































































































































































































































































































































































































Author: СинюковаА.М. Морозова Н.И.
Tags: оружие вооружение артиллерийско-техническое имущество бронированные машины и специальные средства транспорта стрелковое оружие личное оружие боеприпасы и боевые отравляющие вещества управляемые и неуправляемые ракеты и реактивные снаряды техника ракеты
Year: 1969




КОНСТРУКЦИЯУПРАВЛЯЕМЫХБАЛЛИСТИЧЕСКИХРАКЕТПОД РЕДАКЦИЕЙ
профессора А. М. СИНЮКОВА 1
и доцента Н. И. МОРОЗОВА чОрдена Трудового Красного Знамени
ВОЕННОЕ ИЗДАТЕЛЬСТВО
МИНИСТЕРСТВА ОБОРОНЫ СССР
МОСКВА-1969
БЕРЕЗИКОВ Владимир Васильевич
БУРОВ Михаил Александрович
ЗИБЕРОВ Виктор Карпович
КУЙБЫШЕВ Владимир Петрович
КУР0111ЕВ Николай Родионович
ЛЬВОВ Анатолий Иванович
МОРОЗОВ Николай Иванович
НОСКОВ Игорь Викторович
СЕМЕНОВ Владимир Федорович
СИМОНОВ Алексей Александрович
СИ ШОКОВ Александр Митрофанович
ЧЕРНЫШЕВ Михаил Михайлович1(65 Конструкция управляемых баллистических ракет, колл,
авт. М., Воениздат, 1969.444 с 10 500 экз. 1 р. 50 к.В настоящей книге рассматриваются общие вопросы конструирования балли¬
стических управляемых ракет с жидкостными и твердотопливными ракетными
диигателями, принципы устройства и действия современных ракет и их основных
систем, а также вопросы определения статических и динамических нагрузок, дей¬
ствующих на ракету в различных условиях эксплуатации. Освещены вопросы
аэродинамического нагрева и изменения температурных полей в элементах кон¬
струкции ракет при воздействии на нее различных внешних факторов. При рас¬
смотрении конструкций отдельных отсеков ракет приводятся методы расчета их
*лемеитоп на прочность, а также приближенный расчет ряда систем.Киша может служить пособием для инженеров, работающих в области ракег-
Hurt техники, специалистов смежных областей, а также для слушателей высших
учебных злк'Деиий.1-12-407-ив6Т5.2
ПРЕДИСЛОВИЕСовременную эпоху часто называют веком реактивной техни*
mi Пожалуй, ни одна отрасль техники так стремительно не раз¬
минается, как реактивная. Этот успех не является случайным.
Потребовалось много веков упорного труда и исканий в самых
различных областях естествознания, чтобы накопить знания, поз-
иолиющие сделать первые шаги в этом направлении.Пыстрое развитие ракетной техники в последние годы при-
и.'юкло внимание широких технических кругов к вопросам, свя¬
занным с теорией реактивного движения и конструирования ра¬
кет. Некоторые из них, особенно это относится к вопросам дина¬
мики полета ракет, конструирования и расчета ракетных двига-
le.ien, а также проектирования управляемых баллистических ра¬
ке г, достаточно широко освещены в отечественной и иностранной
лпюратуре. Однако систематического изложения вопросов
конструирования, расчета нагрузок и систем ракет в печати
еще нет.Авторы настоящей книги поставили перед собой задачу озна¬
комить читателя с основами конструкций современных баллисти¬
ческих ракет с жидкостными и твердотопливными ракетными дви-
I Н I e.'l я ми.Н главе I (автор кандидат технических наук В. П. Куйбышев)
ирпиодится классификация управляемых баллистических ракет и
I реГшмапия, предъявляемые к ним, анализируются основные фак-
тры, влияющие на скорость, дальность и точность полета ракет.И I лапах II (автор кандидат технических наук В. П. Куйбы-
шем) н III (автор кандидат технических наук А. И. Львов) при¬
ми in tew общие сведения по конструкциям ракет с двигателями на
уымком топливе и особенности устройства ракет с двигателями на
| mi ртом топливе.It кланах IV и V (авторы доктор технических наук А. М. Си¬
мми мм, кандидат технических наук В. В. Березиков и инженер
И М Писков) рассматриваются вопросы расчета статических и
тн 1ммичееких нагрузок, действующих на корпус ракеты в различ¬
ии1 \'Томнях эксплуатации.3
В главе VI (авторы доктор технических наук А. М. Синюков
и кандидаты технических наук А. А. Симонов и М. М. Чернышев)
излагаются общие вопросы аэродинамического нагрева и расчета
температурных полей в элементах конструкции ракеты при воз¬
действии на нее различных внешних факторов.В главе VII (автор кандидат технических наук В. К. Зиберов)
анализируются расчетные случаи и рассматриваются вопросы,
снизанные с определением разрушающих нагрузок для основных
отсеков корпуса ракеты.В главах VIII и IX (авторы кандидаты технических наук
В. В. Березиков и В. К- Зиберов) кратко освещаются вопросы
конструкции и прочности корпуса боевых частей, приборных,
хвостовых отсеков и переходников управляемых баллистических
ракет.В главе X (авторы доктор технических наук А. М. Синюков и
кандидаты технических наук В. В. Березиков и Н. Р. Курошев)
рассматриваются вопросы конструкции и прочности топливных от¬
секов ракет с ЖРД.В главе XI (авторы доктор технических наук А. М. Синюков
и кандидат технических наук А. И. Львов) излагаются вопросы
прочности ракет с РДТТ в различных условиях эксплуатации.В последующих главах книги описываются конструкции и рас¬
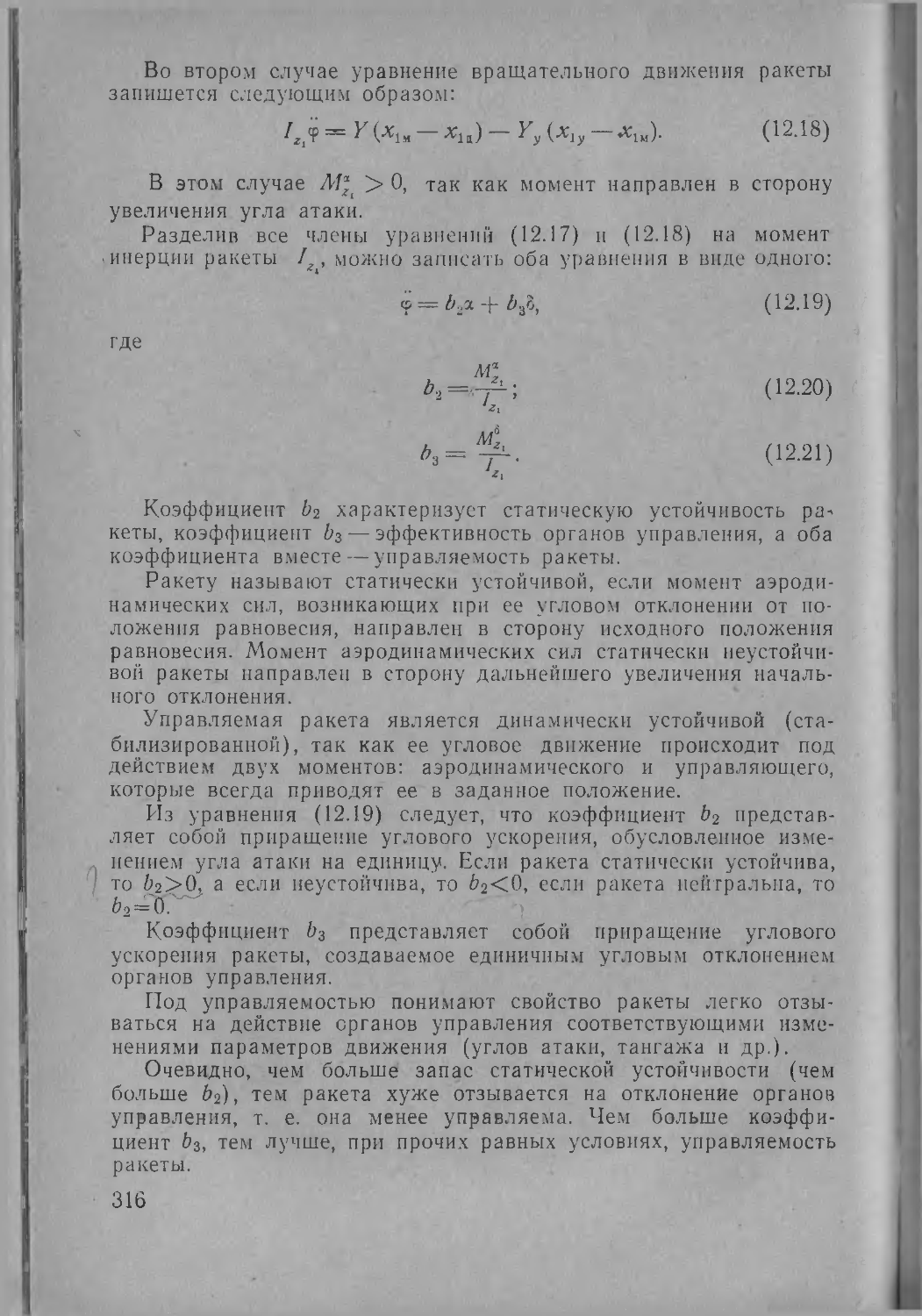
чет основных систем ракеты. Так, в главе XII (автор кандидат
технических наук В. Ф. Семенов) рассматриваются вопросы кон¬
струкции и расчетов органов управления, а в главе XIII (авторы
кандидаты технических наук М. А. Буров и В. Ф. Семенов) —
вопросы конструкции и расчет систем разделения ступеней и от¬
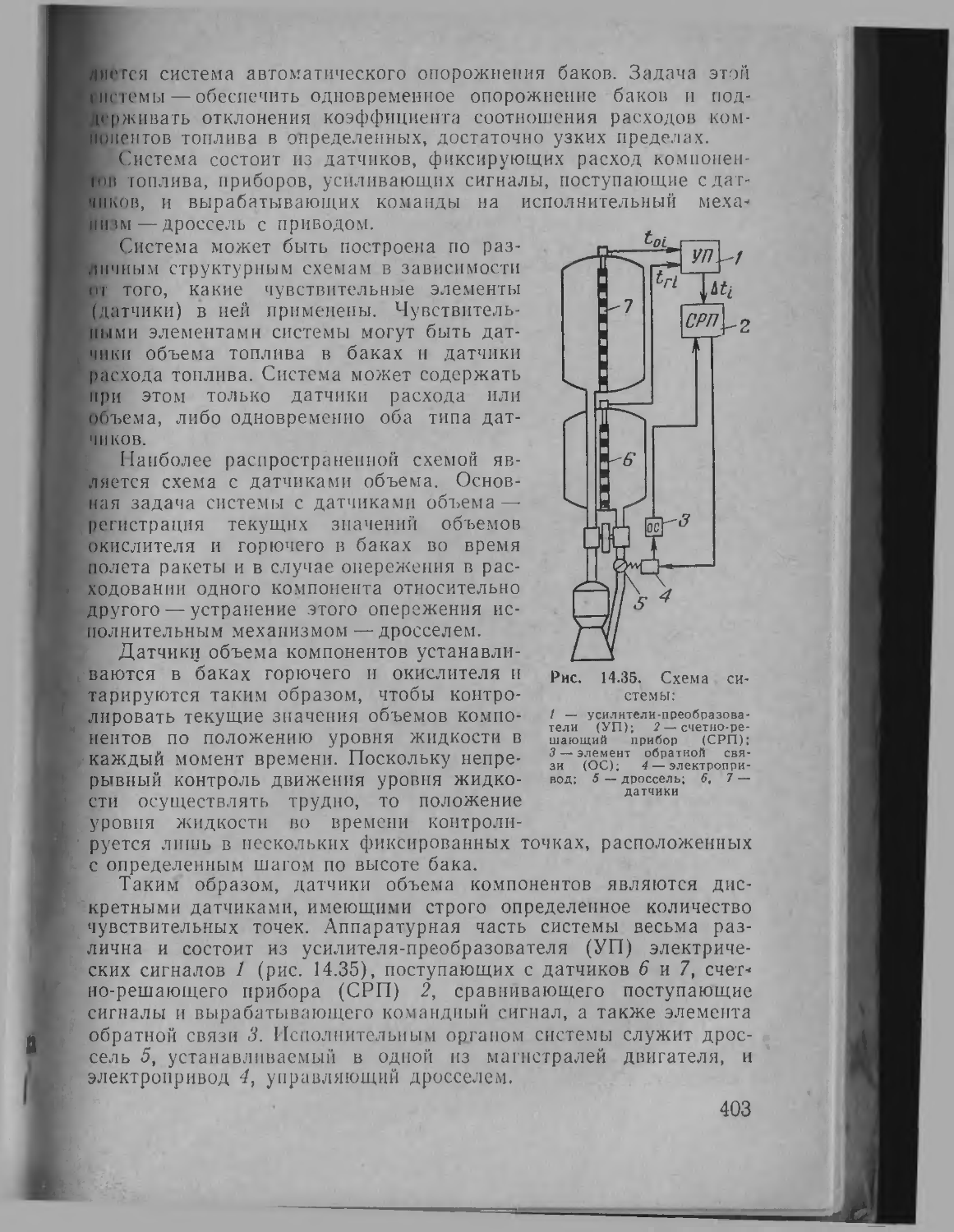
деления боевых частей.Вопросам конструкции и расчета систем питания (авторы кан¬
дидаты технических наук II. Р. Курошев и II. И. Морозов) посвя¬
щена глава XIV книги. В главах XV и XVI (автор кандидат тех¬
нических наук Н. И. Морозов) излагаются вопросы конструкции
и расчета агрегатов автоматики, назначение и структура пневмо-
гпдравлических систем ракет с ЖРД и приводится типичная по¬
следовательность срабатывания элементов ПГС.Весь фактический и цифровой материал книги приведен по
данным открытой иностранной и отечественной печати.
РАЗДЕЛ I
ОБЩИЕ СВЕДЕНИЯ О РАКЕТАХГЛАВА IКЛАССИФИКАЦИЯ РАКЕТ И ТРЕБОВАНИЯ,
ПРЕДЪЯВЛЯЕМЫЕ К НИМ§ 1.1. КЛАССИФИКАЦИЯ РАКЕТУпрлиляемой баллистической ракетой (УБР) называется бес¬
им мииын летательный аппарат, снабженный ракетным двигате¬
лем, системой управления и предназначенный для доставки боевой
•(и»-1 н и район цели по траектории, которая, за исключением срав¬
ни им1.по небольшого участка управляемого полета с работающим
дишлюлем, представляет собой траекторию полета свободно бро¬
шенного тела.1’д житие ракетного вооружения привело к тому, что в настоя-
нн'г нремя имеется большое количество различных видов управ-
лнсмых баллистических ракет. Чтобы установить определенную
н'рминологию, значительно облегчающую работу исполнителей
и процессе создания, испытаний и боевой эксплуатации ракет, их
it ыссмфицируют по ряду признаков (рис. 1.1).Пуск УБР обычно производится с поверхности земли или
| Гюр гм корабля, а при использовании шахтных пусковых соору¬
жений п подводных лодок — из-под земли или из-под воды. Це-
,'I-imii дли стрельбы баллистическими ракетами являются объекты,
расположенные на поверхности земли или воды. Поэтому УБР
mcwuiio огнести к ракетам класса «земля — земля», «земля — ко-
рнгi.’iI.«корабль—земля» и «корабль — корабль».Умрмиляемые баллистические ракеты бывают тактические, опе*
рнIмимо тактические и стратегические.К тктическим ракетам относятся ракеты с дальностью пуска
и 1ич'кол1.ко десятков километров. Они используется на поле боя в
ниIсрссих общевойсковых частей и соединений.(iin pa I инно-тактические ракеты имеют дальность пуска в не-
11,<1 м.mi со|сн километров. Эти ракеты применяются в интересах
I pymii.u поисковых соединений.5
Ci pa готические ракеты в зависимости от дальности пуска под¬
разделяю гея:- па стратегические ракеты средней дальности;- на межконтинентальные ракеты.Стратегические ракеты находятся в распоряжении высшего
командования. Основным назначением стратегических ракет яв¬
ляется нанесение ударов по объектам, сильно защищенным сред¬
инами ПВО и расположенным в глубине территории страны.УЬ'РМестоБое&оастартана значе¬и целиниеЗепля-ЗеппяОсмня -
корабльI Корабль-
ЗепляLТипдвигате¬ляТипсистемыуправления_LЧисло и cnocodbf
соединения
ступенейТакти¬ческие(ТР)Опера -
тивна -
rnanmuw.
(GTP)Страте¬гические(OP)ЖРДСредней
Сальности
(СРСД)Метконти-
■ ментальные
(ПНР)Глобальные
(ГР)рдтт ярдАвтонопнаяОдно -
qmyneH-Комбини¬рован¬наяПоследователь -
ное соединение
ступенейСостав¬ныеПарргллель ное
соединение
ступенейКомбинирован -
ное'соединение
ступенейДвух-отупенчатыеТрех-иртунен-чать/еРис. 1.1. Классификация ракетУправляемые баллистические ракеты можно классифицировать
п по ряду других признаков.По типу применяемого двигателя УБР можно разделить на
следующие группы:■ ракеты с жидкостными ракетными двигателями (ЖРД),
рлСкпающими на жидком топливе;ракеты с двигателями на твердом топливе (РДТТ);
ракеты с комбинированными ракетными двигателями
(КТЦ), использующими при работе жидкие и твердые топлива;
ракеты с ядерными ракетными двигателями (ЯРД).В пасюищсе время широко применяются ракеты с ЖРД И
РД1 Г.О
Ho utn\ применяемой системы управления (СУ) УБР подраз-
Iг оно н и на ракогы с автономной системой управления и ракеты
I инмОшшронлпном системой управления.Литимомпля система основана на применении инерциальной
t м< Iгмм. ,-)га система полностью автономна и состоит только из
<1 и и rypu, установленной на борту ракеты.Комбинированная система управления наряду с автономной
пкчемпп имеет радиоуправление (РУ). Система РУ управляет
типом посредством команд, поступающих с наземного пункта
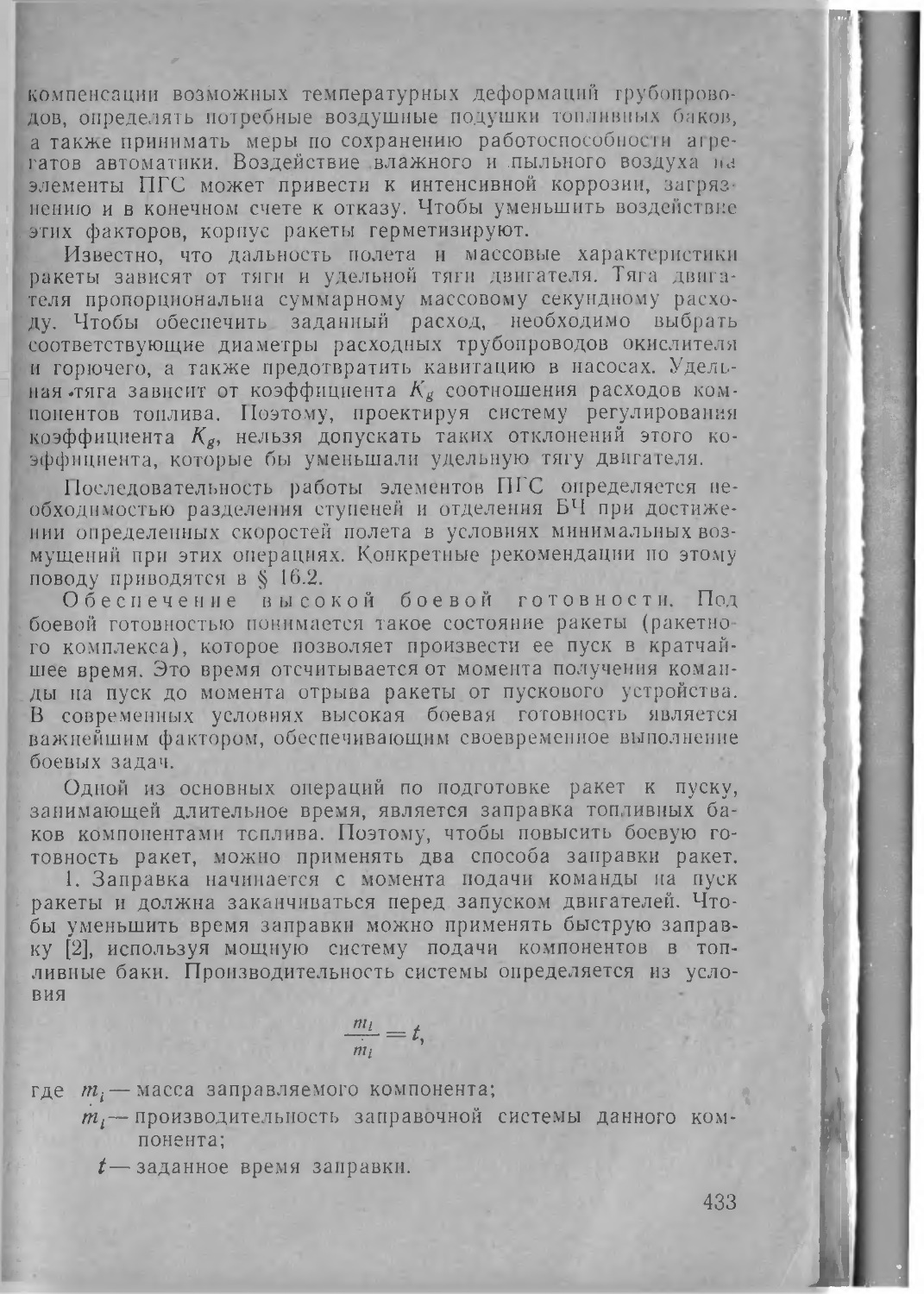
|nrinoyправления (РУН) на приборы, находящиеся на борту ра-1-я ст.2-я ст.3-я ст.и-яст. Б Ч 1 .4-я субрак.
'^ракета2-,3-яч суиракетаРакета (i-я субракета)Рнс. 1.2. Схема составной ракеты с последо¬
вательным соединением ступенеймчи. Система РУ, как правило, работает в течение небольшого
период;! времени перед выключением двигателей, но существенно
понижает точность стрельбы. В случае отказа радиосистемы управ¬
ление полетом обеспечивает автономная система, но точность
iчр('Л1)бы при этом снижается.По числу ступеней ракеты бывают одноступенчатые и состав-
ныс, состоящие из нескольких ступеней.Ступень ракеты состоит из баков с топливом, расходуемым в
период работы двигателей данной ступени до ее отделения, дви-
I шелеп, арматуры и приборов управления (если они имеются в
oiделнющепся ступени), а также из оболочки отсеков и несущей
(Илоной конструкции. Ступени в определенном порядке отбрасы-
пнютги и полете. Последняя ступень не имеет в своем составе бое-
моП части. Составные ракеты могут быть двухступенчатыми, трех-
t I \ 1КЧ1ЧЯ гыми и т. д.По способу соединения ступеней ракета может быть выполнена
по схеме с последовательным, параллельным (пакет) или комби-
ниронлнпим соединением ступеней.оI мн им, что составные или многоступенчатые ракеты можно
рт ема I puna 11. как совокупность нескольких ступеней и субракет
(pill Г.’ и 1.3). Субракетой называется такое сочетание боевой
tiun и иуисней составной ракеты, в котором всегда одна или
несколько ступеней являются действующими, а остальные стуце-
ии, продолжающие полет вместе с боевой частью, составляют
«полезную нагрузку» для данной субракеты. Иначе говоря, сту¬
пень есть отделяемая часть субракеты.Ступени и субракеты нумеруются чаще всего по порядку их
работы, поэтому вся ракета одновременно называется 1-й субра¬
кетой.Боевая часть не включается
в последнюю ступень, но входит
в последнюю субракету.§ 1.2. ТРЕБОВАНИЯ,АШ01
£
f
Cjos;IсоПРЕДЪЯВЛЯЕМЫЕ К РАКЕТАМЖРакета
(1-я субракета JТребования к управляемым
баллистическим ракетам нельзя
рассматривать в отрыве от тре¬
бовании, предъявляемых к ракет¬
ному комплексу в целом. Поэто¬
му необходимо определить, что
такое ракетный комплекс.Ракетный комплекс — это со¬
вокупность ракеты, пусковых
устройств, наземной аппаратуры
управления, испытательного, за¬
правочного и подъемно-транс¬
портного оборудования.Процесс создания управляе¬
мой баллистической ракеты весь¬
ма многогранен и сложен.Он начинается с разработки
тактико-технических требований
к ракете и всему ракетному ком¬
плексу. При этом тактико-техни¬
ческие требования основываются
на анализе боевого применения
проектируемой ракеты и должны
учитывать накопленный опыт
создания аналогичных ракет, а также технические возможности.
Конечной целыо разработки ракеты является достижение макси¬
мальной эффективности ее действия как боевого средства, удоб-
■ та эксплуатации и технологичности изготовления. Кроме того,
не»* предъявляемые требования должны обеспечить безотказный
пуск ракеты в заданное время и полет ее по заранее рассчитанной
прогрнмме.Псе требования к ракете и ракетному комплексу можно под¬
разделить на общие, эксплуатационные и производственно-эконо*
мпчсские. Рассмотрим более подробно эти требования.Рис. 1.3. Схема составной ракеты
г комбинированным соединением сту¬
пеней
Общие требования| >Гчцис требования, предъявляемые к ракете, определяют ее
in минные характеристики: дальность пуска, могущество действия
\ iif hi н надежность.Цельность пуска. Исходя из задач, выполняемых, напри¬
мер, стратегическими ракетами, диапазон их дальностей пусков
I" м.' И быть от сотен до десятков тысяч километров и более. По-■ I" Iьку пуск одной ракеты в большом диапазоне дальностей неэко¬
номичен, приводит к усложнению эксплуатации ракеты, уменьшает
I г эффективность и маневренность, ракеты подразделяются на
I м11ы с различными диапазонами дальностей.Для каждого типа ракет предусматривается кроме максималь¬
ны! м минимальная дальность пуска. Причем минимальная даль-
|ци и, пуска ракет данного типа не должна быть больше макси-
м.1Л1.пой дальности пуска ракет предыдущего типа. Такой выбор
минимальных дальностей позволяет в случае необходимости при¬
менять два типа ракет для поражения одного объекта. Необхо¬
димо иметь в виду, что в общем случае одна и та же ракета в
шишенмости от массы применяемой боевой части может иметь
р.пличную дальность пусков и относиться к различным типам
рпкег.Могущество у цели. Ракеты предназначены для доставки
и район цели боевых частей, имеющих различные боевые заряды.I сражающими факторами таких боевых частей являются ударная
нмлна, световое излучение, радиоактивное излучение продуктов
шрыва и проникающая радиация. Удельный вес каждого поражаю¬
щего фактора может существенно меняться при изменении троти¬
лоного эквивалента заряда.Оптимальные заряды боевых частей ракет определяются из
условий наиболее эффективного выполнения боевых задач. Ущерб,
который ракета наносит противнику, является важнейшей мерой ее
>ффективности. При оценке общего ущерба, причиняемого несколь¬
кими ракетами, необходимо определить «вероятность поражения»,
I е. вероятность эффективного разрушения данной цели при попа-
>i;iiiini в нее одной ракеты.Вероятность поражения цели во многом зависит от точности
I |рельбы. Поэтому при оценке могущества у цели следует обра-
|п.hi, большое внимание на характеристики рассеивания, которые
ип многом зависят от совершенства метода управления полетом
н л кеты и от точности работы аппаратуры системы управления.
N мет,шить рассеивание можно, применяя комбинированную си-
|1ему управления.Рассеивание ракет характеризуется значениями средневероят-
п |.| х отклонений по дальности и по боковому направлению при
мнкеммальной дальности пуска. Например, отклонение ракеты• Д|ляс» (США) составляет 0,04% дальности пуска, т. е. при
д»лI,пости пуска 8000 км отклонение будет равно 3,2 км [5].9
Совершенно очевидно, что при отсутствии рассеивания и оши¬
бок пусков любую малую цель можно уничтожить одной раке-
lufi со сравнительно небольшим ядерным зарядом. Однако пока
1 vшествующие ракеты имеют довольно большое рассеивание, тре¬
буемая надежность поражения цели может быть обеспечена уве¬
личением мощности ядерного заряда. Повысив точность стрельбы,
мы можем уменьшить могущество боевых частей.Таким образом, оценивая эффективность действия ракет
у цели, необходимо рассматривать совместно мощность боевого
заряда, характеристики рассеивания и требуемое при этих дан¬
ных количество ракет для поражения заданной цели. Кроме того,
определение могущества ракеты у цели должно тесно увязываться
со стоимостной оценкой поражения данного объекта. Очевидно,
существует оптимальное значение тротилового эквивалента, при
котором обеспечивается минимум затрат на поражение цели.Надежность ракет и ракетного комплекса. Бое-
пая эффективность ракетного комплекса определяется надежно¬
стью выполнения боевой задачи. Высокая надежность дости¬
гается за счет создания агрегатов и систем, обладающих высо¬
кой безотказностью, и определения соответствующих условий
эксплуатации, поддерживающих эту надежность на требуемом
уровне.Надежность проявляется при эксплуатации ракеты и техноло¬
гического оборудования ракетного комплекса. При этом под экс¬
плуатацией ракеты и оборудования понимают совокупность всех
фаз их существования: хранение, транспортировка, проверка,
подготовка к использованию по назначению, использование по
назначению, техническое обслуживание и ремонт. Под безотказно¬
стью понимают способность непрерывно сохранять работоспособ¬
ность в определенных условиях эксплуатации.Естественно, нельзя забывать, что высокая надежность
ракетного комплекса в большей степени зависит и от качества
подготовки личного состава, эксплуатирующего этот ком¬
плекс.Надежность ракетного комплекса обеспечивается тщательным
контролем изготовления агрегатов и систем на заводе, проведе¬
нием заводских испытаний агрегатов, систем и ракеты в целом,
а также проведением испытаний ракеты перед пуском. Для умень¬
шения времени подготовки ракеты к пуску желательно отказаться
п| предстартовых испытаний, однако в этом случае должны
быть предъявлены более жесткие требования к заводским испы-I амиям.Сохранность боевого заряда в полете и безотказное срабаты-
импие взрывателей гарантирует надежное действие боевого заряда
v цели. Для этого боевые части имеют наружную защиту от аэро¬
динамического нагрева п другие устройства, которые необходимы
Iщ эффективного подрыва боевого заряда,IU
11.1 современном этапе развития ракетостроения к надежности
1’,!м I предъявляются высокие требования. Практически надеж-
и11| и,, по данным иностранной печати, не превышает 80—90% [3].Эксплуатационные требованияПод эксплуатационными требованиями понимают такие, кото-
|||.м обеспечивают сохранность ракеты при транспортировке и
Ч'.ик'нпи, а также позволяют осуществить надежный пуск ракеты
н Iлданное время.Время на подготовку к пуску. Требование минималь¬
но! о времени на подготовку к пуску трудно переоценить. Выполне¬
ние этого требования обеспечивает постоянную боевую готовность
рикет.Виды пуска ракет. Желательно, чтобы конструкция ра¬
мп.! позволяла производить пуск с установок любого типа. Одна¬
ко в ряде случаев это условие трудно выполнить. Так, тяжелые
р л кеты очень сложно приспособить для запуска с подвижных
железнодорожных установок. При использовании жидкого топли-
ил с малым допустимым интервалом изменения температуры поч-
III невозможно произвести пуск ракеты с наземных пусковых
устройств в любое время года. В этом случае единственно воз¬
можным видом пуска является пуск из стационарной шахтной
пусковой установки, имеющей систему термостатирования.Условия транспортировки. Транспортабельность ра'
кет должна быть высокой. Она зависит от размеров ракеты, ее
массы и прочностных характеристик, чувствительности элементов
ракеты к тряске при перевозке и перегрузке, а также от того, в
каком виде перевозится ракета (в собранном, отдельными ступе¬
нями, с топливом или без топлива и т. п.).Средства транспортировки ракет включают специальные ко¬
лесные либо гусеничные машины и грунтовые тележки. Кроме
того, ракеты можно перевозить железнодорожным, воздушным
или водным транспортом. Желательно, чтобы собранная ракета
помещалась в одном вагоне или самолете.Ракеты стратегического назначения мало пригодны для пере¬
возки, так как имеют большие габариты и массу при сравнитель¬
но малой прочности и жесткости конструкции. Прочностные ха¬
рактеристики ракеты в основном выбираются из условия обеспе¬
чения прочности ракеты при пуске и в полете. Увеличение проч*
пости с учетом перевозки нецелесообразно, так как оно связано
с увеличением массы конструкции ракеты и уменьшением дально¬
сти пуска. Поэтому прочность ракет при перевозке обеспечивается
выбором рациональной конструкции транспортных и подъемно-
перегрузочных средств (например, увеличением числа опор и др.),
а также ограничением скорости передвижения при транспорти¬
ровке.11
Стойкость при хранении. Это требование имеет важ¬
ное жопомическое значение, так как оно характеризует потреб¬
ную периодичность ремонта ракет. Повышение стойкости при хра¬
нении предусматривается целым комплексом мероприятий при
создании конструкции ракеты: выбором соответствующих метал¬
лических и неметаллических материалов, применением антикорро¬
зийных покрытий, применением герметической укупорки ракет
и др. Кроме того, стойкость ракет существенно зависит от усло¬
вии хранения.Высокая ремонтопригодность и удобство
проведения технического обслуживания. Под ре¬
монтопригодностью конструкции понимают ее приспособленность
к восстановлению исправности и к поддержанию технического
ресурса путем предупреждения, обнаружения и устранения неис¬
правностей и отказов. Ремонтопригодность характеризуется за-
тратами труда, времени и средств на такие работы.Конструкция ракеты должна быть удобной для проведения
технического обслуживания и всех видов работ в процессе хране¬
ния, транспортировки и при проверках. Конструкция агрегатов и
ракеты в целом должна позволять механизировать и автоматизи¬
ровать рабочие и вспомогательные процессы.Метеорологические условия применения ра¬
кет. Ракетный комплекс должен функционировать при любых
метеорологических условиях.Производственно-экономические требованияК производственно-экономическим требованиям относятся:— простота и технологичность конструкции;— унификация отдельных узлов и агрегатов ракет;— применение отечественных материалов;— применение стандартных сортаментов и марок материалов.Простота и технологичность конструкции сни-жают стоимость изготовления ракет. Технологичной называется
такая конструкция, которая полностью отвечает всем тактико-
техническим и эксплуатационным требованиям и допускает ее де¬
шевое изготовление, применяя высокопроизводительные методы
обработки и сборки.Для определения технологичности разработан ряд показателей,
к которым относятся:коэффициент использования металла Км — отношение веса
|"юного изделия к весу материалов, идущих на изготовление за¬
готовок;коэффициент точности Кт — средний класс точности изго-
|пиления отдельных деталей;коэффициент разрядности работ /Ср — средний разряд работ
при п и'отовлеппн;
■ коэффициент механизации /Смех, определяющий отношение
mмойного машинного времени к штучному и показывающий сте-
ПГИ1, механизации ручных работ.11 I рассмотренных выше показателей следует, что для улуч¬
им кин технологичности ракет необходимо стремиться к увеличе¬
нии! коэффициентов Км и Кжх и к уменьшению коэффициентов Кти А'и.Унификация отдельных узлов и агрегатов сокращает время
и (исходы на отработку ракеты, удешевляет производство и упро-
шпгI снабжение. Унификация в ракетостроении имеет большое
ншчемие, так как различные агрегаты двигателя, элементы его
м.тгики, взрывательные устройства, приборы системы управ¬
ления, боевые части и многие другие элементы могут быть ис¬
пользованы для различных ракет, отличающихся дальностью пу-
«к.1, могуществом и назначением. Унификация ракет позволяет
in уществлять их пуск из различных стартовых устройств (назем¬
ные, шахтные и др.). Широко используются унифицированные
(югные части для ракет различного назначения.Применение отечественных материалов. Мате-
|И1.1ЛЫ, используемые в производстве ракет, должны быть деше-
ними п недефицитными. Применение стандартных сортаментов
и мирок материалов является весьма желательным, хотя изготов¬
имте ракет требует производства и специальных материалов. Надо■ 11 мстить, что бурное развитие ракетной техники в свою очередь
создаст предпосылки для широкого использования новых материа¬
лов в других отраслях промышленности и народного хозяйства.§ 1.3. ОБЩИЕ СВЕДЕНИЯ ОБ УСТРОЙСТВЕ
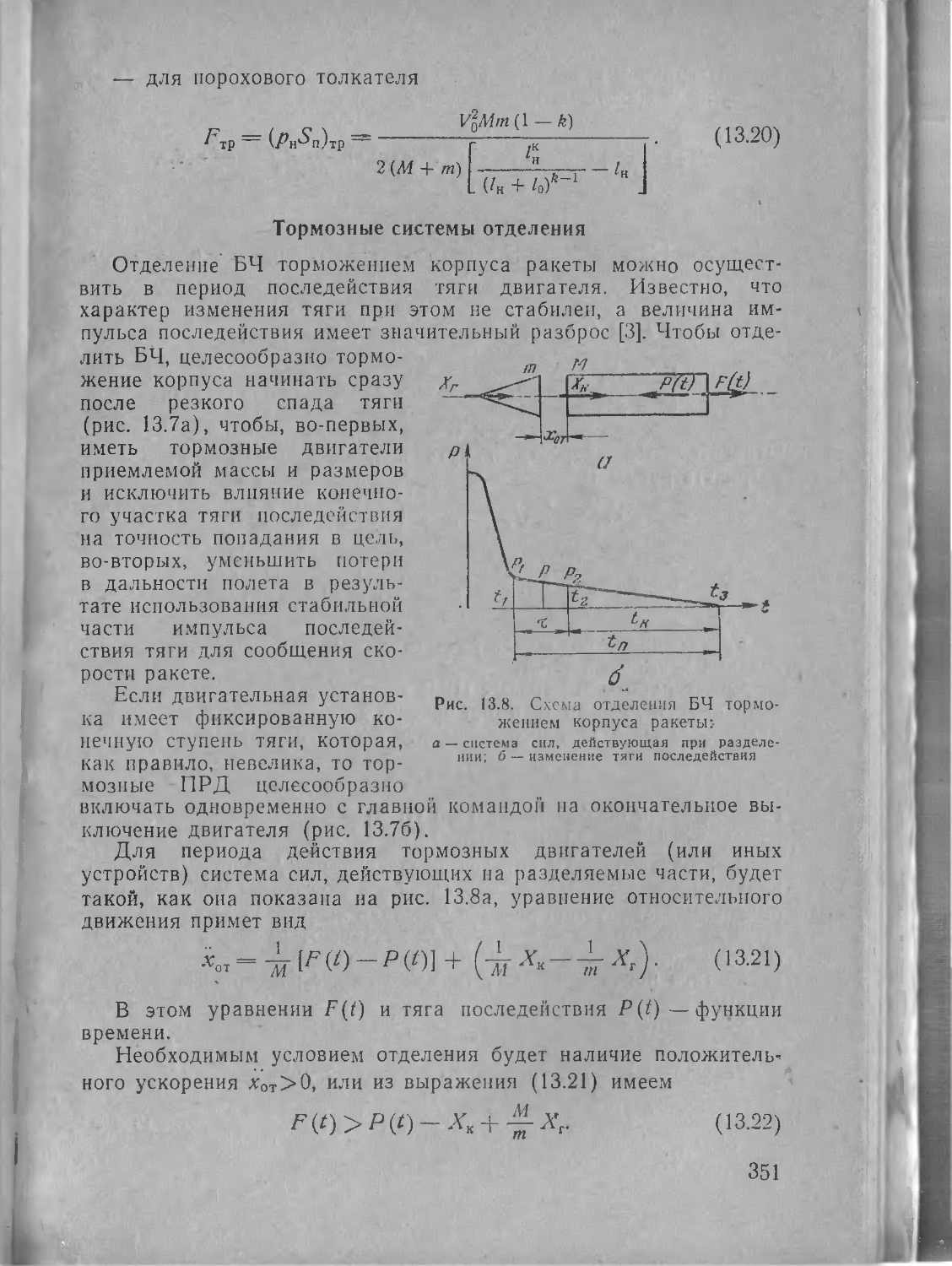
И ПОЛЕТЕ РАКЕТI (есмотря на большое разнообразие управляемых баллистиче¬
ских ракет, все они имеют много общего в своем устройстве.I1од конструктивной схемой ракеты понимается совокупность
м I pei лтов, систем, отсеков и ступеней, определяющая боевые воз-
мпжности, условия эксплуатации и технологию производства pa¬
nel ы Вполне понятно, что в каждом конкретном случае, в зави¬
симости от назначения ракеты, вида топлива, типа двигателей и
других факторов, конструктивные формы составных частей (агре-
ином, отсеков, систем) и их взаимное размещение будут иметь
I in in особенности.Подробно конструктивные схемы ракет с ЖРД и РДТТ будут
(iiici мотрены во II и III гл., поэтому сейчас остановимся только на
устройства ракет.Основными частями одноступенчатой ракеты с ЖРД являютсяг чисть, корпус, двигатель, бортовая аппаратура системыу н 11.1 п I си к и и органы управления (рис. 1.4).13
Поеная часть предназначена для размещения боевого заряда
мчанной мощности и аппаратуры для подрыва его у цели. Боевая
часть отделяется в полете.Корпус ракеты состоит из топливных баков, приборного и хво¬
щового отсеков. Топливные баки являются емкостями для ком¬
понентов топлива. Как правило, их изготавливают
по несущей схеме, т. е. одновременно они являются
силовым элементом корпуса. Приборный отсек слу¬
жит для размещения большей части приборов си¬
стемы управления. Он может располагаться или
между баками, или непосредственно за боевой ча¬
стью. Хвостовой отсек предназначен для размеще¬
ния двигателя и части приборов системы управ¬
ления. Кроме того, хвостовой отсек является сило¬
вым элементом при установке ракеты на пусковое
устройство.Двигатель является важнейшей составной ча¬
стью ракеты. Он создает силу тяги, обеспечиваю¬
щую движение ракеты. Двигатель состоит из ряда
агрегатов и систем (камера сгорания, турбонасос-
ный агрегат, система газогенерации и др.).Исполнительные органы системы > управления
служат для создания управляющих сил и момен¬
тов с целью удержания ракеты при ее движении
на требуемой траектории. В качестве органов
управления используются газоструйные рули, спе¬
циальные рулевые двигатели и поворотные камеры
сгорания основных двигателей.В составных ракетах с ЖРД каждая из ступе¬
ней содержит рассмотренные выше составные
части. Дополнительным элементом в этих ракетах
является система разделения ступеней.В ракетах с последовательным соединением
ступеней (рис. 1.2) сначала работает двигатель
первой ступени. При достижении ракетой опреде¬
ленной скорости происходит отделение первой сту¬
пени и включается двигатель второй ступени и т. д.
При достижении заданной скорости происходит
выключение двигателя последней ступени и отде¬
ляется боевая часть.В ракетах с параллельным соединением ступеней первая сту¬
пень представляет собой пакет ракет, имеющих автономные
днигатели, топливные баки и необходимые приборы управ¬
ления. В виде пакета могут выполняться также вторая и после¬
дующие ступени. Последовательность включения и выключения
дпша голей и отделения ступеней ракет пакетной схемы может
быть самая различная. Она определяется конкретной конструк-
Iпиний схемой ракеты. Отметим, что ракеты с параллельным со-Рис. 1.4 Прин¬
ципиальная
схема односту¬
пенчатой ра¬
кеты:I боевая часть;
'1 бак окислите¬
ля; 3 — прибор-
ii i.i ft отсек; 4 —
б» к горючего; 5 —
хпостовой отсек;
6 — двигатель14
г'Iмнением ступеней обладают рядом недостатков по сравнению с
ракетами, имеющими последовательное соединение ступеней.
К ним в первую очередь относятся трудности транспортировки,
ппльшая масса конструкции, сложное и громоздкое пусковое обо¬
рудование.Ракеты с РДТТ имеют ту особенность, что камера сгорания
питателя одновременно является емкостью для размещения за¬
ри la твердого топлива, а также — несущей конструкцией ракеты
н целом.Траектория движения управляемой баллисти¬
ческой ракеты. Траектория УБР состоит из двух участков:
активного О К и пассивного КВС
(рис. 1.5). На активном участке
ракета движется с работающим
двигателем, а система управле¬
ния обеспечивает заданные пара¬
метры ее движения. В точке К
выключается двигатель и систе¬
ма управления, боевая часть от¬
деляется от корпуса. Отметим,
что активный участок составной
ракеты слагается из активных
участков отдельных ступеней.Активный участок первой ступе¬
ни, г. е. участок полета от мо¬
мента старта до отделения пер¬
кой ступени, называется первым
активным участком. Активный
участок второй ступени с момен¬
та отделения первой ступени до
отделения второй ступени назы-
иается вторым активным участком и т. д. Поражение цели нано¬
сится боевой частью, поэтому на пассивном участке будем рассма-
фнвать только ее движение.С увеличением дальности полета ракеты возрастает протяжен¬
ность как активного, так и пассивного участка. Таким образом, в
1ЛННСИМОСТИ от дальности пуска ракеты конец активного участка
(точка К) может находиться в атмосфере или вне ее. Учитывая
ни обстоятельство, будем в дальнейшем полагать, что точка К
находится на таких высотах, где можно пренебречь силой сопро-
I пиления воздуха.На участке КВС боевая часть, получив в точке К скорость VK,
Iнижется по эллиптической траектории как свободно брошенноэ
I е 1о под действием силы притяжения Земли. Участок атмосферы
при подходе к цели практически почти не изменяет эллиптическую
форму траектории.Нз рис. 1.5 видно, что дальность полета определяется суммой^ЭЛ.> (Т1)15
где /к и Z-эл — дальности, соответствующие активному и эллипти¬
ческому участкам полета.В дальнейшем будем считать, что дальность активного уча¬
стка уже определена по формуле lK=Ro\ Ь находим из выра¬
женияО'-2)где як и ук—координаты, которые определяются в результате
расчета активного участка траектории;R—средний радиус Земли, равный 6371 км.Приближенно можно считать, чтоL — А/.эл, (1.3)где к выражает отношение полной дальности к ее чисто эллипти¬
ческой части.Величина коэффициента k не одинакова для различных ракет
и зависит от скорости или дальности пуска. Для стратегических
ракет в диапазоне дальностей 1000—5000 км значение коэффициен¬
та k равно 1,02-*-1,16 [2], при этом с увеличением дальности зна¬
чение коэффициента k уменьшается. Таким образом, чтобы опре¬
делить полную дальность, необходимо определить эллиптическую
дальность L3JI, которая равна — Из эллиптической тео¬
рии [2] известно, чтоtg-‘сV„2 2 tg V
Vl (R + hK)(1.4)где х=/'М = 3,9862 • 10u м3/сек2 — произведение гравитационной
постоянной на массу Земли;—угол между вектором скорости и местным горизонтом.Тогда получим£эл = 2/? arc (1.5)Рассматривая приведенные выше зависимости, можно сделать
вывод, чтоL = L(Vk] 0к; *к; _ук). (1.6)Таким образом, дальность полета ракеты зависит от координат
конца активного участка траектории, от угла 9К и скорости VK а
конце активного участка. Для каждой скорости существует опре-«
тленное значение угла 8К, при котором получается максимальное
значение дальности. Такое значение угла называется углом мак*
симилыюй дальности 0’. Отметим, что с увеличением дальности
(скорости) угол 0* должен уменьшаться. Поэтому при выбран¬
ной программе движения ракеты на активном участке траекторий
дальность пуска определяется значением скорости Ук.При движении ракеты на активном участке траектории на нее
действуют сила тяги Р, сила лобового сопротивления X, сила тя-
гЖссти mg и управляющие силы. Все эти силы изменяются во вре¬
мени. Сила тяги увеличивается с увеличением высоты полета и
имеет максимальное значение в безвоздушном пространстве. Сила
Лобового сопротивления уменьшается с увеличением высоты по¬
лета. Сила лобового сопротивления прямо пропорциональна ско-pl/2 т/ростному напору q~hr, где р— плотность воздуха, V — теку¬
щая скорость движения, поэтому в безвоздушном пространстве
лобовое сопротивление отсутствует. Сила тяжести ракеты приСС движении на активном участке уменьшается, так как умень¬
шается масса ракеты по мере выгорания топлива.Характер изменения скорости по траектории определяет ве-
личину аэродинамических сил (лобового сопротивления и подъем¬
ном силы), оказывающих влияние на прочность ракеты. Поэтому
рассмотрим изменение скорости V и скоростного напора q в зави¬
симости от времени полета ракеты (рис. 1.6). До момента выклю¬
чения двигателя в точке К скорость ракеты возрастает, скорост¬
ном же напор вначале возрастает (увеличивается V), а затем
убывает, так как резко уменьшается плотность воздуха р. Если
Точка К лежит за пределами атмосферы, то скоростной напор в
конце активного участка становится равным нулю. На пассивном
участке траектории до ее вершины (точка В) скорость боевой ча¬
сти убывает за счет действия силы притяжения Земли. По этой же
причине на нисходящем участке траектории скорость боевой части
миачале растет, а затем резко убывает, так как возрастает сопро¬
тивление воздуха за счет увеличения его плотности.Из рис. 1.6 видно, что наибольшие аэродинамические нагруз¬
ки (q) возникают во время движения боевой части на пассивном
участке траектории при входе в атмосферу Рягиотит показы-
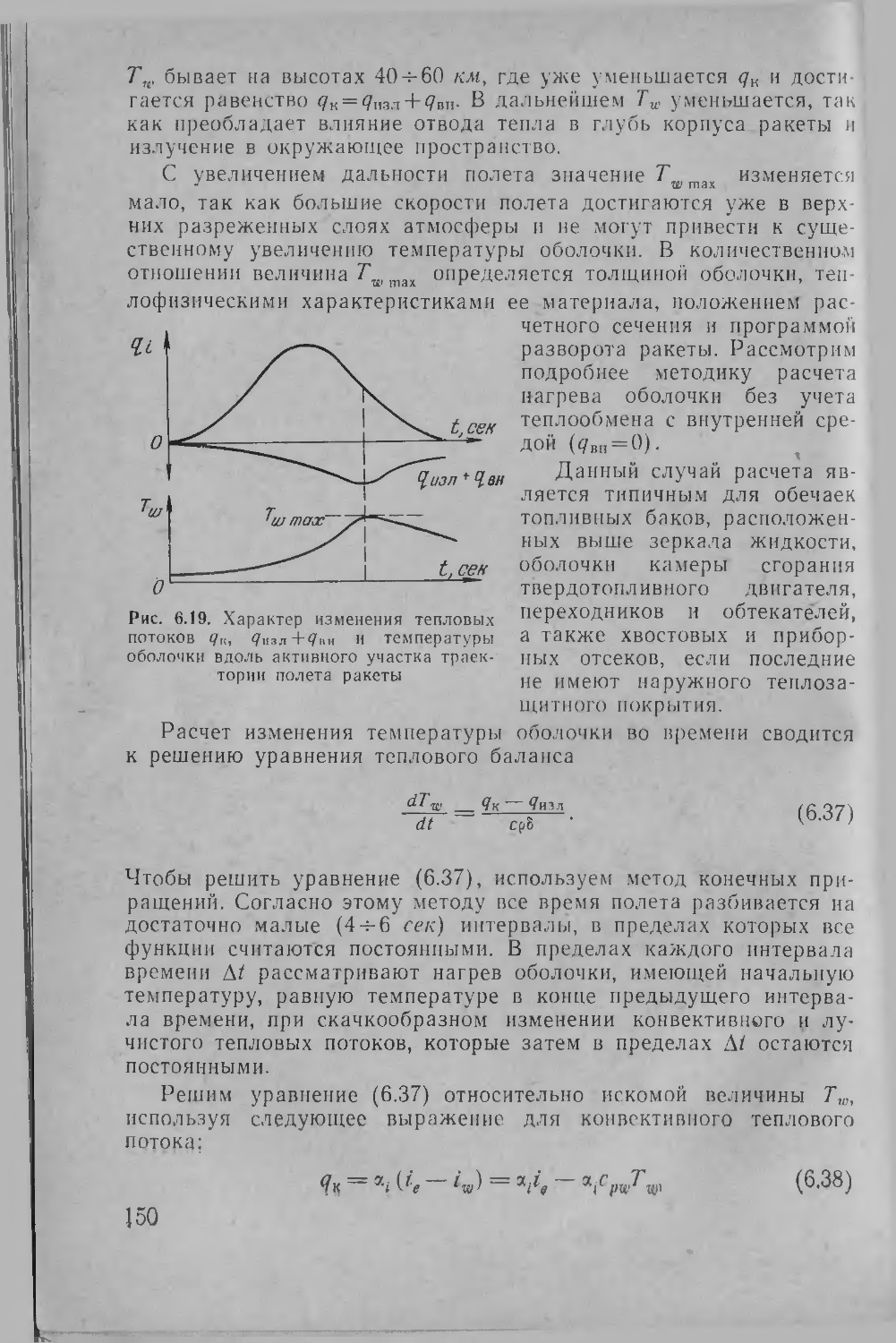
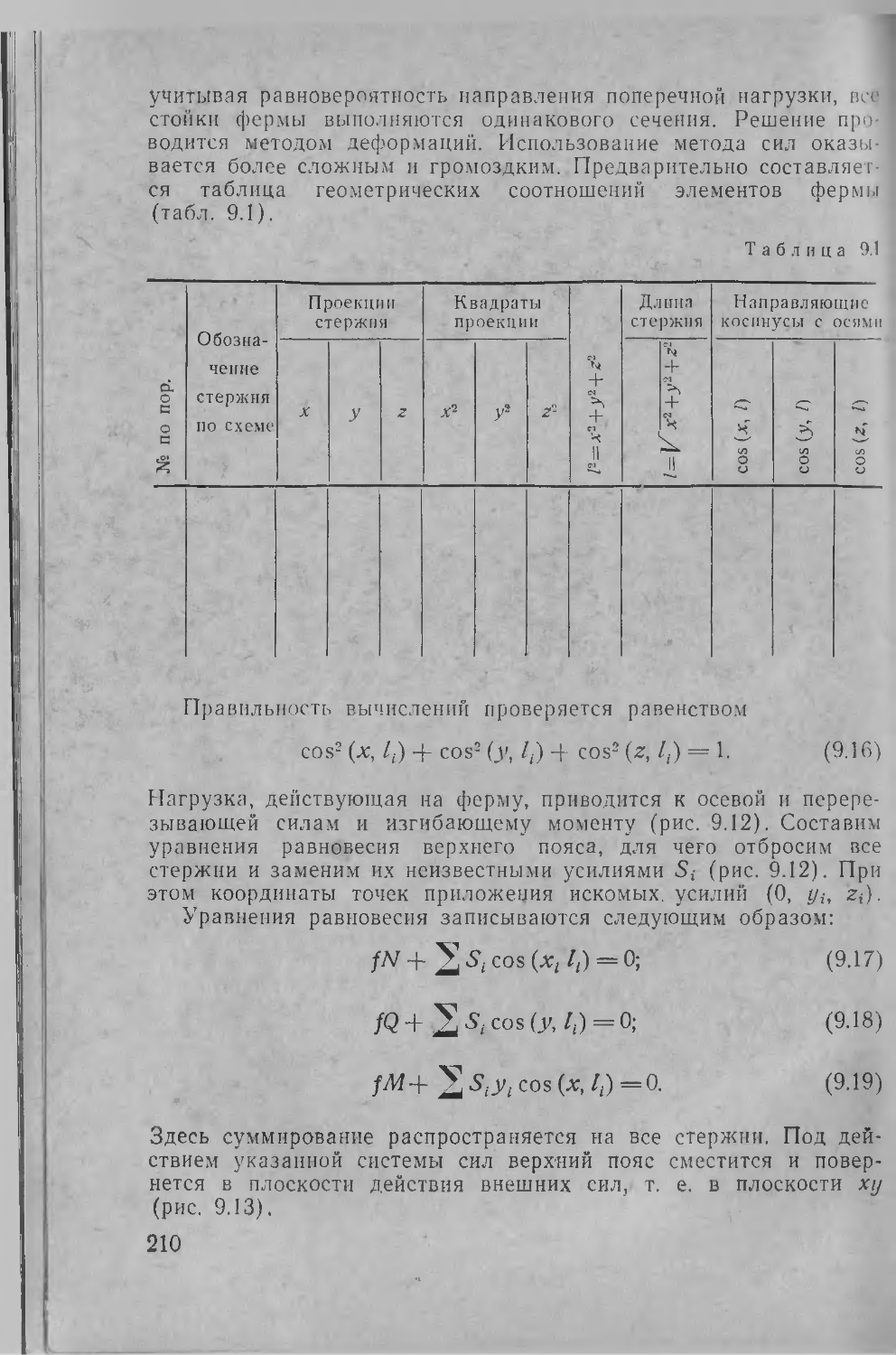
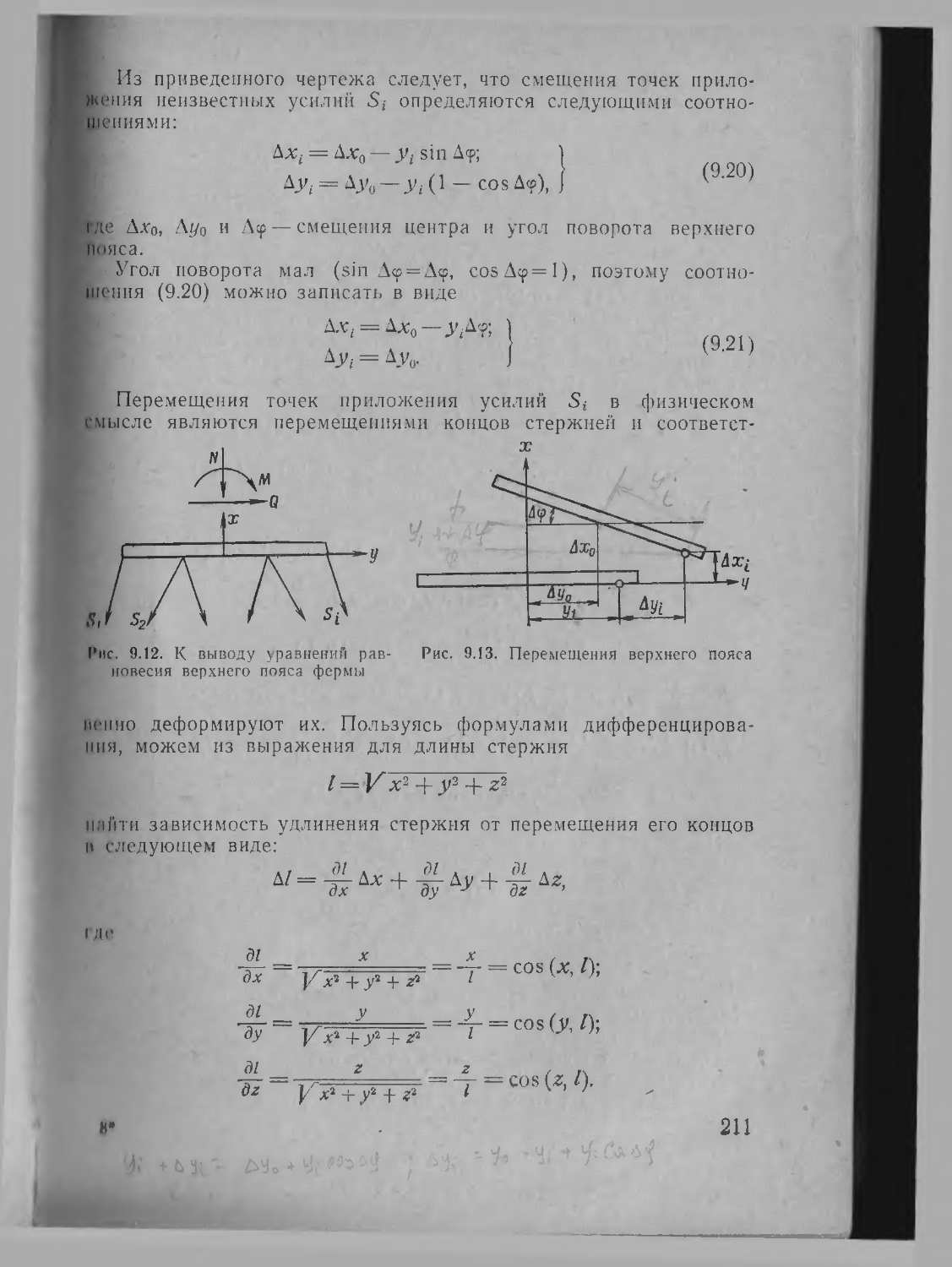
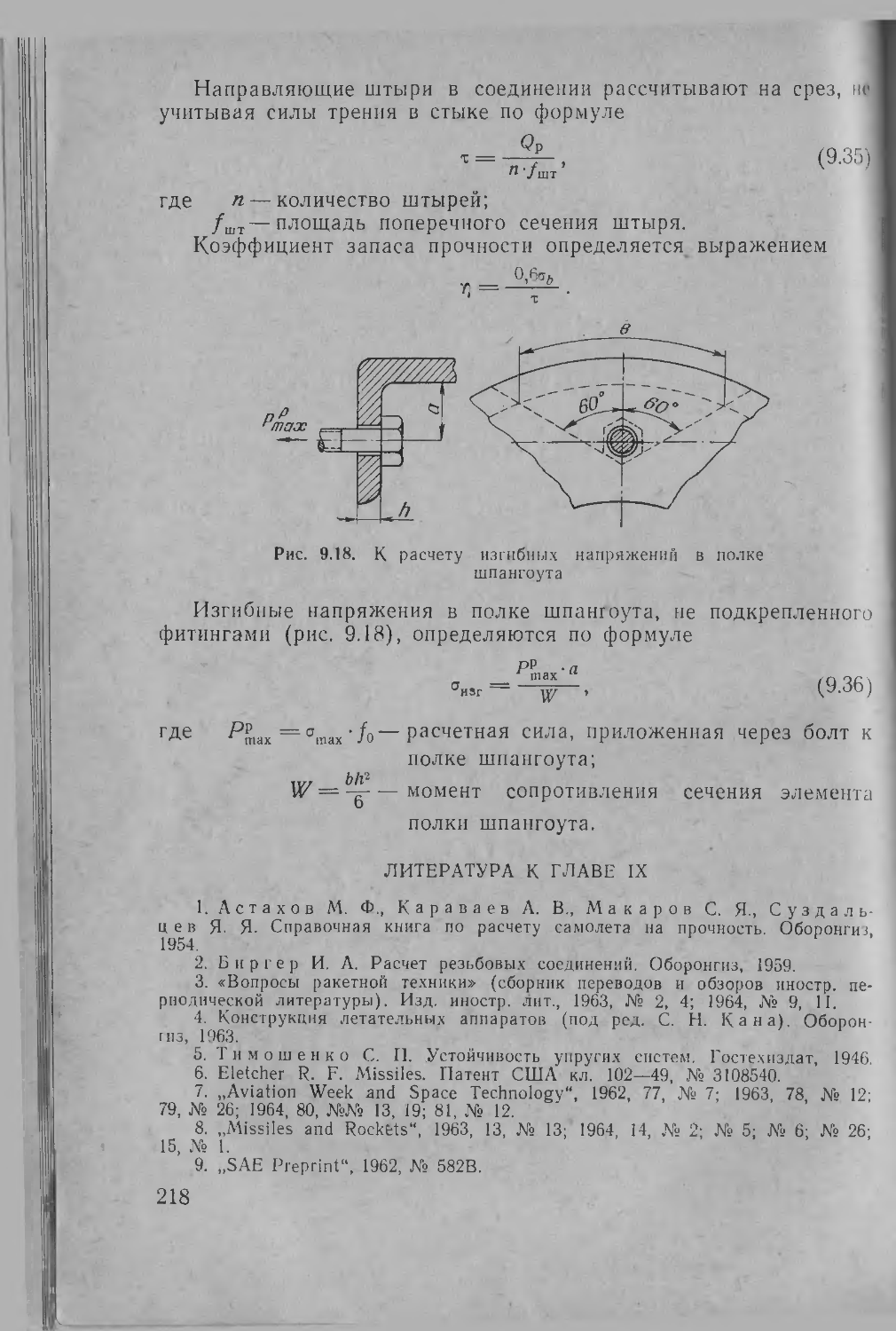
*ают, что при дальности пуска /слГ^ати нагрузки/АКАДЕМИЧЕСКАЯ \2-1736 L л БИБЛИОТЕКА1710419
примерно в 30 раз больше их значения на активном участке траек¬
тории.При движении ракеты на атмосферном участке нисходящей
ветви траектории происходит аэродинамический нагрев элементов
корпуса и, следовательно, прочностные характеристики материала
корпуса снижаются — возникает опасность разрушения корпуса
ракеты. Этого можно было бы избежать, если изготовить корпус
более прочным и применить теплоизолирующие покрытия. Однако
масса конструкции такой ракеты резко увеличилась бы, а даль¬
ность пуска уменьшилась.
Поэтому в стратегических
ракетах применяются бое¬
вые части, отделяющиеся
от корпуса ракеты в кон¬
це активного участка
траектории. При этом
боевая часть покрывается
мощным теплозащитным
покрытием, а прочность
корпуса ракеты рассчиты¬
вается из условий полета
на активном участке.Движение боевой ча¬
сти на пассивном участке
определяется программой
движения ракеты на ак¬
тивном участке траекто¬
рии. На рис. 1.7 показаны
углы, используемые при
рассмотрении программного разворота ракеты в плоскости полета
ракеты:0 — угол между вектором скорости и местным горизонтом;О — угол между вектором скорости и стартовым горизонтом;а — угол между продольной осью ракеты и вектором скорости
(угол атаки);ср — угол между продольной осью ракеты и стартовым гори¬
зонтом (угол тангажа).Разворот ракеты достигается путем изменения угла наклона
продольной оси ракеты относительно стартового горизонта.
Закон изменения угла тангажа ср должен быть таким, чтобы по¬
лучить заданную дальность пуска при минимальном рассеивании.
Таким образом, чтобы обеспечить требуемое движение ракеты,
необходимо ограничить ее движение программой по углу тан¬
гажа ср = српр(0. Кроме основного требования (заданная даль¬
ность— минимальное рассеивание) к программе предъявляют
еще ряд требований, обусловленных прочностью, аэродинамиче¬
ским нагревом, устойчивостью полета и удобствами эксплуатации
ракеты.18
Активный участок стратегической ракеты при отработке типо-
МпО программы состоит из четырех характерных участков.Первый участок характеризуется вертикальным полетом раке-
I ы 11родолжительность этого участка определяют из условий
устйчнвости движения ракеты на первых секундах ее полета.Второй участок характеризуется разворотом ракеты на дозву¬
ковом участке полета под действием сил нормальных к вектору
скорости. Такими силами могут быть:— постоянно действующая составляющая силы тяжести
пц\ cos tt;- поперечная сила (подъемная сила) Yi и составляющая
I п. Ii.i гяги Р sin а..-) I и силы создаются искусственно, путем воздействия органов
управления на ракету, в результате чего ее продольная ось от¬
клоняется от вектора ско-
|мк1 гп на угол атаки а.Характер изменения угла
и Iмкп на активном участ¬
ке показан на рис. 1.8.Па третьем участке
продолжается разворот
пси ракеты только под
и'пгтвием составляющей
т.п.! тяжести (а = 0) до
оптимального значения
у IVI а фопт» которое обеспе¬
чивает получение макси¬
мальной дальности. В дальнейшем угол <ропт остается постоян¬
ным.Четвертый участок называется участком наведения, так как
на (том участке при скоростях, соответствующих получению даль-
Mm тей в диапазоне LmiH-hLMaKC выключается двигатель. Для вы-
иолнения условия <р0пт= const системой управления создаются не¬
большие углы атаки а. В результате этого действие составляющей
ГИЛЫ тяжести компенсируется составляющей силы тяги.§ 1.4. ФАКТОРЫ, ВЛИЯЮЩИЕ НА СКОРОСТЬ И ДАЛЬНОСТЬ
ПОЛЕТА РАКЕТЫI’ll нее было показано, что скорость в конце активного участка
I раекгории определяет дальность пуска ракеты и зависит от сил,
мейегнующих на ракету. В общем случае движение ракеты на
ни шипом участке траектории описывается сложной и громоздкой
гнеи'Мой дифференциальных уравнений. Совместно решить эти
уравнения сложно. Так, например, из уравнения движения центра
миге ракеты в проекции на касательную к траекториит~ =Р— X—mg sin О+аРис. 1.8. Изменение угла атаки на активном
участке траектории19
следует, что скорость ракеты зависит от силы тяги Р, лобового
сопротивления X и составляющей силы тяжести. Определение ско¬
рости из этого уравнения затруднено, так как для интегрирования
уравнения необходимо знать изменение сил во времени.Чтобы определить приближенное' значение скорости односту¬
пенчатой ракеты в конце активного участка при полном израсхо¬
довании топлива, обычно пользуются формулой, выведенной
К. Э. Циолковским в 1903 г., при условии постоянства силы тяги
и без учета аэродинамического сопротивления и гравитационных
потерь:^Ц =-Рудого In (1.7)где Рк — тг — коэффициент наполнения ракеты топливом;/VI оРудо — значение удельной тяги у поверхности земли;
g0 — ускорение силы тяжести у поверхности земли;тт—масса топлива;М0 — стартовая масса ракеты.Из уравнения (1.7) следует, что для повышения скорости не¬
обходимо увеличивать удельную тягу Руд0 и коэффициент наполне¬
ния ракеты топливом р*.Известно, что величина удельной тяги определяется главным
образом энергетическими характеристиками топлива (теплопроиз-
водительностью), а также совершенством конструкции двигателя.
Для современных жидких топлив Руд0 = 260—320 сек, а границей
энергетических возможностей химических топлив считается Руя0 =
= 400 сек [4, 7]. Очевидно, что максимально возможная скорость
одноступенчатой ракеты при заданном значении ограничена
значениями Яудо.Коэффициент наполнения ракеты топливом может быть за¬
писан с учетом, что М0 — т6ч + тк + тТ, следующим образом:|iK = ——- '”т .——, здесь тбч — масса боевой части; тк —• flf)ч “Г гмасса конструкции. Таким образом, величина \и, определяет каче¬
ство конструкции ракеты. При заданной массе боевой части коэф¬
фициент рь тем больше, чем меньше масса конструкции. Отметим,
что увеличение скорости, а следовательно, и дальности пуска мо¬
жет быть получено путем увеличения стартовой массы ракеты М0.
Это объясняется тем, что с увеличением стартовой массы увели¬
чивается коэффициент (ал. Стартовая масса увеличивается глав¬
ным образом за счет увеличения массы топлива; при этом масса
конструкции ракеты и в первую очередь топливных баков растет
медленнее, чем масса топлива. Однако увеличение стартовой
массы затрудняет боевое применение ракет, так как возрастают
размеры пусковых устройств, агрегатов наземного оборудования,
их грузоподъемность* ухудшается подвижность и проходимость.Для современных конструктивных схем одноступенчатых ракет,20
топлив и применяемых конструкционных материалов максимальное
значение коэффициента р;г не превышает значения 0,9.Обратим внимание на то, что с увеличением массы боевой ча¬
сти уменьшается коэффициент р.^. Поэтому ракета, спроектирован¬
ная на определенную дальность при заданной массе боевой части,
будет иметь меньшую дальность, если она комплектуется боевой
частью большей массы. Очевидно, что для доставки к цели боевых
частей больших масс потребуется увеличение массы топлива, в
in язи с чем возрастают необходимая стартовая масса ракеты и ее
габариты.Можно сделать общие выводы, что поскольку ракетная тех¬
ника ограничена как в выборе топлив, так и в выборе конструк¬
ционных материалов, то определенные ограничения имеются и в
повышении удельной тяги, и в повышении параметра Следо¬
нательно, имеются ограничения в повышении скорости и дально¬
сти пуска одноступенчатых ракет. Увеличивать стартовую массу
с целью увеличения дальности пуска нецелесообразно в экономи¬
ческом и эксплуатационном отношениях. Поэтому в настоящее
иремя одноступенчатые ракеты используются в диапазоне даль¬
ностей стратегических ракет средней дальности.Больших скоростей и соответственно дальностей можно дости¬
гать только составными ракетами. При этом составные ракеты
имеют относительно небольшие стартовые массы, что экономи¬
чески выгодно по сравнению с-одноступенчатыми ракетами.Вывод об ограничении скорости и дальности пуска одноступен¬
чатых ракет и необходимости перехода к составным ракетам для
достижения больших дальностей впервые сделал К. Э. Циолков¬
ский в 1929 г.Рассмотрим причины, по которым составные ракеты достигают
больших скоростей и дальностей полета. Анализ проведем на при¬
мере одноступенчатой и двухступенчатой ракет, имеющих одина-
копые стартовые массы М0.Предположим, что общая масса двухступенчатой ракеты Ма
слагается из масс топлива ступеней тт — тт{+тт2, а масса топлива
одноступенчатой ракеты равна т'г В этом случае при равной
стартовой массе ракет М0} тТ немного меньше m'Tt так как двух¬
ступенчатая ракета имеет дополнительные узлы, которые увеличи-
ппют массу ее конструкции. Однако в первом приближении будем
считать, что mT=« гп'г В одноступенчатой ракете все топливо т'т
расходуется на разгон всей массы ракеты. В двухступенчатой ра-
коте, пока используется топливо первой ступени ттЬ никаких от¬
личий по сравнению с одноступенчатой ракетой нет. Топливо тт1,
до полного своего выгорания расходуется на разгон всей массы
ракеты. После отделения первой ступени топливо тт2 расходуется
на разгон значительно меньшей массы второй ступени, следова¬
тельно, скорости получаются большими, з, е. топливо расходуется
более эффективно.21
Конечная скорость второй ступени складывается из скорости',
сообщаемой ей первой ступенью, и собственной скорости. Конеч¬
ная скорость второй ступени оценивается по формуле Циолков¬
ского.Обозначим:yWj и М2—массы первой и второй ступеней;
тп и тт2— массы топлива первой и второй ступеней;Руд01 и Руд02—удельные тяги соответствующих ступеней;M0-Mi~\-M2 — общая стартовая масса ракеты.Тогда конечную скорость VK находим из выражения:—ёо Рут 1 _ № + go Рут In i _ |j,A2> (1-®)где |i.Ai = —коэффициент наполнения топливом первой сту¬
пени;Раз — ^ — коэффициент наполнения топливом второй сту¬
пени.Если допустить, чтоРут ~ Рут — Рутто^к=^0^уд01п (1-Wl)(l-W2) • С1-9)Из выражения (1.9) следует, что если значение близко по
своему значению р* одноступенчатой ракеты, то двухступенчатая
ракета позволяет получить большие скорости и дальности полета,
/(ело в том, что каждая из величин (1 —[ад) меньше единицы, по¬
лому произведение (1—р.ы) (1—|мг) может оказаться достаточ¬
но малым и величина логарифма может достичь больших значе¬
ний, что соответствует большей конечной скорости.Казалось бы, что, увеличивая число ступеней, можно беспре¬
дельно увеличивать скорость в конце активного участка, а следо¬
вательно, и дальность составной ракеты определенной стартовой
массы. Однако увеличение скорости при неизменной стартовой
массе ограничено, так как с увеличением числа ступеней умень¬
шается скорость, приобретаемая от каждой ступени. С увеличе¬
нием числа ступеней уменьшается коэффициент наполнения их
топливом так как для всех ступеней, начиная с первой, все
последующие являются пассивной массой. Кроме того, потеря
скорости из-за длительного полета в поле тяготения Земли уве-
лпчинается.Дли достижения межконтинентальных дальностей, космиче¬
ских скоростей, а соответственно и космических расстояний ис*
миль.чуются только составные ракеты.
ЛИТЕРАТУРА К ГЛАВЕ I1. Алеш ко в М. Н., Жуков И. И. Физические основы ракетного ору¬
жия Воениздат, 1965.2. А п п а з о в Р. Ф., Лавров С. С., Мишин В. П. Баллистика управ-
лиемых ракет дальнего действия. Изд-во Наука, 1966.3. Баррер М., Жомотт А. и др. Движение ракет. Изд. иностр. лит.,
1959.<1. Бонни Е. А., Цукров М. Д., Бессерер К. У. Аэродинамика
Геория реактивных двигателей. Конструкции и практика проектирования. Вое.ч
н |дпт, 1959.5. Л о к к А. С. Управление снарядами. Физматгиз, 1958.6. Мерилл Г., Гольдберг Г., Гельмгольц Р. Исследование опе¬
раций. Боевые части. Пуск снарядов. Изд. иностр. лит., 1959.7. С и н я р е в Г. Б., Добровольский М. В. Жидкостные ракетные
двигатели. Оборонгиз, 1957.8. Ф е о д о с ь е в В. И., Синярев Г. Б. Введение в ракетную технику.
Оборонгиз, 1960.9. Ч у е в Ю. В. и др. Основы исследования операций в военной технике.
Ц|д-во Советское радио, 1965.
ГЛАВА IIРАКЕТЫ С ЖИДКОСТНЫМИ РАКЕТНЫМИ
ДВИГАТЕЛЯМИВ главе I мы коротко рассмотрели особенности устройства ра¬
кет, поэтому здесь остановимся более подробно на конструктив¬
ных схемах ракет с ЖРД. В последующих же главах детально
разберем устройство составных частей ракеты (боевые части,
баки, хвостовые и приборные отсеки) и ее основных систем.§ 2.1. КОНСТРУКЦИЯ и ОСНОВНЫЕ ПАРАМЕТРЫ ОДНОСТУПЕНЧАТЫХИ СОСТАВНЫХ РАКЕТРассмотрим вначале конструктивную схему одноступенчатой
ракеты с ЖРД и определим назначение ее составных частей.Ракета состоит из боевой части 1 (рис. 2.1), переходника 2,
бака окислителя 3, приборного отсека 4, бака горючего 5, хво¬
стового отсека 6, двигателя 7, исполнительных органов системы
управления 8, пневмосистемы 9\ системы горючего 10, системы
окислителя 11, системы наддува 12, системы отделения боевой ча->
сти 13.В боевой части 1 размещается боевой заряд и аппаратура для
подрыва его у цели.В зависимости от мощности заряда одна и та же ракета мо¬
жет комплектоваться боевыми частями, имеющими различные га¬
бариты и массу. Как правило, боевые части имеют притупленную
переднюю часть и теплозащитное покрытие корпуса. Форма бое¬
вой части влияет на массу ее корпуса, на размещение боевого за¬
ряда и может быть конической, цилиндрической и коническо-ци¬
линдрической.Переходник 2 придает ракете в целом обтекаемую форму. Он
применяется только в том случае, если диаметр ракеты больше
диаметра основания боевой части. Ракета может иметь сменные
переходники, соответствующие размерам боевых частей.Топливные баки 3 и 5 являются емкостями для компонентов
топлива и одновременно выполняют роль корпуса ракеты, воспри-24
нммая нагрузки, действующие на нее в полете и при эксплуата¬
ции. Баки могут изготовляться как самостоятельные отсеки, имею¬
щие технологический разъем. В этом случае образуется довольно
большое межбаковое пространство, что увеличивает общую длину
ракеты. Чтобы избежать этого, можно делать баки в виде еди¬
ного топливного отсека, разделенного перегородкой на две поло¬
сти— для окислителя и горючего. В целях улучшения устойчиво¬
сти полета ракеты (центр массы должен находиться впереди
центра давления-—точки приложения равнодействующей аэроди¬
намических сил) в верхний бак помещают окислитель, плотность
которого больше плотности горючего.В приборном отсеке 4 размещаются основные приборы систе¬
мы управления (СУ), и одновременно он является силовым эле-Рис. 2.1. Конструктивная схема одноступенчатой ракеты:/ — боевая часть; 2 — переходник; 3 — бак окислителя; 4 — приборный отсек;' 5 —бак горючего; 6 — хвостовой отсек; 7 — двигатель; 8 — органы, системы управления;9 — пневмосистема; 10 — система горючего; //— система окислителя; 12 — система
наддува; 13 — система отделения боевой частиментом корпуса ракеты. В некоторых случаях, чтобы разместить
приборы СУ, используется межбаковое пространство. Если топ¬
ливные баки имеют технологический разъем, то приборный отсек
часто размещается между баками. Такое расположение прибор¬
ного отсека в районе центра массы ракеты улучшает условия ра¬
боты приборов СУ. Если же баки выполнены в виде единого топ¬
ливного отсека, то приборный отсек располагается за боевой ча¬
стью.Хвостовой отсек '6 предназначен для размещения двигателя,
части приборов СУ, элементов системы наддува и пневмосистемы.
Двигатель может крепиться непосредственно к нижнему баку.
В этом случае во время полета ракеты на хвостовой отсек дей¬
ствуют только аэродинамические силы и поэтому он может быть
сделан менее прочным, а следовательно, более легким.Двигатель предназначен для создания тяги. Возможные ва¬
рианты жидкостных ракетных двигателей более подробно рассмо-I рнм в § 2.2.В качестве органов управления на ракетах с ЖРД использу¬
ются газоструйные рули, специальные рулевые двигатели или
верньерные двигатели, поворотные камеры сгорания основных дви¬
гателей и рулевые сопла.25
По системам горючего 10 и окислителя 11 компоненты топ-
лииа подаются из баков к двигателю, кроме того, через эти систе¬
мы заправляют баки и сливают из них компоненты топлива. Си¬
стемы состоят из магистральных, заправочно-сливных трубопрово¬
дов и агрегатов автоматики.Система наддува топливных баков 12 создает избыточное дав¬
ление в баках непосредственно перед пуском и во время полета
ракеты. Наддув баков необходим для того, чтобы, увеличивая
давление компонентов топлива на входе в насосы, предотвращатьо них кавитацию. Кроме того, избыточное давление в баках
«упрочняет» баки, компенсируя воздействие сжимающих нагрузок,
действующих на баки в полете.Пневмосистема 9 предназначена для питания систем горючего,
окислителя, наддува и некоторых устройств ракеты газами (воз¬
духом, азотом и др.) при пуске и во время полета ракеты. Она
состоит из трубопроводов и агрегатов автоматики, позволяющих
подать газ к определенному устройству в требуемый момент вре¬
мени под нужным давлением.Система отделения боевой части 13 отделяет боевую часть
после выключения двигателя в конце активного участка траекто¬
рии. Система отделения построена на принципе отталкивания бое¬
вой части или на принципе торможения корпуса. В отталкиваю¬
щих системах обычно используются пневматические, пиротехни¬
ческие. или пружинные толкатели, а в тормозящих — тормозные
пороховые двигатели или сопла реверса. В систему отделения
боевой части входят также устройства, крепящие боевую часть
к переходнику ракеты. Такими устройствами могут быть или раз¬
рывные болты, или специальные быстродействующие механиче¬
ские замки.Рассмотрев типичную конструктивную схему одноступенчатой
ракеты, проанализируем конструктивные схемы составных ракет
с ЖРД.В зависимости от расположения ступеней применяются две кон¬
структивные схемы составных ракет:— ракеты с последовательным соединением ступеней;— ракеты с параллельным соединением ступеней.Двухступенчатая ракета с последовательным соединением сту¬
пеней изображена на рис. 2.2. Ракета состоит из боевой части /,
первой (I) и второй (II) ступеней. В свою очередь каждая сту¬
пень включает в себя переходник (2, 8); бак окислителя (3, 9);
приборный отсек (4, 10); бак горючего (5, 11); хвостовой от¬
сек (в, 12) и двигатель (7, 13). Кроме того, ракета имеет те же
системы, которые были рассмотрены для одноступенчатой ракеты.Вторая ступень соединяется с переходником первой ступени
разрывными болтами или быстродействующими замками. Если
диаметры ступеней различны, то переходник имеет коническую
форму. При одинаковом диаметре ступеней применяются цилин¬
дрические переходники.20
Дополнительной в этих ракетах является система разделения
ступеней.Для разделения ступеней используются два способа: «огневой»
н торможение корпуса первой ступени.При «огневом» способе разделения верхняя
ступень разгоняется двигателем, а нижняя — в
это время тормозится продуктами сгорания дви¬
гателя верхней ступени. В этом случае пере¬
ходник первой ступени изготовляется в виде
открытой фермь1 или имеет специальные окна
для выхода продуктов сгорания, так как дви¬
гатель второй ступени запускается раньше, чем
разрушаются разрывные болты или раскрывают¬
ся замки.Чтобы защитить передний бак первой сту¬
пени от высоконагретых продуктов сгорания,
на его днище наносится термозащитное по¬
крытие.При втором способе разделения корпус пер¬
вой ступени тормозится тормозными пороховыми
двигателями.Как указывалось в главе I, составные ра¬
кеты с параллельным соединением ступеней
обладают недостатками по сравнению с раке¬
тами, имеющими последовательное соединение
ступеней, поэтому они не нашли широкого при¬
менения. В настоящее время параллельное со¬
единение ступеней используется в основном в
ракетах — носителях космических аппаратов. По¬
этому в дальнейшем рассмотрим главным обра¬
зом особенности конструкции составных ракет
с последовательным соединением ступеней.При проектировании ракет состав топлива,
масса боевой части и предельная дальность
пуска определяются тактико-техническим зада¬
нием. В этих условиях, чтобы выбрать необхо¬
димое число ступеней, необходимо оценить
влияние числа ступеней на основные характе¬
ристики ракеты: массу и размеры; надежность
при боевом использовании; эксплуатационные
свойства; трудоемкость отработки и изготовле¬
нии; 'стоимость ракеты и ракетного комплекса
н целом.В первую очередь необходимо установить связь между числом
ступеней и потребной стартовой массой ракеты для достижения
заданной дальности пуска. Такой анализ позволяет выявить ва¬
рианты ракет, которые могут обеспечивать заданную дальность
пуска, и сравнивать их стартовые массы »и размеры.Рис. 2.2. Конструк¬
тивная схема двух¬
ступенчатой раке¬
ты с последова¬
тельным соедине¬
нием ступеней:I — ступень; II — сту¬
пень; 1 — боевая
часть; 2 — переход¬
ник; 3 — бак окисли
теля; 4 — приборный
отсек; 5 — бак горю¬
чего; 6 — хвостовой
отсек; 7 — двигатель;
8 — переходник; 9 —
бак окислителя; 10 —
приборный отсек;II — бак горючего;
12 — хвостовой отсек:13 — двигатель27
Отметим, что с увеличением числа ступеней заметно сни¬
мается надежность ракет, возрастает трудоемкость их отработки,
объем регламентных работ и предстартовых испытаний. С уве¬
личением числа ступеней может заметно возрасти и стоимость
ракеты.Анализ показателей надежности, эксплуатационных и экономи¬
ческих данных показывает, что наивыгоднейшее число ступеней
в ракете может отличаться от числа ступеней, при котором ра¬
кета имеет наименьшую стартовую массу. Поэтому число ступе¬
ней берется обычно на одну .меньше по сравнению с тем их чис¬
лом, которое было определено из условия получения минимума
стартовой массы.При заданной массе боевой части и заданной дальности пуска
параметры ракеты, так же как и число ступеней, зависят от рас¬
пределения масс по ступеням. В каждом конкретном случае суще¬
ствует такое распределение масс, которое является наивыгод¬
нейшим.Определяя размеры корпуса ракеты с ЖРД, введем следую¬
щие понятия:7 1Р ,— lp= относительная длина ракеты, где (р — длина ра--« Лкеты, D—диаметр корпуса ракеты (аналогично Jr—jy, отно¬
сительная длина ступени);г, 4М0— — —удельная нагрузка на поперечное сечение ракеты,,, , rl 4/Vljгде М0— масса ракеты (аналогично Рш = —удельная на¬
грузка на поперечное сечение ступени).Чтобы оценить диаметр и параметр Рм ракеты или ступени,
достаточно знать массу ракеты или ступени и задаться их отно¬
сительными длинами. При этом увеличение относительной длины
или уменьшает диаметр, или увеличивает абсолютную длину ра¬
кеты. Кроме того, уменьшение диаметра увеличивает пара¬
метр Рм. Обратная картина будет, если уменьшить относительную
длину.Относительные длины и диаметры ступеней ракеты влияют на
конструктивно-баллистические, эксплуатационные и производст-
ненпо-экономические свойства самой ракеты, а также на анало-I пчпые свойства других элементов ракетного комплекса. В част*-
MOCIH, должно учитываться следующее:— уменьшение диаметров ступеней ракеты возможно лишь до
предела, обеспечивающего размещение двигателей;■ с уменьшением диаметра растет параметр Рм и уменьша¬
ются потери скорости ракеты на преодоление сопротивления воз¬
духа;уменьшение диаметра нижней ступени позволяет создавать
|и*|)хпне ступени такого }ке диаметра, что сокращает и удешев-
лист заводскую оснастку, а также упрощает транспортировочное
п такелажное оборудование;— уменьшение диаметров ступеней ракеты позволяет отка¬
заться от переходников между корпусом верхней ступени и бое-
ной частью, уменьшает размеры и массы днищ баков и других
поперечных перегородок, а также благоприятствует более полному
заполнению внутреннего объема корпуса ракеты оборудованием;
однако увеличение относительной длины ракеты снижает изгиб-
иую жесткость корпуса и может потребовать его упрочнения, по¬
этому уменьшение диаметров ступеней не всегда сопровождается
заметным уменьшением массы конструкции ракеты;— наибольшие возможные диаметры ступеней ограничены
условиями транспортировки ракеты железнодорожным транспор¬
том, самолетами и вертолетами;— при одинаковом объеме дешевле стоят пусковые шахты,
имеющие меньшую глубину, поэтому выгоднее использовать ра¬
кеты с малой относительной длиной;— при выборе диаметров ступеней ракеты необходимо учиты¬
вать наличие на заводе готовой оснастки.Учитывая все перечисленные факторы, двухступенчатые раке-
1Ы с ЖРД выполняют обычно со ступенями, имеющими одинако¬
вый диаметр. Диаметр корпуса таких ракет выбирается исходя
in условий размещения двигателя первой ступени, а относитель¬
ная длина Тр = 8-*-11.Одноступенчатые ракеты с ЖРД имеют относительную дли¬
ну /р= 10-т-14.§ 2.2. ВОЗМОЖНЫЕ КОНСТРУКТИВНЫЕ СХЕМЫ ЖИДКОСТНЫХ
РАКЕТНЫХ ДВИГАТЕЛЕЙЖидкостный ракетный двигатель (ЖРД) является составной
частью ракеты. Он предназначен для создания движущей силы —
тяги в результате сгорания запаса жидкого топлива, размещен¬
ного на борту ракеты. Конструкция ЖРД зависит от состава при¬
меняемого топлива, требуемой мощности двигателя и параметров
ракеты в целом.При всем многообразии конструкций ЖРД любой из них имеет
следующие агрегаты и системы:— одну или несколько камер сгорания;— систему подачи — комплекс агрегатов, подающих топливо
под избыточным давлением в камеры сгорания;— агрегаты автоматики и систему регулирования, обеспе¬
чивающие пуск, нормальную работу в определенном режиме и вы¬
ключение двигателя;— силовую раму и другие узлы, связывающие отдельные агре¬
гаты и передающие тягу от двигателя к ракете.Рассмотрим несколько подробнее назначение и состав назван¬
ных агрегатов и систем.29
Камера сгорания является основным агрегатом ЖРД- В ней
преобразуется химическая энергия топлива в результате его го¬
рения в тепловую энергию газообразных продуктов сгорания и
далее — в кинетическую энергию газового потока. За счет исте¬
чения газов с большой скоростью создается тяга. Находящиеся
и камере сгорания газы имеют высокое давление и температуру.В ЖРД применяются две системы подачи: вытеснительная и
насосная. В первом случае компоненты топлива вытесняются из
баков под действием большого избыточного давления, созданного
в баках. Во втором случае необходимое давление компонентов
топлива создается насосами.В ЖРД применяются центробежные насосы, которые, имея
малые размеры и массу, способны подавать большое количество
жидкости в единицу времени при высоком давлении. Приводом
для центробежных насосов служат газовые турбины, обладающие
большой мощностью. Турбина в совокупности с насосами обра¬
зует турбонасосный агрегат (ТНА). Для работы турбины необхо¬
дим нагретый газ (рабочее тело), находящийся под высоким дав¬
лением. Рабочее тело для турбины, как правило, создается в
специальных газогенераторах в результате горения основных ком¬
понентов топлива, т. е. тех же компонентов, которые подаются в
камеру сгорания.К агрегатам автоматики двигателя относятся различные кла¬
паны, регуляторы и мембранные устройства, находящиеся в ма¬
гистралях, питающих камеру сгорания и газогенератор компонен¬
тами топлива. Они предназначены для управления запуском и
выключением двигателя. Регуляторы увеличивают (форсируют)
или уменьшают (дросселируют) тягу двигателя по командам си¬
стемы управления ракеты. Тяга изменяется регулированием рас¬
хода компонентов топлива в камеру сгорания.Большинство современных ЖРД запускается пиростартерами.
Когда воспламеняется пороховая шашка, помещенная в камеру
пиростартера, пороховые газы приводят в действие турбину ТНА.
Давление за насосами возрастает, а компоненты топлива посту¬
пают в камеру сгорания и в газогенератор. Если топливо само¬
воспламеняющееся, то специальных устройств для его первона¬
чального воспламенения не требуется. В случае применения неса-
мовоспламеняющегося топлива двигатель имеет пирюзажигатель-
ные устройства. Двигатель выключается, когда прекращается по¬
дача топлива в камеру сгорания и в газогенератор.Жидкостные ракетные двигатели могут различаться по спо¬
собу использования рабочего тела турбины, по числу камер сго¬
рания и по методу управления вектором тяги.,По способу использования рабочего тела турбины двигатели
могут быть открытой (разомкнутой) и замкнутой схемы.В двигателях открытой схемы рабочее тело турбины выбра¬
сывается за борт ракеты. Открытая схема ЖРД изображена на30
рис. 2.3. В таком двигателе рабочее тело турбины (турбогаз) соз¬
дается в газогенераторе 3 в результате горения основного топ¬
лива.Имеются двигатели, у которых рабочее тело создается в ре¬
зультате разложения высококонцентрированной перекиси водо¬
рода в иарогазогенераторе. Двигатель с парогазогенератором от¬
носительно прост, однако из-за малой теплопроизводительности
перекиси водорода ее применение ограничено. Кроме того, допол¬
нительный компонент топлива на борту ракеты — перекись водо¬
рода— усложняет ракету и ее эксплуатацию.Основным достоинством газогенератора, работающего на ос¬
новных компонентах топлива, является малая масса системы га-
зогенерации и повышение оптимального давления в камере сгора-3О —1Рис. 2.3. Открытая схема ЖРД:/ — камера; 2 — турбонасосный агре¬
гат; 3 — газогенератор; 4 — отбросное
соплоРис. 2.4.Непредельная
схема ЖРД:замкнутая1 — камера сгорания; 2 — турбина; 3 — на¬
сосы; 4 — газогенераторпня. Это объясняется более высокими по сравнению с парогазом
энергетическими характеристиками турбогаза.В двигателях открытых схем рабочее тело после турбины вы¬
брасывается через отбросные сопла за борт. При этом создается
небольшая дополнительная тяга. Однако рабочее тело после тур¬
бины имеет низкую температуру и давление, поэтому эффектив¬
ность использования его для создания тяги мала. С ростом дав¬
ления в камере сгорания увеличивается потребная мощность тур¬
бины и расход топлива, необходимый для работы газогенератора
ТИЛ. Следовательно, количество топлива, которое с точки зрения
получения тяги двигателя в целом используется неэффективно, ра-
стет. В результате этого удельная тяга двигателя открытой схемы
уменьшается, так как в этом случае она определяется отношением
гяги камеры сгорания и отбросного сопла к суммарному расходу
топлива.Этот недостаток может быть устранен, если создать двигатель,
и котором рабочее тело, обладающее еще значительным запасом
анергии, после турбины подавать в камеру сгорания и там дожи-I л гь вместе с остальными компонентами топлива.Такие схемы двигателей называются замкнутыми, или схемами
е дожиганием. Они в свою очередь могут быть разделены на не¬
предельные и предельные схемы [9, 16].Непредельная схема двигателя приведена на рис. 2.4. Особен-31
постью непредельных схем является подача основной массы топ
лива после насосов непосредственно в камеру сгорания и только
части его — в газогенератор с последующим дожиганием турбо¬
газа.Предельные схемы могут быть с окислительным турбогазом,
с восстановительным турбогазом и двухгазовые.Схема двигателя с окислительным турбогазом приведена на
рис. 2.5. По этой схеме весь окислитель после насоса подается в
газогенератор. Кроме окислителя в газогенератор подается насо¬
сом часть горючего. При этом образуется турбогаз с большим
избытком окислителя. Чтобы турбина была термостойкой в окис¬
лительной среде, температура этого турбогаза на входе в турбинуне должна превышать 650—
800° К [2]. В камеру сгорания по¬
ступает жидкое горючее и окисли¬
тельный генераторный газ.Достоинства рассмотренной
схемы заключаю¥ся в том, что
требуются сравнительно неболь¬
шие давления за насосами ТНА
и просто решаются вопросы охла¬
ждения камеры сгорания. Недо¬
статком этой схемы является
трудность отработки турбины, ра¬
ботающей в окислительной среде.В схеме, двигателя с восстановительным турбогазом в газоге¬
нератор подается все горючее после насоса и только часть окис¬
лителя. Температура турбогаза При избытке горючего может быть
несколько выше. В камеру сгорания подаются жидкий окислитель
и восстановительный генераторный газ.Основным достоинством этой схемы является простота отра¬
ботки турбины, работающей в восстановительной среде. Сущест¬
венный недостаток схемы состоит в том, что необходимо созда¬
вать за насосом горючего очень большое давление.В двухгазовой схеме двигателя имеются два ТНА: один уста¬
новлен в магистрали горючего, другой — в магистрали окисли¬
теля. Соответственно один газогенератор работает с избытком го¬
рючего, другбй — с избытком окислителя. Следовательно, в ка¬
меру сгорания поступают два газа: один — восстановительный,
другой — окислительный. При этом требуемые давления за насо¬
сами получаются более низкими, чем в двигателях с окислитель¬
ным и восстановительным турбогазом. Недостатками двигателя
двухгазовой схемы являются его большая сложность и большая
масса ТНА.В заключение отметим, что оптимальные давления в камерах
сгорания двигателей замкнутых схем могут превышать 150 бар,
ню позволяет получать весьма высокие значения удельной
тяги [16].. 0Рис. 2.5. Замкнутая схема ЖРД
с окислительным турбогазом:/—камера сгорания; 2 — турбина; 3 —
насосы; 4 — газогенератор
По числу камер сгорания двигатели подразделяются на одно¬
камерные и многокамерные (пакет камер сгорания).С увеличением дальности пуска растет стартовая масса ракет,
а следовательно, и потребная тяга двигателя. В свою очередь с
увеличением тяги возрастают геометрические размеры и масса ка¬
меры сгорания. Однако создать камеру сгорания большого объема
(тяги) довольно-таки трудно, так как это связано с появлением
в ней неустойчивого рабочего процесса (в первую очередь горе¬
ния). Поэтому двигатели с большими тягами имеют пакеты камер
сгорания.С другой стороны, габариты и масса двигателя зависят от
числа камер сгорания. Расчеты показывают, что число камер сго¬
рания имеет оптимальное значение, отвечающее минимуму массы
двигателя. Кроме того, необходимо учитывать надежность работы
двигателя, которая, как известно, уменьшается с увеличением
числа элементов в системе. Поэтому в настоящее время стратеги¬
ческие ракеты в зависимости от требуемой тяги имеют или дви¬
гатели с различным числом камер сгорания, или различное число
самих двигателей.Заметим, что двигатели замкнутых схем, как правило, выпол¬
няются однокамерными, так как весьма сложно питать несколько
камер сгорания высоконагретым и имеющим большое давление тур-
богазом от одного газогенератора [16].Для стратегических ракет управляющими органами являются
элементы двигателя, которые создают составляющие тяги отно¬
сительно трех осей управления. Так как управляющей силой
при этом является тяга, то способы управления влияют на кон¬
струкцию двигателя и его характеристики. Как, указывалось в
§ 2.1, вектором тяги можно управлять путем поворота камер
сгорания основных двигателей, рулевых двигателей, поворотны¬
ми соплами и другими способами, которые будут рассмотрены в
главе XII.§ 2.3. КРАТКИЕ СВЕДЕНИЯ О ЖИДКИХ ТОПЛИВАХТопливо для ЖРД является носителем химической энергии и
источником рабочего тела. Современное жидкое топливо пред¬
ставляет собой совокупность двух компонентов — окислителя и го¬
рючего.Рассмотрим требования, предъявляемые к жидким ракетным
топливам.Основные требования вытекают из условия достижения задан¬
ной дальности пуска ракеты с заданной массой боевой части при
минимальной ее стартовой массе.Как известно, дальность пуска в основном зависит от скорости
ракеты Vft в конце активного участка траектории. Из формулы33
Циолковского (1.7) следует, что Vk прямо пропорциональна удель¬
ной тяге двигателя Рудо. В свою очередьРудо = kV Ни • пе,где Ни—теплопроизводительность топлива (количество тепла,
выделяющееся при сгорании единицы массы топлива);
■/]е—эффективный коэффициент полезного действия (харак¬
теризует долю Ни, полезно превращенную в кинетиче¬
скую энергию истекающей газовой струи);
k — коэффициент пропорциональности.Отсюда вытекает первое основное требование — топливо дол¬
жно обладать возможно большей теплопроизводительностью, т. е.
наибольшим запасом химической энергии. Современные жидкиеракетные топлива имеют Ни — 5800-^-9200 .Второе основное требование — топливо должно иметь возмож¬
но большую плотность. Совершенно очевидно, что, чем больше
плотность, тем большее количество топлива можно разместить в
баках того же объема, тем больше будет относительная масса
топлива на борту ракеты, а следовательно, увеличивается коэф¬
фициент наполнения ракеты топливомЗаметим, что свойства топлива весьма существенно влияют на
конструкцию ракеты и ее эксплуатационные качества.Компоненты топлива должны быть физически и химически
стабильны в диапазоне температур, обусловленном тактико-тех-
ническими требованиями. Для этого компоненты топлива должны
иметь оптимальные температуры кипения и замерзания, не дол¬
жны изменять химический состав при длительном хранении и
давать твердые и смолообразные осадки, должны быть негигро¬
скопичными и химически инертными к воздуху. Компоненты топ¬
лива должны быть взрыво- и пожаробезопасны и мало токсичны.
Весьма важным требованием к топливу с точки зрения конструк¬
ции ракеты является возможно малая химическая активность
(коррозионное действие) компонентов топлива по отношению к
конструкционным материалам баков, двигателя и агрегатов авто¬
матики. Это требование особенно важно для ракет, которые дол¬
жны храниться длительное время с заправленными топливом ба¬
ками.Из сказанного ясно, что к жидким ракетным топливам предъ¬
являют многочисленные требования, которые зачастую противо¬
речивы. В настоящее время не существует такого топлива, кото’
рое полностью удовлетворяло бы всем требованиям. Поэтому прак¬
тически приходится в каждом конкретном случае подбирать или
разрабатывать топливо, которое более других обеспечивает по¬
лучение наилучших характеристик ракеты.11а основе данных, опубликованных в иностранной печати, рас¬
смотрим основные компоненты топлива, применяемые в ракетах сЖРД.34
ГорючиеКеросин является фракцией прямой перегонки нефти с темпе¬
ратурными пределами выкипания 150-^280°С. Керосин имеет су¬
щественные преимущества перед многими другими горючими бла¬
годаря своей доступности и низкой стоимости. Он химически ста¬
билен и практически не вызывает коррозии металлов. Нетоксичен.
Керосин может применяться со всеми окислителями на основе
окислов азота и с жидким кислородом. К недостаткам керосина
необходимо отнести большой разброс плотности между партиями.
Кроме того, применение керосина в сочетании с окислителями на
основе азотной кислоты может создавать неустойчивый рабочий
процесс в камере сгорания вследствие коксообразования.Гидразин представляет собой при нормальных условиях бес¬
цветную дымящуюся на воздухе ядовитую жидкость, поглощаю¬
щую из атмосферы влагу, углекислоту и кислород. Гидразин не¬
стабилен, в безводном состоянии подвергается каталитическому и
термическому разложению. Он разрушает резину и многие орга¬
нические материалы.Гидразин является универсальным горючим, поскольку он по¬
вышает Руд в сочетании почти со всеми окислителями. Однако ги¬
дразин обладает весьма высокой температурой замерзания
(+2°С). Более перспективными в качестве горючего являются
производные гидразина — метилгидразин и несимметричный диме-
тилгидр.азин. Эти горючие имеют низкую температуру замерзания
и большую стойкость, чем гидразин.Несимметричный д и м е т и л г и д р а з и н — ДМГ пред¬
ставляет собой бесцветную, весьма летучую и подвцжную жидкость
с интенсивным аммиачным запахом. Он сильно гигроскопичен и
взаимодействует с углекислотой и кислородом из воздуха. Пары
ДМГ в1 смеси с воздухом легко самовоспламеняются при повышен¬
ной температуре, поэтому он обычно хранится в герметичных емко¬
стях под давлением инертного газа. ДМГ коррозионно инертен к
сталям и алюминиевым сплавам. Весьма токсичен. В настоящее вре¬
мя ДМГ используется в качестве горючего в стратегических ра¬
кетах. С окислителями на основе азотной кислоты и окислов
азота он образует самовоспламеняющиеся топлива, обеспечиваю¬
щие надежный запуск двигателя даже в пустоте. ДМГ является
высокоэффективным горючим, позволяющим получить большую
удельную тягу.Широко применяется в качестве горючего аэрозин, представ¬
ляющий собой смесь 50% гидразина и 50% ДМГ.ОкислителиЖидкий кислород представляет собой прозрачную голу¬
боватую легкоподвижную жидкость. Нетоксичен. Жидкий кисло¬
род— активный окислитель. Он взаимодействуете маслами, выделяя35
тепло, что может привести к вспышке и взрыву, поэтому требует-
сн тщательное обезжиривание емкостей, трубопроводов и инстру¬
мента. Многие конструкционные материалы (углеродистые и ма¬
лолегированные стали, магний, цинк и др.) при длительном воз¬
действии жидкого кислорода снижают свою прочность, становятся
хрупкими. Аустенитные стали, медь, медные и алюминиевые спла¬
вы при воздействии жидкого кислорода изменяют механические
свойства незначительно. Обезжиренная кожа и фторопласт сохра¬
няют эластичность при длительном воздействии жидкого кисло¬
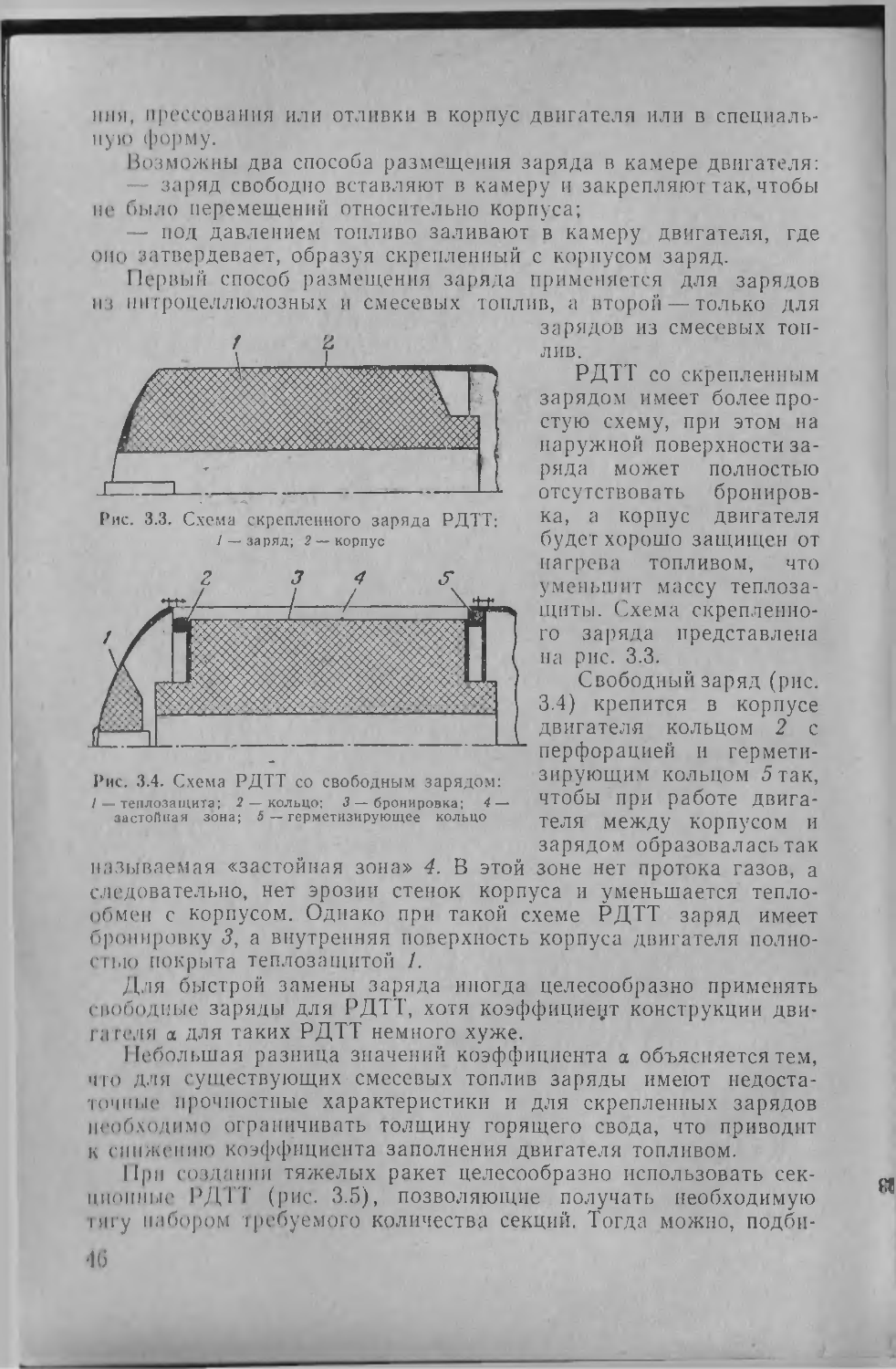
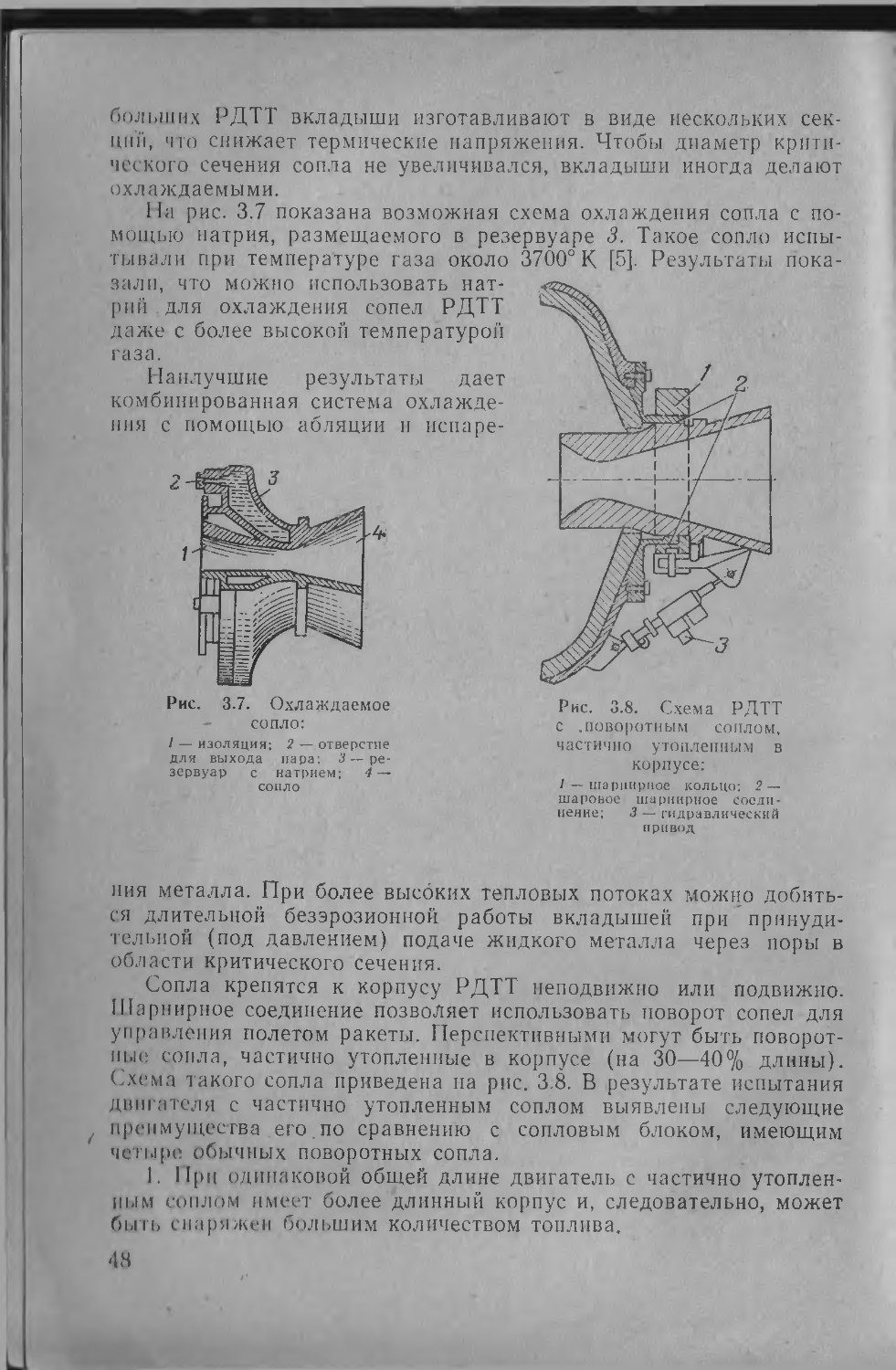
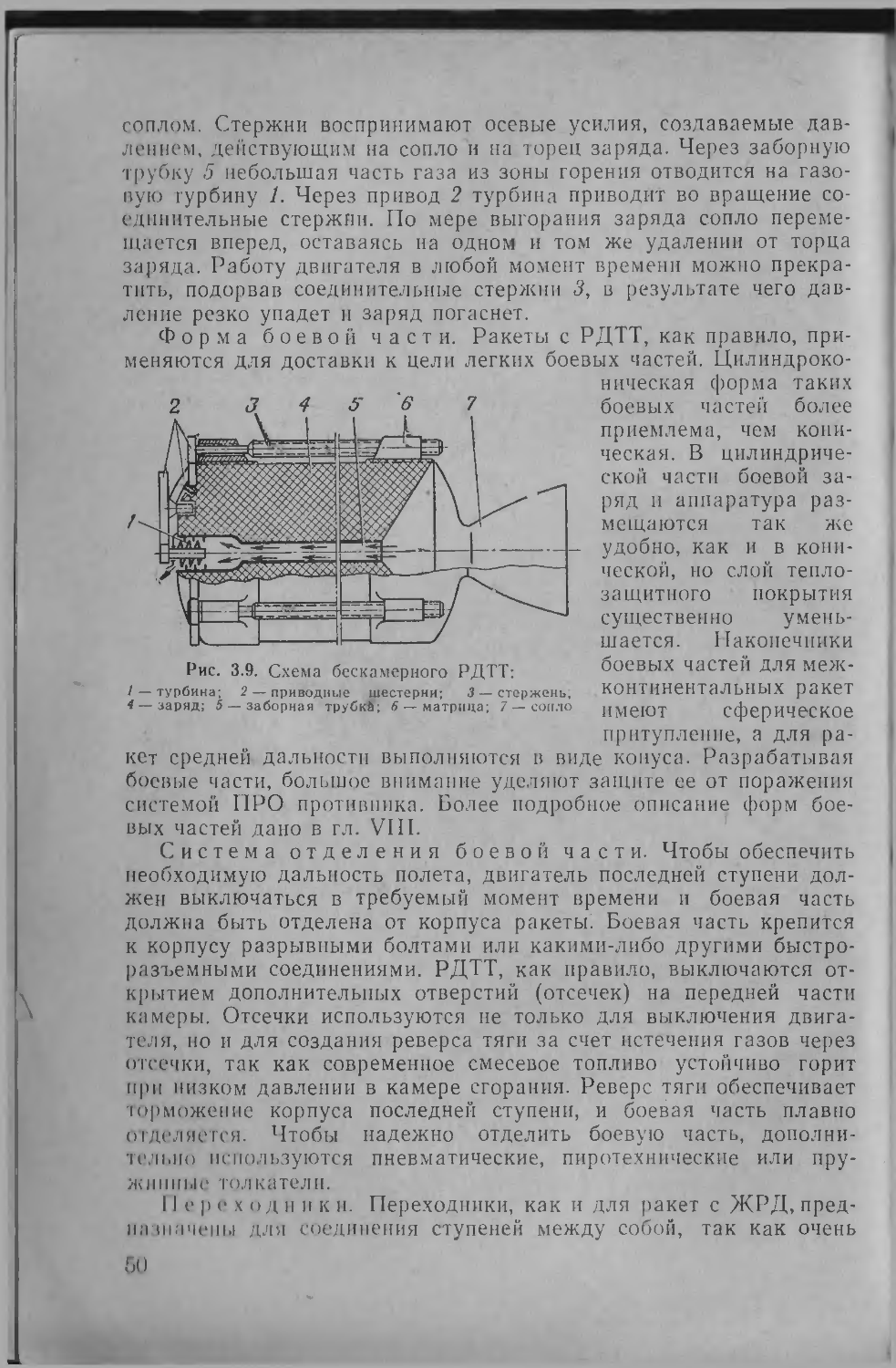
рода.Основными достоинствами жидкого кислорода являются: вы¬
сокое значение удельной тяги топлив на его основе; неограничен¬
ная сырьевая база; использование в других отраслях промыш¬
ленности; простота производства и низкая стоимость. К недостат¬
кам жидкого кислорода необходимо отнести низкую температуру
кипения, что вынуждает производить заправку ракеты непосред¬
ственно перед пуском, и малую плотность.Азотная кислота в чистом виде представляет собой бес¬
цветную ядовитую гигроскопическую жидкость, дымящуюся на воз¬
духе, с сильно раздражающим запахом. Техническая азотная кис¬
лота содержит всегда некоторое количество воды и окислов азота,
поэтому она имеет красно-бурый цвет.Азотная кислота содержит 76% кислорода, что делает ее до¬
статочно мощным окислителем. Она имеет большую плотность
(1520 кг/м3). Кроме того, азотная кислота широко используется
в промышленности. Стоимость ее относительно невелика.При попадании на кожу азотная кислота вызывает тяжелые
ожоги. Азотная кислота весьма агрессивна по отношению ко мно¬
гим металлам и другим конструкционным материалам. Особенно
сильно действует на металл кислота, разбавленная водой. Корро¬
зионно-инертными по отношению к азотной кислоте являются не¬
которые нержавеющие стали, алюминий и многие из его сплавов.Концентрированная азотная кислота в процессе хранения, осо¬
бенна при повышенных температурах, частично разлагается. При
этом в емкостях создаются большие избыточные давления (до
50 бар при 50° С).Чтобы улучшить свойства азотной кислоты как окислителя,
к пей добавляют различные присадки. Этим' увеличивается тепло-
производительность топлива, йовышается плотность окислителя,
уменьшается коррозионное воздействие на конструкционные ма¬
териалы, понижается температура замерзания. В качестве приса¬
док обычно применяют четырехокись азота, концентрированную
серную кислоту, хлорное железо.Азотная кислота и четырехокись азота. Окисли¬
тель представляет собой 30-процентный раствор четырехокиси
лзота в концентрированной азотной кислоте. Этот окислитель ста¬
билен в интервале температур от —40 до +50°С. Его состав
подобран таким образом, чтобы при хранении в емкостях не соз¬
давалось избыточное давление выше 2ч-3 бар при 50°С. Основ¬
ными достоинствами этого окислителя являются: возможность хра¬
нить ракету в заправленном состоянии достаточно длительное
время; высокая плотность; образование самовоспламеняющихся
топлив в сочетании с гидразинными горючими. Недостатком —
то, что удельная тяга топлив на его основе существенно ниже, чем
топлив на основе жидкого кислорода. Кроме того, он токсичен и
обладает довольно высокой коррозионной активностью.Четырехокись азота может применяться в качестве
окислителя в чистом виде. Она представляет собой богатый кис¬
лородом окисел азота, что приводит к увеличению тепЛосодержа-
ния топлива на ее основе (по сравнению с топливом на основе
азотной кислоты и азотной кислоты с присадками).Четырехокись азота — летучая жидкость красно-бурого цвета,,
токсична и пожароопасна, однако ее коррозионная активность не¬
сколько ниже. Она обеспечивает большие удельные тяги топлив
на ее основе, образует самовоспламеняющиеся топлива в сочета¬
нии с гидразинными горючими, имеет широкую сырьевую базу и
низкую стоимость.Основным недостатком четырехокиси азота является ее низкая
температура кипения (+21,5° С) и высокая температура замерза¬
ния (—11,3° С).В заключение отметим, что топлива на основе жидкого кисло¬
рода дают большие удельные тяги по сравнению с азотнокислот¬
ными топливами. Однако хранить ракету длительное время в за¬
правленном состоянии возможно лишь при использовании азотно¬
кислотных топлив.Некоторые основные характеристики окислителей и горючих
приведены в табл. 2.1.Таблица 2.1Ни,кджVсекКомпонентыp-f-20° С,(зам'°С^кип’°скгтопливакг,'м*с 02с керо¬
синомс Огс керо¬
синомЖидкий ки¬
слород (приt° 1
* КИ[! ■)' Азотная ки¬
слота +30°/о
четырехокиси
азота
Четырех¬
окись азота
Керосин
ДМГЖидкий во¬
дород (приt° л1 KHfW11401595Ч-16Ю1440790—840785—79570\—218,4Не выше
—60—11,3—50-f-70
—50—259,2—183
+ 44—=-49+ 21,5-f 150—г—170
-f-55-252,79380936015900938062207200300—310
320
до 400300—31027028037
§ 2.4. МАТЕРИАЛЫ, ПРИМЕНЯЕМЫЕ В РАКЕТАХИзвестно, что относительный запас топлива в ракете, а сле¬
довательно, скорость и дальность ее полета тем больше, чем мень¬
ше масса ее конструкции. Поэтому, чтобы получить высокие лет¬
ные характеристики ракеты при небольшой ее общей массе, не¬
обходимо иметь малую массу конструкции. Последняя задача
может быть решена, если элементы конструкции ракеты изготов¬
ляются из материалов, которые имеют высокие прочностные ха¬
рактеристики при возможных температурах их нагрева и малую
плотность.Кроме этого основного условия материалы, применяемые в ра¬
кетостроении, должны обладать:— достаточно высокой теплопроводностью, исключающей воз¬
можность образования температурных полей с высоким градиен¬
том и появления вследствие этого значительных термических на¬
пряжений в конструкции;— высокой пластичностью, обеспечивающей возможность по¬
лучения листов малой толщины, профилей специальной формы и
возможностью штамповаться;— хорошей свариваемостью;— недефицитностыо и антикоррозионными свойствами.Однако при прочих равных условиях предпочтение отдаетсявсегда тому материалу, который обеспечивает наименьшую массу
конструкции.В качестве критериев, позволяющих сравнивать различные ма¬
териалы с точки зрения их влияния на массу конструкции, при¬
меняются такие параметры, которые позволяют учесть зависимость
массы конструкции одновременно от прочностных характеристик
и плотности. При этом должно учитываться, что для различных
элементов конструкции ракеты и для различных случаев нагру¬
жения существуют свои условия прочности.Анализ реальных конструкций показывает, что определяющими
критериями для сравнения материалов могут быть:— удельная прочность материала;F. V~E~ ,— и■ е—^ удельная жесткость (критерии, характеризующиеустойчивость элементов конструкции),
где — предел прочности материала,Е— модуль упругости,
р—плотность материала.Материалы для боевых частейКорпус боевой части, как правило, представляет собой кони¬
ческую тонкостенную оболочку, работающую в основном на сжа¬
тие или растяжение, поэтому критериями для выбора материала38
могут служитьV ЕМожно считать, что основными мате-Р Рриалами для корпусов боевых частей могут быть малоуглероди¬
стые стали, алюминиево-магниевые сплавы, а также титановые
сплавы и пластические материалы.Для теплозащитных покрытий корпуса боевой части применя¬
ются абляционные материалы. К ним относятся армированные
пластмассы на основе эпоксидных смол и фенольных материалов
и керамические материалы (например, окись кремния),| Материалы для топливных баковМатериалы для топливных баков должны обладать возмож¬
но большей удельной прочностью , высокой коррозионной
стойкостью, должны хорошо свариваться и штамповаться.Для изготовления баков широко применяются алюминиево¬
магниевые сплавы и тонколистовая нержавеющая сталь.В последнее время используют и титановые сплавы, которые
дают значительную экономию в массе по сравнению с использо¬
ванием стали и алюминиевых сплавов. Расширение применения
титана объясняется благоприятным сочетанием его свойств: вы»
сокая удельная прочность, ударная вязкость, пластичность и проч¬
ность при температурах жидкого водорода; стойкость к коррозион¬
ному воздействию большей части горючих и окислителей, абсо¬
лютная стойкость к коррозионному воздействию атмосферной
влаги или соленой воды; устойчивость на продольный изгиб.Материалы для приборных и хвостовых отсековПриборные и хвостовые отсеки являются элементами корпуса
ракеты и представляют собой оболочки, подкрепленные продоль¬
ным и поперечным силовым набором. В отличие от топливных ба¬
ков эти отсеки не имеют внутреннего наддува для компенсации
осевых сжимающих сил. Исходя из этих особенностей конструкции
отсеков, к материалам для их изготовления предъявляются вы-, V Есокие требования по критериям — и ——.Широко применяются сейчас для изготовления этих отсеков
деформируемые алюминиевые сплавы. В тех случаях, когда аэро¬
динамический нагрев стенок приборного и хвостового отсеков бу¬
дет превосходить 500—550° К, применение деформируемых алю¬
миниевых сплавов становится неэффективным. В этом случае
наиболее целесообразно применять жаропрочные сплавы, так как
они имеют более высокую удельную прочность и примерно такую
же удельную жесткость во всем допустимом интервале темпе¬
ратур.39
Необходимо отметить, что все большее применение в ракето¬
строении для изготовления различных деталей корпуса, обтекате¬
лей, экранов, контейнеров и др. находят различные пластмассы,
что существенно уменьшает массу ракеты.ЛИТЕРАТУРА К ГЛАВЕ II1. Алеш ков М. Н., Жуков И. И. Физические основ;,i ракетного ору¬
жия. Воениздат, 1965.2. Баррер М., Жомотт А., Вебек Б. Ф., Ванденкеркхове Ж.
Ракетные двигатели. Оборонгиз, 1962.3. Бессерер К. У. Инженерный справочник по управляемым снарядам.
Воениздат, 1962.4. Бонни Е. А., Цукров М. Д., Бессерер К. У. Аэродинамика. Тео¬
рия реактивных двигателей. Конструкции и практика проектирования. Воен-
из дат, 1959.5. Жидкие и твердые ракетные топлива (сборник переводов). Изд. иностр.
лит., 1959.6. Информационный бюллетень, Военная авиация и ракетная техника,
ВИНИТИ, 1964—65.7. Малышев А. И. Технология металлов и авиационные материалы.
Оборонгиз, 1957.8. М е р и л л Г., Гольдберг Г., Гельмгольц Р. Исследование опе¬
раций. Боевые части. Пуск снарядов. Изд. иностр. лит., 1959.9. Мошкив Е. К. Динамические процессы в ЖРД. Изд-во Машинострое¬
ние, 1964.10. П а у ш к и н Я. М. Химический состав и свойства реактивных топлив
Изд. АН СССР, 1958.11. Реферативный журнал Вооружение ВИНИТИ, 1963—66.12. С и н я р е в Г. Б., Добровольский М. В. Жидкостные ракетные
двигатели. Оборонгиз, 1957.13. Феодосьев В. И., С и н я р е в Г. Б. Введение в ракетную технику.
Оборонгиз, 1960.14. Шевелю к М. И. Теоретические основы проектирования жидкостнь^х
ракетных двигателей. Оборонгиз, 1960.15. Экспресс-информация, Астронавтика и ракетодинамика. ВИНИТИ, 1965.16. Иностранные авиационные и ракетные двигатели. Институт им, П. И. Ба¬
ранова, 1964.
ГЛАВА IIIРАКЕТЫ С РДТТВ последнее время РДТТ широко применяются в качестве сту¬
пеней ракет, ракет-носителей, а также ускорителей для ракет с
ЖРД.§ 3.1. ОБЩИЕ СВЕДЕНИЯ О РАКЕТАХ С РДТТВ конструктивном отношении ракета с РДТТ представляет со¬
бой набор двигателей, расположенных последовательно или па¬
раллельно. Конструкция ракет с РДТТ проще конструкции ракет
с ЖРД: имеет очень мало или совсем не имеет подвижных узлов
и сложных коммуникаций (ТНА, клапаны, трубопроводы для по¬
дачи компонентов топлива и др.).Простота конструкции, сравнительно низкая стоимость отра¬
ботки двигателей и высокая надежность их действия позволяют
широко использовать РДТТ в ракетах самого различного назна¬
чения.Наряду с указанными выше достоинствами ракеты с РДТТ
имеют существенные недостатки. Так, например, энергетические
возможности (по удельной тяге) современных и возможных пер¬
спективных твердых топлив значительно ниже жидких топлив.
Правда, твердые топлива имеют большую плотность, что, казалось
бы, должно компенсировать их меньшие энергетические возможно¬
сти и тем самым обеспечивать одинаковые скорости полета ракет
(при прочих равных условиях), т. е. больший коэффициент запол¬
нения ракеты топливом р^. Однако и в этом ракеты с РДТТ усту¬
пают ракетам с ЖРД. Это объясняется тем, что РДТТ имеют
большую толщину стенки корпуса, тяжелую теплозащиту, массив¬
ные сопловые блоки и весь объем их камеры сгорания не может
быть заполнен топливом.Несмотря на указанные недостатки, ракеты с РДТТ и старто¬
вые комплексы широко применяются благодаря простоте их кон¬
струкции.41
§ 3.2. КРАТКИЕ СВЕДЕНИЯ О ТВЕРДЫХ ТОПЛИВАХЧтобы обеспечить большую дальность стрельбы, твердые топ¬
лива так же, как и жидкие, должны обладать возможно большей
удельной тягой и удельным весом, что позволяет уменьшить вес
конструкции двигателя.Помимо этого общего требования, к твердым ракетным топли¬
вам предъявляют дополнительные требования. Очень важное зна¬
чение имеют химическая стойкость и физическая стабильность
топлива, обусловливающие допускаемые сроки его хранения.
Чтобы предотвратить появление механических повреждений заря¬
дов во время эксплуатации ракеты, топливо должно иметь доста¬
точно высокие прочностные характеристики. Технология изготовле¬
ния топлива и снаряжение двигателей должны быть по возмож¬
ности простыми, обеспечивающими высокую производительность.
Кроме того, топливо должно быть безопасным в производстве и
обращении.Применяемые в настоящее время в ракетной технике топлива
можно разделить на баллиститные пороха и смесевые топлива.Баллиститные пороха широко применяются в РДТТ небольших
размеров, так как они имеют небольшую удельную тягу. Чтобы
повысить удельную тягу, в топливо вводят различные активные
добавки (например, кристаллический окислитель в топливе к ра¬
кете «Минитмен») [1]. Смесевые топлива представляют собой меха¬
ническую смесь тонкоизмельченного минерального окислителя и
органического горючего. Для смесевых топлив соотношение горю¬
чего и окислителя можно изменять в широких пределах, что по¬
зволяет существецно повысить их удельную тягу по сравнению с
баллиститными порохами. Кроме того, из смесевых топлив можно
получить заряды практически любых размеров, обладающие до¬
статочной эксплуатационной прочностью.В качестве горючего для смесевых топлив используют различ¬
ные углеводородные и полиуретановые соединения. В энергетиче¬
ском отношении топлива на этих основах равноценны, но углево¬
дородные более устойчивы при длительном хранении и эксплуата¬
ции [8]. Добавка в смесевое топливо тонкодисперсного порошка
алюминия увеличивает удельную тягу, так как увеличивается тем¬
пература продуктов сгорания. Например, для топлива, содержа¬
щего 68% перхлората аммония, 17% горючего-связки полиэфира
C03II28O4 и 15% алюминия, удельная тяга равна 254 сек (присоединениями бора с водородом позволит еще больше увеличить
удельную тягу, однако токсичность бора и его соединений препят¬
ствует использованию бора в топливах для РДТТ.В качестве окислителя в смесевых топливах применяют перхло¬
рат аммония и калия, нитраты аммония и калия и др. Наибольшее
применение'получил перхлорат аммония, так как он наиболее эф-Замена алюминия бериллием, бором, литием или
фективен. Изучаются возможности использования в качестве
окислителей перхлората нитрония N02C104 и нитрозила 2NOCIO4,
отличающихся от применяемых окислителей более высоким содер¬
жанием кислорода и меньшей теплотой образования [10].Смесевое топливо после смешения компонентов представляет
собой густую пасту, из которой изготавливаются заряды.Чтобы получить тре¬
буемые параметры
РДТТ, заряд твердого
топлива должен:— иметь определен¬
ную величину поверх¬
ности горения, причем
в процессе работы
РДТТ она должна оста¬
ваться постоянной или
изменяться по требуе¬
мому закону;— обеспечить наи¬
большее значение коэф¬
фициента заполнения,
что увеличит дальность
полета ракеты;— иметь необходи¬
мую механическую
прочность И по возмож- Рис. 3.1. Формы зарядов, скрепленных с корпусом
ности защищать стен- двигателя:vu кямрпкт пт ro^jtph- а — торцовый заряд; б — телескопический заряд; в — за¬
лп AdivicpDi ui duряд с каналом звездчатого сечения; г — колесообразныйствия горячих газов; профиль— форма зарядадолжна обеспечить простоту его изготовления и создать условие
устойчивости работы двигателя, определяемое неравенством51 хпр>где х — параметр условий заряжания, определяемый геомет¬
рией заряда [7];
хпр —опытный критерий устойчивости, зависящий от при¬
роды топлива, давления в камере сгорания и геомет¬
рии заряда.Удовлетворить одновременно все перечисленные выше требо¬
вания невозможно, однако они позволяют оценить формы зарядов,
применяемые для РДТТ.Поскольку в большинстве случаев требуется постоянство тяги
двигателя в течение всего времени его работы, постольку формы
зарядов с постоянной поверхностью горения являются основными.
К таким зарядам относятся:— торцовый заряд (рис. 3.1, а), в котором горение происходит
только по поверхности торца, обращенного к соплу;43
— телескопический заряд (рис. 3.1,6), в котором горение про¬
исходит по внутренней поверхности трубки и по боковой поверхно¬
сти центральной шашки;— цилиндрическая шашка с фигурным каналом (рис. 3.1, в, г),
который может иметь различный вид;— щелевой заряд (рис. 3.2).Торцовый и телескопический заряды характерны идеальным
постоянством поверхности горения, однако на практике их приме¬
няют редко, так как первый не обеспечивает большую тягу, а вто¬
рой требует сложной конструкции крепления центральной шаш¬
ки [5]. Распространенная форма заряда—заряд с фигурным кана¬
лом (рис. 3.1, в, г). В таком заряде поверхность горения постоянна,
однако на последней стадии горения происходит дегрессивное до¬
горание остатков топли¬
ва. Чтобы устранить этот
недостаток, в больших
двигателях иногда встав¬
ляют несколько треуголь¬
ных вставок (по числу
лучей звезды) из пено-'
пласта, которые заменя¬
ют дегрессивно догораю¬
щую часть заряда. Это
уменьшает вес «остатков
топлива» при небольшом
увеличении пассивного веса ракеты [4, 9]. В зарядах с каналом
звездчатого сечения отношение толщины горящего свода к диа¬
метру заряда не может выбираться произвольно (оно связано с
изменением поверхности горения во времени) и для вариантов,
обеспечивающих постоянство поверхности, обычно невелико. От¬
сюда сравнительно низкая плотность заряжания. Эти же недо¬
статки свойственны заряду с колесообразным профилем
(рис. 3.1, г).Наиболее приемлемым является щелевой заряд (рис. 3.2), в
котором горение происходит по цилиндрической поверхности ка¬
нала и по поверхности щелей. Увеличение поверхности горения
вследствие разгара канала компенсируется уменьшением поверх¬
ности секторов заряда на участке с щелями. Наружная поверх¬
ность шашки и торцы часто бронируются. Такой заряд имеет до¬
статочно большую поверхность горения при незначительном ее
изменении в процессе работы двигателя, приемлемый коэффициент
заполнения, достаточную механическую прочность, простоту изго¬
товления любым методом, удобство монтажа. Недостаток данного
заряда заключается в недостаточной защите стенок камеры на
участке щелей от воздействия горячих газов.Другие формы зарядов для больших РДТТ практического при¬
менения не находят.Рис. 3.2. Щелевой заряд44
§ 3.3. КОНСТРУКТИВНЫЕ СХЕМЫ РАКЕТ С РДТТЧтобы обеспечить большую дальность полета, ракеты с РДТТ
должны быть, как правило,-многоступенчатыми. В многоступенча¬
тых ракетах с РДТТ так же, как и в ракетах с ЖРД, возможны
следующие схемы расположения ступеней и двигателей:— моноблочная (с последовательным расположением ступеней);— пакетная (с параллельным расположением ступеней);— комбинированная, к которой относят смешанное расположе¬
ние ступеней, а также пакетное расположение двигателей в сту¬
пенях моноблочной схемы.При последовательном расположении ступеней стартовая масса
при прочих равных условиях меньше на 10—30% стартовой массы
ракеты пакетной схемы.' Это объясняется тем, что при пакетной
схеме ракеты с РДТТ необходимо иметь дополнительно узлы креп¬
ления двигателей. В связи с применением в пакете двигателей
меньших диаметров увеличивается также масса конструкции дви¬
гателя.Основными недостатками всех пакетных схем являются их
меньшая надежность, трудность управления и сложность узла со¬
членения, включающего механическую, электрическую и газовую
связи двигателей, входящих в пакет. Газовая связь между двига¬
телями используется потому, что в настоящее время нет отрабо¬
танных систем регулирования тяги РДТТ, что приводит к появле¬
нию разнотяга двигателей, превышающего тот допустимый, кото¬
рый можно ликвидировать органами управления [1]. В схеме ракеты
с последовательным расположением ступеней коэффициент кон-ткл .струкции двигателя а = (отношение массы конструкции дви-«дгателя ткл к массе снаряженного двигателя тд) меньше, чем у
«пакета». Однако в некоторых случаях целесообразно иметь пакет¬
ную схему, так как в этом случае для создания ракет с большой
тягой можно использовать уже отработанные РДТТ, что значи¬
тельно сократит время и затраты на отработку ракеты.В комбинированных схемах нижние ступени ракет состоят из
«пакетов», а верхние — из моноблоков. Эти схемы имеют преиму¬
щества и недостатки схем с последовательным и параллельным
расположением ступеней.Компонуются ракеты с РДТТ аналогично баллистическим ра¬
кетам с ЖРД.Рассмотрим более подробно основные особенности конструкции
отдельных отсеков и систем ракет с РДТТ.Конструктивная схема двигателя. Она во многом
определяется формой заряда и способом его размещения в камере
двигателя.Заряды твердого топлива изготавливаются методами шнекова-45
нии, прессования или отливки в корпус двигателя или в специаль¬
ную форму.Возможны два способа размещения заряда в камере двигателя:
заряд свободно вставляют в камеру и закрепляют так, чтобы
не было перемещений относительно корпуса;— под давлением топливо заливают в камеру двигателя, где
оно затвердевает, образуя скрепленный с корпусом заряд.Первый способ размещения заряда применяется для зарядов
нз нитроцеллюлозных и смесевых топлив, а второй — только длязарядов из смесевых топ¬
лив.РДТТ со скрепленным
зарядом имеет более про¬
стую схему, при этом на
наружной поверхности за¬
ряда может полностью
отсутствовать брониров¬
ка, а корпус двигателя
будет хорошо защищен от
нагрева топливом, что
уменьшит массу теплоза¬
щиты. Схема скрепленно¬
го заряда представлена
на рис. 3.3.Свободный заряд (рис.
3.4) крепится в корпусе
двигателя кольцом 2 с
перфорацией и гермети-
1’ис. 3.4. Схема РДТТ со свободным зарядом: зирующим КОЛЬЦОМ 5 так,/ — теплозащита; 2 — кольцо; 3 — бронировка; 4— ЧТОбы При работе ДВИГЗ-
застойная зона; 5 — герметизирующее кольцо теЛЯ Между КОрпуСОМ Изарядом образовалась так
называемая «застойная зона» 4. В этой зоне нет протока газов, а
следовательно, нет эрозии стенок корпуса и уменьшается тепло¬
обмен с корпусом. Однако при такой схеме РДТТ заряд имеет
бронировку 3, а внутренняя поверхность корпуса двигателя полно¬
стью покрыта теплозащитой 1.Для быстрой замены заряда иногда целесообразно применять
свободные заряды для РДТТ, хотя коэффициент конструкции дви¬
гателя а для таких РДТТ немного хуже.Небольшая разница значений коэффициента а объясняется тем,
что для существующих смесевых топлив заряды имеют недоста¬
точные прочностные характеристики и для скрепленных зарядов
необходимо ограничивать толщину горящего свода, что приводит
к снижению коэффициента заполнения двигателя топливом.При создании тяжелых ракет целесообразно использовать сек¬
ционные РДТТ (рис. 3.5), позволяющие получать необходимуюI игу набором требуемого количества секций. Тогда можно, подби¬4G
рая соответствующим образом диаметр внутреннего канала и длину
секций, получить максимальную тягу двигателя в начальный период
горения заряда, когда РДТТ имеет наибольшую массу. По мере
выгорания заряда масса двигателя уменьшается и одновременно
с этим происходит падение тяги, вследствие чего ускорение может
оставаться почти постоянным.Такая конструкция позво¬
ляет поддерживать ускорение
не выше заданной величины,
чтобы конструкция следующих
ступеней не подвергалась на¬
грузкам, превышающим рас¬
четные. Ускорители ракеты-но¬
сителя «Титан ЗС» являются
секционными РДТТ. Каждый
ускоритель состоит из пяти
центральных секций, верхней секции и секции с сопловым блоком.
Все центральные секции одинаковы и имеют одноканальный скреп¬
ленный заряд с одним бронированным торцом. Верхняя секция сосферическим днищем
имеет заряд со звезд¬
чатым каналом.Секции крепятся
обычными болтами или
специальными замка¬
ми, представленными
на рис. 3.6.С внутренней сто¬
роны корпус каждой
секции покрывают тер¬
моизоляцией (эрозион¬
ностойкий каучук и
др.) переменной толщины на длину выгорания заряда с торца. Это
предотвращает прогорание корпуса во время работы двига¬
теля.Сопловой блок больших РДТТ состоит из нескольких частей,
соединенных между собой болтами. Сопла с внутренней стороны
покрывают слоем теплозащиты толщиной до 50 мм (кремнефеноль¬
ная смола, вольфрамовое покрытие, наносимое методом горячего
напыления, жаростойкая резина, окись алюминия и др.). Корпус
соплового блока, как правило, изготавливают из стали, однако
иногда, чтобы уменьшить вес и увеличить жесткость, сопло делают
двухстеночным из тонкой листовой стали с алюминиевыми сотами
между стенками. Такая конструкция соплового блока использует¬
ся для ускорителя ракеты-носителя «Титан ЗС». Критическое сече¬
ние сопла образуется специальными графитовыми вкладышами.
Для вкладышей используют графит, поверхность которого обра¬
батывают углеводородом при температуре около 2300° К [5]. ДляРис. З.б. Замок крепления секций РДТТ/ 2 3Рис. 3.5. Схема секционного РДТТ:/ — днище с воспламенителем; 2 — секции
РДТТ; 3 — бронировка зарядов47
больших РДТТ вкладыши изготавливают в виде нескольких сек¬
ции, что снижает термические напряжения. Чтобы диаметр крити¬
ческого сечения сопла не увеличивался, вкладыши иногда делают
охлаждаемыми.На рис. 3.7 показана возможная схема охлаждения сопла с по¬
мощью натрия, размещаемого в резервуаре 3. Такое сопло испы¬
тывали при температуре газа около 3700° К [5]. Результаты пока¬
зали, что можно использовать нат¬
рий, для охлаждения сопел РДТТ
даже с более высокой температурой
газа.Наилучшие результаты дает
комбинированная система охлажде¬
ния с помощью абляции и испаре-Рис. 3.7. Охлаждаемое
сопло:/ — изоляция; 2 — отверстие
для выхода пара; 3— ре¬
зервуар с натрием; 4 —
соплоРис. 3.8. Схема РДТТ
с .поворотным соплом,
частично утопленным в
корпусе:/ — шарнирное кольцо; 2 —
шаровое шарнирное соеди¬
нение; 3 — гидравлический
приводния металла. При более высоких тепловых потоках можно добить¬
ся длительной безэрозионной работы вкладышей при принуди¬
тельной (под давлением) подаче жидкого металла через поры в
области критического сечения.Сопла крепятся к корпусу РДТТ неподвижно или подвижно.
Шарнирное соединение позволяет использовать поворот сопел для
управления полетом ракеты. Перспективными могут быть поворот¬
ные сопла, частично утопленные в корпусе (на 30—40% длины).
Схема такого сопла приведена на рис. 3.8. В результате испытания
двигателя с частично утопленным соплом выявлены следующие
преимущества его.по сравнению с сопловым блоком, имеющим
четыре обычных поворотных сопла.I. При одинаковой общей длине двигатель с частично утоплен¬
ным соплом имеет более длинный корпус и, следовательно, может
быть снаряжен большим количеством топлива.48
2. Наличие одного сопла вместо четырех уменьшает потери,
обусловленные турбулентными завихрениями при входе в сопловой
блок.3. Шарнирное соединение частично утопленного сопла меньше
подвержено воздействию истекающих газов, чем шарнирные соеди¬
нения неутепленных сопел.4. Частичное утопление сопла в корпусе смещает шарнирное
соединение, уменьшая аэродинамический шарнирный момент.5. Двигатель с одним соплом имеет большую надежность, и
конструкция его более проста.6. Чтобы обеспечить одинаковый управляющий момент в дви¬
гателе с одним соплом, требуется отклонение сопла на меньший
угол.Но конструкция с одним соплом имеет недостаток, заключаю¬
щийся в том, что возникает необходимость в установке дополни¬
тельных органов управления по углу крена.В качестве органов управления в ракетах с РДТТ могут при¬
меняться поворотные дефлекторы и насадки, газовые и воздушные
рули и рулевые РДТТ. Большие перспективы имеют органы управ¬
ления с инжекцией жидкости или газа в закритическую часть
сопла. В настоящее время экспериментально проверили возмож¬
ность получения усилия для управления в пределах 5% тяги дви¬
гателя. В литературе отмечают, что наименьшую массу имеют си¬
стемы управления с инжекцией горячего газа, отбираемого перед
критическим сечением сопла. Описание конструкции рулевых орга¬
нов приводится в гл. XII.При разработке конструкции РДТТ большое внимание уде¬
ляется уменьшению массы корпуса, а следовательно, и коэффи¬
циента конструкции двигателя а. В ближайшее время возможна
разработка РДТТ, имеющих коэффициент а = 0,08—0,1, а в даль¬
нейшем значение а может быть доведено до 0,05—0,06 [3, 5]. Для
этого потребуется топливо, позволяющее получать скрепленные за¬
ряды с большой толщиной горящего свода и высокими прочностными
характеристиками. Совершенствование форм зарядов даст возмож¬
ность полностью отказаться от бронировки их наружной поверхно¬
сти, сведет к минимуму теплозащиту камеры двигателя, а также
позволит более рационально заполнить двигатель топливом. В на¬
стоящее время стремятся облегчить конструкцию РДТТ и поэтому
используют в качестве конструкционных материалов для корпусов
РДТТ высокопрочные стали, титановые сплавы и различные стек¬
лопластики. Созданием бескамерных двигателей можно существен¬
но уменьшить коэффициент конструкции а. Одна из возможных
сх«м такого двигателя представлена на рис. 3.9 [2]. В двигателе
используется цилиндрический заряд 4 с торцовым горением. Боко¬
вая поверхность заряда защищена от распространения пламени
слоем бронесостава. Заряд с соплом 7 соединяется стержнями 3,
по резьбе которых перемещаются матрицы 6, жестко связанные с3—173649
соплом. Стержни воспринимают осевые усилия, создаваемые дав¬
лением, действующим на сопло и на торец заряда. Через заборную
трубку 5 небольшая часть газа из зоны горения отводится на газо¬
вую турбину 1. Через привод 2 турбина приводит во вращение со¬
единительные стержни. По мере выгорания заряда сопло переме¬
щается вперед, оставаясь на одном и том же удалении от торца
заряда. Работу двигателя в любой момент времени можно прекра¬
тить, подорвав соединительные стержни 3, в результате чего дав¬
ление резко упадет и заряд погаснет.Форма боевой части. Ракеты с РДТТ, как правило, при¬
меняются для доставки к цели легких боевых частей. Цилиндроко¬
ническая форма таких
боевых частей более
приемлема, чем кони¬
ческая. В цилиндриче¬
ской части боевой за¬
ряд и аппаратура раз¬
мещаются так же
удобно, как и в кони¬
ческой, но слой тепло¬
защитного покрытия
существенно умень¬
шается. Наконечники
боевых частей для меж¬
континентальных ракет
имеют сферическое
притупление, а для ра¬
кет средней дальности выполняются в виде конуса. Разрабатывая
боевые части, большое внимание уделяют защите ее от поражения
системой ПРО противника. Более подробное описание форм бое¬
вых частей дано в гл. VIII.Система отделения боевой части. Чтобы обеспечить
необходимую дальность полета, двигатель последней ступени дол¬
жен выключаться в требуемый момент времени и боевая часть
должна быть отделена от корпуса ракеты. Боевая часть крепится
к корпусу разрывными болтами или какими-либо другими быстро¬
разъемными соединениями. РДТТ, как правило, выключаются от¬
крытием дополнительных отверстий (отсечек) на передней части
камеры. Отсечки используются не только для выключения двига¬
теля, но и для создания реверса тяги за счет истечения газов через
отсечки, так как современное смесевое топливо устойчиво горит
при низком давлении в камере сгорания. Реверс тяги обеспечивает
торможение корпуса последней ступени, и боевая часть плавно
отделяется. Чтобы надежно отделить боевую часть, дополни¬
тельно используются пневматические, пиротехнические или пру¬
жинные толкатели.П орех од н и к и. Переходники, как и для ракет с ЖРД, пред¬
назначены для соединения ступеней между собой, так как оченьРис. 3.9. Схема бескамерного РДТТ:/ — турбина; 2 — приводные шестерни; 3 — стержень;
4— заряд; 5 — заборная трубкй; 6 — матрица; 7 — сопло50
часто ступени с РДТТ отличаются одна от другой диаметрами.
Конструкция переходника определяется способом разделения сту¬
пеней. Чтобы уменьшить стартовый вес ракеты, ступени отделяют,
как правило, после выгорания топлива на работающей ступени.
Переходники могут быть как открытого, так и закрытого типа. При
включении двигателя верхней ступени до отделения нижней сту¬
пени переходник должен быть открытый, в виде фермы, чтобы
отводить газы из работающего двигателя. Соединительные фермы
обычно делаются сварными из стальных труб, а закрытые переход¬
ники представляют собой тонкостенные оболочки, подкрепленные
силовым набором. Чтобы уменьшить вес, их делают из алюминие¬
вых сплавов.Приборные отсеки. Ракеты с РДТТ независимо от коли¬
чества ступеней имеют всегда один приборный отсек, а все осталь¬
ные приборы, необходимые для управления работой двигателей
отдельных ступеней, располагаются в переходниках или хвостовых
отсеках этих ступеней. Чтобы обеспечить нормальную работу при¬
боров системы управления, приборные отсеки размещают ближе к
центру тяжести, так как в этом случае меньшее влияние на работу
приборов будут оказывать поперечные колебания ракеты вокруг
центра тяжести. Однако в ракетах с РДТТ приборные отсеки раз¬
мещают только между боевой частью и корпусом двигателя. При¬
борные отсеки изготавливают из алюминиевых сплавов в виде
тонкостенной оболочки, подкрепленной силовым набором.Хвостовые отсеки. На выбор формы хвостового отсека
каждой ступени влияет тип органов управления.На первой ступени хвостовой отсек может быть выполнен за¬
крытым или в виде фермы. Ферменные конструкции несколько
увеличивают аэродинамическое сопротивление ракеты, но это мало
влияет на дальность полета, так как потери скорости за счет аэро¬
динамического сопротивления для межконтинентальных ракет
с РДТТ составляют не более 5%.§ 3.4. МАТЕРИАЛЫ, ПРИМЕНЯЕМЫЕ В РАКЕТАХ С РДТТМатериалы для ракет выбирают в первую очередь с учетом их
пригодности для обеспечения заданных летных характеристик ра¬
ке гы при минимально возможной ее стартовой массе. В первом
приближении анализ материалов можно провести по удельной
прочности материала, представляющей отношение предела проч¬
нист данного материала к его удельному весу. *В табл. 3.1 приведены основные характеристики некоторых ма-
м-риллов, которые могут быть использованы в конструкциях ракет
. !'ДТТ[1].у*51
Таблица 3.1МатериалУдельный
вес, г/см3, Предел проч¬
ности при
растяжении,
кг/мм2Удельнаяпрочность,105 смСталь 4130 нормализованная7,81658,29Сталь 4130 термически обра¬7,8412515,9ботаннаяВысокопрочная сталь7,8419024,25Алюминиевый сплав 75ST2,776021,66Титановый сплав4,436514,67Стеклопластик (существую¬1,664024,1щий)33,33Стеклопластик (перспектив¬1,860ный)Из таблицы видно, что по удельной прочности наиболее прием¬
лемыми материалами для корпусов РДТТ являются стеклопласти¬
ки, однако из-за технологических трудностей они не всегда
применяются. Так, например, для ракеты «Минитмен» кор¬
пус РДТТ нижних ступеней изготавливается из нержавеющей
стали Д-6АС с удельной прочностью около 19,4 • 105 см. При этом
вес корпуса первой ступени составляет примерно 290 кг. При изго¬
товлении этого же корпуса из титанового сплава, включающего
6% алюминия и 4% ванадия (удельная прочность 28,1 • 105 см),
вес его составляет всего 160 кг, т. е. на 130 кг легче корпуса, изго¬
товленного из стали.Чтобы увеличить дальность полета ракеты, наиболее целесооб¬
разно снизить вес последней ступени. Так, снижение веса третьей
ступени ракеты «Минитмен» обеспечивает приращение дальности
полета в 4 раза большее, чем такое же снижение на второй сту¬
пени, и в 16 раз — при таком же снижении веса первой ступени.
Поэтому в качестве конструкционного материала для третьей сту¬
пени ракеты «Минитмен» был выбран стеклопластик «Спираллой»
с удельной прочностью, равной 45,6•105 см. Наряду со стеклопла¬
стиком можно использовать и титановые сплавы, особенно если
учесть, что эти сплавы хорошо обрабатываются, штампуются, сва¬
риваются и легко поддаются термической обработке.Хвостовые отсеки, переходники и приборные отсеки, как пра¬
вило, делают из алюминиевых сплавов. Иногда силовой набор
изготавливается из стали (ракета «Минитмен»). Некоторый вы¬
игрыш в весе получается при замене алюминиевого сплава дру¬
гими сплавами.Для защиты металлических конструкций от нагрева исполь*
зуЮтся теплозащитные покрытия, в состав которых входят эпо¬
ксидные смолы, полиамидный отвердитель, окись алюминия и др.
Критические сечения сопел образуются графитовыми вкладышами,
которые для защиты от эрозии покрываются вольфрамом,
ЛИТЕРАТУРА К ГЛАВЕ III1. Баррер М., ЖомоттА., Вебек Б. Ф., ВанденкеркховеЖ-
Ракетные двигатели. Обсронгиз, 1962.2. Бэкстер. Ракетный двигатель твердого топлива без корпуса «Ракет¬
ная техника», 1961, № 12.3. Бюллетень иностранной научно-технической информации. ТАСС № 72/6481
от 7.9 1961 г.4. Межконтинентальный баллистический снаряд «Минитмен» фирмы «Бо¬
инг». «Вопросы ракетной техники», 1963, № 6.5. Максвелл, Юнг. Большие ракетные двигатели на твердом топливе.
«Вопросы ракетной техники», 1962, № 1.6. Огибалов II. М., Ломакин В. А. Механические свойства стекло¬
пластиков. Инженерный сборник, т XXX, 1960.7. Орлов Б. В., М а зин г Г. Ю. Термодинамические и баллистические
основы проектирования ракетных двигателей на твердом топливе. Изд-во Ма¬
шиностроение, 1964.8. Уимпресс Р. И. Внутренняя баллистика пороховых ракет. Изд.
иностр. лит., 1952.9. Aviation Week, 1962, August, № 9.10. Schumacher E. Perchlorates, their properties manufecture and uses,
New York, Reinhold Publ. Corp. London, Chapman and Hall, 1960.
РАЗДЕЛ IIНАГРУЗКИ И НАГРЕВ КОНСТРУКЦИИ РАКЕТГЛАВА IVСТАТИЧЕСКИЕ НАГРУЗКИ, ДЕЙСТВУЮЩИЕ
НА РАКЕТУ В ПОЛЕТЕ И ПРИ НАЗЕМНОЙ ЭКСПЛУАТАЦИИЧтобы рассчитать отдельные узлы и агрегаты, а также корпус
ракеты на прочность, необходимо знать нагрузки, действующие
на эти элементы конструкции.Определяющими для прочности корпуса ракеты являются
условия полета. Расчет ракеты на прочность при наземной эксплуа¬
тации обычно проверочный и имеет целью установить режимы
эксплуатации, допускаемые прочностью корпуса, и проверить ра¬
циональность конструкции транспортных и перегрузочных средств.В период полета ракеты на нее действуют различные группы
сил, поэтому до определения их конкретных значений в различные
моменты времени целесообразно классифицировать их по общим
признакам. Вначале рассмотрим только силы, воздействующие
на ракету на активном участке траектории.§ 4.1. КЛАССИФИКАЦИЯ НАГРУЗОК, ДЕЙСТВУЮЩИХ
НА РАКЕТУ В ПОЛЕТЕНа активном участке траектории на ракету действуют тяга
двигателя, аэродинамические силы, силы тяжести и управляющие
силы. При изолированном рассмотрении нагружения отдельных
блоков ракеты к этой системе сил присоединяются реакции узлов
сочленения.Чтобы исследовать движение ракеты, все эти силы целесооб¬
разно представлять в виде сосредоточенных так, как это показано
па рис. 4.1: ЦМ — центр масс ракеты; ЦД — центр давления кор¬
пуса ракеты; Р — тяга двигателя; У — подъемная сила; X — лобо¬
вое сопротивление; tViP, ^ip— соответственно поперечная и про¬
дольная составляющие управляющей силы в связанной системе
координат Х\Оух\ mg— сила тяжести; лг1д, xiM, X\v — координаты
центра давления, центра масс и места приложения управляющих
сил; а — угол атаки.54
Чтобы оценить прочность, необходимо еще знать характер рас¬
пределения сил по элементам корпуса. При определении усилий,
действующих на отдельные узлы, следует также учитывать силы
инерции масс и частей ракеты и давления во внутренних ее поло¬
стях.Все нагрузки, действующие на ракету в полете, обычно разде¬
ляют на программные и возмущающие. Программные нагрузки
соответствуют движению ракеты по расчетной траектории, а воз¬
мущающие вызывают отклонения от расчетного (программного)
движения и представляют собой разность между действительны¬
ми и программными значениями нагрузок. Возмущающие нагруз¬
ки зависят от конструктивных особенностей ракеты и системыуправления, состояния атмосферы и точности определения про¬
граммных нагрузок.По характеру действия на конструкцию ракеты различают на¬
грузки статические и динамические. При этом к статическим
условно относят нагрузки, время приложения или изменения ко¬
торых велико по сравнению с периодом собственных упругих ко¬
лебаний корпуса или с периодом колебаний ракеты как твердого
тела. Так, например, силы тяги, лобового сопротивления, давле¬
ния наддува в баках считаются статическими.К числу динамических относят нагрузки, вызванные порывом
ветра, нарастанием тяги на старте и спадом ее при выключении
двигателя, работой тормозных двигателей и т. д.По характеру приложения к корпусу силы подразделяются на
поверхностные и массовые (или объемные). К числу поверхност¬
ных относятся тяга, управляющие силы, аэродинамические силы,
давление наддува. Массовыми силами являются силы тяжести и
инерции.§ 4.2. РАСЧЕТ ОСНОВНЫХ НАГРУЗОК, ДЕЙСТВУЮЩИХ
НА РАКЕТУ В ПОЛЕТЕТяга. Тяга, действующая на ракету, складывается из тяги
основного двигателя и осевых составляющих тяг рулевых камер
сгорания. В двигателях незамкнутой схемы добавляется тяга55
истекающих продуктов газогенерации. Однако вследствие отно¬
сительной малости влиянием ее на прочность ракеты можно пре¬
небречь. Обычно полагают, что тяга основного двигателя прило¬
жена в месте крепления рамы двигателя к корпусу. Составляю¬
щие тяги от рулевых камер сгорания или рулей прикладываются
в местах их крепления. Возможный вследствие производственных
допусков на изготовление эксцентриситет тяги при прочностных
расчетах обычно не учитывают. Величина тяги основного и руле¬
вого двигателей возрастает с увеличением высоты полета соглас¬
но известному -выражениюСила тяжести. Сила тяжести mg ракеты является массо¬
вой силой. Вследствие выгорания топлива, разделения ступеней и
изменения ускорения земного притяжения с высотой полета вели¬
чина ее непрерывно изменяется. Незначительность измененияускорения земного притяжения с высотой yg —go' щ + .где R = 6370 км— радиус Земли, а у— текущая высота полета
ракеты) дает возможность принять его в прочностных расчетах
постоянным и равным g0 = 9,81 м/сек2.Если обозначить через т0 начальную массу ракеты, а т—
секундный массовый расход топлива, то масса ракеты m(t) в про¬
извольный момент времени t будетР = Р0 + Fa-рН0 [1 — х Су)\г(4.1)Р0—тяга на уровне моря или стендовое значение тяги;
Fa—площадь выходного сечения сопла;т, |таImgi)
=—tРис. 4.2. Изменение массы двухступенчатой ра¬
кеты в полете
\к(у)= —функция высоты, представляющая отношение атмо’
Рц осферного давления на произвольной высоте рн к дав¬
лению на уровне моря /?но-m(t) — mQ — т ■ t — т0 (1 — ц),(4.2)
Типичный график изменения массы двухступенчатой ракеты в по¬
лете приведен на рис. 4.2, на котором обозначено: т01 — старто¬
вая масса ракеты; т02 — масса второй ступени ракеты; тцч —
масса боевой части.Силы аэродинамического сопротивления. Дви¬
гаясь в воздухе, ракета испытывает воздействие аэродинамиче¬
ских сил, распределенных по поверхности корпуса. Примерный
характер распределения аэродинамических нагрузок по длине
корпуса ракеты представлен на рис. 4.3.При баллистических расчетах пользуются обычно составляю¬
щими аэродинамической силы в скоростной системе координат:
лобовым сопротивлением X и подъемной силой Y. Для оценкиРис. 4.3. Схема распределения аэродинамических нагрузок по
длине корпуса ракетыпрочности суммарную аэродинамическую силу разлагают на со¬
ставляющие в связанной системе координат: продольную силу X,
н нормальную силу К, (рис. 4.1). Между X, У, Хи Y{ существуют
соотношения:Хг = X • cos а — Y■ sin а,Yx — X- sin а + Y■ cos а.(4.3)Поскольку углы атаки на активном участке малы, то можно по
лагать, чтоХ^Х;Х-а.(4.4)Чтобы определить продольные и поперечные'усилия, действующие
п произвольном сечении корпуса ракеты, необходимо знать зако¬
ны распределения продольной и нормальной сил по длине ракеты,
которые, как известно из аэродинамики, характеризуются част-
дех дс
ними производными И57
Ввиду ТОГО что*1 = Сх, • Я ■ Fм>Y\ = с* - q ■ Fm (4.5)где с —коэффициент лобового сопротивления, а с —коэффи¬
циент подъемной силы, с* — производная от коэффициента подъ¬
емной силы по углу атаки, то продольную и нормальную силы
элементарного участка корпуса длиною йхл найдем по формулам:дс ,dXx = - q-Fu-dx,;dY\ = ^ -o-q-Fu dxy. (4.6)В приведенных формулах:Р*72q = — скоростной напор;р — плотность воздуха;V — скорость ракеты;F„ — характерная площадь ракеты, обычно площадь ми¬
деля.Проинтегрировав выражение (4.6), получим значения продольной
и нормальной сил в произвольном сечении Х\\-г,С V(^i) = q ■ Fu • j • dxjjоx,Yi(xl) = q-FM-a- J ^ ■ dxu (4.7)oили, разбив корпус по длине на i участков величиной Axi и заме¬
нив интегрирование суммированием, находим:kk=lYx{x{) = z-q-Fu-Lxl-y^(^)j.k=i *Заметим, что, интегрируя зависимости (4.7) по Х\, получим вели¬
чины изгибающих моментов в сечении Х\ от действия аэродина¬
мических сил. Определение аэродинамических коэффициентов
dcv дс дс“сх, и cyl~~daL' а также их производных и ~ является одной58
из задач теоретической и экспериментальной аэродинамики. Ме¬
тоды и результаты их расчетов приводятся в специальной литера¬
туре [6]. ,/- 7 • ■
При полете на ракету могут действовать воздушные потоки,
возникающие вследствие неравномерного нагрева поверхностии (м/сек)Рис. 4.4. Примериыи вид графика изменения
максимальной скорости ветра с высотойземли, неравномерного рельефа местности и прохождения грозо¬
вых фронтов. Различают следующие виды воздушных течений:— струйное течение — это течение большой протяженности и
относительно небольшой толщины;— местные вихревые течения
(местные порывы ветра) с боль¬
шими горизонтальными и верти¬
кальными скоростями;— непрерывная атмосферная
турбулентность.При прочностных расчетах
турбулентность условно заменяют
циклическими порывами, т. е.
представляют ее в виде несколь¬
ких одиночных порывов, дейст¬
вующих один за другим. Пример¬
ный характер изменения макси¬
мальной скорости ветра с высо¬
той представлен в виде графика
на рис. 4.4.Рассмотрим действие мгновенного порыва ветра на ракету
(рис. 4.5).Если на ракету подействует встречный порыв со скоростью Л1/,
то угол атаки за время действия порыва ветра (мгновенный по¬Рис. 4.5. Действие мгновенного по¬
рыва ветра на ракету59
рыв) практически останется неизменным, а скорость обтекающего
потока увеличится на А1Л Тогда:(v'+ivo'^v/v^i + s -т);K,-r «F..-L(l/+ + (4.8)При этом увеличение .Yj и У1 небольшое (2-н6%). Примерно на
такую же величину увеличиваются изгибающий момент, осевые и
перерезывающие силы. При действии нормального порыва и ско¬
рость потока, обтекающего ракету, изменяется незначительно,зато существенно изменяется угол атаки = В этомслучаеK,-*;.<«+4«)-/vef-<va./vs£(i + £). («>Сила лобового сопротивления практически не изменяется, а уве¬
личение подъемной силы при действии нормального порыва дохо¬
дит до нескольких сотен
процентов и при прочност¬
ных расчетах должно обяза¬
тельно учитываться.Силы давления.
Оболочка топливных баков
нагружается внутренним из¬
быточным давлением надду¬
ва и давлением столба жид¬
кости. Давление в произ¬
вольном сечении определяет¬
ся по очевидной формулеР = Рь + (4.10)g0— ускорение земного притяжения на уровне моря;
р — плотность жидкости;h — расстояние рассматриваемого сечения от зеркала жид¬
кости. В формулу входит также коэффициент осевой перегруз¬
ки пх , методы определения которого будут подробно рассмотре¬
ны в следующем параграфе. На рис. 4.6 приведен график измене¬
ния давления р по высоте бака. При колебаниях корпуса ракеты в
полете жидкость, увлекаясь стенками бака, приходит в колебатель¬
ное движение и величина давления р изменяется.Силы инерции. Ракета на протяжении всего полета на
активном участке траектории двигается ускоренно, поэтому воз¬
никают силы инерции, которые дополнительно нагружают эле*бакагде рб—давление наддува;60
менты конструкции ракеты. Они являются, как и сила тяжести,
массовыми. Распределение сил инерции по длине определяется
размещением узлов и агрегатов. Их действие на корпус учитывают
совместно с силами тяжести введением так называемых коэффи¬
циентов перегрузок, которые будут рассмотрены ниже.Вопросы, связанные с расчетом управляющих сил, изложеныКак уже отмечалось в предыдущем параграфе, неравномер¬
ность движения ракеты приводит к появлению сил инерции, до¬
полнительно загружающих элементы конструкции. Эти силы, как
и силы тяжести, являются массовыми.Рассмотрим действие сосредоточенного груза А, находящегося
внутри ракеты, на корпус (рис. 4.7). Пусть масса рассматривае¬
мого груза равна ти реакции корпуса в осевом и поперечном на¬
правлениях RXt и Ryi , составляющие ускорения центра масс
ракеты в связанной системе координат соответственно равны wXi
и w . При этом полагаем, что угловые колебания ракеты отно¬
сительно центра масс отсутствуют. Согласно принципу Даламбера
составляем уравнения равновесия сил, действующих на массу tnb
из которых получаем искомые реакции:Усилия NXi и Ny,i с которыми груз воздействует на корпус, по
модулю равны реакциям RXi и R , но направлены в противопо¬
ложную сторону, т. е.в гл. XII.§ 4.3. ПОНЯТИЕ О КОЭФФИЦИЕНТАХ ПЕРЕГРУЗКИРис. 4.7. Действие груза на корпус ракетыRXt = — [wXi + g- sin (0 + a)] • m-,R„ = fw,. + g-cos (9 + a)] • mi-(4.11)(4.12)(4.13)(4.14)61
l ii'i i, пыражения в квадратных скобках показывают, во сколько
р.| I усилие воздействия груза на корпус в том или ином направ-
ii'iimi больше веса этого груза, и называются коэффициентами
uc’ciioii пу и поперечной пу перегрузок.Нес груза зависит ог ускорения силы тяжести, изменяющегося
с высотой. В то же время реакции Rr и Ry (как и NХ{1 N ) от
ускорения силы тяжести не зависят, поэтому безразлично, какое
ускорение подставлять в формулу. Принято вес груза определять
для условий Земли на ее поверхности, т. е. полагать g0*-~- 9,81 м/сек2. С учетом сказанногоКак видно из полученных формул, коэффициент перегрузки в
некотором направлении равен отношению составляющей ускоре¬
ния, которое получила бы ракета при. движении в этом же на¬
правлении, вне поля земного тяготения, к ускорению силы тяже¬
сти на поверхности Земли. Рассматривая выражения (4.15) и
(4.16), можно сделать вывод, что величины реакций или сил, пе¬
редаваемых на корпус ракеты со стороны некоторой массы, мож¬
но определить как произведение силы тяжести рассматриваемой
массы на некоторые безразмерные коэффициенты — коэффициен¬
ты перегрузок.Ускорения wx> и w определяются характером движения ра¬
кеты. Так, на старте до отрыва от пускового стола = wy==0,а угол между осью ракеты и горизонтом 0 + = -у- , g — g0. От¬
сюда следует, что л = 1, а пу = 0.Как известно из теоретической механики, ускорение любой
точки твердого тела равно геометрической сумме ускорения по¬
люса и ускорения этой точки во вращательном движении вокруг
полюса. Если пренебречь осестремительной составляющей враща¬
тельного ускорения (ввиду ее относительной малости), то ускоре¬
ния груза при полете ракеты могут быть выражены через ускоре¬
ния центра тяжести следующим образом:(4.15)(4.16)гдепWx + g-sin (0 + а)(4.17)пgoWyi + g-COS (0 + a)(4.18)УI(4.19)(4.20)62
где w°x и w° —осевая и поперечная составляющие ускорения
центра масс ракеты;® —угловое ускорение ракеты;
хЫч — координата центра масс;
х,—координата рассматриваемого груза.Ускорения центра масс достаточно просто определяются из урав¬
нений движения ракеты. Легко показать, что при полете ракеты
на активном участке траектории:wx> = ~ g sin (9 + *)’ ^4-21^w°y, = V> +J'~ — geos (0 + к), (4-22)где т—масса всей ракеты в рассматриваемый момент времени;
Ylp—поперечная составляющая управляющего усилия
(рис. 4.1).Подставляя полученные значения ускорений в выражения для ко¬
эффициентов перегрузок и учитывая, что Х\~Х, получим:Р— X
'"■go ’(4.23)< + А/гу„(4.24)где. п° =У1^ + к1р_m-go ’(4.25)А\=~£(*11.-*).(4.26)Таким образом, коэффициенты осевой п и поперечнойл пе-регрузок при поступательномдвижении могут бытьопределеныкак отношение поверхностныхсил, действующих в определенномнаправлении, к весу ракеты.При движении ракеты илибоевой части на пассивномучасткетраектории тяга отсутствует ипоэтому коэффициентосевой пере-грузкиX
т -go'л*,=(4.27)Минус показывает, что перегрузка (произведение соответствую¬
щей силы на коэффициент перегрузки) направлена в сторону, про¬
тивоположную положительному направлению оси Х\. Наибольшее
влияние на коэффициент осевой перегрузки оказывает уменьше¬
ние массы ракеты в полете вследствие выгорания топлива. Макси¬
мального значения коэффициент осевой перегрузки достигает к
концу работы двигателя ступени с тягой Ртах- Как изменяется63
коэффициент осевой перегрузки двухступенчатой ракеты на ак¬
тивном участке траектории, показано на рис. 4.8.Если движение ракеты невозмущенное, то ее угловое ускоре¬
ние ср = 0. Следовательно,Ух + Ух рп = пVi У1m-go(4.28)Если сумма моментов относительно центра масс в плоскости дви¬
жения ракеты равна нулю, то можно написать (рис. 4.1), чтоу,р = ■ (4.29)* Л|ЦМРис. 4.8. Изменение осевой перегрузки на активном
участке траекторииПодставляя У]Р из выражения (4.29) в выражение (4.28), полу¬
чимп — п —■У. У,™go\•Vp ^Шм(4.30)Из последнего уравнения видно, что при невозмущенном движе¬
нии величина коэффициента поперечной перегрузки определяется,
в основном, величиной угла атаки а (величиной силы У)).При полете в неспокойной атмосфере коэффициент поперечной
перегрузки рассчитывают, предполагая, что внезапно подействовал
мгновенный порыв ветра перпендикулярно к направлению полета
(§ 4.2). Динамичность действия ветра определяется коэффициен¬
том динамичности &д, который вводится в выражение для управ¬
ляющей силы (4.29). Таким образом, при мгновенном воздействии
ветра<4'3|>V■ -*1ЦМа подъемная силаУх-c;t (а + Ла)-д- Ft(4.32)где Да =U~v64
Определим коэффициент поперечной перегрузки центра масс ра¬
кеты, учитывая действие мгновенного порыва ветра:У\ + ^ipу.nt-goУ] (. , жшм — *шд
1 ~г ~т-go' ЩМ~f5. (а + Да)?-/Гм Л + k _ (4.33)Ш-^о \ Д -*р -*Шм 'В момент порыва ветра рулевое усилие не уравновешивает ра*
кету, поэтому возникает угловое ускорение (рис. 4.9). (•У,у,У!Р^ "ЖJt”< СX,<РшдOS tunх,рРис. 4.9. Схема поперечных сил
Из теоретической механики известно, что М = 1г-<р, откуда? == ~J [ К] (ЛТ|цм Л-1цд) У|р (Л:1р Л-1цм^]у 1/ ('Чим ■^'1цд)(1 ^д)>(4.34)где /г — момент инерции ракеты относительно оси z, проходящей
через центр масс. Методы его определения приведены в гл. XII.
С появлением углового ускорения ср возникает вращательная со¬
ставляющая коэффициента поперечной перегрузкиAnyi = --~(Xuw-Xi)-Подставляя значение <р из выражения (4.34), а значение К, из
выражения (4.32), получимсу, (а "t" ^а) Ч'Ем (1 Лд) (*1Цм — ^шд)Ал,. = -
Обозначим:h'goС — (а 4- Да) • <7 • Fu\\ **р %М(Хтн — *i)- (4.35)(4.36)В-сауГС-( 1-»*)•(*„
1.' -*Шд)65
тогдаА , в , .Л»'"1Г +(4.37)Таким образом, найдены выражения для определения как осевого
(4.23), так и поперечного (4.37) коэффициентов перегрузок.Рассмотрим методы определения нагрузок в различных сече¬
ниях корпуса ракеты.§ 4.4. РАСЧЕТ ОСЕВЫХ НАГРУЗОК В ПОЛЕТЕРассматривая условия равновесия передней части ракеты
(рис. 4.10, сечение а — а) и применяя известное из сопротивления
материалов «правило РОЗУ», получим, что осевое усилие в про-Рис. 4.10. Осевое усилие в произвольном сечении
корпусаизвольном сечении равно сумме осевых составляющих аэродина¬
мической и массовой сил. Осевая составляющая массовой силы
определяется как произведение веса передней части ракеты на
коэффициент осевой перегрузки. Следовательно,Nix,) = (х{) + nx/g0m (х,), (4.38)где Х{ (х,) — осевая составляющая аэродинамическихсил, действующих на рассматриваемую
часть ракеты;Х\m{xi)=\mxdx—масса «отсеченной» части ракеты;6 1тх —погонная масса ракеты.Из рассмотрения схемы сил на рис. 4.10 ясно, что в сечениях,
расположенных перед местом приложения тяги, осевое усилие на66
активном участке траектории всегда сжимающее, а для сечении,
расположенных за местом приложения тяги, как правило, растя¬
гивающее. В сечении b — b в эпюре имеется скачок на ве-1.Рличину тяги P=Ar1(xp)-f пх -gQmx ax, где хр — длина ракеты.оТак как осевые усилия от давления жидкости воспринимаются
задними днищами, то при расчете осевых усилий в жидкостных
ракетах можно полагать, что вся масса топлива как бы сосредо¬
точена в районе заднего днища. Примерная эпюра осевых силЛ.Распределенная осевая нагрузка
от массовых сил д0 /&.., тХ)Сосредоточенная нагрузка от
массовых сил ff0 nXfОсевая (аэродинамическая нагрузка ^ fMm i х i! Hirrrj.li| I li|L_lРис. 4.11. Эпюра осевых сил ракеты с ЖРДпредставлена на рис. 4.11, на котором пунктиром показана эпюра
с учетом разгрузки стенок баков от части сжимающих усилий за
счет давления наддува (AN — рб- Fq, где Fа — пдощадь поперечного
сечения баков). На рис. 4.12 представлена типичная эпюра рас¬
пределения осевых усилий в корпусе твердотопливной ракеты со
скрепленным зарядом. При этом предполагалось, что вся тяга
приложена к переднему днищу двигателя, а воздействие порохо¬
вых газов на сопловой блок учтено скачком в районе критиче¬
ского сечения.Если составная ракета изготовлена по схеме «пакет», то в ее
продольном нагружении имеются некоторые отличия, вызываемые
особенностями конструктивной компоновки центрального и боко^
вых блоков. Так, рассматривая схему, представленную на рис. 4.13,
нетрудно заметить, что в местах крепления боковых блоков воз-67
киРаспределенная нагрузка от массовых сил g0-nx-mxf
Сосредоточжтшшш*.я&&1I * ■IОсевая аэродинамическая нагрузка 'а5Г Я' ^Рис. 4.12. Эпюра осевых сил ракеты с РДТТРис. 4.13. Схема нагружения ракеты, вы¬
полненной по схеме «пакет»
никают дополнительные реакции, величины которых могут быть
найдены по следующим зависимостям:R6N,кP6-i6-Q6,Р6-а — М,^ — Mq^(4.39)гдеR6 и N6-Р6-
h и Q6- Л’б!N^-N6,реакции в местах крепления;
тяга бокового блока;■ осевые составляющие соответственно
и аэродинамических сил.массовыхРис. 4.14. Эпюры осевых усилий для боковых и центральногоблоковЕслиРпгде Рц — тяга центрального блока,таб + т1+1 Щб '
a trii — массы соответствующих блоков, то Rn=Re = 0.В этом случае центральный и боковые блоки ракеты летят
как бы независимо и роль боковых блоков сводится к «транспор¬
тировке» самих себя, что, естественно, недопустимо. В реальных
конструкциях всегда /?ц<0. Эпюры продольных сил для централь¬
ного и бокового блоков изображены на рис. 4.14. Анализируя69
•■жюры продольных сил центрального блока, необходимо обратим,
внимание на дополнительную разгрузку корпуса центрального
блока на отдельных участках за счет реакции боковых блоков.
Пунктиром на рис. 4.14 так же, как и на рис. 4.11, показана эпюра
осевых сил с учетом давления наддува.I J § 4.5. РАСЧЕТ ПОПЕРЕЧНЫХ НАГРУЗОК В ПОЛЕТЕВо время полета на активном участке траектории в попереч¬
ном направлении на ракету действуют нормальные аэродинами¬
ческие, массовые (инерционные и силы тяжести) и управляющие
силы.К управляющим силам обычно относят подъемную силу воз- j
душных рулей (если они есть) и нормальную составляющую 1
(управляющую) сил рулей.Поперечные нагрузки при невозмущенном движении невелики
и их влиянием на прочность по сравнению с осевыми нагрузками
можно пренебречь. При наличии возмущений эффект от попереч¬
ных нагрузок может оказаться сравнимым с действием осевых
сил.Чтобы определить поперечные нагрузки в общем случае, не¬
обходимо совместно решить уравнения возмущенного движения
ракеты, учитывая упругость корпуса и жидкое наполнение, урав¬
нения управления и уравнения чувствительного элемента автомата
стабилизации.В результате можно найти параметры возмущенного движения
(угол^атаки а, угол отклонения управляющих органов 8 и т. д.),
после чего определить поперечные нагрузки. Методы расчета па¬
раметров возмущенного движения изложены в гл. XII. Вследствие
сложности решения перечисленной системы уравнений и отсут¬
ствия достоверных значений некоторых параметров задачу обычно
несколько упрощают, определяя независимо статические и дина¬
мические нагрузки. Расчет статических нагрузок ведут в предпо¬
ложении действия нормального порыва ветра.В этом случае в поперечном направлении ракета нагружается
силами инерции и аэродинамическими силами с суммарной интен¬
сивностьюгде mXi —погонная масса в рассматриваемом сечении. Попереч(4.41)ная сила в произвольном сечении х\ находится, как(4.42)70
Учитывая уравнения (4.36) и (4.37),дсгСледовательно,"? Г дс* 4
Q (*i) = J ^ тх, + B’mXl (^щм — x0(4.43)rf*,. (4.44)На практике этот интеграл обычно не берется, и решение задачи
производят следующим образом. Мысленно разбивают ракету по
длине на 20—50 участков и вместо интегрирования выражения
(4.44) производят его суммирование. 'Если участки Да:\ выбраны
одинаковой длины, тоiq, = д*1-2.Юур=1Таким образом,Q, = Да:, • С+ ^гй2к,(л.цм-7=1;=i*,)]/Как известно из курса сопротивления материалов,М — SQ dx.Следовательно,х,М (л;,) = | Q (X,) • dX\(4.45)(4.46)илии окончательноMi = Ax>'2iQj
;=1j=i k=ii J! - 4 / J=l k__:++ (Лтм-*0Ьj—1 *=1(4.47)На рис. 4.15 приведен примерный вид эпюр Q и М для двухсту¬
пенчатой ракеты с ЖРД. При построении эпюр поперечных сил Q71
и изгибающих моментов М необходимо обращать внимание на
иыиолнение граничных условий: в месте приложения управляю¬щей силы при x\=xip должны выполняться равенстваQ = — Г1р и М — 0.(4.48)Кроме того, максимум (минимум) изгибающего момента должен
совпадать с нулем перерезывающей силы, что совместно с ус¬
ловиями (4.48) служит контролем правильности построения
эпюр, -Нормальная азросгинапическая нагрузкаУ,рСосредоточенная нагрузка от
массовых сил q0nv, bmg. <(" X Щ Ш- Распределенная у пдперечмщнпгруЗ- Ука от массовь/х сан ч0 ny. mXfЗпюра поп^речнб/х сил QsiРис. 4.15. Эпюры перерезывающих сил и изгибающих
моментов§ 4.6. НАГРУЗКИ ПРИ НАЗЕМНОЙ ЭКСПЛУАТАЦИИКак уже указывалось выше, определяющими для прочности
конструкции корпуса ракеты являются условия полета. По¬
этому целью расчета на прочность при наземной эксплуатации
является:— установление режимов наземной эксплуатации, допускае¬
мых ее прочностью (скоростей движения транспортных средств, до¬
пускаемых ускорений при перегрузочных работах и установке ра¬
кеты на стартовой позиции и др.);— проверка рациональности конструкции транспортных и пере¬
грузочных средств.Упрочнение, а следовательно, и утяжеление ракеты, вызывае-72
мое условиями наземной эксплуатации, нежелательно и на прак¬
тике не производится.Как известно, ракеты в процессе эксплуатации транспортиру¬
ются по железным, шоссейным и грунтовым дорогам, перегружа¬
ются с одного транспортного средства на другое, устанавлива¬
ются в вертикальное положение на пусковой стол или опускаются
в шахту и, наконец, содержатся более или менее длительное время
в предпусковом положении на пусковом столе.В зависимости от конструкции и размеров ракета может транс¬
портироваться по железной дороге либо отдельными отсеками
либо целиком. При перевозке по железной дороге корпус ракеты
нагружается силами тяжести и инерции и сосредоточенными у ло¬
жементов опорными реакциями. Осевые усилия в корпусе возни¬
кают лишь при торможении и разгоне поезда, и величина их ока¬
зывается незначительной. Поперечные нагрузки возникают вслед¬
ствие ударов колес о стыки рельс, погрешностей в изготовлении
колес и неровностей укладки рельс. Очевидно, что с увеличением
скорости движения амплитуды и частоты возмущений возрастают.
При транспортировке ракеты по шоссейным и грунтовым дорогам
поперечные нагрузки определяются состоянием дорожного покры¬
тия, скоростью движения и характеристиками амортизации. Если
в результате эксперимента или теоретических исследований опре¬
делены значения максимальных коэффициентов поперечной пере¬
грузки, то величины изгибающих моментов и перерезывающих сил
можно получить умножением ординат эпюр М(хi) и Q(*i) от дей¬
ствия сил веса на коэффициент поперечной перегрузки. Если попе¬
речные нагрузки при движении по плохим дорогам оказываются
чрезмерно большими, то необходимо уменьшить допустимую ско¬
рость движения.Рассматривая вопросы, связанные с транспортировкой ракеты,
необходимо иметь в виду, что выход ее из строя (отказ) редко
бывает связан с разрушением в буквальном смысле этого слова.
Обычно разрушение является результатом постепенного накопле¬
ния повреждений, остаточных деформаций, усталостных трещин
и т. п., которые, достигнув определенной величины, начинают пре¬
пятствовать нормальной эксплуатации конструкции. Поскольку
нагружение, которому подвергается ракета в течение срока служ¬
бы, представляет собой случайный процесс, то и накопление по¬
вреждений в конструкции является случайной функцией времени.
Поэтому при точном подходе к решению транспортировочных за¬
дач, особенно твердотопливных ракет, необходимо прибегать к
статистическим (вероятностным) методам расчета.Разрушение ракеты не является массовым событием и, кроме
того, эксплуатация ракетных конструкций протекает, как правило,
в неоднородных условиях. Эти две причины серьезно затрудняют
возможности с.'мистических методов расчета, оставляя за ними
роль вспомогательного средства исследования, правда, успешно
дополняющего вышеизложенный детерминистический подход.73
При подъеме ракеты на стартовый стол коэффициент попереч-
ной перегрузки определяется величиной предельного угловою
ускорения стрелы подъемного устройства (рис. 4.16):nyi = cos в + -j- {xlb — яД (4.49)где е — угловое ускорение стрелы;xib— координата оси вращения стрелы лафета.
Максимальное значение п достигается, очевидно, при е = 0
и, следовательно,= (4.50)Предельное значение углового ускорения обычноСОтах = 0,15 4-0,30 1 /сек*.Это ограничение обусловлено
поперечными нагрузками, воз¬
никающими в месте стыка бое¬
вой части с корпусом ракеты,
т. е. нагрузками на разрывные
болты (или иные соединитель¬
ные устройства). Так, если
Xib — Xi — ЗО м, a s = 0,30, то
(п ) =1 + Ш- 30= 1,92.V у,)т ах 1 9,81 >Таким образом, при (s)max =
= 0,30 \/сек2 коэффициент по¬
перечной перегрузки для масс,
размещенных в боевой части,
примерно равен двум, что соответствует максимально допустимому
значению п и в других случаях эксплуатации. Предельное значе¬
ние п бывает при разгоне и торможении системы. Приведенная
формула верна, если система «ракета — установщик» жесткая.
Если жесткость стрелы установщика сравнительно мала, то необ¬
ходимо учитывать перегрузки, возникающие вследствие упругих
колебаний стрелы. Если ракета имеет низкую частоту собствен¬
ных поперечных колебаний (тяжелая и длинная), то коэффициент
поперечной перегрузки следует определять, учитывая поперечные
колебания ракеты на стреле.Расчет нагрузок в рассмотренном случае (рис. 4.16) сводится
к построению эпюр перерезывающих сил и изгибающих моментов,
при этом корпус ракеты представляется обычно в виде балки с
шарнирными опорами, нагруженной распределенными по длине
массовыми силами с интенсивностью nVl'Sот'х-Если ракета стоит на пусковом столе, опиг>я^сь на опорные
кронштейны, количество которых, например, четыре, то схема на¬
гружения ее силами тяжести и ветровой нагрузкой, может бытьРис. 4.16. Нагрузки, действующие на
ракету при подъеме на пусковой стол74
представлена так, как это показано на рис. 4.17, 4.18. Наибольшее
значение силы тяжести — вес заправленной ракеты тт • g(). По¬
перечная ветровая нагрузка при отсутствии оперения7 —■ с ■ — • F— Lz о ‘к(4.51)гдеcz — коэффициент сопротивления корпуса, который нахо¬
дится из условий обтекания цилиндра дозвуковым по¬
током;р — плотность воздуха для минимальной температуры экс¬
плуатации;FK— площадь меридионального сечения корпуса.
Рекомендуемое значение коэффициента cz, отнесенного к пло¬
щади меридионального сечения
корпуса, 0,75ч-0,90.Наименьшая величина вет¬
ровой нагрузки, при которой
возможно опрокидывание (при
четырех опорных кронштей¬
нах и ветре в плоскости R\ —
R3) незаправленной ракеты
(рис. 4.17).= mki-a-g0''minжХЩМ
{Jomot2аIE(,~*1ЦД)’(4.52)Рис. 4.17. Ветровая нагрузка на
стартеРис. 4.18. Ветровая на¬
грузка на старте, дейст¬
вующая под углом 45’где тк, — масса сухой ракеты;I — длина ракеты;а — расстояние от продольной оси до опорного крон¬
штейна.Наиболее опасным в отношении устойчивости ракеты на столе
является направление ветра под углом 45° к плоскости установки
кронштейнов (рис. 4.18). В этом случае критическая ветровая на¬
грузка (2)кр, при которой возможно опрокидывание ракеты, най¬
дется из условия /?4 = /?з = 0, т. е./ *7\ Mki ' Ь ‘go~ (I-Хщд)-75
( 7\ __ mk\'a 'SO ' 'кр У~Т (l — х1цд)(4.53)Зная величину допустимой ветровой нагрузки (4.53), с по¬
мощью выражения (4.51) нетрудно найти максимально допусти¬
мую скорость ветра на старте. Если допустимая скорость меньше
заданной, то расположение опорных кронштейнов должно быть
изменено.Ветровая нагрузка вызывает появление и изгибающего момен¬
та, который может быть приближенно вычислен как произведениегде Z' — ветровая нагрузка части корпуса, находящейся выше
расчетного сечения;
х|цд— координата центра давления этой же части корпуса.
Аналогично можно найти зависимости и для большего количе¬
ства опорных кронштейнов.Заметим, что разрушение конструкции на столе может про¬
изойти и вследствие ветрового резонанса, который вызывается пе¬
риодическими силами, возникающими при образовании вихревых
дорожек Кармана.1. Абрамович Г. Н. Прикладная газовая динамика. Гостехтеоретиздат,2. Б е с с е р е р К. У. Инженерный справочник по управляемым снарядам.
Воениздат, 1962.3. Беляев Н. М. Сопротивление материалов. Гостехтеоретиздат, 1953.4. Бонни Е. А., Цукров М. Д., Бессерер К. У. Аэродинамика, тео¬
рия реактивных двигателей, конструкции и практика проектирования. Воениз¬
дат, 1959.5. В о р о н к о в И. М. Курс теоретической механики. Гостехтеоретиздат,1954.6. Л е в и н с о н Я- И. Аэродинамика больших скоростей. Оборонгиз, 1950.М—Z Лщ),(4.54)ЛИТЕРАТУРА К ГЛАВЕ IV1953.
\ГЛАВА VДИНАМИЧЕСКИЕ НАГРУЗКИ, ДЕЙСТВУЮЩИЕ
НА РАКЕТУ В РАЗЛИЧНЫХ УСЛОВИЯХ
ЭКСПЛУАТАЦИИ§ 5.1. ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ КОЛЕБАНИИ.ЗАДАЧИ ДИНАМИЧЕСКОГО РАСЧЕТА КОНСТРУКЦИИЗнакомясь с особенностями действия на ракету кратковремен¬
ных и быстроизменяющихся нагрузок, вспомним основные понятия
теории колебаний на' примере колебаний системы с одной сте¬
пенью свободы.Колебанием называется периодическое движение, т. е. такое
движение, которое повторяется по истечении некоторого проме¬
жутка времени, называемого периодом колебания. Период коле¬
баний обозначается буквой Т и обычно измеряется в секундах.
Простейшим видом периодического движения является гармони¬
ческое колебание (рис. 5.1); в этом случае перемещение х пропор¬
ционально синусу или косинусу линейной функции времени t:х — А ■ sin (u>t + е) или х — А ■ cos (<о£ + е), (5.1)где А — амплитуда колебания;Е — фазовый угол, определяющий величину перемещения
при ^=0.Величина, обратная периоду /==—, называется частотой ко¬
лебания и измеряется числом колебаний в одну секунду. Еди¬
ница частоты — герц (гц). В уравнение (5.1) входит величина <о,
известная под названием угловой, круговой или циклической ча*
стоты; измеряется она числом радианов в секунду.Соотношение между со и f выражется формулойш — 2тс • /.В дальнейшем будем рассматривать колебания упругих механи¬
ческих систем. Важнейшей величиной, характеризующей «дина*77
мическое» поведение механической системы, является число ее
степеней свободы. В динамике упругих систем степенью свободы
называют количество независимых геометрических параметров,
определяющих положение всех масс при всевозможных упругих
деформациях системы. Системами с одной степенью свободы на¬
зываются такие, у которых для полной фиксации их геометри¬
ческого состояния в любое мгновение достаточно знать один па¬
раметр, например положение определенной точки.Классический пример колебательной системы с одной степенью
свободы — груз, подвешенный на пружинке таким образом, что
направляющие позволяют ему перемещаться лишь вверх и вниз
по вертикали (рис. 5.2). С увеличением числа сосредоточенных
хV///7//Рис. 5.2.Пример си¬
стемы с од¬
ной степенью
свободымасс в системе и снятием ограничений в направлении движения
увеличивается число степеней свободы системы. В системах с рас¬
пределенными параметрами (балки, стержни, пластинки и т. д.)
каждая частица обладает массой, а взаимодействие частиц между
собой вызывает возникновение сил упругости и трения. Чтобы
задать состояние такой системы, необходимо знать положение
каждой ее точки, и поэтому число степеней свободы таких систем
делается бесконечно большим. Колебания систем с конечным чис¬
лом степеней свободы описываются обыкновенными дифференци¬
альными уравнениями, а систем с бесконечным числом степеней
свободы — уравнениями в частных производных. Силы трения в
колебательных системах вызывают рассеивание энергии. Посколь¬
ку природа этих сил во многих случаях не выяснена, то матема¬
тическое выражение для них имеется не всегда. Часто исполь¬
зуется гипотеза вязкого трения, согласно которой предполагается,
что силы трения пропорциональны скорости перемещения. Коле¬
бания, которые происходят при отсутствии внешних сил, назы¬
ваются свободными, или собственными. Вследствие наличия сил
трения свободные колебания более или менее быстро затухают.Колебания, происходящие при воздействии внешних возмущаю¬
щих сил, называются вынужденными.78
Свободные колебания представляют собой в общем случае
сумму гармонических колебаний, причем число гармоник и соот¬
ветствующих им частот равно числу степеней свободы системы.
Частоты располагаются в порядке возрастания. Низшая частота
называется частотой первого тона, затем идут частоты второго и
последующих тонов. Наиболее опасны для корпуса ракеты коле¬
бания двух — трех низших тонов, определением которых чаще
всего и ограничиваются.Формой колебаний данного тона называют функцию, выра¬
жающую соотношение амплитуд перемещений отдельных частей
ракеты при колебаниях этого же тона. Форма колебаний не зави¬
сит от начальных условий и определяется с точностью до постоян¬
ного множителя.Точки системы, не отклоняющиеся от положения равновесия
при колебаниях, называются узловыми. Число узлов для какой-
либо формы колебаний равно порядку соответствующей ей ча¬
стоты собственных колебаний. При действии на упругую систему
внешней гармонической силы возникают собственные затухающие
колебания, зависящие от начальных условий, и вынужденные гар¬
монические колебания с частотой внешней силы. При совпадении
частоты возбуждающей силы с частотами собственных колебании
системы будут наблюдаться резонансы, общее число которых
равно числу степеней свободы. Амплитуды колебаний при этом
могут возрастать вплоть до разрушения системы. С увеличением
сил трения, действующих в системе, резонансные пики сглажи¬
ваются и несколько смещаются.Важным понятием вынужденных колебаний является понятие
коэффициента динамичности, который выражает отношение дина¬
мического перемещения к перемещению, вызванному статическим
действием этой же силы,- т. е. показывает увеличение напряжен¬
ности конструкции, вызванное динамичностью приложения на¬
грузки.Уравнение свободных колебаний системы с одной степенью
свободы при отсутствии сил трения может быть записано в видетх + сх = Оилих + ш2 • х = 0, (5-2)где с — коэффициент жесткости системы и со = Vir . Решение
этого уравнения, как известно, записывается следующим образом:х = х0- cos at + sin u>t (5.3)илих — A - sin (м2? + е),(5.4)79
где A=J/ х%-f е = arc tg; х0—начальное отклонение и v0 —скорость массы в момент £=0.При действии на массу силы, изменяющейся во времени по
какому-либо закону P—F(t), система будет совершать вынужден¬
ные колебания, описываемые следующим дифференциальным
уравнением:тх + с • х = F (t)или3e + i02.x = m = j(t). (5.5)Частное решение уравнения вынужденных колебаний опреде¬
ляется выражениемtЛ: =:=~ |/ (Л) sin {t — tx) • dtx. (5.6)оПри переходных процессах полное решение находится как сум¬
ма выражений (5.4) и (5.5). При наличии в системе сил затуха¬
ния R = a-x, пропорциональных скорости перемещения л:, уравне¬
ние Свободных колебаний записывается так:о I 0 „ , <лХ0_1_ • р а ГГ* г се •x= e~nt х,cos а>/ + z’°- ^ -■■■— sin (5.7)илигдех = А-е п1 • sin («о/ + е), (5.8)°1-*0I’o + rix0 ’<*>i = K<o3-/*2; П = 2^; Tx = ^~(а — коэффициент сопротивления). Из уравнения (5.8) видно, что
амплитуда колебаний системы с сопротивлением с течением вре¬
мени убывает по экспоненциальному закону, асимптотически при¬
ближаясь к нулю (рис. 5.3). Коэффициент затухания, представ¬
ляющий отношение абсолютных значений двух последовательных
амплитуд, может быть определен по следующей зависимости:А-е~~п11* = A,e-n(t+T,) == епТ‘ \Натуральный логарифм от коэффициента затухания ф называется
логарифмическим декрементом затухания за период8 = In ф = пТх. (5.9)80
При действии на систему с одной степенью свободы возмущающей
силы перемещение записывается следующим образом:(5.10): Г, 1 I4*! \ X
' \: \ /
\ /Ае nt\ 7-ч—,\ i ?\ • /\ 1 /\ 1 /
\ • /\1 //У/////Более подробные сведения читатель найдет в любом курсе
теории колебаний, например 11].Известно, что при действии динамических нагрузок на ракету
в ее корпусе возникают колебательные процессы, которые при
неблагоприятном сочетании факторов могут оказаться опреде¬
ляющими для прочности и надежности конструкции ракеты.Задачей динамического
расчета является: определе¬
ние максимальных внутрен¬
них динамических усилий и
сравнение их с предельными
или разрушающими, а так¬
же расчет динамической
устойчивости элементов кон¬
струкции ракеты и ракеты
в целом.Главнейшими динамиче¬
скими характеристиками
конструкции являются соб¬
ственные частоты (или пе¬
риоды свободных колеба¬
ний) и формы колебаний.Нели нагрузка нарастаетили вообще претерпевает изменения в течение времени, не превы¬
шающею два — три периода свободных колебаний, то такая на¬
грузка по отношению к конструкции может считаться динамиче¬
ской и быстро изменяющейся.Если продолжительность изменения нагрузки велика и превы¬
шает три — пять периодов свободных колебаний, то влияние такой
нагрузки близко к статическому. Сказанное подтверждает перво¬
степенное значение низших частот свободных колебаний, посколь¬
ку продолжительность изменения нагрузки, соизмеримая с пе¬
риодом свободных колебаний первого — второго тонов, ока¬
зывается значительно больше периодов колебаний высших
топом.Стремление к уменьшению пассивной массы ракеты приводит
к широкому использованию тонкостенных конструкций, к сниже¬
нию жесткости корпуса, что вызывает увеличение периодов сво¬
бодных колебаний. Последнее делает корпус ракеты более чув¬
ствительны м к внешним нагрузкам, так как расширяется диапа¬
зон ширу.'ЮК, создающих заметный динамический эффект.При иоздействии динамических нагрузок в корпусе возникаютРис. 5.3. Экспоненциальное затухание коле¬
баний4-173081
упругие колебания. Для корпуса ракеты различают продольные,
крутильные и изгибные колебания.Продольные колебания вызываются быстрыми изменениями
осевой нагрузки, такими, например, как нарастание или спад тяги
двигателя, пульсация, осевые силы при разделении ступеней и т.д.
Не исключено возникновение таких колебаний, при которых пуль¬
сация тяги, вызывая колебания давления топлива на входе в дви¬
гатель, может существенно усилиться до опасных размеров.Большая длина при относительно малой изгибной жесткости
делает конструкцию ракеты чрезвычайно чувствительной к изгиб-
ным колебаниям. В полете изгибные колебания могут вызываться
атмосферной турбулентностью, порывами ветра, толчками при
разделении ступеней, автоколебаниями системы управления и т.д.
При наземной эксплуатации изгибные колебания возникают от
толчков и ударов при транспортировке и такелажных работах.
Толчки и удары, являющиеся источником изгибных колебаний,
возникают также при старте из шахтного сооружения как в дви¬
жении, так и в момент схода с направляющих. Кроме того, сле¬
дует учитывать упругие колебания ракеты, расположенной в шахт¬
ном сооружении, при действии на нее сейсмо-взрывных нагрузок.
Исследование перечисленных вопросов усложняется по двум при¬
чинам- Первая из них относится к жидкостным ракетам и заклю¬
чается ,в необходимости учета подвижности больших масс жид¬
кости в топливных баках. Известные решения этой задачи даже
для наиболее простых случаев требуют громоздких математиче¬
ских расчетов. Вторая причина — случайный характер значитель¬
ной части возмущающих нагрузок, что требует привлечения ста-
тистических методов исследования.При расчете вынужденных колебаний определяются макси¬
мальные перемещения частей конструкции, или коэффициенты ди¬
намичности. Затем находят деформации и напряжения и прове¬
ряют прочность.Оценивая динамическую устойчивость элементов конструкции,
определяют значения частот и амплитуд возмущающих нагрузок,
при которых амплитуды колебаний могут неограниченно возра¬
стать (резонанс), и вычисляют границы зон этой неустойчивости.В рационально спроектированной конструкции эксплуатацион*
ные параметры нагрузки должны находиться вне пределов зон не¬
устойчивости.В заключение заметим, что задачи динамического расчета не
исчерпываются перечисленными выше. При детальном анализе
конструкции необходимо исследовать динамические характеристи¬
ки большинства систем, агрегатов, узлов и деталей ракеты, на¬
пример систем питания и наддува, трубопроводов, подвески при¬
боров, отбросных элементов (обтекателей, штепсельных разъемов,
гидросоединений) и т. п. К сожалению, ограниченность объема
книги заставляет остановиться на вопросах, связанных лишь с ди¬
намическими расчетами собственно корпуса ракеты.82
§ 5.2. СВОБОДНЫЕ ПРОДОЛЬНЫЕ КОЛЕБАНИЯ КОРПУСА РАКЕТЫРешению любой задачи динамики предшествует анализ работы
конструкции и построение системы гипотез и допущений, позво¬
ляющих правильно выбрать расчетную схему и упростить матема¬
тическую формулировку задачи. Рассмотрим последовательность ре¬
шения задачи о свободных продольных колебаниях корпуса ракеты.Решая задачу динамики, необходимо правильно составить ма¬
тематическое описание движения исследуемой системы в зависи¬
мости от ее параметров, действующих сил и расчетных возмож¬
ностей. Очень важно предельно упростить задачу, выбрав такую
расчетную схему, кото- ..... ...рая позволит решить д . . /^2 4 А . . Аданную задачу с до- ДОстаточной ТОЧНОСТЬЮ ^ \2 с 23 6 п-1,пимеющимися в распо- аряжении вычислитель¬
ными средствами. При m/ q т3 тпOvJпимать РИХцелыйЯ % OV4A^OWVK>WAQ)/WOдопущений, упрощаю- c?Jщих решение. Прежде OsAA
псего это относится
к выбору числа степе- ®Ней свободы. Строго Рис. 5.4. Неразветвленная (а) и разветвлен-
говоря, корпус ракеты ная ^ расчетные схемыпредставляет собойконструкцию с бесконечно большим числом степеней свободы, но
при изучении продольных колебаний вполне допустимо представ¬
ление ракеты в виде системы с конечным числом степеней
свободы, т. е. приведение реальной конструкции к системе с со¬
средоточенными параметрами. Такая схема характеризуется неде-
формируемыми массами и невесомыми жесткостями. Использо-
ишше в этой задаче расчетной схемы в виде стержня переменного
сечения и переменной массы, не давая значительного повышения
ючности, существенно усложняет расчет.В зависимости от конструктивной схемы ракета может быть
приведена к неразветвленной или разветвленной схеме (рис. 5.4).I In рис. 5.4 через т,- обозначены сосредоточенные массы, а через
i'.t соответствующие жесткости. Разветвленная схема соответ-
сгнует пакетной конструкции ракеты. Кроме того, разветвленная
схема учитывает подвижность жидкости в баках, вызванную ее
сжимаемостью и податливостью днища и стенок бака. Ракеты
ишрдого топлива последовательного сочленения приводятся обыч¬
но к неразветвленной схеме. Следует заметить, что сосредоточен¬
ные массы в ответвлениях смещены в сторону условно. В расче-
|/|\ полагаем, что их центры лежат на общей оси симметрии
сие темы.V83
Приведение реальной конструкции к расчетной схеме требует
решения двух следующих вопросов:— выбор количества и величины сосредоточенных масс;— определение жесткостей (податливостей) упругих связей.
Количество сосредоточенных масс приведения определяется изанализа конструкции. В каждой ракете имеются резко выражен¬
ные сосредоточенные массы боевой части, приборного отсека, хво¬
стового отсека с двигателем, соединенные между собой тонкостен¬
ными оболочками баковых отсеков. В самих баках основная частьмассы приходится на сосредоточенные массы днищ со шпангоу¬
тами.Кроме того, значительную часть массы ракеты составляет топ¬
ливо, которое может быть представлено в виде сосредоточенных
масс, присоединенных к корпусу с помощью упругих невесомых
связей.Сосредоточенные массы расчетной схемы выбираются всоответ*
ствии с распределением масс реальной конструкции. Величина
каждой массы определяется как сумма основной сосредоточенной
массы конструкции и части от примыкающих к ней распределен¬
ных масс малой интенсивности.Пример составления расчетной схемы для одноступенчатой
жидкостной ракеты показан на рис. 5.5.После того как количество и расположение сосредоточенных
масс определены, приступают к расчету жесткостей упругих свя¬
зей. Напомним, что жесткостью упругой связи (пружины) назьь
вают силу, которую необходимо приложить, чтобы концы пружи--
ны переместились на единицу длины. При расчетах часто опери¬
руют величинами, обратными жесткости,— податливостью.84
Для расчета жесткости часть корпуса, расположенную меж¬
ду близлежащими массами, разбивают на участки, в пределах
которых можно полагать поперечное сечение корпуса по¬
стоянным.Податливость каждого из участков вычисляется по известной
формуле сопротивления материаловгде I — длина участка;F—площадь поперечного сечения;Е—модуль упругости первого рода.Податливость части корпуса равна сумме податливостей всех
участков:Несколько сложнее обстоит дело с расчетом податливости упру¬
гой связи жидкости с корпусом. Осевое перемещение центра тя¬
жести жидкости может происходить из-за радиальной деформа¬
ции стенок бака, деформации днища и, наконец, сжимаемости
самой жидкости, т. е.где ер—податливость упругой связи, вызванная радиальной де¬
формацией стенок бака;
едн — податливость, вызванная деформацией днища;
есж— податливость, вызванная сжимаемостью жидкости.
Наибольший вес в этой сумме имеет первый член. Не при-
иодя довольно сложных расчетов, ограничимся изложением
лишь основных результатов и расчетных формул для вычисле¬
нии <?р.Величина ер находится по формулеили(5.11)п*=/илиП(5.12)(5.13)ее тт-ш"(5.14)85
где tnT — масса жидкости в баке;ш—частота первого тона колебаний оболочки бака.Для полностью заправленного бака (рис. 5.6) можно восполь¬
зоваться формулойш У [l2/?2(l — (х3)' (т~ + }'2) + (rf+w] ’ (5-15), пк- Rгде т — число волн по окружности поперечного сечения оболоч
ки (полагают т = 4—5);п — число полуволн по длине оболочки (полагают п = 1);
у. — коэффициент Пуассона;Рпр — рст ‘ (1 + Jt\: [ ~' рЖ' .^ ) —приведенная плотность материа¬
ла стенки бака с учетом присоединенной массы жидкости;Рст и Рж—плотность материала стенки бака и жидкости;R, /и8 — радиус, длина и толщина стенки бака.В дальнейшем ограничимся рассмотрением продольных коле¬
баний неразветвленной системы, что позволит несколько сокра¬
тить выкладки, однако основные результаты этого решения в рав¬
ной степени применимы и для разветвленных систем.Пусть координаты определяющие положение точек системы,
отсчитываются от положения равновесия (рис. 5.7).Чтобы составить дифференциальные уравнения движения,
рассмотрим движение i-й массы (рис. 5.8). Слева и справа на
массу действуют только силы упругости, определяемые разностью
перемещений концов пружин.Учитывая выбранное положительное направление отсчета ко¬
ординаты х, получимтi ■ xt — С,_1( t ■ (^_j х^ Cit • (xt (5.16)86
Количество таких уравнений, очевидно, равно числу выбран¬
ных масс или числу степеней свободы системы. Несколько отли¬
чаться будут уравнения для первой массытх ■ хх ■С, ,2 (-*-! Xi)и для последней массытп ■ хп — Сл_, п • (хя_г — хпуmL-i Vn,L Vi Сц<! тм
v*VA' • ЛЛ^ • • Л/VV^ —■(5.17)(5.18)07,JCiХМоопРис. 5.7. Схема отсчета координатНетрудно заметить, что эти уравнения получаются из общего,
если в нем положить С0,i и Сп<п+1 равными нулю. С учетом этого
замечания запишем систему уравнений продольных колебании
в видеmixi — £/_], i {xt_j х;) С, ;+1 (л;,- (5.19)*=1,2... я.Задача динамического расчета сводится к определению коор¬
динат Хг как функций времени и к определению динамических
усилий в сечениях между массами,
равных усилиям в упругих связях:^l-1,i = C._hl-(xl^-xi). (5.20)Решение системы уравнений (5.19)
разыскиваем в видеxt — At • cos (mt + s), (5.21)г. e. полагаем, что все точки системы колеблются с одинаковой
частотой и находятся в одной фазе.Подставив выражение для xt (5.21) в систему уравнений (5.19),
получим7И;Ш2 - Лг = С1} (■ л,.) — СЛ г+1 • (Лг Л.+1)или^ 1, / А-i + (*-'/—I, I + г+i mi ■ ш2) - Лг С( /+1 • Л/+1 = 0. (5.22)Полученная система уравнений является однородной относительно
и» ком и х амплитуд Л,-. Как известно, отличное от нуля решение87т,C(.,jCj,i+iffi-ag/ч)Рис. 5.8. Силы, действующие
на /-ю массу
эта система имеет лишь в том случае, если определитель системы
равняется нулю, т. е.С.1,2т1 ш2, — С121 ОСя-1.= 0.Выписанный определитель называется вековым уравнением или
уравнением частот. Порядок этого уравнения равен п, следова¬
тельно, можно ожидать п значений частот со (отрицательные кор¬
ни отбрасываем, все корни действительные). Однако несложный
анализ убеждает, что один из корней нулевой. Физически нулевая
частота соответствует перемещению ракеты как твердого тела,
когда xi==x2= ,... — хп.Следовательно, количество частот на единицу меньше количе¬
ства масс или числа степеней свободы системы.Рассмотрим в качестве примера простейшие случаи.а) п = 2Определитель частотCsj 2 Т1%\ ' (D3, — 2Cj 9, Сj г) пт 9(0Частота колебаний находится из уравнения
rtil ■ т., • ш3 — Clt 2 (/«[ + т.,) = 0.б) п = 3Определитель частотС| 2 ' ID", 2* 0(yj 2» С] 2 К ^2 3 " ^= 0.0.— с2, 3,J2, 3С2 3 — щ *= 0.Частоту колебаний находим из уравнения
( т2 + т3 , т /я, + т2\• У • ш3 + т{ + т2 + /и3 = 0.<-2, 3 /тх-тгтъ ^а'Сг, з Ч 1 £-1,2Раскрытие и решение определителя частот при п ^ 4 требует
громоздких вычислений, быстрорастущих с увеличением порядка п.Итак, будем полагать, что все частоты системы найдены. Рас¬
положим их в порядке возрастания<»1 < <»2 < < “„-ГПодставляя в систему уравнений (5.22) одну из найденных частот
w3(.S=l, 2... п—1), убедимся, что мы не можем найти амплиту-
ды колебаний Ait а отыскиваем лишь их отношение, например
А„ 'Эти отношения будут различны в зависимости от номера ча¬
стоты, поэтому введем систему коэффициентов= (5.23)Пп, 5По физическому смыслу коэффициенты а,->8 выражают соотноше¬
ние между амплитудами точек системы при колебаниях s-ro тона,
т. е. являются коэффициентами форм колебаний. Исключая из
уравнений (5.22) амплитуды Л,, а с помощью выражения (5.23),
получим систему уравнений для определения а;, „ в виде— tnt • а,2 • а,_, = С,_и i , — «• ,) —— С1,1+1 (а1,з~а1+1,з) (5-24)илиС1-1, L' а/—1, s + (pl-1, I “Ь ^i, (+1 mi' wl) аг, S-С,. ж'аж., = 0- (5-2S)Полученная система уравнений для любого s-ro тона легко ре¬
шается, начиная с последнего п-го уравнения системы, так какGtп, я = 1 •Важнейшим свойством коэффициентов форм колебаний, на
доказательстве которого мы не останавливаемся, является орто¬
гональность, записываемая в виде [1, 2]П2 mi • я,- s ■я,- г = 0 при s =4= /■. (5.26)i=iМожно также показать, чтоП2«V«,, = 0. (5.27);=1Общее решение системы дифференциальных уравнений полу¬
чается как сумма отдельных частных решений, т. е.л-1xi ~ 2 Aj с • cos (ш, • t -f es) (5.28)5=1ИЛИл-1*; = 2 л,, •«/,• cos (<»/ + sj. (5.29)5=1Коэффициенты An,s и s., находим из начальных условий. Система
начальных условий в общем случае должна содержать значения89
координат -Vj(0) и скоростей .v,(0) при t = 0. Наиболее типичнымявляется случай отсутствия начальных скоростей Х;(0)=0 или их
равенство между собой. Легко видеть, что при этом ss = 0 ил-1^ = 2 А». s'Zi.s COSw/. (5.30)х,5=1При ^ = 0 очевиднол-15=1i = 1, 2... /г.Умножив обе части уравнения (5.31) на т,- а;, г и просуммировав
по г от 1 до п, получимп п н-12 “ 22 *•*<.«• ^5,32')
;=1 I — I S:=lВ правой части изменим порядок суммированияII х Н-1 II2 г xi (°)=2 An,s 2 mi ■ *i.r ■ 7-i. s- (5-33)/=1 S=1 1=1Вследствие свойства ортогональности в правой части вместо сум¬
мы no s останется только один член, где £=s. ОтсюдаП(0)= ¥ • (5-34)27, лТаким образом полностью определены параметры свободных ко¬
лебаний системы.§ 5.3. ВЫНУЖДЕННЫЕ ПРОДОЛЬНЫЕ КОЛЕБАНИЯ КОРПУСАРАКЕТЫОпределив характеристики свободных колебаний системы, мы
решили только часть задачи динамического расчета, хотя и важ¬
ную. Другую часть задачи — расчет вынужденных продольных
колебаний корпуса ракеты — начнем с постановки задачи и состав¬
ления уравнения вынужденных колебаний системы.Как уже указывалось в предыдущих параграфах, продольные
колебания могут возникать:— при резком нарастании тяги в период запуска двигателя;90
при резком спаде тяги в момент выключения двигателя;
при пульсационном режиме работы двигателя;
в результате осевых возмущений при разделении ступеней
н иг некоторых других факторов.Рассмотрим физическую сторону возникновения продольных
колебаний.Известно, что перед запуском двигателя полностью заправлен-
ная ракета стоит вертикально на пусковом столе. Ее корпус на¬
гружен силами веса и реакций опор. При запуске двигателя
вследствие нарастания тяги во времени возбуждается колебатель¬
ным процесс, который накладывается на статическое действиеI iiiti. В результате этого происходит увеличение сжимающих уси¬
лии в корпусе. Продолжительность нарастания тяги т составляет
обычно 0,5—0,7 сек. Очевидно, динамический расчет с учетом вы¬
нужденных колебаний следует производить лишь для случаев,
когда период свободных колебаний первого тона заправленной
ракеты больше чем 0,1—0,2 сек.Выключение двигателя предшествует либо отделению первой
ступени, либо отделению боевой части. Топливо соответствующей
ступени в значительной части в этот момент уже израсходовано.
Корпус перед выключением двигателя сжат тягой, силами инер¬
ции и аэродинамическим сопротивлением (если рассматривается
движение в плотных слоях атмосферы). При резком спаде тяги
сжимающие усилия в сечениях корпуса начинают уменьшаться.
Подобно пружине элементы корпуса по инерции проходят равно¬
весное положение, осевые усилия меняют знак, возникают напря¬
жения растяжения. Затем колебания более или менее быстро за¬
тухают. Опасной является лишь первая волна растяжения, ибо
вторая и последующие имеют значительно меньшие амплитуды.
Заметим, что не все элементы корпуса чувствительны к растяже¬
нию. Так, очень хорошо сопротивляются растяжению тонкостен¬
ные элементы (оболочки, стрингеры и т. д.). Для этих элементов
более опасной является волна сжатия, но и она в данном случае
не может довести эти элементы до разрушения, ибо, как будет
показано ниже, динамическая нагрузка гю модулю при выключе¬
нии двигателя оказывается меньше сжимающих статических на¬
грузок. Динамическое растяжение при спаде тяги двигателя ока¬
зывается расчетным в основном для болтовых соединений, так как
при этом нагружаются разрывные и стыковочные болты отсеков
и ступеней, соответствующие фитинги и т. п., в результате чего
возможно раскрытие стыков, что недопустимо.Продолжительность резкого спада тяги при выключении дви¬
гателя составляет в зависимости от типа двигателя 0,01—0,02 сек,
что может вызвать весьма высокие динамические нагрузки.Известно, что во всех типах двигателей тяга двигателя пуль-
сирует по причинам, связанным с процессом горения топлива.
Пульсация опасна не столько нарушением прочности корпуса,
сколько возможностью возникновения при этом колебаний давле¬91
ния топлива в трубопроводах, так как последнее может усилить
в свою очередь пульсацию давления в камере сгорания, а следо¬
вательно, и тяги. В полных динамических расчетах это явление
подлежит обязательному исследованию. Рассмотрим только коле¬
бания собственно корпуса ракеты. Как и в предыдущем парагра¬
фе, вначале остановимся на многомассовой схеме расчета.Пусть, как и раньше, координаты xt отсчитываются от поло¬
жения равновесия. В общем случае на каждую точку системы,
помимо сил упругости связей, действует возмущающая сила
Pi(t)—известная функция времени (рис. 5.9).mL-t mi wi+i• 11С; 1 ; хНС i [t| x"4. (\v 1-7,1 fКА/SAMf-Л • ••(t) V] V Vpfifrz.f’ulftKJX'L-1Xi
-» 4*1Рис. 5.9. Действие сил на произвольные точки си¬
стемыСоставляя уравнения движения, как и в случае свободных
колебаний, введем дополнительно возмущающие силы Pi(t). Тог¬
да уравнения вынужденны^ колебаний' ракеты будут описываться
следующей системой уравнений:mixi — Ct_u . ■ (xi_l х^ С. ;_|_j • (л,- ^i+i) + Pi (0- (5.35)Чтобы приступить к решению этой системы уравнений, следует
иметь решение этой системы для свободных колебаний, для чего
необходимо иметь значения собственных частот <oi, шг, шз ... и со¬
ответствующих им коэффициентов формы колебаний аг1, аг>2, аг>8...
Кроме того, должны быть известны коэффициенты Л„,8 и ss, опре¬
деляемые из начальных условий.Естественно, что, чем больше вычислено частот свободных ко¬
лебаний, тем выше точность расчета, однако следует заметить, что
с увеличением частоты ее влияние уменьшается, а объем вычисле¬
ний сильно возрастает. Обычно ограничиваются лишь первыми
двумя —тремя частотами.Известны несколько методов решения системы уравнений
(5.35). Здесь ограничимся изложением метода, основанного на
разложении решения по собственным формам колебаний [5].Представим частное решение системы (5.35) следующим об¬
разом:л-1(5.36)5=1где Ts—неизвестная пока функция времени.92
После подстановки его в систему (5.35) получимл-iV—5=1+ С,.,+,-«1+,,1П)-Р,(0 (5.37)г= 1, 2...п.Уравнение (5.37) можно упростить, если заменить выражения,
стоящие в квадратных скобках, в соответствии с уравнением
(5.25) тождественным ему выражением mi • <*it s • «4Таким образом, получим следующую систему уравнений:п-i(5-38)5=1i = 1, 2... л.Чтобы избавиться от суммы в левой части уравнений (5.38),
умножим первое из них на коэффициент формы а\,т, второе —
на а.о, г и так до последнего уравнения. После этого сложим все
полученные выражения. Поскольку номер тона г может получать
любое значение от 1 до п—1, то получим новую систему из ti—1
уравнений:Я Я-1 „• 2 щ ■ «/. , (Ts + < ■ Ts) = 2 «I., • Pi (О(=1 s=l ,=1г = 1, 2... п — 1.Поменяем в левой части уравнений порядок суммированиял—1 л я2 (7*1+ • Ts) 2 mi • • а/,. = 2 ал ^ (О4=1 (=1 1=1r= 1, 2... п — 1.Вследствие свойства ортогональности коэффициентов форм коле¬
баний слева из всех п — 1 членов суммы по s сохранится лишь
один и именно тот, где r=s. Таким образом, приходим к следую¬
щей системе, которая распадается на п—1 независимых урав-<
нений:ПТ'+а*.Т5 = Щ — . (5.39)2 mi-Is
/=is — 1, 2... п — 1.93mi' а(, s'i s [^-1, / ■ Л1—\, s (pi—l,l + ^i, i+l) ai,4 “b
Решение полученных уравнений не представляет особого
Правая часть является известной функцией времени, поэтотг^]!?^
шение находим по формуле (5.6):t •т, = п ■ — f 2 “«. *•Pi W •sin ш* ~udt' <5-40)“5 2 г о i=1i=1s= 1, 2...Л — 1.Общее решение уравнений вынужденных колебаний получим как
сумму решений (5.29) и (5.36):П — 1 // — 1xi = 2 л«’ »•*/.*cos (ш/ + •*) + 2 (5-41)
5=1 5=1где функции Т8 определяются выражениями (5.40). Зная смеще¬
ния Xi отдельных точек, можем рассчитать динамические усилия
растяжения в произвольный момент времени•‘Ч, Z-fl “ С/, 1+1 ■ (Xi Xl+1) •Таким образом, задача решена в общем случае.Определим в качестве примера динамические нагрузки при
выключении двигателя. Предположим, что выключение двигателя
происходит на столь больших высотах, что аэродинамическим со¬
противлением можно пренебречь. На корпус, следовательно, дей-
ствует только тяга двигателя, приложенная к п-й массе, т. е.Р\ (О = Р2(/) ==... = (0 = 0, Рп (0 = Р (t).Закон изменения тяги аппроксимируем линейной зависимостью.Р«) = Р.-(1—f)nPH*<0P(t) — 0 при t > т, )где т — продолжительность спада тяги.При t=0, т. е. в момент начала спада тяги скорости точек систе¬
мы Xj(0) равны между собой, а смещения точек системы Xj(0)
определяются из условий статического сжатия корпуса силой Р0
и соответствующими ей силами инерции. При этих начальных
условиях ss = 0. Чтобы определить начальные смещения, Heo6xo-v
димо найти статическое усилие в сечении между г и Л-1 массами.*'
Очевидно, что это усилие равно произведению суммы масс от 1-й
до /-й на ускорение всей системы, т. е. (рис. 5.10)in,. ,+.<°>—2», *=■1=194
с другой стороныNi, 1+1 (°) = с1,1+1 • [*l (°) - xi+1 (°)]-Отсюда получаем систему п—1 уравнений для определения на*
чальных координатi*1 (°) — *1+1 (°) = ~п 2 т* (5’43)С i,i+k~l
(=ii = 1, 2... п — 1.9Координаты находятся с точностью до произвольного слагаемого,Что, однако, не является препятствием для дальнейших расчетов.Как и в общем случае, решение вынужденных колебаний на¬
ходится в виде разложения по коэффициентам форм колебанийг/Яку«««■ p(t Рр//7 —-WvfРис. 5.10. Действие сил при выключении двигателя(5.36). Разрешающие уравнения для определения функции вре¬
мени Т8 запишутся, очевидно, так:П + = (5-44)s= 1, 2.../г— 1.() 1 сюда7’, = —^ (5.45)VI 2 0i=iНаибольшие деформации растяжения наступают после прекра-
шгппи действия тяги, т. е. при t>т. Разбивая мысленно интеграл
(П.45) на два с интервалами от 0 до т и от т до /, замечаем, что
((следствие свойств (5.42) функции P(t) второй интеграл равен
нулю. Чтобы определить функцию Ts при t>х, необходимо вычис¬
лим. следующий интеграл:Пmi'%si—1—• j (i—95
Этот интеграл является табличным. После простых вычислений
получаем/=1sin ■-- cos <s>i -fcos—f-(5.46)Суммируя вынужденные колебания со свободными, получаем/7-1*/ = An,s 7Г2 \cOS<os-t +5=1-22 *<■»?..
1=1+аls-Ро Sin 2 f t us-x\
2i m‘\s 25=1 /=1Первый член оказывается пренебрежимо малым по сравнению со
вторым, и поэтому полагаем//-1Ч . Цу-т:(5.47)Просто находим и динамические усилияN —Сi,i+1 /+1п-1'I . 0>S-Xyto^.qj.cos(„,,_¥). (5,8,jgsem °v2 2^=1 (=iИспользуя полученную формулу, легко находим момент, когда
динамическое усилие достигает максимума.При запуске двигателя на старте скорость ракеты еще мала, и
поэтому аэродинамическое сопротивление также можно не учи¬
тывать. На ракету действует только тяга двигателя, приложенная
к п-й массе, т. е. как и в предыдущем примереЛ(0 = ^(0 = ... = /^(0 = 0, pn{t) = p(t).96
Закон нарастания тяги аппроксимируем линейнои зависи¬
мостью:Р(.*) — Ро'
P(t) = Po(5.49)где т — продолжительность выхода двигателя на режим.При / = 0 скорости точек системы %;(0) равны нулю, следователь*
но, es = 0. Смещения точек системы определяются из условий сжа¬
тия корпуса силами веса заправленной ракеты.Нетрудно заметить, что сила сжатия в сечениимеждуi-й и 1+1 массой равна — g0 ■ 2 mkk= i(рис. 5.11). Приравнивая силу веса силе упруго¬
сти, получаем уравнение для определения п—1
неизвестных начальных координатX, (0) - xi+1 (0){Гос,. Ж i=l
1, 2...Л — 1.(5.50)Координаты находят, как и раньше, с точностью (к)чо постоянного слагаемого,, что не отражается на ^уТ^\Чдальнейших вычислениях. раДля определения неизвестной функции време- Рис 51 j де1-,.ни Ts используем выведенное выше выражение ствие сил при(5.45). Наибольшие деформации, а следовательно, включении дви-п усилия ожидаются после достижения номиналь- гателя
пого значения тяги Р0, т. е. при t>т. Разбивая
интеграл (5.45) на две части и подставляя значения P(t) соглас¬
но выражениям (5.49), получимТ =т I |— \ sin №s (t — /j) (//. + j sin <ол (t — tL) (it-.■I, sВычисляем квадратуры, после чего искомую функцию записываем
м следующем виде:Ts = -п.V
f —1=1(, ssin -• COS [ы.-t-
\ s2 J(5.51)97
Суммируя вынужденные колебания со свободными, получаем пе¬
ремещение 1-й массы:Я— 1xi = An, s-COS *st +П— 1ai,s'Pоi—lCOS(»/-¥)(5.52)Отсюда находим динамические усилия в произвольный момент
времения-1ж“ж, *sin ■)' Л», j' cos со/ +■ COS(»/-¥). (5.53)5=1Исследуя полученное выражение, находим максимальное значе¬
ние динамической нагрузки в рассматриваемом сечении, которое
и вводим в прочностные расчеты.Выше рассмотрены свободные и вынужденные продольные ко¬
лебания ракеты с использованием в качестве расчетной многомас¬
совой «пружинной» схемы. В ряде случаев, особенно для ракет
с двигателями на твердом топливе, целесообразно использовать
в качестве расчетной схемы стержень переменного сечения. Оста¬
новимся на особенностях решения этой задачи.При использовании стержневой схемы предположим, что по¬
гонная масса т'(х) и жесткость EF(х) переменны по длине, т. е.
являются функцией х. Уравнение вынужденных продольных коле¬
баний для нашего случая запишем в видеJj- [Е■ F (х) • -g-] - т! (х) = р (х, 0, (5.54)^ *101. <■<»/где ч — продольное перемещение:Р(х, t) — погонная продольная возмущающая сила.Уравнение свободных колебаний получим, приравняв в уравнении(5.54) правую часть нулюткгО'Ч*)-зг]-”■'(*)-ж-0-(5.55)Представим решение уравнения (5.55) для s-ro тона колебаний
в виде гИ* (■*> t) = Ь (X) sin (со/ + es). (5.56)98
Подставив выражение (5.56) в уравнение (5.55), получим:
£[E.P(xyibjf]sсо\т! (х)(5.57)Функции cfs (х) подобно коэффициентам форм колебаний а г, 4
определяются частотой (тоном) колебаний и носят название соб¬
ственных форм колебаний. Искомые собственные формы колеба¬
ний, естественно, должны удовлетворять соответствующим гра¬
ничным условиям. Так, в случае свободных крндов стержняdjAx).dx■ 0 при х-■■ 0 и х — I,(5.58)где I — длина ракеты, что отражает отсутствие усилий на конце
стержня — ракеты. Точное решение системы уравнений (5.57) и(5.58) известно лишь для нескольких частных случаев распреде¬
ления массы и жесткости. Наиболее эффективным приближенным
методом решения данной задачи является метод последователь¬
ных приближений. С помощью этого метода можно вычислить
частоту собственных колебаний с любой желаемой точностью, а по
разности результатов последовательных приближений легко оце¬
пить погрешность. Применим этот метод к решению нашей зада¬
чи, для чего проинтегрируем уравнение (5.57), считая <ps(x) изве¬
стной функциейd<ts О) _ _
dx Е-F (х)f т' (■*) 9, (*) dx.(5.59)Постоянную интегрирования не выписываем, так как(5.58) следует, что она равна пулю. Интегрируя(5.59), получим?*(*) = —гдеX Xф*= ,f ТТПГ)' j m' W^'dx-0 оПостоянную Ds находим из условия (5.58), которое с
ражения (5.59) можно записать в следующем виде:1| ш' (х) • <ps (я) 'dx = 0.оПодставив выражение (5.60) в выражение (5.62)
|| iiki в, получимиз условия
выражение(5.60)(5.61)
учетом вы-(5.62)
и преобра*т' (х) Фs-dx(5.63)т' (х) dx99
ат' (x)-<S>s-dx(5.64)j т' (x)-dxОбозначимij т’ (х) Фs-dx(5.65)j т' (x)-dxитогда(5.66)Еще раз заметим, что при определении частоты форму колебания
находим с точностью до постоянного множителя, и поэтому вели¬
чина частоты, полученная на предыдущем этапе, не имеет значе¬
ния для определения ws в последующем приближении. Все это
несколько упрощает порядок вычислений, который будет выгля¬
деть следующим образом.Для нахождения низшей частоты toi произвольно задаемся
вероятной формой колебаний cpi, i (а) . В качестве первого прибли¬
жения принимаем форму колебаний стержня постоянного сечения
со свободными концами:где s — порядковый номер тона колебаний.Затем по выражению (5.61) вычисляем первое приближение
функцииПодставив полученное значение <t>i,i в выражение (5.65), полу¬
чим <pi,2 (-^), а из выражения (5.66) —Это и будет первым приближением собственной частоты первого
тона. Подставив ф1,2(^) в выражение (5.61), получим значение
Фj12, с помощью которого находим третье приближение формы
колебания 91, з(х) и второе приближение частоты(5.67)(5.68)(5.69)100
Повторяя этот процесс, получим последовательности cpi,r(x) и
<р, г+1 (л:), отношение которых стремится к квадрату собственной
круговой частоты первого тона., = / jГ ф.?1 ,rWЧастота первого тона(5.70)(5.71)'Pi, r+iWПри расчете второй формы колебаний должно вычисляться усло¬
вие ее ортогональности с первойIj т! (л:) • fi (л:) ■ <р2 (л:) dx = 0. (5.72)Чтобы удовлетворить это условие, к выражению формы колеба¬
ний второго тона (5.64) добавляется член 8-cpi(x), т. е.?2 (х) = ?;(*) + *• ®1 (X), (5.73)где/| т' (х)-Ф.г-йх•Ф2+0—?' (х) =j т' (х) • dx(5.74)Подставив выражение (5.73) в выражение (5.72), получим значе¬
ние искомого коэффициента оij т' (x)-<fr<f'2-dx(x)-dx(5.75)II дальнейшем расчет круговой частоты второго тона т произве¬
ли 1ся аналогично расчету частоты первого тона шь На этом часто
н ограничивают расчет свободных форм и частот продольных ко¬
лебаний.Решение уравнения вынужденных колебаний (5.54) подобно
многомассовой схеме расчета» отыскивается в виде разложения
но собственным формам колебанийи (■*, 0 = 2?* (■*) •Т*(5.76)I не искомая функция времени.101
Вместо бесконечной суммы обычно ограничиваются одним или
двумя членами разложения, что практически обеспечивает доста¬
точную точность. Подставляя решение (5.76) в исходное диффе¬
ренциальное уравнение вынужденных колебаний (5.54), получим:^.{т8'^[Е-Р{х)-а^^-т\х)-чЛх)-Щ==Р(х, t). (5.77)Исключая с помощью выражения (5.57), производные по х, полу¬
чим более простое уравнение- У {ts + *]Т5} • т' (х) • «Р, (х) =р(х t). (5.78)Написанное уравнение аналогично уравнению (5.3$) можно упро<
стить, заметив, что левая часть уравнения (5.78) представляет
собой разложение возмущающей нагрузки по собственным фор¬
мам колебаний ф5(х). Чтобы найти коэффициенты разложения,
умножаем левую и правую части уравнения (5.78) на уТ{х) • dx
и интегрируем по всей длине ракеты.Вследствие ортогональности собственных форм колебаний в
левой части из суммы сохранится лишь один член1 !— [Ts + • 'Л1 • J m' (X) ■ ?2 (х) ■ dx = j р (х, t) • <р, (х) • dxОили окончательноif Р(х, W-dxTs+«1-Ts = - \ , (5.79)J™' М■ ь (x)-dxгде s=l, 2 ... .Если возмущающая нагрузка известна, то вычисление правой ча¬
сти выражения (5.79) не вызывает особых затруднений. Так, на¬
пример, пусть нас по-прежнему интересует деформация корпуса,
вызванная изменением тяги при запуске или выключении двига¬
теля. Обозначим тягу через P(t). Координата сечения корпуса,
к которому приложена тяга, — хя. у. Тогда, очевидно, уравнение
(5.79) после элементарного предельного перехода можно перепи¬
сать в следующем виде:. (5.80)j rn\x)-?s tx)'dx102
IВеличину j m' (x) • (д;) • dx по внешней аналогии с массой иногдаОназывают приведенной массой и обозначаютiтпр, s = J т' (■*) • «Р* (Л) ■ dx. (5.81)оОчевидно, что каждой частоте cos соответствует своя приведенная
масса.Введя понятие приведенной массы (5.81), подучаем следую*
щее уравнение для определения функции Ts:Т, + *1-.Т. = -££--ъ(хд. у). (5.82)"*пр, 5Уравнение (5.82) является хорошо изученным линейным диффе¬
ренциальным уравнением второго порядка с постоянными коэф¬
фициентами, решение которого записываем следующим образом:Ts = Ascosu>s-t-t-Bs- sin t -j-I (6-83>а продольные перемещения корпуса при вынужденных колебаниях
находим в виде суммы°° (и = 21cos sin • t ++ T^~T-5P(V-Sin “sV-Udtt \-b(x), (5.84)rflnp, S V iS-tгде As и Bs определяем из начальных условий.Рассмотрим в качестве примера разобранный ранее случай спада
тигн при выключении двигателя. Ниже этот пример будет числен¬
но решен для случая «многомассовой системы». Здесь же оста¬
новимся только на решении задачи по «стержневой» схеме. Как
и раньше, будем считать, что закон изменения тяги во времени
линейный (5.42).Предположим, что в момент, предшествующий выключению
двигателя, корпус сжат массовыми силами и тягой Ра, колебания
корпуса отсутствуют (сопротивлением воздуха пренебрегаем).Осевые усилия в произвольном сечении корпуса находятся со?
гласно выражению для определения нормальной силы в произ-
жип.пом сечении (см. гл. IV). Соответствующие этим усилиям на-
•I.1 .’11.ПЫС перемещения ии получаем интегрированием известного
дифференциального уравненияEF(x)-^- = N(x), (5.85)103
откудаU« = j E-F\x) ' dx-оНачальные скорости равны нулю, т. е. мн = 0.Подставляя ^ = 0 в уравнение (5.84), получаемео«н = 2 AS ■ fs (*)■ (5-86)5=1Условие нулевых начальных скоростей удовлетворяется при Bs = 0.
Коэффициенты As в выражении (5.86) теперь можно определить,
используя свойство ортогональности функций cps(A:). Для этого
умножаем левую и правую части выражения (5.86) на yr(x)-dx
и интегрируем по всей длине ракеты, после чего получимiJ"н•'Pi {x)-dxAs = ~ . (5.87)I (x)'dxоПеремещения могут быть найдены с учетом того, что Bs = 0, из
следующего уравнения:Амплитудное значение первого члена оказывается значительно
меньше второго и поэтому при отыскании максимальных переме¬
щений им можно пренебречь. Тогда
Соответствующие этим перемещениям максимальные продольные
динамические усилия определяются по известным формулам со¬
противления материалов:оо . CD/C"'irp, s^s -~-Производные заменяем с помощью соотношения (5.59),тогдаоо • IЧпак (*) = P°2L(r~ • J f т' (*) • Ъ (*) • dX- (5'9°) lip, S1=1 2 о15 заключение еще раз заметим, что для тонкостенных элементов
корпуса сжатие является более неблагоприятным случаем нагру¬
жения, чем растяжение. Поскольку динамические нагрузки при спа¬
де тяги оказываются по модулю меньше максимальных сжимающих
статических нагрузок, то они не могут быть определяющими для
прочности корпуса. Вследствие этого, как уже указывалось, на
практике в этом случае ограничиваются динамическим расчетом
стыковочных болтов, крепящих ступени, отсеки и боевую часть.§ 5.4. СОБСТВЕННЫЕ ФОРМЫ И ЧАСТОТЫ ИЗГИБНЫХ КОЛЕБАНИЙКОРПУСА РАКЕТЫНаряду с определением частот и форм продольных колебаний
корпуса ракеты в динамических расчетах всегда необходимо опре-
дел ять частоты и формы изгибных колебаний. Во многих случаях
на задача может быть решена, если представить корпус ракеты
и виде упругоизгибаемого стержня переменного сечения и с пере¬
менным распределением массы по его длине. В настоящее время
известно достаточно много эффективных методов решения этой
мпдачи, однако в данном параграфе не представляется возмож¬
ным сколько-нибудь систематически изложить все существующие
методы. Ограничимся рассмотрением только некоторых из них,
получивших наибольшее распространение и признание. Более
подробные сведения читатель найдет в работах [1], [5].11еречислим кратко допущения, которые принимаются в тео¬
рии колебаний при выводе уравнения поперечных колебаний:- упругая ось корпуса ракеты в недеформированном состоя¬
нии прямолинейна и совпадает с линией центров тяжести попе¬
речных его сечений; при этом под упругой осью понимают геомет¬
рическое место точек, к которым должны быть приложены внеш¬
ние силы, чтобы вызвать изгиб корпуса без кручения;105
— отклонения точек оси при поперечных колебаниях не выво¬
дят деформации корпуса за предел пропорциональности и лежат
в одной плоскости (плоскости колебаний).Совместим начало отсчета с вершиной боевой части, а ось ох
направим по упругой оси корпуса (рис. 5.12). Тогда отклонения
точек оси стержня при поперечных колебаниях однозначно опре¬
деляется функцией координаты х и времени t (рис. 5.13)w = w(x, t).(5.91)Эта функция определяется линейным дифференциальным уравне¬
нием четвертого порядка в частных производных, которое может
быть получено следующим образом. Известно, что приближенноеи/иГuf(x, t)1 - ,_—»,.хh* LРис. 5.12. Выбор системы координатРис. 5.13. Схема перемещений упру¬
гой осиуравнение изогнутой оси корпуса при принятых допущениях имеет
видEJ*lSr = M' (5.92,где EJх — изгибная жесткость;Е— модуль упругости;Jx—момент инерции сечения относительно нейтральной
оси, величина которого в нашем случае зависит от х.
Дифференцируя уравнение (5.92) дважды по х я учитывая, чтодШ ,1*5- = ? (*.*),где q(x, t) — интенсивность поперечной нагрузки, получим(я/, •-£?)=?(*. О. (5.93)В последнем уравнении в виду того, что w является функцией
двух переменных, вместо обыкновенных производных использова-
ны обозначения частных производных.Интенсивность поперечной нагрузки q(x, t) может быть пред¬
ставлена в виде суммы двух составляющих. Первая из ниx qi(x,t)
есть интенсивность сил инерции, обусловленных ускорением по¬
перечных колебаний элементов корпуса ракеты. Вторая — q-2(x, О106
является интенсивностью внешней аэродинамической поперечной
нагрузки. Очевидно, чтоЯх (*, /)** —где тх — линейная массовая плотность стержня.Используя выражения для q\{х, t) и q°(x, t), из уравнения (5.93)
получим; + (5.94)Если <7г (х, 0=0. то получим уравнение свободных поперечных ко¬
лебаний стержняд2 /г., d2w \ , d-w Л /с пгч~д& X х' J + nijc ’ dt2 — (5.95)Чтобы определить произвольные постоянные, появляющиеся
при интегрировании уравнений (5.94) и (5.95), необходимо задать
граничные (краевые) и начальные условия.Граничные условия определяются способом закрепления кон¬
цов. В простейших случаях они выражаются следующими соотно¬
шениями:— конец корпуса свободен (ракета в полете); на этом конце
изгибающий момент и перерезывающая сила равны нулю; следо¬
нательно,d-w Л д ( гу т (Pw \ п-5*=° и— конец корпуса жестко закреплен; на этом конце равны
нулю прогиб и угол поворота поперечного сечения стержня, т. е.a dw лхе> = 0 и = 0;•— конец корпуса свободно оперт (или закреплен шарнирно)?
ми этой опоре равны нулю прогиб и изгибающий момент, т. е.л д2да Л
w=0 и -^" = аВ других случаях, например при опирании на упругую опору,
граничные условия выражаются сложнее и должны учитывать
как характер возможных смещений опоры конца стержня, так и
Ми шикающие упругие восстанавливающие силы. Так, при упру-
Н)М шарнирном опирании правого конца (рис. 5.14) при х*=1 на
• гом конце отсутствует изгибающий момент, а перерезывающая107
сила равна упругой восстанавливающей силе опоры. Следова¬
тельно,где с — жесткость упругой опоры.Начальные условия выражаются следующими соотношениями:/ п\ / \ dw (х, O') , .
zv (я, 0) = и (л:) и —д( ■ — v (х),где функции и(х) и v(x) определяют начальные отклонения и
скорости точек упругой оси стержня.Предположим, что корпус совершает свободные гармонические
колебания с частотой со. В этом случае прогиб w(x, t) можно
представить в видеW (x, t) — ср (л:) COS (со^ -\- е). (5.96)Функция ср(х), выражающая распределение амплитуд отклонений
точек упругой оси от равновесного положения, является собствен¬
ной формой. Каждой собственной форме колебаний соответствует
своя собственная частота со. При изгибных колебаниях корпус
ракеты аппроксимируется балкой с распределенными параметра¬
ми, т. е. системой с бесконечным числом степеней свободы, по¬
этому собственных частот и форм колебаний также бесконечное
множество. Чтобы определить собственные формы, необходимо
использовать уравнение свободных колебаний (5.95), в которое
подставляем выражение прогиба (5.96). При этом получим(EJX ■ <р")" — СО2 • от, • ср = 0. (5.97)Это уравнение исчерпывает все множество собственных форм и
частот, поэтому его записывают для s-й формы и частоты(£/,■ cpj-«>2. т,•<?, = (). (5.98)К уравнению (5.98) необходимо добавить граничные условия для
функции cps(x), которые получаются из граничных условий для
w(x, t) с помощью выражения (5.97). Рассмотрим случай полета,
когда корпус ракеты может быть представлен как балка со сво*108
бодными концами. В этом случае граничные условия записы¬
ваются так:dx2•r=0x=l= 0;ddx(■EJ-"&)jr=oл-=г= 0.(5.99)Задача отыскания функций <ps(дс), удовлетворяющих уравнению
(5.98) и заданным граничным условиям, например (5.99), назы¬
вается краевой задачей.Собственные функции краевой задачи образуют систему орто¬
гональных с «весом» тх функций. Свойство ортогональности за¬
писывается, как и раньше, следующим образом:mJC-<?-f-dx = {<\'nx-fs-dx (s = r).'• 0 (s^r)(5.100)В расчетах можно пользоваться так называемыми нормирован¬
ными собственными формами/.W ^ (5.101)/7m^pdxДля нормированных форм спра-
недливоij тх- f]-dx — 1. (5.102)Рис. 5.15. Примерный вид собствен¬
ных форм первых двух тоновДля удобства сравнения соб¬
ственные формы колебаний частоприводят к одному из концов ракеты, т. е. вместо формы <ps(x)
рассматривают форму fs(x), определенную одним из следующих
способов:Ъ (X)9s (0Характерный вид собственных форм показан на рис. 5.15. Из рн-
супка видно, что в отличие от продольных колебаний количество
у.члов при изгибных колебаниях на единицу превышает порядко-
мый номер тона.Для стержня постоянного сечения уравнение (5.97) (индексы s
опущены) можно записать следующим образом:?iv __ £4. ? = 0( (5.103)где■тЕу- = const. (5.104)к1-.()бщиГ| интеграл этого уравнения имеет видср (х) = А ■ S (х) + В ■ Т {х) + С • U (х) + D V (х), (5.105)109
где S (х), Т (х), U (х) и V(.v)-—функции А. Н. Крылова;А, В, С, D—постоянные интегрирования.Как известно:1S(x) — (ch kx -f cos kx)
T{x)~ ~ (sh kx -f sin kx)
U (.t) = (ch kx — cos kx)V (x) = ~ (sh kx — sin kx)(5.106)В правильности записи общего интеграла -(5.105) можно убе-
диться непосредственной подстановкой функций (5.105) в урав¬
нение (5.103).При пользовании функциями Крылова полезно иметь в виду
следующие их свойства:5(0) = 1 5(0) = 0 S" (0) = 0 S'” (0) = 0т (0) = 0 V (0) = 1 Т" (0) = О Г' (0) = оU{0)=0 С/'(0)=0 U" (0) = 1 О"' (0) = о1/(0)= о У'(0)=0 l/"(0)=0 К'"(0) = 1(5.107)Производные от функций КрыловаФункцииПроизводные от функций Крыловаno XперваявтораятретьячетвертаяkV&Uk*Tk*SтkSk*Vk4Jk*TиkTk'Sk3Vk*UVkUk2Tk*Sk*VФункции Крылова позволяют сразу написать общий интеграл,
удовлетворяющий граничным условиям на конце х = 0. Например,
имея в виду граничные условия (5.99), общий интеграл уравнения
(5.103) получим в виде?(x) = A-S(x) + ВТ(х), (5.108)который, как нетрудно убедиться, удовлетворяет всем граничным
условиям при х — 0:[*"'(*)]<*> = 0. (5-109)110
Постоянные А я В найдутся из условий на конце х = 1(I) = k2 ■ [AU{kl) + В- V (/г/)] = О,
(/) = й8 • [AT {kl) + В-U (Ы)] = О,(5.110)которые составляются с помощью таблицы производных функций
Крылова.Система уравнений (5.110) является однородной относительно
неизвестных А и В. Чтобы эта система имела отличные от нуля
решения, необходимо равенство нулю ее детерминанта. Составим
определитель системы (5.110) и, приравнивая его нулю, получим
так называемое уравнение частотcos kl- ch kl — 1,которое имеет бесконечное множество корней ks
krl = 4,73 k2l — 7,85kJ = 2*±±K„m (5.111)Этой последовательности
тельность частот=значениисоответствует последова-т(5.112)и собственных форм.Уравнение соответствующей собственной формы составляем
следующим образом. Из первого или второго уравнения системы
(5.110) определяем отношениеВ _ T(kl) и (kl)А —I [одставляя отношение
(5.108), получим<р4(х) = Л [ S(ks-x)и (kl) V (kl) •(5.113) в уравнениеT(ksl)U(ks-l)(5.113)форм колебанийT(kjc)]. (5.114)Отсюда следует, что собственная форма колебаний определяется
с точностью до постоянного множителя.Если поперечное сечение стержня (ракеты) переменно, то в
общем случае аналитическое решение уравнения (5.98) не суще-
| шует и его находят численными методами. Рассмотрим случай
полета ракеты, которому соответствуют граничные условия в виде
(П.108). Для решения уравнения (5.98) воспользуемся одним из
численных методов — методом последовательных приближений.H i уравнения (5.98) четырехкратным -янтегризованием находимvt) -f(x) = d, + c,(x—x.и,X X j+ J j m* • ?s • dx* I >J J t r-bs + as • X +0 U(5.115)1115
где хт— абсцисса центра тяжести стержня;as< ds — произвольные постоянные, определяемые из гра¬ничных условий.Используя условия (5.99) на конце л: = 0, получаем as~bs=0. Гра*
ничные условия на конце х=1 эквивалентны следующим условиям
i ij mx<cs ■ dx = 0, | (л: — jct) mx ■ <р4 • dx = 0. (5.116)и иДействительно, интегрируя уравнение (5.98) почленно по длине
стержня с учетом условий на конце х = 1, получим первое соотно¬
шение из условия (5.116). Далее, умножая уравнение (5.98) на
(х — Хт) и повторяя интегрирование, получим второе условие
(5.116). Подставляя выражение (5.115) в выражение (5.116),
определяем постоянные ds и cs:I ijmx• • dx J (x — jct) mx-<bs-dxMcs = ~гдеФ„М = j тх ■ dx, I — j (л; — хту ■ тх • dxо о J(х) =d3+cs (л- - хТ) + Ф, {х).
Тогда из уравнения (5.115)„2 _(5.117)(5.118)(5.119)(5.120)Формулы (5.116) — (5.120) используем при определении собствен*
ных частот и форм. Расчет ведется по схеме(5.118)(5.117)Ч’.Вш(5.113)VI(5.1Z0)В прямоугольниках указаны номера расчетных формул. Индек¬
сами сверху помечен номер приближения. Первое4,приближение
собственной формы <pj определяется каким-либо приближенным
способом, например осреднением жесткости Е1Х и погонной мае*
сы тх по длине балки с последующим расчетом по изложенной
выше методике. Заметим, что в качестве второго приближения
принимается . Это оказывается возможным ввиду определе¬
ния формы собственных колебаний с точностью до постоянного112
Множителя. Повторяя несколько раз процесс приближения, полу¬
чаем ряд собственных форм <?s‘\ отношение двух последователь¬
ных значений которых стремится к квадрату собственной частоты:(5.121)ts(Л-1)ъ(п)Обычно достаточно трех — четырех приближений. Можно также для
расчета частоты пользоваться формулой Рэлея, приведенной ниже,
f Схема расчета при определении собственных форм второго и
более высокого тонов дополняется операцией ортогонализации,
ныполняемой после каждого приближения. В противном случае
при достаточном числе сближений всегда будем приходить к соб¬
ственной форме первого тона. Ортогонализация производится по
формуле5—1«рСл)= Z8i-(Pi + 'PJ(и)гдеIj mx■ fax(5.122)(5.123)Функция
Ч>1, T. e.ортогональна всем ранее вычисленным функциям| тх' п) 'dx — 0.формулыИ этом нетрудно убедиться, подставляя сюда <?[п) из
(.'>,122) и вычисляя интеграл.Критерием окончания расчета является поведение последова-
имьности частот u>^2), u>f*которая своим пределом имеет
'I очное значение частоты.В заключение приведем без вывода значения постоянных инте¬
грирования и функций Фв(л:) для других граничных условий.Случай шарнирного опирания, соответствую¬
щий креплению ракеты при транспортировке.*S + C*-XT = 0> =с0 =ФЛО,ФД*) =dx2EI—гjи иX Xa*+j imx-?s-dx2>dx2и ис,х + Ф, {х).(5.124)I7M113
Случай расположения ракеты на пусковом сто¬
ле; конец при х = 0 свободен, а конец при х = 1 за¬
щемлен.as + bs = О,II XXds cs- хт — j dx j* _. j dx f tnx • • dx,й x x й 0I X Xcs==-\-jr\dx \mx-'?s-dx.и х b оЗаметим, что сравнительная сложность структуры постоянных ин¬
тегрирования не должна смущать. Путем несложных преобразо¬
ваний можно получить простую расчетную формулуII XXЬ (*) = j dx j -J£- • j dx j mx • <P, • dx. (5.125)x x x 0 0В теории колебаний балок известен ряд приближенных мето¬
дов, которые получили название прямых вариационных или энер¬
гетических методов. Рассмотрим один из них — метод Ритца. Сущ¬
ность его кратко состоит в следующем. Предполагается, что энер
гия при свободных колебаниях балки не рассеивается, поэтому
потенциальная энергия, накопленная балкой при максимальном
прогибе, равна кинетической энергии в момент прохождения по¬
ложения равновесия. Составим выражения для потенциальной (ПI
и кинетической (Т) энергий балки:где d<^ = ~dx,
тогдаdn = ~ Md%dn = \ M'-^L-dx,« мгде ~yj кривизна.Проинтегрировав это выражение, получимгдеСледовательно,iп = EIX (w”y- dx.114
Кинетическая энергияТ — -i- f m , • w2 ■ dx.оПредположим, что нам удалось приближенно установить форму
свободных колебаний балки ср (х). Тогда прогиб балки при свобод¬
ных колебаниях можно представить в видеW = <р (х) COS (u>t + е).Подставив выражение прогиба балки в выражения потенциальной
и кинетической энергий, получим:iП = -±- cos3 (orf + •) • j Elx (?")2 dx;/1о0IT — -4~ cu2 • sin2 (со/ + e) j mJ.'fdx\UIT'.nax^-T ^ t m^dX.Согласно сделанному предположениюTV. = П.max’j Elx WT dxОIj mx-^-dx(5.126)оЛпдадим форму прогиба для колебаний первого тона в видеср (х) = сх + с2 ~ + sin — • (5.127)При использовании метода Ритца требования к функции ср(х) не
пч(М11, жесткие. Она даже может не удовлетворять всем гранич¬
ным условиям, так как под интегралом ошибки сглаживаются.Д ш нашего случая» / v Со • ТС TZJC? {x) = -j- + — cos — ;KX<p"(x) = —fsin^(x) = cos ~jKX115
Если балка свободная ?^_0==0; (р’^^0, т. е. граничныеХ=1 Х=1условия полностью не удовлетворены.Кинетическая энергия равнаiТ — -i- ш2 sin2 (ш/ -f е) \ пих ■ <р2 • dx —= 4- (и2 - sin2 (wt -f s)l Lc\ f mx ■ dx + 2^;, • -L- | mx ■ x ■ dx -fl !■-f c\ ■ I mx ■ x2 ■ dx + 2c, 1 mx • sin ~~ ■ dx ++ 2c2 j mx ■ -j- • sin dx + j mx ■ sin2 ■ dxОбозначим:i-Ii, — | mx • dx;
iA2 = -j- f mx ■ x ■ dx;
iЛ, = 4- f tnx- x2 ■ dx;ТогдаА,— mx- sin ~~t~■ dx;4 e 1I45 == j mx • -j- sin • rfx;I'J-6 — .] /?vsm2^f-d*.7* = -j- o>2 • sin* (orf + e) [-4, • cj -f- 2Л2 • • c2 -f Л3 • c| ++ 2Л,- с, + 2с2Л5 + А6]. (5.128)Ищем постоянные с{ и с2 из условия Tmin.дТ п .. дТ л
тсюда2y4j • С] -f- 2Аг' с2 -|~ 2/4^ = 0; А\С\ А2 * с2 —
2Л2 • сх + 2А3 • с2 -(- 2А5 — 0; А2 ■ сх -f- As ■ с2 ■4»А*.Д =Аь А2
А2, As— А\Аг А22; Д! —А±, А2Дг —А■ А,А$, Agаким образом:
А =Ап' Ак — А3 АлЛ] -А3 — Л;и С,— А3 ■ Ai А2 ■ Л3;
— А\' Аь -f А2 ■ А4.А^-At — At ■ AgAt -А3(5.129)'ли известно распределение масс вдоль балки тх, можно вы-
нслить коэффициенты А\ ... А6, найти Ci и с2 и далее по фор¬
муле (5.127) определить форму колебаний. Поскольку7С-~wТо частота колебанийsin — ; W)2 = -jr siя4 г . . пХ-JT ] —-dxsin^Ai'Cj 2A%’Ci'c% + A3‘C2 4~ 2A^c^ + 2Лбс2 -I- Ag(5.130)При практических расчетах балку разбивают на участки и ин¬
тегрирование заменяют суммированием.В том случае, если известна упругая линия балки, можно за¬
писать уравнение для и таким образом:iJ р {х) wdx——j mx-w-dx + 2 mrw2i(5.131)где р(х) —нагрузка, вызывающая прогиб балки (распределен¬
ная или сосредоточенная);
w — статический прогиб балки;
т1 — сосредоточенные массы.§ 5.5. ПОПЕРЕЧНЫЕ НАГРУЗКИ ПРИ ВОЗМУЩЕННОМ
ДВИЖЕНИИ РАКЕТЫВнутренние усилия в элементах конструкции ракеты в период
ее ми смущенного движения во многом зависят от характера рас¬
пределения внешних сил по корпусу и их изменения во времени.
Кик уже указывалось, при быстром изменении величины внешней117
силы, как правило, возбуждаются упругие колебания конструк¬
ции, в результате которых появляются дополнительные напряже¬
ния в ее элементах.Динамические нагрузки, под действием которых возникают из-
гибные колебания ракеты на активном участке траектории, могут
быть как поверхностные (распределенные аэродинамические на¬
грузки), так и сосредоточенные (управляющие силы). Рассмо¬
трим их более подробно.При расчете ракеты на динамическую
прочность расчетными случаями обычно
являются:— действие порыва ветра;— действие порыва ветра совместно
со струйным движением воздуха;— действие управляющей силы (для
начального и конечного отрезков актив¬
ного участка траектории).Ветровые нагрузки обычно задают в
виде одиночного порыва ветра, струйно¬
го воздушного течения или циклических
порывов ветра сравнительно малой ин¬
тенсивности и имеющих противополож-Рис. 5.16. Изменение сред¬
ней скорости ветра по вы¬
сотеСлучай одиночного порыва ветра ме¬
стного вихревого течения воздуха, отли¬
чающегося большой резкостью и силой,
был нами уже разобран в гл. IV. Его
воздействие на конструкцию было
учтено соответствующим коэффициентом динамичности, величи¬
на которого может быть найдена только при решении задачио возмущенном движении ракеты. Предварительно рассмотрим
более подробно структуру воздушного потока, поскольку рас¬
смотрение только максимальных скоростей ветра теперь недоста¬
точно.Величина скорости ветра зависит от географической широты
места старта, времени года и даже суток, а в основном от высоты
полета ракеты. Типичный график изменения средней скорости
ветра и по высоте h показан на рис. 5.16 [4].Как видно из рис. 5.16, в данном случае наблюдается резкое
увеличение скорости ветра на высотах от 6 до 12 км. В большихduпределах изменяются и значения сдвигов скорости ветра повысоте. Практически величина этого сдвига определяется как раз¬
ность скоростей ветра на двух сравнительно близко расположен¬
ных высотах (350н-500 м), деленная на толщину слоя. Наиболее
часто (с вероятностью 40% -ь50%) встречаются сдвиги 0,015-ь
н- 0,025 1 /сек. В некоторых ветреных районах отмечаются (с ве¬
роятностью 2 + 3%) значения сдвигов порядка 0,07н-0,08 1 /сек.118
■Имеются предположения, что большим скоростям ветра Соответ¬
ствуют и большие сдвиги. Данные по сдвигу являются важной
характеристикой ветрового потока, ибо они определяют его про¬
филь, а следовательно, и характер его воздействия на ракеТу. По¬
лучить достоверные статистические характеристики парамеТр0в
даже установившегося ветра в настоящее время весьма трудно.
Поэтому при проектировании ракет обычно считают, что она дол¬
жна пролететь через самый ветреный район во время самого ве-*
гренного сезона. Направ-Рис. 5.17. Условные профили аетра
и, м/секление действия порыва
иетра равновероятно.В первом приближе¬
нии при расчете нагру-
:юк пользуются условно
либо прямоугольным, ли¬
бо треугольным, либо тра¬
пециевидным,'либо синусо¬
идальным законом изме¬
нения истинной скорости
порыва ветра, либо фор¬
мой порыва, определяе¬
мой выражением„ = -££-(1-cos-£-•*) .(5.132)Условные профили по¬
рыва ветра показаны на
рис. 5.17.В дальнейшем порыв ветра будем представлять в виде Сину’
сондальной формы в направлении движения ракеты (рис. 5.18}.Па рис. 5.18 вектор V — вектор скорости движения ракеты,
а -скорость ветра (м/сек), Н — расстояние (л), на котором и из,
меняется от 0 до ит. Обычно принимают Н=(2 — 3)и,п.Круговая частота изменения скорости порыва ветра опреде¬
ляется выражением* я-1/ (5.133)2Н2 Нвремя действия порыва ветра.I ле Дtп уПерейдем к составлению уравнений вынужденных изгибных
Колебаний.lioшущенное движение конструкции ракеты обычно рассма-
фиипется в системе координат о1х]у1 (рис. 5.19).П|,1нужденные поперечные колебания конструкции ракеты спо-i и’доиительным расположением ступеней при действии н^нееоди-119
ночного порыва ветра приближенно описываются линейным диф¬
ференциальным уравнениема’ О (5-134)дх? х' дх2, I ^г2при следующих граничных условиях:
При Х[=0 и Х\ = 1дх^ ’ dxi [ л‘ дхи начальных условиях:
при t = Оw = w0(xl) =.«/„.Внешняя погонная поперечная нагрузка <7г(*ь 0. действующая
на корпус ракеты, равна разности поперечных составляющих аэро¬
динамических и массовых сил:q,(х„ t) = q- Sn■ [гS^Si + At(t)]-— go- д«у, (*1, t) ■ mXi + Ylp-\ (*„ xlR), (5.136)где q—скоростной напор;и (xb t) — скорость порыва ветра;V—скорость ракеты;Д<р (t) — отклонение угла тангажа (угла атаки) при возму*
щенном движении;Дny(xut)— приращение коэффициента поперечной перегрузки,
вызванное порывом ветра;YXp — поперечная составляющая управляющей силы;(хи xlR)—дельта — функция первого рода;лг1Л — координата приложения управляющей силы;SM—площадь миделя ракеты.В выражении (5.136) не учитывается влияние подвижности
топлива в баках жидкостных ракет.о 2Я \
Время действия порыва ветра -у- мало по сравнению с вре¬
менем пребывания ракеты в зоне больших скоростных напоров.
120
оэтому в первом приближении будем считать все коэффициенты
равнения постоянными. Жидкое наполнение ракеты полагаем«за-
пердевшим». Кроме того, пренебрежем влиянием управляющих
сил и изменением угла атаки за счет вращения ракеты относи¬
тельно поперечной оси, проходящей через центр масс ракеты. Эти
Допущения можно объяснить тем, что во многих случаях измене¬
ние управляющей силы происходит с большим запаздыванием и
У,„ достигает своего максимума уже во время выхода ракеты из
‘min,! действия порыва ветра. Для тяжелых ракет угол Дер мал,
Поэтому указанные допущения обычно не вносят больших ошибок
W расчет динамических поперечных сил и изгибающих моментов,
циметно упрощая решение задачи. При сделанных упрощениях
Интенсивность нагрузки выражается следующим уравнением:д сq2 (хи t) = q • — Длу> (xu t). (5.137)Проинтегрировав уравнение (5.134) по Xi, получим следующее вы¬
ражение для поперечной силы:Q (xh t) = AQC (хи t) — j mXi • ~ ■ dxu (5.138)01ЛеAQC (xh t) — J q2 (xu t) ■ dxx — перерезывающая сила, вызванная
статическим действием нагрузки.Повторное интегрирование дает значение изгибающего момента:X, ДГ,М (хи t) = Шс {хъ t) — J dx, J mXi • • dxb (5.139)6 огде/\Мс(хi, t)—изгибающий момент, вызванный статическим дей-
стипем нагрузки (5.137).дг, х,Д Мс (хи t) =\dx if q2 {xu t) ■ dxv (5.140)0 0Пулевые постоянные интегрирования в последних уравнениях
опущены.Представим далее решение уравнения (5.134) в виде суммы
тух слагаемыхw (*!, t) = wx (дг„ t) + w2 (хь t), (5.141)m pnoe из которых описывает свободные изгибные колебания кон¬
струкции ракеты, а второе — вынужденные колебания. Свободные
колебания, представленные в видещ (*i, 0 = 2 А - ь (xi) ■cos Ы + es). (5.142)121
достаточно подробно рассмотрены в § 5.4 и поэтому здесь рассмо¬
трим лишь второй член выражения (5.141). Представим искомое
решение вынужденных колебаний в виде разложения по собствен¬
ным формам:воЩ (*1. 0 = 2*» (*i)' (5.143)i=iгде Ts(t)—некоторые функции времени.Определяя функции Ts(t), подставим решение (5.143) в урав¬
нение вынужденных колебаний (5.134). Получимоо оо2 Т- ■£? (Е!*. ■ -&) + 2 ”...' V Т- = ", Ъ <5Л44>5=1 ' ' 5=1Используя выражение (5.98), упростим полученное уравнение и
запишем его в видеоо2 mXl • Ь + «2 • Ts) = ft (*1, О. (5.145)5=1Разлагая внешнюю поперечную нагрузку <72(^1, 0 по формам
собственных колебаний <pe(*i) с весом шх (для чего умножим
обе части уравнения (5.145) на 9s(*i) и проинтегрируем от 0 до/),
получим:воЯ2 (*ь *) = 2 Н* (0 • Ь (*>) • «**.• (5Л46)5=1Для ракеты аэродинамические силы демпфирования малы по срав¬
нению с силами инерции и силами упругости. Поэтому с достаточ¬
ной точностью можно считать, что они не оказывают влияния на
связь различных тонов друг с другом, а также на амплитуды ко¬
лебаний конструкции ракеты на участке 0 </<-у.Учитывая условие ортогональности форм собственных колеба¬
ний и пренебрегая влиянием демпфирующих сил, будем иметьfs+**Ts = Hs(t), (5.147)где/(О = ТГ- • [ ft (*ь 0 ■ Ъ (*1) dxu (5.148)тпр (jгде Mnv-—приведенная масса ракеты.1M*P = \mXl-£(xx)-dxx. (5.149)О122
Т; jk както| ®5 (л:,) • т х ■ dxx — 0 и J хх • % (Xj) ■ тх • dx\ = О,
dcyt (xt) и (xt, t)#ЛО =Q'np<3a'icp, (Xl) ■ dxx +о+ AtP • f —^r— • C*i) •o+(xp)M,np(5.150)Здесь член с Дп исчезает вследствие указанных выше свойств
||>орм колебаний cps. При больших I скорость ветра нельзя считать
постоянной по длине ракеты. Во многих случаях зависимость ин¬
теграла JdCydf—----X^— • <ь(*,)• dx 1 ог * Для низших тонов(.V = 1,2) можно приближенно аппроксимировать уравнениемВ l-cos^-), (5.151,о2 Нгде а„0 — наибольшее значение интеграла на участке 0 </<-р.Подставив уравнение (5.151) в уравнение (5.150) для Hs(t), а по¬
следнее в уравнение (5.147), найдем в результате следующую
формулу для второй производной от функции Ts(l):ТЛ*)где <» ■cos ш/cos ш/—COS wt]), (5.152)2 Н ■На основании формул (5.142), (5.143) и выражения (5.141)
динамические составляющие поперечной силы и изгибающего мо¬
мента будутQ* (*ь 0 = 2 —ш5 ■cos Q*S=Z 190мА (хи 0=2 —ш1 ■ c°s (ш/ + е*)1 ^ (*л5=1(5.153)(5.154)
123
гдеXtQs(xl) = J mXl'b (xt)-dxx;* ,, (5.155)Ms (xx) = | dxx J mXt-<fs (xx) dxv
и о JЗная Qa и А1Д, для каждого сечения ракеты можно определим,
перерезывающие силы и изгибающие моменты по формулам:Q (*„ t) = AQC (xh t) + Qa (xx, ty, (5.150)M (xx, t) = AMC (xx, t) + MK (xx, t). (5.157)Лальнейший расчет на прочность идет по обычным методикам.
По выражению (5.141) может быть найден Шдтах, а по завися-Wмости ----- искомый коэффициент динамичности.ст maxЛИТЕРАТУРА К ГЛАВЕ V1. Бабаков И. М. Теория колебаний. Гостехтеоретиздат, 1958.2. Безухов Н. И., Лужин О. В. Устойчивость и динамика сооружений.
Госстройиздат, 1963.3. Вельский В. Л. и др. Конструкция летательных аппаратов. Оборон-
гиз, 1963.4. Бонни Е. А., Цукров М. Д., Бессерер К. У. Аэродинамика. Тео¬
рия реактивных двигателей. Конструкции и практика проектирования. Воениз-
дат, 1959.5. Тимошенко С. П. Колебания в инженерном деле. Физматгиз, 195Э.
ГЛАВА VIАЭРОДИНАМИЧЕСКИЙ НАГРЕВ. РАСЧЕТ
ТЕМПЕРАТУРНЫХ ПОЛЕЙ В КОНСТРУКТИВНЫХЭЛЕМЕНТАХ РАКЕТЫ ПРИ РАЗЛИЧНЫХ УСЛОВИЯХ
ЕЕ ЭКСПЛУАТАЦИИПолет ракеты в атмосфере сопровождается нагревом корпуса.
Рост температуры отсеков корпуса вызывает появление в них тер¬
мических напряжений и снижение прочностных характеристик ис¬
пользованных материалов, а тем самым и общее уменьшение не*
сущей способности конструкции летательного аппарата. Это в
свою очередь требует применения тепловой защиты для наиболее
геплонапряженных отсеков (боевой части, космического аппара¬
та) и выступающих элементов корпуса ракеты (обтекателей, пе¬
реходников и т. п.). Заметим, что повышение температуры оказы-
нает определенное влияние на работу агрегатов, находящихся на
борту ракеты. Указанные изменения температуры наблюдаются
не только в полете, но и в период, предшествующий ему. Все это
требует умения определять и учитывать тепловое состояние кон-
мруктивных элементов ракет на всех этапах их использования.
Рассмотрим физическую картину аэродинамического нагрева лета¬
тельных аппаратов в полете.§ 6.1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯИсследуя аэродинамический нагрев, воспользуемся принципом
относительности движения. Будем считать, что не летательный ап-
н,1 рлт движется в неподвижной воздушной среде, а сама эта сре¬
да, называемая в данном случае воздушным потоком, набегает на
неподвижный аппарат со скоростью ию его движения.11олная энергия воздушного потока, как известно, складывает»
ей из кинетической энергии направленного дбижения частиц воз¬
духа, потенциальной энергии давления и веса и внутренней энер»
щи этих частиц.125
Внутренняя энергия частиц (молекул и атомов) воздуха пред¬
ставляет собой кинетическую энергию их хаотического движения
Она характеризуется температурой, называемой термодинамиче¬
ской и обозначаемой Т. В дальнейшем будем называть ее просто
температурой воздуха. Сумму внутренней энергии и потенциаль¬
ной энергии давления называют энтальпией. Поскольку потен¬
циальной энергией веса обычно можно пренебречь, полная энергия
воздушного потока складывается из энтальпии и кинетической
энергии направленного движения частиц.Если воздушный поток тормозится и это торможение не сопро¬
вождается обменом энергии с окружающей средой, то вызванное
им уменьшение кинетической энергии потока будет сопровождать
ся соответствующим увеличением энтальпии. Сумма этих двух ве¬
личин останется без изменения. Это следует из закона сохранения
энергии или первого закона термодинамики. Следовательно, вели
чина энтальпии, достигаемая при полном торможении потока без
обмена энергией, с окружающей средой, может рассматриваться
как мера полной энергии потока. Она называется энтальпией тор¬
можения, обозначается г0 и равнаи!io = i+-f, (6-1)Тгде i—\cpdT — удельная (на единицу массы) энтальпия воз-
° духа;ср— удельная теплоемкость воздуха при постоян¬ном давлении (ср— 1005кг-град) 'При умеренных сверхзвуковых скоростях потока (М<6) мож¬
но полагать, чтотi=\cpdT^cpT. (6.2)оИз соотношений (6.1) и (6.2) нетрудно получить величину темпе¬
ратуры воздуха в потоке, отвечающей энтальпии торможения и
так же являющейся мерой полной энергии потока. Эта величина,
называемая температурой торможения, обозначается Т0 и рав»
няетсято^+ё-р^т+шо (б-3)илиТ0^Т(\-f k 2~1 М2^ , так какk= CpkRT ’ ср k ’ cv126
где k — показатель адиабаты воздуха (&=1,41);R—газовая постоянная воздуха ^R = 286 -h.f™a
cv—удельная теплоемкость воздуха при постоянном объеме(^=718^Ьг)-Обтекая любое тело (в том числе ракеты и космические аппа¬
раты) воздушный поток вблизи поверхности тела вследствие сжа¬
тия и трения тормозится. При этом кинетическая энергия направ¬
ленного движения воздуха уменьшается, а энтальпия (т. е. дав¬
ление и термодинамическаяГолодной скачок
уплотненияХвостовой скачок
\уплотненияПограчичный'
слой„ \
Волны —
разреженияГ7лов ной скачок
уплотненияВихревойследПограничный
слойихревоиследВолны
разреженияХвостовой скачок
уплотнениятемпература) растет. При вы¬
соких скоростях сжатие пото¬
ка прежде всего проявляется
и скачках уплотнения, возни¬
кающих около лобовых и вы¬
ступающих участков поверх¬
ности тела (рис. 6.1 и 6.2).Эти участки поверхности назы¬
ваются областью притупления
и отличие от участков боковой
поверхности, обтекание кото¬
рых бесскачковое. Как видно
из рис. 6.1 и 6.2, у лобовых
поверхностей тел возникает
отсоединенный головной ска¬
чок уплотнения, который вбли¬
зи оси потока можно считать
прямым. За головным скач¬
ком в точке х=0 (ось х на¬
правлена вдоль образующей
поверхности) скорость потока
падает до нуля, а давление,
плотность и температура ста¬
новятся равными параметрам торможения за скачком. Впредь
н им величинам будем приписывать индекс «2». Точку с координатой
лг = 0 называют передней критической точкой. Начиная с нее, поток
•а счет своего высокого давления постепенно ускоряется. При этом
вдоль оси х давление и температура потока непрерывно уменьша¬
ются, а скорость и5 его движения увеличивается, достигая в неко-
юрой точке, называемой звуковой, местной скорости звука.Процесс обтекания боковой поверхности тела сопровождается
сложными явлениями, связанными с вязкостью воздуха. Так, опы*
ил показывают, что на самой поверхности тела воздух вообще ке
движется, а как бы прилипает к ней, задерживая движение со¬
седних слоев воздуха (рис. 6.3). Непосредственно примыкающий
к поверхности тела тонкий (по сравнению с размерами тела) слой
воздуха, в котором проявляется торможение потока за счет вяз¬Рис. 6.1. Характер сверхзвукового обте¬
кания сферы и конуса:
а — сфера: б — острый конус127
кости, называется динамическим пограничным слоем. Для крат
кости его часто называют просто пограничным слоем. По мерс
удаления от передней критической точки количество заторможен
ного вследствие трения воздуха увеличивается, поэтому толщинапограничного слоя 5 от этойуплотненияВолны
разреженияПограничный слойВихревой следsj /Головной скачок I /Волны разрешенияГплоеной скачок^/// / I V/4уплотнения 1/ At//Вихревой
следточки растет.На начальном участке
движение воздуха в погра
ничном слое ламинарное.
В этом случае отдельные
струйки и слои воздуха меж¬
ду собой не перемешивают¬
ся. На некотором удалении
от передней кромки тела
толщина пограничного слоя
достигает критической ве¬
личины, при которой устой¬
чивость течения в погра¬
ничном слое нарушается,
толщина слоя резко возра¬
стает, а течение в нем ста¬
новится турбулентным. Тур¬
булентность проявляется в
виде интенсивного переме¬
шивания всей массы возду¬
ха в пограничном слое. Стро¬
го говоря, турбулентный по¬
граничный слой не является
полностью турбулентным по
всей своей толщине: в не¬
посредственной близости от
поверхности тела распола¬
гается так называемый ла¬
минарный подслой относи
тельно малой толщины (1-ь
ч-2 мм).Переход ламинарного
течения в турбулентное со
вершается не мгновенно, од¬
нако протяженность участ¬
ка перехода весьма невели¬
ка. Поэтому обычно схема¬
тизируют это явление и рас¬
сматривают мгновенный переход, вводя понятие точки перехода хп.
Схематически различные режимы течения воздуха в пограничном
слое показаны на рис. 6.4.Торможение потока в пограничном слое происходит практи¬
чески при постоянном давлении. Возникающий при этом необра-Пограничный
слой'Скачки уплотненияРис. 6.2. Характер сверхзвукового обтека¬
ния тел сложной конфигурации:а — тело сегментальной формы; б — тело слож¬
ной формыВнешний „невязкий"
потокРис. 6.3. Распределение скорости и воз¬
духа около поверхности обтекаемого тела128
тимыи переход кинетической энергии направленного движения ча¬
стиц воздуха в теплоту называется диссипацией энергии. Дис¬
сипация энергии в пограничном слое сопровождается ростом
температуры воздуха, максимальное значение которой оказывает¬
ся весьма близкой к температуре торможения. Эта максимальная
величина называется температурой восстановления, обозначается
Те и равна:Tt, М. — температура и число М на внешней границе погра¬
ничного слоя. Температуре восстановления со¬
ответствует энтальпия восстановления ie:Многочисленными экспериментами удалось установить, что для
ламинарного пограничного слоя <рЛам = 0,845, для турбулентного —
фтур = 0,885 [1].Часть выделившегося в пограничном слое тепла отводится к
обтекаемому телу, поэтому вблизи него происходит уменьшение
полной энергии потока. Тонкий слой воздуха, в котором наблю¬
дается это явление, называется тепловым пограничным слоем.Обтекаемое высокоскоростным потоком тело получает тепло¬
вую энергию не только за счет непосредственного контакта с по¬
граничным слоем, но и за счет теплового излучения как самого
пограничного слоя, так и скачков уплотнения. В результате этого
температура поверхностйГтела возрастает. Это явление называется
кинетическим или аэрод1Жамическим нагревом.Интенсивность обмена тепловой энергией (теплообмена) между
воздушным потоком и телом характеризуется удельным тепловымПОТОКОМ — О’аэр-Он представляет собой количество тепла, поступающего к еди¬
нице поверхности тела в рассматриваемом сечении х в единицу
времени(6.4)где<р—коэффициент восстановления температуры;. , "г*. = *« + <рт •V,Ламинарныи0Г777Т/ / //✓/// / / ^/ / / / / ' ' ' f ' ' ' ' ' '
ПРис. 6.4. Схема пограничного слояхЯаэр *7к ~Ь Ял-i(6.5)129
где </к — конвективный тепловой поток,
q„ —лучистый тепловой поток.Лучистый тепловой поток qa обусловлен тепловым излучением
воздухагде С0 =5,673 вт/м2 град4 — коэффициент излучения абсолютно
черного тела,
е— степень черноты воздуха.Конвективный поток qK вызван подводом к поверхности тела
тепловой энергии, выделившейся при торможении потока в погра
ничном слое с учетом возможной диссоциации и ионизации моле¬
кул и атомов воздуха,В этом выражении величины коэффициентов пропорционально¬
сти а и а г называются соответственно коэффициентом теплоотдачи
и энтальпийным коэффициентом теплоотдачи.§ 6.2. ИЗМЕНЕНИЕ ИНТЕНСИВНОСТИ АЭРОДИНАМИЧЕСКОГО
НАГРЕВА ВДОЛЬ ТРАЕКТОРИИ ПОЛЕТАИнтенсивность аэродинамического нагрева существенно зави¬
сит от скорости и^ и высоты Н полета. Корпус летательного ап¬
парата нагревается тем сильнее, чем больше скорость его полета
и выше плотность окружающего воздуха.Кривая зависимости температуры нагрева оболочки ракеты от
времени полета t в сопоставлении с параметрами траектории пред ¬
ставлена на рис. 6.5. Как видно из графика, кривая Tw=f(t) имеет
два максимума (Т Х| и 7'JBmaXj), соответствующие прохожде¬
нию плотных слоев атмосферы, и пологий минимум (полет в раз¬
реженной среде). На восходящей ветви траектории величина
Тw шах, сравнительно невелика и мало зависит от дальности
пуска, так как большие скорости полета достигаются уже в верх¬
них разреженных слоях атмосферы. Тем не менее, температурные
режимы оболочек отсеков ракеты на активном участке траекто¬
рии (АУТ) необходимо учитывать, ибо их нагрев сказывается
на снижении прочностных характеристик материала.На нисходящей ветви траектории по мере приближения к Зем¬
ле нагрев существенно возрастает (Twmmi 7’tt)max ), так как
здесь большие скорости полета сочетаются со все увеличиваю¬
щейся плотностью окружающего воздуха. Так, например, при
дальности полета 3000 км температура нагрева корпуса ракеты
может достигать на АУТ сотни градусов, в то время как на(6.6)(6.7)или в случае М <; 6qK~<*(,Te — Tw).130
нисходящем участке траектории, как показывают расчеты, она со¬
ставляет тысячи градусов. При дальности полета 12 000 км темпе¬
ратура корпуса на нисходящем участке траектории может быть
значительно больше температуры плавления любых известных
конструкционных материалов. Это же явление характерно и для
возвращаемых космических аппаратов. Чтобы не допустить разру¬
шения оболочек ракеты, в этом случае необходимо предусмотреть
специальные мероприятия по их тепловой защите.Рис. 6.5. Характер изменения скорости и высоты полета
ракеты, а также температуры ее оболочки от времени
полета§ 6.3. ВЛИЯНИЕ ФОРМЫ ТЕЛА НА АЭРОДИНАМИЧЕСКИЙ НАГРЕВЕГО ОБОЛОЧКИМногочисленные исследования показали, что нагрев тел раз¬
личной формы неодинаков. Желательно, чтобы при заданной
массе полезной нагрузки (боевой заряд, приборы и т. п.) масса
боевой части (БЧ) была наименьшей. Поэтому выбор рациональ¬
ной формы БЧ имеет важное значение. Рассмотрим качественно
влияние формы тела на аэродинамический нагрев его оболочки.Как уже отмечалось, аэродинамический нагрев обусловлен пе¬
реходом кинетической энергии тела в тепловую энергию окружаю¬
щего воздуха, часть из которой передается оболочке. Изменение
кинетической энергии тела за время полета в плотных слоях атмо¬
сферы составляет величинуАЕК = ЕК0-ЕКС, (6.8)где Ек0 — -j- m0ul — начальная кинетическая энергия тела;ЕКс = ~y тси2с — конечная кинетическая энергия тела.II этих выражениях:то, тс — начальная и конечная массы тела;Но — скорость полета при входе в плотные слои атмосферы
(на высоте 80-М00 км);131
1ис—конечная скорость полета.Как показали Аллен и Эггерс [18, 21], полное количество теп¬
ла, подведенного к оболочке тела за время его движения в плот¬
ных слоях атмосферы, можно выразить в видеQ==_l(6.9)
Z схгде сх — коэффициент силы лобового сопротивления, который
складывается из коэффициентов волнового сопротивления схв, со¬
противления трения схтр и донного сопротивления схя, т. е.сх = схв + схтр + схя. (6.10)Анализ формул (6.8) — (6.10) показывает, что величину Q мож¬
но уменьшить двумя различными способами. Первый из них за-НаправлениеСкачок уплотнения
Рис. 6.6. Обтекание тела иглообразной формыключается в том, что телу придается хорошо обтекаемая иглооб¬
разная форма, для которой схв~схд~0 и сх~схгр (рис. 6.6).
В этом случаеQzz-^-bEK = -]r(m0u,l — тси2с), (6.11)и снижение Q достигается уменьшением потерь кинетической энер¬
гии при движении в плотных слоях атмосферы.Однако такой способ снижения аэродинамического нагрева
практически неосуществим, так как обеспечить сохранность за¬
остренной формы при скоростях входа Ыо = 6ч-8 км/сек не удается.Более эффективным средством уменьшения нагрева является
второй способ, заключающийся' в увеличении аэродинамического
сопротивления. Для плохо обтекаемых тел, примерами которых
могут служить сфера (сж«1) и сегментальное тело (1<сх<2)
(рис. 6.7), весьма велика составляющая схв (сгстр~0,02) и за счет
этогосх тр> Ем ЕКс.В этом случае основная часть кинетической энергии тела затрачи¬
вается на создание мощного головного скачка уплотнения и во¬
влечения в движение большого объема воздуха, причем оказы¬
вается, чтоQ < 0,01 £ко. (6.12)Такрй способ снижения нагрева широко применяется на косми¬
ческих аппаратах (КА), однако для БЧ распространения не по¬132
лучил. Это объясняется тем, что большое значение коэффициен¬
та сх приводит к значительному торможению тела уже в верхних
разреженных слоях атмосферы. Скорость полета,- например, сфе¬
рической БЧ на малых высотах, как правило, незначительна, что
облегчает уничтожение БЧ средствами ПРО противника, а также
увеличивает рассеивание за счет действия ветра.Обычно требуют, чтобы
БЧ при подходе к цели еще Скачокимела бы сверхзвуковую
,скорость. Этим противо¬
речивым требованиям: иметь
сверхзвуковые скорости на
малых высотах и добиться
наибольшего снижения на¬
грева — удовлетворяют БЧ,
выполненные в форме при¬
тупленного конуса с малым
углом полураствора. Наи*более распространенные формы БЧ межконтинентальных ракет
показаны на рис. 6.8 [25, 26].Нагрев БЧ может быть снижен без ухудшения их тактических
характеристик регулированием лобового сопротивления, т. е. коэф-Рис. 6.7. Примеры плохообтекаемых тел:а — сфера; 6 — сегментальное телоРис. 6.9. БЧ с отделяющимся стабили¬
затором:1 — действительная траектория; 2 — траекто¬
рия, прогнозируемая системой ПРО; 3 — мо¬
мент отделения стабилизатора; 4—отделяе¬
мый стабилизаторРис. 6.8. Различные формы БЧ меж¬
континентальных ракет:л—БЧ со сферическим притуплением;
б — БЧ с эллиптическим притуплением;
а — БЧ с цилиндрическим корпусом; 1 —
притупление (наконечник); 2 — корпус БЧ;3 — стабилизатор (юбка)фициента сх. Пусть для примера БЧ имеет дополнительный стаби¬
лизатор с большим углом полураствора (y = 30-f-50°). По дости¬
жении в полете заданного значения осевой перегрузки срабаты¬
вает механизм отделения. При отделении стабилизатора коэффи¬
циент сх БЧ может быть уменьшен более чем в 2 раза, что при¬
ведет к резкому изменению характеристик траектории полета [27].
И результате обеспечиваются большие скорости полета у цели и
одновременно осуществляется противоракетный маневр БЧ
(рис. 6.9). Возможны также и другие способы регулирования ло¬133
бового сопротивления и противоракетного маневра БЧ, на кото¬
рых мы здесь останавливаться не будем [13, 14].Как было уже указано, снижение аэродинамического нагрева
рациональным выбором формы тела имеет вспомогательное зна¬
чение и не позволяет отказаться от конструктивных мер тепловой
защиты. Выбор рациональной формы лишь обеспечивает наиболее
экономичные параметры тепловой защиты. Поэтому в следующем
параграфе рассмотрим конструктивные способы защиты БЧ и КА
от аэродинамического нагрева.§ 6.4. СПОСОБЫ ТЕПЛОВОЙ ЗАЩИТЫ БОЕВЫХ ЧАСТЕЙ
И КОСМИЧЕСКИХ АППАРАТОВВ настоящее время БЧ и КА защищаются от аэродинамиче¬
ского нагрева нанесенными на внешнюю поверхность силовой обо¬
лочки специальными теп¬
лозащитными покрытия¬
ми. В качестве покрытий
используются керамиче¬
ские или органические
материалы с термостой
ким наполнителем, обла¬
дающие высокими значе¬
ниями теплот фазовых
превращений и низкой
теплопроводностью.В полете покрытие вна¬
чале аккумулирует тепло,
поступающее от погра¬
ничного слоя. При этом
часть аккумулированного
тепла излучается внеш¬
ней поверхностью покры¬
тия в окружающее про¬
странство в форме электромагнитных колебаний. При увеличении
температуры на поверхности покрытия до определенного значения
начинаются физико-химические превращения и унос частиц мате¬
риала воздушным потоком. С этого момента толщина покрытия
уменьшается, и большая часть поступающего извне тепла отво¬
дится от стенки с уносимыми газообразными или конденсирован¬
ными частицами. Одновременно часть тепла излучается с поверх¬
ности в окружающее пространство, а также идет на прогрев вну¬
тренних слоев материала. Именно поэтому после прекращения
уноса частиц на силовой оболочке должен остаться слой мате¬
риала, предохраняющий ее от разрушения вследствие большого
нагрева (рис. 6.10).В настоящее время, по данным иностранной печати, разрабо¬
таны и внедрены в качестве тепловой защиты БЧ и КА теплоза-7 ТРис. 6.10. Схема работы разрушающегося по¬
крытия:1 — теплозащитное покрытие; 2 — силовая оболочка;
3— распределение температур в стенке; Й — началь¬
ная толщина покрытия; s(t) — текущая координата
фронта разрушения материала; гп — скорость уноса
массы с единицы поверхности материала; ^изл“"
тепловой поток излучения покрытия; Т — темпера¬
тура; х — координата; t — время134
щитные и теплоизоляционные материалы различных составов.
В зависимости от того, какой из физико-химических процессов при
уносе массы играет преобладающую роль, все теплозащитные ма¬
териалы можно подразделить на следующие классы:— сублимирующие (например, материалы на основе карбида
кремния);— окисляющиеся (например, графит);— оплавляющиеся (стекловидные материалы на основе Si02);— термически разлагающиеся (армированные пластики).В частности, наиболее рас¬
пространенным теплозащитным
материалом является асбофе-
иольный пластик [20], в состав
которого входят асбест (плавит¬
ся) и бакелитовая смола (разла>
гается с выделением газов и кок¬
са, который в свою очередь го¬
рит). Кроме разрушающихся теп¬
лозащитных материалов можно
использовать и другие способы
тепловой защиты, основанные на
применении теплопоглощающих
экранов, конвективного охлажде¬
ния, испарительного охлаждения и радиационного стока тепла.
Рассмотрим кратко сущность способов защиты, основанных на
этих принципах.Т е и л о п о г л о щ е н и е — это аккумулирование тепла внешней
несиловой оболочкой (экраном), изготовленной из тугоплавкого
металла с хорошей теплопроводностью (вольфрам, молибден, бе¬
риллий). Силовая оболочка отделяется от нагретого до высоких
температур экрана слоем теплоизоляции (рис. 6.11). При этом
большая часть поступающего извне тепла аккумулируется экра¬
ном (~65%) и излучается с его внешней поверхности в виде
лучистого теплового потока (~30%). Оплавления экрана не про¬
исходит, если соответственно выбрать материал и его тол¬
щину [27].Конвективное охлаждение — это аккумулирование
поступающего извне тепла жидким теплоносителем. Силовая обо¬
лочка в этом случае защищается двумя оболочками, между кото¬
рыми течет теплоноситель, и слоем теплоизоляции (рис. 6.12).
Теплоноситель при своем движении вдоль образующей тела по¬
глощает ~90% поступающего извне тепла, после чего выбрасы-
нлется в атмосферу. Наиболее перспективными считаются жидко-
металлические теплоносители (например, литий) [27].При испарительном охлаждении через пористую
пли перфорированную стенку в пограничный слой подаются газ
или пары жидкости (охладитель). Рассмотрим для примера пори¬
стое охлаждение (рис. 6.13).Рис. 6.11. Схема защиты за счет
аккумуляции тепла:1 — теплозащитный экран; 2 — теплонзоля-
тор; 3 — силовая оболочка; 4 — распреде¬
ление температур в стенке135
Температура пористой стенки поддерживается постоянной про¬
граммным регулированием расхода охладителя^. Таким образом,
практически весь поступающий к стенке тепловой поток отводится
от нее с парами фильтрующегося через пористую оболочку охла¬
дителя. Перспективными охладителями считаются, например, ам¬
миак, метиловый спирт, водород [27].Рис. 6.12. Схема теплозащиты за счет конвективного
охлаждения:/ — внешняя оболочка охлаждающего тракта; 2— теплоно¬
ситель; 3 — внутренняя оболочка охлаждающего тракта;4 — теплоизолятор; 5—силовая оболочка; Д<7ТИ —количе¬
ство тепла, аккумулированного изоляцией; — количе¬
ство тепла, аккумулированного теплоносителемСравнительный анализ [27] различных способов теплозащиты по¬
казал, что теплопоглощение и конвективное охлаждение непригодныдля БЧ и КА из-за большой мас¬
сы тепловой защиты. Испари¬
тельное охлаждение хотя и поз¬
воляет обеспечить даже более
экономичные (по массе) пара¬
метры тепловой защиты, чем теп¬
лозащитные покрытия, но усту¬
пает последним в надежности,
конструктивной простоте и в
удобстве эксплуатации. Поэтому
тепловая защита, основанная на
испарительном охлаждении, мо¬
жет найти применение лишь для
тел и участков поверхности, из¬
менение формы и размеров кото¬
рых не допускается или нежела¬
тельно (сопла РДТТ и т. п.) [28].
Наконец, система радиационного стока тепла пред¬
полагает, что большая часть поступающего тепла излучается стен¬
кой в окружающую среду. Этот способ теплозащиты применяется
на планирующих КА, а также для защиты донных областей кон¬
струкций, когда требуется в течение длительного времени отво¬
дить небольшой по величине тепловой поток. Конструктивно этаРис. 6.13. Схема теплозащиты за счет
испарительного охлаждения:/ — пористая стенка; 2 — охладитель; 3 —
силовая оболочка: 4 — распределение тем¬
ператур в пористой стенке; ш —удельный
(на единицу поверхности) расход охлади¬
теля136
система представляет собой совокупность тонких металлических
экранов, закрепляемых на силовой оболочке с помощью сот [29].В заключение заметим, что возможны и различные комбини¬
рованные системы тепловой защиты (например, сочетание покры¬
тий с испарительным охлаждением и т. п.).§ 6.5. РАСЧЕТ КОНВЕКТИВНЫХ ТЕПЛОВЫХ ПОТОКОВЗадачу определения аэродинамического нагрева для удобства
разделяют обычно на две самостоятельные части:1. Определение интенсивности аэродинамического нагрева (т. е.
конвективных и лучистых тепловых потоков) при условии, что тем¬
пература нагрева оболочки ракеты (или ее боевой части) изве¬
стна.2. Расчет прогрева оболочки ракеты (или БЧ) при заданной
интенсивности аэродинамического нагрева и определение необхо¬
димой массы теплозащиты.В данном параграфе рассмотрим способы решения первой за¬
дачи.Величина конвективного теплового потока, поступающего к по¬
верхности обтекаемого тела, зависит от состава и параметров об¬
текающего газа, режима его течения в пограничном слое, а также
от того, сопровождается ли теплообмен между газом и поверх¬
ностью тела массообмепом. Приведем расчетные зависимости, поз¬
воляющие определить конвективные тепловые потоки, поступаю¬
щие от пограничного слоя при отсутствии газовыделения с по¬
верхности тела. Они справедливы в том случае, когда обтекающий
воздух представляет собой сплошную среду, что справедливо для
высот меньше 80 км. На высотах более 80 км конвективный тепло¬
обмен баллистических ракет можно не учитывать.Расчет конвективных тепловых потоков при ламинарном
пограничном слоеРасчет конвективных тепловых потоков по формулам для ла¬
минарного режима течения в пограничном слое производится or
критической точки х=0 до точки .поверхности х = хп, где начи¬
нается переход к турбулентному пограничному слою (см. § 6.1).
Переход ламинарного слоя в турбулентный происходит в таком
сечении поверхности тела, в котором достигается так называемое
критическое число Рейнольдса Relw. Как показывают эксперимен¬
ты [10],= ж 4 • 10» -т- 2 • 10»,где pe, yja—плотность и коэффициент динамической вязкости
воздуха на внешней границе пограничного слоя.137
Величина ReKp зависит от местного числа М&, степени охла-
тждения поверхности ■ ^ (где Tw — температура поверхностиieтела), градиента давления в потоке вдоль поверхности и ее шеро
ховатости. Надежные данные о количественной зависимости вели
чины ReKp от указанных выше факторов пока отсутствуют. По¬
этому обычно считают, что переход ламинарного пограничного
слоя к турбулентному совершается в том сечении, в котором рас¬
чет дает?Г~?кУр.где ^ам —конвективный тепловой поток, подсчитанный по фор¬
мулам для ламинарного пограничного слоя;
qrw — то же, но для турбулентного пограничного слоя.Из этого условия и находят обычно численные значения хп,
приравнивая правые части зависимостей для q™M и qTKyр (см.
ниже).Чтобы определить осредненный по участку поверхности дли¬
ной I конвективный тепловой поток qTM на плоской пластине, к
которой может быть отнесена боковая поверхность обтекаемого
тела при нулевом угле атаки а, и на остром конусе с углом полу¬
раствора у = 5-ь30°, применяют расчетные формулы [30]:— для пластины:Й“ = («ЖР/) (:I - -£-) [-5]; (6.13)— для острого конуса:(1>07т - 2,7 + ф) (1 —^) [-5-]; (6.14)где Рое * — плотность и температура воздуха в набегающем
потоке.Местные значения конвективных тепловых потоков — q"aM в
любом сечении х на поверхности плоской пластины и острого ко¬
нуса определяются соотношением [1]Рqr = 0,5qr. (6.15)В этом выражении поток q*Km вычисляется по формулам (6.13)
и (6.14), в которых величина I принимается равной координате
сечения (/ = *). Вблизи критической точки соотношения (6.13) и
(6.14), а следовательно, и (6.15) становятся непригодными. Ве¬
личину конвективного теплового потока, поступающего к поверх-138
ности тела в критической точке сферического притупления можно
определить по приближенной зависимости [23]г) (Л 4««3,0 0.5дЛШ ==_!_ °° Р°° Л — JjIL) Г—1 (6 16)к сф Л0-5 V foyL-“2J’ ^где R — радиус притупления лобовой поверхности;iw—энтальпия воздуха при температуре поверхности обте¬
каемого тела в критической точке.В ряде случаев форма притупления тела может отличаться от
сферической. Конвективный тепловой поток в критической точке
притуплений различных форм можно определять также по зави¬
симости (6.16), используя дополнительно следующие соотноше¬
ния [9]:— для эллипсоида вращения, если R— радиус кривизны по¬
верхности эллипсоида в критической точке,длам —— /улам .* К ЭЛ ^ к сф ’— для цилиндра радиуса R, обтекаемого поперек оси,/тлам — Г) 7К/7лам •Чк цил — и>/0<»к Сф ’— для пластины шириной 2R, установленной нормально по¬
току,<7лам = 0,63<71ам. ;“кпл > “ к сф ’— для плоского торца радиуса Rдлам _ 0,84fl"la“ .* к тор * “ к сфЗаметим, что обтекая плоские притупления, максимальный тепло¬
вой поток образуется не в критической точке, а в углах торца
или пластины, гдедлам = 1 40длам“к шах > “к сфРасчет конвективного теплового потока при турбулентномд пограничном слое < .Осредненные по поверхности длиной I конвективные тепловые
потоки— <7кУР на плоской пластине и остром конусе (у=4+ 12й)
при турбулентном режиме течения воздуха в пограничном слое
могут быть аппроксимированы [17] следующими зависимостями:— для пластины-,ур = 0195_Ю1! Ц2.24р0,8 . 7-0,69 , (6.17)— для острого конуса»"’р = ^г??(2'25' + « <6Л8>я, 139
Местные значения конвективных тепловых потоков — <7*уР в этих
случаях выражаются формулой [1]<7кУР = 0,8 • ijrjyp. (б.1*>)Здесь поток qlyp вычисляется по формулам (6.17) и (6.18) с пол
становкой в них вместо величины / координаты рассматриваемою
сечения.Чтобы ориентировочно рассчитать максимальный тепловой по
ток на сферическом притуплении, можно использовать завит
мость [23]= (МО).Если форма притупления отличается от сферической, то величину
<7кУтах также можно определить, используя зависимости (6.20) м
следующие соотношения [1]:— для цилиндра радиусом R, обтекаемого поперек оси,& = °.88СсрФ;т# у— для пластины шириной 2 R, установленной нормально к по
току,<JlZ=0,84<J7cV>— для плоского торца радиуса RCTpop = 0.947cVОтметим, что при турбулентном режиме обтекания плоского торца
или пластины максимальные тепловые потоки наблюдаются в йх
углах.Расчет конвективных тепловых потоков в зонах отрыва
пограничного слояДо сих пор мы рассматривали способы расчета конвективных
тепловых потоков на поверхности тел простейшей формы (плоская
пластина, конус, сфера и т. п.). Однако реальные боевые части и
корпуса ракет могут иметь более сложную конфигурацию, пред¬
ставляющую собой как бы комбинацию простейших тел, например
конуса и цилиндра, сферы и обратного конуса и т. п. (рис. 6.8).
Расчет конвективных тепловых потоков на таких телах услож¬
няется за счет особого характера их обтекания.Так, в окрестности точки перехода цилиндрической поверхно¬
сти в коническую возникает отрыв пограничного слоя (рис. 6.14).Эксперименты показывают, что если перед точкой отрыва по¬
граничный слой турбулентный, то интенсивность теплоотдачи в
зоне отрыва такова, как если бы от точки присоединения потока140
по направлению обратных потоков развивался турбулентный слой.
Поэтому местный конвективный тепловой поток, поступающий к
поверхности тела в зоне отрыва, рассчитывается по формулам
для турбулентного пограничного слоя на остром конусе [31]:<7т урОТотрai = 0,034 • Re~0'2 ■а£ (К iw)’и \°-п
hPttl^OTp^OTpда^отр»(6.21)гдехотр—координата, отсчитываемая вдоль поверхности по на¬
правлению от точки присоединения потока к точке
отрыва;СкачокКритический
ска fо куплотнения,Пограничный
слой' С №ЧЧЧЧЧЧЧЧЧЧЧЧЧЧЧЧЧ 'f'Обтекаемая поверхность .Рис. 6.14. Зона отрыва пограничного слоя
в районе перехода цилиндрической поверхно¬
сти в коническую:/ — зона отрыва потока; 2 — точка присоединения
потока; Тз — угол отклонения границы зоны отрыва#отр—скорость воздуха на внешней границе пограничного
слоя острого конуса с углом у = уз, обтекаемого пото¬
ком с числом М —Мь\Pw’Vw—параметры воздуха, определяемые по давлению в
зоне отрыва и температуре нагрева поверхности
тела Tw.Зависимости (6.21) могут быть использованы для расчета теп¬
ловых потоков на конической поверхности тела за зоной отрыва.
В данном случае нужно рассматривать обтекание конуса с углом
f — y3 внешним потоком, параметры которого равны параметрам
воздуха на внешней границе пограничного слоя перед зоной отрыва.
Координата х отсчитывается вдоль поверхности тела начиная от
точки присоединения потока.Пограничный слой отрывается также за донным срезом обте¬
каемого тела (рис. 6.1 и 6.2). Как следует из экспериментальных
данных, в приближенных расчетах теплообмена в области днища
можно брать [32]:?кдн~°.2Сф- (6'22)141I
где <7£асмф — конвективный тепловой поток в критической точке
тела/V- О)Приведенные здесь зависимости позволяют рассчитывать ос*
редненные и местные значения конвективных тепловых потоков
только приближенно, так как большинство из них получено ап¬
проксимацией экспериментальных и расчетных данных [23]. Более
точные зависимости для определения величины <?к имеются в ра¬
ботах [1, 9, 11, 17]. Там же содержатся необходимые данные п
указаны способы расчета параметров сверхзвукового обтекания
тел различной конфигурации.§ 6.6. РАСПРЕДЕЛЕНИЕ КОНВЕКТИВНЫХ ТЕПЛОВЫХ
ПОТОКОВ ВДОЛЬ ПОВЕРХНОСТИ ОБТЕКАЕМЫХ ТЕЛВ предыдущем параграфе были рассмотрены зависимости для
определения конвективных тепловых потоков, позволяющие рас¬
считывать величины <7К в любом сечении БЧ или корпуса ракеты.Однако на практике обычно
ограничиваются расчетом теп¬
лообмена в областях его наи¬
большей интенсивности. Что¬
бы установить такие области,
необходимо рассмотреть рас¬
пределение конвективных теп¬
ловых потоков вдоль поверх¬
ности обтекаемых тел. Разбе¬
рем наиболее общий случай
распределения конвективных тепловых потоков вдоль поверхно¬
сти БЧ сложной конфигурации, представленной на рис. 6.15.Многочисленные расчетные и экспериментальные данные пока¬
зывают [1], что на поверхности обтекаемых тел всегда есть уча¬
сток ламинарного обтекания. Простираясь от передней критиче¬
ской точки, он на больших высотах полета (//> 50 км) зани¬
мает практически всю поверхность БЧ. На высотах же ниже 40 км
на большей части поверхности БЧ есть турбулентный пограничный
слой. В последнем случае наблюдается наибольшая интенсивности
аэродинамического нагрева. Поэтому остановимся на нем по¬
дробнее.Конвективный тепловой поток в критической точке (ламинар¬
ный пограничный слой) подсчитывается по зависимости (6.16).
Если предположить, что температура нагрева поверхности БЧ
вблизи критической точки вдоль оси х не изменяется, то, как
показывают теоретические и экспериментальные исследования,
распределение потока q*au на этом участке будет зависеть лишь
от величины и характера изменения давления. Как известно, дав¬
ление вдоль сферического притупления снижается, поэтому ве¬
личина от критической точки уменьшается вплоть до точкиНаправление отсчетаРис. 6.15. БЧ сложной конфигурации142
Хдтр —-—-.О ССп X,%RZперехода хп (см. § 6.1). Таким образом, на участке ламинарного
обтекания сферического притупления БЧ наибольшие значения
конвективных тепловых потоков имеются в критической точке.За точкой перехода при увеличении х значения qK быстро ра¬
стут, так как возрастает скорость потока на внешней границе
пограничного слоя. Однако
одновременно происходит гн
уменьшение давления (а
следовательно, и плотности
ноздуха рб ), что снижает
интенсивность теплообмена.Поэтому, как показывают
расчеты, тепловой поток на
расстоянии ,v~0,6/? (окре¬
стность звуковой точки)
достигает максимума. Ве¬
личина конвективного теп¬
лового потока в этой точке
определяется уравнением
(6.20). Для л:>0,6 R даль¬
нейшее уменьшение плот¬
ности воздуха на внешней
границе пограничного слоя
уже не компенсируется воз¬
растанием скорости пото¬
ка м5, поэтому величина qK
падает.Скорость этого падения
резко изменяется в точке
*ск сопряжения сферическо¬
го притупления и кониче¬
ской поверхности БЧ. На¬
чиная с этой точки, на уча¬
стке х ^ хск основной при¬
чиной уменьшения конвек¬
тивного теплового потока
является рост толщины по¬
граничного слоя. Здесь тепловой поток (в случае турбулентного
I пограничного слоя) умёньдаа-ется пропорционально х~0’2.В точке х = хт сопряжения конической и цилиндрической по¬
верхностей БЧ, как видно из рис. 6.26, возникают волны разре¬
жения и скорость потока возрастает. -Однако далотность воздуха
за волнами разрежения уменьшается более резко. В результате
этого в данной точке величина qH скачкообразно уменьшается,
после чего конвективный тепловой поток вдоль поверхности про*ХнцЭСотр ХррРис. 6.16. Идеализированная картина рас¬
пределения конвективных тепловых пото¬
ков вдоль поверхности БЧДОЛЖает уменьшаться пропорционально
|цины пограничного слоя.-0,2за счет роста тол-U143
Особые условия конвективного теплообмена возникают за точ
кой отрыва пограничного слоя x—x0TV. Как показывает анализ
формулы (6.21), в точке л:пр присоединения потока величина
qK->oo. Для определенности можно, по-видимому, полагать, что
величина qK max будет такой же, как в углах плоского торца, об¬
текаемого внешним потоком с параметрами, равными параметрам
воздуха на внешней границе пограничного слоя перед зоной от¬
рыва. Согласно тому же уравнению (6.21) и допущениям § 6.;)
тепловой поток qK от точки присоединения вправо до донного сре¬
за и влево до х=л'0Тр уменьшается пропорционально лг0,2.На рис. 6.16 приведен рассмотренный выше характер распре¬
деления конвективного теплового потока вдоль поверхности БЧ и
сферического тела на высотах полета ниже 40 км. Заметим, что
кривая изменения конвективных тепловых потоков вдоль поверх¬
ности сегментальных тел аналогична верхнему графику.§ 6.7. РАСЧЕТ ЛУЧИСТОГО ТЕПЛОВОГО ПОТОКАПри торможении воздушного потока, скорость которого пре¬
восходит 3000 м/сек, температура воздуха в пограничном слое и
за скачком уплотнения настолько повышается, что происходит воз¬
буждение электронных уровней энергии его молекул и атомов, а
также их ионизация с появлением свободных электронов. Одно¬
временно с процессами возбуждения и ионизации непрерывно про¬
текают обратные процессы, связанные с переходом электронов на
более низкие энергетические уровни, которые сопровождаются ис¬
пусканием квантов лучистой энергии. В связи с этим при высоких
температурах воздух становится источником теплового и видимого
(светового) излучения — лучистого или радиационного теплового
потока <7Л.Воздух, обтекающий БЧ, наиболее интенсивно излучает за го¬
ловными скачками уплотнения.Рассмотрим лучистый нагрев критической точки сферического
притупления БЧ, т. е. той точки, в которой qa достигает макси¬
мальной величины.Лучистый тепловой поток q„, поступающий к поверхности БЧ
от нагретого воздуха, определяется в соответствии с законом Сте¬
фана— Больцмана по формуле (6.6). Расчет в этом случае очень
громоздкий, так как степень черноты воздуха в зависит не .только
от параметров газа за скачком уплотнения, но и от размеров и
конфигурации излучающего объема. Вместе с тем оценки пока¬
зывают, что излучение воздуха может увеличить суммарное коли¬
чество тепла, поступающего к притуплению БЧ межконтиненталь¬
ной баллистической ракеты на нисходящей ветви траектории по¬
лета, в пределах 10% [23]. Поэтому в ориентировочных расчетах,
связанных со сравнительным анализом, тепловой поток qn обычно
определяют с помощью простых полуэмпирических зависимостей.Например, рассчитывая интенсивность .лучистого нагрева кри-144
гической точки сферического притупления БЧ, можно использо-
и.тгь следующее выражение:4* = -Tf (б-23)где Ел—интенсивность излучения единицы объема плоскопа¬
раллельного слоя воздуха;.I—толщина излучающего плоскопараллельного слоя;/л—коэффициент формы скачка уплотнения.Рис. 6.17. К расчету излучения воздуха за голов¬
ным скачкомЭмпирическая зависимость для определения величины Ел мо¬
жет быть представлена в следующем виде [24]:(-»/[«/•«']■ <6-24>где коэффициент С и показатели степени т, п зависят от условий
полета (табл. 6.1).Г а б л и ц а G.1их, км!секС, вт/м3тп«„<8,551,68-Ю121,687,48,55 <н„ <11,63,35-10121,4120,0П,6<Иоо1,05-10131,308,0В нашем случае излучающий объем воздуха представляет со*
бой шаровой сегмент высотой /, равной расстоянию отхода скачка
уплотнения от критической точки (рис. 6.17). Для сферического
прнтупления [16]/л=1 +ТГ~0>9 /5-- (6-25)где R — радиус притупления БЧ. '0-1736 145
Зависимость величины I от параметров потока хорошо описы¬
вается простым выражением [12](6.26)где р2 — плотность воздуха за прямым скачком уплотнения. При
скорости полета >6 км/сек приближенно можно полагатьКак уже указывалось выше, максимальная величина лучистых
тепловых потоков наблюдается в окрестности критической точки.
При удалении от нее вследствие уменьшения плотности и темпе¬
ратуры воздуха лучистый тепловой поток быстро уменьшается по
закону [24]и в звуковой точке составляет примерно 0,5 qn max. На боковой
поверхности обтекаемого тела лучистые тепловые потоки, посту¬
пающие от нагретого в пограничном слое воздуха, пренебрежимо
малы.Иногда притупление БЧ может быть выполнено в форме эл¬
липсоида вращения. В этом случае лучистый тепловой поток в
критической точке можно определять также по зависимостям
(6.23) — (6.26), если принятьгде а, b — полуоси эллипсоида, направленные соответственно по¬
перек и вдоль продольной оси БЧ.Лучистый теплообмен между воздушным потоком и обтекае¬
мым телом не только увеличивает нагрев, но и определенно влияет
на конвективный теплообмен, так как перенос лучистой энергии
в пограничном слое изменяет физические характеристики воздуха.
Однако, как показывают расчеты [12], для баллистических ракет,
совершающих полет в атмосфере Земли, это влияние незначи¬
тельно.В предыдущих параграфах были даны рекомендации по опре¬
делению тепловых потоков, воздействующих на корпус ракеты, ее
БЧ или КА. Рассмотрим теперь методы расчета температурных
полей в конструктивных элементах ракет и КА.Для оболочки ракеты расчетным является активный участок
траектории полета, для оболочки БЧ и КА — атмосферный уча¬
сток траектории входа в плотные слои атмосферы.R0,045; /л ~ 0,84.R = а'/Ь,§ 6.8. РАСЧЕТ ТЕМПЕРАТУРЫ КОРПУСА РАКЕТЫ146
Проводя расчеты температурных полей- в конструктивных эле¬
ментах ракеты, будем использовать следующие допущения:— рассматривается нагрев плоской стенки;— теплофизические характеристики материалов не зависят от
температуры;— задача о нагреве стенки сводится к одномерной задаче теп¬
лопроводности.Допуская это, зависимость температуры оболочки ракеты от
времени наиболее просто найти решением уравнения теплового
баланса [5]. Рассмотрим уравнение теплового баланса оболочки
ракеты, для чего выделим участок оболочки корпуса толщиной о,
расположенный на боковой по¬
верхности ракеты вне силового
набора (рис. 6.18). Ось у напра¬
вим в_глубь стенки. Температуру
оболочки перед стартом ракеты
обозначим Тн, а температуру
наружной и внутренней поверх¬
ностей оболочки соответственно
7 ю1 и ^W2-На активном участке полета
излучение воздуха из-за мало¬
сти <7д не учитывают, поэтому
можно считать, что в полете обо¬
лочка нагревается лишь за счет подвода к ней от пограничного
слоя конвективного теплового потока qK. От нагретой оболочки
часть тепла передается внутрь отсека (тепловой поток qBU), часть
тепла рассеивается с наружной поверхности в окружающее про¬
странство излучением (тепловой поток <7Изл).Таким образом, чтобы определить температуру оболочки в по¬
лете, необходимо решить уравнение нестационарной теплопровод¬
ности Фурье(6.27)(6.28)(6.29)(6.30)температура, координата и время;
удельная теплоемкость, плотность и коэффи¬
циент теплопроводности материала оболочки.где Т, у, t —
с, р, X —1в* / Ал**дТ дсР~шду ду )при, следующих начальномТ(Я0) = Т„и граничных условияхд'Т I
ду |у=одТ— Xдуq к *7изл>у=8 = ?вн’Рис. 6.18. Тепловой баланс оболочки
ракеты
Поставленную задачу можно решить просто, сведя систему
уравнений (6.27) — (6.30) к одному уравнению теплового ба¬
ланса.Проинтегрируем уравнение (6.27) по координате у в пределах
от у — 0 до у — Ь и учтем начальное условие (6.28), тогдаВ уравнении (6.31) вынесем знак дифференцирования по t за
знак интеграла, а также учтем граничные условия (6.29) — (6.30).
Поскольку для оболочки корпуса Ь во времени не меняется, т. е.
db/dt — 0, то после ряда преобразований получим:Уравнение (6.32) называют уравнением теплового баланса.Как показывают расчеты, в тонких металлических оболочках
с 8<[4-ь6 мм различия между температурами на наружной ТиЛ
и на внутренней Tw2 поверхностях стенки невелики (например,
7’wi=250°C, ГЮ2 = 240оС). .Поэтому с достаточной для практики
точностью в уравнении (6.32) температуру можно вынести из-под
знака интеграла средним по толщине значением. После преобра¬
зований вместо уравнения (6.32) окончательно получимгде Tw — средняя по толщине температура оболочки.Таким образом, изменение температуры оболочки ракеты вдоль
траектории зависит от величины и характера изменения тепловых
потоков <7К, <7ИЗЛ, <7ВН, а также от толщины и теплофизических ха¬
рактеристик материала оболочки. Тепловой поток излучения стен¬
ки можно рассчитывать по формулегде ew — степень черноты стенки.Величина ew зависит от природы материала, качества поверх¬
ности и температуры стенки. Например, для алюминиевых и маг¬
ниевых сплавов £№ = 0,5-f-0,55,_ для поверхности, покрашенной эма¬
левым лаком, = 0,85ч-0,95.Конкретное выражение для теплового потока qBU в общем виде
записать трудно, так как он зависит от конструкции отсека раке¬
ты, которая определяет механизм передачи тепла от оболочки к
внутренним элементам (теплопроводность или излучение и кон¬C?4t\ (T-TH)dy = qK — ql' (6.32)оdTwdt(6.33)(6.34)148
векция). В частном случае, если внутренняя поверхность оболоч¬
ки соприкасается с жидкой или газообразной средой:<7вн = *вн iTw — твн), (6.35)где ави — коэффициент теплоотдачи к внутренней среде;Тан — температура жидкости или газа.Если принудительное движение жидкой или газообразной среды
отсутствует, то величина авн определяется законами свободной
конвекции. При свободной конвекции«вн = 0,135Хт // рГт (6.36)у чт 1 W "+• 1 внгде Хш, vm, Ргт — коэффициенты теплопроводности, кинема¬
тической вязкости и число Прандтля внут¬
ренней среды;
пх—коэффициент осевой перегрузки ракеты;
g0 = 9,81 м/сек2—ускорение силы тяжести.В расчетах физические свойства среды (v, X, Рг) определяют по
средней температуреТ = — (т +Т )1 m 2 \ 1 W * вн/*Формулу (6.36) можно использовать также, рассчитывая тепло¬
обмен между обечайкой бака и газом наддува выше зеркала топ¬
лива. При наддуве баков горячими газами, имеющими темпера-
туру TB„>TW, тепловой поток qBIl в уравнениях (6.32) и (6.33)
имеет обратный знак. В большинстве случаев расчет зависимости
Tw (t) проводят в запас без учета теплового потока qB„.Уравнение теплового баланса (6.33) позволяет качественно
проанализировать изменение температуры оболочки вдоль траек¬
тории полета.Увеличение температуры оболочки, а следовательно, и появле¬
ние тепловых потоков qn33l и qB,„ обусловлено воздействием кон¬
вективного теплового потока qK. В § 6.5 уже указывалось, что для
ламинарного пограничного слоя qK ~ р^5мА°1 для турбулентного
q« ~ Р0.8^30- Следовательно, величина qK в большой степени зави¬
сит от скорости и высоты полета ракеты.На активном участке траектории вследствие быстрого увели¬
чения скорости полета конвективный тепловой поток вначале
растет, поэтому увеличивается температура оболочки. Затем с вы¬
сотой начинает сказываться уменьшение плотности воздуха, и
конвективный тепловой поток, достигнув некоторого наибольшего
значения, начинает снижаться. На высотах более 80 км полагают
qK~0 (рис. 6.19).В связи с этим температура оболочки растет лишь до опреде¬
ленной высоты. Как показывают расчеты, максимальное значение149
Tw бывает на высотах 40-Т-60 км, где уже уменьшается qK и дости
гается равенство qK = <?Изл + <7вн- В дальнейшем Tw уменьшается, так
как преобладает влияние отвода тепла в глубь корпуса ракеты и
излучение в окружающее пространство.С увеличением дальности полета значение Tw max изменяется
мало, так как большие скорости полета достигаются уже в верх¬
них разреженных слоях атмосферы и не могут привести к суще¬
ственному увеличению температуры оболочки. В количественном
отношении величина Tw max определяется толщиной оболочки, теп¬
лофизическими характеристиками ее материала, положением рас¬
четного сечения и программой
разворота ракеты. Рассмотрим
подробнее методику расчета
нагрева оболочки без учета
теплообмена с внутренней сре¬
дой (<7вн=0).Данный случай расчета яв¬
ляется типичным для обечаек
топливных баков, расположен¬
ных выше зеркала жидкости,
оболочки камеры сгорания
твердотопливного двигателя,
переходников и обтекателей,
а также хвостовых и прибор¬
ных отсеков, если последние
не имеют наружного теплоза¬
щитного покрытия,
оболочки во времени сводится
к решению уравнения теплового балансаdTw qK <7изл /с о-7\ST- ф • (6-37)Чтобы решить уравнение (6.37), используем метод конечных при¬
ращений. Согласно этому методу все время полета разбивается на
достаточно малые (4-т-6 сек) интервалы, в пределах которых все
функции считаются постоянными. В пределах каждого интервала
времени At рассматривают нагрев оболочки, имеющей начальную
температуру, равную температуре в конце предыдущего интерва¬
ла времени, при скачкообразном изменении конвективного и лу¬
чистого тепловых потоков, которые затем в пределах At остаются
постоянными.Решим уравнение (6.37) относительно искомой величины Tw,
используя следующее выражение для конвективного теплового
потока;Рис. 6.19. Характер изменения тепловых
потоков qк, <7изл+<7пн и температуры
оболочки вдоль активного участка траек¬
тории полета ракетыРасчет изменения температуры150(6.38)
Где c„w = ~- — средняя в интервале 0-т-Tw теплоемкостьWвоздуха при постоянном давлении (срш =
= 1,005 кдж/кгград);
ie — энтальпия восстановления;
iw—энтальпия воздуха при температуре Tw.
Подставив уравнение (6.38) в уравнение (6.37), получим. d'Tw , aicpw rp atie qmn n rar)a\~нт~ ^ cpTL_j? ф—-u-Заменим дифференциалы конечными приращениямиdlqp Д / jy ‘iv, 'wi k~dt >~ХГ==~ ’где Tw k, Tw ft+1 —температура оболочки в моменты времени tK
и ^k+l = ^-к + М.IJce функции в уравнении (6.39) определяют по параметрам набе¬
гающего потока для момента времени th+l и по температуре обо¬
лочки TWt h■ В этом случае вместо выражения (6.39) получаем
Следующее алгебраическое уравнение■ (Т -f bja. TWt ft+1 Tw k bx \[*iie)k+j Янзл. t] = 0,, \t Г мгград “I „ n [ 1 w, к V Гem ~1где bx— I gm J ; <7изл,* — Qew у 100 ) I m2 j’Отсюда окончательно получаемI w< k + *i Яюлу *] ('fHO'i'w.W- 1 + Vi, H1>, k • ( ’Порядок расчета по формуле (6.40) проиллюстрируем на примере
определения температуры обечайки топливного бака.Рассмотрим несущий топливный бак, подверженный воздейст¬
вию внешнего конвективного теплового потока qK (рис. 6.20).
В начальный момент времени ^=0 открывается клапан' К и жид¬
кость начинает вытекать из бака с постоянной скоростью V. Дав¬
ление в баке поддерживается неизменным и регулируется надду¬
вом через клапан N или утечкой излишнего газа через дренажный
клапан М. Ось х направим вдоль стенки бака. Рассчитаем зави¬
симость Tw(t) лишь для участка стенки, соприкасающегося с га¬
зообразной средой. В момент времени t = 0 (уровень жидкости А)
считаем, что температура всей стенки равна температуре жидко¬
сти. В качестве граничного условия принимаем, что при x — vt
(уровень жидкости В) T(vt, t)=T„t. Теплообменом стенки с газом
наддува для простоты пренебрегаем (<7вн = 0), что вполне допусти¬
мо, если бак наддувается холодным газом.Все время полета ракеты на активном участке разбиваем на
интервалы At. Для каждого At по известной из расчета для пре¬
дыдущего интервала температуре TWih в рассматриваемом сече-^ i’be.+>»£* и 7^, 6(бЗ#) 151
иии х и данным о скорости полета им, плотности окружающего
воздуха и угле атаки ф наводим величины + гг>/г+1>
qизл, а- По формуле (6.40) рассчитываем новое значение темпера¬
туры Tw,k+1.Аналогично определяются изменения температуры Г№(/) для
всего активного участка полета, в результате чего находится зна¬
чение Twmax в данном сечении. Одновременно ведутся расчетыизменения Tw(t) для других се¬
чений бака л: и определяется
распределение температур
Т(х) при условии T(vt)=Tm.
В итоге находят максимальные
градиенты температур вдольстенки бака ()\ dX / шахЗначение Twmах и (|j)maxиспользуют как входные дан¬
ные для прочностного расчета
обечайки бака. Если эти зна¬
чения превышают допустимые
из требований прочности вели¬
чины, то необходимо либо уве¬
личить толщину оболочки 3,
либо использовать другой ма¬
териал с большей объемной
теплоемкостью (ср) и лучшими
прочностными характеристика-
Рис. 6.20. К расчету температуры обе- МИ, лиоо изменить программучайки несущего топливного бака вывода ракеты.Выше рассматривался аэро¬
динамический нагрев оболочки ракеты. Применяя многосопловые
ЖРД, также необходимо учитывать нагрев днища ракеты от струп
продуктов сгорания [20].Струи газов, истекающих из сопел, имеют высокую температу¬
ру и являются интенсивным источником теплового излучения. При
этом наибольшему лучистому нагреву подвергается центральная
часть днища (сопла двигателей расположены по кольцу) или
днища между соседними соплами (двигатель имеет две камеры
сгорания).Рассмотрим качественно характер обтекания и теплообмен на
днище ракеты с кольцевым расположением сопел двигателя. Кар¬
тина течения газов у днища со временем полета претерпевает ка¬
чественные изменения, поэтому все время работы двигателя под¬
разделяют на три периода.Первый период —старт ракеты или ступени. В момент старта
происходит удар струй продуктов сгорания по отражателю
(рис. 6.21). В струях перед отражателем возникают мощные скач¬Iв камеру сгорания152
ки уплотнения /, что приводит к увеличению излучательной спо¬
собности газов. Газ, обтекающий отражатель, имеет повышенное
давление, поэтому часть газов направляется к днищу и по его
поверхности растекается в атмосферу. Таким образом, в момент
старта нагрев днища обусловлен как лучеиспусканием струй, так
и конвективным теплообменом с обратными токами.Отражатель уже не влияет на нагрев днища, когда ракета под¬
нимается на высоту нескольких калибров сопла, после чего начи¬
нается второй период нагрева. В течение этого периода истечение
продуктов сгорания из сопла происходит с перерасширением(рис. 6.22), так как давление газов на срезе сопла ра меньше
давления атмосферы рт .В этом случае струи продуктов сгорания, выходя из сопел, су¬
жаются и в них появляются косые скачки уплотнения АВ и ВС.
При этом параметры газа меняются вдоль оси струи таким обра¬
зом, что р2 > рк — /7, > ра) T2>Ti>Tn(Ta — температура газов на
срезе сопла), так что области 2 излучают наиболее интенсивно.Сужаясь отдельные струи между собою не перемешиваются и
оказывают эжектирующее влияние на окружающий воздух. По¬
этому часть воздуха засасывается в зазоры между соплами и не¬
сколько охлаждает днище.С подъемом на высоту окружающее давление ра падает, по¬
этому снижается интенсивность скачков АВ и ВС и при ра=Р„
скачки уплотнения в струях отсутствуют. В точке траектории, где
ра =/?„, лучистый нагрев днища будет минимальным.В течение третьего периода сопло работает в режиме недорас-
ширения, так как давление ра начинает превышать давление ат¬
мосферы. Если ра > рк, струи расширяются и сталкиваются другОтражательРис. 6.21. Старт ракеты:/ — скачок уплотнения; 2 —
граница струиРис. 6.22. Работа двигателя
на режиме перерасширения(Ра<Р„ )
с другом (рис. 6.23). При взаимодействии струй в них возникаю!
скачки уплотнения В, вызывающие возрастание температуры и
давления газа.Давление газа за скачками уплотнения выше, чем у днища.
Поэтому из зоны смешения струй некоторое количество газов на
правляется к днищу и растекается через зазоры между соплами.
Следовательно, в нагреве днища, помимо лучистого теплового
потока от струй, принимает участие также и конвективный тепло¬
вой поток.С изменением течения газа изменяется и тепловой поток, по¬
ступающий к днищу ракеты во время ее полета (рис. 6.24). За¬
метим, что падение q на вто¬
ром участке обусловлено сни¬
жением интенсивности скачков
уплотнения А В и ВС, рост qРис. 6.23. Работа двигателя на ре- Рис. 6.24. Характер зависимости q(t)жиме недорасширения (ра>ра) для днища первой ступени ракеты смногосопловым двигателемна третьем участке — возрастанием интенсивности скачка В в
точке соударения соседних струй.Днища ракеты от лучеиспускания струй продуктов сгорании
защищают либо отражающими экранами, либо теплоизоляцией
оболочки днища, либо выбором теплостойкого материала.В заключение очень коротко остановимся на особенностях на¬
грева корпуса твердотопливной ракеты в период старта из шахты.
Хранение твердотопливной ракеты в термостатированной шахте
колодезного типа очень распространено («Минитмен»). Старт из
такой шахты сопровождается тепловым воздействием продуктов
сгорания двигателя на корпус ракеты (рис. 6.25), продолжаю¬
щимся З-т-4 сек. В момент старта струи продуктов сгорания бьют
по отражателю и разворачиваются на 180°, образуя встречное
течение. Газы, истекающие из сопел двигателя, вначале оттесняют
встречный поток к стенкам шахты. В последующем встречный по¬
ток, двигаясь вдоль стенок шахты, постепенно расширяется и в
некотором сечении касается ракеты. В этом сечении, располо¬
женном вблизи донного среза, где истекающая струя заполняет
весь зазор «ракета — шахта», оболочка ракеты максимально на¬
гревается.Конвективный тепловой поток, поступающий к стенке ракеты154
от продуктов сгорания при движении в шахте, можно рассчитать
по формулеЯк — “к (Т’о — Т w), (6.41)где ак — коэффициент теплоотдачи от газов к оболочке ракеты,
определяемый обычно по экспериментальным данным;7'0 — температура торможения продуктов сгорания (темпера*
тура газов в камере сгорания).Чтобы защитить корпус ракеты от воздействия истекающих из
шахты продуктов сгорания, применяют теплозащитное покрытие
толщиной 1,5-^-2,5 мм с низкой температу¬
рой сублимации [6]. Толщину покрытия вы¬
бирают такой, чтобы после выхода из шах¬
ты на ракете остался его тонкий слой, пре¬
дохраняющий твердотопливный заряд от
аэродинамического нагрева на активном
участке полета.Подобный способ защиты от нагрева
используется, например, на американской
ракете «Минитмен».§ 6.9. ОПРЕДЕЛЕНИЕ НЕОБХОДИМОЙ
ТОЛЩИНЫ ТЕПЛОЗАЩИТНОГО ПОКРЫТИЯРассмотрим способы определения необ¬
ходимой массы ттз тепловой защиты БЧ и
КА. При применении теплозащитных по¬
крытий расчет величины /лтз фактически
сводится к определению необходимой тол¬
щины слоя покрытия для различных сече¬
ний оболочки БЧ и КА.Проектируя БЧ и КА, особое внимание
уделяют определению рационального ва¬
рианта покрытия. Под рациональным пони¬
мают такое покрытие, которое создано из уже отработанных мате¬
риалов и при этом имеет минимальную массу.Рациональный вариант определяется в результате анализа не*
стационарных тепловых полей в покрытии.При движении БЧ или КА в плотных слоях атмосферы на
нисходящем участке траектории тепловое взаимодействие между
пограничным слоем и материалом покрытия протекает как бы в
три этапа. Вначале наружные слои покрытия под действием теп¬
лового потока <7аэР прогреваются (первый этап), при этом часть
тепла излучается наружной поверхностью покрытия в окружаю¬
щее пространство (тепловой поток quan).При достижении на поверхности температуры Тр разрушения
основного компонента покрытия начинаются фазовые превраще¬
ния и унос материала. Поэтому второй этап соответствует перио¬V'SP/T?,\/У,V/I/IfАшTIT_мП.LiуУ Рис. 6.25. Старт твердо¬
топливной ракеты из
глухой шахты155
ду уноса массы покрытия. Он начинается на высоте 40-н50 км и
заканчивается к высоте ~10н-15 км (для БЧ) или 20-г-25 км
(для КА) [33, 34].Вследствие аэродинамического торможения в плотных слоях
атмосферы скорость полета БЧ или КА падает настолько, что на
третьем этапе начинает охлаждаться наружный слой покрытия.
Одновременно происходит прогрев оставшегося после-уноса слоя
покрытия, так как накопленное тепло не только теряется в атмо¬
сферу, но и перераспределяется по всей толще оболочки БЧ
или КА.Схематично этапы расчета толщины покрытия показаны на
рис. 6.26, на котором дана зависимость температуры поверхности
покрытия от времени полета в плотных слоях атмосферы. Заме-тРис. 6.26. Этапы расчета толщины
покрытияпервом этапетим, что каждый этап расчета имеет свои особенности. На первом
этапе определяется момент времени tь отвечающий началу раз¬
рушения покрытия (начало отсчета времени ведется от высоты
80-г-100 км). На втором этапе находят толщину унесенного слоя
покрытия 8уН и момент времени t2, отвечающий окончанию уноса
массы. На третьем этапе определяют глубину прогрева 8пр остав¬
шегося слоя покрытия к моменту окончания полета БЧ или КА н
назначают общую толщину покрытия.Расчет нагрева покрытия на первом этапе.
Как уже упоминалось, теплозащитные покрытия создают на осно¬
ве малотеплопроводных материалов, и поэтому, несмотря на боль¬
шие температуры на поверхности 'покрытия, внутренние его слои
не успевают прогреться и остаются некоторое время «холодны
ми». Это означает, что на первом этапе расчета можно для про¬
стоты рассматривать нагрев покрытия неограниченной толщины
(рис. 6.27).Определяя зависимость Tw(t) и момент времени tu когда до¬
стигается равенство Twx(t{) =7’р, где Гр — температура разруше¬
ния покрытия, необходимо решить уравнение теплопроводностид'ГОду>£)(6.42)156
при следующих начальномТ (у, 0) =ТН (6.43)и граничных условиях■фг)у=0 = 1ч + Ял Ян ;.т> (6.44)<6-45>Эту систему уравнений обычно сводят к одному уравнению тепло¬
вого баланса, которое затем решают методом конечных прираще¬
ний. В частности, чтобы определить температуру на поверхности
покрытия, можно пользоваться формулойг Тп + V/, к'е, к + *5 (<7л, k — Чпзп, ft-l) + ]£ ^ ia /ic\w, k ГТ'« а• ьс ’1 Т °2aiMPW, ft-lгде — температура поверхности покрытия в конце к-to ин¬тервала времени (весь полет разбит на малые интер¬
валы времени Д/= l-f-2 сек для БЧ и 5-^ 15 сек для
КА);cpWi 4_! — средняя теплоемкость воздуха в интервале темпера¬
тур О -s-7’lM_1;j—номер интервала времени, но отсчитывается не впе¬
ред от ^ = 0, как отсчитывается k, а назад от к / = 0;
ai k — энтальпийный коэффициент теплоотдачи в момент
времени th\1е „ — энтальпия восстановления в этот же момент времени,
где Ь2 = у ~х [.м*град1вт\;j=b-1S(y)= S(7’w-‘-^7'h)^7=1 . —AJ = 2Vj— V/TT — K/^T (A =0,5860; л2 = 0,0961; Л3 =
= 0,0500 и т. д.).Рассчитав по формуле (6.46), строят график зависимости
Tw=f(t), из которого находят момент времени t\, когда будет
достигнуто равенствоTw{tx) = Tv.На этом расчет по формуле (6.46) временно прекращается.Расчет толщины унесенного слоя покрытия
составляет второй этап расчета.Как уже указывалось ранее, разрушение теплозащитного по¬
крытия в условиях интенсивного аэродинамического нагрева
сопровождается сложными физико-химическими процессами, про¬
текающими как в толще материала, так и на его поверхности (суб¬157
лимация, плавление, горение, термическое разложение и др.).
Обобщая все эти процессы, можно утверждать, что основными
факторами, определяющими разрушение и унос материала, яв¬
ляются газификация и эрозия (механический отрыв частиц в кон¬
денсированном состоянии). Таким образом, баланс массы на по¬
верхности стенки можно записать в видет = т[-\-тк< (6-47)Qk _ 1 Ijf mvЯка aioQ г,Пили, учитывая, что ai0 — . ■ ■. ■,le lyi»^K = ^K0 — — iw)- (6.48)158где mr — скорость уноса массы в газообразном состоянии;тк — то же, но в конденсированном состоянии (за счет эрозии).
В процессе уноса массы теплозащитного покрытия наблюдается
так называемый эффект вдува, который заключается в следую¬щем. Газообразные продукты, выделяющиеся с поверхности по¬
крытия, внедряются в пограничный слой и создают вокруг БЧ
или КА как бы завесу из более холодного, чем в пограничном
слое, газа. В результате конвективный тепловой поток, поступаю¬
щий к стенке, уменьшается.Характер уменьшения конвективного теплового потока при
вдуве газа в пограничный слой показан на рис. 6.28.Для инженерных расчетов зависимость = удобноЧк о ' ai0аппроксимировать линейной функцией (пунктир на рис. 6.28)Рис. 6.29. Прогрев и разрушение
материала при уносе массыО ч-юРис. 6.28. Влияние вдува газа на
конвективный тепловой поток:дК0 — конвективный тепловой поток при
отсутствии вдува газа (тг = 0); qK — при
тТФ 0; qK = (lg - ij, ттФ 0;»ко=“/о г=°;ai0 — энтальпийный коэффициент тепло¬
отдачи при m — 0
Здесь Чг — коэффициент вдува, определяемый из экспериментов.
Например, для ламинарного пограничного слоя в области крити¬
ческой точки\£Г ~07(—)°’3
лам ’ 1
где = 29 — молекулярный вес воздуха;[Ад,— молекулярный вес паров материала.Для турбулентного пограничного слоя¥ Штур ' з лам-Расчет прогрева и разрушения материала при уносе массы
сводится к решению уравнения теплопроводности с подвижнойdsграницей (рис. 6.29). На рисунке т. —с>ж=4Лк% )• №'49)ири следующих начальныхТ = Т (у, tt) (6.50)и граничных условиях~{Х1у)у=1Ю ^)+}<7изл — ^л — (б-51)Т (s, t) = Тр, (6.52)-OfL~=°- (6-53)где Т(у, — распределение температур в стенке в момент вре¬
мени 11, отвечающий началу уноса массы;
s(t) — координата фронта разрушения материала;ДА — тепловой эффект- газификации, отнесенный к 1 кг
уносимого покрытия.Величину Ah определяют, учитывая уравнение (6.47), по формулеДА = ДАГ = ГДАгл*„ (6.54)mГде Г==^т- — степень газификации материала;
mДАГ — тепловой эффект газификации.Предполагается, что все физико-химические процессы сосредото¬
чены на поверхности стенки; тепловые эффекты плавления вклю¬
чены в среднюю теплоемкость с.Чтобы определить скорость уноса массы и толщину унесенного
слоя покрытия 8уН, целесообразно систему уравнений (6.49) —(6.53) свести к одному уравнению теплового баланса. Проинте¬
грировав уравнение (6.49) по у в пределах от y = s(t) до у — оо
и учтя дополнительные условия (6.51), (6.53) и соотношение(6.54), получим159
cp j -|-[ГиО]^ = <7а,-^га-^)-рДА1.Г^-, (6.55)s(()где qw - qKq -j* q л qm,.В уравнении (6.55) вынесем знак дифференцирования по t за
знак интеграла, при этом учтем граничные условия (6.52) и усло¬
вие Т(у-+оо)=Т1и тогда будем иметьj г (.у, t)dy+ cp{Tp-TK)-£ =dc*—ts(t)= qw - ЧЧ (ie - tw) - РДА..Г-§-. (6.56)В уравнении (6.56) обозначим =с (Гр - Гн) + Г [ДЛГ + W (*, - ij1 = Яэфф, (6.57)ооср j [Г CM)] rfy = /(*). (6.58)3 «УВеличина Яэфф называется эффективной энтальпией. Она вклю¬
чает в себя количество тепла, которое аккумулируется одним ки¬
лограммом теплозащитного материала при нагреве от начальной
температуры Гн до температуры разрушения Тр, тепловой эффект
газификации материала с учетом эрозионного уноса частиц t\hr
и эффекта вдува газообразных продуктов в пограничный слой.Производная представляет собой скорость изменения тепло¬
содержания оставшегося (еще не унесенного) слоя покрытия.Учитывая обозначения (6.57) и (6.58), преобразуем уравнение
(6.56)W = q»~ РЖ^фф- (6-59)Из этого уравнения получим выражение для линейной скорости
разрушения материала— = _^sl L(6 60)dt рЯэфф РЯэфф dt >Интегрируя уравнение (6.60) в пределах от t=t\, до t = t2, полу¬
чим толщину унесенного слоя покрытияti t2SyH= \-JT~- (6-61)J р/^эфф j' Р^эффМногочисленные расчеты показывают, что величина второго ин¬
теграла в правой части уравнения (6.61) для условий полета БЧ
и КА по крайней мере на порядок меньше величины первого ин¬
теграла (рис. 6.30) [22]. Поэтому, когда определяется лишь тол-160
dsщина унесенного слоя покрытия, а не зависимость = /(0 >
величиной этого интеграла пренебрегают. Таким образом,ун'Р^эфф(6.62)В формуле (6.62) заменим интегрирование суммированием, тогда
окончательно“ун2*=14w, к^
Р^эфф, к }(6.63)гдеQw, к> ^эфф, к= f(t) для условий полета БЧ и КгАсредние на интервале А^ значения теплово¬
го потока qw и эффективной энтальпии
Н эфф|п— число интервалов А/, на которые разбит
промежуток времени t\-=rt2.Момент времени t2 соответст¬
вует моменту, когда достигает¬
ся равенство Qw—O. При этом
в расчетах по формуле (6.63)
в величину <7ко вводят коэф¬
фициент шероховатости Ашер == 1,2-7-1,3, учитывающий ин¬
тенсификацию теплообмена на
шероховатой поверхности. Зна¬
чения ЯЭфф для теплозащитных
материалов определяют экспе¬
риментально (в лабораторных
условиях и из летных данных).Определение необходимой толщины покры¬
тия составляет третий этап расчета. Чтобы назначить толщину
покрытия, необходимо знать профиль температур в оставшемся
слое материала к концу полета БЧ или КА. Имея зависимость
'Т(у, t), можно оценить толщину слоя 8Пр, прогретого до высоких
температур, и назначить толщину покрытия.Профиль температур в стенке к концу полета БЧ или КА не¬
трудно рассчитать в случае, если известна зависимость темпера¬
туры нагрева поверхности покрытия от времени полета Tw(t). При
аэродинамическом нагреве БЧ и КА зависимость Tw(t) и на
третьем этапе оказывается возможным рассчитать по формуле
(6.46).''Действительно, рассмотрим кривые распределения температур
в стенке для моментов времени t\ и t2 (рис. 6.31). Конкретные
расчеты показывают, что зависимости Т(у, t\) и Т(у — 8ун, t2)
отличаются одна от другой мало. Это является следствием сим¬
метрии в распределении теплового потока qw=j(t) (рис. 6.32).Г />. ШЩмЩ 161
При этом глубина прогрева материала для момента времени t\
всегда несколько больше, чем для момента времени t2.Ту[у,если 0<t&t,У- \у-$уЛ,£с.лцРис. 6.31. Распределение тем¬
ператур в стенке БЧ или КА
для момента времени t\ и t2Рис. 6.32. Характер зависимости
q *■=/(/)Используя допущение Т(у', t\)~T(y\ t2), можно продолжать
прерванный расчет зависимости Tw=f(t) по формуле (6.46),
, jteuiuo<t£ti исключив из рассмотрения интер-
*"1t-(ti-t,).euiu вал времени t\-i-t2. Иными слова-tn<t <t/(Hми, на третьем этапе рассчиты-Кн=*ш~({г~Ь) вается не зависимость Tw(t), а
зависимость Tw—f[t—(t2 — ^)] =
= f(t'). В результате расчета по¬
лучаем зависимость Tw(t'jy пока¬
занную на рис. 6.33, где tKH — вре¬
мя конца нагрева.Имея зависимость Tw=f(t'),
можно рассчитать распределение температур в оставшемся слое
покрытия к концу полета БЧ или КА по формулеm—kРис. 6.33. Зависимость Тт {у, tKH) = Тн + V {TWi k_m — Ти) с„(6.64)гдеcm — erf z, — erf z2\
v v1 2 У am\t' ' 2У а (т + 1) Л< ’Zerf z = \ e~z~dz—табличный интеграл ошибок;Y71 оа = -^ -коэффициент температуропроводности материала;m — номер интервала At, считая от t'm = kM назад к ^=0.
Рассчитывая по формуле (6.64), задают ряд значений у и строят
график зависимости T=f(y) для момента времени /1Ш. Из графика,162
задавшись допустимой температурой силовой оболочки, находят
глубину прогретого слоя 8пр (рис. 6.34). После этого назначают
толщину покрытия ^ун + &пр-(6.65)Рис. 6.34. К определению необ¬
ходимой толщины слоя тепло¬
защитного покрытияУчитывая, что теплофизические характеристики материалов неста¬
бильны и меняются от партии к партии, полученную из расчета
величину 8 можно увеличить на 10-т-15%.Выше был рассмотрен случай, ко¬
гда теплозащитное покрытие является
однослойным. Поскольку часть мате¬
риала уносится, а другая, остающаяся
на оболочке, служит теплоизолятором,
то теплозащитный материал одновре¬
менно должен иметь большую #эфф и
малые значения р и X. Большей частью
эти требования противоречивы, поэто¬
му однослойные покрытия, как прави¬
ло, не являются рациональными.Это обстоятельство привело к
идее создания многослойных, комбинированных покрытий, в кото¬
рых каждый слой на соответствующем участке траектории выпол¬
няет определенную роль. В частности, уносимый слой покрытия
должен быть высокоэнтальпийным материалом, а прогретый слой —
термостойким изолятором с малыми р и X. В этом случае необхо¬
димая масса такого покрытия будет примерно на 25% ниже, чем
масса однослойного.Заметим также, что в различных зонах поверхности тела усло¬
вия теплообмена и прогрев покрытий неодинаковы. Поэтому целе¬
сообразно для тепловой защиты носовых, баковых и донных обла¬
стей применять различные теплозащитные материалы.Комбинированные покрытия особенно необходимо использовать
для тепловой защиты КА. Для КА характерны пологие траектории
входа. Поэтому по сравнению с БЧ аэродинамический нагрев КА
характеризуется существенным увеличением длительности тепло¬
вого воздействия и снижением максимальных значений конвектив¬
ного теплового потока.При увеличении длительности теплового воздействия возрастает
глубина прогрева теплозащитного материала. Более того, уже
после прекращения нагрева (третий этап расчета) внешнее тепло¬
защитное покрытие начинает приносить даже вред, так как из
средства защиты оно превращается в источник аккумулированного
тепла, проникающего в кабину КА. Поэтому для КА можно ис¬
пользовать сбрасываемые теплозащитные оболочки.Расчеты прогрева многослойных покрытий весьма громоздки и
сложны. Обычно они производятся либо с использованием ЭВМ,
либо на специальных моделирующих установках.163
ЛИТЕРАТУРА К ГЛАВЕ VI1. Авдуевский В. С. и др. Основы теплопередачи в авиационной и ра¬
кетной технике. Оборонгиз, 1960.2. Адамс М. К. Последние достижения в теории абляции. «Вопросы ра¬
кетной техники», 1960, № 4.3. Барашкова Е. П. и др. Радиационный режим территории СССР.
Гидрометеоиздат, 1961.4. Газодинамика и теплообмен при наличии химических реакций (сборник
статей). Изд. иностр. лит., 1962.5. Дракин И. И. Аэродинамический и лучистый нагрев в полете. Оборон¬
гиз, 1961.6. American Machinist and Metalworking Manufacturing, № 8, 1964.7. Исаченко В. П, Осипова В. А., С у ко мел А. С. Теплопере¬
дача. Изд-во Энершя, 1965.8. Климатологические справочники СССР. Вып. 1—21. Гидрометеоиздат,
1953—1959.9. К р а с н о в Н. Ф. Аэродинамика тел вращения. Изд-во Машинострое¬
ние, 1964.10. Кутателадзе С. С., Бор иш а не кип В. М. Справочник по теп¬
лопередаче. Госэнергоиздаг, 1959.11. Лойцянский Л. Г. Ламинарный пограничный слой. Физматгиз, 1962.12. Лунев В. В., Мурзинов И. Н. Влияние излучения на течение
в окрестности критической точки тупого тела. Журнал ПМТФ, 1961, № 2.13. Проблемы полета с большими скоростями (сборник статей). Изд.
иностр. лит., 1960.14. Проблемы движения головной части ракеты дальнего действия (сбор¬
ник статей). Изд. иностр. лит., 1960.15. Таблица временной стандартной атмосферы 1960 года (ВСА-60). Изд.
АН СССР, 1960.16. Уинг Л. Д. Теплоотдача излучением к полусферической головной ча¬
сти. «Ракетная техника», 1962, № 1.17. Хейз У. Д., Пробсти и Р. Ф. Теория гиперзвуковых течений. Изд.
иностр. лит., 1962.18. Чепмен Д. Р. Приближенный аналитический метод исследования
входа тел в атмосферы планет. Изд. иностр. лит., 1962.19. Чиркин В. С. Теплофизические свойства материалов. Физматгиз, 1959.20. Вопросы ракетной техники. Изд-во Мир, 1966, 1 — 12,21. А 11 е h ТТ., Е g g е г s A., NASA Rep № 1381, 1958.22. В lecher S. and Sutton G. W., Comparison of Some Approximate
Methods for Calculating Re — Entry Ablation of a Subliming Material. ARS Jour¬
nal, 1961, № 3 (433—435).23. D e t r a R. W., Hidalgo H., Generalized Heat Transfer Formulas and
Graphs for Nose Cone Re-Entry Into the Atmosphere. ARS Journal, 1961, № 3
(318-321).24. N e r e m R. М., Stickford G. H. Shock layer, radiation during hy¬
pervelocity re entry. AIAA Entry Technol. Conf., 1964. N. Y., Amer. Inst. Aero¬
naut and Astronaut. (158—169).25. Missiles and Rockets. 1960, 4/IV, vol 6, № 13.26. Aviation Week. 1960, 11/IV, vol 72, № 15.27. Парфенов В. А. Возвращение из космоса. Воениздат, 1961.28. Ракетная техника и космонавтика. 1964, № 3, изд-во «Мир».29. Райков Л. Г. Нагрев летательных аппаратов в полете. Воениздат, 1962.30. Ракетная техника и космонавтика. 1963, № 7.31. Ракетная техника. 1962, № 5, изд-во иностр. лит.32. Вопросы ракетной техники, 1968, № 9, изд-во «Мир».33. Ракетная техника и космонавтика. 1963, № 1, изд-во «Мир».34. Raketen Technik und Rauinfahrtforschung, Heft 4, 1959.164
РАЗДЕЛ IIIКОНСТРУКЦИЯ И ПРОЧНОСТЬ КОРПУСА РАКЕТЫГЛАВА VIIРАСЧЕТНЫЕ СЛУЧАИ И РАЗРУШАЮЩИЕ НАГРУЗКИВ полете и при наземной эксплуатации корпус ракеты нагру¬
жается определенной комбинацией сил и моментов, действующих
некоторое время. Кроме того, в полете корпус подвергается аэро¬
динамическому нагреву. При этом разные элементы конструкции
корпуса испытывают наиболее опасное с точки зрения прочности
нагружение в различные моменты времени и на различных этапах
эксплуатации ракеты. Естественно, что корпус рассчитывается на
прочность для наиболее опасных сочетаний действующих на него
нагрузок. Это обстоятельство, вынуждает обращаться к понятию
расчетного случая. '§ 7.1. ПОНЯТИЕ О РАСЧЕТНЫХ СЛУЧАЯХ НАГРУЖЕНИЯРасчетным случаем для рассматриваемого элемента корпуса
называется момент, определяющий появление наиболее опасной с
точки зрения прочности комбинации нагрузок и нагрева.Проектируя ракету, вводят расчетные случаи, что в значитель¬
ной степени сокращает объем расчетов на прочность и является
необходимым условием для сравнительного анализа силовых схем
ракет и составления программы статических испытаний готовой
конструкции.Чтобы выявить, какой'случай нагружения является расчетным,
необходимо иметь, кроме знания усилий, возникающих в элемен¬
тах корпуса ракеты при всех полетных и наземных случаях нагру¬
жения, полное представление о тех условиях работы конструкции,
которые оказывают влияние на ее прочность, т. е. на способность
конструкции воспринимать, не разрушаясь,/внешние нагрузки. Для
баллистических ракет эти условия несколько отличаются от усло¬
вий для других летательных аппаратов, что вызвано определенной
последовательностью нагружения корпуса ракеты в процессе экс¬
плуатации как на земле, так и в полете, исключающей, как пра-165
вило, совпадение наибольших значений составляющих усилий по
времени; сравнительно большим кратковременным нагревом обо¬
лочки корпуса ракеты в полете, оказывающим влияние на механи¬
ческие и упругие свойства материала, а следовательно, на несущую
способность и жесткость конструкции; кратковременностью нагру¬
жения конструкции ракеты в полете основными нагрузками и од¬
норазовостью использования ракет, что в основном исключает
случаи усталостного разрушения ее силовых элементов в полете.В настоящее время для определения расчетных случаев широко
используются {метод доминирующей нагрузки иф1етод условной на¬
грузки.I Метод доминирующей нагрузки заключается в том, что в каче¬
стве расчетного случая рассматривается напряженное состояние
элементов корпуса от комбинированного воздействия всех нагру¬
зок в те моменты времени, когда одна из составляющих нагрузок
достигает своего максимального значения.Этот метод достаточно прост, но применительно к ракетным
конструкциям имеет ряд- недостатков. Так, например, он не пол¬
ностью учитывает влияние нагрева на несущую способность кон¬
струкции. Поэтому несущая способность какого-либо элемента
корпуса ракеты, уменьшаясь при высоких температурах, может
привести к разрушению конструкции, наступающему при напряже¬
ниях значительно ниже максимальных, если они получаются в тех
точках траектории, где воздействие аэродинамического нагрева
мало. В подобных случаях метод доминирующей нагрузки дает
ложное представление о потребной несущей способности конструк¬
ции корпуса ракеты.Кроме того, этот метод при комбинированном действии нагру¬
зок фактически не выявляет наибольшего приведенного напряже¬
ния в конструкции. В действительности он определяет случаи
нагружения, и, чтобы найти расчетный, необходимо для каждого
из них проводить расчет на прочность основных элементов кор¬
пуса ракеты.Свободным от указанных недостатков является метод условной
нагрузки. Сущность его состоит в том, что в качестве расчетного
рассматривается случай нагружения конструкции в тот момент
полета, когда своего наибольшего значения достигает некоторая
условная (фиктивная) продольная нагрузка. Величина этой услов¬
ной нагрузки определяется как эффектом комбинированного воз¬
действия сил, так и зависимостью несущей способности конструк¬
ции от ее температуры.В качестве примера рассмотрим вычисление условной нагрузки
для гладкой цилиндрической обечайки несущего топливного бака.
Пусть на бак в некотором сечении х* действуют осевое сжимаю¬
щее усилие N, изгибающий момент М, давление наддува бака Аре
и гидростатическое давление жидкости g$hx\nx\ гДе So— ускоре¬
ние силы тяжести на поверхности земли, р — массовая плотность
жидкости, hxl — высота столба жидкости над рассматриваемым166
сечением и nxi — коэффициент осевой перегрузки. Обечайка бака
имеет радиус R и толщину 3.По теории прочности, основанной на наибольших касательных
напряжениях, при сложном напряженном состоянии эквивалентное
напряжение в оболочке бака определяется зависимостьюаэкв = I а1 | + ст2>где 01 и 02 соответственно меридианальное и кольцевое напряже¬
ния в данном сечении бака.В рассматриваемом случае выражение для эквивалентного на¬
пряжения имеет видN М bp6R (дЯб + go?ltXinXi) R
а°кв ~ 2~Rb + nR4 2В + gСделав приведение подобных ч»л^нов, получимN М \p6R gofhxnxRаэкв ~~ 2nRb + kR4 + 28 5Умножив последнее выражение на площадь поперечного сече¬
ния стенок бака 2и#8, получим величину приведенной продольной
нагрузки;Vnp=N+ ^-+ Ap6*R2 + 2go9hxnxizR2.В общем случае изменение несущей способности корпуса вслед¬
ствие нагрева можно учесть соответствующим изменением вели¬
чины Л/пр, введя некоторый поправочный коэффициент. Оценивая
напряженное состояние, следует учитывать возможный характер
потери несущей способности конструкции, так как температура
по-разному влияет на упругие постоянные материала и его меха¬
нические свойства. Это обстоятельство должно обязательно учи¬
тываться поправочным коэффициентом.Так, например, если конструкция разрушается из-за нарушения
прочности материала, то поправочный коэффициент можно пред¬
ставить в видегде <зЛ — предел прочности материала при нормальной темпера¬
туре;obt-—предел прочности материала при температуре, соответ¬
ствующей данному расчетному случаю.Если же разрушение происходит вследствие потери статиче¬
ской или динамической устойчивости конструкции, то подобный
поправочный коэффициент можно ввести как отношение соответ¬
ствующих критических напряжений при нормальной и рабочей
температуре, т. е.
Таким образом, в рассматриваемом случае условная нагрузка
для несущего топливного бака будет определяться' выражением' ЛГусл = -J- (n + + Др6*ф + 2^0 РА,Й, */?*) . .Расчетный случай должен соответствовать наибольшему зна¬
чению Nycn.На рис. 7.1 показано изменение в полете нагрузок N,' М,
Д/>6+ ^пр и -^усл в зависимости от относительного вре¬мени полета на активном участке траектории t = — для несу-1Кщего бака одноступенчатой баллистической ракеты. Из графиковвидно, что расчетный случай по
условной нагрузке (р. с. 4) не
совпадает с расчетными случая¬
ми по максимумам составляю¬
щих нагрузок {р. с. 1,2,3).§ 7.2. РАСЧЕТНЫЕ СЛУЧАИ
ДЛЯ ОСНОВНЫХ ЧАСТЕЙ
КОРПУСА РАКЕТЫКорпус ракеты рассчитывает¬
ся на, прочность обычно по отсе¬
кам.' В пределах каждого отсека
выбирается несколько расчетных
сечений, количество и место расположения которых зависит от кон¬
структивных особенностей отсека.. Целесообразно выбирать сечения в начале и конце отсека и в
местах передачи на корпус каких-либо сосредоточенных сил и мо¬
ментов, например в местах крепления днищ несущих баков, рамы
двигателя, подвесных баков и т. п. Количество сечений по длине
отсека должно быть таким, чтобы можно было с достаточной точ¬
ностью построить эпюры продольных и поперечных сил и изги¬
бающих моментов для каждого расчетного случая. При этом сле¬
дует иметь в виду, что в принципе каждое сечение может иметь
свой расчетный случай.Строгое определение расчетных случаев нагружения является
весьма трудоемкой операцией. Однако на основании качественного
анализа и опыта проектирования для основных отсеков корпуса
ракеты можно указать некоторое ограниченное число случаев на¬
гружения или моментов полета, которые в основном охватывают
все расчетные случаи. ЕЗ результате объем расчетов значительно
сокращается, так как расчетный случай выявляется из сравнения
условных нагрузок, вычисленных только для небольшого числа
случаев нагружения.Различные части корпуса ракеты имеют свою специфику нагру¬
жения в полете, что отражается в выборе полетных расчетных слу¬
чаев.Рис; 7.1. Изменение нагрузок на не¬
сущий бак баллистической ракеты
в полете168
Боевая часть. При специальном теплозащитном покрытии
корпуса боевой части расчетные случаи устанавливаются методом
доминирующей нагрузки на конечной ветви пассивного участка
траектории. В качестве расчетных принимаются случаи max пхХ и
шах п при наибольшем угле атаки а.Для боевых частей, не имеющих специальной теплозащиты
корпуса, расчетные случаи следует определять методом условной
нагрузки.Кроме того, проверяются на прочность днища и элементы креп¬
ления заряда при шах пх на активном участке траектории.Корпус топливного отсека. Для корпуса топливного
отсека, имеющего баки подвесной схемы, а также для переход¬
ников, приборных и межбаковых отсеков расчетные
случаи устанавливаются максимумом условной нагрузки, если на¬
грев конструкции сравнительно велик, или максимумом соответ¬
ствующей приведенной нагрузки, если нагрев мал.Для этих частей корпуса ракеты при слабом изменении значе¬
ний действующих на них сил в качестве расчетного случая можно
принять случай maxAf(Xi).Для обечайки топливного бака несущей схемы расчетный слу¬
чай-находят по максимуму условной нагрузки, причем поперечные
нагрузки вычисляют, учитывая порывы ветра. Днища баков рас¬
считывают на прочность для наибольшего внутреннего давления
на днище.Хвостовой (двигательный) отсек. Схема нагруже¬
ния хвостового отсека зависит от его компоновки, размеров дви¬
гателя, способа передачи силы тяги на корпус ракеты, действия
управляющих и стабилизирующих сил, а также от схемы установ¬
ки ракеты на пусковом столе. Учитывая еще и некоторую неопре¬
деленность температурного режима работы конструкции хвосто¬
вого отсека, следует очень тщательно анализировать те случаи
нагружения, которые могут оказаться расчетными.Если хвостовой отсек является опорным на пусковом столе, то
к расчетному случаю относится прежде всего нагружение отсека
весом заправленной ракеты и изгибающим моментом от ветровой
нагрузки (при наземном старте). В полете хвостовой отсек прове¬
ряется на случай действия максимального изгибающего момента
от стабилизирующих аэродинамических сил (при стабилизирую¬
щем оперении) и управляющих сил.Для хвостовых отсеков составных ракет с последовательным
расположением ступеней расчетным может быть один из случаев
нагружения максимальной условной нагрузкой, нагрузками при
тахлГ1 или тах«ь соответствующих участку полета при работедвигателей предыдущих ступеней.Рама двигательной установки. В качестве расчет¬
ного случая для рамы следует рассматривать прежде всего пуск
ракеты, т. е. случай выхода двигателей на рабочий режим. В по-169
лете расчетным случаем обычно является действие наибольшей
местной поперечной перегрузки яСтабилизирующее оперение. Для различных стаби¬
лизаторов расчетным является случай полета ракеты с углом
атаки в зоне максимального скоростного напора. Угол атаки опре¬
деляют, учитывая действие порыва ветра на данной высоте.Расчетные случаи в полете обычно являются определяющими
при расчете корпуса ракеты на прочность. Вместе с тем необхо¬
димо проверять прочность ракеты и при ее наземной эксплуата¬
ции, т. е. при транспортировке, перегрузках с транспортных
средств и нахождении ракеты на стартовой позиции. Это особенно
важно, чтобы правильно назначить места установки и крепления
ракеты к различным транспортным и перегрузочным средствам.Если ракета находится на пусковом столе, в качестве расчет¬
ных рассматривают случаи нагружения незаправленной и заправ¬
ленной ракеты при максимальных порывах ветра, определяемых
техническим заданием.§ 7.3. РАСЧЕТНЫЕ НАГРУЗКИ И КОЭФФИЦИЕНТ ЗАПАСА ПРОЧНОСТИРассчитывая внешние эксплуатационные нагрузки, внутренние
усилия и несущую способность корпуса ракеты, обычно пользуют¬
ся условными расчетными схемами и исходными данными, имею¬
щими различную степень точности. Кроме того, большинство на¬
грузок, действующих на ракету, являются случайными функциями
времени и, строго говоря, должны рассчитываться вероятностными
методами. Между тем, особые условия летно-конструкторской от¬
работки крупных баллистических ракет и сравнительно малое ко¬
личество их пусков в пределах одного полигона затрудняют приме¬
нение статистических методов расчета эксплуатационных нагрузок.В практике проектирования самолетов широко распространен
метод расчета конструкции на действие увеличенных по сравнению
с эксплуатационными нагрузок, называемых расчетными. Этот ме¬
тод применяется и при проектировании ракетных конструкций.Расчетная нагрузка Np определяется эксплуатационной
нагрузкой Na из выраженияNp = fNa,
где f — коэффициент безопасности.Она представляет собой некоторую фиктивную нагрузку, ибо коэф¬
фициент безопасности учитывает не только точность расчета на¬
грузок, но и погрешность определения несущей способности кон¬
струкции.Величина коэффициента безопасности f зависит от совершен¬
ства методов прочностного расчета, точности определения эксплуа¬
тационных нагрузок, изученности свойств материалов и совершен¬
ства технологического процесса изготовления корпуса. Выбор
коэффициента безопасности является наиболее ответственным и,
вероятно, наиболее сложным моментом при установлении потреб¬170
ной несущей способности конструкции корпуса ракеты. Очевидно,
что наиболее обоснованно значения коэффициентов безопасности
могут быть приняты в результате тщательного исследования сте¬
пени соответствия реальных режимов работы конструкции расчет¬
ным. Однако проведение таких исследований для конструктора
ограничивается как сроками проектирования, так и отсутствием
достаточно надежных теоретических методов.Поэтому конструкторы обычно пользуются нормированными
значениями коэффициента безопасности, соответствующими раз¬
личным расчетным случаям. Коэффициенты безопасности норми¬
руют, исходя из результатов летных и лабораторных испытаний и
опыта проектирования подобных ракет.Для основных расчетных случаев нагружения баллистических
ракет нормированные коэффициенты безопасности в зависимости
от конкретных условий могут иметь довольно широкий диапазон^
значений. В среднем же при расчете несущих элементов конструк-1
ции на прочность для всех расчетных случаев обычно принимается 1
/=1,1 по отношению к пределу текучести, т. е. условием прочности!
является /сэПри расчете несущих элементов корпуса ракеты на устойчи¬
вость величина коэффициента безопасности зависит от расчетного
случая и в среднем составляет [2, 3, 4]:— для всех наземных случаев нагружения /=1,5;— для случаев полета ракеты на активном участке траектории
/=1,3-1,5;— для случаев max nXi и max п° на участке свободного по¬
лета боевой части /=1,3.Для особо ответственных узлов корпусов ракет, таких, как
стыки отсеков, узлы крепления БЧ, приборов и т. д., рекомендует¬
ся указанные коэффициенты безопасности увеличивать в 1,25 раза.Применение сравнительно больших коэффициентов безопасности
на этапе эскизного проектирования упрощает его и дает возмож¬
ность не учитывать факторы, о которых нет достоверных сведений.С другой стороны, использование таких проектировочных коэффи¬
циентов безопасности ведет к утяжелению конструкции.Коэффициентом запаса прочности называют отно¬
шение фактической разрушающей нагрузки, определяющей несу¬
щую способность конструкции, к расчетной нагрузке•Мраз1—тгг-Вполне очевидно, что условием прочности является Расчетна прочность, как правило, является проверочным. Поэтому коэф¬
фициент запаса прочности часто выражают отношением предель¬
ного и расчетного напряжений
В качестве опред для сжатых элементов принимают критическое
напряжение потери устойчивости оКр, а для растянутых элемен¬
тов— предел прочности о .У рационально спроектированной конструкции ракеты коэффи¬
циент запаса прочности должен быть близок к единице. Соблюдать это условие особенно важно для конструкций по¬
следних ступеней составных ракет.Для первых ступеней ракет, особенно используемых в качестве
носителей КА, может допускаться избыточный запас прочности.
Это часто оправдывается как экономически, так и относительно
малым влиянием некоторого утяжеления конструкции первой сту¬
пени на летные характеристики ракеты.Устанавливая потребную несущую способность конструкции ра¬
кет-носителей, необходимо учитывать возможность их использова¬
ния для серий космических объектов, отличающихся один от дру¬
гого не только размерами, но и массой. Кроме того, некоторое
уменьшение массы конструкции не всегда оправдывает потерю
опытных образцов из-за непредвиденных случаев нагружения, свя¬
занных с некачественной работой отдельных систем. Поэтому зна¬
чения коэффициента безопасности, а следовательно, и коэффи¬
циента запаса прочности для больших ракет-носителей, представ¬
ляющих собой уникальные конструкции, должны выбираться в
каждом конкретном случае в зависимости от общего развития тех¬
ники и имеющегося опыта проектирования ракет.§ 7.4. РАЗРУШАЮЩИЕ НАГРУЗКИ И КРИТИЧЕСКИЕ НАПРЯЖЕНИЯКорпус, баллистической ракеты обычно состоит из отдельных
частей — отсеков, скрепленных между собой разъемными или не¬
разъемными соединениями. Основу конструкции отсеков состав¬
ляют тонкие гладкие оболочки или оболочки, подкрепленные про¬
дольным и поперечным силовыми наборами в виде стрингеров и
шпангоутов. Заметим, что корпус ракеты должен обладать не
только требуемой прочностью, но и определенной жесткостью, т. е.
деформации элементов корпуса не должны превосходить опреде¬
ленных пределов.При полете в элементах корпуса ракеты действуют в основном
сжимающие усилия, а потому необходимо особое внимание уде¬
лять расчету элементов корпуса на устойчивость. Широкое приме¬
нение в ракетных конструкциях силового набора в виде стрингеров
и шпангоутов вызвано необходимости повышения устойчивости
основных элементов корпуса. При этом стрингеры воспринимают
усилия при сжатии и изгибе, а оболочка (обшивка)—перерезы¬
вающие усилия. Шпангоуты же гарантируют неизменность кон¬
тура поперечного сечения отсеков.Исходя из особенностей конструкции корпуса ракеты и ее на¬
гружения сжимающими силами, определяющим критерием прочно¬
сти отсеков является их устойчивость, т, е. разрушающие нагрузки172
и несущая способность конструкции отсеков определяются крити¬
ческими напряжениями потери устойчивости различных элементов
корпуса.При проектировании корпуса ракеты подвергаются обязатель¬
ной проверке на устойчивость элементы продольного силового на¬
бора, оболочки, как подкрепленные продольным и поперечным
силовыми наборами, так и гладкие. Для каждого из этих элемен¬
тов корпуса расчет критических напряжений потери устойчивости
имеет свои специфические особенности.Устойчивость элементов продольного силового набораКак известно, работая на сжатие, тонкостенные конструкции
могут разрушаться при напряжениях ниже предела прочности ма¬
териала из-за потери устойчивости.При сжатии изолированных тонкостен¬
ных профилей продольного силового набора
(стрингеров) возможны как общая потеря
устойчивости со значительным искривле¬
нием оси профиля (рис. 7.2а), так и потеря
устойчивости в результате местного выпучи¬
вания стенки или полки этого профиля
(рис. 7.26). В расчетах используется мень¬
шее из критических напряжений местной или
общей потери устойчивости профиля.Если допустить, что шпангоуты абсо¬
лютно жестки и равноудалены друг от дру¬
га, то, проверяя конструкцию на общую
устойчивость, можно рассчитывать не весь
стрингер, а только часть его, расположен¬
ную между соседними шпангоутами. Тогда
критическое напряжение общей потери устойчивости сжатого про¬
филя в пределах упругих деформаций определяется по известной
формуле Эйлера■., = 'тта. (7-1)(“)где Е — модуль упругости материала;i= — радиус инерции сечения профиля при изгибе вплоскости, нормальной к поверхности обшивки;/ и F—момент инерции и площадь сечеиия;/ — длина профиля (расстояние между соседними шпан-
, гоутами);с—коэффициент, учитывающий характер закрепления
концов профиля;как правило, профили продольного
набора имеют упругое закрепление концов, при
этом можно принять с = 2,Рис. 7.2. Возможные ви¬
ды потери устойчивости
изолированных тонко¬
стенных стержней:а —общая потеря устойчи¬
вости; б — местная потеря
устойчивости173
Пределом применимости формулы (7.1) является условие
окр<ор, где ар — предел пропорциональности материала профиля.Строгое определение акр за пределом текучести при геометриче¬
ской характеристике профиля -f < (4-) = тс 1/ — является за-1 \ 1 /преа ” <>ртруднительным из-за переменного значения модуля Е. Поэтому,
рассчитывая устойчивость, широко используют эмпирические фор¬
мулы. Одной из удобных формул, пригодной как для упругой, так
и для пластической областей деформации, является так называе¬
мая асимптотическая формула- ' — - 1 + v (7.2)•"кр '1 + ч + ч2где-4й-- (оV 1кркр■критические напряжения, определяемые дляразличных элементов по формулам строительной механики, кото¬
рые приводятся ниже).На рис. 7.3 графически пока¬
зано, а что при больших значе¬
ниях напряжение окр, опреде-Рис. 7.3. Зависимость критических
напряжений от гибкости стержняленное по формуле (7.2), стремится к напряжению по формуле
(7.1), а при малых значениях-—к пределу прочности оь-Асимптотическая формула (7.2) применяется для расчета кри¬
тических напряжений местной потери устойчивости профилей, а
также общей и местной потери устойчивости пластин, панелей и
оболочек.Местная потеря устойчивости характеризуется выпучиванием
элементов профиля — стенок или полок. Полкой называют элемент
со свободным краем, а стенкой — элемент без свободного края
(рис. 7.4).В области упругих деформаций для определения критических
напряжений местной потери устойчивости используется формула
Эйлера в виде 0,9kE ^кр(4 Ггде b и 8 — ширина и толщина рассчитываемого элемента про¬
филя; *174
k — коэффициент заделки, учитывающий влияние смежных
элементов на устойчивость рассчитываемого элемента.В специальной литературе приводятся различные способы
расчета коэффициента заделки в зависимости от условий опира-
ния элемента конструкции. Если рассматривать элемент профиля
как пластинку, закрепление которой по контуру аналогично за¬
креплению элемента профиля, то для стенки профиля можно при¬
нимать k — A (по аналогии с пластинкой, опертой по четырем сто¬
ронам), а для полки профиля 6 = 0,425 + (т-)2 (по аналогии с
пластинкой, имеющей одну свободную кромку).Определить критические напряжения стрингера, работающего
совместно с обшивкой, весьма затруднительно. Поэтому обычно
поступают следующим образом. По
формулам (7.1), (7.2) и (7.3) опре¬
деляют наименьшее критическое на¬
пряжение изолированного профиля,
учитывая, что искривление оси про¬
филя при общей потере устойчиво¬
сти может произойти только в на¬
правлении, перпендикулярном плос¬
кости обшивки, и, кроме того, момент инерции / стрингера вычис¬
ляют не относительно оси, проходящей через центр тяжести стрин¬
гера, а относительно оси с—с (рис. 7.5), лежащей в плоскости со¬
прикосновения стрингера с обшивкой.Обычно обшивка теряет устойчивость раньше подкрепляющих
профилей и вследствие волнообразования дополнительно нагру¬
жает элементы силового набора. Поэтому профили, работающие
совместно с обшивкой, выдерживают меньшие нагрузки, чем изо¬
лированные. Этот факт необходимо учитывать при проектировании
отсеков, испытывающих осевое сжатие, и соответственно умень¬
шать критические напряжения профилей, работающих совместно с
обшивкой.Устойчивость панелей, подкрепленных продольным и поперечнымсиловыми наборамиРассчитывая оболочки, подкрепленные продольным и попереч¬
ным силовыми наборами, обшивку разбивают на отдельные ци¬
линдрические панели (рис. 7.6), которые в общей силовой схеме
корпуса могут быть нагружены самым различным образом. При
воздействии осевой силы и изгибающего момента обшивка нагру¬
жается нормальными сжимающими или растягивающими усилия¬
ми, а при воздействии крутящего момента — касательными уси¬
лиями. В расчетной практике наибольший интерес представляет
нагружение панели равномерно распределенной сжимающей на¬
грузкой, действующей параллельно образующей.Рис. 7.5. К определению момента
инерции стрингера175
Чтобы определить критические напряжения сжатых криволи¬
нейных пластинок, существует большое количество как теоретиче¬
ских, так и эмпирических формул. Приведем формулу, хорошо
согласующуюся с экспериментами:крV(7.4)где апгде0,9 kE9 В(f)2 у ЦИЛR_ >1,68 J+0,16 Е
I \ 1,3 ’к= 4 для опертых кромок панели;
к=7 для защемленных кромок панели.При у > 100 удовлетворительные ре¬
зультаты дает более простая формулакр(7.5)Критические касательные напряжения
определяются по формуле7,5 Е-кра* +,(4)!0,1£R(7.6)Рис. 7.6. Цилиндриче¬
ская панельПодкрепленная силовым набором об¬
шивка после местной потери устойчивости
еще в состоянии нести нагрузку, превы¬
шающую критическую. Это объясняется
тем, что часть обшивки, прилегающей к
элементам силового набора, остается невы-
пученной и, следовательно, имеется возможность некоторого до¬
полнительного нагружения этих участков, т. е. сопротивление
обшивки может еще возрастать. Напряжения, которые до потери
устойчивости распределялись равномерно по ширине панели
(рис. 7.7а), после потери устойчивости имеют минимум в середи¬
не панели, достигая своих максимальных значений на подкреплен¬
ных кромках (рис. 7.76).Если обшивка vt стрингеры изготовлены из одного материала,
то напряжения на кромках обшивки и в стрингерах одинаковы.
В середине же обшивки напряжения близки к критическому на¬
пряжению ПОТерИ-УСТОЙЧИВОСТИ ОбШИВКИ 0Кр. обш,-Чтобы определить предельную нагрузку, воспринимаемую под¬
крепленной панелью, действительную эпюру напряжений заменяют
фиктивной эпюрой с постоянным напряжением атах =оСтр на неко¬
торой приведенной ширине bnv<b (рис. 7.7в). Тогда нагрузка, вос-176
принимаемая обшивкой, может быть определена следующим выра¬
жением:р1 обшастр^пр^*(7.7)Рассмотрим часть пластины шириной bav как свободно опертую
и воспользуемся зависимостью (7.3), которая приобретает вид°кр = 3,6 . Если в этом выражении заменить b и окр соответ¬
ственно на 6Пр и остр, то для значения приведенной ширины полу¬
чим*.„=1,98 V-г-Т ОСТрПри потере устойчивости стрингера остр = окр. стр-illГ''ППТа1*ис. 7.7. Распределение напряжений по ширине панели:
а — при О < о6ш; 6 — при 5 > <S Кр о6ш; в — фиктивное распределение
напряжений при а > »кр о6щСледовательно:пр- 1,98 У~-— - (7-8)°кр.стрЕсли стрингеры и обшивка изготовлены из различных материа¬
лов, то напряжения в стрингерах и обшивке пропорциональны их
модулям упругости Е. В этом случае приведенная ширина обшив=
ки определяется формулойь —^^Лр•V:Е,обш(7.9)fcrpl кр. стргде £обш и £*стр — модули упругости обшивки и стрингера.Несущая способность, т. е. предельная осевая нагрузка, кото¬
рую может выдержать панель до разрушения, складывается из7-1736 177
нагрузки, воспринимаемой стрингерами и обшивкой. Если панель
подкреплена п стрингерами, то несущая способностьРнес = ,г^'стракр. стр “Ь I) ^пр&акр- стр- ( / - Ю)При значительном расстоянии между точками крепления об¬
шивки к стрингеру обйивка, сжимаясь, стремится изогнуться, об¬
разуя поперечную полуволну по всей ширине панели. Если проис¬
ходит такое выпучивание, то обшивка в этом месте почти полно¬
стью выключается из работы и дальнейшее увеличение сжимаю¬
щей нагрузки будет восприниматься только стрингерами. В связис этим обшивку между точ¬
ками крепления (заклепка¬
ми или сварными точками)
необходимо рассчитывать на
устойчивость.Рассмотрим обшивку ме¬
жду заклепками как пласти¬
ну с двумя заделанными
концами и двумя свободны¬
ми сторонами. Тогда форму¬
ла для критических напря¬
жений обшивки в области
упругих деформаций имеет
видО,75 бКр стр.Рис. 7.8. График для определения коэффи¬
циента 9кр. зак= 3,6 я(!)\где t — шаг заклепок или сварных точек.Если обшивка между" точками крепления теряет устойчивость
раньше стрингеров, т. е. если окр. зак<окр. стр. то приведенная ши¬
рина обшивкй, вычисленная без учета этого явления, должна быть
уменьшена по формулекр. зак
кр. стр(7.11)Если панель одновременно нагружается сжимающими и сдвигаю¬
щими нагрузками, обшивка теряет устойчивость раньше, чем при
раздельном приложении этих нагрузок. В этом случае ослабление
сопротивления обшивки сжатию учитывается коэффициентом <р,
уменьшающим приведенную ширину обшивки, т. е.*;Р=^пР. (7-12)Значения коэффициента ф находятся из графика (рис. 7.8), в^кр.стркотором входными величинами являются к = -7-——и отношениескр. обшикр. стргде т; — напряжение сдвига в обшивке.Площадь сечения стрингера с присоединенной к нему обшивкой,178
работающей после потери устойчивости, называют приведенным
сечением стрингера /\пРр.Приведенное сечение одношовного профиля (рис. 7.9а)Ь’пр .
стр^стр “Ь Апр§.пр(7.13)Двухшовные профили (рис. 7.96) имеют две опорные полки.
Часть обшивки между швами можно рассматривать как самостоя-Ьв.wnpZ"Р
Z _Рис. 7.9. Одношовные (а) и двухшовные (б) про¬
филительную панель. В этом случае приведенное сечение стрингера
определяется как^'с'тр ~ Естр + (Ацр -f £,) 8. (7.14)Устойчивость оболочек вращенияКонструкции в виде оболочек вращения широко применяются
п технике. Поэтому исследованию таких оболочек посвящено боль¬
шое количество работ. Из многочисленных теоретических и экспе¬
риментальных формул приведем те, которые могут использоваться
при проектировании элементов корпуса ракеты для основных слу¬
чаев нагружения. Все эти формулы относятся только к деформа¬
ции оболочек в упругой области.Критическое напряжение потери устойчивости цилиндрической
оболочки при продольном сжатии или чистом изгибе (рис. 7.10а)
рассчитывается по формуле*кр ‘■02 —> R •(7.15)Критическое давление цилиндрической оболочки, находящейся
под действием равномерного внешнего давления (рис. 7.106),опре¬
деляется по формуле П. Ф. Папковича^0,92М(±)”.(7.16)Критическое давление цилиндрической оболочки, подкреплен¬
ной упругими кольцами и находящейся под действием равномер-7*179
ного внешнего давления (рис. 7.1 Ов), рассчитывается по форму¬
лам:К4-f,p = 0,92£-^j/-i-A,KA, при £<3,35R-V=-; (7.17)V DoаРис. 7.10. Схемы нагружения цилиндрической оболочки:-а — цилиндрическая оболочка при продольном сжатии; б — ци¬
линдрическая оболочка, находящаяся под действием равномер¬
ного внешнего давления; в — цилиндрическая оболочка, под¬
крепленная кольцами, под действием равномерного внешнего
давлениягде ^
'ШЯ кр
D =JL= при £>3,35/?-^-_! ■,V Do^ .D= + Ц.’ ^1 10 П —~ I ’12(1-ц»)Vп - А_1 _l 12(t — t>8)/.и0 £) 1 ~Г g3; >/—момент инерции сечения кольца;
(1 — коэффициент Пуассона.СЕИГет(7.18)■6 ,Рис. 7.11. Схемы нагружения сферического сегмента (а)
и эллиптического тора (б)Критическое напряжение для сферического сегмента при равно¬
мерном внешнем давлении (рис. 7.11а) определяется по следую¬
щим зависимостям;180
— при шарнирном опирании контура сегмента
акр=,0,264Я-^ (г0> 1,3 V~Rb)](7.19)— при жесткой заделке контура сегментакр0,365Я-^- (л0>ЗК^З).(7.20)Критическое давление для эллиптического тора, находящегося
под действием внутреннего давления (рис. 7.116), определяется по
формуле0,358£52(7.21)Критическое давление для эллип¬
тического днища, находящегося под
действием внутреннего давления
(рис. 7.12), находится из выражения0,358£52 /700,Чкр—~ р2 26* ’ \'-zz)/х «ог 'гРис. 7.12. Схема нагружения
эллиптического днищаЛИТЕРАТУРА К ГЛАВЕ VII1. Астахов М. Ф., Караваев А. В., Макаров С. Я., Суздаль-
цев Я- Я. Справочная книга по расчету самолета на прочность. Оборонгиз,
1954.2.. Бонни Е. А., Цукров М. Д., Бессе рер К. У. Аэродинамика. Тео¬
рия реактивных двигателей. Конструкции и практика проектирования. Воениз¬
дат, 1959.3. Кан С. Н., Свердлов И. А. Расчет самолета на прочность. Оборон¬
гиз, 1958.4. Конструкция летательных аппаратов (под ред. С. Н. Кана). Оборон¬
гиз, 1963.
ГЛАВА VIHКОНСТРУКЦИЯ и ПРОЧНОСТЬ
БОЕВЫХ ЧАСТЕЙ РАКЕТЫИспользуя баллистические ракеты в военных целях, в головной
части ракеты размещают боевой заряд и средства его подрыва.
В этом случае снаряженную головную часть называют боевой ча¬
стью (БЧ). В зависимости от назначения боевые заряды могут
быть ядерными, фугасными, химическими, бактериологическими
и др. [4]. Однако для любого заряда конструкция БЧ должна соот¬
ветствовать определенным требованиям, обусловленным специфи¬
кой наземной эксплуатации и полета БЧ, а также противоракетной
обороной противника. В главе не рассматриваются вопросы кон¬
струкции и проектирования боевых зарядов и в дальнейшем под
термином «боевая часть» будем подразумевать корпус боевой ча¬
сти, предназначенный для размещения боевого заряда.§ 8.1. ОСНОВНЫЕ ТРЕБОВАНИЯ К КОНСТРУКЦИИ
И КЛАССИФИКАЦИЯ БОЕВЫХ ЧАСТЕЙК конструкции БЧ предъявляются различные требования, кото¬
рые можно объединить в отдельные группы.Конструктивно-баллистические требования:— минимальное рассеивание точек падения БЧ при пусках ра¬
кет в заданном диапазоне дальностей;— достаточная прочность, т. е. способность выдерживать боль¬
шие знакопеременные нагрузки на активном и пассивном участках
траектории; коэффициент осевой перегрузки на активном участке
траектории может быть рассчитан и достигать 20, а на пассив¬
ном— 80; избыточное давление воздуха на вершине БЧ может
составлять 35—40 бар\— большая теплостойкость; на нисходящей ветви траектории
при входе в плотные слои атмосферы наружная поверхность БЧ
интенсивно нагревается; удельные тепловые потоки могут дости-FA 1 лл MQttlгать 50—100—г-, з температура воздуха в пограничном слое
7500-12000° К;"182
— масса БЧ должна быть минимальной, что позволяет суще-
ственно уменьшить стартовую массу ракеты;— необходимый запас статической устойчивости при полете на
атмосферном участке траектории;— малая уязвимость БЧ средствами противоракетной обороны
противника.Основные эксплуатационные требования:— безопасность личного состава при обслуживании БЧ;— удобство снаряжения БЧ боевым зарядом и его про¬
верки;— удобство стыковки БЧ с ракетой;— высокая надежность действия при длительном хранении;— обеспечение внутри БЧ условий, наиболее благоприятных
для работы автоматики боевого заряда и взрывательного устрой¬
ства (давление, температура и др.).Производственно-экономические требования к конструкции БЧ
аналогичны требованиям, предъявляемым к конструкции ракет.Классификацию боевых частей применительно к баллистиче¬
ским ракетам можно произвести по следующим основным при¬
знакам.1. По аэродинамической компоновке и типу траектории — бал¬
листические, крылатые и орбитальные БЧ.Баллистические БЧ не имеют несущих поверхностей (крыльев)
п совершают полет по баллистической траектории. Крылатые БЧ
могут переводиться на нисходящей ветви траектории в планирую¬
щий полет, что позволяет увеличить дальность полета по сравне¬
нию с баллистическими БЧ. Орбитальные БЧ выводятся на круго¬
вую орбиту вокруг Земли и затем в нужный момент направляются
на цель [14].2. По конструктивной схеме — постоянные, сменные, составные
и разделяющиеся БЧ.Постоянные БЧ, отделяясь от ракеты, совершают полет и дей¬
ствуют у цели как единая БЧ. Для одной ракеты можно иметь
сменные БЧ различной массы, что позволяет при пусках на даль¬
ности, отличные от максимальной, использовать более тяжелые и,
следовательно, более мощные БЧ. Если масса сменных БЧ изме¬
няется в зависимости от количества боевых элементов заряда, то
такие БЧ называются составными.Разделяющиеся БЧ состоят из нескольких отдельных БЧ, со¬
бранных в пакет. Разделяясь в определенной точке траектории,
каждая БЧ действует у цели самостоятельно.3. По характеру полета после отделения от ракеты — неуправ¬
ляемые и управляемые БЧ.В управляемых БЧ параметры траектории корректируются на
пассивном участке, что позволяет значительно уменьшать рассеи¬
вание точек падения БЧ. Это необходимо при больших дально¬
стях полета. При малых дальностях применяются преимуществен¬
но неуправляемые БЧ [15].183
§ 8.2. КОНСТРУКТИВНЫЕ СХЕМЫ БОЕВЫХ ЧАСТЕЙКонструкция и внешняя форма БЧ обусловлены не столько
условиями размещения боевого заряда, сколько условиями приме¬
нения ракеты. Обычно форма БЧ определяется сочетанием кониче¬
ских, цилиндрических и сферических поверхностей и в соответ¬
ствии с этим различают следующие формы БЧ (рис, 8.1):— коническая;— коническая со сферическим притуплением;— коническая со сферическим
притуплением и расширяющейся
конической «юбкой»;— цилиндро-коническая или
цилиндрическая со сферическим
притуплением и конической «юб¬
кой».Форма вершины влияет на ха,-
рактер аэродинамического обте¬
кания БЧ. При полете со сверх¬
звуковой скоростью перед при¬
тупленной вершиной БЧ обра¬
зуется мощный отсоединенный
скачок уплотнения, близкий к
прямому, в котором значитель¬
ная часть энергии набегающего потока воздуха преобразуется в
тепловую энергию. В результате температура и плотность воздуха
за скачком повышаются, а его скорость понижается (см. гл. VI).
При заостренной вершине интенсивность скачка уплотнения мень¬
ше (косой скачок), так что плотность и скорость воздуха на гра¬
нице пограничного слоя изменяются в меньшей степени.Тепловой поток от пограничного слоя к поверхности БЧ зависит
от плотности и скорости обтекающего воздушного потока, поэтому
при одинаковой скорости и высоте полета тепловой поток к по¬
верхности БЧ с притупленной вершиной меньше, чем к поверхно¬
сти БЧ с заостренной вершиной. Таким образом, уменьшается
аэродинамический нагрев БЧ, что позволяет уменьшить толщину
теплозащитного покрытия и тем самым существенно снизить
вес БЧ.Для БЧ баллистических ракет размер и форма притупления
вершины устанавливаются из условий уменьшения массы теплоза¬
щитного покрытия, обеспечения устойчивости полета и высокой
скорости БЧ при подходе к цели. Ракеты большой дальности
обычно снабжаются БЧ с притупленной вершиной, а ракеты сред¬
ней дальности могут иметь БЧ с заостренной вершиной. В послед¬
нем случае аэродинамический нагрев играет значительно меньшую
роль, в то время как заострение вершины существенно уменьшает
лобовое сопротивление, в результате чего скорость БЧ при подходе
к цели увеличивается.Рис. 8.1. Формы БЧ:а — коническая; б— коническая со сфе¬
рическим притуплением; в—коническая
со сферическим притуплением и расши¬
ряющееся конической скобкой; г — цилин¬
дро-коническая со сферическим притупле¬
нием и конической «юбкой»184
Боевая часть после отделения от корпуса ракеты движется по
баллистической траектории в разреженных слоях атмосферы, по¬
чти не испытывая аэродинамического сопротивления. При этом она
совершает сложное вращательное движение относительно центра
масс, обусловленное возмущениями, возникающими при отделении
БЧ от корпуса ракеты.При входе БЧ в атмосферу быстро возрастают аэродинамиче¬
ские силы: лобовое сопротивление, подъемная и поперечная силы.
Под их воздействием вращательное движение БЧ переходит в-за¬
тухающие колебания относительно направления скорости, сопро¬
вождающиеся возникновением больших знакопеременных попереч¬
ных перегрузок. Колебания БЧ способствуют тому, что на внеш¬
нюю поверхность БЧ действуют пе¬
ременные тепловые потоки, которые
по своей величине могут значитель-.
но превосходить тепловые потоки,
возникающие при устойчивом ста¬
билизированном движении БЧ.Характер движения БЧ вокруг
центра масс определяется относи¬
тельным положением центра давле¬
ния аэродинамических сил и центра
масс БЧ. Если центр давления на¬
ходится сзади центра масс, как по¬
казано на рис. 8.2, то при отклоне¬
нии продольной оси БЧ на угол а
от вектора скорости возникает аэро¬
динамический момент, создаваемый
силами Хбч и Убч и стремящийся повернуть БЧ относительно цен¬
тра масс так, чтобы совместить ось БЧ с вектором скорости. В этом
случае БЧ является статически устойчивой. Нетрудно понять, что
при расположении центра давления аэродинамических сил впереди
центра масс возникающий при угле атаки а аэродинамический мо¬
мент стремится увеличить угол атаки, т. е. стремится опроки¬
нуть БЧ.Статическая устойчивость БЧ оценивается отношением
/п'д7~--—-, называемым запасом статической устойчивости, где /ц. д^б.Ч.и /ц. м — расстояния от вершины БЧ соответственно до центра давле¬
ния и центра масс, a L64 — длина БЧ. Отрицательное значение
этого отношения указывает на статическую неустойчивость БЧ.Одним из основных требований к БЧ баллистических ракет яв¬
ляется их статическая устойчивость на атмосферном участке траек¬
тории. Запас статической устойчивости повышается рациональным
размещением узлов БЧ с целью приближения центра масс к вер¬
шине; применением различного рода аэродинамических стабили-
ia торов (конический стабилизатор в виде «юбки», откидные ста¬Рис. 8.2. Схе.ма сил, действую¬
щих на БЧ на пассивном
участке траектории185
билизаторы и т. д.) с целью смещения центра давления к дни¬
щу БЧ.В отдельных случаях применяется газодинамический способ
стабилизации действием тяги реактивных сопел, установленных на
БЧ. В этом случае БЧ должна иметь систему управления и запас
сжатого газа или топлива [15, 16].При дальностях полета более 12000 км углы входа БЧ в плот¬
ные слои атмосферы малы, поэтому даже небольшое отклонение
угла входа от требуемого значения значительно изменяет даль¬
ность. В этих условиях требуемая точность пусков может обеспе¬
чиваться лишь управляемыми БЧ.Управляемая БЧ (рис. 8.3) имеет систему управления и двига¬
тельную установку, включающую • стабилизирующие сопла 1 и
управляющий двигатель 2, при помощи которых корректируются
параметры траектории на пассивном участке [15, 16].Рис. 8.3. Схема управляемой БЧ:/ — стабилизирующие сопла; 2 — управляющий двигательБоевая часть обычно состоит из корпуса, наконечника и тепло¬
защитного покрытия.Корпус является основным несущим узлом конструкции БЧ и
предназначен для размещения боевого заряда и взрывательного
устройства и предохранения их от высоких температур в полете.
Он представляет собой тонкостенную сварную металлическую обо¬
лочку соответствующей формы, подкрепленную шпангоутами. Зад¬
няя часть корпуса выполняет роль стабилизатора. Материал обо¬
лочки и ее толщина выбираются в зависимости от прочности и
аэродинамического нагрева БЧ в полете. Корпус БЧ может быть
собран из отдельных секций, соединенных между собой болтами
по стыковочным шпангоутам. Очень заманчивым является приме¬
нение стеклопластиков для корпуса БЧ. В этом случае целесооб¬
разно оболочку изготовлять как одно целое со шпангоутами.Задний торец корпуса закрывается герметичным днищем, имею¬
щим люк для снаряжения БЧ.Корпус БЧ крепится к ракете задним стыковочным шпангоу¬
том, а электрическая связь боевого заряда с системой управления
ракеты осуществляется соединительными штепсельными разъема¬
ми, установленными на днище корпуса БЧ.Наконечник в основном защищает БЧ от аэродинамического
нагрева при ее полете в атмосфере. Исходя из формы БЧ наконеч¬
ники могут быть коническими и притупленными (сферическими).186
Основу конструкции наконечника' составляет теплозащитная
масса.Боевая часть защищается от нагрева наконечником и теплоза¬
щитным покрытием корпуса, причем последнее в ракетах малой
дальности может и отсутствовать. В качестве тепловой защиты
обычно используются керамические или органические материалы
с высокими значениями теплоты фазовых превращений и низкой
теплопроводностью (см. гл. VI).§ 8.3. ВОЗМОЖНЫЕ СРЕДСТВА ДЛЯ ПРЕОДОЛЕНИЯ
ПРОТИВОРАКЕТНОЙ ОБОРОНЫ ПРОТИВНИКА *Чтобы уменьшить эффективность противоракетной обороны
(ПРО) противника, можно использовать различные средства, свя¬
занные с конструктивными особенностями БЧ. К таким средствам
относятся:— уменьшение радиолокационной отражательной способности
наружной поверхности БЧ;— маскировка БЧ ложными целями;— использование разделяющихся БЧ;— применение орбитальных БЧ;— увеличение стойкости БЧ к поражающему действию проти¬
воракеты;— маневр БЧ в зоне действия ПРО.Помимо перечисленных пассивных средств уменьшения эффек¬
тивности ПРО используются и активные средства. В частности, БЧ
могут снабжаться специальными радиопередающими устройства-
ми, вносящими помехи в работу радиолокационных станций си¬
стемы ПРО противника.Радиолокационную отражательную способность БЧ можно
уменьшить, применяя специальные радиопоглощающие покрытия,
а также гофрируя наружную поверхность БЧ. Гофрированная по¬
верхность БЧ рассеивает радиосигналы, направленные радиолока¬
тором на БЧ, и отраженный сигнал становится менее интенсив¬
ным, что затрудняет обнаружение БЧ и снижает точность опреде¬
ления параметров ее траектории. ,Обнаружить БЧ локатором труднее в том случае, если она дви¬
жется вместе с ложными целями, имеющими такую же отража¬
тельную способность. Ложные цели могут быть в виде диполей,
модулей или надувающихся оболочек из специальных материалов,
выбрасываемых из корпуса БЧ при ее полете на пассивном участ¬
ке траектории.Применение |разделяющихся БЧ в значительной степени умень¬
шает вероятность их поражения противоракетой, а использование
орбитальных БЧ дает возможность поражать цели с направлений,
не прикрытых ПРО.Стойкость БЧ к поражающему действию противоракеты повы¬* По материалам иностранной печати [15, 16, 17, 18, 19].187
шается упрочнением корпуса, постановкой специальных экранов,
ослабляющих действие взрыва, дублированием элементов взрыва-
тельного устройства и другими способами.Система ПРО обычно действует в предположении, что БЧ дви¬
жется по баллистической траектории. Поэтому любой маневр БЧ
в зоне ПРО уменьшает вероятность ее поражения. Боевой частью
можно маневрировать, изменяя ее аэродинамические' характери¬
стики при полете в плотных слоях атмосферы и применяя на ней
специальный реактивный двигатель. Аэродинамические характери¬
стики БЧ можно внезапно изменить, например, сбросом заострен¬
ного наконечника или «юбки» стабилиза/ора.В первом случае (рис. 8.4а) вследствие увеличения лобового
сопротивления БЧ полетит по более крутой траектории по сравне¬
нию с прогнозируемой. Во втором случае (рис. 8.46), наоборот,Н нРис. 8.4. Траектории БЧ со сбрасываемыми наконечни¬
ками (а) и стабилизатором (б)действительная траектория полета БЧ будет более пологой, чем
прогнозируемая.Чтобы достаточно эффективно маневрировать, требуются до¬
полнительные устройства, которые увеличивают массу БЧ. Поэто¬
му вопрос об использовании маневрирующих БЧ требует конкрет¬
ного тактико-технического обоснования.§ 8.4. РАСЧЕТ НА ПРОЧНОСТЬ КОРПУСА БОЕВОЙ ЧАСТИОсновными нагрузками корпуса БЧ являются наружное аэро¬
динамическое давление и сосредоточенные массовые силы от аппа¬
ратуры и заряда. Между оболочкой корпуса и шпангоутами в
процессе эксплуатации возникают силы взаимодействия, учет ко¬
торых в сочетании с внешней нагрузкой и неравномерным темпера¬
турным полем существенно усложняет расчет на прочность.В первом приближении корпус расчленяется на отдельные эле¬
менты, расчет которых производится изолированно, независимо
друг от друга. В этом параграфе изложим лишь характерные осо¬
бенности прочностного расчета оболочки корпуса, промежуточных
шпангоутов и силового шпангоута.188
Оболочка корпуса рассчитывается на случай максимума осе¬
вой (лг п1ах) и поперечной (лу !пах) перегрузок. Максимальнаяосевая перегрузка достигается при полете с нулевым углом атаки,
оболочка корпуса БЧ при этом подвергается действию осесиммет¬
ричной нагрузки: наружного аэродинамического и внутреннего
давления и инерционных сил. Расчет на прочность в этом случае
сводится к проверке устойчивости оболочки. Обычно каждый из
участков корпуса, расположенных между смежными шпангоутами,
рассматривается как коническая оболочка, нагруженная равно¬
мерным внешним давлением p^—fAp и осевой сжимающей силой
Np=fN (рис. 8.5).Ввиду малой конусности рас¬
сматриваемой оболочки для рас¬
чета критических давления р1ф и
меридионального напряжения окр
используются приведенные в
§ 7.4 расчетные формулы для
цилиндрической оболочки, в ко¬
торых вместо радиуса R цилин¬
дрической оболочки подставляется
второй главный радиус кривизны
R2 большего основания. Тогда
расчетные зависимости приобре¬
тут следующий вид:— критическое давление слабоконической оболочки, находя¬
щейся под действием равномерного наружного давления_5_/;КР==0,92Я(^Г)24; (8.1)— критическое напряжение осевого сжатия слабоконической
оболочки°кР ==(0,15-4-0,3) (8.2)Условиями прочности являются4 = -^ >1,0 (8.3)Р ри i ■■'* -Г1==1^7Г > 1'0, (8'4)где меридиональное напряжение oi определяется из следующего
уравнения равновесия■ Oj2ir/?28 cos2 у + Np = 0. (8.5)Рассчитывая максимальную поперечную перегрузку внешняя
нагрузка приводится к осевой силе N, изгибающему моменту М,
перерезывающей силе Q и внешнему давлению А р. Возникающие
при этом напряжения в' оболочке определяют по формулам безмо-
ментной теории,189*Г~!IIРис. 8.5. Расчетная схема оболочки
корпуса БЧ при осесимметричном
нагружении
Так, наибольшие меридиональные оь кольцевые 02 и наибольшие
касательные %■ напряжения рассчитываются по следующим фор¬
мулам:где г — текущий радиус сечения;Y — угол полураствора конуса БЧ.При определении эквивалентного напряжения касательные на¬
пряжения можно не учитывать, так как они сравнительно неве¬
лики. Если применить третью теорию прочности, то при напряже¬
ниях 01 и 02 одинакового знака эквивалентное напряжение равно
наибольшему из двух, а при разных знаках 01 и 02 эквивалентное
напряжение равно сумме их модулей.Условием прочности являетсяУчастки, испытывающие осевое сжатие (oi<0), необходимо также
проверить на устойчивость:где оКр — критическое напряжение осевого сжатия, подсчитанное
по формуле (8.2).Прочность шпангоутов на действие внешнего давления рассчи¬
тывается в предположении, что оболочка потеряла устойчивость
и вся нагрузка воспринимается шпангоутами. В этом случае
исключается сопротивление оболочки действию внешней нагрузки
и размеры шпангоута получаются несколько завышенными. По¬
скольку размеры боевых частей сравнительно невелики, то увели¬
чение размеров и масс шпангоутов оказывается также небольшим.
В то же время расчеты существенно упрощаются.По выполняемым функциям шпангоуты могут подразделяться
на промежуточные, подкрепляющие оболочку, и силовые, воспри¬
нимающие аксиальные нагрузки от аппаратуры и заряда. С этой
точки зрения к силовым могут быть отнесены также и стыковоч¬
ные шпангоуты.В качестве расчетной схемы промежуточного шпангоута при¬
нимается кольцо, нагруженное в своей плоскости системой нор¬
мальных и касательных сил с интенсивностью q и s соответствен¬
но (рис. 8.6)./N , fM(8.6)2w8cos-k — пгЧ cos 1(8.7)(8.8)(8.9)(8.10)190
При осесимметричном нагружении внешним избыточным дав¬
лением шпангоуты сжимаются и поэтому проверяются на устой¬
чивость. Погонная нагрузка на шпангоут равномерно распреде¬
ляется по окружности шпангоута (рис. 8.7) и равнаq=М.р> (8Л1)гдеh + h+iIпр(8.12)Касательные силы в этом случае, очевидно, отсутствуют. Напря¬
жения в шпангоуте вычисляются по следующей зависимости:с = ЛЕр-' (8.13)Рис. 8.6. Расчетная схе¬
ма промежуточного
шпангоутаРис. 8.7. На-грузка, вос¬
принимаемая
одним проме¬
жуточным
шпангоутомУсловие устойчивости шпангоута3 EJя;4 = -^->1,0,
критическая нагрузка на шпангоут;(8.14)J и F — момент инерции и площадь поперечного^сечения
шпангоута.Запас прочности7) = -^. (8.15)Условие прочностит)> 1,0.При расчете на случай максимальной поперечной перегрузки
(случай rjyi max) шпангоуты проверяются на прочность и устойчи¬
вость от внешнего несимметричного давления. Каждый из шпан¬191
гоутов представляется в виде кольца (рис. 8.8), нагруженного
погонной радиальной нагрузкой, которую можно представить сле¬
дующим образом:q = а + b cos <р + с cos 2® при 0<tp<P; )<7 = 0 при J (8.16)Здесь коэффициенты а, Ь, с и р определяются условиями полета
и геометрией БЧ. Радиальная нагрузка в этом случае уравнове¬
шивается касательными усилиямиs — s0 sin ® (8.17)причем значение So находится из условия равновесия шпангоута:] s0 sin2 <\ q cos <p dy.Наиболее простой (при достаточной точности) путь решения за¬
ключается в разложении заданной нагрузки в ряд Фурье и пред¬
ставлении ее в следующем- виде:q = а0 + av cos <р + а2 cos 2<р ++ ... + Я; cos/V (8.18)Вычисление коэффициентов
этого ряда читатель может найти
в специальной литературе.Решать статически неопреде¬
лимую задачу при нагрузке
(8.18) можно очень просто обыч¬
ными методами строительной ме¬
ханики. Расчетные выражения
для изгибающего момента М(<р)
и продольной силы N(ср) в произвольном сечении шпангоута сле¬
дующие:Рис. 8.8. Схема нагружения проме¬
жуточного шпангоута при полете БЧ
с углом атакиИЛИМ (?) = RL 2 тпггcos/=2N(<?) = — /?шп 1^а0 + s0 cos — 2 ттггг cos w'JN(<p) = — Rwn (a0 + s0 cos <p) +*'■ Ш ГТ(8.19)(8.20)(8.21)Найденные выражения для M(cp) и N(cp) представляют собой
тригонометрические ряды, коэффициенты которых быстро убы¬
вают.192
Достаточную для практических целей точность в определении
максимальных значений Л4(<р) и N(ср) можно получить, ограни¬
чиваясь вычислением членов с порядковым номером г = 3—4, т. е.
сохраняя в разложении (8.18) 4—5 членов. Напряжения в наибо¬
лее нагруженных сечениях определяются по известной формуле
сопротивления материалов_ _ Ж + М МW(8.22)где F и W — площадь и момент сопротивления поперечного сече¬
ния шпангоута.Если рассчитываемая полка шпангоута сжата, то необходимо
проверить ее устойчивость. Запас устойчивостигде окр— критическое напряжение местной потери устойчивости.Напряжения в растянутых волокнах сравниваются с пределом
прочности материала шпангоута.Расчетным случаем для силового шпангоута является случай
максимума осевой перегрузки (яА.1тах). Схема сил, действую¬
щих на шпангоут, представлена на рис. 8.9, где Рл и Рп — мери¬
диональные усилия; Мл, Мп, Qn,Qn — моменты и перерезывающие
силы, действующие слева и справа на шпангоут; Р — усилие, дей¬
ствующее со стороны заряда. Все перечисленные виды нагрузок
отнесены к единице длины дуги соответствующего сечения. Уси¬
лия Ра и Ра находятся с помощью эпюры осевых усилий. Угол а
приложения силы Р определяется конструктивными особенностя¬
ми узла крепления заряда. Конусностью оболочки ввиду ее мало¬
сти пренебрегают.Под действием указанной системы сил поперечное сечение
шпангоута переместится на величину w и повернется на угол 0.193
Используя готовые расчетные формулы [5], запишем радиальное
перемещение w и угол поворота б поперечного сечения шпангоута:w-^Q. + Qh-P sin а); (8.24)6 ~ + м* + Q*a ~ Q*b - Р^ ~ Р^ ~ Р1^ (8'25>
Условия неразрывности деформаций шпангоута и оболочки, при¬
мыкающей к шпангоуту слева [6]:w + да = -„з (Рл^л + QJ; (8.26)0 = (2^л + дл). (8.27)• л лУсловия неразрывности деформаций шпангоута и оболочки, при¬
мыкающей к шпангоуту справа [6]:w-9b = - *_ (рпЛ*п + Q..); (8.28)г П П9 = --^Тг(2^п+0п). (8.29)г п ПВ формулах (8.26) — (8.29) п _ Л0л(п) —цилиндрическая^Л(П) — 12 (1 р.2)жесткость оболочки, расположенной слева (справа) от шпангоута,В4 = ^8j|(n> _ 3(1 — jj.2) _^л(п) 4R2 Г) ~ /?2 й2 9
шп л (п) шп л (п)£ и [л — модули Юнга и Пуассона.Решение приведенных уравнений в общем виде весьма громоздко
и поэтому здесь не приводится.В то же время численное решение видимо не представляет осо¬
бого труда и сводится к последовательному исключению неизвест¬
ных. Так, определяя из уравнений (8.26) и. (8.27) Мл и (2л, а из
уравнений (8.28) и (8.29) —Мп и (?„ и подставляя затем эти вы¬
ражения в выражения (8.24) и (8.25), получим два уравнения,
из которых находим искомые прогиб w и угол поворота б попереч¬
ного сечения шпангоута.Максимальные нормальные напряжения в шпангоуте в местах
стыка с оболочкой очевидно равныа = (w + 0 а) (8.30)194
или(8.31)Условие прочности Y) = -^-.> 1,0.Вследствие относительной массивности шпангоута проверку
устойчивости можно не производить. Если же шпангоут представ¬
ляет собой тонкостенную конструкцию, то необходимо также
проверить его устойчивость.ЛИТЕРАТУРА К ГЛАВЕ VIII1. Астахов М. Ф., Караваев А. В., Макаров С. Я., С уз да л fa¬
il е в Я- Я. Справочная книга по расчету самолета на прочность. Оборонгиз,
1954.2. «Вопросы ракетной техники» (сборник переводов и обзоров). Изд.
иностр. лит., 1964, № 9, 10; 1966, № 2.3. Конструкция летательных аппаратов (под ред. С. Н. Кана). Оборон¬
гиз, 1963.4. Мерилл Г., Гольдберг Г., Гельмгольц Р. Исследование опе¬
раций. Боевые части. Пуск снарядов. Изд. иностр. лит., 1959.5. Тимошенко С. П. Сопротивление материалов, II. Гостехиздат, 1946.6. Тимошенко С. П. Пластинки и оболочки. Гостехиздат, 1948.7. „Electronics", 1965, 38, N 1, 89.8. „Missiles and Rockets", 1963, 13, N 5, 19.-9. „Space/Aeronautics", 1964, 41, N 2, 47—59.10. „Aviation Week and Space Technology", 1964, 81, N 8, 50—61.11. „Ordnance", 1963, 48, N 261, 248.12. „Electronic News", 1964, 9, N 461, 1, 22; 1965, 10, N 471, 17.13. „Interavia Air Letter", 1965, N 5694, 7.14. Gallavardin J. Bomb Orbitale, “Strategic”, 1966, № 8.15. Aviation Week and Space Technology, 1967, 87, № 17,90,95,98,99, 103, 105,
108, 109.16. Electronic News, 1967, 12, N 621, 18.17. Times 1967, 10 nov, 4.18. Missile Space Daily, 1967, 28, № 4, 16; 1967, 27, № 41, 201.19. Science News, 1967, 92, N 16, 374.
ГЛАВА IXконструкция и ПРОЧНОСТЬ ПЕРЕХОДНЫХ,
ПРИБОРНЫХ И ХВОСТОВЫХ ОТСЕКОВБаллистические ракеты с ЖРД и РДТТ независимо от их кон*
структивной схемы в качестве обязательных частей корпуса имеют
переходные, приборные и хвостовые отсеки. Хотя эти отсеки имеют
много общего в конструкции, специфичность назначения и предъ¬
являемые требования, а также особенности нагружения вносят
определенное различие в их конструкцию и расчет на прочность.§ 9.1. НАЗНАЧЕНИЕ ОТСЕКОВ И ТРЕБОВАНИЯ,
ПРЕДЪЯВЛЯЕМЫЕ К НИМПереходные отсеки соединяют в одно целое корпуса
ступеней составной ракеты, а также корпус последней ступени
с БЧ. Применение переходных отсеков (переходников) объяс¬
няется различием диаметров стыковочных шпангоутов корпусов
ступеней, если ступени имеют разные диаметры, и удобством
эксплуатации. Стыковочный шпангоут БЧ, как правило, имеет ди¬
аметр, отличный от диаметра последней ступени, поэтому они
также соединяются переходником.Приборные отсеки служат для размещения в них аппара¬
туры системы управления. Чтобы повысить точность работы системы
управления, приборный отсек целесообразно размещать вблизи
центра масс ракеты. Однако в зависимости от типа ракеты и ее
конструктивной схемы он может располагаться в разных местах
по длине корпуса. В ракетах с ЖРД приборный отсек обычно рас¬
полагается между БЧ и топливным отсеком или между баками
окислителя и горючего, а в ракетах с РДТТ между БЧ и двига¬
телем последней ступени.Хвостовой (двигательный) отсек предназначен для
защиты двигателя от непосредственного воздействия внешних сил,196
а также для крепления исполнительных органов системы управ¬
ления и стабилизаторов ракеты. Часто хвостовые отсеки исполь*
зуются также для передачи силы тяги двигателя на корпус раке¬
ты, установки ракеты на пусковой стол и соединения ступеней
ракеты.Рассмотрим основные требования к конструкции переходных,
приборных и хвостовых отсеков, а также конструктивные способы
реализации этих требований.1. Минимальная масса отсека при требуемом запасе проч¬
ности.Стремление выполнить это требование привело к тому, что
большинство существующих ракет имеют конструкцию перечис¬
ленных отсеков в виде тонкостенных оболочек, подкрепленных в
продольном и поперечном направлениях силовым набором. Мож¬
но также применять многослойные оболочки и оболочки «вафель¬
ной» конструкции. Чтобы уменьшить массу последней ступени
ракеты, в отдельных случаях хвостовой отсек этой ступени сбрасы¬
вается после разделения с'предыдущей ступенью.2. Надежное восприятие и передача на другие отсеки всех
действующих сил и моментов.Это требование выполняется соответствующим выбором сило¬
вой схемы отсека и подбором сечений элементов силового на¬
бора. На выбор силовой схемы заметно влияет способ крепления
отсеков. Если соединяемые отсеки представляют собой тонкие
оболочки, подкрепленные силовым набором, то целесообразно для
стыковки отсеков применять болтовое соединение с равномерным
распределением болтов по торцам стыковочных шпангоутов. Чем
жестче указанное соединение, тем больше величина критической
силы, при которой отсек теряет устойчивость. Устойчивость отсека
повышается также, если применить мощные стыковочные шпан¬
гоуты и частый продольный силовой набор.. 3. Удобство в эксплуатации, заключающееся, в частности, в сво¬
бодном доступе к приборам и агрегатам,, расположенным в отсе¬
ках, для их проверки, регулировки или замены.Выполнение данного требования вызывает необходимость
устройства в отсеках достаточно большого числа люков, которые,
конечно, уменьшают несущую способность отсека. Чтобы этого
не допустить, применяется силовая окантовка люков, люки распо¬
лагаются на поверхности отсека в разных сечениях и т. д. Чтобы
быстро снять и поставить крышки люков, используются самоза*
крывающиеся замки, специальные держатели и защелки.4. Герметичность отсеков.Конструкция отсеков должна исключать проникновение внутрь
отсеков пыли и влаги. Поэтому люки отсеков снабжаются специ¬
альным уплотнением, заклепочные соединения герметизируются,
места стыков заклеиваются изолирующей лентой, при хранении
ракеты применяются чехлы и заглушки.Необходимо иметь в виду, что в отдельных случаях требовав197
ния прочности и свойства материалов могут существенно влиять
на технологию изготовления отсеков, причем в ущерб технологич¬
ности конструкции. Так, например, деформируемые алюминиевые
сплавы хорошо свариваются, но недостаточно прочны и жестки
для подобных конструкций. С другой стороны, недеформируемые
алюминиевые сплавы удовлетворяют требованиям прочности, но
плохо свариваются. Чтобы обеспечить наименьшую массу при за¬
данной прочности и жесткости конструкции, часто оказывается
рациональным изготавливать клепаные отсеки из недеформируе-
мых сплавов, хотя это значительно ухудшает технологичность их
производства.§ 9.2. КОНСТРУКЦИЯ ПЕРЕХОДНЫХ, ПРИБОРНЫХ И ХВОСТОВЫХОТСЕКОВПереходные, приборные и хвостовые отсеки с конструктивной
точки зрения обычно представляют собой тонкостенные оболочки,подкрепленные силовым на¬
бором. Силовой набор обра¬
зуется продольными элемен¬
тами-стрингерами и попе¬
речными элементами —
шпангоутами. Оболочкой же
является обшивка, скреплен¬
ная с силовым набором.В современных ракетных
конструкциях применяются
стрингеры в виде профилей,
изготовленных штамповкой
или прокатом. Формы се¬
чений стрингеров отлича¬
ются большим разнообра¬
зием (рис. 9.1), а примене¬
ние той или другой формы определяется конструктивными факто¬
рами и условиями нагружения. Для ответственных частей кон¬
струкции применяются стрингеры с закрытым профилем сечения
(рис. 9.1а, б,в), которые обладают более высокими критическими
напряжениями общей и местной потери устойчивости, чем стрин¬
геры с открытым профилем сечения (рис. 9.1 г, д, е, ж). В по¬
следнее время широко применяются оболочки, изготовленные как
одно целое со стрингерами (рис. 9.2).Стыковочные и промежуточные шпангоуты изготавливаются в
виде кольца из заготовок с различной формой сечения: уголковой,
Z-образной, корытообразной и более сложной конфигурации. За¬
готовки изготовляются штамповкой или прокатом.Более мощные стыковочные шпангоуты могут склепываться из
отдельных листов и профилей. Штампованные шпангоуты более
выгодны с точки зрения уменьшения массы и увеличения полез¬
ного объема.198Рис. 9.1. Формы сечений стрингеров:
а, б, в — закрытые профили; г, д, е, ж — откры¬
тые профилиЛ|
Обшивка приклепывается к стрингерам и шпангоутам. Стрин¬
геры могут частично прорезать промежуточные шпангоуты, соеди¬
няясь с ними отбортовкой или специальными угольниками. Иног¬
да промежуточные шпангоуты приклепываются только к стринге¬
рам, что упрощает технологию сборки отсека и уменьшает коли¬
чество заклепочных швов на обшивке.Одним из новых направлений в конструировании рассматри¬
ваемых отсеков является применение оболочек и панелей «ва¬
фельной» конструкции.Несмотря на многие общие черты в конструкции, отсеки имеют
специфические особенности, обусловленные их назначением, рас¬
положением на ракете и характе¬
ром действующих нагрузок.Переходные отсеки.‘ Переходные отсеки в зависимости
от диаметров соединяемых ступе¬
ней (БЧ) имеют коническую или
цилиндрическую форму. Па рис.9.3 изображена простейшая кон-Рис. 9.2. Оболочка, изготовлен¬
ная за одно целое со стрин¬
герамиРис. 9.3. Переходный отсек:/ — передний шпангоут; 2 — обе¬
чайка; 3— задний шпангоут; 4 —
направляющий штырь; 5 — люкструктивная схема переходника, предназначенного для соедине-
ния БЧ с корпусом ракеты. Он имеет форму усеченного конуса и
состоит из обечайки 2 и двух стыковочных шпангоутов уголково¬
го профиля. Стрингеры в данном случае отсутствуют.На переднем шпангоуте 1 устанавливаются несколько направ¬
ляющих штырей 4 для центрирования БЧ при стыковке и свер¬
лятся отверстия для болтов крепления защитной крышки, уста¬
навливаемой при транспортировке ракеты. Кроме того, к шпан¬
гоуту и оболочке обычно приклепываются фитинги с отверстиями
для установки разрывных болтов, крепящих БЧ.На торцевой полке заднего шпангоута 3 имеются отверстия
для направляющих штырей и болтов крепления переходника к
корпусу ракеты. В обечайке переходника имеются люки 5 для
доступа к разрывным болтам и штепсельным разъемам. Люки
закрываются крышками с крепежными винтами. С внутренней
стороны к обечайке приклепываются кронштейны для крепления
кабельной сети и штепсельных разъемов.Переходные отсеки, работающие в более тяжелых условиях,
например переходные отсеки, соединяющие ступени ракеты, отли¬199
чаются от рассмотренного продольным силовым набором — стрин¬
герами и дополнительными промежуточными шпангоутами. В ка¬
честве материала можно использовать алюминиевые сплавы, а эле¬
менты переходного отсека соединять заклепками.Одним из способов разделения ступеней является так называе¬
мое «огневое» разделение, когда после разрыва связей последую¬
щая ступень за счет тяги, создаваемой ее двигателем, уходит or
предыдущей ступени, двигатель которой работает с уменьшенной
тягой или выключается полностью (см. гл. XIII). Применяя этот
способ разделения, необходимо обеспечить свободный проход вы¬
соконагретых газов через переходник, соединяющий ступени, при
запуске и начальном периоде работы двигателя до разделения
ступеней.Рис. 9.4. Переходный отсек —ферма:/ — труба; 2 — башмак; 3 — стойка; 4 — направляющие
штыриС этой точки зрения удобной конструкцией переходника яв-
ляется открытая ферма, изготовленная из стальных труб, соеди¬
ненных сваркой (рис 9.4). Нижние концы труб 1 привариваются
к башмакам 2, а верхние — к стойкам 3. В нескольких стойках
находятся специальные быстроразъемные замки для стыковки
фермы с верхней ступенью ракеты. Кроме того, на стойках
имеются направляющие штыри 4.К корпусу нижней ступени ракеты ферма крепится через баш¬
маки 2 обычными болтами или шпильками.Приборные отсеки. В зависимости от места размещения
на ракете приборные отсеки могут иметь разную форму: при рас¬
положении непосредственно за боевой частью — форму усеченно¬
го конуса, в случае же размещения между топливными баками —
цилиндрическую форму. Как и в переходном отсеке, основными
элементами приборного отсека являются продольный и попереч¬
ный силовые наборы, скрепленные заклепками с обшивкой.Основной особенностью приборного отсека является наличие
внутри него рамы, на которой крепятся приборы системы управ¬
ления и автоматики ракеты. Вместе с тем она служит силовым
элементом отсека. Обычно рама изготавливается из жестких про¬
филей двутаврового или корытообразного сечения и усиливается200
подкосами и растяжками. Малые деформации рамы способствуют
неизменности ориентации приборов, в первую очередь гироскопи¬
ческих, относительно осей и плоскостей стабилизации ракеты.
Аппаратура в приборном отсеке устанавливается так, чтобы обес¬
печить минимальную вибрацию, наименьшую длину электриче¬
ских связей между приборами и удобство обслуживания.Для свободного доступа к приборам в обшивке приборного
отсека обычно имеется несколько люков с крышками. Обшивка
отсека в районе люков усиливается накладками. Уплотнение кры¬
шек создается герметизирующими прокладками.Стыковочные шпангоуты приборного отсека имеют на торце¬
вых полках отверстия под болты и отверстия или направляющие
штыри для соединения с соседними отсеками.Хвостовые отсеки. Конструкции хвостовых отсеков со¬
временных ракет очень разнообразны. Это объясняется типом и
конкретной компоновкой ракеты, конструкцией двигателя и ис¬
полнительных рулевых органов, способом установки ракеты на
стартовом устройстве и другими факторами.По внешней форме хвостовые отсеки могут быть цилиндричс’
скими и в виде усеченного конуса. Последние применяются в том
случае, если поперечный размер двигательной установки превы¬
шает диаметр ракеты, а также если нужно повысить статическую
устойчивость ракеты в полете, что позволяет уменьшить площадь
стабилизаторов и тем самым сократить поперечные габаритные
размеры ракеты. Кроме того, увеличение диаметра нижнего опор¬
ного шпангоута хвостового отсека повышает устойчивость раке¬
ты на пусковом столе.Для ракеты, имеющей органы управления в виде поворотных
рулевых камер сгорания и тормозные пороховые двигатели для
отделения боевой части или разделения ступеней, в качестве од¬
ного из вариантов можно представить следующую конструктив¬
ную схему хвостового отсека (рис. 9.5). Огсек состоит из корпуса
и четырех обтекателей, расположенных в двух взаимноперпенди-201
кулярных плоскостях стабилизации I—Ш и II—IV. Корпус имеет
силовой набор в виде стрингеров и шпангоутов, к которым при¬
клепана обшивка. В обшивке сделаны люки обычного конструк¬
тивного оформления.Основной и рулевой двигатели ракеты рамой крепятся к уси¬
ленному шпангоуту. На крайнем нижнем шпангоуте хвостового
отсека закреплены опорные кронштейны для установки ракеты На
пусковой стол и размещены гнезда штепсельных разъемов и дру¬
гие устройства, связывающие магистрали ракеты с наземйым обо¬
рудованием.Под обтекателями хвостового отсека размещены поворотные
камеры сгорания рулевого двигателя и тормозные пороховые дви¬
гатели. Обтекатели имеют люки, закрытые крышками, для досту¬
па к рулевым машинам и другим агрегатам. Выходы' сопел тор¬
мозных пороховых двигателей прикрыты крышками, сбрасывае¬
мыми при работе двигателей.Для последних ступеней баллистических ракет могут приме¬
няться сбрасываемые хвостовые отсеки. Так как движение этих
ступеней происходит в разреженных Слоях атмосферы, то отпа¬
дает необходимость защиты двигательной установки от действия
аэродинамических сил, а эффективность аэродинамической ста¬
билизации ракеты становится очень малой. Сброс же хвостового
отсека уменьшает пассивную массу последней ступени и тем са¬
мым способствует увеличению дальности ее полета.Сбрасываемый хвостовой отсек конструктивно может быгь'
выполнен из нескольких панелей, скрепленных между собой спе¬
циальными быстроразъемными замками. Сам же отсёк крепится
к корпусу ступени, например, разрывными болтами. При сбросе
отсека болты крепления рвутся, а замки раскрываются, и панели
отсека разбрасываются в стороны от ракеты.В принципе сбрасывать панели хвостового отсека можно, под¬
рывая взрывчатые заряды, расположенные в виде шнуров в ме¬
стах разделения отсека на панели [6].§ 9.3. СПОСОБЫ СОЕДИНЕНИЯ ОТСЕКОВУзлы крепления отсеков являются весьма важными элемента¬
ми конструкции ракеты. Во всех случаях эксплуатации должна
обеспечиваться их высокая прочность и надежность.Отсеки крепятся между собой обычно различными легкоразъ¬
емными болтовыми соединениями и только в отдельных случаях
применяется сварка. Конструкция узлов крепления зависит от
назначения и компоновки ракеты, характера силового набора
корпуса, принятого способа создания управляющих усилий, спо¬
собов храпения, транспортировки и перегрузки ракеты.Основными требованиями к узлам крепления отсеков яв¬
ляются:202
— достаточная прочность и жесткость соединения при дей¬
ствии всевозможных эксплуатационных нагрузок;— равномерное распределение по сечению корпуса нагрузок,
воспринимаемых узлами крепления;— обеспечение минимальной массы узла крепления.Заметим, что последнее требование выполнить иногда затруд¬
нительно из-за других требований, специфичных для данного узла.
Так, например, получая из условия прочности небольшое потреб-| ное количество болтов малого диаметра, приходится, исходя изI эксплуатационных требований, принимать болты большего диа¬
метра, а чтобы равномерно распределить усилия по сечению—
увеличивать Их число.Конструктивное оформление узлов крепления отсеков в боль*
шой степени зависит от того, в каком состоянии хранится и транс¬
портируется ракета. Одни отсеки могут быть соединены между
[ собой постоянно, другие же могут стыковаться лишь при подго¬
товке ракеты к пуску.Стыковка отсеков должна гарантировать их соосность, что
' достигается установкой направляющих штырей и сверлением со-
ответствующих отверстий на стыковочных шпангоутах. Парис. 9.6а
показана установка направляющего штыря, когда толщина опор-
; ного шпангоута достаточно велика, чтобы применить направляю¬
щий штырь в виде шпильки. В штыре имеется отверстие для во¬
ротка, а шайба предохраняет дюралюминиевый шпангоут от смя¬
тия при ввинчивании стального штыря. Допуск на разметку мест
постановки направляющих штырей и сопрягаемых с ними отвер¬
стий, так же, как и диаметр отверстий под штыри, определяется
допустимой несоосностьр стыкуемых отсеков.Если толщина торцевой стенки шпангоута незначительна
(рис. 9.66) и исключает постановку шпильки, направляющий
штырь крепится гайкой, которая контрится пружинной шай¬
бой.На рис. 9.6 в изображен узел крепления двух отсеков, допу¬
скающий регулировку как в осевом, так и в радиальном направ¬
лении. Крепление в осевом направлении регулируется перемеще¬
нием контргайки 5, торец которой является опорной поверхностью
для шпангоута 9, в радиальном направлении — поворотом эксцен¬
трикового стакана 3. Узлы крепления подобного типа из-за своей
сложности и большой массы применяются только в случаях край¬
ней необходимости.В местах с ограниченным доступом часто применяется крепле¬
ние с «плавающей» гайкой (рис. 9.6г), которая постоянно нахо¬
дится в кармане, приклепанном к опорному шпангоуту. Карман
исключает выпадание и проворачивание гайки. Отверстие гайки
имеет конусную часть, улавливающую конец болта при его ввин¬
чивании. Чтобы предотвратить упор болта, в кармане вырезано
отверстие. Самоотвинчивание болта исключается пружинной
шайбой.203
жРис. 9.6. Узлы крепления отсеков:
а — ж — различные способы крепления и фиксации; 1 — опорный
шпангоут; 2 — обшивка; 3 — эксцентриковый стакан; 4 — болт;
б — контргайка; 6 — зажимная втулка; 7 — стопорная пластин¬
ка; в —обшивка; 9 — опорный шпангоутвинчивание, винты снабжаются пружинными шайбами. Данное
соединение является редкоразъемным, поэтому нет необходимости
в постановке под винт стальной втулки.204-VV.Если два отсека хранятся и транспортируются совместно и
их расстыковка маловероятна, может применяться крепление, по¬
казанное на рис. 9.6д. Чтобы предупредить самопроизвольное от-
В случае когда толщина торцевой полки шпангоута мала и
постановка шпильки или винта невозможна, применяется болто¬
вое соединение (рис. 9.6е). Чтобы удобнее подходить к гайкам,
н фигурном опорном шпангоуте вырезаются окна.Если в процессе эксплуатации предполагается частая рассты¬
ковка отсеков, то применение крепежных винтов и шпилек тре¬
бует установки в шпангоутах из легких сплавов стальных втулок,
обеспечивающих многократное ввинчивание винтов без деформа¬
ции и нарушения геометрии резьбы. Образец такого соединения
показан на рис. 9.6ж. Головка винта в ,этом соединении имеет
внутреннее гнездо под торцевой ключ, так как из чертежа видно,
что в данном соединении применение любого другого ключа за¬
труднительно. Конечно, такое соединение нетехнологично и может
быть оправдано только особыми обстоятельствами.Разделение ступеней ракеты в полете и отделение БЧ требуют
специального крепления для соответствующих отсеков, которое
может быть нарушено в определенный момент времени. Обычно
ступени ракеты и БЧ крепятся разрывными болтами и быстродей¬
ствующими замками различной конструкции.§ 9.4. РАСЧЕТ НА ПРОЧНОСТЬ ХВОСТОВЫХ И ПРИБОРНЫХОТСЕКОВКорпуса хвостового и приборного отсеков, а также корпуса
переходников представляют, как было указано, оболочки враще¬
ния, по форме приближающиеся к усеченному конусу или цилин¬
дру, подкрепленные продольным и поперечным силовым- на¬
бором.Каждый из элементов конструкции отсека работает совместно
с другими элементами в единой схеме и выполняет четко ограни¬
ченные задачи. Так, продольный набор (стрингеры, лонжероны)
воспринимают изгибающий момент и осевую силу. Кроме того,
стрингеры подкрепляют обшивку, повышая ее критическое напря¬
жение потери устойчивости. Обшивка служит в основном для вос¬
приятия крутящего момента и перерезывающей силы, а также
вместе с продольным набором сопротивляется осевой силе и изги¬
бающему моменту. Поперечный набор (шпангоуты) обеспечивает
сохранение формы корпуса и равномерное распределение воздей*
ствий сосредоточенных сил. Являясь опорой для стрингеров и об¬
шивки, шпангоуты в значительной степени определяют величины
их критических напряжений. Особенностью конструкции отсеков
является наличие люков, ослабляющих корпус. Некоторая ком¬
пенсация этого ослабления достигается отбортовкой и окантовкой
отверстий. Конструктивные схемы приборных, хвостовых отсеков
п переходников между собой весьма близки, поэтому и методы
расчета на прочность имеют много общего.Характерным видом нагрузки отсеков является сжатие осевой
силой N и изгиб моментом М. Изложим расчет несущей способ¬205
ности корпуса отсека при совместном действий осевой силы и из¬
гибающего момента.Пусть рассматриваемая оболочка имеет геометрические пара-
метры, изображенные на рис. 9.7. Чтобы приближенно определить
несущую способность подкрепленной оболочки, используется схе¬
матизированная диаграмма о — е потери устойчивости сжатых эле¬
ментов продольного набора (рис. 9.8). Деформация вт соответст¬
вует началу потери устойчивости, а еп — прекращению сопротив¬
ления элемента (разрушению). Используя гипотезу плоских
сечений, деформацию произвольного стрингера запишем в виде:— AVj + С. (9.1)Рис. 9.7. Геометрические параметры
поперечного сечения отсекаРис. 9.8. Диаграмма потери
устойчивости сжатых эле¬
ментовДля волокон, расположенных на нейтральной оси с координа¬
той у но, деформация отсутствует, т. е.ЛУио + С = 0. (9.2)Если известна деформация т-го стрингера, тоет — АУт + (9-3)С помощью уравнений (9.2) и (9.3) получим следующее выраже¬
ние для деформации произвольного стрингера:г, = е_У1—У но
Ут У но(9.4)Предположим, что начало потери устойчивости совпадает с т-ым
стрингером (сжата верхняя часть оболочки отсека) и^кр. стрТогда206°К.р. стрУ1 .УнО
Ут Унд(9.5)(9.6)
При этом на крайнем «-ом стрингере не должно быть падения
напряжения (разрушения), т. е. деформация п-го стрингера рав¬
на еп. Поскольку расстояние между нейтральной и геометрической
осями г/но сравнительно невелико, тогп __ Уп -Уно .—Уп
ет Ут .Уно Ут(9.7)При отсутствии действительных диаграмм устойчивости можно
принимать, что -^-«1,5. Это предположение соответствует по-гттере устойчивости стрингеров в
предельном состоянии в секторе
2ср~90°. Напряжения в стрин¬
герах находятся по известным
формулам сопротивления мате¬
риалов:У1—Уно“Кр.СТр ут-утпри \ (9.8)Рис. 9.9. Расчетная схема сечения
отсека в виде дискретной оболочкиС; = ■—акр. стр ПР» ^ <*'<«■(9.9)Чтобы определить предельные
значения осевой силы Л/пр и изги¬
бающего момента Л1пр, предполо¬
жим, что в сжатой зоне обшивкапотеряла устойчивость и сопротивляется сжатию лишь на приве¬
денной ширине Ьпр. В растянутой же области обшивка сопротив*
ляется внешней нагрузке полностью на ширине Ь. Присоединяя
соответствующую площадь обшивки 6ПР8 (или Ьо) к площади
стрингера FCTpt. получим вместо действительного сечения кор¬
пуса дискретную расчетную систему (рис. 9.9). Приведенное осе¬
вое усилие равно сумме усилий, воспринимаемых каждым стрин¬
гером:^„Р ='кр.стр1Ут У нот—1
/=1у Г-т—1(9.10).Чилк минус в этой формуле соответствует сжатию. Предельный
нагибающий момент, который может выдержать корпус отсека до207
разрушения, получим суммируя • элементарные моменты от каж¬
дого стрингера:m—1■^пр —"'кр. стрУт У но1=1т — 1-у/и?2иу‘рч + 2jy‘F<V(9.11)Рис. 9.10. Зависимость между
предельными изгибающим мо¬
ментом А1Пр и осевой си¬
лон Л^прКак уже было указано, площади для растянутых и сжатых
элементов различны. В растянутой области (Уг^Упо) обшивкаполностью включается в площадь эле¬
ментаFi=F^i + bb. (9.12)В сжатой области (уг>уио) полагаем,
что обшивка - уже потеряла устойчи¬
вость и сопротивляется лишь на при¬
веденной ширине, т. е.Ft = Fcrp < + ^пР8- (9.13)Расчет начинается с построения гра¬
фической зависимости предельной
осевой силы Л/пр от предельного из¬
гибающего момента Мир. Из формул(9.10) и (9.12) следует, что как УУпр, так и Мпр являются функ¬
циями одного и того же аргумента уно. Поэтому расчет выпол¬
няется в такой последовательности. Задаются несколькими значе¬
ниями г/но, причем, поскольку представляет интерес лишь случай
осевого сжатия, ограничиваются отрицательными значениями у1Ю,
например, в интервале от 0 до —(i-^-2)R. Затем вычисляют пло¬
щади элементов для растянутой и сжатой 'зоны и суммыт-1 п т-1 it . т — 1'hiFi,'^Fi, 2З'Л 2З'Л и 2 y]Fh входящие в формулы
1=1 i=tn ;=1 ь=1(9.10) и (9.11). Суммирование распространяется на все элементы
сечения, находящиеся как слева, так и справа от оси у. После
этого по формулам (9.10) и (9.11) строится зависимость Nnv от
Мпр (рис. 9.10).Запас прочности получают, сравнивая расчетный момент Мр и
осевую силу Np с предельными значениями М'пр и N' , находя¬
щимися в том же отношении, что и расчетные (рис. 9,10):МпрN.прМ РУсловие прочности г)>1,0,
208NР§ 9.5. РАСЧЕТ НА ПРОЧНОСТЬ ФЕРМРасчет пространственных статически неопределимых ферм весь¬
ма сложен. Однако некоторые допущения могут существенно упро-
стить решение. Основным допущением является предположение,
что верхний и нижний пояса фермы абсолютно жесткие. В этом
случае, чтобы определить усилия в стержнях фермы, необходимо
рассмотреть равновесие одного, например верхнего, пояса. Кроме
Того, допустим, что стержни фермы соединены шарнирно. Это
допущение не должно вносить существенную погрешность, так
как внешние усилия прикладываются в уз¬
лах фермы.Сделаем несколько замечаний о степени
статической неопределимости. Поскольку
равновесие тела определяется шестью урав¬
нениями статики, то минимальное количе¬
ство стержней в ферме тоже шесть, и для
фермы, изображенной на рис. 9.11, степень
статической неопределимости в общем слу¬
чае равнап = т — 6, (9.14)где т — количество стержней в ферме.Однако вследствие симметрии фермы
при некоторых видах нагрузки степень ста¬
тической неопределимости, а, следователь¬
но, и количество дополнительных к статиче¬
ским уравнений могут быть существенно
снижены. Так, например, если стержни оди¬
накового сечения, то при действии осевой силы усилия в стержнях
одинаковы и ферма оказывается статически определимой.Если действует изгибающий момент и поперечная сила в пло¬
скости симметрии фермы ху, то усилия в стержнях, симметрично
расположенных относительно плоскости ху, равны между собой
ио модулю и знаку, а в стержнях, симметрично расположенных
относительно плоскости xz, равны между собой по модулю, а по
знаку противоположны. Вследствие этого одно из уравнений ста¬
тики, выражающее проекцию сил на ось х, превращается в тож¬
дество. Оставшиеся два уравнения статики позволяют найти уси¬
лия в двух стержнях каждого квадранта (всего в восьми стерж¬
нях фермы). Следовательно, степень статической неопределимостиРис. 9.11. Схема соеди¬
нительной фермыт 0п — —, 2.(9.15)Кик известно, величины усилий в стержнях статически определи¬
мой фермы при заданной нагрузке зависят лишь от геометриче-■ них параметров фермы. В статически неопределимой системе на
распределение усилий влияют также жесткости стержней. Обычно,и 1736 209
учитывая равновероятность направления поперечной нагрузки, все
стойки фермы выполняются одинакового сечения. Решение про¬
водится методом деформаций. Использование метода сил оказы¬
вается более сложным и громоздким. Предварительно составляет¬
ся таблица геометрических соотношений элементов фермы
(табл. 9.1).Таблица 9.1о.ОсосОбозна¬
чение
стержня
по схемеПроекциистержняКвадратыпроекцииг1м++Длинастержнящ+С->+C-JчНаправляющие
косинусы с осямиПравильность вычислений проверяется равенством
cos2 (х, /;) + cos2 (у, /;) + cos2 (z, lt) = 1.(9.16)Нагрузка, действующая на ферму, приводится к осевой и перере¬
зывающей силам и изгибающему моменту (рис. 9.12). Составим
уравнения равновесия верхнего пояса, для чего отбросим все
стержни и заменим их неизвестными усилиями S, (рис. 9.12). При
этом координаты точек приложения искомых, усилий (0, у{, Z;).Уравнения равновесия записываются следующим образом:fN + ^ cos (х; lt) = 0;(9.17)/Q+ 2^ cos (у, ^) = °; (9-18)
fM -f 2 Siyi cos (x, lt) — 0. (9.19)Здесь суммирование распространяется на все стержни. Под дей¬
ствием указанной системы сил верхний пояс сместится и повер¬
нется в плоскости действия внешних сил, т. е. в плоскости ху
(рис. 9.13).210
Из приведенного чертежа следует, что смещения точек прило¬
жения неизвестных усилий S{ определяются следующими соотно¬
шениями:Axt — Дл;0 — yl sin Д<р;Ду,. = Ду„—j/, (1 — cos A?),(9.20)где Axo, Ay0 и Дер — смещения центра и угол поворота верхнего
пояса.Угол поворота мал (sin Аср = Аср, созАф=1), поэтому соотно¬
шения (9.20) можно записать в видеДл:, = Длг0 — уАъ
Д.У/ = АУ0-(9.21)Перемещения точек приложения усилий S, в физическом
смысле являются перемещениями концов стержней и соответст-X1'нс. 9.12. К выводу уравнений рав¬
новесия верхнего пояса фермыРис. 9,13. Перемещения верхнего поясапенно деформируют их. Пользуясь формулами дифференцирова¬
ния, можем из выражения для длины стержняI = У х* + у2 + z2нпйти зависимость удлинения стержня от перемещения его концов
и следующем виде:д'=ЖА* + |-'+гдед1 х х , ,\-з— = - -—- =~г = cos (я, Г);дх Ух* + У» + *» 1 4 ’д1 у У / г\-W = yWT?=^j?=-r-“»Cy.0idl г г ,дг ~ у# + ^ —cos (z, I).•• 211
В условиях нашей задачи Аг=0, а перемещение Лу вызывает не
растяжение, а сжатие. Поэтому удлинение /-го стержня записы¬
вается в видеДля связи удлинений А/* с усилиями S,- используется формула
закона ГукаУравнения (9.17) — (9.19), (9.20) и (9.23) позволяют полностью
решить поставленную задачу по определению усилий в стержнях
фермы. Для этого подставим значения смещений Ах» и Аг/г из
системы (9.21) в выражение (9.22), а полученные удлинения в
формулу (9.23). ПолучимПодставляя значение S* в выражения (9.i7) — (9.19), получим
три уравнения для определения перемещений Алго, Аг/о и угла по¬
ворота Аср:Написанные выражения. можно несколько упростить, если ис¬
пользовать симметрию величин, входящих под знаки суммиро¬
вания. Так, величины F{, 1{ и cos(x, /,-) относительно плоскости
симметрии xz -прямо симметричны. Это означает, что для любого
стержня с одной стороны плоскости xz можно найти симметрич¬
ный стержень с такими же точно вплоть до знака значениями Fit
li и cos (х, /,•). Величины же yt и cos (у, /,-) являются обратно
симметричными, так как пара значений «/,• или cos (у, U) для
симметричных стержней при одинаковых модулях всегда проти¬
воположны по знаку.Если общий порядок обратно симметричных величин под зна¬
ком суммы нечетный (1, 3, 5 .. .^гТо эта сумма равна нулю. Если
же порядок четный (0, 2, 4 ...), то сумма нулю не равна.Mi — Дх, cos (х, /;) — Дyt cos (у, /;).(9.22)(9.23)Si = £Дх0 cos (х, — ЕЬ^~ yt cos (х, lt) — E\y0-^cos(y,lt) (9.24)fN + EAx0^-j- cos2 (x, li) — Е^У^-^-yi cos2 (x, lt) —— £Ду0 2 -§• cos (x, lt) cos (y, lt) == 0;
/Q + £Ax0 ^ -f cos (■*> h)cos O'- 4) —v1 F• Ft (9.25)Еь<? 2*~17Ух COS (x, lt) cos (y, li) — EAy0 _>] cos2(.y, /,)=0;fM + £Дх0 2 Ty-J'i cos2 (x, /j) — £Д® 2 7“ cos2 (x, /,) —— EAy0'^i^yl cos(x, cos (.y, /;) = 0.212
Учитывая сказанное, замечаем, чтоcos2(*’ l‘)==0’2 COS (лг, /,) cos (j/, /;) = О■и система уравнений (9.25) записывается окончательно в еле
дующем виде:/N + ЕЬха ^ cos2 (х, lt) = 0;/Q — £Д? 2 -77 Усcos (*. A) cos (У, /,) —— cos2^- ^) = 0! (9.26)/УИ — ЯД<р 24 ^ cos2 (х1 “— ЗД;о 2 X Л cos (*» */) cos O'? li) = °-Решая систему уравнений (9.26), получаем значения Алг0, Лг/о
н Д<р, по которым с помощью формулы (9.24) находим усилия S;
и стержнях. После этого проверяем устойчивость сжатых стерж¬
ней фермы. Сжатие характеризуется отрицательным значением
УСИЛИЯ S{.§ 9.6. РАСЧЕТ ПРОЧНОСТИ УЗЛОВ СОЕДИНЕНИЯ ОТСЕКОВПроектируя узлы соединения отсеков, необходимо исследовать
прочность всего соединения в целом, т. е. решить задачу в сле¬
дующем аспекте:— установить количество и размеры элементов крепления
(болтов, шпилек) и проверить их на прочность;— проверить и обеспечить нераскрытое стыка соединения;— проверить стыковочные шпангоуты на устойчивость в пло¬
скости стыка отсеков;— проверить невозможность местного изгиба или вырыва пол¬
ки шпангоута вблизи установленных элементов крепления (бол-1'ОП) .Прочность и устойчивость узлов стыков с точки зрения задач,
перечисленных в двух последних пунктах, обеспечиваются еще в
период разработки конструкции отсека. При этом необходимо
учитывать, что сосредоточенные усилия, возникающие в элементах
крепления отсеков от растяжения и изгиба корпуса, на участке
иг> Iп hi разъема постепенно рассредоточиваются, как это показано
ми рис. 9.14, из которого видно, что жесткость шпангоута суше-
| шепио влияет па распределение напряжений в обшивке.213
Так как тонкая обшивка плохо работает на сосредоточенные
силы, то обычно в отсеках под узлами крепления ставят усилен¬
ные стрингеры, которые постепенно включают обшивку в работу.
Приближенно можно считать, что полное включение обшивки и
стрингеров происходит на длине, определяемой расстоянием ме¬
жду стыковочными болтами. Чтобы быстрее включать в работу
стрингеры и обшивку и равномерно распределять по ним усилия,
целесообразно соединять отсеки большим количеством болтов, рас¬
пределенных по всей окружности стыка. Однако такое соединение
возможно только для отсеков ракеты, не разделяемых в полете.Рис. 9.14. Влияние жесткости шпангоута на распре
деление напряжений в обшивкеВвиду того что во время полета составной ракеты необходимо
разделять ступени и отделять БЧ, эти части ракеты соединяются
ограниченным количеством разрывных болтов или замков. Обыч¬
но для этой цели применяют от двух до шести разрывных болтов
или замков.Размеры, форму и материал стыковочных шпангоутов выби¬
рают такими, чтобы обеспечить их требуемую жесткость и устой¬
чивость в плоскости стыка, а также предотвратить изгиб или
вырыв в месте установки крепежного элемента. Последнее обес¬
печивается также усилением шпангоута специальными накладка¬
ми и фитингами в районе отверстий для элементов крепления.В качестве расчетных нагрузок для проверки прочности узлов
соединения отсеков принимают максимальные расчетные силы и
моменты, действующие в данном сечении корпуса ракеты в полете
и при наземной эксплуатации.Рассмотрим методы расчета на прочность элементов крепле¬
ния отсеков. Как уже говорилось, наиболее распространенными
являются соединения отсеков несколькими разрывными болтами
(замками) или болтами (шпильками), равномерно распределен¬
ными по окружности стыка. В этом случае расчет на прочность
сводится к определению напряжений в наиболее нагруженном214
Аолте (шпильке) и проверке его прочности. Кроме того, необхо-
|имо выбрать величину предварительной затяжки болтов, гаран¬
тирующей плотность (нераскрытие) стыка.Отметим, что при равномерном расположении болтов по ок¬
ружности стыка (рис. 9.15) центр тяжести сечений всех болтов
(шпилек) совпадает с центром тяжести стыка (точкой 0).Пусть стык затягивается п болтами, имеющими площадь се¬
чения болта /о и напряжение затяжки оо- Тогда напряжения на
пыке будут равномерно распределены и определятся выраже¬
нием„ "/оа'О .(9.27)I /ю F1 — площадь стыка.Условие плотности стыка состоит в
|'ом,. чтобы во всех его точках после при¬
ложения внешней нагрузки оставались
ипнряжения сжатия. Если в какой-либо
точке стыка по расчету получается рас-
шгпвающее напряжение, это значит,
что в этой точке контакт нарушен. Рас- Рис. 9.15. Сечение стыка
ирытие стыка очень опасно для прочно- отсеков| hi соединения, так как при этом возрас-IIIют усилия на болты, а при переменной нагрузке появляются до¬
полнительные усилия ударного характера.Если на корпус ракеты в сечении стыка действует расчетная
I )<спая сила Np и изгибающий момент 7WP, напряжения на стыке
in внешней нагрузки определяются известной зависимостьюNp МрFtffie Ix— момент инерции сечения стыка;у— расстояние от нейтральной линии до рассматриваемой
точки.Наибольшее напряжение растяжения рассчитывается по фор¬
муле <Р ^.-‘ТГ + ТГ* <9-28)i;ir R— радиус сечения стыка.Условие плотности стыка выражает неравенствоа, = о'Г + а1 max < О- (9-29)Отсюда, используя формулы (9.27) и (9.28), получаем зависи¬
ма и, для напряжения предварительной затяжки болтов, обеспе-
чинпющего нераскрытие стыка.(9-30)215
Определяя затяжку болтов, необходимо предусматривать опре¬
деленный запас по плотности стыка, принимаемый в пределах
1,5—3. Расчетами и практикой установлено, что болты меньше
М10—М12 можно легко разрушить при затяжке. Например, болт
М12 разрушается при силе на ключе, равной 18 кГ (длина ручкигде Е0, Ei — модули упругости материалов соответственно
болта и шпангоутов;/0—площадь сечения болта; х216стандартного ключа L — \5d0). Поэтому для соединения отсеков
не рекомендуется применять болты малых диаметров (меньше
М8). В противном случае необходимо использовать для затяжки
h h специальные моментные ключи.Прочность болтов в кольцевом
стыке отсеков (рис. 9.16) необходи¬
мо обеспечивать, учитывая дефор¬
мацию сжатия полок шпангоутов.
Если учет этой деформации несу¬
щественен для оценки плотности
стыка, то при вычислении напряже¬
ний в болтах от действия внешней
нагрузки деформация полок должна
приниматься во внимание.В обычном соединении отсеков
расчетная перерезывающая сила
Рис. 9.17. Схема для определения Qp> действующая В ПЛОСКОСТИ сты-
площади /1 КЭ) воспринимается силами тренияи направляющими штырями, а
внешний момент Mv воспринимается болтами. В этом случае рас¬
четная формула для определения напряжений в болтах в предпо¬
ложении, что элементы соединения имеют постоянную податли¬
вость, а полки шпангоутов однородны, имеет вид:^(ттмгЬ (9-31)V E0f0х,I
ft — условная площадь поперечного сечения фланцев,
участвующая в деформации от затяжки болта;
Iх — момент инерции сечений болтов.Площадь f 1 определяется следующим образом (рис. 9.17). До-
му (кают, что деформации от гайки и головки болта распространя¬
емся в глубь шпангоутов по конусам с углом а = 30°, при этом
1у а =0,5.Приравнивая объем полученных усеченных конусов объему
условного цилиндра с диаметром Du находимA = D+А+А,I дс D — наружный диаметр опорной поверхности гайки.Тогда= (9-32)ПМомент инерции сечений болтов 1Х =2/оУ1 для малогоi=iчисла болтов можно вычислить непосредственно, суммируя у].Однако При большом числе болтов рациональнее следующий
приближенный способ. Представим себе, что сечения болтов «раз-
мл ьшы» по кольцу равновеликой площади (рис. 9.166), т. е.271^,8 = я/0.Отсюда следует, что момент инерции кольцаТаким образом, выражение (9.31) принимает видНаибольшее напряжение возникает в болте, для которого
I/, Ri. Следовательно,2МР ( 1(9.34)I ,сли соединение выполнено одинаковыми болтами, то фор-
iv м (9.34) является расчетной при проверке их прочности.Коэффициент запаса прочности, учитывая затяжку, обычно
ипредоляют по отношению0,85<j£217
Направляющие штыри в соединении рассчитывают на срез, не
учитывая силы трения в стыке по формулеQpП'/lL(9.35)где л —количество штырей;/шт—площадь поперечного сечения штыря.Коэффициент запаса прочности определяется выражением_ 0,6sftРис. 9.18. К расчету изгибных напряжений в полке
шпангоутаИзгибные напряжения в полке шпангоута, не подкрепленного
фитингами (рис. 9.18), определяются по формулеРр •аmax “: W '(9.36)где ^тах = атах' /о—расчетная сила, приложенная через болт кполке шпангоута;iv/W = -g момент сопротивления сечения элементаполки шпангоута.ЛИТЕРАТУРА К ГЛАВЕ IX1. Астахов М. Ф., Караваев А. В., Макаров С. Я-, Суздаль-
ц е в Я. Я. Справочная книга по расчету самолета на прочность. Оборонгиз
1954.2. Биргер И. А. Расчет резьбовых соединений. Оборонгиз, 1959.3. «Вопросы ракетной техники» (сборник переводов и обзоров иностр. пе¬
риодической литературы). Изд. иностр. лит., 1963, № 2, 4; 1964, № 9, 11.4. Конструкция летательных аппаратов (под ред. С. Н. Кана). Оборон
гиз, 1963.5. Т и м о ш е н к о С. II. Устойчивость упругих систем. Гостехиздат, 1946.6. Eletcher R. F. Missiles. Патент США кл. 102—49, № 3108540.7. „Aviation Week and Space Technology", 1962, 77, № 7; 1963, 78 № 12-
79, № 26; 1964, 80, №№ 13, 19; 81, № 12.8. „Missiles and Rock6ts“, 1963, 13, № 13; 1964, 14, № 2; № 5; № 6- № 26'
15, № 1.9. ,,SAE Preprint", 1962, № 582B.218
Ip 10. ,,Interavia“, 1963, 18, № 12.11. „Missile/Space Daily", 1963, 4, №39; 1964, 5, № 18, №29; 6, № 34
;‘M 36; 7, № 17; 10, № 23.12. „Welding Journal", 1964, 43, № 1.13. „Space/Aeronautics'*, 1964, 42, № 2.14. „Interavia Air Letter", 1964, № 5607, № 5630; 1965, № 5685.15. „Production", 1964, 54, № 3,
ГЛАВА XТОПЛИВНЫЕ БАКИ И РАСЧЕТ ИХ НА ПРОЧНОСТЬ§ 10.1. КОНСТРУКЦИЯ ТОПЛИВНЫХ БАКОВСоздавая ракеты с ЖРД, очень важно правильно спроектиро¬
вать топливные баки, так как они составляют большую часть ра¬
кеты, а их расположение, размеры и масса в основном определяют
весовые, габаритные и летные характеристики ракеты.В зависимости от способа подачи компонентов топлива баки
разделяются на нагруженные баки, т. е. баки, находящиеся при
работе ЖРД под высоким давлением и применяющиеся при лю¬
бой вытеснительной системе подачи, обычно на ракетах малой
дальности, и разгруженные баки, т. е. баки, не находящиеся под
высоким давлением при работе ЖРД, которые используются при
насосной подаче топлива.В данном параграфе рассматривается конструкция только раз¬
груженных топливных баков.Конструкция топливных баков выбирается исходя из конкрет¬
ных условий компоновки ракеты и следующих основных требо¬
ваний:— при заданном количестве топлива баки должны иметь воз¬
можно меньшую массу /я™11, что достигается использова¬
нием прочных и легких материалов, имеющих высокие значения
характеристику- и относительно небольшими запасами проч¬
ности, выбором наиболее рациональных форм баков, а также
обоснованным назначением свободных объемов и гарантийных
остатков топлива;— баки должны быть простыми по устройству и технологич¬
ными в изготовлении;— конструкция баков должна обеспечивать быструю и про¬
стую заправку топливом, требуемую точность заправки и удобный
слив топлива;220
иI — топливные баки должны иметь устройства, обеспечивающие
надежный забор топлива и минимальные остатки незабора;> — конструкция баков должна обеспечивать удовлетворитель¬
ную устойчивость зеркала массы жидкости в баках во время воз¬
мущенного полета ракеты;— конструкция баков и их относительное расположение дол¬
жны быть такими, чтобы перемещение центра масс ракеты в по¬
лете было по возможности малым;— топливные баки должны быть настолько прочными, чтобы
ныдерживать без остаточных деформаций (или при очень малых
остаточных деформа¬
циях) нагрузки при _/■|ранспортировке, хра¬
нении и в полете;' — баки должны
быть устойчивыми про¬
шв коррозии; это осо¬
бенно важно при ра¬
боте ЖРД на агрес¬
сивных компонентах, а
также в том случае,
когда необходимо дли¬
тельное. хранение ра¬
кеты в- заправленном
состоянии.При конструирова¬
нии ракет большое
ииимание уделяется
Выбору формы баков,относительному расположению баков с окислителем и горючим, а
ткже расположению их относительно других отсеков. Это объ¬
ясняется тем, что при заданном количестве топлива форма баков
и их взаимное расположение будут в значительной степени опре¬
делять размеры ракеты в целом и ее массовые характеристики.В двухступенчатых ракетах с последовательным соединением
ступеней наиболее широко применяются баки цилиндрической
формы. Такая форма баков удобна с точки зрения компоновки
ракеты, стыковки отсеков и технологии производства баков. Рас-
смогрим возможные схемы расположения цилиндрических баков
и ступенях ракеты.I. Баки образуют единый топливный отсек (рис. 10.1). В этом
с.чучае они могут иметь технологический разъем (схема «а») или
не иметь его (схема «б»).Конструкция топливного отсека схемы «а» применима для лю-
<,i.i \ компонентов топлива, включая и низкокипящие. В этом слу¬
чае сравнительно легко осуществляется термоизоляция днищ, а
при применении самовоспламеняющихся топлив лучше обеспечи-
ниотси безопасность при эксплуатации. Для этой схемы, кроме221
того, проще технология производства, технологические испытания
и выше ремонтопригодность.Топливный отсек, выполненный по схеме «б», не имеет этих
преимуществ. Однако длина такого отсека и его масса значитель¬
но меньше отсека схемы «а», поэтому, несмотря на имеющиеся
недостатки, топливные отсеки, выполненные по схеме «б», все
больше применяются в ракетостроении.2. Топливные баки разделены (рис. 10.2) приборным отсеком
или удлиненной обечайкой одного из баков. Этой схеме присущите же качества, что и схеме «а» (рис. 10.1), но при расположении
приборов системы управления (СУ) между баками несколько воз¬
растает длина топливных коммуникаций от верхнего бака к дви¬
гателю и, следовательно, увеличивается масса конструкции.Чтобы выполнить требования аэродинамической компоновки
ракеты, иногда целесообразно верхний бак последней ступениРис. 10.4. Топливный
отсек схемы «д»сделать коническим или цилиндро-коническим. Однако в этом слу¬
чае длина и масса бака получаются большими, чем для цилиндри¬
ческого бака той же емкости. Кроме цилиндрических и конических
баков применяются сферические (рис. 10.3). Сферические баки
целесообразно применять в случае использования низкокипящих
компонентов, поскольку сферический бак имеет при одинаковой
емкости с цилиндрическим меньшую поверхность и, следовательно,
масса теплоизоляции будет меньше. Кроме того, при одинаковом
давлении наддува масса самого бака будет меньше, чем цилин¬
дрического.В некоторых случаях, чтобы уменьшить длину ракеты и более222
Компактно расположить агрегаты, на последней ступени приме-
Iя ются торовые баки (рис. 10.4).t- Поскольку в ракетах наиболее широко применяются цилиндри¬
ческие баки, то конструкцию корпуса и днищ рассмотрим приме¬
ни тельно к цилиндрическим бакам. Основными элементами такого
йп ка являются: корпус бака, верхнее и нижнее днище и распор-
Ио-стыковочные шпангоуты.Корпус бака представляет собой силовую оболочку, воспри¬
нимающую как внутреннее давление, так и внешнее воздействие
и ниде изгибающего момен-
1/1, осевых и перерезываю-ири обечаечном методе Рис- 10-5- Схема сбоРкн корпуса бакасборки бака приходитсяприменять точечную сварку для крепления стрингеров. Такой ме¬
тл, сборки нельзя считать рациональным, так как при этом тре¬
буется сложное сварочное оборудование и, кроме того, масса бака
получается больше за счет увеличения толщины оболочки ввидуослабления прочности материала в местах точечной сварки.
Кроме того, качество точечной сварки весьма трудно контролиро-и,| п., это вынуждает увеличивать запас прочности конструкции
н геи самым утяжелять ее. Обечаечную конструкцию корпуса
обычно применяют лишь в тех случаях, когда в баках не устанав-
лимается силовой набор, т. е. в так называемых «гладких» баках
п hi баках «вафельной» конструкции (рис. 10.6).Панельный метод изготовления корпусов баков позволяетзна-
чиюлыю уменьшить массу конструкции и полностью исключает
мчащую сварку, так как панели изготавливаются с уже готовымищих сил. Корпус изготавли-
ИПется чаще всего из обечаек
или панелей (рис. 10.5). В
Том случае, когда из усло-
ний прочности бака требует¬
ся силовой набор в видеI I рингеров и шпангоутов,Рис. 10.6. Панель типа «вафля»223
стрингерами (рис. 10.7). В этом случае шпангоуты собираются
из нескольких сегментов, соединяемых с помощью накладок, и
крепятся к стрингерному набору заклепками (рис. 10.8).За последнее время в производстве баков весьма широко при¬
меняется метод химического травления. При этом методе част:,
металла удаляется с поверхности корпуса и днищ баков, чем обес¬
печивается требуемая равнопрочность по сварным швам и основ
ному материалу, что позволяет уменьшить массу бака. ГлубокимРис. 10.7. Панель оребреннаяхимическим или механическим фрезерованием можно выполнят!,
панели типа «вафля» (рис. 10.6), в которых ребра, полученные
при фрезеровании, выполняют роль силового набора. Проектируя
баки, необходимо обращать большое внимание на конструкциюднищ. Днища баков рабо¬
тают в разных условиях на¬
гружения. Нижнее днище
нагружается избыточным
давлением, равным сумме
гидростатического давления
жидкости и избыточного
давления наддува, а верх¬
нее днище — лишь избыточ¬
ным давлением наддува. В
случае применения для над-
Рис. 10.8. Крепление шпангоутов Дува бака горячих ГЭЗО-Вверхнее днище испытывает
еще и термическое воздействие, которое может в значительной сте¬
пени снизить прочностные характеристики материала днища.Величина напряжений в днище при заданной толщине будет
существенно зависеть от радиуса-кривизны его. Наиболее нагру¬
женными являются участки сопряжения днища с цилиндрической
частью бака. На рис. 10.9 показана качественная картина напря¬
жений в днище. При рассмотрении рис. 10.9 видно, что изгибные
напряжения резко возрастают при уменьшении радиуса кривизны
на участке сопряжения днища с корпусом. Именно поэтому при
проектировании днищ стремятся прежде всего подобрать такие
радиусы кривизны днища, чтобы при принятом запасе прочности
днище имело минимальную массу, и обеспечить наилучшую ком¬
поновку ракеты.224
Наименьшие напряжения в местах сопряжения с корпусом бу¬
дут иметь днища, выполненные по сфере с радиусом, равным ра¬
диусу цилиндрической части бака, однако это не означает, что
такие днища обеспечивают минимальную массу бака при задан¬
ном его объеме. Дело в том, что в этом случае для стыковки баков
ириходится иметь весьма большие обечайки, за счет которых в
конечном итоге возрастает масса топливного отсека. Кроме того,
с точки зрения компоновки ракеты баки с такими днищами не¬
удобны, так как между отсеками образуется много свободного
пространства, которое трудно чем-либо заполнить. Поэтому в на¬
стоящее , время все больше применяют сферические днища с ра-Rccp=i>5R,P=0 рн* Rcip=1>5R;p=i:RРис. 10.9. Характер напряжений в днищахдиусом в 1,2-f-1,5 раза больше, чем радиус цилиндрической части
бака. Заметим, что, применяя такие днища, усложняется сопря¬
жение их с корпусом бака. Задача сводится в данном случае к
тому, чтобы обеспечить заданную прочность днища по месту со¬
пряжения с корпусом без значительного увеличения массы бака.Кроме сферических днпщ применяются также эллиптические
п коробовые днища. Последние более сложны в производстве и на
современных образцах иностранных ракет не применяются [1].В зависимости от конструкции бака и требования к компоновке
шсеков узел сопряжения днища с корпусом может выполняться
по разному. Так, можно устанавливать специальный шпангоут, ко¬
торый будет воспринимать радиальные усилия, стремящиеся де¬
формировать бак в этом сечении. Шпангоут при этом нагружается
ранномерно распределенной погонной нагрузкой. Указанный спо¬
соб выполнения узла сопряжения днища с корпусом является
сложным в технологическом отношении и требует применения кон-
1.1 к гной сварки, которая нежелательна при производстве баков.Колее совершенным является способ сопряжения днищ и кор¬
им.i с помощью распорно-стыковочных шпангоутов специального
профиля. В некоторых случаях целесообразно иметь в баках про¬225
межуточные днища (рис. 10.10). Такие днища обычно устанав¬
ливаются в баках, расположенных впереди, чтобы повысить ста¬
тическую устойчивость ракеты. При наличии промежуточного дни¬
ща компонент топлива сначала расходуется из нижней части
бака, а затем — из верхней. Вполне очевидно, что промежуточное
днище утяжеляет бак, поэтому применять его нужно лишь в край¬
нем случае, если органы управления не обеспечивают стабилиза¬
цию ракеты.Чтобы повысить надежность ракеты при хранении ее в заправ¬
ленном состоянии, а также в условиях полета и обеспечить более
простую технологию сборки, в заводских условиях магистральный
трубопровод от верхнего бака к двигателю прокладывается в тон¬нельной трубе нижнего бака (рис. 10.11). Тоннельная труба при¬
варивается непосредственно к отбортовке отверстий в днищах
бака, когда он имеет небольшие размеры. Если же бак имеет
большую длину, то для компенсации температурных напряжений
тоннельная труба снабжается компенсатором, с помощью кото¬
рого одновременно выбираются технологические погрешности при
установке тоннельной трубы в бак.§ 10.2. АРМАТУРА ТОПЛИВНЫХ БАКОВТопливные баки современных ракет с ЖРД представляют со¬
бой сложные агрегаты, оснащенные различными устройствами.
Топливные баки имеют: сигнализаторы наполнения, датчики си¬
стемы опорожнения, устройства для забора топлива, демпферы226
колебаний жидкости, распылители газа наддува, заправочные и
дренажные клапаны, реле давления, люки-лазы, штуцера, фланцы
и другие элементы. Рассмотрим некоторые из них.Устройства для контроля доз заправкиЧтобы увеличить предельную дальность полета, необходима
точная дозировка заправляемого в баки топлива. В современных
ракетах применяют специальные системы контроля уровня топ¬
лива в баках, к которым предъявляются следующие требования:
высокая точность, надежность, простота устройства и эксплуа¬
тации.Система контроля уровней (СКУ), как правило, включает в
себя чувствительные элементы (сигнализаторы наполнения), пульт
заправки и кабельную сеть.По принципу действия сигнализаторы наполнения могут быть
индуктивные, контактные, потенциометрические, ультразвуковые и
на основе радиоактивных изотопов. Поскольку сигнализаторы на¬
полнения и кабельная сеть, связывающая их с наземным пультом,
имеют значительную массу, то контролировать дозы заправки
можно также с помощью устройств, размещаемых на наземных
заправочных устройствах, в этом
случае на ракете никаких элемен¬
тов СКУ может не быть.Заборные устройства баковОриентация свободной поверхно¬
сти топлива в баках баллистиче¬
ских ракет оказывается достаточно
стабильной и располагается все¬
гда практически нормально к на¬
правлению вектора тяги. Поэтому в баках баллистических ра¬
кет устройства для забора топлива выполняются сравнительно
простыми, так как вероятность отлива Топлива от заборных патруб¬
ков весьма мала. Однако конструктивному оформлению заборных
устройств уделяется большое внимание потому, что при пуске
ракет на максимальную дальность выдвигается требование макси¬
мального использования запасов топлива, находящегося в баках и
магистралях.В конце выработки компонента из бака на определенном ми¬
нимальном расстоянии поверхности уровня от сливного отвер¬
стия hKр возникает провал уровня (рис. 10.12), так как не хватает
»мергии жидкости для реализации заданного расхода при напор¬
ном течении.Провал уровня приводит к попаданию газовых пузырей в ма«
шгтрали питания и в конечном счете к срыву нормального ре¬
лита работы двигателя. В связи с этим двигатель долженРис. 10.12. Провал уровня
топлива227
выключаться раньше, чем произойдет провал уровня в баке. Коли
чество компонента в баке в момент провала уровня относится к
остаткам незабора.Теоретические и экспериментальные исследования показываю i.
что остатки незабора в баке могут быть значительно меньше бла¬
годаря специальным заборным устройствам, которые уменьшают
Л„р и обеспечивают безвихревое притекание компонента к заборному
патрубку. Заборное устройство, устанавливаемое на входе в за
борный патрубок, представляет собой профилированный -конус с
тарелью и ребрами. Такое устройство называется воронкогасите
лем. Ребра предотвращают вращение жидкости на входе в трубу
питания.Устройства в баках для демпфирования колебаний топливаВо время полета ракеты ее корпус испытывает как продоль
ные, так и поперечные колебания с широким спектром частот.
Причинами возникновения колебаний, как правило, являются пуль¬
сация тяги двигателя, работа автомата стабилизации, а также
порывы ветра. Колебания корпуса ракеты воздействуют на массы
жидкостей, заключенных в баках. В свою очередь колебательное
движение жидкости при совпадении частоты ее свободных колеба¬
ний с частотой колебания корпуса может привести к резонансу
и разрушению ракеты. Поэтому при конструировании топливных
баков предусматривают ряд устройств, позволяющих уменьшить
колебания топлива в баках. Эти устройства, как правило, уста¬
навливаются в баках, наиболее удаленных от центра масс раке¬
ты. Часто в качестве демпфирующих устройств применяют перфо¬
рированные поперечные перегородки, конуса и продольные пере¬
городки.Перфорированные поперечные перегородки довольно эффектив¬
но уменьшают амплитуды колебаний топлива. Демпферы в виде
конусов имеют то же назначение, что и перфорированные перего¬
родки, и чаще всего устанавливаются в передней части бака верх¬
ней ступени и в нижней части бака нижней ступени, наиболее уда¬
ленных от центра масс ракеты.Продольные перегородки повышают запас статической устой¬
чивости ракеты по углу крена. Эффективность успокоения коле¬
баний жидкости у продольных перегородок значительно ниже, чем
у поперечных, но зато продольные перегородки демпфируют ко¬
лебания на протяжении всего активного участка, а поперечные —
только при определенном фиксированном уровне. Следует иметь
в виду, что постановка в баках различных демпфирующих
устройств улучшает стабилизацию ракеты, но в то же время пас¬
сивная масса ракеты увеличивается. Поэтому количество демпфи¬
рующих устройств, их конструкция и места расположения в баках
должны всякий раз выбираться таким образом, чтобы демпферы,
выполняя свою роль, не слишком утяжеляли ракету.228
Люки, штуцера и фланцы баковЧтобы выполнить сборочные работы при изготовлении бака и
монтаже оборудования внутри его, на одном из днищ (обычно
верхнем) делают люк-лаз, закрываемый крышкой. При этом стре¬
мятся к тому, чтобы люк размещался на части днища, имеющей
меньшую кривизну (если она переменная), так как при этом на¬
гружение горловины и крышки получается более равномерным.
Во всяком случае вырез не должен близко подходить к линии
сопряжения днища с корпусом, так как там возникают особенно
большие напряжения. При сравнительной простоте устройства
люк-лаз является ответственным и нагруженным элементом топ¬
ливного бака, поэтому при проектировании необходимо рассчиты-Рис. 10.13. Люк-лаз Рис. 10.14. Способы установки штуцеровбака: на баке1 — днище; 2 — горловина;3 — фланец; 4 — крышкавать прочность люка-лаза. Конструктивно люк-лаз выполняется
следующим образом.К отбортовке выреза днища 1 (рис. 10.13) приваривается гор¬
ловина люка 2. К торцу горловины приваривается точеный фла¬
нец 3 с отверстиями под болты или шпильки. Крышка 4 люка
штампуется, а посадочный фланец обтачивается. Крышка на флан¬
це горловины центируется либо штифтом, либо буртиком. Для
герметичности между крышкой и фланцем горловины устанавли¬
вают прокладку. Крышка обычно сферическая.Чтобы присоединить трубопроводы (дренажа, контроля давле¬
ния, проверки герметичности и др.) и установить некоторые агре¬
гаты, на днищах и корпусе бака имеются специальные штуцера и
фланцы. Установка штуцеров на баке производится двумя спосо¬
бами. Если диаметр штуцера свыше 15—20 мм, то штуцер делают
из трубы соответствующего диаметра и приваривают к отбортовке
отверстия (рис. 10.14). При диаметрах штуцеров менее 15 мм их
делают точеными и вваривают в отверстия на баке. Для при¬
соединения трубопровода штуцер имеет наконечник с резьбой и
гайкой.Фланцы делают точеными или фрезерованными и приваривают
к отбортовке отверстий бака (рис. 10.15). Форма фланца и раз¬
меры определяются агрегатом, который на нем устанавливается.229
Рис. 10.16. квыбору осей
координатРис. 10.17. К составлению
уравнений равновесия в осе¬
вом направленииФланцы могут иметь резьбовые или гладкие отверстия под шпиль¬
ки и болты.Чтобы обеспечить требуемую прочность бака, отверстия под
штуцера и фланцы располагаются на определенном удаленииодно от другого и не в одном се¬
чении.§ 10.3. РАСЧЕТ НА ПРОЧНОСТЬ
КОРПУСОВ ЦИЛИНДРИЧЕСКИХ БАКОВКорпус несущего бака, являясь
основным элементом конструкции ра¬
кеты, рассчитывается на прочность
Рис. 10.15. Установка фланцев почти во всех расчетных случаях, ука-
на баке занных в гл. VII. Чтобы определитьнапряжение, используем безмомент-
ную теорию упругих оболочек. Местные изгибные напряжения в
легкодеформируемых тонкостенных оболочках вследствие их сла¬
бого влияния на прочность учитывать не будем. Введем обозначе¬
ния (рис. 10.16):si — меридиональные напряжения;02 — кольцевые напряжения.Из рассмотрения сил, действующих на выделенную часть бака
в осевом направлении (рис. 10.17), получаем значения меридио¬
нальных напряжений, вызываемых внутренним избыточным дав¬
лениемf = (ЮЛ)Поскольку проекция сил давления жидкости на ось бака равна
нулю, то в формуле (10.1) фигурирует только избыточное давле¬
ние наддува.230
Рассматривая равновесие части кольца (рис. 10.18), нагружен¬
ного внутренним избыточным давлением рр = /(Д/?б -f g§nx$ • х\), по¬
лучим величину кольцевых напряженийf(bP6+gonXirx\)R /inm2 X •В этой формуле в отличие от выражения (10.1) в числителе стоит
полное давление в расчетном сечении.Изгибающий момент вызывает появление в оболочке дополни¬
тельных меридиональных напряжений о[м\ Пренебрегая дефор¬
мацией контура поперечного сечения, можем для расчета макси¬
мальных напряжений а[м> использо¬
вать известную формулу сопротивле¬
ния материалов/м : fMq(M) .+W — nR4(10.3)где W—v:R2b — момент сопротивления
тонкостенного кольца.Меридиональное напряжение от
действия осевой сжимающей силы вы¬
числяется по/формулетс<Л0 = •2тiRb(10.4)Рис. 10.18. К составлению
уравнений равновесия в коль¬
цевом направленииСуммируя меридиональные напряжения, получим/Ы2nRbfMnR^b+/W?28(10.5)В зависимости (10.5) знак плюс соответствует растяжению, а ми¬
нус-— сжатию. Если в результате расчета oi окажется положи¬
тельным, то в соответствии с третьей теорией прочности в каче¬
стве эквивалентного напряжения оЭю> принимается наибольшее из
напряжений oi (10.5) или аг (10.2) и запас прочности определяет¬
ся как отношениеVi(10.6)При этом предел прочности аы необходимо выбирать, учитывая
изменения механических характеристик материала бака при на->
греве и ослабления металла в сварных швах. Если oi окажется от¬
рицательным, то эквивалентное напряжение берется равным
сумме абсолютных значений oi и 02, т. е.аэкв. “ I а1 I + а2- О°-7)'..in а с прочности, как и ранее, вычисляется по соотношению (10.6).
Кроме того, при осевом сжатии возможна потеря устойчивости231
оболочки корпуса, и поэтому следует определить критическое на¬
пряжение окр осевого сжатия в соответствии с приведенными в
гл. VII рекомендациями и сравнить меридиональное напряжение
с критическим.Условие устойчивости корпуса записывается в видеОчевидно, второй случай (oi<0) является более опасным и тре¬
бует большего внимания. Выше рассматривалось равновесие верх¬
ней части бака. Сравнительно несложно показать, что общий ре¬
зультат, выраженный зависимостями (10.2) и (10.5), не изменится,
если рассматривать равновесие нижней части бака.Чтобы облегчить корпус бака, сохраняя его достаточную проч¬
ность, необходимо использовать подкрепляющие элементы, в ка¬
честве которых, как уже указывалось, применяются стрингеры,
шпангоуты или ребра жесткости «вафельных» панелей.Возможными видами разрушения в данном случае являются
местная потеря устойчивости стрингера при сохранении круговой
формы поперечного сечения бака и разрыв обшивки бака в растя¬
нутой зоне. Расчет сводится к определению действующих напря¬
жений в стрингерах и обшивке и сравнению их с соответствую¬
щими предельными напряжениями.Взаимодействие силового набора и обшивки в сочетании с не¬
равномерным нагревом приводит к необходимости выполнения
сложных и громоздких вычислений. Поэтому ограничимся изло¬
жением методики расчета для случая, когда силовой набор рас¬
положен настолько часто, что обшивка остается устойчивой вплоть
до расчетных напряжений. Естественно, что эту методику следует
рассматривать как первое приближение.Мысленно заменим корпус бака конструктивно ортотропной
оболочкой с приведенными толщинами 8j и 32 в меридиональном
и кольцевом направлениях соответственно. Значения толщин по¬
лучаем, распределяя равномерно по дуге оболочки площадь по¬
перечного сечения стрингера или шпангоута. Так если площадь
изолированного стрингера F^, а расстояние между смежными
стрингерами — Ь, то приведенную толщину оболочки в осевом на¬
правлении получаем равнойгде 5 —толщина оболочки.Аналогично можем получить выражение для приведенной тол¬
щины оболочки в кольцевом направлении(10.8)(10.9)8, = 8+1 а(10.10)232
где Fa,п — площадь поперечного сечения изолированного шпан¬
гоута;а — расстояние между шпангоутами.Момент сопротивления и площадь поперечного сечения приве¬
денной оболочки рассчитываются по обычным формулам для коль¬
цевого сечения, но с 81 в качестве толщиныw=SKB*tl = 4C& (а + -^р-),F = 2z/?8i = 2tzR ^8 + -у1-) ■Поскольку nb~2v:R, где га —количество стрингеров, выражения
момента инерции и площади могут быть записаны в несколько
другом виде:W = J*.(M + F„py, (10.11)F — п (£8 -f F„р.). (10.12)Меридиональные и кольцевые напряжения определяются по из¬
вестным формулам сопротивления материалов, так же как это
делалось для гладких неподкрепленных оболочек:а = _ 4- 2fM -4- fXp(lRb ■1 п(ЬЬ + FCTp) — tiR (bb + F„p) ‘ 6S + FCTp ’f (bpь +gonxfix\)Ra
ff2- + FaaДля сжатой области производится проверка на устойчивость,
причем в качестве разрушающего принимаем критическое напря¬
жение потери устойчивости стрингера. Условие устойчивости, сле¬
довательно, записывается в виде^ = (10Л5)
Прочность обшивки бака оценивается по отношению предела
прочности abt к эквивалентному напряжению. Условие прочности,
как и раньше, записывается следующим образом(10.16)Эквивалентное напряжение определяется по третьей теории
прочности в соответствии с приведенными выше рекоменда¬
циями.(10.13)(10.14)233
§ 10.4. РАСЧЕТ НА ПРОЧНОСТЬ СФЕРИЧЕСКИХ И ТОРОВЫХБАКОВЧастный случай нагружения сферического бака изображен на
рис. 10.19, где в сечении А—А показаны осевая сила N, равномер¬
но распределенная по периметру, и в сечении В—В тяга Р двига¬
теля, также распределенная по кольцу. Кроме того, на оболочку2%Rsin a>g_/и?2ж Rsinp-yz
Ч>2PCOS if 2
2liRsinZyz
Рис. 10.19. Частный случай нагружениябака действует внутреннее избыточное давление наддува и
давление столба жидкости g0axtPxi-Если ввести в качестве текущей координаты угол 9, а положе¬
ние уровня жидкости в рассматриваемый момент времени охарак¬
теризовать углом ерь то давление в
произвольной точке может быть за¬
дано следующими соотношениями:приО<ср<Ф, р = Ар6; (10.17)при <р, < ® < тс р = Ар6 ++ ёопх p#(c°s — c°s<p). (10.18)Рис. 10.20. К составлению
уравнений равновесияНа участке, нагруженном лишь да¬
влением наддува, при <p<«pi напряже¬
ния в обоих направлениях равны
/Д/>вЯ26(10.19)Чтобы определить меридиональные напряжения 01 на участке, омы¬
ваемом жидкостью, при < <Р < составим уравнение равнове¬
сия части оболочки (рис. 10.20) в осевом направлении:nfinRb sin2<р — f2r.R* Ucos?sin = 0,(10.20)234
Подставляя в это уравнение значения давления, выраженные соот¬
ношениями (10.17) и (10.18), получим/Дp6R . fSonXlр/?2 совЗу, — cos* у (3 cos у, - 2 cos у) nnon
28 68 sin2 у • *• 'Кольцевые напряжения 02 на участке определяемнм уравнения, известного в сопротивлении материалов под назва¬
нием уравнения Лапласа, которое в нашем случае записывается
и следующем виде:Г тг+тг=т- <10-22>()тсюдаg2 — — -f (cos <pt — cos 9) — °i- (10.23)Выражения (10.21) и (10.23) справедливы для <р < -у .При состав¬
лении уравнения равновесия для больших значений ср (на участке,
где -7T<<P<CT2) необходимо принять во внимание не только вну¬
треннее давление, но и осевую силу N, распределенную по пери¬
метру. Поэтому уравнение равновесия будет выглядеть следующим
образом:Cj2ir/?8 sin2T — /2т:/?2 | р cos т sin т ^Т + fN — 0. (10.24)оОтсюдаf\p6R М , fg0nx0R* cos3 <р, — cos2 tf>(3cos9, — 2cos <p)=-28 2kRI sin2 у 68 ( }Кольцевые напряжения по-прежнему определяются из уравнения
Лапласа (10.22). Поэтому для рассматриваемого участка(~Т<Ст<СТг) оказывается справедливой расчетная зависимость(10.23). Следует лишь заметить, что в этом случае в формулу(10.23) подставляется значение меридионального напряжения, вы¬
численное по формуле (10.25).В сечении В—В (рис. 10.19) к оболочке прикладывается тяга
двигателя. Ниже сечения В—В днище бака нагружается только
давлением жидкости, поэтому уравнение равновесия участка обо¬
лочки, лежащего ниже сечения В—В, приобретает следующий вид:к— ijj2tc/?8 sin2т — /2я/?2 ^рcost sin = (10.26)?235
Подставляя сюда величину давления из соотношения (10.18), по¬
лучим25+25COS <pt +fgonxvR2 1 + cos335Sin'1 <p(10.27)Если теперь с помощью найденного выражения (10.27) исключить
напряжение oj из соотношения (10.23), то получим расчетную фор¬
мулу для определения кольцевого напряжения ог на участке, где?2 < ? <РРеД . fgonxj>R*+ oi cos?) —26 ' 25
fg0nXifR‘! 1 + 3 cos 9 — 2 cos3 <p35sin-1(10.28)Величину скачка меридионального усилия в сечении В—В можно
получить, представив тягу в виде вертикальной распределенной поРис. 10.21. Сопряжение кониче¬
ской оболочки со сферой3*NРис. 10.22. Схема нагружения хоро¬
вого бакакольцу реакции и разложив эту реакцию на две составляющие
по направлению касательной и по направлению радиуса.Первая из них определяет величину скачка напряжений, а вто¬
рая вызывает появление местных изгибных напряжений, сжимая
опорное кольцо.Чтобы уменьшить величину изгибных напряжений, желател!що
передавать усилие от двигателя по касательной к меридиану. Это
можно обеспечить, установив между двигателем и днищем бака
коническую обечайку, соприкасающуюся со сферическим днищем
(рис. 10.21).Можно также передавать тягу с помощью фермы, раскосы ко¬
торой направлены по касательной к меридианам.Рассчитывая на прочность торовые баки, необходимо иметь в
виду, что они используются для размещения на борту ракеты
сравнительно небольших количеств топлива, что позволяет суще¬
ственно упростить расчет, исключив из рассмотрения давление
столба жидкости. Рассмотрим тор кругового поперечного сечения
(рис. 10.22), полученный вращением круга радиуса /?т вокруг вер¬
тикальной оси.236
На оболочку тора действуют внутреннее давление наддува Д/?<->,
распределенная по внешнему контуру осевая сила N и тяга дви¬
гателя Р, распределенная по внутреннему кругу.Вначале определим напряжения, возникающие в оболочке от
инутреннего давления. Рассматривая равновесие кольцеобразной
части оболочки АВ (рис. 10.23) в осевом направлении, получим
уравнение равновесияоткуда2тгл8о<р) sin tp — it (г2 — Rfy fAp6 — 0,
/Ар6 (r'-Rl)а[Р) = ■2гЪ sin <fГ Из рис. 10.23 легко усмотреть, что sin <р= —^ °, а следова¬
тельно, выражение для определения напряжения может быть
записано следующим образом:(п) f^PtRj (г + Rp)1 2гЬПодставляя это выражение в уравнение Лапласа. <*2 /Уб
Rt + R* »и учитывая, что для тора R\=Rt, получим:С#»:f\p6Ri (г — R0)
2rbИз рис. 10.23 также следует, что -д-■RaRт. Исключив с по¬мощью написанного соотношения из последнего выражения радиус237
кривизны R2, приводим к окончательному виду выражение для
определения dfKalj(р) _ УР6*т2 28Подобным же приемом можно получить выражение для расче¬
та напряжений и в торе эллиптического сечения.Определение напряжений, вызванных осевыми силами N и Р,
представляет весьма сложную задачу. В первом приближении, сде¬
лав допущение о недеформируемости контура поперечного сече¬
ния, для решения этой задачи используем известное решение [2.5]
задачи о кручении кругового кольца распределенными моментами.
Приближенно величина крутящего момента, приходящегося на
единицу длины осевой линии, может быть определена следующим
образом:М'-PRr NRT2~ (Rq — RT) 2~ (/vi 4- A’.j )Можно показать, что в рассматриваемом случае кольцевые напря¬
жения пропорциональны расстоянию по вертикали от оси Or и
расчетная формула имеет следующий вид:Я(М) MRny MR0y2 / “ */??8 ’где I = kR4 -^-момент инерции сечения тора.Меридиональные напряжения, возникающие при действии крутя¬
щих моментов М, найдем из уравнения Лапласа, предположив
внутреннее давление равным нулю. Очевидно, что1 Я, •Суммируя полученные напряжения, можем проверить прочность
тора подобно тому, как было показано выше для цилиндрических
баков.§ 10.5. РАСЧЕТ НА ПРОЧНОСТЬ ДНИЩ, РАСПОРНЫХ
ШПАНГОУТОВ, ФЛАНЦЕВДнища баков нагружаются внутренним избыточным давлением,
поэтому расчетным случаем является случай максимума внутрен¬
него давления. Напряжения в днищах в первом приближении, как
и для корпуса, определяют по формулам безмоментной теории
упругих оболочек. Задачей расчета обычно является определение
меридиональных а\ и кольцевых <з2 напряжений. Чтобы определить
меридиональные напряжения 01, рассмотрим равновесие части
днища, находящейся ниже сечения п—п (рис. 10.24). Радиус обо¬
лочки в сечении п—п равен г, Кроме того, на чертеже показаны238
первый R\ и второй R2 главные радиусы кривизны оболочки в
манном сечении.Напомним, что первым главным радиусом кривизны R\ поверх¬
ности вращения в некоторой точке называют радиус кривизны ме-
рндиана в этой же точке; вторым главным радиусом кривизны R2
поверхности называют радиус кривизны кривой, полученной от пе¬
ресечения поверхности плоскостью, перпендикулярной к меридиа-
му. Численно второй радиус кривизны всегда равен расстоянию,
намеренному по нормали к оболочке
от данной точки до оси вращения,
т. е.г/?, = ■S1I1 <р(10.31)Рис. 10.24. К определению
меридиональных напряжений
в днищеНа выделенный элемент действуют
внутреннее избыточное давление над-
пува Д/?о, гидростатическое давление
полба жидкости, находящегося выше
рассматриваемого сечения So^x.P-^i,
инерционные силы части жидкости,
находящейся ниже сечения п—п,/',//r рV и уравновешивающие их внутренние меридиональные на¬
пряжения 01.Уравнение равновесия можно записать в следующем виде:/.[(Д/»в + g0nx рд-J) ur3 + g0nXi?V] = 0,2тсл8 sin <p, (10.32)i до V — объем части днища, расположенной ниже расчетного се¬
чения.Для днища эллиптической формы объем нижней части равен
ЪiR>bI I k rv. (1-1,54 + 0,5)•(10.33)им' R — радиус цилиндрической части бака;Ь— высота днища;д:-—расстояние до сечения п—п от геометрической оси эллип¬
соида.Заметим, что приведенная формула пригодна и для сфериче-
| к их днищ, если в ней заменить b на R, а под R понимать радиус
ефепы.Решение уравнения (10.32) дает значение меридионального
напряжения оь Кольцевые же напряжения определяются из урав¬
нения Лапласа| «з _ fpЯ, R2 Ь '(10.34)I не /> Ap6 -f g0nXipXi — избыточное давление в рассматриваемом
> 1**1011 пи.239
Нижнее днище рассчитывают в двух, максимум в трех сече
ниях: вблизи стыка днища с корпусом, в полюсе (самой нижнем
точке) днища и в промежуточном сечении. На рис. 10.24 эти сече
ния обозначены т—т, п—п и р—р.В сечении т—т (sin ср=1, л: = 0, r — R) совместное решение
уравнений (10.32) и (10.33) дает для меридионального напряже
ния эллиптического днища следующую формулу:/ (Ьръ + gt>nx рЛ, + ~gattх оЬ) R
0,=—^ 28-^ — • (10-ЗГ))Кольцевые напряжения определяются из уравнения (10.34)°2=(-Т~ (Ш-36)В приведенные зависимости входят главные радиусы кривизны п
угол <р. Для эллиптического днища главные радиусы кривизны н
угол наклона касательной можно определить по следующим фор¬
мулам:<Щ37)(Ш8)Sln?= RV ■ (10'39)В сечении р—р (Ri=R2 = R2/b, sin ср — 0, г — 0, х=Ь) кольцевые и
меридиональные напряжения равны между собой и определяются
по формуле fpR, _ fpR228 268(10.40)В сферических днищах, высота которых мала по сравнению с вы¬
сотой цилиндрической части, ограничиваются расчетом напряже¬
ний в полюсе. Из уравнения (10.40) следуетfpRcф / 1 Л Л 1 \а1 = а2= —28—. (10.41)где /?Сф — радиус сферического днища.Переднее днище нагружается только давлением наддува А Ра.
Поэтому расчетные формулы упрощаютсяl __1 28 ’(10.42)
(ШЗ)240
Из последней формулы видно, что в сечениях, где -^->2, кольце¬
вые напряжения становятся отрицательными. Так -как меридио¬
нальные напряжения всегда положительны, в сечениях, где> 2, могут возникать большие эквивалентные напряжения,иследствие чего проверка прочности этих сечений обязательна.
Условие прочности, как и ранее, записывается в виде(10.44)Нр*'Отверстия в днищах нарушают равномерность распределения
напряжений, причем у краев отверстий происходит концентрация
напряжений. Для пластинки с круг-
[ лым отверстием, подверженной
Г одноосному растяжению, коэффи¬
циент концентрации напряжений
равен К=3. При равномерном рас¬
тяжении по двум направлениям
максимальное напряжение у краяinверсгия получается вдвое больше Рис. 10.25. 1\ расчсту попореч-
растягивающего напряжения, вы- ного сечения днищачисленного без учета отверстия.Огбортовка или специальное усиление края отверстия выравнивает
/юле напряжений и снижает коэффициент концентрации. Полагая,
'но в районе расположения отверстий кольцевые и меридиональ¬
ные напряжения незначительно отличаются одно от другого, мак¬
симальные напряжения вблизи отверстия будем определять по
следующей формуле:(10.45)где Aoi — максимальное напряжение вблизи отверстия в плоской
пластине при одноосном напряженном состоянии; К = f (F^F^)—
коэффициент концентрации напряжений; F\=bd—площадь умень-
пн'ния поперечного сечения оболочки днища за счет отверстия;
/(Si—Ь)+2hb 1 — площадь увеличения поперечного се-
1ЦЧШЯ оболочки за счет утолщения и отбортовки; рис. 10.25.
Значения коэффициента концентрации [5] помещены в табл. 10.1.Таблица 10.100,10,20,30,40,5* 13,02,532,171,901,691,53I7.W 241
Вблизи стыка днищ с цилиндрической частью возникают рл
диальные распорные усилия, для восприятия которых устанавлп
ваются шпангоуты. Если для большей наглядности пренебре-п.
сопротивлением цилиндрической части и днища местному изгибу,
то, как показано на рис. 10.26, при сферическом днище распор ч
можно представить как радиальную составляющую меридиональfpRc *ного мембранного усилия Nx =—— в днище:q—Nx cos?. (10.40)Отсюда напряжения в шпангоуте будут равныи — 1R. = cos ср. (10.47)^шп.Сравнивая полученные напряжения с критическим, можем соста¬
вить мнение о запасе прочности выбранного сечения шпангоута.К сожалению, этот упрощенный способ, не
учитывающий сопротивление нагрузки оболочки
корпуса и днища, приводит к завышению раз¬
меров и массы распорного шпангоута. Для более
точного учета влияния сопротивления оболочки,
пользуясь методами сопротивления материалов,
составим уравнения деформаций шпангоута,
днища и оболочки корпуса. Для этого рассечем
мысленно топливный бак на участке стыка
днища с корпусом на отдельные элементы (рис.
10.27). Взаимное влияние элементов друг на
друга учтем введением внутренних усилий. Те¬
перь составим уравнения деформаций для каж¬
дого из элементов под действием заданного дав¬
ления и неизвестной пока системы внутренних усилий.Радиальное перемещение w шпангоута внутрь при действии си¬
стемы сил, показанной на рисунке, очевидно равно■w = -~—(Q, + Q2 + A^cos? — fph). (10.48)ШП.Допустим, что поворот сечения шпангоута вокруг центра тяже¬
сти равен нулю и составим уравнение равновесия моментов сил,
приложенных к шпангоуту:М1 - М, + Q& -Q2x2 + NJ, -Ш[2== о, (10,49)меридиональное мембранное усилие в сфере;радиус шпангоута (радиус цилиндрического кор¬
пуса);радиус сферического днища;где N, ■■fpR сфR-Ясфчету распорных
шпангоутов242
F„площадь поперечного сечения шпангоута;Q, и Qs— перерезывающие усилия, отнесенные к единице
длины дуги оболочки;УИ, и М2— изгибающие моменты, отнесенные к единице
длины дуги.Из условия непрерывности деформаций прогиб и угол поворотаповорота шпангоута. Используя готовые расчетные формулы [3, 5],
можем записать:г>22Х2 sin 9 ..2#сфХ sin2 9 fpR-cф(1—(J.) . /,лспч—k—Qi ik—sin?- <10-5°)ГДERcfr*i0 x-_3(i(10.51)jx —коэффициент Пуассона;—толщина днища.Аналогичные уравнения записываются и для края цилиндрической
оболочки:W = ^(^2-Q2) т2ЕЬ-ZppWMf-Q,)- О,3(1-1**) .
где р4 — —5! —R42И#(10.52)(10.53)243
D — Eb3/\2(l—\i.'2) — цилиндрическая жесткость;8-—толщина цилиндрического корпуса.Система шести алгебраических уравнений (10.48)^— (10.53) вклю¬
чает шесть неизвестных: перерезывающие силы Qi и Q2, изгибаю¬
щие моменты М\ и М2, прогиб шпангоута w й угол поворота 0.
Поскольку мы допустили, что угол 0 пренебрежимо мал, то для
определения всех остальных неизвестных нам достаточно пять
уравнений, а шестое может быть использовано для контроля.
Чтобы рассчитать прочность шпангоута, достаточно найти про*
гиб w. Запишем конечную формулу для определения радиального
перемещения поперечного сечения шпангоута_ Jh_ __ 1 —ц _ 8я*
fpR*Rсф. C°S,f RcФ. *sin<f> EbRсф. мл кичW ~ ~2ЕЕ Ш 4/Р ' (10-54)1 + -»—' ' . . + -тг^—^шп.^сф ^ 9 ЕЬШп.Напряжения сжатия, соответствующие найденным перемещениям,
равны° = (10.55)Сравнив полученное напряжение с пределом прочности материала
шпангоута, получаем запас прочности. Следовательно, условие
прочности запишется следующим образом:а> 1. (10.56)Известно, что для монтажных работ и сборки на днище бака
может располагаться люк-лаз, закрытый крышкой. На крышку
действует внутреннее давление, которое передается на фланец.
Расчет фланцевых соединений является весьма сложной задачей,
поэтому ограничимся основными выводами. Более подробные вы¬
кладки читатель найдет в специальной литературе [3] или [5].При расчете фланцевого соединения необходимо определить
нагрузку на болты и проверить прочность фланца в опасном се¬
чении.Нагрузка на болты определяется исходя из двух условий.С од¬
ной стороны, при эксплуатации болты воспринимают силы вну¬
треннего давления Qi и давления уплотнения Q2, т. е.Лр.«. = Qi + Qi- (10.57)Очевидно2Qi=fp^~r; (ю.58)Qz=PynnFynn., (10.59)где dcр — средний диаметр поверхности соприкосновения(прокладки) (рис. 10.28);244
t\mi ’ п^срЬЯф — эффективная площадь уплотнения; (ЬЭф — эффек--
тивная ширина прокладки; рис. 10.29).Давление руПл. на поверхности прокладки (давление уплотне-
IIим) гарантирует герметичность соединения и выбирается в видеРупп. = ЦР™~ (10.60)Рис. 10.28. Схема нагружения фланцаКшффициент т зависит от конструкции уплотнения и материала
прикладки. Значения коэффициента m для некоторых материалов
прннодятся в табл. 10.2.Таблица 10.2Материал прокладкитПредел упругости as,
н/м2ГгНШОВЫЙ лист0,534-105Гиордая резина с тканью1,068 -105Прессованный асбест, паронит2,5зю-ю»Мягкая медь4,75960-Ю5Мягкая сталь5,51230-105< ледовательно, в условиях эксплуатации нагрузка на болтыЛ^ра6=fP + 2*rfcp.v) • (10-61)| /(ругой стороны, усилие на болты должно быть достаточным для
ино, чтобы (расплющить прокладку, т. е.ЛГ9ат =irrfcp>ljJ) (10.62)I ,щ» b — ширина прокладки;os—предел текучести прокладки.Млн расчета болтов в качестве расчетной принимается максималь¬
но из величин, определенных по формулам (10,61) и (10.62).245
Чтобы рассчитать прочность фланца, необходимо его нагрузить
внутренним давлением f-p, которое передается через болты на
фланец в виде равномерно распределенных по окружности силfpdср fpdср. „q = 4,/ ~—4—' д деиствием этих сил поперечное сечение
фланца повернется на угол 0, а стенка патрубка изогнется. ПустьМ0 и Q0 означают изгибающий момент и перерезывающую силу,
отнесенные к единице длины внутренней окружности патрубка.
Значение их находится из условия непрерывности деформаций в
месте соединения трубы и фланца.Рассматривая деформации края горловины под действием М0
и Qо, получим;Af0 == 2pZ?0; (10.63)Q9 = 1W0, (10.64)246
Где D = £S3/12(1 — F2) — цилиндрическая жесткость горловины;12(1 ~^1. (10.65)dpГретье недостающее уравнение получим, используя формулу для
цшюрота сечения фланцаl2MKp'd?:Ш3 In djd2где(10.66)MKp. = q^=^-M0-Q0-^: (10.67)Совместно решая три уравнения относительно М0, получимм —. 1 № (Ю 68)Напряжение в месте стыка фланца с горловиной определяется по
формуле*■ + -£-. (Ю.69)(апас прочности находят, как и раньше, причем необходимо учиты-
иать снижение механических характеристик материала при сварке.§ 10.6. РАСЧЕТ СТАТИЧЕСКОЙ УСТОЙЧИВОСТИ БАКОВ.
ПОНЯТИЕ О ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИКак указывалось в §§ 10.3 и 10.4, расчет на устойчивость баков
является одним из основных расчетных случаев топливного отсека
и целом. В зависимости от конструкции баков, их положения и
крепления в системе топливного отсека и корпуса ракеты, а также
условий нагружения формы потери устойчивости и расчетные схе¬
мы могут быть самыми разнообразными. Остановимся более по¬
дробно на основных расчетных схемах и предпосылках, дающих
возможность решать поставленную задачу в общем виде.Запишем в общем случае исходное уравнение для исследования
устойчивости баков для оболочки двоякой кривизны. Выбираем
координатные оси х и у так, чтобы они совпадали с линиями кри-
иизпы срединной поверхности. Координату z будем отсчитывать
пи нормали к поверхности, считая 2 положительным по направле¬
нию к центру кривизны. Перемещения точки срединной поверхно¬
сти вдоль осей х, у, z обозначим соответственно через и, v и да.
Записав общее уравнение равновесия, геометрические и физиче¬
ские соотношения [4, 5] и введя функцию напряжений ср, разрешаю-247
щие уравнения задачи можем записать в виде системы двух уран
нений с двумя неизвестными <р и w:D , »
-X V2V2®<3л'2 д_у2— 2дх ду дх дуd2w б29 , 1 52<р . 1 д2<? . 1
+ - + -щ- -^г + л7 Л5ду24-y2v2(p = -1Эл2 ,.г
д2ш> 1 д2®л, аудх2(10.70)гдеЭ29ду2DЕ№д2у
дх2у>_д2у_
дх дуXV’12(1-(л2)h-- цилиндрическая жесткость (у. — коэффициентПуассона);■ толщина пластинки;Е— модуль упругости материала;
рг—внешнее давление на оболочку;Rx и Ry—радиусы кривизны оболочки соответственно по на¬
правлению осей .v и у. •В задачах устойчивости начальные усилия в срединной поверх
ности считаются постоянными. Введем эти усилия через функцию
напряжений следующим образом:d2<f оду2д2Уо . то .
дх2 ’ худ2Ъдх ду(10.71)Учитывая сделанные обозначения и пренебрегая бесконечно малы
ми более высоких порядков, перепишем уравнения (10.70) следую¬
щим образом:Е) 9 9 I о d'liv - п
_rv2v.t2, + a0__ + 2x0d2w , _0 d2w
ху дхду ' °у '1 д2уRv '1i-V2V2? = 4;дх2d2w1ду2ду2■Рг = 0;d2wRv дх2(10.72)Здесь и дальше под ср понимается функция напряжений, обуслов¬
ленных только изгибом оболочки в процессе потери устойчивости,
но индекс «изг» опущен.Применяя к первому уравнению системы (10.72) операцию
у2у2 и используя второе уравнение, исключаем функцию напря¬
жений <р, после чего получим единственное разрешающее уравне-248
инс восьмого
ния w:Dпорядка относительно^-vWv2^ + °°V2V2 (-0) + 2т«у v2v2
X °$v2v2 (-@-) + - ^+ -р”&-Т^Л“0.радиального перемеще-д2до)х55щ<"дхадуа+(10.73)В случае круговой цилиндрической оболочки Яу = оо, Ry—R раз¬
решающее уравнение несколько упрощается:-у- v2v2v2v2^ + v2v2 (-|5-) +jry_L JL,f Д2C)4WIFd^w
dx dy
1)+°“V2V3( d2w \['W) +xWA —0. (10.74)Исследуем некоторые частные случаи,
а) Устойчивость цилиндрической обо¬
лочки (баков) при осевом сжатии (ра¬
кета на пусковом столе, баки не надуты,
рис. 10.30). В этом случае начальные
напряжения оказываются равными:' Р/> ау = = 0, 3 разрешающее
уравнение задачи (10.74), в котором,
кроме того, следует положить рг = 0, за¬
пишется следующим образом:-J- у *vaV V® + PxV-V2 (-fjr) ++ (10-75)/777Z*<^6Рис. 10.30. Устойчивость
цилиндрической оболочки
при осевом сжатииИудем предполагать, что оболочка, теряя устойчивость, искрив¬
ляется в продольном и окружном направлениях (рис. 10.31).
Аппроксимируем искривление поверхности бака следующим выра¬
жением:w (х, у):ткх . nv
■ W0 Sin —j— ' sin ---IR(10.76)где w0 — амплитуда радиального смещения;т — число полуволн изогнутой поверхности вдоль обра¬
зующей;п — число полных волн, образующихся в окружном направ¬
лении.Выражение (10.76) описывает предполагаемую картину ис¬
кривления оболочки и удовлетворяет исходному уравнению зада¬249
чи (10.73) вместе с граничными условиями свободного опирания
(при х = 0 и x=l; w(x,y) =0, аПодставляя выражение (10.76) в выражение (10.75), получим:
рх=°г.а + -^, (10.77)где/ А1 . rfi Vа \~Р ^ ~Wjпри?Чтобы найти критическую величину интенсивности осевого сжа¬
тия, необходимо из условия dpx/da = 0 найти то значение пара-(рх)кру 'ju 'a Siltnss
m=6^ur0sinJ3y
п=4Рис. 10.31. Форма потери
устойчивостиРис. 10.32. Цилиндрическая
оболочка под действием
осевого сжатия и попереч¬
ного давленияметра а, которое обращает в минимум выражение (10.77), т. е.
дает наименьшее значение продольных сжимающих напряжений,
способных удержать оболочку в искривленном состоянии.Решая относительно параметра волнообразования а уравнение Е Lda h R- a2= 0.получимR V D •250
Подстановка найденного значения а в равенство (10.77) дает кри¬
тическое значение осевого сжимающего напряженияI !олученное значение критической величины осевого напряжения
оыло найдено в предположении свободного опирания оболочки по
горцам.Этот результат с достаточной для инженерной практики точ¬
ностью будет пригоден и для оболочки, любым образом закреп¬
ленной по торцам. Последнее объясняется тем, что выпучивание
цилиндрической оболочки при продольном сжатии обычно сопро-
кождается образованием большого количества волн как в осевом,
hi к и в окружном направлениях, а влияние граничных условий
1.11 ухает уже в пределах одной полуволны.б) Цилиндрическая оболочка под действием осевого сжатия и
поперечного давления. (Ракета в полете при воздействии аэроди¬
намических сил и т. п., рис. 10.32.)При рассматриваемом характере нагружения начальная равно-
иесная форма определяется следующими напряжениями: а°х = рх:L>/; pz-y', т°у=0, а разрешающее уравнение задачи (10.74)
приобретает видРешение уравнения (10.76) приводит в этом случае к следующему
| ((отношению между интенсивностями действующих на оболочку
нагрузок:111 полученного выражения видно, что при фиксированных значе-
пних т и п между величинами осевого сжатия рх и поперечного
шмления pz существует линейная связь.Чтобы получить критическую величину одного из давлений при
фиксированной величине другого (меньше критического значения
при действии на оболочку только его одного), необходимо мини-
иипровать соотношение (10.80) по параметрам тип.11 шестно, что если, например, величина поперечного давления
мм'шнляет не менее 20% от своей критической величины, то мини¬
мальное значение осевого сжатия получается при т= 1. Тогда
| ин м. между величиной осевого сжатия, числом волн в окружномt/Мкр— Г) ■(10.78).(10.79)(10.80)251
направлении и интенсивностью поперечного давления будет выра¬
жаться следующим соотношением:D п*Р . с ~2/?2 п?Р /1Л01ЧРх Л -‘К2 ^ п4/2 A n2Rh • (10.8 )Чтобы определить критическую величину осевого1 сжатия при
фиксированном значении поперечного давления, необходимо в вы¬
ражении (10,81) п брать таким целым числом, чтобы рх прини¬
мало наименьшее значение. Величина параметра п, обращающая
в минимум выражение для осевого сжатия, находится из уравне-и ujjir> u,ui UJJI5 0,020,0250030035CW0(745 п =180; it/?//=J,95; =Pz =pxR/Eh; pz=pzR/Eh2.
Рис. 10.33. График области устойчивости Область ОАВ можно на¬
звать областью устойчи¬
вого равновесия, т. е. если осевое сжатие и поперечное давление,
воздействующее на оболочку, таковы, что точка, имеющая эти
величины, своими координатами в осях рх и рг оказывается внутри
области ОАВ, то определяемое этими усилиями равновесное со¬
стояние будет устойчивым; если же точка находится на границе
области или вне ее, то оболочка потеряет устойчивость.Пусть, например, необходимо определить критическое значение
осевого сжатия для торового бака (рис. 10.34), изготовленного из
стали 45 (£= 19,6 • 105), находящегося под действием внутреннего
давления /?2 = 19,6 н/см2. Геометрические размеры внутреннего ци¬
линдра таковы, что R/h= 180; icR/l= 1,95. Подсчитываем безраз-а р р^"2мерный параметр поперечного давления рг — - — 0,032.Входя с этим значением безразмерного параметра поперечного
давления в график (рис. 10.33), определим критическое значение
безразмерного параметра осевого сжатия, которое оказывается
равным 0,17. Таким образом, критическая величина осевого сжа¬
тияния dpx/dn = 0.Если в соотношении
(10.81) задаваться ря¬
дом значений интенсив¬
ности поперечного давле¬
ния и всякий раз отыски¬
вать соответствующую
критическую величину
осевого сжатия, то мож¬
но обнаружить линейную
связь между рх и рг. На
рис. 10.33 прямая АВ изо¬
бражает эту связь. Гра¬
фик построен для Rlh~252
Приведенные выше решения основывались на предположении i)О малости перемещений, появляющихся в момент, когда оболочка
бака теряет свою устойчивость. Как следствие этого предположе¬
нии исходные уравнения задачи (10.73) оказались линейными.Результаты расчета по этим зависимостям зачастую сущест-
iti'iiiio расходятся с экспериментальными данными. Оказывается,
например, что при сжатии труб и цилиндрических панелей реаль¬
ные критические напряжения в несколько раз меньше величин,
определяемых по формулам
линейной теории.В настоящее время на осно¬
ве нелинейных представлений
построена теория устойчивости
«и большом», дающая доста¬
точно хорошо совпадающие с
нчспериментами «нижние» зна-;
нения критических величин
ннешних воздействий для обо¬
лочек различной формы. В
рамках данного параграфа
невозможно изложить методы
получения нижних границ
критических значений внеш¬
них воздействий, а потому
приведем конечные результатыисследований устойчивости различным образом нагруженной ци¬
линдрической оболочки:— оболочка, сжатая в осевом направлении(Рх)кр = °>438 Е,г ■ ~ 0,3 4?;\Ух)кр. , л^3(1_(а2) > R ’— оболочка, находящаяся под действием поперечного дав¬
ления, ч nnQ1 Itfi Е ( h \5/2(Л)кр.—0,081 1 ■ (1 ^2)0.75 (я) >— оболочка, находящаяся под действием осевого сжатия и по¬
перечного давления(РЛр.=0,18£^[1 + И (р;)].гдеw*-j>(4)'-Последняя формула справедлива при (/?z)* < 0,17. При (pz)*>> 0,17 критическое значение осевого сжатия следует подсчиты-
нпть по формуле(Рх) кР. = °,6£ •Рис. 10.34. К расчету тора на устойчи¬
вость253
Вопросы, связанные с неупругой устойчивостью оболочек ба¬
ков и устойчивостью неравномерно прогретых элементов кон¬
струкции (учет аэродинамического нагрева в задачах устойчиво¬
сти), опускаем ввиду сложности методик [4, 5] и попутно заметим,
что проверкой прочности и статической устойчивости баков их
расчет не заканчивается. Нужно еще рассчитать динамическую
устойчивость стенок баков.Известно, что теория динамической устойчивости включает в
себя вопросы, связанные с динамикой и статикой сооружений, и
занимается изучением потери динамической устойчивости упру¬
гими системами под действием вибрационных нагрузок.Возникновение явления потери динамической устойчивости,
или, как его иначе называют, параметрический резонанс, возни¬
кает под действием вибрационных нагрузок вида /?0 + /?iCosQ^
только при определенных соотношениях частот возмущающих и
свободных колебаний и в таких системах, у которых статические
формы потери устойчивости совпадают с соответствующими фор¬
мами свободных колебаний.Чтобы изучить явление параметрического резонанса с матема¬
тической точки зрения, необходимо исследовать дифференциаль¬
ные уравнения с периодическими коэффициентами.В частности, для цилиндрической оболочки при малых колеба¬
ниях ее необходимо исследовать решения уравнения Матье при
заданном соотношении между возмущающей частотой Q и часто¬
той свободных колебаний ш. Если решение уравнения Матье при
заданном отношении ш/fi окажется неограниченно возрастающим
со временем, то это значит, что движение неустойчиво, и мы имеем
дело с параметрическим резонансом.В том случае, когда решение уравнения Матье остается огра¬
ниченным с возрастанием времени, движение будет устойчивым и
параметрический резонанс наблюдаться не будет.Исследования показывают, что существует ряд областей не¬
устойчивости. На практике обычно встречается только основной
резонанс, соответствующий первой области неустойчивости,
остальные резонансы практического значения не имеют, так как
для их возбуждения требуются значительные амплитуды внешних
нагрузок.Кроме того, установлено, что неограниченного возрастания ам¬
плитуд в области неустойчивости в реальных конструкциях, пред¬
сказываемого линейной теорией, не происходит вследствие увели¬
чения, ограничивающего влияния затухания, а также нелинейных
факторов по мере возрастания амплитуд колебаний.Более подробные сведения можно найти в работах [3, 4, 5].ЛИТЕРАТУРА К ГЛ. X1. Феодосьев В И., Синярев Г. Б. Введение в ракетную технику.
Оборонгиз, 1960.254
2. Вельский В. Л. и др. Конструкция летательных аппаратов. Оборон¬
гиз. 1963.3. Конторович 3. Б. Основы расчета химических машин и аппаратов.
Машгиз, 1952.4. Тимошенко С. П. Сопротивление материалов. Том II. Гостехиздат,
1946.5. Тимошенко С. П. Пластинки и оболочки. Гостехиздат, 1948.6. Беспилотные летательные аппараты под редакцией Чернобровкина Л. С.
1967. Машиностроение.
ГЛАВА XIОСОБЕННОСТИ ПРОЧНОСТНОГО РАСЧЕТА
РАКЕТ С РДТТКонструктивные схемы ракет с РДТТ существенно отличаются
от конструктивных схем ракет с ЖРД, в связи с чем и расчет на
прочность таких ракет имеет свои особенности. В данной главе
будут изложены некоторые методы расчета на прочность как обо¬
лочки камеры сгорания РДТТ, так и зарядов твердого топлива.§ 11.1. ОСОБЕННОСТИ ЭКСПЛУАТАЦИИ РАКЕТ С РДТТ.РАСЧЕТНЫЕ СЛУЧАИКак известно, ракеты с РДТТ по сравнению с ракетами с ЖРД
обладают рядом технологических и особенно эксплуатационных
преимуществ. Чтобы создать ракету с РДТТ, необходимо иметь ме¬
тоды, позволяющие исследовать взаимосвязь конструкции с заря¬
дом и выяснять напряженно-деформированное состояние заряда в
различных условиях эксплуатации, ибо целостность заряда в ко¬
нечном счете и определяет возможность дальнейшего использова¬
ния ракеты с РДТТ.В существующих РДТТ используются два способа размещения
заряда в камере сгорания:— заряд свободно вставляют в камеру, а затем закрепляют в
ней для исключения перемещений относительно корпуса;— топливо под давлением заливают в камеру двигателя, где
оно затвердевает, образуя скрепленный с корпусом заряд.Ракета с двигателем, в котором заряд скреплен со стенками
камеры, имеет лучшие массовые характеристики, чем ракеты с
двигателями со вставными (свободными) зарядами.При разработке зарядов, скрепленных с камерой, возникают
трудности, связанные с обеспечением нормальной работы этих за¬
рядов в широком диапазоне возможных температур эксплуатации.256
Для всех типов зарядов деформации или прогибы, гак же как
и напряжения под действием нагрузок в различных условиях экс¬
плуатации, не должны превышать допустимых величин. Для каж¬
дой формы и способа крепления зарядов параметр, определяющий
работоспособность конструкции, будет своим, зависящим как от
конструктивных факторов и условий работы, так и от физико¬
механических свойств топлива и материала оболочки (см. § 11.2).Поскольку твердое топливо под действием приложенных к нему
сил обнаруживает в определенных условиях свойство ползучести,
т. е. способность деформироваться во времени без увеличения на¬
пряжений, то в прочностных расчетах необходимо учитывать рео¬
логические свойства топлива, т. е. явление ползучести, и явление
релаксации. Чтобы снизить температурные деформации скреплен¬
ных зарядов, целесообразно сделать близкими один к другому
коэффициенты линейного расширения топлива и оболочки камеры
сгорания. К сожалению, коэффициенты линейного расширения су¬
ществующих твердых топлив и конструкционных материалов от¬
личаются один от другого на порядок и не могут обеспечить сни¬
жение температурных деформаций до желаемого предела. Эю
вызывает необходимость термостатпрования заряда, что услож¬
няет эксплуатацию ракеты с РДТТ [1]. Создание между оболочкой
и зарядом различного рода промежуточных слоев из высокоэла¬
стичных или пористых материалов, как правило, не решает про¬
блемы. Это объясняется тем, что при изменении температуры за¬
ряда промежуточный слой начинает работать на всестороннее
растяжение, а в этих условиях специфика высокоэластичной де¬
формации обычно не.проявляется. Следствием этого является раз¬
рушение зарядов при охлаждении или при испытании охлажден¬
ных зарядов. Реальными мерами по увеличению прочности скреп¬
ленных зарядов в настоящее время являются полимеризация и
скрепление зарядов с камерой без подогрева или с незначитель¬
ным подогревом, а также улучшение эластичных свойств самого
твердого топлива. Определение величины температурных диапазо¬
нов, в пределах которых можно обеспечить безопасную эксплуата¬
цию ракеты с конкретным твердым топливом, является одной из
основных задач прочностного расчета.Таким образом, основными расчетными случаями являются:— изменение температурных условий в процессе изготовления
двигателя и в различных условиях эксплуатации;— длительное хранение ракет в горизонтальном или в верти¬
кальном положении;— транспортировка ракет;— работа двигателя на траектории.Для прикидочных инженерных расчетов напряженно-деформи¬
рованного состояния зарядов, скрепленных со стенками камер, мо¬
гут быть использованы решения теории упругости (задачи Ляме-
Гадолина). При этом важно правильно, учитывая температурно¬
временные зависимости, выбирать значения механических харак¬257
теристик твердого топлива, входящие в соответствующие зависи¬
мости (§ 11.2). Так, например, максимальную относительную де¬
формацию в окружном направлении на внутренней поверхности
телескопического заряда после завершения охлаждения и установ¬
ления теплового равновесия в первом приближении можно под¬
считать по формуле [5, 18]"в^[1 + Мт-1)], (П-1)1 — (*я1 + t*KrnPr_J L+i^ • м = —- N- —ГДе Т — 2 Еп 1 + (хк ’ а ’ ЬЛР + Ек 1+^М*—1' jV2 — 11~=к.А =Л т Л ■ 1 /И2-1 Еп. Л ]_)’1-рп J м* ' N*-1 Ек 1-*Д 1 -Рп)Еп и Ек—модули упругости твердого топлива и материала ка¬
меры;Рп и Кк—соответствующие коэффициенты Пуассона;
а, Ь, с—соответственно внутренний и наружный радиусы за¬
ряда и радиус камеры двигателя;At—перепад температур полимеризации и хранения;
ая и ак—коэффициенты линейного расширения топлива и ма¬
териала камеры сгорания.Напряжения отрыва в этом же случае могут быть найдены по
выражению1 дпЕпМА М*— 1ь— 2 1 — [j.„ М2 ■Более или менее точное решение задач прочности для ракет с
РДТТ может быть найдено в пределах теорий ползучести. Изве¬
стно, что общей теории ползучести, пригодной для всех случаен
жизни, нет и в настоящее время существует много частных теории
ползучести, примененных для очень узкого круга задач. Основная
масса теорий ползучести построена для изотропного однородного
материала, исключение составляет одна из теорий Бейли [6], кото
рая может быть применена и к анизотропному материалу, а так
же теория старения Ю. Н. Работнова [13] для нелинейных вязко
упругих сред.Большинство теорий постулирует несжимаемость материала п
процессе ползучести и лишь отдельные из них считают, что объем¬
ная деформация упругая. Все они исходят из того, что главны?
оси тензора напряжений совпадают с главными осями тензора
деформаций.258
Подавляющее большинство теорий ползучести утверждают так¬
же пропорциональность главных сдвигов главным касательным
напряжениям. Все теории считают, что приложение гидростатиче¬
ского давления вызывает лишь объемную деформацию и что при
растяжении и сжатии свойства материалов одинаковы. Значи-
1ельная часть их исходит из того, что процесс ползучести опреде¬
ляется энергией формоизменения, а отдельные теории считают,
что определяющими являются максимальные касательные напря¬
жения.Таким образом, выбору теории ползучести должен предшест¬
вовать анализ экспериментальных данных о поведении материала
мшлива в различных условиях нагружения.В настоящей главе будут рассмотрены некоторые приближен¬
ные методы определения напряженно-деформированного состоя¬
ния заряда твердого топлива и материала камеры сгорания в раз¬
личных условиях эксплуатации. Чтобы существенно упростить
расчеты, будем рассматривать только плоскую задачу. Вопросы,
связанные с концентрацией напряжений в зарядах с каналом в
форме звёздки и в зарядах со щелями на участках пропилов, рас¬
сматривать не будем. Вместо этих зарядов при определении на¬
пряженно-деформированного состояния рассматриваются эквива¬
лентные заряды цилиндрической формы, а эффект концентрации
учитывается введением соответствующих коэффициентов, которые
могут быть определены, например, методами фотоупругости [2], [1].
Заметим, что действительные коэффициенты концентрации ввиду
релаксации напряжений будут меньше, чем те, которые опреде¬
лены методами фотоупругости, однако эта ошибка идет в «запас»
прочности и ею можно пренебречь.§ 11.2. НЕКОТОРЫЕ СВЕДЕНИЯ О ФИЗИКО-МЕХАНИЧЕСКИХ
СВОЙСТВАХ ТВЕРДЫХ ТОПЛИВ. КРИТЕРИИ ПРОЧНОСТИМеханические свойства твердых топлив на основе баллистит-
ных порохов, так же как и механические характеристики различ¬
ных смесовых твердых топлив, очень сильно зависят от темпера¬
туры и временного режима испытаний. Объясняется это тем, что
полимеры в силу большой длины и гибкости цепей макромолекул
способны подвергаться не только обратимым деформациям тече¬
ния, но и большим высокоэластичным деформациям, а оба эти
процесса являются реологическими, временными процессами. Об¬
щие закономерности поведения механических свойств смесевык
твердых топлив аналогичны поведению механических свойств по¬
лимерных пластмасс [16, 18]. В диапазоне возможных температур
жсплуатации ракеты с РДТТ эти композиции могут находиться
либо в стеклообразном, либо в хрупком состоянии. Для стеклооб¬
разного состояния при приложении соответствующих напряжений
характерны эластичные деформации и сопротивляемость этим де¬
формациям наряду с параметрами хрупкого разрушения является259
главным критерием механической прочности топлива в различных
условиях эксплуатации [16, 18].Результаты экспериментальных исследований физико-механи¬
ческих характеристик твердых топлив смесевого типа показывают,
что эти характеристики в сильной степени зависят от температуры
испытания и скорости деформирования. Влияние изменения скоро¬
сти деформирования на величину предельной относительной де¬
формации значительно слабее, чем влияние скорости деформиро¬
вания на величину предела прочности. Типичная диаграмма рас-Рис. 11.1. Диаграммы растяжения полиуретанового топливатяжения для полиуретанового смесевого топлива при скорости
деформирования е=10-3-^г приведена на рис. 11.1 [8].Деформации ползучести для смесевых твердых топлив начи¬
нают заметно проявляться при температурах выше температур
хрупкости. Типичная серия кривых ползучести для того же топ¬
лива приведена на рис. 11.2 [8].Предельные деформации ползучести при всех температурах ис¬
пытания значительно меньше (примерно на порядок) предельных
деформаций при обычных статических испытаниях, это необхо¬
димо учитывать при прочностных расчетах ракет с РДТТ в раз¬
личных условиях хранения и боевого дежурства, т. е. тогда, когда
деформации ползучести имеют существенное значение [8].Скорость релаксаций смесевых твердых топлив сильно зависит
от температуры испытаний и первоначальной деформации образ¬
ца. Типичные кривые релаксации для полиуретанового смесевого
твердого топлива приведены на рис. 11.3 [8].Чтобы довести результаты прочностного расчета «до числам,
исследователю необходимо знать большое количество эксперимен¬
тальных характеристик по материалам твердого топлива и камеры260
сгорания. Получение этих характеристик всегда связано с боль¬
шими затратами времени и средств, поэтому необходимо распола¬
гать методами, позволяющими обобщить результаты эксперимен¬
тальных исследований с целью сокращения их объема при при¬
менении той или иной теории ползучести.50ЩОЮ3н/мгва=Ю,0Ю5н/п2б„= 7,510sн/м26„=5,0-Ю5Н/М*
6^Z,510sH/n2О 2,0 4,0 в, О в, О 10,0 12,0 40 С
Рис. 11.2. Кривые ползучести топлива при ГПСП = 283°КI В качестве обобщающей величины в опытах на ползучесть обыч¬
ай* е (Опо вводят отношение —L-L, которое называют податливостью иаообозначают буквой /. Податливость возрастает во времени t от
б1:1(Т^н/пгРис. 11.3. Кривые релаксации топлива при 7’IiCn = 289°Kначальной величины /„ = — либо до равновесного значения& (Т0ири t—yоо, которое обозначается через /е, либо беспредельно.
В опытах на релаксацию в качестве обобщающей величины частос ^ (0 °иводят понятие релаксационного модуля = который,как и податливость, является величиной переменной, уменынаю-261-2510sН/М*
=гОЮ5Н/М*
=1510" Н/Пг=ЮЮ5 Н/М*-7,5Ю5н/м2
20,0 х, час
щейся от начального значения Я =— (обычный модуль упру-& е0гости) до нуля или определенного равновесного значения Ее. По¬
скольку опыты на ползучесть и релаксацию обычно охватывают
несколько порядков времени, то при обработке их результатов
целесообразно пользоваться не равномерной масштабной шкалой
времени, а логарифмической шкалой, применение которой, поми¬
мо практического удобства, в ряде случаев имеет и принципиаль¬
ное значение, облегчающее подход к выбору теории ползучести.Функции ползучести и релаксации могут представлять практи¬
ческий интерес лишь в том случае, если они позволяют предска¬
зывать поведение материала не только при постоянном напряже-д-Ю 9тг т, = constнии или постоянной деформации, но и при произвольных режимах
нагружения и деформирования. Это предсказание поведения ма¬
териала твердого топлива легко осуществляется, если материал
обладает линейностью вязко-упругих свойств. В этом случае ма¬
териал имеет одинаковую податливость через определенный про¬
межуток независимо от того, при каком напряжении ведется опыт.
На рис. 11.4 и 11.5 приведены зависимости податливости от на¬
пряжения при различных температурах для полиуретанового топ¬
лива [8]. Рассмотрев кривые, можно утверждать, что смесевое
топливо обладает линейностью вязко-упругих свойств только до
определенных нагрузок, далее оно становится более податливым,
что указывает на появление эффекта силового размягчения. Ин¬
тервал нагрузок, где топливо проявляет линейность вязко-упругих
свойств, зависит от температуры и времени нагружения.В пределах, при которых для топлива наблюдается линейность
его вязко-упругих свойств, к нему может быть применен принцип
суперпозиции Больцмана [7, 16], позволяющий определять пове¬
дение материала при произвольном во времени нагружении и де¬
формировании с помощью простых кривых ползучести и релакса¬
ции. Действительно, согласно принципу суперпозиций Больцмана262
деформация тела в момент t при ступенчатом нагружении равна
просто сумме деформаций от нагрузки оо, oj, ..о; при их незави¬
симом действии. Применительно к релаксационным опытам прин¬
цип суперпозиции может быть сформулирован следующим обра¬
зом: если образец подвергался ряду последовательных деформи¬
рований so, ei, ..., еи каждое из которых происходит в момент вре¬
мени t0, t\, ..., tit то напряжение к моменту времени t может быть
вычислено как простая сумма напряжений, вызванных каждой де¬
формацией в отдельности.К сожалению, для нелинейных систем подобный принцип не
установлен. Однако в ряде случаев для нелинейно вязко-упругих
систем при решении задач в приближенной постановке можно вме¬
сто уравнения Больцманаt(*-*)(-£) Л (11.2)Оиспользовать уравнение Ставерманаt«(*)= j7i (*-‘')Л<»)(-37)*, (аз)Ьгде о (t) — напряжение в момент времени /;£ — деформация в этот же момент времени.Функция /г(е), входящая в выражение релаксационного мо»
дуля £=/,(/) . определяется для каждого материала экспе¬
риментально.263
При сжатии смесевые топлива ведут себя как линейные вязко-
упругие системы, поэтому без большой погрешности можно счи¬
тать их имеющими линейные вязко-упругие свойства при расчетах
деформированного состояния заряда Ьри его хранении в верти¬
кальном и горизонтальном положениях (малые нагрузки).Объем экспериментальных исследований по определению фи¬
зико-механических характеристик твердого топлива может быть
существенно уменьшен, если воспользоваться температурно-вре¬
менным принципом наложения. Сущность данного принципа за¬
ключается в следующем. Если в принятом отрезке времени (ко¬
ординаты логарифмические) определить ползучесть при различ¬ных температурах, то получаются кривые, приведенные на
рис. 11.6. При температуре хрупкости Тхр и ниже податливость /
весьма мала и практически не зависит от времени. При темпера¬
турах между Гхр и температурой стеклования Гс, а также несколь¬
ко выше Тс податливость в процессе опыта возрастает, причем,
чем выше температура, тем выше расположена кривая ползуче¬
сти. При температурах, значительно превышающих Тс, мы попа¬
даем в высокоэластичную область, характеризуемую чисто равно¬
мерной податливостью с малой зависимостью ее от времени. Если
в качестве основы выбрать одну из кривых (например, темпера¬
туру 298° К), а остальные-сдвигать параллельно оси времени, то
обнаружится, что при определенных смещениях отдельные кривые
совпадают, образуя единую плавную линию типа, показанного на
рис. 11.7.Таким образом, можно вычислить механические характери¬
стики при малом и большом времени и без постановки прямых264
экспериментов. Эта возможность значительно сокращает объем
необходимых экспериментальных исследований и может плодо-
творно использоваться при определении реологических свойств но-
иых топлив, особенно при температурах, отличных от нормаль¬
ных, т. е. как раз в тех случаях, когда обычный эксперимент ока¬
зывается наиболее трудоемким. Принцип температурно-временной
эквивалентности может быть успешно использован не только для
построения обобщенных кривых податливости (а следовательно,
кривых ползучести), но и для построения обобщенных кривых ре¬
лаксационного модуля, (а следовательно, и кривых релаксации).Определив физико-механические характеристики твердого топ¬
лива, можно рассчитать напряженно-деформированное состояние
ракеты с РДТТ. Для этой к при 2д8~кцели могут быть приме- 474 /йены в зависимости от "условий нагружения прак-
тически все теории пол- /зучести, которые в на- /стоящее время можно /разбить на три большие /группы:— теория упрочнения; : ——— теория старения; 0 ti *2 L9t— теория предшеству- Рис п ? 0брбщениая кривая ползучести’ ющих влиянии (наслед¬
ственные теории).Наиболее простыми в математическом отношении являются тео¬
рии старения.Теории упрочнения могут применяться для уточненных расче¬
тов напряженно-деформированного состояния зарядов твердого
топлива, однако в математическом отношении их расчетный аппа¬
рат сложнее и более трудоемкий, чем при применении теорий ста¬
рения. Кроме того, возрастет количество зависимостей, подлежа¬
щих экспериментальному определению.Значительный интерес представляют наследственные теории
ползучести, но чтобы их использовать, необходимо знать всю пре¬
дысторию эксплуатации до данного момента и напряженно-дефор¬
мированное состояние шашки твердого топлива после ее изготов¬
ления. Использование этой теории позволит получить наиболее
точные результаты, однако основная трудность заключается в
восстановлении всей предыстории эксплуатации и точном преду¬
смотрении истории эксплуатации.В дальнейших расчетах будем применять лишь нелинейную
теорию старения, которая, хотя и обладает рядом недостатков,
однако дает возможность рассчитать напряженно-деформирован¬
ное состояние заряда ракеты с РДТТ в различных условиях экс¬
плуатации и провести приемлемый для практики минимум экспе¬
риментальных исследований.265
Известно, что определением напряженно-деформированного со¬
стояния конструкции задача прочностного расчета не исчерпы¬
вается. В конечном счете важно знать запас прочности конструк¬
ции в различных условиях эксплуатации, а для этого необходимо
вводить в рассмотрение соответствующий критерий прочности.
В качестве критерия прочности для зарядов ракет с РДТТ в на¬
стоящее время чаще всего применяют величину предельной де¬
формации £цред [8].Использовать в качестве критерия прочности предельную де¬
формацию, а не как в сопротивлении материалов предел прочно¬
сти, в данном случае более удобно, так как эта характеристика
меньше зависит от температурного и скоростного режимов нагру¬
жения. Назначение в качестве критерия прочности величины епреД
тем более естественно, что скрепленный заряд не является несу¬
щим элементом конструкции и, будучи жестко скреплен с каме¬
рой, вынужден «приспосабливаться» к той деформации, которая
возникает в камере либо под действием внутреннего давления
продуктов сгорания, либо от неодинаковых тепловых усадок при
изменении температуры системы. По сути дела, заряду принуди¬
тельно навязывается деформация, определяемая жесткостью обо¬
лочки камеры сгорания, которую он должен выдержать. Однако
критерий прочности еПред лишь качественно учитывает временной
характер разрушения смесевых твердых топлив, которые, как
и другие полимерные материалы, разрушаются под действием
нагрузок не мгновенно, а постепенно в течение определенного про¬
межутка времени.Основываясь на том, что процесс разрушения полимера яв¬
ляется в значительной мере необратимым временным процессом,
можно использовать для установления единого критерия для всех
расчетных случаев эксплуатации ракеты с РДТТ своеобразную
гипотезу о «накопленной усталости».Для нашего случая этот критерий прочности может быть за¬
писан так [5, 7]:гДе si расч.— расчетная обобщенная деформация в соответствую¬
щем слое заряда твердого топлива при определен¬
ном нагружении ракеты с РДТТ;£/пРед. — предельная допустимая деформация при темпера¬
туре этого же слоя.Суммирование величин «накопленной усталости» производится
по всем случаям эксплуатации ракеты с РДТТ.Поскольку предельные деформации ползучести при всех темпе¬
ратурах испытания твердого топлива значительно меньше пре¬
дельных деформаций при обычных статических испытаниях, то
при вычислении «накопленной усталости» целесообразно из общей
деформации $г-расч. упруго-пластическую ее часть отнести к пре¬Е/ расч. ^ |е/ пред.(11.4)266
дельной деформации, полученной в результате статических испы¬
таний, а «пластическую» часть деформации 8граСч, ползучую,—
к предельно допустимой, определяемой в процессе экспериментов
на ползучесть, т. е.v / et расч. упр.-пл. ei расч. полз. \ ^ ^ (115)' £i пред. стат. е/ пред. полз. 'В последнее выражение должна быть внесена поправка на ве¬
личины разброса sj пред. стат. и £/пред. полз. Если в выражении (11.5)
пред. стат. и е; Пред. полз, рассматривать как среднеарифметические
величины результата обработки серии однотипных экспериментов,
а предельный разброс этих величин в процентах от среднеариф¬
метических значений обозначить соответственно через «а» и «Ь»,
то, чтобы получить надежность расчета, близкую к единице (учи¬
тываем предельные отклонения полностью), вместо выражения(11.5) надо записатьо1-6). 100
где А/■!l расч. упр.-пл.
100 й £/ пред. стат.
100 li расч. полз.100 -пред. полз.Уточненный критерий прочности должен учитывать факт от¬
дыха материала заряда.Величина «накопленной усталости», получаемая зарядом при
транспортировке, должна учитываться отдельным членом, экспе¬
риментально определяемым количеством циклов, доводящих обра¬
зец до разрушения при заданной частоте и амплитуде нагруже¬
ния. Если обозначить через пц. раСч. расчетное количество циклов
при заданной амплитуде, а черев яц. пред. предельное допустимое
количество циклов при этой же амплитуде колебаний, то отноше¬
на. расч. ^ „ние будет характеризовать величину «накопленной уста¬
ли. пред.лости», получаемой при данной амплитуде и частоте цикла.Суммируем эту величину для случаев транспортировки с раз¬
личными амплитудами и частотами циклов; результирующая ве¬
личина «накопленной усталости», реализуемая в заряде в про¬
цессе различных случаев транспортировки, может быть определе¬
на из выраженияг(=у%^па. пред.или с учетом разброса величин пя предр — 100 Расч- (ЛЛ о\100— е Лц.пред. >где е — максимальное отклонение величины % пред от среднего
значения в %.267
Итоговая величина «накопленной усталости», получаемая
скрепленным зарядом в процессе различных случаев эксплуам
ции с учетом коэффициента запаса прочности rj, определится m
выражения*-[$и+*>+25]<т- (11-9)Факт концентрации деформаций и напряжений в заряде слож
ной формы и конечной длины должен учитываться соответствую
Щи ми методами расчета величин е. расч. упр..пл, ег.расч. полз. и лц. расч.
или коэффициентами концентрации [5.18].В качестве второго критерия прочности может использоваться
долговечность ракеты, определяемая напряжениями (деформа¬
циями), возникающими в ракете с твердым топливом при ее из¬
готовлении, хранении и пуске. Долговечность ракеты должна во
много раз превосходить время ее эксплуатации и использования,
т. е. должна быть больше фактического (или предполагаемого)
времени жизни этой ракеты, которое складывается из времени из¬
готовления, хранения и пуска. Однако этот критерий менее при¬
годен для практического использования, так как он включает
в себя много неизвестных или трудно определяемых параметров.§ 11.3. НАПРЯЖЕННО-ДЕФОРМИРОВАННОЕ СОСТОЯНИЕ ЗАРЯДА
И КОРПУСА РДТТ ПРИ ИЗГОТОВЛЕНИИВ данном параграфе рассматривается методика расчета на¬
пряженно-деформированного состояния заряда и корпуса РДТТ
при изменении температурных условий эксплуатации, базирую¬
щаяся на теории старения Ю. Н. Работнова для нелинейных вяз-
ко-упругих сред” [13]. При выводах зависимостей не производится
деление температурных напряжений на напряжения, вызванные
градиентом температур по толщине шашки и имеющие место при
ее охлаждении и нагревании, и на напряжения, вызванные раз¬
личной величиной коэффициента линейного расширения материа¬
лов камеры сгорания и топлива.Последнее обстоятельство позволяет более точно вычислить
«накопленную усталость», которая будет вводиться в последую¬
щие расчеты напряженно-деформированного состояния зарядов
при хранении и при работе двигателя на траектории.При расчете напряженно-деформированного состояния скреп¬
ленных зарядов в различных температурных условиях будем счи¬
тать/: что температурное поле заряда и камеры нам известны для
любого рассматриваемого нами момента времени (гл. VI). С очень
большой точностью можно допустить, что температура металли¬
ческой стенки не зависит от того, какой слой по ее толщине рас¬
сматривается и что она равна температуре на внешней поверхнеи
сти заряда [3],268
Для камер сгорания, изготовленных из стеклопластика, харак¬
терен градиент температур по толщине стенки, однако ввиду его
незначительности при расчете температурных напряжений в заря¬
да, твердого топлива им можно пренебречь.3) В дальнейших расчетах будем также считать заданной толщи¬
ну стенки камеры сгорания, ибо она определяется в основном ра¬
ботой двигателя на траектории (§ 11.6). Кроме того, при расчете
температурных напряжений в заряде твердого топлива, возникаю¬
щих после его изготовления в связи с последующим охлаждением,
массовыми силами будем пренебрегать, так как их влияние на
напряженно-деформированное состояние заряда за время охлаж¬
дения его от температуры полимеризации до нормальной незначи¬
тельно. ^При длительном хранении заряда в различных темпера¬
турных условиях влияние массовых сил. становится определяю¬
щим и обязательно учитывается (§ 11.4) f В выводах будут учиты¬
ваться зависимости коэффициентов линейного расширения от тем¬
пературы как для материала заряда, так и для материала обо¬
лочки камеры сгорания.Таким образом, определяя допустимые температурные диапа¬
зоны эксплуатации твердотопливной ракеты, в качестве расчетной
схемы принимаем бесконечно длинную оболочку с нелинейно вяз¬
ко-упругим наполнением, находящуюся в неравномерном и пере¬
менном во времени температурном поле.Взаимодействие оболочки камеры сгорания со скрепленным
с ней зарядом твердого топлива учитываем введением контактно¬
го давления д,которое подлежит определению в процессе расчета.
Считаем, что оболочка камеры сгорания может деформироваться
только упруго, поскольку появление в ней пластических деформа¬
ций в процессе изготовления двигателя и его хранения малове¬
роятно, а, точнее, даже невозможно.Поле напряжений в зарядах твердого топлива в момент окон¬
чания полимеризации принимаем нулевым.Расчет напряженно-деформированного состояния скрепленных
зарядов твердотопливных ракет при изменении температурных
условий можно разбить на две части.'Часть первая — упругое деформирование тонкостенной оболоч¬
ки камеры сгорания под действием изменяющегося температур¬
ного поля и переменного контактного давления достаточно про¬
ста. Действительно, начальное состояние оболочки, например, при
температуре полимеризации нам известно. Изменяя температуру
на величину At = /полимериз. — t, где / — текущая температура обо¬
лочки, относительная окружная деформация оболочки едк — — аД/.
Влияние осевой деформации заряда на величину окружной де¬
формации оболочки можно не учитывать в связи с огромной раз¬
ницей в величинах модулей упругости материалов оболочки и за¬
ряда. Таким образом, можно считать, что воздействия осевой силы
на оболочку камеры сгорания нет. Задача расчета бесконечно
длинной оболочки свелась к расчету тонкостенного кольца, рабо¬269
тающего в пределах упругости. Ввиду м'элого изменения модуля
упругости металла в диапазоне возможного изменения температур
(—40-ь +80°С) будем считать в дальнейшем величину Е металла
не зависящей от температуры. Действие контактного давления с/
на оболочку равносильно "воздействию на нее внешнего давления
такой же величины. Из условия равновесия имеем(,1Л0>где R — радиус оболочки;о — толщина оболочки;£i) сил—силовая относительная деформация кольца.Общая деформация оболочки(1Ш)Из условия совместности деформации эта же величина s(J
должна быть у внешней поверхности заряда твердого топлива.
Из этого же условия найдем величину контактного давления з
произвольный момент времени.Часть вторая — деформированное состояние твердого топлива.
Эта задача сводится к расчету осесимметричной деформации тол¬
стостенного бесконечно длинного цилиндра, находящегося в не¬
равномерном поле и нагруженного внешним растягивающим дав¬
лением q. Материал твердого топлива обладает свойствами не¬
линейной вязко-упругой среды. Будем считать, что нелинейные
зависимости между напряжениями и деформациями для различ¬
ных температур заданы или графиками (§ 11.2), или аппроксими¬
рующими зависимостями, которые будут приведены ниже. Мето¬
дика расчета с учетом влияния ползучести строится, как уже ука¬
зывалось выше, на основе гипотезы старения Ю. Н. Работнова и
применяется для тех случаев, когда внешние нагрузки (в нашем
случае контактное давление q) изменяются во времени достаточ¬
но плавно.Для расчетов принимаем прямоугольную систему координат
с осями: z — вдоль оси оболочки; г — по радиусу заряда; 0 — по
касательной к поверхности цилиндра (заряда). Внутренний ра¬
диус цилиндра обозначим через гь а наружный — через г2. За¬
висимости окружной efj и радиальной вг деформаций от ради¬
ального перемещения да и радиуса г в нашем случае имеют вид:w . dw л 1 ючse = —; *г=~аг- (Ш2)В данной задаче без особой погрешности можно допустить, что
силовое деформирование заряда твердого топлива в процессе
остывания происходит без изменения объема,270
В этом случаее0 + гт + е? — ^9, -(11.13)где sг — осевая деформация; 0 = аЛ/ — температурная деформация
(а — коэффициент температурного расширения материала заряда;
А/ = /Полимериз. — t, a t — текущая температура рассматриваемого
слоя).Заметим, что при охлаждении величина At должна браться
отрицательной, а при нагревании — положительной. Предполагая,
что оболочка находится в условиях плоского деформированного
состояния, осевую деформацию заряда считаем постоянной по
длине, т. е. e2 = const. В этом случае из выражений (11.12) и(11.12), имеем;(11.14)dw w— = СШ _ 8dr ' г zПроинтегрировав выражение (11.14), получимw = JL + ±(11.15)где с — постоянная интегрирования.Подставляя значение w из выражения (11.15) в зависимости(11.12) имеем:+Or dr-г I
гсjrjbrdr+ 30—rtВведем безразмерные величины:Р = 7Г: « = 7Г! T=\QPdP.(11.16)(11.17)Подставив выражения (11.17) в выражения (11.16), получим:(11.18)--4- — + 30-р р2Интенсивность деформаций для случая нашей задачи опреде¬
ляется выражением. _ К*-У(гь-егу+(*г-егу+(е;-*9у.(11.19)271
Подставив в зависимость (11.19) значения е0 и ег из выраже¬
ний (11.18), получимУравнения равновесия элемента цилиндра запишутся следующим
образом:— в проекциях на радиусder , °е~dF г: 0;— в проекциях на ось трубыТг2it | о/ dr = Р.(11.21)(11.22)Интенсивность контурной нагрузки р на внутренней поверхно¬
сти равна р\ = 0, а на наружной — Рг = <?- Таким образом,ОЛ=г, = °5 (аЛ=г2 = Ч-При введении безразмерных величин согласно выражению (11.17)
зависимости (11.21) и (11.22) запишутся следующим образом:(11.23)2 к ■ r\ I* огр dp — Р.аУчитывая, что (ar)r-fi — 0, из первого уравнения (11.23) следуетр"г = .)с9 — <з>dp.(11.24)Зависимости компонентов деформаций от компонентов напря¬
жений в нашем случае имеют вид [2]:=1^7 (а/-—а) +е;= 1^7 (а*—°) +е»(11.25)272
где oz — осевое напряжение;1У2°г+в9 +интенсивность напряжений; (11.26)среднее нормальное напряжение. (11.27)Из выражений (11.25), используя соотношения (11.18), по¬
лучим+ (п'28)
Подставляя последнее выражение в зависимость (11.24), на¬
ходим уравнение для определения радиальных напряженийИз выражения (11.28) получаем уравнение для определения
окружных напряжений?(Ца0 = °г+4с\и1= 3ь 1а1 чрЗ4С+4 Г3Тf2•20). (11.30)Из третьего уравнения системы (11.25), учитывая выражение
(11.27), можем получить уравнение для определения осевого на¬
пряжения ог:(П-31)Подставив в уравнение (11.31) зависимость (11.27), получимаЦ + аГ . 412 +7Г(^“6)' (11-32)В уравнениях (11.29), (11.30) и (11.32) величина с осталась
неизвестной, но определить ее можно, используя второе гранич*
ное условие, согласно которому (аг)г=г, ~ Я-Ю-1736 273
В этом случае из выражения (11.19) получим2 — dp-4' si рIt■dp + q. Г^-JLJ Ч P3(11.33)d pПодставляя во второе уравнение системы (11.23) выражение дляо2 согласно зависимости (11.32), получим:1С6 + , 01 , оч
—Г~ + 17(е'“0)P = 2-rlР dpили2 кг,t-S1 «9 + «г Г в,—т_рйГр + j _6prfpj-g-pdp(11.34)Подставляя в выражение (11.34) значения ое и о2 из уравне¬
ний (11.29) и (11.30), а также пренебрегая для рассматривае¬
мого случая величиной силы Р, получим1 Г Р Рв/ Т1*< Р‘■dppdp+j т?с1?а-I Цйгт‘,'+ 4-v(tf+¥M)1+h1+J(11.35)Используя Для преобразования интегралов, входящих в числи¬
тель выражения (11.35), правиле Дирихле, получим
Таким образом, мы располагаем всеми необходимыми зависи¬
мой ими для решения поставленной задачи.Собственно методика расчета напряженно-деформированного
СоетяНия системы «камера сгорания — заряд твердого топлива»
при изменении температуры может быть представлена такой по-
( »■ тщательностью операций [15].Пусть для каждого момента времени нам известна как темпе-
р.пура оболочки камеры сгорания, так и распределение темпера-I ур по толщине заряда твердого топлива. Чтобы найти истинную
тмпчину контактного давления в расчетный момент времени, не¬
обходимо иметь две кривые е£ = е£(<7) и £”г=г =е"(д), пересе¬
чение которых определит qaCT, одновременно являющегося отрыв¬
ным напряжением заряда твердого топлива в месте скрепления
i*m с оболочкой камеры сгорания. Чтобы проводить расчеты для
ршлнчных моментов времени, по зависимости (11.11) строится
герин кривых ев = £е (Я) с шагом At, определяемым необходи¬
мой точностью расчета. Построение зависимости = е" (q)| in заряда твердого топлива ведется для каждого расчетного мо¬
мент времени отдельно. Предельно необходимое значение qлегко
определяется в процессе расчета. Задаваясь рядом значений q
для каждого из них, зная поле температур по толщине заряда
пи'рдого топлива в расчетный момент времени, по формулам(11.33) и (11.36), используя зависимости (11.17), определяем ме-
Годом последовательных приближений величины с и sz [11].И качестве первого приближения величины —, необходимойе/при вычислении соответствующих интегралов в выражениях
(И 33) и (11.36), можно брать значения условного модуля упру--
тети при средней температуре заряда. Дальнейший расчет ве-
лг|си следующим образом! Определив константы с и ez в первом.;
приближении, по формуле (11.20) рассчитывается величина обоб:
инчпюй деформации для ряда слоев по толщине заряда. По зави-
( имостнм напряжений от деформаций для заданного момента
мрсмсии при температуре слоя по найденным величинам щ опре-
iie ииотся соответствующие величины обобщенных напряжений,
1чН1фые и используются для нахождения константы с и sz во
итром приближении.I’ll счеты повторяются до тех пор пока не найдутся величины с
и t, с заданной точностью, после чего из выражения (11.18)
определяется е" при г—г2. Меняя значение q, расчет повторяется
in построения зависимости е" = e"(q) в требуемом диапазоне
тмепспия q. Пересечение графика е" = е" (q) для расчетного
момента времени с графиком s^ = e^(q), построенным при тем¬
пературе оболочки камеры сгорания в тот же момент времени,
определяет величину истинного контактного давления qaст.I кжторяя приведенный выше расчет для найденного <7Ист> из
выражения (11.20) находится величина е* в каждом слое обо¬
лочки. По этой же методике, но используя уже обычные диаграм¬
мы растяжения, определяется для каждого слоя оболочки вели¬
чина е< без учета ползучести. Выделяется собственно деформация
ползучести по зависимостям, приведенным в § 11.2, и находится
«накопленная усталость» в слое в течение принятого шага вре¬
мени. Суммируя «накопленную усталость»за рассматриваемым
отрезок времени (изготовление двигателя, хранение и т. п.), на¬
ходим общую «накопленную усталость», которую и необходим )
учитывать в расчетах других случаев эксплуатации (хранение, ра¬
бота на траектории и др.).При желании по зависимостям (11.29), (11.30) .и (11.32) мож¬
но определить компоненты напряженного состояния заряда в рас¬
сматриваемый момент времени в каждой точке заряда.§ 11.4. НАПРЯЖЕННО-ДЕФОРМИРОВАННОЕ СОСТОЯНИЕ ЗАРЯДА
И КОРПУСА РДТТ ПРИ ХРАНЕНИИРакеты, с РДТТ в большинстве случаев будут храниться в те¬
чение нескольких лет. Естественно, что за столь длительное время
они могут находиться в самых разнообразных условиях нагруже¬
ния и температурного воздействия. Условия хранения могут быть
и такими, что вызовут недопустимые деформации контура заряда
ракеты и появление такого напряженного состояния, которое при¬
ведет к появлению в отдельных местах заряда трещин, выколов
и т. п. В связи с этим важнейшей задачей прочностного расчета
является выявление случаев, могущих впоследствии привести к
аварийному пуску ракеты, и выдача рекомендаций по условиям и
возможным срокам хранения.Задача определения изменения контура внутреннего канала
заряда в процессе хранения ракеты как в горизонтальном, так и
в вертикальном положении должна решаться для случая хране¬
ния заряда при максимально возможной постоянной температуре,
когда скорости ползучести и релаксации будут наибольшими. За¬
дача определения прочности самого скрепленного заряда в раз¬
личных условиях хранения должна решаться’ для случая, когда
температура окружающей среды будет минимальной, а градиент
температур наибольшим (§ 11.3). При решении этих задач. Необ¬
ходимо одновременно определить «накопленную усталость» в каж¬
дом слое заряда твердого топлива, учитывая изменения условий
хранения. Обе задачи должны решаться параллельно.При хранении двигателя в постоянных температурных усло¬
виях в первом приближении оболочку камеры сгорания считают
абсолютно жесткой, что справедливо для оболочек двигателей,
обладающих значительной жесткостью на изгиб в кольцевом на¬
правлении. Обычно это допущение не приводит к значительному
снижению точности расчета, ибо действующие на оболочку силы
малы.276
В расчет будем вводить только массовые силы, полагая, что
напряжения, имевшие место после изготовления двигателя, успели
релаксировать, а вызванная ими «усталость» учтена предыдущим
расчетом (§ 11.3).Ввиду того что расчетные схемы при горизонтальном и верти¬
кальном хранении ракеты резко отличаются одна от другой, ме-
ыдики расчета напряженно-деформированного состояния двига-
Н'ля ракеты на твердом топливе для этих случаев хранения долж¬
ны быть рассмотрены отдельно.Расчет напряженно-деформированного состояния РДТТ
при хранении в горизонтальном положенииРасчет напряженно-деформированного состояния двигателей
ракет на твердом топливе при хранении в горизонтальном поло¬
жении ведем при / = const, полагая, что ракета хранится в специ-
.1.п.ном термостатированном помещении. Считая оболочку камеры
сгорания абсолютно жесткой, определим изменение контура внут¬
реннего канала заряда в процессе хранения, а также величину
■накопленной усталости» по слоям.В качестве расчетной схемы примем длинный заряд, что дает
иозможность ограничиться рассмотрением только плоской дефор¬
мации.Чтобы решить поставленную задачу, воспользуемся методикой,
которая носит довольно общий характер и может быть исполь-
аоиана для топлив с широким диапазоном изменения вязко-упру-
I'lix свойств. Использование в данной методике модельного пред-
сывдения свойств линейного вязко-упругого материала не являет-
си слишком грубым, так как расчет ведется при действии массо¬
вых сил, когда напряжения малы (§ 11.2).Рассматривая твердое топливо как изотропный материал, в
работе [9] зависимость напряжений от деформаций во времени
свидится в конечном итоге к двум группам линейных операторов:
пдной -для приращений напряжений и деформаций; другой —
/1.1 я гидростатического растяжения. С помощью преобразования
Лапласа исходная задача ползучести сводится к эквивалентной
ей упругой задаче, которая решается в функции преобразованных
упругих констант (модуля упругости и коэффициента поперечной
деформации). Предполагается, что наружная поверхность заря-
л.| (г=г2) закреплена и не имеет перемещений, в то время как
на внутренней поверхности заряда (г=г\) отсутствуют напря¬
жения.Массовые силы (у — удельный вес материала заряда) прила*
глются в момент времени t-О и далее остаются постоянными.
Iiikiim образом, упругая задача сводится к плоской задаче с гра¬
ничными условиями смещенного (и в напряжениях и в деформа¬
циях) типа. При ее решении вводится потенциальная функция,
удовлетворяющая уравнению Лапласа, и используется теорема277
Био и общая комплексная теория плоской задачи упругости с гра
личными условиями первого рода, разработанная Н. И. Мусхе-
лишвили [12]. После решения упругой задачи зависимость пере¬
мещений от времени, как и обычно, находится с помощью обрат¬
ного преобразования Лапласа.Поскольку деформация ползучести в пределах малых пласти-
ческих деформаций происходит с незначительным изменением объ¬
ема, без большой погрешности в дальнейших расчетах, коэффи¬
циент поперечной деформации можно полагать равным 0,5. В этом
случае' зависимости перемещений точек заряда во времени могут
быть записаны следующим образом:w — радиальное смещение точки:
v — тангенциальное смещение точки;6 — полярный угол, отсчитываемый от горизонтальной оси
симметрии поперечного сечения заряда;Ix(t) — коэффициент ползучести при чистом растяжении (дефор¬
мация ползучести при единичном постоянном напряже¬
нии, определяемая из эксперимента на чистое растяже¬
ние).Для точек, лежащих на внутренней поверхности заряда (р=1),
из выражений (11.37) получим [9]:Заметим, что члены, входящие в квадратные скобки выражений(11.37), зависят только от геометрии заряда и не зависят от вре¬
мени и типа рассматриваемого топлива. Влияние геометрии заря-(11.37)где а = -у~; рГЗа4 _ 4а3 + 1 ] I1п "+”(? +О" ’ cosfb/i^)- j(11.38)278
/iii па величину этих членов видно из рис. 11.8, где приведены
кривые:С t ! \ I 0 “2 Р4 — 1 I °4 — 1р 2(i4 + o' ра +2(a4 + i)’х t / \ \ а Зр4 +1 , 3 а* + 1
/2 = /2 (р) = In — -— -1- 2 (а4 + 1)2 (а4 + 1)для а = 1,5; 2,0; 2,5; 3,0.Чтобы определить величину «накопленной усталости» по
слоям, запишем деформационные уравнения плоской задачи вРис. 11.8. Зависимости функций fi(p) и ^(р) от гео¬
метрии зарядаполярных координатах. Относительное удлинение в радиальном
направлениидю*' дгю же в тангенциальном направлениидеформация сдвига
Введя обозначение1 dw dv vTrt — ~Г ~W + ~дг Т'3 Yih (О4 г\ + г\(11.39)(11.40)(11.41)(11.42)
279
и подставив величины w(t) и v(l) из выражений (11.37) в урав¬
нения (11.39), (11.40) и (11.41), получим:er = — A sin 0 (rr| + -~И 4- г4
' 1 + '24 2'Л«„ = Д8те^-^ + ^);Г,.V4 4- 2Л cos 6 (rrl И—lLJ-4 2
12(11.43)Для случая плоской задачи при р. = 0,5 величину обобщенной
деформации можно представить в следующем виде:ei = -g- Vsr~ eree + ee+'-TТл-(11.44)Подставляя в выражение (11.44) значения е,, е9 и уг9 из вы¬
ражений (11.43), получим:2 Го 1 , ■, о I *2 — 2arf 0 bd . d2 1 ,s; = X Л I3 L + + ? 2 “ + 7TJ +6 ab_1_J sin2 s|2,(11.45)где a = r\, b = r* + r$; d =Полученные зависимости позволяют определить изменение кон¬
тура заряда для любого момента времени и величину, накоплен¬
ной усталости» при горизонтальном хранении ракеты для любой
течки заряда твердого топлива при заданных сроках и темпера¬
туре хранения. Вычисляя предельно допустимую «накопленную
усталость» при хранении, необходимо исходить не из величины
«пред, полученной во время испытаний твердого топлива в обыч¬
ных условиях растяжения, а из величины епред, полученной при
испытаниях на ползучесть. Это объясняется тем, что разрушение
вследствие ползучести происходит при весьма малых удлинениях,
значительно меньших, чем удлинения при статическом раз¬
рыве.В заключение отметим, что величину предельной деформации
контура заряда можно сделать сколь угодно малой, введя опера¬
цию проворачивания ракеты вокруг продольной оси при хранении
двигателя в горизонтальном положении. Частота проведения этой
операции и определит величину максимальной деформации' кон¬
тура. Однако величина «накопленной усталости» этой операцией
не может быть уменьшена, а она и определит в конечном счете
допустимые сроки хранения ракеты при заданных условиях.280
В связи с изменением физико-механических свойств топлива
при хранении может произойти растрескивание заряда.Это обстоятельство в изложенной методике не отражено.II ряде работ показано, что вероятность появления трещин, пор
н т. п. в результате физико-химической нестабильности топлива
можно снизить чисто механическим путем. Мы имеем в виду
прежде всего предложение Е. Г. Ли [10], предусматривающее хра¬
нение заряда под давлением, близким к рабочему, что препятст¬
вует раскрытию пор и трещин, появляющихся при разложении
топлива.Хранение заряда под давлением не исключает явления ползу¬
чести под действием массовых сил. Поэтому расчет «накопленной
усталости» может быть проведен и в этом случае по изложенной
выше методике. Наличие предварительного напряженно-деформи¬
рованного состояния учитывается при этом коэффициентом ползу¬
чести, который должен определяться в условиях соответственно
измененного эксперимента (в условиях всестороннего гидростати¬
ческого давления).Приближенный расчет напряженно-деформированного состояния
заряда при хранении в вертикальном положенииПри расчете на прочность заряда и для случая вертикального
хранении ракеты оболочку камеры сгорания можно считать абсо-
,потно жесткой, а температурные условия постоянными. В случае
необходимости учет изменения температурных условий может быть
произведен по методике, изложенной в § 11.3.С точки зрения прочностного расчета сформулированная зада¬
чи сводится к расчету напряженно-деформированного состояния
тела вращения, к которому приложены силы, расположенные сим¬
метрично относительно оси этого тела. За ось вращения примем
ось z, а перпендикулярную ей ось обозначим через г. Главные
напряжения, действующие в меридиональной плоскости, обозна¬
чим через ofj.Обозначив через у объемную силу, отнесенную к единице объ¬
ема и действующую в нашем случае только в осевом направле¬
нии, уравнения равновесия можем представить в следующем виде
(рис. I 1.9):Обозначая перемещения точки (z, г) в направлении оси 2
через w, в направлении радиуса через и (в тангенциальном\(11.46)281
направлении перемещение отсутствует), геометрические уравнения
для данного случая представляются в виде:_ dw _ _ ди
дг*г~'дгdw , du~dF ~Ш'(11.47)В точной постановке решить эту задачу исключительно слож¬
но. Только упростив задачу, возможны различные подходы. Так,
например, рассматривая хранение скрепленного с камерой заря-б*ж д%гkis Lrz+-A illтггРис. 11.9. К выводу уравнений равновесияда, имеющего свободные торцы, исходят из того, что вся тефор-
мация ползучести является деформацией сдвига [5]. 3 этом £Лу_
чае уравнение равновесия принимает вид 1 ук (г2 — r\) Z,y + хгг • 2т-rL — Оилит« = — -тт(г —Т")- (11.48)Физическое уравнение запишется следующим образом-
Гм к как в рассматриваемом случае считают tz — &r~ £в =0, из вы¬
ражений (11.47) следует:d'W /-л дни /11 г*л \«=0; 1г = о; Тя«.¥. (и.50)Из выражений (11.50) следует, что величина да не зависит от
координаты z. Подставляя в уравнение (11.49) значения уГ2 и тгг
in выражений (11.48) и (11.50) получим2 ' \ Г У 3s; дгнлиОтсюдаUfr-i)*-. (11.52)111 эксперимента на ползучесть для любого момента времени из-
исстен коэффициент ползучести /j (t), равный отношению Ве¬личина It(t) от геометрии образца не зависит, поэтому, подставив
«МО в выражение (11.52), получим:да==__.|_т/1 (0 j (r — -r)drНЛП© = —-|-ТЛ(0 (-£ — '■?tar)+ с- (11.53)При r = r2 w = 0, отсюда находим величину с^ = 4-тЛ(о(4-^>пл2). (11.54)Подставив выражение (11.54) в выражение (11.53), окончательно
получим:® = - 4тЛ (0 (г? In L55)Поскольку т«—17 (11-50), а е/ = т^-, получим:ctoI I I П111 а » -г-г Уз1КТ"^7'(11.56)283
Подставив выражение (11.55) в выражение (11.56), находим вы¬
ражение для определения обобщенной деформации в любом слое
заряда•/ = -^г-Л(0 Т^--у-)- О1-57)Из выражений (11.55) и (11.57) может быть найдена для лю¬
бого момента времени и для любого слоя заряда как величина
провисания заряда, так и величина «накопленной усталости» в
первом приближении.Уточнение расчетов может быть произведено следующим обра¬
зом. Пусть заряд твердого топлива скреплен с оболочкой камеры
сгорания как по боковой поверхности, так и по верхнему торцу.
Материал скрепляющего слоя хорошо воспринимает как сдвиго¬
вые, так и отрывные усилия. В этом случае к системам уравнений(11.46) и (11.47) могут быть добавлены следующие зависимости,
определяющие граничные условия задачи при заданном способе
крепления заряда к оболочке камеры сгоранияхгг fa 0) = 0; а, (г, 0) = 0;и (г, L) — 0; w (r2, z) = 0;
а,(г1} z)=°; w(r,L)= 0;
с« fa. *0 = °; ■ “fa. г)=0. ,(11.58)Методика расчета, учитывая явление ползучести, строится на
основе гипотезы старения Ю. Н. Работнова. Имея для каждого
момента времени вполне определенную зависимость напряжений
от деформаций, полученную в результате обработки кривых пол-
,зучести, исходная задача сводится к расчету толстостенной трубы
по теории малых упруго-пластических деформаций. Ввиду того
что силовое воздействие на заряд ограничивается действием мас¬
совых сил, которые малы, пренебрегают упругой частью дефор¬
мации, возникающей в момент постановки ракеты в вертикальное
положение. В этом случае физический закон запишется в следую¬
щем виде:1■(11.59)Поскольку для данного момента времени величина const,то, обозначив ~f\i) ~ ^Ф’ выражение (11.59) переписывается
в виде(11.60)Таким образом, исходная задача сводится к упругой задаче,
где фиктивный модуль упругости материала Еф рассчитывается
для каждого момента времени. Используя обычную запись для284
обобщенного закона Гука, можно представить физические урав¬
нения в следующем виде:2G^~ + >.0;Ф дг«, = 20Ф17+Х9;«, = 20,4 + “;^ [ dw. = О'л, -5Т-, / uw б» \Ф ^ дг /где 0= е, + s, + гг — объемное расширение;(11.61)2^0 ф
1 —2[л— коэффициент Ляме;О,2 (1 + |х) ’I* коэффициент Пуассона.Согласно выражениям (11.47) объемное расширение опреде¬
ляется следующей зависимостью:dw . ди . ~дг дг ' г(11.62)Используя выражения (11.61) и (11.63); а также уравнения
равновесия (11.46), синтезирующую систему уравнений можно
мннсать так:d^w , и d2w , и д2и , 1 dw , k., ди h+ ~7йГ + ЛгЛ, + “-дг + ~ U — R3>дг2
д*и
дг21-1 дг'2
д2и
~дг2I д2и . ,+ ^1 "XT + &дг дг
д2да . ди
дг дг г дгk —о.(11.63)7оф •1 —2ц ’ 2 1Точное решение системы дифференциальных уравнений (11.63)
Щчюзможно. На практике оно может быть найдено каким-либо
приближенным методом, например, методом конечных разностей
вариационным методом.Ч, ||.б. НАПРЯЖЕННО-ДЕФОРМИРОВАННОЕ СОСТОЯНИЕ ЗАРЯДА
И КОРПУСА РДТТ ПРИ ТРАНСПОРТИРОВКЕДля ракет на твердом топливе транспортировка снаряженной
I hi кс I ы является одним из основных расчетных случаев. Действи-
uvii.iio, в результате действия сил, зависящих как от конструктив¬
ных параметров транспортных средств (массы тележки и ее рас¬
пределения по длине и ширине, жесткости рессор и баллонов ко-
,пт, числа осей и их расположения относительно центра тяжести),285
так и от других факторов, не зависящих от транспортных средств
(неровности дороги, жесткость дорожного покрытия, скорость
движения и др.), заряд получает некоторую величину «накоплен¬
ной усталости», которая должна быть обязательно учтена при
дальнейшей эксплуатации ракеты (§ 11.2). Рассмотрим методы
ее учета.Колебательные процессы, вызываемые указанными силами,
определяют динамическую нагруженность ракеты в целом, кото¬
рая зависит как от качества дороги, так и от скорости передви¬
жения. Предельная величина динамических нагрузок, воздей¬
ствующих на ракету, обычно снижается до необходимого уровня
путем ограничения скорости передвижения и соответствующим
подбором рессор и амортизаторов.При точных динамических расчетах как ракеты, так и транс¬
портных средств с их амортизаторами необходимо иметь в виду,
что возмущения, возникающие при транспортировке ракеты но
полевым дорогам или по пересеченной местности, являются слу¬
чайными. Эти возмущения можно описать случайными функция¬
ми. Известно, что случайной называется такая функция, которая
в результате опыта может принять тот или иной заранее извест¬
ный конкретный вид. Графические записи случайных процессов
являются отдельными реализациями случайной функции. Сама
случайная функция определяется множеством конкретных реали¬
заций. Зная эти реализации и используя аппарат статистической
динамики, можно определить максимальные значения перегрузок
и вероятность их появления, а следовательно, и рассчитать кор¬
пус ракеты и заряд твердого топлива на эти воздействия. Полный
динамический расчет, учитывая отмеченные особенности, в на¬
стоящее время трудно осуществить как из-за математических
трудностей, с ним связанных, так и из-за недостатка необходимых
статистических данных. Действительно, в качестве исходных дан¬
ных для такого расчета необходимо взять профиль реальной до¬
роги, который является одной конкретной реализацией случайной
функции.Движение транспортной тележки по дорожному профилю дол¬
жно рассматриваться как стационарный случайный процесс, т. е.
процесс, не зависящий от начала отсчета времени.Для качественной и количественной оценки возникающих коле¬
бательных процессов необходимо знать не только характеристики
динамической системы, но и характеристики источника возмуще¬
ний, т. е. необходимо знать спектр возмущений, который зависит
от профиля дороги и от скорости движения. Зная дорожный про¬
филь, можно построить спектр возмущений при заданной скоро¬
сти движения, используя который, можно рассчитать характери¬
стики колебательного процесса.На различных участках дороги имеются неровности самой раз¬
нообразной формы и размеров. В чередованиях неровностей
нельзя установить какой-либо определенной закономерности, сле¬285
довательно, и спектр возмущений па тележку носит случайный
характер, и амплитуды колебаний тележки с ракетой будут
случайными величинами. Это обстоятельство подтверждается
йкспериментальными записями вынужденных колебаний (рис.
11.10) [14].Из графика видно, что колебания не имеют ни постоянных
амплитуд, ни постоянных периодов, т. е. носят случайный харак¬
тер. Поэтому любой дорожный профиль можно описать только
случайной функцией.Чтобы использовать детерминистскую теорию, которая может
уже в настоящее время применяться в инженерной практике, не¬
обходимо установить наиболее часто встречающиеся неровности,
принимаемые в дальнейшем как типичные. Проведенный стати¬
стический анализ профилей различных дорог [14] позволяет уста-Рис. 11.10. Зависимость угловых перемещений 6 тележки от вре¬
мени tповить классификацию дорог по средней квадратичной высоте
неровностей. Общие характеристики дороги в этом случае выра¬
жаются математическим ожиданием, дисперсией и средним квад¬
ратичным высоты неровностей. Определив эти характеристики по
статистической теории, можно рассчитать типичные возмущающие
усилия, действующие на ракету при транспортировке, и вводить
их н обычный динамический расчет.Расчет корпуса ракеты с двигателем на твердом топливе прин¬
ципиально ничем не отличается от аналогичного расчета корпуса
ракеты с ЖРД, однако наличие в корпусе заряда твердого топ¬
лива накладывает на этот расчет свои особенности. Так, напри¬
мер, как уже указывалось в § 11.2, для определения величины
•■накопленной усталости», появляющейся в заряде при транспор-
тровке, необходимо знать не только амплитуды колебаний, но и
их частоты, причем для каждого типичного участка дороги от-
дсльно. Последнее обстоятельство объясняется тем, что пределу
нос число циклов, выдерживаемое зарядом твердого топлива при
циклическом нагружении, зависит не только от амплитуды коле¬
бания, навязываемого заряду корпусом, но и от частоты, с кото*
рой эти колебания происходят.Естественно, что при расчетах колебаний ракеты на твердом
топливе необходимо учитывать способ размещения заряда в кор-287
пусе. Так, при применении заряда, свободно размещенного в ка¬
мере сгорания, имеющей термоизоляционный слой, расчет корпуса
твердотопливной ракеты, как уже указывалось выше, принципи¬
ально. ничем не отличается от соответствующего расчета ракеты
с жидкостным ракетным двигателем. Правда, при применении в
камере сгорания хрупкого термоизоляционного покрытия необхо¬
димо определить деформации поверхностного слоя при макси
мальных прогибах, чтобы выяснить, не превышают ли они допу¬
стимых с точки зрения отслаивания и растрескивания самого по¬
крытия. Заряд твердого топлива проверяется на прочность в этом
случае отдельно.Применяя скрепленный заряд, особенно при изготовлении кор¬
пуса ракеты из стеклопластика, целесообразно при расчете кор¬
пуса ракеты на случай транспортиро!Вки учитывать заряд, ибо
при применении скрепленного заряда создается более жесткая
система (камера сгорания двигателя — заряд твердого топлива),
способная противостоять большим нагрузкам, чем в случае, когда
заряд свободно размещен в корпусе двигателя. Этот учет позво¬
ляет более точно определять «накопленную усталость» заряда,
а также более обоснованно назначать оптимальные толщины сте¬
нок корпуса ракеты и снижать требования по механическим ха
рактеристикам твердого топлива. Как показали эксперимент
[19], заряд твердого топлива, изготовленного на основе перхлората
и тиокола, прочно скрепленный с камерой сгорания, может вы
держивать перегрузки до 100. Заряд, скрепленный с камерой
двигателя, увеличивает жесткость камеры сгорания и тем самым
позволяет в ряде случаев сохранять малую толщину корпуса ра¬
кеты, выбранную из условия работы двигателя на траектории
Роль заряда в увеличении жесткости конструкции различна для
различных типов ракет. Так, для ракет, корпус которых изготои
лен из стали, роль его в увеличении жесткости корпуса практи¬
чески ничтожна; для корпусов ракет, изготовленных из стекло
пластика, для отдельных видов твердого топлива эта роль может
быть существенна.Учитывая влияние заряда на жесткость конструкции, расчг:
можно произвести по следующей методике. Определяется тем ила
иным способом кривая прогиба корпуса ракеты, не учитывая за¬
ряд и полагая его плотноскрепленным со стенкой камеры сгора¬
ния, находится нагрузка, воспринимаемая зарядом. Величина этой
нагрузки вычитается из заданной и расчет повторяется до полу¬
чения удовлетворительного сближения.Обычно, влияние жесткости заряда на жесткость корпуса ра¬
кеты учитывается автоматически в процессе основного расчета по
определению амплитуды при заданной частоте колебаний (ила
величине перегрузки). Рассмотрим методику расчета на при¬
мере.Пусть необходимо определить амплитуду прогиба корпуса,
а следовательно, и скрепленного с ним заряда исходя из задан¬ия
[ных условий транспортировки твердотопливной ракеты длинои
L — 9 м. и диаметром d=0,29 м при толщине стенки камеры сго¬
рания 8 = 0,004 м. Корпус изготовлен из стали. Эпюра нагрузок
и схема транспортировки ракеты показана на рис. 11.11. На
Гэтом же рисунке приведены эпюры перерезывающих сил и из-
'гибающих моментов для рас¬сматриваемого случая нагру¬
жения. Максимальную дина¬
мическую нагрузку, действую¬
щую при транспортировке в
поперечном направлении, учи¬
тываем коэффициентом дина¬
мичности //Птах Полагаем,
что пластические деформации
корпуса ракеты во время транс¬
портировки недопустимы.Пусть предел текучести ат
для стали равен 9-108 н/м2,
то^стат. пред.= 9- 10?min. стат. пред.7435
9-1078,25- 10-= м34 =WWЭпюра нагрузокА■ 10000-ft1630ят!1ИИИ»ИИИИПТ1ИИ1ИЯИ/,/<гг6,76000н,12900н.АГГ 3.85 гЛ.1- я'\х,|Х20.4Эпюра перерезывающих сил5650на минимально допустимый мо¬
мент сопротивления сеченияW/ТПТГГтт^6000НI960»5290НЭпюра изгибающих моментовДля оболочки без учета за¬
ряда топлива7trf2 s 3,14-0,292-0,004W= — Ь = 4 == 2,67 • 10-4 м\
и, следовательно, запас проч¬
ностиРис. 11.11. К расчету коэффициента
запаса прочностишт. с тэт. пред.2,67-10
8,25-10~6: 3,24.Находим далее кривую прогиба, предполагая, что заряд твер¬
дого топлива не воспринимает нагрузку. Попутно рассмотрим,
и какой степени заряд твердого топлива будет увеличивать жест¬
кость корпуса ракеты. Влияние заряда твердого топлива на жест¬
кость конструкции, как указывалось выше, будем учитывать ме*
годом последовательных приближений.Кривая прогиба находится методом начальных параметров
(рис. 11.12).289
Выбирая начало координат на левой опоре, граничные условия
запишем следующим образом:v0 = 0; ср0 = ? Л10 = —2400 нм; Q0 = 5650 к;Яо — W30 —; vx=b = 0.На правой опоре:vx=b ~ + ~£/ [М. ~gf + Qo -|г + -4т] = 0;“ Tib [_М° Ж + Qo Ж + Я01г] •ТоVУIwooo-ft;1630шшzШШРис. 11.12. К расчету кривой прогиба
Прогиб в любом сечении между точками 2 и 3
v = ср0л; + Г/И0 -Tjp + Q0 -gj- + Яо irj •Для рассматриваемого случая:£ = 2,1 • 1011 W = 2,67 • 10~4 ж3;’ м2 ’ ’7 = ^-8 = 1,37- 10-5 ^ = 6,7 ж; <р0 = — 0,0017.Данные расчета кривой прогиба сведены в табл. 11.1, а кри¬
вая прогиба помещена на рис. 11.13.Таблица 11.1
Зависимость величины прогиба v от координаты хX, м00,511,52,03,04,05,06,06,7v • 10—3, м00,871,732,533,23,983,892,931,320?90
%Кривая прогибов практически соответствует эпюре прогибов
балки на двух опорах под равномерной нагрузкой. Известно, что
для такой балки5 qb*v384£УИЛИ3S4EIv„5 b'Зная максимальный прогиб, полученный конструкцией и, до¬
пуская, что заряд твердого топлива следит за кривой прогиба
корпуса, можно определить ту нагрузку, которую воспринимает
им себя заряд твердого и. 10-з м
топлива.Для рассматриваемого
случая внутренний ра¬
диус заряда /'в = 0,03 м;
наружный — гн = 0,145 м\
момент инерции /т==-3,56-10~~4 м4. Считая
модуль упругости твер-
того топлива Ят =*=4-109 н/м2, получимq = 28 — .1 я,гЭту нагрузку необходимо вычесть из заданной (1630 н/м) и
повторять расчет до тех пор, пока не получим удовлетворитель¬
ного сближения по распределению удельной нагрузки между ка¬
мерой и топливом. Сближения провёряются по значениям макси¬
мального момента от нагрузок.Определив амплитуду колебания заряда при заданной частоте
(пли коэффициенте перегрузки) и зная экспериментально найден¬
ное предельное число циклов при определенной амплитуде и ча¬
стоте колебаний, а также количество циклов колебаний, сооб¬
щенное ракете на данном участке транспортировки, можно опре¬
делить «накопленную усталость»(Яц. расч. \Суммируя величины «накопленной усталости» по различным
ытапам транспортировки, получим ее величинуП'C'l / па. расч. \vs= —~ Ь*ВЯ \ »ц. пред. ' i291
которую и надо учитывать при расчетах общей величины «накоп¬
ленной усталости», определяемой на протяжении всего времени
службы твердотопливной ракеты (§ 11.2). Естественно, что в этих
расчетах при определении величины пц. пред, { необходимо учитывать
влияние отдыха и разброса экспериментальных данных.§ 11.6. РАСЧЕТ НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ
ЗАРЯДА И ОБОЛОЧКИ КАМЕРЫ СГОРАНИЯ НА ТРАЕКТОРИИЧтобы рассчитать напряженно-деформированное состояние,
необходимо рассматривать РДТТ как скрепленную с зарядом обо¬
лочку бесконечной длины, находящуюся под действием внутрен¬
него давления продуктов сгорания заряда. Внутреннее давление
может вызывать пластические деформации заряда, а оболочка
будет работать в пределах упругих деформаций, хотя в отдель¬
ных случаях возможно появление в ней и упруго-пластических
деформаций.При расчетах будем считать геометрические размеры оболоч¬
ки и заряда известными, однако это не исключает в случае необхо¬
димости определения этих размеров по заданному коэффициенту
запаса прочности системы «камера сгорания — заряд твердого
топлива». Кроме того, полагаем, что известны аналитические вы¬
ражения, аппроксимирующие диаграммы растяжения материала
заряда, модуль упругости материала оболочки, закон горения
твердого топлива и закон изменения перегрузок на активном уча¬
стке траектории.Ввиду большой скорости горения топлива и малой его тепло-грев только очень тонкого слоя, уже вступившего в химическую
реакцию, и температура топлива при работе двигателя остается
практически постоянной. Оболочка камеры сгорания защищается
от воздействия высокой температуры продуктов горения самим
зарядом. Поэтому при расчете напряженно-деформированного со¬
стояния как оболочки камеры сгорания, так и- заряда влияние
температуры учитываться не будет [1].Влиянием объемных сил заряда на его напряженно-деформи¬
рованное состояние ввиду их малости будем пренебрегать. Дей¬
ствие инерционных сил заряда на оболочку камеры сгорания бу¬
дем учитывать суммарно, полагая эти силы приложенными не по
всей длине оболочки, а к сопловому блоку, что идет в запас проч¬
ности оболочки камеры сгорания. Для вывода зависимостей вве¬
дем следующие обозначения:р—давление в камере сгорания;
г,_0—внутренний радиус заряда до начала горения;г,— текущий внутренний радиус при горении заряда;
г—радиус произвольной точки по толщине заряда;проводностив процессе горения происходит про-292
г2—наружный радиус заряда;
гз— средний радиус оболочки камеры сгорания;§7,—г,—гх—толщина горящего свода заряда в произвольный
момент времени;8К—толщина стенки камеры сгорания;Мг— масса топлива в рассматриваемый момент времени;
п—коэффициент перегрузки;<7—контактное давление, возникающее в процессе работы
между стенкой камеры сгорания и зарядом.Таким образом, расчет напряженно-деформированного состоя¬
ния заряда сводится к расчету симметричной деформации толсто¬
стенной трубы, находящейся под действием внутреннего (р) и
наружного (q) давлений при осевой силе, возникающей от дей-
гтвия на торец заряда давления р; а расчет камеры сгорания
пюдится к тому, чтобы рассчитать тонкостенную оболочку под
действием внутреннего давления q и осевой силы, возникающей
иг действия давления продуктов горения на сопловой блок и осе¬
ни х сил инерции, переданных на него со стороны заряда. Кон¬
тактное давление q надо определить при расчете.Приближенный расчет напряженно-деформированного
состояния оболочки камеры сгоранияРассмотрим напряженно-деформированное состояние оболочки
камеры сгорания, обозначив ось координат, параллельную оси
оболочки, через 2, а касательную к окружности — через 8.Уравнения равновесия для камеры сгорания по безмоментной
Теории запишутся следующим образом:— на ось zоЦ = -тДг, С11-64)г 2пг3Ък ’ v ’' где N = kp + MTgRti (k — коэффициент пропорциональности, посто¬
янный для данной геометрии оболочки; gR — ускорение силы тя¬
жести на уровне моря);— на ось 0(11.65)Величины*“ и %ниями о* и а* ПрИ условии изотропности1ЛНИСИМОСТЫОв пределах упругости связаны с напряже-материала оболочкиГ:, ("в? = £7 (°5 + °е>(11.66)293■
Таким образом, зная геометрию и материал оболочки (г3, 8„,
|лк, Ек) Для данного момента времени (известны величины р, /с,
Мт, п) и учитывая, что величина контактного давления q найден-!
из дополнительных условий, можно определить как напряженное,
так и деформированное состояния оболочки камеры сгорания.Для оценки прочности целесообразно вычислить обобщенное
напряжение оь которое и сравнить с допускаемым напряже¬
нием [о]В. случае если оболочка камеры сгорания работает за преде¬
лом упругости, вместо уравнений (11.66) можно записать:вместо уравнений равновесия (11.64) и (11.65) можем записатьСвязь между величинами о; и определяется диаграммой рас¬
тяжения металла при соответствующей температуре или аппрок¬
симирующей диаграмму растяжения аналитической зависимо¬
стью.Исключая из выражений (11.71) и (11.72) давление q, получимПодставляя выражение (11.68) в выражение (11.73),будем иметь:(11.67)(11.68)Как и обычно(11.69)Полагая осевую силу N = k\q,гдеkp + Mjgpit(11.70)(11.71)(11.72)(11.73)(11.74)294
или(11.75)(11.76)Выражение для обобщенной деформации г,; (11.69) после под¬
становки в него выражения (11.75) можно записать следующим
Образом:и принятого значения q.Подставляя выражение (11.75) в первое уравнение системы
(11.68), получимТаким образом, при изменении давления q величины о; и гг
являются для данного момента времени функциями только е£.Методика расчета складывается из следующих операций. Зная
толщину оболочки камеры сгорания 8К и ее температуру, а также
величины Мт и п для каждого момента времени, задаемся рядом
значений Д/з, для каждого из которых определяемПо номограммам (речь о них пойдет ниже) или по формуле
(11.77) и зависимости a; = oi(s(-), используя выражение (11.78),
определяем для каждой принятой величины величину -о*.Далее из выражения (11.72) находим величину qy соответст¬
вующую принятому Аг3. Строим график q = q(Ar3), на котором
наносим рабочее давление, исходя из предельной величины интен¬
сивности напряжений (ог = оь).Коэффициент запаса прочности оболочки в данный момент
времени гПовторяя расчет для различных моментов времени, находим
швисимость 1^3 = 143(1) и по ней величину т)аты», которую и срав¬
ниваем с потребной величиной запаса прочности. Если необхо¬
димо, то изменяем толщину стенки камеры сгорания и, повторяя
расчеты, добиваемся получения заданной величины запаса проч¬
ности.(11.78)9пред.295
Как указывалось выше, чтобы определить величину а* при
выбранном значении е* строят номограммы, крайне упрощаю
шие расчет особенно в том случае, когда необходимо провести
серию расчетов для одного материала. Такая система номограмм
должна состоять из четырех серий графиков:а) график для определения по выбранному при извесг
ном значении Вн; график строится на основе зависимости е< =
= Cejf и не зависит от физических свойств материала обо¬
лочки;б) график для определения вспомогательной функции'р(£' = тг; 8в) =который является обычным графиком для умножения двух вели¬
чин;в) график для определения” -тf •: (1 + 4-®)=* №)•>eio7%tz'Рис. 11.14. Номограмма для расчета величины а,,к = ^а(Е^)Все эти графики могут быть использованы при построении их
в соответствующих пределах для любого конструкционного мате¬
риала. 4efBepTbift график представляет собой зависимость секу¬
щего модуля от обобщенной деформации при различных темпера¬
турах и должен строиться для каждого конструкционного мате¬
риала отдельно. Для наиболее распространенных конструкцион¬
ных материалов эти зависимости приведены в работе [3]. Объ¬
единив графики а, б, в и график зависимости Е'(s,) для данного
материала, получим искомую номограмму, приведенную нат
рис. 11.14. Ход вычислений показан на номограмме стрелками.
Общий порядок расчета при пользовании номограммами указан
мыше.В настоящее врехмя перспективным материалом для изготовле¬
ния корпусов РДТТ считается стеклопластик. При приближенном
расчете напряженно-деформированного состояния оболочки ка¬
меры сгорания, изготовленной из стеклопластика, можно исходить
из следующих соображений.Оболочка камеры сгорания, изготовленная из стеклопластика,
нсегда работает в пределах упругих деформаций, так как появле¬
ние в стеклопластике пластических деформаций приводит практи¬
чески к немедленному его разрушению (пределы 00,2 и о& практи¬
чески совпадают). При инженерных расчетах оболочки достаточ¬
но учитывать анизотропность по направлениям (осевое и окруж¬
ное) и можно не учитывать анизотропность по слоям, ориенти¬
руясь на средние характеристики материала по сечению.Анизотропность в осевом и окружном направлениях можно
учесть специальным экспериментом, результаты которого значи¬
тельно упрощают расчеты. Экспериментирование проводится на
трубчатых образцах на машине, предназначенной для испытаний
образцов при сложном нагружении.По результатам эксперимента строится серия диаграмм о; =ог(б;) при различном отношении —. Краевыми диаграммамиаоявляются: диаграмма, построенная при простом растяжении труб¬
чатого образца (о4=0), и диаграмма, полученная в результате
приложения только окружных усилий (о2 = 0). Промежуточные
диаграммы получаются при различных отношениях^-. Одна изтаких серий диаграмм приведена на рис. 11.15.Расчет оболочки, изготовленной из стеклопластика, ввиду
практического совпадения пределов упругости и прочности, целе¬
сообразнее всего вести по методу разрушающих нагрузок. Сама
методика расчета слагается из следующих операций.Разделив выражение (11.71) на выражение (11.72), по¬
лучимЗадаваясь рядом различных значений величин q, а это ведет
к изменению величин kx, и, следовательно, а (формула 11.79),'
с помощью диаграмм, подобных приведенным на рис. 11.15, опре¬
деляем предельные величины а, соответствующие величинам оь
при найденных значениях а. По результатам расчетов строим
график297
Рис. 11.15. Диаграммы 0t=*0i(sf) для камер сгорания, выполненных изстеклопластикаПользуясь выражением (11.81), строим зависимость«,-«,(?)• (П-82)Совмещая зависимости о,(<?) и оь(<?), находим в точке их пере¬
сечения то давление, при котором происходит, разрушение обо¬
лочки.Зная истинное контактное давление, которое действует на обо¬
лочку в данный момент времени, определим запас прочности обо’
лочкиг‘‘~ТТ~- <а83>‘/действПовторяя расчет для различных моментов времени, опреде¬
ляем зависимость г]3=г]з(т) и Tjamin! полученный результат срав-298Согласно выражению (11.69) имеем= КН)2-°Х + К)2 (11 -80)После подстановки выражения (11.71) в выражение (11.80) по¬
лучим— Aq, (11.81)где Л = Ка3 — а. + а3;
Ниваем с потребным запасом прочности, изменяем толщину стен¬
ки камеры сгорания и повторяем расчеты до тех пор, пока не по¬
лучим требуемую ВеЛИЧИНу Yjamin.Расчет напряженно-деформированного состояния двигателя
при учете реологических характеристик материала зарядаОставим в силе все предположения, упрощающие расчет си¬
стемы «заряд — камера сгорания» и рассчитаем напряженно-де¬
формированное состояние двигателя, учитывая реологические
свойства материала заряда. Предположим, что в момент пуска
температурное поле заряда равномерное.Неравномерность температурного поля заряда может учиты¬
ваться по методике, изложенной в § 11.3, однако пуск ракеты
с неравномерным полем температур в заряде маловероятен, по-
мому в данном расчете мы его учитывать не будем. За основу
расчета возьмем методику, приведенную в § 11.3, считая, что
между напряжениями и деформациями имеются известные из
уксперимента нелинейные связи, которые заданы для различных
температур либо графиками, либо аппроксимирующими их функ¬
циями (§ 11.2). Предполагая, что в начальный момент времени
ноле напряжений в заряде и оболочке камеры сгорания равно
нулю, а напряжения, возникающие в процессе изготовления и хра¬
пения, успели отрелаксировать, возьмем за основу учета ползуче¬
сти в процессе работы двигателя, как и в § 11.3, гипотезу
10. Н. Работнова [13]. Накопившуюся в результате релаксации
напряжений, возникших в процессе хранения заряда, «усталость»
будем учитывать снижением предельно допустимых относитель¬
ных деформаций.Не изменяя идею нахождения контактного давления методом
последовательных приближений или методом графического по¬
строения (§ 11.3), получаем возможность, проводя расчеты на¬
пряженно-деформированного состояния системы «заряд твер¬
дого топлива — камера сгорания», учитывая реологические
явления, оставлять без изменений изложенную выше методику
расчета напряженно-деформированного состояния камеры сго¬
рания.Методика расчета заряда твердого топлива может быть пред¬
ставлена следующим образом. Как и раньше (§ 11.3), ведем рас¬
чет для фиксированного момента времени, используя в каждом
случае соответствующие зависимости полученные обработ¬кой кривых ползучести для этого же момента времени. Зависимо¬
сти окружной ге и радиальной sr деформаций от радиального
перемещения w и радиуса г имеют видюdw
Допустим, что деформирование материала заряда происходит
без изменения объема. Отсюда следует, чтоe* + e0>+e, = 0. _ (11.85)Поскольку заряд плотно скреплен с камерой сгорания, а осе¬
вые деформации оболочки камеры сгорания незначительны, ве¬
личину £г для заряда можно полагать равной нулю. Однако более
общим будет случай, когда скрепляющий слой плохо восприни¬
мает сдвиговые деформации и допускает осевое деформирование
заряда под действием сил давления, приложенных к его торцу.
Изложим методику расчета напряженно-деформированного со¬
стояния для второго случая (sz = const); полагая sz = 0, получим
все необходимые зависимости для условий, когда скрепляющий
слой ведет себя одинаково как в радиальном, так и в осевом на¬
правлениях.Итак, полагая &г — const (плЪское деформированное состояние
заряда), из выражений (11.84) и (11.85) имеемdw w~dF + ~T~ ~егИнтегрируя это выражение, учитывая что bz = const, получимw — -у "2”. (П.86)где С — постоянная интегрирования.Подставляя значение w из выражения (11.86) в формулы
(11.84), получим:С е.Введем безразмерные величиныг . rtР Г г ' Г3(11.87)(11.88)Подставив обозначения (11.88) в выражение (11.87), имеем:(11.89)2 •Интенсивность деформаций для нашей задачи определяется вы¬
ражениемн = V (£«— £*)3 + ^ ~ *г)' +\ег — еъУ300
или после подстановки сюда зависимостей (11.89)*<= Kt-f + 4' <u-90>При плоской осесимметричной деформации уравнения равнове¬
сия имеют вид:‘ — в проекции на радиусcl<sr . 17г 59dr•— в проекции на ось трубыf — 0; (П.91)• 22ir | ozrdr — P.'Интенсивность контурной нагрузки на внутреннем радиусе р,
а на наружном радиусе q. Таким образом:(<Ur, = -7>; Ы=,. = -?-Введя безразмерные величины (11.88), зависимости (11.91) за¬
пишутся следующим образом:dnr I п )Р = ^ |1 | ' (11.92)2тиr\ j сггР dp = P. j
« )Из первого уравнения системы (11.92), учитывая что (^r)r-ri~
= —р, следует: ,°r+P= \J4r-d?- (11.93)Зависимости компонентов деформаций от компонентов напря¬
жений в нашем случае имеют вид:
где az — осевое напряжение;°i = YY V(J9 — °г)2 + — °r)2 + (ar — ae)2интенсивность напряжений; (11.95)<Tq “f* ~f~———о среднее напряжение (нормальное). (11.96).Из выражений (11.94), используя соотношения (11.89), после
несложных преобразований получим4-ff- (и-97)Подставляя выражение (11.97) в выражение (11.93), получим
уравнение для определения радиальных напряженийрИз выражения (11.97) получаем зависимость для определения
окружных напряжений°. = Т cj’vT- + TT“?—* (“'99)аИз третьего уравнения системы (11.94), учитывая выражение
(11.96), получаем зависимость для определения осевого напряже¬
ния Oz^9 1 /11 1 г\г\\°z 1 (11.100)В выражениях (11.98) —(11.100) величины sz и С остались
неизвестными. Определим постоянную С, используя второе гра¬
ничное условие, согласно которому (°г)е-1 = —Я- Из выражения
(11.98) имеем1илип Р — Ч(11.101)4 Г <si dp3 J ч о3302
Подставляя во второе уравнение системы (11.92) зависимость
для о2 из выражения (11.100), получимdp = Р, (11.102)гдеР = —ър(г\ — г\) или Р = — ърг\(\ — а2). (11.103)
Подставив выражение (11.103) в выражение (11.102), получим\ 0,1 2 PrfP + j 77р= — -5-Р (! — ®2),или 1- я(1 — «2)«г = т • (11.104)1ТГ е rfpаПодставляя в выражение (11.104) значения ог и ов из выраже¬
ний (11.98) и (11.99), получимег = i-j . (11.105)J v ^аВозьмем по частям интеграла аПриняв= ,1 ITT1 *“1 d?\K = p: ^ =а аполучима а а аа а а303
Применяя к последним двум кратным интегралам формулу пр>
образования ДирихлеXi Xt XiJrfx (Xl — x)x 1 • /(x)dt,X разполучим1 p1 1 1If 2 J eI p3 J £/ p2 2 ,J Si p Г _Si_ _dp_ Г gf dp L CiL I Г B’t dp 1_ (' <Sj dp— J e/ p3 J „I о \ „а “M .. „a1Г <г/ dp1Г о/ dp2 ,) е1 р32 ,) РПодставляя полученное значение в выражение (11.105), имеем:~сЫ*£-3 v £/ р . (11.Ю6)-ITPdPаВнося в выражение (11.106) значение С из выражения (11.101),
окончательно получим—\-{р—я)(11.107)Полученная совокупность уравнений дает возможность решить
поставленную задачу. Чтобы вычислить постоянные вг и С, можно
воспользоваться методом последовательных приближений, пола¬
гая, что в первом приближении существует линейная зависимость
между интенсивностью напряжений и интенсивностью деформа¬
ций Qi=Eti, где модуль упругости Е является известной функцией
безразмерного радиуса.Заметим, что полученной совокупностью зависимостей можно
воспользоваться и для расчета напряженно-деформированного со
стояния системы «заряд твердого топлива — камера сгорания», не304
учитывая реологические характеристики твердого топлива. В этом
случае, имея зависимости о;~ег Для определенной скорости де¬
формирования, методику расчета е9 = ей(у) можно построить сле¬
дующим образом [11].Задаваясь определенным значением контактного давления q для
принятого момента времени, из выражений (11.107) и (11.101)
иаходим величины s2 и С в первом приближении, полагая оi—Ещ.
Затем по формуле (11.90) вычисляем интенсивность деформации
в зависимости от радиуса. По графику зависимости о; = ог (ег) или
пппроксимирующему его выражению находим интенсивность на¬
пряжений в функции радиуса. Вновь подсчитываем интегралы в
выражениях (11.101) и (11.107) и находим постоянные е2 и С во
втором приближении. Повторяем расчет до получения ez и С с тре¬
буемой точностью.По первому уравнению системы (11.87) находим величину ев
при принятом значении q. Расчет повторяем для других значенийq
п других времен. Дальнейшая последовательность расчета не от¬
личается от принятой в § 11.3. После того как определим истин¬
ное значение контактного давления q и постоянных г2 и С, для
найденного q с заданной точностью по формуле (11.90) вновь уста¬
навливаем зависимость интенсивности деформации от радиуса, а
с помощью зависимости аг=/(£г-)—зависимость интенсивности на¬
пряжений от радиуса. Разрушение материала заряда наступает
при достижении е* значения еПред в каком-либо месте заряда.При учете реологических характеристик материала заряда по
гипотезе старения Ю. IT. Работнова методика расчета отличается
от изложенной выше только тем, что для каждого расчетного мо¬
мента времени необходимо пользоваться каждый раз своей, по¬
лученной в результате обработки кривых ползучести, зависимо¬
стью напряжений от деформаций.ЛИТЕРАТУРА К ГЛ. XI1. Баррер М., Жом отт А., Be бек Б. Ф., Ванденкеркхове Ж.
Ракетные двигатели. Оборонгиз, 1962.2. Б е з у х о в Н. И. Теория упругости и пластичности. Гостехиздат, 1963.3. Безухов Н. И., Бажанов В. Л., Гольденблат И. И., Н и-
колаенко Н. А., С и н ю к о в А. М. Расчеты на прочность, устойчивость и
колебания в условиях высоких температур. Машгиз, 1965.4. Биргер И. А., Шор Б. Ф., Шнейдерович Р. М. Расчет на
прочность деталей машин. Машгиз, 1959.5. Вильямс М. Л. Влияние механических свойств на конструкцию дви¬
гателей на твердом топливе. Исследование ракетных двигателей на твердом
топливе, Изд. ин. лпт., 1963.6. Г о л ь д е н б л а т И. И., Николаенко Н. А. Теория ползучести
строительных материалов и ее приложения. Гос. изд. лит. по строительству,
нрхитектуре и строительным материалам, 1960.7. Гуль В. Е. Прочность полимеров. Химиздат, 1964.8. Исследование ракетных двигателей на твердом топливе. Изд, ин. лит.,
1063.11-1736305
9. Лайнис Ж. Напряжения и деформации, возникающие в твердых той
ливах при хранении, «Ракетная техника», № 5, 1962.10. Л и Е. Г. Подавление растрескивания бронированных ракетных пори
ховых шашек. «Ракетная техника», № 6, 1962.11. Малинин Н Н. Пластические деформации и ползучесть целы-юко
ванных роторов турбомашин. Расчеты на прочность. Сборник № 6, Мани и i,
1960.12. Мусхелишвили Н. И. Некоторые основные проблемы математиче¬
ской теории упругости. ПММ, № 8, 1952.13. Работнов Ю. Н. Некоторые вопросы теории ползучести. Вестник
МГУ, 1948, № 10,14. С и л аев А. А. Спектральная теория подрессоривания транспортныч
машин. Машгиз, 1963.15. Феодосьев В. И. Прочность теплонапряженных узлов жидкостных
ракетных двигателей. Оборонгиз, 1963.16. Ферри Дж. Вязко-упругие свойства полимеров. Изд. ин. лит., 196317. Missiles and Rockets, № 8, 1958.18. Williams M. L., The Strain Analysis of Solid Propellant Rockel
Grains, I. Aeronaut, Sci (August, 1960).19. Bills K. W., Svob G. I., Planck R. W., Eriksson T. L., A Cu¬
mulative— Damage Concept for Propellant—Liner Bonds and Its Application to
Solid Rocket Motors. „А1АА 6th Solid Propellant Rocket Conference", Paper
№ 65—191, 1-13.20. Ulrich I. R., Photographic Strain — Measurement Technique. „А1АА
6th Solid Propellant Rocket Conference1*, Paper № 65—170, 1—20.
РАЗДЕЛ IV
СИСТЕМЫ РАКЕТ И ИХ РАСЧЕТГЛАВА XIIКОНСТРУКЦИЯ И РАСЧЕТ ОРГАНОВ УПРАВЛЕНИЯ§ 12.1. ПОНЯТИЕ О ВОЗМУЩАЮЩИХ СИЛАХ И МОМЕНТАХВозмущающими называют силы и моменты, которые вызывают
шк юнения центра масс ракеты от программной траектории и уг-
Iн111>10 ее отклонения по тангажу, рысканию и крену. Большинство
них возмущений является случайным, знание которых необхо¬
димо для расчета управляемости и органов управления ракеты.Возмущающие силы и моменты, вызванные действием ветраВо время полета ракеты на активном участке траектории на
Псе действуют горизонтальный ветер, скорость которого сравни-
|с IM10 слабо меняется с высотой («по¬
стоянный» ветер), а также порывы
пггра, направление которых считается
произвольным.Горизонтальный «постоянный» ве-
|ср обычно задается в виде графика
скорости его в зависимости от высоты.Для порывов ветра принимается ги¬
потетический расчетный график типа|рт|)ика, показанного на рис. 12.1. При этом считается, что ампли-
iy(i.a порыва Wmax. а толщина порыва2 Я = (4 — 6) ишах*При таких характеристиках порыва ветра его длительность х бу¬
дет зависеть от скорости ракеты V и равна2 Нт = Т'11*307
Определим силы и моменты от горизонтального ветра отдельно
по углу тангажа и рыскания.Для угла тангажа силы и моменты можно определить по за¬
висимостям (см. рис. 12.2):FB* = cySaA* в; (12.1)М„ = с* q'SH Дав (хд — хи). (12.2)Для угла рыскания силы и моменты вычисляются по форму¬
лам:F,9 = ^?"5МДРВ;МВР = c^q"SM (хл - х„)А?в.КрГ'ер(12.3)(12.4)гдеРис. 12.2. Ветровые возмущенияВ приведенных выражениях:. I и sin 0А«. = arc tg ^ + f< cos Q;Дрв = агс tg-y',
q' — + и* 4- 2и V cosf (иг+П0—угол наклона вектора скорости ракеты к горизонту;
с*—производная коэффициента нормальной силы по углу
атаки о;— площадь миделя ракеты;Яд— абсцисса центра давления;308
хм—абсцисса центра масс;
р —плотность воздуха.Сила и момент в приземном слое соответственно равны:МВ Fg (ХцО -^н))(12.5)(12.6)гдеcXa_gQO — коэффициент силы лобового сопротивления приобдуве ракеты под углом 90°;хя0— абсцисса центра давления в начале полета ра¬
кеты.Как видно из выраже¬
ний (12.1) — (12.4), ветро-
мыо возмущения зависят от
1коростей ветра и ракеты
и иысоты полета; а момент
г щи н от расстояния между
центрами давления и масс
Пн рис. 12.3 приведены гра
фики сил и моментов, дей
I шующих на гипотетиче
| кVI0 ракету на первом ак
шипом участке траектории
Ни рис. 12.4 представлены аналогичные возмущения на втором ак¬
тином участке.11а первом активном участке максимальные ветровые возму¬
щении, как правило, действуют в период наибольшего скоростногоFвт
Н100090 100 110 120 130 t]ceH
Рис. 12.4. Графики возмущенийинin 1|>п воздуха, на втором — они наибольшие в начале полета
итроЛ ступени.Мтмущающие сила и момент от порыва ветра определяются
и" И1.1 логичным зависимостям, только считается, что скорость
' ■ I )■ .1 меняется (рис. 12.1) по законуU —11 ти sin 2jjt, (12.7)309
Чтобы рассчитать ветровые возмущения по приведенным зави¬
симостям, необходимо знать, помимо аэродинамических характе
ристик, как изменяется программный угол б, скорость и высота по¬
лета ракеты.Возмущающие силы и моменты от погрешностей изготовления
и монтажа двигателя и корпуса ракетыОбычно возмущения, вызванные производственными погреш¬
ностями, подразделяют на две группы: возмущения от погрешно¬
стей двигателя и возмущения от погрешностей корпуса ракеты.Причинами появления
возмущающих сил и момен¬
тов, связанными с погрешно¬
стями двигателя, являются:— перекосы и смещения
геометрических осей камер
сгорания относительно их
установочной базы;— перекос и смещение
установочной базы двигате¬
ля относительно номиналь¬
ного положения;— разнотяг камер сгора¬
ния;— перекосы геометрических осей камер сгорания, обусловлен¬
ные упругой деформацией ракеты.Для ракет с РДТТ основными причинами указанных возмуще¬
ний являются: перекос и смещение геометрических осей сопел и
разнотяг сопел РДТТ.Силы и моменты, вызванные погрешностями двигателя, опре¬
деляются простыми выражениями, вид которых зависит от числа
и компоновки камер сгорания.Например, возмущающие сила и момент перекоса и смещения
установочной базы двигателя равны (рис. 12.5):Fn = Pr\i, |Мп = Pyi, (*дв — *н); (12.8)УИСМ = Ре2, )где Р — тяга двигателя;л:дв — расстояние от вершины ракеты до опорного шпангоута
двигателя.Основными причинами появления возмущающих сил и момен¬
тов, связанными с погрешностями корпуса ракеты, являются:— угловая и линейная несоосность отсеков;— смещение центра масс ракеты в результате весовой асим¬
метрии;— погрешности монтажа стабилизаторов,Рис. 12.5. К расчету возмущений от произ¬
водственных погрешностейзю
Силы н моменты от угловой несоосности отсеков можно опре-
п'лить из следующих соотношений:^д. = К (Свд^-Дахв)* + (^Дя)2 + (спГЧ^мАагч)3; (12.9)л/*. = К [СА(^т)ДЧ2+[^]2+Кч?^„(^гч-^)Ч,]2.(12.10)|дц Да—перекос линии действия тяги относительно базо¬вой оси ракеты;Дагч— перекос геометрической оси головгного отсека от¬
носительно базовой оси ракеты;Дахв— перекос оси хвостового отсека относительно ба¬
зовой оси;Д2п— поперечное смещение центра масс ракеты отно¬
сительно линии действия тяги;
х,;, 11 Ххв— координаты центров давления головного и хво¬
стового отсеков.Перекосы Да, Дахв и Дагч определяются по геометрическим
интим отсеков с учетом допусков на перекосы стыковочных
ишлнгоутов; при определении смещения AZn дополнительно учи-
и.шлются массы отдельных отсеков ракеты.Силы и моменты от линейной несоосности отсеков:F*=y (ЯД«„)2 + (Сч^мД«гч„)2 ; (12.11)Мн = у (PAZHy + [с*гч gSu дагчн (х[Ч - *м)]* , (12.12)и Дан — перекос линии действия тяги относительно оси раке¬
ты, обусловленный линейной несоосностью отсеков;Дее,, — перекос геометрической оси головного отсека отно¬
сительно базовой оси, обусловленный линейной не¬
соосностью отсеков;ДZ„— поперечное смещение центра масс ракеты относи¬
тельно линии действия тяги в результате линейной
несоосности отсеков.Чтобы определить Fn и Мя, необходимо знать допуски на ли-
III'(inую песоосность отсеков ракеты.Hi смущающий момент от весовой асимметрии ракеты можно
HI ре 1|сЛ ить по зависимостиM^PAZb, (12.13)hi Д/, —поперечное смещение центра масс ракеты в полете,
определяемое по формулеД£а = ДД "кух--аст311
AZac — поперечное смещение центра масс сухой ракеты,
обусловленное весовой асимметрией;/исух—масса сухой ракеты;
т — текущая масса ракеты.Поперечное смещение центра масс сухой ракеты обычно опре¬
деляется на балансировочном стенде. Оно может быть также рас¬
считано аналитически при эскизном проектировании ракеты.Возмущающие сила и момент, вызванные погрешностями уста¬
новки стабилизаторов, определяются по формулам:^сТ = И_2_с«ст^мДаС1; (12.14)МСТ = Kf- c*nCT qS„ Даст (хст — хи), (12.15)где Даст — перекос стабилизатора;*ст— координата центра давления стабилизатораF, м/сек9Рис. 12.6. Графики ветровых и производствен¬
ных возмущенийВозмущающий момент по кренуМсткр = Ст^мГстДаст, (12.16)где Гот — плечо подъемной силы стабилизатора.Иногда вместо возмущающей силы и момента определяют нор¬
мальное ускорение центра масс и угловое ускорение ракеты по
формулам:где / —текущий момент инерции ракеты.На рис. 12.6 показаны типичные ускорения центра масс для
ракеты с ЖРД на первом активном участке, вызванные как ве¬
тром, так и суммарными производственными погрешностями. Как
видно из рис. 12.6, наибольшие возмущения от погрешностей по¬
лучаются к концу первого активного участка; она составляют не¬
большую долю от наибольшего ветрового возмущения.312
Характер изменения углового ускорения от возмущений и ве¬
трового воздействия показаны на рис. 12.7. Как видно из рис. 12.7,
суммарные возмущения от производственных погрешностей дости¬
гают максимума к концу первого активного участка и состав¬
ляют при этом небольшую долю от наибольшего ветрового возму¬
щения.Для второго активного участка полета возмущения от произ¬
водственных погрешностей в отличие от первого соизмеримы с ве¬
тровыми и даже .могут их пре¬
восходить.Возмущающие силы
и моменты при разделении
ступенейВозмущающие факторы,
действующие на ракету в пе¬
риод разделения ступеней, удоб¬
но разделить на три группы:1) возмущающие факторы,
характерные для всех основ¬
ных участков движения I и II
ступеней ракеты;2) возмущающие факторы, связанные с процессом разделения;3) возмущающие факторы, связанные с работой системы упра¬
вления в период разделения.К первой группе относятся возмущения:-— от ветра;— от погрешностей изготовления и монтажа двигателя и кор¬
пуса ракеты.Возмущающие силы и моменты от этих факторов подсчитыва¬
ются по приведенным выше зависимостям, только отдельно для
каждой ступени.Ко второй группе относятся:— разброс тяг камер сгорания первой ступени при их выклю¬
чении;— разнотяг камер сгорания на участке последействия;— разновременность срабатывания соединительных болтов;— отключение штекеров и разъем колодок;— асимметрия отражателя первой ступени.Возмущающий момент от разброса тяг и разнотяга камер сго¬
рания можно подсчитать по формулам (12.8).Три другие фактора второй группы возмущений приводят к
возникновению импульса момента, который обычно пересчиты¬
вается в эквивалентную угловую скорость второй ступени.Третья группа факторов связана с уменьшением управляющей
силы первой ступени из-за спада тяги (особенно для основных по¬
воротных камер сгорания и основных поворотных сопел).Рис. 12.7. Графики возмущающих мо¬
ментов f313
К моменту отделения первой ступени имеются какие-то сме¬
щения и скорость центра масс, а также угол поворота и угловая
скорость относительно центра масс, которые вызывают начальное
отклонение органов управления второй ступени. Чтобы исключить
эти факторы, целесообразно принудительно установить органы
управления в начале второго активного участка в нулевое поло¬
жение.Чтобы рассчитать управляющие силы и органы управления, не¬
обходимо знать значения наибольших возмущающих сил и момен¬
тов. Рассмотрев все возмущения, можно сделать вывод, что для
проектирования органов управления первой ступени можно за рас¬
четный возмущающий момент принять наибольший момент от
ветра с некоторым коэффициентом запаса на другие моменты; для
расчета же органов управления второй ступени необходимо вы¬
яснить величины всех составляющих возмущений.§ 12.2. АЭРОДИНАМИЧЕСКАЯ ФОРМА И КОМПОНОВКА РАКЕТЫВыбирая и оценивая аэродинамическую форму и компоновку
ракеты, необходимо учитывать такие важные факторы, как устой¬
чивость и управляемость ракеты, сопротивление атмосферы, на¬
грев и нагрузки в полете, возможности производства и пр.Устойчивость и управляемость ракетыРассмотрим понятия устойчивости и управляемости ракеты
применительно к движению ракеты относительно ее центра масс.В полете вращение ракеты относительно центра масс после
приложения возмущения сопровождается действием следующих
сил (рис. 12.8):— нормальной аэродинамической силы У;— управляющей силы Уу.При этом можно отметить два случая:— центр масс находится впереди центра давления (рис. 12.8, а);— центр масс находится сзади центра давления (рис. 12.8,6).В первом случае уравнение вращательного движения ракетызапишется следующим образом:7^ф= К (хш — х1я) + Yy(xiv — х1и). (12.17)Момент Y (х1н — -Т1я) в правой части уравнения (12.17) назы¬
вают аэродинамическим, статическим моментом.где М* — коэффициент статического момента,
а—угол атаки,.314
Как видно из рис. 12.8, этот момент отрицателен, т. е. он на¬
правлен в сторону уменьшения угла атаки, поэтому в данном слу¬
чае Ml < 0.zlРис. 12.8. Силы, действующие на статическиустойчивую (а) и статически неустойчивую (б)
ракетуМомент Гу(х1у— хы) в правой части называют управляющим.М = Мь 8,г,у г, ’где М\ — коэффициент управляющего момента,
й — угол отклонения органов управления.315
Во втором случае уравнение вращательного движения ракеты
запишется следующим образом:ij = У(х1я - хи) - Уу (х1у-лш). (12.18)В этом случае M‘t > 0, так как момент направлен в сторону
увеличения угла атаки.Разделив все члены уравнений (12.17) и (12.18) на момент■ инерции ракеты / , можно записать оба уравнения в виде одного:Коэффициент Ь2 характеризует статическую устойчивость ра^
кеты, коэффициент 63 — эффективность органов управления, а оба
коэффициента вместе — управляемость ракеты.Ракету называют статически устойчивой, если момент аэроди¬
намических сил, возникающих при ее угловом отклонении от по¬
ложения равновесия, направлен в сторону исходного положения
равновесия. Момент аэродинамических сил статически неустойчи¬
вой ракеты направлен в сторону дальнейшего увеличения началь¬
ного отклонения.Управляемая ракета является динамически устойчивой (ста¬
билизированной), так как ее угловое движение происходит под
действием двух моментов: аэродинамического и управляющего,
которые всегда приводят ее в заданное положение.Из уравнения (12.19) следует, что коэффициент Ь2 представ¬
ляет собой приращение углового ускорения, обусловленное изме¬
нением угла атаки на единицу. Если ракета статически устойчива,
то Ь2>0, а если неустойчива, то Ь2<0, если ракета нейтральна, то
Ь2~О?Коэффициент b3 представляет собой приращение углового
ускорения ракеты, создаваемое единичным угловым отклонением
органов управления.Под управляемостью понимают свойство ракеты легко отзы¬
ваться на действие органов управления соответствующими изме¬
нениями параметров движения (углов атаки, тангажа и др.).Очевидно, чем больше запас статической устойчивости (чем
больше Ь2), тем ракета хуже отзывается на отклонение органов
управления, т. е. она менее управляема. Чем больше коэффи¬
циент bз, тем лучше, при прочих равных условиях, управляемость
ракеты.(12.19)где(12.20)(12.21)316
Возможные формы ракетПолет ракеты на части активного участка траектории происхо¬
дит в атмосфере со скоростью, значительно превосходящей ско¬
рость звука; поэтому форма ракеты должна отвечать определен¬
ным требованиям.Форма ракеты должна обеспечивать:— определенную статическую устойчивость и управляемость в
полете;— минимальное сопротивление полету;— минимальный аэродинамический нагрев, особенно высту¬
пающие частей;— простоту и технологичность производства;— удобства при эксплуатации, связанные с транспортировкой,
перегрузками, обслуживанием ракеты;— возможности рационального и компактного расположения
всех частей и агрегатов ракеты.Выбирая форму ракеты, в первую очередь необходимо обеспе¬
чить: хорошую управляемость ракеты и возможность компенсации
действующих на нее возмущений, а также определенные условия
работы автомата угловой стабилизации. Эти условия и возмож¬
ности характеризуются свойством статической устойчивости ракеты.Чтобы обеспечить работу системы управления, величина коэф¬
фициента Ь2 для ракет должна находиться в пределах:а2<£3<я,. (12.22)При значительном увеличении коэффициента Ь2 управление ра¬
кетой при действии на нее возмущений требует больших управ¬
ляющих сил; ракета делается трудноуправляемой, плохо стабили¬
зируется при возникновении угловых колебаний.Компоновка ракетыПод компоновкой ракеты понимается наиболее рациональное
расположение отсеков, агрегатов и узлов в ней. Компоновка ра¬
кеты тесно связана с ее размерами и формой, а также с прин¬
ципиальной схемой конструкции.К компоновке ракеты предъявляются следующие основные тре¬
бования:— обеспечение необходимой величины расстояния между цен¬
трами масс и давления, а также необходимой эффективности ор¬
ганов управления;— рациональное расположение приборов системы управления
на ракете;— удобство сборки ракеты, транспортировки, испытаний на за¬
воде и в войсках, обеспечение необходимых условий работы от¬
дельных агрегатов ракеты.317
Кроме того, компоновка ракет, особенно многоступенчатых,
влияет на величину их стартовой массы, надежность действия, а
также на конструкцию стартовых устройств.Остановимся более подробно на первых двух требованиях и
в первую очередь на обеспечении межцентрового расстояния и
оценке эффективности органов управления. Эти два понятия ха¬
рактеризуются коэффициентами Ь2 и b3 (см. формулы 12.19 —
12.21).Действительно, коэффициент Ь2 можно выразить в видеЬ,= (1223)Отсюда следует, что для заданной ракеты необходимая вели¬
чина межцентрового расстояния хш — я1д определяется значением
коэффициента Ь2, и поэтому, чтобы знать потребные межцентро-
вое расстояние и эффективность органов управления, необходимо
обосновать границы изменения коэффициентов Ь2 и Ь3.Для этого рассмотрим уравнение свободных угловых колеба*
ний ракеты, учитывая работу автомата стабилизации'е + b.fi + Ь.ЛЬ = 0, (12.24)где 0 — угол поворота ракеты;8—угол поворота органа управления.Из уравнения управления имеем8 = М + М.гс«Ы£о)где ka и k\ — коэффициенты уравнения управления.Подставив 5 в выражение (12.24), получимО -f <М + bs (&j0 + kab) — 0. (12.25)Уравнение (12.25) является уравнением затухающих колеба¬
ний с коэффициентом затухания Д:A = -±-kI68 (12.26)и частотойКгде ks = -у- — коэффициент балансировочной зависимости.Z,Из формулы (12.27) следует, что, й2 + Д22 == *-•каII, У < 1 +ks318
Учитывая возможную перемену знака коэффициента ks, можно на¬
писать(12.28)1 а 1 I каk k *ks ks %Из уравнения (12.28) следует, что интервал Ь2 определится,
гели задать ka, Д, а также знать интервалы изменения Q и ks.
Значение Q можно оценить, учитывая боковые перегрузки и не¬
обходимую подвижность органов управления.Поковая перегрузка оценивается по зависимости®гаах = ®Допоткудавmax®допгде 0тах —допустимое угловое ускорение;Одоп — допустимое угловое колебание.Подвижность органов управления оценивается по формулам:°тах ~ ®Доп>Vax ~ ка й^доП;Значение необходимой величины коэффициента b3 можно опре¬
делить через коэффициенты b2 и ks, т. е.■ (12.29)Для верхних ступеней.ракеты, полет которых происходит прак-
П1 чески в пустоте, b2=fksj=0. Значение же b3 можно получить из
формулы (12.26), т. е, } //6*=ТГ- f!r,, «f (12-3°)Частота колебаний ракеты равнаQ= Vbjta — Л2. (12.31)Характер изменения коэффициента Ь2 показан на рис. 12.9.Как видно из рис. 12.9, наибольшее значение коэффициента Ь2
находится в районе действия наибольшего скоростного напора
поздуха. Поэтому оценку потребного межцентрового расстояния
согласно формуле (12.23) достаточно произвести для времени дей¬
ствия наибольшего скоростного напора.Окончательная оценка выбранных значений коэффициентов Ь2
н Ьз производится на основе анализа действия системы «автомат319
стабилизации — ракета», так как коэффициенты b2, b3, ks, ka, A, 6,
взаимно связаны.Остановимся на некоторых требованиях к расположению при¬
боров управления на ракете.У ракет датчики углового положения могут быть гироскопи¬
ческие. Очевидно, что показания таких датчиков зависят от места
их расположения на борту ракеты, так как корпус ее, помимо
угловых колебаний относительно центра масс, совершает попереч¬
ные изгибные колебания. Поэтому встает вопрос, как располо¬
жить гироскопические приборы на ракете, особенно если коэффи¬
циент затухания поперечных колебаний невелик и частоты коле¬
баний ракеты совпадают с часто¬
тами системы управления. При
большом коэффициенте затуха¬
ния поперечных колебаний дей¬
ствие приборов менее чув¬
ствительно к месту их распо¬
ложения. Иногда осуществляют
искусственное демпфирование
(например, с помощью реактив¬
ных двигателей). В этом случае
рационально размещать приборы
поближе к центру масс ракеты для уменьшения влияния на работу
приборов угловых колебаний.При небольшой величине коэффициента затухания вопрос о
месте расположения приборов решается оценкой устойчивости
движения ракеты с учетом ее поперечных колебаний. Решая та¬
кую задачу, строят области устойчивости и неустойчивости систе¬
мы «автомат стабилизации — ракета» в зависимости 6т места рас¬
положения приборов, частот колебаний ракеты и частот системы
управления.Выбирая место расположения приборов, учитывают возможно¬
сти их защиты от внешнего аэродинамического нагрева и нагрева
от работающего двигателя. Стремятся также к тому, чтобы по
возможности были меньше длина электрических кабелей и более
удобным обслуживание приборов при проверках и других работах
с ними.Обеспечение необходимой компоновки ракетЧтобы обеспечить необходимую компоновку ракеты, требуется
определенный разбег центровки, т. е. определенное изменение
межцентрового расстояния. При эскизном проектировании поль¬
зуются понятием запаса статической устойчивости, определяя его
следующим образом:*1 = &д — *1м) 100%, (12.32)где х1л и ^„ — соответственно относительные (к длине ракеты)
координаты центра давления и центра масс.Рис. 12.9. График изменения коэффи¬
циента Ь2320
VЕсли не принять специальных мер, ракеты получаются в боль¬
ший степени статически неустойчивыми. Поэтому всегда стара¬
ются уменьшить межцентроаое расстояние, т. е. переместить центр
масс вперед, а центр давления назад.Основными мерами, позволяющими переместить центр масс
вперед, являются:■ ' — расположение более тяжелого (по плотности) компонент
топлива впереди по отношению к более легкому; по этой причине,
как правило, баки окислителя располагаются впереди баков го¬
рючего;— ступенчатое опорожнение топливных баков, особенно пе¬
реднего, с более тяжелым компонентом: сначала расходуется ком¬
понент из задней части бака, а затем из передней.Чтобы переместить центр давления назад, применяются ста¬
билизаторы и конические хвостовые отсеки.Если задать необходимый запас статической устойчивости ра¬
кеты, то можно определить необходимую площадь стабилизатора
но формуле . Йу SCT _ спк (-^1м + 0,01т] XlK) i'loo'3v’!ст ~с т~ 2 :j т “ ’ (14-00)cncr(l+2TTdJ U.CT-^M-0,01,))У'М _ 0DtOf>( ,&■?{,.. uXO-i *Ь • 7ГД -wSгде с’к и х]к — коэффициент нормальной силы и центр давления
для корпуса ракеты;Cncv — коэффициент нормальной силы и центр давления
для стабилизатора;21— размах стабилизатора;SK — площадь миделя корпуса ракеты.Пользуясь формулой (12.33), приходится приближенно зада-
нлть координату центра давления стабилизатора, а также некото¬
рые его характеристики (относительное удлинение, стреловид-
мость И др.).Необходимое уширение хвостового отсека можно определить
По формулеЛ — dXB __ ^(^к-Х,м-0.0Ц) /|9ПД13 (jCjm + 0,01yj — Л'1хв)смк> ^1м определяются для ракеты с цилиндрическим
\постовым отсеком. Центр давления Х\хш хвостового отсека можно
и,|метить приближенно на середине его длины.Значение необходимого запаса статической устойчивости мож¬
но получить, зная величину коэффициента Ь%. Используя зависи¬
мости (12.23) и (12.32), можно записать100 b2LУ) = (12.35)C*nqSJp ’321
Этой формулой пользуются применительно ко времени дейст¬
вия наибольшего скоростного напора воздуха.Надо иметь также в виду, что любая из рассмотренных мер
изменения межцентрового расстояния изменяет другие характери¬
стики ракеты, например, увеличивает ее пассивную массу. Перед¬
нее расположение более тяжелого компонента изменяет распреде¬
ление продольных и поперечных нагрузок на ракету и иногда вы¬
зывает необходимость упрочнения корпуса ракеты. Ступенчатое
опорожнение топливного бака требует применения ряда дополни¬
тельных устройств (промежуточных днищ, клапанов и др.), и по¬
этому оно также увеличивает пассивную массу ракеты. Примене¬
ние стабилизаторов и конического хвостового отсека увеличивает
лобовое сопротивление и пассивную массу. Поэтому окончатель¬
ная целесообразность применения той или иной меры изменения
межцентрового расстояния должна оцениваться, учитывая все
факторы, в том числе мощность и массу органов управления,
потерю дальности, связанную с работой органов управления
и т. п.При оценке и выборе органов управления отдается предпочте¬
ние органам управления с наибольшей эффективностью. Оцени¬
вать эффективность при этом можно по величине коэффициен¬
та ks, так какВеличина коэффициента ks должна быть ограничена, так как
рост его (при прочих равных условиях) ухудшает управляемость
ракеты, требует повышения мощности органов управления. Увели
чение ks для сохранения нужных характеристик стабилизации ра¬
кеты потребует повышения коэффициента усиления автомата ста¬
билизации, что может быть нежелательным с точки зрения устой¬
чивости действия системы «автомат стабилизации — ракета».
Понижение же ks (увеличение Ь3) потребует уменьшения коэффи
циента усиления автомата стабилизации, что в свою очередь мо¬
жет снизить точность его действия.§ 12.3. КОНСТРУКЦИЯ ОРГАНОВ УПРАВЛЕНИЯДля умелого проектирования и расчета органов управления по¬
лезно познакомиться с их конструкциями.Основное назначение органов управления — создание сил и
моментов для управления полетом ракеты; органы управления это
исполнительные устройства автомата угловой стабилизации.Программное движение центра масс ракеты осуществляется
под действием аэродинамической силы и составляющей тяги, ко¬
торая возникает благодаря повороту ракеты относительно центра
масс под действием органов управления.322
Классификация органов управления и основные
требования к нимПо виду среды, воздействием которой на орган управления
создается управляющая сила, органы управления делятся:— на аэродинамические (воздушные);— на газодинамические (газовые).Вид среды влияет на конструкцию органа управления, опре¬
деляет его эффективность и надежность действия.Аэродинамические органы управления (воздушные рули) раз¬
личают по компоновке их на ракете.Газодинамические органы управления подразделяют на сле-
дующие типы:— с полным отклонением истекающей струи газов;— с частичным отклонением газовой струи;— с созданием разнотяга многокамерных или многосопловых
дингателей.К органам управления с полным отклонением газовой струи
in носятся: поворотные камеры сгорания и поворотные сопла, con-д.ч с косым срезом, цилиндрический насадок и др.К органам управления с частичным отклонением струи отно¬
си гея: газовые рули различных видов, дефлекторы, прерыватели
потока (интерцепторы), органы управления с впрыском газа или
жидкости в сопло и др. Органы управления этого типа, как пра-
Нило, обладают малой эффективностью действия.В органах управления с разнотягом используют или регулиро-
ннпие величины тяги нескольких камер сгорания или поворот по¬
стоянно наклоненных к продольной оси ракеты сопел.Органы управления должны отвечать следующим основным
требованиям.1. Обладать достаточной эффективностью действия. Эффектив¬
ность действия можно характеризовать коэффициентом Ь3, кото¬
рый выражается формулой, ^ у (^1у -^1м)3 === у >■Z,Где градиент управляющей силы.Эффективность действия представляет собой градиент управ¬
ляющего момента, т. е. управляющий момент при отклонении ор-
I .пт управления на единичный угол.Необходимая эффективность действия определяет тип органа
управления для данной ракеты или ее ступени. Эффективность
действия как характеристика органа управления зависит от его
конструктивной схемы и места его расположения.2. Потери тяги, а следовательно, и дальности, связанные с
управлением ракеты, должны быть минимальными. Потери тяги
ниляются одной из важных характеристик органа управления,323
зависят от его конструкции и определяют выбор типа органа управ¬
ления для различных ступеней ракеты. Всегда стремятся приме¬
нять органы управления с наименьшими потерями тяги, что осо¬
бенно важно для второй и последующих ступеней ракеты.3. Иметь высокую надежность действия. Под надежностью дей¬
ствия органа управления понимают постоянство эффективности
действия в тяжелых нестабильных условиях работы (высокая тем¬
пература и эрозионное действие среды, непостоянство характери¬
стик среды и пр.).4. Иметь малую потребляемую мощность. Потребляемая мощ¬
ность зависит от скорости вращения органа управления, его инер¬
ционности и величины позиционного шарнирного момента (т. е,
момента газодинамических сил). Мощность органа управления м
основном определяет мощность его привода (рулевой машины), а
значит, габариты и массу рулевого привода. Поэтому всегда же¬
лательно снижение потребляемой мощности.5. Быть компактными, иметь небольшую массу органа управ¬
ления, быть простыми и технологичными.Эти и другие требования учитываются при проектировании ор¬
ганов управления и при их сравнительной оценке.Возможные конструкции и применение органов управленияВоздушные рули характеризуются: формой в плане, от¬
носительным удлинением и относительной толщиной профиля.Форма руля может быть прямоугольной, трапециевидной
и треугольной (рис. 12.10). Наиболее рациональной являетсятреугольная форма руля, которая обес¬
печивает по сравнению с другими фор¬
мами большее постоянство эффектив¬
ности, шарнирного момента и меньшее
сопротивление. Для треугольной формы
меньше влияние относительной толщины
на перемещение центра давления
руля.Относительное удлинение руля опре¬
деляется по формулеl = JLS ’Рис. 12.10. Формы воздуш¬
ных рулей где I — длина (размах) руля;S — рабочая площадь руля в плане.Относительное удлинение руля определяет его основные аэро¬
динамические характеристики, например, коэффициент подъемной
силы и местоположение центра давления.Относительная толщина руля324
НДС с — наибольшая толщина профиля;Ьк—корневая хорда.Относительная толщина профиля определяет прочность руля,
f| гакже его сопротивление (потери тяги).Эффективность действия воздушного руля пропорциональна ве¬
личине скоростного воздушного напора.1 Ьшбольший угол поворота воздушного руля не превышает
ИО 12° из-за возможного срыва потока.Ивиду небольшой и непостоянной эффективности действия воз¬
душные рули применяются только как вспомогательные органы
■Правления.Газовые рули. В на¬
стоящее время применяются
юлько центральные газовые
рули. Формы газовых рулей в
плане показаны на рис. 12.11.Наиболее целесообразной фор¬
мой газового руля является
I роугольная, так как при
■ном обгорание передней кром¬
ки практически не сказывает-
| и на перемещении центра
давления, а поэтому и на из¬
менении шарнирного мо¬
мента.Газовый руль изготавли-
ммстся из графита. Тело руля
крепится жестко к валу, с по¬
мощью которого он отклоняет-m и газовом потоке. Устанавливаются газовые рули за срезом соп¬
ла двигателя.Эффективность действия газового руля пропорциональна ско¬
ростному газовому напору на срезе сопла.Газовые рули отличаются простотой конструкции и достаточ¬
ной эффективностью действия и могут применяться как для ракет
I' ЖРД, так и для ракет с РДТТ. Следует отметить недостаточ¬
ную эффективность газовых рулей при низких давлениях газа на
срезе сопла двигателя и малую их эрозионную стойкость при при¬
менении жидких кислородных (высокая температура газов) и
Твердых топлив (твердые частицы в газах).Поворотные камеры сгорания могут быть основны-
мн или рулевыми. Конструкция поворотных камер сгорания ана¬
логична конструкции неподвижных камер сгорания и отличается
только установкой и конструкцией узлов подвода компонентов
топлива.Пяворотная камера сгорания может иметь одну или две сте¬
пени свободы. При двух степенях свободы она устанавливается в
карданном подвесе и может одна обеспечить управление По кана¬325
лам тангажа и рыскания, а при одной степени обеспечивает yrip;i
вление по одному каналу.Конструкция узлов подвода компонентов топлива у основном
и рулевой камер сгорания обычно различная.Поскольку основная камера сгорания имеет большую тягу, то
углы поворота ее для управления небольшие. Поэтому возможен
подвод компонентов топлива по гибким трубопроводам. Правд.',
при этом требуются большие моменты для вращения камеры его
рания, так как трубопроводы находятся под высоким давлением.
Момент сопротивления повороту камеры сгорания может быть
значительно уменьшен, если турбонасосный агрегат разместить мм
самой камере сгорания. В этом случае гибкие трубопроводы мм
ходятся под низким давлением (давлением перед топливными нм
сосами).Рулевые камеры сгорания имеют сравнительно небольшую
тягу, поэтому они поворачиваются на большие углы. В этом слу¬
чае целесообразно подводить топливо через вращающиеся уплот
нения, так как при этом момент сопротивления повороту невелик,
конструкция же уплотнения в узле подвода довольно сложим
Сложность уплотнения состоит в том, что нужно создать большое
давление прилегания уплотняющего кольца к вращающейся по¬
верхности.Основные поворотные камеры сгорания широко применяются
для управления полетом ракеты с ЖРД на первой ступени; руле¬
вые камеры сгорания применяются на второй ступени и выпол
няют роль верньерных (корректирующих) двигателей.Поворотные сопла применяются для управления раке¬
тами с РДТТ. Чаще всего они одновременно являются основными
соплами двигателя. Если двигатель имеет четыре сопла, то каж¬
дое из них имеет одну степень свободы, т. е. снабжено двумя цап¬
фами, расположенными в плоскостях стабилизации ракеты. Если
применяется одно сопло, то оно устанавливается в карданном под¬
весе и обеспечивает управление по тангажу и рысканию. Для
управления по крену необходимо дополнительное устройство.Поворотные сопла применяются также и для ракет с ЖРД-
Они работают обычно на турбогазе (или сжатом газе), развивают
небольшую тягу и могут обеспечивать управление второй сту¬
пенью [10].Рис. 12.12. Поворотное
соплоРис. 12.13. Поворотное
сопло326
Сложность конструкции поворотного сопла состоит в уплотне¬
нии подвижного соединения. Одним из возможных способов яв-
.ммгп'и гидравлическое уплотнение (рис. 12.12). Возможно также
Мноиос (сильфонное) уплотнение (рис. 12.13). [6]. В первой кон-
I ||>укции момент сопротивления повороту является моментом тре¬
пни н кольцах уплотнения. Во второй — момент сопротивления по¬
вороту создается за счет изгиба сильфона, нагруженного внутрен¬
ним давлением.I !оворотные сопла имеют такие же характеристики, как и по-
Поротные камеры сгорания: они имеют небольшие углы отклоне¬
ния н достаточно эффективны. В отличие от поворотных камер
СШрания в них возникают дополнительные потери тяги из-за об-
|иижапия уступа внутри сопла при его отклонении./(ля ракет с РДТТ можно также применять боковые поворот¬
ные сопла, которые питаются газами из основной камеры сго-
рннпн.Поворотный насадок [6] (рис. 12.14)— довольно эффек-111 и 11 ы й орган управления.Достоинствами насадка являются:— сравнительно небольшие потери тяги;- малый момент трения, так как обычно уплотнение по стыку
не применяется.Основной недостаток его — большой газодинамический пози-
нпонный момент.Дефлектор (рис. 12.15) применяется для управления верх¬
ними ступенями ракет с РДТТ, так как имеет недостаточную эф¬
фективность действия. Положительными качествами дефлектора
мнлнются отсутствие газодинамического позиционного момента и
малая эрозия.Интерцепторы (рис. 12.16) могут применяться для управ¬
ления ракет с РДТТ. Действие интерцептора основано на образо-
нинии скачка уплотнения и создании зоны повышенного давления
перед ним.Управление вдувом газа или жидкости в закритическую
чисть сопла применяется для ракет с РДТТ. Схема управления
иду ном показана на рис. 12.17. В потоке газа от вдуваемой струи
образуется косой скачок уплотнения, за которым располагается
область повышенного давления, захватывающая только опреде-Рнс. 12.14. Поворотный
насадокРис. 12.15. Дефлектор327
ленный сектор внутренней поверхности сопла. Управляющая сила
появляется вследствие различия давления на диаметрально про
тивоположных участках поверхности сопла. В качестве вдувие-ИРис. 12.16. Интерцепторымого газа используется газ, отбираемый из камеры сгорания или
получаемый в газогенераторе. В качестве рабочей жидкости мо¬
гут использоваться фреон, азотная кислота,
жидкий азот и др.скачка Механизмы передачи усилий от рулевой
машины к органу управленияРис. 12.17. Схема управ- }<! механизмам передачи усилий от руле-
ления вдувом в0^ машины к органу управления иредъяиляются следующие основные требования:— простота конструкции, небольшие габариты и масса;— небольшие потери энергии, т. е. высокий коэффициент по¬
лезного действия (КПД);— небольшое изменение передаточного числа (лучше постоям
ство);— высокая надежность в сложных условиях (вибрации и воз¬
действие нагрева);— удобство компоновки на ракете.Небольшая масса механизма гарантирует незначительные
инерционные нагрузки на рулевую машину (РМ), а высокий КПД
снижает потребную мощность РМ. Постоянство передаточного
числа механизма упрощает работу системы управления.Тип механизма передачи зависит от вида движения, которое
выдает рулевая машина (обычно выдается вращательное или по¬
ступательное движение).Возможные конструкции механизмов передачиМеханизм т я н у щ е - т о л к а ю щ е г о типа (рис. 12.18)
преобразует поступательное перемещение выходного штока 3 РМ /
во вращательное движение органа управления (камеры сгора-328
(Ши 2). Механизм очень прост. Необходимо только соответствую¬
щем его установкой обеспечить постоянство передаточного числа.
111>и небольших углах поворота основной камеры сгорания это
Л«*| ко получить, если при нейтральном положении камеры сгора¬
нии продольная ось механизма будет перпендикулярна продоль¬
ник оси камеры.Механизм передачи рычажного типа (рис. 12.19)
Выполняется в виде шарнирного четырехзвенника и состоит из
диу.ч рычагов 2 и 4 и тяги 3, связывающих РМ 1 с органом упра¬
вления 5. Механизм прост, имеет высокий
КПД и постоянное передаточное число.
Чтобы передаточное число было постоян¬
ным, длины рычагов 2 и 4 должны бытьРис. 12.18. Меха¬
низм поворота ка¬
меры сгорания:1 — рулевая машина;
2—камера сгорания;
3 — штокРис. 12.19. Механизм поворота ру¬
левой камеры сгорания:1 — рулевая машина; 2 — рычаг; 3 —
тяга; 4 — рычаг; 5 — орган управленияодинаковыми и, кроме того, в нейтральном положении органа уп-
рлмления четырехзвенник должен быть прямоугольным. Чтобы вы¬
полнить последнее требование, тяга 3 механизма делается регули¬
руемой, по длине.Иногда четырехзвенник может быть видоизменен так, что ры¬
чаг 2 в исходном положении повернут на 180° по отношению к
положению его, показанному на рис. 12.19; тогда РМ распола¬
гается выше тяги 3.В отдельных случаях орган управления (например, рулевая ка¬
мера сгорания) снабжается возвратным пружинным механизмом.
Он служит механической отрицательной обратной связью, устра¬
няет люфты в механизме передачи и препятствует самоходу ор¬
гана управления.§ 12.4. РАСЧЕТ ХАРАКТЕРИСТИК ОРГАНОВ УПРАВЛЕНИЯОсновная задача расчета органов управления — определение их
размеров, массы, а также характеристик подвижности и необхо¬
димой мощности привода. Чтобы выполнить эту задачу, необхо¬
димо уметь определять потребные управляющие моменты, для
компенсации возмущений и управления полетом ракеты на актив*
ном участке.329
Расчет необходимого управляющего моментаВеличину необходимого управляющего момента находят для
канала тангажа, так как по этому каналу наряду с стабилизацией
нужно обеспечить программный разворот ракеты.Очевидно, суммарный управляющий момент должен обеспе¬
чить:— программный разворот ракеты;— компенсацию мало меняющихся возмущений;— стабилизацию при действии импульсных возмущений.Программное движение центра масс ракеты задается про¬
граммным значением угла атаки. Благодаря определенному зна¬
чению угла атаки апр в каждой точке траектории создается нор¬
мальная составляющая тяги и подъемная аэродинамическая сила,Рис. 12.20. К определению управляющего моментакоторые смещают необходимым образом центр масс. Чтобы обес¬
печить необходимый угол атаки, надо приложить к ракете опре¬
деленный управляющий момент. Программное значение управляю¬
щего момента будет равноM"P = /kf“anp. (12.36)Второй составляющей управляющего момента является мо¬
мент, компенсирующий действие на ракету постоянного ветра и
возмущений от производственных погрешностей. Как было ука¬
зано в § 12.1, наибольший общий момент от производственных
погрешностей для первого активного участка составляет неболь¬
шую долю от максимального ветрового момента.В § 12.1 были найдены также выражения для момента и силы
от ветра (формулы 12.1 и 12.2). Теперь необходимо найти выраже¬
ние управляющего момента для компенсации этих возмущений.Рассмотрим движение ракеты при действии нормального к ее
оси ветра (рис. 12.20). Если бы не было нормальной стабилиза¬
ции, то положение оси ракеты было бы 0*1, т. е. таким, как и до
появления ветра. Такое положение привело бы к сносу центра
масс. Чтобы не происходило сноса центра масс, необходимо повер¬330
ну I'll ракету в сторону ветра на угол 8я„, т. е. она должна занять
Положение Ол;’. Соответственно такому положению ракеты необ¬
ходимый управляющий момент для компенсации возмущающего
момента Мв будетМ* — (Дав — 8ав), (12.37)при этомДав = arc tg ~y .Чтобы определить угол Вав, составим уравнения равновесия ра¬
ке гы:Гу+ЯЗав=Г(Дав-8ав);Ml (Дав — Ч) = У у (*i, — *1м).Из этих уравнений получим8а„ =К* т Ml-—д«а,,,а В.(12.38)гдеMl'MlВ формуле (12.38) знак « + » берется для статически неустой¬
чивой ракеты.Стабилизирующий момент можно определить, найдя угловое
отклонение [ракеты от порыва ветра.Это угловое отклонение приближенно можно определить из за-
мисимостиГ' (12-39)где итах — амплитуда порыва ветра;ц — коэффициент динамичности, который можно найти изI рафика (рис. 12.21) по отношению длительности действия поры-
uu а к периоду Т собственных колебаний ракеты Т =Ь,=mZiqSulpТГЗначение 0СТ определяется для времени действия максимума
суммы управляющих моментов программного и ветрового.
Стабилизирующий момент равенМ?=МШН9 №(12.40)331I
Для расчета органов управления выясняют наибольшее знач<
ние суммарного управляющего, момента, т. е. находят(12.41mi■■ М”Р -f м° + Мс/.Для второго активного участка, как уже упоминалось, на и-
большие управляющие моменты получаются для момента временипосле отделения первой ступени
Поэтому для расчета управляю
щего момента необходимо допол¬
нительно учесть возмущения, свя¬
занные с разделением ступеней, и
моменты от производственных по
грешностей.Учет возмущений, связанных
с разделением ступеней, произво¬
дится следующим образом: Коли
чественно эти возмущения оцени
ваются импульсом момента ММ,
Под действием этого импульса второй ступени сообщается началь¬
ная угловая скоростьММРис. 12.21. График коэффициента ди¬
намичностиО,20 '(12.42)Вторая ступень совершает колебания 0
тудой.углового ускорения0j = 02о^,где Q — частота угловых колебаний второй ступени.
Необходимый управляющий момент будет равенс ампли-Л/р — Izb20Q.(12.43)(12.44)Если разделение ступеней происходит в пустоте, то расчет не¬
обходимого управляющего момента для второй ступени упрощает¬
ся, так как не нужно рассчитывать ветровые возмущения.Расчет управляющей силыЕсли известна величина управляющего момента, то можно
определить значение необходимой управляющей силы, так как все¬
гда будет известно расстояние от точки приложения управляющей
силы до центра масс ракеты.При известной зависимости управляющей силы от характе¬
ристик органа управления можно определить его размеры и дру¬
гие параметры, если задать величину потребной управляющей
силы. Поэтому необходимо знать выражение управляющей силы
для определенной конструкции органа управления,332
Рассмотрим, как определить управляющую силу для наиболее
широко применяемых органов управления.Поворотная камера сгорания (поворотное сопло).I ели поворотная камера сгорания отклонена на угол 8, то управ-
ниющая сила будет (рис. 12.22) равнаПри малых углах поворотаД (12.46)Чтобы увеличить управляющую силу поворотной камеры сгора¬
нии (12.46), желательно идти по пути увеличения тяги, а не угла
шшорота, так как в этом случае будут меньше потери тяги. Поэго-Поворотный насадок. Будем считать действие поворот¬
ит о насадка аналогичным действию сверхзвукового потока в тру-
iir с коленом. Плоская картина потока будет выглядеть следующим
иПр.чзом (рис. 12.23). В точке А на верхней стенке поток встречает
препятствие в виде плоскости, наклоненной под углом 8 внутрь
пигока. Здесь образуется косой скачок уплотнения АС под углом 3.
in скачком уплотнения давление увеличивается (pi). В точке В
in и ок обтекает развернутый угол. Здесь образуется волна разре¬
шения BD, давление за которой уменьшается (рг).Примем следующие допущения:газ невязкий, т. е. трение о стенки отсутствует;
поле скоростей и плотность газа по всему сечению сопла
однородны;процесс адиабатический;избыточное давление (по отношению к давлению на срезе11 hi л я) на стенки насадка в плоскости, перпендикулярной к его
in и, подчиняется закону косинуса.(12.45)ДР = 2Р sin3 -тр.Рис. 12.22. К расчету управ¬
ляющей силыРис. 12.23. Расчетная схема
насадка333
При таких допущениях управляющая сила получается равнойДефлектор. При тех же допущениях управляющая сила для
дефлектора будет равнагде ра— давление на срезе сопла;R— радиус внутренней сферы дефлектора;
ри — наружное давление.Управление вдувом газа. Расчетная схема показана
на рис. 12.24.Принимаем следующие допущения:— не учитываем отрыв пограничного слоя впереди отверстия
вдува;— пренебрегаем отражением волн и реакциями между вдувае¬
мым и основным потоком.При таких допущениях можно рассчитать управляющую силу
как интеграл избыточного давления в зоне за косым скачком
уплотнения.Управляющая сила выразится формулойYj — 'y (Pi — р2) Rl cos 8,(12.47)где /?! — избыточное давление на верх насадка;
р2 — избыточное давление на низ насадка.
Потери тяги\Р = 4- (/?, — р2) Rl sin о.(12.48)Yy = bR2 [-J- (pv — pa) — -у (pi — Pa)\ cos 8. (12.49)Потери тягиДР = 8Я2 [-J-(л — Ра) — т^Р«~ Ра)_ sinS’ (12.50)tf.<pctgvf(v, 6)<p(v, Р),(12.51)¥ (v, р) =Xj sin2 ч — 1 + ^ Xj coss vX.
tg 8 .
tgN ’Rbo. *(12.52)334
fУгол v определяется из формулы по углу р1 + ‘8* * + ТТГ )2<(12.53)где RItp, Rь Явл — полные реакции газа соответственно для’основ¬
ного потока в критическом сечении и в сечении вдува>и для вду-
наемого потока. Эти реакции можно.определить по зависимостиПо формулам (12.51) — (12.54) можно рассчитать зависимость
управляющей силы от расхода вдуваемого газа и построить гра¬
фик (рис. 12.25). Пользуясь таким графиком, можно определить
суммарный расход вдуваемого газа, необходимый для управления
ракетой.Как показывают расчеты и опыты, управление вдувом газа наи¬
более эффективно, когда вдуваемый газ горячий и вдув газа
мпречный. Эффективность вдува зависит также от места вдува.
Наиболее эффективен вдув, когда сопло вдува находится на вто¬
рой половине длины основного сопла [8, 9].Применяются полученные зависимости следующим образом.По максимальному потребному управляющему моменту опре-
и Iнем максимальную управляющую силу, а далее, задаваясь ра¬
бочим углом поворота рулевой камеры сгорания и поворотного
инсадка, находим необходимую тягу рулевой камеры сгорания по
формулеR = (* + q (А),(12.54)где m — секундный расход газа;(7lo — скорость газа в критическом сечении,q (X) — X -f- X J; X — ——.“крРо1 2 3 4- 5 6 7 *“ Щ
Рис. 12.25. Расчетный график вдуваРис. 12.24. Расчетная схема
вдува(12.55)3-35
Далее по формуле (12.47) находим необходимую длину насадка
/р = —(12.56)р k(J> 1 — Л) К cos 8р v 'Для основной поворотной камеры сгорания (сопла) тяга бывает
определена по летным характеристикам ракеты. Поэтому для них
определяют необходимый угол поворотаора6 = arcsin Цг . (12.57)Для дефлектора по наибольшей управляющей силе находят,
пользуясь формулой (12.49), рабочий угол поворота.Для управления вдувом при выбранных конструктивных харак¬
теристиках (температура вдуваемого газа, угол вдува, место вду¬
ва и др.) определяют общий расход вдуваемого газа.Расчет характеристик подвижности органов управленияК характеристикам подвижности относятся углы,, скорости и
ускорения органов управления. Предельные углы поворота харак¬
теризуют особенности конструкции органа управления и его при¬
вода. При работе органы управления должны иметь наибольшие
углы поворота меньше предельно допустимых.Скорости вращения органов управления определяют необходи¬
мую мощность привода. Чем больше мощность привода, тем боль¬
ше его масса.Ускорения, возникающие при вращении органа управления,
определяют силы и моменты сил инерции и поэтому сказываются
на мощности привода. Чем больше предельные ускорения, тем
больше необходимая мощность привода.Из сказанного следует, что при проектировании ракеты необхо¬
димо установить наибольшие углы, скорости и ускорения враще¬
ния органов управления.Наибольшие углы поворота можно определить следующим об¬
разом.Угол поворота органа управления складывается из програм¬
много угла, угла, вызванного воздействием постоянного ветра, и
угла, определяемого из условия угловой стабилизации ракеты.Значение максимального угла отклонения можно рассчитать по
формуле»™.-К»Т+Ч+8то. О2-58)где 6В — угол компенсации ветра;
йс — угол стабилизации; -(с**8пр —программный угол.336
Эти отклонения определяются по зависимостям:
8.' (Дав 8ав);(12.59)8С = &а9ст,(12.60)MTti _'пр МЬ апр>(12.61)где бет находится по формуле (12.39).Наибольший угол поворота органа управления для второй сту¬
пени8 = у 82 + 82 + 82 + 8ПО) (12.62)шах г в 1 пог 1 с 1 пр’ 4 >где Зцог — угол компенсации производственных погрешностей, опре¬
деляемый по формуле= (12.63)8С — угол стабилизации при действии импульсных возмущений
при разделении ступеней, определяемый по формуле» - /г'02ОЙ (12.64)Кz\Скорость и ускорение органа управления определяются из усло¬
вия обеспечения угловой стабилизации ракеты:8„„„ = k„ Q0rn(12.65)где бет для первой ступени рассчитывается по формуле (12.39), а
для второй — по формуле6СТ=-^. (12.66)Расчет мощности рулевой машины и потерь дальности,
связанных с работой органов управленияПотребная наибольшая мощность привода определяется по
формулеN=M4mtx] (12.67)где Мг — наибольший суммарный момент сопротивления повороту
органа управления.12—1736 3 37
Этот момент-в самом общем виде можно записать следующим
образом.М — Мтр УИин -)- Мизг -f МП03, (12.68)где AfTр, Мин, Мизг, Мпоз — моменты трения, инерционный, изгиб-
ный и позиционный.Момент трения имеется во всех органах управления, поскольку
происходит их вращение при работе. Величина его будетMTp=fFr, (12.69)где / — коэффициент трения, величина которого зависит от типа
применяемых подшипников;F — реакция в опоре;
г — радиус опоры (цапфы).В уплотнительных кольцах поворотного сопла возникает мо¬
ментAfxp = 4«/rM У а* + -£, (12.70)к' с , /**., - -где г—радиус кольца;р — давление прижатия кольца к шаровой поверхности;^— ширина кольца;а — расстояние от плоскости кольца до оси цапф.
Зависимость (12.70) предполагает установку двух упло'тнитель-
ных колец, симметричных относительно оси цапф.Момент сил инерции определяется по формуле^н = /8,пах, (12.71)где /— момент инерции органа управления относительно оси вра¬
щения.Для поворотной камеры сгорания момент инерции относительно
ее центра масс определяется из выражения/кс = ^ , (12.72)где /икс — масса камеры сгорания вместе с компонентами топли¬
ва в рубашке охлаждения и головке;/2 — расстояния от центра масс камеры сгорания до ее
верхнего и нижнего среза.Момент изгиба проявляется при подводе компонентов топлива
в поворотную камеру сгорания по гибким трубопроводам. Его ве¬
личина определяется по формулеМт = 4*рг*АХЪ, (12.73)где р — давление в трубопроводе;
г —радиус трубопровода;ЬХ — стрела прогиба трубопровода при единичном отклоне¬
нии камеры сгорания,338
Г Позиционный момент возникает в результате смещения равно¬
действующей газодинамических сил относительно оси вращения.
Он возникает у воздушных и газовых рулей и у поворотного на-
1'пдка.Для рулей приближенно позиционный моментМП0Э = М\ (12.74)Для поворотного насадкаMno, = \(p{-p2)Rlh, (12.75)где h — расстояние от середины насадка до его оси вращения.Потери дальности, связанные с работой органов управления,
происходят в результате следующих причин:— увеличения пассивной массы ракеты за счет массы органов
управления и привода;— потери тяги при отклонении органа управления;— потери удельной тяги (например, в рулевых камерах сгора-
ния и при управлении вдувом).Потери дальности в результате увеличения сухой массы ракеты
можно определить по выражению<12-76>Потери дальности вследствие потерь тяги и удельной тяги рас¬
считывают по формулеД1 = -|£г ДУ. (12.77)В формуле (12.77) потери скорости вследствие потерь тяги
будутП(1278)i=1а вследствие потерь удельной тяги:АУг=^ (12.79)miгде ДPt и ДЯуд/ — средние потери тяги и удельной тяги на ин¬
тервале времени At{\
т1 — текущая масса ракеты, равная/га, = /я0(1 — ji,). (12.80)ХМО , ^ - nf ЦЧисло интервалов времени и их величина выбираются в зави¬
симости от требуемой точности расчетов.\2* 339
ЛИТЕРАТУРА К ГЛ. XII1. Абрамович Г. Н. Прикладная газовая динамика. Техиздат, 1953.2. Безухов Н. И. Динамика сооружений в примерах и задачах. Строй
издат, 1947.3. Дейч М. Л. Техническая газодинамика. Техиздат, 1953.4. Жаков А. М., Пигулевский Ф. А. Управление баллистическими
ракетами. Воениздат, 1965.5. Краснов Н. Ф Аэродинамика тел врашения. Оборонгиз, 1958.6. О р л о в Б. В., Мазинг Г. Ю. Термодинамические и баллистические
основы проектирования ракетных двигателей на твердом топливе. Машгиз, 1964.7. Федосьев В. И., Синярев Г. Б. Введение в ракетную технику.
Оборонгиз, 1960.8. Вопросы ракетной техники, 3 (61), 6, 10 (62), 4, 5, 6 (65), 1, 2, 3, (66),
изд-во иностр. лит.9. Ракетная техника и космонавтика, 3. 5, 11 (63), 1, 10, 11 (64), 2, (65), Мир.10. Interavia, 1965, № 5.
ГЛАВА XIIIКОНСТРУКЦИЯ И РАСЧЕТ СИСТЕМ РАЗДЕЛЕНИЯК системам разделения относят системы отделения головных
Частей, системы разделения ступеней и системы сброса хвостовых
отсеков, различного рода обтекателей и некоторых других узлов.В настоящей главе рассматриваются системы отделения боевых
Частей и системы разделения ступеней.§ 13.1. ТРЕБОВАНИЯ К СИСТЕМАМ ОТДЕЛЕНИЯ БОЕВЫХ
ЧАСТЕЙ И ИХ ПРИНЦИПИАЛЬНЫЕ СХЕМЫСистема отделения предназначена для отделения БЧ в конце
активного участка траектории, а также крепления ее к корпусу
ракеты при наземной эксплуатации и в полете.I Всякая система отделения включает две группы устройств:
устройства крепления (или средства крепления) и-отделения. Пер-
аые крепят БЧ к корпусу ракеты и освобождают БЧ от кинемати¬
ческой связи с корпусом в момент отделения. Вторые сообщают
относительное движение БЧ и корпусу. В соответствии с устано¬
вившейся терминологией будем называть их механизмами отделе¬
ния, хотя для некоторых конструктивных схем этот термин не
вполне правилен.Для сообщения относительного движения механизмы отделения
используют либо энергию аккумулированную в них, либо энергию
встречного потока воздуха.Системы отделения должны:— обеспечивать надежное отделение БЧ и минимальные воз¬
мущения ее движения в процессе отделения;— обеспечивать надежное крепление боевой части к корпусу
ракеты, быть компактными и иметь небольшую массу;— быть безопасными и простыми в эксплуатации.Заметим, что под надежным понимают такое отделение, при
котором исключается догон отделившейся БЧ корпусом ракеты, а
следовательно, и их -взаимное соударение. Для этого энергия,341
используемая для отделения, должна быть достаточной, а само отде¬
ление происходить в расчетный момент времени по команде систе
мы управления.Не выполнив эти условия, отделение может не произойти вовсе,
или БЧ получит чрезмерные возмущения, существенно изменяю¬
щие параметры ее движения и увеличивающие рассеивание.В процессе отделения относительное ускорение, скорость и пе¬
ремещение корпуса ракеты и БЧ должны быть стабильными oi
ракеты к ракете и возможно ближе соответствовать расчетным;
отклонение их от расчетных приводит к рассеиванию точек паде
ния БЧ.Требование минимальных возмущений является определяющим
при выборе принципиальной схемы системы отделения примени
тельно к конкретной ракете. Учитывают это требование и при вы¬
боре момента отделения.При отделении БЧ может получить два вида возмущений: от¬
клонения вектора абсолютной линейной скорости и угловые скоро¬
сти вращения относительно центра масс.Основной причиной, вызывающей отклонения вектора абсолют¬
ной скорости, является разброс таких параметров, как импульс
тяги последствия двигателя, время срабатывания системы отделе¬
ния, масса ракеты в момент отделения, энергетические характери¬
стики механизма отделения.Причинами появления угловых скоростей вращения БЧ вокруг
собственного центра масс могут быть: упругие поперечные колеба¬
ния корпуса ракеты в период отделения, наличие эксцентриситета
тяги последействия и эксцентриситета в действии сил механизмов
отделения. Заметим, что возмущения вектора,абсолютной скорости
приводят к отклонению точек падения БЧ в результате рассеива¬
ния траекторий всего пассивного участка, тогда как угловые ско¬
рости вращения БЧ вызывают отклонение точек падения в резуль¬
тате рассеивания траекторий лишь на атмосферном пассивном
участке траектории вследствие ухудшения условий стабилиза¬
ции БЧ.Надежность крепления БЧ к корпусу ракеты должна обеспечи¬
ваться на всех этапах эксплуатации от момента пристыковки до
момента отделения. Детали средств крепления должны быть рас¬
считаны на нагрузки, возникающие при работах с ракетой при под¬
готовке ее к пуску, при пуске и на активном участке траектории.
Средства крепления БЧ ракет подвижных ракетных комплексов,
кроме того, необходимо рассчитывать на нагрузки, возникающие
при транспортировке.Компактность и небольшая масса системы являются очень важ¬
ными для ракет, поскольку увеличение массы конструкции ракеты
уменьшает дальность полета, а увеличение габаритов может ухуд¬
шить ее аэродинамические характеристики и условия эксплуата¬
ции. Желательно, чтобы устройства системы отделения не требо¬
вали специальных объемов внутри отсеков, а использовали объемы342
орпуса ракеты, остающиеся незаполненными. При размещении
||р(*гатов системы отделения над обводом ракеты особенно важно,
►Чтобы их габариты были небольшими в целях уменьшения аэроди¬
намических сил.В качестве средств крепления БЧ к корпусу ракеты обычно
Р применяют быстроразъемные устройства в виде разрывных болтов
||| п направляющие штыри или шпильки. Разрывные болты уста¬
навливаются в шпангоуты с радиальным зазором и работают
Только на растяжение. Направляющие шпильки работают на срез,
иш'принимая перерезывающие силы и крутящие моменты.1} зависимости от характера, места приложения и направления
Действия сил, осуществляющих отделение, возможны три группы
ус гройств отделения [1, 6]:— расталкивающие;— тормозящие;— комбинированные.Первые расталкивают БЧп корпус ракеты силами,
действующими в направле¬
нии их продольных осей;
иторые — притормаживают
корпус ракеты; третьи — со¬
четают расталкивание или
притормаживание с поворо¬
том корпуса ракеты вокруг
центра масс.В качестве расталкивающих устройств отделения применяются
пневматические, пружинные или пороховые механизмы (толка¬
тели) .Источником энергии для пневматических механизмов отделения
может служить либо давление, отбираемое из пневмосистемы ра¬
кеты, либо давление наддува переднего топливного бака [I].Пневмотолкатель представляет собой шток с поршнем, поме¬
щенный в цилиндр, ось которого совпадает с осью ракеты. Отде¬
ление БЧ происходит в результате воздействия штока на днище
1>Ч в момент, когда за поршнем будет создано необходимое давле¬
ние, а разрывные болты будут разрушены.Пружинный толкатель [2] целесообразно выполнять в виде не¬
скольких автономных толкателей. На рис. 13.1 показана одна из
нозможных принципиальных схем пружинного толкателя. Толка¬
тели удерживаются во взведенном состоянии чеками /, фиксирую¬
щими стаканы 3 в корпусах 4. По окончании пристыковки БЧ
чеки 1 удаляют, в результате стаканы 3 опираются на днище кор¬
пуса БЧ.При обрыве разрывных болтов пружины 2 разжимаются и
расталкивают БЧ и корпус ракеты.Пружинные толкатели являются самыми тяжелыми из растал¬
кивающих механизмов, но зато и самыми простыми.Рис. 13.1. Пружинный толкатель:/ — чека; 2 — пружина; 3 — стакан; 4 — корпус343
Пороховые расталкивающие механизмы [2] аналогичны пненми
толкателям, отличаясь от них лишь тем, что давление на пориичм,
создается газами при сгорании небольшого порохового заряди
(рис. 13.2).Это, вероятно, самый легкий и компактный из расталкивающий
механизмов. Однако зависимость скорости горения от температу
ры заряда вызывает разброс давления пороховых газов, а следи
вательно, и сил, развиваемых механизмом.Расчеты показывают, что при приемлемых габаритах и мат'
расталкивающие механизмы не позволяют получить силу, необхо
димую для надежного отделения БЧ в период последействия двига
теля. Они должны вступать в работу по его окончании, а это при¬
водит к рассеиванию траекторий полета БЧ вследствие разбросаимпульса последействия тяги.Расталкивающие механиз¬
мы сообщают БЧ дополнитель
ную скорость, а поскольку ве¬
личина ее не стабильна, то вно-
Рис. 13.2. Пороховом толкатель: сится добавочное рассеивание/ — пружина поджатня; 2 — шток с поршнем; ТОЧеК ПЗДеНИЯ БЧ. От ЭТОМ)
3- корпус; 4- пороховой заряд НеДОСТЭТКЭ Свободны ТОрМОЗЯ-щие устройства отделения [1].Торможение корпуса ракеты производится следующими сред¬
ствами:— тормозными двигателями;— газами наддува топливных баков;— аэродинамическими силами.Для торможения корпуса ракеты тормозными двигателями ис¬
пользуют несколько пороховых ракетных двигателей (ПРД) 1,
устанавливаемых симметрично на корпусе ракеты (рис. 13.3).Тормозные ПРД, создавая тягу, направленную в сторону, про¬
тивоположную движению ракеты, притормаживают ее корпус, а
боевая часть, предварительно освобожденная от связи с ним, по
инерции продолжает полет.Размещаются ПРД либо на хвостовом, либо на переднем от¬
секе (приборном или переходнике). Сопло тормозного двигателя
отклоняют наружу от боковой поверхности ракеты на небольшой
угол с тем, чтобы вытекающие из него газы не прожигали корпус
ракеты.Тормозная система отделения с ПРД практически не вызывает
возмущений движения БЧ и не уменьшает, таким образом, точно¬
сти попадания, хотя и является более тяжелой, чем любая из рас¬
талкивающих систем. Система имеет большую массу в том случае,
когда отделение происходит в период последействия тяги.При торможении корпуса ракеты газами наддува [1] на днище
переднего топливного бака делают несколько направленных впе¬
ред, наклоненных к оси ракеты сопел 1 (рис. 13.4), в исходном
состоянии закрытых заглушками 2. Чтобы отделить БЧ, заглушки344
Iiii исех соплах одновременно отбрасываются. Вытекающие из со-
11«*. I газы наддува создают реактивную силу, во многих случаях
дне I а точную для надежного торможения корпуса и отделения БЧ
■ Период последействия тяги двигателя.1акая система имеет небольшую массу и обладает всеми до-
|1пинствами системы с тормозными ПРД. Применяться эта систе-
РИи может не во всех случаях, поскольку, во-первых, в топливномРис. 13.3. Размещение тормозных ПРД:
/- ПРДРис. 13.4. Тормозные сопла, работаю¬
щие' на газах наддува:1 — сопло; 2 — заглушкаОаке давление наддува может оказаться недостаточным, чтобы
пмдать необходимый тормозной импульс; во-вторых, из-за раз¬
броса давлений наддува будет и разброс значений тормозного им¬
пульса.Торможение корпуса ра¬
кеты аэродинамическими си¬
лами возможно на ракетах,
у которых отделение проис¬
ходит в достаточно плотных
слоях атмосферы.Выше указывалось, что
комбинированные устрой¬
ства отделения отделяют БЧ
С одновременным или последующим поворотом корпуса ракеты. По¬
порот корпуса вокруг поперечной оси необходим для того, чтобы
увеличить надежность отделения и исключить возможность догона
отделившейся БЧ корпусом ракеты и соударения их под действием
гиги последействия двигателя.На рис. 13.5 показана одна из принципиальных комбинирован¬
ных схем устройства отделения БЧ [1].Отделение БЧ осуществляется посредством короткого и силь¬
ного импульса, прикладываемого к корпусу ракеты в обратном его
движению направлении и в сторону так, что он сначала отделяет¬
ся от боевой части, а затем догоняет ее на параллельном или дру¬
гом курсе, проходящем мимо боевой части.Такая система в принципе позволяет отделить боевую часть от
I аердотопливной ступени ракеты с работающим двигателем. На¬
правление действия силы, создающей импульс, может проходить% ЮРис. 13.5. Силы, действующие на ракету
в начальный момент отделения345
через центр масс ступени или быть в стороне от него. В первом
случае под действием тяги двигателя ступень догоняет боевую
часть на параллельном курсе, во втором — их траектории расхо¬
дятся, так как ступень при этом совершает поворот вокруг соб¬
ственного центра масс.Очевидно, что импульс, прикладываемый к корпусу ступени, мо¬
жет создаваться не одной, а несколькими силами, при этом в об¬
щем случае и раздельно во времени. Важно, чтобы их равнодей
ствующая уводила корпус ракеты с траектории полета боевой
части.Для создания импульса могут использоваться пороховые ракет¬
ные двигатели, сжатый газ и т. п. Поскольку такое устройство от¬
деления при приемлемой массе создает относительно небольшой
импульс, то оно может осуществить отделение БЧ в конце периода
последействия.§ 13.2. РАСЧЕТ СИСТЕМ ОТДЕЛЕНИЯ БОЕВЫХ ЧАСТЕЙРассмотрим возможные методы расчета устройств отделения.
Решая задачи расчета, сделаем следующие допущения:— угол атаки вследствие его
малости полагаем равным нулю;— угловые колебания ракеты от¬
носительно поперечных осей в мо¬
мент отделения отсутствуют;— масса корпуса ракеты и аэро¬
динамические силы за время отделе¬
ния остаются постоянными;— силами сопротивления штеп¬
сельных и пневматических разъе¬
мов за малостью пренебрегаем.Расталкивающие системы
отделенияНа рис. 13.6а показаны силы,
действующие на ракету в момент
отделения БЧ расталкивающим ме¬
ханизмом. Силы тяжести опущены,
поскольку они ничего не изменяют
в относительном движении разде¬
ляемых частей.Уравнение относительного дви¬
жения в проекции на ось Ох, связанной системы координат,
имеет вид*от = ~ (/=■- xt) + ± (F + Хк-- Р), (13.1)расталкиванием:
а — система сил, действующих при
разделении: б — изменение сил лобо¬
вого сопротивления; в — изменение
относительной скорости за весь период
отделения346
где хот — относительное перемещение корпуса ракеты и БЧ;
F—сила механизма отделения;Хг, ^—аэродинамические силы лобового сопротивления БЧ
и корпуса ракеты;Р—-сила тяги в период последействия;
m и М—масса БЧ и корпуса ракеты в момент отделения.
Допустим, что расталкивающий механизм включается в дей*
П'ние по окончании периода последействия, поэтому тяга двига¬
теля отсутствует (Р = 0).Необходимое условие отделения — получение положитель¬
ного относительного ускорения лгот>0; тогда из уравнения (13.1)
имеемПри выполнении этого условия отделение произойдет, но не ис¬
ключается догон корпусом ракеты-отделившейся БЧ. Таким обра¬
зом неравенство (13.2) является необходимым, но недостаточным
условием отделения.Расчеты показывают, что резкое возрастание сил лобового со¬
противления происходит при отходе БЧ на некоторую длину L0
(рис. 13.66). При этом лобовое сопротивление корпуса ракеты
возрастает на значительно большую величину (из-за волнового
сопротивления вышедшего из аэродинамической тени переднего
торца), чем лобовое сопротивление БЧ (в результате появления
донного разрежения). Их величины определяются диаметрами и
аэродинамическими формами БЧ и корпуса ракеты.Таким образом, чтобы надежно отделить БЧ, необходимо обес¬
печить ее отход от корпуса ракеты на некоторую длину L0 (будем
называть ее достаточной длиной отхода) или более.Выполнение этого условия и будет достаточным условием отде¬
ления. Запишем уравнение относительного движения после окон¬
чания работы механизмаНачальными условиями для решения уравнения (13.3) будутгде V0— относительная скорость БЧ в конце хода толкателя;
/0 — рабочий ход толкателя.ir(F-X[) + ^[(F+XK)> О,откуда необходимая сила отталкивания будетр \ А1Хг тХк
М + т(13.2)(13.3)при t = 0 х0Т — V0) хот = /0,347
Решение уравнения (13.3) запишется так:ъ={-пх'^х-)‘+у* '1 (Ш)■'—LX')'.+ VS + t,\На пути хода толкателя от 0 до /0 скорость хот возрастает от нуля
до Vo, а затем вновь падает до нуля, что и показано на рисун¬
ке 13.6в.Для надежного отделения в конце его должно бытьпри t — tK хот = 0 и хот > L0. (13.5)Если через VTp обозначить относительную скорость отделения
в конце хода толкателя, необходимую, чтобы обеспечить условия
(13.5), то систему (13.4) можно записать в виде:О = — Хг) + VTP] |i/i 1 \ I (13.6)V» + l0- J+ *Решая систему (13.6), найдем требуемую относительную ско¬
рость в конце хода толкателя.Пр = V2 (13.7)Рассмотрим далее методы определения действительной относи¬
тельной скорости движения БЧ в процессе работы механизма. Для
этого запишем уравнение (13.1) в несколько иной форме:*"“(тг--5-)Мтг-'*г<--ж*0- (Ш)Произведем замену переменных" dx0T dxот * dxотхот— dXoT • dt ~xor dXm •В результате получим дифференциальное уравнение с разде¬
ляющимися переменными. Проинтегрировав его левую часть в пре¬
делах от 0 до V0T, а правую от 0 до /о, получим:,, 1 f 2 (М + т) л 2(МХг — тХк) . ..0У Мт АГ Шhгде А[7= \ Fdx0T—полная работа расталкивающего механизма.Запишем выражения для определения работы AF, совершаемой
расталкивающими механизмами различных конструктивных схем.348
Пневмотолкатель. Допустим, что за весь ход толкателя
его сила остается постоянной F — const; тогда выражение для ра¬
боты запишетсяПружинный толкатель. Сила толкателя в этом случае
падает в функции длины его хода по линейному законугде F0 — начальная сила пружины в исходном сжатом состоянии.
Здесь предполагается, что в конце хода толкателя пружина оказы¬
вается полностью разжатой.Пороховой толкатель. Если допустить, что полное сго¬
рание порохового заряда происходит до начала относительного
движения БЧ и корпуса ракеты, а расширение пороховых газов
при движении толкателя — адиабатически, то текущее значение
силы толкателя будетгде рп — начальное давление в цилиндре при полном сгорании
порохового заряда;1Н — начальная длина газовой полости (рис. 13.2);
хот—текущий ход штока толкателя;
k—-показатель адиабаты;^„ — площадь поршня.Проинтегрировав зависимость (13.13) от 0 до /0, найдем выра¬
жение для работыПодставив найденные для работы выражения в выражение(13.9), получим формулы относительной скорости У0 в конце ра¬
боты толкателей в функции их конструктивных характеристик.
Чтобы надежно отделить БЧ, необходимо выполнить условиеДопустив V^o = V'tp и воспользовавшись уравнениями (13.7),(13.10), (13.12) и (13.14), найдем требуемые для этого значения
расталкивающей силы:— для пневмотолкателяАр = FIq.(13.10)(13.11)а полная работа определится из выраженияAF = — F 0/0,(13.12)(13.13)(13.14)MXг — mXK Z,
М + т /с•о .(13.15)349
— для пружинного толкателяF '>1 Отр ^MKj~-jnX^2Lo_.
М + т /0 ’(13.16)— для порохового толкателяМ + т Ы .Mm (k-l) [ {/ц +Если в момент отделения БЧ отсутствуют аэродинамические
силы и тяга последействия, то необходимым и достаточным усло¬вием отделения будет наличие расталкивающей силы F, превы¬
шающей силу сопротивления штепсельных и пневматических разъ-
емов^ Однако для того чтобы повысить надежность отделения и
учесть добавку в скорости БЧ от действия механизма, задаются
величиной скорости в конце хода толкателя Vq и по ней опреде¬
ляют силу ^тр.Допустив в выражении (13.9) Хг—Хк = 0 и воспользовавшись
уравнениями (13.15) — (13.17), найдем:— для пневмотолкателя6tаРис. 13.7. Изменение тяги двигателя ц тормозных ПРД:а — включение тормозных ПРД при выключении двигательной
установки в одну ступень; б — включение тормозных ПРД при
наличии фиксированной конечной ступени тягиF = 1 •210{М + т)>V\Mm(13.18)для пружинного толкателя10(М + т) >(13.19)350
— для порохового толкателяF.тр(лА)тр2 (М + т)1К\ft-iПн + 1оГТормозные системы отделения(13.20)Отделение БЧ торможением корпуса ракеты можно осущест-
вить в период последействия тяги двигателя. Известно, что
характер изменения тяги при этом не стабилен, а величина им¬
пульса последействия имеет значительный разброс [3]. Чтобы отде¬
лить БЧ, целесообразно тормо¬жение корпуса начинать сразу
после резкого спада тяги
(рис. 13.7а), чтобы, во-первых,
иметь тормозные двигатели
приемлемой массы и размеров
и исключить влияние конечно¬
го участка тяги последействия
на точность попадания в цель,
во-вторых, уменьшить потери
в дальности полета в резуль¬
тате использования стабильной
части импульса последей¬
ствия тяги для сообщения ско¬
рости ракете.Если двигательная установ¬
ка имеет фиксированную ко¬
нечную ступень тяги, которая,
как правило, невелика, то тор¬
мозные ПРД целесообразно
включать одновременно с главной командой на окончательное вы¬
ключение двигателя (рис. 13.76).Для периода действия тормозных двигателей (или иных
устройств) система сил, действующих на разделяемые части, будет
такой, как она показана на рис. 13.8а, уравнение относительного
движения примет видРис. 13.8. Схема отделения БЧ тормо¬
жением корпуса ракеты:а — система сил, действующая при разделе¬
нии; 6 — изменение тяги последействияет *«-1т(13.21)В этом уравнении F(t) и тяга последействия P(t)—функции
времени.Необходимым условием отделения будет наличие положитель¬
ного ускорения лгот>0, или из выражения (13.21) имеемF(t)>P(t)Хк + — Яг,к 1 т г(13.22)351
Проинтегрируем уравнение (13.21) так же, как и уравнение (13.8),
•f+a з дел и в. пере м ен и ые. В результате получимпуса и БЧ.Относительные скорость и путь в период работы тормозных
устройств равныРассмотрим особенности расчета систем отделения при исполь¬
зовании тормозных ПРД.Время работы тормозных ПРД весьма'невелико, поэтому уста¬
новившегося режима тяги они обычно не имеют. Практически им¬
пульс тяги ПРД можно представить в виде произведениягде Рт — среднее значение тяги ПРД;
х — полное время его работы.Для определения импульса последействия 1Р аппроксимируем
кривую изменения тяги двигателя, после участка резкого спада, по
линейному закону так, как это показано на рис. 13.86. Тормозные
ПРД включаются в момент t\ и заканчивают работу в момент t2.
Полное время спада тяги равно /3; время торможения — т; время
спада тяги после окончания торможения — tK\ полное время отде¬
ленияОбозначим— импульс силы торможения корпуса в направлении его оси;tIP—\P{t)dt—импульс последействия 'тяги;олобового сопротивления кор-tIp — Prx,(13.25)= * + tK.Текущее значение тяги последействия запишется(13.26)352
Импульс тяги последействия за время торможения х опреде¬
лится по формуле/р=у(Л + Л)^. (13.27)Подставив (13.25) — (13.27) в (13.23) и (13.24), получим значение
относительных скорости и пути в конце торможения= + (-§--£•)> <13'28>'.-[-ж-т + (ж-т)]тг' 03.29)Для определения требуемой скорости отделения необходимо
рассмотреть относительное движение по окончании работ ПРД.
Уравнение относительного движения на этом этапе запишется*от = ~м^Хк ~ пГДопустив, что в период отделения тяга последействия изме¬
няется по линейному закону (рис. 13.8,6), имеем:*КОтсчет времени здесь ведется с момента t2, поэтому уравнение
принимает вид(13.30)Начальные условия для решения уравнения (13.30): при t = Ох0т“Vo, ^от = По¬
решив уравнение (13.30) и имея в виду, что в конце периода
последействия t — tK, получаем:Х°т ~~ ( М Хк т Х[) f* 2М + ^°;Х°т = (lT Хк ~~ 1п ~2 6Ж + v°tk + 10-(13.31)Для надежного отделения необходимо, чтобы по окончании пе¬
риода последействия при некотором t=tH, (tB>tK) отход БЧ был
бы L0 и относительная скорость Vor^0. Если допустить,что при t = tH х,от = 0, xOT = L0, a V0=VTp, то уравнения (13.31) за¬
пишутся так:(13.32)353
Решив систему (13.30) и (13.31), получим+ (13.33)Проектируя тормозные ПРД или иные устройства, необходим^
обеспечить такую скорость V0 в конце торможения, которая был^
бы больше или равна VTV.Поскольку за время торможения тяга последействия изменяет^
ся мало, то, чтобы упростить расчеты, можно допустить Ръ — Ру
Руководствуясь этими соображениями; подставим выражений
(13.29) для 10 в выражение (13.33), приравняем полученное выра,
жение (13.28) и после преобразований получимгдеРт ^ 2" ^ уГ~А1~А2>A=M(±x,—Lx,)-2P,-,(13.34)Аг-м(±Х.-±Х,)[ 2L0M , 2Ptt'L'+Зх2■Pi+ р?*(i — А)1 ' 4x2/Если пренебречь аэродинамическими силами (Хк==А'г=0), tq
из выражения (13.34) имеем(13.35)pr»p,(i + £).Среднюю тягу одного тормозного ПРД в направлении оси сопла
найдем из выражения= (13.36)где п—число тормозных ПРД;у — угол наклона оси сопла ПРД к оси ракеты.Комбинированные системы отделенияРассмотрим вначале комбинированную систему, осуществляю,
щую отделение БЧ и последующий увод корпуса ракеты с траекто¬
рии путем расталкивания и создания поперечной силы за счет
сброса давления наддува в направлении, перпендикулярном оси
ракеты.Процесс отделения разделим на два этапа: первый — период
работы толкателя и второй — поворот корпуса ракеты относитель¬
но поперечной оси.Схема сил, действующих при отделении в период работы тол¬
кателя, показана на рисунке 13,6а, а относительное движение и354
необходимое условие отделения описываются соответственно урав¬
нением (13.1) и неравенством (13.2).Чтобы определить относительную скорость V0 и время работы
толкателя т, проинтегрируем дважды уравнение (13.1), приняв за
начальные условия:при t = О хот ■■
при t — т л:от -: 0; хот = 0;Vo;LКроме того, вследствие кратковременности работы механизма без
большей погрешности можно допустить, что тяга последействияXРис. 13.9. Схема сил, действующих на ракету
в период поворота корпусаза время t Р = Рi = const. Проинтегрировав и решив систему, по¬
лучимVo= VVo(-' — Хт , F+XK-P,
~ ”Г МV —п,2 /„*гF+XK-Pt-М(13.37)(13.38)Далее вступает в действие боковой насадок. Рассмотрим отно¬
сительное движение на втором этапе отделения при следующих
допущениях:— масса и момент инерции корпуса за время отделения по¬
стоянны;— аэродинамические силы отсутствуют;— вокруг продольной оси корпус не вращается.Считая, что момент, создаваемый насадком, действует только
в плоскости рыскания, запишем уравнение движения корпуса ра¬
кеты в системе координат, жестко связанной с БЧ (рис. 13.9)*от = [— Р (0 cos <1> + Ра (0 sin «1»];
^-^-[^(Озшф + ЯиСОсовф];У. Л. (t) InТ / >(13.39)355
где Р (t) — тяга последействия двигателя ракеты;Pn{t)—тяга реактивного насадка; обе силы являются функ¬
циями времени;— момент инерции корпуса относительно поперечной
оси.Чтобы определить тягу реактивного насадка, сделаем следую¬
щие допущения:— расширение газов наддува в баке происходит адиабатически;— процесс истечения газов полагаем квазистационарным.
Поскольку отделение БЧ происходит в сильно разреженныхслоях атмосферы, то режим истечения через насадок за весь пе¬
риод отделения будет надкритическим. Обратившись далее к из¬
вестным уравнениям газодинамики [4], получим следующую фор¬
мулу тяги реактивного насадкаk—показатель адиабаты;/„ — площадь выходного сечения насадка;
р6 — давление наддува в топливном баке в момент
начала истечения;V0 — объем топливного бака, занятый газами над¬
дува;R — удельная газовая постоянная;Т0 — температура газа в момент начала истечения по
шкале Кельвина;
t — текущее значение времени истечения.Сохраняя импульс тяги неизменным, аппроксимируем спад тяги
последействия и тяги реактивного насадка по линейным за¬
конамгде Рн0—начальное значение тяги реактивного насадка;тн — полное время истечения через насадок.
Проинтегрировав последнее уравнение системы (13.39) дважды
при начальных условиях:где — начальная масса газов наддува топливного бака;356
Iесли / = 0, то ф = 0 и ф = 0, получим следующую систему урав¬
ненийС08Ч' + -ж(1-^-) sin Ц»;|ф = Fn0ltt It-— *' ^21У V Зтн / ' )Чтобы решить систему (13.41), целесообразно воспользоваться
численным интегрированием. Задаваясь шагом, например, t =
= 0,1—0,5 сек, определяют координаты центра масс и угол пово¬
рота корпуса, в зависимости от скорости его вращения. Вычисле¬
ния обычно сопровождаются графическим построением взаимного
положения БЧ и корпуса ракеты.Рт гРис. 13.10. Силы, действующие на ракету при
несимметричном торможении корпусаПри решении системы (13.41) среди начальных условий должны
быть: при t = 0 Хот = Vo и *от = ^о-Рассматривая отделение БЧ асимметричным торможением
корпуса, рассмотрим сначала относительное движение за время
работы тормозных ПРД, а затем вращательное движение корпуса
по инерции и под действием тяги последействия.Схема сил показана на рис. 13.10, а уравнения относительного
движения при допущениях указанных выше, запишутся*от = (— р+ пРт) cos 4»;г0т = -м(р~прт) sin*;'У(13.42)где л —число тормозных ПРД;рт — среднее значение тяги одного ПРД в направлении оси
ракеты;г — расстояние от центра выходного сечения сопла тормоз¬
ного ПРД до оси ракеты.357
Допустим, что асимметрично расположен один ПРД.Интегрируя последнее уравнение системы (13.42) дважды и
аппроксимируя тягу последействия по линейному закону, получим««-(М1-!’^)-пРг\^Г-‘ ' (ШЗ)Ф = Фо + V, )где ф0—угол поворота корпуса к моменту окончания ра¬
боты тормозных ПРД;РтгФо——г~ т— угловая скорость поворота корпуса в момент оконУчания работы тормозных ПРД.Системы (13.42) и (13.43) целесообразно решать также числен¬
ным интегрированием, сопровождая решение графическим построе¬
нием взаимного положения корпуса ракеты и БЧ.Первая из них справедлива в интервале времени от 0 до t (пе¬
риод работы тормозных ПРД), а вторая — в интервале от % до t„.В заключение сделаем несколько замечаний.Закон изменения тяги последействия во времени, необходимый
для расчетов систем отделения, бывает известен в тех случаях, ко¬
гда на проектируемой ракете используется существующий двига¬
тель, либо проектирование двигателя .опережает проектирование
ракеты. Если этот закон неизвестен, то можно воспользоваться
кривой тягн последействия существующих двигателей, однотипных
проектируемому. Период последействия тяги имеет разброс, поэто¬
му механизм отделения должен рассчитываться для самой верхней
кривой спада тяги из всех возможных.Расчетным для устройств отделения, работающих по оконча¬
нии периода последействия, является случай полета на минималь¬
ную дальность, поскольку при этом силы лобового сопротивления
Хк и Хг и масса корпуса ракеты Л1к будут наибольшими; и то и
другое требует наибольших энергетических затрат на отделение.§ 13.3. ВОЗМОЖНЫЕ КОНСТРУКЦИИ СИСТЕМ РАЗДЕЛЕНИЯСТУПЕНЕЙСистема разделения ступеней предназначена для прочного со¬
единения ступеней во время полета ракеты и надежного их разде¬
ления в необходимый момент времени по команде от системы
управления.Чтобы разделить ступени, могут применяться две основные си¬
стемы:— огневое разделение, когда двигатель верхней ступени за¬
пускается еще до начала разделения;— холодное разделение или разделение торможением первой
ступени после освобождения узлов крепления ступеней; в этом358
случае двигатель верхней ступени запускается после достижения
определенного расстояния между ступенями.Требования к системам разделения ступеней аналогичны требо¬
ваниям к системам отделения БЧ.Дополнительно необходимо обеспечить:1. Быстроту процесса разделения. Это требование связано со
стремлением уменьшить потери дальности полета вследствие раз¬
деления ступеней от действия сил гравитации. Однако ускорение
процесса разделения должно учитывать возможное увеличение воз¬
мущений, так как сокращение периода разделения требует увели¬
чения действующих при разделении сил.2. Уменьшение потерь дальности в результате действия систе¬
мы разделения. Эти потери зависят от схемы системы разделения,
ее массы, времени разделения, выбранного способа управления
полетом в процессе разделения и других факторов. Так как потери
дальности при разделении могут быть заметными, то всегда оцен¬
ку системы разделения ведут, учитывая потери дальности.Конструкция и сравнительная оценка систем
разделения ракет с ЖРДОсновными устройствами любой системы разделения являются
узлы крепления ступеней и разделения ступеней.При последовательном соединении ступеней для их крепления
применяются быстроразъемные болты (например, разрывные), а
также направляющие штыри. Число болтов и направляющих шты¬
рей и их размеры определяются нагрузками, действующими в
плоскости стыка ступеней. При этом болты считают на осевую,
а штыри на перерезывающую силу, как и в системе отделения БЧ.
Длину штырей выбирают с учетом того, что они служат также для
направления ступеней при стыковке и разделении. Длина штырей
не должна быть слишком большой, так как при разделении ступе¬
ней необходимо уменьшить возмущения.Чтобы разделить ступени торможением, обычно применяются
пороховые тормозные двигатели, устанавливаемые на отделяемой
ступени [1].При огневом разделении встает вопрос защиты отделяемой сту¬
пени в период начала работы двигателя последующей ступени.
С этой целью обеспечивается свободный выход газов работающего
двигателя еще до начала разделения ступеней (ступени соеди¬
няются фермой или в переходнике имеются люки).Оценим применяемые системы разделения.Разделение торможением может выполняться в не¬
скольких вариантах как по действующим силам, так и по времени
выполнения операций. Одна из возможных схем разделения тор¬
можением показана на рис. 13.11. Эта схема предполагает вклю¬
чение двигателя второй ступени после того, как будет приложен359
определенный тормозной импульс к первой ступени и достигнуто
определенное расстояние между ступенями, безопасное для за¬
пуска двигателя.В показанной на рис. 13.11 схеме осуществляется такая после¬
довательность операций:— выключение основного двигателя;— разрыв соединительных болтов и запуск тормозных двигате¬
лей; начинается разделение;— запуск основного двигателя второй ступени.Основными достоинства¬
ми этой системы разделения
являются: разделение под
действием небольших сил
.(оно осуществляется плав¬
но, без больших изгибных,
продольных и угловых коле¬
баний) и сравнительно не¬
большая масса узлов разде¬
ления (тормозные ПРД с
деталями крепления).Однако система разделе¬
ния торможением имеет су¬
щественный недостаток, заключающийся в сложной последователь¬
ности команд на выполнение операций разделения. Этой системе
свойственны также сравнительно большие потери дальности за счет
гравитации.Одна из возможных схем огне¬
вого разделения показана на
рис. 13.12, где основными коман¬
дами являются: запуск двигате¬
ля второй ступени, выключение
двигателя первой ступени и раз¬
рыв соединительных болтов.Преимуществами системы ог¬
невого разделения являются:— быстрота разделения, не
дающая практически гравита¬
ционных потерь скорости;— простота процесса разделения, для чего требуется простая
последовательность команд;— повышенная надежность запуска двигателя второй ступени,
поскольку при запуске возникают осевые перегрузки, создаваемые
еще работающим двигателем первой ступени и обеспечивающие
устойчивую работу заборных устройств баков.Основные недостатки огневого разделения:— большие возмущения, получаемые второй ступенью в про¬
цессе разделения;360г, СилыРис. 13.12. Схема огневого разде¬
ления
— достартовый расход топлива на второй ступени, так как дви¬
гатель второй ступени запускается еще до потери связи между
ступенями.Особенности ракет с РДТТС точки зрения разделения ступеней особенностями являются:— ракеты с РДТТ проходят плотные слои атмосферы с более
высокими скоростями, так как они имеют большие тяговооружен-
ности, чем ракеты с ЖРД;— трудности надежного выключения РДТТ перед разделением
ступеней;— более быстрый запуск и выключение двигателя (меньший
импульс последействия тяги);— ракеты с РДТТ допускают большие продольные и попереч¬
ные перегрузки.Так как ракета с РДТТ имеет большую скорость в плотных
слоях атмосферы, то для отделения первой ступени можно исполь¬
зовать аэродинамические силы. Одновременно в период отделения
первой ступени управление полетом второй ступени можно осуще¬
ствлять с помощью воздушных рулей, так как скоростной напор
воздуха достаточно велик.Из-за трудностей выключения двигателя твердого топлива от¬
деляемой ступени обычно допускают в нем полное выгорание топ¬
лива перед разделением ступеней. При этом отсутствие осевой
перегрузки не влияет на надежность запуска РДТТ последующей
ступени. Быстрый запуск двигателя облегчает задачу управления
в период разделения и уменьшает потери дальности вследствие
разделения ступеней.В целом разделение ступеней ракеты с РДТТ близко к огневой
схеме, только отличается от нее большей быстротой процесса раз¬
деления, возможностью использования аэродинамических сил для
разделения и простотой выполнения команд.§ 13.4. ОСНОВЫ РАСЧЕТА СИСТЕМ РАЗДЕЛЕНИЯ СТУПЕНЕЙРасчет разделения ступеней позволяет правильно выбрать па¬
раметры системы разделения и обеспечить необходимую надеж¬
ность полета ракеты.Рассмотрим основные возможные случаи разделения.Огневое разделениеРазделение ступеней начинается тогда, когда ускорение верх¬
ней ступени превысит ускорение нижней.Задачами расчета являются:— выбор момента времени подачи команды на подрыв узлов
связи ступеней;— проверка надежности разделения ступеней.361
Выбор момента начала разделения. Расчетная
схема разделения показана на рис. 13.12.Принимаем следующие допущения:— расчет ведем по номинальным значениям размеров ступе¬
ней и сил;.— рассматриваем плоское движение.Абсолютное ускорение ступеней ракеты в момент разделения
можно записать в следующем виде:— для второй ступениР,~Х2 .Ходля первой ступенитгсfP2 + Xt Я]miОтносительное ускорение второй ступени найдется по формуле
:: ;; А-*, , + *,-/>,■^отн ^2 я. "г тУсловие начала разделения запишется лгОТн>0
илиР,-Х2 «рЛ + ^.-Л 0и I ' т. ^ >отсюда имеемп ^ m,Xi — m2X2 +m2PiИ*> m~+fnh ’ (1344)где Хх и Х2 — лобовые сопротивления первой и второй ступеней;Рь Р2 — тяга двигателей ступеней в момент разделения;
ср — коэффициент, учитывающий действие двигателя
второй ступени на первую.Разделение ступеней целесообразно начинать в период после¬
действия тяги двигателя первой ступени сразу же после ее резкого
спада. Более раннее начало разделения ступеней будет приводить
к потери дальности, более позднее — может затруднить запуск дви¬
гателя второй ступени (отсутствие осевой перегрузки).Имея графики тяги двигателей первой и второй ступеней и ис¬
пользуя зависимость (13.44), можно определить момент потери
кинематической связи между ступенями.Окончательно временная последовательность прохождения
команд на запуск двигателя второй ступени, на выключение дви¬
гателя первой ступени и на разрыв связи уточняется на основе
оценки надежности разделения, действующих возмущений и потерь
дальности.Проверка надежности разделения. Расчетная схе¬
ма показана на рис. 13.13.362
Примем дополнительные допущения:— рассматриваем плоское движение в связанной системе коор¬
динат (в момент начала разделения);— выбираем наиболее неблагоприятное сочетание в действии
сил.Чтобы проверить надежность разделения, составим уравнения
движения ступеней:jPa_
dV-d2Xiгде1Х~ = Фл, —7>, + УИ’а;т1 dt'rflv,= (Я, — Тх) cos а — Ф sin а — Х{,— Фсов а + {Р{ — Тх) sin а +12 = ^2Е2 + F2S3 + ф;«2 = ^2 + F2) cos Ф + Yy sin ф — Х2;Шо-2rf28dP +- = фг — P2) sin ф — Yy cos ф + Y\ф;(13.45)/j и /2 — моменты инерции ступеней;ITj и Ф — силы воздействия струи двигателя второй
ступени на первую ступень;Т2 — сила воздействия отраженной струи на вто¬
рую ступень;Ь0, Ьъ Ь2, а0, аь а2 — коэффициенты автомата угловой стабили¬
зации;8—угол поворота органа управления.Последнее уравнение системы есть уравнение управления вто¬
рой ступени.Решить систему (13.45) можно только с помощью ЭВМ. Значе¬
ния газодинамических сил Ф, Ть Тг определяются опытом или363
берутся по аналогии с существующими ракетами. При этом значе¬
ния этих сил выясняются в функции расстояния между ступенями
и относительного бокового смещения ступеней.Управляющая сила является функцией угла отклонения орга¬
нов управления:Ку = /(8).Решив эту систему, проверяют (обычно геометрическим по¬
строением) возможность соударения отдельных точек ступеней, а
также устанавливают максимальный угол отклонения органа
управления и наибольший угол поворота второй ступени, т. е. оце¬
нивают устойчивость движения второй ступени после начала раз¬
деления.Разделение торможениемЗадачи расчета следующие:— определить величину тормозного импульса;— проверить надежность разделения.Определение величины тормозного импульса.
Исходными данными для расчета можно принять (рис. 13.11):
массы ступеней, закон спада тяги основного двигателя первой
ступени, тягу органа управления второй ступени и безопасное рас¬
стояние между ступенями к концу разделения.Примем следующие допущения:— перемещения центров масс при разделении происходят по
продольной оси р>акеты; поворота продольных осей ступеней не
происходит;— тормозные двигатели (ПРД) мгновенно выходят на режим;
реакции в месте стыка ступеней с этого момента равны нулю;■— тяга последействия основного двигателя первой ступени и
аэродинамические силы в период разделения постоянны.При таких допущениях для относительного ускорения второй
ступени можно записать" РУ , Рт , *1 А Л'2
х~ "ТГ" + +ПЦ intОбозначима =а =_*i т2 ' х т: т2ПолучимX = d ~{- (lv -f-Pjnот,Относительная скорость к концу разделения определится+ + f > (13.46)364
а относительный путьPmz (tk т)(13.47)где т — время работы ПРД;Рт — тяга ПРД.Если относительное перемещение хк задано, то величина им¬
пульса торможения будет зависеть от времени разделения tK. Чем
больше время разделения, тем меньше импульс торможения и
легче тормозные ПРД; но с увеличением времени разделения
растут потери дальности, поэтому выбирают при заданном хк та¬
кую величину импульса торможения, при которой потери дально¬
сти будут наименьшими.Выбирая время действия тормозных ПРД, необходимо иметь
в виду, что при данном тормозном импульсе масса тормозных ПРД
зависит от времени их действия. Поэтому время их действия бе¬
регся таким, в течение которого получается наименьшая их масса.Проверка надежности разделения предусматривает
исключение соударения характерных точек первой и второй ступе¬
ней и обеспечивает устойчивое движение второй ступени.Применительно к данному виду разделения уравнения движе¬
ния ступеней будут следующими (рис. 13.14):Рис. 13.14. Схема сил при разделении торможениемт{ = (Р: — pm) COS а + Рр cos (а + 8t) — Х{,
т1 'SL = *> + ( Л + Рт) sin а + PPI sin (а + 81);=- ррЛ sin
w2-^r = ^2c°s + — х2 + ррг cos (82 4- ф);(13.48)т'-ЧГГ = Р1 sin Ф + + Ppi sin (83 + ф);365
Решение этой системы проводится для того чтобы получить
картину разделения ступеней, а также определить наибольший
угол поворота рулевых органов второй ступениЛИТЕРАТУРА К ГЛ. XIII1. Журнал «Вопросы ракетной техники» N° 4, 9, 1961, № б, 1962, № 2, 1963,
изд-во иностр. лит.2. Реферативный журнал «Ракетостроение» № 6 и 7, 1965, институт научной
информации АН СССР.3. М о ш к и н Е. К. Динамические процессы в ЖРД. Машгиз, 1964.4. Гарный И. А. Основы газодинамики. Госпромтехиздат, 1961.5. Гончаренко М. Н. Ракеты и проблемы антиракет. ДОСААФ, 1962.6. Палмер, Митчел. Исследования и моделирование высокоточной си¬
стемы разделения космических аппаратов, РТК, № 5, 1966, «Мир».N
ГЛАВА XIVКОНСТРУКЦИЯ И РАСЧЕТ СИСТЕМ ПИТАНИЯК системам питания относятся топливные системы, системы
наддува, пневмосистемы и системы регулирования соотношения
расходов компонентов топлива. Данные системы предназначены
для питания двигателя компонентами топлива и регулирования
расхода компонентов, чтобы улучшить весовые и баллистические
характеристики ракеты.§ 14.1. УСТРОЙСТВО И РАСЧЕТ ТОПЛИВНЫХ СИСТЕМТопливные системы предназначены для размещения на ракете
потребного запаса топлива и его подвода от баков к насосам под
необходимым давлением и в нужном количестве, а также для за-
правки баков и слива из них компонентов топлива в случае несо-
стоявшегося пуска ракеты.Рассмотрим принципиальную схему топливной системы. Она
состоит из двух автономных систем: системы окислителя и горю¬
чего. Система окислителя включает бак окислителя 1 (рис. 14.1),
трубопровод 2, коллектор 4, трубопровод 6, заправочно-сливной
клапан 13, заправочный трубопровод 14, перекрывной клапан 12.
Система горючего состоит из бака горючего 3, трубопровода 5, за¬
правочно-сливного клапана 7, заправочного трубопровода 8, пере-
крывного клапана 9. По трубопроводам 2, 6 я 5 окислитель и го¬
рючее из топливных баков 1 и 3 при открытых перекрывных кла¬
панах 9 и 12 поступают в насос 11 и 10 двигателя. Через
заправочные трубопроводы 14, 8, заправочно-сливные клапаны 7,
13 баки заправляются компонентами топлива и через них компо¬
ненты сливаются. Коллектор 4 устанавливается в местах развет¬
вления трубопроводов. Перекрывные клапаны 9 и 12 предохра¬
няют полости турбонасосного агрегата (ТНА) двигателя от про¬
никания компонентов топлива при хранении заправленной ракеты.
Перед пуском ракеты они должны быть открыты.367I
Конкретные конструкции топливных систем зависят от назня
чения ракеты, особенностей ее конструкции, устройства двигате¬
лей, состава топлива и других факторов. Однако любая конструк¬
ция топливных систем представляет собой совокупность емкостей
трубопроводов и агрегатов автоматики (клапанов, регуляторов),регулирующих подачу топлива,
т. е. топливные системы ракет
мало отличаются от гидросистем,
применяемых, например, в маши¬
ностроении. Однако к топливным
системам ракет предъявляется
ряд специфических требований.
Они должны иметь малый вес,
минимальные гидравлические по¬
тери; должны быть герметичны¬
ми, обеспечивать удобство и без¬
опасность заправки, долговремен¬
ное нахождение ракеты в заправ¬
ленном состоянии, не должно
быть вибрации трубопроводов и
гидроудара.Требование минимальной мас¬
сы систем — общее требование,
предъявляемое к любым агрега¬
там и системам ракеты.Поясним требование мини¬
мальных гидравлических потерь в
системах. Чтобы обеспечить бес-
кавитационную работу насосов,
необходимо выполнить условие/7, = р + Арк,Пренебрегая скоростью Vq ввиду ее малости, из уравнения
(14.1) получаем давление р\-Р\=Рб +Ру .
— ~Ар.(14.2)Рис. 14.1. Топливные системы:/ — бак окислителя; 2 — трубопровод; 3 —
бак горючего; 4 — коллектор; 5 — трубо¬
провод; 6 — трубопровод; 7 — заправочно¬
сливной клапан; 8 — заправочный трубо¬
провод; 9 — перекрывной клапан; 10 —
насос; II — насос; 12 — перекрывной кла¬
пан; 13 — заправочно-сливной клапан; 14 —
заправочный трубопроводгде рх— давление на входе в насос;ps — давление насыщенных паров компонента при данной
температуре;Д/7К — кавитационный запас насоса.Определим давление р\ жидкости на входе в насос, для чего за¬
пишем уравнение Бернулли для сечений 0—0 и 1—1 (рис. 14.2)
для произвольного момента времени полета ракеты:Рь +рУ26р gznx + А ++ 4Р,(14.1)где р6 — давление наддува бака;V6 — скорость движения жидкости в баке;
пх — коэффициент осевой перегрузки;\/\ — скорость жидкости на входе в насос;
Ар — гидравлические потери в системе.3680/7д\01\У□-1Рис. 14.2. К вы¬
воду уравнения
БернуллиИз уравнения (14.2) видно, что для обеспечения заданного давле¬
ния Р\ гидравлические потери Ар должны быть компенсированы
увеличением давления ръ наддува, это приводит к увеличению рас¬
хода рабочего тела наддува и массы системы наддува. Поэтому,
I проектируя системы питания, следует стремиться к тому, чтобы
уменьшить гидравлические потери.Герметичность систем —это одно из важнейших
требований. Известно, что жидкие топлива обла¬
дают рядом неприятных свойств: взрывоопасно¬
стью, токсичностью, способностью к самовоспламе¬
нению при смешивании и т. д. Поэтому при проек¬
тировании систем уделяется серьезное внимание
выбору типа соединений трубопроводов и агрегатов
автоматики, выбору материалов для элементов си¬
стем и технологии их изготовления.Удобство заправки обеспечивается таким разме¬
щением заправочных горловин, которое позволяет
производить сравнительно простое подсоединение и
отсоединение наземных заправочных приспособле¬
ний.Долговременное нахождение ракет с заправленными емкостями
возможно только при применении высококипящих компонентов.
Известно, что ряд этих компонентов является самовоспламеняю¬
щимися и обладает высокой агрессивностью к большинству кон¬
струкционных материалов. Поэтому, проектируя системы, необхо¬
димо выбирать стойкие к компонентам топлива материалы и при¬
нимать меры для устранения возможности контакта компонентов
как в жидкой, так и в парообразной фазах.Вибрация трубопроводов возникает в результате работы дви¬
гателя и перемещения отсеков, к которым крепятся трубопроводы,
а также в результате пульсации давления жидкости в трубопрово¬
дах. В результате воздействия этих источников вибрации возни¬
кают колебания трубопроводов. Когда совпадают частоты возму¬
щающих колебаний с частотами собственных колебаний трубопро¬
водов, возникают резонансные явления, при которых возрастают
амплитуды колебаний трубопроводов и напряжения в них, а это
приводит к разрушению трубопроводов. Чтобы устранить это яв¬
ление, необходимо выбирать соответствующие характеристики тру¬
бопроводов, места и способы крепления их к двигателю и корпусу
ракеты. В связи с тем, что вибрация трубопроводов связана с
большим числом параметров ракеты и двигателя, теоретическое
решение вопросов борьбы с вибрацией пока затруднено и они ре-7,13—1736369
шаются в основном экспериментально с учетом накопленного
опыта проектирования систем.Под гидроударом понимается резкое повышение давления жид¬
кости в трубопроводе, вызванное быстрым перекрытием трубопро¬
вода, по которому происходило движение компонента топлива.
Повышение давления жидкости при определенных условиях может
привести к разрушению трубопровода. Поэтому, проектируя си¬
стемы, следует выявлять возможности возникновения гидроудара
и намечать меры по уменьшению его интенсивности.Рассмотрим конструкции трубопроводов и элементов их креп¬
лений.Трубопроводы могут состоять из отрезков труб с приваренными
фланцами или только из труб. В первом случае трубопроводы со-Рис. 14.3. Трубопровод:/ — труба; 2 — фланец; Я — центрирующие выступы;
4 — теплоизоляционный слой; 5 — компенсаторчленяются, образуя топливную магистраль, фланцевыми соедине¬
ниями, а во втором — сваркой. Трубы могут изготавливаться из
алюминиевых сплавов или сталей. Так как алюминиевые трубо¬
проводы обладают большой удельной прочностью, высокой стой¬
костью к воздействию агрессивных компонентов и к коррозии,
целесообразно применять их в системах питания ракет. Трубы мо¬
гут быть цельнотянутыми и сварными. Последние применяются
при очень больших диаметрах трубопроводов, изготовление кото¬
рых прокаткой затруднено.Трубопроводы систем с верхним расположением баков (напри¬
мер, трубопровод 2 на рис. 14.1) имеют большую длину и при
хранении ракет в горизонтальном положении могут прогибаться
под действием силы тяжести, а в условиях полета — терять устой¬
чивость под действием осевых нагрузок. Чтобы избежать этого,
необходимо магистральные трубопроводы центрировать по всей
длине относительно тоннельных труб, расположенных в нижних
баках. Центрирование создается местными утолщениями из теф¬
лона или стекловолокна, которыми трубопровод опирается на
тоннельную трубу. При применении жидкого кислорода трубопро¬
вод обматывается теплоизоляционным материалом (стеклоткань,370
стекловата) для того, чтобы уменьшить интенсивность теплооб¬
мена между окислителем и окружающей средой.На рис. 14.3 [1] представлен трубопровод, состоящий из тру¬
бы /, к одному концу которой приварен фланец 2, а ко второму —
компенсатор 5. На наружной поверхности имеются теплоизоля¬
ционный слой 4 и центрирующие выступы 3.Компенсаторы представляют собой устройства, состоящие из
двух фланцев / и 3 (рис. 14.4), соединенных сильфоном 2. ЧтобыРис. 14.4. Компенсатор:/-фланец; 2— сильфон; 3 — фланец; 4 — гильзауменьшить гидравлические потери, сильфон отделяется от потока
жидкости гильзой 4. Внутренний диаметр гильзы должен быть
не менее диаметра сочленяемых трубопроводов, а длина — по воз¬
можности большей, но допускающей такое перемещение сильфона,
при котором гильза 4 не упиралась бы во фланец 1 при макси¬
мально допустимых нагружениях. л
Сильфон выполняется в виде тон-
костенной гофрированной трубы, i f-J
которая обладает способностью ( J Т
деформироваться в осевом на- 'правлении и отклоняться в лю¬
бом направлении от продольной
оси. Учитывая эти свойства силь¬
фонов, компенсаторы применяют Рис- 14-5. Несоосность трубопроводов
прежде всего для компенсациипогрешностей изготовления элементов систем при установке тру¬
бопроводов. Применение компенсаторов позволяет, например, со¬
единить стыкуемые трубопроводы при их несоосности равной I
(рис. 14.5), а также при угловых отклонениях а осей соединяемых
трубопроводов. Величины отклонений I и а зависят от параметров
сильфонов, в частности, от их длин и диаметров.Компенсаторы необходимо применять и по другой,, не менее
важной причине. Пусть трубопровод / (рис. 14.6) соединяет бак 4
с ТНА 3 двигателя, жестко закрепленном на корпусе 2 ракеты.
Тогда при температуре трубопровода 1, отличной от температуры
корпуса 2, в трубопроводе возникнут термические напряжения.
Напряжения в трубопроводе возникнут также и при заправке371
Таким образом, компенсаторы играют важную роль в системах
питания и их необходимо вводить в трубопроводы, особенно в те
участки, которые находятся между жесткими опорами.Соединения составных частей систем питания должны обеспе¬
чивать надежную герметичность как при действии рабочих нагру¬
зок, так и при транспортировке. В системах питания обычно ис¬
пользуются следующие типы соединений:— фланцевые;— ниппельные,— сильфонами;— сварные.Фланцевые соединения по аналогии с гидросистемами машино¬
строения могут быть использованы в трубопроводах диаметром
более 80—100 мм. Они могут быть с цельными, свободными и
цельносвободными фланцами. Соединение с цельными фланцами
(рис. 14.7) состоит из двух фланцев 1, 2, приваренных к стыкуемым
трубопроводам. Фланцы представляют собой отдельные детали с
отверстиями для болтов 3. Герметичность соединения достигается
деформированием прокладки 4 при затяжке болтов 3. Соединение
со свободными фланцами (рис. 14.8) состоит из двух наконечни¬бака 4 компонентом топлива, так как днище бака будет деформи¬
роваться и вызывать деформацию трубопровода I. Трубопровод
может также нагружаться при наддуве бака 4, при деформации
рамы двигателя и т. д. При действии перечисленных нагрузок в
трубопроводе могут возникнуть напряжения, превышающие допу¬
стимые, и он может разрушаться. При применении компенсаторов
перечисленные деформации воспринимаются их сильфонами и
поэтому напряжения в трубопроводах существенно уменьшаются.
Заметим, что компенсаторы в некоторой степени гасят колебания,
передающиеся через трубопроводы, а также уменьшают интенсив¬
ность гидроудара, т. к. при внезапном повышении давления в си¬
стеме могут значительно деформироваться.-2
t-—3Рис. 14.6. К необ¬
ходимости приме¬
нения компенса¬
тора:I — трубопровод; 2 —
корпус ракеты; 3—
турбонасосный агре¬
гат; 4 — бакРис. 14.7. Соединение с цель¬
ными фланцами:1, 2 — фланцы; 3 — болт; 4 —
прокладкаРис. 14.8. Соединение со
свободными фланцами:
/. 2 — наконечники; 3, 4 —
кольца; 5 — болт; 5 — про¬
кладка372
ков 1, 2 стыкуемых трубопроводов, колец 3 и 4 с отверстиями для
болтов 5. Между наконечниками зажимается прокладка 6. В со¬
единениях с цельносвободными фланцами (рис. 14.9) -фланеЦ ^
является свободным, а фланец 4 — цельным. Герметичность соеди¬
нения обеспечивается прокладкой 1, которая деформируется при
затяжке болтов 3. Соединения с цельными фланцами применяются
в основном для стыковки прямых трубопроводов, а соединения с
цельносвободными и свободными фланцами —при стыковке изо¬
гнутых трубопроводов.В качестве материала прокладок может применяться пресс¬
шпан, мягкий алюминий, латунь. Потребное усилие затяжки Р3
болтов зависит от многих факторов, поэтому при его определенииРис. 14.9. Соединение с
цельносвободными флан¬
цами:1 —- прокладка; 2 — фланец;
3 — болт; 4 — фланецРис. 14.10. Последова¬
тельность затяжки
гаекиспользуются формулы, полученные на основе накопленного опы¬
та. Расчетные формулы имеют видР8 = kasF6,где k—опытный коэффициент, зависящий от материала про¬
кладки;а,— предел текучести материала болта;F6 — площадь поперечного сечения болта.Равномерное поджатие прокладок достигается большим числом
болтов и определенной последовательностью затяжки гаек при
сборке систем. Шаг болтов t может быть принят по рекоменда¬
циям, известным из машиностроения: t = (2,5-е-4,0)da, где d6 — диа¬
метр болта. Число болтов целесообразно принимать кратным че¬
тырем, благодаря чему при определенной последовательности за¬
тяжки болтов прокладка равномерно поджимается по диаметру.
Последовательность затяжки гаек приведена на рис. 14.10. Болты
затягиваются ключом с такой величиной плеча, чтобы обеспечива¬
лось заданное значение Р3- Заметим, что при расчете усилий за¬
тяжки необходимо проверить жесткость фланцев. Изгиб фланцев
приводит к нарушению поджатия прокладки и появлению негер-7..14—1736373
метичности соединения. Поэтому фланцы изготавливаются с утол¬
щением в районе кольца.Ниппельные соединения применяются для соединения трубо¬
проводов небольшого диаметра (примерно до 25 мм), которыеРис. 14.11. Ниппельные соединения:ь) с прокладкой: 1 — штуцер; 2— накидная гайка; 3 —
наконечник; 4 — прокладка; б) с сопряжением сферы и
конуса: 1 — штуцер; 2—накидная гайка; 3—наконеч¬
ник; в) с опорной шайбой: 1 — штуцер; 2 — накидная
гайка; 3 — опорная шайба; 4— наконечник\MJw[_ 11обычно используются во вспомогательных коммуникациях топлив¬
ных систем. Ниппельные соединения могут быть различными. На
рис. 14.11 приведены некоторые типы ниппельных соединений.„ В соединении, представленном нарис. 14.11а, герметичность достигается
алюминиевой прокладкой 4, зажатой
между наконечником 3 и штуцером 1,
которые соединяются накидной гай¬
кой 2. Соединение без прокладки
(рис. 14.116) состоит из сферического
наконечника 3 и штуцера 1, поджатых
друг к другу накидной гайкой 2. На
рис. 14.11в приведено соединение с
опорной шайбой 3, герметичность кото¬
рого достигается поджатием сфериче¬
ского наконечника 4 к конической поверхности штуцера 1. Поджа-
тие осуществляется накидной гайкой 2.Фланцевые и ниппельные соединения, несмотря на некоторую
сложность конструкции, позволяют упростить монтаж топливных
систем. Недостатком рассмотренных типов соединений является
возможность ослабления резьбовых соединений при транспорти-Рис. 14.12. Соединение трубо-
проводов сильфоном:1 — трубопровод; 2 — сильфон; 3 —
трубопровод374
ровке и хранении ракет. Этот недостаток можно устранить, при¬
меняя сварные соединения.Сварные соединения трубопроводов могут быть осуществлены с
помощью сильфона или непосредственной сваркой. В сильфонном
соединении (рис. 14.12) трубопроводы 1 и 3 соединяются сильфо-
ном 2, который приваривается к трубопроводам. Этот тип соедине¬
ния, как и соединение трубопроводов непосредственной сваркой,
обеспечивает, как показывает опыт эксплуатации таких трубопро¬
водов в машиностроении, надежную герметичность. Однако эти
способы несколько усложняют технологию монтажа систем, так
как затрудняется проведение сварных работ в условиях недостатка
места на ракетах.§ 14.2. РАСЧЕТ ТОПЛИВНЫХ СИСТЕМПроектируя топливные системы, необходимо провести ряд рас¬
четов: вычислить гидравлические потери в системах, рассчитать
диаметры расходных трубопроводов и давление жидкости при
гидроударе,' определить объемы топливных баков и параметры
сильфонов, назначить параметры топливозаборных устройств. На¬
значив размеры элементов систем и выбрав материал для них,
проводят проверочные прочностные расчеты.Расчет гидравлических сопротивленийЗначения гидравлических сопротивлений используются при рас¬
чете систем наддува и при определении диаметров расходных
трубопроводов. Из гидродинамики известно, что при движении
жидкости по трубопроводам возникают потери давления по длине
фубопровода и местные потери. Потери давления по длине трубо¬
провода ДрТр, возникающие в результате внутреннего трения в
жидкости и трения между движущейся жидкостью и стенками
трубопровода, определяются по формулеДЛ р = Х4--1Г’ <14-3)где X — коэффициент потерь на трение;/,, d —длина и внутренний диаметр трубопровода;
р, V — плотность и скорость жидкости.Коэффициент X зависит от числа Рейнольдса Re и качества обра¬
ботки внутренних поверхностей труб. Известно, что Re = -^,где v — коэффициент кинематической вязкости. Значения коэффи¬
циента v для некоторых компонентов топлива приведены в
табл. 14.1 [7].375
Таблица 14.1Значения коэффициента vКомпонент топливаТемпература
компонента, °С■v-10e, Mr jсекТонка 250
Четырехокись азота
Азотная кислота 100%
Несимметричный диметил гидразин
КеросинЖидкий кислород
Гидразин—33,4420+ 30
+ 20
+30
+15
201,190,2550,580,6002,7001,0380,374Для расходных магистралей ракет Re^ 105—10е, т. е. возни¬
кает турбулентный режим течения. Для изготовления трубопро¬
водов применяются гладкие трубы, значения приведенной линей¬
ной шероховатости Д которых могут быть приняты:— для тянутых алюминиевых труб Л = 0,01 мм\— для бесшовных стальных труб А = 0,1 мм.В этих условиях коэффициент X определяется по следующей за¬
висимости:Местные потери давления возникают в результате дополни
тельных возмущений и вихреобразований жидкости в местах со¬
членения трубопроводов коллекторами, отводами, изгибами тру¬
бопроводов, а также при включении в трубопроводы заправочно¬
сливных, обратных клапанов, дросселей и т. д.Местные сопротивления Дрм обычно определяются из зависи¬
мостигде £ — коэффициент местного сопротивления.Теоретический расчет местных сопротивлений затруднен, по¬
этому в практике расчетов используются зависимости и рекомен¬
дации, полученные в результате экспериментов. Наиболее полно
значения гидравлических сопротивлений представлены в рабо¬
те [2], которой и следует пользоваться при расчетах.Учитывая, что в системе может быть п трубопроводов различ¬
ной длины и диаметров, а также т местных сопротивлений, мож¬
но записать:(14.4)(14.5)•376
Точность расчетов потерь на сопротивление составляет 20—30%,
поэтому, определяя полное гидравлическое сопротивление Ар, сле¬
дует вводить коэффициент /е = 1,2—1,3:Др = k (Д/>тр + Да,). (14.6)Определение диаметров расходных трубопроводовРассчитывая диаметры расходных трубопроводов, следует ис¬
ходить из потребного расхода т данного компонента, причемtn — ^FV, (14.7)где F — площадь проходного сечения трубопровода;V — скорость компонента.Расход т должен приниматься максимальным значением, учи¬
тывающим как номинальный расход компонента в камеры сгора¬
ния, так и его увеличение в процессе регулирования двигателя.Чтобы уменьшить массу трубопроводов, следует применять
трубы небольшого диаметра. Однако в этом случае в целях сохра¬
нения m = const, как это следует из уравнения (14.7), необходимо
увеличивать скорость жидкости V. Если увеличить скорость, то
возрастут гидравлические потери (уравнения 14.3, 14.5), которые
при заданном значении давления Pi необходимо компенсировать
Повышением давления наддува. При повышении давления рв воз¬
растет масса системы наддува и начиная с определенных значе¬
ний р6 приходится увеличивать толщину стенок бака, чтобы повы¬
сить его прочность. Таким образом, стремление уменьшить массу
системы применением трубопроводов малого диаметра может при¬
нести к увеличению пассивной массы ракеты в целом вследствие
увеличения массы других ее частей. Очевидно, что существует та¬
кая скорость жидкости, при которой масса систем получается ми¬
нимальной.Расчеты показывают, что оптимальное с точки зрения массы
ракеты значение скорости находится в интервале 6—10 м/сек [7].
Диаметр трубопровода вычисляется по формулеПолученное значение диаметра округляется до ближайшего,
предусмотренного стандартами на стальные или алюминиевые
трубопроводы.Расчет гидравлического удараРасчет гидравлического удара необходим для того, чтобы опре-«
делить нагрузки, действующие на трубопроводы. Явление гидро¬
удара возникает как при полном перекрытии трубопровода, на¬
пример, отсечным клапаном, в результате чего скорость потока15-1736377
IIжидкости падает до нуля (полное торможение жидкости), так и
при неполном торможении жидкости.Пусть по трубопроводу 1 (рис. 14.13) течет жидкость со ско¬
ростью V. В некоторый момент срабатывает отсечной клапан 2,
движение жидкости прекращается, давление может возрасти до
величин, разрушающих трубопровод. Схематично гидроудар мож¬
но представить в виде следующих фаз.В первой фазе при быстром срабатывании клапана сначала
прекращает движение слой жидкости, непосредственно соприка¬
сающийся с клапаном, в результате чего давление жидкости у кла¬
пана резко возрастает, причем чем выше скорость
жидкости в момент срабатывания клапана, тем давле¬
ние жидкости больше. Затем прекращают движение
и последующие слои жидкости на увеличивающемся
со временем расстоянии от клапана. Граница сжатых
слоев перемещается в направлении, обратном перво¬
начальному направлению движения жидкости. В не¬
который момент времени эта граница приходит в бак,
где вследствие резкого увеличения площади скорость
жидкости незначительна и давление практически не
повышается. Таким образом во время первой фазы
давление во всем трубопроводе и, следовательно, в
рассматриваемом сечении 1—1 возрастает до вели¬
чины рУ (рис. 14.14).Вторая фаза начинается с момента обратного
движения жидкости, находящейся под повышенным давлением,
из трубопровода в бак. В результате этого в бак поступит опре¬
деленное количество жидкости, накопленной в трубопроводе и
давление в нем, в том числе и в сечении 1—1, упадет до на¬
чального.В третьей фазе продолжается движение жидкости в бак, при
этом из трубопровода будет увлечен не только тот объем, кото¬
рый был накоплен во время второй фазы, но и некоторый допол¬
нительный. Следовательно, давление в сечении 1—1 трубопровода
упадет ниже давления рь а давление в баке окажется выше зна¬
чения р{.В четвертой фазе происходит движение жидкости из зоны по¬
вышенного давления (бак) в зону пониженного давления (трубо¬
провод), при этом в конце четвертой фазы появятся условия, пред¬
шествующие первой фазе.Таким образом, в трубопроводе возникнут колебания жидко¬
сти, которые вследствие потерь будут затухающими. Изменение
давления в сечении 1—1 (как и в любом другом сечении трубо¬
провода) представлено на рис. 14.14. Известно, что реальные
жидкости при увеличении давления несколько уменьшают зани¬
маемый объем. Поэтому давление определяется при гидроударе
сравнением кинетической энергии жидкости с потенциальной энер¬
гией упругой деформации жидкости и трубы. В зависимости от378Рис. 14.13.К объясне¬
нию гидро¬
удара:/ __ трубопро¬
вод; 2 — отсеч¬
ной клапан
иремени t срабатывания отсечного клапана и длины трубоцр0.
пода L давление гидроудара определяется по формулам Жуков¬
ского:при t ^ py = apV]где а-V"-V1 +Еж*ЕиЬ-скорость распространения ударной волны;V — скорость жидкости в рассматриваемом се¬
чении трубопровода;
d, 8—диаметр и толщина стенки трубопровод^;
Ех — модуль объемной упругости жидкости;Еи — модуль упругости материала трубы.Из зависимости для ру следует, что для уменьшения да$ле.
имя гидроудара необходимо увеличивать время срабатывания от*ААPiРис. 14.14. Изменение
давления при гидро-
удареРис. 14Л5.К объясне¬
нию гидро¬
удара:1 — мембрана;2 — насоссечных клапанов. Расчеты показывают, что при скоростях Жид¬
кости V=5—6 м/сек и времени срабатывания клапана ^<0,02 сек
давлениеру — {б — 7)ръ а при ^ > 0,05 сек // = (1,2—1,5)pvГидроудар при неполном торможении жидкости возникает, на.
пример, при входе в насос в результате того, что внезапно умень¬
шается проходное сечение насоса в месте установки крыльча>Ки.
Пусть после прорыва мембраны 1 (рис. 14.15) жидкость ра^0-15*379
няетхя на участке перекрываемый клапан — насос 2 до скоро¬
сти Увх, а при входе в насос ее скорость снижается до значе¬
ния V. Очевидно, что давление гидроудара определится по фор¬
мулеPY‘=Pi + ?a(Vn— V),где pi — давление газовой среды перед фронтом жидкости.
Прирост давления Ар за счет гидроудара:Ар = ру — р = pa(V„ — V);илиДр - VBXpа ^1 y~J .Учитывая, что объемный расход Q = FV, где F — площадь сечения
магистрали на входе в насос, можно записать:*/>= VBXpa(l —где QBK — расход жидкости на входе в насос;Q—расход жидкости через насос.Таким образом, чтобы определить давление гидроудара ру, не¬
обходимо знать скорость VBX и коэффициент Э = 1 pp- •VbxОпределяя скорость Увх, необходимо учитывать гидравличе¬
ские сопротивления на пути жидкости от перекрывного клапана к
насосу, а для этого необходимо задаваться значениями VBX и ме¬
тодом последовательного сближения добиваться совпадения за¬
данной и полученной скоростей.Расчет объемов топливных баковРасчет объемов топливных баков необходим, чтобы определять
их геометрические размеры. Объем бака состоит из объема, зани*
маемого дозой заправки компонента топлива, и объема воздуш¬
ной подушки.Масса т3 дозы заправки состоит из следующих частей:
т, = тТ+ тгар + тюгде тТ — масса рабочего запаса, полностью сгорающая при пу¬
сках на максимальную дальность;
тгзр—масса гарантийных запасов, обеспечивающих выключе¬
ние двигателя от системы управления при пусках на
максимальную дальность;/яд — .масса дополнительных запасов, включающая додтартсн
вый расход компонента и остатки незабора,380
Масса тт известна из баллистического расчета, а массы тгар
и тд при приближенных расчетах могут быть определены' как
доли от массы мт по статистическим данным. Объем V°a дозы
паправки вычисляется для плотности ро компонента при
/ =288° КВоздушная подушка в баке, т. е. объем газа над компонентом
топлива, необходима:— для компенсации изменения объема дозы-заправки компо*
неита топлива при изменении его температуры;— для обеспечения требуемого давления в баке в процессе
предстартового наддува при запуске двигателя.Проектируя топливные баки, необходимо стремиться к умень¬
шению объема воздушной подушки, т. к. при этом снижается
масса сухой ракеты.Значение объема воздушной подушки зависит от изменения
дозы заправки при изменении температуры компонента. Поэтому
рассчитывая объем подушки, принимают во внимание именно этот
фактор. Из сопротивления материалов известно, что при нагру*
жении топливных баков, представляющих собой сочетание тонко¬
стенных сферических и цилиндрических оболочек, наружным дав¬
лением рп наблюдается потеря устойчивости корпуса или днищ
бака, т. е. нарушение первоначальной геометрической формы кон¬
струкции. Потеря устойчивости корпуса и днищ бака происходит
обычно при таких давлениях рн, при которых меридиональные oi
и кольцевые 02 напряжения оказываются еще значительно ниже
допустимых исходя из условий прочности.Таким образом, при хранении заправленной ракеты нельзя на¬
гружать баки наружным избыточным давлением. В связи с этим
рассматриваемую задачу можно сформулировать следующим об¬
разом: определить объем воздушной подушки бака для расчетной
температуры компонента 7 = 288° К. При этом в заданном темпе’
ратурном диапазоне Тт\п-т-Ттм хранения ракеты должны соблю¬
даться условия:— при минимальной температуре 7"^ р°и р™[п',— при максимальной температуре Ттахгде р° — расчетное наружное давление;pmin — минимально допустимое давление в баке при темпера»
туре Тт1п;
р\ — расчетное внутреннее давление;^шах — максимально допустимое давление в баке при темпе¬
ратуре Тт ах.Расчетное наружное давлениеК = РГ + Vh,381
где /?™ах = 1,2-105 н/м2— максимальное атмосферное давление;Ари — избыточное наружное давление, опре¬
деляемое при расчетах корпуса и дни¬
ща бака на устойчивость.Расчетное внутреннее давлениеР\ =РТ + АРб,где pmia = 0,48 • 105 н/м2—минимальное атмосферное давление;Ар6 — избыточное наружное давление, кото¬
рое вычисляется при расчетах элемен¬
тов бака на прочность.Таким образом для расчета воздушной подушки известны дав¬
ления р™п и /?™ах.Напишем уравнение состояния газа, находящегося в воздуш¬
ной подушке, при расчетной температуреp6V° = m0RT0> (14.8)где р6 — давление газа в воздушной подушке при расчетной тем¬
пературе (можно полагать Рб = /7“ах);V°n — объем воздушной подушки при расчетной температуре;
т0 — масса газа в воздушной подушке;R—газовая постоянная (без учета влияния паров компо¬
нентов), для воздуха и азота ее можно принять равной288 —для гелия — 2,1-103кг-град ’ кг-градУравнение состояния газа при температуре T^un примет видРТ (+ Д V'n) = moRTmin, (14.9)где ДКП = VI— V™in — приращение объема воздушной подушки.
Объем AVn может быть вычислен но формуле^« = 7—W-Г.*,), (НЛО)гшахгде А — температурный коэффициент, характеризующий зависи¬
мость плотности компонента от температуры;Ртах—плотность компонента при Tmin.Определим значение /п0 из уравнения (14.8) и подставим его и
значение Д1/п из зависимости (14.10) в уравнение (14.9). После
простейших преобразований получимAPrvl(T0-Tmin)T0П РтаЛРбТ'пЧп-Рб^о)Полученное по формуле (14.11) значение объема V® необходимо
проверить для температуры Ттах, для чего из соответствующего
уравнения состояния определяется значение /?™ах и проверяется
условие: р'™* <Р°6 ■ Как правило, это условие выполняется.382
Определение параметров сильфоновРанее упоминалось, что компенсаторы допускают взаимное пе¬
ремещение трубопроводов при эксплуатации и изготовлении ра¬
кеты. Поэтому возникает задача определить длину и другие раз¬
меры основного элемента компенсатора — сильфона.Пусть расходная магистраль 2
(рис. 14.16) крепится к топливному ба¬
ку 1 и двигателю 3, который неподвижно
закреплен в точках А и Б. Допустим,
что в некоторый момент температура
трубопровода стала равной Ти а корпу¬
са— Т2. Начальная температура Т0. Ко¬
эффициенты линейного расширения мате¬
риалов трубопровода и корпуса равны
<xi и а2, расчетные длины соответственно
1.1 и L2. Тогда разность перемещений
A/( = A/i — А /г, где А/(, А12— температур¬
ные деформации трубопровода и корпуса
ракеты. Очевидно, чтоДlt — oijZ-j (Тt Т0) u,,L2 {Т., Т'о).(14.12)При ai = a2 = a и L\ — L2=L уравнение (14.12) примет видMt = aL (Т\ — Г.,).Во время полета ракеты под действием гидростатического дав¬
ления жидкости в баке и давления наддува происходит деформа¬
ция нижнего днища, равная А1Р. Она может быть вычислена по
зависимостид/ (1-1>-)Р&
р 2ЬЕ 'где [J- — коэффициент Пуассона материала днища;р — внутреннее давление на днище;/?, 8 — радиус и толщина днища.Внутреннее давление р вычисляется по формулеР~Рв + Р ghn„где рб — давление наддува бака;р — плотность компонента топлива;
h — высота уровня жидкости;пх — коэффициент осевой перегрузки.Давление р следует принимать максимальным значением.Во время полета ракеты под действием осевых сил N происхо¬
дит деформация Mn корпуса на участке L2. Эта деформация может
быть вычислена по закону Гукаа = Ее,Рис. 14.16. К расчету силь¬
фона:/ — топливный бак; 2 — маги¬
страль; 3 — двигатель; 4 — ком¬
пенсатор383
F — площадь поперечного сечения корпуса.Тогда= 4т- (14ЛЗ)В уравнении (14.13) сила N считается постоянной для всего
участка L2.Под действием силы тяги происходит деформация рамы дви¬
гателя на величину Д/д и, следовательно, перемещение ТНА вме¬
сте с закрепленной магистралью. Расчет деформации А/д доста¬
точно сложен, поэтому при расчете сильфона можно воспользо¬
ваться статистическими данными. За¬
метим, что приведенный расчет дефор¬
маций справедлив только для конструк¬
ции, приведенной на рис. 14.16. При
других конструкциях систем необходи¬
мо учитывать специфические для них
условия.Итак, общая деформация А/ силь¬
фона определится как алгебраическая
сумма составляющих:ДI = Alt -f- Д/р _+ Д/дг + Д/д.Зная величину А/, можно приступить к выбору характеристик
сильфона. Сильфон (рис. 14.17) представляет собой гофрирован¬
ную трубу, изготовленную из нержавеющей стали, полутомпака
или алюминиевого сплава. Если за основной размер принять диа¬
метр d, равный диаметру патрубка компенсатора (фланцевое со¬
единение) или диаметру трубопровода (непосредственная сварка
со стыкуемыми трубопроводами), то остальные размеры определя¬
ются из следующих соотношений: s=(0,18—0,5) мм — для стали;
s=(0,15—1,0) мм — для алюминиевого сплава; D=(l,3—1,5)of;
/=(0,07—0,2)d Полная длина L сильфона должна выбираться
так, чтобы его деформация от сжатия не превосходила 0,15L, а де¬
формация растяжения не была более 0,1L [3].Топливозаборные устройстваВыше упоминалось, что в дозу заправки включаются остатки
незабора, которые не сгорают в камере сгорания, увеличивая
массу сухой ракеты и, следовательно, уменьшая дальность ее по¬
лета. Поэтому, проектируя систему питания, необходимо стре¬
миться к тому, чтобы уменьшить массу незабора. Основную часть
массы остатков незабора составляет масса компонента, котораятDdtлммимйЖщлШжН+5Рис. 14.17. Сильфон384
остается в баке для предотвращения образования воронки и по¬
следующего двухфазного (компонент топлива + газы наддува)
течения жидкости. Чтобы уменьшить эту составляющую незабора,
применяются топливозаборные устройства.Сначала рассмотрим процесс образования воронки при опо¬
рожнении бака, в котором топливозаборные устройства отсутст¬
вуют. В конце опорожнения бака может образовываться как вих¬
ревая воронка, так и воронка без вращения. В вихревой воронке
частицы жидкости перемещаются к заборному патрубку по спи¬
рали— происходит закрутка жидкости. В воронке без вращения
над заборным патрубком сначала появится местное, едва замет¬
ное снижение уровня (рис. 14.18, кривая 1), а затем уровень рез¬
ко понижается (кривая 2)—возникает «провал» уровня.Вихревая воронка образуется при более высо¬
ком уровне жидкости в баке по сравнению с ворон¬
кой без вращения. Поэтому, чтобы устранить
закрутку жидкости у заборного патрубка на
днище бака устанавливаются ребра, которые яв¬
ляются одним из элементов топливозаборного
устройства.Схематически причину образования воронки без
вращения можно представить следующим образом.Жидкость перетекает из бака в заборный патрубок
через поверхность сферы радиусом равным напо¬
ру Я [4]. Очевидно, что воронка не будет обра¬
зовываться до тех пор, пока расход ni\ — 2'KH2V\p
(где V\— скорость жидкости на сфере, р — плотность жидкости)
через сферу будет равен расходу т2 через насос. При пониже¬
нии уровня Я до некоторого значения Я„р расход т\ окажется
меньше расхода т2 вследствие уменьшения площади 2-кН2. Недо¬
стающее количество жидкости выбирается из столба над выходным
отверстием бака — возникает «провал» уровня.Величина уровня Якр вычисляется при условии неразрывности
потока:2^к2р^1==^ К, (14Л4)где V2 — скорость жидкости в заборном патрубке на уровне дни¬
ща бака.Допуская, что «провал» уровня пропорционален скоростному
напору потока в сечении площадью 2-1гЯк2р, получим/4,-4. О4-15)где а — коэффициент пропорциональности.разование во¬
ронки с прова¬
лом уровня385
Исключая из уравнений (14.14) и (14.15) значение скорости VuЯ,крможно получить связь между безразмерными параметрами ——
V.И VldЯ,кр(14.16)Обработав опытные данные, получим [4] следующую зависимость:Я,кр= 0,5V, \ 0,55V gd(14.17)Рис. 14.19. Формы заборников:• плоский; б — конический; в — профильныйУравнение (14.17) позволяет определить напор Якр, при котором
появляется возможность образования воронки.Чтобы уменьшить остатки незабора, необходимо сократить ве¬
личину Якр. С этой целью заборники устанавливаются на входев патрубок. Заборники
могут быть плоскими
(рис. 14.19а) и конус¬
ными (рис. 14.196). При
установке заборника
вход жидкости в рас¬
ходный трубопровод пе¬
реносится от патрубка
к кромке заборника,
поэтому расход т\
обеспечивается без об¬
разования воронки при
малых значениях напора h3, так как увеличивается площадь
входа TtD3h3. Рассчитывая параметры заборника, необходимо
определить расстояние h3 между заборником и днищем бака и
диаметр D3 заборника. Заметим, что для уменьшения массы остат¬
ков незабора следует стремиться к уменьшению величины h3, од¬
нако при этом возрастают гидравлические потери в заборнике.
Существует оптимальное значение величины h3, зависящее от рас¬
хода rtii и диаметра D3 заборника. Оптимальное расстояние h3,
диаметр D3 и другие параметры заборных устройств наиболее це¬
лесообразно определять экспериментально.Экспериментальные исследования заборников различной формы
показали, что под плоскими заборниками может скапливаться
воздух, который способствует увеличению гидравлического сопро¬
тивления заборника. От этого недостатка свободны конические
заборники, в которых пузырьки воздуха всплывают на поверх¬
ность или уносятся потоком.В правильно спроектированных заборниках воронка образует¬
ся: при плоских заборниках — в момент понижения уровня жидко¬
сти до нижней поверхности заборника, при конических — в момент
понижения уровня до половины высоты конуса.386
1Гюбы обеспечить полное израсходование жидкости без обра-
ПИмнпи воронки, целесообразно применять конические профиль-
РЦМ«’ мборники (рис. 14.19в). Профиль поверхности конуса в этом
пучш' определяется из соотношения:Fвх __ nP^h * . I оF ~ ъсР_ ~~ ’ * ’4И*1' /'вх—площадь входного отверстия заборника;F—площадь проходного сечения между заборником и па¬
трубком бака.Проектируя топливозаборные устройства, следует предусма-
11>ппать плавные обводы в местах перехода днища к патрубку и
Скруглять входные кромки заборников.§ 14.3. СИСТЕМЫ НАДДУВА ТОПЛИВНЫХ БАКОВСистемы наддува топливных баков являются составными частя¬
ми систем питания ракет с ЖРД. В процессе проектирования и
in работки ракеты системам наддува баков уделяется большое
шшмание, поскольку от совершенства этих систем в значительной
степени зависят надежность работы двигателей и весовые харак-
н'ристики ракеты.Наддув топливных баков в ракетах, имеющих насосную систе¬
му подачи топлива, необходим:— для обеспечения бескавитационной работы насосов на всех
режимах работы двигателей;— для устранения провала давления в баках в момент запуска
двигателей;— для ускорения выхода двигателей на режим, чтобы умень¬
шить предстартовые расходы топлива;— для повышения прочности баков при воздействии на них осе¬
вых сжимающих нагрузок.Поскольку в ракетах с насосной подачей топлива применяются
в основном центробежные лопастные насосы, то для обеспечения
их бескавитационной работы необходимо, чтобы давление жидко¬
сти на входе в насос было всегда выше давления упругости паров
этой жидкости. Это превышение должно быть тем больше, чем
больше расход компонента топлива и число оборотов насоса.Давление жидкости на входе в насос (рВх) складывается из
давления столба жидкости (рст) и давления газа наддува над сво¬
бодной поверхностью жидкости (ра). Учитывая потери давления в
топливной системе (Д/>Д давление на входе в насос будет рав¬
няться:Рва ~ Рс т “Н Рб ^Ps •До пуска ракеты рст=/г0р,где h0 — начальная высота столба жидкости.387
На активном участке траектории давление столба жидкости
перед насосом будет переменным. С одной стороны, за счет вы¬
работки компонента уменьшается высота столба жидкости (h); с
другой стороны — ракета движется с осевым ускорением и, следо¬
вательно, на столб жидкости действует осевая перегрузка (пх).
Поэтому статическое давление на входе в насос будет в каждый
момент времени равноРа = h ■ Р ' ПХх .Если при расчете насоса на кавитацию определена величина ми¬
нимально допустимого давления на входе (рВхтт), то потребное
давление в баке должно быть таким, чтобы при минимальном
давлении столба жидкости обеспечивалось необходимое давление
на входе в насос, т. е.:Р 6 . min Рвх. min Рст. min Д/vК системам наддува баков предъявляются следующие основ¬
ные требования:— безотказность действия и обеспечение заданного режима
наддува с определенной точностью;— малая масса и небольшие габариты элементов системы;— отсутствие взаимодействия газов наддува с компонентами
топлива;— удобство и безопасность эксплуатации.Чтобы обеспечить различные режимы работы двигателя, при¬
меняют следующие виды наддува баков:— предстартовый наддув баков первой ступени, обеспечиваю¬
щий запуск двигателей этой ступени;— бортовой наддув, обеспечивающий работу двигателей на но¬
минальном режиме;— гарантийный наддув или поднаддув баков второй и после¬
дующих ступеней, обеспечивающий запуск их двигателей;— наддув, обеспечивающий работу двигателей на режиме ко¬
нечной ступени.В современных ракетах могут использоваться различные си¬
стемы бортового наддува топливных баков. Наиболее широко при¬
меняются в ракетостроении следующие из них:— системы наддува,’использующие продукты сгорания основ¬
ных компонентов топлива;— газобаллонные системы наддува (воздухом, азотом или ге¬
лием) ;— испарительные системы наддува;— наддув баков скоростным напором воздуха.Выбор той или иной системы наддува определяется в основном
конструктивной схемой ракеты, физико-химическими свойствами
компонентов топлива и требованием обеспечения минимальной
массы конструкции.388
Системы наддува баков с жидким кислородомДля наддува баков с жидким кислородом используются сле¬
дующие методы [1]:— наддув гелием;— наддув газифицированным кислородом;— наддув газифицированным азотом.Наиболее выгодна в весовом отношении система наддува ге-
/шем из бортовых баллонов при условии, что они охлаждаются
жидким кислородом, а перед
поступлением в бак гелий
подогревается в специаль¬
ном подогревателе (рис.14.20). Чтобы охладить бал¬
лоны с гелием, можно про¬
качивать жидкий кислород
через рубашки баллонов или
помещать их непосредствен¬
но в бак с жидким кислоро¬
дом. Последний способ
прост, но взрывоопасен, так
как в случае разрыва балло¬
нах гелием может быть раз¬
рушен бак окислителя.Перед поступлением в
бак гелий подогревается до
требуемой температуры в
специальном теплообменни¬
ке, установленном за турби¬
ной. Выигрыш в весе систе¬
мы наддува при использова¬
нии гелия получается по
двум причинам: во-первых,
требуется небольшое коли¬
чество газа, необходимогодля наддува бака, так как величина RT, определяющая работоспо¬
собность газа, для гелия очень высокая ^RHe — 2,1 • 103 во-вторых, меньше прогрев верхнего слоя кислорода в баке; так как
полностью отсутствует конденсация гелия на поверхности жидкого
кислорода. В данном случае верхний слой нагревается лишь за
счет конвективного теплообмена между газом и жидкостью.Чтобы уменьшить прогрев верхнего слоя, необходимо, чтобы
струя газа не ударяла непосредственно в поверхность жидкости.
Для этого газ вводят в бак через специальные распылители,
уменьшающие скорость газа (рис. 14.21). Меньший прогрев верх¬
него слоя компонента позволяет уменьшить остаток незабора его
в баке, а также понизить давление наддува бака, так как опас-389
ность срыва работы двигателя в конце активного участка из-за
возможности поступления в насос подогретого компонента в дан¬
ном случае мала.Система наддува гелием относительно проста и точно поддер¬
живает заданное давление. Кроме того, она является практически
единственно применимой при работе двигателя на сильно пере¬
охлажденном кислороде. В этом случае при наддуве бака другими
газами будет происходить интенсивная конденсация их и возмож¬
ны недопустимые провалы давления в баке, могущие привести к
срыву работы двигателя.Рис. 14.21. Распылители газа наддува бакаОднако гелиевая система наддува имеет и существенные недо¬
статки. Во-первых, гелий очень дорог; во-вторых, усложняется
эксплуатация ракеты, так как появляется дополнительный компо¬
нент с очень низкой температурой кипения (/Кип = —269°С). Из-за
этих недостатков данную систему наддува целесообразно приме¬
нять лишь для наддува баков с сильно переохлажденным кисло¬
родом или относительно небольших баков космических аппаратов.Для наддува баков с жидким кислородом, имеющим темпера-
ТУРУ —183°ч—190° С, наиболее целесообразна система наддува
газифицированным и подогретым кислородом. В открытой схеме
ЖРД кислород газифицируется и подогревается в теплообменнике
за счет тепла отработанного турбогаза (рис. 14.22).В замкнутой схеме ЖРД кислород может газифицироваться в
специальном теплообменнике газом, поступающим из газогенера*
тора наддува бака горючего (рис. 14.23). Кроме того, наддув бака
с жидким кислородом при замкнутой схеме ЖРД можно произво¬
дить окислительным газом, отбираемым из газогенератора тур¬
бины, с последующей балластировкой его жидким кислородом в
специальном смесителе (рис. 14.24). К достоинствам систем над¬
дува газифицированным кислородом можно отнести: дешевизну,
относительную простоту и надежность, отсутствие дополнительных
компонентов на борту ракеты.390
Наддув баков газифицированным азотом уступает рассмотрен¬
ным системам как в весовом отношении, так и по сложности кон¬
струкции. Такую систему целесообразно применять лишь в том
случае, если наддув бака горючего также производится газифи¬
цированным азотом, так как можно использовать один насос для
подачи жидкого азота и один теплообменник для обслуживания
обоих баков (рис. 14.25) [1].Системы наддува баков с высококипящими окислителямиДля наддува баков с высококипящими окислителями исполь¬
зуются следующие методы:— наддув генераторным газом с большим избытком окисли¬
теля;— наддув газообразным азотом или воздухом из бортовых
баллонов;— наддув встречным потоком воздуха.392Рис. 14.26. Схема над¬
дува бака с высококи-
пящим окислителем при
замкнутой схеме ЖРДРис. 14.27. Схема
наддува бака с вы-
сококипящим окис¬
лителем примене¬
нием специального
газогенератораРис. 14.28. Схема га¬
зобаллонной системы
наддува баков
I l.ii iyn баков генераторным газом наиболее целесообразен в
iM <. Iучае, если применяется ЖРД замкнутой схемы (рис. 14.26).
н i.i газ отбирается после турбины и дополнительно балласти-
iypn ii жидким окислителем в смесителе. Таким образом в бак по-
ptyiuu'T парогазовая смесь с относительно невысокой температу¬
рой В баке некоторая часть паровой фазы конденсируется на по¬
верхности окислителя, сильно прогревая его
игрхний слой, а это вызывает необходимость
унгличить остатки незабора. Когда приме¬
ряется ЖРД открытой схемы, для наддува
Alt кп окислителя приходится иметь специаль-
II|iiII газогенератор, который может быть рас¬
положен в хвостовом отсеке или на перед¬
нем днище бака (рис. 14.27). Применение га-
чогенераторной системы наддува значительно
уменьшает массу конструкции, но при этом
мозрастает количество остатков незабора и
ухудшается надежность системы, так как по-
инляется дополнительный «огневой» агрегат —
гнзогенераТор.В ряде случаев, чтобы повысить надежность
системы наддува и сократить сроки отработки
ракеты, используют газобаллонные системы
наддува (рис. 14.28). Рабочим телом в таких
системах обычно является сжатый воздух или
азот, находящийся под давлением до 300 бар
н баллонах, размещаемых в хвостовых или
приборных отсеках. Рис. 14.29. Схема над-Газобаллоиные системы наддува просты и дувпа0Тб0акк0ам возду™
надежны, но значительно уступают по весу си¬
стемам наддува генераторным газом. Весовуюхарактеристику газобаллонных систем можно несколько улуч¬
шить, если подогревать газ перед тем, как он поступает
в бак.Для наддува бака окислителя первой ступени газобаллонная
система может использоваться в комбинации с системой наддува
встречным потоком воздуха. Такой метод особенно удобен, если
первая ступень имеет больший диаметр, чем вторая, и бак окис¬
лителя расположен в передней части ступени. При этом в забор¬
ные патрубки (рис. 14.29) будет поступать практически невозму¬
щенный поток воздуха.При достаточно большом диаметре патрубков давление над¬
дува при дозвуковых скоростях полета будет близким по вели¬
чине к давлению полного торможения воздушного потока, а при
сверхзвуковых скоростях — к давлению полного торможения по¬
тока за прямым скачком уплотнения, возникающим на входе в па¬
трубок наддува.393
Системы бортового наддува баков горючегоДля наддува баков горючего используются следующие ме¬
тоды:— наддув генераторным газом с большим избытком горю¬
чего;— наддув воздухом или азотом из бортовых баллонов.Наилучшей в весовом отношении является система наддува сиспользованием генераторных газов. В этом случае на борту ра¬
кеты нет дополнительных компонентов. Генераторный газ выра-*
батывается либо в специальном газогенераторе, либо отбирается
из газогенератора ТНА, если последний работает с избытком го¬
рючего. Специальный газогенератор применяется в том случае,
если двигатель выполнен по замкнутой схеме с дожиганием окис¬
лительного генераторного газа в камере сгорания. В обоих случаях
температура генераторного газа слишком велика и непосредствен¬
ный наддув бака таким газом невозможен. Поэтому газ перед по¬
ступлением в бак необходимо охлаждать до требуемой темпера'
туры. Газ может охлаждаться двумя способами:— балластировкой жидким горючим в специальном смеси¬
теле;— охлаждением газа в специальном теплообменнике.Последний способ более прост, но применим лишь в случае,когда имеется низкокипящий окислитель (например, жидкий кис¬
лород), который используется как хладореагент в теплообмен¬
нике.Применение генераторного газа для наддува баков горючего
имеет недостатки:— значительный прогрев верхних слоев горючего в баке, что
вынуждает несколько увеличивать остаток незабора и давление
наддува бака;— необходимость продувки инертным газом свободных объе¬
мов баков горючего перед пуском ракеты для удаления воздуха,
чтобы исключить возможности взрыва при поступлении в бак ге¬
нераторного газа;— наличие паров воды в генераторном газе, что может приве-
сти к конденсации их на холодной поверхности горючего с после¬
дующим образованием льда, лед тонет в горючем и, попадая в
двигатель, может вызвать аварию.Несмотря на указанные недостатки, система наддува баков
горючего генераторным газом легче газобаллонной системы над¬
дува. При этом выигрыш в весе системы особенно важен для верх¬
них ступеней ракеты [1].Применение газобаллонной системы наддува для баков горю¬
чего, так же как и для баков окислителя, может быть оправ¬
дано лишь необходимостью обеспечить высокую надежность
системы или сжатыми сроками проектирования и отработки
ракеты.394
Предстартовый наддув и гарантийный поднаддув топливных баковПредстартовый наддув топливных баков производится возду¬
хом или азотом перед пуском ракеты от агрегатов наземного обо¬
рудования. Предстартовый наддув баков необходим для того,
чтобы:— обеспечить нормальный запуск двигателя: в момент запуска
двигателя давление в баках резко падает, так как начальные сво¬
бодные объемы баков относительно малы; поэтому, если не соз¬
дать достаточно большое избыточное давление в баках перед
пуском ракеты, то в момент запуска двигателя работа насосов
может быть сорвана из-за возникновения кавитации;— ускорить выход двигателя на режим и уменьшить достар-
товые расходы топлива.В некоторых случаях целесообразно производить предстарто¬
вый наддув не только баков первой ступени, но и баков после¬
дующих ступеней для того, чтобы повысить их прочность, а также
сократить время на создание необходимого давления в баках,
обеспечивающего запуск двигателей второй и последующих сту¬
пеней. Следует иметь в виду, что предстартовый наддув баков
второй и последующих ступеней не может гарантировать нормаль¬
ного запуска их двигателей особенно в тех случаях, когда они ра¬
ботают на низкокипящих компонентах топлива. Объясняется это
тем, что при колебаниях жидкости в баках во время полета ра¬
кеты газ интенсивно растворяется в жидкости и за время полета
ракеты на первом активном участке давление в баках верхних
ступеней может упасть до такой величины, что возникнет опас¬
ность срыва запуска двигателей. Поэтому, прежде чем запустить
двигатель последующей ступени, производят дополнительный над¬
дув баков этой ступени. Если система наддува баков газобаллон¬
ная, то для обеспечения нормального запуска двигателя после¬
дующей ступени достаточно произвести наддув ее баков за 0,5—
1,0 сек до запуска двигателя.Сложнее осуществить предварительный наддув баков верхних
ступеней, если применяются системы наддува генераторным газом.
В таких случаях применяют гарантийный наддув или поднаддув
баков верхних ступеней. Гарантийный наддув баков производится
за несколько секунд до запуска двигателя этой ступени азотом
или воздухом — для всех высококипящих компонентов топлива, и
гелием — для низкокипящих. Гарантийный наддув гелием может
осуществляться и как предстартовый с «земли», так как гелий не
растворяется и не конденсируется в жидких компонентах топлива.
Такой способ гарантийного наддува баков верхних ступеней наи¬
более прост, но при этом баки должны иметь надежную герметич¬
ность, так как гелий, обладая высокой проникающей способно¬
стью, может стравиться из баков через ниппельные, фланцевые
соединения или уплотнительные устройства элементов, располо¬
женных на баках.395
Обычно гарантийный наддув баков последующих ступеней про¬
изводят газом из баллонов, размещаемых на предыдущей ступени.Вместо гарантийного наддува можно применять постоянный
поднаддув баков последующих ступеней до момента разделения ма¬
лыми расходами от систем наддува баков предыдущей ступени.§ 14.4. УСТРОЙСТВО И РАСЧЕТ ПНЕВМОСИСТЕМПневмосистема является вспомогательной системой, предназна¬
ченной для обслуживания топливных систем и систем наддува.
Заметим, что пневмосистема на ракете увеличивает массу кон¬
струкции ракеты. Поэтому в настоящее время стараются умень¬
шить число задач, решаемых пневмосистемой, и, следовательно,уменьшить ее разветвленность.
Пневмосистемы просты по
устройству и поэтому еще ши¬
роко применяются в ракетах
для решения задач:— наполнения бортовых
баллонов газом и поддержания
заданного давления в них до
момента пуска ракеты;— предстартового наддува
топливных баков;— управления работой
пневмоавтоматики (т. е. агре¬
гатов автоматики других си¬
стем, использующих энергию
сжатого газа);— контроля давления в
топливных баках при предстартовом наддуве и в бортовых бал¬
лонах;— продувки некоторых устройств ракет (например, обдув при¬
боров управления для охлаждения).Перечисленные задачи в полном объеме выполняются в раке¬
тах с наиболее развитой пневмосистемой. В ракетах с минимально
развитой пневмосистемой круг задач значительно сужен.Чтобы выполнить указанные задачи, пневмосистема должна
содержать следующие устройства:— емкости — баллоны сжатого газа;— систему трубопроводов, по которым сжатый газ транспор¬
тируется от баллонов к потребителям;— регулирующие устройства — редукторы или дроссели, пред¬
назначенные для того, чтобы снизить давление газа;— распределительные устройства, перекрывающие путь газу
(вентили) или направляющие его движение в определенном на¬
правлении (обратные клапаны);— контролирующие устройства (реле давления), предназна¬
ченные для измерения давления газа;Рис. 14.30. Магистраль высокого дав¬
ления:1 — баллон; 2 — реле давления; 3 — запорный
4 — обратный клапан; 5 — трубопро¬
воды; 6 — фильтрвентиль;396
— вспомогательные устройства (фильтры), служащие для очи¬
стки газа от механических примесей.Перечисленные устройства снабжают газом потребителей (топ¬
ливные баки, агрегаты автоматики и т. п.) не только во время
полета ракеты, но и непосредственно перед ее пуском. Чтобы
уменьшить массу пневмосистемы, целесообразно задачи предпу¬
скового периода решать с помощью наземных емкостей, а также
применять регулирующие, распределительные и контролирующие
элементы на наземных устройствах. Поэтому в предпусковой пе¬
риод к ракете часто подсоединяется стартовый пневмощиток
(СПЩ), являющийся частью пневмосистемы ракеты, предназна¬
ченной для обслуживания предпускового периода.Конструктивно пневмосистема состоит из
отдельных магистралей, каждая из которых
выполняет определенную задачу. В зависимо¬
сти от величины давления магистрали де¬
лятся на:— магистрали высокого давления, которые
применяются для заполнения бортовых балло¬
нов и предстартового наддува баков, давление
в магистралях (140—300) • 105 н/м2\— магистрали управляющего давления, ко¬
торые применяются для управления работой
пневмоавтоматики, давление в магистралях
~ 30- 105 н/м2\— магистрали низкого давления, которые
применяются для контроля давления в баках
и продувок; магистрали находятся под давле¬
нием порядка нескольких единиц.Рассмотрим примерный состав перечислен¬
ных магистралей. Магистрали высокого давле¬
ния сообщают бортовые баллоны и топливные
баки с наземными источниками сжатого газа. Например, маги¬
страль заполнения бортовых баллонов (рис. 14.30) может состоять
из фильтра 6, трубопроводов 5, обратного клапана 4, запорного
вентиля 3, бортовых баллонов 1 и реле давления 2. Фильтр 6
устанавливается в месте соединения магистрали со СПЩ. Запорный
вентиль 3 сообщает полости баллонов с наземными источниками
при заправке и с потребителями. Обратный клапан 4 устанав¬
ливается, чтобы предотвратить утечку газа после окончания за¬
правки. Реле давления 2 является контролирующим устройством,
измеряющим давление в баллонах непосредственно перед пуском
ракеты. Если давление в баллонах окажется ниже заданной вели¬
чины, то реле разомкнет цепи готовности ракеты и ее пуск станет
невозможным.Магистрали управляющего давления обычно включают борто¬
вые баллоны / (рис. 14.31), трубопроводы 3, запорный вентиль 2,
редуктор управляющего давления 4, обратный клапан 5, элек-397Рис. 14.31. Магистраль
управляющего давле¬
ния:1 — баллон; 2 — запор¬
ный вентиль; 3 — трубо¬
провод; .4 — редуктор уп¬
равляющего давления;5 — обратный клапан;6 — электропневмоклапа¬
ны ; 7 — агрегаты пнев¬
моавтоматики
тропневмоклапаны 6 и агрегаты пневмоавтоматики 7 или другие
потребители управляющего давления. В данной магистрали элек¬
тропневмоклапаны управляют агрегатами пневмоавтоматики, при¬
пуская газ или прекращая его поступление в полости агрегатом
по командам системы управления.Магистрали низкого давления могут иметь различный состап.
Они включают трубопроводы, обратные клапаны, фильтры, редук¬
торы низкого давления или дроссели.К пневмосистемам предъявляются следующие требования:— минимальная масса;— обеспечение нормального функционирования обслуживае¬
мых агрегатов в течение заданного времени;— герметичность.Требование минимальной массы пневмосистем является об¬
щим требованием. Для его реализации необходимо уменьшать со¬
став пневмосистем и размещать устройства, используемые в пред
пусковой период, в наземных устройствах.Нормальное функционирование пневмосистемы оценивается в
зависимости от задач, которые она решает, следующими показа¬
телями:— необходимым временем достижения заданного давления у по¬
требителя (например, давления, необходимого для срабатывания
агрегатов пневмоавтоматики, давления предварительного наддува
в баках и т. п.);— потребным расходом газов при предстартовом наддуве и раз¬
личных продувках;— безынерционным контролем давления в бортовых баллонах,
топливных баках и т. п. Время достижения заданного давления
у потребителя определяется величиной давления газа в баллонах,
диаметром и длиной трубопровода, соединяющего эти емкости, и
его конфигурацией- Потребный расход газов обеспечивается уста¬
новкой в магистралях дросселей с определенным внутренним диа¬
метром. Безынерционный контроль давления в составляющих ем¬
костях достигается уменьшением объема полости чувствительного
элемента контролирующего устройства, уменьшением длины и уве¬
личением диаметра трубопровода, соединяющего емкость и кон¬
тролирующее устройство. Если нет герметичности пневмосистемы,
то могут не сработать агрегаты автоматики. Герметичность систе¬
мы обеспечивается надежным соединением ее элементов и провер¬
кой плотности соединений.Известно, что во время полета ракеты в результате вибраций
и взаимного перемещения отсеков* ракеты возникают колебания
трубопроводов. Поэтому, чтобы уменьшить амплитуды колебаний
трубопроводов, необходимо выбирать определенные расстояния ме¬
жду их опорами. Так например, для пневмосистем самолетов реко¬
мендуются расстояния между опорами, приведенные в табл. 14.2 [б].Для удобства монтажа и крепления трубопроводы на корпусе
ракеты устанавливаются группами. В качестве опор трубопроводов398
Таблица 14.2Расстояния между опорами трубопроводовf Ипружный диаметр,
ммРасстояния между опорами, ммтрубы из сталитрубы из алюминиевых
сплавов6.40034084503801050040012580500156505602070060025800600н.I корпусе ракеты применяются узлы креплении, поглощающие
энергию колебаний трубопроводов. Чтобы* предохранить трубопро¬
воды от повреждений во время полета вследствие колебаний, они
должны быть удалены от соседних деталей на определенное рас¬
стояние или эти детали должны быть оклеены мягкими материа¬
лами (резиной, сукном и т. д.).Фильтры устанавливаются на входах в магистрали и редук-
горы. Сущность фильтрации заключается в отделении механиче¬
ских примесей при прохождении газа через капиллярные каналы
фильтрующего материала. В качестве фильтрующего материала
применяются металлические сетки с определенным размером
ячеек, замша и металлокерамика.Проектируя пневмосистемы, необходимо рассчитывать гидрав¬
лические сопротивления магистралей и площади проходных сече¬
ний дросселей. Гидравлические сопротивления определяются ана¬
логично сопротивлениям в системах питания с использованием
данных, например, работы [2].Площадь проходного сечения дросселя можно определить по
методу, изложенному в работе [6]. Площадь F0 проходного сече¬
ния дросселя при заданном расходе т газа определяется из зави¬
симости(Ш8)где е— коэффициент, учитывающий расширение газа;[а— коэффициент расхода;Др— перепад давления.Обозначим > гДе D0 — диаметр отверстия дросселя,£>.гр — диаметр трубопровода, и перепишем уравнение (14.18). в
виде
Замечаем, что формулы (14.18) и (14.19) содержат неизвест¬
ные D0, е и [л. Поэтому диаметр D0 рассчитывают следующим об¬
разом. Задаются значением т = 0,15—0,25 и определяют коэффи¬
циент е из зависимостие= 1 — (0,41 + 0,35где р{ — давление перед дросселем,
k— показатель адиабаты.Далее из зависимости (14.19) вычисляют произведение цт, по
которому входят в график ц=ц(/П[л) (рис. 14.32) и определяютГт-II*-Do(Fo)~11Рис. 14.33. Цилин¬
дрический дрос¬
сельРис. 14.34. Конический
дросселькоэффициент [х. Затем по формуле (14.18) вычисляется площадь F0.
Значения коэффициентов местных сопротивлений 5 дросселей
определяются по формулам:400
— для цилиндрического дросселя (рис. 14.33) при Re> 105
£ = [(0,5 + , ]/£) (, _ £) + ( , _ А)* + X £] (£)’;— для конического дросселя (рис. 14.34)Значения коэффициентов £ приведены в табл. 14.3, 14.4, заимство¬
ванных из работы [2].Таблица 14.3
Значение коэффициента £ для цилиндрического дросселя1F-,Do0,020,060,10'0,200,300,500,700,201,000700073024551,518,24,000,970,1300,2660068723048,017,43,750,910,130,010,6570059019942,015,03,200,800,120,011,0426044314931,011,12,400,610,110,022,0377039113427,49,902,200,580,120,044,0377540013227,710,02,250,640,160,086,0387040013328,510,52,420,700,210,128,0400041013730,011,22,580,780,250,1610,0411043014631,011,52,800,890,320,20Таблица 14.3
Значение коэффициента 5 для конического дросселя12_А>0,020,06' 0,100,200,300,500,700,900,01680071023849,517,93,840,120,120,02654068323047,717,23,680,880,120,03631065722045,716,53,500,830,110,04613063521444,215,83,360,800,100,04575060020041,214,63,080,730,090,085300549 '18437,813,52,800,640,08 ,0,012473049016433, о11,92,440,550,060,016446046215431,611,22,280,500,05§ 14.5. СИСТЕМА РЕГУЛИРОВАНИЯ СООТНОШЕНИЯ
КОМПОНЕНТОВСистема регулирования соотношения компонентов является в со¬
временных ракетах с ЖРД одной из важных систем, позволяющих
значительно увеличить максимальную дальность полета ракеты.401
Проектируя ракеты с ЖРД, необходимо определить рабочим
запас компонентов топлива, обеспечивающий получение заданном
максимальной дальности. Рабочий запас рассчитывается для рас¬
четных условий полета ракеты на активном участке траектории.
Однако реальные условия работы двигателя и условия полета ра¬
кеты практически никогда не соответствуют расчетным.Полет ракеты всегда происходит при действии возмущающих
факторов, к числу которых можно отнести:— отклонение температуры компонентов от номинального зна¬
чения — А/;— отклонение давления на входе в насосы — АрВх\— отклонение в объемном соотношении компонентов — AKv\— отклонение в удельной тяге — АЯуД;4— отклонение в «сухой» массе ракеты — Атсух;— отклонение в рабочем запасе компонентов топлива — Атт;— отклонение в лобовом сопротивлении— АХ;— ветер и т. д.Поскольку большинство из указанных возмущающих факторов
являются случайными величинами, то при неблагоприятном соче¬
тании их может оказаться, что рабочий запас компонентов топ¬
лива тТ, определенный для номинальных условий полета, будет
израсходован раньше, чем система управления подаст команду на
выключение двигателя, и ракета не достигнет заданной максималь¬
ной дальности.Поэтому для компенсации влияния возмущающих факторов
дополнительно к рабочему .запасу топлива добавляют гарантий¬
ный запас. Вполне понятно, что введение дополнительного коли¬
чества топлива, которое может оказаться вообще неиспользованг
ным, увеличивает пассивную массу ракеты и, следовательно, от¬
рицательно сказывается на достижении максимальной дальности.Такое противоречивое влияние гарантийных запасов топлива
вынуждает весьма строго подходить к определению их величины.
При расчете гарантийных запасов все возмущающие факторы
разбивают на две группы. К первой группе относят те факторы,
которые не являются случайными и определяются непосредствен¬
ным измерением или расчетом. Ко второй группе относят все слу¬
чайные возмущающие факторы, максимальное значение которых
вычисляется с определенной точностью. Исходя из этого^и гаран¬
тийные запасы также складываются из двух частей. Одна часть
служит для компенсации влияния возмущающих факторов, первой
группы, а вторая часть — второй группы факторов.Как показывает практика проектирования ракет, та часть га¬
рантийных запасов, которая служит для компенсации отклонений
в At, AKv и Арвх, составляет до 70% от массы всего гарантийного
запаса. Поэтому весьма желательно уменьшить эту часть гаран¬
тийного запаса применением специальных устройств, размещаемых
на борту ракеты и позволяющих исключить или значительно
уменьшить влияние указанных отклонений. Таким устройством яв-402
йстся система автоматического опорожнения баков. Задача этой
истомы — обеспечить одновременное опорожнение баков и под-
грживать отклонения коэффициента соотношения расходов ком¬
понентов топлива в определенных, достаточно узких пределах.,' Система состоит из датчиков, фиксирующих расход компонен¬
той топлива, приборов, усиливающих сигналы, поступающие сдат¬
чиков, и вырабатывающих команды на исполнительный меха"
ии.чм — дроссель с приводом.Система может быть построена по раз¬
личным структурным схемам в зависимости
От того, какие чувствительные элементы
(датчики) в ней применены. Чувствитель¬
ными элементами системы могут быть дат¬
чики объема топлива в баках и датчики
расхода топлива. Система может содержать
при этом только датчики расхода или
объема, либо одновременно оба типа дат¬
чиков.Наиболее распространенной схемой яв¬
ляется схема с датчиками объема. Основ¬
ная задача системы с датчиками объема —
регистрация текущих значений объемов
окислителя и горючего в баках во время
полета ракеты и в случае опережения в рас¬
ходовании одного компонента относительно
другого — устранение этого опережения ис¬
полнительным механизмом — дросселем.Датчики объема компонентов устанавли¬
ваются в баках горючего и окислителя и
тарируются таким образом, чтобы контро¬
лировать текущие значения объемов компо¬
нентов по положению уровня жидкости в
каждый момент времени. Поскольку непре¬
рывный контроль движения уровня жидко¬
сти осуществлять трудно, то положение
уровня жидкости во времени контроли¬
руется лишь в нескольких фиксированных точках, расположенных
с определенным шагом по высоте бака.Таким образом, датчики объема компонентов являются дис¬
кретными датчиками, имеющими строго определенное количество
чувствительных точек. Аппаратурная часть системы весьма раз¬
лична и состоит из усилителя-преобразователя (УП) электриче¬
ских сигналов 1 (рис. 14.35), поступающих с датчиков 6 и 7, счет*
но-решающего прибора (СРП) 2, сравнивающего поступающие
сигналы и вырабатывающего командный сигнал, а также элемента
обратной связи 3. Исполнительным органом системы служит дрос¬
сель 5, устанавливаемый в одной из магистралей двигателя, и
электропривод 4, управляющий дросселем.403Рис. 14.35. Схема си¬
стемы:1 — усилители-преобразова¬
тели (УП); 2 — счетно-ре¬
шающий прибор (СРП);
3 — элемент обратной свя¬
зи (ОС); 4 — электропри¬
вод; 5 — дроссель; 6, 7 —
датчики
Система, показанная на рис. 14.35, построена по принципу без-
расходомерной системы, основанной на получении информации о
скорости опускания уровней компонентов в баках по сигналам от
дискретных датчиков уровня 6 и 7. Сигналы с датчиков поступают
через УП 1 в СРП 2, в котором преобразуются во временные сиг¬
налы t0 и tT. По результатам замеров уровней на первой и второй
парах «точек» датчиков уровня СРП производит формирование
временной команды рассогласования уровней (At) в баках окис¬
лителя и горючего и вычисляет величину управляющего сигнала.Выходной управляющий сигнал с СРП подается на привод 4
дросселя 5. Привод устанавливает дроссель так, чтобы к моментувыключения двигателя
рассогласование At было
равным нулю при усло¬
вии, что между вторым
замером и выключением
двигателя возмущение по
Kv постоянно (рис. 14.36).
На следующих «точках»
датчиков происходит кон¬
троль или корректирова¬
ние положения дросселя,
если появляются местные
возмущения по Kv-Для регистрации дви¬
жения уровня жидкости
при расходовании ее применяются различные по устройству и
принципу действия дискретные датчики уровня. Применение дат¬
чиков того или иного типа зависит в основном от свойств компо¬
нентов топлива, т. е. является ли компонент электролитом или
диэлектриком, насколько агрессивно он воздействует на мате¬
риалы и т. п.В настоящее время применяются дискретные датчики контакт¬
ного, емкостного и индуктивного типов. Основными параметрами
любого из указанных датчиков являются число контрольных точек
и расстояние между ними.Максимальное расстояние последнего уровня от нулевого опре¬
деляется допустимым остатком компонента топлива и инструмен¬
тальной точностью обеспечения коэффициента объемного соотно¬
шения компонента Kv- Количество промежуточных точек и рас¬
стояние между ними выбирается таким образом, чтобы в процессе
работы системы ошибка в определении A Kv не превосходила за¬
данной величины.ЛИТЕРАТУРА К ГЛ. XIV1. Elliot Ring — Rocket Propellant and Pressurizalion Sistems, Prentice —
Hall Inc., Englewood, Cliffs, N. I.2. Идельчик И. E- Справочник по гидравлическим сопротивлениям, Гос-
энергоиздат, I960,404
3, Башта Т. М. Машиностроительная гидравлика. Машгиз, 1963.
4 ПОЛИКОВСКИ Й R М Прпо пимаи »Э Р Rnnnui/nn^ndLUl JlvJ, I VKJO.Воронкообразование в В. И., Перельман Р. Г. жидкости с открытой поверхностью. Госэнергоиздат, 1959.ИГ 5. Б а ш т а Т. М. Расчеты и конструкции самолетных гидравлических
устройств. Оборонгиз, 1961.6. Кремлевский П. П. Расходомеры. Машгиз, 1955.7. Ш е в е л ю к М. И. Теоретические основы проектирования жидкостных
Ивкетных двигателей. Оборонгиз, 1960.
ГЛАВА XVКОНСТРУКЦИЯ и РАСЧЕТ АГРЕГАТОВ АВТОМАТИКИВ состав систем питания входят различные по назначению и
устройству агрегаты автоматики, обеспечивающие работу пневмо-
гидравлической системы в заданной последовательности. Под
агрегатами автоматики понимаются устройства, которые служат
для автоматического открытия и закрытия различных магистра¬
лей по командам, поступающим с пультов наземного оборудова¬
ния (в предпусковой период) или от системы управления (в по¬
лете).§ 15.1. КЛАССИФИКАЦИЯ АГРЕГАТОВ АВТОМАТИКИАгрегаты автоматики целесообразно классифицировать по сле¬
дующим признакам:— по принадлежности к системам ракеты;— по назначению;— по способу управления.По принадлежности к системам ракеты агрегаты
автоматики можно разделить на следующие группы: агрегаты
системы окислителя, агрегаты системы горючего, агрегаты систе¬
мы наддува, агрегаты пневмосистемы.По назначению агрегаты автоматики разделяются на
группы: заправочно-сливных клапанов (ЗСК), разделительных
клапанов (РК), дренажно-предохранительных клапанов (ДПК),
обратных клапанов, вентилей слива, электропневмоклапанов
(ЭПК), запорных вентилей, реле давления.Заправочно-сливные клапаны предназначены для заправки ра¬
кеты компонентами топлива и для их слива в случае несостояв-
шегося пуска ракеты. Основная особенность этих клапанов со¬
стоит в том, что после заправки ракеты они непрерывно находятся
под воздействием компонентов топлива.406
Дренажно-предохранительные клапаны используются для по*
стоянного сообщения топливных баков с атмосферой во время за¬
правки ракеты и периодического — во время ее полета в моменты,
когда давление наддува баков превысит допустимое. Много
общего с ДПК по конструкции имеют клапаны наддува,
сообщающие топливные баки с атмосферой для наддува баков
встречным потоком воздуха. ДПК и клапаны наддува после
заправки ракеты находятся под действием паров компонентов топ¬
лива.Разделительные клапаны используются в топливных системах
в качестве устройств, перекрывающих топливные магистрали до
момента подачи команд на их открытие или закрытие. Перекры¬
тие топливных систем необходимо для того, чтобы компоненты
топлива до момента пуска не заполняли коммуникации и насосы
двигателя. РК находятся под воздействием компонентов топлива
с момента заправки ракеты.Обратные клапаны пропускают компоненты топлива или газы
в одном направлении и устраняют перемещение упомянутых рабо¬
чих тел в обратном направлении. В связи с этим обратные кла¬
паны находятся в среде компонентов или газов.Вентили слива устанавливаются в топливных системах для
слива компонентов из ограниченных объемов. В заправленных ра¬
кетах на вентили воздействуют компоненты топлива.Электропневмоклапаны являются распределительными устрой¬
ствами пневмосистемы и системы наддува, обеспечивающими по¬
ступление газа в рабочие объемы пневмоавтоматики или воздуш¬
ные подушки баков при наддуве. Часть элементов ЭПК, располо¬
женных в системе наддува находится под действием паров ком¬
понентов топлива.Запорные вентили обычно используются в пневмосистемах и
служат для соединения различных ее магистралей. Чаще всего
вентили используются на магистралях заправки бортовых бал¬
лонов из наземных емкостей.Реле давления являются контролирующими устройствами, из¬
меряющими давление в пневматических и гидравлических маги*
стралях. В последнем случае некоторые элементы реле могут на¬
ходиться под действием компонентов и их паров.По способу управления агрегаты автоматики можно
разделить на группы: агрегаты пневмоавтоматики, агрегаты пи¬
роавтоматики, агрегаты электромагнитного управления, агрегаты
ручного управления.К агрегатам пневмоавтоматики относятся агрегаты, которые
управляются сжатым газом. Обычно это агрегаты многоразового
действия, позволяющие осуществлять многочисленное срабатыва¬
ние. В эту группу могут входить ЗСК, ДПК, обратные клапаны
и реле давления.Агрегаты пироавтоматики управляются продуктами сгорания
пороха или пиротехнических составов. К этой группе относятся407
разделительные клапаны. Агрегаты пироавтоматики являются
агрегатами одноразового действия.К агрегатам электромагнитного управления относятся электро¬
пневмоклапаны, управляемые электрическим током. Они допу¬
скают многократное срабатывание. ЭПК используются в ракетах,
имеющих развитую пневмосистему.К агрегатам ручного управления относятся вентили слива и
запорные вентили.Чтобы обеспечить нормальную работу пневмогидравлической
системы, агрегаты автоматики должны удовлетворять следующим
требованиям:— высокая надежность и точность работы в разнообразных
условиях эксплуатации ракеты;— ресурс, достаточный для проведения предпусковых опера¬
ций и для срабатывания во время полета;— малый вес и габариты, а также малые потребляемые мощ¬
ности; д— малые гидравлические сопротивления;— герметичность.Удовлетворение перечисленным требованиям достигается кон¬
структивной схемой агрегатов и тщательной экспериментальной их
отработкой, а также технологией изготовления и комплексом ис¬
пытаний.Под надежностью работы агрегатов понимается их свойство
выполнять все функции в заданных условиях эксплуатации. К по¬
следним относятся: температура, давление и влажность окружаю¬
щей среды, атмосферные воздействия. Количественно надежность
агрегатов может оцениваться или вероятностью безотказной ра¬
боты агрегатов в течение заданного времени или вероятностью от¬
каза. Надежность целесообразно оценивать по результатам испы¬
таний агрегатов в процессе их изготовления.Под точностью работы агрегата понимается допуск на вели¬
чину определяющего параметра. Так, если для данного агрегата
определяющим является давление срабатывания, то задается
допуск на величину давления, а если время срабатывания,
то задается допуск на время и т. д. Точность работы задается
на основе анализа системы, в состав которой входит аг¬
регат.Ресурсом называется допустимое число циклов срабатываний,
при котором параметры агрегата не выходят за пределы задан¬
ных значений. Назначение ресурса необходимо для надежной ра¬
боты системы во время пуска и полета ракеты после предпусковых
проверок и испытаний.Малый вес и габариты агрегатов — общее требование, свой¬
ственное для всех элементов ракеты. Однако это требование не
должно входить в противоречие с требованием о надежности и
точности агрегатов. Потребление малых мощностей позволяет
уменьшить массу источников энергии.408
Малые гидравлические сопротивления агрегатов уменьшают
потери в коммуникациях. Заметим, что это требование не отно¬
сится к регуляторам, дросселям и другим агрегатам, предназна¬
ченным для того, чтобы значительно уменьшать давление в маги¬
стралях.Под герметичностью агрегатов понимается свойство не допу¬
скать утечки газов или жидкостей через подвижные или непо¬
движные соединения. Б тех случаях, когда допускается негерме-
I ичность, величина утечки должна быть регламентирована.§ 15.2. КОНСТРУКЦИЯ АГРЕГАТОВ АВТОМАТИКИНаибольшее влияние на конструкцию агрегатов автоматики
оказывает принятый способ управления (привод). Поэтому кон¬
струкцию агрегатов автоматики рассмотрим по группам приме¬
няемых приводов.Агрегаты пневмо¬
автоматики широко
распространены в ракет¬
ной технике. На рис. 15.1
приведена принципиаль¬
ная схема заправочно¬
сливного клапана, состоя¬
щего из рабочего ци¬
линдра 2, в который по¬
ступает сжатый газ из
пневмосистемы, поршня 1
со штоком 3. На конце
штока закреплен кла¬
пан 6 с уплотнительным
кольцом 8. Клапан уплот¬
нительным кольцом поджимается к седлу 7 корпуса 9 пружиной 5,
сжатой между неподвижной опорой 4 и клапаном. Во избежание
проникновения жидкости из полости А в полость Б шток уплотнен
сальниковым уплотнением 10.При заправке топливного бака жидкость из заправочных
устройств под определенным давлением поступает к клапану 6 и
заставляет его переместиться влево, при этом между уплотнитель¬
ным кольцом 8 и седлом 7 образуется кольцевой зазор, через ко¬
торый жидкость поступает в бак. По окончании заправки давле¬
ние перед клапаном падает, усилием пружины и гидростатиче¬
ским давлением столба жидкости клапан прижимается к седлу —
заправка прекращается. Таким образом, открытие клапана проис¬
ходит автоматически под действием давления жидкости.Для слива жидкости из бака клапан 6 открывается принуди¬
тельно. Для этого в рабочий цилиндр подается газ, под действием
давления которого поршень 1 и соединенный с ним клапан 6 пере¬
мещаются влево. При перемещении клапана между кольцом 8Рис. 15.1. Схема заправочно-сливного клапана:А, Б — полости; 1 — поршень; 2 — цилиндр; 3 — шток;
4 — опора; 5 —пружина; 6 — клапан; 7 — седло; 8 —
уплотннтельное кольцо; 9 — корпус; 10 — уплотнение409
и седлом 7 образуется кольцевой зазор, через который жидкость
сливается в наземную емкость. По окончании слива газ из рабо¬
чего цилиндра стравливается и клапан пружиной 5 прижимается
к седлу 7.Схема ДПК приведена на рис. 15.2. ДПК состоит из корпуса 2,
соединенного патрубком И с топливным баком, а решеткой 4 —
с атмосферой, клапана 7, пружины 3, опоры 6, регулировочного
винта 5, сильфона 8, рабочего цилиндра 9, штока 10, штуцера /.Чтобы открыть клапан, в полость В рабочего цилиндра по¬
дается газ, под давлением которого сильфон 8 сжимается в про¬
дольном направлении, шток 10 воздействует на клапан 7 и по¬
следний отходит от седла корпуса. В результате этого бак сооб¬
щается с атмосферой. По окончании заправки топливного бакагазРис. 15.2. Схема ,Д,ПК:В — полость; / — штуцер; 2 — корпус; 3 — пружина; 4 —
решетка; 5 — винт; 6 —опора; 7 — клапан; 8 — сильфон;9 — цилиндр; 10 — шток; // — патрубокили слива компонента топлива из него газ стравливается из по-
лости В и клапан 7 под действием усилия пружины 3 садится на
седло корпуса — бак с атмосферой не сообщается.Как предохранительный этот клапан работает следующим об¬
разом. В момент достижения рабочим телом наддува давления,
превышающего усилие пружины 3, клапан 7 отходит от седла и
через образовавшийся зазор часть рабочего тела стравливается
в атмосферу. Когда давление в баке упадет до расчетного, под
действием пружины 3 клапан садится на седло. Настройка пру¬
жины на заданное давление осуществляется регулировочным вин¬
том 5.На рис. 15.3 приведена схема обратного клапана. Обратные
клапаны могут использоваться как в пневматических, так и в гид¬
равлических системах. Они обеспечивают движение рабочих тел
только в одном направлении. Клапан состоит из корпуса /, кла¬
пана 2 с уплотнительным кольцом 4, пружины 3 и седла 5. Под
действием давления рабочего тела клапан 2 отходит от седла 5.410
Через образовавшийся кольцевой зазор рабочее тело проходит в
направлении, показанном стрелкой. Обратное движение жидкости
или газа невозможно, так как клапан под действием усилия пру¬
жины и давления рабочего тела плотно поджимается уплотнитель¬
ным кольцом 4 к седлу 5.Устройствами, предназначенными для контроля давления раз¬
личных газообразных сред, являются реле давления. Принцип
работы реле заключается в том, что при изменении давления
п магистрали происходит различный по величине прогиб чувстви-
гельных элементов реле — мембран. Перемещение мембран вызы¬
вает замыкание или размыкание электрической цепи и срабатыва¬
ние соответствующих агрегатов автоматики. В зависимости от вели¬
чины контролируемого давления чувствительный элемент должен
обладать определенной прочностью. Принципиальная схема реле/ 2■ь=ЖЖидкостьМидкдрШьZ
.«Lj17-А —Рис. 15.3. Схема об¬
ратного клапана:/ — корпус; 2 — клапан;Л — пружина; -4— уплот¬
нительное кольцо; 5 —
седлоРис. 15.4. Схема реле
давления:/ — штепсельная вилка; 2 —
корпус; 3 — пластина; 4 — не¬
подвижный контакт; 5 — по¬
движный контакт; 6 — шток;
7 — мембрана; 8 — штуцер;
9 — основание4Рис. 15.5. Схема раздели¬
тельного клапана:Л — полость; / — клапан; 2 —
бурт; 3 — пиропатрон; 4 — седлодавления представлена на рис. 15.4. Реле состоит из мембраны 7,
штока 6, пластины 3 с контактом 5, штепсельной вилки /, непо¬
движного контакта 4, корпуса 2, основания 9 со штуцером 8. При
повышении давления в полости под мембраной 7 она прогибается
вверх и перемещает шток 6, который воздействует на пластину 3.
Пластина 3 поднимается, и контакт 5 соприкасается с неподвиж¬
ным контактом 4 — электрическая цепь замыкается. При падении
давления мембрана 7 и шток 6 опускаются, контакты 5 и 4 раз¬
мыкаются.Основным преимуществом агрегатов пневмоавтоматики яв¬
ляется большая надежность, так как они, допуская многократное
срабатывание, позволяют производить проверки каждого агрегата.
Недостатки пневмоавтоматики — громоздкость и большой вес.Агрегаты пироавтоматики применяются в основном в
разделительных клапанах. На рис. 15.5 приведена схема раздели¬
тельного клапана, состоящего из клапана 1 с буртом 2 и пиро¬
патрона 3. При срабатывании пиропатрона продукты сгорания
создают давление в полости А, под действием которого срезается411
бурт 2 и клапан 1 перемещается влево, заклиниваясь в седле 4
и прекращая движение жидкости.Для разобщения как жидкостных, так и газовых магистралей
применяются пиромембраны. В пиромембранах (рис. 15.6) раз¬
рушение мембраны 3 происходит при срабатывании пиропатро¬
на 2. Разрушение мембран должно происходить без образования
кусков, поэтому они имеют насечку в виде незамкнутого кольца
(рис. 15.7) или крестообразную насечку. В первом случае мем¬
брана после прорыва провисает на ненадсеченной части, а во
втором — отгибается в виде лепестков. После разрушения мембра
ны рабочее тело может перемещаться от входного 1 (рис. 15.6)
к выходному 4 штуцеру.Агрегаты пироавтоматики имеют малые габариты и вес, но им
присущ серьезный недостаток — невозможно проверить на функ-rrti/Рис. 15.6. Схема пиромембраны;1 —входной штуцер; 2 —пиропатрон;
3—мембрана; 4-*-выходной штуцерРис. 15.7. Форма надсечекцонирование каждый агрегат. Поэтому отработка агрегатов долж¬
на осуществляться очень тщательно.К агрегатам электромагнитного управления от¬
носятся электропневмоклапаны, которые способны обеспечивать
большие расходы газов в течение достаточно длительного времени
при сравнительно небольших расходах электрической энергии.
Одно из основных требований, предъявляемых к ЭПК, состоит
в том, чтобы в них не применялись мощные электромагниты и
пружины.Несмотря на то, что в ракетах применяются ЭПК разнообраз¬
ных конструкций, все они могут быть разделены на две группы:— ЭПК низкого давления (пропускают газы при давлении
р= (50—60) • 105 н/м2)-,— ЭПК высокого давления (уО = 100• 105 н/м2).ЭПК низкого давления (рис. 15.8) состоит из якоря .3, элек¬
тромагнита 4, штока 5, верхнего клапана 6, уплотнительного коль*
ца 7, нижнего клапана 9 с уплотнительным кольцом /, пружи¬
ны 11, входного штуцера 10 и выходного штуцера 2. Верхний и
нижний клапаны жестко соединены штоком 8.При обесточенном электромагните газ находится под клапа¬
ном 9, обеспечивая совместно с пружиной 11 поджатие клапана412
уплотнительным кольцом 1 к седлу корпуса. Ввиду этого газ не
может поступить к выходному штуцеру 2.При подаче напряжения на электромагнит якорь 3 притяги¬
вается к нему, а шток 5 заставляет переместиться вниз клапан 6
до упора уплотнительным кольцом 7 в верхнее седло корпуса.
При этом нижний клапан 9 под действием штока 8 опустится
вниз. Через образовавшийся кольцевой зазор газ выходит через
штуцер 2 к потребителю. Таким образом в ЭПК данной конструк¬
ции якорь преодолевает давление газа, действующее на рабочий
клапан.Газ-Рис. 15.8. Схема ЭПК
низкого давления:/ — уплотнительное кольцо;
2 — штуцер; 3 — якорь; 4 —
электромагнит; 5 — шток;6 — верхний клапан; 7 —
кольцо; 8 — шток; 9 — ниж¬
ний клапан; 10 — штуцер;11 — пружинаРис. 15.9. Схема ЭПК
высокого давления:С — полость; 1 — штуцер;
2 — канал; 3 — якорь; 4 —
электромагнит; 5 — шток;6 — разгрузочный клапан;7 — пружина; 8 — канал; 9 —
пружина; 10 — рабочий кла¬
пан: 11 — уплотнительноекольцо; 12 — штуцерВ ЭПК высокого давления применение такой конструкции по¬
требовало бы применения мощного электромагнита. Поэтому
в таких ЭПК используется конструкция с разгрузочным клапаном
(рис. 15.9). При обесточенном электромагните 4 разгрузочный
клапан 6 под действием пружины 7 прижимается к седлу корпуса.
Газ высокого давления по каналу 2 проходит в полость разгру^
„зочного клапана и затем по каналу 8 — в полость С рабочего кла¬
пана. Рабочий клапан 10 уплотнительным кольцом 11 плотно
поджимается к седлу, препятствуя прохождению газа в выходной
штуцер 12.При срабатывании электромагнита шток 5 переместит разгру*
зочный клапан 6 вниз, который своим хвостовиком перекроет
канал 2. Газ, находившийся в полости С рабочего клапана, через
канал 8 и зазор между разгрузочным клапаном и его седлом16—1736 4 1 3I
удалится в атмосферу (стрелка «дренаж»). Газ высокого давле¬
ния, воздействуя на выступающие бурты клапана 10, преодоле¬
вает сопротивление пружины 9. Клапан 10 поднимется вверх и
через образовавшийся зазор газ из штуцера 1 поступит в шту¬
цер 12.Таким образом, в данном клапане усилие электромагнита ис¬
пользуется только для того, чтобы переместить разгрузочный
клапан, имеющий незначительные размеры.Агрегаты ручного управления используются исклю¬
чительно для вспомогательных операций, поэтому конструктивные
.схемы этих агрегатов не рассматриваются.§ 15.3. ПРОЕКТИРОВАНИЕ АГРЕГАТОВ АВТОМАТИКИИсходными данными для проектирования агрегатов являются:— назначение агрегата;-— характеристики среды, в которой работает агрегат;— способ управления агрегатом;— параметры источника энергии (вид тока, его напряжение,
давление газа и т. д.);— расход рабочего тела, проходящего через агрегат;—• время срабатывания агрегата;— максимальное и минимальное давление рабочих тел, в сре¬
де которых работает агрегат;герметичность — полная или неполная;■— время нахождения агрегата в данной среде;— способ присоединения к трубопроводам.На основании этих данных разрабатывается эскизный проект
агрегата, в котором должны быть решены следующие задачи:— выбран тип агрегата и определены его размеры;— на основе анализа коррозионных свойств среды и времени
нахождения агрегата в ней определены материалы всех деталей
агрегата;— по способу соединения с трубопроводами (фланцевое соеди¬
нение, сварка) разработаны конструкция входного и выходного
фланцев корпуса;— проведен гидравлический расчет агрегата;— разработана конструкция уплотнений и произведен их рас¬
чет;— рассчитан привод агрегата;— определено время срабатывания агрегата;— элементы агрегата рассчитаны на прочность.В дальнейшем разрабатываются рабочие чертежи на детали
агрегата, технические условия на изготовление и испытания, а так¬
же другая документация. Из перечисленных задач рассмотрим
способы расчетов агрегатов (исключая расчеты на прочность).414
Гидравлический расчет агрегатов11од гидравлическим расчетом понимаются расчеты проходных
М'ичшй агрегатов и их гидравлических сопротивлений. Определяя
(Идраи лическне потери, можно полагать, что каждый из агрега-
Iим представляет собой систему последовательно расположенных
|лгментов, создающих сопротивление (поворот потока, внезапное
I ужение и расширение его, истечение через зазор и т. д.). Поэто¬
му гидравлическое сопротивление агрегата принимается равным
гумме гидравлических потерь в каждом из элементов. Значения
Iн фавлических сопротивлений определяются по справочникам,
И для расчета потерь в седлах можно применять приближенные
шачения коэффициентов ? местных сопротивлений, заимствован¬
ные из работы [1] и приведенные в табл. 15.1.При расчете проходных сечений агрегатов целесообразно рас¬
смотреть два режима работы агрегатов систем питания:— основной режим, при котором соотношение давлений на вхо¬
де pi и выходе р2 в агрегат находится в пределах 1,2;— режим дросселей, при котором ~ > 1,2.Р 2Для агрегатов, работающих в основном режиме, проходные се¬
чения должны выбираться из условия, чтобы потребные расходы
обеспечивались при небольших гидравлических потерях. Чтобы
выполнить это требование, необходимо принимать такие площади
проходных сечений агрегатов, которые бы не были меньше пло¬
щади проходных сечений стыкуемых трубопроводов. Площади
проходных сечений агрегатов при данном значении диаметра Dc
определяются ходом к клапана. Чтобы определить величину /г,
можно использовать следующие зависимости:— для тарельчатого клапанаh = 0,275Д., (15.1).— для конусного клапана (табл. 15.1), А kDc sin а + У (ъРс sin а)2 — 4 sin2 а COS aFK> Sin2 о COS а > \ ■ )г-*где FK = -~-;— для клапана с конусным пояском при малых подъемах,
когда клапан не поднимается над поверхностью седла, ход h кла¬
пана вычисляется по зависимости (15.2), а при большем ходе —
по формуле (15.1); знание величины h позволяет определить ряд
других параметров клапана: характеристики пружины, габариты
корпуса клапана и т. д.16* 415
Таблица 15.1
Значения коэффициентов f для седел агрегатовСхема седлаФормулы и таблицы значений коэффициентов
сопротивлений \Тарельчатый кла¬
пант« = 0,75 + 0,155 (-^)2ЛD70,060,100,140,180,200,220,240,25с43,816,38,75,54,64,03,43,2Клапан с направ¬
ляющими_ГИЧсlJ£ = 1,35 + 0,21 (~^-)2hDc0,060,100,140,180,200,220,240,25560,022,412,07,86,65,75,04,8Клапан с конус¬
ным пояскомhDc0,060,100,140,180,200,220,240,25г28,28,64,02,52,11.91,71,6Конусный клапан
DaЖ.т2а*S = 0,6 + оhDc0,060,100,140,180,200,220,240,25a42,315,68,35,34,43,73,23,0
(оотношение между диаметром ,DK клапана и диаметром Da
Корпуса должно быть таким, чтобы выполнялось условие:±{D\-Dl) = k —где /.■ - 1,1 — коэффициент запаса;DTр—диаметр трубопровода, подсоединенного к клапану.В режиме дросселей работают дренажно-предохранительные
Клапаны и дроссели в системах наддува и пневмосистемах. Чтобы
определить площадь F0 проходного сечения дренажно-предохрани-
пми.ного клапана и дросселя, можно использовать зависимость(15-3>Где т — массовый секундный расход среды;е — коэффициент, учитывающий расширение среды;[J. — коэффициент расхода;Др — перепад давления.Метод расчета по зависимости (15.3) приведен в § 14.4.Конструкция и расчет уплотненийУплотнения предназначаются для того, чтобы исключить утеч¬
ку жидкости или газа, находящихся под избыточным давлением,
через зазор между двумя соприкасающимися деталями. В зави¬
симости от назначения агрегата уплотнения должны обеспечивать
полную или неполную герметичность. Если предусматривается
неполная герметичность агрегата, то величина утечки рабочего
тела оговаривается в техническом задании.В агрегатах автоматики применяются уплотнения неподвиж¬
ных соединений (детали корпуса), подвижных соединений (сочле¬
нение подвижного штока с корпусом) и контактные уплотнения
(соединения клапанов с седлами).Чтобы обеспечить герметичность соединений, необходимо
устранить микрозазоры между уплотняющими поверхностями,
а это может быть достигнуто:— улучшением качества обработки уплотняющих поверхно¬
стей;— увеличением площади контактов уплотняющих поверхно¬
стей;— применением для изготовления уплотняющих поверхностей
материалов и смазок, не смачиваемых данной средой;— приложением к сочленяемым поверхностям внешних на¬
грузок;— конструкцией сопел и клапанов,Улучшение качества обработки и увеличение контактной пло¬
щади поверхностей связано с технологическими трудностями и417
удорожанием агрегатов. Применение несмачиваемых смазок и
материалов не всегда возможно, так как они могут взаимодейст¬
вовать с компонентами топлива. Поэтому герметичность агрега¬
тов обеспечивается в основном приложением к поверхностям
внешних нагрузок и выбором конструкций седел и агрегатов.Заметим, что механизм проникновения жидкостей и газов
через уплотнения ввиду его сложности исследован недостаточно,
поэтому в практике проектирования уплотнений используются
зависимости, полученные опытным путем.Уплотнение неподвижных соединений, типичными
представителями которых являются корпус и крышка агрегата,
достигается поджатием мягких алюминиевых или латунных про¬
кладок. При проектировании таких уплотнений необходимо опре¬
делить размеры прокладок и усилие затяжки. Диаметры прокла¬
док определяются диаметрами сочленяемых деталей, а ширина
имеет значение 3—5 мм. За потребное усилие затяжки прини¬
мается максимальное из усилия предварительной затяжки и уси¬
лия затяжки при наличии рабочей среды.Усилие Qnp предварительной затяжки определяется по фор¬
мулеQnP = %о,где I — длина периметра прокладки по средней линии;
b—ширина прокладки;<70 — удельное давление на прокладке, необходимое для гер¬
метичности соединения, н/м2.Значение вычисляется из зависимости<7о= ЧгСугде <7г — удельное давление герметичности, равное, например, для
мягкого алюминия 3 • 107 н/м2.Коэффициент С определяется по формулеС= I + O.isj/Sгде с?пр — средний диаметр прокладки, м.В рабочих условиях (при наличии рабочей среды в агрегате) уси¬
лие затяжки Qp, обеспечивающее герметичность, определяется
по зависимостиQP = lbqp + Qc,где qp—потребное удельное давление на прокладку, н/м2\
Qc — Kdnpbpc — усилие давления среды, «;рс—давление среды, н/м2.Давление qp вычисляется по зависимости_ 4-10у>с*р Уъ '418
Уплотнительные устройства подвижных соеди-
it г и н й применяются для уплотнения штоков клапанов, поршней и
inviiix деталей, имеющих возвратно-поступательное движение.
I in уплотнения этих соединений применяются манжеты, сальни-
йомые уплотнения, сильфоны. Манжеты изготавливаются из ре-
«ним или фторопласта. Резиновые манжеты могут применяться
п мо.чдушной и азотной средах, а также в средах керосина, спир-
("н и их паров.Для агрегатов, работающих в средах азотной кислоты, четы-
(и'Хпкиси азота, несимметричного диметилгидразина, гидразина
и 1рсхфтористого хлора [2], целесообразно
применять манжеты из фторопласта.Фторопласт является полимером различ¬
ных фторсодержащих соединений. Нали¬
чие во фторопластах значительного ко¬
личества связанного фтора придает им
нысокие механические и антикоррозион¬
ные свойства. Фторопласт прочен, хоро¬
шо механически обрабатывается и нор¬
мально работает в температурном диапа-
юне — 195-*-- +250° С.Резиновые манжеты (рис. 15.10) пред¬
ставляют собой кольца с усами а и б.Усом а манжета прижимается к штоку /,
к усом б — к стенке цилиндра 2. При
установке диаметром d{ манжета по
плотной посадке монтируется на шток,
а диаметром d2 — по плотной посадке в
цилиндр. При подаче давления в полость манжеты усы а и б
плотно поджимаются к уплотняемым поверхностям, компенсируя
неточности их изготовления. Чтобы устранить накапливание рабо¬
чего тела за манжетой и уменьшить перепад давления, в опорных
кольцах 3 имеются дренажные отверстия в. Для фиксации ман¬
жеты при перемещениях штока применяют манжетодержатели 4,
в которых для прохода рабочего тела к манжетам имеются ка¬
налы г.Сила трения Т в манжетных уплотнениях определяется из
зависимостиТ = \ipcisdfi,где р — коэффициент трения (для уменьшения силы трения
в уплотнениях газовых полостей манжеты смазываются
консистентной смазкой, в этом случае = 0,1);
рс -—- давление среды;
d — диаметр штока (цилиндра);h — высота контакта (для резиновых манжет принимается
равной высоте «усов»).Рис. 15.10. Резиновая ман¬
жета:а, б —усы; в — отверстие; г —
канал; / — шток; 2—цилиндр;
3 — опорное кольцо; 4 — манже-
тодержатель419
Гисло манжет в уплотнительных устройствах может быть раз¬
личным; в связи с ограниченным числом срабатываний в агрега¬
тах автоматики обычно ограничиваются постановкой одной ман¬
жеты.Сальниковые уплотнения применяются в тех соедине¬
ниях, в которых установка манжет затруднена. Сальниковые
уплотнения состоят из набора фторопластовых колец I
(рис. 15.11), разделенных .стальным кольцом 2, в полость которого
набивается консистентная смазка. Смазка повышает герметизи¬
рующие свойства уплотнения и уменьшает коэффициент трения.Затягиваются кольца гайкой 3.
В результате этого кольца раз¬
даются в стороны, плотно охваты¬
вают шток 4 и прижимаются к
стенкам цилиндра 5, обеспечивая
герметичность между подвиж¬
ным штоком и цилиндром. При
расчете сальниковых уплотнений
определяются следующие пара¬
метры.1. Высота набивки h и толщи¬
на кольцевого слоя S. Парамет¬
ры h и 5 выбираются по рабоче¬
му давлению, степени ответствен¬
ности и в зависимости jot ряда других факторов: h=(4—10)5,
причем 5 = (0,7—1,5)|^^ш> где dm— диаметр штока. Толщина
колец /г' = 2—3 мм.2- Усилие затяжки Р3 — это давление, создаваемое в кольцах
по направлению оси х при ввинчивании гайки 3.Для ориентировочных расчетов можно воспользоваться зави¬
симостью ряг=грс, где рс. ' давление среды, z — коэффициент,
определяемый из табл. 15.2 [1].Таблица 15.2Значение коэффициента гРо “Iм*2,5•10Б6-10510-10Б16-10625•10640.10»64-10^100-10БX3,03,02,62,22,01,51,31,23. Сила трения между набивкой и штоком определяется из за¬
висимости /Т = 'Мш^с, С ■ „где ф — коэффициент, который для давлений ро<25-105 н/мг
можно определить из табл. 15.3.420Рис. 15.11, Сальниковое уплотнение:1 — кольцо; 2 — га л цинковое кольцо; 3 —
тапка; 4 _ шток; 5 — цилиндр
Таблица 15.3Значение коэффициента ф [1]/I5,05,56,06,57 и более*2,22 .2,552,903,263,65Г, ильфонные уплотнения обеспечивают полную герме-
точность, имеют высокую надежность и большие ресурсы работы.
Они применяются для уплотнения агрегатов, работающих в газо¬
ны \ средах с различными значениями внешнего и внутреннего
яммлений, а также для разделения жидкостных и газовых сред.Рис. 15.12. Плоские Рис. 15.13. Линей-контакты ные контактыЧтобы повысить рабочие перепады давлений, рекомендуется
применять многослойные сильфоны.При проектировании агрегатов автоматики с сильфонными
уплотнениями необходимо выбрать диаметр сильфон^ и рассчи¬
тать его длину. Расчет длины производится по величине, штока,
при этом перемещение сильфона в сторону его сжатия не должно
превосходить 0,15 его свободной длины, а в сторону растяже-
иия — 0,1.Под контактными уплотнительными устройствами понимаются
уплотнения, герметичность которых достигается при посадке по¬
движного клапана на седло. Уплотнения данного типа можно раз¬
бить на две группы:— уплотнения с плоскими контактами (сочленение контактных
поверхностей осуществляется по плоскости (рис. 15.12);. — уплотнения с линейными контактами (контакт уплотнитель¬
ного кольца и седла происходит по линии (рис. 15.13).Чтобы обеспечить герметичность уплотнений с плоскими кон¬
тактами, к клапану необходимо приложить усилиеQ = qF,где/7 — площадь контакта;
q — давление.421
Давление q определяется из формулы [1]п С + kpQ¥ 10 КЗ ’(15.4)где С — постоянная величина, зависящая от материалов контак¬
тов, н/м2;k — коэффициент, учитывающий влияние давления среды на
давление q\
b — ширина уплотнительной поверхности, м.Значения величин С и k для некоторых материалов контактов
приведены в табл. 15.4.Таблица 15.4Значения величин С и kНаименование материалаС',н/м2kАлюминий и его сплавы18•1060,9Резина средней твердости4Ю50,6Сталь351061,0Используя формулу (15.4), необходимо иметь в виду следую¬
щие условия [1]:■— если контактные поверхности изготовлены из различных
материалов, то значение q определяется для более мягкого мате¬
риала; ч— если агрегаты предназначены для работы в среде азотной
кислоты, четырехокиси азота, жидкого водорода и гелия, то по¬
лученные значения q необходимо увеличить в 1,8 раза;— при работе агрегатов в газообразных средах и керосине
значение q увеличивается в 1,4 раза.Заметим, что применяя плоский конический контакт, можно
получить более высокое значение давления q по сравнению с пло¬
ским контактом.Потребное усилие Q для линейных контактов определяется по
формуле [1]Q =где qt =а-\- npQ — давление на единицу длины контактной линии,
н/м\I — периметр контактной линии, м\
а — постоянная, зависящая от материала кольца,
н;м\п — коэффициент, учитывающий влияние давления
среды на давление q.422
11 -11 и н величин awn приведены в табл. 15.5.Таблица 15.5Значения величин а и пМатериал колеца, н/мпМш'каи резина0,40,6Ф|пропласт, капрон1,01,0Форма и размеры седел и колец зависят в основном от мате¬
риала уплотнительных колец. Указанные параметры уплотнений
пЛычно отрабатываются эксперимен-
I ильно.Расчет приводов1}асчет приводов состоит в том, чтобы
определить потребные усилия, необходимые
для управления агрегатами автоматики.В агрегатах пневмоавтомат и-
к н необходимые усилия создаются давле¬
нием газов и пружинами. Давление газа
имеет определенное значение, а диаметр
поршня обычно выбирается из конструктив¬
ных соображений. Поэтому необходимо оп¬
ределить параметры пружины. Определим
исходные данные для расчета пружины кла¬
пана, изображенного на рис. 15.14. В дан¬
ном агрегате клапан закрыт усилием Qnp
нружины, а открывается давлением газа. Определяя усилие Qnp,
необходимо учитывать требование герметичности соединения кла¬
пан — седло.Составим уравнение равновесия клапана:<7/ = Рс^с + mKg0+Qnp, (15.5)где q,— давление герметичности;/—периметр контакта;Fc — площадь клапана, ограниченная седлом;
тк—масса клапана;
рс— давление среды.Имея в виду, что qi = a + npc, после преобразования уравнения
(15.5) получимQnp = al + (nl — Fc)pe — mKg0.Если в создании давления среды участвует гидростатическое дав¬
ление жидкости, то расчет усилия пружины Qnp необходимо про-Рис. 15.14. Клапан за¬
крыт423
вести для нескольких точек активного участка, вычисляя в каж¬
дой из них значение pgznx, где г — соответствующее данной точке
траектории значение высоты столба жидкости. Максимальное зна¬
чение из полученных значений Qnp используется для того, чтобы
определить параметры пружины.Составим уравнение равновесия для
случая, когда клапан I (рис. 15.15) пере¬
местится в крайнее верхнее положение до
упора в ограничитель 6:Рраб^п = Т + Г + mg0 -f Q;p, (15.6)h i////S/77Г.Рис. 15.15. Клапан
открыт:/ — клапан; 2 — шток; *
3—манжетное уплот¬
нение; 4 — поршень;5 — сальниковое уп¬
лотнение; 6 ограни¬
чительРис. 15.16. к расчету агрегатов
пироавтоматикигде Рраб — давление в рабочем цилиндре;Fn— площадь поршня 4\V■—сила трения манжетного уплотнения 3\Т—сила трения в сальниковом уплотнении 5;Q,'р —- усилие пружины в конце хода штока 2.Зная уравнения для сил тренияТ1 = itD,Avpa6, Т = HuiSpm,можно записать зависимость для Q'[p:Qnp = Рр-^п — T-Dnh-Ppzb — WmSp^6 — mg0.Итак, если ход штока h известен из гидравлического расчета,
то по значениям Qrip, Qjip и h можно рассчитать параметры пру¬
жины, пользуясь методами, известными из курса деталей машин.Расчет приводов агрегатов пироавтоматики
состоит в том, чтобы проверить применимость в данном агрегате
имеющихся пиропатронов. Для агрегата, приведенного на рис. 15.16,
потребное давление рл в полости А клапана определяется из
уравненияpAFc = xDcfos, (15.7)где Д. — диаметр, по которому происходит срез бурта;
h — толщина бурта;424
ро* — активная площадь, на которую воздействуют продук¬
ты сгорания пиропатрона;
oj—допускаемое напряжение на срез материала клапана.
Максимальное давление ртах продуктов сгорания пиропатрона
|| объеме V0 определяется из уравнения пиростатики:где /—сила пиротехнического заряда или дымного пороха;ш — масса заряда пиропатрона;I а — коволюм — величина, учитывающая объем жидких и твер¬
дых остатков в продуктах сгорания.Величины а и f имеют значения:
v — для пиросоставов — а =► 0,4 - 10-3 м3/кг, / = 2,1 -105 ;— для дымного пороха а =0,5 • Ю-з мг/кг< f = (3,0—3,4) • 10еОжKi 'Чтобы надежно сработал агрегат,
давление Рт&х примерно в два раза
должно превосходить потребное дав¬
ление Ра, определяемое из уравне¬
ния (15.7). Если условие рт&х ^ 2рА
не выполняется, то нужно проверить
новую марку пиропатрона или
уменьшить объем VVПри расчете электромагнитных приводов не¬
обходимо определять параметры электромагнита (если отрабаты¬
вается новый ЭПК) или проверить возможность применения элек¬
тромагнитов отработанных ЭПК- Исходной величиной в обоих
случаях является максимальное потребное усилие Rmах электро¬
магнита. За усилие Rmax принимается наибольшее из Ri и R2
(рис. 15.17), вычисленных из уравнения равновесия клапана 1
в верхнем и нижнем его положениях. Методика составления урав¬
нений равновесия аналогична принятой для агрегатов пневмоав¬
томатики.Напишем уравнение магнитной цепи для электромагнитаП2я;/г + Я0/0 = /«., (15.9)i—1Пгде — сумма магнитных напряжений в стали;/=1И0—напряженность магнитного поля в воздушном
зазоре /о между электромагнитом и якорем;1 — клапан425
I — сила тока в обмотке электромагнита;
(1) — число витков обмотки.Известно, чтогде В о — магнитная индукция в воздушном зазоре,[ло=10~7 м.кг.сек-2а~2 — магнитная постоянная.Падение магнитного напряжения в стали и в радиальном за*
зоре I между якорем и электромагнитом составляет 15—35% or
падения напряжения в воздушном зазоре /о- Учитывая это обстоя¬
тельство, уравнение (15.9) можно переписать в видегде ср= 1,5—1,35.Сила притяжения якоря к электромагнитугде 5 — «площадь якоря.Подставив в уравнение (15.11) значение В0 из выражения(15.10), получим:Если в зависимости (15.12) величину / подставить в амперах,
постоянную (до — в кг • м • сек~2 ■ а~2, то силу R получим в ньютонах
ЭПК работает нормально при условии, что R Rmах. При
невыполнении этого условия необходимо изменить параметры /ы,
5 электромагнита.Под временем срабатывания tA агрегата пнев¬
моавтоматики понимается промежуток времени с момента
подачи напряжения на ЭГЖ 1 (рис. 15.18) до момента упора кла¬
пана 3 в с^дло 4. Чтобы определить время <а, целесообразно раз¬
бить срабатывание клапана на два периода' — подготовительный
и период движения.Подготовительный период включает время t0 открытия ЭПК,
время tb движения газа по трубопроводу 2 от ЭПК в полость А
и время tn наполнения рабочего объема А клапана до давления рп,
при котором начнется перемещение поршня 5.Под периодом движения понимается время перемещения порш¬
ня из первоначального положения в положение упора на седло 4.(15.10)(15.12)Расчет времени срабатывания426
Нрсмя t0 определяется расчетом времени срабатывания ЭПК,
Мремн tb вычисляется по зависимости tb=~, где L — длина тру¬
бопровода, а —20 }^Т (м/сек)—скорость звука для воздуха и
пнна, Т — температура газа в °К- Чтобы определить время tH, не¬
обходимо знать давление рп, которое можно вычислить из уравне¬
нии равновесия поршня (рис. 15.19):PnFu ™ngo I' Т Qnp ==где F„ — площадь поршня;та — масса подвижных частей;Рис. 15.18. К расчету
пневмоавтоматики:Л — рабочий объем: 1 —
ЭПК; 2 — трубопровод; 3 —
клапан; 4 — седло; 5 — пор¬
шеньщщРи% •\г|:Рис. 15.19. К урав¬
нению равновесия
поршняQnp — усилие пружины в момент начала движения поршня;
Т' — сила трения манжеты;Т — сила трения сальникового уплотнения;
рн — атмосферное давление.Время ta определится из зависимости [4]Al 1 ^ _ V°PaРоRT0mK(15.13)где>пк0,60J/T+IА» То—начальное давление и температура в ра¬
бочем цилиндре;У0 — объем цилиндра;fp6 — критический расход газа;-давление и температура газа в баллоне;
■площадь трубопровода;- коэффициент местных сопротивлений в
трубопроводе.427RT 6
Рв, Тб-6-
Заметим, что зависимость (15.13) получена в предположении, что
процесс заполнения рабочего цилиндра до давления рп принят
изотермическим, а режим наполнения — надкритическим.При расчете периода движения следует учитывать, что напол¬
нение рабочего цилиндра может происходить сначала в надкрити¬
ческом режиме, а затем — в подкритическом. В качестве исход¬
ного принимается уравнение движения поршня (рис. 15.20)mn% = PFu-PvFn-Qn-T-T, (15.14)где р — давление в рабочем цилиндре;у — перемещение поршня.Уравнение (15.14) может быть решено численными методами, для
чего на его основе составляется следующая система уравнений:_ mKRT^tl
fi /-п + yt_{i + р’= (Л + Pi-0 ~т С~ - -J- (Qn + Т' + pHFn) — at_(15.15))i—значения давления, скорости, переме¬
щения и ускорения поршня в момент
времени ;Рь Vi, yit — значения перечисленных параметров в
момент времени tt = A-i + Atf,C = jxicZ)B—постоянная величина для манжетного
уплотнения.После достижения в рабочем цилиндре давления, равного кри¬
тическому, первое уравнение системы (15.15) использовать нельзя,
так как расход газа m при подкритическом режиме становится пе¬
ременным. Расход при подкритическом режиме следует вычислять
по зависимости2 ft+11 / 2k (T ~Tpгде s = -p 6Система, (15.15) используется и для подкритического режима, при
этом для каждого момента ^ необходимо определять расход m
(предполагается, что за промежуток At{ расход m постоянен).
Начальные условия при решении системы (15.15):.Уо = 0, ^о = °, а0 = °. Ро = Ра-428
Для первого промежутка А/,-, можно допустить у\-1=0. Интегри¬
рование продолжается до достижения y^h3ад. Шаг интегрирова¬
ния по t принимается различным для различных агрегатов. Заме-
I им, что чем меньше шаг At, тем точнее вычисления. Время /1(
срабатывания клапана определяется по формулеП= !•
i=1Время срабатывания агрегатов пироавтоматики определяется
следующим образом. После срезания буртика клапан переме¬
щается до упора в седло, причем его скорость VK в момент посад¬
ки на седло будем полагать максимальной. Чтобы определить ско-Рис. 15.20. К урав¬
нению движения
поршнярость VK, вычислим работу Л продуктов сгорания на пути / движе¬
ния клапанаiА = 1 pFKdx,огде р — давление в рабочем объеме клапана.Чтобы вычислить работу А, необходимо знать закон изменения
давления р на пути /. График этого закона приведен на рис. 15.21.
Работа А может быть вычислена из зависимостиЛ = ?PmaxFJ,гдеп — максимальное давление газов, которое вычис-~ шахляется по зависимости (15.8);I pdxкоэффициент заполнения диаграммы, принимае¬
мый равным 0,6—0,7.
c:i учета потерь кинетическая энергия клапана в момент посадки
а седло равнаmViткудау — л/ рк — V тах ’И' т — масса клапана.Время ta срабатывания клапана равноУс 'tn = -це)кончательно■средняя скорость клапана.t = JL
" vK ■Время срабатывания ЭПК определим на примере ЭПК
разгрузочным клапаном (рис. 15.22). Пусть разгрузочный кла-
ан / перекрывает канал а мгновенно и полость А сообщается
атмосферой. При падении давления в полости А до некоторого
значения Р20 клапан 2 начнет перемещаться
вверх до упора. Таким образом, в данном
случае задача сводится к тому, чтобы опре¬
делить время ta спада давления в полости А
до значения р2о и время tK перемещения
клапана 2 на величину h3aд.Истечение газа из полости А происходит
при надкритическом режиме, поэтому для
времени tu справедлива формула:РРн1У0Р»
RTamK ’ис. 15.22. К срабатыва¬
нию ЭПК:где р =Pi + Pwсреднее давление;
У0—объем полости Л;полость; а -
— разгрузочный2 — клапан- канал;
клапан;Та—температура газа;
р __ р{ — давление газа, подведен¬
ного к ЭПК.с.in пренебречь силами трения, то давление р2о можно опреде*
ггь из уравнения равновесия клапанаPy-do = P24Fк -(- Qnp,l,e FK — площадь клапана;d —.диаметр седла;3—нависание клапана 2 над седлом.Ю
Чтобы определить время tK перемещения клапана, составим урав¬
нение движениягде тк — масса клапана;р2—давление в полости А.Уравнение (15.16) можно решить численным методом, составив
следующую систему уравнений:Обозначения в системе (15.17) аналогичны обозначениям в си¬
стеме (15.15). Решение системы (15.17) продолжается до значения
y = hзад. В момент достижения y — haад определяется время tK1. Гуревич Д. Ф. Расчет и проектирование, трубопроводной арматуры.
Машгиз, 1964.2. House Philip A. Resilient seal materials for liquid rocket propellants cts
Nat. Simpos Mater. Space Vehichles Use, Seattle, 1963, Vol. 2, s. e., s. a, 1—12.3. Б a hit а Т. М. Машиностроительная гидравлика. Машгиз, 1963.4. Б e ж а н о в Б. Н. Пневматические системы автоматизации технологиче¬
ских процессов. Машгиз, 1963.(15.16)(15.17)ПЛИТЕРАТУРА К ГЛ. XV431
ГЛАВА XVIПНЕВМОГИДРАВЛИЧЕСКАЯ СИСТЕМА РАКЕТ С ЖРДПод пневмогидравлической системой (ПГС) ракеты пони¬
мается совокупность гидравлических и пневматических емкостей,
коммуникаций, а также агрегатов автоматики систем питания
ракеты и двигателей. Перечисленные устройства позволяют за¬
правлять топливные баки компонентами топлива, а в случае не¬
обходимости сливать их, наполнять бортовые баллоны газами и
стравливать их, осуществлять предстартовый наддув топливных
баков и наддув во время полета, обеспечивать надежный запуск
двигателей и бесперебойное их питание во время полета компонен¬
тами топлива, производить регулирование двигателей и их выклю¬
чение по командам от системы управления. Несмотря на то что
каждый тип ракеты имеет свой состав ПГС и последовательность
работы, можно наметить общие требования к системам и опреде¬
ленные закономерности в последовательности срабатывания эле¬
ментов ПГС.§ 16.1. ТРЕБОВАНИЯ К ПНЕВМОГИДРАВЛИЧЕСКОЙ СИСТЕМЕПГС ракеты должна удовлетворять следующим требованиям:— обеспечивать расчетные баллистические характеристики;— обеспечивать высокую боевую готовность ракеты;— иметь высокую надежность;— быть простой в эксплуатации.Обеспечение расчетных баллистических ха¬
рактеристик. Под баллистическими характеристиками по¬
нимаются дальность полета и параметры рассеивания. Для до¬
стижения заданных баллистических характеристик необходимо,
чтобы все составные части ПГС работали в заданном диапазоне
температуры при любой влажности и запыленности воздуха;— чтобы ПГС обеспечивала заданные значения тяги и удель¬
ной тяги двигателя; запуск и выключение двигателей в определен¬
ной последовательности, согласованной с баллистическими харак¬
теристиками, при этом двигатели должны работать в заданном
режиме, обеспечивая разделение ступеней и отделение БЧ по
командам от системы управления.Изменение температуры воздуха в заданном температурном
диапазоне вынуждает намечать конструктивные мероприятия по432
компенсации возможных температурных деформаций трубопрово¬
дов, определять потребные воздушные подушки топливных баков,
а также принимать меры по сохранению работоспособности агре¬
гатов автоматики. Воздействие .влажного и пыльного воздуха па
элементы ПГС может привести к интенсивной коррозии, загряз¬
нению и в конечном счете к отказу. Чтобы уменьшить воздействие
этих факторов, корпус ракеты герметизируют.Известно, что дальность полета и массовые характеристики
ракеты зависят от тяги и удельной тяги двигателя. Тяга двига¬
теля пропорциональна суммарному массовому секундному расхо¬
ду. Чтобы обеспечить заданный расход, необходимо выбрать
соответствующие диаметры расходных трубопроводов окислителя
и горючего, а также предотвратить кавитацию в насосах. Удель¬
ная «тяга зависит от коэффициента Kg соотношения расходов ком¬
понентов топлива. Поэтому, проектируя систему регулирования
коэффициента Kg, нельзя допускать таких отклонений этого ко¬
эффициента, которые бы уменьшали удельную тягу двигателя.Последовательность работы элементов ПГС определяется не¬
обходимостью разделения ступеней и отделения БЧ при достиже¬
нии определенных скоростей полета в условиях минимальных воз¬
мущений при этих операциях. Конкретные рекомендации по этому
поводу приводятся в § 16.2.Обеспечение высокой боевой готовности. Под
боевой готовностью понимается такое состояние ракеты (ракетно¬
го комплекса), которое позволяет произвести ее пуск в кратчай¬
шее время. Это время отсчитывается от момента получения коман¬
ды на пуск до момента отрыва ракеты от пускового устройства.
В современных условиях высокая боевая готовность является
важнейшим фактором, обеспечивающим своевременное выполнение
боевых задач.Одной из основных операций по подготовке ракет к пуску,
занимающей длительное время, является заправка топливных ба¬
ков компонентами топлива. Поэтому, чтобы повысить боевую го¬
товность ракет, можно применять два способа заправки ракет.1. Заправка начинается с момента подачи команды на пуск
ракеты и должна заканчиваться перед запуском двигателей. Что¬
бы уменьшить время заправки можно применять быструю заправ¬
ку [2], используя мощную систему подачи компонентов в топ¬
ливные баки. Производительность системы определяется из усло¬
виягде т1 — масса заправляемого компонента;mi—производительность заправочной системы данного ком
понента;
t—заданное время заправки.433
Такой способ заправки предъявляет определенные требования
к ПГС по выбору диаметров заправочных и дренажных трубо¬
проводов.2. Заблаговременная заправка ракеты компонентами топлива.
В этом случае ракета непрерывно хранится с заправленными ком¬
понентами топлива в течение определенного времени, но при этом
возникают проблемы, связанные с защитой конструкционных ма¬
териалов от воздействия компонентов топлива и с сохранением
физико-химических свойств самих компонентов топлива [2]. Решить
данные проблемы, очевидно, можно путем выполнения ряда кон¬
структивных и технологических мероприятий в процессе проектиро¬
вания н изготовления ракет.Повысить боевую готовность можно, если сократить время и
на остальные предпусковые операции, связанные с проверкой раз¬
личных систем и приведением системы управления в исходное для
пуска состояние. Это может быть достигнуто автоматизацией пред¬
пусковых операций, а также применением агрегатов автоматики,
не требующих предпусковой настройки и проверки.Готовность можно повысить, если сократить время предстар¬
тового наддува баков. Для этого при проектировании топливных
систем следует стремиться к тому, чтобы уменьшить объемы воз¬
душных подушек баков. В связи с тем что этот объем существен¬
но зависит от температурного диапазона применения ракет, умень¬
шение влияния температуры возможно за счет термостатирования
пусковых устройств.Под надежностью действия ПГС понимается безот¬
казная работа ее элементов во время предстартовой подготовки и
полета ракеты. Высокая надежность достигается налаженной тех¬
нологией изготовления элементов ПГС и сборки ее составных ча¬
стей, предпусковыми проверками и рядом других мероприятий.
Технологический процесс производства ракет должен предусма¬
тривать испытания как отдельных элементов ПГС (трубопрово¬
дов, емкостей, агрегатов автоматики), так и испытания собранных
систем или частей. В процессе подготовки ракеты к пуску могут
проводиться испытания элементов ПГС на функционирование в
комплексе с системой управления. Одновременно с этим высокая
надежность должна быть заложена в самой конструкции системы,
для чего целесообразно:— в процессе проектирования рационально сочетать характе¬
ристики агрегатов автоматики с их весом. В некоторых случаях
мож'но считать допустимым незначительное повышение веса агре¬
гатов вследствие увеличения размеров магистралей систем пита¬
ния, проходных сечений агрегатов, диаметров штоков, усиления
корпусов агрегатов, работающих под большими нагрузками с целью
увеличения их надежности [2];— уменьшать число агрегатов автоматики, одновременно повы¬
шая надежность каждого из них;434
— применять конструкционные материалы для изготовления
элементов ПГС, стойкие к воздействию компонентов топлива и
окружающей среды;— уменьшать число гидравлических и пневматических разъ¬
емов между ступенями ракеты и с агрегатами наземного оборудо¬
вания, так как во время пуска ракеты и разделения, ступеней воз¬
можны отказы в срабатывании соединений;— предусматривать такую последовательность срабатывания
элементов ПГС, при которой последующие операции не должны
выполняться до тех пор, пока не поступил сигнал об исполнении
предыдущих операций; это условие обычно выполняется блоки¬
ровкой между агрегатами, которые контролируют какой-либо па¬
раметр, и агрегатами-исполнителями; например, команда на за¬
пуск двигателя не должна проходить до тех пор, пока в топливных
баках не будет достигнуто заданное давление предстартового над¬
дува.Упрощение условий эксплуатации ракеты имеет
важное значение, так как оно определяет удобство обращения с
ракетой в период предстартовой подготовки, влияет на числен¬
ность личного состава обслуживающих подразделений, состав на¬
земного оборудования и на боевую готовность. Чтобы выполнить
это требование, при проектировании ПГС целесообразно преду¬
сматривать ряд мероприятий:— на борту ракеты следует размещать минимальное число
компонентов топлива и сжатых газов; целесообразно применять
двигатели с газогенераторами турбин и систем наддува, исполь¬
зующих основные компоненты топлива; в этом случае отпадает
необходимость в размещении на борту ракеты емкостей со сжа¬
тым газом, уменьшается число заправочных наземных агрегатови, следовательно, упрощается эксплуатация ракеты и комплекса
в целом;— ПГС должна обеспечивать заправку, дозаправку и слив
компонентов топлива и без снятия ракеты с пускового устрой¬
ства;— расстыковка соединений ПГС с наземными системами при
старте ракеты должна происходить автоматически;— элементы ПГС в процессе предстартовых проверок и запу*
ска двигателей не должны требовать обогрева их воздухом или со¬
держать электронагревательные устройства;— аварийное выключение двигателей при старте, которое про¬
изводится в случае отказа в выполнении какой-либо операции,
должно позволять в кратчайшее время произвести повторный пуск
ракеты.Рассмотренные в данном параграфе требования зачастую про¬
тиворечивы, так как выполнение одних влечет за собой невыполне¬
ние других.435
§ 16.2. ПОСЛЕДОВАТЕЛЬНОСТЬ СРАБАТЫВАНИЯ ЭЛЕМЕНТОВ
ПНЕВМОГИДРАВЛИЧЕСКОЙ СИСТЕМЦАгрегаты автоматики, входящие в состав ПГС, должны взаи¬
модействовать между собой и с системой управления в опреде¬
ленной последовательности, обеспечивающей нормальный запуск
и выключение двигателей и полет ракеты по заданной программе.
Для ракет с ЖРД можно выделить наиболее характерные этапы
работы ПГС, в частности, для двухступенчатых ракет с последо¬
вательным расположением ступеней такими этапами являются:— подготовительные операции;— предстартовый наддув топливных баков;— запуск двигателей нижней ступени и выход их на режим
с последующим подъемом ракеты от пускового устройства (старт
ракеты);— взаимодействие агрегатов автоматики во время полета пер¬
вой ступени (с момента старта до разделения ступеней);— разделение ступеней;— взаимодействие агрегатов автоматики во время полета вто¬
рой ступени;— отделение БЧ.К подготовительным операциям относятся: заправ*
ка ракеты компонентами топлива, срабатывание разделительных
клапанов, отделяющих топливные системы от двигателей, задей¬
ствование бортовых источников электропитания, заправка сжаты¬
ми газами бортовых баллонов и др. Подготовительные операции
могут осуществляться автономно с пультов управления пускового
оборудования или автоматически. В обоих случаях должны быть
определены последовательность проведения операций и время,не¬
обходимое „для проведения каждой операции. При автономном
проведении операций контроль за осуществлением каждой из них
производится оператором визуально или по показаниям соответ¬
ствующих приборов или специальными автоматическими устрой¬
ствами. В последнем случае и в случае полной автоматизации
подготовительных операций должны быть намечены блокировки,
которые не позволяют произвести последующую операцию, если
не выполнена предыдущая.Время, необходимое для проведения каждой операции, опреде¬
ляется на основе расчетов или экспериментов. Так, например, при
определении последовательности срабатывания разделительных
клапанов раньше должна быть подана команда на открытие кла-'
пана того компонента, который большее время заполняет маги¬
страли.Предстартовый наддув топливных баков необхо¬
дим для того, чтобы подготовить двигатели нижней ступени к на¬
дежному запуску. Одновременно с предстартовым наддувом баков
первой ступени может производиться наддув и баков второй сту¬
пени. Давление предстартового наддува не должно превосходить436
величины pmax> которая принимается несколько меньшей давления
настройки дренажно предохранительных клапанов. Однако давле¬
ние наддува не должно быть меньше минимально допустимого
значения /7min, вычисленного из условия бескавитационной работы
насосов. Напомним, что для повышения боевой готовности ракет
необходимо стремиться к тому, чтобы уменьшить время предстар-
тового наддува.Таким образом, чтобы определить последовательность работы
ПГС во время предстартового наддува, необходимо знать следую¬
щие данные:— производится ли предстартовый наддув баков обеих ступе¬
ней или только нижней ступени;— значение давлений ртах и рт\п:— время предстартового наддува.На основании этих данных должны быть решены следующие
вопросы:— по давлениям Ртах и рmin выбраны реле давления, которые
взаимодействуют с агрегатами автоматики, регулирующими дав¬
ление в баках в процессе наддува;— назначены число и агрегаты автоматики, обеспечивающие
проход газов наддува из наземных емкостей в баки, и определены
места их расположения;— по заданному времени наддува вычислены или эксперимен¬
тально подобраны диаметры жиклеров в магистралях наддува.На этапе работы ПГС с момента запуска двига*
телей до старта ракеты производятся операции, главным об¬
разом связанные с обеспечением нормального запуска двигателей.
Плавное возрастание тяги двигателей при их запуске достигается
наличием предварительной ступени тяги у двигателя. Наличие
предварительной ступени приводит к непроизводительному рас¬
ходу топлива (достартовые расходы) и, следовательно, к умень*
шению предельной дальности полета ракеты. Поэтому необходимо
назначить такое время работы двигателя на предварительной
ступени, чтобы предстартовые расходы были минимальными.
Если предусматривается аварийное выключение двигателя при за¬
тяжном выходе его на номинальный режим, то время подачи ава¬
рийной команды должно выбираться таким, чтобы предстартовый
расход не превышал заданной величины.Итак, чтобы определить последовательность и временной ре¬
жим работы ПГС в рассматриваемый промежуток, необходимы
следующие данные:— состав двигателя;— характер нарастания тяги во времени при запуске двига¬
теля;— допустимые значения предстартового расхода топлива;— допустимое время работы двигателя на нерасчетном режиме
для подачи аварийной команды на выключение двигатели. 11а
основе этих данных определяется последовательность запуска437
двигателей, назначаются временные характеристики пусковых
устройств и разрабатывается последовательность операций при
аварийном выключении двигателей.Во время полета ракеты ПГС первой ступени должна
регулировать тягу двигателя и коэффициент соотношения Kg топ¬
лива, а также регулировать наддув баков путем стравливания га¬
зов наддува из баков через дренажно-предохранительные клапа¬
ны в случае превышения допустимого давления. наддува или пу¬
тем увеличения интенсивности наддува при понижении давления
ниже допустимого. При использовании газобаллонной системы над¬
дува с целью экономии рабочего тела часто предусматривается
совместная работа реле давления, измеряющего давление в баке,
с электропневмоклапанами наддува.Агрегаты автоматики ПГС в рассматриваемый период обычно
взаимодействуют по программе, заложенной во временной меха¬
низм системы управления. Временной механизм начинает рабо¬
тать с момента старта ракеты. После старта ракеты производятся
заключительные операции с наземным оборудованием, начинают
работать системы регулирования двигателя по тяге и коэффи¬
циенту Kg, происходит наддув баков из бортовых источников над¬
дува.Исходными данными для данного этапа являются:— перечень заключительных операций с наземным оборудова¬
нием;— диапазоны регулирования двигателей по системе регулиро¬
вания тяги, коэффициенту Kg и время их включения после старта
ракеты;— кривые потребного наддува баков первой ступени с допу¬
скаемыми отклонениями во время полета;— способ наддува топливных баков в полете.На основании этих данных необходимо уточнить перечень агре¬
гатов автоматики для перекрытия магистралей в наземных устрой¬
ствах; наметить в программе временного механизма системы упра¬
вления время включения систем регулирования тяги и коэффи¬
циента Kg двигателя; по кривым потребного давления в баках и
по принятому способу наддува баков рассчитать дроссели в ма¬
гистралях наддува, установить перечень и вид агрегатов автома¬
тики, их число и потребную точность срабатывания. При исполь¬
зовании для наддува баков сжатых газов необходимо предусмо¬
треть установку реле для измерения давления наддува в баках и
их блокировку с электропневмоклапанами, устанавливаемыми в
магистралях наддува. По кривым потребного давления наддува
следует определить время прекращения или увеличения интен¬
сивности наддува баков и выдать соответствующие данные для
составления программы временного механизма системы управ¬
ления.Этап разделения ступеней является наиболее ответ¬
ственным с точки зрения работы ПГС. Под разделением ступеней438
понимается совокупность следующих операций: выключение дви¬
гателя первой ступени, включение рулевого двигателя второй сту¬
пени (если он имеется), нарушение связи между ступенями, тор¬
можение первой ступени и запуск основного двигателя второй сту¬
пени. При разработке последовательности работы ПГС в период
разделения следует выполнять следующие требования:— в процессе разделения ступеней необходимо непрерывное
управление ракетой, в противном случае вторая ступень в период
разделения может получить настолько сильные возмущения, что
с ними не справится система управления;— в процессе разделения следует обеспечивать положительный
коэффициент осевой перегрузки для второй ступени; это необхо¬
димо как для предотвращения перемещения жидкости в баках, в
результате чего возможны большие возмущения в движении вто¬
рой ступени, так и для создания необходимого напора компонен¬
тов на входе в насосы;— для обеспечения бескавитационной работы насосов при за¬
пуске двигателей второй ступени следует предусматривать гаран¬
тийный наддув баков из емкостей или системы наддува первой
ступени;— для уменьшения возмущений, действующих на вторую сту¬
пень в период разделения, необходимо, чтобы временная програм¬
ма проведения операций (выключение двигателей первой ступени,
команда на разрушение связей между ступенями, торможение
первой ступени и т. д.) и временные допуски на них соответство¬
вали данным баллистического расчета;— для устранения возможности догона первой ступенью вто¬
рой ступени ракеты после разделения необходимо, чтобы ПГС поз¬
воляла уменьшить тягу последствия двигателя первой ступени; это
требование может быть выполнено ступенчатым выключением дви¬
гателя, использованием быстродействующих отсечных клапанов в
двигателях и применением продувки камер сгорания при выклю¬
чении двигателей [I]; наиболее эффективным способом уменьше¬
ния влияния тяги последействия является применение тормозных
двигателей.Исходные данные для этого этапа:— значение скорости или времени, соответствующее моменту
разделения ступеней;— состав системы гарантийного наддува баков второй сту¬
пени;— конструктивная схема системы разделения.По перечисленным данным решаются следующие вопросы:— по составу двигателей первой и второй ступеней и кон¬
структивной схеме системы разделения определяется последова¬
тельность работы двигателей и элементов системы разделения, а
также временная программа, которая должна быть заложена в
систему управления;— по выбранному способу гарантийного наддува и его пара¬439
метрам определяется продолжительность наддува, устанавливает¬
ся перечень агрегатов автоматики данной системы и последова¬
тельность их работы.Во время полета второй ступени агрегаты взаимо¬
действуют по программе, заложенной во временной механизм си¬
стемы управления. Исходные данные и объем работы при анализе
этого этапа работы ПГС аналогичны первой ступени.При отделении БЧ происходит выключение двигателей
второй ступени и отделение БЧ от корпуса второй ступени. Для
того чтобы улучшить условия работы приборов системы управле¬
ния и уменьшить импульс последействия, выключение двигателя
может производиться по двум командам:— по первой команде двигатели переходят на режим конечной
тяги (при рулевом двигателе основной двигатель выключается, а
при отсутствии рулевого двигателя основной переключается на ре¬
жим пониженной тяги);— по второй команде происходит окончательное выключение
двигателей и одновременно срабатывают элементы системы отде¬
ления БЧ; на основе конструктивных схем двигателя и системы
отделения БЧ составляется временная программа прохождения
команд на агрегаты автоматики двигателей, системы наддува и
элементы системы отделения; эта программа должна быть согла¬
сована с баллистическими характеристиками ракеты.Выше были схематически изложены некоторые моменты, свя¬
занные с составлением последовательности работы ПГС ракеты.
Естественно, что при составлении упомянутой последовательности
необходимо тщательно согласовывать работу элементов ПГС с ра¬
ботой системы управления и наземным оборудованием.ЛИТЕРАТУРА К ГЛ. XVI1. Шевелюк М. И. Теоретические основы проектирования жидкостных ра-
кетнйх двигателей. Оборонгиз, 1960.2. Двигательные установки на жидком топливе, перевод с английского,
Москва, 1966, «Мир».
ОГЛАВЛЕНИЕСтр.Предисловие 3РАЗДЕЛ 1ОБЩИЕ СВЕДЕНИЯ О РАКЕТАХГлава I. Классификация ракет и требования, предъявляемые к ним 5§ 1.1. Классификация ракет —§ 1.2. Требования, предъявляемые к ракетам 8§ 1.3. Общие сведения об устройстве и полете ракет 13§ 1.4. Факторы, влияющие на скорость и дальность полета ракеты 19Литература к главе I . 23Глава II. Ракеты с жидкостными ракетными двигателями 24§ 2.1. Конструкция и основные параметры одноступенчатых и состав¬
ных ракет —§ 2.2. Возможные конструктивные схемы жидкостных ракетных двига¬
телей 29§ 2.3. Краткие сведения о жидких топливах 33§ 2.4. Материалы, применяемые в ракетах 38Литература к главе II 40Глава III. Ракеты с РДТТ 41§ 3.1. Общие сведения о ракетах с РДТТ ............. —§ 3.2. Краткие сведения о твердых топливах 42§ 3.3. Конструктивные схемы ракет с РДТТ 45§ 3.4. Материалы, применяемые в ракетах с РДТТ 51Литература к главе III . 53РАЗДЕЛ IIНАГРУЗКИ И НАГРЕВ КОНСТРУКЦИИ РАКЕТГлава IV. Статические нагрузки, действующие на ракету в полете ипри наземной эксплуатации 54§ 4.1. Классификация нагрузок, действующих на ракету в полете . . —§ 4.2. Расчет основных нагрузок, действующих на ракету в полете 55§ 4.3. Понятие о коэффициентах перегрузки 61§ 4.4. Расчет осевых нагрузок в полете 66§ 4.5. Расчет поперечных нагрузок в полете 70 •§ 4.6. Нагрузки при наземной эксплуатации 72Литература к главе IV . , 76441
Стр.Глава V. Динамические нагрузки, действующие на ракету в различ¬
ных условиях эксплуатации 77§ 5.1. Основные понятия теории колебаний. Задачи динамического рас¬
чета конструкции § 5.2. Свободные продольные колебания корпуса ракеты 83§ 5.3. Вынужденные продольные колебания корпуса ракеты 90§ 5.4. Собственные формы и частоты изгибных колебаний корпусаракеты 105§ 5.5. Поперечные нагрузки при возмущенном движении ракеты ... 117Литература к главе V . . . . . . . . . . 124Глава VI. Аэродинамический нагрев. Расчет температурных нолей в
конструктивных элементах ракеты при различных условиях ее экс¬
плуатации 125§ 6.1. Основные понятия и определения —§ 6.2. Изменение интенсивности аэродинамического нагрева вдольтраектории полета 130§ 6.3. Влияние формы тела на аэродинамический нагрев его оболочки 131
§ 6.4. Способы тепловой защиты боевых частей и космических аппа¬
ратов 134§ 6.5. Расчет конвективных тепловых потоков 137§ 6.6. Распределение конвективных тепловых потоков вдоль поверх¬
ности обтекаемых тел 142§ 6.7. Расчет лучистого теплового потока 114.§ 6.8. Расчет температуры корпуса ракеты t . 146§ 6.9. Определение необходимой толщины теплозащитного покрытия 155Литература к главе VI 161РАЗДЕЛ IIIКОНСТРУКЦИЯ и ПРОЧНОСТЬ КОРПУСА РАКЕТЫГлава VII. Расчетные случаи и разрушающие нагрузки ....... 165§ 7.1. Понятие о расчетных случаях нагружения —§ 7.2. Расчетные случаи для основных частей корпуса ракеты .... 168§ 7.3. Расчетные нагрузки и коэффициент запаса прочности 170§ 7.4. Разрушающие нагрузки и критические напряжения 172Литература к главе VII L.j ........... . 181Гл^ва VIII. Конструкция и прочность боевых частей ракеты ...... 182§ 8.1. Основные требования к конструкции и классификация боевыхчастей —§ 8.2. Конструктивные схемы боевых частей 184§ 8.3. Возможные средства для преодоления противоракетной обо¬
роны противника . .L.-. . . 187§ 8.4. Расчет на прочность корпуса боевой части . 188Литература к главе VIII . 195Глава IX. Конструкция и прочность переходных, приборных и хво¬
стовых отсеков 196§ 9.1. Назначение отсеков и требования, предъявляемые к ним ... —§ 9.2. Конструкция переходных, приборных и хвостовых отсеков . . . 198§ 9.3. Способы соединения отсеков 202§ 9.4. Расчет на прочность хвостовых и приборных отсеков 205§ 9.5. Расчет на прочность ферм 209§ 9.6, Расчет прочности узлов соединения отсеков 213Литература к главе IX . 218442
Глава X. Топливные баки и расчет их на прочность .....§ 10.1. Конструкция топливных баков § 10.2. Арматура топливных баков § 10.3. Расчет на прочность корпусов цилиндрических баков
§ 10.4. Расчет на прочность сферических и торовых баков .§ 10.5. Расчет на прочность днищ, распорных шпангоутов, фланцев .§ 10.6. Расчет статической устойчивости баков. Понятие о динамической устойчивости ..... Литература к главе X . Глава XI. Особенности прочностного расчета ракет с РДТТ ....§ 11.1. Особенности эксплуатации ракет с РДТТ. Расчетные случаи
§ 11.2. Некоторые сведения о физико-механических свойствах твердых топлив. Критерии прочности § 11.3. Напряженно-деформированное состояние заряда и корпусаРДТТ при изготовлении § 11.4. Напряженно-деформированное состояние заряда и корпусРДТТ при хранении § 11.5. Напряженно-деформированное состояние заряда и корпусаРДТТ при транспортировке § 11.6. Расчет напряженно-деформированного состояния заряда и оболочки камеры сгорания на траектории Литература к главе XI Стр.220226230234238247254256259268276285292305РАЗДЕЛ IVСИСТЕМЫ РАКЕТ И ИХ РАСЧЕТГлава XII. Конструкция и расчет органов управления . . . . .... 307§ 12.1. Понятие о возмущающих силах и моментах —§ 12.2. Аэродинамическая форма и компоновка ракеты 314§ 12.3. Конструкция органов управления 322§ 12.4. Расчет характеристик органов управления 329Литература к главе XII 340Глава XIII. Конструкция и расчет систем разделения 341§ 13.1. Требования к системам отделения боевых частей и их прин- ^ципиальные схемы § 13.2. Расчет систем отделения боевых частей 346§ 13.3. Возможные конструкции систем разделения ступеней 358§ 13.4. Основы расчета систем разделения ступеней 361Литература к главе XIII 366Глава XIV. Конструкция и расчет систем питания 367§ 14.1. Устройство и расчет топливных систем .§ 14.2. Расчет топливных систем 375§ 14.3. Системы наддува топливных баков 387§ 14.4. Устройство и расчет пневмосистем 396§ 14.5. Система регулирования соотношения компонентов 401Литература к главе XIV 404Глава XV. Конструкция и расчет агрегатов автоматики 406§ 15.1. Классификация агрегатов автоматики § 15.2. Конструкция агрегатов автоматики 409§ 15.3. Проектирование агрегатов автоматики 414Литература к главе XV . 431443шшшш
Стр.Глава XVI. Пневмогидравлическая система ракет ЖРД . 432§ 16.1. Требования к лневмогидравлической системе —§ 16.2. Последовательность срабатывания элементов пневмогидравли-ческой системы . . . . 436Литература к главе XVI 444КОНСТРУКЦИЯ УПРАВЛЯЕМЫХ БАЛЛИСТИЧЕСКИХ РАКЕТ
Редактор В. П. ЧерновТехнический редактор Е. Н. Слепцова Корректор Л. ТекучеваГ-52724 Сдано в набор 19.4.68. Подписано к печати 27.9.68 г.Формат бОхЭО'/и- Печ. л. 27*/* (Уел. печ. л. 27,75) Уч-изд. л. 27,003
Бумага типографская № 2. Тираж 10500 9кэ.Изд. М 6/8983 Цена 1 р. 50 к. Зак. 1736Ордена Трудового Красного Знамени
Военное издательство Министерства обороны СССР. Москва, K-160
2-я типография Воениздата
Ленинград, Д-65, Дворцовая пл., 10