/
















































































































Author: Бутенин Н.В. Лунц Я.Л. Меркин Д.Р.
Tags: общая механика механика твердых и жидких тел механика
Year: 1979




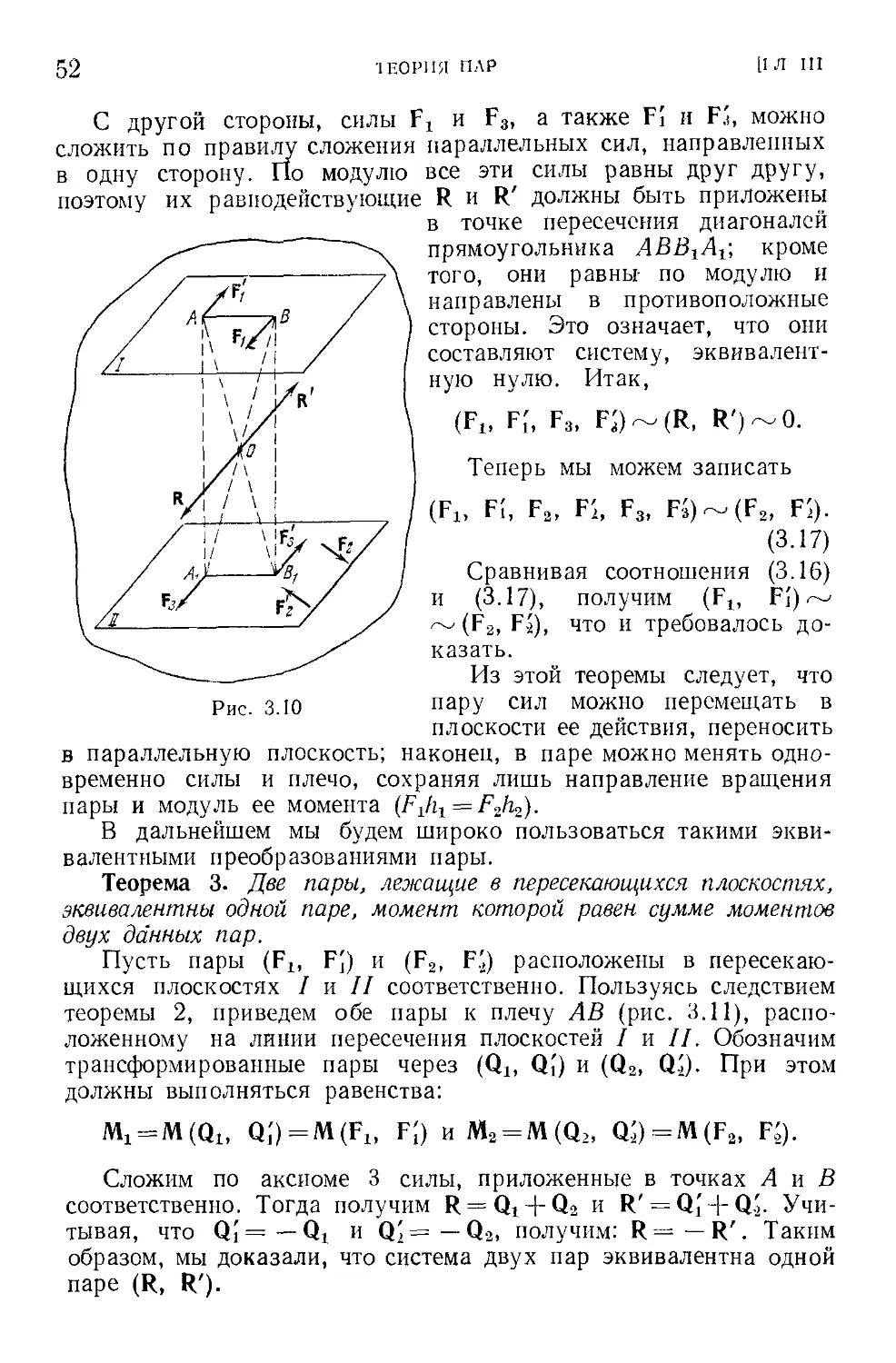
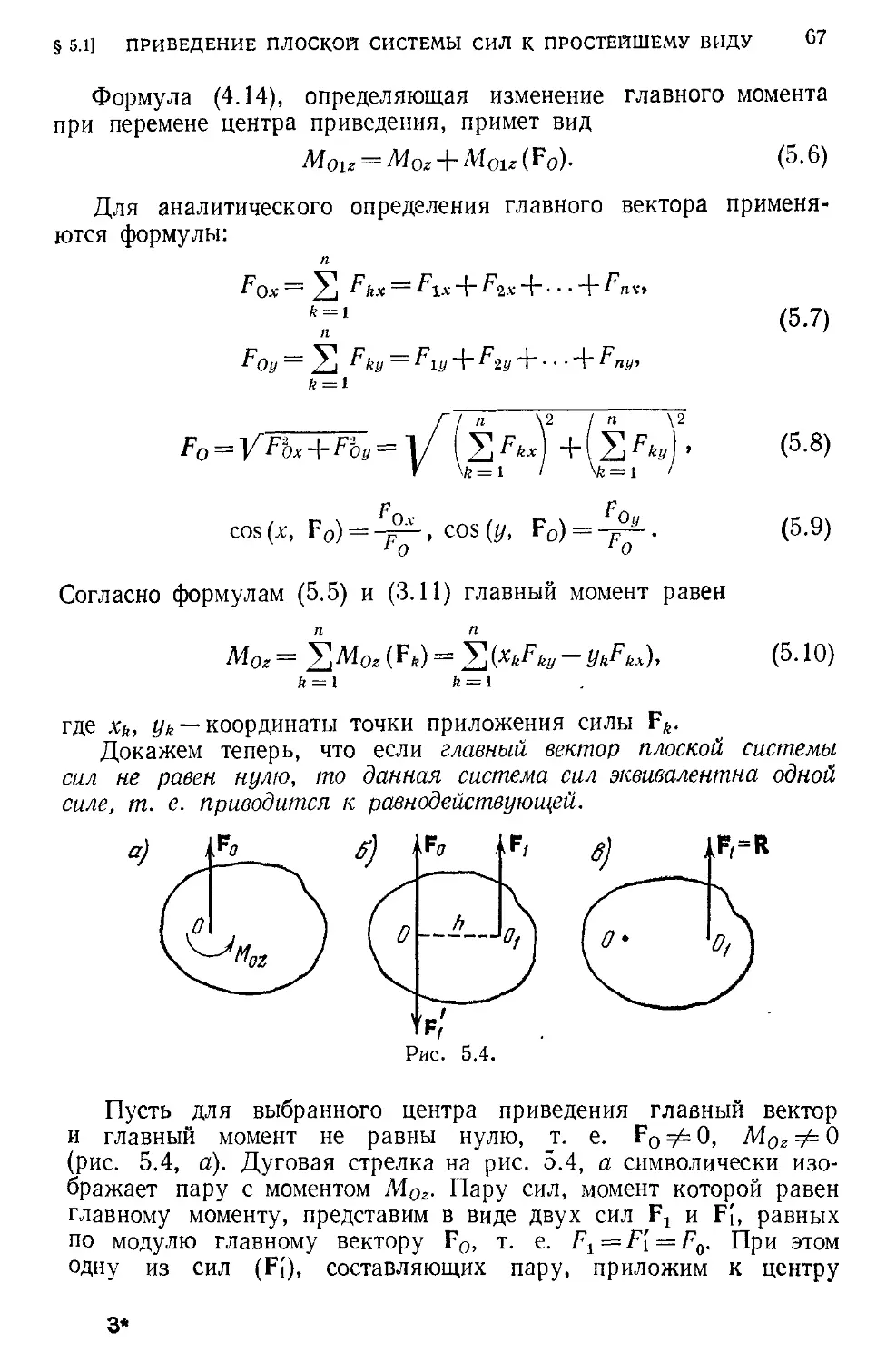
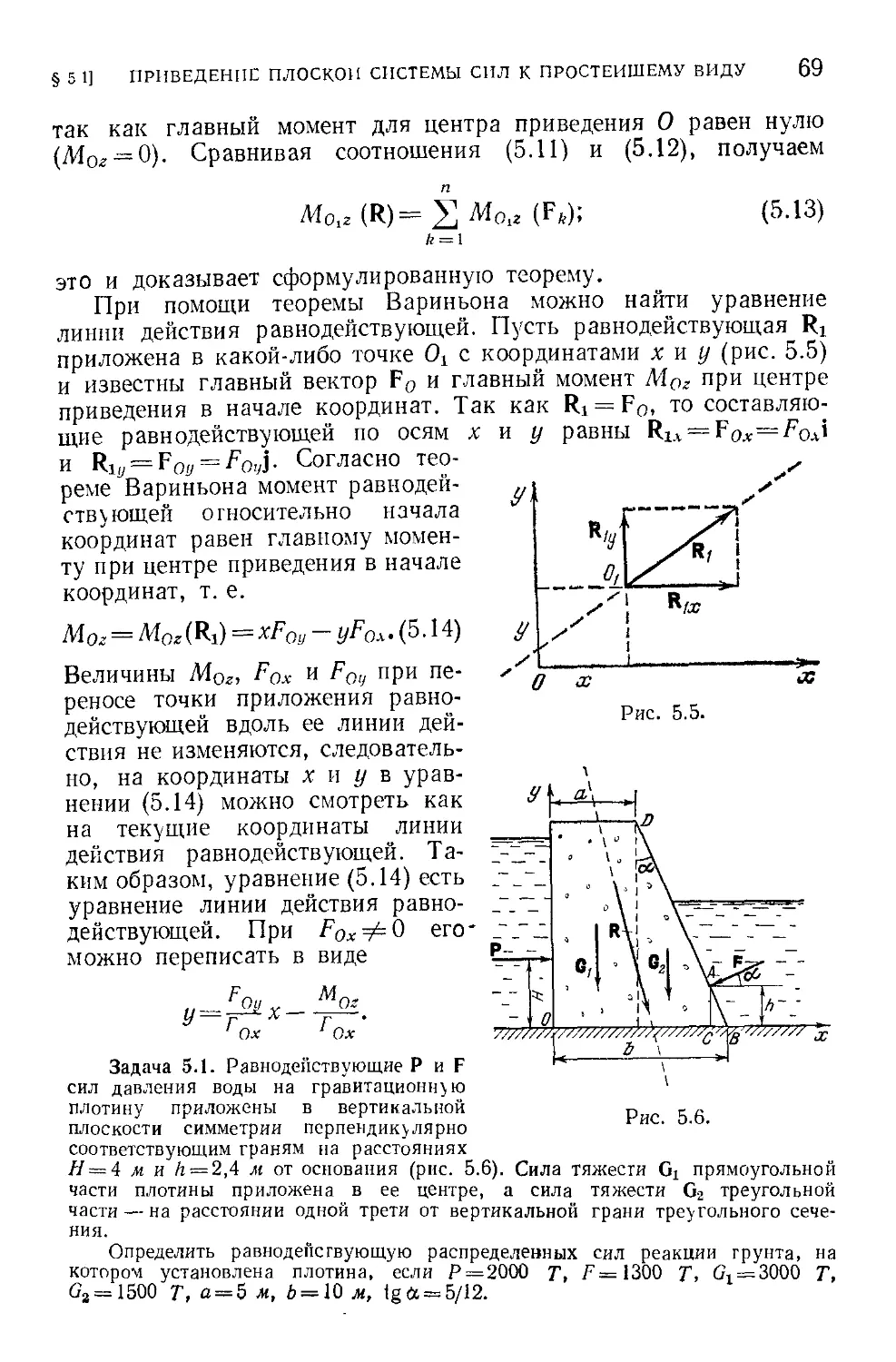
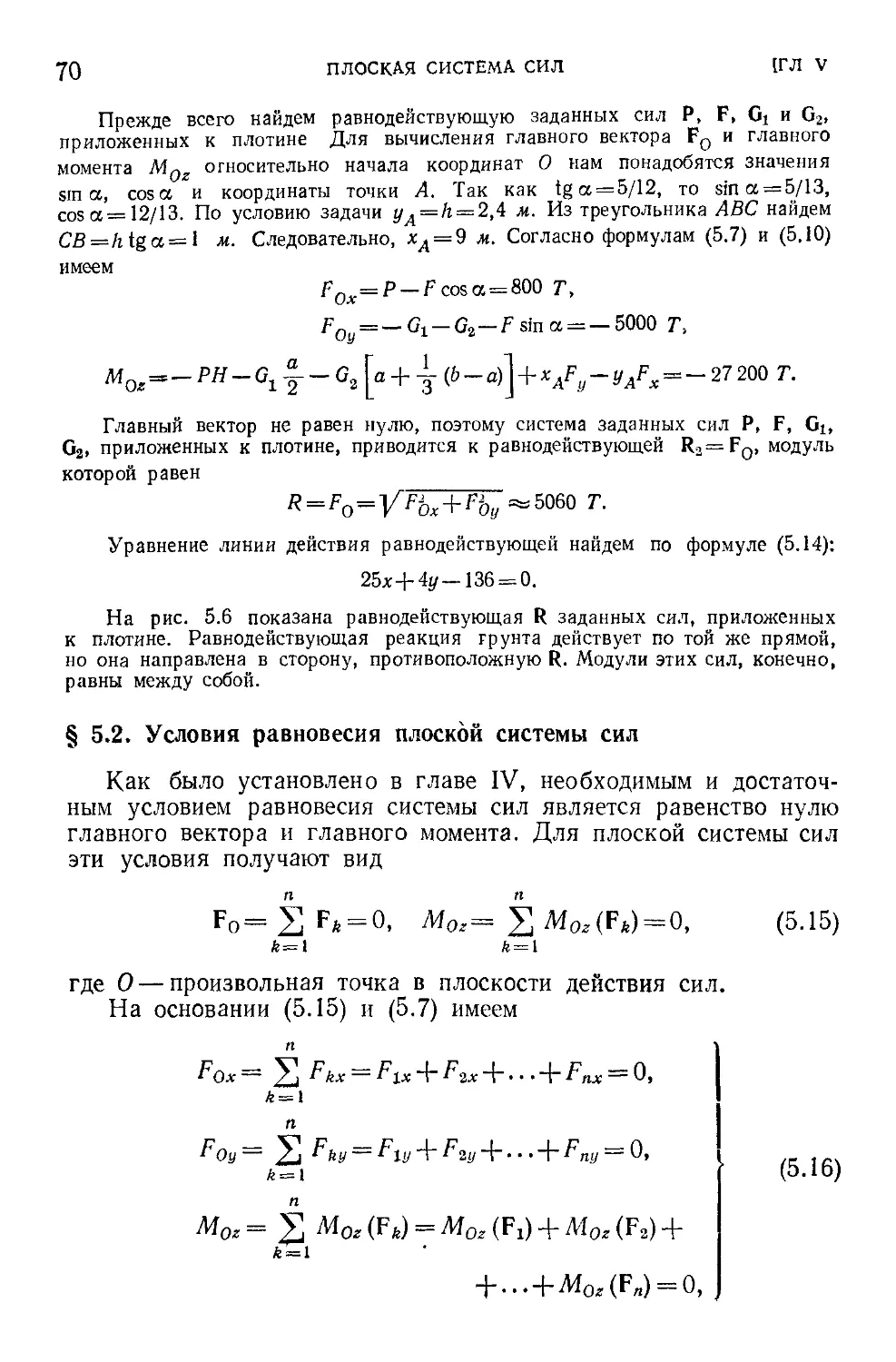
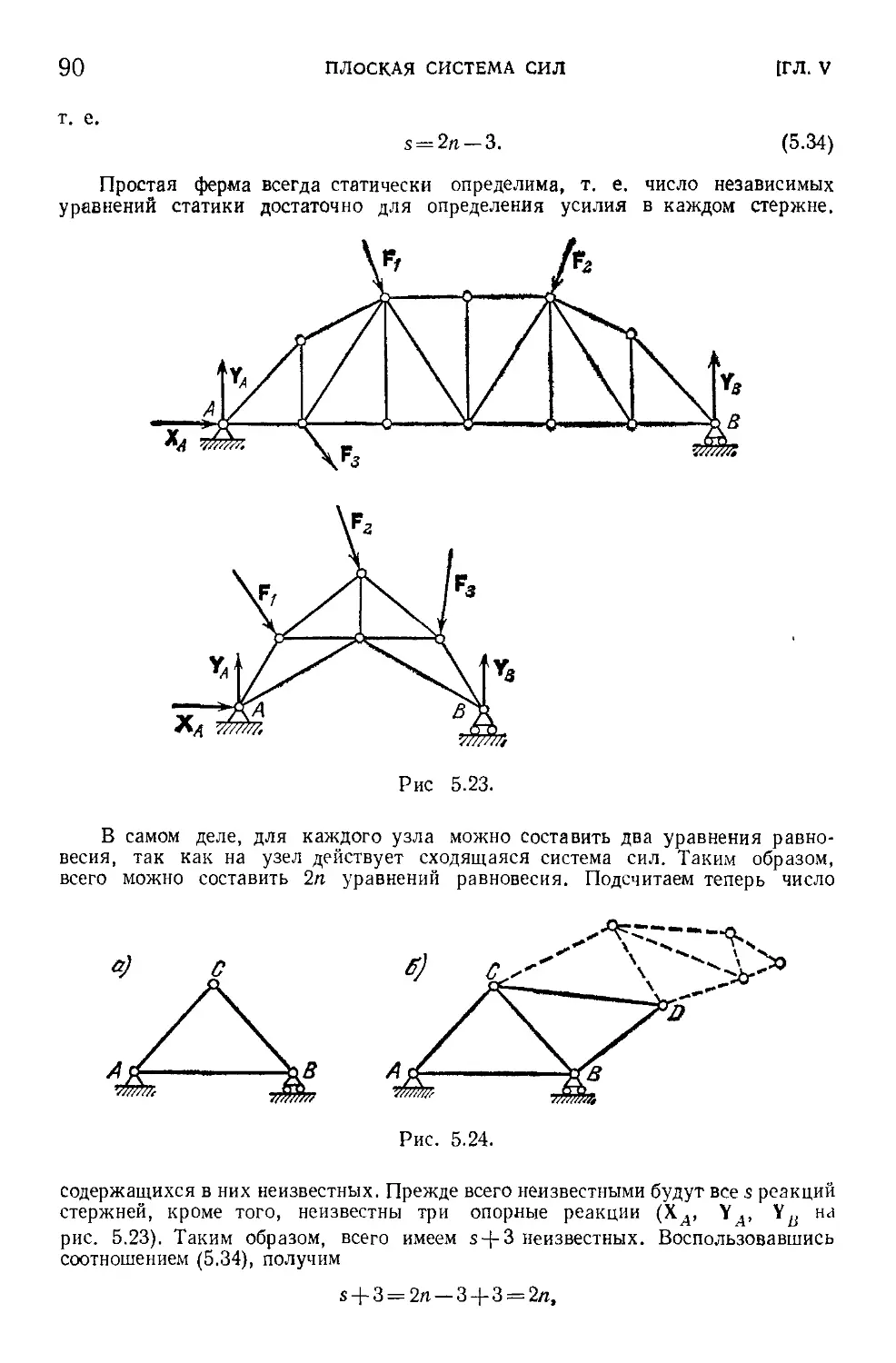
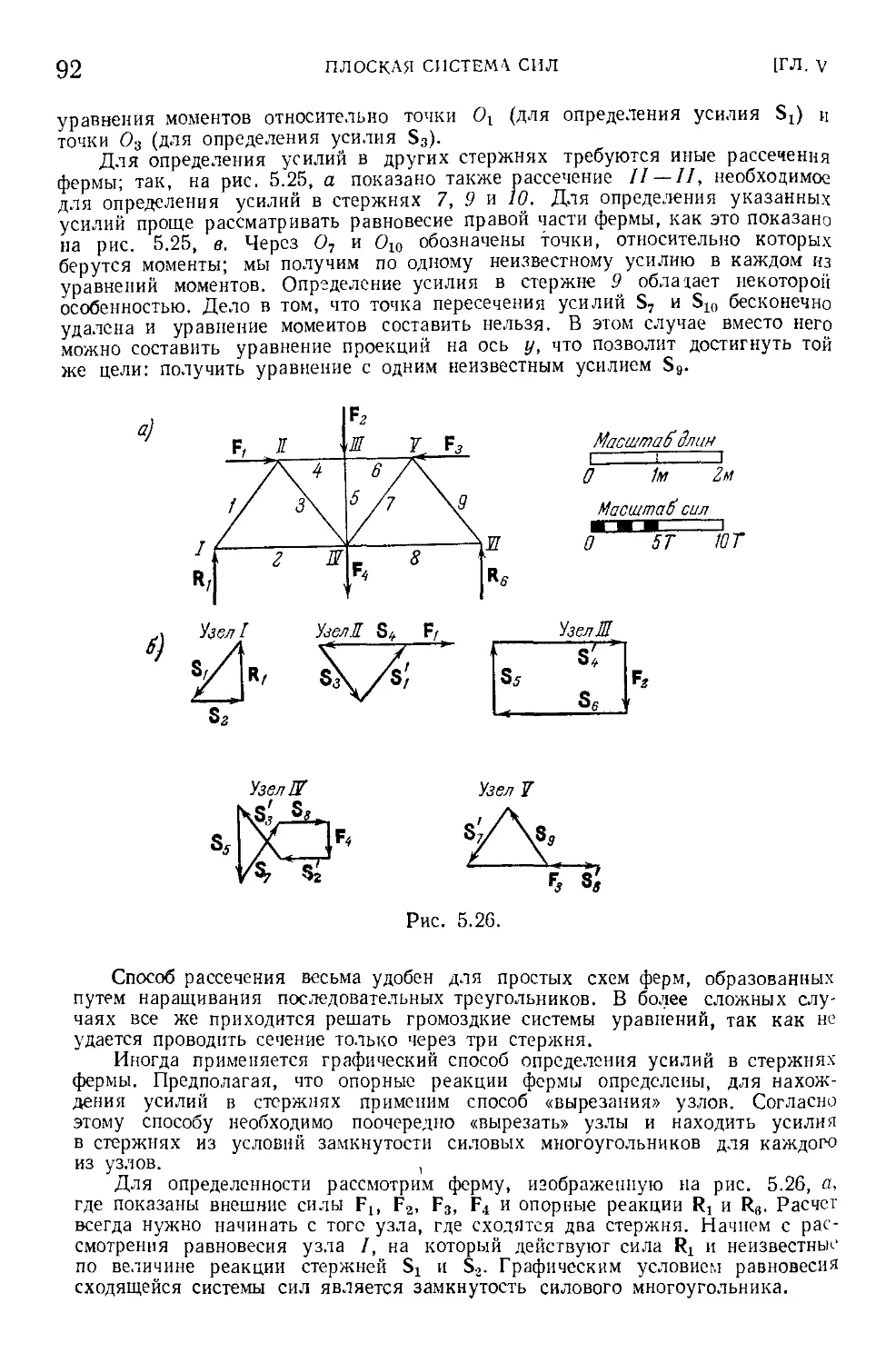
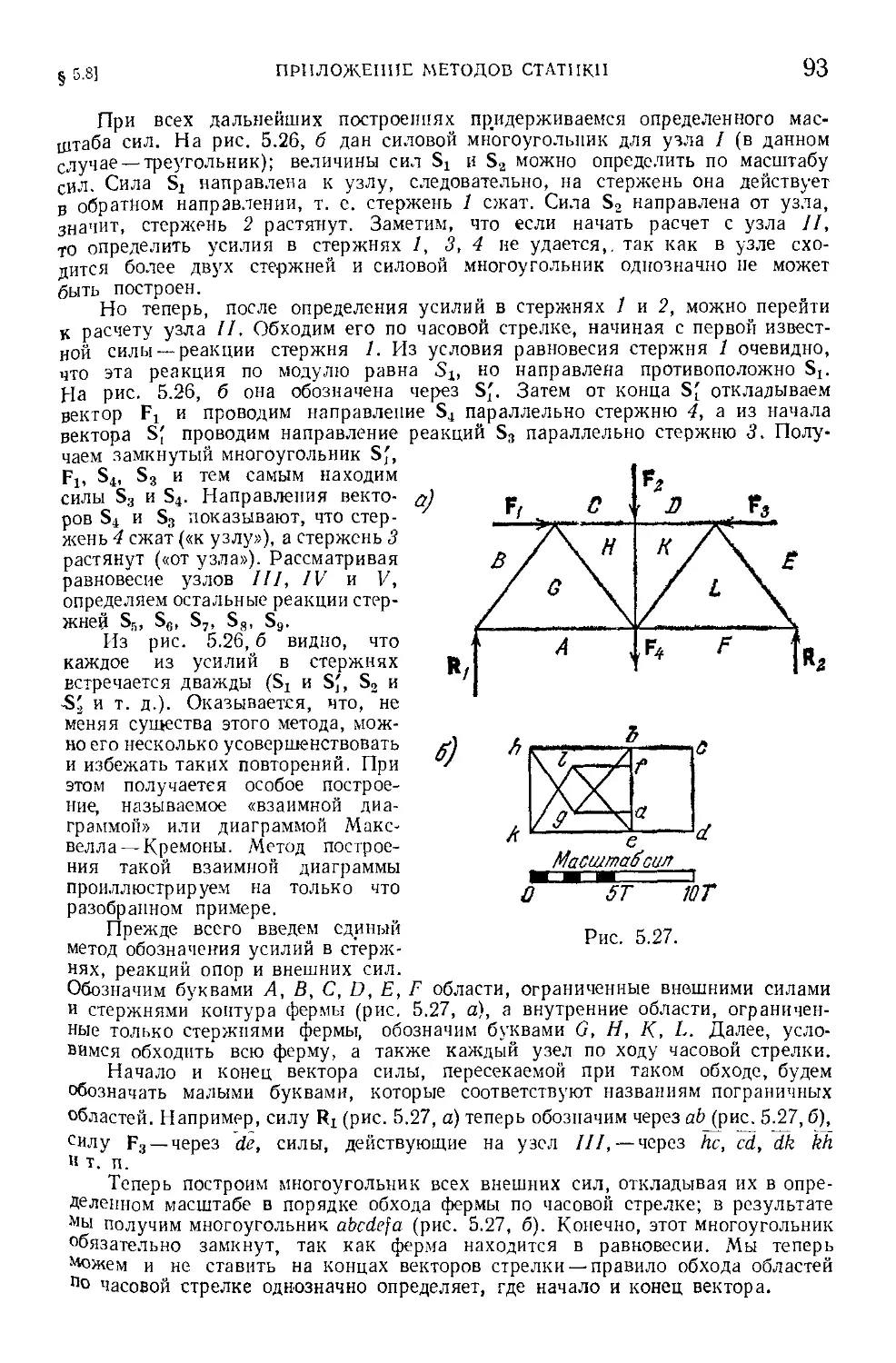
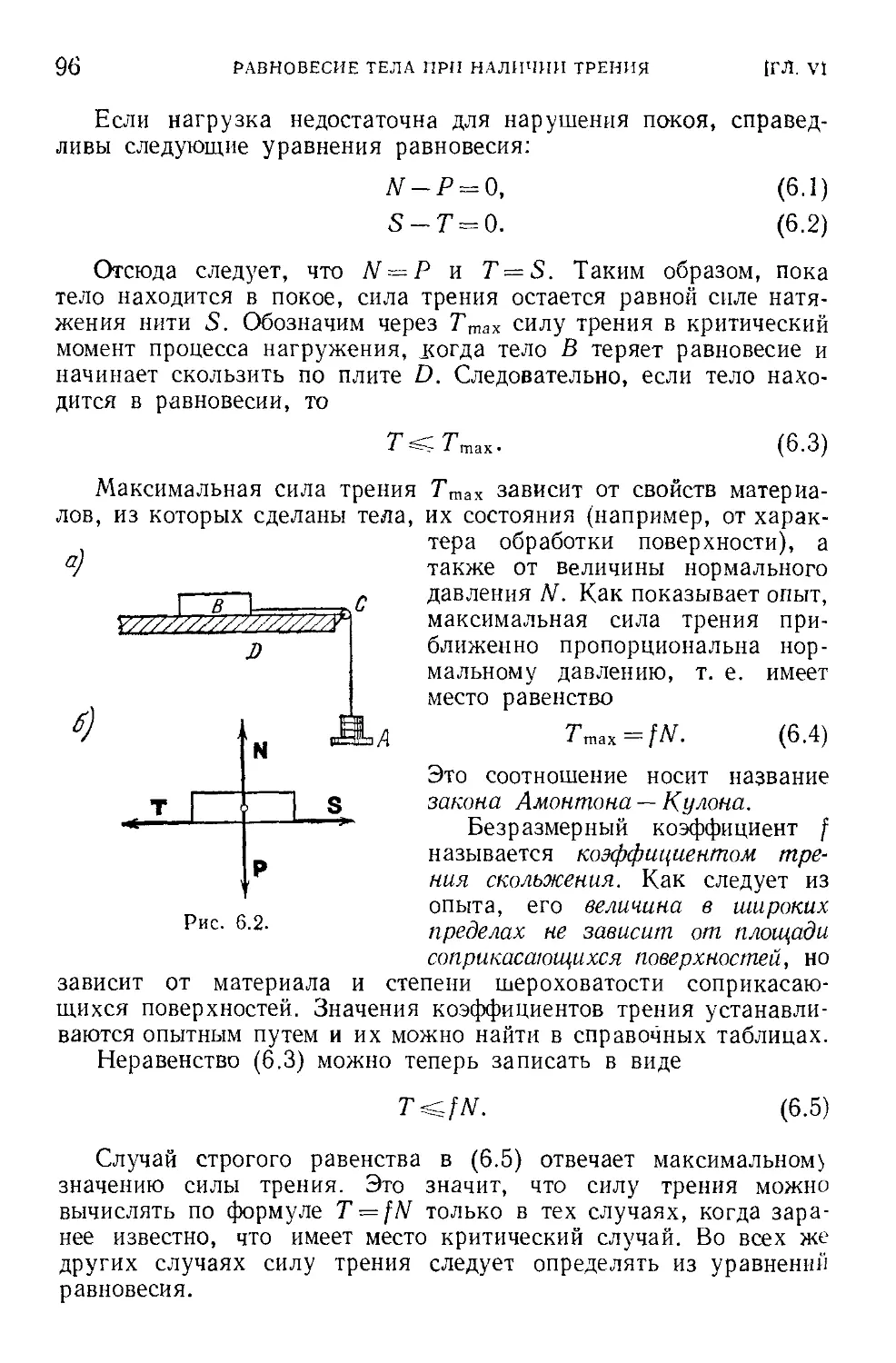
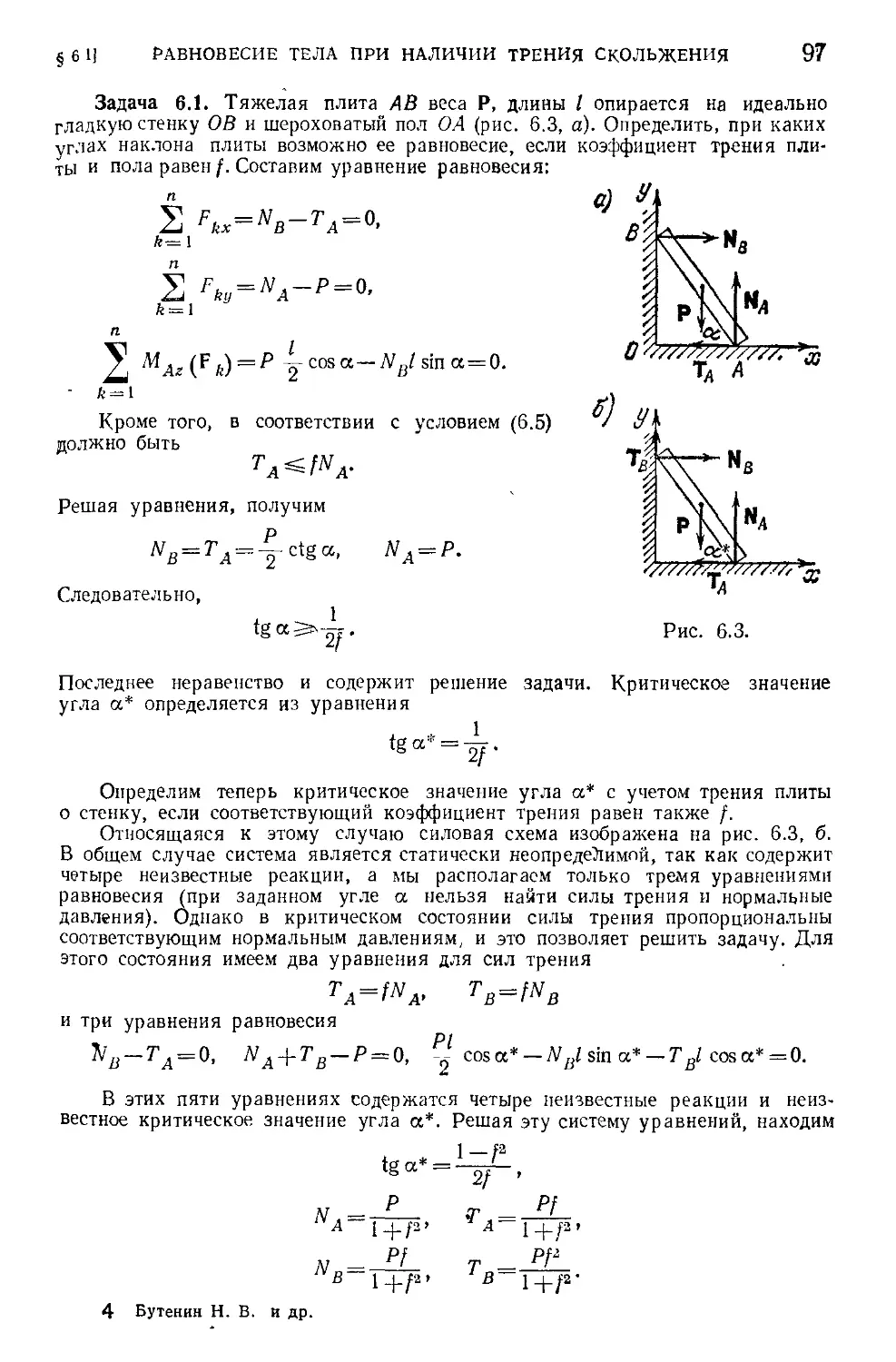
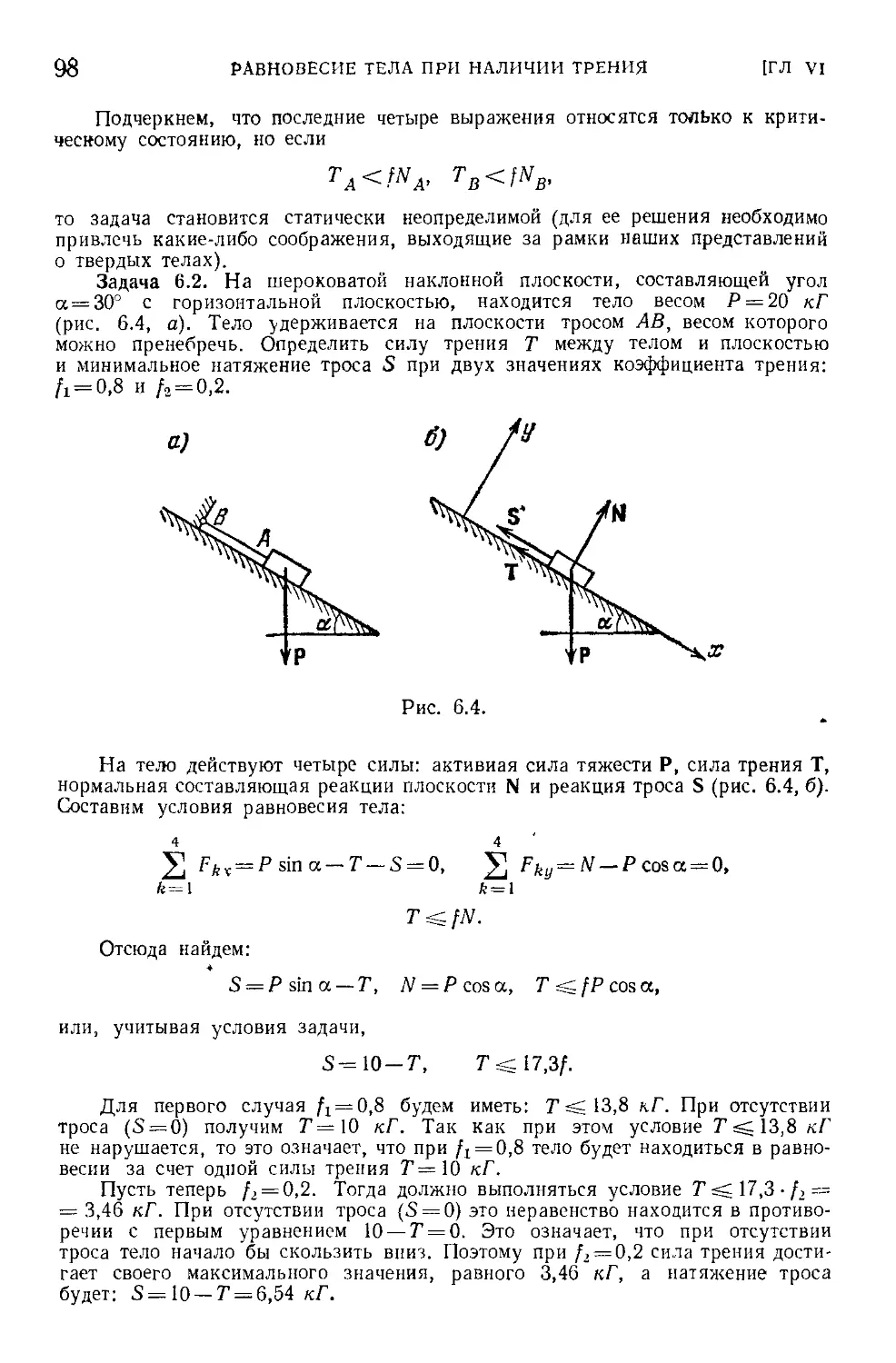
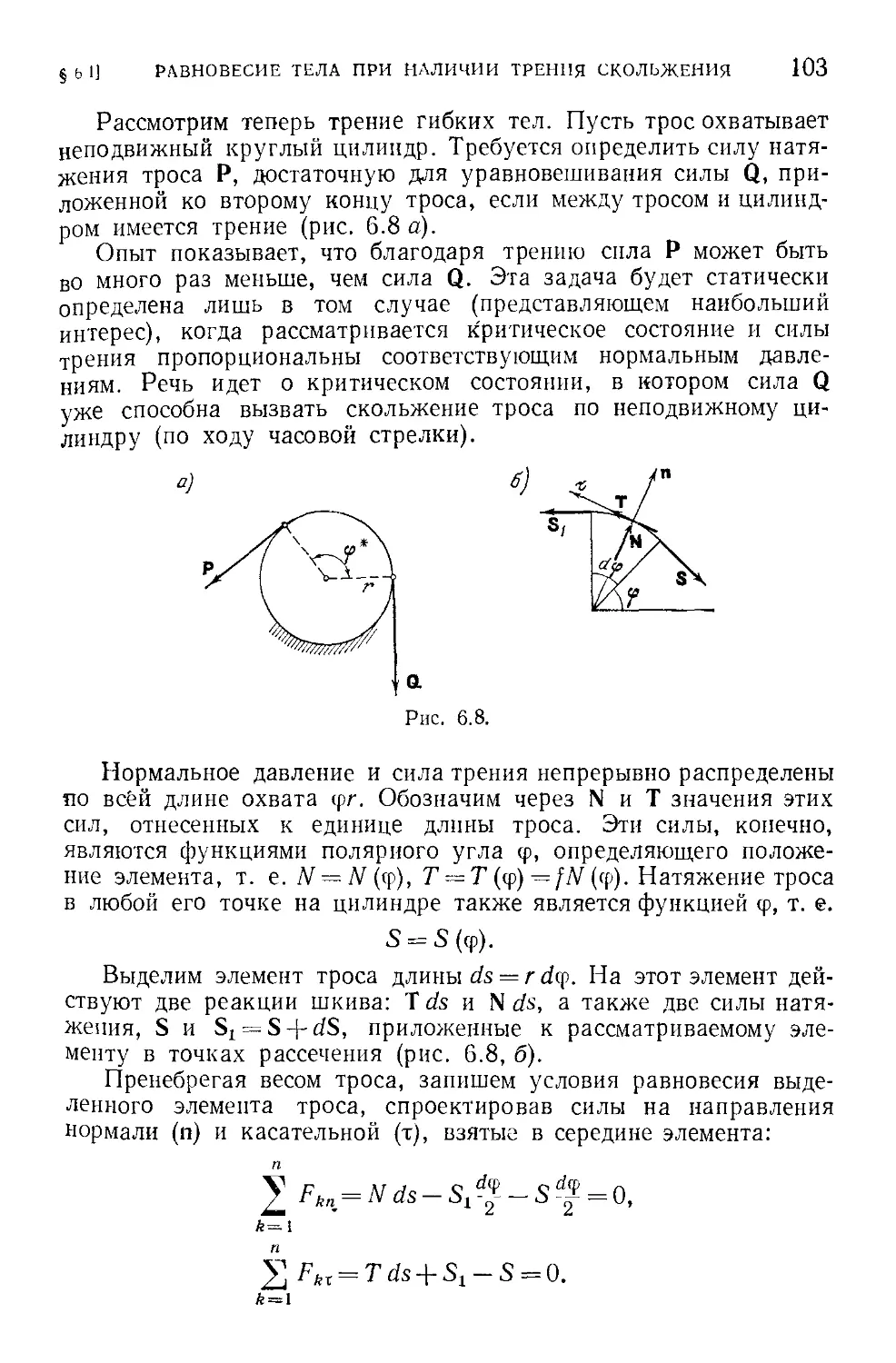
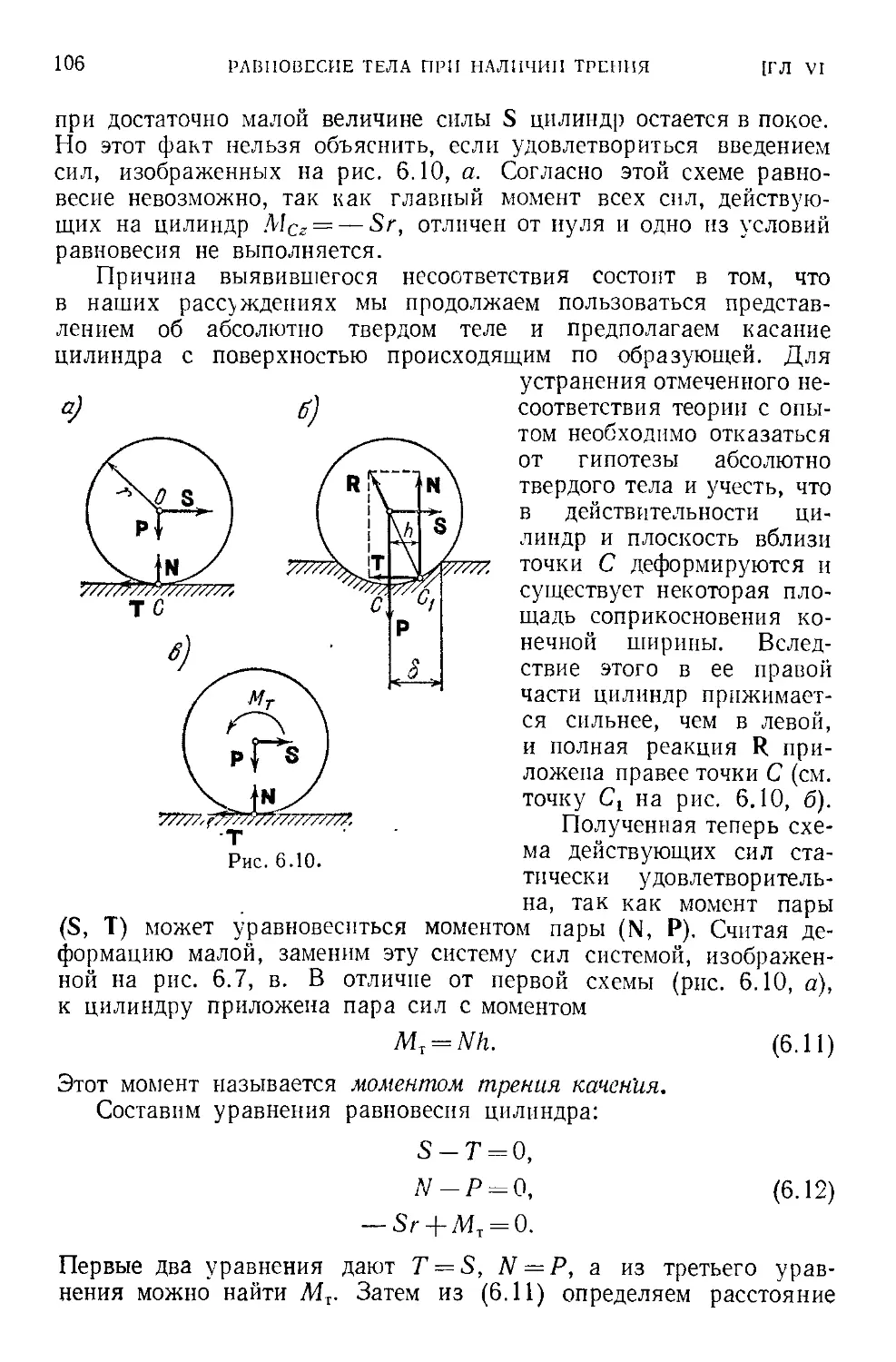
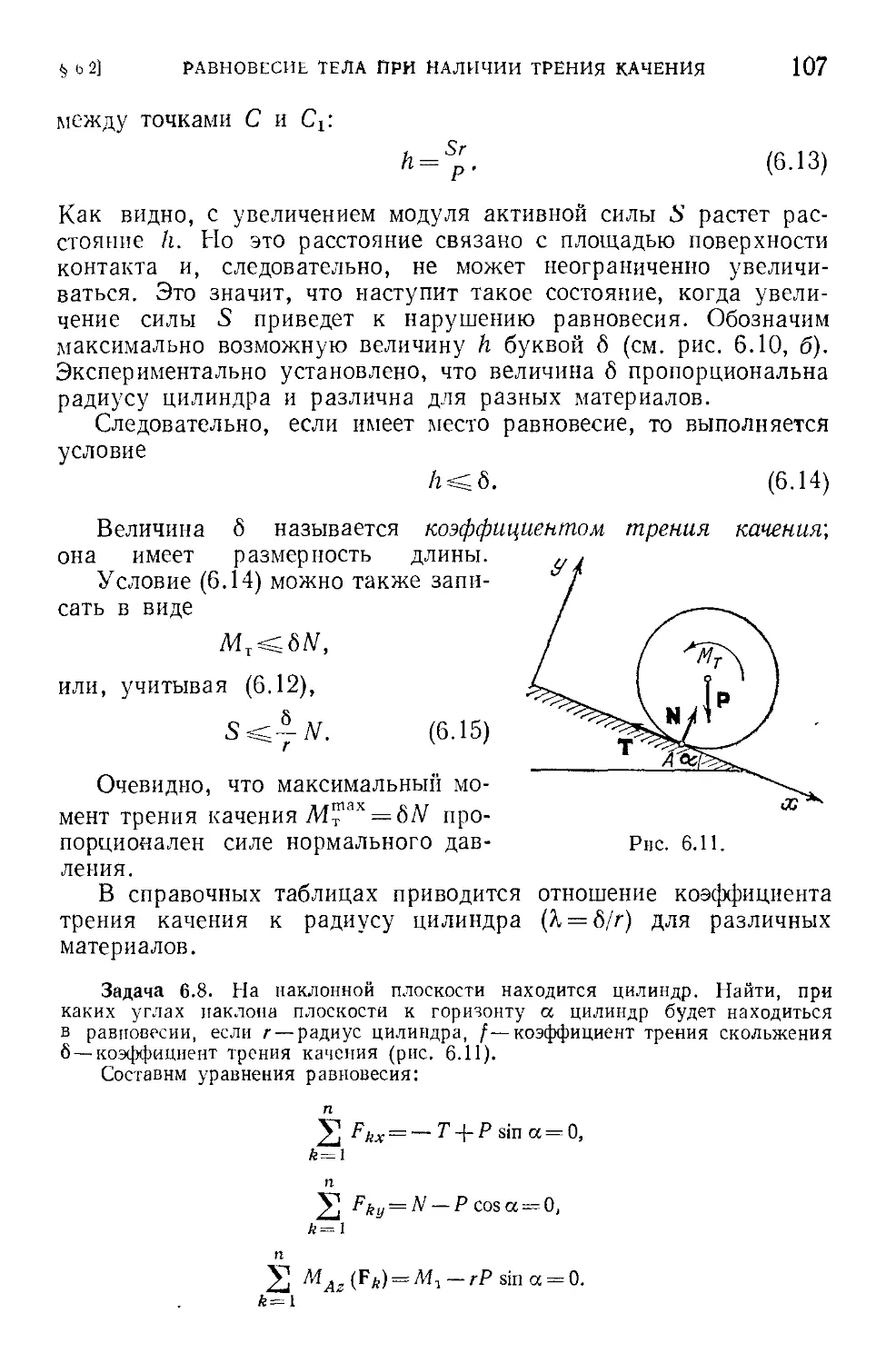
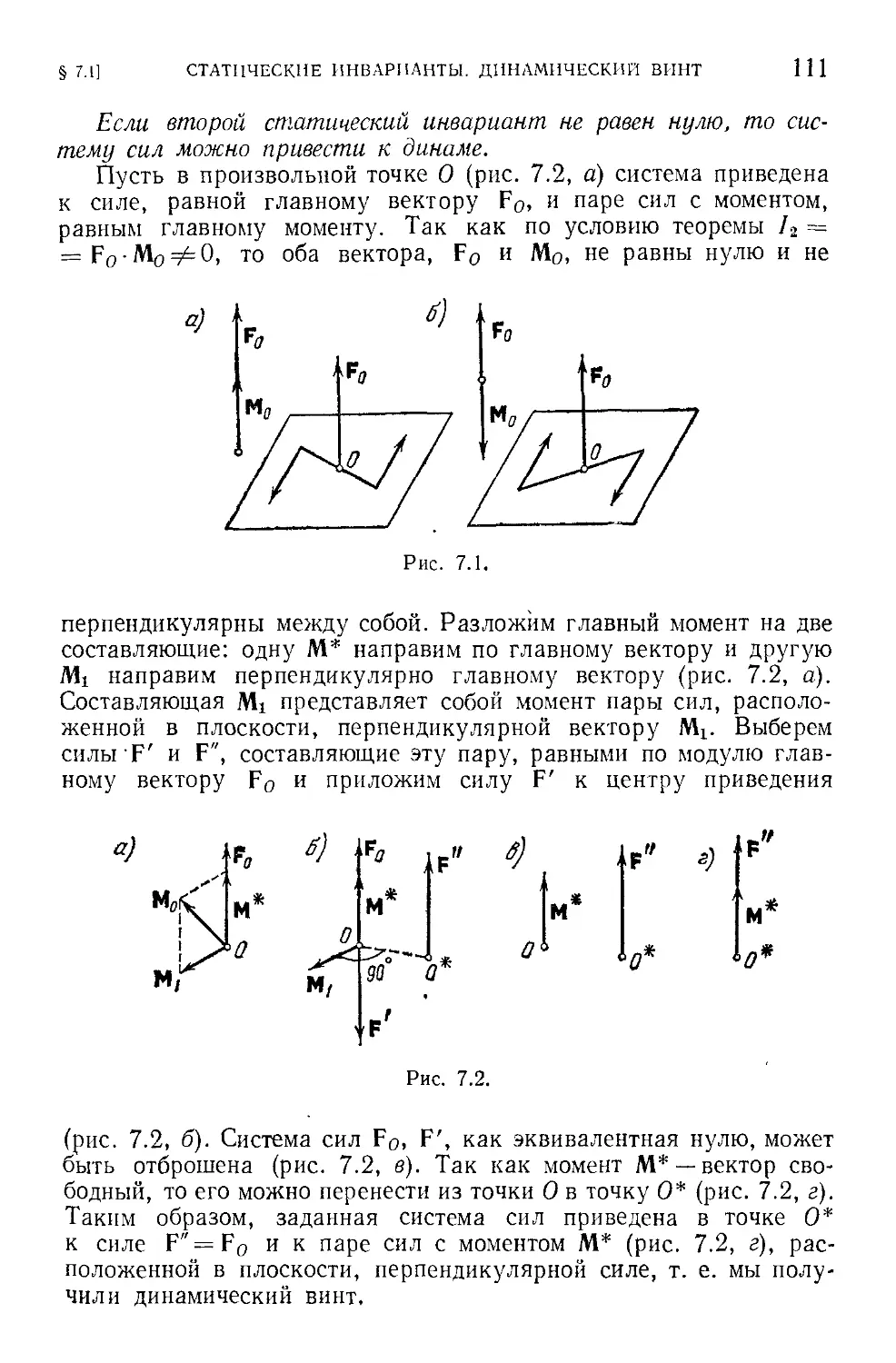
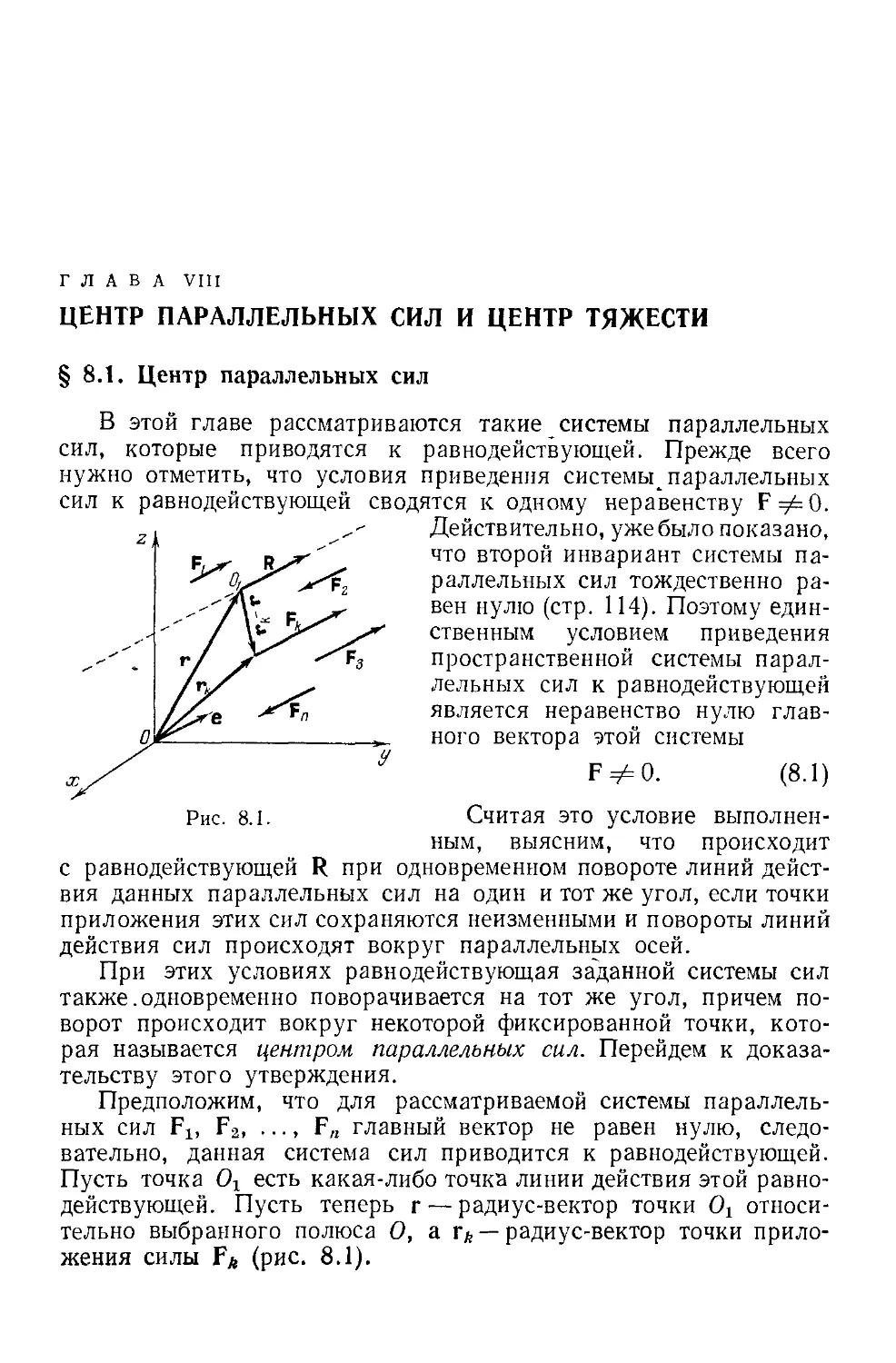
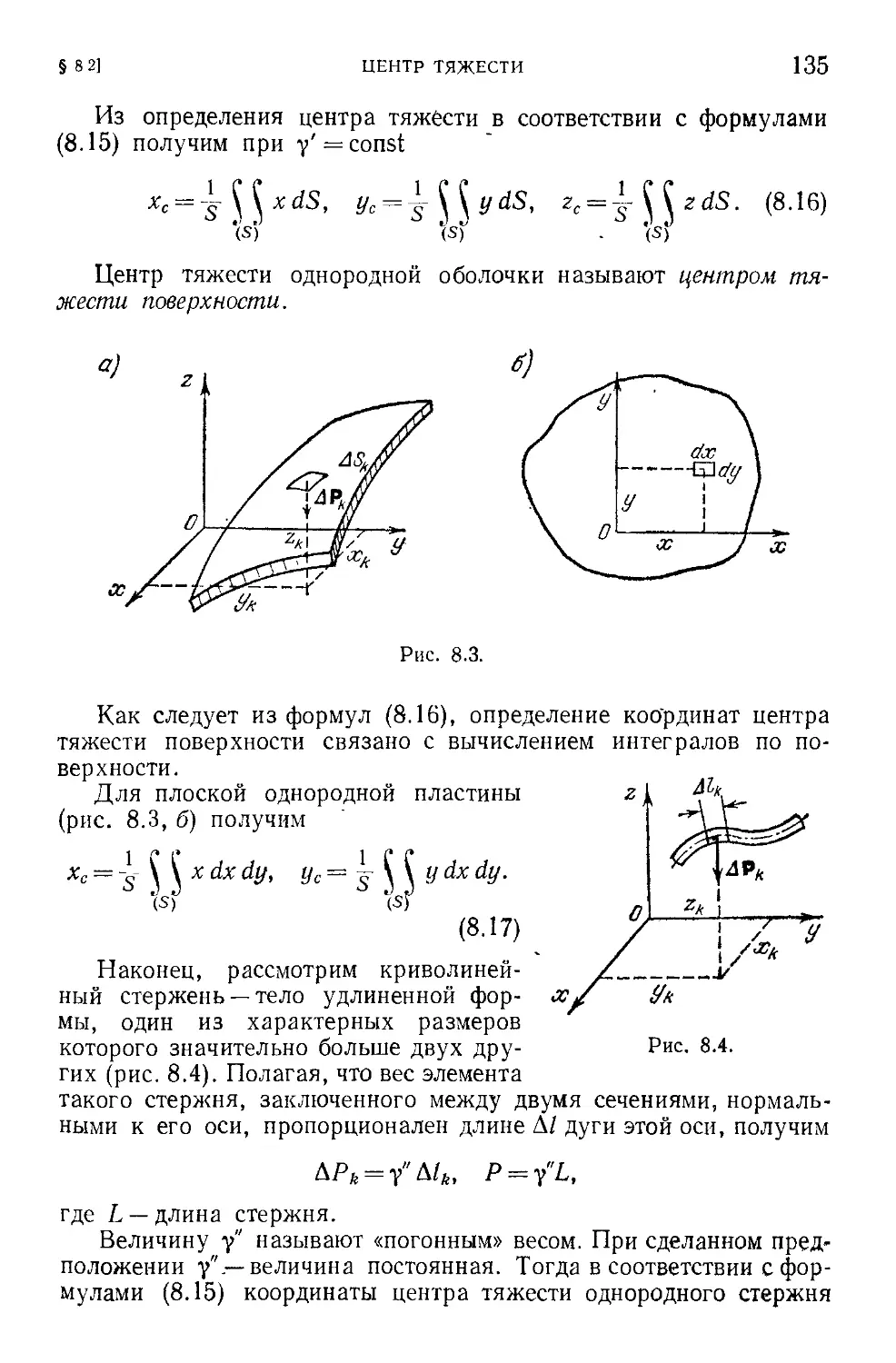
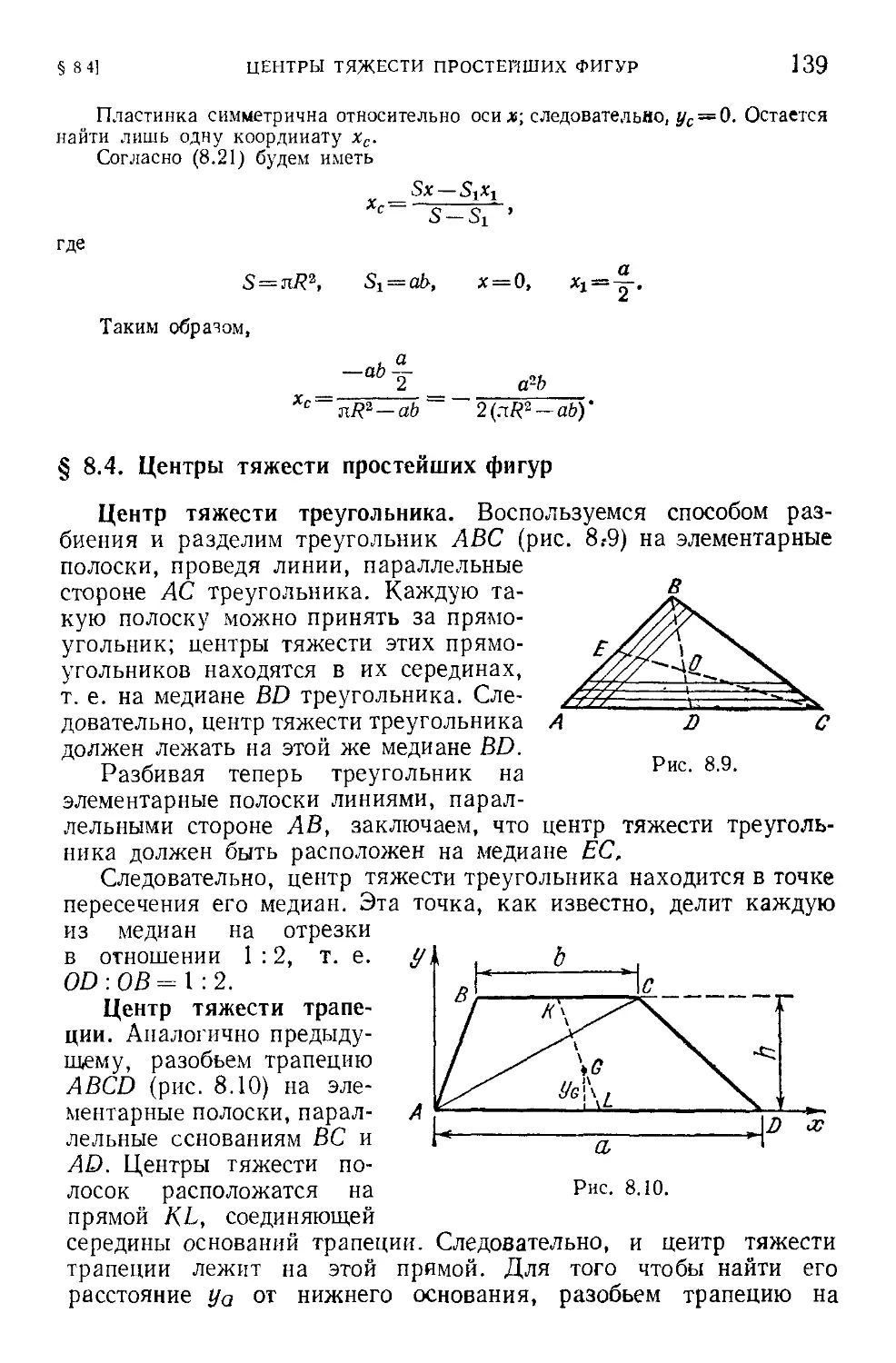
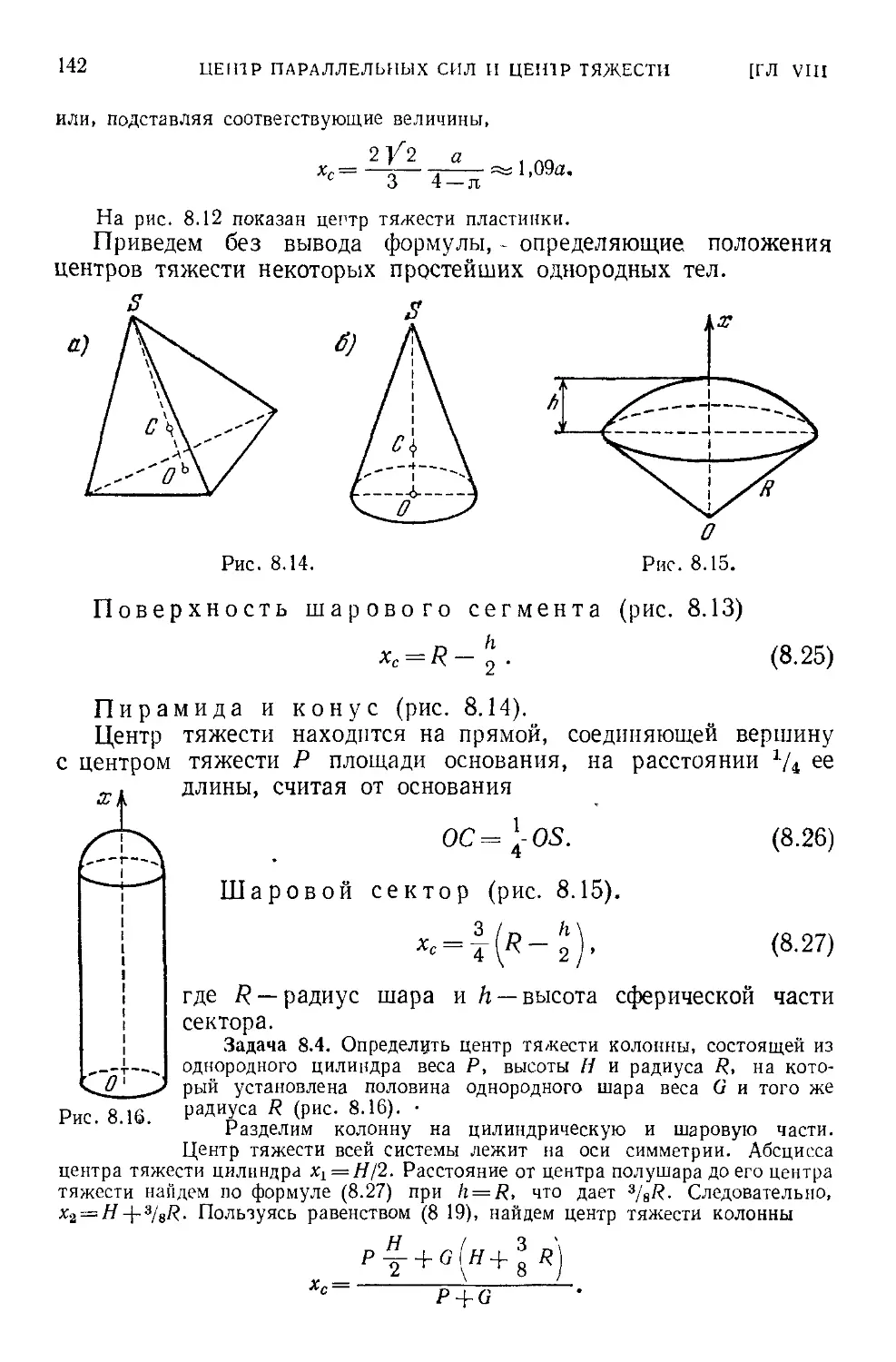
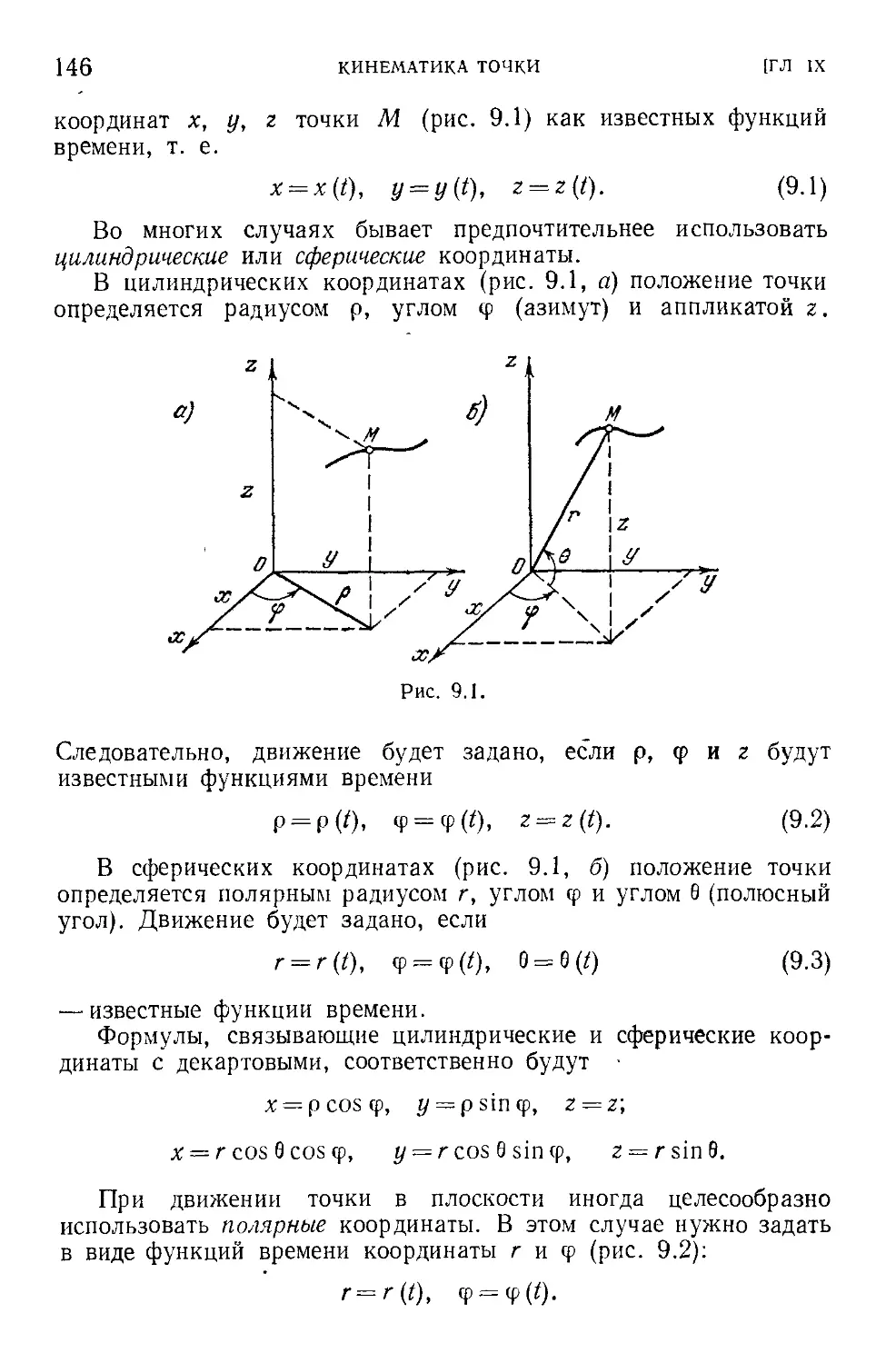
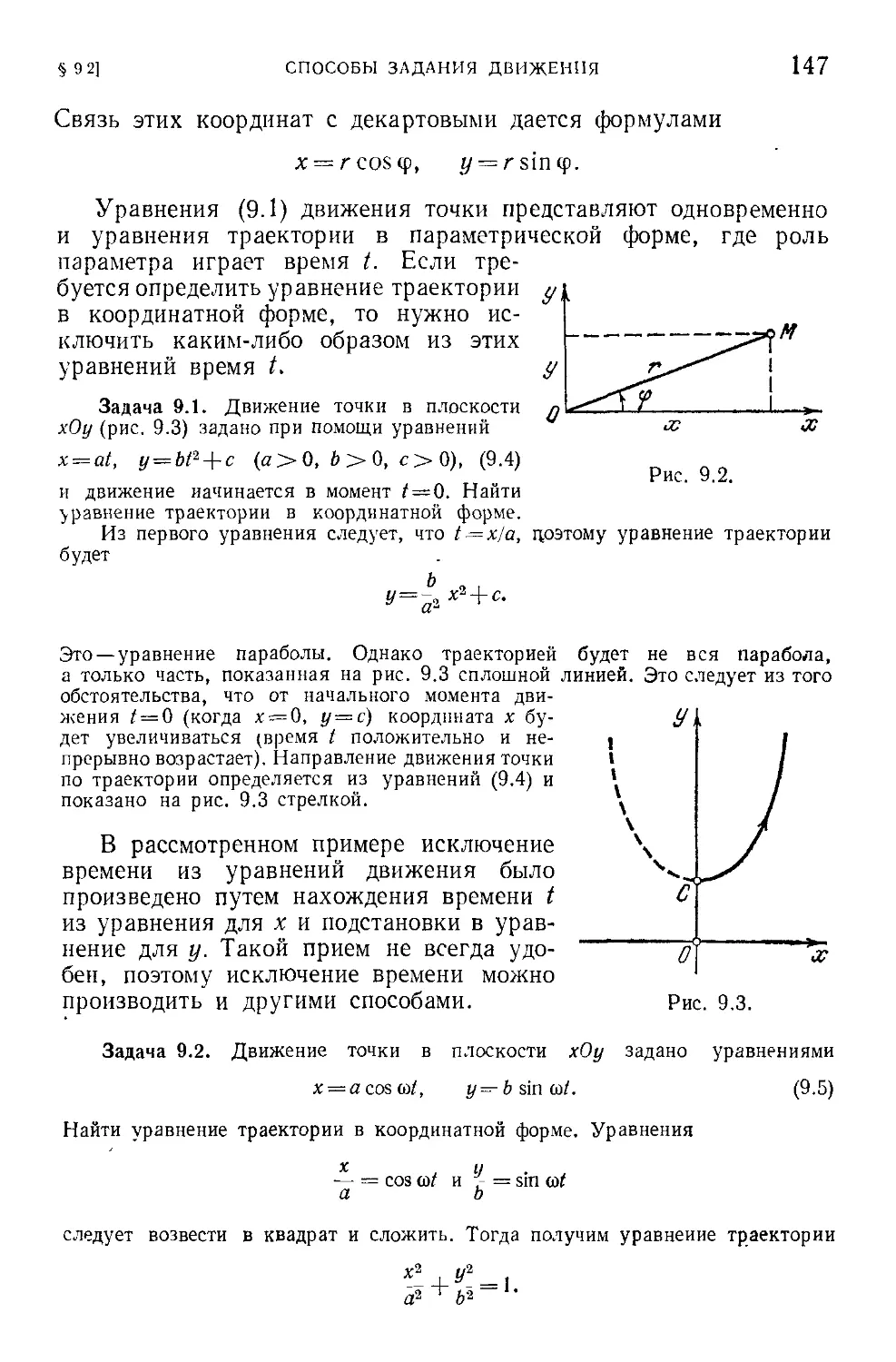
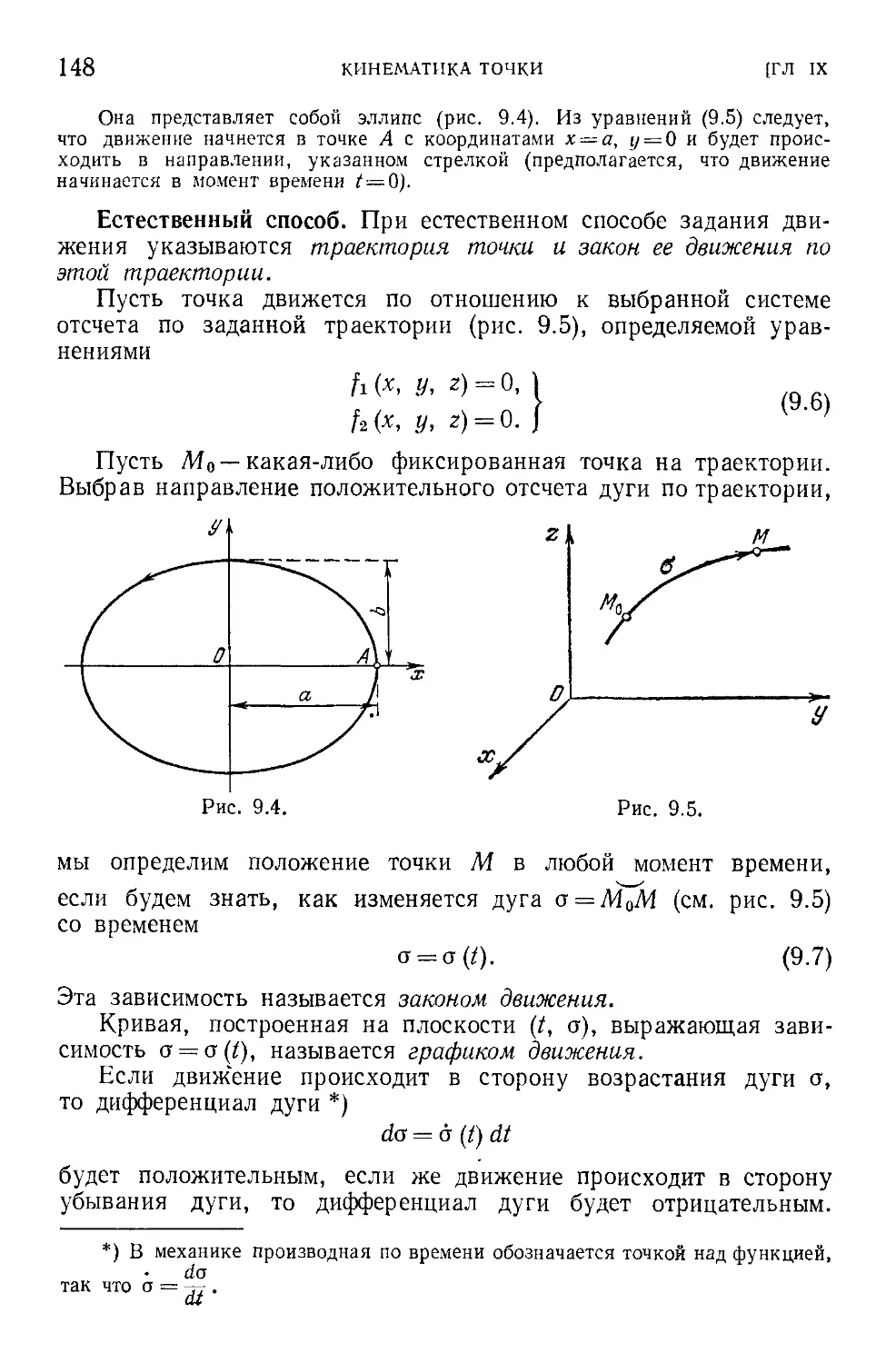
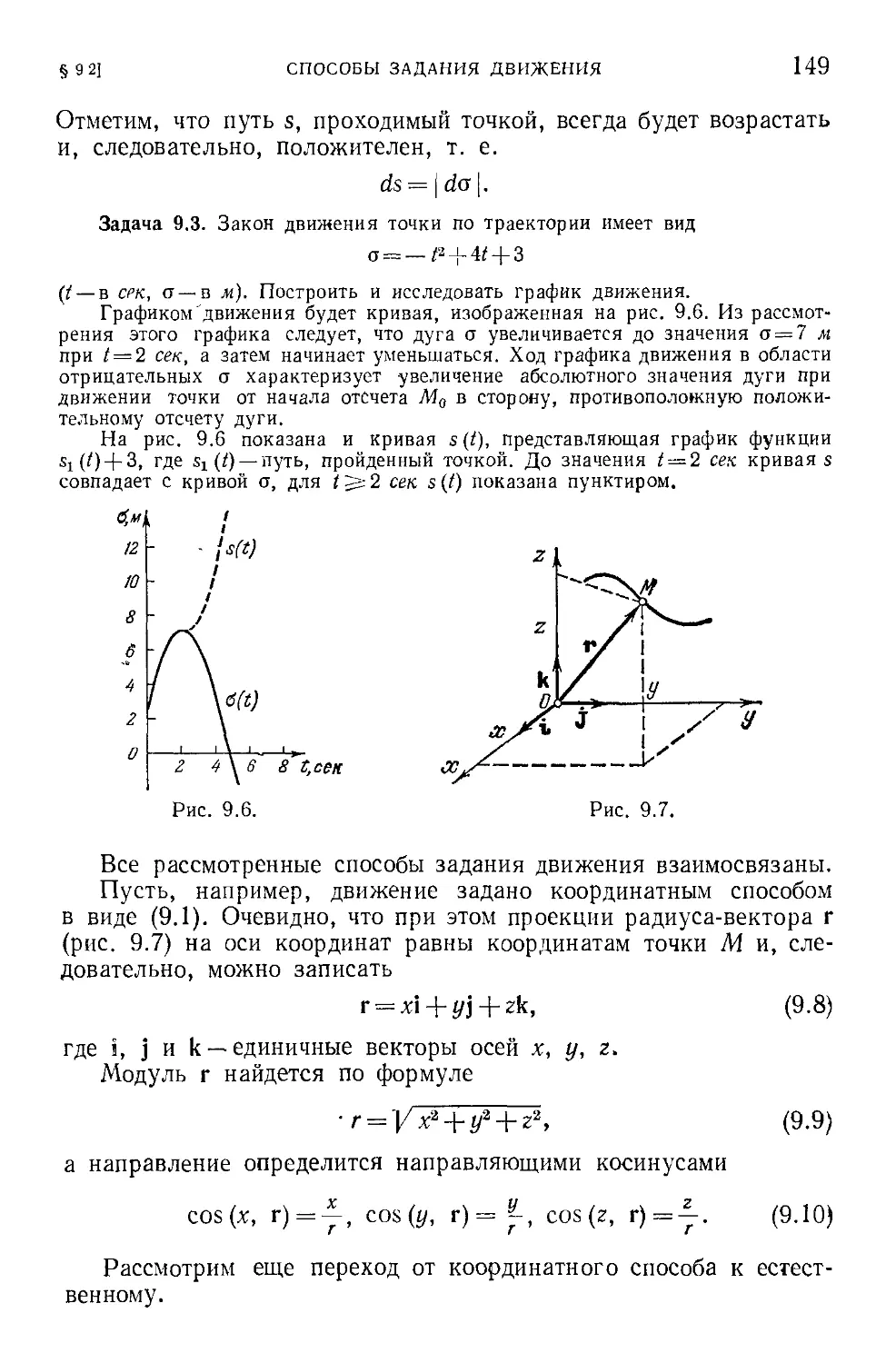
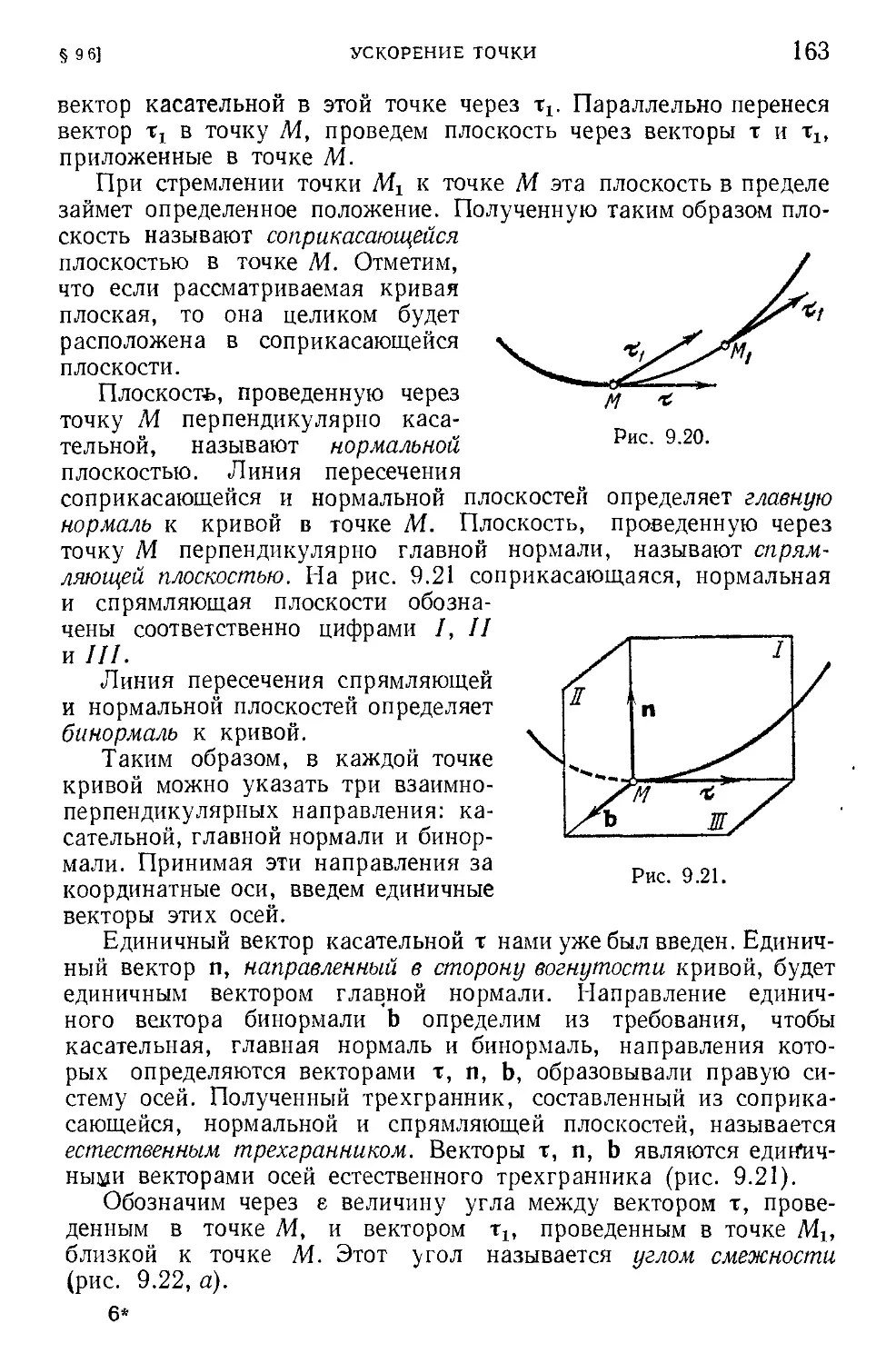
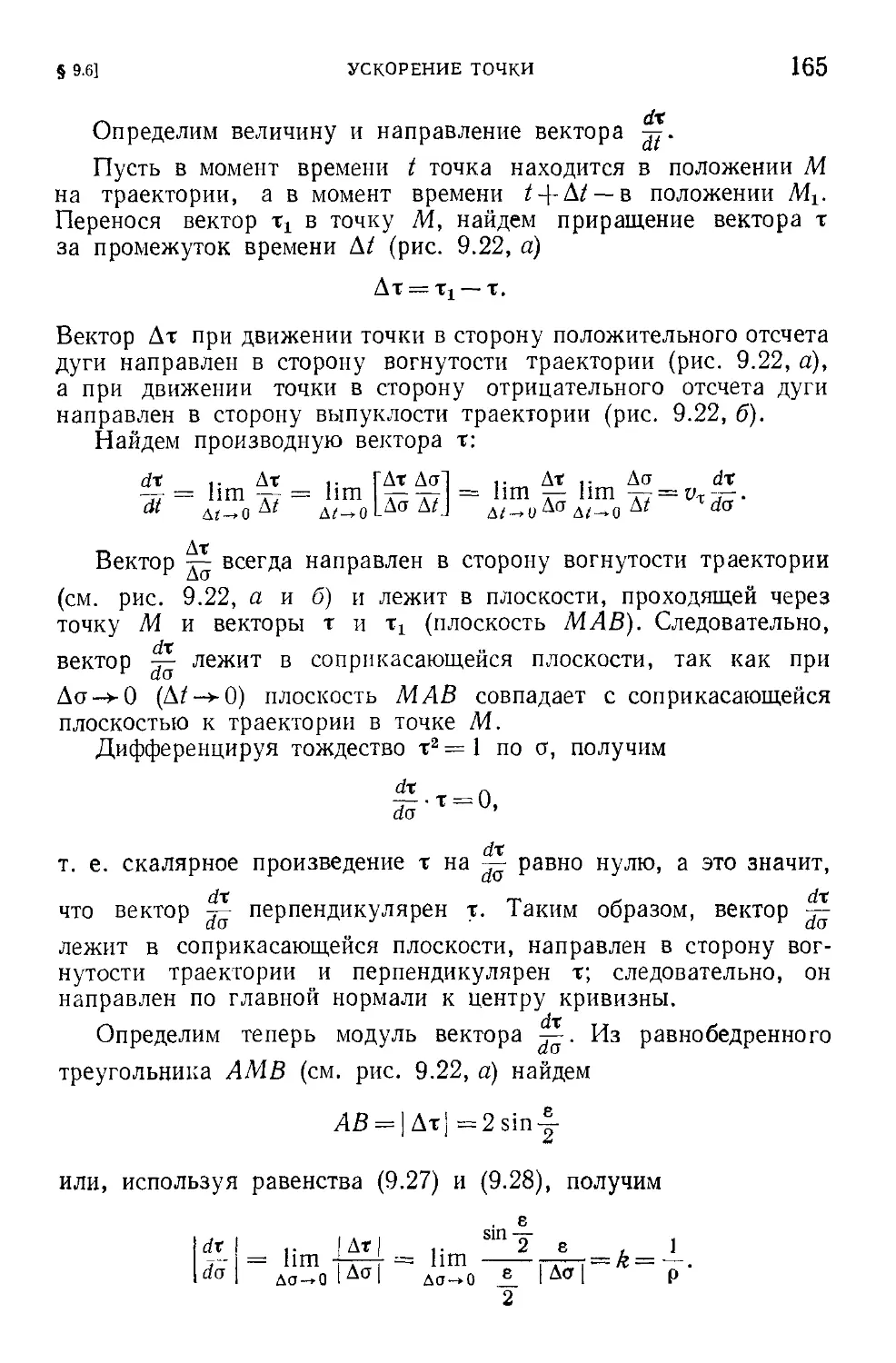
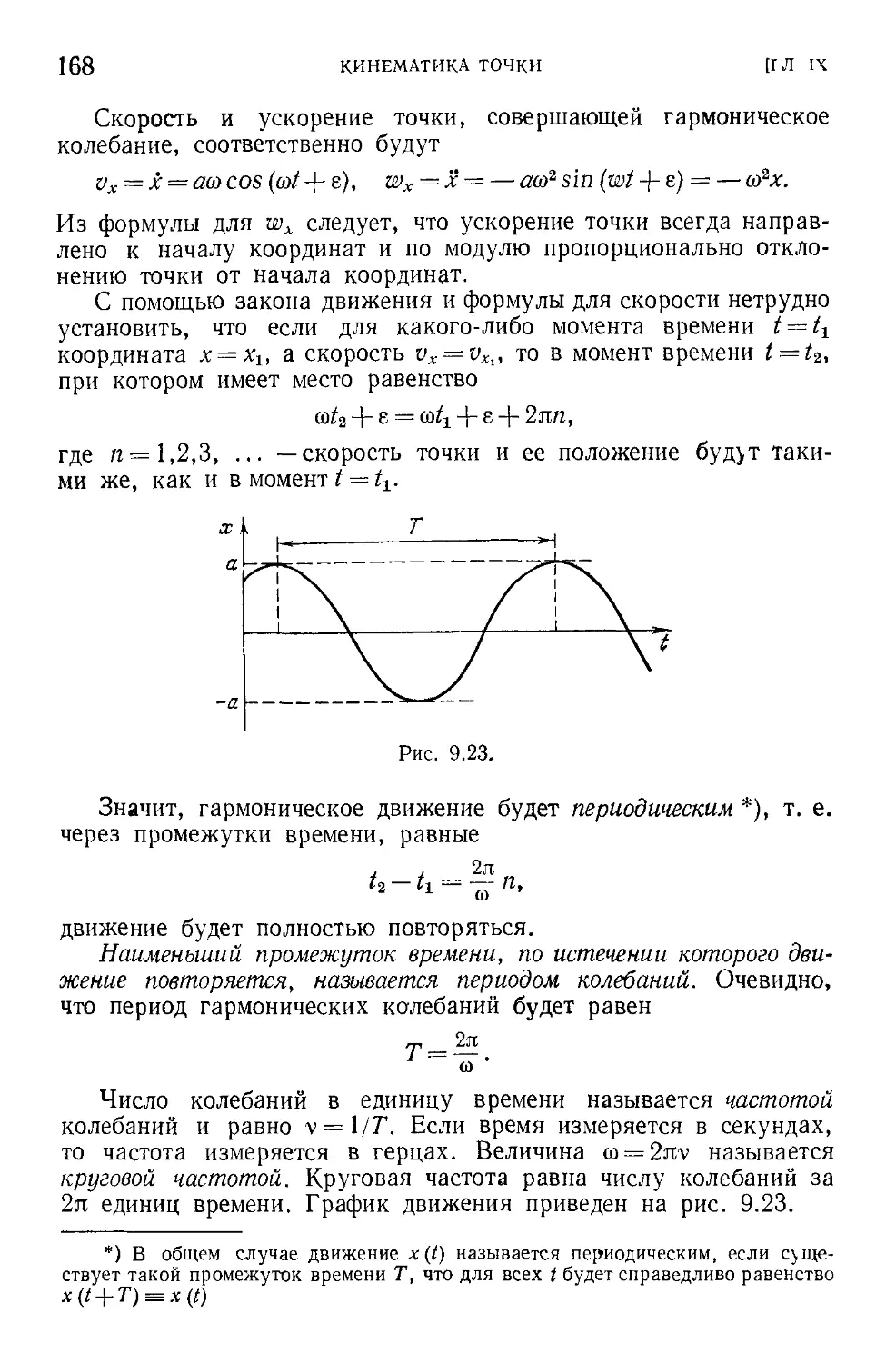
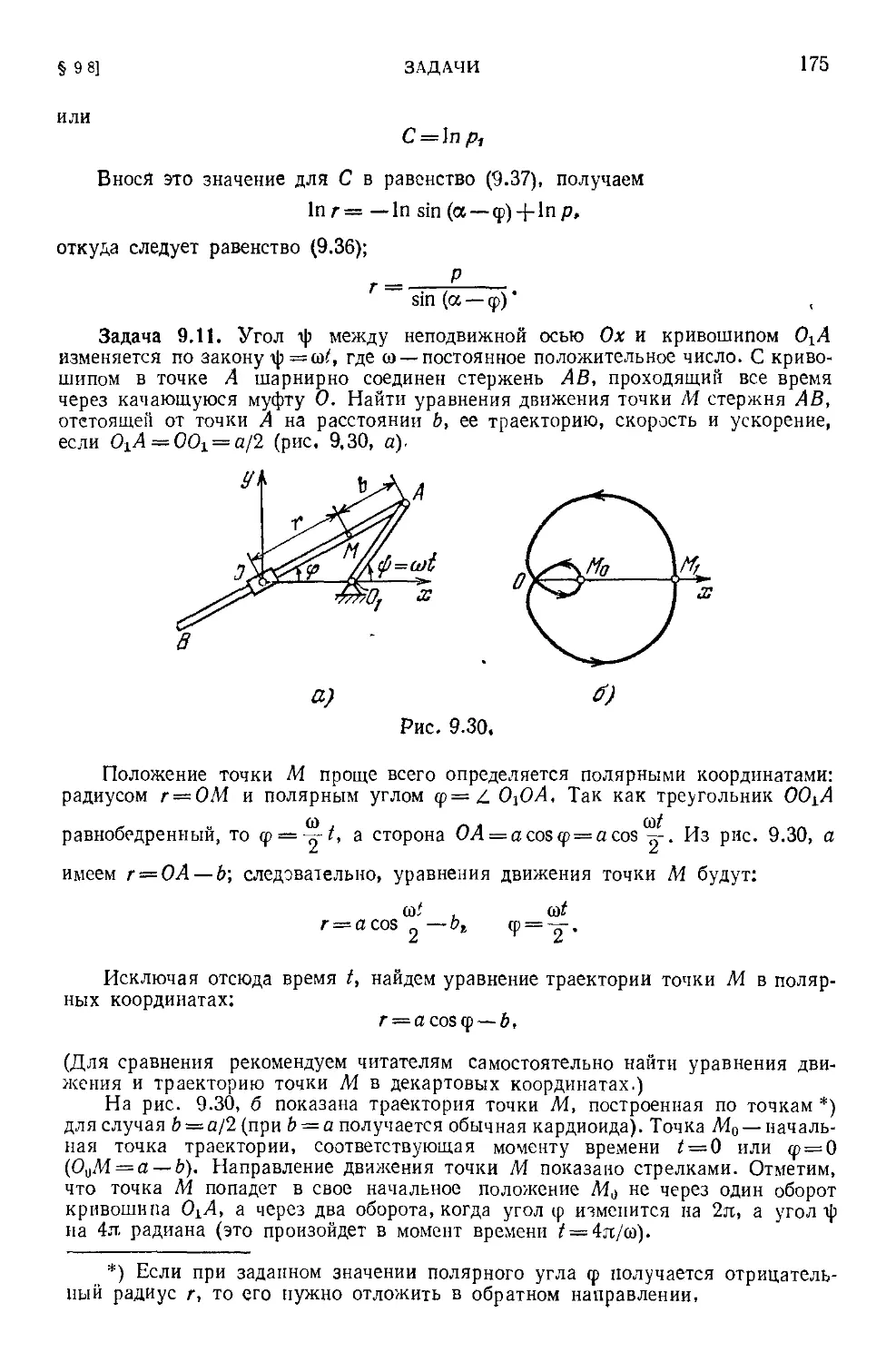
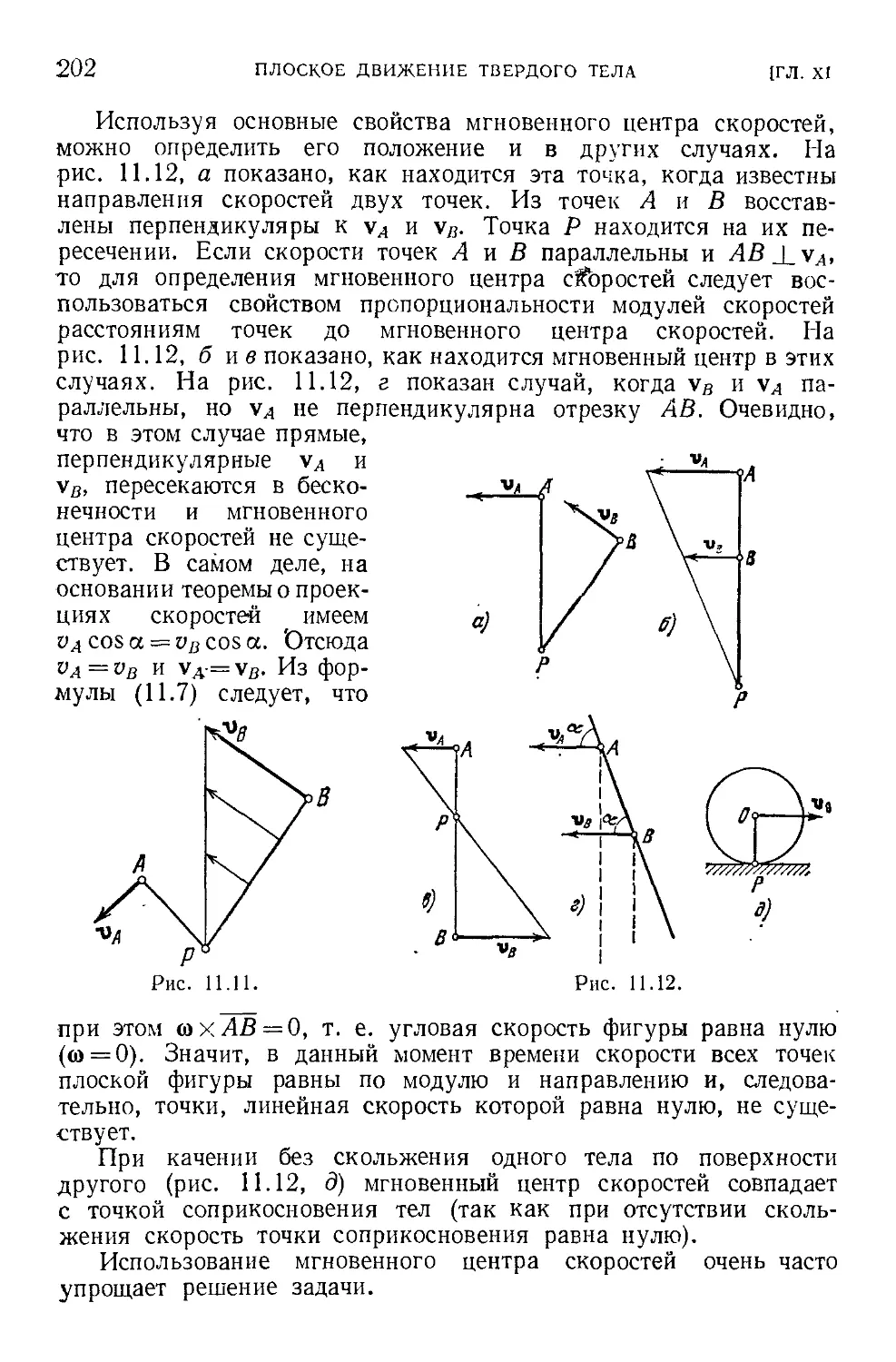
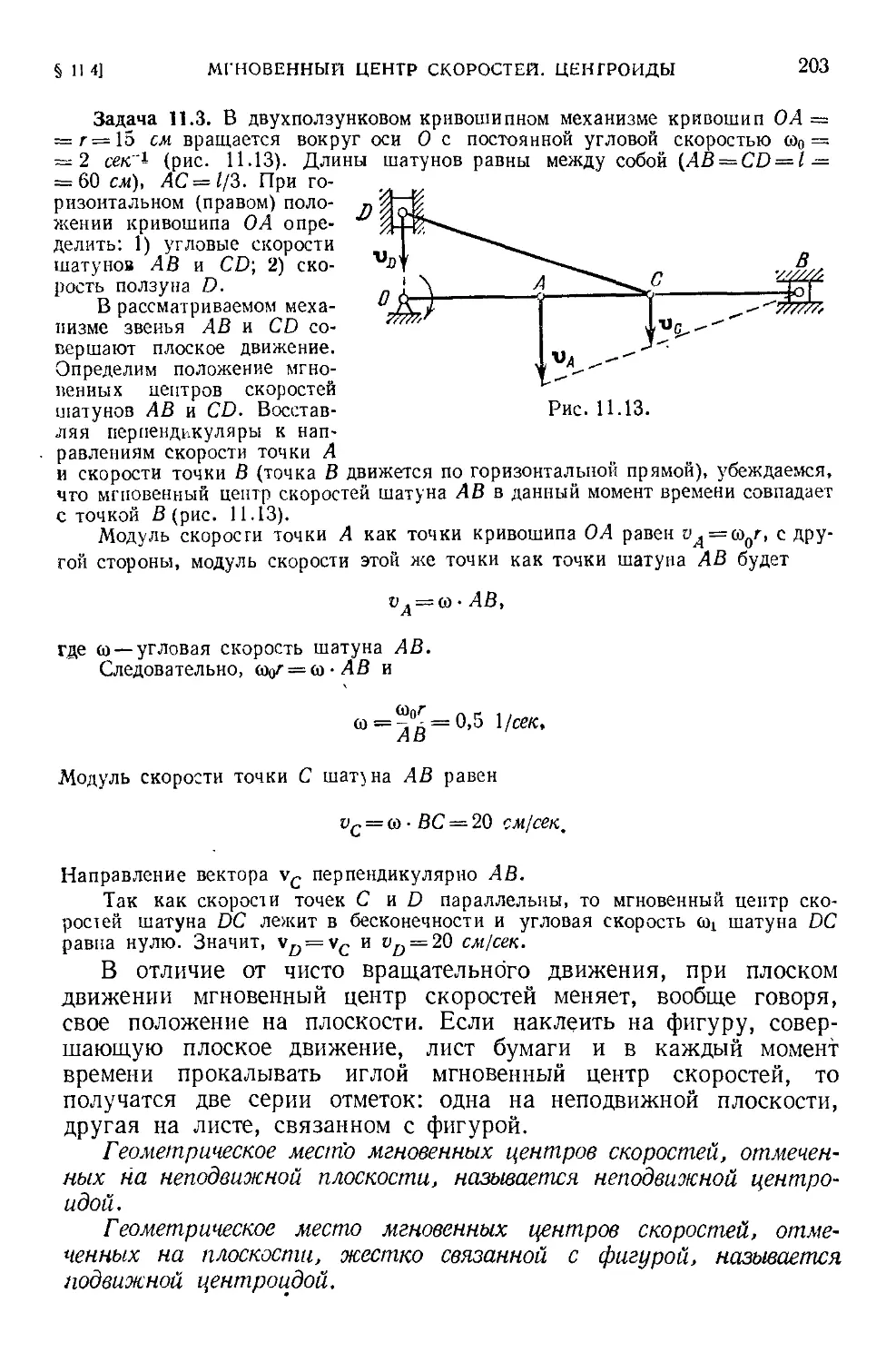
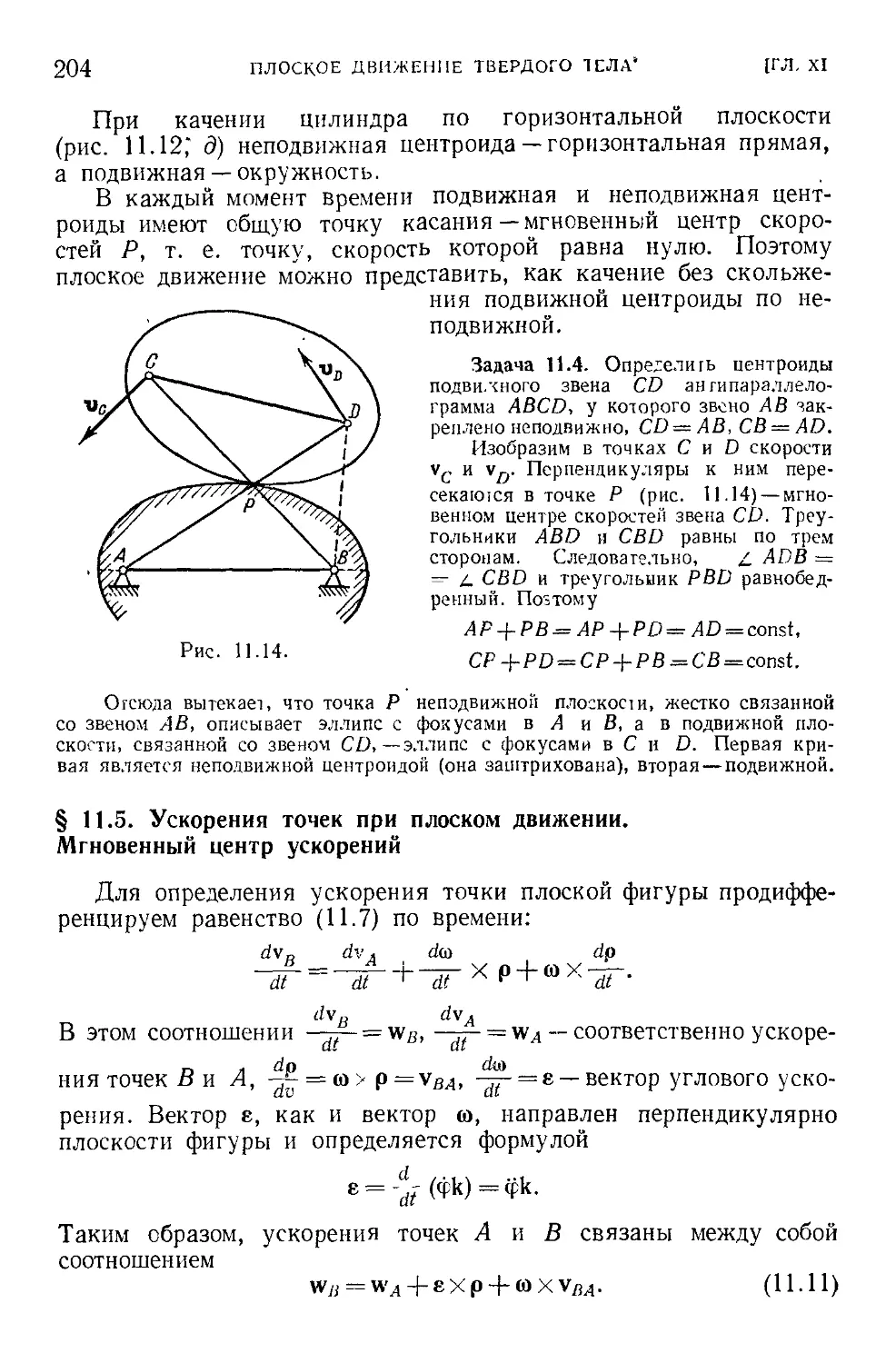
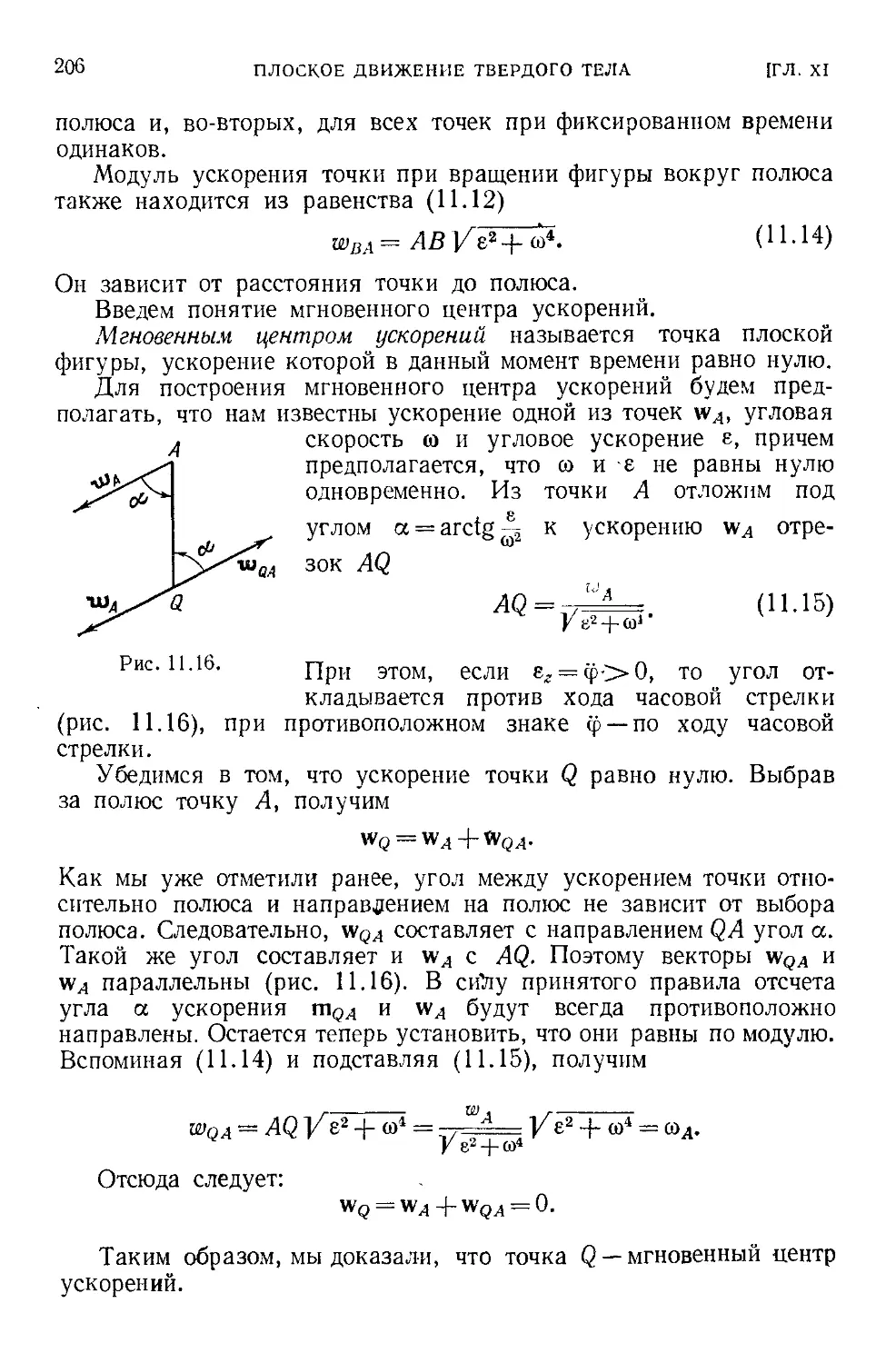
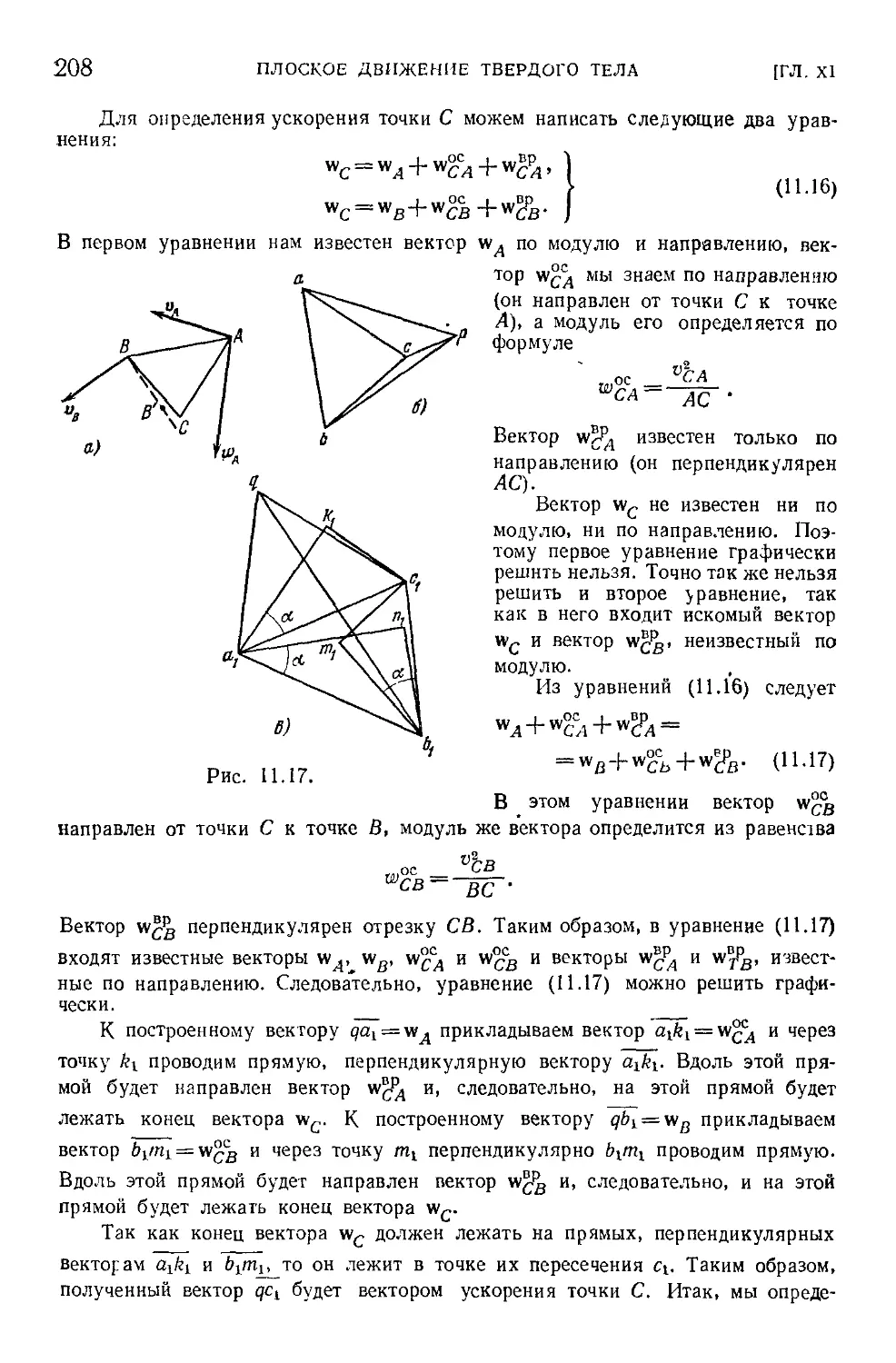
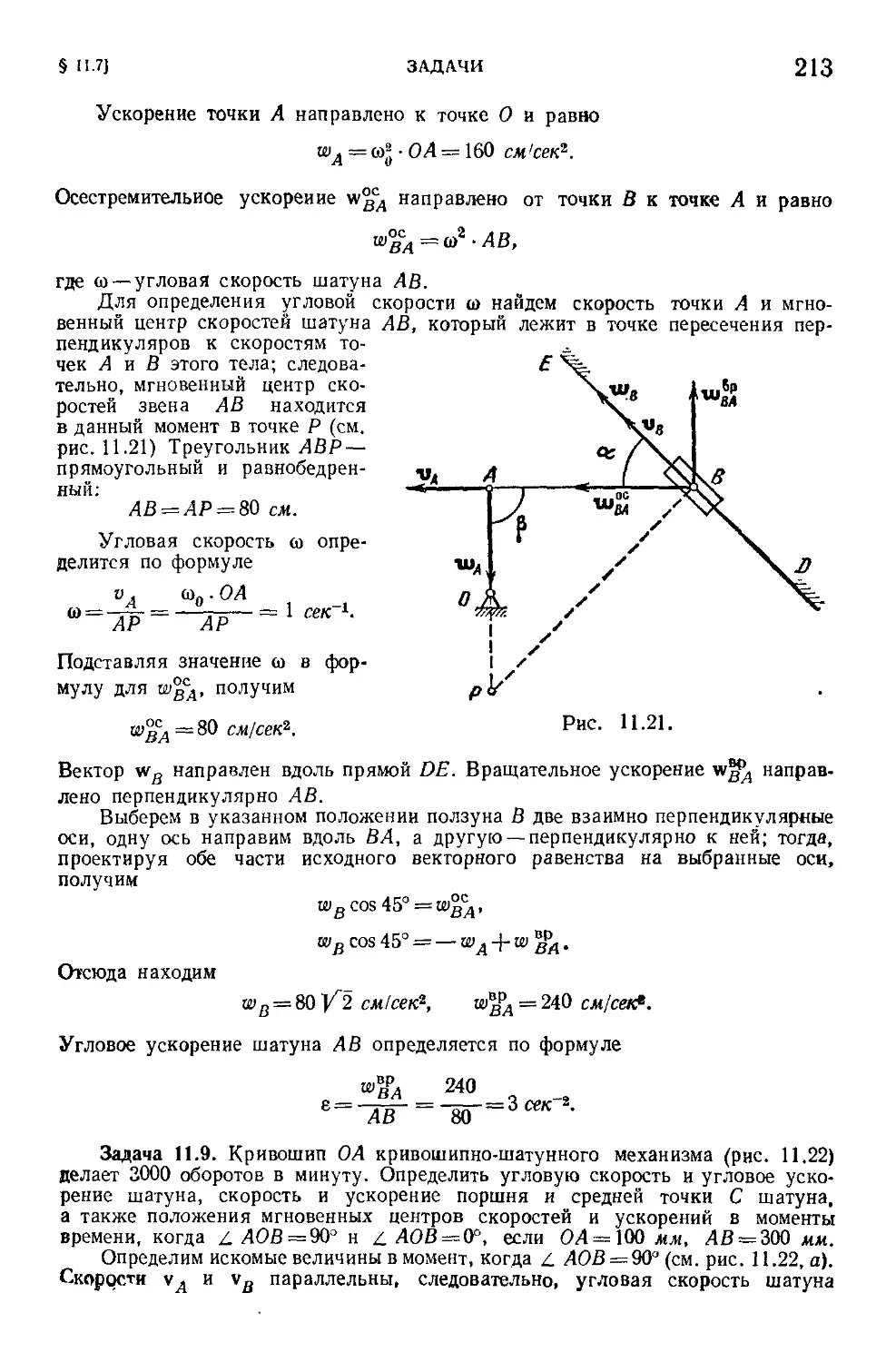
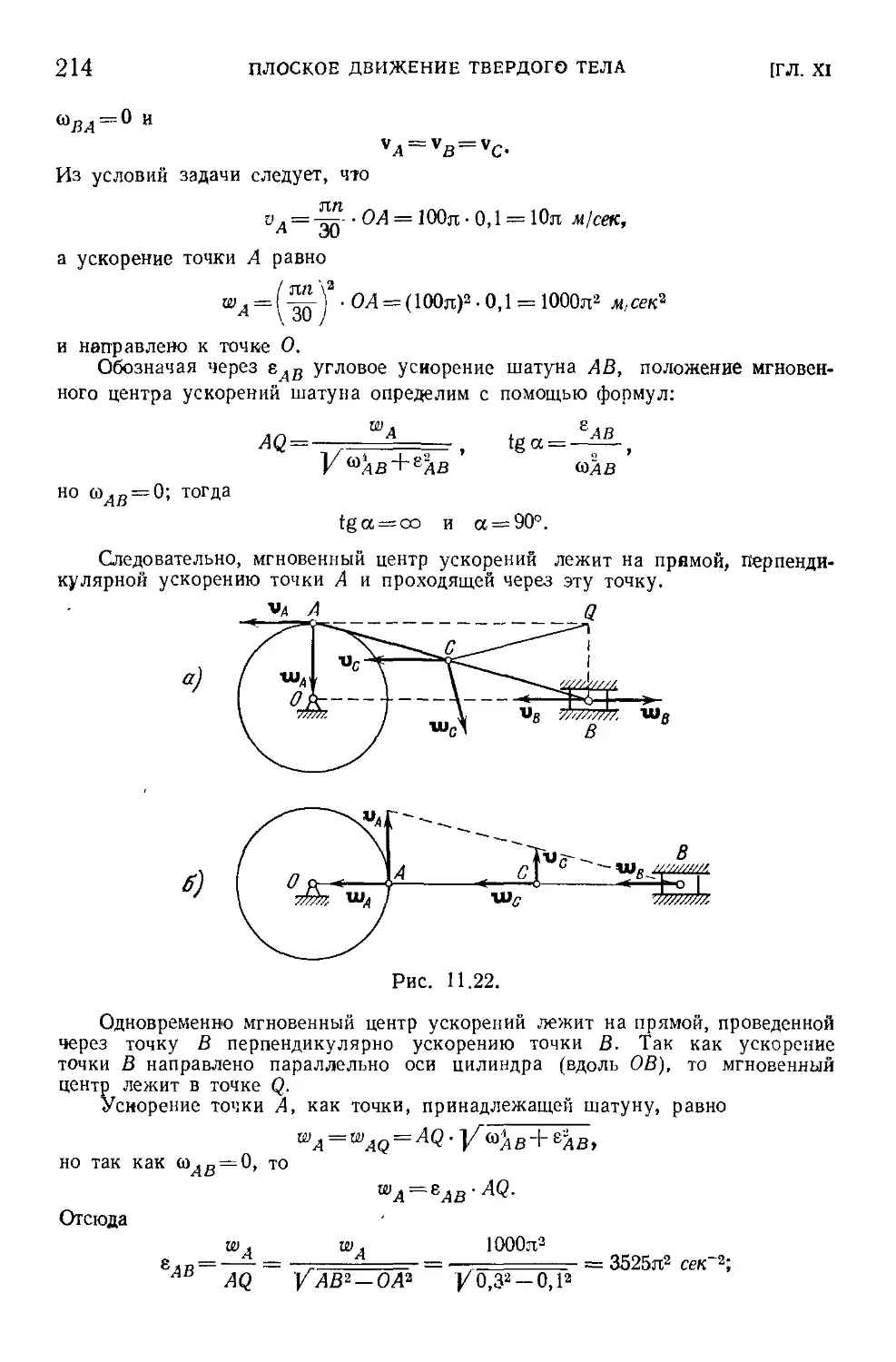
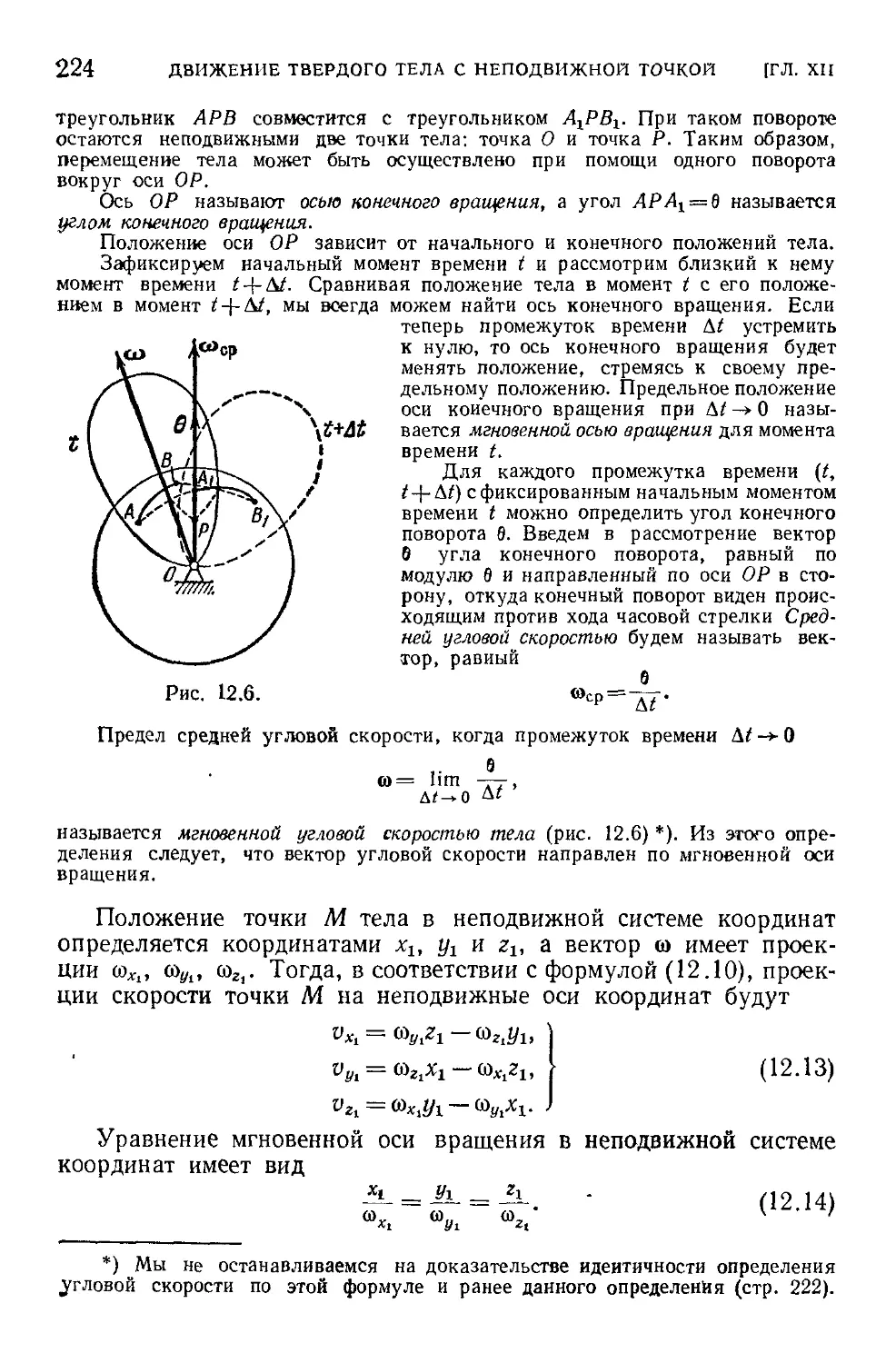
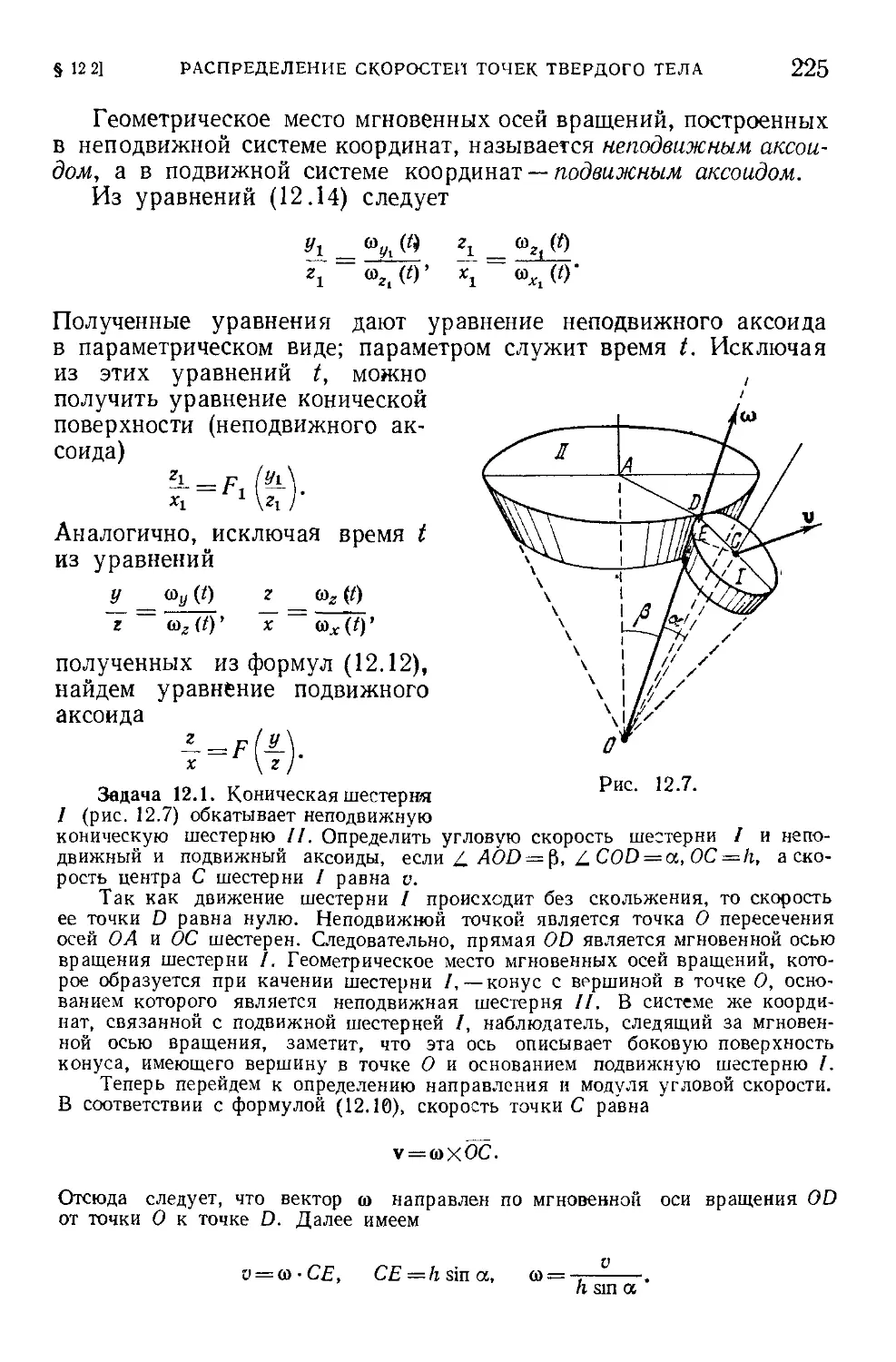
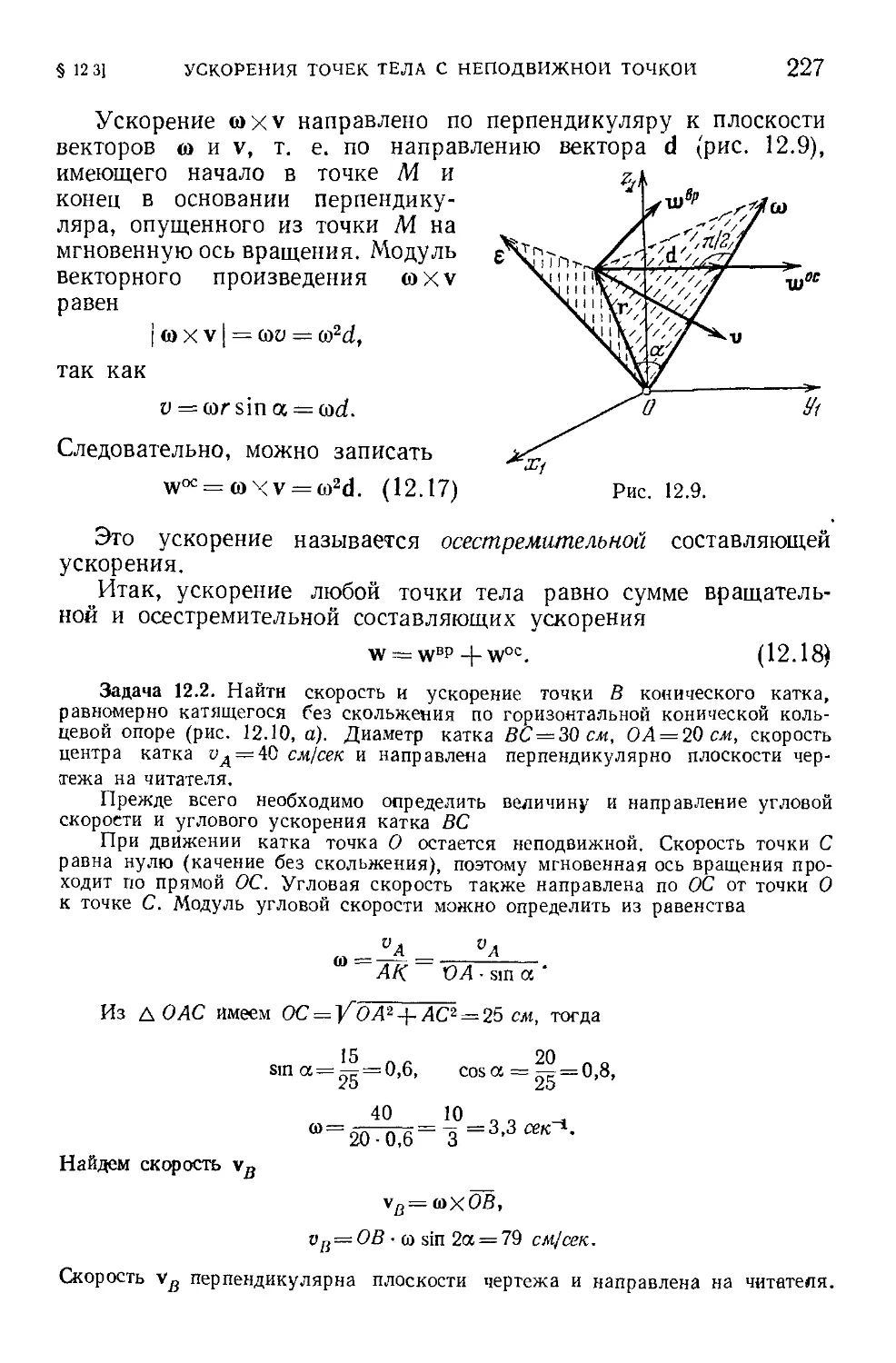
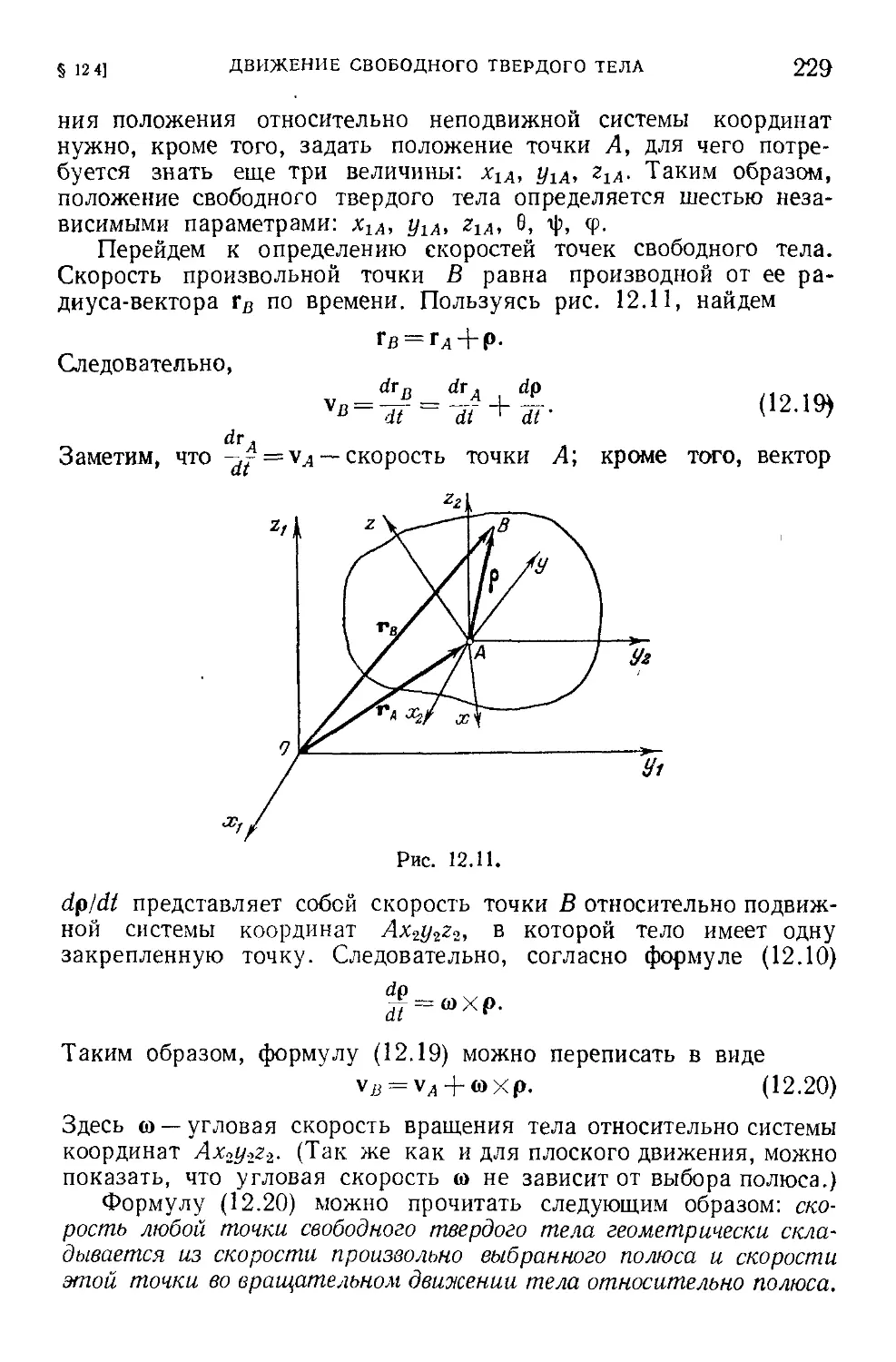
Text
Н В БУТЕНИН, я Л. ЛУНЦ, Д. Р. МЕРКИН
КУРС
ТЕОРЕТИЧЕСКОЙ
МЕХАНИКИ
ТОМ I
СТАТИКА И КИНЕМАТИКА
ИЗДАНИЕ ТРЕТЬЕ, СТЕРЕОТИПНОЕ
Допущено Министерством
высшего и среднего специального образования СССР
в качестве учебника
для студентов высших технических учебных заведений
МОСКВА «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
1979
22.21
Б 93
УДК 531
Б утенин Н. В., Лунц Я. Л., Мер-
кин Д. Р. Курс теоретической механики. В двух
томах. Т. I- Статика и кинематика. — 3-е изд.,
стереотип. — М.: Наука. Главная редакция физико-
математической литературы, 1979. — 272 с.
В книге изложены статика и кинематика. Приве-
дено большое количество примеров и задач, имеющих
прикладное значение. Кроме традиционного материа-
ла, книга содержит некоторые разделы, выходящие
за пределы программы, как, например, определение
натяжения тяжелой подвешенной нити, определение
реакций упругих опор твердого тела, криволинейные
координаты.
Книга рассчитана на студентов дневных, вечер-
них и заочных отделений технических вузов с пол-
ной и сокращенной программой по механике, а также
может быть полезной для аспирантов и инженерно-
технических работников.'
Табл. 3, илл. 223.
20302-062
Б------------ 146-79.
053(02)-79
1703020000
Главная редакция
физико математической лите
издательства «Наука», 1976,
с изменениями
ОГЛАВЛЕНИЕ
Предисловие ко второму изданию......................................................................................... 6
Введение ............................................................................................................. 7
СТАТИКА
Глава I. Основные понятия и аксиомы статики .......................................................................... 16
§ 1.1. Сила. Система сил. Равновесие абсолютно твердого тела ... 16
§ 1.2. Аксиомы статики и их следствия............................................. 19
§ 1.3. Активные силы и реакции связей............................................. 25
§ 1.4. Основные задачи статики................................................................................. 29
Глава II. Система сходящихся сил...................................................................................... 31
§ 2.1. Приведение системы сходящихся сил к равнодействующей . . 31
§ 2.2. Условия равновесия системы сходящихся сил. 36
§ 2.3. Задачи ................................................
Глава III. Теория пар................................................................................................. 43
§ 3.1. Сложение двух параллельных сил ........-................................................................... 43
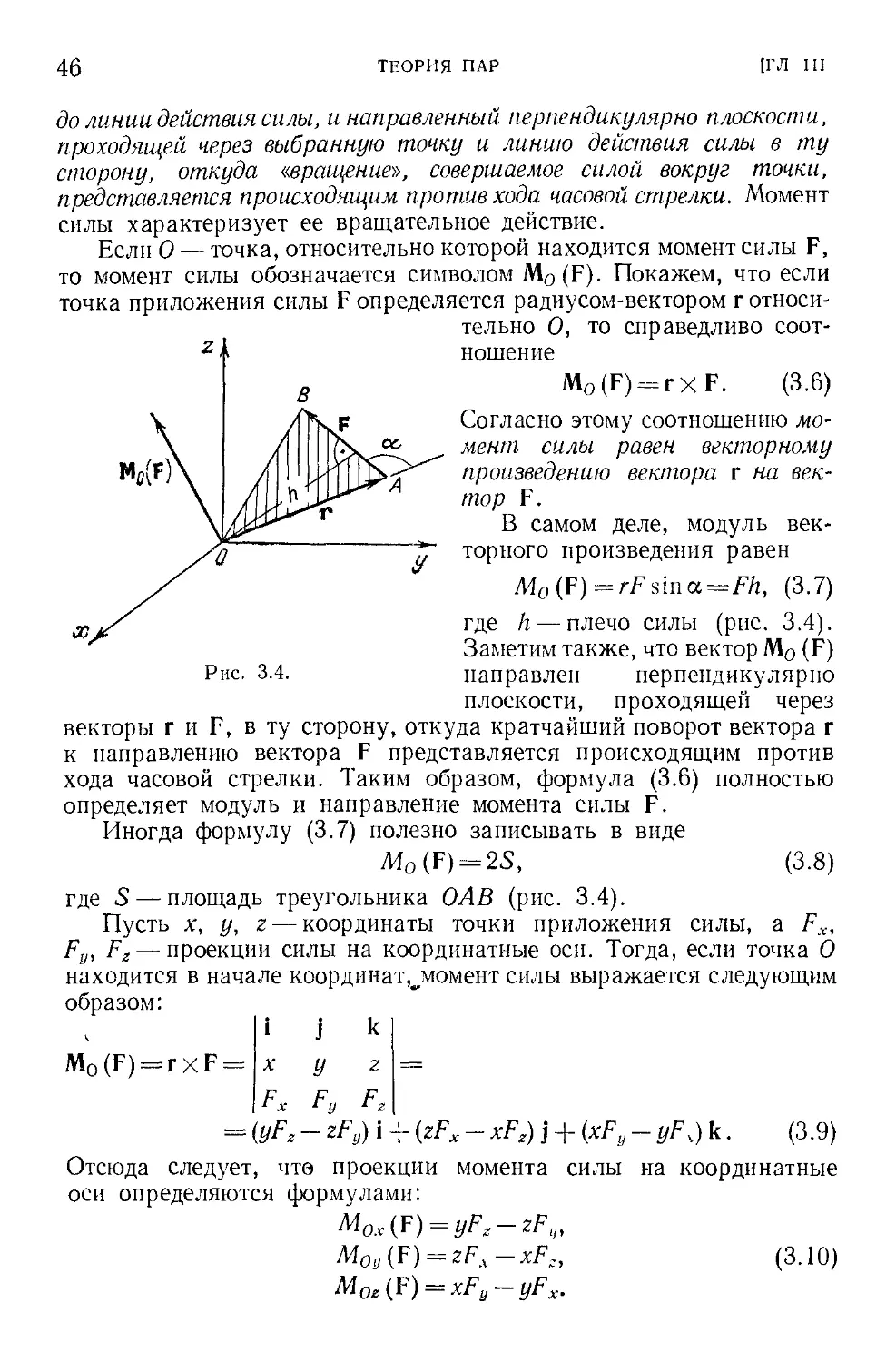
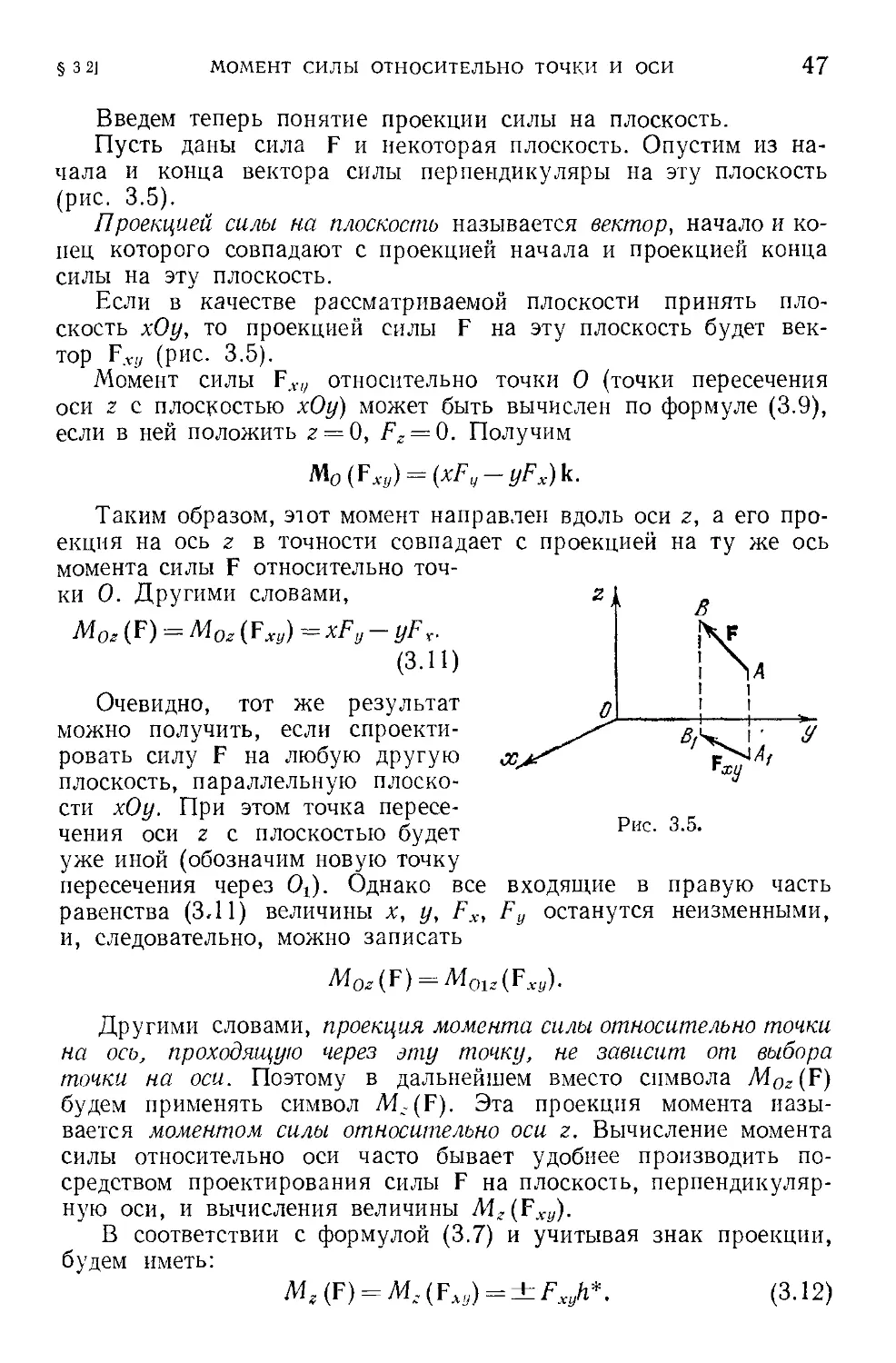
§ 3.2. Момент силы относительно точки и относительно оси. Момент
пары сил......................................................... 45
§ 3.3. Теоремы о парах ........................................................................................... 50
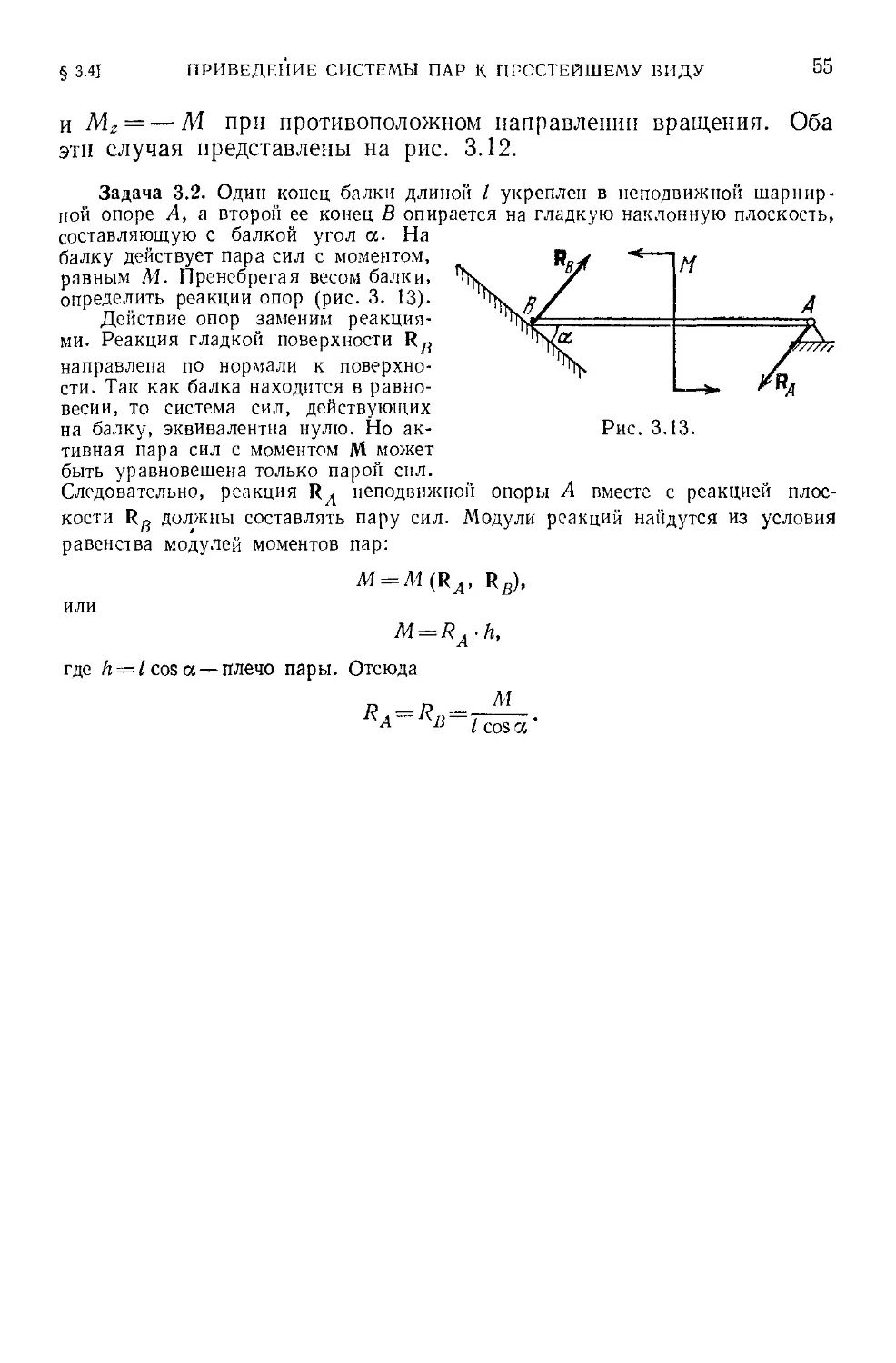
§ 3.4. Приведение системы пар к простейшему виду. Равновесие
системы пар ..................................................... 54
Глава IV. Основная теорема статики н условия равновесия простран-
ственной системы сил............................................. 56
§ 4.1. Лемма о параллельном переносе силы......................................................................... 56
§ 4 2. Основная теорема статики................................................................................. 56
§ 4.3. Аналитическое определение4 главною вектора и главного мо-
мента пространственной системы сил .............................. 58
§ 4.4. Условия равновесия пространственной системы сил ........................................................... 61
Глава V. Плоская система сил.......................................................................................... 65
§ 5.1. Приведение плоской системы сил к простейшему виду .... 65
§ 5.2. Условия равновесия плоской системы сил..................................................................... 70
§ 5.3. Задачи .на применение уравнений равновесия................................................................. 74
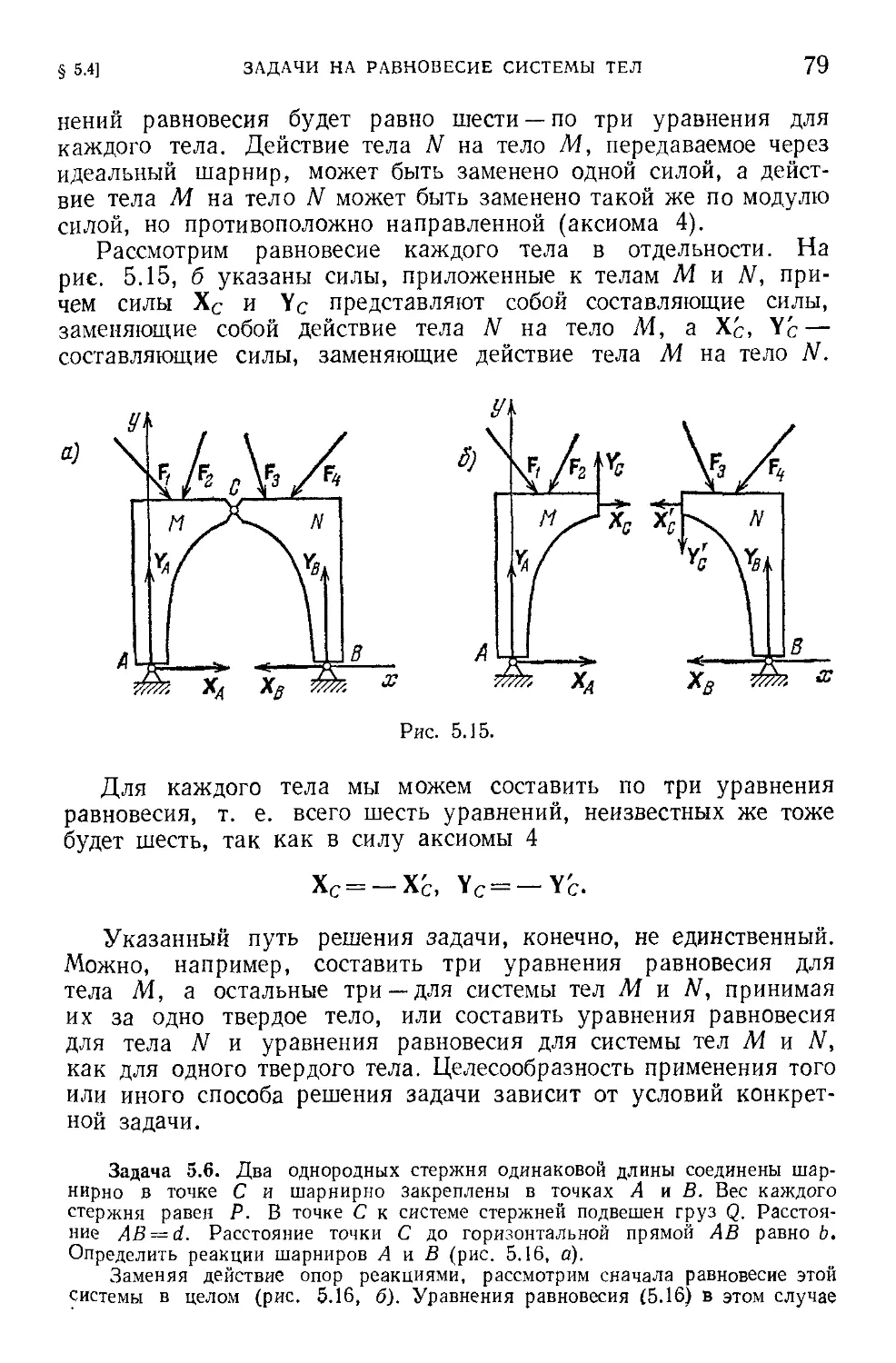
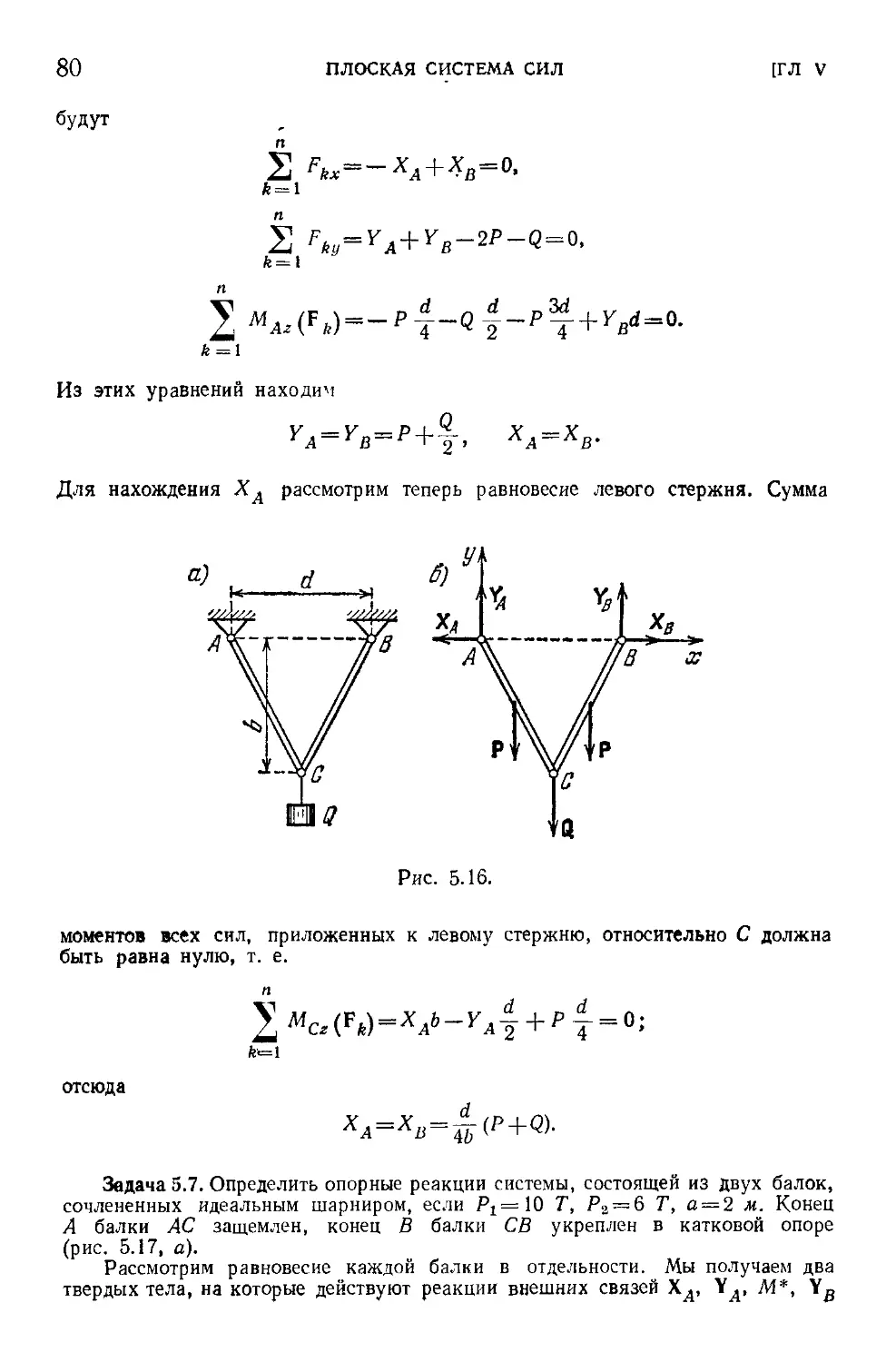
§ 5.4. Задачи на равновесие системы тел............................................... 78
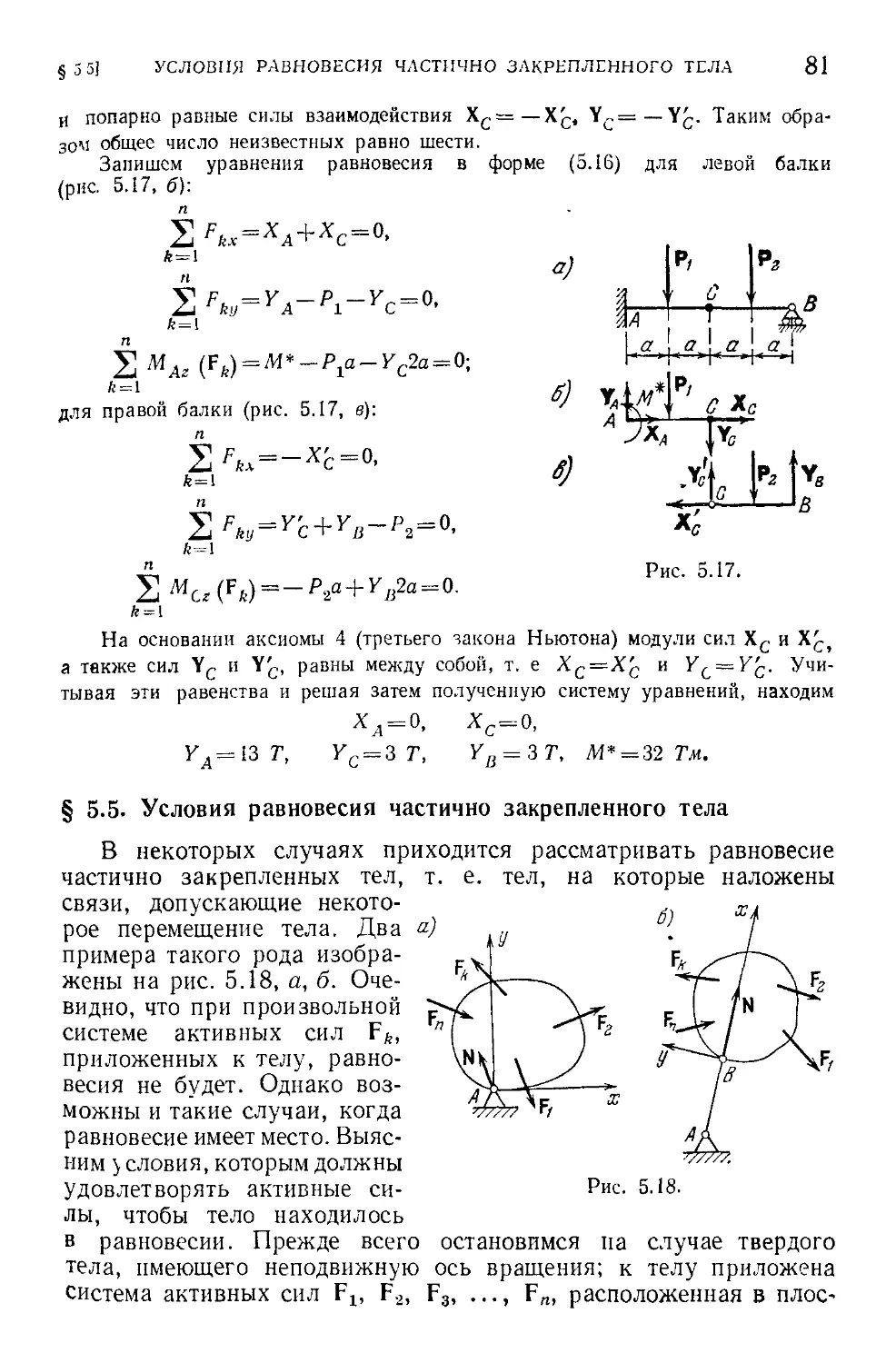
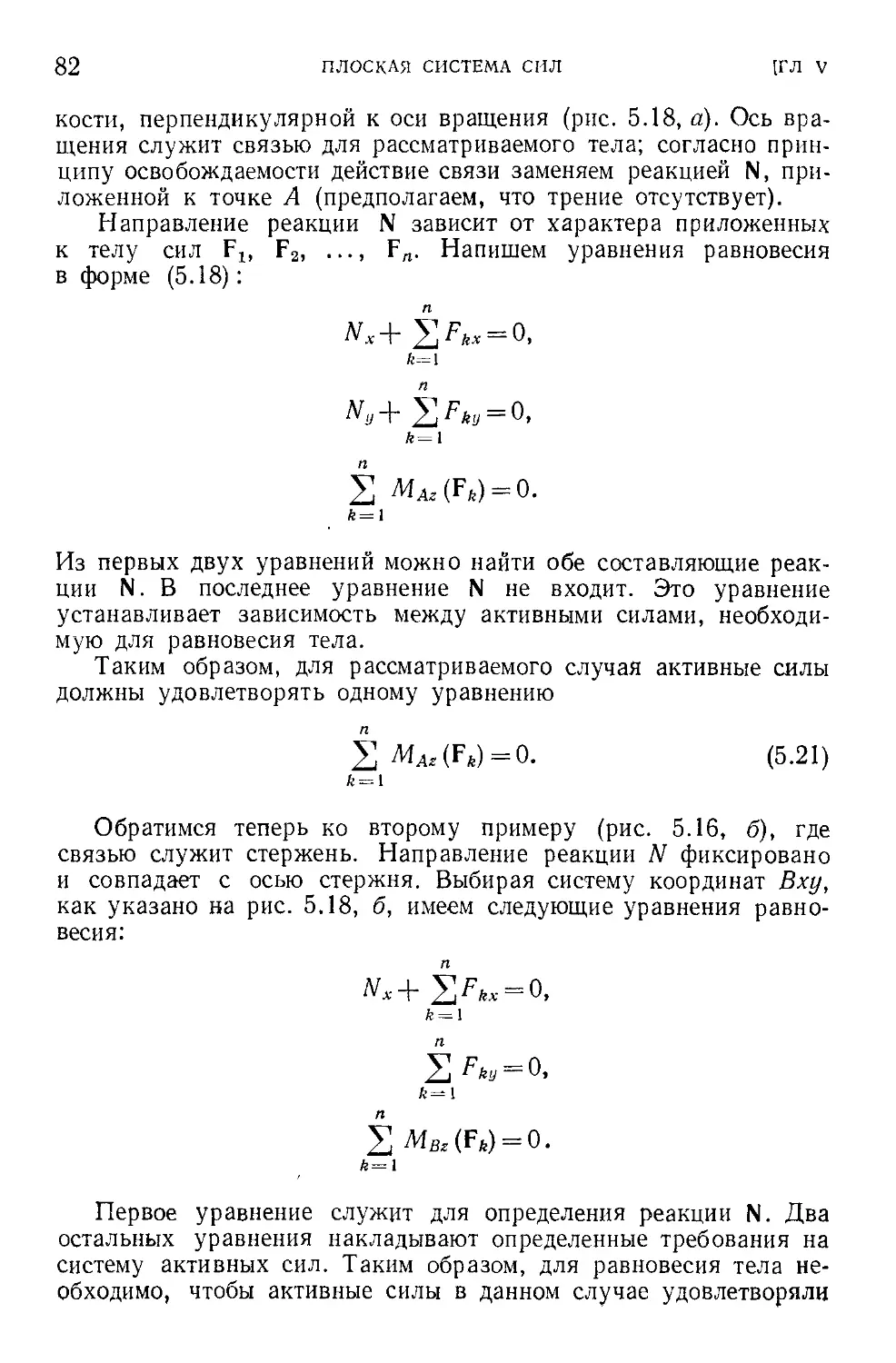
§ 5.5. Условия равновесия частично закрепленного тела ............................................................ 81
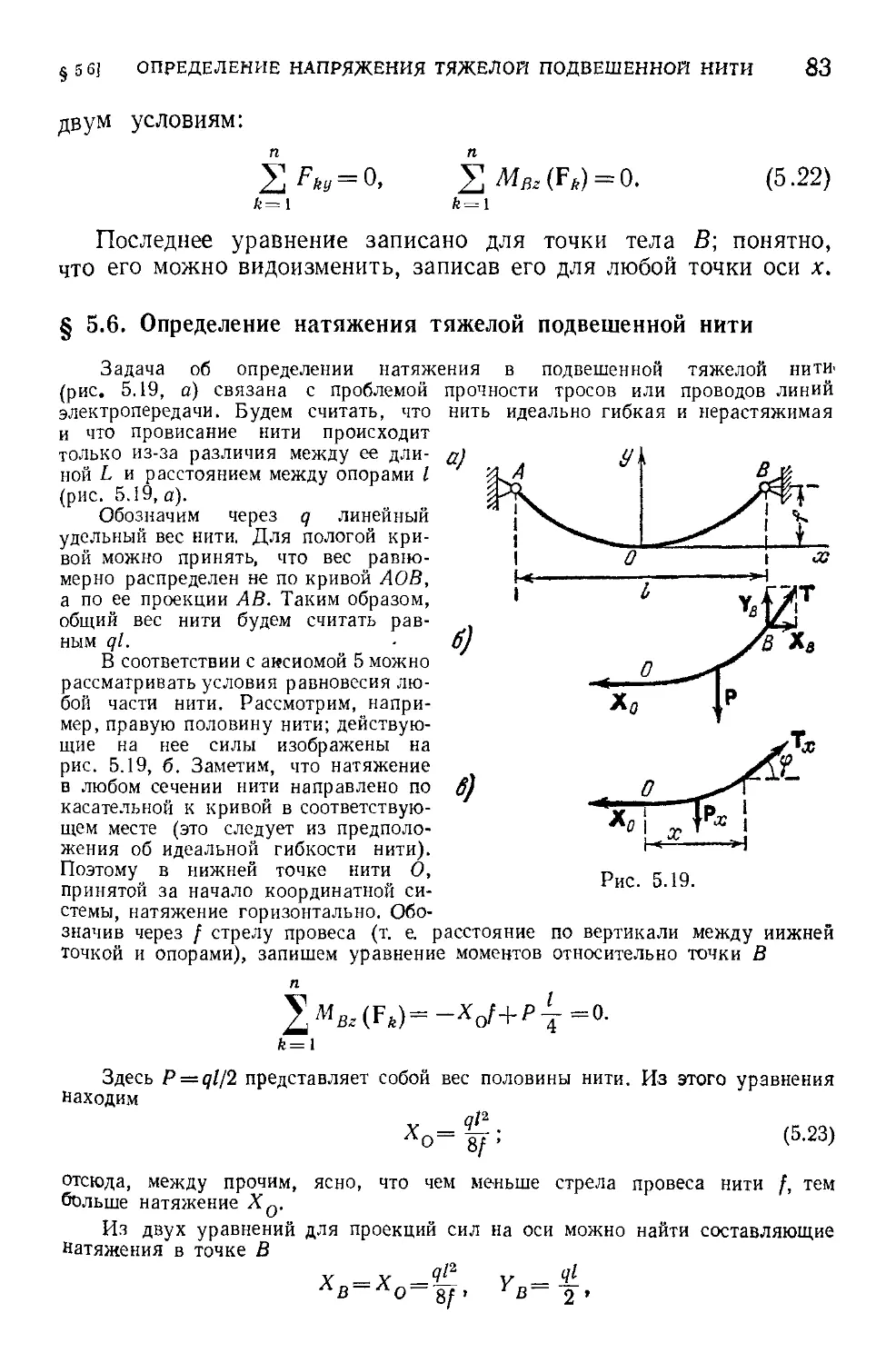
§ 5.6. Определение натяжения тяжелой подвешенной нити ................................ 83
§ 5.7. Определение реакций упругих опор твердого тела ................................ 85
§ 5.8. Приложение методов статикгг к определению усилий в стерж-
нях фермы........................................................ 89
Глава VI. Равновесие тела при наличии трения ......................................................................... 95
§ 6.1. Равновесие тела при наличии трения скольжения ............................................................. 95
§ 6.2. Равновесие тела при наличии трения качения ............................................................... 105
1*
4
ОГЛАВЛЕНИЕ
Глава VII. Пространственная система сил .............................................................. 109
§ 7.1. Статические инварианты. Динамический винт.......... 109
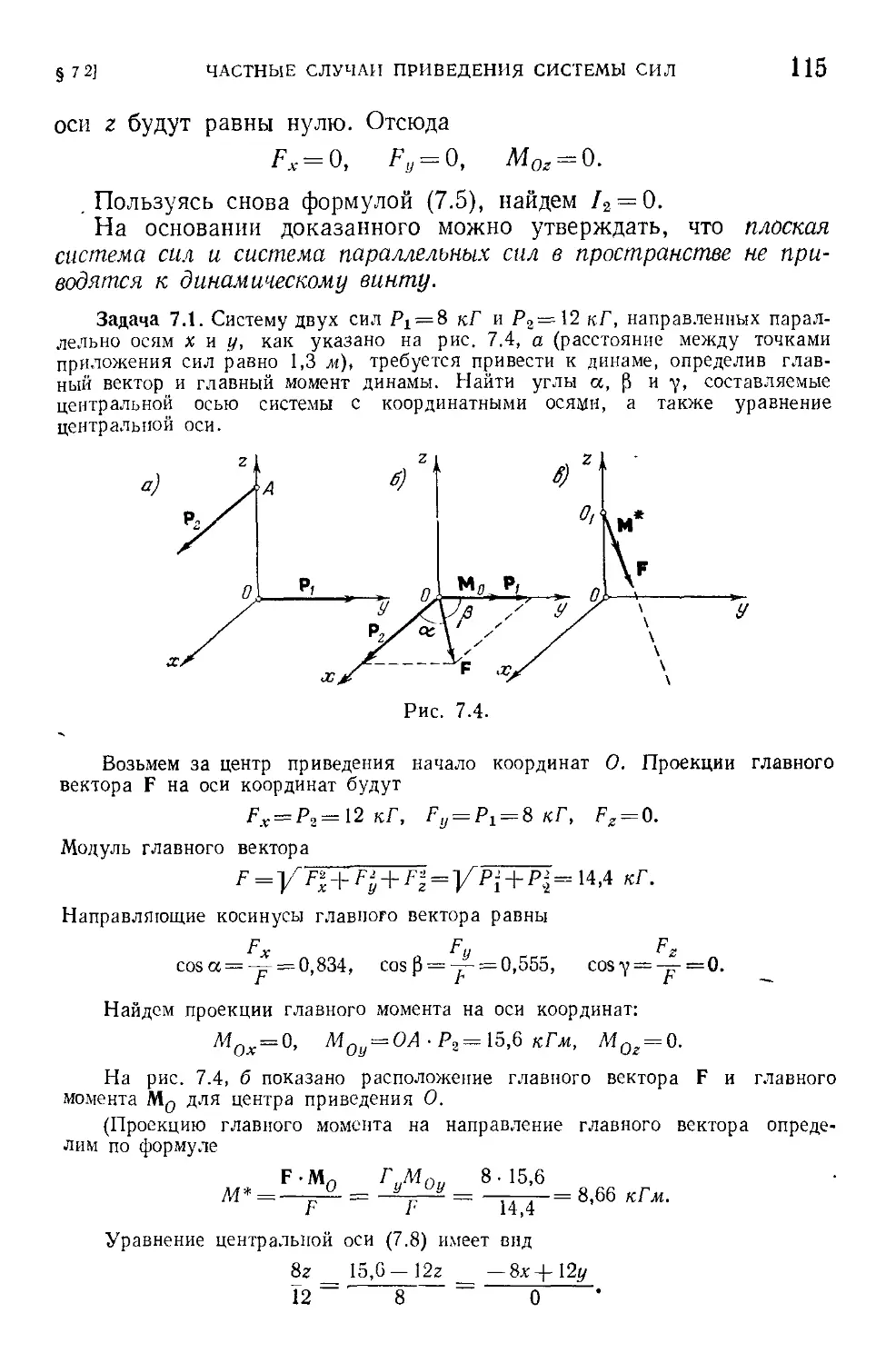
§ 7.2. Частные случаи приведения пространственной системы сил . ИЗ
§ 7.3. Уравнения равновесия пространственной системы сил ... 117
§ 7.4. Задачи................................................................................ 121
Глава VIII. Центр параллельных сил и центр тяжести ................................................... 130
§ 8.1. Центр параллельных сил................................................................. 130
§ 8.2. Центр тяжести ............................................................................. 132
§ 8.3. Методы нахождения центра тяжести ....................................................... ... 136
§ 8.4. Центры тяжести простейших фигур ........................................................... 139
КИНЕМАТИКА
Глава IX. Кинематика точки............................................................................ 143
§ 9.1. Введение................................................................................... 143
§ 9.2. Способы задания движения .................................................................. 144
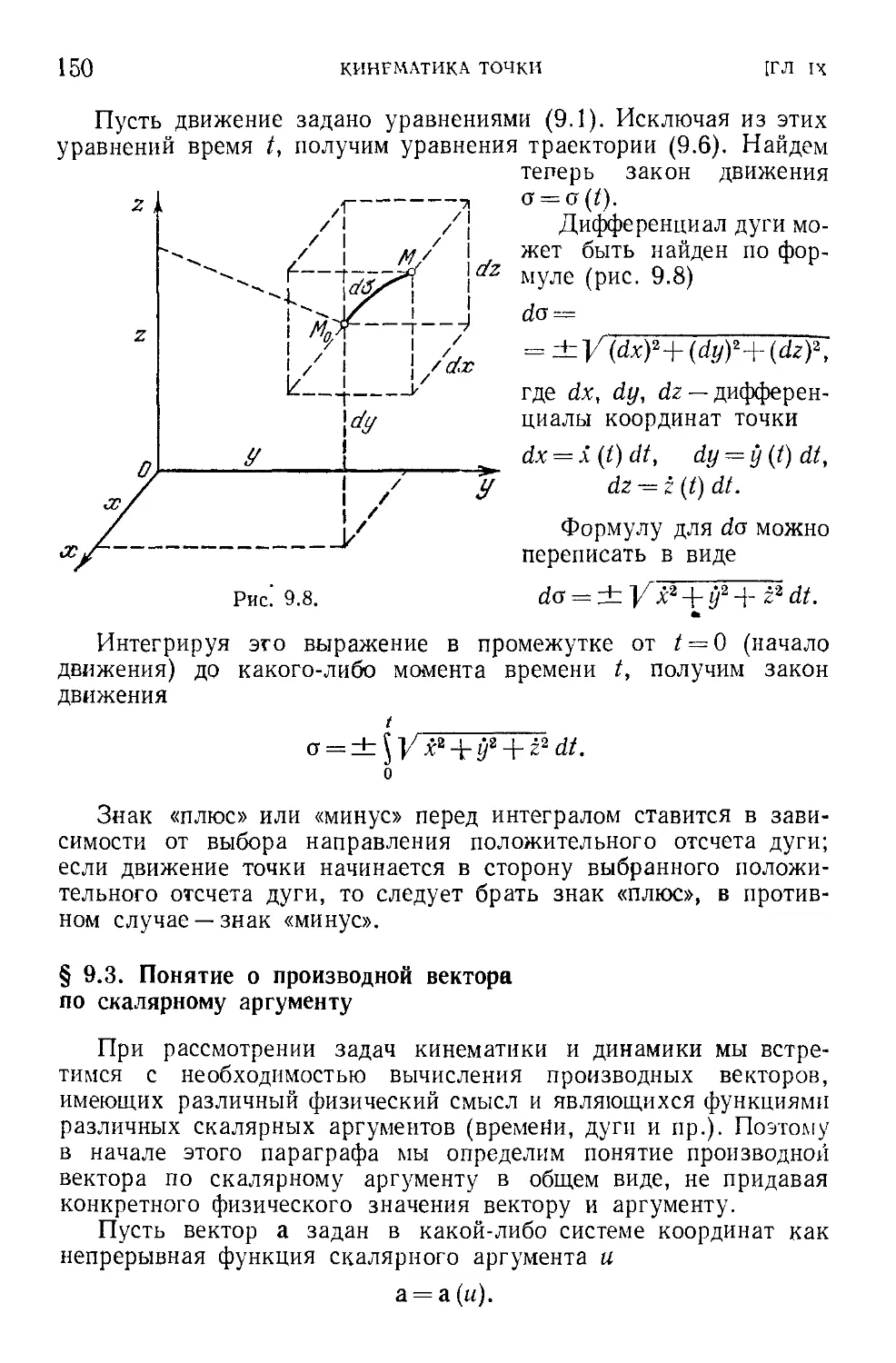
§ 9.3. Понятие о производной вектора по скалярному аргументу . 150
§ 9.4. Скорость точки ............................................................................ 152
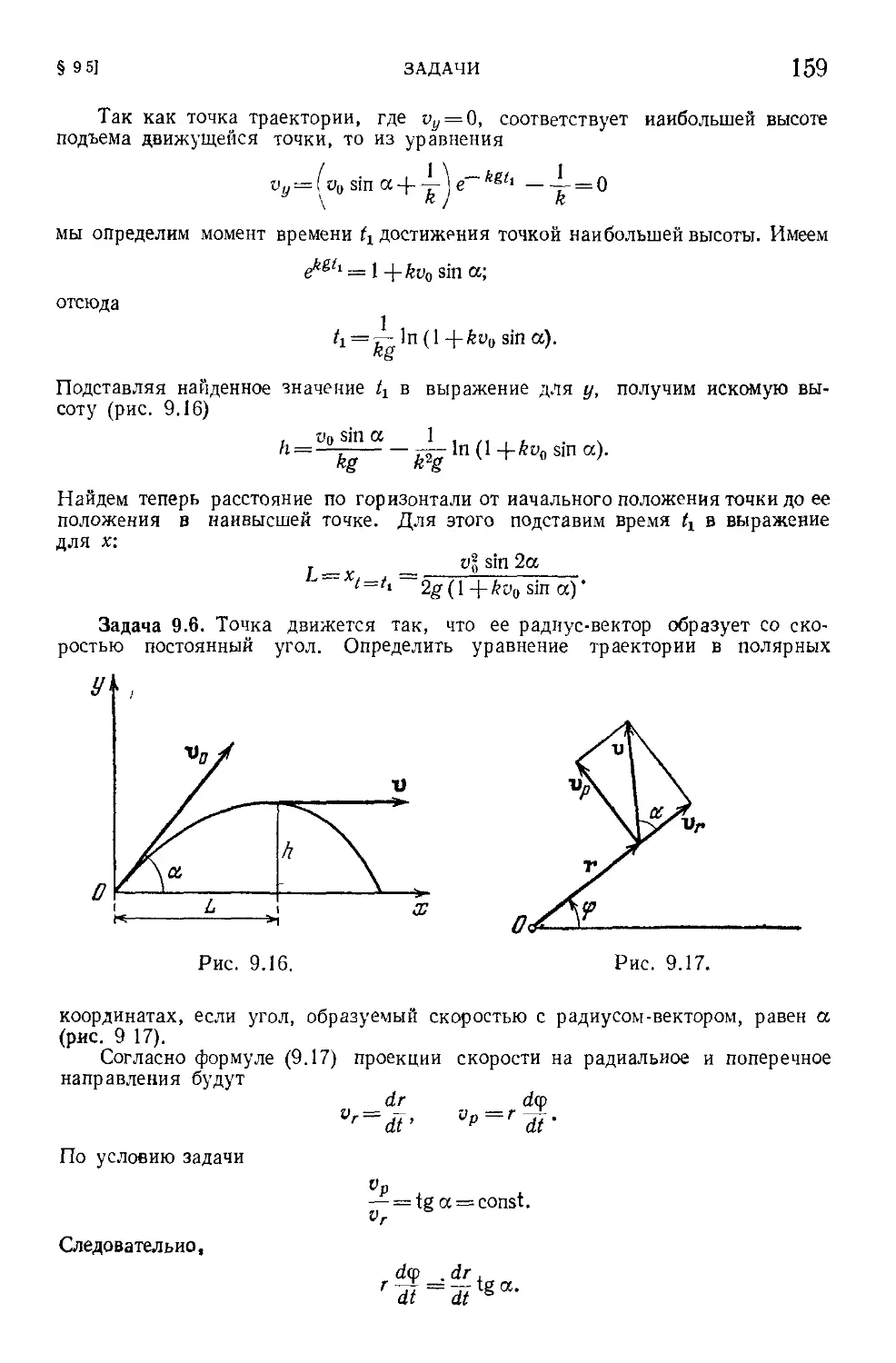
§ 9.5. Задачи..................................................................................... 158
§ 9.6. Ускорение точки ........................................................................... 160
§ 9.7. Частные случаи движения точки ............................................................. 167
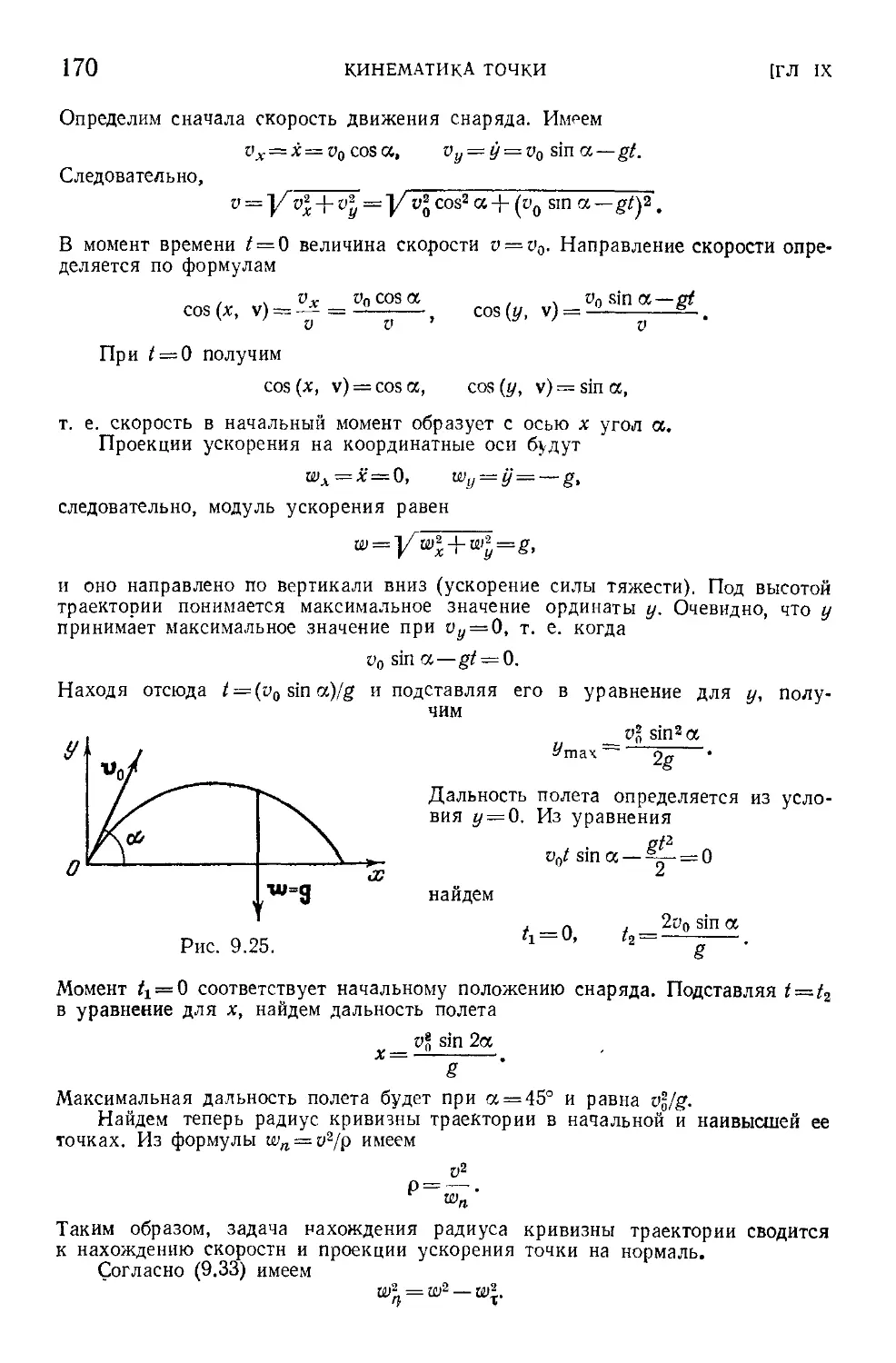
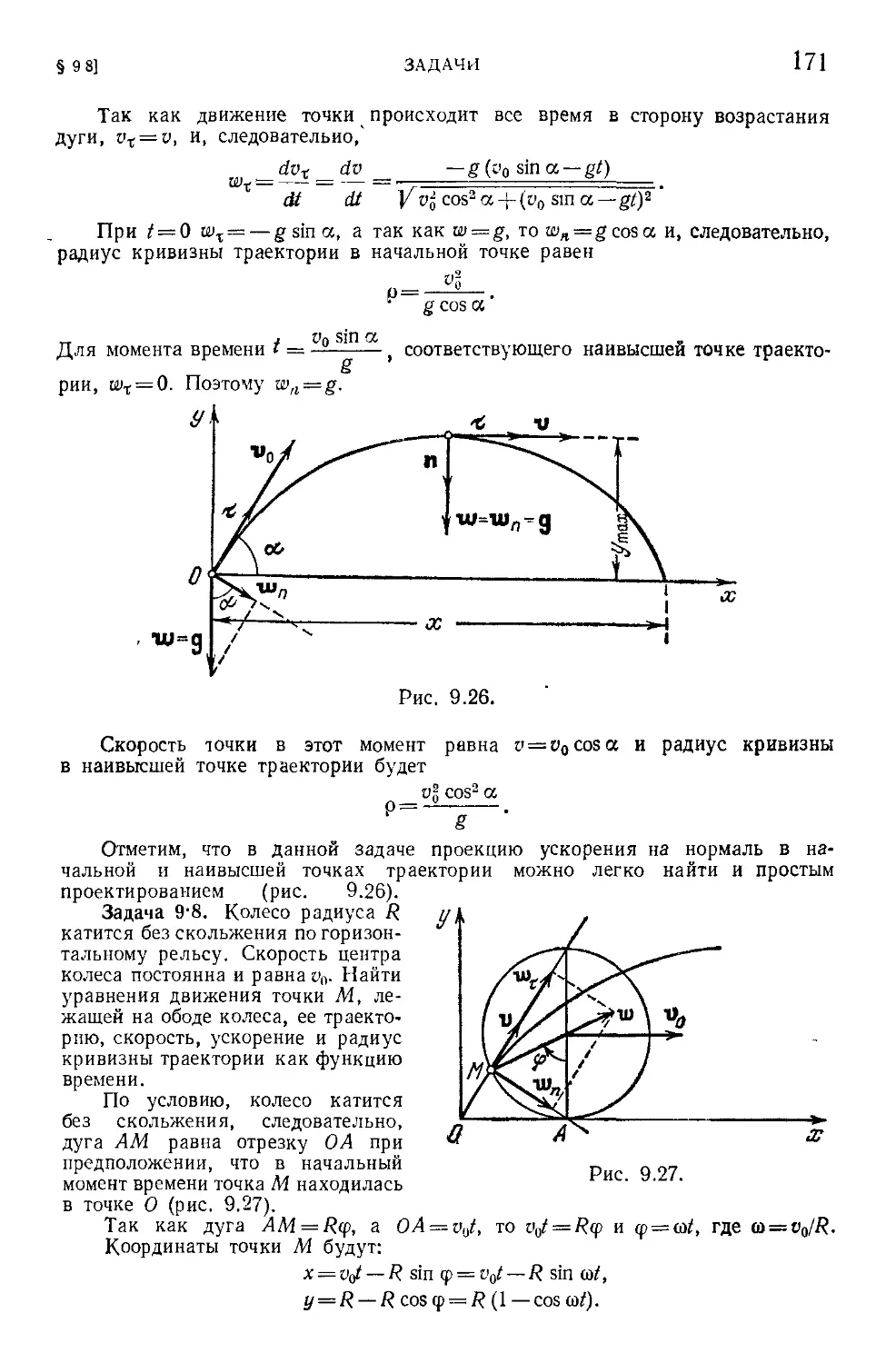
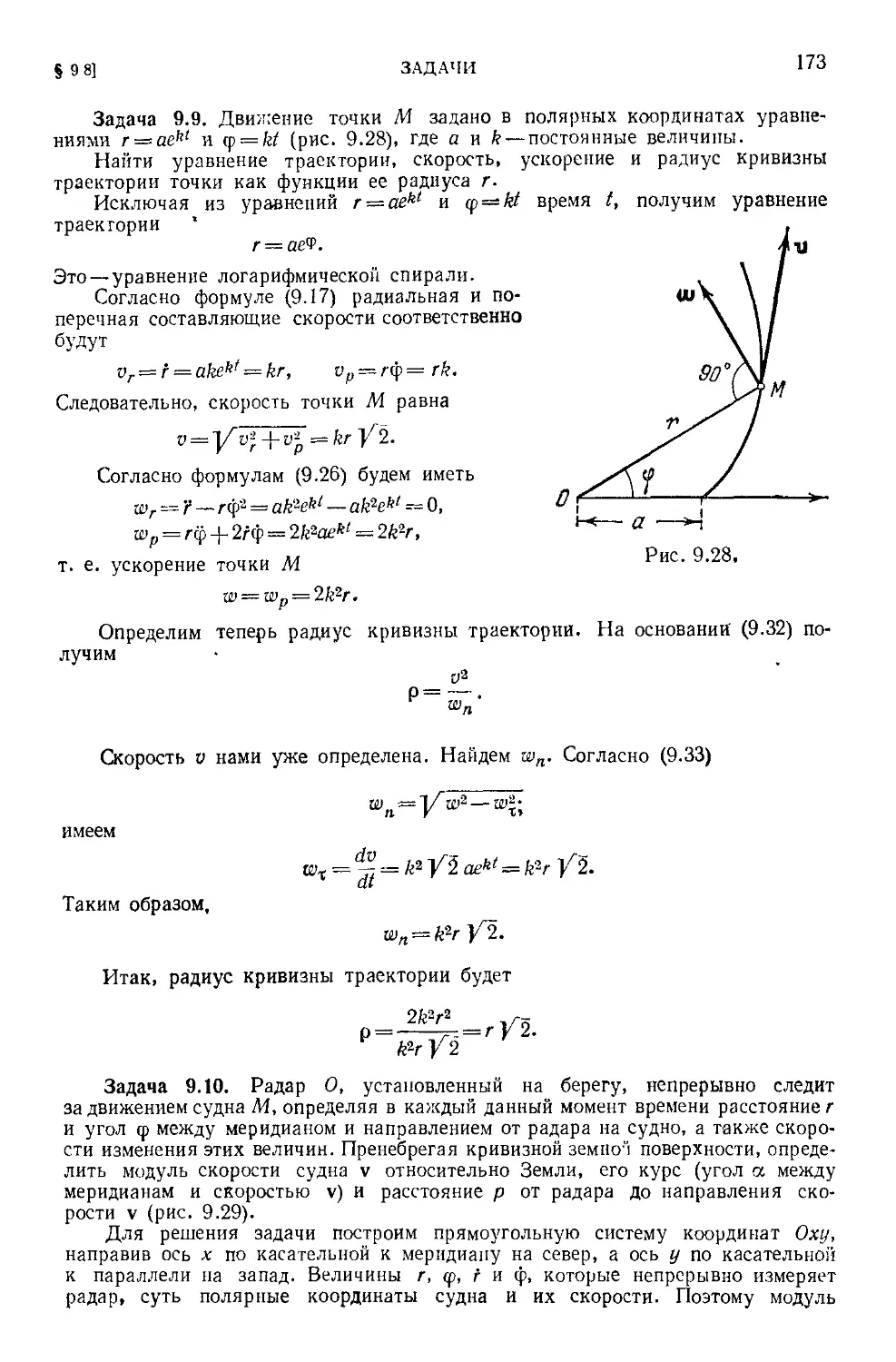
§ 9.8. Задачи..................................................................................... 169
§ 9.9. Криволинейные координаты................................................................... 176
§ 9.10. Задачи ................................................................................... 180
Глава X. Основные движения твердого тела ............................................................. 183
§ 10.1. Задание движения твердого тела............................................................ 183
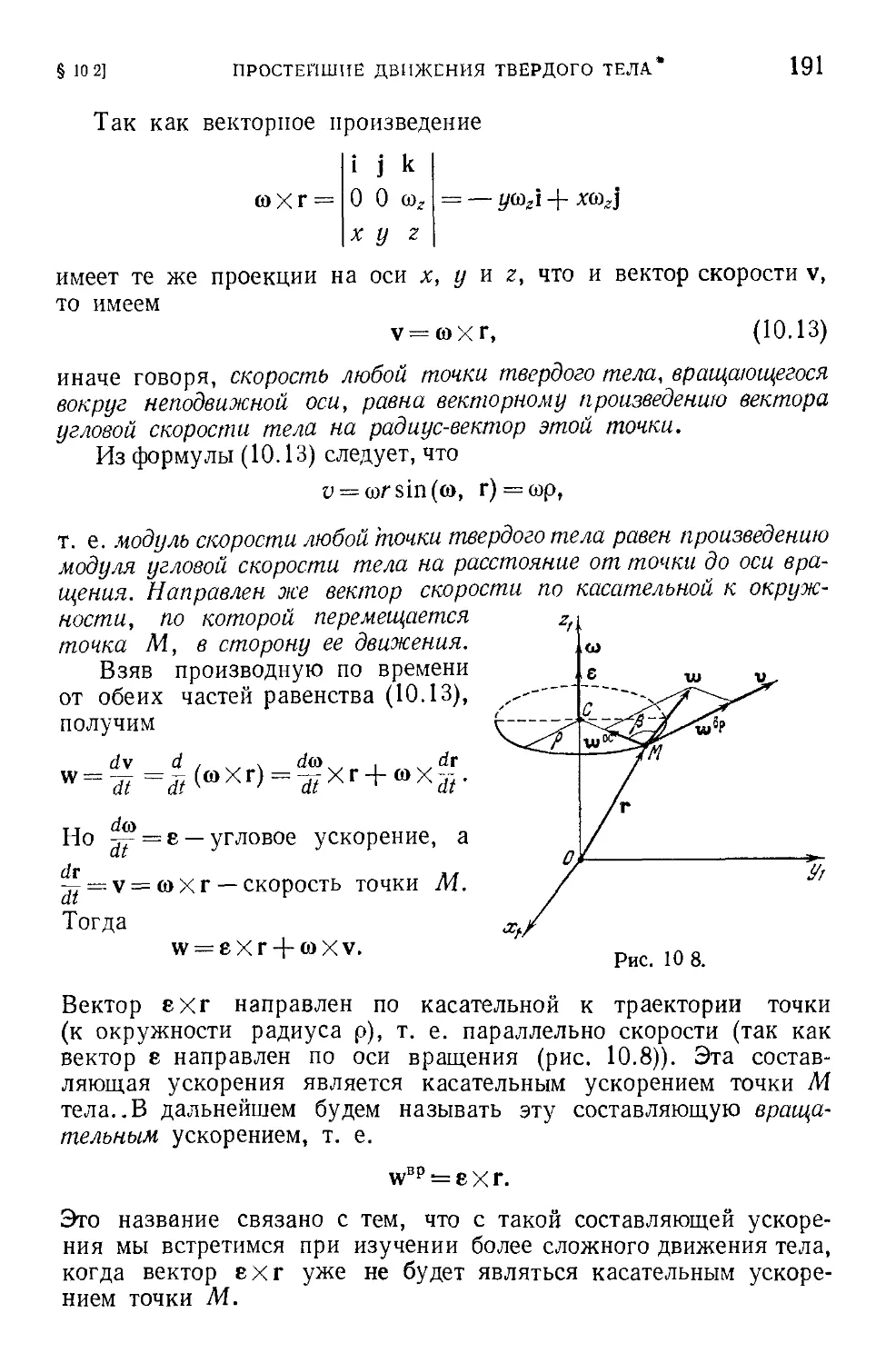
§ 10.2. Простейшие движения твердого тела ........................................................ 184
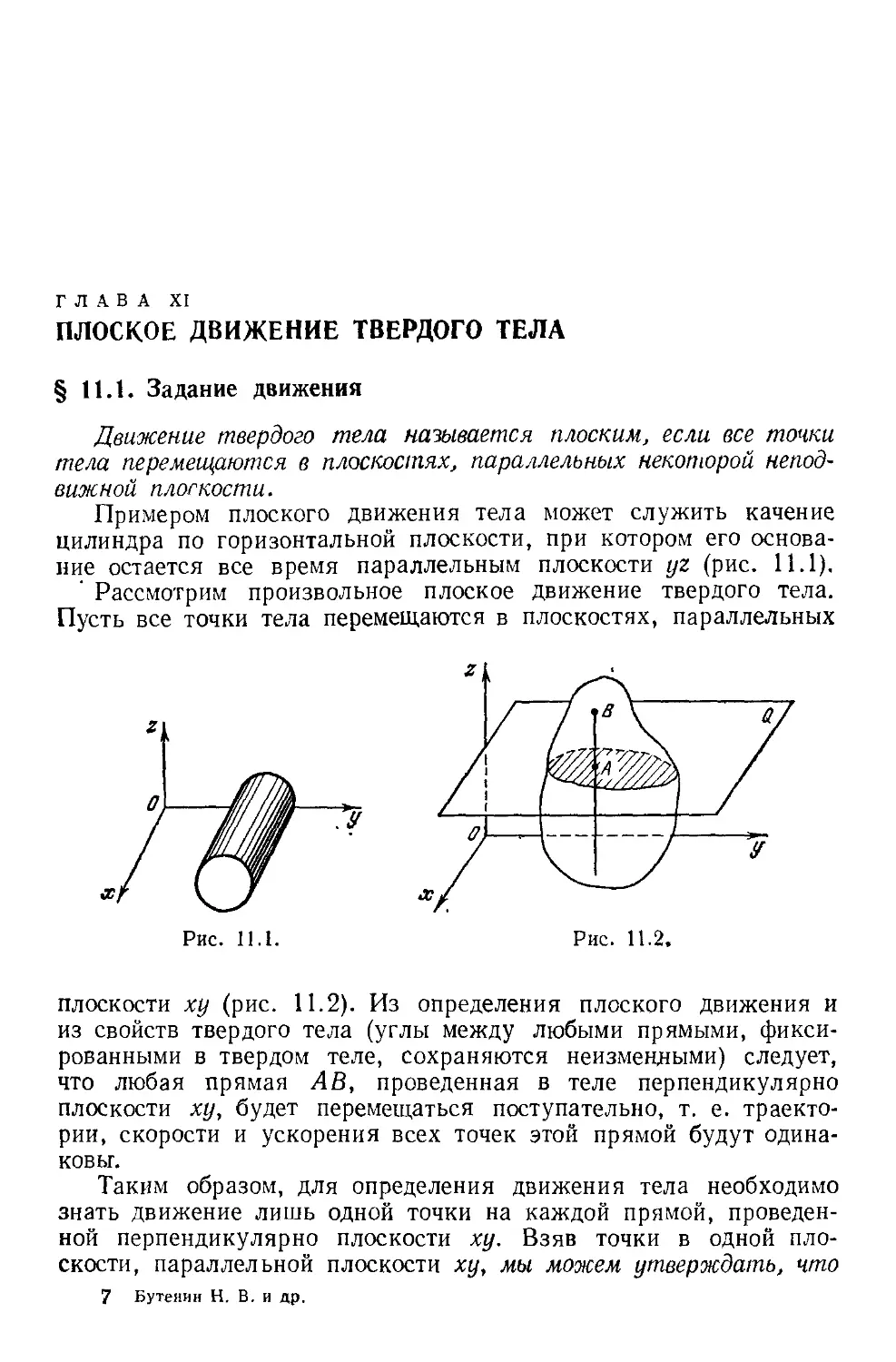
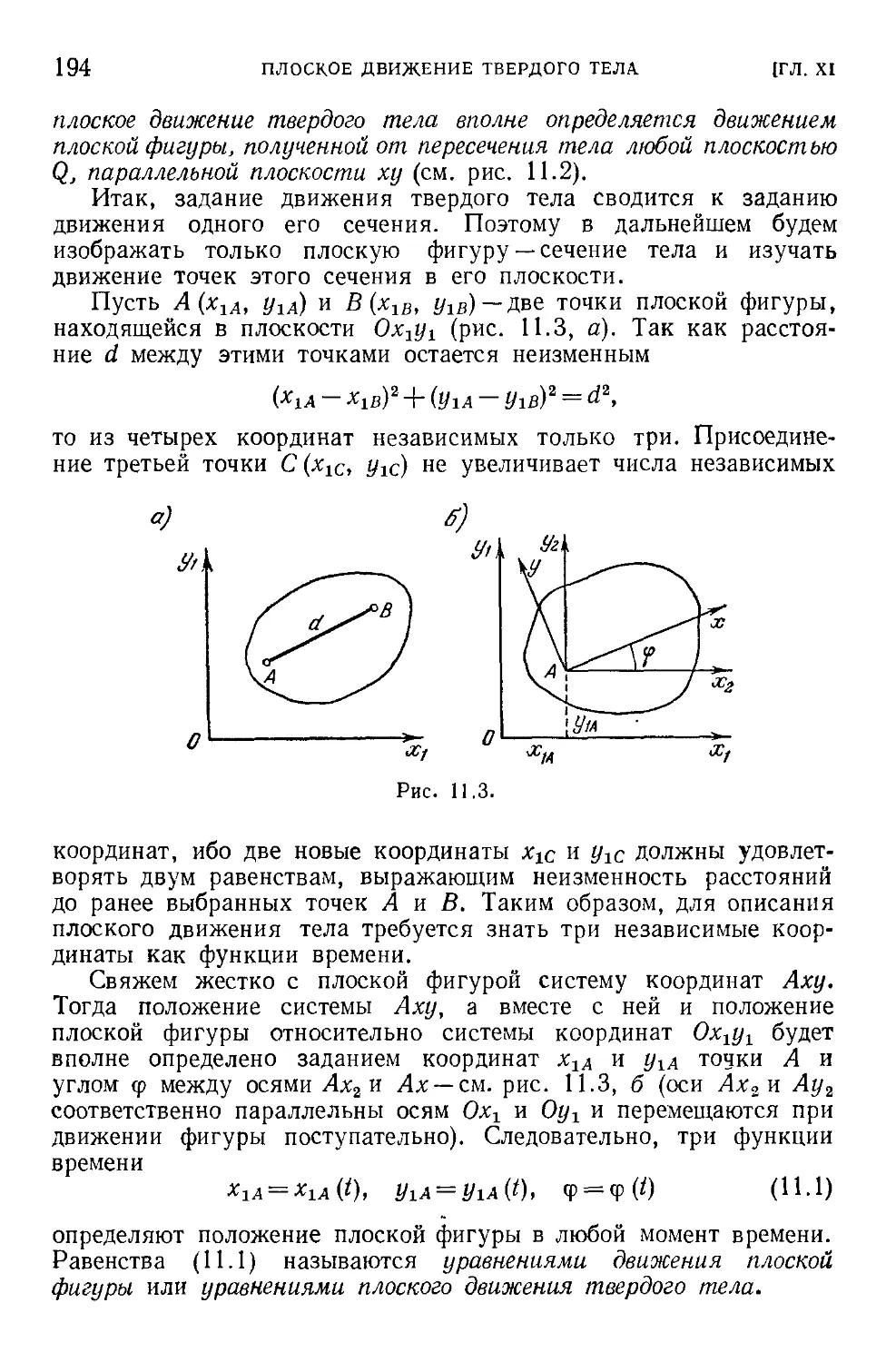
Глава XI. Плоское движение твердого тела.............................................................. 193
§ 11.1. Задание движения........... 193
§ 11.2. Скорости точек тела при плоском движении........... 195
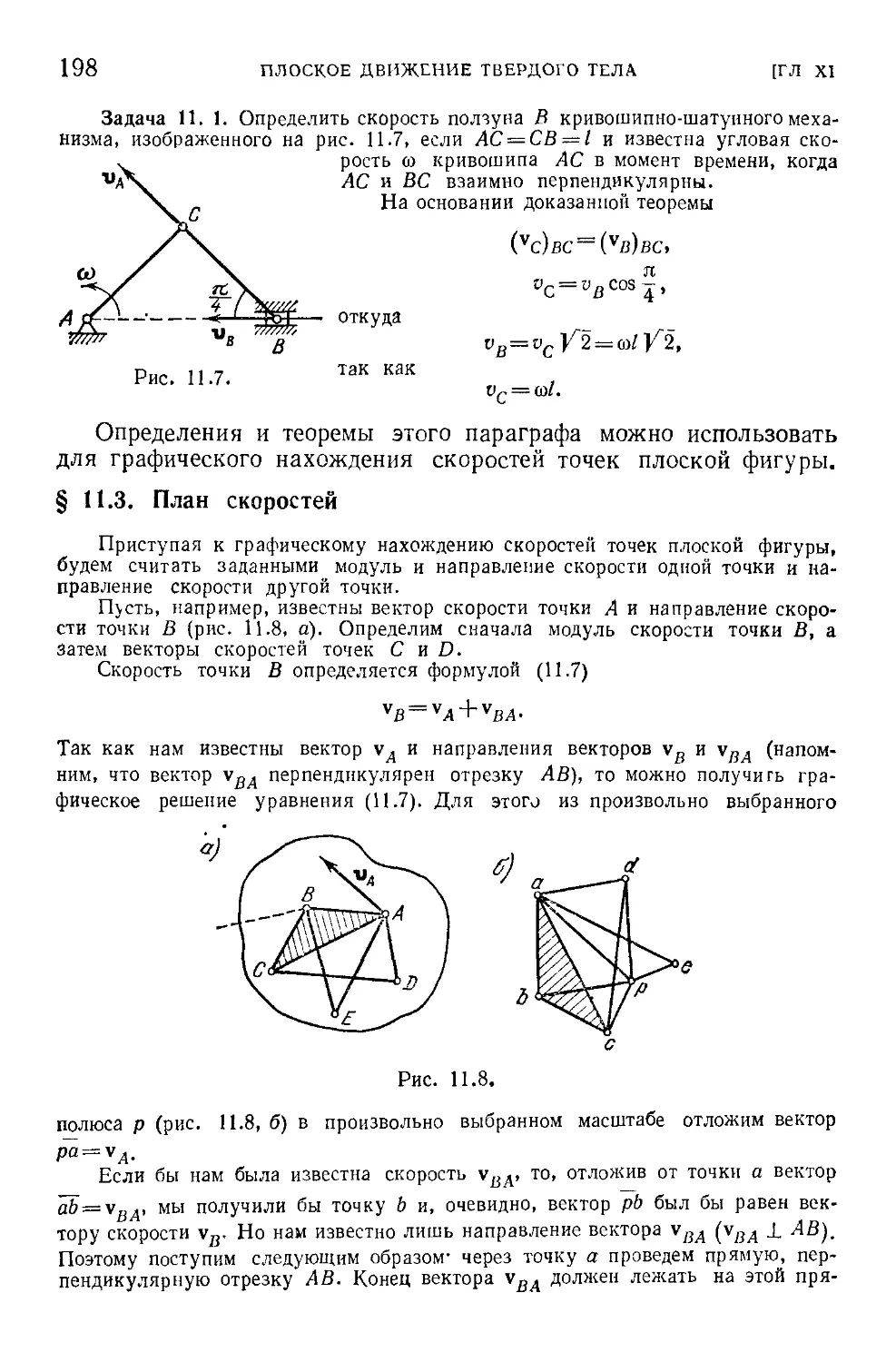
§ 11.3. План скоростей ................. 198
§ 11.4. Мгновенный центр скоростей. Центроиды................. 200
§ 11.5. Ускорения точек при плоском движении. Мгновенный центр
ускорений................................................................................... 204
§ 11.6. План ускорений ........................................................................... 207
§ 11.7. Задачи.................................................................................... 211
Глава XII. Движение твердого тела с одной неподвижной точкой. Сво-
бодное твердое тело............................................ 218
§ 12.1. Задания движения. Углы Эйлера ............................................................ 218
§ 12.2. Распределение скоростей точек твердого тела, имеющего одну
неподвижную точку. Мгновенная ось вращения. Мгновенная
угловая скорость .............................................. 219
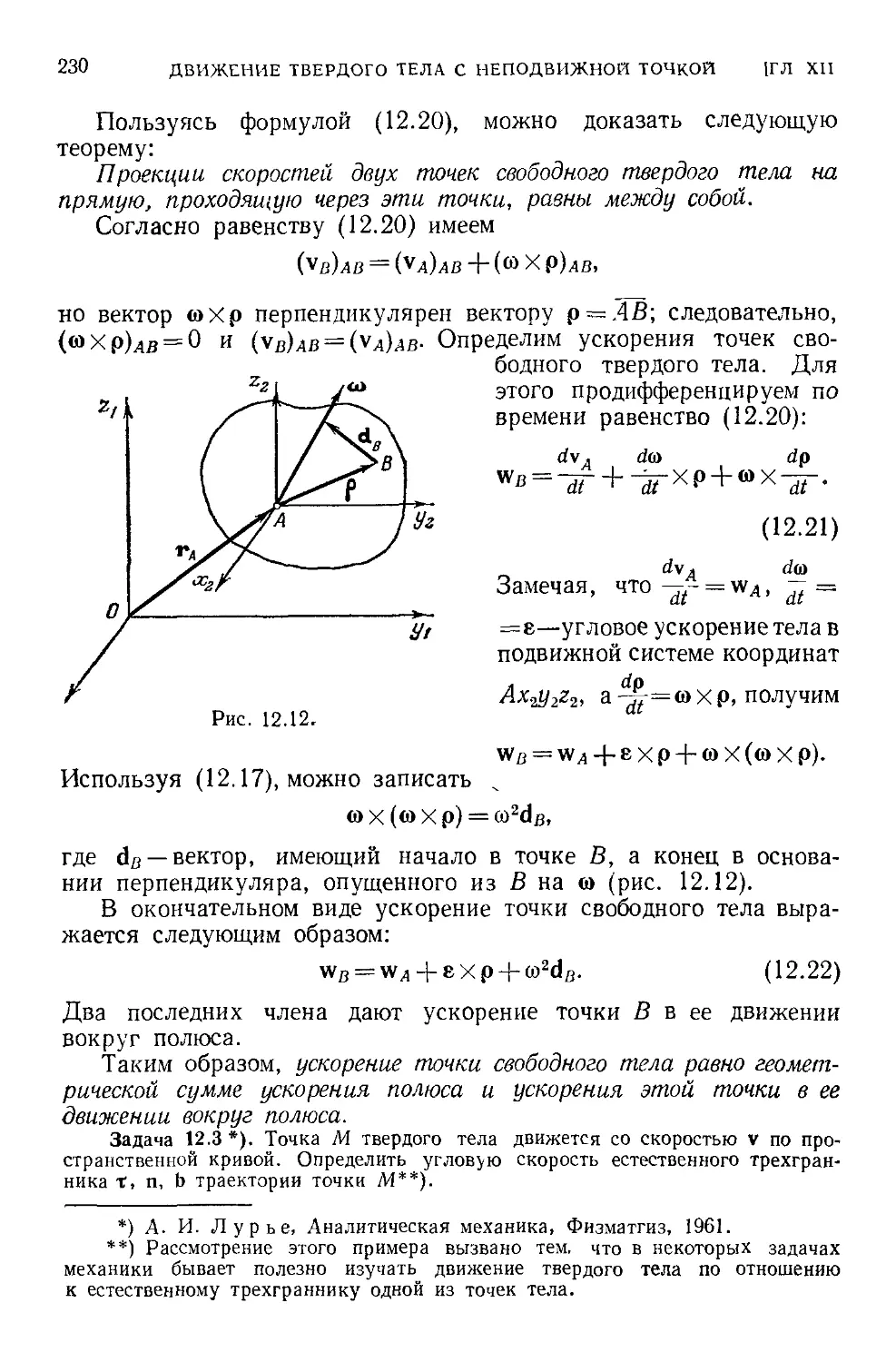
§ 12.3. Ускорения точек тела, имеющего одну неподвижную точку . 226
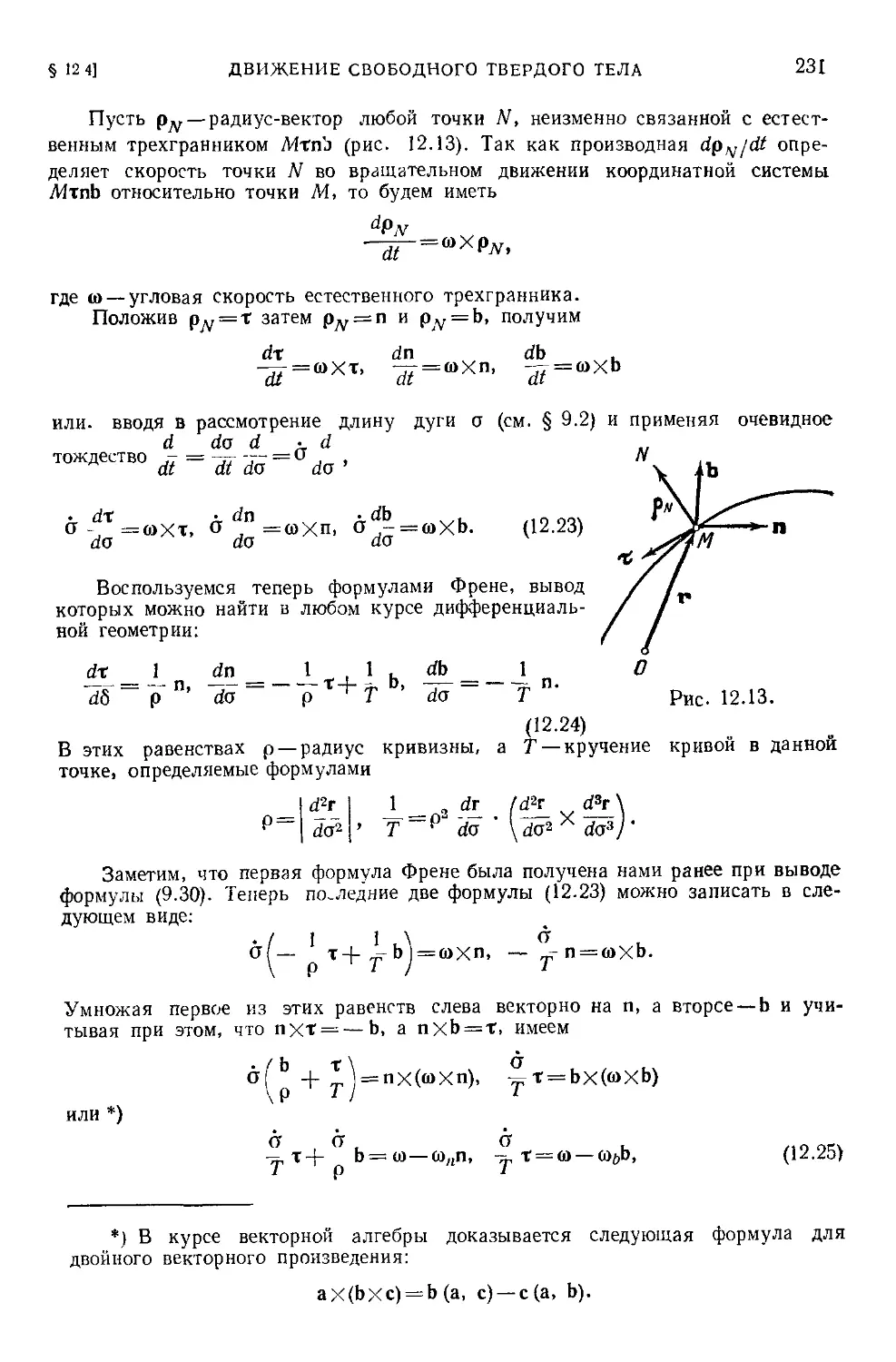
§ 12.4. Движение свободного твердого тела......................................................... 228
Глава XIII. Сложное движение точки................................................................ 233
§ 13.1. Основные определения. Абсолютная и относительная произ-
водные от вектора.............................................. 233
§ 13.2. Теорема о сложении скоростей .............................................................. 235
§ 13 3. Теорема о сложении ускорений (теорема Кориолиса) .... 237
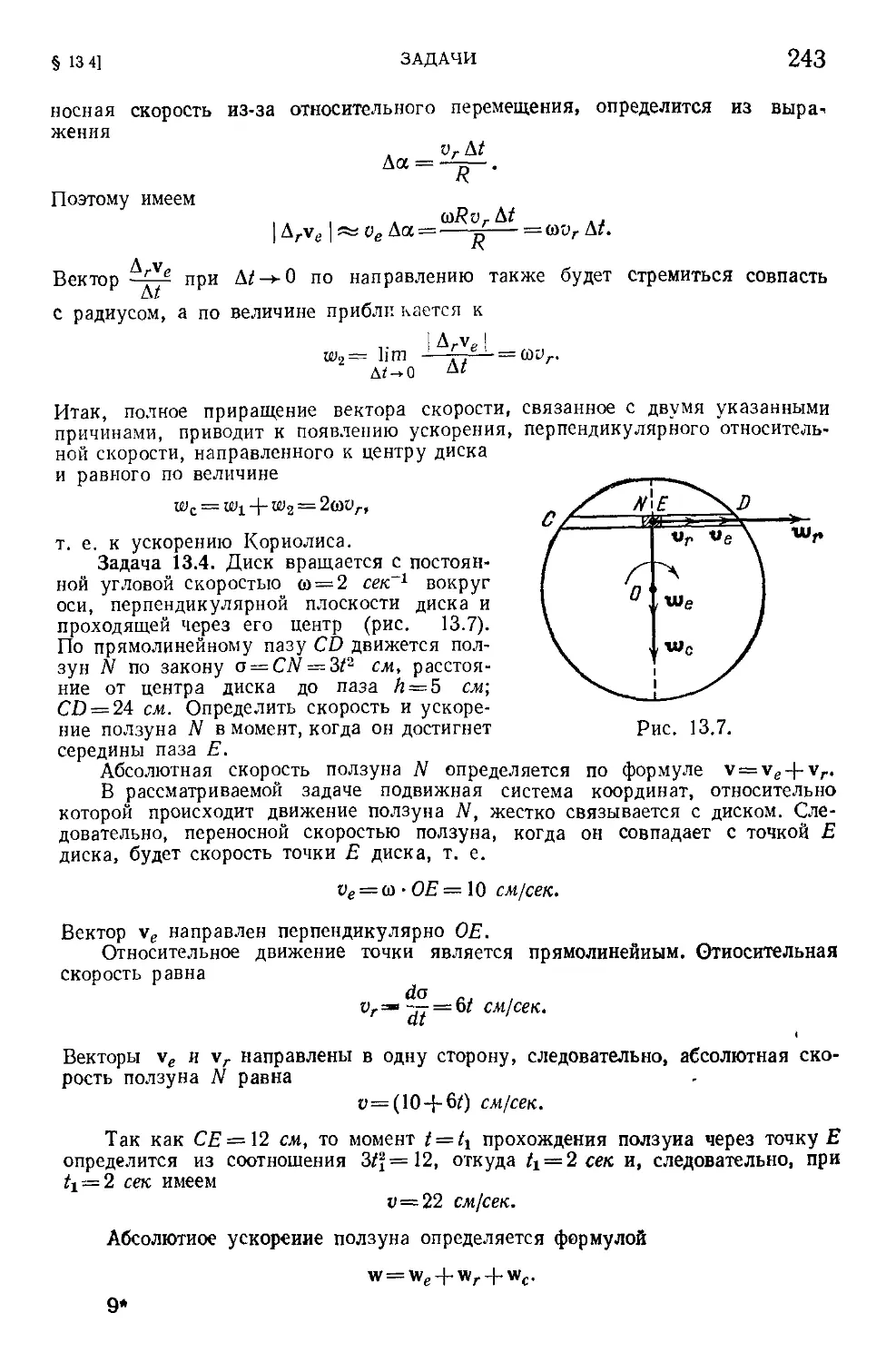
§ 13.4. Задачи ................................................................................... 239
ОГЛАВЛЕНИЕ 5
Глава XIV. Сложное движение твердого тела.......................................................................... 250
§ 14.1. Постановка задачи...........;.......................................................................... 250
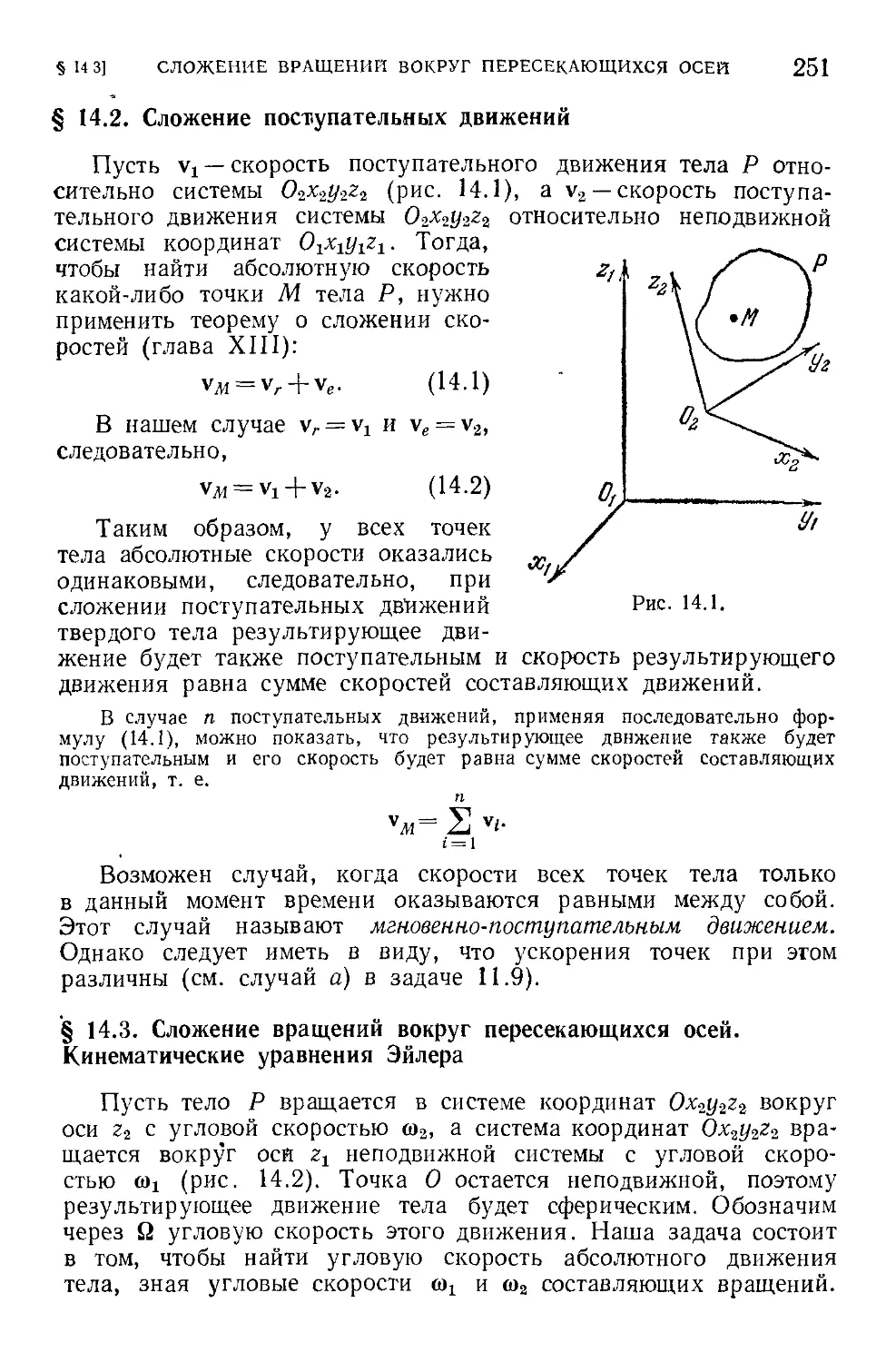
§ 14.2. Сложение поступательных движений....................................................................... 251
§ 14.3. Сложение вращений вокруг пересекающихся осей. Кинема-
тические уравнения Эйлера.................................... 251
§ 14.4. Пара вращений ............................................................................ 256
§ 14.5. Сложение вращений вокруг параллельных осей .................. 257
§ 14.6. Задачи................ 259
§ 14.7. Сложение поступательных и вращательных движений .... 261
§ 14.8. Общий случай сложения движений твердого тела................ 264
Предметный указатель .............................................................................................. 268
ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
Настоящий курс рассчитан на студентов технических вузов
с полной программой по теоретической механике. По сравнению
с традиционными курсами в книге более подробно рассматри-
ваются общие теоремы динамики системы, движение материаль-
ной точки в центральном силовом поле, динамика тела перемен-
ной массы, теория гироскопов, некоторые вопросы аналитической
механики и теории колебаний. При построении курса авторы
стремились к единству иепользуемых методических приемов и
учитывали фактический объем известных студенту втуза сведений,
в частности, в курсе последовательно использован аппарат век-
торной алгебры.
В 1972 г. авторский коллектив понес тяжелую утрату —после
непродолжительной болезни скончался Яков Львович Лунц.
При подготовке второго издания, выполненной Н. В. Бутени-
ным и Д. Р. Меркиным, частично или полностью переработаны
и заново изложены некоторые разделы курса, написана новая,
XXI глава, посвященная элементам теории нелинейных колеба-
ний, введены новые параграфы, в которых рассматривается дви-
жение искусственного спутника Земли относительно центра масс,
добавлено много новых задач, пересмотрен весь текст, исправлены
замеченные опечатки. Сохранены § 5.6 и § 5.7, написанные для
первого издания Я. Г. Пановко.
В связи с тем, что учащиеся многих втузов нуждаются в
более углубленном изучении ряда важнейших разделов механики,
была написана серия книг, дополняющих настоящее руководство.
К настоящему времени Главной редакцией физико-математической
литературы издательства «Наука» изданы следующие приложения:
Н. В. Б у те нин, «Введение в аналитическую механику»,
Я. Л. Лунц, «Введение в теорию гироскопов», Д. Р. Мер к ин,
«Введение в теорию устойчивости движения» (два издания),
Я. Г. Пановко, «Введение в теорию механических колебаний»,
Н. В. Б утенин, Ю. И. Неймар к, Н. А. Фуфаев, «Введе-
ние в теорию нелинейных колебаний», Я- Г. Пановко, «Введе-
ние в теорию механического удара».
Авторы выражают глубокую благодарность С. М. Тарту,
В. К- Прокопову, В. Г. Демину, Г. Д. Мошкову, Л. М. Грин-
шпуну, А. Г. Мамиконову и Г. С. Шпаку, замечания которых
позволили существенно улучшить курс.
ВВЕДЕНИЕ
Теоретическая механика — раздел физики, в котором изу-
чается механическое движение материальных тел, т. е. изменение
с течением времени положения их относительно друг друга.
Так как состояние покоя есть частный случай механического
движения, то в задачу теоретической механики входит также
изучение равновесия материальных тел.
Движение материи происходит во времени и пространстве.
За пространство, в котором происходит движение тел, прини-
мают «обычное» евклидово трехмерное пространство. Для изуче-
ния движения вводят так называемую систему отсчета, понимая
под ней совокупность тела отсчета (тела, относительно которого
изучается движение других тел) и связанных с ним систем коор-
динатных осей и часов. В теоретической механике принимается,
что время не зависит от движения тел и что оно одинаково во
всех точках пространства и всех системах отсчета (абсолютное
время). В связи с этим в теоретической механике, говоря о
системе отсчета, можно ограничиться указанием только тела
отсчета или системы координатных осей, связанных с этим
телом.
Движение тела происходит в результате действия на движу-
щееся тело сил, вызванных другими телами. При изучении ме-
ханического движения и равновесия материальных тел знание
природы сил не обязательно, достаточно знать только их вели-
чины. Поэтому в теоретической механике не изучают физическую
природу сил, ограничиваясь только рассмотрением связи между
силами и движением тел.
Теоретическая механика построена на законах И. Ньютона,
справедливость которых проверена огромным количеством непо-
средственных наблюдений, опытной проверкой следствий (зачас-
тую далеких и вовсе не очевидных) из этих законов, а также
многовековой практической деятельностью человека. Законы Нью-
тона справедливы не во всех системах отсчета. В механике
постулируется наличие хотя 'бы одной такой системы (инерци-
альная система отсчета). Многочисленные опыты и измерения
показывают, что с высокой степенью точности система отсчета
с началом в центре Солнечной системы и осями, направленными
к далеким «неподвижным» звездам, является инерциальной систе-
8
ВВЕДЕНИЕ
мой отсчета (она называется гелиоцентрической или основной
инерциальной системой отсчета).
В дальнейшем будет показано, что если имеется хотя бы
одна инерциальная система отсчета, то их имеется бесчислен-
ное множество (очень часто инерциальные системы отсчета на-
зывают неподвижными системами). Во многих задачах за инер-
циальную систему отсчета принимают систему, связанную с Землей.
Ошибки, возникающие при этом, как правило, столь незначи-
тельны, что практического значения они не имеют. Но имеются
задачи, в которых уже нельзя пренебречь вращением Земли.
В этом случае за неподвижную систему отсчета следует при-
нимать введенную гелиоцентрическую систему отсчета.
Теоретическая механика является естественной наукой, опи-
рающейся на результаты опыта и наблюдений и использующей
математический аппарат при анализе этих результатов. Как во
всякой естественной науке, в основе механики лежит опыт,
практика, наблюдение. Но наблюдая какое-нибудь явление, мы
не можем сразу охватить его во всем многообразии. Поэтому
перед исследователем возникает задача выделить в изучаемом
явлении главное, определяющее, отвлекаясь (абстрагируясь) от
того, что менее существенно, второстепенно.
В теоретической механике метод абстракции играет очень
важную роль. Отвлекаясь при изучении механических движений
материальных тел от всего частного, случайного, менее сущест-
венного, второстепенного и рассматривая только те свойства,
которые в данной задаче являются определяющими, мы приходим
к рассмотрению различных моделей материальных тел, представ-
ляющих ту или иную степень абстракции. Так, например, если
отсутствует различие в движениях отдельных точек материаль-
ного тела или в данной конкретной задаче это различие прене-
брежимо мало, то размерами этого тела можно пренебречь, рас-
сматривая его как “материальную точку. Такая абстракция при-
водит к важному понятию теоретической механики—понятию мате-
риальной точки, которая отличается от геометрической точки тем,
что имеет массу. Материальная точка обладает свойством инерт-
ности, как обладает этим свойством тело и, наконец, она обла-
дает той же способностью взаимодействовать с другими мате-
риальными телами, какую имеет тело. Так, например, планеты
в их движении вокруг Солнца, космические аппараты в их дви-
жении относительно небесных тел можно рассматривать в первом
приближении как материальные точки.
Другим примером абстрагирования от реальных тел является
понятие абсолютно твердого тела. Под ним понимается тело,
которое сохраняет свою геометрическую форму неизменной, неза-
висимо от действий других тел. Конечно, абсолютно твердых
тел нет, так как в результате действия сил все материальные
ВВЕДЕНИЕ
9
тела изменяют свою форму, т, е. деформируются, но во многих
случаях деформацией тела можно пренебречь. Например, при
расчете полета ракеты мы можем пренебречь небольшими коле-
баниями отдельных частей ее, так как эти колебания весьма
мало скажутся на параметрах ее полета. Но при расчете ра-
кеты на прочность учет этих колебаний обязателен, ибо они могут
вызвать разрушение корпуса ракеты.
Принимая те или иные гипотезы, следует помнить о пределах
их применимости, так как, забыв об этом, можна прийти к со-
вершенно неверным выводам. Это происходит тогда, когда усло-
вия решаемой задачи уже не удовлетворяют сделанным предпо-
ложениям и неучитываемые свойства становятся существенными.
В курсе при постановке задачи мы всегда будем обращать вни-
мание на те предположения, которые принимаются при рассмот-
рении данного вопроса.
Приведем некоторые сведения из истории механики. Подобно
всем другим наукам механика возникла и развивалась под вли-
янием практических нужд человеческого общества. Она является
одной из древнейших наук и ее история насчитывает приблизи-
тельно 25 веков напряженных исканий. В примитивном виде
первичные понятия механики, в частности, понятия силы и ско-
рости, появились еще в античный период. Чисто практическое
применение катков, наклонной плоскости, рычага, блоков при
постройке грандиозных сооружений древности (пирамиды, дворцы
и т. п.) накапливало определенный опыт и, очевидно, должно было
привести к обобщению этого опыта, к установлению некоторых за-
конов механики (статики). Так, в трактате «Механические про-
блемы» Аристотель (384 — 322 до н. э.) рассматривает конкретные
практические задачи при помощи метода, основанного на законе
рычага. Однако первые попытки установления динамических зако-
нов оказались неудачными. Аристотель ошибочно полагал, что
скорости падающих тел пропорциональны их весам и что равно-
мерное и прямолинейное движение является результатом дейст-
вия постоянной силы. Потребовалось почти два тысячелетия,
чтобы преодолеть эти ошибочные представления и заложить на-
учные основы динамики. К числу бесспорных достижений антич-
ной механики следует отнести работы Архимеда (287—212 до
н. э.), который был не только выдающимся инженером своего
времени, но и дал ряд научных обобщений, относящихся к
гидростатике (закон Архимеда), учению о равновесии и центре
тяжести.
В течение XIV—XVII столетий под влиянием торгового мо-
реплавания и военного дела возник обширный комплекс задач,
связанных с движением небесных тел, полетом снарядов, проч-
ностью кораблей, ударом тел. Решение этих задач не могло
быть осуществлено старыми методами и требовало прежде всего
10
ВВЕДЕНИЕ
установления связи между движением и причинами, вызываю-
щими его изменение.
Созданию основ динамики предшествовал сравнительно дли-
тельный период накопления опытных данных и их научного
анализа. Здесь необходимо прежде всего отметить работы Н. Ко-
перника (1473—1543), который на основе данных, установлен-
ных многовековыми наблюдениями, показал, что планеты обра-
щаются не вокруг Земли, а вокруг Солнца. Дальнейший шаг
к изучению движения небесных тел сделал Иоганн Кеплер
(1571 —1630). Обрабатывая многочисленные наблюдения своего
учителя Тихо Браге, он установил три закона движения планет.
К этому же периоду относятся работы Галилео Галилея
(1564—1642). Он сформулировал принцип относительности класси-
ческой механики и принцип инерции (хотя и не в общем виде),
установил законы свободного падения тел. Галилеем была по-
строена количественная теория движения тяжелого тела по на-
клонной плоскости и теория движения тела, брошенного под
углом к горизонту. Кроме того, Галилей занимался изучением
прочности стержней и сопротивлением жидкости движущимся
в ней телам. Последователем Галилея в области механики был
Христиан Гюйгенс (1629—1695), который сформулировал поня-
тия центростремительной и центробежной сил, исследовал коле-
бания физического маятника, заложил основы теории удара.
Успешно преодолевая схоластический стиль античной науки,
ученые этого периода с особым вниманием относились к опыт-
ным данным и систематически контролировали истинность своих
теоретических построений экспериментальными наблюдениями. Та-
ковы, в частности, установленные Галилеем и Гюйгенсом законы
движения тел.
В 1687 г. вышла в свет книга Исаака Ньютона (1642—1727)
«Математические начала натуральной философии» (в Англии на-
туральной философией называют физику). Прежде всего в этой
книге Ньютон, завершая работы своих предшественников, глав-
ным образом Галилея и Гюйгенса, создает стройную систему
основных законов динамики. Он впервые вводит понятие массы,
устанавливает основной закон динамики, связывающий массу
точки, ее ускорение и действующую на нее силу, и закон ра-
венства действия и противодействия.
Исходя из законов Кеплера, он математически установил за-
кон всемирного тяготения, а затем доказал, что если этот закон
справедлив, то планеты должны двигаться по законам Кеплера.
Закон всемирного тяготения’, открытый и доказанный И. Ньюто-
ном, получил за последние десятилетия особо важное значение,
так как он лежит в основе расчета межпланетных траекторий
космических кораблей и траекторий искусственных спутников
Земли.
ВВЕДЕНИЕ
И
Ньютон установил также тождественность природы сил вза-
имного тяготения и силы тяжести на Земле. Он показал, что
Земля сплюснута у полюсов, объяснил явления приливов и отли-
вов, заложил основы теории удара.
Установление общих законов механики и закона всемирного
тяготения является научным открытием первостепенного значе-
ния. Но этим не исчерпывается значение «Математических начал
натуральной философии» Ньютона. В своей книге он с предель-
ной ясностью изложил общий метод, которым нужно руководст-
воваться при физических исследованиях.
Кратко этот метод сводится к следующему. Из опытов сле-
дует вывести два или три общих закона (принципы) и затем
показать, как из этих простых законов логически вытекают раз-
личные свойства (следствия), наблюдаемые на практике. Хотя
этот метод исследования не является единственно возможным,
а в наши дни он кажется само собой разумеющимся, ясное
изложение его и блестящий пример построения механики, дан-
ный Ньютоном в его книге, оказал громадное влияние на все
последующие поколения физиков. Именно поэтому академик
С. И. Вавилов сказал, что в истории естествознания не
было события более крупного, чем появление «Начал» Нью-
тона *).
Период развития механики после Ньютона в значительной
мере связан с именем Л. Эйлера (1707— 1783), отдавшего боль-
шую часть своей исключительно плодотворной деятельности Пе-
тербургской Академии наук, членом которой он стал в 1727 г.
Эйлер развил динамику точки (им была дана естественная форма
дифференциальных уравнений движения материальной точки) и за-
ложил основы динамики твердого тела, имеющего одну неподвижную
точку («динамические уравнения Эйлера»), нашел решения этих
уравнений при движении тела по инерции. Он же является осно-
вателем гидродинамики (дифференциальные уравнения движения
идеальной жидкости), теории корабля и теории упругой устойчи-
вости стержней. Эйлер получил ряд важных результатов и в
кинематике (достаточно вспомнить углы и кинематические урав-
нения Эйлера, теорему о распределении скоростей в твердом теле).
Ему принадлежит заслуга создания первого курса механики в
аналитическом изложении.
К этому же периоду относится глубокая разработка механики
свободных и несвободных систем материальных точек. Развитие
этого направления было дано работами Ж- Л. Даламбера (1717 —
1783), Ж. Л. Лагранжа (1736— 1813). В «Трактате по динамике»
первого из этих авторов показано, «каким образом все задачи
*) С. И. Вавилов, «Исаак Ньютон», изд, АН СССР, Москва, 1961,
стр. НО.
12
ВВЕДЕНИЕ
динамики можно решать одним и притом весьма простым и пря-
мым методом». Однако законченное развитие этого метода было
дано лишь спустя- полвека Лагранжей («уравнения Лагранжа»)
в замечательном трактате «Аналитическая механика» (1788 г.), где,
в частности, содержалось также вполне современное изложение
теории линейных колебаний систем с несколькими степенями
свободы.
Последующее развитие механики характеризуется углубленным
изучением ранее намеченных разделов и появлением ряда ее
новых ветвей. Дальнейшее обоснование принципа возможных
перемещений, сформулированного Лагранжем, было проведено
П. С. Лапласом (1749— 1827), который ввел реакции связей,
действующие на каждую точку материальной системы, и сделал
предположение об идеальности связей. М. В. Остроградский
(1801 — 1861) обобщил принцип возможных .перемещений, рас-
пространив его на неудерживающие связи.
В 1829 г. К. Ф. Гаусс (1.777—1855) сформулировал диффе-
ренциальный вариационный принцип — «Принцип наименьшего
принуждения».
Развитие принципа наименьшего действия связано с именами
П. Л. Мопертюи (1698— 1759), Эйлера, Лагранжа, К. Г. Якоби
(1804 — 1851). Существенный вклад в развитие аналитической
механики на основе сформулированного им принципа был сделан
У. Р. Гамильтоном (1805— 1865). Независимо от Гамильтона
этот принцип несколько позднее был разработан Остроградским,
который применил его для более широкого класса задач. Этот
наиболее важный и общий принцип получил название принципа
Гамильтона — Остроградского.
Существенные результаты были достигнуты Остроградским,
Гамильтоном, Якоби в области методов интегрирования уравне-
ний динамики.
Дальнейшее развитие получила теория движения тяжелого
твердого тела. В эту область после существенных результатов
Эйлера и Лагранжа сделала значительный вклад С. В. Ковалев-
ская (1850— 1891). Работа Ковалевской послужила толчком для
целого ряда исследований по отысканию частных случаев инте-
грирования уравнений движения тяжелого твердого тела около
неподвижной точки.
Л. Фуко (1819— 1868) впервые продемонстрировал во Фран-
цузской Академии наук гироскоп в кардановом подвесе. После-
дующее развитие теории гироскопов, обусловленное требованиями
навигационных нужд, происходит в конце XIX века и особенно
интенсивно в XX веке. Наиболее существенные результаты в этом
разделе механики были получены М. Шулером, А. Н. Крыловым
(1863— 1945), Б. В. Булгаковым (1900— 1952), Б. Н. Кудреви-
чем (1884 — 1953) и др.
ВВЕДЕНИЕ
13
Развитие механики неголономных систем связано с именами
С. А. Чаплыгина, П. В. Воронца, П. Аппеля, В. Вольтеры
и многих других ученых.
Существенное развитие получила теория устойчивости равно-
весия и движения, начала которой были даны еще Лагранжем;
наиболее крупные результаты здесь принадлежат Э. Раусу (1831 —
1907), Н. Е. Жуковскому (1847—1921), А. Пуанкаре (1854—
1912) и в особенности А. М. Ляпунову (1857—1918).
Проблема борьбы с опасными вибрациями машин и сооруже-
ний вызвала к жизни углубленную разработку теории колебаний
(исследования Рэлея (1842—1919), А. Пуанкаре, А. Н. Крылова).
В XX веке особенно интенсивное развитие получила теория не-
линейных колебаний, описывающая важные процессы не только
в механи 1еских, но и в радиотехнических системах. Основопола-
гающими в этой области являются работы Ван-дер-Поля,
А. А. Андронова (1901 — 1952), Н. Н. Боголюбова, Л. И. Ман-
дельштама (1879— 1944), Н. М. Крылова (1879—1955), Н. Д. Па-
палекси (1880—1947) и др.
В механике зародилась теория автоматического регулирова-
ния (работы И. А. Вышнеградского (1831-*-1895)); в настоящее
время эта теория представляет собой самостоятельную научную
дисциплину, которую связывают с механикой, помимо историче-
ских корней, теория устойчивости движения и теория колебаний.
В XIX веке сложилась теория упругости—наука о законах
статического и динамического деформирования упругих тел (рабо-
ты Эйлера, Навье (1785—1836), Коши (1789—1857), Сен-Венана
(1797—1886)). В настоящее время ее начинают называть теорией
твердого деформируемого тела в связи с расширением представ-
ления о законах деформирования и учетом вязких и пластичных
свойств реальных тел.
В конце XIX века под сильным влиянием развития надвод-
ного и подводного кораблестроения и авиации начата углублен-
ная разработка проблем гидро- и аэродинамики. Наиболее круп-
ные результаты в этих областях связаны с именами Н. Е. Жу-
ковского, С. А. Чаплыгина (1869 — 1942), Л. Прандтля (1875—
1953), Т. Кармана (1881 —1963).
В известных работах И. В. Мещерского (1859—1935) зало-
жены основы механики тела переменной массы (переменного сос-
тава)—дисциплины, служащей фундаментом изучения реактив-
ного полета. Основополагающими работами в области ракето-
динамики являются работы К. Э. Циолковского (1857—1935).
А1еханика прошла огромный путь развития, но и в наши дни
она представляет живо развивающуюся науку. Укажем на одну
проблему, возникшую в самое последнее время (за последние
десятилетия)—проблему управления движением. Речь идет об
установлении характера изменения сил, с помощью которых
14
ВВЕДЕНИЕ
можно обеспечить движение по заранее выработанной программе.
Сюда непосредственно примыкает проблема оптимального управ-
ления, например, каким образом управлять движением ракеты,
чтобы она вышла на заданную орбиту при минимальном расходе
горючего.
Строго говоря, под механикой следует понимать совокупность
достаточно обособленных отраслей знаний, базирующихся на
законах Ньютона. Круг вопросов, изучаемых механикой, все
время расширяется, охватывая все новые и новые области науки
и техники. Это привело к тому, что ряд разделов теоретической
механики вследствие специфики объектов исследования и приме-
няемых математических методов становится вполне самостоятель-
ными науками. К их числу относятся дисциплины: механика
жидкостей и газов, теория упругости, теория механизмов и ма-
шин, небесная механика, теория регулирования и др. Этот естес-
твенный процесс развития науки продолжается и в наши дни.
Сейчас под собственно теоретической механикой обычно пони-
мают сравнительно узкий раздел механики, а именно: механику
материальной точки, механику абсолютно твердого тела и их
систем. Несмотря на это, теоретическая механика является одним
из важнейших курсов, изучаемых в высшей технической школе;
ее законы и выводы широко применяются в целом ряде других
предметов при решении самых разнообразных и сложных техни-
ческих задач. Все технические расчеты при постройке различных
сооружений, при проектировании машин, при изучении полета
различных управляемых и неуправляемых летательных аппара-
тов и т. п. основаны на законах теоретической механики.
Особое значение механика приобретает сейчас, когда началась
эра исследования космоса*. Расчеты космических траекторий,
разработки методов управления полетом представляют сложные
задачи механики.
Отдавая должное значению механики как одного из важней-
ших разделов физики и фундамента современной техники, следует
все же иметь в виду, что классическая механика лишь прибли-
женно описывает законы природы, ибо в ее основе лежат посту-
латы, не вполне точно отражающие геометрию мира и характер
механического взаимодействия тел. Это стало очевидным после
создания А. Эйнштейном специальной теории относительности, на
которой основывается релятивистская механика.
Согласно теории относительности не существует абсолютного
времени и абсолютного пространства, служащего лишь простым
вместилищем тел' На самом деле свойства пространства и времени
существенно зависят от взаимодействующих в них тел. Более
того, механические характеристики, такие как масса, тоже ока-
зываются переменными и зависящими от обстоятельств движения
(скорости). Однако становление релятивистской механики отнюдь
ВВЕДЕНИЕ
15
не привело к отрицанию классической механики. Классическая
механика, являясь частным (точнее, предельным) случаем реляти-
вистской механики, не теряет своего значения, ибо ее выводы
при скоростях движения, достаточно малых по сравнению со
скоростью света, с большой точностью удовлетворяют требова-
ниям многих отраслей современной техники.
В высших технических учебных заведениях теоретическая
механика делится обычно на три раздела: статику, кинематику
и динамику. Эта сложившаяся традиция нашла отражение и в
настоящем курсе.
В статике изучаются методы преобразования одних совокуп-
ностей сил в другие, эквивалентные данным, выясняются усло-
вия равновесия, а также определяются возможные положения
равновесия.
В кинематике движения тел рассматриваются с чисто геомет-
рической точки зрения, т. е. без учета силовых взаимодействий
между телами.
В динамике движение тел изучается в связи с силовыми
взаимодействиями Между телами. Более подробные сведения о
задачах статики, кинематики и динамики будут даны в соответ-
ствующих разделах курса.
СТАТИКА
ГЛАВА!
ОСНОВНЫЕ ПОНЯТИЯ и АКСИОМЫ статики
§ 1.1. Сила. Система сил. Равновесие
абсолютно твердого тела
Как уже отмечалось во введении, в теоретической механике
изучается движение материальных тел относительно друг друга.
Для этого требуется прежде всего построить модели объектов и
дать определение понятий, с которыми имеет дело механика. В
теоретической механике рассматривается простейшая модель «обыч-
ного» евклидова трехмерного пространства. Постулируется, что
в этом пространстве существует хотя бы одна система коорди-
нат, в которой справедливы законы Ньютона (инерциальная сис-
тема). Многочисленные опыты и измерения показывают, что с
высокой степенью точности система отсчета с началом в центре
Солнечной системы и осями, направленными к далеким «неподвиж-
ным» звездам, является инерциальной системой. В дальнейшем
будет показано, что если существует хотя бы одна инерциальная
система, то их имеется бесчисленное множество*) (инерциальные
системы отсчета условно называются неподвижными).
В статике, не внося никаких погрешностей в вычисления,
можно считать, что системы координат, жестко связанные с Зем-
лей, неподвижны**). Условия относительного равновесия в дру-
гих, неинерциальных системах отсчета, в частности, в системах,
движущихся относительно Земли, будут выяснены в динамике.
Как для статики, так и для динамики одним из основных
является понятие силы. Первичное представление о силе дают
нам мускульные ощущения. В механике под силой понимается
мера механического взаимодействия материальных тел, в резуль-
тате которого взаимодействующие тела могут сообщать друг
*) Более подробно о моделях пространства и инерциальных системах от-
счета будет рассказано в разделе «Динамика» (см. том II, § 1.2). Здесь же
предполагается, что читатель знаком с законами Ньютона в объеме школьного
курса физики.
**) Это объясняется тем, что сила тяжести имеет сложный характер, учиты-
вающий вращение Земли (см. том II, § 6.3).
§ 1 1] СИЛА СИСТЕМА СИЛ 17
другу ускорения или деформироваться (изменять свою форму).
Из этого определения сразу вытекают два способа измерения
сил: первый, динамический способ, основан на измерении ускоре-
ния тела в инерциальной системе отсчета, а второй, статический
способ, основан на измерении деформации упругих тел.
В механике не изучают физическую природу сил. Укажем
только, что силы могут возникать как при непосредственном
контакте тел (например, сила тяги электровоза, передаваемая
вагонам, сила трения между поверхностями соприкасающихся тел
и т. п.), так и на расстоянии (например, силы притяжения небес-
ных тел, силы взаимодействия
электрически заряженных или намаг- /7
ничейных частиц и т. п.). _____ .s’"''
Сила является векторной величи- s'F
ной — она характеризуется числен- / д
ным значением или модулем, точкой ! I
приложения и направлением. Точка А
приложения силы и ее направление -----
определяют линию действия силы.
На рис. 1.1 показана сила F, при- Рис- 11-
ложенная в точке А, длина.отрезка
АВ в соответствующем масштабе равна модулю силы, точка В назы-
вается концом силы; у конца силы ставится стрелка, указываю-
щая направление действия силы. Прямая LM называется линией
действия силы. Условимся обозначать силу буквой жирного
шрифта, например, F, а ее модуль той же буквой обычного
шрифта, т. е. F.
Для измерения модуля силы ее сравнивают с некоторой
силой, выбранной в качестве единицы. В международной системе
единиц измерения физических величин (СИ) за единицу силы
принят один ныотон (1н), а в технической системе единиц (сис-
тема МКГСС) — один килограмм силы (1кГ или 1кгс — не следует
смешивать с единицей массы в системе СИ—1кг). Напомним, чго
эти единицы связаны соотношениями
1 кГ^9,81 «; 1 н^О.102 кГ.
Применяются и более крупные единицы измерения сил, в
частности, 1 Мн = 10е н (меганьютон), 1 кн = 103 н (килоньютон),
1 Т = 1 тс=103 кГ (тонна) и т. п.
Силу часто задают непосредственным описанием, например: к
концу балки приложена сила F, численно равная 5 кн и направ-
ленная вертикально вниз. Но можно задать силу и способом,
которым обычно определяют векторы, а именно, через ее проек-
ции на оси прямоугольной системы координат и точку приложе-
ния силы. Если, как обычно, единичные векторы (орты) осей х,
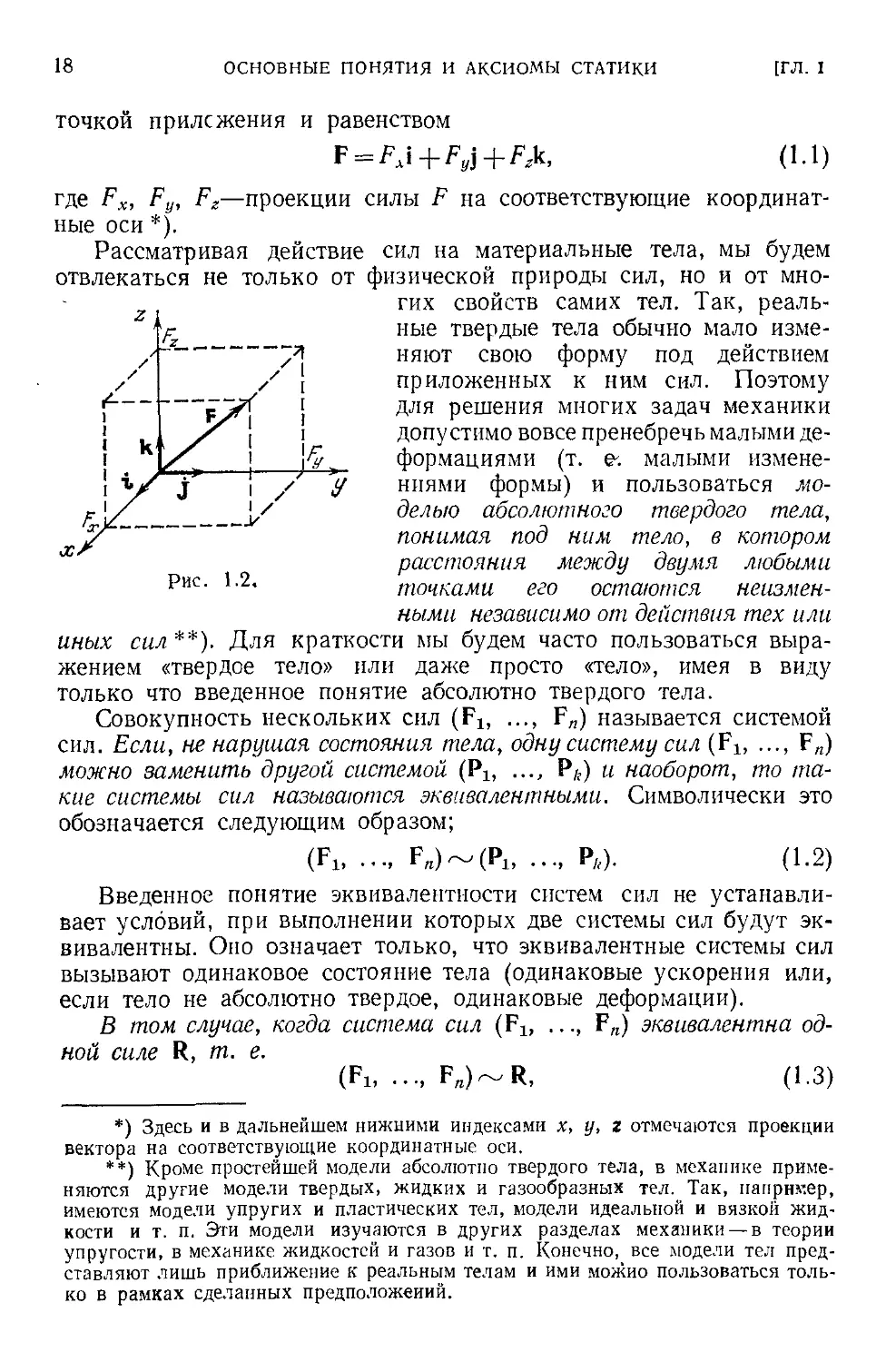
У, г обозначить через j, к (рис. 1.2),_tcl сила F определится
18
ОСНОВНЫЕ ПОНЯТИЯ И АКСИОМЫ СТАТИКИ
[ГЛ. 1
точкой прилсжения и равенством
F = ?J+Faj+FX
(1.1)
где Fx, Fy, Fz—проекции силы F на соответствующие координат-
ные оси *).
Рассматривая действие сил на материальные тела, мы будем
отвлекаться не только от физической природы сил, но и от мно-
гих свойств самих тел. Так, реаль-
ные твердые тела обычно мало изме-
няют свою форму под действием
приложенных к ним сил. Поэтому
для решения многих задач механики
допустимо вовсе пренебречь малыми де-
формациями (т. е-. малыми измене-
ниями формы) и пользоваться мо-
делью абсолютного твердого тела,
понимая, под ним тело, в котором
расстояния между двумя любыми
точками его остаются неизмен-
ными независимо от действия тех или
иных сил**). Для краткости мы будем часто пользоваться выра-
жением «твердое тело» или даже просто «тело», имея в виду
только что введенное понятие абсолютно твердого тела.
Совокупность нескольких сил (Fx, ..., F„) называется системой
сил. Если, не нарушая состояния тела, одну систему сил (Fx, ..., F„)
можно заменить другой системой (Рх, ..., Pft) и наоборот, то та-
кие системы сил называются эквивалентными. Символически это
обозначается следующим образом;
(Fx... F„)~(Pb ..., Рл). (1.2)
Введенное понятие эквивалентности систем сил не устанавли-
вает условий, при выполнении которых две системы сил будут эк-
вивалентны. Оно означает только, что эквивалентные системы сил
вызывают одинаковое состояние тела (одинаковые ускорения или,
если тело не абсолютно твердое, одинаковые деформации).
В том случае, когда система сил (Fx, ..., F„) эквивалентна од-
ной силе R, т. е.
(F1; ..., F„)~R, (1.3)
*) Здесь и в дальнейшем нижними индексами х, у, г отмечаются проекции
вектора на соответствующие координатные оси.
•*) Кроме простейшей модели абсолютно твердого тела, в механике приме-
няются другие модели твердых, жидких и газообразных тел. Так, например,
имеются модели упругих и пластических тел, модели идеальной и вязкой жид-
кости и т. п. Эти модели изучаются в других разделах механики — в теории
упругости, в механике жидкостей и газов и т. п. Конечно, все модели тел пред-
ставляют лишь приближение к реальным телам и ими можно пользоваться толь-
ко в рамках сделанных предположений.
§ 12]
АКСИОМЫ СТАТИКИ И ИХ СЛЕДСТВИЯ
19
последняя называется равнодействующей данной системы сил. Это
означает, что одна равнодействующая сила может заменить дей-
ствие всех данных сил. В дальнейшем будет показано, что не
всякая система сил имеет равнодействующую.
Как уже отмечалось, в инерциальной системе координат вы-
полняется закон инерции. Это означает, в частности, что тело,
находящееся в начальный момент в покое, останется пребывать
в этом состоянии, если на него не действуют никакие силы.
(Полная формулировка закона инерции будет дана в разделе
динамики.) Если абсолютно nieepdoe тело остается в состоянии
покоя при действии на него системы сил
(Fl .... F„), то последняя называется
уравновешенной системой сил или систе- / f у*' Л
мой сил, эквивалентной нулю: /
(Fi....F„)~0. (1.4) ( А X /
Часто в этом случае говорят, что тело \ /
находится в равновесии *). ----------/
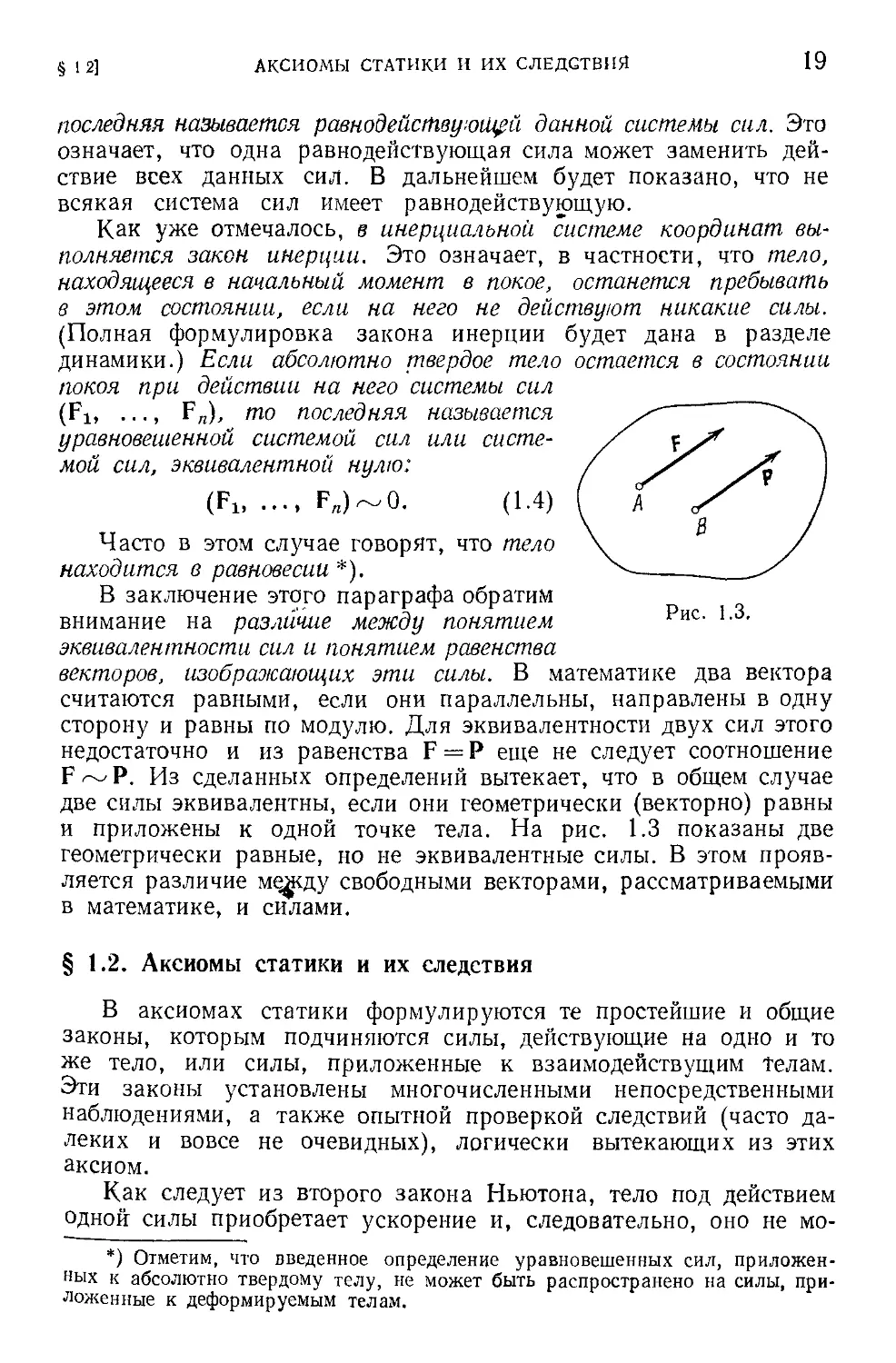
В заключение этого параграфа обратим
внимание на различие между понятием Рис' 13,
эквивалентности сил и понятием равенства
векторов, изображающих эти силы. В математике два вектора
считаются равными, если они параллельны, направлены в одну
сторону и равны по модулю. Для эквивалентности двух сил этого
недостаточно и из равенства F = Р еще не следует соотношение
F^P. Из сделанных определений вытекает, что в общем случае
две силы эквивалентны, если они геометрически (векторно) равны
и приложены к одной точке тела. На рис. 1.3 показаны две
геометрически равные, но не эквивалентные силы. В этом прояв-
ляется различие м^кду свободными векторами, рассматриваемыми
в математике, и силами.
§ 1.2. Аксиомы статики и их следствия
В аксиомах статики формулируются те простейшие и общие
законы, которым подчиняются силы, действующие на одно и то
же тело, или силы, приложенные к взаимодействущим телам.
Эти законы установлены многочисленными непосредственными
наблюдениями, а также опытной проверкой следствий (часто да-
леких и вовсе не очевидных), логически вытекающих из этих
аксиом.
Как следует из второго закона Ньютона, тело под действием
одной силы приобретает ускорение и, следовательно, оно не мо-
*) Отметим, что введенное определение уравновешенных сил, приложен-
ных к абсолютно твердому телу, не может быть распространено на силы, при-
ложенные к деформируемым телам.
20
ОСНОВНЫЕ ПОНЯТИЯ И АКСИОМЫ СТАТИКИ
[ГЛ I
жет находиться в покое. Это означает, что одна сила не может
составлять уравновешенную систему сил. Первая аксиома
устанавливает условия, при выполнении которых простейшая
система сил будет уравновешена.
Аксиома 1. Две сим, приложенные к абсолютно твердому
телу, будут уравновешены (эквивалентны нулю) тогда и только
тогда, когда они равны по модулю, действуют по одной прямой
и направлены в противоположные стороны.
Это означает, что если абсолютно твердое тело находится в
покое под действием двух сил, то эти силы равны по модулю,
действуют по одной прямой и направлены в противоположные
стороны. Обратно, если на абсолютно твердое тело действуют
по одной прямой в противоположные стороны две равные
по модулю силы и тело в начальный момент находилось в покое,
то состояние покоя тела сохра-
нится.
На рис. 1.4 показаны урав-
новешенные силы Fx, F2 и Р1(
Р3, удовлетворяющие соотноше-
ниям: (Fx, F2)^0, (Рх, Р2)/~^0.
При решении некоторых за-
дач статики приходится рассмат-
ривать силы, приложенные к
концам жестких стержней, весом
которых можно пренебречь, при-
чем известно, что стержни находятся в равновесии. Из сформу-
лированной аксиомы непосредственно следует, что действующие
на такой стержень силы направлены вдоль прямой, проходящей
через концы стержня, противоположны по направлению и равны
друг другу по модулю (рис. 1.5, а). Этот вывод сохраняется и
в случае, когда ось стержня криволинейная (рис. 1.5, б).
Первая аксиома устанавливает необходимые и достаточные
условия уравновешивания только двух сил, но, конечно, уравно-
вешенная система сил может состоять и из большего числа сил.
Две следующие аксиомы устанавливают простейшие действия
с силами, при которых состояние тела не изменяется.
§ 1 2]
АКСИОМЫ СТАТИКИ И ИХ СЛЕДСТВИЯ
21
Аксиома 2. Не нарушая состояния абсолютно твердого тела,
к нему можно прикладывать или отбрасывать силы тогда и
только тогда, когда они составляют уравновешенную систему,
в частности, если эта система состоит из двух сил, равных
по модулю, действующих по одной прямой и направленных в про-
тивоположные стороны.
Из этой аксиомы вытекает следствие: не нарушая состояния
тела, точку приложения силы можно переносить вдоль линии ее
действия.
Действительно, пусть сила Рл приложена к точке А (рис.
1.6, а). Приложим в точке В на линии действия силы Fa две
уравновешенные силы FB
и Fb, полагая, что Fs=Fa
(рис. 1.6, б). Тогда соглас-
но аксиоме 2 будем иметь
Рис. 1.6.
Fa-(Fa, Fb, Fb).
Так как силы Рл и Fb
образуют также уравнове-
шейную систему сил (ак-
сиома 1), то согласно аксиоме 2 их можно отбросить (рис.
1.6, в). Таким образом,
Fa-(Fa, Fb, ГЬ)~Рв,
или
Fa-Fb,
что доказывает следствие.
Это следствие показывает, что сила, приложенная к абсолютно
твердому телу, представляет собой скользящий вектор.
Обе аксиомы и доказанное следствие нельзя применять к дефор-
мируемым телам, в частности, перенос точки приложения силы
вдоль линии ее действия меняет напряженно-
деформированное состояние тела. Ffj—
Аксиома 3. Не меняя состояния тела, две
силы, приложенные к одной его точке, можно /I/ / )
заменить одной равнодействующей силой, при- / д у
ложенной в той же точке и равной их гео- (
метрической сумме (аксиома параллелограмма
сил).
Эта аксиома устанавливает два обстоятель- Рис- J,7.
ства: первое —две силы Fx и F2 (рис. 1.7),
приложенные к одной точке, имеют равнодействующую, т. е.
эквивалентны одной силе
(Fi, F^-R;
22
ОСНОВНЫЕ ПОНЯ1ИЯ и АКСИОМЫ СТАТИКИ
[ГЛ I
второе — аксиома полностью определяет модуль, точку приложе-
ния и направление равнодействующей силы
R = F1 + F2. (1.5)
Другими словами, равнодействующую R можно построить как
диагональ параллелограмма со сторонами, совпадающими с Ft
и F2.
Модуль равнодействующей определится равенством
R = yF'j 4-F'l 4- 2FjF2 cos а,
где а —угол между данными векторами Fx и F3.
Отметим, что третья аксиома применима к любым, не обяза-
тельно абсолютно твердым телам.
Вторая и третья аксиомы статики дают возможность перехо-
дить от одной системы
сил к другой системе, ей эквивалентной.
В частности, они позволяют разложить
любую силу R на две, три и т. д. со-
ставляющие, т. е. перейти к другой
системе сил, для которой сила R яв-
ляется равнодействующей. Задавая, на-
пример, два направления, которые ле-
жат с R в одной плоскости, можно по-
строить параллелограмм, у которого
диагональ изображает силу R. Тогда
силы, направленные по сторонам парал-
лелограмма, составят систему, для которой сила R будет равно-
действующей (рис. 1.7). Аналогичное построение можно провести и
в пространстве. Для этого достаточно из точки приложения
силы R провести три прямые, не лежащие в одной плоскости,
и построить на них параллелепипед с диагональю, изображающей
силу R, и с ребрами, на-
правленными по этим пря-
мым (рис. 1.8).
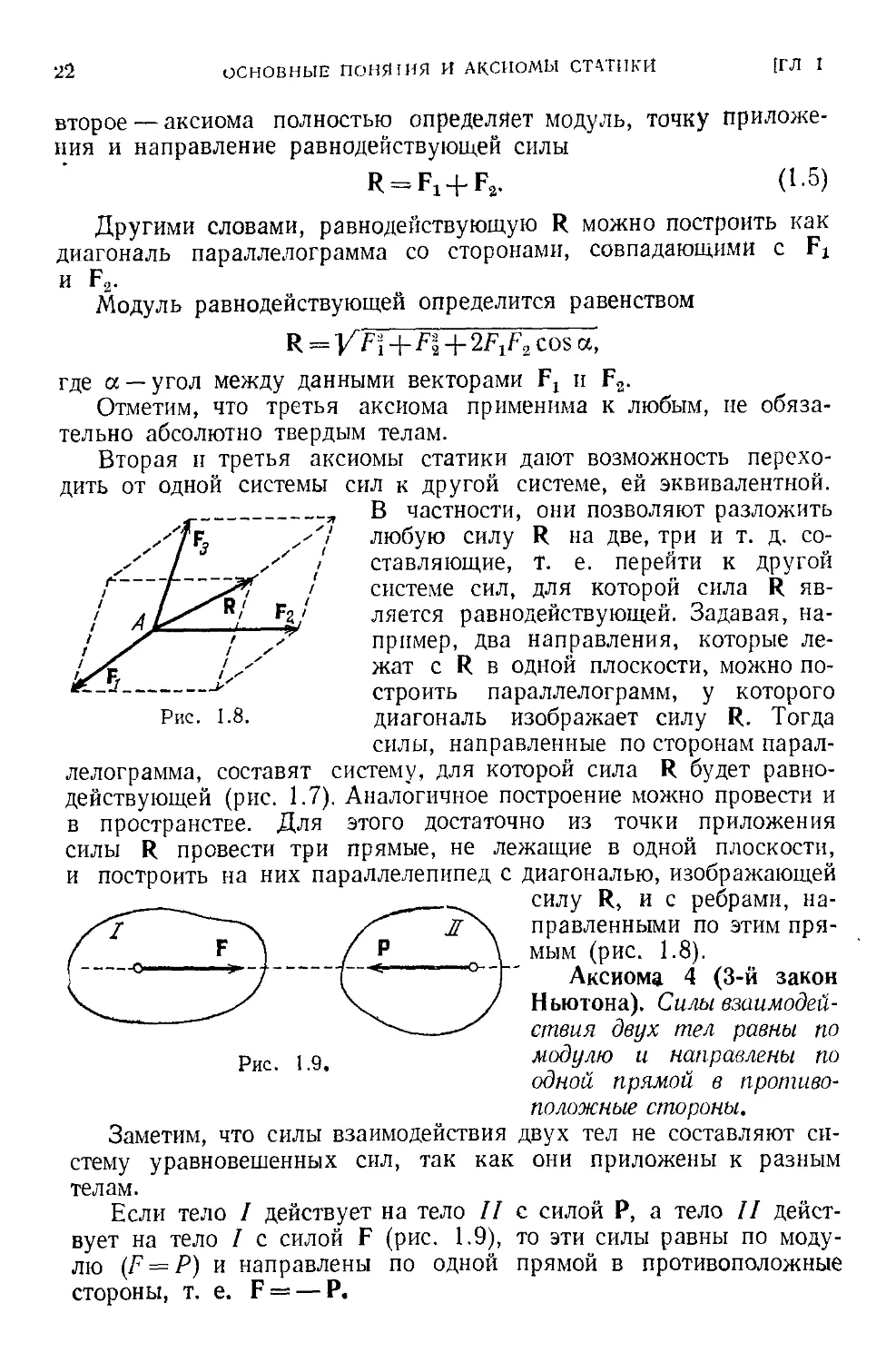
Аксиома 4 (3-й закон
Ньютона). Силы взаимодей-
ствия двух тел равны по
модулю и направлены по
одной прямой в противо-
положные стороны.
Заметим, что силы взаимодействия двух тел не составляют си-
стему уравновешенных сил, так как они приложены к разным
телам.
Если тело I действует на тело II с силой Р, а тело II дейст-
вует на тело I с силой F (рис. 1.9), то эти силы равны по моду-
лю (F = P) и направлены по одной прямой в противоположные
стороны, т. е. F = — Р.
§ 1.2]
АКСИОМЫ СТАТИКИ И ИХ СЛЕДСТВИЯ
23
Если обозначить через F силу, с которой Солнце притягивает
Землю, то Земля притягивает Солнце с такой же по модулю,
но противоположно направленной
силон — F.
При движении тела по плоскости
к нему будет приложена сила тре-
ния Т, направленная в сторону, про-
тивоположную движению. Это — си-
ла, с которой неподвижная плос-
кость действует на тело. На основа-
и
Т Т=-Т
Рис. 1.10.
нии четвертой аксиомы тело действует на плоскость с такой же си-
лой, но ее направление будет противоположно силе Т. На рис. 1.10
показано тело, движущееся вправо; сила трения Т приложена
к движущемуся телу, а сила Т' = —Т — к плоскости.
Рассмотрим еще покоящуюся систему, изображенную на
рис. 1.11, а. Она состоит из двигателя А, установленного на фунда-
менте В, который в свою очередь
находится на основании С. На
двигатель и фундамент действуют
силы тяжести Fx и F2 соответст-
венно (они представляют собой
действие Земли на эти тела). Кроме
указанных двух сил, действуют
также следующие силы:
F3 — сила действия тела А на
тело В (она равна весу тела Л);
F3—-сила обратного действия
тела В на тело А;
F4 — сила действия тел А и В
на основание С (она равна сум-
марному весу тел Л и В);
F£ — сила обратного действия
основания С на тело В. Эти силы
показаны на рис. 1.11, б, в, г.
Согласно аксиоме 4
f3= —f3, f4=-f;,
причем эти силы взаимодействия
определяются заданными- силами
Fi и F2.
Для нахождения сил взаимо-
действия необходимо исходить из
тела Л (рис. 1.11, б) должно быть
аксиомы 1. Вследствие покоя
а'значит, F3=F1.
F3 = -Fb
24
-'ОСНОВНЫЕ понятия и АКСИОМЫ СТАТИКИ
[ГЛ. 1
Точно так же из условия равновесия тела В (рис. 1.11, в)
следует
F^-=-(F3 + F3),
т. е.
F4 = -(F1 + F2)
и
F^Fi + F,.
Аксиома 5. Равновесие деформируемого тела не нарушится,
если жестко связать его точки и считать тело абсолютно твер-
дым.
Этой аксиомой (ее называют иногда принципом отвердевания)
пользуются в тех случаях, когда речь идет о равновесии тел,
которые нельзя считать твердыми. Приложенные к таким телам
внешние силы должны удовлетворять условиям равновесия твер-
до! о тела, однако для нетвердых тел эти условия являются лишь
необходимыми, но не достаточными. Проиллюстрируем это поло-
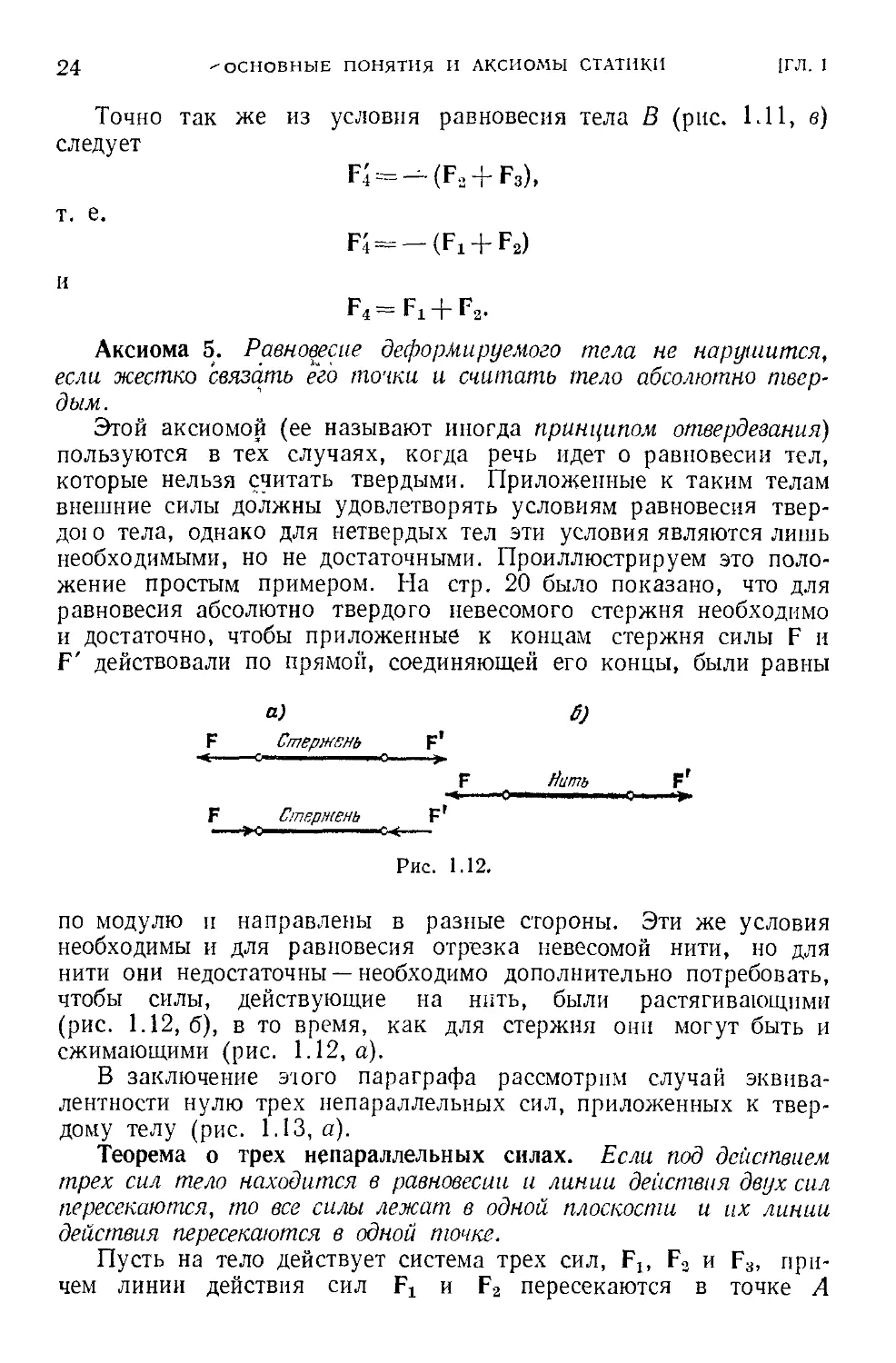
жение простым примером. На стр. 20 было показано, что для
равновесия абсолютно твердого невесомого стержня необходимо
и достаточно, чтобы приложенные к концам стержня силы F и
F' действовали по прямой, соединяющей его концы, были равны
а) б)
F Стержень F*
*--с-11 I о-->
F Нить Fr
----о— ..... о . . >
F Стержень F1
---»о ---
Рис. 1.12.
по модулю и направлены в разные стороны. Эти же условия
необходимы и для равновесия отрезка невесомой нити, но для
нити они недостаточны — необходимо дополнительно потребовать,
чтобы силы, действующие на нить, были растягивающими
(рис. 1.12,6), в то время, как для стержня они могут быть и
сжимающими (рис. 1.12, а).
В заключение этого параграфа рассмотрим случай эквива-
лентности нулю трех непараллельных сил, приложенных к твер-
дому телу (рис. 1.13, а).
Теорема о трех непараллельных силах. Если под действием
трех сил тело находится в равновесии и линии действия двух сил
пересекаются, то все силы лежат в одной плоскости и их линии
действия пересекаются в одной точке.
Пусть на тело действует система трех сил, Fx, F3 и F3, при-
чем линии действия сил Fx и F2 пересекаются в точке А
§ 1.31
АКТИВНЫЕ СИЛЫ И РЕАКЦИИ СВЯЗЕЙ
25
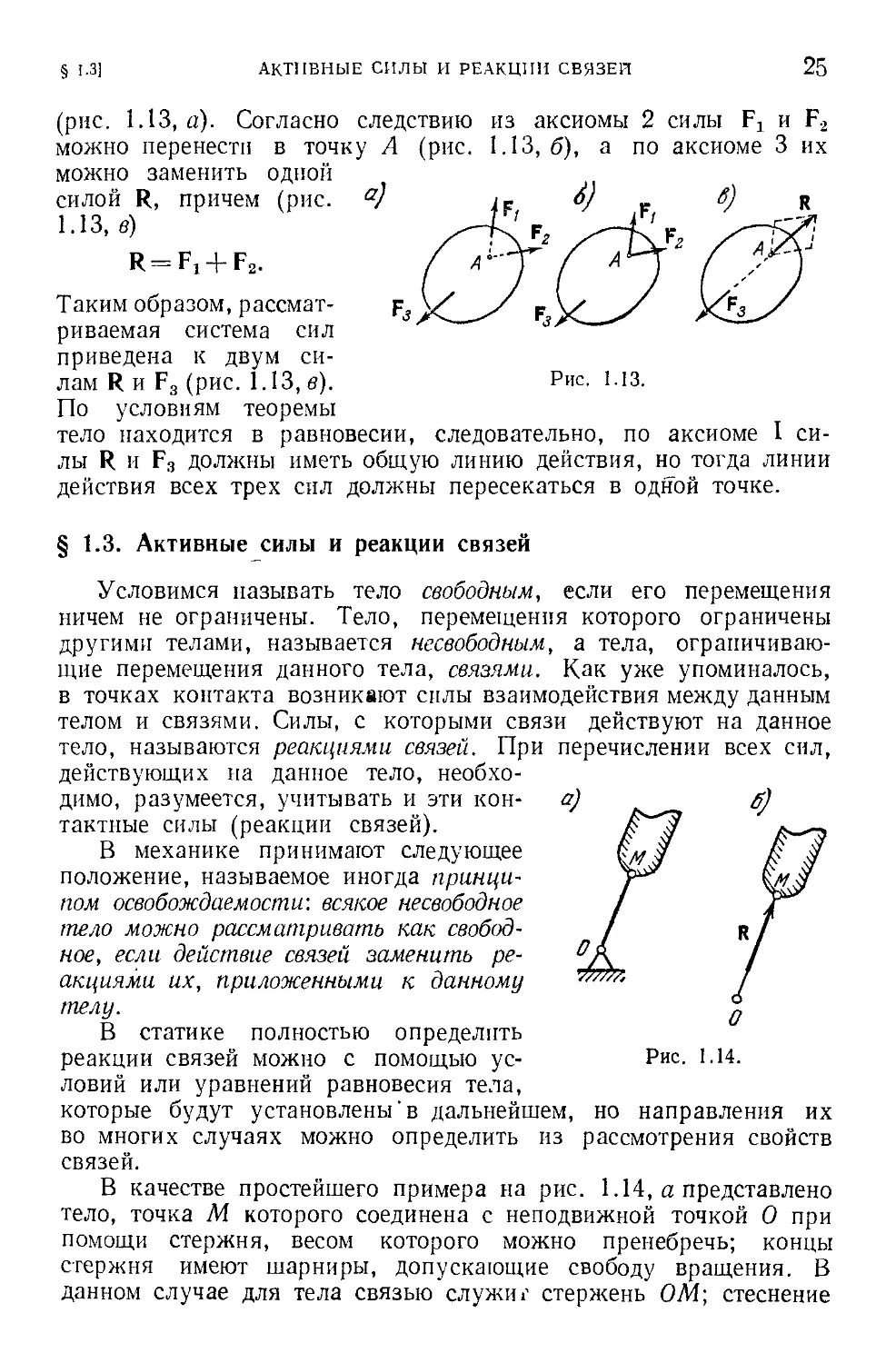
(рис. 1.13, а). Согласно следствию из аксиомы 2 силы Fj и F2
можно перенести в точку А (рис. 1.13, б), а по аксиоме 3 их
можно заменить одной
силой R, причем (рис. а) ,-.6) в) r
1.13, в) К f к
R=F1+F2. / А-'T ( А) ( / )
Таким образом, рассмат- FZ
риваемая система сил 3^~'
приведена к двум си-
лам R и F3 (рис. 1.13, в). Рис. 1.13.
По условиям теоремы
тело находится в равновесии, следовательно, по аксиоме I си-
лы R и F3 должны иметь общую линию действия, но тогда линии
действия всех трех сил должны пересекаться в одной точке.
§ 1.3. Активные силы и реакции связей
Условимся называть тело свободным, если его перемещения
ничем не ограничены. Тело, перемещения которого ограничены
другими телами, называется несвободным, а тела, ограничиваю-
щие перемещения данного тела, связями. Как уже упоминалось,
в точках контакта возникают силы взаимодействия между данным
телом и связями. Силы, с которыми связи действуют на данное
тело, называются реакциями связей. При перечислении всех сил,
действующих на данное тело, необхо-
димо, разумеется, учитывать и эти кон- а) б)
тактные силы (реакции связей).
В механике принимают следующее Cv у У
положение, называемое иногда принци-
пом освобождаемости: всякое несвободное /
тело можно рассматривать как свобод- / r Т
ное, если действие связей заменить ре- /
акциями их, приложенными к данному I
телу. q
В статике полностью определить
реакции связей можно с помощью ус- Рис. 1.14.
ловий или уравнений равновесия тела,
которые будут установлены'в дальнейшем, но направления их
во многих случаях можно определить из рассмотрения свойств
связей.
В качестве простейшего примера на рис. 1.14, а представлено
тело, точка М которого соединена с неподвижной точкой О при
помощи стержня, весом которого можно пренебречь; концы
стержня имеют шарниры, допускающие свободу вращения. В
данном случае для тела связью служит стержень ОМ; стеснение
26 ОСНОВНЫЕ ПОНЯТИЯ II АКСИОМЫ СТАТИКИ [ГЛ I
свободы перемещения точки М выражается в том, что она
вынуждена находиться на неизменном удалении от точки О. Но,
как мы видели выше (см. рис. 1.5,6), сила действия на такой
стержень должна быть направлена по прямой ОМ, и согласно
аксиоме 4 сила противодействия стержня (реакция) R должна
быть направлена вдоль той же прямой. Таким образом, направ-
ление реакции стержня совпадает с прямой ОМ (рис. 1.14,6).
(В случае криволинейного невесомого
у///^///////////////м7//л стержня — по прямой, соединяющей концы
Ч У стержня; см. рис. 1.5,6).
/Кг ' Аналогично сила реакции гибкой не-
растяжимой нити должна быть направлена
( ) вдоль нити. На рис. 1.15 показано тело,
( J висящее на двух нитях, и реакции нитей
\-----------'-S R, и R2.
Возвращаясь к общему случаю, отме-
Рис’ 1-15- тим, что силы, действующие па несвобод-
ное тело (или на несвободную материаль-
ную точку), можно разделить на две категории. Одну категорию
образуют силы, не зависящие от связей, а другую категорию —
реакции связей. При этом реакции связей, в сущности, носят
пассивный характер — они возникают лишь постольку, поскольку
на тело действуют те или иные силы первой категории. Поэтому
силы, не зависящие от связей, называют активными силами
(иногда они называются заданными), а реакции связей — пассив-
ными силами.
F/ А В F2
-<—о---------о—*~
А В
О—> < Q
Rz R2
Рис.
F, А В F,
—х?------------о-<—i
А В
< "О-----------О >'
R/ R^
d)
1.16.
На рис. 1.16, а вверху показаны две равные по модулю
активные силы Fx и F2, растягивающие стержень АВ, внизу
показаны реакции R( и R2 растянутого стержня. На рис. 1.16,6
вверху показаны активные силы Fx и F2, сжимающие стержень,
внизу показаны реакции R( и R2 сжатого стержня.
Рассмотрим еще некоторые типичные виды связей и укажем
возможные направления их реакций; конечно, модули реакций
определяются актйвными силами и не могут быть найдены, пока
последние не заданы определенным образом. При этом мы будем
пользоваться некоторыми упрощенными представлениями, схема-
тизирующими действительные свойства реальных связей.
§ 1 з]
АКТИВНЫЕ СИЛЫ И РЕАКЦИИ СВЯЗЕЙ
27
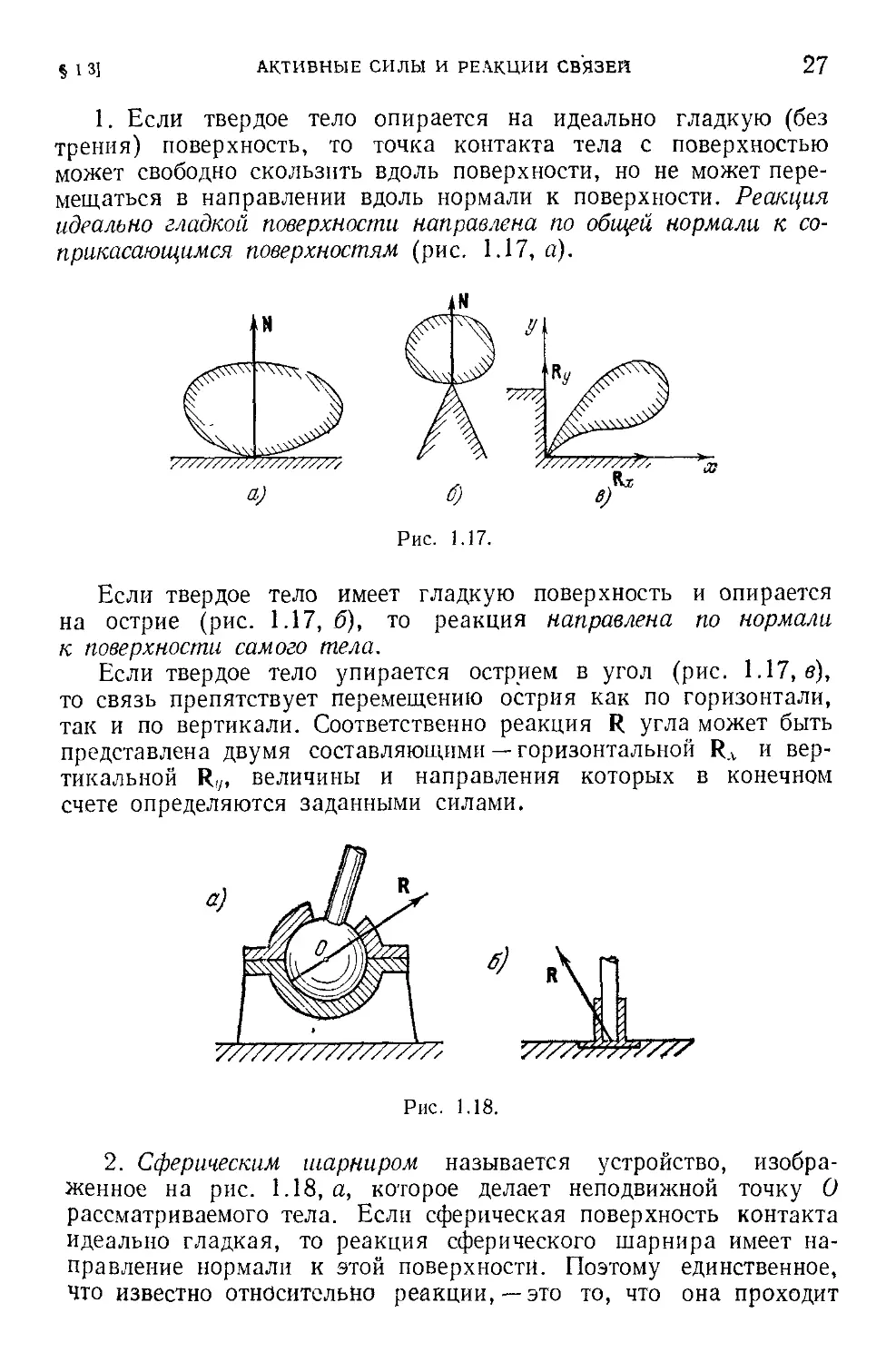
1. Если твердое тело опирается на идеально гладкую (без
трения) поверхность, то точка контакта тела с поверхностью
может свободно скользить вдоль поверхности, но не может пере-
мещаться в направлении вдоль нормали к поверхности. Реакция
идеально гладкой, поверхности направлена по общей нормали к со-
прикасающимся поверхностям (рис. 1.17, а).
Рис. 1.17.
Если твердое тело имеет гладкую поверхность и опирается
на острие (рис. 1.17, б), то реакция направлена по нормали
к поверхности самого тела.
Если твердое тело упирается острием в угол (рис. 1.17, в),
то связь препятствует перемещению острия как по горизонтали,
так и по вертикали. Соответственно реакция R угла может быть
представлена двумя составляющими — горизонтальной R, и вер-
тикальной Rv, величины и направления которых в конечном
счете определяются заданными силами.
Рис. 1.18.
2. Сферическим шарниром называется устройство, изобра-
женное на рис. 1.18, а, которое делает неподвижной точку О
рассматриваемого тела. Если сферическая поверхность контакта
идеально гладкая, то реакция сферического шарнира имеет на-
правление нормали к этой поверхности. Поэтому единственное,
Что известно относительно реакции, —это то, что она проходит
28
ОСНОВНЫЕ ПОНЯТИЯ И АКСИОМЫ СТАТИКИ
[ГЛ I
через центр шарнира О; направление реакции может быть любым
и определяется в каждом конкретном случае в зависимости от
Рис. 1.19.
заданных сил и общей схемы
закрепления тела. Точно так
же нельзя заранее определить
направление реакции подпят-
ника, изображенного на рис.
1.18, б.
3. Цилиндрическая шар-
нирно-неподвижная опора
(рис. 1.19, а). Реакция такой
опоры проходит через ее ось,
причем направление реакции может быть любым (в плоскости,
перпендикулярной оси опоры).
4. Цилиндрическая шарнирно-подвижная опора (рис. 1.19, б)
препятствует перемещению закрепленной точки тела по перпен-
дикуляру к плоскости I — Г, соответственно реакция такой опоры
также имеет направление этого перпендикуляра.
На одно и то же тело может быть наложено одновременно
несколько связей, возможно, различного типа. Три примера
§ I 4]
ОСНОВНЫЕ ЗАДАЧИ СТАТИКИ
29
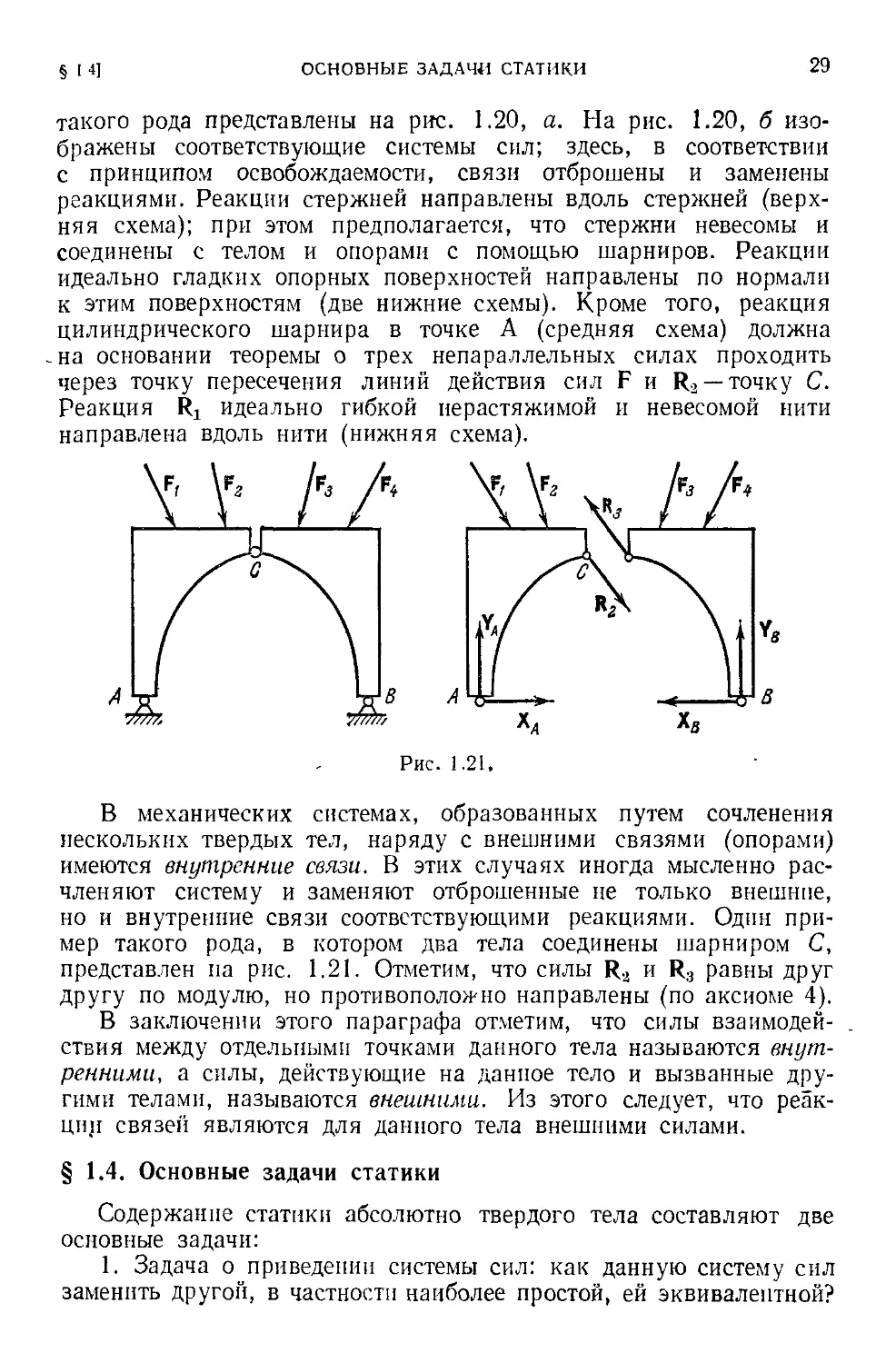
такого рода представлены на рис. 1.20, а. На рис. 1.20, б изо-
бражены соответствующие системы сил; здесь, в соответствии
с принципом освобождаемое™, связи отброшены и заменены
реакциями. Реакции стержней направлены вдоль стержней (верх-
няя схема); при этом предполагается, что стержни невесомы и
соединены с телом и опорами с помощью шарниров. Реакции
идеально гладких опорных поверхностей направлены по нормали
к этим поверхностям (две нижние схемы). Кроме того, реакция
цилиндрического шарнира в точке А (средняя схема) должна
_ на основании теоремы о трех непараллельных силах проходить
через точку пересечения линий действия сил F и R.3 —точку С.
Реакция Rj идеально гибкой иерастяжимой и невесомой нити
направлена вдоль нити (нижняя схема).
В механических системах, образованных путем сочленения
нескольких твердых тел, наряду с внешними связями (опорами)
имеются внутренние связи. В этих случаях иногда мысленно рас-
членяют систему и заменяют отброшенные не только внешние,
но и внутренние связи соответствующими реакциями. Один при-
мер такого рода, в котором два тела соединены шарниром С,
представлен па рис. 1.21. Отметим, что силы R2 и R3 равны друг
другу по модулю, но противоположно направлены (по аксиоме 4).
В заключении этого параграфа отметим, что силы взаимодей-
ствия между отдельными точками данного тела называются внут-
ренними, а силы, действующие на данное тело и вызванные дру-
гими телами, называются внешними. Из этого следует, что реак-
ции связей являются для данного тела внешними силами.
§ 1.4. Основные задачи статики
Содержание статики абсолютно твердого тела составляют две
основные задачи:
1. Задача о приведении системы сил: как данную систему сил
заменить другой, в частности наиболее простой, ей эквивалентной?
30 ОСНОВНЫЕ ПОНЯТИЯ И АКСИОМЫ СТАТИКИ [ГЛ. I
2. Задача о равновесии: каким условиям должна удовлетво-
рять система сил, приложенная к данному телу (или материаль-
ной точке), чтобы она была уравновешенной системой?
Первая основная задача имеет важное значение не только
в статике, но и в динамике.
Вторая задача часто ставится в тех случаях, когда равнове-
сие заведомо имеет место, например, когда заранее известно, что
тело находится в равновесии, которое обеспечивается связями,
наложенными на тело. При этом условия равновесия устанавли-
вают зависимость между всеми силами, приложенными к телу;
во многих случаях с помощью этих условий удается определить
опорные реакции. Хотя этим не ограничивается сфера интересов
статики твердого тела, но нужно иметь в виду, что определение
реакций связей (внешних и внутренних) необходимо для после-
дующего расчета прочности конструкции.
В более общем случае, когда рассматривается система тел,
имеющих возможность перемещаться друг относительно друга,
одной из основных задач статики является задача определения
возможных положений равновесия. Эти вопросы рассматриваются
в аналитической статике (см. том II, глава XVIII).
ГЛАВА II
СИСТЕМА СХОДЯЩИХСЯ СИЛ
§2.1. Приведение системы сходящихся сил
к равнодействующей
Силы называются сходящимися, если линии действия всех сил,
составляющих систему, пересекаются в одной точке. Простейший
случай трех сил был рассмотрен в главе I. Здесь рассматри-
вается общий случай произвольного числа сил, образующих
систему.
Существует немало практических задач, которые требуют
исследования систем сходящихся сил; в частности, они возни-
кают при расчетах шарнирно-стержневых систем (ферм), о чем
будет сказано в § 5.8. Кроме того, изучение системы сходя-
щихся сил необходимо для дальнейших обобщений, относящихся
к произвольной пространственной системе сил.
Прежде всего докажем теорему:
Система сходящихся сил эквивалентна одной силе (равнодейст-
вующей), которая равна сумме всех этих сил и проходит через
точку пересечения их линий действия.
Пусть задана система сходящихся сил Fn F2, F3, ... , F„,
приложенных к абсолютно твердому телу (рис. 2.1, а). Согласно
следствию из аксиомы 1 перенесем точки приложения сил по
линиям их действия в точку пересечения этих линий (рис. 2.1, б).
Таким образом, мы получаем систему сил, приложенных водной
точке. Она эквивалентна исходной системе сходящихся сил.
Складывая теперь силы Fj и F2, на основании аксиомы 3 полу-
чим их равнодействующую:
R2 = F1+F2.
Индекс в обозначении равнодействующей соответствует номеру
добавляемой силы F2. Затем, сложив силу R2 с силой F3, найдем
r3=r2+f3 = Fj+f2+f3.
Сила R3 является равнодействующей трех сил, Fn F2, F3, и
равна их сумме. Дойдя, таким образом, до последней силы F„,
32
СИСТЕМА СХОДЯЩИХСЯ СИЛ
[ГЛ и
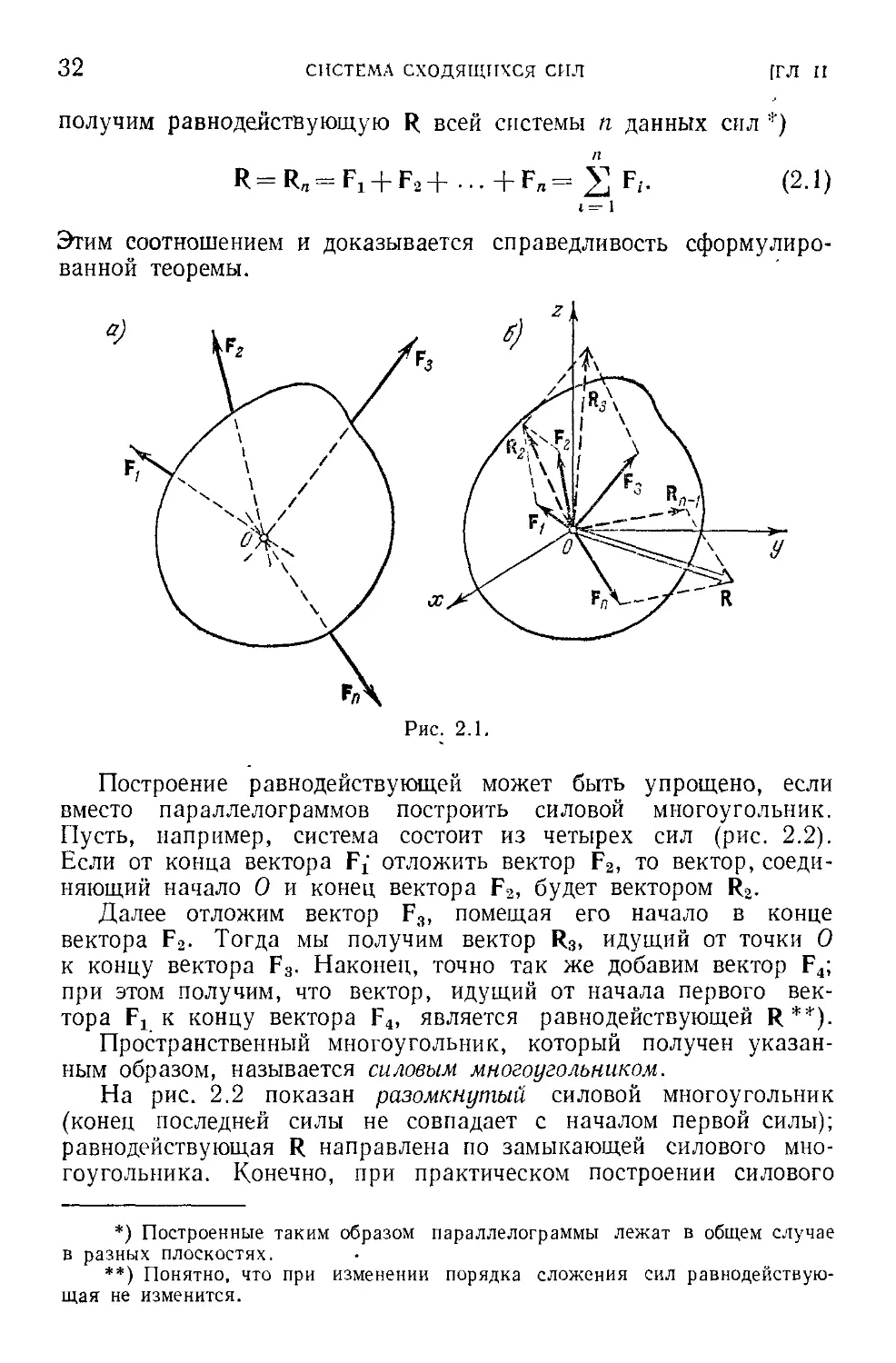
получим равнодействующую R всей системы п данных сил :?)
R=R„=F1 + F2+...+F„= F,.. (2.1)
I- 1
Этим соотношением и доказывается справедливость сформулиро-
ванной теоремы.
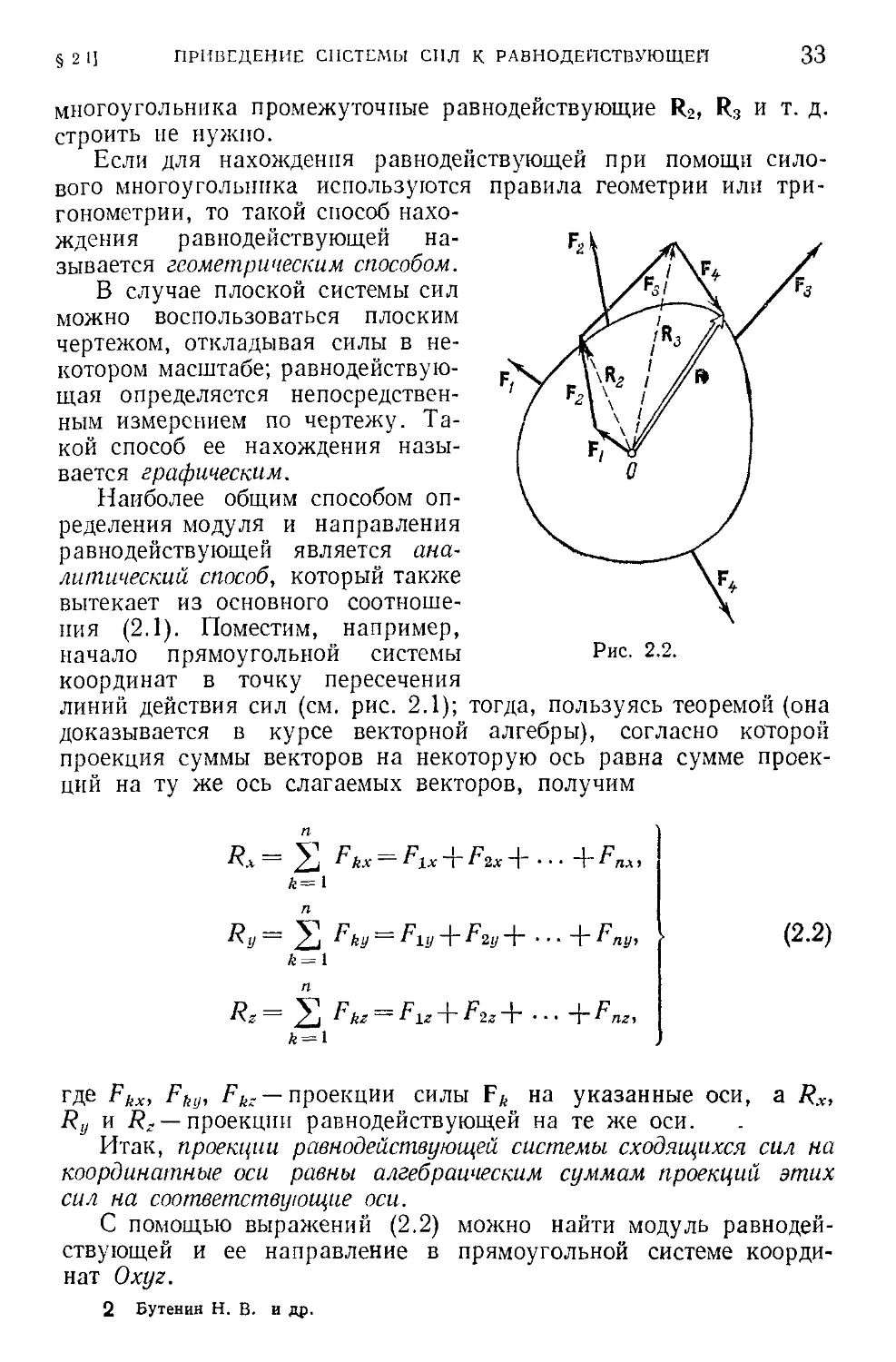
Построение равнодействующей может быть упрощено, если
вместо параллелограммов построить силовой многоугольник.
Пусть, например, система состоит из четырех сил (рис. 2.2).
Если от конца вектора F( отложить вектор F2, то вектор, соеди-
няющий начало О и конец вектора F2, будет вектором R2.
Далее отложим вектор F3, помещая его начало в конце
вектора F2. Тогда мы получим вектор R3, идущий от точки О
к концу вектора F3. Наконец, точно так же добавим вектор F4;
при этом получим, что вектор, идущий от начала первого век-
тора F4 к концу вектора F4, является равнодействующей R*) **).
Пространственный многоугольник, который получен указан-
ным образом, называется силовым многоугольником.
На рис. 2.2 показан разомкнутый силовой многоугольник
(конец последней силы не совпадает с началом первой силы);
равнодействующая R направлена по замыкающей силового мно-
гоугольника. Конечно, при практическом построении силового
*) Построенные таким образом параллелограммы лежат в общем случае
в разных плоскостях.
**) Понятно, что при изменении порядка сложения сил равнодействую-
щая не изменится.
§2 1] ПРИВЕДЕНИЕ СИСТЕМЫ СИЛ К РАВНОДЕЙСТВУЮЩЕЙ 33
многоугольника промежуточные равнодействующие R2, R3 и т. д.
строить не нужно.
Если для нахождения равнодействующей при помощи сило-
вого многоугольника используются
тонометрии, то такой способ нахо-
ждения равнодействующей на-
зывается геометрическим способом.
В случае плоской системы сил
можно воспользоваться плоским
чертежом, откладывая силы в не-
котором масштабе; равнодействую-
щая определяется непосредствен-
ным измерением по чертежу. Та-
кой способ ее нахождения назы-
вается графическим.
Наиболее общим способом оп-
ределения модуля и направления
равнодействующей является ана-
литический способ, который также
вытекает из основного соотноше-
ния (2.1). Поместим, например,
начало прямоугольной системы
правила геометрии или три-
координат в точку пересечения
линий действия сил (см. рис. 2.1); тогда, пользуясь теоремой (она
доказывается в курсе векторной алгебры), согласно которой
проекция суммы векторов на некоторую ось равна сумме проек-
ций на ту же ось слагаемых векторов, получим
Rx — X Fkx — Flx-f-Fix + • • • + Fnx,
k= i
Ry = У Fky = F1y-i(-F2y-]- ... -\-Fny,
k = i
Rz = S F^ = Fu + F22+ ... +Fnz,
k = t
(2.2)
где Fkx, Fky, E*- —проекции силы Ffe на указанные оси, a Rx,
Ry и Rs — проекции равнодействующей на те же оси.
Итак, проекции равнодействующей системы сходящихся сил на
координатные оси равны алгебраическим суммам проекций этих
сил на соответствующие оси.
С помощью выражений (2.2) можно найти модуль равнодей-
ствующей и ее направление в прямоугольной системе коорди-
нат Oxyz.
2 Бутенин Н. В. и др.
34
СИСТЕМА СХОДЯЩИХСЯ СИЛ
1ГЛ. II
Так как составляющие равнодействующей R системы сил
R* = flJ, R, = £yj, R, = ^k (2.3)
взаимно перпендикулярны (рис. 2.1), то модуль равнодействую-
щей равен
R=VR1 + Rl+R2z
\ 2 t п '2
Fky\ + Fkz\ .(2.4)
I \*=i
Направляющие косинусы равнодействующей соответственно равны
Rx Ry R?
cos(x, R) = -£-, cos (z/, R) = -r-, cos (г, R) = -^-. (2.5)
В частном случае, когда все силы расположены в одной
плоскости, удобно выбрать систему координат Оху в плоскости
расположения сил. Тогда проекции всех сил на ось г равны
нулю и вместо формул (2.2), (2.4) и (2.5) будем иметь
Rx - 2 Pkx ~~ Flx-\- Fix-\- 4- Fnx,
k = 1
Ry — S Fky = Fly + F2y + ... 4- Fny,
________________J_
r==уД s fJ+(£ Fky
r \fe = 1 / \fe = 1
Rx Ry
cos (x, R) = -R-, cos (y, R) = -R-.
(2.6)
(2.7)
(2.8)
§ 2.2. Условия равновесия системы сходящихся сил
При приведении системы сходящихся сил (Fn F2, ..., F„)
было показано, что такая система эквивалентна одной равно-
действующей силе
(Fb ..., F„)~R.
Отсюда следует, что для равновесия тела, находящегося под
действием системы сходящихся сил, необходимо и достаточно,
чтобы равнодействующая их равнялась нулю:
R = 0. (2.9)
Следовательно, в силовом многоугольнике уравновешенной си-
стемы сходящихся сил конец последней силы должен совпадать
с началом первой силы; в этом случае говорят, что силовой
многоугольник замкнут (рис. 2.3). Это условие удобно исполь-
зовать при графическом решении задач для плоских систем сил.
§ 2.2]
УСЛОВИЯ РАВНОВЕСИЯ СИСТЕМЫ СХОДЯЩИХСЯ СИЛ
35
Векторное равенство (2.9) эквивалентно трем скалярным ра-
венствам:
Rx = 0, Ru = 0, Rz = 0. (2.10)
Принимая во внимание равенства (2.2), получаем аналитические
условия равновесия:
п ]
2 Fkx = Flx + + • • + Fих = 0,
2 Fity — Fiy + Fty + • • • + F'ny — 0,
k= i
2 Fkz = Flz 4- F2z + • • + Fnz = 0,
k = i
(2.H).
т. e. для равновесия сходящейся системы сил необходимо и доста-
точно равенства нулю алгебраических сумм проекций всех сил
данной системы на каждую из координатных осей.
Для частного случая плоскостей системы сходящихся сил, рас-
положенных, например, в плоскости ху, третье условие (2.10)
отпадает (т. е. обращается в тожде-
ство).
Очевидно, что условия равнове- у"'"' \ F
сия (как в аналитической, так и в F//'
геометрической форме) позволяют Z х.
проконтролировать, находится ли в р ----------К
равновесии заданная система сил.
Однако еще большее практическое Рис. 2.3.
значение имеет другая возможность
использования этих условий. Часто
заведомо известно, что вследствие наложенных связей тело нахо-
дится в равновесии, причем мы знаем только часть действующих
сил, а именно, активные силы; при этом опорные реакции из-
вестны лишь отчасти (например, известны их направления). Тогда
с помощью условий равновесия можно найти остальные неиз-
вестные, определяющие реакции связей. Условия равновесия,
в которые входят неизвестные, будут уже служить уравнениями
для определения этих неизвестных. Конечно, определение неиз-
вестных возможно лишь в тех случаях, когда число неизвест-
ных составляющих реакций не больше числа уравнений равно-
весия. Для определенности решения пространственной задачи
на равновесие системы сходящихся сил она должна содержать
не более трех неизвестных (соответственно трем уравнениям рав-
новесия), а для плоской задачи —не более двух. Если неизвест-
ных реакций больше, чем уравнений равновесия, в которые эти
2*
36
СИСТЕМА СХОДЯЩИХСЯ СИЛ
[гл и
реакции входят, то задача не может быть решена только мето-
дами статики твердого тела (статически неопределимая задача) "").
Хотя выбор направления координатных осей, на которые
проектируются силы, не имеет принципиального значения, однако
при решении задач для получения более простых уравнений
равновесия рационально иногда направлять координатные оси
перпендикулярно неизвестным силам; при этом некоторые урав-
нения равновесия будут содержать меньшее число неизвестных,
чем их содержится в задаче.
§ 2.3. Задачи *) **)
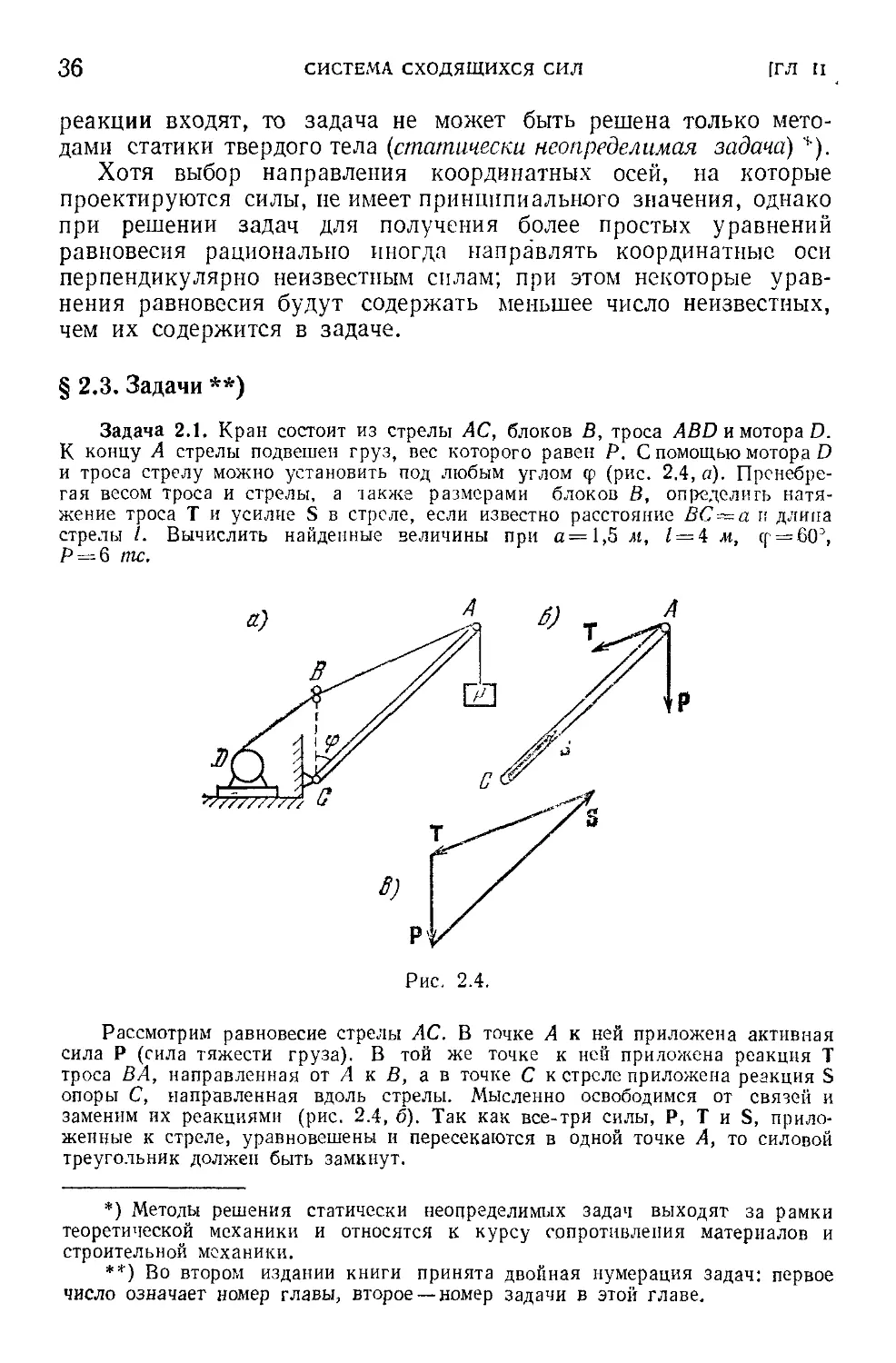
Задача 2.1. Кран состоит из стрелы АС, блоков В, троса ABD и мотора D.
К концу А стрелы подвешен груз, вес которого равен Р. С помощью мотора D
и троса стрелу можно установить под любым углом ф (рис. 2.4, а). Пренебре-
гая весом троса и стрелы, а также размерами блоков В, определить натя-
жение троса Т и усилие S в стреле, если известно расстояние ВС~а и длина
стрелы I. Вычислить найденные величины при а= 1,5 м, 1 = Ь м, ф = бОэ,
Р = 6 тс.
Рассмотрим равновесие стрелы АС. В точке А к ней приложена активная
сила Р (сила тяжести груза). В той же точке к ней приложена реакция Т
троса ВА, направленная от А к В, а в точке С к стреле приложена реакция S
опоры С, направленная вдоль стрелы. Мысленно освободимся от связей и
заменим их реакциями (рис. 2.4, б). Так как все-три силы, Р, Т и S, прило-
женные к стреле, уравновешены и пересекаются в одной точке А, то силовой
треугольник должен быть замкнут.
*) Методы решения статически неопределимых задач выходят за рамки
теоретической механики и относятся к курсу сопротивления материалов и
строительной механики.
**) Во втором издании книги принята двойная нумерация задач: первое
число означает номер главы, второе — номер задачи в этой главе.
5 2.31
ЗАДАЧИ
37
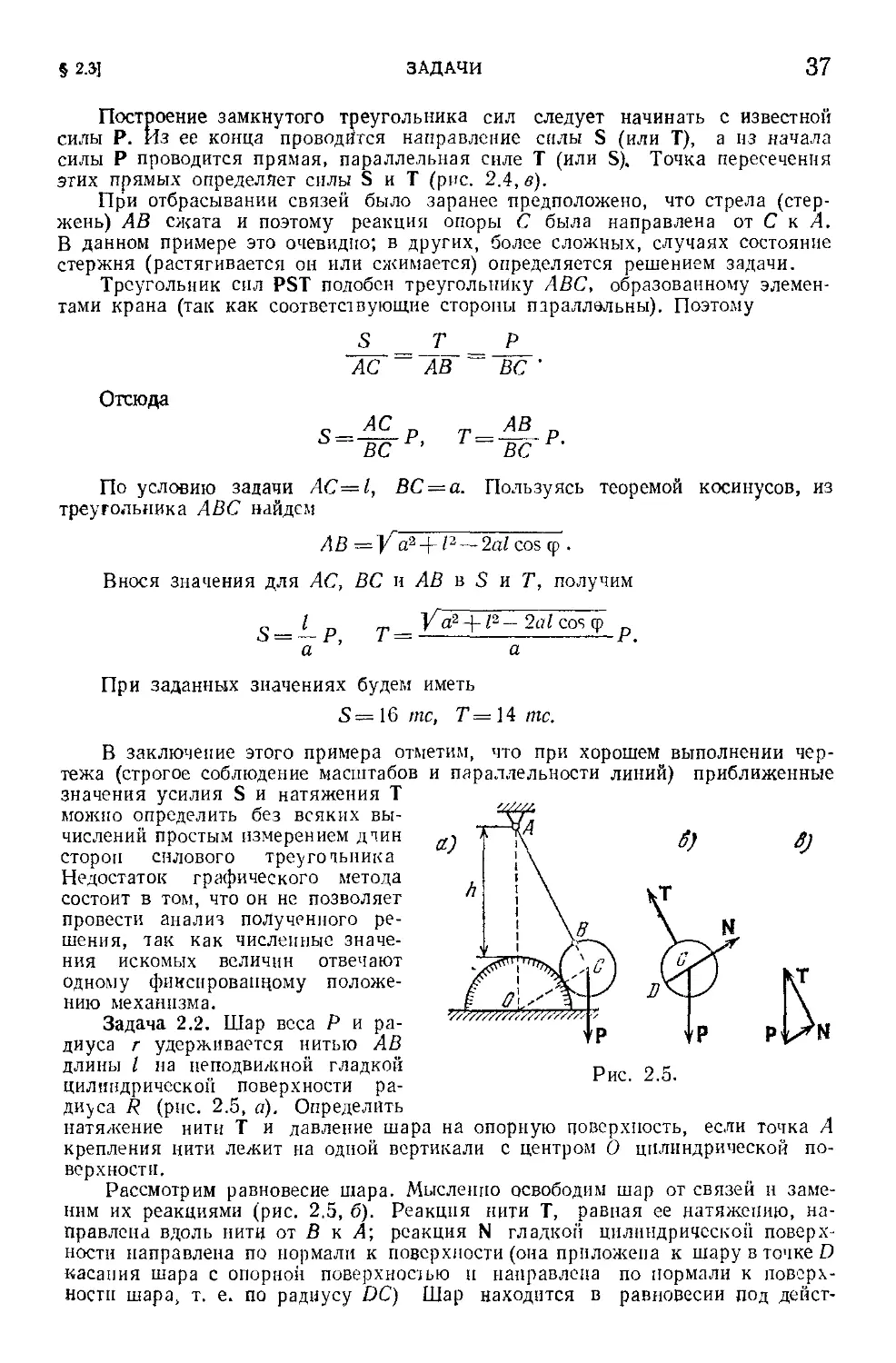
Построение замкнутого треугольника сил следует начинать с известной
силы Р. Из ее конца проводится направление силы S (или Т), а из начала
силы Р проводится прямая, параллельная силе Т (или S). Точка пересечения
этих прямых определяет силы S и Т (рис. 2.4, в).
При отбрасывании связей было заранее предположено, что стрела (стер-
жень) АВ сжата и поэтому реакция опоры С была направлена от С к Л.
В данном примере это очевидно; в других, более сложных, случаях состояние
стержня (растягивается он или сжимается) определяется решением задачи.
Треугольник сил PST подобен треугольнику АВС, образованному элемен-
тами крана (так как соответствующие стороны параллельны). Поэтому
S___Т_______Р
АС ~ АВ ~ ВС '
Отсюда
s=4$-^> т=^-р-
ЬС dC
По условию задачи Л<7=/, ВС = а. Пользуясь теоремой косинусов, из
треугольника АВС найдем
АВ = Vа? +I2 — 2al cos ср .
Внося значения для АС, ВС и АВ в S и Т, получим
е 1 п rr_ Va2-'i-l2- 2al cos ф
= — г, 1---------------------г «
а а
При заданных значениях будем иметь
S= 16 тс, Т=14 тс.
В заключение этого примера отметим, что при хорошем выполнении чер-
тежа (строгое соблюдение масштабов и параллельности линий) приближенные
значения усилия S и натяжения Т
можно определить без всяких вы-
числений простым измерением длин
сторон силового треугольника
Недостаток графического метода
состоит в том, что он не позволяет
провести анализ полученного ре-
шения, так как численные значе-
ния искомых величин отвечают
одному фиксированному положе-
нию механизма.
Задача 2.2. Шар веса Р и ра-
диуса г удерживается нитью АВ
длины I на неподвижной гладкой
цилиндрической поверхности ра-
диуса R (рис. 2.5, а). Определить
натяжение нити Т и давление ша
крепления нити лежит на одной вертикали с центром О цилиндрической по-
верхности.
Рассмотрим равновесие шара. Мысленно освободим шар от связей и заме-
ним их реакциями (рис. 2.5, б). Реакция нити Т, равная ее натяжению, на-
правлена вдоль нити от В к Л; реакция N гладкой цилиндрической поверх-
ности направлена по нормали к поверхности (она приложена к шару в точке D
касания шара с опорной поверхностью и направлена по нормали к поверх-
ности шара, т. е. по радиусу DC) Шар находится в равновесии под дейст-
Рис. 2.5.
на опорную поверхность, если точка А
38
СИСТЕМА СХОДЯЩИХСЯ СИЛ
[ГЛ. и
вием трех сил: Р, N и Т. Построив замкнутый силовой треугольник (из конца
известной силы Р проводим прямою, параллельную DC, а из начала силы Р
прямую, параллельную ВА; точка пересечения этих прямых определяет конец
силы N и начало силы Т; рис. 2.5, в), мы можем определить модули сил N
и Т с '
масштаба
помощью
простым
Измерением их длины. В данном примере
леСко использовать аналитические методы.
Действительно, из подобия треугольни-
ка ОСА (рис. 2.5 я) и силового треуголь-
ника PNT следует
_JV________Т Р
R+r l-\-r R~t-h ’
Отсюда найдем
в)
Al— т= р
R+h ' h
Давление шара N' на. опорную по-
верхность (аксиома 4) равно по модулю
реакции N, но направлено в противопо-
ложную сторону: N'=—N,
Задача 2.3. Однородная балка дли-
ны I и веса Р удерживается в рав-
новесии нитью ВС и шарниром А (рис.
2.6, а).
Найти натяжение нити и реакцию
шарнира А, если Z. BCA = 3(F, Z. АВС =
= 90°.
Рассмотрим равновесие системы, со-
стоящей из балки и нити. Мысленно
освободим систему от связен в точках А
и С и приложим в этих точках реакции
(рис. 2.6, б). К балке приложены сила
тяжести Р, сила натяжения нити Т и
реакция шарнира R. Эта система сил
должна быть эквивалентна нулю. По тео-
силах реакция R должна проходить через точ-
Построим силовой треугольник (рис. 2.6, в).
силового треугольника и треугольника ADC (рис. 2.6, б) сле-
трех непараллельных
реме о
ку D (середину стороны ВС).
Из подобия <
дует, что
Р Г R
AC ~ CD ~ AD '
Подставляя
сюда
АС=21, CD=i^-
получим
т рУз „ RK7
^ = -4"
Начало этих рассуждений может быть несколько видоизменено, если рассмат-
ривать равновесие балки, отделенной как от стены (в точке А), так и нити
(в точке В); см. рис. 2.6, г, Однако последующие выкладки останутся преж-
ними, в частности, тем же останется силовой треугольник на рис. 2.6, в.
Задача 2.4. Определить реакции опорных шарниров невесомой трехшар-
нирной арки АВС, левая половина которой нагружена силой Р (рис. 2.7 а).
§ 2.3]
ЗАДАЧИ
39
Рассмотрим равновесие каждой полуарки отдельно. К правой полуарке
----- .... ----- ------- _ п реакция девой полуарки
приложены две силы: реакция в шарнире В и
на правую. Значит, линии дей-
ствия этих сил проходят че- ,
рез В и С. Левая полуарка
(рис. 2.7, б) находится в равно-
весии, следовательно, силы Р,
Rf и Rc образуют уравнове-
шенную систему и линия дей-
ствия реакции R, проходит че-
рез точку пересечения линий
действия силы Р и реакции Rc
(реакции правой полуарки на
левую). Так как направления
всех сил известны, то можно
построить силовой треугольник
(рис. 2.7, в) и определить ве-
личины искомых реакций. После
этого можно построить систему
сил для правой полуарки; это
сделано на рис. 2 7, г, причем
Rc = Rb~Rc-
Задача 2.5. Однородный
цилиндр веса Р расположен
между двумя гладкими наклон-
ными плоскостями, образую-
щими с горизонтом углы а и
цилиндра на обе опорные плоскости.
Так как плоскости гладкие, то их реакции Rt и R2 (рис. 2.8, б) направ-
направлены к оси цилиндра и вместе
а)
б)
Р
rA
йп
‘5
Рис 2.7.
Р (рис. 2.8, а). Определить силы давления
лены перпендикулярно плоскостям, т. е
Рис. 2.8.
с силой Р образуют сходящуюся систему сил. Запишем уравнения равновесия
этой системы сил:
40
СИСТЕМА СХОДЯЩИХСЯ СИЛ
[ГЛ. II
откуда находим
_ Р sin Р rj _ Р Sln а
1 sin(a-f-p) ’ 2 sin(a + p)
Искомые силы давления R[ и Rj будут равны (согласно аксиоме 4) по
модулю и противоположны по направлению реакциям R( п R,.
Задача 2.6. Горизонтальная балка АВ удерживается в равновесии стерж-
нями АС и AD. Найги усилия в стержнях и балке, если к концу А балки
приложена сила Р, перпендикулярная балке и образующая с вертикалью
угол а.
Дано: дО4В = р, L DAO= L САО = у. Весами балки и стержней пре-
небречь; крепления шарнирные (рис. 2.9, а).
Заменяя действие стержней и балки на узел А реакциями Sj, S2, S3,
получим систему четырех сил, приложенных в одной точке А (рис. 2.9, б).
Проекции этих сил на координатные оси (систему координат см. на
рис. 2.9, б) равны:
Проекции Силы
Р S1 s2 s3
F kx 0 — Sj cos у cos P — S2 cos у cos P S3
Pky Р sin a — Sj sin у S2 sin у 0
Fkz — Р cos a Sj cos у sin P S2 cos у sin P 0
Поэтому в соответствии с условиями (2-.11) уравнения равновесия данной
системы сил имеют вид
п
У Fkx = — Sj cos у cos p — S2 cos у cos p + S3 = 0,
* = 1
n
У Fky — P sin a — sin у + S2 sin у = 0,
A = 1
n
У Fkz = —P cos a-ySi cos у sin P-|-S2cosy sin [3=0.
k = i
Отсюда
$ _P sin ct sin p cos у + cos a sin у
1 2 sin у cos y sin P ’
S _P sin y cos a — sin a sin p cos у
2 2 sin у cos у sin P ’
S3 = P cos a ctg p.
Усилия в стержнях и балке соответственно равны найденным реакциям
Si, 32 и З3.
Если бы балка поддерживалась большим числом стержней, то задача
стала бы статически неопределимой, поскольку число неизвестных превзошло
бы число уравнений.
§ 2.3]
ЗАДАЧИ
41
Задача 2.7. Невесомые стержни АВ и АС, соединенные в точке А шарни-
ром, поддерживаются в равновесии нитью AD. Определить натяжение нити
и усилия в стержнях, если L АВС = L АСВ =- р = 45°, L ЛЕО = а = 30°,
а к точке А приложена горизонтальная сила В = 2 кГ, линия действия кото-
рой образует с плоскостью yz угол у (рис. 2.10, а). Концы стержней В и С за-
креплены шарнирно. Прямая ВС горизонтальна.
Рис. 2.9.
Рис. 2 10.
Заменим действе стержней и нити на узел А реакциями S1F S2 и Т.
Проекции сил F, S,, S2 и Т на оси координат будут (рис. 2.10, б):
Проекции Силы
F s4 T
F kx F sin у — Si cos P Sj cos p 0
F ky F cos у — .S\ sin P cos a — S2 sin p cos a 0
Fkz 0 — St sin p sin a — S, sin p sin a T
42
СИСТЕМА СХОДЯЩИХСЯ СИЛ
[ГЛ. II
Составим уравнения равновесия:
п
У Fkx = F sin у — St cos Р + S2 cos P =0,
n
Fhy = F cos у—St sin P cos a — S2 sin p cos a = 0,
:= 1
Fkz = — Sj sin p sin a — S2 sin p sin a + T = 0;
отсюда
тлу
T = F cosy tga=2^—~ cosy/cf,
О
_ F [ cos у , sin у \ p— /2 V 3 \ „
Si = V -------------s- =/2 —5—cosy + smy кГ,
2 \ sm p cos a cos P / r \ 3 /
_ FIX siny\ / 2 3 . \ „
S.> = ъ- -^s----X = V 2 I —5—• COS у — sin Y } кГ.
2 \ sm P cos Р/ 1 \ 3 1 * /
Натяжение нити и усилия в стержнях соответственно равны полученным
значениям Т, Sx и S2.
Если у = 0, то
Т = ^У~3 кГ, 51 = 52=-Ц^-=«1>63 «Г.
О о
При у = 90°
Т = 0, S1= КТи» 1,41 кГ, Б^-УЪ^-ЛАХкГ
(знак минус в выражении для S2 означает, что стержень АС сжат, а не рас-
тянут, как предполагалось при построении реакций).
При tgY = 2)/ 3/3 (у ~ 49' 5') усилие в стержне АС равно нулю.
ГЛАВА III
ТЕОРИЯ ПАР
§ 3.1. Сложение двух параллельных сил
Настоящий параграф носит вспомогательный характер и не-
обходим для дальнейшего построения теории.
Пусть параллельные и одинаково направленные силы F, и F2
приложены к точкам А и В тела
ствующую (рис. 3.1). Приложим к
точкам А и В равные по модулю
и противоположно направленные
силы Qi и Q2 (их модуль может
быть любым); такое добавление
можно делать на основании ак-
сиомы 2. Тогда в точках А и В
мы получим две силы Rx и R2:
Rirx-J(F1, Qi) и R2~(F2, Q2).
Линии действия этих сил пересе-
каются в некоторой точке О. Пере-
несем силы R, и R2 в точку О и раз-
ложим каждую на составляющие:
Рис. 3.1.
R1~ (FI, QI) И R2~(F2 Q.2).
Из построения видно, что Q( = Qj и Q.2 = Q„ следовательно,
q;=-q; и две эти силы согласно аксиоме 2 можно отбросить.
Кроме того, Fj' = F1f F2 = F2. Силы F( и F.) действуют по одной
прямой, и их можно заменить одной силой
R = F1 + F2, (3.1)
которая и будет искомой равнодействующей. Модуль равнодей-
ствующей равен
/? = Fi + F2.
Очевидно, что линия действия равнодействующей параллельна
линиям действия слагаемых. Из подобия треугольников Оас{
44
ТЕОРИЯ ПАР
(ГЛ. III
и ОАС, а, также ОЬс2 и ОВС получим соотношение
Fi _ ВС
F2 ~ ЛС’
которым определяется точка приложения равнодействующей R.
Таким
в одну
силам,
(3-2)
образом, система двух параллельных сил. направленных
сторону, имеет
причем ее модуль
R,
равнодействующую, параллельную этим
равен сумме модулей слагаемых; линия
действия равнодействующей делит
расстояние между точками прило-
жения слагаемых сил внутренним об-
разом на части, обратно пропорцио-
нальные модулям этих сил.
Рассмотрим теперь задачу о сло-
жении -двух параллельных сил, на-
правленных в разные стороны и не
равных друг другу по модулю. Пусть
даны две силы F, и F2 (рис. 3.2.),
причем для определенности будем
считать, что
Пользуясь формулами (3.1) и (3.2),
можно силу Fi разложить на две
направленные в сторону силы Рг. Сделаем
составляющие, F, и
это так, чтобы сила F.) оказалась приложенной к точке В, и поло-
жим F.) = — F2.
Таким образом, (F1; F2)/-^(R, F2, F2). Теперь заметим, что
силы F2, Fi можно отбросить как эквивалентные нулю (аксиома 2),
следовательно, (Fb F2) R, т. е. сила R и является равно-
действующей. Определим силу R, удовлетворяющую такому раз-
ложению силы Fi. Формулы (3.1) и (3.2) дают
RMi-.Fi, £ =
(3.3)
Отсюда следует
R — Fi — Fa — Fi -f- F2,
и так как силы F, и F2 направлены в разные стороны, то
7? = Fi-F2. (3.4)
Подставим это выражение во вторую формулу (3.3), получим
после простых преобразований
Fi _ ВС
В2 — АС ‘
Из двух последних формул следует, что две не равные
по модулю противоположно направленные параллельные силы имеют
равнодействующую, параллельную этим силам, причем ее модуль
равен разности модулей слагаемых; линия действия равнодействую-
щей делит расстояние между точками приложения слагаемых сил
§ 3 2] МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО точки и оси
45
внешним образом на части, обратно пропорциональные модулям
этих сил. Заметим, что равнодействующая в этом случае всегда
расположена за большей из двух сил.
Прежде чем рассмотреть случай двух равных по модулю,
параллельных, но противоположно направленных сил, заметим,
что из равенств (3.3) и (3.4) следует
АС^^-АВ. (3.5)
Г1 — ' 2
Рассмотрим теперь случай двух параллельных, равных по
модулю, но противоположно направленных сил
система сил называется парой сил или просто
парой и обозначается символом (F1( F2). Рас-
суждения, которыми мы пользовались при вы-
воде соотношений (3.4) и (3.5), здесь непри-
годны. Формальное применение этих соотноше-
ний приводит к заключению, что в данном случае
модуль равнодействующей равен нулю, а линия
ее действия находится на бесконечном удалении
от линий действия слагаемых сил. Чтобы по-
(рис. 3.3). Эта
Рис. 3.3.
нять природу этого результата, вновь вернемся к случаю, когда
слагаемые силы имеют различные модули, и предположим, что мо-
дуль^ постепенно возрастает, приближаясь к значению модуля
Тогда разность модулей будет стремиться к нулю, а система сил
(Fi, Рг) — к паре. При этом модуль равнодействующей будет неогра-
ниченно приближаться к нулю (см. (3.4)), а линия ее действия —
неограниченно удаляться от линий действия слагаемых (см. (3.5)).
Как следует из сказанного, для пары сил понятие равно-
действующей лишено смысла, так как она представляет неуравнове-
шенную систему, которая не может быть заменена одной силой. Го-
ворят, что пара сил не имеет равнодействующей*).
Таким образом, пара сил является неприводимым (неупро-
щаемым) элементом статики; наряду с силой она является вторым
самостоятельным элементом статики.
В следующих параграфах рассматриваются свойства пар сил,
а также правила действия над системами пар.
§ 3.2. Момент силы относительно точки и относительно оси.
Момент пары сил
Прежде чем перейти к исследованию свойств пары сил, введем
понятие момента силы, которое необходимо для дальнейшего.
Моментом силы относительно какой-либо точки (центра) на-
зывается вектор, численно равный произведению модуля силы
на плечо, т. е. на кратчайшее расстояние от указанной точки
*) По этому поводу см. главу IV.
46
ТЕОРИЯ ПАР
[ГЛ III
до линии действия силы, и направленный перпендикулярно плоскости,
проходящей через выбранную точку и линию действия силы в ту
сторону, откуда «вращение», совершаемое силой вокруг точки,
представляется происходящим против хода часовой стрелки. Момент
силы характеризует ее вращательное действие.
Если О — точка, относительно которой находится момент силы F,
то момент силы обозначается символом M0(F). Покажем, что если
точка приложения силы F определяется радиусом-вектором г относи-
тельно О, то справедливо соот-
z | ношение
M0(F) = rxF. (3.6)
Согласно этому соотношению мо-
мент силы равен векторному
произведению вектора г на век-
тор F.
В самом деле, модуль век-
торного произведения равен
Мо (F) = rF sin a—Fh, (3.7)
где h — плечо силы (рис. 3.4).
Заметим также, что вектор Мо (F)
направлен перпендикулярно
плоскости, проходящей через
векторы г и F, в ту сторону, откуда кратчайший поворот вектора г
к направлению вектора F представляется происходящим против
хода часовой стрелки. Таким образом, формула (3.6) полностью
определяет модуль и направление момента силы F.
Иногда формулу (3.7) полезно записывать в виде
M0(F) = 2S,
(3-8)
где S — площадь треугольника ОАВ (рис. 3.4).
Пусть х, у, г — координаты точки приложения силы, a Fx,
Fy, Fz — проекции силы на координатные оси. Тогда, если точка О
находится в начале координат,^момент силы выражается следующим
образом:
к * J •<
M0(F) = rxF= х у z
FX fy fz
= (yfz - zfy) • + (zFx - xfz) j + (xfy - yfd) к. (3.9)
Отсюда следует, что проекции момента силы на координатные
оси определяются формулами:
MoxiF^yFz — zFy,
Moy{F) = zFx—xF., (3.10)
MOe(F) = xFy-yFx.
§ 3 2J
МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО точки и оси
47
Введем теперь понятие проекции силы на плоскость.
Пусть даны сила F и некоторая плоскость. Опустим из на-
чала и конца вектора силы перпендикуляры на эту плоскость
(рис. 3.5).
Проекцией силы на плоскость называется вектор, начало и ко-
нец которого совпадают с проекцией начала и проекцией конца
силы на эту плоскость.
Если в качестве рассматриваемой плоскости принять пло-
скость хОу, то проекцией силы F на эту плоскость будет век-
тор F.v;/ (рис. 3.5).
Момент силы F.vv относительно точки О (точки пересечения
оси z с плоскостью хОу) может быть вычислен по формуле (3.9),
если в ней положить г = 0, Fz = 0. Получим
M0(Fxy) = (xF4-yFx)k.
Таким образом, этот момент направлен вдоль оси г, а его про-
екция на ось z в точности совпадает с проекцией на ту же ось
момента силы F относительно точ-
ки О. Другими словами,
МОг (F) = МОг (Рху) = xFy - yFx.
(З.Н)
Очевидно, тот же результат
можно получить, если спроекти-
ровать силу F на любую другую
плоскость, параллельную плоско-
сти хОу. При этом точка пересе-
чения оси z с плоскостью будет
уже иной (обозначим новую точку
пересечения через О,). Однако все
равенства (3.11) величины х, у, Fx,
и, следовательно, можно записать
входящие в правую часть
Fy останутся неизменными,
М0ДР) = М01г(Рад).
Другими словами, проекция момента силы относительно точки
на ось, проходящую через эту точку, не зависит от выбора
точки на оси. Поэтому в дальнейшем вместо символа МОг (F)
будем применять символ ЛЕД). Эта проекция момента назы-
вается моментом силы относительно оси z. Вычисление момента
силы относительно оси часто бывает удобнее производить по-
средством проектирования силы F на плоскость, перпендикуляр-
ную оси, и вычисления величины A1?(FX!/).
В соответствии с формулой (3.7) и учитывая знак проекции,
будем иметь:
МДР) = МДРАД = ±/%/г*- (3-12)
48
ТЕОРИЯ ПАР
[ГЛ III
Здесь /г* —плечо
если наблюдатель
оси г, что сила
Момент силы
силы Fxy относительно точки О (рис. 3.6);
видит со стороны положительного направления
FA-,7 стремится повернуть тело вокруг оси z
против хода часовой стрелки, то берется
знак «плюс», и в противном случае — знак
«минус».
Формула (3.12) дает возможность сфор-
мулировать следующее правило для вычис-
ления момента силы относительно оси. Для
этого нужно:
1) выбрать на оси произвольную точку и
построить плоскость, перпендикулярную оси;
2) спроектировать на эту плоскость силу;
3) определить плечо проекции силы h*.
относительно оси равен произведению модуля
проекции силы на ее плечо, взятому с соответствующим знаком
(см. изложенное выше правило).
Из формулы (3.12) следует, что момент силы относительно
оси равен нулю в двух случаях: 1) когда проекция силы на
относительно координатных осей
силы F будут
х = а,
плоскость, перпендикулярную оси,
равна нулю, т. е. когда сила и ось
параллельны; 2) когда плечо проек-
ции /г* равно нулю, т. е. когда ли-
ния действия силы пересекает ось.
Оба эти случая можно объединить в
один: момент силы относительно оси
равен нулю тогда и только тогда,
когда линия действия силы и ось на-
ходятся в одной плоскости.
Задача 3.1. Вычислить относительно
точки О момент силы F, приложенной к
точке А и направленной по диагонали
грани куба со стороной а (рис. 3.7).
. При решении подобных задач рацио-
нально сначала вычислить моменты силы F
х, у, г. Координаты точки А приложения
у = а, z = 0.
Проекции силы F на координатные оси:
Подставляя эти значения в равенства (3.10), найдем
*4=^’ Moy=~-/Fa’ Moz^F«-
Эти же выражения для моментов силы F относительно координатных осей
можно получить, пользуясь формулой (3.12). Для этого спроектируем силу F
§3 21
МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО точки и оси
49
на плоскости, перпендикулярные осям х и у (рис. 3 7). Очевидно, что Fxy =
Fy^V‘2aF. Применяя изложенное выше правило, получим, как и следо-
вало ожидать, те же выражения:
Mx = -^Fa, M^-^Fa, Мг = ^2 Fa.
Модуль момента определится равенством
Мо (F) = = V IFa-
Введем теперь понятие момента’пары. Найдем сначала, чему
равна сумма моментов сил, составляющих пару, относительно
произвольной точки. Пусть О — произвольная точка просгранства
(рис. 3.8), a F и F'— силы, составляющие пару.
Т ос да
Mo(F) = 04xF, Mo(F') = OBxF',
огк уда ___
Мо (F) + Мо (F') = О А X F + ОВ х F',
но так как F' = — F, то
Мо (F) + М0 (F') = ОА X F - OB х F - (ОА - OB) х F.
Принимая во внимание равенство ОА — ОВ=ВА, окончательно
находим:
Мо (F) + Мо (F') = BA х F.
Следовательно, сумма моментов сил, составляющих пару, не за-
висит от положения точки, относи-
тельно которой берутся моменты.
Векторное произведение В А X F и на-
зывается моментом пары. Обозначается
момент пары символом M(F, F'), причем
M(F, F') = BA х F = АВ х F',
или, короче,
М = ВА xF = АВ х F'. (3.13)
Рассматривая правую часть этого
равенства, замечаем, что момент пары
представляет собой вектор, перпендику-
Рис. 3.8.
лярный плоскости пары, равный по модулю произведению модуля
одной из сил пары на плечо пары (т. е. на кратчайшее расстояние
между линиями действия сил, составляющих пару) и направлен-
ный в ту сторону, откуда «вращение» пары видно происходящим
против хода часовой стрелки. Если h — плечо пары, то Л4 (F,
50
ТЕОРИЯ ПАР
[ГЛ. III
Из самого определения видно, что момент пары сил пред-
ставляет собой свободный вектор, линия действия которого не
определена (дополнительное обоснование этого замечания сле-
дует из теорем 2 и 3 этой главы).
Для того чтобы пара сил составляла уравновешенную си-
стему (систему сил, эквивалентную нулю), необходимо и доста-
точно, чтобы момент пары равнялся нулю. Действительно, если
момент пары равен нулю, М = Fh = Q, то либо F = 0, т.е. нет
сил, либо плечо пары h равно нулю. Но в этом случае силы
пары будут действовать по одной прямой; так как они равны
по модулю и направлены в противоположные стороны, то на
основании аксиомы 1 они составят уравновешенную систему.
Обратно, если две силы, F, и F2, составляющие пару, уравно-
вешены, то на основании той же аксиомы 1 они действуют по
одной прямой. Но в этом случае плечо пары h равно нулю
и, следовательно, М = Fh = 0.
§ 3.3. Теоремы о парах
Докажем три теоремы, с
можными эквивалентные прес
дениях следует помнить, что
и перенесем точки приложения
ствия в точки А и В соответств
ме 3, получим
помощью которых становятся воз-
бразования пар. При всех рассуж-
они относятся к парам, действую-
щим на какое-либо одно твер-
дое тело.
Теорема 1. Две пары, лежа-
щие в одной плоскости, можно
заменить одной парой, лежа-
щей в той же плоскости, с мо-
ментом, равным сумме момен-
тов данных двух пар.
Для доказательства этой тео-
ремы рассмотрим две пары
(F1( F'i) и (F2, F2) (рис. 3.9)
всех сил вдоль линий их дей-
нно. Складывая силы по аксио-
r = Fj + F2 и R' = F1 + F2,
но
FI = — F\ п F-а = — F2.
Следовательно, R = — R', т. e. силы R и R' образуют пару.
Найдем момент этой пары, воспользовавшись формулой (3.13):
M = M(R, R') = E4xR = B^x(F1 + F2) = OxF1 + BXxF2.
'(3.14)
§3 3] ТЕОРЕМЫ о парах 51
При переносе сил, составляющих пару, вдоль линий их дей-
ствия ни плечо, ни направление вращения пары не меняются,
следовательно, не меняется и момент пары. Значит,
bTxf1=m(f1, f;)=m1( bxxf2=m(f2, f.')=m2
и формула (3.14) примет вид
M = (3.15)
что и доказывает справедливость сформулированной выше теоремы.
Сделаем два замечания к этой теореме.
1. Линии действия сил, составляющих пары, могут оказаться
параллельными. Теорема остается справедливой и в этом случае,
но для ее доказательства следует воспользоваться правилом сло-
жения параллельных сил.
2. После сложения может получиться, что M(R, R') = 0; на
основании сделанного ранее замечания из этого следует, что со-
вокупность двух пар (F1( FJ, F2, F))~0.
Теорема 2. Две пары, имеющие геометрически равные мо-
менты, эквивалентны.
Пусть на тело в плоскости I действует пара (FI; FJ) с мо-
ментом М1. Покажем, что эту пару можно заменить другой
парой (F2, F2), расположенной в плоскости II, если только ее
момент М2 равен Мх (согласно определению (см. § 1.1) это
и будет означать, что пары (F1( F)) и (F2, F2) эквивалентны).
Прежде всего заметим, что плоскости I и II должны быть парал-
лельны, в частности, они могут совпадать. Действительно, из
параллельности моментов М, и М2 (в нашем случае М1=М2) сле-
дует, что плоскости действия пар, перпендикулярные моментам,
также параллельны.
Введем в рассмотрение новую пару (F3, F3) и приложим ее
вместе с парой (F2, F)) к телу, расположив обе пары в плоско-
сти II. Для этого согласно аксиоме 2 нужно подобрать пару
(F3, F3) с моментом М3 так, чтобы приложенная система сил
(F2, F2i F3, F3) была уравновешена. Это можно сделать, напри-
мер, следующим образом: положим F3= — F) и F3= — F\ и сов-
местим точки приложения этих сил с проекциями Л| и Bt точек
А и В на плоскость II (см. рис. 3.10). В соответствии с по-
строением будем иметь: М3 =— Мх или, учитывая, что М1 = М2,
М2Т-М3 = 0,
Принимая во внимание второе замечание к предыдущей тео-
реме, получим (F2, Fj, F3, F3)^0. Таким образом, пары (F2, F2)
и (F3, F3) взаимно уравновешены и присоединение их к телу
не нарушает его состояния (аксиома 2), так что
(Fx, FJ)~(Fx, f;, f2, f; f3, f3). (3.I6)
52
ТЕОРИЯ ПАР
[I Л III
по правилу сложени?
сторону. По модулю
их равнодействующи
сложить
в одну
поэтому
С другой стороны, силы Fr и F3, а также F1 и F.1, можно
параллельных сил, направленных
все эти силы равны друг другу,
R и R' должны быть приложены
в точке пересечения диагоналей
прямоугольника ЛВй1Д1; кроме
того, они равны по модулю и
направлены в противоположные
стороны. Это означает, что они
составляют систему, эквивалент-
ную нулю. Итак,
(Fv F[, F3, F;)~(R, R')~0.
Теперь мы можем записать
(Fb Ft, F2, Fl, F3, F0~(F2, Fl).
(3-17)
Сравнивая соотношения (3.16)
и (3.17), получим (Fr, Fj)r^
(F2, Fl), что и требовалось до-
казать.
Из этой теоремы следует, что
пару сил можно перемещать в
плоскости ее действия, переносить
в параллельную плоскость; наконец, в паре можно менять одно-
временно силы и плечо, сохраняя лишь направление вращения
пары и модуль ее момента (F^ = F2h2).
В дальнейшем мы будем широко пользоваться такими экви-
валентными преобразованиями пары.
Теорема 3. Две пары, лежащие в пересекающихся плоскостях,
эквивалентны одной паре, момент которой равен сумме моментов
двух данных пар.
Пусть пары (Fx, F)) и (F2, Fl) расположены в пересекаю-
щихся плоскостях I и II соответственно. Пользуясь следствием
теоремы 2, приведем обе пары к плечу АВ (рис. 3.11), распо-
ложенному на линии пересечения плоскостей I и II. Обозначим
трансформированные пары через (Q1( Q{) и (Q2, Q1). При этом
должны выполняться равенства:
Mx = M(Qx, Q,')=M(F1, FJ) и M2 = M(Q2i Q1)=M(F2, Fl).
Сложим по аксиоме 3 силы, приложенные в точках А и В
соответственно. Тогда получим R = Qx + Q2 и R' = Qj' + Ql. Учи-
тывая, что Qt'=— Qx и Ql=-Q2, получим: R=— R'. Таким
образом, мы доказали, что система двух пар эквивалентна одной
паре (R, R').
ТЕОРЕМЫ О ПАРАХ
53
§ 3 31
Найдем момент М этой пары. На основании формулы (3.13)
имеем M(R, R') = BXxR, но R = QtJQ, и, следовательно,
М (R, R') = bJx(Qi + Q2) = BXxQ1 + BXxQ2 =
= M(Qlt q;) + m(q2, q2)=m(f1, f;)+m(f2, f2),
или
M = M! + M2,
2). С другой стороны, две
т. е. теорема доказана.
Заметим, что полученный результат справедлив и для пар,
лежащих в параллельных плоскостях. По теореме 2 такие пары
можно привести к одйой плос-
кости, а по теореме 1 их
можно заменить одной парой,
момент которой равен с^мме
моментов составляющих пар.
Доказанные выше теоремы
о парах позволяют сделать
важный вывод: момент пары
является свободным вектором
и полностью определяет дей-
ствие пары на абсолютно
твердое тело. В самом деле,
мы уже доказали, что если
две пары имеют одинаковые
моменты (следовательно, ле-
жат в одной плоскости или
в параллельных плоскостях),
то они друг другу эквивалентны (теорема
пары, лежащие в пересекающихся плоскостях, не могут быть эк-
вивалентны, ибо это означало бы, что одна из них и пара, про-
тивоположная другой, эквивалентны нулю, что невозможно, так
как сумма моментов таких пар отлична от нуля.
Таким образом, введенное понятие момента пары чрезвычайно
полезно, поскольку оно полностью отражает механическое дей-
ствие пары на тело. В этом смысле можно сказать, что момент
исчерпывающим образом представляет действие пары на твердое
тело.
Для деформируемых тел изложенная выше теория пар неприме-
нима. Две противоположные пары, действующие, например, по тор-
цам стержня, с точки зрения статики твердого тела эквивалентны
нулю. Между тем их действие на деформируемый стержень вызы-
вает его кручение, и тем большее, чем больше модули моментов.
Перейдем к решению первой и второй задач статики в слу-
чаях, когда на тело действуют только пары сил.
54
ТЕОРИЯ ПАР
[ГЛ. III
§ 3.4, Приведение системы пар к простейшему виду-
Равновесие системы пар
Пусть дана система п пар (F1( Fi), (F3, Fi), (F„, Fi),
как угодно расположенных в пространстве, моменты которых
равны М1; М3, М„. На основании теоремы 3 первые две пары
можно заменить одной парой (R1( R)) с моментом М*:
М^ = МГ + М2.
Полученную пару (Rx, R[) сложим с парой (F3, F3), тогда полу-
чим новую пару (R2, Ri) с моментом М3:
М3 = М2 М3 — Mj 4“ М2 4" М3.
Продолжая и дальше последовательное сложение моментов
пар, мы получим последнюю результирующую пару (R, R')
с моментом
М = М14-М24-...4-Мл= 2 М*. (3.18)
ь=. 1
Итак, система пар приводится к одной паре, момент которой
равен сумме моментов всех пар.
Теперь легко решить вторую задачу статики, т. е. найти
условия равновесия тела, на которое действует система пар.
Для того чтобы система пар была эквивалентна нулю, т. е. приводи-
лась к .двум уравновешенным силам, необходимо и достаточно,
чтобы момент результирующей пары был
равен нулю. Тогда из формулы (3.18) по-
лучим следующее условие равновесия в
векторном виде:
Мх 4-М24-Мз + ...4-Мл = 0. (3.19)
В проекциях на координатные оси
уравнение (3.19) дает три скалярных урав-
нения.
Условие равновесия (3.19) упрощается,
когда все пары лежат в одной плоскости.
В этом случае все моменты перпендикулярны этой плоскости, и
поэтому уравнение (3.19) достаточно спроектировать только на
одну ось, например ось, перпендикулярную плоскости пар. Пусть
это будет ось г (рис. 3.12).
Тогда из уравнения (3.19) получим:
Afx,4-A12,4-...4-M„ = 0. (3.20)
При этом ясно, что Мг=М, если вращение пары видно
с положительного направления оси z против хода часовой стрелки,
§ 3.4] ПРИВЕДЕНИЕ СИСТЕМЫ ПАР К ПРОСТЕЙШЕМУ ВИДУ 55
и Мг = — М при противоположном направлении вращения. Оба
эти случая представлены на рис. 3.12.
Задача 3.2. Один конец балки длиной I укреплен в неподвижной шарнир
ной опоре А, а второй ее конец В опирается на гладкую наклонную плоскость
составляющую с балкой угол а. На
балку действует пара сил с моментом,
равным М. Пренебрегая весом балки,
определить реакции опор (рис. 3. 13).
Действие опор заменим реакция-
ми. Реакция гладкой поверхности RB
направлена по нормали к поверхно-
сти. Так как балка находится в равно-
весии, то система сил, действующих
на балку, эквивалентна нулю. Но ак- Рис. 3.13.
тивная пара сил с моментом М может
быть уравновешена только парой сил.
Следовательно, реакция неподвижной опоры А вместе с реакцией плос-
кости Rfi должны составлять пару сил. Модули реакций найдутся из условия
равенства модулей моментов пар:
M=M(R4, Rb),
или
M = RA-h,
где h = I cos a — плечо пары. Отсюда
7? =7? =-2Я_.
А I cos a
Г Л А В A IV
ОСНОВНАЯ ТЕОРЕМА СТАТИКИ И УСЛОВИЯ РАВНОВЕСИЯ
ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ
§ 4.1. Лемма о параллельном переносе силы
В этом параграфе рассматривается вспомогательная задача
о параллельном переносе силы.
Докажем лемму:
Сила, приложенная в какой-либо точке твердого тела, экви-
валентна такой же силе, приложенной в любой другой точке
этого тела, и паре сил, момент которой
равен моменту данной силы относительно
новой точки приложения.
Пусть в точке А твердого тела приложена
сила F (рис. 4.1). Приложим теперь в точ-
ке В тела систему двух сил F' и F", экви-
валентную нулю, причем выбираем F' = F
(следовательно, F" = — F). Тогда сила
F —(F, F', F”), так как (F', F") — 0.
Но, с другой стороны, система сил
(F, F', F") эквивалентна силе F' и паре сил
(F, F"); следовательно, сила F эквивалентна силе F' и паре
сил (F, F"). Момент пары (F, F") равен
M = M(F, Г) = ВА X F,
т. е. равен моменту силы F относительно точки В
M = MB(F).
Таким образом, лемма о параллельном переносе силы доказана.
§ 4.2. Основная теорема статики
Введем определения. Пусть дана произвольная система сил
(Fn F2, ..., F„). Сумму этих сил
п
F=S Fa
k = 1
называют главным вектором системы сил.
§4 2]
ОСНОВНАЯ ТЕОРЕМ \СТАТИКИ
57
Сумму моментов сил относительно какого-либо полюса (центра
приведения) называют главным моментом рассматриваемой системы
сил относительно этого полюса.
Пользуясь теперь леммой о параллельном переносе силы,
докажем следующую основную теорему статики (теорема Пуансо):
Всякую пространственную систему сил в общем случае можно
заменить эквивалентной системой, состоящей из одной силы,
приложенной в какой-либо точке тела (центре приведения) и равной
главному вектору данной системы сил., и одной пары сил, момент
которой равен главному моменту всех сил относительно выбран-
ного центра приведения.
Следовательно, основная теорема статики устанавливает закон
эквивалентной замены произвольной системы сил более простой
системой, состоящей из одной силы и одной пары.
Рис 4 2.
Пусть О — центр приведения, принимаемый за начало коор-
динат, г1( г2, г3, ..., гп — соответствующие радиусы-векторы точек
приложения сил F1( F2, F3, ..., F„, составляющих данную систему
сил (рис. 4.2, а). Прежде всего перенесем силы Flt F2, F3, ..., F„
в точку О, а затем сложим эти силы как сходящиеся; в резуль-
тате получим одну силу:
Ро = Рх+Р2 + ... + Р„= 2 F*>
которая равна главному вектору (рис. 4.2,6). Но при последователь-
ном переносе сил Fn Fa, ..., Fn в точку О мы получаем каждый раз
соответствующую пару сил (F1( F'(), (F2, F2), (F„, F„).
Моменты этих пар соответственно равны моментам данных
сил относительно точки О:
^ = №(1^ FI)=r1xF1=M0(F1),
M2 = M(F2, F.J =r2 X F2 = Mo (F2), ед n
Mn = M(F„, F;) = r„ X F„ = Mo (F„).
58
ОСНОВНАЯ ТЕОРЕМА СТАТИКИ
[ГЛ IV
На основании правила приведения системы пар к простейшему
виду все указанные пары можно заменить одной парой. Ее момент
равен сумме моментов всех сил системы относительно точки О,
т. е. равен главному моменту, так как согласно формулам (3.18)
и (4.1) имеем (рис. 4.2, в)
Мо = + М2 +. • 4~ Мл =
= M0(F1) + M0(F2) + ... +M0(F„)= 2 Мо (Fft)= V ffex Fft.
k=\ k=\
Итак, систему сил, как угодно расположенных в пространстве,
можно в произвольно выбранном центре приведения заменить
силой
Fo= £ Fft (4.2)
k=i
и парой сил с моментом
Мо= £ M0(F*)= £ rftxFft. (4.3)
/г = 1 /г = 1
Не следует считать, что главный вектор и главный момент
имеют чисто формальное значение и что их можно найти только
с помощью вычислений. Очень часто отдельно действующие на
тело силы нельзя определить даже опытным путем, в то время
как главный вектор или главный момент находятся сравнительно
легко. Поясним это примером. Рассмотрим вал, находящийся
в подшипниках скольжения. При вращении вала на точки его
поверхности действуют со стороны подшипника силы трения.
Число точек контакта и модули сил трения, как правило, нам
не известны. Не всегда их можно определить и с помощью
эксперимента, однако простым измерением находится сумма момен-
тов всех сил трения относительно оси вращения, т. е. главный
момент сил трения.
По тем же соображениям момент силы и момент пары сил
также не следует рассматривать только как формальные величины,
введенные для удобства доказательства. В технике очень часто
проще задать не силу или пару, а их моменты. Например, в характе-
ристику электромотора входит не сила, с которой статор действует
па ротор, а вращающий момент.
§ 4.3. Аналитическое определение главного вектора
и главного момента пространственной системы сил
Определим модули и направления векторов Fo и Мо. Пусть
декартова система координат Oxyz имеет начало в центре при-
ведения О. Тогда проекции силы Fo на координатные оси
§ 4.31 АНАЛИТИЧЕСКОЕ ОПРЕДЕЛЕНИЕ ГЛАВНОГО ВЕКТОРА 59
найдутся из соотношений:
f ox = 2 ^kx ~ F1А 4" Fzx 4“ • • • + F пх,
Foy = У, Fky — Fiy + F2.j + . • • + Fny, (4.4)
FOz = У Fkz = Flz + F2z + • • • + Fnz.
fe=i
Модуль силы Fo равен
_____________________ Г I П \2 I !i \2 I n \2
Fo = l^Fbx + Fo.v + F’oz = 1 / I У F кх ) 4- । У Fkll\ + У Fkz | ,
Г 4=1 / A=1 I 4=1 I
(4-5)
а направление определяется направляющими косинусами
cos(a, Fo) = ^~, cos (у, Fo) = cos(z, Fo) (4.6)
Для проекций вектора Мо имеем (см. (3.10))
44o.v= У Af0.r(F*) = У (ykFkz-tkFky),
х—\ fe=l
44О!/= У Afoy (Ffc) = У ^kFkx-xkFkz), (4.7)
k=\ k= 1
MOz = у AWFft) = У (XtFky-ykFkJ.
k=i *=i
Следовательно, модуль и направление вектора Мо определя-
ются формулами
Мо = У М 2ох + Мъу 4~ Л'/’ох, (4-8)
cos (а, Мо)=^-, cos (у, Мо) cos (г, Мо)=^. (4.9)
то "о т0
При приведении пространственной системы сил к одной силе
и одной паре сил угол между направлением главного вектора и
направлением главного момента может получиться любым в зави-
симости от действующих сил. Для определения этого угла вос-
пользуемся формулой, выражающей скалярное произведение век-
торов Fo и Мо:
Fo • Мо — F()M0 cos (Fo, Мо).
60
ОСНОВНАЯ ТЕОРЕМА СТАТИКИ
[ГЛ. IV
F,, • М„ Fr!,.M,t,.'- Fn:MFn Мп_
cos(Fo> Мо) = -А^ = Рл м (4Л0)
ro/wo 'ол'о
или, в соответствии с формулами (4.6) и (4.9),
cos (Fo, Мо) = cos (х, Fo) cos (x, Mo) 4- cos (//, Fo) cos (y, Mo) -f-
4- cos (г, Fo) cos (г, Mo). (4.11)
Выясним, как будут меняться сила и пара сил, к которым
приводится рассматриваемая система сил, при перемене центра
_ приведения. Так как сила Fo равна глав-
к ному вектору, т. е. сумме всех сил системы,
г г> то для любого центра приведения она будет
ту/ одной и той же. Если в качестве нового
/ центра приведения взята точка СЦ, то
° F01 = F0=£Ffc. (4.12)
Рпс. 4 3. k= 1
Для центра приведения Ох момент пары равен главному
моменту относительно этого центра приведения
Мо, = 2 г,' х Fb (4.13)
k=i
где г£ — радиус-вектор точки приложения силы Fft, проведенный
из нового центра приведения Ох (рис. 4.3). Из рассмотрения
рис. 4.3 видно, что
r'k = rk + O^O.
Подставив значение г'к в формулу (4.13), получим
Мо, = £ r*xFft= 2 (rfe 4- б]О) Ffe = rftxFft4-t\Ox J] F*.
ь=1 k=.i
откуда на основании формул (4.2) и (4.3)
Мо, = Мо 4- Ofi х Fo = Мо + Мо, (Fo), (4.14)
т. е. момент пары, а следовательно, и главный момент при пере-
мене центра приведения изменяются на момент силы, равной
главному вектору, приложенному в старом центре приведения, отно-
сительно нового центра приведения.
Из формулы (4.14) следует, что если в каком-либо центре
приведения, например, точке О, Fo=0 и Мо =0, то и для любого
центра приведения Oj будет
Fo,-0, Мо, =0.
§4 4] УСЛОВИЯ РАВНОВЕСИЯ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ
61
силой Fn. В
Приведение произвольной системы сил к силе и паре сил не
является единственным способом приведения к простейшему виду
(хотя и применяется наиболее часто). Возможен другой вариант
приведения; согласно этому варианту
система сил, как угодно расположенных
в пространстве, может быть приведена
к двум силам, в общем случае не лежа-
щим в одной плоскости.
В самом деле, пусть произвольная
система сил приведена в данном цент-
ре О к силе Fo* и паре сил с момен-
том Мо. Выберем силы, составляющие
пару,равнымиРиР'(Р = — Р'); приложим
одну из них (например, Р') в центре
приведения (рис. 4.4) и сложим ее с
получим силу Q = Fq + Р', уже не лежащую в плоскости дей-
ствия пары (Р, Р').
Таким образом, пространственная система сил приведена к
двум силам Q и Р, которые в общем случае не лежат в одной
плоскости.
§ 4.4. Условия равновесия пространственной системы сил
В этом параграфе мы обратимся ко второй задаче статики
и установим условия, при которых пространственная система
сил эквивалентна нулю, т. е. условия ее равновесия. Докажем тео-
рему.
Для равновесия пространственной системы сил необходимо
и достаточно, чтобы главный вектор и главный момент этой
системы равнялись нулю.
Достаточность сформулированных условий вытекает из того,
что при Fo = 0 система сходящихся сил, приложенных в центре
приведения О, эквивалентна нулю, а при Мо = 0 система пар
сил зквивалентна нулю. Следовательно, исходная система сил экви-
валентна нулю.
Докажем необходимость этих условий. Пусть данная система
сил эквивалентна нулю. Приведя систему к двум силам, заме-
тим, что в нашем случае система сил Q и Р (рис. 4.4) должна
быть эквивалентна нулю, следовательно, эти две силы должны
иметь общую линию действия и, кроме того, должно выпол-
няться равенство Q = — Р. Но в рассматриваемом нами случае
это может быть, если линия действия силы Р проходит через
точку О, т. е. если li — О. А это значит, что главный момент
равен нулю (Мо = 0). Далее, так как Q + Р = 0, a Q = F04-P',
то Fo-|-P'-|-P = 0, и, следовательно, Fo=0.
62
ОСНОВНАЯ ТЕОРЕМА СТАТИКИ
[ГЛ. IV
Итак, необходимые и достаточные условия равновесия про-
странственной системы сил будут иметь вид
Fo = 0, Мо=0
(4-15)
или, в проекциях на координатные оси,
Fox = У Fhx = Fix + Flx + ... + Fпх — О,
1
FOy = У Fky = Fiy + F2tJ + ... + Fny = 0, (•
i
Foz = У Fkz == Fu + F2z + ... + Fnz = 0,
A=1
(4-16)
Mqx = У MOx (Fk) = MOx (FJ + MOx (F2) + ... Mox (Fn) — 0,
A=1
Moy = S MOtJ (F*) = Moy (Fl) + MOtJ (F2) + ... + AfOv (F„) = 0, •
n
Mqz = У MQz (Fa) = MOz (Fj) MOz (Fa) 4- ••• 4“ MOz (F„) = 0.
/г- i
(4-17)
Таким образом, при решении задач о равновесии простран-
ственной системы сил, приложенных к твердому телу, мы имеем
приведения точку А, тогда
возможность из уравнений (4.16) н
(4.17) определить шесть неизвестных
величин.
Замечание. О невозможности приведения
пары сил к равнодействующей. Проведем дока-
зательство от противного. Пусть пара сил
(Fj, FJ) приводится к равнодействующей R,
приложенной к какой-либо точке А тела.
Тогда эта пара и сила R'(R' =—R), прило-
женная в точке А, эквивалентны нулю (рис.
4.5). На основании только что доказанного
гтавный вектор и главный момент этой системы
должны быть равны нулю. Примем за центр
главный момент Мд 0 и равен моменту пары
(Fi, F[); главный вектор тоже не равен нулю (Ед=Р'=^0). Следовательно,
предположение о существовании равнодействующей для пары сил неспра-
ведливо.
Уравнения равновесия для более частных систем сил могут
быть получены из уравнений (4.16) и (4.17).
§ 4.4] УСЛОВИЯ РАВНОВЕСИЯ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ 63
1. Равновесие пространственной системы параллельных сил.
Направим ось z параллельно линиям действия сил (рис. 4.6).
Тогда проекции сил F* на оси х и у равны
нулю (Fkx = 0, Fky == 0) и остается удов-
летворить только одному из уравнений
группы (4.16):
п
Foz — У Fkz = Fiz FZz .. -f- Fnz = 0.
fe=l
(4.18)
Во второй группе уравнений (4.17)
последнее выполняется тождественно, так
как силы параллельны оси z (Л40г(Рг.) = 0), и остаются только
два уравнения:
МОх = £ MOx(Fft) = МОх (F.) 4- MQx (F2) 4-
4-... 4-Л4оЛ-(Р„) = 0, ,
Д (4.19)
Моу = У МОу (Рk) = МОу (Fх) 4- МОд (F2) 4-
+ ...4-Afo«(F„) = 0.
2. Равновесие плоской системы сил.
Для плоской системы сил из уравнений первой группы оста-
нутся два уравнения:
Fox = J1, Fkx = F1Л- 4- Fix 4- ... 4- F„x = 0,
(4-20)
Foy = У Fky = Fly 4- Fzy 4- ... 4- Fny = 0.
k= i
Из уравнений второй группы два первых удовлетворяются
тождественно, так как силы лежат в одной плоскости с осями х
и у (рис. 4.7). Остается только третье уравнение:
п
MOz - И MOz (Fft) = MOz (Fx) 4- MOz (F2) 4- •.. 4- MOz (F„) = 0.
(4.21)
3. Равновесие плоской системы параллельных сил.
Условия равновесия для этого частного случая следуют из
Уравнений (4.20) и (4.21). Направим ось у параллельно линиям
64
ОСНОВНАЯ ТЕОРЕМА СТАТИКИ
[ГЛ IV
действия сил (рис. 4.8). Тогда первое из уравнений (4.20) удов-
летворяется тождественно (для любой системы параллельных
сил на плоскости) и остаются только два уравнения равновесия:
Fоу = У1. Fky = Flu + Fiy -f- ... -f- FniJ = 0,
k = i (4.22)
МОг= £ Af0z(Fft) = M0z(F1) + M0XF2)+ ... 4-A4Oi(F„) = 0.
k= i
Напомним, что при составлении уравнений равновесия (4.17)
за центр приведения может быть выбрана любая точка (см. § 4.3).
ГЛАВА V
ПЛОСКАЯ СИСТЕМА СИЛ
§5.1. Приведение плоской системы сил к простейшему виду
Рассмотрим систему сил (F1; F2, F„), расположенных в од-
ной плоскости. К этому случаю приводится весьма большое чис-
ло практических задач техники. Совместим с плоскостью распо-
ложения сил систему координат Оху и, выбрав ее начало в ка-
честве центра приведения, согласно основной теореме статики
(§ 4.2) приведем рассматриваемую систему сил к одной силе
п
f0 = j;fa> (5.1)
k=i
равной главному вектору, и к паре сил, момент которой равен
главному моменту
М0=£М0(РД (5.2)
k = 1
где Mo(F4) — момент силы Fft относительно центра приведения О*).
Так как силы расположены в одной плоскости, то сила Fo
также лежит в этой плоскости. Мо-
мент же пары Мо направлен перпен-
дикулярно этой плоскости, так как
сама пара расположена в плоскости
действия рассматриваемых сил. Та-
ким образом, для плоской системы
сил главный вектор и главный мо-
мент всегда перпендикулярны друг
другу (рис. 5.1).
При рассмотрении плоской системы сил мы имеем дело с па-
рами, расположенными в плоскости действия сил. Поэтому в плос-
*) Здесь и в дальнейшем на протяжении всей пятой главы предполагается,
что все силы расположены в одной плоскости ху и что точки, относительно ко-
торых вычисляются моменты, лежат в плоскости действия сил. Ось г, перпен-
дикулярная плоскости действия сил, на рисунках не показывается.
3 Бутенин Н. В. и др.
66
ПЛОСКАЯ СИСТЕМА СИЛ
[ГЛ. V
системах нет необходимости придавать векторный смысл моменту
пары. Момент полностью характеризуется алгебраической величи-
ной Мг, равной произведению плеча пары на величину одной из сил,
составляющих пару, взятой со знаком плюс, если «вращение» пары
происходит против хода часовой стрелки, и со знаком минус,
если оно происходит по ходу часовой стрелки. Иными словами,
за момент пары в плоских системах принимается проекция век-
тора момента пары на ось г,
перпендикулярную плоскости
действия сил.
Пусть, например, даны две
пары, (Fj, F{) и (F2, F2)
(рис. 5.2); тогда согласно дан-
ному определению имеем
Af^Fi, Fi) = A1F1, -а
AMF2, f^-w
Аналогично, моментом силы относительно точки будем назы-
вать алгебраическую величину, равную проекции вектора момента
силы относительно этой точки на ось, перпендикулярную плос-
кости, т. е. равную произведению модуля силы на плечо, взятому
с соответствующим знаком. Для случаев, изображенных на
рис. 5.3, а и б, соответственно будет
MozlFJ^hF,, M0,(F2) = -hF2. (5.4)
Индекс z в формулах (5.3) и (5.4) сохранен для того, чтобы
указать на алгебраический характер моментов.
Модули же момента пары и момента силы обозначаются
следующим образом:
Af(F, F') = |^(F, Г) I, Mo(F) = |Mo,(F)|.
Исходя из этих определений, для нахождения главного мо-
мента вместо формулы (5.2) будем пользоваться формулой
Af0,= £ AWF,).
й = 1
(5-5)
§ 5.1] ПРИВЕДЕНИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ К ПРОСТЕЙШЕМУ ВИДУ 67
Формула (4.14), определяющая изменение главного момента
при перемене центра приведения, примет вид
44oiz = 2Woz + A4oiz(Fo). (5-6)
Для аналитического определения главного вектора применя-
ются формулы:
Дэл,- = У1, Fkx — Fix + F<ix +... FПх,
k:1 (s-n
Foy — S Fky = Flu 4- Fiy +... 4- Fny,
k = i
Fo = VFbx + Fby = 1/ (S FkJ 4- (S F J, (5.8)
V \k = i / \fe = i /
cos(x, Fo) = -^, cos (y, Fo) = -^-. (5.9)
f о ro
Согласно формулам (5.5) и (3.11) главный момент равен
МОг = yiMOs^k')=yi{xkFky-ykFkx'), (5.10)
ft=i k=i
где xh, yk — координаты точки приложения силы Fft,
Докажем теперь, что если главный вектор плоской системы
сил не равен нулю, то данная система сил эквивалентна одной
силе, т. е. приводится к равнодействующей.
Рис. 5.4.
Пусть для выбранного центра приведения главный вектор
и главный момент не равны нулю, т. е. Fo 0, МОг ф 0
(рис. 5.4, а). Дуговая стрелка на рис. 5.4, а символически изо-
бражает пару с моментом МОг. Пару сил, момент которой равен
главному моменту, представим в виде двух сил F5 и FJ, равных
по модулю главному вектору Fo, т. е. F1 = F[ = F0. При этом
одну из сил (F[), составляющих пару, приложим к центру
3*
68
ПЛОСКАЯ СИСТЕМА СИЛ
[ГЛ V
приведения и направим в сторону, противоположную направ-
лению силы Fo (рис. 5.4, б). Тогда система сил Fo и F[
эквивалентна нулю и может быть отброшена. Следовательно,
заданная система сил эквивалентна единственной силе F1( прило-
женной к точке 01, эта сила и является равнодействующей.
В дальнейшем равнодействующую будем обозначать буквой R,
т. е. Fi = R. Очевидно, что расстояние h от прежнего центра
приведения О до линии действия равнодействующей можно
найти из условия \MOz\ = hF1 = hF0, т. е.
Расстояние h нужно отложить от точки О так, чтобы момент
пары сил (Fx, FJ)совпадал с главным моментом МОг (рис. 5.4, б).
В результате приведения системы сил к данному центру могут
встретиться следующие случаи:
1. Fo#=0, MOz^0.
В этом случае система сил может быть приведена к одной
силе (равнодействующей), как это показано на рис. 5.4, в.
2. Fo=#0, MOz = 0.
В этом случае система сил приводится к одной силе (равно-
действующей), проходящей через данный центр приведения.
3. Fo = 0, МОг^0.
При этом система сил эквивалентна одной паре сил.
4. Fo = 0, МОг = 0.
В этом случае рассматриваемая система сил эквивалентна
нулю, т. е. силы, составляющие систему, взаимно уравновешены.
Для системы сил, которая приводится к равнодействующей,
справедлива следующая теорема о моменте равнодействующей.
Теорема Вариньона. Если рассматриваемая плоская система
сил приводится к равнодействующей, то момент этой равно-
действующей относительно какой-либо точки равен алгебраической
сумме моментов всех сил данной системы относительно той же
самой точки.
Предположим, что система сил приводится к равнодействующей
R, проходящей через точку О. Возьмем теперь в качестве центра
приведения другую точку Ох. Главный момент (5.5) относительно
этой точки равен сумме моментов всех сил:
п
MOlZ=SAlO1Z(FJ. (5.11)
k=t
С другой стороны, на основании формулы (5.6) имеем
Mo,z=MOiz (R), (5.12)
§5 1] ПРИВЕДЕНИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ К ПРОСТЕЙШЕМУ ВИДУ
69
так как главный момент для центра приведения О равен нулю
(Мог —0). Сравнивая соотношения (5.11) и (5.12), получаем
п
М012 (R) — 2 М012 (Fft);
k = i
(5.13)
это и доказывает сформулированную теорему.
При помощи теоремы Вариньона можно найти уравнение
линии действия равнодействующей. Пусть равнодействующая R3
приложена в какой-либо точке О, с координатами х и у (рис. 5.5)
и известны главный вектор Fo и главный момент Мо, при центре
приведения в начале координат. Так как Ri = F0, то составляю-
щие равнодействующей по осям х и у равны Ria = Fo.v==^o.J
и Rli/ = FOz/ = FOvj- Согласно тео-
реме Вариньона момент равнодей-
ствующей относительно начала
координат равен главному момен-
ту при центре приведения в начале
координат, т. е.
МОг = А10г (Rj) = xFOy - yFOx. (5.14)
Величины МОг, FOx и FOl/ при пе-
реносе точки приложения равно-
действующей вдоль ее линии дей-
ствия не изменяются, следователь-
но, на координаты х и у в урав-
нении (5.14) можно смотреть как
на текущие координаты линии
действия равнодействующей. Та-
ким образом, уравнение (5.14) есть
уравнение линии действия равно-
действующей. При FOx^Q его
можно переписать в виде
Рис. 5.6.
Задача 5.1. Равнодействующие Р и F
сил давления воды на гравитационную
плотину приложены в вертикальной
плоскости симметрии перпендикулярно
соответствующим граням на расстояниях
Я = 4ли Л = 2,4 м от основания (рис. 5.6). Сила тяжести Gj прямоугольной
части плотины приложена в ее центре, а сила тяжести G2 треугольной
части--на расстоянии одной трети от вертикальной грани треугольного сече-
ния.
Определить равнодействующую распределенных сил реакции грунта, на
котором установлена плотина, если Р = 2000 Т, /?=1300 Т G, =3000 Т
G3=1500 Т, а = 5 м, 6 = 10 м, tga = 5/12.
70
ПЛОСКАЯ СИСТЕМА СИЛ
[ГЛ V
Прежде всего найдем равнодействующую заданных сил Р, F, Gj и G2,
приложенных к плотине Для вычисления главного вектора Fo и главного
момента МОг относительно начала координат О нам понадобятся значения
sin a, cosa и координаты точки А. Так как tga = 5/12, то sina = 5/13,
cos a = 12/13. По условию задачи {/Л = Д = 2,4 м. Из треугольника АВС найдем
СВ =fttga = l м. Следовательно, хл = 9 м. Согласно формулам (5.7) и (5,10)
имеем
FOx=P — F cos a = 800 т,
FOy = — Gi-Gi-F sina = — 5000 T,
M^-PH-G^-G^a + ^kb-a)] + *AFg-yAFx = -27200 T.
Главный вектор не равен нулю, поэтому система заданных сил Р, F, Gi,
G2, приложенных к плотине, приводится к равнодействующей R2=F0, модуль
которой равен
£ = ^ = /^ + /^5060 Т.
Уравнение линии действия равнодействующей найдем по формуле (5.14):
25x4-4^—136 = 0.
На рис. 5.6 показана равнодействующая R заданных сил, приложенных
к плотине. Равнодействующая реакция грунта действует по той же прямой,
но она направлена в сторону, противоположную R. Модули этих сил, конечно,
равны между собой.
§ 5.2. Условия равновесия плоской системы сил
Как было установлено в главе IV, необходимым и достаточ-
ным условием равновесия системы сил является равенство нулю
главного вектора и главного момента. Для плоской системы сил
эти условия получают вид
п п
Fo — S F* = °, МОг= МоДР*) = 0, (5.15)
k=i k=i
где О — произвольная точка в плоскости действия сил.
На основании (5.15) и (5.7) имеем
Fox — 2 4" 4" • • • 4" F пх — 0,
6 = 1
п
Fоу = 2 F'fey = Д1у 4* Fiy 4- • • • 4- Fny = 0,
А = 1
п
Mqz = У ^Ог (Fk) = MOz (Fl) + М-Oz (Рг) 4-
А = 1
+...+ад)=о,
(5.16)
§5 2] х УСЛОВИЯ РАВНОВЕСИЯ ПЛОСКОЙ СИСТЕМЫ СИЛ
71
т. е. для равновесия плоской системы сил необходимо и доста-
точно, чтобы алгебраические суммы проекций всех сил на две
координатные оси и алгебраическая сумма моментов всех сил
относительно произвольной точки равнялись нулю.
Возможны также другие формы уравнений равновесия.
Второй формой является равенство нулю алгебраических сумм
моментов всех сил относительно любых трех точек, не лежащих
на одной прямой:
S МЛг(РА) = 0,
й = 1
А=1
2МсДРл)=0,
л=1
(5-17)
где А, В и С — указанные точки.
Необходимость выполнения этих трех равенств в случае равно-
весия системы сил вытекает из условий (5.15), и нам остается
доказать их достаточность. Предположим, что все равенства
(5.17) выполняются. Равенство нулю главного момента при
центре приведения в точке А возможно, либо если система при-
водится к равнодействующей (R=^0) и линия ее действия прохо-
дит через точку А, либо R = 0; аналогично равенство нулю
главного момента относительно точек В и С означает, что либо
R=y=0 и равнодействующая проходит через обе точки, либо
R = 0. Но равнодействующая не может проходить через все эти
три точки А, В и С (по условию они не лежат на одной прямой).
Следовательно, равенства (5.17) возможны лишь при R = 0, т. е.
система сил находится в равновесии.
Заметим, что если точки А, В и С лежат на одной прямой,
то выполнение условий (5.17) не будет достаточным условием
равновесия, — в этом случае система может быть приведена к равно-
действующей, линия действия которой проходит через эти точки.
Третьей формой уравнений равновесия плоской системы сил
является равенство нулю алгебраических сумм моментов всех сил
системы относительно двух любых точек и равенство нулю алгебраи-
ческой суммы проекций всех сил системы на ось, не перпендику-
лярную прямой, проходящей через две выбранные точки:
п п п
ЦМЛг(Р,) = 0, £Мвг(1\) = 0, ^Fkx = Q (5.18)
*-~i k=i k=i
(ось x не перпендикулярна отрезку АВ).
72
ПЛОСКАЯ СИСТЕМА СИЛ
(ГЛ. V
Необходимость выполнения этих равенств для равновесия сил
вытекает непосредственно из условий (5.15). Убедимся в том, что
выполнения этих условий достаточно для равновесия сил.
Из первых двух равенств, как и в предыдущем случае, выте-
кает, что если система сил имеет равнодействующую, то ее линия
действия проходит через точки А и В (рис. 5.7). Тогда проекция
равнодействующей на ось х, не перпендикулярную отрезку АВ,
окажется отличной от нуля. Но эта возможность исключается
/ - п \
третьим уравнением (5.18) (так как Rx— У Fkx . Следовательно,
\ k =- 1 /
равнодействующая должна равняться нулю и система находится
в равновесии. Понятно, что если ось х будет перпендикулярна отрез-
ку АВ, то уравнения (5.18) не будут достаточными условиями
равновесия, так как в этом случае система
может иметь равнодействующую, линия дей-
ствия которой проходит через точки А и В.
\ Таким образом, система уравнений равно-
/ весия может содержать одно уравнение мо-
ментов и два уравнения проекций, либо два
уравнения моментов и одно уравнение проек-
ций, либо, наконец, три уравнения моментов.
Отметим, что при составлении любой из
форм уравнений равновесия выбор коорди-
натных осей и точек, относительно которых
сил, вообще говоря, произволен. Однако для
получения наиболее простых уравнений равновесия (каждое
из которых содержит минимальное число неизвестных) целесо-
образно координатные оси проводить перпендикулярно неизвест-
ным силам, а указанные точки выбирать на пересечении линий
действия неизвестных сил.
При рассмотрении равновесия несвободного твердого тела на
основании принципа освобождаем ости заменяем действие связей
их реакциями. Значит, если число этих заранее неизвестных ре-
акций будет равно числу уравнений равновесия, в которые реак-
ции входят, то задачу их определения можно выполнить. Если
же число неизвестных реакций будет больше уравнений равнове-
сия, содержащих реакции, то задача становится статически не-
определимой.
Среди плоских задач статики особого рассмотрения заслужи-
вает случай плоской системы параллельных сил. Хотя для этой
системы главный вектор и главный момент по-прежнему опреде-
ляются формулами (5.1) и (5.5), но фактические вычисления зна-
чительно упрощаются.
Пусть линии действия всех сил параллельны оси у (рис. 4.8).
Тогда уравнения равновесия для рассматриваемой системы
Рис. 5.7,
;тся моменты
§ 5.2]
УСЛОВИЯ РАВНОВЕСИЯ ПЛОСКОЙ СИСТЕМЫ СИЛ
73
параллельных сил будут
п
2 ^=0,
6 = 1
п
S AWF*) = 0.
fe=i
(5.19)
В соответствии с (5.17) уравнения равновесия можно также
записать в виде
п п
S MAz (Fft) = 0, 2 <F*> = °- (5-20)
fe = I А=1
причем точки Л и В не должны лежать на прямой, параллель-
ной оси у (если точки А и В будут лежать на прямой, парал-
лельной оси у, то эти уравнения будут удовлетворяться при
равнодействующей, отлич-
ной от нуля, если ее ли-
ния действия проходит че-
рез указанные точки).
В заключение этого па-
раграфа отметим, что си-
стема сил, действующих на
твердое тело, может со- б)
стоять как из сосредоточен-
ных (изолированных) сил,
так и распределенных сил.
Различают силы, распреде-
ленные по линии, по по- v
верхности и по объему тела.
Так, например, давление
тяжелого цилиндрического
катка на горизонтальную Рис. 5.8.
опорную поверхность (рис.
5.8, а) представляет собой силы, распределенные вдоль линии
(в данном случае — вдоль прямой). Давление газа на стенки со-
суда может служить примером сил, распределенных по поверх-
ности (рис. 5.8, б). Действие сил тяжести (рис. 5.8, в) иллюстри-
рует случай сил, распределенных по объему тела.
Распределенные силы задаются их интенсивностью. Так,
например, для объемных сил сначала вводится понятие средней
интенсивности силы в окрестности рассматриваемой точки тела
Здесь ДР —объем элемента, выделенного в окрестности точки,
ДР —сила, действующая на этот элемент. Тогда
р* =
lira
ду-о
SF
SV
А * — _
Гср~ А1/ •
74
ПЛОСКАЯ СИСТЕМА СИЛ
[ГЛ. V
называется интенсивностью силы, распределенной по объему
в данной точке тела.
Аналогично вводится понятие интенсивности для силы, рас-
пределенной по поверхности и по длине линии:
lim
Да-» О
AF
До ’
F*„ =
lim
As-»0
AF
As/
где До и As — соответственно
длины линии.
элементарная площадь и элемент
& г
Рис. 5 9.
Очень часто интенсивность силы называют силой, отнесенной
к соответствующей геометрической единице — длине, площади или
объему. Соответственно этому единицами интенсивности служат
кГ/см?, кГ/см2 и кГ/см.
Понятно, что в простейших случаях (см., например, рис. 5.8,а)
интенсивность определяется простым делением полной силы
давления на длину, площадь или объем участка ее приложе-
ния.
В ряде случаев силы оказываются неравномерно распределен-
ными. Так, на рис. 5.9, а изображено давление воды на стенку
плотины, оно переменно и зависит от глубины, т. е. от коорди-
наты z. На рис. 5.9, б показан случай, когда давление сыпучего
тела на основание является функцией двух координат х и у
из-за переменной толщины слоя.
§ 5.3. Задачи на применение уравнений равновесия
Задача 5.2. Однородная гладкая балка АВ весом Р — 2 кн, закрепленная
в точке А при помощи шарнира, опирается в точке С на стену. В точке В
подвешен груз Q=1 кн. Определить опорные реакции в точках А и С, если
балка составляет с горизонтом угол а=30°, h=\ м и 1 = 3 м (рис. 5.10, а).
§5 31
ЗАДАЧИ НА ПРИМЕНЕНИЕ УРАВНЕНИЙ РАВНОВЕСИЯ
75
Образуем силовую схему, заменив действие связей их реакциями. Реакция
в точке А не известна ни по величине, ни по направлению, поэтому будем
искать эту реакцию через ее проекции XА и Yл; реакция в точке С направ-
лена перпендикулярно балке (рис. 5.10, б).
Уравнения равновесия напишем в форме (5.16):
k=l
X Р^ = ^л-Р + Хссо830э-С=0,
k=l
п
2 МаЛ^) = ~Р {coS30s + .Vc-A^-Q/cos30»=0;
fe=i
отсюда находим
ЛГг = (P+2Q) I sin 60® «а 2,6 кн, -
о 4/i
х. = (-±2^- i cos зо°«а1,3 кн,
л on
YA = P + Q- 1 sin2 60° «= 2,25 кн.
Задача 5.3. Ферма опирается на неподвижный шарнир А и каток В,
который может без трения перемещаться по наклонной плоскости. Определить
реакции опор А и В, если к ферме приложены силы Р = 3 Т и PL = 6 Т
(рис. 5.11, а),
76
ПЛОСКАЯ СИСТЕМА СИЛ
(ГЛ V
Заменяя действие опор реакциями, составляем силовую схему (рис. 5.11, б).
Уравнения равновесия возьмем в форме (5.17). В качестве точек, относительно
которых составляются уравнения моментов, выберем точки А, В и С. Урав-
нения равновесия при этом будут
п
Az\ kl 'В cos 450 12 cos 45
k = i
n
2 ^(РА) = -Ул2а + Р1^^-+Ра=0,
n
2 Л1сИ^) = ^-^+^2^==0:
fc = l
отсюда находим
дг =—Г/ -да 5,13 T,
B 2/2
Р /2~ pi
Ха= 2/2 ^°’63 Т‘
Ул=—;<2/Р1д=3,б2 Т.
А 2/2
Задача 5.4. К балке, изображенной на рис. 5 12, а, приложены: сосредо-
точенная сила F = 1600 кГ и равномерно распределенная нагрузка интенсив-
ности q=120 кГ/м. Угол a = 30J, а = 3 м, Ь = 7 м, (=12 м. Вес балки Р —
= 500 кГ. Определить реакции опор.
$5 31 ЗАДАЧИ НА ПРИМЕНЕНИЕ УРАВНЕНИЙ РАВНОВЕСИЯ 77
Действие опор на балку заменяем реакциями Хл, УА и Rfi, а распре-
деленную нагрузку —ее равнодействующей Q — q(l — b), приложенной в
середине отрезка DB (рис, 5.12, б). Уравнения равновесия имеют вид
2 MA4FJ = -fasina-p4“Q(Z' + 4^) + 7?fiZ = °-
fe=l
п
2 MBe(Fk) = -YAl + F(l-a)sma + P | + Q^ = 0,
k=l
n
1] ^v=XA-Fcosa=0.
k= 1
Решая эти уравнения, получаем
ХА = F cos a = 1390 кГ,
YA = F~(l7a} sina + 4 + Q^F^925 КГ,
Л I 2 2Л
Rb = F“- sina + -J- + QB^^688 kF.
Познакомимся теперь с особым видом связи, которая назы-
вается жесткой (или полной) заделкой. Эта связь препятствует
не только линейным перемещениям закрепленной точки тела,
но и повороту вокруг этой точки.
Такова, например, жесткая заделка левого конца балки
на рис. 5.13, а; этот конец оказывается полностью закрепленным —
невозможны его вертикальное и горизонтальное перемещения,
а также и поворот. Такая связь создает систему реакций,
состоящую (рис. 5.13, б) из двух составляющих Хл и Уд и пары,
момент которой обозначен через Л4*. Это следует из того, что
78
ПЛОСКАЯ СИСТЕМА СИЛ
[ГЛ. V
на заделанный конец балки действует распределенная нагрузка,
которую можно привести к силе, приложенной к точке А, и
к паре сил с моментом /И*.
Рис. 5.13.
Рис. 5.14.
Задача 5.5. К однородной балке, вес которой равен Q и длина I, в точке В
приложена сила Р (рис. 5.14, а). Определить реакции в месте заделки.
Силовая схема изображена на рис. 5.14, б. Уравнения равновесия будут
2 ^=^-<3-^=0.
*=1
п
k=i
отсюда имеем
хд = °- ya=.q+p,
§ 5.4. Задачи на равновесие системы тел
Рассмотрим задачу о нахождении опорных реакций трех-
шарнирной арки, которая состоит из двух частей, М и М,
имеющих шарнирные опоры Л и В и соединенных между собой
идеальным шарниром С (рис. 5.15, а). Если рассматривать эту
систему тел как одно твердое тело (аксиома 5), то будем иметь
три уравнения равновесия с четырьмя неизвестными ХА, Уд,
Хв, Ув (проекции опорных реакций в точках А и В).
Тем не менее эта задача статически определенная. Дело
в том, что в равновесии находятся два тела М и N, соединен-
ных между собой шарниром С, и можно рассматривать равно-
весие каждого тела в отдельности. Таким образом, число урав-
§ 5.4]
ЗАДАЧИ НА РАВНОВЕСИЕ СИСТЕМЫ ТЕЛ
79
нений равновесия будет равно шести —по три уравнения для
каждого тела. Действие тела N на тело М, передаваемое через
идеальный шарнир, может быть заменено одной силой, а дейст-
вие тела М на тело N может быть заменено такой же по модулю
силой, но противоположно направленной (аксиома 4).
Рассмотрим равновесие каждого тела в отдельности. На
рис. 5.15, б указаны силы, приложенные к телам М и N, при-
чем силы Хс и Yc представляют собой составляющие силы,
заменяющие собой действие тела N на тело М, а Х'с, Yc—
составляющие силы, заменяющие действие тела Л4 на тело У.
Для каждого тела мы можем составить по три уравнения
равновесия, т. е. всего шесть уравнений, неизвестных же тоже
будет шесть, так как в силу аксиомы 4
Хс = -Хс, Yc = -Y'c.
Указанный путь решения задачи, конечно, не единственный.
Можно, например, составить три уравнения равновесия для
тела М, а остальные три —для системы тел М и У, принимая
их за одно твердое тело, или составить уравнения равновесия
для тела N и уравнения равновесия для системы тел М и N,
как для одного твердого тела. Целесообразность применения того
или иного способа решения задачи зависит от условий конкрет-
ной задачи.
Задача 5.6. Два однородных стержня одинаковой длины соединены шар-
нирно в точке С и шарнирно закреплены в точках А и В. Вес каждого
стержня равен Р. В точке С к системе стержней подвешен груз Q. Расстоя-
ние AB — d. Расстояние точки С до горизонтальной прямой АВ равно Ь.
Определить реакции шарниров А и В (рис. 5.16, а).
Заменяя действие опор реакциями, рассмотрим сначала равновесие этой
системы в целом (рис. 5.16, б). Уравнения равновесия (5.16) в этом случае
80
ПЛОСКАЯ СИСТЕМА СИЛ
[ГЛ V
будут
S ^,=-*д+*В=0.
Й=1
£ ^=^+гв-2^-<2 = 0.
k = i
2 maHfJ = -p 4—<2 2-Рт + ^=°-
k = 1
Из этих уравнений находив
Уа = Ув-р + ^, *а = *в-
Для нахождения ХА рассмотрим теперь равновесие левого стержня. Сумма
Рис. 5.16.
моментов всех сил, приложенных к левому стержню, относительно С должна
быть равна нулю, т. е.
п
отсюда
^=^=4(Р+<?)-
Задача 5.7. Определить опорные реакции системы, состоящей из двух балок,
сочлененных идеальным шарниром, если Р1==10 Т, Р2 = 6 Т, а = 2 м. Конец
А балки АС защемлен, конец В балки СВ укреплен в катковой опоре
(рис. 5.17, а).
Рассмотрим равновесие каждой балки в отдельности. Мы получаем два
твердых тела, на которые действуют реакции внешних связей Хл, YА, М*, Yfi
§5 51
УСЛОВИЯ РАВНОВЕСИЯ ЧАСТИЧНО ЗАКРЕПЛЕННОГО ТЕЛА
81
И попарно равные силы взаимодействия Хс =—Xq, Yc= — Х'с. Таким обра-
зом общее число неизвестных равно шести.
Запишем уравнения равновесия в форме (5.16) для левой балки
(рис. 5.17, б):
1Хл = Ха + ХС = °-
А = 1
2^ = ^-/’1-ГС = 0-
—1
(Fft) = M*-P1a-Fc2a = 0;
для правой балки (рис. 5.17, в):
2^л=-хс=о.
Л = 1
2^=^с+^-^=°.
й=1
Рис. 5.17.
На основании аксиомы 4 (третьего закона Ньютона) модули сил Хс и X^t
а также сил Yc и Y'c, равны между собой, т. е ХС=Х'С и YC = Y'C. Учи-
тывая эти равенства и решая затем полученную систему уравнений, находим
Хл = 0, Хс = 0,
Уд=13 Т, Yc = 3 Т, YB = 3T, М*—32 Тм.
§ 5.5. Условия равновесия частично закрепленного тела
В некоторых случаях приходится рассматривать равновесие
частично закрепленных тел,
связи, допускающие некото-
рое перемещение тела. Два
примера такого рода изобра-
жены на рис. 5.18, а, б. Оче-
видно, что при произвольной
системе активных сил Fft,
приложенных к телу, равно-
весия не будет. Однако воз-
можны и такие случаи, когда
равновесие имеет место. Выяс-
ним у словия, которым должны
удовлетворять активные си-
лы, чтобы тело находилось
в равновесии. Прежде всего
т. е. тел, на которые наложены
Рис. 5.18.
остановимся па случае твердого
тела, имеющего неподвижную ось вращения; к телу приложена
система активных сил Fx, F2, F3, ..., F„, расположенная в плос-
82
ПЛОСКАЯ СИСТЕМА СИЛ
[ГЛ V
кости, перпендикулярной к оси вращения (рис. 5.18, а). Ось вра-
щения служит связью для рассматриваемого тела; согласно прин-
ципу освобождаемости действие связи заменяем реакцией N, при-
ложенной к точке А (предполагаем, что трение отсутствует).
Направление реакции N зависит от характера приложенных
к телу сил Fb F2, ..., F„. Напишем уравнения равновесия
в форме (5.18):
А^ + 2^ = о,
k=\
Л^+ 2^=0,
k= 1
S AU(F*) = 0.
*=i
Из первых двух уравнений можно найти обе составляющие реак-
ции N. В последнее уравнение N не входит. Это уравнение
устанавливает зависимость между активными силами, необходи-
мую для равновесия тела.
Таким образом, для рассматриваемого случая активные силы
должны удовлетворять одному уравнению
п
SAUO = 0. (5.21)
k=l
Обратимся теперь ко второму примеру (рис. 5.16, б), где
связью служит стержень. Направление реакции W фиксировано
и совпадает с осью стержня. Выбирая систему координат Вху,
как указано на рис. 5.18, б, имеем следующие уравнения равно-
весия:
и+ 2^=о,
k = \
Fky = Q,
k=\
п
S AU(Ffe) = 0.
*=i
Первое уравнение служит для определения реакции N. Два
остальных уравнения накладывают определенные требования на
систему активных сил. Таким образом, для равновесия тела не-
обходимо, чтобы активные силы в данном случае удовлетворяли
§ 5 61 ОПРЕДЕЛЕНИЕ НАПРЯЖЕНИЯ ТЯЖЕЛОЙ ПОДВЕШЕННОЙ НИТИ
83
двум условиям:
2^ = 0,
*= 1
п
2 M/UF*) = 0.
k=i
(5.22)
Последнее уравнение записано для точки тела В; понятно,
что его можно видоизменить, записав его для любой точки оси х.
§ 5.6. Определение натяжения тяжелой подвешенной нити
Задача об определении натяжения в подвешенной тяжелой нити
(рис. 5.19, а) связана с проблемой прочности тросов или проводов линий
электропередачи. Будем считать, что нить идеально гибкая и нерастяжимая
и что провисание нити происходит
только из-за различия между ее дли-
ной L и расстоянием между опорами I
(рис. 5.19, а).
Обозначим через q линейный
удельный вес нити. Для пологой кри-
вой можно принять, что вес равно-
мерно распределен не по кривой АОВ,
а по ее проекции АВ. Таким образом,
общий вес нити будем считать рав-
ным ql.
В соответствии с аксиомой 5 можно
рассматривать условия равновесия лю-
бой части нити. Рассмотрим, напри-
мер, правую половину нити; действую-
щие на нее силы изображены на
рис. 5.19, б. Заметим, что натяжение
в любом сечении нити направлено по
касательной к кривой в соответствую-
щем месте (это следует из предполо-
жения об идеальной гибкости нити).
Поэтому в нижней точке нити О,
принятой за начало координатной си-
стемы, натяжение горизонтально. Обо-
по вертикали между иижней
значив через f стрелу провеса (т. е. расстояние
точкой и опорами), запишем уравнение моментов
относительно точки В
п
k= 1
Здесь Р = ql/2 представляет
находим
собой вес половины нити. Из этого уравнения
X
ЛО- 8/ ’
(5.23)
отсюда, между прочим, ясно, что чем меньше стрела провеса нити f, тем
больше натяжение XQ.
Из двух уравнений для проекций сил на оси можно найти составляющие
Натяжения в точке В
V ___ X _Ч^ у ___ Ч^
лв-ло-8р
84
ПЛОСКАЯ СИСТЕМА СИЛ
[ГЛ V
а затем и полное натяжение в точке В
Второе слагаемое в сумме под знаком корня значительно меньше единицы,
и мы можем воспользоваться приближенной формулой
Гт+^1 + |,
достаточно точной для малых по модулю значений а. Тогда будет
Тъ^+qf. (5.24)
Этот результат определяет наибольшее натяжение нити, которое, впрочем,
мало отличается от наименьшего натяжения
Для вычисления и Т по найденным формулам необходимо знать стрелу
провеса f, а для этого требуется располагать уравнением кривой, по которой
провиснет нить. С этой целью рассмотрим часть нити, расположенную между
началом координат и произвольным сечением с абсциссой х (рис. 5.19, в).
Для этой части можно написать следующие уравнения равновесия (для проек-
ций сил на оси х и у)'.
—XQ Тх cos ф = О,
Тх sin ф — Рх - 0.
Здесь Px — qx-~вес рассматриваемой части нити, Тх — натяжение на правом
конце этой части.
Из первого уравнения можно заключить, что с удалением от нижней
точки, т. е. с увеличением угла ф, натяжение нити возрастает и достигает
максимума в точках подвеса.
Исключив из этих уравнений Тх, получим с учетом формулы (5.23)
Sfx
tg<₽ = -Z2-,
нот§ф=^х, и мы приходим к дифференциальному уравнению, определяю-
щему форму нити в положении равновесия:
Интегрируя его, получаем
4/х2
У=-гг+с-
Постоянную интегрирования С найдем из условия, что у = 0 при х = 0;
отсюда следует
4/х2
Таким образом, приближенно установлено, что тяжелая нить в положении
равновесия принимает форму параболы *). Теперь можно выразить стрелу
*) В тех случаях, когда стрела провеса f не мала по сравнению с длиной
пролета I, уравнение кривой равновесия тяжелой нити определяет цепную ли-
нию.
§571
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ УПРУГИХ ОПОР ТВЕРДОГО ТЕЛА
85
провеса f через L и I. Для этого запишем известное из курса математического
анализа выражение длины дуги
1/2 ------
L= \ V i-\-y'2dx
— Г/2
я заметим, что для пологой нити /2<^1. Поэтому V1 +?/'а^1 + 2 у'2-
Тогда будем иметь
Z/2 Z/2
§ (1+ 2 У'~} dx==l + 2 J У''Лх.
— 1/2 ' — Z/2
Подставляя сюда выражение (5.25), находим
С (^dx = l + ^L;
А •) \ * / wt
-Z/2
отсюда получаем
f=\V3l(L-l).
(5.26)
Задача 5.8. Определить наименьшее и наибольшее натяжение нити, если вес
единицы длины составляет 10 кГ, длина пролета 1 = 20 м, а полная длина нити
L = 21 м.
Прежде всего по формуле (5.26) находим
f= | /3-20- 1 = 1,94 м.
Наименьшее натяжение нити (в нижней точке) определяется по формуле
(5.23):
v 10-202 „„ „
ХО~ 8 1,94 ~ 257 К'
Наибольшее натяжение (в точках подвеса) находим по формуле (5.24):
Т = 257 4-10- 1,94 = 276 кГ.
§ 5.7. Определение реакций упругих опор твердого тела
Если твердое тело опирается на большое число опор, то задача определе-
ния реакции может оказаться статически неопределимой. Такова, например,
балка, изображенная на рис. 5.20, а. Очевидно, что трех уравнений равно-
весия недостаточно для определения пяти реакций, т. е. система статически
неопределимая (единственная определимая реакция, горизонтальная реакция
левой опоры, равна нулю).
Задача определения реакций в таких системах, вообще говоря, выходит
за рамки курса теоретической механики и чаще всего требует использования
методов сопротивления материалов. При этом приходится отказываться от
предположения об абсолютной жесткости балки и исследовать ее изгиб под
Действием заданной нагрузки и неизвестных реакций (рис. 5.20, б).
Однако среди статически неопределимых задач встречаются такие, которые
не требуют привлечения сложных соображений. Здесь мы имеем в виду такие
системы, которые можно схематизировать в виде абсолютно твердых тел,
86
ПЛОСКАЯ СИСТЕМА СИЛ
[ГЛ. V
покоящихся на упругих опорах. Примером может служить та же балка (в пред-
положении ее абсолютной жесткости), лежащая на упругих опорах, показан-
ных на рис. 5.20, в.
а)
Рис. 5.20.
В качестве дополнительного условия примем, что реакции опор пропор-
циональны их осадкам при одинаковом для всех опор коэффициенте жесткости;
по-видимому, это условие приемлемо в тех случаях, когда физические свойства
всех опор одинаковы. Как мы сейчас убе-
димся, это условие вместе с уравнениями
равновесия позволяет легко найти все опор-
ные реакции независимо от их числа. После
приложения нагрузки опоры несколько осям
дут, а балка займет новое положение. При-
нимая координатные оси, как показано на
рис. 5.20, в, мы можем записать уравнение
смещенной оси балки в виде
у = а + Ьх.
Обоснованный выбор расчетной схемы
в виде б) или е) определяется конкретными
соотношениями жесткости балки и опор. Однако случай б) мы вынуждены
оставить в стороне и будем рассматривать только случай в) *). Обозначим
соответственно осадки опор через yj (рис. 5.21), причем
yj^a-ybxj
(Xj — абсцисса /-й опоры).
По предположению, величины реакций опор пропорциональны осадкам
Rj = kyj = k (а + bXj),
*) Может оказаться, что необходим одновременный учет малой жесткости
балки и малой жесткости опор.
§ 5.7] ОПРЕДЕЛЕНИЕ РЕАКЦИЙ УПРУГИХ ОПОР ТВЕРДОГО ТЕЛА 87
где k — коэффициент жесткости; для определения реакций значение коэффи-
циента жесткости несущественно. Введем неизвестные параметры a0 = ka и ba — kb‘,
тогда реакции всех опор будут выражены через эти две неизвестные:
Rj = ЯоЧ- Ь^Х/. (5.27)
Для их определения воспользуемся двумя уравнениями равновесия плос-
кой системы параллельных сил (рис. 5.21):
п т
2 Fky-^ R/ = 0,
* = 1 /=1 (5.28)
п m 4
2 xkFky 2 X/R; = fy
k=l /=1
здесь n — число заданных сил, m —число неизвестных реакций, Подставляя
выражение (5.27) в систему уравнений (5.28), получим
п т
2 Fky — <№i-b0 2 Лу = О,
*=1 /=1
Отсюда находим
Яо —
Внося эти значения во и Ьо в формулу (5.27), получим решение задачи.
К той же категории относится и следующая задача.
Задача 5.9. К жесткой плите А, прикрепленной несколькими болтами
к основанию В, приложена активная пара сил, действующая в плоскости
плиты. Момент пары равен М, координаты центров болтов Ху и yk известны
(рис. 5.22, а). Под действием пары произойдут малые деформации болтов и
Плита повернется вокруг некоторого центра («центра жесткости») на малый угол.
Найти положение центра жесткости и усилия, действующие на каждый
болт, считая, что усилия перпендикулярны радиусам-векторам центров бол-
тов, проведенным из центра жесткости. Усилия можно принять пропорцио-
нальными модулям этих радиусов-векторов.
С$ема сил, действующих на плиту, представлена на рис. 5.22, б, причем
через Ffe обозначены реакции болтов. Система сил F* вместе с моментом М
(рис. 5.22, б) находится в равновесии и должна удовлетворять трем уравнениям
равновесия. Очевидно, что этих трех уравнений недостаточно для нахожде-
ния всех усилий, так как общее число неизвестных равно 2п (каждое усилие
определяется двумя проекциями на координатные оси х и у). Тем не менее
88
ПЛОСКАЯ СИСТЕМА СИЛ
[ГЛ V
нам удастся решить до конца эту задачу, опираясь на указанные выше
дополнительные условия.
Обозначим через х, и yt искомые координаты центра жесткости и через
Ph — радиусы-векторы центров болтов, проведенные из центра жесткости
(рис. 5.22, в).
Усилия Fh, как было сказано, принимаются пропорциональными
чинам рд., т. е.
вели-
Fk = kpk,
(5.29)
где k — коэффициент пропорциональности.
Проекции усилий на оси координат, очевидно, будут
Fkx = Fk cos = Fk У* lUt ,
Pk
Fky — — Fk sin «* = -Fk
rk
Подставляя сюда выражение (5.29), находим
Fkv = k(.yh — y*)’ 1
Fky— k(xk x*), )
(5.30)
Заметим, что все 2n неизвестные составляющие реакций выражены всего
через три числа: координаты центра жесткости х*, у* и коэффициент пропор-
циональности k. Для определения этих величин мы располагаем тремя урав-
нениями равновесия:
У Fkx — k , (Ук— Уч.)—
k = l k=i
S Fky — -Гч.) = О>
k = l
S Mo*z=~kX [(**-**)2 + (Ул-У*)2] + М = 0.
Л=1 fe=l
(5.31)
§ 5 81
ПРИЛОЖЕНИЕ МЕТОДОВ СТАТИКИ
89
Последнее уравнение представляет собой уравнение моментов всей сис-
темы сил относительно центра жесткости О*, причем для момента силы
имеем
^o*z (F*)------^Р*— -----k ((*> — х*)2-}-(ук —
Из первых двух уравнений системы (5.31) находим координаты центра жест-
кости
п п
х*~ ~ У*= 7Г 2 (5.32)
*=1 *=1
после чего из третьего уравнения следует
k = ------------М------------. (5.33)
У [(**-х*)2+ Ч/л-^*)2]
1
Теперь можно с помощью формул (5.29) найти все усилия Е*.
§ 5.8. Приложение методов статики
к определению усилий в стержнях фермы
При перекрытии больших пролетов (мосты, промышленные здания и т. п.)
и в крупных строительных кранах часто применяются сквозные конструкции,
называемые фермами (рис. 5.23). Ферма состоит из большого числа стержней,
соединенных в точках схода их осей; соединения стержней называются узлами.
Важной частью инженерного расчета фермы является определение усилий,
возникающих в стержнях при действии заданной нагрузки на ферму. При
этом обычно исходят из следующих упрощающих предположений:
1) внешние силы приложены только в узлах фермы;
2) веса стержней пренебрежимо малы;
3) узлы представляют собой идеальные шарниры (т. е. силы трения в них
не возникают).
При таких допущениях сила, действующая со стороны какого-либо узла
на примыкающий к нему стержень (усилие в стержне), всегда направлена
вдоль прямой, проходящей через концы этого стержня. Поэтому стержни,
если они прямолинейные, либо растягиваются, либо сжимаются под действием
этих сил.
Прежде чем обратиться к определению усилий в стержнях, необходимо
рассмотреть вопросы структуры ферм.
Простейшей плоской фермой является трехстержневая ферма АВС, изобра-
женная на рис. 5.24, а; она содержит три узла. Если к этой конструкции
добавить еще один узел D с помощью двух стержней, то вновь получится
неизменяемая ферма, содержащая пять стержней и четыре узла (рис. 5.24, б).
Добавляя этим же способом новые узлы, как показано на рис. 5.24, б штри-
ховой линией, можно образовать множество более сложных ферм.
Простой плоской фермой называется такая ферма, которая может быть
получена из треугольной путем последовательного присоединения каждого нового
узла при помощи двух новых стержней.
Найдем связь между числом s стержней и числом п узлов в простой
ферме. Число добавляемых узлов в простой ферме равно п —3, а число добав-
ляемых стержней равно s — 3. Из способа построения простой фермы видно,
что число новых стержней в два раза больше числа новых узлов; следовательно,
s—• 3 = 2 (и — 3),
90
ПЛОСКАЯ СИСТЕМА СИЛ
[ГЛ. V
т. е.
s = 2n —3. (5.34)
Простая ферма всегда статически определима, т. е. число независимых
уравнений статики достаточно для определения усилия в каждом стержне.
Рис 5.23.
В самом деле, для каждого узла можно составить два уравнения равно-
весия, так как на узел действует сходящаяся система сил. Таким образом,
всего можно составить 2п уравнений равновесия. Подсчитаем теперь число
Рис. 5.24.
содержащихся в них неизвестных. Прежде всего неизвестными будут все s реакций
стержней, кроме того, неизвестны три опорные реакции (Хд, YА, Уна
рис. 5.23). Таким образом, всего имеем s4-3 неизвестных. Воспользовавшись
соотношением (5.34), получим
s + 3 = 2n-34-3 = 2л,
§58] ПРИЛОЖЕНИЕ МЕТОДОВ СТАТИКИ 91
т. е. число неизвестных равно числу уравнений равновесия, поэтому простые
фермы всегда статически определимы.
При расчете ферм обычно составляют сначала три уравнения равновесия
для всей фермы, определяют из них три опорные реакции, а затем уже
Приступают к нахождению усилий в стержнях.
Рассмотрим способ расчета фермы, который позволяет найти усилие в любом
стержне фермы независимо от усилий в других стержнях. Согласно этому
способу предварительно необходимо определить реакции опор. Для этого
следует рассматривать ферму как абсолютно твердое тело и написать соот-
ветствующие три уравнения равновесия. Затем мысленно производится полное
рассечение фермы на две части; при надлежащем выборе сечения мысленно
перерезаются, как правило, три стержня. Поэтому для определения трех
Рис. 5.25.
неизвестных усилий могут быть записаны три уравнения равновесия сил, прило-
женных к какой-либо из полученных частей фермы. Чаще всего пользуются
уравнениями в форме (5.17), но иногда пользуются и формой (5.18).
Рассмотрим для примера ферму, изображенную на рис. 5.25, и предполо-
жим, что опорные реакции найдены.
Пусть требуется определить усилие в стержне 4. Для этого мысленно
рассечем ферму разрезом / — I и рассмотрим равновесие левой части фермы,
изображенной на рис. 5.25, а (вместо этого можно рассматривать правую
часть фермы —результат от этого не изменится, но вычисления окажутся
более громоздкими). На эгу часть действуют известные силы Rx и F6, а также
тРи неизвестные по модулю силы Sl( S3, S4. Для определения искомой вели-
чины силы S4 составляем уравнение моментов относительно точки пересечения
направлений 1 и 3 (точка О4); при таком выборе моментной точки усилия S4 и
з в уравнение равновесия не войдут и оно будет содержать только одну
неизвестную величину — искомое усилие S4 (такой выбор точек, относительно
которых берут моменты, типичен для рассматриваемого способа). Обычно при
оставлении уравнения равновесия величины плеч сил снимаются с чертежа
Учетом его масштаба. Понятно, что решение полученного уравнения не
ызовет никаких затруднений. Совершенно таким же образом составляются
92
ПЛОСКАЯ СИСТЕМА СИЛ
[ГЛ. V
уравнения моментов относительно точки Ог (для определения усилия Sx) и
точки Оа (для определения усилия S3).
Для определения усилий в других стержнях требуются иные рассечения
фермы; так, на рис. 5.25, а показано также рассечение II — II, необходимое
для определения усилий в стержнях 7, 9 и 10. Для определения указанных
усилий проще рассматривать равновесие правой части фермы, как это показано
на рис. 5.25, в. Через О7 и О10 обозначены точки, относительно которых
берутся моменты; мы получим по одному неизвестному усилию в каждом из
уравнений моментов. Определение усилия в стержне 9 обладает некоторой
особенностью. Дело в том, что точка пересечения усилий S7 и Slo бесконечно
удалена и уравнение моментов составить нельзя. В этом случае вместо него
можно составить уравнение проекций на ось у, что позволит достигнуть той
же цели: получить уравнение с одним неизвестным усилием S9.
Узел S
Рис. 5.26.
sj
Способ рассечения весьма удобен для простых схем ферм, образованных
путем наращивания последовательных треугольников. В более сложных слу-
чаях все же приходится решать громоздкие системы уравнений, так как не
удается проводить сечение только через три стержня.
Иногда применяется графический способ определения усилий в стержнях
фермы. Предполагая, что опорные реакции фермы определены, для нахож-
дения усилий в стержнях применим способ «вырезания» узлов. Согласно
этому способу необходимо поочередно «вырезать» узлы и находить усилия
в стержнях из условий замкнутости силовых многоугольников для каждого
из узлов. ,
Для определенности рассмотрим ферму, изображенную на рис. 5.26, а,
где показаны внешние силы F^ F3, F3, F4 и опорные реакции R, и R3. Расчет
всегда нужно начинать с того узла, где сходятся два стержня. Начнем с рас-
смотрения равновесия узла I, на который действуют сила Rx и неизвестные
по величине реакции стержней Si и S2. Графическим условием равновесия
сходящейся системы сил является замкнутость силового многоугольника.
§ 5-81
ПРИЛОЖЕНИЕ МЕТОДОВ СТАТИКИ
93
При всех дальнейших построениях придерживаемся определенного мас-
штаба сил. На рис. 5.26, б дан силовой многоугольник для узла I (в данном
случае —треугольник); величины сил Si и S2 можно определить по масштабу
сил. Сила S4 направлена к узлу, следовательно, на стержень она действует
в обратном направлении, т. е. стержень 1 сжат. Сила S2 направлена от узла,
значит, стержень 2 растянут. Заметим, что если начать расчет с узла II,
то определить усилия в стержнях 1, 3, 4 не удается,, так как в узле схо-
дится более двух стержней и силовой многоугольник однозначно не может
быть построен.
Но теперь, после определения усилий в стержнях 1 и 2, можно перейти
к расчету узла II. Обходим его по часовой стрелке, начиная с первой извест-
ной силы —реакции стержня 1. Из условия равновесия стержня 1 очевидно,
что эта реакция по модулю равна Sj, но направлена противоположно S4.
На рис. 5.26, б она обозначена через SJ. Затем от конца S( откладываем
вектор F4 и проводим направление S4 параллельно стержню 4, а из начала
вектора S[ проводим направление реакций S3 параллельно стержню 3. Полу-
чаем замкнутый многоугольник S[,
Fj, S4, S3 и тем самым находим
силы S3 и S4. Направления векто-
ров S4 и S3 показывают, что стер-
жень 4 сжат («к узлу»), а стержень 3
растянут («от узла»). Рассматривая
равновесие узлов III, IV и V,
определяем остальные реакции стер-
жней S5, Se, S7, S8, Sg.
Из рис. 5.26, б видно, что
каждое из усилий в стержнях
встречается дважды (S4 и S[, S, и
-S' и т. д.). Оказывается, что, не
меняя существа этого метода, мож-
но его несколько усовершенствовать
и избежать таких повторений. При
этом получается особое построе-
ние, называемое «взаимной диа-
граммой» или диаграммой Макс-
велла— Кремоны. Метод построе-
ния такой взаимной диаграммы
проиллюстрируем на только что
разобранном примере.
Прежде всего введем единый
метод обозначения усилий в стерж-
Рис. 5.27.
нях, реакций опор и внешних сил.
Обозначим буквами А, В, С, D, Е, F области, ограниченные внешними силами
и стержнями контура фермы (рис. 5.27, а), а внутренние области, ограничен-
ные только стержнями фермы, обозначим буквами G, Н, К, L. Далее, усло-
вимся обходить всю ферму, а также каждый узел по ходу часовой стрелки.
Начало и конец вектора силы, пересекаемой при таком обходе, будем
обозначать малыми буквами, которые соответствуют названиям пограничных
областей. Например, силу Rx (рис. 5.27, а) теперь обозначим через ab (рис. 5.27, б),
силу F3 —через de, силы, действующие на узел III, — через he, cd, dk kh
и т. п.
Теперь построим многоугольник всех внешних сил, откладывая их в опре-
деленном масштабе в порядке обхода фермы по часовой стрелке; в результате
мы получим многоугольник abedeja (рис. 5.27, б). Конечно, этот многоугольник
обязательно замкнут, так как ферма находится в равновесии. Мы теперь
можем и не ставить на концах векторов стрелки —правило обхода областей
по часовой стрелке однозначно определяет, где начало и конец вектора.
94
ПЛОСКАЯ СИСТЕМА СИЛ
[ГЛ. V
Далее воспользуемся способом вырезания узлов. Обойдем узел I по часо-
вой стрелке, начиная с известной силы ab. Эта сила уже имеется в много-
угольнике внешних сил, и остается построить две другие силы, действующие
на узел /, т. е. силу bg и силу ga. Для этого из точек '> и а проводим пря-
мые, параллельные стержням 1 и 2; точка их пересечения даст нам точку g.
Сила bg оказалась направленной к узлу, значит, стержень 1 сжат, сила ga
направлена от узла, следовательно, стержень 2 растянут.
Обращаясь к узлу //, обходим его также по часовой стрелке в порядке
GBCH. Используя уже найденные точки g, b, с, находим точку Л —конец
силы ch и начало силы hg. Для этого из с проводим прямую, параллельную
стержню 4, а из g —прямую, параллельную стержню 3; точка их пересечения
и даст нам искомую точку h.
Продолжая такое построение дальше, для остальных узлов фермы мы
получим фигуру (рис. 5.27, б), называемую взаимной диаграммой или диаграм-
мой Максвелла —Кремоны. Каждому узлу фермы соответствует некоторый
многоугольник диаграммы, стороны которого параллельны стержням, сходя-
щимся в этом узле. Наоборот, каждой вершине диаграммы соответствует
некоторая область плоскости фермы. Таким образом, любой вершине одной
фигуры соответствует многоугольник другой фигуры; такие фигуры называются
взаимными (отсюда и название диаграммы). Легко видеть, что эта фигура
состоит из тех же многоугольников, которые ранее были построены
на рис. 5.26, б. По принятому масштабу сил можно найти численное значение
всех усилий в стержнях.
Таким образом, при построении взаимной диаграммы используется,
по существу, тот же способ вырезания узлов, но здесь чертеж компактнее и
не содержит повторений, в чем легко убедиться, сравнив чертежи на рис. 5.26
и 5.27.
ГЛАВА VI
РАВНОВЕСИЕ ТЕЛА ПРИ НАЛИЧИИ ТРЕНИЯ
§6.1. Равновесие тела при наличии трения скольжения
Если два тела / и II (рис. 6.1) взаимодействуют друг
с другом, соприкасаясь в точке А, то всегда реакцию Йд, дейст-
вующую, например, со стороны тела II и приложенную к телу I,
можно разложить на две составляю-
щие: Na, направленную по общей
нормали к поверхности соприкасаю-
щихся тел в точке А, и Тл, лежащую
в касательной плоскости. Составляю-
щая Na называется нормальной реак-
цией, сила Тд называется силой тре-
ния скольжения — она препятствует
скольжению тела I по телу II. В со-
ответствии с аксиомой 4 (третьим за-
коном Ньютона) на тело II со стороны
тела I действует равная по модулю и
противоположно направленная сила
реакции. Ее составляющая, перпендикулярная касательной плос-
кости, называется силой нормального давления. Как было сказано
выше, сила трения Тд = 0, если соприкасающиеся поверхности
идеально гладкие. В реальных условиях поверхности шероховаты
и во многих случаях пренебречь силой трения нельзя.
Для выяснения основных свойств сил трения произведем
опыт по схеме, представленной на рис. 6.2, а. К телу В, нахо-
дящемуся на неподвижной плите D, присоединена перекинутая
через блок С нить, свободный конец которой снабжен опорной
площадкой А. Если площадку А постепенно нагружать, то с уве-
личением ее общего веса будет возрастать натяжение нити S,
которое стремится сдвинуть тело вправо. Однако пока общая
нагрузка не слишком велика, сила трения Т будет удерживать
тело В в покое. На рис. 6.2, б изображены действующие
на тело В силы, причем через Р обозначена сила тяжести,
а через N —нормальная реакция плиты D.
96
РАВНОВЕСИЕ ТЕЛА ПРИ НАЛИЧИИ ТРЕНИЯ
(ГЛ. VI
Если нагрузка недостаточна для нарушения покоя, справед-
ливы следующие уравнения равновесия:
N — P = 0, (6.1)
S-T = 0. (6.2)
Отсюда следует, что N — P и T = S. Таким образом, пока
тело находится в покое, сила трения остается равной силе натя-
жения нити S. Обозначим через Ттах силу трения в критический
момент процесса нагружения, когда тело В теряет равновесие и
начинает скользить по плите D. Следовательно, если тело нахо-
дится в равновесии, то
Т^Ттах
(6.3)
Максимальная сила трения
лов, из которых сделаны тела,
Рис. 6.2.
Ттах зависит от свойств материа-
их состояния (например, от харак-
тера обработки поверхности), а
также от величины нормального
давления N. Как показывает опыт,
максимальная сила трения при-
ближенно пропорциональна нор-
мальному давлению, т. е. имеет
место равенство
Tmax = fN. (6.4)
Это соотношение носит название
закона Амонтона — Кулона.
Безразмерный коэффициент f
называется коэффициентом тре-
ния скольжения. Как следует из
опыта, его величина в широких
пределах не зависит от площади
соприкасающихся поверхностей, но
зависит от материала и степени шероховатости соприкасаю-
щихся поверхностей. Значения коэффициентов трения устанавли-
ваются опытным путем и их можно найти в справочных таблицах.
Неравенство (6.3) можно теперь записать в виде
T^fK.
(6.5)
Случай строгого равенства в (6.5) отвечает максимальном}
значению силы трения. Это значит, что силу трения можно
вычислять по формуле T = fN только в тех случаях, когда зара-
нее известно, что имеет место критический случай. Во всех же
других случаях силу трения следует определять из уравнений
равновесия.
§ 6 11 РАВНОВЕСИЕ ТЕЛА ПРИ НАЛИЧИИ ТРЕНИЯ СКОЛЬЖЕНИЯ 97
Задача 6.1. Тяжелая плита АВ веса Р, длины I опирается на идеально
гладкую стенку ОВ и шероховатый пол ОЛ (рис. 6.3, а). Определить, при каких
углах наклона плиты возможно ее равновесие, если коэффициент трения пли-
ты и пола равен f. Составим уравнение равновесия:
2 FkX=NB-TA = 0'
k= 1
2 Fky = NA~P = ^
fe = l
n
2 (Ffc)= F у cosa—NBl sin a=0.
- fc = i
Кроме того, в соответствии с условием (6.5)
должно быть
Решая уравнения, получим
^ = rA = 4Ctga' NA = P-
Следовательно,
, 1
tga^-sr.
Рис. 6.3.
Последнее неравенство и содержит решение задачи. Критическое значение
угла а* определяется из уравнения
fga* = >-
Определим теперь критическое значение угла а* с учетом трения плиты
о стенку, если соответствующий коэффициент трения равен также /.
Относящаяся к этому случаю силовая схема изображена на рис. 6.3, б.
В общем случае система является статически неопределимой, так как содержит
четыре неизвестные реакции, а мы располагаем только тремя уравнениями
равновесия (при заданном угле а нельзя найти силы трения и нормальные
давления). Однако в критическом состоянии силы трения пропорциональны
соответствующим нормальным давлениям, и это позволяет решить задачу. Для
этого состояния имеем два уравнения для сил трения
ГА = ^А. ТВ^В
и три уравнения равновесия
— Тa = Q, Na-\-Tb — P = 0, Р? cosa* — NBl sin a* — TBl cosa* =0.
В этих пяти уравнениях содержатся четыре неизвестные реакции и неиз-
вестное критическое значение угла а*. Решая эту систему уравнений, находим
tga*=^=£,
д/ = ' Т — '
в 14-/2- в
4 Бутенин Н. В. и др.
98
РАВНОВЕСИЕ ТЕЛА ПРИ НАЛИЧИИ ТРЕНИЯ
[ГЛ VI
Подчеркнем, что последние четыре выражения относятся только к крити
чесному состоянию, но если
то задача становится статически неопределимой (для ее решения необходимо
привлечь какие-либо соображения, выходящие за рамки наших представлений
о твердых телах).
Задача 6.2. На шероховатой наклонной плоскости, составляющей угол
а = 30° с горизонтальной плоскостью, находится тело весом 7 = 20 кГ
(рис. 6.4, а). Тело удерживается на плоскости тросом АВ, весом которого
можно пренебречь. Определить силу трения Т между телом и плоскостью
и минимальное натяжение троса S при двух значениях коэффициента трения:
/у = 0,8 и /2 = 0,2.
Рис. 6.4.
На тело действуют четыре силы: активная сила тяжести Р, сила трения Т,
нормальная составляющая реакции плоскости N и реакция троса S (рис. 6.4, б).
Составим условия равновесия тела:
4 4
У, F/;V = P sin а — Т — 5 = 0, У, Fky=N — Pcosa = 0,
fe=i *=1
T^zfN.
Отсюда найдем:
5 = Psina — Т, :V = Pcosc/., Т ^fP cos а,
или, учитывая условия задачи,
5=10-7,
7<с 17,ЗД
Для первого случая fx = 0,8 будем иметь: Т 13,8 кГ. При отсутствии
троса (5 = 0) получим 7=10 кГ. Так как при этом условие 7 13,8 кГ
не нарушается, то это означает, что при fl = 0,8 тело будет находиться в равно-
весии за счет одной силы трения 7=10 кГ.
Пусть теперь Д> = 0,2. Тогда должно выполняться условие 7 17,3 • /> =
= 3,46 кГ. При отсутствии троса (5 = 0) это неравенство находится в противо-
речии с первым уравнением 10 — 7 = 0. Это означает, что при отсутствии
троса тело начало бы скользить вниз. Поэтому при = 0,2 сила трения дости-
гает своего максимального значения, равного 3,46 кГ, а натяжение троса
будет: 5 = 10 — 7 = 6,54x7.
§ 61]
РАВНОВЕСИЕ ТЕЛА ПРИ НАЛИЧИИ ТРЕНИЯ СКОЛЬЖЕНИЯ
99
Итак,
при ^ = 0,8: 7=10 кР, 5 = 0;
при f2 = 0,2: 7 = 3,46 кГ, 5 = 6,54 кГ.
Задача 6.3. К однородной прямоугольной призме веса G, находящейся
на шероховатой горизонтальной плоскости, прислонена под углом а однород-
ная балка веса Р и длины 2/ (рис. 6.5, а). Коэффициент трения между балкой
и плоскостью- равен /х, а между призмой и плоскостью /2. Пренебрегая силами
трения между балкой и призмой и поперечными размерами балки, определить:
1) условия равновесия всей системы; 2) условия, при которых призма оста-
нется в покое, а балка начнет двигаться; 3) условия, при которых конец
А балки останется в покое, а призма начнет скользить по плоскости влево
или опрокидываться вокруг ребра Е.
Рис. 6.5.
Расчленим систему и изобразим все силы (активные и реакции связей),
действующие на призму (рис. 6.5, б) и балку (рис. 6.5, в). На призму дейст-
вуют сила тяжести G, сила давления Nb балки на призму, равнодействующая
сил нормального давления плоскости N, приложенная в некоторой точке D,
и сила трения Т2. На балку действуют сила тяжести Р, сила давления Nb
призмы на балку, нормальная составляющая Мд реакции плоскости и сила
трения Tj. Конечно, модули сил Nb и Nb равны между собой (аксиома 4).
Будем считать вначале, что вся система находится в покое, и составим
условия равновесия балки:
k ь
У МА, (Fk) = Pl sin a — NB • 21 cosa = 0, Т\ ,
k
Из уравнений находим
Tt = NB, Na = P, NB = ~tga.
Внеся значения 7\ и NА в неравенство, получим условия равновесия
балки:
tg а < 2fv
4*
100
РАВНОВЕСИЕ ТЕЛА ПРИ НАЛИЧИИ ТРЕНИЯ
[ГЛ. VI
Составим теперь условия равновесия призмы:
= = ^Fky = N-G=0,
k k
5M^(Ffc) = jVB’2ZCOSa_G,C=:0, T2^fiN-
k
Из уравнений находим
T2 = Nb, N = G, Nb=-^—G.
2 2/ cos a
Число с нам неизвестно, но его можно найти из равенства Nb = Nb, или
Р с >
Ttga=2 cosaG:
отсюда
Так как точка приложения силы N, точка D, не может находиться левее
точки Е, то с а, или
-тг I sin a sg а,
и
что дает нам еще одно условие равновесия:
a G
sin a у -р .
Это неравенство равносильно требованию, чтобы под действием силы Nb
призма не опрокинулась вокруг ребра Е (его можно получить из условия,
чтобы момент силы Nb относительно точки Е не превосходил по модулю
момента силы G относительно той же точки).
Потребуем теперь, чтобы, призма не скользила по плоскости, т. е. чтобы
выполнялось неравенство
T2^f2N.
Имеем: Т2 = ./VS = Ув = 1/2Р tg a, N — G. Подставляя это в написанное
выше неравенство, получаем
tg a 2f2 ~.
Таким образом, вся система будет находиться в покое, если угол a
удовлетворяет трем условиям:
tgas£2fi, sinasgy-^-, tgacc2/2-|-. (6.6)
Если будет нарушено только первое из этих неравенств, т. е. при
tga>2fi, sinasgy р-, tg a 2Д, у,
призма останется в покое, а балка начнет двигаться.
Если будет нарушено только второе условие (6.6), т. е. при
tgas<2f1, sina>-“y, tga=g2f2y,
§6 1] РАВНОВЕСИЕ ТЕЛА ПРИ НАЛИЧИИ ТРЕНИЯ СКОЛЬЖЕНИЯ 101
точка А балки останется в покое, а призма начнет опрокидываться вокруг
ребра Е.
Наконец, если будет нарушено только третье условие (6.6), т. е. при
, a G . G
tgas£2A, sinasSy-p-, tga>2f2-^-,
точка А балки снова останется в покое, но призма начнет скользить
по плоскости влево.
Рассмотрим тело, находящееся на шероховатой поверхности.
Будем считать, что в результате действия активных сил и сил
реакции тело находится в предельном равновесии. На рис. 6.6, а
показана предельная реакция R и ее составляющие N и Ттах
а)
(в положении, изображенном на этом рисунке, активные силы
стремятся сдвинуть тело вправо, максимальная сила трения Ттах
направлена влево). Угол <р между предельной реакцией R и нор-
малью к поверхности называется углом трения. Найдем этот угол.
Из рис. 6.6, а имеем
1 Т'гпах
tg<P = ~ >
или, пользуясь выражением (6.4),
tg<p = /. (6.7)
Из этой формулы видно, что вместо коэффициента трения
можно задавать угол трения (в справочных таблицах приводятся
обе величины).
В зависимости от действия активных сил направление пре-
дельной реакции может меняться. Геометрическое место всех воз-
можных направлений предельной реакции R образует коническую
поверхность — конус трения (рис. 6.6, б). Если коэффициент тре-
ния f во всех направлениях одинаков, то согласно формуле (6.7)
конус трения будет круговым. В тех случаях, когда коэффи-
циент трения f зависит от направления возможного движения
тела, конус трения не будет круговым.
102
РАВНОВЕСИЕ ТЕЛА ПРИ НАЛИЧИИ ТРЕНИЯ
[ГЛ VI
Рассмотрим теперь случай, когда активные силы, действую-
щие на тело, приводятся к одной равнодействующей F, состав-
ляющей угол а с нормалью к поверхности (рис. 6.6, в). Такая
сила оказывает двоякое действие: во-первых, ее нормальная со-
ставляющая F„ определяет нормальную составляющую N реакции
поверхности и, следовательно, предельную силу трения Ттах =
= fN, а, во-вторых, ее касательная составляющая FT стремится
эту силу преодолеть. Если увеличивать модуль силы F, то про-
порционально будут возрастать обе составляющие. Отсюда можно
заключить, что состояние покоя или движения тела не зависит
от модуля силы F и определяется только углом а —чем меньше
этот угол, тем меньше тенденция к нарушению равновесия.
Для аналитического решения задачи составим условия равно-
весия тела:
У, Fkx = Т - F sin а = 0,
k
У Fky = N — F cos а = 0,
k
T-FfN.
Из уравнений найдем Т = Esina, A/' = Fcosa и, подставляя
их в неравенство, получим
tga-Ef,
или, учитывая (6.7), tga=gtg$. Следовательно, при равновесии
тела
а <р.
Это означает, что если равнодействующая активных сил нахо-
дится внутри конуса трения, то увеличением ее модуля нельзя
нарушить равновесие тела; для того,
чтобы тело начало движение необходимо
(и достаточно), чтобы равнодействующая
активных сил F находилась вне конуса
трения.
Задача 6.4. Найти условие, определяющее
размер Л самотормсузящегося механизма, изобра-
женного на рис. 6.7. Необходимо, чтобы при-
ложенная к узлу С сила F не могла вызвать
скольжения ползунов А и В по вертикальным
направляющим. Коэффициент трения / = 0,2,
расстояние между направляющими 2 м.
Сила F вызывает сжатие наклонных стержней, и последние передают на
ползуны силы давления под некоторым углом к горизонтальной плоскости.
Для того чтобы скольжение отсутствовало, ось каждого стержня должна
располагаться внутри соответствующего конуса трения. А это имеет место при
выполнении условия
ig <р < 0,2.
Но h = 1 • tg <р. поэтому h < 0,2 м.
§ Ь 1] РАВНОВЕСИЕ ТЕЛА ПРИ НАЛИЧИИ ТРЕНИЯ СКОЛЬЖЕНИЯ 103
Рассмотрим теперь трение гибких тел. Пусть трос охватывает
неподвижный круглый цилиндр. Требуется определить силу натя-
жения троса Р, достаточную для уравновешивания силы Q, при-
ложенной ко второму концу троса, если между тросом и цилинд-
ром имеется трение (рис. 6.8 а).
Опыт показывает, что благодаря трению сила Р может быть
во много раз меньше, чем сила Q. Эта задача будет статически
определена лишь в том случае (представляющем наибольший
интерес), когда рассматривается критическое состояние и силы
трения пропорциональны соответствующим нормальным давле-
ниям. Речь идет о критическом состоянии, в котором сила Q
уже способна вызвать скольжение троса по неподвижному ци-
линдру (по ходу часовой стрелки).
а
Рис. 6.8.
Нормальное давление и сила трения непрерывно распределены
по всёй длине охвата <рг. Обозначим через N и Т значения этих
сил, отнесенных к единице длины троса. Эти силы, конечно,
являются функциями полярного угла <р, определяющего положе-
ние элемента, т. е. N = N(q), Т~Т (гр) —fN (ср). Натяжение троса
в любой его точке на цилиндре также является функцией гр, т. е.
S = S(<p).
Выделим элемент троса длины ds = г dtp. На этот элемент дей-
ствуют две реакции шкива: Т ds и N ds, а также две силы натя-
жения, S и S1 = S + dS, приложенные к рассматриваемому эле-
менту в точках рассечения (рис. 6.8, б).
Пренебрегая весом троса, запишем условия равновесия выде-
ленного элемента троса, спроектировав силы на направления
нормали (п) и касательной (т), взятые в середине элемента:
J Fkn = Nds-S1d^--Sd^ = 0,
k=i
2 Fftt = Tds + S1-S = 0.
*=i
104
РАВНОВЕСИЕ ТЕЛА ПРИ НАЛИЧИИ ТРЕНИЯ
[ГЛ. VI
При составлении этих уравнений мы воспользовались малостью
угла dq> и положили
cosf-^1.
Подставляя в уравнения равновесия вместо Sx и ds их значения
Sx = S + dS, ds = r dtp,
получаем
Nr — S — Q,
Первое из этих уравнений дает S = Nr, а так как T — fN, то
второе уравнение можно переписать в виде
dS = — fS dtp,
или
dS £ ,
s- = -N<p.
Выполняя интегрирование в пределах от <р = 0 до <р = <р*, находим
1п~ = —/ф*.
Здесь So —натяжение в сечении <р = 0, т. е. величина силы Q,
S* — натяжение в сечении ф = ср*, т. е. величина силы Р. Следова-
тельно,
1п^- = —/=<р* (6.8)
и, окончательно,
P^Qe-fv*. (6.9)
Эта формула (формула Эйлера) позволяет найти наименьшую
силу Р, способную уравновесить силу Q.
Можно поставить обратный вопрос: при каком значении Р
наступит скольжение троса против хода часовой стрелки, т. е.
какая сила Р способна преодолеть сопротивление трения вместе
с силой Q? Для ответа на этот вопрос нет необходимости заново
повторять все выкладки; они останутся прежними с тем единствен-
ным различием, что сила трения на рис. 6.8, б изменит свое
направление. Поэтому в окончательном результате, изменяя знак
при коэффициенте трения, получаем
P = Qel<f\ (6.10)
Таким образом, если сила Р удовлетворяет неравенствам
Qe~f4>* ^P^Qefo*,
то трос будет находиться в равновесии.
§6 2]
РАВНОВЕСИЕ ТЕЛА ПРИ НАЛИЧИИ ТРЕНИЯ КАЧЕНИЯ
105
Задача 6.5. Найти угол охвата <р* цилиндра тросом, необходимый для
того, чтобы удержать силой Р = 200 кГ груз весом Q = 2000 кГ, если коэффи-
циент трения / = 0,2.
По формуле (6.8) имеем
1 200 АО *
1П 2000 = —°’2<Р :
отсюда
<р* = 11,5 < 2 • 2л,
т. е. несколько меньше двух полных охватов.
Задача 6.6 К концу троса подвешен груз весом Q = 2000 кГ; угол охвата
цилиндра тросом <р* = 11,5. Найти силу, необходимую для подъема груза,
если коэффициент трения / = 0,2.
В данном случае нужно воспользоваться формулой (6.10)
P = Qef^* = 2000е°’2'"'5^20 000 кГ.
если 200 Г <-20 000 к/. При
Рис. 6.9.
Сопоставляя этот результат с полученным в задаче 6.5, заключаем, что трос
будет находиться в состоянии равновесия, ~ ~ “
р < 200 кГ начинается движение в сто-
рону силы Q, а при Р > 20 000 кГ —
движение в сторону силы Р.
Задача 6.7. При причаливании (швар-
товке) судна матрос удерживает его с по-
мощью каната, накинутого в форме вось-
мерки на причальные тумбы (кнехты),
причем один конец каната А укреплен
на судне, а второй конец каната В на-
ходится в руках матроса (рис. 6.9). Счи-
тая, что угол охвата каждой тумбы равен
5я/3 (300°), определить, какое максималь-
ное усилие Р судна может выдержать матрос, прикладывая силу Q = 50 кГ
при одной, двух и трех уложенных канатных восьмерках, если коэффициент
трения между канатом и причальными тумбами равен 0,2.
При одной восьмерке общий угол охвата <р1 = (10/3)л, а при двух и трех
восьмерках соответственно <р2 = (20/3)л и <р3=10л. Применяя формулу (6.10),
получаем
Р1 = 5Ое°-2(10/3)я,
или, пользуясь таблицами показательных функций, находим (аналогично
получены значения сил Р2 и Р3):
Pi = 404 кГ, Р2 = 3270 кГ, Р3 = 26 400 кГ.
Таким образом, при трех уложенных восьмерках за счет сил трения между
канатом и причальными тумбами один матрос может удержать судно, разви-
вающее усилие в 26,4 тонны, т. е. в 528 раз большее силы, прикладываемой
матросом.
§ 6.2. Равновесие тела при наличии трения качения
Рассмотрим цилиндр (каток), покоящийся на горизонтальной
плоскости, когда на него действует горизонтальная активная
сила S; кроме нее, действуют сила тяжести Р, а также нормаль-
ная реакция N и сила трения Т (рис. 6.10, а). Как показывает опыт,
106
РАВНОВЕСИЕ ТЕЛА ПРИ НАЛИЧИИ ТРЕНИЯ
[ГЛ VI
при достаточно малой величине силы S цилиндр остается в покое.
Но этот факт нельзя объяснить, если удовлетвориться введением
сил, изображенных на рис. 6.10, а. Согласно этой схеме равно-
весие невозможно, так как главный момент всех сил, действую-
щих на цилиндр Л!Сг = —Sr, отличен от нуля и одно из условий
равновесия не выполняется.
Причина выявившегося несоответствия состоит в том, что
в наших рассуждениях мы продолжаем пользоваться представ-
лением об абсолютно твердом теле и предполагаем касание
цилиндра с поверхностью происходящим по образующей. Для
устранения отмеченного не-
соответствия теории с опы-
том необходимо отказаться
от гипотезы абсолютно
твердого тела и учесть, что
в действительности ци-
линдр и плоскость вблизи
точки С деформируются и
существует некоторая пло-
щадь соприкосновения ко-
нечной ширины. Вслед-
ствие этого в ее правой
части цилиндр прижимает-
ся сильнее, чем в левой,
и полная реакция R при-
ложена правее точки С (см.
точку Ct на рис. 6.10, б).
Полученная теперь схе-
ма действующих сил ста-
тически удовлетворитель-
на, так как момент пары
(S, Т) может уравновеситься моментом пары (N, Р). Считая де-
формацию малой, заменим эту систему сил системой, изображен-
ной на рис. 6.7, в. В отличие от первой схемы (рис. 6.10, а),
к цилиндру приложена пара сил с моментом
Мт = Nil.
Этот момент называется моментом трения качения.
Составим уравнения равновесия цилиндра:
S-T = 0,
N-P = 0,
— Sr + MT = 0.
(6.Н)
(6.12)
Первые два уравнения дают T = S, N — P, а из третьего урав-
нения можно найти МТ. Затем из (6.11) определяем расстояние
РАВНОВЕСИЕ ТЕЛА ПРИ НАЛИЧИИ ТРЕНИЯ КАЧЕНИЯ
107
между точками С и Сг:
Sr
Р'
(6.13)
h =
Как видно, с увеличением модуля активной силы 5 растет рас-
стояние h. Но это расстояние связано с площадью поверхности
контакта и, следовательно, не может неограниченно увеличи-
ваться. Это значит, что наступит такое состояние, когда увели-
чение силы S приведет к нарушению равновесия. Обозначим
максимально возможную величину h буквой 6 (см. рис. 6.10, б).
Экспериментально установлено, что величина 6 пропорциональна
радиусу цилиндра и различна для разных материалов.
Следовательно, если имеет место равновесие, то выполняется
условие
/г==сб. (6.14)
Величина 6 называется коэффициентом трения качения',
она имеет размерность длины.
Условие (6.14) можно также запи-
сать в виде
или, учитывая (6.12),
S^~N.
г
Очевидно, что максимальный мо-
мент трения качения Л4™ах = 8N про-
порционален силе нормального дав-
ления.
В справочных таблицах приводится отношение коэффициента
трения качения к радиусу цилиндра (А, = 6/г) для различных
материалов.
Задача 6.8. На наклонной плоскости находится цилиндр. Найти, при
каких углах наклона плоскости к горизонту а цилиндр будет находиться
в равновесии, если г — радиус цилиндра, f—коэффициент трения скольжения
б — коэффициент трения качения (рис. 6.11).
Составим уравнения равновесия:
У FkX = — 71 + Psina = 0,
k=i
У Fky = У — Р cos а = 0,
*= 1
У M-Az (F*) = M1 — rP sin а = 0.
*=1
108 РАВНОВЕСИЕ ТЕЛА ПРИ НАЛИЧИИ ТРЕНИЯ [ГЛ VI
Кроме того, должны выполняться неравенства
Т fN. бЛГ.
Из первых трех уравнений мы можем определить N, Т, Л1т; подставив
эти величины в последние два неравенства, получим
(6.16)
(6J7)
Эти неравенства должны удовлетворяться одновременно. В тех случаях,
б ,
когда — < [, потеря равновесия происходит путем перехода к качению, так
как сначала нарушится неравенство (6.17), если же / < — , то нарушится
неравенство (6.16) и цилиндр начнет скользить.
ГЛАВА VII
ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
§7.1. Статические инварианты. Динамический винт
Ранее было установлено, что главный вектор системы сил,
как угодно расположенных в пространстве,
Fo=£Fft (7.1)
*= I
не изменяется при перемене центра приведения. Главный же
момент при этом изменяется и для нового центра приведения
определяется формулой (см. формулу (4.14))
MO1=Mo + O^xFo, (7.2)
где Мо и Мо, — главные моменты относительно центров приведе-
ния О и Ох. Второе слагаемое в правой части формулы (7.2)
представляет собой момент главного вектора, приложенного
в центре приведения О, относительно нового центра приведения Ог.
Умножим скалярно обе части равенства (7.2) на вектор Fo:
MO1.Fo = Mo-Fo + (O^xFo)-Fo.
Так как вектор O^xFq перпендикулярен вектору Fo, то их
скалярное произведение равно нулю. Следовательно,
M0l.F0 = Mo-F0, (7.3)
т. е. скалярное произведение главного вектора Fo на главный
момент не зависит от центра приведения.'
Таким образом, при перемене центра приведения не изменяются
главный вектор и скалярное произведение главного вектора на
главный момент. Говорят, что эти величины инвариантны отно-
сительно выбора центра приведения.
Первым статическим инвариантом называется главный век-
тор Fo. В более узком смысле этого слова под первым инвариантом
понимают квадрат модуля главного вектора
+ + (7.4)
110
ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
[ГЛ. VII
Вторым статическим инвариантом называется скалярное про-
изведение главного вектора на главный момент:
I2Fo-^o = FxMx+FyMy + FzM2. (7.5)
Из второго инварианта вытекает простое геометрическое след-
ствие. Действительно, запишем равенство (7.3) в следующем виде;
Мо. Fo cos (М01, Fo) = Мо Fo cos (Мо, Fo).
Если Fo т= 0, то
MO1cos(MO1, Fo) = MQ cos (Mo, Fo).
Каждое из этих произведений представляет проекцию главного
момента на направление главного вектора. Следовательно, при
перемене центра приведения проекция главного момента на направ-
ление главного вектора не изменяется. Заметим, что при Fo=^0
это следствие можно принять за определение второго инварианта.
Так как проекция главного момента на направление главного
вектора не изменяется при перемене центра приведения, то можно
утверждать, что для центра приведения,' в котором главный век-
тор и главный момент направлены по одной прямой, модуль
главного момента будет минимальным. В этом случае модуль
главного момента равен величине его проекции на направление
главного вектора.
Очевидно, что проекция М* главного момента на направление
главного вектора определяется равенством
!Лп- Fn
f0
или, принимая во внимание значения первого и второго инва-
риантов,
"•-уд- <7-6)
Совокупность силы и пары сил с моментом, коллинеарным
силе, называется динамическим винтом или динамой. Так как
плоскость действия пары перпендикулярна моменту пары, то
динамический винт представляет собой совокупность силы и пары
сил, действующей в плоскости, перпендикулярной силе. Различают
правый и левый динамические винты. На рис. 7.1, а показан
правый динамический винт, составленный из силы Fo, равной
главному вектору системы, и пары сил с моментом Мо, равным
главному моменту; на рис. 7.1, б показан левый винт, состав-
ленный из тех же элементов.
Может возникнуть вопрос, в каких случаях данную систему
сил можно привести к динаме? На этот вопрос отвечает следую-
щая теорема:
§ 7.1] СТАТИЧЕСКИЕ ИНВАРИАНТЫ. ДИНАМИЧЕСКИЙ ВИНТ 111
Если второй статический инвариант не равен нулю, то сис-
тему сил можно привести к динаме.
Пусть в произвольной точке О (рис. 7.2, а) система приведена
к силе, равной главному вектору Fo, и паре сил с моментом,
равным главному моменту. Так как по условию теоремы /2 =
= Fo-Mo=^=0, то оба вектора, Fo и Мо, не равны нулю и не
перпендикулярны между собой. Разложим главный момент на две
составляющие: одну М* направим по главному вектору и другую
Mi направим перпендикулярно главному вектору (рис. 7.2, а).
Составляющая Mi представляет собой момент пары сил, располо-
женной в плоскости, перпендикулярной вектору Мг. Выберем
силыТ' и F", составляющие эту пару, равными по модулю глав-
ному вектору Fo и приложим силу F' к центру приведения
Рис. 7.2.
(рис. 7.2, б). Система сил Fo, F', как эквивалентная нулю, может
быть отброшена (рис. 7.2, в). Так как момент М* — вектор сво-
бодный, то его можно перенести из точки О в точку О* (рис. 7.2, г).
Таким образом, заданная система сил приведена в точке О*
к силе F"=F0 и к паре сил с моментом М* (рис. 7.2, г), рас-
положенной в плоскости, перпендикулярной силе, т. е. мы полу-
чили динамический винт.
112
ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
[ГЛ. VII
Ючка и” не единственная,
к динаме. В самом деле, силу
Из формулы (7.6) видно, что положительному второму инва-
рианту (/2>0) отвечает правый динамический винт, а отрица-
тельному второму инварианту (/2 < 0) — левый динамический винт.
~ ‘' где система сил приводится
можно переносить вдоль линии
ее действия, момент же пары
сил есть вектор свободный, сле-
довательно, система сил может
быть приведена к динаме во всех
точках прямой, проходящей че-
рез точку О* и являющейся ли-
нией действия силы F" = Fo. Эта
прямая называется центральной
осью системы сил. Найдем те-
перь уравнение центральной оси.
Пусть О* (рис. 7.3) —точка
центральной оси. Тогда для этой
точки главный вектор и глав-
ный момент должны быть кол-
линеарны друг другу. На основании формулы (7.2) главный
момент для точки О* можно записать в виде
M* = Mo + O*OxFo = Mo —OO*xFo.
Условие коллинеарности главного вектора и главного момента
для точки О* записывается следующим образом:
pF0 = M*,
где р — параметр винта, имеющий размерность длины.
Таким образом, ____
pFo = Mo-OO*xFo. (7.7)
Пусть Fx, Fy, Fz и МОх, МОи, МОг — соответственно проекции
главного вектора и главного момента на оси х, у и г; тогда
F0 = FJ + FJ + ^k,
М о = Mqxi -j-Moyj ~^МОгк.
Пусть координаты какой-либо точки О* центральной оси будут
х, у, г, следовательно,
00* = xi + yj + zk.
Подставляя соответствующие выражения в
получим
i
р (FA.i + Fyj + /Тк) = MOxi + MOyj + МОгк-
х
fx
соотношение
j к
У 2 =
(7-7),
=[МОх - (yFt - zFy)] i + [МОу - (zFx - xF,)] j + [Mo — (xFy—yFx)]k.
§7 2] ЧАСТНЫЕ СЛУЧАИ ПРИВЕДЕНИЯ СИСТЕМЫ СИЛ ИЗ
Приравнивая коэффициенты при единичных векторах i, j и к,
будем иметь
pFx = MOx-(yFs~zFy'),
pF у = МОу — (zFx - xFx),
pFx = MOg-(xFy-yFx).
Следовательно,
Мох-(ург~грч) MOy~(zFX~xFz} MOz-(xFy-yFx) ,7ЯА
------к-------=--------у-------=--------. (7.8)
Это и есть искомые уравнения центральной оси.
§ 7.2. Частные случаи приведения пространственной системы сил
Если при приведении системы сил к динамическому винту
главный момент динамы оказался равным нулю, а главный век-
тор отличен от нуля, то это означает, что система сил приведена
к равнодействующей, причем центральная ось является линией
действия этой равнодействующей.
Выясним, при каких условиях, относящихся к главному век-
тору Fo и главному моменту Мо, это может быть. Поскольку
главный момент динамы М* равен составляющей главного мо-
мента Мо, направленной по главному вектору, то рассматривае-
мый случай М* = 0 означает, что главный момент Мо перпенди-
кулярен главному вектору, т. е. /2=Fo-Mo = 0. Отсюда непо-
средственно вытекает, что если главный вектор Fo не равен нулю,
а второй инвариант равен нулю,
Fo#0, /2 = Fo-Mo = 0, (7.9)
то рассматриваемая система приводится к равнодействующей.
В частности, если для какого-либо центра приведения Fo ф О,
а Мо = 0, то это означает, что система сил приведена к равно-
действующей, проходящей через данный центр приведения; при
этом условие (7.9) также будет выполнено.
Обобщим приведенную в главе V теорему о моменте равно-
действующей (теорему Вариньона) на случай пространственной
системы сил.
Если пространственная система сил приводится к равнодейст-
вующей, то момент равнодействующей относительно произвольной
точки равен геометрической сумме моментов всех сил относительно
той же точки.
Пусть система сил имеет равнодействующую R и точка О
лежит на линии действия этой равнодействующей. Если приводить
заданную систему сил к этой точке, то получим, что главный
момент равен нулю.
114
ПРОСТРАНСТВЕННАЯ СИСТЕМА CHJT
[ГЛ. VII
Возьмем какой-либо другой центр приведения Ог; тогда
М01 = S М01 (F*). (7.10)
A=i
С другой стороны, на основании формулы (4.14) имеем
M01 = M0 + M01(F0) = M01(F0), (7.11)
так как Мо = 0. Сравнивая выражения (7.10) и (7.11) и учиты-
вая, что в данном случае Fo = R, получаем
М01 (R) = MOl (Fa). (7.12)
*=!
Таким образом, теорема доказана.
Пусть при каком-либо выборе центра приведения Fo = 0,
Мо=^0. Так как главный вектор не зависит от центра приведе-
ния, то он равен нулю и при любом другом выборе центра при-
ведения. Поэтому главный момент тоже не меняется при пере-
мене центра приведения, и, следовательно, в этом случае система
сил приводится к паре сил с моментом, равным Мо.
Составим теперь таблицу всех возможных случаев приведения
пространственной системы сил:
— Fo - Мо Fo Mo Случай приведения
1 /2=^о Fo 0 awo Динамический винт
2 /2=0 F„#=0 Mo ¥= 0 M„ = 0 Равнодействующая
3 /2=о F„ = 0 Mo #= o Пара сил
4 /2=о Fo = O Mo=O Система сил эквивалентна нулю
Если все силы находятся в одной плоскости, например, в пло-
скости Оху, то их проекции на ось z и моменты относительно
осей х и у будут равны нулю. Следовательно;
Ег = 0, МОх = 0, МОу = 0.
Внося эти значения в формулу (7.5), найдем, что второй инва-
риант плоской системы сил равен нулю.
Тот же результат мы получим и для пространственной системы
параллельных сил. Действительно, пусть все силы параллельны
оси г. Тогда проекции их на оси х и у и моменты относительно
§ 7 2]
ЧАСТНЫЕ СЛУЧАИ ПРИВЕДЕНИЯ СИСТЕМЫ СИЛ
115
оси г будут равны нулю. Отсюда
Л- = 0, ^ = 0,
МОг = 0.
Пользуясь снова формулой (7.5), найдем /2 = 0.
На основании доказанного можно утверждать, что плоская
система сил и система параллельных сил в пространстве не при-
водятся к динамическому винту.
Задача 7.1. Систему двух сил Р1 = 8 кГ и Р3=12 кГ, направленных парал-
лельно осям х и у, как указано на рис. 7.4, а (расстояние между точками
приложения сил равно 1,3 .и)> требуется привести к динаме, определив глав-
ный вектор и главный момент динамы. Найти углы «, ?> и у, составляемые
центральной осью системы с координатными осями, а также уравнение
центральной оси.
Возьмем за центр приведения начало координат О. Проекции главного
вектора F на оси координат будут
FV = P3=12 кГ, Еу = Р1=--Я кГ, Fe = 0.
Модуль главного вектора
^=/^+^ + ^ = -/Р^ + Р|=14,4 кГ.
Направляющие косинусы главного вектора равны
р р f _
cos а = -^ = 0,834, cos 6 = -Д = 0,555, cosy = -^=0.
F г г —
Найдем проекции главного момента на оси координат:
=0, Мп, = ОА • Р2= 15,6 кГм, Мп=0.
kJ У kJZ
На рис. 7.4, б показано расположение главного вектора F и главного
момента Мо для центра приведения О.
(Проекцию главного момента на направление главного вектора опреде-
лим по формуле
F-Mo ГМ 8-15,6
М* =—~ = -у- Г-У- == -г, , = 8,66 кГм.
F F 14,4
Уравнение центральной оси (7.8) имеет вид
8г 15,6—12г —8х ф 12г/
12 8 — 0 ’
116
ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
[ГЛ VII
Отсюда следует, что центральная ось является линией пересечения пло-
скостей
2
z = 0,9, t/ = yX.
На рис 7.4, в показано расположение этой оси (Of?! = 0,9 л;).
Задача 7.2. По ребрам к\ба со стороной а действуют двенадцать равных по
модулю сил, как показано на рис. 7.5, а. Привести систему к простейшему виду.
За центр приведения возьмем начало координат О и вычислим проекции
главного вектора F и главного момента на координатные оси. Имеем
FX^ — 2P, Fy = 4P, Гг — 4Р,
Мх = 0, Му = —2Ра, Мг = 4Ра,
где Р — общее значение модуля заданных сил.
По формулам (7.4) и (7.5) найдем значения статических инвариантов
/1 = 36Р2, /2==8Р2а.
Так как второй инвариант положителен, то система сил приводится к пра-
вому динамическому винту (главный вектор F и момент М* направлены в одну
сторону). Модель момента М* найдем по формуле (7.6):
Напишем уравнение центральной оси (7.8):
— (у-4Р — г-4Р) -2Pa — [z( — 2P) — x-4P] _4Ра—[х 4Р—у( — 2Р)]
-2Р ~ 4Р ~~ 4Р
Отсюда видно, что центральная ось системы представляет линию пересече-
ния плоскостей
2х — 4(/ + 5z — а,
2х + Ьу — 4г = 2а.
Подставляя в эти уравнения сначала 2 = 0, а затем у —а, найдем точки
пересечения центральной оси с нижней и боковой гранями куба (рис. 7.5, б)
13 а о
ХА—[8а’ У А ~ 9 >
5 8
хв— g а’ Ув—а’ гв— 9 а'
§7 3] УРАВНЕНИЯ РАВНОВЕСИЯ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ 117
Таким образом, динамический винт, эквивалентный данной системе сил,
состоит из силы F, модуль которой равен F = У~и пары сил с момен-
том М*, коллинеарным силе F и численно равным М* = ,/3 Ра. Центральная
ось и составляющие динамического винта показаны на рис. 7.5, б.
§ 7.3. Уравнения равновесия пространственной системы сил
Как было выяснено в § 4.4, необходимые и достаточные усло-
вия равновесия пространственной системы сил, приложенных
к твердому телу, можно записать в виде трех уравнений проек-
ций (4.16) и трех уравнений моментов (4.17):
2 Fftv = 0,
А=1
S A40.v О = О,
*=i
У, Fky = 0,
А=1
2 Afo,(Fft) = 0,
fe=i
tFkz = O, (7.13)
А=1
EMO2(F*) = 0. (7.14)
fe=i
Если тело полностью закреплено, то действующие на него
силы находятся в равновесии и уравнения (7.13) и (7.14) служат
для определения опорных реакций. Конечно, могут встретиться
случаи, когда этих уравнений недостаточно для определения опор-
ных реакций; такие статически неопределимые системы мы рас-
сматривать не будем.
Для пространственной 'системы параллельных сил уравнения
равновесия принимают следующий вид (§ 4.4) *):
2^ = 0, £MOv(Fa) = 0,
Л=1
п
£Mo,(Fft) = 0. (7.15)
&=i
Рассмотрим теперь случаи, когда тело закреплено лишь
частично, т. е. связи, которые наложены на тело, не гарантируют
равновесия тела. Можно указать четыре частных случая.
1. Твердое тело имеет одну неподвижную точку. Иначе говоря,
оно прикреплено к неподвижной точке при помощи идеального
сферического шарнира.
Поместим в эту точку (см. точку А на рис. 7.6, а) начало непод-
вижной системы координат. Действие связи в точке А заменим
реакцией; так как она неизвестна по модулю и направлению, то
мы ее представим в виде трех неизвестных составляющих Хл,
Yл, ZA, направленных соответственно вдоль осей х, у, г.
') Предполагается, что линии действия сил параллельны оси г.
118
Пространственная система сил
[ГЛ VIt
Уравнения равновесия (7.13) и (7.14) в этом случае запи-
шутся в таком виде:
1) Хд+£^ = 0,
k = l
2) Ya +2^ = 0,
ki
3) 7л + .Ы = 0,
П (7.16)
4) 2 M^(Ffr) =0,
k = i
5) SM^(Fa)=0,
6) £ВД)=О.
Последние три уравнения не содержат составляющих реакции,
так как линия действия этой силы проходит через точку А. Сле-
довательно, эти уравнения устанавливают зависимости между
Рис. 7.6.
активными силами, необходимые для равновесия тела, причем
три первых уравнения могут быть использованы для определения
составляющих реакции.
Таким образом, условием равновесия твердого тела, имеющего
одну неподвижную точку, является равенство нулю каждой из
алгебраических сумм моментов всех активных сил системы отно-
сительно трех осей, пересекающихся в неподвижной точке тела.
2. Тело имеет две неподвижные точки. Это, например, будет
иметь место, если оно прикреплено к двум неподвижным точкам
при помощи шарниров (рис. 7.6, б).
§73] УРАВНЕНИЯ РАВНОВЕСИЯ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ 119
Выберем начало координат в точке А и направим ось z вдоль
линии, проходящей через точки А и В. Заменим действие связей
реакциями, направив составляющие реакций вдоль координатных
осей (рис. 7.6, б). Обозначим расстояние между точками А и В
через а; тогда уравнения равновесия (7.13) и (7.14) запишутся
в следующем виде:
1)
2)
3)
4)
5)
6)
Хд + Хв+2 T’*v = 0,
* = i
Уа+^в+ У, ^Ау = 0,
А—1
ZaA-ZbA- Л Fkz = £>,
k= i
(7-17)
-aYs+ У <lx(Fft)==0,
' i
aXB+£ MAy(Fk) = 0,
A = 1
2 ВД =0.
k^\
Последнее уравнение не содержит составляющих сил реак-
ций и устанавливает связь между активными силами, необ-
ходимую для равновесия тела. Следовательно, условием равно-
весия твердого тела, имеющего две неподвижные точки, является
равенство нулю алгебраической суммы моментов всех активных
сил, приложенных к телу, относительно оси, проходящей через
неподвижные точки. Первые пять уравнений служат для опре-
деления неизвестных составляющих реакций Х.А, Y А, ZA, Хв,
Ув, ZR.
Заметим, что составляющие ZA и ZB не могут,быть опреде-
лены в отдельности. Из третьего уравнения определяется только
сумма ZA-\-ZB и, следовательно, задача в отношении каждого
из этих неизвестных для твердого тела является статически неоп-
ределимой. Однако, если в точке В находится не сферический,
а цилиндрический шарнир (т. е. подшипник), не препятствующий
продольному скольжению тела вдоль оси вращения, то ZB = C
и задача становится статически определимой.
3. Тело имеет неподвижную ось вращения, вдоль которой онс
может скользшь без трения. Это значит, что в точках А и В
находятся цилиндрические шарниры (подшипники), причем сос-
тавляющие их реакций вдоль оси вращения равны нулю.
120
ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
[ГЛ. VII
Следовательно, уравнения равновесия примут вид:
1)
2)
3)
4)
5)
6)
Хд4-Хв4- Fkx — ®,
Ya + Y.+ ^F^^O,
k = i
£ Fks = 0,
k = i
— <2^b + 2 ^Ал(Р'а) = 0,
* = !
°-Хв+ У Млу (F*) =0,
к = 1
£ AU(Fft) = 0.
* = i
(7.18)
Два из уравнений (7.18), а именно, третье и шестое, накла-
дывают ограничения на систему активных сил, а остальные урав-
нения служат для определения реакций.
4. Тело опирается в трех точках на гладкую плоскость, при-
чем точки опоры не лежат на одной прямой. Обозначим эти точки
через А, В и С и совместим с плоскостью АВС координатную
плоскость Аху (рис. 7.7). Заменив действие связей вертикальными
реакциями Мл, NB и Nc, запишем условия равновесия (7.13) и
(7.14) в таком виде;
1)
2)
3)
4)
2^ = 0,
k=l
У F/гу = 0,
fe = l
5^ + Ул + Ув + ^ = 0,
п
2 AWFa)-WVc = 0,
k = i
(7-19)
5)
6)
п
2 MAy(Fk)-aNB-cNc = Q,
к = 1
п
S МДг (Fft) = 0.
k=l
§ 7.4]
ЗАДАЧИ
121
Третье —пятое уравнения могут служить для определения
неизвестных реакции, а первое, второе и шестое уравнения пред-
ставляют собой условия, связываю-
щие активные силы и необходимые
для равновесия тела. Конечно, для
равновесия тела необходимо выпол-
нение условий У 0, jVb^sO,
NcF- 0, так как в точках опоры могут
возникнуть только реакции приня-
того выше направления.
Если тело опирается на горизон-
тальную плоскость более чем в трех
точках, то задача становится стати-
чески неопределимой, так как при
этом реакций будет столько, сколько
точек, а уравнений для определения
реакций остается по-прежнему только
три.
Рис. 7.7.
§ 7.4. Задачи
Задача 7.3. Найти главный вектор и
главный момент системы сил, изображенной
на рис. 7.8, а; силы приложены к верши-
нам куба и направлены вдоль его ребер,
причем F1 = F2 = Fa = P, Fi = Fa = Fe = 3P. Длина ребра куба равна а.
Проекции главного вектора находим по формулам (4.4):
FX= — P+3P=2P, Fy~P — 3P — — 2P, FS = P + 3P = 4P.
Его модуль равен /:' = ’^^^2P)3-|-(2P)24-(4P)3 = 4,9^’. Направляющие косинусы
будут
cos(x, F) = 2Р 4Т9Р = 0-407’ Zx, F- s 66°,
cos (у, F) = — 9Р 4.9Р- °’407’ L у, Fa а 114°,
cos (z, F) = 4Р 4ДР = °’814’ L Z, Fa а 35:30'
Главный вектор изображен на рис. 7.8, б.
Далее находим проекции главного момента по формулам (4.7):
МОХ = F2a “ F3a + Fьа = ЗРа>
М о и = Fta - гйа = °-
МОг = F±a — F&a = — 2Ра,
122
ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
[ГЛ. VJ1
а модуль главного момента по формуле (4.8)
МО = V (ЗРа)2 + (2Ра)2 ЗЗРа.
Теперь определим направляющие косинусы главного момента:
cos (х, Мп)==-^£- = 0,833, £ х, Мо = 33’40',
и 3,6Ра и
cos (у, Мо) = 0, £ у, Мо = 90’,
2Рл
cos (г, Мп) = - ~- = — 0,555, £г, №п = 123’40'.
и 3,оРа и
Главный момент изображен на рис 7.8, в. Угол между векторами F и Мо
вычисляется по формуле (4.11)
cos (F, Мо) = 0,407 • 0,833—0,407.0 — 0,814 • 0,555= — 0,112.
Следовательно, угол между этими векторами равен 96’30'.
Задача 7.4. Жесткая конструкция, имеющая форму параллелепипеда
ABCDEPGH, прикреплена к основанию шаровым шарниром А и тремя стерж-
нями 1, 2 и 3. Определить реакцию шарнирной опоры и усилия в стержнях,
если задана нагрузка в виде двух сил Pi и Р2, причем Р^ = Р, Р2=2Р. Весом
конструкции пренебречь. Размеры указаны на чертеже (рис. 7.9, а).
Усилия в стержнях обозначим через Np N, и N3; реакцию шарнира пред-
ставим в виде трех составляющих Хд, YА и ZA. Соответствующая схема сил
изображена на рис. 7.9, б. Выбрав координатную систему, как указано на
§ 7 41
ЗАДАЧИ
123
чертеже, составим уравнения равновесия в следующем виде:
2 ^=Xa + 'V3 = °>
k^i
2 ^=za-^-^ + 2P = 0,
*=1
2 MAx-(Fft) = - N^Za + Pa + 2p.2a = 0,
k= 1
2 MAy(Fk)=+N2.3a+N3a-2P.3a^0,
k = l
2 ^(Fft)=-^-2a=°-
k.\
Число уравнений равно числу неизвестных, т. е. рассматриваемая задача
статически определимая. Решив полученную систему уравнений, найдем зна-
чения усилий
Л71 = уР, Л73 = 2Р, Д/3 = 0
и составляющие реакции шарнира
хд==о, уд = р, гд=|р.
Задача 7.5. Прямоугольная пластинка тремя ножками опирается на глад-
кий пол (рис. 7.10). Вес Р пластинки приложен в ее центре. Размеры указаны
124
ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
[ГЛ. VII
на рисунке. В точке с координатами х и у к пластинке приложена вертикаль-
ная сила Q. Определить область, внутри которой можно брать точки прило-
жения силы Q, чтобы пластинка не опрокинулась. Определить также, при
каком соотношении между модулями сил Р и Q вся поверхность пластинки
будет безопасной.
Рис. 7.10.
Заменяя действие пола вертикальными реакциями N^, Nfi, No> составим
уравнения равновесия. Так как все силы, действующие на пластинку, парал-
лельны, то можно воспользоваться уравнениями (7.15):
S^=wa+wb+wd-(2-P = 0>
1
п
fe=l
Отсюда
§ ™1
ЗАДАЧИ
125
Для того чтобы пластинка не
условий:
опрокинулась, необходимо выполнение
В
Границы искомой области найдем из условий:
N
_ Qx Q и+р +
В—~ЬХ~2аУ+4 +
Q
2
= 0.
Отсюда находим
2а , аР ,
FX + 2Q +'
2а аР
TX + 2Q
На рис. 7.10, б искомая область, построенная при P--Q/2, заштрихована. При
Q < Р/2 вся поверхность пла-
стинки будет безопасной.
Задача 7.6. Тонкий стер-
жень ОА, весом которого можно
пренебречь, шарнирно закреп-
лен в точке О и удерживается
в горизонтальной плоскости ни-
Рис. 7.11.
тями АВ и CD (рис. 7.11).
Точка С находится в середине
стержня ОА. На стержень дей-
ствует вертикальная сила Q,
приложенная в точке Е стер-
жня. Дано: A AOD — /.ВАК ~
=а, ОА~1, ОЕ = а, OD = AK.
Найти натяжение нитей АВ и
CD.
Стержень ОА шарнирно ук-
реплен в точке О; для опреде-
ления натяжения нитей вос-
пользуемся уравнениями мо-
ментов.
Заменяем действие нитей
реакциями Tt и Т2. Так как
имеется лишь две неизвестные
величины, то составим уравнения
только относительно осей х и z:
моментов сил, действующих на стержень,
п
У МОх (Fft) = — Qa sin sin a sin a = 0,
k = \
n
У (Ffe) = T2l cos a sin a — T±l sin a cos a — 0.
Отсюда следует:
<т> rp CtQ
i 1 — 1 2 = 7—:-----
I sm a
126
ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
[ГЛ VII
Мы не составляем уравнения моментов относительно оси у, так как оно
удовлс1ворится найденными значениями 7\ и Т-, Это уравнение может служить
для проверки решения задачи.
Определив силы Т, и Т>, можно найти и ре!кцию шарнира О. Для этого
составим уравнения проекций, заменив действие шарнира реакциями Хо
2 ffev = X0 —7'2cosa4-7'1cosa = 0,
1
S ffty = ro-7’isina=0’
k= 1
S ^г = 20 + 72 sin a —Q=0.
Следовательно,
Xo = 0, Уо= T\ sin a =^, Z0 = Q— T' sin a = Q fl—
1 \ ‘ /
Задача 7.7. Прямоугольная пластинка удерживается в горизонтальном
положении при помощи петель в точках А и В и однородного стержня DC,
имеющего шарниры в точках С и D. Стержень имеет длину I и вес Р. Размеры
Рис. 7.12.
пластинки указаны на рис. 7.12, a, £DCE = a. Определить реакции в точках
А, В, С и D, если сила тяжести Q, действующая на пластинку, приложена
в точке с координатами х и у.
В данном случае мы имеем дело с равновесием двух сочлененных тел: пла-
стинки и стержня.
Рассмотрим каждое тело в отдельности. Заменяя связи в точках А, В и С
реакциями Хд, YA, ZA, Хв, Y в, 1В и Хс, Yc, Zc, составим уравнения
§ 7 4] ЗАДАЧИ 127
равновесия пластинки (рис. 7.12, б):
У Т’/г« = ^д + ^в+-Хс = О>
* = 1
2 Ъу=уА+ув+ус=°'
2 f^=za+zb+zc~q=o,
fe=l
2 ^v(Ffr) = -J/Q + Zc“+ZBa = O(
/?-=! x
2 MAy(F,) = ^-ZCb = 0’
fe=l
n
2 лырл)=-\4+гс&-хда=°-
/г=1
Выбрав систему координат Сх'у'г', составим теперь уравнения равновесия
для стержня. Освобождаясь от связей в точках D и С и вводя реакции Хд,
Уд, ZD, Хд, У^, 7/с (рис. 7.12, в), получим следующие уравнения:
2 ^' = XD-XC=0>
k = l
2 ^=^-^Ь=о,
ь - i
2 ^=zD-z^-p=o.
k = l
2 MCx'(^) = -yOZsina = 0’
k = I
n
2 ^C/(F*) = — F cos « + cos «+ sin a — 0.
*=1
Мы не составляли уравнения моментов относительно оси г', так как оно
будет содержать только неизвестную YD, определяемую из уравнения
2 4:v(FJ = 0-
k = i
Так как Х'с = Хс, Y'c = YCt Z’C = ZC> то
•Хд = Хс, Тд = /С и Zd = Zq~YP.
128
ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
[ГЛ. VII
Решая полученные уравнения, найдем:
2 (f + l^ctga, z -о fl- а 2b)’
z — о (— — x ) 2b)’
хс=- (4+т4ctg а’ Zc=-^x. . c b
(4+т 4ctg а’ zd-p+tx’
Ул+Ув=о, rD=o, гс=о.
Как и следовало ожидать, мы не смогли определить реакции YА и YB, а нашли
только их сумму (§ 7.3).
Отметим, что если Р = 0 то, как легко проверить, реакции шарниров С
и D будут направлены вдоль стержня CD.
Задача 7.8. Однородная балка АВ длины 2/ и веса Р опирается верхним
концом В на угол, образованный двумя вертикальными гладкими взаимно
перпендикулярными плоскостями.
Нижний конец балки А, находясь на
горизонтальной шероховатой плоско-
сти, упирается в прямолинейный вы-
ступ DE, отстоящий от оси у на
расстоянии 2а (рис. 7.13). Пренебре-
гая поперечными размерами балки,
определить, при каком угле а, между
балкой и горизонтальной плоскостью
возможно равновесие, если коэффи-
циент трения между концом А балки
и углом, .образованным горизонталь-
ной плоскостью и выступом DE, ра-
вен /.
Прежде чем перейти к составле-
нию уравнений равновесия, введем
вспомогательный угол р (см. рис. 7.13).
Легко видеть, что между углами а
и р имеется простая связь. Действи-
тельно, отрезок АК по условию ра-
вен 2а; с другой стороны, из прямоугольного треугольника ОКА имеем АК =
= ОА Cos р, а из треугольника ОАВ найдем ОА — 21 cos а. Таким образом,
АК = 2а = 21 cos a cos р или
о а
cos а cos р = —.
(7.20)
Перейдем к рассмотрению сил, действующих на балку. Прежде всего
к ней приложена одна активная сила — сила тяжести Р; кроме того, на балку
действуют реакции гладких вертикальных стенок Nx и Ny, нормальные состав-
ляющие Nx и N2 реакции угла, образованного выступом и горизонтальной
плоскостью, и сила трения Т (она направлена влево, так как под действием
силы тяжести Р конец балки А стремится переместиться вправо).
§ Ml
ЗАДАЧИ
129
При равновесии балки перечисленные силы должны удовлетворять урав-
нениям равновесия (7.13) и (7.14). Имеем:
k
^Fky = Ny-T = 0,
k
ZiFk^N2-P = 0,
k
2^o.v (F*)= ~Ny '21 sin a —PZ cos a sin 0 + ^2 • 2Z cosasin 0 = 0,
k
^Mo (Fk) = Nx-2l sin a-|-Рй — Л12 • 2a = 0,
k
У Л40г (Ffc) = NY-2l cqs a sin 0 — T 2a = 0.
k
Пользуясь этими уравнениями, легко найдем
Р Ра
Т=~п ctg a sin 0, Alj=^—--, N2 = P
2 1 21 sin a
(другие величины нас не интересуют).
Для того чтобы балка находилась в равновесии, сила трения должна
удовлетворять условию T^fN, где N-V~Nl~\-Ni — полная нормальная со-
ставляющая реакции угла, в который упирается конец балки А. Внося в это
неравенство найденные значения для Т, \\ и N2, получим
^clgasin0=S:/j/?j^^+P2I
или, возводя в квадрат и сокращая на Р2,
ctg2 a sin2 0 ei P cosec2 a 4- 4/2.
Из равенства (7.20) найдем
a2
sin2 0=1— cos2 0=1 —sec2 a.
Внесем это значение для sin2 0 в предыдущее неравенство. Тогда после
несложных преобразований получим
ctg2 a <
4Z2/2 + (l+/2)a2
Z2-(l+/2)a2 '
Таково условие, которому должен удовлетворять угол а, чтобы при задан-
ных условиях балка находилась в равновесии. Как и следовало ожидать,
при о = 0 это условие совпадает с соответствующим неравенством, полученным
при решении задачи 6.1 (стр. 97).
5 Бутенин Н. В. и др.
ГЛАВА VIII
ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ И ЦЕНТР ТЯЖЕСТИ
§ 8.1. Центр параллельных сил
В этой главе рассматриваются такие системы параллельных
сил, которые приводятся к равнодействующей. Прежде всего
нужно отметить, что условия приведения системы^ параллельных
сил к равнодействующей сводятся к одному неравенству F^O.
Действительно, уже было показано,
что второй инвариант системы па-
раллельных сил тождественно ра-
вен нулю (стр. 114). Поэтому един-
ственным условием приведения
пространственной системы парал-
лельных сил к равнодействующей
является неравенство нулю глав-
ного вектора этой системы
БД-О. (8.1)
Считая это условие выполнен-
ным, выясним, что происходит
с равнодействующей R при одновременном повороте линий дейст-
вия данных параллельных сил на один и тот же угол, если точки
приложения этих сил сохраняются неизменными и повороты линий
действия сил происходят вокруг параллельных осей.
При этих условиях равнодействующая заданной системы сил
также .одновременно поворачивается на тот же угол, причем по-
ворот происходит вокруг некоторой фиксированной точки, кото-
рая называется центром параллельных сил. Перейдем к доказа-
тельству этого утверждения.
Предположим, что для рассматриваемой системы параллель-
ных сил Fb F2, ..., F„ главный вектор не равен нулю, следо-
вательно, данная система сил приводится к равнодействующей.
Пусть точка Ох есть какая-либо точка линии действия этой равно-
действующей. Пусть теперь г — радиус-вектор точки О, относи-
тельно выбранного полюса О, а гА —радиус-вектор точки прило-
жения силы F* (рис. 8.1).
§8 1]
ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ
131
Согласно теореме Вариньона (§ 7.2) сумма моментов всех сил
системы относительно точки Ох равна нулю:
£ (rft-r)xFft = 0, (8.2)
fe=i
так как точка 0х лежит на линии действия равнодействующей.
Полученное равенство можно переписать в следующей форме:
£ r*xFft — £ rxFft= 2 rftxFft-rx £ Fft = 0. (8.3)
Й = 1 ft=l й=1 k = l
Введем теперь в рассмотрение единичный вектор е, параллель-
ный линиям действия сил. Тогда любая сила F* может быть
представлена в виде
Fft = F|e, (8.4)
где Fk = Fk, если направление силы Fft и вектора е совпадают,
и Fk = — Fk, если Fft и е направлены противоположно друг другу.
Очевидно, что при этом
^Fk = ^FL (8.5)
Подставляя выражения (8.4) и (8.5) в соотношение (8.3), получим
У, rfe х F£e — г х е FI = О,
*=1 k=i
откуда
хе = 0. (8.6)
Последнее равенство удовлетворяется при любом направлении
сил (т. е. направлении единичного вектора е) только при усло-
вии, что первый множитель равен нулю:
£г^-г£м. (8.7)
* —1 к=1
В свою очередь это равенство имеет единственное решение
относительно радиуса-вектора г, определяющего такую точку при-
ложения равнодействующей, которая не меняет своего положе-
ния при повороте линий действия сил. Такой точкой и является
центр параллельных сил, чем и доказывается его существование.
Обозначив радиус-векгор центра параллельных сил через гс, из
5*
У rkF*k-r У
*=i k-1
132
ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ И ЦЕНТР ТЯЖЕСТИ’
[ГЛ. VIII
равенства (8.7) получим
V rkFk
& гЛ+гЛ*+-+гЛ
Гс~ « г*+г*+...+г*
*=1
(8-8)
Пусть хс, ус, гс — координаты центра параллельных сил, a xk,
yk, zk — координаты точки приложения произвольной силы Fft;
тогда координаты центра параллельных сил найдутся из формул:
п
’
2j Fk
*=1
п
yiF* + vJ* + _ + yJ*
Ус~ tn ~ '
I
п
V 2 Г*
_ k k ^ + z^ + ...+znF^
ZC V ₽» F*+^*+-+^ ‘
2j П
*=i
Выражения
t t t zkF%
k=i fe=i fe=i
(8-9)
называются соответственно статическими моментами заданной
системы сил относительно координатных плоскостей yOz, xOz, хОу.
Отметим, что если начало координат выбрано в центре парал-
лельных сил, то
xc = yc = zc = ()
и статические моменты заданной системы сил равны нулю.
§ 8.2. Центр тяжести
Тело произвольной формы, находящееся в поле сил тяжести,
можно разбить сечениями, параллельными координатным пло-
скостям, на элементарные объемы (рис. 8.2). Если пренебречь
размерами тела по сравнению с радиусом Земли, то силы тя-
жести, действующие на каждый элементарный объем, можно
считать параллельными друг другу. Обозначим через ДУА объем
§ 8.21
ЦЕНТР ТЯЖЕСТИ
133
элементарного параллелепипеда с центром в точке Mk (см. рис. 8.2),
а силу тяжести, действующую на этот элемент, — через АР*.
Тогда средним удельным весом элемента объема называется отно-
шение \Pk/kVk. Стягивая параллелепипед в точку Mk, получим
удельный вес в данной точке тела, как предел среднего удель-
ного веса
Tfe, Уь, ?k) = lim (8.10)
Таким образом, удельный вес яв-
ляется функцией координат, т. е. у =
= У (х, У, z). Будем считать, что вместе
с геометрическими характеристиками
тела задан также и удельный вес в
каждой точке тела.
Вернемся к разбиению тела на эле-
ментарные объемы. Если исключить
объемы тех элементов, которые грани-
чат с поверхностью тела, то можно получить ступенчатое тело,
состоящее из совокупности параллелепипедов. Приложим к центру
каждого параллелепипеда силу тяжести APft = yfeAEft, где yft —
удельный вес в точке тела, совпадающей с центром параллеле-
пипеда. Для системы п параллельных сил тяжести, образованной
таким образом, можно найти центр параллельных сил
S ГкЫ>Ь
г(«) = 1=2_____
п
S &рк
k= 1
ri АР, -р г2 АР2 + - ..-Ьгга \Рп
&Р1 + АР2 + • • • + АР„
(8-И)
Формула (8.11) определяет положение некоторой точки Сп.
Центром тяжести называется точка, являющаяся предельной
для ^точек Сп при /г->оо. Другими словами, центром тяжести
тела называется такая точка,-радиус-вектор которой определяется
следующим пределом:
£ Tk^Pk
rc = lim г(,г) = lim ------------
«-.со
й = Т
(8.12)
или, переходя к удельному весу,
п
У YAffeAV*
гс = lim k = l
п—><х
lim 2 ykrk ДУА
/Z —CO b=\
S T*AV*
k=l
n
lim У YfeAVfc
(8.13)
134
ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ И ЦЕНТР ТЯЖЕСТИ
[ГЛ. VIII
При таком предельном переходе предполагается, что размеры
всех параллелепипедов стремятся к нулю. Пределы знаменателей
в формулах (8.12) и (8.13) равны весу тела
lim £ APft = lim = Л
n->cofe = i п-сой = 1
Поскольку пределы интегральных сумм в числителе и знаме-
нателе формулы (8.13) представляют собой определенные интег-
ралы, распространенные по объему тела, то гс можно представить
в следующем виде:
Гс = 4“ Ц J v(*> У’ z)rdxdydz.
Координаты центра тяжести определяются формулами:
у, z)dxdydz,
у, z')dxdydz, . (8.14)
у, z)dxdydz.
(V)
Тело называется однородным, если у(х, у, z) = y = const.
В этом случае величина у выносится в формулах-(8.14) за знаки
интегралов в числителе и знаменателе и сокращается. Знамена-
тели в формулах (8.14) после вокращепия их на у равны объему
тела V. Таким образом, получим
= .J J Ху{Х’
(V)
хс = -у- xdxdydz, ус = -^г j ydxdydz,
zc = J J zdxdydz.
(8.15)
Центр тяжести однородного тела часто называют центром
тяжести объема.
В ряде случаев тело можно считать тонкой пластиной или
оболочкой (рис. 8.3, «).
Найдем центр тяжести однородной оболочки, предполагая, что
вес элемента ее поверхности пропорционален площади этого
элемента
AP* = y'ASft
и, следовательно, вес тела Р = y'S (S — площадь рассматриваемой
части поверхности).
§ 8 2]
ЦЕНТР ТЯЖЕСТИ
135
Из определения центра тяжести в соответствии с формулами
(8.15) получим при у'= const
xc = -|-^xdS, ус = у И у dS, zc = ^{zdS. (8.16)
(S) (S) . (S)
Центр тяжести однородной оболочки называют центром тя-
жести поверхности.
Как следует из формул (8.16), определение координат центра
тяжести поверхности связано с вычислением интегралов по по-
верхности.
Для плоской однородной пластины
(рис. 8.3, б) получим
хс — х dx dy,
(S)
(8.17)
Наконец, рассмотрим криволиней-
ный стержень —тело удлиненной фор-
мы, один из характерных размеров
которого значительно больше двух дру-
гих (рис. 8.4). Полагая, что вес элемента
такого стержня, заключенного между двумя сечениями, нормаль-
ными к его оси, пропорционален длине А/ дуги этой оси, получим
bPk = y"Mk, P — y”L,
где L — длина стержня.
Величину у" называют «погонным» весом. При сделанном пред-
положении у".—величина постоянная. Тогда в соответствии с фор-
мулами (8.15) координаты центра тяжести однородного стержня
136
ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ И ЦЕНТР ТЯЖЕСТИ
[ГЛ VIII
имеют вид
= Ус = ^ ^ydl, zc = ~ zdl. (8.18)
(L) (Г) (Г)
Центр тяжести однородного криволинейного стержня называют
центром тяжести линии.
§ 8.3. Методы нахождения центра тяжести
Во многих случаях центр тяжести тела можно определить
с помощью весьма простых методов. Мы рассмотрим некоторые
из них.
Симметрия. Если тело однородно и имеет плоскость симметрии
(рис. 8.5, а), то задача определения центра тяжести несколько
упрощается. Совместим с этой плоскостью симметрии координат-
ную плоскость хОу. Тогда каждому элементу объема тела ДУ*,
положение которого определяется координатами xk, yk, zk, будет
соответствовать элемент объема тела ДУу- с координатами xJt ур
zh причем
ДУ7 = ДУЬ Xj = xk, у} = уъ, z, = — zk.
Следовательно,
lim У zk\Vk
п
так как в сумме zkWk все члены попарно уничтожаются.
<г= 1
Поэтому, если однородное тело имеет плоскость симметрии,
то центр тяжести тела лежит в этой плоскости.
Пусть, далее, однородное тело имеет ось симметрии. Выберем
эту ось за ось г (рис. 8.5, б); тогда каждому элементу объема
§8 3]
МЕТОДЫ НАХОЖДЕНИЯ ЦЕНТРА ТЯЖЕСТИ
137
тела А У* с координатами xk, yk, zk будет соответствовать эле-
мент объема тела А У, с координатами %,, г/,, г,-, причем
АУу = АУй, х, = — xk, у^ — уь, Zj = zk.
Следовательно,
п
Xc = v lim У xftAKft = 0, ус=± lim У ykAVk = 0,
у п->оо у п-+ со
k=l k=l
п п
так как в суммах xkWk и ykWk все члены попарно
k=i k=i
уничтожаются.
Таким образом, если однородное тело имеет ось симметрии,
то его центр тяжести лежит на этой оси.
Аналогично можно показать, что если однородное тело имеет
центр симметрии, то центр тяжести тела будет совпадать с этой
точкой. Так, например, для пластинки, имеющей прямоугольную
форму, центр тяжести лежит в центре прямоугольника.
Разбиение. Иногда представляется возможным разбить тело
на такие части, для которых вес и положение центра тяжести
заранее известны. Пусть гь г2, ..., г„ — радиусы-векторы центра
тяжести каждой части, а Рг, Р
..., Рп — веса соответствующих чг
Из формулы (8.8) следует, что
„ Дг: + РгГзф-- • Ч~Рпгп
Г. =----------р---------,
где
Р = Р1 + Р2 + ... + Рл.
Для однородной пластинки, н
мер, из формулы (8.19) следует
п п
ХС = Ус — ДТ yk^kl
fe=l Й=1
где Sk — площади частей плоской фигуры; xk, yk — координаты
центров тяжести этих частей.
Задача 8.1. Способом разбиения найти координаты центра тяжести пло-
щади поперечного сечения неравиобокого угольника, размеры которого ука-
заны на рис. 8.6.
Разобьем угольник на два прямоугольника, площади которых равны
Si — bd, S2 = (a—d)d.
На основании (8.20) формулы для координат центра тяжести угольника
имеют вид
„ + _yiS1-py2S2
$X + S2 ’ Ус~ St + Sj ’
138 ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ И ЦЕНТР ТЯЖЕСТИ [ГЛ VIII
где «1, ^ — координаты центра тяжести первого прямоугольника, а х2, у2 —
координаты центра тяжести второго прямоугольника.
Очевидно, что
d b , , a — d d
Х‘=Г *2 = d + ~2~>
Таким образом, имеем
у М+(d+-g—jd(a —d) _ az + bd_d2
Xc~ bd + d(a-d) ~ 2(a + b-d) ’
^bd+-^-(a—d)d ~ b2 + ad__d2
Ус~ bd + d(a-d) ~ 2(a + b~d) '
Отрицательные веса. Этот способ применяют при нахождении
центра тяжести тела, имеющего свободные (т. е. пустые) полости.
Пусть дано тело, у которого имеется k свободных полостей
(рис. 8.7), причем Рс — вес тела, гс — искомый радиус-вектор,
определяющий положение центра тяжести
этого тела.
Если бы тело не имело полостей, то его
вес Р, очевидно, равнялся бы сумме
P = PC + P1 + P2 + ... + Pk,
где Ръ Р2, Pk — веса частей тела, кото-
рыми мы мысленно заполняем полости.
Обозначим через г —радиус-вектор, опре-
деляющий положение центра тяжести тела,
не имеющего полостей, а через гь г2, ..., rk —
цадиусы-векторы, определяющие соответственно центры тяжести
частей тела, заполняющих полости. На основании формулы (8.19)
для тела, не имеющего полостей, можно за-
У ' писать
Рис. 8.8.
_ 1~сРс~1~Г1Р1~1~ 1*2^2+ --- + rAPfe
Р С + Pl + Р 2 + • • • + Pfe
Находя из этой формулы радиус-вектор гс
центра тяжести тела, имеющего полости,
получим
Г - ГР ~ Г1Р1 ~ Г2Р2 ~ ~ TfePfe
P-Pj-P2-. ,-Р*
Таким образом, при нахождении центра тяжести тела, имеющего
свободные полости, следует применять способ разбиения, но счи-
тать, что полости имеют отрицательные веса.
Задача 8.2. Найти центр тяжести однородной круглой пластинки ра-
диуса R, у которой вырезано отверстие в виде прямоугольника со сторонами а
и b (рис. 8.8), использовав способ отрицательных весов.
§8 4] ЦЕНТРЫ ТЯЖЕСТИ ПРОСТЕЙШИХ ФИГУР 139
Пластинка симметрична относительно оси х; следовательно, ус = 0. Остается
найти лишь одну координату хс.
Согласно (8.21) будем иметь
Sx — Six,
Хс S-St ’
где
S = nR2, Si —ah, x = 0, —
Таким образом,
nR2 — ab 2(~R- — ab)'
§ 8.4. Центры тяжести простейших фигур
тяжести тре уголь-
центр
Центр тяжести треугольника. Воспользуемся способом раз-
биения и разделим треугольник АВС (рис. 8.-9) на элементарные
полоски, проведя линии, параллельные
стороне АС треугольника. Каждую та-
кую полоску можно принять за прямо-
угольник; центры тяжести этих прямо-
угольников находятся в их серединах,
т. е. на медиане BD треугольника. Сле-
довательно, центр тяжести треугольника
должен лежать на этой же медиане BD.
Разбивая теперь треугольник на
элементарные полоски линиями, парал-
лельными стороне АВ, заключаем, что
ника должен быть расположен на медиане ЁС,
Следовательно, центр тяжести треугольника находится в точке
пересечения его медиан. Эта
из медиан на отрезки
в отношении 1:2, т. е.
OD : OB = I : 2.
Центр тяжести трапе-
ции. Аналогично предыду-
щему, разобьем трапецию
ABCD (рис. 8.10) на эле-
ментарные полоски, парал-
лельные основаниям ВС и
AD. Центры тяжести по-
лосок расположатся на
прямой KL, соединяющей
середины оснований трапеции,
трапеции лежит на этой прямой. Для того
расстояние уа от нижнего основания, разобьем трапецию на
точка, как известно, делит каждую
Следовательно,
и центр тяжести
чтобы найти его
140 ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ И ЦЕНТР ТЯЖЕСТИ [ГЛ VIII
треугольники АВС и ACD. Для этих треугольников соответст-
венно имеем
2 , bh. 1 / о cdi
Используя формулу (8.20), получаем
__У131 + у>8-> h(a-\-2b)
s1 + s2 3 (« + &)’
Центр тяжести дуги окружности. Рассмотрим дугу ADB окруж-
ности радиуса R с центральным углом 2а. Поместим начало
координат в центре окружности и направим ось х перпендику-
лярно хорде АВ (рис. 8.11, а).
В
Рис. 8.11.
Так как вследствие симметрии фигуры относительно оси х
центр тяжести будет лежать на этой оси х, т.'е. г/с = 0, то остается
найти только абсциссу центра тяжести хс\ для этого восполь-
зуемся формулой (8.18). Согласно рис. 8.11, а имеем x = /?coscp,
dl = Rdq>, l = 2Ra и, следовательно,
а
j R2 cos <р dtp
х ______________
с 2aR
R sin а
(8.22)
где а —половина центрального угла в радианах.
В частности, для дуги полуокружности (а = л/2) будем иметь
Центр тяжести кругового сектора. Для определения положе-
ния центра тяжести кругового сектора разобьем его на элемен-
тарные секторы, как показано на рис. 8.11,6. Каждый элемен-
тарный сектор можно принять за равнобедренный треугольник
с высотой, равной R. Но высота в равнобедренном треугольнике
является также и медианой; следовательно, центр тяжести каж-
§8 4]
ЦЕНТРЫ ТЯЖЕСТИ ПРОСТЕЙШИХ ФИГУР
141
2 п
дого элементарного треугольника лежит на расстоянии у К от на-
чала координат О. Соответственно геометрическим местом цент-
ров тяжести всех элементарных треугольников является дуга
2 п
окружности радиуса у R.
Это означает, что центр тяжести площади кругового сектора
можно искать как центр тяжести материальной линии, по кото-
рой непрерывно и равномерно распределен вес этого сектора.
Применив формулу (8.22), получим координату центра тяжести
площади сектора
где а —половина центрального угла в радианах. В частности,
для сектора в виде полукруга (а = л/2) получим
(8.24)
Задача 8.3. Пластинка, изображенная на рис. 8.12, получена из квадрата,
сторона которого равна а, после того как из него была вырезана часть, состав-
ляющая четверть круга радиуса а с центром в вершине А квадрата. Опреде-
лить центр тяжести пластинки.
Рис. 8.12.
О
Рис. 8.13.
Ось х проведем по диагонали квадрата, взяв начало оси в вершине А.
Так как ось х является осью симметрии пластинки, то центр тяжести ее нахо-
дится на этой оси. Площадь квадрата без выреза S = aa, абсцисса его центра
тяжести х = а ]^2/2; площадь вырезанной части Sl = na2/4, абсцисса центра
тяжести ее определяется формулой (8.23), в которой R = a, а=л/4:
Центр тяжести пластинки определим по формуле
___‘Si^i
с~~ S-Sj
142
ЦЕ1ПР ПАРАЛЛЕЛЬНЫХ СИЛ И ЦЕНТР ТЯЖЕСТИ
[ГЛ VIII
или, подставляя соответствующие величины,
2 У2 а . „„
Хс~ з Т=^"“1,09а'
На рис. 8.12 показан центр тяжести пластинки.
Приведем без вывода формулы, - определяющие положения
центров тяжести некоторых простейших однородных тел.
Рис. 8.14. Рис. 8.15.
Поверхность шарового сегмента (рис. 8.13)
хс = /?-2- (8.25)
Пирамида и конус (рис. 8.14).
Центр тяжести находится на прямой, соединяющей вершину
с центром тяжести Р площади основания, на расстоянии х/4 ее
_, длины, считая от основания
Z77\ OC=*-OS. (8.26)
" | ' Шаровой сектор (рис. 8.15).
Q / U \
(8.27)
где R — радиус шара и /г —высота сферической части
Рис. 8.16.
сектора.
Задача 8.4. Определить центр тяжести колонны, состоящей из
однородного цилиндра веса Р, высоты Н и радиуса R, на кото-
рый установлена половина однородного шара веса G и того же
радиуса R (рис. 8.16). •
Разделим колонну на цилиндрическую и шаровую части.
Центр тяжести всей системы лежит на оси симметрии. Абсцисса
центра тяжести цилиндра ху = Н/2. Расстояние от центра полушара до его центра
тяжести найдем по формуле (8.27) при h = R, что дает 3/8Р. Следовательно,
Ж2 = ^ + 3/8Р. Пользуясь равенством (8 19), найдем центр тяжести колонны
КИНЕМАТИКА
ГЛАВА IX
КИНЕМАТИКА ТОЧКИ
§9.1. Введение
В этом разделе курса мы приступим к изучению движения
материальных тел. Когда говорят о движении тела, то подразу-
мевают под этим изменение его положения с течением времени
по отношению к какому-либо другому телу. Это значит, что при
изучении движения тела мы всегда должны указать, относительно
какого другого тела рассматривается его движение. С телом, по
отношению к которому изучается движение (тело отсчета), свя-
зывают систему координатных осей и часы. Эту совокупность
тела отсчета и связанной с ним системой координатных осей
(системы координат) и часов, как было уже сказано во введении,
называют системой отсчета.
Так как в теоретической механике считается, что время,
являясь непрерывно изменяющейся величиной, не зависит от
движения тел и одинаково во всех точках пространства и всех
системах отсчета, то, говоря о системе отсчета, можно ограни-
читься указанием только тела отсчета или системы координатных
осей (системы координат), связанных с этим телом. В кинематике
движение тел изучается с чисто геометрической точки зрения и
связь между движением и движущими силами не рассматривается.
В кинематике движение считается заданным, т. е. считаются
заданными как функции времени параметры, определяющие поло-
жение тела по отношению к выбранной системе координат.
В кинематике безразлично, какое движение совершает выбран-
ная система координат по отношению к каким-то иным телам,
не входящим в рамки нашего рассмотрения. Однако всегда сле-
дует иметь в виду, что характер наблюдаемого движения суще-
ственно зависит от выбора тела (системы координат), относительно
которого изучается движение. Так, .поршень автомобильного дви-
гателя совершает относительно корпуса автомобиля прямолиней-
ное колебательное ^движение, а относительно дороги, по которой
движется автомобиль с постоянной ,скоростью, поршень переме-
щается по синусоиде.
Если тело не перемещается по отношению к выбранной системе
координат, то говорят, что оно находится в покое. Так как покой
144
КИНЕМАТИКА ТОЧКИ
[ГЛ. IX
и движение тела мы рассматриваем лишь относительно выбранной
системы координат, которая в свою очередь может перемещаться
произвольным образом, то понятия «покой» и «движение» являются
относительными понятиями. Однако в кинематике часто поль-
зуются терминами «абсолютное движение», «абсолютная скорость»
и т. п., имеющими, конечно, условный характер. В частности,
если нет специальной оговорки, под выражением «неподвижная
система координат» следует понимать систему осей, относительно
которых рассматривается движение.
Рассматривая движение, мы связываем изменение положения
тела (или точки) с течением времени (будем обозначать его через t).
При изучении движения всегда устанавливается начало отсчета
времени t = t0 (во многих задачах будем полагать /о = О). Под
промежутком времени понимают разность между значениями
времени в какой-либо момент времени t2 и момент времени t±.
При движении тела все его точки в общем случае совершают
различные движения, например, при качении колеса по прямому
рельсу центр колеса движется по прямой линии, а точки обода
движутся по циклоидам. Поэтому изучению движения тела, естест-
венно, должно предшествовать изучение движения точки. Кроме
того, некоторые практические задачи о движении тел могут быть
решены непосредственно на основании изучения движения точки.
Непрерывную кривую, которую описывает точка при своем
движении, называют траекторией точки. В задачах небесной
механики траекторию именуют также орбитой. Если траектория
точки является прямой линией, то движение точки называют
прямолинейным. Если же траектория — кривая линия (не обяза-
тельно плоская), то движение точки называется криволинейным.
Мы сразу начнем с изучения криволинейного движения точки,
так как прямолинейное движение представляет собой частный
случай криволинейного. Приступая к изучению движения точки,
мы должны сформулировать те задачи, которые решаются в кине-
матике. Исходя из того, что основными пространственно-времен-
ными (кинематическими) характеристиками движения точки
являются ее положение, скорость и ускорение, мы можем сфор-
мулировать эти задачи следующим образом: найти способы задания
движения и, исходя из них, найти методы определения скорости
и ускорения.
§ 9.2. Способы задания движения
Прежде всего определим, что значит задать движение.
Движение точки по отношению к избранной системе отсчета
считается заданным, если известен способ, при помощи которого
можно определить положение точки в любой момент времени.
Следовательно, задать движение точки это значит указать способ,
§ 9.2]
СПОСОБЫ ЗАДАНИЯ ДВИЖЕНИЯ
145
позволяющий в любой момент времени определить ее положение
по отношению к выбранной системе отсчета.
Векторный способ. Положение точки в пространстве будет
вполне- определено, если ее радиус-вектор г, проводимый из
какого-либо заданного центра, известен как функция времени,
т. е. г = г(/). Следует, однако, иметь в виду, что задать вектор
как функцию времени значит уметь находить его модуль и направ-
ление в любой момент времени. Это можно сделать, если избрана
какая-либо определенная система координат, т. е. задание ради-
уса-вектора как функции времени обязательно предполагает
наличие системы координат, но в то же время не конкретизирует
ее. Считая, что радиус-вектор задан, мы тем самым должны
предполагать, что умеем определять его модуль и направление
в избранной нами системе координат.
То обстоятельство, что введением радиуса-вектора, определя-
ющего положение точки, мы не связываем себя с конкретной
системой координат, позволяет широко использовать задание
радиуса-вектора как функции времени для получения основ-
ных кинематических характеристик движения. Для решения же
конкретных задач обычно переходят от векторного способа
к координатному .и естественному способам задания движе-
ния.
Введем еще одно полезное для дальнейшего понятие о годо-
графе вектора, рассматриваемого как функция скалярного аргу-
мента (например, времени).
Годографом какого-либо вектора называют кривую, которую
вычерчивает конец этого вектора (предполагается, что начало
вектора находится все время в одной и той же точке) при изме-
нении его аргумента.
Следовательно, годографом радиуса-вектора, определяющего
положение точки, будет траектория точки.
Перейдем теперь к рассмотрению координатного и естествен-
ного способов задания движения.
Координатный способ. Положение точки по отношению к какой-
либо системе координат полностью определяется координатами
точки. Поэтому задание координат точки в виде известных функ-
ций времени дает возможность определить ее положение в любой
момент времени. Способ задания движения, заключающийся
в задании координат точки как известных функций времени,
называется координатным способом задания движения и требует
выбора конкретной системы координат. Этот выбор определяется
содержанием решаемой задачи; конечно, предпочтительнее та
система координат, использование которой наиболее целесообразно
для данной задачи.
При рассмотрении движения в прямоугольной декартовой
системе координат указанный способ заключается в задании
146
КИНЕМАТИКА ТОЧКИ
[ГЛ IX
координат х, у, г точки М (рис. 9.1) как известных функций
времени, т. е.
x = x(f), y = y(t), z = z(t). (9.1)
Во многих случаях бывает предпочтительнее использовать
цилиндрические или сферические координаты.
В цилиндрических координатах (рис. 9.1, а) положение точки
определяется радиусом р, углом <р (азимут) и аппликатой z.
Следовательно, движение будет задано, если р, ф и z будут
известными функциями времени
р = р(/), ф = ф(0, z ==?(/). (9.2)
В сферических координатах (рис. 9.1, б) положение точки
определяется полярным радиусом г, углом ф и углом 9 (полюсный
угол). Движение будет задано, если
г = г(0, <₽ = <₽(/), 6 = 9(0 (9-3)
— известные функции времени.
Формулы, связывающие цилиндрические и сферические коор-
динаты с декартовыми, соответственно будут -
х = рcos ф, г/ = рз1пф, z = z;
х = г cos 0 cos ф, у — г cos 9 sin ср, z = rsin9.
При движении точки в плоскости иногда целесообразно
использовать полярные координаты. В этом случае нужно задать
в виде функций времени координаты г и ф (рис. 9.2):
г=г(0, Ф = <₽(/)•
§9 2]
СПОСОБЫ ЗАДАНИЯ ДВИЖЕНИЯ
147
Связь этих координат с декартовыми дается формулами
x = rcos<p, r/ = rsin<p.
Уравнения (9.1) движения точки представляют одновременно
и уравнения траектории в параметрической форме, где роль
параметра играет время t. Если тре-
буется определить уравнение траектории
в координатной форме, то нужно ис-
ключить каким-либо образом из этих
уравнений время Л
Задача 9.1. Движение точки в плоскости
хОу (рис. 9.3) задано при помощи уравнений
x = at, y=bt2-\-c (а>0, Ь > 0, с>0), (9.4)
и движение начинается в момент t — Q. Найти
уравнение траектории в координатной форме.
Из первого уравнения следует, что t = x/a,
будет
поэтому уравнение траектории
у=а2 *2 + Сф
Это — уравнение параболы. Однако траекторией будет не вся парабола,
а только часть, показанная на рис. 9.3 сплошной линией. Это следует из того
обстоятельства, что от начального момента дви-
жения / = 0 (когда х = 0, у=с) координата х бу-
дет увеличиваться (время t положительно и не-
прерывно возрастает). Направление движения точки
по траектории определяется из уравнений (9.4) и
показано на рис. 9.3 стрелкой.
В рассмотренном примере исключение
времени из уравнений движения было
произведено путем нахождения времени t
из уравнения для х и подстановки в урав-
нение для у. Такой прием не всегда удо-
бен, поэтому исключение времени можно
производить и другими способами.
уравнениями
Задача 9.2. Движение точки в плоскости хОу задано
x = acostiV, y^-bimut.
(9.5)
Найти уравнение траектории в координатной форме. Уравнения
— = cos <oZ и = sin <at
а Ь
следует возвести в квадрат и сложить. Тогда получим уравнение траектории
у 2
- + - = 1.
148
КИНЕМАТИКА ТОЧКИ
[ГЛ IX
Она представляет собой эллипс (рис. 9.4). Из уравнений (9.5) следует,
что движение начнется в точке А с координатами х = а, у —О и будет проис-
ходить в направлении, указанном стрелкой (предполагается, что движение
начинается в момент времени / = 0).
Естественный способ. При естественном способе задания дви-
жения указываются траектория точки и закон ее движения по
этой траектории.
Пусть точка движется по отношению к выбранной системе
отсчета по заданной траектории (рис. 9.5), определяемой урав-
нениями
Ш у, z) = 0, 1
f2 (х, у, z) = 0. J
Пусть /Ио —какая-либо фиксированная точка на траектории.
Выбрав направление положительного отсчета дуги по траектории,
мы определим положение точки М в любой момент времени,
если будем знать, как изменяется дуга о = Л10Л1 (см. рис. 9.5)
со временем
а = а(/). (9.7)
Эта зависимость называется законом движения.
Кривая, построенная на плоскости (/, о), выражающая зави-
симость G = G(t), называется графиком движения.
Если движ'ение происходит в сторону возрастания дуги о,
то дифференциал дуги *)
da = б (/) dt
будет положительным, если же движение происходит в сторону
убывания дуги, то дифференциал дуги будет отрицательным.
*) В механике производная по времени обозначается точкой над функцией,
da
так что a = -гг.
at
§9 2]
СПОСОБЫ ЗАДАНИЯ ДВИЖЕНИЯ
149
Отметим, что путь s, проходимый точкой, всегда будет возрастать
и, следовательно, положителен, т. е.
ds = | da |.
Задача 9.3. Закон движения точки по траектории имеет вид
а = —/2-|-4^ + 3
(t — в сек, ст—в м). Построить и исследовать график движения.
Графиком'движения будет кривая, изображенная на рис. 9.6. Из рассмот-
рения этого графика следует, что дуга ст увеличивается до значения ст = 7 м
при / = 2 сек, а затем начинает уменьшаться. Ход графика движения в области
отрицательных ст характеризует увеличение абсолютного значения дуги при
движении точки от начала отсчета Мд в сторону, противоположную положи-
тельному отсчету дуги.
На рис. 9.6 показана и кривая s(t), представляющая график функции
s1(/) + 3, где Sj(/) —путь, пройденный точкой. До значения / = 2 сек кривая s
совпадает с кривой ст, для 1^-2 сек s(t) показана пунктиром.
Все рассмотренные способы задания движения взаимосвязаны.
Пусть, например, движение задано координатным способом
в виде (9.1). Очевидно, что при этом проекции радиуса-вектора г
(рис. 9.7) на оси координат равны координатам точки М и, сле-
довательно, можно записать
г = xi -j- у] + zk, (9.8)
где i, j и k —единичные векторы осей х, у, г.
Модуль г найдется по формуле
• г = у x2 + y2 + z2y (9.9)
а направление определится направляющими косинусами
cos(x, r) = y, cos (у, г) = cos (г, *)=у- (9.10)
Рассмотрим еще переход от координатного способа к естест-
венному.
150
КИНЕМАТИКА ТОЧКИ
[ГЛ IX
Пусть движение задано уравнениями (9.1). Исключая из этих
уравнений время t, получим уравнения траектории (9.6). Найдем
Рис. 9.8.
теперь закон движения
a = a(t).
Дифференциал дуги мо-
жет быть найден по фор-
муле (рис. 9.8)
da —
= ±V(dXy+(dyy+^)\
где dx, dy, dz — дифферен-
циалы координат точки
dx = x(t)dt, dy = y(t)dt,
dz-^z (t) dt.
Формулу для da можно
переписать в виде
da = ± ]/%2 -{- у2 + z2 dt.
л
Интегрируя эго выражение в промежутке от / = 0 (начало
движения) до какого-либо момента времени t, получим закон
движения
t __________
а = ± $ Ух2 у2 + z2 dt.
о
Знак «плюс» или «минус» перед интегралом ставится в зави-
симости от выбора направления положительного отсчета дуги;
если движение точки начинается в сторону выбранного положи-
тельного отсчета дуги, то следует брать знак «плюс», в против-
ном случае —знак «минус».
§ 9.3. Понятие о производной вектора
по скалярному аргументу
При рассмотрении задач кинематики и динамики мы встре-
тимся с необходимостью вычисления производных векторов,
имеющих различный физический смысл и являющихся функциями
различных скалярных аргументов (времени, дуги и пр.). Поэтому
в начале этого параграфа мы определим понятие производной
вектора по скалярному аргументу в общем виде, не придавая
конкретного физического значения вектору и аргументу.
Пусть вектор а задан в какой-либо системе координат как
непрерывная функция скалярного аргумента и
а = а(и).
§ 9 3]
ПРОИЗВОДНАЯ ВЕКТОРА ПО СКАЛЯРНОМУ АРГУМЕНТУ
151
При изменении аргумента и будут меняться как модуль век-
тора а, так и его направление. Конец вектора а при изменении
аргумента и описывает кривую — годограф векторда(и) (рис. 9.9).
Пусть и — некоторое фиксированное значение аргумента, a Au —
его приращение. Тогда
при значении аргумента
и + Au вектор а будет иметь
другой модуль и другое
направление, чем при зна-
чении аргумента, равном и.
Разность
Аа = а (и -|- Аи) — а (и)
называется приращением
вектора а.
Предел отношения
Аа _ а (м-р Ам) —а (и)
\и \и
Рис. 9.9.
при Au->-0, если он существует, называется производной вектора
- da
по скалярному аргументу и обозначается через т. е.
-^ = lim lim +
Дм—О Ам Д« —0 Ам
Заметим, что вектор Аа всегда направлен по секущей годо-
Ад
графа вектора а (рис. 9.9), а значит, и вектор направлен
также по секущей. При Аи->0 секущая займет предельное поло-
жение, совпадающее с касательной к годографу вектора а. Сле-
довательно, производная вектора по скалярному аргументу всегда
направлена по касательной к годографу этого вектора.
Приведем без доказательства свойства производной вектора
по скалярному аргументу:
1. Производная постоянного по величине и направлению век-
тора равна нулю.
2. Производная суммы векторов равна сумме производных,
т. е.
d (а «К Ь) _ da . db
du du ' du
3. Производные скалярного и векторного произведений век-
торов соответственно определяются выражениями:
d , < . da » I db
-j-(a b) = b-фа -т-,
du ' 'du du
d i «. da । I db
-7- (a x b) = x b + a x .
du v 'du 1 du
152
КИНЕМАТИКА ТОЧКИ
[ГЛ. IX
Пусть вектор а задан в неподвижной прямоугольной системе
координат; тогда
а («) = ах (и) i + (u) j + аг (и) к,
где ах(и), ау(и), аг (и)— проекции вектора а на оси х, у, z
(рис. 9.9). Так как векторы i, j и к постоянные, то
da dax db,, daz
-r- = -т— i + -г- j + -г- к-
du du 1 du 3 du
... da
С другой стороны, вектор можно записать через его проекции
следующим образом:
Сравнивая оба выражения, найдем проекции производной
вектора на координатные оси
da \ dax / da \ day / da\ daz
du/x du ’ \du)y du’ \dulz du
Эти равенства можно прочитать следующим образом: проек-
ции производной вектора на неподвижные оси равны производным
от соответствующих проекций вектора.
Модуль производной определяется из равенства
Если модуль вектора а (и) остается постоянным при измене-
нии аргумента и, то годографом вектора а будет кривая, распо-
ложенная на сфере радиуса а. Следовательно, производная da/du,
направленная по касательной к годографу вектора а, будет
в этом случае перпендикулярна вектору а.
§ 9.4. Скорость точки
Перейдем теперь к определению понятия скорости точки и
методам ее нахождения.
Пусть в момент времени t положение точки определяется
радиусом-вектором г(/), а в момент / +А/— радиусом-вектором
г (/-(-А/). Вектор
Ar = г (t + А/) - г (О
будем называть вектором перемещения точки за время А/
(рис. 9.10).
§9.4]
СКОРОСТЬ точки
153
Отношение вектора Аг к промежутку времени А/ называется
средней скоростью точки за промежуток времени М
_ Аг
'ср Ы
Скоростью в данный момент времени называется предел отно-
шения вектора перемещения точки к
который произошло это перемещение,
времени стремится к нулю, т. е.
v=lim~ = ~=r. (9.11)
Размерность скорости будет
[длина] _ L
[время] Т ‘
Единицами измерения могут быть
м/сек, см/сек, км/час.
Из этого определения видно, яу
что скорость точки равна произ-
водной радиуса-вектора точки по
времени. На рис. 9.10 показаны
средняя скорость vcp и скорость v i
общей теории, скорость точки v — этор вектор, направленный по
касательной к траектории в сторону движения точки.
Скорость точки при координатном способе задания движения.
Пусть движение точки задано в декартовой системе координат,
принятой за неподвижную, т. е. пусть заданы координаты точки
как функции времени
промежутку
когда
этот
времени, за
промежуток
Рис. 9.10.
М. Как следует из
x — x(t), y = y(t), z = z(t).
Согласно выражению (9.8) имеем
r = xi + «/j4-zk.
Так как единичные векторы i, j, к выбранной системы коорди-
нат постоянны, то на основании формулы (9.11) получаем
dr dx. , dti. , dz.
dt dt 1 dt* 1 dt
На рис. 9.11 показано разложение скорости на составляющие
по осям координатной системы Oxyz.
Таким образом, проекции скорости vx, vy, vz на координат-
ные оси будут
dx dy dz
^dt’ Vy=dt’ V' = dt’
154
КИНЕМАТИКА ТОЧКИ
(ГЛ IX
т. е. проекция скорости точки на координатную ось равна
первой производной по времени от соответствующей этой
оси координаты.
Так как производную по
времени мы условились обозна-
чать точкой сверху, то получен-
ные формулы можно переписать
в виде
vx = x, vy = y, v2 = z. (9.12)
Модуль скорости опреде-
ляется формулой
У = + + =
= /x2 + y2 + z2, (9.13)
а направление скорости — направляющими косинусами
cos (x, v) — vx _ X
V ^x2 + y2 + z2 ’
cos(i/, v) _ vy . У
V Ух2 + у2 + &2 '
cos (z, v) __ _ z
V ]^x2+y2 + z2
(9-14)
Если модуль скорости не изменяется с течением времени, то
движение называется равномерным.
Задача 9.4. Движение точки задано уравнениями
х — a cos coz', _ (/ = а sin о/, z = bt.
Найти скорость точки.
В соответствии с выражениями (9 12) получим проекции скорости
ux=x = —аа> sin wt, Vy — y = awcosa>t, v2 — i = b.
Модуль скорости определится формулой (9.13):
v = Ка-ю2 + Ь2.
Направление скорости найдем, используя формулы (9.14):
cos (х, v) = —~
v
vy
cos (у, v) = —
V
cos (г, v) = .
v
— au> sin co(
Уa2co2-(-62 ’
aco cos <jj/
paTr + b2 ’
b
Vd^ + b2 '
§ 9 41
СКОРОСТЬ ТОЧКИ
155
Из этих соотношений видно, что точка движется равномерно (v = const),
но направление скорости изменяется с течением времени.
Исследуем траекторию точки. Из первых двух уравнений движения найдем
х2Ц-//2 = а2.
Это —уравнение цилиндра радиуса а, ось которого совпадает с осью г
(рис. 9.12).
Опустим теперь из ючки М на плоскость хОу перпендикуляр ЛМ и
обозначим угол между осью х и прямой ON через ф. Координаты точки N
будут
х = асозф, 1/=азтф
Сравнивая эти соотношения с уравне-
ниями движения, найдем
ф = со/.
Таким образом, угол ф изменяется про-
порционально времени. Из этого сле-
дует, что прямая ON равномерно вра-
щается, а точка М в это время равно-
мерно перемещается по образующей
NM (г — bt). Следовательно, точка дви-
жется по винтовой линии. Уравнения
винтовой линии в параметрической форме
совпадают с уравнениями движения, а в
координатной форме имеют вид
юг . сог
х = a cos , у - a sin —г-. -
b Ь
Рассмотрим теперь движение, заданное в полярных коорди-
натах, т. е. пусть даны как функции времени полярный радиус
r = r(t) и угол <р = ф (г1), определяющие положение точки.
Введем в рассмотрение единичные векторы: г°, направленный
по радиусу-вектору в сторону возрастания г, и р°, повернутый
относительно г° на угол л/2 в сторону возрастания угла ф
(рис. 9.13). Единичные векторы г° и р° могут быть представлены
через единичные векторы i, j координатных осей:
г° = cos ф • i -|- sin - j,,
р° = cos ^ф + - j • i + sin ^ф + ^ ) j = — sin ф • i + cos ф • j.
В дальнейшем нам будут нужны выражения для производных
по времени от единичных векторов г°, р°.
Дифференцируя г° по времени, получим
dv^ *
~^- = (— sin ф • i 4" cos ф j) ф = фр0. (9.15)
Аналогично
Л- = — (cos ф i 4~ sin ф • j) ф = — фг°. (9.16)
156
КИНЕМАТИКА ТОЧКИ
[ГЛ. IX
Радиус-вектор г, определяющий положение точки, может быть
представлен в виде г = гг° (рис. 9.13). При движении точки
меняются как модуль, так и направление радиуса-вектора г, сле-
довательно, и г, и г° являются функциями времени. На основа-
нии равенства (9.11) имеем
Используя соотношение (9.15), будем иметь
v=±^r ro + r d(Ppo
v dt dt p ’
Полученная формула дает разложение вектора скорости на две
взаимно перпендикулярные составляющие: радиальную vr = rr° и
поперечную ур = гфр° (рис. 9.14).
г/
Р°
Рис. 9.13.
Рис. 9.14.
Проекции скорости на радиальное и поперечное направления
Ог = Г И Vp = r<f
(9-17)
называются соответственно радиальной и поперечной скоростями.
Модуль скорости находится по формуле
v = y^Vr + Vp = фО2 4- Ар2.
(9.18)
Формулу (9.18) можно также получить, используя связь между декарто-
выми и полярными координатами,
х = г cos ф, sin <р-
Продифференцировав эти соотношения по времени х = г cos ф — гф sin ф,
y = r sm ф+/<['cos ф и используя равенство (9.13), получим
о = У'х24- у2 = Уг2 Ц- г2ф2.
Нахождение скорости при естественном способе задания дви-
жения. Пусть точка А1 движется по какой-либо кривой (рис. 9.15).
За промежуток времени А/ точка переместится по кривой из
§ 9 4]
СКОРОСТЬ точки
157
положения М в положение Mi. Дуга MMi = Ao>0, если дви-
жение точки происходит в сторону положительного отсчета дуги
(рис. 9.15, а), и Ло<0, если движение происходит в противо-
положную сторону (рис. 9.15, б). На основании (9.11) имеем
.. Аг
v = lim дг
дг—» о “
Перепишем это равенство в виде
Г Аг Ап 1 Аг ,. Act
v= lim I *---гг = ’ 'im ~xr-
.V-^olAcT At J д^-,0 о
Так как предел отношения дуги к стягивающей ее хорде равен
по модулю единице, а предельное положение секущей ММ± сов-
падает с направлением касательной к кривой в точке М, то
,. Ar dr
lim = -ц—= т,
д(-0 А<т do
где т —единичный вектор касательной к кривой, направленный
в сторону положительного отсчета дуги.
Действительно, если Ао>0, то вектор направлен в сто-
Д р
рону Аг (см. рис. 9.15, а), а при Ао<;0 вектор направлен
в сторону, противоположную Аг (см. рис. 9.15, б). В обоих слу-
dr
чаях этот вектор, а следовательно, и его предел — т, направ-
лены в сторону возрастания дуги о (на рис. 9.15 положительное
направление отсчета дуги о выбрано вправо от начала отсчета Мо).
Принимая во внимание, что
,. Аа do
lim -гг ~ -ГГ = G
д^ О A? dt
158
КИНЕМАТИКА ТОЧКИ
{ГЛ IX
имеем
(9.19)
Обозначая = получим
v = ott. (9.20)
Из формулы (9.20) следует, что о = | vx |. Очевидно, что vx = v,
если движение происходит в сторону положительного отсчета
дуги, и vx =— v, если движение происходит в противоположную
сторону.
Так как проходимый точкой путь всегда положителен, то
элемент пути
ds = | do |
и, следовательно, модуль скорости можно определить по формуле
__________________________I da I ds
V j dt | di
§ 9.5. Задачи
Задача 9.5. Если ось х направить горизонтально, а ось у вертикально
вверх, то движение тяжелой точки (например, артиллерийского снаряда)
у поверхности Земли в предположении, что сопротивление воздуха пропор-
ционально скорости точки, будет описываться уравнениями
x==v0cosa
kg
^Xosma+^(l-^)--
где v0, a, k, g — постоянные величины.
Найти модуль и направление скорости в начальный момент времени.
Найти также наибольшую высоту h подъема точки над уровнем ее начального
положения, дальность L по горизонтали от начального положения точки до ее
наивысшего положения.
На основании (9.12) имеем
vx — х— cos ае~А^,
При t — 0 vx = v0 cos a, vy~vosin а, а модуль v скорости будет
v=V
Направление начальной скорости определим, найдя направляющие косинусы
при i = 0:
vx v0 cos a Vy v0 sin a
cos (x, v) = — --------= cos a, cos (t/, v) = — = —-----= sin a.
v v0 ' 7 V Vo
Следовательно, начальная скорость, равная по модулю о0, направлена под
углем а к горизонту.
§9 5]
ЗАДАЧИ
159
Так как точка траектории, где vy = 0, соответствует наибольшей высоте
подъема движущейся точки, то из уравнения
v4 = (v0 sin а + 4-\е— ketl —
\ к / к
мы определим момент времени достижения точкой наибольшей высоты. Имеем
еШ‘= J д]П а;
отсюда
= In (1 sin а).
Подставляя найденное значение 4 в выражение для у, получим искомую вы-
соту (рис. 9.16)
. и0 sin а 1 .
= —ln(l+boS1n а).
Найдем теперь расстояние по горизонтали от начального положения точки до ее
положения в наивысшей точке. Для этого подставим время в выражение
для х:
__ vf sin 2а
— xt=ti — 2g (1 kv0 sin a)'
Задача 9.6. Точка движется так, что ее радиус-вектор образует со ско-
ростью постоянный угол. Определить уравнение траектории в полярных
координатах, если угол, образуемый скоростью с радиусом-вектором, равен a
(рис. 9 17).
Согласно формуле (9.17) проекции скорости на радиальное и поперечное
направления будут
По условию задачи
vp
— = tga = const.
Vr
Следовательно,
dtp .dr,
d7 = d7tga-
160
КИНЕМАТИКА ТОЧКИ
[ГЛ IX
Отсюда
dr , .
у = dtp ctg а.
Интегрируя это уравнение и приняв при 1 = 0 угол ф = 0, получим
lnr)ro=(PCtga^-
Тогда r — r(fe<ectga’ где г0 —модель радиуса-вектора г в момент времени Z=0.
Таким образом, траектория представляет собой логарифмическую спираль.
Если угол а = 0, то траектория будет прямолинейной—движение будет
происходить вдоль радиуса-вектора. Если угол а=л/2, то движение будет
происходить по окружности, так как г — га.
§ 9.6. Ускорение точки
Предположим, что в момент времени t скорость точки равна
vi = v(Z), а в момент времени Z-f-AZ будет v2 = v(Z + AZ) (рис. 9.18).
Изменение вектора скорости за промежуток времени AZ найдем
v1( если параллельно перенесем век-
тор v2 в точку Mi (рис. 9.18).
как разность векторов v2 и
Рис. 9.18.
Вектор
Av v2 — vx — v (t + AZ) — v (Z)
представляет собой прираще-
ние вектора скорости за про-
межуток времени AZ.
Отношение вектора Av к
промежутку времени AZ на-
зывается средним ускорением
точки за промежуток време-
ни AZ:
W
Av
СР AZ •
Ускорением w точки в данный момент времени называется
предел отношения приращения скорости Av к приращению вре-
мени AZ при условии, что последнее стремится к нулю, т. е.
,. Av dv d2r
W~A ™o ~dt
(9-21)
так как v = y. Можно также пользоваться следующей формой
записи: w = v = r.
Следовательно, ускорение точки в данный момент времени
равно первой производной по времени от вектора скорости точки
или второй производной по времени от радиуса-вектора точки.
Годографом скорости называется кривая, которую вычерчивает
конец вектора скорости при движении точки, если вектор ско-
рости проводится из одной и той же точки (рис. 9.19).
§9 6]
УСКОРЕНИЕ ТОЧКИ
161
ее дВиже-
представить в виде
Очевидно, что скорость точки, вычерчивающей годограф ско-
рости, будет равна w = v, т. е. ускорению точки при
нии по траектории. Размерность
ускорения
г [скорость] _ [длина] _ L
[№] [время] [время]2 Т-'
Единицами измерения могут быть
м/сек2, см/сек2.
Нахождение ускорения при ко-
ординатном способе задания дви-
жения. Пусть движение точки за-
дано в прямоугольной системе
координат:
x = x(t), y=>y(t), z = z(t).
Так
как вектор скорости точки можно
v = t)J + wJ+^k,
то на основании (9.21) будем иметь
dv djx dvy dvz
W = -77 = -и- i + j + -jr k
dt dt 1 dt 3 1 dt
Пусть wx, Wy, wz — проекции ускорения на координатные оси х,
у, г; тогда
avx аиУ аиг /п пт
W*=~di’ wy=4t’ w^ = -dt> <9-22>
m. е. проекция ускорения точки на какую-либо координатную
ось равна первой производной по времени от соответствующей
проекции скорости точки.
Выражения (9.22) на основании (9.12) можно переписать
в виде
Wx = X, Wy=y, Wz = Z
(9.23)
Следовательно, проекция ускорения точки на какую-либо коор-
динатную ось равна второй производной по времени от соответ-
ствующей координаты.
Модуль ускорения определяется по формуле
w = yw2x + w'y + wi = Vx2 + y2 + z2. (9.24)
6 Бутеннн И В. и др.
162
КИНЕМАТИКА ТОЧКИ
[ГЛ IX
Зная проекции ускорения
правляющие косинусы вектора
cos (х, w) = —
и его модуль, легко находим на-
ускорения:
w Уde2 + ij2 + z2 ’
wu ij
cos (y, w) = — = v-- . — ,
' - 1Zl” ' y2 + 52
S
(9.25)
cos (z, w) = —
= ____________
/^2 + ^2+52-
в полярных координатах. Пусть
функции времени
<р = ср(/).
Найдем теперь ускорение
координаты точки заданы как
г = г(0,
Согласно (9.17) имеем
у = ^го + /Ф„о
v dt r dt р •
На основании (9.21) получим
_ dv d2r 0 , dr dr° , drdcp 0 d^cp 0 dtp dp^
dt dt2 ' dt dt ' dt dt ' dt2 " ' dt dt ’
но так как [ем. (9.15) и (9.16)]
= фф „о rfP° = _ фф -о
dt dt " ’ dt dt ’
TO
w = (r — гф2) r° 4- (rip 4- 2гф) p°.
Отсюда находим проекции ускорения на радиальное и попе-
речное направления
wr = г — гф2,
.. , ’ (9.26)
wp = г<р 4- 2г<р.
Модуль и направление вектора ускорения определяются по
формулам
w = У wг 4- ®р>
wp
cos (г°, w) = —, cos (р°, w) = —.
x ’ / ф ’ ХГ > /
Нахождение ускорения при естественном способе задания дви-
жения. Предварительно познакомимся с необходимыми сведениями
из дифференциальной геометрии. Рассмотрим пространственную
кривую. Пусть т —единичный вектор касательной, проведенной
в какой-либо точке М этой кривой (рис. 9.20). Возьмем теперь на
кривой точку Мх, близкую к точке М, и обозначим единичный
§ 9 6]
УСКОРЕНИЕ ТОЧКИ
163
вектор касательной в этой точке через tv Параллельно перенеся
вектор т, в точку М, проведем плоскость через векторы т и ть
приложенные в точке М.
При стремлении точки М1 к точке М эта плоскость в пределе
займет определенное положение. Полученную таким образом пло-
скость называют соприкасающейся
плоскостью в точке М. Отметим,
что если рассматриваемая кривая
плоская, то она целиком будет
расположена в соприкасающейся
плоскости.
Плоскость, проведенную через
точку М перпендикулярно каса-
тельной, называют нормальной
плоскостью. Линия пересечения
соприкасающейся и нормальной плоскостей определяет главную
нормаль к кривой в точке М. Плоскость, проведенную через
точку М перпендикулярно главной нормали, называют спрям-
ляющей плоскостью. На рис. 9.21 соприкасающаяся, нормальная
и спрямляющая плоскости обозна-
чены соответственно цифрами /, //
и III.
Линия пересечения спрямляющей
и нормальной плоскостей определяет
бинормаль к кривой.
Таким образом, в каждой точке
кривой можно указать три взаимно-
перпендикулярных направления: ка-
сательной, главной нормали и бинор-
мали. Принимая эти направления за
координатные оси, введем единичные
векторы этих осей.
Единичный вектор касательной т нами уже был введен. Единич-
ный вектор п, направленный в сторону вогнутости кривой, будет
единичным вектором главной нормали. Направление единич-
ного вектора бинормали b определим из требования, чтобы
касательная, главная нормаль и бинормаль, направления кото-
рых определяются векторами т, п, Ь, образовывали правую си-
стему осей. Полученный трехгранник, составленный из соприка-
сающейся, нормальной и спрямляющей плоскостей, называется
естественным трехгранником. Векторы т, п, b являются единич-
ными векторами осей естественного трехгранника (рис. 9.21).
Обозначим через е величину угла между вектором т, прове-
денным в точке М, и вектором тъ проведенным в точке Mlt
близкой к точке М. Этот угол называется углом смежности
(рис. 9.22, а).
6*
164
КИНЕМАТИКА ТОЧКИ
[ГЛ. IX
Кривизной кривой в точке М называют предел отношения
угла смежности е к абсолютному значению длины дуги MMj =
— До, т. е.
Радиусом кривизны кривой в точке М называется величина,
обратная кривизне
р = 1. (9.28)
Заметим, что кривизна прямой равна нулю, а ее радиус кри-
визны равен бесконечности.. Кривизна окружности во всех ее
точках одинакова и равна обратной величине радиуса
радиус кривизны равен радиусу окружности (p = R).
Если через точку кривой М и две близкие к ней точки про-
вести окружность, то при стремлении этих точек к М в пределе
получится окружность, которая называется кругом кривизны.
Круг кривизны лежит в соприкасающейся плоскости. Радиус
этого круга равен радиусу кривизны кривой в точке М. Центр
круга кривизны лежит на главной нормали и называется цент-
ром кривизны *).
Вектор скорости согласно выражению (9.20) можно предста-
вить в виде
V = V Хх,
где vx — проекция скорости на направление т. На основании
формулы (9.21) имеем
w = = = + (9.29)
*) Доказательства этих утверждений можно найти в любом курсе диффе-
ренциальной геометрии.
§ 9.6]
УСКОРЕНИЕ ТОЧКИ
165
Определим величину и направление вектора
Пусть в момент времени t точка находится в положении М
на траектории, а в момент времени — в положении Мг.
Перенося вектор тг в точку М, найдем приращение вектора т
за промежуток времени Д/ (рис. 9.22, а)
Дт = тг — т.
Вектор Дт при движении точки в сторону положительного отсчета
дуги направлен в сторону вогнутости траектории (рис. 9.22, а),
а при движении точки в сторону отрицательного отсчета дуги
направлен в сторону выпуклости траектории (рис. 9.22, б).
Найдем производную вектора т:
dt ,. Дт , Г Дт Ди1 ।. Дт ।. Ди dr
-ту = lim = lim — — = lim — lim т.= vx .
_ Дт
Вектор всегда направлен в сторону вогнутости траектории
(см. рис. 9.22, а и б) и лежит в плоскости, проходящей через
точку М и векторы т и tj (плоскость МАВ). Следовательно,
dt
вектор лежит в соприкасающейся плоскости, так как при
До->0 (Д/—> 0) плоскость МАВ совпадает с соприкасающейся
плоскостью к траектории в точке М.
Дифференцируя тождество т2 = 1 по о, получим
т. е. скалярное произведение т на равно нулю, а это значит,
что вектор перпендикулярен т. Таким образом, вектор
лежит в соприкасающейся плоскости, направлен в сторону вог-
нутости траектории и перпендикулярен т; следовательно, он
направлен по главной нормали к центру кривизны.
Определим теперь модуль вектора Из равнобедренного
треугольника АМВ (см. рис. 9.22, а) найдем
АВ = \ Дт] = 2sin-|-
или, используя равенства (9.27) и (9.28), получим
е
Idr I | Дт | в1ПУ е , 1
К- = lim -Ц—г == lim --------r-r—- —
Да-» О 1Да1 Да->0 Д 1Дст1 Р
2
166
КИНЕМАТИКА ТОЧКИ
[ГЛ. IX
Учитывая, что п есть единичный вектор главной нормали,
будем иметь
dr ____________________________ п
do р ‘
Значит,
dt vx
— = —- П.
dt р ’
и, следовательно,
w^t + ^n, (9.30)
так как =
Из этой формулы следует, что вектор ускорения лежит в со-
прикасающейся плоскости.
Составляющие ускорения по направлениям тип соответственно
равны
Проекция ускорения на направление т
= t (Ml)
называется касательным (тангенциальным) ускорением. Проекция
ускорения на главную нормаль
-',, = 5 (9.32)
называется нормальным ускорением. Касательное ускорение харак-
теризует изменение модуля скорости, а нормальное ускорение
характеризует изменение скорости по направлению.
Модуль вектора ускорения равен
W = у wi + w2n = ]/" . (9.33)
dvt
Касательное ускорение wx = равно нулю при движении
точки с постоянной по модулю скоростью и в моменты времени,
в которые скорость vx достигает экстремальных значений.
Если vx и wx одного знака, то модуль скорости v = |vt| точки
возрастает и движение в этом случае называется ускоренным.
Если же vx и wx разных знаков, то модуль скорости v = |vt|
точки убывает и движение будет замедленным. При шт==0 модуль
скорости остается постоянным — движение равномерное.
Нормальное ускорение равно нулю при прямолинейном дви-
жении (р = оо), в точках перегиба криволинейной траектории и
в моменты времени, в которые скорость точки обращается в нуль.
§9 7] ЧАСТНЫЕ СЛУЧАИ ДВИЖЕНИЯ ТОЧКИ 167
Отметим, что для вычисления касательного ускорения wx
можно использовать равенство
так как т = —.
Если движение точки задано координатным способом, то
в случае задания движения в декартовых координатах (x — x(t),
y = y(t), будем иметь
_ xx + yy + iS
Wt —---7 — , •
± рА-у2z2 ’
для полярных координат получим
vrwr + vpwp
§ 9.7. Частные случаи движения точки
Прямолинейное движение. Если траектория точки является
прямой линией, то, направляя одну из координатных осей, напри-
мер, ось х, вдоль этой прямой, мы полностью определим поло-
жение точки заданием ее абсциссы как функции времени, т. е.
х = x(t).
Проекции скорости и ускорения на ось х согласно формулам
(9.12) и (9.23) будут
vx — х, wx ~ х.
Модули скорости и ускорения соответственно равны
V = | X |, W = |.
Если с\>0, то движение точки происходит в сторону поло-
жительного направления оси х. Если при этом ayv>>0, то дви-
жение ускоренное, если же ®v<0, то движение замедленное.
При wv<0 точка движется в направлении, противоположном
положительному направлению оси х. Если при этом wx>0, то
движение замедленное, если же wx <0, то движение ускоренное.
В качестве примера рассмотрим прямолинейное движение,
происходящее по закону
x = asin (со/-|-е),
где а, со, е — постоянные величины.
Движение точки по такому закону называют гармоническим.
Величина а, равная максимальному отклонению точки от
положения х = 0, называется амплитудой колебаний; со/-Ее назы-
вается фазой и е — начальной фазой колебаний.
168
КИНЕМАТИКА точки
[ГЛ IX
Скорость и ускорение точки, совершающей гармоническое
колебание, соответственно будут
их = х = аа cos (at 4-е), wx = х = — ааг sin (wt 4- е) = — агх.
Из формулы для wx следует, что ускорение точки всегда направ-
лено к началу координат и по модулю пропорционально откло-
нению точки от начала координат.
С помощью закона движения и формулы для скорости нетрудно
установить, что если для какого-либо момента времени t =
координата х = хг, а скорость vx = vXt, то в момент времени t = t2,
при котором имеет место равенство
(0/2 4" ® 4” & 4- 2лп,
где га =1,2,3, ... —скорость точки и ее положение буд>т таки-
ми же, как и в момент t = t±.
Значит, гармоническое движение будет периодическим *), т. е.
через промежутки времени, равные
, , 2л
h - /1 = — п,
движение будет полностью повторяться.
Наименьший промежуток времени, по истечении которого дви-
жение повторяется, называется периодом колебаний. Очевидно,
что период гармонических колебаний будет равен
гт,______________________________2л
— «в '
Число колебаний в единицу времени называется частотой
колебаний и равно v = l/T’. Если время измеряется в секундах,
то частота измеряется в герцах. Величина <o = 2nv называется
круговой частотой. Круговая частота равна числу колебаний за
2л единиц времени. График движения приведен на рис. 9.23.
*) В общем случае движение x(t) называется периодическим, если суще-
ствует такой промежуток времени Т, что для всех t будет справедливо равенство
x(t-\-T) = x(t)
§ 98]
ЗАДАЧИ
169
Движение точки по окружности. При движении точки по окруж-
ности удобно задать ее движение в полярных координатах, так
как при этом координата г является постоянной величиной, рав-
ной радиусу R окружности (рис. 9.24). Положение точки вполне
определяется углом <р.
Так как г = R — постоянная величина, то проекция скорости
на радиальное направление vr = f = O. Поперечная проекция ско-
рости равна
Vp = rep = Rep.
Модуль скорости будет
v = \vp\ = Ra,
где со = |ф|.
В соответствии с формулами (9.26)
проекции ускорения на
радиальное и поперечное направле-
ния определяются равенствами
wr —— Roj2, wp = R(p.
Модуль ускорения равен
w = J^Wr + Wp = R /со4 + е2,
где е = | ф |.
Если выбрать направление поло-
жительного отсчета дуги, проходимой
точкой, как указано на рис. 9.24,
то очевидно, что касательное уско-
рение точки будет равно o\ = R(p, а
нормальное wn = <d2R (это ускорение
называют центростремительным ус-
корением').
Заметим, что со определяет угловую скорость вращения ради-
уса г, а е —соответствующее угловое ускорение (подробнее об
этом см. § 10.2).
§ 9.8. Задачи
Задача 9.7. Снаряд движется в вертикальной плоскости согласно уравне-
pt-
ниям x = c>(/cosa, y = vot sin a — Определить скорость и ускорение сна-
ряда в начальный момент времени, высоту траектории, дальность полета,
а также радиус кривизны в начальной и наивысшей точках траектории. Ось х
направлена горизонтально, ось у — вертикально вверх (рис. 9.25).
Траекторией снаряда, очевидно, будет парабола
. gx1
r/ = xtga ——=—-—.
2 ц cos2 a
170
КИНЕМАТИКА ТОЧКИ
[ГЛ IX
Определим сначала скорость движения снаряда. Имеем
Следовательно,
vx = х = va cos а, иу = У = v0 sin a —gt.
v = у/'vj. + v2y = ]/ v2 cos2 а + (t>0 sin a—gty,
В момент времени t = 0 величина скорости v = v0. Направление скорости опре-
деляется по формулам
, . vx v0cosa . . vosina—gt
cos (x, v) = — = —-----, cos(w, v) = —--------Ё-.
v v ’ v
При t — 0 получим
cos (x, v) = cos a, cos (y, v) = sin a,
t. e. скорость в начальный момент образует с осью х угол а.
Проекции ускорения на координатные оси будут
шА = х = 0, wy — y = ~— g.
следовательно, модуль ускорения равен
w = yw2x + w2y=g,
и оно направлено по вертикали вниз (ускорение силы тяжести). Под высотой
траектории понимается максимальное значение ординаты у. Очевидно, что у
принимает максимальное значение при vy — 0, т. е. когда
1>0 sin a—gt = 0.
Находя отсюда t = (v0 sin a)/g и подставляя его в уравнение для у, полу-
Рис. 9.25.
чим
sin2 a
J/max— 2g •
Дальность полета определяется из усло-
вия у = 0. Из уравнения
vot sin a — ~ = 0
найдем
4 = 0, 4=?.?°*па,
Момент 4 = 0 соответствует начальному положению снаряда. Подставляя t = t2
в уравнение для х, найдем дальность полета
и? sin 2a
х = —-------.
g
Максимальная дальность полета будет при a = 45° и равна vfi/g.
Найдем теперь радиус кривизны траектории в начальной и наивысшей ее
точках. Из формулы шп = ц2/Р имеем
Таким образом, задача нахождения радиуса кривизны траектории сводится
к нахождению скорости и проекции ускорения точки на нормаль.
Согласно (9.33) имеем
ш2 = w1 — ш2
§ 9 8]
ЗАДАЧИ
171
Так как движение точки происходит все время в сторону возрастания
дуги, vx = v, и, следовательно,'
rj)t = = = ~g(c’o sing —g/)
di dt cos2 g 4- (t>0 sin g —gt)2
При t = 0 wx= — gsing, а так как w=g, то ia„ = gcosg и, следовательно,
радиус кривизны траектории в начальной точке равен
r g cos a
„ j v0 sin a „
Для момента времени t = — t соответствующего наивысшей точке траекто-
рии, шг = 0. Поэтому wrl=g.
Скорость
в наивысшей
точки в этот момент равна u = y0cosa и радиус кривизны
точке траектории будет
t>5 cos2 a
р=-у--
что в данной задаче проекцию ускорения на нормаль в на-
и наивысшей точках траектории можно легко найти и простым
Отметим,
чальной
проектированием (рис. 9.26).
Задача 9’8. Колесо радиуса R
катится без скольжения по горизон-
тальному рельсу. Скорость центра
колеса постоянна и равна t>0. Найти
уравнения движения точки М, ле-
жащей на ободе колеса, ее траекто-
рию, скорость, ускорение и радиус
кривизны траектории как функцию
времени.
По условию, колесо катится
без скольжения, следовательно,
дуга AM равна отрезку ОА при
предположении, что в начальный
момент времени точка М находилась
в точке О (рис. 9.27).
Так как дуга AM — R(f, а OA = v,jt, то v^ = R(p и ф = со/, где a = v0/R.
Координаты точки М будут:
х = vj. — R sin ф = vot — R sin at,
y = R — Rcosq> = R(l —cos co/).
172
КИНЕМАТИКА ТОЧКИ
[ГЛ IX
Эти уравнения можно рассматривать как параметрические уравнения траек.
тории, которая представляет собой циклоиду.
Проекции скорости точки на оси Ох и Оу равны
vx = х = v0 — Rco cos at = i>0 (1 — cos at),
vy = y = sin at — v0 sin co/.
Модуль скорости равен
о = “ио —cos ш02+ sin3 at =
= t>0 K2 (1 — cos co/) = v0 "j/"4 sin2 у = 2v0 sin у.
Заметим, что угол ср изменяется от нуля до 2л и поэтому sin ~ 0.
\ £
Направляющие косинусы вектора скорости будут
' vx 1 — cos со/ со/ vy
COS (Х, v) = — = ------т- = sin , cos (у, v) = —
v ' v - . со/ 2 ’ ’ v
2sm 2~
sin со/ at
----- = COSy.
„ . at 2
2s>ny
Отсюда следует, что вектор скорости все время проходит через верхнюю точку
колеса.
Проекции ускорения на оси Ох и Оу равны
wx=х = г?0со sin со/, wy = y = i>0co cos со/
и, следовательно,
О) = + да3 = t>oco = co2R,
а так как
Wx wy
COS (X, W) = — = sin со/, cos (у, w) = — = cos со/,
то вектор ускорения точки М всегда проходит через центр колеса.
Радиус кривизны траектории найдем из выражения
Так как wn = j/w2 — и при vt = v wx—= Coco cos у
то
V>n= «ош
„со/ . со/
— cos-2 = o(Jco sin у.
Следовательно,
4t>= sin2 у
₽=—i
voa sin -
— 4/? sin -у =2ДЛ4,
где AM = 2R sin ——длина отрезка от рассматриваемой точки колеса до его
нижней точки.
§9 8]
ЗАДАЧИ
173
Задача 9.9. Движение точки Л1 задано в полярных координатах уравне-
ниями г — аеи и ф = /г/ (рис. 9.28), где а и k — постоянные величины.
Найти уравнение траектории, скорость, ускорение и радиус кривизны
траектории точки как функции ее радиуса г.
Исключая из уравнений r = aekt и q — kt
траектории *
г = аеФ.
Это — уравнение логарифмической спирали.
Согласно формуле (9.17) радиальная и по-
перечная составляющие скорости соответственно
будут
vr = г = akebt = kr, t>p=гф = rk.
Следовательно, скорость точки М равна
о = +и'^ ~kr )Z2.
Согласно формулам (9.26) будем иметь
wr = 7 — гф2 = ak2eft! — afe2esz = О,
Wp = гф -|- 2гф = 2k2aekt = 2k2r,
т. е. ускорение точки М
время t, получим уравнение
Определим
лучим
w = wp = 2fe2r.
теперь радиус кривизны траектории. На оснований (9.32) по-
V2
Скорость V нами уже определена. Найдем wn. Согласно (9.33)
= —да2;
имеем
wx = = k2 /2 aekt = k2r /2.
Таким образом,
шл = й2г /2.
Итак, радиус кривизны траектории будет
2k2r2 ,/о
р =----т- = г V 2.
k2rV2
Задача 9.10. Радар О, установленный на берегу, непрерывно следит
за движением судна М, определяя в каждый данный момент времени расстояние г
и угол ф между меридианом и направлением от радара на судно, а также скоро-
сти изменения этих величин. Пренебрегая кривизной земной поверхности, опреде-
лить модуль скорости судна v относительно Земли, его курс (угол а между
меридианам и скоростью v) и расстояние р от радара до направления ско-
рости v (рис. 9.29).
Для решения задачи построим прямоугольную систему координат Оху,
направив ось х по касательной к меридиану на север, а ось у по касательной
к параллели на запад. Величины г, <р, г и ф, которые непрерывно измеряет
радар, суть полярные координаты судна и их скорости. Поэтому модуль
174
кинематика точки
[гл. IX
скорости судна будет (см. формулу (9.18))
п = }Лг24-г2Ф2.
Для определения курса (угла а) разложим вектор скорости судна v
на радиальную vr и поперечную ур составляющие. Имеем (см.,рис. 9.29):
/ СВМ= Z ОМЕ — а — ф
(углы СВМ и ОМЕ — соответственные при параллельных прямых СВ и ОМ
a Z. МЕх — внешний для треугольника ОМЕ).
Из треугольника ВСМ найдем
. . . vp '
tg (a-<p) = --,
иг
или, учитывая значения проекций поперечной vp и радиальной vr состав-
ляющих скорости V,
tg(a-<P) = y. (9.34)
Отсюда
а = ср + arctg Г<^. (9.35)
Из треугольника ОАМ найдем параметр р:
p = r sin (а — ф) = • (9.36)
С помощью счетно-решающих устройств скорость судна V, его курс а и
параметр р определяются по формулам (9.18), (9.35) и (9.36) или им эквива-
лентным непрерывно»
Если судно идет постоянным курсом а, т. е. движется по прямой линии АМВ,
то равенство (9.36) определяет уравнение траектории судна в полярных коор-
динатах. Покажем, что при а = const
это уравнение может быть получено из
равенства (9.34). Действительно, умно-
жая
части
числитель и знаменатель правой
равенства (9.34) на dt, получим
tg(a-<p) = ~^,
или
= ctg (а — ф)<3ф.
Интегрируя обе части этого равенства
и учитывая, что по предположению а =
= const, получим
1пг = —In sin (а —ф)+ С, (9.37)
где С—произвольная постоянная интегрирования. При ф = а — расстояние
от радара до судна будет равно р, т. е. г = р. Подставляя эти значения
в (9.37), найдем
1пр = — In sin y + С,
§9 8]
ЗАДАЧИ
175
или
С = 1п р,
Внося это значение для С в равенство (9.37), получаем
lnr= —In sin (а —<р) + 1пр,
откуда следует равенство (9.36);
sin (а — ф)' ,
Задача 9.11. Угол др между неподвижной осью Ох и кривошипом ОХА
изменяется по закону др = со^, где ы — постоянное положительное число. С криво-
шипом в точке А шарнирно соединен стержень АВ, проходящий все время
через качающуюся муфту О. Найти уравнения движения точки М стержня АВ,
отстоящей от точки А на расстоянии Ь, ее траекторию, скорость и ускорение,
если 01А==001 = а/2 (рис, 9,30, а).
Положение точки М проще всего определяется полярными координатами:
радиусом г = 0М и полярным углом ф=Д OjOA, Так как треугольник OOtA
равнобедренный, то ф = у t, а сторона ОА = a cos ф = a cos у. Из рис. 9.30, а
имеем г = ОА — Ь\ следовательно, уравнения движения точки М. будут:
со' , со<
r = acos — bt ф = у.
Исключая отсюда время t, найдем уравнение траектории точки М в поляр-
ных координатах;
г = асозф — Ь,
(Для сравнения рекомендуем читателям самостоятельно найти уравнения дви-
жения и траекторию точки М в декартовых координатах.)
На рис. 9.30, б показана траектория точки М, построенная по точкам *)
для случая & = а/2 (при Ь — а получается обычная кардиоида). Точка Л40 —началь-
ная точка траектории, соответствующая моменту времени t—О или ф = 0
(О0Л4 = а — Ь). Направление движения точки М показано стрелками. Отметим,
что точка М попадет в свое начальное положение A4j не через один оборот
кривошипа О1А, а через два оборота, когда угол ф изменится на 2л, а угол ф
на 4л. радиана (это произойдет в момент времени / = 4л/со).
*) Если при заданном значении полярного угла ф получается отрицатель-
ный радиус г, то его нужно отложить в обратном направлении,
176
КИНЕМАТИКА ТОЧКИ
[ГЛ. IX
Найдем проекции скорости точки на радиальное и поперечное направления.
Имеем
асо . со/ асо .
vr = r = - sm 2 = — ~2~ 51П ф’
( со/ , \ со со . ,.
vp = rep = I a cos -у — b I у = у (a cos ф—Ь).
Теперь найдем модуль скорости точки А1:
Ц=)/ v* + v2p,
или, подставляя найденные значения для vr и vp и произведя очевидные пре-
образования,
и= ”|/"а2 + &2— 2ab cos у = у Ya2-\-b2 — 2ab coscp.
Для ускорения будем иметь:
., асо2 со/ , &со2 со2 -
Wr = r- гср2= — У c°s ~2 + -4- = 4- (— 2а cos ср + Ь),
.. , п.. асо2 . со/ асо3 .
И’р = гф+2гф=—-2-siny = — 2-sin ср.
Модуль ускорения
w = "|/~4а2 Ь2 — 4а& cos ^ = “- ]/"4а2+ b2 — bab cos ф.
В начальной точке Мо прн / = 0 (<р = 0):
, , . W , со2
v0 = (a — ft) у, ш0=(2а —6)у.
Через один оборот кривошипа ф = 2л, ф = л точка М попадет в положе-
ние Л4Х (рис. 9.30, б) и ее скорость и ускорение будут соответственно равны
, . ,. со со2
У1 = (а + &) 2 , ш1 = (2а + &)у.
§ 9.9. Криволинейные координаты
Положение точки в трехмерном пространстве, как известно,
можно однозначно определить тремя числами. Так, например,
в декартовой системе координат такими числами будут коорди-
наты х, у и z точки, в цилиндрической и сферической системах
координат такими числами соответственно будут р, ср, г и г, 9,
ср (§ 9.2). Очевидно, что можно ввести в рассмотрение и другие
системы координат, в которых определен закон выбора трех
чисел, однозначно определяющих положение любой точки. В этом
параграфе мы рассмотрим так называемые криволинейные коорди-
наты.
Предположим, что для однозначного определения положения
любой точки нами установлен закон выбора трех чисел qlt q2, q3,
§ 9 9]
КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ
177
тем самым нами введена в рассмотрение определенная система
координат. Эти числа qlt q2, q3 называются криволинейными коор-
динатами, а введенная система координат — криволинейной. Пусть
радиус-вектор, определяющий положение точки М, заданной
координатами qY, q2, q3, проведен из произвольно выбранного
полюса О. Этот радиус-вектор будет функцией координат qr,
72, q-л-
г = г(7!, q2, q3). (9.38)
Проекции радиуса-вектора г на оси декартовой системы коор-
динат также будут функциями qr, q2, q3, т. е.
x = x(qi, 72, 7з),
7 = 7(71, 7г, 7з),
г = г (<7!, </2, q3).
(9.39)
Возьмем какую-либо точку Мо с координатами qlt q20, q30;
тогда уравнения
х = х(7ь 720, 7зо),
7 = 7(71, 720, 7зо),
2 = 2 (71 > 7го, 7зо),
в которых переменной является только одна координата qlf опре-
деляют кривую, проходящую через точку Мо. Эту кривую назы-
вают координатной линией, соответствую-
щей изменению координаты qr. Анало-
гично определяются координатные линии,
соответствующие изменению q2 и q3.
Касательные к координатным линиям,
проведенные в точке Al0 в сторону воз-
растания соответствующих координат, на-
зываются координатными осями [71], [</2],
[<73] (рис. 9.31).
Координатными поверхностями назы-
ваются поверхности, определяемые урав-
нениями (9.39) при изменении двух ко-
ординат и при одной фиксированной
координате. Так, например, поверхность (цъ q2) определяется
следующими уравнениями:
x = x(7t, q2, q30),
У = У(Ръ 72, 7зо),
г = ?(71, q2, q30).
Касательные плоскости, проведенные в точке Мо к координатным
поверхностям, называются координатными плоскостями.
178
КИНЕМАТИКА ТОЧКИ
[ГЛ. IX
Определим теперь единичные векторы еъ е2, е3 координатных
осей. Рассмотрим движение точки по координатной линии, соот-
ветствующей изменению координаты qr. Пусть в момент времени
t точка находится в положении Л1о
(рис. 9.32). Вектор , вычисленный
в точке Л40, направлен по касательной
к координатной линии </2 = const, qa =
= const, т. е. он направлен по коорди-
натной ochJ^J в сторону возрастания qL.
Так как
дг _____ дх . ду . . дг ,
дц[ ~ §<71 * ’’’ ^7i J "Г dqi
то
I ar I _ -] Г { дх Л I ду \2 / дг_\2 _ „
I I V {dqj. ) "Г \dqt ) + \dqt / v
(9.40)
Таким образом, единичный вектор eL равен
_ j_ аг
ei-W
Аналогично можно получить
_ I А
62 ~ Яг dq.2 ’
_ i ar
ез~На dqa>
где
(9-41)
(9.42)
(9.43)
(9.44)
Коэффициенты Нъ Н2, На называются коэффициентами Ламе.
Мы будем рассматривать только ортогональные криволинейные
координаты, т. е. такие, у которых координатные оси взаимно
перпендикулярны. Условием ортогональности является
ere, = 0 (i, / = 1, 2, 3; i Ф j). (9.45)
Скорость точки может быть найдена посредством дифференци-
рования соотношения (9.38)
dr аг . , аг . , аг . ,п
у = щ = ащ^ + ^ + а^з, <9-46)
§9 9]
КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ
179
но так как
дг гт дг у, дг „
^7 - Hiei’ M~z ~ ~2' М^ ~ Нзез’
ТО
v = + (?2Я2е2 + q3H&3.
(9.47)
Учитывая, что еь е2, е3 по предположению взаимно перпендику-
лярны, для модуля скорости имеем
v =yqiH'i + qlHl-\-qiHi. (9.48)
Проекции скорости на координатные оси определяются выраже-
ниями
Vq^qiHr, Vq2 = q2H2, v4, = q3H3. (9.49)
Проекция ускорения точки на координатную ось [t/J, оче-
видно, будет равна
1 dv дг
отсюда
,, dv dr d ( дг\ d f дт \
1 41 dt dqr dt \ dqr j dt \dqt j
Взяв частную производную от выражения (9.46) по qr,
dv ___________________________ дг
Mi ~ Mi'
_ дг
Так как производная g—- зависит от координат qlt q2
d / dr \ d2r . d2r . , d2r .
dt \dqi ) dql ' dq2 dqt ' dq3 dqr ^3'
Дифференцируя теперь обе части равенства (9.46) по qlt
dv _________________d2r . . d2r . . d2r
Mi ~ Ml "г Mi Mz ' Mi Ms Q3'
Сравнивая оба выражения, найдем
dv d / dr \
dqt dt \dqi1 ’
(9.50)
получим
(9.51)
и q3, то
получим
(9.52)
Подставляя полученные равенства (9.51) и (9.52) в формулу
(9.50), имеем
и d ( dv \ dv
1 41 dt \ dqjj dqt
Так как v2 = v2, то
dv dv d tv2 \
Mi Mi Mi\2)
180
КИНЕМАТИКА ТОЧКИ
[ГЛ. IX
Аналогично
ду _ д !v2\
V dqi \2 / ’
Теперь выражение для wq, можно записать в следующей форме:
где v находится по формуле (9.48). Аналогично получаем
__ 1 ( d Г д Д2 \1 д fv2 \1
W^~H~2\dt № ~
- 1 И Г-- ___<L
Wq‘ ~ Н3 \di Ldft \ 2 dq3 \ 2 Д
(9.54)
(9.55)
§ 9.10. Задачи
Задача 9.12. Найти скорость и ускорение точки в цилиндрической системе
координат р, ф, г (§ 9.2). Координатные линии и координатные оси показаны
на рис. 9.33.
Так как
х = р cos ср, у = р sin ср, г = г,
то согласно формулам (9.40) и (9.44}
Н1=1, Н2 = р, На=Л.
Следовательно, в соответствии с формулами (9.48) и (9.49), получим
Ор=р, ^ф = рф> =
и
V = У"р2 + р2ф2 + 22.
Для полярной системы координат (p=r, z = 0)
vr = r, сф = гф, v = y г2 + г2фа.
Имея в виду, что
V2 = р2 + р2ф2 + i2,
найдем
Э fv2\ . д [v2\ .. д fv2\
др\2) = р’ = di\2]Z’
(9.56)
Таким образом, по формулам (9.53), (9.54) и (9.55) получим
= Р - РФ2.
®Ф = -р (Р2Ф) = РФ + 2РФ.
wz=S.
(9.57)
§9 10]
ЗАДАЧИ \
181
Для полярной системы координат
а> = г —гф2, К1ф = гф + 2гф.
Задача 9.13. Найти скорость и ускорение точки в сферической системе коор-
динат г, <р, 6 (рис. 9.34).
Декартовы координаты связаны со сферическими
у = г cos 0 sin ф,
Так как
X = г cos 0 cos <р,
зависимостями
г = г sin 4
Ох .
=- = cos и cos ф,
dr т
то согласно формуле (9.40) имеем
0{/ „
= cos 0 sm ф,
дг т
Oz .
=- = sm 6,
Or
Вычисляя далее
Ох . .
Оф т
Ох . „
зЬ- = — Г Sin 6 COS ф,
06 т
Я1 = 1.
Oi/
~ = r COS в COS Ф,
Оф T
Or/ . „
~ — — r sm 0 sm ф,
06 T
и используя формулы (9.44), получим
/72 = г sin 6, Н3 = г.
1” = °-
дф
dz х ft
^ = rc°se
Следовательно, проекции скорости на координатные оси сферической систе-
мы координат равны
vr = r, оф = гфсоз6, vq — гВ (9.58)
и
V2 = /2 Л2ф2 COS2 0 г2д2ф
Вычислив производные
О /о2] 0 /о2\ 0 /о2\
— /—) = /, — | ) = r%cos2 6, Г- =г26,
Or \ 2 / Оф \ 2 / дВ \ 2 /
9 I V* \ • В / \ д ? \
п- Hr =^2c°s26+г62, Г X7-I о- — — г2ф2 cos б sin 0.
or \ 2 j т * дф {2 ] дЬ \ 2 / т
182
КИНЕМАТИКА ТОЧКИ
[ГЛ. IX
найдем проекции ускорения на оси сферических координат:
wr — r — гф2 cos2 6—тб2,
а?(г = —!—- (т2фсоз26) = rfficos 6 + 2/фсозб —2гфб sin 6,
ф г cos 6 dt ' 1
Kig ~ (г2в) ф- гф2 sin в cos в = г в + 2гвф-гф? sin б cos б.
(9.59)
Задача 9.14. Найти скорость и ускорение точки, движущейся равномерно
по винтовой линии.
Так как в этом случае в цилиндрической системе координат
p = R = const, <p^=kt, z = ut
(k а и постоянны), то в силу формул (9.56) имеем
пр = 0, vv=Rk, v2 = u,
и, следовательно,
v = VRik2-\-u2.
Используя формулы (9.57), получим
Wp = — Rk2, и>ф = 0, ac,=0.
Так как o=const, то aix=0 и wn = w — Rk2. Радиус кривизны
= W + «2
Р Rk- ‘
Задача 9.15. Точка движется по земной поверхности (принимаемой за сферу
радиуса R), имея северную и восточную составляющие скорости соответственно
равными vN и v0. Найти ускорение точки относительно Земли, не учитывая ее
вращения. Составляющие vN и v0 считать известными функциями времени.
Из условия задачи находим
vo VN
r=l? = const, ф = т?------г, б=-г5-.
т R cos в ’ R
В соответствии с формулами (9.55) получим
Wr = -^-—2—, w9 = v0-----— tge, ffi’e = vJV + ^-tg9.
ГЛАВА X
ОСНОВНЫЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
§ 10.1. Задание движения твердого тела
При движении твердого тела отдельные его точки движутся
в общем случае по различным траекториям и имеют в каждый
момент времени различные скорости и ускорения. Вместе с тем
имеются кинематические характеристики, одинаковые для всех
точек твердого тела. Основными задачами кинематики твердого
тела являются установление способа задания его движения и
изучение кинематических характе-
ристик, присущих телу, а также
определение траекторий, скоро-
стей и ускорений всех точек тела.
Необходимо сначала уточнить
понятие «задание движения твер-
дого тела». Мы будем говорить,
что движение твердого тела за-
дано, если имеется способ опре-
деления положения любой его
точки в любой момент времени
по отношению к выбранной си-
стеме координат.
Может сначала показаться,
что для задания движения твер-
дого тела требуется задать движение каждой его точки, т. е.
необходимо иметь бесконечное множество уравнений движения.
На самом деле это не так, ибо перемещения отдельных точек
связаны условием неизменяемости расстояний между ними.
Покажем, что положение твердого тела в общем случае вполне
определяется заданием шести независимых параметров. Для этого
возьмем в теле три не лежащие на одной прямой точки (рис. 10.1)
Alt А2, А3 с координатами
xk = xk(t), yk = yk(t), zk = zk(t) (k=l, 2, 3). (10.1)
Так как расстояния dlt d2, d3 между точками твердого тела
не изменяются, то координаты точек должны удовлетворять трем
184
ОСНОВНЫЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
[ГЛ. X
уравнениям:
(х2 - Xi)2 + (z/2 - z/x)2 + (z2 - zx)2 = d23,
(х3 - х>)2 + (у3 - у2)2 + (г3 - z2)2 = di,
(10.2)
(Xi - xtf + (z/! - z/3)2 + (zx - z3)2 = <%.
Следовательно, из девяти координат (10.1) независимых только
шесть, остальные три определяются из уравнений (10.2). Если
взять еще одну точку Л4 с координатами х4, у4, z4, то эти коор-
динаты должны будут удовлетворять трем уравнениям вида (Ю.2),
выражающим неизменность расстояния до ранее выбранных точек
Лх, Л2, А3. Таким образом, положение твердого тела относи-
тельно произвольно выбранной системы координат вполне опре-
деляется шестью независимыми параметрами.
Если твердое тело будет закреплено в какой-либо точке, то
его положение будет определяться уже только тремя независи-
мыми параметрами.
Число независимых параметров, задание которых однозначно
определяет положение твердого тела в пространстве, называется
числом степеней свободы твердого тела.
Заметим, что задание шести декартовых координат, например,
Xi, yi, Zx, х2, у2, х3, не является наилучшим способом задания
движения твердого тела. Как будет позднее выяснено, существуют
более удобные параметры, определяющие положение тела в про-
странстве. В каждом отдельном случае мы будем стараться выби-
определяющие движение твердого
тела, исходя из соображений про-
стоты и удобства решения основ-
ных задач кинематики.
§ 10.2. Простейшие движения
твердого тела
Поступательное движение твер-
дого тела. Поступательным дви-
жением твердого тела называется
такое движение, при котором
любая прямая, проведенная в теле,
остается во все время движения
параллельной своему первоначаль-
ному положению.
Пусть твердое тело движется поступательно относительно
системы координат OxxZ/xZx (рис. 10.2), гл — радиус-вектор точки
А, гв — радиус-вектор точки В, а р —радиус-вектор, определяю-
щий положение точки В в подвижной системе координат Axyz,
жестко связанной с телом (на рис. 10.2 эта система не показана).
рать независимые параметры,
Рис. 10.2.
§ 10 2]
ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
185
Так как рассматриваемое тело абсолютно твердое и его дви-
жение поступательное, то вектор р при движении тела не меняет
модуля и направления.
Из рассмотрения рис. 10.2 следует
Гд = Гд4-р. (10.3)
Пусть в момент времени t тело занимало положение I,
а в момент времени — положение 11 (рис. 10.2). Тогда ДгА
будет вектором перемещения точки А, а Дгв — вектором переме-
щения точки В за промежуток времени Д/.
Во время движения вектор р не изменяется, значит, отрезки
Л050 и АВ равны и параллельны и, следовательно, фигура
А0В0ВА — параллелограмм.
Таким образом,
ДгА = Дгв,
т. е. при поступательном движении абсолютно твердого тела
перемещения всех его точек геометрически равны между собой.
Из равенства (10.3) и условия постоянства вектора р также
следует, что траектории точек тела, движущегося поступательно,
одинаковы и получаются друг из друга параллельным смещением.
Продифференцировав выражение (10.3) по времени, получим
% = -А _l
dt dt ' at ’
но так как р = const, то р = 0 и, следовательно,
dt dt
или
vB = vA,
т. е. при поступательном движении твердого тела скорости всех
его точек в каждый момент времени равны между собой.
Дифференцируя полученное соотношение по времени, получим
dva dvA
dt dt
или
wn = wA,
г. е. ускорения всех точек тела в каждый момент времени равны
между собой.
Таким образом, при поступательном движении твердого тела
все его точки движутся одинаково, так как их перемещения, ско-
рости и ускорения геометрически равны.
186
ОСНОВНЫЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
[ГЛ X
Следовательно, для определения движения твердого тела, дви-
жущегося поступательно, нет необходимости рассматривать дви-
жение всех точек тела, а достаточно рассмотреть движение одной
точки тела, иначе говоря, поступательное движение твердого тела
определяется движением одной точки этого тела, координаты ко-
торой должны быть заданы как функции времени.
Пользуясь понятием поступательного движения, докажем тео-
рему о сложении скоростей точки, совершающей сложное дви-
жение *).
Предположим, что точка М. движется по отношению к системе
координат Ахуг, которая жестко связана с телом, перемещаю-
щимся поступательно по отношению к неподвижной системе коор-
динат OxjZ/jZj. Положение точки относительно неподвижной си-
стемы координат определяется
радиусом-вектором (рис. 10.3)
Г = Гд + р,
Рис. Ю.З.
где г а — радиус-вектор начала
подвижной системы координат,
р — радиус-вектор, определяющий
положение точки М в подвижной
системе координат.
Дифференцируя это равенство
по-времени, получим
dr _ drA , dP '
dt dt ' dt ‘
В этом равенстве есть скорость точки относительно неподвиж-
ной системы координат, которая называется скоростью точки
в сложном движении или абсолютной скоростью и обозначается
через va.
dr.
Первое слагаемое в правой части равенства —скорость
точки А. Так как система координат Axyz движется поступа-
тельно, то это одновременно будет скоростью той точки тела,
с которой в данный момент совпадает движущаяся точка М. Эта
скорость называется переносной скоростью точки М и обозна-
чается ve.
Выясним смысл производной Вектор р определен в под-
вижной системе координат, следовательно,
p = xi + */j+zk,
*) Более общий случай сложного движения точки будет рассмотрен
в главе XIII.
§ 10.21
ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
187
где х, у, z — координаты точки М в системе координат Axyz,
a i, j, к —единичные векторы этих осей.
Так как подвижная система координат перемещается посту-
пательно, то i, j, к —постоянные векторы и их производные по
времени равны нулю, поэтому
$=xi+yj + zk.
Это равенство определяет скорость точки по отношению к по-
движной системе координат и называется относительной ско-
ростью точки М. Обозначим эту скорость .
через vr. ----
Таким образом, имеем
va = ve+vr. (10.4) [
Полученное равенство выражает теорему 'К \ |
;о сложении скоростей: скорость точки в слож- I УчХ ' /
ном движении равна сумме переносной и отно- \
сительной скоростей. у'
Вращение твердого тела вокруг неподвиж- ----
ной оси. При движении твердого тела с двумя
^неподвижными точками А и В (рис. 10.4) все Рис. 10.4.
точки на прямой АВ остаются неподвиж-
ными. Это следует из условия неизменяемости расстояний между
точками твердого тела. Прямая АВ называется осью вращения,
а движение тела называется вращательным. Нетрудно видеть,
что все точки тела описывают дуги окружностей с центрами в
основаниях перпендикуляров, опущен-
ных из этих точек на ось вращения.
; Возьмем на оси вращения две точки
X и В и введем систему координат
lAx^Z} с началом в точке А (рис. 10.5).
‘Так как положение точек А и В нам
известно, то положение тела будет
полностью определено, если мы будем
знать в любой момент времени положе-
ние какой-либо точки С тела (не лежа-
щей на оси вращения). Из трех коор-
динат этой точки независимой будет
только одна, так как расстояния АС и
ВС постоянны и коорди-
наты точки связаны двумя уравнениями:
(хА - хс)2 4- (уа - Ус)2 4- (га - zc)2 = АС2,
(хв - хс)2 4- (Ув - Ус)2 4- (гв - zc)2 = ВС2.
Отсюда следует, что положение твердого тела, вращающегося
вокруг неподвижной оси, определяется одним параметром.
188
ОСНОВНЫЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
[ГЛ X
Направим ось Azj неподвижной системы координат Ахуу-^ по
оси вращения тела. Введем подвижную систему координат Ахуг,
жестко связанную с телом, ось Az которой так же направим по
оси вращения (рис. 10.6). Положение тела будет полностью опре-
делено, если задан угол <р = <р (7) между неподвижной плоскостью
луЛ?! и подвижной плоскостью (жестко связанной с телом) хАг
(рис. 10.6). Этот угол называется углом поворота тела.
Для однозначного определения положения тела необходимо
знать не только величину, но и направление отсчета угла <р.
Условимся считать положительным направлением отсчета направ-
z z ление против хода часовой стрелки,
“ если смотреть с конца оси OzA.
Характер вращательного дви-
жения твердого тела целиком
Г f (' определяется заданием угла его
। | I поворота как функции времени.
; I ; Главными кинематическими харак-
I I | --->. теристиками вращательного движе-
I ния тела Б Целом будут угловая
скорость и угло'вое ускорение, к опре-
делению которых мы и перейдем.
£ Пусть в момент времени t угол
Рис. Ю.6. между неподвижной полупло-
скостью XjAzj и подвижной полу-
плоскостью хАг равен <р (/), а в момент времени 1-\-М равен
ф(/-фД7). Это значит, что за промежуток времени Д/ подвиж-
ная плоскость, а следовательно, и тело повернулись на угол
Дер = <р (/ 4- д/) — <р (/).
Отношение угла поворота Дф к промежутку времени Д/, за
который тело повернулось на этот угол, называется средней угло-
вой скоростью тела за промежуток времени Д/
Ыср-*.
Предел этого отношения при Д/->0 называется угловой ско-
ростью тела в данный момент времени
Введенная таким образом угловая скорость <ог может быть
как положительной, так и отрицательной в зависимости от закона
изменения угла ф. Абсолютное значение угловой скорости будем
„ I фр I
обозначать через со, т. е. и= .
Если угол поворота измеряется в радианах, а время —в се-
кундах, то единицей измерения угловой скорости будет сек'1.
§ Ю.2]
ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
189
В технике часто при равномерном вращении тела пользуются
числом оборотов в минуту. Зависимость между угловой ско-
ростью и числом оборотов в минуту определяется по следую-
щей формуле:
2лп лп , ,
и —-gQ- — эд 1/сек,
где п — число оборотов в минуту.
Пусть теперь в момент времени t угловая скорость вращения
равна (/), а в момент /-|-Д/ равна а>г(/ + Д/); тогда за проме-
жуток времени А/ приращение угловой скорости будет равно
А<ог = (ог (t— аг (t).
Средним угловым ускорением тела за промежуток времени А/
будем называть отношение приращения угловой скорости к про-
межутку времени, за который это изменение произошло, т. е.
\ AtOz
Предел этого отношения при А/->0 называется угловым ускоре-
нием тела в данный момент времени
Дсо, dco, d2tp
г,= im -vr — -n- = = Ф»
At 0 <#3
(10.6)
так как
dtp
^-"di
Угловое ускорение, характеризующее изменение угловой ско-
рости с течением времени, равно производной по времени от угло-
вой скорости или второй производной по времени от угла по-
ворота.
Единица измерения углового ускорения—1/се№.
Весьма полезным для дальнейшего изучения кинематики твер-
дого тела является введение в рассмотрение вектора угловой ско-
рости и вектора углового ускорения.
Вектором угловой скорости твердого тела, совершающего вра-
щение вокруг неподвижной оси, мы будем называть вектор, модуль
которого равен абсолютному значению производной угла поворота
тела по времени, направленный вдоль оси вращения в ту сторону,
откуда вращение тела видно происходящим против хода часовой
стрелки.
Учитывая ранее введенное определение направления положи-
тельного отсчета угла <р, вектор угловой скорости можно опре-
делить по формуле
® = ^к = <огк, (10.7)
где к —единичный вектор оси Oz.
190
ОСНОВНЫЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА.
[ГЛ. X
Из этой формулы следует, что при <ог = ф>0 направление
вектора ® совпадает с направлением вектора к, а при оц —Ф< 0
вектор св направлен в сторону, противоположную направлению
вектора к.
Вектором углового ускорения будем называть вектор, равный
производной по времени от вектора угловой скорости, т.’ е.
е = 5 = = (Ю.8)
где = Из формулы (10.8) следует, что вектор е направлен,
di как и вектор со, вдоль оси вра-
щения.
Величины <ог и ег представ-
ляют проекции векторов угловой
скорости св и углового ускоре-
ния е на ось вращения.
Перейдем к нахождению ско-
рости и ускорения любой точки
тела, вращающегося вокруг не-
подвижной оси. Пусть единич-
ные векторы координатных осей
х, у, г, соответственно будут i,
j и к (рис. 10.7). Радиус-вектор
произвольной точки М можно
представить в виде
г = xi + у j 4- zk, (10.9)
где х, у, 2 —координаты точки (постоянные величины).
Скорость точки М будет равна
V ~di~Xdi + ydt+Zdt- (10Д°)
Так как вектор k неподвижен, то k = 0; что же касается произ-
водных векторов i и j, то мы уже вычисляли их, рассматривая
движение точки в полярной системе координат. Если обозначить
r° = i и p° = j, то формулы (9.15) и (9.16) примут вид
di dj
Подставляя в формулу (10.10) эти производные и учитывая, что
ф = <ог, получим
V = XO)J-Z/(OJ. (10.11)
Отсюда следует, что проекции вектора скорости точки М на
оси х, у и z соответственно равны
Vx~ — уь>г, су = хыг, v£ = 0. (10.12)
§ 10 2]
ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА.
191
Так как векторное произведение
м/г =
' j к
О 0 юг
X у Z
= — + Х(лг]
имеет те же проекции на оси х, у и г, что и вектор скорости v,
то имеем
v = <oxr, (10.13)
иначе говоря, скорость любой точки твердого тела, вращающегося
вокруг неподвижной оси, равна векторному произведению вектора
угловой скорости тела на радиус-вектор этой точки.
Из формулы (10.13) следует, что
о = cor sin (ft), г) = (ор,
т. е. модуль скорости любой точки твердого тела равен произведению
модуля угловой скорости тела на расстояние от точки до оси вра-
щения. Направлен же вектор скорости по касательной к окруж-
ности, по которой перемещается z,i
точка М, в сторону ее движения.
Взяв производную по времени
от обеих частей равенства (10.13),
получим
dv d , ., . d« . „ dr
W=d7=d7(ft>xr)=d7xr + ft>xdr
t т do
Ho = e — угловое ускорение, a
dr
— — v = ft) x r — скорость ТОЧКИ M.
Тогда
w = exr+ <i)Xv.
Вектор 8Xr направлен по касательной к траектории точки
(к окружности радиуса р), т. е. параллельно скорости (так как
вектор е направлен по оси вращения (рис. 10.8)). Эта состав-
ляющая ускорения является касательным ускорением точки М
тела..В дальнейшем будем называть эту составляющую враща-
тельным ускорением, т. е.
wBp — е х г.
Это название связано с тем, что с такой составляющей ускоре-
ния мы встретимся при изучении более сложного движения тела,
когда вектор ехг уже не будет являться касательным ускоре-
нием точки М.
192 ОСНОВНЫЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА. [ГЛ X
Численное значение вращательного ускорения равно
t£)Bp = ersin(r, е) = ер.
Вектор оxv направлен в плоскости окружности радиуса р
от точки Л4 к точке С, т. е. направлен к оси вращения по нор-
мали к траектории и является нормальным ускорением точки М.
Этот вектор
Woc = 0Х V,
направленный к оси вращения, будем называть осестремитель-
ным ускорением.
Так как вектор v перпендикулярен вектору со, то численное
значение осестремительного ускорения равно
Ш0С = (ОО = (02р .
Модуль полного ускорения точки М будет
ш = У (щос)2 + (ьувр)2 = р ]/ е2 4- со4.
Угол р, образованный векторами полного и осестремительного
ускорений, определяется из формулы
tgR = —= А
s Н woc а2
Задача 10.1. Стрелка гальванометра длиной I движется по закону ф =
. 2л ,
= фо sm у <, где фо—угол максимального отклонения стрелки от положения
ф = 0, а Т—-период колебаний. Найти модуль и направление ускорения конца
стрелки гальванометра в момент времени
Угловая скорость "И угловое ускорение соответственно равны
2л 2л , .. 4л2 . 2л ,
«г = Ч> = у-фоСОЗуег —ф = — — ф0 suiy-1.
Модуль вращательного ускорения будет
вп / ,4л2 I 2п J
щвр = /е = /у ф0 sm у Н ,
а модуль осестремительного ускорения
4тг2 9л
= COS2 у Л
При t = T/4
» 4тг2
швр = /у-фо, К1ос = 0.
В момент t = T/4 угол ф = ф0, т. е. стрелка доходит до своего крайнего
положения. В этот момент времени скорость конца стрелки о = /со = 0, а уско-
рение будет равно модулю вращательного ускорения.
ГЛАВА XI
ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
§ 11.1. Задание движения
Движение твердого тела называется плоским, если все точки
тела перемещаются в плоскостях, параллельных некоторой непод-
вижной плоскости.
Примером плоского движения тела может служить качение
цилиндра по горизонтальной плоскости, при котором его основа-
ние остается все время параллельным плоскости yz (рис. 11.1).
Рассмотрим произвольное плоское движение твердого тела.
Пусть все точки тела перемещаются в плоскостях, параллельных
плоскости ху (рис. 11.2). Из определения плоского движения и
из свойств твердого тела (углы между любыми прямыми, фикси-
рованными в твердом теле, сохраняются неизменными) следует,
что любая прямая АВ, проведенная в теле перпендикулярно
плоскости ху, будет перемещаться поступательно, т. е. траекто-
рии, скорости и ускорения всех точек этой прямой будут одина-
ковы.
Таким образом, для определения движения тела необходимо
знать движение лишь одной точки на каждой прямой, проведен-
ной перпендикулярно плоскости ху. Взяв точки в одной пло-
скости, параллельной плоскости ху, мы можем утверждать, что
7 Бутенин Н. В. и др.
194
ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
[ГЛ. XI
плоское движение твердого тела вполне определяется движением
плоской фигуры, полученной от пересечения тела любой плоскостью
Q, параллельной плоскости ху (см. рис. 11.2).
Итак, задание движения твердого тела сводится к заданию
движения одного его сечения. Поэтому в дальнейшем будем
изображать только плоскую фигуру— сечение тела и изучать
движение точек этого сечения в его плоскости.
Пусть А (х1А, у1А) и В (х1В, у1В) — две точки плоской фигуры,
находящейся в плоскости Ox^l (рис. 11.3, а). Так как расстоя-
ние d между этими точками остается неизменным
(х1А - х1В)2 4- (у1А — у1В)2 = d2,
то из четырех координат независимых только три. Присоедине-
ние третьей точки С(х1С, у1С) не увеличивает числа независимых
координат, ибо две новые координаты хгс и у^ должны удовлет-
ворять двум равенствам, выражающим неизменность расстояний
до ранее выбранных точек А и В. Таким образом, для описания
плоского движения тела требуется знать три независимые коор-
динаты как функции времени.
Свяжем жестко с плоской фигурой систему координат Аху.
Тогда положение системы Аху, а вместе с ней и положение
плоской фигуры относительно системы координат OxjZ/j будет
вполне определено заданием координат х1А и у1А точки А и
углом <р между осями Ах2 и Ах — см. рис. 11.3, б (оси Ах2 и Ау2
соответственно параллельны осям Ох± и Оу± и перемещаются при
движении фигуры поступательно). Следовательно, три функции
времени
x1A = x1A(t), y1A = yiA(t), Ф = ф(0 (И-1)
определяют положение плоской фигуры в любой момент времени.
Равенства (11.1) называются уравнениями движения плоской
фигуры или уравнениями плоского движения твердого тела.
§ 112]
СКОРОСТИ ТОЧЕК ТЕЛА ПРИ ПЛОСКОМ ДВИЖЕНИИ
195
§ 11.2. Скорости точек тела при плоском движении
жестко свяжем с плоской фигурой.
*1
Рис. 11.4.
Найдем формулы, позволяющие при заданных .функциях (11.1)
определить координаты любой точки плоской фигуры.
Пусть система координат OXjZ/i является неподвижной систе-
мой, а система координат Ах2у2, имеющая начало в произвольно
выбранной точке А плоской фигуры, движется поступательно.
Систему координат Аху
Радиус-вектор гв, опре-
деляющий положение точки
В относительно неподвиж-
ной системы координат
Ох1у1 (рис. 11.4), можно
задать при помощи двух
векторов: гА; определяю-
щего положение точки А
в системе отсчета Ох^у^
и р, определяющего поло-
жение точки В в системе
отсчета Ах2у2,
Гв = га + Р- (П.2)
Зная координаты х1А и
у1А точки А .и координа-
ты хв и ув точки В в системе координат Аху, а также угол <р
между осями Ах2 и Ах, можно определить координаты х1В и У1В
точки В по формулам:
*ib (/) = х1А (/) + хв COS ср (f) - у в sin ср (1),
У1В (0 = z/iA(Z) + xBsincp (/)4-z/flcoscp (/).
Напомним, что координаты хв и ув — постоянные величины.
Продифференцировав по времени х1В и у1В, найдем проекции
скорости точки В на координатные оси:
Ав = Xia — ХвФ sin ср — увф cos ср,
У1в = У1А + ^вф cos <р — ув<р sin ср.
К этому же результату можно прийти, дифференцируя непосред-
ственно тождество (11.2),
drB _ drA , dP
dt dt + dt *
q d^B dr, dp
«заметим, что ~^- — vB, ~^-~vA. Что же касается то это есть
скорость точки В относительно подвижной системы координат Ах2у2,
7*
(11.3)
(11.4)
(Н.5)
196
ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
[ГЛ XI
т. е. относительная скорость (см. § 10.2). Введем для нее обо-
значение vBA:
dp
Движение тела относительно системы координат Ах2у2 представ-
ляет собой вращение тела вокруг оси* Az2, направленной перпен-
дикулярно плоскости чертежа (рис. 11.4) на читателя. Таким обра-
зом,- скорость vbA есть скорость точки В при вращении тела
вокруг оси Az2. Для определения этой скорости мы уже полу-
чили формулу (§ 10.2)
Ум = <0дХр,
где юд —угловая скорость вращения фигуры вокруг точки А
(вокруг оси Az2), которую в дальнейшем будем называть полюсом.
Формула (11.5) принимает теперь вид
vfl = vAH-(t)A> р = vA + vBA, (11.6)
т. е. скорость какой-либо точки В плоской фигуры равна геомет-
рической сумме скорости полюса А и скорости точки В при враще-
нии плоской фигуры вокруг полюса Д.
Покажем, что угловая скорость вращения фигуры не зависит
от выбора полюса. Пусть А и В —две какие-нибудь точки плос-
кой фигуры. Пусть полюсу А соответствует угловая скорость юА,
а полюсу В — угловая скорость ощ. Найдем скорость точки В,
приняв за полюс точку А
vB = vA + ®Axp.
Приняв теперь за полюс точку В, найдем скорость точки А
vA = vB-b(oBX(— р).
Сложив оба равенства, получим
(®А - шв) X р = 0.
Но вектор юА — <лв перпендикулярен плоскости фигуры, и,
значит, полученное равенство может выполняться только при юА =
— о)В. Таким образом, нет надобности в дальнейшем сохранять
индекс полюса в обозначении вектора угловой скорости, т. е.
<ЙА = ft>B = О).
Формула (11.6) может быть записана теперь в виде
vB = vA + vflA = vAH-ft)X р. (11.7)
Если заметить, что
о>Хр =
>2 h
о о
*23 У2В
кз
со?
0
§ П 2]
СКОРОСТИ ТОЧЕК ТЕЛА. ПРИ ПЛОСКОМ ДВИЖЕНИИ
197
где
x2B — xB cosq> ^~Ув sin ср, y2B~xB sinq> + i/Bcos<p, <»г = ф,
то из (11.7) после проектирования на оси координат можно получить уже ранее
выписанные формулы (11. 4).
Так как vBA = ft>xp = ft)XАВ, то модуль скорости
Одд=(О-ЛВ,
ибо вектор о перпендикулярен плоскости чертежа. Отметим, что
вектор v вл перпендикулярен также АВ. Направление вращения
плоской фигуры вокруг полюса зависит только от знака проекции
угловой скорости на ось Лг2. Так как о>г = ф, то при <лг 2> 0 вра-
щение происходит против хода часовой
стрелки и при и,<0-по ходу часовой
стрелки.
На рис. 11.5, а и б показано, как, зная
скорость точки А, можно найти скорость точ-
ки В при (Щ1>0 и (D, < 0.
Из формулы (11.7) следует одна полезная
Рис. 11.6.
теорема:
При плоском движении проекции скоростей двух точек тела
на ось, проходящую через эти точки, равны между собой.
Выберем положительное направление для оси АВ, как указано
на рис. 11.6. Воспользуемся далее формулой (11.7)
VB = Va + Vba-
Проектируя это равенство на направление АВ, получим
(v в) АВ = (Va)ab + (Vba)ab-
Последнее слагаемое в этом соотношении равно нулю, так
как вектор ува перпендикулярен АВ и, следовательно,
(vb)ab = (у а) АВ-
198
ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
[ГЛ XI
Задача 11. 1. Определить скорость ползуна В кривошипно-шатунного меха-
низма, изображенного на рис. 11.7, если АС = СВ = 1 и известна угловая ско-
, рость со кривошипа АС в момент времени, когда
ЧОк АС и ВС взаимно перпендикулярны.
_ На основании доказанной теоремы
(vc)bc=(vb)bc.
О) / \ Л
Vc — cos 4 ’
И'------------1 — Откуда
в' vb~vc 1/2 = ю/ Уч,
Рис. 11.7. так как
vc — ol.
Определения и теоремы этого параграфа можно использовать
для графического нахождения скоростей точек плоской фигуры.
§ 11.3. План скоростей
Приступая к графическому нахождению скоростей точек плоской фигуры,
будем считать заданными модуль и направление скорости одной точки и на-
правление скорости другой точки.
Пусть, например, известны вектор скорости точки А и направление скоро-
сти точки В (рис. 11.8, а). Определим сначала модуль скорости точки В, а
Затем векторы скоростей точек С и D.
Скорость точки В определяется формулой (11.7)
vB = va + vba-
Так как нам известны вектор vA и направления векторов и vBA (напом-
ним, что вектор vBA перпендикулярен отрезку АВ), то можно получить гра-
фическое решение уравнения (11.7). Для этого из произвольно выбранного
Рис. 11.8.
полюса р (рис. 11.8, б) в произвольно выбранном масштабе отложим вектор
pa = vA.
Если бы нам была известна скорость vBA, то, отложив от точки а вектор
a& = vBA, мы получили бы точку b и, очевидно, вектор pb был бы равен век-
тору скорости vB. Но нам известно лишь направление вектора vВА (vBA J. АВ),
Поэтому поступим следующим образом- через точку а проведем прямую, пер-
пендикулярную отрезку АВ. Конец вектора vBA должен лежать на этой пря-
§ 113]
ПЛАН СКОРОСТЕЙ
199
мой. Проведем теперь из полюса р прямую, параллельную вектору скорости
точки В. Пересечение этих прямых и определит точку Ь, причем вектор ab =
= vBA, а вектор p6 = vfl.
Зная теперь векторы скоростей точек А и В, найдем скорость точки С.
На основании формул
vc==va + vca' vc = '/b + vcb
можно записать:
va + vca = vb + vcb- <1l8)
Проведем из точки а прямую перпендикулярно отрезку АС (так как
усл 1. АС). Конец вектора vCA должен лежать на этой прямой. Из точки b
проведем прямую перпендикулярно отрезку ВС (vCB 1 ВС). Конец вектора vCB
лежит на этой прямой. Следовательно, точка пересечения прямых, проведен-
ных нами из точек а и Ь, определит точку с. в соответствии с равенством
(11.8) будем иметь
ac = vCA, bc = vCB.
Соединяя точки рис прямой, получим
pc = vc'
Для нахождения скорости точки D спедует использовать формулы
vd = va + vda> vd = vc + vdc
и провести аналогичные построения.
Фигура abced (рис. 11.8, б) представляет собой графическую картину
распределения скоростей точек плоской фигуры н называется планом скоростей.
Точки а, Ь, с, е и d называются вершинами, а точка р — полюсом плана
скоростей; векторы pa, pb, рс, ре и pd называются лучами. и представляют
собой скорости соответствующих точек. Векторы, соединяющие вершины плана
скоростей т. е. векторы ab, Ьс, ас, ае, ad, be и cd, равны скоростям точек
В, С, Е, D при вращении фигуры вокруг соответствующих полюсов.
Легко показать, что треугольник относительных скоростей на плане ско-
ростей подобен соответствующему треугольнику плоской фигуры и повернут
по отношению к нему на угол 90°. Так как ab _L АВ, ас _L AC, be _L ВС, то
Z abc= z ABC, Z ас6= Z АСВ, z_cab~ Z CAB,
а следовательно, треугольник abc подобен треугольнику АВС и повернут по
отношению к нему на угол 90°.
Построив план скоростей^ можно определить угловую скорость плоской
фигуры. Так как ab = vBA, bc = vCB и т.д., то, приняв во внимание принятый
масштаб построения плана скоростей, угловую скорость найдем по формуле
Задача 11.2. Определить скорость точки D механизма, изображенного
на рис. 11.9, а, путем построения плана скоростей, если известно, что угло-
вая скорость стержня OjA равна <и0.
Скорость точки А будет равна по модулю vA = OiA-aa и направлена,
как показано на рисунке. Направление скорости точки В перпендикулярно
стержню О2В. Для определения скорости точки D мы сначала должны найти
скорость точки С, принадлежащей как стержню АС, так и стержню CD,
200
ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
[ГЛ. XI
Отложим от полюса р вектор pa = vA, из точки а проведем прямую, пер-
пендикулярную стержню АВ (рис. 11.9, б). Прямая, проведенная из точки р
параллельно направлению скорости точки В, пересечет прямую, проведенную
из точки а, в точке b и, следовательно, вектор pb будет равен vB. Точку с
на плане скоростей получить путем нахождения точки пересечения прямых
линий, проведенных из точки а перпендикулярно стержню АС и из точки Ь
перпендикулярно ВС, нельзя, так как эти линии сливаются. Поэтому для
нахождения точки с воспользуемся соотношениями (И-9):
ab _ Ьс
АИ~ ВС'
Это значит, что точка b делит отрезок ас в том же отношении, что и точка
В —отрезок АС. Таким образом, находим точку с. Вектор pc=vc-
Теперь проведем из точки р прямую, параллельную направлению скоро-
сти точки D, а из точки с прямую, перпендикулярную стержню CD. Пересе-
чение этих прямых определит точку d, причем pd = vD,
§ 11.4. Мгновенный центр скоростей. Центроиды
Мгновенным центром скоростей называется точка плоской
фигуры, скорость которой в данный момент времени равна нулю.
Докажем теорему о существовании мгновенного центра ско-
ростей: если угловая скорость плоской фигуры отлична от нуля,
то мгновенный центр скоростей существует.
Пусть скорость vA произвольной точки плоской фигуры от-
лична от нуля (в противном случае точка 'А была бы мгновен-
ным центром скоростей).
По знаку угловой скорости <»), = <р определяем направление
вращения плоской фигуры вокруг точки Див этом направле-
нии откладываем от точки А отрезок AP = vA/a перпендикулярно
СКОрОСТИ Уд.
§ 11 4]
МГНОВЕННЫЙ ЦЕНТР СКОРОСТЕЙ. ЦЕНТРОИДЫ
201
На рис. 11.10 предполагается, что юг = ф>0, и поэтому от-
резок АР повернут относительно Уд против хода часовой стрелки.
Докажем, что скорость полученной точки Р равна нулю,
т. е. эта точка и есть мгновенный центр скоростей.
В соответствии с формулой (11.7) имеем
Ур = Уд 4~Урл-
Так как скорость vPA перпендикулярна АР, то вектор vPA
параллелен ул. Кроме того, в соответствии с правилом построе-
ния отрезка АР векторы уА и vPA
имеют противоположные направ-
ления. Модуль скорости vPA равен
vPA = со • АР = со = vA.
Два вектора, равных по вели-
чине и противоположно направ-
ленных, в сумме равны нулю. Сле-
довательно,
Ур = Уд4~УрД=0,
т. е. скорость точки Р равна нулю.
Выберем теперь за полюс точку Р. Тогда скорость произ-
вольной точки А плоской фигуры найдется по формуле
(рис. 11.11)
Уд =Ур4~(дхРД = со хДЛ,
(11.10)
tjk как vp = 0.
Отсюда следует, что скорости точек тела при его плоском
движении распределяются точно так же, как и при вращатель-
ном движении. Роль неподвижной оси играет мгновенная ось,
проходящая через мгновенный центр скоростей перпендикулярно
плоскости движения. Таким образом, скорости всех точек фигуры
перпендикулярны отрезкам, соединяющим эти точки с мгновен-
ным центром скоростей (уд I АР), а модули скоростей пропор-
ц юнальны расстояниям до мгновенного центра скоростей
(Уд = ®РЛ).
Зная положение мгновенного центра скоростей, можно найти
скорости всех точек плоской фигуры, если известна скорость
какой-либо ее точки.
В самом деле, пусть известна, например, скорость ул точки А;
т гда из равенства Пд = ю-ДД найдем a=vA/AP и скорость
любой точки В будет vB = vA-РВ/РА. Соединив конец вектора
Уд с точкой Р, получим эпюру распределения скоростей вдоль
отрезка РВ (см. рис. 11.11).
202
ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
[ГЛ. XI
Используя основные свойства мгновенного центра скоростей,
можно определить его положение и в других случаях. На
рис. 11.12, а показано, как находится эта точка, когда известны
направления скоростей двух точек. Из точек А и В восстав-
лены перпендикуляры к vA и vB. Точка Р находится на их пе-
ресечении. Если скорости точек А и В параллельны и ДВ_1_ул,
то для определения мгновенного центра скоростей следует вос-
пользоваться свойством пропорциональности модулей скоростей
расстояниям точек до мгновенного центра скоростей. На
рис. 11.12, б и в показано, как находится мгновенный центр в этих
случаях. На рис. 11.12, г показан случай, когда vB и чА па-
раллельны, но Уд не перпендикулярна отрезку АВ. Очевидно,
что в этом случае прямые,
перпендикулярные vA и
vB, пересекаются в беско-
нечности и мгновенного
центра скоростей не суще-
ствует. В самом деле, на
основании теоремы о проек-
циях скоростей имеем
vA cos а = ув cos а. Отсюда
vA = vB и vA= vB. Из фор-
мулы (11.7) следует, что
при этом <1)хАВ = 0, т. е. угловая скорость фигуры равна нулю
(о) = 0). Значит, в данный момент времени скорости всех точек
плоской фигуры равны по модулю и направлению и, следова-
тельно, точки, линейная скорость которой равна нулю, не суще-
ствует.
При качении без скольжения одного тела по поверхности
другого (рис. 11.12, д) мгновенный центр скоростей совпадает
с точкой соприкосновения тел (так как при отсутствии сколь-
жения скорость точки соприкосновения равна нулю).
Использование мгновенного центра скоростей очень часто
упрощает решение задачи.
§ 11 4]
МГНОВЕННЫЙ ЦЕНТР СКОРОСТЕЙ. ЦЕНТРОИДЫ
203
Задача 11.3. В двухползунковом кривошипном механизме кривошип О А =
= г=15 ел вращается вокруг оси О с постоянной угловой скоростью со0 =
— 2 сек'1 (рис. 11.13). Длины
= 60 ел), АС=1/3. При го-
ризонтальном (правом) поло- г.
женин кривошипа ОА опре-
делить: 1) угловые скорости
шатунов АВ и CD; 2) ско-
рость ползуна D.
В рассматриваемом меха-
низме звенья АВ и CD со-
вершают плоское движение.
Определим положение мгно-
венных центров скоростей
шатунов АВ и CD. Восстав-
шатунов равны между собой (AB = CD = l —
ляя перпендикуляры к нап-
равлениям скорости точки А
и скорости точки В (точка В движется по горизонтальной прямой), убеждаемся,
что мгновенный центр скоростей шатуна АВ в данный момент времени совпадает
сточкой В (рис. 11.13).
Модуль скорости точки А как точки кривошипа ОА равен ил = соог, с дру-
гой стороны, модуль скорости этой же точки как точки шатуна АВ будет
цд = со • АВ,
где со — угловая скорость шатуна АВ.
Следовательно, ov = <o • АВ и
со = =0,5 1 /се/с.
АВ
Модуль скорости точки С шатана АВ равен
vc = со -ВС = 20 см/сек.
Направление вектора vc перпендикулярно АВ.
Так как скорости точек С и D параллельны, то мгновенный центр ско-
ростей шатуна DC лежит в бесконечности и угловая скорость cot шатуна DC
равна нулю. Значит, vD=vc и сд = 20 см/сек.
В отличие от чисто вращательного движения, при плоском
движении мгновенный центр скоростей меняет, вообще говоря,
свое положение на плоскости. Если наклеить на фигуру, совер-
шающую плоское движение, лист бумаги и в каждый момент
времени прокалывать иглой мгновенный центр скоростей, то
получатся две серии отметок: одна на неподвижной плоскости,
другая на листе, связанном с фигурой.
Геометрическое место мгновенных центров скоростей, отмечен-
ных на неподвижной плоскости, называется неподвижной центро-
идой.
Геометрическое место мгновенных центров скоростей, отме-
ченных на плоскости, жестко связанной с фигурой, называется
подвижной центроидой.
204
ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА*
[ГЛ. XI
Рис. 11.14.
При качении цилиндра по горизонтальной плоскости
(рис. 11.12,' д) неподвижная центроида— горизонтальная прямая,
а подвижная — окружность.
В каждый момент времени подвижная и неподвижная цент-
роиды имеют общую точку касания—мгновенный центр скоро-
стей Р, т. е. точку, скорость которой равна нулю. Поэтому
плоское движение можно представить, как качение без скольже-
ния подвижной центроиды по не-
подвижной.
Задача 11.4. Определить центроиды
подвижного звена CD ангипараллело-
грамма ABCD, у которого звено АВ зак-
реплено неподвижно, CD—АВ, CB — AD.
Изобразим в точках С и D скорости
ЧС и vz>* Перпендикуляры к ним пере-
секаются в точке Р (рис. 11.14) — мгно-
венном центре скоростей звена CD. Треу-
гольники ABD и CBD равны по трем
сторонам. Следовательно, Z. ADB =
— д CBD и треугольник PBD равнобед-
ренный. Поэтому
АР РВ-= АР A-PD = AD-= const,
СР + PD = СР + РВ = СВ = const.
Отсюда вытекает, что точка Р неподвижной плоскости, жестко связанной
со звеном АВ, описывает эллипс с фокусами в Л и В, а в подвижной пло-
скости, связанной со звеном CD,—эллипс с фокусами в С и D. Первая кри-
вая является неподвижной центроидой (она заштрихована), вторая — подвижной.
§ 11.5. Ускорения точек при плоском движении.
Мгновенный центр ускорений
Для определения ускорения точки плоской фигуры продиффе-
ренцируем равенство (11.7) по времени:
ст V о v* V д
В этом соотношении = wB, —= v/A — соответственно ускоре-
п л dp dta
ния точек В и А, ~ = и > р =Nba, = е —вектор углового уско-
рения. Вектор е, как и вектор и, направлен перпендикулярно
плоскости фигуры и определяется формулой
е = ddt =: ^к-
Таким образом, ускорения точек А и В связаны между собой
соотношением
W/j = W4 + eXp-f-(0XVB4. (11-11)
§ П 5]
1СК0РЕНИЯ ТОЧЕК ПРИ ПЛОСКОМ ДВИЖЕНИИ
205
Два последних слагаемых в равенстве (11.11) определяют
ускорение точки В при закрепленной точке A (мщ = 0). Поэтому
их сумма
е X р + о X nba = wBA
дает ускорение точки В во вращательном движении относи-
тельно системы координат Ах2у2.
При изучении вращательного движения мы уже выяснили,
как направлены составляющие вектора ускорения w!iA. Легко
еще раз убедиться, пользуясь правилом составления векторного
произведения, что ихувл имеет нап-
равление, совпадающее с ВА (от точки
к полюсу), а ехр перпендикулярно
ВЛ. Сохраним за этими составляющими
старые названия — осестремительного
(или центростремительного) и враща-
тельного ускорений, т. е.
w^ = a>XVB4) w^=exp.
Модули этих составляющих будут
цу^д = и2р = ®2 • АВ, = ео = е • АВ.
(Н-12)
На рис. 11.15 геометрически сло-
жены три вектора и определено уско-
рение точки В при помощи формулы
wb = wx + wbx + wKi. (11ЛЗ>
Таким, образом, ускорение любой точки В плоской фигуры
геометрически складывается, из ускорения полюса и осестремитель-
ного и вращательного ускорений во вращательном движении фигуры
относительно полюса.
Заметим, что при решении задач, прежде чем устроить уско-
рение точки по формуле (11.13), необходимо вычислить угловую
скорость тела, его угловое ускорение и выбрать полюс. За полюс
выбирается обычно такая точка, ускорение которой легко нахо-
дится из условия задачи. Иногда, зная, например, направление
искомого ускорения точки, угловое ускорение можно определить
по формуле (11.13).
Из (11.12) найдем угол, составленный вектором wBA с направ-
лением на полюс (рис. 11.15),
tga
W°BA
8
О)2 ’
Отсюда видно, что этот угол, во-первых, не зависит от выбора
206
ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
[ГЛ. XI
полюса и, во-вторых, для всех точек при фиксированном времени
одинаков.
Модуль ускорения точки при вращении фигуры вокруг полюса
также находится из равенства (11.12)
wba = АВ ]/У2 + w4.
(11.14)
Он зависит от расстояния точки до полюса.
Введем понятие мгновенного центра ускорений.
Мгновенным центром ускорений называется точка плоской
фигуры, ускорение которой в данный момент времени равно нулю.
Для построения мгновенного центра ускорений будем пред-
полагать, что нам известны ускорение одной из точек v/A, угловая
4 скорость и и угловое ускорение е, причем
предполагается, что со и е не равны нулю
одновременно. Из точки А отложим под
углом a = arctg~ к ускорению wA отре-
©С/
A/w»! зок AQ
AQ = (11.15)
Рис. 11.16. ПрИ этом, если ег = ф->0, то угол от-
кладывается против хода часовой стрелки
(рис. 11.16), при противоположном знаке ф —по ходу часовой
стрелки.
Убедимся в том, что ускорение точки Q равно нулю. Выбрав
за полюс точку А, получим
W<3 = W4+W(34.
Как мы уже отметили ранее, угол между ускорением точки отно-
сительно полюса и направлением на полюс не зависит от выбора
полюса. Следовательно, v/qA составляет с направлением QA угол а.
Такой же угол составляет и w4 с AQ. Поэтому векторы wQA и
Wx параллельны (рис. 11.16). В си'лу принятого правила отсчета
угла а ускорения гпрЛ и wA будут всегда противоположно
направлены. Остается теперь установить, что они равны по модулю.
Вспоминая (11.14) и подставляя (11.15), получим
_______W д Г_______
WqA = AQ ]/е2 + О)4 = /е2 + ю4 = “а-
У е2 + со4
Отсюда следует:
Wq = Wx4-Wqx = 0.
Таким образом, мы доказали, что точка Q —мгновенный центр
ускорений.
§ 11.6]
ПЛАН УСКОРЕНИЙ
207
Ускорение любой точки в данный момент времени теперь
может быть определено так же, как и при вращении вокруг
неподвижной оси:
Wa = wQ + wAQ = wAQ = + w*pq
(поскольку Wq = 0).
Следует иметь в виду, что мгновенный центр ускорений и
мгновенный центр скоростей,— вообще говоря, разные точки.
В этом легко убедиться, рассмотрев простой пример. Допустим,
диск катится по горизонтальной плоскости без скольжения
(рис. 11.12, д) и скорость его центра О постоянна. Как мы уже
знаем, мгновенный центр скоростей находится в точке касания Р.
Так как вектор скорости точки О постоянен, то ускорение центра
диска равно нулю. Таким образом, мгновенный центр ускорений
совпадает с центром диска, а мгновенный центр скоростей —
с точкой касания.
§ 11.6. План ускорений
В этом параграфе мы рассмотрим методы графического определения уско-
рений точек плоской фигуры.
Пусть заданы скорости точек плоской фигуры (рис. 11.17) (построен план
скоростей), ускорение точки А и направление ВВ' ускорения точки В.
Определим ускорения точек В и С плоской фигуры. На основании формулы
(11.13) для данных точек А и В фигуры можно записать
wb=wa+wba+wba-
В этом уравнении вектор известен по модулю и направлению, вектор v^A
известен по направлению — направлен от точки В к точке А, а его модуль
определяется по формуле
...ос _ VBA _ (abf
ВА АВ АВ •
Вектор wBBpA направлен перпендикулярно АВ, а вектор wfl — вдоль линии ВВ'.
Поэтому уравнение (11.13) можно графически решить следующим образом.
Выбирая соответствующий масштаб, из произвольной точки q (полюса
построения) проводим вектор qaA, геометрически равный вектору w^. К вектору
qcti прикладываем вектор гц/ц, геометрически равный вектору v^A. Через
точку п1 проводим прямую, перпендикулярную АВ (параллельно вектору
wBPa)’ на эт°й прямой будет лежать конец вектора — последнего слагае-
мого векторной суммы, а следовательно, и конец вектора wfl. Для определения
модуля вектора wB проведем из точки q прямую, параллельную ВВ'. На этой
прямой лежит конец вектора wfl; следовательно, конец вектора wfl будет
лежать в точке bL пересечения прямых, проведенных параллельно векторам
WBA и WB и3 точек п1 и ?•
Таким образом, мы построили векторы qbt = wB, n1b1=w^A, a1n1 = w^1
и aA = w/M.
208
ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
[ГЛ. XI
Для определения ускорения точки С можем написать следующие два урав-
нения:
wc = w4 + w^ + w^, 1
(11.10)
WC = WB + WCB + WCB •
нам известен вектор wA по модулю
и направлению, век-
В первом уравнении
а
1
Рис. 11.17.
тор мы знаем по направлению
(он направлен от точки С к точке
А), а модуль его определяется по
формуле
Вектор известен только по
направлению (он перпендикулярен
АС).
Вектор wc не известен ни по
модулю, ни по направлению. Поэ-
тому первое уравнение графически
решить нельзя. Точно так же нельзя
решить и второе уравнение, так
как в него входит искомый вектор
wc и вектор w^, неизвестный по
модулю.
Из уравнений (11.16) следует
wa + wca + 'vc?a==
= 'vb + 'vcb+w^b- (11л7)
направлен от точки
В этом уравнении вектор w£.g
С к точке В, модуль же вектора определится из равенства
.ОС
св ВС
Вектор W(?B перпендикулярен отрезку СВ. Таким образом, в уравнение (11.17)
входят известные векторы w4, wfl, и w^B и векторы и WyPfi, извест-
ные по направлению. Следовательно, уравнение (11.17) можно решить графи-
чески.
К построенному вектору qal = vtA прикладываем вектор alfe1 = W£?1 и через
точку kv проводим прямую, перпендикулярную вектору а^. Вдоль этой пря-
мой будет направлен вектор и, следовательно, на этой прямой будет
лежать конец вектора wc. К построенному вектору qbt = wB прикладываем
вектор blm1 = w^cB и через точку тг перпендикулярно Ьхтг проводим прямую.
Вдоль этой прямой будет направлен вектор и, следовательно, и на этой
прямой будет лежать конец вектора wc.
Так как конец вектора wc должен лежать на прямых, перпендикулярных
векторам и bqni, то он лежит в точке их пересечения Q. Таким образом,
полученный вектор qct будет вектором ускорения точки С. Итак, мы опреде-
§ 11.61
ПЛАН УСКОРЕНИЙ
209
лили графически ускорения точек В и С. Векторы qalt qbt и qclt выходящие
из полюса q, будут векторами ускорений точек А, В и С.
Фигура qa^^q (рис. 11.17, в), представляющая собой графическую кар-
тину распределения ускорений точек в плоской фигуре, называется планом
ускорений.
На плане ускорений векторы aib1 = 'nBA, alcl = w(-4 и 61c1 = wCB суть
ускорения точек В и С, обусловленные вращением фигуры вокруг соответст.
вующих полюсов, причем
wba = ЛВ • У^е2 + <о4,
wCA = АС •Уе2 + <о4,
гг>св = ВС-'Ке2 + <о4. .
(11.18)
Построив план ускорений, легко показать, что фигура подобна
фигуре АВС и повернута по отношению к ней на угол л — а, где а опреде-
ляется по формуле
, е
tga^<o2‘
Действительно, согласно формулам (11.18) отрезки агЬг, Ьгсг н пропорци-
ональны отрезкам АВ, ВС и С А, поэтому &a1b1c1~ А АВС. Далее, так как
L n^ibi = L m^biC) = £ fe1a1c1 = а, то векторы а^, Ь1с1 и составляют
с отрезками АВ, ВС и СА угол л —а.
Если из плана скоростей мы можем определить угловую скорость плоской
фигуры, то из плана ускорений можно определить угловое ускорение плоской
фигуры. Действительно, так как
= W%PA = 8 • АВ,
то
р ...Ml
АВ •
Следует заметить, что при всех вычислениях нужно принимать во внима-
ние принятый масштаб построения планов скоростей и ускорений.
Задача 11.5. Определить ускорение точки D механизма, изображенного
на рис. 11.18, а.
План скоростей для этого механизма нами уже построен (рис. 11.9, б).
Полное ускорение точки А направлено к точке О1т так как угловая скорость <оо
постоянна, а модуль ускорения точки А равен wA — 01A-a>l. Модуль и на-
правление ускорения точки В нам неизвестны. Определить ускорение точки В
можно, например, следующим образом.
Согласно формуле (11.13) имеем
WB = Wa + WB/1 + WBA-
Вектор wА нам известен, вектор уувл направлен от точки В к точке А, а его
VBA (аЬ)2
модуль равен wBQA = -т-5-=-т-5- (величину ab берем из плана скоростей),
Alj Alj
вектор мгврл перпендикулярен отрезку АВ.
__ Из какой-либо произвольной точки q (рис. 11.18, б) отложим вектор
qal-^'NA (в произвольно выбранном масштабе), к точке аг приложим вектор
c1n1 = wg^> а через точку пг проведем прямую, перпендикулярную отрезку ЯД
8 Бутенин Н. В. и др.
210
ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
[ГЛ. XI
(или вектору at/ij). Очевидно, что конец вектора wB должен лежать на этой
прямой.
Так как стержень 02В вращается вокруг точки О2, то можно представить
вектор ускорения wB в следующем виде:
WB = WBO2 + WBO2’
где wBcOa — осестремительное ускорение точки В относительно О2, направленное
к точке О2 и равное по модулю швсОг =(р&)2/О2В (величина pb берется из
плана скоростей), a wBp02—вращательное ускорение точки В относительно О2,
направленное перпендикулярно О2В. Отложим теперь от точки q вектор
qmv-= wBc0 , а через точку т1 проведем прямую, перпендикулярную стержню О2В.
Конец вектора wB должен лежать на этой прямой. Следовательно, конец век-
тора wв находится в точке пересечения прямых, проведенных из точек и Шр
т. е. wB = q61.
Построив вектор wB, мы можем перейти к определению ускорения точки С.
Заметим, что вектор a1b1 = wBA. Так как векторы viBA и xvCA образуют с на-
правлением стержня АС один и тот же угол a(tga = e/<a2), то векторы
ai^i = wBA и aici = wCA будут лежать на одной прямой. Для нахождения
точки q воспользуемся зависимостями (11.18). Из них следует, что
WBA
АВ
WCA
АС
или
а1ь1 а1с1
АВ АС ’
(г. е. точка сх делит отрезок агЬг внешним образом на части, пропорциональные
отрезкам, на которые точка С делит отрезок АВ. Таким образом, построив
точку Ср находим, что а1с1 = и'сл и qcL=-wc.
Ускорение точки D определяется формулой
wD = wc + woCc + wflPc.
Вектор wc = ^c1 мы только что нашли, вектор направлен от точки D
к точке С и по модулю равен w°BC = (cd)2lDC, а вектор w“pc перпендикулярен
стержню CD. Направление ускорения точки D известно (точка D совершает
§ 11 7]
ЗАДАЧИ
211
прямолинейное движение). Из точки сх отложим вектор w“c = c1^1 (парал-
лельно стержню CD). Проведя теперь из точки прямую, перпендикулярную
стержню CD, найдем ее точку пересечения с прямой, проходящей через точку q
и параллельной направлению ускорения точки D. Эта точка пересечения и
будет точкой di и, следовательно,
c^i = wDC, ^d1 = viD.
§ 11.7. Задачи
Задача 11.6. В двойном кривошипно-шатунном механизме, изображенном
на рис. 11.19, размеры звеньев следующие: ОА = 10 см, АВ = CD = DE = 20 см.
Расстояние между ползунами ВС = 10Уз см. Оси кривошипов О и £ распо-
ложены на одной прямой с направляющей ползунов В и С. Расстояние ОЕ =
= 40 УЗ см. Определить угловую скорость ведомого кривошипа ED в момент,
Рис. 11.19.
когда кривошип ОА перпендикулярен направляющей ОЕ, если угловая ско-
рость кривошипа ОА в этот момент равна <а0=6 сек-1.
Найдем расстояние СЕ. Из рис. 11.19 следует:
СЕ = ОЕ — ОВ — ВС ~ 40 УЗ —10 УЗ — 10 /з = 20 Уз см.
Скорости точек А и В оказались параллельными. Следовательно, на основании
равенства проекций скоростей двух точек плоской фигуры на прямую, их
соединяющую, имеем
vB = vA = <а0 • О А = 6 10 = 60 см/сек.
Заметим, что ползуны В и С составляют одно тело и движутся поступа-
тельно, поэтому vc — vB = (X) см/сек.
Найдем мгновенный центр скоростей для шатуна CD. Восставим перпен-
дикуляры к скоростям vc и vD точка их пересечения Р—мгновенный центр
скоростей шатуна CD.
Скорости точек относятся как их расстояния до мгновенного центра ско-
ростей
VD _ PD
VC PC
Из Д РСЕ следует (по условию CD = DE)
PD = DE = 20 см,
PC = У?£2- С£2 = 20 см.
Отсюда получим
PD
v,, = = 60 см сек.
и u
Искомая угловая скорость кривошипа ED равна
VD 60
<0£0=0£ = ’20 = 3сек 4
8*
212
ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
[ГЛ. XI
Задача 11.7. Стержень АВ движется в вертикальной плоскости так, что
его нижний конец А скользит по горизонтальной прямой ОС, а сам стержень
все время опирается в точке М на выступ, высота которого равна /г (рис. 11.20).
Найти неподвижную и подвижную
центроиды.
Начало неподвижной системы
координат Охгуг возьмем в точке О
(у основания выступа), а ось хх нап-
равим по прямой ОС. Начало подвиж-
ной системы координат Аху возьмем
в нижнем конце А стержня и ось у
направим вдоль стержня.
Так как скорость точки А нап-
равлена горизонтально, а точки
стержня, совпадающей с точкой М,—
вдоль стержня, то мгновенный центр
скоростей лежит в точке пересечения
перпендикуляров, восставленных из
точек А и М к направлениям скоро-
стей этих точек.
Вводя в рассмотрение угол <р между
стержнем и горизонтальной прямой,
центра скоростей в неподвижной системе
получим для координат мгновенного
координат следующие выражения:
х1Р = h ctg <р,
У ip = +КР = h + xip ctg <р = h cosec2 <р.
Исключая из этих уравнений угол <р, получим уравнение неподвижной
центроиды:
х!р
У1Р-Ь+ —
Это — уравнение параболы. На рис. 11.20 неподвижная центроида заштрихо-
вана. Координаты мгновенного центра скоростей в подвижной системе коор-
динат Аху будут
»п , > /г cos m
х„ = АР • cos <р—h cosec2 <p cos <p = —r-=-~.
p т т T sin2 <p ’
—
Ур ~ sin <p
Исключая <p из этих уравнений, получим уравнение подвижной центроиды
Подвижная центроида является кривой четвертого порядка.
Задача 11.8. Коромысло ОА длиной 40 см, качаясь вокруг оси О, приводит
в движение шатун АВ длиной 80 см. Ползун В скользит по направляющей ED,
составляющей с горизонтальной линией угол а = 45°. Найти ускорение пол-
зуна В и угловое ускорение шатуна АВ в момент, когда угол р = 90° (рис. 11.21),
если в этот момент угловая скорость кривошипа ОА равна ш0=2 сек1, а его
угловое ускорение е0 = 0.
Согласно формуле (11.13) имеем
wb = wa + wbpa + wba.
§ 1I.7J
ЗАДАЧИ
213
Ускорение точки А направлено к точке О и равно
Шд = со® • О А = 160 см'сек2.
Осестремительиое ускорение направлено от точки В к точке А и равно
w<ba = 0)2 ’
где со — угловая скорость шатуна АВ.
Для определения угловой скорости со найдем скорость точки А и мгно-
венный центр скоростей шатуна АВ, который лежит в точке пересечения пер-
пендикуляров к скоростям то-
чек А и В этого тела; следова-
тельно, мгновенный центр ско-
ростей звена АВ находится
в данный момент в точке Р (см.
рис. 11.21) Треугольник АВР —
прямоугольный и равнобедрен-
ный:
АВ = АР = 80 см.
Угловая скорость со опре-
делится по формуле
VA “о •0А .
ш=лр=-Тр-=1сек1-
Подставляя значение со в фор-
мулу ДЛЯ Шдд, получим
Рис. 11.21.
= 80 см/сек2.
Вектор направлен вдоль прямой DE. Вращательное ускорение направ-
лено перпендикулярно АВ.
Выберем в указанном положении ползуна В две взаимно перпендикулярные
оси, одну ось направим вдоль ВА, а другую —перпендикулярно к ней; тогда,
проектируя обе части исходного векторного равенства на выбранные оси,
получим
и)всоз45° = и)Вд,
wB cos 45° = — wA + w врл .
Отсюда находим
0^ = 80 1^2 см/сек2, w°ba = 240 см/cetf.
Угловое ускорение шатуна АВ определяется по формуле
«-вРА 240
АВ 80
3 сек 2.
Задача 11.9. Кривошип ОА кривошипно-шатунного механизма (рис. 11.22)
делает 3000 оборотов в минуту. Определить угловую скорость и угловое уско-
рение шатуна, скорость и ускорение поршня и средней точки С шатуна,
а также положения мгновенных центров скоростей и ускорений в моменты
времени, когда А АОВ= 90° н д АОВ = 0°, если ОА = 100 мм, АВ = 300 мм.
Определим искомые величины в момент, когда д АОВ = 90°(см. рис. 11.22, а).
Скорости vA и vB параллельны, следовательно, угловая скорость шатуна
214
ПЛОСКОЕ движение твердого тела
[ГЛ. XI
“ba = ° И
VA = VB = VC-
Из условий задачи следует, что
v . = • О А = 100л -0,1 = Юл м/сек,
л ДО
а ускорение точки А равно
1 '2 • ОА = (100л)2 • 0,1 = 1000л2 мсек2
ТО) . = -
А \, 3
и направлено к точке О.
Обозначая через еАВ угловое усиорение шатуна АВ, положение мгновен-
ного центра ускорений шатуна определим с помощью формул:
но солв = 0; тогда
AQ = —- , tga = -^,
V ШЛв + еАВ ЫАВ
tga = co и a = 90°.
Следовательно, мгновенный центр ускорений лежит на прямой, Перпенди-
кулярной ускорению точки А и проходящей через эту точку.
Рис. 11.22.
Одновременно мгновенный центр ускорений лежит на прямой, проведенной
через точку В перпендикулярно ускорению точки В. Так как ускорение
точки В направлено параллельно оси цилиндра (вдоль ОВ), то мгновенный
центр лежит в точке Q.
Усиорение точки А, как точки, принадлежащей шатуну, равно
WA = WAQ = АQ • /“ав + ^В,
но так как <олв = 0, то
и,Д = 8ав-^-
Отсюда
w, w, 1000л2
е „ = — ==.... А =- = . = 3525л2 сек*2;
Ali AQ }^АВ2-ОА2 К0,32-0,12
§ 117]
ЗАДАЧИ
215
тогда ускорение точки В будет
wb = 8дв ' = 3525л2 -0,1= 352,5л2 м/сек?,
а ускорение точки С
wc = вав ’ CQ —673л2 м/сек?.
Определим искомые величины во втором положении, когда Z 7IOB —0
(рис. 11.22, 6). Мгновенный центр скоростей шатуна будет находиться в точке В.
Угловая скорость шатуна найдется из формулы
vA^^ab-ab>
отсюда
Юл 100
“лв = ^з' = —лсе^1’
Скорость точки В равна нулю, а скорость точки С будет равна
100
vc = аАВ ВС = —д— л • 0,15 = 5л м/сек.
Для определения положения мгновенного центра ускорений необкодимо
иайти угловое ускорение шатуна. Для этого воспользуемся формулой
wb = wa + wba+wba-
В этом уравнении вектор wА направлен к точке О, вектор wBc4 направлен от
точки В к точке А и вектор wB направлен вдоль линии ОВ. Так как вектор wB
параллелен двум слагаемым векторам и v/°BA, то вектор w^, перпенди-
кулярный вектору wA, равен нулю. Но = елд- ВА, следовательно, елв = 0.
Зная ускорение точки А, угловую скорость и угловое ускорение шатуна АВ,
можем найти положение мгновенного центра ускорений Q шатуна:
ш,
XQ = —7-«=0,9 м,
ЫАВ
tga = ^AB-==0, сс = О.
ЫАВ
Точка Q лежит на продолжении примой ВА слева от точки А. Ускорение
точки В определится по формуле
и,в = шв<? = шав ’ Q6= 1333,3л2 м/сек?,
где QB = 1,2 м.
Ускорение точки С находится по формуле
wc ~ ' QC— 1166>7л2 м/сек2,
где QC — расстояние от точки С до мгновенного центра ускорений, рав-
ное 1,05 м.
Задача 11.10. Шестерня I радиуса R приводится в движение кривошипом О А,
вращающимся вокруг оси О неподвижной шестерни II радиуса г по закону
<р = <р(/). Определить ускорения точек М, N, В и положение мгновенного
центра ускорений Q (рис. 11.23).
Найдем сначала угловую скорость и угловое ускорение шестерни I.
Кривошип ОА вращается вокруг оси О с угловой скоростью ф. Поэтому
скорость точки А перпендикулярна кривошипу ОА и равна по модулю
216
ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
[ГЛ, XI
v4 = 0Я • | ф | = (г +Д) | ф |. Так как точка А принадлежит одновременно
шестерне /, то ее скорость определяется равенством (точка М является мгно-
венным центром скоростей)
где ок— угловая скорость шестерни 1. Сравнивая оба выражения для vAt
найдем
“гЯ = (г + Д)ф.
Отсюда
Дифференцируя это соотношение по времени, найдем угловое ускорение ez
шестерни /:
Осестремительиое ускорение точки А, как точки кривошипа О А, направ-
к О и по модулю равно
(7?-|-г)ф2. Вращательное ускорение точки А
перпендикулярно прямой ОА и равно по
модулю (Д-J-/-) | ф | . Таким образом,
<=(/? + г)ф2, ш^ = (Д + г)ф. (11.19)
На рис. 11.23 направление w^p показано
в предположении, что ф>0 и ф > 0.
Ускорения точек М, N и В будем
искать по формуле (11.13), приняв точку
Я за полюс Для точки М имеем
^i = w,i + wX1 + Sia- (И.20)
Ускорение точки А уже найдено через
составляющие w^c и w^p. Осестреми-
тельное ускорение точки М относительно
точки Я направлено к А (см. рис. 11.23),
модуль этого ускорения равен Я со2. Под-
ставляя значение со, будем иметь
лено
ГГ)2.
Вращательное ускорение точки М относительно точки Я перпендикулярно
прямой AM и модуль этого ускорения равен R | ег | , или
w*j$A = (R + r)<f.
п I
Так как, по предположению, ф>0, то ег — —ф>0. Поэтому враща-
тельное ускорение будет иметь направление, указанное на рис. 11.23.
Проектируя обе части равенства (11.20) на оси х и у (см. рис. 11.23) и
принимая во внимание формулы (11.19), получим
wMx = - (Я + г) Ф2 + ф2 = -L (Д + ,) фз,
= (Я + г) Ф - (Я +') Ф = °-
§11.71 ЗАДАЧИ 217
Из этих выражений видно, что ускорение точки М. направлено к точке А и
равно по модулю
Для точки N формула (11.13) примет вид
wa- = wa + wapa + waa-
Вращательное ускорение точки N относительно точки А по модулю равно,
конечно, его направление указано на рис. 11.23. Осестремительное уско-
рение vi^A точки направлено к А и по модулю равно Проектируя
последнее равенство на оси х и у, получим
(Я + г)2 .» (/? + г)(2/? + г)
WNx = — Ф ~ - £ - ф2 = — ---1 - ф*.
и,лч/==(Я + '')ф+ (/?4-r)cp = 2(R + r)<p.
Модуль ускорения точки М равен
«^=(К + г) ]Л(2^2ф*+4<р.
Аналогично находится ускорение точки В. Имеем
И,ВА=ШЛ?А=(^ + '')Ф> а'йА=и,7ИА=-^^Ф2;
направление ускорений и показано на рис. 11.23. Проектируя
равенство
wb = wa + wba+wba
на оси х и у, получим
—(/? + г) ф2 + (/? + г)ф = (/? + г)(ф—ф2Х
^д=(Я+')ф+-^^ф2 = (Я + ')(ф+^^ф2).
Отсюда
ьув = (/? + ') ]/”(ф-ф2)2 + (ф + -^р-ф2^ •
Расстояние от точки М до мгновенного центра ускорений Q в соответствии
с формулой (11.15) равно
г/?ф2
М Q = —.. ... = —— — -1 -
Уай + е2 KW+ (!? + ' )2Ф* "
Для определения угла а между ускорением wJ( и отрезком MQ воспользуемся
формулой
tga = -e-= ...^!_Ф1_..
ё ы2 (г + 7?)ф2.
ГЛАВА XII
ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
С ОДНОЙ НЕПОДВИЖНОЙ ТОЧКОЙ.
СВОБОДНОЕ ТВЕРДОЕ ТЕЛО
§ 12.1. Задание движения. Углы Эйлера
Движение тела, имеющего одну неподвижную точку, назы-
вают иногда сферическим движением или вращением тела вокруг
неподвижной точки. Первый термин объясняется тем, что все
точки тела движутся по поверхностям сфер, общий центр кото-
рых совпадает с неподвижной точкой.
В главе X мы установили, что твердое тело с одной закреп-
ленной точкой имеет три степени свободы. Три параметра, опре-
деляющих положение такого тела относительно неподвижной
системы координат Ох1у1г1 (рис. 12.1), могут быть выбраны раз-
личными способами. В теоре-
тической механике положе-
ние тела с одной неподвиж-
ной точкой, как правило,
определяют при помощи углов
Эйлера, которые вводятся сле-
дующим образом.
Свяжем жестко с телом
подвижную систему коорди-
нат Oxyz, выбрав начало ко-
ординат в неподвижной точ-
ке О (рис. 12.1).
пересекается с неподвижной
Рис. 12.1.
Координатная плоскость хОу
плоскостью XiOt/i вдоль прямой ОК, которая называется линией
узлов. Угол, составляемый неподвижной осью Охх с линией узлов,
называется углом прецессии и обозначается буквой ф. Угол,
составляемый линией узлов с подвижной осью Ох, носит назва-
ние угла собственного вращения и обозначается буквой <р. Угол
между осями Ог± и О? называется углом нутации и обознача-
ется буквой 9. Все углы отсчитываются соответственно от осей
§ 12 2]
РАСПРЕДЕЛЕНИЕ СКОРОСТЕЙ ТОЧЕК ТВЕРДОГО ТЕЛА
219
0%1, ОК и 0гх против хода часовой стрелки, как показано на
рис. 12.1.
Покажем, что, зная три функции ф = ф (0, 6 = 6(0 и <р=<р(0, можно
всегда найти положение системы координат Охуг, а следовательно, и положе-
ние тела, скрепленного с ней. Действительно, откладывая от оси Охх угол
прецессии ф, мы найдем линию узлов ОК- Проведем через точку О плоскость,
перпендикулярную линии узлов, и от оси 0г1 (эта ось должна лежать в по-
строенной плоскости) отложим угол нутации 6. Таким образом, будет опреде-
лено положительное направление оси Ог. Через точку О проведем плоскость,
перпендикулярную оси Ог; эта плоскость пройдет через линию узлов ОК.
Отложим теперь в построенной плоскости от линии узлов угол собственного
вращения <р и определим положительное направление оси Ох. Ось Оу должна
лежать в той же плоскости и со-
ставлять вместе с осями Ох и Ог
правую систему координат. Таким
образом, углы ф, 6 и <р полностью
определяют положение осей под-
вижной системы.
Углы, определяющие по-
ложение тела, можно ввести
и другим способом. Напри-
мер, положение корабля от-
носительно его центра тя-
жести С определяется кора-
бельными углами, введенными
А. Н. Крыловым. Ось Сх
жестко связанной с кораблем
системы координат Cxyz на-
правляется от кормы к носу,
ось Су — клевому борту, ось Cz расположена в диаметральной
плоскости корабля. В положении равновесия корабля оси системы
координат Cxyz совпадают с осями неизменного направления си-
стемы координат Схуу^. Угол ф между осью Сх1 и линией СК,
образованной пересечением плоскостей хСу и xyCzr (рис. 12.2),
называется углом дифферента, угол <р между линией СК и осью
Сх называется углом рыскания. Угол $ между осью Cz и линией
СМ пересечения плоскостей ххСгх и yxCz называется углом крена.
§ 12.2. Распределение скоростей точек твердого тела,
имеющего одну неподвижную точку. Мгновенная ось вращения.
Мгновенная угловая скорость
Пусть твердое тело имеет одну неподвижную точку О. Свя-
жем жестко с телом систему координат Oxyz (рис. 12.3). Система
координат Oxyz однозначно определяет положение рассматривае-
мого тела по отношению к неподвижной системе отсчета Ox^Zi
(§ 12.1). Положение произвольной точки М твердого тела опре-
деляется радиусом-вектором г. Если х, у и z — координаты
220
ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА С НЕПОДВИЖНОЙ ТОЧКОЙ
(ГЛ. XII
точки М в подвижной системе координат, a i, j и к —единич-
ные векторы осей этой системы координат, то радиус-вектор
можно представить в виде
r = xi-f-i/j+zk. (12.1)
Координаты х, у, z точки М в подвижной системе отсчета
являются постоянными величинами, а единичные векторы i, j, k
будут функциями времени, так как
система координат Охуг движется
вместе с твердым телом.
Скорость точки М определяется
по формуле
поэтому, дифференцируя (12.1) по t,
получим
di , di . dk i, fx.
v = х--f-y(12.2)
dt 1 v dt 1 dt ' '
Умножая обе части равенства (12.2) скалярно на 1, j и к, получим
(12.3)
v^v-k=xw-k+^-k+zw-k-
Так как векторы i, j и к взаимно перпендикулярны, то
12=1, j2=l, k2=l, 1
i-j = 0, j k = 0, k i = 0. J
Дифференцируя эти равенства по времени, найдем две группы
формул:
(12.4)
= #-j = 0, f.k=o, (12.5)
-dfk — w-i’ 5-’ = -|-к- <12-6)
Выражения (12.3) при этом примут вид
dk . di .
x dt dt
d> . d] .
y^dF'lx-dF'k2’
vz = • ky — • ix.
г dt v dt
(12.7)
§ 12 2J
РАСПРЕДЕЛЕНИЕ СКОРОСТЕЙ ТОЧЕК ТВЕРДОГО ТЕЛА
221
Формулы (12.7) содержат три скалярные функции времени,
d] . dk . di .
dfk> dTl> dt'i’
для которых введем обозначения:
dj < dk . di , n.
co^^-k, ®y = -^-i, ^=d/b <12-8>
Перепишем теперь формулы (12.7) в виде
Vx = (Лу2 — согу,
Vy — <лгх — co*z,
V г = Ц)ху — (ЛуХ.
(12.9)
Так как
v = pJ4-Vyj4-ti*k,
то, в соответствии с выражением (12.9), имеем
v = i (Шуг - со.у) + j (copc - co*z) + к ((»лу — &ух).
Если теперь ввести вектор со с проекциями со*, соу, со*,
to = со* j 4- coyj 4- co*k,
то скорость точки можно представить векторным произведением
i
v= со*
j
СОу
У
к
®г
г
= <ОХГ.
Итак, скорость точки тела,
жение, определяется формулой
совершающего сферическое
дви-
V = <й X г.
(12.10)
Геометрическое место точек, скорость которых равна нулю,
определяется из уравнения
со X г = О,
(12.11)
представляющего собой условие коллинеарности векторов со и г.
Это векторное уравнение в системе координат Охуг можно запи-
сать в виде
х _ у _ 2
(О* (Оу (0* •
(12.12)
Уравнения
щие косинусы
(12.12) определяют прямую линию, направляю-
которой пропорциональны проекциям со*, соу, <ог
X
222 ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА С НЕПОДВИЖНОЙ ТОЧКОЙ [ГЛ хи
вектора <». В общем случае вектор w и его проекции сох, <о7, сог
являются функциями времени, поэтому положение прямой (12.12)
изменяется как относительно тела, так и относительно непо-
движной системы координат Ох^^.
Прямая (12.12), в каждой точке которой скорости точек тела
в данный момент равны нулю, называется мгновенной осью вра-
щения. (Она также называется мгновенной осью скоростей.)
Введенный нами вектор со направлен по мгновенной оси вра-
щения.
Как уже было установлено, скорость любой точки М тела
определяется формулой (12.10), совпадающей по своей форме
с выражением для скоростей точек твердого тела, вращающегося
вокруг неподвижной оси с угловой скоростью со (см. формулу
(10.13)). Следовательно, скорости точек твердого тела, имеющего
одну неподвижную точку, распределяются так, как если бы тало
вращалось вокруг оси, совпадающей в данный мо'мент с мгновенной
осью вращения. В частности, модуль скорости точки М в дан-
ный момент определяется равенством
v — сор,
где р —расстояние от точки М до мгновенной оси вращения.
Скорость точки М направлена перпендикулярно плоскости, про-
ходящей через ее радиус-вектор г и мгновенную ось вращений
(рис. 12.4).
По аналогии с вращением тела вокруг неподвижной оси назо-
вем в рассматриваемом нами случае сферического движения тела
вектор <в вектором угловойскорости.
При этом следует иметь в виду,
что при вращении тела вокруг
неподвижной оси вектор угловой
скорости о представляет собой
вектор, всегда направленный по
неподвижной оси вращения и ха-
рактеризующий изменение во вре-
мени реального угла <р поворота
тела. Для тела, имеющего одну
неподвижную точку, выражение
«угловая скорость» имеет услов-
ный характер, так как положение тела определяется не одним,
а тремя углами (§ 12.1) и, следовательно, нет такого одного угла,
скорость изменения которого представил бы введенный вектор со.
Кроме того, этот вектор может меняться и по модулю и по
направлению. Проекции этого вектора на координатные оси
являются функциями углов Эйлера и их первых производных.
Эти формулы будут приведены в дальнейшем (§ 14.3).
§ 12 2] РАСПРЕДЕЛЕНИЕ СКОРОСТЕЙ ТОЧЕК ТВЕРДОГО ТЕЛА 223
Отметим, что из формул (12.8) для случая вращения твердого тела вокруг
неподвижной оси, например, вокруг осн Ог, можно получить
dj , .. , „ dk . di..........
<»х= ^--k = —ipi-k = O, = —-i = 0, ®2 = —.j = q>j-j = q>,
di ., di ., dk
так как (§ 10.2) = 1Г=-<Н- ^=0.
Если известны направления скоростей двух точек тела, то
мгновенную ось вращения можно найти графически. Как следует
из картины распределения скоростей точек тела в данный момент
времени, мгновенная ось вращения лежит в плоскости, перпен-
дикулярной направлению скорости точки тела, и проходит через
неподвижную точку тела. Следовательно, если через точки тела,
направления скоростей которых известны, провести плоскости,
перпендикулярные этим скоростям, то линия пересечения этих
плоскостей и будет мгновенной осью вращения.
Мгновенную ось вращения можно определить и в том случае,
когда известна одна точка тела, скорость которой в данный
момент времени равна нулю. Соединяя эту точку с неподвижной
точкой тела, найдем мгновенную ось вращения.
К понятию о мгновенной оси вращения можно прийти и другим путем.
Для этого сначала докажем теорему Эйлера —Даламбера:
Всякое перемещение твердого тела, имеющего одну неподвижную точку,
можно заменить одним поворотом вокруг оси, проходящей через неподвижную
точку.
Возьмем в теле две точки А и В, отстоящие от неподвижной точки на
одинаковом расстоянии, но не лежащие с
через эти две точки сферу с центром в непод-
вижной точке О (рис. 12.5). Пусть в момент
времени t положение тела определяется точ-
ками Л и В. К моменту времени эти
точки переместятся и займут положение Лх и Вг.
Для доказательства теоремы нам достаточно
показать, что поворотом тела вокруг некоторой
оси, проходящей через точку О, можно добиться
совмещения точек А и В с точками Лх и
Соединим точки А к В, А1 и Вх дугами боль-
ших кругов. Тогда АВ=А1В1, так как в твер-
дом теле расстояния между точками сохраняются.
Соединим теперь также дугами больших кругов
точки 4 и В и Bi (рис. 12.5). Из середины
дуг AAt и BBt— точек М и W— проведем сфе-
ней на одной прямой. Проведем
рические перпендикуляры — дуги больших кру-
гов, плоскости которых перпендикулярны плоскостям кругов АОАг и ВОВХ.
Эти сферические перпендикуляры пересекаются в точке Р на сфере (см.
рис. 12.5).
Рассмотрим сферические треугольники (треугольники, составленные дугами
больших кругов) ЛРЛХ и ВР&!. В этих треугольниках дуга АР равна дуге
АгР и дуга ВР равна дуге ВАР как наклонные дуги, имеющие равные проек-
ции. Отсюда следует, что сферические треугольники АРВ и А1РВ1 равны
(по трем сторонам) и, следовательно, при повороте вокруг их общей вершины Р
224 ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА С НЕПОДВИЖНОЙ ТОЧКОЙ [ГЛ. XII
треугольник АРВ совместится с треугольником XjPBj. При таком повороте
остаются неподвижными две точки тела: точка О и точка Р. Таким образом,
перемещение тела может быть осуществлено при помощи одного поворота
вокруг оси ОР.
Ось ОР называют осью конечного вращения, а угол = А называется
углом конечного вращения.
Положение оси ОР зависит от начального и конечного положений тела.
Зафиксируем начальный момент времени t и рассмотрим близкий к нему
момент времени < + Сравнивая положение тела в момент t с его положе-
нием в момент + мы всегда можем найти ось конечного вращения. Если
теперь промежуток времени At устремить
к нулю, то ось конечного вращения будет
менять положение, стремясь к своему пре-
дельному положению. Предельное положение
оси конечного вращения при А/ -> О назы-
вается мгновенной осью вращения для момента
времени t.
Для каждого промежутка времени (t,
Z-J-AZ) с фиксированным начальным моментом
времени t можно определить угол конечного
поворота fl. Введем в рассмотрение вектор
8 угла конечного поворота, равный по
модулю 0 и направленный по оси ОР в сто-
рону, откуда конечный поворот виден проис-
ходящим против хода часовой стрелки Сред-
ней угловой скоростью будем называть век-
тор, равный
в
«ср- дГ
Предел средней угловой скорости, когда промежуток времени О
г 6
<0= hm ——
д/—о ы
называется мгновенной угловой скоростью тела (рис. 12.6) *). Из этого опре-
деления следует, что вектор угловой скорости направлен по мгновенной оси
вращения.
Положение точки М тела в неподвижной системе координат
определяется координатами хъ у± и zlt а вектор w имеет проек-
ции соХ1, <аУ1, о>г1. Тогда, в соответствии с формулой (12.10), проек-
ции скорости точки М на неподвижные оси координат будут
^1 = coiZ/1-wZly1,
цй = ®г1%1 —(ОхЛ,
(12.13)
1’г1 = Юх,У1-С0г,1Х1.
Уравнение мгновенной оси вращения в неподвижной системе
координат имеет вид
м _ У1 = 2
(0„ <0
У1
(12.14)
*) Мы не останавливаемся на доказательстве идентичности определения
угловой скорости по этой формуле и ранее данного определения (стр. 222).
§ 12 21
РАСПРЕДЕЛЕНИЕ СКОРОСТЕЙ ТОЧЕК ТВЕРДОГО ТЕЛА
225
Геометрическое место мгновенных осей вращений, построенных
в неподвижной системе координат, называется неподвижным аксои-
дом, а в подвижной системе координат — подвижным аксоидом.
Из уравнений (12.14) следует
у1 _ ЫУ1 г1 _ % (О
г1-®г1(0’ x1~4>XlW
Полученные уравнения дают уравнение неподвижного аксоида
в параметрическом виде; параметром служит время t. Исключая
из этих уравнений t, можно
получить уравнение конической
поверхности (неподвижного ак-
соида)
_ р / Уу \
Х1 1 \гг /
Аналогично, исключая время t
из уравнений
У _ (0 ? _ юг (О
г ~ ыг (()’ х ~ <ох(0’
полученных из формул (12.12),
найдем уравнение подвижного
аксоида
х \ г / '
Задача 12.1. Коническая шестерня
/ (рис. 12.7) обкатывает неподвижную
коническую шестерню //. Определить угловую скорость шестерни I и непо-
движный и подвижный аксоиды, если Z. AOD = fi, L COD — а, ОС = h, а ско-
рость центра С шестерни / равна о.
Так как движение шестерни / происходит без скольжения, то скорость
ее точки D равна нулю. Неподвижной точкой является точка О пересечения
осей ОА и ОС шестерен. Следовательно, прямая OD является мгновенной осью
вращения шестерни /. Геометрическое место мгновенных осей вращений, кото-
рое образуется при качении шестерни /,—конус с вершиной в точке О, осно-
ванием которого является неподвижная шестерня //. В системе же коорди-
нат, связанной с подвижной шестерней /, наблюдатель, следящий за мгновен-
ной осью вращения, заметит, что эта ось описывает боковую поверхность
конуса, имеющего вершину в точке О и основанием подвижную шестерню I.
Теперь перейдем к определению направления и модуля угловой скорости.
В соответствии с формулой (12.10), скорость точки С равна
v = wxOC.
Отсюда следует, что вектор <в направлен по мгновенной оси вращения OD
от точки О к точке D. Далее имеем
v = e>-CE, CE~h sin a, <о = -~,-----------.
п sin а
226
движение твердого тела с неподвижной точкой
1ГЛ XII
§ 12.3. Ускорения точек тела, имеющего
одну неподвижную точку
Введем прежде всего понятие углового ускорения. Угловым
ускорением называется производная угловой скорости по времени,
т. е.
da
at
(12.15)
Из определения видно, что вектор углового ускорения можно
рассматривать как скорость конца вектора © (рис. 12.8). Угло-
Рис.12.8
вое ускорение е направлено по касатель-
ной к годографу вектора угловой скорости
(рис. 12.8), поэтому его направление
может быть каким угодно в зависимости
от закона изменения вектора угловой ско-
рости. Заметим попутно, что годограф век-
тора угловой скорости —кривая, лежащая
на неподвижном аксоиде (рис. 12.8).
Перейдем теперь к определению уско-
рения произвольной точки тела. Исходя
из определения ускорения и используя
равенство (12.10), получим
Но
следовательно,
_ dv _ d(aX г) _ da
W — dt — di ~ ~dt
dr
dt
= V = (D X Г,
zr-H
da
dt-e>
W = 8Xr-|-®XV.
dr
dt'
(12.16)
Таким образом, ускорение w может быть представлено как сумма
двух ускорений: вхг и w/v.
Ускорение wBp = exr называется вращательной составляющей
ускорения. Модуль этого ускорения равен
давр _ er sin (е> r) = e/i)
где h — расстояние от точки М до вектора е. Направлено это
ускорение перпендикулярно плоскости векторов е и г в ту сто-
рону, откуда кратчайший переход от вектора £ к вектору г ви-
ден против хода часовой стрелки. Заметим, что вследствие не-
совпадения направлений угловой скорости и углового ускорения
вращательная составляющая ускорения может быть направлена
по отношению к направлению скорости под любым углом, оста-
ваясь перпендикулярной вектору г. В этом существенное разли-
чие между вращением твердого тела вокруг неподвижной оси и
движением тела, имеющего одну неподвижную точку.
§ 12 3] УСКОРЕНИЯ ТОЧЕК ТЕЛА С НЕПОДВИЖНОЙ ТОЧКОЙ 227
Ускорение w/v направлено по перпендикуляру к плоскости
векторов <й и v, т. е. по направлению вектора d (рис. 12.9),
имеющего начало в точке М и
конец в основании перпендику-
ляра, опущенного из точки М на
мгновенную ось вращения. Модуль
векторного произведения coxv
равен
| о х v | = ow = соМ,
так как
v = cor sin а = tod.
Следовательно, можно записать
w°c = (oxv = (o2d. (12.17)
Это ускорение называется осестремительной составляющей
ускорения.
Итак, ускорение любой точки тела равно сумме вращатель-
ной и осестремительной составляющих ускорения
W = wBP + woc. (12.18)
Задача 12.2. Найти скорость и ускорение точки В конического катка,
равномерно катящегося без скольжения по горизонтальной конической коль-
цевой опоре (рис. 12.10, а). Диаметр катка ВС —30 см, ОА = 20 см, скорость
центра катка г?д = 40 см/сек и направлена перпендикулярно плоскости чер-
тежа на читателя.
Прежде всего необходимо определить величину и направление угловой
скорости и углового ускорения катка ВС
При движении катка точка О остается неподвижной. Скорость точки С
равна нулю (качение без скольжения), поэтому мгновенная ось вращения про-
ходит по прямой ОС. Угловая скорость также направлена по ОС от точки О
к точке С. Модуль угловой скорости можно определить из равенства
n _VA VA
АК. О А sin а '
Из Д О АС имеем ОС = У О А2 АС2 = 25 см, тогда
15 20 . _
sma = -= = 0,6, cos а = -= = 0,8,
25 25
_ 40 10 , , .
<0—20-0,6— 3 ~3,3 №К '
Найдем скорость vB
vB= ыХ.ОВ,
v[i==OB <л sin 2a = 79 с м/сек.
Скорость vB перпендикулярна плоскости чертежа и направлена на читателя.
228
ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА С НЕПОДВИЖНОЙ ТОЧКОЙ
[ГЛ. XII
Конец вектора w описывает окружность с центром в точке Oi на верти-
кальной оси 001 (Рис. 12.10, б). Найдем теперь угловое ускореннее. Вектор 8
определяется как скорость конца вектора <о, следовательно, вектор е направ-
лен по касательной к окружности,
описываемой вектором ы, т. е. пер-
пендикулярно плоскости чертежа
на читателя. Найдем модуль е. Так
как конец вектора движется по
окружности, то имеем
е = ЙХа.
вр
Здесь Q—угловая скорость враще-
ния плоскости ОАС, в которой
расположен вектор и, вокруг вер-
тикальной оси 00i
40
= 2 сект1.
VA
о— -------
О А ~ 20
Отсюда имеем
„ . /л \ 16
е = ®й sin ( - —а = — -=»
«а 5,3 сек-2.
Перейдем к определению уско-
рения точки В
wB=wb+wbP> «в =“>4
W^P=8XrB.
Заметим, что d = OB • sin 2a = 0,24 м, r^ = OB = 0,25 м. Отсюда
102
w(£ =0,24^=2,7 м/сек2,
4
иЛр = :-=»l,3 м/сек2.
О
Вектор ускорения WgP направлен перпендикулярно ОВ, лежит в плоскости ВОС
и составляет с ускорением w^c угол (5 = 180° — 2а. Тогда
=V(ю^)2 + (ш>р)2 - 2щ^сщ^Р cos 2а ~ 2-56 ^/сек2.
§ 12.4. Движение свободного твердого тела
Рассмотрим движение свободного твердого тела. Введем, кроме
неподвижной системы координат Охууггг, еще подвижную си-
стему координат Ахуу>22, перемещающуюся поступательно от-
носительно осей Ох1у1г1 и связанную с телом только в одной точке —
точке А, и подвижную систему координат Axyz, жестко связан-
ную с телом (рис. 12.11). В подвижной системе координат
Ax2y2z2 тело имеет одну закрепленную в ней точку —точку А,
следовательно, тело в этой системе координат участвует в движе-
нии, рассмотренном нами в предыдущем параграфе. Для того
чтобы задать положение тела в подвижной системе координат
Лх2у2г2, можно ввести три угла Эйлера 6, ф, <р, а для определе-
§ 12 4]
движение свободного твердого тела
229
ния положения относительно неподвижной системы координат
нужно, кроме того, задать положение точки А, для чего потре-
буется знать еще три величины: х1А, у1А, г1А. Таким образом,
положение свободного твердого тела определяется шестью неза-
висимыми параметрами: х1Л, у1А, г1А, 0, ф, <р.
Перейдем к определению скоростей точек свободного тела.
Скорость произвольной точки В равна производной от ее ра-
диуса-вектора гj} по времени. Пользуясь рис. 12.11, найдем
гв = га + Р-
Следовательно,
dr ,> dr. dp ,,
Vb = ~dt = ~dt + dT (12.19)
dr,
Заметим, что — скорость точки А; кроме того, вектор
dp/di представляет собой скорость точки В относительно подвиж-
ной системы координат Ахгуггг, в которой тело имеет одну
закрепленную точку. Следовательно, согласно формуле (12.10)
dp
Таким образом, формулу (12.19) можно переписать в виде
Ул = Ул + ©хр. (12.20)
Здесь со — угловая скорость вращения тела относительно системы
координат Ахгу.г2-2. (Так же как и для плоского движения, можно
показать, что угловая скорость w не зависит от выбора полюса.)
Формулу (12.20) можно прочитать следующим образом: ско-
рость любой точки свободного твердого тела геометрически скла-
дывается из скорости произвольно выбранного полюса и скорости
этой точки во вращательном движении тела относительно полюса.
230
ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА С НЕПОДВИЖНОЙ ТОЧКОЙ
1ГЛ XII
Пользуясь формулой (12.20), можно доказать следующую
теорему:
Проекции скоростей двух точек свободного твердого тела на
прямую, проходящую через эти точки, равны между собой.
Согласно равенству (12.20) имеем
(vb)ab = (у а) ав + (® X р)ав,
но вектор соХр перпендикулярен вектору р = АВ; следовательно,
(®Хр)дв = 0 и (ув)ав = (уд)дв- Определим ускорения точек сво-
бодного твердого тела. Для
этого продифференцируем по
времени равенство (12.20):
dv, da> dp
wB = -dr + ^rXP + ®x-dF'
(12.21)
dv, da>
Замечая, что—,- = №д, ~ =
dt dt
=e—угловое ускорение тела в
подвижной системе координат
Ar2y2z2, а -^-=сохр, получим
Используя (12.17), можно записать
wB = мгл + е х р + о X (со X р).
©x(©xp) = co2dB,
где dB —вектор, имеющий начало в точке В, а конец в основа-
нии перпендикуляра, опущенного из В на о (рис. 12.12).
В окончательном виде ускорение точки свободного тела выра-
жается следующим образом:
wB = w^-|-exp-|-co2dB. (12.22)
Два последних члена дают ускорение точки В в ее движении
вокруг полюса.
Таким образом, ускорение точки свободного тела равно геомет-
рической сумме ускорения полюса и ускорения этой точки в ее
движении вокруг полюса.
Задача 12.3 *). Точка М твердого тела движется со скоростью v по про-
странственной кривой. Определить угловую скорость естественного трехгран-
ника т, п, b траектории точки М**).
*) А. И. Лурье, Аналитическая механика, Фнзматгиз, 1961.
**) Рассмотрение этого примера вызвано тем, что в некоторых задачах
механики бывает полезно изучать движение твердого тела по отношению
к естественному трехграннику одной из точек тела.
§ 12 4]
ДВИЖЕНИЕ СВОБОДНОГО ТВЕРДОГО ТЕЛА
231
Пусть — радиус-вектор любой точки Л\ неизменно связанной с естест-
венным трехгранником МтпЬ (рис. 12.13). Так как производная dpv/dt опре-
деляет скорость точки N во вращательном движении координатной системы
Л1тпЬ относительно точки М, то будем иметь
—j—= wXpjV,
где <о — угловая скорость естественного трехгранника.
Положив p.v = t затем pw=n и pv = b, получим
dr dn db ,
-~5т = (0ХТ, - ,=<охп, -=ыхЬ
dt dt dt
или. вводя в рассмотрение длину дуги о (см. § 9.2) и применяя очевидное
d do d d
тождество = CT da, JY
О =axt, 6 =®Xn, O^ = d>Xb. (12.23)
do do do ' ЛЗД
Воспользуемся теперь формулами Френе, вывод / /
которых можно найти в любом курсе дифференциаль- / /
ной геометрии: / /
dr 1 dn __________ 1 1 . db_______1 О
~d§~ р П’ ~do ~~ ~ ~(>Т ’ do ~ Т Рис. 12.13.
(12.24)
В этих равенствах р —радиус кривизны, а Т — кручение кривой в данной
точке, определяемые формулами
I d2r I 1 _ „ dr / d2r d3r \
p = |d<T2|’ T~p“ do ’ [do2 X do*)'
Заметим, что первая формула Френе была получена нами ранее при выводе
формулы (9.30). Теперь последние две формулы (12.23) можно записать в сле-
дующем виде:
т+ ^b\=<oxn,
— у n = (oxb.
1
Р
Умножая первое из этих равенств слева векторно на п, а вторсе — b и учи-
тывая при этом, что пхт = — b, a nxb=T, имеем
+ * j = nX(wXn), ^T = bx(«Xb)
или *)
у т+ ° Ь= Щ—(ОдП, у т—to — (Oftb, (12.25)
*) В курсе векторной алгебры доказывается следующая формула для
двойного векторного произведения:
ax(bxc) = b(a, с) —с(а, Ь).
232 ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА С НЕПОДВИЖНОЙ ТОЧКОЙ [ГЛ хи
где co„ = w-n и со* = <в • Ь —проекции угловой скорости w на оси п и b соот-
ветственно.
Вычитая из первого равенства второе, найдем
— b = — Wnti + cofrb.
Отсюда ®„ = 0 и, пользуясь первым равенством (12.25), найдем искомую
угловую скорость со естественного трехгранника:
. / т h\ /т b \
w = o = +— j. (12.26)
Таким образом, зная скорость от=о движущейся точки М, радиус кри-
визны р и кручение Т траектории, можно по формуле (12.26) определить угло-
вую скорость естественного трехгранника. Заметим, что вектор <о лежит
в спрямляющей плоскости т, Ь.
ГЛАВА XHI
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
§ 13.1. Основные определения. Абсолютная
и относительная производные от вектора
В главе IX мы изучали основные характеристики движения
точки по отношению к заданной системе отсчета (системе коор-
динат). Однако в некоторых случаях бывает целесообразно изу-
чать движение точки одновременно по отношению к двум систе-
мам координат, одна из которых совершает заданное движение
по отношению к другой (основной), принимаемой за неподвижную.
Случай, когда подвижная система координат совершала поступа-
тельное движение, был нами частично рассмотрен в § 10.2 (при-
ведено доказательство теоремы о сложении скоростей).
В этой главе рассматривается общий случай, когда движение
подвижной системы координат может происходить по любому
заданному закону.
Изучение движения точки по отношению к каждой из этих
координатных систем производится методами, изложенными
в главе IX. Нашей задачей является установление связи между
основными характеристиками этих движений.
Будем называть сложным или «.абсолютным» движением точки
ее движение по отношению к системе координат, выбранной за
основную. Движение точки по отношению к подвижной системе
координат будем называть относительным.
Под переносным движением будем понимать движение подвиж-
ной системы координат относительно неподвижной.
Установление связи между сложным, относительным и пере-
носным движениями позволит решать разнообразные задачи по
определению кинематических характеристик сложного и состав-
ляющих движений.
В этой главе мы встретимся с необходимостью дифференци-
рования вектора, определенного в системе координат, которая
может двигаться произвольным образом. В связи с этим мы
введем понятия абсолютной и относительной производных век-
тора.
234
СЛОЖНОЕ ДВИЖЕНИЕ точки
[ГЛ. Х1П
Пусть даны основная система координат и подвижная система
координат, которая совершает произвольное движение. Пусть
какой-либо вектор а = а(/) определен в подвижной системе коор-
динат, т. е. проекции этого вектора ах, ау, аг на оси подвижной
системы — заданные функции времени. Если i, j, к —единичные
векторы подвижной системы координат, то вектор а может быть
представлен в виде
a = axi-\-ay']-\-azk. (13.1)
Установим теперь правило нахождения производной в непо-
движной системе координат (абсолютной производной) от этого
вектора. Дифференцируя обе части равенства (13.1) по времени,
будем иметь в виду, что векторы i, j и к вследствие движения
подвижной системы координат меняют свое направление, т. е.
являются функциями времени.
Таким образом, абсолютная производная вектора а по вре-
мени будет равна
da dax , day . daz di dj dk
~dt = ~dT ’"^’d? 1+ dt k+Gjc + + (13.2)
Сумма первых трех слагаемых представляет собой производную
от вектора а в подвижной системе координат. В самом деле,
если бы мы поставили задачей изучить изменение вектора а
только по отношению к подвижной системе координат, то мы
учитывали бы при этом только изменение проекций вектора на
оси этой системы координат. Движение же самой системы нас бы
не интересовало.
Назовем сумму первых трех слагаемых в (13.2) относительной
или локальной производной и обозначим ее через da/dt, т. е.
da dax . , day . da,
— dt dt 1 + dt k'
(13.3)
Заменяя в формулах (9.11) и (12.10) радиус-вектор г последова-
тельно на i, j и к, получим
dt=&Xi’ dt=(3>xi, ^ = <oxk.
Поэтому сумма последних трех слагаемых
di . dj . dk
ax dt+a« dt +az dt
может быть представлена в виде
ax -dt + av dt = ax (® X i) + ay (ю X |) + аг (co x k) =
= ©x(aJ4-aj4-a.k) = (oxa, (13.4)
где о —угловая скорость подвижной системы координат.
§ 13 2]
ТЕОРЕМА О СЛОЖЕНИИ СКОРОСТЕЙ
235
Следовательно,
da da
dt dt
+ <i)Xa.
(13.5)
Таким образом, абсолютная производная вектора равна сумме
относительной производной этого вектора и векторного произведе-
ния угловой скорости подвижной системы координат на этот вектор.
§ 13.2. Теорема о сложении скоростей
Выбирая систему координат Oxly1z1 за основную, предполо-
жим, что система координат Axyz движется по отношению
к основной системе произвольным образом (рис. 13.1). Движение
какой-либо точки М может б
к основной, так и по.отношени
нат методами, изложенными ра-
нее. В данном параграфе мы по-
ставим задачу о нахождении
связи между скоростями точки
по отношению к выбранным
нами системам координат. На-
помним данные ранее определе-
ния (§ 10.2).
Скорость точки М по отно-
шению к основной системе
координат называется абсолют-
ной скоростью.
Скорость vr точки по отно-
шению к подвижной системе
координат называется относи-
тельной скоростью.
Важным понятием является
Переносной скоростью v„ точки
подвижной системы координат,
падает движущаяся точка.
Остановимся на этом определении несколько подробнее. Рас-
сматриваемая точка при своем движении относительно подвижного
тела, с которым жестко связана подвижная система координат,
проходит через разные точки этого тела, имеющие в общем случае
отличные друг от друга скорости. Поэтому переносной скоростью
точки в данный момент будет скорость именно той точки подвиж-
ного тела (подвижной системы координат), через которую в дан-
ный момент проходит движущаяся точка.
Если радиус-вектор r = r(Z) определяет положение точки М
по отношению к системе координат Охру^, радиус-вектор гА ~
= Га (t) определяет положение начала системы координат Axyz
ь изучено как по отношению
к подвижной системам коорди-
понятие о переносной скорости,
называется скорость той точки
с которой в данный момент сов-
236
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
[ГЛ XIII
в системе а ридиус-вектор р = р(/) определяет положение
точки М в системе координат Axyz, то в соответствии с рис. 13.1
имеем
г = Га + Р- (13.6)
Пусть координаты точки в подвижной системе координат
будут х, у и г; тогда
р = xi + yj + zk,
где i, j, k —единичные векторы осей подвижной системы коор-
динат.
По определению абсолютная производная радиуса-вектора
по времени будет абсолютной скоростью точки. Следовательно,
дифференцируя равенство (13.6) по времени, найдем абсолютную
скорость точки
Так как вектор р определен в подвижной системе координат,
то для нахождения абсолютной производной от него воспользуемся
формулой (13.5):
^ = ^ + юхр, (13.8)
где о — угловая скорость подвижной системы координат, а
|^ = xi+yj + zk
представляет собой относительную производную от р по времени.
Согласно определению это бу де. относительная скорость точки,
т. е.
vr = xi-|-yj4-zk. (13.9)
Подставляя выражения (13.8) и (13.9) в соотношение (13.7),
получим
v = vA + w х р + vr, (13.10)
dTA
где Ул = — скорость начала подвижной системы координат
по отношению к основной.
Для определения переносной скорости точки закрепим ее
в подвижной системе координат, т. е. положим в формуле (13.10)
vr = 0, тогда получим
Уе = Уд + юхр*). (13.11)
*) Эта формула нам уже знакома (§ 12.4) Скорость, определяемая по этой
формуле, есть скорость той точки свободного твердого тела (подвижной системы
координат), с которой в данный момент совпадает движущаяся точка.
$ 13 3] ТЕОРЕМА О СЛОЖЕНИИ УСКОРЕНИЙ 237
Таким образом, имеем
v = ve + vr, (13.12)
т. е. абсолютная скорость точки равна геометрической сумме
переносной и относительной скоростей.
§ 13.3. Теорема о сложении ускорений (теорема Кориолиса)
Для того чтобы найти абсолютное ускорение точки, т. е.
ее ускорение по отношению к основной системе координат, про-
дифференцируем формулу (13.10) по времени:
dv dv. dot dp dv.
w==dT = ^r + dF><P + 0)Xdr+^- <13’
Абсолютную производную вектора относительной скорости vr
найдем по формуле (13.5):
-г-. dvr
В этом соотношении -у,- есть относительная производная век-
at г
тора vr по времени и, следовательно, представляет собой относи-
тельное ускорение wr, т. е. ускорение точки по отношению
к подвижной системе координат
wr= ^ = ^i + t?j + zk. (13.15»)
Используя равенства (13.8), (13.9), (13.14) и (13.15), преобразуем
формулу (13.13) к виду
w = wA 4- е х р + о х [vr + (о х р)] + wr + о х vr =
= wA4-exp-|-(ox(wxp)-|-wr4-2(oxvr, (13.16)
где wA — Уд — ускорение начала подвижной системы координат,
а 8 ==(i) — ее угловое ускорение.
Для того чтобы найти переносное ускорение we (ускорение
той точки подвижной системы координат, с которой в данный
момент совпадает движущаяся точка!), закрепим точку в подвиж-
ной системе координат, т. е. положим vr = 0, wr = 0.
В этом случае согласно формуле (13.16) будем иметь
We = WA + е X Р + (О X ((О X р), (13.17)
т. е. переносное ускорение представляет собой ускорение точки
свободного твердого тела, с которым жестко связана подвижная
система координат. Таким образом, имеем
w =we4-wr + 2wxv,. (13.18)
238
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
[ГЛ. XIII
Ускорение, определяемое членом 2®xvr, называется поворот-
ным или кориолисовым ускорением и обозначается через wc, т. е.
Итак, имеем
wc = 2coxvr.
w = w^4-wr + wc.
(13.19)
(13.20)
Эта формула выражает содержание теоремы Кориолиса: абсолют-
ное ускорение точки равно сумме пере-
носного, относительного и кориолисова
ускорений.
При использовании формулы (13.20)
полезно иметь в виду, что переносное
ускорение следует определять по пра-
вилам нахождения ускорения точек
твердого тела. При нахождении от-
носительного ускорения подвижную
систему координат следует считать
неподвижной и использовать правила, изложенные в главе IX.
Остановимся несколько подробнее на кориолисовом ускорении
wc = 2w х vr.
Модуль этого ускорения, очевидно, равен
wc = '2<лог sin (со, vr).
(13.21)
Направление кориолисова ускорения определяется направлением
векторного произведения век-
торов о и vr, т. е. кориоли-
сово ускорение будет напра-
влено перпендикулярно пло-
скости, проходящей через
векторы щи vr в ту сторону,
откуда кратчайший переход
от и к vr виден происходя-
щим против хода часовой
стрелки (рис. 13.2). Если
векторы со и vr не лежат в
одной плоскости, удобно
бывает мысленно перенести
вектор © параллельно самому себе в начало вектора скорости vr
и применить указанное выше правило.
Иногда нахождение кориолисова ускорения облегчается при-
менением следующего правила Н. Е. Жуковского (рис. 13.3): про-
екцию относительной скорости vr на плоскость, перпендикулярную
угловой скорости со подвижной системы координат, равную orsina,
следует умножить на 2со и повернуть на угол 90° вокруг ш
§ 13.4]
ЗАДАЧИ
239
в направлении вращения. Вектор, равный по модулю 2ли>г sin а и
имеющий найденное направление, и будет кориолисовым ускорением.
На основании формулы (13.21) можно указать, что кориоли-
сово ускорение равно нулю в следующих случаях:
1) (0 = 0, это будет при поступательном перемещении подвиж-
ной системы координат;
2) угловая скорость со подвижной системы параллельна отно-
сительной скорости vr;
3) в момеьт времени, когда относительна^ скорость vr точки
равна нулю.
§ 13.4. Задачи
Задача 13.1. Круговой спутник пролетает над экватором. Его скорость
г’,,.-—7,9 км/сек. Плоскость орбиты наклонена к плоскости экватора под углом 0.
Определить скорость движения спутника.
видимую с Земли на экваторе, и видимое (север)
направление движения полярного спут- У t.
ника (0 = я/2). Радиус Земли 7? = 6400 км
(рис. 13.4).
Скорость движения по орбите является / /7
абсолютной скоростью в системе коорди- / /7
нат, движущейся поступательно с нача- /Ла/
лом в центре Земли. Земля в этой
системе координат вращается с угловой пг т /1___________________восток)
скоростью ы = 2л/(24 3600) секЩ л
Отложим от оси х, касательной к
экватору, вектор v0. Он составляет Рис. 13.4
с направлением на восток угол 0.
Переносная скорость точки на экваторе равна скорости точки, участву-
ющей во вращательном движении Земли. Следовательно, переносная скорость
направлена по касательной к экватору на восток и равна по модулю
ve = uR = 6400 = 0,465 км/сек .
^4 • uOUu
Зная абсолютную и переносную скорости точки, можно определить и от-
носительную скорость. Для этого разложим вектор v0 на две составляющие,
из которых одна равна ve. Определим проекции относительной скорости на
оси х и у (рис. 13.4):
Vo = ve + vr, vr = v0 — ve,
vrx = v0 cos 0 — ve = 7,9 cos 0 — 0,465,
vry = o0 sin 0 = 7,9 sin 0.
Таким образом, угол ip, составленный относительной скоростью с мери-
дианом, определится из соотношения
vrx _ 7,9 cos 0 — 0,465
vry ~' 7,9 sin 0
а модуль относительной скорости —из равенства
vr = У vrx4-V/y— У ~2о0г?е cos 0 = У7,92 + 0.4652 — 2 - 7,9 0,465 cos 0.
240
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
[ГЛ. XIII
Для полярного спутника в = л/2 и поэтому
5^. = -0,059.
Соответствующий угол тр — —3°,4. Знак минус указывает на то, что при
направлении абсолютного движения на север видимое с Земли направление
скорости отклонено на северо-запад.
Модуль относительной скорости для полярного спутника мало отличается
от модуля абсолютной скорости
ог = фл7,92 + 0,4652 = 7,914 км/сек.
Задача 13.2. Стержень ОА вращается вокруг оси, проходящей через его
конец О, с постоянной угловой скоростью w Ползун А4 движется вдоль
стержня от точки О с постоянной относительной скоростью уг. Определить
величину и направление переносного, относительного и кориолисова ускоре-
ний ползуна в тот момент, когда 0М = х (рис. 13.5, а).
Для того чтобы определить переносное ускорение, мысленно закрепим
ползун на стержне. Переносным ускорением ползуна будет ускорение той
точки стержня, в которой ползун закреплен. Так как стержень вращается
с постоянной угловой скоростью <о, то ускорение этой точки (переносное уско-
рение ползуна) будет направлено к точке О и по модулю равно
we = <02Х.
Относительное движение ползуна равномерное и прямолинейное, поэтому
его относительное ускорение равно нулю, т. е. wr = 0 Согласно формуле
(13.19) кориолисово ускорение численно будет равно
wc = 2(00,.,
так как векторы со и vr перпендикулярны. Направлено же кориолисово уско-
рение перпендикулярно стержню в сторону вращения стержня.
В рассматриваемом примере достаточно просто можно показать причину
возникновения кориолисова ускорения. В самом деле, при нахождении пере-
носного и относительного ускорений мы не учитывали следующих обстоятельств:
во-первых, относительная скорость при вращении стержня меняет свое направ-
ление по отношению к неподвижной системе координат; во-вторых, переносная
скорость ползуна меняет свою величину вследствие перемещения ползуна из
точек стержня с меньшей скоростью в точки стержня с большей скоростью.
Учтем теперь эти обстоятельства.
§ 13.4]
ЗАДАЧИ
241
Пусть в момент времени t расстояние точки М от точки О равно х,
а в момент оно составляет За промежуток времени А/ стержень
повернется на угол Дф = оД/ (рис. 13.5, б). Вектор относительной скорости vr
повернется также на угол Дф. Приращение вектора vr за промежуток Д/,
очевидно, равно
Avr=v;-v
где v'—относительная скорость в момент /4-Д/.
Из рассмотрения рис. 13.5, б следует, что для достаточно малых Д/ мо-
дуль вектора Avr будет равен
| Дvr | = су Дф = vra St.
Разделив обе части равенства на Д/, получим
I Avz-1
Так как д СМВ равнобедренный, то при Д^->0 вектор wT будет направ-
лен перпендикулярно стержню в сторону его вращения.
В момент времени t переносная скорость ползуна равна ус = шх, а в мо-
мент /-}-Д^ — v'e = (i>x1. Приращение величины переносной скорости равно
Sve = v' — ve = со (хх — х) = avr St
или, поделив на St, получим
Вектор w2, учитывающий изменение величины переносной скорости, будет,
очевидно, направлен по переносной скорости, т. е. перпендикулярно стержню
в сторону его вращения.
Складывая теперь ид и щ2, получим
щс = 2(00,-
Это и есть кориолисово ускорение, найденное нами ранее при помощи фор-
мулы (13.19).
Итак, в рассматриваемом случае кориолисово ускорение появляется, во-
первых, вследствие изменения направления относительной скорости по отно-
шению к неподвижной системе координат за счет вращения подвижной системы
координат, во-вторых, вследствие перемещения точки из-за относительного
движения в сторону больших переносных скоростей.
Задача 13.3. По ободу диска радиуса R, вращающегося с постоянной угло-
вой скоростью <0, движется точка М с постоянной по модулю относительной
скоростью vr (рис. 13.6, а). Найти абсолютное ускорение точки М.
Так как диск вращается с постоянной угловой скоростью, то переносное
ускорение будет равно
we — a2R
и направлено к центру диска. Относительное ускорение рацио
и также направлено к центру диска.
Согласно формуле (13.21) модуль кориолисова ускорения
шс = 2uvr.
9 Бутенин Н. В. и др.
242
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
[ГЛ XIII
Направлено же кориолисово ускорение также к центру диска (при относи-
тельном движении точки, направленном в сторону, обратную вращению диска,
ускорение Кориолиса направлено в противоположную сторону).
Таким образом, абсолютное ускорение точки равно
vr
w = v2R + -5- + 2avr.
R
Эту формулу можно получить и иначе. Абсолютная скорость точки равна по
модулю
V = <£>R + vr = const,
а так как траекторией является окружность, то
о2 (о)/? + ог)2 о;
Появление кориолисова ускорения в этом примере связано с двумя при-
чинами: изменением направления относительной скорости вследствие вращения
Рис. 13.6.
диска (подвижной системы координат) и изменением' направления переносной
скорости из-за относительного (по отношению к диску) перемещения точки.
Пусть система координат OxtyL неподвижная, а система координат Оху
жестко связана с диском. За промежуток времени Д/ точка М диска вслед-
ствие его вращения переместится в положение М'. Точка же, движущаяся по
диску за этот же промежуток времени, переместится в положение
(рис. 13.6, б, в).
Приращение относительной скорости, обусловленное вращением диска,
обозначим через Awvr. Из рис. 13.6, б следует, что при достаточно малых At
PwvrH vr-vri
Направление вектора Дшуг/Д^ при Д/ 0 стремится к направлению соответ-
ствующего радиуса диска. Модуль же этого вектора стремится к
I- I Acovz-1
lim -J—=
AZ—О Д*
Приращение вектора переносной скорости, обусловленное относительным
перемещением точки, будет равно (рис. 13.6, в)
^rve = ve-'fe-
Так как дуга М'Мг равна vr Д/, то угол Да, иа который повернется пере-
§ 13 4]
ЗАДАЧИ
243
носная скорость
жения
Поэтому имеем
„ ArVe
Вектор при
с радиусом, а по
из-за относительного перемещения, определится из выра-
Л
Да- R
, . . . a>RvrM .,
\^rve\^veSa=—— =<ovr Л/.
Д/->-0 по направлению также будет стремиться совпасть
величине прибли кается к
w2= lim -—= ы:>
Д/-0
Итак, полное приращение вектора скорости, связанное с двумя указанными
причинами, приводит к появлению ускорения, перпендикулярного относитель-
ной скорости, направленного к центру диска
и равного по величине
Wc = + w2 = 2<0V„
т. e. к ускорению Кориолиса.
Задача 13.4. Диск вращается с постоян-
ной угловой скоростью <о = 2 сек-1 вокруг
оси, перпендикулярной плоскости диска и
проходящей через его центр (рис. 13.7).
По прямолинейному пазу CD движется пол-
зун N по закону o = CN = 3Z2 см, расстоя-
ние от центра диска до паза й = 5 см;
CD = 24 см. Определить скорость и ускоре-
ние ползуна в момент, когда он достигнет
середины паза Е.
Абсолютная скорость ползуна N определяется по формуле v = ve + vr.
В рассматриваемой задаче подвижная система координат, относительно
которой происходит движение ползуна N, жестко связывается с диском. Сле-
довательно, переносной скоростью ползуна, когда он совпадает с точкой Е
диска, будет скорость точки Е диска, т. е.
ve = со • ОЕ — 10 см/сек.
Вектор ve направлен перпендикулярно ОЕ.
Относительное движение точки является прямолинейным. Относительная
скорость равна
ЙО Г-л
vr^ ~ = ы см!сек.
Векторы ve и vr направлены в одну сторону, следовательно, абсолютная ско-
рость ползуна N равна
t>=(10-|-6?) см/сек.
Так как СЕ =12 см, то момент t = tx прохождения ползуна через точку Е
определится из соотношения 3/; = 12, откуда ^ — 2 сек и, следовательно, при
^ = 2 сек имеем
ц=22 см/сек.
Абсолютное ускорение ползуна определяется формулой
w=we + wz + w(..
9*
244
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
[ГЛ. ХШ
Вектор wr направлен вдоль
Рис. 13.8.
Диск вращается с постоянной угловой скоростью, поэтому ускорение точки Е
диска (в которой в момент tx находится ползун) равно
we — w°c = <и2ОЕ = 20 см/сек?.
Вектор wr направлен к центру О диска. Относительное ускорение, как уско-
рение точки в прямолинейном движении, будет
wr = = 6 см'се,г'1-
прямой CD. Так как вектор угловой скорости ®
и вектор vr взаимно перпендикулярны, то ко-
риолисово ускорение равно
wc = 2йо г=24/ см/сек?
и при /1 = 2 сек
о»с = 48 см/сек2.
Направление вектора wc указано на рис. 13.7.
Абсолютное ускорение ползуна N в момент
/ = ^ = 2 сек равно
w = ((ое + да,)2 + w2 я» 68,2 см/сек?.
Задача 13.5. Равнобедренный прямоуголь-
ный треугольник АВС вращается вокруг катета
АВ (рис. 13.8) с постоянным угловым ускоре-
нием е = 0,5 сек-2; начальная угловая скорость
треугольника равна нулю. По гипотенузе треу-
гольника от вершины В к основанию движется
точка М по закону а — ВМ ---2Qt см. Определить абсолютное ускорение точки
М в момент 1 — 2 сек.
Подвижная система координат в рассматриваемой задаче жестко связы-
вается с треугольником АВС. Пусть в рассматриваемый момент времени
точка М находится в положении, указанном на рис. 13.8. Так как угловое
ускорение треугольника постоянно, то угловая скорость треугольника равна
(о = е/ (начальная угловая скорость по условию задачи равна нулю).
Переносное ускорение, т. е. ускорение той точки гипотенузы, с которой
в данный момент совпадает движущаяся точка М, может быть разложено на
вращательное и осестремительное. Модули этих ускорений равны
ш°с = (й2 MV,
щ»Р = е • MN,
где MN — BM sin 45° = 20/ sin 45°. Для / = 2 сек имеем
щ°с = 20 4^2 = 28,2 см/секг,
10 4^2 = 14,1 см/сек?.
Направление ускорений w°c
Относительное движение
и W&P указано на рис. 13.8.
точки прямолинейное. Так как
vr = = 20 см/сек = const,
то и)г = 0.
§ 13.4]
ЗАДАЧИ
245
Ускорение Кориолиса определится по формуле
wc = 2<oxvr,
где <о —угловая скорость треугольника (переносная угловая скорость). Направ-
ление wc указано на рис. 13.8 (wc перпендикулярно плоскости Д АВС).
Модуль кориолисова ускорения равен
щс = 2ШУ,- sin (180° — 45°) = 2ыиг sin 45°
и при ( = 2 сек
о>с^28,2 см/сек2
Модуль абсолютного ускорения точки в момент ( = 2 сек равен
w = У(доВр + wj2 + (и1”0)2 == 509 см/сек?.
Задача 13.6. Определить проекции абсолютного ускорения точки М, дви-
жущейся по меридиану Земли на юг с постоянной по величине относительной
скоростью vr (рис. 13.9), на оси си-
стемы координат Мхуг (ось х напра-
влена по касательной к меридиану
на север, ось у —по касательной к
параллели на запад, ось г — по радиусу
Земли).
Так как абсолютное ускорение
точки определяется формулой
w = we + w/-+wc,
то его проекции на оси координат
будут
wa- = wex + wrx + wcx>
wy — wey + wry + wc у >
w^ = w„ + w^ + wC2.
Угловая скорость £2 Земли по-
стоянна, и, следовательно, переносное
ускорение равно
Рис. 13.9.
we = Q2R cos ф,
где R — радиус Земли, а ф —геоцентрическая широта той точки Земли, с кото-
рой в данный момент совпадает точка М. Направлено we от точки М к оси
вращения Земли. Так как точка М движется по меридиану с постоянной ско-
ростью, то относительное ускорение точки будет по модулю равно
Уг
R
и направлено к центру Земли.
Кориолисово ускорение согласно (13.19) по модулю равно
шс — 2Йцг sin (л — ф) = 2Q vr sin ф
и направлено в сторону, противоположную направлению оси у.
Проектируя we, wr, w£ на оси координат, получим
wex = sin ф cos ф, wey = 0, wez = —Й2/?СО32ф,
uQ
wrx = 0, wri/ = 0, w„ = —__L,
R
= wcy = — 2Qvr sin ф, шсг = 0.
246
СЛОЖНОЕ движение точки
[ГЛ. хш
Таким образом, имеем
wx— Q* 2/? sin ф cos ф,
wy = — 2Qvr sin ф,
v2
wiS = — ПУ? cos2 ф .
R
Задача 13.7. Точка M движется по поверхности Земли по произвольной
траектории. Определить горизонтальную составляющую кориолисова ускоре-
ния точки, если ее скорость относительно Земли равна vr.
Построим географически ориентированную систему координат хуг, напра-
вив ось х по касательной к меридиану на север, ось у по касательной к парал-
лели на запад и ось г по радиусу Земли вверх (рис. 13.10, в). Обозначим
курс точки через ф (угол между относительной скоростью -vr и направлением
Рис 13.10.
на север, т. е. осью х (рис. 13.10, б)). Тогда проекции относительной скоро-
сти vr на оси х, у, г будут
vrx = vr cos ф, vrtJ = — vr sin ф, vrz = 0.
Проекции угловой скорости Й вращения Земли на те же оси определяются
равенствами
Йх=Йсозф, Й^ = 0, Йг = Й5Шф,
где ф —широта места точки М в данный момент (см. рис. 13.10, а).
Кориолисово ускорение найдем по формуле
i
fz-X
wc = 2Q X vr=2
j k
0 йг
Vry 0
Далее находим проекции кориолисова ускорения на горизонтальные оси
X и у
wlx = — 2Qzvry = 2Qvr sin ф sin ф,
wCy = 2Игогх = 2Qvr sin ф cos ф.
Определим модуль горизонтальной составляющей кориолисова ускорения
4- = 2Й1ф sin ф.
§ 13.4]
ЗАДАЧИ
247
Из этого выражения видно, что модуль горизонтальной составляющей
кориолисова ускорения зависит только от относительной скорости vr и широты
места движения точки и не зависит от направления движения.
Покажем, что в северном полушарии горизонтальная составляющая корио-
лисова ускорения направлена всегда перпендикулярно vr влево от движения,
т. е. влево от направления относительной скорости (в южном полушарии
вправо). Действительно, составим проекцию горизонтальной составляющей
кориолисова ускорения на направление относительной скорости уг. Имеем
(см. рис. 13.10, б)
ПРу wc// = wzx cos ф — wcу sin ф
или, подставляя найденные значения для шСЛ- и wzy.
nPV/.Wc/7 = °-
что и доказывает сделанное замечание.
Задача 13.8. Принимая поверхность Земли за сферу радиуса R. и считая,
что движение точки М относительно вращающейся Земли задано, определить
скорость v и ускорение w точки М >
относительно системы координат, дви-
жущейся поступательно и имеющей
начало в центре Земли.
Пусть положение точки М отно-
сительно Земли определяется долго-
той X, широтой ф и высотой /г над
уровнем поверхности Земли. Введем
в рассмотрение подвижную систему
координат Ахуг. Ось г направим по
радиусу Земли так, чтобы она прохо-
дила через точку М, ось х направим
по касательной к меридиану на север,
ось у — по касательной к параллели
на запад. Начало координат А этой
системы располагаем на земной по-
верхности (рис. 13.11). Единичными
векторами осей х, у и г соответст-
венно будут i, j и к.
Эту задачу можно решить различ-
ными методами, в частности, с помощью
теоремы о сложении ускорений. Одна-
Рис. 13.11.
ко мы воспользуемся не методом раз-
ложения движения на простейшие, а используем формулу, связывающую абсо-
лютную производную вектора с относительной производной, так как в дан-
ном примере это приводит быстрее всего к цели.
Пусть система координат O^y^i движется поступательно, а система
координат ОАх2у.2г.2 жестко связана с Землей. Будем считать заданными проек-
ции скорости точки М относительно вращающейся Земли на оси системы
координат Ахуг. Очевидно, что vN, v0, vh — проекции скорости на меридиан,
параллель и вертикаль — соответственно равны
оЛГ = (/? + /1) ф,
оо=(Я X cos ф,
vh = ‘h.
(13.22)
При движении точки М и вращении Земли система координат Ахуг
совершает вращение вокруг оси у с угловой скоростью ф и вокруг оси вра-
щения Земли с угловой скоростью Йф-Х, где Й— угловая скорости Земли
(рис. 13.11). Следовательно, проекции угловой скорости системы координат
248
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
(ГЛ. ХШ
Axyz на ее оси будут
ыд. = (А, + Й) cos ф, Ы|/ = ф, <ог = (Х + Й) sin ф,
или, учитывая (13.22), получим
Ш*=д+7Г + ЙС05Ф>
VN
^~R+h>
= + й cos ф) Ф-
(13.23)
Эти формулы имеют самостоятельное значение в различных прикладных
вопросах.
Радиус-вектор г точки М относительно центра Земли в системе коорди-
нат Axyz представляется в следующем виде:
г = (J?-(-ft) к. (13.24)
Абсолютная скорость точки М (скорость по отношению к системе коор-
динат OjXjf/jZx) равна
где
dr
w = hk = vhk.
Следовательно,
vx=(aXr)x = ay(R + h),
Vy = (<о X r)y = — (£>х (R +й),
0г = 0д.
Принимая во внимание формулы (13.23), получаем
vtJ —— va—-Q(R-\-h') cosф,
Vz = Vh.
(13.25)
Определив вектор v в системе координат Axyz, абсолютное ускорение
точки М найдем по формуле
dv dv „
w=dT= dF + wXv* (13'26)
где
dv dvx _ dvy dvz
d? == ~dt~ ' + ~1[Г ^ + ~dT
B соответствии с формулой (13.26) имеем
do, ,
wx = -gi~ + — ^SVy,
dVy
wy'— dt ^zVx ^xVz>
dvz ,
wz = +&xvy - ti>yVx.
§ 13 4]
ЗАДАЧИ
249
Так как
dvx
~dt VN,
dvy
= — »o — Qv/i cos ф + Й (R +/i) ф sin ф = — й0 — Йол cos ф+vNQ sin ф,
dv,
~~dT=Vh’
то, учитывая соотношения (13.23) и (13.25), найдем
VNVh »n tg Ф
WX = vN + + 2t,°Q sin Ф + Q2 (Я H-Л) Sin ф cos Ф,
vOvh ”№o
wy = - »o - * 1 g ф + 2Q (vN sin ф - Vh cos ф),
O,“.4~
Wz=Vh------p- —2c'0Q cos ф — (R + /i) Й2 cos2 ф *).
Это и есть проекции абсолютного ускорения точки М на оси системы коор-
динат A^yz.
*) Этн соотношения в книге А. И. Лурье, Аналитическая механика
Физматгиз, 1961, получены с использованием формул (13.11) и(13.20). См. также
Е. Л. Николаи, Труды ЛПИ, № 3, 1941.
ГЛАВА XIV
СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
§ 14.1. Постановка задачи
Пусть твердое тело движется относительно подвижной системы
координат 0>,x.y.z->, а последняя в свою очередь перемещается
относительно основной системы координат О^у^, принимаемой
за неподвижную. В этом случае говорят, что тело совершает сложное
движение, которое состоит из двух составляющих движений.
Сложное движение может состоять из п составляющих дви-
жений. В этом случае имеется п систем координат и задается п
движений: движение тела относительно системы координат
Оп^пУп^п.', движение системы Onxnynzn относительно системы
О/г-и т. д., наконец, задается движение системы
OiX^y^ относительно основной системы O1x1y1z1. Движение тела
или движение какой-либо одной системы координат относительно
другой в общем случае ничем не ограничено. Задача заключается
в нахождении зависимости между основными характеристиками
составляющих движений и сложного движения.
В главе XII было установлено, что движение свободного
твердого тела можно представить как сложное движение, состоя-
щее из совокупности сферического движения тела вокруг неко-
торого полюса и поступательного движения тела вместе с систе-
мой координат, связанной с полюсом. Таким образом, основными
кинематическими характеристиками движения тела являются ско-
рость и ускорение поступательного движения и угловые скоро-
сти и ускорения. Следовательно, задача изуиения сложного дви-
жения тела, заключающаяся в нахождении зависимости между
основными характеристиками составляющих движений и слож-
ного движения, сводится к установлению связи между поступа-
тельными и угловыми скоростями и ускорениями составляющих
движений. В настоящем курсе мы ограничимся лишь установле-
нием связи между поступательными и угловыми скоростями.
Рассмотрение начнем с простейших случаев.
§ 14 3]
СЛОЖЕНИЕ ВРАЩЕНИЙ ВОКРУГ ПЕРЕСЕКАЮЩИХСЯ ОСЕЙ
251
§ 14.2. Сложение поступательных движений
Пусть Vi — скорость поступательного движения тела Р отно-
сительно системы O2x2z/2z2 (рис. 14.1), a v2 —скорость поступа-
тельного движения системы O2x2y2z2 относительно неподвижной
системы координат OiXi^Zj. Тогда,
чтобы найти абсолютную скорость
какой-либо точки М тела Р, нужно
применить теорему о сложении ско-
ростей (глава XIII):
VM = v,- + ve. (14.1)
В нашем случае vr = vx и ve = v2,
следовательно,
VM = Vi + v2. (14.2)
Таким образом, у всех точек
тела абсолютные скорости оказались
одинаковыми, следовательно, при
сложении поступательных движений
твердого тела результирующее дви-
жение будет также поступательным и скорость результирующего
движения равна сумме скоростей составляющих движений.
В случае п поступательных движений, применяя последовательно фор-
мулу (14.1), можно показать, что результирующее движение также будет
поступательным и его скорость будет равна сумме скоростей составляющих
движений, т. е.
п
VM= U vi-
i— 1
Возможен случай, когда скорости всех точек тела только
в данный момент времени оказываются равными между собой.
Этот случай называют мгновенно-поступательным движением.
Однако следует иметь в виду, что ускорения точек при этом
различны (см. случай а) в задаче 11.9).
§ 14.3. Сложение вращений вокруг пересекающихся осей.
Кинематические уравнения Эйлера
Пусть тело Р вращается в системе координат Ох2у2г2 вокруг
оси z2 с угловой скоростью <в2, а система координат Ох2у2г2 вра-
щается вокруг оси гх неподвижной системы с угловой скоро-
стью <»! (рис. 14.2). Точка О остается неподвижной, поэтому
результирующее движение тела будет сферическим. Обозначим
через О угловую скорость этого движения. Наша задача состоит
в том, чтобы найти угловую скорость абсолютного движения
тела, зная угловые скорости сщ и <в2 составляющих вращений.
252
СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
[ГЛ XIV
Найдем абсолютную скорость произвольной точки М тела.
Для этого в формулу (14.1) следует подставить
УГ=(В2ХГ, V^Wf/T,
где г — радиус-вектор точки Л4; тогда
Уж = «1 X г + <в2 X г = (<»! + <в2) X г.
скорость той же точки М в абсолютном дви-
жении будет равна
уж = йхг.
С другой стороны,
Сравнивая оба равенства, получим
йхг= (<в1 + <в2)хг.
Так как точка М, а следователь-
но, и ее радиус-вектор г произ-
вольны, то
О = <»! + <а2.
(14.3)
Из формулы (14.3) следует, что
совокупность двух вращений, проис-
ходящих вокруг пересекающихся осей,
эквивалентна одному вращению, про-
исходящему с мгновенной угловой
угловых скоростей составляющих вра-
скоростью, равной сумме
щений.
Замечание. В случае ы, =— <о2 из (14.3) следует, что vM = 0. Следова-
тельно, совокупность двух вращений вокруг одной и той же оси, происходя-
щих с одинаковыми по модулю, но противоположно направленными угловыми
скоростями, эквивалентна покою. Такую совокупность движений всегда можно
присоединять к любому сложному движению тела.
Совокупность п вращений вокруг пересекающихся в одной
точке осей эквивалентна одному вращению с мгновенной угловой
скоростью
0= 2
>= 1
Полученное правило сложения вращений вокруг пересекаю-
щихся осей позволит нам теперь выразить проекции мгновенной
угловой скорости тела, имеющего одну неподвижную точку .0,
через углы Эйлера и их производные.
Напомним (§ 12.1), что положение подвижной системы коор-
динат Oxyz, жестко связанной с телом, полностью определяется
относительно неподвижной системы координат Ox^Zi углами
§14 3] СЛОЖЕНИЕ ВРАЩЕНИЙ ВОКРУГ ПЕРЕСЕКАЮЩИХСЯ ОСЕЙ 253
Эйлера (рис. 14.3). Тело участвует в трех вращениях: первое
вращение, соответствующее изменению угла прецессии "ф, про-
исходит вокруг неподвижной оси Огг с угловой скоростью фку,
второе вращение, соответствующее изменению угла нутации 0,
происходит вокруг линии узлов ОК с угловой скоростью 81', где
i' — единичный вектор линии узлов; наконец, третье вращение,
Рис. 14.3.
соответствующее изменению угла собственного вращения <р, про-
исходит вокруг оси Ог с угловой скоростью фк. Следовательно,
абсолютная угловая скорость тела будет
<|) = фк1-|-61' + фк. (14.4)
Составим таблицу направляющих косинусов единичных векто-
ров kb i' и к в системе подвижных осей Oxyz:
X У 2
ki sin 0 sin <p sin 0 cos q> COS0
i' COS ф — sin ф 0
k 0 0 1
Поясним составление первой строки этой таблицы (вторая и
третья строки непосредственно следуют из рис. 14.3, а). Разложим
единичный вектор kj на две взаимно перпендикулярные составляю-
щие, направив одну из них по оси г (она равна cos б-k, см.
рис. 14.3,6); тогда вторая составляющая, равная sin6-j', где
j' —единичный вектор вспомогательной оси г], будет находиться
в плоскости ху. Следовательно,
kx = cos 0 • k-|-sin 0 • j'. (14.5)
Вспомогательная ось ц составляет с осями х и у углы у-<р и
254
СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
[ГЛ XIV
ф. Проектируя единичный вектор У на оси х, у и г, получим
(напомним, что проекции единичных векторов равны соответст-
вующим направляющим косинусам)
cos (k1( х) = sin 0 sin ф, cos (k1; у) = sin 0 cos ф, cos (kn г) == cos 0.
Эти выражения и составляют первую строку таблицы направ-
ляющих косинусов.
Проектируя теперь обе части равенства (14.4) на оси х, у, г
и учитывая таблицу косинусов, найдем проекции вектора угловой
скорости тела на оси, жестко связанные с телом:
(оА. — ф sin 0 sin ф + 9 сО8ф,
Ыу — ф Sin 0 COS ф — 0 8Шф,
сог = ф COS 0 + ф.
(14.6)
Полученные соотношения носят название кинематических уравне-
ний Эйлера.
Модуль угловой скорости определяется равенством
И = У coj + = "Кф2 + S2 + ф2 + 2фф cos 0. (14.7)
Таблица направляющих косинусов между единичными векто-
рами kb Г и к в системе неподвижных осей Ох^^ имеет вид
Ал У1 2i
ki 0 0 1
i' созф sin ф 0
k sin 0 sin ф — sin 6 cos ф cos 6
чтобы получить последнюю строку, мы разложили век-
Для того
тор к на две составляющие, направив
одну из них по оси zr (она равна
cos 0 • У; см. рис. 14.4); тогда вторая,
равная sin 0 • j", где j" —единичный век-
тор новой вспомогательной оси ц, бу-
дет находиться в плоскости Ох^р
k = cos 0 • kj -ф- sin 0 • j".
Третья строка второй таблицы получена
проектированием этого равенства на
оси xlt ylt Проектируя теперь обе
части равенства (14.4) на оси хь у1г
и пользуясь второй таблицей направ-
ляющих косинусов, найдем ^проекции вектора угловой скорости
§ 14 3]
СЛОЖЕНИЕ ВРАЩЕНИЙ ВОКРУГ ПЕРЕСЕКАЮЩИХСЯ ОСЕЙ
255
на неподвижные оси координат:
= 0cos ф + ф sin 9 sin ф,
(oyi = 9sini|) — фзшЭ cosi|),
coZ1 = Ф + Ф cos 9.
(14.8)
Кинематические уравнения Эйлера (14.6) и (14.8) устанавли-
вают связь между проекциями вектора угловой скорости <в
на соответствующие оси, углами Эйлера ф, 9 и <р и их первыми
производными по времени.
Задача 14.1. Планетарный редуктор с коническими шестернями передает
вращение вала 1 на вал // (рис. 14.5). Определить число оборотов в минуту
вала II и число оборотов в минуту в абсолютном и относительном вращении
сателлитов, если дано: г1 = 80 мм, г2 = 80 мм, г3 = 60 мм и п = 600 об/мин.
Подвижная шестерня 3 вращается вокруг своей оси ОВ и вместе с. этой
осью вращается вокруг оси ОА; мгновенная ось абсолютного движения ше-
стерни 3 проходит через точку пересечения осей слагаемых вращений, т. е.
через точку О и точку С (так как
шестерня 1 неподвижна). Для
определения числа оборотов абсо-
лютного движения шестерни 3 и
числа оборотов при относительном
вращении ее вокруг своей оси вос-
пользуемся формулой (14.3), кото-
рая в рассматриваемом случае при-
нимает вид
= ® 4“ ®з>
где wa —абсолютная угловая ско-
рость шестерни 3, ы — угловая ско-
рость вала /, (Од — относительная
угловая скорость шестерни 3.
Из рассмотрения подобных тре-
угольников ОаЬ и СВО (см. рис.
14.5) следует
“з=Д или = П
ы г3 п г3 ’
Рис. 14.5.
где п3— число оборотов в минуту
а п — число оборотов в минуту вала
п3 = — п = . боо _ 800 об/мин.
гз ои
шестерни 3 в относительном движении,
I. Отсюда имеем
Абсолютная угловая скорость шестерни 3 равна
_ 2лпд
30
100 сект1,
причем через па обозначено число оборотов в минуту шестерни 3 в абсолютном
движении.
В точке D происходит зацепление шестерен 2 и 3, поэтому скорости точек
шестерен 2 и 3, совпадающих с точкой D, равны между собой.
Скорость точки В шестерни 3 равна
256
СЛОЖНОЕ ДВИЖЕНИЕ твердого тела
(ГЛ. XIV
и, следовательно,
_ 2лп
в 30“ гх’
= 2о
Но скорость точки D шестерни 2 равна
лп2
VD -“Зб"^-
Таким образом, учитывая, что ri = r2> получим
пг = 2п = 1200 об/мин.
§ 14.4. Пара вращений
Рассмотрим сложное движение, состоящее из двух вращений
относительно параллельных осей и O2z2 (рис. 14.6).
Пусть угловые скорости относительного (<о2) и переносного (oh)
движений равны по модулю, но противоположно направлены
(<а2 = — (Oj). Такая совокупность движений называется парой вра-
щений.
Найдем абсолютную скорость какой-либо точки М твердого
тела:
v^i = ve + vr.
В нашем случае
Vr = 0)2 X Г2, Ve = (i)! х гх,
следовательно,
v.m = «1 X h + е>2 X г2 =» а>х х rt — (Ох х г2 =
= (|>х х (и — г2) = (1>х х ОхС>2- (14.9)
положения точки М, поэтому
из (14.9) вытекает, что ско-
рости всех точек тела одина-
ковы. Этим свойством обла-
дает только поступательное
движение.
Из (14.9) следует, что
Уж = 6>102 х <1>2. (14.10)
Векторное произведение
ОхО2 х о)2 называется момен-
том пары вращений. Таким
образом, тело, участвующее
в паре вращений, движется
поступательно со скоростью, равной моменту пары вращений.
Легко видеть, что совокупность п пар вращений эквивалентна
одной паре, т. е. поступательному движению. Заметим, что любое
§ 14.5]
СЛОЖЕНИЕ вращений вокруг параллельных осей
257
мгновенно-поступательное движение можно представить как мгно-
венную пару вращений.
Задача 14.2. Велосипедист едет со скоростью 21 км/час, диаметр колес 700 мм,
передаточное число рабно трем/ Определить, сколько оборотов в минуту делает
педаль вокруг своей оси, если велосипед движется без свободного хода.
Педаль велосипеда в результирующем движении перемещается поступа-
тельно. Это поступательное движение образуется из поступательного движения
вместе с велосипедом и поступательного движения педали относительно вело-
сипеда (последнее движение будет поступательным потому, что велосипедист
сТупней своей ноги держит педаль все время параллельно поверхности дороги).
Поступательное движение педали относительно велосипеда осуществляется ее
вращением относительно* своей оси и вращением вместе с осью вокруг оси шату-
на. При таком движении педали ее угловая скорость при вращении вокруг
своей оси будет равна и противоположно направлена ее угловой скорости
при движении вокруг оси шатуна (пара вращений).
Так как велосипед движется без свободного хода, то движение колеса
велосипеда зависит от движения шатуна. Определим число оборотов криво-
шипа вокруг своей оси из условия, что передаточное число равно трем.
Обозначая через п число оборотов колеса, а через «j — число оборотов криво-
шипа, будем иметь
Предполагая, что колесо катится по поверхности дороги без скольжения,
найдем зависимость между скоростью велосипеда и числом оборотов колеса.
Очевидно, это будет
где г — радиус колеса. Таким образом,
30а 30-21 000 500
п =----= = — об/мин.
лг 0,35л • 3600 л
Следовательно, число оборотов шатуна равно
п 500 „ ,,
«,=-=- = —— яа 53 об/мин
□ ОЭТ
и число оборотов п2 педали
п2 — Щ Ка 53 об/мин.
§ 14.5. Сложение вращений вокруг параллельных осей
Из содержания предыдущих параграфов видно, что введенные
выше простейшие кинематические элементы — угловые скорости
вращения тела (или системы координат) и скорости поступатель-
ных движений подчиняются тем же законам, что и силы и пары
в статике. В самом деле, пары вращений или поступательные
движения аналогичны парам сил.- Как и в статике, совокупность
кинематических пар эквивалентна паре, момент которой (или ско-
рость результирующего поступательного движения) равен сумме
моментов слагаемых пар.
258
СЛОЖНОЕ ДВИЖЕНИЕ твердого тела
[ГЛ XIV
Угловые скорости вращения вокруг осей, пересекающихся
в одной точке, заменяются одной угловой скоростью так же, как
и сходящаяся система сил в статике приводится к одной силе
(равнодействующей). Аналогия между угловыми скоростями
составляющих вращений и силами
этим не ограничивается. Мы сей-
час установим, что сложение вра-
щений вокруг параллельных осей
совершенно аналогично сложению
параллельных сил.
Предположим, что тело вра-
щается с угловой скоростью <о2 во-
круг оси 02z2 относительно систе-
мы координат Огх2у2гг, а послед-
няя вращается с угловой скоростью
сщ вокруг оси 01z1 относительно
системы координат О^у^, причем
оси 0^ и O2z2 параллельны (рис.
14.7).
Тогда абсолютная скорость
любой точки М тела
V = Ve + Vr = (Щ X И + (B2 X Г2.
Скорости vr и vt, точки М распо-
ложены в плоскости, перпенди-
кулярной осям O1z1 и 02z2, следо-
сть v точки М лежит в плоскости,
перпендикулярной этим осям. Так как точка М произвольна,
то это означает, что тело участвует в плоском движении. Найдем
в плоскости х^хУх мгновенный центр скоростей в случае, когда
и <в2 направлены в одну сторону (рис. 14.7, а).
Для точки Р, лежащей на прямой vr и ve коллинеарны,
но направлены в разные стороны. Для того чтобы их геометри-
ческая сумма была равна нулю, должно выполняться равенство
и2 • О2Р = ©! • (ДР
или
OjP а>2
О2Р о>1
(14.11)
Точка Р делит отрезок 0102 внутренним образом на части,
обратно пропорциональные модулям угловых скоростей состав-
ляющих вращений.
Перейдем теперь к сложению вращений, имеющих противо-
положные направления. Пусть со2>®1. Скорости vr и ve в этом
случае имеют противоположные направления в точках на пря-
§ 14 6]
ЗАДАЧИ
259
мой 0г02, расположенных вне отрезка О±О2 (рис. 14.7, б). Най-
дем точку Р, в которой эти скорости равны:
®2 • 02Р — <»1 • ОгР
или
Точка Р делит отрезок 0102 внешним образом на части, обратно
пропорциональные модулям угловых скоростей. Такую точку
всегда можно найти, если только
В каждом из рассмотренных случаев точка Р имеет скорость,
равную нулю, т. е.
ур = о)2х-02Р + <В1Х01Р = 0. ( (14.13)
Найдем теперь скорость произвольной точки М:
v=©jX Tj<о2 X г2 = (Bi X lfi±P ~Т г) <о2 X {(?2Р г
Здесь г' — радиус-вектор точки М относительно мгновенного
центра скоростей Р. Раскрывая скобки в правой части и исполь-
зуя равенство (14.13), получим
V = (I)! X 01Р + <щ X г' + <о2 X О2Р + <в2 X f = (<»! + <В2) X г' = й X f,
(14.14)
где й = <1>1 + <в2.
Отсюда следует, что совокупность двух вращений, происходя-
щих вокруг параллельных осей, но не представляющих собой пары
вращений, приводится к одному вращению, мгновенная ось кото-
рого делит внутренним или внешним образом расстояние между
осями составляющих вращений на пасти, обратно пропорциональ-
ные модулям угловых скоростей. Угловая скорость результирую-
щего вращения равна геометрической сумме угловых скоростей
составляют, их движен ий.
Если угловые скорости направлены в одну сторону, то мгно-
венная ось вращения расположена между, осями 01z1 и О2г2 и
модуль результирующей угловой скорости й = щ1 + <о2- В случае
противоположно направленных вращений мгновенная ось распо-
ложена за осью, вокруг которой вращение происходит с большей
угловой скоростью и Q = | coj — со2 Результирующая угловая
скорость направлена в сторону большей из угловых скоростей.
§ 14.6. Задачи
Задача 14.3. В редукторе (рис. 14.8) водило ОС делает п=720 об/мин,
а подвижные шестерни 2 и 3 вращаются вокруг своей оси относительно
поводка в том же направлении с угловой скоростью, соответствующей п23 =
= 240 об/мин. Определить радиус rL неподвижного колеса 1 и число оборо-
тов вала //, если 00 = 240 мм, г4 = 40 мм (гх — радиус шестерни 4).
260
СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
[ГЛ. XIV
Подвижные шестерни 2 и 3 совершают сложное движение. Они вращаются
вокруг оси MN относительно поводка и вместе с этой осью вокруг оси вала I.
Радиус ft неподвижного колеса 1 найдем из условия, что мгновенная ось
абсолютного вращения шестерен 2 и 3, параллельная оси MN, проходит
через точку касания неподвижного колеса 1 и подвижной шестерни 2. На
основании соотношения (14.11) можем
записать:
Рис. 14.8.
г2 _ to
rl to23'’
Н со-рсОаЭ
Г1 <02з ’
___ ОС • (02з
1 со + <Огз ’
где й2з—угловая скорость шестерен 2 и
3 при их вращении вокруг оси MN,
а со —угловая скорость вала I.
Между угловой скоростью и числом
оборотов в минуту существует зависимость
вида
следовательно,
ОС п,3 240 • 240 ..
--;----— = = 60 мм.
/1Д-/123 720-|-240
Абсолютная угловая скорость <ов шестерен 2 и 3 при вращении вокруг
мгновенной оси на .основании (14.14) равна
“ + (02з-
Характеризуя угловую скорость числом оборотов, получим
па = « +«23 = 720 + 240 = 960 об/мин.
Для определения числа оборотов шестерни 4, а следовательно, и вала II,
воспользуемся тем обстоятельством, что абсолютные скорости точек шестерен 3
и 4 в точке В их зацепления равны между собой (нет относительного про-
скальзывания):
nad = n4r4,
где
d = ri —г4.
Таким образом,
па (И — г4) 960(60 — 40) .оп ,
---iL =-------------!_ = 480 об/мин.
Задача 14.4. Сколько оборотов в минуту должен делать ведущий вал I
редуктора (рис. 14.9), чтобы ведомый вал II совершал п4=1800 об/мин?
Первое колесо с внутренними зубьями неподвижно. Дано: /1=150 мм, гг —
='30 мм, г4 = 50 мм.
Подвижные шестерни 2 и 3 как одно целое совершают сложное движение.
Они вращаются вокруг оси MN относительно поводка и вместе с ней вра-
щаются вокруг оси 1.
§ 14.7] сложение поступательных и вращательных движений
261
Мгновенная ось абсолютного вращения этих
точку В — точку зацепления подвижной шестерни 2
Эта ось параллельна оси MN. Так как мгновен-
ная ось абсолютного вращения шестерен 2 и 3
лежит вне осей слагаемых движений, то вра-
щение этих шестерен вокруг оси MN происхо-
дит в сторону, противоположную направлению
вращения вала I.
На основании формул (14.12) и (14.14) имеем
<°гз _ 21
<01 г3
и
<oa = <o23 — <01,
где <огз —угловая скорость вращения шестерен
2 и 3 вокруг оси MN, <о,,—абсолютная угло-
вая скорость этих шестерен.
Из полученных соотношений следует
шестерен проходит через
и неподвижной шестерни I.
Рис. 149.
<0а = <01 ---<01 =<ох--—
Гг гг
Скорости точек зацепления шестерен 3 и 4 равны, т. е. <оа (гх — г4) = <о4г4.
Отсюда следует:
г4г3
0>1 _“4 (т-1 — Г4) (<1 —Г2) ’
или
П1 = п4--------------7 = 1800 inn'^п = 225 об/мин-
(г, — г4) (<1 — г2) 100-120
Вал 1J вращается в ту же сторону, что и вал I.
§ 14.7. Сложение поступательных и вращательных движений
Первый случай. Рассмотрим сначала следующий случай слож-
ного движения: тело Р движется поступательно с постоянной
скоростью v> относительно системы координат а она
в свою очередь вращается вокруг оси z4 неподвижной системы
координат OiXi«/iZi с постоянной угловой скоростью ю, парал-
лельной скорости v0 поступательного движения. Найдем абсолют-
ную скорость некоторой точки М тела (рис. 14.10):
v.m = vr + v(, = v0 + со X г.
Таким образом, абсолютная скорость точки может быть разло-
жена на две составляющие: одну v0, параллельную оси z2> и дру-
гую ve = cox г, перпендикулярную плоскости, проходящей черед
ось г4 и точку М.
Отсюда следует, что точка М движется по боковой поверх-
ности кругового цилиндра с осью z4. Касательная к винтовой
траектории образует с плоскостью, перпендикулярной оси
262
СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
(ГЛ. XIV
цилиндра, угол а, причем
где R — радиус цилиндра (см. рис. 14.10).
Время Т одного оборота тела в винтовом движении
у,____________________________2л
<о ’
Любая точка тела переместится за это время параллельно оси
на расстояние, равное
h = VrT = —-
0 со
называемое шагом винта. Величина р = с0/® называется парамет-
ром винта.
Рассмотренное сложное движение тела называется кинемати-
ческим винтом.
Если скорость v0 и угловая скорость о переменны, то дви-
жение тела будет мгновенно винтовым движением. Естественно,
что параметр винта в общем случае также будет переменным.
Второй случай. Скорость поступательного движения перпен-
дикулярна угловой скорости вращательного движения. Согласно
§ 14.3 мгновенное поступательное движение можно рассматривать
как сложное движение —пару вращений. При этом момент пары
вращений должен быть равен скорости данного поступательного
движения. Плоскость пары вращений должна быть перпендику-
лярна v0 —проведем ее через ось гА (рис. 14.11). Поступательное
движение со скоростью v0 относительно системы координат
можно заменить вращением тела с угловой скоростью о" отно-
§ 14 71 сложение поступательных и вращательных движении 263
сительно некоторой новой системы и вращением этой новой си-
стемы относительно системы
ростью о' = — о". Для
упрощения чертежа пло-
скость уч.О>г2 проведена
перпендикулярно v0 через
ось ьгх. Пусть одно из
вращений, составляющих
пару, имеет угловую ско-
рость ю' = — со и проис-
ходит вокруг оси, совпа-
дающей с гх; тогда другое
вращение имеет угловую
скорость со" = со и проис-
ходит вокруг параллель-
ной оси, проходящей через
точку 03. Для эквивален-
координат Огхчу222 с угловой ско-
z/
Рис. 14.11.
тности этой пары вращений данному
поступательному движению
тела достаточно, чтобы было выполнено условие
Vo = Ox03X(o".
Если OxO3J_Oxzx (см. рис. 14.11), то отсюда следует, что
d^O1o3 = l.
Таким образом, совокупность поступательного и вращатель
ного движений нами приведена к трем вращениям (ю", ю', со)
при этом два последних вращения (o', w) эквивалентны покою
так как угловые скорости от'
и со равны по модулю и нап-
равлены по одной прямой в
противоположные стороны.
Следовательно, результи-
рующее движение эквива-
лентно только одному враще-
нию вокруг мгновенной оси,
проходящей через точку 03,
с угловой скоростью, рав-
ной угловой скорости задан-
ного вращения.
Третий случай. Скорость
поступательного движения
v0 направлена под углом ср
к угловой скорости со вращательного движения (рис. 14.12).
Этрт случай легко приводится к первому. В самом деле,
поступательное движение со скоростью v0 можно сначала пред-
264
СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
[ГЛ XIV
ставить как совокупность двух поступательных движений со ско-
ростями vx и v2, причем Vj || со, v2 I со (рис. 14.12) и v1 + v2 = v0.
Поступательное движение со скоростью v2 (в соответствии со
вторым случаем) можно заменить парой вращений (©', ю"). По-
лучилась система четырех движений (v1; ю", ю', ю); при этом
два последних движения (ю', <о) эквивалентны покою, следова-
тельно, остается мгновенно-винтовое движение (v15 ю").
Если скорости v0, ю постоянны, то движение будет винтовым.
При этом ось винта отстоит от оси z} на расстоянии
Щ sin <р
(0 <0
Шаг винта равен
__ 2ли0 sin ф
<о
§ 14.8. Общий случай сложения движений твердого тела
Продолжим установленную в §§ 14.4 и 14.5 аналогию между
угловыми скоростями и силами, приложенными к твердому телу,
а также между скоростью поступатель-
ного движения и моментом пары сил.
Эта аналогия объясняется тем, что уг-
/ / у \ ловая скорость ю тела и сила, приложен-
/ л ) ная к твердому телу, являются сколь-
I /И / зящими векторами. Можно показать
\ У (мы не будем останавливаться на до-
\______казательстве *)), что любая система
скользящих векторов, независимо от их
Рис. 14.13. физической природы, эквивалентна од-
ному скользящему вектору (главному
вектору) и одной паре скользящих векторов, момент которой
равен главному моменту.
Применительно к сложению движений твердого тела это озна-
чает следующее: если тело участвует одновременно в п вращениях
с угловыми скоростями (Dj, <d2, • , и в т поступательных
движениях, скорости которых равны vx, v2, ..., vm (моменты пар
вращений), то вся система этих движений эквивалентна совокуп-
ности одного вращательного и одного поступательного движений.
Угловая скорость со результирующего вращения равна сумме (глав-
ному вектору) составляющих угловых скоростей
О) — Ы] -|- (1)2 -|-. . . + <Йп
(14.15)
*) См , например, Г. К Суслов, Теоретическая механика, Гостехиздат,
1946, §§ 6—25; Д. Р. Мерк ин, Алгебра свободных и скользящих векторов,
Физматгиз, 1962.
§ 14 8] ОБЩИЙ СЛУЧАИ СЛОЖЕНИЯ ДВИЖЕНИИ ТВЕРДОГО ТЕЛА 265
а скорость чА результирующего поступательного движения равна
сумме (главному моменту) моментов угловых скоростей о), отно-
сительно центра приведения А и скоростей поступательных
движений (моментов пар вращения)'.
vА = Мд (®i) + • • - + МЛ (<о„) + vx + .. • +vm, (14.16)
причем ось вращения проходит через выбранный центр приведе-
ния А.
На рис. 14.13 показаны результирующая угловая скорость о>
вращательного движения (главный вектор) и результирующая
скорость Уд (главный момент) поступательного движения. Век-
торы Уд и о) можно рассмат-
ривать так же, как скорость
полюса А и угловую скорость
вращения тела относительно
полюса (§ 12.4).
Покажем, что имеются
два кинематических инва-
рианта, аналогичных стати-
ческим инвариантам. Дейст-
вительно, из равенства (14.15)
следует, что главный вектор
ю не зависит от выбора центра
приведения А и, следовательно,
представляет собой первый кинематический инвариант. По су-
ществу, инвариантность главного вектора тождественна с ранее
доказанным утверждением о независимости угловой скорости '
тела от выбора полюса. В более узком смысле под первым инва-
риантом будем понимать квадрат модуля главного вектора
Л = (02.
(14.17)
Прежде чем перейти ко второму инварианту, заметим, что
при переходе к новому центру приведения, например точке В,
главный момент vB будет связан с главным моментом vA относи-
тельно старого полюса формулой (рис. 14.14)
vB = УА + ю х р. (14.18)
Эту формулу можно получить непосредственно из равенства
(14.16). Она также следует из того, что главный момент vB есть
скорость точки В твердого тела и определяется формулой (12.20).
Умножим скалярно обе части равенства (14.18) на вектор ю:
VB ft) = Уд • ю + (ю х р) • ю.
Так как вектор юхр перпендикулярен вектору со, то их ска-
лярное произведение равно нулю. Поэтому
Уд • (О = УВ • ю, (14.19)
266
СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
(ГЛ XIV
т. е. скалярное произведение главного вектора ю на главный мо-
мент не зависит от центра приведения, иначе говоря, скалярное
произведение скорости точки твердого тела на угловую скорость
тела в каждый момент времени одинаково для всех точек тела.
Вторым кинематическим инвариантом /2 называется скаляр-
ное произведение скорости v любой точки тела на его угловую
скорость ю
/2 = ую. (14.20)
Запишем равенство (14.19) в следующей форме:
Va(£> COS = VBb) cos a2.
Если co =т^= 0, то '
vA cos ax = vB cos a2.
Каждое из этих произведений представляет проекцию главного
момента относительно соответствующей точки (скорости соответ-
ствующей точки) на направление главного вектора (угловой ско-
® роста тела). Следовательно, если
угловая скорость тела (главный век-
тор) не равна нулю, то проекция
скорости точки тела (главного мо-
мента) на направление угловой ско-
рости тела не зависит от выбора
точки.
Покажем, что если второй кине-
матический инвариант не равен нулю,
U то совокупность всех движений, в
которых участвует тело, может быть
сведена к мгновенному винтовому
рис 14 J5 движению. Действительно, если
/2 =^= 0, то скорость vA любой точки
А тела и угловая скорость его отличны от нуля; кроме того, в этом
случае угол а между векторами ю и vA не равен л/2. На стр. 264
было показано, что в этом случае имеется такая точка В, ско-
рость которой vB параллельна угловой скорости ютела (рис. 14.15).
Для этой точки должно выполняться равенство
vB = ре»
или, учитывая формулу (14.18),
+ юхр = рю, (14.21)
где р —некоторый скаляр, а р —радиус-вектор точки В в си-
стеме координат Axyz, жестко связанной с телом; vB —скорость
точки В.
Очевидно, что равенству (14.21) удовлетворяет радиус-век-
тор р любой точки, лежащей на прямой NN', проходящей через
§ и 8] ОБЩИЙ случай сложения движений твердого тела 267
точку В и параллельной вектору ю. Следовательно, равенство
(14.21) представляет векторное уравнение прямой линии, все
точки которой в данный момент времени имеют скорости, парал-
лельные угловой скорости со. Прямая NN' называется мгновен-
ной винтовой осью тела; совокупность угловой скорости со тела
и скорости v любой точки мгновенной винтовой оси называется
кинематическим винтом, а число р в равенстве (14.21) — пара-
метром кинематического винта. Происхождение этих названий
очевидно: винтовое движение состоит из вращения вокруг неко-
торой оси и одновременного поступательного перемещения вдоль
этой оси. Таким образом, в самом общем случае скорости точек
твердого тела распределяются так, как если бы тело совершало
мгновенно-винтовое движение.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Аксиома параллелограмма сил 21
Аксиомы статики 19—24
Аксоид неподвижный 225
— подвижный 225
Амплитуда колебаний 167
Бинормаль 163
Вектор главный 56 , 58, 61, 65, 109,
115, 121
— углового ускорения 190
— угловой скорости 189, 222
Винт динамический НО, 111, 117
— кинематический 262, 267
Вращение твердого тела вокруг не-
подвижной осп 187
— — —--------точки 218
Время абсолютное 7
Гироскоп в кардановом подвесе 12
Годограф 145
— скорости 160
График движения 148
Движение абсолютное 233
— винтовое 262
— вращательное 187
— гармоническое 167
— замедленное 166
— криволинейное 144
— материи 7
— мгновенно-винтовое 262
— механическое 7
— относительное 233, 243
— переносное 233
— периодическое 168
— по окружности 169
— поступательное 184, 256
— прямолинейное 144, 167
— равномерное 154, 166
— сложное 186, 233
— твердого тела 183, 250
— — — вращательное 158
— — — мгновенно-поступательное
251
— — — плоское 193
Движение твердого тела поступатель-
ное 184, 251
-------- свободного 228
— — — с одной неподвижной точ-
кой 218
— точки по окружности 169
— ускоренное 166
Диаграмма взаимная 93, 94
— Максвелла — Кремоны 93, 94
Динама ПО
Динамика 11, 15
— твердого тела, имеющего одну не-
подвижную точку И
Задача о параллельном переносе силы 56
— статически неопределимая 36, 40,
85, 98, 119
Задачи на равновесие системы тел 78
— статики основные 29, 30, 53
Заделка жесткая (полная) 77
Закон Амонтона— Кулона 96
— Архимеда 9
— всемирного тяготения 10, 11
— движения 148
— инерции 19
— Ньютона третий 22, 81, 95
Законы Ньютона 7, 16
Инварианты кинематические 265
— статические 109, НО, 265
Интенсивность силы 73, 74
Кило! рамм-сила 17
Кинематика 15
— точки 143
Конус трения 101
Координаты криволинейные 176, 177
— — ортогональные 178
— полярные 146
— сферические 146
— цилиндрические 146
Коэффициент трения качения 107
— — скольжения 96
Коэффициенты Ламе 178
Кривизна 164
Круг кривизны 164
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
269
Линия действия силы 17
— координатная 177
— узлов 218
Метод абстракции 8
Механика абсолютно твердого тела 14
— жидкостей и газов 14
— материальной точки 14
— небесная 14
— релятивистская 14, 15
— систем свободных и несвободных
11
— тела переменной массы 13
— теоретическая 7, 8, 14, 16
Многоугольник силовой 32, 33
---замкнутый 34, 92
— — разомкнутый 32
Модели материальных тел 8
Модель тела абсолютно твердого 18
Момент главный 57, 58, 60, 67, 109,
115, 265
— пары 49, 50, 53, 66
---вращений 256
— силы относительно оси 47, 48
--------точки 45, 66
— статический 132
— трения качения 106
Натяжение нити тяжелой подвешен-
ной 83
Начало отсчета 144
Нить тяжелая 83
Нормаль главная 163
Ньютон (единица силы) 17
Опора цилиндрическая шарнирно-не-
подвижная 28
— — шарнирно-подвижная 28
Опоры, их виды 26—29
Определение усилий в стержнях фермы
89
Орбита 144
Ось винтовая мгновенная 267
— вращения 187
— — мгновенная 222, 224
— конечного вращения 224
— координатная 177
— скоростей мгновенная 222
— центральная системы сил 112, ИЗ
Пара вращений 256
--- мгновенная 256—257
— результирующая 54
— сил 45
Параметр винта 262
— кинематического винта 267
Период колебаний 168
План скоростей 198, 199
— ускорений 207, 209
Плоскость координатная 177
— нормальная 163
— соприкасающаяся 163—166
— спрямляющая 163
Поверхность координатная 177
Полюс 196
Правило Жуковского 238
Приведение плоской системы сил к про-
стейшему виду 65
— пространственной системы сил
к простейшему виду 57, 65, 111, ИЗ
— системы пар 1Г простейшему виду
54
Принцип возможных перемещений 12
— Гамильтона—Остроградского 12
— инерции 10
— наименьшего принуждения 12
— освобождаемое™ 25
— отвердевания 24
— относительности классической меха-
ники 10
Проекции производной вектора на
неподвижные оси 152
— скоростей точек при плоском движе-
нии 197
---— свободного твердого тела 230
Проекция равнодействующей системы
сходящихся сил на координатные
оси 33
— силы на плоскость 47
— скорости точки на координатную
ось 154
— ускорения точки на координатную
ось 161
Производная вектора абсолютная 233—
235
— — локальная 234
--- относительная 233, 234
— — по скалярному аргументу 151
Пространство трехмерное евклидово
7, 16
Равновесие материальных тел 7
— пространственной системы сил 117
— тела 19
---— при наличии трения качения
105—108
—---------— скольжения 101, 102
Равнодействующая системы сил 19
Радиус кривизны 164, 170
Реакции упругих опор твердого тела 85
Реакция нормальная 95
— поверхности идеально гладкой 27
— подпятника 28
— связи 25
270
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Связи 25—29
— внутренние 29
Связь жесткая 77
Сила 16, 17
— активная 26
— нормального давления 95, 107
— пассивная 26
— равнодействующая 31
— распределенная 73
— сосредоточенная 73
— трения скольжения 95
Силы взаимного тяготения 11
— внешние 29
— внутренние 29
— сходящиеся 31
— тяжести 11, 132
Система отсчета гелиоцентрическая
инерциальная 8, 16
— — инерциальная 7, 8, 143
— сил плоская 65, 115
--- пространственная 109
— — уравновешенная 21
— — эквивалентная нулю 19
Системы неподвижные 8, 16
— осей координатных 7, 143
— сил эквивалентные 18
Скорость абсолютная 186, 235, 237,
239, 243, 251
— в сложном движении 186
— относительная 187, 235, 236,
239
— переносная 186, 235, 239, 241,
243
— поперечная 156
— поступательного движения 185, 250,
251
— радиальная 156
— точки 152—154
---плоской фигуры 196
--- твердого тела свободного 229
— — тела, вращающегося вокруг не-
подвижной оси 191
— угловая 169, 188, 250
--- мгновенная 224
•--средняя 224
Сложение вращений твердого тела во-
круг параллельных осей 257
-------------пересекающихся осей
251, 252
— движений твердого тела, общий слу-
чай 264
— двух параллельных сил 43—45
— поступательных движений твердого
тела 251
---и вращательных движений твер-
дого тела 261
Сложное движение твердого тела 250
Составляющая ускорений вращатель-
ная 226
---осестремительная 227
Способ аналитический нахождения рав-
нодействующей сил 33
— геометрический нахождения рав-
нодействующей сил 33
— графический нахождения равнодей-
ствующей сил 33
— естественный задания движения 148,
149
— координатный задания движения
145—148
Способы задания движения 144—148
Статика 15, 16
Степени свободы твердого тела 184
Тело абсолютно твердое 8, 19
— несвободное 25, 26, 72
— отсчета 7
— свободное 25
Теорема Вариньона 68, ИЗ, 131
— Кориолиса 237
— о приведении системы сил к динаме
111
--- трех непараллельных силах 24
— Пуансона 57
— сложения скоростей 186, 187, 237.
251
--- ускорений 237
— статики основная 56, 57
— Эйлера — Даламбера 223
Теоремы о парах 50—53
Теория автоматического регулирования
13
— движения тела, брошенного под
углом к горизонту 10
--------по наклонной плоскости 10
— механизмов и машин 14
— нелинейных колебаний 13
— относительности 14
— регулирования 14
— упругости 13, 14
Точка материальная 8
— —, отличие от геометрической точ-
ки 8
Траектория точки 144, 148, 185
Трение гибких тел 103
— качения 105
— скольжения 95
Трехгранник естественный 163
Углы корабельные 219
— Эйлера 218, 222, 228, 252
Угол дифферента 219
— конечного вращения 224
— крена 219
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
271
Углы нутации 218, 253
— поворота тела 188
— прецессии 218, 253
— рысканья 219
— смежности 163
— собственного вращения 218, 253
— трения 101
Узлы фермы 89
Управление движением 13
Уравнения движения плоской фигуры
194
— Лагранжа 12
— плоского движения твердого тела
194
— равновесия плоской системы сил
70, 71
-----пространственной системы сил
117—121
•—Эйлера кинематические И, 254
Ускорение вращательное 191, 244
—, вращательная составляющая 226
—, осестремительная составляющая
227
Ускорение касательное 166
— кориолисово 238—240, 242, 245
•— нормальное 166
— осестремительное 192, 210, 244
— относительное 240, 242
— переносное 240, 242, 244
— поворотное 238
— при поступательном движении тела
185
— тангенциальное 166
— точки 160
------- абсолютное 238, 242, 243
— — плоской фигуры 205
----- свободного тела 230
— угловое 169, 188, 226, 250
— центростремительное 169
Условия равновесия 34, 61—64
— — плоской системы сил 70—72
-----призмы 100
-----пространственной системы сил
56, 61
-----системы сходящихся сил 34
-----твердого тела, имеющего две не-
подвижные точки 119
Условия равновесия твердого тела,
имеющего одну неподвижную точку
----- частично закрепленного тела 81
— уравновешивания двух сил 20
Фаза колебаний 167
----- начальная 167
Ферма 89
— простая плоская 89
—, расчет способом вырезания узлов
92
—, — — рассечения -91
— статически определенная 90
Формула Эйлера для определения на-
тяжения троса 104
Формулы Френе 231
Центр кривизны 164
— параллельных сил 130
— приведения 109, 113, 115
— скоростей мгновенный 200, 258
— тяжести 132, 133
-----дуги окружности 140
-----кругового сектора 140, 141
—• — линии 136
— —, методы его нахождения 136—
138
—• — объема 134
-----однородного тела, имеющего ось
симметрии 137
—-------—, — плоскость симметрии
136
----- поверхности 135
----- трапеции 139, 140
----- треугольника 139
— ускорений мгновенный 204, 206
Центроида неподвижная 203, 212
— подвижная 203 , 212
Частота колебаний 168
— круговая 168
Число степеней свободы 184
Шаг винта 262
Шарнир сферический 27
Николай Васильевич Бутенин
Яков Львович Лунц
Давид Рахмильевич Меркин
КУРС ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ
Том I
Статика и кинематика
М , 1979 г., 272 стр. с илл.
Редактор Н И Розальская
Техн редактор И. Ш. Аксельрод
Корректоры Е. А. Белицкая, Н. Б. Румянцева
ИБ № 11516
Подписано в печать с матриц 20.03.79. Формат 60 X90716.
Бумага тип. № 3. Гарнитура литературная. Печать высокая.
Условн. печ. л. 17. Уч.-изд. л. 16,14. Тираж 45 000 экз.
Заказ № 546. Цена книги 70 коп.
Издательство «Наука»
Главная редакция физико-математической литературы
117071, Москва, В-71, Ленинский проспект, 15
Ордена Октябрьской Революции, ордена Трудового Красного
Знамени Ленинградское производственно-техническое объе-
динение «Печатный Двор» имени А. М. Горького «Союзпо-
лиграфпрома» прн Государственном комитете СССР по де-
лам издательств, полиграфии н книжной торговли. 197136»
Ленинград, П-136, Гатчинская, 26.