/














































































































































Text
$ $
#>
БОЕВАЯ
АВИАЦИОННАЯ
ТЕХНИКА:
}
^^И^ИН^^Я^^^Я^И^Ивоиля^р^с^шТТ
В. Ш. ПАВЛЕНКО, А. А. ДЬЯЧЕНКО, В. И. ЖУЛЕВ,
Б. К. КОЛПАКОВ, А. П. НАЗАРОВ, В. А. ТИХОНРАВОВ
БОЕВАЯ
АВИАЦИОННАЯ
ТЕХНИКА
ЛЕТАТЕЛЬНЫЕ АППАРАТЫ,
СИЛОВЫЕ УСТАНОВКИ
И ИХ ЭКСПЛУАТАЦИЯ
Под редакцией заслуженного деятеля
науни и технини РСФСР, профессора,
донтора твхничесних наун В. Ф. Павленио
МОСКВА
ВОЕННОЕ ИЗДАТЕЛЬСТВО
1984
ББК 68.65
Б75
УДК.623.746.004:621.45
Рецензент кандидат технических наук В. Ф. Старостин
Боевая авиационная техника: Летательные аппараты, сн-
Б75 ловыс установки и их эксплуатация/В. Ф. Павленко,
А. А. Дьяченко, В. И. Жулев и др.; Под ред. В. Ф.
Павленко.—М.: Воениздат, 1984.— 320 с, ил.
В пер.: 1 р. 30 к.
В книге рассматриваются вопросы аэродинамики и динамики полета,
конструкции и систем управления летательных аппаратоп; устройство и принцип ра*
боты авиационных двигателей, их элементов н систем автоматического
управления. Излагаются вопросы инженерно-авиационной службы и организации
эксплуатации авиационной техники.
Предназначена для инженерно-технического и летного состава строевых
частей авиации Вооруженных Сил. моАет быть полезна офицерам, поступающим
в инженерные ВУЗ ВВС но специальности «Летательные аппараты и силовые
установки», а также лицам, интересующимся авиационной техникой.
Б 1304040400-156 ББК 68.65
068(02)-84 ' 355.74
(6) Воениздат, 1984
www.vokb-la.spb.ru - Самолёт своими руками?!
ПРЕДИСЛОВИЕ
Книга включает предисловие, введение и четыре
раздела:
раздел I «Аэродинамика и динамика полета летательных
аппаратов;
раздел II «Конструкция летательных аппаратов»;
раздел III «Авиационные двигатели»;
раздел IV «Инженерно-авиационная служба и организация
эксплуатации авиационной техники».
В труде излагаются законы движения воздуха вблизи
поверхностей обтекаемых частей самолета и его силовое воздействие на
поверхности самолета. Рассматриваются траектории движения
самолета, его устойчивость и управляемость. Объясняются те или
иные конструктивные решения самолета исходя из его назначения,
летно-техпические данные, нагрузки, действующие на него в
полете и при движении по земле. Даются сведения о принципах
работы и конструкции отдельных агрегатов системы управления
самолета.
Объясняется сущность процессов, протекающих в авиационных
двигателях, условия работы элементов конструкции. Обращается
внимание на возможные в эксплуатации дефекты и отказы
отдельных элементов авиационных двигателей или их систем, па
характер их проявления и методы устранения. Излагаются
вопросы назначения и работы систем автоматического регулирования
авиадвигателей и отдельных их агрегатов.
Описание конструкции самолетов, двигателей и их систем
проводится по элементам как иллюстрация к некоторым
принципиальным закономерностям, характеризующим развитие их
конструктивных форм.
В книге излагаются основные задачи, решаемые инженерно-
авиационной службой. Основное внимание обращается на правила
эксплуатации авиационной техники, иа средства наземного
обслуживания, инструментального контроля и вопросы техники
безопасности.
В труде основное внимание уделяется самолетам, вертолетам
и двигателям к ним. Другие типы летательных аппаратов
рассматриваются только в порядке исторического обзора развития
авиации.
1* 3
Книга написана по материалам открытой отечественной и
зарубежной литературы. Предисловие, введение, главы 1, 3, 4, 5, 8
раздела III и главу 5 раздела IV, а также 2.1 и 2.5 главы 2,
6.1 и 6.2 главы 6 раздела III напнсаиы В. Ф. Павленко;
раздел I — А. А. Дьяченко; главы 1, 2, 3 раздела II — В. А. Ти-
хонравовым; главы 4, 5 раздела II — В. И. Ж у левым;
главы 7, 9, а также 2.2, 2.3, 2.4 главы 2 и 6.3 главы 6 раздела III —-
А. П. Назаровым; главы 1, 2, 3, 4 раздела IV — Б. К- Коли а-
к о в ы м.
www.vokb-la.spb.ru - Самолёт своими руками?!
ВВЕДЕНИЕ
Вековая мечта человека о полете в воздухе подобно птицам
в наше время воплотилась в полетах современных первоклассных
самолетов, вертолетов, ракет, спутников и космических кораблей—
творений человеческого гения.
От воздушного шара до многообразия самолетов, вертолетов,
управляемых в полете космических кораблей — таков путь
развития летательных аппаратов.
Вес летательные аппараты (ЛА) могут быть разделены по
принципу полета па воздухоплавательные ЛА, ЛА с
использованием аэродинамических сил для полета, баллистические ЛА.
Воздухоплавательные летательные аппараты
используют для полета подъемную силу газов более легких, чем
воздух. Они плавают в воздушном пространстве. К этому классу
ЛА относятся воздушные шары, аэростаты и дирижабли.
Летательные аппараты с использованием
аэродинамических сил для полета используют подъемную
силу крыла, несущего винта или того и другого одновременно.
К этому классу относятся самолеты, планеры, винтокрылые
летательные аппараты (вертолеты, винтокрылы, вертолеты-самолеты)
и различного типа крылатые ракеты.
Баллистические летательные аппараты
совершают полет за счет начального импульса ракетных двигателей и
действия гравитационного поля Земли, Солнца и планет.
Траектория полета таких аппаратов в гравитационном
поле—криволинейная. К ним относятся баллистические ракеты, искусственные
спутники Земли, космические корабли. Если начальная скорость
инерциального движения тела вокруг Земли равна или более
первой космической (~ 7,9 км/с), то траектория полета представляет
собой замкнутую кривую — окружность или эллипс. Если
начальная скорость равна второй космической скорости (~ 11,2 км/с),
аппараты — космические корабли становятся спутниками Солнца.
Таким образом, по незамкнутым эллиптическим кривым
движутся баллистические ракеты, по замкнутым — искусственные
спутники Солнца, Земли, Луны и других планет.
Среди различных летательных аппаратов наибольшее
применение получили самолеты. Они составили целую эпоху в развитии
авиации и подготовили эру космических полетов.
5
Советская военная авиация родилась вместе с нашей
социалистической Родиной. С первых дней Советской власти Коммчнистн-
чская парши н е( основатель великий Ленин, учитывая роль
авиации, уделяли ей большое внимание. Уже на четвертын день
после начала Великой Октябрьской социалистической революции
по личному распоряжению В. II. Ленина было начато
формирование первого социалистического авиационного отряда для борьбы
с войсками генерала Краснова. В этот же день создано Бюро
Комиссаров авиации и воздухоп тавания, а в декабре 1917 г. была
организована Всероссийская коллегия по управлению Воздушным
Ф..отом Республики с задачами организации воздушного флота и
управления им.
В годы гражданской войны советская авиация внесла большой
вклад в дело разгрома интервенции и контрреволюции. Авиация
сбросила в расположение противника десятки тысяч бомб и
большое количество агитлнтсратуры.
В нюне 1918 г. по решению правительства были
национализированы все авиационные заводы и мастерские, а через некоторое
время создай центр по руководству ими — Главкоавиа.
В декабре 1918 г. по инициативе профессора Н. Е. Жуковского
организуется Центральный аэрогидродннамнческнн институт
(ЦАГИ), ставший центром научной авиационной мысли в нашей
стране, а в сентябре 1920 г. Институт инженеров Красного
Воздушного Флота, впоследствии переименованный в
Военно-воздушную инженерную академию имени проф. Н. Е. Жуковского.
Совет Труда и Обороны под председательством В. II. Ленина
в 1921 г. принял историческое решение о разработке программы-
максимум развития авиации и авиационной промышленности.
В разработанной программе рассматривались все проблемы
развития авиации и намечались конкретные мероприятия.
Во-первых, развернуть отечественное самолетостроение и
моторостроение. Постановление Совета Труха н Обороны требовало
определения числа самолетов, необходимого для обороиы
Республики, и аппаратов легче воздуха, выяснения имеющихся средств
производства и возможностей их расширения, составления плана
постройки и определения типов новых заводов, основы организации
производства.
Во-вторых, организовать снабжение аппаратов средствами
воздушного боя, выработку типов вооружения и организацию
соответствующего производства.
В-третьих, осуществить мероприятия по подготовке
авиационных кадров. Специальной комиссии предписывалось определение
числа необходимых специалистов, разрешение вопросов о типах
школ н учебных программ, открытие курсов при заводах, отрядах,
поездах-мастерских, подготовка кадров специалистов — рабочих,
учет авиаработников и их мобилизация.
В-четвертых, разработать систему широкой авиационной
пропаганды среди всех слоев трудящихся, особенно среди молодежи.
Это постановление имело важнейшее значение в становлении и
6
www.vokb-la.spb.ru - Самолёт своими руками?!
последующем развитии Красного Воздушного Флота,
авиапромышленности н в подготовке авиационных кадров.
В строительстве воздушного флота принимал активное участие
весь советский народ. В 1923 г. было создано Общество друзей
Воздушного Флота, оказавшее большую помощь в начальном
обучении будущих авиаторов и сборе средств на постройку
самолетов.
В 1923 г. коллективом конструкторов под руководством
Н. Н. Поликарпова и И. М. Косткнпа построен первый советский
истребитель И-400, а в ноябре 1925 г. поступил на испытание
созданный под руководством А. Н. Туполева цельнометаллический
тяжелый бомбардировщик ТБ-1. Этот самолет не имел себе
равных в мире: при взлетной массе 7930 кг его скорость равнялась
207 км/ч.
Знаменитый У-2 (По-2) конструкции Н. Н. Поликарпова
успешно прошел испытания в 1928 г.
В 1934 г. на вооружение ВВС был принят скоростной
бомбардировщик СБ (АНТ-40), превосходивший по скорости даже
лучшие иностранные истребители. Именно на нем впервые
применена гладкая обшивка взамен гофрированной.
Почти в это же время вступил в строй истребитель И-16
конструкции Н. Н. Поликарпова. Последние его модификации имели
скорость 525 км/ч.
Коллектив, возглавляемый С. В. Ильюшиным, в 1937 г.
построил дальний бомбардировщик Ил-4. На этом самолете
советские летчики в августе 1941 г. бомбили столицу фашистской
Германии.
Особенно напряженная работа по оснащению
Военно-воздушных сил новой авиатехникой развернулась в предвоенные годы.
В условиях напряженной международной обстановки
Коммунистическая партия и Советское правительство приняли ряд мер по
укреплению мощи отечественных ВВС.
К созданию новых боевых самолетов были привлечены новые
конструкторские коллективы. Это дало свои результаты. Так, в
1940 г. под руководством В. М. Петлякова были созданы
скоростной пикирующий бомбардировщик Пе-2 и тяжелый
бомбардировщик Пе-8.
Под руководством С. В. Ильюшина в 1940 г. был создан
новый тин боевого самолета — штурмовик Ил-2. Этот самолет стал
знаменитым. В период Великой Отечественной войны он наводил
ужас на немецко-фашистских захватчиков, которые прозвали его
«черной смертью».
Коллектив, возглавляемый А. С. Яковлевым, в 1940 г. создал
опытный истребитель И-26, которому после госиспытаний было
даио название Як-1. Коллективом под руководством С. А.
Лавочкина, В. П. Горбунова и М. И. Гудкова создается истребитель
ЛаГГ-1, а затем — его модификация ЛаГГ-3.
Конструкторским коллективом под руководством А. И.
Микояна и М. И. Гуревича создается высотный истребитель МиГ-1,
7
а в конце 1940 г. — МнГ-3. С этими самолетами наши ВВС и
вступили в Великую Отечественную войну.
Во время войны работа по совершенствованию боевых
самолетов и созданию новых не прекращалась. Были созданы широко
применявшиеся истребители Як-3, Як-7Б, Як-9, Ла-5, Ла-7,
пикирующий бомбардировщик Ту-2, штурмовик Ил-10 и другие.
До середины 40-х годов нашего столетня в авиации
безраздельно господствовали поршневые двигатели.
В годы первой пятилетки была создана мощная
научно-исследовательская база для проведения широкого фронта работ в
области авиадвнгатслестроения. Вначале это были винтомоторный
отдел при ЦАГИ, руководимый Б. С. Стечкиным, и Научный
автомобильно моторный институт (НАМИ), где было организовано
под руководством Н. Р. Брилинга авиамоторное отделение.
В 1930 г. решением правительства был организован Центральный
институт авиационного моторостроения (ЦИАМ), которому с
1933 г. присвоено имя начальника ВВС П. И. Баранова.
С самого начала появления поршневых двигателей
развивались и конкурировали между собой двигатели двух типов —
водяного и воздушного охлаждения. Двигатели воздушного
охлаждения отечественной конструкции ведут свое начало от мотора М-11
мощностью 73,5 кВт, разработанного А. Д. Швецовым,
производство которого для самолетов По-2 началось до первой пятилетки
и продолжалось 20 лет вплоть до 1945 г. В последующие
довоенные и военные годы коллективом, руководимым Героем
Социалистического труда, членом-корреспондентом АН СССР А. Д.
Швецовым были созданы мощные поршневые двигатели воздушного
охлаждения АШ-62 с мощностью 736 кВт для самолетов И-16 и
Ли-2, АШ-82ФН с мощностью 1360 кВт, устанавливавшиеся во
время Великой Отечественной войны на самолетах Ла-5, Ту-2 и
др. Двигатели АШ-71Ф и АШ-73ТК с мощностями 1615 и 1765 кВт
соответственно были созданы тем же ОКБ уже в послевоенный
период.
Наиболее совершенные отечественные поршневые двигатели
водяного охлаждения были созданы коллективами, работавшими
под руководством Героев Социалистического труда академиков
В. Я. Климова и А. А. /Никулина.
Коллективом, руководимым В. Я. Климовым, в прошлом
первым начальником моторного цикла Военно-воздушной инженерной
академии им. проф. Н. Е. Жуковского и ее преподавателем, были
созданы мощные и экономичные поршневые двигатели водяного
охлаждения ВК-Ю5ПА, ВК-Ю5ПФ, ВК-107А и ВК-108 с
мощностями 810—1325 кВт, которые устанавливались в период Великой
Отечественной войны на прославленных самолетах-истребителях
Як-1, Як-3, Як-7, Як-9 и на бомбардировщиках Пе-2. А на
самолете Як-3 со специальным двигателем ВК-108 была
достигнута рекордная скорость полета с поршневым двигателем —
740 км/ч.
В 1931 г. А. А. /Никулиным был создан (после М-13 и М-17)
8
nnn.tuKu-d.MU.iu - запилы lbuiimii p. камн.:
двигатель водяного охлаждения М-34. С созданием этого
двигателя мощностью 626 кВт советское авиамоторостроение вышло
на передовые рубежи. Двигатели М-34 устанавливались на
военных самолетах ТБ-3, Р-5, на самолете-гиганте «Максим
Горький», на легендарном АНТ-25, на котором в 1937 г. В. П. Чкалов,
Г. Ф. Байдуков и А. В. Беляков совершили беспосадочный
перелет из Москвы через Северный полюс в Америку. В период
отечественной войны мощные поршневые двигатели А. А. /Никулина
АМ-35, АМ-38 и АМ-42 с мощностями до 1470 кВт
устанавливались на прославленных штурмовиках С. В. Ильюшина Ил-2 и
Ил-10, а также на стражах московского неба — высотных
перехватчиках ПВО МиГ-3.
Большую роль в развитии отечественной авиационной науки и
техники сыграли работы выдающихся русских ученых и
изобретателен Н. Е. Жуковского, К. Э. Циолковского, Н. А. Чаплыгина,
В. П. Ветчинкина, Ф. А. Цандера, Б. С. Стечкина, Б. Н. Юрьева
и многих других.
Создателем современной теории воздушно-реактивных дв ira-
телей является Герой Социалистического труда академик Борис
Сергеевич Стечкин (1891 —1969), который еще в 1929 г.
опубликовал работу по теории воздушного реактивного двигателя (ВРД).
В этой работе им был теоретически обоснован рабочий процесс
и дан впервые вывод формулы тяги ВРД, известной в литературе
как формула Б. С. Стечкина. Там же были даны основные
выражения для КПД ВРД, используемые до настоящего времени.
Своими последующими трудами Б. С. Стечкин внес большой вклад
в развитие рабочего процесса и методов расчета характеристик
газотурбинных двигателей (ГТД) и их элементов. Он стал
участником создания многих образцов отечественных турбореактивных
двигателей. Под его редакцией в пятидесятые годы был издан
фундаментальный учебник «Теория реактивных двигателей»,
получивший широкое признание у нас в стране, а также
переведенный и изданный в ряде зарубежных стран.
Разработка конструкций ГТД началась в 30-х годах. Ранее
в НАМИ была организована группа под руководством Н. Р.
Брилинга. Эта группа занималась изучением циклов и схем
газотурбинных двигателей. С начала тридцатых годов эту группу
возглавил В. В. Уваров, посвятивший много труда оценке
возможностей и путей разработки высокотемпературных газовых турбин и
написавший монографию «Газовые турбины». Была создана
газотурбинная установка ГТУ-1 малой мощности, на основе которой
был разработан проект газовой турбины ГТУ-3 для самолета ТБ-3
мощностью 847 кВт. Впоследствии В. В. Уваров разработал и
опубликовал ряд трудов по ГТД и руководил созданием
оригинальных по схеме газотурбинных двигателей.
В 30-х же годах в ленинградской Газодинамической
лаборатории, а затем в московской и ленинградской группах изучения
реактивного движения были развернуты работы по созданию
ракетных двигателей, ракет и ракетопланов.
6
Инженер (ныне академик) А. \\. Люлька разработал проект
первой отечественного турбореактивного двнгатс 1я Им же был
получен патент на схему двухконтурного турбореактивного
двигателя со смешением потоков за турбиной.
В 1940 г. совершают первые полеты ракетные планеры
конструкции С. П. Королева с жидкостным ракетным двигателем.
15 мая 1942 г. поднялся в воздух первый в мире боевой самолет
с ракетным двигателем, созданный коллективом под руководством
В. Ф. Болховптннова. Пилотировал его летчик-испытатель капитан
Г. Я. Бахчиванджн. Этот полет знаменовал собой наступление
новой эры — эры реактивной авиации.
Реальное создание авиационных ГТД стало возможным только
в 40 х годах на базе соответствующих достижений теории и
конструкции двигателей, металлургии, авиационной технологии.
Первый отечественный турбореактивный двигатель с осевым
компрессором был разработан и построен перед Великой Отечественной
войной в г. Ленинграде под руководством А. М. Люльки.
Нападение на нашу страну фашистской Германии и блокада
Ленинграда не позволили своевременно завершить его испытания.
Работы по созданию авиационных газотурбинных двигателей были
возобновлены в конце войны и в послевоенные годы, и уже в
феврале 1947 г. первый отечественный турбореактивный двигатель
ТР-1 конструкции А. М. Люльки, успешно выдержавший
государственные испытания, был установлен на первом
отечественном турбореактивном самолете Су-11 конструкции П. О.
Сухого.
В послевоенный период в ряде конструкторских бюро
развернулись большие работы но созданию реактивных двигателей и
скоростных реактивных самолетов.
В апреле 1946 г. в воздух поднялись первые реактивные
самолеты МиГ-9, созданные под руководством А. II. Микояна, Як-15,
созданный под руководством А. С. Яковлева, и Ла-150, созданный
под руководством С. А. Лавочкина. По своей аэродинамической
компоновке н схеме они мало отличались от самолетов с
поршневыми моторами. Последующие отечественные реактивные и
турбовинтовые самолеты, созданные коллективами под руководством
О. К. Антонова, С. А. Лавочкина, А. И. Микояна, С. В. Ильюшина,
П. О. Сухого, А. Н. Туполева, А. С. Яковлева (Ан-8, Ан-12, Ла-15,
МиГ-15, МиГ-17, МиГ-19, Ил-28. Ту-16 и другие), имели более
совершенную аэродинамическую компоновку — большую
стреловидность крыла и малую относительную толщину профиля крыла,
более совершенные двигатели, оборудование и вооружение.
Первым массовым серийным сверхзвуковым самолетом стал
самолет МиГ-19. Он имел два двигателя с тягой 32,4 кН
каждый. Максимальная скорость полета достигала 1450 км/ч.
Наиболее массовым отечественным сверхзвуковым самолетом со
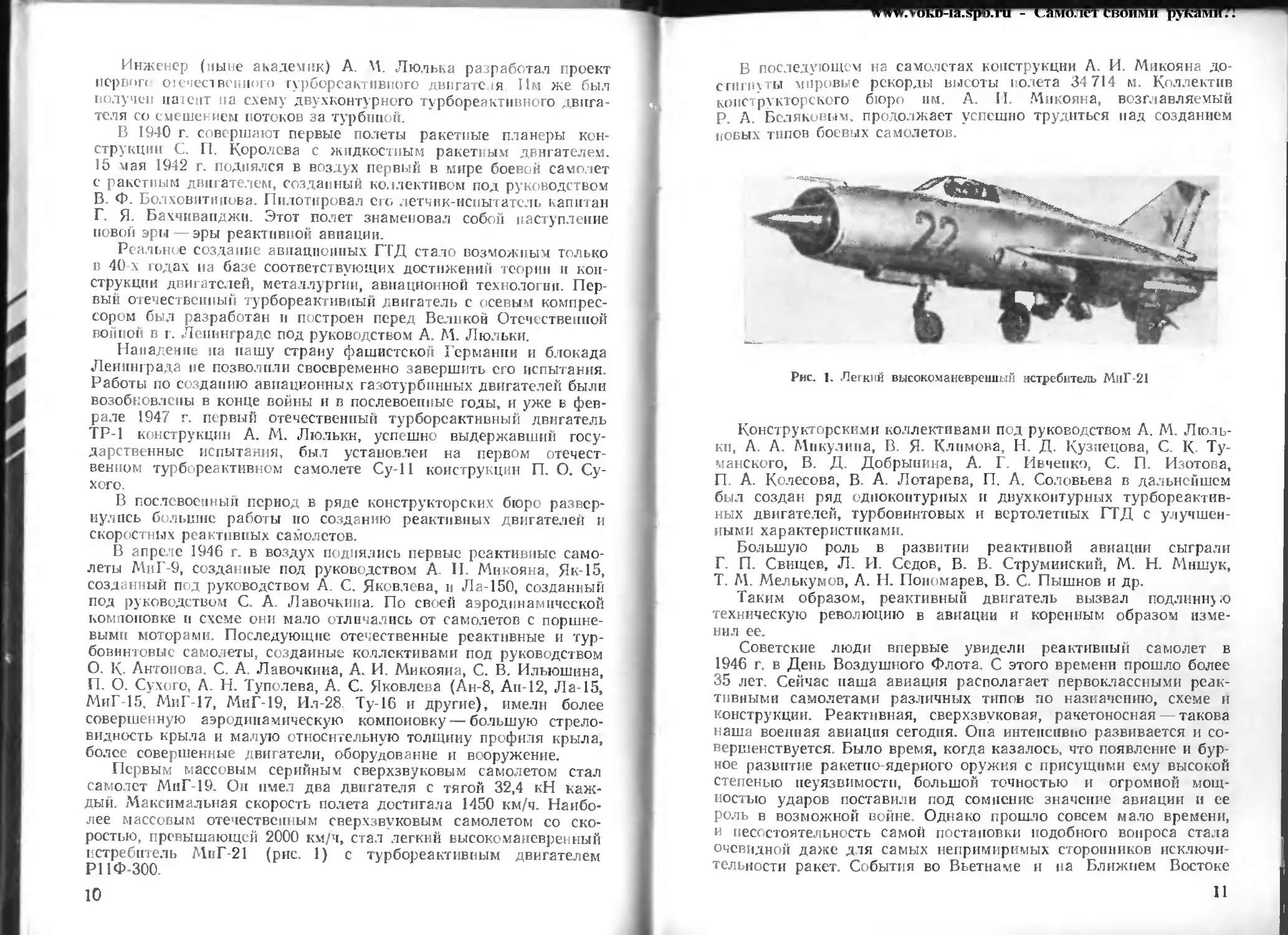
скоростью, превышающей 2000 км/ч, стал легкий высокоманевренный
истребитель МнГ-21 (рис. 1) с турбореактивным двигателем
РПФ-300.
10
* w. otD-ia.spj.ru - самолет своими руками..
В последующем на самолетах конструкции А. И. Микояна
достигать! мировые рекорды высоты полета 34 714 м. Коллектив
конструкторского бюро им. А. II. Микояна, возглавляемый
Р. А. Беляковым, продолжает успешно трудиться над созданием
новых типов боевых самолетов.
Рис. 1. Легкий высокоманеврешшй истребитель МиГ-21
Конструкторскими коллективами под руководством А. М.
Люльки, А. А. Мнкулина, В. Я- Климова, Н. Д. Кузнецова, С. К- Ту-
манского, В. Д. Добрынина, А. Г. Ивченко, С. П. Изотова,
П. А. Колесова, В. А. Лотарева, П. А. Соловьева в дальнейшем
был создан ряд одноконтурных и двухкоитурных
турбореактивных двигателей, турбовинтовых и вертолетных ГТД с
улучшенными характеристиками.
Большую роль в развитии реактивной авиации сыграли
Г. П. Свищев, Л. И. Седов, В. В. Струмииский, М. Н. Мншук,
Т. М. Мелькумов, А. Н. Пономарев, В. С. Пышнов и др.
Таким образом, реактивный двигатель вызвал подлинную
техническую революцию в авиации и коренным образом
изменил ее.
Советские люди впервые увидели реактивный самолет в
1946 г. в День Воздушного Флота. С этого времени прошло более
35 лет. Сейчас наша авиация располагает первоклассными
реактивными самолетами различных типов по назначению, схеме и
конструкции. Реактивная, сверхзвуковая, ракетоносная — такова
наша военная авиация сегодня. Она интенсивно развивается и
совершенствуется. Было время, когда казалось, что появление и
бурное развитие ракетно-ядерного оружия с присущими ему высокой
степенью неуязвимости, большой точностью и огромной
мощностью ударов поставили под сомнение значение авиации и ее
роль в возможной войне. Однако прошло совсем мало времени,
и несостоятельность самой постановки подобного вопроса стала
очевидной даже для самых непримиримых сторонников
исключительности ракет. События во Вьетнаме и на Ближнем Востоке
II
показали, что существует большое число военных задач, которые
могут быть решены с наибольшей эффективностью только
авиационными средствами. Причиной этому служит наличие на борту
летчика. Именно он может в динамике боя выбрать наилучший
вариант решения задачи или внести коррективы в принятое до
полета решение. Только авиация способна отыскивать и
избирательно поражать малоразмерные и недостаточно разведанные цели
противника, особенно подвижные. Весьма эффективной военная
авиация является при выполнении задач борьбы с воздушным
противником.
Большими преимуществами по сравнению с другими
средствами обладает авиация при решении разведывательных задач,
задач поиска и поражения подводных лодок противника.
Наконец, военно-транспортная авиация является единственным
средством быстрой переброски войск и боевой техники из тыла
к фронту и в пределах фронта, а также выброски десантов на
территории противника.
Уже только это краткое перечисление отдельных задач
говорит о большом значении военной авиации в целом и отдельных
типов боевых самолетов разного назначения.
Сейчас имеется большое число разных типов боевых
самолетов.
Тактические (фронтовые) самолеты. Анализ взглядов
зарубежных специалистов и достижений мировой авиационной науки
показывает, что совершенствование фронтовых самолетов идет по
пути многоцелевого их применения. Такие самолеты
предназначаются для поражения наземных целей и в случае необходимости
для борьбы в воздухе с авиацией противника или для поражения
воздушных целей и в случае необходимости для поражения
наземных целей. Такие самолеты, сочетающие в себе качества
истребителей и бомбардировщиков, получили название фронтовых
истребителей и истребителей-бомбардировщиков.
В интересах многоцелевого использования фронтовых
самолетов наряду с другими мерами используется новая
принципиальная особенность конструкции — крыло изменяемой стреловидности
в полете. Плоскости крыла на таком самолете поворачиваются в
процессе полета вокруг вертикальных осей. На рис. 2 показан
советский легкий многоцелевой истребитель с крылом изменяемой
стреловидности в полете.
При прямом расположении крыла (рис. 2, а) самолет способен
совершать длительное патрулирование на дозвуковых скоростях
нли сопровождение дозвуковых самолетов, выполнять
укороченный взлет и посадку на полосы небольших размеров.
Когда крылья отклонены назад, то в сочетании со
стабилизатором оии превращаются в узкий треугольник, напоминая
крылатую ракету (рис. 2,6). Самолет благодаря этому может
совершать сверхзвуковой полет как на больших, так и на малых
высотах.
12
www.vo a»-ia.sp j.ru - .амолет своими руками.!
Рис. 2. Многоцелевой истребитель с крылом изменяемой стреловидности
Штурмовики. Опыт военных действий в Корее, Вьетнаме и на
Ближнем Востоке показал важную роль эффективной
авиационной поддержки, и руководители ВВС США пришли к выводу
о необходимости разработки специализированного самолета
предназначенного для выполнения этих задач, - штурмовика. Штурмо-
.13
вик А-10 является первым самолетом в США, специально
разработанным для непосредственной авиационной поддержки
наземных войск (рис. 3). А-10 — дозвуковой самолет с максимальными
скоростью полета 720 км/ч, взлетной массой 21 500 кг. На нем
установлены два двухкоптурных двигателя. На самолете предус-
Рис. 3. Штурмовик А-10
мотрены разнообразные варианты вооружения, устанавливаемого
на 11 точках подвески. Самолет предназначен для эксплуатации
с грунтовых аэродромов.
Самолеты укороченного, вертикального взлета и посадки.
В целях повышения мобильности военной авиации, уменьшения
зависимости от состояния и длины взлетно-посадочных полос
аэродромов улучшаются взлетно-посадочные свойства самолетов
существующих схем и создаются самолеты укороченного, а также
вертикального взлета и посадки.
На самолетах существующих схем взлетные характеристики
улучшаются применением стартовых ускорителей. При этом
самолет разгоняется до требуемой скорости, при которой самолет
может уйти в полет, за более короткое время и на меньшей
дистанции (меньшей взлетной дистанции). Стартовые ускорители,
представляющие собой ракетные двигатели твердого топлива,
после взлета сбрасываются. На рис. 4 показан
истребитель-бомбардировщик Су-7, который взлетает со стартовыми
ускорителями.
Посадочные характеристики улучшаются за счет применения
систем сдува пограничного слоя, тормозных парашютов и
повышения мощности тормозов колес.
Замечательные достижения по сокращению длин разбега и
пробега были продемонстрированы иа современных типах
отечественных самолетов за счет применения дополнительных
подъемных двигателей, установленных в центральной части фюзеляжа
(рис. 5). На взлете и посадке наличие вертикальной тяги
подъемных двигателей позволяет уменьшить требуемую аэродинами-
14
www.vokb-Ia.spb.ru - Самолёт своими руками?!
ческую подъемную силу крыла, а значит, уменьшить скорость
разбега (или пробега), при которой достигается значение этой
подъемной силы. Как следствие, уменьшаются взлетная и посадочная
дистанции. После взлета подъемные двигатели выключаются и
совершается обычный полет. При этом каналы подвода воздуха
-.TSiiMb
Рис. 4. Истребитель-бомбардировщик Су-/ взлетает со
стартовыми ускорителями
к подъемным двигателям и отвода выхлопных газов от них
закрываются специальными створками. Перед посадкой створки
открываются, запускаются подъемные двигатели и увеличиваются
до необходимой величины их тяги.
Рис. 5. Посадка сверхзвукового реактивного самолета с подъемными
двигателями н тормозным парашютом
Кардинально решает эту задачу самолет вертикального взлета
и посадки, показанный на авиационном празднике в Домодедово
(рис. 6). Он снабжен поворотным устройством, позволяющим
изменять направление истечения выхлопных газовых струй
реактивных двигателей от горизонтального к вертикальному и обратно.
На взлете поворотное устройство отклоняет поток газов вниз.
В результате направление силы тяги изменяется до вертикального.
Самолет поднимается вверх, зависает подобно вертолету. Затем
15
/
Летчик изменяет положение поворотного устройства, доводя
газовые струи до горизонтального положения. Самолет разгоняется и
выполняет обычный полет. Посадка осуществляется в обратном
порядке: после торможения самолета и поворота выхлопных струй
в вертикальное направление самолет зависает, разворачивается
4
Рис. 6. Самолет вертикального взлета и посадки
в горизонтальной плоскости в нужном направлении и, уменьшая
частоту вращения ротора двигателя, совершает плавный
вертикальный спуск до касания с землей. В скоростном полете
управление этим самолетом осуществляется так же, как обычным. На
взлете и посадке, когда аэродинамические рули неэффективны,
самолет управляется специальными реактивными сотами.
Истребители-перехватчики. Успехи аэродинамики, двигателс-
строения и материаловедения позволили создать боевые самолеты
этого типа, обладающие скоростями, в 2—3 раза превосходящими
скорость звука, и высотой полета до 30 км. Большие запасы тяги
обеспечивают им быстрый взлет, набор высоты и энергичное
маневрирование. Оснащение истребителей-перехватчиков
совершенными радиолокаторами и автоматическими устройствами
обеспечивает обнаружение противника в воздухе в сложных
метеорологических условиях, точный выход на рубеж атаки и поражение
цели. Такие истребители-перехватчики получили название
всепогодных (рис. 7).
Одной из концепций боевого использования военных самолетов
является полет на малых высотах.
Для борьбы с самолетами, летящими на малых высотах,
особенно эффективны истребители-перехватчики, обладающие
сверхзвуковой скоростью полета как на больших, так и на малых
высотах (рис. 8).
Бомбардировщики-ракетоносцы. Прошла значительный путь
развития и совершенствования бомбардировочная авиация. Оиа
1С
www.\oKD-ia.s> jd.iu - .амолет своими руками..
Стала сверхзвуковой и ракетоносной. Созданы бомбардировщики,
способные на сверхзвуковых скоростях преодолевать расстояния
в несколько тысяч километров. Современные бомбардировщики-
ракетоносцы на основе усовершенствования аэродинамических
-я
к
Рис 7. Всепогодный сверхзвуковой истребитель-перехватчик
схем, применения экономичных реактивных двигателей и
совершенного оборудования способны совершать полеты как на
больших, так и на малых высотах полета, что затрудняет обнаруже-
?"*
f- -Г: " 1 :
Рис. 8. Сверхзвуковой истребитель-перехватчик
ние их радиолокационными станциями ПВО. Применение
совершенного оборудования для обнаружения цели и наведения на них
ракет позволяет таким самолетам наносить удары, не заходя в
Зону действия средств ПВО противника. С появлением ядерного
оружия возросла п ударная мощь бомбардировочной авиации.
Самолеты противолодочной авиации (ПЛА). С созданием и
развитием подводных лодок, оснащенных ракетно-ядерным оружием,
и упрочением их как основной ударной силы флотов возросло
значение авиации как средства противолодочной обороиы. Самолеты
ПЛА по самому принципу применения должны обладать большой
продолжительностью полета для несения службы над водными
17
/
просторами. Дчя обнаружения подводных лодок применяются
средства по различным физическим полям. Радиолокационные
станции используются для обнаружения подводных лодок в
надводном положении, магнитометры — для обнаружения подводных
лодок по изменению магнитного поля, гидроакустические станции
и бун — для обнаружения подводных лодок по их шуму и т. д.
Рис. 9. Самолет-амфибия
Применяются самолеты противолодочной авиации, как
правило, с турбовинтовыми двигателями, но есть самолеты и с двух-
контурными ТРД. Для обеспечения взлета и посадки как на сухо-
п>тные аэродромы, так и па воду применяют самолеты-амфибии.
На рис. 9 показан самолет-амфибия конструкции Г. М. Бериева.
Как видно, этот самолет необычной формы. Это обусловлено
решением задачи взлета и посадки иа сухопутных аэродромах и
воде, в связи с чем выбрана схема самолета с высокорасположеп-
ным крылом. Двигатели установлены иад крылом, чтобы
обеспечить их бесперебойную работу при взлете и посадке в
штормовую погоду. Фюзеляж выполнен в этих же целях в виде
герметичной лодки. Колеса шасси убираются в верхнюю часть
фюзеляжа.
Боевые вертолеты. Большое развитие в последние годы
получили военные вертолеты. К преимуществам вертолетов по
сравнению с другими летательными аппаратами следует отнести, в
первую очередь, возможность вертикального взлета и посадки с
неподготовленных площадок. Это свойство исключительно
важно в армейских условиях при быстрых темпах передвижения
войск.
В зависимости от выполняемых задач военные вертолеты
подразделяются на боевые, вертолеты боевого обеспечения и
вертолеты вспомогательного назначения. Боевые вертолеты в свою
очередь подразделяются на вертолеты огневой поддержки войск,
противолодочные и транспортно-десантные. Вертолеты огневой
поддержки войск имеют средства поражения наземных целей в
виде пушек, пулеметов, неуправляемых и управляемых ракет,
бомб и др. Одним из представителей такого типа вертолетов яв-
18
www.vokb-la.spb.ru - Самолёт своими руками?!
ляется американский боевой вертолет «Хью Кобра» (рис. 10)
К вертолетам боевого обеспечения относятся
разведывательные, связные, корректирования артиллерийского огня,
постановщики минных заграждений, заправки и др.; к вертолетам
вспомогательного н азн а ч е н и я — вертолеты-краны,
санитарные, учебные и др.
Рис. 10. Боевой вертолет «Хью Кобра»
Самолеты корабельного базирования. Большое развитие
получила палубная авиация. Палубная авиация базируется на
авианосцах, вертолетоносцах и тяжелых авианесущих крейсерах. На
вооружении ВМС США имеются ударные авианосцы типа «Фор-
рестол» и атомные ударные авианосцы типа «Энтсрпрайз». На них
применяются современные самолеты-штурмовикн,
бомбардировщики, истребители, самолеты радиолокационного дозора,
противолодочные самолеты и др. Взлет их обеспечивается с помощью
катапульты, а посадка — с помощью аэрофинишера.
На вертолетоносцах базируются вертолеты для высадки
морского десанта и противолодочные вертолеты. На тяжелых
авианесущих крейсерах — вертолеты и самолеты вертикального взлета
и посадки.
В последние годы за рубежом большое внимание уделяется
палубным вертикально взлетающим самолетам. Иностранные
специалисты считают, что причиной этого стало появление новой
концепции использования авианосцев, по которой на смену
тяжелым авианосца.м могут прийти легкие многоцелевые авианесущие
корабли с вертикально взлетающими самолетами. На этих
кораблях могут базироваться противолодочные вертолеты и вертикально
взлетающие многоцелевые самолеты. На рис. 11 показан
отечественный крейсер «Киев», на котором базируются самолеты
вертикального взлета и посадки.
-1*9
-яй;
т
' i
ft
'i-. ■Л/f;
J
i
Л',
4*.
7',:»
20
www.vokb-la.spb.ru - Самолёт своими руками?!
Военно-транспортные
самолеты и вертолеты.
Военно-транспортные самолеты обеспечивают
быструю доставку войск и боевой
техники в требуемый район
выгрузки или десантирования,
парашютное десантирование войск
и боевой техники. Такие
возможности открылись благодаря
появлению на вооружении военно-
транспортной авиации таких
самолетов, как Ан-12 и Ан-22,
созданных под руководством
генерального конструктора О. К.
Антонова, самолетов с
турбовинтовыми двигателями, созданными
коллективами под руководством
Н. Д. Кузнецова и А. Г. Ивченко.
Военно-транспортиый самолет
Ан-22 «Антей» имеет взлетную
массу 250 т. Он может
перевозить грузы массой до 80 т.
Только с появлением самолета
«Антей» наша военно-транспортная
авиация получила возможность
перебрасывать по воздуху
практически все виды боевой
техники Советской Армии, включая
тяжелые танки и ракетные
комплексы. Военно-транспортные
самолеты обладают хорошими
взлетно-посадочными
характеристиками и способностью
базирования на грунтовых аэродромах.
Несмотря на это, представляется
крайне необходимым
использование для военно-транспортной
авиации преимуществ, которые
дают вертикальный взлет и
посадка. Поэтому наряду с
самолетами на вооружении нашей
военно-траиспортной авиации
имеются и вертолеты
различных типов. Большую роль в
создании отечественных вертолетов
сыграли конструкторские
коллективы под руководством М. Л.
Миля и Н. И. Камова. Ими
создано большое число разных типов
21
вертолетов Ми-1, Ми-2, Ми-4, Мн-6, Ми-8, Ми-10, Ми-12, Ка-10,
Ка-15, Ка-18, Ка-26 с двигателями А. Г. Ивченко, С. П. Изотова,
П. А. Соловьева.
В коллективе конструкторского бюро им. С. В. Ильюшина,
руководимом ныне Г. В. Новожиловым, создан реактивный
грузовой самолет Ил-76 с двухконтурными турбореактивными
двигателями, созданными коллективом под руководством П. А.
Соловьева, перевозящий огромное количество разнообразных грузов по
Рис. 12. Реактивный грузовой самолет Ил-76
необъятным просторам нашей Родины (рис. 12), а затем —
широкофюзеляжный многоместный самолет-аэробус Ил-86 с взлет-
нон массой 206 т на 350 пассажиров.
Развитие самолетов подготовило почву и обеспечило создание
и запуск баллистических ракет, искусственных спутников Земли и
космических кораблей. Наша Родина достигла замечательных
успехов в освоении космического пространства. Яркой
иллюстрацией этого является создание в Советском Союзе мощных
баллистических ракет, запуск 4 октября 1957 г. в СССР первого
искусственного спутника Земли, выведение впервые в мире на
околоземную орбиту 12 апреля 1961 г. в Советском Союзе
космического корабля «Восток» с первым летчиком-космонавтом на
борту Ю. А. Гагариным и выдающийся эксперимент — посадка на
Луну в районе Моря Изобилия автоматической станции «Луна-16»
с забором лунного грунта, доставкой его на Землю, мягкая
посадка на Луну в районе Моря Дождей 17 ноября 1970 г.
автоматической станции «Луна-17» с лунным самоходным аппаратом
«Луноход-1».
Самоходный автоматический аппарат «Луноход-1»,
управляемый с Земли, сошел по специальному трапу на лунную
поверхность и провел ряд экспериментов.
22
www.vokb-la.spb.ru - Самолёт своими руками?!
С этого времени периодически беспилотные автоматические
станции обеспечивали посадку на Луну и проведение
экспериментов па ней, зондирование атмосферы и мягкую посадку на
Венеру и Марс.
Пилотируемые же космические летательные аппараты
используются для изучения околоземного пространства. Для этой цели
создана долговременная орбитальная станция «Салют»,
выполняются полеты к ней на кораблях «Союз», которые стыкуются со
станцией для проведения разнообразных экспериментов.
Запуск космических аппаратов на орбиту искусственных
спутников Землн и па другие планеты позволил достичь скоростей
полета 28 000 и 40 000 км/ч, высот 300—1500 км и удалений от
Землн на многие миллионы километров.
Невольно возникает вопрос: почему самолеты, развитие
которых подготовило создание и запуск искусственных спутников н
космических кораблей, значительно отстали по скорости и высоте
полета от ннх? Дело в том, что ракетные двигатели позволяют
получить огромные мощности за весьма короткое время работы
и разогнать аппарат до требуемой скорости, обеспечивающей
полет его в космическом пространстве, где отсутствует
аэродинамическое сопротивление и, следовательно, не происходит нагрева
аппарата за счет торможения атмосферного воздуха. Проход
атмосферы при выходе на орбиту и сходе с нее осуществляется за
небольшой промежуток времени. Материалы, из которых
изготовлены аппарат и соответствующее защитное покрытие,
обеспечивают падежную работоспособность в течение этого промежутка
времени в тяжелых условиях.
Осуществление же длительного полета на очень больших
скоростях (при М = 7ч-8) в относительно плотных слоях атмосферы
оказалось более трудной задачей, чем полет в космосе, из-за того,
что существующие материалы не могут выдержать возникающих
при этом тепловых нагрузок.
В результате создался разрыв между скоростями 3000—
3200 км/ч, на которых совершается длительный полет
современных самолетов, и скоростями длительного полета спутников
Землн на низких круговых орбитах (примерно 28000 км/ч), а также
разрыв между высотой полета самолетов (примерно 25—30 км)
и высотой полета спутников Земли на тех же орбитах 180—
200 км.
Естественно ожидать, что эти диапазоны скоростей и высот не
могут оставаться совершенно неосвоенными. И действительно, в
зарубежной печати отмечается, что в ближайшие годы начнется
интенсивное освоение этого диапазона скоростей и высот в двух
направлениях. Первое — это увеличение скорости и высоты
полета самолетов при длительном маршевом полете с выходом на
гиперзвуковые скорости. Второе — разработка так называемых
орбитальных самолетов, которые с орбиты снижаются в
атмосферу н совершают в ней частично инерцнальный, частично
самолетный полет. Другими словами, одно направление занимается аппа-
23
ратамй, скорость которых будет непрерывно расти от достигнутых
до гиперзвуковых в перспективе, другое — аппаратами, скорость
которых с орбитальной будет снижаться до гиперзвуковых,
сверхзвуковых и дозвуковых и которые затем будут совершать
посадку, как обычные самолеты.
За годы существования Советского государства достигнуты
огромные успехи по совершенствованию и повышению боевой
мощи отечественной военной авиации. Быстрые темпы развития
советской экономики, пауки и техники, намеченные историческим
XXVI съездом Коммунистической партии Советского Союза,
открывают неизмеримые возможности в дальнейшем прогрессе
советской военной авиации, пути которого видны уже в настоящее
время.
www.vokb-la.spb.ru - Самолёт своими руками?!
РАЗДЕЛ I
АЭРОДИНАМИКА И ДИНАМИКА ПОЛЕТА
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Аэродинамика изучает физическую природу и
закономерности возникновения и изменения внешних сил, действующих на
летательный аппарат в результате движения его в атмосфере.
Динамика полета изучает законы движения летательного
аппарата под действием внешних сил: полной аэродинамической,
тяги силовой установки, тяжести и реакции земли.
Задача изучения движения летательного аппарата в общем
случае весьма сложна. Поэтому эту задачу разделяют на
несколько частей и решают ее по этапам, переходя от простого к
сложному. На первом этапе изучается движение летательного
аппарата как движение материальной управляемой точки с массой,
равной массе летательного аппарата. Здесь изучаются траектории
движения и летные характеристики летательного аппарата. На
втором этапе изучается совместное движение центра масс
летательного аппарата и движение его относительно центра масс.
Задачей второго этапа является изучение характеристик
устойчивости и управляемости летательного аппарата.
На успехи в области аэродинамики и динамики полета,
достигнутые в нашей стране, оказали влияние труды выдающегося
отечественного ученого, профессора Николая Егоровича Жуковского.
В создании современной аэродинамики велика роль С. А.
Чаплыгина. Дальнейшее развитие основных направлений динамики
полета содержится в трудах В. П. Ветчинкина. К динамике полета
самолетов тесно примыкает ракетодинамика, основателем которой
по праву считается К. Э. Циолковский.
Глава 1
ОСНОВНЫЕ АЭРОДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
1.1. ОСНОВНЫЕ ЗАКОНЫ АЭРОДИНАМИКИ.
РАСПРЕДЕЛЕНИЕ ВОЗДУШНОЙ НАГРУЗКИ ПО ПРОФИЛЮ
И РАЗМАХУ КРЫЛА
Основные законы аэродинамики. При движении крылатого
летательного аппарата относительно воздуха на него действуют
распределенные аэродинамические силы. У самолета оии возникают
25
на крыле, фюзеляже, оперении н других частях. Основной
конструктивной частью самолета с точки зрения создания
аэродинамических сил является крыло. Поэтому физическую природу
возникновения аэродинамических сил рассмотрим применительно к
обтеканию крыла потоком воздуха. Заметим, что с точки зрения
возникновения аэродинамических сил безразлично, движется ли
самолет относительно воздуха илн воздух относительно самолета.
Рис. 1.1. Основные геометри- Рис. 1.2. Профиль крыла и обтекание
ческие характеристики крыла его воздушным потоком
Законность такого приема вытекает из принципа относительности
Галилея, который в рассматриваемом случае применяется к
системе «самолет — воздух».
Аэродинамические силы, возникающие на крыле, зависят от
его геометрических характеристик, положения крыла относительно
потока, величины скорости потока воздуха, его плотности и
температуры.
К геометрическим характеристикам крыла относятся:
характеристики его формы в плане и характеристики профиля. На
современных самолетах используются прямоугольные, трапециевидные,
стреловидные, треугольные и сложные формы крыла в плане.
Форма крыла в плане характеризуется размахом /, площадью
в плане S, удлинением K=l2/S, сужением ц и стреловидностью %.
Основные геометрические характеристики крыла приведены на
рис. 1.1.
Размахом крыла/ называется расстояние между концами
крыла.
Площадь крыла в плане S ограничена контуром крыла.
Сужением крыла т] называется отношение осевой
(центральной) хорды bo к концевой хорде Ьк:
Углом стреловидности крыла по его передней
кромке называется угол между перпендикуляром к осевой хорде и
линией передней кромки крыла. Стреловидность также может быть
замерена по задней кромке крыла.
2§
www.vokb-la.spb.ru - Самолёт своими руками?!
Профилем крыла называется форма его поперечного
сечения. Профили могут быть симметричными и несимметричными.
Основными характеристиками профиля являются хорда профиля Ь
н относительная толщина с.
Хордой профиля b называется отрезок прямой,
соединяющий две наиболее удаленные точки профиля (рис. 1.2).
Относительной толщиной профиля с называется
отношение максимальной толщины с к хорде, выраженное в
процентах:
с = -|-100.
Удаление максимальной толщины от носка профиля
характеризуется координатой хс.
При симметричном обтекании положение крыла относительно
потока характеризуется углом атаки а. Углом атаки а
называется угол между воздушной скоростью и хордой крыла. Он
может быть положительным, равным нулю и отрицательным.
Возникновение аэродинамических сил на обтекаемом теле
(самолете) связано с такими физическими свойствами воздуха, как
инертность, вязкость и сжимаемость.
Инертность — свойство воздуха (газа) сопротивляться
воздействию внешних сил. Мерой инертности воздуха является его
масса, нли массовая плотность р.
Вязкость — способность воздуха (газа) сопротивляться
взаимному сдвигу частиц. Она особенно заметно проявляется в
сравнительно тонком слое воздуха, прилегающем к поверхности
обтекаемого тела (самолета). Этот слой называется пограничным
слоем. Вязкость воздуха обусловливает возникновение сил
трения.
Сжимаемость — свойство воздуха (газа) изменять
плотность под действием сил давления. Способность воздуха
сжиматься объясняется большим расстоянием между молекулами.
Жидкие вещества практически несжимаемы, так как их
молекулы находятся на малом расстоянии одна от другой.
Количественно сжимаемость характеризуется отношением
изменения давления Др к изменению плотности Др, т. е. величиной
Др/Др. Из физики известно, что отношение Др/Др равно квадрату
скорости звука о2. Отсюда следует, что скорость звука
характеризует сжимаемость неподвижного воздуха, газа, жидкости. Чем
больше скорость звука в данной среде, тем меньше ее
сжимаемость, и наоборот, чем меньше скорость звука, тем больше
сжимаемость среды. Скорость звука в воздухе зависит от его
температуры. Это следует из формулы
аж20,1УТ, (1.2)
где Т — абсолютная температура,
Г = 273 + / (1.3)
27
(/ — температура по Цельсию). Сжимаемость движущегося
воздуха (газа) нужно оценивать таким критерием, который включал
бы как скорость движения воздуха, так и скорость звука в нем.
Таким критерием является число М, которое представляет собой
отношение скорости набегающего потока воздуха к скорости звука
в этом потоке:
М = -£-. (1.4)
Теория и практика показывают, что при изучении
аэродинамических сил при числах М^0,5 сжимаемостью воздуха можно
пренебречь. При числах М>0,5 неучет сжимаемости может привести
к существенным погрешностям в определении аэродинамических
сил.
Аэродинамические силы самолета и моменты от них,
возникающие при обтекании потоком воздуха, по своей природе
обусловлены силами трения и давления. Сжимаемость воздуха
существенное влияние оказывает иа силы давления. На силы трения она
оказывает значительно меньшее влияние.
В воздушном потоке, обтекающем крыло или другое тело,
изменение давления объясняется двумя основными законами
аэродинамики: законом неразрывности и законом Бернулли.
Рассмотрим сущность этих законов. Пусть иа крыло набегает
установившийся воздушный поток, скорость которого равна Vo
(рис. 1.2). При рассмотрении обтекания крыла удобно представить
поток состоящим из отдельных струек. Для этого вообразим, что
в сечении /—1 перед крылом поставлена сетка. Поток,
проходящий через эту сетку, как бы разделяется па отдельные струйки.
Выделим струйку о—б и проследим за ней. Струйка о—б при
обтекании профиля крыла деформируется, что выражается в ее
искривлении и изменении величины поперечного сечения. Профиль
крыла как бы поджимает струйку, поэтому ее поперечное сечение
перед профилем больше, чем над ним. Над наиболее выпуклой
частью профиля крыла поперечное сечение струйки наименьшее
(сечение 2—2), а после этого оно снова увеличивается. При
деформации струйки скорость воздуха и давление вдоль нее
различные; поэтому говорят о местных скорости и давлении, называя
так скорость и давление в данном поперечном сечении струйки.
Применим к выделенной струйке о—б закон неразрывности
движения и закон Бернулли.
Закон неразрывности формулируется так: масса воздуха,
проходящая через каждое поперечное сечение струйки за одну
секунду, есть величина постоянная. Математически он записывается
в виде уравнения
Pi/i^i = Рг/г^г = const, (1.5)
где pi, fu Vi — плотность воздуха, площадь поперечного сечения
и скорость воздуха в первом сечении струйки;
28
www.vokb-la.spb.ru - Самолёт своими руками?!
02, /г. ^2 — плотность воздуха, площадь поперечного сечения
и скорость воздуха во втором поперечном
сечении струйки.
Так как в рассматриваемом случае воздух считается
несжимаемым, то величина плотности вдоль струйки не изменяется,
т. е. pi = p2-
В таком случае для несжимаемого газа (воздуха) уравнение
неразрывности примет вид
/,1/, = /21/2. (1.6)
Отсюда следует, что у несжимаемого газа (воздуха) скорости
в любых сечениях струйки обратно пропорциональны площадям
этих сечений, т. е.
Zi = A (l7)
Это означает, что при сужении струйки скорость несжимаемого
газа увеличивается во столько раз, во сколько раз уменьшается
поперечное сечение струйки, и наоборот. Итак, на основании
уравнения неразрывности можно сделать вывод, что изменение
поперечного сечения струйки о—б, наблюдающееся при обтекании
профиля крыла, сопровождается изменением скорости воздуха в ней.
Увеличение поперечного сечения струйки перед профилем крыла
приводит к уменьшению скорости, а уменьшение затем
поперечного сечения струйки — к увеличению скорости.
При изменении скорости воздуха в струйке изменяется и
давление. Это следует из закона Берпулли, который устанавливает
связь между скоростью и давлением воздуха (газа) в струйке.
Закон Бернулли для несжимаемого газа математически
выражается уравнением в таком виде:
Pi + -V- = ^ + I2L- С'8)
где pi, p2 — статическое давление в нервом и втором поперечных
сечениях струйки соответственно;
~-х-, —g~ — скоростные напоры в первом и втором поперечных
сечениях струйки соответственно.
Из него следует, что если местная скорость Vi в сечении 2—2
больше местной скорости Vi в сечении 1—1, то и скоростной
напор pl/|/2 будет больше pKf/2, а статическое давление р5
меньше статического давления р\.
Распределение давления по профилю крыла. Установили, что
вследствие изменений величины поперечных сечений струйки
изменяются скорость и давление воздуха в ней. Величина
деформации струйки зависит от формы обтекаемого профиля (тела) и его
расположения относительно потока, т. е. от угла атаки. Это
значит, что и распределение давления по профилю крыла зависит от
2S
формы профиля и его угла атаки. Графическое изображение
распределения давления по профилю крыла называется картиной
распределения давления. Она получается опытным или
расчетным путем и изображается способом векторов или способом
эпюры.
При векторном способе величина избыточного давления
(по отношению к атмосферному давлению), измеренная в данной
точке профиля, откладывается на чертеже в масштабе
перпендикулярно поверхности профиля. Положшельчое избыточное давле-
Рис. 1.3. Картины распределения давления по профилю:
а — векторным способом; б — способом эпюры
иие отмечается стрелками, направленными к контуру, а
отрицательное избыточное давление (разрежение)—стрелкой,
направленной от контура (рис. 1.3,а).
Из рис. 1.3, а видно, что на небольшом участке передней части
профиля имеется положительное избыточное давление. Увеличение
давления в передней части объясняется торможением потока перед
крылом и уменьшением его скорости. В некоторой точке профиля
вблизи его носика скорость уменьшается до нуля. Эта точка
называется критической. В критической точке давление ркр
максимальное и равное сумме скоростного напора pVjj/2 и
статического давления р0 набегающего потока, т. е.
■
(1.9)
Избыточное давление в критической точке (ркр—р0) будет
также максимальным. Если проследить за величиной избыточного
давления, перемещаясь от ноенка к хвостику профиля, то
заметим, что при малых углах атаки а на верхней и нижней
поверхностях профиля избыточное давление сначала уменьшается,
становится равным нулю, затем появляется разрежение, которое
достигает максимума, после чего разрежение уменьшается.
При изображении распределения давления по профилю
способом эпюры перпендикулярно хорде профиля откладывается
коэффициент избыточного давления р. Причем отрицательный ко-
30
www.vokb-la.spb.ru - Самолёт своими руками?!
эффициент избыточного давления р откладывается вверх, а
положительный— вниз. Коэффициенты избыточного давления под-
считываются по формуле
(1.10)
Ри — Ро .
pVo
Рязб
Р^о
где Рм — статическое давление в данной точке профиля, т. е.
местное давление. Картина распределения давления, изображенная
способом эпюры, показана на рис. 1.3,6. Заштрихованная площадь
показывает распределение по
профилю суммарной
аэродинамической нагрузки, равной разности
коэффициентов избыточного
давления на нижней и верхней
поверхностях профиля.
С помощью картины
распределения давления можно
вычислить аэродинамические силы и
моменты, действующие на крыло.
Так, разность давления на
нижней и верхней поверхностях
крыла определяет подъемную силу,
а разность давлений на передней
и хвостовой частях профилей
крыла дает силу сопротивления
давления.
Распределение воздушной
нагрузки по размаху крыла. При
обтекании крыла самолета потоком воздуха профили крыла,
расположенные в центре крыла, на середине полуразмаха и на его
конце, обтекаются неодинаково. Это связано с тем, что условия
обтекания упомянутых профилей крыла существенно зависят от
формы крыла в плане. Неодинаковые условия обтекания
профилей приводят к различным законам распределения давления по
хорде. На рис. 1.4 в качестве примера приведена картина
распределения давления по верхней поверхности стреловидного крыла рв
в трех сечениях: центральном, расположенном на середине
консоли и концевом. Предполагается, что крыло набрано из
одинаковых профилей и установлено под небольшим углом атаки а.
Из рис. 1.4 видно, что в передней части профиля, стоящего
в-центральном сечении, разрежение существенно меньше, чем на
профилях, стоящих на середине полуразмаха и на его конце. В
хвостовой части профиля наблюдается повышенное разрежение в
центральном сечении и меньшее разрежение в концевых сечениях. -
Если средние величины разности давлений каждого сечения
крыла (рн—Рв)ср представить в виде вектора н поставить этот век-
Рис. 1.4. Картипа распределения
давления по верхней поверхности
стреловидного крыла в трех
сечениях:
1 — концевом; 2 — на середине консоли;
3 — центральном
31
юр перпендикулярно размаху крыла, то получим закон
распределения (ри—Рв)ср вдоль размаха. Теория н практика показывают,
что распределение давления (р„—рв)ср вдоль размаха зависит от
формы крыла в плане. На стреловидном крыле (рис. 1.5, о) и на
трапециевидном (рнс. 1.5,6) (р„—р„)<р вдоль размаха изменяются
приблизительно по одинаковому закону. У этих крыльев конце-
Й-4).
Рис.
1.5. Влияние формы крыла в плане иа распределение
давления вдоль размаха
вые сечения имеют большие величины средней разности давлений,
чем корневые. На прямоугольном крыле (рис. 1.5, е) центральные
сечения нагружены больше, чем концевые.
1.2. ПОДЪЕМНАЯ СИЛА И СИЛА ЛОБОВОГО
СОПРОТИВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА.
АЭРОДИНАМИЧЕСКИЕ КОЭФФИЦИЕНТЫ су И с*
Выше было показано, что силы давления, действующие на крыло
самолета (и другие его части), распределены по всей поверхности.
Геометрическая сумма сил давления, действующих на всю
поверхность самолета, и сил трения, возникающих в пограничном
слое, дает полную аэродинамическую силу R. Полная
аэродинамическая сила как равнодействующая сил давления и трения обычно
представляется в виде вектора; она имеет точку приложения,
которая называется центром давления. Полная
аэродинамическая сила направлена под некоторым углом к набегающему
потоку (рис. 1.6), при этом она несколько отклонена назад.
Отклонение ее объясняется в основном разностью давления перед
крылом и за крылом, а также силами трения в пограничном слое.
Полная аэродинамическая сила R определяется по формуле
рК2
R=
fcR ~~2
S,
(1.11)
где cR— коэффициент полной аэродинамической силы;
рУ
— скоростной напор;
5— площадь крыла в плане.
ш
www.vokb-la.spb.ru - Самолёт своими руками?!
Из формулы видно, что чем больше скоростной напор или
коэффициент cr, тем больше силовое воздействие потока воздуха на
самолет.
Полную аэродинамическую силу можно разложить на две
составляющие У и X. Составляющая полной аэродинамической
силы К, направленная перпендикулярно к набегающему потоку
воздуха, называется
подъемной силой.
Составляющая полной
аэродинамической силы X,
направленная параллельно
потоку, называется
силой лобового
сопротивления.
Подъемная сила
обеспечивает поддержание
самолета в воздухе.
Создается она в результате
разности давлений на Рис_ 16. полная аэродинамическая сила и ее
нижней и верхней поверх- составляющие
ностях крыла, оперения,
фюзеляжа.
Расчет подъемной силы производится по формуле
Y = cy-^-S, (1.12)
где су — коэффициент подъемной силы, зависящий от
конфигурации (формы) самолета, его угла атаки и числа М
полета.
Лобовое сопротивление самолета А' создается силами трения
в пограничном слое и силами давления. Сопротивление,
обусловленное силами давления, существует как при подъемной силе,
равной нулю, так и при наличии подъемной силы. Поэтому силу
лобового сопротивления можно представить как сумму двух
слагаемых: безындуктнвного лобового сопротивления Х0 и
индуктивного сопротивления Xi, т. е.
X=X0 + Xt, (1.13)
где Хо — лобовое сопротивление при подъемной силе, равной
нулю.
Лобовое сопротивление самолета определяется по формуле
X = сх —g- S,
где сх — коэффициент лобового сопротивления самолета,
зависящий от его геометрической формы, угла атаки (с„),
числа М полета.
Так как сопротивление самолета складывается из
сопротивления при подъемной силе, равной нулю, и индуктивного, то
2-2129 33
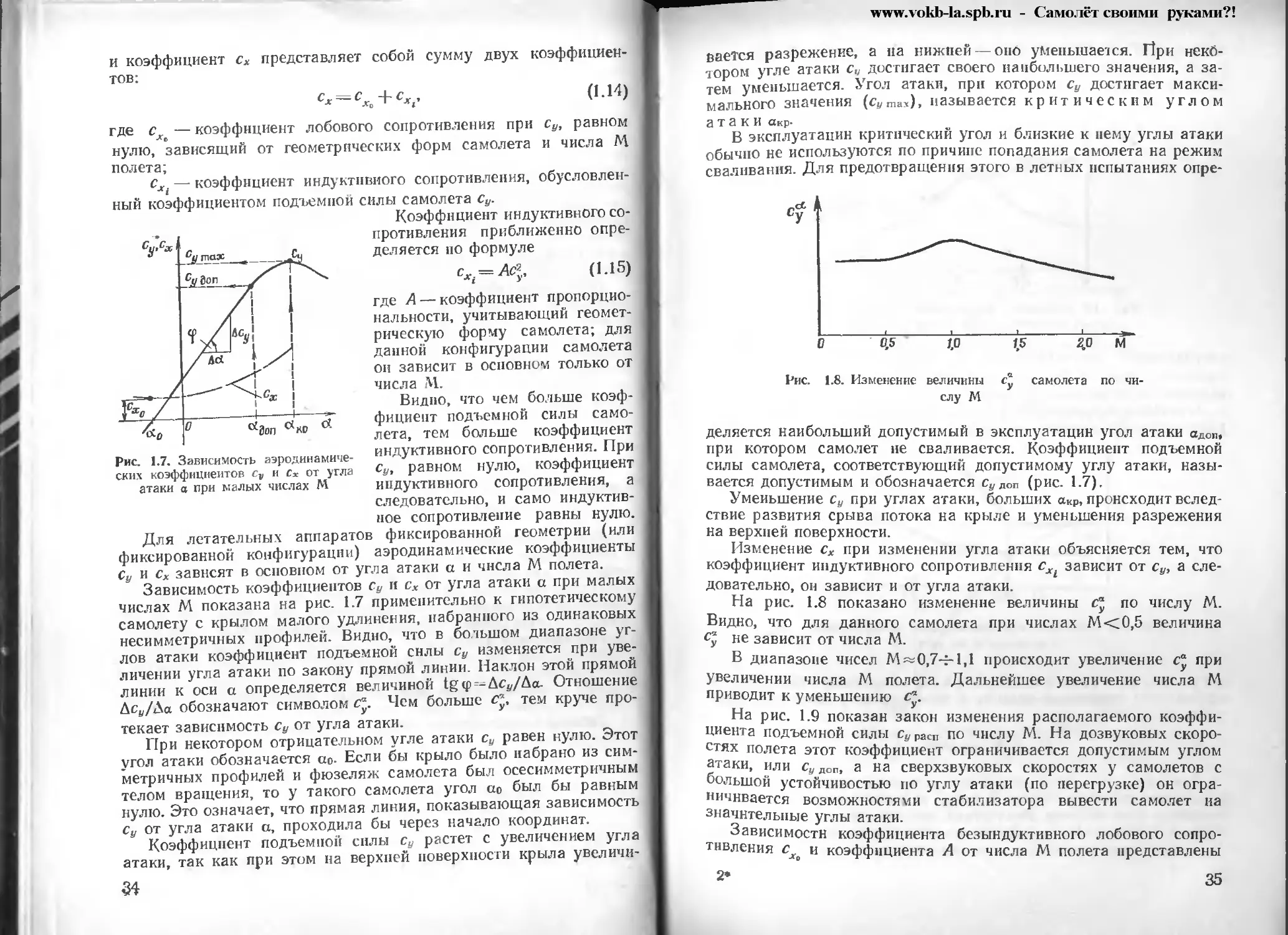
и коэффициент сх представляет собой сумму двух
коэффициентов:
с* = с* + с*.-
0.14)
где с — коэффициент лобового сопротивления при су, равном
нулю, зависящий от геометрических форм самолета и числа М
полета;
с*1 — коэффициент индуктивного сопротивления,
обусловленный коэффициентом подъемной силы самолета су.
Коэффициент индуктивного
сопротивления приближенно
определяется по формуле
сХ| = Лс«. (1.15)
где А— коэффициент
пропорциональности, учитывающий
геометрическую форму самолета; для
данной конфигурации самолета
он зависит в основном только от
числа М.
Видно, что чем больше
коэффициент подъемной силы
самолета, тем больше коэффициент
индуктивного сопротивления. При
Рис 1.7. Зависимость
аэродинамических коэффициентов cv и сх от угла
атаки о при малых числах М
су, равном нулю, коэффициент
индуктивного сопротивления, а
следовательно, и само
индуктивное сопротивление равны нулю.
Для летательных аппаратов фиксированной геометрии (или
фиксированной конфигурации) аэродинамические коэффициенты
Су и сх зависят в основном от угла атаки а и числа М полета.
Зависимость коэффициентов су и сх от угла атаки а при малых
числах М показана на рис. 1.7 применительно к гипотетическому
самолету с крылом малого удлинения, набранного из одинаковых
несимметричных профилей. Видно, что в большом диапазоне
углов атаки коэффициент подъемной силы су изменяется при
увеличении угла атаки по закону прямой линии. Наклон этой прямой
линии к оси а определяется величиной tgq) = ACj,/Aa. Отношение
Дс^/Да обозначают символом с" Чем больше с*, тем круче
протекает зависимость су от угла атаки.
При некотором отрицательном угле атаки су равен нулю. Этот
угол атаки обозначается щ>. Если бы крыло было набрано из
симметричных профилей и фюзеляж самолета был осесимметричным
телом вращения, то у такого самолета угол ш> был бы равным
нулю. Это означает, что прямая линия, показывающая зависимость
Су от угла атаки а, проходила бы через начало координат.
Коэффициент подъемной силы су растет с увеличением угла
атаки, так как при этом на верхней поверхности крыла увеличи-
34
www.vokb-la.spb.ru - Самолёт своими руками?!
бается разрежение, а на нижней — оно уменьшается. При
некотором угле атаки с, достигает своего наибольшего значения, а
затем уменьшается. Угол атаки, при котором су достигает
максимального значения (с,, max), называется критическим углом
атаки акр-
В эксплуатации критический угол и близкие к нему углы атаки
обычно не используются по причине попадания самолета на режим
сваливания. Для предотвращения этого в летных испытаниях опре-
0 0,5 1JD 1JS 2J0 М
Рис. 1.8. Изменение величины ct самолета по
числу М
деляется наибольший допустимый в эксплуатации угол атаки аДОп,
при котором самолет не сваливается. Коэффициент подъемной
силы самолета, соответствующий допустимому углу атаки,
называется допустимым и обозначается судоп (рис. 1.7).
Уменьшение су при углах атаки, больших акр, происходит
вследствие развития срыва потока на крыле и уменьшения разрежения
на верхней поверхности.
Изменение сх при изменении угла атаки объясняется тем, что
коэффициент индуктивного сопротивления сх. зависит от су, а
следовательно, он зависит и от угла атаки.
На рис. 1.8 показано изменение величины cj по числу М.
Видно, что для данного самолета при числах М<0,5 величина
°1 не зависит от числа М.
В диапазоне чисел М«0,7-М,1 происходит увеличение с" при
увеличении числа М полета. Дальнейшее увеличение числа М
приводит к уменьшению с*
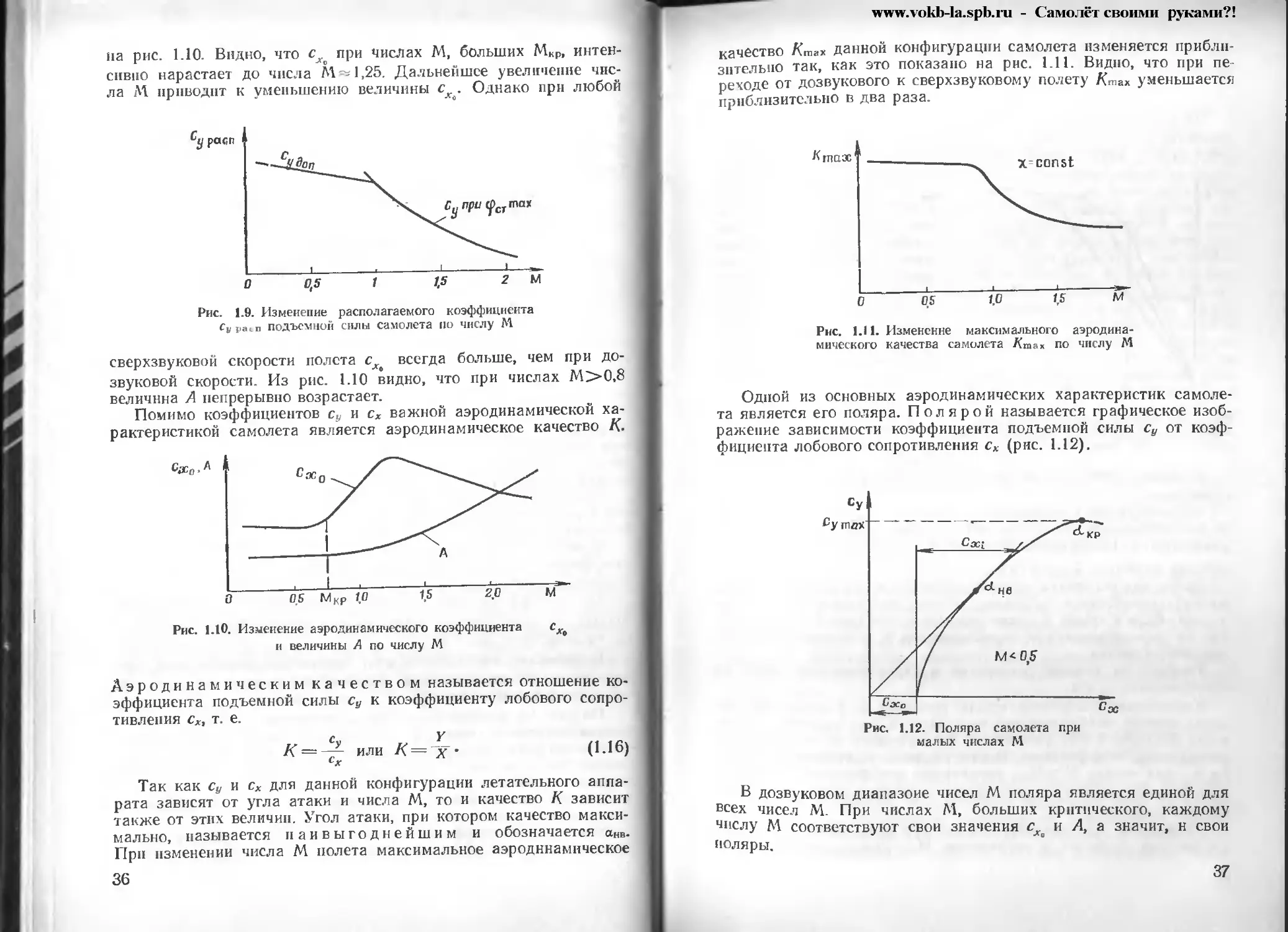
На рис. 1.9 показан закон изменения располагаемого
коэффициента подъемной силы Cj,pacn по числу М. На дозвуковых
скоростях полета этот коэффициент ограничивается допустимым углом
атаки, или су доп, а на сверхзвуковых скоростях у самолетов с
большой устойчивостью по углу атаки (по перегрузке) он
ограничивается возможностями стабилизатора вывести самолет на
значительные углы атаки.
Зависимости коэффициента безындуктивного лобового
сопротивления с и коэффициента А от числа М полета представлены
2* 35
на рис. 1.10. Видно, что сх при числах М, больших Мкр,
интенсивно нарастает до числа М-^1,25. Дальнейшее увеличение
числа М приводит к уменьшению величины сх . Однако при любой
"у расп
СупРи<Ра
Рис. 1.9. Изменение располагаемого коэффициента
су patn подъемной силы самолета но числу М
сверхзвуковой скорости полета сх всегда больше, чем при
дозвуковой скорости. Из рис. 1.10 видно, что при числах М>0,8
величина А непрерывно возрастает.
Помимо коэффициентов су и сх важной аэродинамической
характеристикой самолета является аэродинамическое качество К.
<да„
os мКР id 1,5 го м
Рис. 1.10. Изменение аэродинамического коэффициента cXi
и величины А по числу М
Аэродинамическим качеством называется отношение
коэффициента подъемной силы су к коэффициенту лобового
сопротивления сх, т. е.
К = -^- или К = ~х- (116)
Так как су и сх для данной конфигурации летательного
аппарата зависят от угла атаки и числа М, то и качество К зависит
также от этих величин. Угол атаки, при котором качество
максимально, называется наивыгоднейшим и обозначается анв.
При изменении числа М полета максимальное аэродинамическое
36
www.vokb-la.spb.ru - Самолёт своими руками?!
качество Ктах данной конфигурации самолета изменяется
приблизительно так, как это показано на рис. 1.11. Видно, что при
переходе от дозвукового к сверхзвуковому полету Ктах уменьшается
приблизительно в два раза.
=const
05
1.0
'.5
Рис. 1.11. Изменение максимального
аэродинамического качества самолета Ктах по числу М
Одной из основных аэродинамических характеристик
самолета является его поляра. Полярой называется графическое
изображение зависимости коэффициента подъемной силы си от
коэффициента лобового сопротивления ск (рис. 1.12).
Рис, 1.12. Поляра самолета при
малых числах М
В дозвуковом диапазоне чисел М поляра является единой для
всех чисел М. При числах М, больших критического, каждому
числу М соответствуют свои значения с и А, а значит, н свои
поляры.
37
1.3. ЗАВИСИМОСТЬ АЭРОДИНАМИЧЕСКИХ
ХАРАКТЕРИСТИК ЛЕТАТЕЛЬНОГО АППАРАТА
ОТ ЕГО ВНЕШНИХ ФОРМ
На аэродинамические характеристики крылатого летательного
аппарата наиболее существенное влияние оказывают форма
профиля крыла, форма крыла в плане, форма фюзеляжа и взаимное
положение частей самолета.
В диапазоне скоростей,
когда М>Мкр,
относительная толщина профиля с
оказывает существенное
влияние на сх. Во-первых, с
увеличением с уменьшаетси
критическое число М
полета, т. е. волновое
сопротивление, обусловленное
сжимаемостью воздуха,
наступает раньше; во-вторых, с
увеличением числа М
полета коэффициент
сопротивления крыла с профилями
большей относительной
толщины растет более
интенсивно.
Влииние относительной толщины профиля на величину cj
несущественно.
Максимальный коэффициент подъемной силы сутах при
некотором увеличении относительной толщины возрастает, а затем
уменьшается. Наибольших значений сут!>*. достигает при
относительных толщинах с=-10ч 15%.
Выбор формы крыла в плане (удлинения, стреловидности,
сужения) определяется задачами, которые необходимо решать
самолету. Форма крыла в плане оказывает наиболее сильное
влияние на аэродинамические характеристики в дозвуковой и
околозвуковой областях.
Рассмотрим влияние удлинения и стреловидности крыла на
коэффициенты су и сх.
Уменьшение удлинения крыла приводит к уменьшению
наклона прямой, изображающей нарастание су при увеличении угла
атаки а (рис. 1.13), увеличению критического угла атаки акр,
уменьшению коэффициента безындуктивного сопротивлении
крыла с при числах М>М,ср, увеличению коэффициента
индуктивного сопротивления сх., уменьшению максимального
аэродинамического качества.
Увеличение стреловидности крыла при неизменных прочих его
параметрах приводит к увеличению Мкр, уменьшению величины
Рис. I.I3. Влияние удлинения крыла \ на
зависимость коэффициента подъемной силы
от угла атаки
38
www.vokb-la.spb.ru - Самолёт своими руками?!
коэффициента безындуктивного сопротивления крыла с^ в
диапазонах чисел М=0,8-т-1,4, некоторому уменьшению величин
<у И Су тах-
Изменение величины сужении крыла приводит в основном к
изменению аэродинамической нагрузки вдоль размаха крыла.
Анализ влияния формы крыла в плане на аэродинамические
характеристики самолета показывает, что не удаетси подобрать
такие фиксированные геометрические параметры крыла (и
самолета в целом), чтобы они были наилучшими для всего диапазона
чисел М полета. Отсюда возникает необходимость создания
самолета с изменяемой в полете геометрией, у которого в
зависимости от числа М полета изменялась бы форма крыла в плане.
Изменение в полете стреловидности крыла (при этом изменяется
и его удлинение) в широких пределах позволяет получить лучшие
летные данные самолета. Крыло с малой стреловидностью
(большим удлинением) рационально использовать при взлете и
посадке для получения больших величин су и уменьшения скорости
отрыва и приземления. Длительный полет в дозвуковом диапазоне
скоростей целесообразно выполнять с углами стреловидности
Х = 30-М5°. На сверхзвуковых скоростих полег целесообразно
производить с наибольшим углом стреловидности, т. е. с наименьшим
удлинением крыла.
Выбор формы фюзеляжа и взаимного положения частей
самолета определяется назначением самолета, необходимостью
размещения в нем экипажа, оборудования, грузов и др.
При решении вопросов аэродинамической компоновки важным
является взаимное расположение крыла и фюзеляжа, а также
расположение оперения на фюзеляже. От этого зависит
интерференция (взаимное влияние) прежде всего крыла и фюзеляжа на
лобовое сопротивление и другие аэродинамические
характеристики.
Анализ экспериментальных данных показывает, что при
дозвуковых скоростях наименьшая интерференция крыла и
фюзеляжа будет у среднеплана с фюзеляжем, имеющим плоские
боковые поверхности. У ннзкоплана коэффициент лобового
сопротивления больше, а критический угол агаки меньше, чем у
среднеплана. У высокоплана, наоборот, коэффициент лобового
сопротивления меньше, а критический угол атаки и сутгх больше, чем
у среднеплана.
1.4. СПОСОБЫ УВЕЛИЧЕНИЯ КОЭФФИЦИЕНТА
ПОДЪЕМНОЙ СИЛЫ ЛЕТАТЕЛЬНОГО АППАРАТА
Для улучшения взлетно-посадочных характеристик самолета
необходимо увеличение коэффициента подъемной силы на взлете
и посадке. Это достигается применением механизации крыла.
Существуют следующие основные виды механизации крыла:
щитки простые и сдвижные, закрылки простые и выдвижные, пред-
39
крылки, отклоняемые носки крыла, управление пограничным
слоем, реактивные закрылки.
Щиток — отклоняющейся вниз нижняя часть крыла у задней
его кромки (рис. 1.14, о, б) на угол 5Щ.
^
<7еГ
Z£%
*К
Рис. I.I4- Возможная механизация крыла
Закрылок — отклоняющаяся вниз часть крыла у задней его
кромки (рис. 1.14, в, г, д) на угол 53. Закрылки бывают иещеле-
вые (рис. 1.14,в), однощелевые выдвижные (рис. 1.14,г), двух-
щелевые выдвижные (рис. 1.14,6). Действие закрылка сводится
к увеличению кривизны про-
филя и соответственно к
увеличению давления на нижней
поверхности крыла и росту
разрежении на верхней
поверхности.
Кроме того, перетекание
воздуха с нижней поверхности
крыла через профилированную
щель (рис. 1.14, г, д) на
верхнюю поверхность увеличивает
скорости течения воздуха в
пограничном слое в задней
части верхней поверхности
крыла, что препятствует
возникновению обратного течении
воздуха в пограничном слое.
Все это приводит к
увеличению коэффициента подъемной
углах атаки на величину hcy
(рис. 1.15). Критический угол атаки при выпущенных закрылках
меньше, чем при убранных. При умеренных углах отклонения
механизации крыла 53 прирост коэффициента подъемной силы Асу
тем больше, чем больше угол отклонения механизации.
си
5,>С J
VV
• \ ^
/ / VD
/ / v
4CV/
H4-o;V°
Рис. 1.15. Влияние закрылков и
предкрылков на зависимость коэффициента
подъемной силы от угла атаки:
8 3 — угол отклонения Закрылков;
угол отклонения предкрылка
пр
силы су на взлетно-посадочных
40
www.vokb-la.spb.ru - Самолёт своими руками?!
Многощелевые закрылки более эффективны, чем однощелевые.
С увеличением стреловидности н уменьшением удлинении
крыла эффективность обычных закрылков уменьшается. Поэтому на
таких крыльях устанавливают выдвижные закрылки. Они
позволяют получить больший прирост коэффициента подъемной силы,
так как обладают всеми свойствами обычных закрылков и, кроме
того, увеличивают площадь крыла.
Влияние щитков на коэффициент подъемной силы качественно
аналогично влиянию закрылков.
Предкрылок — представлиет собой небольшое крылышко,
расположенное на некотором расстоянии от носка крыла
(рис. 1.14, е). В канале между профилем предкрылка и контуром
носка крыла воздушный поток разгоняется и далее направляется
вдоль верхней поверхности крыла. Вследствие этого скорость
воздуха в пограничном слое увеличивается, и он становится более
устойчивым на больших углах атаки. При этом увеличиваются
Сутлу. и критический угол атаки (рис. 1.15). Предкрылки могут
устанавливаться по всему размаху крыла.
Отклоняемый носок служит дли предотвращения
раннего срыва потока у носка крыла, имеющего острую переднюю
кромку.
Управление пограничным слоем сводится к тому,
что пограничный слой либо отсасывается внутрь крыла, либо
сдуваетси с верхней поверхности крыла. В том и другом случае
пограничный слой становится тоньше, скорость течения в нем
увеличивается, и он стаиовитси более устойчивым, т. е.
обеспечивает безотрывное обтекание крыла на больших углах атаки.
Максимальный коэффициент подъемной силы сутах и критический
угол атаки при этом возрастают. Зависимость су от угла атаки а
со сдувом пограничного слои проходит выше зависимости су от а
без сдува пограничного слоя, т. е. увеличивается коэффициент су
на всех углах атаки, меньших критического.
Эффект от сдува пограничного слоя получается тем больше,
чем больше масса воздуха и чем с большей скоростью она
выдувается на закрылок. Повышать интенсивность сдува имеет смысл
до тех пор, пока не будет ликвидирован срыв потока с закрылка.
Дальнейшее увеличение сдува эффекта почти не дает.
Максимальный эффект от применения сдува получаетси при больших углах
отклонения закрылков — порядка 60е. Чем больше стреловидность
крыла и тоньше профиль, тем эффект сдува, как и
аэродинамической механизации, получается меньше.
Эффект сдува получается тем большим, чем иа большей части
размаха крыла он действует. Сопротивление крыла при
отклонении закрылка со сдувом растет незначительно.
Реактивные (струйные) закрылки применяютси
также для увеличения коэффициента подъемной силы. Их
принцип действия состоит в том, что воздух от компрессора подается
в щель на нижней поверхности крыла вблизи задней кромки.
Воздушная струя, истекающая с большой скоростью, образует с
41
хордой некоторый угол. При этом указанная струя воздуха (или
газа) воздействует на поток воздуха, обтекающий крыло, подобно
отклоненному закрылку. Кроме того, образуется реактивная сила,
направленная вверх, которая как бы поддерживает крыло.
Эффективность действия такого закрылка зависит от угла атаки
крыла, угла между струей и хордой, а также от величины
реактивной силы. Однако эффект струйного закрылка в основном
определяется не реактивной силой, а изменением распределения
давления по профилю крыла. У самолетов с крыльями изменяемой
в полете стреловидностью коэффициент подъемной силы можно
также увеличить за счет уменьшения угла стреловидности крыла.
При этом увеличиваются размах и удлинение крыла, а
следовательно, увеличиваются несущие свойства самолета. При заданном
угле атаки это приводит к росту коэффициента подъемной силы су.
Гл а в а 2
УСТАНОВИВШЕЕСЯ ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ
САМОЛЕТА
2.1. СИЛЫ, ДЕЙСТВУЮЩИЕ НА САМОЛЕТ
В ПРЯМОЛИНЕЙНОМ ПОЛЕТЕ
Движение летательного аппарата состоит из поступательного
движения его центра масс и вращения ЛА относительно центра
масс. Движение центра масс происходит в результате действия
сил на летательный аппарат. Вращение относительно центра масс
возникает в результате действия на летательный аппарат
моментов.
При изучении движения центра масс, когда рассматриваются
основные летные характеристики ЛА, предполагается, что
моменты ЛА сбалансированы. Поэтому уравнения вращательного
движения ЛА в этом случае опускаются.
Уравнении движения центра масс ЛА принято рассматривать
в траекторией системе осей координат Oxyz* (рис. 1.16, 1.19,
1.24). Начало этой системы осей координат помещаетси в центре
масс ЛА. Ось Ох направлена по касательной к траектории вдоль
вектора скорости полета. Ось Оу перпендикулярна оси Ох и
расположена в вертикальной плоскости. Ось Oz перпендикулярна осим
Ох и Оу и направлена в сторону правой консоли крыла.
Для лучшего понимания сначала рассмотрим наиболее простой
вид движения ЛА — установившееся прямолинейное движение,
а затем — неустановившееси движение.
Условия, уравнения движения и схема сил. Прямолинейность
полета указывает на то, что ускорения центра масс самолета jy
* Здесь и далее по тексту принято такое обозначение осей координат,
чтобы не путать их с обозначениями аэродинамических сил.
42
www.vokb-la.spb.ru - Самолёт своими руками?!
и \z по направлению осей Оу и Oz равны нулю, а слова «устано-
вившийси полет» означают, что ускорение центра масс \х в
направлении скорости полета также равно нулю. Отсюда
получается, что условиями прямолинейного установившегося
горизонтального полета явлиются равенства:
= 0, /v = 0, У, = 0.
(1.17)
Линия
горизонта
Рис. 1.16. Силы, действующие на самолет в
прямолинейном горизонтальном полете
Из механики известно, что масса точки, умноженная на
ускорение в данном направлении, равна сумме внешних сил,
действующих на точку в рассматриваемом направлении. Используя
этот закон, запишем уравнения движения центра масс самолета
в проекциях на оси Ох, Оу и Oz в таком виде:
mjx = Fx\
mjy = Fy; (1.18)
mjz = Fz\
где m — масса самолета (m = G/g);
Fx, Fy, Fz — суммы проекций всех внешних сил, действующих на
самолет, в направлении осей Ох, Оу и Oz
соответственно.
Так как в установившемся прямолинейном полете ускорения /*,
/я /г равны нулю, то для такого полета уравнения движения за-
пишутси в простом виде:
Fx=u,
/=, = 0; (1.19)
Fz = 0,
т. е. суммы проекций всех внешних сил на оси Ох, Оу и Oz
равны нулю.
43
Рассмотрим суммы проекций сил Fx, Fy и Fz. В полете на
самолет действуют три силы: полная аэродинамическая сила R,
сила тяжести G и сила тяги Р (рис. 1.16). В общем случае линия
действия силы тяги Р не совпадает с хордой крыла на угол срР.
Поэтому в прямолинейном полете проекции тяги на оси Ох и Оу
будут Px = PcosaP, Py = Psiuap (рис. 1.16). Так как в
прямолинейном полете угол крена равен нулю, то проекция тяги Рг = 0.
Проекцией полной аэродинамической силы R на ось Ох будет
сила лобового сопротивления X, а на ось Оу—подъемная сила У.
При отсутствии углов крена и скольжения проекция /?г=0.
Сила тяжести G в прямолинейном горизонтальном полете
проектируется только на ось Оу.
Суммы проекций всех внешних сил на оси Ох, Оу и Oz можно
записать в таком виде:
Fx = P cos ар — X;
Fy=Y+Psmap — G, (1.20)
Fz = 0.
Следовательно, в установившемся прямолинейном
горизонтальном полете уравнения движения записываютси следующим
образом:
Р cos яр — X = 0; Pcosap=^;
K+Psinap-C = 0 ИЛИ K+Psinap = G. (1-21)
Схема сил, действующих на самолет в установившемся
прямолинейном горизонтальном полете, показана на рис. 1.16.
При малых углах между тягой и вектором скорости полета
можно принять, что PcosaP=aP, а величина Р sin ар настолько
меньше подъемной силы У, что дли обычных самолетов во многих
случаях ее можно не учитывать. В этом случае уравнения
движения приближенно записываются просто:
Р^Х;
г~с, (1-22>
т. е. в установившемся прямолинейном горизонтальном полете
тига приблизительно равна силе лобового сопротивления, а
подъемная сила приблизительно равна силе тяжести самолета.
Взаимосвязь коэффициента подъемной силы и скорости полета.
Потребная тяга в прямолинейном горизонтальном полете.
Кривые Н. Е. Жуковского. Условие прямолинейности горизонтального
полета Y^G позволяет получить однозначную связь между
скоростью и коэффициентом подъемной силы. Раскрыв выражение
для подъемной силы, получим
cy^-S^G, (1.23)
44
www.vokb-la.spb.ru - Самолёт своими руками?!
отсюда найдем скорость, потребную для горизонтального
прямолинейного полета с заданным си:
^~/5 (1"24)
или потребный коэффициент подъемной силы
_ 20
Lvr.n~' p5V2 •
(1.25)
Из этой формулы, в частности, следует, что по мере уменьшения
скорости прямолинейного горизонтального полета требуется
увеличение коэффициента подъемной силы за счет увеличения угла
атаки самолета. Однако увеличение си (угла атаки) ограничено.
8 связи с этим в прямолинейном горизонтальном полете
приходится ограничивать уменьшение скорости условием, чтобы
коэффициент подъемной силы не превышал предела, установленного
практикой, например с^доп- Величина судо„ меньше свта.х. Тогда
минимальная допустимая скорость прямолинейного
горизонтального полета
По мере увеличения высоты полета минимально допустимая
воздушная скорость возрастает, так как уменьшается плотность
воздуха. С увеличением удельной нагрузки на крыло G/S
минимально допустимая скорость также возрастает.
Из условия постоянства скорости в прямолинейном
горизонтальном полете следует, что сила тиги Р должна быть примерно
равна силе лобового сопротивления X.
Тяга, необходимая для уравновешивания лобового
сопротивления самолета в прямолинейном горизонтальном полете Хг. п,
называется потребной тягой горизонтального полета
Рг-„.
Сила лобового сопротивления прямолинейного горизонтального
полета Xr. n приблизительно равна силе тяжести самолета,
деленной на аэродинамическое качество, т. е. формула для определения
потребной тяги или силы лобового сопротивления проста:
*г.п~|- 0.27)
где К — аэродинамическое качество самолета.
Из формулы дли XV. п следует, что при фиксированной силе
тяжести самолета величина Хг. „ достигает минимального значения
при K=/(max. Максимальное качество соответствует
наивыгоднейшему углу атакн. Следовательно, при прямолинейном
горизонтальном полете с наивыгоднейшим углом атакн потребная тяга,
9 следовательно, и Хг. г минимальны. На меньших и больших углах
45
атаки потребная тяга будет больше, чем при наивыгоднейшем
угле атаки.
Так как каждому углу атаки (или каждому су) соответствует
определенная скорость прямолинейного горизонтального полета,
то потребная тяга (или Хг г) зависит от скорости полета.
Характер изменения лобового сопротивлении в
прямолинейном горизонтальном полете Хг. „ и располагаемой тяги Р от
скорости показан применительно к самолету с ТРД на рис. 1.17.
рлл
wmnTeop mtllflonM-te
mo»
Рис. 1.17. Характерные скорости прямолинейного
горизонтального полета на кривых Н. Е.
Жуковского
Кривые, показывающие зависимость лобового сопротивления
самолета в прямолинейном горизонтальном полете от скорости и
располагаемой тяги, впервые были использованы Н. Е.
Жуковским и поэтому носят его имя.
Кривые Н. Е. Жуковского строятся для каждой высоты
полета.
Для решения вопроса о возможности прямолинейного
горизонтального полета с данной постоянной скоростью необходимо
сравнить величины лобового сопротивления и располагаемой тяги.
Построив кривые потребных и располагаемых тяг самолета
для различных высот его прямолинейного горизонтального
полета, можно решить ряд важных задач по определению летных
характеристик самолета.
2.2. ХАРАКТЕРНЫЕ СКОРОСТИ ПРЯМОЛИНЕЙНОГО
УСТАНОВИВШЕГОСЯ ГОРИЗОНТАЛЬНОГО ПОЛЕТА.
ЭКСПЛУАТАЦИОННЫЙ ДИАПАЗОН ВЫСОТ И СКОРОСТЕЙ
ПОЛЕТА САМОЛЕТА
Характерные скорости прямолинейного горизонтального полета
удобно показать на кривых Н. Е. Жуковского. Пусть для данной
высоты полета эти кривые построены для самолета, летающего
46
'.vokb-la.spb.ru - Самолёт своими руками?!
С дозвуковыми скоростями (рис. 1.17). На этом рисунке даны две
кривые, изображающие изменение располагаемой тяги Р в
зависимости от скорости полета (верхняя — при максимальном угле
отклонении рычагов управления двигателями 6Р max н нижния —
при положении рычагов управления двигателями (РУД),
меньшем максимального ( т. е. при 5Pi<o>max).
Из рис. 1.17 следует, что, изменяя положение РУД, летчик
меняет располагаемую тягу на всех скоростях полета. Кривые
располагаемых тяг при этом сдвигаются вниз при уменьшении
отклонения РУД.
Если из точек пересечения кривых потребной и
располагаемых тяг опустить перпендикуляры на ось скорости V, то получим
значение скоростей установившегося прямолинейного
горизонтального полета на данной высоте. Перпендикуляр, опущенный из
точки си на ось V, дает нам максимальную скорость
установившегося прямолинейного горизонтального полета VmzK.
Другими характерными скоростями установившегося
прямолинейного горизонтального полета являются: наивыгоднейшая
Vm, при которой полет самолета происходит с максимальным
качеством, минимально допустимая Утшдоп н минимальная
теоретическая Vminreop- МиНИМЭЛЫЮ ДОПуСТИМЭЯ СКОрОСТЬ Vmln доп—'
наименьшая скорость прямолинейного горизонтального полета на
данной высоте, ограниченная величиной допустимого угла атаки
самолета (из условия невыхода его на режим сваливания).
Минимально допустимая скорость больше минимальной
теоретической скорости, так как Су ДОп меньше су max- Разность между мак*
симальной и минимальной скоростями на дайной высоте
называется диапазоном скоростей на данной высоте.
По особенностям пилотирования самолета при переходе с
одной скорости на другую диапазон скоростей на данной высоте
делят на два режима — первый (/) и второй (II) (рнс. 1.17).
Первый режим полета происходит при скоростях, больших наи*
выгоднейшей, а второй режим — при скоростях, меньших
наивыгоднейшей.
Эксплуатационный диапазон высот и скоростей полета.
Основные эксплуатационные ограничения, накладываемые на полет
самолета. Построив кривые потребных и располагаемых тяг для ряда
высот полета самолета, можно определить максимальную и
минимальную скорости установившегося прямолинейного полета на
этих высотах. На основе данных, полученных из кривых Н. Е.
Жуковского, строят график в координатах HV (И — высота полета,
V — скорость (число М) полета). На нем изображаются
кривыми изменения максимальной и минимальной скоростей полета
самолета в зависимости от высоты. Эти кривые позволяют судить
о диапазоне высот и скоростей установившегося прямолинейного
горизонтального полета без учета эксплуатационных ограничений.
Эксплуатационный диапазон высот и скоростей полета
сверхзвукового самолета ограничивается слева минимально допустимой
скоростью Vminaom справа—максимально допустимыми скоростя-
47
МИ (Vniajflon)? И (Утахдоп)м, ОГрЯННЧеННЫМИ ВвЛИЧИНОЙ СКОрОСТ-
ного напора q и наибольшим числом М полета соответственно,
сверху — наибольшей высотой полета (рис. 1.18).
По величине максимальной скорости самолеты делятся на:
дозвуковые, сверхзвуковые и гиперзвуковые. Дозвуковыми
принято считать самолеты, у которых максимальная скорость
Я
I I .ЛЛЛЛ*Лч>,У / 1 l~
Va V-2a V
Рис. 1.18. Эксплуатационный диапазон скоростей н
высот прямолинейного горизонтального полета
самолетов с ТРДФ
установившегося прямолинейного горизонтального полета меньше
скорости звука; сверхзвуковыми — самолеты, у которых
Vma* больше скорости звука; гиперзвуковы ми — самолеты,
у которых наибольшая скорость полета более чем в пять раз
больше скорости звука.
Следует отметить, что многие современные самолеты с ТРДФ
при работе силовой установки на форсажном режиме являются
сверхзвуковыми, а при работе силовой установки на режиме
«Максимал» — дозвуковыми (рис. 1.18, штриховая линия).
Наибольшая высота установившегося прямолинейного
горизонтального полета называется статическим потолком и
обозначается Н„. Выше статического потолка установившийся
прямолинейный горизонтальный полет невозможен.
У сверхзвуковых самолетов максимальная скорость
горизонтального полета Vmsx, как правило, не используется ввиду
наличия ограничений максимальной скорости. Ограничения
максимальной скорости для современных самолетов вводятся в основном по
скоростному напору <7тахЯ<ш и числу М. В этой связи возникли
понятия максимально допустимой скорости по скоростному напору
(Ушахдоп)? н максимально допустимой скорости по числу М,
которую Обозначим (Утахдоп)л1 = Мтах допО, Где С — СКОрОСТЬ ЗВука.
Ограничение максимальной скорости по скоростному напору
вводится из условий обеспечения прочности самолета или его
силовой установки. По известной величине <7тахдоп и данным стан-
48
,i , .iu j>-ia.»pu.li - ^«uiUJitl L .umil pj .«""••
дартпой атмосферы определяется изменение с высотой максимально
ДОПУСТИМОЙ СКОрОСТИ (Vmaxflon)c ПО формуле
(^,0^=]/-^*™. (I-28)
Ограничение максимально допустимой скорости по числу М
полета может быть вызвано по крайней мере тремя
обстоятельствами:
— устойчивостью и управляемостью самолета;
— условиями работы силовой установки;
— аэродинамическим нагревом самолета.
На рис. 1.18 эксплуатационный диапазон скоростей и высот
установившегося прямолинейного горизонтального полета
ограничен линиями /—2—3—4—5—6—7 (заштрихованная область).
Видно, что у сверхзвукового самолета имеется два статических
потолка: один на дозвуковой скорости На1, а второй — на
сверхзвуковой скорости ЯП2. Линия 3—4—5—6 называется линией
потолков. Она показывает, что при различных числах М величины
потолков будут неодинаковыми.
2.3. УСТАНОВИВШИЙСЯ НАБОР ВЫСОТЫ И СНИЖЕНИЕ
САМОЛЕТА
Условия, уравнения движения и схема сил. Траектория
установившегося набора высоты представляет собой прямую линию,
наклоненную к горизонту под углом G (рис. 1.19). При этом полет
Gcos6
Рис. 1.19. Схема сил, действующих на самолет в
прямолинейном наборе высоты
самолета происходит без крена. Угол между плоскостью
горизонта и вектором скорости называется углом наклона
траектории 6. При наборе высоты угол 0 считается положительным.
49
В установившемся наборе высоты Скорость вдоль траектории
движения и угол наклона траектории 0 постоянны.
На рис. 1.19 показана схема сил, действующих па самолет в
установившемся наборе высоты. Из схемы сил следует, что
тяга Р, полная аэродинамическая сила и сила тяжести G
проектируются на оси Ох и Оу траекторной системы координат. При
этом сила тягн Р дает проекции: Px = Pcosap; Py = Psinap;
полная аэродинамическая сила здесь представлена в виде двух
составляющих: силы лобового сопротивления X и подъемной
силы У; проекциями силы тяжести будут Gj. = G sin В; Gy = GcosQ.
При малых углах между векторами тяги и скорости полета
PcoscipssP, а величина Р sin ар настолько меньше подъемной
силы У, что при выполнении приближенных расчетов ее можно не
учитывать. Для таких случаев прямолинейного набора высоты с
постоянной скоростью уравнения движения запишутся в таком
виде:
Р — X — GsinGgO;
(1.29)
К—Gcos6=*0
PgA'+GsinB;
KgGcosB.
(1.30)
Из этих уравнений движения видно, что в прямолинейном
наборе высоты с постоянной скоростью сила тяги Р больше
лобового сопротивления, а подъемная сила меньше силы тяжести.
Скорость полета, коэффициент подъемной силы, угол наклона
траектории и вертикальная скорость набора высоты. Условие
прямолинейности набора высоты y»GcosG позволяет получить связь
между скоростью и коэффициентом подъемной силы су в виде
V',
j/^cm е = к пу-^щ (,_3i)
нли
20
-*^ cos в =*,,,„ cos в; (1.32)
где V, Суа—потребные скорость и коэффициент подъемной силы
в установившемся наборе высоты.
Из уравнения (1.32) следует, что при одних и тех же
скоростях полета коэффициент подъемной силы в наборе высоты СуВ
меньше суг. п, а следовательно, индуктивное сопротивление в
наборе высоты Х,„ меньше индуктивного сопротивления в
горизонтальном полете Xt г. „. Безындуктивное сопротивление Х0 при
одной и той же скорости будет одним и тем же в горизонтальном
примолинейном полете и в прямолинейном установившемся
наборе высоты. Отсюда получается, что при одной и той же
скорости и высоте полета лобовое сопротивление в прямолинейном го-
50
www.vokb-la.spb.ru - Самолёт своими руками?!
ризонтальном полете больше лобового сопротивления в
установившемся наборе высоты, т. е. Хи < ХТш „.
Угол наклона траектории G можно определить из первого
уравнения движения системы (1.29) по формуле
sin 6g P~GX" g P~Qr-" . (1-33)
где Р—располагаемаи тяга силовой установки самолета;
(Р — Хг, п) — избыток тягн.
Очевидно, максимальный угол наклона траектории будет при
максимальном избытке тяги. Из кривых Н. Е. Жуковского
получается, что при полете самолета с ТРД на дозвуковых
скоростях это будет примерно на наивыгоднейшей скорости полета.
Установка дополнительных ускорителей дает возможность
повысить располагаемую тягу и ее избыток. При этом угол набора
высоты возрастает. Максимальные углы установившегося набора
высоты маневренных самолетов могут достигать величин более
45°. С подъемом на высоту избыток тяги уменьшается, а
следовательно, уменьшаются и углы набора высоты.
Увеличение полетной массы самолета приводит к уменьшению
углов набора высоты.
Важной характеристикой набора высоты является
вертикальная скорость самолета Vv. Вертикальной скоростью
набора высоты называется высота, которую самолет набирает за
одну секунду. Вертикальная скорость определяется по формуле
l/„ = l/slne. (1.34)
Так как sin в» г^~' то веРтикальнУю скорость можно
выразить следующим равенством:
Vyi^ P~gr-nV. (1.35)
Видно, что максимальней вертикальная скорость Vy max будет
при той скорости полета, при которой произведение (Р—Хг. „) V
максимально. При наборе высоты с дозвуковой скоростью полета
максимальная скороподъемность Vy max получается при скорости,
несколько большей наивыгоднейшей. С увеличением высоты
величина Vy max уменьшается вследствие уменьшения избытков тяги
На статическом потолке вертикальная скорость самолета
равна нулю. Это означает, что для набора высоты статического
потолка при установившемся подъеме требуется бесконечно
большое время. Это не осуществимо на практике, поэтому высоту
51
статического потолка необходимо рассматривать как
теоретическую.
Практический потолок самолета меньше статического. За
практический потолок условно можно принять ту высоту полета,
на которой максимальная вертикальная скорость Vy max равна на
дозвуковых скоростях 0,5 м/с, а на сверхзвуковых скоростях
3 м/с.
Для современных сверхзвуковых самолетов с ТРДФ
практический потолок близок к теоретическому и может достигать
более 20 км.
Установившееся снижение самолета. Под
установившимся снижением самолета понимается его движение по
прямолинейной наклоненной вниз траектории с постоянной скоростью при
малой тяге. Движение самолета по прямолинейной наклоненной
вниз траектории с постоянной скоростью при нулевой тяге
называется установившимся планированием.
Установившееся снижение отличается от установившегося
набора высоты тем, что при снижении самолета угол наклона
траектории отрицательный. Условия и уравнения движения при
установившемся снижении запишутся так же, как и при
установившемся наборе высоты.
Схема сил, действующих на самолет при его снижении,
отличается от схемы сил в наборе высоты тем, что составляющая силы
тяжести G sin в направлена по скорости полета.
Скорость полета, коэффициент подъемной силы и лобовое
сопротивление при установившемся снижении определяются по тем
же формулам, что и при установившемся наборе высоты.
Угол наклона траектории при снижении определяетси по
формуле
tgesji--^-. (1.36)
где ц — тяговооруженность самолета при снижении (ц = Р/С);
/(—аэродинамическое качество при снижении.
При планировании тяга равна нулю, поэтому угол наклона
траектории определяется по более простой формуле
tge=-{. (i.37)
Из формулы следует, что минимальный угол планирования
(в смысле ее абсолютной величины) будет при планировании на
наивыгоднейшей скорости, когда качество максимально.
Вертикальная скорость при снижении и планировании
определяется по юй же формуле, что и при наборе высоты. Но она
будет величиной отрицательной. Отрицательная величина
вертикальной скорости Vy указывает иа уменьшение высоты полета.
52
www.vo ' i-la.spb.ru - Самолёт своими руками?!
Глава 3
НЕУСТАНОВИВШЕЕСЯ ДВИЖЕНИЕ САМОЛЕТА
3.1. РАЗГОН И ТОРМОЖЕНИЕ САМОЛЕТА
Понятие о перегрузках
В предыдущей главе рассматривались основные виды
движения самолета с постоянной по величине и направлению скоростью,
когда ускорения вдоль осей Ох и Оу равны нулю. Однако в
большинстве случаев движения скорость полета изменяется по
величине или по направлению или одновременно и по величине, и по
направлению. Иными словами, в большинстве случаев движение
самолета происходит с ускорением, когда равнодействующая всех
внешних сил (Р, R, G и сил реакции шасси /?ш), действующих на
самолет, не равна нулю. Величина ускорения характеризует
маневренные свойства самолета. Однако на практике маневренные
свойства самолета чаще оцениваются по перегрузке.
Перегрузкой называется безразмерная векторная
величина, равная отношению суммарной поверхностной силы \Я+ Р-\-
+ Яш) к силе тяжести самолета, т. е.
п= * + ^+*". (1.38)
Вектор перегрузки п раскладывается на три составляющие:
продольную перегрузку пх, направленную по касательной к
траектории;
нормальную перегрузку пу, направленную по нормали к
вектору скорости и лежащую в плоскости симметрии самолета;
пг — боковую перегрузку, направленную по нормали к
плоскости симметрии самолета. При симметричном обтекании самолета
перегрузка «г=0.
В полете, когда отсутствуют силы реакции шасси, продольная
перегрузка
/>COSQD— X
«,= -
0 — • (1-39)
При небольших углах аР продольная перегрузка и*=а(Р—X)fG.
В полете нормальная перегрузка пу равна отношению суммы
проекций полной аэродинамической силы и тяги на ось Оу к силе
тяжести самолета. Для рассматриваемого здесь направления силы
тяги, когда угол аР мал, нормальная перегрузка
«„=;
У
y--G- (1-40)
Перегрузки пх и пи могут быть положительными и
отрицательными.
53
Так как величины перегрузок характеризуют величины сил,
действующих на самолет, то по их значению можно судить не
только о движении самолета, но также и о нагруженности частей
самолета.
Допустимые величины нормальной перегрузки пу обычно
ограничиваются физиологическими возможностями летчика, прочностью
конструкции самолета, величиной допустимого коэффициента
подъемной силы сУДОп и другими факторами.
Разгон и торможение самолета
в прямолинейном полете
Разгон и торможение в прямолинейном полете являются
наиболее простыми видами маневра самолета. Однако, несмотря на
это, они широко используются на практике дли догона, подстраи-
вания и ухода от самолета противника.
При разгоне самолета ускорение в направлении скорости
полета /х больше нуля, а при торможении оно меньше нуля.
Используя законы механики, запишем уравнения движения
центра масс самолета в проекциях на оси Ох и Оу в общем
виде:
m'cZ
где m = G/g — масса самолета в момент разгона или
торможения;
Fx, Fy —суммы проекций всех внешних сил, действующих на
самолет, в направлении осей Ох и Оу
соответственно.
Схема сил, действующих на самолет при его разгоне в
прямолинейном наборе высоты, аналогична той, что показана на
рис. 1.19. Разница будет только в том, что проекция Р cos ар
будет больше, чем сумма X+Gsin6.
Уравнения движения самолета в траекторной системе
координат при его разгоне и торможении в прямолинейном наклонном
полете имеют вид:
В 1х (1.42)
K;=;Gcose.
Видно, что при разгоне самолета в прямолинейном наборе
высоты ускорение \х зависит от избыточной тяги (Р—Х), а также
от величины угла наклона траектории 6.
Разгон в прямолинейном горизонтальном полете происходит
с большими ускорениями, чем в наборе высоты, так как в
прямолинейном горизонтальном полете составляющая силы тяжести
Gsine равна нулю.
54
www.vokb- ii.sph.iu - Самолет своими руками'.!
При снижении ускорение }х можно получить еще большим,
так как в этом случае избыточная тяга и С sin 6 действуют в
одну сторону.
Из кривых Н. Е. Жуковского (рис. 1.17) следует, что
избыточная тяга на данной высоте зависит от скорости полета. Помимо
этого, она зависит от высоты полета, режима работы силовой
установки и геометрии самолета. Вполне понятно, что от этих же
факторов будет зависеть и ускорение jx.
3.2. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ САМОЛЕТА
Криволинейное движение в вертикальной плоскости. Самолет
может совершать пространственный криволинейный маневр, а
также криволинейные маневры в вертикальной и горизонтальной
плоскостях. Рассмотрим некоторые маневры самолета в
вертикальной и в горизонтальной плоскостях.
К маневрам в вертикальной плоскости относятся пикирование,
горка, петля Нестерова и др.
При выполнении криволинейных маневров в вертикальной
плоскости скорость полета изменяется не только по величине, но
и по направлению. Отсюда следует, что при таком движении
ускорения центра масс самолета вдоль осей Ох и Оу не будут
равны нулю, а угол наклона траектории G будет меняться.
Исходя из этого, условия криволинейного движения самолета в
вертикальной плоскости запишутси следующим образом:
Ь¥-Ъ А-*0. (1.43)
Используя эти условия, запишем в общем виде уравнения
криволинейного движения самолета в вертикальной плоскости:
G_ . _ _.
g]* r>'
ГД6 Jx — AV/At—ускорение в направлении вектора скорости
(вдоль оси Ох);
Jy = V2lry — ускорение по нормали к вектору скорости,
расположенной в вертикальной плоскости;
гу—радиус кривизны траектории в вертикальной
плоскости;
О— сила тяжести самолета при маневре;
Fx, Fy—суммы проекций всех внешних сил,
действующих на самолет, в направлении осей Ох и
Оу.
Из уравнений криволинейного движении получается, что
суммы проекций всех внешних сил, действующих на самолет, в
направлении осей Ох и Оу не равны нулю. То, что силы в
направлении касательной к траектории движения не находятси в
равновесии, приводит к изменению величины скорости полета; наличие
55
Неуравновешенности Сил По перпендикуляру к вектору скорости
полета приводит к искривлению траектории Искривление
траектории происходит в сторону неуравновешенной силы.
Схема сил, действующих на самолет при криволинейном
движении в вертикальной плоскости, показана на рис. 1.20. Из
рисунка видно, что суммы проекций сил на оси Ох и Оу будут
равны:
Fx=Pcosap~X — GsinG; Z7 = Y+ Pslnap — Gcos 0.
V
Траектория/
\ p\v /k*>
\ v#Sr
/*\ а
\
\ Gcos 6
Рис. 1.20. Схема сил, действующих на самолет при
криволинейном движении в вертикальной плоскости
Подставив величины F, и F9 в уравнения движения в общем
виде, получим уравнения движения, выраженные через силы:
— Jx— P cos ар — X — О sin в;
~— L — Y-f Psin ар — Gcos в.
(1.45)
Разделив левые и правые части этих уравнений на С и
сделав простейшие преобразования, получим уравнения движения,
выраженные через перегрузки:
Л = £(«*-sin 6);
Л = Е(п> -cosв). (1ЛЬ)
Видно, что ускорение \х зависит от разности (Рсо&аР—X) и
угла наклона траектории полета 6. Ускорение /„ в
криволинейном движении обычного самолета зависит в основном от
подъемной силы У и составляющей силы тяжести Gcos в. Если
искривление траектории происходит вверх, то в этом случае подъемная
сила У больше G cos 6. При искривлении траектории вниз
подъемная сила меньше Gcos в.
56
www.vokb-la.spb.ru - Самолёт своими руками?!
Рассмотрим вкратце некоторые маневры самолета в
вертикальной плоскости.
Пикирование — это крутое снижение самолета (рис. 1.21).
Пикирование применяется в бою и в учебных целях для быстрой
потери высоты //, для набора скорости, а также для точного по-
Рис. I.2I. Маневр пикирования:
'вв и ^выв — вь1Соты ввода в пикирование и вывода из него; ^вв, ЬН ик и
"выв —потерн высот при вводе в пикирование. па пикировании и выводе
из него соответственно
ражения наземных целей. Траектория пикирования делится на три
части: ввода, прямолинейного крутого спуска и вывода. К
криволинейному движению имеют непосредственное отношение только
ввод и вывод из пикирования.
Ввод в пикирование совершается в результате действия
неуравновешенной (центростремительной) силы, направленной вниз,
на Нт. Эта сила будет равна разности составляющей силы
тяжести Gcos6 и подъемной силы У (рис. 1.21, участок /—2).
Вывод из пикирования осуществляется в результате действия
неуравновешенной (центростремительной) силы, направленной
вверх. При выводе из пикирования (участок 3—4) подъемная
сила У должна быть больше составляющей силы тяжести G cos 6
настолько, чтобы обеспечить безопасную высоту вывода Нвыв.
Горка —это S-образный маневр в вертикальной плоскости,
Выполняемый для быстрого набора высоты. Она состоит из кри-
57
волинейных участков ввода /—2 (рис. 1.22) и вывода 3—4; в
некоторых случаях между ними имеется прямолинейный участок 2—3.
Набор высоты на горке часто сопровождается уменьшением
скорости. Однако самолеты с большой тяговооруженностью могут
выполнить горку, увеличивая скорость.
Hi
Яве
I
Рис. 1.22. Маневр горки (//Вв, //вив — высоты ввода в горку
И вывода из нее соответственно)
Ввод в горку происходит, когда подъемная сила Y больше
составляющей силы тяжести GcosG, а на выводе из горки
подъемная сила Y меньше GcosB. Из рис. 1.22 видно, что при выводе
из горки подъемная сила «мешает» силе G cos 0 искривлять
траекторию вниз. Для того чтобы вывод из горки происходил
энергичнее (с большей кривизной траектории), нужно уменьшить
подъемную силу до допустимой величины.
Петля Нестерова — криволинейный полет самолета по
петлеобразной траектории (рис. 1.23) в вертикальной плоскости.
Впервые такой маневр был выполнен прославленным русским
летчиком П. Н. Нестеровым, и поэтому он носит его имя. На
первом этапе петли /—2—3 происходит набор высоты с искривлением
траектории и, как правило, с уменьшением скорости. В точке 3
скорость получается наименьшая, а кривизна траектории
наибольшая, так как здесь искривляют траекторию в одном
направлении сила тяжести G и подъемная сила Y. Во второй половине
петли 3—4—5 происходит разгон самолета с постепенным
уменьшением кривизны траектории до нуля в точке 5.
Криволинейное движение самолета в горизонтальной
плоскости. Развороты и виражи. Условиями установившегося криволи-
58
www.vokb-la.spb.ru - Самолёт своими руками?!
иейного движения самолета 6 горизонтальной плоскости
являются:
постоянство высоты полета, что означает равенство нулю
ускорения в вертикальной плоскости (/в = 0);
постоянство скорости полета, т. е. /* = 0;
И и
1
Ъ 3 Хз
Ръ
4'
W
f
G'
„
YsNi
\
Y2
, VZ
Pz
2
*2
V,
S
vs
Рис. 1.23. Петли Нестерова
ускорение вдоль траекторной оси Ог (не равно нулю), так как
на самолет действует центростремительная сила (V-f-Psinap)sinY.
Используя эти условия, запишем уравнения криволинейного
движения самолета в горизонтальной плоскости с постоянной
скоростью в общем виде:
0 = FX; 0 = Fy; ±h = F„
g
(1.47)
где Fx, F„, Fz
- суммы проекции всех внешних сил,
действующих на самолет, на оси траекторной системы
координат Ox, Oy, Oz соответственно;
масса самолета;
g
}г — ускорение центра тяжести в направлении оси
Oz(jz=V2/rz, здесь гг — радиус кривизны
траектории в горизонтальной плоскости, V —
скорость полета).
Из уравнений движения следует, что по касательной к
траектории и по нормали, расположенной в вертикальной плоскости,
Должно быть равновесие сил, а по нормали к траектории,
расположенной в горизонтальной плоскости, равновесия сил пет.
59
Схема сил, действующих на самолет в криволинейном
горизонтальном полете с постоянной скоростью, приведена на рис. 1.24
(о - вид сзади, б — вид сверху).
На этой схеме легко определить суммы проекций сил:
Fx = Pcos3.p— X; Fy = (Y + Psin«p) cosf — С;
/гг = (Y + Psin Ap) sin y.
Плоскость
горизонта
Pcosd-p
PsinctpSinlT
Рис. 1.24. Схема сил, действующих на самолет при маневрировании по
криволинейным траекториям в горизонтальной плоскости
У многих самолетов угол ар небольшой, поэтому для них
можно принять, что cosaP=l, а sinap~0. Подставив выражения F»,
Fy и Fz для обычных самолетов в уравнения движения в общем
виде, получим уравнения движения в упрощенном виде:
P-XzzO;
-Х>.
Kcos i = G;
— cs К sin у.
(1.48)
Разделив левую и правую части каждого уравнения на G,
получим уравнения движения, выраженные через перегрузки:
пх = 0,
пу cos T=l; (,49)
1 V
— — = nysm-[.
60
www.vokb-la.spb.ru - Самолёт своими руками?!
К криволинейному движению в горизонтальной плоскости
относятся виражи, развороты, змейки п др. Виражи бывают
установившиеся и неустановившиеся. Последние здесь рассматриваться
не будут.
Установившимся виражом называется криволинейное
движение самолета в горизонтальной плоскости с поворотом
траектории на 360° при постоянных скорости и угле крена.
Разворот в горизонтальной плоскости составляет часть
виража.
Установившиеся виражи характеризуются следующими
величинами: перегрузкой в направлении подъемной силы пд, радиусом
виража гг и временем виража /„. Перегрузка пу и радиус виража
определяются из второго и третьего уравнений движения:
1 V2
яу = ——; гг = —.—. (1.50)
' cos 1 * gny sin 1 '
Радиус виража можно выразить через скорость и угол
крепа, а также через скорость и перегрузку пу. Подставив для этой
цели выражение для перегрузки пу в формулу для радиуса
виража, получим
', = -£-. (1-51)
Видно, что величина радиуса виража прямо пропорциональна
квадрату скорости и обратно пропорциональна tg-f.
Из тригонометрии известно, что tgf = ^sec'-f — 1, где sec f=
= 1/cosy- Следовательно, tgT = Vn*~l, а радиус виража
легко выражается через скорость н перегрузку в таком виде:
gV пу — \
Видно, что чем больше перегрузка на вираже, тем меньше
радиус виража. С уменьшением скорости (при неизменной
перегрузке) радиус виража уменьшается.
Время установившегося виража гв определяется в результате
деления длины окружности, равной 2тггг, на скорость, т. е.
к=Ч^- о-53)
Гл ава 4
УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ САМОЛЕТА
4.1. ПОНЯТИЯ БАЛАНСИРОВКИ, УСТОЙЧИВОСТИ
И УПРАВЛЯЕМОСТИ САМОЛЕТА
Уравновешивание сил и моментов, действующих па самолет,
называется балансировкой.
61
В полете балансировка самолета достигается отклонением его
Органов управления: стабилизатора (руля высоты), рычагов
управления двигателями (РУД), элеронов (интерцепторов) и руля
направления. Для длительного прямолинейного полета оказывается
недостаточным только создать равновесие сил и моментов. Дело
в том, что это равновесие (балансировка самолета) может быть
легко нарушено какой-нибудь внешней (по отношению к
сбалансированному полету) причиной. Внешние причины называются
возмущениями.
В принципе возмущения могут возникнуть по двум причинам:
в результате изменения состояния среды, в которой движется
летательный аппарат, и в результате изменения состояния
летательного аппарата. В частности, возмущениями могут явиться: порыв
ветра, стрельба из самолетного оружия, сброс груза, отклонение
от балансировочного положения органа управления и др. В
результате нарушения балансировки движение самолета изменится.
Движение самолета, возникшее в результате нарушения его
балансировки, называется возмущенным движением.
В процессе возмущенного движения самолет может вести себя
по-разному. Если силы и моменты, действующие на самолет, с
течением времени восстанавливают свое равновесное состояние, то
такое движение считается устойчивым. Наоборот, если силы и
моменты с течением времени будут все более и более удаляться
от своего исходного равновесного состояния, то движение (или
самолет в этом движении) считается неустойчивым.
Самолеты, которые после нарушения равновесия не проявляют
тенденции ни к возвращению к нему, ни к уходу от него, называются
нейтральными. Исходя из этого под устойчивостью
самолета понимают его способность самостоятельно, без
вмешательства летчика, возвращаться к режиму равновесия после
прекращения действия возмущения.
Для летной эксплуатации балансировка и устойчивость
самолета неравноценны. На самолете, у которого не обеспечена
балансировка, летать нельзя, тогда как на неустойчивом самолете
полет возможен. Происходит это потому, что, осуществляя полет
на неустойчивом самолете, летчик всегда имеет возможность
возвратить его к исходному равновесному состоянию путем
отклонения органов управления. Благодаря такому вмешательству в
процесс развития возмущенного движения летчик не позволяет
самолету сильно отклониться от исходного полета. Но чем более
будет неустойчив самолет, тем чаще и труднее летчику
осуществлять такое вмешательство. Поэтому полет на неустойчивом
самолете хотя и возможен, но труден, утомителен для летчика
и опасен.
Под управляемостью самолета понимают его
способность реагировать на отклонение органов управления.
Сопоставляя понятия устойчивости и управляемости
самолета, можно сделать вывод, что они в известной мере
противоположны. Устойчивость есть способность сохранять заданный режим
62
www.vokb-la.spb.ru - .амолёт своими руками'.!
полета, а управляемость—изменять его. Вместе с гем между
этими характеристиками существует теснейшая связь. Она
заключается в том, что с повышением устойчивости самолета
увеличиваются углы отклонения рулей и усилия на рычагах управления,
необходимые для изменения режима полета. При уменьшении
устойчивости, наоборот, уменьшаются углы отклонения рулей,
необходимые для изменения режима полета, самолет при этом
становится строже в
управлении, t У1
Существуют такие
величины устойчивости, при
которых характеристики
управляемости становятся
для летчика наиболее
удобными.
Изучение вопросов
устойчивости и
управляемости производится обычно
с использованием
связанной системы координат
Ох,у,г, (рис 1.25). За
начало координат
принимается точка, в
которой расположен центр
масс самолета. Ось Ох,
проводится параллельно
хорде крыла и называется
лета
Ых Мх
Рис 1.25. Положительные направления осей
координат, моментов н угловых скоростей
самолета
продольной осью само-
Нормальная ось Оу, перпендикулярна оси Ох, и лежит
в плоскости симметрии самолета.
Ось Ог, перпендикулярна к осям Ох, и Оу,, а следовательно,
и к плоскости симметрии самолета. Она называется
поперечной осью самолета.
На рис. 1.25 показаны положительные направления осей
координат, моментов и угловых скоростей вращения самолета
относительно них.
Момент Мх относительно продольной оси Ох, называется
кренящим. Он считается положительным, если кренит
самолет на правую консоль крыла. Момент Му относительно оси Оу,
называется моментом рыскания. Он считается
положительным, если разворачивает самолет в сторону левой консоли
крыла.
Момент Мг относительно поперечной оси Ог, называется
продольным моментом или моментом тангажа. Он
считается положительным, если носовая часть самолета
поднимается вверх.
Заметим, что совпадение начала связанной системы осей
координат с центром тяжести самолета означает, что сила тяжести
не вызывает моментов относительно осей координат.
63
Положение самолета относительно вектора скорости
набегающего потока характеризуется углами атаки а и скольжения р.
При несимметричном обтекании углом атаки самолета а
называется угол, заключенный между проекцией вектора воздушной
скорости на плоскость симметрии самолета и хордой крыла
(рис. 1.25). Углом скольжения (3 называется угол между
вектором воздушной скорости и плоскостью симметрии самолета.
Угол р считается положительным при скольжении самолета
на правую консоль крыла.
Наличие плоскости симметрии позволяет разделить движение
самолета на продольное и боковое.
К продольному движению относят два поступательных
движения центра масс самолета в вертикальной плоскости (вдоль
вектора скорости и но перпендикуляру к нему) без крена и
скольжения и вращательное движение самолета относительно
связанной оси Ozi. Продольное движение в основном характеризуется
углами атаки а, наклона траектории полета 6, скоростью V и
высотой полета Н, а также положением руля высоты
(стабилизатора) и рычагов управления двигателями. Балансировку,
устойчивость и управляемость при этом движении называют продол ь-
вой балансировкой, боковыми устойчивостью и
управляемостью.
К боковому движению относят поступательное движение
самолета вдоль поперечной оси Ог\ и его вращение относительно
продольной Ох\ и нормальной Оу\ осей. Боковое движение в
основном характеризуется углами скольжения р и крена г,
угловыми скоростями со* и v)y, а также положениями руля направления
и органов поперечного управления. Балансировку,
устойчивость и управляемость в этом движении называют
боковой балансировкой, боковыми устойчивостью и
управляемостью.
В продольном движении самолеты обладают интересным
свойством. Они сравнительно быстро изменяют угол атаки и медленно
изменяют скорость полета. В соответствии с этим продольную
устойчивость принято разделять па устойчивость при постоянной
скорости, когда изменяется перегрузка (или угол атаки),
называемую устойчивостью по углу атаки или по
перегрузке, и устойчивость при изменяющейся скорости, называемую
устойчивостью по скорости. Для летной практики более
важной является устойчивость по перегрузке.
В боковом движении главными являются: вращение самолета
относительно продольной оси, называемое движением крена,
и вращение его относительно нормальной оси Оу\, называемое
движением рыскания. Поэтому при изучении бокового
движения вводятся понятия двух устойчивостей и управляемостей
самолета: поперечной и путевой. Заметим, что раздельно
рассматривать их можно лишь условно в целях упрощения изучения
боковой устойчивости и управляемости.
6*
www.vokb-la.spb.ru - Самолёт своими руками?!
4.2. ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ ЛЕТАТЕЛЬНОГО
АППАРАТА ПО УГЛУ АТАКИ ИЛИ ПО ПЕРЕГРУЗКЕ
Продольная устойчивость самолета по перегрузке (по углу
атаки) тесно связана с понятием фокуса по углу атаки.
Фокусом по углу атаки называется точка приложения
приращения полной аэродинамической силы, вызванного изменением угла
атаки. Так как приращение лобового сопротивления самолета
Рис. 1.26. Характерные точки: центр тяжести (ц. т.), фокус по углу атвки и
нейтральная центровка (ц. п.)
обычно мало влияет на продольный момент, то под фокусом часто
понимают точку приложения приращения подъемной силы,
вызванного изменением угла атаки.
Самолет называется устойчивым по углу атаки (по
перегрузке), если он в полете самостоятельно, без
вмешательства летчика, стремится сохранить угол атаки (перегрузку)
исходного полета после прекращения действия возмущения по
углу атаки. Такое название этому виду устойчивости даио потому,
что увеличение или уменьшение угла атаки при постоянной
скорости сопровождается изменением подъемной силы, а
следовательно, и перегрузки пу.
Для лучшего понимания устойчивости по перегрузке
рассмотрим, как она проявляется. Допустим, что самолет выполняет
прямолинейный установившийся горизонтальный полет со скоростью
Vу. и углом атаки а^. При этом полете все силы и моменты,
действующие на самолет, должны быть уравновешены. Предположим,
что самолет попал в восходящий поток, скорость которого равна
Wy. В результате этого скорость набегающего потока V повернется
на угол Да (рис. 1.26,а), что приведет к такому же увеличению
угла атаки самолета. Увеличение угла атаки вызовет увеличение
подъемной силы ДУ, а значит, и перегрузки на величину Апу=
—AY/G. Из определения фокуса по углу атаки следует, что
приращение ДУ приложено в фокусе.
В общем случае фокус по углу атаки не совпадает с центром
тяжести, поэтому прирост подъемной силы вызовет появление
продольного момента относительно центра тяжести. В случае когда
фокус расположен позади центра тяжести, это будет пикирующий
момент. Под действием этого момента самолет будет опускать
3—22а
65-
нос, уменьшать угол атаки, «сбрасывать» прирост подъемной
силы и перегрузки. Следовательно, возникновение пикирующего
момента при увеличении угла атаки характеризует устойчивость
самолета по перегрузке. Если бы внешнее воздействие привело к
уменьшению угла атаки, то появился бы кабрирующий момент,
который стал бы увеличивать угол атаки, т. е. восстанавливать
перегрузку исходного полета.
Рис. 1.27. Изменение координат фокуса по углу атакн и
нейтральной центровки по числу М
Иная картина получается, когда фокус расположен впереди
центра тяжести (рис. 1.26,6). В этом случае увеличение угла
атаки приведет к появлению кабрирующего момента, а
уменьшение угла атаки — к появлению пикирующего момента, которые
будут еще более отклонять самолет от исходного режима.
Таким образом, статическая устойчивость самолета по
перегрузке зависит только от взаимного расположения фокуса хР и
центра тяжести хт самолета. Она характеризуется величиной
разности относительных координат фокуса и центра тяжести
самолета (Xf—Хт) *. При расположении фокуса позади центра тяжести
(Хг—хт) больше пуля, самолет статически устойчив по перегрузке.
При расположении фокуса впереди центра тяжести (xf—хт)
меньше нуля, самолет статически неустойчив по перегрузке.
Если центр тяжести совпадает с фокусом, то самолет
статически нейтрален по углу атаки.
Величину (хР—хт) часто называют запасом центровки.
В полете изменение устойчивости по перегрузке может
произойти в случае изменения положения центра тяжести или фокуса
самолета.
Изменение положения центра тяжести связано с выработкой
топлива, сбрасыванием бомб (груза) и т. д.
Фокус самолета в полете может перемещаться при изменении
числа М, например, от 0,5 до числа М, большего 1. На рис. 1.27
* XF — хт — -т т—, где Ьл — средняя аэродинамическая хорда крыла
А А
(рис. 1.1).
66
www.vokb-la.spb.ru - Самолёт своими руками?!
показано в качестве примера изменение положения фокуса х>
в зависимости от числа М самолета с фиксированной геометрией
крыла. Там же дано положение центра тяжести хт. Видно, что
при числах М, больших 1, статическая устойчивость по перегруз-
ке ^F—хт) данного самолета в несколько раз больше, чем при
дозвуковых числах М.
У самолетов с изменяемой в полете геометрией крыла
положение фокуса и центра тяжести при данном числе М зависит и
от того, в каком положении находится крыло. Следовательно, и
величина устойчивости по перегрузке таких самолетов зависит
не только от числа М, но и от положения крыла, т. е. зависит
вообще от конфигурации самолета.
Следует отметить, что устойчивость самолета по перегрузке
зависит от величины и знака коэффициента устойчивости по
перегрузке ап- Коэффициент устойчивости по перегрузке определяется
по формуле
°n=-ta-*r) + -i-. 0-54)
где m"* — коэффициент, характеризующий демпфирующий
продольный момент самолета;
\i — 2m/pSbA —относительная плотность самолета.
Для самолетов, устойчивых по перегрузке, an<0, a для
самолетов, неустойчивых по перегрузке, а„>0. При а„ = 0 самолеты
нейтральны по перегрузке. Положение центра тяжести самолета,
при котором ап=0, называется нейтральной центровкой
и обозначается х« (см. рис. 1.26,п). Возможное изменение хя =
= х„1ЬА в зависимости от числа М показано на рис. 1.27.
4.3. ПОНЯТИЯ ПУТЕВОЙ И ПОПЕРЕЧНОЙ УСТОЙЧИВОСТИ
САМОЛЕТА
Путевая и поперечная устойчивость тесно связаны с понятием
фокуса по углу скольжения (бокового фокуса). Фокусом
самолета по углу скольжения называется точка приложения
приращения боковой аэродинамической силы, вызванного
изменением угла скольжения. Так как верхняя и нижняя части самолета,
а также его носовая и хвостовая части несимметричны, то обычно
в нормальном полете фокус самолета по углу скольжения
располагается сзади и выше центра тяжести.
Рассмотрим сначала путевую, а затем поперечную устойчивость
самолета.
Путевой статической устойчивостью самоле-
т а называется его способность при скольжении создавать момент
рыскания, направленный на устранение скольжения.
3* 67
Предположим, что на самолет, летящий прямолинейно и
равномерно без скольжения, подействовал боковой вегер так, что
произошло увеличение (приращение) угла скольжения па
величину ДЗ (рис. 1.28). Тогда в боковом фокусе самолета будет
приложено приращение боковой аэродинамической силы XZp которое,
действуя на плече а, создает приращение момента АМУ огноси-
Фокус по углу
скольжения
GCosuy
Рис. 1.28. Положение фокуса по углу скольжения (бокового
фокуса)
тельно оси Оу\. Если самолет устойчив в путевом направлении,
то это приращение момента рыскания будет стремиться устранить
скольжение. Это происходит в том случае, когда боковой фокус
самолета находится позади центра тяжести (рис. 1.28,а).
Для устойчивого самолета положительное приращение угла
скольжения Др приводит к возникновению отрицательного (по
знаку) приращения момента рыскания AMj,. Отсюда получается1
математическое условие путевой устойчивости самолета1
дм|//др<о.
Момент рыскания (или путевой момент) Му и кренящий
момент Мх представляют собой произведения коэффициентов
моментов, скоростного напора, площади S и размаха крыла /:
My = my-^Sl; Mx=mx-^-Sl.
(1.55)
Приращение путевого момента \МУ будет равно приращенше
коэффициента путевого момента Ату, помноженному на
скоростной напор, площадь крыла S и его размах /:
ДМ, = Д/« J£
SI.
(1.56)
68
www.vokb-la.spb.ru - Самолёт своими руками?!
При изменении угла скольжения прямо пропорционально
изменяется и величина Дт,,, это означает, что ее можно записать
математически в таком виде: &ту= tn^Xi.
Таким образом, условие путевой устойчивости самолета можно
записать так:
Так как произведение (pV2/2)S/ есть положительная величина,
то данное неравенство возможно только в том случае, когда т^
меньше нуля.
Неравенство /nj,<0 является математическим условием
путевой (флюгерной) устойчивости самолета. Величину т®
называют коэффициентом (иногда мерой) путевой
статической устойчивости самолета.
Так как положение бокового фокуса зависит от конфигурации
самолета, а для фиксированной конфигурации зависит от числа М,
то и коэффициент путевой устойчивости trfi зависит также от этих
факторов.
Поперечной статической устойчивостью
самолета называется его способность при скольжении создавать
кренящий момент в сторону, обратную скольжению.
Рассмотрим движение поперечно устойчивого самолета и
выведем условие поперечной статической устойчивости. Пусть в
режиме установившегося прямолинейного горизонтального полета
без скольжения на самолет подействовал боковой ветер Wz так,
что произошло возникновение положительного угла скольжения
Др. Тогда в боковом фокусе самолета возникнет приращение
боковой аэродинамической силы AZ$ (рис. 1.28,6), которое, действуя
на плече Ь, создаст приращение кренящего момента ДМ*. Это
приращение кренящего момента приведет к накренению самолета
влево на величину Ду. При наличии угла крена Ду возникнет
составляющая силы тяжести GsinAy, направленная также влево.
Неуравновешенные боковые силы и главным образом сила G sin
Добудут искривлять траекторию движения самолета влево,
уменьшая при этом величину угла скольжения Др. Это происходит в
том случае, когда боковой фокус располагается выше продольной
оси самолета.
Если боковой фокус расположен ниже продольной оси, то при
возникновении положительного угла скольжения Др накренепие
самолета произойдет на правую консоль крыла и составляющая
силы тяжести G sin Ду будет увеличивать угол скольжения. В этом
случае самолет будет статически неустойчивым в поперечном
отношении.
Из сказанного выше следует, что у статически устойчивого
самолета в поперечном направлении положительное приращение
угла скольжения Др вызывает отрицательное приращение креня-
69
щего момента &МХ. Следовательно, условие поперечной
устойчивости самолета можно математически записать в виде
неравенства
^<0, (1.57)
где AMx = &mx(?Vs/2)Sl(Amx— приращение коэффициента
кренящего момента, обусловленное
скольжением).
Теория и практика показывают, что приращение
коэффициента кренящего момента, обусловленное углом скольжения, прямо
пропорционально углу скольжения Д(3, т. е.
Атх = тх Др.
Подставив это выражение в неравенство, характеризующее
поперечную статическую устойчивость самолета, и выполнив
простые преобразования, получим условие поперечной статической
усгойчивости в простом виде:
<<0. (1.58)
Величина тх называется коэффициентом (или мерой)
поперечной статической устойчивости самолета.
Она зависит от конфигурации самолета, а также от угла атаки,
числа М полета.
Меры путевой т$ и поперечной тх устойчивости самолета
являются важными характеристиками его боковой устойчивости.
Глава 5
ОСНОВНЫЕ СВЕДЕНИЯ О ПОЛЕТЕ ВЕРТОЛЕТА
5.1. СИЛЫ, ДЕЙСТВУЮЩИЕ НА ВЕРТОЛЕТ В ПОЛЕТЕ
При полете вертолета с поступательной скоростью V на него
действуют аэродинамические силы и сила тяжести. Эти силы
действуют на несущий винт (НВ) и корпус вертолета. Рассмотрим
раздельно аэродинамические силы, создаваемые несущим винтом
и корпусом вертолета с его надстройками.
На рис. 1.29 показано, что при косой обдувке вращающегося
НВ возникает аэродинамическая сила R. В зависимости от
решаемой задачи эту силу проектируют либо на оси Ох,у,г, координат,
связанные с плоскостью вращения несущего винта, либо на оси
скоростной системы координат Oxyz. Связанная система
координат Ox,y,z, ориентирована следующим образом: ось Оу,
направлена вверх вдоль оси втулки несущего винта, ось Ох,
перпендикулярна оси Оу\ и расположена в плоскости симметрии вертолета,
ось Oz, перпендикулярна осям Ох, и Оу,. Плоскость Ox,z, назы-
70
www.vokb-la.spb.ru - Самолёт своими руками?!
вается конструктивной плоскостью вращения, она
перпендикулярна оси втулки.
Угол между вектором скорости набегающего потока и
конструктивной плоскостью вращения называется углом атаки НВ.
Угол атаки а считается отрицательным, если вектор скорости
набегающего потока и конструктивная плоскость вращения
расположены так, как показано на рис. 1.29.
Рис. 1.29. Силы, действующие на несущий винт
вертолета
Проекции полной аэродинамической силы R на оси связанной
системы координат обозначаются следующим образом. Проекция
силы R на ось Оу, называется тягой Т несущего винта.
Так как балансировочный угол 6В (угол между вектором силы R
и силой 7") сравнительно невелик, то по абсолютной величине
сила Т практически равна силе R.
Проекция силы R на ось Ох, называется продольной
силой несущего в и и т а и обозначается буквой Н.
Проекция силы R на ось Oz, называется боковой силой
несущего винта S.
Проекции сил на оси связанной системы координат
используют для анализа устойчивости и управляемости вертолета.
Для расчета летных характеристик аэродинамическую силу R
проектируют на оси скоростной системы координат Oxyz
(рис. 1.30). Ось Ох направлена по вектору скорости полета, ось Оу
перпендикулярна ей и лежит в плоскости симметрии вертолета,
ось Oz перпендикулярна осям Ох, Оу. Проекция силы R на ось Ох
называется пропульсивной силой X. Она выполняет с
точки зрения движения ту же роль, что и сила тяги двигателя на
самолете. В зависимости от положения конуса НВ по отношению
к набегающему потоку сила X может быть направлена по полету
или против него.
Проекция силы R на ось Оу называется подъемной
силой У.
71
Пропульсивная и подъемная силы выражаются через
коэффициенты:
Х= —1¥ tx^Rl (»/?B)2; (1.59)
Y = ±-ty^Rl(*RB)\ (1.60)
Рис. 1.30. Схема сил, действующих на вертолет в полете
где /jf, ty — коэффициенты сил;
а — коэффициент заполнения несущего винта,
представляющий собой отношение площадей лопастей к площади
диска НВ (o=/>/?2);
р — плотность воздуха;
RB — радиус НВ;
со — частота вращения НВ.
В формуле для пропульсивной силы знак минус поставлен
потому, что принято коэффициент tx считать отрицательным, когда
сила X больше нуля и направлена по полету. Когда сила X
меньше нуля и направлена против полета, то это означает, что
несущий винт создает сопротивление.
К аэродинамическим характеристикам НВ относится и
коэффициент крутящего момента тк, определяющий тот крутящий
момент Мк, а следовательно, и мощность W„, которые необходимо
приложить к валу несущего винта для создания необходимых
аэродинамических сил.
72
www.vokb-la.spb.ru - Самолёт своими руками?!
Крутящий момент Мк и потребная мощность N„ связаны с
коэффициентом крутящего момента соотношениями:
NB = Жк» = -f tn^Rl («/?.)•.
(1.62)
При полете вертолета с поступательной скоростью V кроме
сил Y и X, действующих на несущий винт, на корпус вертолета
действует сила лобового сопротивления Хвр, которую называют
вредным сопротивлением. Помимо этого на вертолет
действует сила тяжести G (рис. 1.30). Вредное сопротивление
создается не только корпусом, но и хвостовым винтом, шасси и
другими частями вертолета.
5.2. ГОРИЗОНТАЛЬНЫЙ ПОЛЕТ, ВИСЕНИЕ ВЕРТОЛЕТА.
ЭКСПЛУАТАЦИОННЫЙ ДИАПАЗОН СКОРОСТЕЙ ПОЛЕТА
Рассмотрим полет вертолета с постоянной скоростью. Для
такого вида движения схема сил, действующих иа вертолет,
показана на рис. 1.31.
vP^J"^
c£.2|>|ct,|
Рис. 1.31. Схема сил, действующих па вертолет в прямолинейном
горизонтальном полете с различными скоростями
Уравнения установившегося горизонтального полета вертолета
записываются в принципе так же, как и для самолета:
Х = Хп
Y=0.
(1.63)
При увеличении скорости горизонтального полета сила Y не
изменяется. Вредное же сопротивление ХВР увеличивается. Это
означает, что с увеличением скорости необходима все большая
величина пропульсивной силы X для уравновешивания лобового
сопротивления.
Отсюда следует, что при постоянной подъемной силе Y для
увеличения скорости полная аэродинамическая сила R должна
73
бее более наклоняться вперед. Это достигается увеличением угла
наклона плоскостей вращения несущего винта вперед, т. е.
увеличением абсолютной величины угла атаки, что показано на
рис. 1.31.
Отметим, что увеличение вредного сопротивления Хвр связано
непосредственно не только с ростом скорости, но и с тем, что по
мере увеличения скорости фюзеляж вертолета находится под все
большими углами атаки.
W=Eonst
проф
Рис. 1.32. Зависимости потребной мощности NE вертолета и ее
составляющих от скорости полета
Частным случаем полета вертолета является висение, т. е.
такой режим полета, когда скорость полета равна нулю. В этом
случае пропульсивная сила X равна нулю и уравнение движения
запишется просто
К=С^Г. (1.64)
Для определения характеристик режимов полета с
поступательной скоростью или при висении исследуют мощность,
потребную для реализации заданного режима.
Типовая зависимость потребной мощности N„ от скорости
на данной высоте полета при заданной массе вертолета показана
на рис. 1.32, а. При экономической скорости VBK потребная
мощность минимальна. Такое изменение потребной мощности в
зависимости от скорости полета объясняется следующим. Мощность,
подводимая к валу несущего винта, расходуется на создание
подъемной силы несущего винта — эта мощность называется
индуктивной Ni, на преодоление вредного сопротивления — мощность
Мвр, на трение вращающихся лопастей о воздух — мощность
Л^проф. Скорость полета оказывает различное влияние на закон
изменения составляющих мощности (рис. 1.32,6). На малой
скорости полета определяющей является индуктивная мощность N,.
По мере роста скорости индуктивная мощность уменьшается,
а мощность NBP, потребная для преодоления вредного
сопротивления, возрастает.
74
www.yo ..D-ia.spj.ru
.амолет своими руками.
Для определения максимальной скорости прямолинейного
горизонтального полета и изменения диапазона скоростей с
изменением высоты полета необходимо иметь зависимости потребной
и располагаемой мощностей от скорости для ряда высот полета.
Располагаемая мощность ,VP — это такая мощность, которая
может быть подведена к валу несущего винта. Она отличается
от мощности Ne, развиваемой на валу двигателя. Различие обус-
Рис. 1.33. Примерный
вид кривых потребных
Nn н располагаемых
Np мощностей верто-
(Утаэс)н^ v
ловлеио тем, что часть мощности расходуется на принудительное
охлаждение и рулевой винт. Кроме того, часть мощности теряется
за счет трения в трансмиссии и на привод дополнительных
агрегатов.
Располагаемая мощность Np и мощность, развиваемая на валу
двигателя Ne, связаны между собой соотношением
Np:=We. (1.65)
Коэффициент использования мощности £=0,75-=-0,9.
На рис. 1.33 показан примерный вид зависимостей
располагаемой и потребной мощностей от скорости для двух высот полета
Я, и Н2>Н,.
Точки пересечения кривых Np и N„, спроектированные на ось
абсцисс, определяют максимальные скорости Vmax
прямолинейного горизонтального установившегося полета. Каждой высоте
полета соответствует своя максимальная скорость.
Изменение с высотой диапазона скоростей прямолинейного
установившегося горизонтального полета показано на рис. 1.34.
Максимальная высота полета вертолета называется
динамическим потолком Яд„и. Она получается практически на
экономической скорости.
Предельно достижимая высота на нулевой скорости
называется статическим потолком (потолком висения) Нст.
Высота статического потолка вертолетов может достигать более
3000 ы.
75
Различие между статическим и динамическим потолками
обусловлено тем, что на висении избыточная мощность NK3t=Np—Nn
существенно меньше, чем при экономической скорости.
На диапазон скоростей прямолинейного горизонтального
установившегося полета накладываются ограничения. Максимальная
СКОроСТЬ ПОЛета Vmax
обычно ограничивается срывом потока с
Рис. 1.34.
Эксплуатационный диапазон скоростей и
высот полета вертолетов
лопастей несущего винта либо динамической прочностью лопастей.
Для увеличения максимальной скорости полета вертолета
применяются крылья, которые разгружают несущий винт и этим
предотвращают ранний срыв потока с лопастей. Вертолеты с крылом
могут иметь максимальную скорость, достигающую 350—400 км/ч.
У ряда вертолетов может накладываться ограничение на
минимальную скорость прямолинейного горизонтального полета
Vminflon. Это ограничение может быть вызвано неправильными
показаниями указателя скорости, вибрациями и др. Диапазон высот
и скоростей (с учетом ограничений), в котором разрешается
выполнение полетов, называется эксплуатационным.
5.3. ПОДЪЕМ, СНИЖЕНИЕ, ВЗЛЕТ И ПОСАДКА
ВЕРТОЛЕТА
Подъем и снижение вертолета. При прямолинейных подъеме
и снижении вертолета с постоянной скоростью на него действуют
силы, показанные на рис. 1.35.
Уравнения движения в установившемся прямолинейном
наклонном полете имеют вид:
X=XBP + Gsln&,
r=Gcos©; (1.66)
1/, = I/sln0.
76
I
www.vokb-la.spb.ru - Самолёт своими руками?!
При полете по прямолинейной траектории (при подъеме и
снижении) сила У должна быть равна составляющей силы тяжести
С cos 0.
Сила X при подъеме вертолета с постоянной скоростью всегда
направлена по движению, а ее величина должна быть равна
сумме лобового сопротивления Хвр и составляющей силы тяжести
С sin 0.
Рис. I 35. Схема сил, действующих на вертолет при подъеме (а)
и снижении (б)
При снижении с постоянной скоростью потребное направление
силы X зависит от соотношения сил А*вр и G sin 0. Если снижение
осуществляется по пологой траектории с большой постоянной
скоростью, то сила X направлена по движению. Это обусловлено
тем, что при малом угле наклона траектории величина С sin©
невелика и недостаточна для . уравновешивания сопротивления
Лцр.
При снижении с большими углами наклона траектории
составляющая силы тяжести G sin 0, направленная по движению, может
превысить сопротивление Хвр. В этом случае для полета с
постоянной скоростью сила X должна быть направлена назад. Ее
величина определяется из условия
С sin 6 = Л"+*„,,. (1.67)
Потребная мощность при прямолинейном подъеме вертолета
увеличивается по сравнению с прямолинейным горизонтальным
полетом по мере увеличения угла наклона траектории, а при си-
жении — уменьшается. Это объясняется тем, что при наборе
высоты потенциальная энергия вертолета увеличивается на величину
СДЯ, где АН—изменение высоты полета. На изменение
потенциальной энергии необходимо затратить работу, равную
изменению энергии. Выполняемая работа в единицу времени равна
дополнительной потребной мощности, вызванной увеличением вы-
77
соты полета. Дополнительная потребная мощность, обусловленная
ростом высоты при 6 = const, прямо пропорциональна скорости
полета.
При снижении по прямолинейной траектории составляющая
силы тяжести С sin в направлена по движению. Вследствие этого
работа, совершаемая силой G sin G при снижении, уменьшает
мощность, потребную для обеспечения полета по наклонной
траектории.
л/1
6=/S6 087 077S
WP /
-0/75
Hn
—J 7 7 7^
У у / у
N.
/ /
^>-~' у
у /
е=.-о.з5
Рис. 1.36. Влияние угла наклона траектории полета
вертолета на потребную мощность
Зависимости располагаемой Л'р и потребной N„ мощностей от
скорости полета для наклонного полета с различными углами
наклона траектории 6 показаны на рис. 1.36.
Наибольшая вертикальная скорость достигается на скорости
полета, близкой к экономической. При вертикальном подъеме,
если он возможен, вертикальная скорость меньше.
При снижении двигатель задросселирован, так как
уменьшается потребная мощность. Вертикальное снижение не может
осуществляться с большой скоростью из-за возникновения режима,
получившего название вихревого кольца.
Взлет и посадка вертолета. Отличительным свойством
вертолета по сравнению с другими летательными аппаратами является
возможность выполнения им вертикальных взлета и посадки.
Вертолет может выполнять взлет по-вертолетному н по-самолетному.
Взлет по-вертолетному производится следующим
образом. При работе двигателя на взлетном режиме увеличением шага
НВ создается тяга, несколько превышающая силу тяжести.
Вертолет отделяется от земли, поднимается вертикально, и на высоте
1,5—3 м производится контрольное висение. Оно выполняется для
проверки работы системы управления и других систем. После
этого вертолет переводится в режим разгона с набором высоты.
Взлет считается законченным, когда на высоте 25 м вертолет
достигает скорости, близкой к экономической. Выполнение такого
78
www.vokb-la.spb.ru - Самолёт своими руками?!
взлета не всегда представляется возможным, например, оно
неосуществимо при перегруженном вертолете, при повышенной
температуре наружного воздуха, приводящей к падению мощности
двигателя, и при взлете с высокогорных аэродромов. В этом
случае производится взлет по-самолетному.
Взлет по-самолетному состоит из разбега, отрыва,
разгона с набором высоты. При разбеге конус несущего винта
наклонен вперед, сила X направлена по движению. Разбег
выполняется на трех опорах. Однако возможно выполнение последней
части разбега на передней опоре (две задние опоры оторваны
от земли). Этим достигается увеличение силы X, а следовательно,
и ускорения на разбеге за счет дополнительного наклона конуса
НВ вперед. После достижения скорости отрыва вертолет
отделяется от земли и переводится в разгон с набором высоты.
Посадка может осуществляться по-вертолетному и
по-самолетному.
Прн посадке по-вертолетному снижение по
прямолинейной наклонной траектории осуществляется с постоянной
скоростью до определенной высоты, затем за счет увеличения
наклона конуса несущего вннта назад возрастает проекция X
аэродинамической силы. В результате эта скорость постепенно
уменьшается. Вертолет при этом продолжает снижаться с постоянным
углом наклона траектории. После достижения определенной
скорости увеличением шага несущего винта, а следовательно, и тяги
вертолет переводится в криволинейное движение, которое
заканчивается на высоте 2—3 м. Производится зависание, а затем
вертикальное снижение н приземление.
При наличии высоких препятствий возможно выполнение
посадки с зависанием на высоте 5—20 м и более с последующим
вертикальным снижением.
Посадка по-самолетному состоит из снижения,
выравнивания, выдерживания, приземления и пробега. Так же, как и
у самолетов, выравнивание начинается на высоте 8—12 м н
заканчивается на высоте 0,5—1 м. Приземление производится на
основные колеса шасси.
РАЗДЕЛ II
КОНСТРУКЦИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Конструкцию летательного аппарата принято делить на ряд
частей, каждая из которых объединяет элементы, общие по
своему основному назначению, условиям работы, характеру
конструкции, а также по способу контроля, обслуживания, ремонта.
К частям конструкции летательного аппарата относятся
планер, взлетно-посадочные устройства, средства, обеспечивающие
жизнедеятельность и спасение экипажа, силовые системы
(гидравлическую и воздушную), система управления летательным
аппаратом, топливная система.
Каждая из этих частей конструкции должна удовлетворять
общим требованиям: прочности и долговечности,
эксплуатационной надежности и безотказности работы, простоты эксплуатации
и ремонта, технологичности и дешевизны производства
(экономичности), стандартизации н унификации элементов, боевой
живучести.
Все эти требования должны сочетаться с требованиями
минимальной массы конструкции. Значимость последнего требовании
становится понятной, если учесть, что масса конструкции
летательного аппарата составляет порядка 1/3 его массы.
Перечисленные требования в большой степени определяют
боевую эффективность летательного аппарата, время на
подготовку его к повторному вылету и поддержание в боевой
готовности.
Глава 1
ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА
1.1. ОСНОВНЫЕ ЧАСТИ ПЛАНЕРА, ИХ НАЗНАЧЕНИЕ
И ПРЕДЪЯВЛЯЕМЫЕ К НИМ ТРЕБОВАНИЯ
Под планером самолета обычно понимают совокупность его
основных частей, находящихся в потоке воздуха: крыла,
фюзеляжа, оперения (органов управления). У вертолета к планеру
относят также несущий винт.
Планер создает аэродинамические силы и моменты,
управляющие траекторией движения самолета (вертолета), а также основ-
60
www.vokb-la.spb.ru - Самолёт своими руками?!
ную долю его аэродинамического сопротивления. В нем имеются'
объемы, защищенные от воздействия внешней среды (скоростного
потока, низкого давления, температуры), для размещения
экипажа, оборудования п грузов. Масса планера составляет около
2/3 массы всей конструкции.
Планер воспринимает и замыкает все нагрузки, действующие
на летательный аппарат. Поэтому он должен обладать
достаточной прочностью, необходимой для выполнения боевых задач.
Рассмотрим назначение его основных частей.
Основным назначением крыла является создание подъемной
силы (силы, перпендикулярной вектору скорости самолета),
обеспечивающей полет самолета по заданной траектории. Наличие
крыла является отличительной чертой самолета. У вертолета
задачу создания подъемной силы выполняет несущий винт. ЛА, у
которых одновременно используются оба указанных способа созда
имя подъемной силы, называются винтокрылами.
Дополнительно крыло используется для обеспечения попереч
иой устойчивости и управляемости самолета, а также как емкость,
база крепления стоек шассн, двигателей, вооружения.
Фюзеляж самолета (вертолета) является основной
емкостью, в которой располагаются экипаж, оборудование, грузы,
а часто также двигатели, топливо, шассн. Чем меньше
вместимость крыла, тем больше требуется вместимость фюзеляжа.
Фюзеляж выполняет роль силовой базы, к которой крепятся все
остальные части самолета (вертолета): крыло, несущий винт,
оперение, хвостовая балка, во многих случаях шасси.
Органы управления самолетом предназначены для
создания моментов, вращающих самолет вокруг его центра масс
относительно всех трех осей.
Несмотря на различия в назначении основных частей планера,
их внешних форм и размеров, они обладают большой общностью
конструкции и характера пагружения, а следовательно, и
способов их технического обслуживания.
При полете самолета части планера находятся в потоке
воздуха, поэтому их внешние формы и конструкция во многом
определяются требованиями аэродинамики.
Как правило, части планера являются тонкостенными
конструкциями, выполненными в виде обшивкн, подкрепленной рядом
силовых элементов или панелей. Но такая конструкция, создавая
закрытые внутренние объемы, затрудняет подход к оборудованию,
вооружению и другим элементам, расположенным внутри планера.
Поэтому из условия удобства эксплуатации части планера
должны иметь большое количество легкосъемных панелей, крышек
люков и т. д. Удобство производства, ремонта, транспортировки
требует расчленения конструкции планера и его основных частей
на ряд отдельных элементов. При этом должно обращаться
большое внимание на стандартизацию и особенно унификацию
отдельных элементов конструкции, в частности на унификацию
крепежных деталей.
81
Внешние формы планера определяются в основном
требованиями аэродинамики. Главной характеристикой является форма
крыла в плане (стреловидность, удлинение, сужение). Для
дозвуковых, особенно военно-транспортных самолетов, характерны
прямые крылья больших удлинений (л = 6ч-8) с относительной
толщиной профиля с=14-И6%. Такие крылья обеспечивают значения
Ктах=15 и более, большие значения су при посадочных углах
атаки (соответственно большие дальности полета и малые
взлетно-посадочные скорости), а также вместимость, достаточную для
размещения всего топлива. Но на таких крыльях уже при М=
= 0,6ч-0,7 возникает большое волновое сопротивление. На
самолетах со скоростями М=2 и более крылья стали делать
стреловидными или треугольными с углом ■&=№ и более. Но такие
крылья обладают плохими дозвуковыми аэродинамическими
характеристиками (се Пос И A max ). Поэтому на самолетах новых
поколений стали широко применять тонкие крылья малых
удлинений (Х<3), умеренной стреловидности (%=25-т-45°) или крылья
изменяемой в полете стреловидности, что дало возможность
получить одновременно хорошие сверхзвуковые и дозвуковые
аэродинамические характеристики. Для транспортных самолетов
применяют высокое нли низкое расположение крыла по высоте
фюзеляжа для обеспечения свободного внутреннего объема. При
низком расположении крыла облегчается расположение и уборка
шасси и обслуживание самолета, при высоком уменьшается
попадание пыли и грязи в двигатели, расположенные на крыле. На
самолетах других назначений применяется среднее расположение
крыла, наиболее выгодное с точки зрения аэродинамики.
Форма и размеры фюзеляжа определяются назначением
самолета, например, у военно-транспортных самолетов (вертолетов)
габариты фюзеляжей определяются перевозимыми грузами. Для
уменьшения аэродинамического сопротивления фюзеляж
стремятся делать веретенообразной формы (круглого сечения) с большим
удлинением (Хф=8-И0). Для облегчения погрузки-выгрузки и
воздушного десантирования хвостовая часть фюзеляжа часто
делается срезанной снизу. V самолетов фронтовой авиации на
форму фюзеляжа влияет число и место расположения двигателей.
При двух двигателях в фюзеляже, боковых воздухозаборниках
увеличивается поперечный размер средней и хвостовой частей
фюзеляжа фронтовых самолетов, характерной формой сечения
которых становится широкий прямоугольник.
Формы планера самолета существенно зависят от типа и
схемы органов управления, используемых на самолете. Наиболее
распространенной схемой органов управления являлась схема
с вертикальным и горизонтальным хвостовыми оперениями
(рис. 2.1,а). Для уменьшения площади хвостового оперения (а
следовательно, массы и создаваемого сопротивления) его стремятся
вынести возможно дальше от центра масс самолета. Это, в свою
очередь, заставляет удлинять хвостовую часть фюзеляжа и даже
устанавливать горизонтальное оперение на киль. ЛА с такими ор-
82
www.vokb-la.spb.ru - Самолёт своими руками?!
^Ь^
ганами управления часто называют самолетом
нормальной схемы. Схему самолета без горизонтального оперения
называют «б есх воет кой» (рис. 2.1,6). Горизонтальное оперение
может располагаться и впереди крыла, которое при этом
сдвигается несколько назад. Такая схема самолета называется
«уткой» (рис. 2.1,в). При
большой относительной ширине
хвостовой части фюзеляжа
вертикальное оперение делают двух-
килевым, вынося его нз зоны
затенения на борта фюзеляжа.
Внешние формы вертолета
в наибольшей степени
определяются числом и
расположением несущих винтов и
используемой системой управления.
Элементы конструкции
любой части планера могут быть
разделены на ряд характерных
групп:
элементы, основной задачей
которых является создание
аэродинамических форм и
защита внутренних объемов
планера от воздействия внешней
среды; основным таким
элементом является обшивка
крыла, фюзеляжа, оперения;
элементы, обеспечивающие
местную прочность и
жесткость конструкции: несиловые
шпангоуты и нервюры,
стрингеры в лонжеронных
конструкциях, основной задачей которых является подкрепить обшивку и
уменьшить ее деформации;
элементы, предназначенные для восприятия поперечной и
нормальной сил, изшбающего и крутящего моментов, действующих
в сечениях основных частей планера: обшивка и лонжероны,
силовые нервюры и шпангоуты, стрингеры в моноблочной
конструкции. Совокупность этих элементов называют силовой
конструкцией планера (крыла, фюзеляжа и т. д.).
Силовая конструкция является основой всего планера,
определяет его прочность, способность самолета в целом
выдерживать те илн иные нагрузки в полете и прн движении по
аэродрому, значения допустимых эксплуатационных перегрузок и срок
службы самолета. Разрушение этих элементов приводит к
резкому снижению прочности и даже разрушению всего планера
в целом. Поэтому знание силовой конструкции планера н ее
прочностных характеристик необходимо для правильной оценки
Рис. 2.1. Летательные аппараты с
различным расположением
аэродинамических органов управления
83
потери прочности самолета в целом при тех или иных боевых
повреждениях, характера требуемого ремонта, допустимости
дальнейшей эксплуатации при появлении отдельных трещин или
повреждений конструкции, для умения выделить элементы,
подлежащие наиболее тщательному осмотру и контролю.
1.2. НОРМИРОВАНИЕ ПРОЧНОСТИ КОНСТРУКЦИИ
В процессе эксплуатации на летательный аппарат в целом и
на его отдельные части могут действовать различные нагрузки
как по направлению и величине, так и по характеру приложения.
Конструкция аппарата должна быть достаточно прочна, чтобы
эти нагрузки не вызывали не только разрушения отдельных
элементов, но и остаточных деформаций, препятствующих
дальнейшей нормальной его эксплуатации.
Вместе с тем излишняя прочность конструкции, не
требующаяся для успешного выполнения задач, стоящих перед ЛА,
вредна, так как она влечет за собой утяжеление конструкции,
а следовательно, уменьшение массы топлива или полезной
нагрузки, которые может взять аппарат при неизменной его массе,
т. е. снижает эффективность летательного аппарата. Поэтому
запас прочности конструкции (по сравнению с необходимой)
должен быть минимальным. Величины нагрузок, действующих в
разные моменты времени на весь ЛА в целом или его части, могут
быть различными. Наибольшие значения перегрузок (или
нагрузок) , допустимые в эксплуатации, называют
эксплуатационными перегрузками (нагрузками) и обозначают п3 (Р*).
Для каждого летательного аппарата или его части они
указываются в инструкциях н технических описаниях. Если по какой-
либо причине реально возникшая перегрузка (нагрузка)
оказалась больше указанной п3 (Р3), то ЛА должен быть отстранен от
полета и подвергнут тщательному осмотру и нивелировке.
Задание значений эксплуатационных перегрузок производится
на основе общегосударственных документов — норм прочности.
Они устанавливаются на базе последних достижений науки и
всего имеющегося опыта эксплуатации и боевого применения
соответствующих ЛА.
Расчет прочности конструкции производится на разрушающие
перегрузки (нагрузки) п», при которых она ломается. Эти
перегрузки принимаются большими, чем эксплуатационные: лр=/лэ,
где / — коэффициент безопасности. Для всего аппарата в целом
и для большинства его частей /=1,5. Перегрузки, действующие
на ЛА и его отдельные части, могут являться результатом
сознательного действия летчика: например при искривлении
траектории (выполнении маневра), разгоне и т. д., а также результатом
совершаемых летчиком ошибок при пилотировании (например,
посадка с большой составляющей вертикальной или боковой
скорости) .
84
www.vokb-la.spb.ru - Самолёт своими руками?!
Первые из указанных перегрузок, называемые маневренными,
зависят в основном от назначения ЛА, от маневров, необходимых
для выполнения боевого задания. Вторые определяются
квалификацией летного состава, его отношением к полету. Для более
точного задания эксплуатационной перегрузки (в полете)
самолета в целом п3тах все самолеты делятся на три класса:
маневренные, ограниченно маневренные и неманевренные. Для маневрен-
Рис. 2.2. Воздействие на крыло порыва
воздуха
н ы х самолетов перегрузка, с которой выполняется боевой маневр,
ограничивается физиологическими возможностями экипажа (п3тш
задается порядка 8). Для ограниченно маневренных она
принимается меньшей. Для неманевренных самолетов
величину п3тт принимают возможно меньшей — порядка 2,5,
исходя из той, которая может возникнуть независимо от желания
летчика при действии на самолет в полете вертикальных порывов
воздуха. Если самолет, летящий горизонтально со скоростью V,
попадает в зону восходящего потока воздуха («болтанку») со
скоростью W, то изменяется направление суммарной скорости
V'^V воздуха, обтекающего крыло, на угол Да = -гг (рис. 2.2).
При этом появляется прирост подъемной силы крыла на
величину:
ДГ = cjAa J— 5= -i-cjp WVS
и перегрузка самолета
«6олт=1+ IfyWV-^-.
Величина перегрузки, называемой «болтаночной», зависит от
скорости восходящего потока и скорости полета самолета.
Предельная величина W, на которую рассчитывается самолет, равна
15 м/с. Поскольку в грозовой облачности возможны порывы со
значительно большими скоростями, полет в ней недопустим.
Нагружение ряда частей планера (рулевых поверхностей,
фонарей и др.) определяется в основном величиной скоростного
напора, максимально допустимое значение которого для каждого
аппарата лимитируется ограничением максимальной приборной
скорости горизонтального полета.
85
Помимо разрушения от одноразового приложения расчетной
нагрузки элементы конструкции могут со временем разрушаться
и при многократном действии значительно меньших нагрузок (так
называемое усталостное разрушение). Чтобы предотвратить
усталостное разрушение, для каждой детали устанавливается
определенный срок эксплуатации в часах полета или количестве
посадок, при выработке которого деталь (часть аппарата) должна
заменяться новой вне зависимости от отсутствия каких-либо
отклонений от ее начального состояния. Дальнейшее использование
элементов конструкции, выработавших усталостный ресурс,
недопустимо.
1.3. НАЗНАЧЕНИЕ, РАБОТА ОСНОВНЫХ ЭЛЕМЕНТОВ
КРЫЛА И ПРЕДЪЯВЛЯЕМЫЕ К НИМ ТРЕБОВАНИЯ
Крыло крепится непосредственно к фюзеляжу и может быть
разбито на три характерные части: две консоли крыла
(находящиеся вне фюзеляжа) и
центральную часть,
выполняемую часто
совместно с фюзеляжем н
называемую центропланом.
Для удобства
производства, транспортировки и
ремонта самолета
консоли делают отъемными.
Схематически крыло
может быть
представлено как балка на двух
опорах, которыми
являются узлы крепления
крыла к фюзеляжу, а
каждая его консоль как
консольная балка,
закрепленная в борт
фюзеляжа (рис. 2.3).
Основной нагрузкой,
действующей на крыло,
является
распределенная
аэродинамическая нагрузка в
направлении,
перпендикулярном плоскости крыла.
Приближенно ее можно
принять равной подъемной силе крыла Укр- В горизонтальном
полете в среднем на каждый квадратный метр площади крыла
действует подъемная сила, равнаяР0 = Ро'О4 =-с-, которую
называют удельной нагрузкой на крыло. Для маневренных
Рис,
Схема нагружения
крыла
86
www.voib-la.spb.ru - .амолет своими руками.'!
самолетов р0= (3-=-4) • 103 Па, а для тяжелых неманеврениых
самолетов р0 = (5-J-6) • 103 Па. Расчет на прочность как всего
самолета или вертолета в целом, так и их отдельных частей
производится на случай возникновения разрушающих перегрузок пр.
В этом случае нагрузка раэр="рРо и составляет для маневренных
самолетов (3-н5) -10* Па. Нагрузка <7аэр, приходящаяся на
участок крыла шириной Д/=1 см (рис. 2.3), называется погонной
аэродинамической нагрузкой. При полете с расчетной
перегрузкой <7аэр=раэр6 • 1 =nPGb/S, где b — хорда крыла в данном
сечении.
Суммарная подъехЕная сила, действующая при этом на крыло,
равна: J^Kp = npG. "Самолет под действием силы К£р
приобретает ускорение уу = Y%f/Gg = n?g. Ускорение jy вызывает
появление инерционной силы от массы конструкции крыла (в виде
распределенной нагрузки) <7кр = 0,1<7аэр и масс агрегатов и грузов,
установленных на крыле, /5arp = npGarp. Под действием указанных
нагрузок крыло изгибается и в каждом его сечении Zo возникают
поперечная сила Q и изгибающий момент М. Напомним, что
i
Q = J (?аэр — 0кр) dz — S ЛгР
(сумме всех сил, действующих на часть крыла до сечения z0), a
М = J" (?аэр - ?„р) Zdz — S Arp (Zarp — Z0)
■г»
(моменту этих сил относительно сечения го).
Инерционные нагрузки qKP и Рагр всегда действуют в сторону,
противоположную аэродинамической нагрузке qaat>, и уменьшают
изгибающий момент и поперечную силу крыла.
По хорде крыла нагрузки <7аэр, <7кР, Рггр приложены
соответственно в точках: центре давления, центре масс конструкции
крыла, центре масс агрегатов. В сечении крыла имеется только
одна точка, называемая центром жесткости, при приложении
силы к которой крыло не будет закручиваться (а только
изгибаться). Поэтому указанные нагрузки будут создавать крутящий
момент в сечении z0, равный
(
*"кр ~ J (^аэр-^ц.д. ^кр-^ц. м.) "'^ ■£/ ^агр-^агр>
*о
Для получения наглядной картины изменения М, Q, Мкр вдоль
размаха крыла строят их эпюры. Характерные виды эпюр для
крыла многомоторного самолета показаны на рис. 2.4. Как
правило, наибольших значений М, Q, Мкр достигают в корневой части
крыла. Особенно резко на этом участке возрастает М. В сечениях,
в которых располагаются сосредоточенные грузы, значения Q и
Мкр уменьшаются скачком.
87
Основные силовые конструкции крыльев. Для восприятия
изгибающего н крутящего моментов н поперечной силы,
действующих в сечениях крыла, в его конструкции имеются специальные
силовые элементы. Они должны располагаться вдоль всего крыла,
для того чтобы передать нагрузки, действующие на крыло, на
1У
ШЩПШПЙ
^Ь^
ТТТТ^ТТттт-Tm-r^-
ГМРТгпт
Рис. 2.4. Эпюры М, Q и М„р по
размаху крыла
Рис.
2.5. Нагружение элементов
лонжерона крыла
узлы крепления его к фюзеляжу. Совокупность этих элементов
называют силовой конструкцией или схемой крыла.
Напомним, что разрушение элементов силовой конструкции
может сделать крыло неспособным воспринимать действующие на
него нагрузки, т. е. сделать невозможным полет самолета. В
зависимости от того, какими элементами воспринимается
изгибающий момент, силовые конструкции разделяются на лонжеронные
и моноблочные.
В лонжеронных крыльях изгибающий момент М
Воспринимается специальными продольными
балками—лонжеронами, моментно (в двух точках) крепящимися к фюзеляжу
(центроплану). Наиболее выгодной формой сечения балки, работающей
на изгиб, является двутавр, поэтому лонжерон делается в виде
двух мощных полок и тонкой стенки (рис. 2.5). При полете с
положительной перегрузкой верхняя полка от действия М сжимает-
68
www.vokb-la.spb.ru - Самолёт своими руками?!
ся а нижняя полка растягивается силами S=M/H (И —
расстояние между ц. м. полок лонжерона). В полках появляются
сжимающие и растягивающие напряжения a=S/F„, где Fn — площадь
сечения рассматриваемой полки. Поперечная сила воспринимается
стенкой лонжерона, работающей на сдвнг. В ней возникают
касательные напряжения t=<7ct/6Ct = Q/W6ct, где 6Ст — толщина
стенки. За расчетные значения напряжений для элементов лонжерона
принимаются: для нижней растянутой полки орасч=ое (времен-
Рис. 2.6. Восприятие изгибающего момента
моноблочным крылом
ному сопротивлению), для верхней сжатой полки оРасч=окр и для
стенки Трасч=тКр (критическим напряжениям потери устойчивости
на сжатие и сдвиг).
Лонжеронные крылья большей частью применяются на
относительно легких самолетах. Лонжерон обычно делаетси из
дюралюминия, но иногда со стальными полками. Для увеличения
устойчивости на сдвиг стенка подкрепляется вертикальными
стойками.
Наиболее распространены однолонжеронные крылья, но
бывают двух- и миоголоЕ1жеронные. В однолонжеронном крыле
лонжерон устанавливается в зоне наибольшей высоты профиля на
25—30% хорды от Еюска крыла. Центр жесткости такого крыла
располагается на лонжероне. В двухлонжеронных крыльях задний
лонжерон располагают на 60—65% хорды. Он воспринимает
обычно всего 20—25% от изгибающего момента и поперечной силы.
Крылья малых удлинений часто делают мпоголонжеропными.
Повреждение или разрушение лонжеронов крыла резко
уменьшает его прочность и жесткость иа изгиб, особенно повреждение
в корневой части крыла. Это требует тщательного контроля
состояния лонжеронов (особенно полок). При обнаружении
усталостных трещин в лонжероне самолет не может быть выпущен
в полет.
В моноблочных крыльях изгибающий момент М
воспринимается верхней и нижней панелями крыла (рис. 2.6),
которые работают на сжатие и растяжение силами S — MIHcp. Панели
занимают большую часть крыла по хорде (за исключением носка
S9
Рис.
2.7. Конструкции панелей
моноблочных крыльев
и хвостовой части, занятой механизацией). Участок крыла,
занятый силовыми панелями, называют моноблоком. Наиболее
распространена была панель в виде обшивкн, подкрепленной
продольными силовыми элементами —стрингерами (рис. 2.7,а),
которые увеличивали площадь поперечного сечения панели и, главное,
повышали критические напряжения местной потери устойчивости
обшивки сжатой панели, величина которых окр = 3,6£/(6/6)2
зависит как от толщины обшивки 8,
так и от расстояния b между
подкрепляющими элементами (Е —
модуль упругости материала).
Форма стрингеров может быть
весьма разнообразна: при тонкой
обшивке наиболее часто
применяют стрингеры уголкового
сечения, при толстой — стрингеры
закрытого профиля. Чем толще
обшивка и мощнее стрингеры, тем
средние напряжения сср, которые
может выдержать панель иа
сжатие, ближе к св, тем меньше
требуется площадь сечения панели
fiian=S/ccP, тем выгоднее крыло
в массовом отношении. В
последние годы все шире внедряются панели новых конструкций: цельно-
штампованные или фрезерованные с большими значениями сил S
(с большой толщиной панели) (рис. 2.7,6) и сотовой конструкции
(рис. 2.7, е) с малыми силами S и тонкой обшивкой. Особенно
широко сотовые конструкции используются в случае стальной
обшивки. Приклеенная или припаянная к сотам обшивка практически
не теряет местной устойчивости. Но обе указанные конструкции
панелей технологически достаточно сложны.
Для того чтобы панель могла работать на растяжение —
сжатие, крепление консолей крыла к центроплану должею происходить
по всей ширине напели. Обычно для этой цели используют
соединения с болтами, работающими на растяжение (рис. 2.8).
Разрушение отдельных участков силовых панелей (особенно
стрингеров) может привести к значительному снижению прочности
крыла на изгнб, а следовательно, и к уменьшению допустимых
в эксплуатации перегрузок. Поэтому состояние панелей должно
тщательно контролироваться, особенно нижней, работающей
обычно в полете на растяжение. Необходимо в первую очередь
следить за появлением усталостных трещин. В сотовых конструкциях
необходимо вовремя обнаружить отклейку обшивки от сот и
следить за герметизацией сотовых панелей, чтобы внутрь не
проникала влага, вызывая коррозию н способствуя при замерзавши
отрыву обшивки.
Поперечная сила в моноблочных крыльях, как и в лонжероп-
ных, воспринимается вертикальными стенками.
90
www.vokb-la.spb.ru - Самолёт своими руками?!
Крутящий момент, действующий в сечении крыла,
воспринимается замкнутым контуром, образованным обшивкой и стеикой
крыла. При этом в обшивке (и других элементах контура)
возникают касательные напряжения t=A1kp/co6o6ui, где ю — двойная
площадь, ограниченная замкнутым контуром. Для лонжеронного
крыла за площадь контура принимают всю площадь сечения
крыла до задней стенки, для моноблочного крыла — площадь мопо-
Рис. 2.8. Фитинговое соедине- Рис. 2.9. Работа бортовой нервюры
иие крыла
блока, так как носок обычно выполняется со значительно меньшей
толщиной обшивки и жесткость его на кручение относительно
мала. Такой способ передачи крутящего момента наиболее
выгоден в массовом и жесткостном отношениях.
В сечениях, где замкнутый контур заканчивается в месте
крепления лонжеронного крыла к центроплану, начале выреза под
шасси и т. д., устанавливается силовая нервюра, называемая
бортовой, которая снимает с замкнутого контура обшивки поток
касательных усилий <7м (снимает крутящий момент М№) и передает
его в виде пары сосредоточенных сил N на узлы крепления
нервюры (рис. 2.9). Далее, на участке крыла, где отсутствует
замкнутый контур, AfKp передается изгибом лоЕГжеронов.
Повреждение обшивки в крыле любой силовой схемы, так же как и бортовой
нервюры, вызывает уменьшение прочности н жесткости крыла на
кручение. Последнее обстоятельство особенно проявляется при
полетах на больших скоростях, когда могут возникнуть такие
явления, как флаттер, реверс элеронов и др.
Кроме продольного силового набора (лонжеронов,
стрингеров, стенок) в крыле имеется также поперечный
набор, состоящий из нервюр. Нервюры предназначены для
создания и поддержания профиля крыла. Кроме того, они являются
опорами для стрингеров и повышают критические напряжения
всей панели в целом. Тонкостенная конструкция не способна
воспринимать сосредоточенные нагрузки (силы и моменты).
Например, нельзя приложить большую силу, просто вставив болт в
отверстие тонкого листа. Поэтому во всех сечениях крыла, где
к нему прикладываются сосредоточенные нагрузки в вертикаль-
91
ной плоскости (крепятся стойки шасси, бомбодержатели и т. д.),
устанавливаются силовые нервюры. Они передают эти
нагрузки на стенки лонжеронов и обшивку в виде потоков
касательных усилий. Силовые нервюры, как правило, имеют мощные
стенки и полки.
Рис. 2.10. Узлы крепления
Узлы крепления консолей крыла к центроплану должны
обеспечить отстыковку консолей для облегчения транспортировки и
ремонта самолета. Узлы выполняются в виде болтовых
соединений (рис. 2.10). По характеру передаваемой нагрузки узлы можно
разделить на шарнирные (рис. 2.10,6), передающие только силу,
и моментные, передающие помимо силы еще момент (рис. 2.10,а).
Моментный узел обычно имеет две точки крепления, т. е.
фактически представляет соединение воедино двух шарнирных узлов.
Чем больше разнос точек крепления в узле, тем меньшими по
величине силами S=M/H может быть передан момент М. Узлы
могут быть рассчитаны на передачу силы (или момента) в одном
или нескольких направлениях. Моментные узлы крепления
устанавливаются на лонжеронах, а шарнирные на стрингерах и
стенках.
Узлы долже|Ы быть связаны с теми элементами силовой
конструкции, которые воспринимают передаваемую нагрузку. Так,
моментный узел должен обязательно соединяться с полками
лонжерона, а шарнирный — со стенкой. По своей конструкции узлы
можно разделить на узлы в виде проушин с болтами, работаю-
92
www.vokb-la.spb.ru - Самолёт своими руками?!
щими на срез, и в виде фитингов с болтами, работающими на
растяжение. Моментный узел может выполняться с одним
вертикально расположенным болтом — осью с горизонтально
расположенными проушинами. Такой конструкции делаются узлы поворотной
части крыла (рис. 2.11).
Рис. 2.11. Узел крепления поворотной
консоли крыла
Учитывая большую ответственность узловых соединений, а
также неравномерность нагружения, возможный нзнос, силу, на
которую рассчитывается узловое соединение, принимают на 25%
больше расчетвюй силы соединяемых элементов.
В фитинговых соединениях диаметр болта рассчитывается нз
условий разрыва силой S, действующей на соединение: 1иЩА= SjoB,
где ев — временное сопротивление материала болта.
В соединениях посредством проушин диаметр болта
рассчитывается из условий среза: ^dg/4 = 5/твиср, где ■с„ = 0,65зв, ncP —
число плоскостей среза (рис. 2.10), и смятия: ed6= Sjacvncu, где
°см = (1.1 -г-1.2) зв, /гсм—число плоскостей смятия. Проушина
рассчитывается на срез, разрыв и смятие:
2ес =
— ; 2еЬ-.
е<4 = -
В тех случаях, когда материал проушины более податлив
смятию, чем материал болта, в проушину вставляется втулка. Опыт
показывает, что разрушение узловых соединений происходит в
основном в результате действия повторных нагрузок. Поэтому в
эксплуатации должен осуществляться строгий контроль за
состоянием соединений и в первую очередь за теми параметрами, от
которых зависит усталостная прочность. Для фитинговых
соединений это прежде всего величина затяжки болтов. Отсутствие или
уменьшение предварительной затяжки может во много раз
уменьшить прочность соединения на повторные нагрузки — уменьшить
число нагружеиий, которое может выдержать соединение до раз-
Рушения.
93
1.4. НАЗНАЧЕНИЕ, КОНСТРУКЦИЯ И РАБОТА ЛОПАСТЕЙ
НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА
Несущий винт вертолета предназначен для создания
подъемной силы на всех режимах полета, а также силы,
обеспечивающей поступательное перемещение вертолета в заданном
направлении. Кроме того, аэродинамическая сила, создаваемая несущим
винтом, используется для управления вертолетом.
Рис. 2.12. Конструкция лопасти несущего
виита
В процессе эксплуатации на лопасти несущего винта помимо
аэродинамической силы (подъемной силы и силы сопротивления)
действуют большие массовые силы (сила тяжести, центробежная
сила, сила Кориолиса), а также инерционные силы, возникающие
при колебаниях лопасти относительно горизонтального и
вертикального шарниров втулки.
Указанные силы вызывают в сечениях лопасти большую
нормальную силу, растягивающую лопасть, а также изгибающий и
крутящий моменты, поперечную силу.
Конструкция НВ. Несущий винт состоит из втулки и
нескольких лопастей, число которых колеблется на различных вертолетах
от двух до шести. Наиболее распространен винт с шарнирным
креплением лопастн к втулке. Шарнирное крепление производится
относительно всех трех осей: горизонтальной, вертикальной,
осевой. Конструктивно все три шарнира являются элементами
втулки НВ.
Лопасти вертолетов делаются цельнометаллическими, но
появляются и лопасти из композиционных материалов, в частности
из стеклопластика. Самая распространенная конструкция
лопастн показана на рис. 2.12. Передняя часть профиля лопасти
представляет собой силовой элемент — лонжерон, воспринимающий
все силовые факторы, действующие в сечениях лопасти. Лонжерон
делается из алюминиевого сплава. Для повышения усталостной
прочности лопасти проводится поверхностное ее упрочнение.
Особенностями нагружения лопасти являются: относительно
большое значение крутящего момента, что заставляет делать
лонжерон замкнутого сечения с большой толщиной стенки; большие
растягивающие напряжения в сечениях лопасти, определяемые
центробежной силой; относительно малый изгибающий момент,
наибольшей величины достигающий около середины размаха
лопасти; большая амплитуда колебания напряжений в сечениях
лопасти за один оборот (большие периодические силы). Поэтому
94
www.vokb-la.spb.ru - Самолёт своими руками?!
основное значение для лопасти винта представляет усталостная
прочность. Для своевременного предупреждения о выработке
усталостного ресурса — появления усталостной трещины —
внутренняя полость лонжерона герметизируется и наддувается. При
появлении усталостной трещины давление стравливается, на что
указывает специальный сигнализатор. Лопасть в этом случае
подлежит снятию.
Хвостовая часть профиля лопасти выполняется из отдельных
отсеков. Она является несиловой частью и передает действующую
на нее аэродинамическую нагрузку на лонжерон. Конструктивно
отсеки представляют собой тонкую обшивку (0,3—0,4 мм),
приклеенную к сотовому заполнителю. Каждый отсек ограничен
двумя стенками-нервюрами. Поскольку хвостовые отсеки не
являются силовыми, то допускается непроклейка отдельных
участков обшивкн. При увеличении непроклейки отсек заменить.
Каждая лопасть соединяется с втулкой несущего винта моментным
узлом — гребенчатым стальным наконечником — с помощью двух
болтов.
1.5. ОРГАНЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ
АППАРАТАМИ, ИХ КОНСТРУКЦИЯ И РАБОТА
Элеронами называются хвостовые участки крыла,
отклоняющиеся по желанию летчика одновременно в разные стороны на
обеих консолях (рис. 2.13). За счет возникающих при этом изме-
Рис. 2.13. Расположение и работа элеронов
нений подъемных сил консолей ДУ появляется кренящий момент
Mx=AYlg. Элероны являлись до последнего времени основным
средством управления самолетом в поперечном направлении
(относительно оси Ох).
Величина ДУ зависит от площади элерона и угла его
отклонения р. Она получается примерно пропорциональной р. Но при
больших углах отклонения элерона вниз на крыле, имеющем
большой угол атаки а (иа режимах полета, близких к посадочным),
95
на участке крыла с элероном может произойти срыв потока. При
этом величина ДУ уменьшится н уменьшится кренящий момент.
Для того чтобы этого избежать, на крыле устанавливают
предкрылки.
Изменение подъемной силы ДУ при отклонении элерона
происходит как за счет изменения подъемной силы самого элерона ДУЭ,
так я за счет изменения подъемной силы впереди расположенного
Рис. 2.14. Схема нагружения элерона
участка крыла ДУкр. Если же местная скорость обтекания крыла
перед элероном достигает значения скорости звука, то
отклонение элерона не вызовет изменения обтекания впереди
расположенной части крыла и сила ДУкр не появится, что приведет к
уменьшению эффективности элерона.
Элерон нагружается распределенной аэродинамической
нагрузкой, достигающей максимального значения при отклонении его
при максимальной приборной скорости. Равнодействующая
аэродинамической нагрузки ДУЭ располагается примерно на 35—40%
хорды элерона и создает момент относительно оси вращения,
называемый шарнирным моментом (ЛГ1И=ДУяс). Для его
уменьшения ось вращения элерона смещают назад.
Элерон большей частью делают разрезным по длине. Каждая
нз его частей представляет собой балку на двух опорах (рис. 2.14).
Под действием аэродинамической нагрузки в сечениях элерона
возникают изгибающий и крутящий моменты и поперечная сила.
Для восприятия этих силовых факторов конструкция элерона
делается аналогичной конструкции однолонжеронного крыла.
Наиболее нагруженными сечениями, которые требуют основного
внимании при осмотрах, являются сечения вблизи узлов подвески.
Горизонтальное и вертикальное хвостовые оперения
обеспечивают управление самолетом относительно поперечной и
вертикальной осей (Oz и Оу). На дозвуковых самолетах каждое из
оперений состоит из неподвижной и подвижной частей.
Неподвижная часть горизонтального оперения называется
стабилизатором, а вертикального оперения — килем. Их задача сделать
самолет устойчивым относительно вертикальной и поперечной
осей, тем самым облегчить управление самолетом. Подвижные
95
www.vokb-la.spb.ru - Самолёт своими руками?!
части оперения называются рулем высоты и рулем
направления и создают управляющие моменты относительно
осей Ог и Оу. В установившемся полете на хвостовое оперение
действуют нагрузки, уравновешивающие моменты, создаваемые
подъемной силой крыла и аэродинамической нагрузкой
фюзеляжа.
Рис. 2.15. Уравновешивающая нагрузка на
горизонтальное оперение
Например, нагрузка на горизонтальное оперение (рис. 2.15)
ру? = Ккрй
r° ir.o •
Отклонение рулей должно создать дополнительную маневренную
нагрузку и соответственно угловое ускорение самолета ег =
= ^*™Х4.о/Лг. где 1гг — момент инерции самолета
относительно оси Ог. В результате углового ускорения появляются
угловая скорость (яг и поворот самолета Д0, что приводит к изменению
угла атаки на Да, подъемной силы крыла и искривлению
траектории полета.
Горизонтальное и вертикальное оперения по характеру
работы и нагруженню аналогичны крылу с элероном по всему
размаху. Поэтому конструкция и силовые схемы неподвижных частей
такие же, как крыла, а подвижных частей, —как элерона.
Некоторое отличие состоит в том, что рули не делают разрезными по
длине.
Триммером называется небольшая поверхность,
устанавливаемая в хвостовой части руля (элерона), которая по желанию
летчика может отклоняться в ту или иную сторону относительно руля
и оставаться зафиксированной в отклоненном положении.
Образующаяся при этом подъемная сила триммера Утр отклоняет руль
на некоторый угол в сторону, обратную отклонению триммера.
Об этом необходимо помнить при подсоединении проводки
управления триммером. Триммер дает возможность летчику снять
нагрузку с рычага управления при каком-либо режиме полета или
отклонить руль (элерон), не прикладывая усилий к рычагу
управления. Триммер применяется только при прямом управлении. При
наличии гидроусилителя его роль выполняет специальное
устройство в системе управления (механизм триммерного эффекта).
4-229
V7
В эксплуатации необходимо следить за наличием люфтов в
подвеске триммера, так как они могут вызвать появление флаттера.
Управляемый стабилизатор. Эффективность рулей, как и
элеронов, падает при сверхзвуковом обтекании, что особенно
сказывается на возможности управления самолетом в продольном
направлении, и поэтому на сверхзвуковых самолетах делают
горизонтальное оперение полностью отклоняющимся — управляемый
стабилизатор. Это оказалось возможным с появлением
гидроусилителя, воспринимающего
нагрузку, действующую на
управляемый стабилизатор.
Конструктивно управляемый
стабилизатор делается как
однолонжеропиое крыло.
Если крепление
стабилизатора производится только
по лонжерону, то он
передает также и крутящий
момент. Поэтому его делают в
Рис. 2.16. Конструкция управляемого ста- виде трубы (рис. 2.16).
бнлнзатора Дифференциальный
стабилизатор. Элероны,
занимая часть задней кромки крыла, уменьшают размах взлетно-
посадочной механизации. При большой стреловидности задней
кромки элероны малоэффективны. Поэтому от них отказываются,
изыскивая другие способы создания кренящего момента Мх, на-
Рис 2.17. Иитерцептор
пример управляемый стабилизатор, у которого помимо
совместного отклонения обеих половин по желанию летчика может
происходить также отклонение их в разных направлениях (вверх —
вниз), что создает кренящий момент. Такой управляемый
стабилизатор называют дифференциальным.
При малых скоростях полета из-за ограниченности угла
рассогласования отклонения половин стабилизатора и плеча
относительно продольной оси величина кренящего момента может быть
недостаточной для управления самолетом. Поэтому для создания
кренящего момента применяются также интерцепторы.
Интерцептором называют пластинку, расположенную на
верхней поверхности крыла (рис. 2.17), которая может по желанию
летчика отклоняться вверх. При этом происходит срыв потока,
подъемная сила соответствующего участка крыла падает и появ-
W
www.vokb-la.spb.ru - Самолёт своими руками?!
ляется крепящий момент. Надо помнить, что при этом уменьшается
и обшая подъемная сила крыла. Обратим еще раз внимание на
то, что иитерцептор поднимается только на одной нз консолей
крыла. В ряде случаев интерцепторы используют также при
пробеге самолета для увеличения аэродинамического сопротивления
и уменьшения подъемной силы. В этом случае одновременно
поднимают интерцепторы на обеих консолях. Такие интерцепторы
иногда называют спойлерами.
1.6. ФЮЗЕЛЯЖ ЛЕТАТЕЛЬНОГО АППАРАТА,
ЕГО КОНСТРУКЦИЯ И РАБОТА
Масса фюзеляжа современного самолета может достигать 40%
и более массы планера. Столь же велика и доля
аэродинамического сопротивления, создаваемого фюзеляжем. Желание не уве-
Узлы крыла мУкр
Рис. 2.18. Схема нагружсиия фюзеляжа
личивать объем фюзеляжа (его массу и сопротивление),
облегчить процесс сброса боевой нагрузки заставляет выносить
большую часть боевой нагрузки на внешние подвески.
Основными нагрузками фюзеляжа являются сосредоточенные
силы, приложенные в узлах крепления грузов, шасси, оперения
и т. д. (рис. 2.18). Аэродинамическая нагрузка, действующая
непосредственно на фюзеляж, относительно невелика и определяет
в основном его местную прочность. Для определения М, Q, Мкр,
вызываемых этими нагрузками, фюзеляж представляется в виде
консольной балки, опорами которой являются узлы крепления
крыла.
Хвостовая часть самолета наиболее нагружена в полете от
хвостового оперения и расположенных в ней грузов. Основной
нагрузкой носовой части фюзеляжа является нагрузка от стойки
шасси. Под действием указанных нагрузок в сечениях фюзеляжа
возникают крутящий момент, изгибающие моменты и поперечные
силы как в горизонтальной, так и в вертикальной плоскостях.
Инерционные нагрузки Рагр=/гОагр большей частью направлены
4*
99
в ту же сторону, что и нагрузки на хвостовое оперенне, поэтому
грузы, размещаемые в фюзеляже, увеличивают его нагружение.
Наиболее нагруженным является участок фюзеляжа вблизи
крепления крыла.
Конструкция фюзеляжа принципиально аналогична
конструкции крыла. Если изгибающие моменты воспринимаются
специальными продольными элементами, называемыми лонжеронами
Рис. 2.19. Нагружеиие элементов лонжерониого и моноблочного фюзеляжа
прн дейстиии изгибающего момента
(рис. 2.19,а), то силовая конструкция фюзеляжа называется лон-
жеронной, если подкрепленной обшивкой, то — моноблочной
(рис. 2.19,6).
Большей частью фюзеляж имеет четыре лонжерона, два из
которых при изгибе растягиваются, а два сжимаются силами
S=MI2H. Для повышения общей потери устойчивости лонжероны
делают замкнутого профиля. Обшивка у лонжерониого фюзеляжа
тонкая и для обеспечения местной жесткости подкреплена
слабыми стрингерами.
В моноблочном фюзеляже (круглого сечения) изгибающий
момент воспринимается сводами, работающими на растяжение —
сжатие с высотой, равной 1/3D. Равнодействующая сила
каждого свода считается приложенной посредине его высоты.
Сжатый свод должен быть проверен на потерю устойчивости.
Поперечная сила воспринимается участками обшивки
фюзеляжа, в плоскости которых она действует. Для лонжерониого
фюзеляжа считают, что это соответствующие участки между
лонжеронами (рис. 2.19,а), для моноблочного круглого сечения — две
трети высоты обшивки. Возникающие при этом касательные
напряжения в обшивке ZQ — Q/2Hbo6w-
100
www.vokb-la.spb.ru - Самолёт своими руками?!
Крутящий момент воспринимается замкнутым контуром
обшивки, вызывая в ней касательные напряжения тм = Л1кр/(0фбобш, где
ыф — удвоенная площадь сечения фюзеляжа. Наиболее
нагруженными будут участки обшивки, где tq и тм складываются. Их
сумма не должна превышать
значения Ткр-
Большое число сосредоточенных
нагрузок, действующих на
фюзеляж, требует наличия в
соответствующих сечениях силовых
шпангоутов — поперечных силовых
элементов, трансформирующих
сосредоточенные нагрузки Р в распределенные
(рис. 2.20) — в поток касательных
сил q, который передается на
обшивку. Силовые шпангоуты должны
крепиться к обшивке по всему
контуру. Они могут выполняться со
стенкой или рамной конструкции.
Помимо силовых шпангоутов в
фюзеляже ставятся обычные
несиловые шпангоуты, назначение
которых аналогично назначению
нервюр в крыле.
На фюзеляже и крыле для подхода к внутренним объемам
приходится делать в обшивке большое число вырезов различной
конфигурации с размерами от нескольких сантиметров до несколь-
Рис 2.20. Трансформация
сосредоточенной нагрузки силовым
шпангоутом
Рис. 2.21. Усиление вырезов обшивки
ких метров. Компенсация прочности обеспечивается за счет
усиления конструкции путем окантовки выреза рамкой (рис. 2.21),
а в моноблочных конструкциях — постановкой дополнительно по
краям выреза усиливающих продольных элементов.
101
Гл а ва 2
ВЗЛЕТНО-ПОСАДОЧНЫЕ УСТРОЙСТВА ЛЕТАТЕЛЬНЫХ
АППАРАТОВ
2.1. НАЗНАЧЕНИЕ ВЗЛЕТНО-ПОСАДОЧНЫХ УСТРОЙСТВ
И ОСНОВНЫЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К НИМ
Взлетно-посадочные устройства (ВПУ) самолетов и
вертолетов предназначены для решения следующих основных задач:
обеспечения устойчивого движения по аэродрому, для
эксплуатации с которого предназначен данный аппарат;
уменьшения до заданной величины нагрузок, действующих на
планер при движении по аэродрому (включая и первый удар);
обеспечения заданных значений длин разбега — пробега и
взлетно-посадочных скоростей.
Кроме того, ВПУ решают частные задачи: обеспечения
нужного положения оси аппарата при стоянке, удаления его частей от
поверхности аэродрома и др.
Можно выделить две характерные группы взлетно-посадочных
устройств:
опорные устройства, обеспечивающие устойчивость движения и
уменьшение нагрузок;
устройства, улучшающие взлетно-посадочные характеристики
(характерны только для самолетов).
Большинство ВПУ используются только при движении
аппарата по аэродрому, являясь в полете «мертвым грузом». Это дает
возможность часть из них устанавливать на аэродроме, уменьшая
полетную массу и потребный объем аппарата. Но при этом
увеличивается привязанность аппарата к определенной точке
базирования, что принципиально не годится для широкого круга
самолетов. Поэтому такие устройства (катапульты, аэрофинишеры)
получили широкое распространение лишь для корабельной
авиации и одноразовых летательных аппаратов.
Взлетно-посадочные устройства, устанавливаемые на
самолетах (масса их достигает 5—6% полетной массы), в большой
степени определяют размеры и характер покрытия аэродрома, с
которого может работать данный самолет. Поэтому они оказывают
непосредственное воздействие на его боевую эффективность.
Помимо общих требований к взлетно-посадочным устройствам
предъявляется и ряд специфических требований:
неработающие устройства не должны сколько-нибудь заметно
ухудшать аэродинамику самолета (вертолета), что требует
уборки большинства из них во время полета во внутренние объемы
планера;
объемы устройств в убранном положении должны быть
минимальными, так как внутренние объемы современных военных
самолетов весьма ограничены;
102
www.vokb-la.spb.ru - Самолёт своими руками?!
в момент выпуска—уборки устройств изменение моментов,
действующих па самолет, должно легко парироваться летчиком;
надежность срабатывания устройств должна быть очень
высокой.
2.2. УСТРОЙСТВА, УМЕНЬШАЮЩИЕ ВЗЛЕТНО-
ПОСАДОЧНЫЕ СКОРОСТИ САМОЛЕТА
Уменьшение взлетно-посадочных скоростей не только упрощает
пилотирование самолета и делает взлет—посадку более
безопасными, но и уменьшает потребные размеры взлетно-посадочных
полос (ВПП). Потребная длина ВПП раза в два больше
указанных в описаниях длин разбега и пробега. Это объясняется
необходимостью наличия запаса на возможные отклонения
метеорологических условий от стандартных, высоты расположения
аэродрома, ошибки летчика при разбеге и особенно при пробеге
(неправильное использование различных устройств, например
тормозов), разброс точки приземления, скорости взлета—посадки и т. д.
Кроме того, должен иметься запас на аварийные случаи:
прекращенный взлет, отказ какого-либо тормозного устройства.
Для большинства маневренных самолетов длина ВПП
определяется посадкой, а для неманевренных (особенно при грунтовой
полосе) —взлетом.
Уменьшить посадочную (взлетную) скорость
\/ — Л/'ШЕШ
' Ly пос Р°
можно путем увеличения с^пос (Сувзл), площади крыла S или
вертикальной тяги Рв-
Последний способ применяется лишь на самолетах
вертикального или укороченного взлета—посадки. На всех остальных
используется первый путь уменьшения УВзл и Vnoc Рассмотрим
конструкцию и работу конкретных устройств.
Аэродинамическая механизация — наиболее распространенный
способ увеличения су. Наиболее простой и легкой, но наименее
эффективной механизацией являются обыкновенные закрылки.
Более эффективны различные виды сдвижных многощелевых
закрылков, но масса их в 2—3 раза больше обычных.
Эффективность аэродинамической механизации зависит также
от того, какую долю площади крыла она обслуживает. При
наличии элеронов удается механизировать всего 30—40% площади
крыла, что дает снижение посадочной скорости самолета (в
зависимости от типа механизации) на 10—15%. Замена элеронов
интерцепторами дает возможность увеличить механизированную
часть крыла и получить больший эффект снижения скорости.
Конструктивно закрылки аналогичны элеронам, только
отклонение их производится в одну сторону — вниз, и они
рассчитываются на значительно меньшую аэродинамическую нагрузку. По-
103
этому выпуск их на скорости, больше указанной в инструкции,
недопустим. При взлете закрылки, как правило, выпускаются на
меньший угол, чем при посадке, так как в противном случае
большое аэродинамическое сопротивление крыла уменьшит ускорение
при разбеге и длина разбега возрастет. Для увеличения
эффективности закрылков, особенно при больших углах отклонения, на
ряде самолетов вместе с ними применяются предкрылки. В
эксплуатации необходим
тщательный контроль за синхронностью
выпуска закрылков, так как ее
нарушение приведет к появлению
кренящего момента, что
представляет большую опасность в период
взлета — посадки.
Сдув потока с закрылков.
Увеличить подъемную силу крыла
Рис. 2.22. Схема крыла изменяемой можно путем применения сдува
в полете стреловидности с закрылков. При отклонении
закрылка вдоль его верхней /юверх-
ности выдувается воздух с
большой скоростью, что уменьшает срыв потока на закрылке и
увеличивает получаемое приращение hcycR по сравнению с закрылком
без сдува (Лс^е/сд). Приращение Асусд зависит от скорости,
массы и направления струи выдуваемого воздуха и может достичь
зн ачен ия &су сд = 2Acv 6/сд-
При отличии указанных параметров подачн воздуха на
консоли крыла появится кренящий момент. Чтобы этого не было, за
работой системы сдува, за состоянием задней кромки крыла, в
которой располагаются щели выдува, должен вестись тщательный
контроль. Воздух на сдув забирается от компрессора двигателя
с избыточным давлением более 10= Па (для получения скорости
выдува, близкой к звуковой, при температуре порядка 300°С и
более). Для предотвращения прогара конструкции должна быть
обеспечена герметичность трубопроводов, а верхняя обшивка
закрылков выполняться из жаропрочного материала. Применение
сдува может быть ограничено возможностью отбора воздуха от
двигателя. Примерно тот же эффект, что и от сдува с закрылков,
может быть получен при использовании миогощелевых закрылков,
которые нашли сейчас широкое применение.
Крылом изменяемой стреловидности называется крыло, у
которого в полете по желанию летчика может меняться угол
стреловидности всей консоли или ее части (рис. 2.22). При
уменьшении угла х с 65—75е до 15—20е значение су самолета при
взлетных и посадочных углах можно увеличить более чем в 1,5 раза
(на 20—25% снизить взлетно-посадочные скорости). При эгом
существенно увеличивается значение качества самолета и
уменьшается расход топлива при дозвуковых скоростях полета.
Конструктивно на современных самолетах изменение
стреловидности достигается тем, что консоль и центроплан заканчнва-
104
www.vokb-la.spb.ru - Самолёт своими руками?!
ются парой горизонтально расположенных проушин, соединенных
между собой пустотелой вертикально расположенной осью,
позволяющей вращаться консоли в горизонтальной плоскости
(рис. 2.11). Через этот узел с консоли передаются все силовые
факторы: М, Q, Мк„. Размеры узла, его прочность определяются
величиной изгибающего момента М. За состоянием узла, как и
за его системой смазки, в эксплуатации должен вестись
постоянный тщательный контроль.
Поворот консоли и ее фиксация осуществляются специальным
механизмом с гидроприводом. При повороте консоли происходит
значительное смещение фокуса самолета и изменение
направления силового воздействия со стороны консоли на центроплан. При
больших углах стреловидности изгибающий момент консоли
становится для центроплана крутящим. Поэтому допустимая
эксплуатационная перегрузка самолета при разной стреловидности крыла
может быть различной.
2.3. НАЗНАЧЕНИЕ, РАБОТА РАЗГОННЫХ И ТОРМОЗНЫХ
УСТРОЙСТВ
При заданных значениях взлетно-посадочных скоростей длина
разбега (пробега) зависит от средней величины ускорения
самолета уср . /фазб
= V*3J2Jcp. Увеличить ускорение /ср при разбеге
можно путем установки ускорителей. В качестве ускорителей
применяют ракетные двигатели твердого топлива. Тягу
ускорителя берут близкой или даже значительно большей силы тяжести.
После взлета ускорители сбрасываются.
При пробеге самолета для увеличения отрицательного
ускорения применяют целый ряд тормозных устройств.
Тормозной парашют, как правило, используется параллельно
с колесными тормозами, которые будут рассмотрены в § 2.4. Сила
сопротивления, создаваемая тормозным парашютом,
пропорциональна его площади и квадрату скорости движения самолета.
Поэтому задержка с выпуском парашюта резко снижает его
эффективность. Необходимо помнить, что прочность тормозного
парашюта (его крепления) рассчитывается на максимальную скорость
(указанную в инструкциях), незначительно превышающую
посадочную скорость самолета. Выпуск парашюта на большей
скорости может привести к обрыву парашюта. Тормозной парашют
устанавливается в специальном контейнере в верхней хвостовой
части фюзеляжа с таким расчетом, чтобы сила Х„ар проходила
вблизи центра масс самолета. Используемые парашюты более чем
вдвое увеличивают аэродинамическое сопротивление самолета.
В эксплуатации необходимо внимательно следить за
правильностью крепления парашюта и его влажностью, которая может
привести к смерзанию парашюта на высоте.
Реверс тяги двигателя на современных самолетах может
создать ускорения, значительно превышающие ускорения, создавае-
105
мые другими устройствами. Создаваемые ускорения не зависят
ни от скорости движения самолета, ни от состояния аэродрома.
Наиболее просто использовать реверс тяги турбовинтовых
двигателей, осуществляемый путем поворота лопастей винта.
Значительно сложнее конструктивно оформить реверс ТРД,
расположенных в фюзеляже самолета.
2.4. НАЗНАЧЕНИЕ И РАБОТА АВИАЦИОННЫХ КОЛЕС
В зависимости от того, каким элементом самолет
соприкасается с грунтом, шасси называется колесным, лыжным или ко-
лесно-лыжным.
Характеристика установленных на самолете колес или лыж
в основном определяет его проходимость, влияет на длину
пробега и амортизацию ударов при
движении по грунту.
К опорным элементам самолета
(вертолета) — колесам и лыжам
предъявляются следующие требования:
иметь возможно меньшие габариты
(уборка колес и лыж вызывает основные
трудности при уборке шасси);
создавать минимальное
сопротивление движению при разбеге и
максимальное при пробеге самолета;
Рис 2.23. Сечение пиевма- обеспечивать необходимую проходи-
тика авиационного колеса мость;
обладать амортизационными
свойствами.
Масса колес или лыж составляет половину массы всего шасси
в целом.
Колеса в авиации применяются только пневматические,
имеющие хорошую проходимость и амортизационные свойства.
Основными частями колес являются: барабан, устанавливаемый на оси
стойки на роликовых подшипниках; тормоз, вмонтированный
внутрь барабана; пневматнк, надеваемый на барабан. Для
удобства монтажа пневматика барабан имеет одну съемную реборду.
Колеса могут быть и не тормозные, а пневматнк может состоять
только из покрышки без камеры.
Пневматики колес (покрышки) могут различаться размерами,
формой сечения, рисунком протектора, давлением зарядки.
Силовым элементом покрышки (рис. 2.23) является каркас,
выполненный из нескольких слоев кордных нитей / (корда),
закрепленных на бортовых металлических кольцах 2. Чем больше
давление зарядки пневматика, тем делается большее количество
слоев корда. Поверх каркаса наносится слой резины — протектор
3, 4, особенно толстый по беговой дорожке 4, защищающий
каркас от износа и механических повреждений. Эксплуатация по-
106
www.vokb-la.spb.ru - Самолёт своими руками?!
крышки разрешается до тех пор, пока износ протектора не достиг
нитей каркаса.
При нагружении колеса радиальной нагрузкой Рк пневматнк
обжимается на величину б (рис. 2.24).
В паспорте колеса указывается ряд ограничений, которые
должны строго соблюдаться при его эксплуатации.
Рис. 2.24. Диаграмма работы пневматика
Давление зарядки ре. Увеличение давления зарядки
рзар по сравнению с указанным облегчает возможность
механического разрушения нитей каркаса при наезде на посторонние
предметы или об выступающие края ВПП. Особую опасность
представляет уменьшение давления (величина ро задается только с
положительным допуском). Уменьшение р0 приводит (при
неизменной нагрузке на колесо Рк) к увеличению его обжатия, а это,
как будет показано, увеличивает вероятность усталостного
разрушения пневматика или разрушения при больших скоростях
качения.
Говоря о величине р0, не учитываем возможных увеличений
давления от воздействия солнца, иагрева при торможении или
длительном качении, которое может достигать 30% и более.
Поэтому замерять давление зарядки рекомендуется утром до начала
движения самолета, когда оно минимально.
Стояночное обжатие и стояночная нагруз-
к а Рст. Для каждого пневматика устанавливается максимальное
значение обжатия при стоянке бет и соответственно нагрузки РСт,
при которой допускается длительное качение колеса. При этом
гарантируется, что пневматнк будет снят с эксплуатации по износу
протектора, но не по усталостному разрушению нитей каркаса.
Перегрузка колеса (качение его с обжатием 8, большим
указанного бет) приводит к быстрому его разрушению от повторных
нагрузок. На рис. 2.25 показано, как меняется длина пробега, при
которой наступает разрушение при изменении обжатпя б.
Максимально допустимые скорости качения
при взлете Ущахвзл и посадке Vmaxnoe. При качении с большими
скоростями может произойти либо разрушение каркаса пневма-
107
тика, либо вырыв кусков или срез протектора. Особо опасно
превышение скорости для новых неизношенных пневматиков.
Уменьшение давления зарядки снижает значения максимально
допустимых скоростей иа 20—25 км/ч на каждые 105 Па.
Если давление зарядки пневматика рп больше прочности
грунта Огр, то при качении пневматик будет вдавливаться в грунт,
почти не обжимаясь. За колесом будет образовываться колея.
Рис. 2.25. Зависимость Рис. 2.26. Схема дискового тор-
длины пробега L колеса моза
от величины обжатии при
качении
Чем больше нагрузка на колесо Рк, чем меньше прочность оГр, тем
больше будет глубина колеи. Увеличение глубины колеи портит
ВПП и может сделать ее непригедной для последующих взлетов—
посадок, а также увеличивает коэффициент сопротивления
движения колеса /сопр. При глубине колеи в (0,06-^ 0,07) DK (диаметра
колеса) коэффициент /СОпр = 0,25.
ВПП с дерновым покрытием большую часть года имеет
прочность огр>(6Н-7) -105 Па. Поэтому для самолетов, рассчитанных
на работу с грунта, давление зарядки должно быть рс^
< (5н-6) • 105 Па.
Колесные тормоза устанавливаются на большинстве
авиационных колес, в том числе и носовых стоек. Посредством тормоза
летчик может в широком диапазоне менять величину
сопротивления качению колеса Тк.
Колесные тормоза должны отвечать следующим требованиям:
момент Л4™„р1 создаваемый тормозом, должен гарантировать
возможность полной остановки вращения колеса при качении
самолета по бетонированной ВПП с посадочной массой;
изменение момента должно быть плавным и без
запаздывания;
энергоемкость тормоза должна быть такова, чтобы он не
перегревался при энергичном торможении колес в процессе всего
пробега;
108
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 2.27. Силы, возникающие
при качении колеса
габариты тормоза должны позволять размещать его в
барабане колеса.
На большинстве колес устанавливаются дисковые тормоза
(рис. 2.26). Они состоят из набора биметаллических дисков и
дисков с приклепанными металлокерамическими тормозными
секторами. Одни диски вращаются вместе с барабаном, а другие
неподвижно скреплены с осью колеса.
При небольших габаритах
дисковые тормоза могут создать
боЛЬШОЙ ТОрМОЗНОЙ Момент Мторм
благодаря большой суммарной
площади соприкосновения дисков.
Масса тормоза составляет —1/3
массы колеса. Тормоз
достаточно надежен и прост в
эксплуатации, износ дисков в широком
диапазоне ие сказывается на
торможении. Максимальное значение
./Иторм' которое создает тормоз
при максимальном давлении
торможения, указывается в
паспорте колеса.
При торможении колеса на поверхности контакта пневматика
с ВПП появляется сила сопротивления (рис. 2.27) T = MTCV„/(R—6),
максимально возможная величина которой 7,тах = ЦтрРк, где [хтр —
коэффициент трения полиостью заторможенного колеса о ВПП
(цтР=0,45-^-0,55 для сухой бетонированной ВПП). Величина силы
Гтах (особенно при пустом самолете) может быть значительно
меньше максимальной тяги двигателя. Поэтому опробование
двигателя, особенно на форсаже, можно производить только на
закрепленном самолете.
Момент, создаваемый тормозом, пропорционален подаваемому
давлению. Для получения наибольшей силы сопротивления Tmia
летчик должен тормозить с давлением, при котором МТорм=
= 7гпах(Я—6)=[хТрРк(Я—б). При меньших давлениях сила Т
будет меньше 7"тах и длина пробега самолета возрастет. При
больших давлениях начнется проскальзывание колеса и большой износ
протектора. Выдержать при пробеге нужное давление
торможения летчик не в состоянии, так как величины Рк н iiTp все время
меняются. Поэтому эту задачу на самолетах возлагают иа
автомат торможения.
При торможении выделяется тепло, которое нагревает
тормоз, а затем н остальные части колеса: барабан и покрышку.
Все эти элементы могут нормально работать только до
определенных максимальных температур: для дисковых тормозов fmax=
= 450-=-600°С. При превышении температуры тормозов
уменьшается коэффициент трения фрикционной пары и момент,
создаваемый тормозом. Для элементов уплотнения тормозной системы и
109
для пневматика fmax = 110-M20cC. При больших температурах
происходит снижение усталостной прочности покрышки и потеря
эластичности уплотнений, а при /=170-г-175сС покрышка
разрушается на стоянке. Для контроля за температурой, возникающей
при торможении, на барабан колеса устанавливают
термосвидетели и термонредохранители. Энергоемкость тормозов — величина
работы торможения Атортах, при которой температуры частей
колеса достигают максимально допустимых пределов, ограничена.
Она также указывается в
паспорте колеса. Поэтому иа некоторых
самолетах можно перегреть
колеса при пробеге (особенно при
посадке без тормозного
парашюта или на повышенной скорости).
Существенно нагреть тормоза
можно также при резком
торможении при рулении и буксировке
самолета. Энергоемкость тормоза
О /О 20 го 40 50 Тмин увеличивается при низких темпе-
Рис. 2.28. Изменение температуры Р«УР»* окружающей среды и
элементов колеса при максимально уменьшается при ВЫСОКИХ.
допустимом торможении Распространение тепла по
элементам колеса происходит
достаточно медленно — в течение многих десятков минут (рис. 2.28).
Поэтому разрушение пневматика от перегрева тормозов часто
происходит после заруливания самолета.
Для увеличения энергоемкости тормозов применяют
принудительное охлаждение: жидкостное или воздушное.
При жидкостном охлаждении производится впрыск спирто-
водной смеси на элементы тормоза во время его работы. При
этом энергоемкость тормоза увеличивается на 30% и более.
Воздушное охлаждение применяется после торможения.
Длительное время через тормоз с помощью вентилятора
продувают воздух. При этом максимальный нагрев тормоза не меняется,
но уменьшается нагрев барабана и покрышки.
2.5. СХЕМЫ ШАССИ. НАЗНАЧЕНИЕ И РАБОТА
АМОРТИЗАТОРОВ ШАССИ
Схема шасси (число опор, их расположение относительно
центра масс самолета) и ее параметры определяют устойчивость
и маневренность самолета при движении по аэродрому. Каждая
опора в общем случае может иметь несколько колес и даже стоек.
Основной схемой шасси военных самолетов является трех-
опорная схема с носовой опорой (рис. 2.29), при которой две
основные опоры (основные стойки шасси), воспринимающие
основную нагрузку при стоянке самолета, располагаются позади его
центра масс, а третья опора вынесена вперед в носовую часть
фюзеляжа. На вертолетах применяется часто четырехопорная схе-
110
и
V
N
<■—■
Ь тормоза
/~
tбарабане
www.vo db-la.spb.ru - ,'амолёт своими руками?!
Ыа при которой устанавливаются две передние стойки по бортам
*Ю¥„еЯхопориая схема с носовой опорой обеспечивает путевую
„гтойчивость самолета (относительно оси О у) при движении по
ячполрому Возникающие при развороте самолета боковые
силы Л на основных опорах стремятся вернуть его в первоначаль-
Рис. 2.29. Схема шасси с носовой опорой
иое положение. Передняя стойка делается свободно
ориентирующейся, и на пей разворачивающей боковой силы не возникает.
При этой схеме нет опасности взмывания самолета при посадае
с повышенной скоростью, так как возникающие при первом ударе
силы Р, действующие на основные стойки, стремятся уменьшить
угол атаки и подъемную силу. Нет опасности капотирования
самолета даже при очень резком торможении. Но при движении
самолета только на основных стойках самолет становится
неустойчив в вертикальном направлении (относительно оси Ог). На
устойчивость движения существеиную роль оказывают значения
ряда параметров.
База шасси b (рис. 2.29) — расстояние по оси самолета от
носовой стойки до линии расположения основных стоек.
Величина b составляет обычно 30—35% длины самолета. Уменьшение
ее делает самолет более склонным к продольным колебаниям
при движении по аэродрому.
111
Вынос основных стоек от центра масс
самолета е= (0,10-^0,12)3. Увеличение еыносэ затрудняет отрыв
передка- 4S-W
ASoM
Рис. 2.30. Схемы телескопической и рычажных стоек
V.
щ
I
ч/ -
Я!
Раи
р;
ней столки при разбеге, а уменьшение может вызвать
опрокидывание самолета на хвост.
Колея шасси В — расстояние между
основными стойками. Увеличение колеи
затрудняет установку шасси и уборку его
в фюзеляж. Уменьшение — облегчает
опрокидывание на крыло при разворотах,
затрудняет управление самолетом в путевом
направлении посредством тормозов и
требует установки управляемой передней
стойки.
Стойки разделяются по характеру
включения амортизатора на телескопические
(рис. 2.30, а) и рычажные (рис. 2.30,6, е).
■1 В телескопических стойках
амортизатор жестко крепится к оси колеса
(колесной тележки). При рычажной стой-
fac ке амортизатор связан с осью колеса через
промежуточный элемент — рычаг.
Перемещение по вертикали оси колеса Ау0ш
получается больше обжатия амортизатора ASaK.
Отношение tp=AyocJ.AS ам называют
передаточным коэффициентом.
Рычажные стойки можно разделить на стойки с
внешним б и внутренним в
амортизаторами (рис. 2.30). По сравнению с
телескопическими стойками рычажные обладают
рядом преимуществ:
лучше амортизируют передние удары,
их наиболее рациональными Для работы с
ш
^Т-«
Г*
Рис 2.31. Конструкция
однокамерного
амортизатора
что делает
грунта;
112
www.vokb-la.spb.ru - Самолёт своими
меньше (или совсем
отсутствует) изгиб
амортизатора, что делает работу
амортизатора более плавной
и его амортизационные
характеристики более
стабильными;
меньше размеры
амортизатора при том же
перемещении оси колеса по
вертикали, что дает возможность
получить стойку меньшей
высоты.
Но рычажные стойки,
как правило, тяжелее и
конструктивно сложнее
телескопических. Большое
число подвижных соединений
требует более тщательного
контроля состояния стойки
шасси.
Конструкция и работа
амортизатора. Основным
назначением амортизатора
является уменьшение
нагрузок, действующих на
планер при посадке и движении
самолета по аэродрому.
На самолетах и
вертолетах применяются
исключительно газожидкостные
амортизаторы,
представляющие собой цилиндр /
(рис. 2.31) со штоком 2,
заряженный газом под
давлением pi. Для
предотвращения утечки газа имеется
специальное уплотнение. Газ
является упругим
элементом. При ходе штока Sa>,
внутренний объем
амортизатора v° уменьшается па
величину Av = SBUFr и
давление газа рг возрастает по
закону политропы: рг =
= Р? v°l(v° — Av)", где
Fг — площадь газового пор-
шня, а п =1,1. Соответствен-
Камера
низкого
давления CI)
Камера ■
высокого
давленияСЛ.)
нб меняется и сила PT=pTFr, необходимая для сжатия амортизатора.
Помимо силы Рг сжатию амортизатора препятствует также сила
трення между штоком и цилиндром Ртр (в буксах 4 и
уплотнении 3). Она примерно пропорциональна силе РГ. Сила сжатия
амортизатора Рам = Рг+РтР~1,1Рг (рис. 2.32). При действии на
шток силы, перпендикулярной его оси, в опорах штока (нижней
буксе и поршне) могут
возникнуть большие дополнительные
силы трения, которые
существенно ухудшают работу
амортизатора. График,
показывающий зависимости Рвм от
обжатия 5ам (хода штока),
называют диаграммой работы
амортизатора. Площадь,
расположенная под этим
графиком, представляет в
масштабе поглощенную
амортизатором работу. Силу начального
обжатия PJM выбирают такой,
чтобы амортизатор при
стоянке был обжат на величину ScJut
близкую к половине хода S|M.
В рассматриваемом случае
(при одной газовой камере)
жесткость амортизатора
вначале мала, а под конец
обжатия увеличивается на порядок
величин. Такой амортизатор
рассеивает мало энергии
(только за счет силы Ртр) и требует
г. ■ 77.
* - '
Ром Ц,
Sqm
Рис. 2.33. Схема двухкамерного
амортизатора
большого хода S*M для поглощения заданной эксплуатационной
работы Л*м =— viauP|M5|M, так как коэффициент г^ю мал.
Для самолетов с большой разницей взлетных и посадочных
масс становится невозможным получить сколько-нибудь
приемлемые значения Sj£ для всех вариантов загрузки самолета. Все
это заставило перейти на двухкамерные амортизаторы, имеющие
две последовательные газовые камеры с разными давлениями
зарядки (рис. 2.33). При малых нагрузках обжимается только одна
камера /, а при больших — обе вместе. Необходимо помнить, что
давление зарядки камеры // может быть очень большим, поэтому
могут потребоваться специальные баллоны.
Для увеличения рассеивания энергии (уменьшения колебаний
самолета) в амортизатор заливают жидкость, которая при
обжатии— распрямлении амортизатора проталкивается через малые
отверстия (например, на рис. 2.31 через отверстия площадью f»
в плунжере). Диаграмма работы такого амортизатора зависит от
114
www.vokb-la.spb.ru - Самолёт своими руками?!
скорости его обжатия (распрямления). Скорость перетекания
жидкости Уж зависит от скорости обжатия амортизатора Vmr и
соотношения площадей: УЖ=УШТ{Ж1РЖ. Для проталкивания
жидкости с такой скоростью в ней должен быть создан перепад
давлений Лрж = Ра^ж/2. Поэтому для обжатия амортизатора со
скоростью Ушт к нему должна быть приложена дополнительная
сила ДРж=Арж^ж, и общая сила обжатия амортизатора
становится равной Рам = Рг+Ртр±ДРяв (рис 2.32,6). Работа,
затрачиваемая на проталкивание жидкости, рассеивается амортизатором.
Тормозные отверстия для жидкости /ж могут делаться как на
прямом (обжатие), так и на обратном (распрямление) ходах
амортизатора, их площади могут быть постоянными и
неременными.
Торможение жидкости при обжатии увеличивает коэффициент
т]ам, т. е. дает возможность поглотить заданную работу A^v на
меньшем ходе амортизатора. Такие амортизаторы наиболее
удобны для восприятия первого удара при посадке. Но при движении
по грунтовой ВПП скорость обжатия амортизатора при наезде
на неровность может оказаться значительно больше
максимальной скорости при первом ударе. При этом Рам за счет большой
величины ДРЖ может стать больше допустимого
эксплуатационного значения Я|м (рис. 2.32,в). Для избежания этого в
амортизаторах устанавливают разгрузочные клапаны, отключающие
торможение жидкости после первого удара, а в двухкамерных
амортизаторах не делают торможения жидкости во второй
камере.
Упругие характеристики амортизатора могут меняться в
эксплуатации за счет неправильной зарядки газом, жидкостью и
изменения температуры окружающей среды. Уменьшение давления
зарядки амортизатора и понижение температуры не только
уменьшают его энергоемкость, но и увеличивают стояночное обжатие.
При движении тяжело нагруженного самолета по неровностям
такой амортизатор может обжиматься до упора и сила Ргы стать
больше Я|м. Повышение давления зарядки делает амортизатор
более жестким, увеличивает уровень повторных нагрузок,
действующих на самолет, и ускоряет выработку усталостного ресурса.
Поэтому тщательно контролируют правильность зарядки
амортизатора. При значительных изменениях температуры воздуха
техник обязан проверять давление зарядки амортизатора.
Упругие характеристики двухкамерных амортизаторов менее
чувствительны к изменению температуры окружающей атмосферы. Надо
помнить, что проверка правильности величины стояночного
обжатия амортизатора не гарантирует еще правильности его зарядки.
В качестве жидкости применяется масло АМГ-10 с мало
меняющейся вязкостью в диапазоне рабочих температур. Но эта
жидкость взрывоопасна при высоких температурах и давлениях.
Поэтому амортизаторы должны заряжаться азотом, а не воз-
Духом.
115
Глава 3
ГИДРАВЛИЧЕСКИЕ И ПНЕВМАТИЧЕСКИЕ СИСТЕМЫ
3.1. НАЗНАЧЕНИЕ И ОСНОВНЫЕ ДАННЫЕ
Гидравлические и пневматические системы предназначены для
уборки, выпуска шасси и взлетно-посадочной механизации;
управления аэродинамическими рулями и воздухозаборниками
двигателей, воздушными и колесными тормозами и другими объектами
управления.
К этим системам предъявляются следующие требования:
достаточная мощность и энергоемкость;
точность и автоматизация процессов управления;
высокая надежность и боевая живучесть;
приемлемая эксплуатационная технологичность и
ремонтопригодность;
минимальные габариты и масса.
В гидравлических системах, работающих по замкнутому циклу,
мощность от насосов, установленных на двигателях, передается
к исполнительным устройствам жидкостью, а в пневматических
системах, работающих по разомкнутому циклу, — газом
(воздухом).
Суммарная мощность насосов в гидросистемах составляет
десятки киловатт на истребителях и сотни киловатт на
бомбардировщиках, максимальное рабочее давление жидкости достигает
(140-Н220) • 10ь Па. Эта система насчитывает сотни агрегатов, ее
трубопроводы имеют протяженность сотни метров.
Пневматическая система обычно работает от аккумулятора
энергии — газового (воздушного) баллона с зарядным давлением
(120-^200) • 105 Па. После завершения рабочей операции воздух
стравливается в атмосферу.
Гидравлические системы используются там, где требуется
непрерывная и длительная работа объектов управления в полете
(например, отклонение рулей), высокая точность и значительная
мощность.
Пневматические системы используются там, где требуется
ограниченная энергоемкость, большое быстродействие и автономность
(перезарядка оружия, управление фонарем кабины, его
аварийный сброс и т. д.).
Как правило, гидравлические и воздушные системы комплек-
сируются с электрическими путем включения
электрогидравлических и электропневматических агрегатов и устройств,
регулирующих циркуляцию энергии в системах. Это позволяет
использовать основное достоинство электрической системы — простоту
формирования, преобразования и передачи управляющего сигнала
малой мощности, а также уменьшить массу гидросистемы и значи-
116
www.vokb-la.spb.ru - Самолёт своими руками?!
тельно повысить ее боевую живучесть за счет уменьшения длины
трубопроводов, что особенно важно в тех случаях, когда в
гидросистеме применена легковоспламеняющаяся жидкость.
3.2. ПРИНЦИПИАЛЬНАЯ СХЕМА ГИДРАВЛИЧЕСКОЙ
СИСТЕМЫ
В гидравлических системах широко применяют насосы
постоянной и переменной (регулируемой) подачи.
Рис. 2.34. Принципиальная схема гидросистемы:
/ — бак; 2 —насос; 3 — регулятор подачи; 4 —обратный клапан- 5 —
гидроаккумулятор; 6 — предохранительный клапан; 7 —
распределитель; в — силовой цилиндр: 9 — переключатель; 10 — фильтр
Принципиальная схема гидравлической системы с насосом
переменной подачи дана на рис. 2.34.
В принципе работа гидравлической системы проста: насос 2,
обычно установленный на двигателе самолета, засасывает
рабочую жидкость (специальное авиационное масло) из бака / и
нагнетает ее при открытом кране распределителя 7 в полость а
силового цилиндра 8, из полости б через фильтр 10 жидкость
сливается в бак. Давление на выходе из насоса определяется
при малом сопротивлении трубопроводов только
противодействующей нагрузкой на штоке силового цилиндра: чем больше эта
нагрузка, тем большее давление создает насос. После завершения
Рабочей операции, когда поршень упирается в дно цилиндра,
потребный расход жидкости в цилиндр падает до нуля. Насос
подает жидкость в гидроаккумулятор, давление в системе
возрастает, и регулятор подачи 3 уменьшает подачу насоса. При не-
117
котором номинальном давлении за насосом рк подача
практически прекращается. Во всех магистралях, сообщенных кранами
с насосом и аккумулятором, жидкость находится под
давлением р„. Вследствие некоторой негерметичности агрегатов масло
всегда выдавливается из магистрали высокого давления на слнв.
Этот расход, обычно небольшой, компенсируется насосом, поэтому
говорят лишь о практическом прекращении подачи.
Мощность, развиваемая насосом: N = ApQ, где Др=р„—рсл —
перепад давления иа насосе, a Q — расход жидкости.
Поскольку при работе на холостом режиме Q«0, то и N =
=ApQ«0.
Допустим, что теперь кран распределителя 7 переключен так,
что полость б сообщается с магистралью нагнетания, а полость а—
со сливом, причем противодействующая нагрузка на штоке
практически отсутствует. Тогда аккумулятор 5 будет разряжаться в
полость б, давление в гидросистеме падает, и автомат 3
увеличивает производительность насоса. После завершения рабочей
операции насос вновь устанавливается на нулевую подачу. При
отказе регулятора максимальное давление в гидросистеме
ограничивает предохранительный клапан 6. При некотором давлении
(Ртах~Рн+20- 10г' Па) клапан открывается, и жидкость через
него сливается в бак. Однако в этом случае давление на выходе
из насоса равно ртах, поэтому при максимальной подаче насос
развивает и максимальную мощность, что обычно приводит к
перегреву жидкости. Такой режим работы насоса с
предохранительным клапаном является аварийным. На самолетах с
достаточно мощными насосами вместо предохранительного клапана
устанавливают так называемые автоматы разгрузки. Автомат
разгрузки обеспечивает слив жидкости в бак практически без
противодавления на выходе из насоса.
3.3. УСТРОЙСТВО ГИДРАВЛИЧЕСКИХ АГРЕГАТОВ
И ИХ ЭЛЕМЕНТОВ
Насосы. Как правило, в гидравлических системах
применяются шестеренные и плунжерные насосы.
Шестеренный насос (рис. 2.35,а) имеет две шестерни /,
заключенные в корпус 2. Из полости всасывания а жидкость,
заполняющая впадины шестерен, переносится в полость
нагнетания б. Зуб 4, выходя из впадины, освобождает объем для
засасываемой жидкости, а зуб 3, входя во впадину, выдавливает
жидкость в магистраль нагнетания. Подача насоса Q
пропорциональна объему и количеству зубьев шестерен и частоте вращения.
Схема плунжерного насоса приведена на рис. 2.35, б.
При вращении блока цилиндров плунжеры имеют возвратно-
поступательное движение: при опускании плунжера через
отверстия в золотнике / происходит всасывание жидкости, а при
подъеме — нагнетание.
118
www.vokb-la.spb.ru - Самолёт своими руками?!
Производительность насоса пропорциональна числу
плунжеров, их диаметру, ходу (/г=£>1дт) и частоте вращения.
Гидроаккумуляторы предназначены для кратковременного
увеличения мощности системы, уменьшения пульсаций давления,
К регулятору
г
Рис. 2.35. Насосы гидравлических систем:
а __ шестеренный: 1 — шестерни; 2 — корпус: 3. 4 — зубья шестерен; б —
плунжерный: / — распределительный золотник; 2 — блок цилиндров; 3 — пружина. 4 —
плунжер; 5 —наклонная шайба; 6—ось поворота шайбы; 7 — прииодной вал
обеспечения работоспособности систем с насосом постоянной
производительности.
Гидроаккумулятор представляет собой цилиндрический или
сферический (рис. 2.36, а, б) закрытый сосуд с изолированными
газовой / и жидкостной 3
полостями. Они разделены поршнем 2
или диафрагмой 4.
При зарядке аккумулятора
жидкость нагнетается в него
насосом, газ (азот или воздух)
сжимается, аккумулируя энергию.
При включении агрегатов
аккумулятор, отдавая энергию,
помогает насосу и кратковременно
увеличивает мощность
гидросистемы. Упругость газа
обеспечивает сглаживание давления при
пульсациях подачи жидкости в
аккумулятор. Аккумулятор имеет
начальное (зарядное) давление
газа (ро = 50^-100) • 105 Па), оно
обеспечивает оптимальную
полезную энергоемкость.
Правильность зарядки аккумулятора контролируется в процессе
эксплуатации через клапан 5.
Гидробаки предназначены для непрерывной подачи жидкости
к всасывающему штуцеру насоса, для компенсации изменения
объема жидкости в цилиндрах при уборке а них силовых штоков
Гидравлические
аккумуляторы:
с — цилиндрический; б — сферический:
/ — газовая полость; 2 — поршень; 3 —
жидкостная полость; 4 — диафрагма,
5 — зарядный клапан
119
н для слива избытка жидкости при повышении температуры.
Применяются открытые и закрытые баки (рис. 2.37).
7 8 S т N
Рис. 2.37. Баки:
с— открытый; б — закрытый; / — пружина; 2—
штуцер всасывания; 3- поршень; 4— штуцер
слива: 5 — обратный клапан; 6 —
предохранительный клапан; 7 — клапаны, обеспечивающие
перетекание жидкости при сливе и заправке;
В — заливная горловина; 9 — заборный
патрубок; 10 — конус, предотвращающий
образование воронки
Регулятор подачи или регулятор расхода обеспечивает
изменение подачи насоса от номинальной до нуля в определенном
диапазоне давлений на выходе.
Рис. 2.38. Регулятор подачи (о) и характеристика насоса (б):
I — наклонная шайба насоса. 2 — шток сервомеханизма; 3 — пружина. 4 — золотник:
5 — регулировочная пружина
Изменение подачи достигается уменьшением угла наклона
шайбы (рис. 2.38) или всего блока цилиндров (при неподвижной
шайбе). Схема регулятора дана на рис. 2.38,а. Регулирующий
120
www.vokb-la.spb.ru - Самолёт своими руками?!
d ±-„
орган насоса / (шайба или блок цилиндров) управляется
штоком 2 сервомеханизма, положение которого зависит от давления
в нагнетающей магистрали р. Зависимость расхода Q насоса от
давления на выходе дана на рис. 2.38, б.
Предохранительный клапан
ограничивает предельное
значение давления в
гидросистеме. Схема простейшего
клапана приведена на рис. 2.39.
Распределительные
устройства в зависимости от
конструкции элемента,
управляющего потоком жидкости,
различают золотниковые и
клапанные; от количества
фиксированных позиций — двух- и
трехпозиционные; от типа
привода — ручного, гидро-, пневмо- и электроуправления;
управления — прямого и серводействия.
Рассмотрим трехпознционный распределитель с серводейст-
вием, клапанными и золотниковыми распределителями,
комбинированным (электрическим и ручным) управлением (рис. 2.40). Та-
Рис. 2.39.
Предохранительный
клапан:
- клапан: 2 — корпус; 3 — пружина:
4 — регулировочный винт
от способа
Рис. 2.40. Электрогидравлический распределитель (кран):
-золотник; 2. II — толкатели, 3. 10—гильзы. 4, 7 — электромагнитные пре*
образователи; 5. 6 — шариковые клапаны; В — кнопки; 9 — пружины
кой распределитель применяется, например, для уборки и
выпуска шасси. Он имеет штуцера подвода жидкости от
нагнетающей магистрали с давлением р„, подвода и отвода жидкости в
полости силового цилиндра / и // и отвода жидкости иа слив в
бак с давлением рСл- Основным распределителем потока
жидкости является золотник /, имеющий три положения (позиции):
ВЫПУЩЕНО, УБРАНО, НЕЙТРАЛЬНО. При нейтральном по-
12J
ложении (показано на рис. 2.40) магистраль нагнетания
перекрыта золотником, штуцера / и // сообщены со сливом. Золотник
удерживается в нейтральном положении давлением жидкости на
гильзы 3 и 10, а при его отсутствии пружинами 9.
Управление выпуском и уборкой производится
переключателем, подающим ток на обмотку электромагнитного
преобразователя 4 или 7. При этом сердечник смещается и шариковый кла-
Рис. 2.41. Силовые цилиндры:
/ — цилиндр; 2—поршень; 3 —
шток; 4 — наконечник; 5 —
цапфы; 6 — ушко
пан 5 или 6 перекрывает отверстие магистрали нагнетания,
сообщая соответственно полость а или б со сливом. Если включен
электромагнит 7, то давление в полости б падает и давлением
жидкости на толкатель 2 золотник смещается, сообщая
магистраль нагнетания со штуцером //. Штуцер / остается
сообщенным с магистралью слива (рСл).
Ручное управление распределителем (на земле) производится
нажатнем на кнопку 8 (слева или справа) и удержанием ее в
этом положении в процессе срабатывания объекта управления.
Исполнительные устройства служат для непосредственного
перемещения (отклонения) объекта управления (шасси, закрылков
и т. д.). В качестве исполнительных устройств используются
силовые цилиндры и гидромоторы. Схемы силовых цилиндров даны
на рис. 2.41. Стрелками показаны подвод и отвод жидкости. В
цилиндре 1 перемещается поршень 2 со штоком 3. Цапфы 5 и
ушко 6 обеспечивают крепление цилиндра к конструкции.
Цилиндр с двухсторонним штоком, обычно применяемый в
гидроусилителях, имеет одинаковые усилия при движении как в
одну, так и в другую сторону.
Для регулировки длины шток обычно имеет специальный
наконечник 4; для разгрузки от боковых сил, увеличивающих
трение и ухудшающих работу уплотнений, силовые цилиндры
крепятся к конструкции с помощью кардана.
Гидромотор представляет собой в принципе обращенный
гидронасос, к которому подводится высокое давление, а мощность
снимается с вала.
Фильтры предназначены для очистки рабочей жидкости ОТ
122
www.vokb-la.spb.ru - Самолёт своими руками?!
частиц, являющихся продуктами износа деталей и агрегатов
системы, продуктами окисления самой жидкости и попадающих в
жидкость извне. Схема фильтра даиа на рис. 2.42.
Уплотнения предназначены для
обеспечения герметичности гидравлических
систем- В настоящее время
преимущественное распространение получили
резиновые кольца круглого сечения, они
универсальны и могут применяться в
торцевых и радиальных, подвижных и
неподвижных уплотнениях. Принцип
работы такого уп.ютнения (рис. 2.43)
состоит в следующем: при установке
кольца 3 между уплотняемыми деталями /, 2
обеспечивается его деформация и
создается контактное давление Ар,
препятствующее вытеканию жидкости.
При создании одностороннего
давления жидкости рж кольцо прижимается
к стенке канавки и уплотняемым
деталям. При высоких температурах
убыстряются процессы старения и
разложения резины, а прн низких — теряется
эластичность, давление Ар уменьшается,
что может привести к потере
герметичности. При действии высоких давлений
кольцо выдавливается в зазор а и
может быть повреждено о кромки канавки. Для предохранения
резинового кольца устанавливаются экранирующие кожаные или
фторопластовые кольца 4.
Рис. 2.42. Фильтр:
1 — корпус фильтра; 2 — пра
дохранительный клапан; 3 —
Фильтр грубой очистки: 4 —
фильтр тонкой очистки
др
Рак ,\\\\У
W7//WA
pW^ flfcgzE^
Рис. 2.43. Уплотнения гидросистем:
1 — Цилиндр; 2—шток; 3 — уплотннтельное кольцо;
рующее кольцо
4 — экраии*
123
Трубопроводы предназначены для подвода Жидкости к
агрегатам и слива ее в бак. Разрушение трубопроводов может
привести к отказу всей гидравлической системы. В магистралях
высокого давления обычно применяют бесшовные трубы из
нержавеющей стали, в сливных магистралях — трубы из алюминиевых
сплавов.
Жидкости являются в гидравлических системах рабочим
телом. Они должны иметь хорошие смазывающие свойства,
минимальную зависимость вязкости от температуры, высокий
объемный модуль упругости, высокую температуру кипения и малую
упругость насыщенных паров. Жидкости должны быть
нейтральны к материалам, из которых изготовлены агрегаты,
трубопроводы и уплотнения, устойчивы к окислению, нетоксичны и неопасны
в пожарном отношении. Реально применяемые в гидравлических
системах масла удовлетворяют не всем требованиям, например,
они легко воспламеняются.
3.4. ПРИНЦИПИАЛЬНАЯ СХЕМА ПНЕВМАТИЧЕСКОЙ
СИСТЕМЫ
Общая схема пневматической системы дана на рис. 2.44.
Основным источником энергии являются воздушные баллоны 8,
имеющие начальную зарядку воздухом под давлением
Рис. 2.44. Принципиальная схема пневматической системы:
/ — компрессор; 2— отстойник. 3 — фильтр; 4 — автомат
давления; 5 —обратный клапан; б —кран; 7 —зарядный штуцер; в —
баллоны; 9 — редуктор; 10—манометр; // — силовой цилиндр;
12 — кран
(120-^200) • 105 Па. Для контроля за давлением воздуха в
баллоне установлен манометр 10. Зарядка пневматической системы
производится от наземных баллонов через штуцер 7. Для зарядки
124
www.vokb-la.spb.ru - Самолёт своими руками?!
нужно открыть запорный край 6, тогда через обратный клапан 5
воздух поступит в баллоны 8. От баллонов через редуктор 9
воздух поступает к распределителям 12 (или кранам). Вся система до
кранов выполняется однопроводной, так как из полостей
исполнительных устройств (например, полости а цилиндра 11) воздух
через кран стравливается в атмосферу.
На самолетах, совершающих длительные полеты, для
подзарядки баллонов в полете устанавливается компрессор / с
приводом от самолетного двигателя. Воздух от компрессора
проходит через отстойник 2, фильтр 3 и автомат давления 4 в
баллоны 8. Основным назначением автомата давления является
перевод компрессора на холостой режим работы после подзарядки
баллонов до номинального давления (обычно 150* 105 Па) и
подключение компрессора к баллонам после падения давления до
(120-Т-130) -105 Па.
Для увеличения числа циклов срабатывания силовых
цилиндров за счет уменьшения потерь воздуха при стравливании его в
атмосферу (после завершения рабочего цикла) устанавливаются
редукторы 9. Редуктор уменьшает (редуцирует) давление,
подводимое из баллона (ре). При наличии редуктора давление в
рабочей полости а будет после завершения цикла равно давлению
за редуктором рр (допустим, рр=50- 105 Па) до тех пор, пока
Рб^Рр.
3.5. ОСОБЕННОСТИ УСТРОЙСТВА АГРЕГАТОВ
ПНЕВМАТИЧЕСКИХ СИСТЕМ И ИХ ЭЛЕМЕНТОВ
Воздушные баллоны применяются цилиндрические и
сферические. Цилиндрические баллоны изготовлены из
цельнотянутых бесшовных стальных труб, к которым приварены
полусферические донные части. Сферические баллоны изготовлены из
двух полусфер, соединенных сваркой. Баллоны характеризуются:
водной емкостью (внутренним объемом), рабочим и
максимальным давлением воздуха. На баллоне должно быть клеймо
Котлонадзора о допуске к эксплуатации.
Редуктор предназначен для понижения давления воздуха,
поступающего к силовым цилиндрам. Основной характеристикой
редуктора является редуцированное давление. Например,
редуктор РВ-50 имеет давление на выходе, равное 50-Ю6 Па. Оно
Должно быть примерно одинаковым независимо от давления в
баллоне (при рв^50-105 Па). На рис. 2.45 дана схема редуктора
РВ-50. Воздух подводится к штуцеру А, а отводится через
штуцер Б. Поступление воздуха в систему определяется клапаном 5.
Сверху в клапан 5 через шаровую опору 10, мембрану 9 н
толкатели 4 упирается пружина 2, а снизу — пружина 7 через
толкатель 6. Выходное давление подводится под мембрану 9. На
Рис. 2.45 показано закрытое положение клапана, когда давление
за штуцером Б равно 50-105 Па. В этом случае сила от давления
воздуха на мембрану 9 уравновешивает усилие пружины 2, по-
125
этому толкатели 4 не препятствуют пружине 7 закрыть клапан 5.
Естественно, что усилие пружины больше усилия, создаваемого
давлением воздуха из баллона на клапан 5 по площади
центрального отверстия.
При падении давления в
штуцере Б усилия на
мембране уменьшаются и пружина 2
через толкатели 4 открывает
. — 1>щчи-[--гкя^ клапан 5. Воздух из баллона
rF ^i Ъ£§ S 53]НКуЧ_ будет поступать в систему
|__1 Рн^КпЗВДлНИ/ Когда давление в ней
достигнет 50" 105 Па, клапан 5 вновь
закроется.
Давление на выходе из
редуктора регулируется виитом /
с контргайкой 3. Затяжка
пружины 7 регулируется
колпачком 8.
Краны в пневматических
системах применяются только
клапанного типа с
механическим или электрическим
управлением. Клапан, плотно
прижимаясь к седлу, обеспечивает
потребную высокую
герметичность воздушной системы.
Другие агрегаты воздушных систем (трубопроводы,
уплотнения, силовые цилиндры) не имеют принципиальных отличий от
агрегатов гидравлических систем.
Рис.
2.45. Редуктор:
3 — контргайка;
1 — винт; 2 — пруи
толкатель; 5—клапан; 6—толкатель;
пружина; 8 — регулировочный колпачок;
мембрана; 10 — опора
Глава 4
СИСТЕМА УПРАВЛЕНИЯ
4.1. НАЗНАЧЕНИЕ И СОСТАВ СИСТЕМЫ УПРАВЛЕНИЯ
Системой управления называют комплекс технических
устройств, обеспечивающих процесс управления, т. е. изменение
параметров движения в заданном направлении.
Управление самолетом осуществляется изменением его
углового положения по тангажу 6, крену у и рысканию ф, что
обеспечивается соответственно рулем высоты, элеронами и рулем
направления. Система управления имеет соответственно каналы
тангажа, крена и рыскания.
Для реализации управления необходимо решить четыре
задачи:
126
www.vo ;b-l;i.spb.ru - ,'амолёт своими руками?!
1) знать заданные параметры движения (скорость, высоту,
курс и т. д.) в каждый момент времени;
2) знать действительное значение тех же параметров;
3) сравнивая заданные и действительные значения,
определить характер воздействия на рули, устраняющего
рассогласование, т. е. выработать решение или закон управления;
4) отклонить рули в соответствии с выработанным решением
или командой.
Обратная связь обеспечивает летчику суждение о
результатах управления. Она реализуется индикаторами положения
самолета в пространстве, визуальным наблюдением, усилиями на
ручке и педалях управления и т. д. В тех случаях, когда все
четыре задачи управления решает летчик, говорят о режиме
ручного управления. Этот режим реализуется простейшими
системами управления.
Автоматические системы управления могут самостоятельно
решать все задачи управления, что соответствует режиму
автоматического управления.
И, наконец, автоматические системы могут решать только три
первые задачи, оставляя летчику роль исполнителя команд.
Такой режим называется полуавтоматическим или
директор н ы м. Обычно система управления является многорежимной
и может реализовать на отдельных этапах полета один, два или
даже все три режима управления.
Система управления является важнейшей системой на
самолете, оказывающей непосредственное влияние как на боевую
эффективность, так и на безопасность полета. Поэтому к ней
предъявляется ряд специальных требований:
необходимая точность управления, т. е. выдерживания
заданных параметров движения на всех этапах полета, определенных
тактико-техническими требованиями при допустимой
психофизиологической нагрузке летчика; в режиме автоматического
управления это требование реализуется соответствующими
характеристиками автоматической системы, в режиме ручного управления—
правильным сочетанием возможностей летчика с
характеристиками самолета и системы управления, независимостью
управления по тангажу, крену и рысканию, отсутствием в системе
заметных люфтов и сил трения и т. д.;
высокая надежность н отказобезопасность. Это требование
реализуется за счет высокой надежности элементов системы
управления, резервирования и дублирования ее важнейших
агрегатов и отдельных контуров управления, а при появлении отказов
автоматических систем возможностью продолжения полета в ре-
Жиме ручного управления.
Система управления, как и любая другая самолетная
система, должна иметь минимальные массу и объем, обладать высокой
соевой живучестью, эксплуатационной технологичностью и
ремонтопригодностью.
127
4.2. ПРИНЦИПИАЛЬНАЯ СХЕМА СИСТЕМЫ УПРАВЛЕНИЯ
Упрощенная схема многорежимной системы управления для
одного канала (тангажа) дана на рис. 2.46. В режиме ручного
управления летчик, зная заданные параметры движения,
сравнивает их с показаниями соответствующих приборов (указателей
положения самолета) и в зависимости от величины, знака и
количества сигналов рассогласования, перемещая командные рычаги
Указр-
тепи
КПП
НПП
Летчик
Датчики
КРУ - АРУ
X
- РАУ -
РП -
Вычислитель
Б"Б
РМ
Самолет
Рис. 2.46. Принципиальная схема системы управления:
КРУ — командные рычаги управления; АРУ — автомат регулирования управления;
РЛУ — рулевой агрегат управления; РП — рулевой привод; ББ — Слок безопасности;
РМ — рулевая машина; КПП — командно-пилотажный прибор; НПП — навигацноино-
пнлотажный прибор
управления (КРУ), отклоняет рули. На больших по массе и
размерам и на сверхзвуковых самолетах непосредственное
отклонение рулей осуществляет рулевой привод (РП), а летчик
фактически управляет этим РП, так как прямое отклонение рулей
требует очень больших затрат энергии.
Об эффективности управляющего воздействия летчик судит
по усилиям, которые он прикладывает к командным рычагам, и
по перемещениям этих рычагов. Особо важное значение для
летчика имеют две характеристики: Р*>— приращение тянущего
усилия на ручке управления и jejj» — приращение хода ручки,
потребные для увеличения нормальной перегрузки на единицу.
При очень малых усилиях (ЯЦу менее 10 Н на единицу
перегрузки) и перемещениях летчику трудно дозировать
управляющие воздействия, что и приводит, как правило, к раскачке
самолета. При больших перемещениях ручки управление становится
вялым и тяжелым. Важное значение имеет также характер
изменения балансировочных усилий по режимам полета.
Оптимальные усилия и перемещения, обеспечивающие
необходимую управляемость самолета, формирует специальный
автомат регулирования управления (АРУ) в зависимости от режима
полета.
Не менее важное значение, чем усилия и перемещения, имее»
для летчика реакция самолета иа отклонение рулей. На некоторых
128
www.vokb-la.spb.ru - Самолёт своими руками?!
режимах полета самолеты обладают повышенной
колебательностью, она проявляется в том, что переход па новый режим
полета (например, на другой угол тангажа) сопровождается
колебаниями самолета около этого нового режима. Попытка летчика
погасить колебания может привести к раскачке самолета.
Поэтому демпфирование угловых колебаний самолета по углу таигажа
осуществляет специальный автомат демпфирования, который
через раздвижную тягу (агрегат) управления (РАУ) и РП
отклоняет рули па уменьшение угловой скорости вращения самолета.
Таким образом ручное управление оказывается
автоматизированным. При отклонении ручки управления и работе демпфера
руль отклоняется одновременно и летчиком, и демпфером.
Сигнал демпфера на РАУ и отклонение рулей вырабатываются в
вычислителе.
В режиме автоматического управления вычислитель, получая
информацию о заданных и текущих параметрах движения,
вырабатывает потребный сигнал управления и подает его на рулевую
машину (РМ), которая через РП отклоняет рули. Сигнал
управления вырабатывается в соответствии с определенным законом
управления в вычислителе и контролируется блоком безопасности
(ББ), который ограничивает сигнал по условиям безопасности
полета.
Одновременно вычислитель выдает командные сигналы на ди-
ректорные приборы — навигационно-пилотажный (НПП) и
командно-пилотажиый (КПП). Если система автоматического
управления работает исправно, то стрелки КПП находятся в
нейтральном положении. Длительное отклонение стрелок от
нейтрального положения говорит о неисправности системы.
Все автоматические устройства, обеспечивающие управление
самолетом, обычно объединены в одну систему автоматического
управления (САУ). На одних режимах (маршрутный полет,
посадка и др.) САУ обеспечивает автоматическое управление
самолетом, на других (предпосадочное маневрирование и др.)
—полуавтоматическое и на третьих (например, воздушный бой)
управление остается неавтоматическим. Все сказанное выше относится
в равной мере и к вертолету и его системам управления.
Рассмотрим некоторые конкретные агрегаты систем
управления.
4.3. ОСОБЕННОСТИ УСТРОЙСТВА АГРЕГАТОВ
И ЭЛЕМЕНТОВ СИСТЕМ УПРАВЛЕНИЯ
Механическая система управления — сумма устройств (команд- i
них рычагов, тяг, качалок, тросов), обеспечивающих прямую
передачу управляющих воздействий летчика к рулевому приводу
или органам управления (рулям самолета, несущему и
хвостовому винтам вертолета),
5-229 J29
Командными рычагами управления называют
ручку управления (на маневренных самолетах) или штурвальную
колонку (на неманевренных самолетах) и педали управления.
Посредством ручки или штурвала отклоняют рули высоты и
элероны, а посредством педалей — руль направления; иа вертолете
соответственно — автомат перекоса и лопасти хвостового винта.
Рис. 2.47. Командные рычаги:
с — ручка управления: / — труба, 2 — кронштейн; 3 — тяга элероноп;
4 ~ подшипник: 5 — ось; 6 — ручка управления; 7 — рукоятка; 8 —
кнопки управления; б — педали управления: /, 5 — кинематическая
и силовап трубы; 2 ~ втулка; 3 — педаль; 4 — ремень; 6 — тяга
управления; 7 — кронштейн
Направление перемещения командных рычагов при
управлении самолетом соответствует инстинктивным движениям летчика.
Например, при случайном увеличении угла тангажа
инстинктивным движением является перемещение ручки от себя, что
соответствует отклонению руля высоты вниз. При этом на
горизонтальном оперении возникает положительный прирост подъемной
силы и угол тангажа уменьшается.
При появлении крена на правое крыло летчик инстинктивно
отдает ручку влево и, отклоняя элероны, устраняет крен.
Максимальные перемещения командных рычагов подбираются
так, чтобы управление самолетом или вертолетом производилось
130
www.vokb-la.spb.ru - Самолёт своими руками?!
только движением рук и ног без изменения положения тела
летчика. Так, движение ручки от себя и иа себя составляет
соответственно 150 и 180 мм, вправо и влево по 150—200 мм, а
отклонение педалей— 150—180 мм.
гттг
"'" rtrrr Г || —
Рис. 2.48. Проводки управления:
а — тросовая проводка: / — педали; 2 — секторы; 3 — тросы;
4 — ролики; 5 — тандеры: б — жесткая проводка: / — тяги:
2 — качалки: 3 — роликовые направляющие
Одна из применяемых схем ручки управления дана на
рис. 2.47, а. Ручка управления 6 с рукояткой 7 имеет две степени
свободы, указанные стрелками: при отклонении вправо и влево
она поворачивается относительно оси 5, а при отклонении от себя
и на себя вместе с трубой / вращается в подшипниках 4. Тяга 3
передает движение ручки иа элероны, а кронштейн 2,
закрепленный на трубе /, — на руль высоты. Независимость управления
элеронами и рулем обеспечивается тем, что тяга 3 выводится
по оси вращения трубы /. Поэтому при отклонении ручки иа себя
и от себя тяга 3 остается неподвижной. Вращение тяги
относительно ее продольной оси исключается шарниром А,
расположенным внутри тяги. На рукоятке 7 обычно располагаются кнопки 8
управления триммером, тормозными щитками, пуском ракет
и т. д.
На рис. 2.47,6 показаны педали. Педаль 3 с ремнем 4
закреплена во втулке 2, позволяющей регулировать положение пе-
5*
131
дали относительно труб / и 5. Основным силовым элементом
является труба 5, которая может поворачиваться на кронштейне 7.
Она связана тягой 6 с рулем направления. Вторая тяга (труба)
/ — кинематическая, обеспечивает плоскопараллельное смещение
педалей при отклонении, что необходимо для удобства нажатия
на педаль.
Проводка управления предназначена для передачи
перемещений командных рычагов к рулевому приводу и рулям.
Применяют два типа проводок — тросовую и жесткую.
Тросовая проводка управления (рис. 2.48,а) включает педали /,
секторы 2, два троса 3, перекинутых через ролики 4, и тан-
деры 5 для регулировки натяжения тросов. Проводка состоит
из двух тросов, так как каждый трос работает только на
растяжение.
Тросовая проводка представляет собой замкнутую систему,
поэтому отклонение педалей не должно вызывать изменения
суммарной длины тросов. При наличии секторов это обеспечивается
тем, что на один сектор трос наматывается, а с другого —
сматывается.
Для повышения жесткости проводки управления после
установки на самолет в тросах создается усилие предварительной
затяжки So-
Усилие So зависит от температуры окружающего воздуха, так
как коэффициент температурного расширения стали, из которой
выполнен трос, в три раза меньше коэффициента температурного
расширения дюралюминия, из которого выполнен фюзеляж.
С повышением температуры натяжение увеличивается, а с
понижением— уменьшается. Поэтому при регулировке в
зависимости от температуры воздуха задают разные значения усилия
предварительной затяжки. Потребное значение определяется по
графикам, приводимым в техническом описании самолета. В
процессе эксплуатации натяжение тросов контролируется и при
необходимости регулируется.
Жесткая проводка управления (рис. 2.48,6)
выполняется из тяг /, закрепленных на качалках 2 или проложенных в
роликовых направляющих 3. Часто иа одном самолете в проводке
к одному рулю есть и качалки, и роликовые направляющие.
Тяги работают на растяжение и сжатие и выполняются из
стальных или дюралюминиевых труб различного диаметра и
толщины. Концы трубы обжимаются под стальной наконечник
с ушком. Часть наконечников закрепляется в трубе на резьбе,
что позволяет регулировать длину проводки управления.
Роликовые направляющие устанавливаются через одну тягу
дли того, чтобы при изгибе фюзеляжа или крыла тяги не
заклинило. Для уменьшения износа тяг, соприкасающихся с роликами,
их выполняют стальными или вставляют в дюралюминиевую тягу
стальную вставку.
Отрицательное влияние на управление самолетом оказывают
трение и свободные люфты в шарнирах. Трение вызывает скачко-
132
www.vokb-la.spb.ru - Самолёт своими руками?!
обпазное изменение усилий при перемене направления отклонения
команд"ь1Х рычагов, а люфты дают им свободный ход.
Допустимые значения силы трения задаются в техническом
описании самолета, а в процессе эксплуатации величина силы
трения контролируется.
Для уменьшения люфтов сокращается число шарнирных
соединений за счет увеличения длины тяг, в шарнирах монтируются
шариковые подшипники с минимальными радиальными зазорами.
В настоящее время на самолетах и вертолетах широко
применяются как жесткие проводки, так и тросовые. Тросовые
проводки легко прокладываются через отсеки, занятые оборудованием и
агрегатами, имеют малую массу. Жесткая проводка при малой
длине обладает большой жесткостью, незначительными люфтами
и большой живучестью.
Иногда проводки комбинируются и выполняются смешанными.
В последние годы наметилась тенденция к замене
механических проводок электрическими, когда перемещения командных
рычагов преобразуются в электрические сигналы, поступающие
на вход рулевого привода.
Рулевые приводы (гидроусилители) включаются в проводку
управления в тех случаях, когда прямое отклонение рулей или
требует от летчика затраш большой мощности, или вообще
физически невозможно. Если рулевые приводы включаются по так
называемой необратимой схеме, то весь шарнирный момент рулей
преодолевается усилием на штоке рулевого привода. Летчик
управляет фактически только работой привода. При этом, как и
при прямом управлении, рули должны отклоняться без заметного
запаздывания в строгом соответствии с направлением, величиной
и скоростью отклонения командных рычагов.
Рулевой привод состоит из распределительных и
исполнительных устройств, охваченных обратной связью, т. е. он является
следящим гидравлическим приводом. Несмотря на большие
конструктивные отличия приводов, принципы их работы различаются мало.
Рассмотрим эти принципы на примере двухкамерного
гидроусилителя с плоскими золотниками (рис. 2.49). Его
исполнительным устройством является силовой цилиндр 2 со штоком /. Шток
крепится к конструкции самолета, а цилиндр — к рулю высоты
(управляемому стабилизатору). Два рабочих цилиндра
расположены тандемом, так что их усилия складываются.
Подвод жидкости от бустерной и общей гидросистем
регулируют два распределителя с плоскими поворотными золотниками.
Ручка управления связана с входным ушком 3, которое валиком 4
связано с рычагом (качалкой) 5. Между валиком и ответным
ушком на корпусе имеется зазор А, благодаря которому смещение
Ручки управления и ушка 3 приводит к повороту рычага 5. Через
тяги и качалки 7 этот поворот передается золотникам 6.
Каждый золотник с зазором примерно 2 мкм установлен
между опорной поверхностью 12 корпуса и шайбой 10, прижатой
пРУжпнами 8 (и давлением жидкости на поршни 9) к буртику
133
и
Ш
Ч1 чо
N .1
15
IT
I э
134
www.vokb-la.spb.ru - Самолёт своими руками?!
сопуса (опорному кольцу //). Условно смещение золотника на
рисунке показано стрелками.
В зависимости от направления поворота золотника камеры Б
Б сообщаются с нагнетанием и сливом, что и вызывает
смещение цилиндра до тех пор, пока открыты окна в золотниковом
распределителе или пока движется ручка управления. Если ручку
и ушко 3 остановить, то, продолжая смещаться, цилиндр
повернет рычаг 5 относительно валика 4 на закрытие окон. После этого
движение цилиндра прекратится. Этим достигается обратная
связь и обеспечивается перемещение цилиндра на величину,
пропорциональную смещению ручки.
Слежение по скорости обеспечивается соответствующим
открытием окон в золотниковой паре: чем с большей скоростью
отклоняется ручка, тем больше открыты окна. Максимальное их
открытие ограничено зазором А, при этом максимальная
располагаемая скорость штока должна быть большей, чем практически
реализуемая летчиком в процессе управления самолетом.
На входе в гидроусилитель установлены фильтры 14 и
обратные клапаны 13. Если усилие на шток от шарнирного момента
превысит усилие, создаваемое давлением жидкости, возникает
опасность «просадки» руля, т. е. отклонения к нейтральному
положению (по направлению шарнирного момента). В этом случае
клапаны 13 запирают жидкость в цилиндре, создают
гидравлический замок и фиксируют руль.
Рассматриваемый привод не обеспечивает переход на ручное
управление самолетом. Он устанавливается там, где прямое
управление невозможно по условиям преодоления шарнирных
моментов, например на стабилизаторе.
Высокая надежность гидроусилителя обеспечивается
дублированием распределителей, силовых цилиндров и гидравлических
систем, питающих привод.
Возможность перехода па прямое ручное управление
обеспечивается клапанами кольцевания, которые открывают каналы для
свободного перетекания жидкости из полости Б в полость В и
наоборот.
Свободное перемещение ручки управления на земле при
отсутствии давления в гидросистеме говорит о наличии клапанов
кольцевания в гидроусилителе и о возможности перехода на
ручное управление. При их отсутствии ручка без давления в
гидросистемах не перемещается.
На самолетах и вертолетах устанавливаются в принципе
аналогичные усилители.
Автомат регулирования управления. Среди параметров,
определяющих характеристики управляемости самолета, большую
Роль играют усилия на командных рычагах управления и их
перемещения, необходимые для изменения режима полета.
При необратимом включении гидроусилителя загрузка ручки
Управления осуществляется пружинными загружателями
135
(рис. 2.50). При отклонении ручки / сжимается пружина 2 так,
что усилия на ручке будут пропорциональны ее отклонению.
Постоянные усилия снимаются механизмом триммирования 3,
который смещает второй конец пружины и уменьшает ее обжатие.
При жесткой связи ручки с рулем и при такой загрузке
перемещения ручки х"ву п усилия Ру на ней, потребные для изменения
Р?
Рис. 2.50. Автомат регулирования управления:
1 — ручка управления; 2—- пружипа загрузочного механизма; 3 — механизм
триммпрования; 4 — стабилизатор; 5 - Слок управления; 6 — двигатель автомата
перегрузки на единицу, зависят от эффективности стабилизатора
(ср"у), т. е. от его угла отклонения, вызывающего то же
изменение перегрузки. Эта эффективность изменяется в 20—30 раз в
зависимости от режима полета: она максимальна (<Л —
минимальна) на больших дозвуковых скоростях полета у земли и
минимальна на больших высотах при полете со сверхзвуковыми
скоростями. Для того чтобы выдержать х"ву и Р°у в
определенных пределах, на самолетах устанавливаются специальные
автоматы, двигатели 6, которых от вычислителя (блока управления) 5
в зависимости от режима полета (<? и И) регулируют плечи h и
/3, изменяя передаточные отношения проводки управления к рулю
и к пружине. Такие автоматы называются: автоматами
регулирования загрузки (АРЗ), если изменяется только
плечо U; автоматами регулирования передаточных
отношений (АРП), если изменяется только плечо U, или,
наконец, автоматами регулирования управления
(АРУ), если одновременно изменяются оба плеча. Благодаря
применению АРУ можно значительно сократить диапазон изменения
х"ву и РдУ в полете. Такие автоматы должны иметь высокую на-
136
www.vokb-la.spb.ru - Самолёт своими руками?!
нежность, так как при их отказе пилотирование самолета
затрудняется пли вообще может оказаться невозможным.
Включение автоматических устройств в проводку управления.
На рис- 2.51 показано параллельное (агрегаты 5, 6) и
последовательное (агрегат 9) включение рулевых агрегатов САУ в
проводку управления. Рулевой агрегат (РАУ) 9 отклоняет руль
через основной рулевой привод (РП) 8, шток которого связан с
/ т77777
Рис. 2.51. Включение автоматических устройств в проводку управления:
1 — кнопки аварийного отключения САУ, 2 — ручка управления; 3 — датчик
рассогласования: 4 - загрузочный механизм; 5 — механизм триммирования; б —
рулевая машина САУ; 7 — руль; в — рулевой привод; 9 — рулевая машина демпфера:
/О —вычислитель САУ: // — автомат регулирования управления
рулем. Перемещению проводки в сторону ручки препятствует
пружина загрузочного механизма (ЗМ). Сигнал от САУ подается
также и на механизм триммирования (МТ) 5, который при
свободной ручке через пружину смещает всю проводку управления,
в том числе и ручку управления 2. В этом случае МТ играет роль
рулевого агрегата управления. Обычно РАУ отслеживает сигналы
САУ, следующие с достаточно большой частотой (демпфирование,
автоматическое обеспечение устойчивости), а механизм
триммирования — медленно меняющиеся во времени сигналы. В этом
случае в любой момент при переходе на ручное управление усилия
на ручке будут стриммированы.
В режиме ручного управления работает только РАУ,
обеспечивая демпфирование колебаний самолета, повышение
устойчивости и т. д. В режиме автоматического управления работают МТ
и РАУ.
Иногда устанавливают специальную рулевую машину 6,
которая обеспечивает только автоматическое управление самолетом.
В этом случае вмешательство летчика в управление возможно
только от специальной так называемой строевой ручки,
задающей управляющие сигналы в САУ, которая отклоняет рули в
соответствии с полученным сигналом.
137
Для обеспечения безопасности полета при отказе САУ
устанавливаются кнопки / аварийного отключения иа ручке
управления 2, датчики рассогласования 3 в проводке, отключающие
автопилот при приложении летчиком определенных усилий к
рычагам управления, предусматривается пересиливание рулевой
машины. Все это обеспечивает быстрый переход от автоматического
управления на ручное.
Для того чтобы при включении САУ на любом режиме полета
не происходило рывка управления, имеется специальный режим
ее работы — автоматическое согласование. Он состоит в том, что
управляющий сигнал САУ в момент ее включения соответствует
выходу штока РМ 6. Для исключения рывка при переходе с
автоматического режима на ручной, если управление осуществляется
от рулевой машины 6, имеется система автоматического тримми-
рования усилий на ручке.
В режиме автоматического управления летчик контролирует
работу САУ и должен быть в состоянии активной готовности
взять управление на себя в случае ее отказов.
Глава 5
ТОПЛИВНЫЕ СИСТЕМЫ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
5.1. НАЗНАЧЕНИЕ И РАБОТА ТОПЛИВНЫХ СИСТЕМ,
ТРЕБОВАНИЯ. ПРЕДЪЯВЛЯЕМЫЕ К НИМ
Топливная система предназначена для размещения на
летательном аппарате необходимого для полета количества топлива
и подачи его к двигателям. От правильной работы топливной
системы зависят возможность выполнения боевого задания и
безопасность полета. Принципиальное устройство топливной системы
в большой степени определяется типом двигателя, установленного
на летательном аппарате. При воздушно-реактивных двигателях
топливная система рассчитана иа размещение одного компонента
топлива, при жидкостио-реактивных — на размещение двух
компонентов.
Рассмотрим топливную систему самолета (вертолета) с
воздушно-реактивными двигателями. На современных военных
самолетах необходимость размещения большого количества топлива,
масса которого в ряде случаев достигает 50% полетной массы
самолета, делает топливную систему весьма разветвленной,
располагающейся почти по всему самолету.
Топливная система должна удовлетворять целому ряду
специальных требований. К ним относятся:
наличие емкости, обеспечивающей размещение топлива,
необходимого для выполнения боевого задания, и необходимого
аварийного запаса;
138
www.vokb-la.spb.ru - Самолёт своими руками?!
бесперебойная подача топлива на всех режимах полета и
работы двигателей;
малое изменение центровки самолета при выработке топлива;
высокая боевая живучесть;
малое время заправки системы топливом и его слива, в том
числе и аварийного слива в полете;
автоматическое поддержание заданного порядка выработки
топлива;
абсолютная внешняя герметичность (отсутствие подтекания
топлива);
постоянный замер оставшегося в системе топлива.
У ряда самолетов топливная система должна позволять в
случае необходимости значительно увеличивать ее емкость за счет
подвесных баков.
В топливной системе можно выделить три основные части:
емкости для топлива, систему заправки топливом, систему питания
топливом двигателей. Кроме того, имеются системы: контроля
количества топлива, аварийного слива топлива, заправки в воздухе
и др. К топливной системе также относятся: система дренажа и
наддува баков, обеспечивающая заданное значение давления в
самолетных емкостях для топлива, и противопожарная система
(включая систему нейтрального газа), увеличивающая
надежность и боевую живучесть топливной системы.
5.2. ПРИНЦИПИАЛЬНОЕ УСТРОЙСТВО ТОПЛИВНОЙ
СИСТЕМЫ
Топливные емкости могут выполняться в виде отдельных баков
или в виде герметизированных отсеков планера самолета.
Размещение на самолете требуемого большого количества топлива
вызывает большие трудности, особенно у маневренных самолетов.
Из-за малого объема тонких крыльев топливо приходится в
основном размещать внутри фюзеляжа, используя каждое
свободное место и устанавливая большое число малых по величине
емкостей. Это невыгодно как в массовом отношении, так и в
отношении боевой живучести (легче поразить топливную систему и
вызвать пожар). Поэтому на этих самолетах широко используется
постановка подвесных баков для топлива, необходимого для
полетов на повышенную дальность. В боевых условиях эти баки
могут быть сброшены после выработки из них топлива. Для
уменьшения прироста сопротивления самолета выгоднее устанавливать
малое число подвесных баков большой емкости. На тяжелых,
неманевренных самолетах с крылом большой относительной
толщины топливо размещается в основном в крыле.
Баки-отсеки образуются путем герметизации отдельных
участков конструкции планера. Такой способ создания емкостей
выгоден в массовом отношении, но требует повышенного контроля
за герметичностью баков.
139
Съемные баки большей частью делаются мягкими из
прорезиненной ткани. Жесткие металлические баки применяются на
современных самолетах значительно реже, прежде всего, из за
сложности их съемки (постановки) в эксплуатации. Мягкие баки
размещаются обычно в контейнерах, специально сделанных внутри
планера. Стенками контейнера могут быть стенки нервюр или
шпангоутов. Сохранение формы мягкого бака достигается либо за
счет крепления его стенок посредством узлов к контейнеру, либо
за счет постановки специального каркаса внутри бака. Для
избежания складывания мягких баков в эксплуатации при
выработке из них топлива необходимо тщательно следить за
исправностью системы дренажа баков, чтобы в баке ire возникало в
полете отрицательного перепада давлений, даже самого
незначительного.
Как жесткие, так и мягкие баки должны легко монтироваться
и демонтироваться. Формы их должны быть таковы, чтобы невы-
рабатываемый объем размещенного в них топлива был
минимален.
Заправка топливом системы может осуществляться через
заливные горловины заправочных баков. Заполнение остальной
системы происходит самотеком. Воздух из заправляемых емкостей
выдавливается через дренажную систему. Емкости топливных
систем современных самолетов стали столь велики, что время
рассмотренного метода заправки может составлять десятки минут и
даже часы. Заправочные горловины должны располагаться в
верхних точках топливной системы, подход к которым достаточно
затруднен. Все это заставило перейти к централизованной заправке
топливной системы под давлением (к принудительной подаче
топлива в систему под давлением от заправщика). Приемник
топлива может располагаться в любой точке самолета (обычно
на фюзеляже), даже ниже расположения баков. Все это
значительно упрощает и сокращает время заправки самолета топливом.
Подача топлива столь интенсивна, что воздух из баков не
успевает уходить по обычной системе дренажа. Это может привести
к значительному повышению давления в баках, поэтому
необходимо устанавливать в системе дренажа специальные
предохранительные клапаны, открывающие большие отверстия для
стравливания воздуха из баков в период заправки.
Если при полностью заправленных баках не будет
немедленно прекращена подача топлива, то произойдет резкое повышение
давления — гидроудар и баки при этом разрушатся. Поэтому в
системе заправки около каждого бака устанавливаются перскрыв-
ные краны, отсекающие подачу топлива при наполнении бака до
предельного уровня. Краны работают от топливомеров,
устанавливаемых в баках. Централизованная заправка топливом
усложняет и утяжеляет систему и соответственно усложняет ее
обслуживание. Применять ее на самолетах с малыми объемами
топливной системы нецелесообразно.
Система питания должна бесперебойно подавать топливо в
140
www.vokb-la.spb.ru - Самолёт своими руками?!
нужном количестве к топливным насосам двигателей и
обеспечивать заданный порядок выработки его из баков. Обычно
непосредственно к двигателю топливо подается все время из одного
так называемого расходного бака (рис. 2.52). Порядок выработки
определяется подачей топлива в расходный бак. На самолетах
с несколькими двигателями у каждого двигателя может быть свой
Расходный бак
Система \дренаока и наддува'
АР
Двигатель \_
Насос перекачки
Рис. 2.52. Схема топливной системы с расходным баком
расходный бак, но в аварийных случаях питание двигателя
должно переключаться и на другие. В первую очередь производится
выработка топлива из подвесных баков, так как в боевых
условиях онн должны быть сброшены до начала выполнения боевого
задания или при появлении противника. Обычно вслед за
подвесными вырабатывается топливо из крайних консольных баков,
а потом из фюзеляжных.
В эксплуатации необходим тщательный контроль за работой
дренажной системы. Падение давления на выводе дренажной
системы в атмосферу, ее загрязнение, особенно попадание в систему
воды, может привести к тому, что давление в баках при
выработке топлива (или при резком снижении) может оказаться ниже
атмосферного, что может привести к разрушению бака от
сжатия.
Из-за больших гидравлических потерь в трубопроводах,
особенно при больших высотах полета (малом атмосферном
давлении), давление на входе в топливный насос двигателя может
оказаться столь малым, что возникнет явление кавитации — начнется
интенсивное выделение паров топлива. Пузырьки пара, попадая
в насос, нарушают его нормальную работу (резко снижая
производительность), что может привести к остановке двигателя.
Для повышения высотности топливной системы — высоты
полета, на которой в топливной системе не возникает кавитации,
в баки устанавливают подкачивающие насосы, подающие топливо
в трубопроводы под давлением. Для предупреждения возможности
появления кавитации на входе в подкачивающий насос приме-
141
няют систему наддува баков. С поднятием самолета на высоту
дренаж бака с атмосферой закрывается и в бак подается воздух
от компрессора двигателя с избыточным давлением Др.
Принципиально можно создать большое избыточное давление
и обойтись без подкачивающего насоса, но это невыгодно, так
как потребует значительного увеличения прочности баков н нх
массы.
^Г
В
У
А
ш
P^^f-^EIliJ^
1
St.
Рис. 2.53. Схема обеспечения порядка выработки
топлива из баков
Для того чтобы при отрицательных перегрузках
подкачивающий насос всегда находился в топливе, в топливных баках
маневренных самолетов устанавливают клапан отрицательной
перегрузки. Объем клапана определяет время, которое может лететь
самолет с отрицательной перегрузкой.
На неманевренных самолетах, на которых число топливных
баков может составлять несколько десятков, баки сводятся в
отдельные группы, последовательность выработки которых должна
автоматически выдерживаться.
На рис. 2.53 показана широко распространенная
принципиальная схема системы автоматической выработки топлива.
В баках устанавливаются емкостные топливомеры /,
внутренняя полость которых используется для размещения поплавка
индукционного датчика 2 управления подкачивающими насосами3,
работающими иа один общий коллектор 4. При запуске двигателя
включается подкачивающий насос бака / иа рабочий режим
(рраб= (l-i-1,1) • Ю5 Па). Когда большая часть топлива из бака /
будет выработана и поплавок 2 опустится до заранее
установленного уровня а—а, он дает сигнал на усилитель, который включает
насос бака // на рабочий режим и одновременно переключает
насос бака / на форсированный режим (рфоРс = (1,3-М,4) • 105 Па).
Поэтому, несмотря на работающий насос бака //, в магистраль
будет подаваться топливо из бака /. После того как топливо из
бака / полностью выработано, оно без перебоя начнет поступать
из бака //. После выработки определенного количества топлива
в баке // (уровень в—е) его поплавок отключает насос бака /.
J42
www.vokb-la.spb.ru - Самолёт своими руками?!
л делается для гарантии, что насос бака / не отключится при
учайном колебании топлива и оставит его невыработанным.
° В качестве подкачивающих насосов применяются насосы цен-
побежного типа. Они при небольших габаритах обладают
высокой подачей и создают необходимый подпор в трубопроводах. При
неработающем насосе топливо может проходить через него с
небольшими гидравлическими потерями. Насос выполняется
совместно с электромотором, частота вращения ротора которого
возрастает при переводе насоса на форсированный режим.
Для уменьшения вероятности загорания топлива на самолете
или Ддя тушения загоревшегося топлива делается
противопожарная система. Она должна резко увеличить живучесть как самой
топливной системы, так и всего самолета в целом.
Рассмотрим часть противопожарной системы,
непосредственно связанной с топливной. Наиболее простой и широко
распространенной является система нейтрального газа. Как известно,
в пожарном отношении пары топлива более опасны, чем само
топливо (пустой бак может оказаться опаснее полного). Для
уменьшения вероятности пожара полость бака над топливом,
а иногда и отсеки установки баков заполняют нейтральным
газом— углекислотой или азотом.
Начали также применять в баках губчатый заполнитель,
который не только уменьшает вероятность пожара при боевом
повреждении бака, но также уменьшает вероятность разрушения
бака от возникающих аэро- и гидроударов и утечку топлива через
пробоины.
Трубопроводы топливных систем во многом отличаются от
гидравлических, так как топливная система рассчитана на
давление на два порядка меньше и на значительно больший секундный
расход, чем гидравлическая система. Они выполняются из
тонкостенных труб относительно большого диаметра. Топливные
трубопроводы обладают большой жесткостью на изгиб, поэтому
неправильный монтаж трубопроводов вызывает появление в них
больших напряжений и в итоге преждевременное их разрушение.
Огромное влияние на работу топливной системы может
оказать загрязнение топлива. Поэтому в топливной системе
устанавливаются топливные фильтры часто такой же конструкции, как
и в гидросистеме. Фильтры соединяются с отстойниками, одно из
назначений которых — отстой воды, растворенной в топливе.
Раздел Ш
АВИАЦИОННЫЕ ДВИГАТЕЛИ
Гл ава 1
КЛАССИФИКАЦИЯ И ОБЛАСТИ ПРИМЕНЕНИЯ
АВИАЦИОННЫХ ДВИГАТЕЛЕЙ
1.1. ОСНОВНЫЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ
К АВИАЦИОННЫМ ДВИГАТЕЛЯМ
В процессе создания двигателей летательных аппаратов
конструкторы стремятся удовлетворить ряд требований, которые
являются общими для авиационных двигателей различных типов.
Рассмотрим основные из этих требований.
Высокое значение тяги Р или мощности N при малой массе
двигателя. Суммарное значение тягн (для ТВД мощности)
силовой установки должно обеспечивать необходимые взлетные,
разгонные, маневренные и другие характеристики летательного
аппарата.
Высокая экономичность (малые значения удельного расхода
топлива). При данном запасе топлива на летательном аппарате
экономичность двигателя существенно влияет на дальность и
продолжительность полета. Высокую экономичность двигателя
можно обеспечить за счет рационального выбора параметров
рабочего процесса и снижения потерь во всех его элементах.
Малая масса двигателя (при заданной тяге). Уменьшение
массы двигателя снижает его долю в массовом балансе летательного
аппарата и улучшает летно-технические данные последнего
(увеличиваются полезная нагрузка, максимальная высота или
дальность полета).
Уменьшение массы двигателя возможно за счет снижения
размеров как всего двигателя, так и его деталей, применения более
легких и прочных материалов (титан, композиционные материалы)
и совершенствования технологических процессов производства.
Тяга (мощность) двигателя при этом может сохраняться
неизменной за счет повышения степени подогрева воздуха в камере
сгорания.
Малые габариты (малый поперечный размер) и малый объем
двигателя. Максимальный поперечный размер двигателя в случае
его установки в мотогондоле определяет лобовое сопротивление
144
www.vokb-la.spb.ru - Самолёт своими руками?!
повой установки, а следовательно, н величину эффективной Тяги
5Пр„ прочих равных условиях).
При размещении двигателя в фюзеляже более важным пара-
[етроы является доля объема, занимаемая двигателем и канала-
N подвода и отвода от него газов в общем полезном объеме
утренних полостей самолета, где размещаются полезная
нагрузка, оборудование и топливо.
Высокая надежность. Под надежностью авиационного двига-
течя понимают способность его безотказно (исправно) работать
без ухудшения показателей тяги (мощности) н экономичности в
течение заданного интервала времени (ресурса) в определенных
условиях эксплуатации (на всех предусмотренных режимах
работы двигателя, скоростях и высотах нолега и в разных
климатических условиях).
Надежность работы авиационного двигателя является одним
из основных факторов, определяющих безопасность полета.
Необходимый уровень надежности двигателя обеспечивают при его
проектировании, изготовлении, испытаниях и эксплуатации.
Высокая эксплуатационная и ремонтная технологичность.
Выполнение этих требований сокращает время, трудозатраты и
повышает качество выполнения различных профилактических и
ремонтных работ, что способствует снижению стоимости
обслуживания, ремонта авиационной техники и повышению боеготовности
авиационных частей.
Высокая контролепригодность. Еще на этапе проектирования
двигателя должна быть предусмотрена возможность
автоматизированного контроля (с использованием встроенных в двигатель
датчиков) основных параметров работы двигателя как на земле,
так и в полете. Это позволяет проводить прогнозирование
состояния и работоспособности двигателя и его систем, обеспечивает
более раннее выявление отказов и неисправностей, повышает
надежность работы двигателя и безопасность полетов.
1.2. КЛАССИФИКАЦИЯ И ОБЛАСТИ ПРИМЕНЕНИЯ
АВИАЦИОННЫХ ДВИГАТЕЛЕЙ
В настоящее время на летательных аппаратах применяют
главным образом реактивные двигатели.
Реактивными двигателями называют такие двигатели,
в которых энергия первичного источника преобразуется в
кинетическую энергию газовой струи, вытекающей из двигателя, а
поучающаяся при этом сила реакции непосредственно используется
как движущая сила (сила тяги).
Реактивные двигатели в зависимости от рода, вида рабочего
процесса и схемы устройства можно разделить на ряд типов.
Дин из возможных вариантов классификации авиадвигателей
приведен на рис. 3.1.
145
г—
г*
ч
U
п
а
с
со
Реактивные
Ш
Е
о
ей
со
>Ь
со
S
CD
F
а
со
о.
о
э
«о
о
3:
■о
>>
ь
о
з:
8
S&
Н\
2§
Cl
>*
к.
^y
ivffi
IV
зН¥
E' 1
a
со
Е
а
СО
Я
"CQ
а;
X
Е
со
Й
П.
со
о
Е
о
5
ft
с^
1
■э j
* 1
a I
со g
°- a
•о a
i£ =
СО
О
со
CD
Co
ё
*§■
&5
L-J-^
у и
Ш
Si
(S
ршп
■^ /■—^
m 1 .... AJ
4 1 ^
,
rz\
№
ill 7=
111?
11H
Щ
L .Ш
±u
CO
S3
о S
1 с
3 В
g-
~
Р
fc
.
I-
j-,
у
ч
S? f—rj
>»cfr
E?
4
4
Щ T—j.,
— .
G /Г\Л\§/Г i
<=> 1 U
^ 1 ■? 1 1
к га
Б
|Щ
—1 j I^ti
\ 7
i
^
Sco
О X *-
i: =г с:
^S Q.
to £ CC
S-*E
Й&
I
I о
1 vs
1 ^
1 ^-
1
CO
- l-~
CD
e 1
ЧЭ
^1iJb|
к. ri J
gN
1 S
■ -
CD
£.
1 о
1 *
! S
CO
s
5 «■
CR 4-'
L _♦__.
«>
l
^
О
it
1;
1
j
is i
Е!ч
u э fc- J
UE !
_l
146
www.vokb-la.spb.ru - Самолёт своими руками?!
Все реактивные двигатели делятся на две большие группы:
ракетные (РД) и воздушно-реактивные (ВРД). Ракетные двн-
гатети подразделяются по роду топлива на ракетные двигатели
твердого топлива (РДТТ) и жидкостные ракетные (ЖРД),
а воздушно-реактивные двигатели — на прямоточные
(ПВРД) и газотурбинные двигатели (ГТД).
Основное отличие ракетных двигателей заключается в том, что
горючее и окислитель, необходимые для работы двигателя,
размешаются на борту летательного аппарата, т. е. при работе этот
двигатель не использует атмосферный воздух. Поэтому
протекание рабочего процесса в ракетных двигателях мало зависит от
атмосферных условий и они могут применяться в очень широком
диапазоне высот и скоростей полета.
Ракетный двигатель твердого топлива состоит
из камеры, заполненной твердым топливом, имеющим в своем
составе горючее и окислитель, и выходного сопла. Для пуска
двигателя используется пусковой воспламенитель. Газы, образующиеся
при сгорании топлива, с большой скоростью вытекают через сопло
в атмосферу, создавая силу реакции, направленную в
противоположную сторону. Эта сила реакции и является силой тяги,
перемещающей летательный аппарат в пространстве. Время
работы РДТТ ограничено временем сгорания топлива и составляет
несколько десятков секунд. В авиации РДТТ применяются в
качестве стартовых ускорителей взлета самолетов и в качестве
двигателей для управляемых и неуправляемых ракет.
Жидкостный ракетный двигатель состоит из
камеры сгорания, в которую через форсунки подаются жидкие
компоненты топлива — горючее и окислитель, хранящиеся в отдельных
баках, и выходного сопла. Компоненты топлива поступают в
камеру сгорания под давлением, создаваемым либо специальными
насосами (ЖРД с насосной подачей топлива), либо за счет под-
давливания в нужный момент заранее сжатым газом,
заключенным в специальный баллон (ЖРД с вытеснительной подачей
топлива). В камере сгорания ЖРД горючее, соприкасаясь с
окислителем, самовоспламеняется (или воспламеняется электрическим
запальным устройством). Образующиеся в результате сгорания газы
оолыпои скоростью вытекают наружу через сопло, создавая
реактивную тягу двигателя. V
скяиГ сравне1шю с РДТТ жидкостные ракетные двигатели допу-
конгтТ регУлиР°вание тяги в более широких пределах, однако
ных ТИВН° °НИ сложнее и их эксплуатация требует
специальных « wiumncc и ил зпым1}!<11йц11н 1 реоует специаль-
честа пРедостоР°ж"ости. В авиации ЖРД используются в ка-
ракет полетных Ускорителей самолетов и в силовых установках
воздушно. pea
кетных двигателей и
окислителя, а горюче
' "тельного аппарата.
кетщ?у реактивные Двигатели в отличие от
раскис ■; двнгателей используют атмосферный воздух в качестве
тательн & Г0Рючее (керосин) транспортируется на борту ле-
147
Простейшим воздушно-реактивным двигателем является
прямоточный ВРД. В полете встречный поток воздуха, набегающие
на двигатель, тормозится в струе перед входом и во входном
устройстве (диффузоре), за счет чего происходит повышение дав-
ления воздуха, необходимое для последующей организации го
рения (подвода тепла) в камере сгорания. Продукты сгорания
нагретые до высокой температуры, подаются в сопло, где пронс'
ходит увеличение скорости до величин, превышающих скорости
полета, что обеспечивает получение силы тяги.
Недостатком ПВРД является то, что он не может создавать
силу тяги при работе на месте и на малых скоростях полета
когда в камере сгорания нет избыточного давления. Поэтому для
ПВРД необходим стартовый двигатель. При малых числах JV1
полета сжатие воздуха от использования скоростного папора
невелико, н в этих условиях ПВРД имеет малую тягу и низкую эко
номичность. С увеличением скорости полета характеристики ПВРД
улучшаются. Поэтому область эффективного применения ПВРД—
это большие сверхзвуковые скорости полета (М>3,0) на больших
высотах (Н до 30—35 км). Такие двигатели принято называть
сверхзвуковыми ПВРД. Гиперзвуковые прямоточные ВРД
(ГПВРД) рассматриваются в качестве перспективных силовых
установок для разгона космических летательных аппаратов до
М = 6-=-7 или для гиперзвуковых самолетов. ПВРД могут уста
навлнваться на крылатых ракетах.
В настоящее время в качестве основных двигателей для само
летов и вертолетов применяют газотурбинные двигатели. В этих
двигателях давление воздуха на входе в камеру сгорания
повышается с помощью компрессора, приводимого в действие газовой
турбиной. Это обеспечивает получение силы тяги и в статических
условиях.
В газотурбинном двигателе воздух, предварительно сжатый во
входном устройстве (как и у ПВРД), поступает в компрессор,
где осуществляется дальнейшее увеличение его давления. Сжатый
воздух поступает в камеру сгорания, где к нему подводится тепло
за счет сжигания горючего. На выходе из камеры сгорания газ
обладает высокой потенциальной энергией. Часть энергии при
расширении газа в турбине преобразуется в механическую работу
на валу турбины, которая расходуется на привод компрессора и
всех вспомогательных агрегатов. Другая часть этой энергии
преобразуется (при расширении газа в выходном сопле) в
кинетическую энергию газового потока.
В зависимости от принципа создания силы тяги ГТД
подразделяются на турбореактивные двигатели (ТРД), двухконтурные
турбореактивные двигатели (ТРДД), турбовинтовые двигатели
(ТВД) и турбовальные ГТД.
В ТВД основная часть полезно используемой энергии газа
идет на создание механической работы на валу турбины,
осуществляющей привод компрессора и воздушного винта.
Воздушный винт (тянущий — в случае самолетного ТВД или
148
www.vokb-la.spb.ru - Самолёт своими руками?!
щ11й в случае вертолетного ГТД) создает силу тяги в ре-
несУ.ате отбрасывания больших масс воздуха с относительно не-
?£пьшой скоростью, превышающей скорость полета.
В ТРД сила тягн — сила реакции вытекающих из сопла газов
скоростью, превышающей скорость полета. ТРД объединяет
в°себе п двигатель, и движитель.
Широкое применение для силовых установок летательных аппа-
ятов находят двухконтурные ТРД. В отличне от одноконтурного
ТРД (просто ТРД) в ТРДД воздух, поступающий в двигатель,
пелится на два потока: один сжимается в нескольких ступенях
компрессора и направляется в наружный (второй) контур, а за-
см в выходное сопло, а второй сжимается еще в нескольких
ступенях компрессора, поступает в камеру сгорания, проходит
через турбину, а затем объединяется с потоком наружного
контура или раздельно направляется в выходное сопло. В отличие
от ТВД здесь часть мощности турбины расходуется па сжатие
воздуха во втором контуре, благодаря чему повышается общий
расход воздуха через двигатель и снижается скорость истечения
газа из сопла. Это дает такому двигателю некоторое
преимущество в экономичности по сравнению с ТРД при дозвуковых и
трансзвуковых скоростях полета.
Для повышения тягн двигателя ТРД и ТРДД снабжаются
форсажными камерами, при сжигании в которых дополнительного
количества топлива увеличивается скорость истечения газа из
двигателя. Такие двигатели получили наименование
турбореактивный двигатель с форсажем (ТРДФ) и двух-
контурный двигатель с форсажем (ТРДДФ). В ТРДФ
форсажную камеру располагают позади газовой турбины, а в
ТРДДФ — позади камеры смешения (при смешении потоков
внутреннего и наружного контуров за турбиной) или перед выходным
соплом наружного контура. Возможно конструктивное
объединение ВРД различных типов в единой двигательной установке.
Такие двигатели принято называть комбинированными. К ннм
относятся ракетно-прямоточные, турбопрямоточные и ракетно-турбин-
кые двигатели.
Каждый из рассмотренных ГТД имеет определенную область
возможного и наивыгоднейшего применения по скорости и высоте
полета.
ТВД экономичнее двигателей других типов при полетах со
скоростями до 850—900 км/ч на высотах до 12 -14 км, при
которых воздушный винт сохраняет еще достаточно высокие значения
коэффццНеита полезного действия (КПД). ТВД применяются на
военно-транспортных и пассажирских самолетах большой
грузоподъемности и дальности полета.
Максимальная высота полета вертолетов с ГТД не превышает
~° км, скорость полета вертолета ограничивается условиями
Работы несущего впита.
Отсутствие редуктора и возможность дополнительного ежпга-
я топлива в наружном контуре выгодно отличают двухконтур-
149
ный двигатель от ТВД. Область наивыгоднейшего применения
ТРДД ограничена величиной скорости 1000—1400 км/ч на высоте
до 12—16 км, где ТРДД экономичнее ГТД других гипов. Однако
возможно применение ТРДД и при скоростях полета выше
1400 км/ч.
При скоростях полета более 1000—1400 км/ч лучшие
показатели экономичности имеют ТРД.
Для обеспечения полетов на сверхзвуковых скоростях (до
М = 3,04-3,5) и на больших высотах используются ТРДДф и
ТРДФ.
Все указанные выше ГТД устанавливаются на военных
летательных аппаратах в зависимости от назначения, диапазона их
скоростей н высот полета.
Следует заметить, что границы областей применения
двигателей в некоторой степени подвижны, их положение зависит от
значений выбранных параметров рабочего процесса и совершенства
конструкций двигателей.
ГТД различного типа нашли применение и в силовых
установках самолетов вертикального и укороченного взлета и посадки
как в качестве подъемных, так и в качестве подъемно-маршевых
двигателей. Двигатели этого предназначения имеют ряд
особенностей, связанных со спецификой данного типа летательного
аппарата.
1.3. ОСНОВНЫЕ ПАРАМЕТРЫ АВИАЦИОННЫХ ГТД
Одной из основных величин, характеризующих реактивный
двигатель как силовую установку, является развиваемая им сила
тяги, которая на основании уравнения Эйлера о количестве
движения определяется следующим образом:
Р= Grcc - G.V + (рс - р„) Fc,
где От — секундный расход газа через двигатель;
сс — скорость газа на выходе из сопла;
G„ — секундный расход воздуха через двигатель;
Рс — давление газа на обрезе сопла;
Fc — площадь сопла.
Если принять, что Gc^Cb, to при полном расширении газа
в выходном сопле (рс — ри)-
P=GAcc-V). (3.1)
Для современных двигателей в зависимости от их типа н
предназначения величина секундного расхода воздуха GB может
достигать значения 450—500 кг/с и более, а величина силы тяги —
до 250—300 кН.
Для сравнительной оценки различных типов двигателя, а
также различных двигателей одного и того же типа применяют
удельные параметры ВРД, основными нз которых являются удельная
150
www.vokb-la.spb.ru - Самолёт своими руками?!
яга удельный расход топлива, удельная масса н удельная лобо-
пяя тяга.
Удельной тягой Р;д называется отношение тяги к
секундному расходу воздуха через двигатель:
Р = -£-
С учетом формулы (3.1) Руй = сс—V. Удельная тяга
характеризует степень использования воздуха в двигателе. Чем больше
удельная тяга, тем меньше при заданной величине тяги расход
воздуха через двигатель, а следовательно, его диаметр и масса.
Для современных ТРД на стенде Руд=650ч-750 Н-с/кг на
бесфорсажном режиме и 900—1100 Н-с/кг на форсаже. У ТРДД
удельная тяга, особенно на бесфорсажном режиме, существенно
ниже.
Удельным расходом топлива Суд называется
отношение часового расхода топлива GT. ч к развиваемой двигателем
тяге:
С* — т-ч
Wa р •
Удельный расход топлива характеризует экономичность
двигателя. Чем он меньше, тем больше при заданной скорости
дальность и продолжительность полета. Для современного ТРД на
стенде СУд = 0,074-0,08 кг/Нч, а для ТРДД — 0,032—0,06 кг/Н-ч.
Удельной массой двигателя удв называется
отношение массы двигателя GRe к тяге:
Тдв р •
Чем меньше удельная масса, тем меньше абсолютная масса
двигателя при заданной величине тяги. Удельная масса
двигателя зависит от параметров рабочего процесса, конструктивных
параметров, качества конструкционных материалов и
совершенства конструкции двигателя. Для современных ТРД и ТРДД в
зависимости от предназначения и параметров рабочего процесса
Тдв=0,01ч-0,02 кг/Н.
Удельной лобовой тягой Рлов называется отношение
максимальной тяги к наибольшему поперечному сечению
двигателя (к площади миделя):
Р г = —
1 лоб Р - •
' ЛОб
Удельная лобовая тяга оценивает поперечный габарит
двигателя и в некоторой степени характеризует аэродинамическое
совершенство силовой установки (ее аэродинамическое
сопротивление). Для современных ТРД на стенде Люб = 804-100 кН/м2.
Удельные параметры двигателя изменяются при изменении
числа М полета, высоты полета и режима работы двигателя. По-
151
этму в качестве характерных величии обычно приводятся
удельные параметры, соответствующие земным «этическим условиям
1.4. ОБЩИЕ СВЕДЕНИЯ О НАГРУЗКАХ,
ДЕЙСТВУЮЩИХ НА ЭЛЕМЕНТЫ ГТД
При работе ГТД на его детали н узлы действуют
разнообразные нагрузки, которые выражаются в виде сил и моментов. К
таким нагрузкам относятся: газовые силы, массовые силы,
гироскопические моменты роторов, нагрузки, возникающие при стеснен
ном тепловом расширении детален, вибрационные нагрузки и силы
трения.
От действия указанных нагрузок в деталях двигателя
возникают поперечные (перерезывающие) силы, изгибающие и
крутящие моменты. Силы и моменты могут быть как постоянными по
времени и величине, так и переменными. Действуя в деталях,
силы и моменты вызывают напряжения растяжения, сжатия, из-
1иба, кручения. Величина напряжений при изменении режима
работы двигателя, высоты и скорости полета сильно меняется.
Рассмотрим кратко действующие на детали двигателя па-
грузки.
Газовые силы возникают при воздействии газового
(воздушного) потока на элементы двигателя. Газовая сила,
действующая на деталь, определяется как произведение перепада
давления Ар на площадь детали /:
FT = bpf.
На деталях, находящихся в газовом потоке, возникает сила,
вызванная торможением или разгоном газа. В этом случае
Fr = GB(c,-c,).
где GD — расход газа;
Си с2 — скорости газа на вчоде и выходе из канала.
Для упрощения расчетов обычно газовую силу раскладывают
на три составляющих: осевую (вдоль осн двигателя), радиальную
и окружную.
Массовые силы включают в себя силы тяжести, силы
инерции и центробежные силы вращающихся масс. Все эти силы
определяются как произведение массы т детали или узла на
соответствующее ускорение. Например, центробежная сила, возникающая
в детали вращающегося ротора:
Fn = тш-г,
где со — угловая скорость вращения ротора;
г — расстояние от оси вращения до центра тяжести детали.
Гироскопический момент ротора возникает при эволю-
циях летательного аппарата, величина его определяется
формулой
Afr = /p<oSsine,
152
www.vokb-la.spb.ru - Самолёт своими руками?!
j массовый полярный момент инерции ротора;
г^ р утловая скорость вращения летательного аппарата;
q угол между векторами со и Й. При расчетах обычно берут
акспмум гироскопического момента, принимая 6 = 90°. Гироско-
ический момент в виде пары сил воспринимается опорами
ротора.
Нагрузки, возникающие при стесненном тепловом
расширении деталей, характерны для детален, имеющих при работе
лвпгателя высокую температуру. Температурные напряжения в
летали при отсутствии свободы расширения будут тем выше, чем
больше коэффициент линейного расширения материала детали н
выше ее температура. Температурные напряжения возникают
также в случае, если различные точки одной детали имеют разную
температуру.
Вибрационные нагрузки (вибрации) возникают в
элементах двигателя вследствие неравномерности газового потока,
воздействующего на детали, а также вследствие неуравновешенности
(наличия остаточного дисбаланса) ротора. Неравномерность
газового потока создают стойки корпусов, направляющие и
сопловые аппараты, устройства для перепуска и отбора воздуха,
жаровые трубы камеры сгорания и т. п.
Действию вибрационных нагрузок особенно подвержены
лопатки компрессора и турбины, различные корпуса и оболочки,
трубопроводы, а также диски и валы компрессора и турбины.
Глава 2
ПРИНЦИП ДЕЙСТВИЯ И ОСОБЕННОСТИ
КОНСТРУКЦИИ ОСНОВНЫХ ЭЛЕМЕНТОВ
АВИАЦИОННЫХ ГТД
2.1. ВХОДНЫЕ УСТРОЙСТВА ГТД
Входные устройства ГТД предназначены для подвода воздуха
к компрессору и осуществления процесса сжатия его за счет
использования кинетической энергии набегающего воздушного
потока.
Основным элементом входного устройства является
воздухозаборник, за которым расположен канал подвода воздуха к
двигателю.
Воздухозаборник выполняют таким образом, чтобы потери
полного давления при торможении в нем потока воздуха, а также
его внешнее сопротивление были минимальны, а сам
воздухозаборник работал устойчиво во всем диапазоне режимов полета и
работы двигателя.
На дозвуковых н околозвуковых скоростях полета потерн
полого давления связаны в основном с гидравлическими потерями
при течении потока в канале воздухозаборника. На сверхзвуковых
153
скоростях полета основную долю составляют потери, связанные
с торможением потока в скачках уплотнения.
Потери полного давления во входном устройстве оцениваются
коэффициентом сохранения полного давления
Рв
Рн
«J^Z^
д.. ., ^J_^
I
Ъ.
Рис. 3.2. Схема дозвукового воздухозаборника
где р*—полное давление потока воздуха на входе в
компрессор;
р*н — полное давление потока воздуха на данной высоте
полета,
а увеличение давления — степенью повышения давления во
входном устройстве
_ Рв
Рн
В зависимости от скорости полета, размещения входного
устройства на летательном аппарате и формы воздухозаборника они
могут быть дозвуковые или сверхзвуковые, лобовые, боковые, под-
фюзеляжные или подкрыльевые, осесимметричные, плоские или
овальные и др.
Дозвуковые воздухозаборники (рис. 3.2) применяют на
боевых, военно-транспортных и учебно-тренировочных самолетах,
имеющих М^1. Внутренний канал воздухозаборника выполнен в
форме расширяющегося канала (имеет входную часть—U и диф-
фузорный участок — /?), в котором дозвуковой поток тормозится,
а давление его повышается. На выходе из воздухозаборника его
канал делают несколько сужающимся (конфузорный участок —
/з), что приводит к некоторому разгону потока и способствует
выравниванию поля скоростей перед компрессором. Входная
кромка воздухозаборника выполняется округленной для
предотвращения срыва потока при изменении угла атаки.
При работе двигателя с дозвуковым входным устройством в
полете сжатие воздуха начинается еще до входа в канал
воздухозаборника (поток тормозится от скорости Vh полета до скорости
Vbx, равной примерно половине скорости полета). Доля сжатия
154
www.vokb-la.spb.ru - Самолёт своими руками?!
а от скоростного напора вне воздухозаборника на участке
в пу сечениями Я—Я н Вх.—Вх. составляет примерно 75%.
между таком способе торможения потока снижаются потери пол-
о давления, так как на участке от сечения Н—Н до сечения
"оГ ^v 0ТСуТствуют потери на трение и снижается скорость на
оде в воздухозаборник, что уменьшает потери на трение в
садам канале воздухозаборника.
0~m inaa:
0.8
о.е
0,4
02
П'1
^
П'4
■^
\V
Y
М
4
4 М
Рис. 3.3. Зависимость
коэффициента hmii
сохранения полного
давления в сверхзвуковом
воздухозаборнике от
числа М полета
Рис. 3.4. Сверхзвуковые
воздухозаборники:
а — внешнего сжатия; б—
смешанного сжатия; в — внутреннего
сжатия
При выборе допустимой диффузорности, обеспечивающей
безотрывное течение в канале, величины свх дозвуковых
воздухозаборников составляют 0,96—0,98.
Сверхзвуковые воздухозаборники для самолетов с
относительно небольшими сверхзвуковыми скоростями полета (до М^1,4)
выполняются по типу дозвуковых воздухозаборников, но с
заостренной входной кромкой. Такие воздухозаборники работают
с прямым скачком уплотнения на входе. Однако при числах М
полета больше 1,4—1,5 потери полного давления при торможении
потока в прямом скачке начинают сильно возрастать. На рис. 3.3
представлена зависимость коэффициента сохранения полного
давления от числа М полета для различных схем скачков: / — прямой,
2— один косой и прямой, 3— два косых и прямой, 4 — три косых
и прямой. Для уменьшения потерь при больших сверхзвуковых
скоростях полета необходимо тормозить поток в системе скачков.
Число скачков п выбирают тем больше, чем больше расчетное
число М полета самолета.
По принципу организации процесса торможения
сверхзвукового потока воздухозаборники подразделяются на воздухозабор-
155
инки с внешним сжатием (рис. 3.4,о), со смешанным
сжатием (рис. 3.4,6) и с внутренним сжатием (рис. 3.4, е)
Воздухозаборники смешанного н внутреннего сжатия не нашли
пока широкого применения вследствие трудностей вывода нх ца
расчетный режим работы в полете.
В воздухозаборниках с внешним сжатием торможение потока
осуществляется последовательно в скачках уплотнения,
расположенных до входа в канал воздухозаборника (рис. 3.5). Скачки
Рис. 3.5. Изменение давления р и числа М потока по
сечениям воздухозаборника внешнего сжатия на расчетном
режиме:
а — противоиомлажные створки; б — впускные створки
уплотнения (два косых и один прямой) индуцируются
поверхностью торможения (конусом или клином). На расчетном режиме
работы воздухозаборника (при расчетной скорости полета М=
=МР. вх все скачки фокусируются на переднюю кромку обечайки
для обеспечения максимального расхода воздуха через
воздухозаборник (GB miM = Рн^,,/7™, где Fm = FH).
При торможении потока в первом и втором косых скачках
давление его повышается, а скорость остается сверхзвуковой (Mi>l
и М2>1). Переход к дозвуковому течению происходит на прямом
скачке уплотнения (М3<1). Если течение за прямым скачком
уплотнения до двигателя оставить дозвуковым, то относительно
небольшие возмущения от двигателя (компрессора) будут
передаваться на вход воздухозаборника и могут привести к
разрушению системы скачков уплотнения, появлению выбитой
головной волны и возникновению неустойчивой работы
воздухозаборника. Для исключения этого обычно за прямым скачком
уплотнения канал воздухозаборника выполняют в форме сопла Лаваля,
самое узкое место которого называют горлом воздухозаборника
(сечение Г—Г). За горлом образуется сверхзвуковая зона
течения. Переход к дозвуковому течению перед компрессором
происходит в сложной системе скачков, которые условно заменяют
одним эквивалентным замыкающим прямым скачком S.
156
www.vokb-la.spb.ru - Самолёт своими руками?!
В зависимости от положения замыкающего S-скачка разли-
яют три режима работы сверхзвукового воздухозаборника. При
^ачнчин сверхзвуковой зоны течения за горлом (S-скачок
располагается за горлом) режимы работы воздухозаборника называют
сверхкР итическнм н. При размещении S-скачка в плоскости
горл8 воздухозаборника режим работы называют критическим.
При перемещении S-скачка па вход воздухозаборника и
появлении выбитой головной волны режимы работы называют докри-
т и ч е с к и м и.
Рис. 3.6. Схема скачков уплотнения в воздухозаборнике
внешнего сжатия на режиме ниже расчетного
Нормальная работа воздухозаборника на всех режимах полета
и работы двигателя возможна при условии согласования расходов
воздуха через систему скачков, горло и двигатель (компрессор).
Пропускную способность системы скачков уплотнения
характеризуют коэффициентом расхода
?=
G.
Рн^н^н
О.
РН^Н^В)
На расчетном режиме работы воздухозаборника <р=1 (при
М = Мр.вх).
При уменьшении числа М полета по сравнению с расчетным
углы наклона косых скачков увеличиваются (рис. 3.6) и они
отходят от обечайки, вследствие чего происходит уменьшение
расхода воздуха (пропускной способности), поступающего через
скачки уплотнения в воздухозаборник (Fh<Fbx). Вследствие
уменьшения скоростного напора понижается расход через горло, причем
в большей степени, чем снижается расход через систему скачков,
что может привести к появлению перед плоскостью входа
головной волны. Одновременно с уменьшением М полета (при
постоянной высоте полета) снижается температура Т*н, что при
заданной постоянной частоте вращения п приводит к увеличению
приведенной частоты вращения ппр = п!^288/Г^ и повышению
приведенного расхода воздуха через компрессор.
Таким образом, при уменьшении числа М полета меньше
расчетного для согласования расходов через воздухозаборник и
двигатель необходимо увеличивать площадь горла и повышать
пропускную способность системы скачков на входе в воздухозабор-
157
ник. Это обеспечивают в регулируемом Воздухозаборнике за счет
уборки конуса (или панели клина в плоском воздухозаборнике)
внутрь воздухозаборника (рис. 3.6, пунктирные линии). При этом
увеличивается площадь струи воздуха, поступающего в воздухо
заборник (/7Н> FH> и одновременно увеличивается площадь горпа
При увеличении числа М полета картина течения получается
обратной и для согласования расходов воздуха через
воздухозаборник и двигатель конус (или панель клина) необходимо
выпускать (увеличивается /к, рис. 3.5).
Входное устройство необходимо регулировать и при изменении
режима работы двигателя. Уменьшение частоты вращения
двигателя (дросселирование двигателя) приводит к уменьшению
приведенного расхода воздуха через компрессор. Противодавление за
S-скачком повышается, и он перемещается к входу
воздухозаборника. При значительном дросселировании двигателя появляется
головная волна на входе в воздухозаборник, которая, удаляясь
от плоскости входа, разрушает косые скачки, причем в различной
степени. Это приводит к неравномерности полного давления по
высоте канала воздухозаборника и выбросу воздуха на вход
через области пониженного давления в районе обечайки —
возникает неустойчивая работа, помпаж воздухозаборника. Помпаж
воздухозаборника сопровождается сильными пульсациями потока.
В эксплуатации этот режим работы воздухозаборника
недопустим, так как может привести к выключению двигателя,
разрушению его элементов или способствовать появлению
неустойчивой работы компрессора.
Предотвращение помпажа воздухозаборника прн
дросселировании двигателя возможно за счет уменьшения расхода воздуха
через воздухозаборник. Для этого необходимо выдвинуть конус
(увеличить /к). Если выдвижения конуса недостаточно для
обеспечения необходимого запаса устойчивости по помпажу, то
можно перепустить часть воздуха из канала воздухозаборника мимо
компрессора, открыв противопомпажные створки а.
Увеличение частоты вращения двигателя снижает
противодавление за S-скачком. Он перемещается в сторону компрессора,
скорость сверхзвукового потока перед ним увеличивается (так
как за горлом расширяющийся канал) и интенсивность S-скачка
растет. Взаимодействие скачка с пограничным слоем приводит к
отрыву пограничного слоя и появлению высокочастотных
пульсаций. Этот вид неустойчивой работы называется зудом
воздухозаборника. Работа воздухозаборника на этих режимах в
эксплуатации не допускается.
Для устранения неустойчивой работы в форме зуда
необходимо увеличить расход воздуха через воздухозаборник, т. е. убрать
конус (уменьшить 1К).
При работе двигателя на земле (на взлете), когда отсутствует
скоростной напор, потребный расход воздуха через двигатель
158
www.vokb-la.spb.ru - Самолёт своими руками?!
ыне, чем может обеспечить воздухозаборник. В канале возду-
■ чаборннка создается разрежение, а с передней кромки обечайки
Х°чииается срыв потока, что приводит к дополнительным поте-
Н8м и снижению расхода воздуха. Устраняют эти нежелательные
Ря'иия установкой взлетных (впускных) створок б, которые
отбываются внутрь канала воздухозаборника под разностью дав-
еннй и обеспечивают дополнительный подвод воздуха к
компрессору, минуя входной канал воздухозаборника.
По конструкции входные устройства разнообразны. Это
зависит от максимальной скорости летательного аппарата,
размещения двигателей иа летательном аппарате и принятой схемы
воздухозаборника.
Для вертолетов и самолетов с дозвуковыми скоростями полета
применяются нерегулируемые входные устройства, имеющие
закругленные передние кромки и плавно расширяющийся канал
(рис. 3.7,а). Силовой каркас такого устройства состоит нз
поперечных силовых элементов (шпангоутов) 3, продольных силовых
элементов 2, внутренней 4 и наружной 5 обшивок. В передней
части устанавливается обтекатель (обечайка) 1.
Воздухозаборники для самолетов с небольшими
сверхзвуковыми скоростями полета (до М= 1,4-*-1,7) конструктивно
выполняют так же, как и для дозвуковых самолетов, только входная
кромка обечайки 1 выполняется заостренной. Воздухозаборники
для самолетов с большими сверхзвуковыми скоростями полета
(М> 1,6-9-1,7) имеют центральное тело — ступенчатый конус или
клип. Такие воздухозаборники называются ос ее им метр
очными или плоскими. На рис. 3.7,6 показана конструкция
нерегулируемого осесимметричного воздухозаборника. Центральное
тело крепится к обечайке стойками 3. Жесткость центрального
тела обеспечивается точеными кольцами 2, иосик 1 выполняется
из жаропрочных материалов. Для предотвращения косого обдува
в горизонтальном полете центральное тело может
устанавливаться под углом у к оси фюзеляжа.
В регулируемом осесимметричном воздухозаборнике (рис. 3.8)
передняя часть центрального тела перемещается в осевом
направлении с помощью гидравлического силового привода (гидро-
цилиндра). Дополнительное регулирование осуществляется путем
перепуска части воздуха Д0В в атмосферу или из атмосферы в
воздухоподводящий канал через специальные створки (рис.3.8,а).
Выпускные створки (рис. 3.8,6) открываются и закрываются с
помощью гидроцилиндров, впускные створки цилиндров не имеют,
они открываются н закрываются под действием перепада
давлений воздуха
Регулирование плоского воздухозаборника осуществляется пу-
ем изменения с помощью гидроцилиидров положения подвижных
панелей, из которых состоит ступенчатый клин (рис. 3-9).
159
На элементы конструкции входного устройства действуют га.
зовые и массовые силы, вибрационные нагрузки и силы, возни-
кающие при стесненном тепловом расширении деталей.
Рис. 3.7. Конструктивные схемы нерегулируемых
воздухозаборников:
с — дозвукового воздухозаборника: / — обечайка; 2,
3 — силовые элементы; 4. 5 — внутренняя и наружная
обшивки; 6 — сверхзвукового; / - обтекатель (носик);
2 — точеные кольца; 3 — стоики
В настоящее время на входные устройства (кроме выполпе
ния основных функций) возлагается еще одна, новая задача: очн
щать воздух от механических примесей — пыли, песка, мелких
160
www.vokb-la.spb.ru - Самолёт своими руками?!
•амней и кусков бетона, а также птиц, попадающих на вход в
к духозаборник. Механические примеси, называемые также по-
БторОНними предметами, попадая в проточную часть двигателя,
вызывают повреждения деталей, особенно лопаток компрессора.
2 3 4
*t>Ge
а Створка
Створка: .
3 Г
Тяга
управления
о
Рис. 3.8. Схема регулируемого сверхзвукового воздухозаборника:
а — впускные створки, б — противоиомпажные створки; I корпус; 2
-опорная ферма; 3 — енлован труба; 4 — силовой цилиндр
Пылевая эрозия лопаток компрессоров вертолетных ГТД и по_-
вреждення лопаток компрессоров самолетных двигателей
приводят к преждевременному съему двигателей с эксплуатации. Для
очистки воздуха от посторонних
предметов во входном
устройстве устанавливают защитные
решетки, сетки, выполняют окиа-
ловушки на повороте воздушного
потока, создают перед входным
устройством защитные
воздушные завесы и г. п.
2.2. КОМПРЕССОРЫ ГТД
Компрессор предназначен для
сжатия воздуха и подвода его в
камеру сгорания.
Основным типом компрессора ГТД является осевой
многоступенчатый компрессор, процесс сжатия воздуха в котором
осуществляется последовательно в его ступенях.
Ступень осевого компрессора состоит из рабочего колеса (РК)
и расположенного за ним направляющего аппарата(НА), рис.3.10.
"а входе в первую ступень компрессора может устанавливаться
входной направляющий аппарат (ВНА), который обеспечивает
определенное натекание потока иа лопатки рабочего колеса.
Рис 3.9. Схема регулируемого
плоского воздухозаборника;
/ — неподвижная нанечь; 2, 3. 4 —
подвижные панели; 5— силовые цилиндры:
Г — Г — горло воздухозаборника
6-229
161
Все струйки воздуха, входящие в ступень, например, на сред,
ием радиусе, движутся далее по поверхности тока, близкой к ци_
лиидрической. Если рассечь ступень такой цилиндрической
поверхностью (сечение а—а иа рис. 3.10) и полученное сечение
развернуть иа плоскость, то получим решетки профилей ВНА, РК и
НА (рис. 3.11).
Рис. 3.10. Схема ступени осе- Рис. 3.11. Схема решеток профилей
вого компрессора: ступени осевого компрессора
О—О. 1—1. 2—2, 3—3 — сечения
ступени
Лопатки входного направляющего аппарата закручивают
поток в сторону вращения рабочего колеса (положительная
предварительная закрутка воздуха). РК, получая энергию от
турбины, посредством лопаток передает ее воздушному потоку.
Относительно рабочего колеса струйка воздуха движется с
относительной скоростью Wi, которая определяется как разность
векторов абсолютной скорости ci и окружной (переносной)
скорости и. Межлопаточиый канал рабочего колеса вследствие
кривизны его лопаток выполнен расширяющимся (/2k>/ik), поэтому
при дозвуковом течении скорость потока уменьшается (Wi-<Wi),
а давление воздуха растет (p2>Pi). Одновременно происходит
увеличение абсолютной скорости (c2>Ci). При обтекании
потоком лопаток РК иа них возникает аэродинамическая сила Р,
осевая составляющая которой Ра передается на упорный подшипник
вала и участвует в создании силы тяги, а окружная
составляющая Ри препятствует вращению рабочего колеса. Для
преодоления этой силы к валу ступени (компрессора) и должен быть
приложен крутящий момент. Подведение мощности от турбины и обес-
162
www.vokb-la.spb.ru - Самолёт своими руками?!
печивает одновременное увеличение потенциальной (рост давле-
я) и кинетической (рост абсолютной скорости) энергии воз-
Вушного потока при его течении в рабочем колесе.
На лопатки спрямляющего аппарата поток набегает со
скоростью c^ = W2 + «- Межлопаточный канал выполнен тоже
расширяющимся (/за>/га), и в нем дозвуковой поток тормозится
(Сз<СС2), а давление его растет (рз>р2). В направляющем
аппарате повышение давления воздуха осуществляется за счет
преобразования кинетической энергии газового потока, запасенной
в рабочем колесе, в потенциальную энергию.
Таким образом, сжатие воздуха в осевой ступени происходит
как в РК, так и в НА.
Суммарная степень повышения давления воздуха в
компрессоре определяется как
. П • Рк
1-1 *ч>
где р'к — давление заторможенного потока воздуха за
Компрессором.
Для осевых компрессоров я£ может достигать значений 10—25
и более.
Совершенство процесса сжатия воздуха в компрессоре
характеризует его адиабатный коэффициент полезного действия (КПД),
определенный по параметрам заторможенного потока:
Л
где адиабатическая работа сжатия воздуха в компрессоре
С.=п^тПР! п - К) = ^т rt;{,-J -1),
где ^к.м — полная температура воздуха за компрессором при
адиабатическом процессе сжатия;
Т'в — полная температура воздуха иа входе в компрессор;
^? — газовая постоянная воздуха;
k — показатель адиабаты,
а эффективная работа компрессора
mv ы1Н~ л^Ь' п0ТРе^ляемая компрессором, определяется по фор-
г" —оо . современных многоступенчатых осевых компрессоров
'к .0—0,85, а потребляемая мощность достигает величин
десятков тысяч киловатт.
163
Решетки профилей компрессора рассчитываются и проектиру.
ются таким образом, чтобы на расчетном режиме угол атаки i
(рнс. 3.11) был близок к оптимальному, что обеспечивает
минимальные потерн в решетках и максимальный КПД компрессора
В условиях эксплуатации чаще всего компрессор работает на не
расчетных режимах и угол набегания потока на лопатки может
сильно отлч^аться от расчетного. Например, при увеличении осе
вой составляющей скорости
иа входе в рабочее колесо
(вследствие увеличения
абсолютной скорости Ci) угол атаки
Г уменьшается и может стать
отрицательным (рис. 3.12,о),
что вызывает отрыв потока с
вогнутой стороны профиля.
Такой отрыв потока
локализуется в месте возникновения, так
как под действием
центробежных сил поток прижимается
обратно к вогнутой
поверхности лопатки. Увеличение
абсолютной скорости Ci приводит
одновременно к росту относительной скорости V/i, которая по
величине может достичь скорости звука. Это приведет к
«запиранию» межлопаточного канала, и дальнейшее увеличение расхода
воздуха станет невозможным.
При уменьшении осевой составляющей скорости на входе в
рабочее колесо угол атаки i" увеличивается (рис. 3.12,6) и
отрыв потока происходит с выпуклой стороны профиля (со спиики
лопатки). Такой отрыв потока может распространиться на
соседние лопатки, а при определенных условиях и на другие ступени
компрессора и вызвать его неустойчивую работу — вращающийся
срыв илл поыпаж.
Аналогичное изменение углов атаки будет наблюдаться при
изменении скоростей на входе в направляющий аппарат. Для
анализа условий, при которых проявляется такая работа
компрессора, рассмотрим уравнение равенства расходов иа входе в
первую (I) и последнюю (г) ступени компрессора
Рис. 3.12. 1~хема обтекании рабочих
лопаток компрессора на нерасчетных
режимах:
а — осевая скорость больше расчетной; б —
осекая скорость меньше расчетной
или для политропного сжатия воздуха в компрессоре
1
**-»const (Щ\
(3.2)
где
\ P\l pi
(ft — показатель политропы сжатия).
164
www.vokb-la.spb.ru - Самолёт своими руками?!
р!з уравнения (3.2) следует, что при увеличении ~?к (напри-
прн увеличении частоты вращения выше расчетной) отно-
М мне с ic тоже >величивается. Это происходит главным об-
м за счет снижения осевой скорости на входе в последние
*т\'пёни и некоторого увеличения cdt. Следовательно, при
увеличении частоты вращения увеличиваются углы атаки на последних
ступенях (рис. 3.12,6) и срыв потока в них может привести к
неустойчивой работе компрессора. На первых ступенях при этом
происходит уменьшение углов атаки (рис. 3.12, а) и увеличение
скоростей, которое может привести там к «запиранию»
проходных сечений (решеток).
При снижении тс* (например, при снижении частоты вращения
ниже расчетной) отношение са1/са2 уменьшается главным образом
за счет снижения са] и некоторого увеличения саг. При этом
увеличиваются углы атаки на первых ступенях (рис. 3.12,6), срыв
потока в которых может быть причиной появления неустойчивой
работы компрессора, а «запирание» решеток будет происходить
на последних ступенях компрессора.
Неустойчивая работа компрессора сопровождается
повышенными вибрациями и тряской двигателя и может привести к
разрушению элементов компрессора, забросу температуры в камере
сгорания и прогару лопаток турбины или срыву пламени в камере
сгорания (выключению двигателя). Поэтому неустойчивая
работа компрессора в эксплуатации недопустима.
На повышенных приведенных частотах вращения с целью
предотвращения неустойчивой работы компрессора вводят
ограничения максимальной приведенной частоты вращения finpmax. На
пониженных приведенных частотах вращения устойчивая работа
многоступенчатого компрессора без специальных средств
регулирования практически невозможна. Регулирование компрессора на
пониженных Кпр сводится к приближению углов атаки на первых
ступенях, а в некоторых случаях и иа последних ступенях, к их
оптимальным значениям.
Одним из способов регулирования является перепуск воздуха
из средних ступеней компрессора. При этом расход воздуха через
первые ступени увеличивается (возрастает величина осевой
скорости) и углы атаки там снижаются, приближаясь к расчетным.
Перепуск воздуха осуществляется на пониженных частотах
вращения с помощью клапанов или лепт перепуска. Недостатком
этого способа регулирования является то, что часть воздуха,
"а сжатие которого в первых ступенях затрачена работа, вы-
Т1згтаеТСЯ в атмосФеРУ (исключение составляют компрессоры
Ьолее совершенным является регулирование компрессора по-
оротом лопаток НА, которые меняют направление абсолютной
орости на входе в РК в зависимости от окружной скорости и
еспечивают требуемые углы атаки перед лопатками рабочих ко-
165
лес. Достоинством этого способа является возможность
одновременно регулировать течение воздуха в первых и последних
ступенях (при наличии поворотных направляющих аппаратов в
первых и последних ступенях).
В последнее время широкое применение получили двухваль-
ные (иногда трехвалыше) двигатели. В таком двигателе иа
пониженной приведенной частоте вращения (например, за счет
увеличения М полета и Т^) углы атаки на первых ступенях (в
компрессоре низкого давления — КНД) увеличены и КНД как бы
«затяжеляется». Мощность турбины низкого давления (ТНД)
становится недостаточной для поддержания заданной частоты
вращения ротора низкого давления. Частота вращения КНД
снижается (снижается окружная скорость) и направление потока на
входе в рабочие колеса первых ступеней будет приближаться
к расчетному (рис. 3.12).
На последних ступенях компрессора высокого давления (КВД)
при пониженной п„Р, наоборот, углы атаки снижаются (меньше
расчетных), КВД как бы «облегчается» и при неизменной
мощности турбины высокого давления (ТВД) частота вращения КВД
будет увеличиваться, что приведет к некоторому увеличению
углов атаки иа последних ступенях, т. е. приблизит их к расчетным
значениям.
В современных многоступенчатых осевых компрессорах,
имеющих большие степени сжатия, указанные выше способы
регулирования часто применяют в сочетании один с другим.
Конструкция компрессоров. Наибольшее распространение в
настоящее время получили осевые многоступенчатые одно- и двух-
роторные компрессоры. Многоступенчатый осевой компрессор
состоит из ротора и статора.
Роторы компрессора в зависимости от конструкции силовой
части, несущей рабочие лопатки, подразделяются на три типа:
барабанные, дисковые и барабанно-дисковые.
Ротор барабанного типа (рис. 3.13) имеет цилиндрический
или конический барабан, к торцам которого крепятся диски с
передней и задней цапфами. На наружной поверхности барабана
ьыполняются пазы для крепления лопаток. Часто барабан
выполняется цельным, выточенным из одной поковки.
Роторы барабанного типа имеют высокую изгибную жесткость,
но малую несущую способность при действии центробежных сил,
поэтому применяются при окружных скоростях барабана, не
превышающих 180—200 м/с. Для снижения напряжений при действии
центробежных сил иа барабане выполняют ребра.
Ротор дискового типа (рис. 3.14) состоит из ряда дисков,
посаженных на вал. Крутящий момент передается чаще всего
посредством шлиц. Такой ротор хорошо несет центробежные
нагрузки, но имеет недостаточную изгибную жесткость. Для
увеличения нзгибной жесткости между дисками по их периферийной
части устанавливают кольцевые проставки.
166
Ротор барабанно.
дискового типа
(рис. 3.15) имеет и
барабан, и диски, он сочетает
достоинства и
барабанного, и дискового
роторов, поэтому широко
применяется в современных
ГТД.
Узлы соединения
дисков между собой
передают большие крутящие
моменты, осевые и ра-
а диальиые (поперечные)
g силы, должны обеспечить
н надежную центровку и
fe нераскрытие стыка. В на-
о стоящее время нашли
g применение следующие
■? способы соединения дис-
2 ков: стяжка центральным
S болтом в совокупности с
о- торцевыми шлицами на
S барабанных участках дис-
g. ков (рис.3.15), соединение
S по цилиндрическим по-
S. верхностям радиальными
ж штифтами (рис. 3.16,а),
§ фланцевое соединение
g- осевыми призонными бол-
о тами (рис. 3.16,6). При-
°\ меняется иногда и соеди-
Ц неиие дисков методом
™ сварки (рис. 3.16,в).
х При работе двигате-
а ля ротор компрессора
нагружается всеми
нагрузками, которые
перечислены в начале
раздела III.
Рабочие лопатки
компрессора состоят из
профильной части (пера) и
замка. Профильная
часть лопатки
характеризуется формой профиля
(дозвуковая,
сверхзвуковая), хордой Ь,
относительной толщиной с=
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 3.16. Методы соединения дисков:
а — радиальными штифтами: б — осевыми призониыми болтами; в — сварной
Рис. 3.17. Замки рабочих лопаток компрессора:
а — трапециевидный; б — шарнирный; в — елочный
169
= c/fc, углом установки, углом закрутки и другими
параметрами.
Для крепления рабочей лопатки используются замки:
трапециевидный, шарнирный и иногда для тяжелых лопаток елочный
(рис. 3.17).
д е
Рис. 3.18. Методы фиксации рабочих лопаток:
с — осевым штифтом /; 6 — разрезным упругим кольцом 2; в — зубом € яа лопатке в
совокупности с отгибной пластиной 5; г — штифтом 7 в совокупности с отгнбной
пластиной б: д — отгнбной пластиной 5; е — радиальным штифтом 8; 3 — заклепка; 4 — отверстие
На рабочую лопатку действуют газовые силы, которые
вызывают изгиб и кручение, и центробежные силы, которые вызывают
в лопатке напряжения растяжения, изгиба и кручения. Кроме
того, лопатки подвержены вибрациям и температурным
напряжениям.
170
www.vokb-la.spb.ru - Самолёт своими руками?!
При креплении рабочей лопатки с помощью трапециевидного
ямка возникает опасность перемещения лопатки под действием
оставляющей от центробежной силы и составляющей от газовой
гилы вдоль паза. Методы фиксации лопаток от перемещения
вдоль паза показаны иа рис. 3.18.
П7
Узловые
линии
Рис. 3.19. Формы колебаний рабочих лопаток:
а. б — первая и вторая изгибные: в. г — первая и вторая крутильные
Основной причиной, вызывающей колебания (вибрации)
рабочих лопаток, является неравномерность воздушного потока по
скорости и давлению, создаваемая рабочими лопатками впереди
стоящих ступеней, лопатками направляющих и спрямляющих
аппаратов, различными стойками, стоящими в потоке. Некоторые
формы колебаний лопаток показаны на рис. 3.19.
С целью уменьшения возбуждающих сил при создании
двигателя неравномерности воздушного потока стремятся сделать как
можно меньше. Для снижения вибрационных напряжений
(амплитуд колебаний) иа лопатках большой длины выполняют полки
(рис. 3.20).
Шарнирный замок (рис. 3.17,6) также является средством
снижения вибрационных напряжений: благодаря шарниру
значительно снижается изгибающий момент в месте крепления
лопатки и демпфируются (заглушаются) колебания силами
трения.
Статор осевого компрессора состоит из направляющих
(спрямляющих) аппаратов, корпуса и опор ротора. Для
обеспечения возможности монтажа корпус, как правило, имеет попереч-
ные и продольные разъемы. Лопатки направляющих аппаратов
могут быть поворотными и неподвижными, консольными и бан-
Дажированными. На рис. 3.21 показаны направляющие аппараты
171
www.vokb-la.spb.ru - Самолёт своими руками?!
с консольными поворотными лопатками, на рис. 3.22. а — направ-
ляющий аппарат с консольными неподвижными лопатками, ца
рис. 3.22,6, в, г — направляющие аппараты с бандажированны\1Н
неподвижными лопатками. Способы крепления лопаток к
бандажу или корпусу весьма разнообразны, четыре возможных
способа показаны на рис. 3.22.
Рис. 3.20. Рабочая лопат- Рис. 3.21. Направляющие аппараты с пово-
ка с полкой ротными лопатками:
/ — бронзовая втулка: 2 — штифт; 3 — опорное
кольцо: 4 — шайба; 5 — рычаг лопатки; 6 — лыска
Для предотвращения задевания деталей ротора о детали
статора в конструкции предусматриваются радиальные и осевые
зазоры. Наличие зазоров приводит к перетеканию воздуха из
областей повышенного в области пониженного давления, что ведет к
снижению КПД и напорности компрессора. Для уменьшения
зазоров и, следовательно, перетеканий иа корпусе над рабочими
лопатками наносят асбографитотальковые покрытия.
Материалами для деталей компрессора служат алюминиевые
и титановые сплавы н стали. Алюминиевые сплавы применяются
для деталей, работающих при температурах до 200—250Х,
титановые сплавы — для деталей, работающих при температурах до
400—450°С. Детали последних ступеней компрессора,
находящиеся в зоне повышенных температур, выполняют, как правило, из
сталей. Стальными выполняют также лопатки первых ступеней
компрессоров, как более стойкие к забоинам посторонними
предметами.
Рис. 3.22. Способы крепления лопаток направляющих
аппаратов:
" — с помощью трапециевидного замка; 6 —сварной; е — запрессовкой;
г — с помощью цапф
173
172
2.3. ГАЗОВЫЕ ТУРБИНЫ ГТД
Газовая турбина представляет собой лопаточную машину, в
которой потенциальная энергия сжатого и подогретого газа
преобразуется в механическую работу на валу турбины.
В турбореактивном двигателе газовая турбина приводит в дед.
ствие компрессор и вспомогательные агрегаты, в турбовинтовое
двигателе помимо компрессора и вспомогательных агрегатов
турбина приводит во вращение воздушный винт.
Рис. 3.23. Схема сту- Рис. 3.24. Схема решеток профилей
ступени газовой турбины: пени газовой турбины
0—0, 1—1. 2—2 — сечения
ступени
Для газовой турбины характерны большая мощность,
развиваемая в одном агрегате, высокая экономичность, малые
габариты и масса, относительная простота конструкции.
Вследствие высокой мощности, развиваемой осевой ступенью
газовой турбины, в авиационных ГТД число ступеней турбины
меньше числа ступеней компрессора. Процесс расширения газа
в многоступенчатой турбине состоит из последовательно
протекающих процессов расширения в отдельных ее ступенях.
Ступень газовой турбины (рис. 3.23) состоит из неподвижного
соплового аппарата (СА) и рабочего колеса. Рассечем ступень
цилиндрической поверхностью а—а, которую приближенно можно
рассматривать как поверхность тока, а затем развернем сечение
на плоскость. В сечении получим решетку профилей соплового
аппарата и рабочего колеса (рис. 3.24).
Состояние газа на входе в сопловой аппарат ступени
характеризуется давлением ро, температурой То и скоростью с0.
Лопатки соплового аппарата образуют криволинейные сужающиеся ка-
174
www.vokb-la.spb.ru - Самолёт своими руками?!
tf0-^>fiB), в которых дозвуковой поток разгоняется (ci>c0),
Ийрго давление и температура падают (pi<p0; Т,<Т0). Таким
а оы в сопловом аппарате часть по1енциальиой энергии газо-
ого потока преобразуется в диетическую.
Относительная скорость №\ на входе в рабочее колесо опре-
чяется как векторная разность скоростей С\ и и. Лопатки
рабочего колеса обычно также образуют сужающиеся каналы
,i </,„), в которых газ продолжает расширяться (p2<pi). При
этом относительная скорость газового потока увеличивается
flt"2>W'). a температура уменьшается (Т2<.Т1). При течении
газа через лопатки рабочего колеса уменьшается одновременно и
его абсолютная скорость (c2<Ci). Одновременное снижение
скорости и давления объясняется тем, что газ совершает внешнюю
работу.
При обтекании газом лопаток РК в результате поворота по*
тока и действия на частички газа центробежных сил иа вогнутой
поверхности лопаток образуется повышенное давление, а иа
выпуклой — пониженное. Равнодействующую сил давления Р
можно разложить иа две составляющие: окружную Рш которая
создает крутящий момент, приводящий РК в движение, и осевую Ра,
которая передается через упорный подшипник на корпус и
направлена против действия силы тяги.
Ступень турбины, в которой расширение газа совершается как
в сопловом аппарате, так и в рабочем колесе, называется
реактивной.
Если лопатки рабочего колеса профилируются по дуге
окружности, то площади на входе и на выходе из межлопаточного канала
одинаковы (/2k=/ik). В таком канале давление, температура и
относительная скорость газового потока (без учета потерь)
остаются постоянными, и работа вращения совершается газом
только за счет уменьшения его кинетической энергии (c2<Ci).
Такая ступень турбины называется активной.
Распределение адиабатической работы расширения между СА
И РК характеризуется степенью реактивности ступени, которая
определяется как отношение адиабатической работы расширения
газа в рабочем колесе к адиабатической работе расширения газа
во всей ступени:
■-ад. РК
В активной турбине расширение газа происходит только В
сопловом аппарате (1ад. гк=0) и степень реактивности р=0.
В авиационных ГТД нашли применение главным образом
реактивные турбины, имеющие величины р = 0,3-4-0,4.
Потери в газовых турбинах складываются из потерь:
гидравлических, связанных с течением газа через лопаточные венцы
тУРбины; на трение вращающихся дисков об окружающий газ;
в радиальном зазоре; иа перетекание газа через лабиринтные
175
уплотнения; на трение в подшипниках и потерь с выходной
скоростью газа. Рассмотрим КПД одноступенчатой турбины.
Все виды потерь в турбине, за исключением потерь с
выходной скоростью, учитывает адиабатический КПД, который равен
отношению полезной работы к располагаемой адиабатической ра
боте:
£т + 4/2
чад. т — г
где LT — эффективная работа (работа на валу турбины),
отнесенная к 1 кг газа;
с2 - абсолютная скорость газа за рабочим колесом.
Работа
^ад.т— к—1 ^г^с/ 1 —
-¥)■
где Rr — газовая постоянная;
кг — показатель адиабаты для газа.
Кроме адиабатического КПД широкое применение получил
КПД в параметрах заторможенного потока, равный отношению:
._ L,
rh — т* •
*-ад т
где L* т — адиабатическая работа расширения 1 кг газа в
турбине в параметрах заторможенного потока, которая
определяется по формуле
Lln. т = Т^±Г1~ Wo Л ^=г\ ■
\ г; *г J
где Tq —температура газового потока иа входе в турбину;
к* —степень расширения газа в турбине (тс* = рЦр%\;
р*0 —давление газового потока иа входе в турбину.
Для учета всех видов потерь (когда с выходной скоростью
тоже теряется часть энергии) используют эффективный (мощност-
ной) КПД
£г
Для газовых турбин авиационных ГТД ц* = 0,9-н0,92, а т)т =
0,75^-0,82.
Мощность турбины (Вт) зависит от секундного расхода газа
Сг через турбину NT=CrLr.
Конструкция газовых турбин. Газовые турбины
подразделяются по числу роторов на одно-, двух- и трехроторпые и по числу
176
www.vokb-la.spb.ru - Самолёт своими руками?!
из
тупеней на одно-, двух- и многоступенчатые. Турбина состоит
ротора и статора.
ротор турбины состоит из одного или нескольких дисков с
йочими лопатками и вала. На рис. 3.25 показана двухроторная
бича, роторы которой 2 н 4 вращаются с разными частотами.
Рис. 3.25. Двухступенчатая двухроторная турбина:
' — I СА; 2—1 РК: 3—П СА: 4 — П РК; 5 — подшипник турб!.ны низкою
давления; 6 — подшипник турбины высокого давления
Рабочая лопатка турбины (рис. 3.26), состоящая из
профильной части 1 и замка 2, может иметь также баидажиую полку 3,
которая служит для снижения вибрационных напряжений в
лопатке. Для уменьшения перетеканий газа на периферийной
поверхности бандажных полок выполняют ребра (гребешки) 4.
Замки рабочих лопаток турбин относятся к числу наиболее
нагруженных элементов двигателя. Наиболее распространенный тип
замка — елочный с числом зубьев от двух до шести. Иногда
применяют сдвоенный елочный замок (рис. 3.27). Такой замок нозво-
177
ляет поместить на диске большее число лопаток. Кроме того, Зя
счет трения лопаток друг о друга по замку и внутренней полке
увеличиваются силы демпфирования. Посадку лопаток в пазы
диска осуществляют, как правило, с небольшим зазором.
Благодаря этому обеспечивается свобода температурных расширений
Рис. 3.26.
Рабочая лопатка
турбины:
/ — профильная
часть; 5 — замок;
3 — полка; 4 —
уплотняющие
гребешки
Рис. 3.27.
Спаренные рабочие
лопатки турбины
в замке, а также самоустановка лопатки под действием моментов
от центробежных и газовых сил. При достижении частоты
вращения n~0,5nmax лопатки под действием центробежных сил
защемляются в пазах диска. Фиксация лопаток от перемещений
вдоль паза диска осуществляется отгибными пластинами
(рис. 3.25), упором в дефлектор диска, если таковой имеется в
конструкции.
При создании новых двигателей все большее распространение
получают лопатки, охлаждаемые воздухом, который чаще всего
берется из компрессора. По принципу охлаждения все лопатки
можно разделить на три группы: внутреннего конвективного
178
www.vokb-la.spb.ru - Самолёт своими руками?!
чаждения, конвективно-пленочного охлаждения и проникающего
охлаждения.
Лопатки внутреннего конвективного охлажде-
я конструктивно выполняются различно. Наиболее просты ло-
Н ки с радиальным течением охлаждающего воздуха, когда в
J; e Лопатки выполнен ряд радиальных каналов, по которым воз-
03 О 5мм
1015мм
Рис. 3.28.
Охлаждаемая рабочая
лопатка турбины с
дефлектором
Рис. 3.29. Поперечное сечение лопатки
конвективно-пленочного охлаждения:
/ — дефлектор; 5 — стенка лопатки
дух проходит от замка до выходных отверстий в торце лопатки.
С целью повышения интенсивности охлаждения в лопатку может
устанавливаться дефлектор (рис. 3.2Ь). Зазор между стенкой
лопатки и дефлектором составляет 0,5—I мм. В такой лопатке воз-
Дух поступает внутрь дефлектора, затем через отверстия в
дефлекторе выходит к передней, наиболее нагретой части лопатки,
Движется в зазорах по спинке и корытцу и выходит в проточную
часть турбины через щель в задней кромке лопатки или вблизи
нее.
При коивективио-плеиочиом охлаждении часть
воздуха из внутренних каналов выпускается иа поверхность
лопатки, создавая защитную пленку из холодного воздуха.
Отверстия диаметром 0,3—0,5 мм выполняются чаще всего на передней
части лопатки (рис. 3.29). Такие лопатки находят применение пока
только в качестве сопловых лопаток.
Недостатком рассмотренных схем охлаждаемых лопаток
является то, что несущий элемент лопатки (оболочка) сильно на-
179
грет. Указанный недостаток не распространяется иа лопатки пп0
никающего охлаждения (рис. 3.30). Лопатка состоит
силового стержня / и покрывающей его пористой несиловой обо
лочки 2. Охлаждающий воздух проходит вдоль лопатки по каца
лам, выфрезерованпым на поверхности стержня, и выходит через
мелкие отверстия в оболочке на
поверхность лопатки, образуя защит,
ную воздушную пленку.
Следует отмстить, что
проникающее охлаждение не нашло пока
широкого применения из-за отсутствия
надежно работающих пористых
материалов.
На рабочие лопатки турбин дег
ствуют такие же по характеру
нагрузки, что и на рабочие лопаткн
компрессоров. Однако следует имен
в виду, что лопатки турбины
работают при значительно более
высоких температурах, больших
температурных неравномерностях, в
агрессивной среде.
Материалами для рабочих
лопаток турбин являются жаропрочные
сплавы на никелевой основе,
реже — жаропрочные стали.
Диски являются важным
силовым элементом турбины.
Основными нагрузками для дисков
являются центробежные силы собственных
масс, центробежные силы рабочих лопаток и силы, обусловленные
неравномерным нагревом различных частей диска. Разность
температур периферийной и центральной частей диска может
достигать 500 и более. Перечисленные нагрузки вызывают в диске
окружные и радиальные напряжения. Диски подвержены также
вибрациям. Форма поперечного сечеиня диска (изменение
толщины диска по радиусу) выбирается с таким расчетом, чтобы
запасы прочности на любом радиусе диска были достаточнымн-
Узлы соединения дисков между собой и с валом передают
большие крутящие моменты и осевые силы, по этим узлам
осуществляется также центровка деталей. На рис. 3.25 показаны
соединения дисков с валом посредством радиальных призонных
штифтов. Центровка осуществляется путем посадки с натягом дис~
ка на вал по цилиндрической поверхности. Сохранению
центровки при различном нагревании диска и вала способствует наличие
радиальных штифтов. Распространено также соединение дисков
с валом с помощью осевых болтов или шпилек.
Статоры газовых турбин состоят из корпусов н сопловых
аппаратов. Корпус кроме высокой прочности должен иметь вы-
Рис. 3.30. Охлаждаемая рабочая
лопатка:
/ — силовой стержень; 2 — пористая
180
www.vokb-la.spb.ru - Самолёт своими руками?!
изгибную жесткость и обеспечивать надежную центровку
со1Ч сопрягаемых с ним деталей. Для обеспечения сборки узла
всех остуПенчатой турбины корпус обычно имеет разъемы или по-
МН ечные, или продольные. На рис. 3.25 показан статор двухсту-
матой' турбины с неразъемным корпусом. Монтаж ротора 2
П^пбины производится при демонтированном сопловом аппарате
II ступени 3.
Лопатки сопловых аппаратов, как и рабочие лопатки, изготав-
аются из жаропрочных сплавов и сталей. Лопатки могут быть
' аЖдаемыми и псохлаждасмымн в зависимости от рабочей
температуры. Схемы охлаждения сопловых лопаток такие же, как
рабочих. По схеме крепления сопловые лопатки делятся на
лвухопорные / и консольные с бандажированием 3.
Двух опорная схема крепления позволяет иметь меньшие
напряжения в лопатке при действии газовых сил, однако такая
схема применима только на первых ступенях.
При консольном креплении лопаток все нагрузки с них
передаются на корпус турбины. Крепление лопаток к корпусу
может осуществляться винтами, как показано иа рис. 3.25
(позиция 3), болтами и др. Внутренний бандаж на сопловых лопатках
второй и последующих ступеней служит в основном для
снижения вибрационных напряжений. Очень важным в конструкции
сопловых аппаратов является обеспечение свободы температурных
расширений, поэтому и двухонорные и консольные лопатки имеют
возможность радиального расширения.
В лопатках первого соплового аппарата иногда размещают
силовые спицы, передающие радиальные нагрузки от подшипника
турбины.
2.4 ОСНОВНЫЕ И ФОРСАЖНЫЕ КАМЕРЫ СГОРАНИЯ
ГТД
Основные и форсажные камеры сгорания служат для нагрева
рабочего тела (воздуха, газа) за счет сжигания в них топлива.
Горение тошшвовоздушной смеси представляет собой
химическую реакцию окисления, идущую с выделением тепла. Скорость
горения (окисления) зависит от температуры и состава смеси,
который характеризуется коэффициентом избытка воздуха
"~ LB — GTL0 '
где La — действительное количество воздуха для сжигания 1 кг
топлива;
Lb — теоретически необходимое количество воздуха для
полного сжигания 1 кг топлива (для авиационных
керосинов Lc=14,8);
Ст — количество топлива.
181
При достижимых в основных камерах сгорания современт
ГТД температурах 1200—1600 К значение коэффициента избыт
воздуха (среднее для всей камеры) должно составлять а = 2,5-^з°
и более. При таких значениях а топливо не воспламеняется. Пп
этому весь воздух, поступающий в камеру сгорания, делят на тп«
потока (рис. 3.31): первичный G,, вторичный Gn и третий
ный G„
тРетйч
Первичный поток воздуха G, поступает непосредственно
месту расположения форсунки
(а = 0,7н-0,8) и обеспечивается
Рис 3.31. Схема
/ — форсунка; 2 — заверитель;
обратных токов
камеры сгорания:
; 3 — чона
/, где создается богатая смег-
нанбольшая скорость турбулен
ного горения. В передней ч,
сти камеры сгорания (или ж.
ровой трубы, как показано ц
рис. 3.31) организуется зона п
рения. Стабилизация пламени -
зоне горения обеспечивается з
счет создания зоны обратных к
ков 3.
Создание зон обратных ток
возможно, например, за счет j
паточного завнхрителя 2, размг
щепного в передней части жар-
вой трубы. Первичный воздул
проходя через завихритель, закручивается. Вокруг оси каме!
создается вращающийся воздушный вихрь. При этом в централ
ной части вихря возникает область пониженного давления. В э.
область устремляются горячие газы из средней части камеры его
рация, которые повышают испарение и полноту сгорания топлив.
и непрерывно воспламеняют свежую топливовоздушную смес
При этом в зоне горения обеспечивается Т=2300 -=-2500 К.
Вторичный поток воздуха Gn поступает в жаровую труб}
через передние ряды отверстий и предназначен для завершенш
процесса горения. Коэффициент а при этом возрастает до I,5-i-I,8
а температура снижается примерно до 2000 К.
Третичный воздух Gm подводится через задние ряды
отверстий в стенке жаровой трубы в зону смешения и служит для
понижения температуры и создания потребного поля температу1
перед лопатками турбины. Вторичный и третичный воздух исполь
зуются также для охлаждения стенок камеры сгорания.
Процесс горения в камере сгорания существенно зависит от
режима полета и работы двигателя. Увеличение высоты полета
(снижение температуры Ти и давления рн), уменьшение скорости
полета и частоты вращения ротора двигателя снижают
температуру и давление воздуха па входе в камеру сгорания. Испарение
топлива и его распыл вследствие снижения расхода топлива через
форсунки и соответствующего уменьшения перепада давлений на
них ухудшаются, что ведет к снижению полноты сгорания и
температуры в зоне горения и может при определенных условиях вь)-
182
www.vokb-la.spb.ru - Самолёт своими руками?!
ять погасание пламени е камере сгорания. К такому же ре-
ЗЫВ у может привести переобогащенне (а<1) или обеднение
з)'Я j\ топлнвовоздушной смеси при резком увеличении или
' ньшенин подачи топлива на переходных режимах работы
двигателя.
В основной камере сгорания ТРД при а = 2,5-е-3,5 для окисле-
горючего расходуется только часть кислорода воздуха, сле-
""вательно, имеется возможность дополнительного сжигания
топота за турбиной в форсажной камере. - -
Л' Организация процесса горения в
форсажных камерах такая же, как н в
основных камерах сгорания, но с учетом
некоторых особенностей.
Вследствие того что коэффициент
избытка воздуха в форсажной камере
га —1,1 -н 1,8) меньше, чем в основной
камере, и находится в пределах
возможного воспламенения и устойчивого
горения топливо воздушной смеси, нет
необходимости в разделении форсажной
камеры на зону горения и зону смешения.
С другой стороны, большие объемы
свежей смеси (при сравнительно низких
давлениях за турбиной) и отсутствие
избытка кислорода требуют большого
количества форсунок для равномерного
распределения топлива по объему форсажной камеры, которое
впрыскивается обычно навстречу или перпендикулярно газовому
потоку (рис. 3.32).
Высокая температура газов за турбиной и, следовательно,
высокие скорости горения позволяют обеспечить устойчивое горение
"ри сравнительно небольших размерах зон обратных токов,
которые создаются обычно кольцевыми стабилизаторами 5 пламени
уголкового типа.
Пониженная концентрация кислорода и большая скорость
газового потока требуют для первоначального воспламенения смеси
Установки специального источника зажигания — пускового
воспламенителя, выполненного, например, в виде небольшой камеры 3,
которую подается карбюрированная топливовоздушная смесь,
воспламеняемая электрической свечой 2 повышенной мощности.
Конструкция основных камер сгорания. Основные камеры
сгорания по конструктивной компоновке подразделяются на
индивидуальные, кольцевые и трубчато-кольцевые.
ва ИВидУальные камеры сгорания (рис. 3.33) устаиавли-
ются между компрессором и турбиной вокруг вала двигателя.
Вну6Ра состоит из жаровой трубы /, кожуха 2 и диффузора 3.
п->„ ^и жаровой трубы в ее передней части устанавливается
лопаточный завихрнтель.
Рис. 3.32. Схема
диффузора форсажной камеры:
I — форсунка; 2 — свеча вос-
пламенительной камеры (фор-
камеры); 3 — форкамера. 4 —
форсажные форсунки; 5 —
стабилизатор пламени
183
В центральное отверстие завихрителя монтируется голов
форсунки. Отверстия на жаровой трубе на участке А служ*8
для подвода воздуха в зону горения, отверстия на участке £ЭТ
в зону смешения. Отверстия Б позволяют подобрать нужное ря~~
пределение температур газа па входе в турбину, что важно п*
обеспечения надежной работы лопаток турбины. Во избежани"
температурных деформаций крепление жаровой трубы додж
Рис. 3.33. Индивидуальная камера сгорания:
/ — жаровая труба; 2 - кожух,- 3 — диффузор; А — зола горения; Б — зона
смешения
обеспечить ее свободное расширение при нагреве. На участке А
жаровая труба крепится специальным стаканом от осевых пер
мещений, задняя часть жаровой трубы свободно опирается i
детали газосборника (через кожух) и может перемещаться в ос
вом направлении.
Достоинством индивидуальных камер является возможность и)
осмотра и легкой замены в эксплуатации, недостатками — высо
кие масса и занимаемый объем, а также повышенная окружнг.
неравномерность температур газа на входе в турбину.
Кольцевая камера сгорания (рис. 3.34) состоит из кольц
вых наружного / и внутреннего 2 корпусов и общей жаровс
трубы 3 с индивидуальными горелками 6.
Важным достоинством камеры является го, что корпуса / и
включены в силовую схему двигателя. Крепление жаровой трубы
обычно осуществляется в передней части радиальными
штифтами 7 со сферической головкой, в задней части жаровая труб'
опирается на детали соплового аппарата и может иметь осевь№
перемещения. Кольцевая камера имеет малую массу и объем-
меньшие окружные неравномерности температур на выходе, чеь
индивидуальные камеры. Недостатком кольцевой камеры явля
ется трудность замены жаровой трубы, а также ее малая
жесткость.
Трубчато-кольцевая камера сгорания (рис. 3.35) п0
своим свойствам занимает промежуточное положение между
индивидуальной и кольцевой камерами. Она имеет корпуса 5 и >
184
www.vokb-la.spb.ru - Самолёт своими руками?!
185
включаемые в силовую
систему двигателя, и '
дельные жаровые трубцУ
При соответствующе
конструкции иаруЖИо*
корпуса (разъемного и,и
сдвигающегося назад, Как
показано на рис. 3.35)
жаровые трубы в эксплу.
атации могут быть Де.
монтированы для ремон-
та или замены. Крепле
ние жаровой трубы до.
жно обеспечивать
возможность теп/ового
расширения. Одним из узлов креп-
| £ лепия жаровых труб, как
g- *" правило, является топ-
Ь | ливная форсунка 2, кор-
g_ | пус которой делается
■г * ПРОЧНЫМ, СИЛОВЫМ. ВоС-
пламенительиые устройст
ва (запальники)
устанавливаются обычно толькг
на двух жаровых труба*
В остальные трубы пла
мя передается по специ-
$ I альным патрубкам, уста
>." новленным между жаро-
н g выми трубами, так же
ю *• как и в индивидуальны)
га £ камерах сгорания.
с | На элементы камер
о. ~ сгорания действуют еле
к дующие нагрузки. Наруж
й ный и внутренний
корпусе са нагружены усилием
« от перепада давлений, си-
i. лами тяжести и инерции
собственных масс и
вибрационными нагрузками.
На корпус, включенный
в силовую систему
двигателя, действуют также
крутящий момент и
осевая сила, передаваемые с
корпуса турбины. На
жаровые трубы действуют
усилие от перепада да?'
к щ
is i
!!
www.vokb-la.spb.ru - Самолёт своими руками?!
рний газа, массовые силы и вибрационные нагрузки. Во всех эле
рнтах камеры возникают температурные напряжения.
М ^Материалами для корпусов камер сгорания являются жаро
точные стали и сплавы, для жаровых труб — жаропрочные
сплавы.
4
Рис. 3.36. Диффузор форсажной камеры:
/ — наружный корпус; 2 — стойка; 3 — центральное тело; 4 —
воспламенитель; 5 — рассекатель пламени; 6 — пламеперсора-
сыватель; 7 — стабилизатор пламени
Конструкция форсажных камер ТРДФ и ТРДДФ в
значительной мере определяется особенностями процесса горения в них по
сравнению с процессом в основных.
Форсажная камера имеет диффузор, стабилизаторы пламени,
теплозащитный экран, большое количество мелких форсунок, вос-
пламеннтельные устройства, работающие на некоторых
двигателях в течение всего полета.
На рис. 3.36 показан диффузор форсажной камеры ТРДФ с
кольцевыми стабилизаторами и расположенным в центре
воспламенителем 4. Диффузор образован наружным корпусом / и
центральным телом (обтекателем диска турбины) 3, соединенными
стойками 2. Кольцевые стабилизаторы 7, топливные коллекторы
с форсунками и центральное тело 3 крепятся так, чтобы
обеспечивалась свобода температурных расширений деталей. Это
достигается наличием в конструкции зазоров, шарнирных двузвен-
инков. Воспламенитель 4 представляет собой небольшую камеру
Г0Рания, в которую подводится топливовоздушная смесь,
воспламеняемая с помощью одной-двух свечей. Рассекатель пламе-
и о делит факел на две-три части и направляет к радиальным
табилизаторам 6, но которым пламя перебрасывается в зоны
ратных токов, расположенные за кольцевыми стабилизаторами.
187
Воспламенительное устройство с пусковой топливной и кислор0п
ной форсунками может устанавливаться также между корпус
мн / и 3 и подавать факел пламени в зону стабилизаторов ща
мени
На рис. 3.37 показана схема форсажной камеры со струйными
форсунками, выполненными в виде трубок с отверстиями. Корпус
форсажной камеры от стабилизаторов 4 пламени до створок con.
%,
/ л
Z=Z=
йНЯВРё!
z •лЗ—Ч'П-Р^Щ^р^
3
Рис. 3.37. Схема форсажной камеры:
/ — корпус; 2 — теплозащитный экран; 3 — створки
сопла; 4 — стабилизатор пламени; 5. 6 - топливные
коллекторы с форсунками
ла 3 закрыт теплозащитным экраном 2, состоящим нз нескольких
гофрированных колец с мелкими отверстиями. Между кольцам!
и корпусом / проходит менее нагретый газ, препятствующий п
регреву корпуса и экрана. Экран с отверстиями служит одновр
менно для гашения высокочастотных колебаний газа, поэтому t.
называется также антивибрационным.
Элементы форсажных камер испытывают нагрузки: силы инег
ции, от перепада давлений, осевые от сопла, вибрационные н;
грузки, температурные напряжения. Материалами для
форсажных камер являются жаропрочные стали и сплавы.
2.5. ВЫХОДНЫЕ УСТРОЙСТВА ГТД
Выходные устройства предназначены для отвода газа после
турбины, его дальнейшего расширения с целью увеличения
скорости истечения, поворота выхлопных газов для изменения
направления векгора тяги или изменения направления выпуска
газов, а также предохранения деталей самолета или вертолета от
действия высокой температуры газа.
В соответствии с этим выходное устройство может включать:
удлинительную трубу, отводящую газы к выходному соплу; ДНФ"
фузор, предназначенный для уменьшения скорости газов на входе
в форсажную камеру или поворотное устройство; устройство
поворота газов для получения вертикальной составляющей тяги или
отрицательной тяги (реверсивное устройство) или для изменения
направления выпуска газов; выходное сопло.
188
www.vokb-la.spb.ru - Самолёт своими руками?!
\\г силовых установках самолетов с ГТД применяются выход-
ie устройства с соплами разных типов. У турбовинтовых и вер-
^г,1етиых двигателей, имеющих за турбиной давление, близкое к
тмосферному, используются сужающиеся нерегулируемые выход-
уе сопла или выходные патрубки диффузорного типа. Их роль
сводится в основном к отводу выхлопных газов за пределы кон-
стрУк11ИИ летательного аппарата.
Тип сопла определяется прежде всего расчетным
располагаемым (полным) перепадом давления иа сопле. При отсутствии
форсажной камеры яп.р =р*1ри {р'т —полное давление газа за
турбиной). Если на двигателе после турбины установлена форсажная
камера, то полное давление перед соплом будет ниже на величину
потерь в форсажной камере. Тогда яп. р = p*Jp„- Рассмотрим
цвигатель без форсажной камеры.
В зависимости от величины располагаемого перепада
давлений выходное сопло выполняется дозвуковым (сужающимся) или
сверхзвуковым (сужающимся-расширяющимся). При
дозвуковых и относительно небольших сверхзвуковых скоростях полета
применяются сужающиеся выходные сопла, как наиболее простые
в конструктивном отношении. На этих скоростях полета
располагаемая степень расширения не превосходит тсп. Р=5, а потери тяги
в них из-за недорасшнрения не превосходят 1%-
Выходпые сопла сверхзвуковых самолетов работают в
широком диапазоне располагаемых степеней расширения газа тгп. р от
2—5 при дозвуковых до 16—20 при сверхзвуковых скоростях
полета. Для обеспечения высокой эффективности силовой установки
на разных режимах полета приходится применять сверхзвуковые
сопла с регулируемыми площадями критического и выходного
сечений.
В процессе эксплуатации изменяются режимы полета и
работы двигателя, что может существенно изменять располагаемый
перепад давления в выходном сопле. Если на двигателе
установлено дозвуковое (сужающееся) сопло и тсп. р остается на всех
режимах докритическим, то расширение газа в сопле будет полным
(Рс=рн). В случае если тсп. р станет больше якр, то расширение
газа в сопле будет неполным {рс>рн), так как в сужающемся
сопле может быть сработан только критический перепад, и
появятся потери иа недорасшнрение газа.
Для сверхзвукового (сужающееся-расширяющееся или сопло
"аваля) сопла при сверхкритических перепадах действительный
перепад давления в сопле icc=/'*//)c ПРИ безотрывном течении
будет оставаться постоянным и равным расчетному. Тогда
давление на срезе сопла рс будет изменяться пропорционально
давлению р*_ Может оказаться, что располагаемый перепад давле-
лей В СОпле те"-р будет больше (рс>Рн) или меньше (рс<Рн)
Д иствительного перепада давления тсс и появятся потерн, связан-
е с нерасчетиостью режима работы сопла — потери на педо-
•" сширение или перерасширепие газа.
189
Потери, связанные с нерасчетностью режима работы сопла
непосредственно влияют на тягу двигателя. Для объяснения этого
влияния рассмотрим, как будет изменяться тяга двигателя, если
на него устанавливать сопла с неизменным критическим сечением
и различной величиной выходного сечения сопла. Режим работы
двигателя остается при этом
неизменным, изменяется только
режим работы сопла.
Изменение тяги при этом происходит
только за счет изменения
равнодействующей сил давления
действующей на
расширяющуюся часть сопла. На рис. 3.38
показано распределение
давлений вдоль расширяющейся
части сопла на трех режимах
его работы. Из рис. 3.38
видно, что наибольшая
равнодействующая имеет место в
режиме а.
При увеличении площади
выходного сечения сопла (что
соответствует в данном
случае добавлению к исходному
соплу участка длиной U) на
участке U давление внутри
сопла рс<.рн. Это вызывает
появление силы, направленной
в сторону, противоположную
направлению тяги двигателя
(режим б). Следовательно,
тяга двигателя на режиме 6 получается меньшей, чем на
режиме а. На режиме в, когда выходное сечение сопла уменьшилось
по сравнению с режимом а (отброшен участок U), тяга также
снижается, так как вместе с отброшенным участком, на котором
Рс>Ря, теряется и некоторая часть силы тяги, являющаяся
равнодействующей повышенных давлений на этом участке.
Устранение потерь на нерасчетном режиме возможно за счет
регулирования площади среза расширяющейся части сопла, т. е.
регулирования степени расширения газа в сопле. Регулирование
сопла также необходимо для обеспечения устойчивой работы
двигателя при запуске, включении и выключении форсажа и в других
случаях. Для этих целей требуется регулирование критического
(наименьшего) сечеиня сверхзвукового сопла.
Таким образом, на сверхзвуковых самолетах необходимо
регулирование и критического, и выходного сечения сужающегося-
расширяющегося сопла. Регулирование сверхзвукового сопла
сопряжено с определенными конструктивными трудностями и уве-
личением массы сопла. В настоящее время находят применение
190
Рис. 3.38. Распределение давлений
вдоль сопла:
а — при полном расширении; б — при пере-
раеширешш; в — при недорасширенни
т.vokb-la.spb.ru - Самолёт своими руками?!
жр^=
Рис. 3.39. Схема работы
сверхзвукового эжекторного сопла
,як сопла типа сопла Лаваля, так и эжекторные сопла. Эжектор-
Кое сопло имеет разрыв сверхзвукового контура, в который
подается вторичный (эжектпруемый) воздух С2 (рнс. 3.39). На
режимах, когда icn. Р<лс, вторичный поток поджимает первичную
т.уЮ 'газа G\, не допуская ее перерасширения. При этом
давление вторичного потока больше атмосферного и на сужающуюся
часть сопла действует равнодействующая сил давления,
направленная в сторону действия силы
тяги, что увеличивает тягу по
сравнению с тягой сужающегося
сопла.
Характеристики эжекторного
сопла несколько хуже
характеристик регулируемого сопла Лаваля,
что объясняется наличием
дополнительных потерь в жидком
контуре. Для обеспечения нормальной
работы двигателя и улучшения
характеристик эжекторных сопел в
них, так же как и в соплах
Лаваля, регулируют площадь критического сечения и площадь среза
сопла.
Конструктивно нерегулируемое выходное устройство ТРД
состоит (рис. 3.40) из сопла и выходной трубы, длина которой
определяется условиями компоновки самолета. Площадь проходных
сеченнй вдоль трубы выбирается из условия обеспечения
минимальных потерь. Внутренний конус 2, являющийся обтекателем
диска турбины, крепится с помощью стоек 3. Теплоизоляция 5
состоит из нескольких слоев асбеста и алюминиевой фольги.
Сопло крепится болтами 6. Для повышения жесткости выходная
кромка сопла подкрепляется закаткой проволоки или приварным
точеным кольцом.
Регулируемое сужающееся сопло состоит обычно из
кольцевого ряда створок 5 (рис. 3.41). Каждая створка подвешивается
шарнирно на двух штифтах 3. Поворот створок вокруг шарниров
на уменьшение площади сопла производится путем перемещения
кольца 4 вдоль оси двигателя вперед с помощью цилиндров 2.
Поворот створок на открытие производится перепадом давления
газов, при этом кольцо 4 должно быть перемещено вдоль оси
двигателя назад. Для уменьшения износа створок и кольца 4 на
поверхности кольца закрепляются медные пластины, покрытые
слоем графита, а поверхности створок хромируются.
Из множества конструктивных схем регулируемых
сверхзвуковых сопел наибольшее применение получили две схемы,
представленные на рис. 3.42. Створчатое двухрядное сопло (рис. 3.42, а)
имеет два последовательно расположенных кольцевых ряда
створок 3 и 4: первый ряд образует сужающуюся часть сопла, подоб-
Ук> соплу, представленному на рнс. 3.41, второй ряд образует
Расширяющуюся часть сопла. Створки второго ряда подвеши-
191
ваются шарннрно к концам створок первого ряда. Створки обои
рядов могут управляться общей системой гидравлических цилин
дров, тогда они будут в кинематической взаимосвязи, или раз
г z
f s
е
Рис 3.40. Нерегулируемое сужающееся сопло:
корпус; 5 — конус: 3 — силовые стойки; 4 — обтекатели стоек: 5
слой. 6 — болт
- теплозащитный
дельными системами гидравлических цилиндров / и 2, тогда
площади критического и выходного сечений будут изменяться
независимо одна от другой.
Эжекторное сопло (рис. 3.42,6) также имеет два ряда ство
рок, однако эжекторные створки 4 расположены снаружи по
отношению к первому ряду створок 3. Створки 4 кинематически
связаны со створками 3, они управляются общими силовыми ци
линдрамн. В кольцевом пространстве между створками 3 и 4
протекает воздух, эжектируемый (подсасываемый) газовым
потоком, который и образует «жидкий контур» сверхзвуковой части
сопла (см. пунктир). Расход эжектнруемого воздуха регулируется
изменением положения наружных створок 4.
В конструкцию выходных устройств реактивных двигателей
могут входить реверсивные устройства, служащие для создания
отрицательной тяги, необходимой для горможення самолета при
192
www.vokb-la.spb.ru - Самолёт своими руками?!
[
Рис. 3.41. Регулируемое сужающееся сопло:
/ _ корпус; ? — цилиндр; 3 — узел креплении створки: 4 — силовой элемент (коль
цо): 5 — створка
Рис. 3.42. Регулируемые
сверхзвуковые сопла:
а — Створчатое двухрядное'
/, Z — силовые Цилиндры,
3, 4 — створки; б —
эжекторное. 3 — внутренние
створки. 4 — внешние
створки
7-229
193
посадке. Применяются реверсивные устройства двух типов. На
рис. 3.43 представлена схема устройства решетчатого типа,
устанавливаемого перед выходным соплом. Устройство состоит из двух
решеток /, отклоняющих поток вперед, и двух заслонок 2,
управляемых пневмо- или гидроцилиндрами. На рис. 3.43, о показано
положение, когда заслонки перекрывают выходы через решетки,
т. е. двигатель работает па режиме прямой тяги. На рис. 3.43,6
в
Рис, 3.43. Схемы реверсивных устройств:
с — решетчатое устройство выключено; б — решетчатое устройство включено:
1 — решетки: 2 — заслонки; в — двухстворчатое устройство: I — створки;
2 — цилиндр управления
показано положение, когда заслонки перекрыли основное сопло
и открыли выход через решетки, т. е. показана работа двигателя
на режиме обратной (отрицательной) тяги.
На рис. 3.43, в представлена схема реверсивного устройства
двухстворчатого типа, расположенного за соплом двигателя.
Створки / с помощью цилиндров 2 для создания отрицательной
тяги отклоняются назад и перекрывают прямой выход газов. На
режиме прямой тяги створки компактно ложатся вокруг
выходного устройства и не вносят никаких возмущений в работу
двигателя. Однако реверсивные устройства, расположенные за
соплом, дают большие, чем решетчатые устройства, потери на
режиме отрицательной тяги вследствие того, что скорость газов
после сопла выше, чем в канале до сопла, где расположено
решетчатое реверсивное устройство.
Для изменения направления вектора тяги на
взлетно-посадочных режимах и в полете применяют различного рода
отклоняющие устройства. Имеется много различных конструктивных схем
этих устройств.
Для примера приведем схему плоского прямоугольного
выходного сопла. На рис. 3.44, о показано положение элементов
сопла, когда обеспечивается горизонтальная тяга двигателя.
Створки /, 2, 3 обеспечивают изменение площади критического
и выходного сечений сопла в соответствии с режимами работы
двигателя.
194
www.vokb-la.spb.ru - Самолёт своими руками?!
На рис. 3.44,6 показано положение элементов сопла, когда
обеспечивается вертикальная тяга двигателя. Створка 4
обеспечивает поворот потока газов вниз до 90° к горизонтальной оси
двигателя.
Рис. 3.44. Плоское выходное сопло, обеспечивающее отклонение
вектора тяги:
а ~ режим горизонтальной тягн; б — режим вертикальной тяги; I, 2. 3 —
створки, обеспечивающие изменение площади сопла; 4 — створка,
обеспечивающая поворот потока газов
На рисунке справа показано конструктивное выполнение
сопла.
Глава 3
КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ ТРД и ТРДФ
3.1. РАБОЧИЙ ПРОЦЕСС И ОСНОВНЫЕ УДЕЛЬНЫЕ
ПАРАМЕТРЫ ТРД И ТРДФ
Воздух поступает в двигатель через входное устройство, тип
Которого, как указывалось выше, зависит от диапазона чисел М
полета и размещения двигателя иа самолете. На рис. 3.45 даиа
схема ТРДф со сверхзвуковым входным устройством и показано
изменение давления р, скорости с и температуры Т воздушного
„'„газового) потока по тракту двигателя при полете со
сверхзвуковой скоростью.
7*
195
Совокупность термодинамических процессов, протекающих 6
турбореактивном двигателе, результатом которых является
изменение параметров газового потока, представляет собой рабо.
Ф
i
Рис. 3.45. Схема ТРДФ:
- В. X — X. К — К. Г — Г. У — У. T — T, Ф — Ф, КР — KP.
С — С — сечения двигателя
чий процесс (цикл) двигателя. Реальный цикл ТРД в полете в
координатах pv показан на рис. 3.46.
Рис. 3.46. Циклы ГТД:
о —ТРД; 6 —ТРДФ
Во входном устройстве (в скачках уплотнения) и компрессоре
происходит политропное сжатие воздуха (Н—В—К), которое
сопровождается увеличением температуры и снижением скорости
потока. В камерах сгорания к воздуху (/(—Г) или газу (Т—Ф
в форсажной камере) подводится тепло Qi и Q^. Эти процессы
протекают с некоторым снижением давления (вследствие нали-
196
www.vokb-la.spb.ru - Самолёт своими руками?!
иия потерь) и увеличением скорости газового потока (вследствие
снижения плотности газа).
В турбине п выходном сопле происходит нолптронное
расширение газа, протекающее со снижением температуры н
увеличением скорости газового потока, особенно сильным в выходном
гопле. Изобарный отвод тепла Q2 в атмосферу (С—Н) замыкает
цикл-
В результате осуществленного термодинамического цикла
происходит превращение части химической энергии топлива в
полезную работу. В идеальном цикле ТРД полезной работой
является работа цикла Z-ц, эквивалентная всей площади цикла,
которая определяется как разность политропной работы
расширения Ln. р (площадь БКГТСНАБ) и политропной работы сжатия
L„. с (площадь АНВКБА). В реальном цикле ТРД часть работы
расходуется па покрытие потерь в процессе сжатия Lrc
(площадь /) и расширения Lrv (площадь //). Тогда работа цикла
будет эквивалентна незаштрихованной площади цикла на
рис. 3.46, а:
£ц — (^н. р **п. с) \*~г_ с -|- Lr, р) = (Ln_ р LTm р) ■ (/.п. с "Г *т. с)-
Используя уравнение Бернуллн для процессов сжатия и
расширения и учитывая, что для ТРД LT = LK, получим
ci-V
(3.3)
Следовательно, в ТРД полезная работа цикла используется
только для увеличения кинетической энергии газа, проходящего
через двигатель.
Работа цикла зависит от параметров рабочего процесса ТРД:
степени повышения давления к = р"к1ри, степени подогрева
воздуха в двигателе Л = Т*/Тн и коэффициентов полезного действия
процесса сжатия т]с и расширения т]р:
A-I
*«-*
М^Цр1^-')- М
где m — коэффициент, учитывающий различие физических свойств
воздуха и газа (т~ 1,02ч-1,05).
Увеличение степени повышения давления приводит к
повышению эффективности преобразования тепла в полезную работу, и
работа цикла возрастает (рис. 3.47). Однако при этом
увеличивается и температура воздуха за компрессором Г* и при
ограниченной величине температуры перед турбиной Т* количество
тепла, идущего па подогрев воздуха в камере сгорания <Э =
~~ сп (Г* — 7**), уменьшается {с„ — условная теплоемкость
процесса подвода тепла в реальной камере сгорания).
197
При максимальной степени повышения давления ятах = тД11сГ,
количество подводимого тепла уменьшается настолько ((?„,,„)_
что оно идет только иа покрытие потерь, а полезная работа цикла
становится равной нулю. Следовательно, имеется оптимальная
степень повышения давления нот, при которой работа цикла
максимальна.
ч
^г
csa
|
| 1
!\ А
\ '
1 \ *
1 \ У в
! \ / ^ s8
! /,/<C^_^-'cse
i л/ ^~-i—■—
1 js '
—1^- 1 ^
|1ОПТ ЛЭК
птох •
Рис. 3.47. Изменение
удельной тягн Руд, удельного
расхода топлива Суд, работы
цикла Лц и количества
подводимого тепла Q от степени
повышения давления
воздуха я
Рис. 3.48. Изменение
удельной тягн РуЛ, удельного
расхода топлива Суд и работы
цикла Ln от степени
подогрева воздуха Д
*
До величины Дш!п = я /mrKr,f все тепло, подводимое в
двигатель, расходуется на покрытие потерь и работа цикла равна
нулю (рис. 3.48). При дальнейшем увеличении подвода тепла
работа цикла возрастает.
Совершенствование организации процессов, протекающих в
двигателе (повышение КПД), увеличивает работу цикла.
Удельная тяга двигателя связана с работой цикла. Так как
Руд=сс— V, а из уравнения (3.3) следует, что
cc^V2La + V\
Следовательно, зависимость удельной тяги от параметров
рабочего процесса качественно такая же, как н работы цикла. Кроме
того, удельная тяга зависит непосредственно от скорости полета.
Турбореактивный двигатель совмещает в себе тепловую
машину и движитель. Совершенство ТРД как тепловой машины
характеризуется внутренним КПД
1вп =
Оо
198
www.vokb-la.spb.ru - Самолёт своими руками?!
„ q0.— количество подведенного тепла, приходящееся на 1 кг
воздуха в 1 с (Qc = Q/r\r, здесь Q — полезно
использованное тепло, г)г — коэффициент полноты сгорания).
Совершенство ТРД как движителя характеризуется тяговым
КПД
где /-тяг— полезная тяговая работа (/,тяг = PycV)-
В целом совершенство ТРД характеризуется полным КПД
который учитывает все потери в двигателе (тгап^вн^тяг).
Экономичность ТРД помимо полного КПД может
характеризоваться удельным расходом топлива
'-уд р •
Часовой расход топлива
г _ 3600QCG„
т-4 Н
и
где Ни — количество тепла, выделяющегося при полном сгорании
1 кг горючего (теплотворная способность топлива).
Тогда
r __ 3600Q„ fi
Чл-7^Ру7- (6Ь)
Совместное решение формул (3.5) и (3.6) показывает связь
1 дельного расхода топлива с полным КПД двигателя:
Цд- НцТш ■ (3.7)
Следовательно, удельный расход топлива при постоянной
скорости полета однозначно определяется величиной т)„ и при этих
условиях характеризует экономичность двигателя.
Формулы (3.6) и (3.7) позволяют проследить зависимость Суд
от основных параметров рабочего процесса. Удельный расход
топлива при я=1 и it=iirnax стремится к бесконечности, так как
пРи этом Руд=0 и нет полезной работы (рис. 3.47). При
увеличении л от 1 до я0„, удельный расход топлива очень интенсивно
Уменьшается, так как Qe уменьшается, а Руд возрастает. При
™>itor,T падение Суд замедляется, так как Руд начинает снижать-
я- При я = ла1( удельный расход достигает минимума, а затем
возрастает.
зависимость Суд от степени подогрева Д показана на рис. 3.48.
ри Д = Дгтг,1 когда PyR—0, a Qot^O, удельный расход топлива
199
оказывается бесконечно большим (г|вн = 0 и rjr, = 0). С
увеличением степени подогрева внутренний КПД непрерывно
увеличивается. Возрастает и ■>]„, хотя увеличение скорости истечения газов
сс приводит к увеличению потерь с выходной скоростью и
снижению тягового КПД. При Д = ДПК полный КПД достигает
максимума, а Суд соответственно минимума. При дальнейшем
увеличении Д>Дэк решающее значение приобретают возрастающие
потери с выходной скоростью (сильное падение г)Гяг) и полный
КПД начинает снижаться, а Суд увеличиваться. Следует
заметить, что современные двигатели имеют обычно на максимальном
режиме Д>ДЭК, т. е. Гг*№к > Гг* „к.
Увеличение тяги двигателя с целью сокращения длины разбега
самолета при взлете и улучшения его маневренных характеристик
возможно за счет его форсирования.
Форсирование двигателя можно осуществить:
кратковременным повышением частоты вращения ротора
двигателя;
впрыском легконспаряемой жидкости в компрессор
(например, воды или водоспиртовых смесей);
дополнительным сжиганием топлива за турбиной.
Форсирование повышением частоты
вращения ротора двигателя связано со значительными тепловыми и
механическими перегрузками элементов двигателя. При этом
обеспечивается увеличение тяги на 10—20%- Для форсирования
впрыском жидкости необходимо иметь на борту самолета
большие запасы воды, что отрицательно сказывается на
дальности и продолжительности полета самолета. Например, для
увеличения тяги двигателя на 30—40% относительный расход воды
СВод1,т/Ст = 2-=-3.
На современных ТРДФ широкое применение получило
форсирование путем дополнительного сжигания топлива
за турбиной (в форсажной камере). При этом повышается
температура газа перед выходным соплом, вследствие чего
увеличиваются скорость истечения газов, удельная тяга и тяга двигателя.
Одновременно значительно увеличивается удельный расход
топлива. При таком способе форсирования на земле степень
форсирования двигателя Рф = Рф/Р=1,3-ь 1,6 и повышается с
увеличением скорости полета. Поэтому форсажные режимы наиболее
целесообразно использовать на больших сверхзвуковых скоростях
полета.
3.2. КОНСТРУКТИВНЫЕ СХЕМЫ И ОСОБЕННОСТИ
ТРД и ТРДФ
Конструктивные схемы турбореактивных двигателей
чрезвычайно многообразны. Это объясняется большим разнообразием
назначений двигателей и требований к ним.
20Q
www.vokb-la.spb.ru - Самолёт своими руками?!
Конструктивная схема — это Схема (чертеж) двигателя, пока-
ываюшая тип и возможное расположение его основных узлов
^компрессора, камеры сгорания, турбины и т. д.) и характе-
пиз\юшая в основных чертах их функциональное и силовое
взаимодействие. Конструктивные схемы классифицируются по
наиболее характерным признакам его основных узлов, по
числу роторов, по числу опор ротора, по назначению
двигателя и т. п.
ТРД с центробежным компрессором (рис. 3.49) является одно-
роторным двигателем простейшей схемы, применяемым для
самолетов с дозвуковыми скоростями полета. Простота конструкции
и высокая надежность компрессора и турбины, возможность
замены жаровых труб камеры сгорания и рабочих лопаток
турбины делают такой двигатель очень удобным в эксплуатации. В
настоящее время такие двигатели широко применяются на учебно-
тренировочных самолетах. Недостатком двигателей с
центробежным компрессором является низкая удельная лобовая тяга,
поэтому даже при наличии форсажной камеры самолету с
таким двигателем трудно достичь больших сверхзвуковых
скоростей.
ТРД с осевым компрессором — наиболее распространенный в
настоящее время тип газотурбинного двигателя. Возможность
получения практически любой степени повышения давления воздуха
в осевом многоступенчатом компрессоре в сочетании с
высокотемпературной охлаждаемой турбиной, малая площадь поперечного
сечения (площадь миделя), возможность установки за турбиной
форсажной камеры — эти и другие достоинства сделали данный
тип двигателя очень удобным для самолетов военной авиации.
Как отмечалось, существует большое разнообразие
конструктивных схем ТРД и ТРДФ. На рис. 3.50 показан однороторный ТРД
с осевым компрессором, трубчато-кольцевой камерой сгорания,
двухступенчатой турбиной и нерегулируемым соплом. Двигатель
имеет три опоры ротора. Привод агрегатов, обслуживающих
двигательные и самолетные системы, осуществляется через рессору
от передней цапфы ротора компрессора. Регулирование
компрессора (предотвращение неустойчивой работы на пониженных
режимах) осуществляется перепуском воздуха после 5-й ступени
через окна корпуса, закрываемые лентой перепуска, в атмосферу.
Двигатель при необходимости может быть оборудован
форсажной камерой.
На рис. 3.51 показан двухроторный ТРДФ с шестиступеича-
тым двухкаскадным компрессором, трубчато-кольцевой камерой
сгорания, двухступенчатой турбиной, форсажной камерой с коль
цевыми стабилизаторами пламени и регулируемым сужающимся
соплом. Данный двигатель конструктивно сложнее двигателя,
изображенного иа рис. 3.50, однако имеет и лучшие удельные
параметры на нерасчетных режимах (при изменении режимов
работы двигателя, высоты и скорости полета). Благодаря двухро-
201
www.vokb-la.spb.ru - Самолёт своими руками?!
о.
ч
о,
202
203
гэрной схеме пропала необходимость
перепуска сжатого воздуха из
компрессора в атмосферу. Наличие
регулируемого сопла позволяет при вклад.
чении форсажной камеры сохранить
неизменным и высоким режим
работы турбокомпрессора, улучшить
процесс запуска и разгона двигателя,
протекание высотно-скоростных харак-
теристик.
На рис. 3.52 показана схема
ГРДФ для больших сверхзвуковых
скоростей полета. Это одпороторный
двигатель с осевым пятиступенчатым
компрессором, трубчато-кольцевой
камерой сгорания, одноступенчатой
турбиной, форсажной камерой с
кольцевыми стабилизаторами и
сверхзвуковым регулируемым соплом типа
сопла Лаваля. В силовую установку
входит также сверхзвуковое
регулируемое входное устройство. Компрессор
двигателя сравнительно прост по
конструкции, имеет небольшую степень
повышения давления, так как воздух
предварительно уже сжат во
входном устройстве. Особенностью
форсажной камеры такого двигателя
является то, что она работает не
только во время взлета или в экстренных
случаях полета, а в течение всего
времени полета на сверхзвуковых
скоростях. Регулируемое сопло типа
сопла Лаваля существенно повышает
эффективность двигателя, так как
позволяет полнее сработать имеющийся
перед соплом теплоперепад сжатого
и нагретого газа, расширить газ
до давления окружающей
среды.
Разновидностью турбореактивных
двигателей являются подъемные
ТРД, однако этот тип
двигателей будет рассмотрен ниже, в
главе 4.
www.vokb-la.spb.ru - Самолёт своими руками?!
Глава 4
КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ ТРДД И ТРДДФ
4 1. РАБОЧИЙ ПРОЦЕСС И ОСНОВНЫЕ УДЕЛЬНЫЕ
ПАРАМЕТРЫ ТРДД И ТРДДФ
В последние годы двухконтурные турбореактивные двигатели
находят все более и более широкое применение на самолетах
транспортной и военной авиации. Подавляющее большинство
строящихся и разрабатываемых самолетов с околозвуковой и
сверхзвуковой максимальными скоростями полета используют
двухконтурные ТРД.
В настоящее время за рубежом построены или строятся
следующие типы новых самолетов, на которых применены
двухконтурные ТРД: дозвуковые штурмовики, сверхзвуковые
истребители, сверхзвуковые многоцелевые самолеты
(истребители-бомбардировщики), противолодочные, военно-транспортные и
пассажирские самолеты.
В зависимости от схемы компрессора, способа организации
выхода газового потока из двигателя и организации процесса
горения в форсажных камерах двухконтурный ТРД может быть
выполнен по различным схемам.
На рис. 3.53 приведена типичная схема ТРДД двухвальной
схемы с раздельным выходом потоков из контуров. Весь
поступающий в двигатель воздух в количестве Ов£ проходит через
часть ступеней компрессора (в данном случае — три),
являющихся общими для обоих контуров. После этого он разделяется на
два потока. Один поток GBl проходит в компрессор первого
(внутреннего) контура, камеру сгорания, турбину и выхлопное сопло,
а второй Ов[| поступает в свое выхлопное сопло (сопло наружного
(второго) контура). Часто перед поступлением в сопло за
турбиной потоки смешиваются и поступают в одно общее для обоих
контуров выхлопное сопло. Отношение расхода воздуха через
второй контур к расходу воздуха через первый контур (т = С?в11/Ов1)
называется степенью двухконтурности двигателя. Этот
параметр имеет важное значение для двухконтурных ТРД и во
многом зависит от назначения двигателя (области его
применения по скорости полета).
ТРДД более сложны в конструктивном отношении, чем
одноконтурные турбореактивные двигатели, но имеют более высокую
экономичность на дозвуковых и околозвуковых скоростях полета.
Важным достоинством ТРДД по сравнению с одноконтурным ТРД
является снижение его удельных расходов топлива при
увеличении температуры газов перед турбиной.
Увеличение температуры газов перед турбиной, как известно,
Улучшает степень совершенства реального цикла двигателя и
приводит поэтому к росту внутреннего КПД. Но одновременно
205
о.
206
этим увеличение температуры газов перед турбиной
сопровождается увеличением скорости истечения и соответственно
падением тягового КПД. Из-за этого в одноконтурных ТРД иа
дозвуковых и малых сверхзвуковых скоростях полета наилучшая
экономичность получается на относительно низких значениях
температуры газов перед турбиной. Другое дело в двухконтурных ТРД.
Увеличение температуры газов перед турбиной в значительно
меньшей мере сказывается на величине тягового КПД, поскольку
с ростом температуры газов перед турбиной получаемый прирост
энергии можно использовать для увеличения расхода воздуха
через наружный контур или увеличения степени повышения
давления в компрессоре наружного контура. В связи с этим в двух-
контурвом двигателе удается сочетать высокие значения
температуры газов с малой скоростью истечения, т. е. с высоким уровнем
тягового КПД.
Отношение полных давлений в сечениях за компрессором
внутреннего контура К и на входе в двигатель В называется
степенью повышения давления во внутреннем контуре
Pi
^ = 7Г
В выполненных конструкциях ТРДД величина степени
повышения давления во внутреннем контуре в земных условиях со-
*
ставляет 10—30. Аналогично и*п =—**- называется сте-
" Ре
пенью повышения давления в наружном контуре. Ее
значение значительно ниже степени повышения давления во
внутреннем контуре и не превышает 2—3. Важным параметром ТРДД,
как н обычного ТРД, является температура газов перед турбиной,
которая достигает в настоящее время 1400—1600 К и имеет
тенденцию к дальнейшему увеличению.
Все двухконтурные двигатели можно разделить на двигатели
без форсажной камеры и на двигатели с форсажной камерой.
Бесфорсажные ТРДД применяются на дозвуковых штурмовиках,
противолодочных, военно-транспортных и пассажирских
самолетах, а ТРДД с форсажной камерой — на сверхзвуковых
маневренных истребителях и многоцелевых самолетах.
Тяга ТРДД (ТРДДФ) с раздельными контурами представляет
собой сумму тяг внутреннего и наружного контуров и
определяется (при полном расширении) соотношением
P=Grlcci-GBlV+GBllcc„-0BllV. (3.8)
Распределение тяги между контурами зависит от степени двух-
контурности. При увеличении т или ж*и растет доля тяги
второго контура.
207
Удельной тягой ТРДД называется отношение тяги
двигателя к суммарному расходу воздуха
р =_£_ = . я> + я"
CBi С„1 + Сщ|
Разделив числитель и знаменатель на GBi, получим
р» = ПЛй • (3.9)
Удельным расходом топлива ТРДД называется
отношение суммарного расхода топлива в обоих контурах к
суммарной тяге
(-. 5?.jl __ 3600 (От 1 + От ц)
иуд р р •
где Ст, и ClU—секундные расходы топлива через первый и
второй контуры. Разделив числитель и знаменатель на GB|,
получим
Г — ^OOfei + wgTii) /ч in\
где grI и gTli— относительные доли топлива, подводимого к
воздуху в первом и втором контурах.
Для ТРДД со смешением потоков за турбиной его параметры
определяются по тем же соотношениям, что и для ТРД:
P=Grtcc~Ce7y, (3.11)
где GrJ. —суммарный расход газа через двигатель;
ОвЕ —суммарный расход воздуха через двигатель.
Р — Р . Г -— 360°(Ст| + От II) /о 19\
^УД Q » ^УД р • \^-1£,1
При заданных значениях работы цикла внутреннего контура и
степени двухконтурности т величина удельной тяги ТРДД без
подвода тепла в наружном контуре определяется тем, как
распределена работа цикла Ьц1 между контурами. Увеличение доли
энергии, передаваемой в наружный контур, приводит к снижению
удельной тяги внутреннего контура Р , и росту удельной тяги
наружного контура Я в, что объясняется соответствующим
уменьшением скорости сс1 и увеличением скорости ссЦ.
Первоначально такое перераспределение работы цикла ведет к
увеличению удельной тяги двигателя вследствие повышения тягового
КПД внутреннего контура и еще высоких значений тягового КПД
наружного контура. Однако при значительном увеличении
скорости истечения сс|1 тяговый КПД наружного контура начинает су-
2G8
www.vokb-la.spb.ru - Самолёт своими руками?!
ественио уменьшаться, что будет приводить в целом к снижению
..дельной тяги двигателя.
Следовательно, существует некоторое оптимальное распреде
пение работы цикла /.„, между контурами, при котором обеспе
' вается максимальное значение удельной тяги ТРДД. Поскольку
nnii неизменных параметрах цикла внутреннего контура значение
а для ТРДД без подвода тепла во втором контуре (gTll = 0)
остается неизменным, максимуму РУй (при m = const) согласно
формуле (3.10) соответствует одновременно минимум Суд.
На удельные параметры ТРДД при оптимальном распределе
нии работы цикла существенное влияние оказывает величина
степени двухконтурности двигателя т. С увеличением т уменьшается
количество энергии, подводимой к каждому килограмму воздуха,
протекающего через наружный контур, и, как следствие,
уменьшается скорость сса и удельная тяга наружного контура и в
целом удельная тяга двигателя. Уменьшение скорости истечения
газов из ТРДД при увеличении т повышает тяговый и полный КПД
(при неизменном внутреннем КПД) и приводит к снижению
удельного расхода топлива.
Форсирование двухконтурных ТРД возможно за счет
дополнительного сжигания топлива как в наружном контуре или
одновременно за турбиной внутреннего контура н в наружном контуре
(ТРДДФ с раздельными контурами), так и в общей форсажной
камере (ТРДДФ со смешением потоков за турбиной).
4.2. КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ ТРДД И ТРДДФ
На рис. 3.54 приведена схема ТРДДФ для сверхзвуковых
самолетов. Особенностью этой схемы двигателя является
применение двух каскадов компрессора внутреннего контура. Причем пер-
Рис. 3.54. Двухконтурный ТРДФ с двумя каскадами компрессора
высокого давления
выи каскад КНД (компрессор низкого давления) находится на
Дном валу с компрессором наружного контура или, как его иногда
называют, вентилятором. Одна ступень турбины приводит КВД,
° три ее ступени—КНД и компрессор наружного контура. По-
оки внутреннего и наружного контуров объединяются за турби-
°и и поступают в одну общую форсажную камеру с регулируе-
209
мыми створками выхлопного сопла. Как видно из схемы, процесс
смесеобразования н горения начинается в наружном контуре еще
до смешения потоков контуров в общей форсажной камере.
Другая схема ТРДДФ для перспективных сверхзвуковых
самолетов, рассчитанных для работы на М = 3, показана на рис. 3.55
В этой схеме форсажная камера — только в наружном контуре
Потоки внутреннего и наружного контуров смешиваются только
по выходе из своих сопел на входе в общее сужающееся-расщИ-
Рис. 3.55. Двухконтурный ТРДФ с форсажной камерой во втором
контуре
ряющесся сопло. На двигателе этой схемы применены двенадцать
регулируемых элементов: центральный конус / сверхзвукового
воздухозаборника, выпускные 2 и впускные 12 створки для пере
пуска избыточного воздуха и впуска дополнительного воздуха на
взлете; направляющий аппарат 11 компрессора наружного
контура и направляющие аппараты 3 компрессора высокого давления;
лопатки 10 соплового аппарата турбины высокого давления и
лопатки 4 соплового аппарата турбины низкого давления; сопло
с центральным телом 8 первого контура, сопло 5 второго контура,
створки 9 для подпитки воздухом общего эжекторного сопла,
створки 6 реверсивного устройства и выходные створки 7 общего
сопла. Схема турбокомпрессорной части приведенного двигателя
подобна схеме на рис. 3.54. Здесь компрессор наружного контура
объединен на одном валу с компрессором низкого давления
внутреннего контура. Широкий диапазон скоростей и режимов работы
двигателя потребовал большой механизации компрессора. В
результате на всех ступенях компрессора высокого давления
потребовалось применение поворотных лопаток направляющих
аппаратов.
Для обеспечения лучшего согласования работы каскадов
компрессора внутреннего контура н компрессора наружного
контура, особенно у двигателей, предназначенных к использованию
в широком диапазоне скоростей полета и имеющих высокие
степени повышения давления, применяются ТРДД трехвалыюй
схемы (рис. 3.56). Трехступенчатый вентилятор (компрессор наруЖ"
иого контура) приводится двухступенчатой турбиной низкого
давления, а трехступенчатый компрессор среднего давления и шестИ'
ступенчатый компрессор высокого давления приводятся односту
210
www.vokb-la.spb.ru - Самолёт своими руками?!
енчатыми турбинами. Для данной схемы целесообразны высокая
температура газов перед турбиной — более 1500 К, степень двух-
онтурности около 1 и степень повышения давления во внутрен-
Кем контуре более 20. Применение трехвалыюй схемы позволило
на одном из двигателей избавиться от всех регулируемых
элементов турбокомпрессора.
Рис. 3.56. Двухконтурный ТРДФ трехвальной схемы
Для дозвуковых транспортных и противолодочных самолетов
применяются бесфорсажные ТРДД с высокой степенью
двухконтурности. Используются следующие три типовые схемы
двигателей этого типа.
Трехвальная схема ТРДД не отличается от схемы,
приведенной на рнс. 3.56, за исключением размеров контуров из-за
большого различия степени двухконтурности (6—8 вместо 1).
Кроме того, все двигатели с большой степенью двухконтурности
не имеют смешения потоков внутреннего и наружного контуров.
Как правило, воздух наружного контура выпускается в атмосферу
через короткий кольцевой патрубок, устанавливаемый после врн-
тилятора. Трехвальная схема ТРДД для дозвуковых самолетов
Еыгодна при большой степени двухконтурности. Большая степень
двухконтурности, в свою очередь, является весьма эффективным
средством повышения экономичности ТРДД на дозвуковых
скоростях полета.
Если вентилятор устанавливается на отдельном (третьем) валу
и приводится от отдельной турбины, то газогенераторная часть
внутреннего контура, создающая энергию для турбины, может
быть выполнена по простой двухвальной схеме. При этом оба
компрессора (высокого и низкого давлений) внутреннего контура
работают со степенями повышения давления, допустимыми при
отсутствии регулируемых направляющих аппаратов. Окружные
скорости всех трех роторов могут быть выбраны оптимальными
и не зависящими друг от друга.
Двухвальный ТРДД с большой степенью двухконтурности
с поворотными лопатками направляющих аппаратов нескольких
ступеней компрессора высокого давления приведен на рис. 3.57.
dTOT двигатель имеет одноступенчатый вентилятор / со
следующими за ним двумя рядами 2 и 3 спрямляющих лопаток.
Трехступенчатый компрессор низкого давления 4 механически связан
с вентилятором, приводимым во вращение четырехступенчатой
211
турбиной низкого давления 8. Одшшадцатиступснчатый компрес.
сор 6 высокого давления имеет три ряда поворотных лопаток
направляющих аппаратов 5. Он приводится во вращение двухсту-
Рис. 3.57. Двухконтурный ТРД с большой степенью двухконтур-
ности
пенчатой турбиной высокого давления 7. Ротор опирается на
четыре подшипника-, спереди на два шариковых II к 12 к сзади ыа
два роликовых 9 и 10.
Рис. 3.58. Двухконтурный ТРД с большой степенью двухконтурности и
приводом вентилятора через редуктор:
1 — вентилятор: 2 — компрессор ПД; 3 — камера сгорания; 1 -сопло; 5—турбина НД;
б __ турбина ВД; 7 — центробежная ступень компрессора ВД; 8 — редуктор
Двухвальный ТРДД с редуктором для привода вентилятора
с большой степенью двухконтурности приведен на рис. 3.58.
Компрессор внутреннего контура состоит из трех осевых
ступеней 2 низкого давления и одной центробежной ступени 7 высокого
давления. Цеитробежная ступень приводится во вращение одно-
212
www.vokb-la.spb.ru - Самолёт своими руками?!
тугпенчатой турбиной 6 высокого давления, а компрессор низкого
Сявления и вентилятор / приводятся во вращение
двухступенчатой турбиной 5 низкого давления. Принципиальным отличием от
,,х первых схем является то, что для получения оптимальных
оКРУжных скоРостей компрессора низкого давления и вентиля-
Рис. 3.59. Подъемно-маршевый ТРДД с поворотными соплами
тора последний приводится от носка компрессора низкого
давления через редуктор 8. Камера сгорания кольцевая протнво-
точная, расположена над корпусом турбины.
По конструкции элементы ТРДД мало чем отличаются от
соответствующих элементов ТРД, но очевидно, что они выполняются
с учетом специфических условий работы на конкретном типе
двигателя.
Силовые установки самолетов вертикального взлета и
посадки (СВВП) существенно отличаются от обычных. По принципу
создания вертикальной и горизонтальной тяг они подразделяются
на единые силовые установки; составные силовые установки;
силовые установки с агрегатами усиления тягн.
Единые силовые установки — это такие установки,
которые служат как для вертикальных взлета и посадки, так и
Для горизонтального полета (рис. 3.59).
Составные силовые установки — это такие установ-
и- У которых имеются отдельные двигатели для получения вер-
икальной тяги — подъемные (рис. 3.60) для взлета и посадки и
Дельные двигатели для получения горизонтальной тяги.
213
Рис. 3.60. Подъемный ТРД
Рис. 3.61. Агрегат усиления тяги:
/ — Газосборннк; 2 — лопатка соплового аппарата; 3 — лопатка турбины;
латка вентилятора; 5 — спрямляющая лопатка; 6 — сопло
214
www.vokb-la.spb.ru - Самолёт своими руками?!
Силовые установки с агрегатами усиления
яГп — это такие установки, у которых для горизонтального
помета и для вертикальных взлета и посадки используется один н
тот же двигатель, но на взлете и посадке для создания
вертикальной тяги применяются дополнительные агрегаты,
работающие от основного двигателя как от газогенератора (рис. 3.61).
Глава 5
КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ ТВД
И ТУРБОВАЛЬНЫХ ГТД
5.1. РАБОЧИЙ ПРОЦЕСС И ОСНОВНЫЕ УДЕЛЬНЫЕ
ПАРАМЕТРЫ ТВД И ТУРБОВАЛЬНЫХ ГТД
Газотурбинный двигатель, у которого турбина развивает
большую мощность, чем требуется для вращения компрессора, и
избыточная мощность турбины передается на привод воздушного
винта, называется турбовинтовым двигателем (рис. 3.62).
Если избыточная мощность турбины передается на вал винта
вертолета, двигатель называют т у р б о в а л ьи ы м ГТД (рнс. 3.65).
Рабочий процесс турбовинтовых двигателей и турбовальиых ГТД
для вертолетов, no-существу, одинаков.
Особенность рабочего процесса ТВД по сравнению с рабочим
процессом ТРД состоит в том, что вследствие большей степени
расширения газа в турбине давление газа на выходе из турбины
меньше, чем в ТРД, н в ряде случаев меньше атмосферного.
В ТВД эффективная работа турбины LT больше эффективной
работы компрессора LK. Избыточная работа турбины Le = Lr—LK
передается на воздушный вннт и является частью полезной
работы цикла ТВД
которая может быть выражена через параметры рабочего
процесса.
Тяговая мощность в ТВД создается за счет подводимой к воз-
Душному винту через редуктор мощности и реактивной силы тяги
Nrm = Nm.B+PV. (3.13)
Разделив выражение (3.13) на СЕ, получим соотношение для
полезной тяговой работы ТВД:
гДе LT„r_B — тяговая работа винта, отнесенная к 1 кг воздуха,
проходящего через двигатель в 1 с.
215
216
www.vokb-la.spb.ru - Самолёт своими руками?!
Величина
^-тяг. в '-b'ib **e lin Jo»
где LB — работа, подводимая к винту (отнесена к 1 кг/с воздуха);
т]„— КПД винта;
ilm — механический КПД редуктора.
Такую же величину тяговой работы можно было бы получить
одним только винтом, если к нему подвести эквивалентную
работу
*-эк — т — *-в ~Г
Соответственно этой работе получается эквивалентная
мощность
Чв
Для современных самолетных ТВД Л/зк = 3500-М 1 000 кВт,
а для вертолетных ГТД N3K= 10004-6000 кВт. Введение
эквивалентной мощности удобно для оценки совершенства ТВД,
которое характеризуется величиной удельных параметров двигателя.
Удельная эквивалентная мощность
N = ^«-
"эк. уд Св •
Удельный расход топлива
Г — Ст-ч илн г __3600£о
•"эк "„•"'эк. уд
Для ТВД полный КПД определяется как
. **тяг ^*тяг
,а~ Оо ~ ОоСв '
но Лгя=ЛгА.аВД = Л';<.уд, тогда
Со Чв /-. 3600%
N3K. уд Чп "„In
Для современных ТВД на стенде Сс = 0,34-0,4 кг/кВт-ч,
^эк. уД =150ч-200 кВт-с/кг.
Работу цикла в ТВД распределяют между винтом и реакцией
таким образом, чтобы получить максимальную тяговую работу.
При этом полный КПД будет максимальным, а Сс —
минимальным.
Теоретически доказывается, что максимальная тяговая работа
'ВД получается при условии
Ss = '
217
из которого следует, что, чем больше скорость полета и меньц
11в, тем больше должна быть скорость истечения газа из сопп
двигателя сс, тем меньше будет работа, передаваемая на винт3
Влияние параметров рабочего процесса лк и Д (или Г*) .
удельные параметры ТВД качественно такое же, как и в ТРп
Исключение составляет влияние температуры перед турбиной н
удельный расход топлива. В ТРД существует экономическое зи/
чение температуры газа перед турбиной Г' ж, при которой Су =
= Суд. mm- Это обусловлено тем, что при увеличении Т* и
соответствующем росте Ln возрастают также потери с выходящими
газами, что снижает тяговый КПД ?]T„r=2/(l+cc/V) и при Г">
>Т"эк — полный КПД. В ТВД основная часть тяговой работы
создается воздушным винтом, КПД которого (характеризующий
степень преобразования основной части работы цикла Le в
тяговую работу) не зависит от величины Т'г (или Д). Поэтому в ТВД
при увеличении Г* удельный расход топлива непрерывно
уменьшается. Следовательно, в ТВД целесообразно повышать темпера
туру газа перед турбиной как с точки зрения увеличения мощно
сти двигателя, так и с точки зрения повышения его
экономичности.
5.2. КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ
ТВД И ТУРБОВАЛЬНЫХ ГТД
Конструктивные особенности ТВД и турбовальных ГТД
обусловлены особенностями рабочего процесса и способа получения
тяги. Компрессор и камера сгорания ТВД принципиально не
отличаются от компрессора и камеры сгорания ТРД. Турбина ТВД
срабатывает практически весь теплоперепад газа, поэтому число
ступеней турбины —от 3 до 5. По конструкции турбина ТВД
может быть одно- и двухроторной. Выходное устройство ТВД
служит только для отвода отработанных газов в атмосферу,
регулирование площади выходного сечеиия сопла не производится.
Входное устройство ТВД всегда дозвуковое. Установка перед
компрессором редуктора, имеющего большие габариты, приводит
к ухудшению условий входа воздуха в компрессор.
Конструктивные схемы ТВД различаются по числу роторов,
воздушных винтов, местоположению редуктора по отношению к
турбокомпрессору (с присоединенным или выносным редуктором)!
по типу камеры сгорания, турбины и т. п.
На рис. 3.62 представлена конструктивная схема одноротор-
ного ТВД с присоединенным редуктором для привода одиночного
винта. ТВД имеет десятиступенчатый компрессор и
трехступенчатую турбину, общую для привода компрессора и воздушного
винта. Ротор двигателя выполнен но трехопорной схеме с консольво
218
www.vokb-la.spb.ru - Самолет своими руками.'!
тановленным ротором турбины и подвижным соединением ва-
Ус компрессора и т>рбины. Редуктор, установленный в передней
л тИ двигателя, загромождает вход воздуха в компрессор и
увеличивает поперечные размеры двигателя.
На рис. 3.63 представлена конструктивная схема ТВД, у
которого одноступенчатая турбина высокого давления приводит во
вращение только компрессор высокого давления, а
трехступенчатая турбина низкого давления — компрессор низкого давления и
в0здушный винт.
Существуют схемы двухроторных ТВД, у которых турбина
низкого давления (свободная турбина) приводит во вращение только
воздушный винт.
Турбовальные двигатели, применяемые в качестве
вертолетных, конструктивно выполняются обычно по двухроторной схеме
со свободной турбиной, устанавливаемой после турбины компрес
сора. Отсутствие механической связи между ротором
турбокомпрессора и свободной турбиной позволяет снизить ее
расчетную частоту вращения относительно частоты вращения
турбокомпрессора и, следовательно, уменьшить степень редукции
передачи к низкооборотному валу несущего винта. Наличие
свободной турбины в турбовальных двигателях также значительно об
легчает запуск и регулирование силовой установки в целом.
К настоящему времени создано много типов вертолетных тур
бовальпых двигателей. Рассмотрим наиболее характерные из них
и особенное ги конструкции их узлов.
Известные вертолетные турбовальные двигатели можно
разделить по типу газогенератора на следующие группы:
с центробежным компрессором и центростремительной
турбиной;
с центробежным компрессором и осевой турбиной;
с осецентробежным компрессором и осевой турбиной;
с осевым компрессором и осевой турбиной.
В свою очередь, каждая из приведенных групп подразделяется
по типу применяемых камер сгорания (прямоточные, противоточ-
иые), месту расположения приводного вала силовой турбины,
количеству ступеней компрессора, турбины привода компрессора и
силовой турбины, а также по многим другим признакам.
На рис. 3.64 приведена компоновка турбовального
газотурбинного двигателя с одноступенчатым центробежным
компрессором и одноступенчатой радиальной
центростремительной турбиной. Компрессор двигателя 2 имеет односторонний
вход / н лопаточный диффузор 3. Сжатый в компрессоре воздух
из лопаточного диффузора поступает в улитку компрессора 8 и
Далее — в противоточную камеру сгорания 5, выполненную в виде
изогнутого патрубка. Из камеры сгорания газы направляются в
Улитку турбины 7, затем на лопатки центростремительной
радиальной турбины 4 и в выхлопной патрубок 6. Мощность
двигателя передается от турбины через редуктор на выходной вал. Как
видно из схемы, рабочие колеса центробежного компрессора и
219
центростремительной турбины непосредственно связаны
собой, т. е. без промежуточного вала. Это способствует уменьщр
мея<Д5
Рис. 3.64. Турбовальный ГТД с центробежным
компрессором и центростремительной турбиной
нию осевых размеров, компактности и простоте
конструкции.
Рис. 3.65. Турбовальный ГТД с центробежным компрессором и осевой
турбиной
Схема турбовалыюго ГТД с центробежным компрео
сором и осевой турбиной приведена на рис. 3.65.
220
www.vokb-la.spb.ru - Самолёт своими руками?!
Воздух в двигатель поступает через кольцевой
воздухозаборник 3 и, пройдя через двухступенчатый центробежный
компрессор 4, 5, протнвоточную кольцевую камеру сгорания 9, осевую
одноступенчатую турбину 6 привода компрессора и
одноступенчатую свободную турбину 7, выбрасывается через выходной
канал 8.
Вал от одноступенчатой свободнон турбины проходит через
вал турбокомпрессора к редуктору 10, установленному в
передней части двигателя. Выводной вал / редуктора может быть
обращен как к передней, так и к задней стороне двигателя. На
редукторе крепятся все дополнительные агрегаты 2.
Такая схема вертолетных ГТД применяется при малых
мощностях и соответственно малых расходах воздуха при
относительно высокой степени повышения давления воздуха.
Одна из многочисленных схем турбовальных ГТД с осе
центробежным компрессором и осевой турбиной
показана на рис. 3.66.
Осецентробежный компрессор / состоит из семи осевых
ступеней 2 и одной центробежной 3. Диски каждой ступени,
отлитые заодно с рабочими лопатками, и крыльчатка центробежного
компрессора стянуты в единый ротор 13 сквозным болтом 14.
Центробежная ступень компрессора имеет безлопаточный
диффузор с выходной улиткой 4 и двумя патрубками, к которым крепятся
два внешних воздухопровода, подводящие сжатый в компрессоре
воздух к камере сгорания 9. Камера сгорания — однотрубная,
противоточная, расположена в задней части двигателя соосно
с валом турбины и компрессора и имеет одну форсунку подачи
топлива.
Турбина 8 с валом 10 привода компрессора — одноступенчатая.
Свободная турбина 7— двухступенчатая, диски ее выполнены
заодно с рабочими лопатками и соединены с внешним соосным
валом 12, на конце которого расположена ведущая шестерня
привода редуктора 6 с выводным валом 5.
Выходное устройство // состоит из двух выпускных
патрубков, направленных кверху под углом 45°. Редуктор расположен
между компрессором и камерой сгорания; его корпус содержит
передачи к приводу коробки агрегатов и измерителю крутящего
момента.
Турбовальный ГТД с осевым компрессором и осевой
турбиной широко применяется на вертолетах. Двигатели
могут иметь расход воздуха через компрессор от 6 до 22 кг/с и
более.
Все двигатели, построенные по этой схеме, имеют осевой
компрессор, прямоточную камеру сгорания, осевую турбину привода
компрессора и осевую свободную турбину. Имеются две
разновидности этих схем: одна — с выходным валом, расположенным
на выходе нз двигателя, а другая — с выходным валом,
расположенным в передней части двигателя.
221
f-
222
WWW.tOkD-ia.SJD.IU - LdtKUKl uiunm pjuHH..
На рис. 3.67 приведена схема турбовального ГТД с осевым
компрессором, прямоточной камерой сгорания и осевой турбиной
с задним расположением выходного вала. Осевой компрессор /
имеет 13 ступеней. Лопатки входного направляющего аппарата н
следУюЩ|1Х трех направляющих аппаратов — поворотные;
лопатки остальных направляющих аппаратов-—фиксированные. Ротор
компрессора — барабанного типа.
Рис. 3.67. Турбовалышй ГТД с осевым компрессором и осевой турбиной
Камера сгорания £ — кольцевая с 16 форсунками; впрыск
топлива — по потоку.
Турбина привода компрессора 3 — двухступенчатая.
Одноступенчатая свободная турбина 4 имеет заметно больший диаметр и
соответственно более низкие частоты вращения по сравнению с
частотами вращения турбины компрессора. Диск этой турбины
выполнен заодно с выходным валом 5, расположенным в задней
части двигателя. В этом же месте может располагаться
небольшой редуктор, передающий крутящий момент от свободной
турбины к выходному валу.
Глава 6
СИЛОВЫЕ СИСТЕМЫ ГТД
Под силовой системой ГТД понимается совокупность
соединенных между собой силовых деталей, воспринимающих
нагрузки, действующие па все элементы двигателя, и передающих
Результирующие силы и моменты этих нагрузок на узлы
крепления двигателя к летательному аппарату. Силовая система ГТД
состоит из силовой системы ротора (роторов) и силовой системы
корпуса. В двух-, трехроториом ГТД силовая система роторов,
в свою очередь, состоит из силовых систем отдельных рото-
Е°в- по принципу устройства аналогичных ротору одновальных
223
6.1. СИЛОВЫЕ СИСТЕМЫ РОТОРОВ
Силовую систему ротора образуют детали роторов
компрессора и турбины, узла их соединения, приводов агрегатов, а в случае
ТВД — и дета пи редуктора.
Рис. 3.68. Схемы силовых систем роторов:
а, 6, в. г — двухопорные роторы, /—ротор компрессора; 2 — ротор турбины; 3 — опорно-
упорный подшипник: д — трехопорнып ротор- / — шлицевое соединение: 2 — шарнир;
3 — опорно-упорный подшипник
Силовые системы роторов классифицируются по числу и
расположению опор ротора и по способу соединения между собой
валов компрессора и турбины.
По числу опор роторы могут быть двух-, трех- и четырехопор-
ными Двухопорные роторы применяются при малой длине
ротора, например, в качестве ротора ВД в двухроторном ГТД.
В этом случае соединение ва.юв компрессора н турбины —
жесткое. Возможные схемы двухопорных роторов показаны на рис. 3.68.
224
Выбор той или иной схемы для конкретного двигателя зависит
от многих факторов: общей компоновки двигателя, получаемых
габаритов и массы двигателя, изгибной жесткости ротора при
выбранной схеме и т. п. Например, схема в практически не
применяется, так как имеет наибольшую длину, а для обеспечения
нужной изгибиой жесткости требуется иметь тяжелый вал
большого диаметра. В схеме г опорно-упорный подшипник установлен
за первым рабочим колесом компрессора, что даст возможность
не загромождать вход в компрессор стойками опоры. Как видим,
выбор схемы в данном случае определен факторами не
прочностного, а газодинамического характера. Конкретное исполнение
двухопорных схем роторов приведено на рис. 3.51, 3.53.
При большой длине ротор требуется ставить на три или
четыре опоры. Пример трехопорной силовой системы с подвижным
соединением валов компрессора и турбины приведен на рис. 3.68, д.
Шлицевое соединение / и шарнир 2 образуют соединительную
муфту, которая передает крутящий момент (шлицами), осевую и
радиальную силу (шарниром). Наличие осевой связи между
роторами компрессора и турбины позволяет значительно снизить
осевую нагрузку на опорно-упорный подшипник 3, который
воспринимает в этом случае только разность осевых сил этих узлов.
Шарнир 2 является также второй опорой ротора турбины.
Наличие шарнира в соединении валов компрессора и турбины
позволяет подходить менее строго к обеспечению соосности опор.
Допуская при монтаже и во время работы двигателя некоторый
перекос осей валов, подвижное соединение тем самым позволяет
избежать перегрузки радиальных подшипников и изгиба валов.
При очень большой длине и массе роторов компрессора н
турбины каждый из них может устанавливаться на двух опорах.
Силовые схемы двухвального ротора, как отмечалось, состоят
из силовых схем двух одновальиых роторов. Особенность схем
состоит только в том, что осевые и радиальные нагрузки с
некоторых опор одного ротора передаются на другой ротор, а уже
с него на корпус.
6.2. СИЛОВЫЕ СИСТЕМЫ КОРПУСОВ. КРЕПЛЕНИЕ
ДВИГАТЕЛЯ К ЛЕТАТЕЛЬНОМУ АППАРАТУ
Силовые системы корпусов классифицируют по способу
соединения между собой корпусов компрессора и турбины. Различают
следующие схемы силовых систем:
с одноконтурной внутренней (по отношению к газовому
тракту) силовой связью корпусов компрессора и турбины (рис. 3.69, о);
с одноконтурной внешней (по отношению к газовому тракту)
силовой связью корпусов компрессора и турбины (рис. 3.69,6);
с двухкоитурной незамкнутой силовой связью корпусов
компрессора и турбины (рис. 3.69, е);
с двухкоитурной замкнутой силовой связью корпусов
компрессора и турбины (рис. 3.69,г).
8-229
225
На рис. 3.69 в схеме о кожух» индивидуальных камер, а в схе
ме б внутренний корпус камеры сгорания не участвуют в передаче
нагрузок между корпусами турбины и компрессора, они выпод.
няют только газодинамические функции. В схеме е внутренний
корпус камеры сгорания уже участвует в передаче сил и
моментов от сопловых аппаратов тур.
бины к корпусу компрессора
(узлам / подвески двигателя).
В схеме г наиболее полно
используются нагрузочные
способности всех корпусов. Корпус 3
через силовую диафрагму 4 и
силовые элементы 5 жестко
соединен с нагруженным корпусом
турбины 6 и берет на себя часть
сил и моментов с наружного
контура. Соотношение сил и
моментов, которые передаются по
наружному корпусу 2 и по
внутреннему корпусу 3, зависят от
жесткости этих корпусов, а также
жесткости элементов 4 и 5.
Замыкание контуров в
существующих ГТД (элемент 5)
осуществляется или спицами,
установленными в лопатках первого
соплового аппарата (рис. 3.25), или
силовыми стойками,
установленными между жаровыми трубами.
Схема г нашла широкое
применение в современных ГТД.
Крепление двигателя к летательному аппарату осуществляется
с помощью специальных узлов, установленных на его силовом
корпусе. Узлы крепления располагают в двух, реже в трех
плоскостях, перпендикулярных осн двигателя. Основные узлы
крепления, передающие на самолет силу тяги и основную часть
массовых нагрузок, располагают в плоскости, расположенной вблизи
центра масс двигателя (обычно это задняя часть корпуса
компрессора). Вспомогательные узлы располагают по возможности
дальше от основных узлов, чтобы получить при действии
гироскопического момента и момента от сил инерции при большом
плече возможно меньшие силы (опорные реакции). Место
расположения узлов подвески на корпусе двигателя выбирают так,
чтобы деталь корпуса, к которой крепится узел, имела большую
жесткость и не теряла форму при действии нагрузок, в
противном случае детали ротора (лопатки) могут задевать за корпус.
Конструкция узлов крепления должна обеспечивать свободу
температурных расширении корпуса двигателя как в осевом, так
и в радиальном направлении.
Рис. 3.69. Схемы силовых систем
корпусов:
а — с одноконтурной внутренней связью;
б — с одноконтурной внешней связью:
е — с двухконтурной незамкнутой
связью; г — с двухконтурной замкнутой
связью
т
www.vokb-la.spb.ru - Самолёт своими руками?!
6.3. БАЛАНС СИЛ И МОМЕНТОВ, ДЕЙСТВУЮЩИХ
В ГТД
На рис. 3.70 приведена схема нагружения элементов ТРД при
работе его на земле осевыми газовыми силами н крутящими
моментами от газовых сил. Радиальные газовые и центробежные
силы уравновешиваются внутри двигателя и иа схеме не
показаны.
Величины осевых сил даны в процентах от силы тяги, которая
принята за 100%. Сила тяги является равнодействующей осевых
газовых сил, действующих на все детали двигателя.
На установившихся режимах работы двигателя равны и
противоположно направлены крутящие моменты: Мрот. турб =
= —-"-'рот. компр» ^ ч:оР. турб := ■'^кор. KOMnpf '^рот. турб кор. турб*
При этом на узлах крепления двигателя к самолету крутящий
момент Л1уЭ = 0, а иа переходных режимах работы ТРД МузфО.
Глава 7
СИСТЕМЫ, ОБЕСПЕЧИВАЮЩИЕ РАБОТУ ДВИГАТЕЛЯ
7.1. СИСТЕМА СМАЗКИ
Система смазки служит для подвода необходимого
количества масла к трущимся деталям двигателя, отвода поданного
масла, его охлаждения и очистки. Масло уменьшает трение и изиос
деталей, отводит от них тепло, предохраняет от коррозии, уносит
с трущихся поверхностей продукты износа.
В газотурбинных двигателях смазываются все подшипники,
шестерни и шлнцевые соединения. Для смазки подшипников ТРД
применяют масла малой вязкости (МК-8, МК-6, трансформатор-
ное). для подшипников двигателей сверхзвуковых самолетов,
работающих при повышенных температурах, — синтетические
масла. Для смазки шестерен высоконагруженных редукторов ТВД
применяют масла средней вязкости, например смесь масел малой
(МК-8) и повышенной (МС-20 или МК-22) вязкости.
По схеме системы смазки, используемые в ГТД, могут быть
циркуляционными и нециркуляционными.
В циркуляционных системах масло используется в
течение определенного срока службы, в нециркуляционных
после однократного использования в двигателе масло
выбрасывается. Нециркуляционные системы выполняются на двигателях,
работающих кратковременно.
Циркуляционные системы смазки состоят из бака / (рис. 3.71,
3.72), нагнетающего 2 и откачивающих 8 насосов, фильтров 4,
радиатора 10, воздухоотделителя 9, редукционного клапана 3 и
трубопроводов. Циркуляционные системы, в свою очередь, под-
8*
227
ЕЯ IRg
W
+
228
www.vokb-la.spb.ru - Самолёт своими руками?!
пазДеляются иа нормально замкнутые и короткозамкнутые,
открытые и закрытые.
В нормально замкнутых системах (рис. 3.71) все
отработанное масло поступает через воздухоотделитель 9 и радиатор 10
бак. В короткозамкнутых системах (рис. 3.72) основная
чоля масла (около 90%) из двигателя через воздухоотделитель 9
Рис 3.71. Схема циркуляционной Рис 3.72. Схема циркуляционной
нормально звмкиутой системы короткозамкнутой системы смазки:
СМаЗКИ: позиции 1—10 даны на рис. 3.71: // —
/-бак. 2-нагнетающий насос; 3 - ре- насос подпитки: 12 - жиклер
Аукционный клапан; 4 — фильтр: 5 —
предохранительный клапан; 6— обратный
клапан; 7 — двигатель: В — откачивающие
насосы; 9 — воздухоотаелитель; 10 —
радиатор
и радиатор 10 поступает к нагнетающему насосу и далее идет
снова в двигатель, мннуя, таким образом, бак. Только примерно
10% масла из воздухоотделителя или радиатора (см. пунктир)
через жиклер 12 идет в бак, откуда через подкачивающий насос
(насос подпитки) // поступает на вход в основной нагнетающий
насос 2. Применение короткозамкнутых систем позволяет увеличить
высотность маслосистемы вследствие того, что подкачивающий
и откачивающий насосы повышают давление иа входе в
нагнетающий насос. Ускоряется также прогрев масла при запуске
двигателя. Недостатком короткозамкнутой системы является ее
сложность. Применяются такие системы в основном в ТВД, где
используется масло увеличенной вязкости.
Высотность системы смазки — это высота, до кото-
Рой обеспечивается необходимая прокачка масла через
двигатель. С увеличением высоты полета падает давление в баке и на
входе в нагнетающий насос, что приводит к увеличению количе-
229
ства пузырьков газа в масле и падению массовой подачи
насоса.
Наибольшая потребная прокачка масла определяется
количеством тепла, которое необходимо отвести от трущихся деталей.
Тепло образуется при трении и поступает от соседних горячих
деталей двигателя. Потребная прокачка масла, л/с, определяется
по формуле
Vn =
£мРыД<
Рис. 3.73. Изменение давления рОЫ1
и прокачки масла V через двигатель:
а — при изменении режима работы
Двигателя (л); С — при изменении высоты
полета Н
где Qn — тепло, которое надо отвести;
си — удельная теплоемкость масла;
рм — плотность масла;
А/ — подогрев масла в двигателе, допустимый из условия
сохранения его свойств при нагреве.
Как отмечалось выше,
подача нагнетающего насоса с
подъемом на высоту
уменьшается, поэтому для
обеспечения нужной прокачки через
двигатель на высоте подача
нагнетающего насоса на
земле в 1,5—3 раза больше
потребной для земных условий.
Избытки масла VK
перепускаются редукционным клапаном
(регулятором давления
масла) на вход в нагнетающий
иасос. Количество (прокачка)
масла, подаваемого насосом VH
и поступающего в
двигатель Уд, показано на рис. 3.73. Графики на рис. 3.73, о
получены при изменении частоты вращения двигателя на Н = const,
графики на рис. 3.73,6—при изменении Н и «IIOM = const. Высота
ЯКр — высота полета, на которой подача насоса V„ становится
равной потребной прокачке через двигатель Уд. „, выше Якр
система смазки не обеспечивает двигатель нужным количеством
масла.
Система смазки называется открытой, если давление в
масляных полостях и в баке при изменении высоты полета
поддерживается атмосферным.
Для выпуска в атмосферу воздуха и газов из масляных
полостей служат суфлеры. Для предотвращения выхода в атмосферу
вместе с газами капель масла суфлер имеет уловитель масла.
Наиболее эффективным оказался центробежный уловитель,
поэтому и суфлер называется центробежным.
Система смазки называется закрытой, если выход газов в
атмосферу перекрыт клапаном, устанавливаемым на суфлере.
Пружина клапана обычно настраивается иа перепад давлений
230
www.vokb-la.spb.ru - Самолёт своими руками?!
(Ol-r-0,2) • Ю5 Па. Таким образом, в закрытых системах в
масляных полостях и баке давление всегда выше атмосферного. Это
увеличивает высотность системы смазки.
К наиболее характерным неисправностям систем смазки
относятся падение давления, большой расход, перегрев масла, а
также разжижение масла керосином. Эти неисправности являются
следствием износов деталей насоса и уплотнений подшипников в
двигателе, усадкн или поломки пружины редукционного клапана,
засорения масляных фильтров. Неисправности выявляются по
показаниям приборов в кабине самолета, при осмотрах силовой
установки, контрольных проверках качества масла и т. п.
7.2. ТОПЛИВНАЯ СИСТЕМА
Топливная система предназначена для подачи топлива в
камеры сгорания в требуемом количестве. В общем случае оиа
состоит из пусковой, основной и форсажной систем. Пример прии-
Рис. 3.74. Схема системы топливопитаиия:
/ — подкачивающий насос; 2—расходомер: 3— фильтр; 4~ по*
жарный кран; 5 — двигательный подкачивающий насос; 6 — топ-
ливомасляный радиатор; 7 — фильтр; 8 — основной насос; 9, 10,
II, 12, 13, 15 — агрегаты автоматики; 14 — форсажный насос;
16 — топливные коллекторы; 11 — пусковой топливный бачок; 18 —
фильтр; 19 — насос; 20 — пусковой клапан; 21 — воспламенитель:
22. 23 — топливные коллекторы
Ципнальной схемы топливной системы ТРДФ приведен на рис. 3.74.
Бак и элементы /—4 (соответственно подкачивающий насос,
расходомер, фильтр и пожарный кран) относятся к топливной
системе самолета, остальные элементы — к топливной системе
двигателя.
Пусковая топливная система подает топливо к пусковым
форсункам основной камеры сгорания. В нее входят бачок 17
пускового топлива, фильтр 18, пусковой насос 19 с электропри-
231
водом, электромагнитный клапан 20 и воспламенитель 21. Часто
отдельного пускового бачка не ставят, топливом для пусковой
системы служит топливо из основных топливных баков.
Основная топливная система обеспечивает подачу топлива
в основную камеру сгорания. Она включает в себя
подкачивающий насос 5 с приводом от ротора двигателя, топлнвомасляный
Рис. 3.75. Плунжерный насос:
1,6 — подшипники; S — корпус; 3 - наклонная шайба; 4 — канал;
5—ротор; 7 — распределительный золотник; 8 — поршень; 9 —
пружниа; 10— серьга; // — плунжер; 12— крышка;
13—уплотнение; 14 — шлицы
радиатор 6, фильтр 7, основной насос 8, агрегаты топливной
автоматики 9 и 10, топливные коллекторы 22 и 23 с основными
топливными форсунками.
Форсажная топливная система подает топливо к
форсункам форсажной камеры. Топливо от подкачивающего насоса 5
через радиатор 6 и фильтр 7 поступает к форсажному насосу 14,
при этом избытки его перепускаются клапаном 15. Далее топливо
через агрегаты автоматики 13 и 12, сливной клапан 11 к
топливные коллекторы 16 поступает к форсункам.
Устройство и работа агрегатов топливной автоматики будут
рассмотрены ниже, в специальной главе.
Топливные насосы современных ГТД должны подавать
топливо под давлением до 100 -105 Па в количестве до 40000 кг/ч и
более. Применяются плунжерные, шестеренные и центробежные
насосы.
Плунжерные насосы (рис. 3.75) нашли широкое
применение из-за возможности менять их подачу без перепуска
топлива вне зависимости от частоты вращения. Насос состоит из
ротора 5, вращающегося на подшипниках / и 6, в котором
равномерно по окружности в наклонных к оси барабана отверстиях
расположены плунжеры // и пружины 9. Пружины прижимают
233
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 3.76. Шестеренный насос:
/ — канал; 2 — корпус подшипника; 3 — гид-
рополость; 4 — втулка
„лунжеры к наклонной шайбе 3, а ротор — к распределнтельйоМу
золотнику 7. Полости под плунжерами сообщаются с окнами о
или б распределительного золотника, а последние соединяются
с каналами подвода и отвода топлива. Наклон шайбы 3 может
меняться при перемещении поршня 8 сервомотора. При вращении
ротора 5 каждый плунжер совершает одно
возвратно-поступательное движение за один
оборот барабана, что
соответствует одному такту
всасывания и одному такту
выталкивания жидкости. Для
обеспечения минимума
пульсаций давления топлива
число плунжеров делают
нечетным (7, 9). Подача
насоса зависит от частоты
вращения барабана и хода
плунжеров. Плунжеры
выполняют из стали, а ротор—
из бронзы или стали с
бронзовыми втулками.
Сверления 4, выполненные в
барабане между плунжерами,
являются каналами
центробежного насоса,
увеличивающего давление в полости
корпуса. Силой этого давления ротор дополнительно прижимается
к распределительному золотнику 7, благодаря чему уменьшается
перетекание топлива из полости высокого давления в полость
низкого (в магистраль подвода).
Плунжерные насосы позволяют иметь высокие давления
топлива, хорошо приспособлены для регулирования подачи, однако
они уступают другим типам насосов в простоте и технологичности
изготовления, чувствительны к чистоте топлива, а также имеют
ограничение по максимальной производительности (7000—
10000 кг/ч) вследствие непропорционального роста габаритов
ротора и напряжений в нем.
Шестеренные насосы нашли широкое применение в
системах топливопитания вследствие их простоты, надежности,
неприхотливости к чистоте топлива. При одинаковых с
плунжерными насосами габаритах и массе шестеренные имеют в 1,5—2 раза
большую подачу. Недостатком шестеренных насосов является
необходимость иметь перепуск топлива из магистрали высокого
давления на вход как средства регулирования подачи иасоса. Это
вызывает подогрев топлива и дополнительные затраты мощности
на привод насоса. На больших высотах полета, где расход
топлива мал, перепускается до 80% топлива.
Шестеренный насос (рис. 3.76) состоит из корпуса и двух
шестерен. Корпус должен иметь высокую жесткость для сохранения
233
Рис. 3.77. Схема центробежного
насоса:
/ — вход; 2 — крыльчатка: 3 — диффузор
радиальных зазоров между внутренней поверхностью стенки и
головками зубьев шестерен, поэтому он отливается из чугуна и
имеет ребра на наружной поверхности. Шестерни изготавливаются
из цементируемых или азотируемых сталей. Для уменьшения
перетекания топлива по торцам шестерен ставятся бронзовые
шайбы, причем с одной стороны эти шайбы выполняются
подвижными (плавающими) в осевом направлении. Подвижные шайбы
прижимаются к торцу шестерен пружинами и давлением топлива.
Центробежные насосы
давно применяются в качестве
подкачивающих, а в последние
годы находят все более широкое
применение в качестве основных
и форсажных. Подача
центробежного насоса может достигать
40000 кг/ч и более с нужным
давлением иа выходе при работе
на средних и высоких режимах.
Однако при низких частотах
вращения, например при запуске
и на малом газе, центробежный
насос не создает нужного
давления, поэтому для работы при
запуске и на малом газе требуется иметь второй, например,
плунжерный, небольшой насос.
Центробежный насос еще менее чувствителен к примесям в
топливе, его масса еще меньше, чем у шестеренного насоса.
Регулирование центробежных насосов может производиться путем
его дросселирования иа выходе или на входе.
На рис. 3.77 приведена схема центробежного насоса. Он
состоит из крыльчатки 2, корпуса и улитки (диффузора) 3.
Крыльчатка может быть открытого, полузакрытого (рис. 3.77) и
закрытого типа.
Подкачивающие центробежные насосы (рис. 3.78) работают
при давлениях (3-4-5) • 105 Па. На входе в центробежный насос
поставлен шнековый преднасос 2, который, повышая давление
топлива, улучшает кавитационные свойства центробежного иа-
соса. На выходе из центробежного насоса установлен регулятор
давления топлива, состоящий из дросселирующего клапана 9,
пружины и мембраны. Под мембрану подводится давление
топлива из горловины сопла 10.
Форсунки, применяемые в авиационных ГТД, могут быть
распыливающими, испарительными и эмульсионными. Они
осуществляют ввод топлива в камеру сгорания соответственно в
жидкой, паровой фазе или в виде топливовоздушиой эмульсии.
Наиболее широко применяются распыливающие форсунки. Эти
форсунки под давлением подают топливо в камеру сгорания.
Наиболее благоприятны для воспламенения капли диаметром 70—
100 мкм. Все форсунки двигателя должны иметь одинаковый рас-
234
www.vokb-la.spb.ru - Самолёт своими руками?!
топлива. Распыливающие форсунки могут быть струйными и
Рис. 3.78. Подкачивающий центробежный насос:
/ —вннт- 2 —шнековый преднасос; 3 — крыльчатка: 4. 7 — подшипники;
5—уплотнение; 6 — рессора- 8 —радиальные ребра: 9 — дросселирующий клапан; /0 —сопловой
насадок
иые форсунки получили самое широкое распространение. Они,
в свою очередь, делятся на нерегулируемые и регулируемые.
Нерегулируемые форсунки (рис. 3.79) используются в
форсажных' камерах, реже в основных. Они могут применяться I
в основных камерах только тогда, когда диапазон изменения рас- I
ходов топлива GTmax/GTmin<4H-5. Расход топлива через
нерегулируемую форсунку изменяется только за счет изменения
перепада давления топлива на форсунке. Форсунка имеет один топли-
воподводящий канал, камеру закручивания топлива 2, несколько
тангенциальных каналов / и сопло 3.
Регулируемые форсунки применяются в случае, если
диапазон расходов топлива больше 4—5 и нельзя обеспечить иуж-
235
ные расходы топлива через форсунки только за счет изменения
давления. Применяются в основном два типа регулируемых
центробежных форсунок.
Рис. 3.79. Нерегулируемая центробежная
форсунка;
/ — тангенциальный канал; 2 — камера
закручивания: 3 — Сопло
Рис. 3.80. Двухсопловая центробежная форсунка:
/, 2— каналы гюдпода топлива; 3— завшеритель; 4, 6 —
сопла: 5 — шайба с тангенциальными каналами; 7. 8 —
корпуса сопел; 9 — воздушный канал; 10 — золотник APT
Двухсопловая центробежная форсунка (рис. 3.80) состоит из
двух концентрично расположенных сопел. Регулирование
производится путем включения или выключения второго сопла 7 с по-
236
www.vokb- a.sp l.ru - .амолет спои ми j -ами..
иошью автомагического распределителя топлива (APT).
Пружина APT при малых давлениях топлива, действуя на золотник 10,
перекрывает путь топливу через канал / н сопло 7, называемые
основными. Топливо идет только через канал 2 и центральное
сопло 8. При возрастании давления топлива APT автоматически
Рис. 3.81. Двухступенчатая центробежная форсунка:
I. 2 — каналы подвода: 3 ~ золотник APT; 4. 6 — тангенциальные
каналы; 5 — завихритель; 7—камера закручивания: 8 — сопло
открывается, увеличивая суммарную площадь сопла форсунки,
поэтому данный метод регулирования называют регулированием
путем изменения площади сопла.
Двухступенчатая форсунка (рис. 3.81) имеет два канала:
основной 2 и дополнительный /, одну камеру закручивания 7 и одно
сопло 8. В камеру закручивания топливо подводится по двум
■руппам тангенциальных каналов 4 и 6, причем одна из групп,
подающая топливо из основного канала 2, может перекрываться
золотником APT. Эффект регулирования состоит в том, что при
включении APT топливо в камеру закручивания начинает
подаваться через гораздо большее число тангенциальных каналов.
При одном и том же расходе скорости частиц топлива в
тангенциальных каналах становятся меньше, в результате чего
уменьшается диаметр воздушного вихря, который имеется в камере
закручивания и сопле. Площадь сопла, занятого жидкостью, уве-
237
личивается. Отношение площади сопла, занятого вытекающее
жидкостью, ко всей площади сопла называется
коэффициентом расхода, поэтому данный метод регулирования
называется регулированием форсунок путем изменения
коэффициента расхода.
Неисправности форсунок чаще всего связаны с нарушением
герметичности и нагарообразованием на торцевой поверхности
вблизи сопел. Для уменьшения нагарообразования организуется
продувка воздуха через каналы 9 (рис. 3.80).
мктг
7.3. ПУСКОВАЯ СИСТЕМА
Пусковая система служит для перевода двигателя из
нерабочего состояния в состояние устойчивой работы на режиме
малого газа. В систему входят:
стартер, служащий для раскрутки
ротора двигателя до частоты
вращения, при которой турбина дэига-
теля дает крутящий момент,
больший, чем момент сопротивления
компрессора;
пусковая топливная система и
электросистема зажигания, создающие
первоначальный факел пламени в
пусковых воспламенителях;
топливный автомат запуска,
дозирующий подачу топлива через
основные форсунки при запуске;.
система автоматики,
обеспечивающая автоматизацию всего процесса
запуска двигателя.
Пусковая система должна
обеспечить надежный многократный
автоматический запуск двигателя на земле и
в воздухе.
Рассмотрим процесс запуска двигателя на земле по графикам
рис. 3.82, показывающим изменение крутящих моментов,
развиваемых стартером Мст и турбиной М7, и момента сопротивления
Мс, зависящего в основном от компрессора. Процесс запуска
можно разбить на три этапа.
Первый этап (от п = 0 до ni) соответствует прокрутке
ротора запускаемого двигателя только стартером, турбина еще не
дает положительного крутящего момента. На втором этапе (от
п\ до /is) раскрутка ротора ведется и стартером, и турбиной
запускаемого двигателя. Температура газов перед турбиной в это
время достигает максимальной. При частоте вращения п = Щ,
когда Мг=Мс (так называемая равновесная частота вращения),
можно было бы выключить стартер, однако для надежности
запуска стартер выключают на Пг>"р. На третьем этапе (от №
Рис. 3.82. Изменение
крутящих моментов М и темпера-
Туры газов /,. по этапам
запуска
238
www.vokb-la.spb.ru - Самолёт своими руками?!
до Ям. г) раскрутка ротора осуществляется только за счет избытка
мощности турбины. В конце запуска подача топлива в основную
камеру сгорания уменьшается до соответствующей режиму
малого газа, при этом температура газов перед турбиной также
снижается.
К стартеру -
генератору
К
двигателю
Ш / _
Рис. 3.83. Схема двухскоростной передачи:
/ — храповая муфта; 2 — фрикционная муфта; 3, 5. 9,
10 — шестерня; 4. 7 — внешнее и внутреннее кольца
роликовой муфты: 6 — роликовая муфта: 8 — вал
Время запуска зависит or величины избыточного крутящего
момента и величины п„. г, т. е. частоты вращения, при которой
данный двигатель начинает работать устойчиво. Чем больше
начальный момент М0 (Mo3>Mo2>M0i), создаваемый стартером, и
чем больше момент, создаваемый при запуске турбиной, тем
меньше время запуска.
В пусковых системах современных авиационных ГТД нашли
применение электрические и турбинные стартеры.
Электрические стартеры подразделяются на
электростартеры и стартеры-генераторы. Электростартер представляет
собой электродвигатель, работающий только при запуске.
Стартер-генератор в период запуска работает как
электродвигатель, а после запуска — как электрогенератор, дающий
электрический ток в сеть самолета. Для выполнения одной электрической
машиной двух функций ее ротор требуется вращать с разной
частотой вращения, поэтому ротор старгера-генератора соединяется
с ротором запускаемого двигателя двускоростнои передачей
(рис. 3.83). На стартерном режиме крутящий момент от стартера
239
Рис. 3.84. Схема ротора турбокомп-
рессорного стартера:
/ — ротор компрессора; 2 — ротор
турбины компрессора: 3 — ротор свободной
турбКНЫ; 4 — реДУКТОР
через фрикционную муфту 2 и шестерни 3 и 10 передается на хра.
новую муф|у /, собачки которой находятся в зацеплении. Далее
крутящий момент через шестерни 9 и 5 передается на выходной
вал 8. Роликовая муфта свободного хода 6 в это время
выключена.
На генераторном режиме крутящий момент передается от дВи.
гателя через вал 8, замкнутую роликовую муфту 6, фрикционную
муфту 2 к стартеру-генератору. Храповая муфта / в это время
выключена, ее собачки за
счет центробежных сил
находятся в разъединенном
положении.
Турбинные стартеры
подразделяются на турбоком-
прессорные,
воздушно-турбинные, пороховые
(твердотопливные) и жидкостные.
Турбокомпрессорный
стартер представляет собой
малогабаритный
газотурбинный двигатель, у которого
избыточная мощность турбины
используется для раскрутки
ротора запускаемого
двигателя. Кинематическаи схема турбокомпрессорного стартера со
свободной турбиной показана на рис. 3.84. Запуск стартера
производится своим электростартером. Все узлы (ротор
компрессора /, камера сгорания, ротор турбины компрессора 2, ротор
свободной турбины 3, редуктор 4) максимально упрощены. Тем
не менее в целом данный стартер является сложным по
конструкции. Положительным качеством такого стартера является его
полная независимость от аэродромных средств. Топливом для
стартера является керосин, который используется для основного
двигателя.
Воздушно-турбинный стартер представляет собой
высокооборотную турбину, работающую на сжатом воздухе, с
редуктором и муфтой сцепления. Источником сжатого воздуха могут быть
бортовые или аэродромные баллоны или вспомогательные
газотурбинные установки, устанавливаемые на борту самолета или
вертолета. Воздушно-турбшшые стартеры весьма компактны и
надежны, развиваемая ими мощность достигает 100 кВт и более.
Твердотопливный турбостартер (рис. 3.85) состоит из
турбины 6, редуктора / и камеры 3, в которой устанавливается
пороховая шашка, дающая при сгорании газ для работы турбины.
Газ на лопатки турбины подводится по двум- четырем соплам.
Турбина развивает мощность 100 кВт и более, время раскрутки
ротсра очень малое (12—15 с). Для нового запуска необходимо
заменить пороховую шашку.
Жидкостный турбостартер аналогичен твердотопливному!
2ТО
www.vokb-la.spb.ru - Самолёт своими руками?!
только в камере сгорает не твердое, а жидкое топливо.
Недостатками твердотопливного и жидкостного турбостартеров
являются опасность взрыва горючего и недостаточная автономность.
Рис. 3.85. Твердотопливный турбостартер:
/ — редуктор; 2 — труба: 3 — камера: 4 — воспламенитель; 5 — ограничитель давления;
б турбина; 7 — муфта
Глава 8
ХАРАКТЕРИСТИКИ И ЭКСПЛУАТАЦИОННЫЕ
ОГРАНИЧЕНИЯ АВИАЦИОННЫХ ГТД
8.1. ПРОГРАММЫ РЕГУЛИРОВАНИЯ
АВИАЦИОННЫХ ГТД
В процессе эксплуатации авиационный двигатель работает в
широком диапазоне скоростей и высот полета, температур и
давлений атмосферного воздуха, на различных режимах.
Задачей регулирования авиационного двигателя является
поддержание в различных условиях полета таких значений его пара»
метров и КПД отдельных элементов, которые обеспечили бы
наивыгоднейшее для данного летательного аппарата протекание
характеристик двигателя и всей силовой установки. Вместе с тем
Должна обеспечиваться устойчивая работа двигателя на всех
режимах и исключаться возможность появления механических и
тепловых перегрузок в отдельных его элементах.
Тяга и удельный расход топлива определяются заданием
основных параметров процесса: степени повышения давления
воздуха в компрессоре я* (или частоты вращения п), температуры
газов перед турбиной 7"* и в форсажной камере Г*. Эти
параметры в процессе регулирования поддерживаются постоянными
241
или изменяются по определенному закону и называются
регулируемыми параметрами. Значение регулируемых
параметров устанавливается с помощью регулирующих факторов
основными из которых в случае ТрДф являются расход топлива
в основных камерах сгорания G,, в форсажной камере От.ф1
критическое сечение выхлопного сопла FKp.
Каждым регулирующим фактором можно изменять любой
регулируемый параметр, но одним регулирующим фактором можно
независимо воздействовать только на один регулируемый
параметр. Поэтому число регулирующих факторов должно
соответствовать числу регулируемых параметров. В современных ТРДф_
чаще всего расходом основного топлива воздействуют на п,
площадью FKP — на 7"*, а расходом форсажного топлива GT. ф —
на Г*
Ф
Закон изменения регулируемых параметров (или
регулирующих факторов) в зависимости от условий полета и положения
рычага управления двигателем (РУД) называется программ
мой регулирования.
Для получения хороших разгонных и взлетных характеристик
самолета необходимо, чтобы двигатель на различных режимах
создавал максимальную тягу. Максимальная тяга двигателя
получается при максимальной частоте вращения (наибольшем
расходе воздуха), максимальной температуре газа перед турбиной и
в случае включенного форсажа при наибольшей температуре 7^.
Поэтому одной из наиболее очевидных программ регулирования
двигателя является
для ТРД:
««.= const; 7-;max = const; (3.14)
для ТРДФ:
«та* = С0Ш* 7'rmax = COnst-. 7'ф„1ах = С0П^
В отдельных случаях в ТРД применяют упрощенные
программы регулирования, которые обеспечивают получение тяги, близкой
к максимальной:
итах = const (FKP = const) (3.15)
или
7,r,roa, = COnst(/7KP = COnst). (3.16)
При программе регулирования (3.15) температура Т* уже не
остается постоянной, но в ряде случаев изменение температуры
получается небольшим и допустимым в эксплуатации. При
программе регулирования (3.16) постоянство температуры газа перед
турбиной обеспечивается регулированием подачи топлива, при
этом будет изменяться частота вращения. .
Непосредственное измерение и регулирование температур Гг
Т1 обеспечить сложно в силу значительной неравномерности по-
212
www.vokb-la.spb.ru - Самолёт своими руками?!
лей температур и сложности создания надежных
малоинерционных датчиков высоких температур. Поэтому у ТРДФ, имеющих
на бесфорсажных режимах программу регулирования (3.15),
широко применяются программы регулирования
"max = const; *; = const (FKP = const). (3.17)
Поддержание л* = const при включении и работе на форсаже
обеспечивает неизменность режима работы турбокомпрессора.
При этом температура 7^ изменяется пропорционально Г*,
которая при программе регулирования (3.15) меняется незначительно
(приблизительно на 3—5%), что позволяет в широком диапазоне
режимов полета обеспечивать тягу, близкую к максимальному
ее значению.
Несколько более простой задачей является измерение и
регулирование температуры за турбиной 7"*, которая
пропорциональна температуре Г". Температура Т* может поддерживаться
постоянной или изменяться в зависимости от режима полета,
например, 7";=/(гу.
Некоторые особенности имеют программы регулирования двух-
вального ТРД, у которого при трех регулируемых параметрах
(частоты вращения ротора КНД пк и КВД ив, 7"*) есть только
два регулирующих фактора (Ст и FKp). Часто у таких двигателей
используют только один фактор Ст, который независимо
воздействует лишь на один регулируемый параметр, остальные два
регулируемых параметра при этом изменяются. Тогда возможны
три программы регулирования:
пн = const (Frp = const);
пв = const (FKP = const); (3.18)
Г* = const (FKP = const).
Выбор той или иной программы регулирования, а возможно,
и их сочетание определяется типом двигателя и предназначением
летательного аппарата (эксплуатационным диапазоном высот н
скоростей полета).
8.2. ВЫСОТНО-СКОРОСТНЫЕ И ДРОССЕЛЬНЫЕ
ХАРАКТЕРИСТИКИ ТРД и ТРДФ
Характеристиками ТРД называются зависимосги тяги и
Удельного расхода топлива от скорости, высоты полета и режима
работы двигателя. Соответственно различают скоростные,
высотные и дроссельные характеристики ТРД.
Скоростные характеристики ТРД — зависимости
тяги и удельного расхода топлива от скорости полета при
постоянной высоте полета и принятой программе регулирования
Двигателя.
243
Рассмотрим скоростные характеристики при программе
регулирования п = const; 7"*= const.
Изменение тяги Р=РУдОв по скорости полета определяется
тем, как изменяются по скорости полета удельная тяга и расход
воздуха через двигатель (рис. 3.86). С увеличением скорости
полета увеличивается степень повышения давления во входном
устройстве явх и, хотя ^* уменьшается (вследствие повышения
Рис. 3.86. Зависимость удельной тя- Рис. 3.87. Зависимость тяги Р и
ги Руд, расхода воздуха С„ через дви- удельного расхода Су1 топлива от
гатель и количества тепла Qn, подво- скорости полета
димого в камеру сгорания, от
скорости полета
температуры воздуха на входе в компрессор), общая степень
повышения давления в двигателе ■тс = яы1с* растет. Увеличение л
приводит к повышению давления (плотности) газа перед
турбиной и при Г*= const —к увеличению расхода газа и воздуха
через двигатель. Увеличение давления за турбиной р* (поскольку
я увеличивается, а к* = const) приводит к увеличению
располагаемого перепада давления в выходном сопле и увеличению
скорости истечения газа сс. Однако скорость сс растет медленнее,
чем скорость полета. Это объясняется тем, что с увеличением я
возрастает температура за компрессором Г* и при Г*^const
уменьшается количество тепла Q0, подводимого в камеру
сгорания с топливом. Вследствие этого при я>я<>пт уменьшается
работа цикла Lu=(cl — V-)/2 и удельная тяга Руд=сс—V- При
некоторой максимальной скорости полета Vmax величина Qc
оказывается настолько малой, что подводимой с топливом энергии
достаточно только на покрытие потерь в компрессоре, камере
сгорания, турбине и других элементах двигателя, а полезная работа
цикла и удельная тяга равны нулю.
На малых скоростях полета, пока расход воздуха изменяется
мало, а удельная тяга уменьшается, тяга двигателя снижается
244
www.vo -1- a.spb.ru - Самолёт своими руками?!
(рис. 3.87). Затем в связи с интенсивным ростом Ов тяга начинает
возрастать, достигает своего максимума, после чего вследствие
резкого уменьшения Руд быстро снижается до нуля.
Изменение удельного расхода топлива Cya = 3600Qo/#uPyfl по
скорости полета объясняется взаимным протеканием кривых
Qo=/(y) и Рул = 1(У). При увеличении скорости полета Суд
постоянно растет. Сначала быстро, пока уменьшение Q0 не очень
заметно, затем достаточно медленно. В итоге прн Руд=0
удельный расход топлива неограниченно возрастает (при V=Vmax).
Экономичность двигателя характеризуется значением
_ 3600V
"и1-УД
При V=0 полный КПД равен нулю; при V=Vn;ax, когда Р = 0,
Суд стремится к бесконечности, т)п тоже равен нулю, а максимум
г]и достигается примерно при М = 2-т-3 (наилучшая экономичность
ТРД).
Форсирование двигателя увеличивает работу цикла, и тяга
значительно возрастает. При увеличении скорости полета степень
форсирования увеличивается. Кроме того, максимальное и
нулевое значения тяги двигателя с форсажем смещаются в область
больших скоростей полета по сравнению с теми же параметрами
бесфорсажных ТРД. Это объясняется повышением температуры
газов за турбиной на форсаже и увеличением скорости истечения
газов. Изменение тяги и удельного расхода топлива ТРДФ
показано на рис. 3.87. На умеренных скоростях полета экономичность
ТРД выше, чем ТРДФ (СУД<СУД. ф). Это объясняется тем, что
в ТРДФ большая доля топлива сжигается в форсажной камере
при малых давлениях, где эффективность преобразования тепла
в полезную работу ниже, чем в основной камере сгорания. На
больших сверхзвуковых скоростях полета, где ТРД «вырождается»
(его тяга становится равной нулю), экономичность ТРДФ
становится лучше, чем ТРД (Суд. ф<Суд).
Высотные характеристики — зависимости тяги и
удельного расхода топлива от высоты полета при постоянной
скорости полета и принятой программе регулирования
двигателя.
Рассмотрим высотные характеристики при программе
регулирования «=const; 7'* = const. Изменение тяги по высоте полета
зависит от характера изменения удельной тяги и расхода воздуха
(рис. 3.88). Удельная тяга до 11 км увеличивается, так как
понижается температура атмосферного воздуха Тн и вследствие этого
увеличивается степень повышения давления компрессора и*
(возрастает иПр) а степень подогрева воздуха в двигателе Л = ТЦТ„.
На высотах более 11 км температура Тн не изменяется и Руц оста-
ется постоянной.
Расход воздуха с увеличением высоты полета интенсивно
Уменьшается вследствие уменьшения плотности р« (давления рн)
245
ашосферы, причем до высоты 11 км расход воздуха уменьшается
медленнее, чем рн, в результате повышения ~*. Начиная с 11 км
падение G„ становится более интенсивным (пропорционально
уменьшению давления атмосферы), так как п"к остается
постоянной
-1 — i 1 „
77км Н Пкм Л
Рис. 3.88. Зависимость Руя, Q0, C„ Рис. 3.89. Зависимость тяги иудель-
и ри от высоты полета ного расхода топлива от высоты
полета И
Увеличение Руд до высоты 11 км происходит медленнее, чем
снижение GB, в результате чего тяга интенсивно уменьшается
(рис. 3.89), но медленнее, чем плотность атмосферы. На высотах
более 11 км тяга снижается пропорционально атмосферному
давлению (плотности рн).
Удельный расход топлива с увеличением высоты полета до
11 км незначительно уменьшается, так как при 7"*= const
количество тепла <2о возрастает из-за уменьшения температуры
воздуха за компрессором Т* в меньшей степени, чем увеличивается
Руд. Указанный характер изменения Суд объясняется
увеличением степени повышения давления воздуха в двигателе и
связанным с этим улучшением использования тепла. На высотах более
11 км <2о и Руд не изменяются и удельный расход топлива
остается постоянным.
Высотные характеристики ТРДФ имеют качественно такой же
характер, как и характеристики ТРД.
Дроссельные характеристики — зависимости тяги и
удельного расхода топлива от частоты вращения ротора при
постоянных скорости, высоте полета и принятой программе
регулирования.
Дроссельные характеристики ТРД с нерегулируемой
проточной частью пока*аны на рис. 3.90. На характер протекания этих
характеристик большое влияние оказывает температура 7"*,
которая на пониженных режимах имеет относительно большую ве^
личину вследствие снижения КПД компрессора >j* и турбины Чг
240
1( малых значений степени расширения газа в турбине с*. При
увеличении частоты вращения ротора двигателя выше пы г
интенсивно увеличиваются v;*, т:* (пока перепад давления в выходном
сопле докритический) и ч*, что приводит к снижению
температуры Т*. При достижении критического перепада давления в
выходном сопле к* остается постоянной, и для обеспечения равен-
с$
ства LT=LH (работа компрессора
по мере увеличения п
возрастает) температура Т'
увеличивается.
При увеличении частоты
вращения расход воздуха через
двигатель интенсивно увеличивается,
растут \ и давление по тракту
двигателя и соответственно перепад в
выходном сопле, скорость истечения и
удельная тяга двигателя.
Интенсивность увеличения тяги повышается
с частотой вращения ротора. Так,
например, изменение п на 1%
приводит к изменению тяги на 2% при
средних значениях частоты
вращения, на 4—5% при максимальной
частоте вращения.
При увеличении п удельный расход топлива снижается
вследствие увеличения я* и обусловленного этим улучшением
использования тепла в цикле, достигает минимального значения вблизи
крейсерского режима, а затем несколько увеличивается в
результате преобладающего над к* увеличения температуры Т*
(разность температур Т*~Т* и Q0 возрастают) и снижения КПД
компрессора.
''М.Г Лтпах '*
Рис. 3.90. Зависимость тяги и
удельного расхода топлива,
температуры Тт от частоты
вращения п ротора ТРД
8.3. ОСОБЕННОСТИ ХАРАКТЕРИСТИК ТРДД
Высотно-скоростные и дроссельные характеристики ТРДД в
Целом аналогичны характеристикам ТРД, но отличаются от них
рядом особенностей.
В ТРД удельная тяга снижается вследствие того, что скорость
истечения газа сс растет медленнее, чем скорость полета. При
этом Руд снижается тем интенсивнее, чем меньше сс при V=0.
В ТРДД при V=0 скорость истечения меньше, чем в ТРД, и тем
Меньше, чем больше степень двухконтурности т. Поэтому в двух-
контурном ТРД удельная тяга при увеличении скорости полета
Уменьшается быстрее, чем в ТРД (рис. 3.91, с), и тем быстрее,
чем больше степень двухконтурности, которая, кроме того,
увеличивается с ростом скорости полета. Скорость полета, при ко-
247
торой Руд=0, в ТРДД Достигается раньше, чем в ТРД е теми же
параметрами рабочего процесса.
Вследствие более резкого падения удельной тяги в двухкон-
турном ТРД тяга по скорости полета снижается более интенсив-
т-О(ТРЛ)
Рис. 3.91. Зависимость удельной тяги и тяги ТРДД и ТРД от
скорости полета
но, чем в ТРД (рис. 3.91,6), и при большой степени двухконтур-
ности может не иметь максимума, как в ТРД (рис. 3.87).
На взлете и на дозвуковых
СУэ, i
Рис. 3.92.3ависимость удельного
расхода топлива ТРДД и ТРД от
скорости полета (М)
скоростях полета ТРДД более
экономичен, чем ТРД (рис. 3.92).
Однако с ростом скорости
полета Суд ТРДД увеличивается
быстрее, чем растет Сул ТРД. Это
объясняется более резким
падением удельной тяги ТРДД при
увеличении скорости полета.
В ТРД минимальное
значение Суд, соответствующее Т*вк<
достигается на крейсерском
режиме при П<Птах- В ТРДД
Судшт достигается при больших
значениях частоты вращения, чем
в ТРД, а при большой степени двухконтурности минимальный
удельный расход может соответствовать максимальному режиму
(«max). Это объясняется тем, что Лэктрдд>- 4,ктрд за счет более
высоких значений тягового КПД. Поэтому снижение т]тяг в ТРДД
оказывает заметное влияние на снижение г%, при более высоких
температурах Т*, чем в ТРД. При большой степени
двухконтурности такие значения температур могут соответствовать
максимальному режиму работы двигателя.
8.4. ХАРАКТЕРИСТИКИ ТВД И ТУРБОВАЛЬНЫХ ГТД
В отличие от ТРД и ТРДД у ТВД с нерегулируемой
геометрией проточной части имеются два регулирующих фактора:
расход топлива От и угол установки лопастей воздушного винта фе>
248
www.vokb-la.spb.ru - Самолёт своими руками?
Рис. 3.93. Скоростные
характеристики ТВД
что позволяет независимо изменять два регулируемых параметра.
Для двигателя одновалыюй схемы это частота вращения ротора п
и температура перед турбиной Т*.
Скоростные характеристики ТВД — зависимости
эквивалентной мощности NBK (или мощности на валу вннта NB
и реактивной тяги Рр) и удельного расхода топлива Се от
скорости полета при неизменной высоте полета и принятой
программе регулирования.
Рассмотрим скоростные
характеристики ТВД при программе
регулирования /i = const; T* = const,
обеспечивающей получение
максимальной мощности и
минимального удельного расхода топлива
(рис. 3.93).
У ТВД во всем
эксплуатационном диапазоне скоростей полета
(М<1) перепад давлений в
выходном сопле докритический. Поэтому
с ростом скорости полета и
увеличением тс постоянно возрастают ^*
и itc, что ведет к непрерывному
увеличению работы турбины LT и,
следовательно, работы винта LBl
а также скорости сс (вследствие роста перепада давлении в
выходном сопле). Однако скорость сс, как и в ТРД, растет
медленнее, чем скорость полета. Эквивалентная работа L3K, как и работа
цикла Z-ц, у ТВД сравнительно мало изменяются с изменением
скорости полета, так как в эксплуатационном диапазоне скоростей
полета изменение -с не очень велико. Расход воздуха с
увеличением скорости полета постоянно возрастает. Такое изменение
параметров ТВД приводит к весьма значительному увеличению
эквивалентной мощности N3K и мощности на валу винта и
снижению реактивной тяги (аналогично снижению тяги ТРД на малых
скоростях полета).
Удельный расход топлива с увеличением скорости полета
уменьшается в результате роста степени повышения давления
воздуха в двигателе и вызванного этим улучшения использования
тепла в цикле. Однако при М> 0,85 -^0,9, когда эффективность
воздушного винта снижается и надает т]в, удельный расход топ-
С
лива, определенный по тяговой мощности С„ тяг = —-, начинает
увеличиваться.
Высотные характеристики ТВД — зависимости
эквивалентной мощности Лэк (или Nk и Яр) и удельного расхода
топлива от высоты полета при постоянной скорости полета и
принятой программе регулирования.
249
«ОГР
Рис. 3.94. Высотные характеристики ТВД
Рассмотрим высотные характеристики ТВД при программе ре-
гулирования « = const; 7"*= const (рис. 3.94).
При увеличении высоты полета эквивалентная мощность Na
и реактивная тяга Рр уменьшаются, так как значительно умень
шается расход воздуха через двигатель вследствие снижения
плотности воздуха (полная аналогия с ТРД). Начиная с высоты
11 км темп падения
мощности и тяги усиливается, так
как остаются неизменными
величины те и Д (вследствие
постоянной температуры Тн)
и перестают увеличиваться
работа турбины и удельная
тяга.
До высоты 11 км
удельный расход топлива
уменьшается вследствие роста л,
Д и улучшения
использования тепла в цикле, а на
высотах более 11 км Се не
изменяется.
В целях уменьшения
габаритов и массы редуктора
(и в целом силовой
установки) мощность ТВД нередко ограничивают на малых
высотах некоторой величиной Worp, обеспечивающей
удовлетворительные взлетные качества самолета. Эта высота зависит от
скорости полета. Чем выше скорость полета, тем больше высота
ограничения //огр. В этом диапазоне скоростей ТВД переходит на
программу регулирования /i=const; Worp=const. Ограничение
мощности винта при уменьшении высоты полета ниже Яогр
обеспечивается снижением температуры Т*. При этом удельный
расход оказывается большим, чем при работе двигателя на
максимальном режиме (без ограничений).
Дроссельные характеристики ТВД — зависимости
эквивалентной мощности (или WB и Рр) и удельного расхода
топлива от частоты вращения ротора (или расхода топлива) при
неизменных высоте и скорости полета.
Дроссельные характеристики ТВД с винтом фиксированного
шага лопастей (ВФШ) (p,, = const такие же, как у ТРД с
нерегулируемой геометрией. Отличие заключается лишь в том, что с
уменьшением частоты вращения Се постоянно возрастает (в ТРД
имеется Cyflmin), так как ТВД не имеет Т" эк.
У ТВД с винтом изменяемого шага лопастей (ВИШ) имеется
возможность выбора различных программ регулирования при
дросселировании, так как появляется второй регулирующий
фактор <рв.
Дросселирование одиовального ТВД, имеющего программу ре-
2§0
www.vokb-la.spb.ru - Самолёт своими руками?!
гулирования 7,* = const, обеспечивается снижением частоты
вращения п. Такая программа дросселирования ТВД приводит
обычно к неустойчивой работе компрессора (кривая / на рис. 3.95).
Кроме того, двигатель в течение всего ресурса работает при
максимальных тепловых нагрузках.
*К
е.пр
Рис. 3.95. Программы дросселирования
ТВД
Се
;
|\
1 \
1 \
1
1
1
i
Yema
Се
уф х
Vemm
Vemin
, ТВ ГЛОХ
"мг
Пт,
Рис. 3.96. Дроссельные харак
тернстики ТГЗД при
комбинированной программе
дросселирования
Дросселирование ТВД, имеющего программу регулирования
n = const, обеспечивается снижением температуры Т", а частота
вращения поддерживается постоянной за счет облегчения винта
(снижения фв) по мере снижения TjT. При дросселировании
двигателя рабочая точка удаляется от границы неустойчивой работы
(кривая // на рис. 3.95) и запас устойчивости компрессора
возрастает. Этот способ дросселирования имеет лучшую
экономичность, чем при программе 7"* = const, но при этом двигатель в
течение всего ресурса работает на максимальной или близкой
к ней частоте вращения и для обеспечения « = const во всем
диапазоне режимов работы двигателя требуется большой диапазон
изменения <рв, что вызывает определенные трудности.
Дросселирование ТВД возможно и за счет одновременного
уменьшения Г* и п — это промежуточные программы (между /
и // программами).
Обычно дросселирование одновальных ТВД осуществляется с
использованием комбинированных программ (кривые // и III на
рис. 3.95). На рабочих режимах двигатель дросселируется
снижением 7"* (рис. 3.96) при «maii = consl (или небольшом
изменении п) до установки лопастей винта на упор минимального шага
фвтш, а затем N3K снижается с одновременным уменьшением 7"" и
251
п при фиксированном шаге лопастей винта <рв mm = const. Такая
программа регулирования позволяет использовать преимущества
I и II программ регулирования.
8.5. ЭКСПЛУАТАЦИОННЫЕ ОГРАНИЧЕНИЯ И ОСОБЫЕ
СЛУЧАИ В ПОЛЕТЕ, СВЯЗАННЫЕ С РАБОТОЙ
АВИАЦИОННЫХ ГТД
Рассмотренные программы регулирования авиационных ГТД пе
всегда достаточно полно учитывают нагруженность деталей и
узлов и условия обеспечения устойчивой работы отдельных
элементов двигателя. Поэтому в программы регулирования может
вводиться ряд ограничений, обеспечение которых возлагается на
топливную автоматику двигателя, а в некоторых случаях на
летчика— в виде задания ограничений диапазона высот и скоростей
полета н др.
Ограничения по прочности приходится вводить при малых
высотах и больших скоростях полета, низких температурах
окружающего воздуха. Ограничения по прочности элементов
конструкции учитываются заданием предельных значений отдельных
параметров, выбор которых определяется принятой программой
регулирования двигателя. К этим параметрам относятся: «тах. 77п,ях •
/'ктах (по условиям прочности элементов турбокомпрессора и
форсажной камеры); Т'Ншт (по условиям прочности и охлаждения
элементов двигателя и работоспособности маслосистемы).
Ограничения по устойчивой работе компрессора
вводятся для предотвращения неустойчивой работы компрессора
при изменении условий полета и режима его работы на малых
Лир mm и больших «пртах приведенных частотах вращения.
Ограничения по устойчивой работе входного
устройства (например, запрещение уборки РУД ниже положения
МАКСИМАЛ иа больших сверхзвуковых скоростях полета)
вводятся для исключения сильного рассогласования расходов воздуха
через воздухозаборник и двигатель и возникновения помпажа
воздухозаборника.
Ограничения по у стой чи вой работе камер сгорания
и включению форсажа задаются обычно минимальными
величинами давления в основной и форсажной камерах сгорания.
Могут иметь место и другие ограничения.
В условиях полета вследствие отказа авиационной техники
возможно нарушение нормальной работы силовой установки. К та~
ким особым случаям относится следующее.
Неустойчивая работа компрессора, которая
может привести к разрушению элементов компрессора и турбины
(прогар лопаток) и выключению двигателя в полете.
Неустойчивая работа компрессора может возникнуть и в результате
попадания в двигатель пороховых газов при пуске ракет.
252
www.vokb-la.spb.ru - Самолёт своими руками?!
Неустойчивая работа воздухозаборника (пом-
паж и «зуд»), которая может привести к разрушению элементов
конструкции воздухозаборника и возникновению неустойчивой
работы компрессора.
Отказы в системе управления створками
критического сечения сопла, которые могут привести в
случае нераскрытия створок при включении форсажа к забросу
температуры Т'т выше допустимого значения и появлению неустойчивой
работы компрессора, а в случае неприкрытия створок при
выключении форсажа - к резкому провалу тяги двигателя.
Появление отрицательной тяги ТВД в полете при
переходе лопастей винта на отрицательные углы фв вследствие отказа
системы управления.
Недопустимая раскрутка р о т о р а неисправного ТВД
до я>Ятах вследствие перехода лопастей винта под действием
центробежных сил на малые углы атаки.
Указанные случаи являются серьезными предпосылками к
летному происшествию и в эксплуатации недопустимы.
Глава 9
АВТОМАТИКА АВИАЦИОННЫХ ГТД
9.1. ЗАДАЧИ АВТОМАТИКИ. ТРЕБОВАНИЯ,
ПРЕДЪЯВЛЯЕМЫЕ К СИСТЕМАМ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
Авиационный ГТД работает в широком диапазоне скоростей
и высот полета, режимы его работы также изменяются в широких
пределах, причем это изменение в некоторых случаях
осуществляется весьма быстро. Указанные явления приводят к тому, что
двигатель в процессе полета получает сильные возмущающие и
управляющие воздействия, на которые его узлы и системы
реагируют неодинаково, в результате чего может разрушиться
какая-то деталь или появиться рассогласование в работе узлов и,
как следствие, неустойчивая работа какого-то узла, например пом-
паж компрессора, входного устройства, срыв пламени в камере
сгорания и т. п. Проводить согласование работы различных узлов
двигателя человеком без автоматов практически невозможно.
С другой стороны, от двигателя часто требуется получить
максимальную тягу или мощность при минимальном расходе
топлива, для чего требуется параметры процесса в двигателе
поддерживать на высоком уровне, но не переходить за их предельный
Уровень из условий прочности. Если учесть, что при изменении
высоты и скорости полета различные параметры процессов в
двигателе меняются, то становится ясным, что задачу поддержания
253
максимального режима без автоматических устройств решить
также трудно.
Необходимы автоматические устройства при управлении
двигателем и в целом ряде других случаев, например при запуске
двигателя, при его разгоне и т. д.
В общем случае средствами автоматики в ГТД решаются
различные задачи. Основными из них являются:
поддержание заданного летчиком режима работы при
изменении внешних условий работы двигателя (рн, р'в. Г") или
изменение режима по заданной программе;
предотвращение неустойчивой работы элементов (узлов)
двигателя;
защита конструкции от механических и тепловых перегрузок;
обеспечение запуска, быстрого вывода двигателя на заданный
режим и дросселирования;
обеспечение различных блокировок и переключений с одних
автоматов на другие и т. п.
Для решения перечисленных задач на двигателе имеется
столько автоматических систем управления (регулирования),
сколько регулируемых параметров имеет ГТД.
К системам автоматического регулирования (САР)
предъявляются следующие основные требования:
высокая статическая точность — точность поддержания
регулируемого параметра на установившихся режимах;
хорошие динамические свойства: малые «забросы»
регулируемого параметра на переходных режимах (при переходе с одного
режима работы на другой);
высокая надежность работы, простота обслуживания, малые
габариты и масса.
В предыдущей главе были рассмотрены программы
регулирования авиационных ГТД, регулируемые* и ограничиваемые
параметры двигателей, а также регулирующие * факторы, с
помощью которых удобно воздействовать на выбранные
регулируемые параметры.
9.2. СВОЙСТВА ГТД КАК ОБЪЕКТА АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
На установившихся режимах работы ГТД все его параметры
остаются неизменными, на переходных режимах, вызванных
любыми управляющими или возмущающими воздействиями,
параметры процессов в двигателе меняются во времени. Время
перехода с одного режима на другой, а также изменение параметров
при этом зависят как от свойств автоматических устройств, так и
от свойств собственно двигателя. Указанные свойства двигателя
называются динамическими. Рассмотрим динамические
* Регулируемые параметры называют также управляемыми величинами,
а регулирующие факторы — управляющими факторами.
254
www.vokb-la.spb.ru - Самолёт своими руками?!
свойства ГТД на примере однороторного ТРД с неизменяемой
геометрией.
Динамические свойства характеризуются реакцией двигателя
на изменение управляющего или возмущающего воздействия.
Например, как изменится частота вращения ротора двигателя при
изменении подачи топлива или при изменении высоты (скорости)
«т
const
*«,.%
Рис. 3.97. Устойчивость ТРД с независимой подачей топлива
полета при неизменной подаче топлива? Важным вопросом при
рассмотрении динамических свойств ТРД является вопрос его
собственной устойчивости, т. е. способности двигателя после
случайного отклонения от установившегося режима возвращаться на
первоначальный режим.
Анализ устойчивости ТРД можно провести по статическим
моментным характеристикам: графической зависимости от п
момента Мк, потребного для вращения компрессора, и равного ему
для установившегося режима момента, развиваемого турбиной Мт
(рис. 3.97). На этом же рисунке показана зависимость
потребного расхода топлива Gr от частоты вращения п.
Для рассмотрения устойчивости возьмем четыре точки (/, 2,
3, 4). Рассмотрим изменение крутящих моментов Мк и Мг при
случайном отклонении от установившегося режима, например от
я,о на величину + Ди.
гЧа установившихся режимах при неизменных внешних
условиях работы двигателя, которые обозначим общим символом Fi(t),
моменты Мх и Мг равны между собой. Как известно, они зависят
255
от расходов топлива и воздуха, а на установившихся
режимах эти расходы постоянны. Поэтому, например, в точке /'
При отклонении частоты вращения от л1 на величину +Дя
равенство моментов Мк и Мт нарушается, так как располагаемый
расход топлива остался прежним GT1 = const, а потребный
расход топлива вырос в соответствии с кривой GT = Gz (л).
Кроме того, вследствие роста частоты вращения увеличился
расход воздуха. По указанным причинам Мк увеличился, а Мт
уменьшился. Разность моментов ДЛ1 = УИТ—Мк оказывается
отрицательной, поэтому после ликвидации причины, вызвавшей рост п,
частота вращения ротора уменьшается снова до и, .
При случайном снижении п на величину Ди от я,
происходит обратная картина: появляется избыток топлива, &М=МТ—Мк
имеет положительное значение. Происходит разгон ротора до
•с
Аналогичные процессы происходят и при случайном
отклонении п от установившегося режима в точке 2. Разница только в
том, что восстановление режима происходит более вяло, чем в
точке 1, так как при одинаковом отклонении частоты вращения от
частоты установившегося режима величина избыточного момента
В точке 2 меньше.
Принципиально иная картина наблюдается, если случайное
отклонение Ли произойдет на режиме, расположенном левее пг ,
например в точке 4. При случайном разгоне ротора, т. е. при
+Ди, появляется избыток топлива, а момент Л1т>/Ик. Ротор
будет разгоняться еще дальше, и если не принять мер, то разгон
прекратится только в точке 2. При —Ди частота вращения ротора
будет снижаться вплоть до останова двигателя. Таким образом,
двигатель в области режимов, расположенных левее я3 ■
является неустойчивым.
Границей устойчивости ТРД является режим п3 ==п 0.
Режим п 0 характерен тем, что на этом режиме при данных
внешних условиях GT является минимальным.
В проведенных выше рассуждениях подача топлива в
двигатель осуществлялась системой, совершенно независимой от
двигателя.
Однако подача топлива в авиационном ГТД осуществляется
топливным насосом (ТН), который приводится во вращение от
ротора двигателя. В этом случае между двигателем и насосом
возникает положительная обратная связь: при увеличении
частоты вращения п увеличивается подача топлива GT. Увеличение GT
| ведет к новому увеличению п (рис. 3.98). При уменьшении п
наблюдается обратная картина.
Располагаемая подача топлива кроме частоты вращения п за-
256
www.vokb-la.spb.ru - Самолёт своими руками?!
висит от положения регулирующего органа насоса m (угла на-
ктона шайбы плунжерного насоса или положения перепускного
клапана шестеренного насоса).
Топливн.
насос
Дозируют
кран
ТТД
тт;
it)
Рис. 3.98. Схема топливоподачи ТРД с приводным
топливным иасосом (Р — координата дозирующего крана)
Зависимость GT. pacn = GT.pacn (я, т) представлена на рис. 3.99
прямыми линиями, здесь же приведен график потребной для
двигателя подачи топлива GT. ПотР на установившихся режимах.
Рис. 3.99. Устойчивость ТРД с приводным топливным
насосом
Как же повлияло на устойчивость двигателя то
обстоятельство, что топливный насос приводится во вращение от ротора
двигателя?
Рассмотрим устойчивость двигателя на режиме я,о. При
случайном отклонении я от равновесного режима, например, на ве-
8-229 257
личину + Дя располагаемая подача топлива при mj=const
оказывается меньше потребной, поэтому появится недостаток
крутящего момента. Ротор вернется в исходное положение. При
отклонении п на величину —Дя произойдет обратная картина —
появится избыток крутящего момента. Ротор снова вернется в исходное
положение. Аналогичная картина будет на всех режимах от я,
до п3, т. е. двигатель будет устойчивым.
Иное положение можно наблюдать, например, в точке 4,
соответствующей и,. При случайном отклонении режима от
равновесного располагаемая подача топлива оказывается такой, что
способствует «уходу» ротора от положения равновесия, т. е. режим
будет неустойчивым. Например, при случайном увеличении п из
точки 4 разгон пойдет до точки 2.
Нетрудно видеть, что границей устойчивости является частота
вращения п3 =пгРт.
Если на рнс. 3.99 показать игрс . т° видно, что nrpm лежит
правее и,рС . Таким образом, граница устойчивости двигателя,
имеющего приводной топливный насос, сместилась вправо, в
область более высоких режимов.
Современные ТРД при работе в стендовых условиях имеют
«грт = (0.35ч-0,65) /ггаах, а »,.,= (0,35~0,45)яшш, т. е. обычно
яГрт>/гм.Г, поэтому, если не принятьмер, появляется опасность
иметь диапазон неустойчивых режимов.
9.3. ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ (САР) ТРД
При неизменных условиях полета тяга и удельный расход
топлива ТРД зависят от к* и температуры газов перед турбиной Т"г ,
а в случае ТРДФ еще от температуры в форсажной камере Г1.
Эти параметры процесса и являются основными регулируемыми
параметрами этих двигателей. Однако вместо с* более удобным
оказался параметр л (частота вращения ротора), связанный с\.
Вместо параметра Т'г часто берут Т* — температуру газа за
турбиной, так как последняя значительно ниже и ее легче замерить.
Поскольку Т'т однозначно связана с 7"г* только при постоянных
значениях степени расширения газа на турбине и ее КПД, то
в данный регулятор вводится часто коррекция, например по Т"н.
На рис. 3.100 представлена функциональная схема системы
автоматического регулирования ТРДФ, состоящая из трех
подсистем. Изменение режимов работы двигателя производится с
помощью РУД через механизм объединенного управления (МОУ)-
Показанные подсистемы являются весьма сложными и носят
названия или по регулируемому параметру (например, САР час-
258
www.vokb-la.spb.ru - Самолёт своими руками?!
тоты вращения), илн по регулирующему (управляющему)
фактору (например, САР сопла).
Указанные САР могут быть замкнутыми по регулируемому
параметру, как показана САР частоты вращения, а могут быть
незамкнутыми, программными, как показана САР подачи топлива
в форсажную камеру (САР Ст. ф).
!=d
Ограничишь
Ллрив
'в
МО У
"ч
*
-^ 'ч
*
*к ^
1
Г
Регулятор
п
Регулятор
\
Регулятор
■у*
ф
Ограничитель „
К
*
*д
ч:кр
>,
«.
ТРДФ
Ст.Ф
Т
Рис. 3.100. Функциональная схема автоматических систем ТРДФ
Кроме приведенных на схеме регуляторов на двигателе могут
быть ограничители некоторых параметров, например,
ограничитель давления /?*. ограничитель п„рив, в случае двухроторного
двигателя обязательно должен быть ограничитель частоты вращения
второго ротора. В то же время в случае ТРД с нерегулируемым
соплом отпадает САР сопла.
В систему автоматического регулирования любого ГТД входят
автоматы приемистости и запуска.
9.4. СИСТЕМЫ УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ
РОТОРА ДВИГАТЕЛЯ
Система управления частотой вращения ротора ГТД приводит
подачу топлива насосом в соответствие с потребной подачей для
работы двигателя на заданном режиме при данных высоте и
скорости полета.
Существуют ручное и автоматическое управление частотой
вращения. При ручном управлении летчик с помощью РУД
управляет количеством топлива, поступающего в КС. Поскольку
на различных высотах и скоростях полета для поддержания одной
и той же частоты вращения требуется различное количество
топлива, то летчик для поддержания п = const должен вручную
корректировать подачу топлива, перемещая РУД. При
автоматическом управлении летчик с помощью РУД задает нужную п,
а регулятор л при изменении условий полета без вмешательства
летчика управляет подачей топлива, поддерживая заданную п.
8»
259
Вследствие сложности создания автоматической системы,
работающей во всем диапазоне режимов двигателя, на первых
двигателях в области низких режимов (до (0,7н-0,8)лта1()
управление выполнено ручным, а в области высоках (от лНар — начала
автоматического регулирования до пта*) — автоматическим. На
современных двигателях удалось создать всережимные САР п,
которые работают от пы. г до иНАР
Рис. 8.101. Функциональная схема регулятора постоянства
подачи топлива (рк. K=const)
Рассмотрим принципы устройства и работы систем управления
частотой вращения.
Система ручного управления частотой вращения может
функционировать только в случае, если двигатель является
устойчивым в данной области режимов. Однако, как было установлено
выше, именно в диапазоне пониженных режимов двигатель с
приводным топливным насосом неустойчив, поэтому для обеспечения
устойчивости двигателя в систему ручного управления включается
регулятор постоянства подачи топлива (регулятор GT = const).
Этот регулятор чаще всего выполняют в виде регулятора,
поддерживающего постоянный перепад давления на дроссельном кране
ДК, поэтому он также носит название «регулятор рд.к = const».
На рис. 3.I0I представлена функциональная схема регулятора
Рд. н. Задача регулятора — поддержать постоянным перепад
давления на ДК рд. к = рн—Рф. Замеренный рд. к сравнивается с
заданным рд. к. з, который для данного регулятора всегда одинаков.
По сигналу рассогласования Дрд.к и работает регулятор рдк,
управляя наклонной шайбой насоса (в случае плунжерного
насоса).
Рассмотрим основные случаи работы регулятора рд. K = const.
При перестановке РУД, например при открытии ДК
летчиком с целью перехода на более высокий режим, перепад рд. „
уменьшается, появляется сигнал рассогласования Дрд. к>0 и
наклонная шайба перейдет на больший угол. Подача топлива
насосом увеличится до восстановления прежнего рд.к. При этом
соответственно открытию ДК возрастет н двигателя.
260
www.vokb-la.spb.ru - Самолёт своими руками?!
При изменении высоты или скорости полета
при неизменной пока подаче топлива частота вращения ротора
двигателя изменится, соответственно изменится и п насоса.
Например, при росте Н„ и сохранившейся пока подаче топлива
частота вращения вырастет, следовательно, рд. к начнет расти. Тогда
регулятор уменьшит наклон шайбы и восстановит перепад рд. к.
При этом подача топлива уменьшится соответственно росту Яп.
Входтоппива 9
Рис. 3.102. Принципиальная схема регулятора постоянства подачн топлива
lP.i- n=const):
Л 3 — жиклеры; 2 — клапан постоянного давления; 4 — пружина; 5 — золотник
регулятора РЯш к; 6 — дроссельный кран; 7 — рычаг, связанный с РУД; 'в — дроссельный пакет;
9 — поршень
Приведенные примеры показывают, что регулятор Cr = const
обеспечивает такую подачу топлива в двигатель, какую установил
летчик, поставив ДК в определенное положение. Благодаря этому
обеспечивается ручное управление двигателем.
На рис. 3.102 представлена принципиальная схема регулятора
Рд. K = const. К золотнику 5 регулятора снизу подводится
давление р„, а сверху через жиклер 3 — давление рф. Сверху на
золотник 5 действует также пружина 4, усилие от которой и определяет
Рд. к. з. На установившемся режиме золотник 5 находится в
равновесии, количество топлива, входящего в полости А и Б,
находящиеся справа и слева от поршня 9, и выходящего из этих полостей,
равно. При изменении рд. к золотник перемещается, вследствие
чего изменяется давление в полостях А и Б. Поршень 9 изменяет
положение наклонной шайбы.
261
Системы автоматического регулирования частоты вращения
ротора, работающие в диапазоне от «нар до «max. В настоящее время
авиационные ГТД имеют САР «, работающие обычно на
принципе отклонения Функциональная схема такой системы показана
На рис. 3.103.
" -ъ
m 3
17/
ГН
Гидропривод
Обратная
связь
<—|
<?т
У
Уг.
ГРД
Измеритель у
ъ
Na
Задат-
чику
РУД
Рис. 3.103. Функциональная схема регулятора частоты вращения
Измерительное устройство сравнивает действительную частоту
вращения л с заданной п3 и по результатам сравнения выдает
сигнал y-f(An) на гидропривод наклонной шайбы топливного
насоса. В- зависимости от знака сигнала у наклонная шайба
будет переставлена на увеличение или уменьшение подачи топлива.
Изменение подачи топлива в двигатель будет происходить до тех
пор, пока не наступит равенство « = я3. Обратная связь
гидропривода служит для уменьшения забросов иа переходных режимах.
Упрощенная принципиальная схема регулятора (без обратной
связи гидропривода) представлена на рис. 3.104. На золотник 4,
управляющий подачей рабочей жидкости (топлива) в полости
гидропривода (поршня 6), действуют: слева — сила от
центробежных грузиков /, а справа — сила пружины 3. Затяжка
пружины соответствует «3, она может изменяться летчиком от РУД.
Данный регулятор реагирует на изменение «3 летчиком и п
двигателя при изменении условий полета.
Как отмечалось выше, данный регулятор « так сконструирован,
что может работать только в диапазоне от «нар до «max. В
диапазоне от «м. г до пН№ работает регулятор Gi = const. Наличие на
двигателе двух регуляторов, работающих последовательно,
вызвало необходимость обеспечения своевременного и надежного
выключения одного и включения другого регулятора, причем как
при переходе от ручного управления (от регулятора GT = const)
к автоматическому, так и обратно. Имеется также и другое
неудобство, состоящее в том, что плавное изменение « двигателя
при изменении положения РУД (дроссельного крана) происходит
только в земных условиях. На Н„>0 при переходе от ручного
262
www.vokb-la.spb.ru - Самолёт своими руками?!
управления к автоматическому на «нар появляется холостой ход
РУД, причем тем больший, чем больше высота полета, при этом
ям. г с ростом Н„ растет. Это обусловлено тем, что регулятор рд. к =
=const обеспечивает Gi = const независимо от « двигателя. В то
же время данная подача топлива на высоте Н„>0 обеспечивает
уже другие, более высокие режимы работы двигателя.
Клапан малого газа
Рис. 3.104. Принципиальная схема регулятора частоты вращения:
/ — Центробежные грузики; 2 — клапан постоянного давлении; 3 — пружина; 4 —
управляющий золотник; 5 — пружина; 6—поршень; 7 — наклонная шайба; 8. 9 — винты
минимальной и максимальной производительности насоса
Всережимные системы автоматического регулирования частоты
вращения не имеют отмеченных выше недостатков. Они работают
в диапазоне от «м. г до «max. В этих системах тоже имеется два
регулятора: рд. K = const и регулятор «. Однако они работают не
последовательно, имея каждый свой диапазон рабочих режимов,
а параллельно. При этом регулятор ря. K = const выполняет как бы
подсобную работу, обеспечивая во всем диапазоне режимов
постоянный перепад давления на дозирующей игле (кране),
положением которой всегда управляет регулятор п. При отказе
регулятора п управление двигателем ведется только с помощью
регулятора рд. к = const.
253
Принципиальная схема всережимной СЛР п с шестеренным
топливным насосом приведена на рнс. 3.105. Топливо после
насоса / подводится к дозирующей игле //, а также к регулятору 13
постоянного перепада давлений на дозирующей игле. В данной
системе регулятор ра. „=consl выполнен без усилителя, как это
3
11 10
Рис. 3.105. Принципиальная схема вссрежнмного регулятора частоты
вращения:
1 — насос; 2 — центробежные грузики; 3 — кулачок; « — заслонка; 5 клапан постоянного
давления; 6, 12. « — жиклеры; 7 - дроссельный пакет; 8 — поршень- 9 — поршень
дозирующей иглы; 10 — втулка: // — дозирующая игла; 13— регулятор постоянного перепада
было в схеме, показанной на рис. 3.102. Такие регуляторы
называются ре гулятор а м и прямого действия. Золотник
регулятора 13 перемещается для перепуска избытков топлива на
слив под действием только перепада давлений топлива. Под
золотник подведено давление рф, над золотником действует
давление р„. Пружиной определяется заданный перепад давлений на
дозирующей игле ря „. 3.
Положением дозирующей нглы //, а следовательно, подачей
топлива в двигатель управляет регулятор п. В измерительном
устройстве сила от центробежных грузиков 2, пропорциональная
частоте вращения ротора двигателя п, сравнивается с силой
пружины, пропорциональной п3. Затяжка пружины производится по-
264
WWH.VUhU-1..^ .1 - -. «J* ..Ulllll pjh.ailll..
средством кулачка 3, связанного с РУД. В случае если (п—п3)ф(>,
управляющая заслонка 4 отходит от прежнего положения,
вследствие чего изменяется давление в полости Б гидроци.шидра.
Поршень 9 будет перемещаться, изменяя подачу топлива в двигатель.
Данный регулятор реагирует на изменения п3 летчиком и п
двигателя вследствие изменения высоты или скорости полета.
Рассмотрим в качестве примера работу регулятора при
увеличении летчиком Пз- Пусть РУД перемещен вперед с целью
увеличения режима работы двигателя. В этом случае сила пружины
стала больше силы от центробежных грузиков, заслонка 4
переместится вверх. Расход жидкости из канала в уменьшится, а так
как приток ее от клапана постоянного давления 5 через жиклер 6
продолжается, то давление в канале в вырастет. Через
дроссельный пакет 7, а также благодаря перемещению вниз поршня 8
повышение давления распространится па полость Б. Поршень 9
переместится влево, площадь проходного сечения между втулкой 10
и иглой // увеличится. Подача топлива в двигатель увеличится,
частота вращения п будет расти до п = п..
Поршень 8 в совокупности с дроссельнымпакетом 7 выполняет
роль корректирующего устройства, не допускающего больших
забросов п двигателя при перенастройке регулятора. На
установившихся режимах корректирующее устройство па работу регулятора
не влияет.
9.5. АВТОМАТИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ
ВЫХОДНЫМ УСТРОЙСТВОМ И ПОДАЧЕЙ ТОПЛИВА
В ФОРСАЖНУЮ КАМЕРУ
На рис. 3.100 показана схема автоматических систем ТРДФ.
Видно, что три регулятора воздействуют на работу одного
двигателя и, следовательно, они взаимосвязаны через объект
регулирования (двигатель). Посмотрим, как осуществляется эта связь
на примере изменения площади критического сечения сопла Fc. Кр.
При уменьшении, например, Fc. кр давление газов за турбиной
вырастет, перепад давлений на турбине я* упадет, мощность
турбины уменьшится, частота вращения ротора двигателя л начнет
уменьшаться. Это уменьшение «почувствует» регулятор п,
который увеличит количество топлива GT до восстановления
прежней п, однако при этом вырастет температура газов перед
турбиной 7"j." (и соответственно — за турбиной Г*). При увеличении
Fc. нр происходит обратная картина— 7^ снижается. Таким
образом, путем изменения Fc. кр можно управлять температурой
газов.
Аналогичное прикрытию сопла влияние на к* оказывает
подача топлива в форсажную камеру (если площадь сопла
оставить неизменной): чем больше подача топлива Gr. ф, тем больше
давление за турбиной, тем выше Т* перед турбиной. Следует
265
сказать, что ни практике повышение 7** при включении
форсажной камеры обычно не допускается; этого достигают путем
соответствующего открытия сопла.
Рассмотрим принципы построения САР выходного устройства
н САР подачи топлива в форсажную камеру.
Программные системы управления выходным устройством.
Автоматика сопла обеспечивает изменение площади Fc. кр в
зависимости от режима работы и условий полета в соответствии с про-
&£.
f»
\Fc«P
Регулятор
Регулятор
—>
L--*
1 >
'с.кр
ТРД
Рис. 3.106. Функциональная схема САР л и САР сопла
граммой управления, которая выбирается из условия
поддержания нужных температуры газа перед турбиной, запаса
устойчивости компрессора и времени приемистости двигателя.
Зная изменение параметров двигателя и площади сопла по
режимам работы двигателя, можно найти зависимость между Fc. кр
и одним из параметров, характеризующих режим работы
двигателя и полетные условия. Такими параметрами могут быть -*, п
нли Пчрив, арУд и другие параметры. Система управления соплом
по заранее составленной программе изменения fc. кр в зависимости
от одного из указанных параметров называется программной
системой. Рассмотрим в качестве примера САР сопла по
"руд-
На рис. 3.106 приведена функциональная схема
автоматической системы, включающей замкнутый контур САР п и
программную САР сопла. В программно-задающее устройство (ПЗУ)
закладывается программа изменения Fс. кр, обеспечивающая
заданное изменение температуры Г* при дросселировании
двигателя. При этом площадь сопла может изменяться как плавно,
непрерывно, так и ступенчато. Естественно, что при ступенчатом
изменении Fc. кр система управления получается более простой,
ио более далекой от оптимальной.
На рис. 3.107 показана упрощенная принципиальная схема
программной САР сопла с электрическим ПЗУ. При перемещении
РУД передвигается ползунок задающего реостата /, являющегося
одним из плеч электрического мостнка. Равновесие плеч мостика
нарушается. Поляризованное реле 2 реагирует на направление и
266
www.vokb-la.spb.ru - Самолёт своими руками?!
величину тока рассогласования и включает в зависимости от этого
в гидроусилителе 3 правый или левый электромагнит. Например,
при перемещении РУД на прикрытие сопла включается правый
электромагнит. Его сердечник перемещается влево, открывая
шариковый клапан. Гидросмесь от насоса поступает в правую
полость гидроцилиндра 4 и перемещает его поршень влево. Створки
Рис. 3.107. Принципиальная схема программной САР сопла:
/ — задающий реостат; 2 — поляризованное реле; 3 — гидроусилитель; 4 —
гидроцилиндр: 5 — реостат обратной связи
сопла будут идти на прикрытие, причем до тех пор, пока будет
существовать сигнал рассогласования Д/7С = /Гс. кр — Fc_ кр. э
(рис. 3.106). На схеме 3.107 обратная связь осуществляется
посредством реостата обратной связи 5, размещенного в одном из
штоков поршней гидроцилиндров 4.
Замкнутые автоматические системы управления выходным
устройством (соплом). САР сопла, если она выполнена по замкнутой
относительно 7^ схеме, называют иногда САР температуры
газа. На рис. 3.100 показана именно такая автоматическая
система, хотя иепосредственно замеряется температура газов не
перед турбиной, а за турбиной — Т*. Любое отклонение
температуры газа 7"* от заданного значения 7** 3 устраняется
регулятором 7"* путем воздействия на площадь сопла Fc. кр. Управление
режимами производится от РУД через механизм объединенного
управления, который на пониженных от максимального (на дрос-
267
сельиых) режимах выдает Г* а в зависимости от п так, чтобы при
этом обеспечивался Суат1„.
Достоинством данной замкнутой системы является высокая
статическая точность поддержания температуры газа, что важно,
так как это сильно влияет на прочность рабочих лопаток. В то же
время при создании такой системы возникают большие трудности
при обеспечении требуемых динамических свойств (при разгоне).
Это связано как с большой инерционностью термопар, с помощью
которых замеряется Т", так и со взаимным влиянием (через
объект—двигатель) друг на друга САР я и САР температуры газа.
В связи с отмеченными недостатками применяются также
системы управления соплом по другому внутридвнгательному
параметру, который однозначно определяет температуру газа перед
турбиной. Таким параметром является степень расширения газа
на турбине =■*. Если n = consl; 7^ = const, а перепад давлений на
выходном устройстве сверхкритический, то Т*г изменяется
пропорционально jt*. Однако в полете Т*н не остается постоянной,
поэтому регулятор сопла должен иметь коррекцию по
температуре Гн.
Автоматические системы подачи топлива в форсажную камеру.
В начале данного параграфа было показано, что подача топлива
в форсажную камеру (ФК), если не принять соответствующих
мер, оказывает влияние на работу турбокомпрессора. В связи
с этим основное внимание при создании регулятора подачи
топлива в ФК уделяется вопросу поддержания в форсажной камере
высокой Т1 без влияния на степень расширения газов на
турбине *■*, т. е. при сохранении давления/;*. Ясно, что для этого САР
нодачи топлива в ФК должна работать в тесной связи с САР
сопла. На рис. 3.100 показана схема автоматики ТРДФ, в
которой САР подачи топлива в ФК является незамкнутой
программной. Незамкнутые программные САР От. ф являются наиболее
простыми по конструкции и надежными в эксплуатации.
На рис. 3.108 показан регулятор подачи топлива в ФК,
осуществляющий регулирование температуры Г1 в зависимости от
давления воздуха за компрессором р*. Обеспечивая сохранение
отношения GT_ ф//;* ss const, регулятор поддерживает примерно
одинаковым коэффициент избытка воздуха а,., а следовательно,
У!»const. Если, например, уменьшилось /;* (из-за роста
высоты или снижения скорости полета), то регулятор
пропорционально уменьшит нодачу топлива GT. ф, следовательно, начнет
уменьшаться и давление за турбиной. Вступят в работу
регулятор п и регулятор Г". Последний уменьшит площадь сопла Fc. кр,
обеспечивая Г* ж const.
Для изменения режима работы ФК нужно переставить РУД
в новое положение. При этом регулятор CAP GT. ф перестроится
268
www.vokb-la.spb.ru - Самолёт своими руками?!
на новое значение отношения (GT. ф//?*), ~ const. Одновременно
регулятор сопла изменит площадь сопла Fc. Кр, обеспечивая
поддержание Г* s: const.
Принцип работы регулятора подачи топлива в ФК состоит в
следующем. Воздух из-за компрессора с давлением р*
воздействует на сильфои / н далее через рычаг 2 и ролнк 3 на суммирую-
Выхов Слив
Рис. 3.108. Принципиальная схема регулятора подачи топлива в
форсажную камеру:
/ —сильфон; 2— рычаг. 3 — ролик; 4 — рычаг, соединенный с РУД; 5 -рычаг-заслон,
ка: 6 — пружина обратной связи; 7 — управляющая полость; 8 — дозирующая игла
щее устройство — рычаг 5. Положение ролика 3, являющегося
местом передачи сил от рычага 2 на рычаг 5, меняется в
зависимости от положения РУД. На рычаг 5 действует также сила от
пружины 6 обратной связи, соответствующая действительному
положению дозирующего устройства (иглы 8). Таким образом,
давление в полости 7 и, следовательно, положение дозирующего
устройства определяется двумя факторами: р* и яруд. На игле 8
поддерживается постоянный перепад давления регулятором,
аналогичным показанному на рис. 3.101 и 3.102.
9.6. АВТОМАТИЗАЦИЯ ПРОЦЕССОВ РАЗГОНА
И ЗАПУСКА ГТД
Автоматизация приемистости. Для обеспечения высоких
маневренных свойств самолета желательно, чтобы изменение тяги
двигателя следовало за изменением положения РУД без
запаздывания. На практике изменение тяги несколько отстает от
изменения положения РУД. Это происходит вследствие большой инер-
269
I
ционности ротора ГТД, а также вследствие того, что нельзя резко
увеличивать подачу топлива в КС.
Способность ГТД к изменению режима работы называется
приемистостью. Приемистость обычно оценивают временем
разгона двигателя от «м.г до итах. У современных ТРД это
время составляет 3—10 с.
Для обеспечения малого времени приемистости необходимо
получить на роторе максимально возможный избыточный крутящий
момент (Мг—Мк), который возникает в том случае, если подача
топлива в КС при разгоне значительно превосходит подачу
топлива, потребную для работы на установившихся режимах.
Предельно допустимая подача топлива в процессе разгона
ограничиваегся устойчивостью горения богатой топливом
воздушно-топливной смеси, неустойчивой работой (помпажом)
компрессора н перегревом турбины. Рассмотренные выше автоматические
системы подачи топлива в основную КС не могут обеспечить
оптимальную для разгона подачу топлива, так как они предназначены
для стабилизации заданных режимов и потому выполняются
быстродействующими.
Задача обеспечения оптимальной подачи топлива в двигатель
при разгоне возлагается на автоматы приемистости. Автоматы
приемистости (АП) делятся на две группы: программные по
времени (временные) АП и АП, работающие по внутрндвигательным
параметрам (ипр, /?*, я* и т. п.).
Принципиальная схема временного автомата приемистости —
замедлителя перенастройки регулятора частоты вращения
—показана на рис. 3.109. Замедлитель перенастройки регулятора п
устанавливается между РУД и механизмом настройки регулятора.
Его задача — производить затяжку пружины 10 регулятора п
с определенной скоростью, соответствующей допустимой для
разгона подаче топлива, как бы быстро не был переставлен РУД.
Замедлитель состоит из управляющей втулки 13, связанной с
РУД, которая может перекрывать отверстие 2 выхода топлива из
полости Б поршня 4, при движении которого через рычаг 8 может
быть изменена затяжка пружины 10 регулятора п, и двух
дроссельных пакетов 5 и 9.
На установившихся режимах замедлитель не влияет на работу
регулятора. Топливо от клапана постоянного давления // через
дроссельный пакет 9 поступает в полость Б и выходит из нее
через дроссельный пакет 5 и частично открытое отверстие 2. При
этом элементы замедлителя занимают вполне определенное
положение. Сила, возникающая на поршне 4 от перепада давлений в
полостях А и Б, уравновешена силой пружин 3 и 10.
При быстром перемещении РУД на увеличение режима
втулка 13 продвинется по штоку поршня 4, закроет отверстие слива 2
и остановится. Давление в полости Б будет расти, поршень 4
пойдет вправо, увеличивая затяжку пружины 10 и перемещая
отверстие 2 относительно края втулки 13. Движение поршня 4
270
www.voib-la.spj.ru - Самолёт своими руками?!
вправо прекратится тогда, когда часть отверстия 2 выйдет из
втулки 13 и снова начнется слив из полости Б. Время, прошедшее
с момента перемещения РУД (втулки 13) до окончания
движения поршня 4, и есть время задержки перенастройки регулятора п.
Это время определяется объемом полости Б и производительностью
дроссельного пакета 9. Задержка перенастройки регулятора п
Рис. 3.109. Принципиальная схема временного автомата приемистости:
/ — рычаг управления, i — шперстне слива; 3, 4 — пружина и поршень гидрозаыедлитсля;
5. S — дроссельные пакеты, б — впит: 7 —винт регулировки пюзк; в рычаг; 10 — пружина
регулятора п: 11 — клапан постоянного давления; 12 — винт регулировки лцдр: 13 —
управляющая втулка: 14 — дроссельный кран
приведет к замедлению роста подачи топлива в двигатель.
Дроссельный пакет 5 служит для замедления перенастройки
регулятора п при снижении режима.
Рассмотренный АП не имеет коррекции по высоте и скорости
полета, поэтому он обеспечивает оптимальные разгонные
характеристики только для определенных условий полета. Обычно для
земных условий время разгона завышено.
Автоматизация запуска. Процесс запуска современных
авиационных ГТД полностью автоматизирован. Автоматические
системы запуска обеспечивают включение, вывод на расчетный ре- J
жим и выключение стартера, включение и выключение запальных I
устройств, управление подачей топлива при запуске через основ- ||
ные форсунки вплоть до выхода иа режим малого газа,
включение и выключение подпитки кислородом.
271
i
К форсункам
Согласование при запуске работы различных автоматических-
устройств осуществляется с помощью автоматической панели
двигателя (АПД). Согласование проводится по времени, частоте
вращения роторов двигртетя и стартера и другим параметрам. АПД
является электрическим
устройством.
Рассмотрим вопросы
автоматизации подачи топлива при
запуске через основные топливные
форсунки.
Запуск — это
неустановившийся процесс, поэтому
топливные автоматы запуска (ТАЗ)
строятся на тех же принципах, что
и автоматы приемистости. ТАЗ
могут быть программными,
временными и могут работать по
внутридвигательным параметрам.
Широкое распространение
получили, например, так называемые
пневматические ТАЗ,
выполненные как ограничители давления
топлива перед форсунками
прямого действия с переменной
настройкой по (р'к ~pl).
На рис. 3.110 приведена
схема пневматического ТАЗ. В
процессе запуска под действием сил давления топлива перед
форсунками открывается золотник / автоматического распределителя
топлива по контурам форсунок, и топливо может поступать к
форсункам основной КС. Одновременно топливо с давлением рф через
жиклер 5 подводится к соплу 4, закрываемому клапаном слива 2.
Клапан 2 управляется мембраной 3, на которую действуют силы,
обусловленные давлениями воздуха р*к и /?*. В начале запуска,
когда давление за компрессором />* мало, клапан 2 открыт почти
Полностью и перепускает на слив большую часть топлива. По
мере раскрутки ротора двигателя давление воздуха за
компрессором р* растет, следовательно, нужно увеличить и подачу
топлива. Давление />*, действуя на мембрану 3, перемещает клапан 2
вниз, уменьшая слив, подача топлива в двигатель увеличивается.
На режиме, несколько меньшем им г, клапан 2 закрывается
полностью и в дальнейшем не оказывает влияния на работу других
автоматических устройств.
Рис. 3.110. Принципиальная схема
пневматического автомата запуска:
/ — золотник APT; 2 — клапан слива;
3 — мембрана; 4 — сопло слива; 5 —
жиклер
www.vokb-la.spb.ru - Самолёт своими руками?!
РАЗДЕЛ IV
ИНЖЕНЕРНО-АВИАЦИОННАЯ СЛУЖБА
И ОРГАНИЗАЦИЯ ЭКСПЛУАТАЦИИ
АВИАЦИОННОЙ ТЕХНИКИ
Глава 1
НАЗНАЧЕНИЕ И ЗАДАЧИ ИНЖЕНЕРНО-АВИАЦИОННОЙ
СЛУЖБЫ
Инженерно-авиационная служба (НАС), являясь
неотъемлемым составным элементом авиационной части, предназначена для
содержания авиационной техники в исправности и готовности к
применению, для обеспечения безотказной ее работы в полете и
высокой эффективности применения.
Инженерно-авиационная служба осуществляет техническую
эксплуатацию авиационной техники (AT), се ремонт и
инженерно-техническую подготовку личного состава частей.
Техническая эксплуатация AT включает подготовку к
применению и технически грамотное применение ее в полете,
выполнение регламентных работ, войсковой ремонт и хранение авяацион-
ной техники.
При подготовке авиационной техники к полету проводится:
контроль исправности и готовности ее к безотказной работе в
предстоящем полете, программирование полета (ввод исходных
данных в соответствии с заданием на полег), настройка
оборудования для выполнения полетной задачи, снаряжение
авиационной техники в соответствии с заданием на полет.
Эксплуатация летательного аппарата в полете включает:
подготовку к применению средств выполнения полетной задачи,
контроль работоспособности оборудования, управление системами ЛА
(бортинженером, борттсхником).
При выполнении регламентных работ на AT проводится
определение и прогнозирование ее технического состояния на
межрегламентный срок, восстановление надежности и
межрегламентного ресурса.
Ремонт AT производится для восстановления ее
работоспособности и ресурса. Войсковой ремонт — комплекс работ,
проводимых инженерно-техническим составом авиационных частей по
восстановлению исправности и работоспособности авиационной
техники. Восстановление ресурса авиационной техники производится
при проведении заводского ремонта.
273
Хранение AT кратковременное (до бдного года) и длительное
(более года) включает: подготовку к хранению, консервацию,
проведение работ в процессе хранения (осмотры, работы по уходу,
облеты и др.), расконсервацию и подготовку ее к использованию
по назначению.
Инженерно-техническая подготовка проводится для
совершенствования знаний и навыков личного состава
инженерно-авиационной службы авиационных частей в применении, эксплуатации и
ремонте авиационной техники, обучения летного состава
эксплуатации авиационной техники в воздухе и на земле.
Для улучшения боевых качеств авиационной техники ИАС
разрабатывает предложения по повышению эффективности ее
применения и расширению боевых возможностей, повышению ее
надежности и улучшению других эксплуатационных характеристик.
Рассмотрим некоторые понятия, определения и краткое
содержание основных мероприятий, проводимых личным составом
инженерно-авиационной службы для решения возлагаемых иа ИАС
задач.
Большинство мероприятий, проводимых ИАС, направлено на
обеспечение высокой боеготовности авиационной техники.
Боеготовность AT определяется ее исправностью, запасом ресурса и
временем, потребным на подготовку к применению.
Количество исправных самолетов должно быть не менее
установленного от списочной численности. При этом средний остаток
межремонтного ресурса всех самолетов и авиационных двигателей
должен быть не менее требуемого.
Исправным считается самолет, на котором выполнены
предусмотренные регламентом технической эксплуатации работы,
устранены обнаруженные в полете н при осмотрах неисправности
и имеется запас ресурса (не менее необходимого для полета на
максимальную дальность). Для приведения в боеготовое
состояние исправный самолет должен быть подготовлен к полету и
снаряжен согласно поставленной задаче.
Основой в работе ИАС по обеспечению высокого уровня
исправности авиационной техники является точное выполнение
каждым авиационным специалистом правил эксплуатации i ремонта.
Это, прежде всего, качественное и в срок выполнение па AT всех
работ, предусмотренных регламентом технической эксплуатации,
своевременное предупреждение, обнаружение н устранение
отказов и неисправностей, недопущение поломок на земле, простоя
самолета в неисправном состоянии из-за несвоевременно
выполняемых работ по замене агрегатов, выработавших ресурс, и др.
Учет, анализ неисправностей авиационной техники, разработка
и проведение мероприятий по их предупреждению одна из
важных задач в деятельности ИАС по обеспечению высокого уровня
исправности и надежности AT. На каждый отказ, неисправность
авиационной техники составляется карточка учета
неисправностей. В практике '.асто наблюдаются случаи, когда без
проведения специальных исследований трудно, а порой и вообще невоз-
274
www.vokb-la.spb.ru - Самолёт своими руками?!
можно определить причины возникновения отказа той или иной
детали или агрегата AT. В таких случаях неисправная деталь
направляется на исследование в специальную лабораторию с целью
установления истинной причины отказа.
На основе материалов исследования производится разработка
рекомендаций по предупреждению причин возникновения отказов
авиационной техники. Такие рекомендации могут быть
разработаны как для строевых частей, так и для изготовителей и
проектировщиков авиационной техники.
Борьба за сокращение сроков подготовки AT к применению
проводится по нескольким направлениям, так как основными
факторами, определяющими необходимое время для ее подготовки
к полету, являются:
эксплуатационная технологичность — приспособленность
самолета к выполнению работ по технической эксплуатации с
минимальными затратами времени;
объем работ, выполняемых на каждом самолете;
степень механизации и автоматизации процесса подготовки;
количество, расстановка и квалификация технического
состава, участвующего в подготовке;
количество и характеристики средств наземного обслуживания,
применяемых при подготовке;
принятый метод подготовки и совершенство ее организации
и др.
Одним из важнейших направлений по сокращению времени
подготовки авиационной техники является механизация и
автоматизация выполняемых работ. Как известно, любая механизация
облегчает труд и сокращает сроки выполнения работ. Так
сложилось, что погрузочно-разгрузочные работы и заправка
самолетов горючим и смазочными материалами в значительной
степени механизированы. Однако многие трудоемкие работы,
связанные с подготовкой авиационной техники к полетам, в настоящее
время частично механизированы. Часть проверок выполняется
визуально или вручную (проверка крепления деталей, затяжка
гаек, винтов и др.). Трудности возникают при съемке и установке
подвесных баков, при очистке самолета после посадки на
грунтовой аэродром с размокшим грунтом, при съемке, разборке и
монтаже колес шасси для замены пневматиков колес.
Автоматизация процессов подготовки повышает
производительность труда специалистов. Например, заправка тяжелых
самолетов топливом занимает определенное время, при этом
затрачиваются силы и время на перенос шлангов с заправочными
пистолетами от одной заправочной горловины к другой, необходим
визуальный контроль за уровнем топлива в баках во избежание
перелива. Внедрение централизованной заправки под давлением
позволяет освободить несколько специалистов от этой операции,
так как такая заправка осуществляется через одну точку, а
контроль за последовательностью и уровнем заправки обеспечивается
автоматически.
275
Дальнейшая механизация и автоматизация трудоемких работ
и контроля состояния AT при подготовке к полетам позволит
значительно сократить сроки подготовки, а также повысить
эксплуатационную надежность.
Автоматизация процессов контроля состояния агрегатов,
систем и оборудования самолетов является тем средством, которое
обеспечивает объективный контроль и быстрый поиск
неисправностей. Современные наука и техника позволяют создать
автоматические (автоматизированные) системы контроля, способные
решать такие задачи, как обеспечение высокой объективности
контроля, существенное сокращение времени на проверку
оборудования, быстрое отыскание мест повреждения с указанием
мероприятий по устранению неисправностей, возможность
прогнозирования надежности систем и элементов.
Обучение личного состава знанию авиационной техники,
правилам ее технической эксплуатации и ремонта — важнейшее
направление в работе ИАС. Выполнение этой задачи в частях
производится путем организации систематического обучения всего
личного состава. Процесс обучения рассчитан на то, чтобы
каждый авиационный специалист имел достаточные знания по теории
и конструкции авиационной техники и умел применить их на
практике. В частях постоянно проводится инженерно-техническая
подготовка, которая обеспечивает качественное выполнение задач,
стоящих перед частями. Инженерно-техническая подготовка
проводится в форме самостоятельной работы, классно-групповых и
практических занятий, учебных сборов, технических разборов,
семинаров и конференций, а также путем индивидуального
обучения в процессе работы на авиационной технике.
Технические знания и практические навыки специалистов ИАС
проверяются по окончании переучивания и стажировки, при
допуске к самостоятельной эксплуатации AT, при длительных
перерывах в работе на авиационной технике, а также в случае
грубых нарушений правил ее эксплуатации.
Большое внимание в деятельности ИАС уделяется вопросам
организации контроля за соблюдением личным составом
установленных норм и правил эксплуатации и ремонта авиационной
техники. Основой в организации и проведении контроля за
соблюдением установленных норм н правил эксплуатации и ремонта
AT является многоступенчатая система контроля всеми
должностными лицами инженерно-авиационной службы за работой и
деятельностью своих подчиненных. Состояние авиационной техники
и соблюдение правил ее эксплуатации проверяют механики,
техники и вышестоящие руководители ЙАС в соответствии с
инструкцией но эксплуатации н регламентом технической
эксплуатации данного типа самолета. В систему технической 3Ko^ayaTaj
ции внедрен пооперационный контроль, предусматривающим
обязательную проверку правильности выполнения отдельных
операций вышестоящими авиационными специалистами в ходе
выполнения данной работы. Главным при контроле правил технической
276
www.vokb-la.spb.ru - Самолёт своими руками?!
эксплуатации AT является проверка выполнения требований
регламентов технической эксплуатации и технологий выполнения
работ.
Эксплуатация самолета и его оборудования осуществляется
специалистами различных профилей подготовки. Эксплуатация
бортовых комплексов производится специальными группами
подготовки и группами регламентных работ, которые формируются
из специалистов ИАС различного профиля в соответствии с
составом бортовых комплексов. Эксплуатация бортовых
комплексных систем, ие входящих в состав бортового комплекса,
производится группами подготовки и регламентных работ
соответствующих специальностей или специальными группами.
При выполнении задач по сбережению авиационной техники
должны учитываться условия ее размещения и эксплуатации,
а также климатические особенности района базирования.
Различные климатические условия, воздействующие на AT в процессе
ее эксплуатации и хранения, могут вызывать разрушение
защитных покрытий, появление коррозии, структурные изменения в
материалах, изменять механические свойства отдельных деталей,
а также характеристики и работоспособность некоторых
агрегатов, оборудования.
Под действием влаги и солнца лакокрасочные покрытия
разрушаются, растрескиваются, омеляются, коробятся.
При изменении температуры происходит конденсация паров,
содержащихся в воздухе. Влага и частицы пыли, осаждаясь на
металлических изделиях, вызывают в них коррозию. Наиболее
распространенной причиной коррозии является совместное
действие на детали и агрегаты влаги, пыли и промышленных газов,
находящихся в воздухе. Наличие во влаге солей, кислот и
щелочей сильно влияет на развитие электрохимической коррозии.
Коррозия причиняет наибольший вред. Поэтому борьбе с ней и
мероприятиям по ее устранению и предупреждению нужно уделять
большое внимание. Под вредным действием солнечной
радиации— ультрафиолетовых лучей — изменяются свойства
материалов, применяемых для деталей остекления самолета. На солнце
прозрачные пластики мутнеют, приобретают иную окраску,
растрескиваются.
При низких температурах уменьшается упругость резиновых
изделий и их сопротивляемость износу. Резина становится
хрупкой, ухудшаются ее уплотнительные свойства. Попадание влаги
и пыли в топливную, гидравлическую, пневматическую и другие
системы самолета может вызвать отказы в работе отдельных
агрегатов этих систем.
Уход за авиационной техникой во время эксплуатации и
храпения должен способствовать тому, чтобы се летно-технические
качества не ухудшались и работоспособность всех механизмов и
агрегатов не нарушалась. Необходимо помнить, что детали
конструкции самолета меньше разрушаются от коррозии, когда он
постоянно летает, и, наоборот, быстрее разрушаются, если не ле-
277
тает. Поэтому за самолетами, которые мало летают, уход и
контроль должны быть усилены. При длительных перерывах в
полетах самолеты для сохранности подвергаются консервации.
Обобщение и распространение передового опыта
эксплуатации и ремонта авиационной техники является одним из важных
направлений в работе ИАС для повышения мастерства и
квалификации инженерно-технического состава. Обобщением опыта
работы инженерно-технического состава и распространением
передового опыта должны заниматься все должностные лнца ПАС.
Большая работа в этом направлении проводится
централизованно: издаются информационные бюллетени, сборники материалов
но опыту эксплуатации отдельных типов авиационной техники
и др.
Развитие авиационной науки и техники в послевоенный период
привело к появлению на вооружении авиации реактивных
самолетов с более сложной конструкцией планера и двигателя, а
также со сложным радиотехническим, специальным и авиационным
оборудованием. Произошло резкое увеличение трудоемкости
технического обслуживания самолетов. Существующий экипажный
принцип организации обслуживания авиационной техники
затруднял внедрение прогрессивных методов организации труда
инженерно-технического состава и рациональное использование средств
инструментального контроля. Это потребовало введения так
называемой групповой системы технического обслуживания и ремонта
авиационной техники. Сущность организации ИАС части по этой
системе заключалась в создании специализированных групп для
выполнения определенных работ на авиационной технике.
Для выполнения регламентных работ, мелкого ремонта и
некоторых доработок в авиационных частях были созданы
специальные подразделения — технико-эксплуатационные части (ТЭЧ),
в состав которых вошли группы регламентных работ по
специальностям и слесарно-механическая группа. Для выполнения
работ по подготовке самолетов к полету в авиационных
подразделениях были созданы группы обслуживания. Такая организация
ИАС повысила ответственность за все работы по технической
эксплуатации авиационной техники, привела к повышению
качества выполняемых работ и снижению трудозатрат.
В настоящее время применяются три основных метода
технической эксплуатации авиационной техники: ноэкнпажный, груп
повой и смешанный.
Поэкьпажный метод заключается в том, что для
проведения всех видов работ по технической эксплуатации самолет
закрепляется за наземным техническим экипажем, который
возглавляет техник самолета. В состав технического экипажа, как
правило, входят специалисты всех профилей: по самолету и
двигателю, авиационному и радиотехническому оборудованию и ДР-
Количество и квалификация их зависят от сложности и объема
работ по обслуживанию самолета. Достоинствами этого метода
являются:
278
www.vokb-la.spb.ru - Самолёт своими руками?!
персональная ответственность за сроки и качество подготовки
одного «своего» самолета, отсутствие обезлички;
хорошая сработанность специалистов наземного экипажа друг
с другом и с летиым экипажем, который постоянно летает иа
одном и том же самолете;
глубокое знание специалистами наземного экипажа
индивидуальных эксплуатационных особенностей данного самолета.
Вместе с тем поэкипажпый метод имеет н серьезные
недостатки. К ним относятся необходимость укомплектования каждого
технического экипажа большим количеством разнообразных
специалистов, причем с усложнением авиационной техники число пх
должно иепрерывио увеличиваться; необходимость иметь большое
количество контрольно-измерительной аппаратуры, инструмента и
малый коэффициент их использования; невозможность узкой
специализации и достижения высокой квалификации, так как
технический экипаж сравнительно редко может выполнять
некоторые виды работ (например, регламентные); трудность
обеспечения постоянной и равномерной загрузки специалистов как
внутри экипажа, так и экипажей в целом; невозможность
применять поточные методы обслуживания; трудность организации
маневра силами технического состава и средствами наземного
обслуживания внутри подразделения и особенно в масштабе части;
сложность организации подготовки авиационной техники в ходе
маневра части (при перебазировании).
Групповой метод заключается в том, что
инженерно-технический состав объединен в группы, за которыми обезличенно
закреплены самолеты подразделения. При этом они могут
формироваться либо по целевому назначению — группы
обслуживания, группы регламентных работ, группы контроля, либо по
профилю подготовки специалистов — группы по самолету и
двигателю, группы по авиационному оборудованию и т. п. Для
выполнения некоторых видов работ могут создаваться группы, в
которые входят специалисты различных профилей подготовки.
Количество и состав группы определяются типом и количеством
самолетов, находящихся в части.
Преимущества группового метода технической эксплуатации
авиационной техники перед поэкипажным следующие:
более рациональное и с большим коэффициентом загрузки
использование специалистов и средств наземного обслуживания,
возможность маневрирования ими в масштабе части;
лучшая приспособленность к применению поточных методов
работы специалистов;
большая возможность узкой специализации отдельных лиц при
выполнении работ по подготовке самолетов к полету, выполнению
регламентных и ремонтных работ.
Недостатком группового метода является некоторая
обезличка— самолет не закреплен за конкретным лицом технического
состава. Это приводит к тому, что данные об индивидуальных
особенностях каждого самолета в одном месте не накапливаются,
279
контроль за тенденциями в изменении технического состояния
самолета затрудняется.
В связи с этим в настоящее время в частях ВВС широко
распространен смешанный метод технической эксплуатации AT,
при котором часть специалистов представляет технический
экипаж, за которым закреплен самолет (как правило, это техник и
механик самолета), а другая находится в группах. Такой метод
позволяет использовать достоинства поэкипажпой и групповой
систем и избежать их недостатков.
С поступлением на вооружение новых самолетов по-новому
ставится вопрос об эффективности использования авиационной
техники и экономичности ее эксплуатации. Поэтому организация
НАС непрерывно развивается и совершенствуется.
Глава 2
ОРГАНИЗАЦИЯ ЭКСПЛУАТАЦИИ И ВОЙСКОВОГО
РЕМОНТА АВИАЦИОННОЙ ТЕХНИКИ
2.1. РАЗМЕЩЕНИЕ АВИАЦИОННОЙ ТЕХНИКИ И СРЕДСТВ
НАЗЕМНОГО ОБСЛУЖИВАНИЯ
Территория аэродрома, где находятся самолеты, наземное
оборудование и служебпо-тсхнические помещения ИАС образует
стоянку самолетов.
На аэродроме кроме мест стоянок самолетов создаются и
оборудуются технические позиции, помещения для работы личного
состава ИАС, а также помещения и места для хранения
эксплуатационного инвентаря, съемного оборудования и т. п.
На стоянке авиационного подразделения должны быть
предусмотрены места для размещения средств наземного обслуживания,
хранения имущества группового пользования, емкости для сбора
использованной ветоши. Для проверки работы авиационных
двигателей иа максимальных и форсажных режимах на стоянках
оборудуются специальные газовочные площадки.
При размещении самолетов на групповых стоянках должны
соблюдаться определенные интервалы между концевыми
обтекателями крыльев рядом стоящих самолетов (осями винтов
вертолетов) .
На стоянке самолета размещается эксплуатационное
оборудование индивидуального пользования: верстак или контейнер для
хранения инструмента, приспособлений, стеллажи, подставки,
подъемники, буксировочное приспособление, стремянки и т. п.
Размещение этого имущества должно быть в строгом соответствии
с установленным единым для части порядком, который должен
280
www.vokb-la.spb.ru - Самолёт своими руками?!
обеспечивать удобство и безопасность работы личного состава,
безопасность выруливания (зарулнвания) самолетов и
сохранение AT.
Самолеты содержатся на стоянке в зачехленном виде. При
этом кабины и все люки надежно закрываются и устанавливаются
все съемные заглушки. Посадочные и тормозные щитки
устанавливаются в положение УБРАНО, рули и элероны закрепляются
стопорными устройствами или струбцинами, а самолет
заземляется. Съемные заглушки, струбцины, швартовочные
приспособления, чехлы приемников воздушного давления окрашиваются в
яркий, чаще всего в красный цвет и маркируются номером самолета
с целью их четкого обозначения. Кроме того, с целью исключения
случаев выпуска в полет самолетов с неснятыми чехлами их
(чехлы) соединяют лентами между собой и с заглушкой входного
устройства.
Открытые стоянки легких самолетов и вертолетов должны
быть оборудованы швартовочными устройствами,
обеспечивающими безопасность AT при сильном ветре.
В целях обеспечения противопожарной охраны самолетов на
стоянке и специальных помещений, предназначенных для
производства работ и хранения оборудования, на каждой стоянке
самолетов подразделения устанавливаются не менее одной
передвижной углекислотной установки возимых огнетушителей, а
также ручные углекислотные огнетушители из расчета не менее
одного иа каждый самолет.
Стоянка самолетов должна содержаться в чистоте и
систематически очищаться от сухой трави, мусора, ветоши, снега и
грязи.
Для обеспечения противопожарной безопасности запрещается:
запускать авиационные двигатели без средств пожаротушения;
оставлять без надзора работающие средства подогрева;
проливать горючее и смазочные материалы;
производить заправку горючим без заземления самолетов и
заправочных средств;
курить вне мест, специально отведенных для этой цели;
допускать на аэродром к обеспечению авиационной техники
спецавтомобили без средств пожаротушения;
разжигать паяльные лампы и средства подогрева авиационных
двигателей на близком расстоянии от самолета и ангаров.
В ангарах запрещается:
загромождать проходы и подступы к противопожарному
инвентарю, устанавливать наземное и другое оборудование вне мест,
специально отведенных для этой цели;
при заправке самолетов топливом допускать какие-либо
работы, связанные с ценообразованием;
разжигать горелки, паяльники и подогреватели;
хранить промасленную ветошь, смазочные материалы,
баллоны с кислородом и снятые с самолета аккумуляторы;
производить какие-либо работы без средств пожаротушения.
т
Таким образом, все работы на авиационной технике иа
стоянках, в ангарах должны проводиться при условии строгого
соблюдения мер противопожарной безопасности.
2.2. ОРГАНИЗАЦИЯ ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
АВИАЦИОННОЙ ТЕХНИКИ
Для обеспечения безотказности работы AT, выпуска в полет
исправных и подготовленных согласно заданию самолетов
существует система различных видов подготовок и контроля ее
технического состояния.
Работы иа авиационной технике выполняются личным
составом ИАС в дни полетов, предварительной подготовки и в
парковые дни. Периодический осмотр является углубленным видом
контроля технического состояния самолетов. Он проводится
руководящим инженерно-техническим составом в объеме и сроки,
устанавливаемые регламентом технической эксплуатации. Назначение,
содержание и организация различных видов подготовок,
парковых дней, регламентных работ и доработок авиационной техники
рассмотрены в следующей главе.
Продолжительность выполнения всех видов подготовки к
полетам и регламентных работ для конкретных типов AT
определяется на основании директивных или типовых норм времени
с учетом конкретных условий обстановки, квалификации личного
состава, наличия материальных средств. Установленные сроки
должны обеспечивать качественное выполнение работ в полном
объеме требований руководства (инструкции) и регламента
технической эксплуатации при высокой интенсивности работы
специалистов. При этом объем работы, поручаемой специалисту ИАС
иа авиационной технике, должен составлять технологически
завершенную операцию и обеспечивать выполнение им начатой
работы до конца в течение дня (смены).
Недопустимо поручать выполнение иа самолете работ, не
оконченных одним специалистом, другому при проведении
предполетной подготовки и подготовки к повторному полету. В случае
крайней необходимости подготовка самолета к полету должна
производиться другим специалистом с повторным выполнением всех
работ. За качество и своевременность выполнения работ на AT
отвечают лица, выполнявшие эти работы. Качество работы на
авиационной технике постоянно контролируют техники самолетов
и другие должностные лица ИАС.
Все работы па самолете выполняются только с разрешения
техника самолета и в его присутствии. О начале и окончании
работ на самолете, а также об обнаруженных неисправностях и их
устранении все специалисты должны докладывать технику
самолета. По завершении работ по подготовке самолета к полету
производятся соответствующие записи в журнале контрольных листов
(в журнале подготовки самолета к полетам). Дополнительные ра-
т
www.vokb-la.spb.ru - Самолёт своими руками?!
боты, выполненные на Самолете, и неисправности, обнаруженные
при осмотре самолета, записываются в журнал учета
неисправностей. Неисправности устраняются после окончания осмотра
самолета. Лица, выполнявшие работы (устранявшие
неисправности), и лица, осуществлявшие контроль, расписываются в
журнале учета неисправностей.
За количество и качество заправляемых жидкостей, газов и
надежность закрытия заправочных устройств отвечают техники
(механики), производящие заправку самолетов. Перед заправкой
самолета необходимо убедиться, что в паспорте (контрольном
талоне) на топливо, масло, специальные жидкости и газы есть
отметки должностного лица ИАС о разрешении на заправку.
Необходимо также проверять по контрольному талону соответствие
поданных к заправке (зарядке) топлива, масла, жидкости, газа
требованиям руководства (инструкции) по эксплуатации данного
типа самолета, исправность раздаточных устройств, заземление
самолета и заправочного средства.
За полноту, качество и своевременность подготовки самолета
к полету отвечает техник самолета, который обязан выполнить на
самолете все работы, предусмотренные его обязанностями, а
также проверить качество работ авиационных техников и механиков
и убедиться в том, что все необходимые работы на самолете вы
полнены и сделаны соответствующие записи в журнале
контрольных листов (журнале подготовки самолета к полетам) и журнале
учета неисправностей самолета.
При выполнении работ по снятию и установке агрегатов,
приборов и узлов, ремонтных и регламентных работ необходимо
принять меры, исключающие попадание инструмента, мелких деталей
(винтов, болтов, гаек, контровочиого материала), рабочих
жидкостей, пыли, дождя, снега на разъемы и в агрегаты
авиационной техники. Для этой цели должны применяться защитные
устройства (сетки, чехлы, ловушки, заглушки).
Агрегаты (блоки, детали), поступившие со складов и баз, для
определения их исправности перед установкой на самолет
обязательно осматриваются или проверяются в ТЭЧ ап.
При выполнении работ на самолете и двигателях недопустимо
класть детали, узлы, агрегаты самолета и двигателей,
посторонние предметы и инструмент на поверхности самолета. По
окончании работ необходимо проверить, ие осталось ли посторонних
предметов в люках, отсеках, на узлах, агрегатах самолета и
двигателей, а также наличие инструмента по описи.
Для сбережения авиационной техники иа стоянке необходимо:
плотно закрывать, а где предусмотрено, и герметизировать
кабины, эксплуатационные люки и различные входные и выходные
устройства самолета; своевременно удалять с самолета и
наземного оборудования снег, лед, грязь, не допускать при работе на
самолете повреждений обшивки и лакокрасочного покрытия,
надежно укрывать самолеты и агрегаты съемного оборудования
чехлами.
283
2.3. ВОЙСКОВОЙ РЕМОНТ АВИАЦИОННОЙ ТЕХНИКИ
В результате различного вида износов, эксплуатационных
повреждении на земле, а также повреждений при применении
авиационная техника нуждается в ремонте. В зависимости от характера
неисправностей и повреждений, определяющих трудоемкость п
содержание ремонтных работ, различают мелкий, текущий, средний
и капитальный ремонт; из них первые три вида (войсковой
ремонт) выполняются непосредственно в авиационных частях и
войсковых ремонтных органах, а последний — в заводских
условиях. К войсковым ремонтным органам относятся авиаремонтные
мастерские (ВАРМ). На указанные мастерские возлагается
задача по быстрому и высококачественному ремонту авиационной
техники. Достигается это тем, что соответствующие мастерские
оснащаются необходимым оборудованием и специалистами.
Рассмотрим краткую характеристику указанных трех видов
войскового ремонта.
Мелкий ремонт самолета заключается в восстановлении его
исправности путем устранения отдельных незначительных
повреждений или неисправностей детален, узлов, механизмов, блоков,
приборов, агрегатов и деталей, выявленных при осмотрах.
При мелком ремонте двигателя устраняют незначительные
повреждения (заварка небольших пробоин, правка, панка, засвер-
ловка трещии), заменяют детали и агрегаты без сложных
регулировок с проведением обычного опробования двигателя. Для
выполнения мелкого ремонта, а также настройки и регулировки
систем летательного аппарата обычно не требуется специального
оборудования, кроме придаваемого к летательным аппаратам и
имеющегося в эскадрилье.
Текущий ремонт самолета заключается в восстановлении его
исправности путем устранения повреждений или неисправностей
отдельных узлов, механизмов, блоков, приборов и агрегатов.
Обнаруженные неисправности устраняют заменой агрегатов или
узлов с последующей регулировкой или выполнением других
незначительных ремонтных работ, ие требующих полной разборки
и применения сложного технологического оборудования. Для
выполнения текущего ремонта необходимы штатная контрольно-
проверочная аппаратура, слесарно-клепалыюе, сварочное и
другое оборудование.
При текущем ремонте двигателя заменяют отдельные узлы,
детали, агрегаты с опробованием двигателя на земле и с облетом
самолета в воздухе. Текущий ремонт агрегата позволяет
устранить незначительные повреждения и неисправности; при этом
могут заменяться отдельные неисправные детали, узлы и
приборы, а также производиться регулировочные, крепежные и
другие ремонтные работы.
К среднему ремонту относят восстановительные работы,
выполняемые через определенное количество часов налета (после
284
www.vokb-la.spb.ru - Самолёт своими руками?!
определенного количества лет эксплуатации) или требующие для
устранения повреждений сравнительно больших трудозатрат. При
этом восстанавливают неисправный ЛА путем неполной разборки,
дефектацнн, ремонта или замены поврежденных или изношенных
деталей, узлов, механизмов, блоков, приборов и агрегатов. В
процессе среднего ремонта проверяют системы, узлы и детали,
разбирают отдельные агрегаты, устраняют люфты и регулируют
зазоры в соединениях.
Средний ремонт двигателя заключается в неполной разборке,
замене или ремонте узлов и деталей, имеющих местные
повреждения, с проведением всех видов регулировок, а также наземных
и летных испытаний по специальной программе.
Основой производственно-технической базы войскового
ремонта являются подвижные контрольно-ремонтные средства (ПКРС),
оснащенные ремонтным оборудованием, контрольно-проверочной
аппаратурой и инструментом. ПКРС закрепляются за
начальниками групп ТЭЧ ап и ВАРМ и специалистами, непосредственно их
применяющими при ремонте авиационной техники.
Подвижные контрольно-ремонтные средства представляют
собой комплекс мастерских, лабораторий, станций и
энергоагрегатов, смонтированных на шасси автомобилей и прицепов. В состав
ПКРС входят, кроме того, легкотранспортабельиые
вспомогательные производственные помещения. Контрольно-ремонтное
оборудование ПКРС обеспечивает проведение ремонтных п
регламентных работ на авиационной технике в полевых условиях.
Подвижные контрольно-ремонтные средства ТЭЧ an и ВАРМ имеют
несколько производственных групп.
Оборудование мастерских предназначено для механической
обработки деталей при ремонте, термической обработки мелких
деталей, вулканизации резиновых изделий. С помощью этого
оборудования производится ремонт деталей и узлов, в основном
планера самолета. Оборудование подвижных средств позволяет
производить токарные, сверлильные, заточные, фрезерные, долбежные,
слесарпо-монтажпые работы, развальцовку труб, термообработку
мелких деталей, определение твердости металлов, магнитную
дефектоскопию, электрогазосварочные, слесарные, клепальные, мед-
иицко-жестяиицкие, кузнечные, швейные, малярные,
деревообделочные работы и гибку труб.
Одни средства позволяют производить ремонт и проверки
агрегатов топливных, пневматических, гидравлических систем,
проверку пусковых форсунок, электроавтоматики двигателя на
соответствие техническим условиям, консервацию изделий, промывку и
сушку фильтров и др.
Другие средства позволяют производить проверку и ремонт
электростартеров, электродвигателей, высокочастотных
преобразователей, электрокоммутациониой аппаратуры, регуляторов
напряжения, электрооборудования самолетов, пилотажио-иавига-
ционного, кислородного оборудования, гироскопических приборов,
285
автопилотов, топливомеров, приборов контроля работы двигателей,
радиостанций, радиокомпасов, радиовысотомеров и др.
Средства энергообеспечения включают источники
электроснабжения, источники питания мастерских сжатым воздухом и
гидроустановки.
Для обеспечения высокого уровня исправности авиационной
техники весь личный состав ИАС авиационных частей и ВАРМ
должен быть подготовлен к выполнению войскового ремонта
летательных аппаратов. С этой целью в авиационных частях
проводится обучение личного состава ремонту и постоянное
совершенствование ремонтных средств.
2.4. ДОКУМЕНТАЦИЯ ИАС
Вся существующая в настоящее время документация ИАС
делится на эксплуатационную, ремонтную (технологическую),
учетную и отчетную. Документация ИАС предназначена для изучения
конструкции, летно-технических данных, правил эксплуатации и
ремонта авиационной техники, учета ее наработки и состояния,
а также для учета работ, выполняемых на авиационной технике
в процессе ее технической эксплуатации и ремонта. Кроме того,
в документации отражаются сведения о перемещении AT, о
передаче ее в другие организации, сведения об отказах и
неисправностях авиационной техники и о содержании работ по их
устранению, о расходе топлив, масел, спецжидкостей, запасных частей
и расходных материалов во время эксплуатации авиационной
техники, производится учет контрольно-измерительной
аппаратуры, оборудования, приспособлении и инструмента, осуществляется
планирование работы личного состава ИАС и др.
Эксплуатационная документация подразделяется на понумер-
ную и типовую техническую документацию. Понумерная
техническая документация включает формуляры самолета и
двигателя и паспорта на агрегаты и оборудование. Основным
эксплуатационным документом является формуляр самолета. Все
остальные документы представляют собой дополнения к формуляру
самолета и прилагаются к нему в качестве его неотъемлемых частей.
Типовая техническая документация разрабатывается и
издается централизованно для данного типа авиационной техники.
Этот вид документации включает технические описания,
инструкции по технической эксплуатации, регламенты технической
эксплуатации и прилагаемые к ним технологии выполнения
регламентных работ, инструкции экипажу самолета, фидерные,
монтажные схемы, альбомы и др.
Ремонтная (технологическая) документация предназначена
для организации правильного выполнения процессов ремонта.
Этот вид документации включает в себя технологии сварки,
пайки, термообработки и других технологических процессов,
применяемых при ремонте любых или конкретных образцов авиацион-
286
www.vokb-la.spb.ru - Самолёт своими руками?!
ной техники. Кроме того, она содержит правила организации
ремонта и контроля выполнения этих правил для данного типа
авиационной техники.
Учетная документация ИАС предназначена для учета данных
о деятельности инженерно-технического состава и состояния
авиационной техники. Оиа является необходимой формой текущей
регистрации основных показателей, характеризующих качество,
эффективность и экономичность эксплуатации AT, деятельность ИАС
и состояние материальных ресурсов авиационной части. Учетная
документация ИАС применяется в форме книг учета,
специальных журналов, рабочих тетрадей, ведомостей и карточек учета.
По назначению эта документация делится на документацию
авиационных подразделений, технико-эксплуатационной части и
документацию должностных лиц авиационных частей.
Содержание и формы всей учетной и отчетной документации
устанавливаются специальным документом. В этих целях
разрабатывается сборник форм учетной, отчетной и рабочей
документации ИАС. В сборнике приведены формы документации ИАС
частей с краткими указаниями о порядке их ведения и
заполнения, а также порядок и сроки представления отчетов и донесений.
Техник самолета лично ведет следующую документацию:
формуляры и паспорта по самолету и двигателям;
журнал подготовки самолета к полету;
карточки учета неисправностей AT;
ведомость учета выработки технического ресурса агрегатов.
Объективность, полнота и оперативность ведения учетной и
отчетной документации позволяют своевременно вырабатывать
мероприятия по совершенствованию эксплуатации и ремонта
авиационной техники, повышению ее надежности и
боеготовности.
Гл ава 3
ПОДГОТОВКА АВИАЦИОННОЙ ТЕХНИКИ К ПРИМЕНЕНИЮ
3.1. НАЗНАЧЕНИЕ И СОДЕРЖАНИЕ РАЗЛИЧНЫХ ВИДОВ
ПОДГОТОВКИ АВИАЦИОННОЙ ТЕХНИКИ К ПОЛЕТАМ
Высокая надежность в полете и готовность авиационной
техники к полетам обеспечиваются принятой системой подготовок,
контроля ее технического состояния, выполнения регламентных
работ, периодических и целевых осмотров.
Подготовка авиационной техники к полетам и контроль ее
состояния осуществляются личным составом ИАС в дни полетов,
предварительной подготовки и парковые дни. Готовность
авиационной техники к полетам обеспечивается несколькими видами
подготовки.
287
В зависимости от того, в каком состоянии находится самолет,
готовят ли его к первому или последующим полетам в данный
летный день или же заблаговременно к очередным полетам, т. е.
в зависимости от задач, объема п характера работы, подготовка
авиационной техники к полетам подразделяется на следующие
виды: предварительную, предполетную, подготовку к повторному
полету и послеполетную подготовку.
Каждая подготовка имеет свое назначение, содержание и
порядок проведения. Однако, несмотря на специфические
особенности каждой подготовки, все они имеют общие элементы, а также
общность методики и организации проведения работ.
К таким общим элементам относятся:
подготовительные работы;
выполнение осмотров;
устранение неисправностей;
заправка (дозаправка) и зарядка топливной, пневматической,
гидравлической и кислородной систем самолета.
Подготовительные работы включают подготовку рабочих мест,
инструмента, настройку контрольно-измерительной аппаратуры,
расчехление, укладку матов и специальных трапов, установку
стремянок, снятие крышек люков и т. п. Объем этих работ
зависит от вида подготовки самолета к полету.
Перед выполнением осмотров наружные поверхности
летательного аппарата, агрегатов, узлов, трубопроводов и проводки
очищают от грязи, пыли и старой смазки. Те же места, где могут
возникнуть трещины, тщательно промывают и протирают чистой
ветошью. Перед началом работ на авиационной технике
необходимо принять меры предосторожности и проверить наличие
средств пожаротушения.
Выполнение осмотров. В подготовку самолета к полету
обязательно входит соответствующий ей вид осмотра. Осмотры
различаются назначением, количеством осматриваемых узлов и
агрегатов, детальностью, временем, а также количеством используемой
контрольно-измерительной аппаратуры. Несмотря на различия,
общими для всех осмотров являются организация их проведения
и методика выполнения. Все осмотры, входящие в подготовки
самолетов к полету, проводятся в строго определенной
последовательности но замкнутому маршруту (рис. 4.1),
устанавливаемому регламентом технической эксплуатации самолета.
Осмотр по маршруту способствует устранению излишнего
передвижения лиц технического состава, проводящего осмотр,
правильному их распределению в зависимости от специальности и
исключению пропуска операций контроля, т. е. более полному,
качественному и быстрому его выполнению.
При осмотрах должны строго соблюдаться все меры
предосторожности. Осмотр самолета и двигателя от начала до конца
проводится техником самолета g привлечением специалистов
групп обслуживания,
238
www.vokb-la.spb.ru - Самолёт своими руками?!
В качестве примера рассмотрим маршрут осмотра самолета-
истребителя. Осмотр начинается с носовой части, с канала
воздухозаборника силовой установки. Особое внимание уделяется
проверке заклепочных швов, целости н состояния крепежных винтов
управляемого конуса. Далее проверяется передняя стойка шасси,
створки закрытия ниш шасси и агрегаты в нише, целость и гер-
Рис. 4.1. Маршрут осмотра самолета.
1 -всасывающие каналы; 2- носовая часть фюзеляжа; 3 — йерхннй
носовой отсек; 4 — носовая стопка шасси; 5 — правая основная стойка
шасси; f — правое полукрыло; 7 — правая сторона фюзеляжа; 8 —
оперение; 9 — реактивное сопло; 10 — левая сторона фюзеляжа; //-- левое
полукрыло; 12 — левая основная стойка шасси; IJ — проверка заправки
самолета. 14 — кабина
метичность трубопроводов и их соединений. Осматривается
покрышка и проверяется величина давления в пневматике колеса.
Тщательно осматривается стойка шасси в целях определения
трещин по сварным швам и местам перехода от одной поверхности
к другой, где могут возникнуть повышенные концентрации
напряжений. При необходимости целесообразно применить приборный
контроль (магнитным переносным дефектоскопом или
использовать метод красок). Проверяется просадка амортизатора,
крепление гасителя колебания и отсутствие подтекания масла.
Далее осматривают правую часть крыла, где также проверяют
целость обшивки и состояние заклепочных швов. Если часть
объема крыла используется в качестве топливных баков, то,
осматривая крыло, обращают внимание на герметичность топливных
отсеков и проверяют, нет ли недопустимых люфтов в узлах
навески элеронов и посадочных щитков.
Проверка правой стойки шасси аналогична проверке передней
стойки. После осмотра правой части крыла переходят к правой
стороне фюзеляжа. При внутрифюзеляжном расположении
двигателя через люки осматривают состояние двигателя,
герметичность топливных, масляных и гидравлических систем, а также
состояние тяг и качалок управления. Не допускаются касание и
потертости тяг управления, а также потертости трубопроводов.
При осмотре хвостового оперения проверяют узлы его
крепления, обшивку стабилизатора, киля, руля направления, состояние
разрядников, надежность закрытия крышек лючков.
Ю—229
289
Осмотр левой половины самолета выполняется аналогично
осмотру правой. Заканчивается он проверкой заправки емкостей
топливной, масляной, гидравлической систем и зарядки сжатыми
газами с последующим осмотром кабины. В кабине проверяют
состояние остекления фонаря, средств аварийного покидания
самолета, системы герметизации фонаря, состояние приборов и
оборудования. Перечисленный объем осмотра и проверок является
далеко не полным и содержит лишь часть работ и общие
требования.
Устранение неисправностей, выявленных как в полете, так и
при осмотрах, — важный и ответственный этап в подготовке
авиационной техники к полету.
До полного окончания осмотра обнаруженные неисправности,
как правило, не устраняются, так как вначале должно быть
установлено общее состояние самолета и определен порядок
устранения неисправностей с учетом их сложности и взаимосвязи. Кроме
того, такая методика исключает недосмотры и помогает
правильно организовать работу по выявлению и устранению
неисправностей. Об окончании и результатах осмотра самолета специалисты
групп обслуживания докладывают технику самолета и
начальникам соответствующих групп, которые личио осматривают место
неисправности и дают указания о порядке их устранения. В свою
очередь техники самолетов и начальники групп обслуживания
докладывают о результатах осмотра и состоянии самолетов своим
непосредственным начальникам и в случае необходимости
получают от них указания о порядке п методах устранения
неисправностей, а также о необходимом времени и потребных запасных
частях, агрегатах и расходных материалах. Инженеры части по
специальностям и заместители командиров подразделений по ПАС
инструктируют личный состав о методах выявления и устранения
наиболее сложных неисправностей и лично проверяют качество
выполнения этих работ. Лнца, устранявшие неисправности, и лица,
контролировавшие эту работу, расписываются в соответствующих
разделах журнала подготовки самолета.
При появлении новых, ранее не встречавшихся неисправностей,
особенно скрытого характера, целесообразно проведение целевого
осмотра иа всех самолетах части.
Заправка и зарядка систем самолета. В подготовку
авиационной техники к полету входит важным и ответственным элементом
проверка и заправка самолета топливом, маслом, специальными
жидкостями н зарядка сжатыми газами. Каждый тип самолета
имеет свои конструктивные и эксплуатационные особенности, с
учетом которых в инструкциях по эксплуатации данного типа
самолета даются методика и порядок проведения проверок и
заправок (зарядок) систем.
Однако, несмотря на эти особенности, существуют общие
правила выполнения заправок самолета топливом, маслом,
специальными жидкостями и зарядки сжатыми газами, которые будут
рассмотрены ниже.
290
www.vokb-la.spb.ru - Самолёт своими руками?!
Топливо, смазочные материалы, специальные жидкости и
сжатые газы должны соответствовать ГОСТ и требованиям
инструкции по эксплуатации данного типа самолета.
Средства заправки также должны удовлетворять определенным
требованиям независимо от того, являются ли они подвижными
(топливозаправщики, маслозаправщики, заправочные тележки)
или централизованными. Эти средства должны быть надежны
в эксплуатации, иметь исправные фильтрующие, заборные и
раздаточные элементы. Заливные горловины, фильтры и агрегаты
средств заправки должны быть опломбированы.
Заправка самолетов горючим, маслом и специальными
жидкостями производится с разрешения соответствующих
должностных лиц ИАС, которые перед допуском к ней осуществляют
контрольный осмотр средств заправки и аэродромную проверку
качества горючего, масла и спецжидкостей. При этом особое
внимание обращается на исправность и чистоту фильтров,
раздаточных устройств, пломбировку средств заправки и на
соответствие установленным нормам физико-химических
показателей заправляемых веществ (по паспорту или контрольному
талону).
Разрешение на заправку записывается в контрольном талоне
на ГСМ, имеющемся у водителя средств заправки, или иа
централизованной заправочной системе (ЦЗС). За качество
заправляемого в самолет горючего, масла, специальных жидкостей и
сжатых газов в соответствии с заданием на полет отвечает техник
(механик) самолета. При обнаружении некондиционности или
загрязнения горючего, масла, специальных жидкостей,
медицинского кислорода и других газов заправку (зарядку) следует
немедленно прекращать, а о случившемся докладывать по команде
заместителю командира части по ИАС как о предпосылке к
летному происшествию.
Заправка горючим. Проверка заправки и заправка
(дозаправка) самолетов горючим производится при проведении всех
видов подготовки самолета к полету. Количество заправляемого
горючего, а также необходимость установки подвесных баков с
горючим определяются заданием па полет. В результате осмотра
техник самолета должен знать, какое количество горючего
необходимо дозаправить для выполнения полетного задания.
По прибытии топливозаправщика на стоянку (при заправке от
подвижных средств заправки горючим) техник самолета,
убедившись в наличии разрешения на заправку, обязан проверить
исправность и чистоту раздаточных устройств, наличие и
сохранность пломб иа заливной горловине, дыхательном клапане,
фильтрах и крышках приемных патрубков, надежность заземления
самолета и топливозаправщика. В процессе заправки следует
проверить перепад давления на топливных фильтрах
топливозаправщиков, величина которого характеризует состояние фильтра
(отсутствие перепада свидетельствует о порыве фильтрующих
элементов, повышенный перепад — о загрязнении).
10» 291
Тщательное заземление самолета и топливозаправщика
необходимо для того, чтобы предотвратить пожар при заправке. Дело
в том, что в полете в результате трения о воздух самолет
заряжается статическим электричеством, разрядка которого должна
происходить в землю после посадки. Однако из-за плохого
контакта тросов колес шасси с землей это может и не произойти.
Кроме того, при перекачивании горючего из резервуара
топливозаправщика в топливные системы самолета вследствие трения
горючего о стеики гибкого шланга возникают электростатические
заряды. Таким образом, при заправке горючим между
раздаточным пистолетом и заправочной горловиной может проскочить
искра и возникнуть пожар. Необходимо также следить за
сохранностью металлизации гибкого шлаига и хорошим соединением его
с раздаточным пистолетом и наконечником заземления
топливозаправщика, а также обеспечивать плотное прижатие пистолета
к корпусу заправочной горловины. В местах заправки самолетов
горючим обязательно должны быть углекнслотные огнетушители
и противопожарный инвентарь. Контроль за полнотой заправки
производится по показанию приборов в кабине самолета и на
топливозаправщике, кроме того, обязательно контролируются
заливные горловины. После заправки из отстойников баков
самолета целесообразно взять пробу (путем слива отстоя в
стеклянную посуду) и проверить качество топлива иа отсутствие в нем
воды и механических примесей.
Места заправки самолетов должны быть оборудованы
специальными закрывающимися ящиками для хранения проб горючего.
Горючее должно быть чистым, без механических примесей и воды.
Механические примеси могут привести к засорению форсунок,
износу и заеданию механизмов топливной аппаратуры. Наличие
воды в горючем недопустимо, так как даже небольшое ее
количество в виде эмульсии крайне отрицательно сказывается на
работе агрегатов топливной аппаратуры двигателя, вызывая
коррозию. Кроме того, вода в свободном состоянии, впитываясь в
фильтрующий элемент, резко увеличивает сопротивление протеканию
горючего через фильтр низкого давления, что может вызвать
прекращение подачи горючего и остановку двигателя. При низких
температурах вода выпадает в виде кристалликов льда, что
еще в большей степени ухудшает работу топливной аппаратуры и
фильтров.
При заправке самолетов горючим необходимо строго
соблюдать меры предосторожности и правила противопожарной
безопасности:
запрещается заправлять самолеты, находящиеся в потоке
газов и пыли от рулящих самолетов;
группы баков заполнять горючим в определенной (указанной
в инструкции по эксплуатации) последовательности, чтобы
сохранить в заданных пределах центровку самолета;
при заполнении баков горючим через заправочные горловины
(если не предусмотрена заправка под давлением) по окончании
292
www.vokb-la.spb.ru - Самолёт своими руками?!
заправки сразу закрывать баки пробками, так как возможно
перетекание горючего из вышераспсюженных баков и его
проливание;
не допускать проливания горючего иа лакокрасочные
покрытия и резиновые изделия, которые при этом ускоренно
разрушаются;
не допускать попадания горючего на кожу человека, так как
это может привести к ожогам, а при наличии в горючем
жидкости «И» возможно отравление;
запрещается проверять уровень горючего в баках ночью с
освещением открытым пламенем.
Заправка масляной и гидравлической систем
самолета. Уровень масла обычно контролируется по меткам
(рискам) на мерных линейках. Для заправки маслом
используются маслозаправщики, снабженные сетчатыми фильтрами.
При заправке маслосистемы двигателя необходимо выполнять
все меры предосторожности, избегая пролива и перезалива
масла.
Для гидросистем большинства самолетов применяют в
настоящее время масло. Уровень масла в гидробаках контролируется
по мерным линейкам иа гидробаке или по оцифровке шкал
смотровых стекол (трубок) в закрытых системах.
Чтобы предупредить отказы в работе агрегатов масляной
системы и гидросистемы, особое внимание обращают на
правильность заправки (дозаправки) согласно инструкции по
эксплуатации, а также на чистоту сеток раздаточного пистолета или
чистоту зарядного наконечника при заправке под давлением.
Зарядка сжатым воздухом (азотом).
Пневматические системы самолета заряжают через бортовые зарядные
штуцера. Перед зарядкой воздухом (азотом) необходимо убедиться,
что краны, пропускающие воздух (азот) в бортовые емкости,
открыты. При подсоединении зарядного шлаига к бортовому
штуцеру шланг следует продуть сжатым воздухом для удаления
влаги, пылн или кристаллов льда. Закрепление (подсоединение)
должно быть тщательным, так как малейшая небрежность
может привести к самопроизвольному рассоединению с паиесеиием
травм обслуживающему персоналу и повреждению авиационной
техники.
Зарядка систем контролируется по манометрам. Зарядив
систему самолета до требуемого давления, перед отсоединением
шлаига из него стравливают давление и только после этого
отсоединяют от бортового штуцера. После зарядки систем сжатыми
газами необходимо проверить по манометру, нет ли утечки газов
из систем.
Рассмотрим содержание и порядок проведения различных
видов подготовки авиационной техники к полетам.
Предварительная подготовка является основным видом
подготовки авиационной техники к применению. Периодичность
проведения предварительной подготовки устанавливается регламентом
293
технической эксплуатации конкретного Типа авиационной
техники.
Предварительная подготовка включает: подготовительные
работы, контрольный осмотр самолета, устранение неисправностей,
выявленных при осмотре, подготовку съемного оборудования,
заключительные работы и работы по уходу за авиационной
техникой, оформление документации.
Подготовительные работы обычно составляют от 10 до 15%
трудозатрат на предварительную подготовку. К ним относятся
расчехление самолета, снятие крышек люков и капотов,
установка стремянок, подбор необходимого инструмента для проведения
осмотра, настройка контрольно-измерительной аппаратуры.
Контрольный осмотр самолета выполняют инженеры и
техники, участвующие в проведении предварительной подготовки,
каждый по своей специальности в соответствии с регламентом и
инструкцией по технической эксплуатации данного типа
авиационной техники. Контрольный осмотр проводится по установленному
маршруту (рис. 4.1). При проведении контрольного осмотра
инженерно-технический состав руководствуется следующими общими
положениями:
все системы планера и силовой установки должны быть
герметичными, не допускаются потертости и касания трубопроводов;
немедлсиио устраняется касание тяг управления о
неподвижные детали, заершенность тросов системы управления;
если обнаружены трещины на остеклении кабин, обшивке,
силовых элементах конструкции длиной более допустимой нормы,
то эти элементы подлежат ремонту;
при наличии в пневматиках колес и амортизаторах стоек
шасси давления менее нормы необходимо произвести их дозарядку;
при обнаружении забоин на лопатках компрессора двигателя
сверх допустимых норм двигатель подлежит замене;
если при проверке работоспособности авиационного,
радиоэлектронного н специального оборудования обнаружены
отклонения от норм допусков, необходимо найти неисправности и
устранить их;
все шарнирно-болтовые соединения должны быть затянуты и
законтрены таким образом, чтобы исключить их
самопроизвольное отворачивание;
гидравлические, пневматические, масляные, кислородные,
противопожарные системы, а также системы кондиционирования и
охлаждения должны быть заправлены кондиционными
жидкостями и газами до установленной нормы.
По каждому типу авиационной техники объем осмотра
детально изложен в разработанной технической документации —
регламенте технической эксплуатации.
Устранение неисправностей производится после записи их в
журнал подготовки и начинается обычно с менее трудоемких
работ после окончания осмотра самолета. После устранения
неисправностей докладывается об этом вышестоящему должностному
294
www.vokb-la.spb.ru - Самолёт своими руками?!
лицу, которое контролирует качество выполненных работ. В
случае необходимости после устранения неисправностей
производится проверка системы на работоспособность.
Предполетная подготовка самолета проводится
непосредственно перед полетами в соответствии с задачами летного дня н
включает: подготовительные работы, предполетный осмотр самолета,
проверку соответствия заправки горючим, маслом, специальными
жидкостями и газами заданию на полет и дозаправку (дезарядку)
гнетем самолета, установку на самолет съемного оборудования,
проверку готовности самолета к полету согласно заданию и
передачу самолета летному экипажу.
Подготовительные работы выполняются так же, как и при
предварительной подготовке, но в несколько ограниченном объеме
и для осмотра вскрывается меньшее количество люков и капотов.
Предполетный осмотр проводится с целью выявления
неисправностей, которые могли возникнуть за период после проведения
предварительной подготовки. Выполняется он аналогично
контрольному и по тому же маршруту, ио контролируется меньшее
количество агрегатов, механизмов и оборудования.
При обнаружении негерметичиостн топливной, гидравлической,
пневматической или кислородной системы авиационную технику
отстраняют от подготовки и подвергают более тщательному
осмотру. Если выявлена неисправность, причина которой не
изучена, самолет отстраняется от дальнейшей подготовки к полетам,
а остальные самолеты осматриваются дополнительно с целью
выявления аналогичной неисправности.
Предполетный осмотр авиационной техники проводят
специалисты всех профилей в соответствии с технологическими
карточками. При осмотре делаются записи в журнале подготовки об
обнаруженных неисправностях, их устранении и контроле за
устранением со стороны соответствующих должностных лиц. Там же
специалисты заверяют своей подписью готовность самолета к
полетам и проставляют количественную заправку топливом и
снаряжение грузами.
При предполетном осмотре производится слив отстоя топлива
из полостей фильтров низкого давления, где скапливается влага
из топлива при полете и стоянке авиационной техники. При
необходимости производится дозаправка и дозарядка систем
самолета.
Установка съемного оборудования включает установку
аккумуляторных батарей, ранее снятых для хранения в теплом
помещении, а также установку аэрофотоапнаратуры, средств
объективного контроля, подвесных баков (при необходимости) и т. д.
Проверка работоспособности систем самолета и двигателя
производится перед полетами. Запуск и опробование двигателей
с целью экономии ресурса, топлива и времени на подготовку на
многих типах самолетов обычно совмещают с запуском для
полета. В этом случае проверку работы силовой установки
производит летчик и ему помогает техник.
295
Наличие большой тяги у современных двигателей требует
создания специальных площадок для опробования их, что
усложняет организацию предполетной подготовки.
При опробовании двигателей (рис. 4.2) кроме установки
упорных колодок под колеса шасси применяют швартовочиые
приспособления. Площадку для опробования двигателей кроме шварто-
вочных приспособлений оборудуют газоотражательными щитами и
приспособлением, исключающим
возможность попадания
посторонних предметов в
воздухозаборники силовой установки
самолета. Газоотражательные щиты
предохраняют разрушение грунта
реактивной струей. На
площадке также устанавливают
противопожарные средства. При
запуске и во время работы
двигателей должны быть приняты
меры предосторожности,
исключающие травмирование личного
состава и повреждение
авиационной техники.
Работоспособность силовой
установки с ее агрегатами должна проверяться так, чтобы никакие
неисправности не остались невыявленными при осмотре и
опробовании двигателя на земле.
Опробование любого газотурбинного двигателя иа самолете
состоит из следующих этапов:
запуск двигателя;
прогрев двигателя и проверка работоспособности бортовых
систем и агрегатов автоматического регулирования на различных
режимах (номинальный, максимальный, форсажный);
проверка приемистости;
охлаждение и выключение двигателя.
После выполнения предполетной подготовки самолета техник
самолета и специалисты заполняют контрольный лист и
докладывают по команде о готовности самолета. По прибытии летного
состава техник самолета докладывает командиру экипажа о
готовности самолета к полету. Летный состав экипажа производит
прием и проверку готовности самолета.
При изменении задания иа полет и необходимости
использования в полете дополнительной аппаратуры, ие подвергавшейся
предполетной подготовке, ее устанавливают и проверяют в объеме
предполетной подготовки.
Подготовка к повторному полету и послеполетная подготовка.
Подготовка к повторному полету производится перед каждым
новым полетом в период стартового времени в соответствии с
заданием на предстоящий полет и включает: стартовый осмотр
самолета, устранение неисправностей, выявленных в предыдущем по-
Рис. 4.2. Расположение самолета
на газовочной площадке:
/ — приспособление для защиты
воздухозаборника от попадания посторонних
предметов; 2 — упорные колодки; 3 —
швартовка самолета; 4 —
газоотражательный щит; 5 — противопожарные средства
296
www.vokb-la.spb.ru - Самолёт своими руками?!
лёте и при осмотре, заправку самолета топливом, маслом,
специальными жидкостями и зарядку сжатыми газами, установку на
самолет съемного оборудования, проверку готовности самолета к
полету согласно заданию.
Начинается подготовка к повторному полету с получения
замечаний летного экипажа о работе авиационной техники в полете.
Если была обнаружена неисправность в полете, то командир
экипажа делает соответствующую запись в контрольном листе
готовности самолета к полету в разделе замечании.
Стартовый осмотр проводится с целью выявления
неисправностей, которые могли возникнуть на самолете в процессе
предыдущего полета, и осуществляется по установленному маршруту.
При стартовом осмотре проверяется, нет ли внешних
повреждений, герметичность систем, нет ли следов жидкости на нижней
части крыла и фюзеляжа. Тщательно контролируется состояние
органов приземления. Осматриваются пневматики колес и
проверяется нагрев тормозов, состояние стекол фонарей кабин, щитков
колес, амортстоек шасси, закрылков, элеронов и т. д. По
окончании стартового осмотра или параллельно с ним производится
заправка топливом, маслом и специальными жидкостями, зарядка
газами, установка тормозного парашюта и снаряжение грузами.
В настоящее время для ускорения подготовки авиационной
техники к повторному полету применяется
параллельно-последовательный метод выполнения работ. При этом весь процесс
подготовки расчленяется на комплексы операции, выполняемых на
специально создаваемых технических позициях (№ 1, 2 и 3), через
которые последовательно после посадки проходит самолет.
Инженерно-технический состав, участвующий в подготовке
авиационной техники, закрепляется за позициями.
В целях повышения налета па каждый самолет в течение
летного дня может применяться посменное обслуживание
авиационной техники в летный день. При посменных полетах самолеты
используются в течение всего летного дня, а личный состав,
обслуживающий самолеты, по истечении половины общего
(увеличенного) стартового времени меняется. Инженерно-технический
состав делится на две части (смены). Наиболее простой
организационной формой посменного обслуживания является такая, при
которой создаются пары техников самолетов. Один из них в
течение каждой смены обслуживает два самолета: свой и
напарника. Первая смеиа проводит предполетную подготовку и
обеспечивает полеты первой половины стартового времени. Вторая
смена обслуживает самолеты в течение второй половины стартового
времени и проводит послеполетную подготовку.
Послеполетная подготовка авиационной техники проводится в
конце каждого летного дия и включает: послеполетный осмотр
самолета, устранение неисправностей, выявленных в полете и
обнаруженных при осмотре, заправку и снаряжение самолета.
Послеполетный осмотр проводится с целью выявления
неисправностей, которые могли возникнуть на самолете в течение по-
297
следнего полета. Осмотр осуществляется по установленному
маршруту. Объем осмотра, как правило, совпадает с объемом
стартового. Он предусматривает главным образом визуальный
контроль со вскрытием лишь основных люков для проверки (нет ли
течи и повреждении наиболее ненадежных узлов).
Кроме того, производится дозаправка топливом, дозарядка
сжатыми газами систем самолета.
Послеполетная подготовка может проводиться иа технической
позиции как завершающий этап работы ИАС в летный день,
а также иа основных местах стоянок. Иногда бывает удобно на
технической позиции произвести лишь заправочные работы,
пользуясь наличием здесь заправочного оборудования, а остальные
работы выполнять на основных местах стоянок. Техник самолета и
специалисты групп обслуживания после окончания послеполетной
подготовки производят записи в журнале подготовки самолета
к полетам о выполненных работах на самолете и докладывают
о его состоянии по команде.
3.2. НАЗНАЧЕНИЕ И ПОРЯДОК ПРОВЕДЕНИЯ ПАРКОВОГО
ДНЯ И РЕГЛАМЕНТНЫХ РАБОТ
Парковый день проводится обычно перед днем
предварительной подготовки. В парковый день выполняются наиболее
сложные и трудоемкие целевые осмотры и работы на авиационной
технике, осмотры авиационной техники летным составом и тренажи
летного состава, работы по уходу за средствами наземного
обслуживания и др.
К работе на авиационной технике в парковые дни
привлекается весь личный состав авиационной части. План работы в
парковый день включает: распорядок работы личного состава, перечень
и технологию работы на самолетах, тематику проводимых тре-
нажей, а также время и место проведения технических разборов.
Все работы на самолетах выполняются летными, техническими
экипажами и специалистами групп обслуживания. Контроль
полноты и качества выполняемых работ осуществляют должностные
лица ИАС, а также должностные лица летного состава.
В конце паркового дня, после завершения работ на
авиационной технике и зачехления самолетов, проводится технический
разбор результатов выполнения плана паркового дня. На разбор
привлекается весь личный состав, участвующий в работе на
авиационной технике.
Регламентные работы по самолету и двигателю и всем видам
оборудования выполняются для проверки технического состояния,
предупреждения износа (выхода из строя) авиационной техники,
сохранения ее летно-технических характеристик в пределах
установленных допусков и обеспечения безотказной работы ее в меж-
регламеитный период.
В настоящее время регламентные работы на самолетах выпол-
298
www.vokb-la.spb.ru - Самолёт своими руками?!
няются личным составом технико-эксплуатационной части (ТЭЧ)
в соответствии с регламентом технической эксплуатации данного
типа авиационной техники в единые сроки, определяемые, как
правило, налетом самолета. По своему типу ТЭЧ могут быть
стационарные и подвижные. Стационарная ТЭЧ включает
следующий комплекс зданий и сооружений:
открытую площадку или ангар для выполнения регламентных
и ремонтных работ непосредственно иа самолетах;
производственное здание для выполнения регламентных и
ремонтных работ на отдельных агрегатах самолетов, двигателей и
специального оборудования с необходимыми вспомогательными н
бытовыми помещениями;
открытые площадки или навесы для специальных автомобилей
ТЭЧ и наземного Оборудования.
Современная ТЭЧ оснащена контрольно-проверочными
установками и оборудованием.
В подвижных ТЭЧ организуют:
монтаж оборудования в кузовах специальных прицепов и
автомобилей; кузова одновременно служат рабочими помещениями
ТЭЧ;
монтаж оборудования в контейнерах, которые, в свою
очередь, устанавливаются в кузовах прицепов и автомобилей.
На регламентные работы самолеты поступают согласно плану.
Для наиболее правильной организации труда и рационального
использования оборудования в группах регламентных работ весь
процесс выполнения регламентных работ может быть разбит на
несколько этапов.
На первом этапе уточняется налет самолета, наработка
двигателей и количество посадок, после чего дается заявка на
выполнение регламентных работ в ТЭЧ. Затем производится
комплексный осмотр в объеме не менее контрольного с целью
выявления неисправностей, которые фиксируются в журнале
подготовки самолета к полету и устраняются силами технического
экипажа и групп обслуживания. После устранения неисправностей
самолет передается в ТЭЧ. Вместе с самолетом в ТЭЧ передается
понумерная техническая документация на самолет, а также
перечень агрегатов, блоков и деталей, выработавших ресурс ко дню
подачи самолета на регламентные работы.
На втором этапе должностные лица ТЭЧ просматривают
формуляры, контрольные листы подготовки самолета к полету,
знакомятся с неисправностями самолета в межрегламентный
период, с записями летных экипажей в контрольных листах, а
также с неисправностями, выявленными при осмотре самолета в
подразделении. Специалисты групп регламентных работ ТЭЧ
производят комплексный осмотр самолета в объеме не менее
контрольного, проверяют работоспособность аппаратуры под током,
уточняют объем предстоящих работ. Затем у самолета устанавливается
необходимое наземное оборудование (стремянки, подъемники,
тележки и т. п.) для выполнения регламентных работ.
299
На третьем этапе выполняются регламентные работы н
проверяется качество их выполнения. Этот этап является основным
и наиболее продолжительным. Все работы на самолетах
выполняются специалистами в соответствии с требованиями
технологических карт. Качество работ проверяется после выполнения
отдельных операций. Для этого надо четко определить, кто, когда
и каким образом контролирует ту или иную операцию, работу,
регулировку. Такой метод проведения контроля качества
выполнения работ получил название метода пооперационного
контроля.
Все работы в ТЭЧ должны выполняться по технологическому
графику. Технологический график регламентирует
производственный процесс ТЭЧ и определяет период времени в рабочих часах,
в течение которого самолет проходит все стадии этого процесса
с момента поступления его для выполнения регламентных работ
до момента выхода из ТЭЧ. При выполнении регламентных работ
широко используется поточный метод их выполнения.
Сущность этого метода состоит в том, что личный состав
специализируется по отдельным узлам (кабина, шасси, крыло и др.) и
выполняет последовательно работы, переходя от одного самолета
к другому (от одного узла к другому) в соответствии с
технологическим графиком.
На четвертом (заключительном) этапе производится
контроль состояния авиационной техники после выполнения на ней
всех работ. Окончательный контроль самолета проводится для
проверки полной готовности его к выходу из ТЭЧ на контрольно-
испытательной площадке специалистами лаборатории
инструментального контроля. После осмотра самолета и опробования
двигателя проверяется работоспособность оборудования самолета в
целом и по специальностям. Из ТЭЧ самолет направляется в
подразделение только после выполнения на нем всего
предусмотренного объема работ, после устранения неисправностей, выявленных
при осмотре в ТЭЧ, проверки технического состояния личным
составом подразделения.
Прием самолета из ТЭЧ и контроль его состояния
производится личным составом подразделения, эксплуатирующего
данный самолет, и осуществляется путем проведения контрольного
осмотра. Готовит самолет к контрольному полету личный состав
подразделений совместно со специалистами ТЭЧ. О выполнении
регламентных работ на самолете делается запись в формуляре
самолета. За выполнение работ расписывается начальник группы
регламентных работ, а техник самолета — за проверку их
выполнения.
3.3. СРЕДСТВА НАЗЕМНОГО ОБСЛУЖИВАНИЯ
Выполнение большинства работ, относящихся к технической
эксплуатации AT, в настоящее время невозможно без применения
специальных машин и механизмов, агрегатов, вспомогательных
300
www.vokb-la.spb.ru - Самолёт своими руками?!
приспособлений и устройств — так называемых средств наземного
Обслуживания (СНО).
Кроме перечисленных средств имеются средства,
обеспечивающие выполнение работ по подготовке и содержанию в рабочем
состоянии взлетно-посадочных полос, рулежных дорожек и мест
стоянок самолетов, средства добычи сжатых и сжиженных газов.
В основном СНО принадлежат авиационно-техиическим
частям и ими эксплуатируются. Они подаются на места подготовки
летательных аппаратов по соответствующим заявкам летных
частей. Все средства можно классифицировать по назначению на
следующие группы:
1. Средства заправки летательных аппаратов жидкостями:
подвижные и стационарные средства заправки летательных
аппаратов топливом (горючим и окислителем) —топливозаправщики и
смазочным маслом — маслозаправщики. Кроме того, для заправки
(дозаправки) небольших количеств масла в систему смазки
двигателей, гидросистем и систем запуска применяются
малогабаритные подвижные установки с несколькими емкостями,
заполняемыми различными жидкостями и маслами.
2. Средства обеспечения электроэнергией для проверки
самолетов и их систем при неработающих двигателях и для запуска
последних: подвижные (самоходные или прицепные)
аэродромные агрегаты (АПА), а также стационарные, развертываемые на
позициях подготовки авиационной техники в виде
централизованных систем снабжения электроэнергией. Основными источниками
электроэнергии являются генераторы постоянного и переменного
тока, а также аккумуляторные батареи, собранные в группы,
которые могут работать как автономно, так и в буфере с
генератором постоянного тока. Кроме рассмотренных средств на
аэродромах используются аккумуляторно-зарядные станции (АЗС),
предназначенные для зарядки, разрядки, ремонта и хранения
аккумуляторных батарей.
3. Средства обеспечения летательных аппаратов сжатыми
газами (добывающие и заправочные). В настоящее время в
аэродромных условиях при обслуживании самолетов используются в
основном заправочные средства: компрессоры низкого давления
(КНД), воздухозаправщики (ВЗ), автомобильные углекислотно-
зарядные станции (АУЗС), кондиционеры (для охлаждения
отсеков и др.), средства транспортирования, хранения и заправки
газообразным кислородом (АКЗС), жидкого кислорода или азота
(ТРЖК).
4. Средства для подогрева двигателей, оборудования, кабин,
просушки и удаления льда с обледеневших поверхностей,
обогрева чистым воздухом палаток и др. К ним относятся моторные
подогреватели, инжекторные подогреватели,
электроподогреватели.
5. Транспортировочные и грузоподъемные средства. Для
перевозки различных грузов применяются самоходные и прицепные,
а также специализированные тележки, транспортировочные маши-
301
ны. Для передвижения самолетов по аэродрому используются
буксировщики (автомобили, тракторы, тягачи, специальные
буксировочные машины).
К грузоподъемным средствам относятся подъемные краны
различной грузоподъемности, автопогрузчики, электро- и мотокары
с соответствующим оборудованием, автотранспортеры, автомобили
с подъемными кузовами, автолифты, самоходные площадки
обслуживания высоко расположенных частей, раздвижные лестницы,
самоходные и буксируемые пассажирские трапы, гидравлические
и винтовые подъемники различной грузоподъемности, аварийные
пневматические тканевые подъемники.
6. Средства контроля, проверки, ремонта и специальной
обработки авиационной техники. При выполнении регламентных,
ремонтных, проверочных и регулировочных работ применяется ряд
установок и агрегатов. Они позволяют производить в полевых
условиях слесарно-механические, проверочные и ремонтные
работы по системам самолета, авиационного вооружения,
авиационного и радиоэлектронного оборудования. Соответствующие
установки комплсксируются в виде лабораторий инструментального
контроля (ЛИК) или как наземные части системы
автоматизированного контроля. Для испытания гидравлических систем
самолета при неработающем бортовом насосе применяются установки
проверки гидросистем (УПГ).
Для специальной обработки авиационной техники,
подвергшейся воздействию средств массового поражения, используются
автодегазационные машины (ЛДМ), авторазливочные станции (АРС),
ранцевые дегазационные приборы (РДП), авиационные дезакти-
вациоиные комплекты (АДДК), комбинированные поливочные
машины (КПМ), водообмывочные станции.
К работе на авиационной технике допускаются только
исправные средства наземного обслуживания. К работе на иих
допускается личный состав, знающий устройство и правила
эксплуатации этих средств.
Глава 4
ПОДДЕРЖАНИЕ НАДЕЖНОСТИ АВИАЦИОННОЙ
ТЕХНИКИ
4.1. ПОНЯТИЕ О НАДЕЖНОСТИ АВИАЦИОННОЙ ТЕХНИКИ
Высокая надежность авиационной техники является одним из
основных условий ее боевой готовности, эффективности
применения, а также безопасности полетов. Надежность является
комплексным свойством, которое включает безотказность,
долговечность, сохраняемость и ремонтопригодность.
302
www.vokb-la.spb.ru - Самолёт своими руками?!
Под безотказностью понимается свойство авиационной
техники непрерывно сохранять работоспособность в течение
некоторой наработки (налета) или некоторого календарного времени.
Долговечность — свойство AT сохранять
работоспособность до наступления предельного состояния при установленной
системе технической эксплуатации.
Ремонтопригодность — свойство авиационной техники,
заключающееся в приспособленности к предупреждению и
обнаружению причин возникновения ее отказов, повреждений и
устранению их.
Сохраняемость — свойство непрерывно сохранять
исправное и работоспособное состояние в течение срока службы и после
хранения или транспортирования.
Надежность авиационной техники оценивается рядом
количественных показателей. Чтобы эти показатели вычислить, необходимы
статистические данные о неисправностях авиационной техники.
Статистические данные получают на основе обработки
поступающих из частей карточек учета неисправностей. Поэтому
своевременное, полное и достоверное заполнение карточек является
основой оценки показателей надежности.
Эти показатели определяются для каждого типа самолета и
его агрегатов. На основе анализа показателей определяются
уровень надежности, возможности продления ресурса, мероприятия
по повышению и поддержанию надежности. Наиболее важными
показателями надежности AT служат наработка на отказ,
проявившийся в полете, и наработка на неисправность, выявленную
на земле и в полете.
Состояние авиационной техники в процессе эксплуатации
характеризуется наличием на ней отказов и неисправностей. Отказ—
событие, заключающееся в нарушении работоспособности
объекта. Таким образом, под отказом авиационной техники
понимается всякая потеря ее работоспособности (полная, частичная,
временная), проявившаяся как в полете, так и на земле. Примерами
отказов могут служить самовыключение двигателя в полете,
зависание частоты вращения ротора двигателя, нсвыпуск шасси и т. п.
Под неисправностью понимается любое несоответствие
системы (агрегата) или ее элементов (узлов, деталей)
требованиям эксплуатационной или ремонтной документации независимо
от того, привело или не привело это несоответствие к потере
работоспособности.
4.2. ПРИЧИНЫ ПОЯВЛЕНИЯ НЕИСПРАВНОСТЕЙ
Все неисправности авиационной техники принято разделять на
внезапные и постепенные. Внезапные могут быть вызваны
скрытыми производственными недостатками, некачественными
материалами, ударными и вибрационными нагрузками, перегревом,
быстрым охлаждением и т. п.
303
^
/7
J
И
t,4
Рис. 4.3. Зависимость интенсивности
отказов X от времени работы в
процессе эксплуатации
В отличие от внезапных постепенные неисправности (отказы)
появляются в результате износа и старения, возникающих в
процессе длительной эксплуатации. Смысл постепенного отказа
сводится к тому, что в результате медленного и длительного
количественного изменения состояния какого-либо узла или механизма
один или несколько параметров выходят за пределы
эксплуатационных допусков. К постепенным отказам можно отнести износ
трущихся деталей, потерю эла-
^ щ стичности резинотехнических
''" — изделий и др.
Количественно
безотказность авиационной техники
оценивается рядом показателей,
среди которых наиболее
характерными являются
интенсивность отказов (X) и наработка
на отказ (Тс). Наработка па
отказ характеризуется
средним временем налета
летательного аппарата,
приходящимся на один отказ (в полете,
на земле). Интенсивность отказов статистически можно оценить
по формуле X*(t)=An/m(t)M, где An — число отказов за время
М, a m (t) — число исправно работающих объектов в момент
времени t. Изменение А во времени называют ламбда-характе-
р ист и кой. Характерный вид кривой X(t) показан на рис. 4.3.
Подобная кривая имеет три явно выраженных участка,
обозначенных на рисунке цифрами I, II, III. Участок I (период
приработки) соответствует начальному периоду работы и
характеризуется повышенным количеством отказов (в единицу времени),
вызванных скрытыми производственными недостатками. Участок II
(с постоянным и более низким количеством отказов) наиболее
продолжителен (так называемый нормальный период
эксплуатации). На участке III возникают массовые изиосовые отказы и
отказы, вызванные старением. Чтобы этот участок отодвигался по
времени, в процессе эксплуатации авиационной техники
выполняется большой комплекс мероприятий по поддержанию уровня
ее надежности. Выявление и анализ участка III весьма важны
для определения сроков службы авиационной техники и
назначения технического и межремонтного ресурсов, а участка I — при
оценке сроков гарантии.
Под назначенным (техническим) ресурсом (сроком
службы) понимается наработка (календарная продолжительность
эксплуатации) авиационной техники, по достижении которой
эксплуатация должна быть прекращена независимо от технического
состояния.
Межремонтный ресурс — наработка AT между двумя
последовательными ремонтами.
304
www.vokb-la.spb.ru - Самолёт своими руками?!
Межрегламентный ресурс — наработка AT между
регламентными работами.
Гарантийный ресурс (срок гарантии) — наработка AT, в
течение которой завод-изготовитель или авиационное ремонтное
предприятие гарантирует и обеспечивает выполнение
установленных требований к авиационной технике при условии соблюдения
в частях правил эксплуатации, хранения и транспортирования.
Аппаратура, агрегаты и механизмы самолета, ресурс которых
не определен, эксплуатируются в пределах ресурса того самолета,
на котором они установлены.
Очень важно устанавливать истинные причины отказов и
неисправностей. Особенно тщательно должны анализироваться вновь
выявленные неисправности. В этом случае, как правило,
проводятся целевые осмотры отказавших узлов на всех самолетах,
разрабатываются мероприятия но выявлению, устранению и
предупреждению появившихся неисправностей.
Необходимо внимательно анализировать замечания летного
состава о работе авиационной техники в полете, учитывая, что
некоторые отказы могут проявиться только при определенном
сочетании условий, которые имеют место в полете и не могут быть
воспроизведены в земных условиях. Эти так называемые
перемежающиеся отказы очень опасны, так как выявить их трудно,
а проявление в полете может привести к летному происшествию.
Иногда инженерно-технический состав допускает нарушения
инструкций и указаний по эксплуатации авиационной техники.
Например, имеются случаи разрыва пневматиков колес при
зарядке их без манометра и специального приспособления, поломки
стоек шасси при буксировке самолетов по грунту вследствие
неправильной замены срезной шпильки буксировочного
приспособления более прочной, пожара на самолете из-за наличия
неудаленной консервирующей смазки перед запуском двигателя при
расконсервации и т. п.
К отказам авиационной техники может привести
неудовлетворительное качество выполнения регламентных и монтажных
работ, в том числе выполнение их не в полном объеме,
неправильные монтаж трубопроводов и регулировка механизмов,
автоматики двигателя и т. п. Для исключения таких случаев требуется
организация тщательного пооперационного контроля выполнения
работ.
Иногда, особенно в периоды освоения новых образцов
авиационной техники, ее отказы и предпосылки к летным
происшествиям появляются как следствие слабых знаний конструкции и
правил эксплуатации AT, а также недостаточных практических
навыков инженерно-технического состава.
Причиной отказов может быть также небрежность в работе
технического состава. Наиболее характерными примерами
являются:
неполное закрытие люков, капотов, горловин масляных и
топливных баков;
305
Неправильным монтаж проводки управления, перепутываниё
полярности проводов;
повреждения авиационной техники вследствие нарушений
правил обращения с оборудованием кабины самолета, например сброс
подвесных топливных баков на земле и др.;
нарушения мер безопасности при работе на авиационной
технике, например попадание в воздухозаборник двигателя головных
уборов при нахождении специалистов слишком близко от него;
оставление на самолете посторонних предметов и инструмента
после выполнения работ.
Основными мерами борьбы с отказами по вине технического
состава являются повышение уровня теоретических знаний и
практических навыков личного состава ИАС, улучшение
организованности ее работы, повышение качества и увеличение объема
контроля выполнения работ руководящим составом службы.
Некоторые отказы можно предотвратить путем внедрения
более рациональных конструкций отдельных узлов, например таких
конструктивных решений, которые исключают возможность
неправильного монтажа. Инженерно-технический состав,
основываясь на опыте эксплуатации, должен вносить предложения по
совершенствованию серийной авиационной техники.
Отказы и неисправности авиационной техники существенно
увеличивают трудоемкость ее обслуживания. Особенно большие
трудозатраты, как показывает практика, расходуются на поиск
неисправностей, на установление точного диагноза состояния
авиационной техники.
Для сложных систем поиск неисправностей может составлять
около 70—80% суммарного времени выявления и устранения их.
Поэтому весьма важной задачей инженерно-технического состава
является овладение современными методами поиска
неисправностей.
4.3. МЕТОДЫ ПОИСКА НЕИСПРАВНОСТЕЙ АВИАЦИОННОЙ
ТЕХНИКИ
Анализ причин неисправностей авиационной техники должен
включать:
изучение обстоятельств появления неисправности AT и
условий ее работы с использованием зафиксированных показаний
приборов бортовых и наземных средств контроля, записей бортовых
н наземных средств регистрации ее параметров в полете;
проверку правильности эксплуатации и ремонта авиационной
техники;
подбор и изучение статистических материалов по аналогичным
неисправностям;
определение характера неисправности авиационной техники по
внешним признакам и оценку возможности ее проверки
контрольно-измерительной аппаратурой;
www.voib-la.spj.ru - Самолёт своими руками?!
проведение проверок AT для определения характера
неисправности, разборку (при необходимости) для определения состояния
узлов и деталей;
установление причины неисправности.
Определение неисправностей авиационной техники в условиях
эксплуатации можно производить последовательной проверкой
работоспособности отдельных участков системы и методом,
учитывающим частоту появления аналогичных неисправностей.
Для выяснения причин неисправности вначале устанавливают
ее внешнее проявление, а затем причины, которые могут вызвать
подобную неисправность. Для этих целей используют схемы,
чертежи, описания, бюллетени. Если в результате анализа выявлено,
что неисправность вызывается причинами, которые могут быть
обнаружены визуально, и на осмотр не требуются большие
трудозатраты (на снятие дополнительных агрегатов для осмотра), то
в первую очередь осматривают место наиболее вероятного
нахождения неисправности.
При проведении анализа внешнего состояния знакомятся с
обстоятельствами отказа: где отказ произошел — на земле или в
воздухе. Изучение самой отказавшей детали (агрегата) начинают
с внешнего осмотра. Осмотр отказавшей детали для
установления внешних повреждений производится вначале визуально.
Для более точного исследования применяются различного рода
оптические устройства, такие, как зеркала, лупы, микроскопы
и др.
Если визуальный осмотр не дал положительного результата,
то поочередно проверяют работоспособность отдельных участков
(узлов) системы и последовательно исключают из рассмотрения
исправные участки. Сущность этого метода состоит в следующем.
Систему, состоящую из нескольких агрегатов, рассматривают в
целом, а затем производят поочередную проверку каждого
агрегата системы. При этом вместо проверяемого агрегата
(считаемого неисправным) в систему устанавливают исправный
эталонный агрегат. Проверка работоспособности агрегата производится
на специальных установках (после его снятия с самолета)
продувкой сжатым воздухом, прозваниванием электроцепи, опрессов-
кой гидравлической жидкостью и т. д., причем последовательность
проведения проверок агрегатов осуществляется по принципу от
простого к сложному. Такая последовательность позволяет быстрее
подойти к неисправному агрегату (узлу).
Работоспособность технических устройств можно также
проверять поочередным отключением отдельных агрегатов или заменой
их исправными с обязательным замером параметров. Такой метод
проверок используется на практике при определении
неисправностей в гидравлических, воздушных и топливных системах
самолетов.
Если имеются опыт эксплуатации и статистические данные о
неисправностях авиационной техники, то применяются методы.
307
учитывающие статистическую вероятность (частость) появления
подобных отказов.
Среди мероприятий, направленных на повышение надежности
работы авиационной техники в эксплуатации, большое значение
имеет установление причин неисправностей самолетов, двигателей
и их оборудования и разработка рекомендаций по устранению
причин неисправностей. Важнейшее значение имеет установление
истинных причин предпосылок к летным происшествиям и
разработка мероприятий по их устранению и предотвращению.
4.4. ОБЕСПЕЧЕНИЕ ВЫСОКОЙ НАДЕЖНОСТИ
АВИАЦИОННОЙ ТЕХНИКИ В УСЛОВИЯХ ЭКСПЛУАТАЦИИ
В процессе эксплуатации надежность авиационной техники
может ухудшаться. Задачей ИАС является поддержание ее на
определенном уровне и даже повышение, что достигается:
точным выполнением установленных правил эксплуатации
авиационной техники;
постоянным повышением качества эксплуатации н ремонта AT
на основе внедрения передового опыта;
разработкой и внедрением профилактических мероприятий на
основе систематического накопления и обобщения опыта
эксплуатации и ремонта, в том числе анализа данных об отказах и
неисправностях авиационной техники и ошибок летного и инженерно-
технического состава при ее эксплуатации;
своевременным и качественным выполнением доработок на AT.
Несоблюдение правил эксплуатации влечет за собой
появление отказов. Например, превышение максимальной скорости
полета на малых высотах может привести к появлению трещин в
конструкции планера и т. д. Необходимо помнить, что все
рекомендации по эксплуатации являются обобщением большого опыта
эксплуатации данного типа самолета. Для вновь созданных
самолетов рекомендации являются результатом проверки их в
условиях летных испытаний и испытаний на земле.
Само проведение периодических проверок и контроля состояния
авиационной техники без предупреждения отказа еще не приводит
к повышению ее надежности. Однако, зная границы допусков
изменения параметров агрегатов, можно наметить срок, до которого
возможна эксплуатация без появления отказа.
Проведение регламентных работ имеет также целью оценить
состояние авиационной техники. При этом проводятся работы по
замене смазки, устранению ослабления отбортовки
трубопроводов, замене вышедших из строя элементов, регулировке агрегатов,
систем и др. Все эти мероприятия при их выполнении с высоким
качеством повышают надежность авиационной техники по
сравнению с существующим уровнем.
Повышению надежности способствует в немалой степени
проведение доработок авиационной техники, выполняемых по
отдельным агрегатам и узлам. Путем проведения доработок могут быть
308
www.vokb-la.spb.ru - Самолёт своими руками?!
ликвидированы особо опасные отказы отдельных элементов.
Выполнение комплексных доработок может существенно повысить
надежность самолетов.
Обобщение опыта эксплуатации помогает
инженерно-техническому составу освоить передовые методы обслуживания AT.
Повышение квалификации специалистов позволяет исключить
нарушения правил эксплуатации авиационной техники.
Наряду с указанными мероприятиями безотказную работу AT
обеспечивает постоянное совершенствование организационных
форм ее подготовки н повышение уровня знаний летного и
инженерно-технического состава.
Глава 5
ГОРЮЧЕЕ И СМАЗОЧНЫЕ МАТЕРИАЛЫ
5.1. ГОРЮЧЕЕ, ПРИМЕНЯЕМОЕ В ГАЗОТУРБИННЫХ
ДВИГАТЕЛЯХ
Все виды горючего, применяемого в настоящее время в
газотурбинных двигателях, представляют собой смеси различных
соединений углерода и водорода, т. е. являются органическими
веществами, получаемыми из нефти или иногда из угля.
Окислителем в них является кислород, содержащийся в атмосферном
воздухе.
Строго говоря, топливом называется совокупность горючего
и окислителя, которые являются источником тепловой энергии
(например, керосин — горючее, воздух — окислитель, а их
сумма— топливо). Однако на практике применительно к ГТД
различие между терминами «горючее» и «топливо» обычно не делается.
Поэтому керосин называют не горючим, а топливом
(соответственно говорят: топливный насос, топливозаправщик, топливная
система и т. п.).
К топливам для авиационных двигателей предъявляются
разные требования: высокая теплотворность и высокая плотность,
позволяющие поместить заданное количество топлива в баках
минимального объема; стабильность, т. е. способность сохранять
свой состав и свойства при хранении и в условиях полета;
возможно меньшая пожароопасность при хорошей воспламеняемости
в рабочих условиях; малая коррозионная активность, способность
оставаться в жидком виде в требуемом диапазоне изменения
температуры. Одно топливо удовлетворить одновременно всем
требованиям практически не может. Поэтому приходится в основном
удовлетворять только тем из них, невыполнение которых приводит
к ухудшению тактико-технических данных летательного
аппарата, ведет к его значительному усложнению или снижает
надежность двигателя.
309
Основным показателем, позволяющим оценить энергетические
свойства топлива, является теплота сгорания (теплотворность).
Чем она выше, тем меньше удельный расход топлива и (при про-"
чих равных условиях) больше дальность и продолжительность
полета. Теплотворностью топлива называется количество тепла,
которое выделяется при полном сгорании единицы массы (массовая
теплотворность) или единицы объема (объемная теплотворность)
н последующем охлаждении продуктов сгорания до начальной
температуры.
Так как теплота сгорания у водорода в три с половиной раза
выше, чем у углерода, то увеличение массовой доли водорода в
топливе, которое характерно для более легких фракций нефти,
повышает его теплотворность. Так как плотность керосинов
существенно больше плотности бензинов, объемная теплотворность
более тяжелых топлив выше, чем более легких. Например, у
авиационных керосинов она составляет 34000—34 400, а у бензинов —
31 400—31 800 кДж/л. Объемная теплотворность характеризует
собой количество тепла, выделяющегося при сгорании единицы
объема топлива. Так как емкость баков летательного аппарата
задана, уменьшение плотности топлива ведет к уменьшению
максимальной дальности полета.
Большое эксплуатационное значение имеет испаряемость
топлива, так как она влияет на процессы смесеобразования и
горения, на потери топлива при хранении и при высотных полетах, на
надежность работы топливопроводов. Испаряемость
нефтепродуктов характеризуют фракционным составом, т. е. зависимостью
доли выкипевшей жидкости от ее температуры. Фракционный
состав позволяет оценивать важные свойства топлива.
Особое значение имеют низкотемпературные свойства топлива.
При понижении температуры из нефтяных топлив начинают
выпадать отдельные компоненты, которые в дальнейшем
кристаллизуются. Появление кристаллов в топливах опасно, так как это
может привести к обмерзанию и закупорке фильтров, изменению
проходных сечений дозирующих или регулирующих органов
системы автоматики или даже выходу ее из строя. Температура
кристаллизации топлива строго контролируется. Так, стандартом
предусмотрено, что температура начала кристаллизации
авиационных керосинов должна быть ниже —60СС.
Большое влияние на надежность работы двигателя и его
ресурс имеет также состояние, в котором находится топливо. Так,
например, даже небольшие твердые включения, попавшие в
топливо, могут вызвать засорение фильтров и нарушить нормальную
работу аппаратуры и автоматики или усилить их износ.
Источниками твердых включений являются: кристаллы замерзшей в
топливе воды и механические примеси, попавшие в топливо в
результате его загрязнения или износа и коррозии трубопроводов или
аппаратуры. Твердые частицы могут также выпадать из топлива
при его перегреве.
Попадание воды в топливо н образование в ием водяной
310
www.vokb-la.spb.ru - Самолёт своими руками?!
Эмульсии может происходить при изменении температуры воздуха.
Жидкие углеводороды, входящие в состав горючего, способны в
небольших количествах растворять в себе пары воды. Кроме
опасности замерзания вода опасна и тем, что может послужить одной
из причин коррозии насосов, трубопроводов, баков и других
элементов топливной системы. Заправлять самолетные баки
топливом, содержащим примеси воды, запрещается. Отсутствие в
топливе воды проверяют путем слива отстоя из отстойника цистерны
в чистую стеклянную посуду после 10-минутной стоянки
топливозаправщика. Отобранная проба при просмотре на свет должна
быть однородной и прозрачной. При хранении топлива в
самолетных баках необходимо проводить контроль на наличие в нем воды
путем проверки отстоя, слитого из нижних точек баков.
Растворенная в топливе вода может выпасть из раствора уже
в полете. Чтобы она не замерзла, применяются специальные
присадки. Наиболее эффективной присадкой является жидкость «И».
Добавка ее (или аналогичной по назначению жидкости)
производится в зависимости от температуры окружающего
воздуха в количестве 0,1—0,3% массы топлива. При правильном
хранении топлива жидкость «И» может сохранить свою
эффективность в течение 1—2 месяцев.
Требования к степени очистки топлив от механических
примесей постоянно возрастают. Это объясняется тем, что мелкие
твердые частицы в топливе практически не отстаиваются, они легко
слипаются в более крупные, нарушающие работу аппаратуры и
усиливающие износ деталей топливной системы. Поэтому перед
заправкой топливо подвергают тщательной и многократной
фильтрации.
При контакте с кислородом воздуха происходит окисление
керосина. Однако при низкой температуре скорость этого процесса
Мала и керосин может храниться достаточно долго. При
повышении температуры керосина процесс окисления ускоряется, а часть
образовавшихся продуктов выпадает в виде твердых частиц,
представляющих опасность для топливной аппаратуры двигателя.
Интенсивное выпадание таких частиц начинается при нагреве до
некоторой температуры (90—150°С), зависящей от
термостабильности каждого конкретного керосина. Практически эта температура
является предельной для применения данного топлива.
Рассмотрим основные свойства топлив, применяемых в
газотурбинных двигателях (реактивных топлив).
В качестве топлив для ГТД применяют в основном различные
сорта керосинов. В нашей стране для этих целей используется
несколько сортов керосина: РТ, Т-1, ТС-1, Т-6,
широкофракционное топливо Т-2, представляющее собой смесь керосиновых и
бензиновых фракций, и некоторые другие.
Топливо Т-1 получается прямой перегонкой
высококачественных нефтей, содержащих мало серы и мало парафиновых
углеводородов, имеющих плохие низкотемпературные свойства.
Количество месторождений такой нефти невелико. Малое содержание
311
парафинов в исходном сырье позволяет получить требуемую
температуру начала кристаллизации (—60°С), включив в топливо
Т-1 фракции с пределами выкипания от 150 до 280СС. Топливо Т-1
обладает сравнительно высокой плотностью (не менее 0,8 г/см3)
и малым содержанием серы (не более 0,1%).
Фракции, полученные из рядовых нефтей. выкипающие в том
же диапазоне температур, как Т-1, дают топливо с температурой
кристаллизации порядка —35 н 40DC, что стандартом не
допускается. Поэтому в реактивное топливо, изготовляемое из этих
нефтей, не включаются сравнительно тяжелые фракции. Такое
топливо, маркируемое ТС-1, имеет пределы выкипания 150—250аС
и плотность не менее 0,775 г/см3. Так как исходная нефть
содержит значительное количество серы, в топливе ТС-1 ее содержится
больше, чем в Т-1 (до 0,25%). В некоторых случаях для
уменьшения ее количества и повышения стабильности топливо ТС-1
подвергается специальной очистке путем нагрева в атмосфере
водорода (гидрирование). Обеспечить требуемую температуру
кристаллизации топлива можно не только путем удаления тяжелых
фракций, но и смешением его с более легкими бензиновыми
фракциями. Таким способом получено широкофракционное топливо
Т-2, в которое включены продукты, выкипающие в диапазоне
температур от 60 до 280°С. Из-за наличия бензиновых фракций
топливо Т-2 получается сравнительно легким: его плотность
ограничена 0,755 г/см3 (т. е. на 6—7% ниже, чем у Т-1). Высокая
испаряемость увеличивает потери топлива через дренажную систему
и повышает опасность возникновения паровых пробок и
кавитации в трубопроводах. Поэтому для высотных полетов Т-2
непригодно.
Топливо РТ вырабатывается с применением гидроочистки,
которая обеспечивает более высокую термостабильность н меньшее
содержание коррозионно активных примесей по сравнению с топ-
ливами Т-1 и ТС-1. В нем меньше ароматических углеводородов,
способствующих образованию нагара. Смазывающая способность
топлива обеспечена введением нафтеновых кислот (0,003%).
Плотность топлива РТ не ниже 0,775 при 20°С, т. е. такая же,
как у топлива ТС-1. По требованию потребителей могут
вырабатываться партии топлива РТ с плотностью, как у топлива Т-1
(не ниже 0,8), но с некоторым снижением других показателей
качества.
Выработка топлива РТ начата с 1973 г. Оно может быть
получено из различных нефтей, по различной технологии и с
различными присадками. У сорта РТ впервые регламентированы
некоторые ранее не контролировавшиеся показатели качества,
например показатель излучения пламени — люминометрическое
число. Оно определено для этого топлива не ннжс 60.
Топливо Т-6 предназначено для больших сверхзвуковых
скоростей полета. Оно состоит из гидрированных фракций нефти
с температурой выкипания от 195 до 315СС, обладает высокой
термостабильностью и высокой плотностью (не ниже 0,840 г/см3).
312
www.vokb-la.spb.ru - Самолёт своими руками?!
5.2. СМАЗОЧНЫЕ МАТЕРИАЛЫ
Как известно, при движении одного твердого тела
относительно другого возникает противодействующее движению внешнее
трение, сопровождаемое значительным повышением температуры
трущихся поверхностей и их сильным износом. Если поверхности
движущихся деталей разделены слоем жидкой смазки, то
сопротивление движению уже не зависит от рода и состояния трущихся
поверхностей, а определяется свойствами жидкости — ее
вязкостью. Вязкость масла является одной из основных его
характеристик. При слишком малой вязкости масло выдавливается из
узлов трения, при излишне большой возникают затруднения с
запуском двигателя, кроме того, масло не проникает в зазоры
между трущимися деталями, и смазка их нарушается. Вязкость
зависит от состава масла и его температуры. При повышении
температуры вязкость всех жидких масел уменьшается. Зависимость
вязкости от температуры масла называется его
вязкостно-температурной характеристикой. Для разных масел эта
характеристика имеет разную крутизну: в заданном интервале
температур менее вязкие масла изменяют свою вязкость меньше, чем
более вязкие.
При низкой температуре характеристика вязкости масла
протекает весьма круто, а при относительно небольшом понижении
температуры вязкость масла быстро увеличивается вплоть до полной
потерч текучести. Это затрудняет запуск. Так, например,
мощность стартеров ТРД при вязкости масла свыше 3000 сСт может
оказаться недостаточной для прокрутки двигателя.
Смазочные масла обладают способностью образовывать на
поверхности деталей топкие пленки, которые прочно сцеплены с
поверхностью металла. Такие пленки, препятствуя
непосредственному контакту трущихся деталей, существенно уменьшают их износ.
Толщина и прочность таких пленок зависят как от свойств масла,
получивших название маслянистости или смазывающей
способности, так и от материала трущихся деталей.
При хранении смазочные материалы вполне стабильны.
Однако во время работы, когда температура масла повышается,
происходит частичное его окисление кислородом воздуха. При этом
повышается кислотность масла, образуются плотные
нерастворимые вещества, которые выпадают в осадок.
При нагреве и окислении в тонком слое после испарения части
масла образуется прочная лаковая пленка. Обладая низкой
теплопроводностью, она приводит к перегреву деталей, вызывает при-
горание сепараторов подшипников и поршневых колец, ведет к
заеданию штоков агрегатов гидравлических систем. Изменение
свойств масла во время работы требует периодической его
замены.
Наибольшее распространение в настоящее время имеют
нефтяные масла, которые получают вакуумной перегонкой мазута с
последующей очисткой полученных продуктов.
313
К числу масел, применяющихся в ГТД, относятся нефтяные
масла МК-8, МК-8П, МС-8, МС-8П, трансформаторное масло,
синтетические масла ВНИИ НП-50-1-4Ф, 36/1КУ-А, ИПМ-10, МН-7,5.
Масло МК-8 является основным сортом, применяющимся на всех
ТРД в течение ряда лет, ио оно при повышении температуры в
маслосистеме недостаточно стабильно. Это масло обеспечивает
надежный запуск двигателя без предварительного подогрева до
температуры от —30 до -г35°С и длительную надежную его работу
при температуре масла на выходе из двигателя, не превышающей
+ 100°С. Добавка в это масло антиокислительной присадки ионо-
ла (масло МК-8П) позволяет длительно применять его до
температуры от +120 до +140СС. Трансформаторное масло обладает
несколько худшими, но близкими к маслу МК-8 свойствами и
служит его заменителем. Масла МС-8 и МС-8П применяются на
всех двигателях наравне с МК-8 и МК-ЬП. По сравнению с этими
маслами они содержат меньше легких фракций, обладают
лучшими вязкостно-температурными свойствами, более стабильны
при работе двигателей.
Нефтяные масла имеют сравнительно крутую
вязкостно-температурную характеристику. Поэтому температурные пределы
работоспособности этих масел ограничены. При этом повышение
температуры масла ограничивается не только падением вязкости
масла, но и их недостаточной термической стабильностью. Поэтому
все чаще начинают применять синтетические масла. Наиболее
распространены масла на основе сложных эфиров. К их числу
относится, например, отечественное масло ВНИИ НП-50-1-4Ф. По
сравнению с нефтяными они имеют более пологую
вязкостно-температурную характеристику и меньшую испаряемость, что
позволяет использовать их в более широком диапазоне температур.
Недостатком таких масел является то, что они вызывают набухание
резины и других органических материалов.
Другим отечественным синтетическим маслом является поли-
гликолевое масло 36/1КУ-А, исходным сырьем для получения
которого служат продукты переработки нефти. Это масло обладает
высокой стойкостью против окисления и не дает смол и лаковых
отложений.
При работе с синтетическими маслами необходимо соблюдать
соответствующие правила техники безопасности, так как все они
ядовиты. Они обеспечивают запуск неподогретого двигателя до
—40ГС и работоспособны до температур порядка +200СС, а
кратковременно — даже выше.
В ТВД наряду со смазкой теплонапряженных подшипников
качения, требующих маловязкого масла, необходимо смазывать
высоконагруженные шестерни редуктора, которые для
уменьшения износа нуждаются в маслах с повышенной смазочной
способностью и вязкостью. Поэтому для смазки ТВД употребляют смеси
маловязких масел типа МК-8 и высоковязких масел МС-20 и
МК-22. Наличие высоковязких масел в смеси ухудшает пусковые
свойства двигателя, делая его запуск без предварительного подо-
314
www.vokb-la.spb.ru - Самолёт своими руками?!
грева возможным лишь при Температуре окружающего воздуха
не ниже —5-; 10°С. Лучшими характеристиками обладают по-
луеннтетические масла, например МН-7,5.
Масло МН-7,5 для ТВД получается путем загущения
маловязкого масла МС-6 высокоэффективным полимером и добавления
присадок противоизносного, противозадирного,
антиокислительного и антикоррозийного действия.
В таких узлах трения, в которых смазку желательно нанести
заранее, так как подводить ее во время работы затруднительно,
применяют консистентные или пластичные смазки. Такие смазки
не стекают со стенок и не вытекают из негерметичных узлов
трения. При относительно небольших усилиях их можно подавать
к трущимся деталям, на которых они образуют масляный клин и
антиизносную пленку. Консистентные смазки представляют собой
смесь жидких нефтяных или синтетических масел и твердых
загустителей.
Наиболее распространена смазка ЦИАТИМ-201, диапазон
рабочих температур которой от —60 до +140°С. В сильно
нагруженных узлах трения, например узлах крепления роторов,
вертолетов или лопастей воздушного винта, применяется смазка ЦИА-
ТИМ-203, а в подшипниках колес самолетов — тугоплавкая
смазка НК-50. Находят применение и другие консистентные смазки.
5.3. АЭРОДРОМНЫЙ КОНТРОЛЬ КАЧЕСТВА ГОРЮЧЕГО
И СМАЗОЧНЫХ МАТЕРИАЛОВ
Каждый образец авиационной техники надежно работает
только на вполне определенных горючем и смазочных
материалах, которые должны обладать заданными свойствами, т. е. точно
соответствовать техническим условиям, утвержденным ГОСТ.
Поэтому физико-химические свойства применяемых материалов и
продуктов подвергаются тщательному контролю не только при
изготовлении, но и перед применением. Такой контроль осуществляется
окружными, базовыми и аэродромными лабораториями ВВС.
Необходимость многократного контроля вызывается тем, что за
время, прошедшее от изготовления до применения, некоторые
свойства продуктов могут заметно изменяться, в них могут попасть
механические примеси и вода.
Горючее и смазочные материалы, не соответствующие нормам
хотя бы по одному показателю, использовать по прямому
назначению запрещается.
Аэродромный контроль качества горючего и смазочных
материалов осуществляется инженерно-авиационной службой летной
части.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
Алтухов В. А., Брага В. Г., Б у т е н к о Г. Ф. и др. Практическая
аэродинамика маневренных самолетов. М., Воениздат, 1977.
Васильев Д. П., Демнн Н. Л., Каримов А. Г. н др. Основы
конструкции и эксплуатации авиационного турбореактивного двигателя. М., Воен-
издат, 1972.
Дьяченко А. А., М н к н р т у м о в Э. Б, С у ш к о В. В. и др.
Практическая аэродинамика самолетов с турбовинтовыми двигателями. М-, Воениз-
дат, 1970.
Максимов Н. А., Секнстов В. А Двигатели самолетов и вертолетов.
М., Воениздат, 1977.
Мншук М. Н. Авиация в век ракет. Наука и жизнь, 1967, № П.
Морозов Ф. К, Гренадеров А. П., К о н ы ш е в А. А. и др. Основы
конструкции авиационных газотурбинных двигателей. М., Воениздат, 1974.
Нечаев Ю. Н., Федоров Р. М. Теория авиационных газотурбинных
двигателей. Ч. 1. М., Машиностроение, 1977, ч. 11, 1978.
Нечаев Ю. Н., Федоров Р. М., Каманин Л. Н. и др. Теория
авиационных двигателей. М., Воениздат, 1980.
Основы конструкции самолетов. Под ред. К. Д. Туркнпа. М.. Воениздат,
1974.
Павленко В. Ф., Дьяченко А. А., Ж у л е в В. И. и др.
Летательные аппараты, силовые установки и их эксплуатация. М., Изд. ВВИА им.
проф. Н. Е. Жуковского, 1978.
Павленко В ф. Силовые установки летательных аппаратов
вертикального взлета н посадки. М., Машниостроенне, 1972.
Павленко В. Ф. Гиперзвуковая авиация. Авиация и космонавтика,
1967, № 3, 5, 8.
Пономарев А. Н. Авнацня на пороге в космос. М., Воениздат, 1971.
Пономарев А. Н Советские авиационные KoncTpvKTopbi. Ч., Воениздат,
1980
Пономарев Л. Н. Покорители неба. М., Воениздат, 1980.
Покорение космоса. М.. Машиностроение, 197?
Развитие авиационной иаукн и техники в СССР. М., Наука, 1980.
Ромасевнч В. Ф., Самойлов Г. А. Практическая аэродинамика
вертолетов. М., Воениздат, 1980.
Советская военная энциклопедия. М., Воениздат, 1976—1980.
Д е м е и ч е н о к В. П., Дружинин Л. Н., Пархомов А. П. н др.
Теория двухконтурных турбореактивных двигателей. М., Машниостроенне,
1979.
Ш п и л е в К. М„ К о т е и к о Ю. В., Вотяков Н. Г. и др. Инженерно-
авнацнонная служба, эксплуатация и ремонт авиационной техники. М.,
Воениздат, 1979.
Шавров В. Б История конструкций самолетов в СССР. М.,
Машиностроение, 1978.
Harrier. Air Pictorial, vol. 37, XI, p 426—427.
Т. H. M i 11 e г, О. М. Bake r. AV-8A. Harrier concept and operational
performance „AGARD-CP-126", 1973.
316
www.vokb-la.spb.ru - Самолёт своими руками?!
ОГЛАВЛЕНИЕ
Стр.
Предисловие . ^
Введение . . ^
РАЗДЕЛ 1. Аэродинамика и динамика полета летательных аппаратов 25
Глава 1. Основные аэродинамические характеристики летательных
аппаратов . :
1.1. Основные законы аэродинамики. Распределение воздушной
нагрузки по профилю н размаху крыла ; —
1.2. Подъемная сила н сила лобового сопротивления
летательного аппарата. Аэродинамические коэффициенты (, и [. . . . 32
1.3. Зависимость аэродинамических характеристик летательного
аппарата ог его внешних форм j 38
1.4. Способы увеличения коэффициента подъемной силы
летательного аппарата » 39
Глава 2. Установившееся прямолинейное движение самолета ... 42
2.1. Силы, действующие на самолет в прямолинейном полете . . —
2.2. Характерные скорости прямолинейного установившегося
горизонтального полета. Эксплуатационный диапазон высот и
скоростей полета самолета ^6
2.3. Установившийся набор высоты и снижение самолета .... 49
Глава 3. Неустановившееся движение самолета
1.1. Основные части планера, их назначение и предъявляемые
к ним требования
53
3.1. Разгон н торможение самолетв —
3.2. Криволинейное движение самолета 55
Глава 4. Устойчивость и управляемость самолета 61
4.1. Понятия балансировки, устойчивости и управляемости
самолета —
4.2. Продольная устойчивость летательного аппарата но углу
атаки или по перегрузке 6'"»
4.3. Понятия путевой и поперечной устойчивости самолета ... 67
Глава 5. Основные сведения о полете вертолета *0
5.1. Силы, действующие на вертолет в полете —
5.2. Горизонтальный полет, висеиие вертолета. Эксплуатационный
диапазон скоростей полета '3
5.3. Подъем, снижение, взлет и посадка вертолета 76
РАЗДЕЛ II. Конструкция летательных аппаратов 80
Глава 1. Планер летательного аппарата —
317
Стр.
1.2. Нормирование прочности конструкции 84
1.3. Назначение, работа основных элементов крыла и
предъявляемые к ннм требования 86
1.4. Назначение, конструкция и работа лопастей несущего винта
вертолета 94
1.5. Органы управления летательными аппаратами, их
конструкция и работа 95
1.6. Фюзеляж летательного аппарата, его конструкция и работа 99
Глава 2. Взлетно-посадочные устройства летательных аппаратов . . 102
2.1. Назначение взлетно-посадочных устройств и основные
требования, предъявляемые к ним —
2.2. Устройства, уменьшающие взлетно-посадочные скорости
самолета 103
2.3. Назначение, работа разгонных и тормозных устройств . . . 105
2.4. Назначение н работа авиационных колес 106
2.5. Схемы шасси. Назначение и работа амортизаторов шасси . . ПО
Глава 3. Гидравлические и пневматические системы П6
3.1. Назначение и основные данные —
3.2. Принципиальная схема гидравлической системы П7
3.3. Устройство гидравлических агрегашк и н_\ элементов. .... П8
3.4. Принципиальная схема пневматической системы 124
3.5. Особенности устройства агрегатов пневматических ciitrevi и их
элементов 125
Глава 4. Система управления 126
4.1. Назначение и состав системы управления —
4.2. Принципиальная схема системы управления 128
4.3. Особенности устройства агрегатов и элементов систем
управления 129
Глава 5. Топливные системы летательных аппаратов 138
5.1. Назначение и работа топливных систем, требования,
предъявляемые к ним . . —
5.2 Принципиальное устройство топливной системы 139
РАЗДЕЛ III. Авиационные двигатели 144
Глава 1. Классификация и области применения авиационных
двигателей —
1.1. Основные требования, предъявляемые к авиационным
двигателям —
1.2. Классификация и области применения авиационных двигателей 145
1.3. Основные параметры авиационных ГТД 150
1.4. Общие сведения о нагрузках, действующих на элементы ГТД 152
Глава 2. Принцип действия и особенности конструкции основных
элементов авиационных ГТД . . 153
2.1. Входные устройства ГТД —
2.2. Компрессоры ГТД 161
2.3. Газовые турбины ГТД 174
2.4. Основные н форсажные камеры сгорания ГТД 181
2.5. Выходные устройства ГТД 188
318
www.vokb-la.spb.ru - Самолёт своими руками?!
Стр.
Глава 3. Конструктивные особенности ТРЛ и ТРДФ 195
3.1. Рабочий процесс и основные удельные параметры ТРД и ТРДФ —
3.2. Конструктивные схемы и особенности ТРД и ГРДФ .... 200
Глава 4. Конструктивные особенности ТРДД и ТРДДФ 205
4.1. Рабочий процесс и основные удельные параметры ТРДД и
ТРДДФ —
4 2 Конструктивные особенности ТРДД и ТРДДФ 209
Глава 5. Конструктивные особенности ТВД и турбовальных ГТД 215
5.1. Рабочий процесс и основные удельные параметры ТВД и
турбовальных ГТД —
5.2. Конструктивные особенности ТВД и турбовальных ГТД . . 218
Глава 6. Силовые системы ГТД 223
6.1. Силовые системы роторов 224
6.2. Силовые системы корпусов. Крепление двигателя к
летательному аппарату
225
6 3. Баланс енл и моментов, действующих в ГТД 227
Глава 7. Системы, обеспечивающие работу двигателя —
7.1. Система смазки ~
7.2. Топливная система 231
7.3. Пусковая система 238
Глава 8. Характеристики и эксплуатационные ограничения
авиационных ГТД 241
8.1. Программы регулирования авиационных ГТД —
8.2. Высотно-скоростные и дроссельные характеристики ТРД и
ТРДФ . 243
8.3. Особенности характеристик ТРДД 247
8-4. Характеристики ТВД и турбовальных ГТД 248
8.5. Эксплуатационные ограничения и особые случаи в полете,
связанные с работой авиационных ГТД 2£2
Глава 9. Автоматика авиационных ГТД 253
9.1. Задачи автоматики. Требования, предъявляемые к системам
автоматического управления —
9.2. Свойства ГТД как объекта автоматического управления . . 254
9.3. Общие принципы построения систем автоматического
регулирования (САР) ТРД , 258
9.4. Системы управления частотой вращения ротора двигателя 259
9.5. Автоматические системы управления выходным устройством
н подачей топлива в форсажную Kaviepy 265
9.6. Автоматизация процессов разгона и запуска ГТД .... 269
РАЗДЕЛ IV. Инженерно-авиационная служба и организация
эксплуатации авиационной техники
273
Глава I. Назначение и задачи инженерно-авиационной службы ... —
Глава 2. Организация эксплуатации и войскового ремонта
авиационной техники j 280
2.1. Размещение авиационной техники и средств наземного
обслуживания —
2.2. Организация технической эксплуатации авиационной техники 282
2.3. Войсковой ремонт авиационной техники 284
2.4. Документация НДС . . . . , 286
319
Стр.
Глава 3. Подготовка авиационной техники к применению 287
3.1. Назначение н содержание различных видов подготовки
авиационной техники к полетам -
3.2 Назначение и порядок проведения паркового дня и
регламентных работ £93
3.3. Средства наземного обслуживания . ЗСО
Глава 4. Поддержание надежности авиационной техники 302
4 1. Понятие о надежности авиационной техники —
4.2. Причины появления неисправностей 303
4.3 Методы поиска неисправностей авиационной техники 306
4.4. Обеспечение высокой надежности авиационной техники в
условиях эксплуатации 308
Глава 5 Горючее и смазочные материалы 309
5.1. Горючее, применяемое в газотурбинных двигателях —
5.2. Смазочные материалы 313
5.3. Аэродромный контроль качества горючего и смазочных
материалов 315
Список использованной литературы „ 316
Виктор Федорович Павленко, Александр Андреевич Дьяченко,
Василий Иванович Жулев, Борис Константинович Колпаков,
Александр Павлович Назаров, Владимир Александрович Тихонравов
БОЕВАЯ АВИАЦИОННАЯ ТЕХНИКА
Редактор Л. М. Фролов
Художник В. А. Белкин
Редактор (литературный) И. Б. Кузнецова-Морева
Художественный редактор И. Б. Попова
Техннческкй редактор И. Я- Богданова
Корректор Г. К. Леньщикова
ИБ М 1817
Сдано в набор 08.02.83. Подписано к печати 17.02.84. Г-72671
Формат 60X90/ie- Печ. л. 20. Усл. печ. л. 20. Усл. кр.-отт. 20,13. Уч.-изд. л. 20.66
Тираж 23.000 экз. Изд. № 7/6960 Заказ 229 Цена I р. 30 к.
I
Воениздат. IO3I60, Москва. K-I60
2-я типография Военнздата
JSI065. Ленинград, Д 65. Дворцовая пл.. д. IQ.
www.vokb-la.spb.ru - Самолёт своими руками?!
\