









































































































































































































Author: Ерофеев В.И. Кажаев В.В. Семерикова Н.П.
Tags: колебания тел колебания тел с распределенными массой и упругостью возбуждение колебаний электроэнергетика электротехника физика математическая физика дисперсные системы издательство физматлит
ISBN: 5-9221-0294-X
Year: 2002




УДК 534.1 JT Издание осуществлено при поддержке
Е78 ^* ту "^ Российского фонда фундаментальных
ББК 31.27-01 ^^ ** ^^ исследований по проекту 02-01-Ц091
Ерофеев В. И., Кажаев В. В., Семерикова Н. П.
Волны в стержнях. Дисперсия. Диссипация. Нелинейность. —
М.: ФИЗМАТЛИТ, 2002. - 208 с. - ISBN 5-9221-0294-Х.
Монография содержит изложение теоретико-волнового подхода к изу-
изучению динамических процессов в одномерных упругих системах. Из ва-
вариационного принципа Гамильтона-Остроградского выведены уточненные
уравнения колебаний стержней при наличии геометрической и физической
нелинейностей. Подробно проанализированы дисперсионные, диссипативные
и нелинейные эффекты, проявляющиеся при распространении различных
типов упругих волн.
Книга предназначена для специалистов, работающих в области механики
деформируемого твердого тела, в области физической и технической акусти-
акустики, а также для аспирантов и студентов соответствующих специальностей.
Табл. 4. Ил. 142. Библиогр. 200 назв.
ISBN 5-9221-0294-Х © ФИЗМАТЛИТ, 2002
ОПЕЧАТКИ И ИСПРАВЛЕНИИ
36
37
39
39 •
43
44
44
45
47
1 48
49
50
Строка
Подрисуночная подпись
Подрисуночная- подпись
Подрисуночная подпись
Подрисуночная подпись
Подрисуночная подпись
Подрисуночная подпись
Подржуцочная подпись
Подрисуночная подпись
Подрисуночная подпись
Подрисуночная подпись
Подрисуночная подпись
Подрисуночная подпись
Напечатано
Рис. 3.4
Рис, 3=5
Рис. 3.6
Рис, 3.7
Рис. 3.8
Рис Л .9
Рис. ЗЛО
Рис. 3.11
Рис. 3.12
Рис. 3.13
Рис, 3.14
Рис.ЗЛ5
Следует читать
Рис, 3.4 а
Рис. 3.4 6
Рис. 3.5 а
Рис 3,5 б
Рис. 3,5. в
Рис, 3.6 а
Рис.-3.6 б
Рис. 3.7
Рис, 3,8
Рис. 3.9
Рис, ЗЛО
Рис. 3.11
В тексте отсутствуют следующие рисунки:
Рис.ЗЛ2
Рис.ЗЛ4
Рис, 3.l?
Рис.ЗЛ5
ОГЛАВЛЕНИЕ
Предисловие ......................
ГЛАВА 1
СВЕДЕНИЯ ИЗ ТЕОРИИ ЛИНЕЙНЫХ КОЛЕБАНИЙ,
ТЕОРИИ ЛИНЕЙНЫХ ВОЛН И АНАЛИТИЧЕСКОЙ МЕХАНИКИ
§ 1.1.0 колебательных процессах ....................... 6
§ 1.2. Некоторые сведения о волнах ...................... 11
§ 1.3. Вариационный принцип Гамильтона-Остроградского ......... 16
ГЛАВА 2
РАСПРОСТРАНЕНИЕ УПРУГИХ ВОЛН В БЕЗГРАНИЧНОЙ СРЕДЕ
И ОГРАНИЧЕННЫХ ТЕЛАХ
§ 2.1. О напряженно-деформированном состоянии материалов ....... 21
§ 2.2. Уравнения Ламе. Волны дилатации и сдвига .............. 22
§ 2.3. Отражение волн от свободной поверхности полупространства. По-
Поверхностные волны Рэлея ........................ 24
§ 2.4. Нормальные волны в упругом слое ................... 26
§ 2.5. Уравнения переноса энергии и волнового импульса .......... 31
ГЛАВА 3
ПРОДОЛЬНЫЕ, КРУТИЛЬНЫЕ И ИЗГИБНЫЕ ВОЛНЫ В СТЕРЖНЯХ.
МАТЕМАТИЧЕСКИЕ МОДЕЛИ И ДИСПЕРСИОННЫЕ СВОЙСТВА
§ 3.1. Типы нормальных волн в стержнях ................... 33
§ 3.2. Продольные волны ............................ 33
§ 3.3. Крутильные волны ............................ 40
§ 3.4. Изгибные волны ............................. 45
ГЛАВА 4
ВОЛНЫ В ВЯЗКОУПРУГИХ СТЕРЖНЯХ
§ 4.1. О внешнем, внутреннем и конструкционном трении ......... 51
§4.2. Соотношения между напряжением, деформацией и временем дефор-
деформации ................................... 51
§ 4.3. Стержни Фойхта-Кельвина и Максвелла ................ 56
§4.4. Внутреннее трение как результат рассеяния волн на случайных неод-
неоднородно стях материала ......................... 61
ГЛАВА 5
АНАЛИЗ УРАВНЕНИЙ НЕЛИНЕЙНЫХ ОСЦИЛЛЯТОРОВ,
ВСТРЕЧАЮЩИХСЯ ПРИ ИЗУЧЕНИИ НЕЛИНЕЙНЫХ ВОЛН
ДЕФОРМАЦИИ
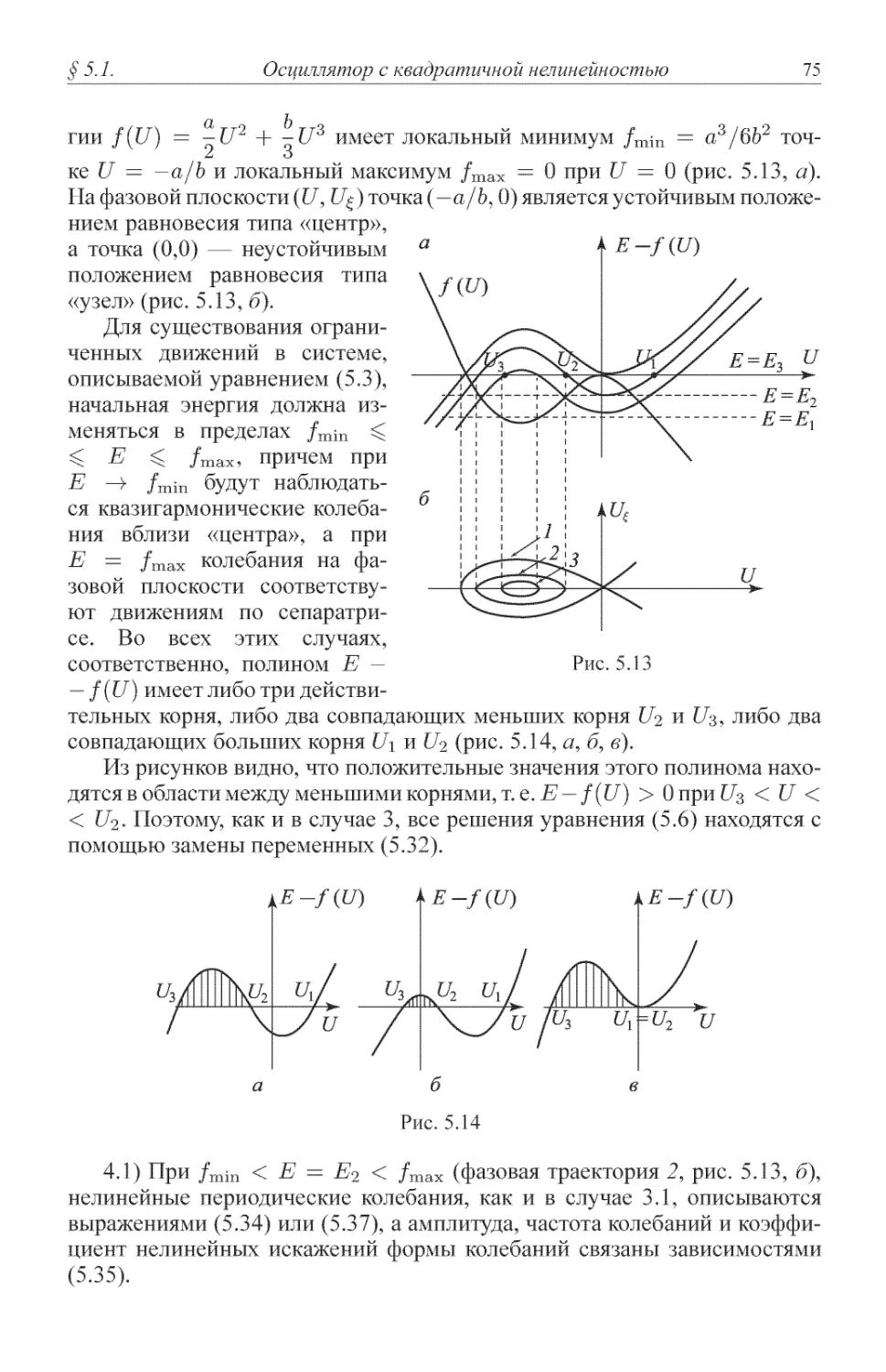
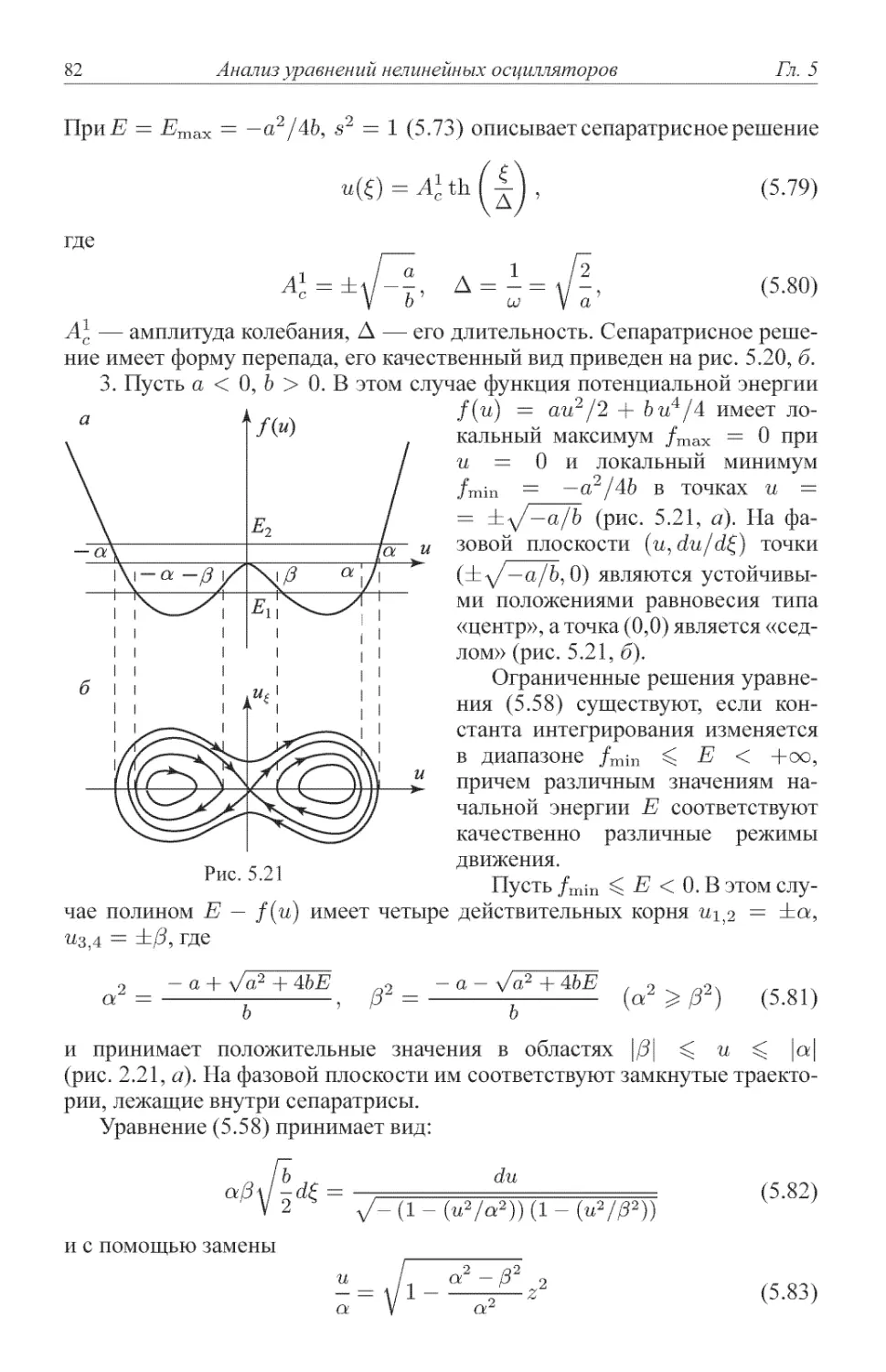
§ 5.1. Осциллятор с квадратичной нелинейностью .............. 63
§ 5.2. Осциллятор с кубической нелинейностью ............... 77
§ 5.3. Осциллятор с нелинейностью в отрицательной степени . ....... 86
Оглавление
ГЛАВА 6
НЕКОТОРЫЕ НЕЛИНЕЙНЫЕ МАТЕМАТИЧЕСКИЕ МОДЕЛИ
СТЕРЖНЕЙ, СОВЕРШАЮЩИХ ПРОДОЛЬНЫЕ И ИЗГИБНЫЕ
КОЛЕБАНИЯ
§ 6.1. Нелинейная упругость твердых тел ................... 102
§ 6.2. Модель связанных продольно-изгибных колебаний стержня ..... 104
§ 6.3. Модель изгибных колебаний стержня (нелинейное обобщение модели
Тимошенко) ................................ 108
§ 6.4. Модель продольных колебаний стержня (нелинейное обобщение мо-
модели Миндлина-Германа) ........................ 111
ГЛАВА 7
РАСПРОСТРАНЕНИЕ НЕЛИНЕЙНЫХ ВОЛН В СТЕРЖНЯХ
§ 7.1. Нелинейные продольные стационарные волны . ............ 113
§7.2. Модуляционная неустойчивость квазигармонических изгибных волн.
Стационарные волны огибающих .................... 125
§ 7.3. Нелинейные изгибные стационарные волны .............. 129
ГЛАВА 8
РЕЗОНАНСНЫЕ ВЗАИМОДЕЙСТВИЯ
ПРОДОЛЬНЫХ И ИЗГИБНЫХ ВОЛН В СТЕРЖНЕ
§ 8.1. О нелинейных резонансных взаимодействиях упругих волн ..... 136
§ 8.2. Трехволновые взаимодействия продольных и изгибных волн . .... 137
ГЛАВА 9
ВОЛНЫ В ЛИНЕЙНО-УПРУГИХ СТЕРЖНЯХ
С НЕЛИНЕЙНЫМИ ГРАНИЧНЫМИ УСЛОВИЯМИ
§ 9.1. Сведение краевых задач в частных производных к решению
задачи Коши для обыкновенных дифференциальных уравнений
с отклоняющимся аргументом ...................... 145
§ 9.2. Периодические волны в стержне с нелинейно-упругим закреплением 147
§ 9.3. Крутильные автоколебания вращающегося стержня .......... 150
ГЛАВА 10
ГАШЕНИЕ КОЛЕБАНИЙ В РАСПРЕДЕЛЕННЫХ СИСТЕМАХ
ДВИЖУЩИМИСЯ ОБЪЕКТАМИ
§ 10.1. Взаимодействие распределенной системы с сосредоточенной .... 162
§10.2. Движение массы вдоль струны под действием волнового давления . 164
§ 10.3. Гашение колебаний струны движущимися сосредоточенными
объектами ................................. 167
§ 10.4. Гашение вибраций балки свободно скользящей массой . ....... 175
Приложение. Солитоны и периодические волны деформации в стержнях,
пластинах и оболочках (обзор) ..................... 179
Список литературы ............................... 198
Предисловие
Вопросам динамического поведения стержней и стержневых систем
традиционно уделяется большое внимание в механике и акустике машин
и конструкций [2, 4, 16, 20, 27, 32, 36, 40, 92, 101, 103, 125, 140, 142,
144, 145, 155, 162, 165, 173, 175, 179]. Это связано с их многочисленными
техническими и технологическими приложениями.
Монография посвящена рассмотрению закономерностей распростра-
нения продольных, крутильных и изгибных волн в стержнях. Поскольку
многообразие волновых процессов определяется соотношением нелиней-
нелинейности, дисперсии и диссипации, особое внимание уделено изучению влия-
ния именно этих факторов.
Главы 1-5 содержат систематизированное изложение классических ре-
результатов, касающихся колебаний и волн в механических системах. При
их написании учитывался опыт преподавания курса «Волновые процессы
в сплошных средах», читаемого студентам механиш>математического фа-
факультета Нижегородского университета им. Н.И. Лобачевского и студентам
кораблестроительного факультета Нижегородского технического универси-
университета.
В главах 6-10 (а частично и в главах 4, 5) используются и развиваются
оригинальные результаты, полученные авторами в лаборатории волновых
процессов в материалах и конструкциях Нижегородского филиала инсти-
института машиноведения им. А.А. Благонравова Российской академии наук.
В основу книги положены работы [5-7, 51-70, 80-88,137,156,177,182].
В той или иной мере в ней удалось отразить и результаты исследований
наших коллег, содержащиеся в публикациях [25, 27-30, 37, 42, 94-97, 115—
120, 138, 139, 159, 183, 185, 186, 192].
Авторы причисляют себя к нижегородской научной школе волновой ди-
динамики механических систем, основанной профессором А.И. Весницким,
светлую память о котором они сохраняют.
Большую помощь при подготовке книги к изданию оказала кандидат
физико-математических наук Н.В. Клюева, авторы искренне благодарят ее
за это.
ГЛАВА 1
СВЕДЕНИЯ ИЗ ТЕОРИИ ЛИНЕЙНЫХ КОЛЕБАНИЙ,
ТЕОРИИ ЛИНЕЙНЫХ ВОЛН И АНАЛИТИЧЕСКОЙ
МЕХАНИКИ
§ 1.1. О колебательных процессах
Движения или процессы, обладающие той или иной степенью повторя™
емости во времени, называются колебаниями [166].
Гармонические колебания
Примером простейшей механической колебательной системы может
служить следующая: шарик массы га, горизонтально расположенный и
упруго закрепленный (рис. 1.1), выведен из положения равновесия путем
сжатия или растяжения пружины. Если
потери отсутствуют, то шарик начинает
совершать незатухающие гармонические
колебания относительно положения рав-
равновесия. В системе действуют две силы:
d2x
Рис | | сила инерции Fu = ш—^ (второй закон
Ньютона, где х — смещение шарика) и
сила упругости Fy = Ш (закон Гука, где К — коэффициент упругости).
Условие баланса сил Fu + Fy = О дает дифференциальное уравнение
колебаний шарика:
m^ + Hz^O, A.1)
ИЛИ
^ + ^ох = 0, A.1')
где ujq = \ собственная круговая частота.
У то
Уравнение A.1') называется уравнением гармонического осциллято™
ра — этот основное уравнение в теории линейных колебаний систем с
одной степенью свободы.
Собственная круговая частота ш0 связана с частотой колебаний /0 (из-
(измеряемой в герцах, Гц) и периодом колебаний Т (измеряемым в секундах, с)
соотношением
оо0 = 2тг/0 = 2тг/Г. A.2)
При начальных условиях x(t = 0) = хш, x(t = 0) = xm решение
уравнения A.1) имеет вид
х = xm cos(uj0 + <р0). A.3)
§1.1.
О колебательных процессах
Здесь величина ш® + (р® называется
фазой колебаний, (р0 — начальной фа™
ЗОЙ.
Дифференцируя A.3) по времени,
получим скорость х и ускорение х ко-
колеблющегося шарика:
dx
—
х = — = -
sin(uot + (f0) =
= -хш sin(o;ot +
A.4)
d2x
х = —^ = —хтш0 cos(ujot + (fo) =
- амплитуды колебатель- w
Рис. 1.2
где хт и х,
ной скорости и ускорения.
При гармонических колебаниях зна-
значения смещения, скорости и ускорения
периодически изменяются во времени
с одинаковой частотой, но смещены по
фазе (рис. 1.2, а, б, б).
Кинетическая WK = -тх2 и потенциальная Wn = -Нж2 энергии си™
А А
стемы изменяются во времени (рис. 1.2, г, д).
Полная энергия консервативной системы не изменяется: W = WK +
-\-Wn = const.
Затухающие колебания
Консервативные системы являются изолированными от внешней среды
(идеальными). В реальных системах всегда существуют потери энергии,
обусловленные взаимодействием с окружающей средой. Колебания некон-
неконсервативной системы являются затухающими. В этом случае в балансе сил
наряду с силой инерции и силой упругости будет участвовать сила со-
сопротивления Fr, обычно пропорциональная колебательной скорости: Fr =
dx
= г-
dt
Уравнение колебаний запишется в виде
d2x
dx
-
A.6)
где 25k = г/т.
При начальном условии x(t = 0) = хт оно будет иметь следующее
решение:
^t JI i A.7)
Сведения из теорий
Гл. 1
Рис. 1.3
Потери приводят к уменьшению ампли-
туды и частоты колебаний.
Величина Sk, называемая декрементом
колебаний (или декрементом затухания), по™
казывает, во сколько раз уменьшается ам-
амплитуда колебаний через каждую секунду.
График затухающих гармонических ко™
лебаний показан на рис. 1.3.
Вынужденные колебания
Для того, чтобы неконсервативная система совершала незатухающие
колебания, к ней необходимо внешнюю силу и эта сила должна быть пери-
периодической: F = Fm cos ujbt.
Уравнение динамики A.6) будут иметь вид
d2x
dx
at
2 Fm
Ч)Ж = COS UJbt.
m
Это уравнение имеет следующее решение:
х = хъ cos(ubt + ip
A.8)
A.9)
показывающее, что в системе устанавливаются незатухающие колебания с
хь /л частотой внешней силы шь, сдвинутые по
фазе на угол (р.
Колебания, описываемые уравнением
A.8), называются вынужденными. Их ам-
амплитуда определяется формулой
Рис. 1.4
колебаний от частоты
A.10)
S - Pb) + (fbSk/жJ
где fb = шь/2тг.
Зависимость амплитуды вынужденных
и декремента Sk показана на рис. 1.4.
При резонансе Д = /о амплитуда колебаний максимальна:
A.11)
При малых частотах (/& <С /о) зависимость амплитуды хь от частоты выну-
вынуждающей силы незначительна.
В консервативной системе (г = 0) амплитуда колебаний хъ возрастает
при резонансе до бесконечности. В неконсервативных системах накопление
энергии будет ограничиваться затратами на преодоление потерь и соверше-
совершение полезной работы.
§1.1.
О колебательных процессах
Анализ колебательных систем на фазовой плоскости
Уравнение гармонического осциллятора A.1) имеет первый интеграл
га /' dx
Н— х2 = W = const,
A.12)
имеющий смысл закона сохранения энергии W = WK + W-a.
Уравнение A.12) перепишем в виде
= Е = const, A.13)
Рис. 1.5
где Е = W/m.
Амплитуда колебаний хт связана с энер™
гией соотношением хт = \/2Е/ujq =
На плоскости (ж, ж) соотношение A.13)
определяет семейство эллипсов с полуосями
\/2Е/ш® и л/2Е. Размеры таких эллипсов будут увеличиваться с увеличе-
увеличением Е (рис. 1.5).
Плоскость (ж, ж) называется фазовой плоскостью, а линии на фазовой
плоскости — фазовыми траекториями. Эллипсы — фазовые траектории
гармонического осциллятора.
Уравнение A.1;) перепишем в виде системы дифференциальных урав-
уравнений первого порядка:
dx
¦ = У,
dy
A.14)
В более общем случае (включающем в себя, в частности, уравнение
A.6)), такая система будет иметь вид
dx
dy
—
= д(х,у)'
A.15)
Точки (жо,2/о)> в которых правые части системы A.15) обращаются в
нуль (т. е. /(жо> 2/о) = 9(хо> У о) = 0)? называются особыми точками.
Уравнение гармонического осциллятора A. V) имеет одну особую точку
х = у = 0.
Особая точка, окруженная замкнутыми фазовыми траекториями, пазы-
вается центром (рис. 1.5).
Если бы нам пришлось иметь дело с уравнением, отличающимся от
A.17) знаком перед вторым слагаемым
dt2
- C2х = 0,
A.16)
10
Сведения из теорий
Гл. 1
то энергия системы, в отличие от A.13) была бы знакопеременной:
A.17)
Фазовые траектории A.17) приведены на рис. 1.6, они представляют
собой два семейства гипербол (при Е>0иЕ<О)и семейство прямых
линий у = ± (Зх (при Е = 0), являющихся асимптотами для гипербол.
Начало координат х = у = 0 представляет собой особую точку, на-
называемую седлом. Прямые линии у = ±/Зж, проходящие через седло и
разделяющие траектории разных видов, называются сепаратрисами.
Для осциллятора с затуханием A.6) Е ф
Ф const, и справедливо уравнение измене™
ния энергии
dE
"Ж
= -26к
= -25ку2. A.18)
При 5к > 0 энергия уменьшается со вре-
временем. Изображающая точка, двигаясь на
рис> i? фазовой плоскости, переходит от траекто-
траекторий с большими значениями Е к траектори™
ям с меньшими значениями Е. В результате при t —^ оо изображающая
точка оказывается в начале координат.
Если 5k < си® (малое трение), то в системе наблюдаются слабо зату™
хающие осцилляции (рис. 1.3). Фазовые траектории, отвечающие такому
движению, приведены на рис. 1.7. Особая точка х = х = 0 в этом случае
называется устойчивым фокусом.
Рис. 1.7
Рис. 1.8
При 8к > ^о (большое трение) в системе совершается апериодическое
затухание. Фазовые траектории приведены на рис. 1.8. Особая точка х =
= у = 0 в этом случае называется устойчивым узлом.
При 8к < 0 (отрицательное трение) фазовые портреты не изменяют
своей формы, но направление движения вдоль траекторий будет изменяться
§1.2.
Некоторые сведения о волнах
11
на обратное. Возникают особые точки типа неустойчивый фокус (рис. 1.9)
и особые точки типа неустойчивый узел (рис. 1.10).
Рис. 1.9
Рис. 1.10
Желающим подробнее изучить проблемы и методы теории колебаний
рекомендуем обратиться к книгам [3, 16, 23, 32, 39, 92, 104, 121, 135, 141].
§ 1.2. Некоторые сведения о волнаж
Изменения состояния среды, распространяющиеся в этой среде и несу™
щие с собой энергию, называются волнами [166].
Для волн любой природы характерно распространение с конечной ско-
скоростью и перенос энергии без переноса вещества.
В [35] приведен следующий критерий: если характерный размер систе-
системы L < сТ (где с — скорость распространения возмущения, Т — время
заметного изменения этого возмущения), о процессе следует говорить как
о колебательном, происходящем в си™
стеме с сосредоточенными параметра-
параметрами; если L > сТ, то систему следует й
считать распределенной, а происходя-
происходящий в ней процесс — волновым.
Волны могут иметь различную фор-
форму. Различают одиночные волны или
импульсы — сравнительно короткие
возмущения (рис. 1.11, а); цуги волн —
ограниченный ряд повторяющихся воз™
мущений (например, отрезок синусои-
синусоиды, рис. 1.11, б); гармонические волны
(бесконечные синусоидальные волны,
рис. 1.11, в). Рис. 1.11
В комплексной форме гармоническая волна записывается в виде
- кх) + А* ехр —i(u)t — kx), A.19)
здесь А = аег(р — комплексная амплитуда волны; а — действительная
амплитуда; out - kx = Ф(ж, t) — фаза волны; ш = 2тг/Т — частота волны;
Т — период волны; к = 2тг/А — волновое число; А — длина волны.
12 Сведения из теорий Гл. 1
Гармоническая волна является идеализированной, ее возбуждение в ре™
альных условиях проблематично. Однако ее важное значение заключается в
том, что волну любой формы можно представить как сумму гармонических
волн различных частот (гармоник). В линейных распределенных системах
выполняется принцип суперпозиции, приводящий к тому, что эффекты, вы-
вызываемые негармоническими волнами, могут быть определены как сумма
эффектов, создаваемых в отдельности каждой из ее гармонических состав™
ляющих.
Для гармонических волн A.19) вводится понятие фазовой скорости.
Фазовой скоростью г;ф гармонической волны называется скорость переме-
перемещения в пространстве точки, в которой фаза волны остается постоянной
., dФ dx
Ф = out — кх = const, т.е. -— = w -/г-~-= и и, следовательно
at at
Зависимость фазовой скорости от длины волны (волнового числа или
частоты) называется дисперсией волны. Если в системе есть дисперсия,
то частота ш является нелинейной функцией волнового числа к и наоборот.
Более общим случаем, чем монохроматическая волна, является набор из
разных гармонических волн, который называется волновым пакетом. Про™
стейшим примером здесь является пакет, состоящий из двух гармонических
волн с близкими частотами wi^h одинаковыми амплитудами (биения):
U{x, t) = a cos(u)it — к\х) + a cos(w2t — кчх) «
(t )
t х) coE(u)®t к®х)^ A.21)
Ш1 + ш2 . кг + к2
где ujq = , ко = среднее значение частоты и волнового
числа, Аш = ш\ — а/2, Ак = к\ — кч — разность частот и волновых чисел.
Волна A.21) промодулирована по амплитуде, и ее огибающая распростра-
няется со скоростью, отличной от фазовой скорости v$ = —. Предельное
ко
значение скорости распространения огибающей при Аш, Ак —)> 0 характе-
характеризует движение группы волн (волнового пакета) и называется групповой
скоростью
Аш duj
vrD = iim -—- = —-. A.22)
р Аш,Ак^о Ак dk x J
Групповая и фазовая скорости связаны между собой следующим соот-
соотношением (формула Рэлея):
^гр = ^ф + к^ = уф - А^. A.23)
§1.2. Некоторые сведения о волнах 13
Дисперсия волны называется нормальной, если t;rp < v$9 и аномаль-
аномальной, если vrp > ^ф. Из A.23) следует, что при нормальной дисперсии —^ <
< 0, а при аномальной дисперсии —^ > 0.
Сьгь
Поскольку в среде с дисперсией фазовые скорости гармонических со™
ставляющих различны, то фазовые соотношения между ними будут изме-
изменяться, и в результате будет изменяться форма огибающей волнового паке™
та. Оказывается, что изменение огибающей модулированной волны можно
рассматривать как некоторый волновой процесс — волну огибающей, для
которой записываются свои уравнения движения [141].
В теории линейных волн фундаментальное значение имеет волновое
уравнение
|^ = 0, A.24)
д2 д2 д2
где А = т^7 + тг^т + -тг^ — оператор Лапласа, cq — положительная
дх2 ду2 dz2
постоянная.
Динамическое поведение произвольной линейной системы без диспер-
дисперсии и поглощения описывается уравнением A.24).
Более частные виды волнового уравнения описывают распространение
волн в одном и двух измерениях. Например, распространение возмущений
по натянутым мембранам описывается двумерным волновым уравнением
а распространение возмущений по натянутой струне — одномерным вол™
новым уравнением
Общим решением одномерного волнового уравнения является следую-
следующая сумма:
и(х, t) = f(x - cot) + g(x + cot), A.27)
где f,g — произвольные дважды непрерывно^дифференцируемые функ™
ции.
В A.27) первое слагаемое соответствует волне, распространяющейся в
положительном направлении оси х со скоростью cq, а второе слагаемое —
волне, распространяющейся в отрицательном направлении оси х.
Убедимся в том, что A.27) является общим решением одномерного вол-
волнового уравнения. Вместо х и t введем новые координаты
f = х - со1, rj = x^cot, A.28)
14
Сведения из теорий
Гл. 1
в которых уравнение A.26) примет вид
~*д2и- = о.
После интегрирования этого уравнения по т] получаем
ди
A.29)
A.30)
где / — произвольная функция ?.
Интегрируя затем A.30) по ?, получим и = /(?) + g(rj)9 т. е. убеждаемся
в том, что решение идентично выражению A.27).
Уравнение A.26) является уравнением
гиперболического типа, следовательно, с
ним связаны особые линии на плоскости
(#,?)? = const и rj = const, называемые
характеристиками (рис. 1.12).
Вдоль характеристики ? = const х воз-
возрастает со временем, а вдоль характеристик
ки rj = const — убывает.
Координаты, остающиеся постоянными
на характеристиках, называются характеристическими координатами.
Волновое уравнение эквивалентно на характеристиках следующим урав™
нениям в обыкновенных производных, имеющим более низкий порядок:
Рис. 1.12
d I 2cq
V
= 0 при ? = const
d f 2cn— I = 0
1 drij
при
= const.
Уравнение поперечных колебаний струны
Рассмотрим уравнение колебаний струны (ее линейную плотность обо-
обозначим через р). Будем предполагать, что колебания плоские. Это позво-
позволяет описать их функцией u(x,i), характеризующей вертикальные пере-
перемещения. Струна не сопротивляется изгибу, следовательно, натяжение TV,
действующее на искривленный элемент струны ds9 всегда направлено по
касательной к ее мгновенному профилю. В точке х натяжение направлено
под углом 0 к горизонтальной оси, а в точке х + dx этот угол равен 9 + d0.
Длина искривленного элемента вычисляется по формуле
ds =
§1.2. Некоторые сведения о волнах 15
При малых колебаниях струны удлинения ее участков практически не про-
/я \ 2
исходит, f -7™— | <С 1 и ds « dx.
\dxj
Сила, действующая на элемент dx в положительном направлении оси и9
равна N sln(<9 + d0) — N sin в. Она же равна, в силу закона Ньютона, массе,
умноженной на ускорение, т. е.
, д2и 1 д2и
dd
ди
Из-за малости угла 9 имеем sin в « tg 0 = — и сила равна
N
дх)
x-\-dx
,т<7 U .
или N-r—dx.
дх-
,2
Из всего сказанного следует, что уравнение движения малого элемента dx
принимает вид
д2и 2
J ди
pdx—- =
di2
или
где с = y/N/p.
Малые поперечные колебания струны описываются волновым уравне-
уравнением. Возмущения распространяются со скоростью с, зависящей от силы
натяжения и плотности материала. Дисперсия отсутствует: г>ф = vrp = с.
Волны в струне, лежащей на упругом основании
Уравнение поперечных колебаний струны, лежащей на упругом осно-
основании имеют вид
д2и 2д2и h
"Ш? - с 1ГЧ + ^и = °5 (I-32)
dt2 дх2 р
где h — коэффициент, характеризующий жесткость «постели»; с = y
Согласно A.32) частота и волновое число связаны соотношением
ш1. A.33)
Через ш* = л/h/p обозначена критическая частота, при превышении
которой колебания струны носят волновой характер.
Поперечные волны в струне, лежащей на упругом основании, обладают
дисперсией. Их фазовая скорость определяется по формуле
A.34)
16
Сведения из теорий
Гл. 1
а групповая скорость равна
с2к
A35)
Легко видеть, что величина с = л/N/p представляет собой максимально
возможное значение скорости поперечных волн и достигается при ш —>> оо.
Согласно определению, величина и знак фазовой скорости определя-
определяются тангенсом угла наклона секущей, проведенной из начала координат к
дисперсионной кривой (о;, к). Величина и знак групповой скорости опре-
определяются тангенсом угла наклона касательной.
tgG) = C
V
VI
( "т к
к
Рис. 1.13
На рис. 1.13 на примере струны на упругом основании показан графи™
ческий способ определения фазовых и групповых скоростей волн в диспер-
диспергирующих системах. Здесь v^ = tg a, a vrp = tg /3.
§ 1.3. Вариационный принцип
Гамильтона-Остроградского
Системы с конечным числом степеней свободы
В вариационном принципе Гамильтона-Остроградского производится
сравнение близких движений, переводящих систему материальных точек
из начального положения в момент времени t\ в конечное положение в
момент времени ^. Предполагается, что:
— система голономна;
- все движения начинаются в один и тот же момент времени и завер-
завершаются в один и тот же момент времени, следовательно время не
варьируется (вариации изохронны);
§1.3. Вариационный принцип Гамильтона—Остроградского 17
- вариации обобщенных координат при t = t\ и t = ti тождественно
равны нулю, т. е.
(Sqi)t=t1 = (Sqi)t=t2=O (г = 1,2,..., га). A36)
В сравниваемых движениях система проходит за один и тот же промежу-
промежуток времени различные расстояния, следовательно обобщенные скорости
в соответствующие моменты времени различны (щ ф q[) и значения кине-
тической энергии в этих движениях с соответствующие моменты времени
различны (WK ф W?). Различны и значения потенциальной энергии, зави-
зависящей от координат ^ и q[ (Wn ф W^).
Вводится в рассмотрение определенный интеграл
*2
J= Ibdt, A.37)
называемый действием по Гамильтону, где L = WK — Wn — функция Ла-
гранжа, и определяется, что только в истинном движении изохронная вари-
вариация действия по Гамильтону равна нулю:
*2
= \
5J = \EL)dt = 0. A.38)
Составим выражение SJ. Поскольку L = L(qi,qi), а время не варьиру-
варьируется, то
г=1
а в конечном итоге
¦/
dL d dL
и=г »"*^г1*Ф
dt =
при любых пределах интегрирования ti и ?2, следовательно
п
Е
Из-за голономности системы все (% независимы и поэтому каждая скоб™
ка в A.39) должна равняться нулю, т.е. получаются уравнения Лагранжа
второго рода:
d dL дЬ п ,. ^ ^
18 Сведения из теорий Гл. 1
являющиеся уравнениями истинного движения системы материальных точек.
Легко видеть, что уравнение гармонического осциллятора A.1) может
быть получено из A.40) при gi = х, q\ = х, qj = qj=O (j Ф 1), L = WK —
-Wa, WK=l-mx\ Wn = ±Kx2.
Распределенные системы
Для упругого тела, занимающего объем F, ограниченный поверхно-
поверхностью S, действие по Гамильтону записывается в виде
«2 / \
J = I LdV + RdS dt, A.41)
ч) \ <J Л ч) <J <J g
ti \ v sa /
где L — объемная плотность функции Лагранжа (лагранжиан); R — по™
верхностная плотность; Sa — та часть поверхности S, на которой заданы
усилия.
Условие стационарности функционала A.41) 8J = 0 приводит к си™
стеме уравнений Эйлера-Остроградского, дающей уравнения движения и
естественные краевые условия.
Рассмотрим одномерную распределенную систему (например, стержень
длиной I), соединенную на концах х\ =0и^2 = 0с дискретными система-
системами. Пусть распределенная система описывается лагранжианом, зависящим
от одной функции u(x,t) и ее частных производных до второго порядка
/ ди ди д2и д2и
включительно: L = L [и,
\
dt 5 дх' dxdt' дх2 5
Дискретные системы в точках х\ = 0 и Х2 = I описываются соответ-
соответственно функциями Лагранжа LK = LK(t,qk^qkiVkiVk), где gfc(t), ^fc(t) —
обобщенные координаты. Полагаем, что система находится под действием
распределенных сил f(x,t) @ < х < I) и сил, сосредоточенных на гра-
границах Q(t) и HK(t)9 а связи являются идеальными и голономными. В этом
случае из условия стационарности функционала действия
2
FL + /<5и) dx + / (<5ЬК + QK5qk + HK5rjk) } dt = 0 A-42)
получаются неоднородное уравнение динамики распределенной системы
дЬ д дЬ д дЬ д2 8L д2 дЬ
6>
уoxoti
A.43)
§1.3.
Вариационный принцип Гамильтона—Остроградского
19
и естественные граничные условия
(* = 1,2),
дЬ
д
дх
дЬ
дх2
д
дЬ
dxdi
д
~дх"
дЬ
д2и
д
Ж
дЬ
д2и
dxdt
дЬ
д2и
A.44)
A.45)
oqi at oqi
A.46)
d 8L,
A.47)
A.48)
dL
д
д2и
[din dtdm) 2'
A.49)
Часто, кроме свободных и вынужденных колебаний, рассматриваются
задачи с начальными условиями, когда при t = 0, например, задаются
распределения смещений и скоростей в стержне:
u(x,0) = U(x),
A.50)
совместные с краевыми условиями A.44)-—A.49).
Соотношения A.43)—A.50) определяют начально-краевую задачу, опи-
описывающую динамику одномерной распределенной системы, взаимодей-
взаимодействующей на границах х\ =0и^2 = / с дискретными системами. Если гра-
граничные закрепления или нагрузки движутся вдоль упругой направляющей,
то динамика такой системы описывается более сложной краевой задачей
(см., например, [27]).
20 Сведения из теорий Гл. 1
Заметим, что обобщение A.43)—A.50) на случай вектор-функций и(ж, i)
не представляет труда. Уравнение A.43) перепишется в виде
дЬ д дЬ д дЬ д2 дЬ д2 дЬ _
A.51)
Если логранжиан зависит не только от обобщенных координат, их пер-
первых и вторых производных, но и от производных более высокого порядка,
то уравнения динамики будут иметь вид [185]:
дЬ
ди
A.53)
п=1
а граничные условия задаются соотношениями
дь АА п/ ап дь дп дь
п=1п=1
С? = 1,2,3,..., та). A.54)
ГЛАВА 2
РАСПРОСТРАНЕНИЕ УПРУГИХ ВОЛН
В БЕЗГРАНИЧНОЙ СРЕДЕ И ОГРАНИЧЕННЫХ ТЕЛАХ
§ 2.1. О напряженно-деформированном состоянии
материалов
Твердое тело под влиянием внешних воздействий изменяет свою форму
и объем, т. е. деформируется.
Если деформация тела не превышает некоторых пределов, то при сня™
тии внешних воздействий оно возвращается к своему первоначальному
состоянию. Это свойство называется упругостью.
При значительных деформациях снятие внешнего воздействия не при-
приводит к полному исчезновению деформаций. Сохраняется остаточная де™
формация тела. Эта остаточная деформация называется пластической.
Внутренние силы, возникающие в процессе деформации, называются
напрмженимми.
Важнейшими характеристиками напряженно-деформированного состо™
яния твердого тела являются тензор деформаций (?), тензор напряжений
(а), вызванных деформацией и вектор перемещений (и) той или иной точки
объема, вызванных деформацией.
Линейная классическая теория упругости придерживается гипотез о
малости градиентов перемещений и об идеальной упругости материала.
Первая из перечисленных гипотез приводит к линейной связи между
деформациями и перемещениями (формула Коши):
_ 1 (дщ , дщ
?ij - 2
где компоненты ец характеризуют относительные удлинения в направлении
соответствующих осей, a Eij характеризуют изменение углов между осями
oxi и oxj, т. е. относительные сдвиги.
Гипотеза об идеальной упругости материала (в случае малых дефор-
деформаций) приводит к линейной зависимости между компонентами тензоров
напряжений и деформаций (обобщенный закон Гука):
где Xijki — тензор упругих постоянных, содержащий в общем случае 81
компоненту и обладающий свойством симметрии
Kjkl = Xklij = Xijlk = Xjikl-
В частных случаях число независимых констант в B.2) уменьшается.
Если все направления в твердом теле эквивалентны, тело называется изо™
22
Распространение упругих волн
Гл.2
тройным. Для него число независимых постоянных в обобщенном законе
Гука равно двум и все упругие постоянные \jki могут быть выражены
через константы Ламе Ли//:
B3)
О,
при .'=
j
- символ Кронекера.
Обобщенный закон Гука для изотропного тела принимает следующую
форму:
При характеристике упругих свойств материалов часто вместо постоян™
пых Ламе (А и /х) используют пары других констант: (Е, и), (G, i/), (К, G),
где G — модуль сдвига; Е — модуль Юнга; К — модуль объемного сжатия;
v — коэффициент Пуассона. Связь между этими константами приводится
в табл. 2.1.
Таблица 2.1
Константы
упругости
А
KG)
Е
К
V
Основная пара
А, //
А
/X
/iCA + 2/i)
A + /i
X
2(A + /i)
E, v
vE
(l + v)(l-2v)
2A+ v)
?7
E
3A - 2v)
G, v
2t;C
1 - 2v
G
2G(l + u)
2G(l + u)
3A - 2v)
V
K, G
k-Io
G
9KG
3K + G
К
3K -2G
21^ 2G
§ 2.2. Уравнения Ламе. Волны дилатации и сдвига
Динамические процессы в изотропных упругих средах описываются
уравнениями Ламе
B.5)
где р — объемная плотность материала.
§ 2.2. Уравнения Ламе. Волны дилатацыи и сдвига 23
Это векторное уравнение можно переписать в виде системы скалярных
уравнений относительно компонент вектора перемещений:
д2щ д2ик д2щ
Р^-(А + м)^-^--М^^ = 0 B.5')
или в виде системы, содержащей компоненты тензора напряжений:
dt2 dxj
Зададимся вопросом: какие типы волн могут распространятся в изо-
изотропных упругих средах?
Если применить к уравнению B.5) операцию div, то получим скалярное
волновое уравнение
= 0, B.6)
где q =
AFAF
Но divu = ?ц +?22 +^зз = 1Г77 характеризует относительное
изменение объема (AF) твердого тела при деформации (дилатация). Сле™
довательно, уравнение B.6) описывает волну расширения-сжатия (или
волну дилатации). Такая волна распространяется без дисперсии со скоро-
скоростью Q.
Если теперь применить к уравнению B.5) операцию rot, то получим
волновое уравнение
— ^4Aj rot 11 = 0, B.7)
где ст = л/jijp.
Волны, описываемые уравнением B.7), характеризуют изменение фор-
формы элемента среды при неизменном объеме. Волны этого типа называются
волнами искажения или сдвиговыми волнами. Они распространяются с
постоянной скоростью ст и не обладают дисперсией.
Отношение скоростей распространения упругих волн сдвига и волн
расширения-сжатия зависит только от коэффициента Пуассона и:
с, _ Г l-2i/
ci I 2A-1/)
1/2
B.8)
Известно, что коэффициент Пуассона для различных материалов изме™
няется в пределах 0 ^ v ^ 0,5, следовательно отношение /3 меняется в
пределах 0^/3^ л/2/2. Откуда видно, что волна расширения-сжатия
распространяется быстрее, чем волна сдвига. Поэтому в сейсмологии при-
принято различать упругие волны по времени их прихода: волну расширения-
24 Распространение упругих волн Гл. 2
сжатия называют р-волной (от слова primary — первичный), а волну сдви-
сдвига — s-волной (от слова secondary — вторичный). Эту терминологию мы
тоже иногда будем использовать. Рассмотрим частный случай. Пусть пере-
перемещения зависят только от одной координаты х\ : щ = щ{х\^?), а возму-
возмущения распространяются вдоль оси ох\. Уравнения B.5') перепишутся в
виде
U Ь UJL i
(Z9)
С/ 1/2 3 2 & и% 3 ~
Первое уравнение показывает, что для одномерного процесса направле™
ние перемещения частиц среды (щ) и направление распространения волны
лежат в одной плоскости. Волну растяжения-сжатия в этом случае назы-
называют продольной волной, а с/ — скоростью распространения продольной
волны.
Из двух других уравнений системы видно, что направления переме™
щений A/2,з) и направление распространения волны находятся во взаимно-
перпендикулярных плоскостях. Волну сдвига в этом случае называют попе-
поперечной волной, а ст — скоростью распространения поперечной волны.
§ 2.3. Отражение волн от свободной поверхности
полупространства. Поверхностные волны Рэлея
В безграничной среде волны растяжения-сжатия (р-волны) и волны
сдвига (s-волны) распространяются независимо друг от друга. Наличие гра™
ниц твердого тела существенно меняет волновую картину. Взаимодействуя
с границей раздела сред, волны разных типов могут трансформироваться
друг в друга.
Рассмотрим изотропное упругое пространство (ограничимся двумер-
двумерным случаем, когда все процессы однородны по оси х^). Динамические
процессы при жз < 0 описываются уравнением Ламе B.5), а граница жз = О
свободна от напряжений. Уравнения B.5) следует дополнить граничными
условиями вида
— ^зз := —0з |жз=о = 0 B.10)
или в перемещениях:
дх3 д\хз=0
B.10')
§2.3.
Отражение волн от свободной поверхности полупространства 25
Решение задач о взаимодействии р- и s-
волн с границей полупространства можно
найти, например, в [41, 127]. Схематичное
изображение таких взаимодействий приве-
приведено на рис. 2.1.
Если на свободную границу ж3 = О
под произвольным углом в падает р-волна,
то в общем случае отраженное возмуще-
возмущение будет представлять собой сумму р- и
s-волн. Для р-волн угол падения будет ра-
равен углу отражения 0\ = в. Угол отражения
сдвиговых волн определяется соотношени-
соотношением cos 7i = — cos 0, он всегда больше угла
падения р-волны G1 > в) (рис. 2.1, а).
Если на свободную границу жз = 0 по-
полупространства под произвольным углом
7 падает сдвиговая волна, то в отраженном возмущении будут присутство-
присутствовать р- и s-волны. Углы их отражения связаны с углом падения следующими
соотношениями: 71 = 7? cos 191 = —cos 7 рис. 2.1, б).
сТ
При взаимной трансформации волн может возникнуть такая комбина-
комбинация р- и s-составляющих, что возмущение будет представлять собой волну,
бегущую вдоль границы жз = 0 и резко затухающую при удалении вглубь
полупространства.
Эти волны называются поверхностными волнами Рэлея. Исходными
для их изучения являются уравнения Ламе B.5) и граничные условия B.10).
Решение ищется в виде
Uj = Aj exp [-qx3 + гк(хг - cRt)\ (j = 1, 3),
Щ = 0,
B.11)
где q > 0 — коэффициент, характеризующий убывание возмущений вглубь
полупространства, с — скорость распространения поверхностной волны.
Подставляя соотношение B.11) в уравнение B.5) и граничные условия
B.10), получим алгебраическое уравнение для определения cr:
а2 [а6 + 8а4 + 8C - 2f32)a2 - 16A - /?2)] = 0,
B.12)
где а = cR/cT9 /3 = ct/q.
Из B.12) следует, что волна Рэлея не обладает дисперсией, ее скорость
является постоянной величиной для каждого материала.
Связь скорости поверхностной волны Рэлея со скоростями р- и s-волн
дается соотношениями
CR = «Ост = aOPch
где «о < 1 постоянная величина (обычно q;q = 0,87^0,96).
B.13)
26
Распространение упругих волн
Гл.2
Зависимость скорости волн Рэлея от коэффициента Пуассона показана
на рис. 2.2.
0,6
0,4
0,2
0
0,2
Рис. 2.2
0,4 v
0,4 0,8 1,2 х3
Рис. 2.3
Форма волны Рэлея определяется распределением в ней компонент век™
тора перемещений. Такое распределение показано на рис. 2.3, (где щ =
§ 2.4. Нормальные волны в упругом слое
Чаще всего твердая среда ограничена не одной, а двумя поверхностя-
поверхностями. В этом случае говорят о распространении волн в упругом слое. Если
границы слоя свободны от напряжений, то задача сводится к решению
уравнения Ламе B.5) (вновь ограничимся рассмотрением случая и^ = 0;
^1,з = ^1,з (xi 5 жз ? t)) с граничными условиями типа B.10), но задаваемыми
при жз = ±/i, где 2 h — толщина слоя.
С помощью скалярного и векторного потенциалов
u = grad Ф + rot Ф
система B.5) приведется к волновым уравнениям
B Л 4)
B.15)
д2 д2
где А = ^-2 + ^-2, решения которых будем искать в виде
1 3
B.16)
§ 2.4. Нормальные волны в упругом слое 27
Соотношения B.16) показывают, что решения ищутся в виде волн, бе-
бегущих вдоль координаты х\ш имеющих статическое распределение по ко-
координате жз- Через с обозначена фазовая скорость (заранее не известная).
Подстановка B.16) в B.15) превращает последние в обыкновенные диф-
дифференциальные уравнения относительно Ф* и Ф*:
Ф* =0,
B.17)
Ф* =0,
dxl
= (к2 klI'2 к
где va = (к2 - klI'2; ка = —;а = 1,2.
Решения уравнений B.17) описываются гиперболическими функциями
и будут содержать в себе произвольные постоянные. Следовательно, B.16)
будут иметь вид
Ф = (A sh 1/гх3 + В ch игх3) exp{ifc(xi - ct)},
Ф = (С sh v2x$ + D ch 1/2ж3) ехр{{к(хг - ct)}.
Выразим через Ф и Ф перемещения и напряжения:
дФ <9Ф дФ <9Ф
дх\ дхз ' 3 дхз дх\'
1 1 + ААФ , (Ji3 = и 1 2 1
дх\ дхгдхз/ \ дхгдхз дх\ дх\
B.20)
Подставляя B.18) в B.19) и B.20) и используя граничные условия
<Тзз(^1-1 dz/l, tj = 0, ^з(^1? i^5 v = "¦>
получим систему четырех линейных однородных уравнений, содержащих
постоянные А, В, С, D.
Если приравнять детерминант этой системы к нулю, то можно прийти
к характеристическому уравнению (дисперсионному уравнению), из кото-
рого при заданных р, A, /i, ш находится фазовая скорость.
Решение задачи, однако, упрощается, поскольку можно рассмотреть две
системы частных решений:
— ct)} chi/хжз,
И B.21)
Ф2 = Ae^p{ik(x± c?)}shi/iff3,
ф2 = Dexp{ifc(a;i — ct)} ch щх
28
Распространение упругих волн
Гл.2
Первая из них B.21) описывает колебания, симметричные относительно
срединной плоскости слоя ж3 = 0 (рис. 2.4, а), а вторая B.22) — антисим-
антисимметричные колебания (рис. 2.4, б).
Рис. 2.4
Подставляя B.21) в B.20) и используя граничные условия, получим
систему двух уравнений, содержащую постоянные В ж С:
В ehuth
Cchu2h = 05
B.23)
где^« = y;a = 1,2.
Из условия существования нетривиального решения системы B.23) по-
получаем дисперсионное уравнение, справедливое при симметричных коле-
колебаниях слоя:
th(l/!fe)= A+/31J
th{v2h) 4/3i/32 e l ' j
Аналогично, подставляя B.22) в B.20) и используя граничные усло-
условия, получим систему, содержащую постоянные А и D. Следствием суще™
ствования нетривиального решения этой системы является дисперсионное
уравнение
B.25)
th{u2h) A + /5|J '
справедливое при антисимметричных колебаниях слоя.
Таким образом, из-за граничных условий распределения смещений и
напряжений по поперечному сечению слоя существенно более сложны,
чем у волн в неограниченных твердых средах. В результате многократ-
многократных переотражений и взаимных трансформаций р- и з^волн в слое могут
сформироваться нормальные волны, т. е. гармонические волны, распро-
распространяющиеся в нем без изменения формы.
§ 2.4. Нормальные волны в упругом слое 29
Важное значение нормальных волн определяется тем, что любое вол™
новое поле внутри слоя может быть представлено в виде их суперпозиции,
подобно тому, как любое возмущение в безграничной среде может быть
представлено в виде суперпозиции р- и s-волн.
Нормальные волны в слое, имеющие перемещения частиц как в на™
правлении распространения волны, параллельном плоскости слоя, так и
перпендикулярные плоскости слоя, называются волнами Лэмба.
Волны Лэмба делятся на две группы: симметричные (s) и антисиммет™
ричные (а) относительно срединной плоскости жз = 0. В симметричных
волнах в верхней и нижней половинах слоя перемещение щ имеет оди-
одинаковые знаки, а перемещение щ — противоположные (рис. 2.4, а). В
антисимметричных волнах в верхней и нижней половинах слоя перемеще-
перемещение ч\ имеет противоположные знаки, а перемещение щ — одинаковые
(рис. 2.4, б).
Анализ дисперсионных уравнений B.24) и B.25) показывает, что волны
Лэмба обладают дисперсией, их скорости являются функциями частоты.
При частоте ш в слое может одновременно распространяться определенное
конечное число симметричных и антисимметричных нормальных волн. Эти
волны будут различаться между собой фазовыми и групповыми скоростями
и распределением перемещений (и напряжений) по толщине слоя. Число
u)h
нормальных волн увеличивается с ростом отношения —, где ст — скорость
ст
распространения сдвиговых волн в безграничной среде.
^ ~ (uh A
При малой толщине слоя I — <1 в нем возможно распространение
V ст )
лишь двух нормальных волн нулевого порядка — одной симметричной I
и одной антисимметричной («о).
В симметричной волне (sq) преобладает продольная компонента (щ)
вектора перемещений, а поперечная компонента (щ), появляющаяся из-за
наличия свободных поверхностей, в —^- раз меньше щ. Из-за податливости
ООП
боковых граней продольная жесткость слоя уменьшается, это приводит к
тому, что фазовая скорость волны sq будет немного меньше скорости р-
волны в бесконечной среде:
«1'о) = ct
Антисимметричные волны обладают дисперсией и в низкочастотном
диапазоне. Фазовая скорость волны (clq) при этом пропорциональна квад™
ратному корню из частоты:
При увеличении толщины слоя волны sq и uq по своим дисперсионным
свойствам становятся все более и более похожими друг на друга. При —^>1
30
Распространение упругих волн
Гл.2
фазовые и групповые скорости этих волн стремятся к скорости поверхности
ной волны Рэлея cR (рис. 2.5). Перемещения локализуются вблизи свобод-
свободных границ слоя, превращая каждую из волн sq и а® в две релэеевских
волны, распространяющиеся на обеих свободных поверхностях.
cR/cT-
12 kTh
4 6
Рис. 2.5
10 12 kTh
Волны Лэмба, имеющие порядок выше нулевого, могут распространять-
распространяться лишь начиная с некоторых «критических» значений uh/cT, а до этого
представляют собой лишь быстрозатухающие осцилляции.
При больших толщинах слоя у всех волн Лэмба, кроме волн s® иао,
имеется только поперечное смещение и3, которое синусоидально распре-
распределено по толщине с пространственным периодом 2h/n или 2h/(n — 1/2),
где п — порядок волны. Отношение амплитуды этого перемещения в толще
слоя к его амплитуде на поверхности слоя стремится к нулю. И симметрич-
симметричные и антисимметричные движения становятся локализованными в толще.
Фазовые и групповые скорости всех нормальных волн (кроме sq иао) при
kTh^> 1 стремятся к ст.
х3>
2h
х7
Рис. 2.6
Кроме волн Лэмба в упругом слое могут распространяться нормаль-
нормальные волны еще одного типа — поперечные нормальные волны. Эти волны
являются чисто сдвиговыми. Они имеют только одну компоненту вектора
перемещений и^ параллельную плоскости слоя и перпендикулярную на-
направлению распространения волны (рис. 2.6). Напомним, что компонента
42 в волнах Лэмба отсутствует.
§2.5.
Уравнения переноса энергии и волнового импульса
31
Поперечные нормальные волны делятся на две группы: симметрич-
симметричные (s) и антисимметричные (а) относительно срединной плоскости х% = 0.
В симметричных волнах в верхней и нижней половинах слоя перемеще-
перемещение U2 имеет одинаковые знаки и распределено по закону
=
—
ti
—- sln(^szi — out),
ti
в антисимметричных волнах в верхней и нижней половинах слоя переме-
перемещение U2 имеет противоположные знаки и распределено по закону
a^— sin{kaxi — out).
Здесь kSia — волновое число симметричной (s) и антисимметричной (а)
волн; ms = 0,1,2,3,... — последовательность чисел, обозначающих но™
мера (порядки) симметричных волн; та = 1/2, 3/2, 5/2, 7/2, — то же для
антисимметричных волн. v ln
При шк/(тгсТ) < 1/2
в слое может распростра-
распространяться только одна вол-
волна (ms = = 0). Эта вол-
волна симметрична и смеще-
смещение в ней одинаково во всех
точках поперечного сечения
(cosmsGix%)fh = 1). Вол-
Волна (so) не обладает диспер-
дисперсией: г^ф = г;гр = ст и
по своим свойствам иден-
идентична сдвиговой волне, рас-
2h/\r
2
Рис. 2.7
0 2 4 6
пространяющейся в безгра-
безграничной среде.
Поперечные нормальные волны, имеющие порядок выше нулевого, мо-
могут распространяться лишь начиная с некоторых «критических» значе-
ujh
ний —. И симметричные (при m
> 0) и антисимметричные волны облада-
ют дисперсией. Зависимости фазовых и групповых скоростей поперечных
волн от толщины слоя показаны на рис. 2.7.
§ 2.5. Уравнения переноса энергии и волнового импульса
Важными характеристиками динамического состояния среды являются
энергия и импульс, переносимые упругими волнами. Уравнения переноса
энергии и волнового импульса имеют следующий вид:
dW
+ div S = 0,
B.26)
32 Распространение упругих волн Гл.2
ВС4 -^
—+ divT = O. B.27)
Здесь W — плотность энергии, S — вектор плотности потока энергии
(вектор Умова-Пойнтинга); G — вектор волнового импульса; Т — тензор
плотности потока волнового импульса (тензор радиационных напряжений).
Если ограничиться рассмотрением одномерных упругих систем, то
уравнения B.26), B.27) могут быть получены из функционала A.42) наряду
с уравнениями движения A.51). В этом случае справедливы соотношения
dL д dL д dL \ 8L
Ujt
G = - > -—ujx + ujxx , B.30)
^ \dujt J dujXt J I
i=i ч
rr-т Sr\( dL д dL 9 OL \ 8L
f[ ) +
Плотность потока энергии связана с тензором напряжений B.4) соотноше-
соотношением [41]:
S = ??. B.32)
Усредненные значения плотности энергии и плотности потока энергии свя-
связаны соотношением
(S) = Vrp (W), B.33)
2тг
где (...) = —[(...) с1в, 0 = out - кх.
2тг J
о
дш
Из B.33) следует, что энергия переносится с групповой скоростью Vrp = -^-.
и к
ГЛАВА 3
ПРОДОЛЬНЫЕ, КРУТИЛЬНЫЕ И ИЗГИБНЫЕ ВОЛНЫ
В СТЕРЖНЯХ. МАТЕМАТИЧЕСКИЕ МОДЕЛИ
И ДИСПЕРСИОННЫЕ СВОЙСТВА
ЛАГ
§ 3.1. Типы нормальных волн в стержнмж
Под стержнем принято понимать упругое тело, два размера которого
малы по сравнению с третьим, обладающее конечной жесткостью на рас-
тяжение, кручение и изгиб.
В отличие от слоя (двумерного объекта) стержень является одномерным
объектом.
Нормальные волны в стержнях подразделяются на три типа: продоль-
продольные, изгибные и крутильные (рис. 3.1).
Продольные волны аналогичны сим-
симметричным волнам Лэмба. Движение
частиц при распространении волны про™
исходит симметрично относительно сре-
срединной линии стержня (жз = 0). Преобла-
Преобладает продольная компонента вектора пе-
перемещений щ (рис. 3.1, а).
Мзгибные волны аналогичны анти-
антисимметричным волнам Лэмба. Срединная
линия стержня (жз = 0) претерпевает из-
изгиб. Преобладает поперечная компонента
вектора перемещений щ (рис. 3.1,6).
Крутильные волны аналогичны попе-
поперечным нормальным волнам в слое. Век-
Вектор перемещений содержит в этом случае
лишь одну — азимутальную—компонен-
ЛАГ
Рис. 3.1
ту и^. Движение частиц представляет собой вращение поперечного сечения
стержня относительно срединной линии (ось х% = 0) и симметрично отно™
сительно этой оси (рис. 3.1, в).
§ 3.2. Продольные волны
Рассмотрим распространение продольных волн в однородном стержне,
отнесенном к декартовой системе координат Oxyz (где х = х±, у = #2, z =
= жз). В технической теории, принадлежащей Д. Бернулли, и в некоторых
уточненных теориях предполагается:
- любые точки, лежащие в плоскости, перпендикулярной к оси стерж-
стержня, имеют одинаковые перемещения (гипотеза плоских сечений):
ui(x,y,z,t) = u(x,t); C.1)
34
Продольные, крутильные и изгибные волны в стержнях
Гл.З
— выполняются условия одноосного деформированного состояния:
&22 = ^33 :=: —г/?Ц) C*2)
или
поперечные напряжения равны нулю:
С2 = С3 = 0.
C.2')
C.3)
Из соотношения C.2;) путем интегрирования по поперечным координа-
координатам можно найти перемещения ^2,з-
ди
и2(х, у, z, t) = -i/y — (ж, i),
ох
u3(x,y,z,t) — -i
УХ
ди
C.4)
C.5)
Кинетическая энергия стержня длиной I, с учетом C.1)—C.5), будет
определяться по формуле
О F
dt
dt
dFdx =
-И
\dxdtj
dx, C.6)
где /) — плотность материала, F — площадь поперечного сечения стержня,
/0 = (у2 + z2)dF — полярный момент инерции сечения.
Первое слагаемое в C.6) описывает кинетическую энергию продольного
движения частиц стержня, второе — кинетическую энергию поперечного
движения.
Потенциальная энергия стержня определяется по формуле
О F
а12 + ст12
dFdx =
где Е — модуль Юнга, /i — модуль сдвига.
§3.2.
Продольные волны
35
Первое слагаемое в C.7) описывает потенциальную энергию дефор-
маний, отвечающих за изменение объема (еи\ второе — потенциальную
энергию сдвиговых деформаций (eLi при г ф j).
Уравнения динамики стержня могут быть получены из вариационного
принципа Гамильтона-Остроградского с помощью функции Лагранжа L =
= WK - Wu.
Техническая теория Д. Бернулли
В технической теории продольных колебаний стержней, наряду с требо™
ваниями о выполнении гипотез C.1), C.2), C.3), вводятся дополнительные
упрощения:
- предполагается, что вклад в кинетическую энергию слагаемых, опи™
сывающих поперечное движение частиц стержня, пренебрежимо мал:
\dxdt)
'0;
пренебрегается касательными напряжениями {а\2 = агз = 0), сле-
следовательно, вклад потенциальной энергии сдвиговых деформаций в
C.7) также не учитывается:
Распространение продольных волн в стержне описывается уравнением
Бернулли
- EF— = 0
д2
C.8)
Важнейшие типы краевых условий для продольных колебаний стержня,
описываемых уравнением C.8) приведены в справочнике [32].
Легко видеть, что C.8) является волновым уравнением, следовательно,
согласно технической теории Д. Бернулли, продольные волны в стержне
распространяются без дисперсии. Частота и волновое число гармонической
волны и = щ exp {i(ut — kx)}9 будут связаны соот-
соотношением (рис. 3.2)
и = ±
C.9)
Из C.9) находим скорость распространения про-
продольной волны в стержне:
Е
со = \1- = Щ =
(ЗЛО)
Рис. 3.2
которая оказывается меньше скорости распространения волны дилатации
(р-волны) в неограниченной среде.
36
Продольные, крутильные и изгибные волны в стержнях
Гл.З
Уточненные теории Рэлея—Лява и Бишопа
Простейшее обобщение теории Д. Бернулли было сделано Рэлеем, пред-
предложившим учесть вклад в кинетическую энергию слагаемого, отвечающего
за поперечные движения частиц стержня (т. е. второе слагаемое в C.6) не
равно нулю). Это приводит к тому, что уравнение продольных колебаний
стержня принимает вид
dt2
дх2
д4и
}dx2dt2
= 0.
C.11)
Уравнение C.11) впервые появилось в книге Рэлея «Теория звука» [144].
Позднее оно вошло в курс теории упругости А. Лява [109], поэтому уравне-
уравнение C.11) иногда называют уравнением Ля-
Лява. Третье слагаемое в уравнении C.11) на-
называется поправкой Рэлея.
~ Согласно C.11) частота и волновое чис-
число связаны соотношением (рис. 3.3)
4-
0
5 10
Рис. 3.3
15
сок
л/1 + u2R2k2 ¦
C.12)
где R = л/l®/F — полярный радиус инерции.
Следовательно, математическая модель C.11) утверждает, что продоль-
продольные волны обладают дисперсией. Их фазовая скорость определяется по
,* формуле
C.13)
а групповая скорость равна
со
Vrn =
C.14)
Зависимости г;ф и г;гр от волнового чис-
числа изображены на рис. 3.4. Обе скорости
при малых к близки к с® и уменьшаются
при увеличении волнового числа.
Отношение фазовой скорости к группо-
6 вой — = l~\~u2R2k2 > 1 при любых значе-
ниях к, следовательно, во всем частотном
диапазоне имеет место нормальная дисперсия.
Введение поправки Рэлея изменяет и граничные условия. Например, для
свободного конца вместо условия EF— = 0 следует писать условие [4]:
2 4
Рис. 3.4
= 0.
C.15)
§3.2.
Продольные волны
37
В уточненной теории Бишопа учитывается кинетическая энергия по-
поперечного движения и потенциальная энергия сдвиговых деформаций, т. е.
слагаемыми, содержащими v2 в C.6) и C.7) не пренебрегается. Такая поста-
постановка приводит к следующему уравнению продольных колебаний стержня:
2ii Я4<г, Я4*»
€1/ От- *-' *¦¦*' О -ж- *-S *-*' ^ ^,*% -и ^х
или
д и
}д2и
ft2
= 0.
(ЗЛ6/)
Последнее уравнение наглядно демонстрирует, что в стержне происхо-
дят два связанных между собой волновых процесса: продольные движения
частиц стержня и поперечные движения (толщинные колебания).
Дисперсионное уравнение, соответствующее модели Бишопа, имеет вид
2 , ,2 D2 l.2
+ civ2 R2 к
= к
а фазовая и групповая скорости определяются по формулам
"*=* =
2 . 2 2 т">2 ? 2
С0 + CTV R К
C.17)
C.18)
C.19)
Дисперсионная кривая C.17) изображена на рис. 3.5.
При малых к она близка к прямой ш = сок, а при больших к асимпто-
асимптотически стремится к прямой ш = стк. На низких частотах волны распро-
распространяются с фазовыми скоростями, близкими к стержневой скорости cq, a
на высоких частотах — близкими к скорости сдвиговых волн.
В точке перегиба дисперсионной кри-
кривой
групповая скорость волны достигает наи-
наибольшего значения
max г;гр
= 4
2)з~" 0 4 8 12 16
Рис. 3.5
Учет потенциальной энергии сдвиговых деформаций существенно из-
изменит и граничные условия. Например, для свободного конца стержня сле-
следует писать не одно условие, как в предыдущих моделях, а два:
ох
C.20)
38
Продольные, крутильные и изгибные волны в стержнях
Гл.З
Теория Миндлина—Германа
При выводе уравнений Миндлина-Германа следует отказаться от гапо-
тезы о том, что поперечные деформации при осевом растяжении или сжатии
пропорциональны продольной деформации C.2). В этом случае для опи-
описания движения частиц стержня в поперечном направлении вводится еще
одна функция го (ж, i) и принимается следующая система перемещений:
ui(x.y. z.t) = u(x,t),U2(x,y,z,t) = —w(x.t).us(x.y.z.t) = —w(x.t).
v 7 v J x J a a
C.21)
где а — радиус стержня.
Кинетическая и потенциальная энергии будут определяться выраже-
выражениями
d2w
Ы
dx.
C.22)
dw
-го™
dx. C.23)
где Hi?2 — корректирующие коэффициенты, смысл которых будет пояснен
позднее.
Уравнения Миндлина-Термана, описывающие продольные колебания
стержня, имеют следующий вид:
d2w
;2 1 дх2 2 ар дх
>d2w 8N!(A + aO
C.24)
ар дх
7^=0.
Для изучения дисперсионных свойств системы представим продольное
и поперечное перемещения в виде бегущих гармонических волн
и = щ ex.p{i(ujt — kx)}, w = wq ещ){{(шг — kx)}. C.25)
Подстановка C.25) в C.24) приведет к системе алгебраических уравнений
2Л
(—ш2 + cfk2)uo + ^2 — ikwg = 0;
C.26)
a2 p
ap
f
ijbo = o.
§3.2.
Продольные волны
39
Вычисляя ее детерминант и приравнивая его нулю, получим дисперсионное
уравнение:
C.27)
а2 р
а2р2
Уравнение C.27) имеет четвертый порядок по
по ш. Имеется две дисперсионных ветви,
одна из которых исходит из нуля, а вторая
ИЗ ТОЧКИ
12
к и четвертый порядок
Дисперсионные зависимости изображе-
изображены на рис. 3.6.
Обзор нескольких моделей продоль-
продольных колебаний стержней вызывает во-
вопрос: какой из них следует пользоваться
в той или иной ситуации? Вопрос есте-
ш
/
/у
/
/
/ у
/ /V
/V
/3
/
у
/у
/У
/у
tga =
4C =
/
Q
к
О
20
10
Рис. 3.6
ственный, ведь разными моделями по-разному трактуется наличие или от-
отсутствие дисперсии продольных волн, даются разные законы дисперсии в
случае ее наличия.
В [4] проведен сравнительный анализ законов дисперсии различных
моделей стержней, стержня-полосы (упругого слоя). На рис. 3.7 приведены
результаты сравнительного анализа. Цифрами 1,2,3 обозначены дисперси-
дисперсионные кривые трех первых продольных нормальных волн в упругом слое (в
узком высоком стержне-полосе). По осям
отложены безразмерные волновое чис-
число кН и частота шН/ст, где Н — высота
стержня.
Прямая В соответствует дисперсион-
дисперсионной ветви C.9) модели Бернулли. Она
совпадает с дисперсионной ветвью 1 до
частот, при которых размер стержня 2Н
О
4
16
8 12
Рис. 3.7
равен половине длины сдвиговой волны (шН/ст = тг/2). Следовательно,
модель Бернулли хорошо описывает распространение продольной волны
в реальном стержне вплоть до сравнительно высоких частот. Уравнению
C.11) соответствует дисперсионная кривая R. Эта модель имеет несколько
большие пределы применимости.
Очень хорошо аппроксимируют кривую 1 дисперсионная ветвь (BI),
соответствующая уравнению Бишопа и дисперсионная ветвь (МН), соот-
соответствующая нижней дисперсионной ветви уравнения Миндлина—Германа.
Отличия кривых 7 и Bi различимы лишь на самых высоких частотах. Отли-
Отличия кривых 7 и МН не различимы во всем диапазоне частот. Заметим, что
в исходной постановке кривая МН на высоких частотах стремилась (как
40 Продольные, крутильные и изгибные волны в стержнях Гл. 3
и кривая BI) к асимптоте ш = сТк, введение корректировочных коэффи-
коэффициентов Hi52 переводит ее на асимптоту ш = с^к, где сд — скорость по-
поверхностной волны Рэлея, увеличивая тем самым диапазон применимость
модели.
К сожалению, дисперсионная кривая 2 не может сколь-либо удовле-
удовлетворительно аппроксимироваться верхней дисперсионной ветвью модели
Миндлина—Германа.
Итог проведенного анализа таков: на высоких частотах при изучении
продольных нормальных волн в стержне следует пользоваться моделями
Бишопа и Миндлина-Германа, в более низкочастотном диапазоне целесо-
целесообразно пользоваться моделью Бернулли, которая значительно проще.
§ 3.3. Крутильные волны
Технические теории Кулона и Сен-Венана
В основе теории кручения стержней, принадлежащей Ш.О. Кулону, ле-
лежат две гипотезы:
- недеформируемость поперечного сечения в своей плоскости (жест-
(жесткий контур);
- отсутствие продольных смещений (отсутствие депланации, т. е. вы-
выхода сечения из первоначального плоского состояния).
Сечения стержня, согласно этим гипотезам, скользят друг по другу,
поворачиваясь в своей плоскости как жесткие площадки.
Перемещения точек стержня имеют вид
ui(x,y,z,i) = 0, u2{x,y,z,t) = -z0(x,i),
C.28)
u3(x,y,z,t) =y6(x,t),
где 0 — угол поворота сечения.
Отличными от нуля являются следующие компоненты тензора напря-
напряжений:
Кинетическая и потенциальная энергия стержня длиной I с учетом C.28)
и C.29) будут определяться по формулам
OF
§3.3. Крутильные волны 41
Уравнение динамики стержня может быть получено е помощью функ-
функции Лагранжа L = WK — Wn и будет иметь вид
В2в В2в
'J°^-^ = °- <3-32>
Из волнового уравнения C.32) следует, что согласно технической тео™
рии Кулона, крутильные волны в стержне распространяются без дисперсии
с той же скоростью ст, с которой распространяются сдвиговые волны в
неограниченной среде.
По теории Б. Сен-Венана (теория жесткого кручения) кручение стержня
складывается из кручения по Кулону и продольных смещений, приводящих
к депланации. Депланация полагается одинаковой для всех сечений и зави-
зависящей от координаты х.
Перемещения точек стержня будут иметь вид
C.33)
u3(x,y,z,t) =yO(x,t),
а отличные от нуля касательные напряжения запишутся в виде
дщ дв\ (d<pi , дв\ .....
-^ z— , 0-13 = // -^- + у^- . C.34)
\ ду dxj \ dz dxj
Согласно C.33), C.34) кинетическая и потенциальная энергии будут
определяться по формулам
C.35)
О
содержащим, кроме полярного момента инерции /о, момент инерции при
кручении
F
Здесь (р — функция кручения, определяемая из решения уравнения Лапласа
с граничным условием на контуре сечения j
-^ = z cos(n, у)-у cos(n, z), C.39)
где п — направление нормали к контуру 7-
42 Продольные, крутильные и изгибные волны в стержнях Гл. 3
Таким образом, распространение крутильных волн по теории Сен~Ве~
нана описывается волновым уравнением
отличающимся от C.32) наличием /к. Это приводит к тому, что скорость
крутильной волны скр = сг^1Кр/1о отличается от скорости волны сдви-
сдвига на постоянный множитель, зависящий от формы поперечного сечения
стержня.
Если стержень имеет круговое или кольцевое поперечное сечение (ци-
(цилиндрический стержень), то /о = 1кр,(р=0. Для стержней иных поперечных
сечений /0 Ф /кр, (р Ф 0.
Основные типы краевых условий для крутильных колебаний стержней
приведены в [32].
Уточненные теории Тимошенко и Власова
Если депланация неоднородна вдоль стержня, то кручение принято на-
называть стесненным. В основе теории стесненного кручения лежат следую-
следующие гипотезы:
- недеформируемость поперечного сечения в своей плоскости (жест™
кий контур);
дв
- депланация пропорциональна относительному углу закручивания —.
Тогда перемещения точек стержня будут иметь вид
ВО
)(t)
iin(r II z t) — —zQ(t t) 0-41)
u3(x,y,z,t) =y6(x,t),
где (f — функция кручения, определяемая из решения краевой задачи C.38),
C.39).
Выражение для кинетической энергии стержня, соответствующее пере-
перемещениям C.41) будет определяться по формуле
\() I(?l)(з-42)
о о
Первое слагаемое в C.42) описывает кинетическую энергию вращения, вто-
второе — кинетическую энергию депланации. Величина /^ = ^2(|/, z)dF
F
называется моментом депланации.
§3.3.
Крутильные волны
43
С помощью закона Гука вычислим компоненты тензора напряжений:
(Гц =
д2е
dip
дх
дв
дх^
C.43)
и определим потенциальную энергию:
~двх2
о
C.44)
Первое слагаемое в C.44) описывает потенциальную энергию сдвиго-
сдвиговых деформаций, второе — потенциальную энергию продольных деформа™
ций, вызывающих неоднородную депла™
нацию.
В теории Тимошенко учитывается 1,6 *
потенциальная энергия депланации, но
не учитывается ее кинетическая энергия '
(второе слагаемое в C.42) приравнивает™ ~ „
ся к нулю). '
Уравнение крутильных колебаний по о,4
теории Тимошенко имеет вид
4 8 12
Рис. 3.8
16
Частота и волновое число гармонической волны связаны соотношением
(рис. 3.8)
ш = =Ъст1
C.46)
из которого следует, что крутильные волны обладают дисперсией. Их фа™
зовая скорость
C.47)
при малых волновых числах близка к ск и неограниченно возрастает при
стремлении к к бесконечности.
В теории Власова в C.42), C.44) учитываются и кинетическая, и по™
тенциальная энергии депланации. Это приводит к следующему уравнению
крутильных колебаний стержня:
"dx2dt2
C.48)
44
Продольные, крутильные и изгибные волны в стержнях
Гл.З
или
д2е
д2
"т2
крдх2 10 дх2
_ 2
дх*
= 0.
C.48')
Легко видеть, что по форме уравнение Власова идентично уравнению Би-
Бишопа C.16), описывающему продольные колебания стержня. Уравнение
C.48) описывает два связанных между собой волновых процесса: крутиль-
крутильные колебания частиц стержня и продольные движения частиц, связанные
с депланацией.
Дисперсионное уравнение, соответствующее модели Власова имеет вид
= к
1 + A<р/1о) к2 '
а фазовая и групповая скорости определяются по формулам
(eg-4,
io
C.49)
C.50)
C.51)
При условии со > ск (а это, как правило, так), дисперсия имеет аномаль™
ный характер, поскольку групповая скорость волнового пакета оказывается
больше фазовой скорости отдельных гармоник.
На низких частотах волны распространяются с фазовыми скоростями,
близкими к скорости крутильных волн ск, введенной по гипотезам Сен-
Венана, а на высоких частотах — со скоростями, близкими к скорости
продольных волн со в стержне Бернулли.
Закон частотной дисперсии C.49) показан на рис. 3.9, законы изменения
фазовой C.50) и групповой C.51) скоростей в зависимости от волнового
числа приведены на рис. ЗЛО, а, б.
16
12
10
Рис. 3.9
20
8 12
Рис. ЗЛО
16
§3.4.
Изгыбные волны
45
Граничные условия для уравнений Тимошенко C.45) и Власова C.48),
имеющих четвертый порядок по ж, существенно отличаются от граничных
условий для уравнений Кулона C.32) и Сен-Венана C.40), имеющих второй
порядок по х.
Например, для свободного конца стержня, совершающего крутильные
колебания, описываемые уравнением C.48), задаются следующие условия:
дв
д3
д3
7 dxdt2
= 0.
C.52)
§ 3.4. Изгибные волны
Техническая теория Бернулли-Эйлера
При поперечных колебаниях стержня каждый его элемент изгибается.
В классической теории Я. Бернулли и Л. Эйлера техническая теория пред-
предполагает:
- поперечные сечения стержня, плоские и перпендикулярные его оси,
во время изгиба остаются плоскими и перпендикулярными деформи™
рованной оси стержня;
- продольные сечения стержня сопротивляются изгибу независимо, не
оказывая друг на друга влияния (т. е. нормальные напряжения на пло-
площадках, параллельных оси, пренебрежимо малы);
- инерцией вращения элемента стержня при изгибе пренебрегается.
Из второго предположения следует, что из компонент тензоров напря-
напряжений и деформаций существенными признаются только ац и ец9 т.е.
волокна либо растягиваются, либо сжимаются, в результате чего запасает-
запасается потенциальная энергия.
Рассмотрим изгиб стержня прямоугольного поперечного сечения
(рис. 3.11). Для вычисления потенци- ,
альной энергии следует найти удлине™
ние волокон, определить работу упру-
упругих сил, деформирующих волокно и
проинтегрировать ее по площади попе-
поперечного сечения стержня.
Длина дуги деформированной сре-
срединной линии будет равна
y/(dxJ + (dwf =
dw
дх
где R — радиус кривизны.
dx = Rda,
46
Продольные, крутильные и изгибные волны в стержнях
Гл. 3
При малых поперечных перемещениях
ff/2
R =
{dw/dx
d2w/dx2
откуда
da = -
d2w/dx2'
dx
dx) d2w/dx2
и, следовательно, удлинение волокна шириной dz будет равно
(R + z)da — dx =
1 J d2w
ir^ - 1 \dx = z—r
dx2 J J dx2
По этому удлинению вычисляется работа упругих сил по растяжению или
сжатию волокна:
Интегрируя ее по z, получим плотность потенциальной энергии
где 1у = Ьа3/12 — осевой момент инерции прямоугольного поперечного
сечения, в общем случае Iy = \\z2 dF.
F
Плотность кинетической энергии поперечного движения определяется
по формуле
dx-
C-54)
Зная C.53) и C.54), составим лагранжиан L = WK ~~ Wn и выведем уравне-
уравнение изгибных колебаний стержня (уравнение Бернулли-Эйлера):
C-55)
Полагая w = w® ex.p{i(ut — kx)}9 получим дисперсионное уравнение
- сУук4 = 0,
C.56)
§3.4.
Изгыбные волны
А1
где гу = yjly/b
персии
ш =
фазовую и групповую скорости
осевой радиус инерции. Из C.56) находим закон дис-
;2, C.57)
C.58)
vrp = 2согук. C.59)
Легко видеть, что изгибные волны распространяются вдоль стержня с
дисперсией. Форма любого негармонического возмущения будет искажать™
ся по мере его распространения. Дисперсия имеет аномальный характер.
Групповая скорость при любой частоте будет в два раза превышать фазовую.
Основные типы граничных условий для уравнения C.55) приведены в
справочнике [32].
Уточненные теории Рэлея и Тимошенко
В теории Рэлея принимаются первые два допущения предыдущей мо-
модели, но учитывается инерция вращения элемента стержня при изгибе.
Плотность потенциальной энергии остает-
остается прежней C.53), а плотность кинетиче™
ской энергии принимает вид
Wk = -pF
dw
2pIy
d2w
dxdt
dx.
C.60)
Рис. 3.12
Уравнение Рэлея, описывающее изгибные колебания стержня, записы-
записывается в виде
„д w , „г д w T д w =()^ ^61^
Из C.61) находим закон дисперсии:
C.62)
Эта зависимость приведена на рис. 3.12.
В теории Тимошенко предполагается:
- поперечные сечения остаются плоскими, но не перпендикулярными
деформированной оси стержня;
- нормальные напряжения на площадках, параллельных оси, пренебре-
пренебрежимо малы;
- учитываются инерционные составляющие, связанные с поворотом
сечений.
48
Продольные, крутильные и изгибные волны в стержнях
Гл.З
Первое из предположений приводит к
необходимости учета сдвиговых деформа-
деформаций.
На рис. 3.13 показано, что угол поворота
сечения при малых поперечных перемеще-
'dw ...
, будет равен
ниях
dw
C.63)
Рис. 3.13 где через C обозначен угол сдвига.
Если в качестве обобщенных координат выбрать поперечные переме-
перемещения частиц срединной линии стержня w{x^t) и угол поворота сечения
(р(х, i), то плотность кинетической энергии будет определяться по формуле
dx.
C.64)
Плотность потенциальной энергии определяется по следующей формуле:
2 / ^ \ 2"
C.65)
W — -
Wn- 2
д(р
дх
dx.
Потенциальная энергия элемента стержня тоже состоит из двух частей:
- потенциальной энергии сдвига - f
dw
dx
r 1
- и потенциальной энергии изгиба -
EIy ^ 1 T
= -Ыу
dip
~dx~
dx,
д
новый радиус кривизны.
„, \д (dw Л
где Я = т^ т^ Р
[дх \ dx ) J
Отклонение от теории плоских сечений учитывается поправочным ко-
коэффициентом N, зависящим от способа определения среднего значения для
угла сдвига и характера распределения сдвигов по сечению.
Если касательные напряжения, возникающие при изгибе, определяются
по формуле Журавского
QS
а =
где Q — поперечная сила, S — статический момент части сечения, от™
сеченного плоскостью z = const, b — ширина поперечного сечения при
z = const, а под C понимается среднеквадратичное значение
§3.4.
Изгыбные волны
49
то Н определяется по формуле
F Г f S2 dF
Например, для стержня прямоугольного сечения Н = 5/6.
Согласно C.64), C.65) динамическое поведение стержня по теории Ти-
Тимошенко будет описываться системой уравнений
dw
C.66)
Если из первого уравнения выразить — через производные от го, под™
ставить во второе уравнение, предварительно продифференцировав его
по ж, придем к одно скалярному описа-
описанию изгибных колебаний (уравнение Ти™
мошенко): <
PF
d2w
EL
d4w
:1пг = 0- С3»67)
d4w
Х dx2dt2 +
Заметим, что при Н = 1 уравнение
C.67) называется уравнением Бресса. Рис- 3.14
Нахождение решения C.67) в виде бегущей гармонической волны при-
приводит к дисперсионному уравнению
и2? ,2
= 0,
C.68)
имеющему четвертый порядок по к и четвертый порядок по ш. Имеется две
дисперсионных ветви, одна из которых исходит из нуля (описывает преиму-
преимущественно изгибные волны), а вторая — из точки ш = —, к = 0 (описывает
ГУ
преимущественно сдвиговые волны). Дисперсионные зависимости изобра™
жены на рис. 3.14.
Для каждого фиксированного значения волнового числа существует два
значения фазовой скорости
A,2)
±
rgfe2
1/2'
1/2
C.69)
50
Продольные, крутильные и изгибные волны в стержнях
Гл.З
В длинноволновом диапазоне (при Гук <С 1)
L
L
с®гук, vL ~ —^-.
т.е. v
A)
ф совпадает с фазовой скоростью, введенной в технической теории
Бернулли-Эйлера, а скорость t;^; при кг —)• 0 неограниченно возрастает
(групповая скорость при этом стремится к нулю, следовательно энергия
не переносится). В коротковолновом диапазоне (при г^к >» 1)
\/Нст
cq близка к скорости продольных
близка к скорости волн сдвига, а ф
волн в стержне.
На рис. 3.15 изображены зависимости фазовых скоростей изгибных
волн в стержне от волнового числа по различным теориям. Штриховыми
линиями изображены зависимости, полученные по теориям Бернулли-Эй-
л ера (БЭ) и Рэлея (Р), штрих-пунктиром — зависимости, полученные по
теории Тимошенко B\ и Т2).
Сплошными линиями изобра-
изображены дисперсионные зависи™
мости, соответствующие трем
первым антисимметричным нор-
нормальным волнам (ао, «1, «2),
рассчитанные с помощью реше-
решения уравнения Ламе для упруго-
упругого цилиндра.
Нетрудно видеть, что уравне-
уравнение Бернулли-Эйлера дает удо™
влетворительное приближение
дисперсии к кривой uq лишь при
очень длинных волнах (частота
близка к нулю). Учет поправки
Рэлея лишь незначительно улуч-
x+dx
Рис. 3.15
шает это приближение. Теория Тимошенко дает хорошее совпадение с вет-
ветвью ад в широком диапазоне длин волн и имеет лишь качественное совпа-
совпадение с ветвью а±. В пределе к —>> оо фазовая скорость антисимметричной
нормальной волны стремится к скорости поверхностной волны Рэлея с#.
Эту асимптотику теория Тимошенко не отслеживает.
В книге [4] показано, что путем введения не одного Н, а большего числа
произвольных коэффициентов можно добиться «улучшения» дисперсион-
дисперсионных свойств модели Тимошенко, в частности, удается добиться количе-
количественного совпадения ее дисперсионной ветви с кривой а\.
ГЛАВА 4
ВОЛНЫ В ВЯЗКОУПРУГИХ СТЕРЖНЯХ
§ 4.1. О внешнем, внутреннем и конструкционном трении
Рассеяние энергии в механических системах происходит по различным
причинам, которые, правда весьма условно, могут быть разделены на три
группы:
- потери в окружающую среду (внешнее трение);
- потери, обусловленные внутренними процессами в материале (вну~
треннее трение);
- потери, обусловленные трением в опорах, шарнирах и.т.п. (конструк-
ционное трение).
Учет конструкционного трения обычно приводит к нелинейным соотно-
соотношениям. Этих вопросов мы намереваемся коснуться в последующих главах,
когда речь пойдет о фрикционных колебаниях.
Наиболее распространенная модель внешнего трения линейна и относи-
относительно проста, в ней считается, что диссипативные силы являются вязкими
и пропорциональными скоростям движения
I « ——, где и — вектор перемещения.
at
Как уже говорилось, внутреннее трение связано с диссипацией энергии
колебаний в материале системы. Диссипативные свойства конструкцион-
конструкционных материалов разнообразны, что приводит к необходимости введения для
их описания различных математических моделей. Одни из этих моделей
позволяют описывать гистерезисные явления, происходящие при цикли-
циклическом деформировании. Другие модели позволяют описывать поведение
материала, объединяющее в себя свойства упругости и вязкости (т. е. вмз-
коупругие свойства).
§ 4.2. Соотношения между напряжением, деформацией
и временем деформации
Во всех тех случаях, когда деформирование элемента материала (об-
(образца) происходит со скоростью, значительно меньшей скорости распро™
странения в нем упругой волны, следует вводить в рассмотрение два типа
деформации — мгновенную и вязкую, — различающиеся по характеру их
связи с напряжением.
Мгновенная деформация связана с напряжением конечным соотноше-
соотношением. Она может быть как упругой, так и пластической.
52
Волны в еязкоупругих стержнях
Гл. 4
Вязкая деформация Еь связана с напряжением некоторым дифференци-
дифференциальным соотношением вида
%=^(М), D.1)
Из D.1) следует, что деформация зависит не только от значения напряже-
напряжения в рассматриваемый момент времени, но и от истории предшествующего
напряжения образца.
а Л
arctg E
а Л
Рис. 4.1
Упругое и упругопластическое деформирование материалов можно изу-
изучать на воображаемых механических моделях, представляющих собой ком™
бинации идеально упругих элементов и элементов сухого (кулонова) трения.
Рассмотрим образец в виде кубика с единичными длинами ребер. Пред™
положим, что его сопротивление деформированию равно сопротивлению
пружины, помещенной в объеме кубика. Это возможно, если коэффициент
жесткости пружины численно будет равен модулю упругости материала Е
(рис. 4.1, а). Диаграмма деформирования такого материала показана на
рис. 4.1,6. Она отвечает линейной зависимости напряжения от деформации.
Рис. 4.2
Простейшей модели упруго-пластического материала соответствует
комбинация из пружины и элемента сухого трения, помещенная в объем
кубика (рис. 4.2, а).
§4.2.
Соотношения между напряжением, деформацией и временем
53
На диаграмме деформирования, изображенной на рис. 4.2, б, напряже-
напряжение текучести аТ отвечает предельному сопротивлению проскальзывания
элемента сухого трения.
Рис. 4.3
Вязкое деформирование можно изучать на модели, представляющей со™
бой воображаемое приспособление, состоящее из цилиндра, заполненного
вязкой жидкостью, и перемещающегося в этом цилиндре поршня (рис. 4.3).
Предположим, что скорость смещения поршня пропорциональна действую-
действующему на него усилию. Закон вязкого деформирования будет записываться
в виде
deb/dt = ст/rj, D.2)
где rj — коэффициент вязкости.
Из D.2) следует, что деформация в некоторый момент времени t9 отсчи-
отсчитываемый от начала нагружения, будет равна
D.3)
где 0 — моменты времени, предшествующие t.
Комбинация из последовательного соединения элементов упругого и
вязкого сопротивления моделирует гипотетический материал, известный
под названием среды Максвелла (рис. 4.4, а).
Полная деформация е равняется сумме упругой и вязкой деформаций.
Если выразить обе деформации через напряжения, то
de I da a /A А.
Выражение D.4) называется уравнением состояния или кинетическим урав-
уравнением, обычно его записывают в виде
da a de
~db + Т d*'
D.5)
где величина Т = — называется временем релаксации.
54
Волны в еязкоупругих стержнях
Гл. 4
Рис. 4.4
Диаграмма деформирования среды Максвелла при постоянной скорости
нагружения йаъ/dt = va = const показана на рис. 4.4, б. Кривая а(е)
описывается выражением
?=1 + 2ЖГт' D-6)
которое получается из D.5) после интегрирования и подстановки t = —.
В точках, близких к началу координат, тангенс угла наклона касательной
к этой кривой равен модулю упругости пружины. Кривая а(е) тем больше
приближается к прямой а = Ее, чем выше темп нагружения. Поэтому Е
называют мгновенным модулем упругости.
Если задается постоянная скорость деформирования — = v? = const,
то уравнение кривой деформирования приобретает вид
а = v?f]{l — ехр{ Т}).
D.7)
Из D.7) следует, что в начале координат, как и в предыдущем случае, кривая
касается прямой а = Ее и будет неограниченно приближаться к ней с
ростом v?.
Рис. 4.5
§4.2.
Соотношения между напряжением, деформацией и временем 55
При постоянном напряжении ад появляются деформации ползучести,
нарастающие с постоянной скоростью (рис. 4.5, а)
(Jot
Г]
D.8)
При постоянной деформации происходит постепенное снижение напряже™
ний (релаксация) по закону (рис. 4.5, б)
а = <7Оехр{-—}
D.9)
и к моменту времени t = Т напряжение снижается в е раз.
Комбинация из параллельного соединения элементов упругого и вязкого
сопротивления моделирует другой гипотетический материал, называемый
средой Фойжта-Кельвина (рис. 4.6).
Полное напряжение для этого матери-
материала равняется сумме напряжений в вяз-
вязком и упругом элементах, испытывающих
одинаковые деформации, откуда, как след-
следствие, получается уравнение состояния:
* - - , D.10)
e
т
или в интегральной форме
e(t) = -
»
-:~й
9. D.10')
0
Рис. 4.6
Кривая деформирования при va = const описывается выражением
а Т
D.11)
Она изображена на рис. 4.7, а. В начале координат эта кривая касается
оси а, а с ростом va неограниченно приближается к этой оси.
Ev?
arctg E
Рис. 4.7
56
Волны в еязкоупругих стержнях
Гл. 4
Диаграмма деформирования при v? = const изображена на рис. 4.7, б.
Видно, что с увеличением v? наклонный участок поднимается (пунктир),
при v? —> oo жесткость элемента мате-
материала, как и в предыдущем случае, будет
неограниченно возрастать.
При постоянном напряжении а = а®
проявляется ползучесть
(ТО
= _ ( i_exp<!--
D.12)
Рис. 4.8
она имеет затухающий характер (рис. 4.8,
кривая 1).
При быстром снятии напряжения начинается обратная ползучесть (по-
(последействие). Элемент материала постепенно восстанавливает исходные
размеры. Согласно уравнению D.10) закон обратной ползучести является
экспоненциальным (рис. 4.8, кривая 2).
^1 D.13)
Релаксация напряжений при постоянной деформации в среде Фойхта-Кель-
вина не проявляется.
Кроме моделей Максвелла и Фойхта-Кельвина возможны различные
комбинации, состоящие из большего числа элементов упругого и вязкого
сопротивлений [32, 100, 133, 145].
§ 4.3. Стержни Фойхта-Кельвина и Максвелла
Стержень, материал которого подчиняется закону деформирования сре-
среды Фойхта-Кельвина, будем называть стержнем Фойхта-Келъвина. Если
же материал стержня подчиняется закону деформирования среды Максвел-
Максвелла, то будем называть его стержнем Максвелла.
Распространение продольных волн
Продольные волны в стержне Фойхта-Кельвина описываются уравне-
нием
д2и
= 4
~дх^
= 0,
D.14)
где u(x,t) — продольное перемещение частиц срединной линии, с0 =
Отыскивая решение D.14) в виде бегущей гармонической волны и =
= A exp{i(a;t — kx)}9 придем к дисперсионному уравнению
ш2 - сЦк2 + Тгшк2) = 0, D.15)
из которого следует, что волновое число должно быть комплексным:
k = kr^ia. D.16)
§ 4.3. Стержни Фойхта—Кельвина и Максвелла 57
Подставляя D.16) в комплексное дисперсионное уравнение D.15) и выделяя
его действительную и мнимую части, придем к системе алгебраических
уравнений:
ш2 - 4(-2Тшкга + к2- а2) = О,
/Л 1 Т\
2кга + аи (к* - а2) = О,
откуда
кг = ±
I
У
~2ш2с20(Т
ш2 + 1
2ш2 +
) + л/^(хL4
Ас2" ('
1) + s/4uj4c
(Т2ш2 + 1) -
W +1J
4{Т2ш2 + 1)
f 4cgT2o;6
+ 4с2Т2с^
>6(Т2а;2
МJ
D-
+ 1J
"^ У 4С2(Т2ш2 + 1J
D.19)
Комплексная величина волнового числа означает, что волна имеет посто™
янную распространения кг и затухает по экспоненциальному закону, т. е.
перемещение можно записать в виде
1х(ж, i) = ещ)(ах) cos(ut — кгх). D.20)
Из анализа соотношений D.18), D.19) следует, что низкочастотные воз™
мущения распространяются практически без дисперсии и потерь, а высо-
высокочастотные обладают ярко выраженной частотно зависимой диссипацией
и дисперсией, пропорциональными л/ш. Как и следует ожидать, с увели™
чением коэффициента диссипации (rj = ТЕ) дисперсия продольных волн
начинает проявляться в более низкочастотном диапазоне.
Продольные волны в стержне Максвелла описываются уравнением
д (д2и 1 ди
(+
Частоты и волновые числа связаны следующим комплексным дисперсион-
дисперсионным уравнением:
^3 + ic^2^a; = 0. D.22)
Полагая, как и прежде, к = кг + ш, перейдем от D.22) к системе
2c%kra + -w = 0,
W2^Cg(fcr2^a2) = 0.
Решая систему, найдем частотные зависимости fcr и а:
D.24)
58 Волны в еязкоупругих стержнях Гл. 4
2
- Тш2 + шл/Т2ш2 + 1
При отсутствии вязкости волны в стержне Максвелла распространяться
не могут. Наличие вязкости приводит к возможности существования бегу-
бегущих гармонических волн, затухающих по экспоненциальному закону.
При частотах ш, больших по сравнению с 1/Т, kr « ш и, следовательно,
дисперсия отсутствует, а затухание принимает постоянное значение а =
= Тс0, не зависящее от частоты.
Деухмодоеая модель продольных колебаний стержня
с внутренним трением по Фойхту
Рассмотрим теперь более сложную модель продольных колебаний стерж™
ня — модель Миндлина-Германа, в которую введен член, связанный с дис™
сипативными потерями по Фойхту [60, 94]:
д2и /2 А2Н| \д2и а2р д4и (А + 2/i + //N?) а2 д4и
J + +
| (А + /i) W 8^2 (А + fi) dxWt2 +
pdx*dt
Здесь р — объемная плотность материала; ст = у/\ijp — скорость распро-
распространения сдвиговых волн в стержне; q = \/(А + 2/х)/р — скорость рас-
распространения продольных волн в стержне; Hi, Н2 — корректирующие коэф-
коэффициенты, выбираемые из условия близости дисперсионных веток данной
модели и точной теории.
Вводя безразмерные переменные х' = х/а9 f = tcT/a, и' = и/щ,
преобразуем уравнение D.26) к виду (штрихи далее опускаем)
д2и ( s2 \ д2и 1 д4и
dt2 \ s + lj дх2 8 (s + 1) at4 8 (s + 1) dx2dt2
8(s + l) dx4 ' dx2dt ' *¦ ;
где s = A//i, 7; = ——= — безразмерные параметры, поправочный ко-
эффициент К2 принят равным единице из условия равенства фазовой и
стержневой скорости на низких частотах.
Подставляя в уравнение D.27) решение в виде бегущей гармонической
волны и = ио exp{i(out — kx)}9 получим
ш4 - 8 (s + 1) ш2 + 8 Cs + 2) к2 - (s + 2 + Н?) ш2к2 - 8 (s + 1) jfiouk2 = 0,
D.28)
где к, ш — волновое число и частота гармонической волны.
§4.3.
Стержни Фойхта—Кельвина и Максвелла
59
На рис. 4.9 приведены дисперсионные кривые модели Миндлина—Гер-
мана (сплошные линии): первая мода в случае, когда не учитывается дисси-
диссипация G = 0), а также с диссипацией G = 0,3 и j = 0,45); вторая мода
при 7 = 0, 7 = 0,Зи7 = 0,45. Для сравнения на этом же рисунке по™
казаны дисперсионные кривые модели Бернулли (штриховые линии): без
диссипации G = 0) и с диссипацией G = 0,3; 7 = 0,45).
Re k
Tmk
7 = 0,45
2 4
Рис. 4.10
На рис. 4.10 приведены зависимости мнимых частей волнового числа
от частоты для первой моды модели Миндлина—Германа с диссипацией
при G = 0,3) и G = 0,45). На этом же рисунке показаны аналогичные
зависимости для модели Бернулли при j = 0, 7 = 0,Зи7 = 0,45.
20 г
10
ReJc
-20
10
5
0
-5
ш _ю
10
а
15 20 0 2,5
Рис. 4.11
5 7,5 10
б
Дисперсионное уравнение модели Миндлина-Германа без диссипации
до частоты запирания имеет кроме действительного корня, соответствую-
соответствующего первой распространяющейся моде, также чисто мнимый корень, отве™
чающей локализованной моде и, обычно, не рассматривающийся (рис. 4.11).
На самом деле дисперсионное уравнение имеет четыре корня: два действи-
действительных и два мнимых. Мы рассматриваем только корни, находящиеся в
верхней полуплоскости.
При введении диссипативного члена в уравнение локализованная мода
превращается в распространяющуюся (рис. 4.9). Для этой моды характер™
60
Волны в еязкоупругих стержнях
Гл. 4
ны большие длина волны и коэффициент затухания по сравнению с первой
модой (коэффициент затухания возникшей моды может быть больше коэф-
коэффициента затухания первой моды на несколько порядков). Таким образом,
возникшая распространяющаяся мода во многом сохраняет локализован-
локализованный характер и не дает существенного вклада в перенос энергии.
Затухание первой моды на низких частотах почти линейно растет с ро-
ростом частоты, как и в модели Бернулли. С увеличением частоты усиливается
влияние дисперсионных членов. Именно они обусловливают неожиданное
поведение дисперсионной кривой первой моды на высоких частотах, когда
длина волны не увеличивается с увеличением вязкости, как можно бы-
было бы ожидать, а, напротив, уменьшается (так как дисперсионные члены
имеют четвертый порядок, а диссипативный член — только третий). Ана™
логично ведет себя коэффициент затухания с ростом частоты. На низких
частотах он растет с увеличением частоты, а затем рост сменяется убывани-
убыванием. На рис. 4.12 представлены зависимости коэффициента затухания а =
= Imk/Лек от частоты для первой моды модели Миндлина-Германа с
диссипацией при j = 0, 7 = О53 и j = 0,45 (сплошные линии). Для срав-
сравнения на этом же рисунке показаны аналогичные зависимости для модели
Бернулли с внутренним трением по Фойхту при тех же параметрах (штри-
(штриховые линии).
0,6
0,4
0,2
1,4
1,2
2 4 6
Рис. 4.12
2 4
Рис. 4.13
На рис. 4.13 показана зависимость фазовой скорости от частоты при
следующих значениях коэффициента вязкости: с диссипацией при 7 = 0,3
и 7 = 0,45 и без диссипации при 7 = 0- Влияние вязкости приводит к
увеличению фазовой скорости на низких частотах.
Распространение изгибных волн
Изгибные волны в стержне Фойхта-Кельвина описывается уравнением
о2
О W
где w(x,i) — поперечное перемещение частиц средней линии, гу -
радиус инерции.
D.29)
- осевой
§4.4. Внутреннее трение 61
Частоты и волновые числа будут связаны соотношением
ИЛИ
ш ( arctanТш + 2жп . arctan Тш + 2ттп\ . л ^ л.
к = \ cos Hsm , D.31)
V °огу V 4 4 /
где п = 0^3.
Из D.31) получаем частотные зависимости действительной (кг) и мни-
мнимой (а) частей волнового числа. В этом случае имеются две волны с оди-
одинаковыми частотами и разными волновыми числами (длинами). Нетрудно
видеть, что при малых частотах декремент затухания пропорционален ^/ш,
причем при одной и той же частоте этот эффект проявляется сильнее для
коротких волн, т. е. они затухают быстрее.
§ 4.4. Внутреннее трение как результат рассеяния волн
на случайных неоднородностяж материала
Наряду с традиционным описанием внутреннего трения с помощью рео-
реологических моделей (п. 4.2), практикуется способ, в котором среда пред-
предполагается случайно-неоднородной, а внутреннее трение есть результат
рассеяния упругих волн на неоднородностях.
В работе [28] получены эффективные операторы для среднего поля сме-
смещений в случайно-неоднородных стержнях, совершающих продольные и
изгибные колебания. В предельном случае, когда неоднородности являют-
являются мелкомасштабными, проведено сравнение с реологическими моделями
стержней Фойхта-Кельвина.
Распространение продольных волн в неоднородном стержне описыва-
описывается уравнением
, ,д2и д Г , ,ди\
Погонную плотность р{х) и модуль Юнга Е(х) представим в виде
р(х) = ро + р'{х), Е(х) = Е0 + Е'{х). D.33)
где ро? EQ — постоянные значения, //(ж), Е'(х) — случайные функции
координаты. Считается, что флуктуации параметров малы по сравнению со
средними значениями р' <С р, Е1 <С Е®.
Воспользуемся методом среднего поля [45], для чего смещения и(х^ i)
представим в виде суммы
и(х, t) = и{0) (х, t) + u'(x, t), D.34)
где и^ — среднее поле перемещений, и' — флуктуационное поле {и1 «С
62 Волны в еязкоупругих стержнях Гл. 4
Уравнение, описывающее среднее поле при произвольном масштабе
неоднородностей, будет иметь вид
оо
р
д2и{0) д2и{0) сп Г д3и{0)
где ? = х ~~ z, т = t ~~
В предельном случае среды с мелкомасштабными неоднородностями,
когда длина волны много больше радиусов корреляций флуктуации, урав-
уравнение D.35) преобразуется к виду
Здесь т] = ^ (clap(p2) + аЕ{Е2)/<§ - 2арЕ(рЕ)), а через (р2), ар; (Е2)9
ае', (рЕ), пре обозначены дисперсии и радиусы корреляций соответствую-
соответствующих флуктуации.
Из уравнения D.36) видно, что учет малой случайной неоднородности
материала приводит к появлению дополнительного слагаемого в волновом
уравнении, описывающего затухание среднего поля за счет рассеяния. Вяз-
коупругий оператор, получаемый согласно реологической модели Фойхта-
Кельвина D.14), совпадает с D.36).
Распространение изгибных волн в неоднородном стержне описывается
уравнением
, ,d2w д2
где w(x,i) = го0(ж, i) + w'(x, t) — поперечное перемещение частиц сред-
средней линии стержня, р(х) = ро + р'{х) — погонная плотность материала,
R(x) = E(x) Jy(x) = Rq + Rf(x) — произведение модуля Юнга и осевого
момента инерции.
В случае если неоднородности стержня являются мелкомасштабными,
уравнение, описывающее среднее поле, будет иметь вид
D.38)
3/2
Здесь п = 1-J (Ь2{р2)ар + (R2)aR/b2 - 2{pR)apR)/Ro.
Вязкоупругий оператор в уравнении D.38) является наследственным и
не совпадает с оператором, полученным из реологической модели Фойхта^
Кельвина. Напомним, что согласно этой модели последнее слагаемое имеет
ГЛАВА 5
АНАЛИЗ УРАВНЕНИЙ
НЕЛИНЕЙНЫХ ОСЦИЛЛЯТОРОВ,
ВСТРЕЧАЮЩИХСЯ НРИ ИЗУЧЕНИИ
НЕЛИНЕЙНЫХ ВОЛН ДЕФОРМАЦИИ
§ 5.1. Осциллятор с квадратичной нелинейностью
В данном параграфе проанализируем ограниченные решения обыкно-
обыкновенного дифференциального уравнения, описывающего колебания ангар-
ангармонического осциллятора с квадратичной нелинейностью:
d2U 9
—+aL/ + bC/2 = O. E.1)
Для отыскания его решений умножим E.1) на Щ, проинтегрируем и в
результате получим первый интеграл:
Здесь Е — константа интегрирования, имеющая смысл начальной энер-
энергии, а функция /(С/) = -U2 Н—U3 имеет смысл потенциальной энергии.
2 о
Поэтому уравнение E.2) можно интерпретировать как закон сохранения
энергии для ангармонического осциллятора. Полученное уравнение допус™
кает разделение переменных:
Ш E.3)
и имеет ограниченные решения при условии, что Е — f(U) > 0. Решения
будут периодическими, если функция Е — f(U) принимает положительные
значения между двумя своими вещественными нулями. Эта функция явля-
является кубическим полиномом и может иметь либо три вещественных корня,
либо один вещественный корень. Но последний случай (т. е. наличие одного
действительного корня) рассматривать не имеет смысла, так как решения
E.3) оказываются неограниченными. Поэтому в дальнейшем полагаем, что
полином Е — f(U) имеет три действительных корня ?/1,2,3? для которых
зададим следующий порядок величин: U\ ^ U2 ^ Us.
Выразим полином Е — f(U) через корни ?/,2,3 •
$± l - U2)(U - U3). E.4)
64
Анализ уравнений нелинейных осцилляторов
Гл. 5
Корни полинома связаны между собой соотношениями
За
Ь'
- и2и3 = о,
ЗЕ
•и2 + иъ = -\
E.5)
и зависят от коэффициентов а и Ь уравнения E.1) и начальной энергии Е.
Кроме того, вещественные корни кубического полинома могут быть различ-
ными или любые два из них могут совпадать, что приводит к качественно
различным типам решений уравнения E.3).
Для нахождения ограниченных решений уравнение E.3) перепишем с
учетом разложения E.4) в виде
dU
E-f{U)
>f(U)
E.6)
и проанализируем полученное уравнение в зависимости от знаков коэффи-
коэффициентов а и Ъ и значения константы интегрирования Е.
1. Пусть а > 0, Ь > 0. В этом случае функция потенциальной энергии
/([/) = -U2 Н—U3 имеет локальный минимум /min = 0 при U = 0 и
2t о
локальный максимум /тах = «3/662 при U = —а/b. Поэтому точка @,0) на
фазовой плоскости (С/, Щ) является устойчивым положением равновесия
типа «центр», а точка (—а/Ь, 0) — неустойчивым положением типа «узел».
На рис. 5.1, а показана функция по-
потенциальной энергии f(U) и поли-
полином Е — f(U) при различных значени-
значениях константы интегрирования Е, а на
рис. 5.1, б показаны соответствующие
им фазовые траектории.
Ограниченные решения уравнения
E.3) существуют, если константа ин-
интегрирования изменяется в пределах:
0 ^ Е ^ а3/6Ь2, причем различным Е
соответствуют качественно различные
типы решений.
1.1) При /min < Е = Е2 <
< /max в системе происходят движе-
движения по замкнутым траекториям вбли-
вблизи сепаратрисы (фазовая траектория 2,
рис. 5.1, б). В этом случае корни ?/1,2,3
различны, причем положительные значения полинома Е — f{U) находятся
между двумя большими корнями U\ и U2, т. е. Е — f(U) > 0 при U\ < U <
< U2 (рис. 5.2, а).
Рис. 5.1
§5.1.
Осциллятор с квадратичной нелинейностью
65
iE-f(U)
iE-f(U)
а б
Рис. 5.2
Тогда с помощью замены переменных
Ux-U
иг^и2
(О < Y2 < 1)
E.7)
и интегрирования уравнение E.6) сводится к неполному эллиптическому
интегралу первого рода
dy
E.8)
где введено обозначение s2 = * @ < s2 < 1). Обращая эллиптиче-
U\ — из
ский интеграл, стоящий в правой части выражения E.8) при Y = 0, ^о = О?
получаем решение, описывающее периодические движения, в виде
E.9)
E.10)
--U1-{U1-U2)i
В выражении E.9) введем следующие обозначения:
= U1-U2,
где А — амплитуда колебаний, s — модуль эллиптической функции, опре™
деляющий степень искажения формы колебания U(?) по сравнению с си-
синусоидальной, ш — аналог частоты. Колебания являются периодическими,
их период равен
А =
2K(s)
\зК(з),
E.11)
где K(s) — полный эллиптический интеграл первого рода.
Решение E.9), описывающее периодические колебания, содержит во-
восемь параметров: А, У, s9 К, Ui52,3? E9 которые связаны между собой ше-
шестью соотношениями E.5)—E.10), так что независимыми среди них будут
66 Анализ уравнений нелинейных осцилляторов Гл.5
только два. В качестве независимых параметров выберем амплитуду коле™
баний А и модуль эллиптической функции s, который в дальнейшем бу-
будем называть коэффициентом нелинейных искажений. Тогда решение E.9)
через независимые параметры и коэффициенты уравнения можно предста-
представить в виде
Корни ?/i,2,3 кубического полинома находятся численно через вспомога-
вспомогательные величины, которые вычисляются с помощью таблиц, и имеют сле-
следующий вид:
2b\ \3 Ъ) у' * 26
E.13)
где (р = arccos [ 1 — E 1, 0 ^J E ^ -—. Очевидно, что при Е = О
у as J ш2
a3
вспомогательная величина </? = 0, а при .Е = /тах = ~f^(P = 7Г*
Подставляя найденные корни E.13) в соотношения E.10), получаем
следующие зависимости:
6 3 г— tp ср
V3 cos Ь sin —
о о
E.14)
Эти соотношения являются неудобными для анализа, поэтому, исключая из
них вспомогательную величину <?>, получим новые связи между параметра-
параметрами в решении E.12):
. За s 2 а /т л г\
А= -} от = — -} E.15)
^о у 1 — sz + s4
а само решение можно представить в виде
17@ = ^(l + s2-Vl-52 + s4) ^Asn2(o;e,s). E.16)
Качественный вид периодического решения E.9) представлен на рис. 5.3.
1.2) При Е = Ei ^ /min в системе происходят движения по замкнутым
фазовым траекториям вблизи положения равновесия типа «центр» (фазо™
вая траектория I, рис. 5.1, б). Это соответствует квазигармоническим ко™
лебаниям с малыми амплитудами, так как в этом случае большие корни
§5.1.
Осциллятор с квадратичной нелинейностью
67
полинома Е — f{U) сближаются между собой, т.е. U\ « С/2, и решения,
существующие в малой области С/2 ^ С/ ^ C/i (рис. 5.2, б), являются пре-
предельным случаем нелинейных периодических колебаний E.16) при А —>• О
1 + s2 -
— sz
E.17)
Учитывая, что при s —>• 0 1 + s2\/l — s2 + s4 « -s2 и sln2(a;?) = - A —
— cosBa;?)), решение, описывающее колебания ангармонического осцил-
осциллятора вблизи положения равновесия, запишем в виде
=-АсовBш?).
E.18)
1.3) При Е = /тах = а3/6Ь2 в системе происходят движения по се-
сепаратрисе (фазовая траектория 3, рис. 5.1, б). В этом случае два меньших
корня С/2 и Us полинома Е — f(U) совпадают и область существования
ограниченных решений расширяется: Us = U2 ^ U ^ U\ (рис. 5.2, в).
Рис. 5.3
Тогда уравнение E.6) принимает вид
Рис. 5.4
(U-U2)y/b(U1-U)/S
E.60
и после замены переменных E.7) и интегрирования дает сепаратрисное
решение:
= U2
-и2)
E.19)
Выражение E.19) описывает локализованное возмущение, максимум ко-
которого U\ определяется условием ? = 0, а при ? —>- =Ьоо его значения
приближаются к С/2. Качественный вид решения представлен на рис. 5.4.
Если в выражении E.19) ввести обозначения
Ас = Ut - С/2, А =
6
b{Ui-U2)
6
ЬА"
E.20)
Анализ уравнений нелинейных осцилляторов
Гл. 5
где Ас — амплитуда колебания, А — его длительность, и учесть, что JJ^ =
= —a/b9 то сепаратрисное решение можно представить в виде
E.21)
Решение E.19) является еще одним предельным случаем нелинейных
периодических решений E.12) или E.16) при s = 1 и описывается выра-
выражением
4- А-
где
А --
с ~ 26 '
E.22)
E.23)
2. Пусть а < О, b > О. В этом случае функция потенциальной энергии
f(U) = -U2 Н—U3 имеет локальный максимум /тах = 0 при U = 0 и
локальный минимум /min = a3/6b2 при С/ = —а/Ь (рис. 5.5, а). Поэтому на
фазовой плоскости (и,Щ) точка (—а/Ь, 0) является устойчивым положе-
положением равновесия типа «центр», а точка @,0) — неустойчивым положением
равновесия типа «узел» (рис. 5.5, б). На рис. 5.5, а показаны функция потен-
потенциальной энергии и полином Е — f(U) при различных значениях константы
интегрирования Е.
>E-f(U)
f(U).
Рис. 5.5
Периодические колебания в системе, описываемой уравнением E.1), су-
существуют, если начальная энергия системы изменяется в пределах а3/6Ь2 <
§5.1.
Осциллятор с квадратичной нелинейностью
69
< Е < 0. При Е —>> /min E.1) описывает квазигармонические колебания,
соответствующие движениям по замкнутым фазовым траекториям вблизи
положения равновесия (фазовая траектория 1, рис. 5.5, б). Значение Е = 0
соответствует движению по сепаратрисе (фазовая траектория 3, рис. 5.5, б).
У полинома Е — f(U) при Е = /m;n совпадают два больших корня U\ и С/2,
при Е = /тах совпадают два меньших корня С/2 и 173, а при других значе-
значениях константы интегрирования Е из указанного промежутка все три корня
будут различны, причем положительные значения этого полинома находят™
ся в области U2 < U < U\ (рис. 5.6, а, б, в). Поэтому, как и в случае 1.1, все
решения уравнения E.6) находятся с помощью замены переменных E.7).
2.1)При/тщ < Е = Е2 < /max периодические колебания нелинейного
осциллятора описываются выражениями E.9) или E.12), а амплитуда, ча™
стота колебаний и коэффициент нелинейных искажений формы колебаний
связаны зависимостями E.10).
Корни f/i,2,3 кубического полинома в этом случае имеют вид
где (р = arccos ( —1 +
E24)
, — ^ Е ^ 0, причем при Е = 0 9? = тг, а
при ?7 = /min = а3/6Ь2 у? = 0.
Подставляя найденные корни в соотношения E.10), получаем следую-
следующие зависимости:
E.25)
70
Анализ уравнений нелинейных осцилляторов
Гл. 5
Исключая из E.25) вспомогательную величину, получим новые связи
между параметрами в решении E.12):
26
ш = —
E.26)
а само решение можно представить в виде
U@ = (A/3s2) (l + s2 + л/1 - s2 + s4 ) - A sir2 (wf, 5). E.27)
Качественный вид периодического решения E.27) представлен на рис. 5.7.
и (О
и (О
U2 =
К 2К ЪК 4К
Рис. 5.7
Рис. 5.
2.2) При Е = Ег^ /min в системе происходят квазигармонические коле-
колебания с малыми амплитудами вблизи положения равновесия типа «центр».
Квазилинейные решения являются предельным случаем нелинейных пери-
периодических решений E.27) при А —>> 0, s —>- 0, и sn(w^, s) « sin(a;^):
= (A/352)
Это решение также можно представить в виде
U (С) « -а/Ь + 0,5А (cos Bа;О - 1),
E.28)
E.29)
где величина —а/Ъ на фазовой плоскости соответствует «центру». Поэтому
квазигармонические колебания осциллятора происходят на фоне постоян™
ной составляющей, определяемой положением «центра» в данной системе.
2.3) При Е = Е% = /max корни полинома Е — f(U) U2 = ?/3 = 0
(рис. 5.6, в) и сепаратрисное решение, получаемое из E.19), принимает вид
U'(О = t/i sech2
E.30)
Вводя обозначение: Ас = U\ — амплитуда колебания (локализованного
возмущения), А = л/б/ЬЩ = ^/б/ЬАс — его длительность, выражение
E.29) можно записать в виде
и(О^АссЪ-\?/А), E.31)
где Ас — -За/26, Д — 2/у/-а- Вид решения E.30) приведен на рис. 5.8.
§5.1.
Осциллятор с квадратичной нелинейностью
71
3. Пусть а > О, Ь < О. Смена знака перед нелинейным слагаемым в
уравнении E.1) не приводит к изменению характера решений, а приводит
лишь к тому, что на фазовой плоскости A7, Щ) происходит поворот фазо-
фазовых портретов, рассмотренных в предыдущих случаях, в противоположную
сторону. Изменение же знака перед линейным слагаемым, как следует из
рассмотренных выше случаев, сдвигает начало координат в одно из поло-
положений равновесия: либо в «центр», либо в «узел».
a \E-f{U)
U
Рис. 5.9
Функция потенциальной энергии f(U) = aU2/2 + bf73/3 имеет локаль™
ный минимум /min=0 при U = 0 и локальный максимум /max = а3/6Ь2 при
U = —а/Ь (рис. 5.9, а). На фазовой плоскости (U, Щ) точка @,0) являет-
является устойчивым положением равновесия типа «центр», а точка (—а/Ь, 0) —
неустойчивым положением равновесия типа «узел» (рис. 5.9, б).
kE-f(U)
Т
\U2 U,
XT"
E-f(U)
и
а б
Рис. 5.10
При этом полином Е — f(U) имеет три действительных корня, если
значения константы интегрирования Е выбирать из интервала 0 < Е <
< а3/662. При Е = /min совпадают два меньших корня полинома JJ^ и Us,
а при Е = /шах совпадают два его больших корня U2 и U\, причем поло™
жительные значения полинома находятся между его меньшими корнями,
т. е. Я - f(U) > 0 при U3 < U < U2 (рис. 5.10, а, б, в).
72
Анализ уравнений нелинейных осцилляторов
Гл. 5
3.1) При /min < Е = Е2 < /max в системе, описываемой уравнением
E.3), происходят периодические колебания, соответствующие на фазовой
плоскости движениям по замкнутым траекториям вблизи сепаратрисы (фа-
(фазовая траектория 2, рис. 5.9, б). Ограниченные решения уравнения E.6)
существуют в области Us < U < U2 (рис. 5.10, а). В этом случае с помо-
помощью замены
E.32)
и интегрирования уравнение E.6) приводится к неполному эллиптическому
интегралу первого рода
dY
E.33)
@
1). Обращая эллип-
где введено обозначение s2 = — —
U\ — из
тический интеграл при Y = 0, ^о = 0, получим решение, описывающее
периодические колебания:
В выражении E.34) введем следующие обозначения:
А = U2 -
E.34)
E.35)
где А — амплитуда колебаний, s — модуль эллиптической функции, яв-
являющийся коэффициентом нелинейных искажений формы колебаний U(?),
ш — аналог частоты. Колебания являются периодическими, их период ра-
вен:
E.36)
где K(s) — полный эллиптический интеграл первого рода.
Решение E.34) содержит параметры A, Y, s, К, ?/i?2,3j Е9 которые свя-
связаны соотношениями E.35) и соотношениями между корнями кубического
полинома E.5). Если в качестве независимых переменных выбрать ампли™
туду колебаний А и коэффициент нелинейных искажений s9 то решение
принимает вид
¦Asa2
E.37)
§5.1.
Осциллятор с квадратичной нелинейностью
73
Корни кубического полинома в этом случае имеют вид
где ш = arccos ( 1
Е ), 0
J
E.38)
Е ^ —-. При Е = 0 вспомогательная
662
у J
величина </? = 0, а при Е = /тах = а3/6Ь2 у? = тг.
Тогда параметры колебательного процесса — амплитуда А, частота ш
и коэффициент нелинейных искажений формы колебаний s выражаются
следующим образом:
E39)
^ = _lcos|+ 1 sin|,.
Исключая из соотношений E.39) величину (р, получаем следующие связи
между параметрами:
25 л/1 - s2 + s4 '
E.40)
а само решение E.37), описывающее нелинейные периодические колебания
ангармонического осциллятора представимо в виде
A sn2
E.41)
Вид решения приведен на рис. 5.11.
3.2) При Е = Ег « /min уравнение E.3) описывает квазигармониче-
ские колебания с малыми амплитудами вблизи положения равновесия ти-
типа «центр». При таких значениях Е меньшие корни полинома Е — f(U)
сближаются между собой, т. е. U2 ~ ?/з и решения, существующие в малой
области Us < U < U2 (рис. 5.11, б), яв-
являются предельным случаем нелинейных
периодических решений E.41) при s —>- О U2-
^Vl-s2 + S4-l-
. E.42)
Рис. 5.1
74
Анализ уравнений нелинейных осцилляторов
Гл.5
Учитывая, что при s —> 0 \/l — s2 + s4 — 1 « —s2, a sln2(a/^) = -A —
— cosBa;^)), решение, описывающее колебания ангармонического осцил-
осциллятора вблизи положения равновесия, имеет вид
E.43)
3.3) При Е = /шах уравнение E.6) описывает колебания, которые на
фазовой плоскости соответствуют движениям по сепаратрисе (фазовая тра-
траектория 3, рис. 5.9, б). В этом случае два больших корня U\ и 172 полино-
полинома Е — f(U) совпадают, и область существования ограниченных решений
расширяется: Щ < U < U2 = U\ (рис. 5.10, в). Тогда уравнение E.6)
принимает вид
{U - U2) y/-b(U-U3)/3
E.6")
Применяя к нему замену E.32) и интегрируя, получим сепаратрисное ре-
решение
U(С) = U2- A/2 - U3) sech2
~(U2 - I/зК J , E.44)
которое является еще одним предельным случаем нелинейных периоди-
периодических решений E.34) или E.41) при U\ = U2 и s = 1. Если в выраже-
выражении E.44) ввести обозначения
E.45)
где Ас — амплитуда колебания, А — его длительность, и учесть, что Ui =
= —a/b, то сепаратрисное решение можно представить в виде
U(О = ^1 -
E.46)
Через параметры исходного уравнения E.1) амплитуда и длительность ко-
колебания выражаются следующим образом: Ас = ^За/2Ь, А = 2/л/а, по-
поэтому сепаратрисное решение можно
представить в виде
Рис. 5.12
E-47)
Качественный вид этого решения приве-
приведен на рис. 5.12.
4. Пусть а < О, Ь > 0. В этом
случае функция потенциальной энер-
§5.1.
Осциллятор с квадратичной нелинейностью
75
гии /A7) = -U2 -\—U3 имеет локальный минимум /min = a3/6b2 точ-
ке U = -а/Ь и локальный максимум /тах = 0 при U = 0 (рис. 5.13, а).
На фазовой плоскости (С/, С/^) точка {—а/Ъ^ 0) является устойчивым положе-
положением равновесия типа «центр»,
а точка @,0) — неустойчивым а | E—f{U)
положением равновесия типа
«узел» (рис. 5.13, б).
Для существования ограни™
ченных движений в системе,
описываемой уравнением E.3),
начальная энергия должна из-
изменяться в пределах /тщ ^
^ Е ^ /max, Причем При
Е —>- /min будут наблюдать-
наблюдаться квазигармонические колеба™
ния вблизи «центра», а при
Е = /шах колебания на фа™
зовой плоскости соответству-
соответствуют движениям по сепаратри™
се. Во всех этих случаях,
соответственно, полином Е —
— f(U) имеет либо три действи-
действительных корня, либо два совпадающих меньших корня U2 и Us, либо два
совпадающих больших корня U\ и С/2 (рис. 5.14, а, б, в).
Из рисунков видно, что положительные значения этого полинома нахо-
находятся в области между меньшими корнями, T.e.E — f(U) > 0 при Щ < U <
< ЬТ2- Поэтому, как и в случае 3, все решения уравнения E.6) находятся с
помощью замены переменных E.32).
E-f{U)
Рис. 5.13
У U
Рис. 5.14
4.1) При /min < Е = Е2 < /шах (фазовая траектория 2, рис. 5.13, б),
нелинейные периодические колебания, как и в случае 3.1, описываются
выражениями E.34) или E.37), а амплитуда, частота колебаний и коэффи-
коэффициент нелинейных искажений формы колебаний связаны зависимостями
E.35).
76
Анализ уравнений нелинейных осцилляторов
Гл. 5
Корни ?/i,2,3 кубического полинома в этом случае имеют вид
E.48)
/ -|ai2 \ 3
/ \-2о \ п
где ш = arccos I — 1 -\ — Е , —- ^ Е ^ 0, причем при Е = 0 ш = тг, а
V а / 6Ь
при ^ = /min = — <р = 0.
Подставляя найденные корни в соотношения E.35), получаем следую-
следующие зависимости:
3
E.49)
Исключая из E.49) вспомогательную величину if, получим новые связи
между параметрами в решении E.37):
26
ш = —
а само решение можно представить в виде
E.50)
E.51)
Качественный вид периодического решения E.51) представлен на рис. 5.15.
4.2) При Е = Ег « /min (фазовая
траектория I, рис. 5.13, б) периодические
tJ~ колебания вырождаются в квазигармониче™
ские с малыми амплитудами вблизи поло™
жения равновесия типа «центр», координа™
ты которого на фазовой плоскости опре-
определяется величиной (—а/Ь, 0). Квазилиней-
Рис. 5.15 ные решения являются предельным случа-
случаем нелинейных периодических решений E.51) при А —> 0, и sh(uj^ s) «
^Ю = -тг*
y/l -
Asm2
E.52)
§5.2.
Осциллятор с кубической нелинейностью
11
А
Выражая из E.50) величину —- =
F К J 3 3s2
можно представить в виде
= , решение E.52) также
E.53)
4.3) При Е = Е3 = 0 (фазовая траектория 3, рис. 5.13, б), у полинома
-Е — f(U) два больших корня ^ = [/2 = 0 и сепаратрисное решение,
получаемое из E.44), принимает вид
E.54)
Вводя в E.54) обозначения для амплитуды
колебания Ас = —Щ = За/2Ь и его дли-
тельности А = л/—6/ЬАс = 2/\/—a, cena™
ратрисное решение можно записать в виде
Рис. 5.16
E.55)
Качественное поведение сепаратрисного решения показано на рис. 5.16.
§ 5.2. Осциллятор с кубической нелинейностью
В данной части работы остановимся на анализе ограниченных решений
уравнения ангармонического осциллятора с кубической нелинейностью,
называемого уравнением Дуффинга:
d2u
+ аи + Ъи
Уравнение E.56) имеет первый интеграл
du
= 0.
E.56)
E.57)
который можно интерпретировать как закон сохранения энергии для ангар-
монического осциллятора. Здесь Е — константа интегрирования, имеющая
смысл начальной энергии системы, а функция f(u) = -и2 + -и4 имеет
смысл потенциальной энергии.
Уравнение E.57) допускает разделение переменных:
Vе -fЧ«)
E.58)
78
Анализ уравнений нелинейных осцилляторов
Гл. 5
и имеет ограниченные решения в области между любыми действительными
корнями полинома Е — f(u)9 где Е — f(u) > 0. Вид решения зависит от
коэффициентов а и Ъ в уравнении Дуффинга E.56) и начальной энергии Е.
1. Пусть а > 0, Ь > 0. В этом
случае функция потенциальной энер-
энергии f(u) = -и2 Л—и4 имеет локаль-
2 4
НЫЙ МИНИМУМ /min = 0 ПрИ U = 0
(рис. 5.17, а). На фазовой плоскости
(и, du/d^) точка с координатами @,0)
является устойчивым положением рав-
равновесия типа «центр» (рис. 5.17, б).
Ограниченные решения уравнения
E.58) существуют при 0 < Е < +оо.
Полином Е — /(и)в этом случае имеет
два действительных корня щ^ = =Ь«
и два мнимых корня щ^ = ~^Ф, где
— а
б
\
г?
V ^
/
/
и
а
и
Jit-
- а+
451?
E.59)
Рис. 5.17
и принимает положительные значения при —а < и < а (рис. 5.17, а).
Тогда уравнение E.58) перепишем в виде
ар\ -dt =
du
E.60)
и с помощью замены
сведем к эллиптическому интегралу первого рода
E.61)
dz
E.62)
/()
Обращая эллиптический интеграл, стоящий в правой части E.62) при
z = 0, ^о = 0, получаем решение, описывающее нелинейные периодиче-
периодические колебания в виде
E.63)
§5.2.
Осциллятор с кубической нелинейностью
79
В выражении E.63) введем следующие обозначения:
А = а =
-а + •
E.64)
л/а2 + 4ЪЕ
а2+/32
где А — амплитуда колебаний, ш — аналог частоты, s — модуль эллипти™
ческой функции, имеющий смысл коэффициента нелинейных искажений
формы колебания и(?). Из соотношений E.64) видно, что при изменении
Е от 0 до +оо амплитуда колебаний и частота изменяются в пределах 0 ^
^ А < +оо, л/а ^ w < оо а коэффициент нелинейных искажений — в
интервале: 0 ^ s2 < 1/2.
Исключая из выражений E.64) константу интегрирования Е9 получаем
связи между параметрами А, и, s в решении E.63):
E.65)
Здесь Т — период колебаний, K(s) — полный эллиптический интеграл
первого рода. Из этих соотношений выразим зависимость амплитуды и
частоты колебаний от коэффициента
нелинейных искажений и коэффициентов
уравнения Дуффинга:
Па
А= \ —
Ъ 1 - 2s2 '
ш =
Л
\/4K(Sj\/&K(s)\y
Рис. 5.18
'E.66)
При Е —>- 0 (s2 ^ О и i -> 0) выражение
E.63) описывает квазигармонические колебания вблизи положения равно-
равновесия вида
и = Acos(u)?). E.67)
При i? —>¦ +оо s2 —)> 1/2, и в этом случае E.63) описывает существенно
нелинейные колебания
и = Асп(ш^ s), E.68)
которые имеют пилообразную форму (рис. 5.18).
2. Пусть а > О, Ь < 0. В этом случае функция потенциальной энергии
-и имеет локальный максимум /тах = —а /46 в точках
и = ±у/—а/Ъ и локальный минимум /min = 0 при и = 0 (рис. 5.19, а).
Поэтому на фазовой плоскости (w, du/d^) точка @,0) является устойчивым
Анализ уравнений нелинейных осцилляторов
Гл. 5
положением равновесия типа «центр»,
а точки f ± yJ—a/Ъ) О 1 — неустой™
чивыми положениями равновесия ти-
типа «узел». Фазовый портрет системы
приведен на рис. 5.19, б.
Ограниченные решения уравне-
уравнения E.58) в этом случае существуют
ТОЛЬКО ПрИ 0 ^ Е ^ /max- ПрИ ЭТОМ
полином Е — f(u) имеет четыре дей-
действительных КОрНЯ 11152 = ±а, Щ,4 =
= ±р, где
а =
+ АЬЕ
а + л/а2 +
Рис. 5.19 E.69)
и принимает положительные значения при —а < и < а (рис. 5.19, а). При
Е = /max = ^а2/4Ь корни попарно совпадают щ = г^з, щ = ^4, что
соответствует на фазовой плоскости движению по сепаратрисе.
Уравнение E.58) принимает вид
ав\ —dt =
2
du
E.70)
и с помощью замены
приводится к эллиптическому интегралу первого рода
E.71)
dz
E.72)
где s2 = а2/C2 .
Обращая эллиптический интеграл, стоящий в правой части E.72) при
z = 0, ?0 = 0, получаем решение, описывающее нелинейные периодиче-
периодические колебания в виде
— a sn
E.73)
§5.2.
Осциллятор с кубической нелинейностью
81
В выражении E.73) введем обозначения:
А = а =
(а-
/ 1
а —
л/а2
(
к
л/а2
+
V
+
ЛЬЕ)
АЬЕ
E-74)
где А — амплитуда колебаний, ш — аналог частоты, s — коэффициент
нелинейных искажений, а период колебаний равен Т = 4K(s)/cu. Из со-
отношений E.74) следует, что при изменении Е от 0 до Ешах = ^«2/4Ь
частота колебаний уменьшается от ш = л/а до ш = л/а/2, а амплитуда
колебаний изменяется в пределах: 0 ^ А ^ А\ = л/а/Ъ, где А\ — ам-
амплитуда колебания, соответствующего на фазовой плоскости движению по
сепаратрисе. Коэффициент нелинейных искажений при этом изменяется в
интервале О ^J s2 ^ 1.
Аналогично, исключая Е из выражений E.74), получим связи между
параметрами A, w9 s в решении E.73):
ЬА2
s = —
ш =
2а + ЬА2 5
E.75)
Т =
Другая форма записи этих зависимостей:
2а s2
ш =
1 + s2"
E.76)
С учетом введенных обозначений ре-
решение E.73), описывающее нелинейные периодические колебания по за™
мкнутым фазовым траекториям вблизи сепаратрисы, можно представить в
виде
и(?) = Asn(u^s). E.77)
При s, близких к единице, форма колебаний приведена на рис. 5.20, а.
При Е —> 0 (s2 « 0 и А « 0) выражение E.73) описывает квазигармони™
ческие колебания вблизи положения равновесия вида
^, s).
E.78)
82
Анализ уравнений нелинейных осцилляторов
Гл. 5
ИртЕ = Еша^ = —а2/46, s2 = 1 E.73) описываетсепаратрисноерешение
E.79)
где
А =±1 -т.
E.80)
А\ — амплитуда колебания, А — его длительность. Сепаратрисное реше™
ние имеет форму перепада, его качественный вид приведен на рис. 5.20, б.
3. Пусть а < 0, Ь > 0. В этом случае функция потенциальной энергии
f(u) = аи2 /2 + ЬиА/А имеет ло-
локальный МаКСИМуМ /шах = 0 ПрИ
и = 0 и локальный минимум
/min = —a2/4b в точках и =
= ±^/—а/Ь (рис. 5.21, а). На фа-
фазовой плоскости (u,du/d?) точки
(±л/^а/Ъ^ 0) являются устойчивы-
устойчивыми положениями равновесия типа
«центр», а точка @,0) является «сед™
лом» (рис. 5.21, б).
Ограниченные решения уравне-
уравнения E.58) существуют, если кон™
станта интегрирования изменяется
в диапазоне /min ^ Е < +оо,
причем различным значениям на-
начальной энергии Е соответствуют
качественно различные режимы
движения.
Пусть /min ^ Е < 0. В этом слу-
случае полином Е — f(u) имеет четыре действительных корня и\^ = i«?
= ±/3, где
Рис. 5.21
\/о?
(а2 ^ /З2) E.81)
и принимает положительные значения в областях \/3\ ^ и ^
(рис. 2.21, а). На фазовой плоскости им соответствуют замкнутые траекто-
траектории, лежащие внутри сепаратрисы.
Уравнение E.58) принимает вид:
du
и с помощью замены
и
а
E.82)
E.83)
§5.2.
Осциллятор с кубической нелинейностью
83
сводится к эллиптическому интегралу первого рода
dz
E.84)
где s2 = (a2 - f32)/a2. Обращая элиптический интеграл при z = О, Со = 0?
получаем решение, описывающее нелинейные периодические колебания в
виде
u(li) = a dn
В выражении E.85) введем обозначения:
а -
т2
а2-
4
= V
-рг
{-а
Ъ
—а + 1
2л/а?
+ 4ЪЕ)
/а2 + 4ЪЕ)
+ 4ЬЕ
E.85)
E.86)
где А — амплитуда колебаний, s — коэффициент нелинейных искажений,
ш — аналог частоты, Т = 4K(s)/uj — период колебаний. Из соотноше-
соотношений E.86) видно, что при изменении Е от Еш{п = —а2/4Ь до 0 частота
колебаний увеличивается от ш = л/—а/2 до ш = у^а, амплитуда перио-
периодических колебаний изменяется от значения А = АI = ^—а/Ь до значения
А = А2, = ^/^
b, где
амплитуды колебаний, соответствую-
/
щих движениям по сепаратрисам для фазовых портретов, приведенных на
рис. 5.19, б и 5.21, б соответственно. Коэффициент нелинейных искажений
формы колебаний изменяется в пределах 0 ^ s2 ^J 1.
Исключая из выражений E.86) константу интегрирования Е, получим
связи между параметрами А, ш, s в решении E.85):
которые также можно представить в виде
л i 2а
А= \ -—-
6J = Л/ —
т =
(О
/ЪА*
<: 1).
E.87)
E.88)
С учетом введенных обозначений решение E.85), описывающее нели-
нелинейные периодические колебания по замкнутым фазовым траекториям вну-
внутри сепаратрисы, можно представить в виде
E.89)
84
Анализ уравнений нелинейных осцилляторов
Гл. 5
4K(s)
""А А Л
*
Эти колебания не имеют линейного вы-
вырождения, так как при Е —>> ЕШ-1П =
= -а2/4Ь 5->0и dn(o;f, 0) = 1.
При Е = 0 s = 1 из E.85) получаем
вырождение в сепаратрисное решение
E.90)
V4*w V
где
= ±л -
2а
из V а
E.91)
А2 — амплитуда колебания, А — его
длительность.
Качественный вид нелинейных пе-
периодических движений, описывае-
описываемых дельта-амплитудой приведен на
рис. 5.22, а, а на рис. 5.22, в показан вид сепаратрисного решения.
Пусть Е = 0. В этом случае полином E—f (и) имеет два действительных
корня tii;2 = =Ь«, г/3,4 = ±i@9 где
E.92)
и принимает положительные значения в области —а < и < а (рис. 5.21, а).
На фазовой плоскости ограниченным решениям при таких значениях Е
соответствуют замкнутые фазовые траектории, лежащие вне петли сепара-
сепаратрисы (рис. 5.21, б).
Уравнение E.58) принимает вид
du
и с помощью замены
сводится к эллиптическому интегралу первого рода
E.93)
E.94)
E.95)
где s2 = а2/(а2 + /З2). Обращая эллиптический интеграл при z = 0, Со = 0,
§5.2. Осциллятор с кубической нелинейностью 85
получаем решение, описывающее нелинейные периодические колебания в
виде
E.96)
В выражении E.96) введем следующие обозначения:
/(-а + У^ТШ)
/4 E.97)
- а + л/а2 + 4ЬЕ
где А — амплитуда колебаний, s — коэффициент нелинейных искажений,
ш — аналог частоты, Т = 4K(s)/uj — период колебаний. Анализируя
соотношения E.97), получим, что при изменении Е от 0 до +оо частота
колебаний возрастает от значения ш = л/^а до +оо, амплитуда колеба-
колебаний также неограниченно возрастает от значения А = А2С = ^/—2a/b, a
коэффициент нелинейных искажений при этом уменьшается от 1 до 1/2.
Исключая из E.97) константу Е, получим зависимости между парамет-
параметрами A,uj, s:
Т= ^_. E.98)
' Va + ЬА2 1 '
Эти соотношения можно представить также в виде
-> 1
С учетом введенных обозначений решение E.96), описывающее коле-
колебания по замкнутым фазовым траекториям вне сепаратрисы, представим в
виде
и = Acn(u^s). E.100)
Это решение описывает существенно нелинейные колебания, которые не
имеют линейного вырождения. Их форма при s2, близких к единице, пока-
показана на рис. 5.22, б. При s = 1 из E.100) получаем сепаратрисное решение
E.90).
4. При а < 0, Ь < 0 уравнение Дуффинга E.56) не имеет ограниченных
периодических движений.
86 Анализ уравнений нелинейных осцилляторов Гл.5
§ 5.3, Осциллятор с нелинейностью
в отрицательной степени
Рассмотрение стационарных волн огибающих в нелинейных средах с
дисперсией приводит к необходимости анализа следующего уравнения аи™
гармонического осциллятора:
^ + aw + bw3 + dw~3 = 0, E.101)
где a, b, d — размерные постоянные коэффициенты. Анализ этого урав™
нения усложняется наличием слагаемого, пропорционального го™3. Однако
при с? = 0 E.101) совпадает с уравнением Дуффинга, и это служит проверь
кой правильности полученных результатов при их вырождении.
Поведение системы E.101) зависит от трех размерных параметров, од-
однако, располагая двумя независимыми масштабами по w и t, уравнение
E.101) можно привести к однопараметрическому. Замена
T=\l\a\t, u= \l - w E.102)
приводит к уравнению вида
—% + Sau + Sbu3 + Du~3 = 0. E.103)
dr2
Здесь введены следующие обозначения: Sa = sign(a), St = sign(fe), D =
= d b 3 /1 a |3. Таким образом, поведение системы E.103), а также координаты
и типы состояний равновесия определяются знаками коэффициентов а, Ъ
и величиной параметра D.
du
Для нахождения решений уравнения E.103) умножим его на — и запи-
ат
шем первый интеграл в виде
+ П(и) = #, E.104)
Q Q Г)
где Ш(и) = -?- и2 + — и4 — — и~2, Е — константа интегрирования. Уравне-
2 4 2
ние E.104) представляет собой закон сохранения энергии для ангармониче-
ангармонического осциллятора, в котором первое слагаемое определяет кинетическую
энергию, полином Л(и) — потенциальную энергию, а константа Е — на-
начальную энергию в системе.
§ 5.3. Осциллятор с нелинейностью в отрицательной степени 87
Полученное уравнение допускает разделение переменных:
V2dr = du E.105)
/Е - (Sa/2) ti2 - Eь/4) tx4 + (D/2) и
и с помощью замены
2
U = u2 E.106)
приводится к более простому виду
- (Sa/2) U* - (Sb/4) t/3 + (D/2)
E.107)
Для уравнений типа E.107) известно [4], что ограниченные периодические
движения U(т) существуют в области между любыми двумя веществен™
ными корнями кубического полинома, где P(U) = EU -U2 U3 +
Н > 0. Введенная замена E.106) накладывает дополнительное условие
на корни: оба корня, между которыми P(U) > 0, должны быть положи-
положительными.
В дальнейшем, полагая для корней ?/1,2,3 следующий порядок вели™
чин: U\ ^ U2 ^ Us и раскладывая P(U) по теореме Виетта, приходим к
уравнению
E.108)
/~Sb (U - Ui) (U - U12) (U - U3)
в котором ?/i?2,3 связаны между собой соотношениями
Ut + U2 + Щ = ^2^, иги2и3 = —,
Ьъ
Ниже исследуются решения уравнения E.108) в зависимости от знаков
коэффициентов а ш Ъ исходного уравнения E.101), величины параметра D
и константы интегрирования Е.
1. Пусть а > 0, Ь > 0. Функция потенциальной энергии Ii(u) = -и2 +
+ -1х4 — ir^~2 имеет две ветви, симметричные относительно оси и = 0.
Для нахождения точек экстремума П(к) воспользуемся заменой E.106) в
выражении для ее производной:
цб+ц; + Р1;а + ^Д. E.110)
Анализ уравнений нелинейных осцилляторов
Гл. 5
Стационарные точки потенциальной функции являются корнями куби-
ческого уравнения
U3 + U2 + D = О,
E.111)
при этом нас будут интересовать только его положительные корни. Для
наглядности анализ корней E.111) будем сопровождать рисунками.
Q(U)
Рис. 5.23
На рис. 5.23, а, б показан вид полинома Q(U) = U3 + U2 + D при
различных значениях параметра D > 0 и D < 0 соответственно.
1.1) При D > 0 кубическое уравнение E.111) не имеет действитель-
действительных положительных корней (кривая 1, рис. 5.23, а). В рассматриваемой
области положительных значений U Uf (и) > 0 для ветви потенциальной
функции и = +у/С/ и Л' {и) < 0 для ветви и = —\fjj. Потенциальная функ-
функция Ш(и) всюду монотонна и в точках
(±B1}I/8? A/2)B1}I/3) ИМеет перегиб.
Ее график приведен на рис. 5.24. В силу
симметрии П(и) в дальнейшем ограничим™
ся исследованием ее положительной ветви
На фазовой плоскости (и, du/dr) в
этом случае отсутствуют замкнутые фазо™
вые траектории и, следовательно, не суще™
ствует ограниченных движений в системе
E.104).
1.2) При D < 0 кубическое уравне™
ние E.111) имеет действительный положи-
положительный корень (кривые I, 2, рис. 5.23, б), при переходе через который про-
производная П'(гх) для положительной ветви потенциальной функции меняет
знак с «минуса» на «плюс». Функция потенциальной энергии И(и) дости-
достигает своего минимума ЕШ1П = П(±глт1П) в точках, координаты которых
зависят от величины параметра D и определяются выражениями
Рис. 5.24
— 1, где
27
= arccos | — D + 1
2t
§5.3.
Осциллятор с нелинейностью в отрицательной степени
:
1 / Ч> / 27
иШ1П = -=\ 2cos--l,me<p = arccos --D-
27
в)
4 1 / о? / 27
-—: иш1п = -=\ 2ск--19тд&(р = arch I -^,0 - 1
Величина минимума потенциальной энергии Еш[п также зависят от па™
раметра и связана с ним следующим соот-
ношением:
27
4
~27(
E.112)
D
-6 -4 -2
График ЕШ1П(В) приведен на рис. 5.25.
Заметим, что Еш-Ш = 0 при D = 0, что
совпадает с соответствующим уравнением рис> 5.25
Дуффинга.
На рис. 5.26, а показан вид потенциальной функции, а на рис. 5.26,бпри-
веден фазовый портрет системы E.104). На фазовой плоскости (и, du/dr)
точкам с координатами (гхт1П, 0) соответствуют устойчивые положения рав™
новесия типа «центр».
>П(и)
Рис. 5.26
90
Анализ уравнений нелинейных осцилляторов
Гл. 5
P{U)
U
л
Ограниченные решения уравнения
E.104) существуют, если константа ин-
интегрирования Е изменяется в диапазоне:
^min ^ Е < +оо. Для отыскания этих дви-
движений рассмотрим уравнение E.108), ре-
решения которого зависят от вида полинома
Рис.527
случае P(U) принимает положительные значения между своими большими
корнями иг и U2, т. е. P(U) > 0 при U2 ^ U ^ Щ (рис. 5.27).
Тогда с помощью замены переменных
(О < Y2 < 1)
E.113)
уравнение E.108) сводится к эллиптическому интегралу первого рода
|__, E.114)
обращая который при условии tq = 0 при Y = 0, получим решение в виде
E.115)
Здесь и в выражении E.114) введено следующее обозначение: s2 =
Uг - U2 ' „ , _
= модуль эллиптической функции, определяющий форму дви™
Ui — Us
жения E.115). Форма колебаний U(r) в общем случае не синусоидальна и
зависит от величины s2. Из введенного выше порядка корней ?/1,2,3 поли-
полинома P(U) следует, что величина s2 всегда меньше единицы. Более точную
оценку можно провести, найдя эти корни:
E.116)
SEcoslhv-
где
if = arccos
D/2 - 4/27 - 2Е/3
D/27) A + ЗЕ) VI + З
E.117)
§ 5.3. Осциллятор с нелинейностью в отрицательной степени 91
С учетом E.116) выражение для модуля эллиптической функции принимает
вид
52 = 28Ш(У/3) . E.118)
лД cos (<p/3) + sin (99/З)
Анализ E.118) показывает, что в положении равновесия при Е —>• Еш-Ш
s2 —>> 0, а при I? ^ +oo s2 ^ 1/2. Таким образом, модуль эллиптической
функции изменяется в интервале 0 < s2 < 1/2, причем при s2, близких к
1/2, форма 17(т) существенно не синусоидальна. При s2 —>- 0 E.115) опи-
описывает квазигармонические колебания малой амплитуды вблизи положения
равновесия:
U(r) = U1-(U1-U2) sin2 f у^(Е71-Е7з)т) . E.119)
В выражении E.115) введем следующие обозначения:
Ul~Ua 2 Ul~U' 'i(Ux-U3) = lfL, E.120)
где Aq — амплитуда колебаний, величину s2 будем называть коэффици-
коэффициентом нелинейных искажений формы колебания U(r)9 ш — аналог часто™
ты. Колебания, описываемые E.115), явля-
являются периодическими, их период опреде-
определяется выражением
где K(s) — полный эллиптический инте- ^ - т ш
грал первого рода. 1
Если в качестве независимых парамет™
ров, входящих в E.115), выбрать ампли™ ис* *
туду колебаний и коэффициент нелинейных искажений, то решения урав-
уравнения E.104), соответствующие обеим ветвям потенциальной функции,
можно представить в виде
и(т) = ±у -- + ^Ао— 2А0 sn2 (шт, s). E.122)
Качественно вид решения E.122) при, близких к 1/2, приведен на рис. 5.28,
где величины определяются соотношениями E.116), E.117).
2. Пусть а < 0, Ъ > 0. Потенциальная функция описывается выраже-
пм 1 2 1 4 ^ -2
нием щи) = —-и -\- -и — —и , а положительные нули ее производной
2 4 2
л,6 Л,4 _|_ f) jj3 jj2 _j__ 7")
E.123)
±uVu
92
Анализ уравнений нелинейных осцилляторов
Гл. 5
являются корнями кубического уравнения
U3 - U2 + D = 0.
E.124)
На рис. 5.29, а, б показан вид полинома Q(U) = U3 — U2 + D при
различных значениях параметра D.
/ / А
2/3
D = Q
D<0
Рис. 5.29
2.1) При 0 < D < 4/27 кубическое уравнение E.124) имеет два дей-
действительных положительных корня, при переходе через которые производ-
производная П; (и) меняет знаки (кривая 1, рис. 5.29, а). В этом случае потенциальная
энергия достигает своего минимального Дцщ = (=b^min) и максимального
Emax = n(±wmax) значений в точках:
а) при 0 ^ D ^ —: иш{п = — \ 2 cos ^ + 1,
= -pW-2cos ( ^+ ^
, где <р = arccos ( - —
^+ ^) +1, где <р = arccos ( 17
График потенциальной функции И(и) приведен на рис. 5.30, а, а на
рис. 5.30, б показан фазовый портрет системы E.104). На фазовой плоско-
сти \ щ — 1 точки с координатами (±timin, 0) являются «центрами», а точ-
V dTJ
ки (±итах, 0) являются «седловыми». Ограниченные движения в системе
E.104) существуют, если константа интегрирования изменяется в пределах
-E'min ^ E ^ i^max? причем минимум и максимум потенциальной энергии
§5.3.
Осциллятор с нелинейностью в отрицательной степени
93
зависят от параметра D и связаны с ним
соотношениями:
2 27 3 mm
4
= -2Г<1 + 3?
D ?.2 _
2 27 Я ах —
Щи)
E.125)
Графики Emin(D), Ешах(В) приве-
дены на рис. 5.31. Заметим для срав-
сравнения, что в соответствующем уравне-
уравнении Дуффинга ограниченные решения
существуют при —1/4 ^ Е ^ Ои при
Е > 0. В системе E.104) значениям Е >
> 0 соответствуют незамкнутые фазо-
фазовые траектории.
Рис. 530
Ограниченные решения уравнения E.108) при 0 < D < 4/27 и
^min ^ E ^ I^max формально находятся с помощью замены E.113), как
и в случае 1.2, и имеют вид E.115). Ха-
рактер полинома F(U) тот же, что и на
рис. 5.27, но его корни распределены еле™
дующим образом:
;+^ +i
-1/3
где
= arccos I —
E.126)
D/2 + 4/27 +
Рис. 5.31
D/27) A + 3E) VI
E.127)
Модуль эллиптической функции в выражении E.115) по-прежнему име-
имеет вид E.118). Анализ E.118) показывает, что при Е —>> Еп
¦ 0, а при
Е —>• Ешах s —>- 1. Таким образом, коэффициент нелинейных искажений
формы колебаний E.115) изменяется в пределах 0 ^ s2 ^ 1. При s2 —ь-
-> Ов системе E.104) существуют квазигармонические колебания малой
94
Анализ уравнений нелинейных осцилляторов
Гл. 5
амплитуды вблизи положения равновесия вида E.119). Другой предельный
случай выражения E.115) — это сепаратрисные движения при s2 = 1:
U(t) = U2
Ui-U2
E.128)
С учетом обозначений E.120) периодические решения системы E.104)
при 0 < s2 < 1 имеют вид
- 2А0 sn2 (шт, s), E.129)
и(т) =
а решения на сепаратрисе при s2 = 1 описываются выражениями
E.130)
Качественный вид периодических решений приведен на рис. 5.32, а,
где величины Ui^ определяются соотношениями E.126), E.127). Каче-
Качественный вид сепаратрисного решения показан на рис. 5.32, б, при этом
величины Ui?2 определяются из E.126) при (р = тг.
/^1/2
Рис. 5.32
2.2) При D = 4/27 кубическое уравнение E.124) имеет корень второй
кратности, равный 2/3, при переходе через который производная JIf(u) не
меняет своего знака (кривая 2, рис. 5.29, а), а при D > 4/27 действительных
положительных корней не существует (кривая 3, рис. 5.29, а). В этих случа™
ях потенциальная функция U(u) (±B1}I/8,^BDI/3/2) всюду является
монотонной и имеет перегиб в точках. Ее график приведен на рис. 5.33. На
фазовой плоскости ( и, — ) при!) ^ 4/27 отсутствуют замкнутые фазовые
траектории и в системе E.104) не существует ограниченных движений.
2.3) При D < 0 кубическое уравнение E.124) имеет один действи™
тельный положительный корень, при переходе через который П7 (и) меняет
§5.3.
Осциллятор с нелинейностью в отрицательной степени
95
знак (кривая I, рис. 5.29, б). Потенциальная энергия в этом случае имеет
минимум ^min = n(zbixmin) в точке iimili = -^=\/2ch^-+1, где <р =
/27 \
= arch ( ZD 4- 1 1 и изображена на рис. 5.26, а. Величина минимума
энергии связана с параметром D соотношением
D 4 2 4
2 27 3 mm ~~ 27 ^
и представлена на рис. 5.34.
1п) V !
E.131)
Рис. 5.33
Рис. 5.34
На фазовой плоскости (к, du/dr) точкам (±ггт1П, 0) соответствуют по™
ложения равновесия типа «центр». Фазовый портрет системы E.104) при-
приведен на рис. 5.26, б.
Ограниченные решения уравнения E.108) существуют при Е ^ Ет[п
и описываются выражением E.115). Корни полинома P(U) задаются вы™
ражениями E.116), но при этом (р определяется из соотношения E.127).
Модуль эллиптической функции, описываемый выражением E.118), изме-
изменяется от нуля при Е —> Еш{п до 1/2 при Е —>• +оо. В системе E.104)
при s2 —>> 0 существуют квазигармонические колебания вида E.119), а при
s2 —>> 1/2 форма движений существенно не синусоидальна.
Периодические решения системы E.104), соответствующие обеим вет-
ветвям потенциальной функции, описываются выражением E.129). Их каче™
ственный вид приведен на рис. 5.28, где величины Щ^ определяются из
E.116) и E.127).
3. Пусть а > 0, Ь < 0. Выражение для функции потенциальной энергии
имеет вид И(и) = -и2 — -и4 и~2, а нули ее производной
П'(и) =
+ D - U3 + U2 + D
±uvu
E.132)
являются корнями кубического уравнения
Ud + U2 + D = 0.
E.133)
96
Анализ уравнений нелинейных осцилляторов
Гл. 5
Полином Q(U) = —U3 + U2 + D при различных значениях параметра D
приведен на рис. 5.35, а, б.
Q{U)
и
-4/27 <D<0
Рис. 535
3.1) При D > 0 кубическое уравнение E.133) имеет один действи-
действительный положительный корень, при переходе через который производная
U! (и) для положительной ветви потенциальной функции меняет знак с
«плюса» на «минус» (кривая 1, рис. 5.35, а). В этом случае потенциала
ная функция достигает максимального значения Ешах = П(±итах) в точке
мтах = — 4 2 ch —Ь 1, где (р = arch ( — D + 1 I. Ее график приведен на
V3 V 3 ' ^^г у 2 7
рис. 5.36, а зависимость максимума энергии от параметра D -
Щи)
-нарис. 5.37.
-2-
Рис. 5.36
Рис. 5.37
На фазовой плоскости (и, du/dr) точки с координатами (итаХ5 0) явля™
ются узловыми. В системе E.104) не существует ограниченных движений.
4
3.2) При —— < D < 0 уравнение E.133) имеет два положительных
корня, при переходе через которые производная П; (и) меняет знаки (кри-
(кривая 1, рис. 5.35, б). Потенциальная функция достигает своего минимального
-E'min = П(± иш{п) и максимального Ешах = П(±итах) значений в точках
a)
: ixmin = -i=W-2cos (^+ |
27
ишах = -^= \12 cos — + 1, где (р = arccos ( -^-'
V 3 V 3
§5.3.
Осциллятор с нелинейностью в отрицательной степени
97
—: иш1п =
^+^j +1, где <р = arccos ( - — D + 1
6j \ i
при-—
График потенциальной функции приведен на рис. 5.38, а, а фазовый
портрет системы E.104) — на рис. 5.38, б. На фазовой плоскости ( ад, —
V dT.
точки (±wmin,0) являются устойчивыми положениями равновесия типа
«центр», а точки (± адтах5 0) — «седловыми» точками.
\Щи)
Рис. 5.38
Ограниченные движения в системе E.104) существу ют при ЕШ-1П ^ Е ^
^J ^max, причем связь минимума и максимума потенциальной энергии с
величиной параметра D определяется соотношениями
7^ + о
27 ^ 3
27
in) V 1
E.134)
Зависимости ^min(^)? ^max(^) приведены на рис. 5.39. В соответ™
ствующем уравнении Дуффинга ограниченные движения существуют при
0 ^ Е <С 1/4.
98
Анализ уравнений нелинейных осцилляторов
Гл. 5
\Р(Ц)
Рис. 5.39
Рис. 5.40
Для отыскания ограниченных решений рассмотрим уравнение E.108).
В этом случае полином P(U) принимает положительные значения между
своими меньшими корнями, т.е. P(U) > 0 при Us ^ U ^ JJi (рис. 5.40).
Тогда уравнение E.108) сводится к эллиптическому интегралу E.114) с
помощью замены:
Y2 = -—— @ < Y2 ^ 1). E.135)
Обращая эллиптический интеграл E.114) при tq = 0 и Y = 0, получаем
решение в виде
U{t) =
(U2-U3)sn2[ ^(С^-Е^т,*),
E.136)
где s2 = {U2 — Us)/(Ui — Us) — модуль эллиптической функции, опреде-
определяющий форму колебаний U(r).
Корни полинома определяются выражениями
E.137)
где
/ D/2 - 4/27 + 2Е/3
in = arccos .
\(А/27) A - ЗЕ) у/Т^З.
Выражение для модуля s2 принимает вид
s =
E.138)
E.139)
Анализируя E.139), получаем, что в положении равновесия при Е
ЕШ-1П s —)> 0, а при Е
1. Таким образом, модуль
§5.3.
Осциллятор с нелинейностью в отрицательной степени
99
эллиптической функции изменяется, как и в соответствующем уравнении
Дуффинга, в пределах 0 ^ s2 ^ 1.
При s2 —>> 0 решение E.136) описывает квазигармонические колебания
малой амплитуды вблизи положения равновесия:
Щт) = U3 + (U2 -
sin2
-U3)t\,
а при s2 = 1 E.136) описывает движения на сепаратрисе вида
и<т) = и,+ , -¦
Ch2 (y/(U2-U3)/2T)
В выражении E.136) введем следующие обозначения:
U2-U3
2 U2-U3
s = tz 7^.
и =
E.140)
E.141)
E.142)
где Ао — амплитуда колебаний, s2 — коэффициент нелинейных искажений
формы колебаний, ш — аналог частоты. Период колебаний определяется
выражением E.121).
ix и
u2m
Рис. 5.41
С учетом принятых обозначений периодические решения системы E.104)
при 0 < s2 < 1 имеют вид
+ 2A0 sn2 (шт, s).
Решения на сепаратрисах при s2 = 1 описываются выражениями:
u(r) = ±J
2А0
ch"
E.143)
E.144)
Качественный вид периодических движений приведен на рис. 5.41, а,
где величины С/2,з определяются из соотношений E.137), E.138), а на
рис. 5.42, б показан вид сепаратрисного движения, причем 172,з вычис-
вычисляются при (р = 0.
100
Анализ уравнений нелинейных осцилляторов
Гл. 5
Щи)
Щи)
Рис. 5.42
Рис. 5.43
3.3) При D = ^4/27 кубическое уравнение E.133) имеет корень вто-
второй кратности, равный 2/3, при переходе через который, производная П' (и)
не меняет своего знака (кривая 2, рис. 5.35, б) при положительных значе-
4
ниях и, а при D < действительных корней для и ^ 0 не существует
(кривая 3, рис. 5.35, б). В этих случаях потенциальная функция имеет не-
региб в точках (± (-2DI/8, ± (—2Z>I/3/2) и всюду является монотонной.
Ее график приведен на рис. 5.42. При D ^ ^4/27 в системе E.104) нет
ограниченных движений.
4. Пусть а < 0, Ь < 0. Потенциальная функция имеет выражение
D
-2
Щи) = —-uz — -и* — —и
2t 4 2
производной
а нули ее
E.145)
являются корнями кубического уравнения
С/3 + 172-^ = 0. E.146)
Рис. 5.44
На рис 5.23, а, б показан вид полинома
Q(U) = U3 + U2 - D при различных значе-
значениях параметра D, при этом случаю D > 0
соответствуют кривые, изображенные на рис. 5.23, б, а случаю D < 0 —
кривые на рис. 5.23, а.
4.1) При D < 0 кубическое уравнение E.146) не имеет действительных
положительных корней, а производная П7 (и) < 0 для положительной вет-
ветви потенциальной функции (кривая 1, рис. 5.23, а). Потенциальная функ-
функция является всюду монотонной и имеет перегиб в точках (± (^2?)I/8,
^(^2DI/3/2). Ее график приведен на рис. 5.43. Ограниченных движений
в системе E.104) не существует.
4.2) При D > 0 уравнение E.146) имеет действительный положитель-
положительный корень, при переходе через который производная меняет знаки (кри-
§ 5.3. Осциллятор с нелинейностью в отрицательной степени 101
вые 1,2, рис. 5.23, б). В этом случае потенциальная энергия имеет максимум
^тах = Щ± ишах) В ТОЧКаХ
а) при 0 ^ D <: |=:
1 /тг <р\ ( 27
™—i/2cos (--- 1-1, где <р = arccos I- — D + 1);
v3 У \^ о I \ i
2 4
27 ^ ^27'
= -t= 1/2 cos ^ - 1, где ^ = arccos I — D - 1 );
у б V *j \ ^
4 1 (p /27
в) при?> ^ —: nmax = ^=i/2ch-^ 1, где (p = arccos — D -
Вид потенциальной функции приведен на рис. 5.36, а зависимость мак™
симума потенциальной энергии от параметра D на рис. 5.44. В системе
E.104) ограниченных периодических движений не существует.
ГЛАВА 6
НЕКОТОРЫЕ НЕЛИНЕЙНЫЕ МАТЕМАТИЧЕСКИЕ
МОДЕЛИ СТЕРЖНЕЙ, СОВЕРШАЮЩИХ
ПРОДОЛЬНЫЕ И ИЗГИБНЫЕ КОЛЕБАНИЯ
§ 6.1. Нелинейная упругость твердых тел
Вычислим изменение расстояния dl между двумя близкими точками
тела вследствие его деформации. До деформации квадрат расстояния между
этими точками равен (dlJ = (dx\J, где Х{ — декартовы координаты. После
деформации:
(dl'} = (dx{ + dv,i) = (dxi) + 2—^dxj dxi + ¦—-^ -^-^dxj dxni F.1)
0Xj OXj OXfi
, dm
поскольку ащ = ——dxj, где щ — компоненты вектора перемещении.
3
Из F.1) следует, что приращение квадрата расстояний между двумя
близкими точками определяется выражением
(dl'f - (dlJ = 2eij dxi dxh F.2)
1 [dm дщ dun dun
{ + +
Формула F.2) являет собой точное выражение для компонент тензора
деформаций. При малых деформациях она переходит в линеаризованное
выражение B.1).
Нелинейная связь между компонентами тензора деформаций ец и ком™
понентами вектора перемещений щ называется геометрической нелиней-
нелинейностью [17, 38, 71,105,106, 170].
Для удобства описания деформируемого и напряженного состояний
твердого тела вводят термодинамические потенциалы. При адиабатических
процессах в качестве такого потенциала обычно выбирается внутренняя
энергия U. Компоненты тензора напряжений могут быть выражены через
внутреннюю энергию соотношением
F-3)
13 д(дщ/дх6)'
Из теории упругости известно, что внутренняя энергия изотропного
тела инвариантна относительно преобразования координат. Но, посколь™
ку внутренняя энергия является функцией только деформации тела, она
должна зависеть только от инвариантов тензора деформаций. Внутренняя
§6.1.
Нелинейная упругость твердых тел
103
энергия может быть задана в виде разложения в ряд Тейлора относительно
начального состояния:
F.4)
где /i = su; /2 = SikSkf, /3 = ^ik^kj^ij —инварианты тензора конечных
деформаций F.2). Здесь А, /х — адиабатические константы упругости второ-
второго порядка; Vj — константы упругости третьего порядка; 7j — константы
упругости четвертого порядка. Все эти модули называются константами
Ламэ соответствующего порядка.
Разложение F.4) не единственная полиномиальная форма записи вну~
тренней энергии через компоненты тензора деформаций е^. Тогда в разло™
жение для U будут входить иные константы упругости. Например, войдут
модули упругости третьего порядка, введенные Мурнаганом или Ландау.
Эти коэффициенты не являются независимыми. Между различными кон-
константами второго и третьего порядков существуют однозначные связи, поз™
воляющие вычислять значения одних констант по известным значениям
других.
В табл. 2.1 уже приводились связи между различными константами
упругости второго порядка. В табл. 6.1 указаны связи между константами
третьего порядка.
Таблица 6.1
Связь между упругими постоянными третьего порядка
т
п
1
А
В
С
VI
V2
Щ
коэффициенты
Мурнагана
т, п, 1
п
т — п/2
1 - т + п/2
21-2т + п
т — п/2
п/4
коэффициенты
Ландау
А, В, С
А/2 + В
А
В + С
2С
В
А/А
коэффициенты
Ламе
Vl, V2, V3
v2 + 2v3
4v3
гл/2 + v2
4v3
V2
vx/2
Кроме геометрической нелинейности вводится понятие физической
нелинейности [17, 38, 71,105,106, 170], связанной с тем, что внутрен™
няя энергия деформированного тела представляет собой не только квад-
квадратичную функцию инвариантов тензора деформаций (~ /2, /2), но и за™
104
Некоторые нелинейные математические модели стержней
Гл. 6
висит от третьих (^ If, /1I2, /3) и более высоких степеней инвариантов
(~/i, /|, 1\1ъ). Физическая нелинейность определяется модулями упруго-
упругости третьего и четвертого порядков.
§ 6.2. Модель связанных продольно-изгибныж
колебаний стержня
Геометрия деформирования
Рассмотрим деформацию тонкого стержня при конечных прогибах. Бу-
Будем предполагать выполненными следующие условия: изгиб стержня вы™
зывает удлинение его средней линии; нормальные сечения при деформации
остаются плоскими, но, вообще говоря, не перпендикулярными срединной
линии, продольные волокна при растяжении сжимаются в поперечном на™
правлении (деформируемые нормали); боковые поверхности свободны от
напряжений.
Найдем распределение смещений в стержне с учетом сделанных пред-
предположений. Считаем, что срединная линия стержня совершает движение
в плоскости рисунка (рис. 6.1). Ма-
Материальная точка стержня с лагран-
жевыми координатами М0(ж, z) в ре-
результате деформации перемещается
в новое положение М(?, ?). Ее на-
начальное и текущее положения опре-
определяются радиус-векторами го =
= (x,z) и г = (?,?), а пере-
перемещение — вектором и = г —
^г0 = {u!(x,z,t), 0, u2(x,z,t)}. Рас-
Рассмотрим точку N, принадлежащую
оси стержня. Ее перемещение ха-
характеризуется вектором U = R —
— Ro = {?/(#, ?),0,г<;(ж,?)}. Переме-
Перемещение произвольной точки стержня,
лежащей до деформации на нормали
NqMq, однозначно определяется по
перемещению точки N и углу поворота (р сечения NM относительно вер-
вертикальной оси:
z
z
V
1 \ 1X
Рис. 6.1
щ(х, z,t) = u(x,t) — z sin (p(x,i), ^2(^5 z,t) = 0,
щ(х, z, i) = w(x, t) — z(l — cos ip(x, i)).
F.5)
Это первая (кинематическая) часть гипотезы плоских сечений, являющаяся
обобщением геометрических соотношений Тимошенко на случай конечных
прогибов. Она совпадает с последними при отсутствии растяжимости сре-
срединной линии (и = 0) и выполнении приближенных условий
§6.2.
Модель связанных продолъно-изгибных колебаний стержня
105
Если нормальные сечения остаются перпендикулярными к деформирован-
деформированной оси стержня в процессе движения (т. е. справедливы предположения
Бернулли-Эйлера), то угол (р(х, t) совпадает с углом поворота касательной
к оси стержня ф(х^), который определяется выражением
tgф =
dw/dx
. + ди/дх'
F.6)
Воспользовавшись им, находим
dw/dx
тиф =
- du/dxJ + (dw/dxJ
созф =
-du/dx
du/dxJ + (dw/dxJ
F.7)
Учтем в разложении sin ф и cos ф по степеням — и -тг™ слагаемые не
дх дх
выше второго порядка малости, тогда распределение смещений F.5) примет
вид
dw
u(x,t) — z
щ
— z
dx
3
2
1 -
= 0,
2"
F.8)
Вторая (динамическая) часть гипотезы плоских сечений предполагает,
что напряжения, нормальные к площадкам, расположенным параллельно
срединной оси стержня, пренебрежимо малы по сравнению с нормальными
напряжениями, действующими на площадку, перпендикулярную этой оси.
Таким образом, считаются выполненными условия одноосного растяже-
растяжения стержня, при котором диагональные компоненты тензора деформаций
в линейном приближении удовлетворяют соотношениям Пуассона 622 =
= е33 = —vs\\ (у — коэффициент Пуассона материала). Используя F.8)
и соотношения Пуассона, находим уточненное распределение смещений
с учетом конечности прогиба и поперечного сжатия продольных волокон
стержня при растяжении:
dw
'u — z-
du
dx
du
2 \~dx
dw
— " и i
— vz
( du
ydx
(du
\dx
d
0
z
2w\
X2)
r\2
о w
F.9)
Заметим, что щ являются нелинейными функциями от градиента переме™
щений срединной линии и, следовательно, будут приводить к появлению
нелинейных слагаемых даже в линейной части тензора деформаций ?.
106
Некоторые нелинейные математические модели стержней
Гл. 6
Уравнения динамики
Воспользуемся распределением перемещений F.9) при выводе урав™
нений продольных продольно-изгабных колебаний прямого стержня. Для
учета физической нелинейности удержим в разложении внутренней энер-
энергии U по инвариантам тензора деформаций, кроме квадратичных, еще и
кубические слагаемые. В этом случае погонные плотности кинетической и
потенциальной энергий будут иметь вид
>
d
dx dxdt dxdt
dw
( d2w\2 du ( d2w\
\ dxdt) ~ ~dx \ dxdt)
1 r dw d3w
F.10)
EF
d2u
rx2 \ 2
5 г?;л
E
Я г г
z2 dFy Iz = \\y2 dF — осевые геометрические моменты инер-
инерции, /0 = (у2 + z2) dF — полярный момент инерции, 1\ =
2/ 2
у2
+ z2/4) dF — геометрический момент четвертого порядка, а\^ — коэффи™
циенты, определяющие вклад геометрической и физической нелинейностей
в энергию продольно-изгибных колебаний стержня:
+
Е
F Л 2)
«2 = — + у
+4z/3-
В выражениях F.10) и F.11) удержаны все слагаемые до третьей степени
fdw\4
включительно и слагаемое ~ I — 1 , определяющее главную часть нели™
нейности при изгибных колебаниях стержня. Для оценки относительного
§6.2.
Модель связанных продолъно-изгибных колебаний стержня
107
вклада нелинейных слагаемых в F.10), F.11) можно использовать прибли-
, (dw\
жение Кирхгофа: -тт—
\дх)
ди (ди\
дх \дх
В рамках принятых ограничений нелинейные уравнения связанных про-
дольно-изгибных колебаний стержня имеют вид
О U 2 ( "ttl ®u \
W~C° { + ^дх~)
д
~ дх
\(cl M 2
2 д2 I
Туdxdt \
d2w
V
~ г
j д2и d2w
1 dxdt dxdt
д2и 22 д2 fd2u 2 д2и\2
Ъ^~и дх* \д? ~~ °т дх^)
ч/гл\2 / о2 \ 2 / о2 \ 2
\ / OW \ 2 1 ® W \ О-2 2 1 ^ W\
1 1 <™\ 1 ' 11 1 ^Л *™\ s I ^ *?1 1 <™Ч О I
/ \ 1/Jy / \ L/JbUb 1 и \ C/X /
/dwd2w\ /2 , 2ч 2 д<2 (dwd2w\ /r л^
кдх dxdt) + (C° ^^)гУдх2 {dx dx2) ' FЛЗ)
^4w 2/i ^ d4w
dx4 'yK J dx2dt2
7ЙГ -с2гтЛ) =1Г \(с1 + 2с\OГ1Г +
(jt (JX / (УХ С/Ж С/Ж
5 2 /o>W^3 /2 , /,2^2 д2и d<2w
1 2C(J \дх) ' ^u ' Сг^Г1/ дх2 дх2
92 Ч + 4^Й^-2^
ди d2w
ди d2w д2и dw
у dxdt V dx dxdt dxdt dx
a/2
F Л 4)
a/2
где ry,z = (Iy,z/F) — осевые радиусы инерции; R = (Ip/F)
полярный радиус инерции (для цилиндрического стержня радиуса a R =
= аД/2); сА = (А/РоI/2.
Из F.13) и F.14) видно, что продольные и изгибные волны в стержне
взаимодействуют лишь в нелинейном приближении. При этом нелинейные
слагаемые в F.13) и F.14) входят несимметрично: продольные волны воз-
воздействуют на изгибные колебания параметрическим образом, а изгибные
колебания служат нелинейным источником для продольных волн. Такой
несимметричный характер нелинейного взаимодействия различных типов
упругих волн является весьма распространенным для твердых деформиру-
деформируемых тел.
Если ограничиться упрощенным вариантом распределения смещений
без учета нелинейных слагаемых в F.9) и деформируемости нормалей, т. е.
= 0,
F.15)
108
Некоторые нелинейные математические модели стержней
Гл. 6
и воспользоваться соотношением Пуассона 822 = ^зз = —veu непосред-
ственно в выражении для тензора деформаций, то F.13) и F.14) перейдут
при R = г у = rz = 0, а\ = 0 в известные уравнения связанных продольно-
изгибных колебаний стержней [92] (модель первого приближения):
д2и
^С0'
о2
О U
~2~~дх
d2w
±согу
дх4
= со
дх
ди dw
дх дх
dw
дх
с\д_
2 дх
F.16)
F.17)
Сравнение уравнений F.13), F.14) и F.16), F.17) показывает, что учет
нелинейных слагаемых в F.9), возникающих при больших прогибах и боль™
ших углах поворота, приводит к заметному увеличению коэффициентов
нелинейного взаимодействия, а учет эффекта сжатия продольных волокон
при растяжении приводит к появлению старших производных в линейных
частях уравнений F.13) и F.14) и дополнительных нелинейных слагаемых.
Для каждой конкретной ситуации необходима оценка порядков величин
малых линейных и нелинейных слагаемых, входящих в уравнения F.13) и
F.14). Однако даже поверхностный анализ показывает, что для большин-
большинства металлов главные нелинейные слагаемые и линейные слагаемые, учи-
учитывающие инерцию вращения элементов и радиальные движения частиц в
стержне, при А > 30а, е ^ 10~5 имеют одинаковые порядки малости и их
влияние на волновые процессы следует учитывать совместно.
§ 6.3. Модель изгибных колебаний стержня
(нелинейное обобщение модели Тимошенко)
Как известно (см. гл. 3), СП. Тимошенко сделал следующие предполо-
предположения, уточняющие техническую теорию изгиба стержней: поперечные се™
чения остаются плоскими, но не перпендикулярными деформируемой оси
стержня; нормальные напряжения на площадках, параллельных оси равны
нулю (о2 = 0); учитываются инерционные составляющие, связанные с
поворотом сечений.
Для вывода нелинейной модели Тимошенко введем систему перемете-
щ =
dtp
Vyz—,
= -«,--z-. F.18)
где w(x,i) — поперечное смещение; (р(х, t) — угол поворота поперечно-
поперечного сечения; v — коэффициент Пуассона; y,z — поперечные координаты.
Отметим, что такое распределение смещений, вообще говоря, справедливо
лишь при малых прогибах стержня.
§6.3. Модель изгибных колебаний стержня 109
Компоненты тензора деформаций в этом случае принимают значения:
д(р z / о<р \ I dw \ vz ow о (р dip
dx 2 ydxj ydxj 2 dx dx2 ' dx'
(^>2 i/|/z d2(p uy dip
dw tjz2 d2ip x d(p t dw dtp\
F.19)
2
iF и потенциала
Z \ Ol I
F
и
ной Wn = м/ dF энергий определяются выражениями:
F 2 2
p
?l3 = _ ^ ______ + Z(p
Я1 / л
- p [ -^
2 \ at
F
F
Коэффициенты aj9 характеризующие геометрическую и физическую
нелинейности среды равны
Л fi 1 3
«1 = g + ^ + ^^i + 2 ^2 + 2i/3 + 7i + 72 + 7з + 74,
X а 3 5 3
«2 = J + 7Г + V\ + Т^2 + ^Z/3 + 72 + Т73 + 74,
42 4 2 4 F22)
Л /х 1 1 1 l ;
3 1
а5 = -2i*2 + 4i/3 - 72 - 27з - 274, «6 = -^^2 - Щ - 74,
где ^1,2,з — константы упругости третьего порядка; 71,2,3 — константы
упругости четвертого порядка.
110 Некоторые нелинейные математические модели стержней
Гл. 6
Составляя лагранжиан L = WK — Wn и применяя принцип Гамильтона^
Остроградского, получаем систему уравнений, описывающую изгибные
колебания стержня при наличии геометрической и физической нелиней-
ностей:
d2w
d2w др
дх2 дх
д
~дх
f dw
Vdx~
, F.23)
1 дх
дх
дх
dtp dw
~dxlhc
dw
dw
'?• ^
Будем предполагать, что стержень является бесконечным. Такая идеали-
идеализация допустима, если на границах стержня находятся оптимальные демп™
фирующие устройства, т. е. параметры граничного закрепления таковы, что
падающая на него изгибная волна не будет отражаться [29, 30].
Введем безразмерные переменные
A
Кг у'
Ary '
wo ¦
F.25)
где (ро — максимальный угол поворота поперечного сечения стержня при
изгибе, wo — максимальная амплитуда изгибной волны, Л — характерная
длина волны.
Если углы поворота поперечных сечений при изгибе малы I <po ~
^ 10^2 -г-^-1, а динамические процессы являются длинноволновыми (Л ^
^ 10-г-102, то систему можно значительно упростить, сведя ее к одному
уравнению (штрихи опущены):
d2w d4w
+
/
a4n;
a^2at2
d4w
" ° ""X. F^26,
Er2 дх \дх)
§6.4.
Модель продольных колебаний стержня
111
§ 6.4. Модель продольных колебаний стержня
(нелинейное обобщение модели Миндлина-Германа)
Если в F.13), F.14) w = 0, то получим уравнение продольных колебаний
нелинейно-упругого стержня
д2и
Уравнение F.26) обобщает модель Бишопа на случай учета нелинейных
факторов. Авторами работы [70] это уравнение было названо нелинейным
уравнением Бишопа, а в работах [146, 151] его называют уравнением «с
двумя дисперсиями».
Если при выводе линейных уравнений продольных колебаний стержня
снять гипотезу Пуассона об одноосном растяжении, а для описания движе-
движения частиц стержня в поперечном направлении ввести еще одну функцию
w(x, i)9 то придем, как известно, к модели Миндлина-Германа (см. гл. 3).
В работе [70] получены нелинейные уравнения колебаний стержня, яв-
являющиеся обобщением линейной модели Миндлина-Германа на случай
учета геометрической и физической нелинейностей среды. При выводе
нелинейных уравнений Миндлина-Германа делаются такие же предполо™
жения о смещениях стержня, как и при выводе линейной модели:
г/i(ж, г/, z5 i) = u(x, ?),
У
71/, z, t) = -w(x, t),
F.28)
u3(x,y,z,t) = -w(x,t),
где а — радиус поперечного сечения стержня.
Уравнения динамики стержня могут быть получены из вариационного
принципа Гамильтона-Остроградского с помощью функции Лагранжа L =
= WK - Wn. Кинетическая энергия WK и потенциальная энергия Wn будут
определяться выражениями
du
dt
dx,
F.29)
Wn =
+
¦(
)(
1
"Г
ди\
дх)
Г-
а2
tu2 —
дх
и!
22
(А
У
«5
т
+
ди
дх
з аз (ди\2
+ —w я" +
а уожу
2 / о \ 2"
\ «6 ( OW\
1 1 ^ 1 ~о— 1
/ 2а \dxj
^и+тик +тт-^ -s- • F.^0)
112 Некоторые нелинейные математические модели стержней
Гл. 6
Здесь u(x,i)9 w(x,t) — продольные и поперечные смещения частиц стерж-
стержня; Ki;2 — корректирующие коэффициенты, выбираемые из условия близо-
близости дисперсионных веток данной модели и точного решения Похгаммера-
Кри; коэффициенты ctj9 характеризующие геометрическую и физическую
нелинейности среды равны
г = А/2
= А + /х
4i/3/3,
= А + v\ + 2i/2,
a4 = А
, а5 = А + 2
= A + /i + x/2
¦21/2,
+ 2i/3,
F31)
где z/i,2,3 — константы упругости третьего порядка.
Уравнения продольных колебаний стержня, обобщающие модель Мин-
длина-Германа на случай учета геометрической и физической нелинейно-
стей среды, имеют следующий вид:
,a2ii 2AHi aw
at2
d2w
дх2
дх
ap dx
du
ap
du
dx
a4
a2 p
4p \dx
, F32)
r2^2
d2w
a2 p
du d
12a2
ap
ap dx dx
du\ 4«4
dx I a2 p
L P
du
dx
2ae dwl
ap dx\
a6
ар
dw
ox
где cT = л/fi/p — скорость распространения сдвиговых волн, q =
= \/{Х + 2/i)/p — скорость распространения продольных волн в ма-
материале стержня.
Введем безразмерные переменные ж; = ж/A, tf = (c|t)/A, n; = и/щ9
w! = w/wq, где ж, t — размерные координата и время, wq, гоо — макси-
максимальные амплитуды продольной и поперечной волн соответственно, А —
длина волны. Если а/А ^ Ю, wq/u® ~ Ю™2, (Х,^)/щ ^ Ю,
но/А ^ 10™4, то систему можно упростить и свести к одному уравнению
(штрихи опущены):
d2u
dx4
азиоА ди д и
'2mc2p2k dx dx2 '
F34)
где ст =
ГЛАВА 7
РАСПРОСТРАНЕНИЕ НЕЛИНЕЙНЫХ ВОЛН
В СТЕРЖНЯХ
§ 7.1. Нелинейные продольные стационарные волны
На распространение продольных волн, описываемых уравнением F.34),
будут влиять два фактора: дисперсия и нелинейность. Нелинейность при-
приводит к зарождению в волне новых гармоник, что способствует появлению
в движущемся профиле волны резких перепадов. Дисперсия же, наоборот,
сглаживает перепады из-за различия в фазовых скоростях гармонических
составляющих волны. Совместное действие этих факторов может привести
к формированию стационарных волн, которые распространяются с посто™
янной скоростью без изменения формы (обзор основных результатов теоре-
теоретических и экспериментальных исследований нелинейных стационарных
волн в стержнях, пластинах и оболочках содержится в Приложении).
Решения уравнения F.34) ищем в классе стационарных волн деформа-
ди
ции U(i) = —, где ? = х — Vt — «бегущая» координата, V = const —
скорость стационарной волны. Уравнение F.34) сведется к дифференци-
дифференциальному уравнению в обыкновенных производных:
—грг + ttiiU + WI2U2 = 0, G.1)
где
8A422c2m2^\ + pcUV2^:
™>i = 5"~4
pr2cf Q(V)
Q(V) =
Ограниченные решения уравнения G.1), описывающего колебания ос-
осциллятора с квадратичной нелинейностью были исследованы в гл. 5. Здесь
будут использоваться некоторые из полученных результатов.
Умножая G.1) на -^- и интегрируя, получим
Здесь Е — константа интегрирования, имеющая смысл начальной энергии
U2 НU3
системы, функция f(U) = —U2 H U3 — потенциальная энергия си-
114 Распространение нелинейных волн в стержнях Гл.7
схемы. Поэтому уравнение G.2) можно интерпретировать как закон сохра-
сохранения энергии для ангармонического осциллятора. Полученное уравнение
допускает разделение переменных:
- f(U)
G.3)
и имеет ограниченные решения при Е — f(U) > 0. Решения будут пери-
периодическими, если функция Е — f(U) принимает положительные значения
между двумя своими вещественными нулями. Пусть кубический полином
Е — f(U) имеет три действительных корня Щ ^ U2 ^ U\. (Наличие одно-
одного действительного корня не рассматривается, так как решения уравнения
G.3) в этом случае будут неограниченными). Выразим полином Е — f(U)
через корни Ui52,3*
VU ^UU<){UUMUUs). G.4)
Корни полинома связаны между собой следующими соотношениями:
U!+U2 + U3 = -^p-, U1U2 + U1U3 + U2U3 = 0, U!U2U3 = —.
2W12 ТП2
G.5)
Перепишем уравнение G.3) в виде
V2 d? = Ш . G.6)
y/-m2(U ^ иг)(и - U2)(U - U3)/S
О возможности существования нелинейных стационарных волн уравнения
G.1) можно судить по знакам коэффициентов mi и тп^ и значения констан™
тыЕ.
Для стержней, изготовленных из большинства металлов и сплавов пара™
метр нелинейности «з < 0? а для стержней из композиционных материалов
возможно и «з > 0.
Физически реализуемыми являются лишь те случаи, когда в волне де-
деформации отсутствует постоянная составляющая. Мы будем рассматривать
только эти случаи.
1. Пусть mi > 0, тп2 > 0. При аз > 0 скорости распространения ста™
ционарных волн в стержне удовлетворяют условию V > 1, а при аз < 0 —
условию Hi^<F<4/l -. В этом случае функция потенциальной
ci у 1 — г/
энергии f(U) имеет локальный минимум /ш{п(и = 0) = 0 и локальный
/ \ з
максимум /шах ( U = ^^ ) = ——2J т-е- точка @,0) на фазовой плоскости
тт dU\
с/, — I является устойчивым положением равновесия типа «центр», а
точка (—rai/?7i2,0) — неустойчивым положением равновесия типа «узел».
§7.1. Нелинейные продольные стационарные волны 115
Ограниченные решения уравнения G.3) существуют, если константа Е из-
/ з \
меняется в пределах ^min ^ E ^ ^max ( ^тах = тгЛ, ^тт = 0 ), тогда
полином Е — f(U) будет иметь три действительных корня), причем разным
значениям Е отвечают различные типы стационарных волн.
При 0 < Е = Е2 < -—2? стационарные волны являются периодически™
ми кноидальными волнами, соответствующими движениям по замкнутым
траекториям вблизи сепаратрисы. В этом случае корни ?/1,2,3 различны,
причем Е — f(U) > 0 при U\ < U < U2. Тогда с помощью замены пере-
переменных
У2 = ^г (О<2/2<1) G.7)
и интегрирования уравнение G.6) сводится к неполному эллиптическому
интегралу первого рода
G.8)
где s2 = — —- @ < s2 < 1). Обращая эллиптический интеграл при у =
U\ — U3
= о, ?о = 0, получаем решение, описывающее периодические нелинейные
волны, в виде
В выражении G.9) введем следующие обозначения:
^з) = у^, G.10)
где ^4 — амплитуда колебаний, s — модуль эллиптической функции, опре-
определяющий степень искажения формы колебаний ?/(?) по сравнению с си-
синусоидальной, ш — аналог частоты. Период колебаний равен
G.11)
где K(s) — полный эллиптический интеграл первого рода.
Решение G.9) содержит восемь параметров А, V, s, ш, ?/1,2,3? Е, кото-
которые связаны между собой шестью соотношениями G.5) и G.10). Через два
независимых параметра: амплитуду колебаний А и коэффициент нелиней-
116
Распространение нелинейных волн в стержнях
Гл. 7
ных искажений s9 а также коэффициенты
уравнения решение G.9) можно пред ста™
вить в виде
G.12)
- Asn
Рис. 7.1
Качественный вид периодического ре-
решения G.9) представлен на рис. 7.1. Параметры периодической нелинейной
волны G.12) связаны соотношениями
А =
2w2 у/1 - s2 + s4 '
Тогда G.11) можно записать в виде
А
3^
G.13)
G.14)
Качественные зависимости амплитуды периодической волны от ее ско-
скорости при различных значениях коэффициента нелинейных искажений при™
ведены на рис. 7.2. Здесь s\ < S2 < s%; выделенная кривая s = 1 отвечает
солитонному решению.
si
Рис. 7.2
В диапазоне скоростей V > 1, соответствующем случаю 1 (mi > О,
т2 > 0) при положительном параметре нелинейности («з > 0), амплитуда
волны растет с ростом скорости.
В диапазоне скоростей Hi^
ci
случаю 1 (mi > 0, т2 > 0) при
ростом скорости.
2
, соответствующем
< 0, амплитуда волны уменьшается с
§7.1.
Нелинейные продольные стационарные волны
111
В остальных диапазонах скоростей эти зависимости не построены, так
как они соответствуют физически нереализуемым случаям.
v=l
На рис. 7.3 и 7.4 показаны качественные зависимости амплитуды вол-
волны А от коэффициента нелинейных искажений s при фиксированной ско-
скорости ( здесь F* = Ni—, F** = \ 1 - ^^ ).
V С| v 1~v)
Когда параметр нелинейности положителен (а% > 0), скорости волн
удовлетворяют условию V > 1 (рис. 7.3). В этом случае кривые A(F, s)
лежат выше кривой, соответствующей V = 1; при увеличении скорости
нарастание амплитуды с ростом s происходит быстрее (V\ < V2).
При «з < 0 скорости волн находятся в диапазоне Ni— < V <
ci
< \ /1 (рис. 7.4), кривые A(F, s) лежат между кривыми V* и V**;
при увеличении скорости нарастание амплитуды с ростом s происходит
медленнее (Vi < V2).
2. При mi < 0, Т7г2 > 0 скорость распространения стационарных волн
<
находится в интервалах 0 < V < Ni— при «з > 0 и у 1 -
< V < 1 при «з < 0. В этом случае функция потенциальной энергии
f(U) имеет локальный максимум fmax(U = 0) = 0 и локальный минимум
и = = —т, т.е. точка (—mi/m2,0) на фазовой плоскости
тт dU\
(/, — I является устойчивым положением равновесия типа «центр», а
точка @,0) — неустойчивым положением равновесия типа «узел». Ограни™
ченные решения существуют, если начальная энергия системы изменяется в
пределах —^ = ^mm ^ Е ^ Ешах = 0. Различным значениям Е соответ-
118 Распространение нелинейных волн в стержнях Гл.7
о
ствуют различные типы решений. При —^ < Е < 0 стационарные волны
являются периодическими кноидальными волнами, при Е —>• Ет[п будут
наблюдаться квазигармонические колебания, соответствующие движениям
по замкнутым фазовым траекториям вблизи положения равновесия типа
«центр», а при Е = Ешах колебания на фазовой плоскости соответствуют
движениям по сепаратрисе. Во всех этих случаях соответственно полином
Е ~~ f(U) имеет либо три различных действительных корня, либо (при Е =
= ^min) два совпадающих больших корня U\ и ?/, либо (при Е = Ешах)
два совпадающих меньших корня U2 и U$ • Положительные значения поли-
полинома находятся в области U2 < U < U±. Поэтому, как и в случае 1, решения
уравнения G.6) находятся с помощью замены G.7).
При Е = Еша-К = 0 стационарные волны уравнения G.1) являются
уединенными. В этом случае совпадают два меньших корня полинома: U2 =
= U3. Ограниченные решения существуют в области U3 = U2 ^ Е ^ Ег.
Уравнение G.6) примет вид
G.15)
(U-U2)y/m2(U1-U)/3'
которое после замены переменных G.7) и интегрирования дает решение
6 v-x -^ , G.16)
Решение G.16) — предельный случай нелинейных периодических решений
при s = 1. Введем обозначения:
— U2)
G.17)
где ^4* — амплитуда, А — ширина солитона.
В солитоне постоянная составляющая отсутствует: U2 = 0. Решение
G.16) можно переписать в виде
Качественный вид солитонного решения представлен на рис. 7.5. Пара-
Параметры солитонного решения связаны между собой соотношениями
, G.19)
§7.1.
Нелинейные продольные стационарные волны
119
Вид решения и зависимости между параметрами уединенной волны пред-
представлены в табл. 7.1. Из графиков, приведенных в табл. 7.1, видно, что
Щ
— < V < 1 («з < 0) поведение уединенной
при скоростях 4/1
V 1 — f
волны является классическим для солитонов: волна большей амплитуды
имеет меньшую ширину и распространяется с большей скоростью. Когда
скорости волн находятся в интервале 0 < V < Ni— («з > 0) поведение со™
ci
литонов является аномальным: волна меньшей амплитуды имеет меньшую
ширину.
U2=0
Рис. 7.5
3. Пусть 77ii > 0, тп2 < 0. Стационарные волны в этом случае распро-
распространяются со скоростями Ni—<V<yl при «з > 0 и V > 1
при «з < 0. Смена знака перед нелинейным слагаемым в уравнении G.1)
(тт dU\
приводит к тому, что на фазовой плоскости [U, — \ происходит поворот
фазовых портретов, рассмотренных в предыдущих случаях, в противопо™
ложную сторону, т. е. стационарные волны имеют в этом случае отрица-
отрицательную амплитуду. Изменение знака перед линейным слагаемым сдвигает
начало координат в одно из положений равновесия: либо в «центр», либо в
«узел». Функция потенциальной энергии f(U) имеет локальный максимум
гг mi\ mi i»
U = = —« и локальный минимум тш{
/
= 0) = 0. На
Ш
х - (тт Ш\ ( I п\
фазовой плоскости I (У, — I точка (—mi/?7i2,0) является неустойчивым
положением равновесия типа «узел», а точка @,0) — устойчивым положе-
положением равновесия типа «центр». Начальная энергия системы изменяется в
пределах 0 =
Е
120
Распространение нелинейных волн в стержнях
Гл. 7
Таблица 7.1
«з > 0
< О
О < V < Ni —
1- —^< V < 1
1 — v
ch2 ((ж - Ft)/A)
ch2 ((x - Vt)/A)
K,%-
§7.1.
Нелинейные продольные стационарные волны
121
ml
При 0 < Е = Е2 < —2 в системе происходят периодические коле™
бания, соответствующие на фазовой плоскости движениям по замкнутым
траекториям вблизи сепаратрисы. В этом случае корни С/^2,3 различны,
причем Е — f(U) > 0 при Щ < U < U<i- Поэтому ограниченные реше-
решения уравнения G.6) существуют в области С/3 < U < U^. В этом случае с
помощью замены
2 U^U3
(О ^ у2 ^ 1)
G21)
U2 - С/з
и интегрирования уравнение G.6) приводится к неполному эллиптическому
интегралу первого рода
dy
A22)
1). Обращая эллиптический интеграл при у =
2 С/з-С/з ,п .
где^ = ^-^ (°^^
= 0, ^о = 0, получим решение, описывающее периодические нелинейные
волны:
G.23)
Введем в G.20) следующие обозначения:
G.24)
где А — амплитуда колебаний, s — коэффициент нелинейных искажения
формы колебаний Е/(?), ш — аналог частоты. Период колебаний равен
Л =
2К(з)
sK(s),
G.25)
где K(s) — полный эллиптический интеграл первого рода.
Решение G.23) содержит параметры A, V9 s9 ш, Е9 C/i52,3> которые
связаны между собой соотношениями G.5) и G.24). В качестве двух незави-
независимых переменных выберем амплитуду колебаний А и коэффициент нели-
нелинейных искажений s. Тогда решение можно представить в виде
Asn2
G.26)
Качественный вид периодического решения представлен на рис. 7.6.
122 Распространение нелинейных волн в стержнях Гл. 7
Параметры в решении G.26) связаны следующим образом:
Л = ^^ t «' ,„* = t mi - G27)
2m2 y/1 - s2 + s4 л ° ' A
Уравнение G.26) примет вид
A
Качественные зависимости амплитуды периодической волны от ее ско-
скорости при различных значениях коэффициента нелинейных искажений при-
приведены на рис. 7.2. В диапазоне скоро-
скоростей V > 1, соответствующем случаю
3 (mi > 0, wi2 < 0) при отрицатель™
ном параметре нелинейности (аз < 0),
амплитуда волны растет с ростом скоро-
скорости.
В диапазоне скоростей Ni— < V <
Рис. 7.6
*V i^2
1 , соответствующем слу-
случаю 3 (mi > 0, wi2 < 0) при «з > 0,
амплитуда волны уменьшается с ростом скорости. Здесь si < S2 < s%;
выделенная кривая s = 1 отвечает солитонному решению.
Качественные зависимости амплитуды волны А от коэффициента нели-
нелинейных искажений s при фиксированной скорости показаны на рис. 7.4
/ / 9~~9 \
I cT 2i/ щ 1
при «з > 0 и диапазоне скоростей Hi — < V < \ 1 — и рис. 7.3
(при «з < 0 и V > 1). Здесь V* = Ni—; F** = dl ~~
4. При TTii < 0, гп2 < 0 скорости волн в стержне удовлетворяют усло-
/ 2i/ щ ст
вию 4/1 < V < 1 при «з > 0 и условию 0 < V < Hi— при
V 1 — v Q
аз < 0. Функция потенциальной энергии f(U) имеет локальный макси-
максимум /тах(С^ = 0) = 0 И ЛОКаЛЬНЫЙ МИНИМУМ /min I U = I = ^",
х - [тт dU\ ( mi Л
т.е. на фазовой плоскости I G, — I точка I ,0 I является устоичи-
вым положением равновесия типа «центр», а точка @,0) — неустойчи-
неустойчивым положением равновесия типа «узел». Ограниченные решения суще-
бт2,
= ^min ^ E ^ i^max = 0, причем при Е —$> Еш1п будут наблюдаться ква-
квазигармонические колебания вблизи положения равновесия типа «центр»,
§7.1.
Нелинейные продольные стационарные волны
123
а при Е = Еша^ колебания на фазовой плоскости соответствуют движени-
движениям по сепаратрисе. Во всех этих случаях соответственно полином Е — f(U)
имеет либо три действительных корня, либо два совпадающих меньших
корня U2 и Us, либо два совпадающих больших корня U\ и U2. Положи™
тельные значения полинома Е — f{U) находятся в области Us < U < U2.
и (О
Поэтому, как и в случае 3, решения
уравнения G.6) находятся с помощью
замены G.21).
При Е = i?max = 0 стационар-
стационарные волны являются уединенными. В
этом случае два больших корня поли-
полинома совпадают: U\ = U2. В солитоне
постоянная составляющая отсутствует:
U2 = 0. Ограниченные решения суще-
существуют в области Us ^ Е ^ Е2. При™
меняя замену G.21) к уравнению G.6), получим решение, которое является
предельный случай нелинейных периодических решений при s = 1:
Рис. 7.7
= Щ sec h2
Качественный вид солитонного рашения представлен на рис. 7.7.
Вводя обозначения
A* = ~U, = ~
Зпы
2т2 '
G.29)
G30)
где А* — амплитуда, А — ширина солитона, решение G.30) можно пере-
переписать в виде +
G.31)
ch2 ((х - Vt) /A) '
где
G.32)
G.33)
Основные зависимости между параметрами солитонного решения при-
приведены в табл. 7.2.
< V < 1 (при «з > 0) поведение
В диапазоне скоростей \ 1 —
l-i/
солитонов является классическим: волна большей амплитуды имеет мень-
меньшую ширину и распространяется с большей скоростью. Когда скорости
волн удовлетворяют условию 0 < V < Ni— (при «з < 0) поведение со™
ci
литонов является аномальным: волна меньшей амплитуды имеет меньшую
ширину.
124
Распространение нелинейных волн в стержнях
Гл. 7
Таблица 12
«з > О
а3 < О
1 -
1-v
<v ¦
О < V < Ni —
ch2 ((x - Vt)/A)
ch2 ((x - Vt)/A)
UqX
1A
\
n-
2уЩ22 l
1-v
§ 7.2. Модуляционная неустойчивость квазигармонических изгибных волн 125
§ 7.2. Модуляционная неустойчивость
квазигармонических изгибныж волн.
Стационарные волны огибающиж
В линейном приближении решение F.26) представляется в виде набора
гармоник, частоты (ш) и волнового числа (к) которые связаны дисперсной™
ным соотношением
с2
ш
4 = о.
G.34)
Качественный вид дисперсионных зависимостей изображен на рис. 7.8.
Изгибные волны обладают сильной дисперсией, поскольку их фазовая
ш
скорость Уф = —
к
const и различные гармоники распространяются с
разными скоростями. Поэтому при наличии слабой нелинейности решение
F.26) близко к решению линейной зада-
задачи и его можно представить в виде набо-
набора квазигармоник. Кроме того, для систем
с кубической нелинейностью эффект само™
воздействия обычно преобладает над эф-
эффектом генерации высших гармоник и
последним можно пренебречь [141]. Это
позволяет отыскивать решения уравнения
F.26) в виде одной гармоники с медленно
меняющимися в пространстве и времени амплитудой и фазой:
2
Рис. 7.8
W(x, t) = А(ех, et) exp'
i(out-kx)
+K.C.
G.35)
где A(x,i) — комплексная амплитуда, ш и к удовлетворяют соотношению
G34);
дАп Л дА, л
-^-/кА - — шА - е < 1.
дх dt
Используя метод усреднения по «быстрым» переменным [141], от F.26)
перейдем к укороченному уравнению огибающей квазигармонической вол-
ны. В системе координат, движущейся с групповой скоростью Vgr = —
\ Сьгь
? = х — Vgrt, т = et эволюция огибающих будет описываться нелинейным
уравнением Шредингера
.дА
dVgr д2А
G.36)
часто встречающимся при изучении волновых процессов в оптике, физике
плазмы, акустике, электродинамике [79, 104, 141].
126
Распространение нелинейных волн в стержнях
Гл. 7
Здесь
а = —
2ЕШ [
При этом для стержней, изготовленных из большинства металлов и
4g
сплавов, величина —
2Ег*
> 0, поскольку коэффициент нелинейности
«6 < 0. Для композитных стержней знаки могут быть иными: а® > 0 а,
следовательно, — -
Известно, что при определенных условиях квазигармоническая волна
оказывается неустойчивой по отношению к разбиению на отдельные волно-
волновые пакеты (модуляционная неусточи-
вость) [79]. Наличие в системе такой
неустойчивости определяется по крите-
критерию Лайтхилла [79, 164]
dk
¦а < 0.
G37)
2 4 Возможна ли модуляционная неустой-
Рис. 7.9 чивость изгибных волн в балке? Ответ
на этот вопрос будет отрицательным, если пытаться искать его, остава-
ясь в рамках технической теории изгибных колебаний стержней (модель
Бернулли-Эйлера) [51]. Модель балки Тимошенко дает иной результат:
квазигармонические изгибные волны могут быть как устойчивыми, так и
неустойчивыми в зависимости от частоты
и принадлежности к той или иной диспер-
дисперсионной ветви.
На рис. 7.9 изображена диаграмма, по-
показывающая при каких частотах (а;) и
волновых числах (к) возможна модуля-
модуляционная неустойчивость. Область устой-
устойчивости отмечена квадратами, область
неустойчивости — крестами. Расчеты
производились при коэффициенте Тимо-
Тимошенко Н = 0,98, коэффициенте Пуассона
v = 0,3 и а6 < 0.
0
ОД
0,5
0,3
Рис. 7.10
Волны, описываемые нижней дисперсионной ветвью, в интервале 0 ^
^ к ^ 1 устойчивы. В этом интервале модели Тимошенко и Бернулли-
Эйлера по дисперсионным свойствам идентичны. Волны, имеющие к в
интервале A, 2,8), неустойчивы к самомодуляции, а волны, у которых к >
> 2,8, устойчивы.
Волны, описываемые верхней дисперсионной ветвью, в интервале 0 ^
^ к ^ 1,1 неустойчивы, а при к > 1,1 —устойчивы.
Величина области модуляционной неустойчивости изгибных волн за-
зависит и от упругих свойств материала стержня. На рис. 7.10 показано, что
область неустойчивости увеличивается с ростом коэффициента Пуассона.
§ 7.2. Модуляционная неустойчивость квазигармонических изгибных волн 127
Если вместо комплексной амплитуды (А) ввести действительную ам-
амплитуду (а) и фазу (в): А = а ехр {10}, то уравнение G36) запишется в
виде системы
д (а2\ . д (д?9Гдв Л
-di{-Wdia J=0' G38)
дв dVgrd2a dVgr (дв\2 о Л ,^ЛЧ
ая 7driu2+-fdra\ju) + сш = °- G-39)
дт дк д^2 дк \д?/
Определим, как будут выглядеть волновые пакеты, на которые разбивается
квазигармоническая изгибная волна в результате модуляционной неустой-
неустойчивости. Для этого достаточно проанализировать стационарные волны оги-
бающих.
Будем искать решения системы G38), G39), зависящие от одной бе-
бегущей переменной г] = ? — W, где V = const — скорость стационарной
волны: а = a(rj), 0 = 0(т]).В этом случае фаза волны 0 выражается через
ее амплитуду а:
где d — константа интегрирования, а изменение амплитуды описывается
уравнением ангармонического осциллятора, содержащим нелинейность в
отрицательной степени:
-т^ + тга + т2а2 + т3оГ3 = 0, G.41)
jr'Z / птг \ ¦" / птг \ 1
T№mi = T\-diT) >m2^-a\dkj •- -удк
Заметим, что в уравнении G.41) коэффициент перед а всегда положите-
положителен, перед а™3 всегда отрицателен. Знак же коэффициента перед а3 может
быть как положительным, так и отрицательным, в зависимости от свойств
материала и частотного диапазона. Изучаемой нами области модуляцион-
модуляционной неустойчивости будет соответствовать положительное значение этого
коэффициента.
Для анализа уравнения G.41) удобно перейти к новым переменным
dVgr\ г V
а-
дк
-1/2
а, G.42)
позволяющим переписать его в виде
d2u
—- + и + и3 + Du^3 = 0, G.43)
128
Распространение нелинейных волн в стержнях
Гл. 7
где D =
8da2
F3
dVgr
дк
. Это уравнение имеет первый интеграл
2
+ Щи) = Е
G.44)
где Щи) = -ад2 Н—ii4 пГ2\ Е — константа интегрирования.
Аналитические решения уравнения G.43) найдены и проанализированы
в гл. 5. Амплитуда волн огибающих описывается выражением
-2A0sn2(k0(,s).
G.45)
Здесь Ад = — амплитуда стационарной волны огибающей, ко =
аналог волнового числа, s2 =
модуль
эллиптической функции. Через Щ (Ui
U1-U3
Us) обозначены корни
полинома P(U) = ?^17 U2 U3 Н—D, которые имеют следующие
значения:
7Г (f
? ~ ?
где ю = arccos
_ 2
2 (D/2 - 4/27 - 2Е/3)\
G.46)
Решение G.45) описывает периодические движения, форма которых в
общем случае, не синусоидальна и определяется модулем s e @,1/2).
Таким образом, квазигармоническая изгибная волна, промодулирован-
ная по периодическому закону, описывается выражением
W(x,t) = ±v
6(x,t) =
дк
1/2
W(x, t) exp
0)} + к.с, G.47)
dvqr\ г i v
дк
dVm
dVqr
дк
W*(x,t).
где
= x - (Vg
§7.3.
Нелинейные изгибные стационарные волны
129
W(x,t) =
\
V
дк
-1
Периодическая последовательность волновых пакетов, на которые в ре™
зультате модуляционной неустойчивости разбивается изгибная волна, ка-
качественно (при s2 близком к 1/2) изображена на рис. 7.11.
W{x,t)
W(xj)
Рис. 7.11
Рис. 7.12
В частном случае D = 0 уравнение G.43) является уравнением Дуф-
финга, решение которого
и(() = у-1 + VYT4E сп (A + 4ЕГГ1/2 С,
G.48)
при s2 —>> 0 близко к синусоидальному, а при s2 —>> 1/2 имеет пилообраз™
ную форму.
В этом случае изгибная волна, промодулированная по периодическому
закону, будет описываться выражением
W(x, t) exp {i(ut -kx + 0)} + к.с, G.49)
V
dVm
а-
дк
Здесь
W(x,t) = ^-
Периодическая последовательность волновых пакетов G.49) качествен-
качественно (при s2 близком к 1/2) изображена на рис. 7.12.
Формально стационарные волны огибающих могут существовать и в
отсутствии модуляционной неустойчивости. Такой случай был рассмотрен
в [177], однако механизм их формирования при этом не очевиден.
§ 7.3. Нелинейные изгибные стационарные волны
В § 7.2 изучались особенности распространения квазигармонических
изгибных волн в нелинейно-упругам стержне. Были проанализированы
условия возникновения модуляционной неустойчивости таких волн, при™
водящей к их самомодуляции и формированию стационарных волн огибаю-
огибающих.
130
Распространение нелинейных волн в стержнях
Гл. 7
Рассмотрим случай, когда нельзя ограничиться изучением квазигармо-
нических процессов, а необходимо учитывать широкополостность нели-
нелинейных изгибных волн. При этом изгибные волны обладают большой ин-
интенсивностью и находятся в области слабой дисперсии, т. е. в том диапазоне
частот, в котором фазовые скорости различных гармоник близки между собой.
dW
Решения уравнения F.26) ищем в классе стационарных волн w = ,
где ? = х — Vt — «бегущая» координата, V = const — скорость волны.
Уравнение F.26) сведется к уравнению Дуффинга
w
aw о
-— + miw + m2w = 0,
G.50)
имеющему первый интеграл
2
1 fdwY
ТП2
w — mo—O.
G.51)
V2
Здесь mi = —, m2 = -
через Q обозначен полином
— постоянная интегрирования, а
~~ * п2 I *¦ "т" v>^2 I ^ "т" ^2 ' (/.JZj
О возможности существования нелинейных стационарных изгибных
волн в том или ином классе материалов можно судить по знакам коэффи™
циентов mi и тп^ а в конечном счете, — по знакам параметра нелинейно™
G(v)
сти {olq/E) и положительной или отрица-
отрицательной определенности полинома Q(V).
Знак полинома определяется из реше-
решения биквадратного алгебраического урав-
уравнения Q(V) = 0, имеющего корни V^ =1,
= С2 =
< 1. Следовательно, по-
Рис. 7.13
-1 лином является отрицательно определен™
ным (Q(V) < 0) в диапазоне скоростей
С < \V\ < 1 и положительно определен-
определенным (Q(V) > 0), если скорость стационарной волны находится вне этого
интервала, т. е. при | V| > 1 или \У\ < С (рис. 7.13).
О знаке нелинейного слагаемого [а^/Е) говорилось выше. Напомним,
что для стержней, изготовленных из большинства металлов и сплавов, коэф-
коэффициент нелинейности qiq/E < 0, а для композитных стержней возможно
ша6/Е > 0.
§7.3.
Нелинейные изгибные стационарные волны
131
Волны в металлическом стержне (cxq/E < 0)
Стационарные изгибные волны могут распространятся со скоростями
О < V < С или со скоростями V > 1. Волны являются периодическими и
описываются выражением
где А
амплитуда стационарной волны, к =
т2А2
G.53)
аналог
волнового числа, s =
модуль эллиптической функции,
2(mi+m2A2) J ^J
изменяющейся в интервале 0 ^ s2 < 1/2. При s2 —>- 0 волна G.53) близка
к гармонической, а при s2 —>> 1/2 ее профиль трансформируется в пилооб-
разный (рис. 7.14).
A(v,s)
-А -
С 1
Рис. 7.15
Рис. 7.14
Параметры стационарной волны G.53) A, F, s связаны соотношением
A = ±V<l-^ 2S
l-2s2
(О < V < С, V > 1).
G.54)
Амплитуда изгибной стационарной волны растет прямо пропорционально
росту скорости, а угол наклона прямой A(V, s) зависит от величины модуля
эллиптической функции и увеличивается при увеличении s. Качественная
зависимость амплитуды волны от ее скорости при различных значениях
коэффициента нелинейных искажений приведена на рис. 7.15 (кривые 1,
2, 3, соответствующие si < «2 < S3). Амплитуды всех волн, скорости
которых лежат в интервале 0 < V < С, изменяются от нуля до А =
Eri
2s2
. Изгибные стационарные волны, распространяющие
1 - 2s2
тг 1 л /
еся со скоростями V > 1, начинаются с амплитуды А = \ /
^ г *
В диапазоне скоростей С < V < 1 для стержней с а®/Е < 0 нелинейных
стационарных волн не существует.
На рис. 7.16 показана качественная зависимость амплитуды волны А
от коэффициента нелинейных искажений s при фиксированной скорости.
132
Распространение нелинейных волн в стержнях
Гл. 7
A{v,s)
Кривые A(V,s) лежат ниже зависимо™
сти А = Сх!^ Ег"у
2s1
a6Wgl - 2
рис. 7.16) для скоростей 0 < V < С и выше
зависимости А = С\ —
2s2
вая 2, рис. 7.16) для волн со скоростями V >
> 1. При увеличении скорости нарастание
амплитуды с ростом s происходит быстрее.
На фазовой плоскости (w,dw/d?) ре™
шениям G.53) соответствуют замкнутые
фазовые траектории, концентрирующиеся вокруг особой точки типа
«центр», расположенной в начале координат.
Волны в стержне из композиционного материала (ocq/E > 0)
Нелинейные стационарные изгибные волны могут формироваться во
всем диапазоне скоростей (V). Однако в зависимости от величины ско-
скорости имеются качественно различные волновые картины, поскольку при
этом уравнение Дуффинга G.50) имеет качественно различные решения.
Типы фазовых портретов уравнения G.50) в зависимости от скорости ста™
ционарной волны приведены на рис. 7.17.
Рис. 7.17
Если скорость стационарной волны V < С или V > 1, то уравнение
Дуффинга G.50) имеет два типа финитных решений — периодическое и
уединенное.
Периодическое решение выражается через эллиптический синус:
G.55)
Л „ , 12т1+т2А2
где А — амплитуда стационарной волны, к = \j — аналог
волнового числа, s2 = —
ГП2А2
2mi
• модуль эллиптической функции,
изменяющейся в интервале 0 ^ s2 ^ 1.
§7.3.
Нелинейные изгибные стационарные волны
133
Параметры изгибной стационарной волны связаны соотношением
= ±V
Erl
2s2
a6W02 2s2 + 1
@ < V < С, V>1).
G.56)
Амплитуда волн растет прямо пропорционально с ростом скорости, а угол
наклона прямых G.56) возрастает при увеличении s от 0 до 1. Поэтому
графики зависимостей A(V,s) (рис. 7.18, кривые 1, 2) лежат ниже соот-
соответствующей зависимости для уединенной волны А\ = ± V а
(рис. 7.18, кривые 3). Из рис. 7.18 также видно,
что амплитуда волн, скорости которых нахо-
находятся в интервале 0 < V < С, не превосходит
величины А = С
Erl
2s2
2s2
а волны со
скоростями V > 1 не имеют линейного выро-
вырождения, т. е. они начинаются с порогового зна-
значения амплитуды А =
Eri
2s2
За-
Рис. 7.18
a6W02 2s2 + Г
висимость амплитуды от коэффициента нели-
нелинейных искажений при фиксированной скорости приведена на рис. 7.19, а, б.
A(y,s) i
I
0<F<C, V>\
Рис. 7.19
Уединенная волна, являющаяся предельным случаем периодических
волн G.55) описывается выражением
Ц?)=^Ц?/Д). G.57)
Ее скорость (V), амплитуда (А\) и ширина (А) связаны соотношениями
Er:
1/2
(О < V < С и V
А = ^2 (V2 - 1) (У2 - C2)/V.
G.58)
134
Распространение нелинейных волн в стержнях
Гл. 7
A(V)
Зависимость А\(У) выделена на рис. 7.18 жирной линией (кривая 3),
а зависимость A(F) приведена на рис. 7.20. В этом случае при скоростях
V > 1 проявляется аномальное поведение уединенной волны, которое вы-
выражается в увеличении ее длительности с ростом скорости и амплитуды.
При 0 < V < С поведение уединенной
волны является классическим для соли-
тонов: большая по амплитуде волна име~
ет меньшую ширину и распространяется
с большей скоростью.
Для скоростей, лежащих в интервале
С < V < 1, фазовый портрет уравнения
G.56) содержит два устойчивых положе™
ния равновесия, в окрестности которых
фазовые траектории имеют форму, близ-
близкую к эллипсу (рис. 7.17). В этом случае
имеется три типа финитных решений.
с {с 1
Рис. 7.20
Одним из решений уравнения Дуффинга является уединенная стацио-
стационарная волна
w(?) = Ас2 ch(f/Д), G.59)
связывающая между собой два класса периодических волн. На фазовой
плоскости это решение соответствует сепаратрисе, проходящей через нача-
начало координат (то = 0) и отделяющей одну область периодических решений
(т0 < 0) от другой (т0 > 0).
Скорость (V), амплитуда (А^) и ширина (А) уединенной волны связаны
соотношениями
" <-f2Erl\12 (с<У<1),
А = л/A - V2) (V2 - С2)/К G.60)
Зависимость A^(V) выделена на рис. 7.18 жирной линией (кривая 6), а
зависимость A(F) приведены на рис. 7.20. В диапазоне скоростей л/С <
< V < 1 поведение уединенной волны является классическим для солитсь
нов: большая по амплитуде волна имеет меньшую ширину и распространя-
распространяется с большей скоростью.
Поведение уединенной волны становится аномальным в диапазоне ско-
скоростей С < V < л/С. Здесь волны большей амплитуды имеют большую
ширину.
Движения по замкнутым траекториям вблизи положений равновесия (в
области (то < 0)) описываются функциями дельта-амплитуды:
G.61)
— аналог волнового
где А — амплитуда стационарных волн, у-
числа, s
¦2 = 2
7711
т2Л27
- модуль эллиптической функции.
§7.3. Нелинейные ызгибные стационарные волны 135
Параметры волны связаны соотношением:
Прямые зависимостей G.62) при фиксированном коэффициенте нелиней-
нелинейных искажений s заключены между прямыми зависимостей A(V) для уеди-
ненных волн, т. е. А\ ^ А ^ А% (рис. 7.18, кривые 4, 5). На рис. 7.19, б
тонкой линией показана зависимость амплитуды dn-волн от коэффициента
нелинейных искажений при фиксированной скорости.
Другой тип периодических движений (в области (гао > 0)) описывается
эллиптическим косинусом
), G.63)
где А — амплитуда стационарной волны, к = угт m2yl2 — аналог
2
9 т2А „
волнового числа, sz = — —- — модуль эллиптической функции,
2 (mi + т2А2)
изменяющийся в интервале - < s ^ 1. Для таких волн связь между пара™
метрами А, V, s имеет вид
Коэффициент наклона прямых зависимостей G.64) при фиксирован-
фиксированном s больше \/б, т.е. A{V,s) ^ A^V). Эти периодические волны на™
л п I Егу ^^
чинаются с пороговой амплитуды А = С\ -^— и ограничены
у скбИ/о 2s2 + 1
„ А ПЁг* ^^
величиной А = ¦ '
a6W§ 2s2 + 1*
Однако при s2 —> - угол наклона этих прямых неограниченно воз-
возрастает (рис. 7.18, кривые 7, 8). На рис. 7.19, б жирной линией показана
зависимость амплитуды сгьволн от коэффициента нелинейных искажений
при его изменении от 1 до - и фиксированной скорости.
ГЛАВА 8
РЕЗОНАНСНЫЕ ВЗАИМОДЕЙСТВИЯ
ПРОДОЛЬНЫХ И ИЗГИБНЫХ ВОЛН В СТЕРЖНЕ
§ 8.1. О нелинейных резонансных взаимодействиях
упругих волн
Предположим, что существуют источники, которые создают в безгра-
безграничной упругой среде нестационарное поле смещений W(r, t), а при нали™
чии других источников реализуется поле V(r, t). При наличии как тех, так
и других источников, в случае линейной среды, получаем суперпозицию
U = V + W, (8.1)
причем
Ц (U) = L, (V + W) = L3 (V) + Lj (W) = 0, (8.2)
где через L3 обозначены линейные операторы. Это может быть, например,
оператор Ламе
д2
Li = р-д-% — (А + 2/i) grad div +/i rot rot.
Иная ситуация возникает в нелинейной среде. Поля, создаваемые различны™
ми источниками, будут влиять друг на друга — взаимодействовать. Част™
ным случаем нестационарных упругих полей являются квазигармониче-
квазигармонические волны.
В системах со слабой нелинейностью взаимодействие волн приводит
к их существенному искажению лишь в том случае, когда взаимные воз™
мущения могут накапливаться на достаточно большом пространственно-
временном интервале, т. е. взаимодействие оказывается резонансным. Усло-
Условие резонансности взаимодействия сводится к условию эффективного воз™
буждения одной из волн другими. Для квазигармонических волн это уело™
вие можно записать в виде
j j
^2 ш3п3 = Аш; ^ к3п3 = Ак, (8.3)
3=1 3=1
где ujj — частоты и kj — волновые векторы взаимодействующих волн
должны удовлетворять дисперсионному уравнению линейной задачи
D(uj,kj) = 0. (8.4)
В (8.3) nj — целые числа, Ак <С kj, Аш <С ш3 — малые расстройки, J —
число взаимодействующих волн.
§8.2.
Трехволновые взаимодействия продольных и изгибных волн
137
Трехволновые взаимодействия
В системе с квадратичной нелинейностью при коллинеарном распро™
странении двух плоских волн с частотами ш\ ш ш2 возникает третья волна
на комбинационной частоте. Эти волны
образуют резонансную тройку, если их ча-
частоты и волновые числа удовлетворяют
условиям (До; = Ак = 0)
± ш2 = а;3,
± к2 =
(8.5)
Рис. 8.1
где ujj = uj(kj), kj — частоты и волновые числа взаимодействующих волн,
удовлетворяющие дисперсионному уравнению (8.4).
На рис. 8.1 схематично изображены возможные типы трехволновых
процессов: слияние двух волн в одну (а) и распад волны на две (б).
Частными случаями этих процессов являются генерация второй гармо™
ники, второй субгармоники (деление частоты пополам) и параметрическое
усиление (шг = ш2 =
Четырехволновые взаимодействия
В системах с кубической нелинейностью число резонансно взаимодей™
ствующих волн не может быть больше четырех. Для четырехволновых ре-
резонансных взаимодействий плоских волн должны выполняться условия
где ujj, kj удовлетворяют дисперсионному уравнению (8.4).
(8.6)
Рис. 8.2
На рис. 8.2 приведены диаграммы различных типов четырехволнового
взаимодействия.
§ 8.2. Трехволновые взаимодействия
продольныж и изгибныж волн
В работах, посвященных изгибным колебаниям стержней при конечных
прогибах, часто принимается допущение о квазистатическом растяжении
срединной линии, что позволяет избавиться от связи изгибных колебаний
с продольными волнами. Однако при высоких частотах вибраций, вообще
говоря, нельзя пренебрегать динамическими эффектами, возникающими
138 Резонансные взаимодействия продольных и изгибных волн в стержне Гл. 8
при растяжении срединной линии, а следовательно, и взаимным влиянием
продольных и изгибных волн. Учет этого фактора приводит к появлению
новых нелинейных эффектов. Изучение различных типов взаимодействия
продольных и изгибных волн, по-видимому, сможет помочь разобраться
в механизме динамической потери устойчивости стержней и цилиндриче-
цилиндрических оболочек при осевом ударе. В настоящем параграфе рассматриваются
частные классы решений системы F.13), F.14), описывающие трехчастот-
ные резонансные взаимодействия продольных и изгибных волн.
Взаимодействие бегущих волн1
Решение системы F.13), F.14) будем искать в виде набора бегущих гар-
гармонических волн с медленно меняющимися комплексными амплитудами
N
u(x,t) = 2_J В'п(fit, fix) exp{i(Qnt — Кпх — (fno)} + fi>Qi(x,i) + к.с,
n=l
(8J)
/j 11 | гуъ ~f 1 % /\ | | | ¦/¦ is гуь 1 С\~\ГТЛ J Q I /, 1 ~§~ L^ SY* 1 Q /1 „ | I j I I f 1^* I T* ~f 1 I Tf f*
LU 1 th ^ LI 7 Ji-Ylb \jjLL) jJLJU I СЛ-jJ1 1 & {UJfyi L tbffitl/ \~ ly777,0 / J "T~ 1^^%2 \ "-1 ? ^) ~T~ JV.C j
171=1
(8.8)
где к.с. — обозначает комплексно-сопряженную часть решения, Ат, Вп —
комплексные амплитуды, (рп® и фт® — начальные сдвиги фаз, Qi^ —
малые добавки, /i <С 1 — малый параметр. При слабой нелинейности взаи-
взаимодействие приводит к существенному изменению амплитуд волн толь-
только в том случае, если возмущения могут накапливаться на достаточно
большом пространственно-временном интервале (резонансное взаимодей-
взаимодействие), иначе возмущения будут незначительными (^ /i) и ими можно пре™
небречь.
Известно, что в системах с квадратичной нелинейностью при распро-
распространении двух волн возникает третья волна на комбинационной частоте.
Если частота и волновое число возникающей волны удовлетворяют дис-
дисперсионным соотношениям, то волна будет нарастать по мере распростра-
распространения.
В рассматриваемой системе реализуется резонансное взаимодействие
трех волн, две из которых — изгибные и одна — продольная. Частоты и
волновые числа этих волн связаны условиями синхронизма
шг ± ш2 = О, кг ± к2 = К (ujj > О, О > 0) (8.9)
и удовлетворяют дисперсионным соотношениям
^2
1 Режим бегущих волн можно создать, например, в кольце. Однако следует учиты-
учитывать, что кольцевая система обладает специфическими особенностями, связанными
с наличием кривизны и замкнутости [96, 97].
§8.2.
Трехволновые взаимодействия продольных и изгибных волн
139
ш = к
(8.11)
Рассмотрим случай, когда высокочастотной является продольная волна
(т. е. О = ш\ + а/2). Условия (8.9)—(8.11) удовлетворяются, если2
К
К К"
1/2
1/2
(8.12)
На рис. 8.3 изображены дисперсионные характеристики продольных (/) и
изгибных (//) волн, а также тройка взаимодействующих волн, удовлетво-
удовлетворяющих условиям синхронизма (8.9).
Рис. 8.3
Из (8.12) следует, что к±к2 < 0, т. е. изгибные волны, удовлетворяющие
условиям синхронизма, должны распространяться навстречу друг другу.
Методом усреднения по «быстрым» переменным получим систему уко-
укороченных уравнений для определения комплексных амплитуд взаимодей-
взаимодействующих волн:
(8.13)
DAW
¦ PYTl 4 9 VV \- 1 '
\А2
(8.14)
(8.15)
2Выражения (8.12) получены с точностью до слагаемых ~ i/°.
140 Резонансные взаимодействия продольных и изгибных волн в стержне Гл. 8
^ (duA dU
Здесь В = грю + ^20 — ^о — фаза взаимодействия; 1-^-1 , -j^
dk dK
повые скорости изгибных и продольных волн; Го = 1 + v2r2pK<1, Гт =
= A + ГуA — и)к2 + и2--к2), т = 1, 2; коэффициент нелинейного взаи-
взаимодействия равен
D — — I r A- 9r -4- r
2a2
Po
(8.16)
Отсюда видно, что эффекты, связанные с геометрической нелинейностью,
пропорциональны третьей степени волнового числа, а эффекты, связан-
связанные с физической нелинейностью, — пятой степени. Поэтому для длинно-
длинноволновых возмущений (8.7) и (8.8) (кт <С 2тг/а, а — поперечный размер
стержня) геометрическая нелинейность будет существенно преобладать над
физической. Кроме того, кубическая нелинейность, связанная с изгибны-
ми деформациями, входит в (8.13) с мнимой единицей и, следовательно,
влияет лишь на фазы взаимодействующих волн. Система (8.13) обладает
интегралом движения, имеющим смысл закона сохранения энергии
^(Ео + Ег + Е2) + ^(^о + Si + S2) = 0, (8.17)
где Ет = Ттш2п \Ат\2 — плотности энергий изгибных и Е0 = Т0п2 \В\2 —
продольной волны; Sm = (dcu/dk)m Emj Sq = (du/dk) Eq — плотности
потоков энергий. Кроме того, выполняются следующие частотно-энергети-
частотно-энергетические соотношения
дх yUJi UJ
являющиеся континуальным аналогом соотношений Мэнли-Роу, извест™
ных в теории нелинейных колебаний.
В стационарном случае (д/дх = 0) из соотношений (8.16) следует
So Si
— -\ = const,
50 S2 ,
TV H = const,
il UJ2
51 S2
= const.
(jj-^ UJ2
§8.2. Трехволновые взаимодействия продольных и изгибных волн 141
Они показывают, что продольная волна высокой частоты О распадается на
две изгибные волны более низких частот ш\ и ш^ (распадная неустойчи-
неустойчивость). При этом распределение энергии между изгибными волнами опи-
описывается следующим выражением:
со, (du/dK) (d/dK) (In п)
E=E=,)Eo> m = 1'2" (8Л9)
Взаимодействие стоячих волн
В стержне, имеющем конечную длину, не всегда удается создать режим
бегущих волн. В связи с этим представляет интерес исследование нелиней™
ного резонансного взаимодействия стоячих волн.
Представляя решение в виде набора стоячих гармонических волн с мед™
ленно меняющимися комплексными амплитудами
exp
+ B^(fjLt) exp {-гПп*}] cos(Knx + ipn0) + /iQ2(x, t), (8.20)
м
w(x,t) = ^^ [-4m(/-¦?) exp {i(jjmt} +
m=l
+ A^fit) ex.p {-iumt}]cos(kmx ^ фт0) ^ fiQ1(x,t)J (8.21)
из системы F.13), F.14) получим укороченные уравнения для определе-
определения действительных амплитуд am(t), bn(t) и фаз pn(i)9 фт(г) (Ат =
= amexp{i-0m}, Bn = bnex.p{iipn}) взаимодействующих волн, удовле-
удовлетворяющих условиям синхронизма (8.9) и дисперсионным уравнениям
(8.10), (8.11):
Ь = п\п2 sin 6^ d &i6>
T\UJ\
(8.22)
= —D 1 —7 cos 6>+
kWi + 2klal)
где D — коэффициент нелинейного взаимодействия (8.14); 6(t) = (р — фг —
— ф2'9 а начальные фазы (ро, ф\, ф2 подчиняются условию, полученному
ранее для бегущих волн. Предположим, что в начальный момент времени
в стержне была возбуждена мощная продольная волна частоты п слабая
142 Резонансные взаимодействия продольных и изгибных волн в стержне Гл. 8
изгибная волна на частоте ш\. В процессе их взаимодействия будет гене™
рироваться изгибная волна разностной частоты Ш2 = О — ш\. Принятые
предположения соответствуют начальным условиям
6@) = Ьо, ai@) = ао, а2@) = 0. (8.23)
Из уравнений (8.20) следует, что кубическая нелинейность системы непо-
средственно не влияет на изменение амплитуд взаимодействующих волн, а
сказывается лишь на изменении их фаз. Кроме того, она является величиной
более высокого порядка малости по сравнению с квадратичной нелинейно-
нелинейностью, так как пропорциональна четвертой степени волнового числа. При
кт <С 2тг/а можно пренебречь кубической нелинейностью, тогда система
уравнений (8.20) становится интегрируемой, и ее решения выражаются че-
через эллиптические функции Якоби. Изменение амплитуд взаимодействую-
взаимодействующих волн описывается следующими выражениями:
ai(t) = —\ dn(?,s), «2 @ = ^о
s V Г1Ш1
где ? = K(s) + Db()t/s^TiT2UJiuJ2, K(s) — полный эллиптический инте-
интеграл первого рода, s = Ьо^/TqQ/ (Tiljiclq + ГоОЬд) — модуль эллипти-
ческой функции.
Взаимодействие стоячих волн имеет характер биений, период которых
определяется выражением 7\ = 2sy/r1r2^i^2^(s)/bo^- Расчеты показы™
вают, что в стальном стержне с площадью поперечного сечения F = 1 см2
при возбуждении продольных колебаний на частоте /о = 0/2тг = 10 кГц
(длина волны Aq = 50 см) с амплитудой Ьо = Ю мк (е0 — 3 • 10^5) возника-
возникают изгибные колебания на частотах /i = 4 кГц (Ai = 18 см) и /2 = 6 кГц
(Ai = 15 см). Если амплитуды начального возмущения изгибных волн рав-
равны ао = ОДЬо и 62@) = 0, то полная перекачка энергии из одного типа
волн в другой происходит за время At ^ 10~г с (полупериод биений). Ко-
Коэффициент усиления изгибной волны на частоте /i равен maxai(?)/ao =
= Q = 16, а максимальная амплитуда изгибной волны на частоте f2 равна
шах п2 (t)/a® = 13. В этом случае модуль эллиптических функций s ~ 0,998
и изменения амплитуд взаимодействующих волн имеют ярко выраженный
ангармонический характер (рис. 8.4). Если в начальный момент времени
в стержне наряду с продольной волной существовала изгибная волна ам-
амплитуды ао = Ьо, то коэффициент усиления этой волны Q = 1,9, а полная
перекачка энергии продольной волны в изгибные волны происходит за вре-
время At ~ 4 • 10~2 с.
Заметим, что здесь не учитывались нелинейные искажения самой про-
продольной волны, которые возможны и в отсутствии изгибных возмущений.
Искажения продольной волны возникают за счет возбуждения ей своих выс-
высших гармоник и, прежде всего, второй гармоники. Эффективная генерация
§8.2.
Трехволновые взаимодействия продольных и изгибных волн 143
Рис. 8.4
второй гармоники будет происходить в системе при выполнении условий
синхронизма
О2 = 20 К2 = 2К, (8.25)
которые следует рассматривать совместно с дисперсионным уравнением
(8.10). Укороченные уравнения, описывающие изменение комплексной ам-
амплитуды продольной волны Bi и амплитуды ее второй гармоники В2, имеют
вид
\Bi\
Эта система позволяет определить время, за которое можно ожидать значи-
значительной перекачки энергии продольной волны в энергию ее второй гармо-
гармоники:
At2 ^
(827)
144 Резонансные взаимодействия продольных и изгибных волн в стержне Гл.
Важной характеристикой является отношение этого времени к характер™
ному времени перекачки энергии от продольной волны в изгибные волны
(~ 0,5At)
т =
At
2At2
Если ао = bo и 62@) = 0, т.е. амплитуды продольной и изгибной волн
имеют одинаковый порядок, то т « 0,3. Перекачка энергии продольной вол™
ны в высшие гармоники в этом случае незначительна. При а® = ОДЬо,
^2@) = 0 получаем т « 0,8. Возбуждение изгибных волн успеет произой™
ти и в этом случае, однако их амплитуды будут меньше рассчитанных по
(8.22), так как при искажении продольной волны уменьшается амплитуда
ее основной гармоники.
ГЛАВА 9
ВОЛНЫ В ЛИНЕЙНО-УПРУГИХ СТЕРЖНЯХ
С НЕЛИНЕЙНЫМИ ГРАНИЧНЫМИ УСЛОВИЯМИ
§ 9.1. Сведение краевыж задач в чаетныж производных
к решению задачи Коши
для обыкновенных дифференциальных уравнений
с отклоняющимся аргументом
Линейные распределенные системы с нелинейными граничными за-
закреплениями занимают некоторое промежуточное положение между ли™
нейными и нелинейными распределенными системами. Исследования та™
ких систем имеет свою специфику, так если диссипативными и диспер-
дисперсионными эффектами в линейной части системы можно пренебречь, то
начально-краевая задача может быть сведена к конечной системе обык-
обыкновенных дифференциальных уравнений с отклоняющимися аргументами
нейтрального типа. Термин нейтральный тип уравнения означает, что от-
отклоняющийся аргумент присутствует в старшей производной [129]. Для
таких уравнений известно, что даже гладкие начальные условия могут при-
приводить к разрывным решениям. Переход от краевой задачи в частных произ™
водных к начальной задаче для дифференциальных уравнений с отклоняю-
отклоняющимися аргументами позволяет учесть краевые условия весьма широкого
класса (нелинейные, с переменными параметрами, с источниками энергии,
подвижные и хп.) и не нуждается в дополнительных упрощающих предпо-
предположениях.
Это можно продемонстрировать на примере линейного волнового урав-
уравнения без дисперсии и потерь:
if ~с2тЛ =0. (9.1)
ut их
Граничные условия запишем в виде дифференциальных (в общем случае
интегро-дифференциальных) операторов с переменными коэффициентами
а начальные распределения искомой функции и ее производной по времени
удовлетворяют условиям:
ди
ОХ ?=0
где #i (t) и #2 (t) — внешние источники на подвижных границах х = h (i),
x = i2(t)9 h(t) ^ i2(t).
146
Волны в линейно-упругих стержнях
Гл. 9
Подставляя решение волнового уравнения (9.1) в виде бегущих волн
u{x^t) = u\{t-\-x/c)-\-U2(t — x/c) в краевые условия (9.2), получим систему
обыкновенных дифференциальных уравнений с отклоняющимся аргумен-
аргументом (система уравнений нейтрального типа)
[щ (t
+ и2 (* - п)}, К (t + n) + u'2 (t -
-c[<(t-
, К
,t) =
), (9.4)
(t -
+ v!2 (t- n)], t =
- К (t + ¦
Здесь n = h(t)/C, t2 = h(t)/C; штрихи означают дифференцирование
функций г/i, г/2 по всему аргументу.
Для решения системы (9.4) необходимы начальные условия на щ^ (t ±
±^/G), которые получаются путем разложения начальных возмущений
(9.3) по бегущим волнам при t = 0:
.@«
ct
(9.5)
При этом, естественно, должны выполняться условия согласования началь-
начальных и граничных условий (9.2), (9.3), а так же условия дифференцируемости
функций.
Отметим, что исследование волновых процессов в отрезке линейной
среды с сосредоточенными нелинейностями на границах представляет ин-
интерес во многих отраслях физики и техники [117-119], где такие процессы
используются для синхронизации мод резонатора и формирования корот-
коротких импульсов. Системы такого рода являются частным случаем перио-
периодических структур с нелинейными дискретными элементами. Их важным
свойством является то, что распределения полей в любой точке распреде-
распределенного звена можно выразить через значения полей в точках подключения
нелинейных элементов. Это позволяет свести исследование динамики рас-
распределенной системы к анализу процессов на ее границах. Если одна из
границ неподвижна (например h(t) = 0), то поля их и щ в произвольной
§ 9.2. Периодические волны в стержне с нелинейно-упругим закреплением 147
точке х иногда бывает удобно выразить через поля в точке х = 0 оператор-
операторными соотношениями
du(x,t) . Л du@,t) Л du(O,t)
— = smhpx— h cosnjxe— ,
ot ox ot xq ^x
du(x,t) . du@,t) . . du(O,t)
дх дх dt
где exp {±pt} — оператор сдвига, (exp {±pt} f(t) = f(t =L ж)), coshpa: =
= — (exp {pt} + exp {—pt}), sinhpx = - (exp {pt} ~~ exp {—pt}).
Теоретически очевидно, что исследование задачи (9.4)^(9.5) ничем не
легче исследования (9.1)—(9.3), так как это просто разные формы записи
одной и той же задачи. Однако для исследования с помощью ЭВМ форма
(9.4)^(9.5) может быть предпочтительнее, поскольку не требует использова™
ния сеточных методов, что может существенно сократить объем программы
и время на ее отладку. К тому же в ряде случаев, когда линеаризованные
граничные условия близки к идеальным (например и = 0 или их = О
при х = li)9 т.е. дисперсия границ мала1, у системы могут иметься ста™
ционарные периодические решения с периодом, кратным времени пробе-
пробега волны. В этом случае использование условий периодичности приведет
постановку (9.4)^(9.5) к аналогичной системе уравнений с малым отклоно-
нением аргументов. Неизвестные функции щ могут быть разложены в ряд
по степеням этого малого отклонения аргумента, что сведет задачу к систе-
системе обыкновенных дифференциальных (или интегро-дифференциальных)
уравнений уже без отклоняющегося аргумента. При этом суммарный диф-
дифференциальный порядок системы и степень ее адекватности исходной си™
стеме зависит от количества удерживаемых членов ряда. Полученная таким
образом (приближенная) система уравнений может описывать только пери-
одические процессы.
§ 9.2. Периодические волны в стержне
с нелинейно-упругим закреплением
В качестве примера рассмотрим динамические процессы в стержне с од-
одним жестким (х = 0) и одним нелинейно-упругим закреплением (х = L)
(рис. 9.1). Для длинных продольных волн нелинейная краевая задача, опи™
сывающая свободные колебания стержня в безразмерных переменных (xf =
= x/L9 t' = Cst/L) имеет следующий вид (штрихи у безразмерных пере-
менных опущены):
utt ~ ихх '=z О? и\ —п = О-»
=1 = ки - /хФ(м), "|t=0 = Uo(x), ut\t=0 = V0(x)
¦'При отражении от упругой границы гармоническая волна приобретает сдвиг
фазы, который изменяется с увеличением частоты нелинейно. Отклонение сдвига
фазы волны от линейного закона можно рассматривать как дисперсию.
148
Волны в линейно-упругих стержнях
Гл. 9
где Ф(и) — произвольная функция, определяющая вид нелинейности, /х —
малый параметр, характеризующий слабое влияние нелинейности границы,
к — жесткость пружины, Uq(x) и Vq(x) — некоторое начальное распреде-
распределение смещений и скоростей вдоль стержня, а квадрат стержневой скорости
С^ = Е/р — есть отношение модуля упругости материала Е к линейной
плотности стержня р.
О
Рис. 9.1
Подстановка решения в виде бегущих волн в систему (9.6) приводит к
дифференциально-разностному уравнению с отклоняющимся аргументом:
'{t
f(t -l) = k [u(t + 1) - u(t - 1)] - /хФ (u(t
- u(t - 1)).
(9.8)
В случае, когда упругое закрепление обладает кубической нелинейно-
нелинейностью, краевая задача (9.8) сводится с помощью метода изложенного в преды-
предыдущем параграфе к решению нелинейного дифференциально-разностного
уравнения
[u(t) + u(t -2)}-к [u(t) - u(t - 2)}
[u(t) - u(t - 2)f = 0 (9.9)
с начальными условиями на интервале запаздывания:
"t-i
1 г
u(i) = — "Из (С) ^С ~~ U()(t — 1) , О
2 J
. о
2.
(9.10)
Здесь параметр к пропорционален отношению коэффициента упругости
граничного закрепления к волновому импедансу стержня и характеризует
как жесткость пружины (рис. 9.1), так и время взаимодействия волны с
границей.
Если к <С 0 (или к ^> 1), то стержень с такими граничными условиями
в линейном приближении (/х = 0) представляет собой четвертьволновый
(или полуволновый) резонатор. При этом у системы (9.9)—(9.10) имеются
стационарные периодические решения1, период которых кратен времени
пробега волны по стержню и определяется наинизшей собственной ча-
частотой линеаризованной системы, т. е. Т = Тп + А, где Тп — период
Стационарные волны в стержне с нелинейно-упругими границами, обладаю-
обладающими кубической нелинейностью, изучались в работах [117-119].
§ 9.2. Периодические волны в стержне с нелинейно-упругим закреплением 149
наинизшей гармоники волны в линейном приближении, А — нелинейная
расстройка. Воспользовавшись тем, что при к >> 1 время пробега волны
вдоль стержня близко к целому числу полупериодов стационарной волны,
можно записать условия периодичности:
u(t) = -u(t-2-A), (9.11)
где А — малое запаздывание, характеризующее относительное время вза-
взаимодействия волны с нелинейно-упругой границей, а при fc< 1 условия
периодичности имеют вид
u(t) = u(t-2 + A). (9.12)
Раскладывая правые части условия периодичности в ряд по малому А и
подставляя в (9.9), ограничиваясь членами порядка А3 приходим к обыкно-
обыкновенному дифференциальному уравнению1, описывающему динамику ос-
осциллятора с возвращающей силой пропорциональной кубу смещения —
уравнение Дуффинга:
F"@+^@-^3@ = 0, (9.13)
где F (О = 2Auf (С), ш2 = 2 A - к А) А^25 а = 2^кА~1. Если заме-
заменить ? на t ± ж, то входящая в уравнение функция F (?) будет определять
бегущую волну напряжения с точностью до членов порядка А3. Аналогич-
Аналогично при к «С 1 получим (9.13), где F (?) при ? = t ± x описывает бегущую
волну смещения, при этом ш2 = к/ A + к А) А, а = 2/Z&/4 A + к А) А.
Мы не будем останавливаться на решении уравнения Дуффинга, оно
достаточно подробно изложено в гл. 5. Что же касается малого параметра А,
который по сути определяет период стационарных колебаний системы, то
его можно вычислить из разности периодов колебаний линеаризованной
системы (при \i = 0) и получаемого периода решения уравнения Дуффинга,
он имеет достаточно сложное выражение через эллиптические интегралы
и зависит от амплитуды волны.
Заметим, что периодические стационарные волны могут реализоваться
в рассматриваемой системе только при соответствующих начальных усло-
условиях. При других же начальных условиях в системе скорее всего будет на-
наблюдаться «непрерывный переходный» процесс, т. е. распространяющиеся
в стержне волны не будут стационарными. Это является следствием того,
что консервативная (пассивная) нелинейность не обладает организующим
свойством (т. е. не приводит к образованию стационарных движений или
предельных циклов).
В противоположность пассивной, активная нелинейность, управляю-
управляющая энергетикой системы, как правило, приводит к формированию, из лю-
любых начальных условий, установившихся стационарных движений, кото-
которые называются предельными циклами системы. Теперь перейдем к более
подробному изучению таких движений, обусловленных активной нелиней-
нелинейностью.
^з соображений симметрии, технически удобнее осуществлять подстанов-
подстановку в (9.8).
150
Волны в линейно-упругих стержнях
Гл. 9
§ 9.3. Крутильные автоколебания вращающегося стержня
Рассмотрим крутильные колебания тонкого стержня кругового попе-
поперечного сечения, которые в области линейного закона Гука описываются
волновым уравнением
ви -ClBxx = 0. (9.14)
Один конец стержня (х = 0) вращается с постоянной угловой скоростью:
O\x=0=ut, (9.15)
а на другом конце (х = 1) закреплен диск с моментом инерции, находящий-
находящийся в непрерывном контакте с внешней
поверхностью и взаимодействующий с
ней посредством сил трения (рис. 9.2):
(Jge
gett
x-L
Рис. 9.2
¦GJkexmtp(et))\x=L = 0.
(9.16)
Здесь С% = G/p9 G — модуль упруго-
упругости при кручении, р — плотность мате-
материала, Jk — момент инерции при кру-
кручении, О (ж, ?) — угол поворота сечения, mtp (Qt) — момент сил трения
диска о поверхность.
Момент сил трения имеет падающий участок (рис. 9.3), и в точке пере-
перегиба (rn'lp (@t) = О) его можно разложить в ряд по степеням Otj ограничи-
ограничиваясь в разложении кубическими слагаемыми:
mtp (&t) = mo — TniQt + тп^В^ + О (В^) . (9.17)
Переходя к безразмерным величинам
it /77T~ it т Jg^r miCT _ m^Cl _ шЬ
у = x/L, т = y/G/pt/L, J = 7—-, a = -77^—, P = П1 г2, п = —
(9.18)
и вводя новую искомую величину (р(у,т)9 характеризующую отклонения
движения стержня от равномерно-
равномерного вращения и статической закрутки
{moLy/GJ)
^/^От, (9.19)
получим нелинейную однородную кра-
краевую задачу относительно новой вели-
величины (р:
= 0, (f\y=Q = 0,
[j(fTT
Рис. 93
= 0.
(9.20)
§9.3. Крутильные автоколебания вращающегося стержня 151
Подстановка в граничные условия (9.20) решения в виде бегущих волн
) = <р(т + у)-<р(т-у) (921)
приводит (9.20) к дифференциально-разностному уравнению в обыкновен-
ных производных:
J У'[т + 1) - ip" (г - 1)] + [<р'(т + 1) + <р'(т - 1)] -
- а [<р'(т + 1) - <р'{т - 1)] + /3 [<р'(т + 1) - <р'{т - I)]3 = 0, (9.22)
которое относительно производной и(т) = (р'(т) является дифференциаль-
дифференциальным уравнением с отклоняющимся аргументом (уравнение нейтрального
типа)
J [и'(т + 1) - и'{т - 1)] + [и(т + 1) + и{т - 1)} -
- а [и(т + 1) - и(т - 1)] + /3 [гл(т + 1) - к(т - I)]3 = 0. (9.23)
Форма колебаний стержня зависит от характера спектра собственных частот
соответствующей линейной консервативной системы (а = /3 = 0):
ctgO = JO. (9.24)
Для реальных конструкций обычна частотно зависимая диссипация, ко-
которая приводит к быстрому затуханию колебаний на высоких частотах, по-
поэтому будем интересоваться началом спектра. Из спектрального уравнения
(9.24) следует, что имеется три качественно различных вида расположения
собственных частот системы, определяющих ее динамическое поведение.
Релаксационные автоколебания
Если относительная инерция диска мала (J <С 1), то начало спектра
эквидистантно. В предельном случае, когда диска на конце стержня нет
(J = 0), установившийся процесс автоколебаний, развивающийся из за-
заданных начальных условий, описывается разрывной функцией:
^ sign (sin (^l
<т) = \М^ sign (sin (^l) ) (9.25)
(где п — номер собственной формы, по которой задано начальное возму™
щение), что легко проверяется подстановкой (9.25) в (9.23), а также может
быть получено графически с помощью построения Ламерея [3,23]. Остано-
Остановимся на анализе автоколебаний, когда инерцией диска пренебречь нельзя
(J ф 0). Пусть щ(т) —решение порождающего уравнения соответствую-
соответствующей консервативной системы (а = /3 = 0), тогда установившейся режим
будем искать в виде
и(т + 1) - и(т - 1) = А(т) [щ(т + 1) - щ(т - 1)],
(9.26)
и(т + 1) + и(т - 1) = А(т) [щ(т + 1) + щ(т - 1)].
152 Волны в линейно-упругих стержнях Гл.9
Подстановка (9.26) в (9.23) приводит к уравнению Бернулли. Можно пока™
зать, что при нулевых начальных условиях (А@) = 0) решение
-1/2
9Й ( 9лт1 Г ( 9п?1
2/3
(9.27)
соответствует установившемуся процессу. Из (9.26) следует условие пери™
одичности на функцию А(т):
А(т + 1) = А(т-1). (9.28)
Точность выполнения (9.28) является точностью решения (9.27) и, следо-
следовательно, (9.23). Окончательное решение имеет вид
и(т) = щ(т)
2/3 Г 2ат
-ехрг-
1 -1/2
(9.29)
Переходя здесь к пределу J —>> 0, приходим к выражению (9.25), причем
условие (9.28) выполняется точно. Таким образом, с помощью изложенной
процедуры можно получать приближенные аналитические решения для
стационарного движения стержня с фрикционным источником на границе.
Для подтверждения результатов теоретического анализа было проведе-
проведено исследование решений (9.23) на аналоговом вычислительном комплексе
с использованием аналого-цифрового блока запаздывания. Блок-схема, мо-
моделирующая уравнение (9.23), приведена на рис. 9.4.
На рис. 9.5, а приведена диаграмма машинного решения, развивающего-
развивающегося из начальных условий, заданных по первой собственной форме, которая
хорошо согласуется с найденным аналитическим решением (рис. 9.5, б).
Наличие кратных частот (спектр эквидистантен) обеспечивает их эф-
эффективное взаимодействие на кубической нелинейности, что в данном слу-
случае приводит к формированию некоторого энергетического баланса.
При этом амплитудно-частотная характеристика (или форма) устано-
установившегося процесса зависит только от набора частот в начальных услови-
условиях, но не от их амплитуд. Это обстоятельство подтверждают машинное и
аналитическое решения (рис. 9.6, а шб соответственно), получающееся из
начальных условий, заданных на первых трех собственных частотах при
различном соотношении амплитуд (рис. 9.5 и 9.6 получены при J = 0,1).
Из полученных решений следует, что в случае эквидистантного спектра
по системе распространяются волны деформаций (~ иг(т)), имеющие ярко
выраженный релаксационный характер.
§9.3. Крутильные автоколебания вращающегося стержня 153
Рис. 9.4
/«//3
V(t)
б
Рис. 9.5
154
Волны в линейно-упругих стержнях
Гл. 9
\Л
IaJ
Рис. 9.6
«Деухпериодические» автоколебания
При большой инерции диска (J ^> 1) в спектре присутствует низшая
частота f Oi —>- y/l/J, при J —)> ooj, а остальной спектр эквидистантен.
Будем искать решение (9.11) в виде суперпозиции двух функций, описы-
описывающих «медленное» движение, соответствующее первой собственной ча-
частоте системы, и периодическое движение с периодом, близким к 2 (что
соответствует Оп, п ^ 2) («быстрые» движения)
(9.30)
где х(т±Т)=х(т), Т = 2 + Д.
Малые параметры /i <C 1 и А <С 1 можно определить (в первом прибли-
приближении) из спектрального уравнения (9.24), или, считая их неизвестными,
определить по периодам полученного в дальнейшем решения. Подставляя
(9.28) в (9.23), с учетом периодичности приходим к дифференциальному
уравнению с малыми отклонениями аргументов. Разложим функции, входя™
щие в это уравнение, в ряд по отклоняющимся аргументам, ограничиваясь
2 2
членами порядка /х2 и
р
А2:
J^ [Ах (г) + 2/V (/хг)] + 2 [Х (т) + »<р (fir)] -
^а [А± (г) + 2/V (fir)} + /3 [Ах (г) + 2/V (fir)f = 0. (9.31)
Здесь точка соответствует дифференцированию по «быстрому» времени (т),
а штрих — по «медленному» (fir). Поскольку «медленные» и «быстрые»
§9.3. Крутильные автоколебания вращающегося стержня 155
движения имеют, в общем случае, несоизмеримые периоды, то в первом
приближении взаимосвязью функций х (т) и <?> (мг) на кубической нели-
нейности можно пренебречь. Это приводит (9.14) к двум независимым
обыкновенным дифференциальным уравнениям
11 / \ -1- /\ f / \ H H1 .о , ч
(f \I^t) -\ -(p y/JLT) (f \1^t) -\ (p {f^T) = 0.
J \l Jfl J
Уравнения этого типа известны как уравнения Рэлея и хорошо изучены
[104]. Они описывают как квазигармонический режим автоколебаний, так
и релаксационный, в зависимости от соотношений коэффициентов отри-
отрицательного трения (источник энергии) и нелинейной диссипации, ограни-
ограничивающей амплитуду автоколебаний. Из анализа (9.32) следует, что малые
параметры можно оценить следующим образом: А « 2/тг2J, /л « y^l/J.
Из соотношения коэффициентов видно, что при увеличении отрицательно-
отрицательного трения релаксационный режим появляется сначала для «быстрых» дви-
движений, при этом «медленные» движения еще квазигармонические. Этот
результат, вообще говоря, очевиден, поскольку «медленно» меняющаяся
функция (р (fir) описывает движение массивного диска на упругом валу
(длина волны много больше длины системы), а «быстрая» % (т) описывает
волновой процесс, развивающийся в самом вале, для которого закреплен-
закрепленный на валу диск доставляет почти идеальное кинематическое граничное
условие. Так как все собственные частоты, начиная со второй, являются
кратными, колебания на этих частотах эффективно взаимодействуют из-за
наличия в системе кубической нелинейности, что приводит к возникнове-
возникновению релаксационных автоколебаний для «быстрого» движения практиче-
практически при любом коэффициенте отрицательного трения.
На рис. 9.7 показаны осциллограммы численного расчета (9.32) без уче-
учета взаимного влияния «быстрого» и «медленного» движений (рис. 9.7, а),
с учетом этого влияния (рис. 9.7, б), а также решение уравнения (9.23) при
J = 10 (рис. 9.7, в).
Из численных расчетов видно, что система уравнений достаточно хоро-
хорошо описывает «двухпериодическое» движение вала. В случае учета взаим-
взаимного влияния «медленных» и «быстрых» движений возникает небольшой
дрейф фазы «быстрых» движений относительно «медленных». «Быстрые»
движения имеют характер релаксационных автоколебаний, в то время как
«медленные» — квазигармонические автоколебания. Заметим, что ампли-
амплитуда «медленных» движений больше амплитуды «быстрых» движений, но
учет «быстрых» движений необходим, так как энергия «быстрых» движе-
движений сравнима с энергией «медленных» движений (а иногда может превы-
превышать ее в несколько раз). При этом в реальных механизмах энергия «бы-
«быстрых» движений рассеивается в материал вала (повышается его темпера-
температура) и в окружающую среду в виде акустических волн.
156
Волны в линейно-упругих стержнях
Гл. 9
Квазигармонические автоколебания
В линейных системах значения собственных частот в общем случае
зависят от величины коэффициентов при «неконсервативных» слагаемых.
Покажем, что для линеаризованной системы (9.30) (/3 = 0) в случае малого
коэффициента при неконсервативной части (а <С 1) в первом приближении
(по а) поправки к значению собственных частот отсутствуют.
Действительно подставляя решение
<р(у,т) = A sin (Ay) exp
а 1
J±iXT)
(933)
в линеаризованное граничное условие (9.20) при у = 1, /3 = 0, получим
уравнение на отыскание собственных значений краевой задачи
ctg A = JX ± га.
Разложим А в ряд по степеням малого параметра а:
А = ш = aAi + ...,
(9.34)
(9.35)
где ш — одна из собственных частот соответствующей консервативной
системы (см. (9.24)). Ограничиваясь в (9.35) членом порядка а, подставим
его в (9.34)
ctgw — aAi (l + ctg2 ш) = Jou + aJXi ± ш,
откуда
¦2 2\
= ±гA + J + J2uj[
(9.36)
§9.3. Крутильные автоколебания вращающегося стержня 157
Таким образом, поскольку Ai является чисто мнимой величиной, то по-
поправка к частоте в первом приближении отсутствует. Тогда (9.33) с учетом
(9.35) и (9.36) имеет вид
(р (у, т) = Аsin (Ху) exp | j + 1 +J^ J2^2 ± ш | , (9.37)
а а
где выражение —| ^—^ является инкрементом системы. Из вы™
ражения для инкремента видно, что он практически не зависит от частоты,
поэтому амплитуды колебаний в начале спектра нарастают одинаково.
При неэквидистантном спектре энергия колебаний с одной частоты не
может эффективно перераспределяться на другие частоты, так как соб-
собственные частоты системы не находятся в кратном соотношении. Поэтому
нелинейное слагаемой влияет в основном лишь на ограничение суммарной
амплитуды колебаний. Это обстоятельство дает возможность построения
приближенного аналитического решения при малых а и /3.
Решение ищем в виде
и(т) = А(ат) °и(т), А@) = 1, (9.38)
где А (ат) — медленно меняющаяся амплитуда, а °и(т) удовлетворяет
уравнению
J[°u(t + 1)-°u(t-1)]' + [°и(т + 1)-°и(т-1)] = 0. (9.39)
Подставляя (9.38) с учетом (9.39) в (9.23) и раскладывая в ряд по а до вели-
величин порядка а2, получаем уравнение первого приближения, описывающее
медленно меняющуюся амплитуду
JA' (ат) { [°и (г + 1) - °и (т - 1)]' + [°и (т + 1) - °и (т - 1)} } -
^А (ат) [°и (г + 1) - °и (т - 1)] +
+ ]ЗА 3 (ат) [°и (т + 1) - °г^ (т - 1)]3 = 0, (9.40)
гдеД = /3/а<1, А{0) = 1.
Уравнение (9.40) является обыкновенным дифференциальным уравне-
уравнением с быстро меняющимся квазипериодическими коэффициентами. Для
его решения можно применять различные способы усреднения [104, 121].
Руководствуясь простотой интегрирования потребуем, чтобы невязка
(9.40) была ортогональна функции °и(т + 1) — °и(т — 1) на ее периоде.
Для этого умножим (9.40) на эту функцию и проинтегрировав по быстрому
времени т, получим
(Ь2 + Jc2) A' - с2А + р-А3 = О, (9.41)
158
Волны в линейно-упругих стержнях
Гл. 9
где
Уравнение (9.41) решается в квадратурах:
А(ат) = Г 2eXp{BQCV)/(fe2 + JC2)}
2 - /Зс2 + (Зс2 ехр {Bас2т) / (Ъ2 + Jc2)},
1/2
(9.42)
Из (9.42) следует, что амплитуда установившихся колебаний приблизитель-
приблизительно равна y/2a/f3c2.
Рис. 9.8
Полученное аналитическое решение достаточно хорошо описывает и
переходной процесс, показанный на рис. 9.8, что подтвердилось сравне-
сравнением результатов численного моделирования уравнений (9.23) и (9.40) с
приближенным решением. Результаты машинного моделирования подвер-
подвергались фурье-анализу, который показал, что спектр установившихся коле-
колебаний практически совпадает со спектром начальных возмущений.
Численные расчеты проводились при J = 1, а = ОД, C = 0,1-^0,5,
начальные условия задавались как сумма колебаний на первых трех соб-
собственных формах соответствующей консервативной системы. При этом для
различных реализаций варьировалось соотношение начальных амплитуд,
которое оставалось неизменным на всем времени переходного процесса.
Переходной процесс длится примерно 20-50 периодов (при максимальной
амплитуде начального возмущения -4@) = ОД), а начальное соотношение
§9.3. Крутильные автоколебания вращающегося стержня 159
амплитуд гармоник сохраняется на временах порядка 90—100 периодов. Да-
Далее это соотношение медленно разрушается, что может быть следствием
нелинейных эффектов более высокого порядка малости или несовершен-
несовершенством расчетной схемы.
Из проведенных аналитических и численных исследований можно сде-
сделать вывод о том, что спектральный состав установившегося процесса сов-
совпадает со спектральным составом начальных условий.
Устойчивость
В заключение исследуем устойчивость установившегося режима. Пусть
ф(у-)Т) описывает установившийся процесс, удовлетворяющий уравнению
и граничным условиям (9.20), а еф (у, т) есть малое (порядка е <С 1) от-
отклонение от этого процесса. Устойчивость ф (у, т) оценивается по поведе™
нию возмущения ф (у, т) (если оно неограниченно нарастает, то процесс
неустойчив). Для этого подставим «возмущенное решение»
<р (у, т) = ф (у, т) + еф (у, т) (9.43)
в (9.20) и линеаризуем полученную систему по малому параметру е:
Фтт ^Фуу = 0 Ф\у=0 = 0,
(9.44)
1фтт + фу + (ЗРФ1 - а) фт\у=1 = 0.
Поведение ф (у,т) (в смысле нарастания или убывания) полностью
определяется неконсервативными слагаемыми (З/Зф^ — а) фт, которые
можно интерпретировать как изменяющуюся во времени силу трения
Ftp = (Ц3ф2т -а)фт. (9.45)
Если на периоде установившегося процесса среднее («действующее») зна-
значение этой силы положительно, то система теряет энергию, т. е. с течением
времени любое возмущение стационарного процесса затухает. Поэтому до-
достаточно исследовать только знак интеграла
(-a)dr, (9.46)
о
где Т — период (или квазипериод) стационарного процесса ф. Так, если
его знак больше нуля — стационарный процесс асимптотически устой-
устойчив; случай, когда интеграл (9.46) равен нулю, соответствует орбитальной
устойчивости, а знак меньше нуля характеризует неустойчивый процесс.
При исследовании устойчивости распределенных систем возникает во-
вопрос: по отношению к какому функционалу имеется в виду устойчивость.
В данном случае с физической точки зрения целесообразно исследовать
устойчивость по отношению к функционалу энергии
1
D>2T + 4>l)dy. (9.47)
160 Волны в линейно-упругих стержнях Гл.9
Для определения знака интеграла (9.46) запишем дифференциальное урав-
уравнение переноса энергии (уравнение Умова-Пойнтинга) для установивше-
установившегося процесса:
™ = -Щ&гФу). (9-48)
После интегрирования, (9.48) по длине системы с учетом граничных усло-
условий по времени, получим уравнение изменения энергии системы за период
за счет работы неконсервативных сил (9.45)
(9-49)
Поскольку в установившемся процессе энергия системы на периоде не
изменяется (W = const), из (9.45) следует, что коэффициент трения есть
положительно определенная функция. Тем самым доказано, что установив-
установившийся процесс (р (у,т) асимптотически устойчив.
ГЛАВА 10
ГАШЕНИЕ КОЛЕБАНИЙ
В РАСПРЕДЕЛЕННЫХ СИСТЕМАХ
ДВИЖУЩИМИСЯ ОБЪЕКТАМИ
После того как мы рассмотрели возможность генерации вибраций в
одномерных конструкциях, возникает естественный вопрос, как понизить
уровень этих вибраций, если возникнет такая необходимость.
Проблема уменьшения уровня колебаний конструкций возникает в раз-
различных областях техники: промышленном и гражданском строительстве,
тяжелом, транспортном и энергетическом машиностроении, приборостро-
приборостроении и т.п. Во многих случаях она связана с необходимостью повышения
прочности и снижения материалоемкости конструкций, однако не менее
важны и такие аспекты проблемы, как выполнение технологических требо™
ваний, предъявляемых условиями эксплуатации, и защита людей от вред-
вредного действия вибраций. Актуальность проблемы непрерывно возрастает в
связи с увеличением размеров конструкций, повышением быстроходности
машин, ужесточением санитарных и технологических требований к допу™
стимым уровням колебаний.
К настоящему времени известны различные методы и средства борь-
борьбы с недопустимыми колебаниями конструкций, и даже перечисление этих
методов займет много места. Все эти методы обладают различными досто-
достоинствами и недостатками, которые мы рассматривать не будем.
Здесь же мы будем рассматривать совершенно новый способ пониже-
понижения уровня вибраций одномерной распределенной системы, основанный на
«саморегулирующем свойстве» сил давления волн.
Задачи о взаимосвязанном движении распределенной системы и со-
средоточенного объекта относятся к новому, еще мало изученному классу
граничных задач. В таких системах особую роль играют известные еще
с конца XIX века силы давления волн, распространяющихся по распре-
распределенной системе и встречающих на своем пути препятствие в виде со-
сосредоточенного объекта. До недавнего времени, пока скорости механизмов
были малы, и волновыми свойствами системы можно было пренебречь,
учитывать силы волнового давления в проектно-конструкторских расчетах
не было необходимости. Увеличение скорости работы механизма до ско-
скорости распространения волн в конструкции этого механизма приводит к
необходимости учитывать силы давления волн уже на этапе проектирова-
проектирования, так как на этапе «доводки» увеличить скорости распространения волн
в конструкции весьма проблематично и требует увеличения материалоем-
материалоемкости или с использования более дорогих конструкционных материалов.
По-видимому, в ближайшее время силам давления волн будет уделяться
больше внимания, как механиками-теоретиками, так и практиками.
Идея гашения вибраций заключается в том, что под действием силы дав™
162
Гашение колебаний в распределенных системах
Гл. 10
ления волн сосредоточенный объект движется вдоль упругой направляю™
щей, при этом резонансные свойства такой объединенной системы (объект-
направляющая) изменяются, таким образом, что можно «отстраивать» си-
систему от резонанса. Для этого необходимы некоторые предварительные
замечания, которые дают возможность вывода граничных условий.
§ 10.1. Взаимодействие распределенной системы
с сосредоточенной
Рассмотрим задачу о поперечных колебаниях струны с нанизанной на
нее «бусинкой» массы га, которая может скользить вдоль струны без трения
(рис. 10.1).
Уравнение переноса волнового импульса имеет следующий вид:
дх
+
= 0,
A0.1)
где рщих — плотность волнового импульса, 1/2 {ри2 + Nu^) — ненуле™
вая компонента тензора плотности потока волнового импульса р, N —
плотность и натяжение струны.
Для гармонической волны и = a cos (cut — kx) плотность волнового им™
пульса имеет вид рыки2 (x,i). Это означает, что волновой импульс является
квадратичной величиной по амплитуде и переносится в направлении рас-
распространения волны. Среднее значение 1/2 ршка2 не равно нулю, в отличие
от среднего значения плотности механи-
механического импульса рщ = 0, для которого
уравнение переноса в данном случае явля-
является дивергентной формой записи уравне-
уравнения поперечных колебаний струны (здесь
и далее черта над переменной означает ее
среднее по времени значение)
х = 0 x=Lt
Рис. 10.1
x=L
дх
Заметим, что если среднее значение меха™
нического импульса рщ было бы отлично от нуля, это означало бы наличие
переноса вещества.
Когда волна взаимодействует с каким-либо препятствием, мешающим
ее свободному распространению, она (волна) «передает» этому препят-
препятствию некоторый импульс, причем посредником передачи выступает сила
давления волн. Выражение для этой силы можно получить из интегрального
закона сохранения полного импульса системы в проекции на направления
распространения волны.
Запишем интегральный закон сохранения полного импульса всей систе-
системы в проекциях на горизонтальную и вертикальную оси:
Jiml +
Ж2 Х2
^ I (рщих) dx = A I i [pu2t + Nu2x) dx, A0.2)
§10.1. Взаимодействие распределенной системы с сосредоточенной 163
-^m°u + — pu+dt = ^r~ Nuxdx, A0.3)
dt at I ox I
где °u(i), • • -l(t) — смещения бусинки в поперечном и продольном направ-
направлениях. В точке нахождения бусинки х = l(i) производные щ и их имеют
разрывы. Для нахождения условий, которым они удовлетворяют, следует
устремить пределы интегрирования к точке разрыва. Учитывая, что щ и их
имеют конечные пределы слева и справа от разрыва, и используя формулу
дифференцирования интегралов с переменными пределами интегрирова-
интегрирования
— f(x,t)dt= -Qjdt + bf(b)-af(a),
a(t) a(t)
из A0.2) и A0.3) получим
ml = 1/2 [pu2t + Nu2x]\+_°0 - I [putux]\+_l, (Ю.4)
Tfi и — \Nu ~\~ I 0Uf\ A0 5)
где квадратными скобками обозначена разность предельных величин по
разные стороны от точки разрыва (х = l(t)). Соотношения A0.4), A0.5)
являются условиями баланса поперечных и продольных сил в точке. Для
гармонической волны среднее значение правой части в A0.5) равно нулю,
а в A0.4) отлично от нуля. Это и есть «сила давления» вибраций струны
на бусинку, т. е. — волновое давление. При этом первое слагаемое опреде-
определяет силу, действующую на неподвижное препятствие, а второе учитывает
поправку к силе давления из-за движения бусинки.
Для изгибных волн в балке (модель Бернулли-Эйлера) уравнение пере-
переноса волнового импульса можно получить из уравнения
pFwu — EJwxxxx = 0, A0.6)
где ги(ж, i) — поперечное смещение срединной линии, р — объемная плот-
плотность материала, F — площадь поперечного сечения, Е — модуль Юнга,
J — осевой момент инерции. В этом случае волновой импульс имеет такой
же вид, как и для струны G = —pwtwx, а уравнение для плотности потока
волнового импульса имеет более сложное выражение:
1 / 2 2 \
Р = - lpwt + EJwxx) - EJwxwxxx. A0-7)
z
Нетрудно показать, что их средние значения связаны между собой следую-
/ т^ т
щим соотношением: Р = VgG, где Vg = 2j—^ — групповая скорость
волны в балке. Следовательно, волновой импульс, так же как и энергия
волны, переносится вдоль системы с групповой скоростью, которая много
164 Гашение колебаний в распределенных системах Гл.10
больше скорости движения «частиц» балки, это указывает на то, что данный
эффект не может быть непосредственно связан с переносом массы.
§ 10,2. Движение массы вдоль струны
под действием волнового давления
Исследуем влияние сил волнового давления на характер согласованного
движения струны и свободно скользящей по ней массы (рис. 10.1). Мате™
матическая постановка задачи имеет вид
рии - Nuxx = 0, A0.8)
т °u(t, l(t)) = р (N/p - I2) К] ?°, A0.9)
[u2x] ?°, (ШЛО)
u@,x) = <р(х), A0.11)
щ@,х) = ф(х), A0.12)
u(t,0) = u(t,L) = 0, A0.13)
°u(t) = u(x,t) \x=i-o = u(x,t) \x=i+o , A0.14)
где p, N — погонная плотность и натяжение струны, u{x^t) — ее попереч-
поперечное отклонение, т — масса сосредоточенного объекта («бусинки»), l{t) —
координата, описывающая его положение на струне. От классических задач
математической физики с краевыми условиями на неподвижных границах
рассматриваемая задача A0.8)—A0.14) отличается в уравнении баланса сил
A0.9) дополнительным слагаемым пропорциональным I2 и новым нелиней™
ным уравнением A0.10), описывающим закон движения бусинки х = l(t).
Последнее описывает преобразование поперечных колебаний струны в про-
продольные движения массы.
В настоящее время не разработано общих аналитических методов да-
даже приближенного исследования таких задач, являющихся принципиально
новыми задачами математической физики. В связи с этим возникает необ-
необходимость в моделировании системы A0.8)-—A0.14) численными метода-
методами. Для исследования на ЭВМ систем, описываемых дифференциальными
уравнениями в частных производных, обычно применяют хорошо разрабо-
разработанные сеточные методы или методы, основанные на замене производных
по координате конечными разностями и последующем сведении к боль-
большой, но конечной системе обыкновенных дифференциальных уравнений.
В данном случае применение подобных методов неэффективно, так как
осложнено наличием подвижной границы х = l(t)9 что требует на каждом
шаге модификации уравнений, описывающих взаимодействие с границей.
Перейдем к безразмерным переменным (далее индексы «и» будут опу-
опущены):
хн = xc/L, tH = tcLy/N/p,
A0.15)
ixH = uc/L, M = m/pL, IH = lc/L
§10.2. Движение массы вдоль струны под действием волнового давления 165
и подставим решение волнового уравнения в форме бегущих волн:
и(х, t) = F(t + x)-F(t-x), 0 ^ х ^ l{t), A0.16)
и(х, t) = G(t-l + x)-G(t + l- ж), l(t) ^x^l A0.17)
в граничные условия. В результате приходим к системе дифференциальных
уравнений в обыкновенных производных с отклоняющимся аргументом
нейтрального типа:
°u(t) = F(t + 1) - F(t - 1) = G{t - 1 + I) - G(t + 1 - I), A0.18)
M °u(l(i),t) = 2 [G(t - 1 + /) - °u(l, t) - F(t - 1)] , A0.19)
- [Gf(t + 1 - I) + G'(t - 1 + I]2} .
A0.20)
Численное интегрирование таких уравнений одношаговыми методами ти~
па методов Рунге-Кутта нецелесообразно, так как для вычисления правых
частей внутри шага требуется применение интерполяционных алгоритмов,
которые усложняют программу и увеличивают время вычислений. Наибо-
Наиболее удобно использование многошаговых методов прогноза-коррекции с
постоянным шагом интегрирования. За постоянный шаг интегрирования
приходится платить большим числом итераций, но при этом снимается
проблема начала счета, так как начальные условия задаются на всем интер-
интервале от 0 до 2. При этом алгоритм не имеет ветвлений и реализующая его
программа получается относительно простой, требующей минимальных
временных затрат на разработку и отладку.
При моделировании начальные условия задавались по собственным
формам (модам) колебаний струны без объекта (т.е. М = 0): Ашткх.
В ходе решения варьировалась амплитуда
начальных условий А, номер моды к, мае™
са М и ее местоположение на струне 1@)
A@) = 0).
Моделирование показало, что ее™
ли начальное распределение смещений
струны симметрично относительно на-
начального положения объекта 1@), то сум-
суммарная сила волнового давления, дей-
действующая на объект в каждый момент
времени, равна нулю, и в процессе, дви-
движения системы объект не меняет своего
положения на струне. Такие положения объекта совпадают с пучностями
струны и, как будет показано далее, являются устойчивыми положения-
положениями равновесия. На рис. 10.2 приводится серия «фотографий» струны с
объектом (крестик), следующих через равные промежутки времени, для
Рис. 10.2
166 Гашение колебаний в распределенных системах Гл.10
начальных условий, заданных по различным собственным формам стру-
струны А; = 1 (а), к = 2 (б). При этом форма струны в процессе движения
системы далека от первоначальной. Объект совершает периодические дви-
движения вдоль струны, амплитуда которых зависит от его начального поло-
положения 1@), а период от начальной формы и массы объекта, как это видно
из графиков.
Для начальных условий, заданных по первой собственной форме стру-
струны, когда объект находится вблизи положения равновесия, удается постро-
построить приближенное аналитическое решение.
Разложим решение волнового уравнения A0.16), A0.17) при х = l(t) в
ряд по \l(t)\ < 1. Ограничиваясь двумя членами ряда имеем:
F(t ±l) = F(t) ± l{t)Ff(t) + o(l), A0.21)
G(t ±(l- 1)) = G(t) ±(l- l)Gf(t) + o((l - IJ). A0.22)
Подставляя A0.21), A0.22) в систему A0.18)—A0.20), придем к системе
обыкновенных дифференциальных уравнений
°u(t) = 2lFf(t) = 2A - l)Gf(t), A0.23)
М °u{t) = 2A - I2) [Gf(t) - Ff(t)}, A0.24)
M l(t) = -2A - /2) [Gf2(t) - Fl2{i)] . A0.25)
Из A0.23) следует, что функции, описывающие колебания струны по разные
стороны от бусинки, могут быть выражены, через смещения самой бусинки:
Исключая из A0.24) и A0.25) Ff(t) и Gf(t), получим систему двух обык-
обыкновенных дифференциальных уравнений, описывающих динамику только
сосредоточенного объекта:
A0.27)
(I - 1I
с начальными условиями 1@) = 0, °и@) = asinTrl(Q), °й@) = 0.
Приближенное решение A0.27), A0.28) имеет вид
°u(t) « u@) cos(y/2/Mt), A0.29)
l(t) « 0, 5 - @, 5 - 1@)) cos (^Q=t) - A0.30)
§10.3.
Гашение колебаний движущимися объектами
167
Оно получено с точностью, соответствующей точности разложения A0.21),
A0.22), и справедливо при М ~ 1, \и@)\ < 1, |0,5 - 1@)| < 1.
Полученные аналитические зависимости A0.29), A0.30), описывающие
движения объекта, хорошо совпадают с результатами численного модели™
рования системы A0.8)—-A0.14) (см. рис, 10.2 и 10.3).
Отметим, что частота поперечных колебаний объекта близка к первой
собственной частоте объединенной системы (струна+объект) когда объект
находится в середине струны A@) = —0,5).
Численные и аналитические исследования показывают, что энергия ко-
колебаний струны преобразуется в энергию движения объекта вдоль струны
1
0,8
0,4
/@
20
Рис. 10.3
40
60
и обратно таким образом, что пери-
период и амплитуда поперечных колебаний
объекта (°u(i) при М ^ 1) прак-
практически не меняются (см. рис. 10.3).
Все результаты, показанные на рисун-
рисунках, сделаны при массе объекта рав-
равной массе струны (т. е. М = 1), и
малых амплитудах отклонения стру-
струны | и\ <С1.
Так как в процессе движения си-
системы сосредоточенный объект меня-
меняет свое положение, то меняются спек-
спектральные свойства системы в целом.
Это дает основание предполагать, что
возможно использование эффекта движения массы вдоль упругой направ-
направляющей под действием волнового давления для создания конструктивно
простых автоматических регуляторов вибраций распределенных систем без
дополнительных источников энергии [6].
§ 10.3. Гашение колебаний струны
движущимися сосредоточенными объектами
Динамическое гашение колебаний основано на изменении вибрацион-
вибрационного состояния объекта виброзащиты путем присоединения к нему допол-
дополнительных устройств — гасителей [98]. Однако эти устройства эффектив-
эффективны, как правило, лишь в узкой полосе частот и требуют точной настройки
при эксплуатации. Вследствие этого при динамическом гашении колеба-
колебаний распределенных упругих систем, обладающих широким спектром ре-
резонансных частот, конструкция самого гасителя часто оказывается более
сложной (громоздкой), чем защищаемая система.
Наряду с этим, давно известен факт, что кольцо, свободно скользящее по
стержню, может снижать уровень вибраций в широкой полосе частот [33].
Теория такого гасителя до настоящего времени не достаточно разработа-
разработана. В [18] были найдены положения равновесия кольца на вибрирующем
стержне без учета его влияния на колебания стержня. Постановка задачи,
корректно учитывающая взаимное влияние сосредоточенного объекта на
168
Гашение колебаний в распределенных системах
Гл. 10
колебания одномерной упругой системы и колебаний системы на движение
объекта впервые была получена в работах А.И. Весницкого и Г.А. Утки™
на (см. [27]). Это позволило в [8] исследовать динамическое поведение
гасителя в предположении медленного движения кольца (в сравнении со
скоростью волн) в области частот, близких к первой собственной частоте
системы с распределенными параметрами. В этом случае кольцо ведет се-
себя как регулятор колебаний, изменяющий резонансные свойства системы
в целом в зависимости от частоты возбуждения, где энергия, требуемая
для такого изменения, черпается из энергии колебаний объекта виброзащи-
ты. Посредником преобразования энергии колебаний стержня в энергию
движения кольца выступает сила давления волн.
Ниже рассмотрены две простейших модели гасителей: струна со сво-
свободно скользящей по ней массой и струна со свободно скользящим по ней
осциллятором. Найдены положения равновесия, исследована их устойчи-
устойчивость, и для установившихся режимов (объект находится в устойчивых
положениях равновесия) определены максимальные амплитуды колебаний
струны в зависимости от частоты возбуждения.
Гаситель — движущаяся масса,
Пусть по струне с плотностью р и натяжением N может свободно сколь-
скользить сосредоточенный объект массы т его положение на струне харак-
характеризуется координатой L\{t). Концы струны (х = 0, х = L) совершают
синусоидальные колебания с частотой ш и амплитудой А0 (рис. 10.4)
0,04
-0,04
о
60
20 40
Рис. 10.4
Движение массы вдоль струны происходящее под действием сил давле-
давления вибраций описывается уравнением:
«'1г!!п с10-31)
A0.32)
а ее поперечные колебания — уравнением
§10.3. Гашение колебаний движущимися объектами 169
в котором учтены конвективные силы, пропорциональные квадрату скоро-
скорости движения массы f L\).
Динамика струны описывается решениями уравнения
р чп - N ихх = 0, A033)
удовлетворяющими краевым условиям
и\х=о =u\x=L =A°sm(u)t) A0.34)
и условиям непрерывности смещений в месте положения массы
^|*=Li(t)-o =u\x=LlW+0 = °u(t) A0.35)
Определим положения равновесия массы на струне из уравнения дви-
движения A0.31) и условий равновесия L\ = L\ = 0. При этом нелинейное
уравнение A0.31) переходит в условие для определения положений равно-
весия
[^]J A0.36)
а краевая задача A0.32)-—A0.35), описывающая колебания системы, стано-
становится линейной
vTT -vyy = 0 A0.37)
v \y=o = v \y=i = Asm От A0.38)
M°v=[vy]l+°0 A0.39)
A0.40)
Здесь у = x/L9 I = Li/L, r = у л/N/p, М = m/pL, v = u/L,
°v = °u/L, О = uj/ujq, A = A0 /L — безразмерные переменные, ujq =
= — л/N/p — первая собственная частота распределенной системы.
JU
Частное решение задачи A0.37)—A0.40) описывает установившиеся вы-
вынужденные колебания системы при фиксированной частоте возбуждения
(
v (у,т) = A sin S2т х <
a2 cos О A-у) + sin О A - 2/),
Коэффициенты ai и а2 пространственной формы колебаний определя™
ются из A0.39)—A0.40) системой двух алгебраических уравнений
ai sin 01 - a2 sin О A - I) = cos О (I - 1) - cos OI A0.41)
ai (cos (OI) - MO sin OI) - a2 cos О (I - 1) =
= sin OI - sin О (I - 1) + MO cos OI,
170
Гашение колебаний в распределенных системах
Гл. 10
откуда
1 - cos О - MO cos 01 sin О (I - 1)
sin О + MO sin 01 sin О (I- 1) '
cosO- l-MOsmOlcosO(l- 1)
A0.42)
2 sin О + MO sin 01 sin О (I - 1) '
Заметим, что резонансные частоты находятся из условия равенства нулю
детерминанта системы A0.41)
А = sin п + МО sin 01 sin О (I ~~ 1)
A0.43)
и зависят от величины и положения сосредоточенной массы на струне. На
рис. 10.5 показаны зависимости пяти первых резонансных частот системы
от положения объекта (при М = 1).
0--
ч-
х=0 x=Ll{i)
Рис 10.5
x=L
Из рис. 10.5 видно, что изменяя положение массы на струне, можно как
настраивать, так и отстраивать систему от резонанса.
Условия равновесия A0.36) с учетом решения A0.42) имеют вид
l п) =
(sin О + МО sin 01 sin О (I - I)J
A0.44)
Все равновесные положения массы при заданной частоте возбуждения О
определяются соотношением
A0.45)
1),
A0.46)
где к = 0, ±1, ± 2,... и, вследствие ограниченности системы (О
удовлетворяют неравенству
О , О
< к < —
7Г Ж
Состояния равновесия соответствуют положениям узлов и пучностей
возбуждаемой в струне без массы формы колебаний. Если возбуждается п-
я форма (т. е. птт < О < (п + 1)тг), то количество равновесных положений
равно 2п + 1.
§10.3.
Гашение колебаний движущимися объектами
171
Определение устойчивости положений равновесия является одним из
главных вопросов при исследовании динамики рассматриваемой системы.
Рассмотрим малое (порядка е <С 1) отклонение массы от положения рав-
равновесия 1{т) = Iq + eZ(r) и линеаризуем уравнение движения A0.31) по
параметру е
Z"{9) - F{(l0,0)(l - cose)Z{9) = 0
A0.47)
где 9 = От — новое время. В данном случае устойчивость положения рав-
равновесия означает ограниченность решений Z@)9 т. е. если для любого ма-
малого 5 : \Z@)\ < 5 следует, что |^@)| ^ В < оо при 0 ^ (9*, то положение
равновесия 1(т) = 1д устойчиво. Уравнение A0.47) является уравнением
Матье, для которого известно, что если амплитуда источника меньше дли-
длины возбуждаемой волны ( А ^ 0, 2— 1, то решения Z@) ограничены при
F/(I0,0) < 0 и неограниченны при F/(Z0,0) > 0.
Так как F(Iq, О) — пропорциональна постоянной составляющей силы
давления волн, то результаты исследования устойчивости физически озна-
означают, что вблизи устойчивых положений равновесия сила давления волн
направлена в сторону положения равновесия (т. е. в данном случае она яв-
является «возвращающей» силой).
п
Lh
.0*
L
1
0,5 1
Рис. 10.6
0,0
0,5
Рис. 10.7
1,0
На рис. 10.6 на плоскости параметров (I, в) показаны положения равно-
равновесия, при этом устойчивые положения равновесия соединены сплошными
линиями, неустойчивые — пунктиром. Частоты пп = птт разграничивают
области, соответствующие различным формам колебаний (рис. 10.6). При
переходе через пп состояния равновесия меняют характер устойчивости на
противоположный и возникает пара новых устойчивых положений равно-
равновесия.
Заметим, что устойчивые положения равновесия совпадают с пучностя-
пучностями смещений, возбуждаемой формы колебаний струны, а неустойчивые —
с узлами.
Для установившегося режима колебаний, когда масса находится в устой-
устойчивых положениях равновесия, на рис. 10.7 построена зависимость ампли-
172
Гашение колебаний в распределенных системах
Гл. 10
туд колебаний струны ( U = max я (ж, t) 1 от частоты возбуждения. Для
V ОМ) /
сравнения пунктиром приведена аналогичная характеристика струны без
гасителя. Видно, что система с регулятором имеет неограниченную ампли-
амплитуду только на единственной частоте 0 = 0* значение, которой зависит от
величины массы регулятора и всегда меньше первой собственной частоты
распределенной системы без регулятора (см. A0.43)).
0*1
2
Рис, 10.1
V
О
2 4
Рис. 10.9
В качестве оценки эффективности гашения вибраций К выберем отно™
шение энергии установившихся колебаний системы с регулятором Е
+
о о
к энергии колебаний системы без гасителя Eq
К(п) = Е/Ео
(рис. 10.8) К(п) ^ 1 всюду, кроме небольшой области с центром О*, при™
чем, как и следовало ожидать, максимальная эффективность достигается
вблизи тех частот вибронагрузки, которые соответствуют резонансным ча-
частотам незащищенной системы.
Гаситель — скользящий осциллятор
Рассмотрим конструкцию, когда к скользящей по струне массе mi че-
через пружину жесткости к присоединена масса гаг. Вся остальная конструк-
конструкция соответствует системе, описываемой уравнениями A0.31)—A0.35). При
этом к математической постановке добавляется уравнение движения массы
гаг (в проекции на ось «U»). В безразмерных переменных имеет вид:
vTT -vyy =
v \y=o = v \y=i = a sin От
M1ov = [vy]l+oo + k{z-°v)
A0.48)
A0.49)
A0.50)
§10.3. Гашение колебаний движущимися объектами 173
M2z =
y=i+o =
-M2)i =
к (°v - z)
r iZ+O
A0.51)
A0.52)
A0.53)
где Mi = mi/pL, M2 = Ш2/'pL, az(r)—лагранжева координата попереч-
поперечного отклонения массы М2. Исследование системы A0.48)—A0.53) будем
проводить также, как и исследование системы A0.31)—A0.35).
Когда осциллятор находится в положении равновесия на струне 1 = 1 =
= 0, частное решение задачи A0.48)—A0.52) описывает установившиеся
вынужденные колебания системы при фиксированной частоте возбужде™
ния.
v{y,r) - cos Ut х I Асш0A _ ^ + с sin 0A -y), y^ l(r) (ia54)
z(t) = D cos Or,
где амплитудные коэффициенты В, G, Z) находятся из системы линейных
алгебраических уравнений третьего порядка
В sin 01 - С sin 0A - I) - A [cos 0A - I) - cos OI]
Bk sin OI + ?> (O2M2 - ife) = -AJfe cos OI A0.55)
В (О cos OI + k sin OI - Мг О2 sin OI) + CO cos A - I) - Dk =
= О (sin 0A - I) + sin OI) + (M1O2 - jfe) cos OI.
Из условия равенства нулю детерминанта A0.55)
А = (jfe _ О2М2) sin О + О [O2MiM2 - ife (Mi + M2)] sin OI sin 0A - I)
определяются собственные (резонансные) частоты объединенной системы
при заданном положении осциллятора (l(r) = const = 1, 0 ^ I ^ l). Уело™
вия равновесия 1 = 1 = 0 превращают уравнение движения A0.53) в уравне-
уравнение для определения равновесных положений осциллятора на струне (силы
волнового давления нет):
Подстановка A0.54) в A0.56) дает возможность определить все равно-
весные положения осциллятора на струне (Г(О, Mi, M2, к)) при заданной
частоте возбуждения О. При этом коэффициенты пространственной формы
имеют вид:
В = А {(к - О2М2) A - cos О) +
+ О sin О A - I) [Mi (к ~~ О2М2) cos OI + кМ2 sin OI] } /А
174 Гашение колебаний в распределенных системах Гл.10
С = А {(к - п2М2) A - cos О) + пк (Mi + М2) cos 01 sin Ш-
[п2М1М2 ^к{Мг + М2)] sin 01 cos О A - I)} /A
D = Ак (sin 01 + sin О A - !)) /А
Как и ранее, для определения характера устойчивости положений рав-
равновесия, рассмотрим малое (порядка е <С 1) отклонение от положения рав-
новесия 1(т) = F+ е!(т) и линеаризуем уравнение движения A0.53) по е.
Получим уравнение Матье
T,l{e)_dFg{l,u)
dl
Jl- cos 0I@) = 0 A0.57)
где в = От — новое время, а через F§ A,0) — обозначено среднее значение
силы давления волн. При dFg (I, О) /81 < 0 решение A0.57) ограничено,
что и означает устойчивость движения при 1(т) = I.
На рис. 10.7 на плоскости @,1) показаны равновесные положения,
устойчивые соединены сплошной линией, неустойчивые — пунктирной.
Как и в предыдущем случае, устойчивые положения равновесия совпадают
с пучностями возбуждаемой формы колебаний, а неустойчивые — с узла-
узлами. Частоты Оп = тгп (n ^ 2) разграничивают области, соответствующие
различным формам колебаний струны. При переходе через Оп состояния
равновесия меняют характер устойчивости на противоположный и возни™
кает (или исчезает) пара устойчивых положений равновесия.
Выбор оптимальных параметров гасителей является одним из основных
вопросов теории виброгашения. Это требует дополнительных исследова-
исследований и здесь почти не затрагивается. В связи с громоздкостью аналитических
выражений задачу оптимизации параметров, по-видимому, целесообразно
решать численными методами. Однако в теории гасителей для сосредото-
сосредоточенных систем задача оптимизации решена. Используем данный подход
для исследуемой системы и проанализируем полученные результаты.
Так, если система струна со свободно скользящей по ней массой М име-
имеет неограниченный резонанс на наинизшей собственной частоте О* (О* =
= 0,56 при М = 1), то для того, чтобы отстроиться от этого резонанса,
необходимо выбирать параметры гасителя из условия:
к - п*М2 = 0, М = Мг + М2 A0.58)
При этом, как показывают численные исследования, на частоте возбу-
возбуждения наблюдается антирезонанс. Учет потерь в пружине вероятнее всего
должен привести к расширению области антирезонанса и относительно
небольшому смещению центра этой области (т. е. уменьшению численного
значения частоты антирезонанса). Здесь имеется полная аналогия с теорией
динамических гасителей с трением.
За использование осциллятора в качестве гасителя приходится «пла-
«платить» наличием еще одного неограниченного резонанса. Так, если поведе-
§10.4.
Гашение вибраций балки свободно скользящей массой
175
ние системы струна-масса аналогично одночастотной системе с неограни-
неограниченным резонансом на частоте О*, то поведение системы струна-осцилля-
струна-осциллятор (без трения) подобно поведению двухчастотной системы с неограни-
неограниченными резонансами п\ < О* иО*2 > О*
Для установившегося режима колебаний, когда осциллятор находится
в устойчивом положении равновесия, на рис. 10.8 построена зависимость
амплитуды колебаний струны j U = max u(x,i) 1 от частоты возбуждения.
V (ж>*) у
Параметры осциллятора удовлетворяют условию A0.58). Для сравнения
пунктиром показана аналогичная характеристика для случая, когда гасите-
гасителем является сосредоточенная система. Из рис. 10.8 видно, что при частоте
возбуждения, большей С1*2, осциллятор ведет себя как сосредоточенная мае™
са. Расчеты, для построения рисунков выполнены при М = 1, М\ =0,5,
М2 = 0,5, О* = 0,56, к = 0,13 (п*г = 0,32; О* = 0,71)
§ 10.4. Гашение вибраций балки
свободно скользящей массой
В технике обычно применяют механические конструкции с элемента™
ми, обладающими сильной дисперсией в области низких частот колеба-
колебаний (валы, балки, роторы и т.п.), поэтому изучение возможностей гашения
вибраций в таких системах имеет практический интерес (например, для
машиностроения).
max U(x,t)
и i
}г О* п2 1
Рис. 10.10
В качестве объекта виброзащиты рассмотрим балку длины L с погонной
плотностью р и моментом инерции сечения J0. Низкочастотные изгибные
колебания балки достаточно хорошо описываются уравнением Бернушш-
Эйлера:
putt + EJ°uxxxx=0, A0.59)
где Е — модуль Юнга. Пусть края балки (х = 0, х = L) через шарниры
закреплены на вибростенде, совершающем синусоидальные колебания с
амплитудой а и частотой ш:
' x=L
A0.60)
A0.61)
176 Гашение колебаний в распределенных системах Гл.10
Самосогласованные движения сосредоточенного объекта массы т с мо-
моментом инерции j и балки в поперечном направлении определяются урав-
уравнениями непрерывности
ux\x=Ll(t)+0 = W*L=Ll(t)_o = V*)> (Ю.63)
а также уравнением баланса перерезывающих сил и моментов в месте на-
нахождения объекта (х = Li(i))
m°u = EJ° [иххх]^°0 A0.64)
j <>ф = EJ° [uxx]LL\tl A0.65)
Уравнение
т1г = — [u2tu2xx - 2uxuxxx]LL1i^l A0.66)
описывает движение объекта вдоль балки под действием сил волнового
давления.
Определим положения равновесия объекта вдоль балки из уравнения
A0.66) с учетом условия равновесия L\ = L\ = 0. При этом уравнение
A0.66) переходит в условие для определения положений равновесия (здесь
приведена запись уже в безразмерных переменных).
Fa = ~ \ [v2T + v2yy - 2vyvyyy] |+° , A0.67)
а краевую задачу A0.59)—A0.66) запишем в безразмерных переменных:
тр j
у = x/L. I = Li/L, v = и/а, М = —т.
У ' ' ' ' 7 ' pL ' A0.68)
J = j/ELJ°, п = ш/тг2, т = Ш0, А = а/Ь
\у=0
VTT ~ Vyyyy = 0 A0.69)
y=1=AsmUT A0.70)
vyy\y=0 = vyy\y=1 = 0 A0.71)
«U-o = «1„=1„+о = °« (Ю.72)
/=/o-0
°<^ A0.73)
M % = - [vyyy]\oot°o (Ю.74)
A0.75)
§10.4.
Гашение вибраций балки свободно скользящей массой
111
Частное решение системы A0.69)—A0.75) имеет вид:
) = A sin пт х ¦
у ^ Iq
(cos ky + cosh ky) /2 + Сц sin ky +
+ Сi2 cosh ky,
(cos fc (y - 1) + cosh fc (j/ - 1)) /2 +
+ C21 sin k(y — 1) + cosh A; (y — 1), 1/ ^ Io
A0.76)
где fc = \/O. Оно описывает установившиеся вынужденные колебания си™
стемы на фиксированной частоте вибро стенда. Коэффициенты про стран™
ственной формы колебаний (Cij) определяются из системы четырех ли-
линейных алгебраических уравнений, получаемой подстановкой A0.76) в
A0.72)—A0.75). Резонансные частоты находятся из условия равенства нулю
детерминанта системы алгебраических урав™
нений. На рис. 10.11 показаны зависимости
пяти первых резонансных частот системы от
положения объекта (при M = l, J = 1Q~3).
Из рисунка видно, что, изменяя положение
объекта, можно как настраивать, так и отстра-
отстраивать систему от резонанса.
Условия равновесия A0.67) с учетом ре™
шения A0.66) имеют вид
25
16
Fg = Fg A,0) A - cos 2пт) A0.77)
где Fg
_ 1 (п2 Г2
С1
амплитуда силы давления волн.
Состояния равновесия {Fg (Iq5O) = 0)
соответствуют положениям узлов и пучно-
пучностей возбуждаемой в балке формы колеба-
колебаний, причем, если возбуждена п-я форма, то
количество равновесных положений равняет™
ся 2п + 1.
Рассмотрим малое (порядка ? <С 1) от-
отклонение объекта от положения равновесия
1{т) = Io + sz{r) и линеаризуем уравнение движения A0.77) по е.
Q
0,5
Рис. 10.11
- cos 29) z (в) = 0, A0.78)
где в = От — новое время. В данном случае устойчивость положения
равновесия означает ограниченность решения z (в), т.е. если для любого
малого S : \z @)\ < 5 следует, что \z (в)\ < оо при в ^ в*, то положе™
ние равновесия устойчиво. Уравнение A0.78) является уравнением Матье.
Оценка зон ограниченности решений в этом случае показала, что если ам™
плитуда вибростенда меньше длины волны, то решение ограничено при
Fg (Io, О) < 0 и неограниченно при Fg (Iq, О) > 0, т. е. когда сила волново-
волнового давления направлена в устойчивое положение равновесия. На рис. 10.12
178
Гашение колебаний в распределенных системах
Гл. 10
показаны на плоскости (I, О) положения равновесия: устойчивые — сплош-
сплошными линиями, неустойчивые — пунктиром. При переходе через частоты,
соответствующие различным формам колебаний (см. рис. 10.12), состоя-
состояния равновесия меняют характер устойчивости на противоположный. При
этом возникает (или исчезает) пара устойчивых положений равновесия.
Заметим, что устойчивые положения равновесия совпадают с пучностями
возбуждаемой формы колебаний, а неустойчивые — с узлами.
max V
25-
16-
9-
4-
1-
/1
\\\
0,01
0,5
Рис. 10.12
0,9
9 20
Рис. 10.13
25
Для установившегося режима колебаний, когда объект находится в
устойчивых положениях равновесия, на рис. 10.13 построена зависимость
колебаний системы I maxF = max г;(у, т | от частоты возбуждения. Для
сравнения пунктиром приведена аналогичная характеристика балки без га™
сителя. Из рисунка видно, что система с объектом имеет неограниченную
амплитуду только на единственной частоте возбуждения О = Q*, значе-
значение которой зависит от инерционных характеристик регулятора и всегда
меньше первой собственной частоты распределенной системы без объекта.
Солитоны и периодические волны деформации 179
Приложение
СОЛИТОНЫ И ПЕРИОДИЧЕСКИЕ ВОЛНЫ ДЕФОРМАЦИИ
В СТЕРЖНЯХ, ПЛАСТИНАХ И ОБОЛОЧКАХ (ОБЗОР)
Из теории волн известно, что в одномерных системах все многообразие
волновых процессов определяется соотношением нелинейности, диспер-
дисперсии и диссипации. В двумерных и трехмерных системах к ним добавляется
еще и явление дифракции. В случае, когда нелинейные, дисперсионные и
дифракционные факторы уравновешивают друг друга, а диссипация ма-
мала, в системе могут формироваться уединенные нелинейные стационарные
волны (солитоны), распространяющиеся с постоянной скоростью без изме-
изменения своей формы. Согласно определению, данному в [166], «Солитон —
структурно устойчивая уединенная волна в нелинейной диспергирующей
среде. Солитоны ведут себя подобно частицам: при взаимодействии между
собой и некоторыми другими возмущениями солитоны не разрушаются, а
расходятся вновь, сохраняя свою структуру неизменной».
Термин «солитон» ввели в обращение Н. Забуски и М. Крускал в 1965
году, этот тип волны отметил еще в 1834 году Дж. Скотт Рассел при наблю-
наблюдении волн в каналах. Солитонное решение для длинных волн на поверх-
поверхности жидкости было впервые получено Буссинеском A872 г). Кортевег
и де Вриз вывели уравнение, носящее их имена, и нашли решение в виде
периодических (кноидаильных) волн в 1895 г.
После открытия Гарднером К., Грином Д., Крускал ом М. и Миурой Р.
[178] метода обратной задачи рассеяния (МОЗР) в 1967 году и ряда полно-
полностью интегрируемых уравнений (см. монографии [1, 21, 22, 44, 49, 74, 89,
107,108,114,160,161]) интерес к солитонамрос непрерывно. Вскоре после
открытия МОЗР, в 1968 г. Лаксом П. [184] была выполнена работа, вскрыв-
вскрывшая алгебраический механизм, лежащий в основе этого метода. В работах
Захарова В.Е. и Шабата А.Б. [75-77], Захарова В.Е. и Манакова СВ. [73], а
также Абловица, Каупа, Ыыоэла и Сигура [98] метод обратной задачи был
значительно развит и с его помощью найдены решения не менее интерес-
интересных, чем уравнение Кортевега-де Вриза (КдВ), нелинейных уравнений.
На фоне увеличивающегося внимания к солитонам поднялся интерес
к нелинейным волнам в стержнях как одному из наиболее доступных в
экспериментальном плане для изучения объектов и, в то же время, широко
используемому в технике [2, 16, 32, 40, 125, 155].
Под стержнем принято понимать деформируемое твердое тело, два раз-
размера которого малы по сравнению с третьим, обладающее конечной жест-
жесткостью на растяжение, кручение и изгиб. Нормальные волны в стержнях
подразделяются на три типа: продольные, крутильные и изгибные. В пря-
прямолинейных стержнях в линейном приближении различные типы волн не
взаимодействуют.
180 Приложение
Продольные волны в стержнях
Классическая модель Д. Бернулли (техническая теория) предполагает,
что при описании продольных колебаний стержня можно пренебречь по-
потенциальной энергией сдвиговых деформаций и кинетической энергией
поперечных движений частиц стержня. Согласно этой теории линейные
волны в стержне распространяются со скоростью cq = у/Е/р (где Е — мо™
дуль упругости Юнга; р — плотность материала), не зависящей от частоты.
Следовательно, сделанные предположения не позволяют описать геомет-
геометрическую дисперсию продольных волн, наблюдаемую экспериментально.
Математические модели, предложенные Редеем и Лявом, Бишопом,
Миндлиным и Германом (уточненные теории) [4], устраняют этот недоста-
недостаток. Из одномерных моделей дисперсию продольных волн в широком ча™
стотном диапазоне наиболее точно описывает модель Миндлина—Германа.
Учет нелинейности связей между деформациями и градиентами пере-
перемещений (геометрическая нелинейность), деформациями и напряжениями
(физическая нелинейность) приводит к нелинейным обобщениям упомяну™
тых математических моделей.
При определенных условиях для описания нелинейных продольных
волн в стержне применимо уравнение Кортевега де Вриза (КдВ)
vt + 6vvx + vxxx =0 (П.1)
где v = иХ9 и — продольное перемещение частиц срединной линии; х —
безразмерная координата; t — безразмерное время. (Здесь и далее по тек-
тексту нижний буквенный индекс обозначает дифференцирование по соответ-
соответствующей независимой переменной).
Это впервые было показано в работе Нариболи Г.А. [188]. Позднее в
совместной работе Нариболи Г.А. и Седова А. [189] были учтены диссипа-
тивные эффекты и выведено обобщенное уравнение Бюргерса-Кортевега-
де Вриза (БКдВ), описывающее влияние дисперсии и диссипации на волны
малой, но конечной амплитуды в вязкоупругих стержнях и пластинках:
Щ + Yl + olvvx - Cvxx - jvxxx = 0 (П.2)
где а, /3, 7 — параметры, описывающие влияние нелинейности, диссипа-
диссипации и дисперсии, п = 0,1, 2 для плоских, цилиндрических, сферических
волн соответственно. Случай сферической волны был приведен только для
общности, в работе он не рассматривался. В работах [188, 189] уравне-
уравнение КдВ было получено методом возмущений по нескольким малым па-
параметрам из точной системы уравнений теории упругости, описывающей
нелинейные волны в круглом стержне.
В монографии Энгельбрехта Ю.К. и Нигула У.К.[170] при переходе от
полученных сложных уравнений движения к простым (в частности КдВ)
также используются идеи метода возмущений, а именно применяются идеи
лучевого метода. Например, для модели вязко-упругого стержня уравнение
переноса первого порядка имеет вид уравнения БКдВ.
Солитоны и периодические волны деформации 181
Островский Л.А. и Сутин A.M. [131,132] рассмотрели распространение
продольных волн в однородном стержне из нелинейно-упругого материа-
материала, внутренняя энергия которого является функцией инвариантов тензора
деформаций с точностью до кубического члена включительно. Они показа™
ли, что эволюция продольной компоненты вектора смещения описывается
уравнением (нелинейное обобщение модели Релея-Лява или нелинейное
уравнение Буссинеска)
ии - ихх - ихихх - uxxtt = 0. (П.З)
К полученному уравнению был применен разработанный одним из авторов
метод упрощения систем уравнений с малыми нелинейностью и дисперсией
[130]. В случае малых нелинейности и дисперсии это уравнение сводится
к уравнению КдВ.
Молотков И.А. и Вакуленко Е.В. в [26, 122] рассмотрели стержень с
медленно меняющимися вдоль оси стержня плотностью и модулем Юнга.
Полученное возмущенное уравнение КдВ для продольной скорости ча™
стиц стержня решалось методом возмущений. Были получены выражения
для амплитуды и скорости возмущенного солитона. Решение представля-
представляет собой локализованное в малой области пространства ядро солитона, за
которым следует имеющий почти постоянную величину хвост солитона.
Более строго приближенное решение возмущенного уравнения КдВ с
использованием асимптотического метода работы [181] находилось в ста-
статьях Самсонова A.M. и СокуринскойЕ.В. [147, 149, 152, 195]. В их работах
рассматривались стержни с переменным поперечным сечением, перемен™
ным модулем Юнга, коэффициентом Пуассона и параметром нелинейности,
находились асимптотические и численные решения задачи об эволюции со™
литонов в этих стержнях. Отмечалось удовлетворительное совпадение чис™
ленного и асимптотического решений. Были получены более точные, чем
у Молоткова И.А. и Вакуленко С.А., выражения для амплитуды и скоро-
сти солитона. Интересное поведение решения наблюдается при определен™
ных соотношениях между параметром нелинейности и модулем Юнга Е,
а именно при f]2E~3 = const амплитуда и энергия солитона не меняются.
При Р4Е^3 = const амплитуда солитона меняется, но плато за солитоном
не образуется. Замечено, что при упрочнении материала (Е увеличивается)
солитон теряет массу и энергию, а при разупрочнении (Е уменьшается)
амплитуда и энергия могут неограниченно возрастать, что может привести
к необратимым деформациям.
В работе Ерофеева В.И. и Потапова А.И. [70] была предложена методи™
ка сведения трехмерных уравнений нелинейной теории упругости к при-
приближенным уравнениям теории стержней, основанная на аппроксимации
перемещений в поперечном сечении стержня и применении вариационного
принципа Гамильтона-Остроградского. Получены нелинейные уравнения,
обобщающие модели Бишопа и Миндлина-Германа. Первое из этих урав-
уравнений имеет вид:
l ^ ) ихх - 1У2гр(ии - с2Тихх)хх = 0 (П.4)
182 Приложение
где а = —| A — 6z/) + 1/2A — 2i/) + -1/3 — коэффициент, характеризую-
Л X} о
щий геометрическую и физическую нелинейности стержня; ст = л/JjJp —
скорость распространения упругой сдвиговой волны в материале; /х — мо-
модуль сдвига; v — коэффициент Пуассона; гр — полярный радиус инерции
поперечного сечения стержня.
В работах Самсонова A.M. и Сокуринской Е.В. [146, 148, 151, 153,
154, 194] уравнение (П.4), переписанное в градиентах перемещений было
подробно исследовано:
vtt ~ vxx = ? (Gv2 + vtt - bvxx)xx (П.5)
где b = BA +- z/))" < 1, e < 1 — малый параметр задачи. Авторы называ-
называют (П.5) «уравнением с двумя дисперсиями». Разрешенные значения скоро-
скоростей, т. е. те значения при которых возможно распространение уединенной
волны заключены в интервалах @, сг), (со, оо) и, следовательно, кроме ре™
шений типа «сверхзвуковых» солитонов деформации, существование кото-
которых, правда, с другими параметрами следует из анализа решений уравнения
КдВ, уравнение (П.5) допускает в качестве решений «дозвуковые» солито-
ны. Условие баланса между нелинейностью и дисперсией, обеспечивающее
существование локализованного квазистационарного решения уравнения
(П.5) принципиально отличается от аналогичного условия для уравнения
КдВ и уравнения Буссинеска, поскольку связывает все параметры реше-
решения, а не только амплитуду и ширину импульса. Это объясняется разными
дисперсионными свойствами этих уравнений, и в частности тем, что дис-
персионные слагаемые в уравнении могут даже компенсировать друг друга
при скорости близкой к скорости волны сдвига, после чего баланс нелиней-
нелинейности и дисперсии будет нарушен. Найдено несколько законов сохранения
для уравнения (П.5). По мнению автора работы [194] приведение уравнения
(П.5) к КдВ существенно сужает класс решений и дает грубые оценки для
параметров солитонов, что затрудняет их экспериментальное обнаружение
в стержнях.
Основная часть работы Дрейдена Г.В., Островского Ю.И., Самсоно-
Самсонова A.M., Семеновой И.В., Сокуринской Е.В. [46] посвящена эксперимен-
экспериментальному исследованию формирования и распространения уединенных
волн в стержнях. Согласно [46], при возбуждении в торцевой части стерж-
стержня радиуса R импульса сжатия с амплитудой давления Ро и длительно-
длительностью т0 = — на расстоянии А от торца стержня может сформироваться
локализованная плоская волна, имеющая амплитуду деформации А, шири-
ширину А и скорость V:
RV ( E \
Т{Щ\)
3/2
А?\1/2
V^coll,
Солитоны и периодические волны деформации 183
где
0 =
ЗЕ + 2А
L(l - 2i/3) -
+ 6ВA
= ЗЯН
-21/-
1-2/A
f 2u2 -
^2uf
4i/3) + 2C{1
+ 4m(l-2i/^
- 2vf =
)(l + i/J4
- 6raz/
— параметр нелинейности материала, зависящий от модулей упругости
второго (Е, v) и третьего (А, В, С — модули Ландау, а /, m, га — модули
Мурнагана) порядка.
Приведены конкретные примеры расчета параметров уединенных волн
при заданном радиусе стержня и давлении начального импульса. Авторам
работы, по-видимому, впервые удалось сформировать из первичной удар-
ударной волны и зарегистрировать нелинейную уединенную волну (солитон)
продольной деформации в твердотельном волноводе (стержне из полисти-
полистирола).
В работе [47] тех же авторов были произведены некоторые усовершен-
усовершенствования методики эксперимента, расширяющие возможности регистра™
ции исследуемых волн по сравнению с [46]. Это позволило не только на-
наблюдать генерацию уединенной волны, но и ее распространение на боль™
ших расстояниях, а также получить картину ее эволюции вдоль стержня и
тем самым экспериментально показать, что волна действительно сохраняет
свою форму и отношение амплитуды к длине, что и позволяет называть ее
солитоном продольной деформации.
В работе Порубова А.В., Самсонова A.M. [136] уточнены гипотезы,
положенные в основу теории распространения продольной волны дефор-
деформации в нелинейно-упругом стержне цилиндрической формы, основанной
на нелинейном уравнении (П.5). Для осевой и и радиальной w компонент
вектора смещения вдоль осей х и г соответственно приняты следующие
соотношения:
и = U(x, t) + r2V(x, i), w = -rvllx + r3W(x, t),
где U, V и W — функции, подлежащие определению. При V = W = О
эти выражения представляют собой запись гипотезы плоских сечений Ля™
ва, использованной для вывода уравнения с двумя дисперсиями. Получено
уточненное «уравнение с двумя дисперсиями» для составляющей продоль-
продольной деформации v = их:
vtt - &хх = « ( -v2 + uR2(v - l)vtt + vR2clvxx ) , (П.6)
1 \p J xx
где f3 — параметр нелинейности материала, зависящий от модулей упруго™
сти второго (Е, v) и третьего (I, m, п) порядка; v—коэффициент Пуассона.
В рамках уточненной теории получена оценка величины линейной состав™
ляющей касательного напряжения на боковой поверхности стержня: агх <
< 3,95R3fiu2A/C — 2i/)A3, т.е. значение максимального напряжения агх
на границе уменьшается в Е/ \/ЗА\ раз по сравнению с его максималь-
максимальным значением в рамках теории [146]. Уточнение модели распространения
184 Приложение
продольных волн деформации в нелинейно-упругом стержне позволяет су™
щественно уменьшить теоретически предсказываемые на границе величи-
величины касательных напряжений, что представляется полезным с точки зрения
дальнейшей разработки экспериментов по возбуждению и исследованию
распространения солитонов деформации в нелинейно-упругом стержне.
Следует отметить, что помимо весьма общей теории возмущений для
частных решений нелинейных уравнений [181, 199], применявшейся в ра-
работах [26, 122, 140, 147, 152, 154, 195] существует теория возмущений для
солитонов, развитая на основе метода обратной задачи рассеяния (МОЗР)
(здесь прежде всего следует выделить работы Карпмана В.И., Маслова Е.М.
[90, 91], а также работу Д. Каупа, А. Ньюэла [180]). Эти методы позволяют
вывести возмущенные уравнения, описывающие эволюцию данных рас-
рассеяния, используя теорию возмущений соответствующей линейной задачи
рассеяния.
Соэрснсен М.П., Христиансен П.Л., Ломдал П.С. и Сковгард О. [197,
198] показали, что при учете членов четвертого порядка в разложении плот-
плотности упругой энергии по инвариантам тензора деформаций и при следую-
следующей нелинейной связи между радиальным смещением urad и продольной
деформацией
3
(у\ ? V2, Щ — коэффициенты Пуассона 1, 2 и 3 порядка) распространение
продольных нелинейных уединенных волн описывается модифицирован-
модифицированным усовершенствованным уравнением Буссинеека
vtt ^vxx±^ (v3)xx + vxxtt = 0, (П.7)
а при учете членов только третьего порядка - усовершенствованным урав-
уравнением Буссинеека
vtt - vxx + - (v2)xx + vxxtt = 0, (П.8)
Авторы нашли решения типа уединенной волны для этих уравнений
(для уравнения (П.7) имеются также решения в виде антисолитона и бризе-
ра). При численном исследовании столкновения таких решений обнаруже-
обнаружено их почти упругое поведение, т. е. волны почти сохраняют свою форму и
скорость, но, дополнительно образуется излучение. В работе исследовались
столкновения солитона и антисолитона, совместное распространение дви-
двигающихся рядом солитона и анти солитона с одной скоростью в бризеропо-
добном состоянии, столкновение бризеров для уравнения (П.7). Показано,
что антисолитоны в случае квадратичной нелинейности либо разрушаются,
либо приводят к сингулярным решениям. В работе [198] авторами иссле-
исследовалось численно отражение и расщепление уединенных волн в стержне
с переменны сечением (сечение меняется непрерывно и скачком), отраже-
отражение уединенных волн от массивного конца, а также взрыв и разрушение
антисолитона в случае усовершенствованного уравнения Буссинеека. Рас-
Рассмотренные уравнения являются почти интегрируемыми и их решения типа
Солитоны и периодические волны деформации 185
уединенной волны не являются солитонами в строгом смысле. Однако, вви-
ду того, что эти уравнения приводятся к полностью интегрируемым (КдВ
и мКдВ) в случае малых амплитуд, то решения в виде уединенных волн с
малыми амплитудами обнаруживают солитонное поведение.
П.А. Кларксон, Р.Дж. Левек и Р. Сэкстон в [176] получили для продоль-
продольных волн в стержнях из нелинейных несжимаемых или почти несжимаемых
материалов уравнение:
vtt ~vxx±- (vp)xx + vxxtt = О, (П.9)
где р = 3 илир = 5 в зависимости от особенностей материала. Отмечается,
что четные значения р представляют интерес в том случае, если известно,
что материал стержня глобально динамически неустойчив. Последнее урав-
уравнение авторы работы назвали нелинейным уравнением Похгаммера-Кри.
Численно исследовалось столкновение двух уединенных волн, являющихся
решениями нелинейного уравнения Похгаммера-Кри, с одинаковыми па-
параметрами двигающихся навстречу друг другу. Следует отметить, что при-
менимость модели нелинейного несжимаемого материала является весьма
узкой.
В работе Потапова А.И., Семериковой Н.П. [137] рассматривались нели-
нелинейные продольные волны в стержне с учетом взаимодействия полей де~
формации и температуры. Система уравнений нелинейной динамической
задачи термоупругости имеет вид:
ии - A + 6их)ихх ~~ е{ии ~~ Ъихх)хх = -ат(Т - Т0)х
{ ' }
где Т и То — безразмерные значения текущей температуры и температуры
окружающей среды, е < 1 — малый параметр, ат, а^ X — безразмерные
коэффициенты теплового расширения, теплообмена и температуропровод-
температуропроводности, Ь=BA + г/))~1<1. Если первое уравнение системы продиффе-
продифференцировать по хш записать относительно продольной деформации v = иХ9
то оно будет отличаться от уравнения (П.5) только наличием члена, опи™
сывающего тепловое расширение. На основе анализа системы (П. 10) было
показано, что конвективный теплообмен приводит к диссипации энергии
продольной волны, типичной для модели вязкоупругого материала с после™
действием и релаксацией. Получено уравнение изменения амплитуды бе-
бегущей волны и проанализированы законы затухания квазигармонических,
кноидальных волн и солитонов.
В работе [118] Милосердова И.В. и Потапов А.И. исследовали нелиней™
ные продольные волны в стержне конечной длины с жестко закрепленными
концами. Решалась краевая задача для такого же уравнения, как и в работе
[132]. Используется приближение (часто называемое одноволновым), когда
рассматриваются две бегущих навстречу друг другу стационарных волны
и влияние нелинейности учитывается в два этапа. Вначале не проводит-
проводится учет взаимодействия встречных волн, а учитываются только эффекты
186 Приложение
нелинейности и дисперсии для одной волны. Решения уравнения одновол-
нового приближения выражаются в эллиптических функциях. Относитель-
Относительно встречного взаимодействия утверждается, что в системе с квадратичной
нелинейностью встречные волны в первом приближении не взаимодейству-
взаимодействуют. Солитонные решения, полученные в [132], в данном случае существо-
существовать не могут.
Несмотря на созданную аналитическую теорию, позволяющую в прин-
ципе найти нестационарные решения полностью интегрируемых уравне-
уравнений с помощью МОЗР, вопрос о численных алгоритмах для КдВ и других
полностью интегрируемых уравнений представляется важным, так как при
произвольных начальных данных получить решение в замкнутой форме,
используя аналитические методы, вряд ли возможно. Для численного ие-
следования уравнений КдВ и БКдВ применяются такие схемы предиктор-
корректор, как схема Лакса, Лакса^Вендрофа, Мак-Кормака. Эти разност-
разностные схемы искажают монотонные решения, поскольку обладают численной
дисперсией. Однако их можно использовать при решении КдВ и БКдВ, ес-
если выбирать шаг по пространственной координате так, чтобы численная
дисперсия была существенно меньше физической. Используются также
трехслойные явные схемы, которые являются весьма простыми и удобны-
удобными для реализации. Для решения уравнений КдВ и БКдВ используются
также полуспектральные и спектральные методы. В спектральном методе
производится разложение искомого решения в гармонический ряд. Подста-
Подстановка этого ряда в исходное уравнение дает бесконечную систему урав-
уравнений для амплитуд гармоник. Чтобы сделать систему конечной, вводится
максимальное волновое число, значение которого подбирается. Эти мето-
методы могут дать хорошую точность, но технически они значительно сложнее
конечно-разностных методов и неэффективны в смысле затрат машинного
времени. Обзор численных методов с подробным описанием физических
моделей, алгоритмов и результатов расчетов дан в работе Березина Ю.А.
[13], где есть также многочисленные ссылки на работы по численному мо-
моделированию. Есть работы, в которых численные исследования КдВ и БКдВ
являются основным средством изучения нелинейных волновых процессов
в стержнях, но, как правило, отмечаемые в этих работах эффекты не яв-
являются специфическими (т. е. чисто «стержневыми») и уже давно хорошо
известны. В качестве примера можно указать работу А. Накамуры [187],
где численно исследовалось распространение солитона в тонком стержне
из расплавленного кремния.
В работе Самсонова A.M., Дрейдена Г.В., Порубова А.В., Семено-
Семеновой И.В. [196] теоретически анализируется эволюция уединенной волны
продольной деформации и приводятся данные экспериментов в нелинейно-
упругом конусообразном стержне. Теоретически предсказана фокусировка
солитона в стержне с уменьшающимся поперечным разрезом, которая на-
наблюдается и в эксперименте. При фокусировке наблюдается асимметричная
деформация солитона. В работе развит подход для получения аналитиче-
аналитических связей между продольными и сдвиговыми нелинейными деформаци-
деформациями и найдено асимптотическое решение, точно удовлетворяющее гранич-
Солитоны и периодические волны деформации 187
ным условиям на боковой поверхности стержня. Получено точное соотно-
соотношение для амплитуды солитона в зависимости от изменения радиуса попе-
поперечного сечения стержня. Показано, что допустимый интервал скоростей
солитона существует и зависит от упругих свойств стержня. В эксперимент
тах показано, что солитон упругой деформации не поглощается даже на
расстояниях, намного больших, чем типичная длина линейного затухания
волны в полистироле.
В работах [150, 191] рассмотрено распространение нелинейных упру™
гих продольных уединенных волн деформации в цилиндрическом стержне,
находящемся в контакте с внешней упругой и вязкой (антивязкой) средой. В
работе A.M. Самсонова и Е.В. Сокуринской [150] в качестве модели упру-
упругой среды используется уточненная модель Винклера—Пастернака, согласно
которой воздействие окружающей среды можно представить как результат
работы упругих пружин на сжатие и на сдвиг, а в [191] реакция на сдвиг со
стороны внешней среды принимается равной нулю. Выведено нелинейное
уравнение волн продольной деформации, которое в случае упругой внеш-
внешней среды совпадает с уже известным «уравнением с двумя дисперсиями»,
но с увеличенной линейной «стержневой» и уменьшенной сдвиговой скоро™
стями. В случае вязкой (активной) среды появляется член vtxx в указанном
уравнении. В отличие от случая свободного стержня, внешняя среда может
изменять тип солитона деформации. Предложен подход для возможного
экспериментального определения модулей упругости Мурнагана третьего
порядка.
В работах Ерофеева В.И., Клюевой Н.В. и Семериковой Н.П. [62-64]
рассматривается нелинейная математическая модель, описывающая про-
продольные колебания стержня с учетом сдвиговых деформаций и попереч™
ных движений частиц срединной линии (нелинейное обобщение модели
Миндлина-Германа). Изучаются особенности распространения нелиней-
нелинейных стационарных волн деформации: периодических волн и солитонов.
Получены зависимости между основными параметрами таких волн (ам-
(амплитудой волны, длиной волны, скоростью ее распространения и коэф-
коэффициентом нелинейных искажений формы волны). Показано, что наряду
с классическим поведением солитонов (волна большей амплитуды имеет
меньшую ширину и распространяется с большей скоростью), может на-
наблюдаться и их аномальное поведение (амплитуда волны уменьшается с
ростом скорости).
В работе Рыбака С.А. и Скрыникова Ю.И. [143] показано, что распро™
странение нелинейных волн продольной деформации в стержне постоянной
кривизны может быть описано уравнением Клейна-Гордона следующего
вида:
2
vtt - c2Qvxx + j^v = ^(^2)жж, (П. 11)
где R—радиус кривизны. Поперечными перемещениями, которые в криво-
криволинейных стержнях уже в линейном приближении связаны с продольными,
пренебрегается. Найдено решение в виде уединенной стационарной волны.
188 Приложение
Солитон уравнения (П. 11) в окрестности вершины имеет параболический
профиль, а его спадающие на бесконечности хвосты имеют ту же структу-
структуру, что и хвосты солитона Кортевега-де Вриза. Ширина солитона А ~ \J~A.
(где А — амплитуда).
Влияние диссипации на свойства солитонов, описываемых уравнением
(П.11), проанализировано в работе Скрыникова Ю.И. [157].
В работе Мягкова Н.Н. [123] изучается распространение продольных
упруго-пластических волн в стержне. Стержень находится в стадии, назы-
называемой деформационным разупрочнением (падение напряжения при увели-
увеличении деформаций). Для широкого класса материалов (среди которых ме-
металлы, бетон, геоматериалы) такое поведение предшествует разрушению.
Рассматривается модель, в которой функция текучести зависит не только от
напряжения и деформации, но и от градиента деформации второго порядка:
de = dV_ dV = das(e)de 2д3е
dt дх ' dt ds дх дх*' У - )
где s — полная деформация, V — скорость, а8(е) — диаграмма деформи-
деформирования материала (она предполагается квадратичной). Через 5 обозначен
малый безразмерный параметр, введение которого позволяет регуляризо-
вать модель, поскольку попытки описать разупрочнение с помощью моде-
моделей, нечувствительных к скорости деформации, приводят к потере гипербо-
гиперболичности системы уравнений и некорректности задачи Копти. С помощью
преобразования Хироты строятся точные решения системы, полученной из
(П. 12) для приращений деформации (ef). Такие решения представляют со-
собой нестационарные уединенные волны, эволюция которых описывает про-
процесс локализации деформации в разупрочняющемся стержне, возникающей
из гладкого начального возмущения и заканчивающейся коллапсом.
Во многих случаях стержни работают в пределах линейно-упругого по-
поведения материала, а нелинейными являются лишь граничные закрепления
(например, наличие зазоров или ограничителей в соединениях деталей).
В работах Милосердовой И.В., Новикова А.А. и Потапова А.И. [117-120]
показано, что в таких системах при наличии внутренних резонансов могут
существовать нелинейные стационарные волны деформации с широким
спектром частот, обладающие свойствами, сходными со свойствами волн в
стержнях с распределенной упругой нелинейностью.
В работах Кажаева В.В. [83, 84] приведены результаты аналогового и
численного моделирования нестационарных волновых процессов в стержне
с нелинейно-упругим закреплением, включающие в себя эффекты распада
начального возмущения на солитоны, обменное взаимодействие солитонов
и явление возврата.
Изгибные волны в стержнях
В отличие от продольных, изгибные волны в стержне обладают силь-
сильной дисперсией. Согласно модели Бернулли-Эйлера (техническая теория)
частота гармонической волны пропорциональна квадрату волнового числа,
Солитоны и периодические волны деформации 189
следовательно дисперсия имеет аномальный характер. Групповая скорость
при любой частоте будет в два раза превышать фазовую.
Распространение изгибных волн в нелинейно-упругом стержне описы-
описывается уравнением (учитывается геометрическая нелинейность):
wu + wxxxx = - (wl)x. (П.13)
Здесь введены безразмерные переменные: х' = x/ry, t' = с®г/гу, wf =
= w/ry, где г у — осевой радиус инерции поперечного сечения. Штрихи в
(П.13) опущены.
В работе Ерофеева В.И. [53] анализируются нелинейные стационарные
волны огибающих, возникающие при распространении квазигармониче-
квазигармонических изгибных волн в стержне. С помощью метода связанных нормальных
волн [128] от уравнения (П.13) осуществлен переход к двум связанным
нелинейным уравнениям Шредингера, одно из которых имеет вид:
t%-g + \v-ww-vr = o. да.*,
а второе является комплексно сопряженным с (П. 14) (U* — величина,
комплексно-сопряженная с U). Функции U и U* связаны с поперечным
смещением го соотношениями:
Изменение амплитуды квазигармонической волны U = A exp {i(ut — kx +
+ ф)} + к.с. описывается уравнением ангармонического осциллятора:
— + -А-А#А = 0.
Утверждается, что уравнение имеет солитонное решение при \d\ = F/18\/3,
где V — скорость стационарной волны. Все параметры солитона могут
быть выражены через значение амплитуды волны деформации на границе
стержня («о). Скорость солитона пропорциональна первой степени а® : V =
= 3 v^3 ао, а его амплитуда пропорциональна квадрату этой величины Ао =
= ^—uq. Ширина солитона определяется выражением А = 2/3 лКЗ а$.
В работе Ерофеева В.И. [51] изучаются нелинейные изгибные колебания
стержня, точки срединной линии которого совершают движения в двух
взаимно перпендикулярных плоскостях. Исследованы спиральные волны
в бесконечном стержне (в частности, солитоны огибающих спиральных
волн) и циркулярно-поляризованные колебания стержня конечной длины.
В книге Каудерера Г. [92] предложена модель изгибных колебаний фи-
физически-нелинейного стержня
-a \\wxxxx(wxx) + 2 (wxxx) wxx\ ,
190 Приложение
где w(x,t) — прогиб точки х оси стержня в момент времени t9 а а и
Л — некоторые постоянные, содержащие геометрические и упругие ха-
характеристики стержня. В работе Березовского А.А., Жернового Ю.В. [14]
исследованы стационарные волновые решения этого уравнения.
В работе Абрамяна А.К., Индейцева Д.А. и Вакуленко С.А. [172] рас-
рассмотрено распространение солитона в нелинейном стержне, находящемся
в контакте с идеальной сжимаемой жидкостью. Солитон, распространяю™
щийся по стержню, контактирующему с жидкостью, интерпретируется как
«движущееся включение». Найдены аналитические выражения для уеди-
пенных волн. Рассматриваются два случая: когда скорость солитона боль-
больше, чем скорость акустических волн в жидкости и когда скорость солитона
меньше скорости звука в жидкости. В первом случае жидкость не может
быть вовлечена в движение солитона, возникают большие силы сопротив-
сопротивления, при этом солитон быстро теряет скорость. Во втором случае солитон
при своем движении по балке приводит в движение жидкость, на движении
солитона влияние жидкости сказывается незначительно.
В работах Ерофеева В.И., Кажаева В.В., Семериковой Н.П., [58, 59,
177] изучаются особенности распространения нелинейных изгибных волн
в стержне Тимошенко. Уравнения динамики такого стержня, учитывающие
геометрическую и физическую нелинейности, были получены в работе [52]:
pFwu — ttfiF (wxx — (fx) = [2d2J2Wx(px
+ a5J2(fw2x
~~ wx) =
2
где w(x,i) — поперечное смещение; <p(x,i) — угол поворота попереч™
Г Г
ного сечения; р — объемная плотность материала; J\ = z4dF, J2 =
j j
F
= z2dF — осевые моменты инерции; Н — коэффициент Тимошенко;
f
olj (j = 1,6) — коэффициенты, характеризующие геометрическую и фи-
физическую нелинейности среды. В предположении малости углов поворота
поперечных сечений для длинноволновых процессов система (П.16) сво-
сводится к одному уравнению, которое для стационарных волн принимает
вид уравнения Дуффинга. В работе [58] были проанализированы условия
возникновения модуляционной неустойчивости квазигармонических волн,
приводящей к их самомодуляции и формированию стационарных волн оги-
огибающих. В сравнении с моделью изгибных колебаний Бернулли-Эйлера,
в которой изгибные волны всегда устойчивы, в модели Тимошенко нет та-
такой однозначности. Квазигармонические изгибные волны могут быть как
Солитоны и периодические волны деформации 191
устойчивыми, так и неустойчивыми в зависимости от частоты и принад-
принадлежности к той или иной дисперсионной ветви, упругих свойств материала.
Приведена диаграмма, показывающая области устойчивости и неустойчи-
неустойчивости на дисперсионных кривых. В отличие от [58] в работе [59] основное
внимание уделено случаю, когда изгибные волны обладают большой ин-
интенсивностью и находятся в области слабой дисперсии. Показано, что в
зависимости от величины скорости имеются качественно различные вол-
волновые картины. Найдены соотношения, связывающие основные параметры
стационарных волн (периодических и солитонов): амплитудой волны, дли-
длиной волны, скоростью ее распространения и коэффициентом нелинейных
искажений формы волны. Показано, что в некоторых диапазонах скоростей
может наблюдаться аномальное поведение солитонов.
В работах Кажаева В.В., Потапова А.И. и Семериковой Н.П. [86, 87]
изучаются локализованные изгибные стационарные волны в тонком растя-
растянутом стержне.
wu ~~ Ci(l + awx)wxx - 7-3,A - v)(wtt - clwxx)xx = О, (П.17)
где с\ = 2&o(A+ /i)/p — скорость поперечных волн в стержне; С2 =
= {Е/2 + е0 [3(А + 2/х) — EА + fi)u]}/(l — v) — некоторая величина,
имеющая размерность скорости; A, /jlq- константы Ламе, sq- начальная де-
формация; а = Зе^1- коэффициент нелинейности. Были проведены ана-
аналитические и численные исследования этого уравнения. Для численного
моделирования использовалась неявная трехслойная разностная схема с
порядком аппроксимации О(т2^ h2). Заметим, что при С = — > 1 урав-
нение обладает аномальной (положительной) дисперсией, что приводит к
появлению новых нелинейных эффектов. При С > 1 на плоскости па-
параметров «амплитуда-скорость» для стационарных волн существуют две
области ограниченных решений с качественно различным поведением. Ис-
Исследуются решения из области сильно нелинейных волн, несуществующих
при амплитудах меньше некоторого критического значения. Такие волны
описываются выражением
U(x, t) = ±AA arctg sh f j , wx = U{x, t)
и, как следует из результатов численного исследования, во многих случаях
ведут себя подобно солитонам, но обладают рядом свойств, которые отлича-
отличают их от классических солитонов. Так при встречных столкновениях волн,
если их амплитуды превышают некоторое пороговое значение, они расщеп-
расщепляются, порождая вторичные частицеподобные волны и волновой пакет.
Экспериментальное наблюдение расщепления разнополярных импуль-
импульсов (солитонов) при встречных столкновениях содержится в работе Пота-
Потапова А.И. и Весницкого А.И. [192].
Учет геометрической нелинейности приводит не только к самовоздей-
самовоздействию изгабных волн, но и к взаимодействию изгабных волн с продольными.
192 Приложение
Резонансные взаимодействия квазигармонических продольных и изгиб-
ных волн в прямолинейных стержнях и кольцевых резонаторах, приводя-
приводящие к формированию нелинейных волн огибающих, изучались в работах
[56,68,97, 183].
В работе Березовского А.А. и Жернового Ю.В. [15] изучаются про-
дольно-изгабные волны в упругом неограниченном стержне. В явном виде
через эллиптические функции Якоби найдены периодические кноидаль-
ные волновые решения для прогиба w(x,i) = w(kx ~~ ujt) и продольного
перемещения. Получены соответствующие дисперсионные соотношения,
связывающие волновое число к, частоту ш и амплитудный параметр А.
Заслуживают внимания, стоящие несколько особняком, задачи о «выну-
«вынужденных нелинейных стационарных волнах», т. е. — о возбуждении волн
нагрузками, движущимися по нелинейно-упругим направляющим. Некото-
Некоторые из таких задач рассматривались в диссертации Быченкова В.А. [25] и
статье Метрикина А.В. [115].
Крутильные волны в стержнях
Кроме продольных и изгибных волн в стержне могут распространяться
также и крутильные волны. Особенностью крутильных волн является от-
отсутствие дисперсии у нулевой моды — фазовая и групповая скорости для
нее равны ст = у/ \ij р. Это обстоятельство обусловило меньший интерес к
нелинейным крутильным волнам.
В работе Милосердовой И.В. [116] выведено уравнение с кубической
нелинейностью для нелинейных крутильных волн в стержне с учетом де-
планационных эффектов
Ои - A + @хJ) ехх - (ви - С2вхх)хх = О, (П.18)
являющегося обобщением известных нелинейных волновых уравнений.
Здесь в — безразмерный угол закручивания. Уравнение (П.18) примени-
применимо также для описания нелинейных изгибных волн в стержне и выше в
обзоре уже говорилось об аналитическом и численном исследовании этого
уравнения в работах [86, 87].
В работе Ерофеева В.И., Клюевой Н.В., Моничева С.А. и Семерико-
Семериковой Н.П. [61] изучалось влияние разномодульности материала и деплана-
ции на распространение нелинейных крутильных волн в стержне. Разномо-
дульность, обусловленная наличием поврежденное™ материала, приводит
к тому, что доминирующую роль играет не кубическая нелинейность, а
квадратичная (существование которой для сдвиговых и крутильных волн
классическая теория упругости «запрещает»). Совместное действие квадра-
квадратичной нелинейности и дисперсии, вызванной депланационными эффекта-
эффектами, приводит к формированию солитонов и стационарных периодических
волн. Определены зависимости между основными параметрами волн (ско-
(скоростью, амплитудой, шириной для солитона или частотой для периодиче-
периодической волны) и повреждениестью материала. Показано, что эти зависимости
Солитоны и периодические волны деформации 193
могут быть положены в основу разработки акустического метода диагно-
диагностики поврежденности материалов и конструкций.
Волны в пластинах
Распространение уединенных плоских продольных волн в пластинах
описывается теми же уравнениями, которые используются для описания
подобных процессов в стержнях. Естественно, коэффициенты этих уравне-
уравнений другие [132, 189].
Мартынов А.В. [113] исследовал продольные колебания пластины и
показал, что при распространении плоской волны исходные уравнения мо-
могут быть сведены к уравнению синус-Гордона, имеющему решения в виде
солитонов.
В работе Топчяна Д.Х. [163] изучаются одномерные квазигармониче-
квазигармонические волны изгиба в нелинейно-упругой пластине, находящейся на линей-
линейно-упругом основании. Показано, что при kh < 0,3 (где к — волновое
число, h — толщина пластины) наблюдается устойчивость волновых па-
пакетов, а при kh > 0,3 — модуляционная неустойчивость, приводящая к
формированию стационарных волн огибающих.
В работах Багдоева А.Г. и Мовсисяна Л .А. [9-11 ] рассматриваются моду-
модулированные волны в пластинах при наличии геометрической и физической
нелинейностей. При этом физическая нелинейность является квадратичной
и (или) кубической. В случае квадратичной нелинейности независимо от
знака коэффициента всегда имеется неустойчивость модуляций. Найдены
условия, при которых кубическая нелинейность может привести к устой-
устойчивости.
В работе Шенявского Л.А [169] найдены два типа точных волновых ре-
решений следующих нелинейных уравнений продольно-изгибных колебаний
пластины
ии - cl(uxx + wxwxx) = 0,
\h2 1 Е (Ш9)
Wtt + Cq —Wxxxx - (WXUX)X = 0, Cq = —т- ^V
I iz I p{l ~~ v )
Эти уравнения получены из теории тонких пологих оболочек при беско-
бесконечном радиусе кривизны. Решения, описывающие связанные продольно-
изгибные волны в (П. 19), при скорости распространения с > со имеют вид
a dnDKvQ - kcnDKvQ 2h2Kv
] (?) znDKv?)
]n 2 u(?)
о ^1 _ fa ос
Л/ЩЩЩ
194 Приложение
а при с < со -
= h\ arcsin [ftsnDKt>?)], u{?) =
V ос
2hco
где h — толщина пластины; zn — дзета-функция; sn, en, dn — эллиптиче-
эллиптические функции Якоби; к — модуль эллиптической функции, К и Е — пол-
полные эллиптические интегралы первого и второго рода соответственно; ? =
= t — x/c. Связанные продольно-изгабные волны полностью определяются
двумя параметрами, например скоростью распространения с и модулем п.
Частота колебаний продольной составляющей и вдвое больше частоты ко-
колебаний изгибной составляющей го. При с > с® нелинейные связанные
продольно-изгабные волны вырождаются в чисто продольную волну. Рас-
Рассчитаны зависимости скорости распространения продольно-изгибных волн
от частоты для различных значений амплитуды изгибных составляющих.
Важным отличием в постановке задачи для нелинейных волн в пла-
пластинах является вопрос об устойчивости плоских волн к поперечным воз-
возмущениям. Неочевидно, что солитон, существующий в стержне, будет су-
существовать в пластине. Дело в том, что в двумерных системах поперечные
возмущения могут разрушить неустойчивую уединенную волну. В качестве
примера можно сослаться на работу Богоявленского О.И. [19], в которой
изучалось взаимодействие длинных волн, распространяющихся вдоль од-
одной координатной оси с простыми волнами Римана, распространяющимися
в поперечном направлении, и было показано, что солитонные решения при
таком взаимодействии опрокидываются. В работе Захарова В.Е., Кузне-
Кузнецова Е.А., Рубенчика A.M. [200] для уравнения Кадомцева-Петвиашвили
показано, что уединенные и периодические стационарные волны в среде с
отрицательной дисперсией устойчивы относительно поперечных возмуще-
возмущений. Совершенно другая ситуация имеет место для волн с положительной
дисперсией. Здесь одномерный солитон оказывается неустойчивым по от-
отношению к поперечным возмущениям.
Наличие еще одной пространственной переменной приводит к тому,
что плоские волны уже не являются характерными для пластин и оболо-
оболочек. Даже если в начальные моменты времени фронт волны в бесконечной
пластине близок к прямой линии, с течением времени он будет искри-
искривляться из-за дифракционной расходимости. Конкуренция нелинейности,
дисперсии и дифракции приводит к появлению новых эффектов, таких как
самофокусировка.
В работе Потапова А.И., Солдатова И.Н. [139] выведены двумерные
уравнения продольных колебаний пластины с учетом геометрической и
физической нелинейностей. Исследовано распространение слаборасходя-
щегося пучка нелинейных продольных волн в пластине и показано, что в
Солитоны и периодические волны деформации 195
этом случае компонента продольной деформации удовлетворяет уравнению
Кадомцева-Петвиашвили (КП)
—
— (фх + афф^ - Ьфш) = -7^7777, (П.20)
и в пластинах могут распространяться двумерные солитоны. (Здесь ф =
= г/о? — компонента продольной деформации). Отмечено, что влияние
граничных условий (т. е. то, что пучок распространяется в пластине, а не в
безграничной среде) проявляется в величине коэффициентов нелинейности
и дифракционной расходимости, а не только в том, что в уравнении есть
дисперсионный член.
В работе Сокуринской Е.В. [158] приведены уравнения волн нелиней-
нелинейной продольной деформации в пластинах из несжимаемого материала Му-
ни и сжимаемого материала Мурнагана. Показано, что с использованием
функции деформации / = их (и — перемещение вдоль направления рас-
распространения волны в срединной плоскости пластины) эти уравнения могут
быть приведены к виду:
fee + af + 126/ = О, (П.21)
где 0 = х ± ку ± Vt, V^k — const;
_ 72(к2 + 1) Цу2 - (к2 + 1))
п ~ (к2 + 1) - W2 ' ~ е(к2 + 1) [(к2 + 1) - W2} '
Здесь выражения для коэффициентов а и Ъ приведены для материала
Муни, а для материала Мурнагана они имеют несколько иной вид. За-
Заменой переменных последнее уравнение сводится к хорошо известному
уравнению Вейерштрасса, которое разрешимо в эллиптических функциях.
Уравнение Вейерштрасса, подробно исследованное в работах [146, 150]
имеет решение в виде локализованных разрывов, кноидальных и уединен-
уединенных волн. Утверждается, что в отличие от описания двумерных нелинейных
волн деформации с помощью уравнения Кадомцева-Петвиашвили в работе
[139], допускающего только солитоны сжатия, описание волн деформации
в пластине с помощью уравнения Вейерштрасса является более общим,
поскольку последнее уравнение имеет более широкий класс решений, куда
входят, в частности, локализованные волны не только сжатия, но и растя-
растяжения.
В работе Кившаря Ю.С., Сыркина Е.С. [93] рассмотрены сдвиговые со-
солитоны в упругой пластине, выведено нелинейное параболическое уравне-
уравнение (нелинейное уравнение Шредингера), описывающее динамику огибаю-
огибающих сдвиговых волн, показано, что в зависимости от нелинейных свойств
упругой пластины в ней могут распространяться «светлые» или «темные»
сдвиговые солитоны, параметры которых связаны с линейными модами
пластины. Сдвиговые солитоны в упругой пластине наблюдались экспери-
экспериментально Плано М., Хомади М. - авторами работы [190].
196 Приложение
В работе Дрейдена Г.В., Порубова А.В., Самсонова A.M., Семено-
Семеновой И.В [48] приведены результаты экспериментов по возбуждению в упру-
упругой пластине из полистирола локализованной нелинейной волны продоль-
продольной деформации, способной распространяться с сохранением своей формы.
Для генерации уединенной волны использовалась установка, аналогичная
применявшейся в экспериментах по возбуждению солитона в стержнях
[46, 47]. Амплитуда солитона продольной деформации оказалась в 2,45 ра-
раза меньше, чем в стержне при тех же условиях возбуждения. Сам соли-
тон представлял собой достаточно протяженную волну продольной дефор-
деформации сжатия корытообразной формы, за которой отсутствовали сколько-
нибудь значительные по амплитуде волны растяжения.
Волны в оболочках
Условия возникновения модуляционной неустойчивости квазигармони-
квазигармонических изгибных волн в нелинейно-упругих цилиндрических оболочках
изучались в уже упомянутых выше работах Багдоева А.Г. и Мовсисяна Л.А.
[9, 10].
Первое экспериментальное наблюдение солитона огибающей изгибной
волны в тонкой металлической цилиндрической оболочке описано в работе
Рудника И., By Дж., Витли Дж.И., Питермана С. [193].
В работах Мартыненко М.Д., Нгуен Данг Бик, Фам ши Виня [110-
112] проанализированы условия существования солитонов в нелинейно-
упругих телах и рассмотрены задачи о распространении упругих волн в
движущихся циллинрических оболочках с учетом нелинейных эффектов,
обусловленных влиянием инерционных сил.
В работах Ковригина Д.А. [95, 96] изучались нелинейные резонансные
взаимодействия квазигармонических волн различных типов в тонкостенной
цилиндрической оболочке:
а) параметрическое взаимодействие осесимметричной волны с изгиб-
ными волнами, распространяющимися попутно в продольном на-
направлении и бегущими встречно в окружном направлении;
б) кросс-взаимодействие осесимметричных и неосесимметричньж волн,
приводящее к образованию стационарной волны;
в) самомодуляция осесимметричной волны в продольном направлении.
Было показано, что как и в прямолинейном стержне, в оболочке мо-
могут формироваться трехчастотные солитоны огибающих, представляющие
собой модулированные волны, бегущие в продольном направлении.
Приведение уравнений динамики оболочек (а также стержней и пла-
пластин) к нелинейным эволюционным уравнениям производилось в диссер-
диссертации Човнюка Ю. А. [168].
Широкий круг вопросов нелинейной волновой динамики цилиндри-
цилиндрических оболочек освещен в работах Землянухина А.И., Могилевича Л.И.,
сведенных в монографию [78]. Рассмотренные ими задачи включают в себя:
а) вывод эволюционных уравнений, моделирующих распространение
продольных, сдвиговых и изгибных волн в нелинейно-упругих, нели-
Солитоны и периодические волны деформации 197
нейно-вязко-упругах, однородных и неоднородных цилиндрических
оболочках;
б) нахождение классов точных солитонных и ударно-волновых реше-
решений;
в) выявление условий, при которых возникающие модели связаны с ин-
интегрируемыми методом обратной задачи рассеяния;
г) теоретико-групповой анализ нелинейных уравнений в частных про™
изводных и механическую интерпретацию инвариантных решений.
В данном обзоре уделялось внимание вопросам распространения соли™
тонов деформации в упругих элементах конструкций, когда наличие дис-
дисперсии связано с конечностью размеров рассматриваемых объектов в на™
правлении, поперечном относительно направления распространения вол-
волны, т. е. с волноводными свойствами зондируемых образцов.
Другим фактором, обуславливающим появление дисперсии, является
влияние микроструктуры материала.
Анализ показывает, что и «микроструктурная» дисперсия, проявляюща-
проявляющаяся при значительно более высоких частотах, чем «волноводная», может,
при наличии нелинейности, привести к формированию в материале соли-
тонов деформации.
Освещение различных вопросов нелинейной волновой динамики твер-
твердых сред с микроструктурой можно найти в монографиях Наугольных К.А.
и Островского Л.А. [124], Николаевского В.Н. [126], Ерофеева В.И. [50],
Быкова В.Г. [24], Ерофеева В.И., Клюевой Н.П. и Шешенина С.Ф. [67].
198 Список литературы
СПИСОК ЛИТЕРАТУРЫ
1. Абловиц М., СигурХ. Солитоны и метод обратной задачи. - М.: Мир, 1987.
2. Авиационная акустика / Под ред. Мунина А.Г. - М.: Машиностроение, 1986, Т. 1,2.
3. Андронов А.А., Витт А.А., Хайкин С.Э. Теория колебаний. -М.: Наука, 1981.
4. Артоболевский И.К, БобровницкийЮ.И., Генкин М.Д. Введение в акустическую
динамику машин. - М.: Наука, 1979.
5. А.С. № 1599875 (СССР). Способ формирования запаздывания сигнала / Кажа-
ев В.В., Прокофьев Е.В., Сибирякова Л.Л. Заявлено 29.02.88, № 4385309/24-24.
Опубл. 15.10.90. Бюл. № 38.
6. А.С. № 1768826 (СССР) Колебательная система / Черкунова А.В., Чехалова
Н.А., Болдин В.П., Весницкий А.И., Кажаев В.В., Черкунов В.Б., Черкунов Б.В.
Заявлено 10.12.90, № 4889369/28. Опубл. 15.10.92. Бюл. № 38.
7. А.С. №1672349 (СССР). Способ определения коэффициента отражения упругих
волн от неоднородности в волноводе / Ерофеев В.И., Родюшкин В.М. Заявлено
31.10.88; -№4643255/28. Опубл. 23.08.91, Бюл. №31.
8. Асташев В.К, Бабицкий В.К, Веприк A.M., Крупенин В.Л. Гашение вынужден-
вынужденных колебаний струн и стержней подвижной шайбой // ДАН СССР, 1989. Т. 304,
№ 1.С. 50-54.
9. Багдоев А.Г., Мовсисян Л.А. Квазимонохроматические волны в нелинейно-упру-
нелинейно-упругих пластинах // Изв. АН СССР. Механ. тверд, тела, 1981, № 4.
10. Багдоев А.Г., Мовсисян Л.А. Некоторые вопросы распространения квазимоно-
квазимонохроматических волн в пластинах и оболочках // Труды XXII Всес. конф. по
теории оболочек и пластин. - Ереван: Изд. АН Арм. ССР, 1980.
11. Багдоев AT., Мовсисян Л.А. О нелинейных одномерных волнах в пластинах //
Пробл. динамики взаимодействия деформир. сред. - Ереван: Изд. АН Арм. ССР,
1990, С. 50^52.
12. Белокобыльский СВ., Ветюков М.М., Нагаев РФ. О фрикционных автоколеба-
автоколебаниях бурильной колонны // Машиноведение. 1982, № 2. С. 15-20.
13. Березин Ю.А. Моделирование нелинейных волновых процессов. - Новоси-
Новосибирск: Наука. 1982.
14. Березовский А.А., Жерновой Ю.В. Изгибные стационарные волны в стержнях
при нелинейном законе упругости // Украинский матем. журнал. 1981. Т. 33. № 4.
С. 493-498.
15. Березовский А.А., Жерновой Ю.В. Нелинейные продольно-поперечные стацио-
стационарные волны в упругих стержнях // Сб. Матем. физика, № 30, - Киев: Наукова
думка, 1981, С. 41-48.
16. Бидерман В.Л. Теория механических колебаний. - М.: Высшая школа. 1980.
17. Бленд Д.Р. Нелинейная динамическая теория упругости. - М.: Мир. 1972.
18. Блехман ИМ., Малахова 0.3. О квазиравновесных положениях маятника Чело-
мея // ДАН СССР, 1986. Т. 287, № 3. С. 289-294.
19. Богоявленский О.И. Опрокидывающиеся солитоны. — М.: Наука, 1991.
20. Болотин В.В. Динамическая устойчивость упругих систем. - М.: Гостехиздат. 1956.
21. Буллаф Р.К., Кодри П.Дж. Солитоны: Пер. с англ. - М.: Мир, 1983.
22. Бхатнагар П. Нелинейные волны в одномерных дисперсных системах - М.:
Мир, 1981.
Список литературы 199
23. Бутенын Н.В., Неймарк Ю.И., Фуфаее НА. Введение в теорию нелинейных
колебаний. — М.: Наука, 1976.
24. Быков ВТ. Нелинейные волновые процессы в геологических средах. - Влади-
Владивосток: Дальнаука, 2000.
25. Быченков В.А. Волновое сопротивление движению нагрузок вдоль одномерных
упругих систем. Дисс. канд. физ.-мат. наук. - Горький: ГГУ, 1988, 184 с.
26. Вакуленко С.А., Молотков И.А., Островский Л.А., Сутин A.M. Нелинейные
продольные волны в упругих стержнях // Волны и дифракция, VIII Всес. симп.
По дифракции и распространению волн. Т. 99. — М., 1981, С. 107-110.
27. Весницкий А.И. Волны в системах с движущимися границами и нагрузками.
-М.: Физматлит, 2001.
28. Весницкий A.M., Метрикин А.В. Внутреннее трение в одномерных упругих си-
системах как результат рассеяния волн на случайных неоднородностях среды //
Испытания материалов и конструкций: сб. научн. трудов / под ред. СИ. Смир-
Смирнова и В.И. Ерофеева. - Н.Новгород: Изд-во «Интелсервис» Нф ИМАШ РАН,
1996. С. 147-150.
29. Весницкий А.К, Милосердова И.В. Волновые методы борьбы с вибрациями //
Проблемы машиностроения и надежности машин. 1998, № 3. С. 16-25.
30. Весницкий А.И., Романов Н.Д. К построению демпфера гашения изгибных ко-
колебаний балки // Прикладная механика. 1988. Т. 24, № 6. С. 122-124.
31. Ветюков М.М. Нелинейные модели и задачи динамики твердого тела с трением
на плоскости. - С.-Петербург: Изд-во СПГГИ. 2000.
32. Вибрации в технике. Справочник в 6-ти томах. Т. 1 / под ред. Болотина В.В.
-М.: Машиностроение, 1978.
33. Вибрации в технике. Справочник в 6-ти томах. Т. 6 / под ред. Фролова К.В. - М.:
Машиностроение, 1981.
34. Викторов И.А. Физические основы применения ультразвуковых волн Рэлея и
Лэмба в технике. - М.: Наука, 1966.
35. Виноградова М.Б., Руденко О.В., Сухорукое А.П. Теория волн. -М.: Наука, 1990.
36. Волъмир А.С. Нелинейная динамика пластинок и оболочек. - М.: Наука, 1972.
37. Гордеев Б.А. Разработка гидроупругих технологий гашения вибрации мобиль-
мобильных машин и акустических средств виброизмерений. Дисс. доктора технич. наук.
- Н.Новгород: Нф ИМАШ РАН, 2002, 347 с.
38. Горьденблатт ИМ. Нелинейные проблемы теории упругости. - М.: Наука, 1969.
39. Горяченко В.Д. Элементы теории колебаний. - Красноярск: Изд-во КГУ, 1995.
40. Григолюк Э.И., Селезов И.Т. Неклассические теории стержней, пластин и обо™
лочек. - М.: ВИНИТИ, 1973.
41. Гринченко В.Т., Мелешко В.В. Гармонические колебания и волны в упругих
телах. - Киев: Наукова думка, 1981.
42. Дерендяев КВ., Солдатов КН. О движении точечной массы вдоль колеблю-
колеблющейся струны // ПММ. 1997. Т. 61, № 4. С. 703-706.
43. Добронравов В.В. Основы аналитической механики. — М.: Высшая школа, 1976.
44. Додд Р., ЭжбекДж., Гиббон Дою., МоррисX. Солитоны и нелинейные волновые
уравнения: Пер. с англ. - М.: Мир, 1988 с.
200 Список литературы
45. Докучаев В.П., Разин А.В. Распространение упругих волн в твердой среде с
флуктуирующими параметрами // Изв. АН СССР. Физика Земли, 1987, № 4.
С. 40-45.
46. ДрейденГ.В., Островский Ю.К, Самсонов A.M., Семенова КВ., СокуринскаяЕ.В.
Формирование и распространение солитонов деформации в нелинейно-упругом
твердом теле // ЖТФ, 1988, Т. 58, № 10, С. 2040-2047.
47. Дрейден Г.В., Островский ЮЖ., Самсонов A.M., Семенова КВ., Сокуринская
Е.В. Об экспериментах по распространение солитонов деформации в нелинейно-
упругом стержне // Письма в ЖТФ,' 1995, Т. 21, Вып. 11. С. 42-46.
48. ДрейденГ.В., Пору бое А. В., Самсонов A.M., Семенова КВ. Генерация и наблю-
наблюдение солитона продольной деформации в пластине. // Письма в ЖТФ, 1996,
Т. 22, Вып. 21. С. 61-68.
49. Дубровин Б.А., Матвеев В.Б., Новиков СП. Нелинейные уравнения типа Корте-
вега-де Фриза, конечнозонные линейные операторы и абелевы многообразия //
Успехи мат. наук, 1976, Т. 31, Вып. 1A87). С. 55-136.
50. Ерофеев В.К Волновые процессы в твердых телах с микроструктурой. - М.:
Изд. Моск. ун-та, 1999.
51. Ерофеев В.К Пространственные колебания гибкого стержня // Прикл. механи-
механика, 1991, Т. 27. № 9. С. 100-106.
52. Ерофеев В.К Распространение нелинейных изгибных волн в стержнях с дви-
движущимися закреплениями // Прикл. задачи динамики систем /Сб. научн. трудов /
Горьк. ун-т., 1983. Вып. 6. С. 90-107.
53. Ерофеев В.К Солитоны огибающих при распространении изгибных волн в нели-
нелинейно-упругом стержне. // Акустический журнал, 1992. Т. 38. № 1. С. 172-173.
54. Ерофеев В.И. Введение в теорию упругих волн. Учебное пособие. -Н.Новгород:
ННГУ,2001.
55. Ерофеев В.К, Кажаев В.В., Короткое КВ. Акустические волны в вязкоупругих
элементах конструкций // Конструкция и прочность судов и сооружений / Труды
ВГАВТ № 293. Н.Новгород. 2000. С. 39-45.
56. Ерофеев В.К, Кажаев В.В., Потапов AM. Параметрическая трансформация
продольных волн в изгибные в тонких стержнях // Волны и дифракция. - М.:
ИРЭ АН СССР, 1981. Т. 2. С. 82-85.
57. Ерофеев В.И., Кажаев В.В., Семерикова Н.П. Осциллятор с нелинейностью
в отрицательной степени // Испытания материалов и конструкций / Сб. научн.
трудов. Н.Новгород, Изд-во «Интелсервис», 1996. С. 166-179.
5 8. Ерофеев В.И., Кажаев В.В., Семерикова Н.П. Квазигармонические изгибные вол-
волны в нелинейно-упругой балке Тимошенко // Испытания материалов и конструк-
конструкций / Сб. научн. трудов. Н.Новгород, Изд-во «Интелсервис», 1996. С. 180-187.
59. Ерофеев В.И., Кажаев В.В., Семерикова Н.П. Нелинейные стационарные изгиб-
изгибные волны в балке Тимошенко // Прикладная механика и технологии машино-
машиностроения / Сб. научн. трудов. Н.Новгород, Изд-во «Интелсервис», 1997. Вып. 3.
С. 56-66.
60. Ерофеев В.И., Кчюева Н.В. Вязкоупругие волны в стержне Миндлина-Германа
// Испытания материалов и конструкций / Сб.научн. трудов - Н.Новгород, Изд-во
«Интелсервис», 2000. Вып. 2. С. 137-142.
Список литературы 201
61. Ерофеев В.И., Клюева КВ., Монычев С.А., Семерикова Н.П. Влияние разномо-
дульности материала и депланации на распространение нелинейных крутиль-
крутильных волн в стержне // Испытания материалов и конструкций / Сб.научн. трудов
- Н.Новгород, Изд-во «Интелсервис», 2000. Вып. 2. С. 117-137.
62. Ерофеев В.И., Клюева Н.В., Семерикова Н.П. Нелинейно-упругие волны в
стержне Миндлина-Германа // Известия вузов. Прикладная нелинейная дина-
динамика. 1999. Т. 7. № 4. С. 35-47.
63. Ерофеев В.К, Клюева КВ., Семерикова Н.П. Солитоны деформации в стержне
Миндлина-Германа // Прикладная механика и технологии машиностроения. /
Сб. науч. трудов. Н.Новгород: Изд-во «Интелсервис» НФ ИМАШ РАН, 1998.
С. 85-95.
64. Ерофеев В.К, Клюева КВ., Семерикова Н.П. Об особенностях распростране-
распространения нелинейных стационарных волн в стержне Миндлина-Термана // Труды 3-й
научной конференции по радиофизике. Н.Новгород: ННГУ, 1999. С. 236-237.
65. Ерофеев В.К, Клюева Н.В., Семерикова Н.П. Солитоны деформации в стерж-
стержнях, пластинах и оболочках. Обзор // Акустика неоднородных сред. Ежегодник
Российск.акстич.общ-ва / Сб.трудов семинара научной школы проф. С.А. Рыба-
Рыбака. - М.: Изд-во МФТИ. 2000. С. 65-88.
66. Ерофеев В.И., Клюева КВ., Солдатов КН. Сравнительный анализ дисперси-
дисперсионных зависимостей волн Лэмба, распространяющихся в слое и в стержне //
Моделирование динамических систем / Сб. науч. трудов. Н.Новгород: Изд-во
«Интелсервис» НФ ИМАШ РАН, 2002. С. 11-21.
67. Ерофеев В.К, Клюева КВ., Шешенин С.Ф. Упругие волны в твердых смесях.
Н.Новгород: Изд-во «Интелсервис» НФ ИМАШ РАН, 2002. 86 с.
68. Ерофеев В.К, Потапов А.И. Трехчастотные резонансные взаимодействия про-
продольных и изгибных волн в стержне // Динамика систем. Горький: ГГУ, 1985.
С. 75-84.
69. Ерофеев В.И., Потапов А.И., Солдатов КН. Нелинейные волны в упругих
телах с пространственной дисперсией. Монография / Горьковский ун-т. Деп. в
ВИНИТИ 25.07.86. № 5440 - В. 86.
70. Ерофеев В.К, Потапов А.И. Нелинейные модели продольных колебаний стерж-
стержней // Гидроаэромеханика и теория упругости / Всес. межвуз. сб. Днепропет-
Днепропетровск: ДГУ. 1984. Вып. 32. С. 78-82.
71. Зарембо Л.К, Красылъников В.А. Введение в нелинейную акустику. - М.: Наука,
1966.
72. Захаров В.Е. К проблеме стохастизации одномерных цепочек нелинейных ос-
осцилляторов // ЖЭТФ, 1973. Т. 65. № 1G). С. 219-225.
73. Захаров В.Е., Манаков СВ. К теории резонансного взаимодействия волновых
пакетов в нелинейных средах // ЖЭТФ, 1975. Т. 69. Вып. 5. С. 1654-1673.
74. Захаров В.Е., Манаков СВ., Новиков СП., Питаевский Л.П. Теория солитонов:
Метод обратной задачи. - М.: Наука. Гл. ред. физ.-мат. литер., 1980.
75. Захаров В.Е., Шабат А.Б. Интегрирования нелинейных уравнений математиче-
математической физики методом обратной задачи рассеяния II // Функц. анализ, 1979. Т. 13.
Вып. 3. С. 13-22.
76. Захаров В.Е., Шабат А.Б. Схема интегрирования нелинейных уравнений мате-
математической физики методом обратной задачи рассеяния I // Функц. анализ, 1974.
Т. 8. Вып. 3. С. 43-53.
202 Список литературы
11. Захаров В.Е., Шабат А.Б. Точная теория двумерной самофокусировки и одно-
одномерной автомодуляции волн//ЖЭТФ, 1971. Т. 61. Вып. 1G). С. 118-134.
78. Землянухж AM., Могилевич Л.И. Нелинейные волны в цилиндрических обо-
оболочках. - Саратов, 1999.
79. Кадомцев Б.Б. Коллективные явления в плазме. - М.: Наука, 1988.
80. Кажаев В.В. Гашение вибраций балки свободно скользящим объектом // Вол-
Волновые задачи механики / Сб науч. трудов. Горький: Гф ИМАШ АН СССР, 1990.
С. 41-47.
81. Кажаев В.В. Гашение вибраций струны скользящим осциллятором // Волновые
задачи механики / Сб науч. трудов.Н.Новгород: Нф ИМАШ АН СССР, 1991.
С. 102-107.
82. Кажаев В.В. Крутильные автоколебания вращающегося стержня // Волновые
задачи механики / Сб науч. трудов. Н.Новгород: Нф ИМАШ РАН, 1994. С. 145-
162.
83. Кажаев В.В. Волновые процессы в распределенных системах, взаимодействую-
взаимодействующих с сосредоточенными объектами. Дисс. канд. физ.-матем. наук. Н.Новгород:
Нф ИМАШ РАН, 1998. 138 с.
84. Кажаев В.В. Нестационарные волны в стержне с нелинейно упругим закреп-
закреплением // Изв. ВУЗов. Северо-Кавказский регион. Естественные науки, 2001.
Спецвыпуск: Математическое моделирование. С. 95-96.
85. Кажаев В.В., Потапов А.И. Крутильные автоколебания упругого стержня //
Динамика систем. Горький: ГГУ, 1986. С. 43-54.
86. Кажаев В.В., Потапов А.К, Семершова Н.П. Локализованные стационарные
волны и их свойства в тонком растянутом стержне // Волновые задачи механики
/ Сб. науч. трудов. - Н.Новгород: Нф ИМАШ РАН, 1991. С. 123-129.
87. Кажаев В.В., Потапов AM., Семерикова НМ. Расщепление частицеподобных
волн при встречных столкновениях // Изв. ВУЗов. Радиофизика, 1995. Т. 38.
№1-2. С. 100-105.
88. Кажаев В.В., Уткин Г.А. Движение массы вдоль струны под действием сил
волнового давления // Дифференциальные и интегральные уравнения / Межвуз.
сб. науч. трудов. - Горький: ГГУ. 1989. С. 112-117.
89. Калоджеро Ф., ДегасперисА. Спектральные преобразования и солитоны: Пер.
с англ. - М.: Мир, 1985.
90. Карпман ВМ. Система солитонов под действием возмущения. Осцилляторные
ударные волны // ЖЭТФ, 1979. Т. 77. Вып. 1G). С. 114-123.
91. Карпман ВМ., Маслов Е.М. Структура хвостов, образующихся при воздействии
возмущений на солитоны // ЖЭТФ, 1978. Т. 75. Вып. 2(8). С. 504-517.
92. Каудерер Г. Нелинейная механика. - М.: Наука. 1961. 777 с.
93. Кившаръ Ю.С., Сыркин Е.С. Сдвиговые солитоны в упругой пластине // Аку-
стич. журнал, 1991. Т. 37. Вып. 1. С. 104-109.
94. Клюева КВ. Дисперсионные, диссипативные и нелинейные эффекты при рас-
распространении волн в стержне Миндлина-Германа. Дисс. канд. физ.-матем. наук.
Н.Новгород: Нф ИМАШ РАН, 2000. 124 с.
95. Ковригин Д. А. Нелинейная динамика тонкостенных циллиндрических оболочек.
Свободные колебания // Препр. Гф. ИМАШ АН СССР, Горький, 1990. 24 с.
Список литературы 203
96. Ковригин Д. А. Нелинейные резонансные взаимодействия волн в упругих эле-
элементах конструкций. Дисс. канд. физ.-матем. наук. Н.Новгород: Нф ИМАШ РАН,
1992. 140 с.
97. Ковригин Д.А., Потапов AM. Нелинейные резонансные взаимодействия про-
продольных и изгибных волн в кольце // Докл. АН СССР, 1989. Т. 305. № 4. С. 803^
807.
98. Коренев Б.Г., Резников Л.М. Динамические гасители колебаний. — М.: Наука,
1988.
99. Косевич A.M., Ковалев А.С. Введение в нелинейную физическую механику. —
Киев: Hayкова думка, 1989.
100. Кочнева Л.Ю. Внутреннее трение в твердых телах при колебаниях. — М.: Наука,
1979.
101. Красилъников В. А., Крылов В.В. Введение в физическую акустику. - М.: Наука,
1984.
102. Куликовский AT., Свешникова ЕМ. Нелинейные волны в упругих средах. - М.:
Московский лицей, 1998.
103. Ланда П. С. Автоколебания в распределенных системах. - М.: Наука, 1983.
104. Ланда П. С. Нелинейные колебания и волны. - М.: Наука, 1997.
105. Ландау Л.Д., Лифшиц Е.М. Теория упругости. — М.: Наука, 1987.
106. Лурье А.И. Нелинейная теория упругости. - М.: Наука, 1980.
107. ЛэмДж.Л. Введение в теорию солитонов: Пер. с англ. - М.: Мир, 1983.
108. ЛэмбДж. Элементы теории солитонов: Пер. с англ. - М.: Мир, 1984.
109. Ляв А. Математическая теория упругости. - М.; — Л.: ОНТИ, 1935.
110. Мартыненко М.Д., НгуенДанг Бик, Фом ши Винъ. Уединенные волны в упру-
гопластической среде с предварительным напряжением // Докл. АН БССР, 1991,
Т. 35. №4.
111. Мартыненко М.Д., Нгуен Данг Бик. Уединенные волны в нелинейной упругой
среде с трением // Весщ АН Беларусь Сер. физ.-мат. наук, 1992. №. 1.
112. Мартыненко М.Д., Нгуен Данг Бик. Существование уединенных волн, распро-
распространяющихся в упругопластическом пространстве // Дифф. уравн. 1990. Т. 26.
№ 12.
113. Мартынов А.В. Качественный анализ продольных вибрационных колебаний
в тонкой пластине // Избр. вопр. алгебры, геометрии и дискр. математики / МГУ.
мех.-мат. фак. - М., 1992.
114. Марченко В.А. Нелинейные уравнения и операторные алгебры. - Киев: Наук.
Думка, 1986.
115. Метрикин А.В. Стационарные волны в нелинейно-упругой системе, взаимо-
взаимодействующей с движущейся нагрузкой // Акустич. журнал, 1994, Т. 40. № 4.
С. 647-650.
116. Милосердова И.В. Об одной возможности акустического измерения упругих
констант четвертого порядка// Горьк. ун-т. / Горький, 1983. -8 с. -Деп. в ВИНИТИ
28.03.83. №1796.
117. Милосердова КВ., Новиков А.А., Потапов AM. Импульсные волны в одно-
одномерной системе с нелинейными границами // Волны и дифракция. Т. II. Москва,
1981. С. 118-121.
204 Список литературы
118. Милосердова И.В., Потапов А.И. Нелинейные стоячие волны в стержнях ко-
конечной длины // Акустич. журнал, 1983. Т. 29. Вып. 4. С. 515-520.
119. Милосердова КВ., Потапов AM. Продольные колебания в стержне с нелиней-
нелинейно-упругим закреплением // Известия АН СССР. Механика твердого тела. 1980.
№6. С. 178-183.
120. Милосердова И.В., Потапов AM. Релаксационные колебания в консерватив-
консервативных линейных системах с нелинейными граничными закреплениями // Динамика
систем, Горький: Изд-е Горьк. университета. 1987. С. 172-182.
121. Моисеев Н.Н. Асимптотические методы нелинейной механики. - М.: Наука,
1981.
122. Молотков И.А., Вакуленко С.А. Нелинейные продольные волны в неоднород-
неоднородных стержнях // Интерференционные волны в слоистых средах. 1. Зап. науч.
семин. ЛОМИ, Т. 99. - Л.: Наука, 1980. С. 64-73.
123. Мягков Н.Н. О динамической локализации деформации в разупрочняющемся
стержне // Механ. композиц. матер, и констр., 199. Т. 5. № 3. С. 28-32.
124. Наугольных К А., Островский Л.А. Нелинейные волновые процессы в акусти-
акустике. -М.: Наука, 1990.
125. Никифоров А. С, Будрин СВ. Распространение и поглощение звуковой вибра-
вибрации на судах. - Л.: Судостроение, 1968.
126. Николаевский В.Н. Гидромеханика и флюидодинамика. - М.: Недра, 1996.
127. НовацкыйВ. Теория упругости. - М.: Мир, 1975.
128. Новиков А.А. О применении метода связанных волн к анализу нерезонансных
взаимодействий // Изв. ВУЗов. Радиофизика, 1976. Т. 19. № 2. С. 321-323.
129. Норкин СБ. Дифференциальные уравнения второго порядка с запаздывающим
аргументом. -М.: Наука, 1965.
130. Островский Л.А., Пелиновский ЕМ. О приближенных уравнениях для волн
в средах с малыми нелинейностью и дисперсией // ПММ, 1974. Т. 38. Вып. 1.
С. 121-124.
131. Островский Л. А., Сутин A.M. Нелинейные упругие волны в стержнях // Препр.
/НИРФИ, 1975. №71.
132. Островский Л.А., Сутин A.M. Нелинейные упругие волны в стержнях // ПММ,
1977. Т. 41. Вып. 3. С. 531-537.
133. Павлов П.А., Кондакова ОМ. Механические свойства материалов и условия
прочности элементов конструкций. Конспект лекций. Часть 1. - Ленинград: Изд-
воЛПИ, 1973.
134. Палъмов В.А. Колебания упруго-пластических тел. - М.: Наука, 1976.
135. Пет Г. Физика колебаний и волн. - М.: Мир, 1979.
136. ПорубовА.В., Самсонов A.M. Уточнение модели распространения продольных
волн деформации в нелинейно-упругом стержне // Письма в ЖТФ, Т. 19. Вып. 12.
С. 26-29.
137. Потапов AM., Семерикова МП. Нелинейные продольные волны в стержнях с
учетом взаимодействия полей деформации и температуры // ПМТФ, 1988. № 1.
С. 57-61.
138. Потапов AM., Солдатов ИМ. Квазиоптическое приближение для пучка сдви-
сдвиговых волн в нелинейной наследственной среде // ПМТФ, 1986. № 1. С. 144-147
Список литературы 205
139. Потапов AM., Солдатов И.Н. Квазиплоский пучок нелинейных продольных
волн в пластине. // Акустический журнал. 1984. Т. 30. В. 6. С. 819-822.
140. Применение ультразвука в промышленности. - М.: Машиностроение, 1975.
141. Рабинович ММ., Трубецков ДМ. Введение в теорию колебаний и волн. - М.:
Наука, 1984.
142. Работное ЮМ. Механика деформируемого твердого тела. - М.: Наука, 1988.
143. Рыбак С. А., Скрынников ЮМ. Уединенная волна в тонком стержне постоянной
кривизны // Акустич. журнал, 1990. Т. 36. № 4. С. 730^732.
144. Рэлей (Стретт Дж.) Теория звука. — М.: Гостехиздат, 1955.
145. Сагомонян А.Я. Волны напряжения в сплошных средах. — М.: Изд-во МГУ,
1985.
146. Самсонов A.M. О существовании солитонов продольной деформации в беско-
бесконечном нелинейно-упругом стержне // ДАН СССР, 1988. Т. 299. С. 1083-1086.
147. Самсонов A.M. Солитоны в нелинейно-упругих стержнях с переменными свой-
свойствами // Пробл. нелинейн. и турбулент. процессов в физ. Труды II Междунар.
раб. группы, 1983. Ч. 1. - Киев: Наук, думка, 1985. С. 219-221.
148. Самсонов A.M. Существование и усиление уединенных волн в нелинейно-
упругих волноводах. // Препр. / АН СССР, Физ.-тех. ин-т, 1988. Ш 1259. С. 1-26.
149. Самсонов A.M. Эволюция солитона в нелинейно-упругом стержне переменно-
переменного сечения. // ДАН СССР, 1984. Т. 277. № 2. С. 332-335.
150. Самсонов A.M., Сокуринская Е.В. Нелинейные волны деформации в упругих
волноводах, взаимодействующих с внешней средой // Препр. / АН СССР, Физ.-
тех. ин-т, 1988. № 1293. С. 1-32.
151. Самсонов A.M., Сокуринская Е.В. О возможности возбуждения солитона про-
продольной деформации в нелинейно-упругом стержне // ЖТФ, 1988. Т. 58. Вып. 8.
С.1632-1634.
152. Самсонов A.M., Сокуринская Е.В. Солитоны продольного смещения в неодно-
неоднородном нелинейно-упругом стержне. // Препр. / АН СССР, Физ.-тех. ин-т, 1985.
№983. С. 1-44.
153. Самсонов A.M., Сокуринская Е.В. Солитоны продольной деформации в нели-
нелинейно-упругих стержнях // Теория распространения волн в упругих и упруго-
пластических средах. Новосибирск: ИГД СО АН СССР, 1987. С. 28^32.
154. Самсонов A.M., Сокуринская Е.В. Уединенные продольные волны в неодно-
неоднородном нелинейно-упругом стержне // ПММ, 1987. Т. 51. Вып. 3. С. 483^488.
155. Светлицкий В.А. Механика стержней. - М.: Высшая школа. 1987. Т. 1,2.
156. Семерикова НМ. Стационарные продольные волны в нелинейно упругом
стержне // Волновые задачи механики / Сб науч. трудов. Н.Новгород: Нф ИМАШ
РАН, 1994. С. 121-144.
157. Скрынников ЮМ. Солитон со сглаженным профилем нелинейного уравнения
Клейна-Гордона//Акустич. журнал, 1998. Т. 44. № 5. С. 712-714.
158. Сокуринская Е.В. Некоторые точные решения задачи о нелинейных упругих
волнах в пластине. // Письма в ЖТФ, 1994. Т. 20. Вып. 3. С. 36-41.
159. Солдатов И.Н. Уравнения движения «бусинки» на растяжимой струне // Ис-
Испытания материалов и конструкций / Сб.научн. трудов - Н.Новгород, Изд-во
«Интелсервис», 2000. Вып. 2. С. 261-265.
206 Список литературы
160. Солитоны в действии / Под ред. К. Лонгрена и Э. Скотта: Пер. с англ. - М.:
Мир, 1981.
161. Тахтаджян Л. А. Фаддеев Л Д. Гамильтонов подход в теории солитонов. - М.:
Наука, 1986.
162. Тимошенко СП. Колебания в инженерном деле. - М.: Наука, 1967.
163. Топчян Д.Х. Волны модуляций в пластинах на упругом основании // Пробл.
динамики взаимодействия деформир. сред. - Ереван: Изд. АН Арм. ССР, 1987.
С. 270-274.
164. УиземДж. Линейные и нелинейные волны. - М.: Мир, 1977.
165. Ультразвук. — М.: Советская энциклопедия, 1979.
166. Физический энциклопедический словарь / Гл. ред. A.M. Прохоров. - М.: Сов.
Энциклопедия.
167. Филиппов АЛ. Колебания деформируемых систем. - М.: Машиностроение,
1970.
168. Човнюк Ю.В. Нелинейные волнообразования нестационарных процессов в
деформируемых средах и телах. Дисс. канд. физ.-мат. наук. Киев. КИСИ. 1988.
155 с.
169. Шенявский Л. А. Влияние геометрической нелинейности на волны, распростра-
распространяющиеся в свободной тонкой пластине // ПММ, 1979. Вып. 6. Т. 43. С. 1089—
1094.
170. Энгелъбрехт ЮЖ., Нигул У.К. Нелинейные волны деформации. — М.: Наука,
1981.
171. Ablowitz M.J., Каир D.J., Newell А. С, Segur Н. Nonlinear evolution equation of
physical significance // Phys. Rev. Lett, V. 31. P. 125-127.
172. Abramian A.K., Indejtsev D.A., Vakulenko S.A. Wave localization in hydroelastic
systems // Flow, Turbulence and Combustion. 1999. № 61. P. 1-20.
173. Achenbach J.D. Wave propagation in elastic solids. North-Holland Publishing Com-
Company, Amsterdam, 1973.
174. Bejda J. Propagation of nonlinear dispersive and dissipative waves // Arch. mech.
stosow., 1977. V. 29. № 3. P. 477-490.
175. BlandD.R. Wave theory and applications. Clarendon Press, Oxford, 1988.
176. Clarcson P.A., LeVeque R.J., Saxton R. Solitary wave interaction in elastic rods //
Stud. Appl. Math., 1986. V. 75. № 2. P. 95-122.
177. Erofeyev VI, Semerikova N.P. Nonlinear modulated waves in the Timoshenko beam
// Wave mechanical systems / Prog, intern, seminar. Kaunas: Technology a. 1996. P. 12-
15.
178. Gardner C.S., Greene J.M., Kruskal M.D., Mima R.M. Method for solving the
Korteweg-de Vries equation // Phys. Rev. Lett., 1967. 19. P. 1095-1097.
179. Graff K.E Wave motion in elastic solids. Clarendon Press, Oxford, 1975.
180. Каир D.J., Newell А. С. Solitons as particles, oscillators and in slowly changing
media: a singular perturbation theory // Prog. Roy. Soc. London A, 1978. 361. P. 413-
446.
181. Kodama J., Ablowitz M. Perturbation of solitons and solitary waves // Stud. Appl.
Math., 1981. V. 64. P. 225^245.
Список литературы 207
182. Kazhaev V, Vesnitsky A. The effect of reducing vibratory level in one-dimensional
systems with an object traveling freely along the letter // Wave Processes in Machinery
and Structures / Proc. Colloquium Euromech 295. 1992.
183. Kovriguine D.A., Potapov A.I. Nonlinear waves in elastic bar // Eur. J. Mech. A. /
Solids, 1996. V. 15. P. 1049-1075.
184. Lax P.D. Integrals of nonlinear equations of evolution and solitary waves //
Communs. Pure and Appl. Math. V. 21. P. 159-193.
185. Metrikine A. V, Askes H. One-dimensional dynamically consistent gradient elasticity
models derived from a discrete microstructure. Delft University of Technology. CM
2001-002.2001.
186. Metrikine A.V., Vrouwenvelder A.C.W.M. Dynamics of structures. Part 2: Wave
dynamics. Delft University of Technology. CT 4140. 2001.
187. Nakamura A. Soliton formation process calculated for longitudinal sound waves
in solid bar // Проблемы нелинейной акустики. Сб. трудов XI Международного
симпозиума по нелинейной акустике. Ч. 1. Новосибирск. 1987. С. 378-382.
188. Nariboli G.A. Nonlinear longitudinal dispersive waves in elastic rods // J. of Math
and Phys. Sciences. 1970. V. 4. P. 64-73.
189. Nariboli G.A., SedovA. Burgers 's-Korteweg-de Vries equation for viscoelastic rods
and plates // J. Math. Anal. And Appl., 1970. V. 32. № 3. P. 661-667.
190. Planat M., Hoummady M. Observation of soliton-like envelope modulation
generated in an anisotropic quartz plate by metallic in interdigital transducers // Appl.
Phys. Lett, 1989. V. 55. № 2. P. 103.
191. PorubovI. V, SamsonovA.M., Velarde M. G., Bukhanovsky A. V. Strain solitary waves
in an elastic rod embedded in another elastic external medium with sliding // Phys.Rev.
E, 1998. V. 58.1. 3. P. 3854-3864.
192. Potapov Al., Vesnitsky A.I. Interaction of solitary waves under head-on collections/
Experimental investigation // Wave Motion, 1994. V. 19. P. 29-35.
193. Rudnick L, Wu J., Wheatley J., Putterman S. Flexural waves envelope solitons in
a metallic cylindrical thin shell. // Проблемы нелинейной акустики. Сб. трудов XI
Международ, симп. по нелин. акустике. Ч. 2. - Новосибирск, 1987. С. 208-212.
194. SamsonovA.M. II Proc. of the Intern, conf. On Plasma Physics, V. 4. - Kiev: Naukova
dumka, 1987. P. 88-90.
195. Samsonov A.M. Soliton in nonlinear elastic rods with variable characteristics //
Nonlinear and Turbulent Processes in Physics. V. 2 / ed. R.Z. Sagdeev. -N.Y.: Gordon
and Beach, 1984. P. 1029-1035.
196. Samsonov A.M., Dreiden G.V, Porubov I.V., Semenova I.V Longitudinal strain
soliton focusing in a narrowing nonlinearly elastic rod // Phys. Rev. В., 1998. V. 57.
№10. P. 5778-5787.
197. Soerensen M.P., Christiansen PL., LomdahlP.S. Solitary waves on nonlinear elastic
rods. I // J. Acoust. Soc. Amer., 1984. V. 76. № 3. P. 871-879.
198. Soerensen M.P., Christiansen PL., Lomdahl P.S., Scovgaard O. Solitary waves on
nonlinear elastic rods. I // J. Acoust. Soc. Amer., 1987. V. 81. № 6. P. 1718-1722.
199. Taniuti Т., Wei C.C. Reductive perturbation method in nonlinear wave propagation
I // J. Phys. Soc. Jpn., 1968. V. 24. P. 941-946.
200. Zakharov VK, Kuznetsov E.A., Rubenchik A.M. Soliton stability // Prepr. / Inst.
Automaton & Electrometry SB AN USSR. 1983. № 199. P. 1-62.
Научное издание
ЕРОФЕЕВ Владимир Иванович
КАЖАЕВ Владимир Владимирович
СЕМЕРИКОВА Надежда Петровна
ВОЛНЫ В СТЕРЖНЯХ. ДИСПЕРСИЯ.
ДИССИПАЦИЯ. НЕЛИНЕЙНОСТЬ
Редактор Р. А. Бунатян
Оригинал-макет: Е. В. Третьяков
Оформление переплета: К. А. Кретова
ЛР№ 071930 от 06.07.99
Подписано в печать 01.08.02. Формат 60x90/16
Бумага офсетная. Печать офсетная
Усл. печ. л. 13. Уч.-изд. л. 15,1. Тираж 400 экз. Заказ №
Издательская фирма «Физико-математическая литература»
МАИК «Наука/Интерпериодика»
117997 Москва, Профсоюзная, 90
E-mail: fizmat@maik.ru
Отпечатано с готовых диапозитивов
в ФГУП «Ивановская областная типография»
153008, г. Иваново, ул. Типографская, 6
EBN 5-9221-0294-Х
9 785922 102940