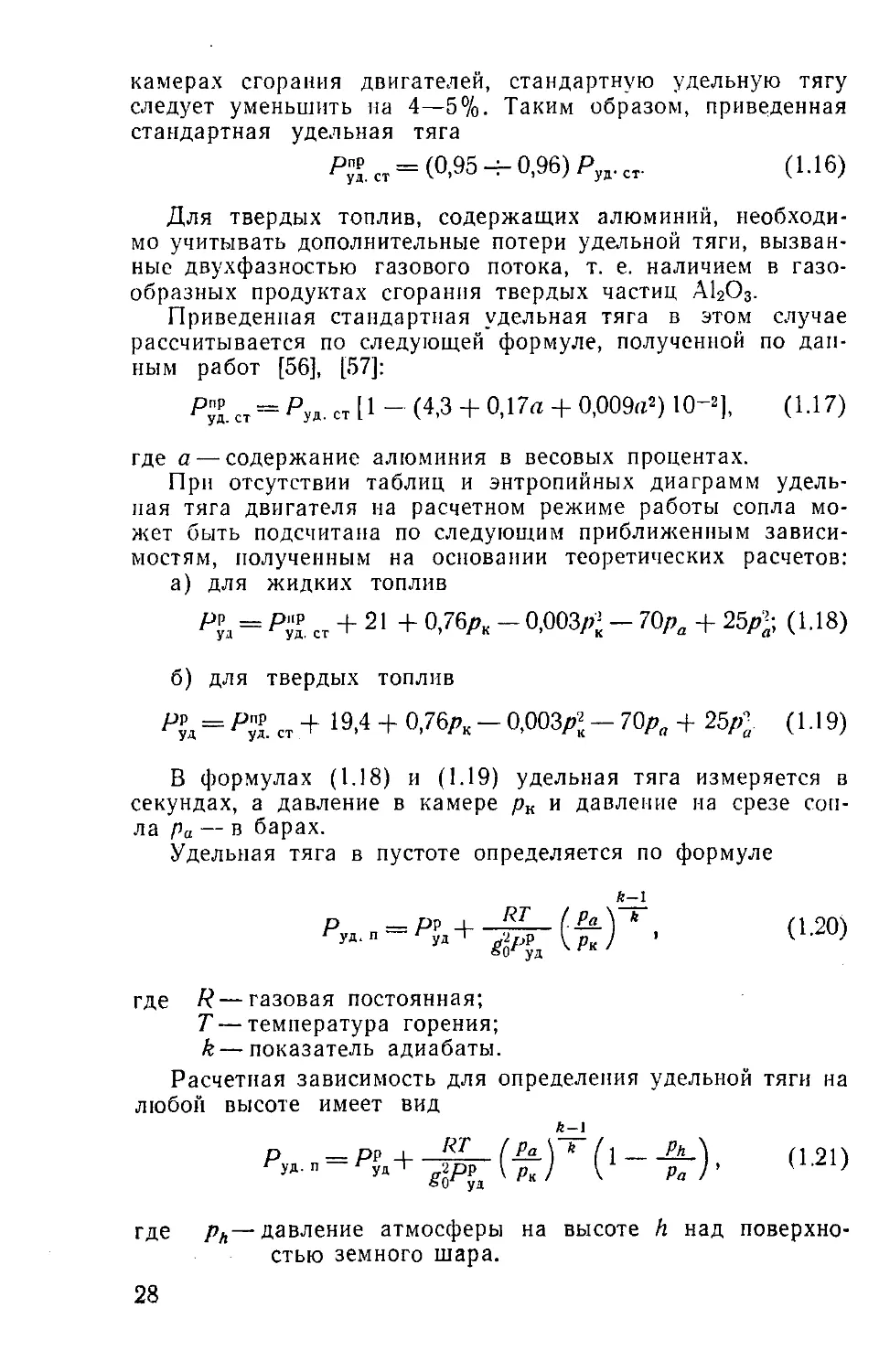
камерах сгорания двигателей, стандартную удельную тягу
следует уменьшить на 4—5%. Таким образом, приведенная
стандартная удельная тягаРул. ст= (0,95 -г- 0,96) Руя. ст. (1.16)Для твердых топлив, содержащих алюминий, необходи¬
мо учитывать дополнительные потери удельной тяги, вызван¬
ные двухфазностью газового потока, т. е. наличием в газо¬
образных продуктах сгорания твердых частиц AI2O3.Приведенная стандартная удельная тяга в этом случае
рассчитывается по следующей формуле, полученной по дан¬
ным работ [56], [57]:Рул. ст == Руд- ст [ 1 - (4,3 + 0,17а + 0,009а2) 10-2], (1Л7)где а — содержание алюминия в весовых процентах.При отсутствии таблиц и энтропийных диаграмм удель¬
ная тяга двигателя на расчетном режиме работы сопла мо¬
жет быть подсчитана по следующим приближенным зависи¬
мостям, полученным на основании теоретических расчетов:а) для жидких топлив/» = Р% ст + 21 + 0-76/,к - 0,003/Я - 70ра + 25/Я; (1.18)б) для твердых топливррд = я;р ст+ 19,4+ 0,76Л-0,003^-70/»fl + 25/А (1.19)В формулах (1.18) и (1.19) удельная тяга измеряется в
секундах, а давление в камере рк и давление на срезе соп¬
ла ра — в барах.Удельная тяга в пустоте определяется по формулеР,,. = ЯРД+Л-(А)Ч (1.20)где R — газовая постоянная;Т — температура горения;
k — показатель адиабаты.Расчетная зависимость для определения удельной тяги на
любой высоте имеет видй-)' (121>где ph—давление атмосферы на высоте h над поверхно¬
стью земного шара.28
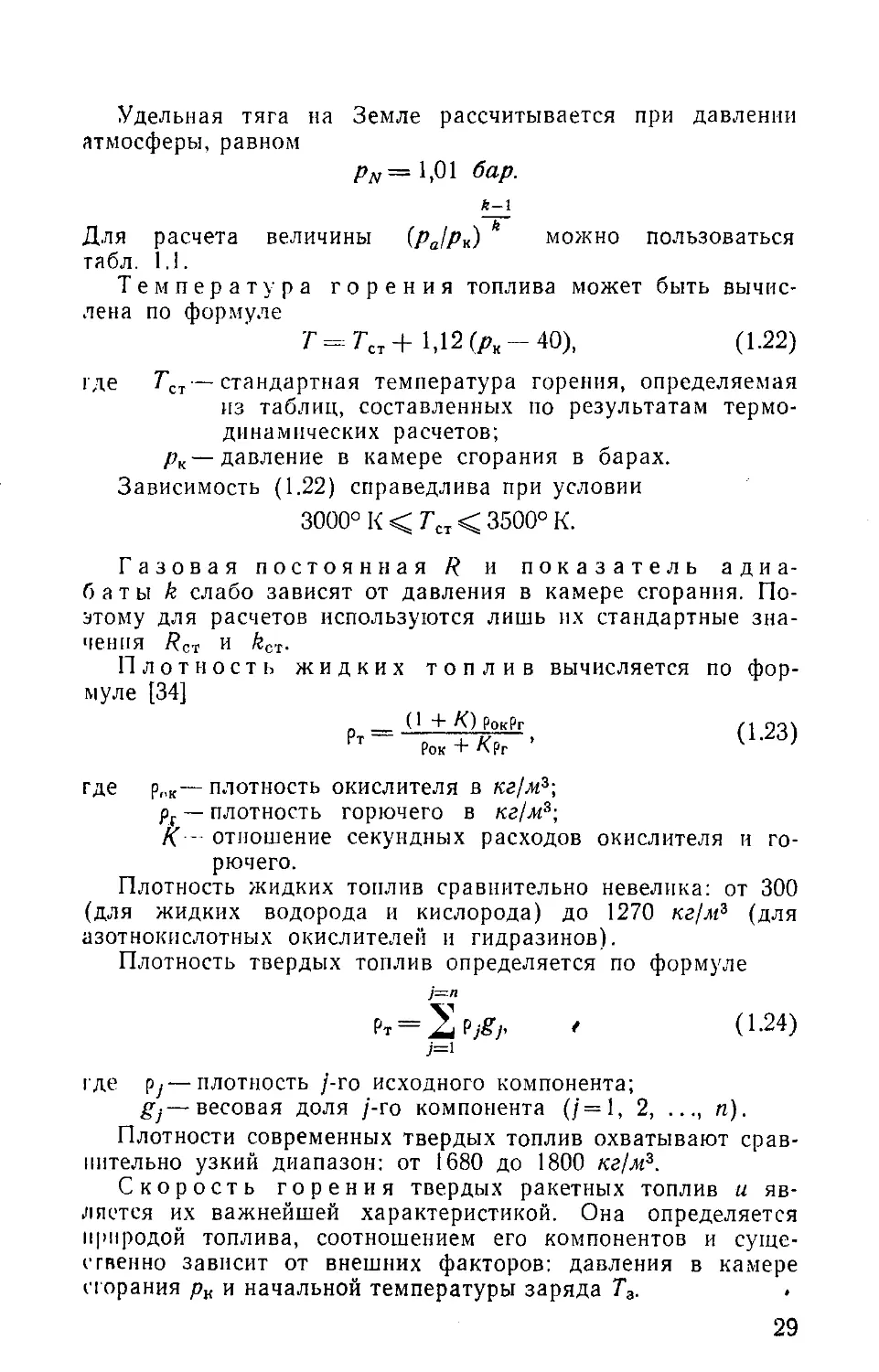
Удельная тяга на Земле рассчитывается при давлении
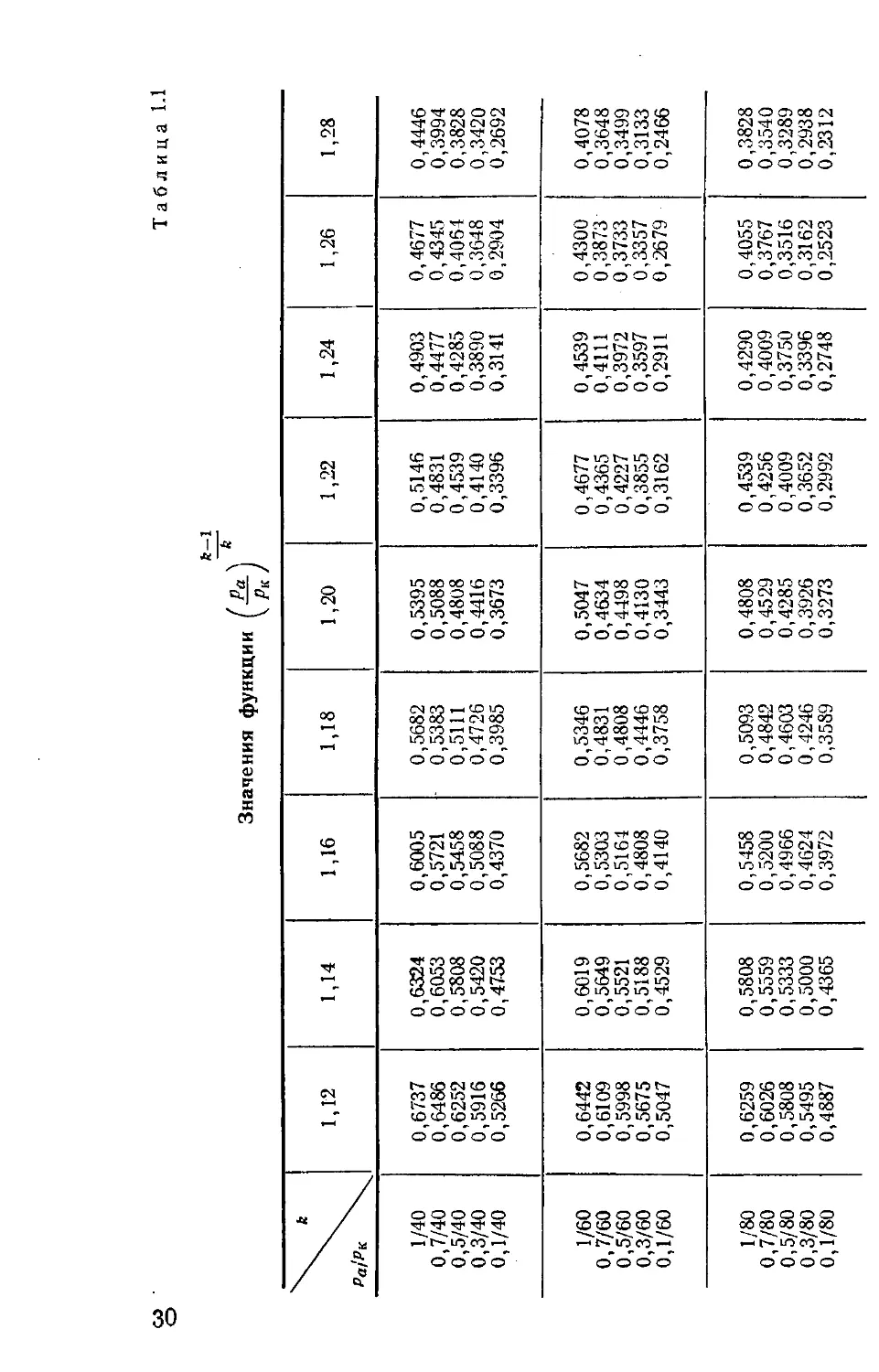
атмосферы, равномpN = 1,01 бар.k-\Для расчета величины (pJpK) k можно пользоваться
табл. 1.1.Температура горения топлива может быть вычис¬
лена по формулеТ — Тст-\- 1,12 (рк 40), (1.22)где Тст— стандартная температура горения, определяемая
из таблиц, составленных по результатам термо¬
динамических расчетов;
рк—давление в камере сгорания в барах.
Зависимость (1.22) справедлива при условии
3000° К < Т„ < 3500° К.Газовая постоянная R и показатель адиа¬
баты k слабо зависят от давления в камере сгорания. По¬
этому для расчетов используются лишь их стандартные зна¬
чения /?ст и йст.Плотность жидких топлив вычисляется по фор¬
муле [34]_ (I + К) РокРг (\ оо\Рт~ Рок + КРг ’где р„к— плотность окислителя в кг/м3;
pt — плотность горючего в кг/м3\К - отношение секундных расходов окислителя и го¬
рючего.Плотность жидких топлив сравнительно невелика: от 300
(для жидких водорода и кислорода) до 1270 кг/м3 (для
азотнокислотных окислителей и гидразинов).Плотность твердых топлив определяется по формулеРт = 2р jSp * (1-24);=1где Pj—плотность /-го исходного компонента;gj—весовая доля /-го компонента (/=1, 2, ..., п).
Плотности современных твердых топлив охватывают срав¬
нительно узкий диапазон: от 1680 до 1800 кг/м3.Скорость горения твердых ракетных топлив и яв¬
ляется их важнейшей характеристикой. Она определяется
природой топлива, соотношением его компонентов и суще¬
ственно зависит от внешних факторов: давления в камере
сгорания рк и начальной температуры заряда Т3.29
Таблица 1.1sCtfasX>,•в*XvD*сзXмютгсоомтр CD CM CM CDтр 0> оо тР ©
тр со со со смо" о” о" о* о*С-- Ю *1" оо тр
I- тР tO тр о
0COOOG1
тр тр тр СО С<1о о о о оГО S 1Л О i-t
О t- оо О *r
CD тР CM 00 гчтр тр *p со со
о © © © отр со со v _
оо ю < соIC^^TJCO©" o' ©~ o' ©Ю 00 00 о со
0)00 0*hN
00 © 00 3*<0
lOiOTf Tt-fO©" ©" ©” o' ©~CM СО —< © Ю
00 00 *— CM ooto CO 1—1t"- c>ююю^со
o' a> o' © o'о © © © ©TP CO 00 ©CO© © ю ю тр
cT©"*©*© оЙ§8Й28
I" тр CM CD CM
to © to Ю Ю© © cT ©" o'© © © © ©
тр тр тр тр Tp
?—Г t~— LO CO ^
©"©'©*©'t*- тр CT> CO t-
© © tP _< ^^ CO CO CO CMo' ©" o’ o' ©© CO CO t-~ ©
© CO Ю t—
СО 0O t-- CO ©
тр CO CO CO CM
© © © © ©4 t«- 0> i-H<01ЮС)
тР тР CO CO CMo’©*©"о o'S3:MOhlClN
t- © CM uo ©© со см со >—•тр тР tP со CO© o' © ©" ©Г- тр 00 © CO•g* со cd со ^
© to i— тр
Ю ^ тр тр CO©o’©©©*'© T-t oo © CO
TP CO © TP LOсо oo oo тр c-»ю tP TP TP CO
© © © © ©CM CO ^ CO ©
00 © tO О тр
© CO -—I oo 1—1
© © ©” © ©OOwOOO)
CM 00 CMSCO Ю t—< Ю
Ю Ю Ю ^Po' ©" © © o'С^фООЮК
TP © CD Г- TP
TP т-4 CD © О
© © Ю Ю Ю© o' ©" © ©"© <
© t* © © ©
> © © ©
©~ o' o' ©00 О O) 00 CM
CM TP 00 CO *-*•00 Ю CM CD CO
CO^CO CO CM CM© о © o' o’"Ю t— © CM CO
Ю © © CM
ОМОнЮ
^ со CO CO CMо © © o' ©© CT) о © OO
CD © Ю CD TP
CM О N CO N
тР тр CO CO CMo' o” o' <DG>CD © CD CM CM
СО Ю © Ю CD
ю см © © cdтР tP tP CO Cvl© o' o' © ©C© CD Ю © CO
о CM CO CM o-
ОО Ю CM o4! CM
Tp Tp^Tp CO CO
© © © © ©CO CM CO © CD
CD тр © Tp 00
© oo © CM Ю
Ю Tp Tp тр CO© © © © оCO © © TP см
ЮОЮСМГ>
Tp CM CD © ©
UO «-О тр тр CO© © ОООю to Ю Ю '
© © © © ©CD © 00 Ю t"-
Ю CM О CD oo
CM ©00 TP oo
© © Ю lO тр
© © © © ©© © © © ©
00 00 00 00 oo*—< О- Ю CO 'o’ © ©" ©*30
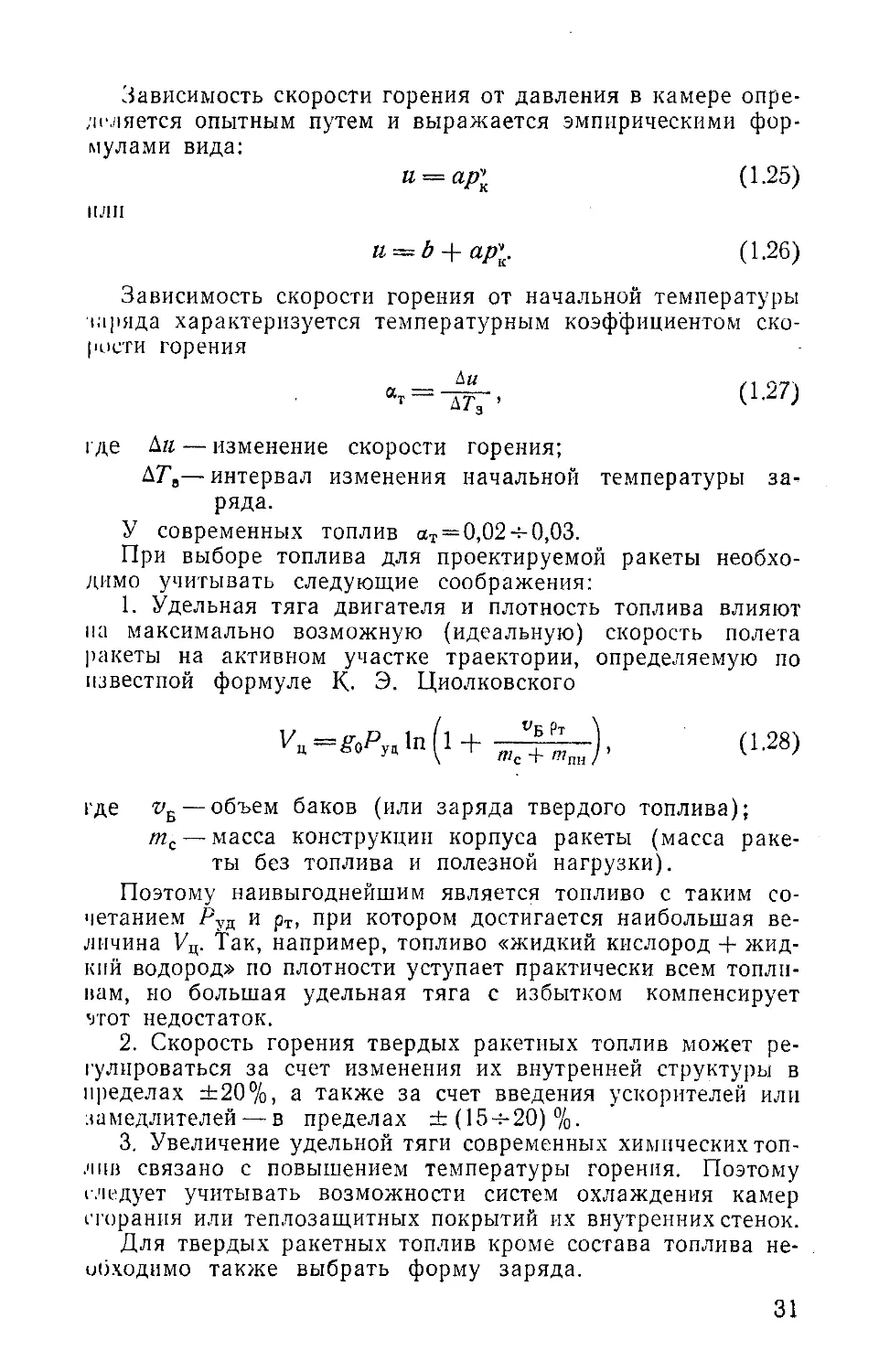
Зависимость скорости горения от давления в камере опре¬
деляется опытным путем и выражается эмпирическими фор¬
мулами вида:Зависимость скорости горения от начальной температуры
члряда характеризуется температурным коэффициентом ско¬
рости горениягде Д« — изменение скорости горения;ДГя—интервал изменения начальной температуры за¬
ряда.У современных топлив ат = 0,02 н- 0,03.При выборе топлива для проектируемой ракеты необхо¬
димо учитывать следующие соображения:1. Удельная тяга двигателя и плотность топлива влияют
па максимально возможную (идеальную) скорость полета
ракеты на активном участке траектории, определяемую по
известной формуле К. Э. Циолковскогогде vB — объем баков (или заряда твердого топлива);тс — масса конструкции корпуса ракеты (масса раке¬
ты без топлива и полезной нагрузки).Поэтому наивыгоднейшим является топливо с таким со¬
четанием Руд и рт, при котором достигается наибольшая ве¬
личина Уц. Так, например, топливо «жидкий кислород + жид¬
кий водород» по плотности уступает практически всем топли¬
вам, но большая удельная тяга с избытком компенсирует
чгот недостаток.2. Скорость горения твердых ракетных топлив может ре¬
гулироваться за счет изменения их внутренней структуры в
л ределах ±20%, а также за счет введения ускорителей или
замедлителей — в пределах ±(15-г-20)%.3. Увеличение удельной тяги современных химических топ¬
лив связано с повышением температуры горения. Поэтому
следует учитывать возможности систем охлаждения камер
сгорания или теплозащитных покрытий их внутренних стенок.Для твердых ракетных топлив кроме состава топлива не¬
обходимо также выбрать форму заряда.(1.25)илии = Ь + ар\.(1.26)(1.28)31
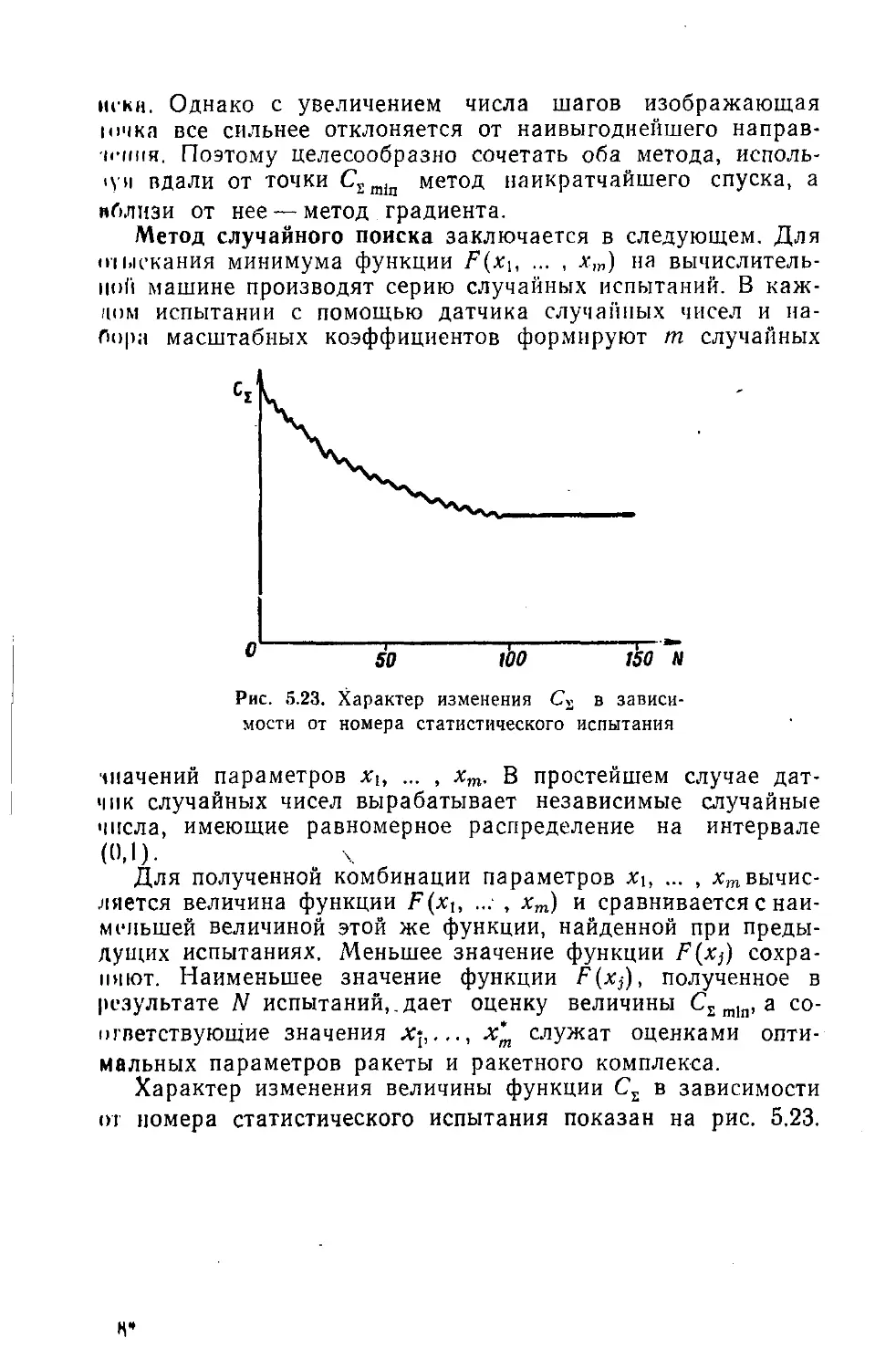
ШШ//ШЛ-При выборе формы заряда учитывают необходимость
обеспечения:а) постоянства поверхности горения во время работы дви¬
гателя;б) большого секундного прихода газов;в) большого коэффициента заполнения камеры сгорания
топливом.Кроме того, форма заряда должна отличаться простотой
технологии изготовления и монтажа заряда.Из многочисленных
возможных форм за¬
рядов лишь немногие
по своим характеристи¬
кам подходят для
РДТТ стратегических
ракет. Находят приме¬
нение заряды телеско¬
пической формы, заря¬
ды с продольными ще¬
лями и заряды со
звездообразным кана¬
лом (рис. 1.5).Горение таких заря¬
дов происходит по вну¬
тренним поверхностям,
в то время как внеш¬
няя, а иногда и торцо¬
вые поверхности по¬
крыты инертной бронировкой. Заряд также может быть
скреплен с внутренней поверхностью камеры сгорания.Основными геометрическими характеристиками заряда яв¬
ляются:1) наружный диаметр заряда d3;2) относительная длина зарядаJ _Ь_ (1.29)d3 'где 1Я — длина заряда;3) относительный диаметр внутреннего канала (для заря¬
дов со щелями и звездообразным каналом)dKРис. 1.5. Формы зарядов твердого топлива:а — заряд телескопической формы; б —заряд с
продольными щелями; в — заряд со звездообраз¬ным каналом(1.30)где dK — диаметр внутреннего канала;4) относительная длина щелей для заряда с продольны¬
ми щелями (рис. 1.6)Л = -£- = 0,37/8 —0,30, (1.31)а3где h — длина щелей.32
При баллистическом проектировании твердотопливных ра¬
кет можно пренебрегать различием между наружным и вну¬
тренним диаметрами цилиндрической части камеры сгорания
н наружным диаметром заряда. Следовательно, можно счи¬
тать для г-ой ступениd3i = dM, (1.32)Относительные длины зарядов 13 являются проектными па¬
раметрами ракеты.по А-А> г з 4 „НЕ-\ ■. hЖ llРис. 1.6. Заряд с продольными щелями:/ — топливо; 2 — бронировка; 3 — центральный канал; 4— щельОтносительный диаметр внутреннего канала при отсутст-
имн ограничений на прочность заряда выбирается из усло-
иия [58]крd:(1.33)кргдеFclплощадь свободного от топлива поперечного
сечения камеры сгорания перед началом ра¬
боты двигателя;^кр и dKр—площадь и диаметр критического сечения
сопла.Для заряда, скрепленного с камерой сгорания, при усло-
itim, что имеются ограничения на его прочность, внутренний
дмнметр канала dK выбирается из соотношения [3]dK = (0,3 -т- 0,5) d3. (1.34)Теоретически можно использовать любую комбинацию
пкцелителей и горючих, образующих ракетное топливо. При
ныбранных компонентах состав жидкого топлива характери-
цчтея коэффициентом избытка окислителяК
где К = —™— отношение массового секундного расхода
,Пг окислителя к массовому секундному расхо¬
ду горючего;Рис. 1.7. Зависимость термодинамических
параметров продуктов сгорания и удельной
тяги от коэффициента избытка окислителя:У — жидкое топливо; 2 — твердое топливо без алю¬
миния; 8 — твердое топливо с алюминиемv0—коэффициент стехиометрии, соответствую¬
щий такому значению К, при котором сго¬
рают горючие элементы топлива до продук¬
тов полного окисления.Состав твердых топлив, обычно задаваемый весовыми
процентами компонентов и выражаемый условной химиче¬
ской формулой килограмма топлива, характеризуется анало¬
гичным параметром — а. Для твердого топлива, состоящего34
Состав и основные характеристики некоторых жидких топлив [3], [52], [53]руд. ст’сек2803351268270253ьи4<м1,221,231,231,23Ь'01S378520О00со370378°кст35503270336033003140-Ло. м
3*1075320118512401280и\О. £80000о00890ООО00Й *
О fj
О.11421142145014501570к2,94,762,82,83,0/ГорючееКеросинЖидкий водородНесимметричныйдиметилгидразинАэрозин-50*НесимметричныйдиметилгидразинОкислительЖидкий кислородЖидкий кислородЧетырехокисьазотаАзотная кислота
(70%), окислы азота
(30%)2" ' 35Смесь 50% несимметричного диметилгидразина и 50% гидразина.
из углеводородного горючего, перхлората аммония (окисли¬
теля) и алюминиевого порошкаК== 2а + 0,5(6 — е) + 1,5/> (1-36)где с— количество граммов кислорода, содер¬жащееся в килограмме топлива;
а, Ь, е и /— количества граммов соответственно
углерода, водорода, хлора и алюминия,
содержащиеся в килограмме топлива.На рис. 1.7 представлены типовые зависимости термоди¬
намических параметров продуктов сгорания и стандартных
удельных тяг от параметра а. Из графиков на рис. 1.7 сле¬
дует, что для каждой топливной системы существует опти¬
мальное соотношение компонентов а0Пт, соответствующее
максимуму ЯУд. ст- Как правило, оптимальный состав не сов¬
падает со стехиометрическим (а0Пт<1), но приближается к
нему при повышении давления в камере сгорания.Для твердых ракетных топлив характерно повышение ско¬
рости горения с ростом а. Варьируя составом компонентов,
можно изменять в желаемом направлении удельную тягу,
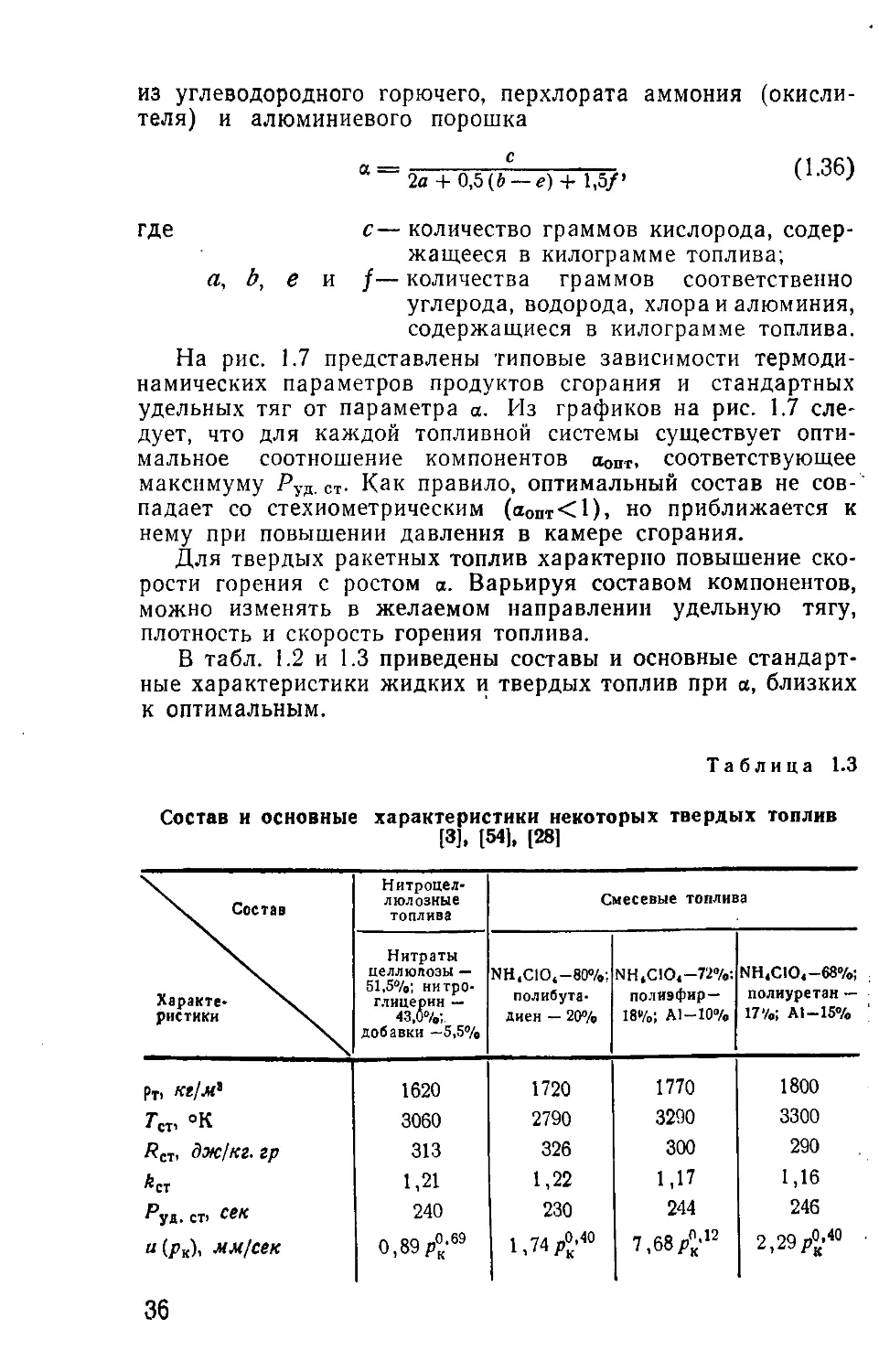
плотность и скорость горения топлива.В табл. 1.2 и 1.3 приведены составы и основные стандарт¬
ные характеристики жидких и твердых топлив при а, близких
к оптимальным.Таблица 1.3Состав и основные характеристики некоторых твердых топлив[3], [54], [28]N. СоставНитроцел-люлозныетопливаСмесевые топливаN.Нитраты
целлюлозы —N11,010,-80%;NH,C10,-72%:NH,CIO,-68%;Характе- N.
ристики N.51,5%; нитро¬
глицерин —
43,0%;
добавки —5,5%полибута¬
диен — 20%полиэфир—
18%; А1-10%полиуретан —
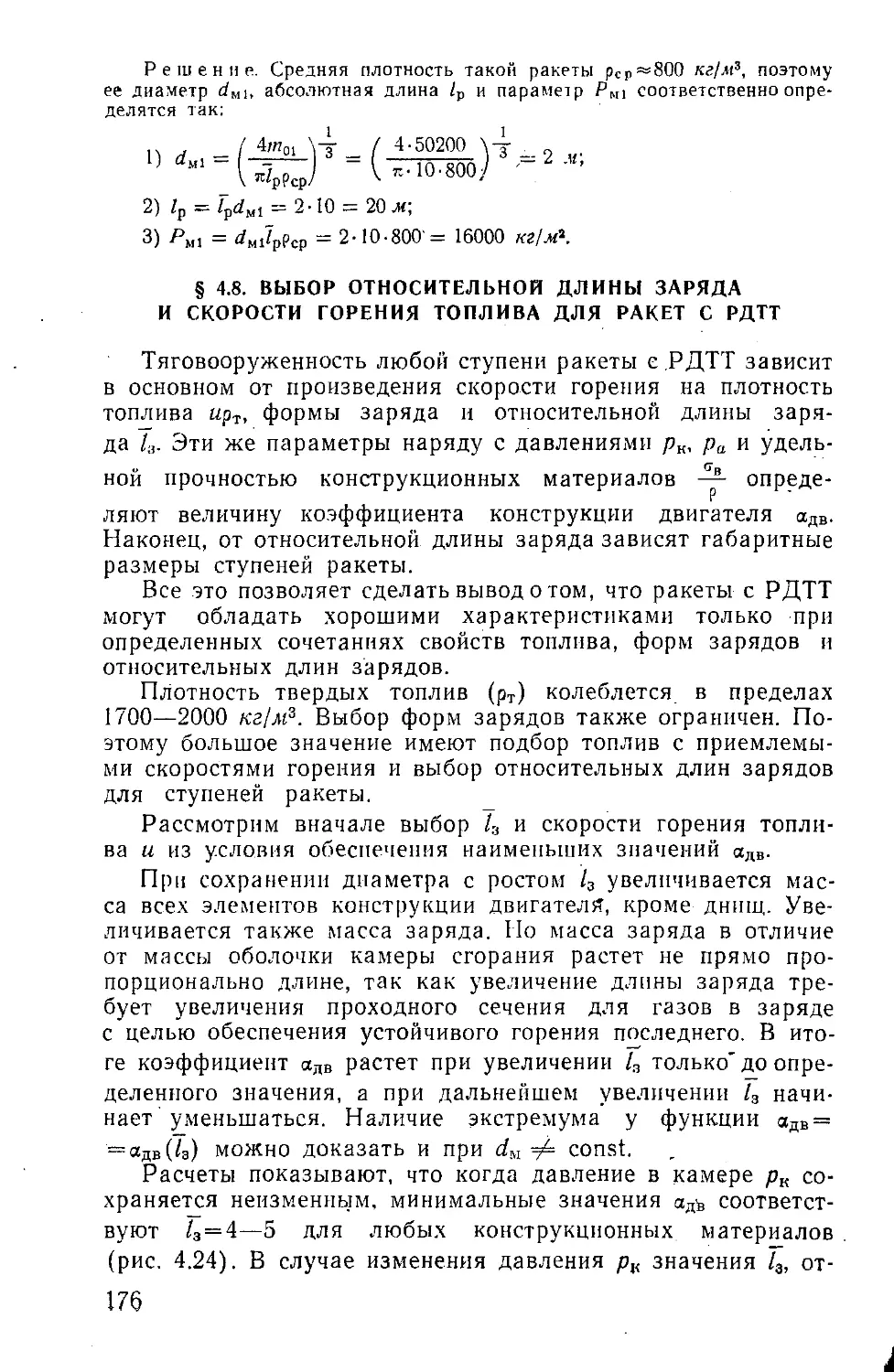
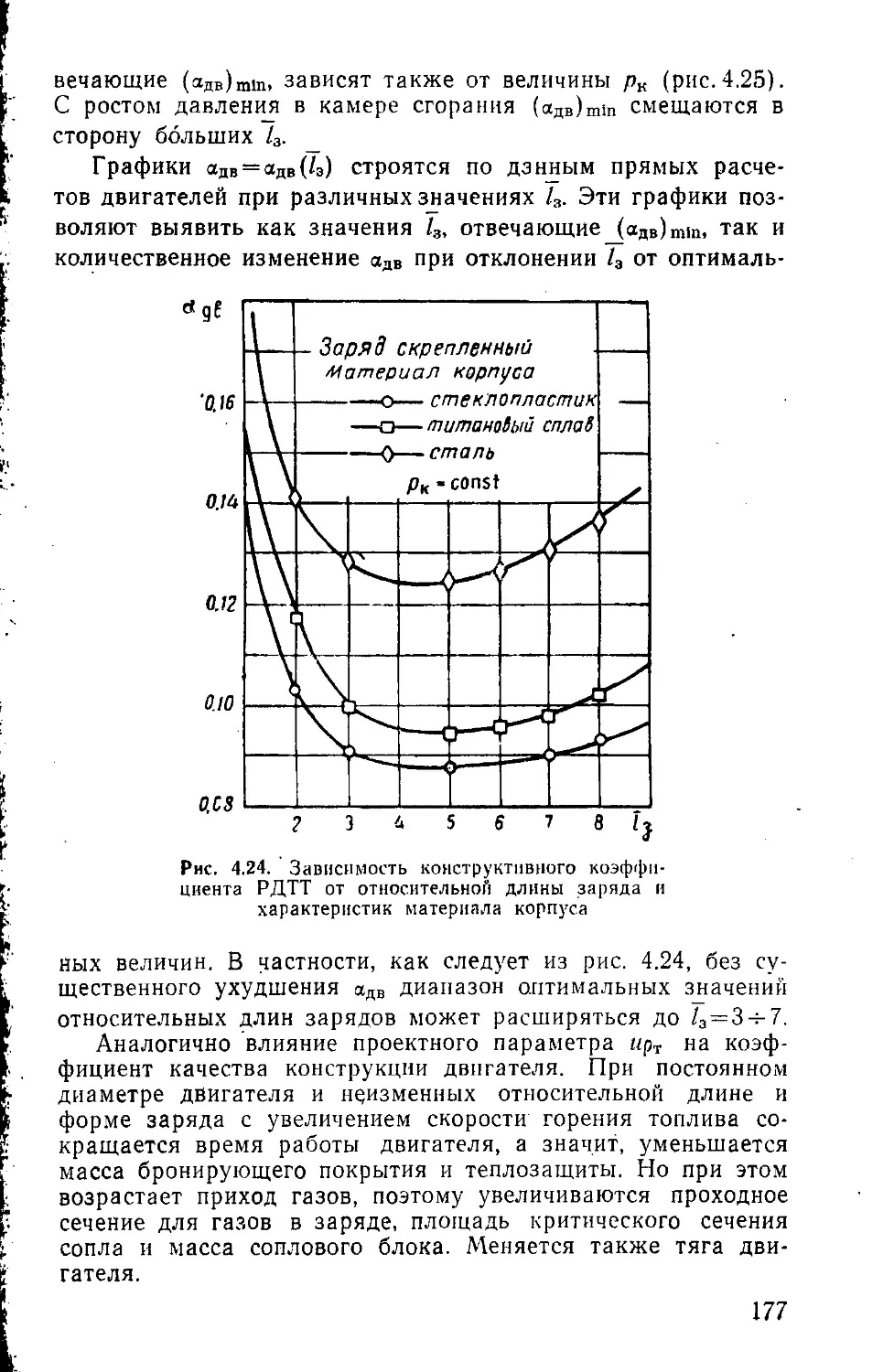
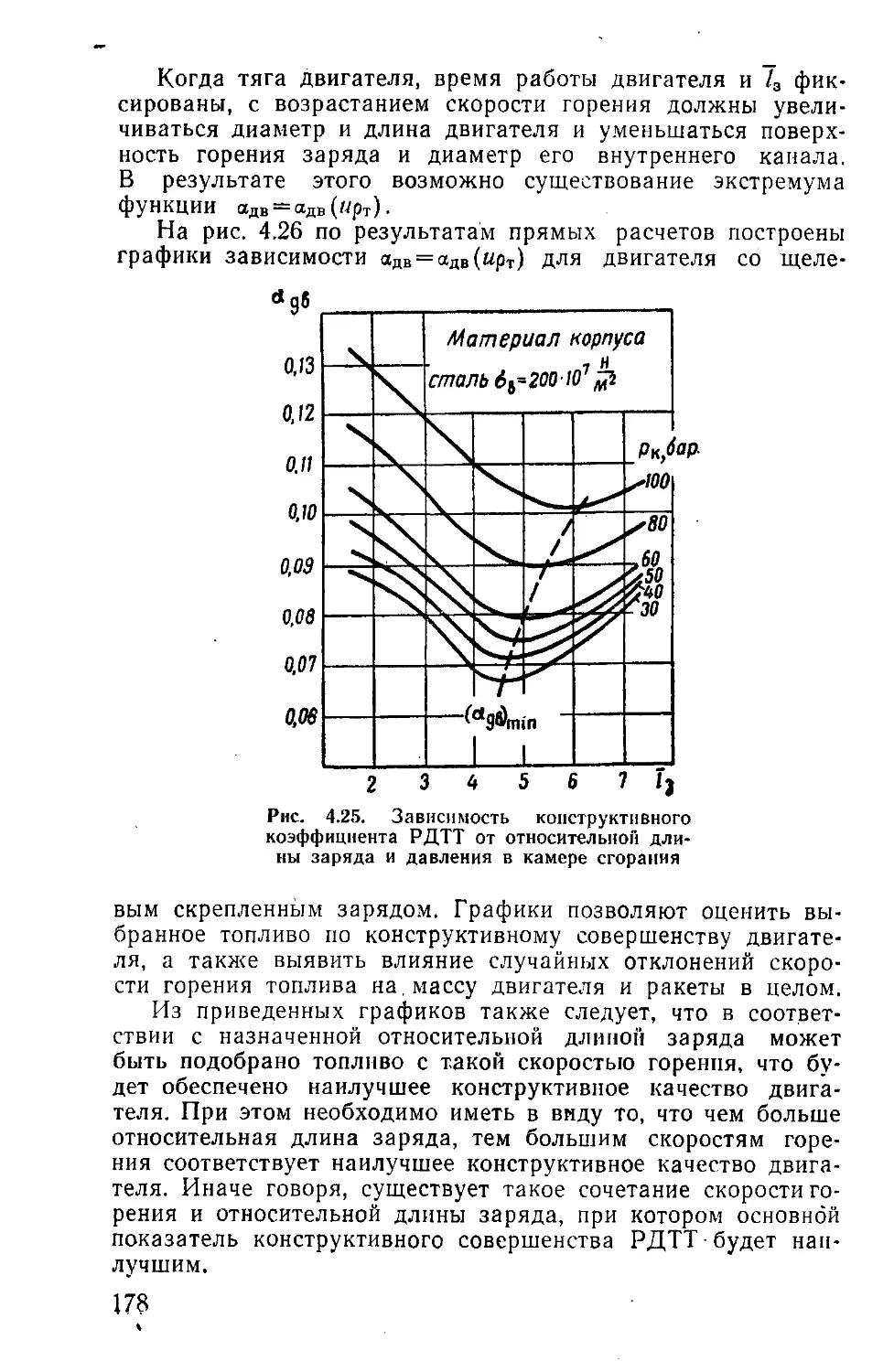
17 У0; А1—15%Рт. кг/м116201720177018007-ст, °К3060279032903300RCT, дж/кг. гр313326300290он1,211,221,171,16^уд. ст» сек240230244246и (Рк)> мм/сек0,89/к’691,74 />°к-407,68/к'122,29 р°,4°36
§ 1.5. ВЫБОР КОНСТРУКТИВНОЙ СХЕМЫ РАКЕТЫРакета представляет собой сложное техническое устрой¬
ство, включающее большое число агрегатов, систем и меха¬
низмов, в основе работы которых часто лежат совершенно
различные физические принципы. Разработка конкретного об¬
разца ракеты связана с отысканием оптимального сочетания
параметров составляющих ее элементов, обеспечивающего
'•жстремум основного критерия качества ракеты (стоимости
ракеты или ее стартовой массы).Приступая к баллистическому проектированию, необходи¬
мо выбрать принципиальную конструктивно-компоновочную
схему ракеты, материал для изготовления ее корпуса, агре¬
гатов и систем, типы системы управления и органов управле¬
ния, принципиальные схемы двигателей и т. п. Выбор
конструктивно-компоновочной схемы ракеты и ее систем
иосит, как правило, творческий характер. При этом необ¬
ходимо руководствоваться следующими общими требова¬
ниями.Конструктивная схема ракеты должна:— отражать новейшие достижения науки в области ра¬
кетной техники и в технологии производства ракет;— обеспечивать минимальные затраты на разработку и
производство ракеты;— позволять с наибольшей полнотой использовать уни¬
фицированные узлы и агрегаты;— учитывать технические возможности существующей
производственной базы либо затраты на создание новых про¬
изводств и специализированных цехов.Принципиальная конструктивно-компоновочная схема су¬
щественно влияет на геометрические и массовые характери¬
стики ракеты, находя отражение в коэффициентах весовых
уравнений. При выборе ее необходимо принять решение о
количестве ступеней, способе их соединения, типе органов
управления, системах разделения ступеней и отделения
боевой части. Здесь же устанавливается взаимное распо¬
ложение отсеков и принципиальные схемы топливных от¬
секов.Количество ступеней ракеты во многих случаях прини¬
мается априорно. Так, межконтинентальные ракеты на жид¬
ком топливе обычно имеют две ступени, а твердотопливные —
три [38].При очень легких боевых частях принципиально возмож¬
но создавать одноступенчатые межконтинентальные ракеты
с ЖРД и двухступенчатые с РДТТ. Количество ступеней у
ракет-носителей может доходить до пяти и зависит от массы
космического аппарата и характеристик рабочей орбиты, на
которую он выводится [38], [87].37
Конструктивно-компоновочные схемы составных ракет мо¬
гут иметь последовательное, параллельное и комбинирован¬
ное соединение ступеней [39].Схема с последовательным соединением ступеней предпо¬
лагает соосное расположение ступеней, одна за другой; в ли¬
тературе ее называют иногда схемой «с поперечным деле¬
нием» или схемой «тандем». При прочих равных условиях
ракеты с последовательным соединением ступеней имеют сле¬
дующие достоинства:— хорошая компактность;— наименьшая, по сравнению с другими схемами, стар¬
товая масса за счет простоты узлов сочленения и рациональ¬
ности общей конструктивной формы;— сравнительно небольшие возмущения при разделении
ступеней;— небольшое аэродинамическое лобовое сопротивление;— простое стартовое устройство в виде пускового
стола;— легко разбираются на отдельные блоки (ступени) и
также сравнительно просто собираются (стыкуются), что
упрощает их транспортировку и подготовку к пуску.К недостаткам тандемной схемы можно отнести:— необходимость проектирования и отработки каждой
ступени в отдельности, вследствие чего увеличиваются сроки
и повышается стоимость отработки изделия;— необходимость запуска двигателей второй и последую¬
щих ступеней в полете при низких атмосферных давлениях,
что повышает вероятность отказа в запуске и, следовательно,
понижает надежность ракеты;— большую длину ракет (в особенности тяжелых ракет-
носителей), что усложняет подготовку их к пуску и обслу¬
живание на стартовой позиции;— чувствительность конструкции такой схемы к попереч¬
ным перегрузкам из-за невысокой изгибной жесткости.Конструктивную схему с параллельным соединением сту¬
пеней иногда называют «пакетной», поскольку ступени раке¬
ты соединяются (связываются) одна с другой в пакет по
образующим так, что их продольные оси параллельны или на¬
клонены одна к другой на небольшой угол. Ракеты такой схе¬
мы можно создавать, соединяя в связку необходимое коли¬
чество корпусов одноступенчатых ракет. При этом в качестве
ступеней ракеты могут использоваться как твердотопливные,
так и жидкостные ракеты.Ракеты пакетной схемы могут выполняться с автономны¬
ми 'блоками или же с гидравлической связью (по топливу)
между двигателями соседних блоков. На старте запускаются
двигатели либо только боковых блоков, либо сразу всех бло¬
ков. По выгоранию топлива боковых блокор последние отде*38
лиются, а вторая субракета (центральный блок) продолжает
полет.Наименьшую стартовую массу обеспечивает схема, у ко¬
торой на первой ступени все двигатели работают на топливе
Гнжовых блоков. При этом уменьшается пассивная масса вто¬
рой ступени, что увеличивает дальность полета ракеты. Мож¬
но представить и другие варианты последовательности за¬
пуска и выключения двигателей ракеты пакетной схемы при
наличии гидравлической связи между блоками.Ракеты пакетной схемы имеют следующие достоинства:— небольшую длину;— высокую надежность ракеты в случае запуска всех
диигателей на старте;— при использовании готовых (штатных) блоков упро¬
щается и ускоряется отработка ракеты;— просто решается проблема транспортировки тяжелых
ракет-носителей пакетной схемы, поскольку их отдельные
Сиюни могут быть транспортабельны.К недостаткам такой схемы можно отнести:- значительные поперечные размеры ракеты, серьезно
усложняющие и удорожающие конструкцию стартового
упройства;— большую стартовую массу из-за достаточно сложной
и громоздкой конструкции узлов сочленения ступеней и не¬
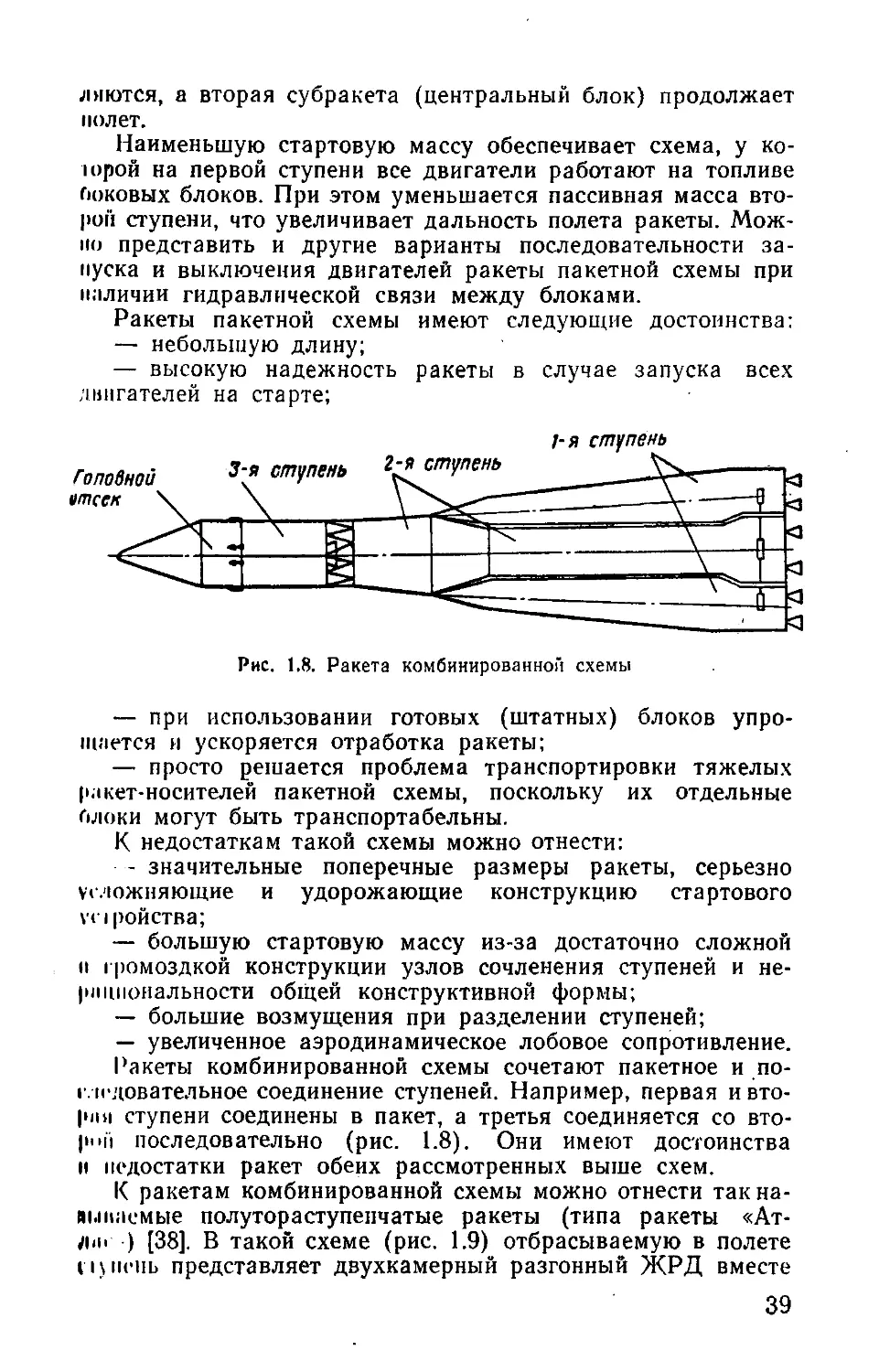
рациональности общей конструктивной формы;— большие возмущения при разделении ступеней;— увеличенное аэродинамическое лобовое сопротивление.Ракеты комбинированной схемы сочетают пакетное и по¬
следовательное соединение ступеней. Например, первая и вто¬
рая ступени соединены в пакет, а третья соединяется со вто¬
ром последовательно (рис. 1.8). Они имеют достоинства
н недостатки ракет обеих рассмотренных выше схем.К ракетам комбинированной схемы можно отнести так на¬
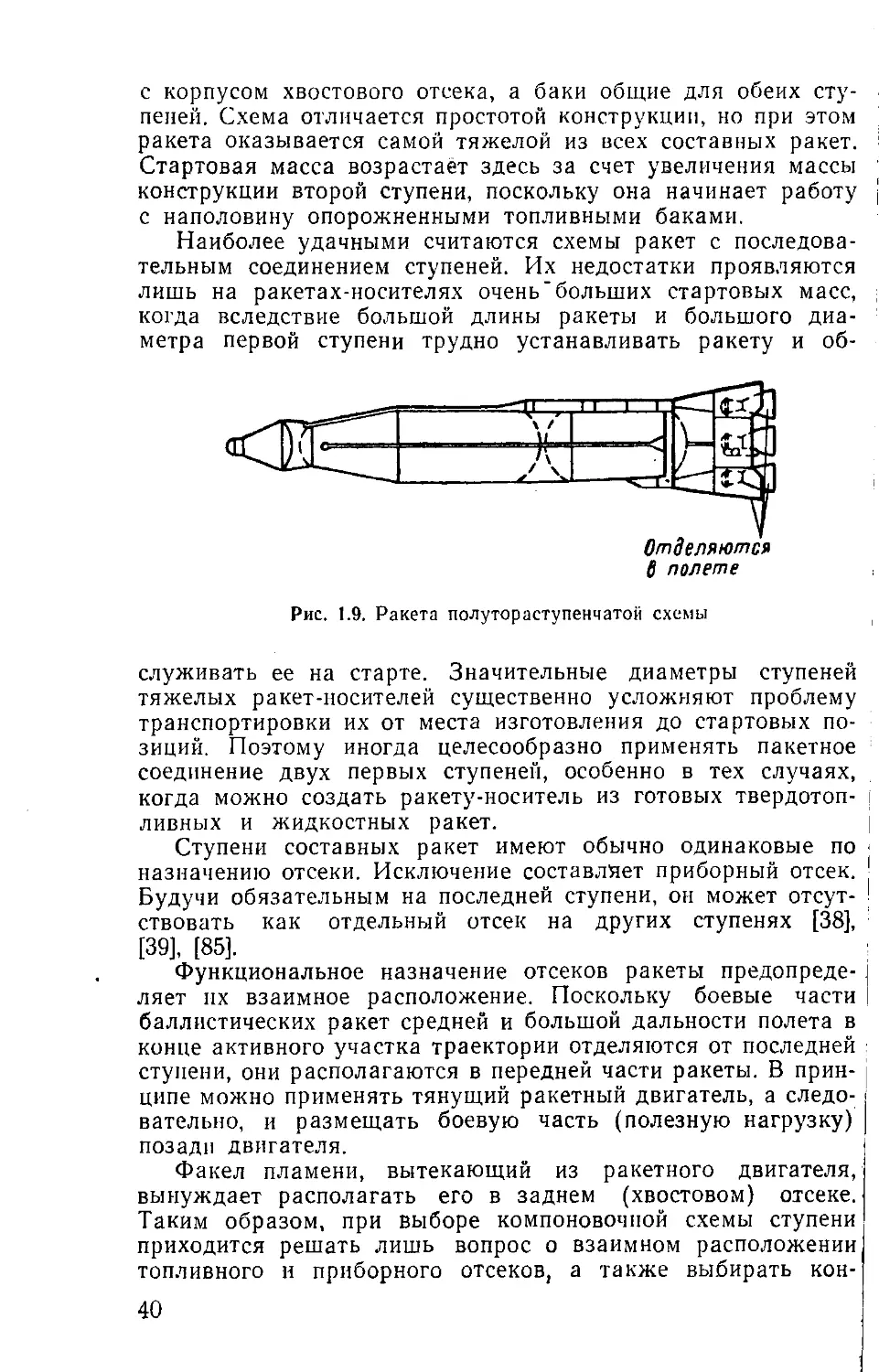
нимаемые полутораступенчатые ракеты (типа ракеты «Ат-
ла. ) [38]. В такой схеме (рис. 1.9) отбрасываемую в полете11 \ пень представляет двухкамерный разгонный ЖРД вместе39
с корпусом хвостового отсека, а баки общие для обеих сту¬
пеней. Схема отличается простотой конструкции, но при этом
ракета оказывается самой тяжелой из всех составных ракет.
Стартовая масса возрастает здесь за счет увеличения массы
конструкции второй ступени, поскольку она начинает работу
с наполовину опорожненными топливными баками.Наиболее удачными считаются схемы ракет с последова¬
тельным соединением ступеней. Их недостатки проявляются
лишь на ракетах-носителях очень "больших стартовых масс,
когда вследствие большой длины ракеты и большого диа¬
метра первой ступени трудно устанавливать ракету и об-Рис. 1.9. Ракета полутораступенчатой схемыслуживать ее на старте. Значительные диаметры ступеней
тяжелых ракет-носителей существенно усложняют проблему
транспортировки их от места изготовления до стартовых по¬
зиций. Поэтому иногда целесообразно применять пакетное
соединение двух первых ступеней, особенно в тех случаях,
когда можно создать ракету-носитель из готовых твердотоп- |
ливных и жидкостных ракет.Ступени составных ракет имеют обычно одинаковые по ■
назначению отсеки. Исключение составляет приборный отсек, j
Будучи обязательным на последней ступени, он может отсут¬
ствовать как отдельный отсек на других ступенях [38],
[39], [85].Функциональное назначение отсеков ракеты предопреде- j
ляет их взаимное расположение. Поскольку боевые части
баллистических ракет средней и большой дальности полета в
конце активного участка траектории отделяются от последней :
ступени, они располагаются в передней части ракеты. В прин¬
ципе можно применять тянущий ракетный двигатель, а следо¬
вательно, и размещать боевую часть (полезную нагрузку)
позади двигателя.Факел пламени, вытекающий из ракетного двигателя,
вынуждает располагать его в заднем (хвостовом) отсеке.
Таким образом, при выборе компоновочной схемы ступени
приходится решать лишь вопрос о взаимном расположении
топливного и приборного отсеков, а также выбирать кон-40
струкцию переходников, соединяющих ступени и боевуюПриборный отсек, являющийся частью корпуса ракеты,
предназначается для размещения основных приборов систе¬
мы управления. С целью уменьшения инерционных нагрузок,
усложняющих работу чувствительных элементов (датчиков)
системы управления, приборный отсек целесообразно распо¬
лагать вблизи центра масс ступени Для этого более всего
подходит межбаковое про-приборного
топливного
поскольку
рядом дви-■i-.1/■УТ7ЛгРис. 1.10. Топливный отсек с авто¬
номными баками:/ — бак окислителя; 2 — межбаковый отсек;
3 — бак горючего/2 3странство топливного отсе¬
ки, если оно на ступени
имеется, в противном слу¬
чае приходится располагать
приборный отсек впереди
топливного.Размещение
отсека позади
нежелательно,
расположенный
г ;i гель является источником
гепла и вибраций, сущест-
иенно затрудняющих работу
приборов системы управ¬
ления.Кроме указанного выше
необходимо принимать во
ниимание удобство обслу¬
живания приборов системы
управления на стартовой по-
шции и длину кабелей, со¬
единяющих приборный от¬
сек с двигателем и с назем¬
ным оборудованием, по¬
скольку масса кабельных
столов весьма значительна.Иногда вместо отдельногоприборного отсека (как части общего корпуса ракеты) при¬
диры системы управления размещают в контейнерах под об¬
итателями на внешней поверхности ракеты [87]. У ракет с
1’ДТТ обычно встречается переднее расположение приборного
штока.Для размещения усилителей, преобразователей и источ¬
ников питания, обслуживающих органы управления, могут ис¬
пользоваться переходники и хвостовые отсеки соответствую¬
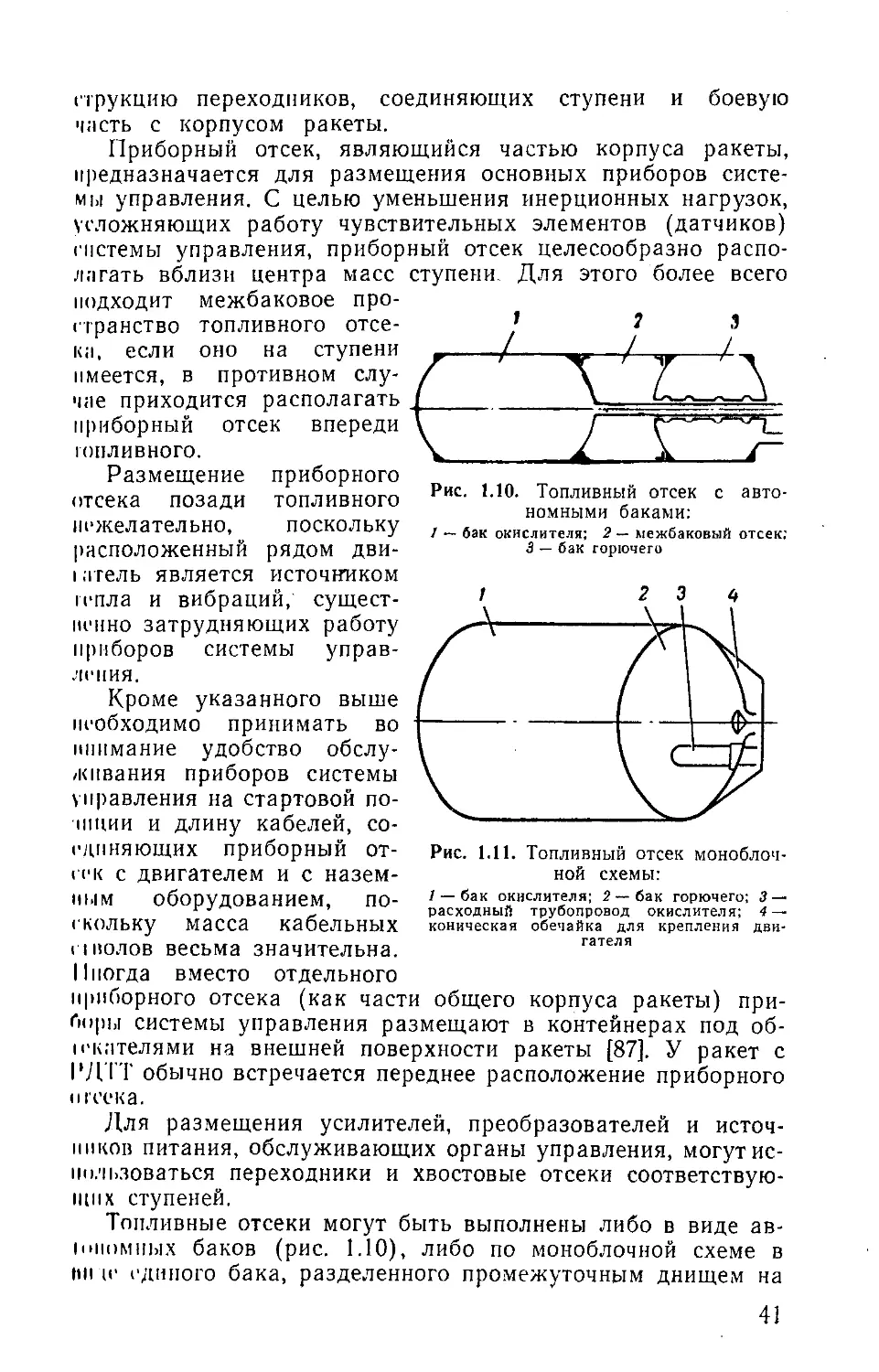
щих ступеней.Топливные отсеки могут быть выполнены либо в виде ав-
iniioMiibix баков (рис. 1.10), либо по моноблочной схеме в
tune единого бака, разделенного промежуточным днищем наРис. 1.11. Топливный отсек моноблоч¬
ной схемы:1 — бак окислителя; 2 — бак горючего; 3 —
расходный трубопровод окислителя; 4 —
коническая обечайка для крепления дви¬
гателя41
бак окислителя и бак горючего (рис. 1.11). При прочих рав¬
ных условиях первые имеют большие габариты и массу, чем
вторые. Однако при выборе схемы топливного отсека следует
принимать во внимание возможности технологии производ¬
ства и ремонтопригодность ракеты, что в свою очередь опре¬
деляется масштабами производства. Изготовление крупнога-Сечение А-АРис. 1.12. Топливный отсек пакетной схемыбаритных моноблочных отсеков сопряжено с большими за¬
труднениями, чем изготовление автономных баков.С позиций эксплуатационной надежности предпочтитель¬
ней применение топливных отсеков с автономными баками.Для улучшения устойчивости ракеты в полете необходи¬
мо, чтобы центр масс ракеты находился впереди центра дав¬
ления, поэтому желательно располагать баки окислителя впе¬
реди баков горючего.42
Наибольшее распространение получили несущие цилин¬
дрические топливные баки, стенки которых являются одно-
иром енно корпусом ракеты. Однако можно применять и пол¬
ноценные баки, на которые действуют лишь внутреннее ги¬
дростатические давление и давление наддува. Эти последние
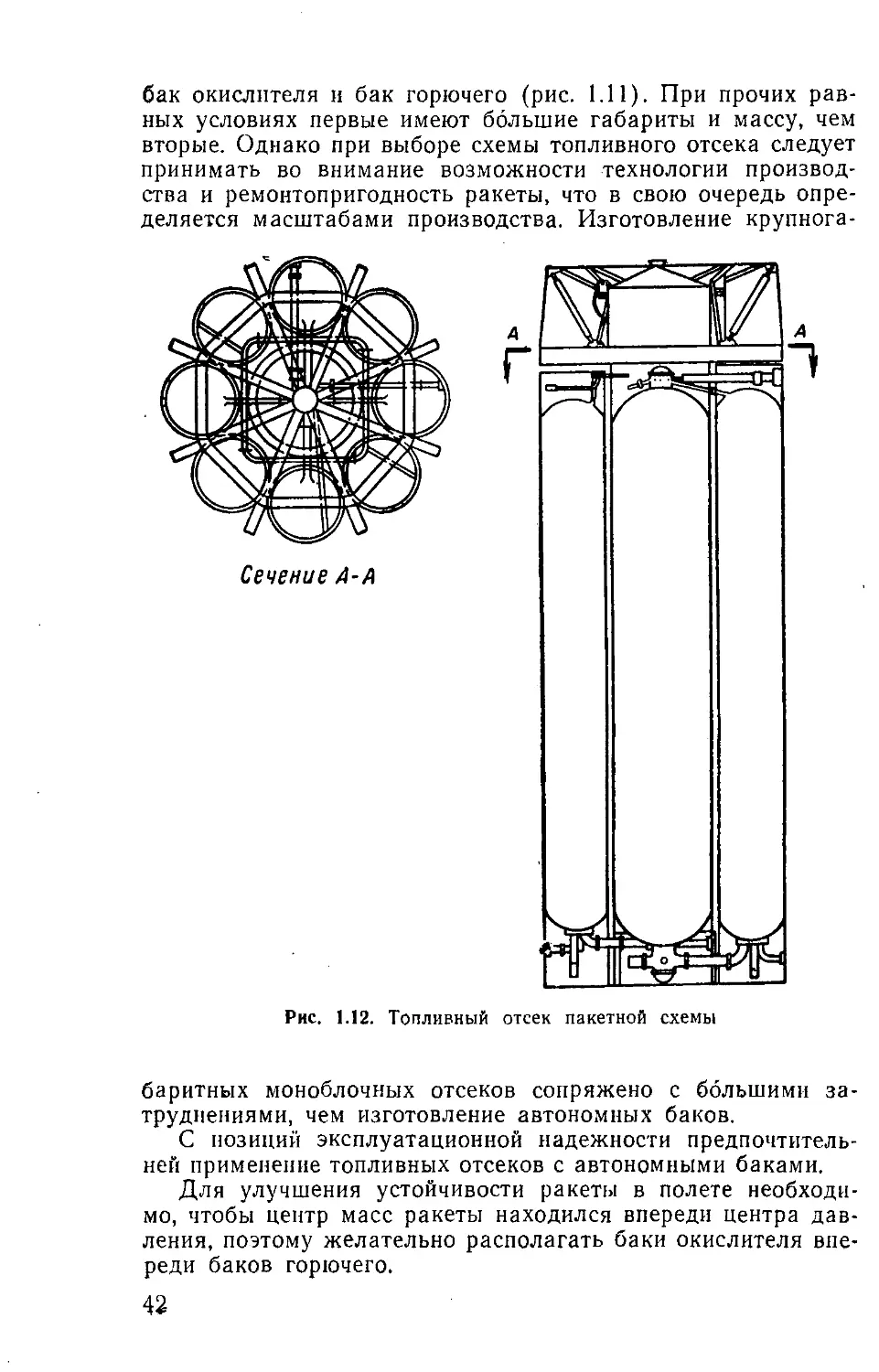
Используют иногда на ступенях тяжелых ракет-носителей,
когда топливный отсек выполняется в виде пакета автоном¬
ных цилиндрических баков (рис. 1.12). В этом случае несу¬
щими являются лишь баки, заполненные одним из двух ком¬
понентов топлива.В конструкции баков для жидкого водорода предусматри-
нается высокоэффективная тепловая изоляция, предупреж¬
дающая чрезмерные потери
подорода на испарение. Она
может быть в виде слоя
легкого материала с низкой
теплопроводностью, наклеи-
иаемого снаружи или изну¬
три бака. Кроме того, бак
может быть сделан с двой¬
ными стенами, в простран¬
ств между которыми соз¬
дается вакуум различной
глубины [39], [87]. Относи¬
тельная масса конструкции
нодородного бака за счет
теплоизоляции и малой плотности водорода получается зна¬
чительно большей, чем у баков для обычных ракетных
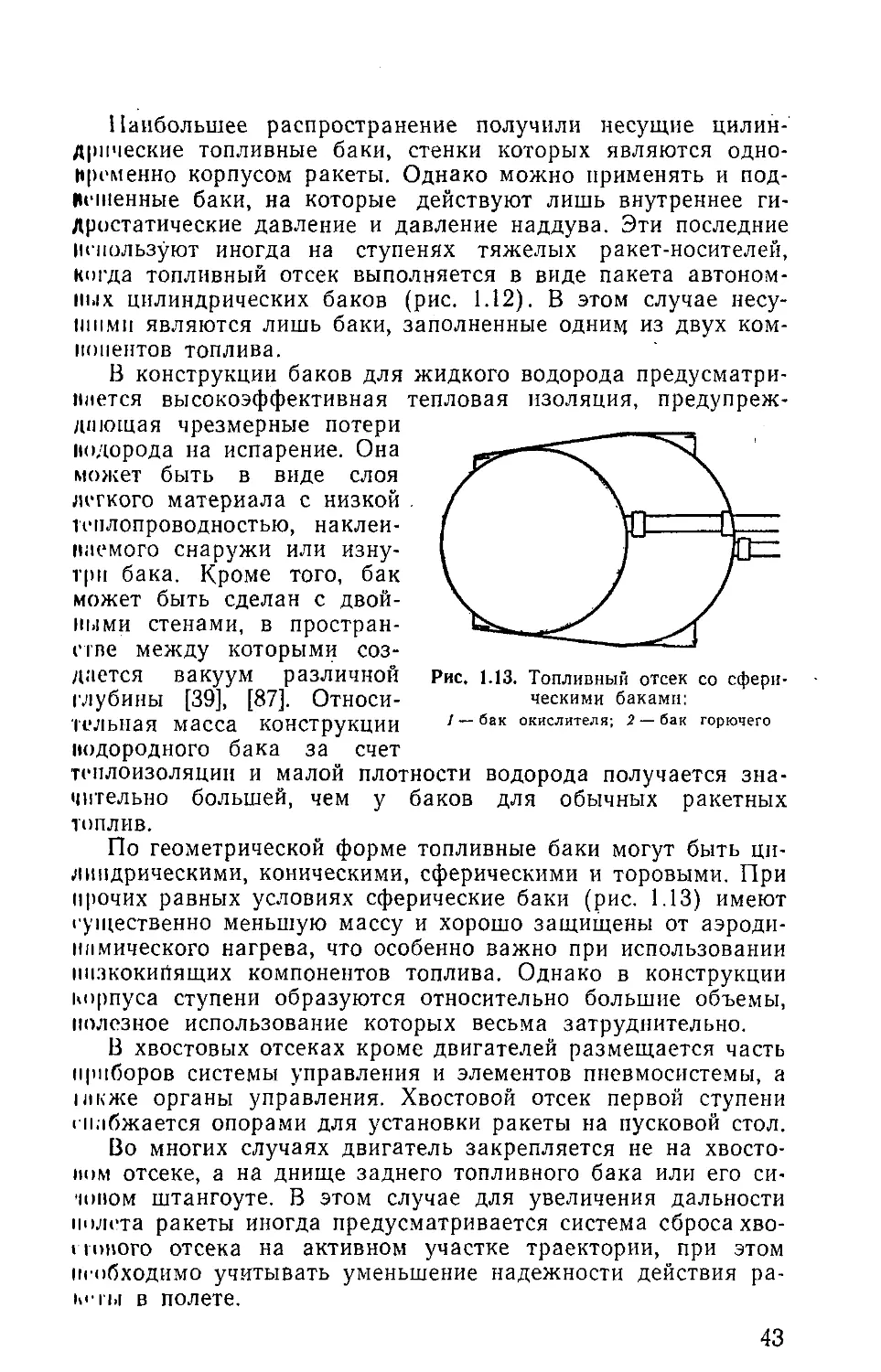
топлив.По геометрической форме топливные баки могут быть ци¬
линдрическими, коническими, сферическими и торовыми. При
мрочих равных условиях сферические баки (рис. 1.13) имеют
существенно меньшую массу и хорошо защищены от аэроди¬
намического нагрева, что особенно важно при использовании
нпзкокийящих компонентов топлива. Однако в конструкции
корпуса ступени образуются относительно большие объемы,
полезное использование которых весьма затруднительно.В хвостовых отсеках кроме двигателей размещается часть
приборов системы управления и элементов пневмосистемы, а
ткже органы управления. Хвостовой отсек первой ступени
снабжается опорами для установки ракеты на пусковой стол.Во многих случаях двигатель закрепляется не на хвосто-
иом отсеке, а на днище заднего топливного бака или его си-
моном штангоуте. В этом случае для увеличения дальности
полета ракеты иногда предусматривается система сбросахво-
I-итого отсека на активном участке траектории, при этом
необходимо учитывать уменьшение надежности действия ра¬
кеты в полете.43
Вопросы конструкции органов управления ракетой и спо¬
соба разделения ступеней и отделения боевой части, как пра¬
вило, решаются совместно.На стратегических ракетах обычно применяются газоди¬
намические органы управления трех типов [39], [85]:— с отклонением всей истекающей струи газов;— с отклонением части газовой струи;— с созданием «разнотяга» многокамерных двигателей.В качестве органов управления с отклонением всей исте¬
кающей струи газов можно использовать отдельные рулевые
двигатели, поворотные камеры сгорания основного двигате¬
ля, поворотные автоматные двигатели, разрезные и поворот¬
ные сопла и т. п.Применение отдельного, обычно четырехкамерного, руле¬
вого двигателя утяжеляет (в сравнении с другими типами
органов управления) и увеличивает стоимость ракеты, услож¬
няет и снижает надежность системы управления работой дви¬
гателя. Угол поворота камер сгорания рулевого двигателя
достаточно велик, что создает проблему подвода компонен¬
тов топлива из неподвижных магистралей высокого давления
в качающиеся камеры. Однако обойтись без отдельного руле¬
вого двигателя на последней ступени ракеты иногда не удает¬
ся, так как малая конечная ступень тяги двигателя необхо¬
дима для повышения точности работы системы управления.
В таких случаях роль верньерного выполняет рулевой двига¬
тель. Кроме того, при наличии отдельных рулевых двигате¬
лей проще обеспечить управляемость ступеней в процессе их
разделения.Использование поворотных камер сгорания (или автоном¬
ных двигателей) усложняет подвод компонентов топлива к
ним и утяжеляет рулевые машины. Однако общая масса дви¬
гательной установки с поворотными камерами сгорания мень¬
ше, чем при установке рулевых двигателей.Подвод компонентов топлива к автономным двигателям
прост, поскольку в этом случае по гибким трубопроводам
компоненты подаются при низких давлениях на входы в топ¬
ливные насосы, монтируемые обычно на камерах сгорания.Поворотных камер сгорания, способных обеспечить управ¬
ление полетом ракеты, должно быть не менее двух. Если при¬
меняется одна камера сгорания, установленная в кардановом
подвесе, то для устранения крена ракеты должно использо¬
ваться не менее двух дополнительных поворотных сопел или
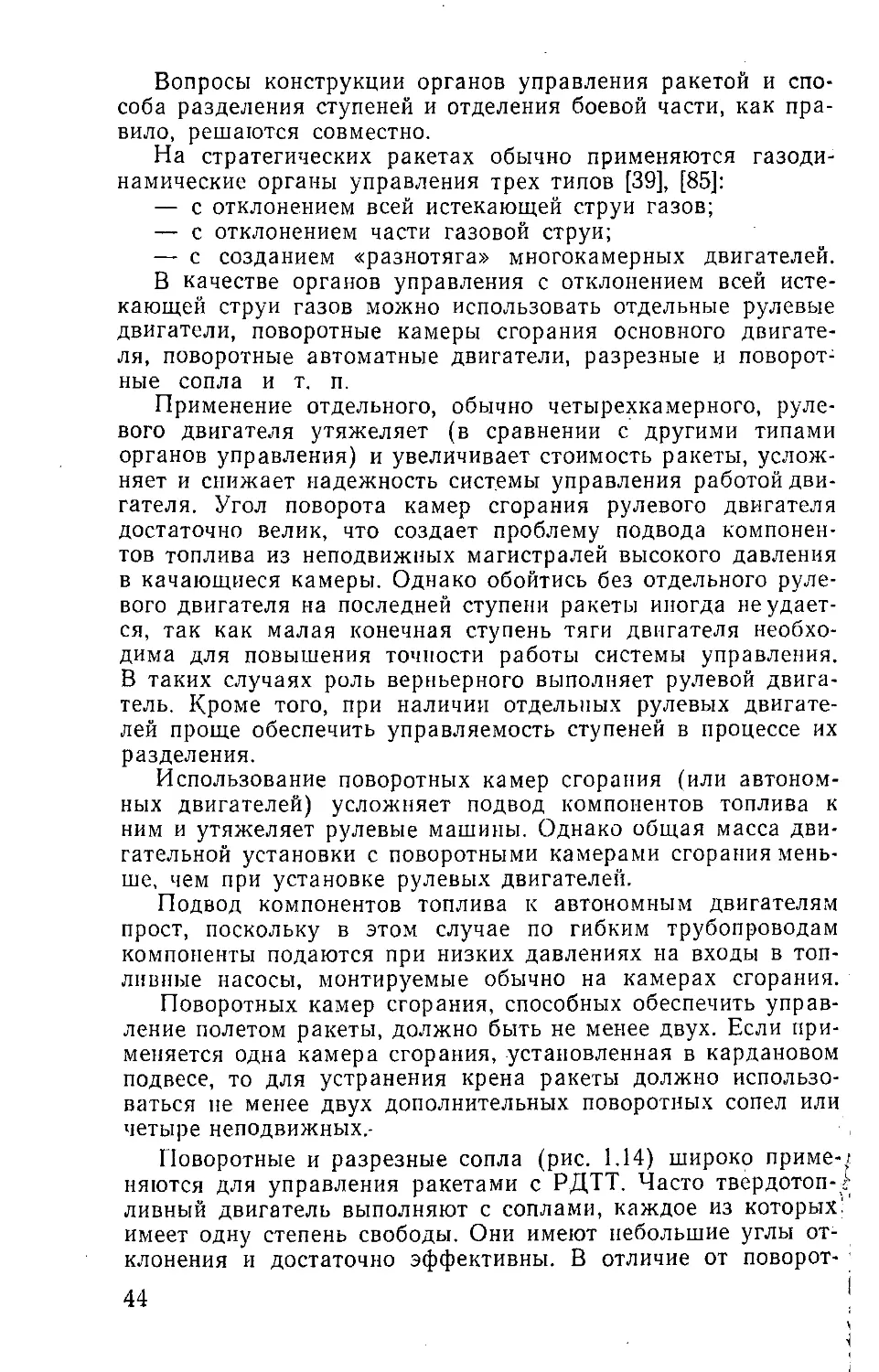
четыре неподвижных,-Поворотные и разрезные сопла (рис. 1.14) широко приме-;
няются для управления ракетами с РДТТ. Часто твердотоп-1
ливный двигатель выполняют с соплами, каждое из которых!
имеет одну степень свободы. Они имеют небольшие углы от¬
клонения и достаточно эффективны. В отличие от поворот- '
ммх камер в них возникают дополнительные потери тяги
in-за образования уступа внутри сопла при его отклонении,
но в целом эти потери невелики.Для поворота сопел нужны рулевые машины сравнитель¬
но небольшой мощности, так как масса, приводимая во вра¬
щение, мала. Поворотные сопла, работающие на выхлопных
ычах турбины жид¬
костного ракетного дви-
г.тгеля, просты по уст¬
ройству и небольшие
по массе, но из-за ма¬
лой тяги они приме-
пшотся лишь на верх¬
них ступенях.В качестве органов
\правления с отклоне¬
нием части газовой
струи применяются га-
аоиые рули и дефлек-
юры [36]. Кроме того,
может использоваться
иирыск газа или жид¬
кости в закритическую
часть сопла и некото¬
рые другие спосо-
Ги.| управления векто¬
ром тяги.Газовые рули отли¬
чаются простотой кон-
ггрукции и достаточной
эффективностью. Их не-
цостатки— малая эро-
шонная стойкость (так
как они постоянно на¬
ходятся в газовом по¬
токе) и ощутимые по-
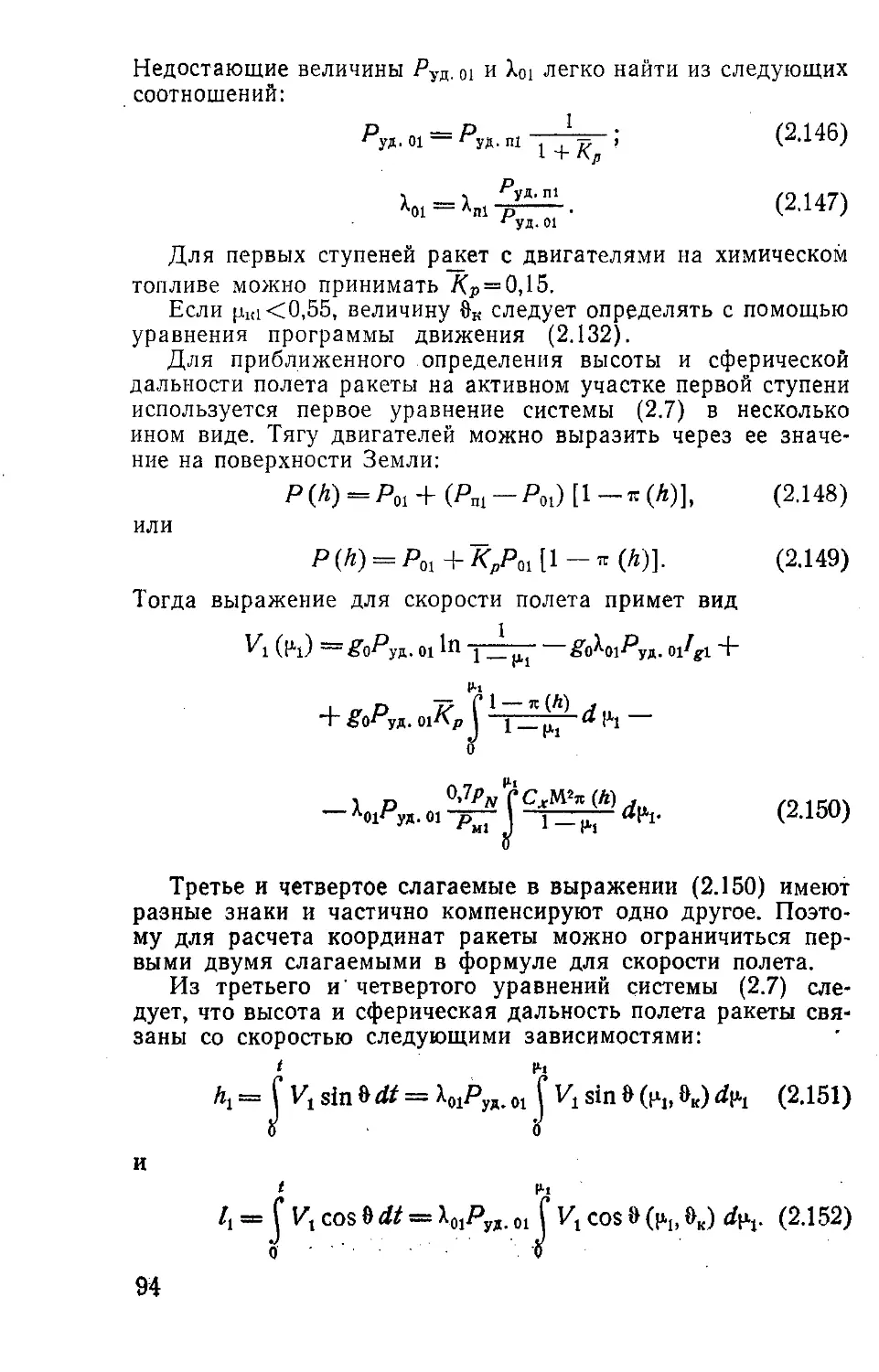
И'рн тяги двигателя.Дефлекторы не под-
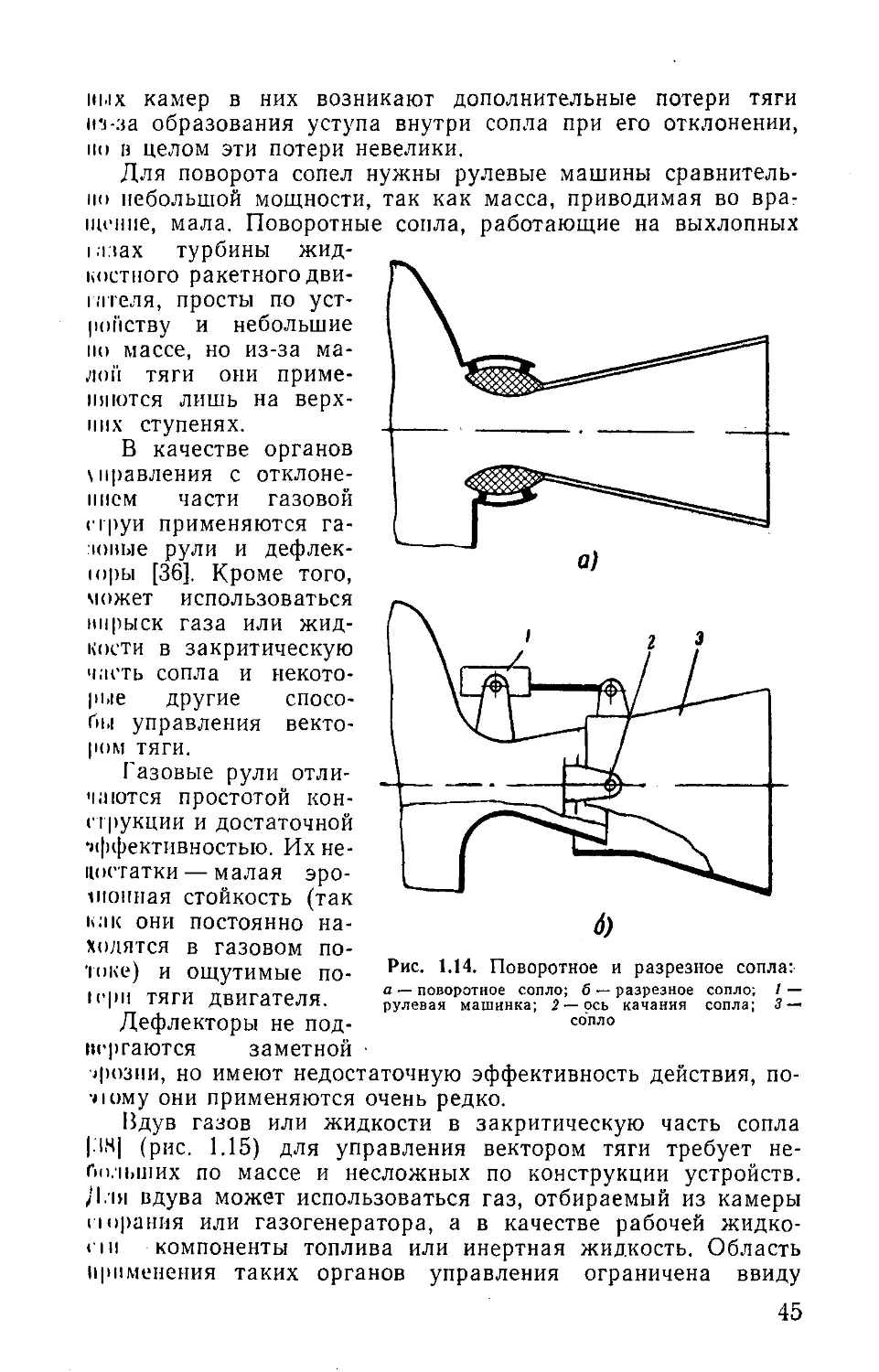
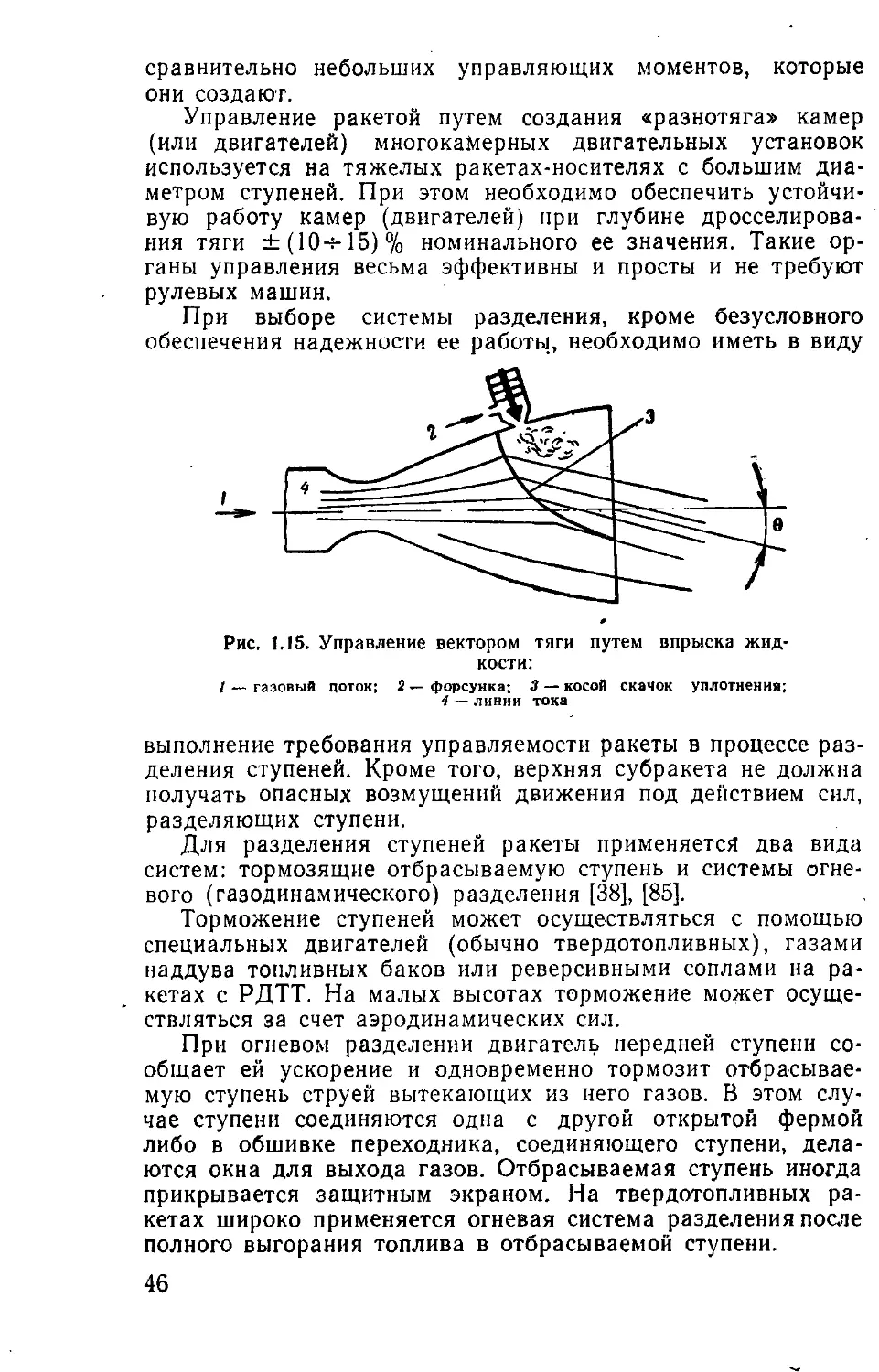
иергаются заметной
эрозии, но имеют недостаточную эффективность действия, по-
•#|ому они применяются очень редко.Вдув газов или жидкости в закритическую часть сопла
| 1Н| (рис. 1.15) для управления вектором тяги требует не¬
больших по массе и несложных по конструкции устройств.
Л '|н вдува может использоваться газ, отбираемый из камеры
гюранмя или газогенератора, а в качестве рабочей жидко-
пн компоненты топлива или инертная жидкость. Область
применения таких органов управления ограничена ввиду6)Рис. 1.14. Поворотное и разрезное сопла:
а — поворотное сопло; б — разрезное сопло; 1 —
рулевая машинка; 2 — ось качания сопла; 3 —
сопло45
сравнительно небольших управляющих моментов, которые
они создают.Управление ракетой путем создания «разнотяга» камер
(или двигателей) многокамерных двигательных установок
используется на тяжелых ракетах-носителях с большим диа¬
метром ступеней. При этом необходимо обеспечить устойчи¬
вую работу камер (двигателей) при глубине дросселирова¬
ния тяги ±(10-И5)% номинального ее значения. Такие ор¬
ганы управления весьма эффективны и просты и не требуют
рулевых машин.При выборе системы разделения, кроме безусловного
обеспечения надежности ее работы, необходимо иметь в видуРис. 1.15. Управление вектором тяги путем впрыска жид¬
кости:/ — газовый поток; 2 — форсунка; 3 — косой скачок уплотнения;4 — линии токавыполнение требования управляемости ракеты в процессе раз¬
деления ступеней. Кроме того, верхняя субракета не должна
получать опасных возмущений движения под действием сил,
разделяющих ступени.Для разделения ступеней ракеты применяется два вида
систем: тормозящие отбрасываемую ступень и системы огне¬
вого (газодинамического) разделения [38], [85].Торможение ступеней может осуществляться с помощью
специальных двигателей (обычно твердотопливных), газами
наддува топливных баков или реверсивными соплами на ра¬
кетах с РДТТ. На малых высотах торможение может осуще¬
ствляться за счет аэродинамических сил.При огневом разделении двигатель передней ступени со¬
общает ей ускорение и одновременно тормозит отбрасывае¬
мую ступень струей вытекающих из него газов. В этом слу¬
чае ступени соединяются одна с другой открытой фермой
либо в обшивке переходника, соединяющего ступени, дела¬
ются окна для выхода газов. Отбрасываемая ступень иногда
прикрывается защитным экраном. На твердотопливных ра¬
кетах широко применяется огневая система разделения после
полного выгорания топлива в отбрасываемой ступени.46
Конструктивно огневая система разделения существенно
проще тормозящей, поскольку она не имеет дополнительных
агрегатов — тормозных двигателей или сопел сброса газов
наддува.Процесс разделения торможением, будучи относительно
длительным, приводит к заметным потерям в дальности по¬
лета, в то время как огневое разделение сопровождается
значительными возмущениями движения ракеты.Разделение ступеней ракет пакетной схемы осуществляет¬
ся посредством создания поперечных импульсов сил, от¬
брасывающих боковые блоки в стороны от централь¬
ного [87].В качестве средств крепления ступеней получили распро¬
странение разрывные болты, мгновенно обрывающиеся при
подаче на них импульса электрического тока.Можно указать на три класса систем отделения боевых
частей: тормозящие, расталкивающие и комбинированные[38], [39], [85]. Первые осуществляют отделение за счет при¬
тормаживания корпуса ракеты; вторые — путем расталкива¬
ния боевой части и корпуса ракеты силами, действующими
п направлении их продольных осей; третьи — сочетают рас¬
талкивание или притормаживание с поворотом корпуса ра¬
кеты вокруг поперечной оси либо поперечной и продольной
одновременно.Торможение корпуса ракеты возможно тремя спосо¬
бами:— тормозными двигателями, обычно твердотопливными;.— газами наддува топливных баков;— аэродинамическими силами.Тормозные твердотопливные двигатели размещаются на
переднем либо на хвостовом отсеке верхней ступени. Ввиду
перемещения центра давления назад за счет выступающих за
обвод корпуса обтекателей тормозные двигатели следует раз¬
мещать на хвостовом отсеке. Из-за относительно небольшой
массы тормозных двигателей на положение центра масс ра¬
кеты их размещение сказывается мало.В случае размещения тормозных двигателей на переднем
отсеке возникают дополнительные небольшие возмущения в
лиижении боевой части от действия скоростного напора га-
нж, вытекающих из тормозных двигателей. При решении
■того вопроса следует принять во внимание и удобства экс¬
плуатации.Система торможения корпуса газами наддува топливного
Пака имеет небольшую массу и обладает всеми достоинствами
систем с тормозными твердотопливными двигателями, одна¬
ко не во всех случаях ее можно применять, поскольку давле¬
ние наддува невелико и может оказаться недостаточным для
создания необходимого тормозного импульса.47
Торможение корпуса ракеты аэродинамическими силами
возможно лишь в тех случаях, когда отделение происходит
в достаточно плотных слоях атмосферы.Тормозящие системы не только обеспечивают минималь¬
ные возмущения при движении боевой части, но, что особен¬
но важно, позволяют производить отделение в период после¬
действия двигателя, устраняя таким образом рассеивание
из-за разброса импульса последействия. Вместе с тем в слу¬
чае применения тормозных двигателей возрастает пассивная
масса ступени.В качестве расталкивающих устройств отделения могут
быть использованы три типа механизмов (толкателей): пнев¬
матические, пружинные и пороховые. Источником энергии
для пневматических механизмов отделения служит управляю¬
щее давление пневмосистемы ракеты либо давление над¬
дува переднего топливного бака.Расталкивающие системы отделения при приемлемых га¬
баритах и массе обладают относительно небольшим импуль¬
сом силы, вследствие чего вступают в действие по окончании
периода последействия, увеличивая таким образом рассеива¬
ние траекторий полета.Комбинированные системы, осуществляя отделение с од¬
новременным или последующим поворотом корпуса, увели¬
чивают надежность отделения боевой части. Для поворота
корпуса ракеты может использоваться:— сброс давления наддува топливного бака через боко¬
вой насадок;— импульс тяги небольшого твердотопливного ракетного
двигателя;— вскрытие отсечек, выполненных на боковой поверхно¬
сти двигателя для случая твердотопливной ракеты.Комбинированные системы отделения могут вступать в
действие до окончания периода последствия, уменьшая таким
образом рассеивание ракет.При создании ракет необходимо использовать материалы
с высокой удельной прочностьюгде ав — предел прочности материала в н/м2\Р — плотность материала в кг/м3.Для изготовления корпуса р.акеты применяются алюми¬
ниевые, магниевые и титановые сплавы, высоколегированные
стали, пластмассы и стеклопластики. Узлы и агрегаты дви¬
гателей изготавливают в основном из легированных сталей
и алюминиевых сплавов. Для изготовления корпусов и сопел
двигателей твердотопливных ракет широко применяются
стеклопластики. Масса их при конструировании получается48
гзначительно меньше массы двигателей, изготовленных из вы-
пжолегированных специальных сталей [87].При выборе материалов принимается во внимание их
стоимость и антикоррозионная стойкость в условиях дли¬
тельного хранения ракет, в том числе в заправленном со¬
стоянии.Применяются два вида принципиальных схем жидкост¬
ных ракетных двигателей: открытая и замкнутая. В двига¬
телях открытой схемы часть топлива выбрасывается за борт
ракеты в виде выхлопных газов турбины. При этом суммар¬
ная удельная тяга двигателя снижается.В двигателях замкнутой схемы турбогаз поступает в ка¬
меру сгорания, где дожигается и вытекает из сопла с боль¬
шой скоростью вместе с остальным топливом.Для управления ракетами могут применяться автономные
системы управления, системы радиоуправления и комбиниро¬
ванные системы, сочетающие две первых. Известная чувстви¬
тельность радиосистем к помехам делает их применение не
всегда целесообразным.Для пуска ракет используются как стационарные, так и
подвижные пусковые установки. Стационарные пусковые уста¬
новки могут быть наземными и подземными (шахтными).
В качестве подвижных стартовых средств могут использо¬
ваться подводные лодки, надводные корабли и. сухопутные
железнодорожные и грунтовые специальные подвижные пу¬
сковые установки [39]. Тип пускового устройства является од¬
ним из важных факторов, которые должны учитываться при
выборе принципиальной конструктивно-компоновочной схемы
ракеты.Приведенное выше даже краткое рассмотрение возмож¬
ных решений по выбору конструктивно-компоновочной схемы
ракеты свидетельствует о многочисленности вариантов ракет,
которые получаются в результате баллистического проекти¬
рования. В табл. 1.4 приведены основные характеристики не¬
которых американских ракет, заимствованные из работ [38],[39], [41], [42], [44], [45], [87]. Часть характеристик (например,
|1Кг, 1т) получена расчетом.49
Основные характеристики управляемых бал1Ракеты
ПараметрыТитан IIТитан IIICСатурн IСатурн IBСатурн VSiиЧ<ЖРД1ст —
РДТТ‘2-4-4 ст—ЖРДЖРДЖРДЖРДЖРД24• 2231,515065049054527001183,05—12,012,019,24,931-4-3336,640,247,988,126,23,09,76,556,55103,03,03,05,56,5510—3,0 6,55—10,5—6,17,38,818,714000—1140012700270001660057534863654069,45722565640—69,4———__0,60,70,70,70,7_0,20,20,150,150,15.— 0,2——0,15—0,77' 0,790,730,7820,830,630,7150,831,521,311,52——1,28——2,58—0,7450,550,7880,7070,7400,920,7870,640,6960,7700,610—-—0,51—0,457—1,051,070,881,090,83 —0,80—0,75—*“0,75————270245255250260250298298292284282—316316420420394309314422Тип двигателяЧисло ступенейСтартовый вес
тй, тНаибольший по¬
перечный раз¬
мер, мДлина ракеты /р, мДиаметры ра- ( £>,
кеты по сту- | D2
пеням, м I DзОтносительнаяhдлина ракеты •=-
АПараметр РмЬ ~
ч м*Давление в I рк1
камере, \ рк2
баР { Ркз
Давление в [
выходном I
сечении | Р“2
сопла, бар \Р°Ъ'Гяговоору- | }01
женность | ^п2I ЛпзКоэффициент |^к1Ы £к2УгкгОтношения(^тм/^кзУдельная
тяга, секУД 01Р,УД Г11'"УД П2уд пзрЖРД2110-1133,0303,02,410,01220040450,50,1525028031050
Таблица 1.4мимических ракет и ракет-носителей СШАО,1 91
и --ц
н
. к
1 cj■' :лМинит-
мен IМинит-
мен ИПоларисА-1ПоларисА-2ПоларисА-3Тор-Аджена DТор-ДельтаЛОНЮпитер'|<1'ЛРДТТРДТТРДТТРДТТРДТТЖРД1,2 ст.-
ЖРД
3 ст.—
РДТТЖРДЖРД2332222311П229,733,113,014,816,055,852,15050■1/.)1,71,71,371,371,372,442,442,442,7.'1216,418,28,79,49,524,827,922,218:»,01,71,371,371,372,442,442,72,7II, 01,11,321,371,371,371,520,84——0,90,9'10,7' 9,610,76,36,96,910,011,58,67,0186001300014500880010000109009400870095006900■1049496566,563 —40,33535—24,626,5•————3535——————0,70,7 -0,230,23 — 0,20—0,140,14—— — —0,7230,3900,4280,360,38 0,6750,6540,7350,7351,310,310,540,39—1,050,700———————0,330——0,660,590,530,630,610,940,86——0,1)1)0,650,670,860,760,950,79——0,650,63——0,84——0,88 1,261,361,25—0,92——0,991,07———0,98——————— ——236236230230—250250250245—__——■ —285284——•120285—230230—240323—_29029025451'I
РакетыПараметрыТитан 1Титан IIЫX<0нSНСатурн IСатурн ISСатурн VАтлас EFВес топлива,т—139533,5427,55162534109Вес топлива( “1_112380386415200991,5J “2. 2711445,510142217,5по ступ嬫!•——29,5—103ням, т[«!——10———Вес двига- (тЯВ. 11,71,7805,15,148,61,21телей по 1^ДВ. 20,60,591,81,21,68,00,46ступе- Iтяв. 3——0,57——1,0—ням, т (Идв.40,20Сухой вес
ракеты, твсей689353,45651786,2Сухой вес( тс13,958045511363ракеты по1 «С22,137,58,451432,63,2ступеням,I тс»■———9,0т{"—2,9—*Вес приборов си¬
стемы управле¬
ния /ису, кг40132—23502350 160Тип системы
управленияРадио-инер-циаль-наяРадио-инер-циаль-наяРадио-инер-циаль-наяРадио-инер-[шаль¬наяРадио-инер-циаль-наяРадио-инер-циаль-наяИнер-цнальнаяВес боевой
или КА, гчасти1,5-4--f-2,83,613,5914,5901,5-т--г-2,8ТопливоКеросий!
RP-1++ЖИДКИЙАэро-зин-50-f-+четы-1 ст. —
смесевое
твердоеОкисли¬
тель —жидкийЖидкийкисло-род+Окис¬литель—жидкийЖидкийкисло-Р°Д+кислородрехокисьазотатопливо;
2—4 ст.—
Аэро-
зин-50-f-
-{-четы-
рехокись
азотакисло¬род;горю¬чее:1 ст. —
ЯР-1;2 ст. —
жидкий
водород-j-жидкийводородкисло-ро’д;горю¬чее:1 ст. —
/?Р-1;
2*3 ст.—
жидкий
водород+керо-син52
ПродолжениеАтлас-КентаврМинит¬
мен IМинит¬
мен ИПоларисД-1Поларис
А-2ПоларисА-3Тор-
1 Аджена D1Тор-ДельтаТорЮпитер—24,724,710,212,7413,62—47,33———19,719,76,919,279,75 45 14553,293,473,87—2,13—— —0,20— 1,91,91,221,491,17_0,90,87■— •0,50,50,530,540,65—0,28———0,140,14—103,872,822,4————4,7_ —. —3,6 -— —0,56———— —— —0,039—— ————15012314110236—————Инер-циаль-наяИнер-циаль-наяИнер-циаль-наяИиер-циаль-наяИнер-циаль-наяРадио-ииер-циаль-наяРадио-инер-циаль-наяИнер-циаль-наяИнер-циаль-ная—0,60,750,50,50,50,430,230,660,66Окис¬Перхло¬То же,1 ст. — перхлоратПерхло¬1 ст. —1 ст. —ЖидкийЖидкийли¬рат ам¬что уаммония 4- поли¬рат ам-жидкийжидкийкисло-кисло-тель—мония-}*Минит-уретани алю-МОНИЯ +кисло-кисло¬род4ке-род+ке-жидкийкисло¬род;1 орю-
чее:1 ст. —
м’роснн;
: ст. —
жидкий
модород+ПОЛИ-
бута-
диен-
акрило-
вая ки¬
слотамена-1мин
2 ст. — п
аммония
целлюл
трогли
алюкий;ерхлорат
-j-нитро-
оэа, ни»
1ерин и1ННИЙ4-поли¬
уретан
и алю¬
минийрод+4-керо¬син;2 ст. —
красная
дымя¬
щаяся
азотная
кисло-
та4ди-
метил-
гидразинрод 4
4-керо¬
син;2 ст. —
белая
дымя¬
щаяся
азотная
к-та 4-
4диме-
тилги-
дразин;3 ст. —
смесе-воетопливоросин
RP-1росин
RP-153
Глава 2БАЛЛИСТИЧЕСКИЕ РАСЧЕТЫ РАКЕТЫ§ 2.1. УРАВНЕНИЯ ДВИЖЕНИЯ РАКЕТЫ НА АКТИВНОМ
УЧАСТКЕ ТРАЕКТОРИИТраектория полета управляемой баллистической ракеты
состоит из двух участков: активного и пассивного. На актив¬
ном участке осуществляется управляемое движение ракеты с
работающими двигателями. На пассивном участке отделив¬
шаяся от ракеты боевая часть совершает свободный полет
по инерции.Движение управляемой баллистической ракеты и ракеты-
носителя на активном участке траектории описывается си¬
стемой уравнений, которая обычно включает:— три дифференциальных уравнения движения центра
масс ракеты в проекциях на оси декартовой системы коорди¬
нат под действием тяги, аэродинамических сил, силы тяже¬
сти и управляющих сил;— три дифференциальных уравнения вращения ракеты
относительно ее центра масс, вызываемого аэродинамически¬
ми, внутренними демпфирующими и управляющими момен¬
тами;— уравнения кинематической связи между составляющи¬
ми линейной скорости центра масс ракеты ~и ее декартовыми
координатами, а также между угловыми координатами и со¬
ставляющими угловой скорости вращения ракеты относитель¬
но центра масс;— уравнения системы управления.Такого рода системы уравнений движения можно найти
в специальной литературе по теории полета, например, в [2].На этапе предэскизного проектирования рассматривается
ряд баллистических задач. Однако необходимые для их ре¬
шения конструктивные характеристики ракеты либо вовсе
неизвестны, либо известны весьма приближенно. Из-за отсут¬
ствия точных сведений о силах и моментах, действующих на
ракету, при определении полной дальности полета можно
ограничиться точностью, характеризуемой ошибкой в 3—5%.54
Чтобы обеспечить такую точность, используют упрощенные
системы уравнений движения ракеты на активном участке,
в которых отброшены или осреднены члены уравнений, мало
влияющие на дальность полета.При проектировании ракеты целесообразно рассматривать
ее движение относительно неподвижной Земли. Учет влиянияРис. 2.1. Система сил, действующих на ракету на
активном участке траектории (Ац—центр земного
шара)на дальность полета вращения Земли и географических ко¬
ординат старта и цели удобнее производить каждый раз, ис¬
ходя из конкретных условий пуска. При этом следует иметь в
виду, что действительная дальность полета ракет (межконти¬
нентальных особенно) может существенно отличаться от
дальности относительно неподвижной Земли.Поскольку силы и моменты, вызывающие боковое движе¬
ние ракеты, малы, то ими можно пренебречь и считать дви¬
жение ракеты на активном участке плоским. Влиянием вра¬
щательного движения ракеты на поступательное движение
центра масс также можно пренебречь.55
Чтобы не учитывать влияния параметров системы управ¬
ления на движение ракеты, система управления считается
идеальной. При этом ракета совершает движение строго по
программной траектории.При сделанных допущениях система уравнений движения
ракеты на активном участке траектории в проекциях на оси
земной системы координат (рис. 2.1) запишется так:
dVxт. (t) ■dtm(t)dVv- P (h) cos ® — X (V, h, a) cos 0 —- Y(V, h, a) sin 9 — /w(f)£sinv);
P(h) sin <p—X (V, h, a) sin 0+(2.1)dt-f Y (V, h, a) cos 0 — m (t)gcos yj;— = V •
dt v*>^L=V-dt v У»V2=V/2+ V*Г* = Л;2 + (R + yY\
h = r — R;tl = arc tg ;fl Vjc0 = arc cos ;OC = tp — 6;9 = ?nP (0.где m(t) — текущее значение массы ракеты;P(h)—суммарная тяга двигателей, направленная по
продольной оси ракеты;X, Y— соответственно сила лобового сопротивления и
подъемная сила ракеты;
g—текущее значение ускорения силы притяжения
Земли;<р— угол тангажа, измеренный между продольной
осью ракеты и горизонтом старта;?пр (0—программное значение угла тангажа;
a—угол атаки;h—высота ракеты над поверхностью Земли;0—угол наклона вектора скорости к горизонту
старта;
у) — полярный угол;
г— радиус-вектор;R—bZ7\KM — средний радиус земного шара.56
В дальнейшем мы будем пренебрегать различием между
ускорением силы притяжения Земли и ускорением силы тя¬
жести, полагая, чтоСистема (2.1) содержит 11 уравнений с 11 неизвестными:Она может быть решена, если известны масса ракеты m(t) и
функциональные связи P(h), X(V, h, а) и Y(V, /г, а).В пределах активного участка г-й ступени ракеты инте¬
грирование системы уравнений удобнее производить по аргу¬
менту который связан со временем полета ракеты сле¬
дующим соотношением:где т1 — средний секундный расход топлива при работе
двигателей /-й ступени;
tKl-^—момент выключения двигателей (t—1)-й сту¬
пени;тй1—начальная масса /-й субракеты;t—текущее значение времени с момента старта.
Ниже приводится система уравнений движения ракеты на
активном участке траектории первой ступени, в которой ар¬
гументом является величина щ:£ = £<) = 9.81 м/сек2.(2.2)V, V„ Vy, х, у, г, h, <Р, 6, а, У}.= Ах Sin ? — Л2С, (М) +
+ A2C;(M)*^--As^(R+y>,(2.4)= VI +1/2;
гг = х2 + (R + у)2;
h = г — R;<Р = Тпр (0.57
где А, = -{Р„ш01 + ДРУАЛ [ 1 - * (Л)]};■ил _ „ 70952 „ М**(А) .« Яи, Лзт=^Г’А$ — ^Ol^yfl.Oli
^*удЛ = ^уд.пх Руц.01 — ^рРуа .011М — число Маха;
к(Н) = pk/pN — табличная функция изменения атмосфер¬
ного давления с высотой;pN—нормальное атмосферное давление на по¬
верхности Земли (Pn = 101360 н/м2).Коэффициент Кр, характеризующий приращение удельной
тяги на активном участке I-й ступени, может быть принят
равным:для первой ступени ракеты Кр = 0,15—0,18;для второй (и последующих) ступеней Кр=0.Аэродинамические коэффициенты Сх и С“, входящие в
систему уравнений (2.4), зависят от формы и размеров кор¬
пуса ракеты. На стадии предэскизного проектирования для
ракет с конической головной частью, все ступени которых
имеют одинаковый диаметр, могут использоваться следую¬
щие зависимости для определения Сх и С“, полученные рас¬
четным путем для ракеты «Титан-П»:0,29, 0<М<0,8;Сх=\ М — 0,51, 0,8<М< 1,068;0,091 + 0,5 м-1, М> 1,0682,8, . 0 < М < 0,25;2,8 + 0,447 (М —0,25), 0,25 <М< 1,1;’
С; = { 3,18 —0,660 (М —1,1), 1,1<М<1,6;‘ 2,85 + 0,350 (М — 1,6), 1,6 < М < 3,6;
3,55, М>3,6.(2.5)(2.6)Методика выбора программы движения ракеты на актив¬
ном участке траектории срПр(0 рассматривается в § 2.3.Системы уравнений движения (2.2) и (2.4) решаются с
помощью ЭЦВМ и моделирующих установок. Для прибли¬
женного решения баллистических задач с применением руч¬
ного счета используются упрощенные системы уравнений
движения, получаемые при следующих допущениях:58
1) ускорение силы тяжести в диапазоне высот активного
участка траектории может считаться постоянным по абсолют¬
ной величине, но направленным к центру Земли;2) углы атаки малы и поэтому;sin а г; а;
cosa~l;X{V, h, a)xX(V, /г);3) программа движения ракеты на активном участке тра¬
ектории задана в виде зависимости 9пр(0> ГДе ^ — Угол на‘
клона вектора скорости к местному горизонту (рис. 2.1).Тогда система уравнений движения ракеты в проекциях
па оси скоростной системы координат примет вид:m(t)~ = P(h) — X(V, h) — m (t)g0 sin»;m(t)-§ = P(h)ol + Ya(V,h)a-m(t)g0(ldt3C0SldtjVdtR + hcos 9;(2.7))Если дальность активного участка не превышает 200 км,
иоле тяготения можно считать постоянным. В этом случае
удобнее пользоваться системой уравнений вида:dVdy
dt
dx
dt
6 =X(V,y)-
= V sin 0;
= V cos 0;= M*).m (t) g0 sin 0;(2.8)§ 2.2. СВЕДЕНИЯ ИЗ ВАРИАЦИОННОГО ИСЧИСЛЕНИЯПриближенная программа движения, используемая при
Оаллистическом проектировании, создается путем некоторого
упрощения типовой реальной программы, закладываемой в
систему управления полетом ракеты.Реальная программа движения основывается на идеаль¬
ной программе по тангажу, нахождение которой требует ре¬
шения вариационной задачи. Поскольку читатель может
(н.|ть не знаком с аппаратом вариационного исчисления,59
приведем краткое изложение его основ применительно к зада¬
чам теории полета ракет.Вариационное исчисление рассматривает задачу о разы¬
скании экстремальных значений (максимума и минимума)
определенных интегралов специального вида, тем самым
обобщая соответствующий прием дифференциального исчис¬
ления. Разберем некоторые особенности этой задачи. Пусть в
простейшем случае речь идет об интеграле видаьy,y)dt, (2.9)ав котором подынтегральная функция содержит независимое
переменное t, его функцию и производную от функции по
аргументу. Совершенно ясно, что не зная, как зависит у
от t, фактически нельзя вычислить интеграл (2.9). Пусть
эта зависимость как-либо аналитически изображена в
формеУ = <?(*). (2.10)Тогда, выражая подынтегральную функцию через t, най¬
дем по выполнении всех операций вполне определенное чис¬
ловое значение интеграла J. Будем теперь менять форму за¬
висимости (2.10). Если, например, это была квадратическая
зависимость, то сделаем ее кубической и т. д. Тогда очевид¬
но, что и числовой результат, т. е. значение J, также изме¬
нится. Иными словами, каждой новой форме связи y = cp(t)
соответствует свое определенное числовое значение интегра¬
ла J. Таким образом, получаем обобщение понятия функции
и аргумента. В обычном понимании функции и аргумента
функция зависит от конкретных числовых значений аргумен¬
та: каждому определенному значению аргумента соответст¬
вует определенное числовое значение функции. Здесь это по¬
нятие расширяется. Каждой форме функции (2.10) соответ¬
ствует числовое значение интеграла (2.9). Во избежание
путаницы понятий этот интеграл назвать функцией опасно,
так как он зависит уже не от числового, а от функциональ¬
ного аргумента. В математике для этого случая выбрали
новый термин, созвучный старому, — функционал.Теперь можно говорить о различных значениях функцио¬
нала, соответствующих различным формам функций г/ =
= <р(0- Например, можно поставить вопрос о разыскании та¬
кой формы связи (2.10), которой соответствует экстремаль¬
ное значение функционала /. В этом и состоит задача ва¬
риационного исчисления в простейшем случае. Кривую г/ =
= <?(t) называют экстремалью функционала J. Совершенно
очевидно, что разбираемая задача допускает следующие ста¬
дии обобщения:' 60
— подынтегральная функция может содержать более вы¬
сокие производные;— число неизвестных функций у и у2, Уз может быть уве¬
личено, соответственно чему экстремаль будет браться в
трехмерном, четырехмерном и т. д. пространствах;— число независимых аргументов также может быть уве¬
личено, в связи с чем кратность интеграла соответственно по¬
вышается.Условимся, что экстремаль y = ip(t) всегда будет проходить
через две определенные точки tu у\ и i2, у2 (рис. 2.2).Сформулируем окончательно задачу.Из всех кривых вида y = y(t), проходящих через две точ¬
ки tu ух и t2, у2, надо выбрать ту, уравнение которой, под¬
ставленное в интеграл/2W- У, y)dt,
t,доставило бы ему экстремальное значение.Предположим, что экстремаль найдена и ее уравнение
дано в форме y = y(t). Рассмотрим кривые, проходящие через
те же краевые точки и несколько уклоняющиеся от экстре¬
мали, так называемые кривые сравнения (рис. 2.3). В дан¬
ном случае прибегаем к изменению формы функционального
аргумента, т. е. к ее варьированию. Отсюда и происходит
термин «вариационное исчисление». Таким образом, варьиро¬
вание есть операция, родственная дифференцированию.61
приведем краткое изложение его основ применительно к зада¬
чам теории полета ракет.Вариационное исчисление рассматривает задачу о разы¬
скании экстремальных значений (максимума и минимума)
определенных интегралов специального вида, тем самым
обобщая соответствующий прием дифференциального исчис¬
ления. Разберем некоторые особенности этой задачи. Пусть в
простейшем случае речь идет об интеграле видаъ•/=]>(', y,y)dt, (2.9)ав котором подынтегральная функция содержит независимое
переменное t, его функцию и производную от функции по
аргументу. Совершенно ясно, что не зная, как зависит у
от 1, фактически нельзя вычислить интеграл (2.9). Пусть
эта зависимость как-либо аналитически изображена в
формеУ = <?(*)- (2.Ю)Тогда, выражая подынтегральную функцию через t, най¬
дем по выполнении всех операций вполне определенное чис¬
ловое значение интеграла J. Будем теперь менять форму за¬
висимости (2.10). Если, например, это была квадратическая
зависимость, то сделаем ее кубической и т. д. Тогда очевид¬
но, что и числовой результат, т. е. значение /, также изме¬
нится. Иными словами, каждой новой форме связи y = <?{t)
соответствует свое определенное числовое значение интегра¬
ла J. Таким образом, получаем обобщение понятия функции
и аргумента. В обычном понимании функции и аргумента
функция зависит от конкретных числовых значений аргумен¬
та: каждому определенному значению аргумента соответст¬
вует определенное числовое значение функции. Здесь это по¬
нятие расширяется. Каждой форме функции (2.10) соответ¬
ствует числовое значение интеграла (2.9). Во избежание
путаницы понятий этот интеграл назвать функцией опасно,
так как он зависит уже не от числового, а от функциональ¬
ного аргумента. В математике для этого случая выбрали
новый термин, созвучный старому, — функционал.Теперь можно говорить о различных значениях функцио¬
нала, соответствующих различным формам функций у —
= 9(t). Например, можно поставить вопрос о разыскании та¬
кой формы связи (2.10), которой соответствует экстремаль¬
ное значение функционала J. В этом и состоит задача ва¬
риационного исчисления в простейшем случае. Кривую у —
= 9 (t) называют экстремалью функционала J. Совершенно
очевидно, что разбираемая задача допускает следующие ста¬
дии обобщения:' 60
— подынтегральная функция может содержать более вы¬
сокие производные;— число неизвестных функций уи г/2. Уз может быть уве¬
личено, соответственно чему экстремаль будет браться в
трехмерном, четырехмерном и т. д. пространствах;— число независимых аргументов также может быть уве¬
личено, в связи с чем кратность интеграла соответственно по¬
вышается.Условимся, что экстремаль y = <p(t) всегда будет проходить
через две определенные точки tu Ух и t2, у2 (рис. 2.2).Сформулируем окончательно задачу.Из всех кривых вида y = <p(t), проходящих через две точ¬
ки 11, г/j и t2, г/2, надо выбрать ту, уравнение которой, под¬
ставленное в интегралtzJ= \F{t,y,y)dt,Кдоставило бы ему экстремальное значение.Предположим,_что экстремаль найдена и ее уравнение
дано в форме y = q(t). Рассмотрим кривые, проходящие через
те же краевые точки и несколько уклоняющиеся от экстре¬
мали, так называемые кривые сравнения (рис. 2.3). В дан¬
ном случае прибегаем к изменению формы функционального
.фгумента, т. е. к ее варьированию. Отсюда и происходит
термин «вариационное исчисление». Таким образом, варьиро-
иапие есть операция, родственная дифференцированию.61
Можно даже сказать, что это есть дифференцирование функ¬
ционала по форме его функционального аргумента. Общее
уравнение кривых сравнения можно представить в такой
форме_у = ^4-аг](*), (2.11)где •»)(/) — любая непрерывная функция, обладающая свой¬
ством 7)(£|)=0 и т](^г)=0-.
а — параметр, не зависящий от t.Таким образом, форма функции теперь регулируется од¬
ним независимым переменным числом а. Ясно, что и значе¬ние интеграла J теперь также будет зависеть от а. Другими
словами, J как функционал превратился в функцию пере¬
менного независимого аргумента а. Теперь в силу этого, ис¬
пользуя соответствующее правило дифференциального исчис¬
ления о разыскании экстремума, можно написать условие
того, что y = <p(t) является действительно экстремалью, т. е,
сообщает интегралу J крайнее значение(-Й-Ц-0- <2Л5>Уравнение (2Л2\, дающее решение поставленной задачи,
после некоторых несложных преобразований с учетом зави¬
симости (2.11) может быть приведено к следующему виду:
dF d / dF\
Функция F включает в себя функцию ср, следовательно, по¬
лученное уравнение может трактоваться' как дифференциаль¬
ное уравнение экстремали, проходящей через точки t\, ух
и t2, у2. Уравнение (2.13) было известно еще Леонарду Эйле¬
ру и независимо от него получено Лагранжем, поэтому и
имеет наименование уравнения Эйлера — Лагранжа.Поступая аналогично, нетрудно обобщить формулу (2.13)
и на другие случаи функционала J.Подынтегральное выражение содержит производные вы¬
соких порядков до уя) включительно:
t3J= \p(t, у, у, у,..., yin))dt.
иУравнение Эйлера в данном случае запишется так:дУ dt [ ду ) + at* [ ду ) + + 1 l) dt» ( dyW ) и-Функционал имеет видJ = jj/=■(■*. У, z> Р’ Я) dx dy,
сгде z = z(x, у);дгР=1БГ’дгq~~ду~•Таким образом, речь идет об экстремуме двойного интегра¬
ла, распространенного на некоторую поверхность, ограничен¬
ную контуром С. Экстремалью будет поверхность, проходя¬
щая через тот же контур. К каждой из частных производных
применимы приведенные выше рассуждения, и поэтому урав¬
нение Эйлера принимает видdFдг--Mf-)—5г(-ЗгЬ°- (2Л4)До сих пор предполагалось, что на функцию, дающую
экстремум функционалу, не наложены никакие дополнитель¬
ные условия. Экстремум в этом случае называется безус¬
ловным.Совершенно аналогично в вариационном исчислении ста-
иится задачи об экстремуме некоторого функционала при
условии, что искомая функция должна удовлетворять неко¬
торым дополнительным соотношениям.63
Пусть, например, требуется найти экстремум функцио¬
налаt2$F(t, у, y)dt (2.15)t,при условии, что другой функционал по величине постояненtzЛ= |ЧГ(*. y,y)dt = C. (2.16)ЛВ функционалах (2.15) и (2.16) должны быть заданы функ¬
ции F и ¥, а также граничные условия:t = tuy=y{t1y, (2.17)t = t2 ,y=y(t2). (2.18)Задачи такого типа называются изопериметрическими.
Это название происходит от одной частной задачи, в которой
среди всех линий заданной длины требуется найти такую,
которая ограничивала бы наибольшую площадь.Решение изопериметрической задачи сводится к составле¬
нию уравнения Эйлера для вспомогательного функционала*2T=$GV,y,y)dt, (2.19)где G = F + Х¥; ' (2.20)X — некоторая подлежащая определению постоянная.
Составив для функции G уравнение Эйлера и решив его,
получим две произвольные постоянные С\ и Сг. Эти постоян¬
ные и величина X определяются из двух граничных условий
и из изопериметрического условия (2.16).В общем случае функционала, содержащего п функций уи
У2, Уз Уп't2J = j F V, Уь Уи Уъ Уъ • • •. Уп, Уп) dt (2.21)hи при наличии любого числа k изопериметрических связей
вспомогательный функционал записывается в виде
/2У' = J Gdt — j (F + + X2W2 + ... + >А) dt, (2.22)
1. hа число уравнений Эйлера равно п. В этом случае имеется
(2n + k) постоянных, которые определяются из 2п граничных
условий и k изопериметрических условий.Сделаем одно замечание по поводу выражения (2.20). Со¬
вершенно очевидно, что решение задачи не изменится, если64
пместо принятого выражения записать функцию Q в симме¬
тричной формегде Xi и Xg — постоянные.Поскольку в это выражение функции F и Ч1, входят сим¬
метрично, то вместо задачи определения экстремума функ¬
ционала (2.15) при условии (2.16) можно решать задачу
определения экстремума функционала (2.16) при условии,
что функционал (2.15) равен постоянной величине. В этом
состоит так называемый принцип взаимности в его простей¬
шей форме.Несколько сложнее формулируется задача на условный
экстремум. В этом случае требуется найти вид функций x(t)
и y(i), дающих экстремум функционалуПосле подстановки выражения (2.27) в систему (2.26) ин¬
теграл будет зависеть только от функции x(t), т. е.Для функционала (2.28) условие экстремума [уравне¬
ние (2.13)] запишется так:или после вычисления соответствующих производных и под¬
становки их в выражение (2.29) примет следующий вид:О = KF + Х2Ф,(2.23)(2.24)и удовлетворяющих условиюф(*. х, У) = О(2.25)при граничных условиях:(2.26)Решив уравнение (2.25) относительно у, получимy = <?(t, х).(2.27)(2.28)hгдеdy dx
дх dt '(2.29)QF dy Г dF d j dF\ Л d I dF
После дифференцирования уравнения (2.25) по х имеемдф . дФ dtp ^дх + ду дх ~ 'Исключая из двух последних уравнений , получимdF d_ / dF\ dF d_ ! dF \dx dt (дх) = дУ ^ j dy)' goдФ дФдх дуПравая и левая части равенства (2.30) могут рассматривать¬
ся как одна и та же функция независимого переменного, по¬
лучившая наименование множителя Лагранжа. Обозначим
эту функцию X(t). Тогда необходимым условием экстремума
функционала (2.24) с учетом условия (2.25) будут выра¬
жения:[-£ + MO-g-]-i-(-f) = 0;Эти же условия можно записать иначе. Введем обозначениеG = F + I (0 Ф.Тем самым вместо основного функционала (2.24) введен
вспомогательный функционалп*7 = j Qdt= f [F + X (О Ф] dt.Тогда условия экстремума функционала совпадут по форме с
условием (2.13):= (2.31)dGdy dtp|) = 0. (2.32)Связи, не содержащие производных от искомых функций,
называются голономными связями. Такова, например, связь
(2.25). Условия экстремума функционала (2.31) и (2.32) ока¬
зываются справедливыми и для неголономных связей видаФ (t, х, х, у, у) = 0.Число наложенных связей' может быть любым, однако ва¬
риационная задача на условный экстремум может быть по-66
ставлена только в том случае, если число связей меньше
числа неизвестных функций. Подынтегральная функция вспо¬
могательного функционала будет выглядеть так:s—k5=1где k—число связей, меньшее числа неизвестных функ¬
ций, входящих в выражения F и Ф8;Xs(t) — множитель Лагранжа;—наложенная голономная или неголономная связь.концомДо сих пор предполагалось, что на концах интервала ин¬
тегрирования (tи t2) значения искомых функций заданы. Та¬
кие задачи называются задачами с закрепленными концами.
Если же граничные условия не заданы жестко, то граничные
условия называются естественными, а задачи такого рода —
задачами со свободными концами.Рассмотрим часто встречающуюся в динамике полета за¬
дачу, в которой одно из граничных условий зафиксировано, а
другое естественное. Пусть отыскивается экстремум функ¬
ционала^аj>(A y,y)dt,
t,иричем левый конец искомой кривой закреплен (yt=ti=y\),
п на правый конец никаких условий не наложено, кро¬
ме очевидного условия, что он находится на прямой ^ =
(рис. 2.4). Если кривая ym(t) обеспечит экстремум функцио¬3*67
налу J, то, по-видимому, она останется экстремалью и при
закреплении второго конца.Из этого предположения можно получить граничное усло¬
вие на свободном конце:— =0. (2.33)ду ШгИзложенные выше общие методы разыскания экстремали
сводят вопрос к интегрированию уравнения Эйлера — Лаг¬
ранжа, что не всегда возможно. Поэтому на практике обыч¬
но пользуются приближенными методами решения вариа¬
ционной задачи (Бубнова — Галеркина, Ритца и т. д.). За¬
метим также, что изложенные методы предполагали, что оты¬
скивается всегда минимум функционала.§ 2.3. ВЫБОР ПРОГРАММЫ ДВИЖЕНИЯ РАКЕТЫ
НА АКТИВНОМ УЧАСТКЕ ТРАЕКТОРИИВыбор приближенной программы движения управляемой
ракеты на активном участке траектории является одной изчастных задач баллистического проектирования. Под про¬
граммой понимается одна из зависимостей: ср(^), 9(0, 0(/)
или а(0- В точной постановке задача выбора оптимальной
программы по тангажу <р(/) очень сложна и не имеет анали¬
тического решения. Однако для целей баллистического про¬
ектирования можно ограничиться приближенным решением.
Примем следующие упрощающие предположения:— поле тяготения постоянно;— суточное вращение Земли не учитывается;— аэродинамические силы пренебрежимо малы по срав¬
нению с тягой двигателей;— расход топлива является известной функцией времени
(в частности, расход топлива может быть постоянным).68
Кроме того, при решении задачи будем считать задан¬
ными следующие характеристики ракеты:— коэффициент заполнения ракеты топливом ц„;— удельную тягу двигателей на Земле Яуд. о;— коэффициент начальной тяговооруженности ракеты на
Земле Хо.Движение центра масс ракеты рассматривается в старто¬
вой системе координат Оху (рис. 2.5), при этом система
уравнений движения на активном участке траектории
имеет вид:cos 9;= —- sin «р — ^0;*= К;9 = <РпР (О-(2.34)Известно, что при постоянном запасе топлива на борту
ракеты скорость в конце активного участка VK зависит от
программы изменения угла тангажа во время полета ерПр(0-
Следовательно, задача отыскания оптимальной программы по
тангажу, обеспечивающей максимально возможную ско¬
рость VK, является типично вариационной задачей. При реше¬
нии ее прежде всего необходимо выбрать выражение для ос¬
новного функционала, минимум которого обеспечивает иско¬
мая функция.Выберем в качестве основного функционала величину
(—V^), которая может быть записана в интегральной форме
так:‘к ‘кJ = _ VI - - j 2 (VXVX + VyVy) dt = j Fdt. (2.35)О 0Итак, сформулируем задачу: найти закон регулирования
угла тангажа 9, обеспечивающий экстремум скорости полета
ракеты в конце активного участка траектории при условии,
что на ракету действуют только тяга двигателей и сила при¬
тяжения Земли, и при заданных значениях рк, Руд. 0, \ и 6К.С точки зрения математики сформулированная задача от¬
носится к классу вариационных задач на условный экстре¬
мум. В качестве дополнительных связей, отражающих систе¬69
му сил, действующих на ракету в полете, используем первые
два уравнения системы (2.34), приведенные к виду:®i = К — —■ cos <р; (2.36)ф2 = V, — ~ 9 + go- (2-37)Запишем выражение для подынтегральной функции вспомо¬
гательного функционалаG^F+X, (/)*! +МО Ф2- (2.38)В развернутом виде подынтегральная функция запишется
так:G = — 2(VXVX + VyVy) + Xt (Vx - -£■ cos ср) ++ h ( Vy — -J sin <p + &,) • (2-39)Неизвестными функциями являются Vx, Vv, cp, Xi и Хг, а от-
Рношение — согласно допущению о расходе топлива пред¬
ставляет собой известную функцию времени.Вычислим производные, необходимые для составления
уравнений Эйлера — Лагранжа:■ = — 2VX; *L = -2Vx + Xi; *(*L) = -2Vx + Xi;dGdVx- дух~ dt [dy_■fr=~2l'» + x=: +dG P \ \ dG л(Xj sin cp —X2cos<p); —d<t m v 1 ' 2 T/> d<fУравнения Эйлера—Лагранжа имеют вид:Xj = 0; (2.40)Х2 = 0; (2.41)Xj sin <р — Х2 cos ® «= 0. (2.42)Решая уравнения (2.40) — (2.42), получим:Xj = CjJ Х2 = С2;tgcp = ^f = -g- = tgcp0.(2.43)Таким образом, оптимальная программа по тангажу предпо¬
лагает, что угол наклона оси ракет£>1 к горизонту остается по¬
стоянным на всем активном участке траектории (рис. 2.6),
Величина <р0 определяется из граничных условий, в каче¬
стве которых можно использовать выражения:ИкС08вк==^0Яуд.оС08?01пТзг^; (2.44)VK sin 6К = g0PyA. о sin <р0 In ‘ — gohPyA. oh<- (2-45)1 ГКРис. 2.6. К выбору оптимальной программы по
тангажу для УБРПри заданных 6„, Х0) Руд. о и |л„ из уравнений (2.44) и (2.45)
можно найти неизвестные величины ф0 и У к методом после¬
довательных приближений.Рис. 2.7. К выбору оптимальной программы по тангажу для
ракеты-носителяРассмотрим теперь оптимальную программу по тангажу
на активном участке траектории ракет-носителей. В общем
случае выведения космического аппарата на рабочую орбиту
траектория полета ракеты-носителя состоит из двух участков
(рис. 2.7):— активного участка ОК;— пассивного (баллистического) участка КА.71
Вариационная задача формируется так: найти закон ре¬
гулирования угла тангажа ср на активном участке траектории
заданной продолжительности tK, обеспечивающей экстремум
высоты орбиты Н при условии достижения на этой высоте
заданной горизонтальной составляющей скорости VАх при
VAv=0.В постоянном поле тяготения справедливы следующие со¬
отношения;Ах '(2.46)(2.47)Искомая функция <p(t) должна обеспечивать максимум высо¬
ты орбиты Н или минимум величины (—Н). Поэтому за ос¬
новной функционал можно взять выражение (2.47) в инте¬
гральной форме'к ‘кj = (Vy + ^-)dt = - f Wdt. (2.48)f> ОЗадание величин VAX=VKX и Vд„ = 0 требует привлечения
в качестве уравнений связи первых двух уравнений систе¬
мы (2.34), записанных в форме:ф1 — К — ~ cos <р = 0; (2.49)Ф2 = Vy — sin <р + g0 = 0. (2.50)Выражение для подынтегральной функции вспомогательного
функционала запишется так:р = _ ш + X, (t) Ф1 + Х2 (О Ф2 (2.51)или в следующем развернутом виде:
Вычислим производные, необходимые для составления урав¬
нений Эйлера — Лагранжа:dVx ’ av, 11 dt \dVx) 1dFdVvgo1; _^= J- + X2;dVgoddtdF P 1 „ ч dF n~d?~ = ~m ( i Sln ^ *2 COS <p); — 0.Уравнения Эйлера — Лагранжа имеют вид:^ = 0;*, = - 1;Xj sin? — X2cos(p = 0.Решая эти уравнения, получим:Xi = С{,Х2 = с2 — /;Обозначим:Отметим, чтоtg(p = _ =
= tg <р0,Ха __ Cj — th~~~cr~С$ I 1 Cl — tg'Po. "cl °‘C2= -c-tgVo-’-'OОкончательно получимtg? = tg<po — C0t.(2.53)(2.54)(2.55)(2.56)(2.57)(2.58)Таким образом, при оптимальной программе по тангажу
для ракеты-носителя tg<p представляет собой линейно-убы-
вающую функцию времени. Константы Си (и их сочета¬
ния: tg<po и С0) определяются из граничных условий.Первым граничным условием является достижение задан¬
ной горизонтальной скорости Ука; в конце активного участка:'к *к
ГР Г Р dt
I CQS ® at = I —7T—SSSSSZ в .J т jj т V\ + (tgtfp-CoO»(2.59)73
Для вертикальной составляющей скорости в конце актив¬
ного участка можно использовать естественное граничное
условиеdF =0dVyили из уравнения (2.53)
dFdVy1/ку. + Х2к = 0. (2.60)SoИз формулы (2.57) следует, что ХгК = С2 — tK, или, учитывая
выражение (2.58), получимх2к =-^-tgcp0 — tv (2.61)'-'ОСопоставляя формулы (2.60) и (2.61), находим—— = Г /Л- sin tp — 1) dt = tg ср0 — tK
go J U# r / C0Uили окончательноД*2 = Г — -т7- dt. (2.62)Со J gom >/^1 -f- (tg <р0 — CV)2При заданных величинах tK и VKX из формул (2.59) и (2.62)рможно определить неизвестные tg<p0 и С0. Отношение — яв¬
ляется при сделанных ранее допущениях известной функцией
времени.Итак, идеальная программа движения для УБР требует
постоянства угла тангажа в пределах активного участка тра¬
ектории, а идеальная программа движения ракет-носителей
представляет собой линейно-убывающую функцию времени.Эти идеальные программы закладываются в основу по¬
строения реальных программ движения.Обычно к реальным программам движения УБР и ракет-
носителей предъявляют следующие требования:— обеспечение максимально возможной скорости в конце
активного участка (при прочих равных условиях);— возможность осуществления вертикального старта;— ограничение перегрузок (главным образом нормаль¬
ных или поперечных);— плавное изменение параметров (для нормального
функционирования системы управления требуется существо¬
вание на всем активном участке производных ср и ер);74
— отсутствие углов атаки при околозвуковых скоростях
полета.Перечисленным требованиям, например, удовлетворяет
траектория полета на активном участке, включающая сле¬
дующие составные части (рис. 2.8):Рис. 2.8. Траектории полета УБР и ракеты-носителя на
активном участке— вертикальный участок Оа\— участок завала ab;— участок разворота Ьс\— участок наведения ck.Рис. 2.9. Характер изменения углов ср, 9 и а на актив¬
ном участке траектории УБРПервые три участка лежат в пределах плотных слоев ат¬
мосферы, а участок наведения вне их и поэтому иначе на¬
зывается безатмосферным участком. На рис. 2.9 показан ти¬
пичный характер изменения углов <р, 9 и а на активном уча¬
стке траектории УБР.Анализ реальных программ движения УБР и ракет-носи¬
телей позволяет создать приближенные программы, которые75
используются при решении задач баллистического проектиро¬
вания управляемых ракет.Так, для первых ступеней УБР близкой к оптимальной
является приближенная программа, описываемая соотноше¬
нием<Р =~2~ > 0 ^ 1*1 ^ 0,05;
6,25 (-=- - 9к) (0,45 - ft)* + <рк. 0,05 < ft < 0,45;
И. >0,45.«Рк-(2.63)Идя по линии дальнейшего упрощения приближенной
программы, можно пренебречь величинами углов атаки.В этом случае угол тангажа можно заменить углом 0 и
использовать хорошо согласующуюся с реальными прибли¬
женную программу вида [2]:•f-, 0<ft<0,05;
4 (-£- - К) (0,55 - ft)* + 0,05 < ft < 0,55;
К, ^ >0,55.(2.64)§ 2.4. РАСЧЕТНЫЕ ЗАВИСИМОСТИ ДЛЯ ПАССИВНОГО
УЧАСТКА ТРАЕКТОРИИТраектория полета управляемой баллистической ракеты
состоит из активного участка ОК (рис. 2.10) и пассивного уча¬
стка КЦ. Пассивный участок в свою очередь состоит из уча¬
стка свободного полета KF и конечного или атмосферного,
участка FL[. Движение боевой части ракеты на участке сво¬
бодного полета совершается под действием только силы при¬
тяжения Земли, поскольку на высотах, превышающих 80—
100 км, атмосфера практически отсутствует.На конечном (атмосферном) участке кроме силы земного
тяготения на боевую часть действуют аэродинамические силы
и моменты. Началом атмосферного участка принято считать
высоту 80 км над поверхностью Земли.Если не учитывать действия аэродинамических факторов
на атмосферной части пассивного участка, то это приведет к
ошибке в определении полной дальности полета, равной при¬
мерно 1%. Поэтому при проектировочных баллистических
расчетах можно рассчитывать весь пассивный участок траек¬
тории как участок свободного полета. Однако, при исследо¬
вании параметров движения боевой части, в частности при
определении скорости и времени ее полета на атмосферном
участке, необходимо учитывать действие аэродинамических
сил и моментов.76
Движение боевой части на пассивном участке траектории
удобно рассматривать в инерциальной системе координат,
движущейся поступательно, равномерно и прямолинейно вме¬
сте с центром Земли.Будем рассматривать движение боевой части на участке
свободного полета как движение материальной точки под
действием только силы тяжести в основной земной системе
координат хОу, начало которой помещено в точку старта,Рис. 2.10. Траектория полета управляемой баллистиче¬
ской ракетыа плоскость (х, у) совпадает с плоскостью полета. Система
уравнений движения при этом принимает следующий вид:х--g0R2Xгъ(2.65)Для перехода к полярным координатам системы (т), г), по¬
люс которой совпадает с центром Земли, а полярная ось на¬
правлена в точку старта О, используем соотношения:х(R + >0г sin ■»); 1
= rcos?]. j(2.66)77
После преобразования получим:г — г(ч)* = —(2.67)Интегрирование системы (2.67) приводит к уравнению траек¬
тории свободного полета в виде уравнения конического сече¬
ния в полярных координатахг Р (2.68)1 — е cos (т| — к!в)где р — фокальный параметр конического сечения;
е — эксцентриситет конического сечения;
т]в — угол, определяющий положение фокальной оси.
Величины р и е являются константами траектории, зави¬
сящими от начальных параметров движения на участке сво¬
бодного полета.р = п cos2 & — rKvK cos2i\; (2.69)е = У(1 — v)2 cos2 & + sin2& == K(1 —vK)2cos2 »K + sin2»K; (2.70)v = ^; (2.71)Vlr,к' к*0(2.72)где тс0 = 3,98-1014 мв/сек2.Индексом «к» здесь обозначены параметры в конце актив¬
ного участка траектории.Форма траектории характеризуется величиной эксцентри¬
ситета. Из анализа уравнения (2.68) вытекает возможность
существования трех видов траекторий свободного полета:— эллиптической при vK<2 (при этом е<1); в частном
случае (при vK=l, е = 0) круговая орбита;— параболической при vK=2 (е=1);— гиперболической при vK>2 (при этом е>\).Таким образом, траектория свободного полета ракеты
представляет коническое сечение, в одном из фокусов кото¬
рого находится центр Земли. Для стрельбы по наземным це¬
лям параболические и гиперболические траектории, уходя¬
щие в бесконечность, не представляют интереса. Поэтому
рассмотрим ряд частных баллистических задач по определе¬
нию параметров эллиптических траекторий.Весь пассивный участок примем за участок свободного
полета. При решении частных задач во всех случаях будем78
полагать известными координаты хк и ук конца активного
участка траектории относительно точки старта. Будем счи¬
тать также известными радиус-вектор гк и высоту hK, так как
они легко определяются но формулам:tg^KR + Ук ’R + Ук __ ХкCOS 1)ssin %-R.(2.73)1. Определение требуемой скорости VK по заданной
полной дальности пассивного участка Ln и высоте /;кИзвестно, что каждой дальности полета на пассивном уча¬
стке отвечает некоторый оптимальный угол &*, при котором
для достижения этой дальности требуется наименьшая ско¬
рость Ук.тш. Из выражения (2.72) имеем■it -j /~^о^к. minк. min |/ гкСледовательно, задача сводится к исследовании? на экстре¬
мум зависимости безразмерной скорости vK.min от угла V-
Опуская выкладки, которые можно найти, например, в ра¬
боте [2], дадим формульную схему решения задачи (см.
рис. 2.10):h = (2-74)= (2.75)К. „ь = . (2.76)Для прикидочных расчетов можно пренебречь высотой ак¬
тивного участка. Тогда расчетные формулы упростятся и
примут вид: '?« = -#-; (2-77)К = 4-(к-К); (2.78)'•‘Т 7Рцsin • Л2 кмП.т1п = 11.19 |/ 7—(2-79)+ sm79
Заметим, что угол 0* является оптимальным с точки зре¬
ния получения ракеты наименьшей стартовой массы и суще¬
ствует оптимальный угол, обеспечивающий наименьшее рас¬
сеивание точек падения боевых частей. Следовательно,
имеется такое значение угла 0К> которое может быть най¬
дено по минимуму стоимости выполнения боевой задачи.2. Определение максимальной дальности пассивного
участка /,птах по известной скорости в конце активного
участка VK и высоте //кЗадача сводится к отысканию оптимального угла ft*,
обеспечивающего получение максимальной дальности пассив¬
ного участка. Для ее решения необходимо найти функцио¬
нальную зависимость между центральным углом (3 и углом Эк.
Исследуя далее эту зависимость на экстремум по углу 9К,
найдем искомый угол ft’. Окончательно схема расчета мо¬
жет быть представлена так:В формуле (2.85) скорость VK измеряется в км/сек, дуга
arctg в градусах, а дальность в км.3. Определение дальности пассивного участка L„
по известным параметрам конца активного участкаВ этой задаче кроме высоты конца активного участка Лк
известны также величина скорости Ук и угол наклона век¬
тора скорости к местному горизонту 0К. Используя уравнения
(2.68), (2.72), можно получить следующую формульную схе¬
му расчета:^(Л + А,)(2.80)(2.81)(2.82)(2.83)Полагая й„ = 0, имеем:tgft* = Ki-(2.84)(2.85)£гаах _ 222,4 arc tg15,82 V62,57 — V2K '(2.86)(2.87)a — 2R{\ + tg2 ftK) — (2R -f hK) vK;80
b — vkR tg 0K; (2.88)с == vKAK; (2.89)tg Jk = .* t V bl+.a.c...; (2.90)
4i i1La = RK (2-91)Если пренебречь высотой активного участка, то вся схема
расчета сводится к единственной формуле^tg».62,57 (1 + tg2 SK) — ]/гкLn = 222,4 arc tg Д*Д л , (2.92)где скорость измеряется в км/сек, дуга arctg — в градусах,
а дальность в км.4. Определение требуемой скорости в конце активного
участка VK по заданной дальности пассивного
участка Ln, углу и высоте //кИз формулы (2.72) имеем,vK=Безразмерную скорость vK найдем, воспользовавшись уравне¬
нием (2.68) и зависимостями (2.69) и (2.70). В результате
можно получить следующую схему расчета:Рд=4г; (2.93)2Л(1 +tg*»e)tg*^.(2R + hK) tg» Ц- + 2R tg 9К tg ■Jk- + Лк(2.94)(М5)Если положить hK — 0, то требуемую скорость в км/сек най¬
дем по формуле-+Vb... tg-&-. (2.96)-f- + tg*K81
5. Определение изменения дальности в зависимости
от малых изменений высоты, скорости и углаПроизводные дальности пассивного участка La по пара¬
метрам конца активного участка траектории VK, hK и 9К опре¬
деляются по следующим зависимостям:где4 ап* Ц. \ТГ _ *dVK~ *KvKcos2»K Кк-L'h = —ш
h dftK ~*кL'Мп да ддк к vK cos2 ftK1 2 sin2 ~2~R {R + hK) vK cos2 &K
sin РцRWK~tg&K+-^|Pa/2'(2.97)(2.98)(2.99)(2.100)6. Определение параметров движения в любой точке
эллиптической траекторииЗадача сводится к отысканию параметров движения V,
h, Ь и времени t в любой точке траектории, определяемой
центральным углом |3 по известным начальным параметрам /гр,
Ук иЕе решение можно найти во многих работах по теории по¬
лета, например, в работе [2]. Может быть рекомендована
следующая схема расчета:vliR + bK)TCq(2.101)tg Р.(2-i°2>P = vK (R + K) cos2 »K; (2.103)e = V (1 — vK)2 cos2 ак -f- sin2 *>K; (2.104)r= i_«cof(p,—p) ’ (2.105)h = r — R; (2.106)_v = 2-(2 -vk)|^L; (2.107)V=Y^-, (2.108)82
cos» = Y-L = COS &K; (2.109)+ KvK (2 — vK) • sin »„) + — arc sin -Ц-^- +— arc sin+ Kv (2 — v) • sin (2.110)В формуле (2.110) знак минус берется для точек, распо¬ложенных на восходящей ветви траектории, а знак плюс—
для точек, расположенных на нисходящей ветви траектории.Для вершины траектории, как для частного случая, пара¬
метры движения определяются по более простым формулам:7, Приближенный баллистический расчет атмосферной
части пассивного участкаПри исследовании параметров движения боевой части на
атмосферной части пассивного участка траектории необходи¬
мо учитывать влияние аэродинамического лобового сопро¬
тивления.Движение центра масс боевой части относительно невра-
щающейся Земли при нулевом угле атаки в проекциях на
оси скоростной системы координат описывается следующей
системой уравнений (рис. 2.11):(2.111)vB = 1 — е;(2.112)(2.113)(2.114)(2.115)83
где т6ч — масса боевой части;h — высота боевой части над местным горизонтом;I — дальность, измеряемая по дуге земного шара;
Ь — угол наклона вектора скорости к местному го¬
ризонту, отсчитываемый от линии горизонта по
часовой стрелке.Приближенное решение системы уравнения (2.115) нахо¬
дится при следующих до¬
пущениях:— поле тяготения счи¬
тается постоянным, т. е.
g=go = 9,81 м/сек2;— функция плотности
воздуха принимается из¬
меняющейся с высотой
по экспоненциальному за¬
кону;— полагаем, что отно-
Схшение постоянно иsm «равно отношению сред¬
них на траектории значе¬
ний Сх и sini}cp; такое
допущение основывается
на том факте, что коэф¬
фициент лобового сопро¬
тивления Сх и sin О
вдоль траектории возра¬
стают.В результате интегри¬
рования при указанных
допущениях можно полу¬
чить следующие расчет¬
ные формулы:Рис. 2.11. Траектория полета боевой ча¬
сти УБР на атмосферном участке тра¬
екториигдеУ = VF [1 +.7,5D + и (h)] ехр (Лтсд);
cos 0 = cos • еп,A = — l,№-lO-*B Cjc'cp ■(2.116)(2,117)sindcp ’Щч ’D= 2,2.10-»-^;VFu{h)=DEi(—A«k)\л = 1,1-10-» Inn«л,01680,5a (h)l84
Po—плотность воздуха на поверхности земного шара(р0= 1,226 кг/м3);
тсА = и(Л) — табличная функция изменения давления с высо¬
той;VF— скорость головной части в точке «входа» (на вы¬
соте h = 80 км);FM — площадь миделя корпуса боевой части.Функция Ei является табличным интегралом видаИсходными данными при расчете атмосферного участка
являются параметры движения боевой части в точке «входа»,
определяемые по формулам (2.Ю6)(2.П0). Значение Сх
для расчета коэффициента А выбирается средним в диапа¬
зоне чисел Маха от трех до максимальных. Значение sin 9ср
берется равнымФормулы (2.П6) и (2Л17) справедливы для расчета па¬
раметров движения боевой части, начиная с высот 30 км и
ниже. Анализ расчетов по результатам точных решений урав¬
нений движения показывает, что без существенных погреш¬
ностей можно принимать скорость движения V и угол 9 до
высот, равных 2530 км, неизменяющимися и равными их
значениям в точке «входа», т. е. V=VF, 9 = 9*-. Начиная с вы¬
соты 4 км, оба эти параметра вновь остаются постоянными.Как было отмечено, баллистические расчеты представ¬
ляют собой одну из частных задач баллистического проекти¬
рования ракеты. Эта задача формулируется так: требуется
определить коэффициенты заполнения топливом субракет p,Ki,
обеспечивающие заданную максимальную дальность полета
при условии, что топливо и конструктивная схема ракеты вы¬
браны.Исходными данными для расчета являются максимальная
дальность полета Lmax, число ступеней ракеты п, удельные
тяги двигателей Руд ы, начальные тяговооруженности суб¬
ракет ХП{, коэффициенты xi соотношения относительных весов
топлива смежных субракет, начальная поперечная нагрузка
на мидель ракеты Рм1.Решение задачи ведется в два этапа. Первый этап носит
название проектировочного баллистического расчета. Его цель§ 2.5. ПРОЕКТИРОВОЧНЫЙ И ПРОВЕРОЧНЫЙ
БАЛЛИСТИЧЕСКИЕ РАСЧЕТЫ85
состоит в том, чтобы по заданным Lmax, п, щ и Руд П). найти
приближенные значения относительных весов топлива суб¬
ракет.Второй этап расчета называется проверочным баллисти¬
ческим расчетом. Он имеет целью уточнение величин ^кг- с
учетом выбранных коэффициентов тяговооруженности Xni, на¬
чальной поперечной нагрузки на мидель ракеты, а также
выбранной программы движения ракеты на активном участке
траектории.При решении основной задачи военно-технического про¬
ектирования ракетного комплекса баллистические расчеты
повторяются при каждом существенном изменении исходных
данных и проектных параметров ракеты. При этом широко
используются ЭВМ или моделирующие установки, в которые
заложены заранее составленные алгоритмы решения задачи.На первых этапах решения задачи баллистического про¬
ектирования ракеты наряду с машинными методами находят
применение приближенные аналитические методы баллисти¬
ческого расчета, позволяющие быстро получить ориентиро¬
вочные летные характеристики проектируемой ракеты. Сущ¬
ность этих приближенных методов и рассматривается в дан¬
ном параграфе.1. Проектировочный баллистический расчетПолная дальность полета управляемой баллистической
ракеты равна:L = lK + Ln. (2.118)Как было показано в § 2.4, дальность эллиптического уча¬
стка траектории определяется тремя параметрами:Ln = Ln(VK, »к, hK).Тогда с учетом зависимости (2.118) полная дальность по¬
лета ракетыL = L{VK,K, К, Iк). (2.119)Управляемые баллистические ракеты одного класса имеют
обычно подобные одна другой программы движения на ак¬
тивном участке траектории. Это приводит к тому, что вели¬
чины /г„, /„ и Эк для различных ракет с одинаковой полной
дальностью полета оказываются примерно постоянными. При
этом следует учитывать, что параметры hK, /к и 0К влияют на
дальность полета значительно слабее, чем скорость VK.В табл. 2.1 приведены ориентировочные значения hK, 1К
для баллистических ракет с различными максимальными
дальностями полета при начальных тяговооруженностях суб¬
ракет Хт=0,5.86
Таблица 2.1Зависимость hK, 1К, Кк и Lv от полной дальности полетаЛ, тыс. км2468101214Лк, км90135165195225250270/и, км110195285365480590740к39353028252320VK, м/сек3920520060006500690071507400L.' КМ1,061,882,904,005,226,628,20у' м/секКроме того, в табл. 2.1 указаны оптимальные значения
углов 8К. которые при дальностях до 6000 км совпадают с
углами наибольшей дальности &*,. определяемыми по фор¬
муле (2.75). Для межконтинентальных дальностей полета
указанные в табл. 2.1 значения оптимальных углов 9К превы¬
шают углы &к*. Из-за этого дальность полета снижается,
но обеспечивается приемлемое рассеивание точек падения
боевых частей.В дальнейшем будет показано, что Лк и /к пропорциональ¬
ны коэффициенту тяговооруженности. Поэтому величины Лк
и найденные из табл. 2.1, следует умножить на поправоч¬
ный коэффициент(2.120)где Хср — среднеинтегральная величина коэффициента на¬
чальной тяговооруженности для всех субракет.В случае двухступенчатой ракеты с ЖРД среднеинте¬
гральная величина Хср близка к ХП2- Для ракет с РДТТ
в качестве Хср можно принять среднеарифметическое зна¬
чение коэффициентов начальной тяговооруженности суб¬
ракет.При известных величинах hK, 1К и 9К скорость ракеты в
конце активного участка траектории однозначно зависит87
от дальности полета. Для расчета величины Ук используются
следующие рабочие формулы:Q L .Р— R ,, R sin Р
tg(0 =(R + hK) — R cos p ’
= R + h„R -j- hK ® 2 cos #K cos (to — dK)(2.121)Результаты расчета скорости VK при различных дально¬
стях полета приведены в табл. 2.1. Наконец, в этой же таб¬
лице помещены значения производных дальности пассивного
участка по скорости Lv, вычисленные по формуле (2.97).
Скорость ракеты в конце активного участка траекторииПVK = ni In т~-Д VU, (2.122)г=1где ДУпот — суммарные потери скорости на активном участке
траектории.Если приближенно принять, что удельные тяги двигателей
всех ступеней одинаковы, то формула (2.122) примет видУк ^ ^°Руд' ср 1П (l-(xKl)(l-ixK2) ...(1-цкп) — Л1/пот’ (2Л23^где Руд. ср — среднее значение удельной тяги двигателей
всех ступеней ракеты.Введем понятие приведенного коэффициента заполнения
ракеты топливом [лПр, под которым будем понимать относи¬
тельный вес топлива эквивалентной одноступенчатой ракеты,
имеющий такую же теоретическую (идеальную) скорость по¬
лета, как и рассматриваемая составная ракета. По определе¬
нию |лПр равняется:t> = 1 — (1 — H-ki) (1 — Ь’-кг) - 0 — Рки). (2.124)В этом случае формула для определения скорости в конце
активного участка траектории записывается так:V/K = g0PyA. ср In - Д VnoT. (2.125)Средняя удельная тяга для ракет с ЖРД приближенно
равнаруд. ср ~ 2^Т (РуД 012Ру"-! + 2 5 ру-"«) ' (2Л26)88
и для ракет с РДТТ+ (2-127)Суммарные .потери скорости ДУП0Т за счет действия сил
тяжести, аэродинамического сопротивления и противодавле¬
ния составляют определенную часть идеальной скорости, ко¬
торую сообщают ракете двигатели. Можно приближенно при¬
нять, чтоVK + AVn0T = kvVK, (2.128)где kv — коэффициент потерь скорости, зависящий от дально¬
сти полета, удельной тяги и начальной тяговооруженности
субракет.Для межконтинентальных ракет с дальностью полета
L=10h-14 тыс. км коэффициент kv= 1,15-*-1,25, при этом
большим дальностям полета соответствует меньшее значе¬
ние ky. Разрешая уравнение (2.125) относительно [лпр, по¬
лучаемБаллистический расчет ведется в предположении, что от¬
носительные веса топлива субракет связаны зависимостями
видаЫ = V *2 - V-г ftci- (2.130)Поэтому выражение (2.124) можно переписать так:1 [*Пр == (1 Pki) (1 Xl^Kl)— О Х1 — *я—lftsl)- (2.131)Уравнение (2.131) можно использовать для определения
[лк1. В частности, для случая двухступенчатой ракеты оно
превращается в квадратное уравнение*1^1 — О + Xl) Рк1 + Рпр = 0,откудаДалее нетрудно найти |лК2, а в общем случае и остальные
коэффициентыКроме аналитических существуют номографические мето¬
ды проведения баллистических расчетов, описание которых
приведено в § 5.5.89kvVKgoP.УД- ср(2.129)
2. Проверочный баллистический расчетИсходными данными при проверочном баллистическом
расчете являются:— число ступеней ракеты п;— относительные веса топлива субракет |лкг-;— удельные тяги двигателей ступеней в пустоте РуД.щ\— начальные тяговооруженности в пустоте для всех суб¬
ракет Хп,;— начальная поперечная нагрузка на мидель ракеты
Р м1>Кроме того, должна быть выбрана программа движения
ракеты на активном участке траектории. Для приближенных
расчетов можно использовать программу (2.64), которую для
составной ракеты можно записать следующим образом:&([*/А) =0<[х1<0,05;4 (•y - К) (0,55 - + »к, 0,05 < р, < 0,55;&К, 0,55 < [1, < цк1;[АК9, ... ; о < < и*к„.Точное решение задачи проверочного баллистического рас¬
чета может быть получено лишь путем интегрирования па
ЭВМ системы уравнений движения ракеты на активном уча¬
стке траектории (§ 2.1). По результатам расчетов составля¬
ются сборники баллистических таблиц. Однако в практике
проектирования нередко встречаются случаи, когда необхо¬
димо не только определить летные параметры ракеты в конце
активного участка траектории, но и проанализировать влия¬
ние основных проектных параметров. В таких случаях, а так¬
же при отсутствии под руками баллистических таблиц при¬
меняют приближенные методы расчета траекторных параме¬
тров ракеты на активном участке. Эти методы позволяют
обойтись без численного интегрирования системы уравнений
движения ракеты. Для ускорения расчетов используются
вспомогательные таблицы или графики. В основе всех при¬
ближенных методов лежит преобразование уравнения дви¬
жения центра масс ракеты в проекции на касательную к тра¬
ектории. Рассмотрим первое уравнение системы (2.7) приме¬
нительно к активному участку первой ступени ракеты. Тогда
имеемт (О'4г = р (А) - X(V, h) - т (t) g0sin о (t). (2.133)Тяга двигателей равнар (Л) = Ящ - (Ящ - рт) * (Л). (2.134)90
Разность тяг в пустоте и на поверхности Земли можно
пыразить через соответствующее приращение удельных тяг,
т. е.р р р рп1~-Ро1 р руд- п1 ^уд'01 ('2 13'^Рщ —П1 —ni Ро1 — руд 01 •Введем обозначение-ту Рул. П1 — Рул■ 01 /0 1 пс\Кр = р • (2.136)и Гул. 01ТогдаP{h) = Pal-KpP^{h). (2.137)Величина аэродинамического сопротивления подсчиты¬
вается по формулеX(V,k) = 0,7pNCx (М) М2 * (A) FHl. (2.138)Наконец учитываем, что текущая масса первой субракеты
равна/?&! = /% (1—ft). (2.139)Подставим выражения (2.137), (2.138) и (2.139) в урав¬
нение (2.133) и перейдем к новому аргументу — относитель¬
ному весу выгоревшего топлива который связан со вре¬
менем полета соотношениями:^ = ^Ol-^ya. 01 Pl — ^п1^уд. nlPl- (2.140)После интегрирования получимр-i— еЛмР - Н-1^1 Ы = goPy*. nl In -j—- — Я, W 01 sin о • rfft —Первое слагаемое в выражении (2.141) представляет со¬
бой идеальную скорость, кбторую ракета приобрела бы в пу¬
стоте при отсутствии притяжения Земли. Второе слагаемое
представляет собой гравитационные потери скорости. Введем
обозначениеЪIgl — j sin »(ft, К) difr. (2.142)оЗначения интеграла Igi для программы движения вида
(2.64) приведены в табл. 2.2.91
Таблица 2.2Значения функций Ui (I*), Ц2 М. fgi (и-, »к)ц. адц2 (и)/gl (v-) при20°25°30°35°40°45°0,100,200,300,400,500,550,600,650,700,750,800,850,900,950,1054
0,2231
0,3567
0,5109
0,6931
0,7985
0,9163
1,0499
1,2040
1,3863
1,6094
1,8972
2,3026
2,99570,00520,02150,05050,09350,15350,19050,23350,28250,33900,40350,47850,56550,66970,80030,1000,1890,2600,3120,3520,3690,3860,4040,4210,4380,4550,4720,4880,5050,1000,1910,2660,3240,3710,3920,4130,4340,4550,4770,4980,5190,5400,5610,1000,1920,2710,3350,3880,4140,4380,4640,4880,5130,5380,5630,5880,6130,1000,1940,2750,3450,4050,4360,4630,4910,5200,5480,5770,6060,6340,6630,1000,1950,2800,3540,4220,4540,4860,5180,5500,5820,6140,6460,6780,7100,1000,1960,2830,3720,4360,4710,5060,5420,5770,6120,6450,6830,7180,754Третье слагаемое в выражении (2.141) характеризует по¬
тери скорости на статическое противодавление или, иначе го¬
воря, представляет собой поправку к идеальной скорости на
изменение тяги с высотой. Обозначим(2Л43)Как показывают расчеты, величина интеграла, входящего
в выражение (2.143), мало зависит от проектных параметров
и программы движения на активном участке. Зависимость 1Р\
от аргумента jii при /Ср = 0,15 представлена на рис. 2.12.Наконец, четвертое слагаемое в выражении (2.141) пред¬
ставляет собой потери скорости на аэродинамическое сопро¬
тивление. Для приближенного определения этой величины
следует учитывать, что:— аэродинамические формы ракет «тандемной» схемы
практически подобны одна другой и характеризуются неко¬
торым средним законом Сх(М);— значения углов атаки на активном участке траектории
первой ступени ракеты невелики и мало сказываются на
аэродинамическом сопротивлении;— при постоянном значении pi скорость полета пропор¬
циональна удельной тяге, плотность воздуха в первом при¬
ближении обратно пропорциональна высоте полета, которая92
в свою очередь пропорциональна произведениюрР>^д. 01 >следовательно, скоростной напор должен быть обратнопропорционален коэффициенту тяговооруженности Х0ьАнализ результатов расчетов показывает, что величина по¬
терь скорости на лобовое сопротивление с точностью до
10 м/сек может быть найдена по формулеДКXI ■р9
*м1Х01 У sin2 Зк(2.144)где /.nGh)—вспомогательная функция, определяемая по гра¬
фику рис. 2.13;P9t— эталонная начальная поперечная нагрузка на ми¬
дель ракеты (P*j = 12- 10s кг/м2).Таким образом, рабочая формула для определения скоро¬
сти ракеты на активном участке ее первой ступени имеет вид(f*l) — goPуд. щ^1 (l^l) go^Py*. Ol^s-t (Pli ».)■1X\ (t*i)P9MlPyi. wJp\ (l^l) 3 ~px01 y~ sin2 aK(2.145)где Цх (ft) = In11—И-tфункция, определяемая по табл. 2.2.Для проведения расчетов по формуле (2.145) вполне до¬
статочно исходных данных, перечисленных на стр. 90.93
Недостающие величины Руд. 0i и X0i легко найти из следующих
соотношений:Ру*. 01 — Яуд, п1 ^ ^ _ ; (2.146)*01 = *»!-^. (2.147)МГД. 01Для первых ступеней ракет с двигателями на химическом
топливе можно принимать /Ср = 0,15.Если [jlki <0,55, величину &к следует определять с помощью
уравнения программы движения (2.132).Для приближенного определения высоты и сферической
дальности полета ракеты на активном участке первой ступени
используется первое уравнение системы (2.7) в несколько
ином виде. Тягу двигателей можно выразить через ее значе¬
ние на поверхности Земли:Р (h) = Р01 + (Рп1 - Р01) [1 _ * (Л)], (2.148)илиР(А) = Р01 + KpP0l [1 - 1Г (А)]. (2.149)Тогда выражение для скорости полета примет вид^1 (l^l) — SoPyp,. 01 1 ^ goKSуд. 01^1 ++р.-О- Х«1^уд. оЩ dH. (2.150)Третье и четвертое слагаемые в выражении (2.150) имеют
разные знаки и частично компенсируют одно другое. Поэто¬
му для расчета координат ракеты можно ограничиться пер¬
выми двумя слагаемыми в формуле для скорости полета.Из третьего и' четвертого уравнений системы (2.7) сле¬
дует, что высота и сферическая дальность полета ракеты свя¬
заны со скоростью следующими зависимостями:
t ii«Ах = Г V1 sin bdt= Х01Руд. 01 Г V* sin & (ft, &к) <fyi (2.151)
Тогда после подстановки в формулы (2.151) и (2.152) пер¬
вых двух слагаемых скорости из выражения (2.150) получим:К = A (®i 1гдек = А (ф2Ф,I1!I'"А — go^Pl. 01»
11-иф.In■Нчsin »(ft, эк) rfft;cos »(ft, »K) dft;Ф4 = j* fgl (Pl. 8к) cos 0 (ft, ft.) rfft.(2.153)(2.154)Значения вспомогательных функций Фь Ф2, Ф4 могут
быть найдены по графикам рис. 2.14, 2.15 и 2.16.Итак, летные параме- ^
тры ракеты в пределах 1
активного участка пер¬
вой ступени (в том числе озд
и в конце этого участка)
могут быть найдены по
формулам (2.145), (2.153)
и (2.154) с помощью
вспомогательных таблиц и 020
графиков.Перейдем к определе¬
нию летных параметров
верхних ступеней ракеты.Как показывает анализ
баллистических расчетов,
к концу активного участ¬
ка первой ступени раке¬
ты с ЖРД выходят из
плотных слоев атмосфе¬
ры вторая и последующие
ступени практически не
испытывают аэродинами¬
ческого сопротивления.Естественно, что при этом нет и потерь тяги двигателя на
статическое противодавление.0 0.1 0,2 0.3 Ofi 0,5 0,6 Mki
Рис. 2.14. Зависимость Ф1 от и 8„95
96Рис. 2.15. Зависимость Ф2 от (ii и 8К Рис. 2.16. Зависимость Ф4 от щ
У ракет с РДТТ активный участок первой ступени часто
заканчивается на сравнительно малой высоте, поэтому полет
второй ступени частично происходит в плотных слоях атмо¬
сферы. Это обстоятельство можно учесть следующим обра¬
зом. Анализ графиков на рис. 2.12 и 2.13 показывает, что
зависимости /pi([jh) и /Ж1 (jj-i) носят характер кривых «насы¬
щения». Это свидетельствует о том, что суммарные потери
скорости на аэродинамическое сопротивление и противодав¬
ление ограничены некоторой предельной величиной, завися¬
щей от формы траектории и проектных параметров ракеты.
Поэтому при расчете летных характеристик второй ступени
ракеты с РДТТ можно_ учесть потери скорости на аэродина¬
мическое сопротивление и противодавление по формулам:где /”“ = 48 —предельное значение функции /*1(^1);
/шах __ о^д— предельное значение функции 1Р\(щ).верхних ступеней, легко прийти к следующим зависимостям
для расчета летных параметров ракеты:(2.155)ДУР2=Ру,.ог VT-I* (he,)],(2.156)л Jiiunbiilit YJ'nvunii 'Plvt-M/*Учитывая постоянство угла 0 = 9„ на активных участкахVk2 — К, "Ь SoРуд. пз/к (Рк:> ^п2> ^к), (2.157)гдеfv (Р'КЗ) ^П21 ®к)— Ц.1 (^кг) ^пз!хк2 S*4 (2,158)Координаты конца активного участка второй ступени мо¬
гут быть найдены по формулам:АК2 = К\ + A sin ак [У\2?К2 + fs (Р*к2) Хп2> &к)1: (2.159)
4а = In + D, COS &к [У12Цк2 + fs CUK2- ХП2. &к)]> (2.160)гдеDi — йо^пг^уд. п2>(2.161)(2.162)fs (f*K2) ^П2) »к) — U-2 (Ркз) 2 ^п2^к2 ^к’Ц2 (н*) = I1 + С1 — р) 1п С1 — н-)-Функция Цг ((J.) приведена в табл. 2,2.4—2582(2.163)(2.164)97
Аналогично определяются летные параметры активного
участка третьей и последующих ступеней ракеты. Расчетные
формулы для третьей ступени имеют вид:^кЗ = ^К2 + SqPуд. nbfv (Р*КЗ> ^пЗ> ^к)> (2.165)^кз == ^к2 “Ь Ц, sin [^З^кЗ “Ь fs (ftc3> ^пЗ> ^к)]> (2.166)^кз = ^кг “Ь COS &к [ ^гз^кз “Ь fs (ьЧз) ^пз> ^к)]> (2.167)
где Va =(2.168)50^уд. ПЗ£>3 = goKs^iуд. пЗ'Дальность полета ракеты рассчитывается по формулам
эллиптической теории (см. § 2.4):а ■■Vl (R + hK)v = ;к *0(2.169)2# (1-{ tg2 — vK) — AKvK;(2.170)ь = tg »к;(2.171)с - vK/?K,(2.172)Р Ь + У Ь2 + ас
tg 2 а >(2.173)Ln = ЯР;(2.174)L = Ln -f- lK,(2.175)где Кк, Эк, ^к. /к — летные параметры ракеты в конце актив¬
ного участка последней ступени.Кроме аналитических методов решения задачи провероч¬
ного баллистического проектирования существуют номогра¬
фические методы, один из которых описан в § 5.5.§ 2.6. ГАРАНТИРОВАННАЯ ДАЛЬНОСТЬ ПОЛЕТА
И ГАРАНТИЙНЫЕ ЗАПАСЫ ТОПЛИВАНа ракету в полете действуют возмущения, вызываемые
изменениями состояния атмосферы, отклонениями аэродина¬
мических характеристик ракеты, погрешностями производ¬
ства ракеты, ошибками системы управления, отклонениями
доз заправки и характеристик топлива, изменениями пара¬
метров двигателей. Это приводит к тому, что в момент пол¬
ного выгорания топлива в ракетах с РДТТ или одного из
компонентов в ракетах с ЖРД скорость и координаты центра
масс, а следовательно, и дальность полета могут существен¬98
но отличаться от расчетных значений. По этой причине при
работе двигателей последней ступени до полного выгорания
топлива (одного компонента топлива) рассеивание точек па¬
дения боевых частей весьма велико.Чтобы уменьшить рассеивание при стрельбе на макси¬
мальные дальности, необходимо выключать двигатели по¬
следней ступени ракеты по командам системы управления.Та максимальная дальность полета, которая- обеспечи¬
вается при выключении двигателей последней ступени раке¬
ты по командам системы управления с вероятностью, близкой
к единице, называется Гарантированной дальностью. По¬
скольку ракета предназначена для использования в широком
температурном диапазоне, температура компонентов жид¬
кого топлива может существенно изменяться. При некоторых
способах заправки баков ракет с ЖРД вес заправленного
топлива оказывается зависящим от температуры в момент за¬
правки. Следовательно, гарантированная дальность полета
ракет с ЖРД может зависеть также и от температуры ком¬
понентов топлива.Чтобы при стрельбе на максимальную дальность с вероят¬
ностью, близкой к единице, двигатель был выключен по коман¬
дам системы управления, на борту последней ступени нужно
иметь дополнительные запасы топлива сверх расчетных. Эти
запасы будут израсходованы полностью лишь в том случае,
если все случайные возмущения, действующие на ракету в
полете, будут уменьшать дальность полета. При другом со¬
вокупном влиянии возмущений дополнительные запасы сго¬
рают частично или остаются полностью на борту в момент
выключения двигателя ракеты.Минимальные запасы топлива, сверх расчетных, которые
с вероятностью, близкой к единице, обеспечивают выключе¬
ние двигателя по командам системы управления при возму¬
щенном полете ракеты, называют гарантийными запасами
топлива. Гарантийные запасы могут быть не только на по¬
следней ступени ракеты, но и на всех остальных ступенях.
Они обеспечивают разделение ступеней по командам от си¬
стемы управления при возмущенном полете ракеты.Гарантийные запасы увеличивают пассивную массу раке¬
ты, и поэтому при прочих равных условиях нужно стремиться
уменьшать их величину.Известно, что часть топлива сгорает до отрыва ракеты от
пусковой установки (разделения ступеней) и не используется
для разгона конструкции. Эту часть топлива называют до-
стартовым расходом. В ракетах с ЖРД, кроме того, для нор¬
мальной работы двигателя до момента выключения необхо¬
димо оставить некоторое количество топлива в баках, маги¬
стралях системы питания и полостях двигателя. Эту часть
топлива называют остатком незабора.4*99
Таким образом, масса заправки (заряда) топлива вклю¬
чает в себя следующие составные части:шз — ш + шгар + “дс + “на. (2.176)где со—рабочий (расчетный) запас топлива;(0гар — масса гарантийных запасов топлива;(одс—масса достартовых расходов топлива;
о)„3—масса остатков незабора.Естественно, что для ракет с РДТТ шнз = 0. Величина о)Нэ
для ракет с ЖРД определяется по результатам экскизного
проектирования. Достартовые расходы топлива зависят от
скорости выхода двигателя на режим, а для верхних ступе¬
ней ракеты — и от принятой схемы разделения блоков. До¬
стартовые расходы топлива в ракетах с РДТТ значительно
меньше, чем в ракетах с ЖРД, так как твердотопливные дви¬
гатели быстрее выходят на режим.При проектировании ракеты возникают задачи определе¬
ния масс рабочего запаса и гарантийных запасов топлива.
В процессе же испытаний ракеты определяются гарантирован¬
ная дальность полета при принятой массе заправки (заряда)
топлива.Величина гарантийных запасов топлива а)гар складывается
из двух составляющих. Первая составляющая “rap компен¬
сирует все возмущения, действующие на ракету на активном
участке траектории в предположении, что оба компонента
топлива сгорают одновременно. Вторая составляющая Аа)гар
компенсирует возможную неодновременность сгорания двух
компонентов топлива. Естественно, что для ракет с РДТТ
Лшгар = 0 и понятия первой составляющей и гарантийных за¬
пасов топлива совпадают.Рассмотрим методику расчета первой составляющей га¬
рантийных запасов топлива.Величина гарантийных запасов топлива зависит от спосо¬
ба выключения двигателя и точности работы системы управ¬
ления. Двигатель последней ступени ракеты должен обяза¬
тельно выключаться по команде системы управления.Запишем первое уравнение системы (2.7) в таком
виде:4^ + gosin^gW-|-M. (2.177)Левая часть уравнения (2.177) носит название кажущегося
ускорения ракеты и обозначаетсяW=-~- + g0sin&. (2.178)100
Проинтегрировав выражение (2.178), получим формулу
для кажущейся скорости ракетыtW= V+ f£0sine<tf. (2.179)Путем интегрирования кажущегося ускорения система управ¬
ления полетом измеряет кажущуюся скорость ракеты.Двигатели промежуточных ступеней ракет с ЖРД обычно
выключаются по достижении заданного значения кажущейся
скорости ракеты W, измеряемой в направлении продольной
оси ракеты. В ракетах с РДТТ двигатели промежуточных
ступеней, как правило, работают до полного выгорания топ¬
лива. Таким образом, для промежуточных ступеней ракет с
РДТТ wrap = 0, но при этом каждая следующая ступень начи¬
нает работать при дополнительных случайных разбросах на¬
чальной скорости и координат. Это, с одной стороны, приво¬
дит к необходимости иметь увеличенные гарантийные запасы
на последней ступени, но, с другой стороны, упрощает про¬
цесс выключения двигателей промежуточных ступеней.Выключение двигателей по достижении ракетой заданного
значения функции управления дальностью * обеспечивает
меньшее рассеивание, чем при выключении. по величине W.
Однако для расчета гарантийных запасов топлива на стадии
проектирования, когда величины некоторых возмущений из¬
вестны еще недостаточно точно, можно считать, что двига¬
тели всех ступеней ракеты с ЖРД выключаются при дости¬
жении ракетой заданного значения W.Для плоского кажущегося движения центра масс ракеты,
пренебрегая углами атаки, можно записатьW рл — FaPnk (h) — х(2.180)go tngoгде Fa — площадь выходного сечения сопла.Интегрируя выражение (2.180) в пределах от 0 до tK, по¬
лучим f *»., ЬУ .(2.181)go т0—а J go (щ_ mt) ) go (m<)_ mt)0 0Введем новые обозначения. На основании уравнения (2.181)
можно записать^ = ^уд.п1п-^Г-Гх-7'Л, (2.182)* Функция управления дальностью учитывает совместное влияние
значений координат и составляющих вектора скорости центра масс ра¬
кеты на дальность полета.
Рассмотрим случайные отклонения величины Т, которые
возникают из-за случайных изменений удельной тяги в пу¬
стоте, стартовой массы, массы рабочего запаса топлива, а
также величин Тх и Th. Отклонения величины Тх в основном
вызваны отклонениями аэродинамических характеристик ра¬
кеты и в меньшей степени состоянием атмосферы. Отклоне¬
ния величины Th вызваны атмосферными возмущениями (из¬
менением давления, плотности, ветром). Отклонения в стар¬
товой массе и секундном расходе топлива мало влияют на ве¬
личины случайных отклонений Тх и Th. Поэтому обычно по¬
лагают, что отклонения ЬТХ и bTh независимы и появляются
лишь на активном участке траектории первой ступени ракеты.Итак, имеем функциональную связьТ = Т (Руд. п, СО, /Ио, Тх, Т„).Линеаризируем функцию Т относительно случайных откло¬
нений аргументов. Учитывая выражение (2.182), получимьт = - ЬТХ - bTh + In 8РУД. п +Р{ул'п(Л.Ьпг0. (2.183)т0{т0 — ч>) и ' 'РУД-П я... рул.п<°т0 — и>Рассмотрим подробнее, из каких составляющих склады¬
ваются отклонения 8со и Ът0.Посколькут0 = тк + ш„ — сояс, (2.184)тоЪт0 = Ътк + 8о)3 — 8шдс, (2.185)где (Оде и 8шдс—достартовый расход и его случайные откло¬
нения;тк и б/га*—конечная масса и случайное отклонение ко¬
нечной массы субракеты.
На основании уравнения (2.176) полагая Ди>гар=0, можно
записать8ю = 8о>3 — 8юдс — 8о)нз — 8(в'ар)(2.186)где 8а/ар— случайное значение первой составляющей до¬
полнительных (гарантийных) запасов топ¬
лива.Подставляя выражение (2.185) и (2.186) в выражение
(2.183), после преобразований получимПри определении гарантийных запасов топлива можно пре¬
небречь разбросами величин содс и ш„з как величинами вто¬
рого порядка малости, т. е. можно считать 5шдС=8и>Нз=0.Кроме рассмотренных выше причин появления случайных
отклонений величины Т следует учесть еще два вида случай¬
ных отклонений Т:— случайные отклонения bTJ{, вызванные разбросом им¬
пульсов последействия тяги двигателей всех ступеней, уча¬
ствовавших в разгоне данной субракеты;— случайные отклонения bTf\ вызванные инструмен¬
тальными ошибками измерения кажущегося ускорения систе¬
мой управления.Для i-й ступени ракеты случайное отклонение величины Т,
вызванное разбросом импульсов последействия тяги, опреде¬
ляется так:где Uj — случайное отклонение импульса последействия
тяги j-й ступени;/Яку — масса ракеты в конце активного участка /-й сту-Наконец, необходимо отметить, что в величину В7\- слу¬
чайного отклонения кажущейся скорости i-й ступени входят
отклонения S7"i, ЬТ2, ..., 87\-_i, если двигатели всех промежу¬
точных ступеней работали до полного выгорания топлива.
При выключении двигателей промежуточных ступеней от си¬
стемы управления в эти величины входят только инструмен¬
тальные ошибки.8Г = - 8Тх - ЬТ„ + In ЬРуд. п +(2.188)пени.103
Учитывая все сделанные замечания, можно записать для
последней ступени ракеты выражение*Тп = 87\ + ЬТ2 + ... + 8Гя_, + 8Г™ + ЬТп - ЪТХ - 87, ++ |п SP>*'"" + Т- ““к» » ”—г^8”-") (2Л89)Выключаться двигатель последней ступени должен так, что¬
бы выполнялось условие87’я = 0. (2.190)Тогда из уравнения (2.189) найдем:Чарн. „ = 7^, [8Г' + Щ + - + 8?Vl + 877 + ЬТ]П ~ ЬТХ ~— 8Тл + In ■■■■ ■ — ЬР „„1 + (1 — |хкл)8ш3„ — ркпЪткп. (2.191)1 р.кл J _JВ уравнении (2.191) случайное значение первой состав¬
ляющей дополнительных (гарантийных) запасов топлива на
последней ступени ракеты ош'ар п является линейной функ¬
цией ряда случайных параметров. Считая все эти случайные
параметры независимыми и нормально распределенными,
найдем предельное отклонение дополнительных запасов топ¬
лива, т. е. первую составляющую гарантийных запасов топ¬
лива на последней ступени ракеты:Чар. . - Vlf^zT [АГ- + А71+ - + + (АГ“Н)2+ А7^++ Д7* + Щ + (inj^ ДЯуд. пп)2 + (1 - !^кП)2 Л< ++ (2.192)где ЬТь ДTf, ДTJn. Д Тх, ДГЛ, ДРуд. Дш9,„ Дшк„ — предельные
отклонения соответствующих случайных параметров.Рассмотрим принципы определения величин ATiy входя¬
щих в формулу (2.192). Предположим, что двигатели проме¬
жуточных ступеней работают до полного выгорания топлива.
В этом случае гарантийные запасы топлива на этих ступенях
отсутствуют. По аналогии с формулой (2.189) можно запи¬
сатьЬТ1 = 87\ + ЬТ2 + ... + 87V, + 877» + 87л ~ ЬТ* ~ ЬТь ++1"№,,.«+ <2193>104
Выражение для предельного отклонения величины Т для
t-й ступени в этом случае имеет видДГ; = VLT\ + Д Ц +... + Д77_, + (Д^)2 + Д Т\ + Д Т\ + ЬТ{ +О способе определения веллчины Аш3, входящей в формулы(2.192) и (2.194), будет сказано ниже.Таким образом, при выключении двигателей каждой сту¬
пени по достижении заданных значений Т (типично для ра¬
кет с ЖРД) первая составляющая гарантийных запасов топ¬
лива и/ на этих ступенях находится по формуле (2.192),
где АТх, АТ2,..ATi — инструментальные ошибки определе¬
ния значений Т системой управления.При работе двигателей промежуточных ступеней до пол¬
ного выгорания (типично для ракет с РДТТ) гарантийные
запасы на этих ступенях отсутствуют. Гарантийные же за¬
пасы топлива на последней (/г-й) ступени определяются по
зависимости (2.192), но входящие в.эту зависимость вели¬
чины ATu АТ2,..., ATn-i предварительно находятся из вы¬
ражения (2.194).Перейдем к определению величины Дш3.При выводе зависимости (2.192) рассматривались масса
рабочего запаса топлива со и масса заправки топлива о)3. Для
ракет с ЖРД, имеющих два компонента топлива, необходимо
знать гарантийные запасы окислителя (огар. 0к и гарантийные
запасы горючего шгар. г. Зная номинальный коэффициент со¬
отношения расходов окислителя и горючегоа также гарантийные запасы двух компонентов топлива wrap,
можно вычислить гарантийные запасы окислителя и горю¬
чего:По аналогичным зависимостям могут быть найдены рабочие
запасы и заправки каждого компонента топлива, если изве¬
стны соответствующие суммарные величины.Чтобы определить предельное отклонение массы заправки
жидкого топлива Aw3, входящее в зависимости (2.192) и(2.193), необходимо оценить предельные отклонения массI/ /WOKt\N :(2.195)(2.196)шгар. г 1 I is wrap-
^ лN
заправок окислителя Ла>3. ок и горючего Лсо3. г. Эти отклонения
зависят от изменения плотности заправляемых в баки ком¬
понентов. Плотность топлива может изменяться из-за откло¬
нений его температуры и химического состава.Поэтому отклонения плотности i-го компонента можно
представить в таком виде:8Pi = 8Pi(C) + ^, (2.197)В зависимости (2.197) первый член выражает отклонение
плотности из-за изменения химического состава, а второй —
из-за изменения температуры топлива. Измерения темпера¬
туры и определение химического состава топлива перед за¬
правкой позволяют учитывать основные отклонения его плот¬
ности. Однако измерение температуры и химический анализ
проводятся также с некоторыми ошибками.Ракеты с ЖРД могут заправляться специально рассчитан¬
ными или постоянными как объемными, так и весовыми до¬
зами топлива. В специально рассчитанных дозах заправки
могут быть учтены измеренные отклонения плотности компо¬
нентов топлива. Наиболее простом с точки зрения осуще¬
ствления и наиболее общим с точки зрения расчета гаран¬
тийных запасов топлива является способ заправки баков ра¬
кеты до постоянных уровней. В этом случае, если пренебречь
ошибками измерения уровня и тарировки баков, отклонения
массы заправок будут вызваны отклонениями плотности ком¬
понентов топлива. Случайное отклонение массы заправки
складывается из случайных отклонений рабочих запасов
окислителя §шок и горючего 8шг, так как отклонениями вели¬
чин неиспользуемого топлива можно пренебречь, т. е.8ш3 = 8шок + 8(1),.. (2.198)Подставляя выражение (2.197) в выражение (2.198), по¬
лучим зависимость случайного отклонения массы заправки
топливаК = Vox [8Рок(С) + 3^ок] + I/ ГвРг (С) + ^к] , (2.199)где Уок и VP — объемные дозы заправок окислителя и горю¬
чего. В зависимости (2.199) случайные величины 8^„к и 8^г
являются положительно коррелированными. Это связано с
тем, что в момент заправки температура топлива существен¬
но зависит от температуры окружающего воздуха. При боль¬
ших изменениях температуры компонентов (например, от
—50 до +50° С) разность температур окислителя и горючего
обычно не превосходит 10°,106
Полагая, что все случайные величины, входящие в выра¬
жение (2.199), распределены нормально и с учетом сделан¬
ного выше замечания, получим выражение для предельного
отклонения массы заправки топливаА-.= V ^ А2. <с> + (vo- Ш "«)"+ <с> ++ (v'&u'h 2V°*V- Швт(2'200)где Д — предельные отклонения случайных параметров;г — коэффициент корреляции случайных величин 8^>к
и Ыг.Таким образом, найденное отклонение массы заправки
топлива позволяет рассчитать первую составляющую гаран¬
тийных запасов и для ракет с ЖРД. Однако для определе¬
ния суммарных гарантийных запасов необходимо также опре¬
делить вторую составляющую Дшгар, компенсирующую не-
одновременность израсходования компонентов.Неодновременное окончание окислителя и горючего мо¬
жет быть вызвано рядом причин..Из-за неизбежных ошибок при заправке топлива на борту
может оказаться больше окислителя или горючего, чем это
нужно для двигателя с коэффициентом соотношения расходов
компонентов Kn- Кроме того, в самом двигателе из-за слу¬
чайных технологических погрешностей истинный коэффи¬
циент К обычно отличается от номинального Kn- При проли-
вочных испытаниях может быть измерено значение коэффи¬
циента расхода ЛиЗМ, которое будет отличаться от истинного
значения К лишь на ошибку измерения. При расчете пере¬
менных доз заправок может быть учтена разность Kn— -Кизм-
Отклонения доз заправок и коэффициента расхода ЖРД
может быть учтено во время полета ракеты специальной си¬
стемой, задачей которой является обеспечение одновремен¬
ного опорожнения баков окислителя и горючего. В этом
случае расход компонентов или, другими словами, коэффи¬
циент К изменяется в полете так, чтобы обеспечить одновре¬
менное окончание окислителя и горючего. Однако при работе
такой системы из-за инструментальных ошибок может ока¬
заться какой-то небольшой предельный объемный остаток
одного компонента А V. Чтобы его сжечь в двигателе, необхо¬
димо иметь дополнительные гарантийные запасы топлива шгар.
Допустим, что остаток топлива имеет плотность окислителя,
тогда вторая составляющая гарантийных запасов горючего
может быть рассчитана по следующей зависимости:Да)гар.г = т^РоКД1/. (2.201)107
Если остаток имеет плотность горючего, то по аналогии
с зависимостью (2.201) имеем:Суммарные гарантийные запасы окислителя и горючего при
нормально распределенных и независимых первой и второй
составляющих определяются следующими зависимостями:При заправке компонентов топлива по весу или до разных
уровней, а также при отсутствии системы, обеспечивающей
одновременное опорожнение баков, расчеты доз заправок и
гарантийных запасов топлива несколько видоизменяются.
Однако суть их остается в аналогичном учете и компенсации
тех же возмущений, что были рассмотрены в этом параграфе.(2.202)(2.203)(2.204)
Глава 3
ВЕСОВОЙ АНАЛИЗ РАКЕТКак отмечалось выше, одним из этапов баллистического
проектирования ракет является весовой анализ, целью кото¬
рого является установление взаимосвязи между стартовой
массой (весом) ракеты, ее проектными параметрами и отно¬
сительными весами топлива субракет |лк,. Это позволяет при
заданной массе полезной нагрузки по известным величи¬
нам |лКг определить стартовую массу ракеты. Структура весо¬
вых уравнений существенно зависит от типа двигателя. Вна¬
чале рассмотрим весовые уравнения ракет с ЖРД.§ 3.1. ВЕСОВЫЕ УРАВНЕНИЯ РАКЕТ С ЖРДНачальную массу ракеты (субракеты) можно представить
как сумму:тй1 = /я0ж + та + <*>!>;. (3-1)где т01 — начальная масса /-й субракеты;тош — начальная масса (/+1)-й субракеты (для по¬
следней ступени — полезная нагрузка);
тс1 — масса «сухой» конструкции г-й ступени;
шзг—масса заправки топлива i-u ступени.Масса конструкции ступени mci может быть найдена как
сумма масс агрегатов, узлов и деталей корпуса. При этом
должны учитываться особенности компоновочной схемы сту¬
пени, характеристики конструкционных материалов, форма и
размеры агрегатов и деталей. Достаточно точно подобная за¬
дача может быть решена лишь на этапе эскизного проекти¬
рования ракеты, когда все перечисленные выше данные из¬
вестны. На более ранних этапах проектирования использу¬
ются приближенные методы оценки величины mci. При этом
нецелесообразно «дробить» корпус ступени на большое число
деталей, так как это приведет к суммированию ошибок опре¬(109
деления их масс. Если ограничиться рассмотрением только
крупных частей, то массу конструкции ступени можно пред¬
ставить в виде следующей суммы масс:«сI = «ау. i + тдв. I + «хп. / + «то. /> (3-2)где тау-1 — масса аппаратуры управления;
тлв. i — масса двигателя;т*п. i — масса хвостового и приборного отсеков, борто¬
вой кабельной сети и деталей общей сборки;
тто. i — масса топливных баков, трубопроводов, систе¬
мы наддува баков, арматуры баков.Основная часть аппаратуры управления обычно разме¬
щается в приборном отсеке последней ступени ракеты. Масса
аппаратуры управления may. 4 определяется типом ракеты, тре¬
буемой точностью управления полетом и уровнем развития
ракетного приборостроения. Таким образом, масса аппара¬
туры управления не зависит от проектных параметров раке¬
ты. Для последней ступени ракеты величину тау.„ можно
считать составляющей массы полезной нагрузки, т. е.«О/Ж == «пн == «бч «ау. я> (3-3)где /Пбч—масса боевой части ракеты.Для остальных ступеней ракеты массу аппаратуры управ¬
ления целесообразно включать в массу приборного отсека и
бортовой кабельной сети. Это позволяет упростить структуру
весового уравнения ракеты.Масса двигателя в общем случае зависит от величины
тяги конструктивной схемы двигателя, качества используе¬
мых материалов, давлений в камере и на срезе сопла. Таким
образом, для конкретной конструктивной схемы двигателя«дв. I === / (Рщ* Рк/) Pal)• (3'4)При приближенном весовом анализе обычно зависимость
упрощают и выражают массу двигателя в долях создаваемой
им тяги, т. е./77 — — Р
"'дв. 1 g 'П/1где i — масса двигателя ступени, кг;bt — безразмерный коэффициент («удельный вес»
двигателя);Рп1—тяга двигателя в пустоте, н.Используя проектный параметр Хт- (коэффициент началь¬
ной тяговооруженности субракеты в пустоте), можно перейти
от тяги к начальной массе субракеты:'«дв. ,• = ут т<н- (3.5)ЛП*110
Массу хвостового и приборного отсеков вместе с бортовой
кабельной сетью и аппаратурой управления (для всех сту¬
пеней, кроме последней) можно приближенно считать про¬
порциональной начальной массе субракеты:Л**п. i = ^>о/, (3.6)где N9 — безразмерный коэффициент.При решении задачи по определению стартовой массы ра¬
кеты или коэффициентов |iKj можно объединить массы двига¬
теля и хвостового и приборного отсеков:л*дв. I + тхп. I = Nim<H, (3.7)где^1 = ^ + ГГ- <3-8)Коэффициент Ni характеризует массу конструкции сту¬
пени, пропорциональную начальной массе субракеты.Массу заправки топлива I-й ступени можно представить
в виде суммы:°>3i = + Д(Ог, (3.9)где шг-—рабочий запас топлива, используемый для сооб¬
щения ракете ускорения;Дмг — неиспользуемый запас топлива.В неиспользуемый запас топлива входят: достартовый
расход, заливка двигателей и трубопроводов, остатки неза-
бора топлива в баках и гарантийный запас топлива. При соз¬
дании ракеты конструкторы стремятся уменьшить неисполь¬
зуемый запас топлива, однако по величине он остается соиз¬
меримым с массой хвостового и приборного отсеков и
поэтому его необходимо обязательно учитывать при весовом
анализе.Рабочий запас топлива выражается через начальную
массу субракеты и относительный вес используемого топли¬
ва |лК1-:°>i = Н-к^о/- ’(3.10)Неиспользуемый запас топлива должен прибавляться к
рабочему запасу и поэтому естественно определять его так:Д(в; = Vi. (зи)где ami — безразмерный' коэффициент, характеризующий
степень совершенства системы питания двига¬
теля.Масса топливного отсека /пто.; зависит от объема заклю¬
ченного в нем топлива, конструктивной схемы, относительной
длины баков и прочностных характеристик материалов. Дляш
баков, выполненных из алюминиевых сплавов, при реальных
относительных длинах можно считать массу топливного от¬
сека пропорциональной объему заправки топлива:(3.12)где рто. i—конструктивный коэффициент (средняя плот¬
ность сухого топливного отсека), кг/м3;
pTi— средняя плотность топлива, кг/м3.Введем обозначение Рто. iтогда масса топливного отсека(3.14)В ряде случаев можно рассматривать совместно массу
топливного отсека и неиспользуемый запас топлива как часть
массы конструкции ступени, пропорциональную массе рабо¬
чего запаса топлива. Введем обозначениеKi = ато. i + аш/, (3.15)тогда, пренебрегая произведением малых величин aT0.i
можно записатьт™. I + До>* ^ ---- к^ит01. (3.16)Весовое уравнение субракеты принимает видЩi = л*ож + Wi + (1 + Ki) ft,,] m0l. (3.17)Решив уравнение (3.17) относительно т0,-, получим"ol=Tz.NlJT+Kl)b- <ЗЛ8>Учитывая, чтот01="м т°2 . . . -^ отпн, • (3.19)01 «02 «оз ет„н пн v ^получим следующее выражение для стартовой массы ракетытп, =[l-JV.-U+K.W,] [i-yv2-(i+K2)^K2] ... [l-N„-(l +К„) цкпГ(3.20)Уравнение (3.17) можно также использовать для опреде¬
ления коэффициента [лкг- В этом случае оно должно быть пре¬
образовано так:^-w-тгтЙ^- <3-21)112
Первое слагаемое в формуле (3.21) носит название пре¬
дельного коэффициента заполнения субракеты топливом.
Обозначим его так:Во второе слагаемое формулы (3.21) входит один из про¬
ектных параметров ракеты — отношение масс смежных суб¬
ракет.Следовательно, одна из форм записи весового уравнения
субракеты такова:При отсутствии полезной нагрузки (sn = 0) коэффициент
заполнения топливом последней субракеты становится рав¬
ным своему предельному значению. Из формулы (3.21) вид¬
но, что даже в этом случае коэффициент р.к ограничен. Мак¬
симальное осуществимое на практике значение р.к для одно¬
ступенчатой ракеты составляет 0,90—0,92.В развернутом виде формула для расчета записывает¬
ся таким образом:Для расчетов по . формулам (3.18) и (3.25) требуется
знать конструктивные коэффициенты ступеней ракеты N}t
Ь» Рто. ь аы- Рассмотрим методы их определения.На ранних стадиях развития теории проектирования ра¬
кет коэффициенты весовых уравнений определялись путем рас¬
чета масс отдельных агрегатов и деталей, являющихся со¬
ставными частями ракеты. При решении такой задачи обыч¬
но производится схематизация ракеты, упрощение действи¬
тельной формы и устройства отдельных агрегатов и узлов,
что, естественно, приводило к ошибкам в определении состав¬
ляющих весовых коэффициентов. Стремление повысить точ¬
ность весового анализа путем увеличения числа рассматри¬
ваемых элементов не всегда приводило к положительным
результатам, так как происходило накапливание ошибок
расчета масс отдельных элементов. Но тем не менее такой
метод приходится применять при весовом анализе принци¬
пиально новых конструктивных схем ступеней ракет.(3.22)moi+im0t(3.23)(3.24)^ 1 — Л/f — j moi — moi+1(3.25)(1 + “то. I + «0») moiгде ато.+ am. = Kt.113
Что же касается весового анализа существующих или со¬
вершенствуемых схем ракет, то по мере накопления опыта
их проектирования и создания появилась возможность опреде¬
лять конструктивные коэффициенты на основании обработки
статистических данных по осуществленным образцам. При
этом целесообразно рассматривать лишь наиболее крупные
агрегаты и части ракеты, массы которых зависят от различ¬
ных проектных параметров.Такими агрегатами и частями являются:— двигатель, масса которого считается пропорциональ¬
ной создаваемой тяге;— топливный отсек, масса которого пропорциональна
объему заключенного в нем топлива;— силовой блок (хвостовой и приборный отсеки с борто¬
вой кабельной сетью), масса которого пропорциональна на¬
чальной массе рассматриваемой субракеты;— неиспользуемый запас топлива, пропорциональный ра¬
бочему запасу топлива.При обработке статистических данных по осуществленным
конструкциям ракет необходимо учитывать перспективы и
тенденции развития ракетной техники. Поэтому нельзя фор¬
мально объединять статистические характеристики ракет, от¬
носящихся к разным периодам истории ракетной техники.
Отсюда также следует, что коэффициенты весовых уравне¬
ний не могут рассматриваться как раз и навсегда найденные
величины, а должны периодически уточняться, отражая совре¬
менный уровень конструирования ракет.Обработка статистических данных для ракет, созданных
за рубежом (в основном в США) за последнее десятилетие,
позволяет получить следующие эмпирические формулы для
коэффициентов весовых уравнений:б. = 0,0067 [1 + Зехр (— 0,0038Япг)]; (3.26)N“ = 0,010 [1 + 3,5ехр (— 0,034/я0,)]; (3.27)Рто. г = 25 [ 1 + 1,5ехр (- 0,075(0^)1; (3.28)аы = 0,014 [1 + 0,5ехр (0,075т,)]. (3.29)В этих формулах величины m0i и ш; должны быть выра¬
жены в тоннах, а тяга Рл{ в килоньютонах. Вместо расчетов
по формулам (3.26) — (3.29) можно пользоваться графиками
на рис. 3.1, 3.2 и 3.3.После определения конструктивных коэффициентов Ьь
Л/V, рто. ,• и аш(. по формуле (3.25) легко определить относи¬
тельный вес топлива субракеты p.Ki. Чтобы определить на¬
чальную массу субракеты, необходимо пользоваться форму¬
лой (3.20). В последнем случае расчет ведется методом ите¬
раций.114
Рис. 3.1. Зависимость конструктивного коэффициента 6; от тягидвигателяРис. 3.2. Зависимость конструктивного коэффициента N® от началь¬
ной массы субракеты115
Следует отметить, что рассмотренная методика определе¬
ния конструктивных коэффициентов весовых уравнений мо¬
жет использоваться лишь для решения задач по определению
начальных масс субракет m0i или относительных весов топ¬
лива субракет [лкг, т. е. в тех случаях, когда находятся сум¬
марные весовые характеристики.В практике проектирования ракет с ЖРД приходится ре¬
шать и другие задачи, в которых требуется учитывать зави¬
симости масс отдельных агрегатов ступеней ракеты от
проектных параметров. Например, при оптимизации тягово-Рис. 3.3. Зависимость конструктивных коэффициентов рто. i и <*ш[
от рабочего запаса топлива -оруженностей субракет необходимо знать, какая часть массы
конструкции ступени пропорциональна тяге двигателя. При¬
веденные в настоящем параграфе зависимости выведены в
предположении, что только масса двигателя пропорциональна
тяге. Но прочностные расчеты топливного, приборного, а
иногда и хвостового отсеков производятся с учетом действую¬
щих на них полетных нагрузок, а следовательно, изменение
тяги должно приводить к изменению толщин оболочек и масс
всех отсеков ракеты.Таким образом, найденная по формуле (3.26) величина
занижена, а коэффициенты М и рт0.,-, определяемые по фор¬
мулам (6.28), (6.29), —завышены, так как общая масса кон¬
струкции ступени при любом методе определения весовых
коэффициентов должна быть неизменной.При оптимизации давлений в камере сгорания рк и на
срезе сопла ра необходимо знать зависимость массы двига¬
теля от этих проектных параметров. Формула (3.26) не от¬116
ражает этой зависимости, поэтому при решении таких задач
приходится уточнять связи конструктивных коэффициентов с
проектными параметрами ракеты.§ 3.2. ВЕСОВЫЕ УРАВНЕНИЯ РАКЕТ С РДТТВесовое уравнение ракеты с РДТТ в общем случае может
быть записано следующим образом:т<н = «от + /иДв. i + т™. / + (3-30)где т01—начальная масса i-я субракеты;mQi+1—начальная масса (г'+1)-й субракеты;
тлв. i — масса конструкции двигателя /-й ступени;
т^0 t — масса хвостового отсека г-й ступени;шз; — масса заряда топлива двигателя /-й ступени.В массу хвостовых отсеков тхоЛ удобно включить массу
переходников, массу приборов управления ступени и борто¬
вую кабельную сеть. Величина тхоЛ пропорциональна массе
субракеты, т. е.™*o.i = Nimor (3.31)где Ni = 0,009-^0,012 соответственно для нижней и верхних
ступеней ракеты.В массу заряда co3i помимо рабочего запаса топлива не¬
обходимо включить дополнительный гарантийный запас топ¬
лива Лю*, методика определения которого была изложена в
§ 2.6. Все ступени ракет с РДТТ, кроме последней, обычно
работают до полного выгорания топлива и поэтому не имеют
гарантийных запасов. Только двигатель последней ступени,
выключаемый по команде системы управления, должен иметь
гарантийный запас, который можно оценить в долях рабочего
запаса топлива последней ступени, т. е.До)„ = ат • (в„. (3.32)Тогда масса заряда в общем случае будет представлять
собой сумму рабочего запаса топлива юг и гарантийного за¬
паса:шз« = °>1 + = (1 + аш/) «V (3.33)Массу конструкции двигателя тдвЛ принято выражать че¬
рез массу заряда и коэффициент конструкции двигателя адв.г:< ®дв. /«V (3-34)Используя зависимость (3.33), получимтдв.; = аДв. г (1 + аш/) ш1- (3-35)117
Учитывая выражения (3.30), (3.31) и (3.35), масса субра¬
кетыm0l = m0i+l + Ntm0l + ш, (1 + «дв.,) (1 + aei).Пренебрегая малыми второго порядка, весовое уравнение
для субракеты можно записать в следующем виде:Щ i — moi+i + Nimoi + “/(I + ^/)> (3.36)где Kj = адв., + aei.Введя коэффициент [ак; = , после преобразований оконча¬
тельно получимw,-71 *,),*• <3-37)Обычно в ракетах с РДТТ основная часть приборов си¬
стемы управления располагается на последней ступени в спе¬
циальном приборном отсеке, а массы их либо задаются, либо
включаются в массу полезной нагрузки. В проектировочных
расчетах массу приборных отсеков и приборов системы упра¬
вления удобно объединить в общую массу — тау. Тогда для
последней ступени ракеты имеемт — "'бч + way” —1—АГ„ —(1 +K„)vKn' ( 'Для трехступенчатой ракеты формула для определения
стартовой массы имеет видmoi — тпи /"3 4Q4[l-JV1-(l+a„.1)1iKl][l_tfs-ll+aeB.s) М[1-Л/з-(1+^з)М ’ ^ 'где тт1=т5ч + тау-—масса полезной нагрузки.Из уравнения (3.37) легко получить выражение для коэф¬
фициента заполнения субракеты топливом.. _ (1 — Ni) moi — т0Ш /q^Ki_ (1 + Ki) ты -которое по форме записи совпадает с выражением (3.22) для
ракет с ЖРД.Основное отличие весового анализа твердотопливных ра¬
кет по сравнению с жидкостными состоит в методике опре¬
деления коэффициентов конструкции двигателей адв. Попыт¬
ка получить средние значения адв по статистическим данным
не привела к положительным результатам, так как они во
многом зависят от свойств топлив, форм зарядов и способов
их размещения в камерах сгорания, а также от характери¬
стик применяемых конструкционных материалов. Кроме того,118
многие параметры ракеты непосредственно связаны с пара¬
метрами двигателей..Для упрощения вычисления адв удобно ввести понятие ти¬
пового двигателя, под которым мы будем подразумевать
РДТТ, включающий в себя только самые необходимые эле¬
менты (узлы), обеспечивающие его нормальное функциони¬
рование, и характеризующийся параметрами, учитывающими
основные связи между параметрами ракеты и характеристи¬
ками топлив. В самом общем случае такими основными эле¬
ментами будут (рис. 3.4): цилиндрическая камера сгоранияРис. 3.4. Типовой реактивный двигатель твер¬
дого топлива:/ — теплозащитное покрытие днища камеры сгора¬
ния; 2—камера сгорания; 3 — заряд твердого топ¬
лива; 4 — теплозащитное покрытие камеры сгорания
и сопел; 5 — бронировка; 6 — соплос днищами и расширяющимися соплами; теплозащитное по¬
крытие камеры сгорания днищ и сопел; заряд твердого топ-
лива; бронирующее покрытие части поверхности или слой,
скрепляющий заряд со стенками камеры.Таким образом, масса конструкции двигателя может быть
представлена как сумма:тяв = тп ■+ тла + т6р + mz + /и„, (3.41)где тп — масса цилиндрической части камеры сгорания;
тя„ — масса днищ корпуса двигателя;
т6р — масса бронирующего покрытия и скрепляющего
слоя;тс — масса расширяющихся сопел;— масса теплозащиты.Тогда в соответствии с зависимостью (3.34)
та +тАН +тбр +тс +тТЗ“дв^ ^ • (3-42)Методику определения величин, входящих жв формулу(3.42), и возможные связи между параметрами двигателя и
ракеты и характеристиками топлив продемонстрируем на
примере. Рассмотрим двигатель со скрепленным зарядом119
четырехщелевой формы, обращенным щелями к заднему дни¬
щу (рис. 3.4).Масса цилиндрической части камеры сгорания в предпо¬
ложении, что длина ее равна длине заряда, а диаметр
равен диаметру миделя ступени ракеты, определится по
формулетп = ic/s8-4pttrfM) (3.43)где 8ц —толщина стенки камеры;
dM — диаметр миделя ступени;/„ — длина заряда;рц — плотность материала камеры.Толщина стенки камеры сгорания может быть найдена по
формуле Лапласа для тонкостенных оболочек8« = ^Ч, (3-44)где Ркв, — расчетное внутреннее давление в камере сгорания;
о — предел прочности материала камеры;
г, =1,25—2,0 — коэффициент запаса прочности.Введя параметр la = -k- и пренебрегая для скрепленного“3заряда разницей между d3 и dM, окончательно получим сле¬
дующее выражение для массы цилиндрической части каме¬
ры сгорания:m^^kdl. (3.45)Масса днища эллиптической формы с соотношением полу¬
осей 1:2 вычисляется по формулетт = ^дАнРдн- (3-46)где «Г.Принимая 8дН=8ц и пренебрегая размерами вырезов для со¬
пел в заднем днище, получим суммарную массу двух днищтя„ = А^з (3.47)Масса бронирующего покрытия соплового торца заряда и
скрепляющего слоя по всей внешней поверхности заряда
равнат6р = ml р + mCQ, (3.48)где /wjp — масса бронировки торца заряда;
тсс — масса скрепляющего слоя.120
Масса бронировки торца заряда без учета размеров ши¬
рины щелей равна:'4 = -fW‘*2M-40’ (3-49)где 8бр — толщина бронировки;
р„р — плотность бронировки;dK — диаметр цилиндрического канала в заряде.
Толщина бронирующего торцевого покрытия зависит от
времени работы двигателя, которое в свою очередь опреде¬
ляется диаметром заряда и скоростью горения топлива. Что¬
бы определить величину 8бР, можно рекомендовать прибли¬
женную зависимость36Р (3.50)где «6р = (0,04 4-0,10)Учитывая выражение (3.49), получим<а51>где dK — относительный диаметр канала.Масса скрепляющего поверхностного слоя при допущении,
что его плотность равна плотности бронировки, определится
по формулетсс тс^мрбр^з^сс==: ^рбр^з^сс^м- (3.52)Для определения толщины скрепляющего слоя Ьсс необходи¬
мо учесть разницу между диаметром камеры сгорания dM и
диаметром заряда d3, которой до сих пор мы пренебрегали.Примем, что d3 = sdM,
где е = 0,97 4- 0,99.Следовательно, толщина скрепляющего слоя= (3.53)Тогда масса скрепляющего слоя определится по зависимо¬
ститСс = -у- Рбр^, (1 —«) <РЫ. (3.54)Объединяя выражения (3.51) и (3.54), окончательно получимot«p = Щ,121
где £=-J-p6p^-(1 -4)+ 4(1 — в)(3.55)Масса расширяющихся сопел может быть найдена по за¬
висимоститс = ntSc (рс8с -j- ртс^тс)> (3.56)где пс—число сопел;Sc — площадь поверхности одного сопла;
рс — плотность материала сопла;8С—средняя толщина стенки сопла;Рте ^тс — соответственно плотность и средняя толщина
теплозащитного покрытия сопла.Площадь поверхности сопла конической формы с углом
полураствора рс рассчитывается по формуле<3-57>где Fa — площадь выходного сечения сопла;Гк?—площадь критического сечения сопла;
й1(р — диаметр критического сечения сопла. >Отношение Ja- может быть найдено как функция — и k1 кр Ркпо таблицам газодинамических функций или по графику
рис. 3.5. Диаметр критического сечения сопла найдем из
условия равенства прихода и расхода газов:(3-58)izdlу RT4где «S’ — поверхность горения заряда (практически постоян¬
ная во время работы двигателя);
и — скорость горения топлива;
рт — его плотность;Ко — коэффициент, зависящий от показателя адиабаты.
Решая уравнение (3.58) относительно d*p, имеемd2 = *Su*? УRT . (3.59)кр ъКоР«пс v 'Преобразуем выражение, стоящее в скобках, в форму¬
ле (3.56):Рс8с + РхАс~Р'р(8с + 8хо), (3.60)где р'Р — средняя плотность материала (металла и тепло¬
защиты) расширяющегося сопла.122
Исследования показывают, что средняя толщина стенки
сопла с теплозащитой пропорциональна диаметру камеры
сгорания, т. е.“Ь 8ТС ас^м(3.61)k-wmmmwгде ас = 0,004 -г- 0,008.Для рассматриваемой формы заряда при условии, что
диаметр внутреннего каналаd«. — (0,3 -г- 0,5) d№, (3.62) Fa
поверхность горения Fu
S = kJL3dl, (3.63)
где ks = 2,03 — 3,4.
Подставив выражения
(3.57), (3.59), (3.60), (3.62),(3.63) в формулу (3.56), полу¬
чим окончательное выражение
для массы сопелтс = cdlгдес — МРтРсР ^ ГРТ “с / /'.КоРк sin I(3.64)в Щ 200 «Ю Ш 500В формуле (3.64) давление рк рИс. 3.5. Зависимость от £±и kкрРквыражено в н/м2, скорость го¬
рения и — в м/сек, газовая по¬
стоянная R — в дж/кг-гр.Значения коэффициента Ко в функции показателя адиа
баты k приведены в табл. 3.1.Таблица 3.1Зависимость коэффициента Ко от показателя адиабаты Кk1,121,141,161,181,201,221,241,26Ко0,6330,6380,6410,6450,6480,6520,6550,659Масса теплозащиты камеры сгорания имеет две состав¬
ляющие;(3.65)123те»
где т™ — масса теплозащиты днищ камеры сгорания;— масса теплозащиты цилиндрической части каме¬
ры сгорания на участке щелей.Для двух днищ (пренебрегая размерами вырезов для со¬
пел) получимгде h — длина щелей.Длина щелей заряда рассматриваемой формы может быть
приближенно найдена по зависимостиТогда масса теплозащитного покрытия определится сле¬
дующим образомТолщина теплозащитного покрытия 8ТЗ зависит от тепло¬
физических характеристик материала, температуры продук¬
тов горения топлива Т, допустимой температуры нагрева
стенки камеры сгорания Tw и времени работы двигателя.Точный расчет толщины теплозащитного покрытия доста¬
точно сложен и требует учета многих параметров, которые
еще неизвестны на стадии предэскизного проектирования.
Приближенно толщина неаблирующего теплозащитного по¬
крытия может быть найдена по зависимости [28]Tw — начальная температура стенки камеры сго¬
рания.Время работы двигателя может быть определено по оче¬
видной зависимостиd3 cfu 1 d(3.66)где ртз — плотность теплозащитного покрытия;
8ХЗ —толщина теплозащитного покрытия.
Для теплозащиты на участке щелей имеем== л^Ртз^тз^ю *(3.67)^ = (0,37/в — 0,30) du.(3.68)mn = [2 -f * (0,374 - 0,30)] Ртз8тз^. (3.69)гдеtK — время работы двигателя;
а„ — коэффициент температуропроводности теп¬
лозащиты;0Г_ Iw безразмерная температура;* * «».
Тогда толщина теплозащитного покрытия будет равна8тз==0,8|/Л 2й~ 0,1 — 0^8 lg 9 (3'71)Расчеты толщины теплозащиты для различных материалов
показали, что в практическом диапазоне изменения dM зави¬
симость (3.71) без существенной погрешности может быть
заменена линейной вида (рис. 3.6)8тэ = ) du = $ГЗЮ? r_nn„„o„= Kr3dM. (3.72)Коэффициенты Атз И Втззависят от величины атз.Если задаться прибли¬
женно диаметром корпу¬
са ступени </„, то коэф¬
фициент Ктз может быть
определен с помощью вы¬
ражения (3.72) или гра¬
фика рис. 3.6.Окончательное выра¬
жение для массы теплоза¬
щитного покрытия каме¬
ры сгорания примет вид
m„ = qdl, (3.73)где г. Го , (п ryfj Рис- 3.6. Зависимость толщины тепло-<7 — ЛТз ~г \U,J'^з защитного покрытия от dM и атз— 0,30)] ртз (3.74)Теперь определим массу заряда. Для рассматриваемой
формы заряда с допустимой погрешностью справедливо со¬
отношение:(3.75)илисо, ш (3.76)где ф = (1 — Щ) рт.Если цилиндрическая часть камеры сгорания и днища из¬
готовлены из одного материала, т. е. рц=рдн=рм, то после объ¬
единения формул (3.45) и (3.47) получим+ /идн = ad\, (3.77)125
где а= (-f?,+ l)^». (3.78)После подстановки выражений (3.55), (3.64), (3.74),(3.76) и (3.78) в формулу (3.42), получима + Ь + с+4' (379)УзТогда весовое уравнение субракеты с РДТТ запишется
так:mQi = m0l+l + Nim0i + (at + bt + ct -f qt + ф/з;) d3ul, (3.80)*ИЛИmQl — m0l+j + Л^/и0; + (1 + *дВ. *) (3-81)Аналогично можно получить выражение для адв в случае
применения других форм зарядов и конструкций двигателей.§ 3.3. ТРЕБУЕМАЯ ТОЧНОСТЬ ВЕСОВЫХ УРАВНЕНИЙУстановим связь между погрешностью определения кон¬
структивных коэффициентов весовых уравнений ракет с ЖРД
• и РДТТ и ошибками расчета дальности полета.В соответствии с формулой (2.97) производная сфериче¬
ской дальности пассивного участка траектории по скорости
L'v равна4/?sin2 -£з-
dL„ _ * П 2 1R(3.82)д У К vk cosa И, ...... В.'к к к к R tg «к + к Ctg -2S.Для целей дальнейшего анализа целесообразно
к логарифмическим производным, которые связаны
щим соотношением:перейтиследую-dL _ dL„ VKdVK(3.83)t-a д У к LaВведем обозначение'у*^-п(3.84)График функции f{L), построенный по данным табл. 2.1,
приведен на рис-. 3.7. Из графика видно, что при малых даль¬
ностях полета ракет изменение скорости Ук на 1 % вызывает
изменение дальности на 2%. Для межконтинентальных ракет
изменение скорости VK на 1% вызывает изменение дальности
полета на 4% (при 0к = 0Овт).126
На этапе предэскизного проектирования ракет точность
определения дальности полета считается удовлетворительной,
если отклонение расчетной дальности от заданной не превы¬
шает 4—5%. Следовательно, скорость в конце активного уча¬
стка траектории межконтинентальных ракет должна рассчи¬
тываться с точностью не менее 1%.Рис. 3.7. Зависимость коэффициента /(L) от даль¬
ности полетаПриближенно скорость в конце активного участка траек¬
тории /г-ступенчатой ракеты оценивается по формуле
К. Э. ЦиолковскогоУ к п = ngoPуж. ср In Т=^7 - (3-85)где Руа. ср — средняя удельная тяга двигателей ступеней;рк,- — коэффициент заполнения топливом, одинако¬
вый для всех субракет.Ошибка расчета скорости VKn является следствием оши¬
бок определения средней удельной тяги и вычисления коэф¬
фициентов |aKi. Полагаем, что эти ошибки независимы, носят
случайный характер и распределены по нормальным зако¬
нам.' Случайная ошибка расчета скорости равнаWK„ = VKn {? , (3.86)\ уд. ср /где ® = . (3.87)(1-^-)|пт^127
Значения функции приведены в табл. 3.2.Таблица 3.2Значения функции (р.к/)Н-к<0,50,550,60,650,700,750,800,851,441,541,641,771,942,172,492,99Среднеквадратическое отклонение скорости ракеты в кон¬
це активного участка траектории<з-88>где о у — среднеквадратическое отклонение VK\
mv — математическое ожидание величины 1/к;<зр — среднеквадратическое отклонение Руд. ср;
т.р — математическое ожидание £уД. ср!— среднеквадратическое отклонение цК1-;
т — математическое ожидание |лкг-Ошибки определения удельной тяги связаны с разбросом
характеристик топлива и конструктивных параметров двига¬
телей, а также с выбором способа осреднения удельных тяг
двигателей различных ступеней. Предельное отклонение
удельной тяги обычно не превышает 2 сек. Поэтому при
«гр« 300 сек можно принять= 0,002.трПредельно допустимое отклонение скорости VK (соответ¬
ствующее трем среднеквадратическим отклонениям) в соот¬
ветствии с приведенными выше рассуждениями примем рав¬
нымДУк„ = 0,01 - ту.Тогда среднеквадратическая ошибка расчета скорости
оу — 0,0033rnv.Наконец в качестве математических ожиданий величи¬
ны [лКг можно принять для межконтинентальных двухступен¬
чатых ракет с ЖРД т =0,75, а для трехступенчатых ра¬
кет с РДТТ = 0,65.128
При этих условиях из формулы (2.88) получаем средне¬
квадратическое отклонение коэффициента ^Ki для ракет с
ЖРД и РДТТ% ж 0,001.Следовательно, предельно допустимая ошибка расчета
равнаAfV, = 3^ = 0,003.Таким образом, вычислять величину |лк необходимо с точ¬
ностью до 0,001.Перейдем к установлению связи между ошибками расче¬
та коэффициентов jiKf и конструктивных коэффициентов ве¬
совых уравнений.Можно предположить, что ошибки определения весовых
коэффициентов носят случайный характер и распределены по
нормальному закону. Тогда ошибка расчета [лКг должна опре¬
деляться как функция случайных величин.В соответствии с формулой (3.25) для ракет с ЖРД
имеемМ-£)то i — mol+iЫ = (l+«TO." + «e/)mo/ • (3-89)Для ракет с РДТТ согласно формулам (3.37) и (3.79) по¬
лучаемЫ = / . (3.90)Гк< / , я, + bt + а + qt\ _ v ’Л —= т01tyiUt 1Случайная ошибка расчета |лк{, вызванная ошибками опре¬
деления конструктивных коэффициентов весовых уравнений,
равна для ракет с ЖРД:^ -тт%г+ I + -Тгк*** (3-91>а для ракет с РДТТ:1+«дв./ (1 +адВ.,) фА, ‘ (1+адв.,)ф,/э, 1н ^ =-tc. ч ^ =-bq, + 8Ф,. (3.92)(1+«дв./)ФА/ (1 + «дв./)<Ма/ (1+“дв./)Ф/ Т‘ ’Полагая, что ошибки определения конструктивных коэф¬
фициентов независимы, получим следующее выражение для
среднеквадратической ошибки расчета цш-, вызванной по¬
грешностями весового анализа ракет с ЖРД:о, = V(AoNy + (Ваьу + (Са.)* + (CoJ* (3.93)
5—2582 129
А -,++».' (3-94)
В ” »ы(1+». + *.)' ^3'95)г = ’Hit • (3.96)С 1 +та + таг V '«т о№ аА, о., ош— соответственно среднеквадратические
отклонения величин цк(, 7V;°, aTOi ит , т , т — соответственно математические ожи-р.» а» шдания величин aT0. h «ш/.Ошибки определения конструктивных коэффициентов свя¬
заны с допущениями, которые принимаются при весовом ана¬
лизе ракет с ЖРД, а также с погрешностями вычисления
этих величин с помощью формул (3.26) — (3.29) или графи¬
ков рис. 3.1—3.3. Будем полагать, что среднеквадратические
ошибки расчета весовых коэффициентов одинаковы, т. е.°N = ab = = »«• (3-97)Тогда, пользуясь уравнением (3.93), можно оценить тре¬
буемую точность определения конструктивных коэффициен¬
тов для ракет с ЖРД:0дг=... = в = -■> ■■■?£ (3.98)V А* + В2 + 2С2Математическое ожидание величины, стоящей в знамена¬
теле формулы (3.98), по данным § 3.1 равно ~2. Следова¬
тельно, требуемая точность определения конструктивных
коэффициентов характеризуется среднеквадратической ошиб¬
кой0,001 п ПАЛС
°N— ■■• — а<0 = —12— = 0,0005-Предельно допустимая ошибкаДЛ^ = ... = Даш/ = 3aw = 0,0015.Таким образом, конструктивные коэффициенты весовых
уравнений ракет с ЖРД могут рассчитываться с точностью
до 0,001.Для ракет с РДТТ путем аналогичных рассуждений по¬
лучим<v = V{Eo„)' + {Foaf + (Fob)t + (F*cy + (?*,)*+((bj*, (3.99).
130
где E = T^—i (3.100)F = E (3.101)(1 + ma) m^l3iG = /гг-т-\—; (3.102)(1 +тв)тф> v 'V am ab. а?> аф ~ соответственно среднеквадратиче¬
ские отклонения величин у-пЬ Nit at,Ъь ct, qb ф,;tn , m , т. —соответственно математические[А’ а’ фожидания величин p.ni, адв h фг.
Коэффициенты F и G имеют размерность лг3/кг, а коэф¬
фициент Е — безразмерен. Среднеквадратические отклонения
аь> Сс> аф соответственно имеют размерность кг/м3.
Ошибка определения коэффициента /V,- для ракеты с
РДТТ связана с теми же причинами, что и ошибка определе¬
ния коэффициента Щ для ракеты с ЖРД. Поэтому можно
принять в формуле (3.99)aN = 0,0005.Естественно предположить, что среднеквадратические
ошибки расчета весовых коэффициентов, входящих в выраже¬
ние для ядв. и равны между собой, т. е.= = = a9 = V (3.103)Тогда/2 2[**№]■ (3-Ю4)В качестве математических ожиданий величин адв.г и ф*
по данным § 3.2 можно принять:тл = 0,10, /иф = 1200 кг/м3.При этих условиях требуемая точность расчета конструк¬
тивных коэффициентов РДТТ будет характеризоваться сред¬
неквадратическим отклонениемаа = • • • ~ аф = 3 кг/м3,а предельно допустимая ошибка равна
Да. = ... = Дфг з* Ю кг/м3.Следовательно, конструктивные коэффициенты РДТТ мож¬
но рассчитывать с точностью до 10 кг/м3.5* 131
Глава 4ВЫБОР ПРОЕКТНЫХ ПАРАМЕТРОВ РАКЕТ
§ 4.1. ПРОЕКТНЫЕ ПАРАМЕТРЫ РАКЕТ С ЖРД И РДТТПри принятой программе движения на активном участке
скорость ракеты в конце этого участка и дальность полета
зависят от следующих параметров:— числа ступеней п\— относительных весов топлива субракет ц„<;— удельных тяг двигателей ступеней Руд. т-;—■ тяговооруженностей субракет, характеризуемых коэф¬
фициентами Хпг-;— начальной поперечной нагрузки на мидель ракеты Рм].
Иначе говоря, дальность полета баллистической ракетыможет представляться в виде функцииL == /| ([^к/, Рун. гц> h Ph.), ^ == 1, 2, ..., Л.Удельная тяга двигателя зависит от состава топлива, кон¬
струкции двигателя и величины давлений в камере сгора¬
ния рк и в выходном сечении сопла ра. Следовательно, когда
состав топлива и конструкция двигателя выбраны, дальность
полета является функцией видаL == f{{рщ, Ркь Раь ^пг> РЛ 2,..., П- (4.1)Относительные веса топлива субракет (iKf могут быть вы¬
ражены через коэффициент заполнения топливом первой суб¬
ракеты [iKi, а именно:t*K2 =^кЗ == х2РкЗ ~ 3tl>t2tAKt» / Л п\132
где =ГК*Параметр х,- характеризует соотношение масс смежных
субракет.Следовательно, функцию (4.1) можно записать так:==/l (l^Kl, xf- ii РкЬ Pah Pul), i =z lt 2,..., It.Эту же зависимость можно рассматривать как обратную
функцию вида^Kl (L, x;_j, "Хщ, РкЬ Pali Р»l)i ^=1, 2,..., п. (4.3)Стартовая масса ракеты с ЖРД, если известны состав
топлива, конструктивные особенности двигателей и ракеты в
целом, как следует из формулы (3.21), может быть пред¬
ставлена приближенно в виде функциит0\ !Акр К,), i== 1, 2,..., п.Стартовая масса ракеты с РДТТ в соответствии с форму¬
лами (3.39) и (3.79) выражается функциейЩ\ == /з (^пн> !Ак/, Ркь РаЬ ^/), i 1» 2,..., ft.Учитывая зависимости (4.2), получим соответственно для
ракет с ЖРД и РДТТ:Wo 1 ==/2(^пн> РкЬ ч;_1> i), ^ == 1) 2,..., П, (4.4)^01 ==: /:) (^пш !хк1> Л/. РаЬ ^з/' i 1» 2, .. . , /7. (4.5)Подставляя выражение (4.3) в формулы (4.4) и (4.5), полу¬
чим для ракет с ЖРД и РДТТ соответственно:Щ\ == fi (тпн, L, j, Ркь Pall Ры\)у i 2,..., л, (4.6)^0! == /з (^ПН1 */—1> Л/, Pah Риь ^()> ^ == 1> 2, . . . , Я. (4.7)Из формул (3.58), (3.63) и (3.76) следует, что для субракеты
с РДТТ\ =”21 1 ' (4.8)^уд. ПI Ui?Ti К$1я1 ' тъ№кI /Таким образом, коэффициент тяговооруженности твердо¬
топливной субракеты является функцией величин m0i, Руа. пиLi, [iKi, (upt)i и не является независимым параметром.Начальная поперечная нагрузка на мидель РМ| для твер¬
дотопливной ракеты может быть представлена в таком виде:133
т. е. величина Рм1 определяется как сочетание других пара¬
метров, входящих в выражение (4.7).С учетом этого стартовая масса ракеты с РДТТ может
рассматриваться как функция^01 == /з (^пн> L, j, Рк1) Pali ^3ii Pt(')i ^ 1,2, ...,/2. (4.10)Параметры ракеты, которые при заданных максимальной
дальности полета L, массе полезной нагрузки тпв, а также
выбранных топливе, конструктивной схеме и материалах для
изготовления ракеты позволяют однозначно определить весо¬
вые, габаритные и тяговые характеристики ракеты, принято
называть ее проектными параметрами.Для ракет с ЖРД проектными параметрами являются*(> ^n/i Рк'р Ра'р Риг,
а для ракет с РДТТPv.li Pah ь («Рт )г-Очевидно, что при заданной стартовой массе ракеты тт и
массе полезной нагрузки тпн проектные параметры одно¬
значно определяют дальность полета, а также габаритные и
тяговые характеристики ракеты.Одна и та же дальность полета ракеты может обеспечи¬
ваться при различных сочетаниях проектных параметров. Но
изменение сочетания проектных параметров влечет при этом
изменение стартовой массы и размеров ракеты. Могут замет¬
но изменяться также стоимость, надежность и другие свой¬
ства ракеты. Изменение числа ступеней, массы и размеров
ракеты требует в свою очередь изменения характеристик дру¬
гих элементов ракетного комплекса: шахтных сооружений,
транспортировочных средств, средств для перегрузки ракет и
установки их в шахту и т. д. По указанным причинам проек¬
тировщика интересует не любой вариант ракеты, позволяю¬
щий обеспечить заданную дальность стрельбы при заданной
полезной нагрузке, а лучший из них.Задачу по отысканию сочетания проектных параметров,
обеспечивающего наиболее приемлемый вариант ракеты, на¬
зывают задачей оптимизации проектных параметров ракеты.В общем случае для решения задачи по оптимизации
проектных параметров ракеты необходимо учитывать влияние
этих параметров на свойства не только самой ракеты, но и на
свойства остальных элементов ракетного комплекса. В част¬
ности, без анализа характеристик всего ракетного комплекса
невозможно окончательно обосновать количество ступеней в,
ракете. Чтобы правильно выбрать распределение масс по
ступеням, тяговооруженности ступеней, давления pKi и раи134
относительные длины зарядов 1^ в ракетах с РДТТ или от¬
носительные длины ступеней Ц в ракетах с ЖРД, обычно
достаточно проанализировать характеристики самой ракеты.§ 4.2. ВЫБОР ЧИСЛА СТУПЕНЕЙ РАКЕТЫ. ВЛИЯНИЕ МАССЫ
ПОЛЕЗНОЙ НАГРУЗКИ НА СТАРТОВУЮ МАССУ РАКЕТЫПолная дальность полета ракеты связана со скоростью
в конце активного участка траектории приближенной зави¬
симостью:L = (1,04 ~ 1,07) 222,4 arc tgу2’ и15,8 V62,5 — VlВ свою очередь скорость VK может быть приближенно опре¬
делена по формуле1=п^ = Й^Я,д..(1п Т^--Д1/пот, (4.11)1=1 кгде Д1/пот—суммарные потери скорости, обусловленные
земным притяжением, сопротивлением возду¬
ха и снижением тяги двигателей вследствие
противодавления атмосферы.При типовых программах движения ракеты на активном
участке траектории суммарные потери скорости составляют:— для одноступенчатых ракет с ЖРД и двухступенчатых
с РДТТ с дальностями полета от 2000 км до 6000 кмЬУ потV*: 0,25-4-0,15;— для двухступенчатых ракет с ЖРД и трехступенчатых
с РДТТ с дальностями полета от 6000 км до 14000 км: 0,22 — 0,18.Оценим баллистические возможности одноступенчатых ра¬
кет. Согласно приведенным соотношениям скорость VK и
дальность полета L одноступенчатой ракеты могут быть су¬
щественно увеличены только за счет повышения удельной
тяги двигателя и относительного запаса топлива в ракете.Величина удельной тяги зависит от энергетических харак¬
теристик топлива и совершенства конструкции двигателя.
Для реально используемых в стратегических ракетах жидких
топлив РУд. пж300—320 сек, а границей энергетических воз¬
можностей жидких топлив считается Руд. п~ 450 сек. Удель¬
ная тяга РДТТ ограничена пока значениями Рул.п~280 —
290 сек.135
Возможные значения зависят от состава топлива,
свойств материалов, совершенства конструкции двигателя,
системы управления и ракеты в целом, массы полезной на¬
грузки и стартовой массы ракеты. Как было показано ранее,
связь между р.„ и основными параметрами одноступенчатой
ракеты может быть описана приближенно уравнением1 — N+ Ко + К) т0 •(4.12)Рис. 4.1. Зависимость (лк отт оДЛЯодноступенчатой ракетыВ приведенном весовом уравнении коэффициенты N и К
характеризуют весовое качество конструкции ракет. Их зна¬
чения могут уменьшаться
за счет:— применения более ка¬
чественных конструкцион¬
ных, теплоизоляционных и
теплозащитных материалов;— выбора более рацио¬
нальных форм твердотоп¬
ливных зарядов в ракетах с
РДТТ;— выбора более совер¬
шенных схем и конструкций
ЖРД в жидкостных раке¬
тах;— выбора более рацио¬
нальных форм и силовых
схем отсеков и переходни¬
ков;— совершенствования методов прочностного расчета и
испытаний ракет, что позволяет снижать запасы прочности
и массу конструкции.Для снижения массы и размеров ракеты большое значе¬
ние имеет уменьшение массы полезной нагрузки тпн, в со¬
став которой входят масса аппаратуры управления тау и
масса боевой части т&ч. По мере совершенствования прибо¬
ров системы управления их масса, как правило, становится
меньше. При заданном тротиловом эквиваленте величинат^ч
может быть снижена за счет выбора более рациональных
форм боевой части и использования в ней более качествен¬
ных конструкционных и теплозащитных материалов. Кроме
того, совершенствование ядерных зарядов также ведет к их
облегчению.Поскольку выбор топлива и материалов, возможности ра¬
кетостроения и приборостроения на каждом этапе развития
ракетной техники ограничены, то увеличение относительного
запаса топлива в ракете и соответственно дальности полета136
достигается в первую очередь путем изменения массы и раз¬
меров ракеты и массы полезной нагрузки.Характер зависимости коэффициента заполнения ракеты
топливом jjK от отношения стартовой массы к массе полезнойнагрузки тпн показан на рис. 4.1. С увеличением коэф-тпнфициент jiK монотонно растет, стремясь в бесконечности к
отношению ) + ^ • При этом изменение коэффициента |лк с ро¬
стом т0 получается весьма неравномерным: значительное
увеличение [iK имеет ме¬
сто лишь при относитель¬
но малых стартовых мас¬
сах ракеты, а в диапа¬
зоне больших значений
т0 рост [i,< резко замед¬
ляется. Замедление ро¬
ста |лк наступает тем бы¬
стрее, чем меньше полез¬
ная нагрузка. Для совре¬
менного уровня развития
ракетной техники верхним
пределом коэффициента
заполнения одноступенча¬
той ракеты топливом счи¬
тают [лк = 0,92 для ракете
ЖРД и |л„«0,88 для ра¬
кет с РДТТ (табл. 1.4).Указанная закономерность изменения ;iIt в функции,,гпнопределяет аналогичный характер зависимости дальности по¬
лета одноступенчатой ракеты от стартовой массы, показан¬
ный на рис. 4.2. Расчет произведен при следующих проект¬
ных параметрах: Pw0 = 270 се/с; Рудп = 310 сек; Х0 = 0,55. При
этих условиях существенное увеличение скорости 1/к и даль¬
ности полета L происходит только до -^2-«50. Дальнейшее/ЛПНже увеличение стартовой массы (при постоянной величи¬
не тпн) слабо влияет на дальность полета. Так, увеличение
т0 в 3 раза дает прирост дальности примерно на 13%. Даль¬
нейшее увеличение величины —почти' не дает прироста uKтпни дальности.При средней удельной тяге Руд. СР~270 сек и относитель¬
ном весе топлива |iK = 0,90—0,92 одноступенчатые ракеты с
ЖРД могут обеспечивать дальности полета 5000—6000 км.
Чтобы получить дальность полета около 10000 км, необходи¬
мо увеличить среднюю удельную тягу до 310 сек и довестиРис. 4.2. Зависимость дальности полета
Щот для одноступенчатой ракеты^пн137
относительный вес топлива до |лк = 0,94. В этом случае ра¬
кета будет иметь приемлемую стартовую массу (около 100 г)
лишь при использовании очень легких боевых частей
(— 150 кг) и очень легкой аппаратуры управления
(~50 кг). Увеличение полезной нагрузки или облегчение
ракеты возможно при дальнейшем усовершенствовании (об¬
легчении) конструкции ракеты.Баллистические возможности одноступенчатых ракет с
РДТТ заметно ниже, так как удельная тяга современных
РДТТ на 10—15% меньше удельной тяги ЖРД и ракеты с
РДТТ обладают меньшими значениями [лк.Задача обеспечения больших скоростей и дальностей по¬
лета решается значительно проще, если ракета делается со¬
ставной (многоступенчатой). Смысл использования многосту¬
пенчатых ракет состоит в том, что в процессе полета после¬
довательно отделяются те элементы конструкции ракеты, на¬
добность в которых миновала. Вследствие этого снижаются
затраты энергии топлива на сообщение дополнительной ско¬
рости элементам ракеты, бесполезным с точки зрения даль¬
нейшего движения. В конечном счете многоступенчатая ра¬
кета, как это следует из формулы (4.11), может иметь ту же
скорость и дальность полета, если сохраняется одинаковое
значение Руд. п, при заметно меньшем общем относительном
запасе топлива.Что может дать переход от одноступенчатой ракеты к
многоступенчатой, поясним на следующем примере. Пусть
имеется одноступенчатая ракета со стартовой массой т01 —
= 90 т, рабочим запасом топлива ш = 75 т и удельной тягой75^уд. п=300 сек. У такой ракеты р.к = = 0,835, поэтому
без учета потерьУд = goPy*. П In = 9’81 ■ 3001п 1 —0,835 ^ 5350 М1СвК-Теперь рассмотрим двухступенчатую ракету с такой же
стартовой массой и с таким же суммарным запасом топлива
при условии, что: 1) масса первой ступени 60 т, запас топли¬
ва в ней 50 т\ 2) масса второй ступени 30 т, запас топлива
в ней 25 г; 3) удельная тяга двигателей на обеих ступенях
Руд. п=300 сек.В данном случаепоэтомуУц g<jPy;{. п In(1 — — И-ка)= 9,81 -300 In(1—0,56) (1—0,83)7450 м/сек,т. е. получили прирост скорости около 2100 м/сек.
138
При проектировании ракет состав топлива, масса полез¬
ной нагрузкн и предельная дальность полета являются за¬
данными. Чтобы в этих условиях обоснованно выбрать число
ступеней ракеты, необходимо знать влияние числа ступеней
на массу и размеры ракеты, на надежность ракеты при бое¬
вом использовании, на эксплуатационные свойства ракеты,
на трудоемкость отработки и изготовления ракеты, на стои¬
мость самой ракеты и ракетного комплекса в целом.it тыс км.тпнРис. 4.3. Зависимость дальности по-
т олета от —— и числа ступеней ракетРис. 4.4. Зависимость дальности
тйполета от и числа ступеней"'пнракет с РДТТАнализ начинается всегда с установления связи между
числом ступеней и потребной стартовой массой ракеты. Для
этого при заданном топливе и принятых проектных параме¬
трах ракеты обычно рассчитывают и строят графики зависи-мости L от ——•"'пнПодобные графики изображены на рис. 4.3 и 4.4. Они поз¬
воляют выявить варианты ракет, которые могут обладать за¬
данной дальностью полета, и сравнить стартовые массы этих
вариантов. Определив дополнительно размеры этих вариан¬
тов ракет, можно сравнить их также по габаритным харак¬
теристикам.Анализ графиков на рис. 4.3 и 4.4 позволяет сделать сле¬
дующие выводы:— баллистические возможности одноступенчатых ракет с
ЖРД и двухступенчатых ракет с РДТТ практически одина¬
ковы;— в диапазоне дальностей 1000—1500 км одноступен¬
чатые и двухступенчатые ракеты с ЖРД обладают практи¬139
чески одинаковой стартовой массой ( —жб — 7); в этомV тпн /же диапазоне дальностей полета одинаковой стартовой мас¬
сой (—7) обладают двух- и трехступенчатые ракеты сV таи }РДТТ;— двухступенчатые ракеты с ЖРД могут обеспечить по¬
лет практически на любые дальности, в том числе межконти¬
нентальные; при -^-^50 ракета способна вывести полезныйт\\игруз на круговую орбиту;— трехступенчатые ракеты с ЖРД, начиная с дальностей2000—3000 км, обладают несколько меньшей стартовоймассой, чем двухступенчатые; однако выигрыш в стартовой
массе не превышает 10%;— увеличение числа ступеней ракет с РДТТ свыше трех
не приводит к существенному приросту дальности полета
(или снижению стартовой массы).Остальные характеристики ракет меняются с изменением
числа ступеней следующим образом. Надежность ракеты с
увеличением числа ступеней заметно снижается, так как с
увеличением количества ступеней возрастает количество эле¬
ментов, отказ или неправильное функционирование которых
влияет на надежность ракеты в целом. Особенно это харак¬
терно для ракет с ЖРД. С увеличением количества ступеней
возрастают также трудоемкость отработки и изготовления
ракеты, объем регламентных работ с ракетой и объем кон¬
трольных проверок перед пуском. Если переход от одного
числа ступеней к другому не связан с очень большим облег¬
чением ракеты, то с увеличением количества ступеней может
заметно возрасти и стоимость ракеты. Габариты и стоимость
подъемно-транспортного оборудования и пусковых устройств
(например, шахт) зависят в основном от массы и размеров
ракеты, поэтому уменьшение массы и размеров ракеты поз¬
воляет снижать стоимость такого оборудования.При учете всех факторов наивыгоднейшее количество сту¬
пеней в ракете .оказывается обычно на единицу меньшим того
количества ступеней, при котором ракета гмеет наименьшую
стартовую массу.Сказанное поясним на конкретных примерах американ¬
ской ракетной техники. Американские стратегические раке¬
ты средней дальности «Поларис» выполнены двухступенча¬
тыми, а межконтинентальные ракеты «Минитмен» трехсту-
ленчатыми. В то же время элементарными расчетами можно
показать, что при использовании тех же топлив и при тех
же весовых коэффициентах наименьшей стартовой массой
будут обладать при стрельбе на средние дальности трехсту¬
пенчатые ракеты (с выигрышем массы по сравнению с двух¬140
ступенчатыми на 15—20%), а при стрельбе на межконтинен¬
тальные дальности до 10000—12000 км— четырехступенчатые
(с выигрышем массы по сравнению с трехступенчатыми на
5-20%).При оценке возможностей ракет с ЖРД и РДТТ необхо¬
димо учитывать также ограничения, которые могут наклады¬
ваться на массу и габариты ракеты условиями транспорти¬
ровки (по железной дороге, водным и воздушным путем),
перегрузки и установки в пусковые сооружения.Ракеты с ЖРД транспортируются без топлива. Заправка
топливом таких ракет производится после установки их в
пусковое устройство.Следовательно, при
эксплуатации таких ра¬
кет возникают лишь
ограничения на габари¬
ты ракеты. Сухой вес
у ракет с ЖРД неве¬
лик, поэтому такие ра¬
кеты имеют значитель¬
ную стартовую массу и
снабжаются тяжелыми
боевыми частями. Так, 0 г 4 6 8 Ю тпи тIШ'например, американ¬
ские ракеты «Атлас» И Рис. 4.5. Зависимость стартовой массы ра-
«Титан» имеют старто- кеты с ЖРД от массы полезной нагрузки
вую массу в пределах100—150 т и снабжаются боевыми частями с массой до
2,7—3,6 т.Ракеты с РДТТ транспортируются со снаряженными дви¬
гателями, поэтому имеют существенные ограничения и по
стартовой массе.Если в качестве допустимой стартовой массы ракеты с
РДТТ принять m0i~50 г, то элементарными расчетами мож¬
но показать, что у межконтинентальных ракет с РДТТ масса
боевой части не может превышать 1 т, а у стратегических ра¬
кет средней дальности — 2,5 т.В заключение рассмотрим зависимость стартовой массы
ракеты от массы полезной нагрузки. Весовое уравнение
(3.20) для случая двухступенчатой ракеты имеет видmoi = [1_^1_(1 + /<2)[лк2] • (4ЛЗ)Если бы коэффициенты весовых уравнений и /(,- не за¬
висели от масс субракет, то при постоянных значениях p.Ki
(при неизменной дальности полета ракеты) стартовая масса
была бы связана с массой полезной нагрузки линейной за¬
висимостью. Как следует из рис. 4.5, влияние масс субракет141I
на коэффициенты №р Ьь рто , и ящ( проявляется в незна¬
чительном отклонении зависимости m0=f(mn„) от линейной.
Минимальная по величине полезная нагрузка представляет
собой вес аппаратуры управления.Более точную зависимость m0i от тап определяют, учиты¬
вая влияние массы полезной нагрузки на прочность корпуса
ракеты. С изменением tnm меняются инерционные нагрузки,
действующие на расположенные ниже отсеки корпуса, по¬
этому должна меняться масса этих отсеков.Для ракет с РДТТ зависимость т01 от mmi может считать¬
ся чисто линейной.§ 4.3. ВЫБОР РАСПРЕДЕЛЕНИЯ МАССЫ РАКЕТЫ ПО СТУПЕНЯМ
И НАЧАЛЬНЫХ ТЯГОВООРУЖЕННОСТЕИ СУБРАКЕТВ систему проектных параметров ракет с ЖРД входят
соотношения относительных весов топлива смежных субра¬
кет осг- и коэффициенты начальной тяговооруженности субра¬
кет Xni. Анализ зависимости стартовой массы ракеты от про¬
ектных параметров выявляет взаимосвязь величин уц и Хп«-
Поэтому их выбор представляет комплексную задачу.В данном параграфе рассматривается принцип подхода к
решению задач по выбору проектных параметров и Хш- и
раскрывается качественная сторона основных зависимостей.1. Выбор распределения масс по ступенямЧтобы найти наиболее приемлемое распределение масс по
ступеням ракеты, необходимо прежде всего оценить влияние
этого распределения на потребную стартовую массу и на га¬
бариты ракеты. Важное значение имеет также влияние рас¬
пределения масс по ступеням на трудоемкость опытной отра¬
ботки и изготовления ракеты, на стоимостные показатели по¬
следней.Например, трудоемкость опытной отработки и трудоем¬
кость изготовления многоступенчатой ракеты с ЖРД могут
быть существенно уменьшены, когда принятое распределение
масс по ступеням позволяет использовать на всех ступенях
одинаковые двигатели (за исключением перерасширения со¬
пел двигателей, которое на разных ступенях должно быть
различным). В этом случае каждая ступень ракеты имеет
только различное число двигателей. С точки зрения умень¬
шения материальных затрат важно также стремиться к та¬
кому распределению масс по ступеням, которое позволяет
выполнить все ступени в одном калибре.Рассмотрим влияние распределения масс по ступеням на
стартовую массу ракеты. Распределение масс по ступеням
наиболее удобно характеризовать соотношениями между142
коэффициентами заполнения субракет топливом [лКг, поэтому
анализ влияния распределения масс на стартовую массу ра¬
кеты сводится к расчету зависимостей гп01 = т01(х\) для
двухступенчатых ракет (рис. 4.6) и зависимостей тт =
= m0i(xi, хг) для трехступенчатых ракет (рис. 4.7). Имея гра¬
фики таких зависимостей, можно найти соотношения между
[лКг, отвечающие минимуму стартовой массы, и оценить рост
стартовой массы при отклонении соотношений между ^кг
в ту и иную сторону. Наивыгоднейшие по стартовой массе
ракеты соотношения между цкг- субракет зависят в основном
от массы полезной нагрузки, от дальности полета ракетыРис. 4.6. Зависимость старто- Рис. 4.7. Зависимость стартовой массы
вой массы двухступенчатой ра- трехступенчатой ракеты от коэффициен-кеты от коэффициента тов *1*и *2(скорости VKn), состава топлива и типа двигателей, значений
удельных тяг двигателей на различных ступенях, совершен¬
ства конструкции (весовых коэффициентов) ступеней. Общие
закономерности в этих зависимостях таковы:— с ростом дальности полета ракеты (с ростом старто¬
вой массы) оптимальные относительные массы верхних сту¬
пеней уменьшаются;— с увеличением массы полезной нагрузки оптимальные
относительные массы верхних ступеней увеличиваются;— с увеличением удельных тяг двигателей на верхних
ступенях оптимальные относительные массы этих ступеней
увеличиваются, так как в них более эффективно использует¬
ся топливо, а повышение удельной тяги на нижней ступени
уменьшает относительные массы верхних ступеней;— улучшение конструкции любой ступени (уменьшение ее
весовых коэффициентов) приводит к росту ее наивыгодней¬
шей относительной массы;— зависимость moi от распределения масс по ступеням
имеет около точек оптимума пологий характер, поэтому не¬
большой отход от экстремальных соотношений масс ступеней
не приводит к заметному переутяжеленню ракет.*1143
Последний факт особенно важен, поскольку в отдельных
случаях можно за счет небольшого переутяжеления ракеты
добиваться заметного улучшения ее других характеристик
(например, унификации двигателей по ступеням, сохранения
общего диаметра ступеней и т. д.). Унификация двигателей
для ступеней и диаметров ступеней влечет за собой увеличе¬
ние относительных масс последних ступеней ракеты.Анализ конкретных расчетов, проведенных при весовых
коэффициентах, тяговооруженностях и удельных тягах, кото¬
рыми обладают современные американские ракеты
(табл. 1.4), показывает, что у ракет с ЖРД наивыгоднейшие
соотношения между близки к следующим:— у двухступенчатых ракет[%2 = ( 1 > I ~ 1 >3) [Д.кЬ— у трехступенчатых ракет
р-кз = (1,10-j- 1,15) jj.k-2 = (1,20 -г-1,25) jjlki-У ракет с РДТТ, когда все
ступени ракеты имеют одинако¬
вое топливо, ркз= (1,0 -н 1,05) р.к2 =
= (1,0-И,1)ц„1.Практически в предваритель¬
ных расчетах таких ракет можно
ориентироваться на равенствоР'кз = Р“к2 = !АК1-Очень близкое совпадение действительного наивыгоднейшего
распределения топлива по ступеням , с равенством цкз = Рк2 =
= цк1 У ракет с РДТТ объясняется тем, что их верхние сту¬
пени имеют более высокие значения Pvn..ni при заметно боль¬
ших (хдв г. Иначе говоря, увеличение Яуд. ш У верхних ступе¬
ней такой ракеты компенсируется ухудшением весовых ха¬
рактеристик их двигателей.Если изменение стартовой массы и размеров ракеты не
связано с существенным изменением ее конструктивных осо¬
бенностей, то стоимость ракеты меняется с увеличением ее
стартовой массы примерно пропорционально массе. Это озна¬
чает, что изменение распределения масс по ступеням в опре¬
деленных пределах будет влиять на стоимость многоступен¬
чатой ракеты примерно так же, как на стартовую массу ра¬
кеты. Лишь в определенных точках, где перераспределение
масс сопровождается существенным изменением конструк¬
тивных особенностей ракеты (унификацией двигателей и
диаметров по ступеням и т. д.), может возникнуть разрыв в
стоимости (рис. 4.8), что является наиболее характерным
для ракет с ЖРД. Для ракет с РДТТ приближенно можно
принимать, что, когда на всех ступенях используется одно иРис. 4.8. Характер зависи¬
мости стоимости двухступен¬
чатой ракеты от коэффици-144
то же топливо, стоимость изменяется в соответствии с изме¬
нением стартовой массы ракеты.Имея графики зависимостей Woi = ^oi (*ь *г) и Ср—
= Ср (*1, х2). можно окончательно уточнить наиболее приемле¬
мое распределение масс по ступеням ракеты.2. Выбор начальных тяговооруженностей субракетНачальную тяговооруженность субракеты характеризуют
коэффициентом(4.14)'П*Влияние коэффициентов тяговооруженности на парамет¬
ры ракеты рассмотрим вначале на примере ракет с ЖРД.Если количество ступеней в ракете и начальные массы
субракет заданы, то с изменением коэффициентов тяговоору¬
женности должна меняться тяга двигателей, установленных
на ступенях. Повышение тяги связано с увеличением разме¬
ров и массы ЖРД, а также с увеличением размеров и массы
хвостового отсека. В итоге с увеличением тяговооруженности
(с уменьшением Хот-) возрастают относительные массы дви¬
гателя и хвостового, отсека ступени, что должно вызвать
уменьшение относительного запаса топлива в ней.При постоянном расходе топлива времена работы двига¬
телей ступеней прямо пропорциональны их коэффициентам
тяговооруженности:^К1 ^щЯуд. nll^Kl == ^(И^уд, Olt^KlJ (4.15)Д4/ = Хп;Яуд. п;Цкг. (4.16)Заметим, что произведение коэффициента тяговооруженно¬
сти на удельную тягу для данной субракеты есть величина
постоянная, т. е.^п;Яуд. Hj — ^'о/Яуд. о;, (4.17)что дает возможность легко переходить от тяговооруженно¬
сти в пустоте к тяговооруженности на земле.Следовательно, с увеличением тяговооруженности време¬
на работы двигателей ступеней и соответственно общее вре¬
мя активного полета уменьшаются.При неизменной программе движения ракеты на активном
участке это приводит к существенному снижению гравита¬
ционных потерь скорости и повышению за счет этого Ук- По¬
тери скорости ракеты на активном участке, вызываемые со¬
противлением воздуха, с ростом тяговооруженности увеличи-
раются, так как в этом случае ракета проходит плотные слои145
атмосферы с более высокими скоростями и, кроме того, при¬
ходится увеличивать углы атаки ракеты.Увеличение тяговооруженности влечет за собой также
рост осевых и поперечных перегрузок и аэродинамических
нагрузок, действующих на ракету на активном участке по¬
лета. В самом деле, используя общее выражение для коэф¬
фициента осевой перегрузкипх~ — , (4.18)х g0m ’ v 'можно получить, что осевая перегрузка ракеты к концу ра¬
боты двигателя первой ступенипх.п = хп1(1-,хк1)’ (4Л9)т. е. осевые перегрузки ракеты на активном участке полета
обратно пропорциональны Хт-Увеличение поперечных перегрузок пу\ с ростом тягово¬
оруженности ступеней объясняется следующим. В случае бо¬
лее форсированного разгона ракеты сокращается активный
участок полета и повышается кривизна этого участка при
заданной программе разворота. В итоге растут как потреб¬
ные значения углов атаки ракеты, так и значения коэффи¬
циента поперечной перегрузки. Вполне очевидно, что те же
причины попутно вызовут рост аэродинамических нагрузок и
необходимость повышения мощности (размеров и массы)
органов управления.Таким образом, увеличение тяговооруженности (уменьше¬
ние Хт) субракет с ЖРД влечет:— увеличение абсолютных и относительных масс марше¬
вых и рулевых двигателей (при постоянных т01 и тпн);— увеличение аэродинамических и инерционных нагру¬
зок, действующих на корпус ракеты, и за счет этого рост
массы отсеков корпуса ракеты (масса хвостовых отсеков уве¬
личивается также вследствие увеличения их размеров, вызы¬
ваемого увеличением размеров двигателя);— увеличение потерь скорости на преодоление сопротив¬
ления воздуха;— уменьшение потерь скорости на преодоление силы тя¬
жести.Исследование влияния тяговооруженности на параметры
одноступенчатой ракеты заключается в расчете и построении
графика зависимости т0(Х0) при фиксированных L и тШ1.
Приближенно такую зависимость можно получить с помощью
формул (2.145) и (3.25). Для выяснения качественной
зависимости т0 от Х0 можно ограничиться учетом только146
гравитационных потерь скорости, т. е. пользоваться фор¬
мулойК = goPy*. о (In - — V* sin &ср) , (4.20)где sin 0Ср — среднее значение величины sin 0 на активном
участке траектории.Характер зависимости m0=f(X0) показан на рис. 4.9. Об¬
ращают на себя внимание следующие особенности кривой:
наличие оптимума; при
Хо-^-О стартовая масса ракеты
m0-voo; при Х0>1 стартовая
масса резко возрастает,
стремясь к бесконечностиприАп11 — И-к 'Все эти особенности лег¬
ко объясняются физически.В самом деле, с одной сто¬
роны, уменьшение Х0 вле¬
чет за собой увеличение мас¬
сы конструкции ракеты
(уменьшение р„), а с дру¬
гой стороны, это же умень¬
шение Хо вызывает уменьше¬
ние гравитационных потерь
скорости. Следовательно,
для ракеты с заданными L
и тпн должно существовать
вполне определенное значе¬
ние Х0, при котором старто¬
вая масса т0 имеет мини¬
мальную величину.При значениях Хо, близких к нулю, резко возрастает
масса двигателя и, чтобы получить достаточно большой
коэффициент |лк, требуется сильно увеличить стартовую
массу.Характер возрастания величины то при увеличении Хо по
сравнению с (Х0)Опт объясняется тем, что гравитационные по¬
тери скорости растут прямо пропорционально величине Хо, в
то время как снижение массы двигателя замедляется.На рис. 4.10 показан график зависимости L — L(X0) для
одноступенчатой ракеты при фиксированных от0 и /ппн. Поло¬
жение оптимума примерно такое же, как на графике зависи¬
мости m0 = m0(X0). Первое пересечение функции L(X0) с осью
абсцисс соответствует случаю, когда масса двигателя приРис. 4.9. Зависимость стартовой мас¬
сы ракеты от коэффициента началь¬
ной тяговооруженности147
малом значении Хо достигает такой величины, что не остается
места для топлива. Из условияъ1—№ —: о1 + К т0 (1 + К)легко получить это минимально возможное значение Хо:1 Ьт00 (1 — №)т0-■тп(4.21)Резкий спад кривой L(X0) при Х0>1 объясняется тем, что в
этих случаях существенно возрастает «достартовый расход»
топлива.Рис. 4.10. Зависимость дальности полета ракеты от
коэффициента начальной тяговооруженностиВторое пересечение функции L(Xо) с осью абсцисс отве¬
чает равенству^*0 =^0^0 (1 — Р-к),* 1т. е. значению тяговооруженности X0 = -j .Если дополнительно учесть влияние тяговооруженности на
величину потерь скорости на аэродинамическое сопротивле¬
ние, а также на массу корпуса ракеты, то положение опти¬
мума на кривых /По(Хо) и L(X0) несколько сместится в сто¬
рону больших значений Х0. Однако характер этих зависимо¬
стей не меняется.Общие закономерности влияния тяговооруженности на
стартовую массу остаются такими же и для многоступенча¬
тых ракет с ЖРД. С целью выбора коэффициентов тягово-148
оруженности рассчитываются и строятся зависимости т0\ =
= т0i(Xni, ХП2, •••, Хпп). Для двухступенчатых ракет задача
сводится к построению графика, вид которого представлен на
рис. 4.11.Анализ расчетов ракет с ЖРД показывает (табл. 1.4),
что:— с ростом дальности полета ракеты L и массы полезной
нагрузки тпн оптимальные значения Х< увеличиваются;— зависимости m0i = m0i(Xi) имеют в точках оптимума по¬
логий характер, поэтому небольшие отклонения Х< от опти¬
мальных значений приводят к небольшому росту /и0ь— для одноступенчатых ,
ракет с ЖРД (Х0)Опт= ,Хпг
= 0,55-н 0,60; "oil . 1— для двухступенчатых
баллистических ракет с
ЖРД (Х01)ппт = 0,55-0,75, а
(ХП2) опт = 0,7—0,9;— верхние ступени ракет-
носителей с ЖРД имеют
ОбЫЧНО (Хпз)опт= 1,0 —1,2.Для ракет с ЖРД су¬
ществует закономерность
(Xoi)onT < (Хп2)оПТ ■'С (Хпз)опт,
которая объясняется тем,
что по мере движения раке¬
ты уменьшается угол на¬
клона касательной к траек¬
тории д. Уменьшение углов & влечет за собой снижение
гравитационных потерь скорости, поэтому оптимальные зна¬
чения X,- сдвигаются в сторону их увеличения. Отметим, что
практическая реализация желаемых тяговооруженностей сту¬
пеней в ракетах с ЖРД не вызывает затруднений, так как
двигатели требуемых мощностей всегда вписываются в габа¬
риты ступеней таких ракет.Расчет и построение зависимости /?г01 = /тг01 (Х01, Хп2, ...)
позволяет не только определить оптимальные с точки зрения
массы ракеты значения X,;, но и оценить изменение стартовой
массы и размеров ракеты при отходе от оптимальных значе¬
ний Xj. В итоге знание зависимости т01 = т01 (Х01, Хп,, ...)
позволяет унифицировать двигатели по ступеням или исполь¬
зовать в проектируемой ракете уже имеющиеся отработан¬
ные ЖРД от других ракет.При унификации двигателей или использовании уже от¬
работанных двигателей сокращаются сроки отработки и сни¬
жается стоимость ракеты. Чтобы выявить целесообразность
этих мероприятий, кроме зависимости тт =тт (Х01, Хп2, ..,)
необходимо знать влияние тяговооруженности ступеней на(^Ql)РПТ.ЛП2)опТ.'01Рис. 4.11. Зависимость стартовой
массы двухступенчатой ракеты от
коэффициентов начальных тяговоору¬
женностей субракет149
стоимость ракеты. Когда не используются отработанные
ЖРД от других ракет или не унифицируются ЖРД по сту¬
пеням, зависимость СР = СР(Х01, ХП2, ••■) носит примерно такой
же характер, что и зависимость т0\ = та\ (Х0\, ХП2, •••)• Уни¬
фикация двигателей по ступеням или использование отрабо¬
танных двигателей влекут появление в функции Ср — Ср{Хт,
Хп2, ...) точек разрыва и, следовательно, могут изменить наи¬
выгоднейшие значения X, для проектируемой ракеты
(рис. 4.12).У ракет с РДТТ коэффициент начальной тяговооруженно¬
сти обычно не включается в число проектных параметров, нопри выборе относительной длины
заряда и скорости горения топлива
необходимо учитывать ограничения
по допустимым продольным пере¬
грузкам. Кроме того, следует иметь
в виду, что программный разворот
ракеты происходит в основном
на активном участке первой сту¬
пени. Поэтому уменьшение тягово¬
оруженности первой субракеты по¬
зволяет уменьшить углы атаки, а
следовательно, и величину управля¬
ющего момента, или же снизить по¬
перечные нагрузки, действующие на
корпус ракеты.После выбора проектных пара¬
метров lai и iii необходимо сравнить расчетные значения коэф¬
фициентов начальной тяговооруженности с допустимыми, кото¬
рые находятся в пределах (табл. 1.4):— для двухступенчатых стратегических ракет средней
дальности (Хш) опт = 0,4 0,5 и (ХП2)опт = 0,2н-0,3;— для трехступенчатых межконтинентальных ракет
(Xoi) опт = 0,4 -г- 0,5; (Хп2) опт = 0,2 н-0,3 и (Хпз) опт = 0,15-5-0,20.Для первой ступени оптимальные значения Хг получаются
у ракет с РДТТ заметно большими потому, что на первом ак¬
тивном участке производится наиболее крутой разворот ра¬
кеты и наиболее велики поперечные перегрузки и аэродина¬
мические нагрузки.Приведенные значения (Хг)0Пт для ракет с РДТТ отвечают
условиям, когда нет ограничений на перегрузки ракеты с
точки зрения работы приборов системы управления и проч¬
ности твердотопливных зарядов, а также нет ограничений на
подбор топлив с необходимой скоростью горения. Реальный
выбор тяговооруженности ступеней у ракет с РДТТ может
существенно зависеть от этих дополнительных факторов.Известно, чго приборы системы управления работают до¬
статочно точно только до определенных значений перегрузок,Рис. 4.12. Характер зависи¬
мости стоимости ракеты от
коэффициента начальной тя¬
говооруженности150
а затем с ростом перегрузок их точность существенно сни¬
жается. Предельно допустимые значения перегрузок зависят
от совершенства приборов (от их стойкости к перегрузкам)
и обычно не превосходят пх=\Ъ—35. Могут иметься также
ограничения на осевые перегрузки ракеты, обусловленные
механической прочностью топлива и скрепления заряда
со стенкой двигателя. С учетом указанных факторов для
верхних ступеней ракет приходится обычно принимать
Xni > 0,2—0,3.Для пояснения второго ограничивающего фактора рас¬
смотрим выражение для тяги РДТТ:Рц == п^Рт^Го^уд, nk^3d'a, (4.22)где ks — коэффициент, зависящий в основном от формы за¬
ряда и значений /3 и dM.Из этого равенства следует, что обеспечение той пли иной
тяговооруженности ракеты с РДТТ возможно только при
определенном сочетании свойств топлива (и, рх, Яуд. „) с фор¬
мой заряда и относительной длиной заряда. Варьирование
относительными длинами зарядов ограничено, причем изме¬
нение 1а в допустимых пределах дает малое изменение X;
(обычно не более чем на 10—25%). Более существенно мож¬
но влиятц на Xj выбором формы заряда. Так, при одинаковых
размерах камеры сгорания и одинаковом топливе переход от
заряда со звездчатым каналом к щелевому заряду влечет
изменение тяги и тяговооруженности почти вдвое. Наиболее
же универсальным способом изменения тяговооруженности
является изменение свойств топлива и прежде всего измене¬
ние его скорости горения.Известно, что выбор формы зарядов по различным при¬
чинам ограничен. Имеются также ограничения в изменении
свойств твердых топлив и в подборе марок топлив, которые
наряду с другими приемлемыми свойствами (энергетикой,
прочностью, стойкостью и т. д.) обладали бы скоростью го¬
рения, строго отвечающей требуемой тяговооруженности ра¬
кеты. В связи с этим реализовать наивыгоднейшие тягово¬
оруженности в ракетах с РДТТ не всегда удается.Из сказанного следует, что разрабатываемые твердые топ¬
лива должны обладать не только высокой энергетикой (высо¬
кими Ру„. п), достаточной прочностью, высокой стойкостью,
технологичностью, но и вполне определенной скоростью го¬
рения; так как только в этом случае возможно создание оп¬
тимальных вариантов ракет с РДТТ.Более подробно вопрос о выборе относительной длины за¬
рядов и скорости горения топлив будет рассмотрен в § 4.8.151
§ 4.4. ОПТИМИЗАЦИЯ РАСПРЕДЕЛЕНИЯ МАСС ПО СТУПЕНЯМ
И ТЯГОВООРУЖЕННОСТЕЙ СУБРАКЕТЧтобы построить графики зависимостей стартовой массы
или стоимости ракеты от значений проектных параметров,
требуется произвести очень большой объем вычислительных
работ. В связи с этим определенного внимания заслуживают
прямые аналитические, методы определения значений проект¬
ных параметров, отвечающих минимуму стартовой массы или
минимуму стоимости ракеты. Сложность и точность этих ме¬
тодов зависят от числа факторов, которые при этом учиты¬
ваются, и от степени учета этих факторов.В качестве примера рассмотрим следующую задачу. За¬
даны масса полезной нагрузки, дальность полета L (или ско¬
рость 1/„) ракеты, состав топлива и число ступеней в ракете.
Требуется найти распределение масс по ступеням и тягово¬
оруженности субракет, обеспечивающие минимум стартовой
массы ракеты при неизменных других проектных параме¬
трах.Для конкретности возьмем трехступенчатую ракету с
ЖРД. Как изменится решение задачи при другом числе сту¬
пеней, будет указано ниже.Стартовая масса трехступенчатой, ракеты выражается за¬
висимостью/я01 = 7=3 — • (4-23)П (1 +Ki)i4ili=i L Л"‘ JСкорость ракеты в конце активного участка приближенно
равна1=3Ks = go 2 РуА.т (in —^ — Кы Sin f>Cp., (4.24)i=iгде sin 9Ср. г — среднеинтегральное значение величины sin 8
на активном участке г-й ступени.Минимуму стартовой массы при тпн = const соответствуетftlnuмаксимум отношения или, что одно и то же, максимумт01величиныO' = In т'"'«01которая согласно выражению (4.23) запишется так:<=з9~51п[1-А^-Г7“(1 + • (4-25) (=1152
Теперь поставленную задачу можно сформулировать так:
требуется определить значения аргументов и ХП{, которые
обеспечивают максимум функции q при условии достижения
заданной скорости Укз.С точки зрения математики эта задача представляет со¬
бой задачу на условный экстремум функции, которая в дан¬
ном случае сводится к отысканию максимума вспомогатель¬
ной функции видаF = q (Им, Ю + ЛФ (ft«, *п/). (4.26)где А—неопределенный множитель Лагранжа;Ф — функция, описывающая наложенную связь.В качестве связи следует использовать уравнение (4.24),
записанное в такой форме:/=зФ ((*№ ^п/) = ^кз So Pyji.nl i
/=1— Xn(fxK/ sin »ср. i). (4.27)Таким образом, вспомогательная функция равнаF=Sln О-''?—&-(1+*')|ч1+/=11=3^кз So РуА.Щ J ^ sin ®Ср.(4.28)Условия экстремума функции F находятся из уравнений Эй¬
лера:^7 = 0. 1. 2-3 («9)и^--0, i= 1,2,3. (4.30)Если принять для упрощения задачи, что весовые коэф¬
фициенты Щ, bt и Kt не зависят от и Хп<, то уравнения
Эйлера запишутся так:1 + Ki±i_I+ А^оЯуд.п/ (т~^7 — Ki sin »Ср. ,) =0, i = 1, 2, 3; (4.31)
bi+I**,+ Ь-ёоРуя. тРк1 sin »ср., = 0, i = 1, 2, 3. (4.32)153
Таким образом, получена система из шести уравнений, кото¬
рые содержат три неизвестных Хт-, три неизвестных и
неопределенный множитель Л. Эта система принципиально
может быть использована для определения искомых вели¬
чин |jiKf и Хт, если дополнительно привлечь уравнение (4.24),
в котором скорость Ккз считается известной.После исключения Л система уравнений примет вид:(т^ --».р.+ *•> •*..]=
= ТТХГ (г4г, -х»si" 9-=) [‘ -£ - (‘+*■> !*»] ■-= I + /■', (|—|*и ~ ^"8 8'П ^Р-з) Х\ (1 P-Ki) sin $Cpj17“ 2 X1=3^кз = So Рун. Пi (ln 1 рк/ ^п/Рк/ sin ®cp. i'j ■telЧтобы решить систему уравнений (4.33) — (4.35) относи¬
тельно цкг и Хпг, необходимо знать весовые коэффициенты №t
bh Kt, удельные тяги двигателей ступеней Яуд. ш- и значения
sin 9ср. 1. Решение этой системы уравнений может произво¬
диться графо-аналитическим методом в такой последователь¬
ности:— после подстановки ХПг из выражений (4.34 )в сдвоенное
равенство (4.33) последнее распадается на три функции, каж¬
дая из которых зависит только от одного аргумента p.Ki; ра¬
венство (4.33) принимает вид/i (lAki) — /2 (р-кг) = /з (н-кз)> (4.36)— строятся графики функций /ь /? и /3 (рис. 4.13); из
условия формулы (4.36) следует, что каждому значению
функций отвечают вполне определенные соотношения ме¬
жду |1кЬ JJ-K2 И [1„з;— после подстановки значений Хпг- в формулу (4.35) ско¬
рость превращается в функцию только трех параметров: цкЬ
Цк2> Цкз; поскольку Между [1К1, [Лк2. Рка существуют вполне
определенные связи, вытекающие из выражения (4.36), за¬
висимость УкЗ= Укз(рк1> Цк2, Ркз) можно свести к зависимо-(4.33)(4.34)(4.35)154
сти 1/KS = Ук5 (pKi); для построения зависимости Ук3 =
= Vk3(|jiki) достаточно задаться рядом значений р,кь затем из
рис. 4.13 найти соответствующие значения |л„2, р.кз и для каж¬
дой комбинации |j.Ki, р.К2, jj-кз по формуле (4.35) определить
скорость Vk3 (рис. 4.14);— зная требуемое значение скорости из графика
Ук(цт) можно найти значение а по последнему из
рис. 4.13 определяются рк2 и рь-3;— зная значения ркЬ рК2, ркз, по формулам (4.34) можно
найти значения Хпь Хп2, Хп3;Рис. 4.13. Графики функций //(н-к/) Рис- 4-!4. График зави¬симости VK ОТ [АК]— по полученным значениям p.Kj и Хш- массы субракет
определяются последовательно из равенств:тп) Р*кзт02 =Щз«01 !т02(А.^•nl+ ко (ак1(4.37)Воспользовавшись системой уравнений (4.33) — (4.35),
без труда можно написать аналогичную систему уравнений
для ракет с любым числом ступеней, отличным от трех. При
этом число членов в равенстве (4.33) и число уравнений типа(4.34) будет соответствовать числу ступеней в ракете. Остает¬
ся совершенно аналогичной и последовательность решения.Из полученной системы уравнений непосредственно выте¬
кают решения для некоторых частных случаев.Так, например, в том случае, когда весовые коэффициен¬
ты и удельные тяги двигателей у всех ступеней одинаковы и155
дополнительно соблюдается равенство sin ftcp. t = sin вср, 2 =
= .. . = sin 9cp. n, должны быть одинаковыми коэффициенты за¬
полнения субракет топливом и тяговооруженности субракет:При этом потребные массы субракет образуют геометриче¬
скую прогрессию:Поэтому оптимальная масса второй субракеты у двухступен¬
чатой ракеты с заданной массой m0i определится в данном
случае кака оптимальные массы субракет у трехступенчатой ракеты со
стартовой массой т0\ найдутся соответственно по формуламНапомним, что система уравнений (4.33) — (4.35) полу¬
чена при следующих основных допущениях:— весовые коэффициенты ракеты М, bt, не зависят
от значений параметров |лк* и Хп<;— на активном участке первой ступени ракеты потери
скорости, вызываемые сопротивлением воздуха, компенсиру¬
ются приростом скорости за счет действия высотной добавки
тяги, а на активных участках всех последующих ступеней
плотность атмосферы пренебрежимо мала.На самом деле коэффициенты весовых уравнений зависят
от Xni и цкг, причем эта зависимость более сложная, чем опи¬
сываемая приближенными весовыми уравнениями. Это обстоя¬
тельство уже отмечалось в § 3.1. Кроме того, средние значе¬
ния sin 9 для активных участков различных ступеней также
зависят от ХПг и цкг• Все это означает, что оптимальные значе¬
ния параметров р.к< и Хп* могут определяться с помощью по¬
лученной системы уравнений с невысокой точностью.Особенно низкой точностью обладает формула (4.34).
В этой формуле совершенно не учитывается влияние коэффи¬
циентов тяговооруженности на величину нагрузок, действую¬
щих на ракету, и соответственно на массу корпуса ракеты и
агрегатов управления.. Поэтому формула ..типа:... формулы
(4.3.4) дает..существенно, .'заниженные значения Ху. В:, .связи
с этим при пользовании системой, уравнений (4.33) :-е (4.35)1^к1 — ^кз — ■ • ■ — !*кп>
Xnj ХП9 = . , . = Ап/(.(4.38)(4.39)«03. «02.
^02 Щ\(4.40)^02 = У тпн-тои(4.41)(4.42)(4.43)156
целесообразно коэффициенты \щ не рассчитывать по этим
формулам, а назначать согласно указанным в § 4.3 реко¬
мендациям или принимать по аналогии с Хп< для сущест¬
вующих ракет. Тогда задача сведется к определению только
|лК1- путем совместного решения зависимостей (4.33) иБолее точное определение оптимальных значений ц„г и Хп«
требует учета зависимости весовых коэффициентов ракеты
от величины этих параметров и более точного расчета VKn.
Подход к решению задачи в этом случае остается таким же
(используется метод неопределенных множителей Лагран¬
жа), но расчетные уравнения- получаются значительно бо¬
лее сложными, особенно если пользоваться сложными свя¬
зями между весовыми коэффициентами ракеты и параметра¬
ми p.Ki и Xni.Выйод уравнений для определения оптимальных значе¬
ний (jiKt и ХПг проводился применительно к ракетам с ЖРД.
Посмотрим, как изменятся эти уравнения при решении ана¬
логичной задачи для ракет с РДТТ.Вполне очевидно, что, если для определения стартовой
массы трехступенчатой ракеты с РДТТ воспользоваться ра¬
нее принятым выражениеми расчет скорости Укз такой ракеты1 вести по формуле (4.24),
то смысл совместной оптимизации параметров |хк; и Хпг- про¬
падает. Последнее объясняется тем, что уравнение (4.44) на¬
писано при допущении, что масса конструкции ракеты с
РДТТ от тяговооруженности субракет не зависит.При пользовании весовым уравнением (4.44) возможна
только оптимизация параметров |лК{, если заданы определен¬
ные значения Хпь ХП2, Хп3. Конечная система уравнений для
определения [л„ь цК2, Цкз в данном случае запишется так:(4.35).(4.44)П [1 — jV/ — (1 + Ki) цК(1
После определения параметров jiK< массы субракет нахо¬
дятся последовательно по формулам:m0i =
т02 —
т,01т„(1 — iV3) — (1 + K3)ft<3 ’ ^03 .(1-ЛГа)-(1 +Яя)Ря ’т02(1 — А^,)— (1 +/<1)|ЛК|(4.47)§ 4.5. ВЫБОР ДАВЛЕНИЙ В КАМЕРЕ СГОРАНИЯ И НА СРЕЗЕ
СОПЛА ЖРДОт величины давлений в камере сгорания рк и на срезе
сопла ра зависят удельная тяга, размеры и масса двигателя.
Изменение размеров двигателя влечет в свою очередь необ¬
ходимость изменения размеров и массы хвостового отсека,
вследствие чего значения давлений рк и ра влияют на массу
конструкции и на летные характеристики ракеты.Поскольку надежность ракеты от значений рк и ра прак¬
тически не зависит, а стоимость ракеты изменяется при
варьировании этими давлениями примерно пропорционально
массе конструкции, с целью обоснования значений рк и ра
обычно ограничиваются анализом влияния их либо на массу
и размеры ракеты (когда задана дальность полета), либо на
дальность полета (когда задана масса ракеты).1. Выбор давления рклюбойТяга камеры сгорания ЖРД на
определяется по формулевысоте полетагде ткР = ткс Wa + Fa (ра — ph),
секундный расход топлива;(4.48)Wa—скорость истечения продуктов горения из сопла;
Fa — площадь выходного сечения сопла;
ph — внешнее атмосферное давление на высоте h.
Скорость истечения продуктов горения из сопла камерыRT1(*)(4 49)где <pi — коэффициент потерь скорости, равный" 0,98—0,99.Секундный расход продуктов горения через сопло, равный
секундному расходу топлива, определяется по формулеКоРк^Кр Рк^кр /л^кс = <р3 -у==-=—g—, (4.50)158
где В ■■У RT
Ч-Хо— параметр, зависящии от состава топлива
и величины давления в камере сгорания;коэффициент потерь.
Удельная тяга двигателя замкнутой схемы
Р W„ , Fn В ра-рпУД 'g0mKC So • кр So Рка удельная тяга двигателя открытой схемыО Ркс ~Ь ^гг , \ / ^ а | $ f а Ра Ph• ^ mrv \ go So FkP РкУД£о («КС + тгг)(4.51)(4.52)т ксРис. 4.15. Характер изменения Wa и Рис. 4.16. Характер изменения Wa
Руд в зависимости от рк для ЖРД и Руя в зависимости от рк для
замкнутой схемы ЖРД открытой схемыгде Ягг— дополнительная тяга, возникающая при истече¬
нии отработанного турбогаза в окружающую
атмосферу;тГ[ — расход топлива через газогенератор турбины.Приведенные формулы позволяют легко выявить зависи¬
мость удельной тяги двигателя от величины давления рк при
заданных значениях давлений ра и ph.Удельная тяга ЖРД замкнутой схемы при увеличении рк
непрерывно растет (рис. 4.15), так как растет скорость исте¬
чения продуктов сгорания из сопла Wa. Рост скорости W,,
при увеличении рк обусловливается снижением диссоциации
продуктов горения и соответственно увеличением произведе¬
ния RT, а также увеличением термического к. п. д. двига¬
теля1Ля)Рк )>-1kИную картину изменения удельной тяги с ростом давле¬
ния рк имеют двигатели открытой схемы (рис. 4.16). В данном159
случае скорость истечения продуктов сгорания Wa и соответ¬
ственно удельная тяга самой камеры сгоранияРР ==■'уд. КС £о«кстакже непрерывно растут с увеличением рк. Но повышение
давления в камере требует увеличения мощности ТНА и от¬
носительного расхода топливат кс(4.53)на газогенерацию рабочего тела турбины. Поэтому удельная
тяга двигателя в целом растет только до тех пор, пока дав¬
ление рк не достигнет опре¬
деленного значения, а затем
начинает уменьшаться. Дав¬
ление рк, отвечающее макси¬
мумур —. р
~удтпgo («КС + «гг)оптРис. 4.17. Зависимость стартовой мас¬
сы двухступенчатой ракеты от дав¬
лений рк и разависит в основном от соста¬
ва топлива и для освоенных
марок топлив находится в
пределах 80—120 бар.Когда тяга двигателя Р
и давление ра сохраняются
неизменными, габариты и
масса двигателя меняются
с ростом давления рк сле¬
дующим образом. Повышение давления рк позволяет сокра¬
тить потребный объем камеры, поэтому габариты и масса ка¬
меры сгорания с ростом рк несколько снижаются. Но повы¬
шение давления рк требует увеличения давления на выходе из
насосов, поэтому возрастают габариты и масса ТНА, газоге¬
нератора и масса топливных трубопроводов. В итоге масса
всего двигателя при Р — const и ра — const с ростом рк хотя и
слабо, но увеличивается.Суммарное влияние давления рк через удельную тягу и
массу конструкции двигателя на характеристики ракеты та¬
ково, что в каждом конкретном случае существует опреде¬
ленное значение рк, при котором для обеспечения заданной
дальности полета требуется ракета наименьшей массы. Наи¬
выгоднейшие значения рк зависят в основном от марки топ-
лийа и конструкции двигателя. Для двигателей открытой
схемы они практически совпадают со значениями рк, отвечаю¬
щими максимуму Руд двигателя, и могут находиться в пре¬
делах 50—120 бар (табл. 1.4). С увеличением перерасшире-160
ния сопел (с уменьшением ра) наивыгоднейшие значения дав¬
ления рк уменьшаются, поэтому двигатели нижних ступеней
ракет могут иметь большее давление рк, чем двигатели верх¬
них ступеней.Поскольку оптимальные значения давления рк зависят от
значений давления ра, то задача по отысканию наивыгодней¬
ших значений рк и р0 решается совместно. Само решение
задачи обычно сводят к прямому расчету параметров ракет
при различных значениях рк и ра и построению либо гра¬
фиков mQ = fl(pK, ра) при заданных тШ1 и L, либо графиков
L = U(pK, Ра) при т0 == const и т„н — const (рис.тические методы определе- 'ния оптимальных значенийдавления рк. В качестве примера рассмотрим один из упро¬
щенных методов применительно к одноступенчатой ракете
(или нижней ступени многоступенчатой ракеты), снабженной
ЖРД открытой схемы.У двигателей первой ступени многоступенчатой ракеты и
у двигателей одноступенчатых ракет давление ра принимает¬
ся обычно близким к среднеинтегральному значению давле¬
ния /7Л на активном участке, т. е.Тогда средняя по высоте активного участка удельная тяга
двигателя может быть представлена как функция давления в
камере сгорания4.17 и рис. 4.18). Такие гра¬
фики позволяют выявить
не только оптимальные точ¬
ки, но и зависимость пара¬
метров ракеты от рк и ра
вне этих точек. Последнее
важно потому, что зависи¬
мости параметров ракет от
рк и ра в районах оптиму-
мов имеют пологий харак¬
тер.Возможны также анали-Рис. 4.18. Зависимость дальности по¬
лета двухступенчатой ракеты от дав¬
лений рк и р„(4.54)Wa __ Ч max
go goU+CAc)’- (4.55)где(4.56)6-2582161
Последнее равенство отвечает допущению, что относительный
расход топлива на газогенерацию рабочего тела турбины в
исследуемом диапазоне давлений рк прямо пропорционален
величине этого давления.Масса конструкции двигателя, когда рк меняется в узких
пределах, может быть выражена зависимостьютлв = Ь'РкМо- (4.59) .Поэтому зависимость коэффициента [лк от рк выразится сле¬
дующей формулой:цк = (1-N°-fcX)«°-«nH (4.60)Гк (1 + К)т0 v 'Если программа движения ракеты и начальная тяговоору-
женность не меняются, потери скорости на гравитацию и со¬
противление воздуха слабо зависят от давления рк. Это дает
основание определять оптимальное значение давления рк,
пользуясь формулой^к = ^уд(/гСр)1пг^Гк. (4.61)Задача по оптимизации давления в камере сгорания мо¬
жет быть сформулирована так: требуется найти величину рк,
обеспечивающую минимальное значение стартовой массы тй
при условии, что в конце активного участка траектории ра¬
кета достигает заданной скорости VK. Однако в соответствии
с принципом взаимности (§ 2.2) эту же задачу можно сфор¬
мулировать иначе. Будем искать величину рк, обеспечиваю¬
щую максимум скорости VK при условии постоянства старто¬
вой массы ракеты т0 и массы полезной нагрузки тпн.Для решения задачи на условный экстремум функции ис¬
пользуем метод неопределенных множителей Лагранжа, как
и при оптимизации параметров (iK{ и Хпг-. Необходимо найти
условие максимума функции/7=^к(Л,^к) +AW(/7Kl[xK), (4.62)где(4'63)1 -+- Срк 1w=_ ['1 - N° - ь'рк - о + ю fcJ; (4.64)Л — неопределенный множитель Лагранжа.162
Условия экстремума функции F находятся из уравнений
Эйлера:-F-о; -у— = о.дрк дркЕсли исключить из уравнений Эйлера неопределенный
множитель Лагранжа, то оптимальное давление в камере сго¬
рания рк может быть представлено как функция [лк следую¬
щего вида:(А)опт = - D + , (4.65)где(4-66>(4-67)А=- (1 + /0(1-^) in(i-M • (4-68)Аналогичным образом может решаться задача для верх¬
них ступеней многоступенчатой ракеты.2. Выбор перерасширения сопел ЖРД (давления ра)Из теории двигателей известно, что при любом давлении
в камере рк ракетный двигатель развивает наибольшую
удельную тягу, когда давление продуктов горения топлива
в выходном сечении сопла равно давлению в окружающей
среде, т. е. когда ра=рк-В процессе разгона ракеты давление ph непрерывно ме¬
няется. Следовательно, максимально возможное значение им¬
пульса тягиj = (4.69)при сжигании имеющегося в ракете запаса топлива принци¬
пиально возможно лишь в случае использования двигателей
с соплами регулируемых размеров.Создать ЖРД с соплами регулируемых размеров очень
трудно, поэтому реально используются только двигатели же¬
сткой геометрии. Перерасширение сопел таких двигателей
назначается с учетом диапазона изменения давления рь. в
процессе работы двигателя. При этом учитывают влияние
давления ра как на импульс тяги двигателя, так и на требуе¬
мые размеры сопел двигателя и на размеры двигательного
отсека.6*163
Уменьшение давления ра при заданном давлении рк до¬
стигается за счет увеличения площади выходного сечения
сопла. Следовательно, уменьшение давления ра сопровож¬
дается увеличением размеров и массы сопел двигателя и
' двигательного отсека. Поскольку с увеличением размеров со¬
пел растет охлаждаемая поверхность двигателя, то может
потребоваться также повышение давления на выходе из на¬
соса охлаждаемого компонента топлива и как результат по¬
вышение мощности ТНА. Таким образом, уменьшение давле¬
ния ра влечет утяжеление двигателя и корпуса ракеты.Но с уменьшением дав¬
ления ра повышается эффек¬
тивность использования топ¬
лива: растут среднеинте¬
гральное значение удельной
тяги за время работы дви¬
гателяЯуд.ср = -Нк <Т(4.70)и полный импульс тяги дви¬
гателя'кJ = j p(t)dt = goP^cр(В.(4.71)У двигателей верхних ступеней ракеты, работающих в
практически безвоздушном пространстве, Руд. ср и / растут
с уменьшением ра непрерывно. Двигатель одноступенчатой
стратегической ракеты и двигатель нижней ступени много¬
ступенчатой ракеты начинают работать при Ph=PN и закан¬
чивают при ph^O. У таких двигателей максимумы Руд.ср и /
отвечают вполне определенному значению pa<PN (рис. 4.19),
что легко можно объяснить, если проанализировать измене¬
ние тяги такого двигателя с высотой полета ракеты при раз¬
личных значениях давления ра (рис. 4.20).Суммарное влияние давления ра через массу двигателя и
двигательного отсека и через полный импульс тяги двигателя
на характеристики ракеты таково, что существуют вполне
определенные значения давления ра, при которых для обес¬
печения заданной дальности полета требуется ракета наи¬
меньшей массы (рис. 4.21). Поскольку с увеличением ра
уменьшается масса двигателя, очевидно, что давления ра,
отвечающие минимуму стартовой массы ракеты, по величине
всегда больше, чем давления ра, отвечающие максимуму пол¬
ного импульса тяги.Рис. 4.19. Зависимости Руд. ср и J
от давления ра:/ — для двигателей первой ступени; 2-*
для двигателей верхних ступеней164
Для ЖРД одноступенчатых стратегических ракет и ЖРД
первой ступени многоступенчатых ракет давления ра, отве¬
чающие минимуму стартовой массы ракеты, лежат в преде¬
лах (табл. 1.4):(Д,1)опт = °>45 — °>70 баР-Для двигателей второй ступени ракет, работающих при
ph** 0:(Pai)041 = 0,10 — 0,20 бар.Рис, 4.20. Влияние давле- Рис. 4.21. Зависимости т0 н /ния ра на характер измене- от давления ра для односту-ния тяги двигателя с вы- пенчатой ракетысотойДля двигателей третьей ступени ракет:(Рач)опт = 0,05 — 0,15 бар.При окончательном назначении ра{ для двигателей проек¬
тируемой ракеты учитываются дополнительно реальные воз¬
можности размещения двигателей, а также тот факт, что за¬
висимости т0 — т0(ра) имеют в районах оптимумов пологий
характер, поэтому небольшой отход от ра—(ра)от не влечет
заметного изменения массы ракеты. Обычно отклоняются в
сторону увеличения ра, так как это позволяет сократить га¬
бариты двигателя и облегчить тем самым его охлаждение и
размещение в ракете.Как уже указывалось ранее, для обоснованного выбора
перерасщирения сопел двигателей ведутся прямые расчеты
параметров ракеты при различных значениях ра и рк и
строятся либо графики m0=/i(/?K, ра) при заданных L и тпн,
либо графики L=f2(pK, Ра) при m0 = const и mnH = const.Приближенная оценка оптимальных значений ра, т. е. зна¬
чений ра, отвечающих экстремальным точкам кривых, может
производиться также аналитическим путем. Покажем метод
решения такой задачи для второй ступени ракеты с ЖРД.165
3. Определение оптимального значения давления ра
для двигателей второй ступениу*Самостоятельный полет второй ступени протекает обычно
в безвоздушном пространстве при постоянном угле тангажи,
поэтому скорость ракеты к концу работы двигателя второй
ступени^К2 = VKt + goPyi.n* (in — X„o!i.K2 sin »к), (4.72)где КК1 — скорость ракеты к концу работы двигателя первой
ступени.Будем полагать, что давление рк% задано и задачу опре-'
деления оптимального давления ра% заменим задачей опреде¬
ления оптимального отношенияz = ^~. (4.73)Як 2Пренебрегая влиянием раг на величину гравитационных
потерь скорости, можно свести задачу к определению усло¬
вия максимума приращения идеальной скорости полета на
активном участке второй ступени'/2 = ^л.„ЛпТ1^ (4.74)при постоянных величинах тог и тап. Будем полагать, что
ступень снабжена ЖРД замкнутой схемы. Тогда в соответ¬
ствии с формулами (4.49), (4.51) и (4.56) удельная тяга дви¬
гателяВеличина -Sa2 определяется из известного соотношенияГ Кр, 2(_2\k+lJ V k+\-Г- - . , (4.76)г*р 1/ 2 *±JV гт-г *анализ которого показывает, что для достаточно широкого
диапазона значений г оно хорошо аппроксимируется зависи¬
мостьюFai _ | _ 1 (л 77\
ГЛе а, и а2 — коэффициенты, зависящие от показателя адиа-
Латы k (если А = 1,1, то а,=2,8 и 02 = 0,121). Поэтому удель¬
ная тяга окончательно представляется в видеЛ-1_ I И 1 _ -уд’пе goгдеD = 5я,; С — 5а2.Приращение массы конструкции ступени Д/пс2, вызывае¬
мое уменьшением /?а2, складывается из приращения массы
сопел Дm'c,y и приращения массы корпуса хвостового отсе¬
ка Д т[2-_Д/гес2 = Д/н’2 -+ Д/га’2. (4.79)-Fl\Обозначив исходное отношение ----- через /0, а новое от-/7 кр’2ношение через /, приращения указанных масс можно' Кр. 2|рнближенно выразить так:ЧС2 = ^кр. 2 \J JUJ sin -j ’Д<2 = /7кр.2(/-/о)^, (4-81)где qx—масса единицы поверхности сопла;q2— масса единицы поверхности хвостового отсека;
у—угол полураствора выходного конуса сопла;£— безразмерный коэффициент, характеризующий
связь между диаметрами выходных сечений сопел
и диаметром хвостового отсека (зависит от числа
сопел).Поскольку согласно выражению (4.50)^кр. г Вт Нтогдет02 Рк2т№ РК- ^пг^уд. П2Д тс(4.82)/Ио 2■а2(А,-+ А2)( 4—(4'83>A^-Ti р <4'84>Рк ^П2-*уД. п2 sln ТА — — 1 £<?2 Мвб")А*~ Рк Хп,Руд.п1 tgf ^ ^167
Поставим условие, чтобы при изменении размеров сопла
масса ступени не менялась. Вполне очевидно, что в этом слу¬
чае изменение массы сопел и хвостового отсека должно ком¬
пенсироваться изменением массы топлива и топливного от¬
сека, поэтому если ступень до изменения сопел имела"'пн + тс2 +то после изменения размеров сопла будем иметь1к2 '(4.86)(4.87)Подставив выражения (4.78) и (4.87) в уравнение (4.74) и
вычислив производную от Vi по г, получим условие для опре-Рлделения оптимальной величины отношения z = -r“Р кв видеD2kzk V 1—,k-л
. кIn [1-1лк2 + ГТ/с2(-7-“7г)] ++WL maxv,_k-\
_ кA1 +K,X= 0.(4 88)где А =Й2(А 1 +Лг).Для двигателя открытой схемы (ра)от можно определять
также по формуле (4.88), так как постоянный множитель1— сокращается при вычислении производной.1 + ?гг4. Определение оптимального значения давления ра
для двигателя первой ступениДля двигателя первой ступени решение задачи усложняет¬
ся наличием переменного давления окружающей среды. При¬
ближенно задача может решаться при допущении, что удель¬
ная тяга двигателя не меняется на активном участке первой
ступени и равна<4-89)где рн. ср — среднеинтегральное значение ри за время работы
двигателя, определяемое по формуле (4.54).168
Если обозначитьС = ^ (4.90)Г К1и использовать приводившиеся ранее соотношения, то можно
записатьv.-nr' • -** +!(“.+т-)<*-с>- <4-91>Воспользовавшись дополнительно выражением для цк1 из
формулы (4.87), можно получить условие оптимума дляZ — в виде
p«i^.,(1-г_Г)“Тг‘Т-0-ССг-!]хX In [1 - К, - VTK1 (т -i) J + [г-« (> - ^ +А _2+ (P+-f-)<«-{>], . 1+/-', пг-О. (4.92)где D = Ва{,С = Ва2.Вполне очевидно, что формулы, полученные для второй
ступени ракеты, пригодны для любой верхней ступени, а фор¬
мулы, полученные для первой ступени, пригодны для односту¬
пенчатых ракет.§ 4.6. ОСОБЕННОСТИ ВЫБОРА ДАВЛЕНИЙ В КАМЕРЕ
СГОРАНИЯ И НА СРЕЗЕ СОПЛА РДТТ1. Выбор перерасширения сопелУвеличение перерасширения сопел у РДТТ влечет за со¬
бой увеличение размеров и массы соплового блока двига¬
теля, размеров и массы хвостового отсека, прикрывающего
сопловой блок, или размеров и массы открытой фермы, со¬
единяющей ступени ракеты. Когда сопла выполняют роль
органов управления и делаются поэтому поворотными, уве¬
личение их перерасширения может вызывать также повыше¬
ние мощности и массы рулевых машин и приводов. Таким
образом, увеличение перерасширения сопел РДТТ всегда при¬
водит к увеличению массы конструкции ракеты и к снижению
относительного запаса топлива в ней.m
Но увеличение перерасширения сопел, особенно у двига¬
телей верхних ступеней ракеты, существенно повышает сред¬
неинтегральное значение удельной тяги и полный импульс
тяги двигателя.В итоге общая картина влияния перерасширения сопел
двигателя на характеристики ракеты у ракет с РДТТ такая
же, что и у ракет с ЖРД:— зависимости т0 = т0{ра) имеют тот же вид, что у ракет
с ЖРД (рис. 4.21);— для каждой ступени ракеты имеются определенные
значения давления ра, при которых стартовая масса ракеты
получается наименьшей.Остаются аналогичными и методы решения задачи по
определению наивыгоднейших значений ра.Для обоснованного выбора давлений ра рассчитываются и
строятся графики зависимостей то = т0(ра, рк) при задан¬
ных L и (Пли или графики зависимостей L =L (ра, рк) при
т0 — const и тпи = const. .Аналитическое решение задачи по отысканию (ра)опт для
различных ступеней ракеты с РДТТ отличается от рассмо¬
тренного выше решения для ступеней ракет с ЖРД лишь ве¬
личинами весовых коэффициентов. Выражение для цк в дан¬
ном случае вместо выражения (4.87) имеет видгде л — коэффициент конструкции РДТТ без учета массы
соплового блока.Параметры А\ и А2 рассчитываются по формулам (4.84)
и (4.85), но при других значениях qu q2 и s.Анализ параметров ракет с РДТТ при различных пере-
расширениях сопел показывает, что:— зависимости inQ = m0(pa) при неизменных L и таа и
зависимости L = L(pa) при неизменных. т0 и тШ1 имеют в
районах оптимумов пологий характер;— наивыгоднейшие значения давления ра зависят в ос¬
новном от диапазона высот работы двигателя и находятся
в пределах (табл. 1.4):для первых ступеней ракет раi == 0,5—0,75 бар\
для вторых ступеней ракет ра2 = 0,20—0,35 бар\
для третьих ступеней ракет /?а3 = 0,10—0,18 бар.
Указанные значения pai отвечают случаям движения ра¬
кет на активном участке по типовым программам. Когда про¬
грамма движения проектируемой ракеты сильно отличается
от типовой, в качестве первого приближения значение ра для
каждой ступени может приниматься равным/»„ = /Vcp+(0,05-r-0,10) бар.(4.94)170
Предельно возможное перерасширение сопел двигателей
ограничивается величиной диаметров ступеней. Вполне оче¬
видно, что поворотные сопла могут иметь меньшее перерас¬
ширение, чем неподвижные.2. Выбор давления в камере сгоранияПри повышении давления в камере сгорания непрерывно
увеличивается удельная тяга РДТТ. Но с повышением дав¬
ления в камере растет масса конструкции двигателя (увели¬
чивается коэффициент конструкции двигателя <хдв), так как
потребная толщина несущей оболочки камеры сгорания
РДТТ прямо пропорциональна давлению рк. В итоге давле¬
ние в камере сгорания РДТТ так же, как давление в камере
сгорания ЖРД, выгодно повышать лишь до определенных
значений.Обоснованный выбор давлений рк в двигателях ступеней
обычно требует прямых расчетов и последующего анализа
параметров ракет при различных значениях рк.Приближенно наивыгоднейшие значения рк могут оцени¬
ваться также путем аналитического решения экстремальных
задач.Исследования показывают, что давления рк, отвечающие
минимуму стартовой массы ракеты при заданных L и тпв,
зависят в основном от свойств топлива, качества конструк¬
ционных материалов для РДТТ, относительных длин заря¬
дов и находятся в пределах (табл. 1.4).:для первых ступеней ракет /?„, —50—80 бар\
для вторых ступеней ракет ри2 = 30—60 бар-,
для третьих ступеней ракет р„З = 30—50 бар.Наличие закономерности(/^К1 )опт ^ (Л2)опт ^ (Ркз)оптобъясняется увеличением перерасширений сопел двигателей
и уменьшением относительных длин зарядов у верхних сту¬
пеней по сравнению с нижними.В качестве примера на рис. 4.22 представлены данные по
расчету трехступенчатой ракеты при различных значениях
давления рк в двигателях ступеней. Кривые рисунка харак¬
теризуют зависимость приращений скорости на активных
участках ступеней (ЛКш, А17ь-2, Л^нз) от давления рк при
условии, что массы ступеней и общая масса ракеты т01
сохраняются неизменными, а двигатели изготавливают
из сталей с пределом прочности ов = 160 • 107 н/м2 или171
ов = 200-107 н/м2. Относительные длины зарядов и давления
Pai приняты равными:4х = 4; /з2 = 3; ”^з8 === 1»^»Pal = °,6; Pat = 0& Pai = 0,2.Обращает на себя внимание тот факт, что наивыгодней¬
шие давления рк для РДТТ по величине меньше, чем наивы-1з2’3>Ро2'0'2ба{!6 g =200-Ю7 н/мг
б в= 160-Ю7 н/мг
1_1 1,б в ~200 Ю н/м2вв» 160-107 н/м*I I 1 'Ра,~°‘В6аРб й-200-107н/м2| | бъ-т-ю1 н/м150 60 70 80 90 J00 рк6арРис. 4.22. Зависимости приращеннй скорости на актив¬
ных участках ступеней ракеты с РДТТ от давления
в камере сгораниягоднейшие давления рк для ЖРД. Причина этого заклю¬
чается в том, что масса конструкции РДТТ растет при увели¬
чении рк значительно сильнее, чем масса конструкции ЖРД.Наряду с удельной тягой и массой конструкции двигателя
с ростом давления рк меняется скорость горения заряда, по¬
этому меняются тяга двигателя и тяговооруженность субра¬
кеты. Представление о том, как тяговооруженности субракет
могут меняться при повышении рк у- трехступенчатых ракет,
дает рис. 4.23. Кривые Х*=»Х*(#Н) этого рисунка отвечают172
условию, что 13г, ра{, массы отдельных ступеней и общая
масса ракеты при варьировании давлением рк сохраняются
неизменными. На рисунке показано также изменение прира¬
щения скоростей ступеней у этой ракеты.Поскольку для каждой ступени существует наивыгодней¬
шая тяговооруженность, то при выборе давления рк иногдаРис. 4.23. Зависимости приращении скорости па
активных участках ступеней ракеты с РДТТ и тяго-
вооруженностей субракет от давления в камере сго¬
ранияприходится учитывать также влияние этого давления на тя¬
говооруженность ступеней ракеты.В целом задача выбора давления pKi для ступеней РДТТ
облегчается тем, что зависимости AVK{ от pKi при неизмен¬
ных массах ступеней имеют в районах оптимумов пологий
характер, поэтому небольшие отклонения pKi от (pKi)опт не¬
значительно сказываются на параметрах ракеты.173
§ 4.7. ВЫБОР ОТНОСИТЕЛЬНЫХ РАЗМЕРОВ КОРПУСА
РАКЕТЫ С ЖРДМасса одноступенчатой ракеты или многоступенчатой,
выполненной в одном калибре, приближенно равната\ — PcpV^m, (4.95)7где /р = -5 относительная длина ракеты;“MlРср — средняя (приведенная) плотность заправлен¬
ной ракеты, вычисленная в предположении,
что ракета представляет собой цилиндр дли¬
ной /р и диаметром основания dMi.Средняя плотность рср зависит в основном от состава
топлива и относительной длины ракеты. Для ракет с топли¬
вами на основе азотной кислоты и четырехокиси азота при
/р = 8,5—13 средняя плотность рср = 790—850 кг/м3, а ракеты
с кислородными топливами при Тр = 8—12 имеют рср =
= 630—650 кг/см3. С ростом /р средняя плотность ракеты не¬
сколько увеличивается, так как уменьшается влияние за¬
острения головной части на отличие реальной формы ракеты
от цилиндра.Для многоступенчатой ракеты с разными диаметрами сту¬
пеней можно ввести относительную длину ступени/. = ^' (4 96)
где pi — средняя плотность ступени.При проектировании ракет можно в качестве проектных
параметров выбирать относительную длину или диаметр
ракеты. При выбранной величине /р проектный параметр Рм1
определяется из формулы (1.15). Если выбран диаметр ра¬
кеты, то величина параметра PMj рассчитывается по форму¬
ле (1.14), а относительная длина ракеты — по формуле7р = Т- (4-97)^MlPcpЧтобы обоснованно выбрать относительные, длины и Диа¬
метры ступеней ракеты, необходимо знать их влияние на
конструктивно-баллистические, эксплуатационные и произ¬
водственно-экономические свойства самой ракеты, а также
на аналогичные свойства других элементов ракетного ком¬
плекса. В частности, необходимо учитывать, что:— уменьшение диаметров ступеней ракеты возможно
лишь до предела, обеспечивающего размещение двигателей;
когда разгонные двигатели выполняются поворотными, тре¬
буется корпус большего диаметра;174
— с уменьшением диаметра растет параметр ЯМ1 и
уменьшаются потери скорости ракеты на преодоление сопро¬
тивления воздуха;— уменьшение диаметра нижней ступени создает более
благоприятные условия для выполнения верхних ступеней
в одинаковом калибре с нижней ступенью; выполнение ступе¬
ней ракеты в одном калибре позволяет сократить и удеше¬
вить заводскую оснастку, а также упростить транспортиро¬
вочные и такелажные средства;— уменьшение диаметров ступеней ракеты позволяет ис¬
пользовать на верхних ступенях топливные баки наиболее
выгодных форм и исключить надобность в дополнительных
переходниках между корпусом верхней ступени и боевой ча¬
стью, влечет уменьшение размеров и массы днищ баков и
других поперечных перегородок, а также благоприятствует
более полному заполнению внутреннего объема корпуса ра¬
кеты оборудованием; однако увеличение относительной дли¬
ны ракеты снижает изгибную жесткость корпуса и может
потребовать его упрочнения, в связи с чем уменьшение диа¬
метров ступеней не всегда сопровождается заметным умень¬
шением массы конструкции ракеты;— наибольшие возможные диаметры ступеней ограничи¬
ваются условиями транспортировки ракеты; чтобы ракеты
можно было транспортировать по железной дороге, ее ступе¬
ни (блоки) должны вписываться в габариты железнодорож¬
ных вагонов; если предусматривается транспортировка ра¬
кеты воздухом, при выборе диаметров ступеней учитываются
реальные возможности транспортных самолетов и вертоле¬
тов; при транспортировке водным путем должны учитываться
возможности морских и речных судов;— при окончательном выборе диаметров ступеней ракеты
необходимо учитывать готовую заводскую оснастку, которая
использовалась для изготовления корпусов предшествующих
ракет; это значительно снизит расходы па развертывание про¬
изводства новой ракеты.Учитывая все перечисленное факторы, двухступенчатые ра¬
кеты с ЖРД выполняются обычно в одном калибре. Диаметр
корпуса находится из условия размещения двигателя первой
ступени, относительная длина ракет /р = 8,5—11,0. Односту¬
пенчатые ракеты с ЖРД имеют относительную длину /р =
= 10—14.Пример. Проектируется двухступенчатая ракета с двигателями, ис¬
пользующими топливную пару «N204 + аэрозин». Оценить размеры и
параметр Рмj ракеты при условии, что она выполняется в одном ка¬
либре, имеет стартовую массу т<л = 50200 кг и относительную длинуГр=ю.
Решение. Средняя плотность такой ракеты рср==800 кг/м3, поэтому
ее диаметр d„ь абсолютная длина /р и параметр P„,i соответственно опре¬
делятся так:2) /р = lvdMi = 2-10 = 20м;3) Ры 1 = rfMJpPcp = 2-10-800 = 16000 кг/м*.§ 4.8. ВЫБОР ОТНОСИТЕЛЬНОЙ ДЛИНЫ ЗАРЯДА
И СКОРОСТИ ГОРЕНИЯ ТОПЛИВА ДЛЯ РАКЕТ С РДТТТяговооруженность любой ступени ракеты с РДТТ зависит
в основном от произведения скорости горения на плотность
топлива upт, формы заряда и относительной длины заря¬
да /3. Эти же параметры наряду с давлениями рк, ра и удель¬
ной прочностью конструкционных материалов -у- опреде¬
ляют величину коэффициента конструкции двигателя адв.
Наконец, от относительной длины заряда зависят габаритные
размеры ступеней ракеты.Все это позволяет сделать вывод о том, что ракеты с РДТТ
могут обладать хорошими характеристиками только при
определенных сочетаниях свойств топлива, форм зарядов и
относительных длин зарядов.Плотность твердых топлив (рт) колеблется в пределах
1700—2000 кг/м3. Выбор форм зарядов также ограничен. По¬
этому большое значение имеют подбор топлив с приемлемы¬
ми скоростями горения и выбор относительных длин зарядов
для ступеней ракеты.Рассмотрим вначале выбор 73 и скорости горения топли¬
ва и из условия обеспечения наименьших значений <хдв.При сохранении диаметра с ростом /3 увеличивается мас¬
са всех элементов конструкции двигателя, кроме днищ. Уве¬
личивается также масса заряда. Но масса заряда в отличие
от массы оболочки камеры сгорания растет не прямо про¬
порционально длине, так как увеличение длины заряда тре¬
бует увеличения проходного сечения для газов в заряде
с целью обеспечения устойчивого горения последнего. В ито¬
ге коэффициент адв растет при увеличении /3 только'до опре¬
деленного значения, а при дальнейшем увеличении /3 начи¬
нает уменьшаться. Наличие экстремума у функции адв =
= адв (k) можно доказать и при du const.Расчеты показывают, что когда давление в камере рк со¬
храняется неизменным, минимальные значения адв соответст¬
вуют /3 = 4—5 для любых конструкционных материалов
(рис. 4.24). В случае изменения давления рк значения /3, от-176
вечающие (aHB)min. зависят также от величины рк (рис.4.25).
С ростом давления в камере сгорания (адв)т1п смещаются в
сторону больших /3.Графики аДв = аДв(/з) строятся по данным прямых расче¬
тов двигателей при различных значениях 1а. Эти графики поз¬
воляют выявить как значения Т3, отвечающие (адв)тш, так и
количественное изменение адв при отклонении /3 от оптималь-«*дЕ'0,1ВOJU0.120.100.CS? 3 '4 5 6 7 В IfРис. 4.24. Зависимость конструктивного коэффи¬
циента РДТТ от относительной длины заряда и
характеристик материала корпусаНых величин. В частности, как следует из рис. 4.24, без су¬
щественного ухудшения адв диапазон оптимальных значений
относительных длин зарядов может расширяться до /3 = 3-f-7.Аналогично влияние проектного параметра ирт на коэф¬
фициент качества конструкции двигателя. При постоянном
диаметре двигателя и неизменных относительной длине и
форме заряда с увеличением скорости горения топлива со¬
кращается время работы двигателя, а значит, уменьшается
масса бронирующего покрытия и теплозащиты. Но при этом
возрастает приход газов, поэтому увеличиваются проходное
сечение для газов в заряде, площадь критического сечения
сопла и масса соплового блока. Меняется также тяга дви¬
гателя.177
Когда тяга двигателя, время работы двигателя и /3 фик¬
сированы, с возрастанием скорости горения должны увели¬
чиваться диаметр и длина двигателя и уменьшаться поверх¬
ность горения заряда и диаметр его внутреннего канала.
В результате этого возможно существование экстремума
функции адв — адв (Мрт) .На рис. 4.26 по результатам прямых расчетов построены
графики зависимости адв = адв(ырт) для двигателя со щеле-Рис. 4.25. Зависимость конструктивного
коэффициента РДТТ от относительной дли¬
ны заряда и давления в камере сгораниявым скрепленным зарядом. Графики позволяют оценить вы¬
бранное топливо по конструктивному совершенству двигате¬
ля, а также выявить влияние случайных отклонений скоро¬
сти горения топлива на . массу двигателя и ракеты в целом.Из приведенных графиков также следует, что в соответ¬
ствии с назначенной относительной длиной заряда может
быть подобрано топливо с такой скоростью горения, что бу¬
дет обеспечено наилучшее конструктивное качество двига¬
теля. При этом необходимо иметь в виду то, что чем больше
относительная длина заряда, тем большим скоростям горе¬
ния соответствует наилучшее конструктивное качество двига¬
теля. Иначе говоря, существует такое сочетание скорости го¬
рения и относительной длины заряда, при котором основной
показатель конструктивного совершенства РДТТ будет наи¬
лучшим.178
Однако выбор параметров 1% и нрт, соответствующих
(®дв)т1п> хотя и является желательным, не всегда обеспечи¬
вает приемлемое значение коэффициента тяговооруженности.
Кроме того, необходимо учитывать, что наилучшим двигате¬
лем для работы является не тот, у которого меньшее значе¬
ние адв, а тот, который обеспечивает минимум стартовой
массы ракеты.Чтобы выявить сочетания параметров /3 и нрт, при кото¬
рых обеспечивается желаемая тяговооруженность ступенейРис. 4.26. Зависимость конструктивного
коэффициента РДТТ от параметров ирт и /3ракеты, необходимо анализировать зависимость тяговоору¬
женности от значения этих параметров.Для первой ступени ракеты с РДТТj _ £omoi (л qo\01- Р01 ~51И1р11Руд.01[1-М-(1+«дв.|)М' V '
Но поскольку согласно формуле (4.22)S — Ь./з^ы'то01 [1 ' ^1 (1 "Ь адв. l) l^KllАналогичный вид имеют выражения для тяговооруженно-
стей верхних ступеней, т. е. для Хп2, Хпз-По результатам прямых расчетов ракет можно построить
области распределения 4 и мрт, в которых любое сочетание
значений этих параметр.ов обеспечивает требуемые величи¬179
ны Х<. Такие области для РДТТ с зарядами четырехщелевой
формы изображены на рис. 4.27.При проектировании ракет из множества сочетаний зна¬
чений 13 и upт необходимо брать такие, которые гарантирова¬
ли бы получение коэффициентов тяговооруженностей в реко¬
мендуемом интервале и давали малые значения адв. Для
этого наряду с рис. 4.27 нужно одновременно пользоваться
графиками рис. 4.25 и 4.26.h5.55.04.5й,03.53.02.52.010 12 /4 16 18 20Рис. 4.27. Области сочетаний параметров 1Л
и ирт, обеспечивающие приемлемые тягово¬
оруженности субракет с РДТТСкорости горения современных твердых ракетных топлив
различаются не более чем в 2—2,5 раза, а относительная
длина заряда часто выбирается из чисто конструктивных или
технологических соображений. Для ракет с РДТТ относи¬
тельные длины зарядов при переходе от нижних ступеней
к верхним убывают и обычно имеют такие значения:= 4,0 -5,0; & = 2,5-3,5; = 1,5 - 2,5.Скорости горения топлив в этом случае должны распре¬
деляться по ступеням в обратном порядке, т. е.M'S ^•> ^2 ^и иметь значения;их = 7,0 — 8,0 мм/сек-, и2 — 7,5 — 10,0 мм/сек;
и3 = 8,5 — 10,5 мм/сек.180
ГЛАВА 5МЕТОДЫ БАЛЛИСТИЧЕСКОГО ПРОЕКТИРОВАНИЯРАКЕТ§ 5.1. ПРИБЛИЖЕННОЕ БАЛЛИСТИЧЕСКОЕ ПРОЕКТИРОВАНИЕРАКЕТ С ЖРДПри приближенном решении задачи баллистического про¬
ектирования входными данными являются тип ракеты, со¬
став топлива, масса полезной нагрузки тин и максимальная
дальность полета Z-шах- Цель проектирования заключается
в том, чтобы определить стартовую массу и основные габа¬
риты ракеты. Остальные исходные данные, перечисленные
в § 1.3, не влияют на стартовую массу ракеты и поэтому не
используются при приближенном проектировании. Ориенти¬
ровочная оценка стоимости ракеты может быть произведена
исходя из предположения, что стоимость корпуса ракеты
пропорциональна его массе.Приближенное баллистическое проектирование ракет
с ЖРД ведется в такой последовательности:— выбирается конструктивно-компоновочная схема ра¬
кеты;— определяются основные характеристики топлива;— выбираются проектные параметры ракеты: Хш-, Ркг, Раи
Кг, Рий— выбирается программа движения ракеты на активном
участке траектории;— определяются удельные тяги двигателей по расчетным
формулам или специальным таблицам;— проводится проектировочный баллистический расчет
с целью приближенного определения относительных весов
топлива;— проводится проверочный баллистический расчет с
целью уточнения величин коэффициентов ркг-, обеспечи-181
вающих достижение заданной максимальной дальности
полета;— проводится весовой расчет с целью определения стар¬
товой массы ракеты, а также начальных масс субракет и доз
заправки ступеней топливом;— определяются тяговые характеристики двигателей всех
ступеней ракеты и габариты ракеты.Поскольку зависимости, используемые при проведении
проектировочного баллистического расчета, иТиеют сугубо
приближенный характер, полученная при этом величина ко¬
эффициента [лпр нуждается в уточнении. При проведении про¬
верочного баллистического расчета можно задаваться не¬
сколькими значениями |лпр и определять соответствующие им
дальности полета до тех пор, пока не будет достигнуто
удовлетворительное совпадение с заданной дальностью
полета.Чтобы сократить число вариантов расчета, целесообразно
находить поправку к начальному значению цПр с помощью
частных производных.Из соотношенияследует, что поправка к величине |лПр равнаA,AnP = д£ дук 'dVK др.иргде AL — ошибка определения дальности полета, равная раз¬
ности между заданной дальностью и дальностью, полученной
при проверочном баллистическом расчете.Частная производная может быть вычислена путем^Н'прдифференцирования выражения= ёоРуц. ср 1° 1 _ |Х(]р > (5.3)откуда■fc = ^°Руя-ср 1-н-пр • (5,4)Частная производная определяется по формуле(2.97) или по табл. 2.1.Таким образом, уточненное значение цпр равно182^пр Рпр “Ь ^H'npi(5.5)
где [лПр — приведенный коэффициент заполнения ракеты топ¬
ливом, полученный из проектировочного баллистического
расчета.Уточненные значения коэффициентов |л,а- определяются по
формулам вида (2.131) и (2.130).Проиллюстрируем методику баллистического проектиро¬
вания ракет с ЖРД на числовом примере.Пример. Требуется определить основные весовые, тяговые и габарит¬
ные характеристики ракеты при следующих исходных данных:максимальная дальность полета £|пах = 11000 км;масса полезной нагрузки пгпн=!,5 т;топливо: четырехокись азота и несимметричный диметилгндразин.Выбор конструктивно-компоновочной схемы ракетыВ соответствии с выводами, сделанными в § 4.2, целесообразно вы¬
брать двухступенчатую ракету. Кроме того, остановимся на схеме ра-Рис. 5.1. Компоновочная схема двухступенчатой управляемой баллистиче¬
ской ракеты с ЖРД:/ — двигатель первой ступени; 2 — бак горючего первой ступени; 3 — приборный от-
1;ек первой ступени; 4 — бак окислителя первой ступени; 5 — переходник; S — двига¬
тель второй ступени; 7 — бак горючего второй ступени; 4 — бак окислителя второй
ступени; Я — приборный отсек второй ступени; 10 — боевая частькеты с последовательным расположением ступеней и с одинаковыми диа¬
метрами цилиндрических частей первой и второй ступеней (рис. 5.1).
Будем полагать, что обе ступени ракеты снабжены двигателями откры¬
той схемы с качающимися камерами сгорания, которые служат также
органами управления полетом. ,Определение характеристик топливаПо табл. 1.2 находим:стандартная удельная тяга Руд. ст =268 сек;
газовая постоянная Rc т=380 дж/кг-гр;
показатель адиабаты /Сет = 1,23;
температура горения 7'ст=3360° К;
плотность окислителя рОк=1450 кг/м3;
плотность горючего рг=808 кг/м3;коэффициент соотношения расходов окислителя и горючего К=2,8.183у
Выбор проектных параметров и программы
движения ракеты на активном участке
траекторииВ соответствии с рекомендациями, сделанными в гл. 4, принимаем
следующие величины проектных параметров:начальная тяговооруженность ракеты на земле X0i = 0,55;
начальная тяговооруженность второй субракеты в пустоте Х„2=0,7;
давление в камерах сгорания двигателя первой ступени р„i = 80 бар;
давление в камерах сгорания двигателя второй ступени рн2=100 бар;
давление на срезе сопла двигателя первой ступени раt = 0,5 бар;
давление на срезе сопла двигателя второй ступени раг=0,15 бар;
коэффициент соотношения относительных весов топлива субракет
*1=1,2;начальная поперечная нагрузка на мидель Рмi = 16 • 103 -jp •В качестве программы движения ракеты на активном участке траек¬
тории примем зависимость (2.64). Угол наклона вектора скорости к мест¬
ному горизонту в конце активного участка траектории выберем по
табл. 2.1:Ик = 24°.Определение удельных тяг двигателейПо формуле (1.18) вычислим удельные тяги двигателей первой и
второй ступеней ракеты при выбранных давлениях в камерах сгорания
и на срезе сопел для расчетных режимов работы;^уд. 1 = 0,95-Руд, ст + 21 + 0,76pKi — 0.003/& — WPai + 25ргаХ —= 0,95-268 + 21 + 0,76-80 —0,003-802 -70-0,5 + 25-0,5* = 289 сек;Рун. 2 = 0,95Руд. сх + 21 + 0,76/>к2 0,003Як2 - + 25ра2 == 0,95-268 + 21 + 0,76-100 — 0,003-1002 — 70-0,15 + 25-0.152 = 302 сек.
Удельные тяги двигателей в пустоте определяем по формуле (1.20):р — рР + RT (Ejil\ k — 289 + 380'3360 /0у5_\i,аз
Уд-п1-/УД-1+ ррд ]g2 + 289-9,81= V 80/ JO/ceA,,fc-1 0,23р . лв , RT /раЛ h оло | 380-8360 / 0,15у,23 _>уд.п*-/уд.з+ pp”"^3 + 302.9)812 ^ юо ) ~— 315 сек.Удельная тяга на земле для двигателей первой ступени ракеты вы¬
числяется по формулеР - Р RT - ^ - 307 380,3360 • М - 271 секуд- 01 уд. ni ррд jgjj Pat 289-9,812 0,5Начальная тяговооруженность первой субракеты в пустоте опреде¬
ляется из соотношенияАщ = *о. = 0,55 ~ = 0,485.184
Средняя удельная тяга двигателей ракеты определяется по формуле
(2.126)_ 1 /РУД-°‘ +РУД'П1 , „» > 1 /271 + 307 ,'уд- ср - 2л — 1 [ 2 + уд- "7 ~'2-2— 1 V 2 ++ 2-315) = 306 сек.Проектировочный баллистический расчетПользуясь табл. 2.1, определяем ориентировочную величину высоты
активного участка, траектории hw2. При этом учитываем, что тяговоору-
женность второй субракеты ХП2 Ф 0,5. Поэтому к соответствии с форму¬
лой (2.120) находим поправочный коэффициентК - _ 0J — j -j
“ 0,5 _ 0,5Тогда высота активного участка траектории
hK2 = 1,4-240 = 336 км,
а сферическая дальность активного участка траектории
1к2 = 1,4-546 = 764 км.По формулам (2.121) вычисляем требуемую скорость в конце актив¬
ного участка траектории:1ты — 7к2 11000 — 764R _ 6371== 1,655; £° = 95°;#sinP _ 6371 sin 95° _ n 070. _ лю.g “ ~ (R + Лк2) — R cos p " 6707 — 6371 cos 95° ’ ’V - l/ n° tr ^ Sina =K2 r R + ftK2 2 cos0Kcos(w — \)-V3,98.10“. sin 41° спол . tg 47°,5 JTT3 7Т-Г5 TinT = 6980 м сек.6707 b cos 24° cos (41° — 24°)Используя рекомендации § 2.5, выбираем коэффициент потерь ско¬
рости, соответствующей заданной дальности полета:kv = 1,175.По формуле (2.129) определяем (лПр:1 ( W, \ , ( 1,175-6980 ~\,пр = 1 - ехр ( -1 - ехр ( - -рпзоб- ) = 0,935.Решая квадратное уравнение вида (2.132) при *1 = 1,2, получаем1 + 1,2 i//l + l,2y 0,935 ,1К7ПV (-2ЛТ) = °’670'.2тогда[1к2 =г. = 1,2-0,670 = 0,804.185
Проверочный баллистический расчетПо табл. 2.2 определяем значения функций Щ Cp-ki) 11 lg\ (l^Ki. вк):U.i (fJ-Ki) = 1,107,!g\ (н-кь ®к) = 0,442.По графикам на рис. 2.12 и 2.13 находим значения функций lpi ((*Ki)
и IXiIP1 (fta) = 0,39;IXl (Pki) = 48.По графикам на рис. 2.14, 2.15, 2.16 определяем значения функций Ф1,
Ф2 и Ф4:Ф1 (l*Kl. »«) = О.165'’Ф2 (^кь ^к) = 0,300;»к) =0,150.По формулам (2.145), (2.153) и (2.154) рассчитываем скорость VK\ и
координаты конца активного участка траектории первой ступени Лкi
и /Ki:*Х1 Pl1v« ~ SoPyn. ni \Ц\ (H-ki) РуА. оJр\ з ко,]/' sin2dK= 9,81.307 (1,107 — 0,485 -0,442) — 271 -0,39 —48 12-10’з 16-1030,55 Vsin2 24°= 2465 м/секг.Лк1 = йо^уд. oixoi (®i-*oi-y-j = 9,81 -271*.0,55^0,165 — 0,55-5^1^-) == 44 км\ki = ёоРуйм Х01 (Ф2 — Х01ф4) = 9,81 -2712-0,55 (0,300 — 0,55-0,150) = 86 км.
По табл. 2.2. определяем значения функций U,i(pK2) и Ц^йм):Ui (ни) = 1,628;Из (р-кг) = 0,485.Вычисляем значения вспомогательных функций Уц и D2 110формулам (2.158), (2.161), (2.162) и (2.163):fy (К-кг, ^п2, ®к) = Ц< (lJ-кг) — ^пгР-кг sin = 1>628 — 0,7-0,804-sin 24° = 1,39;
fs (р-кг» ^п2, \) = 1Дг (н-кг) *п2Н-к2 s^n == 0,485 — 0,5 • 0,7 •0,804* sin 24° = 0,39;р _ V* 2465 _ . „ _12 &Руд.п* 9,81-315Ai = йЛш^д. п2 = 9.81 -0,7-315» = 681 км.186
По формулам (2.157), (2.159) и (2.160) рассчитываем скорость VK2
и координаты конца активного участка траектории второй ступени hKi
и 1к2:VK2 = VKl + g0Pyn. П2-/у = 2465 + 9,81 -315-1,39 = 6755 м/сек,Лк2 = ЛК1 + D2 sin ак (Р12р.к2 +fs) = 44 + 681 sin 24° (0,798-0,804 ++ 0,39) = 340 км;
lK2 = lKi + D% cos 0K (Ki2(ik2 +fs) = 86 + 681 cos 24° (0,798-0,804 ++ 0,39) = 724 km.По формулам (2.169) —(2.175) рассчитываем полную дальность по¬
лета ракеты:Vl2(R + hK2) 67552-6711 ....v«2 = = 3,98-10» = °’769:а = 2R (1 + tg2 ®к) - (2R + Лк2) vK2 == 2-6371 (1 + tg2 24°) — (2-6371 + 340) 0,769 = 5280 км;Ъ = vk2£ tg дк = 0,769-6371 -tg 24° = 2285 км;
с = iK2hK2 = 0,769-340 = 262 км;Ь+ V& + ас _ 2285 + V22852 + 5280 • 262 А оп <.“ коол <ЛоУ4,tg 2 ~ а 5280-£■ = 41°48'; = 83°36’; Р = 1,46;Zn = /?р = 6371 ■ 1,46 = 9300 км;L = /.„ + /к3 = 9300 + 724 = 10024 км.Полученная дальность полета отличается от заданной на 8,9%. Сле¬
довательно, значение Цпр оказалось заниженным. Определим поправку квеличине цпр по формуле (5.2). Частную производную -5—— вычислимС'Р’прпо формуле (5.4):^ «р -9'81 -т Г=Ш5 = 46100Для заданной дальности полета по табл. 2.1 находимdLdVK ~ 6'Следовательно:11 000- 10 024 ППЛ„
д(*пр — 46 100-6 — °.0035,тогдаН-пр = М-пр + д(*пр = °'935 + 0,0035 = 0,9385.Уточненное значение цК1 определим из квадратного уравнения (2.132)
Проведя проверочный баллистический расчет при уточненных значе¬
ниях [Лк1 и (J.K2, получаем вполне удовлетворительное совпадение требуе¬
мой и расчетной дальностей полета. Результаты расчета сведены в
табл. 5.1. Данные 2-го варианта используем для проведения весового рас¬
чета.Таблица 5.1Результаты баллистического расчетааосоа«Варианты12№ по пор.Варианты121t’-Kl0,6700,67815Л0,3900,4022Р-К20,8040,81316V\o0,7980,8103lg>0,4420,44617Л2, км6816814!Р\0,390,3918VK2, м/сек675569625lXl484819^К2, КМ3403526ф,0,1650,17020КМ724 '7477ф.0,3000,305210,7690,74784>t0,1500,15522а, км544047809VkU м/сек2465253223Ь, км2285243310hKi, км44,045,524с, км26228811/ j. км868725Р1,461,6412Hi (Р-ка)1,6281,67426Z.n, км93001044013>Иг (Н-кг)0,4850,50027Z., км100241118714fv1,3901,43428ОозН—8,9%+ 1,7% ‘Весовой расчетПо формуле (1.23) определяем среднюю плотность топлива(1 + К") РокРгРт = 'Рок + К?г(1 + 2,8) 1450.808 _1450 + 2,8-808 “ ' 'Используем уравнение (3.17) для определения начальной массы вто¬
рой субракеты методом итераций. Конструктивные весовые коэффициенты
находим с помощью графиков на рис. 3.1, 3.2 и 3.3.Результаты расчета сведены в табл. 5.2.Таблица 5.2Определение т02«Но*Р„2Nl<02fTO. 2аш2/ (^*02)ш,г10 т140 кн0,03500,0216. 8,12т45,4 кг/м30,017810,73 т+0,73г20 т280 кн0,02770,013616,24т34,8 кг/м30,015819,40 т—0,60 т188
Здесь f(m02) представляет собой величину правой части выражения
(3.17), а А/п02 — разность между и /(«оа)-
Путем линейной интерполяции находимтю - 16 т.Аналогичным способом определяем стартовую массу ракеты. Расчет
сведен в табл. 5.3.Таблица 5.3Определение »tolрш*5<0,рто. 1“mlf{m oi)AlUo,50 т1010 кн0,01640,007233,8 т28,6 кг/м30,014652,6 т+ 2,6 т80 т1620 кн0,01250,006754,2 г25,6 кг/м30,014174 г—6,0 гПутем линейной интерполяции находимт01 = 59 т.Таким образом, проектируемая ракета с ЖРД имеет следующие ос¬
новные весовые характеристики:стартовая масса woi = 59 г;масса первой ступени rn01 — — w02) = 43 г;масса второй ступени «ю = {т<п — тпн) = 14,5 т;заправка топливом первой ступени °>3i = 40,6 г;заправка топливом второй ступени “32 = 13,2 т;суммарная заправка горючим (®ri + “гг) = 14,2 г,суммарная заправка окислителем (о>ок, i + “ок. 2) = 39,6 т;вес сухой ракеты (с полезной нагрузкой) (m0i — <о3) = 5,2 т.Определение геометрических и тяговых
характеристик ракетыДиаметр корпуса ракеты находим по формуле (4.95), приняв /р= 10
и рСр“*800 кг/м*. Получаем„3/Т^Г . ,3/ 4-59-10» .." 1 2,1
Следовательно, полная длина ракеты/р = TpdMl — 10-2,1 = 21 м.Начальная поперечная нагрузка на мидель ракеты, 4m0i 4• 59• 10а 17,^3 д;г/Ла
Pul- m кг1м-189
При выборе проектных параметров было принято значение Рмi =
^16-103 кг/м2. Поправка к скорости 1/К2, вызванная погрешностью вы¬
бора параметра Р„и равна:ьу*I / рэ пэXI | Ml ■ м1*01 Vsin2 дк 4 Рт30,55 У sin2 24°По формуле (3.83) с помощью графика на рис. 3.7 находим ошибку
в дальности полетаЗаданная дальность превышена весьма незначительно, поэтому уточ¬
няющий расчет можно не производить.Наконец определяем тяговые характеристики проектируемой ракеты:тяга двигателя первой ступени на земле Я01 = 1050-кн;тяга двигателя первой ступени в пустоте Рпi = 1190 кн;тяга двигателя второй ступени в пустоте ^ Рп 2 = 224 кн;расход топлива двигателя второй ступени пц = 73 кг/сек;расход топлива двигателя первой ступени пц = 396 кг/сек;время работы двигателя первой ступени tKX = 101 сек;время работы двигателя второй ступени (tK2 — ^Ki) = 178 сек.§ 5.2. ПРИБЛИЖЕННОЕ БАЛЛИСТИЧЕСКОЕ ПРОЕКТИРОВАНИЕРАКЕТ С РДТТМетоды и последовательность баллистического проектиро¬
вания ракет с РДТТ принципиально такие же, как для ракет
с ЖРД. Имеются отличия лишь в методике весового анализа
и выбора проектных параметров ракеты. В частности, прием¬
лемые тяговооруженности субракет с РДТТ достигаются пу¬
тем подбора топлив, форм зарядов и относительных длин за¬
рядов.Приближенное баллистическое проектирование ракет с
РДТТ ведется в такой последовательности:— выбираются конструктивно-компоновочная схема ра¬
кеты и топлива для двигателей ступеней;— выбираются программа движения ракеты на активном
участке траектории и величины проектных параметров рк{,Paiy У-i, Isi И (ирт) г',—- определяются удельные тяги двигателей;— производится расчет весовых коэффициентов (весовой
анализ ракеты);— проводится проектировочный баллистический расчет
с целью определения относительных весов топлива суб*
ракет;190
— определяются весовые, тяговые и габаритные характе¬
ристики первого варианта ракеты;— производится проверочный баллистический расчет пер¬
вого варианта ракеты.Далее расчет повторяется вновь с определения весовых,
тяговых и габаритных характеристик при измененных коэф¬
фициентах [iKi до тех пор, пока не будет получено удовлетво¬
рительное совпадение заданной и расчетной дальностей по¬
лета.Проиллюстрируем методику баллистического проектирова¬
ния ракет с РДТТ на конкретном примере.Пример. Требуется оценить весовые, геометрические и тяговые ха¬
рактеристики ракеты с РДТТ при следующих исходных данных:
максимальная дальность полета Z-max= 10000 км;
масса боевой части тбч= 500 кг;
масса аппаратуры управления тау=120 кг.Выбор конструктивно-компоновочной схемы
ракеты и топливаОстанавливаем выбор на трехступеичатой ракете с последователь¬
ным соединением ступеней, ка^кдая из которых имеет моноблочную кон-Рис. 5.2. Компоновочная схема трехступенчатой управляемой балли¬
стической ракеты с РДТТ:/ — боевая часть; 2 — аппаратура управления; 3 — топливный заряд третьей
ступени; 4 — хвостовые отсеки; 5 — сопловые блоки; в — переходники; 7 —
топливный заряд второй ступени; 8 — топливный заряд первой ступениструкцию (рис. 5.2). Ступени соединены коническими переходниками, в
передней части ракеты располагаются приборный отсек и боевая часть.Двигатели всех ступеней имеют по четыре поворотных сопла. Дви¬
гатели первой и второй ступеней работают до полного выгорания топ¬
лива, а двигатель третьей ступени выключается с помощью отсечек тяги
по команде от системы управления. Отделение боевой части производится
за счет реверса тяги.Для изготовления зарядов выберем два вида топлива (см. табл. 1.3):а) перхлорат аммония — 80%;
полибутадиен •— 20%;б) перхлорат аммония—68%;полиуретан — 17%; -алюминий — 15%.Принимаем, что каждый заряд имеет центральный канал и четыре
продольные щели, обращенные к заднему днищу. Заряд скреплен с кор¬
пусом клеящим составом, задний торец заряда покрыт бронировкой.Характеристики выбранных топлив приведены в табл. 5.4.191
Характеристики топливТаблица 5.4Топливо
X а р а к т е р и с т и к аПолиуретановоеПолибутадиеновоерт, кг/м318001720RCT, дж/кг. гр290 •326Л’ст1,161,227 °, К33002790Руд. cTi сек
и = и (рк)2462,29-Л0’402301,74-/>к °’40 'В качестве материала для изготовления корпусов камер сгорания
выбираем сталь с' пределом прочности ов = 200 • 107 н/м2 и плотностью
рм=7800 кг/м3. Принимаем плотность бронирующего и клеящего составов
Pep —1200 кг/м3, плотность теплозащиты рт3=2000 кг/м3 и коэффициент
температуропроводности аТз=0,26 • 10~6 м2/сек. Среднюю плотность со¬
пел двигателей принимаем равной рсср = 4900 кг/А3.Выбор проектных параметров и программы
движения ракетыВ соответствии с рекомендациями, сделанными в гл. 4, выбираем сле¬
дующие величины проектных параметров ракеты:давление в камерах сгорания двигателя первой ступени рИ|=60 бар\
двигателя второй ступени />к2=50 бир\
двигателя третьей ступени ркз=40 бар;
давление на срезе сопладвигателя первой ступени /?а!=0,6 бар-,
двигателя второй ступени ра2=0,3 бар-,
двигателя третьей ступени />„3=0,15 бар-,
коэффициенты соотношения относительных весов топлива субракет
х,=х2=1.Для выбора проектных параметров /3( и («р)с учетом ограничений,
накладываемых на величины тяговооруженностей субракет, предваритель¬
но рассчитаем скорости горения выбранных топлив при выбранных дав¬
лениях /7,,;. Расчетные формулы приведены в табл. 5.4, а результаты рас¬
чета — в табл. 5.5.Таблица 5.5Результаты расчета скоростей горения''ТопливоПолиуретановоеПолибутадиеновое№ сту¬
пени (/)РК1,а, мм{сек, кги, мм'сек> кг(и^т)' M'-fcetc(ирт)’ мусек16011,821,29,015,325011,019,88,314,334010,018,07,613,1192
Пользуясь рис. 4.27, определяем величины /3,-, соответствующие вы¬
численным значениям (ирт) и обеспечивающие допустимые тяговооружен-
мости субракет X0i, ^-пг и Хпз- Затем по графику рис. 4.26 находим кон¬
структивные коэффициенты двигателей для каждого топлива. Результаты
сведены в табл. 5.6.Таблица 5.6
Результаты расчета проектных параметровПолиуретановоеПолибутадиеновоеhi“дв. 1Гз 1“дв. 11——40,082220,1073,50,08331,750,11030,085Для первой ступени ракеты только полибутадиеновое топливо обеспечи¬
вает приемлемую тяговооруженность (Xoi=0,4h-0,5). Для второй и третьей
ступеней полибутадиеновое топливо дает несколько меньшие значения
коэффициентов ацв 2 и адв.Е- Однако, как видно из табл. 5.4, удельная
тяга полиуретанового топлива на 7% больше, чем у полибута диенового.
11оэтому окончательно выбираем в качестве проектных параметров ра¬
кеты:hi = 4, (wpx)i = 15,3 кг/мЧек (топливо полибутадиеновое);/32 = 2, (ирх)а = 19,8 кг/мЧек (топливо полиуретановое);733 = 1,75, (ирт)3 = 18,0 кг/мЧек (топливо полиуретановое).В качестве программы движения ракеты на активном участке траек¬
тории принимаем программу, описанную зависимостью (2.64).Определение удельных тяг двигателейПо формуле (1.17) определяем приведенную удельную тягу полиуре¬
танового топлива, в состав которого входит алюминий:ст = ■Руд. СТ [1 - (4,3 + 0,17л + 0,009а2) • 10 "2] == 246 [1 — (4,3 + 0,17-15 + 0,009 -152) -10~2] = 224 сек.Рассмотрим подробно расчет удельных тяг только для двигателя
нторой ступени. Результаты расчета характеристик остальных двигателей
приведены в табл. 5.7.Таблица 5.7
Результаты расчета характеристик двигателей№ ступени, 1
Иираметры " —123Ti, °к273033103300Руд. Qh227——Руд. п! 1 сек2662732767 2582193
Удельная тяга на расчетном режиме работы сопла согласно фор¬
муле (1.19) равнаРурд. 2 = Р$. ст + 19,4 + 0,76ркг - 0№р12 - 70ра2 + 25Р2а2 == 224 + 19,4 + 0,76-50 —0,003-50= — 70-0,3 + 25• 0,32 = 245 сек.
Температура горения рассчитывается по формуле (1.22).7%, = Тст + 1,12 (рк2 — 40) = 3300 + 1,12 (50 — 40) = 3310° К,а удельная тяга в пустоте — по формуле (1.20):*-1 0,16о р , -RT* (РагУ*' с,,-, 290-3310 / 0,3\ТЛб_07,,Руд. п2 - Руд. 2 + ^ ( ркг ) - 24о + 9>812 245 ^ 50 j 273 сек.Определяем среднюю удельную тягу по формуле (2.127)1уд.ср ■уд. 01+ Р-уд. П11 /227 + 266
' 3 ( 2+ Руд. П2 + Руд. ПЗ
273 + 276^ = 265 сек.Расчет весовых коэффициентов ракетыПриведем подробный расчет весовых коэффициентов только для пер¬
вой ступени ракеты. Результаты расчета весовых коэффициентов для вто¬
рой и третьей ступеней помещены в табл. 5.8.Таблица 5.8
Результаты расчета весовых коэффициентов" № ступени, /Параметр123а„ кг/м320510070bi, кг/м3824340г/, кг/м3223748<?/, кг/м3794457кг/м3114512501230 ‘®дв. 10,0830,0900,102аы000,025Ni0,0120,0120,012К,0,0830,0900,127Рассчитываем по формуле (3.78) коэффициент аь учитывающий массу
корпуса и днищ двигателя первой ступени:, ЛАйР«Ч ( « , , Л 60-10*- 7800-1,2«1 - (y'rt + V —-(T4+V 200ПО* = 205 кг/м*.194
JКоэффициент bu учитывающий массу бронирующего покрытия и
клеящего слоя, находим по формуле (3.55), приняв ai5P=0,07, е=0,99 иrfi<=0,3jh - ~Y Рбр С1 — 4) + ?u (1 “ *)] == Jii 1200 [ 0,0[8-^-- + 4 (1 - 0,99)] = 82 кг/м».Коэффициент сь учитывающий массу сопел двигателя вместе с их
теплозащитным покрытием, вычисляем по формуле (3.64), приняв ас=0,005
п 8С=20°. Кроме того, по табл. 3.1 находим Ко=0,652, а по графику
Fрис. 3.5 Раи k) = 11Дгкртогда2,03 («1Рт) Рср УШ\ /.Fai \ 7
С‘ ~ KoPki sin Рс V Лер ) 31“С ~2,03-15,3-4900 У326-27900,652-60-105-sin 20°• (11,3 — 1) 4-0,005 = 22 кг/м*.Коэффициент <7ь учитывающий массу теплозащиты днищ и корпуса
камеры сгорания (на участке щелей), находим по формуле (3.74), пред-
нарительно задавшись величиной dMi=sl,6 м и определив с помощью гра¬
фика рис. 3.6 толщину теплозащитного покрытия. В данном случае 8Гз.1 —
"11,3- 10_3 м, поэтомук _ ®тз. 1 11,3-10-*т3,1 _ _—Цб"^-710 ’тогдаЯ\ = Ктз. 1 [1,96 + я (0,37l3i — 0,30)] рхз == 7-Ю-з [1,96 + я (0,37-4 — 0,30)] 2000 = 79 кг/мКЧтобы определить массу заряда топлива, рассчитываем коэффи¬
циент ф! по формуле (3.76):ф, = JL (1 —7^) Рт = (1 — 0,32) 1720 = 1145 кг/мККонструктивный коэффициент двигателя первой ступени ракеты„ _ ai + + Р» + Ч\ _ ?
*/312Q5 + 82 + 22 + 791145-4= 0,083.Коэффициент, учитывающий массу гарантийного запаса топлива на
третьей ступени ракеты, принимаем равным0,025.Коэффициенты, учитывающие массы хвостовых отсеков, считаем оди¬
наковыми дЛя всех ступеней и равнымиHi = 0,012.7* 195
Проектировочный баллистический расчетПо табл. 2.1 определяем ориентировочные размеры активного уча¬
стка траектории ракеты и угол наклона вектора скорости в конце этого
участка. Получаем:hK3 я 225 км; /кз « 480 км; вк = 25°.С помощью зависимостей (2.122) — (2.125) определяем требуемую ско¬
рость в конце активного участкаКк3 = 6940 м/сек.Для приближенной оценки величины потерь скорости на активном уча¬
стке траектории принимаем коэффициент kv =1,165. ТогдаКкз + А1/Пот = kvVK3 = 1,165-6940 = 8100 м/сек.
Рассчитываем относительные веса топлива субракет по формуле (2.131)При УСЛОВИИ, ЧТО рк1 = (1и2=^кз:, ( kVV™ \ , / 8Ю0 N ....ш - 1 - ,хр (-Щр^) = 1 - =«р (- Гадгав) - 0'647'Определение весовых и геометрических
характеристик ракетыПользуясь табл. 5.8, рассчитываем массы субракет по формулам
(3.37) и (3.38):тбч + тау 500 + 120т°3 ~ 1 — N3 — (1+ Кз) Ркз ~ 1 — 0,012 — (1 + 0,127) ■ 0,647 ~ кг)_ т03 2380 0т°2 ~ 1 — Nt — (1 + К2) (ак2 - 1 —0,012 — (1 + 0,090) -0,647 ~ 00 КГ'т ^02 §400 01 _ 1 — Nx — (1 + Ki) h-ki " 1 — 0,012 — (1 + 0,083) -0,647 ~ z кг'Диаметр третьей ступени находим из соотношения (3.81):Ъг (1 — Nj) т03 — тпн ,3/ (1 — 0,012)2380 — 620. У (1 — N,) т0з - тт _ J/.(. _М8 " У (1 + «дв. з) Ф.7., " У (1 + °’102) 1230'^ " 'Аналогично получим:dw2 — 1,3 м, = 1,6 м.Время работы двигателя третьей ступени находится следующим образом:
<*ы.(1-Зк) 0,9 (1-0,3)А*кз 2ЙГ 2-0,010 ’ “ 31 иК'Аналогично получим:Мк2 = 41 сек; #к1 = 61 сек
(скорость горения и( берется из табл. 5.5).196
Коэффициенты тяговооруженности субракет равны:= 0,42;tKi 61Р-к^уд.010,647-227Мк241(0.к2^уд.П2_ 0,647'273*<131И'кз^’уд.ПЗ~ 0,647-276} _ К2 _ _ П ОО.П2 — .. г» — п «/1-7Л-7Ч — U1ZC)>п* “ ^кз^уд. пз 0,647-276 и’10-Таким образом, тяговооруженности субракет не выхолят из допусти¬
мых интервалов.Наконец, находим начальную поперечную нагрузку на мидель ра¬
кетыPul = -^г- = = 14,5-103 кг/м*.Проверочный баллистический расчетПроверочный баллистический расчет ракеты проводится по методике,
описанной в гл. 2 и проиллюстрированной примером расчета ракеты с
ЖРД (§ 5.1). В результате получаем для первого варианта расчетаL = 11 200 км при [j,Ki = 0,647.Повторив расчет, начиная с определения весовых и геометрических харак-
юристик при уменьшенных относительных весах топлива субракет, полу-
чаем для второго варианта расчетаL = 9800 км при р.к; = 0,625.Наконец, применив линейную интерполяцию для уточнения величин р*»,
получаемL — 10 050 км при = 0,630.Определение характеристик ракетыКроме весовых и геометрических характеристик ракеты, полученных
и последнем варианте расчета, необходимо определить тяги двигателей,
носа ступеней и зарядов, а также длины ступеней и всей ракеты в целом.
Для решения последней задачи необходимо задаться относительными дли¬
нами переходников, хвостовых и приборного отсеков. Примем их рав¬
ными диаметрам соответствующих ступеней.Приведем основные характеристики проектируемой ракеты с РДТТ,
полученные в результате расчетов.А. Весовые характеристикистартовая масса ракеты т01=23,7 г;масса первой ступени т01 = (т01 — т02) = 16,5 г,масса второй ступени т02 ~ (т<я — тоз) = 5 т;
масса третьей ступени т*0% = (т03 — тпн) — 1,7 г;
масса боевой части /wg4 = 0,5 г;197
масса топливного заряда первой ступени ш31 = 14,5 т;
масса топливного заряда второй ступени <л32 = 4,7 г;
масса топливного заряда третьей ступени <в33 = 1,Зт.Б. Тягов нехарактеристикитяга двигателя первой ступени на земле P0i = 580 кн;
тяга двигателя первой ступени в пустоте Рп\ — 690 кн;
тяга двигателя второй ступени в пустоте Рп2 = 310 кн;
тяга двигателя третьей ступени в пустоте Рпз = 122 кн;
время работы двигателя первой ступени MKi = 58 сек;
время работы двигателя второй ступени Ык2 = 40 сек;
время работы двигателя третьей ступени ktK3 = 26 сек.В. Геометрические характеристикиполная длина ракеты (без боевой части) } = 20 м;длина первой ступени 1\ = 11 м;длина второй ступени 12 = 5 м;длина третьей ступени /3 = 4 м;диаметр первой ступени dMi = 1,48 м;диаметр второй ступени du2 = 1,24 м;диаметр третьей ступени dK3 = 0,87 м.§ 5.3. ОСОБЕННОСТИ БАЛЛИСТИЧЕСКОГО ПРОЕКТИРОВАНИЯ
РАКЕТ-НОСИТЕЛЕЙ С ЖРДРассмотренная в § 5.1 методика баллистического проекти¬
рования УБР может быть использована и для приближенно-Рис. 5.3. Траектория ракеты-носителя при пря¬
мом выведении космического аппарата на
орбитуго определения параметров ракет-носителей с ЖРД, необхо¬
димых для вывода космических аппаратов (КА) на задан¬
ные орбиты. Поэтому исходными данными при баллистиче¬
ском проектировании ракет-носителей являются: масса по¬
лезной нагрузки тШ1 и параметры орбиты (обычно высоты
перигея и апогея). Проектирование ракет-носителей с ЖРД
ведется примерно в такой же последовательности, что и про¬
ектирование УБР. Отличие в о.сновном заключается в мето¬
дике вывода программы движения ракеты-носителя на уча¬
стке выведения КА на орбиту.Существуют три основных способа выведения КА на
орбиты;№
Рис. 5.4. Выведение с промежуточным
баллистическим участком:ОК — активный участок; КВ — промежуточный
участок; BF — участок раз¬
гонабаллистический— прямое выведение;— выведение с промежуточным баллистическим участком;— выведение с проме¬
жуточными орбитами.Прямым выведением
(рис. 5.3) называется спо¬
соб выведения КА на ор¬
биту, при котором двига¬
тели ступеней работают
непрерывно один за дру¬
гим, а в конце активно¬
го участка траектории до¬
стигается требуемая ор¬
битальная скорость по¬
лета. Из-за ограниченно¬
го времени работы дви¬
гателей и больших грави¬
тационных потерь скоро¬
сти высота орбиты для
ракет-носителей с ЖРД
обычно не превосходит
200—300 км (150—200 км
для носителей с РДТТ).При втором способе
выведения траектория по¬
лета ракеты-носителя со¬
стоит из трех участков
(рис. 5.4): активного ОК,
пассивного (баллистиче-
i-кого) КВ и участка раз¬
гона BF, на котором дви¬
гатель последней ступени
ракеты-носителя доводит
скорость полета до тре¬
буемой орбитальной. Этот
способ выведения позво¬
ляет достигать высот до
2000 км.При выведении с про¬
межуточной орбитой тра¬
ектория полета раке¬
ты-носителя включает
(рис. 5.5):— активный участок ОК, в конце которого
лета превышает первую космическую скорость;— промежуточную орбиту КВ, представляющую
половину эллипса;Рис. 5.5. Выведение с промежуточной
орбитой:ОК — активный участок: КВ — промежуточная
орбита; BF — участок разгонаскорость ПО-собой199
— участок разгона BF, на котором двигатель последней
ступени сообщает ей импульс тяги ДК, достаточный для
удержания КА на рабочей орбите.Точки В и F практически совпадают, так как длина уча¬
стка разгона мала по сравнению с размерами орбиты.Метод выведения с двумя промежуточными орбитами за¬
ключается в следующем. В конце активного участка ОК
(рис. 5.6) ракета-носитель достигает скорости, близкой к пер¬
вой космической. Да-
д д уг лее ракета движется
" по первой промежуточ¬ной, ной орбите КВ, кото¬
рая по форме близка
к круговой. В нужный
момент времени дви¬
гатель последней сту¬
пени создает импульс
тяги Д Vj для перево¬
да ракеты на вторую
промежуточную орби¬
ту ВА. Последняя пред¬
ставляет собой полови¬
ну эллипса. В апогее
этой орбиты вновь
включается двигатель
последней ступени и
сообщает импульс тяги
ДУг, достаточный для
перехода КА на рабо¬
чую орбиту. Такой ме¬
тод выведения иногда
называют «двухимпульсным», с его помощью можно выводить
КА на орбиты любой высоты.Заметим, что при полете ракеты-носителя по промежу¬
точному баллистическому участку или промежуточной орби¬
те корпус ракеты должен стабилизироваться относительно
центра масс. Для этой цели используется специальная си¬
стема стабилизации, исполнительными органами которой
могут быть реактивные или струйные двигатели малых тяг.Наряду с проектированием и созданием новых ракет-но¬
сителей, специально предназначенных для доставки КА в кос¬
мос, часто в качестве носителей используются существующие
управляемые баллистические ракеты. В этом случае возни¬
кает необходимость оценки возможностей УБР по выведе¬
нию различных полезных грузов на орбиты с заданными па¬
раметрами. Такую оценку можно сделать, используя методы
решения частных задач баллистического проектирования.Рассмотрим методику решения задачи по определениюРис. 5.6. Выведение с двумя промежу¬
точными орбитами:ОК — активный участок; КВ — первая проме¬
жуточная орбита; BF — первый участок раз¬
гона; F А — вторая промежуточная орбита;
А Д — второй участок разгона200
массы полезной нагрузки тпп, которая может быть выведена
мл заданную рабочую орбиту управляемой баллистической
ракетой с известными весовыми, тяговыми и геометрически¬
ми характеристиками.Исходными данными являются:— характеристики УБР (без боевой части);— параметры рабочей орбиты (высота круговой орбиты
или высоты апогея и перигея'для эллиптической орбиты);— требуемая точ¬
ность выведения КА на
рабочую орбиту, т. е.
допустимый разброс
нысот орбиты.При решении по¬
ставленной задачи мож¬
но придерживаться та¬
кой схемы:1. Выбирается спо¬
соб выведения КА на
заданную орбиту. Тем
самым определяется
программа движенияракеты-носителя на активном участке траектории. Для пря¬
мого выведения и выведения с промежуточной орбитой мо¬
жет использоваться приближенная программа движения вида
(рис. 5.7):4 , о<х<-Рис. 5.7. Приближенная программа движе¬
ния ракеты-носителя на активном участке
траектории»(т) =г1(5.6)где х—безразмерное время полета ракеты-носителя на ак¬
тивном участке траектории (0 х <: 1);
т0—момент времени, соответствующий окончанию верти¬
кального участка полета;
т* — момент времени, соответствующий переходу от квад¬
ратичного закона изменения угла 9 к линейному
(рис. 5.7);ft* — угол, соответствующий моменту времени х*.
Величина х определяется из соотношения*=Т5Г-1 '• (5.7)*П»РуД. п/Н'К!1=1где t — время полета ракеты-носителя, отсчитываемое от мо¬
мента старта первой ступени.201
Для ступенчатых ракет можно считать, что моменту т*
соответствует конец активного участка первой ступени. В этом
случае для расчета параметров движения первой субракеты
можно использовать программу, -описанную выражением(2.64), которая применяется и при выведении с промежуточ¬
ным баллистическим участком.2. Уточняется конструктивно-компоновочная схема раке¬
ты. Вместо боевой части носитель снабжается обтекателем,
который предохраняет космический аппарат от действия
аэродинамических сил и сбрасывается после выхода ракеты
из плотных слоев атмосферы.Чтобы обеспечить полет ракеты-носителя по новой про¬
грамме движения, можно ввести в состав аппаратуры управ¬
ления дополнительные приборы. В частности, для повышения
точности выведения целесообразно включить в состав систе¬
мы управления блок радиокоррекции.Массу обтекателя и дополнительной аппаратуры управле¬
ния нужно считать частью массы полезной нагрузки.3. Проводится баллистический расчет для определения
относительных весов топлива субракет обеспечивающих
выведение различных по величине полезных нагрузок на за¬
данную рабочую орбиту (с допустимой погрешностью).Баллистический расчет активного участка первой ступени
ракеты-носителя ведется по тем же расчетным зависимостям,
что и для управляемых баллистических ракет.Рассчитывать параметры траектории второй и последую¬
щих ступеней ракеты-носителя можно путем приближенного
интегрирования уравнений движения совместно с уравнением
(5.6). Однако такой метод при определенном сочетании про¬
ектных параметров отличается низкой точностью. Чтобы по¬
высить точность баллистических расчетов, необходимо учиты¬
вать непостоянство угла 9 на активных участках верхних
ступеней и вызванное этим обстоятельством появление значи¬
тельных по величине углов атаки а.При написании систем уравнения движения УБР (§ 2.1)
предполагалось, что углы атаки малы. Это допущение непри¬
емлемо для активных участков верхних ступеней ракет-носи¬
телей, особенно при выведении КА на орбиты с малыми вы¬
сотами. В последнем случае возникают отрицательные углы
атаки величиной в десятки угловых градусов. Поэтому урав¬
нение движения второй ступени ракеты-носителя в проекции
на касательную к траектории следует записать так:т (t) ~^- — рп cos а — т (^)gsin &(5.8)или(5.9)202
После интегрирования первое слагаемое в формуле (5.9)
преобразуется в приращение идеальной скорости, второе сла¬
гаемое дает гравитационные потери скорости, а третье —
потери скорости на угол атаки.Для двухступенчатых ракет с ЖРД в случае прямого
выведения КА на круговую орбиту скорость в конце актив¬
ного участка может рассчитываться по формулеVK2 ~ V„ + goPy» пз i _ jj,k2 ~ btK2fg., /e2, (5.10)где ktK2 = (tK2 — tKl) — продолжительность полета ракетына активном участке второй сту¬
пени;Is2 — вспомогательная функция, характе¬
ризующая гравитационные потери
скорости;/а2 — вспомогательная функция, характе¬
ризующая потери скорости из-за на¬
личия углов атаки.Величина Ig2 представляет собой интеграл вида1^2 = ^0 j У sin ^ (»к1, Ык2)с&, (5.11)оГде 6= 1 -к! безразмерное время полета ракеты-К2носителя в пределах активного участ¬
ка второй ступени.Для определения величины lg2(8кь А/К2) можно использо¬
вать график (рис. 5.8).203
Функция 1л2 представляет собой интеграл видаГ sin47а2 — 2ё0 J 1—^(5.12)Для определения величины /а2 (&к„ Д/к2) служит график
рис.. 5.9.При тех же условиях, при которых справедлива формула
(5.10), высота и сферическая дальность активного участкаЛ* 2»,
м/сек‘/у/4*hJ/3)fr 47r *r /V//»/s/\s<К)Рис. 5.9. Зависимость 1а, от -^кг итраектории ракеты-носителя могут быть рассчитаны по фор¬
мулам:Лк2 = hK1 g0 (Д^кг)2 "Ь ’ . (5.13)где^к2 — Аи ёо (^кг)г )nJ >// __12 ’1Ф5 = | sin 'l> di;01Ф6 ~ J* cos & db®8 = Jxb-cos&d\;(5.14)(5.15)(5.16)(5.17)(5.18)(5.19)204
ф,= fsiф,1-fR + hsin &RR + hУ sindb,(-^ГнУ sin Шd%(5.20)(5.21)Величины Ф* определяются по графикам рис. 5.10—5.15.ФбOJ30,80,1ч\vX\\\гW *
&Л2\<АЛ\s\'го зо «о so 60I'uc. 5.11. Зависимость Фц
от Мк2 и »к1В общем случае для любого числа ступеней ракеты-носи¬
теля и при произвольной программе движения на активном
участке траектории баллистический расчет производится
путем численного интегрирования системы уравнений дви¬
жения.Требуемая точность баллистического расчета зависит от
допусков на отклонение высоты орбиты. Границы допусти¬
мых отклонений орбитальной скорости и высоты конца ак¬
тивного участка траектории ракеты-носителя можно устано¬
вить следующим образом.Если заданная орбита круговая, то расчетные орбиты не
должны выходить за пределы кольца, ограниченного окруж¬
ностями с радиусами (рис. 5.16):RX = R + H-AH;
R2 = R + H-+ ДЯ(5.22)(5.23)
205
Этому условию удовлетворяет бесчисленное множество
орбит, каждая из которых характеризуется определенной ско¬
ростью VF и высотой hF в конце активного участка траекто¬
рии ракеты-носителя. Следова¬
тельно, любая орбита может
изображаться точкой на коор¬
динатной плоскости (VF, hf).
Совокупность всех допустимых
орбит изображается четырех-%0.750 60 \)*к,Рис. 5.12. Зависимость Ф7
от Мк2 и ак1 - —N‘ф Ч.v\x20 30 40 SO 60Рис. 5.13. Зависимость Фа
, от btK, и ак1угольником (рис. 5.17). Вершины этого четырехугольника ха¬
рактеризуют четыре предельных случая выведения (рис. 5.16):ь0,15
0.10
0.05
О^*К2»
100 чсек200-
300-
400-
50(h20 30 4О SO 60 vKIРис. 5.14. Зависимость Ф9 от
Д*К2 и »к.Рис. 5.15. Зависимость Ф10 от
Д/К2 И ^К11. КА выведен на круговую орбиту радиуса R2. Требуе¬
мая скорость на орбите является первой космической ско¬
ростью для высоты (Н + АН) и определяется по известной
формуле(VA-Vlt <5-24)2. КА выведен в апогей эллиптической орбиты, у которой
радиусы-векторы апогея и перигея равны соответственно R3206
и Ri. В этом случае скорость в конце активного участка
должна быть равна<5-25>3. КА выведен на круговую орбиту радиуса R\. Требуе¬
мая скорость на орбител»,- Vlt-(5.26)4. КА выведен в пе¬
ригей эллиптической
орбиты, у которой ра¬
диусы-векторы апогея
н перигея равны соот¬
ветственно /?2 и R\.Скорость в конце ак¬
тивного участка% Ri Rx + *(5.27)Заданная рабочая
орбита изображается
на рис. 5.17 тонкой О.При этом скорость в конце активного участка на высоте Н
должна быть равна »Результаты баллистического расчета считаются удовле¬
творительными, если расчетная точка попадает в зону допу¬
стимых отклонений высоты и
скорости в конце участка вы¬
ведения.При проведении баллисти¬
ческого расчета относительные
веса топлива субракет рассчи¬
тываются следующим образом.
Для верхней субракеты, _ ' Nn ntmtХ+Кп (1 + /<я) ’(5.29)
207Рис. 5.17. Зона допустимых от¬
клонений высот и скоростей на
круговой орбитеРис. 5.16. Возможные отклонения от круго¬
вой орбиты
где т.0п = топ — тбч + ягпн;теч — масса боевой части УБР;
тпн—масса полезной нагрузки ракеты-носителя.
Относительные веса топлива промежуточных субракет
определяются по формулам, аналогичным формуле (5.29).
Таким образом, для всей ракеты (первой субракеты):Для расчета [лк; необходимо задаваться рядом значений
массы полезной нагрузки тШ1.В массу полезной нагрузки входят: масса космического
аппарата, масса сбрасываемого обтекателя и деталей систе¬
мы сброса и масса дополнительной аппаратуры управления,
которая должна быть добавлена к приборам УБР для пре¬
вращения ее в ракету-носитель.При выведении с промежуточным баллистическим участ¬
ком или с промежуточной орбитой в массу полезной нагруз¬
ки кроме перечисленного выше входит масса дополнительной
ступени, обеспечивающей разгон ракеты до требуемой орби¬
тальной скорости. Дополнительная ступень состоит из кор¬
пуса, двигателя и емкостей для компонентов топлива. Масса
этих элементов рассчитывается по зависимостям, приведен¬
ным в § 3.1. Относительный вес топлива, обеспечивающего
работу двигателя дополнительной ступени, определяется по
формуле Циолковского без учета гравитационных потерь.Пример. Определить массу полезной нагрузки, которая может быть
выведена на круговую околоземную орбиту высотой Я =200 км с по¬
мощью управляемой баллистической ракеты. Характеристики ракеты опре¬
делены в примере § 5.1. Допустимое отклонение высот орбиты АН=Решение. 1. Выбираем в качестве способа выведения КА на ра¬
бочую орбиту прямое выведение.2. Определяем требуемую орбитальную скорость3. Определяем границы зоны допустимых отклонений скорости и вы¬
соты в конце активного участка:^К1 1 + *1 (1 + Ki) т'т1 — Nj т02(5.30)где(5.31)= ±20 км(vr)o = ^=V:R + Н ~v\3,98-10й
6371 + 200= 7785 м!сек.Rt = R + H — ДЯ = 6371 + 200 — 20 = 6551 км;
R2 = R + Н + АН = 6371 + 200 + 20 = 6591 км;208
ТО, = то, У- 7770 У = 7760 .«/««ТО, = У-%- У- 7800 м!с.к(V-л = O',). УТ5^- - 7800 У 6К2|-6Д91 = 7810 .«/«*.Зону допустимых скоростей и высот наносим на график рис. 5.18.4. По формулам (5.29), (5.30) рассчитываем величины [iKi и (1К2. соот¬
ветствующие различным массам полезной нагрузки (т6ч= 1500 кг) Рас¬
чет сведен в табл. 5.9.Таблица 5.9Результаты расчета коэффициентов рк1 и [*х2тпн> кгЕ006Я0700800900Ркз0,8560,8500,8440,8380,832М-к!0,6820,6810,6790,6780,6775. При проведении баллистического расчета задаемся сочетаниями пара¬
метров (т„и, 9Ki). Найденные для каждого варианта расчета величины
Ук2 и hкг наносим на график (рис. 5.18).При переходе к новым вариантам расчета следует иметь в виду, что
угол 8ц| и масса полезной нагрузки по-разному влияют на высоту и ско¬
рость в конце участка выведения. Увеличение угла 8Ki приводит к росту
высоты А,,2, но одновременно уменьшается скорость V„2 из-за возраста¬
ния гравитационных потерь. Уменьшение массы полезной нагрузки тПИ
при постоянном угле 8„| приводит к увеличению скорости V,,i за счет
возрастания коэффициентов |iKi и ц„2, а также к некоторому увеличению
высоты h„2. Следовательно, для увеличения высоты hK2 необходимо уве¬
личивать угол 8,а, а для увеличения скорости VII2 — выбирать меньшее
значение т„„.Результаты баллистического расчета сведены в табл. 5.10.Таблица 5.10Результаты баллистического расчета ракеты-носителя с ЖРД№ по
пор.Варианты расчетаIиinIVV1^ПН,8008005006506752Н-К20,8380,8380,8,560,8470,84553!*к10,6780,6780,6820,6800,6804«К125°30°30°30°30°5И-i, м/сек253225142556253725376ЛК1, км43,550,250,250,250,27Д*к5, сек18418418818618581,72,12,12,12Д91*20,150,35о;з50,350,3510м/сек7761751880097815777511Ф*0.200,250,250,250,2512Ф,0,080,110,110,110,1113Ф«+0,01-0,01-0,01—0,01—0,0114Лк 2, КМ176214218216216209
Последний (V) вариант баллистического расчета удовлетворяет по¬
ставленным условиям задачи. Расчетная 'точка находится внутри зоны
допустимых отклонений скорости и высоты в конце участка выведения
(рис. 5.18).Из анализа графика рис. 5.18 видно, что «попадание» в зону допу¬
стимых отклонений высоты и скорости возможно и при ряде других со¬
четаний параметров (цкь Цкг, 9ki). Например, получение эллиптическойорбиты, у которой перигей совпадает с концом активного участка тра¬
ектории на высоте 180 км, возможно при следующих параметрах:Вывод ракетой полезных грузов на орбиты с высотами 200±20 км
возможен во всех случаях, когда параметры р.кi, ркг и вН1 не выходят
из диапазонов:Ш О8.0-7.9-70 , 180 200 220 hp .кмРис. 5.18. Интерполяционный график для опреде¬
ления допустимых полезных нагрузок ракеты-
носителя с ЖРДг1-к2 — 0,840;
P-Ki = 0,678;V = 25°5./|хк2 = 0,840 -г- 0,846;
fiKi = 0,678 ~ 0,680;
-= 25°5 Н- 30°5-210
Этому соответствует согласно табл. 5.9 диапазон масс полезной нагрузкитпн — 670 770 кг.Таким образом, управляемая баллистическая ракета с максимальной
дальностью полета Lmax—ПООО км и массой боевой части тбч= 1,5 т
может быть использована в качестве ракеты-носителя для выведения на
круговую околоземную орбиту высотой Я=200±20 км полезного груза
массой тпн = 700 кг.§ 5.4. ОСОБЕННОСТИ БАЛЛИСТИЧЕСКОГО ПРОЕКТИРОВАНИЯ
РАКЕТ-НОСИТЕЛЕЙ С РДТТДля запуска небольших искусственных спутников Земли
(ИСЗ) широко используются ракеты-носители с РДТТ. Как
правило, такие ракеты составляются из готовых (товарных)
двигателей или ступеней, имеющих высокую надежность и
сравнительно низкую стоимость серийного производства. При
создании подобных ракет-носителей первым этапом является
проведение приближенных расчетов Для оценки возможно¬
стей имеющихся твердотопливных ракет по выводу полезных
грузов на орбиты в космосе. Далее можно выбирать опти¬
мальную комбинацию готовых ступеней или двигателей.И в том и в другом случае можно использовать методы
решения частных задач баллистического проектирования
УБР с РДТТ.Рассмотрим особенности решения задачи по оценке воз¬
можностей применения УБР с РДДТ в качестве ракеты-носи¬
теля. Полагаем, что в число исходных данных входят:— характеристики ракеты (без боевой части);— параметры орбиты;— допустимые погрешности выведения КА на заданную
орбиту.Порядок расчета имеет много общего с последовательно¬
стью решения аналогичной задачи для ракеты с ЖРД (§5.3).
Укажем лишь на две особенности проектирования ракет-
носителей с РДТТ.Во-первых, для твердотопливных носителей неприменим
способ прямого выведения и даже при сравнительно малых
высотах орбиты используется способ выведения с промежу¬
точным баллистическим участком (рис. 5.4). Для этого спо¬
соба выведения используется программа движения ракеты
на активном участке траектории, описанная выражением(2.64). Угол в конце активного участка 9„ варьируется в ходе
расчета для изменения высоты вершины баллистического
участка.Летные параметры ракеты в вершине баллистического
участка определяются по формулам (2.101), (2.104), (2.105),
(2.106), (2.107), (2.108), приведенным в § 2.4, п. 6.211
Во-вторых, на участке разгона движение ракеты должно
происходить по эквипотенциальной поверхности, т. е. на по¬
стоянной высоте. Это возможно лишь при создании опреде¬
ленных углов между осью ракеты и вектором скорости (уг¬
лов атаки), когда вертикальная составляющая тяги двига¬
теля уравновешивает силу тяжести.Однако при скоростях полета, близких к первой космиче¬
ской скорости, требуемые углы атаки малы. В самом деле,
из второго уравнения системы (2.7) при условии8 = 0 и & = 0
следует, что ■--Вт)'■ <5-32>Потери скорости из-за наличия углов атаки, как было по¬
казано в § 5.3, пропорциональны а2. Легко убедиться, что
на участке разгона эти потери пренебрежимо малы и могут
не учитываться.Методику оценки возможностей УБР с РДТТ по выводу
КА на орбиту проиллюстрируем примером.Пример. Определить массу полезной нагрузки, которая может быть
выведена на круговую околоземную орбиту высотой // = 500 км с по¬
мощью УБР с РДТТ. Характеристики ракеты определены в примере§ 5.2. Допустимое отклонение высот орбиты АН =±50км — ±10%^ .Решение. 1. Выбираем в качестве способа выведения — выведе¬
ние с промежуточным баллистическим участком. Первые две ступени
ракеты обеспечивают ее полет на активном участке траектории. Затем
третья ступень с полезным грузом совершает полет по промежуточному
баллистическому участку, в вершине которого включается двигатель
третьей ступени. В конце участка разгона при достижении первой кос¬
мической скорости полезный груз отделяется о г корпуса третьей ступени.2. Для стабилизации корпуса третьей ступени на промежуточном
баллистическом участке применяется система стабилизации, включающая
баллон со сжатым газом и управляющие струйные сопла. Масса элемен¬
тов системы стабилизации включена в массу полезной нагрузки.3. Определяем требуемую орбитальную скорость.га. - У-RTW ‘ У(Ш|'+ 5ГО) № = 76004 Определяем границы зоны допустимых отклонений скорости и вы¬
соты в конце участка разгона:/?! = R + H — ДН = 6371 + 500 — 50 = 6821 км;R2 = Я + Н + ДЯ = 6371 + 500 + 50 = 6921 км;га, -Уж‘У IraF =■7580 */ак= (^V)i У h\ т '/<■, ^ 7580 I 0821 + 6921 ~ 7530212
(^). - Vt; - Vдат =7640С'Л = С'Л К-кгпгг - 7640 / ггаг - 7690По результатам расчета строим зону допустимых скоростей и высот
(рис. 5.19).5. По формулам, аналогичным формулам (5.29) и (5.30), определяем
коэффициенты цК1, соответствующие различным массам полезной нагрузки
в диапазоне:тпя = 100 — 300 кг.Рис. 5.19. Интерполяционный график для определения допу¬
стимых полезных нагрузок ракеты-носителя с РДТТОдновременно уточняем значение величин X„i. Расчет сведен в табл. 5.11.Таблица 5.11Результаты расчета проектных параметров"'пн' *г300200100t*Kl0,6380,6410,644Ркз0,6510,6600,670Ркз0,7380,7790,825*010,4730,4710,468к*0,2200,2170,214*пз0,1560,1480,1406. Проводим баллистические расчеты нескольких вариантов ракеты-
носителя, задаваясь комбинациями параметров (tfinm Найденные213
в результате расчетов высоту вершины баллистического участка Ав и ско¬
рость в конце участка разгона наносим на график рис. 5.19.Расчет сведен в табл. 5.12.Таблица 5.12Результаты баллистического расчета ракеты-носителя с РДТТ№ по
пор.Вариантырасчета111шIV1^ПН13001002002002»К230°30°30°35°3VKi, м/сек18781925191918884VKt, м/сек44864712456245585VK20,3260,3610,3380,3386е0,7680,7450,7600,7887VB0,2320,2560,2400,2128Лв, км450. 5104705809Д^кз. м/сек358046504040404010Vg, м/сек3680\ 38403740361011VF, м/сек7260849077707650Нанеся на график рис. 5.19 интерполяционную сетку, можно прийти
к выводу, что выбранная в качестве ракеты-носителя управляемая бал¬
листическая ракета с РДТТ способна вывести на круговую околоземную
орбиту высотой 500±50 км полезную нагрузку массойтпи - 220 — 235 кг.§ 5.5. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ РАКЕТЫ С ПОМОЩЬЮ
НОМОГРАММВ предыдущих параграфах были рассмотрены аналити¬
ческие методы определения основных летных, весовых, тяго¬
вых и геометрических характеристик ракет. Несмотря на то,
что аналитические методы имеют приближенный характер,
трудоемкость расчетов по ним довольно велика. Поэтому
для быстрых прикидок параметров ракет наряду с аналити¬
ческими применяют методы, использующие заранее постро¬
енные номограммы.Точность номографических методов определяется мас¬
штабом чертежа и характером зависимостей, используемых
для его построения.В приложении приведены Номограмма I для расчета па¬
раметров ракет с ЖРД и Номограмма II — для ракет
с РДТТ.В левых верхних квадрантах Номограмм I и II (гра¬
фик 1) приведено семейство кривых L (цк, Руд. 0, Хо), отра¬
жающих взаимосвязь между максимальной дальностью по¬
лета Z-шах. относительным весом топлива и коэффициен-214
том тяговооруженности Хо одноступенчатой ракеты. Данные
для построения кривых L(jjlk, Руд. о, ^-о) были получены чис¬
ленным интегрированием на ЭЦВМ совокупности уравнений
(2.3), (2.4) и (2.5).Кривые L([.iK, Руд. о, Х0) служат для определения макси¬
мальной дальности полета одноступенчатой ракеты по изве¬
стным Руд. о, цк и Х0, а также для отыскания коэффициента
наполнения топливом одноступенчатой ракеты р,„ при задан¬
ных L, Руд. о и Х0.Наконец с помощью этих же квадрантов номограмм можно
решать аналогичные задачи для многоступенчатых ракет.
В этом случае оперируют параметрами приведенной односту¬
пенчатой ракеты (по существу «фиктивной» одноступенчатой
ракеты), летящей по той же траектории и имеющей ту же
скорость в конце активного участка, что и исследуемая мно¬
гоступенчатая.Условие равенства скорости полета в конце активного
участка для приведенной и многоступенчатой ракет запишет¬
ся так:— ёо^у? (in ! _р,пр ^np^npAip) =■=i—rt(ln i |*к/ (5.33)/=i кгде РуР— удельная тяга приведенной ракеты;Хпр—коэффициент начальной тяговооруженности
приведенной ракеты;[Апр — относительный вес топлива приведенной ра¬
кеты;/пр— среднее значение sin 9 для приведенной ракеты;Igt—среднее значение sin 9 для г-й ступени много¬
ступенчатой ракеты.Уравнение (5.33) содержит четыре неизвестных парамет¬
ра приведенной одноступенчатой ракеты: Р"р, цпр, Хпр и /пр>
Для их определения необходимо ввести три дополнительных
связи. В качестве первой связи допустим, что идеальные ско¬
рости в конце активного участка траектории для многосту¬
пенчатой и приведенной одноступенчатой ракет одинаковы.
Отсюда следует равенство соответствующих гравитационных
потерь скорости. Таким образом, получаем два уравнения:i—tigoPg In -T3L- = g0 2 Py>. m In -YZ—-; (5.34)
F 1=1
i=n^Го^прРпр^удЛф = £o 2 ^пг^к^уд. njgi • (5.35)fc=l215
В уравнение (5.34) входит два неизвестных параметра при¬
веденной ракеты [j-np и Р*р.Чтобы определить их, достаточно ввести еще одно усло¬
вие. Если принять удельные тяги двигателей ступеней рав¬
ными, то величина [лпр может быть определена из соотно¬
шенияПри этом условии из выражения (5.34) следует, что удель
ная тяга приведенной ракетыЕсли полагать, что —^Цкп, то из выражения(5.37) получим более простое выражение1=пВ уравнение (5.35) входят еще два параметра приведен¬
ной ракеты /пр и Хпр. Чтобы определить их, используем усло¬
вие совпадения программ движения многоступенчатой и при¬
веденной ракет.Для удобства сравнения программ перейдем к аргументу
г —безразмерному времени полета ракеты на активном уча¬
стке траектории. Программа движения, описанная выраже¬
нием (2.64), для многоступенчатой ракеты примет следую¬
щий вид:где т, то и х* имеют тот же смысл, что и в формуле (5.6).
Для приведенной одноступенчатой ракетыРпР = 1 — (1 — Pki) (1 — Нк2)... (1 — (О • (5.36)УД. П( In (1 |Ак1) -f In (1 [Ак2) + ... + In (1 (iKn) ‘In (1 — lJ.Ki)(5.37)i=1(5.38)2о <т < To;t(5.40)^прРпр^удТогда величина /пр для приведенной ракеты определится
так:
Приближенное значение /пр может быть найдено по фор¬
муле/пР“^+зтдк(1--^-), (5.42)где тК1—доля активного участка первой ступени во всем
активном участке составной ракеты.Поскольку влияние Хпр на дальность полета сравнительно
невелико, принимают для МКР /пр—0,5, а для СРСД */пр = 0,6.При известной величине /пр из уравнения (5.35) можно
найти коэффициент тяговооруженности приведенной ракеты1=п^ПР ~ ~Епр / j ^п/^к/Руд. n Jgi. (5.43)^уд^пр'пр Jmdгде lgi — среднее значение sin 9 для i'-й ступени;у МКР /«1 = 0,55 и /«2=/«3=0,4; у СРСД /gi = 0,65 и
Ig 2 = Ig з=0,5 -s- 0,6.Для упрощения расчетов можно принять, что [лК1 = Цк2 =
=... = р>кп> тогдап <5-44>УД г'пр пр “Таким образом, при определении дальности полета много¬
ступенчатых ракет с помощью номограмм необходимо пред¬
варительно рассчитать входные величины Ру£, (а„р и Хпр
по формулам (5.36), (5.38) и (5.44).Коэффициенты jj.Ki составной ракеты по заданной дально¬
сти полета L определяются методом последовательных при¬
ближений. Вначале по Номограмме I определяется величина|лпр в первом приближении при Хпр ==X0i- Затем по формуле
(5.44) вычисляется уточненное значение Хпр и находится окон¬
чательно [лПр- Далее по шкалам в правой части Номограм¬
мы I определяются коэффициенты ^„ь Цк2, Цкз-Номограмма I охватывает следующие значения входных
величин;Руд. 0 = 220 — 400 сек\Х0 = 0,6 — 0,8.Номограмма II, предназначенная для расчета параметров
ракет с РДТТ, охватывает область:Руд. 0 = 200 -ч- 300 сек-,Х0 = 0,3 — 0,5.* СРСД — стратегическая ракета средней дальности.217
Правые квадранты номограмм (график 2) предназначены
для весовых расчетов одноступенчатых ракет с ЖРД и РДТТ,
т. е. для определения относительного веса полезной нагрузки
по известным величинам цк.Семейство прямых на Номограмме I рассчитано по весо¬
вому уравнению (3.21), приведенному к виду^n„ = l-(l + /Of\-Ar (5.45)— т пнгде т„н = — относительный вес полезной нагрузки.Введем обозначение= + (5.46)тогдаmm = m'aH — N. (5.47)Семейство прямых на Номограмме II рассчитано по ве¬
совому уравнению/йш, == 1 — (1 + яДв) |хк (5.48)С помощью правых квадрантов Номограмм I и И
можно решать аналогичные задачи и для многоступенчатых
ракет.При этом вместо массы полезной нагрузки /пШ! следует
употреблять величину moi+l (начальный вес последующей
субракеты). Таким образом, для многоступенчатой ракеты:^ = 1 - (1 + Kt) ы - ; (5.49)1—(1 + AT;) (5.50)При определении относительного веса полезной нагрузки
субракет вначале по рпр устанавливают коэффициенты на¬
полнения их топливом, используя для этой цели шкалы в
правой части Номограмм I и II; зачтем для и соответст¬
вующих им Ki или идв,находят m*It и mnn t-Дальнейшие расчеты параметров одноступенчатых и мно¬
гоступенчатых ракет как с ЖРД, так и с РДТТ ведут с по¬
мощью одних и тех же графиков 1, 2, 3 и 4, приведенных в Но¬
мограмме III.На графике 1 представлено семейство прямых для уста¬
новления стартовой массы одноступенчатой или начальной
массы субракеты многоступенчатой ракеты в соответствии
с зависимостью■т01 = т01+1>тПЯш1. (5.51)218(
График 2 отражает зависимость диаметра миделя субра¬
кеты dMi от начальной массы субракеты т0* и коэффициен¬
та Сди определяемого по формулесЯ1=т°1^?—■ (5-52)И*На графике 3 изображено семейство прямых, характери¬
зующих связь между относительной длиной ступени /,• и ко¬
эффициентом Cqi. Прямые построены по зависимости= (5.53)Абсолютные длины ступеней ракеты определяются с по¬
мощью графика 4, при построении которого использовано
соотношение= (5-54)Расчет параметров с помощью Номограммы III ведется
для всех типов ракет в одинаковой последовательности:— с помощью графика 1 по тпн., определяют стартовую
массу одноступенчатой ракеты или начальную массу верхней
субракеты многоступенчатой ракеты;— по графику 3 для известных относительных удлинений
одноступенчатой ракеты или ступеней многоступенчатой ра¬
кеты находят величины Сд,-;— используя график 2, по Cqi и (m0i — trtoi+i) устанав¬
ливают диаметр субракеты;— с помощью графика 4 определяют длину одноступен¬
чатой или ступеней многоступенчатой ракет. ,Пример 1. Найти параметры одноступенчатой ракеты с ЖРД при
следующих исходных данных: L=4 000 км, тпн= 1,5 т, Рул.о=260 сек,
Хо=0,6, /(=0,04, W=0,03, 1=9.Решение. 1. По графику 1 Номограммы I найдем требуемое зна¬
чение коэффициента наполнения ракеты топливом(ак - 0,895.2. По графику 2 определим относительную полезную нагрузку"»™ = °>07.тогда«пн = — N = 0,07 — 0,03 = 0,04.3. Определим стартовую массу ракеты. По графику 1 Номограммы IIIша — 37,5 г.4. Найдем Сч. Для этого при /= 9 по графику 3 получимСц = 6,5 г/л*.
5. Определим диаметр ракеты. Масса ракеты без боевой части равнат0 = Wq —— — 37,5 — 1,5 —- 36 г»По т'0 и С, из графика 2 получимd„ = 1,8 м.6. Найдем длину ракеты без боевой части. По графику 4 получаем
/р = 16 м.Пример 2. Найти параметры двухступенчатой ракеты с ЖРД при
следующих исходных данных:L = 11 ООО км, тт = 1,5 г, Руж. 0) = 271 сек, Рул. п1 = 307 сек,Руд п2 = 315 сек, А01 = 0,55, Хп2 = 0,7, /(, = 0,037, К? = 0,047,Ni = 0,031, Л/2 = 0,048, 7, = 8,5, /2 = 3, Рср = 800 кг/м3, lgi = 0,55,
lg, = 0,40, /пр = 0,5.Решение. 1. Определим удельную тягу приведенной ракетыппр_ 1 / РУД 01 + ЯУД- "I , г»У* 2 \ 2 ‘•'уд- пг^ —1 /271 + 307 , „,Л опо л— 2 I g ~f- 315 ) ^ 302 сек,2. По графику 1 Номограммы I при Xnp=*oi найдем в первом при¬
ближении (1Пр=0,91.3. Вычислим коэффициент тяговооруженности приведенной ракетыI — V 1 — (J.np ^ л
^лр = ~ (^о^уд. ojgi + ^пг^уд. nilgi) =•PjJfinpAip= 1 302^0,9Ь0^~ (0’55'271 ■<*» + 0,7-315.0,40) = 0,85.4. Найдем требуемые значения коэффициентов наполнения субракет
топливом. По графику 1 Номограммы 1 определим цПр=0,940.Из графика 2 для |лПр=0,940 получим ц„1=0,69 и ^«2=0,82.5. Определим относительную полезную нагрузку ступеней. По гра¬
фику 2 при заданных К\ и Кг j = 0,29 и тт 2 = 0,14.Вычитая величины Nu получим:тпн. i = я»*н , — А/, = 0,29 — 0,031 = 0,26;тпи. г = тпн. 1 — ^2 = 0,14 — 0,048 = 0,09.6. Определим массы субракет и ступеней. По графику 1 Номограм¬
мы III при тпн._2 =1,5 т и/ипн, 2=0,09 найдем т02=16,8 т. При «пн. i=
=>т02=16,8 т и тлпн., =0,26 определим стартовую массу ракеты: /Яо1=в5 т.
Массы ступеней равны:= т02 — тпн = 16,8 — 1,5 = 15,3 т;/По; = «01 — «ог = 65 — 16,8 = 48,2 т.7. Вычислим Cqi ступеней, для чего при /|=8,5, /2=4,2 и рср—
«800 кг/м3 по графику 3 найдем:4 Cqi = 6 т/мг И Cqi = з т/м*.
8. Определим диаметры ступеней. Из графика 2 при т’02 =15,3 г,
С9а = 3 т/м3 получим d„2 = 1,8 м, а при rnQl = 48,2 т, С?1 = 6 т/м3
найдем dMj = 2,15 м.9. Определим длины ступеней. По графику 4 при dai«=2,15 м и
Л -=8,5 получим длину первой ступени /j = 18,5 м, а для dw2= 1,8 м иС,2 = 3 т/м3 установим, что длина второй ступени равна 1г=7,5 ж.10. Определим длину ракеты (без боевой части)/р = 1\ 4- /2 = 7,5 4- 18,о = 26 и/.Пример 3. Определить параметры трехступенчатой ракеты с РДТТ
|фн следующих исходных данных:I. = 10 ООО км, шпн = 620 кг, Руд. 0i = 227 сек, Руд, m = 266 сек,п2 = 273 сек, Руд. п3 = 276 сек, А01 = 0,42, Хп2 = 0,23, Хп3 = 0,18,/, = 4, Т2 = 2, Г, = 1,75, адв., = 0,083, адв, 2 = 0,090, ядв, 3 = 0,127,1 — 0,55, /g") = 0,40, Ig3 = 0,40, /пр = 0,о.Решение. 1. Определим удельную тягу приведенной ракетыPJP _ ('"у.. - + Рп м + Рп J == -i- (-—'2 — + 273 + 276) = 2652. Установим цПр- По графику 1 Номограммы II при Xnp“Xoi, нахо¬
дим [1Пр = 0,94.3. Определим коэффициент тяговооруженности приведенной односту¬
пенчатой ракетыз1 Г 1 (ЛпрАПр = — (XoiPуд. oJgl + ^П2^уд. П2^2 ~Ь ^-ПЗ^УД. пз/^з) =^уд ^Пр^Пр3 = 1 ~ (0,42-227-0,55 + 0,23-273-0,4 + 0,18-276-0,4) = 0,48.^!OD*vJj*? »*U)04. Найдем требуемые значения коэффициентов наполнения субракет
топливом. По графику 1 Номограммы II определим Цпр=0,945. Из гра¬
фика 2 для |лпр=0,945 установим i=|Лк2=|^кз=0,622.5. Определим относительную полезную нагрузку ступеней. По гра¬
фику 2 Номограммы II при заданных адв-,, адв адв- 3 получим:mnH. 1 = 0,33, тпа, 2 ~ 0,32, тпн. з = 0,30.6. Определим веса субракет и ступеней, для чего воспользуемся Но¬
мограммой III. По графику 1 для jnnH=620 кг и т пн з—0»3 найдем
/Ни-2,1 Т. При отпн. 2 = /Яоз = 2,1 т, 7й11Н. 2 = 0,32 получим т02 = 6,5 г
п наконец для отпн 3 =/я02 - 6,5 г, отпн., = 0,33 установим стартовую
массу ракеты /я01 = 20 т.Миссы ступеней равны:гп03 ■= т0з — «пн = 2,1 — 0,62 = 1,48 г;
т*02 = Щг — даоз = 6,5 — 2,1 = 4,4 г;
т0j = Wei — тог = 20 — 6,5 = 13,5 г.221
7. Определим C4i ступеней, для чего при /( =4, /2 = 2, /8 = 1,75
по графику 3 найдем Cqi = 3,6 т/м3, Cqi — 2,0 т/м3 и Cq3 = 1,5 т/м3.8. Определим диаметры 'ступеней. Из графика 2 при mm = 1,48 т иСдз = 1,5 г/ж3 получим rfM3 = 0,8 ж, для mj,2 = 4,4 г и С?2 = 2,0 г/ж3
найдем а?м2 = 1,3 ж, а в случае т01 = 13,5 г и C?1 = 3,6 г/ж3 найдем
dMl = 1,5 ж.9. Установим длину ступеней. По графику 4 получим (i=6 м, /2=
= 2,6 м и 4 = 2,3 ж.10. Найдем длину ракеты (без боевой части)= h + h + h — 6 + 2,6 + 2,3 = 10,9 ж.§ 5.6. ПОНЯТИЕ О МЕТОДАХ БАЛЛИСТИЧЕСКОГО
ПРОЕКТИРОВАНИЯ РАКЕТ С ПРИМЕНЕНИЕМ ЭВМНапомним постановку задачи баллистического проектиро¬
вания ракеты, которая была приведена в § 1.2. Требуется
определить параметры ракеты, обеспечивающие минималь¬
ные затраты средств на проведение боевой операции (пора¬
жение группы целей) при заданной дальности полета и изве¬
стной массе полезной нагрузки. Возможна и' более общая
постановка задачи, когда масса полезной нагрузки заранее
не известна, а выбирается в ходе решения задачи из условия
минимума стоимости ракетного комплекса. В этом случае
баллистическое проектирование ракеты производится одно¬
временно с оптимизацией параметров боевой части. Решение
последней задачи приводится в § 10.2.Таким образом, стоимость выполнения боевой задачи
может рассматриваться как функция проектных параметров
ракеты и основных параметров ракетного комплекса:Cj = F(/,, п, ХП(-, рК[, pai, Т„ <J, ®п, Рт, Pp,...\i= 1, 2п. (5.55)*Это же выражение можно записать так:Cs = F (л^, дг3,..., Xj,..., xm), (5.56)где Xj — параметры, от которых зависит стоимость выполне¬
ния боевой задачи.Отыскание условий минимума величины Cs представляет
экстремальную многопараметрическую задачу. Решение по¬
добных задач с помощью ЭВМ может производиться мето¬
дами слепого поиска, последовательных приближений (ите¬
раций) или случайного поиска. Кратко остановимся на сущ¬
ности этих методов.Метод слепого поиска заключается в том, что для каждо¬
го параметра Xj определяется область его возможных значе¬
ний, в которой последовательно с определенным шагом вы¬
бираются дискретные значения этого параметра. Для каждой222
комбинации параметров хи ... , хт вычисляется величина Сг
и путем сравнения результатов расчета отыскивается такое
сочетание параметров, при котором С£ достигает минимума.
Преимущество этого метода состоит в том, что он не связан
с какими-либо ограничениями, налагаемыми на вид функции
f'(Xj). Не требуется, например, чтобы эта функция была ана¬
литической, дифференцируемой и т. п. Недостатком метода
является длительность поиска решения (даже при использо¬
вании ЭВМ).Метод градиента представляет вариант метода последова¬
тельных приближений, который обычно предполагает такую
последовательность действий. Вначале задается произволь¬
ная начальная комбинация параметров Хю, ... , хт0 и вычис¬
ляется значение функцииCj.q = F (-^loi • ■ •, A-mo) •Затем производится обследование малой окрестности точ¬
ки Хю, ... , хт0, которое состоит из серии вычислений величи¬
ны С£ по формуле= F (л10 -)- ..., xmQ -f- &xm)при фиксированных комбинациях 8хь ... , Ъхт. Далее анали¬
зируются результаты обследования и вычисляются координа¬
ты лгю + Ляь ... , *mo + Axm новой точки, в которой величина
t’j. должна быть меньше, чем С1ТРезультатом обследования в методе гра/Гиента являются
величиныДСд.; = F (хю,..., xi0 -f- Sxt,..., хт0) ■
— F {хш..., хт) & , (5.57)а величины рабочих шагов определяются уравнениемАхt = — aACxi ~ — а~ Ьхь (5.58)где а — коэффициент (а>0).Метод градиента имеет пространственную интерпретацию
(рис. 5.20). Если т — 2, то на плоскости аргументов xt и х2
линии равного значения Cs, т. е. F(x\, x2)=const будут пред¬
ставляться замкнутыми, непересекающимися кривыми. При
Су. = С£ mjn линии постоянного уровня стягиваются в точку.
Задача определения точки минимума заключается в том,
чтобы, отправляясь от произвольной точки плоскости (хи
Гм) и не зная предварительно конкретной формы кривых
= const, достичь точки F [х\, x‘) = Cs mjn. Все сказан¬
ное выше можно распространить на случай т>2; при этом223
кривые равного уровня Сг =const становятся гиперповерх¬
ностями в пространстве т измерений. Однако в целях на¬
глядности изложения рассмотрим лишь случай двух аргу¬
ментов.В каждой точке плоскости (хи х2) существует вектор-гра¬
диент, определяемый следующим образом:%тайр = Т>1^ + Т2Ж' (5'59)где и i2 — единичные координатные векторы.Градиент указывает в каждой точке плоскости М0 с коорди¬
натами xlt х2 то направление, на котором функция F изме¬
няется наиболее быстро. На окружности малого радиуса е,
проведенной из точки М0, существуют наибольшее и наимень¬
шее значение F, находящиеся на пересечении направления
градиента и окружности. Градиент направлен в сторону наи¬
большего возрастания функции.Если в точке М0 (рис. 5.20) определить величины част¬
ных производных, то направление наибольшего убывания
функции будет противоположно направлению градиента.
Приращения аргументов, найденные по формуле (5.58), да¬
дут точку Мх с координатами Хю+Лль x2o+A*2, в которой
F(Mi) <Р(М0). В точке Mi нужно вновь определить частные
производные и передвинуть изображающую точку в положе¬
ние М2 и т. д. Наконец, в очередной точке величины истанут равными нулю или пренебрежимо малыми. Это значит,
что достигнута точка минимума.224
Если аналитический вид функции F(xu ... , хт) неизве-
ni'ii, но она может быть вычислена при любом сочетании
иргу ментов, то вычисление частных производных может быть
вменено вычислением малых приращений функции при ма¬
лых конечных приращениях ее аргументов.Поскольку параметры ракеты и ракетного комплекса из¬
меняются в ограниченных диапазонах, то на область измене¬
ния функции F(хь ..., хт) накладываются ограничения
иидаOj {хъ. • •, хт) < 0, (у = 1,..., т). (5.60)Рис. 5.21. Влияние ограничений на поиск С2 min
по методу градиентаНа плоскости (а.'ь х2) можно провести линии G}(xn х2)=0,
которые ограничивают разрешенную для поиска область. На
рис. 5.20 в направлении запрещенной области на линии
(i) = 0 нанесена штриховка.Точка, где величина С2 является наименьшей, может на¬
ходиться либо в допустимой области Gj ^ 0, либо на линии
G)*=0 (рис. 5.21), либо в частном случае — в точке пересече¬
ния нескольких линий С3 = 0. Запрещенная область характе¬
ризуется тем, что в ней Gj>0.Если начальная точка находится в запрещенной области,
то первый шаг делается по направлению (—grad G,), в ре-
|ультате чего изображающая точка перемещается из запре¬
щенной области по нормали к границе разрешенной области
(рис. 5.21). Как только Gj станет равным нулю, вычисляют
составляющие gradF и делают новый рабочий шаг в направ¬й -2582225
лении к абсолютному минимуму Сг. При этом изображаю¬
щая точка снова перехедит границу, но уже в другой точке.
В результате зигзагообразного процесса поиска вдоль гра¬
ницы изображающая точка приходит к такому положению
на границе, в котором векторы grad F и grad G, коллинеар-
ны и направлены навстречу один другому.Метод наискорейшего спуска отличается от метода гра¬
диента тем, что после вычисления частных производных оце¬
ниваются величина и знак приращения функции F(xu ..., хт)
за рабочий шаг:дF = F (л;10 + Д*! хтй -f &хт) — F (*10>.... хт),Рис. 5.22. Поиск CSm|n по методу наикратчай¬
шего спускаа затем либо делается еще один рабочий шаг, т. е. вычис¬
ляется величина ^(лгю-Ь2Д*ь ... , xm0+2Axm), если А/г<0,
либо вновь вычисляются частные производные в последней
точке, если Д/7>0.'Геометрически это означает (рис. 5.22), что из начальной
точки лгю, ... , хт0 делается не один шаг, как при использо¬
вании метода градиента, а несколько шагов подряд по на¬
правлению, обратному grad СЕ9, до тех пор, пока на этом
направлении не будет обнаружен частный минимум. Призна¬
ком для обнаружения этого частного минимума является из¬
менение знака приращения функции AF за очередной шаг.
Новую точку Mi принимают за начальную и процедура по-dFвторяется, пока частные производные не станут доста¬
точно близкими к нулю.Основное преимущество метода наикратчайшего спуска
перед методом градиента состоит в уменьшении времени по¬226
иска. Однако с увеличением числа шагов изображающая
I<)<iкп все сильнее отклоняется от наивыгоднейшего направ-
чгнпя. Поэтому целесообразно сочетать оба метода, исполь-
iyti пдали от точки СХтЫ метод наикратчайшего спуска, а
«близи от нее —метод градиента.Метод случайного поиска заключается в следующем. Для
отыскания минимума функции F(x\, ... , xw) на вычислитель¬
ной машине производят серию случайных испытаний. В каж¬
дом испытании с помощью датчика случайных чисел и на¬
бора масштабных коэффициентов формируют m случайныхРис. 5.23. Характер изменения Cs в зависи¬
мости от номера статистического испытанияшачений параметров хи ... , хт. В простейшем случае дат¬
чик случайных чисел вырабатывает независимые случайные
числа, имеющие равномерное распределение на интервале
(0,1).Для полученной комбинации параметров хи ... , хт вычис¬
ляется величина функции F (хь ... , хт) и сравнивается с наи¬
меньшей величиной этой же функции, найденной при преды¬
дущих испытаниях. Меньшее значение функции F(Xj) сохра¬
няют. Наименьшее значение функции F(x3), полученное в
результате N испытаний,, дает оценку величины Cs ш1п, а со¬
ответствующие значения jcj,х’т служат оценками опти¬
мальных параметров ракеты и ракетного комплекса.Характер изменения величины функции С^ в зависимости
от номера статистического испытания показан на рис. 5.23.
РАЗДЕЛ IIВОЕННО-ТЕХНИЧЕСКОЕ ПРОЕКТИРОВАНИЕ
ЭЛЕМЕНТОВ РАКЕТНЫХ КОМПЛЕКСОВГ л а в а 6МАТЕМАТИЧЕСКИЕ МЕТОДЫ ОПТИМИЗАЦИИ,
ИСПОЛЬЗУЕМЫЕ ПРИ ВОЕННО-ТЕХНИЧЕСКОМ
ПРОЕКТИРОВАНИИ РАКЕТНЫХ КОМПЛЕКСОВ§ 6.1. ОБЩАЯ ХАРАКТЕРИСТИКА МЕТОДОВПри решении главных задач военно-технического проекти¬
рования широко используют методы оптимизации.Поскольку в данном случае оптимизируют параметры
перспективных еще не существующих ракеты и комплекса,
то объектами исследования служат их математические мо¬
дели, причем при расчетах моделируют также и условия раз¬
работки, производства, эксплуатации и боевого приме¬
нения.В данном случае математическая модель представляет
систему математических уравнений, сетей операций, логиче¬
ских правил и ограничений. Пользуясь ими, можно для каж¬
дого объекта вычислять значения критериев, по которым
осуществляется оптимизация.Задачи военно-технического проектирования относятся
к компромиссным, в них оптимальное решение определяется
в функции нескольких показателей (критериев).Ввиду того что оценка по нескольким критериям трудна,
иногда пытаются искусственно объединить главные показа¬
тели в один. Порок таких составных критериев, полученных
сложением или умножением, заключается в том, что они, как
правило, не имеют физического смысла.В некоторых случаях компромиссные задачи удается све¬
сти к задаче с одним критерием, если стремиться обращать
в максимум (минимум) только один главный критерий, а на
остальные накладывать определенные ограничения. Такой228
прием широко используется при решении главных задач во-
гшш-технического проектирования, в которых устанавливают
г чтой целью ограничения по времени, надежности или тру¬
доемкости.11омимо этого, для получения оптимального компромисс¬
ного решения может быть применен метод последовательных
уступок. В данном случае вначале устанавливают значение
параметра (параметров) при экстремуме главного критерия
К|, а затем оценивают отклонение главного показателя в слу¬
чае, если удовлетворяются экстремальные значения осталь¬
ных в порядке убывания их важности. Накладывая ограни¬
чение на отклонение главного критерия, ценой уступки АК\
находят значения оптимизируемого параметра, при котором
решение будет существенно лучшим по второстепенным кри¬
териям.Чтобы определить экстремум критерия в функциях иссле¬
дуемых параметров, используют две группы методов:— методы прямых расчетов, когда находят область су¬
ществования и значения параметров, соответствующих ма¬
ксимуму (минимуму) критерия, путем задания ряда дискрет¬
ных значений параметров и вычисления соответствующих им
иеличин критерия:— аналитические методы оптимизации.Математический аппарат, служащий для описания связеймежду параметрами и критериями, содержит два типа зави¬
симостей:— зависимости, описывающие модель объекта, опреде¬
ляющие связь между его конструктивными, массовыми, энер¬
гетическими, летными, надежностными и экономическими ха¬
рактеристиками;— зависимости, определяющие величину критерия в
функции исследуемых параметров объекта.Первый тип зависимостей устанавливается при решении
каждой конкретной задачи военно-технического проектиро-
иапия. Такие соотношения приведены ниже при решении со-
пгнетствующих задач. Второй тип зависимостей имеет мно¬
го общего с первым, так как при исследовании главных за¬
лам военно-технического проектирования используют ограни¬
ченное число критериев.Таким образом, в случае решения основных задач балли¬
стического проектирования используют в основном массовые
шергетические, надежностные и баллистические соотноше¬
ния. При решении задач оптимизации надежности, интервала
лальности боевого применения ракет, тротилового эквива¬
лента и точности полета используют также игровые методы
установления критериев оптимизации.В случае оптимизации процесса разработки, кроме того,
применяют методы сетевого планирования, а при оценке ра¬229
кетных комплексов в условиях противодействия сторон ши¬
роко распространены метод моделирования боевых действий
на ЭЦВМ и различные аналитические математические мето
ды описания динамики боевых действий.Аналитические методы оптимизации, используемые при
военно-техническом проектировании, так же, как и задачи,
весьма разнообразны.Однако во всех случаях в задачу оптимизации входит
определение минимального (или максимального) значения
оцениваемой величины.Оцениваемая величина может являться функцией одного
f(x) или нескольких аргументов f(xu х2, ... , хп), а также
функционалом Fs[/(x)].Большинство задач по определению экстремума функции
решается методами математического анализа, позволяющими
найти экстремумы непрерывных и дифференцируемых функ¬
ций как при отсутствии ограничений на множество допусти¬
мых значений аргумента, так и при наличии его в форме ра¬
венств.В первом—случае находятся безусловный, а во втором —
условные экстремумы. • Задача на условный экстремум ре¬
шается методом Лагранжа. -Задача оптимизации экстремума функционала заключается
в установлении области существования S функции f(x), при
которой /^[/(я)] имеет максимум (или минимум). Эта задача
решается обычно классическими методами вариационного
исчисления, разработанными Эйлером и Лагранжем.При исследовании параметров комплекса с учетом проти¬
водействия сторон встречаются задачи оптимизации функций
при ограничениях на область ее определения, заданных не¬
равенствами. Такие задачи решаются обычно методами ма¬
тематического программирования.Задача математического программирования в общем слу¬
чае ставится следующим образом: минимизировать функ¬
цию п переменных при наличии т ограничений, причем все
функции предполагаются дифференцируемыми. Решение за¬
дачи, удовлетворяющее ограничениям, называют допустимы¬
ми решениями задачи математического программирования.
Оптимальным считается одно из таких решений, при котором
значение функции больше (или меньше), чем при других до¬
пускаемых решениях.В настоящее время достаточно полно разработаны мето¬
ды решения задач линейного программирования, когда ис¬
следуемая функция линейна, а ограничения имеют вид ли¬
нейных неравенств.В случае определения экстремума функционала при огра¬
ничениях в виде неравенств используют принцип максимума
академика Понтрягингз Л; С- и метод решения неклассиче-
спич вариационных задач — динамическое программирова¬
ние, разработанное Р. Веллманом и его учениками.Метод динамического программирования позволяет опти-
ми шровать не только непрерывные, но и дискретные много-
нлппые процессы.Задача линейного программирования формулируется так:
Максимизировать (минимизировать) линейную функциюОсновную задачу линейного программирования можно ин¬
терпретировать геометрически.Каждое неравенство — anxi — ••• — alnx„ + ОN «-мерном пространстве определяет полупространство, состоя¬
щее из точек x(xi, ..., хп), расположенных по одну сторону
or плоскостиII па самой плоскости.Точки, принадлежащие всем полупространствам, обра-
:iyioi' некоторый выпуклый многогранник Q.Значение функции К(х), проходящей через ближайшую
иг начала координат вершину многогранника, можно рассма-
1ринать как решение, удовлетворяющее условию минимума,
(I через наиболее удаленную — максимума исследуемой вели¬
чины К при заданных ограничениях линейной формы.И настоящее время существует несколько методов реше-
IIII>i задачи линейного программирования, по преимуществу
приспособленных для машинной реализации. Для наиболее
Простых задач используют симплекс-метод и методы, осно-
ииипые на принципе двойственности.Метод динамического программирования позволяет ис-
еледовать как детерминированные, так и стохастические
процессы.Задачей метода является установление оптимума некото¬
рого критерия — функции параметров состояния (или функ¬
ционала).Метод предполагает ряд характерных особенностей ис¬
следуемого процесса:в управляемом процессе предыстория не имеет значе¬
нии при определении последующих действий (марковский
процесс);каждый этап (шаг) процесса характеризуется ограни¬
ченным числом параметров состояния;К = c,xt + ... + спх„При условияху. = —аахх —... — ainxn + bt = 0231
— результатом управляющего воздействия является вы¬
бор на каждом шаге из множества допустимых оптимального
перемещения.При решении задачи динамического программирования
используют принцип оптимальности, который формулируется
следующим образом: оптимальная стратегия имеет то свой¬
ство, что каково бы ни было начальное состояние и принятое
первичное решение, все остальные решения на последующих
этапах должны соответствовать оптимальным стратегиям.Принцип оптимальности
обеспечивает решение зада¬
чи как в случае исследова¬
ния процесса от начального
состояния к конечному, так
и в обратном направлении.
В связи с этим существуют
два основных приема реше¬
ния задач динамического
программирования: метод
«попятного» движения и ме¬
тод итераций.Первый основывается на
отыскании оптимального ре¬
шения последовательно от
последнего этапа (шага)
с возрастанием числа шагов
до включения в многошаго¬
вый поиск первого шага.
Во втором приеме, рас¬
сматривается весь процесс
в целом и методом итерации устанавливается оптимальная
стратегия.В качестве примера использования первого приема опре¬
делим оптимальный путь движения ракеты из точки А в
точку В, при котором пройденное расстояние, обозначенное
на рис. 6.1, минимально.Согласно принципу оптимальности независимо от того,
какой путь прошла до этого ракета, на участке вВ и жВ он
должен быть оптимальным, т. е. в нашем случае более корот¬
ким, следовательно, оптимальным будет и путь вВ. Для при¬
хода в точку в оптимальным по тем же соображениям яв¬
ляется путь бв и так далее. Таким образом, методом «по¬
пятного» движения легко установить оптимальный путь — А,
з, г, д, б, в, В.Заметим, что при решении главных задач военно-техниче¬
ского проектирования оперируют по существу случайными ве¬
личинами, так как объекта исследования на стадии проектиро-2329— —
©р- ■ W7)Э :Is ®Gl<2 ,ЭЭггэ :,,3 ©,К (0э©© (ГL_@.J«-© J? © 1Рис. 6.1. Схема возможных маршру¬
тов ракеты (в кружках расстояние
между точками в километрах, двой¬
ной линией обозначен оптимальный
путь из точки А в точку В)
iMinni еще не существует, а само осуществление проекта яв-
лмпеи случайной реализацией программы.()днако исследование задачи оптимизации параметров
комплекса в стохастической постановке неоправдано слож¬
но Поэтому при решении главных задач военно-технического
проектирования используют расчетные зависимости, основан¬
ные на детерминированном представлении о процессе осуще-
| | мления программы, причем под величинами тех или иных
критериев понимают их математическое ожидание.Чтобы установить доверительный интервал отклонений
критерия используют обычные статистические приемы.§ 6.2. СЕТЕВЫЕ МЕТОДЫВ разработке и создании новой ракетной системы уча-
| гпует большое число научно-исследовательских и проектных
организаций, а также промышленных предприятий. В этих
условиях традиционные методы планирования работ и упра-
иления их осуществлением оказываются недостаточно эффек-
шиными. На смену приходят методы сетевого планирования,
которые дают возможность отобразить с любой степенью де-
тлизации объем всего комплекса работ, выявить важные
операции, определяющие успех реализации проекта в срок,
сосредоточить на них внимание руководства, установить ра¬
циональное распределение ресурсов времени, средств и рабо¬
чей силы.Методы сетевого планирования обеспечивают четкую ко¬
ординацию деятельности организаций-исполнителей. Они поз-
иоляют прогнозировать сроки выполнения заданий, провести
многовариантный анализ плана и выбрать наилучшие пути
по реализации. Перечисленные преимущества свидетельст-
муют о целесообразности широкого применения сетевого пла¬
нирования в ракетостроении в целях оптимальной организа¬
ции научно-исследовательских работ, опытно-конструктор¬
ских разработок, опытного и серийного производства ракет,
п также летно-конструкторских испытаний.Сущность сетевого планирования состоит в следующем.
Илаи реализации проекта строится в виде графика, в кото¬
ром комплекс всех работ расчленяется на определенные
операции. График отображает логическую взаимосвязь и взаи¬
мообусловленность операций. Понятие «операция» исполь-
(уется в широком смысле: как «трудовой процесс» с затрата¬
ми времени и средств, как «ожидание» — операция, не тре¬
бующая затрат труда и средств, но занимающая время, и
кик «фиктивная операция», которая никаких затрат не тре¬
бует, а представляет собой логическую связь, указывающую
н,I то, что одна операция не может начаться до тех пор, пока
не завершится другая. Продолжительность операции, как233
процесса, устанавливается в единицах времени, либо в ка¬
ких-нибудь других показателях (например, стоимости, тру¬
доемкости и т. п.).Исходные состояния и конечные результаты операций, на¬
зываемые событиями, представляют собой одновременно мо¬
менты окончания одних операций и начала других. Если со¬
бытие отображает результат нескольких операций, то оно
не может наступить до тех пор, пока не завершится послед¬
няя из этих операций. Точная формули¬
ровка событий, указывающая на то, в
каком конкретном, виде должны быть за¬
вершены соответствующие операции, осо¬
бенно важна в тех случаях, когда опера¬
ции поручены разным исполнителям или
организациям-смежникам. События обо¬
значают на графике кружками, опера¬
ции— соединяющими их стрелками (фик¬
тивные — пунктиром, остальные — сплош-
Рис. 6.2. Сетевой гра- НЫМИ ЛИНИЯМИ).фик События в сети нумеруются в логи¬ческой последовательности, а каждая
tj-я операция обозначается номерами ее начального (i-ro)
события и конечного (/-го) события. В сети всегда имеются
исходное событие (например, выдача конструкторскому бюрокритичесниапутьместный путьнаибольшейпротяженноститехнического задания на проектирование ракеты) и завер¬
шающее событие (например, представление эскизного проек¬
та ракеты). Последовательность операций, при которой конеч¬
ное событие предыдущей операции является одновременно
начальным событием следующей за ней операции, называют
путем L. Пример сетевого графика приведен на рис. 6.2.При построении сетевых графиков необходимо соблюдать
ряд правил (рис. 6.3):— в сети не должно быть событий (кроме начального),
которым не предшествует ни одна операция (рис. 6.3, а, со-234
Си,мне 4); это означало бы, что исходные условия для соот-
нпттнующей операции (4, 6) никем из исполнителей не под-
I(Ч мвливаются, а следовательно, эта операция и все следую¬
щие за ней не могут быть выполнены;- не допускаются события (кроме завершающего), с ко-
ю|)ых не начинается ни одна операция (рис. 6.3, а, собы-
те 7); такие события означали бы, что получен результат,
который в дальнейшем никому не требуется;— в сети не должно быть замкнутых контуров (рис. 6.3, б),
ибо это противоречит логике;в случае параллельных операций (рис. 6.3, в) или при
необходимости разветвления операции (рис. 6.3, г) вводят до¬
полнительные события;- зависимость одних опера-
пни от других показывают вве¬
дением фиктивных операций
(рис. 6.3,<?).Рассмотрим основные пoлoжei
пня метода сетевого планирова¬
ния на примере. Отдел конструк¬
торского бюро получил задание
н.1 проектирование топливного
шсека ракеты. Группа № 1 от¬
дела проектирует корпус отсека,I руппа № 2 — арматуру, группа № 3 разрабатывает про¬
грамму испытаний, заказывает цеху № 3 испытательное обо¬
рудование, получает через отдел снабжения предприятия не¬
обходимую измерительную аппаратуру и монтирует испыта¬
тельный стенд. Производство корпуса поручено цеху № 1,
производство арматуры — цеху № 2. После сборки опытный
образец предъявляется на испытания. Сетевой график
(рис. 6.4) отображает последовательность и взаимосвязь ра¬
бот отдела и цехов; содержание операций и событий указано
и габл. 6.1 и 6.2.После составления сетевого графика приступают к расче¬
там времени. В целях прогнозирования реальности назначен¬
ных сроков обычно определяют, основываясь на накопленных
н практике данных, три показателя: xmin — минимальную
продолжительность операции при благоприятном стечении об¬
стоятельств (оптимистическая оценка), ттах—максимальную
продолжительность операции при неблагоприятном стечении
обстоятельств (пессимистическая оценка) и тнв— наибо¬
лее вероятную продолжительность операции. По этим
шншым оценивают ожидаемую продолжительность опера¬
ции [33]:^min ^нв -f" Tmax \‘Еож = § ’Рис. 6.4. Пример сетевого
планирования235
Перечень операцийТаблица 6.1SпзCl,ОперацияОценка продолжи¬
тельности опе¬
рацииСроки начала и оконча¬
ния операции<L>С'ОеЁРсаXн*СЧЕиЯоншо.оа.ясОСе1-2Проектирова¬
ние корпуса25303229,5029,5.■029,501,171-3Проектирова¬
ние арматуры20232522,8022,811,734,511,70,831-4Разработкапрограммыиспытаний12151714,9014,935,250,135,20,83ю1соСогласование
документации
групп № 1 и 24565,029,534,529,534,500,332-4Уточнениепрограммыиспытаний57107,229,536,742,950,123,40,832-5Изготовлениекорпуса36404339,829,569,337,477,27,91,17■чг1СОУточнениепрограммыиспытаний6787,034,541,543,150,18,60,333-5Изготовлениеарматуры40434542,734,577,234,577,200,834-6Заказ изме¬
рительной
аппаратуры467.5,841,547,358,764,517,20,504—7Изготовлениеиспытательногооборудования20252824,741,566,250,174,88,61,34СП1ОоСборка от¬
сека710129,877,287,077,287,000,836-7Поставка из¬
мерительной
аппаратуры8101410,347,357,664,574,817,21,007-8Монтажиспытательногостенда10121512,266,278,474,887,08,60,83которую и используют во всех дальнейших расчетах. В на¬
шем примере оценка продолжительности операций (в днях)
указана в табл. 6.1.Наиболее ранний срок /р(/) наступления /-го события
определяют последовательно, от исходного события сети к
завершающему событию по пути Lx max максимальной про¬
должительности, предшествующему данному событию:;p(/> = M0 + -(W)]eW (6-2)236
Перечень событийТаблица 6.2М но
мор.Событиячtп«й1Задание группам № 1, 2 и 3
выдано0002Рабочие чертежи корпуса сданы
в цех № 129,529,503Рабочие чертежи арматуры сданы
в цех № 234,534,504Программа испытаний разрабо¬
тана и согласована41,550,18,65Корпус и арматура сданы в цех
сборки77,277,206Заказ на аппаратуру сдан в отдел
снабжения47,364,517,27Испытательное оборудование и
аппаратура сданы в цех сборки66,274,88,68Испытательный стенд смонтиро¬
ван. Опытный образец отсека со¬
бран и установлен на стенде87,087,00Наиболее поздний допустимый срок tn(i) наступления
i-го события определяют в обратной последовательности, по
пути L2 max максимальной продолжительности, от завершаю¬
щего до i-го события:tn(i)=[tn (/)-*(*, y)]ew (6-3)Символ £ в формулах (6.2) и (6.3) означает принадлеж¬
ность рассматриваемых событий соответствующему пути. Для
нашего примера величины tp и tn, выраженные в днях, указа¬
ны в табл. 6.2. Например, для того, чтобы наступило собы¬
тие 3, необходимо выполнить операцию (1—3) продолжитель¬
ностью 22,8 дня, а также операции (1—2) и (2—3) общей
продолжительностью 34,5 дня. Следовательно, событие 3 мо¬
жет наступить не ранее, чем через 34,5 дня от момента вы¬
дачи заданий. Событие 4 связано с событием 7 операцией
(4—7), занимающей 24,7 дня, а также операциями (4—6) и
(6—7), на которые должно быть затрачено в сумме 16,1 дня.
Событие 7 должно наступить не позднее, чем за 12,2 дня до
окончания работ. Двигаясь по пути 8—7—4 наибольшей про¬
должительности, устанавливаем, что событие 4 должно со-
норшиться не позднее, чем за 36,9 дня до события 8. Иначе
говоря, ^(4) =50,1 дня.Зная tp и tn событий, нетрудно определить для любой опе¬
рации (/, /) самый ранний из возможных сроков ее начала
^p,i(^> /) или окончания tpo(i, /), а также самый поздний из237
допустимых сроков ее начала tmi(i, у) или окончания tn0(i,j)
по формулам:*рв (*> У) = tp (‘У’ '», (i, У) — 4 (У) — * (г, У);^ро (г, У) = tp (i) + -t (*, у); *„o (А У) = (У).Для нашего примера эти сроки указаны в табл. 6.1 в днях,
считая от начала работ. В реальных расчетах удобнее пере¬
водить их в календарные даты. Сравнивая величины и tn
в табл. 6.2, замечаем, что события 4, 6 и 7 имеют резерв
времениR(i) = ta(i)-tf(i). (6.5)Остальные события лежат на пути Z,KP, имеющем наи¬
большую продолжительность ткр (на критическом пути), и
резерва времени не имеют. Поскольку т,ф определяет срок
выполнения всего комплекса работ в целом, то для сокраще¬
ния этого срока необходимо прежде всего уменьшить про¬
должительность операций, лежащих на критическом пути.
При этом может выявиться в результате перераспределения
времени другой критический путь. Если в нашем примере
уменьшить продолжительность работ в цехах № 1 и 2 на
20 дней, то вместо критического пути 1—2—3—5—8, опреде¬
ляемого сроками проектирования корпуса, производства ар¬
матуры и сборки отсека, появится критический путь 1—2—3—
4—7—8, определяемый временем изготовления и монтажа ис¬
пытательного оборудования, а общая продолжительность ра¬
бот ткр уменьшится до 78,4 дня.Операции, лежащие на критическом пути, должны быть
в центре внимания руководителей, поскольку задержка в этих
операциях ставит под угрозу невыполнения в срок весь ком¬
плекс работ.Операции, не лежащие на критическом пути, имеют ре¬
зерв времениR (t, У) = К (У) — /р (г) — т (г, /). (6.6)Например, корпус отсека можно изготавливать не
39,8 дня, а 47,7 (операция 2—5), так как имеется резерв
7,9 дня. Чем менее длителен в целом некоторый путь L в
сравнении с критическим, тем больше соответствующий ему
резерв времениR(L) = tKp — x(Z.),который показывает, на сколько в сумме можно увеличить
продолжительность всех операций рассматриваемого пути, не
влияя на срок выполнения задания. Такой резерв называют
полным. Если операция входит в состав нескольких путей и
обладает соответственно различными резервами, то полным238
ннлнстся наименьший из них (т. е. соответствующий макси¬
мальному из путей).В тех случаях, когда продолжительность операции мень¬
ше разности между наиболее ранним из возможных сроков
it конечного события и наиболее поздним из допустимых
сроков ее начального события, появляется так называемый
свободный или независимый резерв_Ясв = М/>-М0-^,/>- (6.7)Например, независимый резерв операции (2—4) составляет
•1,8 дня.Использование независимого резерва не влияет на сроки
начального и конечного событий и резервы других операций.Резервами можно маневрировать, перемещая часть сил и
средств в операции, лежащие на критическом пути.В начале расчетов ожидаемая продолжительность опера¬
ции была определена ориентировочно. Неопределенность су¬
ждения об истинной продолжительности операции можно ха¬
рактеризовать величиной дисперсии о2, определяя ее по фор¬
мулеа2 = ( ^шах-^шш J' (6 8)1:сли /д(0—-директивный срок окончания работ или наступ¬
ления t-го события, то вероятность Р{ того, что рассматри¬
ваемое событие наступит в запланированный срок, можно
определить, пользуясь таблицами нормальной функции рас¬
пределения [10]:Pi = **(*,),аргумент которой Xi вычисляется по формуле(0 №l/s«:
* *=1(6.9)В знаменателе выражения (6.9) суммируются дисперсии
продолжительностей всех тех операций, которые использо¬
вались при вычислении наиболее раннего срока tv(i). Расчет
вероятности выполнения задания в указанный срок следует
проводить по критическому пути.В табл. 6.1 приведены значения дисперсий продолжи¬
тельности операций для рассматриваемого примера. Пусть
мадан директивный срок предъявления опытного образца для
испытаний ^д=90 дней. Используя выражение (6.9), на¬
ходим, что вероятность выполнения задания в срок равна0,962,
Аналогично расчетам времени по сетевому графику могут
быть произведены расчеты других показателей (стоимости,
трудоемкости, затрат средств и др.).При рассмотрении сетевого графика мы полагали, что от¬
дельные операции и весь комплекс работ определены един¬
ственным образом. На практике же стремятся отыскать наи¬
выгоднейшие пути для их осуществления. Оптимальный ва¬
риант можно установить прямыми расчетами большого числа
вариантов либо аналитическими методами. Поскольку рас¬
сматриваемые процессы носят явно выраженный дискретный
характер и поддаются расчленению на ряд этапов, то из чис¬
ла аналитических методов оптимизации наибольшего внима¬
ния заслуживает метод динамического программирования.Следует помнить, что сетевое планирование не подменяет
функций руководства, а лишь помогает принять правильное,
обоснованное решение. Это обстоятельство особенно сказы¬
вается в задачах проектирования ракет, когда возможны
компромиссы между затратами времени, затратами ресурсов
и качественными показателями.§ 6.3. МЕТОДЫ ТЕОРИИ ИГРОдной'из задач проектирования ракетного комплекса яв¬
ляется исследование его боевых возможностей в условиях
противодействия сил и средств сторон. Оценивая надежность
выполнения боевой задачи ракетным комплексом, следует
рассчитывать на то, что противник будет действовать наилуч¬
шим для себя образом, стремясь' свести к минимуму эффек-
тивнцсть наших средств поражения.Обычно рассматривают два вида противодействия: огне¬
вое, имеющее целью нанести противнику невосстановимый
ущерб (вывести из строя ракету или стартовое сооружение,
уничтожить боевую часть); радиопротиводействие, вызываю¬
щее, как правило, временное снижение эффективности путем
создания активных и пассивных помех,Целесообразно несколько расширить понятие противодей¬
ствия, относя к нему и степень защищенности цели (инже¬
нерные сооружения, маскировку, возможности маневра),
поскольку этот фактор, наряду с воздействием ПРО, непосред¬
ственно препятствует выполнению боевой задачи, и, следова¬
тельно, должен быть учтен при сравнении эффективности
перспективных ракет.В простейшем случае применительно к одной ракете для
учета противодействия противника достаточно умножить по¬
казатель эффективности на вероятность того, что противодей¬
ствие окажется безуспешным. Так, в зависимость для оцен¬
ки надежности выполнения боевой задачи входят множите¬
лями вероятности неуничтожения ракеты на старте и успеш-240
пого пролета боевой части через систему ПРО противника.
Предполагается, что эти вероятности заданы, или по крайней
мере имеется возможность их приближенно оценить.В реальной боевой ситуации намерения противника обыч¬
но неизвестны. Более того, в зависимости от нашего решения
он может предпринять те или иные контрмеры. В этих усло¬
виях единственная возможность прогнозировать ход событии
основывается на предположении, что противник будет дейст¬
вовать наивыгоднейшим для себя и наихудшим для нас об¬
разом. Мы же должны выбрать из всех возможных наи¬
лучший способ действий (стратегию) в расчете на разумного
противника.Подобные задачи с конфликтными ситуациями, в которых
сталкиваются интересы сторон, решаются методами теории
игр.Пусть требуется, например, выбрать наилучший из т ва¬
риантов ракетного комплекса (т стратегий стороны А) при
условии, что возможны п
вариантов действий против¬
ника (п стратегий стороны
В). Предположим, что для
каждой комбинации страте¬
гий А{ и Bj ущерб, нано¬
симый нашим комплексом
противнику, оценивается оп¬
ределенным показателем эф¬
фективности Wn. Каждое
значение называемоеплатежом, можно рассма¬
тривать как некоторый
выигрыш для стороны А и
проигрыш для стороны В.Габл. 6.3 значений назы¬
вается платежной матрицей
игры.Решение игры сводится к отысканию оптимальных стра¬
тегий сторон и определению соответствующей им цены
игры v — ожидаемого выигрыша стороны А и проигрыша сто¬
роны В, т. е. в нашем примере ущерба, который нанесет про-
пшпику оптимальный ракетный комплекс при наиболее эф¬
фективном противодействии.Основной принцип теории игр —выбор стратегии в рас¬
чете на наихудший для нас образ действий противника, поз¬
воляет установить разумные пределы, в которых заключена
иона игры.Противник заинтересован в наименьшем проигрыше. По¬
этому, оценивая каждую из своих стратегий, мы можем на¬
деяться только на минимальный из соответствующих ей вы¬Таблица 6.3Матрица игры „ту.пив.ваBnAtWnWln^2WtlWtnАтwmlW^2Wmn241
игрышей. Но в выборе стратегий мы свободны и, естествен¬
но, отдадим предпочтение той из стратегий Л,-, которой соот¬
ветствует максимальный из этих минимальных выигрышей.
Таким образом, нижняя цена игры или «максимин»а = тпах; min • Wi} (6.10)означает наш максимальный, гарантированный при всех об¬
стоятельствах выигрыш.Рассуждая аналогичным образом за противника, который
добивается минимального проигрыша, но вынужден считать¬
ся с нашим стремлением к максимальному выигрышу, можно
определить верхнюю цену игры или «минимакс»р = miny max,- U^. (6.11)Истинная цена игры v лежит в пределаха < v < р.Рассмотрим некоторые практические приемы решения игр
на примере матрицы игры «4X5» (табл. 6.4). Перед тем какприступить к решению, сле-Та б л и ц а 6.4
Матрица игры „4X5“дует проанализировать ма¬
трицу, чтобы исключить дуб¬
лирующие и заведомо невы¬
годные (доминирующие)
стратегии. В нашем приме¬
ре все элементы столбца В5
идентичны элементам столб¬
ца В\. Поэтому одну из
этих стратегий (В5 или Вi)
можно исключить. Сравни¬
вая по элементам строки
А2 и А4, видим, что для сто¬
роны А стратегия Л4 заве¬
домо невыгодна, поскольку
в любом случае она обес¬
печивает выигрыш меньший,
чем стратегия Л2. Исклю¬
чим стратегию Л4. Сравнивая столбцы В{ и В4, убеждаемся,
что для стороны В стратегия В4 является доминирующей, по¬
скольку проигрыш при ее применении в любом случае не
меньше, чем при применении стратегии Вх. Исключим страте¬
гию В4. Таким образом, исходная матрица игры «4X5» све¬
дена к матрице игры «3X3» (табл. 6.5). Добавим столбец
минимумов выигрышей по строкам и строку максимумов вы¬
игрышей по столбцам. Отметив звездочками значения верх¬
ней и нижмей цены игры, замечаем, что а = [3^=5. Элемент ма¬
трицы, являющийся в этом случае одновременно минималь¬
ным в своей строке и максимальным в своем столбце (в нашем/VВ,Взв4В,А48254Л256765А43У44А35643242
Т а б л п ц а 6.5Матрица игры „3X3“ с седловой
точкойВ,в2В3rainстроки4822а25675*А,4393maxстолбца5*89случае №21 = 5), называют
гсд’юиой точкой. Соответ¬
ствующие ему стратегии (А2
и ВО являются оптималь-
иыми. Найденное решение
игры устойчиво в том смыс¬
ле, что для каждой из сто¬
рон отступление от седло-
поII точки (от оптимальной
стратегии) невыгодно.В отличие от игр с сед-
лоиой точкой при а =^Р ре¬
шение неустойчиво. Это мож¬
но показать на следую¬
щем примере. Анализируя
кшл. 6.6, мы должны вы¬
брать стратегию А2, и рассчи¬
тывать при этом на выигрыш,равный 5. Но если противник узнает о нашем выборе, он
заменит стратегию В2 на В3, и наш выигрыш уменьшится
до 3. Поэтому в играх с а=^=Р применяют смешанные стратегии,представляющие собой ком-
Таблица 6.6 бинации нескольких «чи¬
стых» (активных) стратегий,
чередуемых случайным об¬
разом с определенными ча¬
стотами.Решение игры в смешан¬
ных стратегиях сводится в
основном к определению
частот, с которыми необхо¬
димо чередовать активные
стратегии, чтобы обеспечить
максимальный выигрыш
или минимальный проигрыш.
При этом используется сле¬
дующее важное свойство
игры: если одна сторона
применяет оптимальную
смешанную стратегию, то ее
выигрыш остается неизмен¬
ным и равным цене игры независимо от того, как поступает
другая сторона в пределах ее активных стратегий.В простейшем случае игры «2X2» легко найти решение
аналитически. Пусть сторона А имеет ракеты двух типов
(стратегии А\ и А2), а сторона В может противопоставить
два типа противоракет (стратегии В{ и В2). Какое количе¬
ство ракет того и иного типа следует иметь стороне Л? ИначеМатрица игры „3X3“ без седловой
точкиВ\в2в3minстрокиА,1481А 26533*А32472шахстолбца65*8243
говоря, с какими частотами р\ и р2 следует чередовать стра¬
тегии Л] и Л2 в оптимальной смешанной стратегии?Мы не знаем, выберет ли сторона В стратегию Bi или
стратегию В2. Составим в том и другом случае выражения
среднего значения (математического ожидания) выигрыша,
Приравнивая его цене игры v согласно сформулированному
выше овойству, получим систему уравнений:Wapi+Wnps = 4.i ^Добавим очевидное равенствоА+/>2=1.Рис. 6.5. Графическое
определение оптимальной
стратегии стороны А в
игре «2x2»Рис. 6.6. Графическое
определение оптимальной
стратегии стороны В в
игре «2X2»Разрешив полученную систему, находим оптимальные ча¬
стоты:п __ ^22 4^21 .Pl ~ Wn + W22 - Wt2 — ’р2= 1 —Pl.После подстановки pi и р2 в любое из уравнений (6.12)
определяем цену игры v. Аналогично можно было бы опреде¬
лить соотношение количества противоракет первого и вто¬
рого типов (частоты qx и q2, с которыми следует чередовать
стратегии fij и В2 в оптимальной смешанной стратегии сто¬
роны В).Другим примером применения игры «2X2» может быть
сравнительный анализ эффективности двух вариантов боевой
части ракеты при стрельбе по малым и крупным целям.Игра «2X2» решается просто не только аналитически, но
и графически. На рис. 6.5 по оси ординат аа отложены зна¬
чения выигрыша стороны А при ее стратегии Льанаосий& —
при стратегии Л2. Отрезок оси абсцисс ab принят равным
единице. Уравнения (6.12), соответствующие стратегиям В{244
п В2, представляются двумя прямыми, точка пересечения ко¬
торых (точка М) есть решение системы. Ордината этой точ¬
ки равна цене игры v, а абсцисса определяет оптимальное
соотношение частот р\ и р2. Аналогично находится оптималь¬
ная смешанная стратегия стороны В (рис. 6.6).Заметим, что, рассуждая за сторону А, мы ищем макси¬
мум минимального выигрыша, т. е. наибольшую ординату
нижней границы выигрыша (утолщенной ломаной на рис. 6.5).
Для стороны В определяется минимум максимального вы¬
игрыша, т. е. наименьшая ордината верхней границы вы¬
игрыша. Графический способ решения распространяется наигры «2Хп» или «тх2». В игре «2Х«», построив нижнюю
границу выигрыша и найдя ее наибольшую ординату, вы¬
являем две активные стратегии стороны В (стратегии В2 и Въ
на рис. 6.7) и тем самым сводим игру «2Хп» к игре «2X2».
Аналогично сводится к игре «2X2» игра «шХ2» с тем лишь
различием, что нужно строить верхнюю границу выигрыша
(рис. 6.8) и находить наименьшую ординату ее.Решение игры «тХп» является весьма трудной задачей,
сложность которой возрастает с увеличением тип. Цена
игры и частоты, с которыми следует чередовать активные
стратегии для получения оптимальной смешанной стратегии,
определяются, как правило, приближенно, итерационными
методами.Наиболее трудным моментом является установление ак¬
тивных стратегий сторон. Стратегия, невыгодная по сравне¬
нию с линейной комбинацией нескольких или всех остальных
стратегий данной стороны, не может быть взята в качестве
активной в составе смешанной стратегии. Иначе говоря, она
входит в смешанную стратегию формально, с частотой, рав¬
ной нулю.Игровые задачи решают в следующем порядке:— составляют платежную матрицу и выясняют возмож¬Ь Ягр, PiРис. 6.7. Графическое
определение оптимальной
смешанной стратегии в
игре «2Хп»Рис. 6.8. Графическое
определение оптимальной
смешанной стратегии вигре «их2»245
ность понизить порядок ипры исключением дублирующих и
доминирующих стратегий;— определяют верхнюю и нижнюю цену игры;— проверяют наличие седловой точки; если седловая точ¬
ка имеется, то соответствующие ей стратегии являются опти¬
мальными, и решение игры найдено;— при отсутствии седловой точки составляют смешанные
стратегии сторон, комбинируя активные стратегии, взятые с
неизвестными пока частотами (Ль А2, ... Ат — с частота¬
ми ри р2, ... рт соответственно; fib В2, ... Вп— с частота¬
ми qu q2, ... qn).Вначале все чистые стратегии считаются активными.
Справедливость этого предположения выясняется лишь после
нахождения соответствующих частот.Согласно сформулированному выше свойству игр при
искомой оптимальной смешанной стратегии стороны А и лю¬
бой чистой (активной) стратегии Bj стороны В проигрыш по¬
следней составит по крайней мере не меньше цены игры v.
Исходя из этого и составляя выражение проигрыша для каж¬
дой стратегии Bj в виде линейной комбинации элементов со¬
ответствующего /-го столбца матрицы, взятых с частотами р(,
получаем систему неравенств:Выигрыш стороны А при любой ее стратегии Л* и иско¬
мой оптимальной смешанной стратегии стороны В не превы¬
шает цену игры. Это выражается следующей системой нера¬
венств:Универсальным методом решения игры «тХп» является
линейное программирование. Чтобы свести рассматриваемую
игровую задачу к задаче линейного программирования, раз¬
делим частоты pi на величину цены игры v>0 в неравенствах
(6.13) и очевидном равенствеWnPl+ Wnpl-Sr Wmlpm^v;
W12 Pi + ^22р2 + • • • + WmiPm'^'*')(6.13)Wnq1 + W12q2 + • • • + W’lпЯп <1 v;Wnqv -f W2./j2 + ... + W2nqn v;(6.14)WmXqi + Wm2q2 + ... + Wmnq„ v.Pi + Pi + • • • + Pm — 1-ОбозначаяУ246
получимZ. = Xi -(- x2 “t- ... -f • xm.
и преобразованную систему неравенств:Wnxt + W2Lx2 -f ... + WmXxm ^ 1;
W^ ,Xl -f- W^^X2 -f- ... + Wmixm ^ 1;Wxnxx + W2nx2 -j- ... + Wmnxm ^ 1. .Очевидно, что xx ^ 1, x2 ^ 1,... ,xm 1.В интересах стороны А частоты pi должны быть подобра¬
ны так, чтобы величина v была максимальной. Иными слова¬
ми, требуется найти неотрицательные хи соответствующие
минимуму линейной формы (6.15) при соблюдении ограниче¬
ний (6.16). Нетрудно видеть, что задача нахождения ча¬
стот <7j формулируется аналогично, но находится максимум
линейной формы, поскольку сторона В стремится к мини¬
муму V.Некоторые из найденных частот могут оказаться равными
нулю. Поэтому необходимо проверить решение на актив¬
ность, подставив ри q, и v в неравенства (6.13) и (6.14). Если
эти неравенства не удовлетворяются, то приходится исклю¬
чать последовательно каждую из стратегий и вновь отыски¬
вать решение до тех пор, пока оно не окажется верным.Наряду с линейным программированием для решения
игровых задач иногда применяют итерационный метод, суть
которого состоит в следующем. Проводится фиктивная игра.
Сторона А выбирает для первого хода стратегию, которая
представляется ей наиболее выгодной. Сторона В отвечает
выбором наиболее выгодной для себя стратегии’ с учетом пер¬
вого хода противника. В свою очередь сторона А выбирает
в качестве ответной стратегию, наименее выгодную для сто¬
роны В, учитывая при этом свой первый выбор. Аналогично
поступает сторона В во втором своем ходе и т. д. Предыду¬
щие выборы рассматриваются как некоторая смешанная
стратегия, в которой «удельный вес» чистых стратегий соот¬
ветствует частоте их применения в прошлом. В процессе та¬
кой фиктивной игры происходит -своеобразное «самообуче¬
ние» сторон. С увеличением числа ходов стратегии сторон
приближаются к оптимальным, а средний выигрыш в очеред¬
ном ходе — к цене игры. При высоком порядке платежной
матрицы такой метод более удобен, чем линейное програм¬
мирование, однако он менее точен. Последнее не является
существенным недостатком, так как исходные данные задач
проектирования, как правило, являются ориентировочными,
и расчеты носят приближенный характер.(6.15)(6.16)
Глава 7СТОИМОСТЬ И НАДЕЖНОСТЬ РАКЕТНЫХ
КОМПЛЕКСОВ§ 7.1. ОБЩИЕ ПРИНЦИПЫ ЭКОНОМИЧЕСКИХ РАСЧЕТОВПовышение надежности ракетных комплексов связано с
проведением определенных дополнительных мероприятий, а
следовательно, с увеличением стоимости. В данной главе рас¬
сматриваются вопросы стоимости и надежности.Вопросы экономической оценки вооружения в разных
аспектах рассматривались в работах отечественных [1], [14],
[29], [31] и др. и зарубежных ученых [26], [14], [61], [66] и др.
Ниже излагаются аналогичные приемы экономических иссле¬
дований только для перспективных ракетных систем.При экономическом анализе расходы на вооружение раз¬
бивают на четыре группы статей:— разработка (проектирование и опытная отработка);— производство ракет и технологического оборудования;— строительство сооружений;— эксплуатация.Расходы подразделяются также на капитальные и экс¬
плуатационные. Самостоятельной категорией является «лик¬
видный капитал», учитывающий средства от реализации обо¬
рудования и сооружений, входящих в снимаемую с вооруже¬
ния систему. Расчет стоимости ведется, руководствуясь
указанным составом статей, причем сначала определяются
расходы на агрегаты и элементы комплекса, а затем на объ¬
екты, не входящие в комплексы. Расходы на разработку оце¬
ниваются по системе в целом.В задачу экономических исследований ракетных комплек¬
сов входит:— установление критериев экономической оценки ком¬
плекса и его элементов, а также процессов проектирования,
опытно-конструкторской отработки и эксплуатации;248
— разработка зависимостей для определения величины
экономических критериев;— установление стоимостных уравнений (функций стои¬
мости), отражающих связь между затратами и варьируемыми
параметрами с целью оптимизации характеристик комплекса.Наиболее дешевой ракете не всегда соответствует самый
■жономичный комплекс. Поэтому следует сравнивать затраты
не на ракеты и другие элементы комплекса, а на комплекс
в целом.Различные комплексы имеют разную боевую эффектив¬
ность. Этим объясняется необходимость использовать в каче¬
стве основных критериев экономичности не стоимость элемен¬
та или комплекса, а затраты на выполнение определенной
боевой задачи.При проведения исследований, в которых варьируемые
параметры влияют лишь на расходы по изучаемому элемен¬
ту, естественно использовать в качестве критерия его стои¬
мость. Нужно учитывать также и то, на каком этапе выпол¬
нения программы вооружения рассматривается стоимость
(опытного, серийного образца и т. д.).В качестве экономических критериев при военно-техниче¬
ском проектировании наиболее часто используются [I], [11],
[14], [29]:— суммарная стоимость программы вооружения с иссле¬
дуемым комплексом Срк;— затраты на выполнение боевой задачи С2;— затраты на поражение типовой цели Сц;— затраты на пуск одной ракеты С’.— годовые эксплуатационные расходы С1э;— стоимость ракеты, агрегата, сооружения и т. д.За начало реализации программы вооружения с новым
комплексам принимают момент утверждения ТТЗ, концом
программы считают решение о снятии системы с вооруже¬
ния. Весь этот период называют сроком реализации про¬
граммы.Сравнение ракетных комплексов следует вести в одина¬
ковых условиях, для чего вводят понятия: нормативный
(установленный заказчиком) срок реализации программы Ти
и нормативный срок эксплуатации Тэ [62]. Например, для
стратегических ракет США Тп составляет 12—15 лет, а Та
принят равным 10 годам.Затраты на программу вооружения с учетом распределе¬
ния капиталовложений по годам определяют по формулетпСрк = 2СД1 + кУп_\ (7.1)i=i249
где С; — капиталовложения по годам;А.',, — нормативный коэффициент, учитывающий ущерб,
наносимый народному хозяйству за счет отвлече¬
ния средств.В связи с тем что на этапе проектирования трудно опре¬
делить капиталовложения по годам, чаще стоимость про¬
граммы находят как сумму затрат;СрК = Срз + Ср + Сто + Ссс + С„ (7.2)где Срэ — расходы на разработку;Ср — расходы на производство ракет;Сто — расходы на производство технологического обо¬
рудования;Ссс — расходы на строительство сооружений;С9 — расходы на эксплуатацию.Расходы на разработку включают средства, отводимые на
руководство созданием системы, научные исследования, опыт¬
но-конструкторскую отработку и подготовку личного состава.
Расходы на производство ракет, а также агрегатов техноло¬
гического оборудования состоят из средств, идущих на ма¬
териалы, комплектующие изделия, заработную плату, на на¬
кладные цеховые и заводские расходы, на освоение нового
производства, на отчисления.Расходы на строительство сооружений включают сред¬
ства, отводимые на сооружение объектов боевых порядков
комплекса, на средства связи и управления, инженерную
сеть (дороги, энергосеть, телефонную сеть, водопровод, кана¬
лизацию), а также на возмещение ущерба, обусловленного
отчуждением участков земли.Эксплуатационные расходы включают затраты на форми¬
рование частей, на материально-техническое обслуживание
вооружения и контрольные пуски, на боевую подготовку и
довольствие личного состава, заработную плату гражданско¬
му персоналу, а также амортизационные расходы и средства,
выделяемые на строительство жилых городков.Годовые расходы на эксплуатацию с учетом отвлечения
средств из народного хозяйства определяют по формулеС“=5 +Д'„СрК, (7.3)где Cl — годовые эксплуатационные расходы;К„Срк — ущерб, наносимый народному хозяйству за
счет отвлечения средств.Величину С° используют для оценки целесообразности
модернизации или замены существующих систем. Для модер¬
низируемой системы величину С° определяют из выраженияС® — С^ К и (СрК + Срк Сл),(7.4)
где Сс —стоимость старой системы;С,—ликвидный капитал.Если затраты по одному из вариантов будут меньшими,
то в случае равной боевой эффективности этот вариант счи¬
тается лучшим.Реализация программы вооружения предполагает, что бу¬
дет создано определенное количество комплексов и изготов¬
лено N5 боевых ракет. Затраты на пуск одной ракеты могут
быть определены так:Стоимость ракеты слагается из затрат на боевую часть
Сбч, корпус Сс, двигатель Сдв, топливо Ст, систему управ¬
ления ССу, а также из расходов на монтаж, сборку и испыта¬
ния Сси*Ср = С6ч + Сс -f Сдв -f Сш + Ссу + Сси. (7.6)Рассмотрим общий характер распределения расходов на
ракету и ее пуск на примере стратегического ракетного во¬
оружения США (табл. 7.1). Заметим, что для ракеты «Ми¬
нитмен» расходы, приходящиеся на пуск, почти в 10 раз
больше стоимости ракеты.Таблица 7.1Стоимость стратегических ракет США [63]№ по
пор.Тип ракетыАтлас FТитан IТитан IIМинитмен1Стоимость ракеты
(млн. долл.)676,51,5-2,22Стоимость ракеты
без боевой части
(млн. долл.)1,91,91,3-1,40,43Расходы на пуск
одной ракеты (млн.
долл.)4252,752,712,2Своеобразно распределяются затраты и на агрегаты ра¬
кет. Для ракет «Атлас F» и «Титан II» расходы делятся сле¬
дующим образом: на боевые части — 42—50%, на носитель
(без боевой части) —50—54% (из них на корпус —28—32%,
па систему управления — 10—11% и на двигатели—11 —
12%). Для ракеты «Минитмен» расходы распределяются так:
на боевые части — 60—70%- на носитель — 30—35% (из них
на систему управления — 18—22% и на двигатели — 12—
18%).
§ 7.2. МЕТОДЫ ОПРЕДЕЛЕНИЯ СТОИМОСТИ РАКЕТЫ
И РАКЕТНОГО КОМПЛЕКСАЧтобы решить задачу перспективного проектирования,не¬
обходимо знать стоимость ракет и ракетных комплексов не
только при каких-либо определенных условиях, но и зави¬
симость стоимости от основных параметров ракеты и ком¬
плекса. Например, необходимо знать, как будут меняться
стоимость ракеты и всего ракетного комплекса при измене¬
нии максимальной дальности полета ракеты, тротилового
эквивалента заряда, точности работы системы управления,
эксплуатационной надежности и боеготовности ракеты.Определение связи между стоимостью объекта С и ис¬
следуемыми его параметрами П* ведется по данным осуще¬
ствленных прототипов.При установлении функций стоимости С(ПЬ ..., П;, ...,
Пп) встречаются значительные трудности, обусловленные ря¬
дом причин: во-первых, нет достаточно полного статистиче¬
ского материала; во-вторых, сведения о стоимости относятся
к разработкам с разными условиями реализации программы.Чтобы в какой-то мере компенсировать недостаточность
информации, статистическую обработку рационально вести
на базе расчлененных затрат, так как среди малых звеньев
легче подобрать такие, которые были бы близки по своим
особенностям к звеньям будущих кфмплексов. Чтобы уточ¬
нить экономические расчеты, следует пр.иводить первичные
статистические данные к единым базисным условиям произ¬
водства.При оценке трудоемкости изготовления, а следовательно,
и стоимости изделий, должны учитываться следующие фак¬
торы, характеризующие условия производства:— масса и габаритные размеры изделия;— степень освоения, характеризуемая порядковым номе¬
ром N;— степень сложности, определяемая числом деталей D;— масштабы производства, оцениваемые числом изделий,
выпускаемых в квартал NKB\— требуемая надежность Р.Масса (вес) однотипных изделий влияет на их стоимость
через объем обработки деталей. Для геометрически подоб¬
ных изделий масса пропорциональна кубу линейного разме¬
ра, а поверхность — квадрату. Следовательно, объем ра¬
бот Wi по обработке детали, пропорциональный ее поверх¬
ности, равенWi = Кт]\ (7.7)где К — коэффициент;
rttj^ — масса детали.252
Степень освоения производства ракеты и агрегатов техно¬
логического оборудования, определяемая их порядковым но¬
мером, очень сильно влияет на стоимость. Обычно первые об¬
разцы стоят в несколько раз дороже, чем последующие.Характер изменения стоимости в функции порядкового
номера приведен на рис. 7.1 [2]. Из рисунка видно, что, на¬
чиная с некоторого номера, стоимость ракет снижается срав¬
нительно мало. Анализ кривых C(N) позволяет дать мате¬
матическое описание этой функциональной связи в видеcn = cxn-*\ (7-8)где CN и Ci — стоимости N-ro и первого изделий;N — порядковый номер изделия;
а2— статистический коэффициент, равный 0,18—0,25 [2].Рис. 7.1. Зависимость стоимости ра¬
кеты от порядкового номера ее изго¬
товленияИз выражения (7.8) следует, что средняя стоимость об¬
разца из партии N изделийNСср = 7Г S C'N~*2 dN = • (7-9)ол стоимость всей партии из N изделийN(7Л°)i=iУчитывая характер зависимостей (7.7) и (7.8), в качестве
функции стоимости для элементов комплекса принимают сле¬
дующее выражение [6]:1=пС = C0m'‘'N-*‘D*’N&P1' П П]1, (7.11)<=1253
где С0 — статистический коэффициент;
т—масса элемента комплекса;D — число деталей, входящих в элемент комплекса;
Nrb—показатель масштаба производства;Р—требуемая надежность элемента;Пг—параметры комплекса;<*„ р, — постоянные коэффициенты (он =2/3, = 0,18 -4- 0,25
и т. д.).Если принять, что при переходе от характеристик прото¬
типа к базисным коэффициенты а; и (3* не изменяются, то
стоимость объекта, приведенного к базисным параметрам,
будет равнаi—nс = Cjn'N-**D%*Nl\PH П Ц1, (7.12)(=iгде Сп —стоимость прототипа;т., N, D, NKa, Р и П; — отношения соответствующих ха¬
рактеристик и параметров прото¬
типа к базисным.При статистической обработке данных вначале устанав¬
ливают он и Pi, а затем параметры прототипа приводят к ба¬
зисным. В качестве базисных характеристик для ракет при¬
нимают: jV = 200, Л/'кв = 10, Р = 0,9.Определение коэффициентов а,- и fa производят в следую¬
щем порядке:— исходя из диапазона возможных значений а* и fa, со¬
ставляют матрицу их ожидаемых значений (через 0,01—0,02);— на ЭВМ решают задачу установления таких значений
коэффициентов формулы (7.11), при которых расчеты по ней
дают результаты, наиболее близкие к данным прототипов во
всей области исследования, для чего решение находят из
условия минимума среднеквадратического отклонения' tonгг=т2(с‘-с*‘)* - (7ЛЗ>
/=1где Ct — действительная стоимость i-го прототипа;СФ1 — стоимость прототипа, найденная по формуле(7.11);т — число известных прототипов.Чтобы получить надежные значения а г и fa, число стати¬
стических данных о прототипах Должно быть существенно
большим числа определяемых величин. Поэтому обработку254
гипнотических данных обычно сводят к установлению более
вростых функций стоимости, в частности функций вида:Чтобы установить стоимость проектируемой ракеты или
другого объекта, используют три метода:— стоимость объекта оценивают в целом с помощью за¬
висимостей вида (7.12);— стоимость объекта находят по стоимостям его агрега¬
тов, используя зависимости вида (7.12);— стоимость объекта находят по стоимостям агрегатов, ис¬
пользуя для отыскания затрат на агрегаты известные методы
укрупненных расчетов по сметной калькуляции или по ба-
мисной статье калькуляции. Сущкость метода сметной каль¬
куляции заключается в том, что для агрегатов ракеты на¬
ходят расходы по статьям: затраты на основные материалы
(f.'„M), затраты на готовые изделия (Сги), заработная плата
(Л’;ш), накладные цеховые и заводские расходы (Снр), потери
si брака (СбР), затраты на освоение нового изделия (Сос);
iis'itm суммирования затрат по статьям и агрегатам находит¬
ся стоимость ракеты:j;п> s — число агрегатов ракеты;Kt — коэффициенты (t = l, 2, ..., 5).Укрупненный расчет на основе затрат по базисной статье
ыии.куляции предполагает, что при переходе от прототипа
h новому образцу соотношение расходов по статьям не изме-
нмстся, тогдаI ос Су, — расходы на г'-й элемент /-го агрегата по статье(7.14)(7.15)(7.16)1Д1‘ С01, С02,'С03 — статистические коэффициенты;
/7;—базисный параметр.i=i+ Qp. / + С0с.;) Ki,(7.17)(7.18)калькуляции;255
— удельный вес расхода по /-му агрегату в процентах
от общей стоимости образца;
kj — число элементов в /-м агрегате.При укрупненных расчетах стоимости ракеты наиболее ча¬
сто используют второй метод.Путем обработки статистических данных по формуле(7.12) для стоимости корпуса ракеты может быть получена
зависимостьП= • (7-19)1=1где КС1 — коэффициент;п — число ступеней.Стоимость двигательной установки определяется по фор¬
мулеПСдв = (Скс ^кс. I “Ь СТна ^тна. I ~\~ Сар таР. /). (7-20)
<=1где Скс — стоимость 1 кг камеры сгорания;Стна — стоимость 1 кг турбонасосного агрегата;С\р—стоимость 1 кг арматуры.Расчет стоимости топлива ведется по формуле■п= 2 С0к. г шок. / + Cr( u)ri, (7.21)/=1где шоК., и «)г/—соответственно масса окислителя и горю¬
чего;С0К. ( и Cri — удельные стоимости окислителя и горю¬
чего.Стоимость системы управления оценивается по форму¬
ле [64]Ссу — Л'су В~т, (7.22)где /(’ey, м—постоянные коэффициенты;Вп — срединное отклонение точек падения боевых
частей.Стоимость боевой части приближенно может быть опи¬
сана формулой [2]Сбч = аУТ (7.23)или формулойСбч = А + Вдп, (7.24)256
|де q — тротиловый эквивалент;Свч— стоимость боевой части;
а, А, В, п — постоянные коэффициенты.Таким образом, стоимость ракеты может быть определена
по формулеПСр = (Kci Ml If "Ь Скс IUkz.i ~Ь Схца И^тал. I ~Ь
<=1+ Сар /Иар. i + Сок. i ^ок. I + Cri Шг() ++ KcyB-"‘ + A + Bq". (7.25)Стоимость технологического оборудования слагается из
затрат на подвижные и стационарные агрегаты. Для опреде¬
ления- этих затрат пользуются зависимостями вида:Сто. г = + Ь1таЬ , (7-26)Сто. ( = ^то. г та1 > ' (7-27)С10.г = СТ0.гОТаг, (7.28)где аг, bt и КТ0. г — коэффициенты;mai — базисный параметр (обычно масса
агрегата, транспортируемого или пе¬
регружаемого объекта);Сто.; ~ удельная стоимость.Для определения стоимости строительных сооружений
устанавливается объем земляных, бетонных, железобетонных
п монтажных работ, общая протяженность линий связи, во¬
допровода, дорог и канализации, кубатура технологических
п жилых помещений. Затем, учитывая конкретные условия
строительства, определяют общие затраты по формулеmССС = 2С^, (7.29)t=iгде m — число видов работ;Wi — объем работы данного вида (в м3, км, м2, тит.п.);С,- — удельная стоимость вида работ.Естественно, что для некоторых сооружений используют
более точные зависимости, позволяющие оценить стоимость
строительства в функции основных условий и параметров.Затраты на этапе разработки имеют наиболее неопреде¬
ленный характер. Например, в США затраты на научные ис¬
следования и опытно-конструкторскую разработку часто пре-
ш.пиали запланированные в 2—3 раза, тогда как ошибки в
оценке расходов на ракеты, технологическое оборудование0-2582257
и сооружения не превышали 60—80%, а на эксплуатацию —
100%.Уровень затрат на этапе разработки зависит:— от характера работы (новая проблема, разработка ва¬
рианта существующего объекта, усовершенствование);— от категории и состава научно-исследовательских учре-
ждений, привлекаемых к работам;— от сроков проведения работ и обеспечения опытных ис¬
следований.Длительность этапа разработки во многом определяется
требованиями, предъявляемыми к системе. Существует тен¬
денция всемерного сокращения сроков разработки и совме
щения разработки с этапом производства и строительств;!
объектов системы. Для разных вариантов комплексов систе
мы «Минитмен» на этап разработки приходится 2—3 года, ни
этап производства и строительства — около двух лет и на экс¬
плуатацию планируется 10 лет. Приближенно затраты ип
разработку определяют по формулетс-=2ё-!с» (7'30)/=1где С[ — стоимость изготовления i-ro элемента;т — число разрабатываемых элементов;Тра. i и Тпр. i — удельные веса затрат соответственно
на разработку и производство (или
строительство) для г-го элемента н
общей сумме расходов на систему.
При определении эксплуатационных расходов расчет ве¬
дут от элементов к системе в целом.Эксплуатационные расходы на техническое обслуживание
элемента комплекса определяют по формулеqs = K9lcb (7.31)где С,-—стоимость элемента (объекта);К,1 — стоимостной коэффициент эксплуатации.
Эксплуатационные расходы, связанные с денежным до¬
вольствием, находят из выраженияСэ = Мш (Крс + Л'оф /Се) Сд, (7.32)где yvui—штатный состав комплекса;Сд — условное денежное довольствие солдата за год;
/Срс — отношение числа солдат к полному составу;Ксф — отношение числа офицеров к полному составу;Кс — отношение полного довольствия офицера к со¬
держанию солдата.258
I,Яй1|>аты на контрольные пуски находят из выраженияC? = NKBCpKm, (7.33)NKn —число контрольных пусков;(’р—стоимость ракеты;Л"кп — коэффициент, учитывающий дополнительные за-
» траты в связи с контрольными пусками.■ Распределение ежегодных затрат по статьям (обслужива-
Пг, довольствие и контрольные пуски) для ракетных ком-
ИЙрксов США приведено в табл. 7.2.Таблица 7.2liН|П|>|'ЛСление затрат на обслуживание ракетных комплексов [65[]К ППЮ«РНаименование статьиРасходы, "/о1Техническое обслуживание и ремонт12чДенежное содержание, плата за довольствие421 мКонтрольные пуски30iОстальные расходы16Амортизационные расходы определяют по зависимостик(7-34)i=ik — число объектов;С;—стоимость объекта;Та1 — нормативное время эксплуатации объекта.7.3. ОПРЕДЕЛЕНИЕ ОПТИМАЛЬНОЙ ЭКСПЛУАТАЦИОННОЙ
НАДЕЖНОСТИ РАКЕТЫВ § 1.2 уже отмечалось, что критерий эффективности ра-
Мтиого комплекса зависит от характеристик надежности его
1#йствия. Под надежностью боевого применения ракетного
Комплекса следует понимать вероятность того, что в нужный
Комент времени с помощью ракетного комплекса в район
Цмн будет доставлена боевая часть и произведен взрыв бое-
|ого заряда [29]. Если обратиться к формуле (1.3), то за кри-
T*pnfi надежности ракетного комплекса нужно принять/V = /W>npo. (7-35)ГДР /\ — вероятность того, что за установленное время с
момента подачи команды ракетный комплекс259
будет подготовлен к пуску ракет и не будет по¬
ражен противником;Рр — условная вероятность (при Яг=1) безаварий¬
ного пуска ракеты, доставки боевой части в
район цели с допустимым рассеиванием и без¬
отказного действия боевого заряда;ЯПро — условная вероятность (при РгРр=1) прохожде¬
ния боевой частью системы противоракетной
обороны противника.Величина Рг характеризует надежность технологического
и испытательного оборудования пусковой установки. Пара¬
метр Рр является критерием надежности ракеты, а величина
Рпр0 зависит от степени защищенности рассматриваемой
группы целей средствами системы ПРО, а также от параме¬
тров боевой части.Каждому состоянию процесса разработки и создания ра¬
кетного комплекса соответствует определенный уровень на¬
дежности его элементов. Можно говорить о проектной надеж¬
ности, надежности опытного образца, надежности серийного
образца, эксплуатационной надежности. Надежность выпол¬
нения ракетным комплексом боевой задачи определяется в
конечном счете эксплуатационной надежностью основных ча¬
стей комплекса. В то же время затраты средств на выполне¬
ние боевой задачи складываются из затрат на всех этапах
разработки и создания комплекса и, следовательно, зависят
от надежностей, характеризующих все эти этапы.Надежность ракетного комплекса повышается с увеличе¬
нием затрат на проектирование и отработку, производство и
ремонт, она растет с увеличением времени на разработку,
уменьшается при длительном хранении и восстанавливается
полностью или частично после проведения регламентных ра¬
бот и ремонта техники.Исследование надежности ракетного комплекса при его
разработке производится с целью:— установления требований к надежности ракетного ком¬
плекса и к его элементам при составлении ТТТ;— анализа условий, при которых обеспечивается требуе¬
мая надежность;— определения надежности при эксплуатации по данным
испытаний.Одна из главных задач военно-технического проектирова¬
ния ракетных комплексов заключается в определении опти¬
мальной надежности комплекса. Эта задача может быть
сформулирована так: требуется определить закон изменения
надежности ракетного комплекса на различных этапах его
создания, который обеспечивает минимальный расход средств
на выполнение боевой задачи. Впервые в аналогичной поста-260
попке задача оптимизации надежности рассматривалась в
работе [76].Поскольку решение подобной задачи представляет весь¬
ма сложную проблему, то можно ограничиться исследова¬
нием оптимальной надежности ракеты Рр. Таким образом,
предполагается, что надежность технологического и испыта¬
тельного оборудования близка к единице, а система ПРО
противником не применяется.Средняя стоимость одной ракеты может быть выражена
как сумма:q, = q3 + qn + qp+q, (7.36)где С'3 — затраты на разработку проекта ракеты, прихо¬
дящиеся на одну серийную ракету;С*п—затраты на отработку и испытания опытного об¬
разца, приходящиеся на одну ракету серийного
выпуска;С'р — стоимость производства одной ракеты, приведен¬
ная к базисным параметрам;С1 — эксплуатационные расходы, приходящиеся на
одну ракету.Надежность ракеты на любом этапе ее создания зависит
от объема мероприятий по повышению надежности и в ко¬
нечном счете определяется затратами на проведение этих ме¬
роприятий и временем, т. е.Р> = /(?>. С),1,2, 3,4, (7.37)где <рj — коэффициент, учитывающий, какая часть затрат
идет на повышение надежности ракеты;
у — индекс, относящийся к рассматриваемому этапу
создания ракеты.Следовательно, существует обратная функциональная за¬
висимость видаС} = /, (Я,, <ру,*у),У=1,2,3,4. (7.38)Тогда суммарная стоимость выполнения боевой задачи
представится выражениемcs = 4nqn + Nec;, (7.39)где Non, N6 — соответственно расходы ракет на опытную
отработку и на поражение запланированных
целей;С'оп ~ средняя стоимость ракеты на этапе опытной от¬
работки; .261
С‘р — средняя стоимость ракеты на этапе боевой экс¬
плуатации, определяемая по формуле (7.36).
Учитывая соотношение (7.37), можно считать величину
функцией видаq = F (Ррз, РоП, Рпр, Р» ffj, *,),/=1, 2, 3, 4, (7.40)где Ррз — надежность ракеты на этапе разработки проекта;
Роп —надежность опытного образца;РПр—надежность серийного образца;Рэ—эксплуатационная надежность ракеты.Для решения поставленной задачи составляется схема
процесса перехода надежности из одного состояния в другое.
Одна из возможных схем такого типа приведена на рис. 7.2.При составлении схемы устанавливаются связи между на¬
дежностями состояний, затратами и объемом варьируемых
мероприятий. Надежность ракеты определяется надежностя¬
ми ее основных частей и агрегатов (двигателя, системы упра¬
вления, системы питания, корпуса и боевой части).Повышение надежности агрегатов и систем ракеты может
быть осуществлено тремя путями:— путем резервирования элементов;— путем обеспечения избыточности (запаса);— путем уменьшения интенсивности потока отказов.В случае применения резервирования надежность г-го ре¬
зервируемого соединения Рг- определяется по формулеР, = 1 — (1 — P0i)1+"4 (7.41)где Рш—надежность /-го нерезервируемого элемента;/га,- —кратность резервирования.Стоимость г-го резервируемого изделия определяется по
формулеCi — Q; + Сог /иг.= C0i (1 + /яг), (7.42)где С0, — стоимость г-го нерезервируемого изделия.Подставив величину (1 +rrii) из выражения (7.41) в фор¬
мулу (7.42), получим(7.43)Стоимость устройства из п изделий определится как<7'44>(=1где у —коэффициент, учитывающий дополнительные расходы
на устройство е целом,262
Ср (Рру Pan) Ср (Port. Р on) Ср(РПр. Рпр) £р(^э. ^з)®1•§t!g§=о||53 b а»c*с5?S в» 5S <b <5to s ч-
S'а.сG °»^ сз з0>“ТО >,
К &к саяжтосоосоТОа.VOО4>О,СUечоSа263
В случае повышения надежности путем обеспечения из¬
быточности стоимость устройства определяется по формулег—С ln^~^ С7 45’)0 In (1 — Я0) ’ '•/ЛЭ'где Р0 и С0 — надежность и стоимость до введения избы¬
точности;Р— надежность после введения избыточности.В случае повышения надежности путем уменьшения ин¬
тенсивности потока отказов стоимость устройства изменяется
согласно зависимости [75]с = с/с4с0) (7.46)где К — коэффициент, показывающий, во сколько раз
уменьшена интенсивность отказов;С0 — составляющая стоимости, не зависящая от на¬
дежности;С и Р — статистические коэффициенты.При экспоненциальном законе распределения надежность
определяют по формулам [74]:P0 = exp(-X/); (7.47)р = ехр(— (7.48)где Р0 — надежность до уменьшения потока отказов;Р—надежность после уменьшения потока отказов;X — интенсивность отказов.Из формул (7.47) и (7.48) следует, что*=■££, (7.49)тогда стоимость устройстваC = c(igAy + C0. (7.50)Для оценки стоимости разработки проекта ракеты поль¬
зуются следующей приближенной зависимостью:Срз = Ср8(г—^-) , (7.51)гДе Сра — стоимость разработки ракеты, первый опытный
образец которой имеет надежность Рра;Pps — базисная надежность первого опытного образца
ракеты (надежность прототипа);264
Р'0 „ — проектируемая величина надежности первого
опытного образца или надежность ракеты на
этапе разработки проекта;Р0—коэффициент ((30>0).Затраты на опытное производство по аналогии с зависи¬
мостью (7.51) можно описать формулойCin = Cin(|^)P‘, (7.52)|де С'оп—затраты на опытное производство одной ракеты
с надежностью Р*п;Р0„—требуемая надежность опытного образца до его
испытаний;^—-коэффициент (j3i>0).В процессе опытной отработки надежность ракеты повы¬
шается, как будет показано в § 11.3. Если принять за закон,
изменения надежности выражение [76]:Я = 1 — a exp (— bN), (7.53)со получимр:р = 1 - (1 - Рои) exp b,Noa - 2 я А/}. (7-54)|де Я*р — надежность ракеты после опытной отработки,
равная надежности первого серийного образца;
Non — число опытных пусков ракет;
я,-— число испытаний i-го агрегата ракеты;
k — число агрегатов, подвергаемых испытаниям;
bh b2i — постоянные коэффициенты.Затраты на серийное производство одной ракетыО =0 (/1~~РпрУ‘, (7.55)пр "Р^-Рпр/ ' 'гдн С*— затраты на производство первого серийного об¬
разца ракеты с надежностью Р*р;Япр — требуемая надежность серийного образца;
р2 — коэффициент ({3г>0).В процессе производства стоимость каждого последую¬
щего изделия оказывается меньше стоимости предыдущего.
Ммиисимость средней стоимости ракеты от объема производ-
< !ii;i описывается формулой (7.9).I (адежность серийных образцов поддерживается на опре¬
деленном уровне за счет испытания агрегатов и контрольных265
пусков. Изменение надежности на этом этапе описывается
соотношениемР'9 = 1 — (1 — РпР) ехр Ь8 NKn — 2 n,bu j , (7.56)где Я* — надежность ракеты после контрольных испыта¬
ний, равная начальной эксплуатационной надеж¬
ности ракеты;Мкп — число контрольных пусков ракеты;
т — число агрегатов ракеты, подвергшихся испыта¬
ниям;nL — число испытаний i-ro агрегата ракеты;
bs, Ьи — постоянные коэффициенты.Эксплуатационная надежность со временем уменьшается
и ее уровень зависит от расходов на ремонт и проведение рег¬
ламентных работ. Расходы, на эксплуатацию одной ракеты
могут быть найдены по формулеCIгде С*—затраты на эксплуатацию, необходимые для под¬
держания уровня надежности Р'а;Рэ — требуемый уровень эксплуатационной надежно¬
сти ракеты;— коэффициент (рз>0).Окончательно затраты на поражение запланированных
целей определяются так:с С f1 Ррз |'° I г1 f1 Р°п |Р' ^оп 1 IЧ-Mi-pJ +Con{i=b~n! ~,+- / 1 — Р* \^2 — /1 — Р*+ а(гг7г-:) *: + ч(ггч) "* +4-C(»,)-lC(,V,J(,4 MJ + C,, (7.58)где С (rtt) — расходы на испытания агрегатов впроцессе опытной отработки и при се¬
рийном производстве;С (Non + NKn) — расходы на пуски ракет при опытной
отработке и на контрольные пуски при
серийном производстве;С0 — расходы, не связанные с надежностью
ракеты;N6 — число ракет, необходимое для пораже¬
ния запланированных целей,266
Требуемый расход ракет для поражения однотипных це¬
лей определяется по формулеN< = -та In (1 — W)In { 1 — ^г^э^ПРО1 — exp 1 —Ri.(7.59)|'де тц — число целей данного типа.Варьируя затратами на разработку, числом испытаний
агрегатов, числом опытных и контрольных пусков ракет, за¬
тратами на эксплуатациюII требуемыми уровнями
надежности на различных
■папах создания ракеты,
можно найти такое со¬
четание этих параметров,
при котором затраты
средств на выполнение
боевой задачи будут ми¬
нимальными. Для реше¬
ния задачи используются
:-)ЦВМ.В результате этого бу¬
дут найдены оптималь¬
ная эксплуатационная на¬
дежность ракеты Рэ, опти¬
мальный объем испыта¬
ний при опытной отра¬
ботке, а также оптимальное распределение средств по эта¬
пам создания ракеты.Для приближенной оценки зависимости Cs
чуется упрощенное уравнение виданой надежности ракетыот Р3 исполь-CIN6(P,),(7.60)где С' — расходы на разработку, создание, эксплуатацию
и пуск одной ракеты;N6—число ракет, необходимое для поражения запла¬
нированных целей.В свою очередь(Л)+ CJ (/>.), (7.61)1 /l,“ q. (Р.) — затраты на изготовление ракеты, включая
разработку и испытания.Характер изменения величин Cs, О, Орз, С' показан на
рис. 7.3. Как видно из рис. 7.3, кроме минимума Cs суще¬267
ствует минимум величины С*; который иногда используется
для оценки факторов, влияющих на область оптимальных
значений эксплуатационной надежности ракеты.Если предположить, что эксплуатационные расходы малы,
то стоимость одной ракеты можно представить в виде зави¬
симостиС1 = -
р (1Сг(7.62)где С(, — коэффициент.Суммарные расходы на по¬
ражение запланированных це¬
лей будут равны1m«,ni-WРис. 7.4. Приближенная зависи¬
мость Сг от эксплуатационной
надежности ракеты(1 -Pj In1(7.63)где Р[— вероятность поражения цели с учетом вероятно¬
стей готовности ракетного комплекса к пуску и
преодоления боевой частью системы ПРО.
Анализируя выражение (7.63), легко обнаружить сущест¬
вование минимума С£ (рис. 7.4).Однако определение оптимальной надежности ракеты при
комплексном решении главных задач военно-технического
проектирования ракетного комплекса требует более деталь¬
ного учета зависимостей типа (7.58) и (7.59).
Глава 8МЕТОДЫ ОПТИМИЗАЦИИ основных СВОЙСТВ
РАКЕТНЫХ КОМПЛЕКСОВ§ 8.1. ОПТИМИЗАЦИЯ ИНТЕРВАЛА БОЕВОГО
ПРИМЕНЕНИЯ РАКЕТНЫХ КОМПЛЕКСОВСтратегическое ракетное вооружение может быть исполь-
•шиано в интервале дальностей от 1000 до 16000 километров
н (шлее.Очевидно, поражать близкие цели межконтинентальными
(шкетами не рационально. Создавать же комплексы, для
слишком узких промежутков дальностей не выгодно, так как
мри этом растет число комплексов, их общая стоимость и
понмость выполнения боевой задачи. Поэтому для пораже¬
нии целей стратегического значения создают ограниченное
число ракетных комплексов с разной дальностью полета. За-
лича' выбора интервала дальностей для ракетных комплексов
формулируется обычно так: ну>кно установить интервал бое-
погс применения комплекса (Lmax — Lmm), обеспечивающий
мииесение противнику максимального ущерба при заданных
пссигнованиях средств на вооружение с учетом возможностей
уже существующих комплексов. Возможна обратная поста-
нонка задачи: установить интервал (Lmax — £min), отвечаю¬
щий минимуму затрат средств на выполнение боевой задачи.Задача определения оптимального интервала дальностей
|шспадается на тактическую и техническую. В тактическую
иходит определение числа и характеристик целей, районов
Лнчирования и удаления проектируемых комплексов от объ¬
ектов поражения, оценка требуемого уровня их поражения.I гхиическая часть задачи включает анализ боевой эффектив¬
ности ракет С раЗНЫМИ (Lmax— ^mln)-Заметим, что аналогичные вопросы, но для установления
пишмального интервала дальностей применения тактических
н мспитных управляемых ракет впервые рассматривались в‘269
работе [29]. Тактические аспекты этой проблемы примени¬
тельно к стратегическим ракетам оценены в труде [67], неко¬
торые технические вопросы изложены в работах [26], [27)
и [31].В отдельных случаях задача оптимизации интервала даль¬
ностей пуска ракеты рассматривается совместно с установле¬
нием тротилового эквивалента и точности пуска в предполо¬
жении, что противник может в качестве контрмеры создавать
аналогичное оружие.Одна из простейших логических моделей исследования
прямой задачи оптимизации интервала боевого применения
комплекса приведена на рис. 8.1. В соответствии с этой мо¬
делью основными этапами решения задачи являются:— выбор районов размещения боевых позиций (БП) и
ракетных комплексов (блок 1);— установление целей, их размеров, требуемого уровня
поражения и расстояний от БП до целей (блок 2);— оценка плотности распределения целей по дальности
(блок 3), для чего цели разбиваются по дальности на от¬
дельные группы (см. рис. 8.2);— выбор вариантов (Lmax — Z-mm) с учетом обеспечения
всего диапазона требуемых дальностей пусков (блок 4);— определение по Lmах параметров ракеты (блок 5), со¬
става технологического оборудования и сооружений (блок 6);— оценка стоимости пуска ракеты и числа ракет, кото¬
рые могут быть изготовлены на выделенные средства (бло¬
ки 7 и 8);— определение числа поражаемых при том или ином диа¬
пазоне (Lmax — Lmtn) целей (блок 9), сравнение вариантов(блок 10).Наивыгоднейшим считается диапазон дальностей, при ко¬
тором целевая функция имеет максимум.Оптимальные параметры ракеты для выбранных сочета¬
ний Lmax и таи определяются методами баллистического про¬
ектирования.Состав технологического оборудования и сооружении
устанавливается по данным прототипов или специальных ис¬
следований. Затраты на пуск определяются по - зависимо¬
стям, приведенным в § 7.2. Число ракет, требуемых для по¬
ражения малой цели, определяется из выражения (1.4):где W — требуемая величина критерия эффективности (ве¬
роятность поражения цели хотя бы при одном пуске).270
пигошэшэпо
п mvooHdi/uwoH fgwanП91/ЗП ЭПНЭИЭ0ЭС1иЭОс1
■ Ши0^и)Ш^_ XDUJ^н Hodoujo gu/jgadj n irno
ипдшэпздодпшойи xungoifoh g gowHDndDg апнзндос/j5IкIIcrs '^3
§§
<о
§ *
4j (о
«о CjlС5 D* Есз ^<й,■аО)§а-5J5: о
tu :rQj-gсэ5*ьtoGCl.Pi5s<=;CS4:■4‘«эCj5:осо<3сQa.4 •-•Qa:<5Sa;c>5У '
C3c*.§■5sCQ£A.Od1IIi<L>СЭ5s;=5gS3§О a
C; 3;
в toIII«СЭ Ws 53
< a:Cj О
§•1
*-f
o' 0
c& 00
'ts C5
Qj ^C5 S-C3Vto=»NaEСЭc>eCo<ba:QjsQjC5t<|
<i fc:f-l
i h.
§ &
Hj5 I
£ *
gǤ
I §si*sii]ЧЭa:G4«4Оa:
*•=>
<3 Qj&C;f£ «j
С x.^ о
5 a;
^ a:Qj ^5*5>ипновонгпээу 'ОЭХЭ/Г , ,
-umn тот пендо n unyairgoduH ow
-зшэпз ^ ир'Ь 'ппнэжАсЮоэ n чпнодод
-lidopo огохзэьпгоианхэш gowooj
'ouidoiuo uni 4Qwanod un±ВооPietООs&271
•s> •&cuaJ
<y
s
аsa.с<N00sa272
Расход ракет для поражения крупных целей может быть
найден из выражения (1.6):ЛГ =In (1 — W)(8.2)In 1-РгРпЯ,\Рр Р ПРО ^ — ехРK'j д 'К + °>5 ЯцВ системе стратегического ракетного вооружения, так же
к;Iк и в артиллерии, соблюдается принцип перекрытия диа¬
пазонов дальностей дейстння ракет различных типов. Опти¬
мальный диапазон дальностей действия ракетного комплекса
тачительно расширяется в случае использования сменных
Гюеных частей.Впервые задача оптимизации параметров ядерной боевой
части и системы управления применительно к зенитным ра-
м'тным комплексам рассмотрена в работе [29].Задача оптимизации тротилового эквивалента заряда и
юч ности пусков предполагает совместное их исследование,
in к как эффективность выполнения боевой задачи опреде¬
лится совокупностью q и оп. Из формул (8.1) и (8.2) сле¬
дует, что при сохранении одинакового уровня поражения
цели между q и оп существует соотношениеI. е. ухудшение точности стрельбы на 1.0% может компенси¬
роваться увеличением тротилового эквивалента заряда на
;»<)%. Задачи оптимизации тротилового эквивалента заряда
н тчности стрельбы обычно формулируются следующим об¬
разом: требуется найти сочетание q и оп, обеспечивающее
поражение заданной группы целей с минимальными затра¬
тами средств. Возможна обратная постановка задачи: тре¬
буется найти сочетание q и оп, обеспечивающее нанесение
противнику максимального ущерба при выделенных ассигно-
иипиях на ракетные комплексы.Логическая модель оптимизации q и оп приведена на
рис. 8.3. В данном случае исследование распадается на па¬
раллельное решение четырех частных задач:
оптимизация q при on = const;
оптимизация оп при q = const;
оптимизация конструкции боевой части;
оптимизация системы управления (блоки 2—5).§ 8.2. ОПТИМИЗАЦИЯ МОГУЩЕСТВА РАКЕТ
И ТОЧНОСТИ ПУСКОВАд(8.3)273
»ЯоваCDОО.но?.СОоС?«соЕстественно, что при
исследовании учитывают
связи между частными
задачами, так как ищет¬
ся оптимальное сочета¬
ние параметров боевой
части и системы управ¬
ления.Часто возникает более
простая задача, в кото¬
рой тип системы управле¬
ния и конструкция бое¬
вой части заданы. Реше¬
ние прямой задачи опти¬
мизации q и оп, когда за¬
даны конструкция бое¬
вой части и система
управления, включает
(рис. 8.4):— установление весо¬
вых зависимостей т^ч (q),
^ау(оп) и стоимостных
зависимостей СбЧ(<7),
Сау (°п) Для рассматри¬
ваемых вариантов q и сп
(блоки 1—6);— определение для
каждого сочетания q и вп
параметров ракеты, тех¬
нологического оборудова¬
ния и сооружений (бло¬
ки 7 и 8);— определение затрат
на пуск ракеты, состава
целей и их характеристик
(блоки 9 и 12);— оценку затрат на
поражение целей и при¬
нятие решения (блоки 10,11 и 13).В результате расче¬
тов по матрице Cs (q,
вп) находят оптималь¬
ные q и оп. В данном
случае затраты на си¬
стему, обеспечивающую274
Установление t, ^ Баллистическое
зависимости /ni4(q) j проектированиеи$ п Ь
nHniuondsujHodDx
aiQHQifoivnujuQ«ОЕко3О.«3во3в
*- — 5Ь: **
к» Scs«•>сS.t**!
о &* 5
о а'-’.Г'bs’Oа*->сЧ>*о3Clа«от3^
? 5
III п
С 5н>КО£0Ко,сDUldDLUd uniпэиэь оиопьXDUJ 7
t9UJ3UOd ип±4о5о1=3соЯа275
выполнение определенной задачи, определяются по фор¬
мулеC, = (C9+Ca + C0)TV6, (8.4)где С — затраты, зависящие от q\Са — затраты, зависящие от ап;С0 — затраты, не зависящие от q и оп;Л/6 — число ракет, необходимое для выполнения боевой
задачи.Результаты решения задачи могут быть представлены
графически в виде кривых, аналогичных приведенным нарис. 8.5. В случае решения обратной ' задачи оптимальные
значения q и оп находятся по максимуму функции N(q, оп).При определении ущерба, наносимого противнику, проти¬
водействие его стратегического оружия учитывается путем
решения игровых задач [11], [68], [69]. В этом случае графы
матрицы N(q, оп) предлагают находить, как цену игры меж¬
ду нашей стороной и противником. Для ее отыскания ис¬
пользуют наиболее простую модель боевых действий и игру
«2x2», которые предполагают два варианта чистых страте¬
гий для каждой из сторон:первый — поражение крупных целей;второй — уничтожение точечных (малых) целей.Этим стратегиям соответствуют правила игры, основанные
на определенных тактических приемах использования ору¬
жия. Стратегия поражения крупных целей «К» предпола¬
гает, что сторона, придерживающаяся ее, запускает ракеты
только по крупным целям. Стратегия поражения малых це¬
лей «М» предполагает пуски ракет по малым целям до их276
полного уничтожения, а затем пуски ракет по крупным це¬
лим.В качестве платежей матрицы можно использовать раз¬
ность между числом пораженных крупных целей противника
н числом пораженных наших крупных целей.Цена игры матрицы «2X2» находится обычно по седловой
точке. В качестве примера найдем платеж матрицы игры
«2x2» при следующих упрощающих условиях:200-1100Сторона А1-й пуск 2-й пускI Потери ракетных— арт-I Потери крупных
I целей3-й пуск время0Цт100Сторона вI-и пуск 2-й пускРис. 8.6. График потерь сторонВремя— число крупных целей у сторон А и В одинаково и рав¬
но 300;— число СП* у сторон —100; причем с каждой СП мо¬
жет быть запущено последовательно три ракеты;— для поражения СП требуется две ракеты, а для пора¬
жения крупной цели — одна ракета;— система оповещения отсутствует;— оружие используется во встречном ракетно-ядерном
ударе.Характер действия сторон, когда сторона А придержи-
тктся стратегии «К», а сторона В — стратегии «М», пред-
павлен на рис. 8,6. Матрица игры для рассматриваемого
примера приведена в табл. 8.1.* СП — стартовая позиция ракет.277
Матрица игры „2X2“Таблица 8.1р.К".М‘rain строки300 — 300 = 0150— 100 = +1500„Af“100 — 150 = —500-50шах столбца0+ 50Из табл. 8.1 следует, что стратегия поражения крупных
целей по принятому критерию является оптимальной для
обеих сторон.Задача оптимизации q при оп=const может ставиться
применительно к двум условиям стрельбы:— когда поражается группа одинаковых целей;— когда поражается группа из разных целей.Во втором случае задача решается методом, изложенным
выше. Когда стрельба ведется по одинаковым целям, воз¬
можно прямое аналитическое решение задачи. Рассмотрим
это решение.Масса и размеры ракеты определенного типа зависят
главным образом от максимальной дальности пусков п
массы полезной нагрузки.Для учета влияния параметров боевой части (полезной
нагрузки) на характеристики ракеты нужно знать связь меж¬
ду тротиловым эквивалентом и массой спецзаряда. Если
предположить, что спецзаряд состоит из синтезируемой и де¬
лящейся частей, то его массу можно определить по формулетсз = тпз + clV)i +^с2г]2 ^где тпз — масса первичного заряда;и С2 — соответственно удельные тротиловые эквивален¬
ты синтезируемого вещества и делящейся обо¬
лочки;Yii и у\.2 —коэффициенты использования энергии синтези¬
руемого вещества и оболочки;К — отношение массы оболочки к массе синтезируе¬
мого вещества.Между массой.боевой части и тротиловым эквивалентом
зависимость не линейная. Но анализ характеристик боевых278
мастей МКР США показывает, что в диапазоне <7 = 1 —
П млн. тЩч = А + Bi Я- (8.6)Из формулы (8.1) следует, что при Рг РРЯПР0 = 1 расход
ракет, требуемый для поражения малой цели, зависит от q
следующим образом:<8-7>При определении оптимального тротилового эквивалента
при On= const затраты на пуск одной ракеты могут быть
найдены по формулеС\ — Ср/пр + Сбчт6ч -f Д С, (8.8)|де т.р—стартовая масса ракеты без боевой части;
СриСвч — соответственно стоимости единицы массы раке¬
ты и боевой части;ДС—дополнительные затраты на пуск.Величина дополнительных затрат слагается из расходов,
Пропорциональных массе ракеты, и расходов, не зависящих
от нее:ДС = Стотр + ДС0. (8.9)Стартовая масса ракеты почти линейно зависит от массы
Лоевой части, поэтому можно записатьт0 = А + Вт6ч = Е + Dq, (8.10)iAi‘ Е — А-\- ВА{,D = BBVПренебрегая разницей между тр и тэ, получим следую¬
щее выражение для стоимости пуска одной ракеты в функ¬
ции от q :Ср = (£ + Dq) Cl + (А, + ВД С6ч + Д С0, (8.11)I ЦСС р .Ср 4 СТ.Стоимость пуска всех ракет, необходимых для поражения
тчечной цели, равна^Зп [^1^64 + ЕСр + ДСо
Из выражения (8.12) следует, что минимум затрат на по¬
ражение точечной цели соответствует2 (а?+е^- + ^?опт = ^ Сб>С"4-- (8-13)Bi + D^L
^бчИз формулы (8.13) видно, что q0пт не зависит от W и оп-Пример. В качестве примера определим оптимальный тротиловый
эквивалент заряда для ракеты типа Титан II, приняв Л=50 г, В = 48,^ ОД т, Bi = 0,35-10-6, дс0 = 0, С*/С’бч = 0,01.Решение. 1. Е — А + AJi = 50 + 48-0,1 = 54,8 т.2. D - ВВХ = 48-0,35-10-е = 16,8-10-6., _ _ 2(0,1 + 54,8-0,01)• q°nT 0,35-10-6+16,8-10-6.0,01 ~ ’ МЯН' ТЗаметим, что формула (8.13) справедлива только в слу¬
чаях, когда полученный по ней тротиловый эквивалент мень¬
ше требуемого для надежного поражения цели одной раке¬
той. Поэтому по мере роста точности пусков возможно ста¬
нет ненужным создание ракет с большим тротиловым экви¬
валентом для поражения точечных целей.Для ракет, предназначенных для разрушения крупных це¬
лей, необходимо использовать боевые части с тротиловым
эквивалентом, при котором все запланированные крупные
цели будут поражены при минимальных затратах средств.
В данном случае расчет q0пт ведется следующим образом:— для ряда значений q определяют требуемый расход
ракет на поражение целей;— находят параметры ракеты, оборудования и сооруже¬
ний, затраты на пуск одной ракеты и затраты на поражение
всех целей:i=k(8-14)где k — число групп крупных целей;п1 ■— число целей в группе;Nt — число ракет, необходимых для поражения цели
i-ii группы;С>—стоимость пуска одной ракеты;280
— строят график зависимости Cs (q) и из него находят7опт-Таким же путем можно установить оптимальный тротило-
иый эквивалент ракет, предназначенных. для поражения
крупных и малых целей. У ракет, предназначенных для по¬
ражения только крупных целей, при условии on = cosnt в диа¬
пазоне (^Jnax — <7min) затраты на пуск ракеты в функ¬
ции q\ меняются почти линейно. Поэтому ^0пт примерно
равнот2^опт = ‘Щ, • (8.15)2i=iгде т —число групп целей;п1 — число целей в группе;q\ —тротиловый эквивалент, необходимый для пораже¬
ния i-й цели одной ракетой.У ракетных комплексов, предназначенных для поражения
крупных целей, оптимальный тротиловый эквивалент и точ¬
ность пусков значительно меньше, чем у ракетных комплек¬
сов, предназначенных для уничтожения защищенных мало¬
площадных целей.С учетом ПРО, прикрывающей преимущественно крупные
цели, оптимальный тротиловый эквивалент ракет несколько
уменьшается.§ 8.3. ОПТИМИЗАЦИЯ ПАРАМЕТРОВ СТАЦИОНАРНЫХ
СТАРТОВЫХ КОМПЛЕКСОВВопросы оптимизации стартовых комплексов рассматри-
пались одновременно с оценкой их эффективности в отечест¬
венных [11], [29] и зарубежных работах [26], [27], [14]. Здесь
уга задача выделена как самостоятельная.К основным видам стартовых комплексов относятся:— стационарный шахтный;— стационарный наземный;— подвижный.Все эти виды стартовых комплексов в свою очере'дь мо¬
гут быть одиночными или групповыми, одноразового или мно¬
горазового использования.Каждый тип стартового комплекса имеет специфические
сооружения и оборудование, предполагает свою технологию
пуска ракет, характеризуется определенной живучестью.Известно, что доля затрат, приходящихся на оборудова¬281
ние и сооружения стартового комплекса, составляет 40—60%
расходов на ракетную систему в делом. Следовательно, во¬
просы выбора типа старта и оптимизации параметров стар¬
тового комплекса имеют большое практическое значение.
Задача оптимизации параметров стартового комплекса
формулируется обычно так: нужно установить свойства ком¬
плекса, обеспечивающие выполнение боевой задачи при ми¬
нимуме затрат средств. Возможна обратная постановка
задачи: определить свойства комплекса, при которых против¬
нику наносят максимальный ущерб при заданных ассигнова¬
ниях средств на вооружение.Задача оптимизации стартового комплекса предусматри¬
вает: оптимизацию типа старта, технологии пуска, состава
технологического оборудования, сооружений и живучести.Кроме того, уже при исследовании стартового комплекса
решаются в первом приближении вопросы оптимизации упра¬
вления и связи, боеготовности и реализации проекта.Логическая модель исследования стартового комплекса
приведена на рис. 8.7. Из этого рисунка следует, что реше¬
ние задачи оптимизации стартового комплекса включает па¬
раллельное исследование частных задач (блоки 1—5 и 7—10)
и определение лучшего варианта (блоки 11 —12).Характеристики эффективности стартового комплекса за¬
висят не только от его качества, но и от боевой ситуации, в
которой применяется оружие. Поэтому оценку стартовых
■комплексов целесообразно вести хотя бы при двух возмож¬
ных ситуациях:1. Производится ответный удар при нормальном функцио¬
нировании системы оповещения о массовых пусках МКР
противником и безотказной работе систем управления и
связи. _2. Производится ответный удар при условии отказа си¬
стем оповещения, управления и связи.Желательно каждую ситуацию рассматривать в двух ва¬
риантах: с учетом действия ПРО сторон и без учета ПРО.Чтобы представить себе влияние условий начала боевых
действий на эффективность различных типов стартов всех
комплексов, оценим это влияние хотя бы качественно.Вполне очевидно, что в первой ситуации при боеготовности
ракет выше 3—8 мин почти все ракеты будут использованы
в ответном ударе независимо от степени защищенности ком¬
плексов. Следовательно, в этих условиях выгодно иметь наи¬
более дешевые слабозащищенные одноразовые групповые
комплексы.В условиях отказа системы оповещения, управления и свя¬
зи (ситуация 2) лучшую эффективность обеспечат хорошо
защищенные шахтные и высокоманевренные подвижные ком¬
плексы.282
Рис. 8.7. Логическая модель оптимизации параметров стартового комплекса
Если предположить, что любая боевая ситуация можг1
возникнуть с некоторой вероятностью, то в ряде случаев pit
ционально иметь для одного и того же типа ракет разлим
ные варианты комплексов.Об оптимальном сочетании комплексов можно судить nil
величине [12]где П—математическое ожидание суммарных потерь, ни
носимых противнику при заданных ассигнования
средств на вооружение;
т — число ситуаций;Mtj—математическое ожидание числа поражаемых цо
лей при /-й ситуации ракетами /-го типа старт;i
п — число исследуемых типов стартов.Логическая схема решения задачи по выбору типа стпр
товых комплексов приведена на рис. 8.8. В начале исследп
вания (блоки 1—2) отбирают подходящие варианты старто
вых комплексов и наиболее вероятные боевые ситуации. 3;i
тем (блоки 3—6) для различных типов стартов устанавлм
вают геометрические, весовые и энергетические характер:!
стики технологического оборудования и сооружений ком
плекса. После этого оценивают организационно-штатиук
структуру части и стоимость стартового комплекса (блок!
7—8). В заключение определяют результаты боевого приме
нения различных вариантов при одинаковых ассигнования)
средств (блоки 9—10).Заметим, что на выбор типа стартового комплекса раке
существенно влияет вероятность разведанности (Рраз) CI
противником до начала боевых действий. Параметр Рраз вно
дится в расчеты по выбору оптимального типа стартовоп
комплекса так же, как и параметр Рг, характеризующий жи
вучесть комплекса.При оптимизации технологии пуска для заданного тип
старта выбирают несколько приемлемых технологически
схем. Для каждой технологической схемы устанавливают со
став технологического оборудования и сооружений. Поел
определения характеристик ракеты, ее топлива, двигателе!)
боевой части и системы управления находят параметры оГщ
рудования и сооружений. Затем устанавливают организаии
онно-штатную структуру части, определяют условия упр;ш
ления и связи, оценивают эксплуатационные расходы, боот
товность, живучесть и степень возможной разведанности СИт п(8. HiPt — вероятность г-й ситуации284
КаоКоб00285
Для рассматриваемых вариантов находят стоимость пуска
ракеты и затраты на выполнение боевой задачи.Оптимальной считается технология пуска, при которой
обеспечиваются минимальные затраты средств на выполне¬
ние боевой задачи.Решение частных задач оптимизации состава и парамет¬
ров технологического оборудования и сооружений предпола¬
гает детальное исследование всех агрегатов технологического
оборудования и строительных объектов. Под оптимальными
параметрами оборудования и сооружений понимают такую
совокупность их значений, при которой возлагаемые на ис¬
следуемый комплекс задачи решаются при требуемых на¬
дежности, боеготовности, живучести с минимальными затра¬
тами средств.Решение задач оптимизации параметров отдельных агре¬
гатов технологического оборудования и сооружений так же,
как и решение задачи оптимизации параметров ракет, свя¬
зано обычно с исследованием многопараметрических экстре¬
мальных задач. В данном случае в качестве проектных пара¬
метров для агрегатов и объектов принимаются величины,
позволяющие моделировать их размеры. Так, например, для
транспортных средств в качестве проектных параметров при¬
нимают ширину колеи, клиренс, базу, для шахтных соору¬
жений— степень защищенности и другие. При определении
параметров электросилового оборудования изучают графики
нагрузки, протяженность линий передач, релейную защиту,
устойчивость.Только на основе анализа основных вопросов эксплуата¬
ции электросилового, заправочного, подъемно-транспортного,
пускового и испытательного оборудования комплекса выда¬
ются рекомендации по их параметрам.В отличие от оптимизации параметров ракеты задача оп¬
тимизации параметров технологического оборудования имеет
больше ограничений, накладываемых указаниями по стан¬
дартизации и унификации. Так, для подвижных агрегатов
технологического оборудования вводят ограничения на углы
проходимости, клиренс, ширину колеи и радиусы разворота.
Благодаря ограничениям и сравнительно простым связям
между параметрами агрегатов и объектов стартового ком¬
плекса оптимизация их ведется главным образом на основе
конструкторской проработки.В данном случае конструкторская проработка агрегатов
технологического оборудования и сооружений комплекса
дает более полную информацию об оптимальном решении.
Эта информация используется не только при разработке ТТТ,
но и при выдаче тактико-технических заданий исполнителям,
если принимается решение о строительстве исследуемой си¬
стемы.286
Под живучестью комплекса понимают вероятность нор¬
мального его функционирования после ракетно-ядерного- уда¬
ра противника. Живучесть комплекса в случае пуска против¬
ником определенного количества ракет зависит от удалений
между боевыми позициями комплекса и от степени защищен¬
ности СП.Степень защищенности боевых позиций определяют вели¬
чиной избыточного давления во фронте ударной волны, при
котором СП выводится из строя [26].Задача оптимизации живучести шахтных комплексов фор¬
мулируется следующим образом: нужно установить степень
|ащищенности боевых позиций комплекса и удаления между
ними, обеспечивающие при заданных' затратах средств на
комплекс нанесение противнику максимального ущерба в
условиях нанесения по ним ракетно-ядерного Удара.Решение данной задачи проводится в такой последова-
н'льности:1) для варьируемых удалений Аз между СП и степеней
1лщищенности АРф устанавливают протяженность дорог, ли¬
ний связи, размеры шахт и командных пунктов;2) оценивают стоимость различных вариантов комплек¬
та н число комплексов, которое может быть создано на вы¬
деление ассигнования;3) при принятых условиях воздействия противника (за¬
дается число атакующих ракет, их q и оп) находят для каж¬
дого варианта /д и АРф свои потери;4) оценивают ущерб, который может быть нанесен опре¬
деленному составу целей противника ракетами после его
ндерного удара.Вариант расчета, при котором решение задачи произво¬
дится наилучшим образом, принимается за оптимальный.§ 8.4. ОПТИМИЗАЦИЯ ПАРАМЕТРОВ ПОДВИЖНЫХ
РАКЕТНЫХ КОМПЛЕКСОВВ отличие от стационарных подвижные комплексы могут
непрерывно менять расположение боевых позиций, что за-
1|>удпяет их обнаружение противником и снижает тем самым
нх уязвимость. Важнейшими свойствами подвижных ком¬
плексов являются скорость передвижения Vn, время пере-
чо,ча из походного положения в боевое ^Пб и время перехода
и I боевого положения в походное /бп-Задача оптимизации подвижных комплексов обычно фор¬
мулируется следующим образом: необходимо найти сочета¬
ние параметров Lmax, q, аш Vn, tnб и tnп, обеспечивающее на-
нееопие противнику максимального ущерба при заданных ас-
I in нованиях средств.287
Возможна другая постановка задачи: необходимо найти
сочетание параметров Lmax, <7> ®п, Уп, 4б и ten, при котором
подвижные комплексы нанесут противнику требуемый ущерб
при минимальном расходе средств.В первом случае рассматривается игровая ситуация с пол¬
ной информацией, когда стороны могут иметь одинаковые
ассигнования (симметричная игра) или разные ассигнования
на строительство комплексов (несимметричная игра).Во втором случае предполагается изолированное от стра¬
тегий противника исследование функций стоимости вица
С\,(УП, ta6, tan, Lmax, q, On) на минимум при условии выпол¬
нения боевой задачи, что близко к реальным условиям, если
вооружение сторон предполагается применять только для
поражения крупных целей противника.Рассмотрим решение лишь первой задачи в случае задан¬
ных ^пб И (qu-В настоящее время наиболее полно разработаны методы
исследования парных игр с нулевой суммой при ограничен¬
ном числе ходов и стратегий сторон. Для реализации этих
методов могут быть сделаны следующие допущения:— величина платежа матриц рассматривается как прямо
противоположная для оценки результатов игры сторонами;— игра исследуется как конечная при ограниченном чис¬
ле стратегий;— каждая ситуация оценивается как независимое собы¬
тие.Первое допущение позволяет при приближенном опреде¬
лении результатов игры реализовать методы, применяемые
для решения задач с нулевой суммой. Второе допущение
дает возможность ограничить объем матриц. Третье допуще¬
ние позволяет рассматривать изолированно группы малых
матриц и по обобщенной матрице определять цену игры.Для более объективной оценки подвижных комплексов
иногда используют матрицы с двумя платежами. Платеж
матриц обычно определяют, учитывая динамику противодей¬
ствия сторон по результатам пуска всех ракет сторон.При решении задач оптимизации параметров подвижно¬
го старта растет число ракет, которые могут быть произве¬
дены на выделенные средства. Расчет ведется в такой после¬
довательности:1. Задавшись несколькими значениями q, определяют о„
по формулеап = а2 + j/'a2 + а‘по , (8.17)где опо — минимально возможное среднеквадратическое отно¬
шение ракет при стрельбе.288
Если стоимость системы управления (при оп — опо = 1)
равна Сс°у, то параметр а определяется из равенства(8.18)mo В2— стоимостный коэффициент боевой части.Уравнение (8.17) получается из условия минимума стои¬
мостей системы управления Ссу и боевой части Cqч в пред¬
положении, что:2. Для каждого сочетания, параметров q и оп определяют///(',ч, ^су» бч И3. Используя методы баллистического проектирования, по
сочетаниям параметров Lmах, q, оп определяют параметры
ракет.4. Устанавливают параметры технологического оборудо¬
вания и сооружений.5. Находят стоимость пуока одной ракеты С(j. Определяют число ракет, которое может быть изготов¬
лено при заданных бюджетных ассигнованиях:7. При числе ракет у сторон, полученном в п. 6, в зависи¬
мости от числа варьируемых величин строится матрица. При
илрьировании Lmax, q и оп и рассмотрении трех вариантов
ггратегий, для каждой конфликтной ситуации анализируется
матрица «243x243», при варьировании двумя параметра¬
ми -матрица «27X27» и одним — матрица «3X3».Весьма неясным вопросом при решении задачи оптими-
1/щии параметров подвижного комплекса является учет ве¬
роятности поражения их при ядер-ном ударе против¬
ника.Вероятность поражения подвижного комплекса до перво¬
го пуска ракет ЯП1 зависит от вероятности разведанности
координат СП и живучести комплекса, а вероятность пора-
Лишя комплекса после первого пуска Рл2— от вероятности
точного определения координат после первого пуска, живу¬
чести комплекса и скорости его перемещения на новую бое-
иую позицию для последующего пуска.(8.19)К) -2582289
Влияние скорости перемещения подвижного комплекса на
вероятность его поражения можно учесть путем искусствен¬
ного увеличения ошибки подготовки, полагай, что°n=V<t(8-2°)где одоп — дополнительная среднеквадратическая ошибка.
Приближенно *Vn _ Vn (£п + ^оп) /О 01 \адоп = — = 8 , (0-^1)где Vn — скорость перемещения;t'n—время полета ракеты противника с добавкой на
время работы системы оповещения.Используя значения седловых точек частных матриц,
можно составить обобщенную матрицу, позволяющую судить
не только об оптимальных q и оп, но и об оптимальных Lmax
и Vn.§ 8.5. ПОСТАНОВКА ЗАДАЧ ОПТИМИЗАЦИИ БОЕГОТОВНОСТИ,
СИСТЕМ УПРАВЛЕНИЯ И СВЯЗИБоеготовность стратегических ракетных комплексов оце¬
нивают временем на подготовку ракет к пуску из различных
состояний. В зависимости от состояния комплекса разли¬
чают транспортную, постоянную, повышенную и полную бое¬
готовность. Наиболее показательной является полная боего¬
товность, характеризуемая временем на подготовку и пуск
ракет /г.При проектировании ракетных комплексов стремятся мак¬
симально уменьшить tr. Это объясняется тем, что с умень¬
шением /г удается поднять в воздух больше ракет до того,
как на боевые позиции обрушатся атакующие боевые части
противника. Однако уменьшение времени на подготовку
к пуску и пуск ракет, как правило, достигается введением
дополнительных устройств, поэтому сопровождается сниже¬
нием надежности и повышением стоимости комплекса.Выбор боеготовности существенно зависит от условий на¬
чала боевых действий так же, как выбор типа стартового
комплекса. Задача установления оптимального времени бое¬
готовности имеет смысл лишь в случае нанесения ответного
удара при нормальной работе систем оповещения, управле¬
ния и связи (ситуация 1).В ситуации 2 уменьшение времени боеготовности, на¬
чиная с нескольких минут, практически не влияет на эф¬
фективность оружия, так как мы не знаем, когда на нас обру¬
шатся боевые ракеты противника.290
Предположим, что в ситуации 1 сторона А нанесла пер-
iii.iii удар по стороне В, которая предполагала вести пуски
|мкет с плотностью, распределение которой представленои.I рис. 8.9.Из рис. 8.9 следует, что еслиtr<ta-toa, (8.22)• де tn— время полета ракет стороны А до СП стороны В\
ton—время с момента пуска ракет стороны А до-момента
их обнаружения стороной В,
id эффективность вооружения при дальнейшем уменьшении tr
практически не увеличивается.Потери стороны В в рассматриваемой боевой ситуации
характеризуются числом выведенных из строя ракет:ANB = NBl(l- Р*) Р* + NB2 Р% (8.23)где NB1 — число ракет, запланированных стороной В для
первого пуска;NB2 — число ракет, запланированных стороной В для
второго пуска;— надежность пуска ракет стороной В\Р* — вероятность поражения СП стороны В сторо¬
ной А.Если сторона В запланирует пуск всех ракет одним зал¬
пом (сократит N^2 До нуля), то ее потери при tt ^ ta — /оп
Лудут очень малы и удар стороны А по СП стороны В будет
иг эффективным.10#291
Задача оптимизации боеготовности комплексов формули¬
руется так: нужно установить такое значение времени на
подготовку и проведение пуска ракет, при котором боевая
задача выполняется комплексом при минимальных затратах
средств.Логическая модель исследования боеготовности приведе¬
на на рис. 8.10. В качестве исходных условий исследованияРис. 8.10. Логическая модель оптимизации боеготовности ракетного ком¬
плексасчитаются заданными: боевая задача и система оповещения,
тип старта и параметры ракеты, состав технологического обо¬
рудования и сооружений, система управления и связи. В бло¬
ках 1 и 2 варьируют боеготовностью и условиями начала
боевых действий. В блоках 3—5 находят требуемые измене¬
ния в ракете, технологическом оборудовании и сооружениях,
а также в организационно-штатной структуре. В блоках 6—9
находят стоимость пуска ракеты, устанавливают надежность
и живучесть, определяют число ракет, необходимое для по¬
ражения целей, и стоимость выполнения боевой задачи.292
IJ блоке 10 производят сравнение вариантов и выбор опти¬
мального варианта.Вопросы установления оптимальной боеготовности орга¬
нически связаны с организацией систем оповещения, управ¬
ления и связи.Системы управления и связи определяют не только тре¬
буемую боеготовность, но и эффективность использования
оружия.Задача оптимизации системы управления и связи форму¬
лируется так: установить организационную структуру и бое-
1н,ie порядки, примерные штаты частей, а также систему свя-
III, обеспечивающие требуемую эффективность применения
вооружения при минимальных затратах средств.Логическая модель исследования задачи оптимизации си¬
стемы управления и связи приведена на рис. 8.11.В данном случае исходные условия исследования сохра¬
няются почти такими же, как и при оптимизации боеготов¬
ности. В блоках 1—6 отбираются приемлемые варианты бое-
иых порядков, управления, связи, охраны объектов, состава
подразделений обеспечения и боевых расчетов. В блоках
7—10 устанавливаются организационная структура части,
состав штаба и КП *, состав средств управления и оборудо-
иания, параметры линий связи, состав сооружений управле¬
ния и связи, состав сооружений и караулов охраны. В бло¬
ках 11 — 12 устанавливаются степень занятости расчетов и
штатный состав части. В блоках 14—16 определяются надеж¬
ность, боеготовность, живучесть, вероятная разведанность
стартов противником. В блоках 17—19 оцениваются стои¬
мость эксплуатации комплекса и стоимость пуска ракеты,
находится число ракет, необходимое для выполнения типо-
иой задачи, сравниваются варианты и отбирается лучший
вариант.Таким образом, в результате исследования определяются
боевые порядки, организационно-штатная структура части,
состав объектов управления и связи, а также наиболее ра¬
циональные условия их использования.При оптимизации управления и связи оценка деятельно¬
сти части, естественно, должна вестись для периодов:— ввода на боевое дежурство;— боевого дежурства;— боевых действий.Каждый период имеет свои задачи и требует особой под¬
готовки расчетов и технических средств. То, что не нужно во
время повседневного управления, может быть главным во
время выполнения боевой задачи.* КГ1 — командный пункт.293
пехдэ п
tsrnauqodufi тн/АшЗпэ
NdwawodouQouJHondDg jnmHfjDdj
rihogoc зпнзниоипд он wodwoc зпнзиздзаирчпнооос
озодзод зпнзниошчд мр шаяоо
s уизпь зпнэузеэйиот /чшдной омэЛи
пшэомпошэ uiahoodппн-ажАйооз п'ипнодоеАйодо
огояоэнпгоионхэш дошэоэ'nwsxod dmo/Iu unaowoHxai
"ошйошз uni294Рис. 8.U. Логическая модель оптимизации системы управления и связи
Глава 9ОПТИМИЗАЦИЯ ПРОЦЕССА РАЗРАБОТКИ
И ОЦЕНКА КОМПЛЕКСОВ С УЧЕТОМ
ПРОТИВОДЕЙСТВИЯ СИЛ И СРЕДСТВ СТОРОН§ 9.1. ОПТИМИЗАЦИЯ ПРОЦЕССА РАЗРАБОТКИ
ПРОГРАММЫК основным этапам процесса выполнения программы соз¬
дания ракетной системы относится:— определение потребности в системе;— обоснование тактико-технических требований (ТТТ)
к ней;— проектирование и конструирование элементов си¬
стемы;— опытная отработка;— серийное производство;— строительство сооружений и поставка оборудования;— принятие на вооружение;— эксплуатация.Работа над программой создания ракетной системы тре¬
бует оптимальной координации действий больших коллекти-
иов на всех этапах ее выполнения. Уже при обосновании ТТТ
млжно четко представлять оптимальный вариант процесса
разработки программы.Исследования показали [24], что время, фактически за¬
траченное на проектирование осуществленных систем воору¬
жения, в 1,4 раза, а затраты в 1,7—3,2 раза превышают за¬
планированные.Только на основе подробного исследования всех этапов
разработки и эксплуатации ракетной системы можно надеж-
ми судить о трудоемкости и затратах средств на про¬
грамму.В связи с этим задачу оптимизации процесса разработки
ракетной системы следует рассматривать как главную зада-295
чу военно-технического проектирования, завершающую ис¬
следование оптимальных характеристик ракетного ком¬
плекса.Целью задачи оптимизации процесса разработки ракет¬
ной системы является установление первичного плана работ,
определение трудоемкости и затрат на программу.Задача оптимизации процесса разработки ракетной си¬
стемы может быть сформулирована так: установить опти¬
мальную последовательность работ над программой, обеспе¬
чивающую подготовку ракетных комплексов с определенны
ми тактико-техническими параметрами к боевому дежурству
в минимальный срок при заданных ассигнованиях на ракет¬
ную систему либо с минимальными затратами средств на
создание системы при заданных сроках и характеристиках
комплексов.Логическая схема решения задачи оптимизации разработ¬
ки ракетной системы приведена на рис. 9.1.В соответствии со схемой вначале устанавливают общую
структуру организации и управления программой, по кото¬
рой находят требования к ее звеньям. Далее путем исследо¬
вания частных структур организации и управления звеньев
находят их оптимальные параметры. Затем при оптимальных
параметрах звеньев анализируют модель общей структуры
организации и управления.На основе решения этой задачи путем изменения дисцип¬
линирующих условий уточняют функции звеньев и их опти¬
мальные параметры.Общая структура организации и управления, как прави¬
ло, включает связи между военными организациями и пред¬
ставителями промышленности, НИИ, КБ.Прежде всего рассмотрим структурную схему взаимодей¬
ствия между военными организациями. В качестве примера
оценим две схемы [24]: первую со структурой функциональ¬
ного управления (рис. 9.2) и вторую с управлением на осно¬
ве проекта (рис. 9.3).Структурная схема функционального управления четко
обозначает подчиненность лиц, но в ней нет никого, кто мог
бы быть признан полностью ответственным за проект, так как
в поле зрения такого общего руководства находится не¬
сколько проектов. Управление на основе проекта более слож¬
но в смысле подчинения, однако око позволяет руководите¬
лю проекта, -наделенному соответствующими полномочиями,
подчинить координацию всех действий аппарата задачам вы¬
полнения проекта.Техническими отделами такой системы организации могут
быть отделы: аэродинамики и баллистики, разработки ракет,
двигателей и средств запуска, организации производства,
обеспечения качества, исследований и испытаний, операций296
к*но>оСОСиXX=гтаСПSгSЕ-CSОКXЯ<v3о>Сил4
ф
*3
оЙIII л - /ЛР00Я 914HUD'S297
по запуску, а также отделы вычислений и финансовых рас¬
четов.Поскольку, помимо военных, в разработке проектов уча-
ст; '.ют и гражданские организации (предприятия, КБ, НИИ
и т. д.), то с целью построения сетевых моделей структуру
функциональных связей удобно изображать в виде сетки
управления.Рис. 9.2. Структура функционального управления (по материалам США)На рис. 9.4 приведена сетка управления. Каждая ее клет¬
ка отражает действие, которое должно быть выполнено, на¬
пример: разработка проекта узла, оформление чертежей, со¬
гласование и т. д. Внутренние линии показывают, какой от¬
дел несет ответственность за выполнение данного действия;
граничные линии — какие санкции и от кого должны посту¬
пить при выполнении задачи или какие действия необходимо
выполнить субподрядчикам.Такая сетка управления (сетевая модель) позволяет ис¬
следовать критические пути по времени, затратам и надеж-298
ности с целью выдачи первичных рекомендации для оптими¬
зации процесса организации и управления ее звеньями. Пос-
ос исследования задача сводится к установлению коорди¬
нации действий в звеньях, включающих взаимодействие от¬
делов, цехов, групп и отдельных исполнителей на объектах,
участвующих в реализации программы строительства ракет-
iioi'i системы.МинистерствоармииУправления специально¬
го проектированияIКомандование
вооруженных силПроектХОтделы по родам мате-
риально-технически обеспечетТехнический
директорИсследования
и разработкиЛ- ОтдIIОтдОтдЛабо¬раторияД и ректор
программы±ПроизводствоОтдОтдОтдI-ОтдОтдСекторСекторГоуппа1контора1Lбюропроекта»хпроекта„А*проекта
«А.СредствапомощиОтдРис. 9.3. Структура управления на основе проектаАнализ микроструктуры организации и управления
шоиьев (объектов) изложен в § 6.2. На его основе уже на
»in не разработки ТТТ можно оценить целесообразную рас¬
пиновку сил и распределение средств при выполнении про¬
ект;!. Естественно, что методы § 6.2 полностью применимы
при исследовании общей сети организации и управления про¬
цессом строительства новой ракетной системы.Заметим, что в отдельных случаях недостаточно полно
нпилизируется общая сетевая модель организации и управ¬
ления и тогда рекомендации по финансированию и. срокам
ипшпченным для проведения работ отдельных звеньев могут299
дать не оптимальный суммарный (интегральный) эффект.
В частности, в работе [24] показано, что в случае поэтапного
выполнения программы, когда только после окончания пред¬
шествующего этапа начинается работа над последующим,
интегральная эффективность использования средств полу¬
чается плохой.Такое положение можно объяснить тем, что для уже под¬
готовленной к использованию ракеты в процессе ожиданияФункц ииВремя —Помощь и услуги
при эксплуатации,2 обеспечение
С качества.В Заготовки а3 Закупки.5 П роизеодство,£ Организация работ
исполнителей.^ Финансы.
Руководство
контрактами.Информаций в
роботах исполнители
Лроера MMupoSanue.
а Обеспечение
» операций.
сз обеспечение
5 оборудованием,«>5 к онтрольto структурой
системы.Рис. 9.4. Структура управления по схеме: явление — логическая связьзавершения остальных этапов возникает потребность в дора¬
ботке конструкции.Неизбежная в таком случае доработка ракеты и растяну¬
тость этапов приводит к увеличению сроков и затрат на про¬
грамму. В связи с этим считают целесообразным по возмож¬
ности совмещать этапы проектирования, опытной отработки,
производства и строительства сооружений.Рациональная степень совмещения этапов может быть
выяснена только на основе исследования конкретной общей
сетевой модели организации и управления процессом реали¬
зации программы строительства ракетной системы.Конкретные исследования общей и частных сетевых мо¬
делей организации и управления проектом базируются на
определенном представлении о методах и функциях руко¬
водства.300
К методам и средствам управления относят: периодиче¬
ские совещания; технические конференции, отчеты о выпол¬
нении графиков и технических планов работы; отчеты об ис¬
пользовании ассигнований; инспектирование; технические до¬
кументальные фильмы; отчеты о выполнении всей про¬
граммы. чВ основные функции руководства входят: планирование
работ, общая организация всех видов деятельности коллек¬
тивов, расстановка персонала, управление видами деятель¬
ности, относящимися к постановке задачи и поверка их вы¬
полнения, контроль, направленный на стимулирование свое¬
временного выполнения задач плана. Процесс руководства
заключается в координации выделенных выше пяти функций
н широком круге связей между отдельными звеньями —
коллективами, участниками выполнения программы.При исследовании задачи оптимизации процесса разра¬
ботки ракетной системы прежде всего необходимо решить:— когда вооружение будет поставлено на боевое дежур¬
ство;— откуда можно взять или как подготовить персонал для
мксплуатации техники;— степень нагрузки предприятий, КБ и НИИ, а также
рациональный план их работы и финансирования.В результате исследования задачи оптимизации разра¬
ботки необходимо уточнить цель программы и сроки первых
операций, установить требования к структуре системы, а так¬
же организовать управление программой разработки.Должны быть определены и зафиксированы сроки: нача¬
ла проектирования, завершения отработки опытного образца,
завершения испытаний опытного образца, завершения дора¬
боток, государственного испытания, запуска в серийное про¬
изводство, завершения поставок вооружения и срока поста¬
новки комплексов на боевое дежурство.Естественно, что для этого применяют методы сетевого
планирования и управления. Одновременно по сетевым моде¬
лям необходимо оценить расходы для всех перечисленных
иыше этапов выполнения программы, дисперсию стоимости и
времени, а также установить возможные сферы работ, кото¬
рые нельзя точно определить.Чтобы обеспечить высокое качество вооружения, уже при
решений задачи оптимизации разработки на этапе обоснова¬
ния ТТТ должны быть выявлены пути и намечена программа
работ по обеспечению качества и надежности конструкции.В управлении и организации больших систем существует
много спорных вопросов как в разработке систем, так и в ее
организации и в руководстве системами. Еще много спорного
к вопросах функциональной связи между заказчиком и
исполнителями (предприятиями, КБ и НИИ). Недостаточ¬301
но определились принципы руководства в программах работ,
связанных с новой техникой, не ясны полностью организаци¬
онные формы работы, система контроля и отчетности.Вопросы организации и управления в нашем социалисти¬
ческом хозяйстве всегда занимали центральное место. Здесь
на базе теории больших систем сейчас решают ответствен¬
ные задачи.§ 9.2. СРАВНЕНИЕ РАКЕТНЫХ КОМПЛЕКСОВ В УСЛОВИЯХ
ПРОТИВОДЕЙСТВИЯ СИЛ И СРЕДСТВ СТОРОННаиболее полное представление о качестве ракетного ком¬
плекса, его преимуществах и недостатках можно получить,
решая девятую главную задачу военно-технического проекти¬
рования с учетом изменения боевой ситуации во времени.
При этом обнаруживается ослабление сил и средств сторон
как результат их противодействия, учитывается пополнение
сторон за счет резервов, проявляется наряду с другими свой¬
ствами комплекса его боевая производительность.Действие ракетного и других видов вооружения удобно
представлять как поток событий. При взаимном наложении
нескольких независимых случайных потоков событий практи¬
чески всегда получают поток, близкий к пуассоновскому.
Для пуассоновского потока плотность успешных выстрелов
(пусков)А = Р\, (9.1)где X — плотность потока пусков;Р—вероятность поражения цели при одном пуске.В случае пуассоновского потока с целью описания дина¬
мики противодействия сторон при значительном числе взаим¬
ных ударов используют уравнения Ланчестера. Процесс дуэ¬
ли между «красными»., и «синими», описываемый изменением
их средней численности, можно представить уравнениями [27]:^ = -Л2т2; (9.2)а-^ = -А,ть ' (9.3)где т1 и т2— среднее численное значение сил «красных» и
«синих»;А1 и Л2—плотность потока успешных пусков соответст¬
вующих сторон.При выводе уравнений Ланчестера предполагается, что,
как только боевая единица противника уничтожена, огош.
переносится на другую цель. В реальных условиях боевых
действий стратегического ракетного вооружения более пра-302
имлыю предположить, что информация о поражении цели от¬
сутствует и перенос огня не осуществляется.В этом случае, оценивая ущерб сторон, надо учитывать
и нероятность того, что успешный пуск пришелся по непора¬
женной цели.Тогда по Динеру следует, что= — (9.4)dt * -m01 9 4 'dttir, , fti-i C\иг = -к*тч^> <9-5>m i m,где—l = u,h—-=[»,:—вероятности того, что пуск произошел
0*01 m02по непораженной цели «красной» и
«синей» сторон;
т01 и т02—начальное численное значение сил со¬
ответствующих сторон.Не производя промежуточных выкладок, приведем реше¬
ние уравнений Динера [29]:<**>
<9'7)AiOToi . „ Аа/я0аI де н-i — —5 , Из — — ./Коз "‘01Известны и более сложные формулы для описания раз-
Ш'рнутых моделей противодействия сторон. Однако для срав¬
нения стратегического ракетного вооружения они исполь¬
зуются довольно редко. Это объясняется тем, что при при¬
мечании стратегических ракет число взаимных ракетно-ядер-
пых ударов сторон ограничится 3—4 ударами. Поэтому в
данном случае динамика противодействия сторон в стохасти¬
ческой постановке оценивается путем использования цепей
Маркова и в детерминированной по средним результатам
обмена ударами.В последнем наиболее распространенном при решении за¬
дачи сравнения ракетных комплексов случае результат про-
шиодействия определяют по математическому ожиданию
ущерба, наносимого сторонами друг другу во время боевых
действий.При сравнении ракетных комплексов прежде всего со-
гшвляют математическую модель боевых действий, которая
должна отражать соотношение сил и средств сторон и про¬
цесс их Изменения в результате потерь и восстановления.303
В общем случае такие модели чрезвычайно громоздки, по¬
скольку они охватывают действия частей различных видов
вооруженных сил, а также совокупность большого числа раз¬
нообразных целей [25], [27], [29].В задачах сравнения вариантов ракетного комплекса воз¬
можны существенные упрощения моделей. Так, можно счи¬
тать состав цел'ей качественно неизменным, не учитывать
ущерб, наносимый обеим сторонам в результате воздействия
других средств вооружения, рассматривать объекты пора¬
жения укрупненно, подразделяя их на несколько групп поСторона АБоевыепозициипротиворакетГруппы основ¬
ных объектов
пораженияulmЕТ.Т£боевыеРезервыпозицииракетногоранетвооружения "Т■ч:Группы осноТ
ных одъектоб
поражения1—Резервы .БоевыеракетногопозициивооруженияранетJБоеЬые
позиции
противоракетСторона вРис. 9.5. Блок-схема противодействия сил и средств сторондиапазонам дальности, размерам (крупные и малые цели)
и степени защищенности.В упрощенной модели, показанной блок-схемой на
рис. 9.5, выделены ракетные комплексы, комплексы противо¬
ракет, резервы ракетного вооружения и несколько групп
целей. Боевые действия представляются в виде ряда последо¬
вательных ударов, в результате которых обе стороны несут
потери. За счет резерва потери могут частично восстанавли¬
ваться, а неповрежденные пусковые установки снабжаются
в ходе боевых действий ракетами.В общих чертах можно наметить следующую схему реше¬
ния задачи определения эффективности ракетного комплекса
в динамической постановке:1. На основе анализа группировок целей, реального во¬
оружения и стратегических концепций сторон составляется
блок-схема противодействия.2. По современным представлениям о важности целей на¬
мечается программа действий сторон. Делается предположе¬
ние о том, какая из сторон первой наносит удар (для опре*
деленности будем именовать ее стороной А),304
3. Оценивается эффективность W^ для каждой комбина¬
ции стратегий сторон в первом ударе с учетом надежности
иыполнения боевой задачи в условиях противодействия. ^4. Составляется матрица значений эффективности Н^для
первого удара. Методами теории игр отыскиваются опти¬
мальные стратегии сторон в первом ударе и соответствующее
им значение эффективности (цена игры) Н^011Т.5. Устанавливаются условия для оценки возможностей
продолжения боевых действий теми объектами, которые под¬
верглись удару.6. С помощью уравнений потерь определяются потери
стороны В, по которой был нанесен первый удар, и выяв¬
ляются по условиям п. 5 возможности стороны В нанести
ответный удар по стороне А.7. Аналогично п. 3 оценивается эффективность W]j для
каждой комбинации стратегий сторон во втором ударе (от¬
ветном ударе стороны В). Вносятся изменения в количест¬
венный состав сторон в соответствии с потерями стороны В
в первом ударе и пополнением сторон за время между пер¬
вым и вторым ударами. Аналогично п. 4 составляется мат¬
рица значений эффективности для второго удара, отыски¬
ваются оптимальные стратегии сторон и соответствующее им
значение эффективности W"onT.8. Определяются потери стороны А в результате второго
удара и выявляются возможности нанесения стороной А сле¬
дующего удара.9. После нискольких поочередных ударов сторон оцени¬
ваются результаты выполнения боевой задачи:Проведя аналогичные расчеты для нескольких вариан¬
тов ракетного комплекса, можно выбрать наилучший ва¬
риант.Остановимся подробнее на вопросе определения потерь
сторон. В связи с высокой эффективностью и большой стои¬
мостью ракетного вооружения число пусков ракет невелико,
а динамика боевых действий ракетных войск имеет четко
выраженный дискретный характер. Поэтому ослабление сто¬
рон можно определять простым суммированием потерь по
ударам. Применительно к модели, представленной на рис. 9.5,
уравнения потерь составляются следующим образом.Для стороны А:ГД Wp = (/д ёл)т% ~Г~ cpt Рм Апр) а>р Вр; (9.8)р i=iгAWjip = (f А Ал) т% ^4^ 2 ^ПР < С"Р iP*i Аар) wnp ^р> (9-9)305
AUf =
ДЦ* =
дцл =Для
Длр =А^прдц? =АЦ? =дцв =
где®р, ^"пр,306— 2 м1 — СкРл/Лпр)^; . (9.10)1=1Г^2i/^Ai ^пр) ш2 ^р> (9-U)1=1— 2 М1 ~ cKi Ли А.Р) “к Яр. (9.12);=iстороны - В:(*а — S's) «р — ТГ- 2 аР/ С1 — dPj Рвj Впр) »Р Л‘> (9л3)
р ;= 1(/в ^в) лпр g 2 йпр j (1 ^пр jPBj ^пр) ^пр^4р! (9-14)2 «i; (! —dijPej впр) »i Лр; (9.15)У=1>]й2/.(1 —^/?йУ5пр)»2/1р; (9.16)у=1—— dyPnj Bnp)S>, Af,. (9.17)j=iAp и Bp — число ракетных ^комплексов сторон
А и В соответственно;Аар и Впр — число комплексов ПРО сторон;
отр и пр — число ракет в ракетном комплексе■ стороны А и стороны В;'Пар и ппр — число противоракет в комплексе
ПРО стороны А и стороны S;
тр> <Р> пр< <р — начальное число ракет и противо¬
ракет в комплексе;Uf, U2V.., ЦКА — число объектов поражения стороны
А в 1, 2, к-й группах целей;Uf, Uf uf- число объектов поражения стороный в 1, 2, v-й группах целей;
аь а2,tfv — относительное число ракет, выпу¬
скаемых одним ракетным комплек¬
сом стороны А по боевым позициям
ракет, противоракет и по целям I,
2,..v-й групп объектов поражения
стороны В соответственно;^р> ^пР! Ьь Ь2,..., Ьк — относительное число ракет, выпу¬
скаемых одним ракетным комплек¬
сом стороны В по боевым позици¬
ям ракет, противоракет и по целям1, 2, ..., к-й групп объектов по¬
ражения стороны А соответственно;Ср, £пр) съ Со, ..ск—относительное число противоракет,
обеспечивающих прикрытие соот¬
ветствующих объектов стороны А;
dp, dnp, d\, d.,,..., d4—относительное число противоракет,обеспечивающих прикрытие соот¬
ветствующих объектов стороны В\
1а, 1в, /а, /а—интенсивности подвоза ракет и про¬
тиворакет из резерва (в процентах
к начальному их числу) за время
между ударами;
ёл, ёв, hA, hB—относительный расход ракет и про¬
тиворакет, определяемый пусками
и естественной убылью вследствие
недостаточной технической и экс¬
плуатационной надежности; •Ра, Рв— вероятности уничтожения ракеты
противника противоракетой сторо¬
ны А и стороны В соответственно;
s, г— число ударов сторон А и В соответ¬
ственно;uij,, сопр, (Oj, <о2,шк — ущерб, наносимый соответствую¬
щим объектам стороны А ракетой
стороны В\V ^Пр> ^2, •••, »—ущерб, наносимый соответствую¬
щим объектам стороны В ракетой
стороны А.Заметим, что при составлении уравнений потерь состав
комплексов по числу ракет (пгр, тпр, пр, пар) был принят
одинаковым. Если комплексы различаются числом ракет (на¬
пример, /72Р1 тР2 и т. д.), то следует составлять аналогич¬
ные уравнения для каждого типа комплексов.По принципу, положенному в основу составления урав¬
нений потерь, нетрудно дополнить приведенную систему
уравнениями и членами, характеризующими воздействие
огневых средств авиации, флота и ПВО, а также соответст¬
вующие потери этих средств.При составлении матрицы эффективности в качестве по¬
нижателя W{j можно использовать суммарный ущерб, нане¬
сенный всем объектам поражения в одном ударе. При этом307
«единичный» ущерб си или 9, наносимый одной ракетой объ¬
екту рассматриваемого типа, выражается математическим
ожиданием числа пораженных малых целей или поражаемом
площади крупной цели. Полный ущерб определяется резуль¬
татами s и г ударов, нанесенных сторонами Л и В в течение
выбранного интервала времени. Для стороны А суммируются
значения UPonT, соответствующие оптимальным стратегиям во
втором, четвертом и всех остальных четных ударах, вплоть
до r-го, для стороны В суммируются lFunT всех нечетных
ударов вплоть до s-ro. Отношение полных ущербов сторон— WW = WB (9Л8)характеризует эффективность их ракетных комплексов.В целях сравнения нескольких вариантов ракетного ком¬
плекса по эффективности следует провести аналогичные рас¬
четы для каждого варианта и сравнить полученные значе¬
ния W. Наилучшим окажется комплекс, обеспечивающим
максимальный относительный ущерб при прочих равных
условиях.Пусть полный ущерб WA, который необходимо нанести
стороне А, задан, и требуется выбрать наиболее экономич¬
ный для стороны В вариант ракетного комплекса. Для реше¬
ния этой задачи необходимо выразить в единицах стоимости
элементы матрицы Шц, затраты на поражение одной мало!)
цели или единицы площади крупной цели, а также «единич¬
ный» ущерб 9, наносимый типовому объекту стороны В ра¬
кетой стороны А в ответном ударе. Расчеты следует прово¬
дить для. каждого варианта до тех пор, пока полный ущерб,
нанесенный стороне Л, не достигнет величины WA. Сравне¬
ние суммарных затрат стороны В, рассчитанных для каждо¬
го варианта с учетом ущерба, нанесенного ответными удара¬
ми стороны А, выявит наиболее экономичный вариант ракет
ного комплекса.Рассмотренная расчетная схема пригодна в принципе и
для сравнения вариантов ракетных комплексов по боевоП
производительности.\
РАЗДЕЛ IIIОПЫТНАЯ ОТРАБОТКА И ИСПЫТАНИЯ РАКЕТГлава 10ОЦЕНКА НАДЕЖНОСТИ И ЭФФЕКТИВНОСТИ
РАКЕТЫ§ 10.1. ЗАДАЧИ ОПЫТНОЙ ОТРАБОТКИ РАКЕТКак уже отмечалось, эффективность применения ракетно¬
го комплекса для поражения целей крупных размеров может
йыть определена как математическое ожидание поражаемой
Чисти площади цели по формуле (1.6)I л’W=l— 1 —РгЯрРр4 про1 — ехр2.*+ 0,5*2/](10.1)При использовании ракетного комплекса для поражения
Мплых целей за критерий эффективности принимается веро¬
ятность поражения цели при пусках, определяемая по фор¬
муле (1.4):W= 11 — Р Р Р1 “г “р'пРО1<Ьф[-Из приведенных выражений видно, что ракетный комплекс
Может обладать заданной эффективностью W, если будут
оГк'Сиечены вполне определенные значения параметров R3,
Яр, Рг и РЛР0. Из них совершенство ракеты (без боевой
чисти) характеризуют параметры оп и Рр. Величина РПР0
N основном определяется совершенством противоракетной
ийороны противника и в некоторой степени конструкцией и
Мпдом траектории ракеты.В процессе опытной отработки ракетного комплекса ре¬
шаются две основные задачи:дорабатываются конструкция, технология производ-
«миа и эксплуатации всех элементов комплекса с целью309
повышения или достижения заданных значений критерия эф¬
фективности W и гарантированной дальности полета Lr;— определяются значения основных параметров элемен¬
тов ракетного комплекса и его критерий эффективности по
результатам испытаний.На этапе опытной отработки ракеты как основного эле¬
мента ракетного комплекса решаются аналогичные задачи:— дорабатываются конструкция ракеты с целью улучше¬
ния или достижения заданных значений гарантированной
дальности полета Lv, критерия надежности ракеты Рр и сред¬
него квадратического отклонения точек падения боевых ча¬
стей о;— определяются значения параметров LT, Рр и о по ре¬
зультатам испытаний ракеты в составе ракетного комплекса.Перед тем как рассматривать поставленные выше зада¬
чи, целесообразно напомнить некоторые положения матема¬
тической статистики.§ 10.2. СТАТИСТИЧЕСКАЯ ОЦЕНКА ПАРАМЕТРОВ
РАСПРЕДЕЛЕНИЯЛюбая ракета как при боевом дежурстве, так и при пуске
имеет какие-то значения параметров, характеризующих ее
боевые свойства.Обозначим какой-либо параметр ракеты (комплекса) че¬
рез X. Из-за невозможности точно повторить все случайные
условия производства, эксплуатации и пуска параметры ра¬
кет несколько отличаются один от другого, то есть яв¬
ляются значениями х случайной величины X. Совокупность
всех возможных значений параметра X составляет генераль¬
ную совокупность этого параметра, а характеристики рас¬
пределения ®{х) называются генеральными характеристика¬
ми. Например, масса конструкции ступени ракеты тс в гене¬
ральной совокупности ракет данного типа имеет нормальное
распределение(тс — Мт)2<р(тс)= ' :ехр
<sm V 2л(10.2)В этом случае математическое ожидание массы конструк¬
ции Муп и дисперсия являются постоянными числами, на¬
зываемыми соответственно генеральным средним и генераль¬
ной дисперсией.Чтобы в результате испытаний определить генеральные
характеристики параметров ракеты, строго говоря, необхо¬
димо провести испытания всех ракет, составляющих гене
ральиую совокупность. В связи с одноразовостью действии
основных элементов ракеты такая задача чаще всего явлжч310
t и бессмысленной хотя бы потому, что найденные значения
митральных характеристик будут отражать свойства уже не-
| v шествующих ракет. Кроме того, для определения некото¬
рых свойств ракет необходимо проводить их испытания в
\ пиниях ' боевых действий.При проведении ограниченного числа п испытаний можно
ннределить лишь п реализаций искомого параметра X, т. е.
шачеиия:хь хь ..., xh ..., хп. (10.3)Совокупность чисел (10.3) называется выборкой. При про-
иедсиии испытаний целесообразно стремиться к тому, чтобы
иыборка хорошо представляла свойства генеральной сово¬
купности. Например, при определении надежности ракет
нельзя проводить дополнительные, не предусмотренные пра-
пилами эксплуатации, проверки и выбраковки ракетных
.нрегатов и систем, предназначенных для испытаний; если
иыборка достаточно хорошо представляет генеральную сово¬
купность, то она называется репрезентативной (предсгави-
I ельной).Для выборки (10.3) можно найти ее характеристики (на¬
пример, среднее значение т\ или дисперсию а*). Эти харак-
П'рнстики называются выборочными. Нетрудно заметить, что
при проведении другой серии испытаний объектов, принадле¬
жащих к той же генеральной совокупности, можно найти
новую выборку с другими выборочными характеристиками.
I avui же провести большое число серий испытаний объектов
и I одной и той же генеральной совокупности, то можно по¬
ручить целый ряд значений выборочных характеристик, на¬
пример;Kv <2- •••><, •-(10.4)axV °х’2 ’ • ■ ■ > axj'Отсюда можно сделать важный вывод, что выбороч¬
ные характеристики сами являются случайными вели¬
чинами.Следовательно, в результате проведения ограниченного
числа испытаний невозможно определить генеральные харак¬
теристики параметра X, а можно найти реализации случай¬
ных выборочных характеристик. Другими словами, в реаль¬
ных условиях может идти речь лишь о более или менее точ¬
ной оценке генеральных характеристик. Если какая-нибудь
иыборочная характеристика у* при я оо, где п число испы-
I.inиii, формирующих выборку, сходится по вероятности с ге¬
неральной характеристикой г/, то величина у* называется
еоетоятельной оценкой у.ЗИ
Если при любом фиксированном п математическое ожи¬
дание у* равно у, т. е.М[у*]=у, (10.5)то величина у* является несмещенной оценкой у. Другими
словами, оценка у* не содержит систематической ошибки.
Обозначим разность между оценкой и истинным значением
генеральной характеристики через и:и = _у* —у. (10.6)Поскольку у является постоянной величиной, дисперсия раз¬
ности и равна дисперсии оценки:аЦи) = сЦу*—у) = аЦу*). (Ю.7)Чем меньше дисперсия (10.7), тем лучше оценка у*. Оцен¬
ка с минимальной дисперсией называется эффективной. При
обработке результатов испытаний нужно стремиться полу¬
чать состоятельные несмещенные и эффективные оценки ге¬
неральных характеристик параметров ракеты.§ 10.3. ТОЧНОСТЬ СТАТИСТИЧЕСКИХ ОЦЕНОК ПАРАМЕТРОВ
РАСПРЕДЕЛЕНИЯРассмотренные выше положения позволяют сформулиро¬
вать две практические'задачи, которые возникают при обра¬
ботке опытных данных.Во-первых, необходимо найти такие формулы, по которым
на основании наблюдений (10.3) можно было бы найти со¬
стоятельные, несмещенные и эффективные оценки генераль¬
ных характеристик измеряемых параметров.I Во-вторых, целесообразно оценить возможный просчет,связанный с заменой генеральных характеристик их оцен¬
ками.Для решения этих задач в первую очередь необходимо
знать закон генерального распределения ср(х).' На основе этого закона можно различными методами,
основным из которых является метод максимума правдопо¬
добия, получить формулы для оценок основных характери¬
стик.Отсылая читателя к литературе по математической ста¬
тистике (например, [19], [35]), приведем здесь некоторые ос
новные формулы оценок, которые будут использованы далее
в этой книге.Для нормального генерального распределения<ШЯ)312
| остоятельной несмещенной и эффективной оценкой матема-
шческого ожидания тх является величина/га.2 х,i=i(10.9)Оценка т* имеет также нормальный закон распределе¬ния¥«) =■ ехр(тх — тх)г
п(10.10)с математическим ожиданием тх и средним квадратиче¬
ским отклонением .V пСостоятельной несмещенной и эффективной оценкой дис-
иерсии о2 является величина(«,*)* =Распределение величины2 (^ -О*/=1z =(л-1) (°*)2(10.11)(10.12)следует закону %2 с (п—1) степенями свободы, плотность
вероятности которого выражается следующей формулой:ср (г) =Л-12 2 Гпри z > 0, (10.13)(г?)где Г |'п ~~ -*■ j— гамма-функция от -у-.Для нормальной генеральной совокупности случайные ве¬
личины т’х и а* независимы.В практике определения надежности ракетных систем
большое значение имеет оценка величины вероятности р по
данному числу т появления события А в п независимых
испытаниях. Вероятность р является параметром, входящим
в распределение дискретной величины X, принимающей
только два значения 1 и 0, в зависимости от того, появляется
ли событие А в рассматриваемом испытании или нет. Несме¬
щенной состоятельной и эффективной оценкой параметра р
мнляется частость появления события А в п опытах:Р* =(10.14)313
Эта оценка является несмещенной. Ее математическое ожи¬
даниеМ\р*\=р, (10.15)а дисперсия£)[/>*]= р-{-~^. (10.16)Оценка р* так же, как и вероятность р, имеет биноми¬
альное распределение. Вероятность того, что событие А по¬
является ровно m раз, выражается известной формулойРт,п = Стпрт(\-рГт. (10.17)Характерной особенностью законов распределения оце¬
нок, как это видно из формул (10.10), (10.13) и (10.17), яв¬
ляется то, что они зависят не только от случайной оценки как
от аргумента, но и от истинного значения оцениваемого па¬
раметра и числа испытаний.В общем виде Плотность распределения оценки у* может
быть представлена следующим образом:9(У*1У,п), (10.18)где у — истинное значение оцениваемого параметра.При большом числе испытаний законы распределения
(с*)2(я — 1) * , „оценок — и р* сходятся к нормальному. Это поло¬
жение часто упрощает определение точности оценок. Так,
при п>50 для решения практических задач законы распреде¬
ления (10.13) и (10.17) можно заменять нормальными.При ограниченном числе испытаний оценки неизвестных
параметров, находимые, например, по формулам (10.9),
(10.11) и (10.14), представляют собой лишь частные значе¬
ния некоторых случайных величин. Чтобы получить пред¬
ставление о точности и надежности оценки у* параметра у,
широко пользуются понятием доверительного интервала и
доверительной вероятности. Раскроем смысл этих понятий.Для каждого малого а>0 можно указать такое Ьу, чтоВер (.у* — < у <у* + Ьу) = 1 — а. (10,19)Чем меньше для данного а будет величина Ьу, тем точнее
оценка у*. На основании выражения (10.19) можно сделать
следующее заключение: вероятность того, что интервал (у*— йу, у* + §у) со случайными концами покроет неизвестным
параметр у, равна 1—а. Такой интервал называют довери¬
тельным, а вероятность 1 — а — доверительной вероятно¬
стью.Задачу определения точности и надежности оценки мож¬
но сформулировать и несколько иначе.314
Для каждого малого а>0 можно указать такие неслу¬
чайные числа у — Ьу, у + Ьу, чтоВер (у — Ьу <у* <у + 8_у) = 1 — а. (10.20)Выражение (10.20) можно пояснить следующим образом.
Если извлекается выборка в п значений из генерального рас¬
пределения, соответствующего значению параметра у, то со¬
бытие у — 8у <у* <.у ■+- Ьу имеет вероятность 1—а.Рассмотренные выше законы распределения оценок поз¬
воляют найти связь между доверительными интервалами, до¬
верительными вероятностями и числом необходимых испы¬
таний.Действительно,Вер (у — Ьу <у* < Ьу + у) =y+Sy— j <?(у*/у, n)dy* = \—x. (10.21)y-SyТаким образом, при известном законе распределения
оценки у{у*!у, п) и известном истинном значении у всегда
можно на основании уравнения (10.21) определить одну из
величин а, Ьу, п при двух других заданных.§ 10.4. СТАТИСТИЧЕСКИЕ ЗАДАЧИ ОПЫТНОЙ ОТРАБОТКИРАКЕТПосле рассмотрения вопросов определения оценок по ре¬
зультатам ограниченного числа испытаний целесообразно
вновь вернуться к содержанию этапа опытной отработки
ракет.В § 10.1 были сформулированы две основные задачи это¬
го этапа. При решении первой задачи дорабатываются кон¬
струкции ракеты и других элементов комплекса. Это приво¬
дит к изменению генерального распределения искомых пара¬
метров. Однако по ряду агрегатов, систем и машин может
быть накоплен статистический материал, позволяющий по¬
лучить оценки тех генеральных характеристик, которые не
претерпевают изменений из-за конструктивных доработок.При решении второй задачи предполагается неизменным
генеральное распределение, что дает возможность получить
основной статистический материал для получения оценок
исех искомых параметров ракет.В связи с большой стоимостью и сложностью организа¬
ции натурных испытаний элементов ракетного комплекса
чаще всего невозможно получить большие выборки. В этом
случае весьма ценной является априорная (доопытная) ин¬
формация об истинном значении тех или иных параметров,315
получаемая на стадии проектирования, моделирования и ис¬
пытаний отдельных узлов или систем. На основании априор¬
ной информации можно построить гипотетическое распреде¬
ление фпМ параметра X. Например, можно считать, что ве¬
роятность безотказной работы ракеты, представляемой на
летные испытания, равномерно распределена на интервале
от 0,4 до 0,9.При наличии предварительного, гипотетического распре¬
деления срп(х) и полученной в результате п испытаний оцен¬
ки х*, можно по теореме гипотез найти апостериорную (по-
слеопытную) плотность распределения истинного значения
параметра х:где <?(х*/х,п) —плотность распределения оценки х*, зави¬
сящая от истинного значения х и числа ис¬
пытаний га;<р(х/х*,п) — плотность распределения истинного значе¬
ния х при условии получения оценки х*
после проведения п испытаний.Таким образом, в ходе проектирования и опытной дора¬
ботки ракеты необходимо получить предварительные законы
распределения интересующих нас параметров <рп(*)- При
проведении же натурных испытаний можно получить оценки
этих параметров х*, что позволит при известных законах
ср (х*/х, п) наиболее достоверно судить о положении истинных
значений х.Отсюда становится понятной вся важность получения за¬
конов распределения оценок.§ 10.5. ЗАКОН РАСПРЕДЕЛЕНИЯ ОЦЕНОК КРИТЕРИЯ
ЭФФЕКТИВНОСТИ РАКЕТНОГО КОМПЛЕКСАОценки критерия эффективности, получаемые в ходе лет¬
ных испытаний, являются наиболее информативными. Одна¬
ко при проведении летных испытаний обычно нет возможно¬
сти учитывать воздействие противника на ракетный комплекс
и действие боевой части по цели. Параметры же, характери¬
зующие вероятность подготовки ракеты к пуску за заданное
время, можно определять и без запусков двигателей ракеты.
Поэтому в ходе летных испытаний целесообразно фиксиро¬
вать безотказность доставки боевой части в район цели, а
также точность этой доставки.Таким образом, в результате летных испытаний находят
ся оценки параметров Pv и о при фиксированных значенияхJ <рп М ч (х*/х, п) dx(10.22)ч316
Рп ^*про> Rs, Л* N. Поэтому оценка критерия эффективности
ни результатам летных испытаний W*mi в соответствии с за-
иисимостью (10.1) будет определяться оценками Р* и о*:WЛИ1 —{1 - РгР'р Рпро 1-ехр2 (**)2N(10.23)Оценка вероятности безотказной доставки боевой части
в соответствии с выражением (10.14) имеет следующий вид:где т — число отказов.Оценка Я* подчиняется биномиальному закону распреде¬
ления (10.17). Поскольку отклонения точек падения боевой
чисти имеют нормальный закон распределения, то оценка
дисперсии (о*)2 может быть найдена по формуле (10.11),
и ее закон распределения выражается через плотность рас¬
пределения %2 согласно выражению (10.13).Таким образом, поставленная задача сводится к опреде¬
лению закона распределения случайной величины яв¬
ляющейся нелинейной функцией (10.23) двух случайных ве¬
личин Р* и (а*)2 с известными плотностями вероятности.Можно считать, что причины, вызывающие внезапный от¬
каз и формирующие оценку Р* не зависят от причин, вызы-
иающих рассеивание точек падения и формирующих оцен¬
ку (о*)2. Однако между этими оценками все же есть опре¬
деленная связь. Дело в том, что при отказах на траектории
число наблюдений п уменьшается до величиныс учетом которой определяют оценку (о*) 2.При этих условиях после ряда преобразований и преодо¬
ления трудностей, связанных с дискретностью распределения
оценки Я* и непрерывностью распределения оценки (о*)2,
может быть получен искомый закон распределения оценки
критерия эффективностит(10.24)пп, = п — т,(10.25)
В выражении (10.26) считаются заданными числа N, R3,
йц, Q№, Рр, а, определяющие истинное значение критерия
эффективности 1У;ЛИ, так как в соответствии с зависимостями
(10.1) и (10,23)Формула (10.26) на первый взгляд кажется достаточно
громоздкой. Однако, задаваясь определенным .истинным зна¬
чением Гли и числом испытаний п, можно с помощью таб¬
лиц биномиального распределения и распределения %г вруч¬
ную рассчитать кривую ® (Н^*и/и^ли, л). При использовании
электронных цифровых вычислительных машин такой расчет
вообще не вызывает особых трудностей.На рис. 10.1 показан вид плотности вероятности
f(vr„ira.*) при ^ли = 0,81, п=10 и N= 1. Несколько не¬
обычный вид кривой можно объяснить следующим образом.
Поскольку оценка Р'р дискретна, то в точкахимеют место пики плотности вероятности, которые убывают
по мере удаления от истинного значения №лк. Кроме того,
вид закона искажается границами распределения (0,1). Если
истинное значение критерия эффективности близко к 1, что
обычно бывает, то кривая ^(М^ли/^ли, п) становится резко
асимметричной.При увеличении числа испытаний кривая, естественно,
стягивается к истинному значению, так как при этом умень¬
шается вероятность отклонения оценки.(10.27)(10.28)318
Найденный таким путем закон распределения позволяет
теперь определить точность и надежность оценок критерия
эффективности.Действительно, на основании выражения (10.21) можно
записать так:При оценке эффективности ракетного комплекса всегда
можно найти такое небольшое число oW, при котором откло¬
нение критерия эффектив-большую чем ±bW. Дру¬
гими словами, решениеуравнения (10.29) позволяет планировать необходимое число
испытаний для определения переменного значения критерия
эффективности при заданной точности bW и достоверности,
характеризуемой вероятностью 1 — а. Если же задать вели¬
чины п и 1 —а, то решение уравнения (10.29) определяет точ¬
ность оценки W'XI.Полученный выше закон распределения оценки критерия
эффективности ракетного комплекса может быть также ис¬
пользован при принятии решения об окончании летных испы-I Л ПИЙ.В ходе опытной отработки до проведения летных испыта¬
нии накапливается информация, позволяющая судить о зна-
чгннях параметров, характеризующих надежность и точность
работы отдельных систем и всей ракеты. На основании этого
материала, формируемого при проектировании, лаборатор¬
ных и стендовых испытаниях, можно указать возможные гра¬
ницы, в которых лежит истинное значение критерия эффек-
ипшости ракетного комплекса.При статистическом подходе к этой задаче на основе ана¬Вер (Гли - 8И/ЛИ < Ur„ < 1ГЛИ + bW) ='f(W'jWM,n)dW'XH=l-a. (10.29)пости на ±8^ не приво¬
дит к заметному измене¬
нию эффективности. Сле¬
довательно, для решения 5
практических задач целе- 4
сообразно прс-вести такое 3
число п летных ис-пыта- 2
иин, при которых полу- I* (И'ли/И'ли.п)чеиная оценка с вероят¬
ностью 1 —а не будет от¬
личаться от истинного
чначеиия на величину,1,v и,з и,о V,/ и,о и, d wmРис. 10.1. Закон распределения оценки
критерия эффективности319
лиза информации о работе ракеты, собранной до проведения
летных испытаний, можно получить гипотетическое, предва¬
рительное распределение величины критерия эффективности,
выражаемое плотностью вероятности При наличии та¬ких данных возникает следующая задача.До проведения летных испытаний нам известно предвари¬
тельное распределение критерия эффективности cpn(lF). Если
бы оно было достаточно точным, то вопрос об оценке крите¬
рия был бы уже решен. Однако эти данные еще не были про¬
верены при натурных испытаниях ракетного комплекса и мо¬
гут содержать существенные ошибки, связанные с неточно¬
стью математической модели, связывающей отдельные,
разрозненные опытные и расчетные данные с величиной кри¬
терия эффективности. Кроме того, в ходе проектирования и
опытной отработки этих данных, как правило, накапливается
не так уж много, чтобы можно было с большой достоверно¬
стью характеризовать работу ракеты.В связи с этим необходимость летных испытаний даже
при наличии данных о распределении <pn(W) не вызывает
сомнения. При проведении серии в п летных испытаний в со¬
ответствии с выражением (10.23) могут быть найдены оценки
критерия эффективности 1У*И. При этом возникает необхо¬
димость найти наилучшую оценку критерия эффективности,
которая бы учитывала накопленные ранее сведения о вели¬
чине- критерия, содержащиеся в плотности вероятности срп(1^),
а также в оценке W'm, полученной в результате п летных ис¬
пытаний. Эта задача может быть решена при использовании
теоремы Бейеса (10.22), на основе которой можно получить
плотность распределения истинного значения критерия эф¬
фективности при условии получения фиксированной оцен-
ки К* по результатам летных испытаний, т. е. функциюЗаконы распределения <рп (W) и <р (W'm/W, я) содержат
всю информацию, необходимую для определения закона<P(W„, «).Практическая ценность закона распределениял)
заключается в том, что он позволяет оценить вероятность на¬
хождения истинного значения критерия эффективности на не¬
которых интервалах при условии получения фиксированной
оценкиРассмотрим пример, иллюстрирующий последовательность
решения задачи.Пусть перед летными испытаниями найдено распределе¬
ние (fu(W), причем известно, что0<ГН<Г<1ГВ<1,320
а изменение критерия эффективности на величину ±8№ не
приводит к практическому изменению эффективности ракет¬
ного комплекса.В этом случае после проведения летных испытаний нас
может интересовать вероятность того, что истинное значение
критерия эффективности находится на интервале длиной 2bWt
т. е. в условиях нашего примераBep(WH^W<WH + 2bW/W:a,n)^= ртк, пу,Bep(lFH + 28lF<lF< IFh + 481F/IF;h, л) == P(WzlK,ny,(10.30)Вер (IFH + (2/ — 2) 8 IF < IF < IFH + 2ib IF, W’m, n) == P(W,/W’m, л);Вер (WB - 28 U7 < IF < WB/ IF;,, n) ==pmw;»,n).Эти данные позволяют оценить степень соответствия ис¬
тинного значения критерия эффективности ракетного ком¬
плекса W величине U/TP, указанной в тактико-техническом за¬
дании, при достоверности, характеризуемой вероятностью утр.Сведения, содержащиеся в выражениях (10.30), позво¬
ляют судить не только о том, что истинное значение критерия
эффективности с определенной вероятностью больше или
меньше 1FTP, но и насколько оно отличается от требуемого
значения. Если в силу каких-либо конструктивных, техноло¬
гических, эксплуатационных и других особенностей ракет¬
ного комплекса истинное значение критерия W будет суще¬
ственно отличаться от требуемого значения lFTp, то данные,
заключенные в выражениях (10.30), позволят обоснованно
принять решение о доработке комплекса с целью увеличения
его эффективности или учете при боевом использовании из¬
быточной, против запланированной, эффективности.Может случиться так, что при проведении п летных испы¬
таний вероятность у, характеризующая достоверность поло¬
жения величины W, окажется мень'ше требуемого значе¬
ния уТр, т. е. не выполняется условие1(10.31)J n)dW<, 1-Ттр.WтрЭто будет свидетельствовать о том, что необходимо про¬
должить летные испытания ракет. Таким образом, рассма-‘/„11—2582321
триваемый метод оценки критерия эффективности позволяет
вести оперативный контроль за результатами летных испыта¬
ний. До сих пор мы говорили об определении оценки крите¬
рия эффективности W'm после проведения серии в п летных
испытаний. Однако такие оценки можно получать и после
каждого летного испытания, полагая, что величина серии
п = 2, 3, 4 ... Другими словами, если бы после каждого лет¬
ного испытания можно было бы определять выражения(10.30), то мы всегда могли закончить эти испытания и не
только выбрать обоснованное решение о доработке или при¬
нятии ракетного комплекса на вооружение, но и определить
его эффективность.Рассмотрим последовательность расчета выражений(10.30). На основании гипотетического распределения срп(Н?)
необходимо определить вероятности нахождения истин¬
ного значения критерия эффективности на интервалах дли¬
ной 2bW\wH+imvВер(Гн<1Р< ГН + 28Г)= j <p„(W)dW=P(Wiy,l*'H+45№'Bep(IFH+28r<lT<lTH+48U^= j. 4a{W)dW=P{W2)\Wa+28 W'' Вер [WH + (2i — 2) W<W„ + 2iWH+2iSW= j <Pn(W)dW=Pm;WH +(2i-2)«W'Вер [WB — 281F< 1T< WB] =WB= J (W)dW = P(Wk).W-2&WDВ выражениях (10.30) и (10.32) предполагается, что на
интервале (Wn, U?B) укладывается k отрезков 2bW. Такое до¬
пущение упрощает техническую сторону расчетов.Далее необходимо найти вероятности получения оценки
иг по п летным испытаниям при условии, что истинное ,
значение критерия W находится на каком-то участке длиной
в 2bW. Для этого можно использовать закон распределения
оценки критерия эффективности <р (Wm/W, п).(10.32)322
Искомые вероятности могут быть выражены следующим
образом:Вер (W'JWn + (2 i — 2) 81F< W < WH + 2ibW, n) =- J 'fiW'JWt^dW^PiWJWb't). (10.33)W'H+(2/-2)5WВ связи с тем что закон распределения оценки' критерия
эффективности (10.26) весьма трудно представить как функ¬
цию величины W, непосредственно определить вероятность
Р{W^JWt, п) по зависимости (10.33) невозможно. Если пред¬
положить, что величина 8lF->0, то будет справедливо Следую¬
щее равенство, заменяющее площадь под кривой распреде¬
ления площадью прямоугольника:Wn+2l&WJ 9{W-JW,n)dW=4{W'JWa + {2i-\)bW,n)2bW. (10.34)№'п+(2/-2)ШТаким образом, искомые условные вероятности получения
оценки приближенно (так как в действительности bW =£0)
могут быть найдены по зависимостям:? (KJ WH + bW,n)2bW = P (WJ Wlt /г);+ 36 W, n)2bW = P (WJW?„ n);9 (KJWa + (2 i -l)bW, n) 281F = P (W'JWh «);(10.35)<P-bW,n) = P{W-JWk, n).Выражения (10.32) и (10.35) позволяют по теореме Бейеса
(10.22) найти искомые вероятности, характеризующие поло¬
жение истинной величины W после летных испытаний:п) - . (10.36)Ь»)/=1Проследим еще раз последовательность решения задачи.
Перед началом летных испытаний по заданному значению bW
и найденному закону распределения (рп(И7) в соответствии с
ныражениями (10.32) находятся вероятности P(Wt).После каждого (начиная со второго) летного испытания
по формуле (10.23) находится оценка W'm и в соответствии
с ней по формулам (10.35) определяются вероятности'/,11* 323
P(WjWb я). По зависимости (10.36) рассчитываются k зна¬
чений вероятностей Рп).Анализ полученных вероятностей, которые определяют
плотность вероятности распределения истинного значения
критерия эффективности 9 /г) при данной оценкепозволяет принять решение о продолжении или пре¬
кращении летных испытаний ракет.Если истинное значение критерия эффективности ракет¬
ного комплекса W существенно не отличается от требуемого
значения WTP, то выполнение условия (10.31) является осно¬
ванием для его принятия.В заключение следует заметить, что при оценке резуль¬
татов испытаний мы использовали лишь малую часть опыт¬
ной информации, а именно: величины отклонений точек паде¬
ния боевых частей и наличие отказов при пуске ракеты и во
время ее полета. В ходе летных испытаний могут быть полу¬
чены более подробные данные телеметрических, внешне-
траекторных, метеорологических и других измерений, харак¬
теризующих условия и качество работы отдельных элементов
ракеты. Целесообразность использования этих данных при
расчете эффективности ракеты не вызывает сомнения и эти
вопросы будут изложены в последующих главах. Однако при
этом мы должны будем использовать опытные данные coiBMe-
стно с математическими моделями. В этом случае сократится
необходимый объем летных испытаний, но будет частично
утеряно их главное достоинство—воспроизведение реальных
условий полета ракеты.Рассмотренный на примере оденки критерия эффективно¬
сти ракетного комплекса статистический подход к решению
задачи испытаний имеет довольно общий характер. Анало¬
гичным образом может быть поставлена и решена задача
определения точности и надежности оценки любого пара¬
метра ракеты,, фиксируемого в ходе испытаний.§ 10.6. ОПРЕДЕЛЕНИЕ ОЦЕНОК ОСНОВНЫХ ПАРАМЕТРОВ РАКЕТВ ходе опытной отработки часто возникает задача раз¬
дельного определения оценок вероятности безотказной рабо¬
ты ракеты Р* и дисперсии точек падения (а*)2. Иногда это
бывает вызвано тем, что систему управления, определяющую
величину (о*)2, и конструкцию ракеты разрабатывают раз
ные организации. В этих условиях возникает задача о нахо¬
ждении оценок Р' и (о*)2, а также о выборе метода опро
деления их достоверности.Эффективные состоятельные и несмещенные оценки (о*)а
и Р* могут быть найдены на основе опытных данных соот-324
m-тственно по формулам (10.11) и (10.14). При определении
достоверности оценок можно всегда найти такие малые из¬
менения параметров ±8о и ±ЬРр, которые практически не
меняют эффективности ракетного комплекса. При таких рас¬
суждениях достоверность оценок или объем испытаний, не¬
обходимых для подтверждения этой достоверности, могут
rtUTb найдены из решения уравнения типа (10.21). Заметим,
что эта задача упрощается, так как законы распределения
оценок (о*)2 и Я* известны (формулы (10.13) и (10.17). Од¬
нако подобная задача может быть решена и более эффек¬
тивно, если отказаться от мысли, что объем выборки являет¬
ся постоянной величиной. При определении достоверности
оценок параметров (о*)2 и Я* методом проверки статистиче¬
ских гипотез используем последовательный критерий А. Валь-Особенностью проверки статистических гипотез по после¬
довательному критерию является то, что объем выборки не
планируется заранее, а является случайным. Использование
дополнительной информации о последовательности появления
случайных результатов испытаний позволяет получить более
достоверную, чем при классических методах, информацию
при том же числе испытаний или сократить число испытаний
при том же уровне достоверности. А. Вальдом разработана
процедура проверки по последовательному критерию про¬
стых гипотез типа:Такая процедура дает лишь одностороннюю оценку. Про¬
верки гипотез как о положении о, так и Рр имеют аналогич¬
ную структуру. Поэтому рассмотрим Процедуру проверки при¬
менительно к оценке р = 1 —Яр вероятности отказа ракеты на
траектории..Мы хотим проверить гипотезу р<^р' против р>р'. Для
чтого выбираются вероятности ошибок первого и второго
рода а и р, а также назначаются числа ро<р'<р. Риск, свя-
мпнный с принятием неправильного решения, может быть
определен следующим образом.Вероятность считать, что р>р' при р равна а, а ве¬
роятность считать р<р' при р^р’ равна {3.Для проведения проверки в плоскости (т, п) (рис. 10.2)
строятся прямые:да [8].Яр =» Яр0 против Яр = Яр0 — 28Яр;
О — а0 против О == а0 — 28а.(10.37)(10.38)12—2582325
где h0 =hi =inlIn ^1- — In 1■PiPaIn1 Po1-pIn — in ^■PiPoIn1 —Pos =1 —/>0
1 —PiInp±Po- Ini — Pi1 — poПлоскость (m, и) этими прямыми делится на зоны откло¬
нения, безразличия и принятия нулевой гипотезы (р </>')•Процедура проверки
заключается в следую¬
щем. После каждого ис¬
пытания откладывает¬
ся точка т., п; при вы¬
ходе точки из области
безразличия прини¬
мается или отклоняется
нулевая гипотеза.Нетрудно заметить,
что область безразли¬
чия при такой проце¬
дуре проверки незамк¬
нута. Поэтому число
испытаний, необходи¬
мых для окончания проверки, является случайной величиной,
распределенной на интервале (0, оо). Математическое ожи¬
дание числа испытаний, необходимых для окончания провер¬
ки, определяется по формуле1-РРис. 10.2. Проверка гипотез по А. ВальдуМ(/г) =L (p) In-1 — аpln А+(1.РоР) In1 -Pi1 — Po(10.39)где L(p)—оперативная характеристика, определяемая из си¬
стемы уравнений:(^)‘- .L(P)326(*)*-(■£*)*'(10.40)
В пяти точках L(p) находится легко и в практике этих
пяти точек достаточно для построения оперативной характе¬
ристики:L (0) = 1; L (р0) = 1 — a; L {р{) = р;^w-TdWi(1)=a (10'41)Таким образом, существующий метод дает возможность
определить лишь полузамкнутый интервал, на котором распо¬
ложено истинное значение величин Рр или о при случайном
числе испытаний, необходимых для завершения проверки.
Поэтому обычно находят число испытаний ппр, определяемое
но классическому методу проверки гипотез, разработанному
Д. Нейманом и Е. Пирсоном. Если проверка не оканчивается
мри п—ппр, то можно принять решение, используя классиче¬
скую схему. При таком усечении последовательного критерия
случайное число испытаний распределено уже не на интерва¬
ле (0, оо), а (0, ппр).Для проверки гипотез, позволяющих ограничить с двух
сторон интервал, содержащий истинное значение параме¬
тров Яр или о, а также для планирования требуемого объема
испытаний можно предложить следующую процедуру про¬
верки гипотез по последовательному критерию. Рассмотрим
ее применительно к определению вероятности отказов р =
= 1 — Рр. Истинное значение р может лежать в широких пре¬
делах. Однако всегда можно по априорным данным назна¬
чить такой интервал {р„, рв), выход за который истинного
значения р практически невозможен. Кроме того, всегда из-
нестно, чтоО </>„</>< А <!■' (10.42)Будем полагать, что задан интервал ±ЪРР’°Ьр, физический
смысл которого изложен выше, а также заданы вероятности
ошибок 1 и 2-го рода аир.Суть предлагаемой процедуры заключается в одновремен¬
ной проверке сетки нулевых и конкурирующих гипотез. Для
каждой i-й пары гипотез выбираем величины pot и ри сле¬
дующим образом:Ри Рв — 2М | (10.43)
Ри == Pot + 28/,‘ )Такое решение позволяет найти один из интервалов дли*
ной 2 5/7, на котором находится истинное значение р с вероят¬
ностью у = 1 — (а + р):Рв~2¥<Р<Рв,
Рв — <Р < Рв — 28/»; пп,,.12*Рн<Р<Рн+2*Р-327
Для каждой пары гипотез по формуле (10.38) можно най¬
ти уравнения прямых LH и Loi. Из формул (10.38) видно, что
прямые Lu и Z-oj (i j) пересекаются, образуя замкнутую
область безразличия А (рис. 10.3).Таким образом, максимальное число испытаний не рав¬
но оо, а является решением системы уравнений:•^1 г+i = ^1 г+i “Ь si+in>L0l = h0i-\-s-.n. (10.45)Но если учесть дискретность числа отказов т, то макси¬
мальное число испытаний nmax можно получить из неравен¬
стваAi ш + si+1nmax - hoi - Slnmax < 1.Окончательно получим, {hi i+1 — fi0() — 1
Лтах ^ Si — Si+l > (10.46)где Нц+j, h0l, si+1, Si определяются по формулам (10.38).Анализ формул (10.38) и (10.46) показывает, что лтах за¬
висит от истинного значения величины р, а также от задан¬
ных а, J3 и 8р. При выборе величин р, Ьр, а и р максимальное
число испытаний определяется однозначно.Для случая проверки гипотез о значении о в силу непре¬
рывности оценки о*о»-47)В остальном же предлагаемая процедура проверки анало¬
гична описанной выше.Таким образом, может быть найден новый интервал
(0, Яшах), на котором распределено случайное число испыта¬
ний, необходимых для окончания проверки.Предлагаемая процедура ликвидирует два отмеченных
выше недостатка последовательной проверки, разработанной
А. Вальдом. При рассмотренной выше процедуре можно по¬
лучить замкнутый интервал, на который попадает оценка, а
также максимальное конечное число испытаний, необходи¬
мых для проведения проверки.Оценим эффективность предлагаемой процедуры. Много¬
численные расчеты показывают, что значение птах, найден¬
ное по формуле (10.46) или (10.47), всегда не превышает усе¬
чения ппр, определяемого по классическому методу, а иногдл
уменьшается на 40—50%.В табл. 10.1 приведены данные об уменьшении объемаиспытаний ( —„ ’ та-) 100% для -( = 1— .(а+Р) при усе-
' "та* *т
I. 0.650.753нояяхя*2J3чоSл«=(оо.>»чо=гоа,Ссоо' я
&329
чении последовательного критерия по предлагаемой и клас¬
сической процедуре.Т а б л и ц а 10.1Уменьшение объема испытанийа) Для оценки критериянадежности б) Для оценки дисперсии с20,050,07'''—6з0,10,20,502240,5035300,90 •39460,9046360,9543490,955346Рассмотрим пример процедуры проверки гипотез. Пусть
заданы 8/? = 0,05; а = (3 = 0,25; 0,05 </> < 0,35 (0,65 Рр ^0,95), где р — вероятность отказов.По формулам (10.38) и (10.43) рассчитаны данные, необ¬
ходимые для построения прямых Loi и LH (табл. 10.2).Таблица 10.2Исходные данные/1’ыРиhM=~\lsi10,250,352,290,29220,150,251,720,19180,050,150,910,093На рис. 10.3 построены прямые L0i и Lu, дающие замкну¬
тую область безразличия А. Процедура проверки заключает¬
ся в том, что после проведения каждого испытания отклады¬
вается точка т, п. Рассмотрим возможные исходы испы¬
таний.1. Ломаная пересечет прямую Ь\з(Рр <!0,85), а затем —
прямую Li2(PP < 0,75). При этом истинное значение 0,65*^< Рр < 0,75, так как по условию ЯР ^ 0,65,2. Ломаная пересечет прямую £i3(Pp < 0,85), а затем
ШРР> 0,75).В этом случае 0,75 < Рр < 0,86.3. Ломаная пересечет Loi(Pp ^ 0,76), а затем — L\%{Pp •'< 0,85) .330
В этом случае 0,75 < Рр < 0,85.4. Ломаная пересечет Lo^Pp^ 0,75), а затем L02(Pp ^
.-0,85).В этом случае 0,85 < Яр < 0,95, так как по условию
/'„<0,95.Максимальное число испытаний ограничено областью А,
й математическое ожидание числа испытаний может быть
мпйдено по формулам (10.39) — (10.41).Уменьшение максимального числа испытаний, требуемого
для проверки гипотез, по-видимому связано с использованием
и завуалированном виде априорной информации о величине
интервала, на котором находится истинное значение оцени-
ннемого параметра. Кроме того, при усечении последователь¬
ного критерия, строго говоря, несколько меняются значения
параметров аир, которые при расчете табл. 10.1 и 10.2 связы-
иллись с величиной доверительной вероятности. Поэтому в
каждом конкретном случае целесообразно уточнять эффек¬
тивность предлагаемого усечения.
Глава 11ИСПЫТАНИЯ РАКЕТ И РАКЕТНЫХ СИСТЕМ§ 11.1. МЕТОДИКА ОЦЕНКИ ГАРАНТИРОВАННОЙДАЛЬНОСТИ ПОЛЕТА И ХАРАКТЕРИСТИК РАССЕИВАНИЯРАКЕТВажнейшими параметрами, характеризующими баллисти¬
ческую ракету, являются гарантированная дальность поле¬
та LT, среднее квадратическое отклонение точек падения бое¬
вых частей о и вероятность безотказной работы всех систем
и агрегатов ракеты на траектории Рр.Рассмотрим методы опытного определения параметров Lt
и о.Оценки Z* и о* параметров Lv и о могут быть найдены
по результатам летных испытаний ракет.В § 10.5 предполагалось, что оценка о* находится по из¬
меренным отклонениям точек падения от расчетного Зна¬
чения.Следует заметить, что при выводе формулы (10.1) для
критерия эффективности It7 предполагалось, что <2 иа = 4-(а£ + °Д С11-1)где ol и о* — средние квадратические отклонения точек паде¬
ния соответственно по дальности и по направлению.При проведении пусков на одну и ту же расчетную даль¬
ность с координатами (Lo, zQ) можно найти искомые оцен¬
ки a'L и а* по следующим формулам:а* = 1/ —y,(L, — Loy;L у « (11.2)°z=\ i 2 (‘I"*)'.” (=1Тде L{, Zi — координаты точки падения.332
В формулах (11.2) предполагается, что координаты L0, Zo
ииляются истинными значениями математических ожиданий(обычно г0 = 0). Поэтому в формулы входит множитель
1и не f.п — 1Понятия о расчете предельной (гарантированной) дально¬
сти полета и гарантийных запасах топлива для ракет с ЖРД
и РДТТ были даны в гл. 2. Определение гарантированной
дальности полета по результатам летных испытаний для ра-
Ki‘T с ЖРД основано на замерах остатков топлива в баках
специальными датчиками в момент выключения двигательной
установки. Величины остатков окислителя и горючего позво¬
ляют рассчитать время, до которого мог бы нормально, ра¬
ботать двигатель, а также дальность, которой при этом мог¬
ла бы достигнуть боевая часть. Для ракет с РДТТ практи¬
чески оказывается сложно измерить остатки топлива даже
п момент выключения двигателя.Таким образом, возможности непосредственного опреде¬
ления оценок o'L, а* и L* по результатам летных испыта¬
ний весьма ограничены.Для надежного определения величин и ог необходимо
найти оценки а* и <?* по результатам не менее 100 летных
испытаний, проведенных на одну и ту же дальность. Посколь¬
ку необходимо иметь оценки и а' и для промежуточных
дальностей полета, то задача заметно усложняется. Оцен¬
ка гарантированной дальности полета даже для ракет с ЖРД
может быть найдена только косвенно, путем пересчета траек¬
тории полета в соответствии с измеренными остатками топ¬
лива. Для ракет с РДТТ отпадает и эта возможность.Здесь мы сталкиваемся с ос-новной проблемой нахождения
оценок параметров ракетного комплекса. Небольшое количе¬
ство дорогостоящих натурных испытаний дает весьма скуд¬
ную с точки зрения статистики информацию.Для более точного определения большинства параметров
ракет необходимо использовать не чисто опытные методы,
основанные на классических идеях математической статисти¬
ки, а опытно-теоретичеокие методы.Суть этих методов заключается в том, что опытная ин¬
формация обрабатывается вместе с математическими моде¬
лями, достаточно полно описывающими физический про¬
цесс.Например, в полете практически невозможно измерить
тягу двигателя Р. Однако знание точной математической мо¬
деливРп = Врю (11.3)333
где Ра — тяга в пустоте;В— коэффициент тяги;
рк — давление в камере двигателя,
позволяет по измерениям только параметра рк и расчетному
значению В определить величину Рп.Такой же, в принципе, подход применяется при оценке па¬
раметров оl, oz и Lr. Эти величины характеризуют возму¬
щенное движение управляемой ракеты. Движение же раке¬
ты достаточно точно описывается системой дифференциаль¬
ных уравнений. Эти уравнения должны отражать движение
центра масс ракеты, движение вокруг центра масс, а также
процессы управления полетом ракеты. В эти уравнения бу¬
дут входить и возмущающие факторы.Системы уравнений, описывающих движение ракеты, были
приведены в разд. I. Поэтому здесь мы рассмотрим лишь об¬
щую постановку задачи.Основными возмущающими факторами, определяющими
параметры aL, ог и LT, являются: инструментальные ошибки
системы управления, случайные отклонения силы тяги, секунд¬
ного расхода топлива, стартовой массы ракеты, импульсои
последействия тяги двигательных установок, отклонения па
раметров, характеризующих атмосферу, ошибки подготовки
данных н прицеливания, технологические погрешности изго¬
товления ракеты и т. д. Все эти факторы могут быть введе¬
ны в систему дифференциальных уравнений, описывающих
движение ракеты в виде случайных величин и случайных
функций. Таким образом, может быть получена математиче¬
ская модель возмущенного движения управляемой баллисти¬
ческой ракеты. В общем виде эта модель может быть запи¬
сана так:dy.,-аГ=1ЛУ 1. У» Ут, хь х2, ..., хл, t), (11.4)
(v = 1, 2, ..., /и),где /v — известные линейные или нелинейныефункции;АГц дг3) ..., xk — входные величины, характеризующие
возмущения;Ух, Учу-1Ут — искомые решения системы;
t — независимый аргумент.Как правило, система (11.4) обеспечивает единственность
решений в области задания начальных условий. Посколь¬
ку *i, х2,xk являются случайными величинами или слу¬
чайными функциями, то и решения уи у2 ут являютсяслучайными параметрами.Теперь задача сводится к определению статистических ха¬
рактеристик решений системы (например, законов распреде¬
ления, математических ожиданий, дисперсий).334
Решениями системы (11.4) могут быть координаты точек
падения, значения параметров движения в момент выключе¬
нии двигателей и т. п. Средние квадратические отклонения
ючек падения и являются искомыми параметрами aL и oz.Чтобы определить статистические характеристики реше¬
ний системы (11.4), необходимо знать статистические харак-
к’ристики входных возмущений xt, х%,..., х/,. Таким образом,
если выбрать параметры х,, х2,..., xh так, чтобы их легко
Оыло измерить при испытаниях, то можно получить необхо¬
димые входные данные для решения поставленной задачи.
При таком подходе математическая модель (11.4) может за¬
менить дорогостоящие летные испытания, так как значения
параметров xt, х2, ..., xh могут быть получены не только в
ходе летных, но и по результатам лабораторных и стендовых
испытаний. Рассмотренная постановка задачи включает
дна фундаментальных направления, позволяющих в резуль¬
тате ограниченного числа натурных испытаний получить
необходимые данные о параметрах испытываемого объ¬
екта.Первое направление заключается в создании математиче¬
ской модели, частично или полностью заменяющей натурные
испытания.Второе направление связано с накоплением опытной ин¬
формации на всех этапах экспериментирования до проведе¬
ния натурных испытаний. Это позволяет использовать стати¬
стическую информацию совместно с математической мо¬
делью.Рассмотренные выше два направления будут в дальней¬
шем использоваться при определении параметров ракетных
конструкций и систем.Сформулированная задача по определению о/,, о2 и Lr до¬
статочно сложна, так-как функции /v (11.4), как правило,
являются нелинейными.Существует универсальный метод, позволяющий опреде¬
лить вероятностные характеристики случайных решений си¬
стемы (11.4). Он получил в литературе название метода ста¬
тистических испытаний или метода Монте-Карло [6].Рассмотрим кратко его содержание.Применение метода статистических испытаний связано с
использованием электронных вычислительных машин. Входя¬
щие в систему (11.4) случайные величины* х,, х2, ..., xh в
соответствии с их законами распределения могут формиро-
наться, например, специальными алгоритмами, датчиками
случайных чисел. Проведя интегрирование системы (11.4)
при случайном наборе реализаций величин х,, х2, ..., xh, мож¬* Если Х\, Х2, . . X/, являются случайными функциями, то с помощью
канонических разложений их можно представить в виде неслучайных функ¬
ций и случайных величин [32].335
но получить реализацию случайных решений у\, у2, ут.
Повторяя интегрирования при различных значениях реализа¬
ций х\, х2, xh п раз, можно получить по п реализаций ре¬
шений у и г/г, •••, Ут- Если математическая модель (11.4) вер¬
на и точны входные данные о распределениях параметров Х\,
х2, ..., Xh, то можно рассматривать п значений решений как
выборку из п натурных испытаний.В нашем случае многократное интегрирование уравне¬
ний движения управляемой ракеты при случайном задании
возмущений даст данные о результатах летных испыта¬
ний, конечно, при условии, что модель и входные данные
точны.Рассмотренный метод статистических испытаний прак¬
тически реализуется в том случае, если все величины
х'и х2, ..., Xt, некоррелиро'ваны или даже независимы между
собой. Поэтому при постановке такой задачи нужно стре¬
миться к введению в систему (11.4) независимых возму¬
щений.Рассмотренный метод Монте-Карло является универсаль¬
ным. Он позволяет при достаточно большом числе проб опре¬
делить не только математические ожидания, дисперсии, но и
законы распределения решений системы (11.4). Недостатком
этого метода является то, что при таких расчетах трудно
уловить влияние отдельных возмущающих факторов на рас¬
сеивание точек падения или отклонения гарантированной
дальности.Если нас интересуют только математические ожидания и
дисперсии решений системы (11.4), то может быть исполь¬
зован метод Б. Г. Доступова [20]. Поскольку отклонения
траекторий полета от номинальной всегда формируются боль¬
шим числом малых независимых возмущений, то в соответ¬
ствии с центральной предельной теоремой теории вероятно¬
стей можно считать законы распределений параметром
движения нормальными. В этом случае математические
ожидания и дисперсии полностью определяют искомые реше¬
ния. Метод Б. Г. Доступбва при числе случайных некоррели¬
рованных величин Х[, х2, ..xh менее 50 дает существенные
преимущества по сравнению с методом статистических испы¬
таний. К достоинствам метода можно отнести также возмож¬
ность проследить влияние каждого фактора хи х2, ..., xh ii;i
случайные отклонения решений уи у2, ..., ут. Кроме того, для
задания значений Х\, х2, ..., хк нет необходимости обращап.
ся к специальным подпрограммам выработки 'случайных
чисел.Сущность метода заключается в следующем.Пусть задана система обыкновенных нелинейных диффе
ренциальных уравнений (11.4). Если х2> xh являются336
случайными функциями,- то они могут быть представлены
каноническими разложениями вида [32]П* (о ««*(*) +2 *#<(*).<=1где mx(t)— неслучайная функция математического ожи¬
дания;xt— случайная центрированная величина;<ft (t) — неслучайная координатная функция.Таким образом, всегда можно представить параметры, ха¬
рактеризующие возмущения, в виде случайных величин. По¬
этому в дальнейшем под.хь х2, ..будем понимать слу¬
чайные величины.Пусть также заданы первые и вторые моменты случайных
величин:М [Xj] = 0; М [XjX,]; (/ /=1,2, k).На основании теоремы о непрерывной зависимости реше¬
ния дифференциального уравнения от параметров интегралы
системы (11.4) могут быть разложены в ряд Маклорена по
параметрам хи х2, Хь. с остаточным членом третьего по¬
рядкаК (*. хи Х2 л-*) = K0v (t, 0, 0, .... 0) +■ л- 1 S'™' x'- + R+ 2j ~^rXi + т 2dixf ъ + R*’/=i ;=1 ‘(v= 1, 2,..., т).Если остаточный член пренебрежимо мал, то можноопределить первые и вторые моменты случайных решений Kv.При решении задачи необходимо определить частные про-
dYvизводные . Чтобы вычислить производные, обычно ин¬
тегрируют специальные системы дифференциальных уравне¬
ний, в которые дх'- входит в качестве искомых функций.В рассматриваемом методе эта задача сведена к решению
системы, состоящей из алгебраических уравненийи к (N+1) -кратному интегрированию исходной системы(11.4). После этого первые и вторые моменты решений систе¬
мы могут быть найдены по конечным формулам.Если система возмущений, действующих на ракету, све¬
дена хотя бы к пятидесяти случайным величинам (£ = 50),то нужно решить систему, состоящую из -у (k + 2) - (£+1) =• 337
=1326 алгебраических уравнений, а затем провести 1327 ин¬
тегрирований исходной системы дифференциальных уравне¬
ний (11.4).Решение такой системы алгебраических уравнений пред¬
ставляет сложную задачу, не говоря уже об интегрированиях
системы (11.4).Однако метод имеет интересный частный случай, когда все
случайные величины х{ некоррелированы между собой.Если представить все возмущения, действующие на раке¬
ту, в виде некоррелированных случайных величин, то реше¬
ние поставленной задачи сводится только к (& + 3) -кратному
интегрированию системы (11.4). Обычно такой объем вычис¬
лительной работы (несколько часов машинного времени при
работе на универсальных цифровых машинах) является впол¬
не приемлемым.При интегрировании системы (11.4) каждая случайная ве¬
личина задается неслучайным числом £,• в порядке, указан¬
ном в табл. 11.1.Таблица 11.1Последовательность интегрированийНомер интегрированияSУсловия интегрированияхгЧ-\xk1?!00020. . .00...ft - 1005ft-l0ft00•0ft + 15.5ft-l5*ft + 2—?!— *2’ft—1ft + 300. . .00338
Значения неслучайных чисел ij* определяется зависимо¬
стью^ = ц,где 0<Х<[ 3 — произвольное число.Математические ожидания M[Y^\ и дисперсии D[Y^\ ре¬
шения Y4 системы (11.4) находят по следующим формулам:где Кч5 — решение системы Kv, полученное при s-м инте¬
грировании.Рассмотрим основные случайные функции и величины,ко¬
торые должны быть введены в систему уравнений движения
ракеты для расчета гарантированной дальности полета и ха¬
рактеристик рассеивания ракеты:— случайная функция тяги двигателя;— случайная функция секундного расхода;■ — случайная величина массы конструкции ракеты;— случайная величина массы топлива;— случайные функции, характеризующие плотность, тем¬
пературу и давление воздуха;— случайные функции скорости ветра;— случайные функции отклонения аэродинамических ха¬
рактеристик ракеты от расчетных значений;— случайные функции, определяющие инструментальные
ошибки системы управления;— случайные функции соотношения расходов компонен¬
тов топлива и ошибок систем регулирования расхода топ¬
лива;— случайные величины начальной температуры и плот¬
ности топлива;— случайные ошибки тарировки и заправки баков ракет
с ЖРД.Определение статистических характеристик этих функций
и величин должно проводиться в ходе лабораторных, стендо¬
вых, натурных испытаний отдельных систем, агрегатов
и ракеты в целом, а также при зондировании атмо¬
сферы.339
§ 11.2. МЕТОДИКА ОЦЕНКИ КРИТЕРИЯ НАДЕЖНОСТИ РАКЕТЫОбычно при определении надежности сложного техниче¬
ского изделия вводятся понятия элемента и системы.Под элементом понимается часть системы или устройство,
надежность которого изучается независимо от надежности
составляющих его частей. В дальнейшем мы будем полагать,
что ракета является системой и состоит из ряда элементов
(корпус, двигательная установка, система управления и т.д.).
В то же время можно рассматривать корпус, систему управ¬
ления, двигательную установку
так же, как системы, состоящие
из множества элементов.Для дальнейшего изложения
материала целесообразно при¬
вести здесь некоторые сведения
из теории надежности. Система¬
тическое и подробное изложе¬
ние математического аппарата
теории надежности, в случае не¬
обходимости, читатель сможет
найти в обширной специальной
литературе.Пуск и полет ракеты по тра¬
ектории могут быть представле¬
ны как работа невосстанавливаемой системы до первого
отказа. Поэтому и критерием надежной работы такой
системы является вероятность безотказной работы в течение
определенного времени t.Вероятность безотказной работы элемента за время I
(функция надежности) записывается в видеРис. 11.1. Функция опасно¬
сти отказов:/ — период приработки; 2— пе¬
риод нормальной работы; 3 —
период старенияР (t) = expX (t) dt(11.5)где X(^) —плотность вероятности отказа в момент t при усло¬
вии, что до этого момента элемент работал безотказно.Функция X(t) обычно называется опасностью отказа. Для
многих элементов >.(/) имеет график, представленный нм
рис. 11.1. В период приработки (1) X(t) имеет повышенное
значение (выход из строя элементов из-за скрытых дефек
тов). После периода приработки следует период (2) нор¬
мальной работы и затем период (5) старения, в котором фи
зико-химические превращения ухудшают качество элемента.При условии X(i) =X = const функция надежности прини¬
мает видP(t) = e~M. (11.6)340
Такой закон надежности называется экспоненциальным'.
Он хорошо описывает надежность некоторых элементов в пе¬
риод нормальной работы. Кроме него, в теории надежности
широко распространены другие законы.Нормальный закон надежности имеет видооp(() = Ts f (-$)**• ("-7>t-r,<300где Т0 — j Р (t) dt — среднее время жизни элемента;-=][ 2.f
Т оt Р (t) dt — Т20 — среднее квадратическоеоотклонение времени жизни элемента.Нормальный закон обычно применяется для описания на¬
дежности стареющих элементов.Закон ВейбуллаР (0 = exp (--If) (11.8)хорошо описывает надежность быстро стареющих или имею¬
щих скрытые дефекты элементов.При оценке надежности сложных систем находит примене¬
ние также гамма-распределение, при которомооP(/)=I 4we~xdx' (11-9)игде Г (а)—гамма-функция.При логарифмически-нормальном распределении функция
надежностиp<<)=w (lu°)dzДля степенного распределения эта функция имеет видр(0= j_ . 111-11)
(,+^)В соответствии с формулой (11.5) для определения зако¬
на надежности необходимо знать опасность отказа \(t).341
Оценка X*(t) может быть найдена, например, при одновре¬
менном испытании до отказа N одинаковых элементов
(рис. 11.2):** (0 = 7ЛГГПк(N — «1 — ... — яа-i) Л
при (k—1) h^t <С kh,(11.12)Рис. 11.2. Оценка функции опасности
отказовгде h — шаг по времени;nh — число отказов на интервале [(/г—1) h, kh], k=\,
2, ...При условии, что проведены испытания с весьма большим
числом элементов, можно получить приемлемые оценкидля функций надежности
P*(t).Однако даже исчер¬
пывающая информация о
функциях надежности
элементов не дает пред¬
ставления о надежности
системы, которую они
формируют.Получение же оценок
функции Х*(() для такой
системы, как ракета, пу¬
тем натурных испытаний,
как правило, невозможно. Поэтому и при оценке надежно¬
сти системы нам придется обратиться к тем же приемам,
которые были рассмотрены в § 11.1.В первую очередь целесообразно построить модель систе¬
мы, определяющую связи между ее элементами. Если бы
удалось получить совершенно точную модель системы, то ис¬
черпывающей информацией о ее надежности являлись бы
функции P(t) составляющих элементов.Действие всех систем и агрегатов ракеты может быть
представлено функциональной схемой. Например, для ракет
с ЖРД последовательность действия пневмогидравлических
элементов обычно представляют специальной схемой, назы¬
ваемой иногда «ключом» к работе пневмогидравлической схе¬
мы. Блок-схемы системы управления отражают функциональ¬
ные связи между отдельными ее агрегатами и элементами.
На основании функциональных схем могут быть построены
схемы, которые отражают связь между надежностью элемен¬
тов и надежностью системы. Они получили название струк¬
турных схем надежности.Элементы, формирующие систему, могут быть соединены
последовательно, параллельно или составить различные ком-342
бинации из последовательно и параллельно соединенных эле¬
ментов.Для последовательного соединения функции надежности
и опасности отказов системы имеют вид:P{t) = Px{t)P3{t)„.Pk{t)-,= \ 1 (*) + *, (О + ... + М0.где Pt (t) и (t) — соответственно функции надежности и
опасности отказов элементов.При параллельном соединении элементов эти характери¬
стики системы зависят от того, при каких условиях наступает
отказ. Если отказ наступает только при выходе из строя
всех k параллельно соединенных независимых элементов, 'то
функция надежности системы может быть представлена в сле¬
дующем виде:p{t) = 1 — [1 -р, (t)] [1 -p,(t)]... [i-я* т (11.14)Чтобы определить надежность ракеты, желательно построить
такую структурную схему, где все элементы были бы неза¬
висимы и соединены последовательно. Такая простая модель
позволяет легко определить функцию надежности системы по
функциям надежности элементов.Для одноступенчатой ракеты с ЖРД можно построить
структурную схему, представленную на рис. 11.3, а. Для двух¬
ступенчатой ракеты с РДТТ примерная структурная схема
представлена на рис. 11.3,6.. При таких структурных схемах предполагается, что отказ
одного элемента приводит к аварийному пуску ракеты. В са¬
мом простом случае, когда все k элементов, входящих в си¬
стему, имеют функции надежностиЯ;(0 = ехр(—ХД (11.15)вероятность безотказной доставки и срабатывания боевой
части в районе целиРР(0 = ехр^-2 V). (И.16)т. е. закон надежности системы остается экспоненциальным.
Обычно усилия разработчиков ракеты и направлены на пред¬
ставление функции надежности ракеты в таком виде. Однако
при этом делаются существенные допущения. Рассмотрим их
подробнее.Во-первых, экспоненциальный закон не всегда хорошо от¬
ражает реальные функции надежности.Все заключается в том, что элементы, представленные па
рис. 11.3, сами являются сложными системами. В некоторых(11.13)343
5»<*;4:|ttTlil|Cl»cSiI^=rg**o4344Рис. 11.3. Структурные схемы надежности ракет с ЖРД и РДТТ:а — для ракеты с ЖРД; б — для ракеты с РДТТ
из них применяется резервирование. Если даже все исходные
элементы имеют экспоненциальные законы, то уже законы
надежности систем могут существенно изменяться. Это сле¬
дует в частности из формулы (11.16), которая справедлива
лишь при последовательном соединении элементов. Кроме
того, некоторые элементы ракеты характеризуются функция¬
ми надежности, отличными от экспоненциальной. Так, напри¬
мер, надежность ЖРД наиболее удачно описывается законом
Вейбулла. Таким образом^ часто рассмотренные в структур¬
ных схемах элементы ракеты имеют разные законы надеж¬
ности.Во-вторых, предположение о независимости элементов, со¬
ставляющих такую укрупненную структурную схему надеж¬
ности ракеты, при более подробном рассмотрении вызывает
сомнения. Обычно трудно представить независимость отказов
таких крупных элементов ракеты, как системы управления и
двигательной установки, колеблющегося в полете корпуса ра¬
кеты и системы управления и т. д. Таким образом, для по¬
лучения действительно независимых элементов необходимо
существенно детализировать структурные схемы надежности
ракеты.При устранении этих недостатков рассмотренных струк¬
турных схем надежности ракеты можно получить более стро¬
гую математическую модель, по которой формируется вероят¬
ность безотказной работы системы. При этом без использо¬
вания ЭВМ уже не удается так легко, как по формулам(11.13), получить искомую функцию надежности ракеты. Та¬
ким образом, более глубокая проработка структурных схем
надежности ракеты, более строгий учет функций надежности
элементов при условии применения электронных вычисли¬
тельных машин может дать достаточно точную функцию на¬
дежности системы.До сих пор мы предполагали, что законы надежности
элементов, входящих в структурную схему, известны совер¬
шенно точно. В действительности можно лишь с определен¬
ной уверенностью говорить о типе закона надежности эле¬
ментов, в то время как определяющие его параметры (на¬
пример, функция X(t), как правило, могут быть найдены
лишь по ограниченному числу испытаний. Другими словами,
мы имеем дело со случайными оценками Я* (/f), P't (t) гене¬
ральных хаграктеристик Х*(/) и Pi(i). В этом случае задача
определения надежности системы становится более сложной.
Однако и такая задача может быть успешно решена рассмо¬
тренным ранее методом статистического моделирования.Действительно, нам известна математическая модель,
связывающая неслучайные функции надежности элементов и
системы. Эта модель графически представляется структур¬
ной схемой надежности, и в случае независимых последова¬345
тельно соединенных элементов описывается уравнениями(11.13). Если нам известны законы распределения оценок
функций надежности исходных элементов, то, рассматривая
параметры функций надежности как независимые случайные
величины, можно найти вероятностные характеристики оце¬
нок параметров функции надежности системы. Эта задача в
принципе ничем не отличается от рассмотренной в § 11.1
задачи определения характеристик рассеивания и гарантиро¬
ванной дальности полета ракеты.Причем задача оценки надежности ракеты таким методом
оказывается менее трудоемкой, так как математическая мо¬
дель, представленная уравнениями (11.13), существенно про¬
ще, чем система дифференциальных уравнений, описываю¬
щая управляемый полет ракеты.Закон распределения оценки вероятности безотказной до¬
ставки боевой части с заданным рассеиванием<Р (РЦРр, «1, П,,, ..., я*)_ (11.17)является исчерпывающей вероятностной характеристикой Р*.
Этот закон, естественно, зависит от истинного значения Рр и
числа испытаний исходных элементов /г,, п2, ..., tih (форму¬
ла 10.18). Знание закона распределения (11.17) позволяет
решением уравнения, подобного уравнению (10.21), найти до¬
верительный интервал критерия надежности ракеты, довери¬
тельную вероятность и объем необходимой для этого стати¬
стической информации.Таким образом, применение простейших структурных схем
надежности ракет с ЖРД и РДТТ, приведенных на рис. 11.3,
и допущений, позволяющих определить вероятность безотказ¬
ной работы по формуле (11.16), могут быть оправданы лишь
на этапе проектирования, когда многие связи сложной систе¬
мы еще окончательно не установлены и нет достаточной
опытной информации о надежности отдельных элементов.
В процессе же опытной отработки -ракеты ее надежность дол¬
жна оцениваться, как правило, в такой постановке, как это
было изложено выше.§ 11.3. ИЗМЕНЕНИЕ НАДЕЖНОСТИ РАКЕТЫ В ПРОЦЕССЕ
ЕЕ ОПЫТНОЙ ОТРАБОТКИВ процессе опытной отработки возникают две задачи,
аналогичные тем, что были сформулированы в § 10.1:— доработка и изменение конструкции ракеты с целью
увеличения (достижения заданного значения) критерия на¬
дежности;— оценка истинного значения критерия надежности, раке¬
ты, достигнутого к определенному моменту времени.346
Для этого проводится большое число испытаний, которые
обычно делятся на лабораторные, стендовые и полигонные.Лабораторные испытания, как правило, проводятся с
целью установления качественной картины исследуемого
процесса. В ходе таких испытаний выбирается оптимальная,
в каком-то смысле конструктивная схема и приближенно
определяются ее параметры. Для проведения таких испыта¬
ний используется специальное лабораторное оборудование.
Объектами испытаний чаще всего являются модели систем
ракеты. Лабораторным испытаниям подвергаются обычно си¬
стемы управления ракеты, элементы двигательной установки.Целью стендовых испытаний является отработка функ¬
ционирования систем ракеты, определение количественных
характеристик этих систем, а также подготовка всех систем
ракеты к полигонным испытаниям. Такие испытания прово¬
дятся, как правило, с натурными объектами, хотя иногда при¬
меняется и частичное, моделирование.Проектирующие организации имеют специально оборудо¬
ванные стенды для испытаний двигательных установок с
ЖРД и РДТТ, органов управления, ступеней ракет, систем
управления.Лабораторные и стендовые испытания обычно завершают
период разработки первых опытных образцов ракеты.Полигонные испытания позволяют проверить совместную
работу всех элементов ракеты в составе ракетного комплекса,
провести его конструктивную доработку и проверить соответ¬
ствие тактико-технических характеристик требованиям такти¬
ко-технического задания.Поэтому проводят транспортировочные испытания, испы¬
тания при крайних климатических условиях и летные испы¬
тания. Естественно, что наиболее дорогостоящими и инфор¬
мативными являются летные испытания ракет.В ходе всех этих испытаний проводится доработка кон¬
струкции элементов ракетного комплекса и накапливается
статистическая информация, необходимая для оценки его эф¬
фективности.После того как проект ракеты проанализирован с точки
зрения надежности и выполнены первые опытные образцы,
ракета, как правило, имеет невысокий критерий надежности.
Это связано с тем, что в таком сложном изделии практически
невозможно учесть все связи и взаимодействия отдельных
элементов, формирующих систему, а также их реакции на
внешние по отношению к системе воздействия.В процессе опытной отработки идет постепенное повыше¬
ние надежности ракеты за счет изменения комструкции от¬
дельных агрегатов и систем. С точки зрения математической
статистики в этот период изменяется такая генеральная ха¬
рактеристика, как критерий надежности ракеты Рр. После347
каждого испытания системы (ракеты, двигательной установки,
системы управления) оценивается успешность испытания и
затем на основании опытной информации вносятся те или
иные разумные изменения в конструкции. Такие изменения
могут повысить, оставить на прежнем уровне или даже
уменьшить критерий надежности системы. Таким образом,
изменение генеральной характеристики Р в ходе испытаний
может быть представлено ступенчатой линией 1 (рис. 11.4).Однако истинное значение генеральной характеристики Р
ускользает от испытателя. Если бы после какого-то опыта
можно было приостановить внесение изменений в конструк¬
цию и провести боль¬
шое число испытаний,
то на основании полу¬
ченной выборки можно
было бы найти оценку
критерия надежно¬
сти Р, отвечающую
данному уровню отра¬
ботки системы. Однако
использовать для этого
опытные образцы эко¬
номически невыгодно,
поэтому в ходе опыт¬
ной отработки ракеты
не проводится специ¬
альных испытаний для подтверждения достигнутого уровня
надежности. Лишь на заключительном этапе летных испыта¬
ний может быть выделена партия ракет для уточнения значе¬
ний критериев эффективности и надежности, достигнутых
к моменту принятия комплекса на вооружение.Следует отметить, что с переходом от опытного изготов¬
ления ракет к их серийному производству уровень их надеж¬
ности также изменяется. Этот процесс не прекращается и на
стадии эксплуатации ракетного комплекса.Постепенное изменение генеральной характеристики Рр в
процессе создания ракетного комплекса имеет определенные
закономерности. Обычно удается заменить ломаную линию 1
(рис. 11.4) плавной кривой.Обработка статистических данных, а также некоторые
теоретические соображения позволяют получить аналитиче¬
ские выражения, связывающие критерий надежности Рр с
числом натурных испытании п (рис. 11.4, кривые 2 и 3) [22]:Рр = 1 — аё~ь'п~х) (11.18)илирр = ^р--Г- (1U9)гРис. 11.4. Изменение надежности ракеты:/ — истинное изменение надежности; 2 — ап*
проксимация по выражению (11.18); 3 —аппро¬
ксимация по выражению (11.19)348
Характер изменения этих кривых свидетельствует о том,
что первые испытания существенно повышают начальные зна¬
чения 1—а или РПр —а затем изменение надежности
уменьшается и для случая (11.19) /у->Лф при п-*-оо. Пере¬
ход к новому предельному значению критерия надежно¬
сти Рпр обычно возможен лишь при коренном изменении кон¬
струкции ракеты.Если бы были известны параметры а и Ь или РПр и а, то
аадача определения генеральной характеристики Рр была бы
решена. В действительности эти параметры неизвестны и ис¬
пытатель стоит перед довольно сложной проблемой: по огра¬
ниченному числу результатов зависимых испытаний, пред¬
ставляющих выборку из различных генеральных совокупно¬
стей, определить оценки постоянно меняющихся генеральных
характеристик.Эти трудности заставляют еще несколько упростить схему
роста надежности ракеты. Весь процесс опытной отработки
ракеты. разбивается на ряд интервалов. Каждый интервал
может отражать какой-то период времени (например, один
месяц опытной отработки), группу испытаний (например, се¬
рию в 10 испытаний), вид испытаний (стендовые, летные).
На основе опытных данных, полученных за этот интервал
времени, определяется точечная оценка надежности ракеты н
ее доверительные интервалы.Цолученные точки кривой роста надежности позволяют
методом максимума правдоподобия или методом наименьших
квадратов определить искомые параметры выражения (11.18)
или (11.19). Рассмотрим несколько подробнее процесс накоп¬
ления информации и оценку надежности на каждом этапе.Если использовать биномиальную модель испытаний, при
которой информацией является отказ или успех, то для по¬
лучения оценок надежности ракеты необходимо большое чис¬
ло испытаний. Покажем это на одном частном примере [10].
Пусть в ходе п независимых испытаний изделие не отказало
ни разу. Требуется найти доверительный интервал для ве¬
роятности отказа. Необходимо найти верхнюю границу рв,
так как нижняя граница рв, естественно, равна нулю.Вероятность наблюденного события А, заключающегося в
том, что изделие в п испытаниях.не отказало ни разу, может
быть выражена зависимостью/>(Л) = (1-/0".Требуется найти максимальное значение р, которое совме¬
стно с событием А. Несовместным с событием А, естествен¬
но, считать такое, вероятность которого меньше 1 — у, где у
доверительная вероятность.Следовательно, можно записать, что1 — у = Р(А) при р = рв.349
При этом условии получим1 Т === (1 Рв)ПилиПо этой формуле можно найти число успешных подряд ис¬
пытаний, необходимых для подтверждения верхней границы
вероятности отказа рв с доверительной вероятностью у.Несложные расчеты по этой формуле могут предостеречь
некоторых проектировщиков и исследователей от завышен¬
ных требований к вероятности безотказной работы изделия и
доверительной вероятности, с которой она должна быть опре¬
делена.Для сложных систем подобные требования невольно вы¬
текают из желания получить общую высокую надежность.
Однако при этом нужно видеть и возможности опытного под¬
тверждения закладываемых при проектировании системы
числовых характеристик надежности ее элементов. Приведем
пример.Для подтверждения надежности 0,999 с доверительной ве¬
роятностью 0,9 необходимо получить подряд 2303 успешных
исходов испытания. Для подтверждения надежности 0,99 в
тех же условиях необходимо иметь 299 успехов подряд, а для
надежности 0,9 соответственно — 23. Получение хотя бы од¬
ного отказа существенно увеличивает необходимое число ис¬
пытаний.Здесь мы сталкиваемся с такой же картиной, что и при
оценке рассеивания и гарантированной дальности полета ра¬
кеты. В этом случае скудные опытные данные должны быть
дополнены нашими знаниями физического процесса, выра¬
женными в математической модели. Такой моделью при оцен¬
ке надежности является структурная схема. Если отказаться
от опытной проверки самой структурной схемы и считать ее
достаточно точной, то в ходе испытаний системы (ракеты)
можно получить более полную опытную информацию о ра¬
боте каждого элемента системы (двигательной установки, си¬
стемы управления).В ходе испытаний ракеты мы можем установить не толь¬
ко отказ ракеты, а и отказ определенного элемента. Если от¬
дельные элементы работали нормально, то мы получим до¬
полнительную важную информацию о наработке до отказа.
Таким образом, наличие математической модели (структур¬
ной схемы) позволяет существенно уменьшить число необхо¬
димых испытаний. После каждого испытания системы работм
составляющих ее элементов может быть квалифицирован;!
как успех или отказ. Если из-за отказа какого-либо элемеи-350
та не удалась выяснить характер работы некоторых агрега¬
тов системы, то они исключаются из оценки результатов дан¬
ного опыта. Такие исключения могут быть предусмотрены
при использовании в силу крайней необходимости устарев¬
ших или дефектных элементов в составе системы. Однако та¬
кие элементы должны быть заявлены до проведения испы¬
тания.Полученные в результате серии испытаний системы оцен¬
ки функций надежности Я/ (t) или опасностей отказов A* (t)
элементов вместе со структурной схемой (она также может
уточняться в ходе опытной отработки) являются тем исход¬
ным материалом, на основе которого может быть определена
надежность ракеты в соответствии с методами, изложенными
в § 11.2.Ряд теоретических трудностей, возникающих при обработ¬
ке результатов испытаний ракеты, сложность планирования
и организации, большие затраты средств и сил в процессе
опытной отработки заставляют искать оптимальные про¬
граммы построения этого периода создания ракетного ком¬
плекса.В качестве критерия при постановке такой оптимальной
задачи может служить стоимость создания ракеты с задан¬
ной надежностью при ограничениях, накладываемых на вре¬
мя опытной отработки. При этом необходимо учитывать до¬
статочную достоверность подтверждения достигнутого уровня
надежности.§ 11.4. ОПЫТНАЯ ОТРАБОТКА СИСТЕМ РАКЕТЫВ § 11.2 были рассмотрены основные ракетные системы,
надежность которых в ходе опытной отработки должна быть
доведена до требуемых значений и определена с заданной
точностью. Далее мы рассмотрим основные вопросы опытной
отработки систем отделения боевой части и разделения сту¬
пеней, систем наддува и питания топливом ракет с ЖРД.Испытания и отработка систем управления, автоматики
боевых частей и двигателей с органами управления обычно
проводится не разработчиками ракеты и ракетного комплек¬
са, а специальными организациями. Изложение этих вопро¬
сов выходит за рамки данной книги. Основное содержание ис¬
пытаний ракетных конструкций дается в следующей
главе.Опытная отработка системы проводится в несколько эта¬
пов. В ходе проектирования проводятся лабораторные и стен¬
довые испытания системы, которые подтверждают ее работо¬
способность и позволяют получить приближенные количест¬
венные характеристики основных параметров.351
Затем в порядке подготовки к летным испытаниям пропо
дятся стендовые испытания системы в составе ступени или
всей ракеты.Во время таких испытаний имитируются основные усло¬
вия полета. Кроме того, система может проходить автоном
ные испытания, которые позволяют накопить статистический
материал о ее надежности.В дальнейшем система участвует в полигонных испыта¬
ниях в составе ракетного комплекса.Во время опытной отработки система может претерпевать
конструктивные изменения, вносимые как после -отдельных,
как правило, неудачных испытаний, так и после определен¬
ного этапа испытаний. Процесс испытаний системы естест¬
венно разделить на три периода:— разработка программы испытаний;— организация и проведение испытаний;— обработка и анализ результатов испытаний.Рассмотрим содержание работ, проводимых в эти пе¬
риоды.При разработке программы испытаний необходимо найти
один или несколько критериев, наиболее полно характери¬
зующих работу системы. Для основных ракетных систем, рас¬
смотренных в § 11.2, таким критерием является вероятность
безотказной работы при пуске и полете ракеты. Для системы
управления, кроме надежности, важным показателем являет¬
ся точность работы. Однако всегда можно рассматривать вы¬
ход параметров, характеризующих точность системы управ¬
ления, за установленные пределы как ее отказ. Это позво¬
ляет ограничиться одним обобщенным критерием Р, харак¬
теризующим работу системы.Поскольку все ракетные системы имеют большую стои¬
мость и многие входящие в них элементы одноразового дей¬
ствия, то непосредственное определение оценок Р* неэффек¬
тивно. Кроме того, в процессе доработок изменяются гене¬
ральные характеристики системы. Поэтому при разработке
программы испытаний должна быть использована структур¬
ная схема надежности системы, позволяющая установить ос-
нрвные связи между составляющими ее элементами. Однако
такой упрощенной модели системы бывает недостаточно для
оценки надежности некоторых дорогостоящих или сложных
элементов. Поэтому при разработке программы испытаний
необходимо иметь математическую модель работы системы,
которая бы связывала легко измеряемые при испытаниях па¬
раметры (давление, напряжения, перемещения и т. д.) с кри¬
терием надежности элемента и системы в делом. Наличие
уравнений, описывающих работу системы, позволяет выбрать
параметры, которые могут и должны быть измерены, а также
требуемую точность измерений.352
Статистические данные, полученные при измерениях, яв¬
ляются лишь исходными для решения системы уравнений,
представляющих математическую. модель испытываемого
объекта. Поэтому при разработке программы испытаний не¬
обходимо найти метод решения такой системы для определе¬
ния статистических характеристик искомых критериев рабо¬
ты объекта.Решение этих вопросов позволяет подобрать соответст¬
вующую измерительную аппаратуру, определить необходи¬
мый объем испытаний, а также выбрать специальные усло¬
вия их проведения. При оценке требуемого объема и точно¬
сти опытных данных должны быть также учтены стоимость
испытаний и необходимое для их проведения время.Вся описанная выше подготовительная работа позволяет
составить обоснованную программу испытаний системы.
Обычно программа испытаний содержит следующие основ¬
ные сведения:— измеряемые параметры;— характер изменения параметра (непрерывный, мгно¬
венный и т. п.);— тип и место расположения датчика;— период измерения параметра во время испытания;—средства передачи, записи и дешифрирования измеряе¬
мого параметра.Все эти данные сводятся в таблицы, а также составля¬
ются схемы расположения датчиков и другой измерительной
аппаратуры. При проведении некоторых стендовых и летных
испытаний разрабатываются также схемы, поясняющие ис¬
пользование каналов телеметрических систем для передачи
показаний датчиков.При организации испытаний подготавливается и настраи¬
вается измерительная аппаратура (измерительные и телеме¬
трические системы, служба единого времени), тарируются и
устанавливаются датчики на объекте испытания, а также
предусматриваются меры, обеспечивающие безопасность лич¬
ного состава и сохранность имущества.В результате проведения испытаний накапливается боль¬
шое количество опытной информации. Так, например, при
проведении одного опытного пуска ракеты непрерывно изме¬
ряются сотни параметров. Только данные телеметрических
измерений на активном участке траектории фиксируются в
виде 2—10 миллионов чисел. Обилие дорогостоящих опыт¬
ных данных требует тщательной организации сбора, учета,
хранения и подготовки к обработке всей инфор¬
мации.Уровень обработки результатов испытаний зависит от
сложности системы, объема измерений имеющегося обору¬
дования и средств.353
Идеальными условиями обработки можно считать такие,
когда вся масса опытной информации поступает в электрон¬
ные вычислительные машины и по специальным алгоритмам
дешифрируется и обрабатывается.В принципе при достаточном совершенстве электронных
вычислительных машин в результате такой обработки можно
получить данные о статистических характеристиках основных
параметров, а также найти связи между внешними условия¬
ми и реакциями системы. Однако в настоящее время далеко
не всегда могут быть созданы такие условия при испытаниях
ракетных систем.§ 11.5. ПРИМЕР РАЗРАБОТКИ ПРОГРАММЫ ИСПЫТАНИИ
СИСТЕМЫ ОТДЕЛЕНИЯ БОЕВОЙ ЧАСТИПусть принята следующая схема отделения боевой части.
До момента подачи команды на отделение (главной коман¬
ды) основной двигатель работает на режиме пониженной
тяги. При подаче главной команды выключается основной дви¬
гатель, включаются два тормозных двигателя, расположен¬
ных на корпусе ступени, а также подается напряжение па
разрывные болты, крепящие боевую часть к корпусу ступени.
Выберем основной критерий, характеризующий работу си¬
стемы.Таким критерием на основании изложенного в § 11.2 яв¬
ляется вероятность безотказной работы системы Р. Оценку
вероятности Р* можно получить в ходе натурных (летных)
испытаний системы. Однако статистика, полученная в ходе
таких испытаний, будет недостаточной или обойдется весьма
дорого. Поэтому желательно использовать какие-то матема
тические модели системы, упрощающие ее испытания. Для
этого рассмотрим возможные варианты неуспешной работы.
В случае несрабатывания разрывных болтов или тормозных
двигателей произойдет отказ системы. Если разрывные бол
ты сработают, но после отделения боевой части ступень до¬
гонит и ударит ее под действием тяги основного двигателя,
то боевая часть получит повышенное рассеивание. Такая ра
бота системы может быть приравнена к отказу. Если из-.ча
больших разбросов характеристик системы боевая часть бу*
дет иметь большие разбросы скорости в момент отдс
ления, то это приведет также к повышенному рассеиванию
точек падения и может быть квалифицировано как отказ.Следовательно, вероятность безотказной работы системы
отделения боевой части Р может быть выражена следующим
образом:Я = Яр6ЯПрдЯТр, (11-")354
где Ррб — вероятность срабатывания разрывных болтов;Рпрд — вероятность включения и нормальной работы
тормозных двигателей; ✓Ртр — вероятность того, что рассеивание точек падения
не превысит заданного значения гтр.Отклонение в дальности AL и боковое отклонение Дz то¬
чек падения, вызванные разбросами скорости в момент отде¬
ления боевой части, можно оценить приближенно по зависи¬
мостям:М = -^-ЬУх + ^-ЬУу; (11.21)dLdVx■*VX +dLdV},Дг =dz" dV2где Vx, Vy, Vz— проекции скорости в момент отделенияна оси стартовой системы координат;dL dL dz-Qy расчетные частные производные откло¬
нений в дальности при изменении про¬
екций скорости в момент отделения на
оси стартовой системы координат.Вероятность Ртр может быть определена какЯтр=Вер(КД/-2+ Дг*<гтр). (11.22)Таким образом, зная вероятность характеристики случай¬
ных величии 5Va, bVy, 8Кг, можно найти величину Рхр. Одна¬
ко следует заметить, что прямо измерить линейные дополни¬
тельные скорости боевой части трудно. Поэтому выражения
(11.21) и (11.22) должны быть дополнены уравнениями, опи¬
сывающими относительное движение двух разделяющихся
блоков под действием случайных сил. Кроме того, в эту си¬
стему должно быть введено условие отсутствия соединения
ступени и боевой части.Уравнение (11.20) представляло собой простейшую мо¬
дель системы. Величина же Ртр теперь сама должна быть по¬
лучена на основании решения системы дифференциальных
уравнений со случайными величинами и случайными функ¬
циями, описывающими возмущенное движение двух блоков.
Такая задача может быть решена методами, рассмотренными
в § 11.1. Полученная таким образом математическая модель
связывает измеряемые в ходе испытаний параметры с кри¬
терием работы системы Р.Иногда на основании предварительных исследований мож¬
но утверждать, что для обеспечения определенной величи¬
ны Яхр необходимо получить относительную скорость боевой
части и ступени в определенный момент времени t после их355
отделения в пределах от (Уотн)пип до (V0TH)max. В этом слу.
чае нетрудно связать величину относительной скорости с из¬
меряемыми параметрами.Для рассматриваемой нами конструктивной схемы^„= j-(П.23)tотдгде Рт — тяга тормозных двигателей;Рпд — тяга основного двигателя в период последейст
вия;тк — масса ступени в момент t0тд отделения боевой
части.Такая математическая модель уже значительно проще.
Однако и ее исследование потребует применение методов, из¬
ложенных в § 11.1.Для оценки относительного движения блоков по формуле(11.23) необходимо знать статистические характеристики ii;i
раметров РТ, Рпя, тк. Рассмотрим их подробнее. Изменение
тяги тормозных двигателей РТ может быть описано зависи
мостьюРх — ВТрКТ, (11.21)где Вт—случайный коэффициент тяги;ркт—случайное давление в камере двигателя.Величина Дт и ее разбросы обычно известны из расчетом.
Для определения кривых ркт(0 необходимо провести огне
вые испытания тормозных двигателей с записью кривой дан.
ления, а при наличии специальных стендов и полного им.
пульса тяги.Импульс последействия тяги основного двигателя обычно
может быть замерен лишь косвенно, например по изменении!
давления в камере.Случайная величина массы конструкции может быть опре¬
делена по расчетным данным, величинам заправки топлива н
изменению секундного расхода с момента начала работы сту¬
пени до момента /0тд-Для контроля предварительных исследований, позволим
ших перейти к зависимости (11.23), желательно также изме
рять угловые скорости и относительный путь боевой части
Эксцентриситеты приложения тяги основного и тормозных
двигателей могут быть найдены в результате анализа дону
сков, указанных в сборочных чертежах.Проведенные выше предварительные рассуждения помио-
ляют наметить теперь программу опытной отработки системы
отделения боевой части.
Необходимо провести автономные испытания разрывных
болтов и накопить статистические данные для оценки вели¬
чины Ррб- Если в системе применяется штатный разрывной
болт, то необходимо собрать имеющийся статистический ма¬
териал по проведенным ранее испытаниям.Тормозные двигатели должны пройти огневые испытания
на стендах при начальной температуре заряда —50° С,
•(-50° С и +15° С. В ходе этих испытаний должны быть за¬
мерены кривые изменения давления в камере, масса заряда,
полный импульс тяги.При стендовой отработке основного двигателя должен
быть определен импульс последействия тяги и его разброс.
Эти статистические данные должны быть переданы разработ¬
чикам системы отделения боевой части.Ввиду того что система отделения достаточно проста, а
основные ее элементы будут отработаны на стендовых испы¬
таниях, по-видимому, нет необходимости проводить никаких
других испытаний перед летными испытаниями ракеты.В ходе летных испытаний необходимо измерять следую¬
щие параметры:— время подачи главной команды;— время срабатывания каждого разрывного болта;— время запуска каждого тормозного двигателя;— момент появления отрицательной перегрузки ступени;— момент отделения боевой части;— относительный путь, пройденный боевой частью;— три угловые скорости ступени и боевой части в момент
их отделения;— интеграл проекции кажущегося ускорения на продоль¬
ную ось ракеты.Чтобы сделать эти измерения, необходимо установить на
ракете датчик относительного пути, датчик импульса и дат¬
чик отрыва. Моменты прохождения команд фиксируются че¬
рез систему управления, а угловые скорости — гироприбора-
ми ракеты.Таковы основные соображения, которые могут лечь в ос¬
нову программы опытной отработки. Мы намеренно не косну¬
лись здесь целого ряда вопросов, решаемых при разработке
программы. К ним можно отнести оценку точности измере¬
ний, определение объема испытаний и доверительных интер-
палов оценок надежности системы. Однако все это требует
больших выкладок, которые могут существенно затруднить
понимание путей опытной отработки. Кроме того, такие слож¬
ные зависимости, как правило, пригодны лишь для конкрет¬
ных конструктивных схем.357
Глава 12ОПЫТНАЯ ОТРАБОТКА И ОЦЕНКА НАДЕЖНОСТИ
РАКЕТНЫХ КОНСТРУКЦИЙ§ 12.1. ОЦЕНКА НАДЕЖНОСТИ КОНСТРУКЦИИ РАКЕТЫРакетная конструкция в процессе ее использования можп
отказать вследствие разрушения или появления недопусти
мых деформаций.Все отсеки ракеты функционируют нормально до разру
шения. В некоторых агрегатах недопустимые деформации ii.i
ступают раньше разрушения. Например, в камере -сгораним
ЖРД необходимо иметь определенные зазоры между опп
вой стенкой и рубашкой для обеспечения нормального режн
ма охлаждения. Большие деформации стенок камеры мои i
вызвать прогар и, следовательно, отказ двигателя.В некоторых случаях ■ трудно указать, какое из двух ни
званных предельных состояний является определяющим д.т
ракетной конструкции. Поэтому в общем случае под надсж
ностыо ракетной конструкции понимают вероятность тот
что во время хранения, транспортировки, боевого дежурстпп
пуска и полета ракеты не произойдет разрушения или не мм
явятся недопустимые деформации конструкции.Условие прочности записывается в видеR — N*~u>0, (1Q.I!где R—несущая способность конструкции по прочности;N — эксплуатационная нагрузка.Условие отсутствия недопустимых деформаций имеет ним
логичную форму:q — s=v> о, (lu.'j;где Q—несущая способность конструкции по деформации
5 — эксплуатационная нагрузка.358
При производстве ракетных конструкций всегда бывают
случайные отклонения в геометрических размерах отдельных
Клементов, технологии их изготовления и сборки. Механиче¬
ские свойства конструкционных материалов также имеют не¬
которые случайные отклонения. Все это свидетельствует о
том, что несущая способность конструкции является случай¬
ной величиной. При более подробном анализе работы ракет¬
ных конструкций иногда приходится рассматривать несущую
способность как случайную функцию.Нагрузки, действующие на ракету в процессе ее эксплуа¬
тации, являются также случайными функциями.В фиксированный момент времени R, N, Q, S можно рас¬
сматривать как случайные величины. Критерий надежности
ракетной конструкции на основании определения и формул
(12.1), (12.2) может быть представлен в видеоо оо» f f ср (и, v) dudv, (12.3)и оР = Вер (и >0, v > 0) iгде <р(и, и)—плотность вероятности совместного распреде¬
ления случайных величин и и V.Для определения закона ср (и, v) необходимо знать зако¬
ны распределения величин R, N, Q, S, а также случайные
связи между ними. В простейшем случае, когда величины R,
N, Q, 5 независимы, а законы их распределения нормальны,
надежность ракетной конструкции может быть определена
по зависимостиво ОО 00P^^u{ll)duj%(v)dv = -^J—JexpX00IX(и — тиу2 ef.(■v — mv)22<,dv, (12.4)где <р„ (и) и <р„ (v)законы распределения случайных вели¬
чин и и у;средние квадратические отклонения ве¬
личин и и у;математические ожидания величин и и и.Интегралы, входящие в выражение (12.4), являются таб¬
личными. Поэтому в такой постановке задача сводится
к определению математических ожиданий и дисперсий вели¬
чин и и V.Математические ожидания определяются по зависимо¬
стям:т„ = пнmv = mq-тN >т(12.5)359
где mR, mN, triQ, ms — математические ожидания Л\
N, Q, S.Если считать величины R я N, а также Q и S некорре
лированными, то средние квадратические отклонения могу г
быть получены следующим образом:'Ju = VGl + gn >( 1 — ,i > )= V°q + °!.где O^, a2N, o|—дисперсии величин R, N, Q, S.Надежность ракетных конструкций может быть оценен.i
наиболее точно по результатам натурных испытаний. В irniM
случае значение критерия надежности находится по форму¬
ле (10.14). Однако использование рассмотренной выше маг¬
матической модели надежности позволяет также свести
дачу к определению статистических характеристик величин
R, N, Q, S [37]. В большинстве случаев, когда отказ ракп •
ной конструкции может произойти только из-за разрушении,
в ходе испытаний необходимо найти только статистические
законы распределения величин R и N. Эти величины праыи-
чески можно считать независимыми и нормально распреде¬
ленными.Тогда задача сводится к определению оценок m*R, m'N,и a*N. Такой подход к определению надежности ракетниц
конструкций существенно упрощает, а главное, удешевляет
получение необходимой опытной информации.Математическое ожидание и дисперсию несущей cnocoiV
ности ракетной конструкции можно определить по резульы*
там лабораторных или стендовых испытаний, отдельных у.»*
лов, агрегатов и отсеков ракеты. При этом испытываемые
объекты могут быть в виде моделей. В ходе таких испытании
опытные образцы нагружаются достаточно точно измеряв,
мыми нагрузками, близкими к тем, которые будет испьпы»
вать конструкция при эксплуатации ракеты.Опытное определение нагрузок проводится в ходе натур*
ных испытаний ракеты (транспортировочных, летных).До сих пор мы не делали разницы между статическим н
динамическим нагружением ракетной конструкции., Рассмог*
ренный выше общий подход к опытному определению надеж*
ности конструкции справедлив для всех видов нагружении,
Однако конкретные методы определения оценок матемнш*
ческих ожиданий и дисперсий несущей способности и пи-
грузки при различных видах нагружения конструкции конси
но существенно отличаются один от другого.Для оценки надежности каждой ракетной конструкции
выбирается определенный расчетный случай. Соответстиун»'
щая ему математическая модель, связывающая величины
несущей способности и эксплуатационной нагрузки с ря/тм360
flriKo измеряемых параметров, позволяет существенно упро-
14шъ получение опытной информации. Однако в этом слу-
чне возникают некоторые математические проблемы. Дело
шключается в том, что теперь измеряемые при испытаниях
Нпраметры входят в систему дифференциальных или алге-
Араических уравнений, которые обычно значительно сложнее
Выражений (12.1) и (12.2). Решениями такой системы яв¬
ляются или непосредственно критерий надежности или ста¬
тистические характеристики несущей способности и нагру-
Аок, действующих на ракетную конструкцию.Методы решения таких задач были рассмотрены в гл. 11.
Поэтому после общей постановки задачи рассмотрим содер¬
жание и принципы организации испытаний, в результате ко-
|(||нлх могут быть найдены статистические характеристики
н шеряемых параметров, т. е. входные данные для последую¬
щей аналитической оценки надежности ракетной конст¬
рукции.§ 12.2. СТАТИЧЕСКИЕ И ДИНАМИЧЕСКИЕ ИСПЫТАНИЯ
РАКЕТНЫХ КОНСТРУКЦИИРакетные конструкции подвергаются статическим и дина¬
мическим испытаниям.В ходе статических испытаний определяются напряжен¬
но-деформированное состояние испытываемых объектов,
Жесткость конструкции, а также несущая способность (зна¬
мения разрушающих нагрузок) конструкции в расчетных
случаях нагружения.Динамические испытания проводятся для того, чтобы
определить частоты и формы собственных колебаний, коэф¬
фициенты демпфирования, а также для проверки прочности
конструкции при действии динамических нагрузок.Рассмотрим содержание и организацию статических ис¬
пытаний ракетных конструкций [15].В соответствии с техническим заданием лаборатория ста¬
тических испытаний составляет программу испытаний и раз¬
рабатывает опытную установку.Для проверки установки и исправности измерительной
иппаратуры конструкция подвергается воздействию нагрузки,
составляющей примерно 20% от эксплуатационной нагруз-
кн N. После такой проверки конструкция последовательно,
с определенной выдержкой подвергается воздействию на¬
грузок0,Ш; 0,2jV; ...; 0,9N; N.В ходе испытаний может быть проведено и повторное
нагружение. Проводимые при этом измерения деформаций,
линейных и угловых перемещений позволяют определить или13-2582361
уточнить напряженно-деформированное состояние коппри.■
ции.После таких испытаний проводится нагружение копе111. ь
ции до разрушения. При этом фиксируются только pa >ру
шающие нагрузки. Конструкция обычно фотографируй и
как до, так и после разрушающих испытаний.Рассмотрим особенности испытаний основных отсек, щ
ракеты. Корпус головной части испытывается на дейспшг
осевой силы и внешнего давления, что соответствует рлоь i
ному случаю максимальной осевой перегрузки при вхо;ь и
атмосферу. Этот отсек испытывается также на совмесмпи
нагружение осевой силой, изгибающим моментом и нерп пн. ■
мерным внешним давлением, что соответствует воздейа шин
максимальной поперечной перегрузки.Переходники, хвостовые и приборные отсеки ракеты h.i
гружают осевой силой и изгибающим моментом. Корпч* i
днища, сопловые блоки РДТТ, а также трубопроводы окИ'
лителя и горючего испытываются на действие внутреннею
давления. Топливные отсеки испытываются на действие нп\
треннего давления до разрушения, а также на действие <нг
вой нагрузки.Чтобы проверить устойчивость крупногабаритных тоны
стенных объектов при воздействии равномерно распредели н
ного внешнего давления, их помещают в специальные i и i
равлические установки. Если критическое внешнее давленпг
не превышает одной атмосферы, то нагрузка имитируепм
откачкой вакуумным насосом воздуха из внутренней полосы
испытываемого объекта. При испытаниях важно создать rp.i
ничные условия закрепления, близкие к тем, которые бу ш
при реальной работе конструкции.Значительно сложнее создать неравномерно распределил
ные внешнюю и внутреннюю нагрузки. Такие нагрузки, к.н.
правило, имитируются приближенно. Например, наконечник
корпуса головной части нагружается аэродинамическими > и
лами по законур — рй cos2 ®,где <р — угол между нормалью к поверхности оболочки и
осью вращения.Такая нагрузка приближенно имитируется путем прнж,1
тия наконечника корпуса головной части прессом к сухмц
песку, покрытому брезентом.Нормальная аэродинамическая нагрузка на стабилим
торы ракеты имитируется с помощью рычажных систем, ки
торые используются при испытаниях самолетных констр\к
ций [15].При испытаниях топливных баков внутреннее дав.’п-ип.
создается путем подачи в них воды под определенным л л и362
М'иием. Когда длина баков большая, могут испытываться
hi дельные секции, чтобы учесть действие инерционного гид¬
ростатического давления при больших перегрузках в по¬
ите.Секции могут герметизироваться специальными днищами.I >севые нагрузки на баки прикладываются через соседние
пгсеки или специальные приспособления, имитирующие жест¬
кость этих отсеков. Осевая нагрузка создается прессом с по¬
мощью гидравлических силовозбудителей и металлических1 чг.В реальных условиях полета корпус ракеты испытывает
иоздействие высоких температур. Поэтому при статических
испытаниях отсеков корпуса ракеты имитируется равномер¬
ный или неравномерный прогрев конструкции. Полученные
при таких испытаниях разрушающие нагрузки, а также ве¬
личины деформаций и напряжений позволяют более строго
определить характеристики несущей способности конструк¬
ции.Динамические испытания проводятся в специально обо¬
рудованной лаборатории [17]. В такой лаборатории должен
Г»ыть силовой пол, силовая рама для подвешивания опытных
образцов, вибровозбудители и регистрирующая аппара¬
тура.Частоты и формы собственных колебаний изделия чаще
исего определяются резонансным методом. В плоскости ко¬
лебаний изделия устанавливаются вибродатчики; в плоско¬
сти, нормальной к плоскости колебаний, приклеиваются де¬
ревянные бруски, через которые колебания изделия пере¬
даются на рычаги виброскопов.С помощью вибратора путем плавного изменения часто¬
ты колебаний отыскивается первый резонанс. Меняя частоту
позбуждения, можно отыскать и все другие резонансные ча¬
стоты конструкции. Весь процесс может быть зафиксирован
на фотопленку. Фазы колебаний могут быть определены
с помощью стробоскопов.Анализ резонансных частот и форм позволяет установить
природу их возникновения. Каждая частота изделия зависит
от упругости корпуса и упругости внутренних элементов.
Для изменения резонансных частот могут быть проведены
конструктивные изменения и доработки отдельных элементов
и агрегатов изделия.При динамических испытаниях определяется также дек¬
ремент затухания. Для этого конструкцию вводят в резонанс
соответствующего тона и мгновенно прекращают действие
нозмущающей силы. Конструкция при этом, совершает сво¬
бодные затухающие колебания. Обработка осцилограмм поз¬
воляет определить величины убывающих амплитуд колеба¬13»363
ний Аи А2, ..., А{... Логарифмический декремент опреде¬
ляется по формулеКоэффициент динамичности конструкции находят по лм
плитудно-частотной характеристике системы, колеблющем! и
под действием постоянной по величине гармонической emu
Для сравнения находят смещение от действия статически!!
силы той же величины, приложенной в той же точке. Опт
шение амплитуд к статическому смещению для каждого сн
отношения частот дает значение коэффициента динамич
ности.Кроме того, ракетные конструкции испытывают на прич
ность и выносливость под действием динамической нагрузки
Для этого используют специальные стенды, имитирующие
эксплуатационную нагрузку, например подпрыгивание, ги.ш
пирование, виляние, боковую качку системы вагон — ракет
Суммарное время таких испытаний должно быть не меш.им-
времени работы изделия.§ 12.3. ОПЫТНОЕ ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКИХ
НАГРУЗОК И ТЕМПЕРАТУРНЫХ ПОЛЕЙДля оценки надежности ракетных конструкций необхоли
мо знать нагрузки, действующие на ракету при транспорт
ровке, хранении, перегрузке, пуске и в полете.Определяющими для прочности, а следовательно, и па
дежности корпуса ракеты являются нагрузки в полете, ll.i
грузки, действующие при наземной эксплуатации, опреде
ляются с целью обоснования режимов хранения, транспорт
ровки и подготовки ракеты к пуску.Таким образом, основным источником получения опытиоО
информации о нагрузках, действующих на ракету, являютен
летные испытания.В ходе этих испытаний необходимо определить статиче
ские и динамические нагрузки, а также температурные пол-i,
действующие на корпус ракеты. Для определения надеж ни
сти отсеков корпуса ракеты необходимо определить перечне
ленные выше нагрузки на активном участке, а для оценки
надежности корпуса головной части — на пассивном.Прочность и надежность корпуса ракеты в основном
определяются его способностью выдерживать статически!
нагрузки при воздействии высоких температур. , Поэтому и
ходе летных испытаний особенно важно достаточно точии
определить статические нагрузки и температурные поля, дсП
ствующие на конструкцию ракеты.364
Динамические нагрузки чаще всего оказывают существен¬
ное влияние лишь на условия работы приборов системы
управления, устойчивость движения и управляемость ракеты.Рассмотрим вначале особенности определения динамиче¬
ских нагрузок и температурных полей.Для определения динамических нагрузок, действующих
на ракету в полете, обычно бывает достаточным найти собст¬
венные частоты и формы изгибных, а также продольных ко¬
лебаний. Крутильные колебания из-за их малости редко
учитываются при оценке надежности корпуса ракеты.Для определения частот и форм колебаний при летных
испытаниях на ракете в 5—7 сечениях устанавливаются виб¬
родатчики. В каждом сечении обычно необходимо измерять
вибрационные перегрузки вдоль трех осей. Кроме того, из-за
невозможности одним типом датчика измерить вибрации в
большом диапазоне частот (от 10 гц до 10 кгц) приходится
в каждом сечении корпуса устанавливать низкочастотные,
среднечастотные и высокочастотные датчики.Таким образом, на ракете устанавливаются десятки виб¬
родатчиков, которые работают на всем активном участке
траектории полета. Датчики фиксируют изменение перегру¬
зок вдоль определенного направления во времени. Обычно
коэффициенты виброперегрузок имеют величины от десятых
долей до сотен единиц.Точность измерения виброускорений невысока: предель¬
ная относительная ошибка в определении амплитуды колеба¬
ний может достигать 5—20% [18]. Причем с большей точ¬
ностью определяются амплитуды низкочастотных колебаний.
Предельная относительная ошибка в определении частот ко¬
лебаний составляет 5—10%. Такие большие погрешности
в определении амплитуд и частот колебаний вызваны неуста-
новившимся характером вибраций и их сложным структур¬
ным составом, а также тяжелыми условиями работы изме¬
рительной аппаратуры.Кроме непосредственного определения характеристик ко¬
лебаний ракеты, в ходе летных испытаний определяются не¬
которые динамические нагрузки, вызывающие эти колебания.
Так, зондирование атмосферы позволяет получить некоторые
данные о скорости ветра, действующего на ракету в полете.
Измеряются также параметры, характеризующие изменение
тяги двигателя в момент его запуска и выключения. Записы¬
ваются процессы отделения блоков ракеты, что позволяет
проследить динамическое изменение массовых сил. Фикси¬
руются параметры, характеризующие динамические характе¬
ристики системы управления и органов управления. Все эти
данные позволяют в ходе обработки опытной информации
рассчитать основные динамические нагрузки, действующие на
ракету в полете.365
Рассмотрим некоторые особенности определения частот и
амплитуд колебаний по записи измерений перегрузки мн
времени. По изменению, например, поперечной перегрузки
г-го тона круговая частота может быть найдена по следую
щей зависимости:где N — число периодов колебаний за промежуток време
ни At. Определение формы колебаний значительно сложнее,
так как вибродатчик фиксирует перегрузку, вызванную не
только изгибными колебаниями корпуса, но и поперечным
перемещением, а также вращением ракеты как абсолютно
жесткого тела. Чтобы выделить значения перегрузок, вызван¬
ных только упругими колебаниями, и по ним определить ам
плитуды в различных сечениях ракеты, необходимо имел,
данные об основных силах, действующих на центр масс ра¬
кеты, об управляющих силах и скорости их изменения, а так¬
же об углах и скоростях вращения корпуса вокруг центра
масс. Все эти данные обычно непосредственно измеряются
или определяются косвенно при летных испытаниях ракет.Знание температурных режимов позволяет определить:— условия нагружения ракетных конструкций;— необходимые меры для теплозащиты отдельных узлов,
агрегатов, отсеков;—- условия работы приборов системы управления и дру¬
гих агрегатов.Все эти сведения необходимы для оценки надежности
конструкции ракеты, ее отдельных агрегатов и системы
управления. Тепловые расчеты достаточно сложны и, как
правило, основаны на целом ряде допущений. Поэтому толь¬
ко опытные данные позволяют уточнить характер тепловых
процессов. Программы летных испытаний ракет с ЖРД и
РДТТ включают обычно следующие температурные изме¬
рения.Внутри головной части измеряется температура воздуха
и отдельных приборов. Для этого используются датчики
с диапазоном измерения температур ±50°С. Для измерения
температуры стенок корпуса применяются датчики с диапа
зоном (—50—Ь350)°С. На наружной поверхности днища
устанавливают датчики с диапазоном измерения темпера
тур от —50 до +1000° С. Внутри теплозащитного покрытия
необходимо измерять температуры от —50 до +2500° С.В приборном и хвостовом отсеках измеряются темпера
тура воздуха и температура некоторых приборов. Диапазон
изменения температуры в атом случае (—50—1-50)°С. Тем¬
пература стенок корпуса измеряется в диапазоне от —50 до
Ч" 350° О,356
В хвостовом отсеке измеряется также температура донной
защиты. Диапазон изменения температуры защиты состав¬
ляет (—50— +1000)° С.Для ракет с ЖРД измеряются также температуры сте¬
нок баков и компонентов топлива в баках.Особенности топлива (низкокипящий или высококипящий
окислитель), а также системы наддува (использование горя¬
чих или холодных газов) определяют температурные диапа¬
зоны этих измерений. Обычно стенки баков и компоненты
топлива в полете не нагреваются выше, чем до +350° С. Про¬
грамма измерения температур в самом двигателе существен¬
но зависит от схемы ЖРД. Чаще всего измеряются темпера¬
туры компонентов топлива в магистралях питания, мятого
газа после турбины, рабочего тела наддува.В ракетах с РДТТ измеряются температуры заряда, сте¬
нок и теплозащитных покрытий внутри двигателя и соплово¬
го блока. Таким образом, для современных баллистических
ракет температурные измерения требуют установки десятков
датчиков, способных с достаточной точностью измерять тем¬
пературу воздуха, газовых потоков, стенок конструкции, теп¬
лозащитных покрытий. Измерение перечисленных выше тем¬
пературных режимов в течение всего времени полета ракеты
позволяет накопить опытный материал, необходимый для
оценки надежности конструкции.§ 12.4. ОПЫТНОЕ ОПРЕДЕЛЕНИЕ СТАТИЧЕСКИХ НАГРУЗОКЧтобы оценить прочность и надежность корпуса ракеты,
необходимо знать осевые и поперечные нагрузки, действую¬
щие на корпус в полете.Для любого момента времени полета ракеты осевая сила
в сечении корпуса Х\ может быть определена по зависимости*| ,,Т (х0 = пхХ (A?t) g0 j m (*,) dxx + Fu j - dxx, (12.7)о 0 1где nxl (xt) — коэффициент осевой перегрузки в сечении хх;
гп(х]) — масса, распределенная вдоль оси Х\\Р—плотность воздуха;УФ—скорость обтекания ракеты набегающим пото¬
ком воздуха;Сх\ — коэффициент лобового сопротивления;FM—площадь миделя;gQ—ускорение силы тяжести на земле,367
Для топливного бака, нагруженного давлением наддуни
Ре. осевое усилие7’т(а:1) = 7’(х1)-/?(а:1)А) (Г-’Л)где — площадь сечения бака.Распределенная поперечная нагрузка на корпус в нор
мальном и боковом направлениях может быть выражена еле
дующими зависимостями:дСа V2Яу\ (*i) = ± “а.р -г-Fm ± пу\ C*i) Soт (*i);В 2 О2''1дС^ VЯл (*i) = ± -щг- К? -f-Fu ± nz\ go т{хх),где лу1 (л^), пл (л:,) — коэффициенты нормальной и бою»вой перегрузок в сечении Х\\Рда — углы атаки и скольжения с учетом
действия ветра;Су|, С\ — коэффициенты нормальной и боко¬
вой аэродинамической силы, отнесен
ные к угловой единице.Суммарная поперечная распределенная нагрузка q{x\),
перерезывающая сила Q(*i) и изгибающий момент Л1(ДГ|)
находятся по зависимостямя (Xi)=Vя*у, (-«г) + я\ (*i);Q (-«i) = J Я (*i) dx£ ! (12.1(1)0X,M(л;,) = j Q (x1)dx1.Таким образом, для определения статических нагрузок,
действующих на корпус ракеты в полете, необходимо знай,
коэффициенты перегрузок, углы атаки и скольжения, давлети
наддува баков для ракет с ЖРД или давление в камер>
РДТТ, распределение массы ракеты, плотность воздуха и екн
рость обдува ракеты. Распределение плотности воздуха ш»
высоте уточняется путем зондирования атмосферы перед н\
ском ракеты.Давления в камерах сгорания РДТТ, ЖРД и в топлпи
ных баках, измеряются в процессе летных испытаний дагчн
нами давлений. Коэффициенты перегрузок вдоль трех oieii
измеряются датчиками перегрузок, располагаемыми обычно
в корпусе головной части, в приборных, топливных и хвост*
вых отсеках ракеты.368
По результатам летных испытаний бывают известны пе¬
регрузки в 5—7 характерных сечениях ракеты.Аэродинамические коэффициенты ракеты Схь С“, С\
обычно определяются при испытании модели ракеты в аэро¬
динамической трубе.Скорость обдува ракеты Vw может быть найдена по опре¬
деляемой внешнетраекторными измерениями скорости цен¬
тра масс ракеты и скорости ветра, получаемой при зондиро¬
вании атмосферы.Углы aw и |3№ могут быть определены косвенно по записи
углов отклонения органов управления с учетом программных
изменений угла атаки и скольжения.Начальное распределение массы ракеты обычно известно
из весовой сводки и данных о заправке топливом. Измерение
текущих уровней жидкости в баках и косвенное определение
секундного расхода топлива позволяют определить также
функцию т(хi) в каждый момент времени полета ракеты.Многие из перечисленных параметров измеряются весьма
приближенно. Так, предельная ошибка определения аэроди¬
намических коэффициентов ракеты достигает ±(10—20)%'.
Трудно также судить о реальной скорости ветра во время
полета ракеты на высотах 25—50 км по результатам зонди¬
рования атмосферы на высотах до 25 км.Коэффициенты перегрузок с помощью датчиков, распо¬
ложенных на борту ракеты, определяются, как правило,
с предельной относительной ошибкой не менее ±(2—5)%.Следует отметить, что проводимые в ходе летных испыта¬
ний измерения перечисленных выше случайных величин или
случайных функций позволяют лишь определить их оценки
с широкими доверительными интервалами. Все это сильно
затрудняет получение достаточно точных оценок статических
нагрузок и проведение строгого расчета надежности ракет¬
ных конструкций.Однако совместная обработка специальными математиче¬
скими методами большого объема опытной информации, по¬
лучаемого в ходе телеметрических, внешнетраекторных и ме¬
теорологических измерений, проводимых при летных испыта¬
ниях ракет, может обеспечить получение оценок искомых
параметров с достаточной для расчетов надежности точно¬
стью. В следующем параграфе будут изложены постановка
подобной задачи и некоторые пути ее решения.§ 12.5. ОПРЕДЕЛЕНИЕ ТЯГОВЫХ, РАСХОДНЫХ
И АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК РАКЕТЫ
ПО РЕЗУЛЬТАТАМ ЛЕТНЫХ ИСПЫТАНИЙДля определения характеристик рассеивания точек паде¬
ния, гарантированной дальности полета и выполнения проч-369
ностных расчетов необходимо знать основные силы, прило¬
женные к центру масс ракеты в полете. Сила тяги P(t, Л),
сила лобового сопротивления X(t, h) и секундный расход
массы m(t) являются случайными функциями времени t и
высоты h. Поэтому в ходе летных испытаний могут решаться
две задачи:— определение оценок математических ожиданий и дис¬
персий искомых случайных функций по результатам серии
независимых испытаний;— определение оценок реализаций этих функций и их
дисперсий по результатам одного испытания.В последнем случае дисперсия оценок реализаций учиты¬
вает ошибки измерения и разбросы оценок из-за ограничен¬
ного числа измерений.Поскольку определение реализаций искомых функций и
величин после каждого испытания позволяет затем провести
совместную обработку данных по серии, то рассмотрим ре¬
шение только второй задачи.В ходе летных испытаний- не удается непосредственно ил-
мерить аэродинамические силы. В ракетах с РДТТ, кроме
того, трудно измерить секундный расход массы. Поэтому
перечисленные выше силы могут быть определены лишь
косвенно. Эти силы можно представить в следующем виде:где pK(t)—случайная функция давления у переднего дни
ща камеры двигателя;Vw— скорость обдува ракеты;
ph{K)—случайная функция атмосферного давления;Fa и FM— площадь выходного сечения сопла и площадь
миделя ракеты;С (t) и Е (t)—случайные функции коэффициентов тяги в пу¬
стоте и расхода топлива;
я—скорость звука;
k— показатель адиабаты воздуха.На основании выражений (12.11) удельная тяга двигате
ля в пустотет. е. является также случайной функцией времени.Случайные функции Cx(t), E(t) и C(t) между собойслаГш
коррелированы. Поэтому для определения тяги, секуидпотP(t, К) —С (t) рк (t) — Fа ph (/г);
m{t) = E(t)pK{t)-(12.11)(12.1'.’)370
расхода массы, удельной тяги и лооового сопротивления ра¬
кеты достаточно найти статистические характеристики слу¬
чайных функций Cx(t), E(t) и C(t).Искомые характеристики связаны известным уравнением
движения центра масс ракетыmW — Р— X,центра(12.13)масс нагде W — проекция кажущегося ускорения
продольную ось ракеты.После преобразований, учитывая зависимости (12.11),
уравнение (12.13) примет следующий вид:т.— \ Е (t) рк (t) dtW{t)= С (t) рк (t) — FaPh (h) YV (t)-Pn{h)Cx{t\ (12.14)где tn0 — стартовая масса ракеты.В ходе испытаний измеряются или бывают известны из
расчетов функции pK{t), W(t), ph(h), Vw{t), a(t) и величины
то, Ра, FM, k.Случайные функции C(t), E(i) и Cx(t) могут быть пред-
! ставлены в виде суммы расчетных неслучайных значений и
случайных центрированных функций bC(t), bE(t) и oCx(t).В свою очередь реализации этих центрированных слу¬
чайных функций молено представить в виде суммы случай¬
ных величин и неслучайных функций вида:ЬС (/) = хj х<£ -}~ х-|-...; jЬЕ (0 = д:р + xp+1t + x(+2t2 + ...; (12.15)(0 — xi W + xi\4'14* - IУравнение (12.14) с учетом зависимостей (12.15) может
быть после преобразований сведено к линейному уравнениюj^ ctj (t) Xj — у (t), (12.16)J=iгде cij(t) и y(t)—функции, определяемые по данным испы¬
таний;Xj — неизвестные величины;J — число неизвестных величин.Не нарушая общности рассуждений, можно считать, что
все ошибки измерений сосредоточены в функции y(t). Как
правило, измерения проводятся в дискретные моменты вре¬
мени /г, ..., tn (рис. 12.1). Поэтому в результате всех371
372Рис. 12.1. Измеренные значения параметров
измерений можно получить систему из п так называемых
условных уравнений [23]:
j^iajiXj=yi {i =1,2, п). (12.17)J=iОшибки измерения параметров, входящие в значения уи
могут быть приведены к случайным стационарным функциям
с нормированными корреляционными функциями следующе¬
го вида (рис. 12.2):г(т):(12.18)Рис. 12.2. Нормированная
корреляционная функция
ошибок измеренийПоскольку ошибки измерений при испытаниях зависят от
большого числа факторов, то на основании центральной пре¬
дельной теоремы можно предполо¬
жить нормальный закон их распре¬
деления. В этом случае для обра¬
ботки опытной информации может
.быть применен метод наименьших
квадратов [23]. Однако возможностьIнепосредственного применения это¬
го метода усложняется коррелиро-
.ванностью измерений и большим
объемом опытной информации. Рас¬
смотрим один из возможных путей
обработки коррелированных изме¬
рений.Выберем такой интервал zR (рис. 12.2), кратный шагу
измерений, на котором корреляционной связью ошибок мож¬
но пренебречь. Выделим теперь из выборки измерений
только такие измерения упп (рис. 12.1), которые следуют
через интервал -сн, начиная с номера i — r. Поскольку такие
измерения будут некоррелированными, то для их статистиче¬
ской обработки можно применить метод наименьших квадра¬
тов. Если число независимых измерений больше числа неиз¬
вестных (М>/), то на основе системы М условных уравне¬
ний (12.17) для г-й выборки получим систему J нормальных
уравнений видаj2 AkjrXjr — Ykr,'(*=1,2 J), (12.19)мгде Ак}, = 2 а‘тп—\Мktm ajrm>у*,=2акгт У гт=1373
Решения системы (12.19) имеют видjS(-l )k^MfJ)Ykr
? — fe=1
Ч'~ д,XJr=±1 , (12.20)где Дг—определитель матрицы \\Akjr\[;Mfft — минор матрицы \\Akjr\\, соответствующий элемен¬
ту^ й,>.Оценки Xjг для искомых параметров являются несметен
ными и состоятельными. Кроме того, для своей выборки иг
мерений 1/,-т они будут и эффективными, то есть будут имен,
наименьшую дисперсию. Оценку для этой дисперсии можно
определить по формулем I J \22 f Угт — 2 ajrmXjr М{гП)п. =3=} у 1^1 ' Г122ПJ' (M — J)\ ■ ^ JОдиако при такой обработке используется только часп.
измерений, следующая через интервал тк (рис. 12.1). Кроме
того, первое наблюдение, определившее выборку г, взято
произвольно. Все остальные выборки имеют практически та-
кую же информативность. Для определения возможности
использования всей опытной информации рассмотрим сред
нее арифметическое коррелированных оценок Х;г для у-го не
известного:R<12-22>Чтобы оценка X была несмещенной, необходимо маге
матическое ожидание приравнять истинному значению парп
метра, т. е.M[Xj] = Xr (12.23)На основании теоремы о математическом ожидании ли¬
нейной функции коррелированных величин можно записан,,
чтоя(12.2*1)г=1Но так как оценки Xjr, полученные по г-й выборке, не
смещенные, тоM[Xjr} = Xr (12.2:.)374
На основании выражений (12.24) и (12.25) условие(12.23) выполняется, т. е. среднее арифметическое коррели¬
рованных оценок является несмещенной оценкой искомых
величин.Чтобы избежать необходимости составления и решения R
систем нормальных уравнений (12.19), рассмотрим возмож¬
ность одновременной обработки всех п коррелированных
измерений. Можно доказать, что оценки, полученные при ре¬
шении системы нормальных уравненийj■ ^AkjXj=Yb (12.26))= 1Пгде Akj = 2 aki ап\1=1ПУ к = ^ аыУь
1=1(составленной с учетом всех п условных уравнений, совпадают
!с оценками Xj, полученными осреднением выборочных оце¬
нок по формуле (12.22). Решения системы (12.26) будут
иметь вид2 (-1 )к ч М^УкXj = — д , (12-27)где Л — определитель матрицы ЦА^||;М'М—минор матрицы [| ^4*^ ||, соответствующий элемен¬
ту Akj.Сравнивая выражения (12.26) и (12.19), получимRА -У А •(12.28)RV V у1 к — krr=1т. e. элементы матриц ЦЛ^Ц и || KJ| являются суммами эле¬
ментов матриц ||А^Л|| и Ц.Предполагая, что коэффициенты ац незначительно изме¬
няются во времени, па основании выражения (12.19) с точ¬
ностью до одного слагаемого при различных г Ahjr = const,
т. е,Akl = RAHlr. (12.29)375
Тогда на основании выражений (12.20), (12.22) и (12.2Н)
получим:Rjг=12 (-1 )k+iM(rkJ) YkrJ2 (-1 fh+^MW)Ykд(12.30)что соответствует формуле (12.27).Таким образом, обрабатывая одновременно всю опытную
коррелированную информацию по схеме метода наименьших
квадратов, можно получить несмещенные оценки Х} искомых
параметров. Чтобы применять такой способ обработки ii.i
практике, необходимо убедиться в эффективности получае¬
мых таким путем оценок. Другими словами, нужно показан.,
что дисперсия Dj оценок Xj всегда меньше, чем дисперсия
Djr оценок Xjr, полученных только по выборкам некоррели¬
рованных измерений.На основании выражения (12.22) и теоремы о дисперсии
линейной функции коррелированных случайных величии
можно записать, чтогде Кгр — корреляционные моменты оценок Xjr и Xje;~^S — символ суммирования всех парных сочетаний корг=грреляционных моментов при г<р.Поскольку все г выборок имеют практически одинаковы!'
дисперсии, тоDj R2 (^Djr + 2^;>2rrp) — Djr ( r + ’ (12.32)r<P t<p 'где rTf — коэффициенты корреляции оценок Xir и X..Dj = ~$r 2X + 2IX , (12.31)r<p376
На основании выражения (12.20) оценки Xjr являются
линейными функциями измерений угт. Поэтому для любых
двух оценок Xjr и Xjp можно записать:Xjr— Ьг\Уг1 + ^г2Уг2+ - + ^/-т-1 Л т-1 ++ brmyrm + ... + brMyrM;Xj9 = ^pi^pi + b^yf 2 + ... + bp m_j yp m_j ++ ЬртУрт + - + bpM.ypM„где b — некоторые коэффициенты;УгпиУрт—некоррелированные измерения, начинающиеся
с номера 1 = г и / = р (рис. 12.1); М* = М или
М* = М— 1.Из рис. 12.1 видно, что каждое измерение угт коррелиро-
вано только с измерениями Урт_1 и у так как интервал
между ними меньше тя.Поэтому, учитывая стационарность случайной функции
ошибок измерений, можно записать
м* м^rmPftnr ( Угт' Уpm) ^гтРр ш—1 ^ (Угт1 Ур т—l)m—’i .. . „ .„/ ~М ЛГ “ .(12.34)/ М М*1/2^2т т=1 т=1Ь'1тртПолагая, что на интервале тд коэффициенты b практи¬
чески не меняются, что соответствует предположению о несу¬
щественном изменении коэффициентов а,ц, окончательно по¬
лучим= г W (р - Г)] + г [т* - и (р - г)], (12.35)где At — шаг времени, через который следуют измерения.Подставляя выражение для коэффициента корреляции(12.35) в выражение (12.32), после преобразований, учиты¬
вая, что из R выборочных оценок можно получить R(R—1)
парных сочетаний, получим-g- = -L {1 + 2 [г (т,) + А- (та) +...+ г (хй_х)]) = , (12.36)rRгде S= I r(x)dt и вычисляется по формуле трапеций.оТаким образом, при известной корреляционной функции
ошибок измерений на основании выражений (12.36), (12.29)
ц (12.21) можно найти дисперсию оценок Xj, получаемых при377
ш ж1 п ш ш
/ / /совместной обработке всех коррелированных измерений по
схеме метода наименьших квадратов.Проанализируем полученную зависимость. Из формулы(12.36) видно, что эффективность оценок Xj по сравнению
с оценкой XjT зависит от вида корреляционной функции ошн
бок измерений и числа R измерений на интервале xR. Ис¬
пользуя полученную формулу, построим график отношенияD: Т„d — -~— для различных чисел/? = 4j~ и видов корреляциоп
ных функций ошибок измерения (рис. 12.3). Из рисунка видно, что дисперсии оценок А',
меньше дисперсии оценок
Xjr, полученных только по
выборке некоррелированных
измерений.Таким образом, одновре¬
менная обработка всех кор¬
релированных измерений по
схеме метода наименьших
квадратов эффективнее ста
тистической обработки вы¬
борки только некоррелиро¬
ванных измерений.Кроме того, из рис. 12.3
следует, что при уменьше-
й нии шага обработки At ко¬
эффициент d, а следователь¬
но, и эффективность оце¬
нок Xj, быстро стремится
к некоторому предельно¬
му значению, определяемому
корреляционной функцией ошибок измерений. Причем при ве¬
личине шага между измерениямиД< < (0,14-0,2) т„ (12.37)дисперсия оценок Xj уже практически не уменьшается. Исхо¬
дя из этого, можно сделать вывод, что в указанном выше
смысле такой шаг обработки и измерений является опти¬
мальным. Если шаг обработки больше оптимального, то мы
существенно проигрываем в эффективности оценок, а егш
он меньше оптимального, то дополнительные затраты на об¬
работку результатов измерений не ведут к заметному увели
чению эффективности оценок.Формула (12.36) несколько неудобна тем, что при одно
временной обработке коррелированных измерений по схом<-
метода наименьших квадратов получаются оценки для днеч-I 3 5 7 9 U 13 15 17 19 21 23Рис. 12.3. Оптимальный шаг измере¬
ний:а — виды корреляционных функций типа
I, II, III, IV; 6 —* соответствующие им
отношения дисперсий
Персии Dj, а не дисперсии Djr, необходимые для вычисле¬
ний Dj. Однако, используя формулу (12.36) и выражая дис¬
персии DjT через дисперсии Dj, можно получить следующую
зависимость(12.38)где и:т=10,5 + 2 г(т) ; (г = At, 2М, ..., оо).Из выражения (12.38) видно, что дисперсии Dj и D} со¬
впадают только при некоррелированных измерениях, когда
г( т) = 0.Рассмотренный выше метод определения тяговых, расход¬
ных и аэродинамических характеристик ракет совместной
обработкой коррелированных наблюдений достаточно общий.
Такой же подход может быть предложен и для определения
других параметров, перечисленных в § 12.4, точность непо¬
средственного определения которых невысока. Следует заме¬
тить, что применение метода наименьших квадратов является
весьма эффективным для получения оценок параметров ра¬
кеты, которые непосредственно не могут быть измерены, но
связь которых с измеряемыми величинами известна.При рассмотрении метода оценки тяговых и расходных
характеристик ракеты мы нигде не оговаривали число камер
двигателя. Поэтому все полученные выше формулы справед¬
ливы и для многокамерных двигателей. При расчете стати¬
стических характеристик параметров С и £ (12.11) мы на¬
ходим суммарные для двигателя (ракеты) величины. Однако
там, где в формулы входит случайная функция /?К(0.ДЛЯ мно¬
гокамерного двигателя имеется в виду среднее давление p{t).
Для простоты изложения далее индекс k будем опускать.Среднее давление для двигателя с п камерами может
быть определено по зависимостиР (0 = 4- \Р\ (О -Ь Рг V) + ... + Р, (*) + ... + Рп (*)], (12.39)где pj{t)—случайная функция давления в /-й камере.Найдем вероятностные характеристики функции среднего
давления p(t). В соответствии с теоремой о математическом
ожидании линейной функции от случайных параметров ма¬
тематическое ожидание функции p(t) имеет вид'(*)e-7rS'V*)’ Ьз.40)j=iгде mPj(t)—математическое ожидание давления в /-й ка¬
мере.379
На основании теоремы о дисперсии линейной функции от
случайных параметров дисперсия функции p(t) может быть
записана в видегде Dpj(t) — дисперсия давления в }-й камере;К л (р) — корреляционный момент давлений в /- й и 1-пДля ракет с ЖРД процессы горения в камерах зависимы
и коррелированы. Это вызывается наличием общей системы
подачи топлива в камеры (общие баки, турбонасосные агре¬
гаты) .Для случая независимых камер дисперсия среднего дав¬
ленияЕсли все камеры работают в одинаковых условиях,
то есть Dpi(t) =Dp2(t) — ...—Dpn(t) и все корреляционные
моменты равны между собой, тогде pi2(0—коэффициент корреляции для давлений в любой
паре камер или средний для двигателя.Среднее квадратическое отклонение функции p(t) соответ¬
ственно выражается зависимостьюДля независимых камер при равенстве дисперсий давле¬
ния в каждой камере:Таким образом, если ракета имеет многокамерный двиги
тель, то для определения ее тяговых, расходных и аэродина¬
мических характеристик необходимо предварительно по фо|>ПL j= l j<lкамерах.П(12.42)+ (л - l)pi2(*)],(12.43)(12.44)(12.45)380
мулам (12.39) — (12.45) найти вероятностные или статисти¬
ческие характеристики среднего давления.Для ракет с многокамерными двигателями, кроме рас¬
смотренных выше функций тяги, секундного расхода топлива
и лобового сопротивления, важной характеристикой нагру¬
жения конструкции является разность тяг отдельных камер
A P{t).Разность тяг n-камерного симметричного двигателя яв¬
ляется случайной функцией только времени, так как величину
Fa.Ph{h) можно считать одинаковой для всех камер.На основании формулы (12.11), учитывая сказанное
выше, можно записатьЛР(0 = С(0-^[А (Ор2 (О + - + Р„ 2 (О ~Рп'1-\л (Ол/2+2(О- Рп (01 = C(t)Lp(t\(12.46)где Ap(t)—случайная функция средней разности давлений
многокамерного двигателя.Для определения вероятностных характеристик функции
Ap(t) необходимо знать математические ожидания и диспер¬
сии давлений в каждой камере, а также корреляционные
моменты давлений в каждой паре камер, то есть те же вели¬
чины, что и для оценки среднего давленияp(t). По аналогии
с выражением (12.40) математическое ожидание функции
Ap(t) имеет видтлр У) =1Г Я/2j-1тр] (t)тр!(0(12.47)Аналогично выражению (12.41) можно записать зависи¬
мость для дисперсии функции Ap(t)j<l(12.48)В формуле (12.48) корреляционные моменты имеют раз¬
ные знаки, так как и входящие в функцию Ap(t) значения
давлений имеют различные знаки (12.46).Для симметричного двигателя при одинаковых условиях
работы камер (DpX = Dp, = ... = Dpn и Кп = Кп — - — К{п__х)пУ-DAp (t) = -i- [nDpl (t) - nKa (01 = ~- [1 ~ Pi2 Ш (12-49)381
Соответственно среднее квадратическое отклонение этой
функции имеет вид(12.50)Для двигателей с независимыми процессами в одинаконо
работающих камерах среднее квадратическое отклонение
функции Дp(t) определяется следующей формулой:Сравнение формул (12.45) и (12.51) показывает, что сред¬
ние квадратические отклонения функций p(t) и Дp(t) при
независимых процессах одинаковы.Для двигателя с зависимыми процессами в камерах увО'
личиваются суммарные разбросы тяги и секундного расхода
топлива, определяемые дисперсией средней разности давле¬
ния Dip(t) (12.49), (12.50).Это видно из отношения средних квадратических откло¬
нений функций p(t) и Дp(t)Для двигателя с независимыми процессами в камерах ни
основании формул (12.45) и (12.51) можно записатьРассмотренная выше особенность нагружения ракеты
с многокамерным двигателем может быть объяснена и чисто
физическими соображениями. Случайное положительное от
клонение давления в одной камере сопровождается одновро
менным повышением давления в остальных камерах, так как
в двигателе имеет место положительная корреляция. При
независимых процессах отклонения давлений в камерах
чаще всего имеют разные знаки, поэтому суммарные pat-
бросы меньше, а разность давлений больше. Следует также
заметить, что, несмотря на большое увеличение дисперсии
тяги при зависимых процессах в камерах, абсолютные pa i
бросы тяги в многокамерном двигателе всегда меньше, чем
абсолютные разбросы в однокамерном двигателе с такой же
величиной тяги, как в многокамерном.(12.51)(12.62)382
Действительно, если положить, что тяга Р\ однокамерно¬
го и тяга Р многокамерного двигателей равны, то2jl/J Ъп1 р (12.54)°/>| ар\~кНа основании зависимости (12.44) можно записать(12.55)Для независимых камер рiа = 0 и тогда на основании вы¬
ражений (12.55) или (12.45) получим_Н5/М(12.56)Анализ формул (12.55) и (12.56) показывает, что с уве¬
личением числа камер и уменьшением степени зависимости
менаду процессами в них (pi2) суммарные абсолютные раз¬
бросы тяги ракеты падают.
СПИСОК ЛИТЕРАТУРЫ1. Алеш ко в М. Н., Жуков И. И. Физические основы ракетного
оружия. Воениздат, 1965.2. А п п а з о в Р. Ф., Лавров С С., Мишин В. Г1. Баллистика
управляемых ракет дальнего действия. «Наука», 1966.3. Баррер М., Жомотт А., Вебек Б. Ф., Ванденкерк-
хове Ж- Ракетные двигатели. Оборонгиз, 1962.4. Бонни Е. А., Цукров М. Д., Бессерер К. У. Аэродинамика.
Теория реактивных двигателей. Конструкция и практика проектирования.
Воениздат, 1959.5. Большее Л. Н., Смирнов Н. В. Таблицы математической ста¬
тистики. Изд-во АН СССР, 1965.6. Б у с л е н к о Н. П., Шрейдер Ю. А. Метод статистических ис¬
пытаний. Физматгиз, 1961.7. Б у с л е н к о Н. П. Математическое моделирование производствен
ных процессов на цифровых вычислительных машинах. «Наука», 1964.8 Вальд А. Последовательный анализ. Физматгиз, 1960.9. В е н т ц е л ь Е. С. Введение в исследование операций. Изд-во «Со¬
ветское радио», 1964.10. Вентце ль Е. С. Теория вероятностей. Физматгиз, 1959.11. Вентце ль Е. С. Элементы теории игр. Физматгиз, 1960.12. Гнеденко Б. В., БеляевЮ. К., Соловьев А. Д. Мате¬
матические методы в теории надежности. Физматгиз, 1965.13. Гнеденко Б. В. Курс теории вероятностей. Физматгиз, 1962.
^ 14. Г у д Г. X., М а к о л Р. Э. Системотехника. Введение в проектиро¬
вание больших систем. Изд-во «Советское радио», 1962.15. Гудков А. И., Лешаков П. С., Райков Л. Г. Внешний
нагрузки и прочность летательных аппаратов. Оборонгиз, 1962.16. Дрешер М. Стратегические игры. Теория и применение. Изд-но
«Советское радио», 1964.17. И ори ш Ю. И. Измерение вибраций. Машгиз, 1956.18. Кантор А. В. Аппаратура и методы измерений при испытаниях
ракет. Оборонгиз, 1963.19. К р а м е р Г. Математические методы статистики. Изд. иностр.
лит., 1948.20. Казаков И. Е., Доступов Б. Г. Статистическая динамнк.1
нелинейных систем. Физматгиз, 1962.21. Куров В. Д., До л жа некий Ю. М. Основы пороховых ракетных снарядов. Оборонгиз, 1961.22. Ллойд Д., Л и п о в М. Надежность. Изд-во «Советское радио»,
1964.23. Л и н н и к Ю. В. Метод наименьших квадратов и основы мше
матическо-статистической теории обработки наблюдений. Физматгиз, 1911'^384
24. Наука — техника — управление. Под редакцией Ф. Каста и Д. Ро-
зенцвейга. Перев. с англ. Изд-во «Советское радио», 1966.25. М а к - К и и с и Дж. Введение в теорию игр. Физматгиз, 1960.^26. Меррил Г., Гольберг X., Гельмгольц P. X., Исследо¬
вание операций. Боевые части. Пуск снарядов. Перев. с англ. Изд. иностр.
лит., 1959.27. Морз Ф. М., Кимбелл Д. К. Методы исследования операций
Изд-во «Советское радио», 1956.28. О р л о в Б. В., М а з и н г Г. Ю. Баллистическое проектирование
ракег на твердом топливе. Оборонгиз, 1964.V 29. Основы исследования операций в поенной технике. Под обшей
ред. Ю. В. Чуева. Изд-во «Советское радио», 1965.30. О с т о с л а в с к и й И. В., Стрижена И. В. Динамика полета.
Траектории летательных аппаратов. Обороним, 1963.731. Применение теории игр в военном деле. Сборник переводов под
ред В. О. Ашкенази. Изд-во «Советское радио», 1961.32 Пугачев В. С. Теория случайных функций. Физматгиз, 1960.33. Р е к с и н В. Э. Методы сетевого анализа в управлении производ¬
ством. «-.Экономика», 1966.34. С и и я р е в Г. Б., Добровольский М. В. Жидкостные ракет¬
ные двигатели. Оборонгиз, 1957.35. Смирнов Н. В., Д у н и и - Б а р к о в с к и й И. В. Курс теории ве¬
роятностей и математической статистики. Физматгиз, 1965.36. Ф е о д о с ь е в В. И., С и н я р е в Г. Б. Введение в ракетную тех¬
нику. Оборонгиз, 1960.37. X э в и л е н д Р. Инженерная надежность и расчет на долговеч¬
ность. «Энергия», 1966.38. «Вопросы ракетной техники», 1957—1965.39. «Ракетная техника и космонавтика», 1965.40. Aerospace Range. Instrumentation. By Scovullo I. I., Paul F. I.,
Princeton, New Jersey, 1965.41. “Aviation Week", 1957—1965.42. “Flight”, 1958—1965.43. G о 1 d s in i t h M. On the Optimization of Two—Stage Rocket.
Rand Corporation Report. RM. 1796, 1956.44. “Interavia”, 1959—1965.45. “Jet Propulsion”, 1958—1965.46. К г a s e H. Allgemeine Theorie der Stufenrakete. “Weltraumfahrt”,
1953.47. M a 1 i n a F. and Summerfield M. The Problem of F.scape
from Earth by Rocket. “Journal of the Aeronautical Sciences”, 1947.48. “Missiles and Rockets”, 1957—1965.49. Schurmann E. Optimum Staging Technique for Multistaged
Rocket Vehicles. “Jet Propulsion”, 1957.50. Vertregt M. Calculation of Step—Rockets. “Journal of the Aero¬
nautical Sciences”, 1947.51. Williams M. L. The Calculation of the Fuel Distribution in
Step—Rockets. “Journal of the British Interplanetary Society”, 1957.52. П а у ш к и н Я. М. Химический состав и свойства реактивных топ¬
лив. Изд-во АН СССР, 1958.53. Шевелюк М. И. Теоретические основы проектирования жидко¬
стных ракетных двигателей. Оборонгиз, 1960.54. Силантьев А. И. Твердые ракетные Топлива. Воениздат, 1964.55. Шапиро Я. М., М а з и н г Г. Ю., Прудников Н. Е. Основы
проектирования ракет на твердом топливе. Воениздат, 1968.56. Клигель Д. Р. Течение смеси газа с частицами в сопле. «Во¬
просы ракетной техники», № 10, 1965.57. Вопросы горения. Физматгиз, 1961.58. Локк А. С. Управление снарядами. Перев. с англ. ГИТТЛ, 1957.385
59. Трапезников В. Предприятия будущего. «Известия», 17 мая
1967 г.60. Военная, стратегия. Под ред. Соколовского В. Д. Воениздат, 1963.
•J 61. А н д р и а н о в Д. Н. и др. Расчет себестоимости управляемыхреактивных снарядов на стадии проектирования. МАИ, 1962.62. П а т е т А. Е., Рамо С. Конструирование управляемых снарядов.
Перев. с англ. Воениздат, 1963.63. Матричные игры. (Сборник переводов). Под ред. Воробьева Н. Н.
Физматгиз, 1961.64. Предварительное определение трудоемкости и стоимости изготов¬
ления авиационных изделий. Изд-во МАИ, 1962."V 65. Р е й ч е р т Г. Стоимость ракетных систем. Перев. с англ. ВИА,
1963.J66. Лебедев В. И., Р умянцев А. Н., Соколов Г. И. Методы
исследования операции. ВИА. 1964.67. С о р о к и н Я- М., Лебедев А. В. Главное мерило качества.
Изд-во «Советское радио», 1962.68. Сведения о состоянии, количестве и стоимости систем ракетного
оружия Атлас, Титан, Минитмен. «Бюллетень экономической информации»,
№ 20. 1964.69. Л ю и с Р. Д., Райфа X. Игры и решения. Изд. иностр. лит.,1961.70. Р о з е н б е р г В. Я., Прохоров А. И. Теория массового об¬
служивания. Изд-во «Советское радио», 1963.71. Дружинин Г. В. Надежность устройств автоматики. Изд-во
«Энергия», 1964.72. 3 у х о в л ц к и и С. И, Авдеев Л. И. Линейное и гыпуклое
программирование. Справочное руководство. Изд-во «Наука», 1964.73. К о у д е н Д. Статистические методы контроля качества. Метал-
лургиздат, 1961.74. X е м ф р и с Дж. Ракетные двигатели и управляемые снаряды.
Изд. иностр. лит., 1958.75. Б е л л м а н Р. Теория динамического планирования. Изд. иностр.
лит., 1960.76. Эдмоне Д. С., С а'! с n II п, Д. Соотношение «стоимость — на¬
дежность». Перев. с англ. АНТИ, 1964.77. Б у р г е с с Э. Управляемое реактивное оружие. Изд. иностр. лит.,
1958.78. Исследование операций на практике. Перев. с англ. Воениздат,1962.79. Конструирование управляемых снарядов. Перев. с англ. Воениз¬
дат, 1963.80. Л о г о в с к и й А. Н. Стратегия и экономика. Госэнергоиздат, 1962.81. Маликов И. М., Половко А. М., Романов И. А., Ч у к-
реев П. А. Основы теории и расчета надежности. Судпромгиз, 1960.82. Паккет А., Эдвард Р. Оптимальные характеристики ракетных
снарччо” малой дя.льт'остч. Оборонгиз, 1959.83. С а а т и Т. Л. Математические методы исследования операций.
Перев. с англ. Воениздат, 1963.84. Хинчин А. Я. Работы по математической теории массового об
служивания. Физматгиз, 1963.85. Конструкция управляемых баллистических ракет. Под общей |ц-
дакцией С и н ю к о в а А. М. и Морозова Н. И. Воениздат, 1969.386
ПРИЛОЖЕНИЕ
3«э.
© iLflMMMIMi4 liil ЮМ1! I 111! 31113 IB 51
3Злкжэ 2332 к стр. 3S8Номограмма ш
ОГЛАВЛЕНИЕСтр.Предисловие . . 3Введение 5Раздел I
БАЛЛИСТИЧЕСКОЕ ПРОЕКТИРОВАНИЕ РАКЕТГлава 1. Задачи проектирования ракет 9§ 1.1. Задачи военно-технического проектирования ракетных ком¬
плексов —§ 1.2. Эффективность ракетного комплекса и критерии ее оценки 14§ 1.3. Задачи баллистического проектирования ракет 21§ 1.4. Выбор топлив и определение их характеристик при бал¬
листическом проектировании ракет 26§ 1.5. Выбор конструктивной схемы ракеты . . . 37Глава 2. Баллистические расчеты ракеты 54§ 2.1. Уравнения движения ракеты на активном участке траек¬
тории —§ 2.2. Сведения из вариационного исчисления 59§ 2.3. Выбор программы движения ракеты на активном участкетраектории 68§ 2.4. Расчетные зависимости для пассивного участка траекто¬
рии 76§ 2.5. Проектировочный и проверочный баллистические расчеты 85
§ 2.6. Гарантированная дальность полета и гарантийные запасытоплива 98Глава 3. Весовой анализ ракет 109§ 3.1. Весовые уравнения ракет с ЖРД —§ 3.2. Весовые уравнения ракет с РДТ'Г 117§ 3.3. Требуемая точность весовых уравнений 126Глава 4. Выбор проектных параметров ракет 132§ 4.1. Проектные параметры ракет с ЖРД и РДТТ —§ 4.2. Выбор числа ступеней ракеты. Влияние массы полезнойнагрузки на стартовую массу ракеты 135§ 4.3. Выбор распределения массы ракеты по ступеням и началь¬
ных тяговооруженностей субракет • • 142389
Стр.% 4.4. Оптимизация распределения масс по ступеням и тягово¬
оруженностей субракет 152§ 4,5. Выбор давлений в камере сгорания и на срезе сопла ЖРД 158
§ 4.6. Особенности выбора давлений в камере сгорания и на сре¬
зе сопла РДТТ 169§ 4.7. Выбор относительных размеров корпуса ракеты с ЖРД 174
§ 4.8. Выбор относительной длины заряда и скорости горениятоплива для ракет с РДТТ 176Глава 5. Методы баллистического проектирования ракет .... 181
§ 5.1. Приближенное баллистическое проектирование ракет с§ 5.2. Приближенное баллистическое проектирование ракет сРДТТ .... 190§ 5.3. Особенности баллистического проектирования ракет-носи-телей с ЖРД 198§ 5.4. Особенности баллистического проектирования ракет-носите¬
лей с РДТТ . . 211§ 5.5. Определение параметров ракеты с помощью номограмм . . 214
§ 5.6. Понятие о методах баллистического проектирования ракет
с применением ЭВМ . . .... 222Раздел IIВОЕННО-ТЕХНИЧЕСКОЕ ПРОЕКТИРОВАНИЕ ЭЛЕМЕНТОВ РАКЕТНЫХ
КОМПЛЕКСОВГлава 6. Математические методы оптимизации, используемые при
военно-техническом проектировании ракетных комплексов .... 228§ 6.1. Общая характеристика методов . —§ 6.2. Сетевые методы 233§ 6.3. Методы теории игр 240Глава 7. Стоимость и надежность ракетных комплексов .... 248§ 7.1. Общие принципы экономических расчетов —§ 7.2. Методы определения стоимости ракеты и ракетного ком¬
плекса 252§ 7.3. Определение оптимальной эксплуатационной надежности
ракеты 259Глава 8. Методы оптимизации основных свойств ракетных ком¬
плексов 269§ 8.1. Оптимизация интервала боевого применения ракетных ком¬
плексов —§ 8.2. Оптимизация могущества ракет и точности пусков .... 273
§ 8.3. Оптимизация параметров стационарных стартовых ком¬
плексов 281§ 8.4. Оптимизация параметров подвижных ракетных комплексов 287
§ 8.5 Постановка задач оптимизации боеготовности, систем упра¬
вления и связи 290Глава 9. Оптимизация процесса разработки и оценка комплек¬
сов с учетом противодействия сил и средств сторон . . . . . . 295§ 9.1. Оптимизация процесса разработки программы ...... —.§ 9.2. Сравнение- ракетных комплексов в условиях рротиводей-
• ствия сил и средств сторон . .. . •.- ... . .у. ; . ... . . - 302390
Стр.Раздел IIIОПЫТНАЯ ОТРАБОТКА И ИСПЫТАНИЯ РАКЕТГлава 10. Оценка надежности и эффективности ракеты 309§ 10.1. Задачи опытном отработки ракет —§ 10.2. Статистическая оценка параметров распределения .... 310
§ 10.3. Точность статистических оценок параметров распределе¬
ния 312§ 10.4. Статистические задачи опытной отработки ракет .... 315
§ 10.5. Закон распределения оценок критерия эффективности ра¬
кетного комплекса 316§ 10.6. Определение оценок основных параметров ракет 324Глава II. Испытания ракет и ракетных систем 332§ 11.1. Методика оценки гарантированной дальности полета и ха¬
рактеристик рассеивания ракет —§ 11.2. Методика оценки критерия надежности ракеты 340§ 11.3. Изменение надежности ракеты в процессе ее опытной от¬
работки 346§ 11.4 Опытная отработка систем ракеты 351§ 11.5. Пример разработки программы испытаний системы отде¬
ления боевой части 354Глава 12. Опытная отработка и оценка надежности ракетных
конструкций .458§ 12.1. Оценка надежности конструкции ракеты § 12.2, Статические и динамические испытания ракетных кон¬
струкций .Ml§ 12.3. Опытное определение динамических нагрузок и темпера¬
турных полей . 364§ 12.4. Опытное определение статических нагрузок 367§ 12.5. Определение тяговых, расходных и аэродинамических ха¬
рактеристик ракеты по результатам летных испытаний .... 369Список литературы 384ПриложениеНомограмма I Вкл.Номограмма II Вкл.Номограмма III Вкл.391
ПРОЕКТИРОВАНИЕ И ИСПЫТАНИЯ БАЛЛИСТИЧЕСКИХ РАКЕТ
Редактор В. П. Черное
Художник Н. Б. Попова
Технический редактор Е. 11. Слепцова Корректор Л. А. ГекучеваСдано в набор 19.8.68. Подписано к печати 8.10.69.I-62552Формат 60х90*/ц. Печ. л. 24'/«(Уел. печ. л. 24,5) + 3 вкл. Печ. л. 1*/ч (Уел. печ. л. 1,25)Уч.-изд. л. 22,446
Бумага типографская >& 3 Тираж 6400 экз.Изд. М 6/9210 Зак. 2582Цена 1 р. 27 к.Ордена Трудового Красного Знамени
Военное издательство Министерства обороны СССР. Москва, К-160
2-я типография Воениздата
Ленинград, Д-65, Дворцовая пл., 10