/




















































































































































Text
Л. Г. ЛОИЦЯНСКИИ, А. И. ЛУРЬЕ
КУРС
ТЕОРЕТИЧЕСКОЙ
МЕХАНИКИ
ТОМ ПЕРВЫЙ
СТАТИКА И КИНЕМАТИКА
ИЗДАНИЕ ВОСЬМОЕ,
ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
Допущено Министерством
высшего и среднего специального образования СССР
в качестве учебного пособия
для высших учебных заведений
МОСКВА «НАУКА»
ГЛАВНАЯ РЕДАЩИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
1982
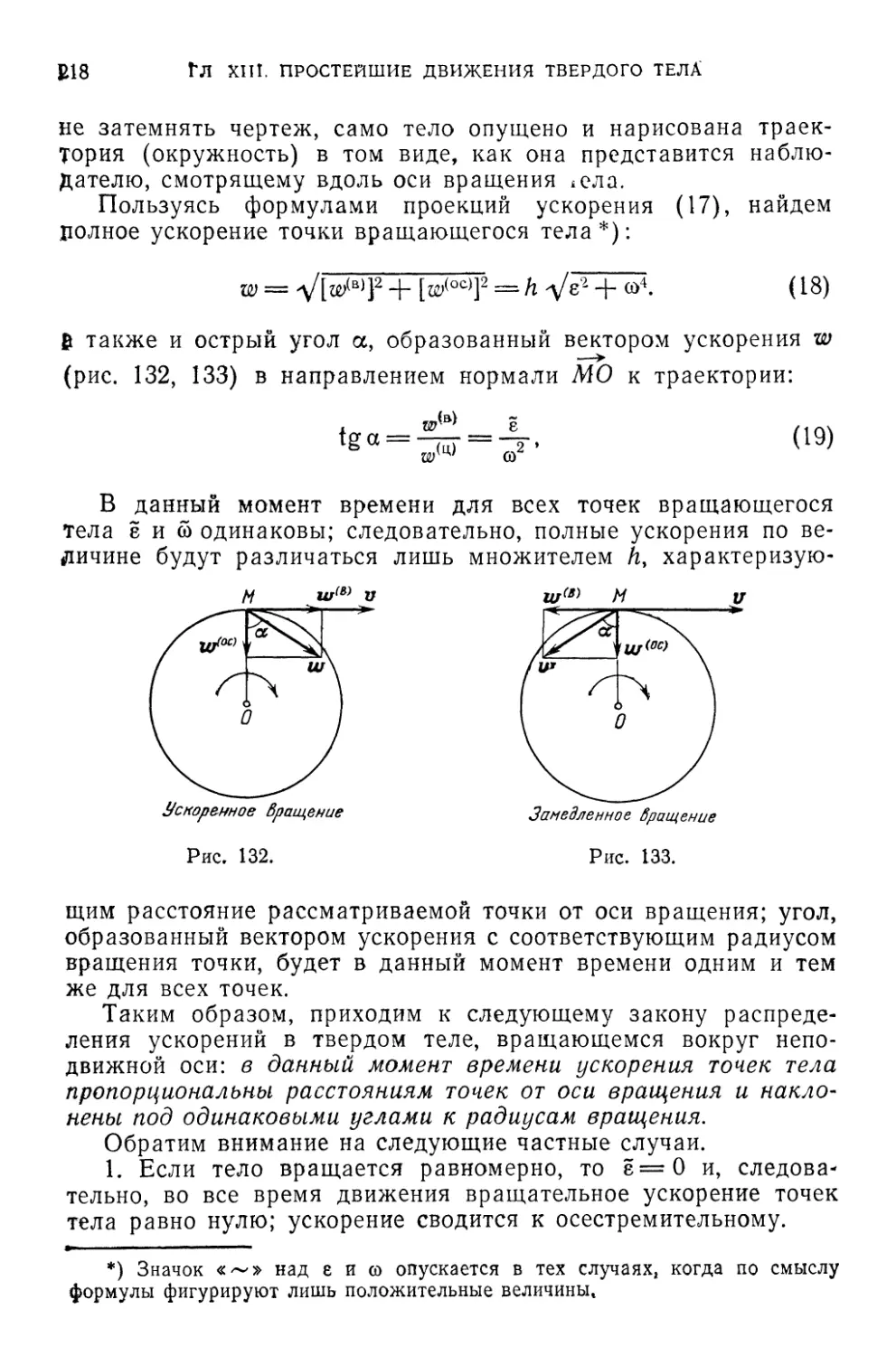
22.2!
Л 72
УДК 531
Л о й ц я н с к и и Л. Г., Лурье А. И. Курс теоретической механики:
В 2-х томах. Т. I. Статика и кинематика. — 8-е изд., перераб. и доп. — М.:
Наука, Главная редакция физико-математической литературы, 1982. — 352 с.
Первый том курса теоретической механики содержит отделы «Статика» и
«Кинематика» в объеме требований программ для высших учебных заведений,
а также некоторый дополнительный материал.
В курсе, наряду с обычным содержанием отделов статики и кинематики
точки и абсолютно твердого тела, приводится расширение предмета теорети-
теоретической механики з сторону сплошных деформируемых сред, в частности, из-
излагается введение в статику сплошных сред и обобщение теоремы о переме-
перемещении и движении абсолютно твердого тела на случай элементарного объема
деформируемой и идеально текучей среды.
Курс предназначен для студентов университетов и втузов, а также для
аспирантов и преподавателей.
Илл. 233.
Лев Герасимович Лойцянский,
Анатолий Исакович Лурье
КУРС ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ
том первый
СТАТИКА И КИНЕМАТИКА
Редакторы В. А. Брострем, А. Г. Мордвинове
Техн. редакторы Еш В. Морозова, С. #. Щкляр
Корректоры Я. В. Сидоркина, В. Я. Сорокина
ИБ № 12145
Сдано в набор 29,12.81. Подписано к печати 23.08.82. Формат 60 X 90!/w.
Бумага тип. К* 1. Литературная гарнитура. Высокая печать.
Условн. печ. л. 22. Уч.-изд. л. 21,77. Тираж 42 000 экз. Заказ Nfc 18. Цена I р.
Издательство «Наука»
Главная редакция физико-математической литературы
117071, Москва, В-71, Ленинский проспект, 15
Ленинградская типография Nt 2 головное предприятие ордена Трудового
Красного Знамени Ленинградского объединения «Техническая книга»
им. Евгении Соколовой Союзполиграфпрома при Государственном комитете
СССР по делам издательств, полиграфии и книжной торговли.
198052, г. Ленинград, Л-52, Измайловский проспект, 29
„1703020000—126 1ол оо © Издательство «Наука».
Л П,о/по\ ЯО 120"82 Главная редакция
[)Ь6\\J)Ь/. физико-математической литературы.
1982
ОГЛАВЛЕНИЕ
Предисловие
Введение J
§ 1. Предмет теоретической механики. Основные модели материальных
тел. Разделение механики на статику, кинематику и динамику . . 7
§ 2. Основные понятия теоретической механики , . 9
Отдел первый
СТАТИКА
Глава I. Общие сведения о силах . . . . ' 12
§ 3. Модель механического взаимодействия — сила. Сила как вектор.
Приложенные и скользящие векторы. Деформируемые среды и
принцип затвердевания 12
§ 4. Действие и противодействие. Метод сечений 15
§ 5, Опорные реакции и простейшие типы опор 17
Глава II. Приведение пространственной совокупности сил, сходящихся
в точке, к равнодействующей силе . . 22
§ 6. Силовой многоугольник . 22
| 7. Геометрический метод решения задач 25
§ 8. Проекции силы на оси прямоугольной системы координат .... 30
§ 9. Уравнения равновесия твердого тела под действием сходящейся со-
совокупности сил 32
§ 10. Примеры 34
Глава III. Приведение несходящейся совокупности сил к простейшему виду 36
§ 11. Момент силы относительно точки как вектор. Моменты силы отно-
относительно осей координат и их аналитические выражения .... 36
§ 12. Пара сил и ее момент. Свойства пар. Сложение пар 43
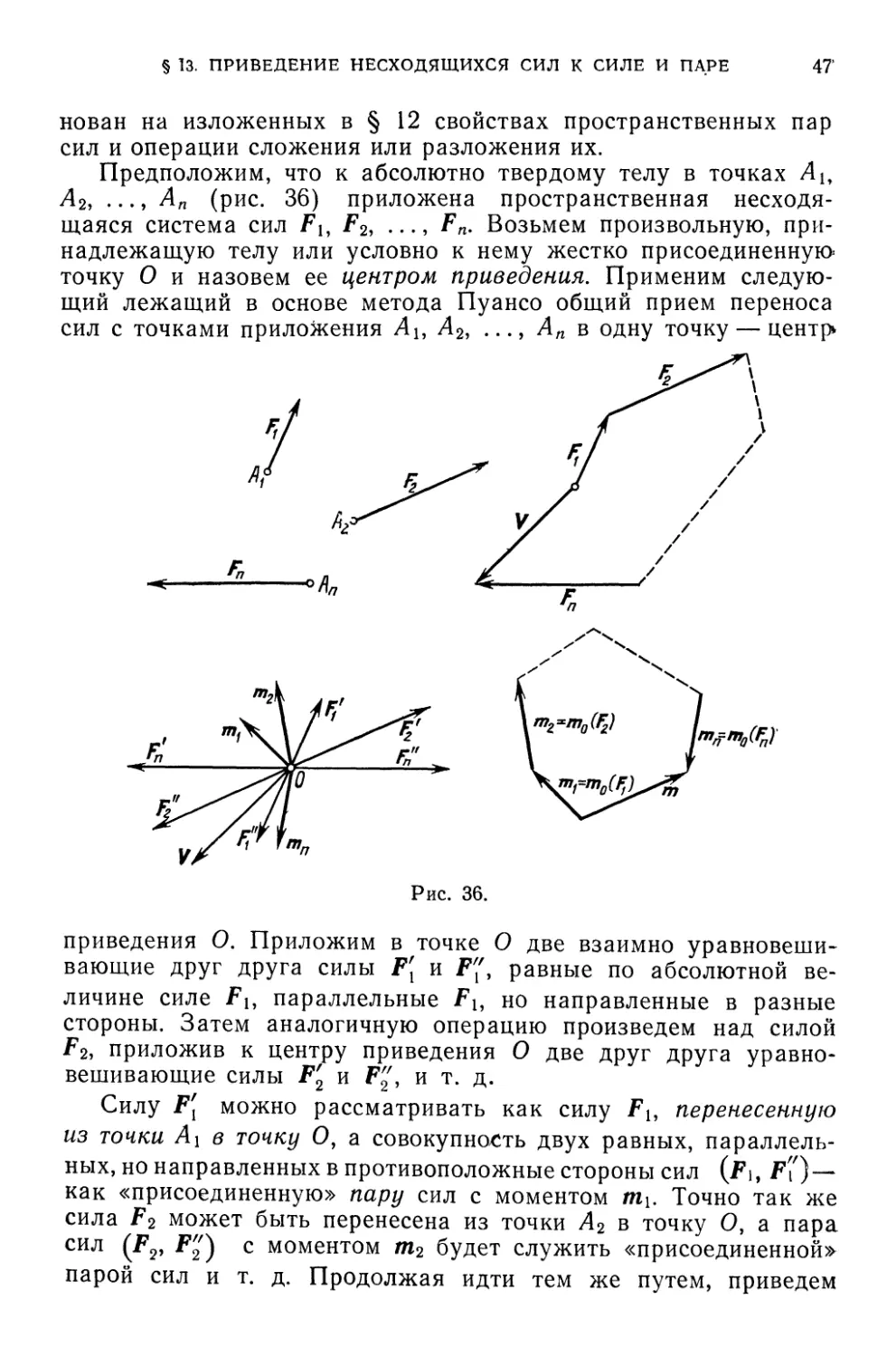
§ 13. Приведение пространственной несходящейся совокупности сил к од-
одной силе и одной паре. Главный вектор и главный момент совокуп-
совокупности сил ." . 46
§ 14. Уравнения равновесия абсолютно твердого тела под действием не-
несходящейся совокупности сил 50
§ 15. Равновесие тела с двумя закрепленными точками 55
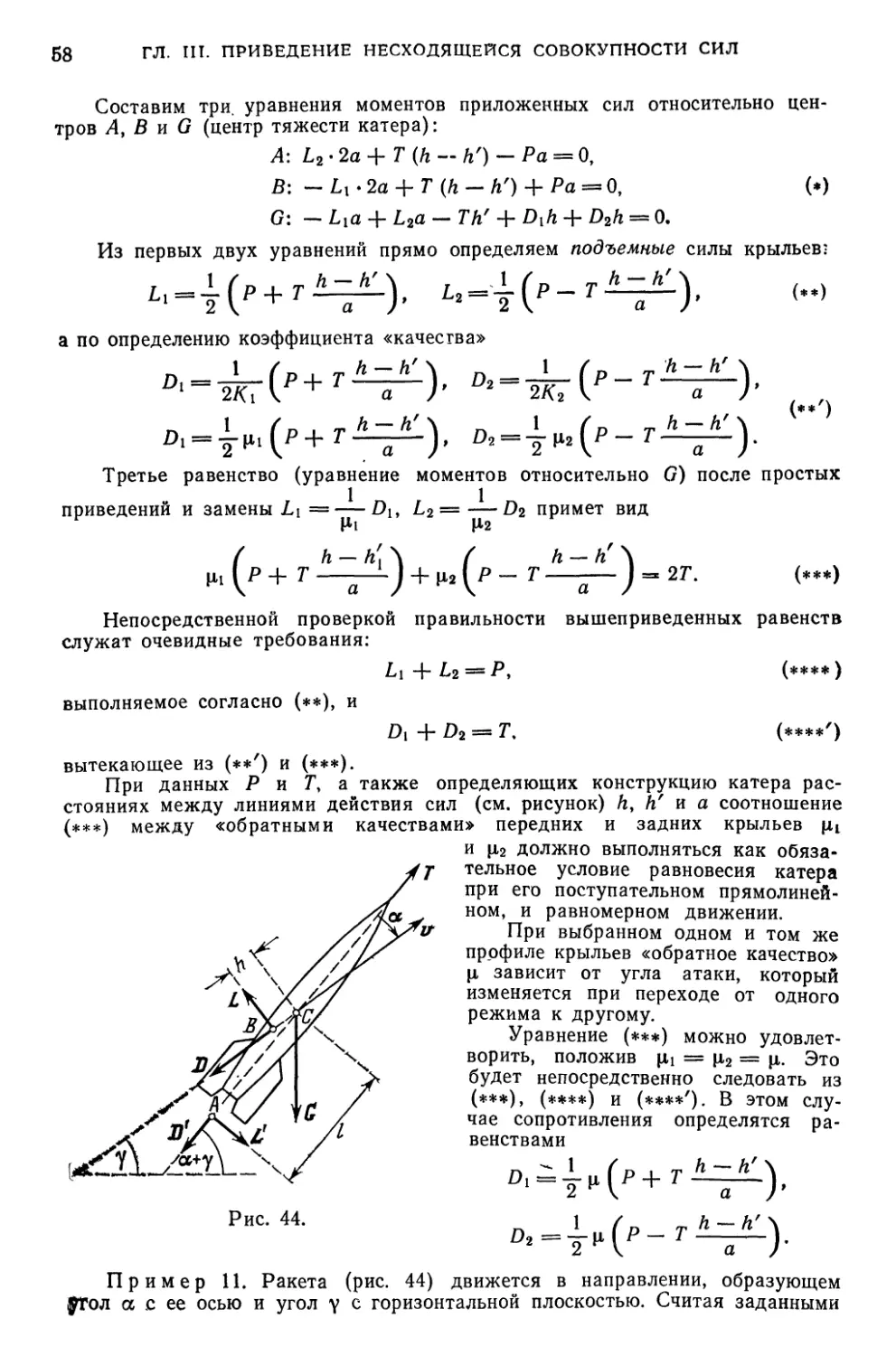
§ 16. Примеры 57
Глава IV. Приведение пространственной несходящейся совокупности сил
к динаме 63
§ 17. Влияние изменения центра приведения на главный момент .... 63
§ 18. Приведение несходящейся совокупности сил к динаме 65
| 19. Аналитические выражения элементов динамы 68
§ 20. Приведение пространственной несходящейся совокупности сил к
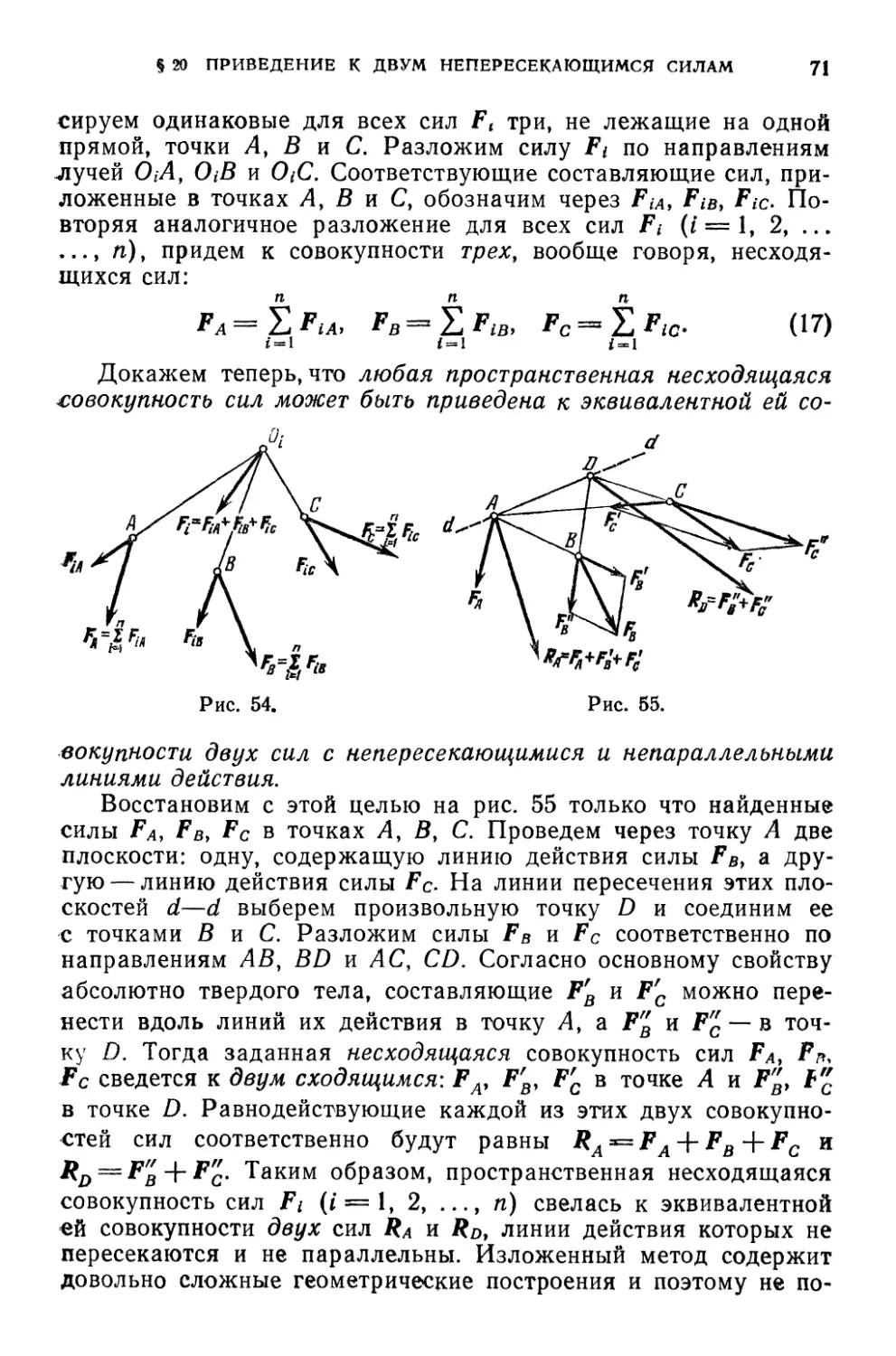
двум непересекающимся силам 70
Глава V. Равновесие при наличии сил трения 74
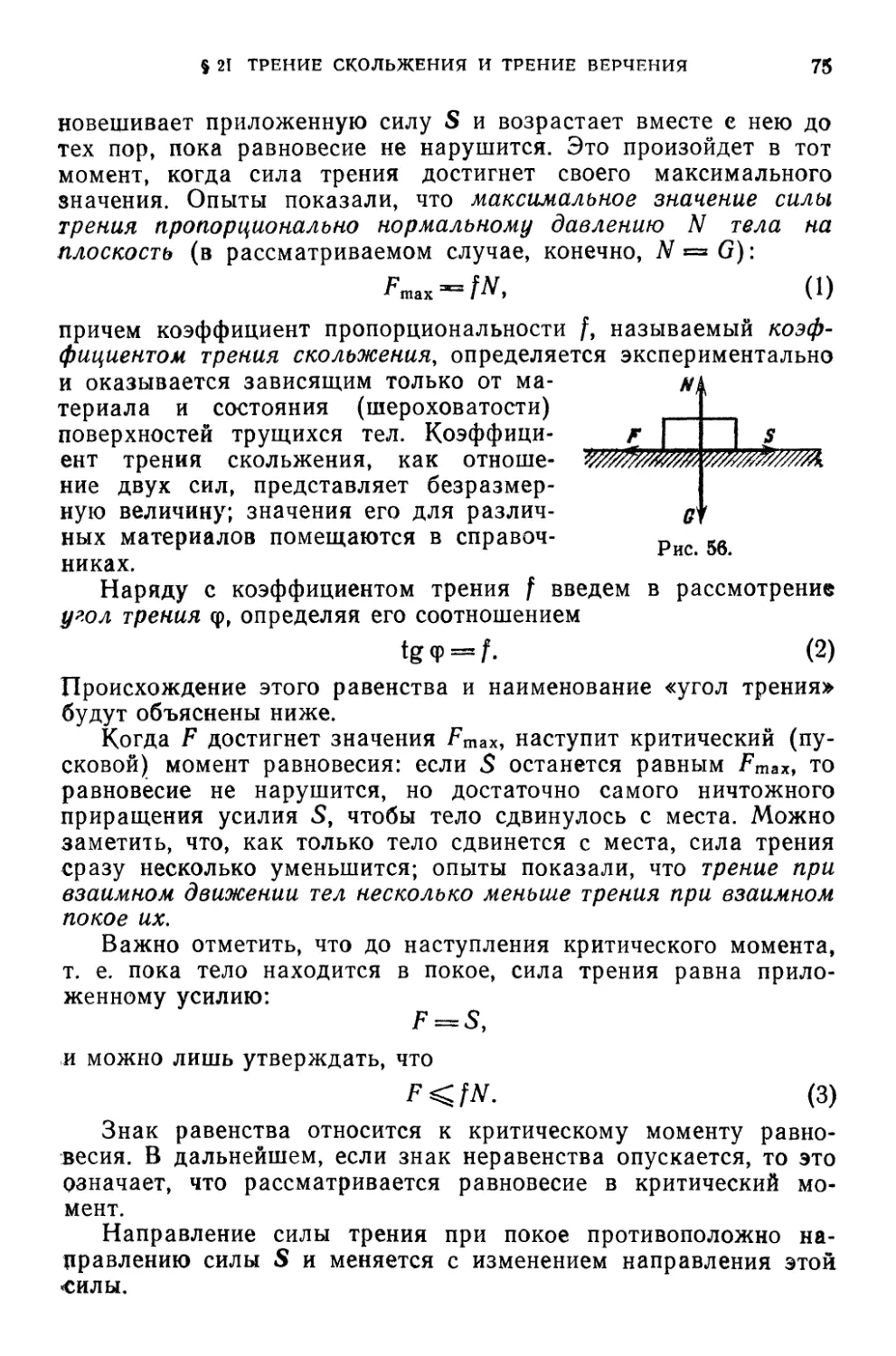
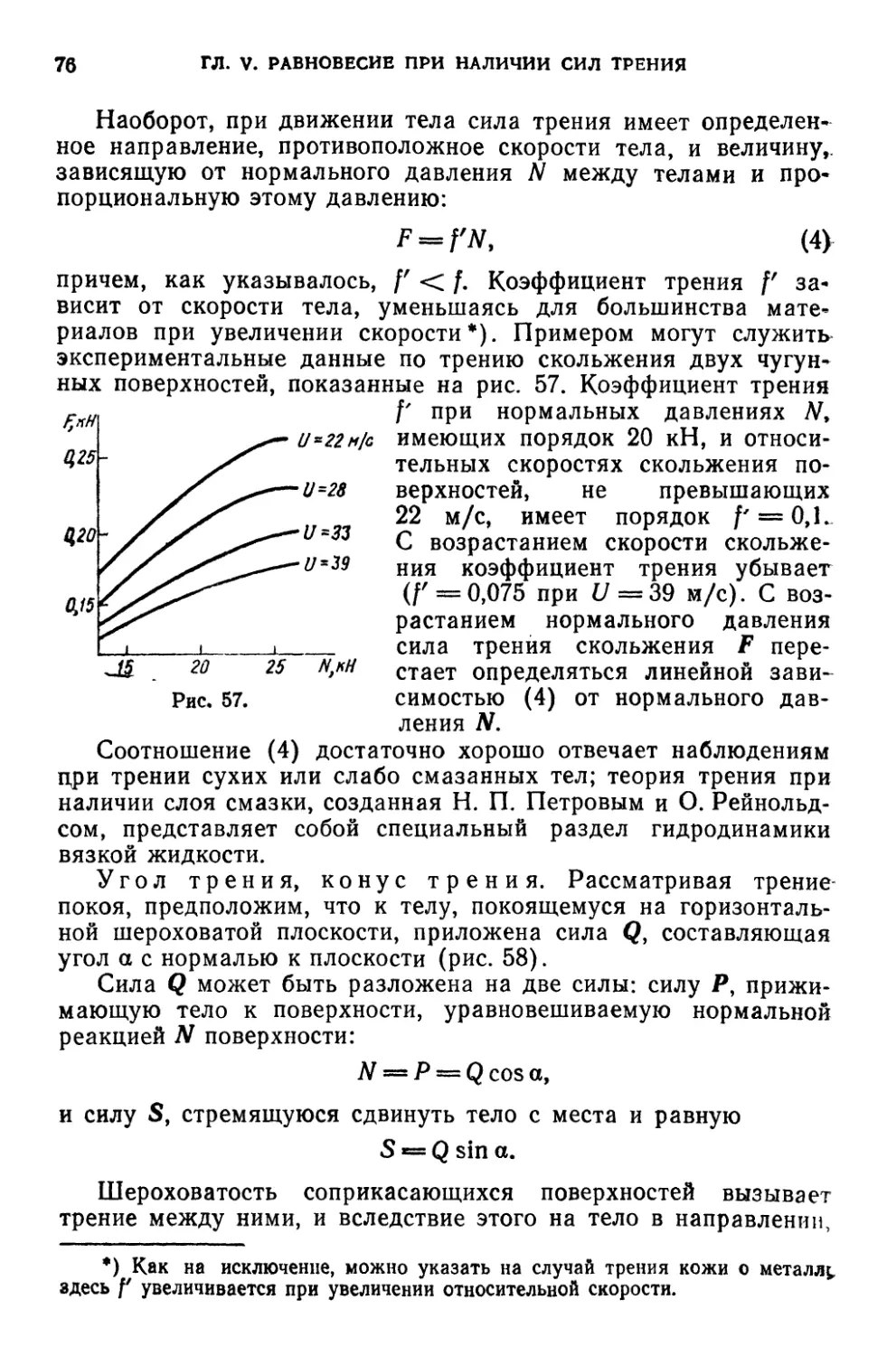
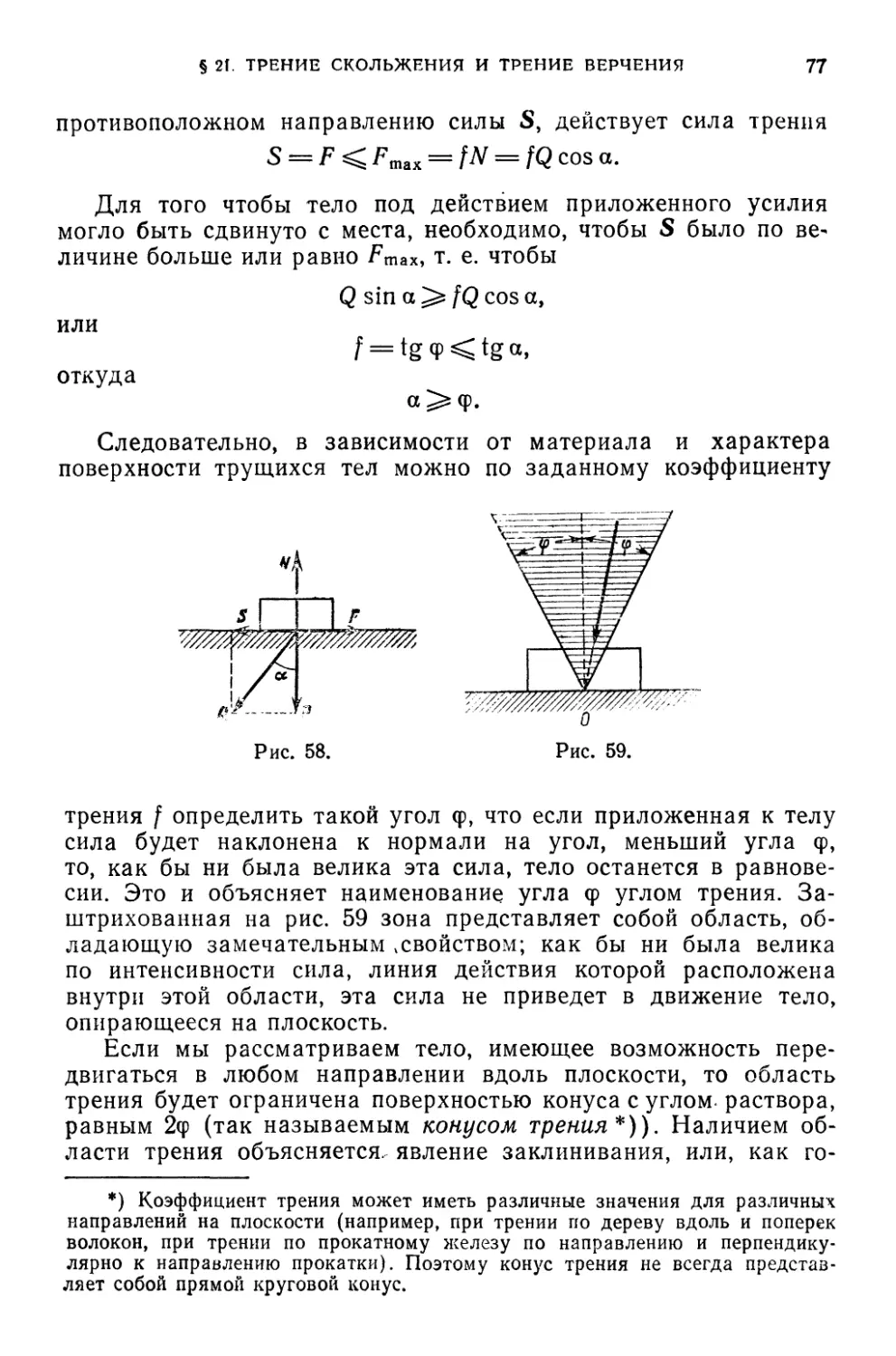
§ 21. Трение скольжения и трение верчения 74
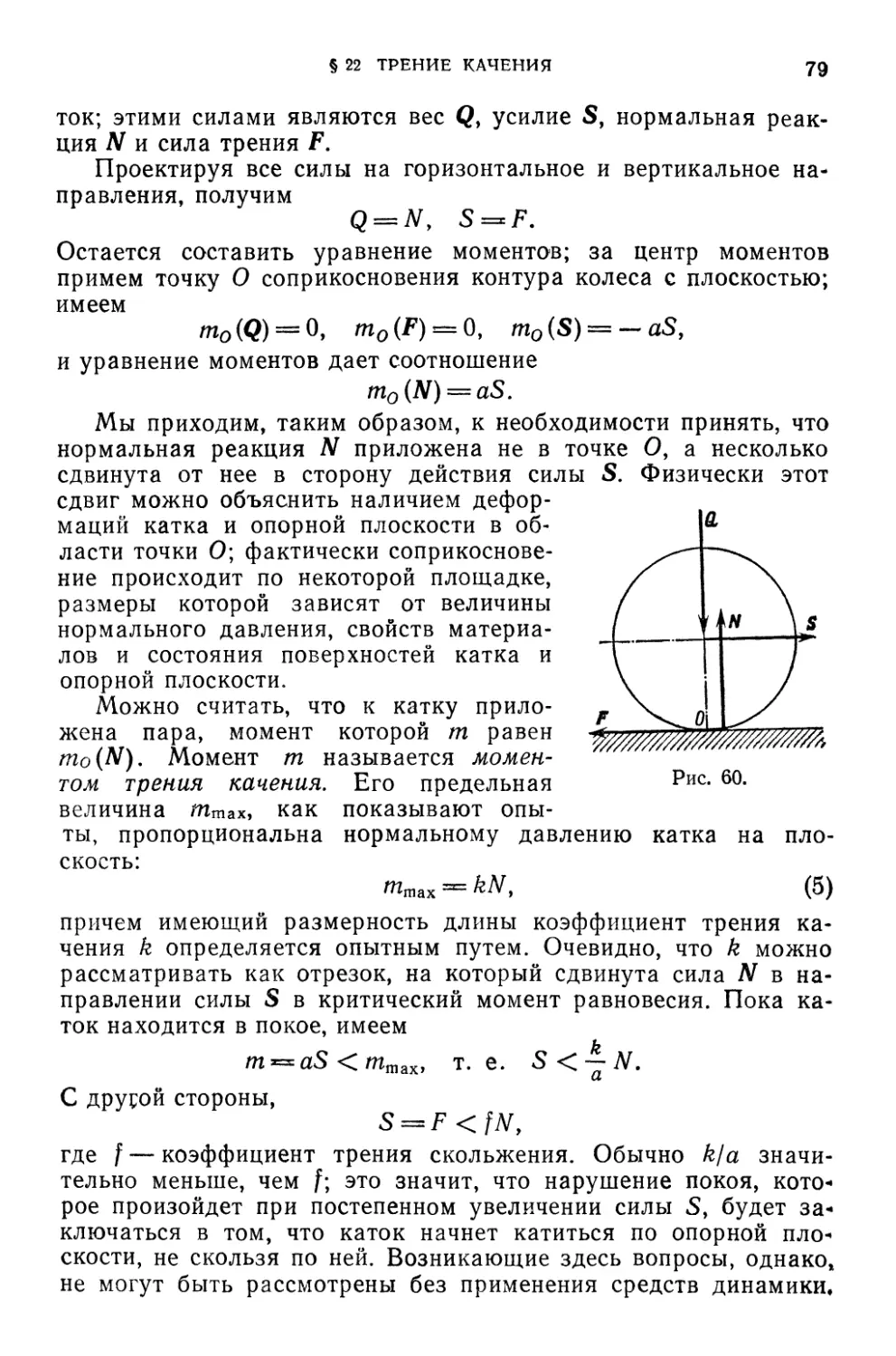
§ 22. Трение качения 78
1*
4 ОГЛАВЛЕНИЕ
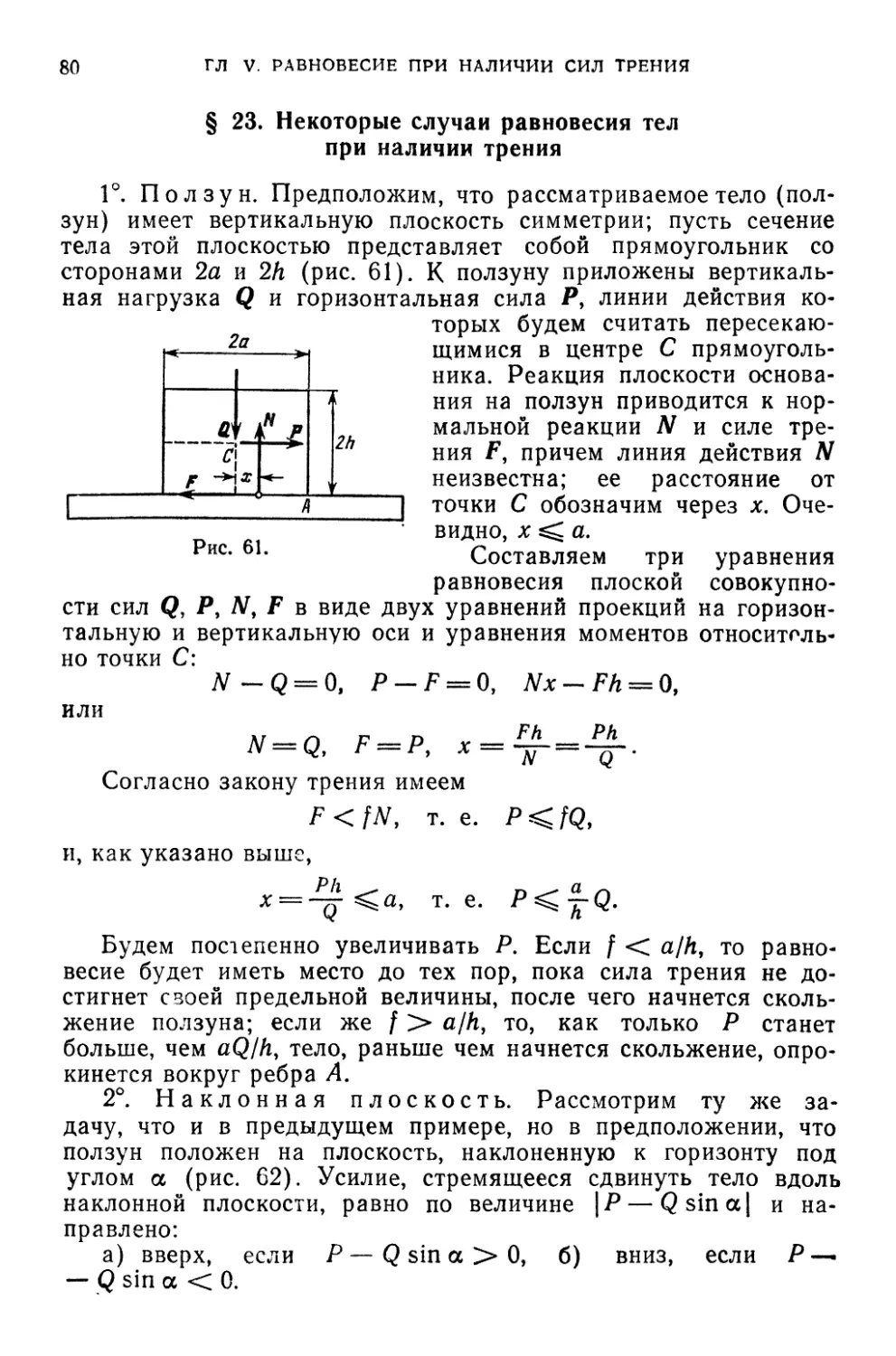
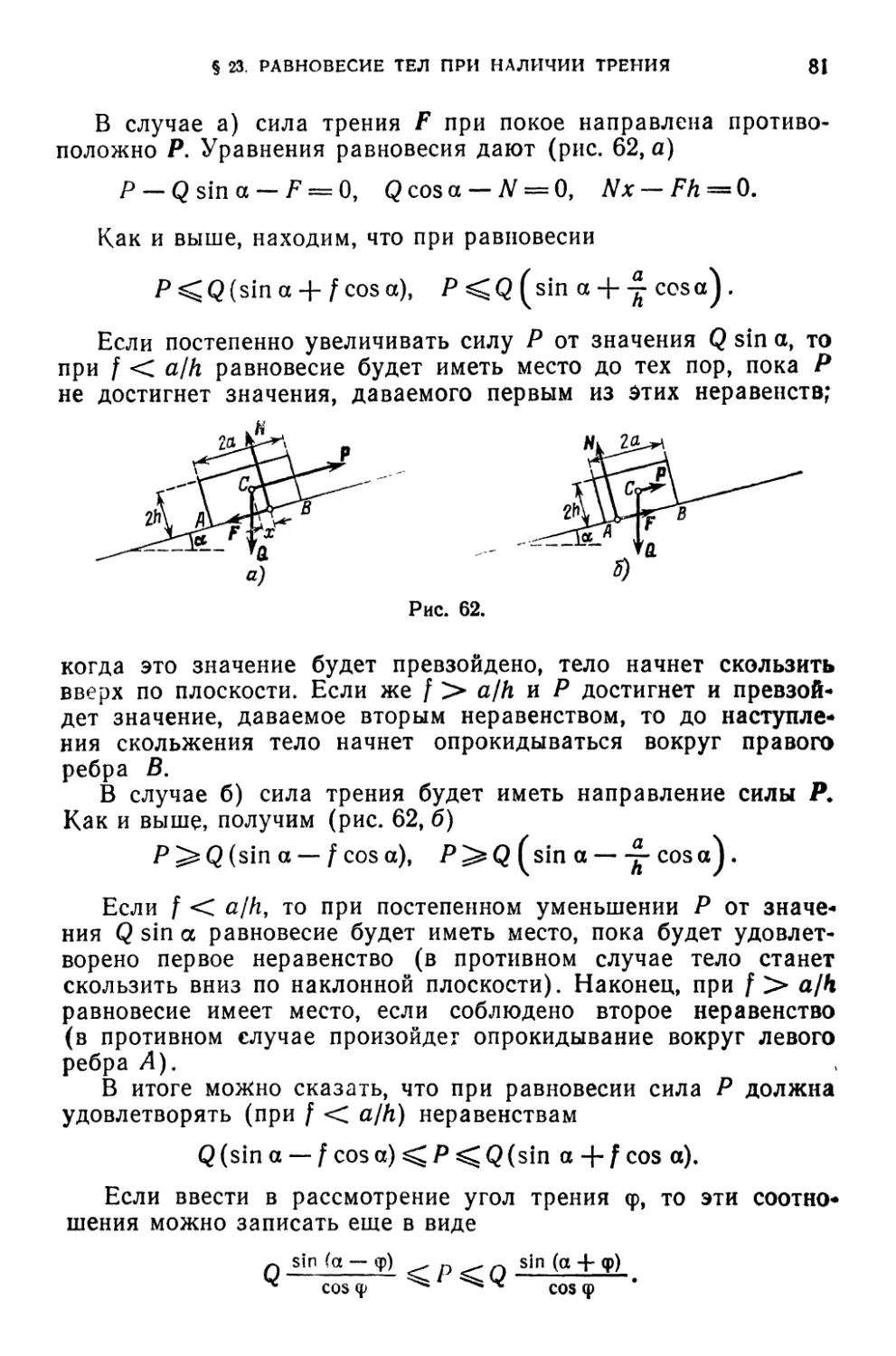
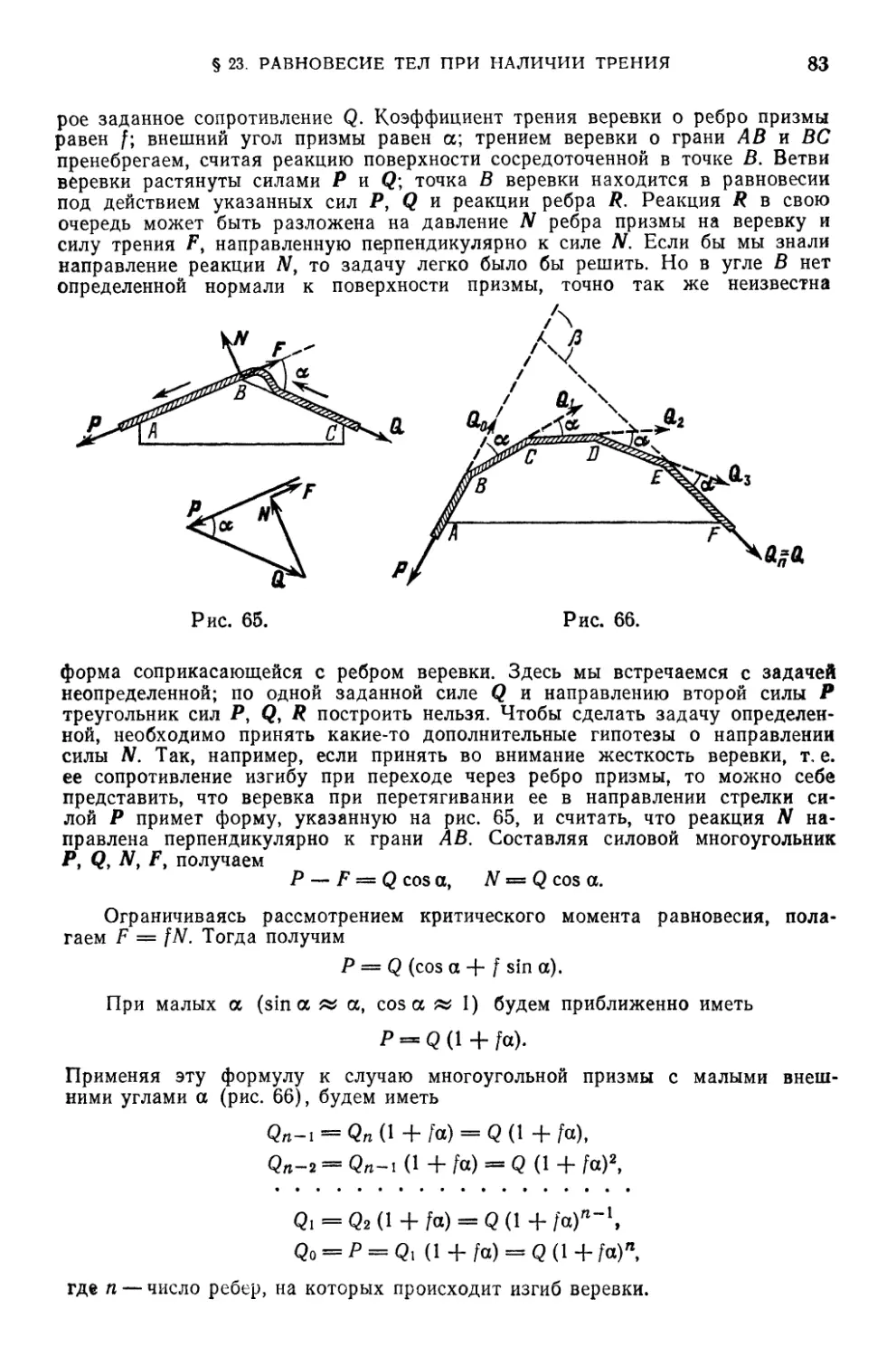
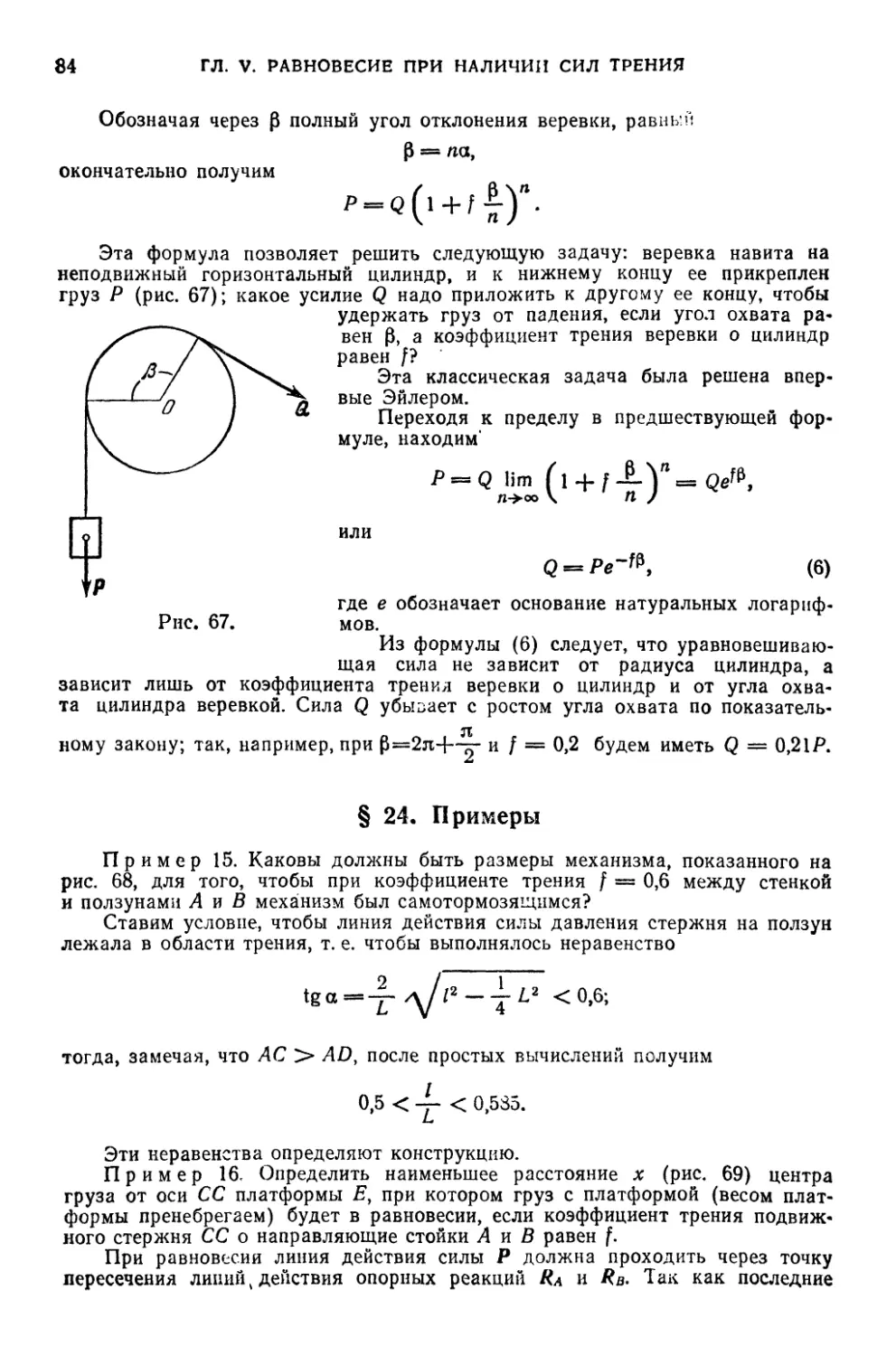
§ 23. Некоторые случаи равновесия тел при наличии трения 80
§ 24. Примеры 84
Глава VI. Центр параллельных сил и центр тяжести 89
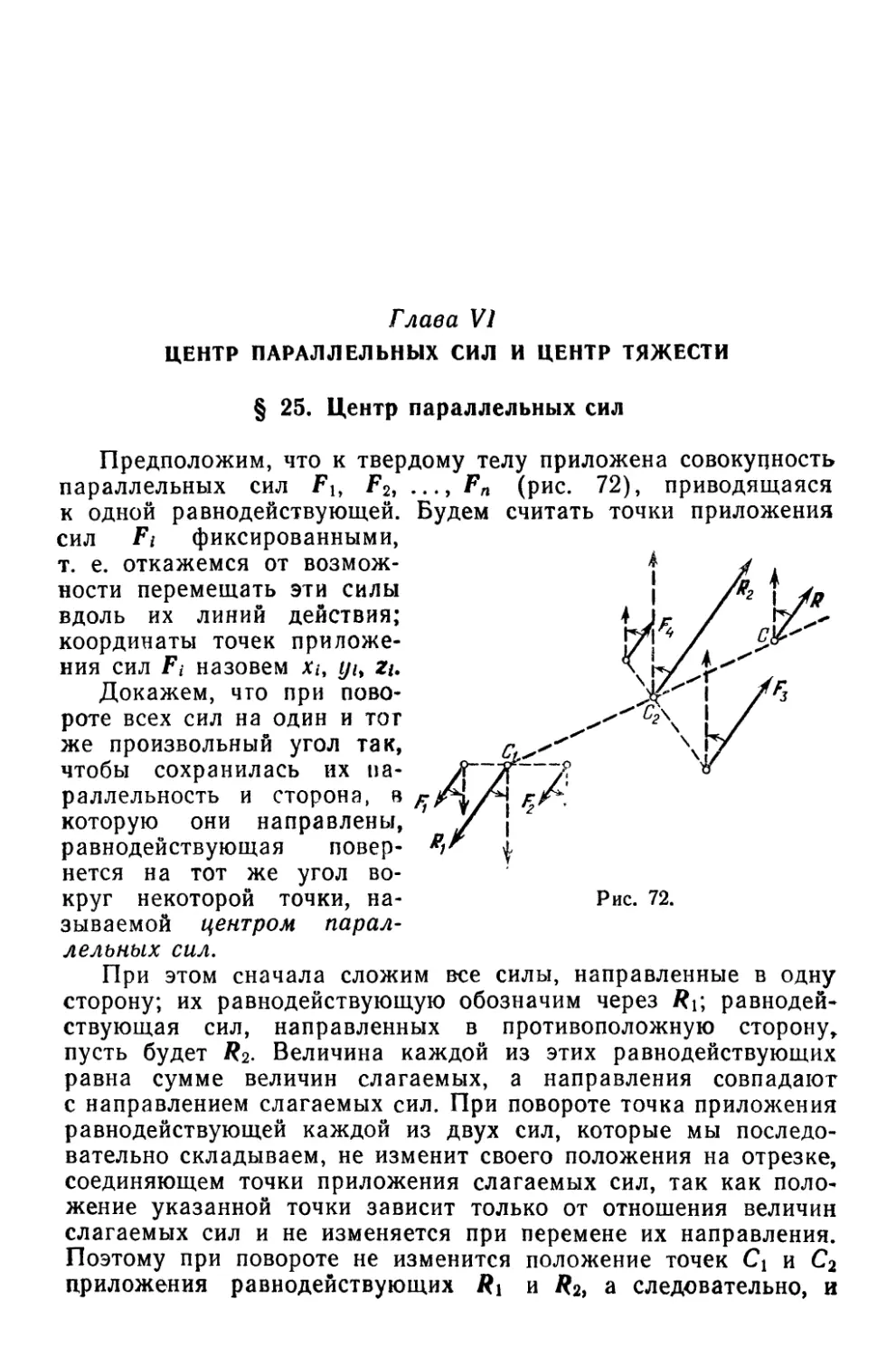
§ 25. Центр параллельных сил 89
§ 26. Центры тяжести объема, поверхности, линии 91
| 27. Методы определения координат центра тяжести 94
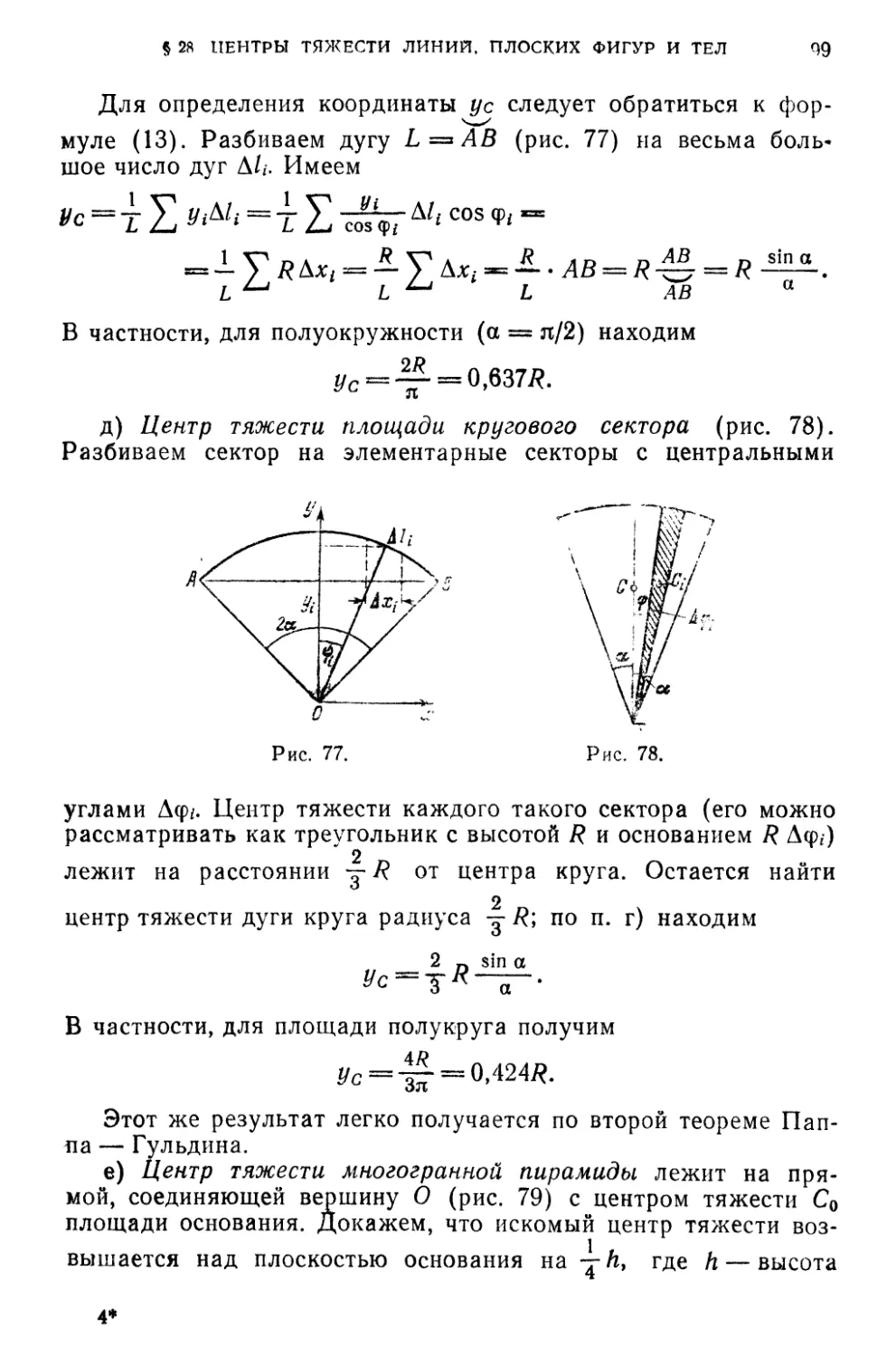
§ 28. Центры тяжести некоторых линий, Плоских фигур и тел .... 97
Глава VII. Распределение сил в сплошной среде. Напряжения 103
§ 29. Сплошная среда. Объемные и поверхностные силы. Напряжения 103
§ 30. Равенства Коши 106
§ 31. Взаимность касательных напряжений 109
Глава VIII. Элементы тензорнвй алгебры 112
§ 32. Поле физической величины. Условия физической объективности
аналитического определения вектора 112
§ 33. Линейная вектор-функция. Тензор второго ранга. Условия его фи-
физической объективности. Простейшие операции над тензорами. Пе-
Перемножение тензора и вектора. Диада и диадное представление
тензора 115
§ 34. Разложение тензора второго ранга на симметричную и антисиммет-
антисимметричную части. Сопутствующий антисимметричному тензору вектор.
Инварианты. Сферическая и девиаторная части тензора 120
§ 35. Главные оси и главные значения симметричного тензора . . . .125
Глава IX. Тензор напряжений. Необходимые условия равновесия сплош-
сплошной среды 129
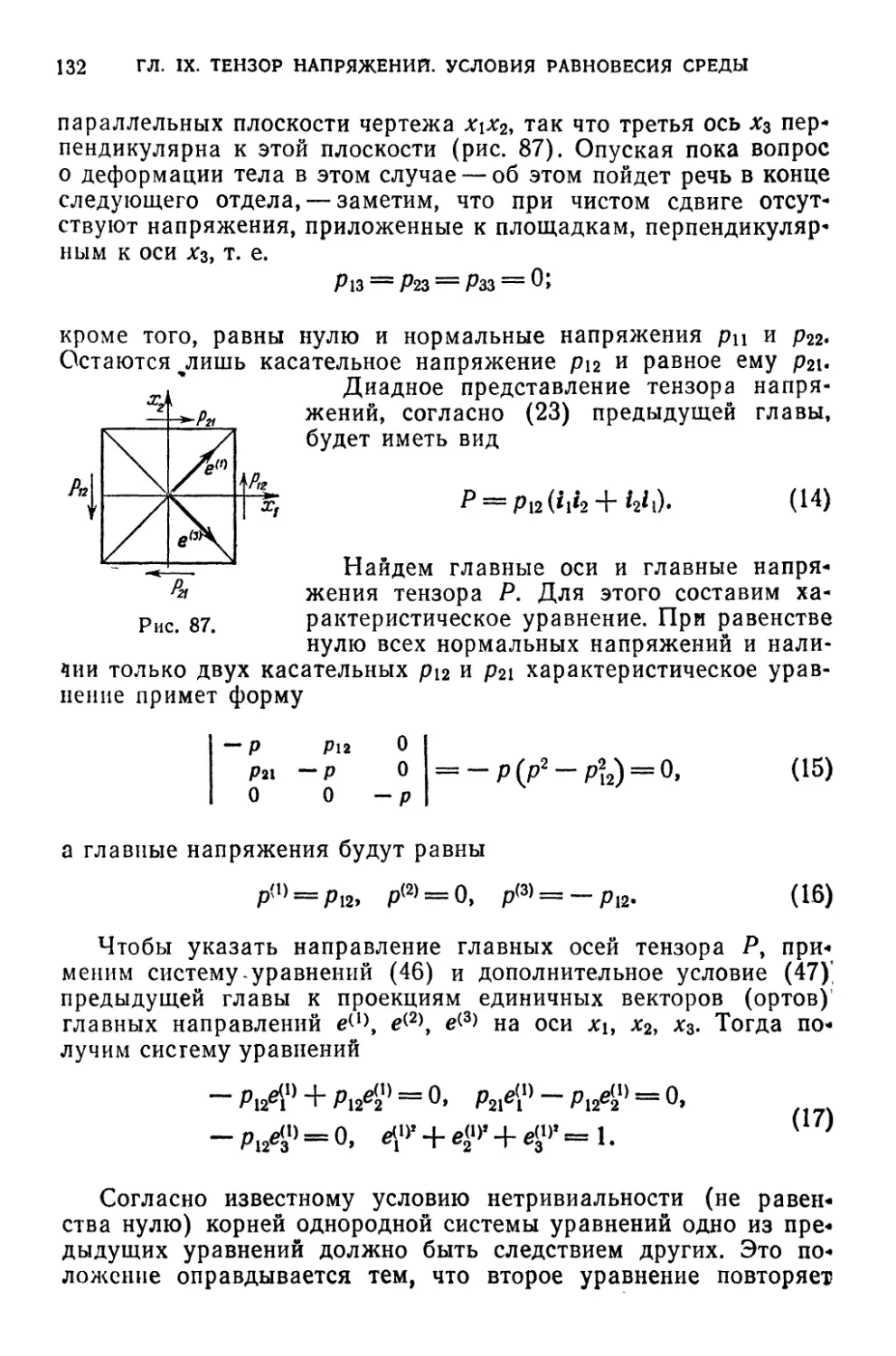
§ 36. Тензор напряжений 129
§ 3?. Формула Гаусса'-г" Остроградского * . 133
§ 38. Уравнения статики сплошной среды «в напряжениях» 137
Отдел второй
КИНЕМАТИКА
Глава X. Уравнения движения точки , 142
§ 39. Введение. Основные особенности кинематического описания движе-
движения 142
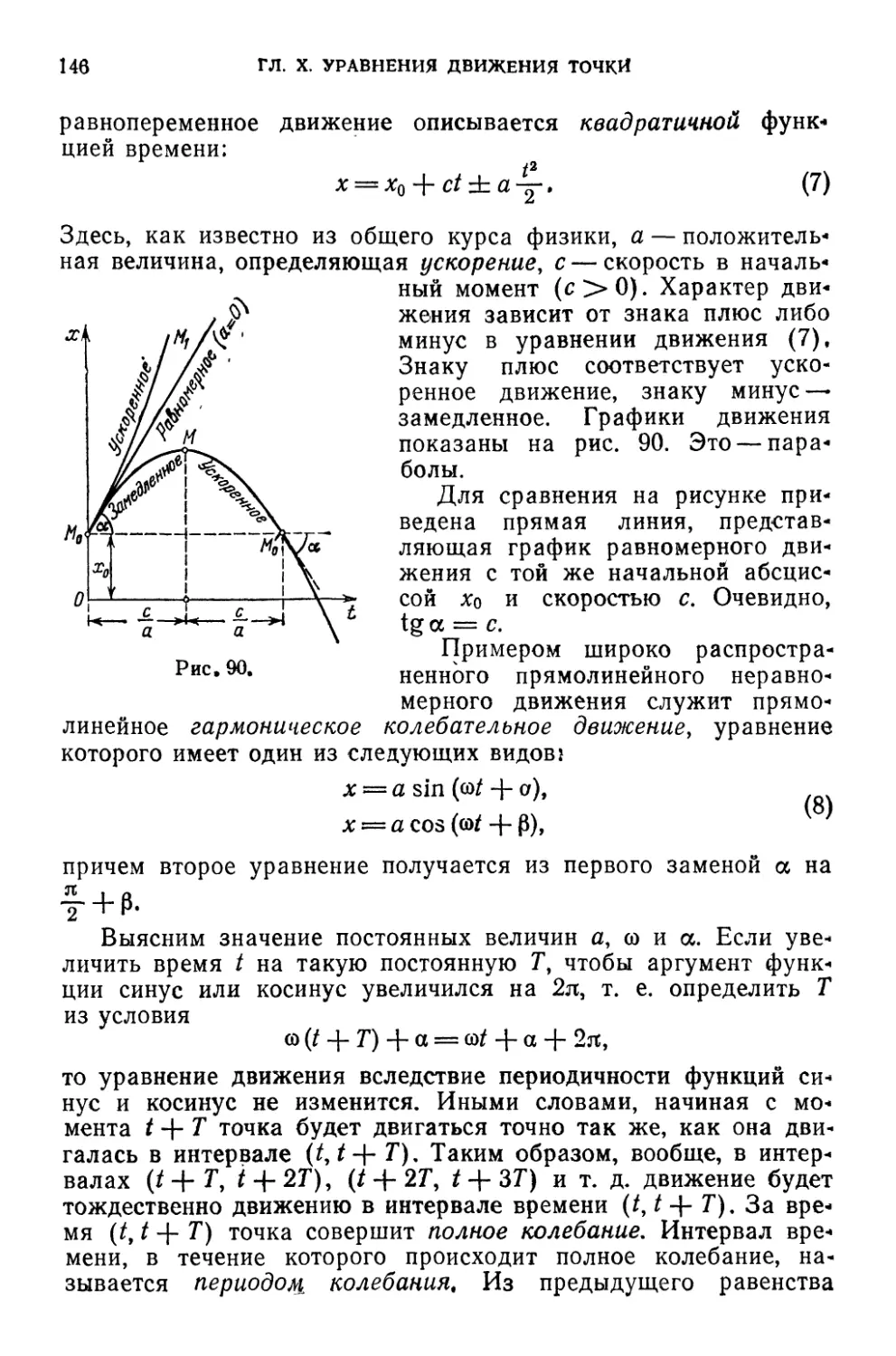
§ 40. Уравнения движения точки. Траектория. Примеры прямолинейных
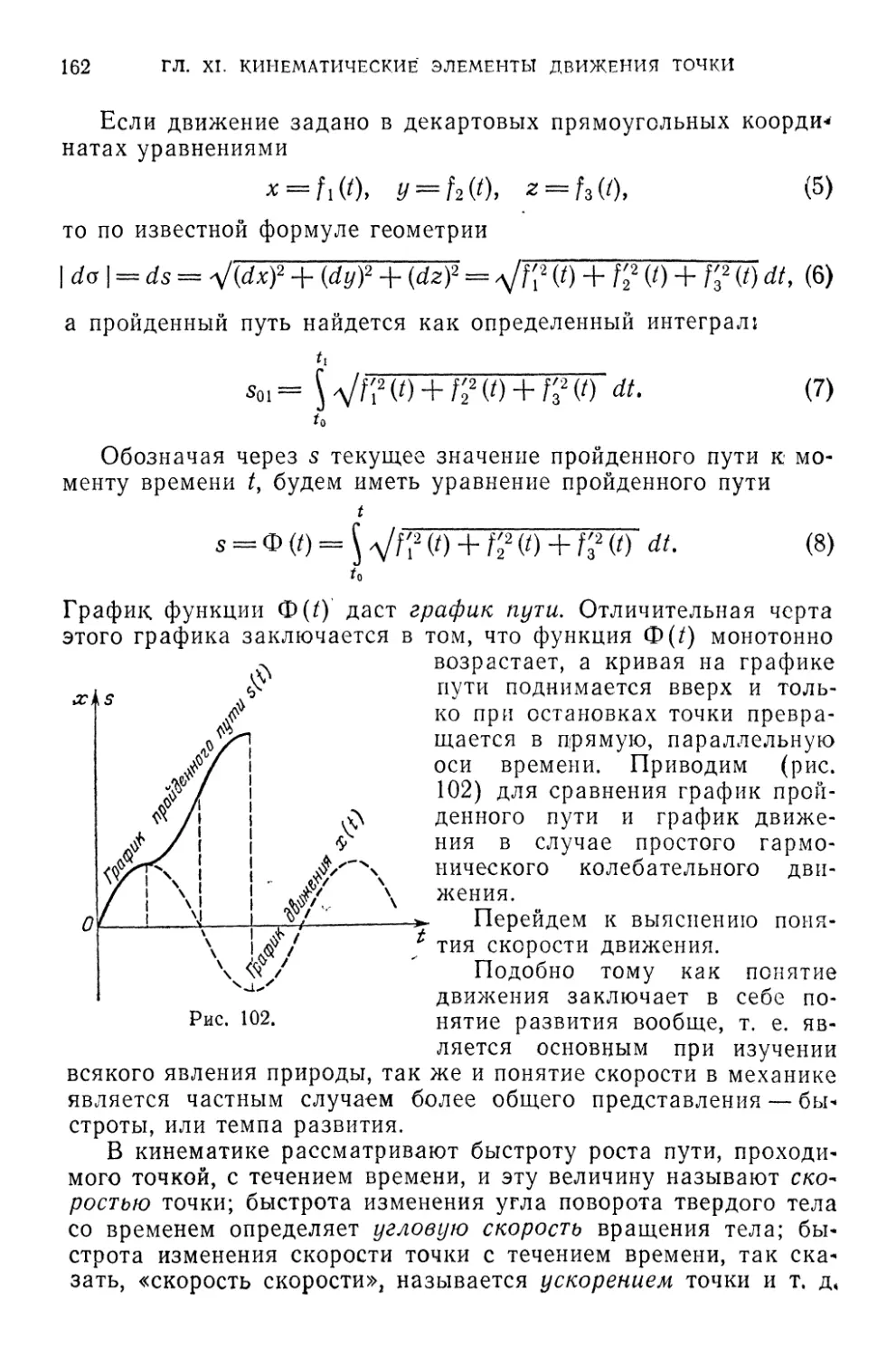
движений. Графики движений 144
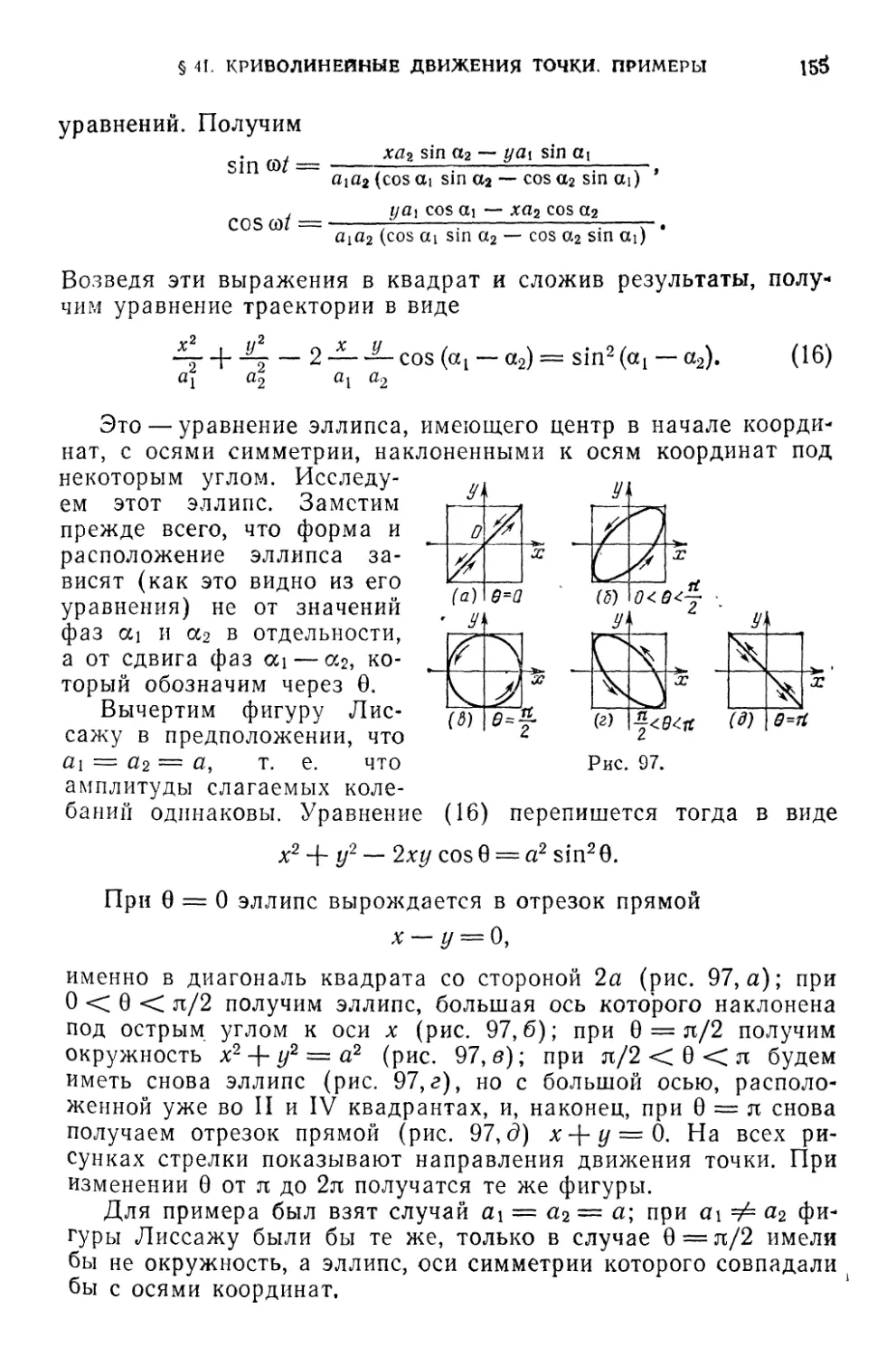
§ 41. Криволинейные движения точки. Примеры 154
Глава XI. Кинематические элементы движения точки 161
§ 42. Скорость и ускорение 161
§ 43. Скорость и ускорение в прямолинейном движении 168
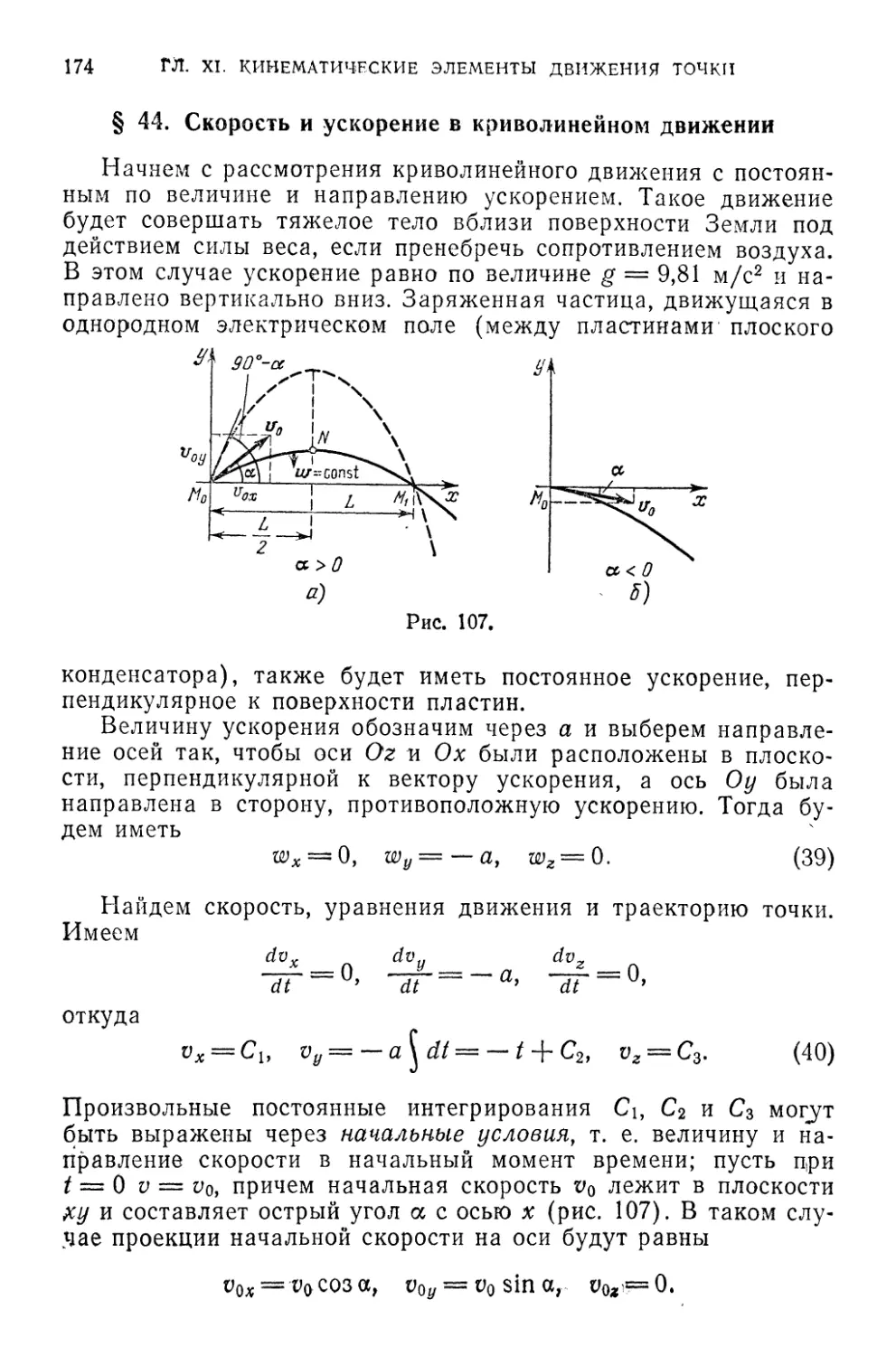
§ 44. Скорость и ускорение в криволинейном движении 174
§ 45. Натуральный триэдр (естественный трехгранник) траектории . .180
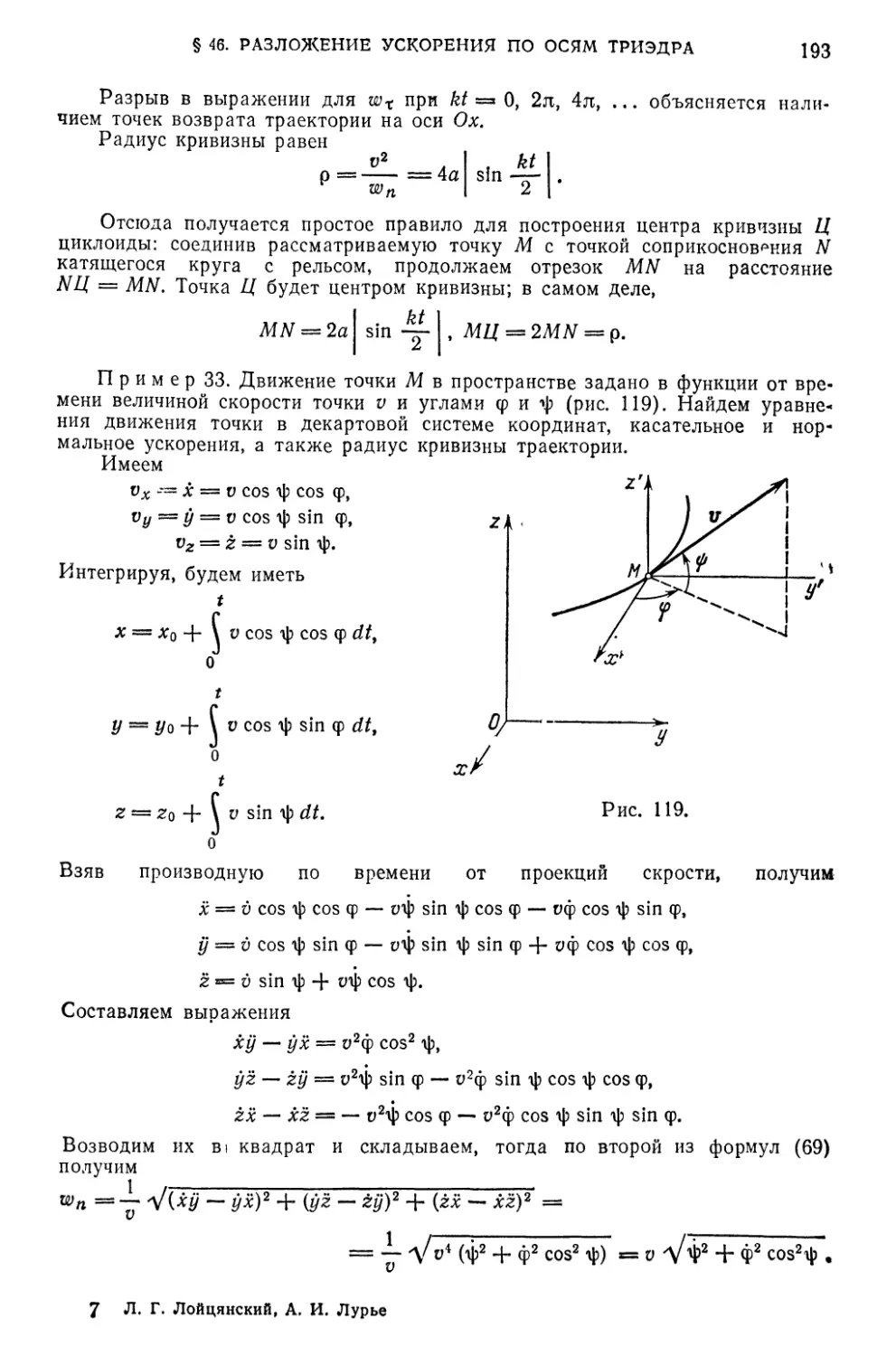
§ 46. Разложение ускорения по осям натурального триэдра траектории 187
Глава XII. Кинематика точки в криволинейных координатах 195
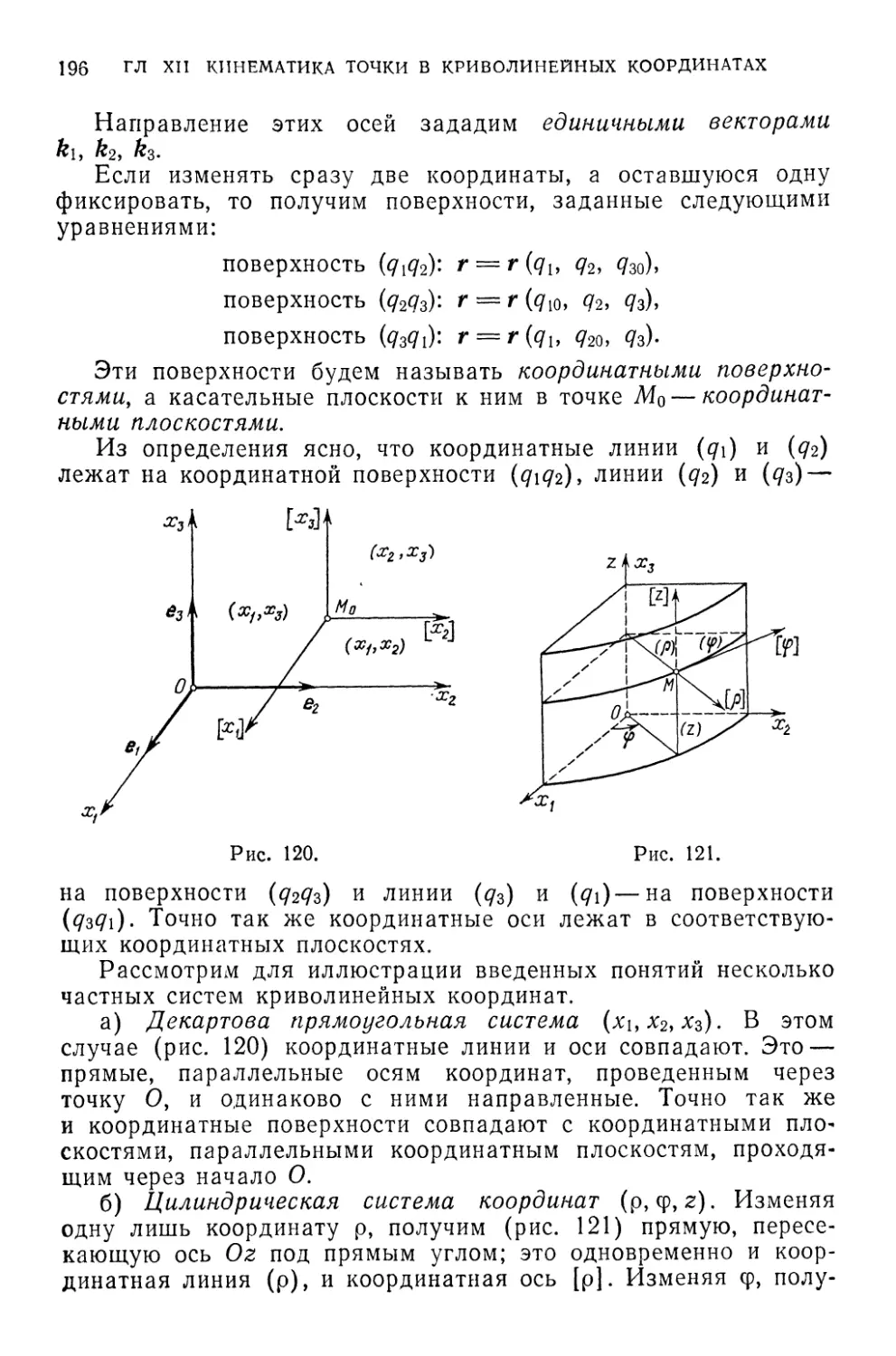
§ 47. Криволинейные координаты точки , ,.195
§ 48. Проекции скорости и ускорения на оси криволинейных координат 199
Глава XIII. Простейшие движения абсолютно твердого тела 207
§ 49. Поступательное движение твердого тела . 207
§ 50. Вращение твердого тела вокруг неподвижной оси. Угловая ско-
скорость. Угловсе ускорение 209
ОГЛАВЛЕНИЕ 5
>§51. Скорости и ускорения точек твердого тела, вращающегося вокруг
неподвижной оси 216
§ 52. Векторные формулы скорости и ускорения точек твердого тела,
вращающегося вокруг неподвижной оси 222
Глава XIV. Плоское движение твердого тела 227
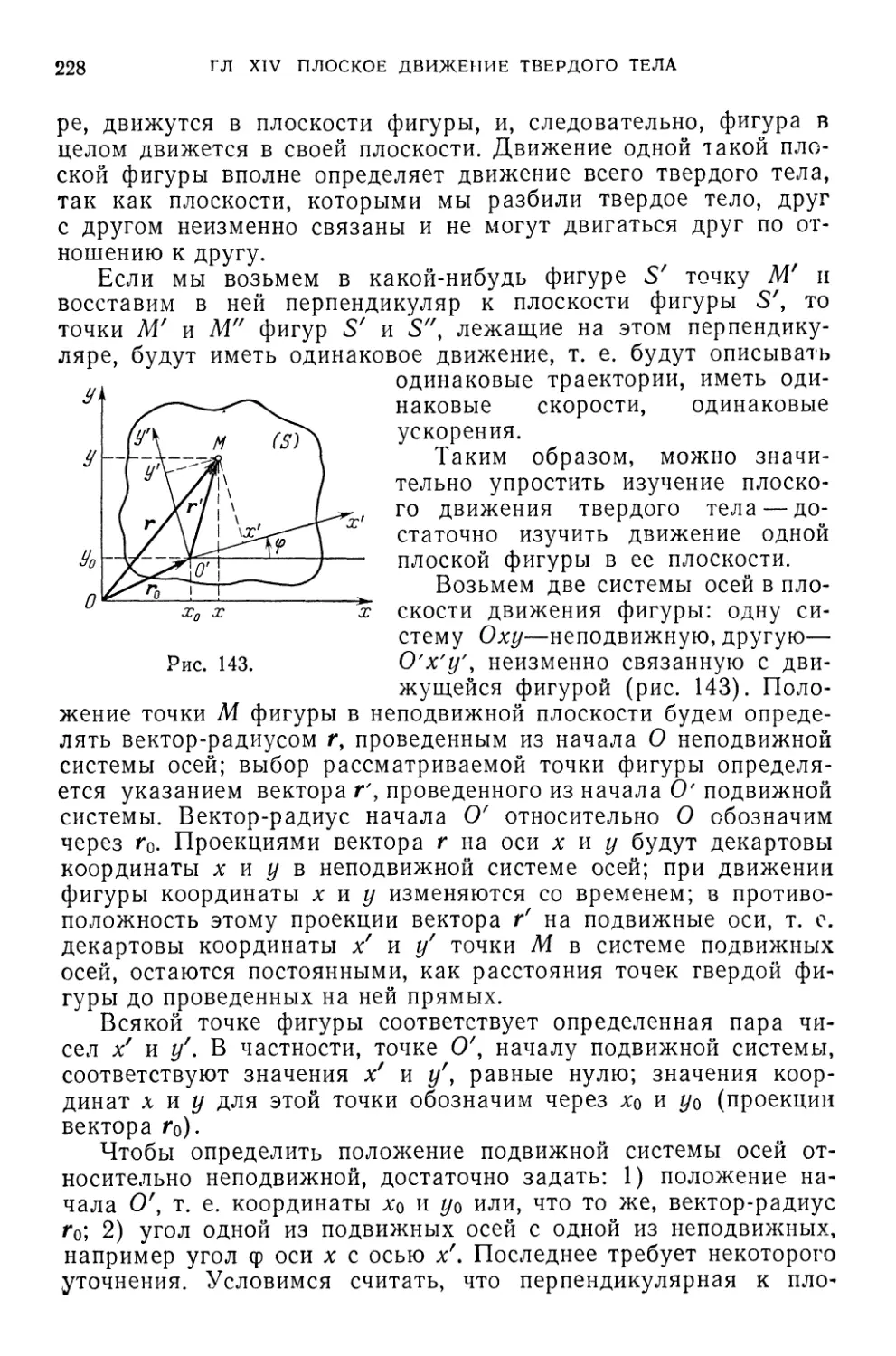
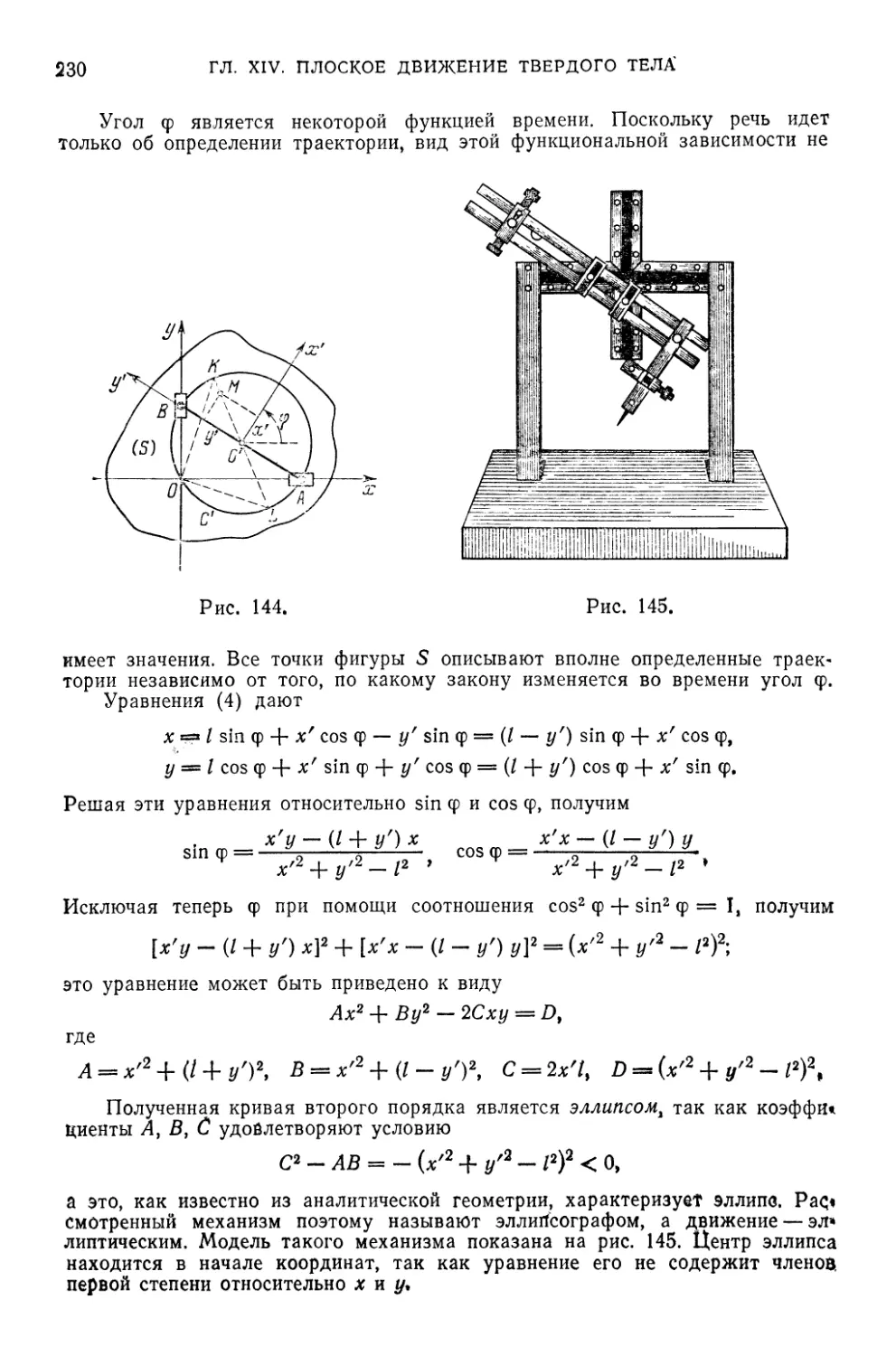
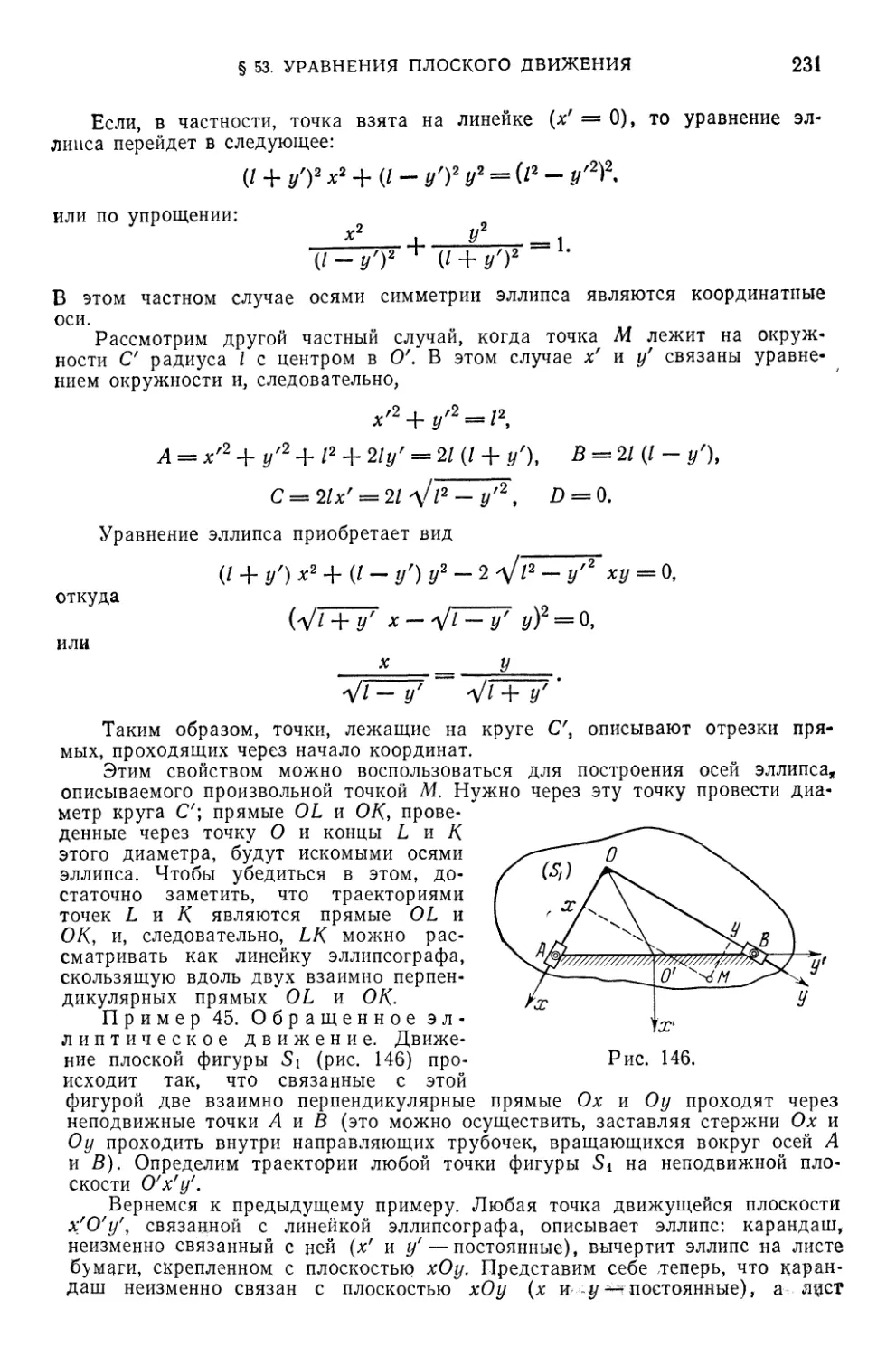
§ 53. Уравнения плоского движения 227
§ 54. Перемещение плоской фигуры 233
§ 55. Поле скоростей точек плоской фигуры 238
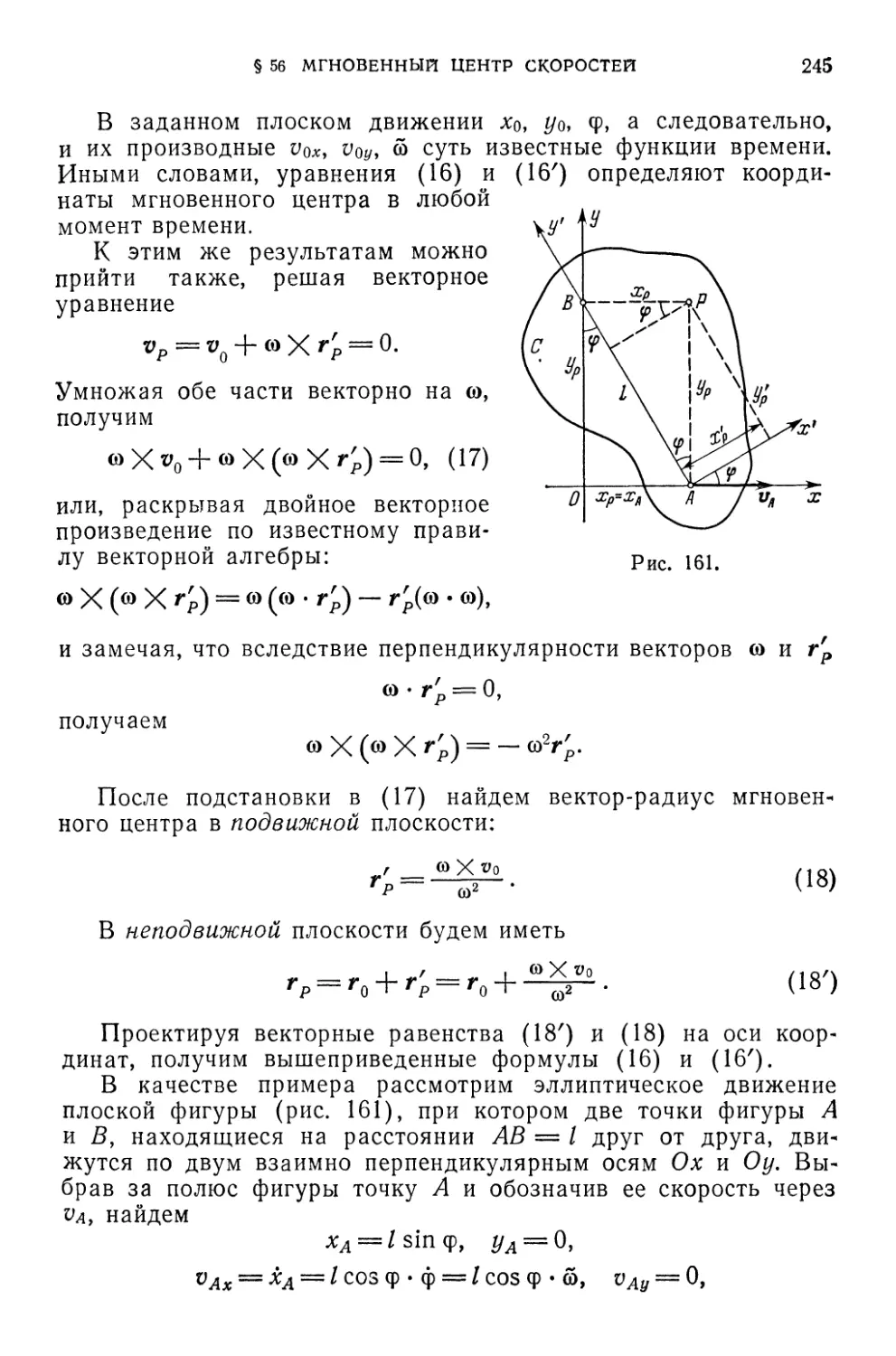
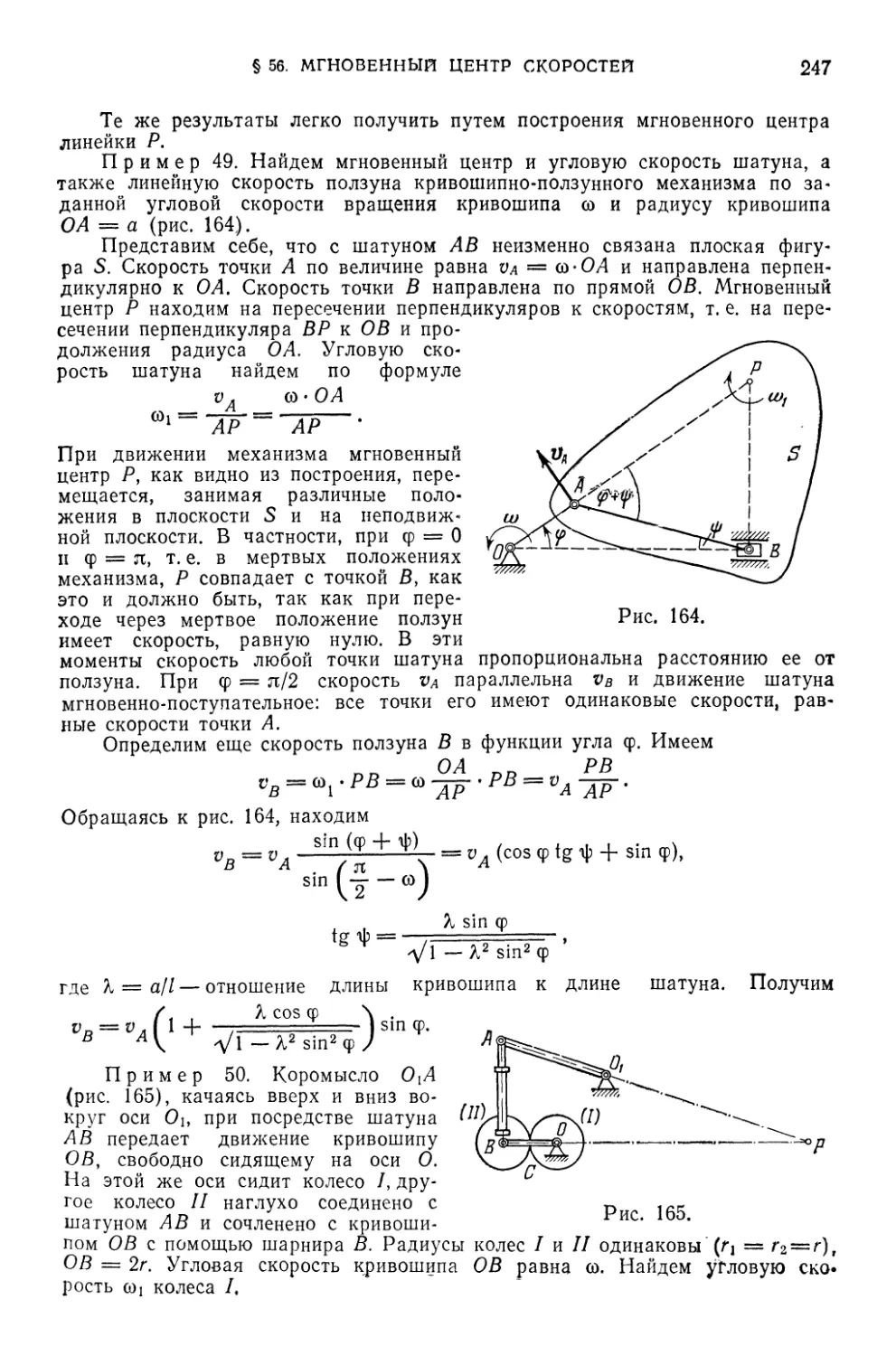
§ 56. Мгновенный центр скоростей 240
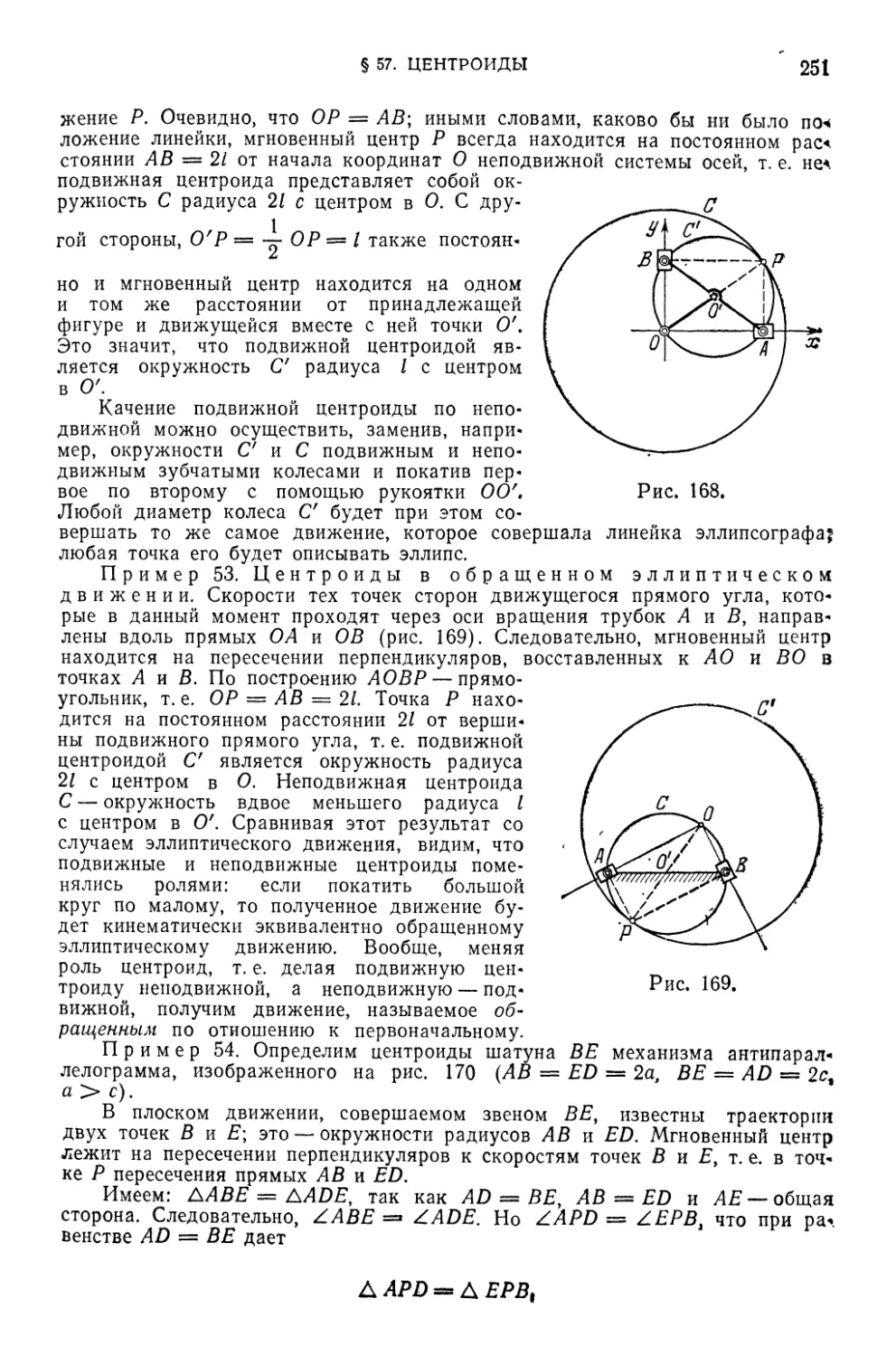
§ 57. Центроиды . 248
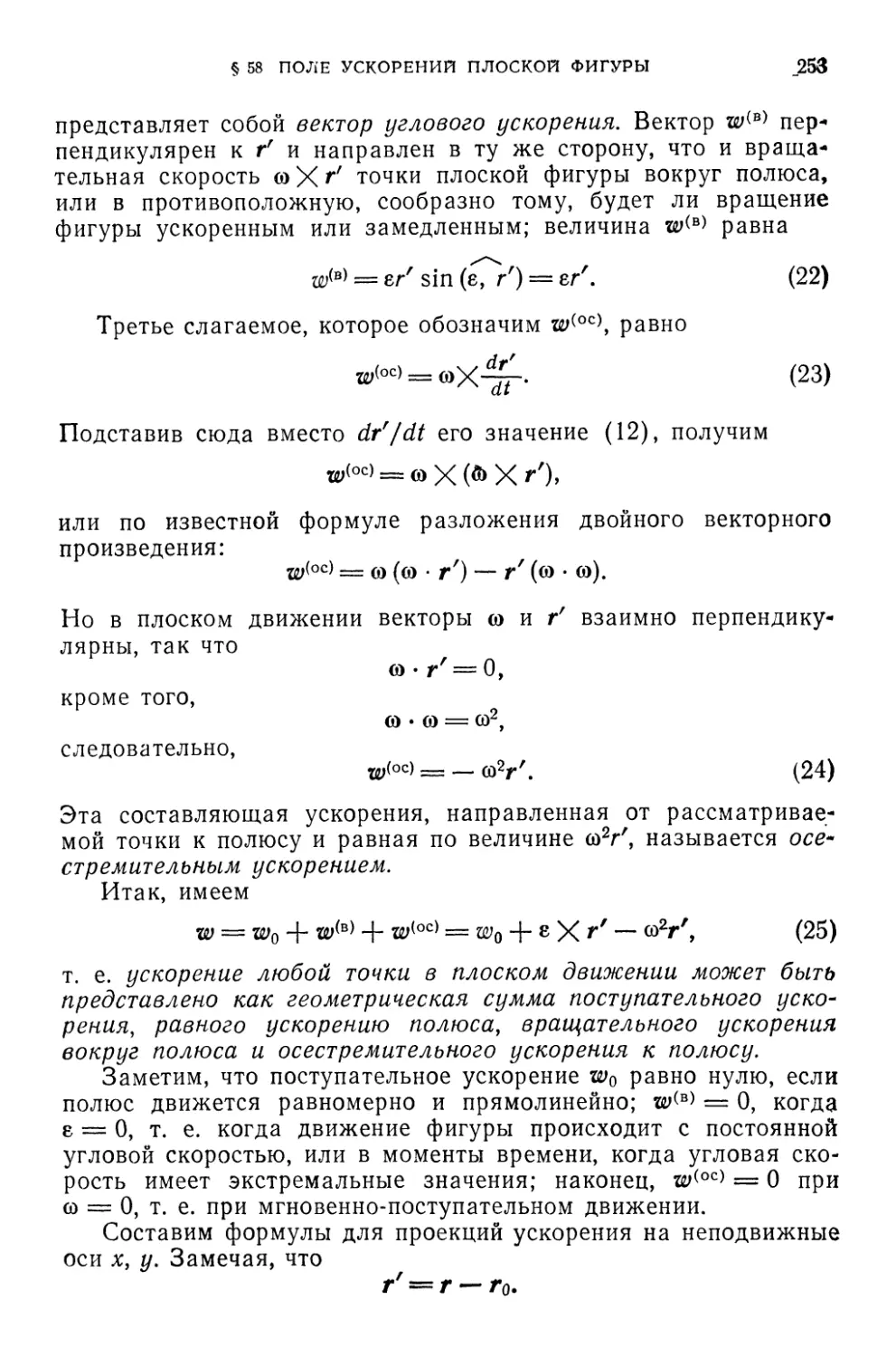
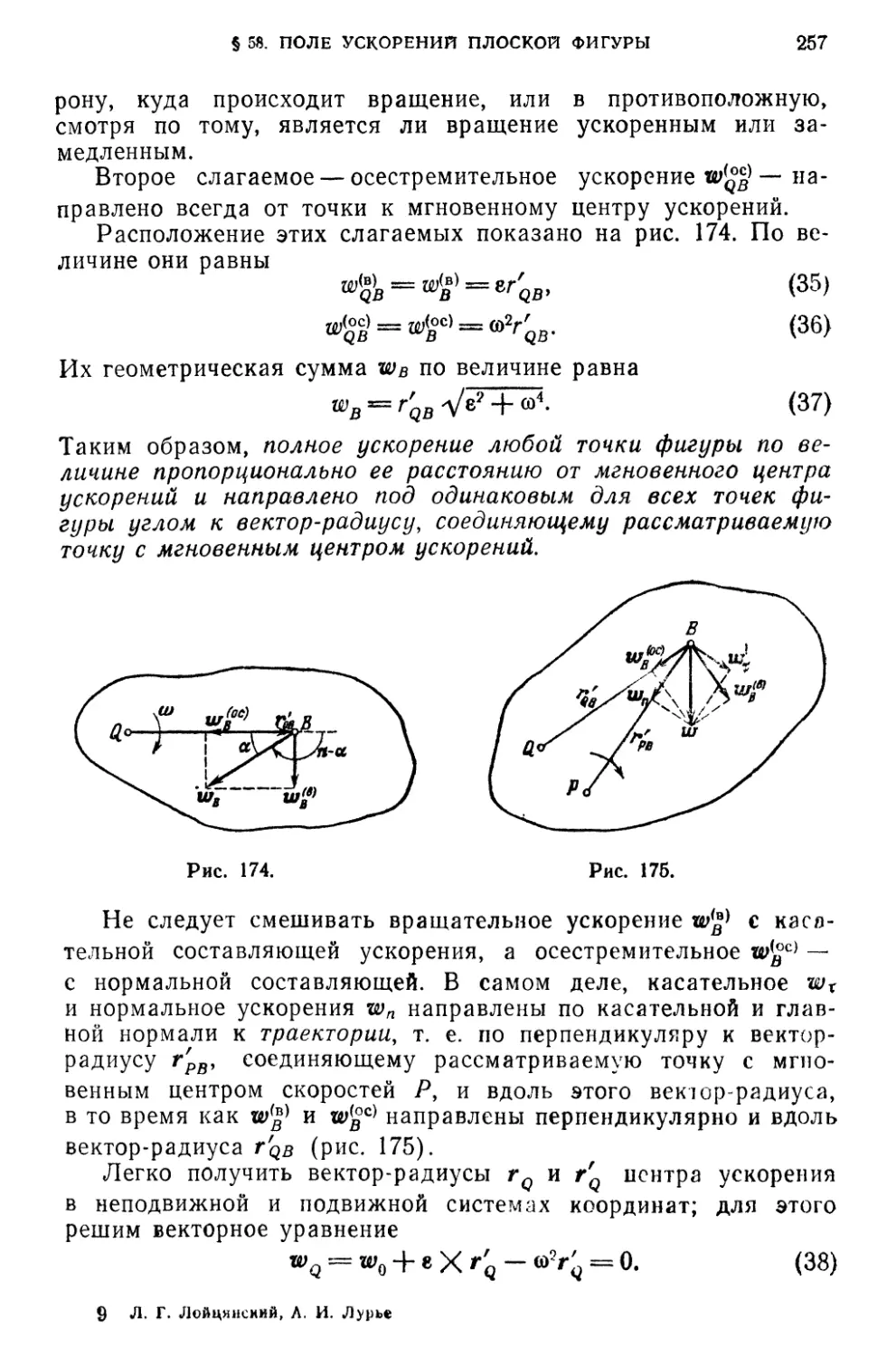
§ 58. Поле ускорений плоской фигуры. Мгновенный центр ускорений . . 252
Глава XV. Вращение твердого тела вокруг неподвижной точки .... 262
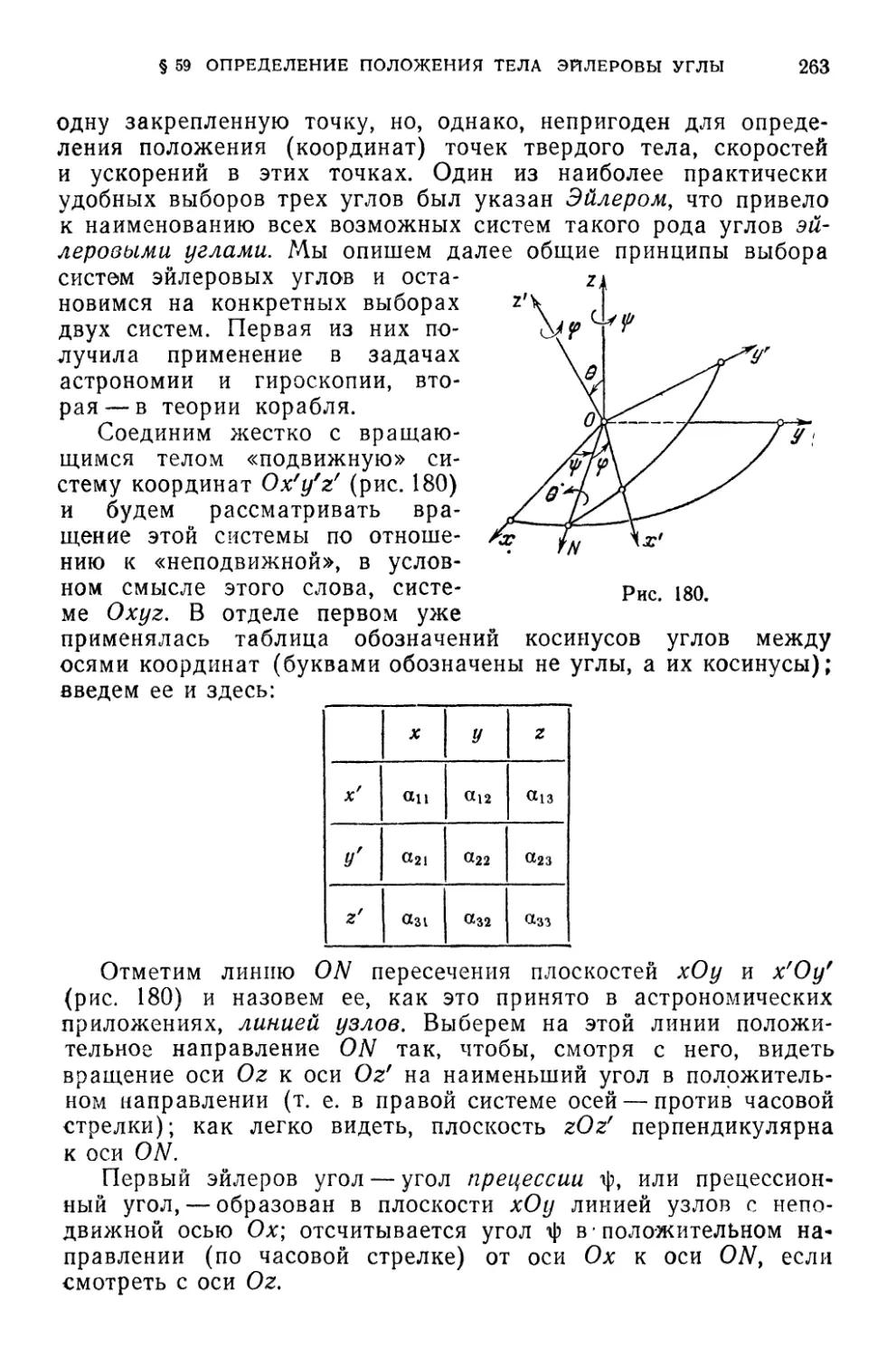
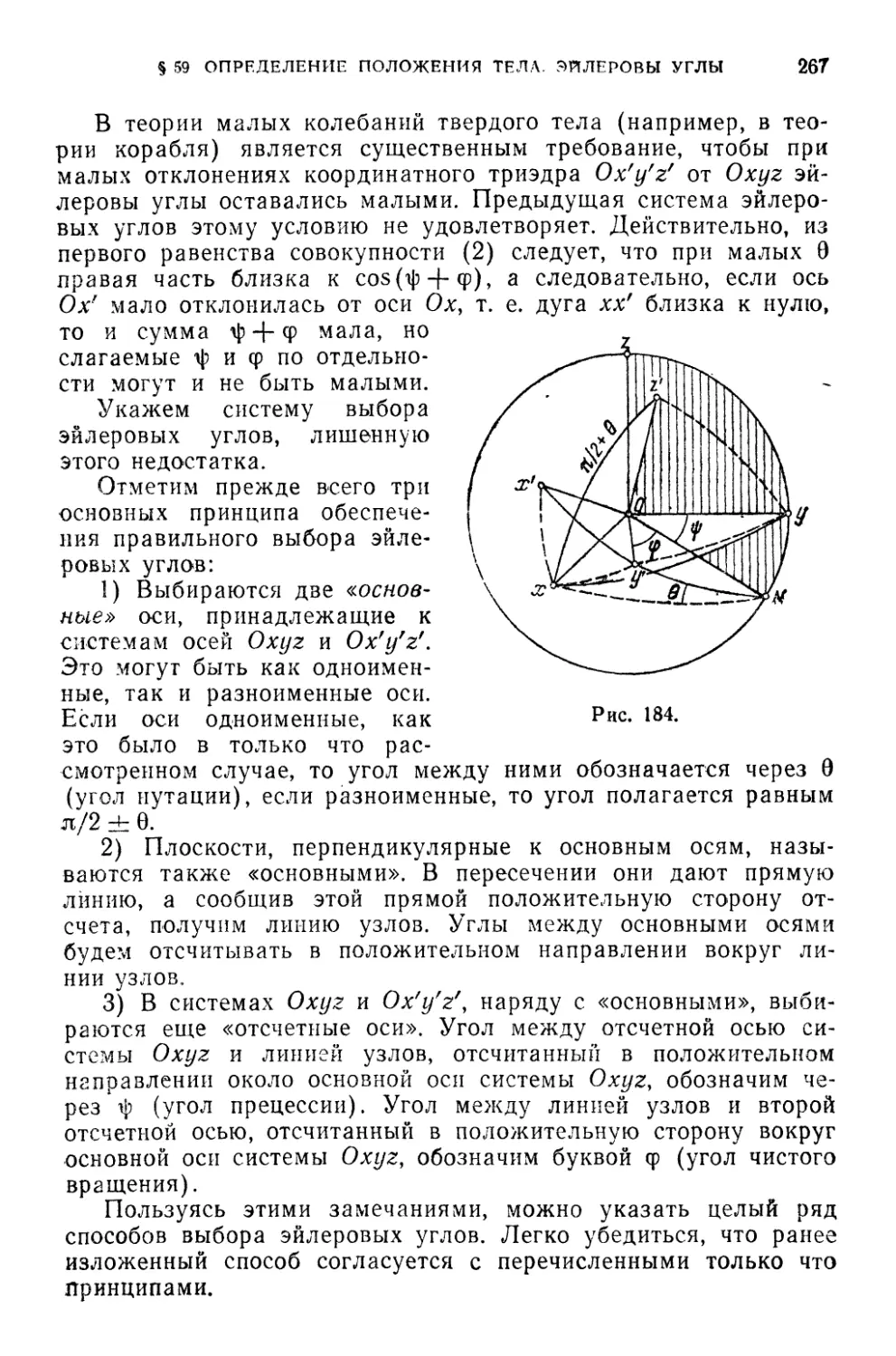
§ 59. Определение положения твердого тела, имеющего неподвижную
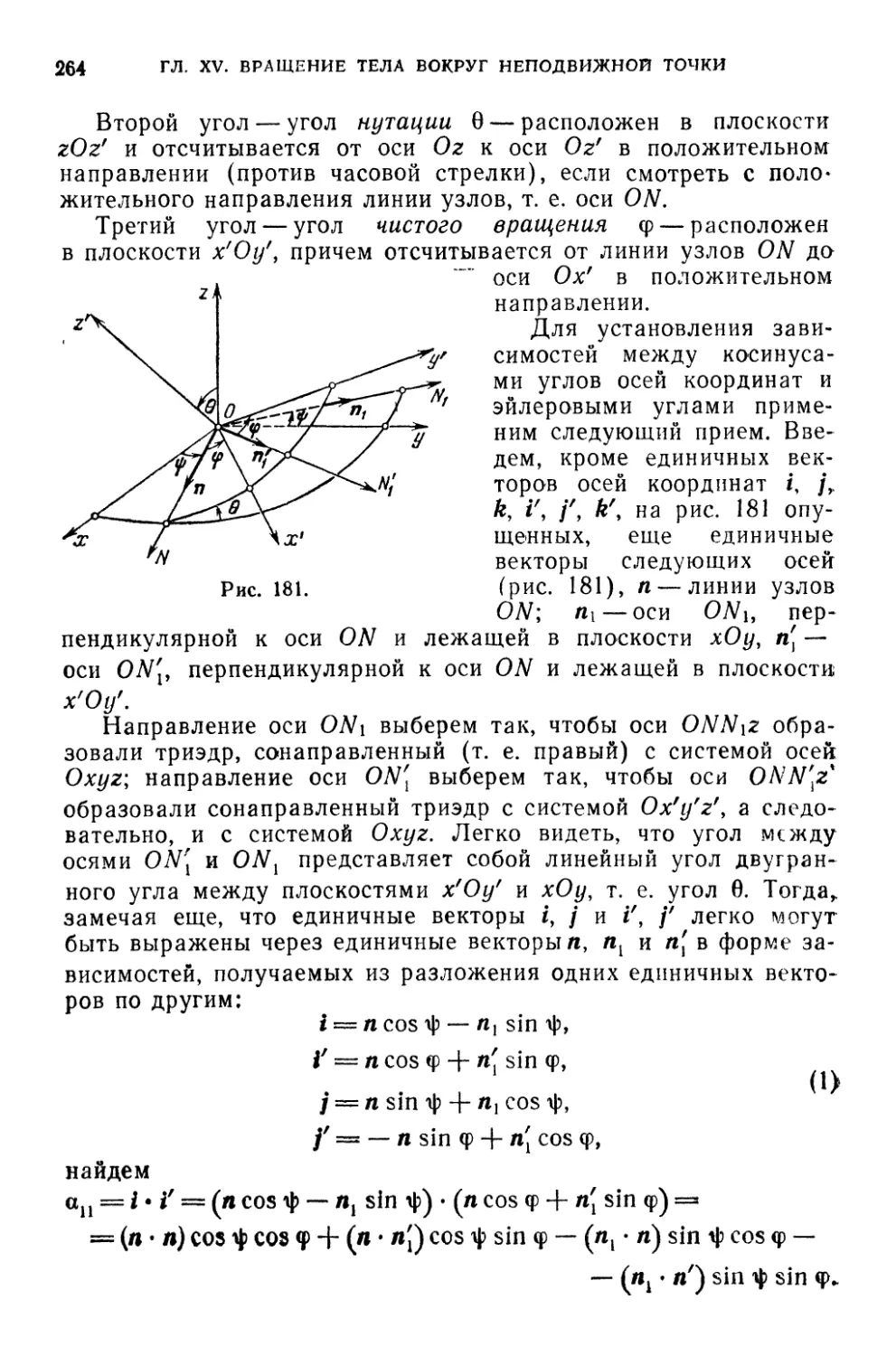
точку. Эйлеровы углы 262
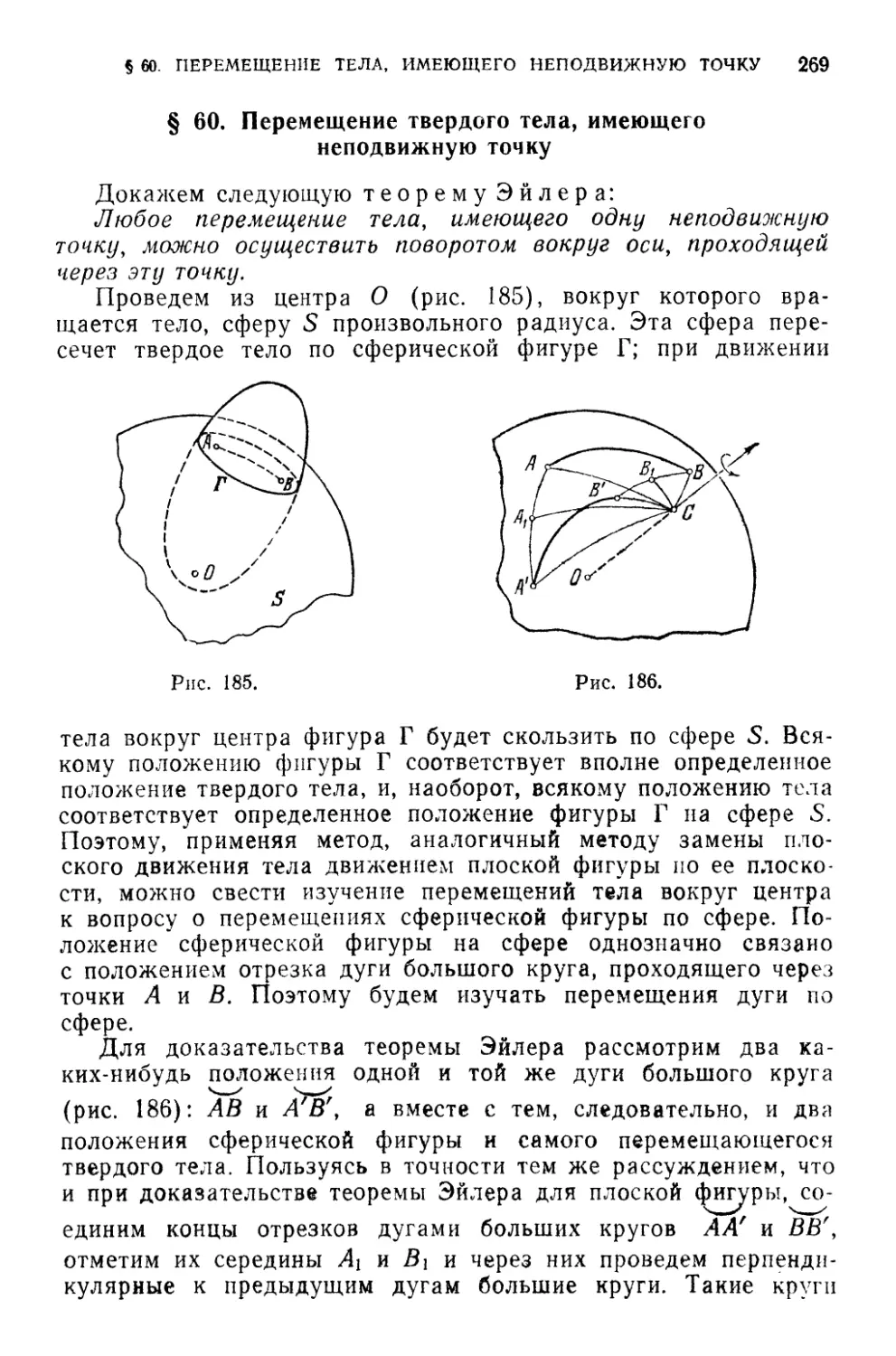
§ 60. Перемещение твердого тела, имеющего неподвижную точку . . . 269
§ 61. Поле скоростей в твердом теле, вращающемся вокруг неподвижной
точки 271
§ 62. Мгновенная ось вращения твердого тела; аксоиды 274
§ 63. Поле ускорений в твердом теле, вращающемся вокруг неподвиж-
неподвижной точки 276
Глава XVI. Общий случай движения абсолютна твердого тела .... 281
§ 64. Определение положения твердого тела в пространстве. Основная
теорема о перемещении абсолютно твердого тела 281
§ 65. Поля скоростей и ускорений в общем случае движения твердого
тела 283
§ 66. Винтовая ось. Винтовые аксоиды 289
Глава XVII. Относительное движение 297
§ 67. Абсолютное, относительное и переносное движения 297
§ 68. Сложение скоростей 302
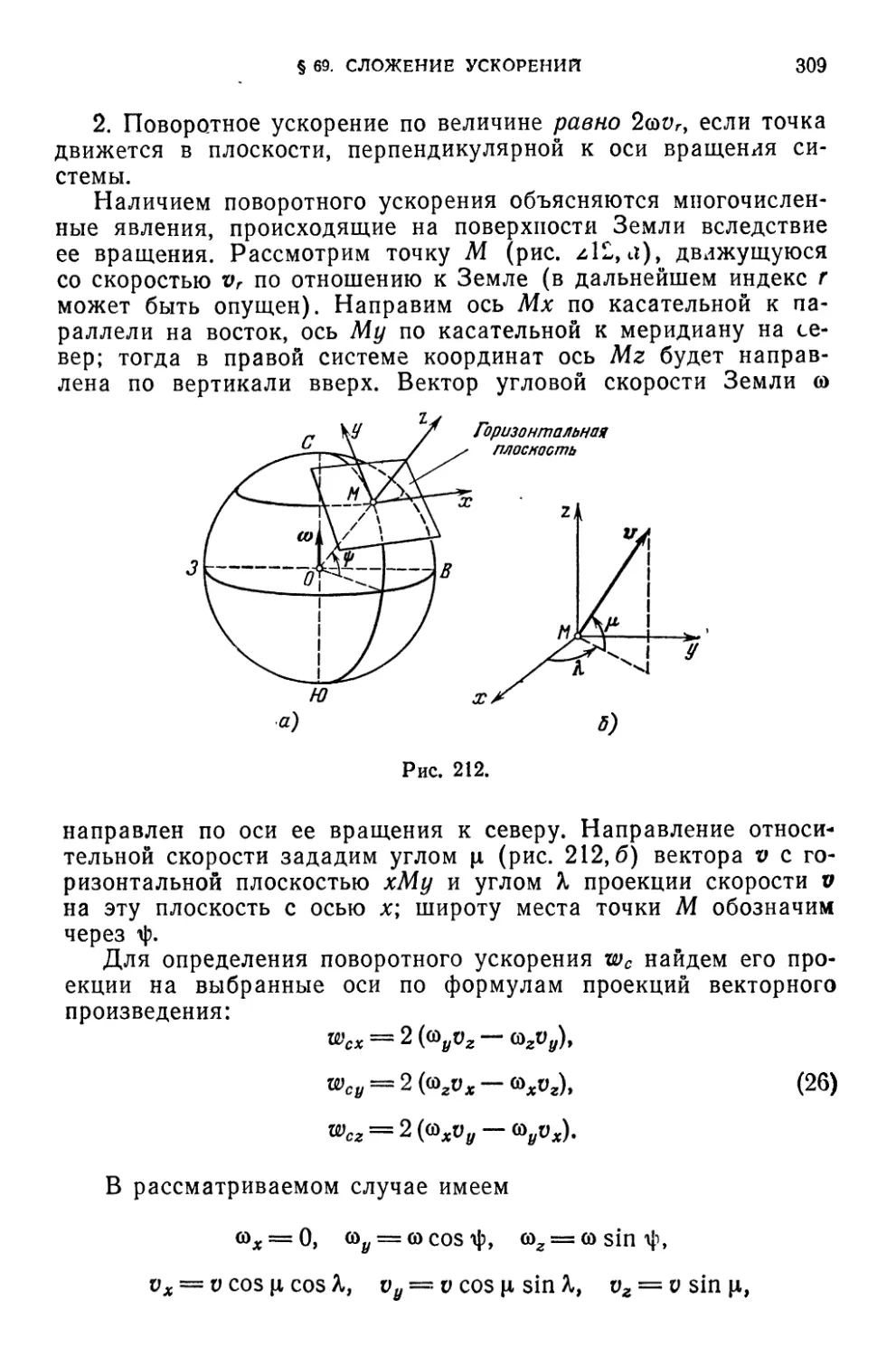
§ 69. Сложение ускорений 306
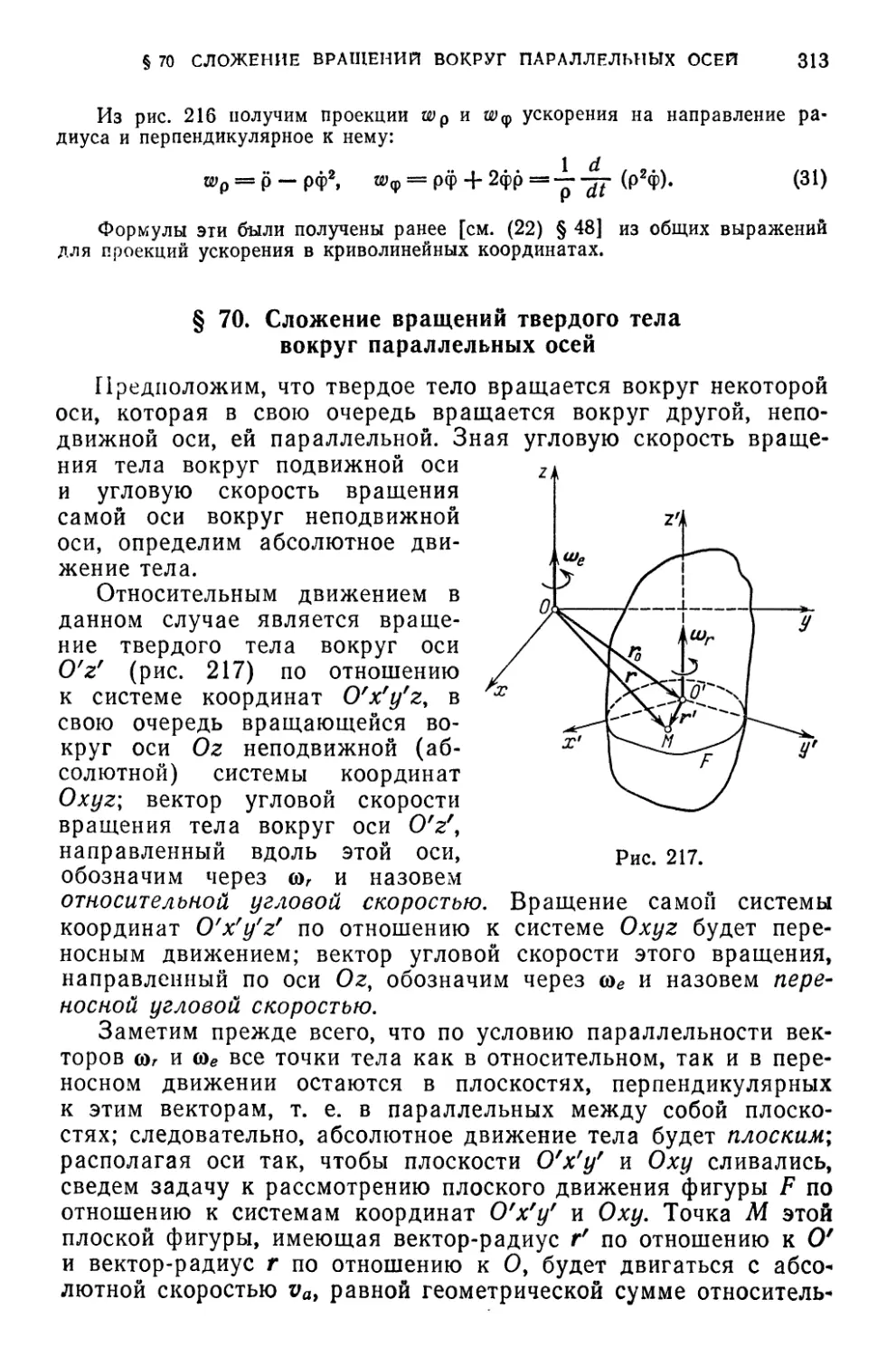
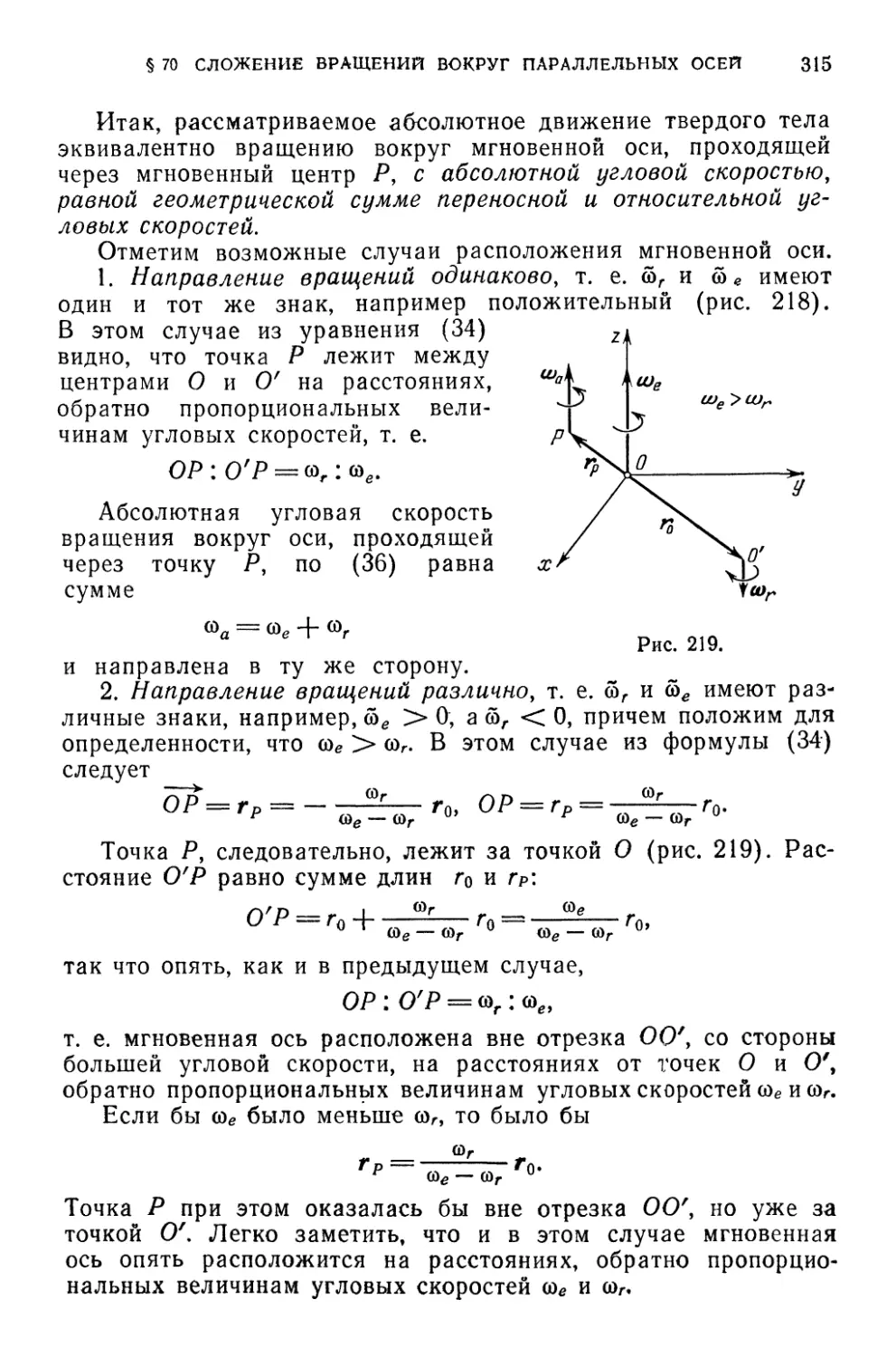
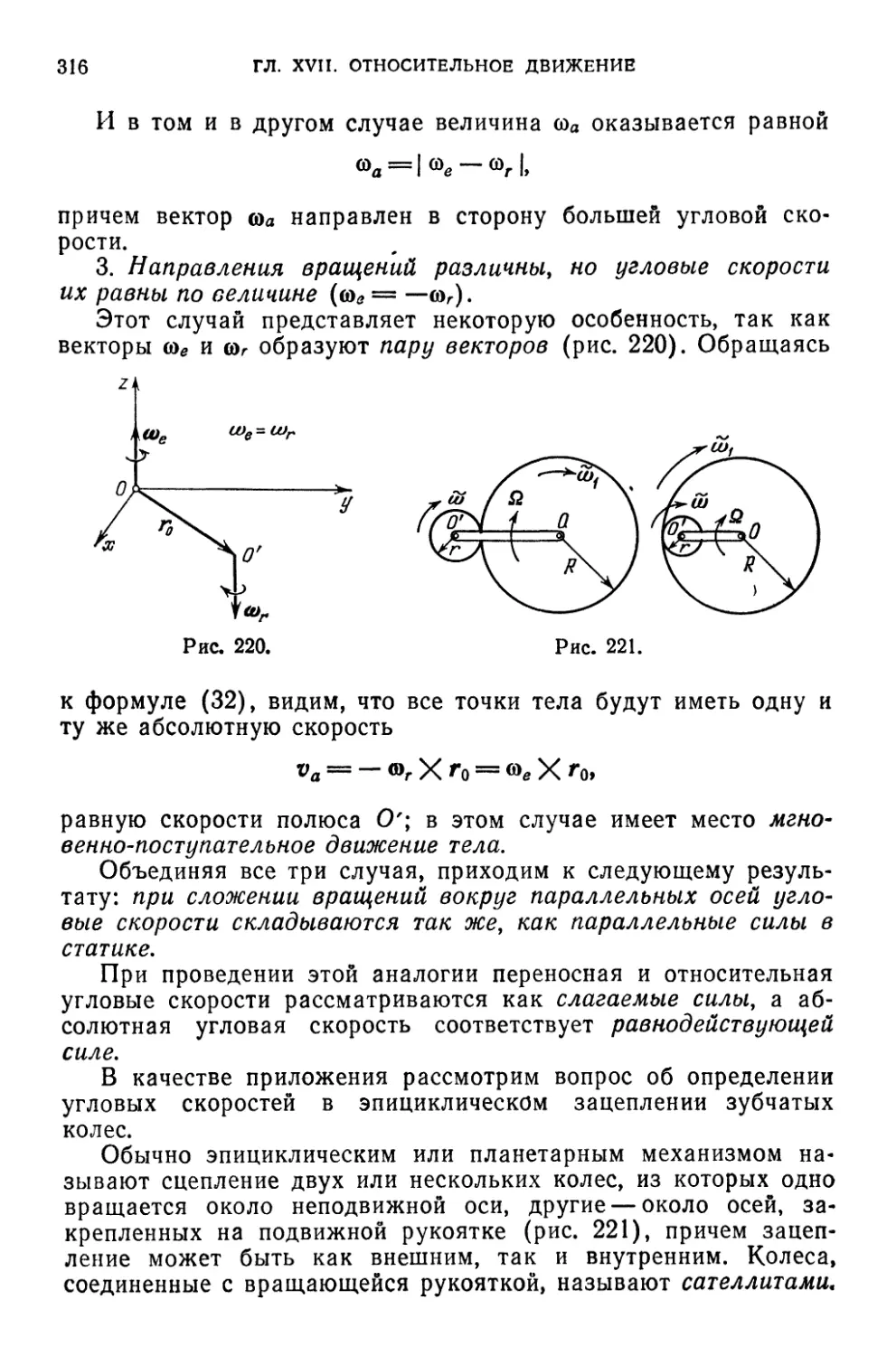
§ 70. Сложение вращений твердого тела вокруг параллельных осей . . 313
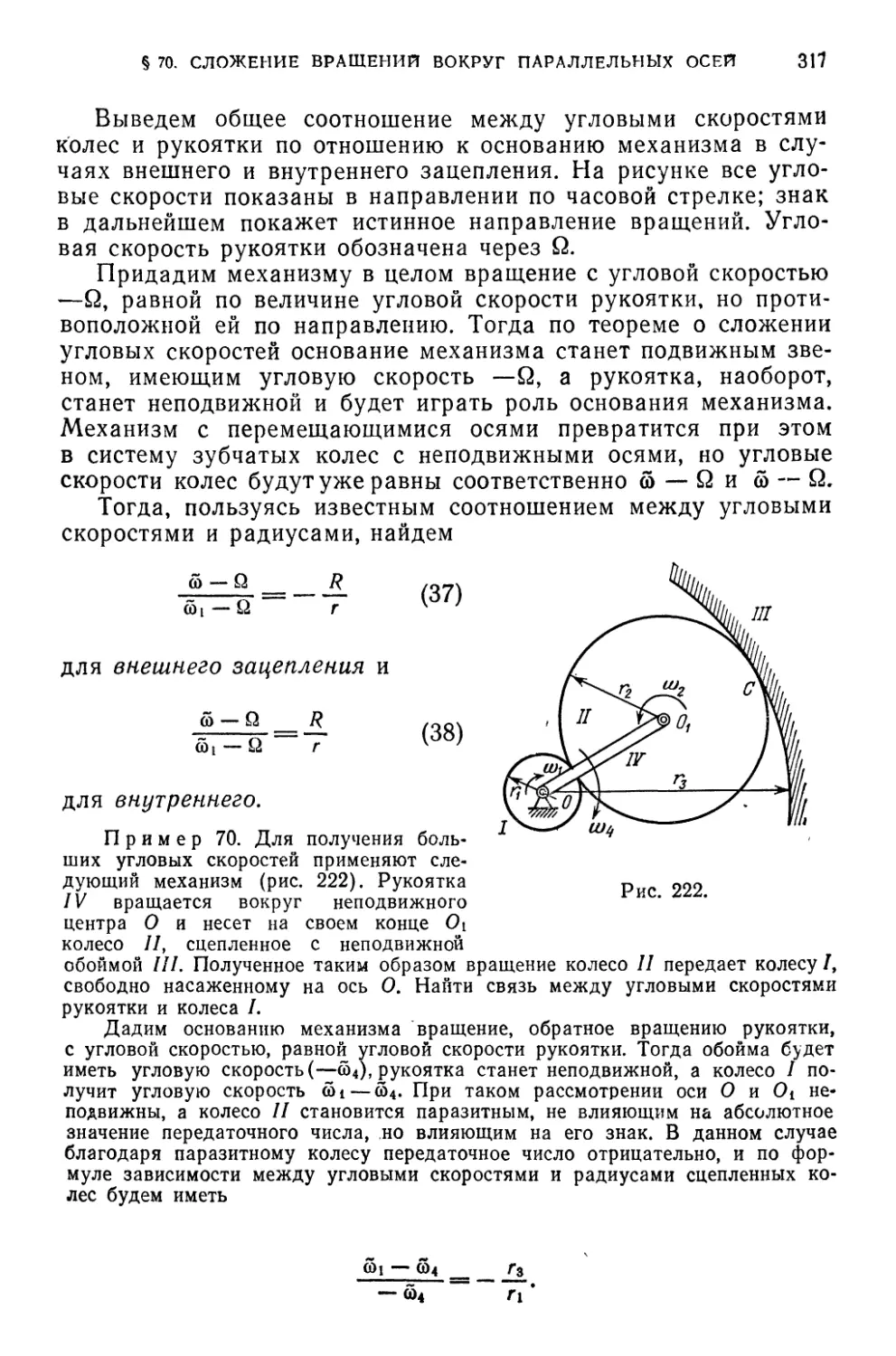
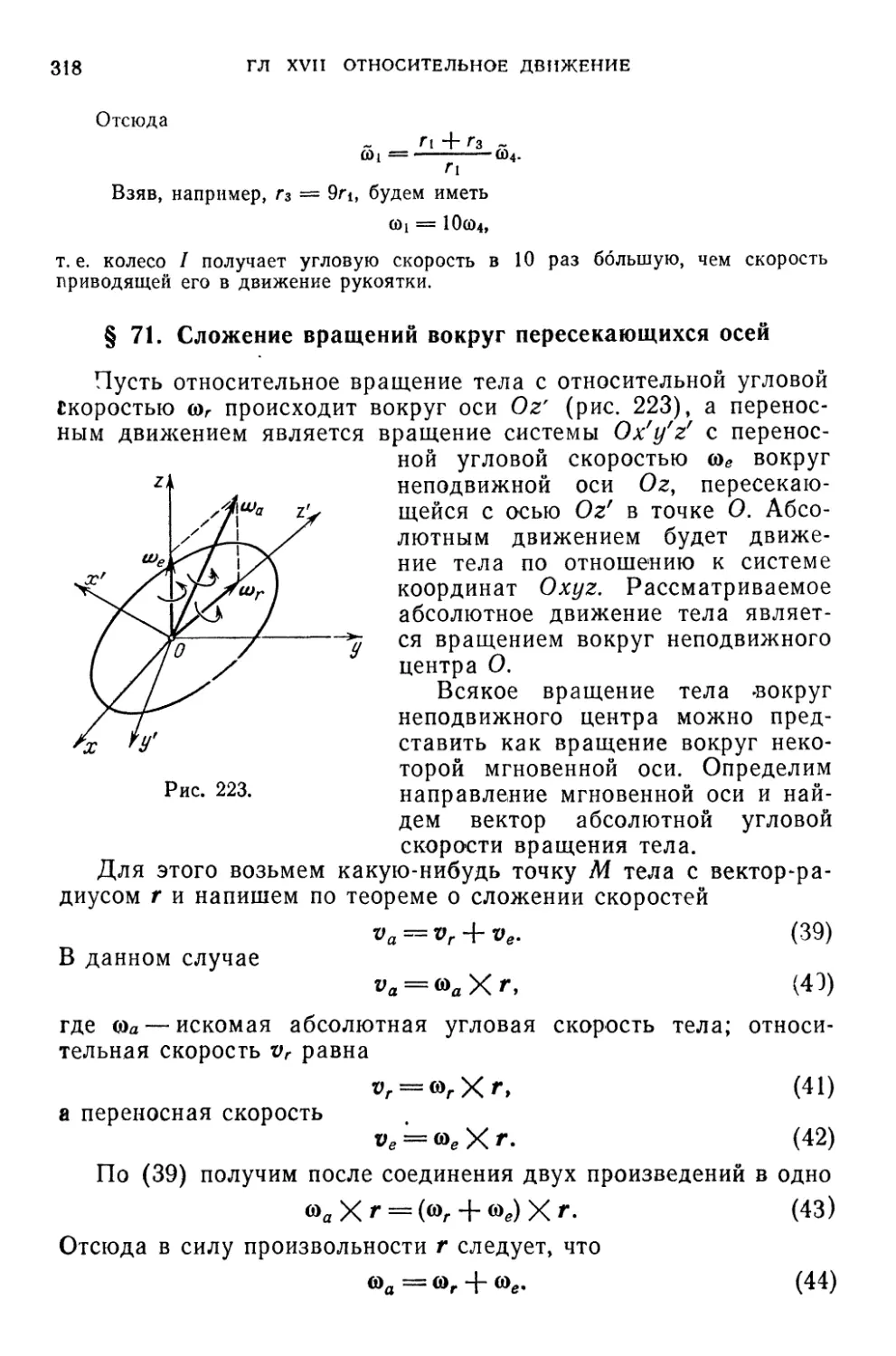
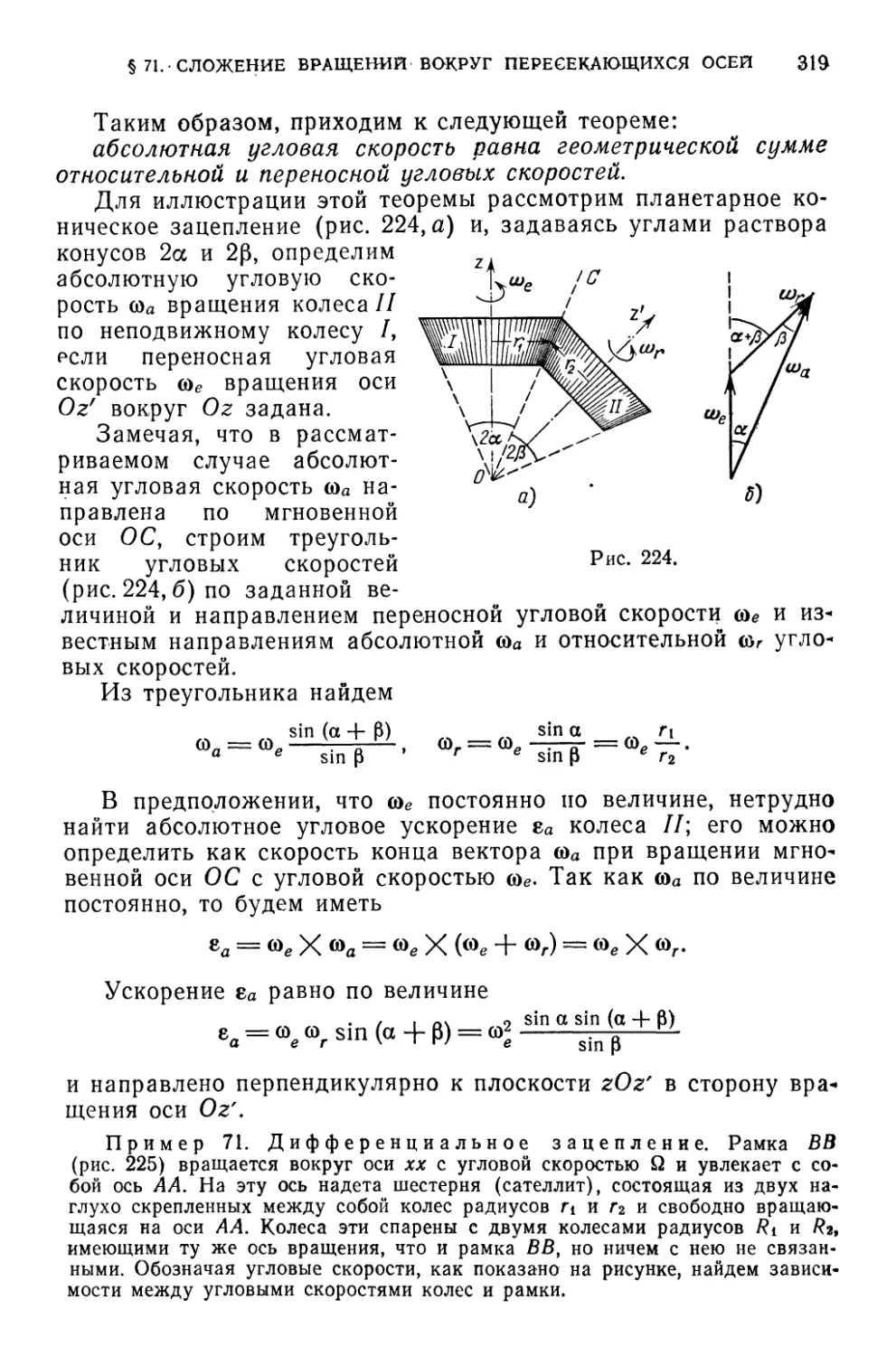
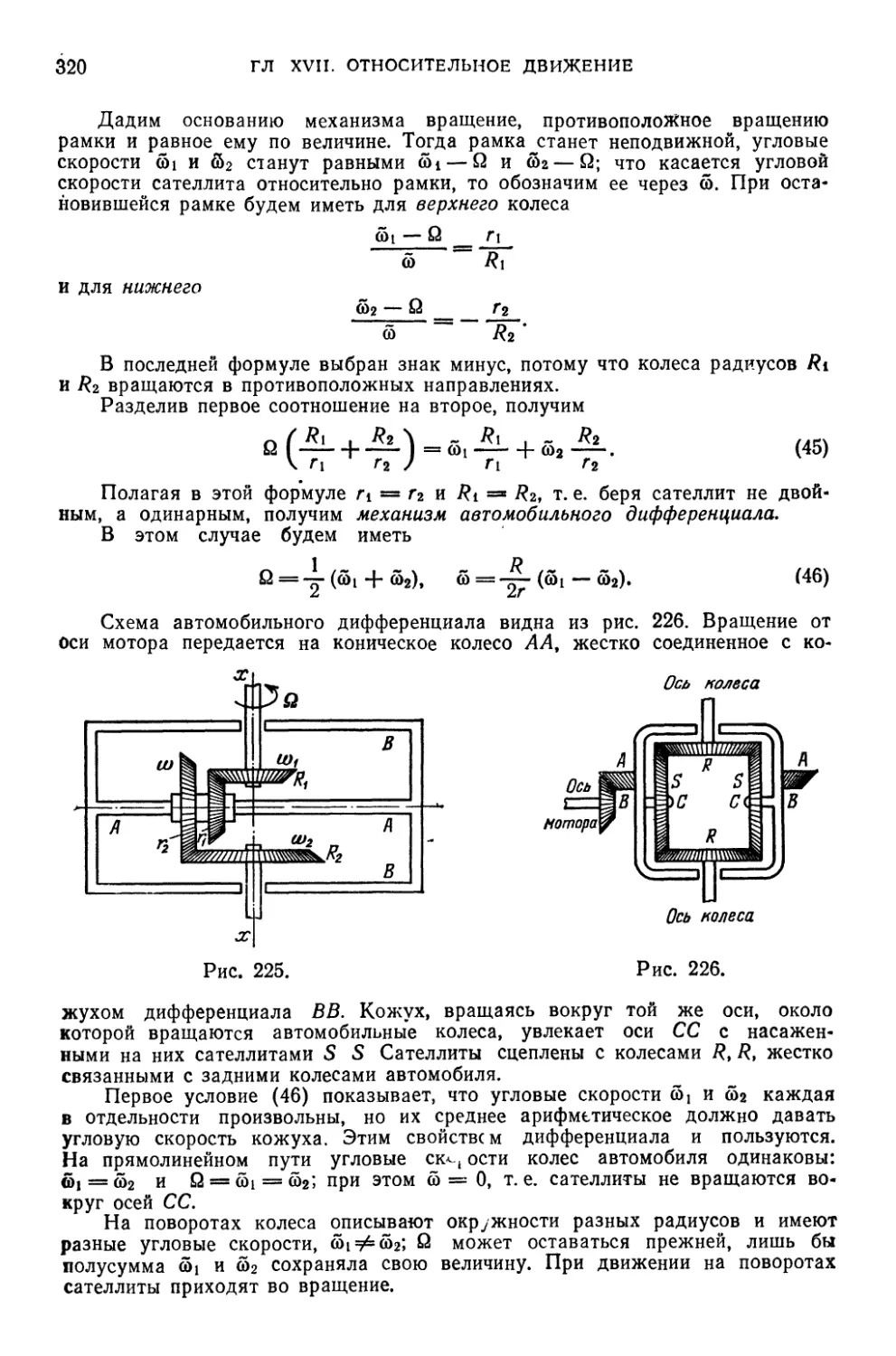
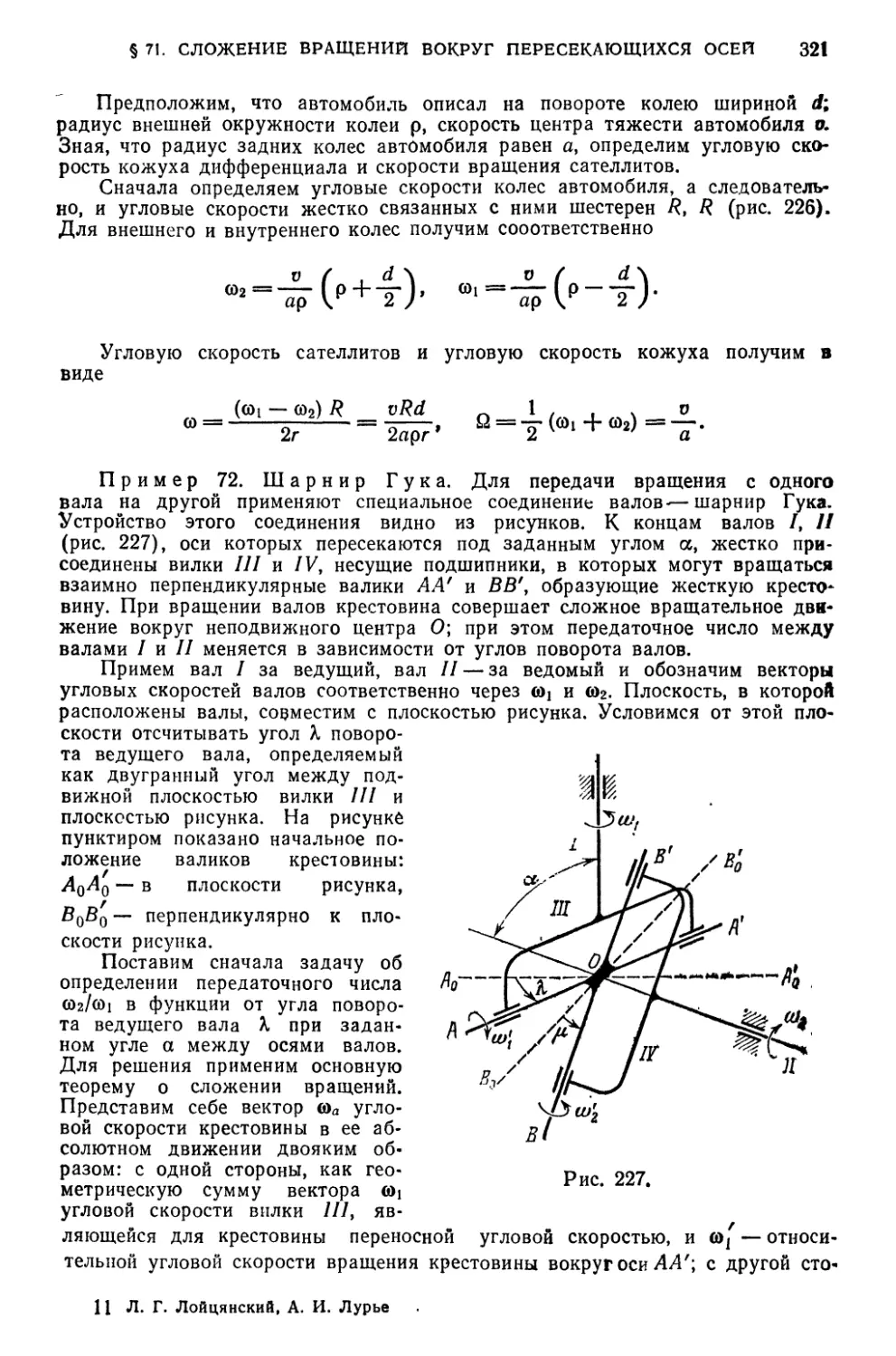
§ 71. Сложение вращений вокруг пересекающихся осей 318
^ 72. Общая задача об относительном движении твердого тела .... 324
Глава XVIII. Основы кинематики сплошной среды 329
§ 73. Определение положения и движения сплошной среды. Переменные
Лагранжа и Эйлера 329
§ 74. Перемещения, скорости и ускорения точек сплошной среды в пере-
меннык Лагранжа 331
| 75. Дифференциальные операции поля 332
| 76» Ускорение точек среды в переменных Эйлера. Локальное и кон-
конвективное ускорения 336
§ 77. Теорема Гельмгольца о бесконечно малом перемещении элементар-
элементарного объема сплошной среды. Квазитвердое перемещение .... 338
§ 78. Тензоры деформаций и скоростей деформаций. Кинематический
смысл их компонент 341
Предметный указатель 346
ПРЕДИСЛОВИЕ
Настоящее издание выходит в свет после длительного, бо-
более чем двадцатилетнего перерыва. Возросший в настоящее
время интерес к механике сплошных сред побудил авторов к
расширению традиционного предмета теоретической механики
в этом направлении. Некоторые первоначальные представле-
представления статики и кинематики сплошных сред содержатся в гла-
главах VII—IX и XVIII. Ознакомление с этими главами облегчит
учащемуся усвоение материала последующих курсов учебного
плана технических вузов: сопротивления материалов и гидрав-
гидравлики (технической механики жидкости).
Новое издание первого тома курса, помимо только что ука-
указанных глаз, содержит еще ряд других дополнений. Так, в от-
отделе статики изложен классический вопрос о приведении про-
произвольной совокупности сил к двум непересекающимся силам,
дано несколько новых примеров. В отделе кинематики расши-
расширено представление о возможных системах эйлеровых углов.
Моему дорогому другу и соавтору Анатолию Исаковичу
Лурье не было дано судьбой принять участие в работе над
новым изданием нашего курса. Не может быть сомнения в том,
как велик был бы его вклад в это дело.
Г. Ю. Степанов взял на себя труд прочтения рукописи и
сделал ряд ценных замечаний. И. Л. Лойцянская оказала авто-
автору большую помощь в методической работе над курсом и в
подготовке рукописи к изданию. Автор приносит указанным ли-
лицам свою глубокую благодарность.
Л. Г. Лойцянский
ВВЕДЕНИЕ
§ 1. Предмет теоретической механики.
Основные модели материальных тел.
Разделение механики на статику, кинематику и динамику
Предметом теоретической механики являются материальные
тела, представленные своими простейшими моделями и рас-
рассматриваемые в связи с изменением их взаимного расположе-
расположения в пространстве и времени. Такое «внешнее» движение мо-
моделей тел, рассматриваемое в отвлечении от «внутренних», мо-
молекулярных, атомных и других подобных «скрытых» движений
материи в действительных телах, называют «механическим
движением» и противополагают общим движениям материи
(тепловым, электрическим, магнитным и другим), изучаемым в
физике.
Теоретическая механика занимается общими закономерно-
закономерностями механических движений материальных тел и механиче-
механических (силовых) взаимодействий между ними, а также взаимо-
взаимодействий тел с физическими (тяготения, электромагнитными)
полями.
В механике используются следующие модели материальных
тел: 1) материальная точка и дискретная совокупность (систе-
(система) материальных точек, 2) сплошная среда, в частности абсо-
абсолютно твердое и деформируемое твердое тело, текучие твердые,
аморфные, сыпучие, жидкие и газообразные тела.
Основным разделом теоретической механики, изучающим
движения материальных тел в тесной связи с силовыми взаимо-
взаимодействиями их между собой, а также с физическими полями,
является динамика.
По классическому определению Ньютона, динамика должна
«по явлениям движения распознать силы природы, а затем по
этим силам изъяснить остальные движения». Этот тезис Нью-
Ньютона лежит в основе динамики; его методическое значение бу-
будет подробно разъяснено в начале второго тома настоящего
курса.
В какой-то степени вспомогательными по отношению к ди-
динамике служат статика и кинематика, которые по установив-
установившемуся порядку принято выделять в самостоятельные отделы
теоретической механики.
8 ВВЕДЕНИЕ
Первый из них — статика — представляет собой общее уче-
учение о совокупности сил, приложенных к материальным телам,
и об основных операциях над силами, позволяющих приводить
совокупности их к наиболее простому виду. Вместе с тем в
статике выводятся условия равновесия материальных тел, на-
находящихся под действием заданной совокупности сил. В даль-
дальнейшем под равновесием материального тела подразумевается
его покой относительно некоторой выбранной системы отсчета,
т. е. рассматриваются относительные равновесие и покой. Так,
тело, покоящееся относительно Земли, на самом деле совершает
вместе с нею далеко не простые движения относительно так
называемой «неподвижной» системы координат, связанной с
удаленными звездами.
Только в случае самой простой модели — материальной
точки — понятие равновесия, т. е. изолированности от действия
сил, связывают с ее прямолинейным равномерным «движением
по инерции» относительно данной системы отсчета, включая
сюда и ее покой относительно этой системы. Движение твердо-
твердого тела «по инерции», т. е. в отсутствие приложенных к нему
извне сил, может быть также названо равновесным, но она
оказывается настолько сложным, что в этом случае под рав-
равновесием понимают только покой тела относительно рассмат-
рассматриваемой системы отсчета.
В кинематике изучаются способы количественного описания
существующих движений материального тела в отрыве от си-
силовых взаимодействий его с другими телами или физическими
полями. Недаром кинематику называют иногда «геометрией
движения», включающей, конечно, понятие времени. Основны-
Основными характеристиками движений в кинематике являются: траек-
траектория, пройденный путь, скорость и ускорение движения.
Велико разнообразие изучаемых теоретической механикой
движений. Это — орбитальные движения небесных тел, искус-
искусственных «спутников» Земли, ракет, колебательные движения
(вибрации) в широком их диапазоне — от вибраций в маши-
машинах и фундаментах, качки кораблей на волнении, колебаний
самолетов в воздухе, тепловозов, электровозов, вагонов и дру-
других транспортных средств, до колебаний в приборах управле-
управления. Все эти и многие другие встречающиеся в природе и тех-
технике движения образуют широкое поле практических примене-
применений механики. Как уже указывалось в предисловии, в курсе
ведется подготовка учащегося к изучению равновесия и движе-
движения не только абсолютно твердых тел, но и сплошных дефор-
деформируемых сред. С этой целью в первый отдел — статику,—на-
статику,—наряду с традиционными методами статики абсолютно твердого
тела, введено изложение основ статики сплошной деформируе-
деформируемой среды.
§ 2. ОСНОВНЫЕ ПОНЯТИЯ ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ 9
В главе VII, как естественное расширение понятия о внут-
внутренних силах, вводятся представления о напряжениях в сплош-
сплошной среде и об их основных свойствах, выражаемых равен-
равенствами Коши и теоремой о взаимности касательных напряже-
напряжений. В главе IX, после изложения элементарных сведений из
области тензорной алгебры (глава VIII), вводится понятие о
тензоре напряжений как единой, физически объективной вели-
величине, характеризующей напряженное состояние среды, дается
тензорная форма равенств Коши и уравнений равновесия
сплошной среды «в напряжениях». Из тех же соображений вто-
второй отдел настоящего тома, посвященный в основном кинема-
кинематике точки и абсолютно твердого тела, заканчивается (гла-
(глава XVIII) обобщением теоремы о перемещении (движении)
абсолютно твердого тела — этого простейшего примера сплош*
ной среды — на случай элементарного объема деформируемой
сплошной среды. Это приводит к рассмотрению тензоров де-
деформаций и скоростей деформаций, сопровождаемому описа-
описанием кинематического смысла их компонент.
Изложение указанных только что вопросов связано с при-
применением основ векторного и тензорного исчислений, которые,
быть может несколько бегло, но в достаточном для пользования
ими виде, излагаются в §§ 37 и 75.
Настоящий курс посвящается изложению основных разде-
разделов классической механики Ньютона. Что же касается более
общей, релятивистской механики Эйнштейна, содержащей в
себе как частный случай классическую механику движений
с малыми скоростями, по сравнению со скоростью света, и
в малых, по сравнению с космическими масштабами, областях,
то некоторые сведения об этой замечательной области естест-
естествознания будут даны во втором томе курса — динамике.
§ 2. Основные понятия теоретической механики
Механика Ньютона покоится на трех основных законах
Ньютона: законе инерции, законе связи между силой, прило-
приложенной к материальной точке, и сообщаемым ею ускорением,
и законе действия и противодействия. Последовательное изло-
изложение этих законов и их следствий в случае любого движения
материальной точки или системы материальных точек будет
дано в начале второго тома при изложении основ динамики.
В статике учащийся встретится с несколько ограниченными
их применениями. Для кинематики имеют значения лишь
общие ньютоновские представления о пространстве и времени.
Предполагая, что учащийся уже осведомлен в какой-то мере
об основных понятиях механики из курса физики, остановимся
вкратце на тех из них, которые имеют непосредственное
10 ВВЕДЕНИЕ
отношение к отделам настоящего первого тома курса: статике и
кинематике.
Основной количественной мерой механического взаимодей-
взаимодействия тел, характеризующей интенсивность и направление
этого взаимодействия, является сила. Понятие силы, зародив-
зародившееся из опытных представлений о давлении одного тела на
другое при непосредственном их соприкасании, о приведении
тела в движение при помощи каната и т. п., было в дальней-
дальнейшем обобщено на силы, возникающие при упругой деформации
тел, на взаимное притяжение небесных тел, взаимодействие
электрически заряженных частиц.
Различают две формы силового взаимодействия материаль-
материальных тел: близкодействие и дальнодействие. Под первым пони-
понимают взаимодействие, осуществляемое путем непосредственного
контакта тел, под вторым — результат взаимодействия тел
с физическими полями (тяжести, тяготения, электрическими и
магнитными), по отношению к которым находятся в равнове-
равновесии или движутся материальные тела.
Наряду с понятием силы, совершенно достаточным для от-
отдела статики, и классическими представлениями о простран-
пространстве и времени, в кинематике, в динамике возникает дополни-
дополнительная потребность количественного описания инерционных
свойств материальных тел, характеризуемых понятиями массы
и моментов инерции.
Движения материи развиваются в пространстве и времени,
представляющих собой неотъемлемые атрибуты движения ма-
материи, а следовательно и всех явлений мира. В порядке допу-
допустимого отвлечения от действительности можно себе предста-
представить существование чисто геометрического «абсолютного» про-
пространства и протекающего в нем не зависящего ни jot каких
физических условий «абсолютного» времени. Такого рода аб-
абстракцию допускает классическая механика Ньютона — Гали-
Галилея, которая пользуется понятием о пространстве как о неко-
некоторой абсолютно неизменяемой, безгранично во все стороны
распространяющейся сплошной совокупности точек, аналогич-
аналогичной по схеме абсолютно твердому телу. По отношению к таким
системам — их иногда называют «системами отсчета» — и рас-
рассматриваются перемещения тел в их механическом движении.
Эти системы отсчета могут быть либо неподвижными по от-
отношению к одной основной системе, принимаемой условно за
абсолютно неподвижную, либо двигаться произвольным обра-
образом по отношению к ней.
Измерение протяженности тел и определение их положения
в таком пространстве производится приемами, устанавливае-
устанавливаемыми геометрией пространства, отражающей с той или иной
степенью отвлечения действительные свойства материального
%2 ОСНОВНЫЕ ПОНЯТИЯ ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ Ц
пространства. В классической механике такой геометрией, еди-
единой для всех систем отсчета, служит евклидова геометрия.
В механике космических объектов геометрические свойства про-
пространства связываются с особенностями распределения в нем
материи. Законы геометрии такого пространства отличны от
геометрии Евклида.
Классическая механика принимает в качестве времени одно
«абсолютное время», одинаковое для всех систем отсчета, как
бы они ни двигались по отношению друг к другу. Таким об-
образом, в соответствии с принятой степенью отвлечения, в клас-
классической механике не учитывается связь свойств пространства
и времени с распределением материи. Это приводит к тому,
что выводы классической механики являются приближенными.
Как уже упоминалось, они тем более точны, чем меньше ско-
скорости рассматриваемых движений по сравнению со скоростью
света и чем ограниченнее масштабы движений по сравнению
с космическими.
Выбор единиц длины и времени предполагается известным
из общего курса физики. О некоторых особенностях процессов
измерения длин и промежутков времени в релятивистской ме-
механике будет упомянуто в разделе динамики.
Отдел первый
СТАТИКА
Глава I
ОБЩИЕ СВЕДЕНИЯ О СИЛАХ
§ 3. Модель механического взаимодействия — сила.
Сила как вектор. Приложенные
и скользящие векторы. Деформируемые среды
и принцип затвердевания
Повседневный опыт говорит о наличии механического взаи-
взаимодействия между материальными телами и их взаимодействия
с физическими полями. При этом даже такое простейшее взаи-
взаимодействие двух тел, как прямой контакт между ними, имеет
далеко не простую природу и до сих пор привлекает внимание
физиков. В частности, это относится к явлению трения между
поверхностями соприкасающихся тел. Еще более сложны яв-
явления взаимодействия тел с физическими полями. До сих пор
не существует общепризнанной теории тяготения, которая объ-
объяснила бы физическую природу этого явления. Между тем
так называемый четвертый закон Ньютона о всемирном тяготе-
тяготении имеет простое количественное выражение, которым широко-
пользуются.
Трудно поэтому переоценить историческую заслугу Ньюто-
Ньютона, положившего в основу своей механики количественные за-
законы сил, независимо от того, ясна ли их природа. Основные
стороны такой, не претендующей на глубокое понимание физи-
физического механизма явления, модели силы изложены в его клас-
классическом труде «Математические начала натуральной филосо-
философии» (русский перевод А. Н. Крылова в издании Морской ака-
академии, относящийся к 1915 г.).
Модель силы, по второму закону Ньютона, определяется
тремя главными количественными сторонами: величиной (ин-
(интенсивностью), направлением действия и точкой приложения.
Такому определению силы полностью отвечает образ вектора^
равного по длине выраженной в масштабе величине силы, при-
приложенного в данной точке и направленного в сторону действия
силы.
Силы, равные по величине, одинаковые по направлению и
имеющие одну и ту же точку приложения, признаются равными
$ 3. СИЛА КАК ВЕКТОР. ПРИНЦИП ЗАТВЕРДЕВАНИЯ 13
между собой, т. е. могут быть заменены одна другой. Говоря
о равенстве двух физических величин, мы подразумеваем не
абсолютное их равенство во всех отношениях — тождество,
а лишь некоторое относительное равенство в смысле выбран-
выбранных признаков сравнения. Так, называя две силы равными,
мы не утверждаем тождественности их (например, силы тяже-
тяжести и силы давления от соприкосновения двух тел). Очевидно,
что двум равным силам соответствуют «тождественные» в гео-
геометрическом смысле векторы.
Рассмотрение совокупного действия нескольких сил основы-
основывается на следующем положении:
Совокупность нескольких сил, приложенных в одной и той
же тючке, может быть заменена одной силой; наоборот, одна
сила может быть разложена на совокупность нескольких сил,
приложенных в той же точке.
Две совокупности сил, обладающие тем свойством, что при
замене одной совокупности другою относительный покой (рав-
(равновесие) тела или системы тел не нарушится, считаются ста-
статически эквивалентными. Указанная ранее возможность замены
совокупности сходящихся в точке сил одной силой представляет
простейший пример замены данной совокупности сил ей стати-
статически эквивалентной.
В дальнейшем под понятием эквивалентности двух совокуп-
совокупностей сил будет всегда подразумеваться статическая их экви-
эквивалентность, но для краткости термин «статическая» иногдз
будет опускаться.
Из общего курса математики известны правила сложения
векторов, приложенных в одной точке. Это — правила парал-
параллелограмма в случае двух векторов, параллелепипеда в случае
трех и векторного многоугольника в случае любого числа век-
векторов. Эти же правила сохраняются и для сходящейся системы
сил.
При рассмотрении совокупности сил, приложенных к раз-
различным точкам данного тела или системы тел, физические свой-
свойства этих тел становятся существенными.
Из всего возможного многообразия физических свойств тел
для нас пока достаточно остановиться на простейшем — дефор-
деформируемости тела. Все физические тела под влиянием приложен-
приложенных сил изменяют свою форму, причем величина деформации
зависит от различных условий: материала тела, формы его, ве-
величины и направлений приложенных сил. Некоторые тела, на-
например жидкости и газы, легко деформируются; твердые тела
(например, металлы, дерево и др.), наоборот, обычно получают
незначительные деформации.
В строительном деле, в машиностроении и других областях
техники тела и нагрузки выбирают так, чтобы возможные
Н ГЛ. I. ОБЩИЕ СВЕДЕНИЯ О СИЛАХ
деформации не выходили ла ограниченные, наперед заданные
пределы. В таких случаях в первом приближении можно пренеб-
пренебречь влиянием деформируемости и этим значительно упростить
решение задач статики, сводя их к рассмотрению тел недефор-
мируемых. Таким путем мы приходим к естественной абстрак-
абстракции — абсолютно твердому телу, как «жесткой» системе точек,
т. е. такой, в которой взаимное расположение отдельных точек
не изменяется.
Рассматривая действие заданной совокупности сил на дан-
ное твердое тело, будем пока предполагать, что это тело яв-
является свободным, т. е. не подверженным никаким другим воз-
воздействиям со стороны окружающих его тел или полей, кроме
включенных в число заданных.
Следующее свойство модели свободного абсолютно твердого
тела является основным:
Свободное абсолютно твердое тело под действием двух сил
будет находиться в равновесии только в том случае, когда эти
силы равны по величине и направлены вдоль одной и той же
прямой в противоположные стороны.
Стержень под действием такой совокупности сил будет ис-
испытывать сжатие, если силы приложены к концам стержня и
направлены внутрь стержня, и, наоборот, растяжение, если
силы направлены вовне. Абсолютно твердый стержень недефор-
недеформируем, и в этих условиях никакого изменения в его состоянии
не произойдет. Только что указанная совокупность двух сил,
равных по величине и направленных вдоль одной и той же пря-
прямой в противоположные стороны, является для абсолютно
твердого тела эквивалентной нулю.
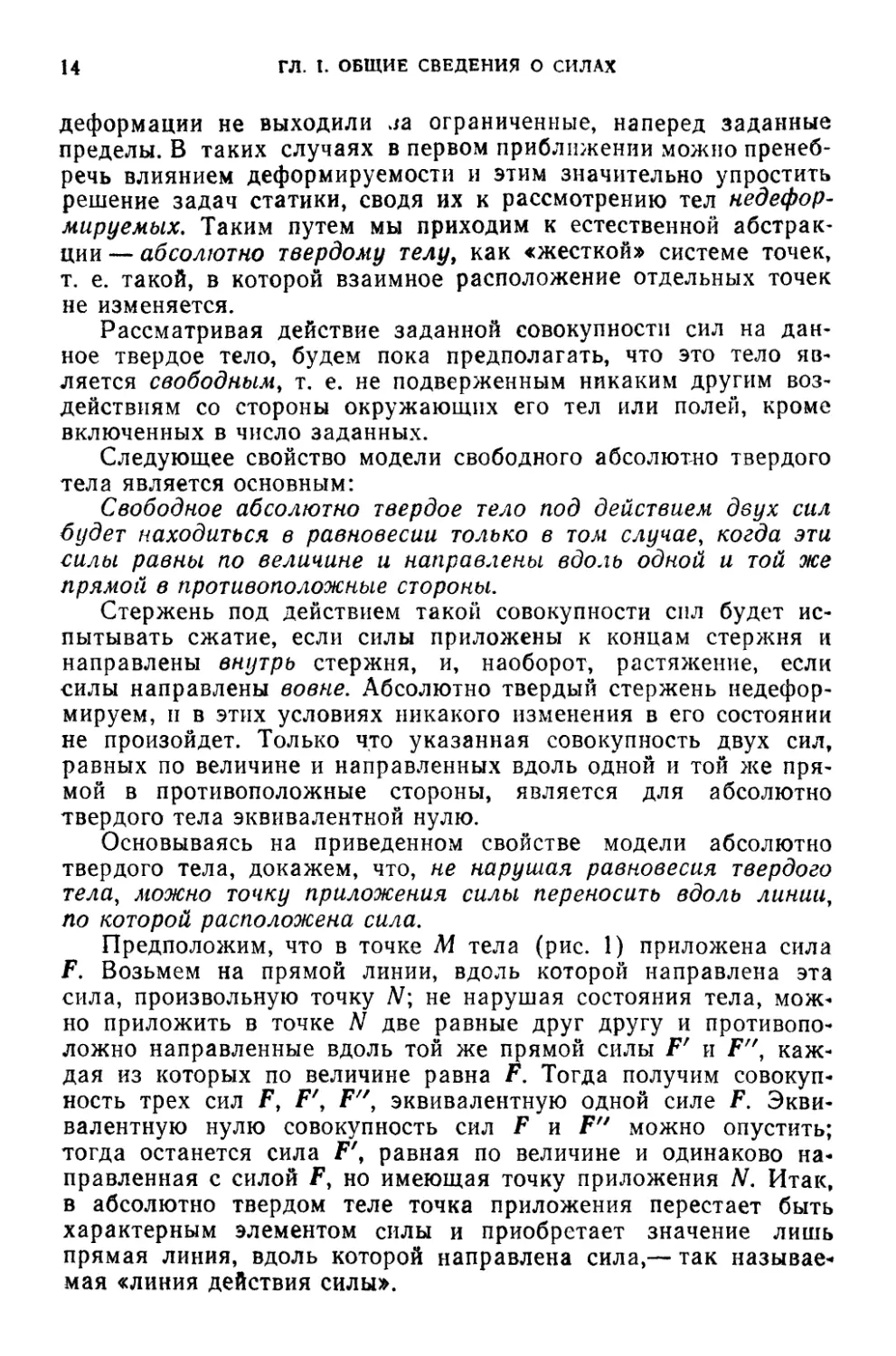
Основываясь на приведенном свойстве модели абсолютно
твердого тела, докажем, что, не нарушая равновесия твердого
тела, можно точку приложения силы переносить вдоль линии,
по которой расположена сила.
Предположим, что в точке М тела (рис. 1) приложена сила
F. Возьмем на прямой линии, вдоль которой направлена эта
сила, произвольную точку N; не нарушая состояния тела, мож*
но приложить в точке N две равные друг другу и противопо-
противоположно направленные вдоль той же прямой силы F' и F", каж-
каждая из которых по величине равна F. Тогда получим совокуп-
совокупность трех сил F, F', F", эквивалентную одной силе F. Экви-
Эквивалентную нулю совокупность сил F и F" можно опустить;
тогда останется сила F', равная по величине и одинаково на-
направленная с силой F, но имеющая точку приложения N. Итак,
в абсолютно твердом теле точка приложения перестает быть
характерным элементом силы и приобретает значение лишь
прямая линия, вдоль которой направлена сила,— так называе-
называемая «линия действия силы».
§ 4. ДЕЙСТВИЕ И ПРОТИВОДЕЙСТВИЕ. МЕТОД СЕЧЕНИЙ 15
Векторы, обозначающие силы, в этом случае теряют свое
наименование «приложенных» и становятся «скользящими».
Название это отражает возможность силы, приложенной к аб-
абсолютно твердому телу, произвольно менять точку приложения
вдоль линии ее действия. Заметим, что далее излагаемые ме-
методы приведения совокупности сил к простейшему виду отно-
относятся в одинаковой степени ко всем «скользящим» векторам.
Итак, в статике абсолютно твердого тела определяющими
элементами силы являются: численная величина (интенсив-
(интенсивность) силы, линия действия ее и сторона, в которую направ-
направлена сила вдоль своей линии действия. Учет наличия точки при-
приложения силы иногда все же необходим, как, например, это бу-
будет иметь место в учении о центре па-
параллельных сил (§ 25) и центре тяже-
тяжести (§ 26).
Указанное различие между абсолют-
абсолютно твердым и деформируемым телами не
означает полного отсутствия связи меж-
между статикой этих тел. Далеко не полные,
но вместе с тем все же существенные
сведения о равновесии деформируемых
тел можно получить, применяя следую-
следующий принцип затвердевания:
Если деформируемое тело находится Рис*
в равновесии, то замена его или отдель-
отдельных его частей соответствующими ему телами в абсолютно
твердом состоянии равновесия не нарушит.
Полезна еще следующая формулировка принципа затверде-
затвердевания: в число условий равновесия деформируемого тела вхо-
входят и условия равновесия того абсолютно твердого тела, кото-
которое образуется из данного деформируемого тела при его зат-
затвердевании.
При такой формулировке становится ясным, что условия
равновесия жесткой системы являются необходимыми, но не
достаточными условиями равновесия деформируемой системы.
Принцип затвердевания позволит в дальнейшем решать про-
простейшие задачи статики деформируемых тел (ремень, цепь,
нить и др.)» применяя к ним-приемы статики твердого тела.
§ 4. Действие и противодействие. Метод сечений
Отметим важный случай взаимодействия двух материаль-
материальных точек А и В. Будем говорить, что точка В действует на
точку А, а точка А противодействует ей. Обе эти силы, дей-
действие и противодействие, имеют общую линию действия, равны
между собою по величине и противоположны по направлению.
16
ГЛ. I. ОБЩИЕ СВЕДЕНИЯ О СИЛАХ
Эта закономерность составляет содержание третьего закона
Ньютона*), сформулированного им как общий механический
закон, одинаково справедливый как для материальных точек,
находящихся в относительном покое, так и при любом их
взаимном движении.
Очень важно подчеркнуть, что, хотя действие равно и про-
противоположно по направлению противодействию, они не урав-
уравновешиваются, так как приложены к разным материальным
точкам.
В природе не существует одностороннего действия сил. Ма-
Материальные тела могут только взаимодействовать, причем, бла-
благодаря наличию этого взаимодействия, при учете сил, дейст-
действующих в системе, мы всегда будем иметь четное число сил,
так как всякому действию всегда будет соответствовать равное
ему по величине и противоположное по направлению противо-
противодействие. Выделяя в системе какое-нибудь одно тело и ставя
Til
V////////S////////////,
N
г;
N'
Рис. 2.
вопрос о его равновесии или вообще о действии сил на него,
мы должны разграничить приложенные к выделенному сво-
свободному телу действия других тел от противодействий рассмат-
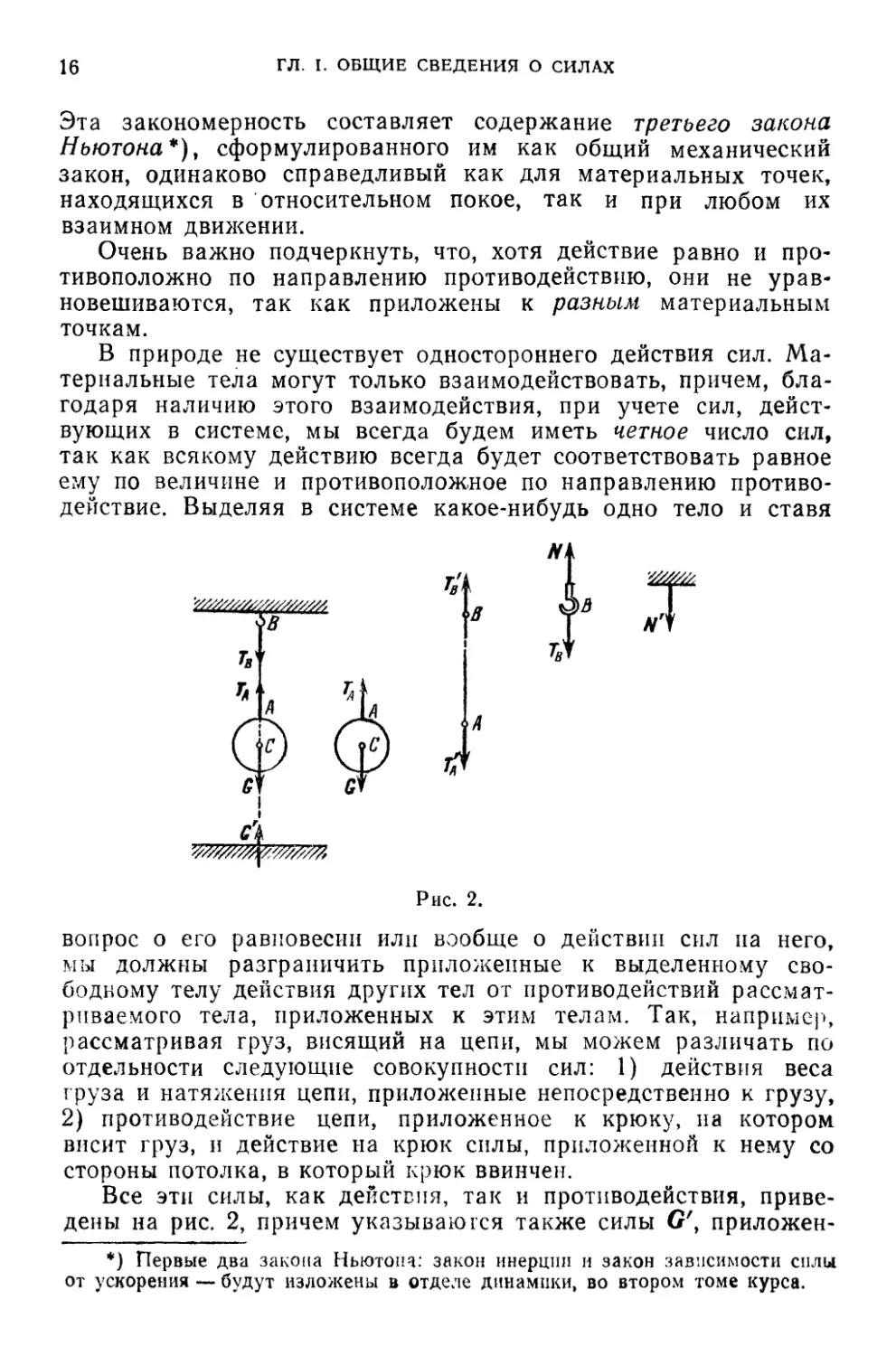
рассматриваемого тела, приложенных к этим телам. Так, например,
рассматривая груз, висящий на цепи, мы можем различать по
отдельности следующие совокупности сил: 1) действия веса
груза и натяжения цепи, приложенные непосредственно к грузу,
2) противодействие цепи, приложенное к крюку, на котором
висит груз, и действие на крюк силы, приложенной к нему со
стороны потолка, в который крюк ввинчен.
Все эти силы, как действия, так и противодействия, приве-
приведены на рис. 2, причем указываются также силы С, приложен-
*) Первые два закона Ньютона: закон инерции и закон зависимости силы
от ускорения — будут изложены в отделе динамики, во втором томе курса.
§ 5. ОПОРНЫЕ РЕАКЦИИ И ПРОСТЕЙШИЕ ТИПЫ ОПОР 17
ные к полу, и сила N', приложенная к потолку со стороны
крюка.
Практически необходимо сосредоточить свое внимание на
одном из тел и учитывать лишь силы, приложенные к этому
телу (в рассмотренном примере — к грузу). В некоторых зада-
задачах рассмотрением одного тела обойтись нельзя; в этом случае
после рассмотрения сил, приложенных к данному телу, мы
переходим к рассмотрению сил, приложенных к следующему
телу; естественно, что при этом некоторые силы окажутся теми
же по величине, что и прежде, но направленными в противо-
противоположную сторону. Таким образом, выбирая только те тела,
которые действительно имеют значение для данной задачи, и
рассматривая лишь те
силы, которые приложе- fr А С Л ¦ t jjg
ны к этим телам, мы наи-
наиболее просто поставим и ^ А С Тс
решим задачу. Итак, при « ° ~—°~ **•
изучении условий равно- рис. з.
весия данного тела рас-
рассматриваем его как свободное, для чего мысленно выделяем его
из общей цепи взаимодействующих тел и сосредоточиваем все
внимание на силах, приложенных к этому телу.
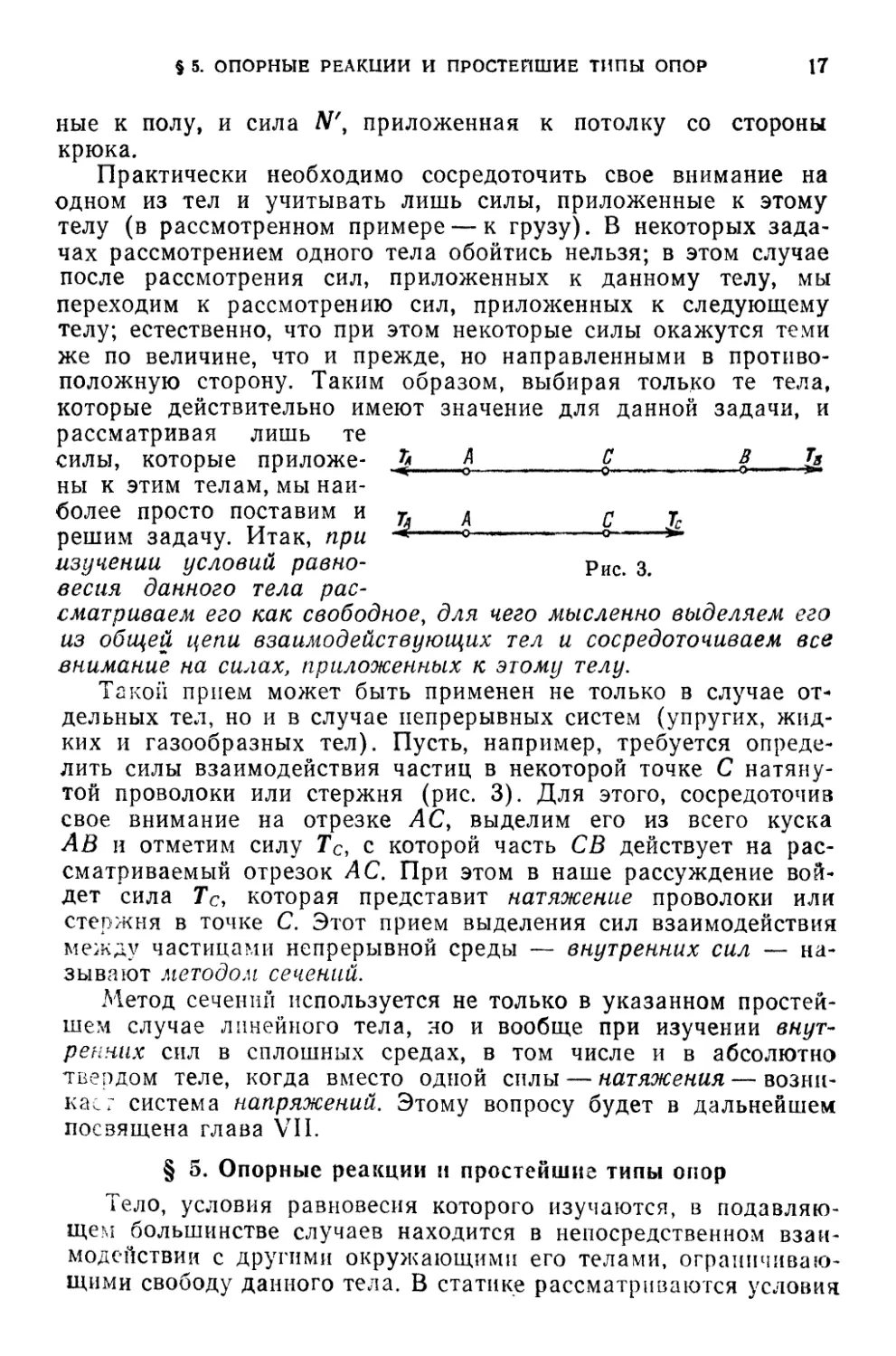
Такой прием может быть применен не только в случае от-
отдельных тел, но и в случае непрерывных систем (упругих, жид-
жидких и газообразных тел). Пусть, например, требуется опреде-
определить силы взаимодействия частиц в некоторой точке С натяну-
натянутой проволоки или стержня (рис. 3). Для этого, сосредоточив
свое внимание на отрезке АС, выделим его из всего куска
АВ и отметим силу ТСу с которой часть С В действует на рас-
рассматриваемый отрезок АС. При этом в наше рассуждение вой-
войдет сила Тс, которая представит натяжение проволоки или
стержня в точке С. Этот прием выделения сил взаимодействия
между частицами непрерывной среды — внутренних сил — на-
называют методом сечений.
Метод сечений используется не только в указанном простей-
простейшем случае линейного тела, но и вообще при изучении внут-
внутренних сил в сплошных средах, в том числе и в абсолютно
твердом теле, когда вместо одной силы — натяжения — возни-
возникает система напряжений. Этому вопросу будет в дальнейшем
посвящена глава VII.
§ 5. Опорные реакции и простейшие типы опор
Тело, условия равновесия которого изучаются, в подавляю-
подавляющем большинстве случаев находится в непосредственном взаи-
взаимодействии с другими окружающими его телами, ограничиваю-
ограничивающими свободу данного тела. В статике рассматриваются условия
18
ГЛ. 1. ОБЩИЕ СВЕДЕНИЯ О СИЛАХ
равновесия свободного твердого тела; поэтому мы должны
в число приложенных к телу сил включать и все воздействия
на это тело со стороны окружающих его тел, после чего уже
рассматривать тело как свободное. Этот прием будет обобщен
в динамике и составит содержание принципа освобождаемости.
Тела, ограничивающие свободу данного тела, являются по
отношению к нему связями, воздействия связей на тело — реак-
Рис. 4.
Рис. 5.
циями связей. Подробное рассмотрение связей приводится в
динамике.
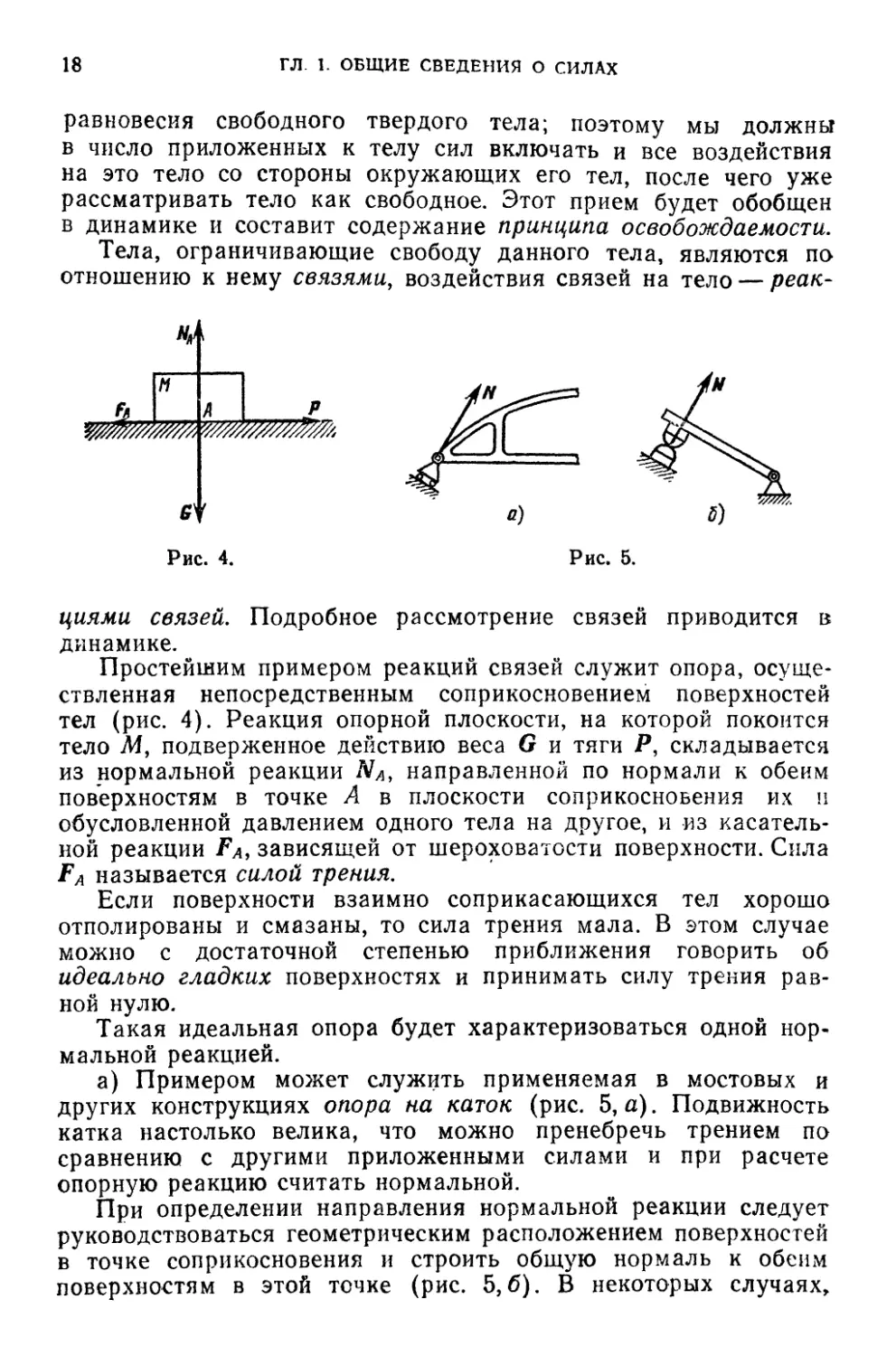
Простейшим примером реакций связей служит опора, осуще-
осуществленная непосредственным соприкосновением поверхностей
тел (рис. 4). Реакция опорной плоскости, на которой покоится
тело М, подверженное действию веса G и тяги Р, складывается
из нормальной реакции NAi направленной по нормали к обеим
поверхностям в точке А в плоскости соприкосновения их н
обусловленной давлением одного тела на другое, и из касатель-
касательной реакции /% зависящей от шероховатости поверхности. Сила
FA называется силой трения.
Если поверхности взаимно соприкасающихся тел хорошо
отполированы и смазаны, то сила трения мала. В этом случае
можно с достаточной степенью приближения говорить об
идеально гладких поверхностях и принимать силу трения рав-
равной нулю.
Такая идеальная опора будет характеризоваться одной нор-
нормальной реакцией.
а) Примером может служить применяемая в мостовых и
других конструкциях опора на каток (рис. 5, а). Подвижность
катка настолько велика, что можно пренебречь трением по
сравнению с другими приложенными силами и при расчете
опорную реакцию считать нормальной.
При определении направления нормальной реакции следует
руководствоваться геометрическим расположением поверхностей
в точке соприкосновения и строить общую нормаль к обеим
поверхностям в этой точке (рис. 5,6). В некоторых случаях,
§ 5. ОПОРНЫЕ РЕАКЦИИ И ПРОСТЕЙШИЕ ТИПЫ ОПОР
19
однако, направление этой нормали может оказаться неопреде-
неопределенным. Примером может служить опора ребром или верши-
вершиной угла (рис. 6); в этом случае нормальная реакция направ-
ч?
Рис. 6.
лена по перпендикуляру к той из поверхностей, к которой про-
проведение перпендикуляра представляет операцию определенную.
б) В случае заделки одного тела в другое (рис. 7) реакция
опоры N становится неопределенной и, кроме того, не единст-
единственным фактором взаимодействия
между телами. Кроме силы N с
проекциями Nx•< 0, Ny>0, реак-
реакцию определяет еще пара сил с мо-
моментом т (см. § 12). Эта совокуп-
совокупность силы и пары сил зависит от
условий работы опоры и должна
определяться из общих уравнений
равновесия тела, опирающегося в
заделку.
в) Подшипник, или цилиндрический шарнир (рис. 8). По
самой своей конструкции этот весьма распространенный вид
опоры таков, что в зависимости от системы сил, приложенной
Рис. 7.
Обойма
Рис 8.
к телу, вал или «палец» могут прижиматься к самым различ-
различным точкам обоймы; ввиду этого даже при отсутствии трения
реакция такого шарнира неизвестна по направлению; можно
лишь утверждать, что реакция цилиндрического шарнира лежит
20
ГЛ. I. ОБЩИЕ СВЕДЕНИЯ О СИЛАХ
в плоскости, перпендикулярной к оси шарнира, если в осевом
направлении трение в шарнире ничтожно. Если можно прене-
пренебречь трением в шарнире, то реакция пересекает ось шарнира
(этот случай изображен на рис. 8).
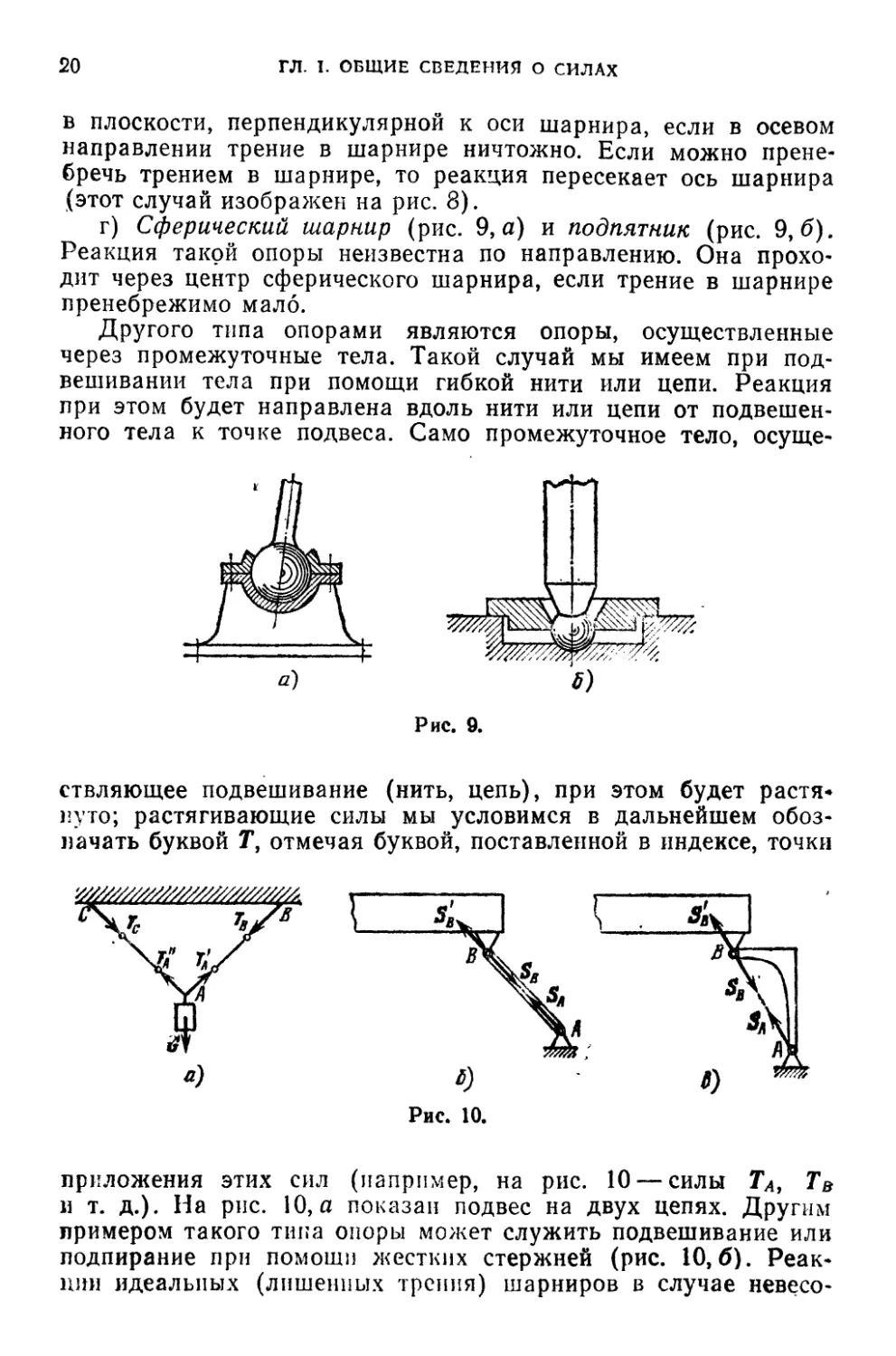
г) Сферический шарнир (рис. 9, а) и подпятник (рис. 9,6).
Реакция такой опоры неизвестна по направлению. Она прохо-
проходит через центр сферического шарнира, если трение в шарнире
пренебрежимо мало.
Другого типа опорами являются опоры, осуществленные
через промежуточные тела. Такой случай мы имеем при под-
подвешивании тела при помощи гибкой нити или цепи. Реакция
при этом будет направлена вдоль нити или цепи от подвешен-
подвешенного тела к точке подвеса. Само промежуточное тело, осуще-
Рис. 9.
ствляющее подвешивание (нить, цепь), при этом будет растя*
нуто; растягивающие силы мы условимся в дальнейшем обоз-
обозначать буквой Т, отмечая буквой, поставленной в индексе, точки
приложения этих сил (например, на рис. 10 — силы ТА, Тв
и т. д.). На рис. 10, а показан подвес на двух цепях. Другим
примером такого типа опоры может служить подвешивание или
подпирание при помощи жестких стержней (рис. 10,6). Реак-
Реакции идеальных (лишенных трения) шарниров в случае невесо-
§ 5. ОПОРНЫЕ РЕАКЦИИ И ПРОСТЕЙШИЕ ТИПЫ ОПОР 2!
мого абсолютно твердого стержня направлены вдоль стержня;
действительно, по предыдущему невесомый стержень под дей-
действием двух сил (реакций шарниров) может быть в равнове-
равновесии лишь в том случае, когда реакции направлены вдоль одной
прямой (оси стержня); при этом реакции будут играть роль
сжимающих или растягивающих сил. Сжимающее усилие обо-
обозначим буквой S, причем, как и ранее, подстрочная буква бу-
будет обозначать точку приложения силы (SA, SB и т. д.). Роль
стержня может играть и изогнутый рычаг (рис. 10, в); в этом
случае реакции также направлены по прямой, соединяющей
шарниры.
Глава II
ПРИВЕДЕНИЕ ПРОСТРАНСТВЕННОЯ СОВОКУПНОСТИ СИЛ,
СХОДЯЩИХСЯ В ТОЧКЕ, К РАВНОДЕЙСТВУЮЩЕЙ СИЛЕ
§ 6. Силовой многоугольник
Предположим, что к некоторому абсолютно твердому телу
ъ точках Мь iW2, ..., Мп (рис. 11) приложены силы Fu F2, ...
..., Fn (на рисунке показаны четыре силы), причем линии дей-
действия этих сил пересекаются в одной точке О. Такую совокуп-
совокупность сил будем называть сходящейся.
По свойству абсолютно твердого тела силы могут быть
перенесены вдоль линии действия в точку О, так что сходя-
сходящаяся совокупность сил эквивалентна совокупности сил, при-
приложенных в одной точке (§ 3).
Эта сходящаяся совокупность сил может быть приведена
к одной силе R — равнодействующей, приложенной в той же
точке О.
Для определения величины и направления равнодействую-
равнодействующей будем последовательно складывать силы по правилу си-
силового треугольника. Чтобы не загромождать рисунка, проде-
проделаем это в стороне, построив векторную диаграмму — силовой
многоугольник.
Напомним известный из общего курса физики порядок по-
построения. Из произвольной точки О' откладываем вектор F(9
геометрически равный Fu т. е. равный по величине, параллель*
ный и направленный в ту же сторону; из конца его отклады-
откладываем вектор Р<г9 геометрически равный F2 *). Соединив О'
с концом этого второго вектора, мы найдем вектор R/[9 геомет*
рически равный равнодействующей Rx сил F{ и F2. Построение
такого треугольника полностью определяет вектор R\ и де-
делает излишним построение затемняющего рисунок параллело-
параллелограмма сил.
Продолжая построение, откладываем на диаграмме из конца
Р'2 или, что то же, из конца R[ вектор F'v геометрически рав-
равный силе F3. Снова соединяя начало О' диаграммы с концом
¦) Конец вектора — острие изображающей его стрелки; начало — противо-
противоположная точка.
$ 6 СИЛОВОЙ МНОГОУГОЛЬНИК 23*
этого вектора, получим вектор, геометрически равный равно-
равнодействующей /?i и Fz, или равнодействующей трех сил FXr:
Продолжая таким же образом, сложим сколько угодно сил
(на рисунке — четыре силы) и получим вектор /?', геометриче-
геометрически равный равнодействующей R заданной совокупности сил.
Совершив построение, замечаем, что проведение промежу-
промежуточных векторов R[f R2 было излишним; можно было, отложив.
Рис. и.
на диаграмме вектор F\, к концу его приложить начало век-
вектора F2> затем к концу F2 — начало F'v к концу Fg —начало
FfA и т. д., после этого начало О' первого вектора соединить
вектором R' с концом последнего вектора F'v направив R' на*
встречу последней силе. Этот вектор R' и даст нам величину
и направление равнодействующей.
Будем называть векторы F[, F2, ... составляющими, вектор
R', соединяющий начало первой составляющей с концом пос-
последней и направленный ей навстречу,— замыкающим.
Итак, равнодействующая сходящейся совокупности сил рав-
равна векторной (геометрической) сумме слагаемых сил:
t
и определяется замыкающей стороной силового многоугольника,
построенного на слагаемых силах как на составляющих; точка
приложения равнодействующей совпадает с точкой пересечения
линий действия слагаемых сил.
п
В формуле A) символ X («сигма») обозначает суммирований
стоящих справа от него, отмеченных индексом i величин по всем
последовательным значениям этого индекса от i==l до i = п^
24 ГЛ. II. ПРИВЕДЕНИЕ СХОДЯЩИХСЯ СИЛ
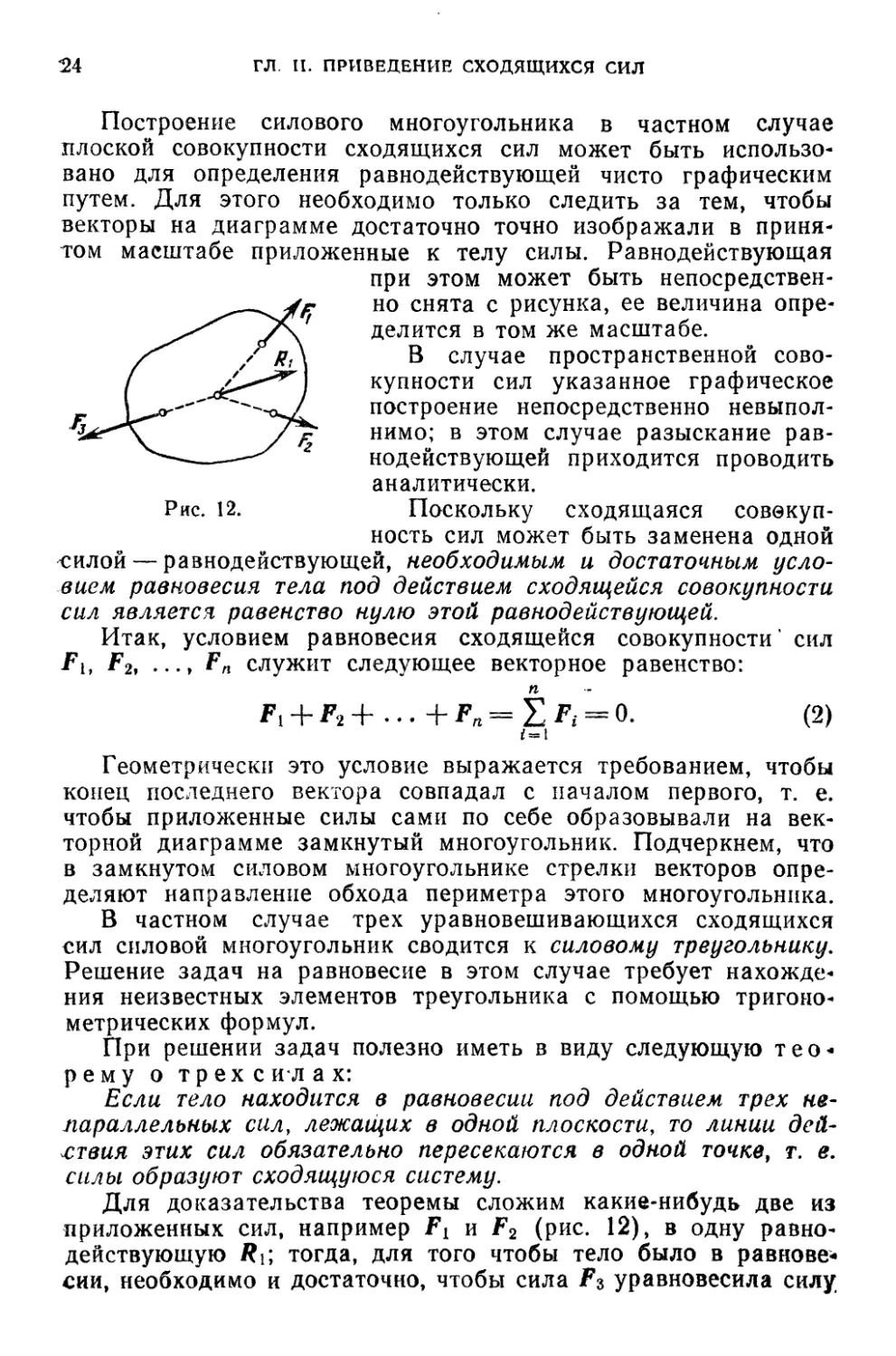
Построение силового многоугольника в частном случае
плоской совокупности сходящихся сил может быть использо-
использовано для определения равнодействующей чисто графическим
путем. Для этого необходимо только следить за тем, чтобы
векторы на диаграмме достаточно точно изображали в приня-
принятом масштабе приложенные к телу силы. Равнодействующая
при этом может быть непосредствен-
непосредственно снята с рисунка, ее величина опре-
определится в том же масштабе.
В случае пространственной сово-
совокупности сил указанное графическое
построение непосредственно невыпол-
невыполнимо; в этом случае разыскание рав-
равнодействующей приходится проводить
аналитически.
Рис. 12. Поскольку сходящаяся совекуп-
ность сил может быть заменена одной
силой — равнодействующей, необходимым и достаточным усло-
условием равновесия тела под действием сходящейся совокупности
сил является равенство нулю этой равнодействующей.
Итак, условием равновесия сходящейся совокупности' сил
F\, F2, ...» Fn служит следующее векторное равенство:
Fl + F2+...+Fft=Ei7i = 0. B)
Геометрически это условие выражается требованием, чтобы
конец последнего вектора совпадал с началом первого, т. е.
чтобы приложенные силы сами по себе образовывали на век-
векторной диаграмме замкнутый многоугольник. Подчеркнем, что
в замкнутом силовом многоугольнике стрелки векторов опре-
определяют направление обхода периметра этого многоугольника.
В частном случае трех уравновешивающихся сходящихся
сил силовой многоугольник сводится к силовому треугольнику.
Решение задач на равновесие в этом случае требует нахожде-
нахождения неизвестных элементов треугольника с помощью тригоно-
тригонометрических формул.
При решении задач полезно иметь в виду следующую тео*
рему о трех с и-л а х:
Если тело находится в равновесии под действием трех не-
параллельных сил, лежащих в одной плоскости, то линии дей-
действия этих сил обязательно пересекаются в одной точке, т. е.
силы образуют сходящуюся систему.
Для доказательства теоремы сложим какие-нибудь две из
приложенных сил, например Fi и F2 (рис. 12), в одну равно-
равнодействующую /?ь тогда, для того чтобы тело было в равнове*
сии, необходимо и достаточно, чтобы сила F3 уравновесила силу
§ 7 ГЕОМЕТРИЧЕСКИЙ МЕТОД РЕШЕНИЯ ЗАДАЧ
25
i?i, а это возможно лишь в том случае, если Fd имеет общую
линию действия с R\, равна ей по величине и противоположна
по направлению. Отсюда следует необходимость пересечения
линий действия трех сил в одной точке.
Доказанная теорема в своей формулировке требовала, чтобы
рассматриваемая совокупность трех сил была плоской (ком-
(компланарной). Как это непосредственно видно из рис. 12, при рав-
равновесии трех сил они должны образовывать компланарную со-
совокупность сил, так как по условию равновесия сила F3 должна
лежать в плоскости первых двух сил (см. конец § 20).
§ 7. Геометрический метод решения задач
Непосредственное использование многоугольника сил при
решении задач статики приводит к геометрическим построениям
с последующим определением неизвестных элементов с по-
помощью тригонометрических формул. В отличие от аналитиче-
аналитических методов, излагаемых далее, эти приемы решения задач
можно назвать геометрическими. В большинстве случаев за-
задача сводится к составлению и последующему решению одного
или нескольких силовых треугольников, чем и определяются
число и характер необходимых исходных данных.
Пример 1. Один конец веревки длины 2/ неподвижно закреплен в
тодке С (вне. 13), другой, D, находится в руке у человека на одном уровне
Рис. 13.
с точкой С. В середине веревки в точке Л прикреплен груз веса Р. Опреде-
Определить, как будет изменяться в зависимости от угла а наклона веревки к го-
горизонту усилие Q, испытываемое рукой.
Прежде всего заметим, что искомое усилие Q равно по величине натя-
натяжению веревки Тн> ясно, далее, что вследствие симметрии т'А «= т" Чтобы
найти связь между Тд и Р, рассмотрим узел А и составим условие его
равновесия: треугольник, построенный на приложенных к узлу силах Р,
Т'л и Уд, должен быть замкнутым. Начинаем построение силового треуголь-
треугольника с Заданной силы, в данном случае Р. Через начало и конец силы Р
(рис. 13, справа) проведем лучи, параллельные направлениям сил Т*А и Гд
6
ГЛ ТТ. ПРИВЕДЕНИЕ СХОДЯЩИХСЯ СИЛ
(левой и правой ветви веревки), и отметим точку пересечения их. Получен*
ный при этом треугольник и будет искомым силовым треугольником *); на-
направление сил показано на рисунке. Оно находится по правилу обхода пе-
периметра треугольника в сторону, указываемую заданной силой Р.
Остается определить величину ТА; сразу видно, что
Вместо угла наклона веревки можно ввести стрелу провисания ее h\ по-
получим
Из формулы видно, что чем меньше стрела провисания h (или угол а),
тем большее усилие надо приложить к свободному концу веревки, чтобы
удержать груз в равновесии. При малых углах а усилие Q становится очень
-большим. Например, при а = 5°, sin а = 0,0875, Q = 5,75Р; при а = 1°
Q=*2%fiP и т. д. При а-*0 Q-*-oo; это означает, что при наличии на-
нагрузка веревка не может быть вытянута в одну прямую.
Пример 2. Определить опорные реакции в шарнирах стержневой си*
«стемы ABC (рис. 14) пренебрежимо малого веса, один из стержней которой
Рис. 14.
«агружен посредине силой Р = 2 кН; стержни равны па длине и наклонены
« горизонту под углом а = 30°.
Рассмотрим сначала равновесие ненагруженного стержня ВС. На стер-
стержень действуют только две сжимающие его силы Sb и Sc; они равны ао
величине и противоположны по направлению; сила, с которой стержень ВС
действует на точку С стержня АС, т.е. реакция Nc, будет поэтому направ-
направлена вдоль ВС. Это позволяет найти линию действия реакции в точке Л. По
теореме о трех силах ищем точку D пересечения линий действия сил Р и Nc
и проводим линию действия силы NA через точки А и D. Строим теперь си-
силовой треугольник и отмечаем его углы. По теореме синусов
sin (90° — a) sin (ф + а — 90°)
или
sin A80°
Р
cos а
cos (ф + а) sin ф *
*) Отложив силу Р, можно было бы вслед за нею вместо силы Гд на-
нанести силу Т'д. При этом мы получили бы силовой треугольник, показанный
на рис. 13 пунктиром. Такая возможность имеет место во всех случаях
построения силовых треугольников; это не отражается на решении задали.
I 7. ГЕОМЕТРИЧЕСКИЙ МЕТОД РЕШЕНИЯ ЗАДАЧ
27
Для определения тригонометрических функций неизвестного угла <р об-
обратимся к рассмотрению ACDE и AACD. Замечая, что ACDE равнобедрен-
равнобедренный и, следовательно, ?>?«= Ч%АС, из AACD находим
откуда
cos 30° '
l/a — cos 2а
при а в» 30е ctg Ф '
sin 30°
sin 2a
« /\ откуда NA — 2 cos 30°«
АС
'¦ 0, ф
1,73 кН,
2 sin ф
= 90°; получаем
n — 1 kH.
Рассмотренная задача эквивалентна задаче об опорных реакциях двух-
арочной фермы (рис. 15), если здесь положить
tga»
2h
Т
К тому же типу задач относятся и задачи, в которых вместо шарниров
могут быть другие по характеру опоры, но с реакциями, так же неопреде-
неопределенными по направлению, как
и в шарнире (врубленная бал-
ка, балка, опирающаяся в угол /\ м—_?.
между двумя плоскостями. vlv . с
и т. д.). Такова, например, за-
задача об опорных реакциях бал-
балки, показанной на рис. 16.
Пример 3. Зная величи-
величину и направление усилия Р, при-
приложенного к пальцу В криво-
кривошипа АВ (рис. 17) шарнирно-
шарнирного четырехзвенника ABCD,
найти уравновешивающее уси-
усилие <?, приложенное к пальцу С
Рис. 15.
коромысла CD, действующее в
данном направлении.
В шарнире В заданная сила Р уравновешивается реакциями NB и SB,
направленными вдоль стержней АВ и ВС; составив силовой треугольник,
находим эти реакции; их направления определятся обходом периметра тре-
а
Рис. 16.
Рис. 17.
угольника в сторону, указываемую силой Р. Поскольку NB и SB представляют
собой силы, приложенные к шарниру В, то согласно закону действия и про-
противодействия к стержням А В и ВС в точке В приложены силы, направлен-
направленные внутрь стержней, так что последние будут сжаты.
28 ГЛ. П. ПРИВЕДЕНИЕ СХОДЯЩИХСЯ СИЛ
К шарниру С приложены сила Sc, равная по величине силе Sb, но на-
направленная в противоположную сторону, а также сила Nc, направленная
вдоль стержня CD, и сила Q, направление которой задано. Начиная построе-
построение силового треугольника с силы Sc> которая уже имеется на рисунке, про-
проводим через ее начало и конец линии, параллельные стержню CD и задан-
заданному направлению силы Q.
Пользуясь обозначениями углов, показанными на рис. 17, получаем по
теореме синусов
5 -_ Р s*n (« + У) 5 __, q sin № + в) f
откуда (S3
sin (q + у) sin (P + Ф)
sin (q — ф) sin (P + 6)
Пример 4. Груз веса О (рис. 18) подвешен в точке О соединения
двух брусьев ОБ и ОС одинаковой длины, удерживаемых тросом ОА, за-
закрепленным в точке Л, равноотстоящей от точек В и С. Определить усилия
в брусьях и тросе при указанном на рис. 18 расположении.
Узел О находится в равновесии под действием пространственной сово-
совокупности сходящихся сил: усилий St и S2 в брусьях, натяжения троса Т ш
Рис. 18.
веса груза О, Вследствие симметрии Si *=* S2 и их равнодействующая S, на-
направленная по биссектрисе угла БОС, будет лежать в одной плоскости с
силами G и Т. Таким образом, рассмотрение пространственной совокупности
сил сводится к рассмотрению двух плоских совокупностей G, S, Т и S, Sit &».
На рис. 18 показано построение треугольника сил G, S, Т. Из этого тре>
угольника находим
S T G
sin 60° e sin 46° ет sin 15° *
откуда имеем
3,360, Г «2,740.
§ 7. ГЕОМЕТРИЧЕСКИЙ МЕТОД РЕШЕНИЯ ЗАДАЧ
29
Из рассмотрения ромба, построенного на силах Si и S2, находим
S
2 cos 30°
¦ 1.93G.
Рис. 19.
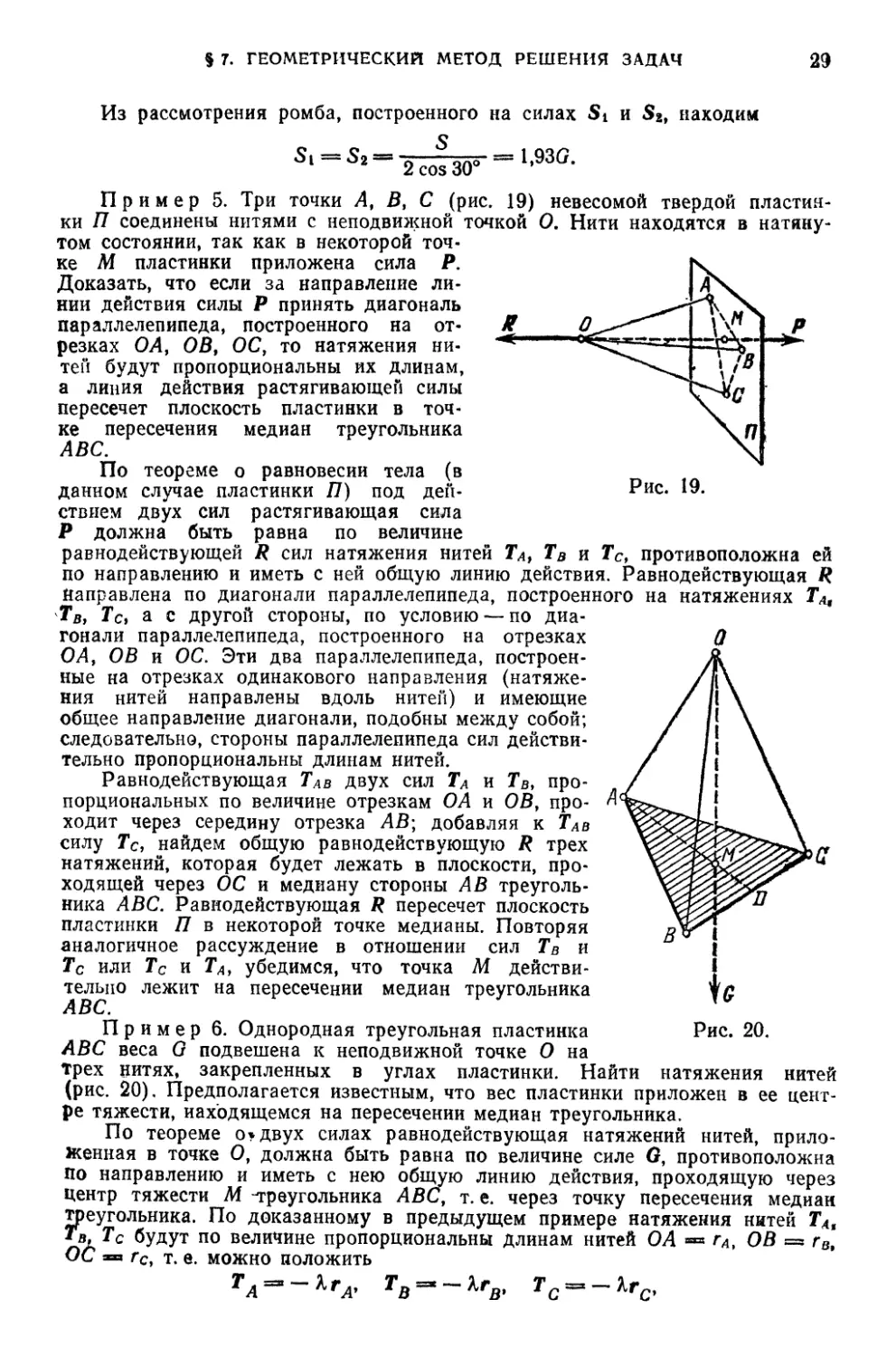
Пример 5. Три точки А, В, С (рис. 19) невесомой твердой пластин-
пластинки П соединены нитями с неподвижной точкой О. Нити находятся в натяну-
натянутом состоянии, так как в некоторой точ-
точке М пластинки приложена сила Р.
Доказать, что если за направление ли-
линии действия силы Р принять диагональ
параллелепипеда, построенного на от-
отрезках О А, ОВ, ОС, то натяжения ни-
нитей будут пропорциональны их длинам,
а линия действия растягивающей силы
пересечет плоскость пластинки в точ-
точке пересечения медиан треугольника
ABC.
По теореме о равновесии тела (в
данном случае пластинки П) под дей-
действием двух сил растягивающая сила
Р должна быть равна по величине
равнодействующей R сил натяжения нитей TAi TB и TCt противоположна ей
по направлению и иметь с ней общую линию действия. Равнодействующая R
Направлена по диагонали параллелепипеда, построенного на натяжениях ТА,
"Тв, Tct а с другой стороны, по условию — по диа-
диагонали параллелепипеда, построенного на отрезках
О А, О В и ОС. Эти два параллелепипеда, построен-
построенные на отрезках одинакового направления (натяже-
(натяжения нитей направлены вдоль нитей) и имеющие
общее направление диагонали, подобны между собой;
следовательно, стороны параллелепипеда сил действи-
действительно пропорциональны длинам нитей.
Равнодействующая ТАв двух сил ТА и Ts, про-
пропорциональных по величине отрезкам ОА и ОВ, про-
проходит через середину отрезка АВ\ добавляя к ТАВ
силу Тс, найдем общую равнодействующую R трех
натяжений, которая будет лежать в плоскости, про-
проходящей через ОС и медиану стороны АВ треуголь-
треугольника ABC. Равнодействующая R пересечет плоскость
пластинки П в некоторой точке медианы. Повторяя
аналогичное рассуждение в отношении сил Тв и
Тс или Тс я ТА, убедимся, что точка М действи-
действительно лежит на пересечении медиан треугольника
ABC.
Пример 6. Однородная треугольная пластинка
ABC веса G подвешена к неподвижной точке О на
трех нитях, закрепленных в углах пластинки. Найти натяжения нитей
(рис. 20). Предполагается известным, что вес пластинки приложен в ее цент-
центре тяжести, находящемся на пересечении медиан треугольника.
По теореме о*двух силах равнодействующая натяжений нитей, прило-
приложенная в точке О, должна быть равна по величине силе О, противоположна
По направлению и иметь с нею общую линию действия, проходящую через
Центр тяжести М -треугольника ABC, т. е. через точку пересечения медиан
треугольника. По доказанному в предыдущем примере натяжения нитей ТАя
Тв, Тс будут по величине пропорциональны длинам нитей ОА «» rAt ОВ = rBt
ОС «и ге, т. е. можно положить
г,--;
Л г> =я* """"* i
Ж ~ =* — к
30 ГЛ. 11. ПРИВЕДЕНИИ СХОДЯЩИХСЯ СИЛ
где X — неизвестный положительный скалярный множитель, а гл, гв, *с — век-
векторы ОАЧ ОВ, ОС; знак минус выражает тот факт, что реакции нитей на-
направлены к точке О. По условию равновесия
Докажем, что
где вектор гм = ОМ определяет положение центра тяжести треугольника на
вертикали, проходящей через точку О. Имеем
•1 (OB -f ОС) « OD == 0% + АО,
где D — середина отрезка ВС. Таким образом,
АО = ~ (OS + ОС) - 0%
и, далее,
OAf « О4 + А АО =4* (ОЛ + ОБ + ОС) = 4-(''л + **« + Ы.
3 3 3 х л д с/
Итак,
и, следовательно.
Or- GrR Grr
§ 8. Проекции силы на оси прямоугольной системы координат
Изложенный ранее способ задания" силы ее величиной, ли-
линией действия и направлением вдоль линии действия не являет-
является единственным способом задания силы. В некоторых случаях
этому геометрическому способу задания силы следует предпо-
предпочесть другой способ — аналитический.
Аналитический метод задания силы заключается в том, что,
выбрав совершенно произвольно некоторую прямоугольную си-
систему координатных осей Oxyz (рис. 21), задают: 1) проекции
силы F на координатные оси FXi Fy, Fz и 2) координаты точки А
приложения силы.
Для получения проекций силы поместим в точку А прило-
приложения силы (рис, 21) начала трех осей Ах\ Ау\ Az\ параллель-
параллельных заданным осям Ox, Oy, Oz. Тогда, проводя через конец В
вектора три плоскости, перпендикулярные к координатным
осям и, следовательно, параллельные координатным плоско-
плоскостям, отсечем этими плоскостями на осях проекции FXi Fy, Fz.
§ 8 ПРОЕКЦИИ СИЛЫ НА ОСИ КООРДИНАТ
31
Обозначим через а, р, у углы, образованные направлением
силы F с направлениями осей координат. Тогда, вспоминая, что
лроекция ап любого вектора а на ось ON определяется пд фор-
формуле
C)
где ф — угол между векто-
вектором и выбранным на оси
ON положительным на-
направлением, будем иметь
Fх = F cos a, Fy = F cos p,
FZ = F cosy. D)
Z i
/
/
71
г
X'm
Рис. 21.
С другой стороны, по известному свойству диагонали пря-
прямоугольного параллелепипеда
? 4- F2 4- F2 (б)
причем берется, конечно, арифметическое значение корня.
Из формул D) и E) можем найти выражения косинусов
углов силы с осями координат:
Fx Fx
7~~
cos a
cos3
ч
F
F)
Формулы D) определяют
проекции силы по заданной ее Рис. 22.
величине и направлению действия,
формулы E) и F), наоборот, определяют величину и направ-
направление силы по заданным проекциям силы. На рис. 22 показан
другой прием получения проекций сил на оси координат:
сначала сила проектируется на координатную плоскость, со-
содержащую выбранную ось проекций, например Оу (А'В' =
= пр. АВ на плоскость ху или А"'В"' = пр. АВ на плоскость yz)r
затем полученный отрезок повторно проектируется на ось, ле-
лежащую в этой плоскости (Л'/ = пр. А'В' на ось Оу или
А"В" = пр. А"'Впг на ось Оу). Этот прием бывает часто более
удобным.
32 ГЛ II. ПРИВЕДЕНИЕ СХОДЯЩИХСЯ СИЛ
Пусть Fu F2, ..., Fn представляют собой сходящуюся со-
совокупность сил. В таком случае по формуле A) их равнодей-
равнодействующая R равна их геометрической сумме, и по известной
теореме о проекции геометрической суммы векторов проекции
1? на оси координат Ox, Оу, Oz будут равны
Rx^t/tx, Ry^t/iy, Rz-t/u. G)
Таким образом, проекции равнодействующей сходящейся со-
совокупности сил на оси координат равны алгебраическим сум-
суммам проекций составляющих сил на эти оси.
Формулы G) дают аналитические выражения проекций рав-
равнодействующей на оси координат. Зная проекции слагаемых
сил FiXt Fiy9 Fiz (i=l,2, ..., л), по формулам G) находим
проекции равнодействующей RXi Ry, Rz, а затем по E) и F) —
величину и направление равнодействующей:
- R , wo H — ^ , v.wo у — ^ .
Формулы G) и (8) полностью решают задачу об аналити-
аналитическом определении равнодействующей по заданным состав-
составляющим силам.
§ 9. Уравнения равновесия твердого тела
под действием сходящейся совокупности сил
Если тело под действием данной сходящейся совокупности
сил находится в равновесии, то R — О и, следовательно, Rx = О,
Ry = 0, Rz = 0, и по G) получаем следующие уравнения рав-
равновесия тела под действием сходящейся -совокупности сил:
п
Rx=ZFix*=F1x + F2x+ ...+Fnx = 0,
п
Ку — Lj r iy — г \у ^С г2у ^Г • • • П^ г пу — и> W;
В случае сходящейся плоской совокупности сил можно при-
принять плоскость, в которой расположены силы, за плоскость
хОу\ тогда проекция любой силы на ось z будет равна нулю,
третье уравнение равновесия будет выполнено тождественно и
условия равновесия плоской совокупности сходящихся сил све-
§ 9 РАВНОВЕСИЕ ПОД ДЕЙСТВИЕМ СХОДЯЩИХСЯ СИЛ 33
дутся к двум уравнениям:
ЕЛ* = 0, t/iy = O. (Ю)
Итак, необходимые и достаточные условия равновесия твер-
твердого тела, находящегося под действием совокупности сходящих-
сходящихся сил, сводятся к равенству нулю алгебраических сумм проек*
ций на оси координат всех приложенных сил. Число уравнений
равновесия равно трем в случае простран-
ственнои совокупности сил и двум— для
плоской совокупности.
Число неизвестных, подлежащих опре-
определению при решении задач о равновесии
тела, подверженного действию совокупно-
совокупности сходящихся сил, не должно превосхо-
превосходить числа уравнений, т. е. двух для пло-
плоской и трех для пространственной системы.
Поэтому в тех задачах, где число неизвест-
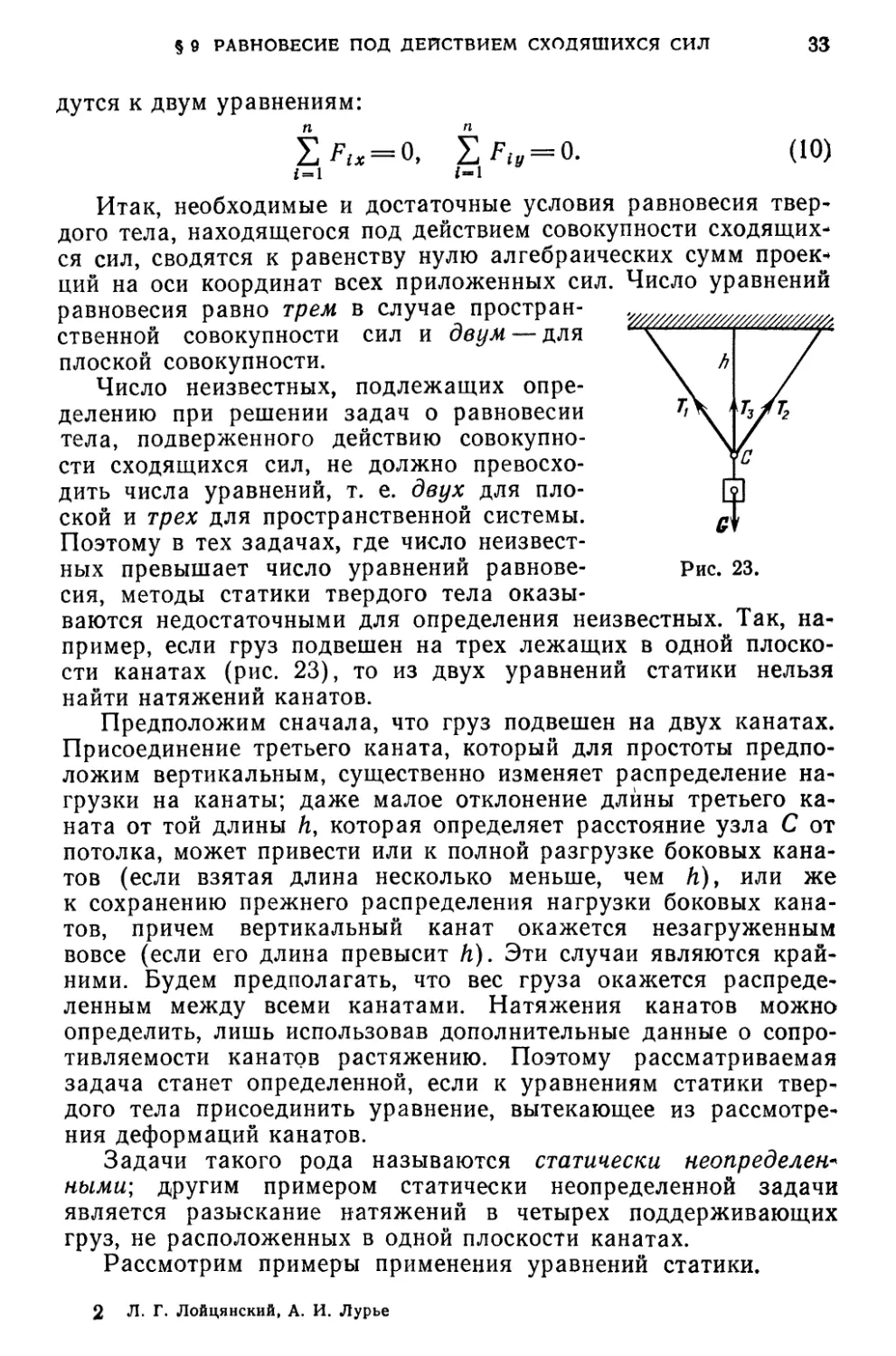
неизвестных превышает число уравнений равнове- Рис. 23.
сия, методы статики твердого тела оказы-
оказываются недостаточными для определения неизвестных. Так, на-
например, если груз подвешен на трех лежащих в одной плоско-
плоскости канатах (рис. 23), то из двух уравнений статики нельзя
найти натяжений канатов.
Предположим сначала, что груз подвешен на двух канатах.
Присоединение третьего каната, который для простоты предпо-
предположим вертикальным, существенно изменяет распределение на-
нагрузки на канаты; даже малое отклонение длины третьего ка-
каната от той длины ft, которая определяет расстояние узла С от
потолка, может привести или к полной разгрузке боковых кана-
канатов (если взятая длина несколько меньше, чем Л), или же
к сохранению прежнего распределения нагрузки боковых кана-
канатов, причем вертикальный канат окажется незагруженным
вовсе (если его длина превысит ft). Эти случаи являются край-
крайними. Будем предполагать, что вес груза окажется распреде-
распределенным между всеми канатами. Натяжения канатов можно
определить, лишь использовав дополнительные данные о сопро-
сопротивляемости канатов растяжению. Поэтому рассматриваемая
задача станет определенной, если к уравнениям статики твер-
твердого тела присоединить уравнение, вытекающее из рассмотре-
рассмотрения деформаций канатов.
Задачи такого рода называются статически неопределен*
ными; другим примером статически неопределенной задачи
является разыскание натяжений в четырех поддерживающих
груз, не расположенных в одной плоскости канатах.
Рассмотрим примеры применения уравнений статики.
2 Л. Г. Лойцянский, А. И. Лурье
34
ГЛ II. ПРИВЕДЕНИЕ СХОДЯЩИХСЯ СИЛ
§ 10. Примеры
Пример 7. Груз G = 20 кН (рис. 24) поднимается лебедкой при по-
помощи каната, перекинутого через неподвижный блок в точке В, Пренебрегая
трением в блоке, определить натяжение Г бруса АВ и усилие 5 в брусе СВ.
Выбрав оси координат, как показано на рисунке, будем иметь следующие
два уравнения равновесия:
а) уравнение проекций на ось Вх:
S cos 30° — Т — Q cos 60° = 0;
б) уравнение проекций на ось By:
— S cos 60° + Q cos 30° + G = 0.
Замечая, что по свойству идеального блока *) Q = G = 20 кН, находим
S = 74,64 кН, Т = 54,63 кН.
Пример 8. Определить натяжения 7\, Г2, Гз (рис. 25) проволок OCt
ОЛ и ОВ, если узел О нагружен гирей веса G. Плоскость проволок ОА и ОВ
наклонена к вертикали под углом р и перпендикулярна к вертикальной пло-
плоскости, проходящей через ось проволоки ОС. Сами проволоки расположены
симметрично относительно указанной плоскости и образуют с нею углы а.
Выбираем оси: Ох — по линии пересечения плоскости проволок АОВ с
проходящей через точку О горизонтальной плоскостью, Оу — по проволоч-
проволочке ОС, Oz — по вертикали вверх. Составляем затем уравнения равновесия!
а) уравнение проекций на ось Ох:
Т2 sin а — Тъ sin а = 0;
*) Блок называется идеальным, если трением в шарнире можно пре-
пренебречь по сравнению с натяжениями веревок. Тогда линия действия реак-
реакции оси блока пройдет через его центр и на основании теоремы о трех силах
будет направлена по биссектрисе угла между силами Q и G. Поэтому при
равновесии идеальный блок изменяет направление передаваемого усилия, но
сохраняет неизменной его величину.
§ 10 ПРИМЕРЫ 35
б) уравнение проекций на ось Оу:
Тх — Т2 cos a sin P — Г3 cos а sin р = 0,
в) уравнение проекций на ось Oz:
Т2 cos a cos Р + Г3 cos а cos р — G = 0.
При проектировании сил Тг и Тз на ось Оу вместо того, чтобы разыски-
разыскивать углы между Т% и Оу, гораздо проще воспользоваться ранее указанным
приемом: сначала спроектировать силу Т2 на плоскость yOzt что даст
Тг cos a, a уже потом этот отрезок спроектировать на ось Оу.
Аналогично проектируем силы Т2 и Г3 на ось Oz. Из уравнения а) сле-
следует
Гг-Гз,
о чем можно было догадаться и сразу из соображений симметрии. Из урав-
уравнения в) найдем
Т —Т — G
2~ 3" 2cosacosp*
Наконец, из уравнения б) получим
Тх == 2Г2 cos a sin P == G tg p.
2*
Глара III
ПРИВЕДЕНИЕ НЕСХОДЯЩЕЙСЯ СОВОКУПНОСТИ СИЛ
К ПРОСТЕЙШЕМУ ВИДУ
§ 11. Момент силы относительно точки как вектор.
Моменты силы относительно осей координат
и их аналитические выражения
В постановке задачи о приведении несходящейся совокупно-
совокупности сил к простейшему виду важное значение приобретают два
основных понятия статики: момент силы относительно точки и
момент силы относительно оси. Понятия эти исторически воз-
возникли в учении Архимеда о равновесии рычагов и впоследствии
были обобщены на любые пространственные совокупности сил.
Напомним, что в этом учении момент силы относительно
точки рассматривался в плоскости, проходящей через линию
действия силы и точку, называемую «центром момента», и
определялся алгебраической величиной произведения величины
силы на плечо, т. е. кратчайшее расстояние линии действия
силы от центра момента; эта величина бралась со знаком плюс
либо минус в зависимости от того, в какую сторону стремилась
повернуть тело' приложенная к нему сила.
При переходе к пространственной совокупности сил, с произ-
произвольным расположением их в пространстве, такое алгебраиче-
алгебраическое определение момента силы становится недостаточным.
Появляется необходимость учесть различные возможные на-
направления плоскостей, проходящих через линии действия сил
совокупности и общий для них центр моментов.
Направление плоскости в пространстве, как известно, может
быть задано перпендикуляром к этой плоскости. Чтобы одно-
одновременно определить величину момента силы относительно
точки и направление плоскости, проходящей через линию дей-
действия силы и центр момента, естественно рассматривать момент
силы mo(F) относительно точки О (рис. 26) как вектор, при-
приложенный в эгой точке, равный по абсолютной величине произ-
произведению величины силы F на кратчайшее расстояние h линии
действия силы от центра момента, т. е. плечо, и направленный
по перпендикуляру к плоскости, содержащей линию действия
§ 11. МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ И ОСИ
37
Правая система
силы и центр момента, в ту или другую сторону, в зависимости
от того, в каком направлении будет стремиться приложенная
к телу сила повернуть его вокруг центра момента.
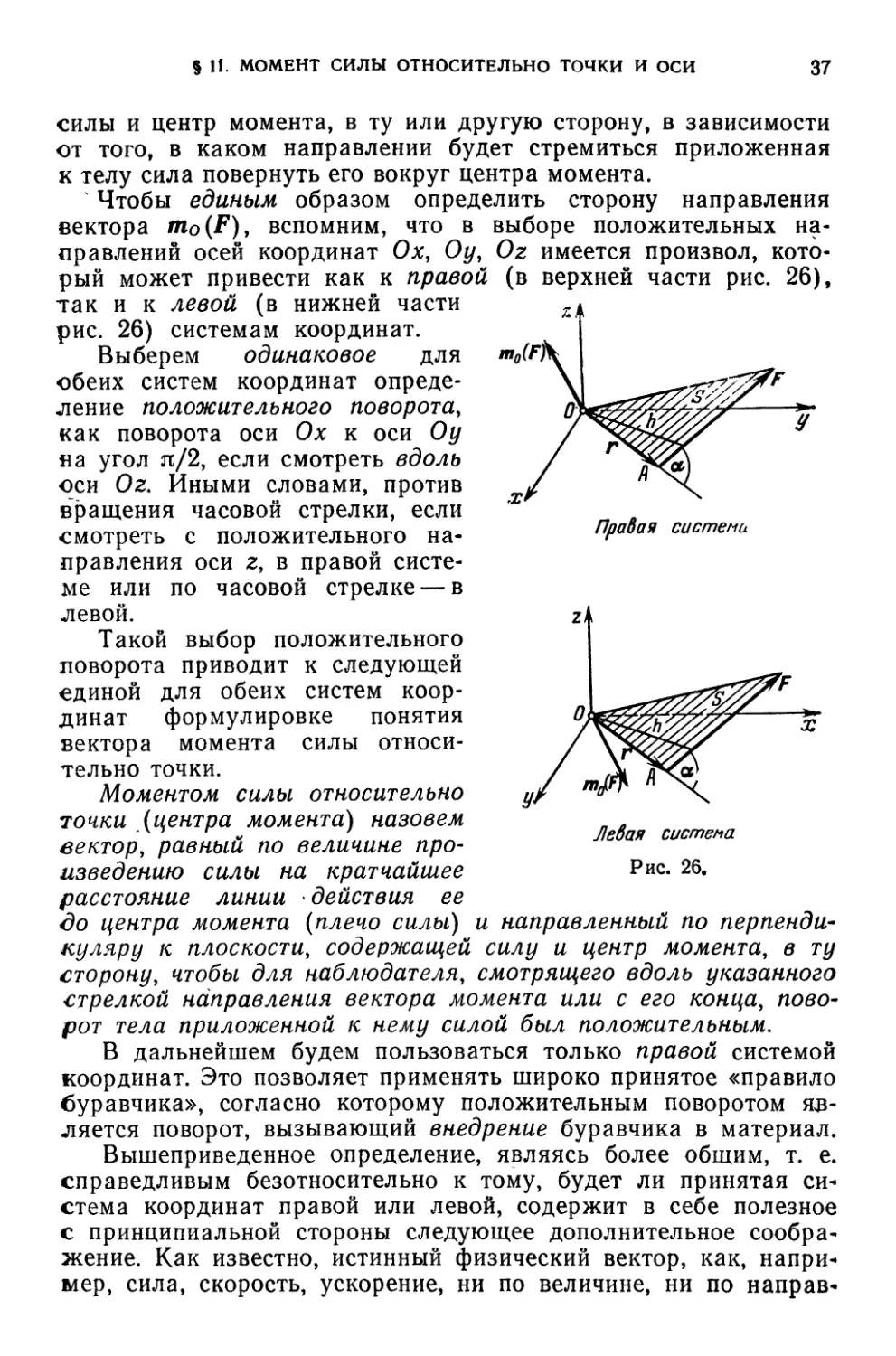
Чтобы единым образом определить сторону направления
вектора mo(F)y вспомним, что в выборе положительных на-
направлений осей координат Ox, Оу, Oz имеется произвол, кото-
который может привести как к правой (в верхней части рис. 26),
так и к левой (в нижней части
рис. 26) системам координат.
Выберем одинаковое для
обеих систем координат опреде-
определение положительного поворота,
как поворота оси Ох к оси Оу
на угол я/2, если смотреть вдоль
оси Oz. Иными словами, против
вращения часовой стрелки, если
смотреть с положительного на-
направления оси z, в правой систе-
системе или по часовой стрелке—-в
левой.
Такой выбор положительного
поворота приводит к следующей
единой для обеих систем коор-
координат формулировке понятия
вектора момента силы относи-
относительно точки.
Моментом силы относительно
точки (центра момента) назовем
вектор, равный по величине про-
произведению силы на кратчайшее
расстояние линии • действия ее
до центра момента (плечо силы) и направленный по перпенди-
перпендикуляру к плоскости, содержащей силу и центр момента, в ту
сторону, чтобы для наблюдателя, смотрящего вдоль указанного
стрелкой направления вектора момента или с его конца, пово-
поворот тела приложенной к нему силой был положительным.
В дальнейшем будем пользоваться только правой системой
координат. Это позволяет применять широко принятое «правило
буравчика», согласно которому положительным поворотом яв-
является поворот, вызывающий внедрение буравчика в материал.
Вышеприведенное определение, являясь более общим, т. е.
справедливым безотносительно к тому, будет ли принятая си-
система координат правой или левой, содержит в себе полезное
с принципиальной стороны следующее дополнительное сообра-
соображение. Как известно, истинный физический вектор, как, напри-
например, сила, скорость, ускорение, ни по величине, ни по направ-
Левая система
Рис. 26.
38
ГЛ. TIT. ПРИВЕДЕНИЕ НЕСХОДЯЩЕЙСЯ СОВОКУПНОСТИ СИЛ
лению не может зависеть от выбора системы координат, при
помощи которой он аналитически выражен (об этом см. далее
§ 32 гл. VIII). Вектор момента силы относительно точки, как
это непосредственно следует из верхнего и нижнего рис. 26,
такому условию не удовлетворяет. При переходе от правой си-
системы координат к левой или наоборот вектор mo{F), сохра-
сохраняя величину, меняет направление на противоположное. Такие
векторы называют «псевдовекторами», иногда «аксиальными
векторами». В дальнейшем мы будем часто встречаться с та-
такого рода векторами. К ним относятся, в частности, векторы
угловой скорости, углового ускорения и др.
Легко видеть (рис. 26), что по численной величине момент
силы относительно точки равен удвоенной площади 2S тре-
треугольника, построенного на силе
как на основании и с вершиной в
центре момента. Вместо удвоенной
площади треугольника можно взять
площадь параллелограмма со сто-
сторонами, равными силе и отрезку гу
соединяющему центр моментов с
точкой приложения силы, так что
= Frsina. A)
Рис. 27.
Если сила не равна нулю, то момент ее может обратиться
в нуль только тогда, когда плечо равно нулю, т. е. когда линия
действия силы проходит через центр момента.
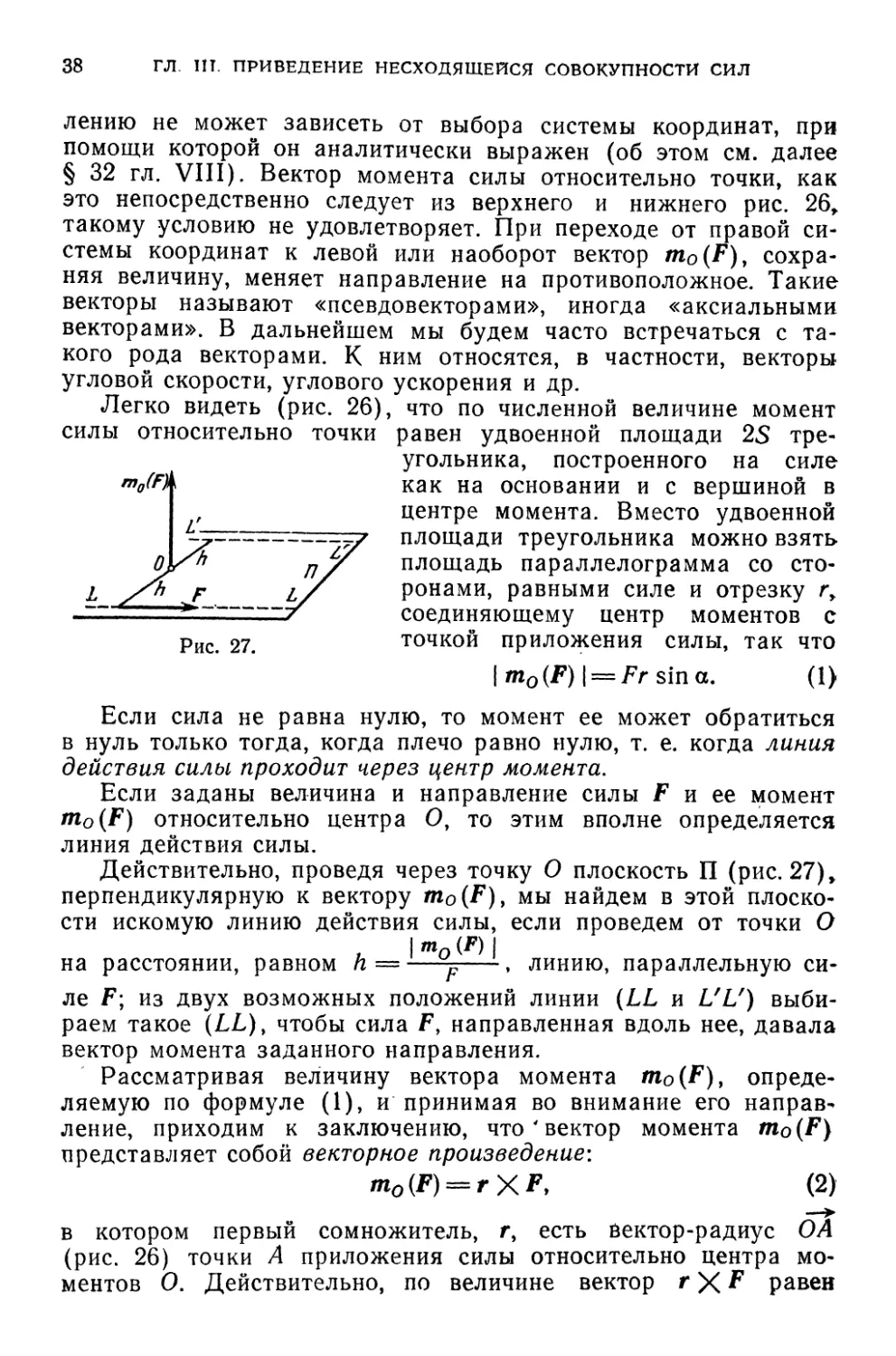
Если заданы величина и направление силы F и ее момент
mo(F) относительно центра О, то этим вполне определяется
линия действия силы.
Действительно, проведя через точку О плоскость П (рис. 27) t
перпендикулярную к вектору mo{F), мы найдем в этой плоско-
плоскости искомую линию действия силы, если проведем от точки О
и
на расстоянии, равном h =
линию, параллельную си-
силе F; из двух возможных положений линии (LL и L'U) выби-
выбираем такое (LL), чтобы сила F, направленная вдоль нее, давала
вектор момента заданного направления.
Рассматривая величину вектора момента mo(F), опреде-
определяемую по формуле A), и принимая во внимание его направ-
направление, приходим к заключению, что'вектор момента mo(F)
представляет собой векторное произведение:
rXF, B)
в котором первый сомножитель, г, есть вектор-радиус ОА
(рис. 26) точки А приложения силы относительно центра мо-
моментов О. Действительно, по величине вектор гХ^ равен
$ IT МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ И ОСИ 39
•произведению rF sin a = hFy а по направлению совпадает с на-
направлением перпендикуляра к плоскости векторов г и F в ту
сторону, чтобы, смотря вдоль него, видеть вращение г к F на
наименьший угол в положительном направлении.
Итак, момент силы относительно некоторого центра равен
векторному произведению вектор-радиуса точки приложения
силы на вектор силы.
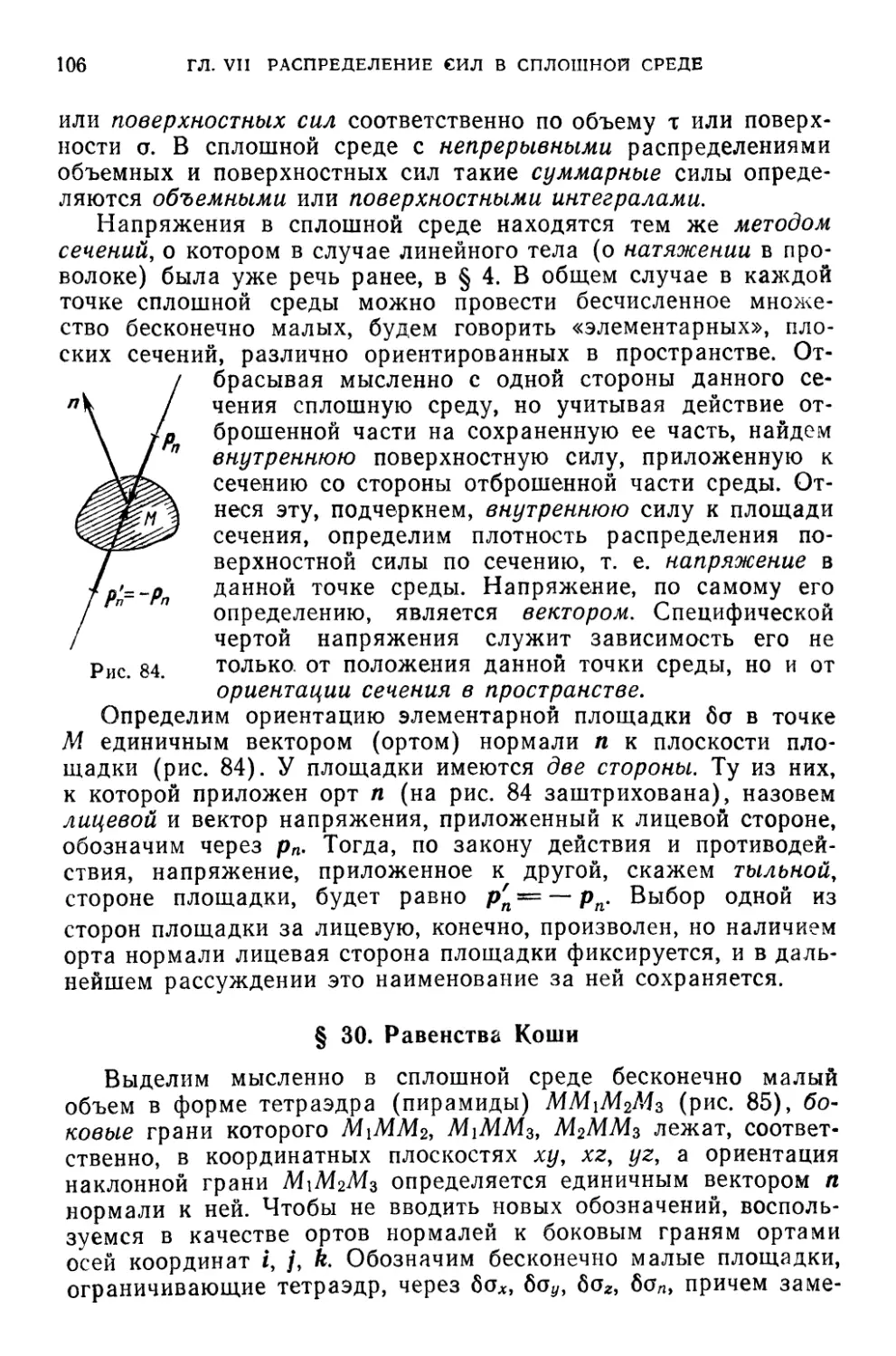
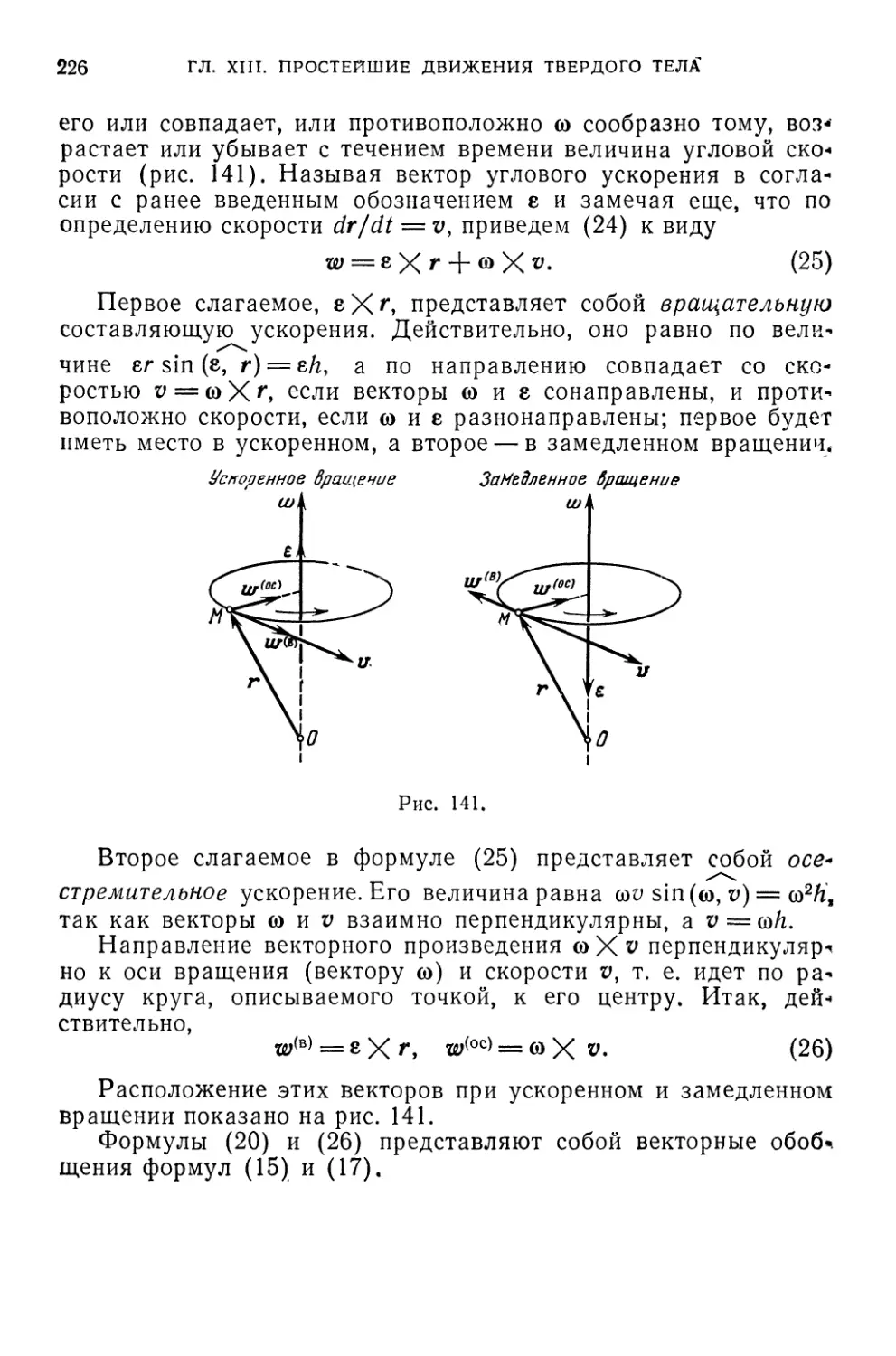
Известное свойство распределительности векторного произ-
произведения, заключающееся в том, что
а X F+ <?+¦..) = (а X 6) + (а X *)+...,
выражает в применении к пространственной совокупности схо-
сходящихся сил теорему Вариньона:
Момент равнодействующей пространственной сходящейся со-
совокупности сил относительно произвольной точки равен вектор-
векторной сумме моментов слагаемых сил от-
относительно той же точки.
Действительно (рис. 28), если сово-
совокупность сил F\, F2, ..., Fn сходится в Л^ jr^ /**&Ft
точке А, то ее равнодействующая пред-
представляется силой " N. 1 /^^Тг
приложенной в той же точке А.
Возьмем какую-нибудь точку О и
обозначим через г вектор-радиус точки
А относительно точки О. Тогда по определению момента равно-
равнодействующей и свойству распределительности найдем
ш0 (R) = г X R = г X (Fi + F2 + ... + Fn) =
= m0 (F{) + m0 (F2) + ... + m0 (Fn), C)
что и доказывает теорему.
Подчеркнем, что теорема Вариньона верна только для схо-
сходящейся совокупности сил, а также, как далее будет показано
(§ 25), и для совокупности сил с параллельными друг другу
линиями действия. Последний случай можно рассматривать как
предельный, соответствующий удалению точки А пересечения
линий действия на бесконечность.
В случае несходящейся совокупности сил, как это станет
ясным из последующего, само представление о равнодействую-
равнодействующей несходящейся совокупности сил будет лишено смысла и
заменится более общим понятием главного вектора. Для даль-
дальнейшего полезно подчеркнуть, что присоединение к заданной
40
ГЛ. III. ПРИВЕДЕНИЕ НЕСХОДЯЩЕЙСЯ СОВОКУПНОСТИ СИЛ
сходящейся совокупности сил дополнительной силы F' (на
рис. 28 показанной пунктиром) с линией действия, проходящей
через центр моментов Л, момент равнодействующей не изме-
изменяет.
Вектор момента силы относительно точки может быть
спроектирован на оси координат. Покажем, что этим проекциям
Рис. 29.
можно придать более простой смысл моментов силы относи-
относительно оси.
Введем сначала векторное представление о составляющей
вектора по плоскости.
Чтобы получить составляющую вектора силы F по плоско-
плоскости П (рис. 29), опустим из начала А и конца В вектора F пер-
перпендикуляры АА' и ВВ' на плоскость П; определенному таким
образом отрезку А'В' сообщим направление от А/ к В\ соответ-
соответствующее направлению вектора F. Вектор Fn, лежащий в пло-
плоскости П, и будет искомой составляющей силы F по плоско-
плоскости П.
Введем теперь в плоскости П момент силы Fn относительна
центра О, определенный алгебраически как произведение ве-
величины Fn на плечо h' со знаком плюс либо минус в зависи-
зависимости от направления вращения тела силой Fn.
Алгебраическую величину момента составляющей силы Fn
по плоскости П относительно точки пересечения оси Ох с пло-
плоскостью П, взятую со знаком плюс либо минус в зависимости
от того, будет ли поворот тела вокруг оси Ох составляющей
силой Fn по плоскости П положительным или отрицательным*
назовем моментом силы относительно оси Ох и будем обозна-
обозначать символом mx(F) (аналогично вводятся my(F), mz(F)).
Из определения момента силы относительно оси следует,
что он может быть равным нулю в двух случаях: 1) если линия
действия силы пересекается с осью и 2) если линия действия
§ II. МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ И ОСИ 41
силы параллельна оси, т. е. если сила и ось лежат в одной
плоскости.
Приняв указанное определение момента силы относительно
оси, легко показать, что проекция-вектора момента силы отно-
относительно некоторой точки на ось, проходящую через точку,
равна моменту силы относительно этой оси.
Для доказательства заметим, что проекция гпох (F) вектора
момента mo(F) силы F относительно точки О (рис. 29) на не-
некоторую ось Ох равна
тох (F) = | m0 (F) | cos a = 2 пл. Л ОАВ cos а = ± 2 пл. Л О А! В' *),
так как угол а между вектором mo(F) и осью х равен углу
между плоскостью АОАВ и плоскостью П, а площадь АОА'В'
есть проекция площади АОАВ\ вместе с тем согласно опреде-
определению момента силы относительно оси
±2пл. AOA'B'=*mx{F)
и, следовательно,
mOx(F) = rnx(F), D)
что и требовалось доказать.
Если сила F задана аналитически, т. е. своими проекциями
FXi Fy, Fz и координатами х, у, z точки приложения, то по фор-
формулам B) и D) имеем
Вспоминая выражение проекций векторного произведения на
оси координат, найдем следующие аналитические выражения
моментов силы относительно осей координат:
mz(F)y=xFy-yFx. 2 E)
Вводя единичные векторы (орты) осей координат I, /, k,
можно переписать систему равенств E) в форме одного век-
векторного равенства:
i } k
к У z . F)
х Fy Fz
Раскладывая этот определитель по элементам первой строки,
получим
ш0 (F) = i (yFz - zFy) + j (zFx - xFz) + k (xFy - yFx),
что эквивалентно системе равенств E).
*) Площадь треугольника представляет собой положительную величину;
поэтому знак плюс или минус должен быть взят в зависимости от знака cos a.
ГЛ TIT ПРИВЕДЕНИЕ НЕСХОДЯЩЕЙСЯ СОВОКУПНОСТИ СИЛ
Формулы E) можно было бы получить также, заменяя
силу F ее составляющими по осям координат F\, F2, Fz (рис. 30).
Воспользовавшись теоремой Вариньона о моменте равнодейст-
равнодействующей сходящейся системы сил, получим
тх (F) = тОх
= тх (
= тОх (F,
+ mx (F2)
+ тОх (F2) + тОх (F3) =
mx (F8) = 0 - zFy + yFz
и аналогично для моментов относительно осей у и z.
Составим еще выражение для момента силы относительно
оси OL любого направления, проходящей через начало коорди-
г нат. Направление оси OL зададим
единичным вектором /; проекции /
на оси координат представляют со-
собой косинусы углов между OL и
координатными осями:
А.
/
1
•
у
/х
X
Рис. 30.
Согласно только что доказан-
доказанной теореме момент силы относи-
относительно оси OL равен проекции на
эту ось вектора момента силы от-
относительно точки на оси, т. е. по определению скалярного про-
произведения
где б — угол между осью QL и вектором mo(F).
Вспоминая, что скалярное произведение двух векторов равно
сумме произведений их одноименных проекций на оси коорди-
координат:
а . Ь = axbx + ayby + azbz,
будем иметь
mL (F) = тОх (F) cos а + тОу (F) cos 3 + mOz (F) cos у,
или, по формулам D) и E),
ть №)= тх (F) cos а + Щ (F) cos р + тг (F) cos у =
= (yF2 - zFy) cos а + (zFx - xFz) cos 0 + (xFy - yFx) cos y. G)
Это выражение можно также представить в виде определителя:
mL(F):
cos a cos p cos у
X у 2
(8)
§ 12. ПАРА СИЛ И ЕЕ МОМЕНТ СВОЙСТВА ПАР
43
§ 12. Пара сил и ее момент. Свойства пар. Сложение пар
Парой сил называют совокупность двух равных по величине
сил, имеющих параллельные линии действия, но направленных
в разные стороны. Плоскость, проведенная через линии дейст-
действия сил пары, образует плоскость пары.
Рассмотрим в плоскости пары П (рис. 31) две равные по
величине, параллельные, но противоположные по направлению
силы Р и Q, образующие пару. Сумму векторов моментов этих
сил относительно произвольного центра О, равную (Q = —Р; г
и г\ — вектор-радиусы то-
точек А я В приложения
сил Р и Q)
не зависящую от выбора
центра моментов О, а рис> 31.
только от вектора В А =
= г — гь определяющего взаимное расположение точек Л и В,
назовем моментом пары сил и обозначим через т.
Согласно определению момента пары (9), длина этого век-
вектора равна (рис. 31)
т = Р\г — г11 sin а = Р • АВ • sin а = РА,
где кратчайшее расстояние h между линиями действия сил
пары называется плечом пары. Момент пары т направлен по
перпендикуляру к плоскости пары П, причем так, чтобы, смотря
вдоль указанного стрелкой направления его, увидеть поворот
тела парой сил положительным, т. е. при пользовании правой
системой координат, вектор т направлен по ходу винта с пра-
правой нарезкой.
Момент пары вполне определяет статическое действие пары
на абсолютно твердое тело. Иными словами, две пары с одина-
одинаковыми по величине, направлению и стороне поворота момен-
моментами статически эквивалентны.
Эту почти очевидную теорему докажем по частям.
1°. Не нарушая действия пары на абсолютно твердое тело,
ее можно повернуть в своей плоскости на произвольный угол.
Пусть к^гвердому телу приложена пара сил (рис. 32) (Р, Q)
с плечом АВ = h, стремящаяся для наблюдателя, смотрящего
на рисунок, повернуть тело против часовой стрелки. Проведем
44
ГЛ. III. ПРИВЕДЕНИЕ НЕСХОДЯЩЕЙСЯ СОВОКУПНОСТИ СИЛ
Рис. 32.
через точку В отрезок А'В, равный по величине АВ = Л, и в
точках А1 и В приложим эквивалентную нулю совокупность сил
Р\ Р", Q', Q", не изменяющую действие пары. Сложим по пра-
правилу параллелограмма силы Р и Р", перенесенные вдоль линий
своего действия в точку С, в одну равнодействующую R и ана-
аналогично поступим с силами Q и Q", приводящимися к одной
равнодействующей R'. Силы R и R', очевидно, уравновешивают-
уравновешиваются, и к твердому телу остается приложенной лишь пара сил
(Р', Q') с плечом А/~В = h, т. е. пара (Р, Q) статически экви-
эквивалентна паре (Р', Q')y повернутой по отношению к паре (Р, Q)
на произвольный угол. Моменты этих двух пар равны друг
другу. Поворачивая пару и переме-
перемещая силы пары вдоль их линий
действия, сможем, не нарушая ее
действия, переносить пару в любое
место в ее плоскости.
2°. Не изменяя действия парыу
можно менять величину входящей
в нее силы и длину плеча, но таку
чтобы их произведение — абсо-
абсолютная величина момента — сохра-
сохранялось.
Пусть дана пара (Р, Q) (рис. 33) с плечом АВ = h. Отло-
Отложим от середины плеча О в обе стороны равные отрезки ОС и
OD и в точках С и D по две взаимно уравновешивающиеся
силы (Р', Р") и (Q', Q"). Полученная таким образом совокуп-
совокупность шести сил Р, Q, P', Q', P", Q" статически эквивалентна
паре сил (Р, Q). Равнодействующая
двух неравных, параллельных друг
другу и направленных в ту же сто-
_^1л РОНУ сил> как известно из курса фи-
~фп зики, равна по величине их сумме,
направлена в ту же сторону, что
и складываемые силы, причем точ-
точка приложения равнодействующей
Рис. 33. лежит на отрезке, соединяющем
точки приложения слагаемых сил>
и делит этот отрезок обратно пропорционально величинам сла-
слагаемых сил.
Сложим силы Р и Q" (рис. 33). Равнодействующая их R бу*
дет равна сумме /? = Р + Q", направлена параллельно им в ту
же сторону, а точка приложения равнодействующей окажется
в точке О, так как по условию Р-ОА = Q"-OD. Аналогично»
складывая силы Q и Р", получим равнодействующую R', рав-
равную сумме тех же по величине сил, совпадающую по линии
§ 12 ПАРА СИЛ И ЕЕ МОМЕНТ СВОЙСТВА ПАР
45
действия с силой R, но направленную, по сравнению с R, в про-
противоположную сторону. Силы R и R' взаимно уничтожаются, и
остается лишь пара сил (P\Q')> статически эквивалентная паре
сил (PyQ), что и доказывает вышевысказанное положение.
Аналогичным приемом доказывается и необходимое для
дальнейшего последнее свойство пар сил.
3°. Не изменяя действия пары на абсолютно твердое тело,
можно менять плоскость пары на любую параллельную ей
плоскость.
Пусть в плоскости П (рис. 34) задана пара сил (Р, Q)
с плечом АВ. В любой другой, но параллельной П плоскости П'
проведем отрезок А'В\ равный и параллельный отрезку АВ, и
в точках А' и Вг отложим, как и в предыдущем пункте, взаимно
друг друга уравновешивающую совокупность четырех парал-
параллельных Р и Q сил Р\ Р", Q\ Q". Полученная таким образом
совокупность шести сил Р, Q, P', Q', Р", Q" статически экви-
эквивалентна заданной паре (P,Q). Складывая теперь по отдель-
отдельности параллельные силы Р и Q" и Q и Р", придем, очевидно,
к двум уравновешивающим друг друга равнодействующим R
и R\ так что остающаяся пара сил (Р\ Q') соответствует образу
пары сил (P,Q), перенесенной
из плоскости П в параллельную
ей плоскость ГГ.
Изложенные в пп. 1°, 2° и 3°
свойства пар приводят к заклю-
заключению, что единственной, пол-
полностью определяющей ее дейст-
действие количественной характери-
характеристикой пары является ранее вве-
введенный вектор m момента пары.
Вектор m не имеет ни опреде-
определенной точки приложения, ни
линии действия, т. е. не является
ни приложенным, ни скользящим
вектором, а задается лишь своей
величиной и направлением. Такие векторы называют свободны-
ми векторами.
Докажем следующую теорему о сложении пар:
Совокупность пар, как угодно расположенных в простран-
пространстве, статически эквивалентна одной паре с моментом, равным
векторной сумме моментов слагаемых пар.
Сложим две пары (Рь Qi) и (Р2, Q2) (рис. 35) с моментами
тх и т2. Для этого, предполагая, что в общем случае плоско-
плоскости пар П и IT не параллельны, отметим линию пересечения
их LL, отложим на ней отрезок АВ и приведем, на основании
п. 2°, обе пары к одному плечу АВ = h. При этом силы Рь Р^
Рис. 34.
46
ГЛ. III. ПРИВЕДЕНИЕ НЕСХОДЯЩЕЙСЯ СОВОКУПНОСТИ СИЛ
и силы Qu Q2 будут, соответственно, приложены в точках А и
В. Складывая эти силы по правилу параллелограмма, придем
к равнодействующей паре сил (/?, /?'). По теореме Вариньона
(§11) моменты силы R и силы R' относительно любой точки 6
будут равны сумме моментов слагаемых сил, т. е.
т0 (R) = т0 (Рх) + т0 (Р2),
(Ю)
а искомый момент т равнодействующей пары (R, R') по фор-
формуле (9) будет равен сумме моментов:
т2.
+ то(Р2) + т0 (Q2) =
Таким образом, теорема о сложении пар доказана. В слу-
случаях пар сил с параллельными плоскостями, а следовательно,
и моментами сложение векторов моментов упрощается и сво-
сводится к сложению векторов т{ и т2, расположенных вдоль од-
одной прямой и направленных в одну или разные стороны. Сло-
Сложение многих пар сил производится по правилу векторного
многоугольника (§ 6) их моментов.
§ 13. Приведение пространственной несходящейся совокупности
сил к одной силе и одной паре. Главный вектор
и главный момент совокупности сил
Как уже упоминалось, основной задачей статики, а следо-
следовательно и ее применений в динамике, является приведение за-
заданной несходящейся совокупности сил к простейшему виду.
Остановимся на общепринятом методе Пуансо («Элементы
статики», русский перев., 1864 г.) приведения несходящейся со-
совокупности сил к одной силе и одной паре сил. Метод этот ос-
§ 13. ПРИВЕДЕНИЕ НЕСХОДЯЩИХСЯ СИЛ К СИЛЕ И ПАРЕ
47
нован на изложенных в § 12 свойствах пространственных пар
сил и операции сложения или разложения их.
Предположим, что к абсолютно твердому телу в точках Ль
Л2, • -, An (рис. 36) приложена пространственная несходя-
несходящаяся система сил Fu F2, ..., Fn. Возьмем произвольную, при-
принадлежащую телу или условно к нему жестко присоединенную
точку О и назовем ее центром приведения. Применим следую-
следующий лежащий в основе метода Пуансо общий прием переноса
сил с точками приложения Ль Л2, ..., Лп в одну точку — центр*
Рис. 36.
приведения О. Приложим в точке О две взаимно уравновеши-
уравновешивающие друг друга силы F[ и F", равные по абсолютной ве-
величине силе Fb параллельные Fb но направленные в разные
стороны. Затем аналогичную операцию произведем над силой
F2, приложив к центру приведения О две друг друга уравно-
уравновешивающие силы F'2 и F%, и т. д.
Силу F[ можно рассматривать как силу Fb перенесенную
из точки А\ в точку О, а совокупность двух равных, параллель-
параллельных, но направленных в противоположные стороны сил (Fi, Р")—
как «присоединенную» пару сил с моментом гп\. Точно так же
сила F2 может быть перенесена из точки Л2 в точку О, а пара
сил (Fr FQ с моментом ш2 будет служить «присоединенной»
парой сил и т. д. Продолжая идти тем же путем, приведем
48 ГЛ. III. ПРИВЕДЕНИЕ НЕСХОДЯЩЕЙСЯ СОВОКУПНОСТИ СИЛ
заданную произвольную несходящуюся совокупность сил
F\, ?2) ».., Fn к эквивалентной ей сходящейся совокупности сил
F'v F'2, ..., F'n в точке О и к совокупности пар с моментами
т\у т2, -.-, тпу являющимися свободными векторами (§ 12).
Сходящаяся совокупность сил F'v Frv ..., Frn эквивалентна
одной силе, равной сумме
или, что все равно с точки зрения построения силового много-
многоугольника,
V = Fl + F2+...+Fn=?iPi. A2)
Вектор, полученный геометрическим сложением совокупно-
совокупности векторов, т. е. вектор, определяемый замыкающей сторо-
стороной многоугольника, будем называть главным вектором сово-
совокупности векторов. Главный вектор не заменяет физически дей-
действия совокупности векторов, суммированием которых он полу-
получен. Говоря, что вектор V есть главный вектор совокупности
сил F\, F2, ..., Fn, а не равнодействующая той же совокупно-
совокупности сил, мы подчеркиваем, что сила V не может заменить дей-
действия совокупности сил Fu F2, ..., Fn9 т. е. не эквивалентна
этой совокупности сил. Сила V является равнодействующей со-
совокупности сил Fj, F'2, ..., F'n, а не заданной совокупности сил
FuF* ...,Fn.
Особенно отчетливо сказывается разница между понятиями
главного вектора и равнодействующей в случае совокупности
сил, приложенных к различным телам. В этом случае понятие
равнодействующей вообще не имеет смысла, так как нельзя
складывать силы, приложенные к различным телам; главный
же вектор такой совокупности можно построить.
Итак, полученный вектор V, приложенный в выбранном по
произволу центре приведения О, является главным вектором
приложенных к телу сил.
Рассмотрим теперь совокупность присоединенных пар; по
теореме, доказанной в § 12, эта совокупность пар эквивалентна
одной паре с моментом т, равным геометрической сумме мо-
моментов слагаемых пар:
m = m{ + m2+ ... +mn. A3)
Вспоминая, что момент пары всегда можно рассматривать
как сумму моментов входящих в пару сил относительно произ-
произвольной точки (§ 12), имеем, например, для пары сил Fb F"
mi = mo (Fi) + mo (FO = m0
§ 13. ПРИВЕДЕНИЕ НЕСХОДЯЩИХСЯ СИЛ К СИЛЕ И ПАРЕ 49
так как линия действия силы F" проходит через точку О; ины-
иными словами, момент присоединенной пары равен моменту при-
приложенной к телу силы относительно выбранного центра приве-
приведения.
Аналогичным образом получим
т2 = ш0 (F2), ..., mn = m0 (Fn) A4)
и согласно A3) найдем
т = то(Рх) + m0 (F2) + ... + mo(Fn). A5)
Вектор tn, равный геометрической сумме моментов прило-
приложенных к телу сил относительно произвольного центра приве-
приведения, назовем главным моментом совокупности сил относи-
относительно центра приведения и будем обозначать т@).
Метод Пуансо приводит к следующей общей теореме
статики абсолютно твердого тела:
Произвольная пространственная несходящаяся совокупность
сил, действующая на абсолютно твердое тело, статически экви-
эквивалентна одной. силе — главному вектору, приложенному в
произвольно выбранной точке тела (в центре приведения), и
одной паре с моментом, равным главному моменту сил относи-
относительно центра приведения.
В аналитических методах расчета пространственных несхо-
несходящихся совокупностей сил главный вектор V заменяют проек-
проекциями его Vx, Vy, У г на выбранные оси координат, а главный
момент т<°> относительно начала координат О — проекциями
\ равными, согласно соотношениям D) и A5),
щ(О) = J
) = J]
т(О) = g rnOy (Ff) - t my (Ff)f A6)
tO2i)t
Алгебраическую сумму моментов всех входящих в совокуп-
совокупность сил относительно некоторой оси называют главным мо-
моментом совокупности сил относительно этой оси. Главные мо-
моменты относительно осей х, у, z будем обозначать
Согласно этому определению и уравнениям A6) имеем
mz. A7)
50 ГЛ Ш ПРИВЕДЕНИЕ НЕСХОДЯЩЕЙСЯ СОВОКУПНОСТИ СИЛ
Соответственно формулам E) найдем теперь по формулам
A6) аналитические выражения для главных моментов совокуп-
совокупности сил относительно осей координат:
п
i = l
п
my=Yj (ZiFix — xtFiz), A8)
П
z 1?(iiy Uiix)
Здесь Fix, Fiy, Fu — проекции сил Ft на оси координат, a Xi, yi»
Zi — координаты точек их приложения.
§ 14. Уравнения равновесия абсолютно твердого тела
под действием несходящейся совокупности сил
Рассмотрим теперь условия равновесия абсолютно твердого
тела под действием пространственной несходящейся совокупно-
совокупности сил. Подчеркнем, что под равновесием в случае твердого
тела понимается его относительный покой в данной системе ко-
координат, а не движение «по инерции», которое в случае твер-
твердого тела, не подверженного действию внешних сил и пар, в
зависимости от его формы и распределения в нем массы может
быть очень сложным.
Определяя так понятие равновесия абсолютно твердого тела^
получим условия равновесия в виде равенств нулю главного век-
вектора и главного момента сил:
У = 0, т<О) = 0. A9)
Очевидно, что под действием такой совокупности сил свобод-
свободное твердое тело сохранит свой относительный покой. Обратно,
если равновесие имеет место, то должны быть выполнены усло-
условия A9). Действительно, если бы, например, было V ф 0,
т@) — 0, то совокупность сил F\, F2, ..., Fn привелась бы к
одной силе V, приложенной в точке О, и равновесия не было бы;
при V = 0, но т{0' ф 0 мы имели бы пару и равновесия также
не было бы. Не будет равновесия и при V Ф 0 и т@) Ф 0, так
как сила и пара не могут уравновесить друг друга. Итак, усло-
условия A9), которые согласно A2) и A5) можно также записать
в виде
F. + F.+ ...+*„«<>,
mo(Fl) + mo(F2)+ ...+mo(Fn) = 0, V '
представляют собой необходимые и достаточные условия равно-
равновесия свободного твердого тела, находящегося под действием
§ 14. УРАВНЕНИЯ РАВНОВЕСИЯ ТВЕРДОГО ТЕЛА 51
совокупности сил, произвольным образом расположенных в про-
пространстве.
Два векторных условия B0) могут быть в общем случае при-
приведены к шести алгебраическим уравнениям; для этого надо
спроектировать левые части этих уравнений на три оси коорди-
координат, произвольно выбранные в пространстве. Тогда, вспоминая
еще, что проекция вектора момента тела на ось равна моменту
относительно оси, будем иметь следующие шесть уравнений рав-
равновесия абсолютно твердого тела:
Z
п B1)
тх (Fi) + mx (F2) + ... + тх (Fn) =^т, (Ft) = О,
my (F{) + my (F2) + ... + my (Fn) = ? my (Ft) = 0,
тг (Fx) + mz (F2) +...+тг (Fn) = t mz (Ft) = 0,
которые выражают следующее положение:
При равновесии твердого тела под действием пространствен-
пространственной совокупности сил суммы проекций приложенных сил на оси
координат и суммы моментов приложенных сил относительно
осей координат обращаются в нуль.
В отдельных частных случаях некоторые из этих шести урав-
уравнений могут выполняться тождественно; при этом число урав-
уравнений равновесия уменьшается. Отметим важнейшие из этих
частных случаев.
Г. Сходящаяся совокупность сил. Выбирая точку,
в которой сходится линия действия сил, за центр моментов, заме-
заметим, что левые части последних трех уравнений B1) тожде-
тождественно обратятся в нуль, так как линии действия сил пересекут
оси координат. В соответствии с теорией, изложенной в § 9,
число уравнений равновесия сокращается до трех уравнений
проекций на оси координат.
2°. Плоская совокупность сил, т. е. такая, что все
силы совокупности лежат в одной плоскости. Расположим ось z
перпендикулярно к плоскости действия сил. Тогда тождественно
обратятся в нуль левые части третьего уравнения B1), так как
52 ГЛ. III ПРИВЕДЕНИЕ НЕСХОДЯЩЕЙСЯ СОВОКУПНОСТИ СИЛ
силы перпендикулярны к оси, и четвертого и пятого, так как ли-
линии действия сил пересекают ось моментов или параллельны ей.
Остающиеся при этом уравнения равновесия тела под дей-
действием плоской совокупности сил будут
t/ty = ^ B2)
т2 (Fx) + mz (F2) + ... + mz (Fn) = ? mz (F,) = 0.
3°. Совокупность параллельных сил. Направим
ось z параллельно линиям действия сил; тогда первые два и
последнее уравнение системы B1) выполняются тождественно и
уравнения
mx (F,) + mx (Fa) + ... + m* (Fn) = f mx (Pt) = 0, B3)
П
my{Fx) + m^(F2) + ... + my (Fn)= Z ml/(Fi) = 0
будут служить уравнениями равновесия пространственной сово-
совокупности параллельных сил.
Возвращаясь к общему случаю совокупности сил, произволь-
произвольно расположенных в пространстве, заметим, что задача будет ста-
статически определенной, если число неизвестных не превышает
шести. Рассмотрим, какое число неизвестных вводят в задачу
различные способы закрепления тела.
Неподвижное закрепление точки тела можно осуществить,
например, при помощи сферического шарнира, т. е. приспособ-
приспособления, обеспечивающего неподвижность точки закрепления тела
и допускающего возможность поворота тела вокруг любой оси>
проходящей через эту точку. Реакция неподвижно закрепленной
точки не известна ни по величине, ни по направлению; в урав-
уравнения статики войдут при этом три неизвестные проекции сил.
Закрепление тела может быть осуществлено также в форме
подпятника, в форме конического или полусферического углуб-
углубления, в которое вставляется тело своим коническим или сфери-
сферическим концом, и т. д.
Реакция опоры, допускающей свободное перемещение тела
вдоль некоторой оси, например реакция лишенного трения ци-
§ 14 УРАВНЕНИЯ РАВНОВЕСИЯ ТВЕРДОГО ТЕЛА 5$
линдрического подшипника (или муфты, цилиндрического шар-
шарнира и т. п.), перпендикулярна к этой оси. В уравнения статики
при наличии соединения этого рода войдут две неизвестные
проекции реакции. Одну неизвестную будем иметь в случае со-
соприкосновения гладких тел (реакция нормальна к гладкой опор-
опорной поверхности), в случае подвижной опоры на катках и т. д.
Чтобы сделать неподвижным твердое тело, достаточно за-
закрепить три его точки, не лежащие на одной прямой линии.
Если закрепления осуществить, например, при помощи трех
сферических шарниров, то в уравнения статики войдут девять
неизвестных проекций реакций и задача будет статически не-
неопределенной.
Прием придания неподвижности телу, при использовании ко-
которого задача нахождения реакций опорных закреплений ока-
оказывается статически определенной, состоит в том, что одна точ-
точка тела делается неподвижной (три неизвестные), вторая точка
ставится в направляющий прямолинейный желобок и может*
перемещаться по его направлению (реакция перпендикулярна
к желобку — две неизвестные), третья точка опирается на глад-
гладкую плоскость и может по ней скользить в любом направлении
(реакция перпендикулярна к плоскости — одна неизвестная).
Такой прием применяется в строительном деле, а также при
установке физических приборов и геодезических инструментов-
Он обеспечивает вполне неподвижную установку прибора все-
всегда в одном и том же положении, а также оставляет возмож-
возможность конструкции свободно расширяться при изменениях тем-
температуры.
Другой прием состоит в закреплении тела при помощи шести
нерастяжимых стержней, шарнирно присоединенных концами к:
телу и к опорам. Такое крепление может обеспечивать непо-
неподвижность тела при всевозможных способах загружения его.
Условия обращения в нуль главного вектора и главного мо-
момента, конечно, не обязательно формулировать аналитически в.
форме уравнений B1). Чтобы обратить в нуль некоторый век-
вектор, достаточно обратить в нуль его проекции на три любых (не*
обязательно взаимно перпендикулярных) направления, не ле-
лежащих в одной плоскости. Это допускает широкий произвол в-
выборе осей проекций и моментов, пользуясь которым можно-
максимально упростить вид уравнений статики в каждой част-
частной задаче. Оси следует выбирать так, чтобы система шести
уравнений распадалась на несколько систем, в каждую из кото-
которых входила бы только часть неизвестных.
Например, можно доказать в общем виде, что в случае тела,,
закрепленного шестью стержнями, реакции стержней опреде-
определяются из решения трех систем уравнений, в каждую из кото-
которых входят лишь две неизвестные.
54
ГЛ TIT ПРИВЕДЕНИЕ НЕСХОДЯЩЕЙСЯ СОВОКУПНОСТИ СИЛ
\
\
Покажем это на нескольких примерах, так как общее рас-
рассмотрение вопроса требует довольно сложных геометрических
рассуждений.
В качестве первого примера рассмотрим ферму крана, под-
поддерживаемую шестью попарно пересекающимися стержнями
(рис. 37). Желая определить усилия Т$
и Г6, мы можем составить одно уравне-
уравнение моментов относительно показанной
на рисунке пунктирной линии, соединяю-
соединяющей общие точки стержней /, 2 и <?, 4\
второе уравнение моментов надо будет
составить относительно линии пересече-
пересечения плоскостей (/,2) и C, 4), опреде-
определяемых указанными стержнями. Если бы
эти плоскости оказались параллельны-
параллельными, то второе уравнение пришлось бы
написать в виде уравнения проекций на
направление, перпендикулярное к этим
плоскостям. Аналогичным образом мы
могли бы написать две системы, состоя-
состоящие каждая из двух уравнений, для определения реакций в
стержнях У, 2 и 3, 4.
На рис. 38 имеем более простую схему стержневой системы,
лоддерживающей плиту ОАСВ; ход решения задачи таков:
В с
Рис. 37.
Рис. 38.
Рис. 39.
уравнение моментов относительно оси ОА и уравнение мо-
моментов относительно оси DD' определяют Т$ и Г6;
уравнение моментов относительно оси А'А определяет Г3;
уравнение моментов относительно оси О'О определяет Г4;
уравнение моментов относительно оси В'С и уравнение про-
проекций всех сил на ось ОА определяют Т\ и Т2.
На рис. 39 имеем три стержня, пересекающихся в одной
точке, и другие три стержня, лежащих в одной плоскости. Здесь
можно определить каждую из неизвестных реакций по отдель-
отдельности:
§ 15 РАВНОВЕСИЕ ТЕЛА С ДВУМЯ ЗАКРЕПЛЕННЫМИ ТОЧКАМИ
55
Рис. 40.
уравнение моментов относительно оси СС определяет Т\\
уравнение моментов относительно оси СС", проведенной в
плоскости D, 5, 6) параллельно стержню 5, определяет Г2;
уравнение проекций на ось АС определяет Г3;
уравнение моментов относительно оси АС определяет Г4;
уравнение моментов относительно оси АА' определяет Г5;
уравнение моментов относительно оси АВ/ определяет Г6.
Еще один случай представлен на рис. 40. Составив здесь
уравнение моментов относительно оси СС\ убедимся, что это
уравнение вовсе не будет содержать
неизвестных реакций (стержни 2, 4
пересекают ось, стержни i, 3, 5, 6 ей
параллельны). Равновесие будет воз-
возможно, только если главный момент
системы заданных нагрузок относи-
относительно указанной оси равен нулю.
Если составить каким бы то ни было
образом шесть уравнений статики для
рассматриваемого случая, то опреде-
определитель этих уравнений обратится в
нуль, т. е. уравнения равновесия не
будут независимы друг от друга. Си-
Система стержней не обеспечивает рав-
равновесия при произвольной системе нагрузок, и применения ее
следует избегать.
Из приведенных рассуждений можно сделать вывод: при
пользовании уравнениями равновесия можно, сохраняя доста-
достаточное их число, менять содержание каждого из них, т. е. не
придерживаться обязательно трех уравнений проекций и трех
уравнений моментов. Можно, когда это приводит к уменьшению
числа неизвестных в данном уравнении, увеличивать количество
уравнений проекций либо уравнений моментов. Сюда же можно
отнести замечание о том, что с той же целью надо стремиться
применять наиболее удачный выбор направлений осей проекти-
проектирования и осей, относительно которых определяются моменты,
так чтобы в каждое из уравнений входило наименьшее число
неизвестных сил.
§ 15. Равновесие тела с двумя закрепленными точками
Предположим, что точки О и О7 (рис. 41) закреплены; тогда
тело будет иметь возможность поворачиваться вокруг оси 00'.
Проекции на оси координат реакций в точках закрепления обо-
обозначим соответственно через N\, N2, N3 и N{, N'2, Щ.
Задача будет статически неопределенной; одна неизвестная
будет лишней, так как только пять из шести уравнений статика
ГЛ III. ПРИВЕДЕНИЕ НЕСХОДЯЩЕЙСЯ СОВОКУПНОСТИ СИЛ
будут содержать эти неизвестные: в уравнение моментов отно-
относительно оси z (ось вращения 00') реакции, пересекающие эту
ось, не войдут.
Обозначим через Fu F2, ..., Fn заданные силы, приложен-
приложенные к телу. Три уравнения проекций сил будут
¦N['
, м' •
iV2
•к
Flx = 0,
ft
ZFiy = O,
B4)
t-1
жо
В уравнения моментов относительно осей х и у войдут толь-
неизвестные составляющие N'2 и N[ (составляющая N'3 по
оси z пересекает эти оси). Обозначая
длину 00' через А, получим
B5)
t
Рис. 41.
Наконец, уравнение моментов отно-
У сительно оси z не содержит реакций; оно
имеет вид
B6)
и выражает условие, налагаемое на силы Fi, F2, »>., Fn, обес-
обеспечивающее равновесие тела.
Из первых двух уравнений B4) и двух уравнений B5) опре-
определяются четыре поперечные реакции Nx> JV2, N'v N'r
Для определения двух продольных реакций Л^з и Л^з остается
одно лишь уравнение — последнее уравнение B4). Из него на-
находим сумму этих реакций; каждая же реакция по отдельности
остается неопределимой, что естественно, так как прибавление
или отбрасывание системы двух уравновешивающихся сил лю-
любой величины, направленных вдоль оси 00', ничего не изменит
:в условиях равновесия тела.
Статическая неопределимость устраняется, если предполо-
предположить, что в одной из точек закрепления, например О', имеется
подшипник; при отсутствии в нем трения Af3=*0, и Л/з мoжet
<быть найдено из последнего уравнения B5),
§ 16. ПРИМЕРЫ
57
§ 16. Примеры
В настоящем параграфе приводятся примеры решения задач как на пло-
плоские, так и на пространственные совокупности сил.
Пример 9. Реактивный самолет (рис. 42) веса Р под действием по-
постоянной реактивной тяги Т летит поступательно, прямолинейно и равно-
равномерно под углом а к горизонтальной плоскости. Распоряжаясь указанными
на рисунке размерами a, b и с, определить отношение К полной подъемной
силы, равной сумме подъемных сил крыла L и стабилизатора Z/, к полному
сопротивлению самолета D (это отношение называют суммарным «качеством»-
самолета), а также раздельно L,L' и
D, выразив их через заданные вес Р и
тягу Т, . л
Проектируя совокупность приложен-
приложенных сил один раз на продольную, ^^"~iL. L
другой — на поперечную оси, получим у
D = Т - Р sin a, L + V = Р cos а, (•)
так что на первый вопрос сразу получа-
получается ответ:
L + L' Pcosct
/С-
D
Т — Р sin a '
Для раздельного определения L и V составим уравнение моментов от-
относительно центра тяжести G самолета:
G — D) с + L'a — Lb=*0. (¦•>
Пользуясь уравнениями (*) и (**), найдем
fl CQS а 4- с sin а
Л V-.
Ь cos а — с sin а
а + b ' ' а + b .
Пример 10. Катер на подводных крыльях (рис. 43) движется поступа-
поступательно, прямолинейно и равномерно, опираясь на крылья с центрами в точ-
точках А (передние крылья) и В (задние крылья), расположенных на расстоя-
нии h от горизонтали, проходящей через центр тяжести G катера. Считая,
что движение происходит на режиме полного выхода катера над водой, опре-
определить подъемные силы передних крыльев (Li) и задних крыльев (L2), a
также их сопротивления (Di и D2) по заданному весу катера Р и тяге
винта Т. Пользуясь терминами (см. пример 9) «качество» крыла К для от-
отношения подъемной силы крыла к его сопротивлению и «обратное качество»
jx = 1//С, найти условие, которому должны быть подчинены «качества» перед-
передних и задних крыльев при равновесии катера, заданных Р и Т, а также при
указанном на рисунке расположении линий действия сил.
58
ГЛ. III. ПРИВЕДЕНИЕ НЕСХОДЯЩЕЙСЯ СОВОКУПНОСТИ СИЛ
Составим три. уравнения моментов приложенных сил относительно цен-
центров Л, В и G (центр тяжести катера):
A: L2 • 2а + Т (h - h') - Pa = О,
В: -Ll-2a + T(h-h') + Pa = 0, (*)
G: .— Lxa + L2a — Th' + 0iA + D2h = 0.
Из первых двух уравнений прямо определяем подъемные силы крыльев-
*(,-г
(*•)
а по определению коэффициента «качества»
* ~ft/
Третье равенство (уравнение моментов относительно G) после простых
приведений и замены Lt = — Du L2=—D2 примет вид
/
111 V
( h-ti\
стоян
(***)
Непосредственной проверкой правильности вышеприведенных равенств
служат очевидные требования:
Li + L2 = P, (****)
выполняемое согласно (**), и
Dx + D2 = Г, (••••/)
вытекающее из (**') и (***).
При данных Р и Г, а также определяющих конструкцию катера рас-
расстояниях между линиями действия сил (см. рисунок) h, h' и а соотношение
(***) между «обратными качествами» передних и задних крыльев \iv
и ц2 должно выполняться как обяза-
i тельное условие равновесия катера
при его поступательном прямолиней-
прямолинейном, и равномерном движении.
При выбранном одном и том же
профиле крыльев «обратное качество»
\i зависит от угла атаки, который
изменяется при переходе от одного
режима к другому.
Уравнение (***) можно удовлет-
удовлетворить, положив jjti === jx2 = jji. Это
будет непосредственно следовать из
(***), (****) и (****'). В этом слу-
случае сопротивления определятся ра-
равенствами
Рис. 44.
Пример 11. Ракета (рис. 44) движется в направлении, образующем
угол а с ее осью и угол \ с горизонтальной плоскостью. Считая заданными
§ 16. ПРИМЕРЫ 59
вес ракеты G и тягу двигателя Т и принимая движение ракеты за равно-
равновесное, определить подъемную силу L, лобовое сопротивление ее D, а также
поперечную силу U, сообщаемую ракете газовым рулем; сопротивлением
газового руля D' и силами, сообщаемыми ракете воздушными рулями, пре-
пренебрегаем.
Для определения трех неизвестных сил L, D и V составляем три урав-
уравнения равновесия: одно при помощи проектирования всей совокупности сил
на ось ракеты, другое — на направление движения центра тяжести ракеты С
и третье — уравнение моментов приложенных сил относительно центра тя-
тяжести ракеты С.
Имеем систему уравнений относительно L, V и D:
L sin а — D cos а = G sin (а + Y) — ^\
Z/ sin а — D = G sin y — Т cos а,
Решение этой системы уравнений дает искомые величины:
т / cos у I sin a
V--
/ — h cos а
h cosy
/ —- h cos а
/ — h cos а
h sin а
/ — h cos а
h sin (a + y) — I sin
/ — h cos а
q
T,
h ~ / cos а
/ — h cos а
Пример 12. Ha рис. 45 показана ременная трансмиссия. По заданным
натяжениям т' и Тгг вертикальных ветвей ремня первого шкива и на-
натяжению Г2 одной из ветвей ремня второго шкива найти реакцию подшип-
подшипников Л и В и натяжение Т" другой ветви второго шкива; ремни второго
11
аг
т;
Рис. 45.
шкива расположены в его плоскости, параллельны друг другу и составляют
угол а с горизонтом.
Начинаем решение задачи с определения т". Для этого составим урав-
уравнение моментов относительно оси х, в которое не войдут реакции подшипни-
подшипников А и В, пересекающие эту ось. Получаем
60 ГЛ. Ш. ПРИВЕДЕНИЕ НЕСХОДЯЩЕЙСЯ СОВОКУПНОСТИ СИЛ
и, следовательно,
/2 —/2 + ^Г, — Т{)—.
Переходим к определению поперечных реакций подшипников: N{2A\ N**\
NiB). Подшипник не препятствует смещению вдоль оси х. Поэтому
продольные реакции N[A\ N[B) обращаются в нуль. Уравнение проекций на
ось х удовлетворяется тождественно. В нашем распоряжении остаются еще
четыре уравнения статики: два уравнения проекций на оси у и z и два
уравнения моментов относительно этих осей. Начало координатной системы
возьмем в центре левого подшипника Д. Получаем
- 01 + Т'О - (j'2 + ТГ) sin о + JV<* + <> = 0,
(Т[ + ГП а, + 01 + Т%) {I - а2) sin а - Ш^ = 0.
- G-2 + Т2') (/ - а2) cos а + INBB) = 0.
Решив эти уравнения, найдем
4В)- (l -¦?¦) (К + Tj) sin а + (г; + Т'() ^L.
^А) - 0 - т-) (г> +т")+& +т") тsin °-
Пример 13. Подшипник двигателя установлен на кронштейне М
(рис. 46). Основанием кронштейна служит плита, имеющая форму равно-
равнобедренного треугольника (АС = ВС) с основанием / и углом при вершине а.
Эта плита притянута к гладкой горизонтальной поверхности фундамента
болтами в точках А и В и свободно опирается на нее в точке С. Болт А
проходит через круглое отверстие в плите, тогда как для постановки бол-
болта В в плите сделан продолговатый паз, имеющий направление стороны А В,
вдоль которого болт может свободно скользить. На подшипник, в его цен-
центре О, расположенном на высоте L над основанием кронштейна, передается
со стороны двигателя горизонтальное усилие Н и вертикальное Q. Считая,
что точка О проектируется на плоскость основания в центр тяжести Ох
(точка пересечения медиан) треугольника АСВ, определить опорные реак-
реакции в точках Л, В, С. Весом кронштейна пренебрегаем.
Кроме заданных сил Я и Q, к кронштейну приложены реакции #(Л), #<в>
и #(С) в точках Л, В, С. Первая из этих реакций не известна ни по вели-
величине, ни по направлению; заменим ее тремя составляющими N\ \ ЛГ2 , #з
по осям х, уу z. Реакция в точке В по направлению перпендикулярна к пазу,
и ее составляющая по оси х обращается в нуль; надо определить состав-
составляющие #25) и iVg8* по осям У и z- Наконец, реакция в точке С дает со*
ставляющую N^ только по оси г.
Имеем шесть неизвестных: N[A\ N[a\ N(A\ N{2b\ NCb\ N^\ для опре-
определения которых надо составить шесть уравнений статики.
§ 16 ПРИМЕРЫ
61
Возьмем координатную систему хуг с началом в точке А и составим три
уравнения проекции на эти оси:
уравнение проекций на ось х:
уравнение проекций на ось у:
уравнение проекций на ось z содержит уже три неизвестные:
Чтобы упростить решение задачи, уравнения моментов составим отно-
относительно осей ABt АС и оси Az.
Уравнение моментов относительно оси АВ содержит лишь одну неиз-
неизвестную -Л^3С) (все остальные реакции либо параллельны оси, либо пересе-
пересекаются с ней):
Н
В уравнение моментов относительно оси АС
также войдет лишь одна неизвестная
- Л^/cos у + jQh sin у + HL cos ~ = 0.
Наконец, в уравнение моментов относитель-
относительно оси Az
находим
войдет одна неизвестная
Остается заметить, что
Решая полученные уравнения,
Рис. 46.
Пример 14. Поплавок подвешен к несущей поверхности гидросамолета
при помощи стержней, изображенных в трех проекциях на рис. 47, а. Опре-
Определить усилия в стержнях, предполагая, что к поплавку приложена, как
показано на рисунке, реакция воды Р.
Расположение стержней показано в перспективе на рис. 47, б. Рассмо-
Рассмотрим группы стержней (У, 2), C, 4), E, 6). Вследствие симметрии располо-
расположения стержней и линии действия силы Р имеем
62 ГЛ III. ПРИВЕДЕНИЕ НЕСХОДЯЩЕЙСЯ СОВОКУПНОСТИ СИЛ
В
О'
Рис. 47.
Определяем 7\ и Т2 из уравнения моментов относительно оси А'В' (ли-
(линия пересечения плоскостей; проведенных через стержни 5, 6 и 5, 4):
— а{Тх + Т2) cos а + РЬ = 0;
следовательно,
7 д = Г 2 = ¦
Здесь
2а cos a
1 d
Определяем Г3 и Г4 из уравнения моментов относительно оси ОС:
Стержни 5 и 4 сжаты.
Наконец, определяем Гб и Гб, проектируя все силы на ось ЛОз
Глава IV
ПРИВЕДЕНИЕ ПРОСТРАНСТВЕННОЙ НЕСХОДЯЩЕЙСЯ
СОВОКУПНОСТИ СИЛ К ДИНАМЕ
§ 17. Влияние изменения центра приведения на главный момент
В § 13 было показано, что совокупность сил Fi, F2y ..., Fn,
приложенных к твердому телу, статически эквивалентна одной
силе V и одной паре с моментом т. Сила V — главный вектор
совокупности сил —
приложена в произ-
больно выбранной точ-
точке — центре приведе-
йия, а по величине и
направлению опреде-
определяется как векторная
сумма сил Fu F2y ...
..., Fn. Момент т па-
пары равен главному мо-
моменту т^0) совокупно-
совокупности сил относительно
центра приведения О,
т. е. векторной сумме моментов относительно точки О сил, вхо-
входящих в совокупность.
При переносе центра приведения из точки О в новый центр
О* главный вектор сохраняет свою величину и направление;
чтобы разобраться, как при этом будет изменяться главный мо-
момент, найдем связь между моментом силы F относительно точ-
точки О и моментом этой силы относительно другой точки О*.
Пусть (рис. 48) г — вектор-радиус точки М приложения силы F
относительно точки О, г0 — вектор-радиус точки О* также отно-
относительно О. Тогда
Рис. 48.
представит вектор-радиус точки М относительно точки О*. По
определению момента силы относительно точки
64 ГЛ. IV. ПРИВЕДЕНИЕ НЕСХОДЯЩИХСЯ СИЛ К ДИНАМЕ
ИЛИ
A)
Векторное произведение ro\F можно рассматривать как мо-
момент силы F, перенесенной в точку О*, т. е. силы F* относитель-
относительно точки О. Таким образом, получаем вместо (I)
B)
т. е. момент силы относительно некоторой точки равен моменту
этой силы относительно другой тонки, сложенному векторно с
моментом относительно первой точки той же силы, перенесенной
во вторую точку.
Пользуясь этим результатом, можно найти связь между
главным моментом совокупности сил относительно точки О —
обозначим его через т@> — и главным моментом т@*} той же
совокупности относительно точки О*; имеем
т(О) = ? Шо {Fi) _ ? mo, {Pi) + ? mo (FJ)#
ii *i *i
Первая сумма с правой стороны есть не что иное, как т@*\
вторая же по теореме Вариньона о моменте совокупности сил
Ft, сходящейся в точке О*, представляет момент главного век-
вектора V% приложенного в точке О*, относительно точки О, так
что
m{O) = m{Ot) + mu(T), C)
т. е. главный момент совокупности сил относительно некоторой
точки равен главному моменту этой совокупности относительно
другой точки, сложенному векторно с моментом относительно
первой точки главного вектора, перенесенного во вторую точку.
Спроектируем обе части равенства C) на направление глав-
главного вектора. Тогда, замечая, что момент mo(V*) перпендику-
перпендикулярен к главному вектору (по определению момента), получим
пр.кт<0) = пр.^°*>, D)
т. е. проекция главного момента на направление главного век-
вектора не зависит от выбора центра приведения.
Вместо проекции главного момента на направление главного
вектора можно рассматривать скалярное произведение
главного момента на главный вектор, отличающееся от преды-
предыдущей проекции лишь множителем V, а именно:
т • V =т - V. (я)
§ 18 ПРИВЕДЕНИЕ НЕСХОДЯЩИХСЯ СИЛ К ДИНАМЕ
65
Таким образом, скалярное произведение главного момента
на главный вектор не зависит от выбора центра приведения.
Чтобы отметить независимость этого произведения от выбора
центра приведения, его называют первым инвариантом совокуп-
совокупности сил или первым статическим инвариантом. Вторым неза-
независимым статическим инвариантом совокупности сил является
сама численная величина V главного вектора.
§ 18. Приведение несходящейся совокупности сил к динаме
Как выше было доказано, произвольную совокупность сил
можно заменить эквивалентной ей совокупностью двух векто-
векторов— силы V и момента /п<0), приложенных в точке О (рис. 49).
При изменении поло-
положения центра приведе-
приведения О главный вектор
V будет сохранять ве-
величину и направление,
а главный момент т<0)
будет изменяться. До-
Докажем, что если глав-
главный вектор отличен от
нуля и не перпендику- l
лярен к главному мо-
моменту, т. е. Рис. 49.
V ФО, У>т@)ФО,
то за центр приведения может быть выбрана такая точка О*,
что главный момент т'0** относительно этой точки и главный
вектор расположатся на одной прямой.
Для доказательства разложим момент т° на две состав-
составляющие— одну m{v]> направленную вдоль главного вектора, и
другую т±} —перпендикулярную к главному вектору. Тем са-
самым пара сил с моментом т раскладывается на две пары с
моментами mv = m<°> и тх = т!°\ причем плоскость первой
пары перпендикулярна к V, а плоскость второй пары П, пер-
перпендикулярная к вектору mL (рис. 49), содержит вектор V.
Совокупность пары с моментом т± и силы V образует пло-
плоскую совокупность сил, которая может быть сведена к одной
равнодействующей силе. Действительно, выберем плечо пары
равным h=m±/V; тогда силы V*, V (рис. 50), составляющие
пару, будут равны по величине V. Располагая пару так, чтобы
одна из входящих в нее сил, V, была приложена в точке О и
направлена противоположно V, сведем совокупность трех сил
V, V*, V' к одной равнодействующей силе V*, лилия действия
3 Л. Г. Лойцянский, А. И. Лурье
ГЛ IV ПРИВЕДЕНИЕ НЕСХОДЯЩИХСЯ СИЛ К ДИНАМЕ
которой LU проходит через точку О*; момент mo<(V) силы V
относительно точки О* равен т± и не зависит от выбора точ-
точки О* на линии LL'.
Таким образом, совокупность главного вектора V и главного
момента /п@) в точке О сведена к силе V* с линией действия LL',
проходящей через точку О*, и паре с моментом mv (рис. 50),
параллельным этой прямой, что и требовалось доказать.
Легко показать, что момент этой пары mv равен главному
моменту т{0*] рассматриваемой совокупности сил относительно
точки О*. Для этой цели применим равенство C), связывающее
главные моменты сил относи-
относительно разных центров приведе-
приведения; будем иметь
гп =ж т -+- Шп\у )
откуда (рис. 49)
- т0 (V*) =
Рис. 50.
F)
Здесь за точку О* может быть принята любая точка на линии
LL'.
Совокупность силы и пары, плоскость которой перпендику-
перпендикулярна к линии действия силы, называется динамой. Наглядное
представление о динаме дает совокупность усилий, развиваемых
при сверлении отверстия буравчиком. При этом прикладывают
силу, направленную по оси буравчика, и пару, создающую по-
поворот буравчика вокруг его оси. Рис. 51 дает изображение ди-
намы в случае векторов V и tnv одинакового направления;
JL.K
Рис. 61.
vt
Рис. 62.
здесь имеется совокупность усилий, развиваемых в буравчике
с правой нарезкой; чтобы такой буравчик перемещался в осе-
ром направлении вдоль F, наблюдатель, смотрящий вдоль V,
должен вращать буравчик по часовой стрелке; рис. 52, на кото-
§ 18. ПРИВЕДЕНИЕ НЕСХОДЯЩИХСЯ СИЛ К ДИНАМЕ 67
ром векторы V и mv имеют противоположные направления, со-
соответствует буравчику с левой напезкой.
Итак, пространственная сове гупность сил, главный вектор
которой не равен нулю и не перп, ндикулярен к главному момен-
моменту, может быть приведена к динаме. Линию действия силы, вхо-
входящей в динаму, назовем центральной осью.
Входящие в определение динамы величины V главного век-
вектора и проекции т(у] главного момента т{0) относительно про-
произвольной точки О, принятой за центр приведения, на направле-
направление главного вектора не зависят от выбора этой точки, так как
эти величины являются статическими инвариантами совокупно-
совокупности сил (§ 17). В следующем параграфе будет доказано, что от
выбора центра приведения О не зависит также и положение цен-
центральной оси в пространстве.
Центральную ось иногда еще называют осью минимальных
моментов, так как при выборе центра приведения на ней мы
всегда получим меньший главный момент, чем относительно
всякой другой точки, не лежащей на центральной оси; в самом
деле, для любой точки О (рис. 53),
не лежащей на центральной оси,
главный момент равен векторной
сумме момента т\°\ равного момен-
моменту т@*) относительно точки на цен-
центральной оси, и дополнительного
слагаемого пг^К убывающего до ну-
нулевого значения при приближении
к центральной оси.
Обратимся к рассмотрению част-
частных случаев приведения совокупно-
совокупности сил к простейшему виду. -
1°. Составляющая главного мо- ис*
мента по направлению главного
вектора равна нулю (m(l?)==0), т. е. главный момент перпен-
перпендикулярен к главному вектору. В этом случае совокупность
сил приводится к одной равнодействующей. Центральная ось
превращается в линию действия равнодействующей. Для разы-
разыскивания линии действия равнодействующей применим ранее
указанный прием: зная главный момент т<°>, ищем такую ли-
линию действия силы V*, чтобы имело место равенство
то(Г) = т<°). G)
Для этого в плоскости, перпендикулярной к т<0), откладываем
перпендикулярно к V отрезок h = mS0)/V в такую сторону,
чтобы поворот тела под действием силы V* был положительным.
з*
68 ГЛ TV ПРИВИДЕНИЕ НЕСХОДЯЩИХСЯ СИЛ К ДИНАМЕ
Рассмотренный случай перпендикулярности главного момен-
момента и главного вектора будет иметь место при приведении к про-
простейшему виду плоской совокупности сил, так как при этом
главный вектор и равнодействующая пара будут лежать в
одной плоскости и момент пары будет перпендикулярен
к главному вектору. Следовательно, если главный вектор не ра-
равен нулю, то совокупность сил приведется к одной равнодей-
равнодействующей.
Другими примерами совокупности сил, приводящихся к од-
одной равнодействующей, могут служить совокупность сходящихся
сил и любая пространственная совокупность параллельных сил,
направленных в одну сторону или в разные стороны, если сово-
совокупность не приводится к паре.
2°. Составляющая главного момента по направлению, пер-
перпендикулярному к главному вектору, равна нулю; это соответ-
соответствует расположению центра приведения на центральной оси
совокупности сил.
3°. Главный момент равен нулю, главный вектор не равен
нулю — центр приведения находится на линии действия равно-
равнодействующей совокупности сил; при центре приведения, не ле-
лежащем на этой линии, главный момент будет отличен от нуля,
но перпендикулярен к главному вектору.
Обратимся еще раз к формуле G): V* есть равнодействую-
равнодействующая, к которой, по предположению, приводится рассматривае-
рассматриваемая совокупность сил, а т{0) — главный момент системы сил от-
относительно произвольной точки О; поэтому, если совокупность
сил приводится к одной равнодействующей, то момент этой рав-
равнодействующей относительно произвольной точки равен геомет-
геометрической сумме моментов слагаемых сил относительно этой точ-
точки. Такова самая общая форма теоремы Вариньона для сово-
совокупности сил, приводящейся к одной равнодействующей.
§ 19. Аналитические выражения элементов динамы
Покажем, как элементы динамы могут быть разысканы по
заданным аналитически силам и координатам точек их прило-
приложения, т. е. по величинам
Ftx* Fiy> Ftz\ xh yh z{ (/=1,2, ...,n).
Главный вектор по величине и направлению определяется
по неоднократно упоминавшимся формулам
Vx~f.Fi* Vi-jt/i» V.-t/u. (8)
§ 19. АНАЛИТИЧЕСКИЕ ВЫРАЖЕНИЯ ЭЛЕМЕНТОВ ДИНАМЫ 69
Аналитическое выражение главного вектора V (второй стати-
статический инвариант) будет
Главный момент относительно начала координат О опреде-
определяется формулами
Е
Зная их, можно найти первый статический инвариант — проек-
проекцию главного момента на направление главного вектора:
т@) ¦ т=т«}'v* + Ч0) • уу + <°*'v*)-
Выражение
часто называют параметром динамы. Знание главного вектора
и параметра динамы дает, как это видно из A2), возможность
определить силу и пару динамы. Остается найти уравнение
центральной оси в пространстве.
Для вывода уравнения центральной оси достаточно заме-
заметить, что центральная ось представляет собой геометрическое
место точек О*, для которых главный момент т*0** параллелен
главному вектору V, и написать условие параллельности этих
векторов:
Вспомним, что по C)
m —m —tno\y\ A4)
где nio{V*)—момент относительно точки О силы V* = V, дей-
действующей вдоль центральной оси, и применим формулы
70 ГЛ. IV. ПРИВЕДЕНИЕ НЕСХОДЯЩИХСЯ СИЛ К ДИНАМЕ
где х, у, z — координаты текущей точки О* на центральной
оси, когда за начало координат принят центр приведения О.
Тогда по A3) получим уравнения центральной оси
Ух Vy
Пользуясь этими уравнениями, легко доказать, что положе-
положение центральной оси в пространстве не зависит от выбора цент-
центра приведения сил. Действительно, примем за центр приведения
вместо начала координат О точку А с координатами а, Ь, су
уравнения центральной оси по A5) будут
г?4Л) — (у — Ь) Уz + (z — с) Vy т^ — (г — с) Ух + (х — а) Уz
_ = — в
^тг „{x-a)vy + (y-b)Vx ^ A6>
Но по C) имеем
где V — главный вектор, перенесенный в точку О, координаты
которой по отношению к точке А равны —а, —Ь> —с. Проекти-
Проектируя последнее равенство на оси, получим
-by л.су
Подставляя эти выражения в A6), после простых сокра-
сокращений получим уравнения A5), что и доказывает независимость
положения центральной оси от выбора центра приведения.
Удовольствуемся этими краткими сведениями об аналитиче-
аналитических свойствах динамы. Пример аналитического определения
динамы и уравнения центральной оси будет дан в следующем
параграфе для частного случая двух сил с непересекающимися
и непараллельными линиями действия — «скрещивающихся»
сил.
§ 20. Приведение пространственной несходящейся
совокупности сил к двум непересекающимся силам
Покажем сначала, как пространственная несходящаяся со-
совокупность сил может быть приведена к эквивалентной совокуп-
совокупности трех сил.
Обозначим через Oi (рис. 54) точку приложения какой-ни-
какой-нибудь /-й силы Fi (любую точку на линии ее действия) и зафик-
§ 20 ПРИВЕДЕНИЕ К ДВУМ НЕПЕРЕСЕКАЮЩИМСЯ СИЛАМ
71
сируем одинаковые для всех сил Ft три, не лежащие на одной
прямой, точки Л, В и С. Разложим силу Ft по направлениям
лучей OiA, 0{В и OiC Соответствующие составляющие сил, при-
приложенные в точках Л, В и С, обозначим через Fia, Fib, Fie. По-
Повторяя аналогичное разложение для всех сил Fi (/ = 1, 2, ...
,.., n)t придем к совокупности трех, вообще говоря, несходя-
несходящихся сил:
L tiB, Fa-i/ic. A7)
Докажем теперь, что любая пространственная несходящаяся
совокупность сил может быть приведена к эквивалентной ей со-
Ъ~?*№ «»
Рис. 65.
вокупности двух сил с непересекающимися и непараллельными
линиями действия.
Восстановим с этой целью на рис. 55 только что найденные
силы Fa, Fb, Fc в точках Ау В, С. Проведем через точку Л две
плоскости: одну, содержащую линию действия силы Ffi, а дру-
другую — линию действия силы Fc. На линии пересечения этих пло-
плоскостей d—d выберем произвольную точку D и соединим ее
с точками В и С. Разложим силы Fb и Fc соответственно по
направлениям Л В, BD и Л С, CD. Согласно основному свойству
абсолютно твердого тела, составляющие FrB и Frc можно пере-
перенести вдоль линий их действия в точку Л, a F"B и F"c — в точ-
точку D. Тогда заданная несходящаяся совокупность сил Гд, F#,
Fc сведется к двум сходящимся: FA, F'B, F'c в точке Л и FB, trfc
в точке D. Равнодействующие каждой из этих двух совокупно-
совокупностей сил соответственно будут равны RA = FА + FB + Fc и
RD = FB + F'q. Таким образом, пространственная несходящаяся
совокупность сил Ft (t = l, 2, ..., п) свелась к эквивалентной
€й совокупности двух сил Ra и RDf линии действия которых не
пересекаются и не параллельны. Изложенный метод содержит
довольно сложные геометрические построения и поэтому не по-
72 ГЛ. IV. ПРИВЕДЕНИЕ НЕСХОДЯЩИХСЯ СИЛ К ДИНАМЕ
лучил практического применения. В частности, условие равно-
равновесия заданной пространственной несходящейся системы сил
заключается, согласно только что изложенному методу, в сов-
совпадении линий действия сил RA и Rd, равенстве их по величине
и противоположности по направлению. Этим требованиям удов-
удовлетворить при решении конкретных задач на вывод условий рав-
равновесия тела было бы крайне затруднительно; такая методика
не разрабатывалась. Однако легко убедиться, что, поскольку
все проведенные операции сложения и разложения сил приво-
приводили к эквивалентным совокупностям сил, главный вектор сил
Ra и Rd равен главному вектору V сил Fi (/= 1, 2, ..., п),
а главный момент этих сил относительно произвольного цент-
центра О будет равен главному моменту ш@) совокупности сил F*
относительно центра О. В этом можно убедиться и непосред-
непосредственно, сопровождая все этапы приведенного доказательства
формулами сложения и разложения сил и моментов.
Пользуясь теорией, изложенной в § 19, определим элементы
динамы и уравнения центральной оси несходящейся совокупно-
совокупности сил Ra и Rd.
Обозначим через h кратчайшее расстояние между линиями
действия сил Ra и Rd. Ось z направим по общему перпенди-
перпендикуляру к этим линиям и за начало координат примем точку
пересечения линии действия силы Ra с этим перпендикуля-
перпендикуляром; ось х направим по этой линии действия. Перенося силы
вдоль линии действия, примем, что их точки приложения лежат
на оси z.
Проекции сил на оси координат и координаты точек прило-
приложения будут для силы RA: Rax = Ra. /?^^==0, /?„* = (); x = 0,
у = 0, z = 0; для силы Rd: Rdx — Rd cos a, RDy = Rd sin a,
i?D* = 0; x = 0, # = 0, z = h, причем a обозначает угол, обра-
образованный направлением силы Rd с осью х.
Имеем
Rx = Ra + ^d cos a, Ry = RD sin a, Rz = 0,
m<0) = _ hRD sin a, m<f> = hRD cos a, ni^ = 0.
По A5) уравнения центральной оси будут
— hRD sin a + zRD sin a hRD cos a — z (RA + RD cos a)
_____ ___
xRD sin a + у (RA + RD cos a)
откуда следует, что центральная ось лежит в плоскости, парал-
параллельной хОу и находящейся от нее на расстоянии
§ 20 ПРИВЕДЕНИЕ К ДВУМ НЕПЕРЕСЕКАЮЩИМСЯ СИЛАМ 73
В этой плоскости центральная ось совпадает с прямой, пересе-
пересекающей ось г и имеющей уравнение
RD sin a
Результат упрощается, если величины сил равны между
собой:
В этом случае будем иметь
h • (X
9 "—*¦• 11 ——«• УТЛ*
т. е. центральная ось делит отрезок А пополам и образует оди-
одинаковые углы с направленийми сил.
Из рассмотренного следует, что совокупность двух несходя-
несходящихся, т. е. непересекающихся (ft Ф 0) и непараллельных
(а Ф 0 и а ф я), сил приводится к динаме с силой, равной по
величине
# = д/#д + Rd + %RaRd cos a,
и с парой, проекция момента которой на направление главного
вектора будет
Таким образом, тело, находящееся под действием двух не-
несходящихся сил, не может ни находиться в равновесии, ни быть
уравновешенным одной силой. Поэтому, если тело находится
в равновесии под действием трех сил, то никакая комбинация
двух из них не может быть несходящейся, т. е. все три силы
должны лежать в одной плоскости (см. § 6).
Глава V
РАВНОВЕСИЕ ПРИ НАЛИЧИИ СИЛ ТРЕНИЯ
§ 21. Трение скольжения и трение верчения
Трение друг о друга двух соприкасающихся твердых тел
представляет собой сложное физическое явление, сопровождае-
сопровождаемое нагревом трущихся тел, их электризацией, разрушением
поверхностей, диффузией вещества и т. д. Явление трения
можно себе представить как вдавливание, сопровождающееся
сцеплением, бугорков шероховатости (иногда волнистости) по-
поверхности одного из тел в промежутки между бугорками дру-
другого, вызывающее при взаимном движении тел деформацию,
а иногда и разрушение этих бугорков. Интенсивность такого
рода взаимодействия трущихся поверхностей зависит от мно-
многих обстоятельств, среди которых наибольшее значение имеют
интенсивность сдавливания тел, характеризуемая нормальной
составляющей реакции взаимодействия между телами, скорость
их относительного перемещения, степень обработки поверхно-
поверхностей, наличие смазки.
Различают три основные формы взаимодействия между тру-
трущимися поверхностями тел: 1) трение скольжения, соответст-
соответствующее поступательному (без вращения) движению тел друг
по другу, как, например, ползуна кривошипного механизма по
направляющей, 2) близкое по природе трению скольжения тре-
трение верчения (подпятник) и 3) трение качения, например, ко-
колеса по рельсу.
Трение скольжения впервые экспериментально изучалось
в конце XVII в. французским физиком Амонтоном A663—1705)у
который обнаружил независимость силы трения от величины
поверхности соприкосновения тел. Законы трения были сфор-
сформулированы почти сто лет спустя Кулоном A736—1806).
К телу веса G, лежащему на горизонтальном столе (рис. 56),
будем прикладывать горизонтальное усилие S. Если S = 0, то
тело будет в равновесии (в данном случае в покое по отноше-
отношению к столу); если силу S начнем увеличивать, то тело все же
будет оставаться в покое; следовательно, горизонтальная со-
составляющая реакции стола, называемая силой трения F, урав-
$ 21 ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ ВЕРЧЕНИЯ 75
новещивает приложенную силу S и возрастает вместе е нею до
тех пор, пока равновесие не нарушится. Это произойдет в тот
момент, когда сила трения достигнет своего максимального
значения. Опыты показали, что максимальное значение силы
трения пропорционально нормальному давлению N тела на
плоскость (в рассматриваемом случае, конечно, N*=G):
Лпах = /#, A)
причем коэффициент пропорциональности /, называемый коэф-
коэффициентом трения скольжения, определяется экспериментально
и оказывается зависящим только от ма-
териала и состояния (шероховатости)
поверхностей трущихся тел. Коэффици-
ент трения скольжения, как отноше-
ние двух сил, представляет безразмер-
безразмерную величину; значения его для различ-
ных материалов помещаются в справоч- рис 56
никах.
Наряду с коэффициентом трения f введем в рассмотрение
угол трения ф, определяя его соотношением
tgq> = /. B)
Происхождение этого равенства и наименование «угол трения»
будут объяснены ниже.
Когда F достигнет значения Fmax, наступит критический (пу-
(пусковой) момент равновесия: если S останется равным Fmax, то
равновесие не нарушится, но достаточно самого ничтожного
приращения усилия 5, чтобы тело сдвинулось с места. Можно
заметить, что, как только тело сдвинется с места, сила трения
сразу несколько уменьшится; опыты показали, что трение при
взаимном движении тел несколько меньше трения при взаимном
покое их.
Важно отметить, что до наступления критического момента,
т. е. пока тело находится в покое, сила трения равна прило-
приложенному усилию:
F = S,
и можно лишь утверждать, что
F<fff. C)
Знак равенства относится к критическому моменту равно-
равновесия. В дальнейшем, если знак неравенства опускается, то это
означает, что рассматривается равновесие в критический мо-
момент.
Направление силы трения при покое противоположно на-
рравлению силы S и меняется с изменением направления этой
силы.
76
ГЛ. V. РАВНОВЕСИЕ ПРИ НАЛИЧИИ СИЛ ТРЕНИЯ
0,25-
Наоборот, при движении тела сила трения имеет определен-
определенное направление, противоположное скорости тела, и величину,,
зависящую от нормального давления N между телами и про*
порциональную этому давлению:
F = f'N, D)
причем, как указывалось, /' < /. Коэффициент трения f за-
зависит от скорости тела, уменьшаясь для большинства мате*
риалов при увеличении скорости*). Примером могут служить
экспериментальные данные по трению скольжения двух чугун-
чугунных поверхностей, показанные на рис. 57. Коэффициент трения
FnH /' при нормальных давлениях Nt
и*22 м/с имеющих порядок 20 кН, и относи-
относительных скоростях скольжения по-
поверхностей, не превышающих
22 м/с, имеет порядок /' = 0,L
С возрастанием скорости скольже-
скольжения коэффициент трения убывает
(/' = 0,075 при ?/ = 39 м/с). С воз-
возрастанием нормального давления
сила трения скольжения F пере-
перестает определяться линейной зави-
зависимостью D) от нормального дав-
давления N.
Соотношение D) достаточно хорошо отвечает наблюдениям
при трении сухих или слабо смазанных тел; теория трения при
наличии слоя смазки, созданная Н. П. Петровым и О. Рейнольд-
сом, представляет собой специальный раздел гидродинамики
вязкой жидкости.
Угол трения, конус трения. Рассматривая трение-
покоя, предположим, что к телу, покоящемуся на горизонталь-
горизонтальной шероховатой плоскости, приложена сила Q, составляющая
угол а с нормалью к плоскости (рис. 58).
Сила Q может быть разложена на две силы: силу Р, прижи-
прижимающую тело к поверхности, уравновешиваемую нормальной
реакцией N поверхности:
N = Р = Q cos a,
и силу S, стремящуюся сдвинуть тело с места и равную
S*=Q sin а.
Шероховатость соприкасающихся поверхностей вызывает
трение между ними, и вследствие этого на тело в направлении,
*) Как на исключение, можно указать на случай трения кожи о металлу
здесь У увеличивается при увеличении относительной скорости.
§ 2f. ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ ВЕРЧЕНИЯ
77
противоположном направлению силы S, действует сила трения
5 = F < Fmax = fN = fQ cos a.
Для того чтобы тело под действием приложенного усилия
могло быть сдвинуто с места, необходимо, чтобы S было по ве-
величине больше или равно Fmax, т. е. чтобы
или
откуда
Q sin a ^ fQ cos а,
Следовательно, в зависимости от материала и характера
поверхности трущихся тел можно по заданному коэффициенту
1
\А
Рис.
1 ...
58.
\ 1 -j
Рис.
р
Г
/
59.
трения / определить такой угол ф, что если приложенная к телу
сила будет наклонена к нормали на угол, меньший угла ф,
то, как бы ни была велика эта сила, тело останется в равнове-
равновесии. Это и объясняет наименование угла ф углом трения. За-
Заштрихованная на рис. 59 зона представляет собой область, об-
обладающую замечательным .свойством; как бы ни была велика
по интенсивности сила, линия действия которой расположена
внутри этой области, эта сила не приведет в движение тело,
опирающееся на плоскость.
Если мы рассматриваем тело, имеющее возможность пере-
передвигаться в любом направлении вдоль плоскости, то область
трения будет ограничена поверхностью конуса с углом раствора,
равным 2ф (так называемым конусом трения*)). Наличием об-
области трения объясняется, явление заклинивания, или, как го-
*) Коэффициент трения может иметь различные значения для различных
направлений на плоскости (например, при трении по дереву вдоль и поперек
волокон, при трении по прокатному железу по направлению и перпендику-
перпендикулярно к направлению прокатки). Поэтому конус трения не всегда представ-
представляет собой прямой круговой конус.
78 ГЛ V РАВНОВЕСИЕ ПРИ НАЛИЧИИ СИЛ ТРЕНИЯ
ворят, «заедания», частей машин, когда никакой приложенной
внутри конуса силой не удается сдвинуть с места соответст-
соответствующую часть машины. Приложенная сила увеличивает нор-
нормальную реакцию, последняя в свою очередь вызывает возра-
возрастание силы трения, и приложенная сила оказывается недоста-
недостаточной для преодоления сопротивления трения.
Трение верчения. В отличие от абсолютно твердых тел, которые
могут соприкасаться в одной точке, соприкосновение прижатых друг к другу
реальных тел происходит всегда по некоторой площадке. Приведению одного
из тел во вращение по другому препятствуют силы трения скольжения, рас-
распределенные по площадке соприкосновения и определяющие в своей совокуп-
совокупности так называемое трение верчения.
Совокупность этих сил может быть приведена к паре, которая уравно-
уравновешивается парой, приложенной к телу и стремящейся повернуть его вокруг
оси, перпендикулярной к площадке соприкосновения.
Определение предельной величины момента пары трения верчения пред-
представляет собой сложную задачу, так как этот момент зависит от распреде-
распределения давлений по площадке соприкосновения, а последние в свою оче-
очередь— от формы поверхностей и упругих свойств прижатых друг к другу
тел. Предельную величину момента трения верчения М принимают пропор-
пропорциональной прижимающей силе N и определяют формулой
здесь \i — коэффициент трения верчения, имеющий размерность длины. Этот
коэффициент в свою очередь зависит от коэффициента трения скольжения f.
Так, например, при соприкосновении плоского основания круглого цилиндра
радиуса а с плоской поверхностью коэффициент трения верчения \х может
быть определен теоретически и оказывается равным
М- = -j- fa « 0,79/а,
В более сложном случае соприкосновения тела, ограниченного поверхностью
вращения, с телом, ограниченным плоской поверхностью, имеем
где а — радиус образующейся при соприкосновении тел круговой площадки,
в свою очередь зависящий от силы, которая прижимает тела друг к другу,
от радиуса кривизны поверхности вращения в точке соприкосновения ее с
плоской поверхностью и от упругих постоянных*).
§ 22. Трение качения
Представим себе каток веса Q и радиуса а, покоящийся на
горизонтальной плоскости (рис. 60). Опыт показывает, что, если
приложить к оси катка горизонтальную силу S, каток будет
оставаться в покое, пока величина этой силы не достигнет не*
которого значения. Чтобы объяснить этот факт, составим урав-
уравнения статики для плоской системы сил, действующих на ка-
*) Галин Л. А. Контактные задачи теории упругости. — М: Гостехиз-
дат, 1953, с. 204.
§ 22 ТРЕНИЕ КАЧЕНИЯ 79
ток; этими силами являются вес Q, усилие S, нормальная реак-
реакция N и сила трения F.
Проектируя все силы на горизонтальное и вертикальное на-
направления, получим
Q = N, S = F.
Остается составить уравнение моментов; за центр моментов
примем точку О соприкосновения контура колеса с плоскостью;
имеем
т0 (Q) = 0, т0 (F) «= 0, т0 (S) = - aS,
и уравнение моментов дает соотношение
Мы приходим, таким образом, к необходимости принять, что
нормальная реакция N приложена не в точке О, а несколько
сдвинута от нее в сторону действия силы S. Физически этот
сдвиг можно объяснить наличием дефор-
деформаций катка и опорной плоскости в об-
области точки О; фактически соприкоснове-
соприкосновение происходит по некоторой площадке,
размеры которой зависят от величины
нормального давления, свойств материа-
материалов и состояния поверхностей катка и
опорной плоскости.
Можно считать, что к катку прило-
жеяЛг, паРла> момент кот°р°й m Равен
nio(N). Момент m называется момен-
моментом трения качения. Его предельная Рис- 60-
величина mmax, как показывают опы-
опыты, пропорциональна нормальному давлению катка на пло-
плоскость:
"W = kN> E)
причем имеющий размерность длины коэффициент трения ка-
качения k определяется опытным путем. Очевидно, что k можно
рассматривать как отрезок, на который сдвинута сила N в на-
направлении силы S в критический момент равновесия. Пока ка-
каток находится в покое, имеем
m*^aS < mmax, т. е. 5 < -| N.
С другой стороны,
S = F<fNy
где f — коэффициент трения скольжения. Обычно k/a значи-
значительно меньше, чем f; это значит, что нарушение покоя, кото-
которое произойдет при постепенном увеличении силы 5, будет за-
заключаться в том, что каток начнет катиться по опорной пло-
плоскости, не скользя по ней. Возникающие здесь вопросы, однако»
не могут быть рассмотрены без применения средств динамики,
80
ГЛ V. РАВНОВЕСИЕ ПРИ НАЛИЧИИ СИЛ ТРЕНИЯ
§ 23. Некоторые случаи равновесия тел
при наличии трения
1°. Ползун. Предположим, что рассматриваемое тело (пол-
(ползун) имеет вертикальную плоскость симметрии; пусть сечение
тела этой плоскостью представляет собой прямоугольник со
сторонами 2а и 2А (рис. 61). К ползуну приложены вертикаль-
вертикальная нагрузка Q и горизонтальная сила Р, линии действия ко-
которых будем считать пересекаю-
щимися в центре С прямоуголь-
прямоугольника. Реакция плоскости основа-
основания на ползун приводится к нор-
нормальной реакции N и силе тре-
трения F, причем линия действия N
неизвестна; ее расстояние от
точки С обозначим через х. Оче-
видно, х <; а.
Составляем три уравнения
равновесия плоской совокупно-
совокупности сил Q, Р, iV, F в виде двух уравнений проекций на горизон-
горизонтальную и вертикальную оси и уравнения моментов относитель-
относительно точки С:
iV — Q = 0, Р — Т^О, Nx-Fh = 0,
или
х г s\ r< г» Fh Ph
N = Q, F = P, x =-%- = -§-.
Согласно закону трения имеем
F<fN, т. е. P<fQ,
и, как указано выше,
Рис. 61.
Ph
т. е.
Будем поаепенно увеличивать Р. Если / < a/h, то равно-
равновесие будет иметь место до тех пор, пока сила трения не до-
достигнет своей предельной величины, после чего начнется сколь-
скольжение ползуна; если же f > a/h, то, как только Р станет
больше, чем aQ/hy тело, раньше чем начнется скольжение, опро-
опрокинется вокруг ребра А.
2°. Наклонная плоскость. Рассмотрим ту же за-
задачу, что и в предыдущем примере, но в предположении, что
ползун положен на плоскость, наклоненную к горизонту под
углом а (рис. 62). Усилие, стремящееся сдвинуть тело вдоль
наклонной плоскости, равно по величине \Р — Qsina| и на-
направлено:
а) вверх, если Р — Q sin a > 0, б) вниз, если Р —
— Q sin a < 0.
§ 23. РАВНОВЕСИЕ ТЕЛ ПРИ НАЛИЧИИ ТРЕНИЯ
81
В случае а) сила трения F при покое направлена противо-
противоположно Р. Уравнения равновесия дают (рис. 62, а)
Р — Qsina — F = 0, Qcosa —JV = O, Nx — Fh = 0.
Как и выше, находим, что при равновесии
Р < Q (sin a + / cos a), P < Q ( sin a + ~ cos a) .
Если постепенно увеличивать силу Р от значения Q sin a, то
при f < a/h равновесие будет иметь место до тех пор, пока Р
не достигнет значения, даваемого первым из этих неравенств;
Рис. 62.
когда это значение будет превзойдено, тело начнет скользить
вверх по плоскости. Если же / > a/h и Р достигнет и превзой-
превзойдет значение, даваемое вторым неравенством, то до наступле-
наступления скольжения тело начнет опрокидываться вокруг правого
ребра В.
В случае б) сила трения будет иметь направление силы Р.
Как и выше, получим (рис. 62, б)
Р > Q (sin a — / cos a), P > Q ( sin a — -?• cos a).
Если f < a/h, то при постепенном уменьшении Р от значе-
значения Q sin a равновесие будет иметь место, пока будет удовлет-
удовлетворено первое неравенство (в противном случае тело станет
скользить вниз по наклонной плоскости). Наконец, при f > a/h
равновесие имеет место, если соблюдено второе неравенство
(в противном случае произойдет опрокидывание вокруг левого
ребра Л).
В итоге можно сказать, что при равновесии сила Р должна
удовлетворять (при / < а/К) неравенствам
Q (sin a — / cos a) ^ P ^ Q (sin a + f cos a).
Если ввести в рассмотрение угол трения <р, то эти соотно*
шения можно записать еще в виде
sin (a — ф)
coscp
sin (a + ф)
сскф
82
ГЛ. V. РАВНОВЕСИЕ ПРИ НАЛИЧИИ СИЛ ТРЕНИЯ
Заметим, что при а < ф тело будет оставаться в равнове-
равновесии при любом значении Q и при отсутствии силы Р (самотор-
(самоторможение на наклонной плоскости).
3°. Вкладыш и цапфа. Предположим, что вкладыш
подшипника неплотно облегает цапфу, т. е. радиус последней г
несколько меньше радиуса вкладыша
(рис. 63). Пусть цапфа нагружена си-
силой Q и некоторой парой, момент
которой т. Вследствие наличия этой
пары точка А соприкосновения цап-
цапфы и вкладыша сместится при равно-
равновесии немного над нижней точкой
вкладыша: цапфа «взбегает» по вкла-
вкладышу.
Будем пренебрегать трением каче-
качения и влиянием смазки на трение
скольжения. Реакция вкладыша на
цапфу при равновесии должна сво-
сводиться к силе /?, равной по величине
Q и направленной противоположно Q
(так как главный вектор всех сил, действующих на цапфу, дол-
должен равняться нулю). Но этого недостаточно; нужно еще,
чтобы пара сил (Q, R) уравновешивалась приложенной па-
парой т. Если через \|) обозначить
угол, на который отклонена реак-
реакция R от общей нормали в точке А
к поверхностям вкладыша и цап-
цапфы, то получим
Рис. 63.
— Q = 0, Rr sin -ф — т = О,
т. е. m = Qr sin ijr,
Ф, где ф — угол трения, находим
sin ф.
Рис. 64.
имея в виду, что \|?
Если это неравенство не соблюдено, то цапфа будет вра-
вращаться, скользя по вкладышу.
Построим круг радиуса rx = r sin ф с центром в центре
цапфы (так как радиусы вкладыша и цапфы очень мало отли-
отличаются друг от друга, то за центр этого круга можно принять
без большой ошибки и центр вкладыша). Это — так называе-
называемый круг трения. При равновесии линия действия реакции R
должна пересекать круг трения или касаться его.
4°. Трение каната о шкив. Предварительно рассмотрим такую
задачу: определить усилие Р (рис. 64), необходимое для перетягивания через
ребро В призмы ABC веревки, к другому концу которой приложено некото-
§ 23. РАВНОВЕСИЕ ТЕЛ ПРИ НАЛИЧИИ ТРЕНИЯ
83
рое заданное сопротивление Q. Коэффициент трения веревки о ребро призмы
равен f; внешний угол призмы равен а; трением веревки о грани АВ и ВС
пренебрегаем, считая реакцию поверхности сосредоточенной в точке В. Ветви
веревки растянуты силами Р и Q; точка В веревки находится в равновесии
под действием указанных сил Р, Q и реакции ребра R. Реакция R в свою
очередь может быть разложена на давление N ребра призмы на веревку и
силу трения F, направленную перпендикулярно к силе N. Если бы мы знали
направление реакции Nt то задачу легко было бы решить. Но в угле В нет
определенной нормали к поверхности призмы, точно так же неизвестна
Рис. 65.
Рис. 66.
форма соприкасающейся с ребром веревки. Здесь мы встречаемся с задачей
неопределенной; по одной заданной силе Q и направлению второй силы Р
треугольник сил Р, Q, R построить нельзя. Чтобы сделать задачу определен-
определенной, необходимо принять какие-то дополнительные гипотезы о направлении
силы N. Так, например, если принять во внимание жесткость веревки, т, е.
ее сопротивление изгибу при переходе через ребро призмы, то можно себе
представить, что веревка при перетягивании ее в направлении стрелки си-
силой Р примет форму, указанную на рис. 65, и считать, что реакция N на-
направлена перпендикулярно к грани АВ. Составляя силовой многоугольник
Р, Q, N, Ft получаем
Р — F = Q cos а, N = Q cos а.
Ограничиваясь рассмотрением критического момента равновесия, пола-
полагаем F = fN. Тогда получим
P = Q (cos a + f sin а).
При малых a (sin а « а, cos а « 1) будем приближенно иметь
Применяя эту формулу к случаю многоугольной призмы с малыми внеш-
внешними углами а (рис. 66), будем иметь
Qn-2 = Qn-i A + fa) = Q A + faJ,
где n — число ребер, на которых происходит изгиб веревки.
84 ГЛ. V. РАВНОВЕСИЕ ПРИ НАЛИЧИИ СИЛ ТРЕНИЯ
Обозначая через Р полный угол отклонения веревки, равный
Р = па,
окончательно получим
Эта формула позволяет решить следующую задачу: веревка навита на
неподвижный горизонтальный цилиндр, и к нижнему концу ее прикреплен
груз Р (рис. 67); какое усилие Q надо приложить к другому ее концу, чтобы
удержать груз от падения, если угол охвата ра-
равен р, а коэффициент трения веревки о цилиндр
равен /?
Эта классическая задача была решена впер-
впервые Эйлером.
Переходя к пределу в предшествующей фор-
формуле, находим'
Р — Q Hm f I 4- f JEL
или
Q = Pe~№, F)
IP
где е обозначает основание натуральных логариф-
Рис. 67. мов.
Из формулы F) следует, что уравновешиваю-
уравновешивающая сила не зависит от радиуса цилиндра, а
зависит лишь от коэффициента трения веревки о цилиндр и от угла охва-
охвата цилиндра веревкой. Сила Q убывает с ростом угла охвата по показатель-
показательному закону; так, например, при Р=2л+-г- и / = 0,2 будем иметь Q = 0,21Р.
§ 24. Примеры
Пример 15. Каковы должны быть размеры механизма, показанного на
рис. 68, для того, чтобы при коэффициенте трения / = 0,6 между стенкой
и ползунами Л и В механизм был самотормозящимся?
Ставим условие, чтобы линия действия силы давления стержня на ползун
лежала в области трения, т. е. чтобы выполнялось неравенство
tga^-y- а//2----/,2 <0,6;
тогда, замечая, что АС > AD, после простых вычислений получим
0,5 < — < 0,535.
Эти неравенства определяют конструкцию.
Пример 16, Определить наименьшее расстояние х (рис. 69) центра
груза от оси СС платформы Е, при котором груз с платформой (весом плат-
платформы пренебрегаем) будет в равновесии, если коэффициент трения подвиж-
подвижного стержня СС о направляющие стойки А и В равен f.
При равновесии линия действия силы Р должна проходить через точку
пересечения линий v действия опорных реакций Ra и Rb. Так как последние
§24. ПРИМЕРЫ
85
в критический момент направлены под известными углами трения ср к гори-
горизонтали, то точку пересечения D этих реакций легко найти. Из геометриче-
геометрических соображений получим
h . , d h . d
*min = -2 ctg Ф + —Г + "'
Ясно, что чем меньше коэффициент трения, тем большее расстояние груза
от оси стойки придется взять, чтобы сохранить равновесие. При х > хтт>
т. е. при
^ h . d
платформа будет самотормозящейся, так как при любой величине нагрузки Р
платформа сохранит равновесие. На свойствах самоторможения такого рода
конструкций основан ряд строительных приспособлений и других механизмов.
Рис. 68.
Рис. 69.
Пример 17. Определить, в каких пределах может изменяться при
равновесии клинового пресса (рис. 70) сила Р при заданной нагрузке на
пресс Q. Даны коэффициенты трения /, ft и /г (или соответствующие углы
трения ф, ф1, фг) и угол клина а.
На тело B) действуют: сила Q, реакция #2 опоры В и реакция R
тела A). Каждая из этих реакций отклонена от нормали на некоторый угол,
не превосходящий угла трения между соответствующими поверхностями
(р ^ Ф> Р2 ^ фг) • Поскольку тело B) находится в равновесии под действием
плоской совокупности трех сил, то линии действия этих сил должны пересе-
пересекаться в одной точке, что и показано на рисунке. На тело (/) действуют;
перемещающая клин сила Р, реакция Ri опоры А и реакция R* тела B)t
также пересекающиеся в одной точке; конечно, R* = —R и pi< ф1.
Направлениям сил на рисунке соответствует случай, когда некоторое
увеличение силы Р сопровождается перемещением тела B) вверх, а тела
(/)—вправо. Составим силовые треугольники для первого и второго тела;
из них получим
sin ( ^ + Р2)
_
sin I ~ —
Р
R*
sin (a + р +
имея в виду, что R
/?*, находим теперь
p — q sin (q + P + Pi) cos p2
cos (a + p + p2) cos pi *
86
ГЛ. V. РАВНОВЕСИЕ ПРИ НАЛИЧИИ СИЛ ТРЕНИЯ
Конечно, углы р, ри р2 неизвестны. Из построения силовых треугольни-
треугольников можно, однако, заключить, что увеличение этих углов при фиксирован-
фиксированных Q и а сопровождается увеличением Р*). Поэтому
Р < О $*П Ф "^ ^ ~f" Ф1) С03 Ф2
"^ cos (а 4- ф 4* фг) cos Ф1 ' '*'
Рассмотрев аналогичным образом случай, когда некоторое уменьшение
силы Р может сопровождаться перемещением тела B) вниз а тела Г Л —
влево, получим ' v '
Р > Q sln (а — Ф ^" Ф1> cos ф8
"*" cos (a —- ф — ф2) cos (pi
Этот случай отличается от предыдущего тем, что в критический момент
равновесия реакции /?, Rit Rz отклонены от нормалей в стороны, противо-
У////////////Л
Рис. 70.
положные принятым на рис. 70. Поэтому можно просто в правой части не-
неравенства (*) изменить знаки углов ф, <р4> ф2, изменив одновременно знак <•
на знак ^. ^
Итак, при равновесии клинового пресса имеем
sin (а — ф — ф1) cos ф2
cos (а — ф — ф2) cos ф!
р
sin (а + Ф + фО cos cp2
cos (а + ф 4- Фг) cos ф!
Пресс будет самотормозящимся (т.е. будет оставаться в равновесии при
исчезновении давления на клин Р и при любом Q), если а < ф 4-ф1.
Пример 18. Учитывая трение в шарнире, определить, в каких пределах
может при равновесии углового прямоугольного рычага изменяться сила Р
уравновешивающая заданную нагрузку Q. Радиус шипа г, угол трения q>'
длины сторон рычага соответственно равны а и 6 (рис. 71).
Р?аьг*'.йя шарнира #, очевидно, равна по величине равнодействующей
V/^+Q1 сил Р и Q Построим круг трения, т.е. круг радиуса ri*~rsinm
с центром в центре шипа С (на рисунке показан пунктиром). Линия действия
реакции R при равновесии рычага проходит через точку А пересечения линий
действия сил Р и Q внутри круга трения (или в крайнем случае касается
*) Это легко доказать и более строго; нужно только проверить что
частные производные дР/др, дР/дри дР/дрг положительны.
24. ПРИМЕРЫ
87
этого круга). Иными словами, линия действия R проходит внутри (или по
сторонам) угла между касательными, проведенными из Л к кругу трения.
Поэтому уравнение моментов относительно точки € имеет один из двух
видов: или
или
Ра « Qb + г"
причем rj^Tj, г"
первым из этих равенств, убывает, когда гj возрастает *); наоборот,
определяемое вторым равенством, возрастает вместе с гх. Поэтому
Qb - гх -y/W+lF < Ра < Qb + п л/Р2 + Q2 .
. Можно убедиться, что значение Я, определяемое
(*)
Решение этих неравенств относительно Р приводит к сложным выра-
выражениям. Поэтому мы воспользуемся приближенным представлением ради-
А /fi*\ J>
Рис. 71.
кала, предложенным Понселе**); пусть х > у > 0; тогда с относительной
погрешностью, не превосходящей ±4%, можно принять
YFTl/5" -= ах + fa/, а = 0,960, р = 0,398,
что соответствует замене дуги окружности в пределах @, я/4) секущей
прямой с коэффициентами, определенными из условия наименьшего отклоне-
отклонения этой секущей (в смысле Чебышева) от дуги окружности [см. сноску на
этой странице].
*) Действительно, рассматривая Р как неявную функцию от г\, имеем
dP m
dr\ вЯ"
**) Понселе (J. Poncelet, 1788—1876)—французский математик и инже-
инженер, один из основателей прикладной механики. Доказательство формулы
Понселе, основанное на теории П. Л. Чебышева функций, наименее укло-
уклоняющихся от нуля, приведено в «Лекциях о функциях, наименее уклоняю-
уклоняющихся от нуля» А. А. Маркова (см. Марков А. А. Избранные труды. — Мл
Гостехиздат, 1948).
88 ГЛ V. РАВНОВЕСИЕ ПРИ НАЛИЧИИ СИЛ ТРЕНИЯ
Пусть а > Ь, тогда Р < Q (если трение невелико). Из неравенств (*)
получаем
Если Р меньше, чем величина в правой части первого неравенства, та
груз Q станет опускаться; если же Р превзойдет величину правой части
второго неравенства, то нарушение равновесия будет,сопровождаться подъ-
подъемом груза Q.
Глава VI
ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ И ЦЕНТР ТЯЖЕСТИ
§ 25. Центр параллельных сил
Предположим, что к твердому телу приложена совокупность
параллельных сил Fu F2, ..., Fn (рис. 72), приводящаяся
к одной равнодействующей. Будем считать точки приложения
сил Ft фиксированными,
т. е. откажемся от возмож-
ности перемещать эти силы
вдоль их линий действия;
координаты точек приложе-
ния сил Ft назовем Xit yu Zu
Докажем, что при пово-
роте всех сил на один и тог
же произвольный угол так,
чтобы сохранилась их па-
раллельность и сторона, в
которую они направлены,
равнодействующая повер-
нется на тот же угол во-
вокруг некоторой точки, на-
зываемой центром парал-
параллельных сил.
При этом сначала сложим все силы, направленные в одну
сторону; их равнодействующую обозначим через R\\ равнодей-
равнодействующая сил, направленных в противоположную сторону,
пусть будет /?2- Величина каждой из этих равнодействующих
равна сумме величин слагаемых, а направления совпадают
с направлением слагаемых сил. При повороте точка приложения
равнодействующей каждой из двух сил, которые мы последо-
последовательно складываем, не изменит своего положения на отрезке,
соединяющем точки приложения слагаемых сил, так как поло-
положение указанной точки зависит только от отношения величин
слагаемых сил и не изменяется при перемене их направления.
Поэтому при повороте не изменится положение точек Ct и С2
приложения равнодействующих R\ и i?2, а следовательно, и
Рис. 72.
90 ГЛ. VI. ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ И ЦЕНТР ТЯЖЕСТИ
положение точки С приложения равнодействующей R всей со-
совокупности сил.
Величина и направление равнодействующей определяются
формулой
Для последующих приложений важно иметь формулы, опре*
деляющие координаты хс, \)сУ zc точки приложения равнодей-
равнодействующей — центра параллельных сил.
Поскольку совокупность сил приводится к одной равнодей-
равнодействующей, момент равнодействующей относительно произволь-
произвольной точки равен геометрической сумме моментов слагаемых сил
относительно той же точки (теорема Вариньона). Поэтому мо-
момент равнодействующей относительно произвольной оси будет
равен алгебраической сумме моментов слагаемых сил относи-
относительно той же оси.
Повернув все силы на одинаковый угол так, чтобы линии
действия их стали параллельными оси Ог, составим выражение
момента равнодействующей относительно оси Оу:
u(Fi). B)
Заметим, что после поворота
Fix = Fiy = 0, Fiz^Ft (/=1,2,...,*),
где через Ft обозначена алгебраическая величина, равная Fi
(величине силы), если повернутая сила направлена в положи-
положительную сторону оси г, и равная (—Ft) в противном случае.
Поэтому
Rx = Ry = 0, *, = !>,,==??,. C)
Вспоминая аналитическое выражение момента силы относи-
относительно оси и пользуясь только что указанными обозначениями,
получим по B)
или
t
§ 26. ЦЕНТРЫ ТЯЖЕСТИ ОБЪЕМА, ПОВЕРХНОСТИ, ЛИНИИ 91
Заменяя х на у и у на z, получим следующие формулы для
координат центра параллельных сил:
z xi
t
Ус— n > zc — n
Полученные формулы можно рассматривать как результат
проектирования на координатные оси выражения вектор-радиу*
са центра параллельных сил
F)
где г, — вектор-радиусы точек приложения сил Ft.
§ 26. Центры тяжести объема, поверхности, линии
Предположим теперь, что параллельные силы непрерывно
распределены по объему тела. Это значит, что к каждому из
весьма малых (элементарных) объемов Ati, на которые можно
мысленно разбить тело, приложена сила Fi = piAri9 пропорцио-
пропорциональная по величине рассматриваемому объему; величина pi
определяет силу, отнесенную к единице объема, и может быть
постоянной во всех точках тела, но может и изменяться от
точки к точке. В дальнейшем считаем, что все силы имеют оди-
одинаковое направление, и отбрасываем поэтому значок над бук*
вой pi. Из формул E) получаем
Xipt At* ]? ytpt At/ ? zipi Atj
• Ус^—п . *с = Ч . G)
pi At* У pi At* У pt At*
Эти формулы являются приближенными, так как значения
координат хи Уи zt определяются с точностью до размеров
объемов Дт*. Чем меньше эти объемы, тем меньшую ошибку
мы сделаем, определяя координаты центра параллельных сил
по формулам G). Поэтому к вполне точным выражениям коор-
координат центра параллельных сил можно прийти в результате
предельного перехода, устремляя объемы Дт; к нулю, а число
их п к бесконечности. Предел такого рода называется опреде-
определенным интегралом.
92 ГЛ. VI ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ И ЦЕНТР ТЯЖЕСТИ
Формулы G) в векторном обозначении могут быть при этом
переписаны так (гс — вектор-радиус центра параллельных сил,
г — текущий вектор-радиус):
(8)
Наиболее важное значение имеет случай силы тяжести. При
небольших размерах тела во всех технических приложениях
можно считать силы тяжести отдельных частиц тела системой
практически параллельных сил*). Формулы (8) дают коорди-
координаты центра параллельных сил тяжести частиц тела, или,
кратко говоря, координаты центра тяжести тела. В этих фор-
формулах величина р есть вес единицы объема, т. е. удельный вес
тела у. В случае однородного тела величина у постоянна (не
зависит от координат) и может быть вынесена за знак суммы
в числителе и знаменателе, а затем сокращена. Таким образом,
получаем формулы для координат центра тяжести однородного
тела:
п п п
Е **Дт* Е у*Лт* ЕZi Лт*
*с«-*=Ц; . Ус=М х ¦ *с=ЫХ % ¦ О)
или в пределе и в векторном обозначении (гс — вектор-радиус
центра тяжести):
!$ A0)
Здесь через т обозначен объем тела. Так как в последних фор-
формулах фигурируют только геометрические величины, то гово-
говорят, что они определяют центр тяжести объема.
Если параллельные силы непрерывно распределены по не-
некоторой поверхности а, то в формулах E) надо положить
Ft- = f(-A(T/, где fi — сила, отнесенная к единице площади по-
поверхности (напряжение), а Да,- — элементарные площадки, на
которые мысленно разбита поверхность. Получаем
*(?«-*=; . (И)
Е и Аог<
l
*) Угол между направлениями сил тяжести двух точек, расположенных
на поверхности Земли на расстоянии 1 км друг от друга по меридиану,
равен 32".
§ 26 ЦЕНТРЫ ТЯЖЕСТИ ОБЪЕМА, ПОВЕРХНОСТИ. ЛИНИИ 93
Считая ft весом единицы площади, будем иметь дело с цент-
центром тяжести тонкой плоской пластинки или с центром тяжести
неплоской тонкой оболочки. При однородном материале и по-
постоянной толщине пластинки или оболочки ft будет постоянным,
и мы получаем формулы для координат центра тяжести одно-
однородной поверхности:
02)
И в этом случае суммы могут быть заменены интегралами,
но уже вычисляемыми по поверхности тела, т. е. поверхност-
поверхностными интегралами; так, например, в случае однородной поверх-
поверхности будем иметь (а — общая поверхность)
где ст= Yj Acrt- — площадь поверхности. Здесь понятие центра
тяжести [как и в случае формул (9)] уже имеет чисто геомет-
геометрическое значение.
Сила тяжести не является единственным примером непре-
непрерывного поверхностного распределения параллельных сил. Что-
Чтобы дать другой пример, представим себе плоскую пластинку,
погруженную в жидкость. Сила гидростатического давления
жидкости на пластинку дает пример совокупности непрерывно
распределенных параллельных сил (они перпендикулярны к
пластинке), величина которых пропорциональна расстоянию от
свободной поверхности жидкости до рассматриваемой точки.
В этом случае центр параллельных сил называется центром
давления жидкости на пластинку. Точно так же можно гово-
говорить о центре давления сыпучего тела на подпорную стенку.
Параллельные силы могут быть также непрерывно распре-
распределены вдоль некоторой линии, как, например, силы тяжести,
приложенные к тонкой проволоке, ось которой представляет
данную линию. Полагаем F,- = qiMt. При однородном материале
и постоянном поперечном сечении вес qi единицы длины — по-
погонный вес — проволоки будет постоянным, и мы получаем фор-
формулы для координат центра тяжести однородной линии:
A3)
n
где L — 2] A/* — длина линии. В случае плоской кривой, рас-
расположенной в плоскости ху, получим zc = 0. Так же как и
94 ГЛ VI ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ И ЦЕНТР ТЯЖЕСТИ
ранее, суммы должны заменяться на свои предельные значе-
значения — интегралы:
L
Вопрос о нахождении центра непрерывно распределенных
вдоль линии параллельных сил возникает не только в случае
сил веса. Речь, например, может идти о вычислении координат
центра непрерывно распределенных параллельных нагрузок на
балку (с прямолинейной или криволинейной осью), причем эти
нагрузки могут изменяться по тому или иному закону вдоль
оси балки. Во всех этих случаях следует пользоваться форму-
формулами E), выражая Ft по данным задачи.
В случае плоской фигуры (ее плоскость примем за пло-
плоскость ху) координаты центра тяжести будут
xc — ^ > Ус — j •
Числители этих выражений называются статическими момен-
моментами площади относительно осей у и х:
п п
Му = Е Xi^Oi, мх = Е uAoi. A6)
*1 *1
Вообще, статическим моментом площади относительно оси
называется сумма произведений элементарных площадок, на
которые разбита площадь, на расстояние каждой площадки до
оси. Знание статического момента площади относительно неко-
некоторой оси позволяет определить расстояние от оси центра тяже-
тяжести площади согласно формулам
Ми Мх
§ 27. Методы определения координат центра тяжести
Фактическое разыскание координат центра тяжести объема,
поверхности или линии требует применения методов интеграль-
интегрального исчисления. В практических приложениях часто прихо-
приходится иметь дело с телами, составленными из нескольких тел,
имеющих правильную геометрическую форму, положение цент-
центров тяжести которых известно. Для таких тел положение цент-
центра тяжести может быть определено без вычисления интегралов.
1°. Пусть однородное тело имеет плоскость симметрии, ко-
которую примем за плоскость ху. Это значит, что каждому эле-
элементу объема Дт/ с координатами xt9 yu Zi будет соответство-
§ 27. МЕТОДЫ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ 95
вать равный по величине элемент объема с координатами лс/, yit
—Zi. Поэтому
п
откуда
т. е. центр тяжести лежит в плоскости симметрии.
При наличии двух плоскостей симметрии центр тяжести бу-
будет находиться на прямой их пересечения; в частности, при на-
наличии оси симметрии центр тяжести расположен на этой оси.
Наконец, в случае трех плоскостей симметрии центр тяжести
совпадает с точкой пересечения этих плоскостей.
В случае симметричной плоской фигуры центр тяжести бу-
будет лежать в плоскости этой фигуры на ее оси симметрии,
а в случае наличия двух осей симметрии — совпадать с точкой
их пересечения.
2°. Представим себе, что однородный объем т может быть
разбит на несколько объемов ti, Т2, ..., тт, координаты цент-
центров тяжести которых известны. Тогда нетрудно найти и коор-
координаты центра тяжести объема т. В самом деле, имеем
откуда следует:
т-*с= ? **А**+ ?**А** + ... + ?
@ Ы ()
Но, называя через хф координату по оси х центра тяжести
объема тл, получим
и, следовательно,
Ь0 B)
т • хс т2
ft-1
Имеем
m m m
Л-1 й-1 Л«1
Аналогичные формулы могут быть н^цисаны в случае по-
поверхности плоской фигуры, а также и для неоднородных тел,
поверхностей и линий.
В случае, если для составления объема г некоторые из сла-
слагаемых объемов нужно вычесть (тело с отверстиями), можно
96 ГЛ. VI. ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ И ЦЕНТР ТЯЖЕСТИ
пользоваться теми же формулами A8), если условиться сла-
слагаемые, соответствующие отбрасываемым объемам, брать с от-
отрицательными знаками.
Для плоской фигуры соответствующие формулы будут
иметь вид
или, если воспользоваться понятием статического момента пло-
площади,
B0)
mm ч '
k-l
3°. Определение центров тяжести линий и площадей во мно-
многих случаях может быть облегчено, если пользоваться теоре-
теоремами Паппа — Гульдина*).
Эти теоремы гласят:
Боковая поверхность тела вращения, описанного дугой пло-
плоской кривой, вращающейся вокруг оси, расположенной в плос-
плоскости кривой и ее не пересекающей, равна длине дуги, умно-
умноженной на длину окружности, описываемой центром тяжести
дуги. Это — первая теорема.
Объем тела вращения, описанного плоской фигурой, вра-
вращающейся вокруг оси, расположенной в плоскости фигуры и не
пересекающей ее контура, равен произведению площади фигуры
на длину пути, описанного ее центром тяжести. Это — вторая
теорема.
Действительно, согласно рис. 73, элемент боковой поверхно-
поверхности тела вращения, описанного дугой АВ вокруг оси у, будет
равен 2nxi Д/«. Поэтому вся боковая поверхность будет
F = 2jtV XlMh
причем суммирование ведется по всем элементам дуги AB = L.
Но по формулам A3)
Yjii c,
и, следовательно,
F = 2nxcL. B1)
*) Папп — александрийский математик, деятельность которого одни ав-
авторы относят к третьему, другие к четвертому веку н. э.; сочинение Гульдина
о центре тяжести появилось в 1635 г.
§ 28. ЦЕНТРЫ ТЯЖЕСТИ ЛИНИЙ, ПЛОСКИХ ФИГУР И ТЕЛ
97
Точно так же, обращаясь к рис. 74, видим, что объем эле-
элементарного кольца, описываемого площадкой Да* вокруг оси у,
равен 2Ш{ Да,-. Получаем
B2)
Формулы Паппа — Гульдина позволяют определять положе-
положение центра тяжести линии и плоской фигуры в тех случаях,
когда известны поверхность или объем тела, полученного вра-
вращением этой линии или фигуры вокруг оси.
§ 28. Центры тяжести некоторых линий»
плоских фигур и тел
а) Центр тяжести площади треугольника находится в точке
пересечения медиан треугольника. Это легко получить из таких
соображений. Разбиваем треугольник прямыми, параллельными
основанию, на бесконечно тонкие полоски. Центр тяжести каж-
каждой такой полоски находится в ее середине; но середины всех
прямых, параллельных основанию треугольника, лежат на ме-
медиане этого основания; поэтому центр тяжести этого треуголь-
треугольника должен лежать на этой медиане; так как аналогичное
рассуждение применимо и к медиане другой стороны треуголь-
треугольника, то искомый центр тяжести должен лежать в точке пере-
пересечения медиан. Отсюда следует также, что центр тяжести тре-
треугольника находится на расстоянии, равном одной трети вы-
высоты треугольника, от соответствующего основания.
б) Центр тяжести четырехугольника. Зная центр тяжести
треугольника, можно найти центр тяжести произвольного мно-
многоугольника, разбивая его на треугольники и пользуясь далее
приемом, изложенным в п. 2° § 27.
В частности, для произвольного четырехугольника (рис. 75)
построение производится так. Разбиваем четырехугольник
4 Л. Г. Лойцяиский, А. И. Лурье
98
ГЛ. VI. ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ И ЦЕНТР ТЯЖЕСТИ
ABED диагональю BD на два треугольника и отмечаем их
центры тяжести Сь С2. Центр тяжести четырехугольника нахо-
находится на отрезке С\С2. Точно так же, проведя диагональ AEt
наметим положение центров тяже-
тяжести С3 и Са треугольников ADE и
ABE. Искомый центр тяжести С
находится на пересечении прямых
^1^2 и СгСь так как центр тяже-
тяжести двух материальных точек ле-
лежит на прямой, их соединяющей.
в) Центр тяжести трапеции
можно найти также, применяя сле-
следующий прием. Повторяя рассуж-
рассуждение, приведенное для треугольни-
треугольника, убедимся, что центр тяжести трапеции должен лежать на пря-
прямой MN, соединяющей середины параллельных сторон (рис. 76).
Чтобы найти высоту he центра тяжести над нижним основа-
основанием, разбиваем трапецию на два треугольника ABG и BGD.
В формуле [см. A9)]
Рис. 76.
где индексы «1» и «2» относятся соответственно к треугольни-
треугольникам ABG и BGD, имеем
¦ ¦«- ah, a2 =
и, следовательно,
1 Л (a + 26)
//B) _ A. U
Ус — з а
Из этой формулы вытекает следующее построение: на про-
должениях параллельных сторон откладываем BE = a, GF = Ь.
Центр тяжести С находим в пересечении прямых MN и FE.
г) Центр тяжести дуги окружности радиуса R с централь-
центральным углом 2а. В силу симметрии центр тяжести лежит на бис-
биссектрисе центрального угла, которую примем за ось у, так что
0
§ 28 ЦЕНТРЫ ТЯЖЕСТИ ЛИНИЙ, ПЛОСКИХ ФИГУР И ТЕЛ 99
Для определения координаты ус следует обратиться к фор-
формуле A3). Разбиваем дугу L=*AB (рис. 77) на весьма боль*
шое число дуг Д//. Имеем
cos
L АВ
В частности, для полуокружности (а = п/2) находим
Ус = В- = 0.637Я.
д) Центр тяжести площади кругового сектора (рис. 78).
Разбиваем сектор на элементарные секторы с центральными
углами Дф/. Центр тяжести каждого такого сектора (его можно
рассматривать как треугольник с высотой R и основанием R Дф/)
2
лежит на расстоянии у/? от центра круга. Остается найти
центр тяжести дуги круга радиуса -^ R; по п. г) находим
и 2 п sin a
В частности, для площади полукруга получим
Этот же результат легко получается по второй теореме Пап-
па — Гульдина.
е) Центр тяжести многогранной пирамиды лежит на пря-
прямой, соединяющей вершину О (рис. 79) с центром тяжести Со
площади основания. Докажем, что искомый центр тяжести воз-
возвышается над плоскостью основания на -т-А, где h — высота
100
ГЛ. VI. ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ И ЦЕНТР ТЯЖЕСТИ
пирамиды. Направляя ось Oz вниз, имеем выражение элемен-
элементарного объема:
где
i — площадь сечения пирамиды плоскостью, параллельной
о
Рис. 79.
основанию и отстоящей от вершины О на расстоянии zu По из*
вестной теореме о площадях подобных фигур
, ИЛИ
где Fo—площадь основания. По формуле (9) имеем
1
Is.
xh*
t-1
Вычисление предела полученной суммы при м->оо сводится
к нахождению определенного интеграла:
п h
Таким образом, получим
Замечая, что r = -g-F0^, найдем
4т *
3 ,
откуда и следует сказанное выше.
Из хода вывода видно, что результат не зависит от формы
фигуры, лежащей в основании, и от наклона пирамиды. Поэ-
Поэтому центр тяжести любого наклонного конуса также распо-
располагается на расстоянии одной четверти высоты конуса от пло-
плоскости основания.
§ 28. ЦЕНТРЫ ТЯЖЕСТИ ЛИНИЙ, ПЛОСКИХ ФИГУР И ТЕЛ
101
В справочных изданиях приводятся формулы для коорди-
координат центров тяжести других геометрических фигур и тел.
Пример 19. Определить центры тяжести плоских фигур, изображенных
на рис. 80 и 81.
Рис. 80.
Рис. 81.
Координату ус проще всего получить, воспользовавшись теоремой Пап-
па — Гульднна. Для случая рис. 80 находим по формуле B2)
откуда
По формуле A9) находим xc
пг2
- 14 г
пг2 3
В случае рис. 81 найдем
яг2
2
8
*с-.7Гг-
Пример 20. Определить положение центра тяжести С площади попе-
поперечного сечения однородного штампа, размеры которого показаны на рис. 82,
1
1
Ьа
ч
А К
I В
\с
а)
Рис. 82.
х
Проведем вдоль вертикальной оси симметрии сечения ось О у (рис. 83), а
перпендикулярно к ней по основанию сечения ось Ох.
102 ГЛ. VI. ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ И ЦЕНТР ТЯЖЕСТИ
Определение положения центра тяжести сводится к вычислению лишь
координаты ус (хс ¦« 0).
Вспомогательной линией PS разобьем площадь сечения на три одина-
одинаковых прямоугольника с центрами тяжести Ci, C2 и С8 (рис. 83, а). Исполь-
Используя формулу A5), найдем
4а2 • За + 4а2 • За + 4а2 • у
ус - зПЙ*- ~ 2>17а •
Центр тяжести площади сечения находится в точке С с координатами
хс «=0jc« 2,17а.
Эту же задачу можно решить иначе, проведя вспомогательную прямую
KL (рис. 83, б) и представив площадь сечения штампа в виде разности
площадей двух прямоугольников ABDE и KLMN с центрами тяжести соот-
соответственно Ci и Сг.
Используя опять формулу A5), вновь получим (хс «¦ 0)
4а • ба • 2,5а — 2а • 4а • За п t~
у с 4а-5а-2а-4а ' " 2'17а'
Глава VII
РАСПРЕДЕЛЕНИЕ СИЛ В СПЛОШНОЙ СРЕДЕ. НАПРЯЖЕНИЯ
§ 29. Сплошная среда. Объемные
и поверхностные силы. Напряжения
Систему материальных точек в том случае, когда число их
очень велико и они расположены плотно друг по отношению
к другу, можно приближенно заменить моделью сплошной
среды, с непрерывным распределением вещества, его физических
свойств (плотности, вязкости, тепло- и электропроводности
и др.), а также общих механических характеристик движения
среды (перемещений, скоростей, ускорений, сил и др.).
Как известно из общего курса физики, материальные тела
обладают сложной молекулярной структурой, причем молекулы
среды совершают «тепловые» движения: хаотичные в газах, бо-
более или менее упорядоченные в жидкостях и аморфных телах
и колебательные в кристаллических решетках твердых тел. Эти
внутренние движения определяют физические свойства тел, ко-
которые в модели сплошной среды задаются наперед основными
«феноменологическими» закономерностями (например, законы
Бойля — Мариотта, Клапейрона — в газах, законы вязкости —
в ньютоновских и неньютоновских жидкостях, закон Гука —
в твердых телах).
Простейшим примером сплошной среды служит рассмотрен-
рассмотренная в предыдущих главах модель абсолютно твердого тела. Ха-
Характерная особенность статики абсолютно твердого тела заклю-
заключается %в отсутствии сколько-нибудь значительного внимания
к вопросу о внутренних силах в такого рода телах. В § 4 ко-
коротко говорилось о принципе затвердевания, который устанав-
устанавливает необходимые условия равновесия деформируемых сред,
сводящиеся к уравнениям равновесия соответствующих, выде-
выделенных в них, «затвердевших» объемов под действием прило-
приложенной совокупности внешних сил. Понятие о внутренних силах
вводилось в том же § 4 в связи с применением метода сечений,
идея которого сохраняет свою силу и в статике сплошной де-
деформируемой среды. Именно в механике сплошных сред поня-
понятие о внутренних силах раскрывается во всей своей глубине,
104 ГЛ VII РАСПРЕДЕЛЕНИЕ СИЛ В СПЛОШНОЙ СРЕДЕ
и это способствует расширению кругозора в направлении общего
учения о силах, каковым является статика.
Для описания движения и, в частности, равновесия сплошной
среды приходится переходить от сосредоточенных в отдельных
точках среды значений физических величин к их непрерывным
распределениям по среде и количественно характеризовать эти
распределения плотностью распределения физической величины
по сплошной среде.
Простейшим примером, выходящим за границы статики, но
хорошо известным из общего курса физики, является понятие
о плотности среды, кратко выражающего, собственно говоря,
слова: плотность распределения массы в сплошной среде.
Поскольку понятие плотности распределения физической ве-
величины получает дальнейшие применения, осветим несколько
подробнее его содержание.
Напомним, что средняя плотность рср распределения массы
в объеме т определяется отношением массы среды m в этом
объеме к величине объема т и выражается в кг/м3:
Стягивая поверхность, окружающую выделенный объем
среды, в данную точку, получим плотность распределения
массы, т. е. просто плотность среды р в этой точке:
p hm
или, вводя для бесконечно малых масс и объемов обозначения
Ьт и 6т,
Поясним, что здесь и в дальнейшем под символом б пони-
мается произвольная бесконечно малая величина в простран-
пространстве; она не должна смешиваться с понятием дифференциала
d — бесконечно малого приращения некоторой величины в зави-
зависимости от бесконечно малого приращения (дифференциала)
времени dt.
Из равенства B) непосредственно следует выражение бес-
бесконечно малой, будем говорить элементарной, массы 6т через
плотность среды р и элементарный объем 6т:
6т = р6т. C)
Аналогично, под средней плотностью распределения сил, при-
приложенных в точках сплошной среды, будем понимать отношение
главного вектора сил V, приложенных в точках объема среды т,
к массе объема m = рсрт и назовем это отношение средней объ-
§ 29 СПЛОШНАЯ СРЕДА. ОБЪЕМНЫЕ И ПОВЕРХНОСТНЫЕ СИЛЫ 105
емной силой. Сохраним для этой, имеющей размерность [Н/кг],
т. е. [м/с2], величины обычное обозначение вектора F.
Средняя объемная сила определится равенством
я объемная сила в данной точке — пределом
откуда следует выражение главного вектора сил в данной точке:
F)
Так, например, объемной силой для сил тяжести будет слу-
служить вектор ускорения g свободного падения тел, для инерцион-
инерционной, центробежной силы — центробежное ускорение ш2г, где
<о — угловая скорость вращения системы отсчета, г — вектор, на-
направленный по кратчайшему расстоянию от точки приложения
центробежной силы до оси в сторону от оси.
Объемные силы, действие которых не проникает сколько-ни-
сколько-нибудь глубоко внутрь сплошной среды, как, например, силу тре-
трения между отдельными слоями среды или силу давления, при-
приложенную в областях контакта между двумя средами, заменяют
предельным понятием поверхностных сил, определяемых плот-
плотностью распределения их по геометрической поверхности, раз-
разграничивающей области взаимодействующих сред.
Среднюю плотность распределения поверхностных сил опре-
определяют как отношение главного вектора VnOB поверхностных сил
к площади а поверхности, на которой эти силы действуют, и на-
называют средним напряжением:
Рср^1^. G)
Напряжение имеет размерность [Н/м2] и выражается в «пас-
калях» (Па). Переходя к пределу путем стягивания площадки а
в данную точку поверхности, получим вектор напряжения в этой
точке, равный
р=,Пш___-. (8)
Произведение Ьа напряжения р в данной точке на элемен-
элементарную площадку 8а определит поверхностную силу, приложен-
приложенную к элементарной площадке 8а в данной точке сплошной
среды; будем ее называть элементарной поверхностной силой.
Главные векторы объемных и поверхностных сил, приложен-
приложенных к конечным объемам т или к конечным площадям поверх-
поверхностей а, определяют суммированием элементарных объемных
106 ГЛ. VII РАСПРЕДЕЛЕНИЕ СИЛ В СПЛОШНОЙ СРЕДЕ
или поверхностных сил соответственно по объему т или поверх-
поверхности а. В сплошной среде с непрерывными распределениями
объемных и поверхностных сил такие суммарные силы опреде-
определяются объемными или поверхностными интегралами.
Напряжения в сплошной среде находятся тем же методом
сечений, о котором в случае линейного тела (о натяжении в про-
проволоке) была уже речь ранее, в § 4. В общем случае в каждой
точке сплошной среды можно провести бесчисленное множе-
множество бесконечно малых, будем говорить «элементарных», пло-
плоских сечений, различно ориентированных в пространстве. От-
Отбрасывая мысленно с одной стороны данного се-
сечения сплошную среду, но учитывая действие от-
отброшенной части на сохраненную ее часть, найдем
внутреннюю поверхностную силу, приложенную к
сечению со стороны отброшенной части среды. От-
Отнеся эту, подчеркнем, внутреннюю силу к площади
сечения, определим плотность распределения по-
поверхностной силы по сечению, т. е. напряжение в
й'п=-рп Данной точке среды. Напряжение, по самому его
определению, является вектором. Специфической
чертой напряжения служит зависимость его не
Рис. 84. только, от положения данной точки среды, но и от
ориентации сечения в пространстве.
Определим ориентацию элементарной площадки 6а в точке
М единичным вектором (ортом) нормали п к плоскости пло-
площадки (рис. 84). У площадки имеются две стороны. Ту из них,
к которой приложен орт п (на рис. 84 заштрихована), назовем
лицевой и вектор напряжения, приложенный к лицевой стороне,
обозначим через рп. Тогда, по закону действия и противодей-
противодействия, напряжение, приложенное к другой, скажем тыльной,
стороне площадки, будет равно р'п — -~Рп- Выбор одной из
сторон площадки за лицевую, конечно, произволен, но наличием
орта нормали лицевая сторона площадки фиксируется, и в даль-
дальнейшем рассуждении это наименование за ней сохраняется.
§ 30. Равенства Коши
Выделим мысленно в сплошной среде бесконечно малый
объем в форме тетраэдра (пирамиды) ММ\М2МЪ (рис. 85), бо-
боковые грани которого М{ММ2, М\ММз, М2ММз лежат, соответ-
соответственно, в координатных плоскостях ху, xz, yzy а ориентация
наклонной грани М\М2МЪ определяется единичным вектором п
нормали к ней. Чтобы не вводить новых обозначений, восполь-
воспользуемся в качестве ортов нормалей к боковым граням ортами
осей координат i, /, k Обозначим бесконечно малые площадки,
ограничивающие тетраэдр, через 6а*, 6а*,, 6а2, 6ал, причем заме-
§ 30. РАВЕНСТВА КОШИ
107
тим, что в силу выбора ортов нормалей к боковым граням
внешние по отношению к объему тетраэдра стороны граней 6вх,
баг/, 6вг будут тыльными, а наклонная грань &оп — лицевой.
Применяя метод сечений, отнимем окружающую тетраэдр
сплошную среду и заменим ее действие силами —рх 8а*, —ру 8оу,
—pzboZi рлба«. Знаки минус у первых трех сил показывают, что
они приложены к тыльным сторонам боковых граней; знак плюс
у последней силы выражает тот факт, что силарп6а„ приложена
к лицевой грани тетраэдра. Индексы х, у, г, п у напряжений
служат указанием направлений нормалей к площадкам.
Выделенный в среде объем тетраэдра 6т находится в равно-
равновесии под действием силы pF 6т, где р — плотность среды, F —
объемная сила, и четырех только
что указанных сил, приложенных к
четырем граням тетраэдра.
Согласно принципу затвердева-
затвердевания (§ 3), условия равновесия те-
тетраэдра выражаются равенствами
нулю главного вектора и главного
момента приложенных к нему сил.
Обратим внимание на то, что эти
силы имеют различный порядок
малости, а именно: силы, прило-
приложенные к граням тетраэдра, содер-
содержащие множители 6а*, ба^, ба*,—
второй порядок малости, а сила
F из-за наличия множителя бт—
Рис. 85.
p
третий порядок малости. Отсюда следует, что в условиях равен-
равенства нулю главного вектора и главного момента сил, приложен-
приложенных к тетраэдру, последняя сила, как величина более высокого
порядка малости, может быть опущена.
Равенство нулю главного вектора сил, приложенных к эле-
элементарному тетраэдру, может быть записано в виде
Рп
рг Ьаг,
(9)
или, замечая, что площадки ба*, ба^, Ьаг служат проекциями
площадки 6а/г на координатные плоскости, и обозначая косинусы
углов между ортом п нормали к наклонной площадке и осями
координат, представляющими нормали к координатным пло-
площадкам, через пх, пу, nZi получим
A0)
л* 6<хй,
6az==nz6an.
Подставляя эти значения ба*, ба^, 6a2 в правую часть (9) и со-
сокращая на бая, получим искомое равенство, связывающее р*
и Рх, ру, рг.
108 ГЛ. VII. РАСПРЕДЕЛЕНИЕ СИЛ В СПЛОШНОЙ СРЕДЕ
Переходя, для удобства, к цифровой индексации, т. е. пола-
полагая xi —х, х2 = у, xs — z; п\=пх, п2 = пу, пъ = пг\ pi=px,
p2=iPyi рг = рг, получим указанное равенство в виде
Рп = rtiPi + п2р2 + «зРз. (П)
Векторы напряжений рь р2, рз, приложенные к координатным
площадкам, не имеют объективного физического смысла, так
как зависят от выбора системы координат, по отношению к ко-
которой они определены. Такие величины — подробнее об этом
говорится в начале следующей главы — не могут быть причис-
причислены к истинным физическим векторам, а носят наименование
«квазивекторов». Заметим, что к ним можно применять все
операции, применимые к физическим векторам, в частности,
проектировать их на оси координат.
Проектируя обе части A1) на оси координат, придем к си-
системе трех равенств:
Рш = ttiPn + п2р21 + Язрзь
Рп2 = ПХр12 + П2р22 + /13рз2, A2)
РпЪ ~ ^lPl3 + ^2Р23 + %РЗЗ-
В этих равенствах, в полном соответствии с принятыми обо-
обозначениями, первый индекс при р отмечает принадлежность
напряжения к площадке, перпендикулярной к данной оси коор-
координат, второй — ось проекций. Так, например, p3i обозначает
проекцию на ось х\ напряжения, приложенного к площадке, пер-
перпендикулярной к оси Ох3.
Равенства A2) или, что то же, A1) носят имя Коши, опуб-
опубликовавшего их в 1827 г. Они выражают напряжение, прило-
приложенное к любой элементарной площадке в сплошной среде,
через напряжения, приложенные к трем взаимно перпендику-
перпендикулярным площадкам в той же точке среды.
Отдельные слагаемые в правой части равенства A1) зависят
от выбора направлений осей координат, их можно было бы
в этом смысле назвать «квазивекторами», но их совокупность,
определяемая суммированием, является физическим вектором,
определяющим вектор напряжения, приложенный к любой эле-
элементарной площадке. Отметим одну существенную особенность
физических векторов напряжения рп — они не образуют поля,
так как в каждой точке сплошной среды имеется бесчисленное
множество напряжений, зависящих от ориентации в простран-
пространстве площадки, к которой они приложены. Напряжения рп но
представляют собой вектор-функции точки.
Величины с разными индексами: pi2, pis, Ргь Ргз, Рзь Рзг —
называют касательными напряжениями, так как, согласно при-
принятому правилу обозначений, соответствующие им проекции
§ 31. ВЗАИМНОСТЬ КАСАТЕЛЬНЫХ НАПРЯЖЕНИЙ
109
вектора напряжения расположены б координатных плоскостях.
Величины с одинаковыми индексами: оцу р<я, р3з — представ-
представляют собой проекции на нормали к координатным плоскостям
и называются нормальными напряжениями. К первым относятся,
например, напряжения трения, ко вторым — напряжения давле-
давления в сплошной среде.
В технических курсах принимают следующие обозначения
для нормальных и касательных напряжений:
а иногда еще
рп — Хх, р22 = Yy,
= Ху9
= *23 И Т. Д.,
Yz и т. д.
§ 31. Взаимность касательных напряжений
Обратимся ко второму условию равновесия тетраэдра —
к равенству нулю главного момента приложенных сил, выте-
вытекающему из принципа за-
затвердевания (§ 3).
Пользуясь малостью
площадок граней тетраэдра,
можем считать распределе-
распределения напряжений по этим
площадкам однородными и
сосредоточенными в геоме-
геометрических центрах граней,
т. е. в точках пересечения
медиан треугольников (§ 28,
п. а). Обозначим вектор-ра-
вектор-радиусы этих точек пересече-
пересечения (рис. 86) так:
. 86.
Ш2
г<8>.
Чтобы не затемнять чертежа, на рис. 86 нанесены лишь век-
вектор-радиусы точек N и Л/з. Уравнение моментов в цифровой
индексации будет
г X РпЬоп = г<1> X Pi Ьах + г<2> X P2S<72 + г<8> X Рзб<т3. A3)
Заменяя рп его разложением A1) и принимая во внимание
равенство A3), получим
^0. A4)
НО ГЛ. VII. РАСПРЕДЕЛЕНИЕ СИЛ В СПЛОШНОЙ СРЕДЕ
Точка iVa пересечения медиан треугольника М\ММ2 яв-
является проекцией соответствующей точки N пересечения медиан
в треугольнике М\М%Мъ на плоскость Х\х2.
Направленный отрезок N3N равен
и как проектирующий точку N на плоскость х\Х2 перпендикуля-
перпендикулярен к этой плоскости и параллелен оси Мх3. Следовательно,
его направление совпадает с направлением единичного вектора
i3. Аналогично покажем, что векторы г — г<!> и г — г<2> парал-
параллельны единичным векторам i\ и г2. Введя пока не определенные
скаляры А,A), ЯB), ЯC), можем написать, что
г - г<п = КЩЬ г - г<2) = АЯ*2, г — г<3> «, ХЩ3. A5)
Подставляя эти значения разностей векторов в A4), получим
*(Ч (h X Pi) + Я<%2 (i2 X р2) + Ж%3 (h X Рз) = 0. A6)
Остается найти значения скаляров ЯA), ЯB), ЯC). Для этого
продлим направленные отрезки MNb MN2, MN$ (на рис. 86
показан только отрезок MN3) до пересечения их в точках
N'v #2» ^з, с плоскостью M\M2Ms. Полученные при этом век-
векторы MN'V MN'V MN'S> согласно известной теореме о положении
точки пересечения медиан в треугольнике, будут, соответственно,
равны
Поскольку концы векторов MN'V MN'2, MN'V так же как
и MN, лежат в наклонной плоскости M\M2M3i проекции их на
нормаль п к плоскости М\М2М3 будут равны одной и той же
величине расстояния h точки М до плоскости M\M2MZf так что
|(ГО) • л) = | (г<2> • я) = |(г<3> • я) = й. A7)
Умножая обе части каждого из равенств A5) скалярно на п,
получим по A7)
(Г - го>). п = г • я - г*1* • л = /г —|-А=~Л
и аналогичные выражения для других разностей.
Отсюда следует, что
§ 31 ВЗАИМНОСТЬ КАСАТЕЛЬНЫХ НАПРЯЖЕНИЙ 111
Подставляя эти значения ХA), ЯB), А/3) в равенство A6) и со-
сокращая обе части полученного равенства на А, придем к сле-
следующему соотношению:
h X Pi + к X р2 + h X Рз = 0. A9)
Проектируя обе части этого равенства на оси координат
и пользуясь известными формулами проекций векторного произ-
произведения на те же оси, окончательно получим систему равенств
Р\2 = р2\, Р23 = Р32, P31=Pl3> B0)
выражающих следующую теорему о взаимности каса-
касательных напряжений:
Если через какую-нибудь точку, среды провести три взаимно
перпендикулярные бесконечно малые (элементарные) площадки,
то для каждых двух из них проекции вектора напряжения, при-
приложенного к площадке, на нормаль к другой равны между
собой.
Совокупность девяти величин ры (k, /= 1, 2, 3) при выпол-
выполнении некоторых условий, о которых пойдет речь в следующей
главе, образует тензор второго порядка, именуемый тензором
напряжений.
Глава VIII
ЭЛЕМЕНТЫ ТЕНЗОРНОЙ АЛГЕБРЫ
§ 32. Поле физической величины. Условия физической
объективности аналитического определения вектора
В отличие от механики системы дискретных материальных
точек и механики абсолютно твердого тела, требующих лишь
знакомства с операциями векторного исчисления, механика
сплошных сред не может обойтись без основных сведений из
области тензорного исчисления. В дальнейшем предполагается,
что основы векторной алгебры известны, что же касается на-
начальных представлений тензорной алгебры, то они излагаются
в ближайших параграфах.
Напомним, что в векторном исчислении*приходилось иметь
дело с физическими величинами, представимыми либо одной
величиной — скаляром, либо тремя алгебраическими величина-
величинами — вектором. Требование физической объективности существо-
существования величин в том смысле, что по самой своей сущности они
не могут зависеть от расположения в пространстве той или дру-
другой системы координат, при помощи которых эти физические
величины определяются, приводит к специальным ограничениям,
налагаемым на аналитические их представления.
Имея в виду дальнейшие приложения в механике сплошных
сред, будем считать, что все рассматриваемые физические ве-
величины непрерывно распределены в пространстве, занимаемом
сплошной средой, причем в каждой точке этого пространства
однозначно определены значения физических величин как не-
непрерывных функций координат точек пространства, или, как
иногда говорят, функций точек пространства.
Такая совокупность значений физической величины, одно-
однозначно сопоставляема^ точкам пространства в некоторой обла-
области, определяет поле физической величины.
Поле задается функциями координат в области определения
физической величины, а в общем случае — и времени, причем
на эти функции накладываются ограничения непрерывности
и существования производных по координатам и времени такого
порядка, который необходим для проводимого исследования.
§ 32. ПОЛЕ ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ
113
В отдельных специальных случаях в пространстве, где за-
задано поле, могут существовать точки, кривые или поверхности
разрыва непрерывности величины, описываемой полем. Такие
точки, кривые и поверхности, соответственно, образуют особые
точки, кривые и поверхности поля.
Рассмотрим сначала поле скалярной величины, например
температурное поле. Оно задается одной функцией <р(х, у, z;t)
координат точек поля и времени, представляющей температуру
среды. Значение этой функции должно быть одним и тем же
независимо от того, в какой координатной системе функция
определена. В этой инвариантности функции, задающей поле
скалярной величины, т. е. независимости от выбора системы
координат, заключается условие физической объективности поля
скалярной величины. Это требование распространяется на все
скалярные величины.
Сложнее обстоит дело с понятием физической объективности
вектора и соответствующего ему векторного поля. Три его про-
проекции на оси координат зависят от выбора направления этих
осей в пространстве; проекции вектора в этом смысле вариантны,
но длина вектора, выражающая в выбранном масштабе абсо-
абсолютное значение физической величины, не может зависеть от
произвольного выбора координатной системы. Эта инвариант-
инвариантность длины вектора налагает на функции координат, представ-
представляющие его проекции, определенные ограничения.
Воспользуемся ранее введенной числовой индексацией коор-
координат {хи х2, х3) и проекций вектора а на соответствующие оси
(а\9 #2, #з). Косинусы углов между «старыми» и отмечаемыми
штрихами «новыми» осями будем обозначать буквой а с двумя
индексами, поясняющими, о каких осях идет речь. Так, напри-
например, ос21 обозначает косинус угла между первой осью «старой»
системы Ох\ и второй осью Ох 2 «новой» системы. Начало коор-
координат у обеих систем возьмем общее, так как параллельный
перенос осей на проекциях вектора сказываться не будет.
Формулы связи между «старыми» и «новыми» координата-
координатами легко выписываются, если воспользоваться следующей таб-
таблицей:
f
х{
г
х2
г
н
«и
«21
«3!
х2
«12
«22
«32
Хъ
«13
«23
«33
114 ГЛ. VIII. ЭЛЕМЕНТЫ ТЕНЗОРНОЙ АЛГЕБРЫ
и разлагать любую из координат по другим, применяя в каче-
качестве коэффициентов в этих разложениях те косинусы, которые
расположен^ в строках (при разложении х' по х) или в столб-
столбцах (при разложении х по х\ согласно принятой таблице).
В развернутом виде формулы преобразования координат бу-
будут иметь вид
*!=а1Л+а12*2 + а13*3>
Х2 = a2\Xl + <*22*2
#3 = CtgjATj -f- СХ32Л^2 • a3
а для обратного преобразования
х2 = а12х[ + а22х'2 + а324, B)
Следует обратить внимание на разницу в порядке индексов
при а в случаях перехода от хь к хгк и от х\ к xk. Предыдущую
группу формул можно записать в виде
з з
/ у» у» ,
или, пользуясь общепринятым приемом опускания знака суммыу
когда подразумевается суммирование по дважды повторяюще-
повторяющемуся индексу от 1 до 3 в суммируемых одночленах, короче так:
Дважды повторяющиеся индексы, по которым предпола-
предполагается суммирование, называют «немыми» в знак того, что
наименование их совершенно произвольно и может в процессе
вычислений изменяться, а после выполнения суммирования они
исчезают. Сохраняющиеся в процессе суммирования индексы
носят наименование «свободных». Например, в первой формуле
C) безразлично, писать ли атпхп или атрХр и т. п., так как
индекс п — «немой». Индекс т — «свободный»; он определяет
координату «новой» системы, которая выражается через «ста-
«старые» координаты; во второй формуле C), наоборот, индекс т —
«немой», а п — «свободный». Указанный прием опускания сим-
символа суммирования значительно упрощает выкладки, особенно
если приходится перемножать суммы одночленов.
Формулы C) сохранят свою силу и в применении к проек-
проекциям вектора а'т и ап в сравниваемых координатных системах:
«новой», отмечаемой штрихом, и «старой» — без штриха. Это
вытекает из того, что проекция вектора на ось равна разности
§33. ЛИНЕЙНАЯ ВЕКТОР-ФУНКЦИЯ ТЕНЗОР И5
координат конца и начала вектора. Применив формулы C) один
раз к концу вектора а, а в другой раз —к началу и вычтя по-
почленно эти равенства одно из другого, получим
am = amnan> an = amnam- D)
Покажем, что эти формулы выражают условие физичностщ
или, как иногда говорят, объективности, вектора а в том смысле,
что при переходе от одной системы координат к другой, непо-
неподвижной по отношению к ней системе величина вектора а не
меняется (например, скорость самолета по отношению к Земле
не зависит от того, в какой неподвижно связанной с Землей
системе координат мы рассматриваем скорость самолета). Для
этого заметим, что сумма квадратов проекций вектора на оси
координат не меняется при переходе от одних осей координат
к другим и, таким образом квадрат длины вектора, т. е. квадрат
абсолютного значения вектора, является инвариантом по отно-
отношению к изменению системы координат.
Для доказательства вычислим сумму квадратов проекций
вектора а, которую для сохранения возможности использования
краткой записи формул представим согласно D) так (здесь все
индексы «немые»):
арар = aprar%sas = W А' <5)
Как известно из курса аналитической геометрии, сумма про-
произведений aprons по повторяющемуся индексу р представляет
собой косинус угла между r-й и s-й осями координат и, следова-
следовательно, будет равна единице, если г = s, или нулю, если г Ф s:
1, если г = s,
0, если гФэ.
Равенство E) при этом переходит в следующее (суммиро-
(суммирование по р слева и по s справа):
(
что и доказывает инвариантность суммы квадратов проекций
вектора, т. е. квадрата его длины.
§ 33. Линейная вектор-функция. Тензор второго ранга.
Условия его физической объективности. Простейшие
операции над тензорами. Перемножение тензора и вектора.
Диада и диадное представление тензора
В статике и кинематике сплошной среды важную роль играет
операция перехода от одного вектора а к другому &, задаваемая
линейным преобразованием
b = La9 (8)
116 ГЛ. VIII. ЭЛЕМЕНТЫ ТЕНЗОРНОЙ АЛГЕБРЫ
в проекциях выражаемым тремя линейными функциями:
(9)
или, в принятом выше кратком обозначении,
bp = lpqaq (/?= 1,2,3). A0)
Пример такого преобразования мы имели в § 30. Это — ра-
равенства Коши A2) гл. VII, в которых единичный вектор п пре-
преобразуется в вектор напряжений рп.
Если в результате преобразования (9) физический вектор а
переходит также в физический вектор 6, то совокупность коэф-
коэффициентов преобразования lpq имеет объективный физический
смысл, определяемый процессом перехода вектора а в вектор Ь*
Совокупность коэффициентов линейного преобразования (9)
/hi /l2 /l8\
[ /21 /22 /28 j,
Л ^81 /32 /зз /
(И)
преобразующего физический вектор также в физический, опре-
определяет тензор второго (по числу индексов при /) ранга L, а таб-
таблица A1) представляет собой матрицу тензора L.
Тензоры в дальнейшем обозначаются заглавными буквами.
Элементы их матриц называют компонентами тензора и иногда
для упрощения письма обозначают соответствующими заглавной
букве строчными буквами.
По числу компонент — в случае вектора .это три его проек-
проекции на оси координат — вектор можно рассматривать как тен-
тензор первого ранга, скаляр — как тензор нулевого ранга.
В дальнейшем нам придется иметь дело с тензорами только
второго ранга, в связи с чем указание ранга тензора будет
опускаться.
Подчеркнем с самого начала, что, так же как в случае век-
вектора, компоненты тензора L являются функциями координат,
определяющими поле тензора L. Компоненты тензора вариант-
ны, т. е. зависят от выбора координатной системы, в которой
они записаны, но совокупность компонент в целом определяет
единую физическую величину, имеющую вполне конкретный
объективный смысл и, как все физические величины, не завися-
зависящую от выбора направлений осей координат.
Для того чтобы тензор имел объективный, не зависящий от
выбранной системы координат смысл, т. е. был физическим тен-
вором, компоненты его, в полной аналогии с вектором, должны
§33 ЛИНЕЙНАЯ ВЕКТОР-ФУНКЦИЯ. ТЕНЗОР 117
подчиняться некоторым ограничениям, следующим из наличия
линейной связи (9) между двумя физическими векторами.
Используя D) и A0), получим
Из этой цепочки равенств следует
но в новой системе координат (со штрихами) должно быть
Из сравнения с предыдущим равенством получим формулу
преобразования компонент тензора L
^вО„<*.Лг (Р, 5=1,2,3) A2)
и обратного преобразования
V = VA fo, r =1,2,3). A3)
Равенства A2), A3) выражают тот факт, что компоненты
физического тензора при переходе от одной системы координат
к другой преобразуются, как произведения координат при том
же переходе. Это положение можно было бы принять за опре-
определение тензора, эквивалентное ранее данному его определению
как совокупности коэффициентов линейной связи A0) между
проекциями двух физических векторов.
Отметим два примера линейных преобразований вектора
в вектор, совокупности коэффициентов которых образуют тен-
тензоры. Это, как уже упоминалось, равенства Коши A2) гл. VII,
в которых коэффициенты представляют собой нормальные и ка-
касательные напряжения. Эта совокупность образует тензор на-
напряжений Р с компонентами pki (&, / = 1, 2, 3).
Вторым примером служит совокупность равенств A) или
B), которые можно рассматривать как преобразования, перево-
переводящие вектор-радиусы точек пространства из «старого» в «но-
«новое» положение, т. е. как поворот абсолютно твердого тела, свя-
связанного с координатными системами. Тензор, матрицей которого
служит таблица косинусов углов между «старыми» и «новыми»
осями, называется тензором поворота.
Операции сложения и вычитания тензоров, а также умноже-
умножения их на скаляр те же, что и у векторов:
(P±Q± ...)ks^Pks±Qks± ..., (И)
= ЯР,5 (ft = l,2,3; 5=1,2,3).
Введем операцию умножения тензора Р на вектор а «спра-
«справа», обозначаемую как Ра и определяемую вектором Ъ с
118 ГЛ. VIII. ЭЛЕМЕНТЫ ТЕНЗОРНОЙ АЛГЕБРЫ
проекциями
bk = (Pa)k = Рк1а{ + Pk2a2 + Р^з = Pksas (k = 1,2, 3). A6)
Аналогично, назовем произведением вектора а на тензор Р
или произведением тензора на вектор слева вектор с = аР
с проекциями
ck = (aP)k = axPlk + a2P2k + a3P3k = asPsfe (k = 1, 2, 3). A7)
Введенная операция определяет векторы бис как линейные
вектор-функции вектора а с коэффициентами, равными компо-
компонентам тензора Р.
Отметим, что определение произведения тензора на вектор
или вектора на тензор соответствует операции перемножения
матрицы || pks || тензора Р на матрицу \а\ а2 а3| или \\as\\
вектора а.
Операции умножения тензора на вектор и вектора на тензор
отличаются порядком индексов у тензора.
Условимся в дальнейшем тензору Р приписывать матрицу его
компонент
(Рп Р\г Ри\
P2i ргг р2з I,
Р31 Р32 РЗЗ /
A8)
Р31 Р32
в которой первый индекс у компонент показывает номер строки,
а второй — столбца.
Тензор с матрицей
/ Pll P2\ p3l \
( рЦ Р22 Р32 1,
VP13 P23 РЗЗ /
A9)
P23 РЗЗ
отличающейся от матрицы тензора A8) порядком индексов,
называют тензором, «сопряженным» с данным, или, иначе,
«транспонированным» тензором и обозначают через Р*, так что
Р*гш=*Ршг E, г =1,2,3). B0)
Пользуясь понятием о сопряженном тензоре и равенствами
A6), A7), найдем
Ра = аР\ Р*а = аР. B1)
Введем в рассмотрение так называемый мультипликативный
тензор, или диаду, как тензор с компонентами, равными попар-
попарным произведениям проекций двух физических векторов а и Ь.
.Матрицей такого тензора будет служить таблица
/ a{bx a{b2 a{b3\
I a2bx a2b2 a2b, j. B2)
§33 ЛИНЕЙНАЯ ВЕКТОР й УНК11ИЯ ТЕНЗОР Ц9
Обозначается диада при помощи рядом поставленных векторов
аЬ без каких-либо знаков между ними. Диаду можно рассмат-
рассматривать как третью операцию умножения вектора на вектор —
диадное произведение двух ректоров, приводящее, в отличие от
скалярного и векторного произведений, к тензору.
Убедимся в том, что если векторы а и 6 являются физиче-
физическими векторами, то составленная из них диада будет физиче-
физическим тензором. Вспоминая условия физичности вектора D), бу~
дем иметь
Составляя произведение
<&s = <VV*A (P, ^ = 1,2,3)
и сравнивая эти равенства с определением физического тензора
A2), убедимся, что компоненты диады apb's в «новой» системе
выражаются через компоненты диады в «старой» системе aqbr
по определяющим физичность тензора диады формулам, состав-
составленным как проекции двух физических векторов. Из единичных
векторов (ортов) осей координат i\, i2, *з, соединяя их попарно
в диадные произведения ipiq (р, 9 = 1, 2, 3), можно составить
девять «координатных диад». Составим матрицу какой-нибудь
из них. Замечая, что компоненты матрицы равны
где справа стоит обычное произведение двух скалярных произ-
произведений ортов осей, удовлетворяющих равенствам
f 1, если г = р, ( 1,
р г (О, если гфр, q s I 0,
если 5 = q,
если
заключаем, что в каждой из матриц (не будем их выписывать)
элемент, находящийся на пересечении р-й строки и #-го столбца,,
будет равен единице, а все остальные равны нулю. Такой тен-
тензор носит наименование «тензорной единицы» и обозначается
заглавной буквой Е.
Не будем останавливаться на деталях различных применений
диад и, в частности, «координатных диад»; отметим лишь сле-
следующее. Аналогично тому, как вектор а может быть представ-
представлен суммой
а = ахгх + a2i2 + a3i3 = apipy
так и тензор Р с компонентами pqr допускает разложение
Р=*РЯ№ B3>
по диадам iqin
120 ГЛ VIII. ЭЛЕМЕНТЫ ТЕНЗОРНОЙ АЛГЕБРЫ
§ 34. Разложение тензора второго ранга на симметричную
и антисимметричную части. Сопутствующий антисимметричному
тензору вектор. Инварианты. Сферическая и девиаторная части
тензора
Тензор Р, компоненты которого не зависят от порядка ин-
индексов, так что
Р* = Р, Plr = Prs, B4)
называется самосопряженным или симметричным тензором. По-
Последнее наименование оправдывается тем, что согласно B4)
в матрице самосопряженного тензора Р компоненты, зеркально
расположенные по отношению к главной диагонали матрицы,
одинаковы:
У симметричного тензора различных компонент будет только
шесть. Простейшим примером симметричного тензора может
служить «тензорная единица» Еу компоненты которой усло-
условимся, как это принято, обозначать через 8^. Тензор Е = 6
определяется равенством
Еа = аЕ = а, B5)
что поясняет его наименование.
Из определения B5) следуют значения компонент тензор-
тензорной единицы *):
( 1, если p = q,
6"-\0, если p+q9 B6)
так что матрица тензорной единицы имеет вид
B7)
/i О 04
< о i о ].
\о о \)
Приняв за определение тензора Е задание его компонент
B6), необходимо убедиться, что компоненты удовлетворяют ра-
равенствам B6) в любой системе координат. Имеем по определе-
определению тензора Е
q r^n ОС ОС О .
p(f рг (js ts
или по B6)
4'рГад. B8)
Сумма acpr&qry стоящая в правой части равенств B8), со-
согласно F) равна нулю, если q ф р, и единице, если q » р, т. е.
*) Тензор д «в Я называют символом Кронекера.
§ 34. РАЗЛОЖЕНИЕ ТЕНЗОРА НА ЧАСТИ. ИНВАРИАНТЫ 121
а это и означает, что матрица B7) сохранит свой вид в любой
системе координат (свойство изотропии тензорной единицы).
Пользуясь ранее отмеченным свойством матриц координат-
координатных диад, разложим по ним тензорную единицу. Будем, оче-
очевидно, иметь
Е = Mi + М2 + Мз = bpq lpir B9)
Наряду с симметричными тензорами рассматриваются еще
антисимметричные, или кососимметричные, тензоры Q, обладаю-
обладающие свойством
т. е. такие, что при изменении порядка индексов знак компо-
компоненты меняется на противоположный:
Qi2 = — Q21, Q23 = -Q32, Q31 == — Q13, C0)
причем, очевидно,
Qii = Q22 = Q33==0. C1)
Среди возможных видов матрицы антисимметричного тен-
тензора выделим тот, в котором будут фигурировать только компо-
компоненты Q12, Q23, Q31 с индексами, имеющими порядок круговых
перестановок индексов 1, 2, 3. Матрица будет иметь вид
(О Qia -Q3i\
-Q12 О Q23 ). C2)
Q81 -Q28 0 У
Различных компонент у антисимметричного тензора — три.
Докажем, что из взятых в порядке
компонент антисимметричного тензора Q с подстрочными индек-
индексами, образующими круговую перестановку, можно образовать
физический вектор с. Примером такого вектора может служить
угловая скорость, о чем будет речь в конце настоящего тома
курса.
Для доказательства воспользуемся условием A2) физично-
сти тензора Q, причем в целях простоты выпишем в развернутом
виде выражение одной из компонент, например Q'2b — c'v в «но-
«новой» системе координат («2» и «3» — свободные, г, 5 — немые
индексы):
= С\ =
в этом равенстве учтено, что Qn = Q22 = Q33 = 0. Замечая, что
по C0) и C1) Q32 = —Q23 = —с,, Qia = — Q31 = — c2i Q21 =
122 ГЛ VTTI. ЭЛЕМЕНТЫ ТЕНЗОРНОЙ АЛГЕБРЫ
и —Q12 = —с3, перепишем предыдущее равенство в виде
< = («22аЗЗ ~ а23а32) С1 + («23а31 "" а21«3з) С2 + (а21«32 ~ a22a3l) CV
Возведем определитель матрицы (таблицы) косинусов углов
между осями координат (см. стр. 113) в квадрат. Членами по-
полученного при этом нового определителя будут суммы произве-
произведений <ХрГаЯг, равные согласно F) единице при р = ^ и нулю
при рФ qy что соответствует диагональным и недиагональным
членам определителя. Квадрат определителя равен единице,
а следовательно, будет равен взятой со знаком плюс либо минус
единице и определитель матрицы косинусов углов между осями
«старой» и «новой» систем координат (вертикальные черты
обозначают определитель)
(Xfl <XB OCi з
I «г J =
(X22 0&23
±1,
причем верхний знак в правой части выражает то, что «старая»
и «новая» системы координат сонаправлены, т. е. обе правые
или обе левые, нижний знак соответствует случаю разнонаправ-
разнонаправленных координатных систем.
По свойству взаимности определителя можно приравнять
элементы его первой строки алгебраическим их дополнениям,
т. е. положить
<хп = ±
а13 = ±
При этом равенство C4) перепишется в виде
и к нему можно присоединить аналогичные равенства для дру-
других компонент с в «новых» координатах:
с[ = ± (a2l^ + а22с2 + а23^),
сз = ± (аз1<ч + а32^2 + азз^з)-
Полученные выражения проекций вектора с'г в «новых» ко-
координатах через «старые» cs запишутся в краткой форме так:
<?;~±агЛ (г =1,2,3). C5)
Вектор с с компонентами Q23, фзь Qu носит наименование
«сопутствующего» антисимметричному тензору Q. При помощи
этого сопутствующего вектора можно доказать, что произведе-
произведение антисимметричного тензора на вектор справа или слева при-
приводит к векторному произведению^ сомножителями в котором
§ 34. РАЗЛОЖЕНИЕ ТЕНЗОРА НА ЧАСТИ ИНВАРИАНТЫ 12$
служат данный и сопутствующий антисимметричному тензору
векторы. Действительно, имеем для произведения на вектор
справа
и для произведения на вектор слева
(aQI = a1Q11 + a2Q21
(aQJ^axQl2 + a2Q22
(&Q/3 === ^lQia ~h ^Q23
Эти равенства эквивалентны следующим векторным:
в которых порядок сомножителей в левой и правой частях раз-
различен.
Если обозначить через с* «= —с сопутствующий вектор для
сопряженного с Q антисимметричного тензора Q*, то можно
предыдущие равенства переписать еще в виде
сохраняющем порядок сомножителей слева и справа.
Наличие двух знаков в правой части C5) говорит о том, что
при разнонаправленное™ «старой» и «новой» координатных си-
систем переход от одной из них к другой сопровождается измене-
нием направления вектора на противоположное. Векторы, обла-
обладающие этим свойством, «объективны» по величине и линии
действия, но не по стороне, в которую они направлены. Это
характерное отличие лишает их права полностью считаться
истинными, физическими векторами; их называют псевдовекто-
псевдовекторами, иногда аксиальными векторами.
Примерами таких псевдовекторов могут служить, как мы
только что видели, векторное произведение двух физических
векторов, а следовательно, вектор момента силы относительно
точки, момент пары сил, вектор угловой скорости вращения
абсолютно твердого тела.
Покажем, что всякий (асимметричный) тензор Р можно
представить в виде суммы двух тензоров: симметричного S и ан-
антисимметричного А.
Пользуясь определенными ранее операциями сложения тен-
тензоров и умножения их на скаляр, составим тождество
1 |П C8)
124 ГЛ. VIII. ЭЛЕМЕНТЫ ТЕНЗОРНОЙ АЛГЕБРЫ
В первой скобке стоит симметричный тензор, так как от за*
мены Р на Р* и Р* на Р значение этой скобки не изменится,
вторая скобка содержит антисимметричный тензор, так как при
замене Р на Р* и Р* на Р изменится знак заключенной в этой
скобке величины. Таким образом, вводя обозначения
C9)
получим
P**S + A. D0)
Это разложение будет иметь важное значение при рассмот-
рассмотрении в отделе кинематики вопроса о бесконечно малом пере-
перемещении, а также о движении элементарного объема деформи-
деформируемой сплошной среды, в частности жидкости.
В связи с применениями тензорной алгебры в механике
сплошных сред, необходимо познакомиться со свойством инва-
инвариантности, т. е. независимости от выбора системы координат,
некоторых скалярных совокупностей компонент тензоров вто-
второго ранга, именуемых инвариантами тензора.
Физический скаляр представляет, как уже было ранее пояс-
пояснено, сам по себе инвариант. Физический вектор имеет один
инвариант; это — его длина, т: е. абсолютное значение изобра-
изображаемой вектором физической величины. Тензору второго ранга
соответствуют следующие три, являющиеся скалярами, инва-
инварианта:
а) линейный инвариант /i, равный сумме диагональных ком-
компонент тензора Р:
h — P\\ + Р22 + Рзз = Рт D1)
называемый «следом» тензора.
б) Квадратичный инвариант /2, равный сумме попарно взя-
взятых произведений всех компонент тензора:
h = PrsPrs, D2)
служащий аналогом квадрата длины аиаь. вектора а.
в) Кубический инвариант /3, равный определителю матрицы
тензора:
1 Рп Рп Р1з
<detprs. D3)
Не будем останавливаться на доказательствах инвариантно-
инвариантности /ь /г, /з. Доказательства эти основываются на условиях
физичности A2) или A3) тензора Р.
Пользуясь первым инвариантом /i, можем получить разло-
разложение тензора второго ранга на сферическую (шаровую) а
Рп
Рп
Рп
Рп
Ргг
РЪ2
Р13
Р23
Ргг
§ 35 ГЛАВНЫЕ ОСИ СИММЕТРИЧНОГО ТЕНЗОРА 125
девиаторную части. Имеем тождество
D4)
Первое слагаемое P(s), как произведение скаляра (l/3)/i на
тензорную единицу ?, обладает тем же свойством изотропии,
что и Е. Компоненты тензора P(s) не зависят от изменения си-
системы координат, т. е. от поворота осей; они удовлетворяют
условию сферической симметрии, и поэтому тензор P(s) назы-
называется «сферическим» или «шаровым». Тензор P(rf) представляет
собой отклонение (девиацию) тензора Р от сферической части
и носит наименование «девиатора» тензора Р.
§ 35. Главные оси и главные значения
симметричного тензора
Пусть задай симметричный тензор S и некоторое, пока не-
неопределенное, направление с единичным вектором е. Выясним,
существуют ли для данного тензора 5 такие направления, соот-
соответствующие вектору е, чтобы в результате умножения тензора
5 на вектор е получился вектор того же направления, скажем
Хе, где X — пока неизвестный скаляр. Для исследования такой
возможности запишем требуемое условие в виде равенства
{Е — тензорная единица)
Se = Ke, или (S-XE)e = 0. D5)
Проектируя это векторное равенство на оси координат и вы-
выражая тензоры через их компоненты, получим три равенства:
EП — X) е{ + s{2e2 + sl3es =« О,
($22— А-) е2 +523^3 = 0, D6)
+ «23^2 + ($33 ~ А,) #3 = О,
которые можно рассматривать как однородную систему линей-
линейных алгебраических уравнений относительно неизвестных е\, #2»
?3. Система эта имеет тривиальное решение ei = е2 = ?3 = О,
которое, однако, противоречит очевидному условию
e\-\-el + e\=\. D7)
Условие того, чтобы однородная система уравнений D6)
имела решения, отличные от нуля, заключается, как известно,
в равенстве нулю определителя системы:
— Я S\2
•О, D8)
126 ГЛ. VITT ЭЛЕМЕНТЫ ТЕНЗОРНОЙ АЛГЕБРЫ
а это приводит к необходимости решения относительно Я алгеб-
алгебраического уравнения третьей степени, называемого «характе-
«характеристическим».
Остановимся на общем случае трех неравных корней уравне-
уравнения D8), которые обозначим ЯA), ЯB), ЯC); подчеркнем, что это
три скаляра. Система уравнений D6) при выполнении условия
D8) позволит определить три единичных, соответствующих
каждому из корней К(р) (р = 1, 2, 3) вектора е{р) (р = 1, 2, 3)
и тем самым три различных направления в пространстве. Дока-
Докажем, что эти три направления взаимно ортогональны. Для до-
доказательства составим уравнения D5) для двух каких-нибудь
значений ХA), Я<2) и соответствующих им еA), еB). Будем иметь
E — W»?) *(I) = 0, (S — №Е) е<2> = 0.
В левых частях этих равенств стоят произведения тензоров
на векторы, т. е. векторы. Умножим обе части этих равенств
скалярно на еB) и еA). Найдем
e<2>. D9)
Заметим, что, в силу симметричности тензора 5, будет
так что, вычитая почленно одну из другой обе части равенств
D9), получим
0 (ЯЛ>
откуда, в силу предположенного неравенства корней характе-
характеристического уравнения (ЯA) Ф А,B)), следует
е<1>.е<2>ето. E0)
Аналогично доказываются и равенства еB)-е(8>=0 и
?C).?(i) = o, что подтверждает взаимную ортогональность еди-
единичных векторов еA), еB), еC), а следовательно, и осей, по кото-
которым они направлены.
Можно убедиться, что три не равные друг другу корня ЯA),
ХB) и ЯC) должны быть вещественны. Действительно, пусть, на-
например, корни ХA) и Х{2) — комплексные и, следовательно, сопря-
сопряженные величины, тогда таковыми же будут и проекции
ер] = \ХР + У > ер] ^Vp- V>
сумма произведений которых будет равна (суммирование по
12)
Скалярное произведение еA)-еB), равное этой величине, не могло
бы быть, по только что доказанному, равным нулю, что и дока-
§ 35 ГЛАВНЫЕ ОСИ СИММЕТРИЧНОГО ТЕНЗОРА 127
-зывает вещественность не равных между собой корней харак-
характеристического уравнения D8).
Три взаимно ортогональных направления, соответствующих
единичным векторам еA), еB), еC), определяют главные оси сим-
симметричного тензора. Докажем, что если принять за оси коор-
координат главные оси, то диагональные компоненты симметричного
тензора S будут равны корням характеристического уравне-
уравнения А,A), А,B), ЯC), а недиагональные равны нулю; диагональные
компоненты называются главными значениями симметричного
тензора.
Действительно, из равенства D5) следует, что (по р не сум-
суммировать!)
тогда
Se(P). е(я) = А,(р)в<р). е(Ф pq
Обозначим штрихом компоненты тензора S в главных осях;
тогда из последнего равенства будет следовать
pq pq \ О, если цфр, v '
что и доказывает ранее высказанное положение. Матрица сим-
симметричного тензора в главных осях будет иметь вид
fc<l> 0 о
О аЯ о . E2)
о о а/3)
В случае кратности корней, например А,A) = А/2), только
третья главная ось будет иметь определенное направление
в пространстве, характеризуемое единичным вектором еC).
Остальные главные оси будут расположены в перпендикулярной
к еC> плоскости, и положение их будет определяться с точ-
точностью до произвольного поворота вокруг третьей главной оси
с ортом еC>. Не будем останавливаться на доказательстве этого
положения.
В случае равенства между собой трех корней характеристи-
характеристического уравнения (№1) = №2) = А,C) = X) все направления
в пространстве являются главными. Такой тензор S обладает
свойством изотропии и называется, по предыдущему, шаровым
или сферическим. У этого тензора все компоненты равны %> так
что
или, в матричной форме,
/Я 0 0\ /10 0\
( 0 X 0 ] = Я( 0 10 1.
\0 О К ) \0 0 I/
128 ГЛ. VIII. ЭЛЕМЕНТЫ ТЕНЗОРНОЙ АЛГЕБРЫ
Выражение для компонент spq тензора S в произвольных
осях координат через главные компоненты s^> = ЯA), sB) = №2\
s<3> = A/3> по общим формулам связи компонент в двух систе-
системах координат A2) будет иметь вид
E3)
где главные оси приняты за «старые»; краткая форма этой
записи в данном случае непригодна, так как индексы 1, 2, 3,
по которым производится суммирование в правой части, пов-
повторяются в каждом слагаемом не два, а три раза.
Тензор S в главных осях имеет диадное представление
S = WWW) + %weWeW + Я<3>е<3>е<3>. E4)
Проекции вектора, равного произведению вектора а на тен-
тензор S или, что в случае симметричного тензора одно и то же,
тензора S на вектор а, на главные оси будут по определению
A6) равны (по р не суммировать!)
(p= 1,2,3). E5)
Глава IX
ТЕНЗОР НАПРЯЖЕНИЙ. НЕОБХОДИМЫЕ УСЛОВИЯ
РАВНОВЕСИЯ СПЛОШНОЙ СРЕДЫ
§ 36. Тензор напряжений
Равенства Коши A2) гл. VII можно рассматривать как ли-
линейную векторную связь между физическими векторами рп и п,
а коэффициенты рц, р2\ и т. д.— как компоненты физического
тензора, который, как уже упоминалось в § 30, называется
тензором напряжений и будет обозначаться заглавной буквой Р.
Название это объясняется тем, что компонентами тензора Р
являются касательные и нормальные напряжения в данной
точке среды.
Тензор Г, как единая физическая величина, характеризует
напряженное состояние сплошной среды в данной ее точке.
В отличие от вектора напряжения рл, тензор напряжений Р
является однозначной функцией точки и, следовательно, обра*
зует поле.
Матрица коэффициентов при пь п2, п3 в системе равенств
A2) гл. VII
(РП Р21 Р31 \
Pl2 P22 Р32 1 A)
Pl3 P23 РЗЗ /
соответствует сопряженному тензору Р*, так как первый индекс
относится к столбцу, а второй — к строке, но, как было пока-
показано в конце § 28, касательные напряжения обладают свойст-
свойством взаимности, а следовательно, тензор напряжений симмет-
симметричен, так что Р = Р* и матрица A) может быть переписана
в обычном стандартном виде:
/Pll Pl2 Pu\
I P21 Р22 Р23 J. B)
V p3l P32 РЗЗ /
Правые части равенств Коши A2) гл. VII можно рассмат-
рассматривать как проекции произведения, в данном случае благо-
благодаря симметрии тензора напряжений, безразлично тензора на
5 Л. Г. Лойцянский, А. И. Лурье
130 ГЛ. IX. ТЕНЗОР НАПРЯЖЕНИЙ. УСЛОВИЯ РАВНОВЕСИЯ СРЕДЫ
вектор или вектора на тензор!
Рп = Рп = пР. C)
Преимущество формулы C) перед аналитической формой
тех же равенств A2) гл. VII заключается в том, что в ней на-
напряжение, приложенное к любой площадке в сплошной среде,
прямо выражается через произведение двух основных факто-
факторов: напряженности в данной точке среды и ориентации пло*
щадки в ней. Формула C) имеет объективный характер, не
зависящий от выбора направлений осей- координатной системы.
Линейный инвариант [D1), гл. VIII] тензора напряжений
равен сумме нормальных напряжений:
а взятое с обратным знаком среднее арифметическое трех нор-
нормальных напряжений принимают за давление р в данной точка
среды, полагая
Р = — з" (Рп + Рп + />зз) = — jlu E)
так что, разлагая тензор напряжений на сферический тензор
и девиатор, будем иметь, согласно D4) предыдущей главы,
Р = -рЕ+(Р + рЕ). F)
В главных осях тензора напряжений Р недиагональные ком-
компоненты его матрицы — касательные напряжения — равны
нулю, а диагональные — нормальные напряжения — главным
напряжениям, которые обозначим через рA), рB>, рC>.
Выражения компонент prs тензора напряжений Р в любой
системе координат через главные напряжения рA), рB), рC) бу-
будут, согласно E3) предыдущей главы, иметь вид
Prs = <Ma5lp<l> + ar2as2p<2> + ar3as3pC) (r, s = 1, 2, 3). G)
В системе главных осей тензора напряжений Р равенства
Коши A2) гл. VII примут вид
P«i = P(W P*2 = PBV^, Р*з = Р(%C), (8)
где n<!>, nB), n&> — косинусы углов между нормалью п к пло-
площадке, к которой приложен вектор напряжения рп, и главными
осями.
Проиллюстрируем изложенные представления на некоторых
простейших примерах напряженного состояния сплошной среды
в условиях ее относительного покоя.
В качестве первого примера рассмотрим равновесие идеаль*
но текучей среды, т. е. такой, в которой при ее относительном
покое отсутствуют касательные напряжения. К такого рода
§ 36 ТЕНЗОР НАПРЯЖЕНИЙ 131
средам принадлежат все газы и большинство жидкостей (вода,
спирт и др.), не обладающих специальной молекулярной струк-
структурой. Исключением являются масляные краски, глинистые ра-
растворы и другие так называемые вязкопластичные жидкости.
В такого рода реологических жидкостях при равновесии их ка-
касательные напряжения (например, трение) отличны от нуля
и обладают некоторым «предельным» значением.
Из условия отсутствия касательных напряжений при рав-
равновесии идеально текучей среды следуют равенства
Рп = Р2\ = Р23 = Р32 = Р31 = Pl3 — 0> (9)
и, кроме того, из того же условия на наклонной площадке сле-
следует, что
Таким образом, равенства Коши A2) гл. VII сведутся к сле-
следующим:
РпП\ ~ РФи Рпп2 = р22#2» Ря^З = РзЗ^З-
Произведя очевидные сокращения, найдем
Рп=Р22 = Ры=1Рп- 00
Отсюда следует, что при равновесии идеально текучей среды
нормальные напряжения не зависят от ориентации сечения
в среде. Общую для всех площадок в данной точке среды ве-
величину рп обозначим, через —/?, а саму величину р назовем
гидростатическим давлением в данной точке среды.
Гидростатическое давление представляет собой скалярную,
инвариантную величину, измеряемую в ньютонах на квадрат-
квадратный метр [Н/м2] или, что то же, в Паскалях (Па).
Таблица тензора напряжений в случае равновесия идеально
текучей среды принимает вид
/ —р 0 0 \ /10 0\
I 0 —р 0 ) = -р 0 10) A2)
\ 0 0 -р/ \0 0 1/
или, согласно определению тензорной единицы ?,
Р = -рЕ. A3)
Отмеченная только что изотропия тензора напряжений в на-
находящейся в равновесии идеально текучей среде, т. е. незави-
независимость величины нормального напряжения от ориентации пло-
площадки, к которой оно приложено, составляет содержание из-
известного закона Паскаля.
Другим также простым примером может служить плоское
напряженное состояние, соответствующее чистому сдвигу
среды. Будем считать, что сдвиг осуществлен в плоскостях,
5*
132
ГЛ. IX. ТЕНЗОР НАПРЯЖЕНИЙ. УСЛОВИЯ РАВНОВЕСИЯ СРЕДЫ
параллельных плоскости чертежа Х\х2, так что третья ось л:з пер-
перпендикулярна к этой плоскости (рис. 87). Опуская пока вопрос
о деформации тела в этом случае — об этом пойдет речь в конце
следующего отдела, — заметим, что при чистом сдвиге отсут-
отсутствуют напряжения, приложенные к площадкам, перпендикуляр-
перпендикулярным к оси лгз, т. е.
Р\г= ?2ъ = Рзз = 0>
кроме того, равны нулю и нормальные напряжения рц и р22.
Остаются %лишь касательное напряжение р\2 и равное ему р2\.
Диадное представление тензора напря-
^р21 жений, согласно B3) предыдущей главы,
будет иметь вид
A4)
Найдем главные оси и главные напря-
напряжения тензора Р. Для этого составим ха-
характеристическое уравнение. При равенстве
нулю всех нормальных напряжений и нали-
наличии только двух касательных р\2 и р2\ характеристическое урав-
уравнение примет форму
— Р
о
Pl2 О
р О
о -р
а главные напряжения будут равны
A5)
A6)
Чтобы указать направление главных осей тензора Р, при-
применим систему уравнений D6) и дополнительное условие D7)'
предыдущей главы к проекциям единичных векторов (ортов)'
главных направлений в^>, е&\ е<3> на оси х\у х2у лг3. Тогда по-
получим систему уравнений
= 0,
-р1Д1> = 0,
4й'
A7)
Согласно известному условию нетривиальности (не равен*
ства нулю) корней однородной системы уравнений одно из пре-
предыдущих уравнений должно быть следствием других. Это по-
положение оправдывается тем, что второе уравнение повторяет?
§37. ФОРМУЛА ГАУССА - ОСТРОГРАДСКОГО 133
первое. Решая остающуюся систему уравнений, найдем
е{\) е{\) L _J А\) __ И
е\ — е2 — ^ ^ * 3 —
е{2) _ рB) _ О gB) _ _f- 1 рC) _ __ рC) _ ц. ! ^C) = О
Ъх t?2 и, tf3 =П 1 , tfj ?^2 -Г: ^2" * 3
Сопоставляя полученные значения проекций единичных век-
векторов еA\ е&\ е&\ убедимся, что главные оси еA) и е^3) будут
направлены (рис. 87) по диагоналям квадрата, стороны кото-
которого параллельны осям координат х\ и х% а орт главной оси
еC) будет перпендикулярен к плоскости сдвига, т. е. направлен
по *'3.
§ 37. Формула Гаусса — Остроградского
Для вывода уравнений равновесия сплошной среды нам по-
понадобится общая формула векторного анализа, носящая наиме-
наименование интегральной формулы Гаусса — Остроградского.
Эта формула связывает интеграл, взятый по замкнутой по-
поверхности, с интегралом по объему, ограниченному этой поверх-
поверхностью.
Остановимся сначала на выводе формулы Гаусса — Остро-
Остроградского в ее простейшем применении к скалярной функции
ф(*ь х2у xz) и ее производной по координате х\.
В дальнейшем условимся различать дифференциалы, выра-
выражающие приращения некоторой* величины вследствие беско-
бесконечно малого изменения времени, и сохраним для таких
дифференциалов обычное обозначение буквой d> а для дифферен-
дифференциалов, определяющих произвольные малые величины в про-
пространстве в данный фиксированный момент времени, например
бесконечно малые отрезки, площадки, объемы и т. п., будем
применять символ б.
В рассматриваемом простейшем случае формула Гаусса —
Остроградского имеет вид
где слева стоит интеграл, вычисляемый по некоторому объему
т,— объемный интеграл от частной производной функции <р по
хи а справа — интеграл, вычисляемый по поверхности а, огра-
ограничивающей объем т,— поверхностный интеграл от значений
функции ф, умноженных на косинус угла между единичным
вектором внешней нормали п к поверхности а и осью х\. Интег-
Интегралы представляют суммы бесконечно малых величин -р-6*
134 ГЛ. IX. ТЕНЗОР НАПРЯЖЕНИЙ. УСЛОВИЯ РАВНОВЕСИЯ СРЕДЫ
по элементарным объемам — в объемном интеграле и ц>П\6а —
по элементам поверхности — в поверхностном интеграле.
Мы тотчас будем производить непосредственное вычисление
этих сумм, что поможет выяснению смысла введенных в A8)
интегралов.
С этой целью разобьем объем т (рис. 88) на тонкие цилинд-
цилиндрические трубки вдоль оси х\ (на рис. 88 они показаны пунк-
пунктиром), ограниченные по краям, в
точках М и N, малыми площадка-
площадками Д<т<1) и Аа<.2>. Для простоты бу-
будем считать поверхность а выпук-
выпуклой, т. е. такой, что ось Мх\ ци-
цилиндрической трубки будет пересе-
пересекать поверхность о только в двух
Рис» 88. . точках М и N. Разделим отрезок
MN на k равных малых частей h и
через точки деления проведем равные между собой нормальные
сечения Да. Объем трубки разобьется на малые объемы At =
= h Да Производную ду/дх\ можно приближенно выразить как
(^ —знак приближенного равенства)
Фз+1 ~~ Фз
дкх Js h
где индекс s обозначает номер сечения, а ф5 — значения функ-
функции ф в этом сечении.
Часть объемного интеграла, стоящего в левой части равен-
равенства A8), вычисленную по длине выделенной трубки, можно
приближенно представить суммой
или, после очевидных сокращений, в форме только двух край-
крайних слагаемых:
— q>1Aa + <pfe+1Acr. A9)
Для крайних значений функции ф на поверхности а введем
обозначения фA> и фB); кроме того, обозначим через ДаA>, Да<2>
малые площадки, образующиеся в пересечении поверхности ци-
цилиндрической трубки с поверхностью а, а через л<^ и я<2> —
орты внешних нормалей к этим площадкам. Легко видеть, что
сечения Да являются проекциями площадки ДоA) или Да<2> на
плоскости, перпендикулярные к оси Х\, так что*, принимая во
внимание отрицательный знак косинуса тупого угла между n<*>
и осью хи получим
Да = - п\{) Да<1> = nf Aa<2>. B0)
§37 ФОРМУЛА ГАУССА - ОСТРОГРАДСКОГО 135
Это позволит переписать выражение A9) в виде
ф(*Ц*> До*» + ф(%B) д^ B1)
представляющем собой сумму двух элементов поверхностного
интеграла, стоящего в правой части равенства A8), относя-
относящихся к краям трубки.
Суммируя теперь элементы объемного интеграла в цилинд-
цилиндрической трубке для всех трубок, составляющих объем т, и
элементы поверхностного интеграла B1) по поверхности а и
затем переходя к пределу, соответствующему убыванию вели-
величин интервалов дробления объема т и поверхности а до нуля,
докажем справедливость формулы A8).
Аналогично A8), для осей, параллельных х2 и #3, получим
B2)
Умножая почленно обе части равенств A8) и B2) на орты
осей координат i\y i2i H и складывая, получим
\ (жli+-штк+-Sr *зNт=\Шх+*2+Пз'з) ф б<т- B3)
Вектор с проекциями dyfdx\, dq>/dx2y д<р/дх$ носит 'наимено^
вание градиента скалярной функции <р и обозначается симво-
символом grad ф. Подробнее о градиенте см. в начале § 75, спе«
циально посвященного дифференциальным операциям поля.
Формуле B3) можно придать вид
\ grad ф бт = \ яф бег, B4)
т а
являющийся векторным представлением формулы Гаусса —
Остроградского для операции градиента над скалярной функ-
функцией.
Применим широко распространенный в векторном анализе
символический прием, полезный для запоминания последней и
следующих формул. Введем дифференциальный оператор V как
условный вектор с проекциями Vi = d/dxt (i= I, 2, 3), так что,
например,-только что введенный вектор градиента grac^ будет
символически выражаться как произведение Уф. Тогда преды-
предыдущая формула Гаусса — Остроградского примет символиче-
символический вид
^ Уф бт == ^ жр бег, B5)
136 ГЛ. IX. ТЕНЗОР НАПРЯЖЕНИЙ. УСЛОВИЯ РАВНОВЕСИЯ СРЕДЫ
который легко запоминается, если заметить, что оператору V
в объемном интеграле слева соответствует единичный вектор п
нормали к поверхности а в поверхностном интеграле справа.
Равенству B5) можно придать символическую операторную
форму
J V ... 6т = J л ... ба, B6)
х о
где вместо многоточий, стоящих в обеих частях этого равен-
равенства, можно подставлять любую, как скалярную, что будет
соответствовать символическому равенству B5), так и вектор-
векторную либо тензорную, функцию. Для доказательства только что
указанной общности символической формулы B6) достаточно
применить равенства A8) или B2) сначала к проекциям век-
вектора или компонентам тензора, а затем объединить полученные
результаты в соответствующие векторные илн тензорные фор-
формулы. Покажем это на непосредственно нужной для дальней-
дальнейшего тензорной функции Ф.
Объединяя формулы A8) и B2) в применении к алгебраи-
алгебраическим величинам компонент Фы (&,/=1, 2, 3) тензора Ф,
будем иметь (k — «немой» индекс суммирования)
(/==1>2,3),
т * а
или, согласно принятой символике,
\ Ч&ы бт = \ пкФк16а (/=1,2,3). B7)
% а
Вспоминая введенное в гл. VIII определение операции умно-
умножения вектора на тензор, получим вместо B7)
а (/=1,2,3),
или, умножая последовательно обе части этих равенств на 1\ и
складывая их между собой,
B8)
т в
Вектор УФ с проекциями (суммирование по k)
дФь,
называют дивергенцией тензора и обозначают символом
Div Ф.
§ 38. УРАВНЕНИЯ СТАТИКИ СПЛОШНОЙ СРЕДЫ 137
Проекции вектора Div Ф на оси координат будут (для за-
запоминания их полезно подробно выписать)
B9)
или, в краткой форме (суммирование по k),
= ^г- С = 1.2,3). C0)
PaeeHcfBo B8) принимает свой обычный вид:
C1)
где под знаком поверхностного интеграла стоит произведение
вектора п на тензор Ф слева.
Тензорная форма формулы Гаусса — Остроградского C1)
получает применение в следующем параграфе при выводе урав-
уравнений равновесия сплошной среды.
§ 38. Уравнения статики сплошной среды «в напряжениях»
Согласно изложенному в § 3 принципу затвердевания,
в число необходимых условий равновесия деформируемого тела
входят уравнения равновесия абсолютно твердого тела, соот-
соответствующего «затвердевшему» дефор-
деформируемому телу, под действием внешних
сил. Эти условия являются необходимы-
ми, но не достаточными условиями рав-
равновесия деформируемого тела.
Составим еще одно, также только не-
обходимое условие равновесия деформи-
деформируемого тела, но, в отличие от преды-
предыдущего, учитывающее взаимодействие
внутренних сил в сплошной среде.
Для получения необходимых и доста- рис# gg.
точных условий равновесия надо при-
принять во внимание физические свойства сплошной среды (упру-
(упругость), без чего система уравнений равновесия сплошной среды
сохраняет свой неопределенный характер, а задача о равнове-
равновесии остается статически неопределенной.
Выделим в сплошной среде произвольный объем т (рис. 89)",
ограниченный поверхностью а. К элементу объема бт приложена
138 ГЛ. IX. ТЕНЗОР НАПРЯЖЕНИЙ. УСЛОВИЯ РАВНОВЕСИЯ СРЕДЫ
сила pF бт, где F — ранее упомянутая объемная сила, а к эле-
элементарной площадке &о, ориентированной согласно единичному
вектору нормали п к поверхности а, — сила рпЬо, где рп—бек-
то р напряжения в точке N поверхности а.
Запишем необходимое, согласно принципу затвердевания,
условие равенства нулю главного вектора приложенной к объ-
объему тик ограничивающей его поверхности о совокупности сил.
Будем иметь
$$ = 0, C2)
где первый интеграл, взятый по поверхности а, представляет
собой главный вектор внешних поверхностных сил рябсг, прило-
приложенных к элементам поверхности а, а второй — сумму (главный
вектор) сил pF6t, приложенных к элементам объема т.
Применяя равенство Коши в форме C), приведем уравне-
уравнение равновесия C2) к виду
J яР 6a + J pJPfir = O. C3)
а т
Перейдем от поверхностного интеграла к объемному его
эквиваленту, использовав для этого формулу C0). Будем
иметь
^пРбо= \ DivP6r,
О %
и уравнение равновесия C2) приведется к виду
0. C4)
Пользуясь произволом в выборе объема т, применим равен-
равенство C3) к элементарному объему бт. Тогда интеграл, стоящий
в левой части, сведется к одному слагаемому, так что вместо
C4) получим равенство
Замечая, что бт представляет собой произвольную беско-
бесконечно малую величину, но не равную нулю, разделим обе ча-
части предыдущего равенства на 6т и получим искомое уравнение
статики «в напряжениях»:
Div|P+pF = 0, <35)
которое, в проекциях на оси координат хи *г, *з, согласно B9)
приведется к системе трех дифференциальных уравнений в ча«
§ 38. УРАВНЕНИЯ СТАТИКИ СПЛОШНОЙ СРЕДЫ 139
стных производных относительно неизвестных компонент тен-
тензора напряжений:
По ранее доказанному свойству симметрии тензора напря-
жений касательные напряжения, отличающиеся порядком ин-
индексов, равны между собой:
Pi2 = p2b Р2з = Рз2> Рз1 = Pis-
Система трех уравнений равновесия заключает в себе шесть
неизвестных компонент тензора напряжений, что делает ее не*
достаточной для определения этих шести неизвестных.
Как уже ранее упоминалось, такой статической неопределен-
неопределенности можно избежать, только вводя дополнительные допуще-
допущения о физических свойствах сплошной среды, например о ее уп«
ругости, подчиняющейся закону Гука о пропорциональности
тензора напряжений тензору деформаций. Об этом тензоре
пойдет речь в конце второго отдела настоящего курса, посвя-
посвященного кинематике.
Задачи равновесия упругой среды рассматриваются в кур*
сах сопротивления материалов и теории упругости.
Наиболее прост вопрос о равновесии идеально текучей
среды (§ 32), в которой касательные напряжения отсутствуют,
а нормальные определяются сферическим тензором —рЕ, где
р — гидростатическое давление.
В этом случае, как легко видеть,
Div Р = — grad p>
и уравнение равновесия в векторной форме примет вид
pF = grad/7, C7)
или, в проекциях на оси координат,
^-4к' Р*Ч?. Р^з^-Ц-. C8)
Уравнения C8) носят наименование уравнений Эйлера гид-
гидростатики.
Интегрирование этих уравнений для различных заданий
объемных сил F и представляющих практический интерес форм
границ жидкости рассматривается в разделах гидростатики
140 ГЛ. IX. ТЕНЗОР НАПРЯЖЕНИЙ. УСЛОВИЯ РАВНОВЕСИЯ СРЕДЫ
курсов теоретической и технической гидродинамики, а также
гидравлики.
Уравнения C8) легко интегрируются для случая объемной
силы тяжести, равной, как мы уже знаем, F = g. Жидкость,
подверженную силе тяжести, в отличие от «невесомой» назы-
называют «тяжелой» жидкостью. В этом случае уравнение C7) при-
примет вид
9ё — grad p. C9)
Направляя ось Ох3 вертикально вниз, будем иметь g"i =
g*2 = 0, g3 = g", и уравнения C8) сведутся к одному такому:
D0)
Отсюда следует закон гидростатического давления в тяжелой
жидкости:
Р = Р?*3 + const,
или, если ввести удельный вес у = pg,
р = Y*3 + const. D1)
Для определения константы поместим начало координат в точ-
точку на поверхности жидкости и обозначим давление в этой точке
через ра (обычно это атмосферное давление). Тогда, вводя за
определение давления в жидкости величину
т. е. превышение гидростатического давления р над давлением
на поверхности жидкости, запишем гидростатический закон D1)
в форме
р' = У*з. D2)
Погрузим в тяжелую жидкость с удельным весом у твердое
тело объема тис поверхностью а. Главный вектор R сил дав-
давления жидкости на поверхность тела, согласно равенству Гаус-
Гаусса — Остроградского, будет равен
JR = -— \ яр 8а = —- \ grad p бт.
Но по C9)
где G — вектор силы тяжести жидкости в объеме т, так что
= -G. D3)
§ 38. УРАВНЕНИЯ СТАТИКИ СПЛОШНОЙ СРЕДЫ 141
В этом заключается известный закон Архимеда: тело, по-
погруженное в .жидкость, теряет в своем весе столько, сколько
весит жидкость в объеме погруженного тела. Главный вектор R
называют архимедовой силой или гидростатической подъемной
силой в знак того, что она стремится вытолкнуть тело из окру-
окружающей его жидкости.
Легко вычисляется также момент сил давления тяжелой
жидкости на поверхность погруженного в нее тела. Имеем по
той же формуле Гаусса — Остроградского [см. B4) § 75]
= J V X гр6т= $ rot (рг) 6т. D4)
о а х х
Замечая, что по известной формуле векторного исчисления,
по C9) и очевидному тождеству rot г = О
rot (pr) = p rot r + grad PXr=—rX grad p=--rXp«f,
перепишем D4) в форме
l^-\rXgradpdx = -\irXpg?>T. D5)
X X
Вводя выражение вектор-радиуса гс центра тяжести вытес-
вытесненного телом объема жидкости (§ 26)
X X
убедимся, что момент L можно представить как
L = - -У \ rpg 6т X G = - гс X G,
X
или, по D3),
Ь ХЯ
D6)
Отсюда следует, что линия действия главного вектора сил
давления жидкости на погруженное в нее тело проходит через
центр тяжести вытесненного телом объема жидкости.
За деталями применения закона Архимеда к явлению пла-
плавания тел отсылаем к разделам гидростатики курсов гидрав-
гидравлики, а также теоретической и технической гидродинамики.
Во втором томе нашего «Курса теоретической механики»,
посвященном изложению динамики, основываясь на тех же
представлениях, что и в настоящем параграфе, но обобщенных
на случай движения сплошной среды, выведем уравнения ди-
динамики сплошной среды «в напряжениях».
Отдел второй
КИНЕМАТИКА
Глава X
УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ
§ 39. Введение. Основные особенности кинематического
описания движения
Все движения материи происходят в пространстве и во ере-
мена. Это фундаментальное положение естествознания, отно-
относящееся к наиболее общему представлению о движении мате-
материи, в механике отражается только той своей частью, которая
относится к механическому движению, заключающемуся в из-
изменении во времени взаимного расположения материальных тел
в пространстве.
В отличие от статики, в настоящем отделе, посвященном
кинематике, отвлекаются от силовых взаимодействий между
материальными телами и влияния на них силовых полей, а рас-
рассматривают механические движения тел в отрыве от того, ка-
какие силы создают и поддерживают их движения.
В связи с этим в отделе кинематики полностью отсутствуют
такие физические понятия, как сила и масса. Принятая сте-
степень абстракции сближает кинематику с геометрией, но отли-
отличается от нее своей связью с изменением времени.
В отделе кинематики мы будем пользоваться представле-
представлением об «абсолютном пространстве», сопоставляя ему образ
безграничного абсолютно твердого тела, чисто геометрические
свойства которого не зависят ни от размещения в нем, ни от
движения по отношению к нему материальных тел. В этом
пространстве выбирается начало координат и три взаимно пер-
перпендикулярные координатные оси, служащие для определения
положения отдельных точек тел.
Абсолютное пространство рассматривается как евклидово,
т. е, все геометрические построения в нем отвечают основным
положениям геометрии Евклида. Так, применение теоремы
Пифагора позволяет определить квадрат расстояния между
двумя точками как сумму квадратов разностей соответствую-
соответствующих координат точек и т. п.
Наряду с абсолютным пространством в классической кине-
кинематике используется понятие «абсолютного времени», одина-
$ 39. ВВЕДЕНИЕ. КИНЕМАТИЧЕСКОЕ ОПИСАНИЙ ДВИЖЕНИЯ 143
ково и равномерно текущего во всех точках абсолютного про*
странства.
Такие абсолютные представления о пространстве и времени
характерны для классической механики Ньютона, но противо-
противоречат современным взглядам на эти основные атрибуты мате-
материи в релятивистской механике Эйнштейна. Этому вопросу бу-
будет посвящена отдельная глава во втором томе курса; заметим
лишь, что все выводы классической механики с достаточной для
практики точностью справедливы, если скорости движения
малы по сравнению со скоростью распространения света, а раз-
размеры областей пространства, в которых происходит движение,
далеки от космических расстояний.
Существенной особенностью содержания кинематики служит
то, что движения тел происходят в системах координат (систе-
(системах отсчета), движущихся друг по отношению к другу. В ки-
кинематике переход от одной системы координат к другой, дви-
движущейся по отношению к первой, приобретает самостоятельное
и важное значение. Это служит основанием теории относитель*
ных движений, в которой устанавливаются связи между кине-
кинематическими характеристиками' движений (траекториями, ско-
скоростями и ускорениями) в двух произвольно движущихся друг
по отношению к другу системах координат. В этой теории одна
какая-то координатная система принимается условно за «абсо-
«абсолютно неподвижную», а другие — за движущиеся по отноше-
отношению к ней «относительные» системы координат. В отличие от
динамики, абсолютная неподвижность какой-то одной, положен-
положенной в основу рассуждений системы отсчета не имеет объектив-
объективного значения. Только в динамике стремление к установлению
такой «абсолютно неподвижной» системы приобретает смысл.
Так, среди всех возможных систем координат выделяют гелио*
центрическую систему с центром в Солнце, а осями координат,
ориентированными на так называемые «неподвижные» звезды.
В динамике рассматриваются также «инерциальные», или «га-
лилеевы», системы координат, движущиеся поступательно, пря-
прямолинейно и равномерно по отношению к системе, выбранной
за «абсолютно неподвижную», а следовательно, и друг по от-
ношению к другу.
«Подвижными», «относительными» системами при эгом
явятся, например, «земные», т. е. жестко связанные с вращаю-
вращающейся Землей, «лабораторные» системы координат, а также
различные «планетные» системы.
Требование объективности физических величин, упомянутое
в гл. VII, заключалось в независимости их от произвольно выб-
выбранных, но неподвижных друг по отношению к другу систем
координат. В кинематике это требование, конечно, сохраняется,
но не относится к изменяющим во времени свое положение в
144 ГЛ. X. УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ
пространстве подвижным системам. Так, например, вектор ско-
скорости по отношению к различным инерциальным системам
координат будет иметь разные значения, хотя, как это будет
разъяснено в начале следующего тома, динамические процессы
во всех инерциальных системах будут одинаковы.
Предметом изучения кинематики служат те же модели ма-
материальных тел, что и принятые в статике. Это — материальная
точка и система материальных точек, сплошная среда и ее ча-
частный вид — абсолютно твердое тело, но, конечно, в той сте-
степени абстракции от физических свойств, которая присуща гео-
геометрическим образам кинематики, о чем уже была речь выше.
Как уже подчеркивалось во введении, в отличие от боль-
большинства традиционных курсов теоретической механики, в за-
заключительной части настоящего отдела уделяется внимание
основам кинематики сплошных деформируемых сред. В частно-
частности, излагается расширение основной теоремы кинематики аб-
абсолютно твердого тела об общем случае перемещения и движе-
движения тела в пространстве на случай деформируемой среды и
проводится выяснение кинематического смысла компонент тен-
тензоров деформаций и скоростей деформаций.
§ 40. Уравнения движения точки. Траектория. Примеры
прямолинейных движений. Графики движений
Положение точки в пространстве будем определять ее век-
вектор-радиусом г относительно начала координатной системы
Oxyz. Как уже известно из отдела статики, проекции вектор-ра-
вектор-радиуса на оси координат равны координатам точки:
гх = х, гу = у, гг = г9 A)
причем длина вектора г равна
r = V^TF+^, B)
а косинусы его углов с осями декартовых координат опреде-
определяются формулами
C)
'V х- f у Т z~
cos (r, z) = z2 =r.
При движении точки в пространстве координаты ее изме-
изменяются с течением времени. По закону изменения этих коорди-
координат можно судить о характере движения точки. Предположим,
§ 40 УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ. ТРАЕКТОРИЯ 145
что нам заданы координаты точки в функции времени, т. е.
Заданы уравнения
* = Mft y = f2@, * = fa(O. D)
Эти уравнения называют уравнениями движения точки в де-
декартовых координатах. Вместо декартовых координат х9 у, г
можно взять какие угодно другие координаты: полярные, сфе-
сферические, цилиндрические и др. Выраженные в функции вре-
времени, они дадут уравнения движения точки в соответствующей
системе координат.
Линия, описываемая движущейся точкой в пространстве,
называется траекторией точки.
Уравнения движения D), определяющие координаты точки
в любой момент времени, могут рассматриваться как парамет-
параметрические уравнения траектории. При переходе от параметри-
параметрических уравнений кривой линии к уравнениям, связывающим
координаты точки, исключают параметр; так же поступают и
в кинематике, исключая время из уравнений движения. Ит^к,
для получения уравнений траектории необходимо из уравнений
движения исключить время.
Рассмотрим сначала простейший случай движения точки -—
прямолинейное движение, когда траекторией служит прямая
линия.
В случае прямолинейного движения можно принять прямую,
по которой движется точка, за одну из координатных осей, на-
например за ось х. Положение точки на этой оси вполне опреде-
определяется ее абсциссой х, и уравнение движения точки (в этом
случае одно) будет
x = f(t). E)
Чтобы сделать эту зависимость более наглядной, прибегают
к построению графиков движения, т. е. изображают закон дви-
движения графически в виде соответствующей ему кривой, откла-
откладывая по горизонтальной оси время t, а по вертикальной — абс-
абсциссу х.
Примером прямолинейного движения является равнопере-
равнопеременное движение, заключающее в себе как частный случай рае-
номерное прямолинейное движение. Направим ось Ох так, что-
чтобы она совпала с направлением движения точки в начальный
момент, и пусть начальная абсцисса х0 для определенности по-
положительна. В отличие от равномерного движения, которое
описывается линейной функцией:
х = *0 + ct, F)
146
ГЛ. X. УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ
равнопеременное движение описывается квадратичной функ*
цией времени;
+ ct ± a -
G)
Здесь, как известно из общего курса физики, а — положитель-
ная величина, определяющая ускорение, с — скорость в началь-
начальный момент (с>0). Характер дви-
движения зависит от знака плюс либо
минус в уравнении движения G),
Знаку плюс соответствует уско-
ускоренное движение, знаку минус —
замедленное. Графики движения
показаны на рис. 90. Это — пара-
параболы.
Для сравнения на рисунке при-
приведена прямая линия, представ-
представляющая график равномерного дви-
движения с той же начальной абсцис-
абсциссой Хо и скоростью с. Очевидно,
tg a = с.
Примером широко распростра-
распространенного прямолинейного неравно-
неравномерного движения служит прямо-
прямолинейное гармоническое колебательное движение, уравнение
которого имеет один из следующих видов г
х = a sin (со/ + а),
х = a cos (®t + Р),
Рис.90,
(8)
причем второе уравнение получается из первого заменой ос на
Выясним значение постоянных величин а, <о и а. Если уве-
увеличить время / на такую постоянную Г, чтобы аргумент функ-
функции синус или косинус увеличился на 2л, т. е. определить Т
из условия
®(t + Т) + а = о/ + а + 2jt,
то уравнение движения вследствие периодичности функций си-
синус и косинус не изменится. Иными словами, начиная с мо-
момента t + Т точка будет двигаться точно так же, как она дви-
двигалась в интервале (t,t-\- Г), Таким образом, вообще, в интер-
интервалах (t+T, i + 2T), (/ + 2Г, / + ЗГ) и т. д. движение будет
тождественно движению в интервале времени (/, t + Г), За вре-
время (t, t + Т) точка совершит полное колебание. Интервал вре-
времени, в течение которого происходит полное колебание, на-
называется периодом колебания. Из предыдущего равенства
§ 40. УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ. ТРАЕКТОРИЯ 147
следует, что
? ?
Величина со называется круговой частотой колебательного
движения в отличие от более краткого термина частота, под
которой обычно понимают величину v = 1/Г. Происхождение
термина «круговая частота» вскоре станет понятным. В даль-
дальнейшем круговая частота о будет называться для краткости
просто частотой. Частота v может быть выражена или в ве-
величинах, обратных секунде A/с), или в герцах (Гц). Единица
частоты 1 Гц соответствует частоте, при которой одно полное
колебание совершается в течение одной секунды.
Абсцисса в гармоническом колебательном движении, пред-
представленном уравнением (8), меняется от —а до а, а движу-
движущаяся точка отклоняется симметрично в обе стороны от не-
некоторого центра колебания на расстояния, равные по абсо-
абсолютной величине а. Согласно уравнению (8) центр колебания
находится в начале координат (х = 0).
Максимальное отклонение точки от центра колебания на-
называется амплитудой колебания, расстояние между крайними
положениями колеблющейся точки — размахом колебания. На-
Наконец, постоянная а (или Р) характеризует начальное положе-
положение точки при t = 0 и называется начальной фазой колебания,
а выражение a>t + а (или Ы + E) — фазой колебания.
Формулам (8) можно придать комплексную форму. Введем
в рассмотрение известную из курса высшей математики фор-
мулу Эйлера (<р — действительная величина)
е*ф = cos ф +' sin ф (/ = У—1 )
и ^примем обычное обозначение Re г = Re (я + *ф) == х Для
действительной части (partie reelte) комплексной величины
z = х + ир. Тогда вторую из формул (8) можно выразить
в комплексной форме так:
х = Re [ае1 №+Щ = Re (ае** • еш) = Re (AeM).
Комплексная величина
носит наименование комплексной амплитуды гармонического
колебания. Комплексная амплитуда, в отличие от обычной, дей-
действительной амплитуды а, является функцией амплитуды а и
фазы а.
Метод комплексных амплитуд общепринят для рассмотре-
рассмотрения гармонических колебаний в линейных электрических цепях.
148 ГЛ. X. УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ
Прямолинейное гармоническое колебательное движение со*
вершает, в частности, проекция точки, движущейся с постоян-
постоянной скоростью по окружности, на диаметр этой окружности.
Таково будет, например, движение рамки КК кулисного ме-
механизма, представленного на рис. 91, если кривошип ОМ вра-
вращается равномерно, а стержень LL, жестко соединенный с рам-
рамкой, может скользить в направляющих SS. Рамка снабжена
прорезью, вдоль которой движется ползунок М, шарнирно сое-
соединенный с кривошипом. Угол ф, обра-
образованный кривошипом ОМ с осью Ох,
будет изменяться по закону
\
где постоянный коэффициент со опреде-
определяет угол, описываемый кривошипом в
1 с (угловая скорость кривошипа), а по-
постоянная р равна значению угла в на-
начальный момент времени t = 0. Абсцис-
Абсцисса рамки х, как непосредственно видно
из рисунка, равна
х = ОМ cos ф = a cos (со/ + Р)>
рис> 9i# где а — амплитуда, равная длине криво-
кривошипа. Это и есть уравнение гармониче-
гармонического колебательного движения. Период колебаний, очевидно,
совпадает с продолжительностью полного оборота кривошипа.
Совпадение частоты колебаний са с угловой скоростью кри-
кривошипа объясняет происхождение термина «круговая частота».
Угол ф между кривошипом и осью Ох является фазой колеба-
колебания, начальное его значение при t = 0, т. е. р, определяет на-
начальную фазу колебания.
Примеров гармонического прямолинейного колебания мож-
можно привести очень много. При качании длинных маятников
с малыми углами отклонения от вертикали нижний конец
маятника совершает гармонические колебания, причем ввиду
большой длины маятника можно дугу круга принимать за пря-
прямолинейный отрезок. Точно так же, если закрепить один ко-
конец упругой пластинки и привести в движение другой, то пос-
последний при малых отклонениях будет совершать гармоническое
колебательное движение, тем больше приближающееся к пря-
прямолинейному, чем длиннее пластинка или чем меньше размахи
ее колебания.
Воспользовавшись определением гармонического колебания
как проекции равномерного движения точки по окружности на
диаметр, построим график этого движения — синусоиду или
косинусоиду.
§ 40. УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ. ТРАЕКТОРИЯ
149
Проведя окружность радиуса а (рис. 92), отложим на ней
дугу ОМо с центральным углом а и через точку Мо проведем
горизонтальную прямую до пересечения с осью Ох; это даст
A М,
х,
Рис. 92.
У/////////////////Л
начальную тЬчку кривой, соответствующей моменту t = 0 (хо =
= a sin а). Для построения всей кривой разметим прежде всего
шкалу времени. Примем некоторый отрезок на оси t за период
колебания Т = 2я/<о и разделим его на 8, 16, 32, ... (или дру-
другое число 2п) равных частей. На чертеже период разделен на
восемь частей; аналогично этому и дугу
полной окружности, начиная от точки MOt
разделим тоже на восемь частей. Через эти
точки проведем горизонтальные прямые до
пересечения с перпендикулярами, восстав-
восставленными из точек деления периода Г,
имеющих соответствующие номера. Тогда в
пересечении получатся точки искомой кри-
вой /', 2' и т. д. Горизонтальные прямые,
проведенные через точки А и В окруж-
ности, дадут верхнюю и нижнюю грани-
границы кривой.
W////////////A
Г1
'W//WW///
Пример 21. Колеблющийся на пружине груз
в начальный момент касается пола; при наивысшем
положении высота его над полом равна 0,1 м. Про-
Продолжительность 10 размахов равна 15 с. Составить рис# 93.
уравнение движения груза, считая колебание груза
гармоническим.
Выберем за ось координат Ох (рис. 93) вертикальную прямую, на-
направленную вниз, и поместим начало координат в точку на оси, соответ-
соответствующую центру колебаний, находящуюся над полом на половине размаха,
т.е. на высоте 0,05 м. Период колебания равен 15/5 = 3 с, следовательно,
частота будет —г- 1/с. Искомое уравнение имеет вид
= 0,05 sin
м.
150 ГЛ. X. УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ
Для определения начальной фазы полагаем здесь / = 0; будем иметь
х0 = 0,05 sin а м,
тогда как по условию хо = 0,05 м; следовательно, а = л/2, и уравнение дви-
движения примет вид
х -0,05 sin (~ t + --) = 0,05cos -у-1 м.
В дальнейшем часто придется встречаться с уравнениями
движения, правая часть которых представляет сумму несколь-
нескольких гармонических колебаний одинаковой или разной частоты.
Отдельные слагаемые такой суммы называют гармониками.
Докажем, что сумма нескольких, гармоник одинаковой ча-
частоты дает уравнение гармонического колебательного движе-
движения той же частоты.
Достаточно доказать это для двух гармоник; пусть общая
их частота равна со, амплитуды их а\ и аг, фазы cci и аг; тогда
уравнение движения будет иметь вид
х = а{ sin ((ot + сц) + #2 sin (erf + <*2). A0)
Приведем составное колебательное движение A0) к од-
одному колебанию с амплитудой а и начальной фазой а. Вос-
Воспользовавшись формулой для синуса суммы углов, получим
x==a1cosaj sin со/ + а{ sin сц cos©/
+• ®2 sin a2 cos Ш = a sin (©/ + a)>
где для краткости введены новые постоянные а и а:
a i cos щ + а2 cos 02 = а соз а,
а{ sin a, + a2 sin щ = a sin a.
Постоянную а, т. е. амплитуду результирующего колебания,
находим, взяв сумму квадратов левых и правых частей урав-
уравнений A1); получим
Начальную фазу а результирующего колебания можно опре-
определять по формуле
ь at cos «i -f* a2 cos с*з ч 7
принимая во внимание при определении а знаки sin a и cos a,
совпадающие по A1) со знаками числителя и знаменателя
в формуле A3).
Рассмотрим теперь случай сложения гармоник разной ча«
стоты.
§ 40. УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ ТРАЕКТОРИЯ
151
Покажем, что если частоты или периоды слагаемых гармо-
гармоник соизмеримы, то движеяие будет периодическим, в против-
противном случае — непериодическим.
Пусть движение задается уравнением
х = а{ sin {®)t + а{) + а2 sin (со2/ + %) =
= а{ sin (у- t + аЛ +a2sin ("^7^ + a2)' ^14)
и пусть периоды гармоник соизмеримы. Это значит, что отно-
отношение периодов представляет рациональное число, т. е,
Г! _ П\
где пх и п2 — целые числа, причем, не нарушая общности, мож-
можно считать, что числа П\ и п2 взаимно простые. При этом
и будет искомым периодом, так как по прошествии времени Т
повторится наименьшее целое число периодов слагаемых гар-
гармоник; оба слагаемых и сумма их вернутся к прежним значе-
значениям. Если, например, период одной гармоники Т\ = 2 с, а вто-
второй Т2 = 5 с, то период сложного движения будет Г =10 с;
действительно, за 10 с повторится пять раз полное колебание
первой гармоники и два раза —второй, и, поскольку пройдет
целое число периодов, движение точки начнет повторяться.
Обращаясь к частотам, видим, что частота результирую-
результирующего колебания выражается следующим образом:
2л 2я 2я
т. е.
п2
Особый интерес представляет случай сложения колебаний
с мало отличающимися друг от друга периодами. При этом
Рис 94.
152
ГЛ X УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ
получается результирующее колебание большого периода. На-
Например, если периоды разнятся на 1 с, один из периодов сла-
слагаемых колебаний равен Тх = 5 с, а другой Т2 = 6 с, то период
результирующего колебания будет равен Т = 30 с.
На рис. 94 показаны графики слагаемых колебаний и ре-
результирующего колебания (жирная линия), отвечающие ука-
указанному отношению периодов.
Такое периодическое колебание носит наименование биения.
При несоизмеримых периодах слагаемых колебаний резуль-
результирующее движение будет не-
непериодическим, так как не су-
существует такого промежутка
времени Г, который был бы
целым кратным двух несоиз-
несоизмеримых друг с другом перио-
периодов Гь Т2 слагаемых коле-
колебаний.
Пример 22. Кривошипно-ползунный механизм. Составим
уравнение прямолинейного движения ползуна К кривошипно-ползунного ме-
механизма OAK (рис. 95), предполагая, что кривошип вращается равномерно с
угловой скоростью со и что отношение X длины кривошипа а к длине шатуна /
мало.
Механизм состоит из кривошипа О А, вращающегося вокруг оси О, и ша-
шатуна Л/С, шарнирно соединенного с кривошипом в пальце кривошипа Лис
ползуном /(, движущимся взад и вперед по направляющей линейке В. При
заданном угле ф кривошипа с осью Ох определим положение ползуна К его
абсциссой х.
Из треугольника OAK имеем
х = a cos ф + / cos г|г,
с другой стороны,
а ^
Sin \j) = -у- Sin ф = A Sin ф,
и, следовательно,
Рис. 95.
cos -ф = V1 — <
¦ sin* ф,
х = a cos ф + / V1 — X2 sin2
причем радикалу приписываются лишь положительные значения, так как
•§ < я/2 и cos ф > 0.
По условию задачи кривошип вращается равномерно, т.е. угол ф растет
пропорционально времени; полагая ф = Ы (где со — угловая скорость вра-
вращения кривошипа), будем иметь
х = a cos Ы + / дЛ — X2 sin2 со/ .
Движение ползуна, очевидно, колебательное, так как при возрастании
времени косинус и синус будут возвращаться к прежним значениям; ползун
будет ходить влево и вправо по линейке между крайними своими положе-
положениями
rnin ' шах '
соответствующими горизонтальным расположениям кривошипа. Движение
будет периодическим. Найдем его период. Для этого заметим, что sin2oitf=s
«= ~- (I — cos 2(о/) имеет период—, a cos со/ имеет период, в два раза боль»
-& со
§ 40. УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ. ТРАЕКТОРИЯ
153
ший, т.е. ; последний период заключает в себе предыдущий, так что
общий период движения будет равен Г = , т.е. времени оборота вала.
Периодическое колебание ползуна не является гармоническим; действитель-
действительно, оно состоит из гармонического члена, представленного первым слагаемым
в правой части уравнения движения, и дополнительного слагаемого — квад-
квадратного корня, которое нарушает гармоничность колебания.
Всякое периодическое движение частоты со может быть представлено в об-
общем случае бесконечной (а в частных случаях или в допустимом прибли-
приближении конечной) суммой гармонических колебаний с частотами, кратными
основной частоте со. Такое представление осуществляется с помощью
приемов гармонического анализа; в рассматриваемом случае можно с впол-
вполне удовлетворительной точностью представить уравнение движения ползуна в
виде суммы двух гармоник.
Для этого заметим, что по условию отношение длины кривошипа к длине
шатуна Я = а/1 мало. При таком предположении уравнение движения может
быть упрощено. Именно, разлагая радикал в ряд
Vl — Я2 sin2 со/ = A — Я2 sin2 со/I/2 =
« 1 - 1 я2 sin2 со/ + ... =1- -jX2 -f-~X2cos2co/+ ...
•и пренебрегая членами порядка Я4 ввиду их малости, получим
/Я2 Я2 \
х = / f 1 + Я cos со/ + — cos 2со/ J.
( №\
Колебание представлено в форме суммы постоянного члена /II— *р Ь
от которого можно освободиться пере-
переносом начала координат в точку с абс-
( Я2 \
циссой /II I~J'H ДВ^Х гаРмоник с
частотами со и 2со.
Положим, что Я = 1/5 и что вал
делает 100 об/мин. Тогда время полного
оборота вала Т = 60/100 с; следова-
следовательно,
Уравнение движения принимает вид
-L =* Э,99 + 0,2 cos 10,5/ + 0,01 cos 21/.
Рис. 96.
Желая вычертить график, заметим, что на чертеже надо показать вели-
величину порядка единицы (первое слагаемое) и величину порядка одной сотой
(третье слагаемое). Величины эти настолько различны, что откладывать их
на чертеже в одном и том же масштабе невозможно. Для избежания этого
неудобства поместим начало координат не в точку х = 0, а в точку х = I
(рис. 96); тогда первое слагаемое изобразится в виде прямой, параллельной
оси времени и показанной на рисунке пунктиром. Нанеся два гармонических
слагаемых и складывая их по ординатам, получим искомую кривую (жирная
линия).
154 ГЛ. X. УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ
§ 41. Криволинейные движения точки. Примеры
Число уравнений движения в криволинейном движении равно
двум, если движение плоское, а траектория — плоская кривая,
или трем в общем пространственном случае, когда траектория —
Кривая двоякой кривизны.
Рассмотрим сначала некоторые частные примеры криволи-
криволинейного движения.
Если координаты точки изменяются по закону
A: = a1sin(cD1/ + a1),
r/ = a2sin(co2/ + a2),
т. е. если проекции движущейся точки на оси координат совер-
совершают простые гармонические колебания, то сама точка описы-
описывает в плоскости хОу кривые, называемые фигурами Лиссажу.
В зависимости от соотношения амплитуд, частот и начальных
фаз этих колебаний получаются те или другие кривые. Отсюда
вытекают практические применения этих кривых в акустике,
оптике, электротехнике и механике для изучения колебательных
движений. Проектируя след «зайчика» или вообще колеблю-
колеблющуюся прямолинейно точку на фотопластинку, совершающую в
свою очередь определенное гармоническое колебание в перпен-
перпендикулярном направлении, анализируют полученную фигуру Лис-
Лиссажу и по ней определяют амплитуды, частоты и фазы состав-
составляющих взаимно перпендикулярных гармонических колебаний.
Таково, например, применение фигур Лиссажу в катодном
осциллографе и других приборах.
Рассмотрим уравнение фигур Лиссажу, причем сначала оста-
остановимся на простейшем случае равных частот взаимно перпен-
перпендикулярных колебаний.
а) Случай одинаковых частот взаимно перпендикулярных
колебаний. Уравнения движения будут иметь вид
х = а{ sin (со/ -f- а{),
у = а2 sin (со/ + <*2).
Для нахождения траектории будем исключать время из урав-
уравнений движения. Проще всего это сделать так. Представив си-
синус суммы по известной формуле тригонометрии, получим урав-
уравнения движения в виде
х = а{ cos <Xj sin со/ -f #i sin a{ cos со/,
у = a2 cos a2 sin со/ -f- a2 sin a2 cos со/.
Определим отсюда sin со/ и cos со/ как две неизвестные из двух-
§ 41. КРИВОЛИНЕЙНЫЕ ДВИЖЕНИЯ ТОЧКИ. ПРИМЕРЫ
уравнений. Получим
. Q, _ ха% sin а2 — уа\ sin ax
" ~{(cosai sinaa — cosa2 sin ai) '
cos со/ =
cos ai — xa2 cos a2
(cos ai sin п2 — cos аг sin ai)
Возведя эти выражения в квадрат и сложив результаты, полу-
получим уравнение траектории в виде
х2 и2 х и
-Т + ~2* ~~ 2 ~cos(at — a2)= sin2(at — a2). A6)
ах а2 а{ а2
Это — уравнение эллипса, имеющего центр в начале коорди-
координат, с осями симметрии, наклоненными к осям координат под
некоторым углом. Исследу-
Исследуем этот эллипс. Заметим
прежде всего, что форма и
расположение эллипса за-
зависят (как это видно из его
уравнения) не от значений
фаз оы и а2 в отдельности,
а от сдвига фаз а\ — <%2, ко-
который обозначим через 0.
Вычертим фигуру Лис-
(а)
(б)
(г)
Рис. 97.
(д)
сажу в предположении, что
п\ — п2 = а, т. е. что
амплитуды слагаемых коле-
колебаний одинаковы. Уравнение A6) перепишется тогда в виде
Х2 ^_ yi _ 2xy cos 9 = a2 sin2 9.
При 9 = 0 эллипс вырождается в отрезок прямой
именно в диагональ квадрата со стороной 2а (рис. 97,а); при
0 < 0 < я/2 получим эллипс, большая ось которого наклонена
под острым углом к оси х (рис. 97,6); при 9 = я/2 получим
окружность х2 + у2 = а2 (рис. 97, в); при я/2 < 0 < я будем
иметь снова эллипс (рис. 97,г), но с большой осью, располо-
расположенной уже во II и IV квадрантах, и, наконец, при 9 = я снова
получаем отрезок прямой (рис. 97,(9) х-{-у = Ь. На всех ри-
рисунках стрелки показывают направления движения точки. При
изменении 9 от я до 2я получатся те же фигуры.
Для примера был взят случай а\ = а2 = а; при а\ ф а2 фи-
фигуры Лиссажу были бы те же, только в случае 0 = я/2 имели
бы не окружность, а эллипс, оси симметрии которого совпадали
бы с осями координат.
156
ГЛ. X. УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ
Как легко видеть из уравнений движения, абсолютные зна-
значения х и у не превосходят соответственно а\ и а2. Отсюда сле-
следует, что все фигуры Лиссажу ограничены прямоугольником со
сторонами 2а\ и 2а2 (у нас на рисунке они все вписаны в ква-
квадрат со стороной 2а).
Из только что приведенного примера видно, что при исклю-
исключении времени теряются некоторые необходимые сведения о
траектории. Например, в случае 6 = 0 и 6 = я получаем урав-
уравнения
т. е. уравнения бесконечных прямых, а на самом деле траекто-
траекториями служат лишь отрезки этих прямых, заключенные в ква-
квадрате со стороной 2а. Из уравнений движения это ясно видно, из
уравнений же траекторий это не следует.
б) Случай различных частот взаимно перпендикулярных ко-
колебаний. Определим кривые Лиссажу в случае не равных между
собой частот взаимно перпендикулярных колебаний. Рассмотрим
для простоты частный случай, когда частота одного из колеба-
колебаний в два раза больше частоты другого, а начальные фазы и
амплитуды одинаковы.
Равенство начальных фаз не является ограничительным
условием, так как всегда можно так изменить начало отсчета
времени, что фазы станут одинаковыми. Такое выравнивание
фаз возможно, конечно, при разных частотах.
Уравнения движения имеют вид
х = a sin Bю/ — а), у = a sin ((о/ — а).
Здесь исключение времени приведет к уравнению алгебраи-
алгебраической кривой четвертого порядка. Чтобы вычертить траекто-
траекторию, проще нанести на рисунке точки М(ху у) при разных зна-
значениях t и потом их соединить плавной кривой. При этом полу-
получатся кривые, показанные на рис. 98.
<х=0
кг 4
Рис. 98.
При значениях а от п до 2я получим фигуры, симметричные
вычерченным относительно вертикали.
В случае а = я/2 траекторией будет служить отрезок пара-
параболы, заключенной, как и все фигуры Лиссажу, в квадрат со
§ 4Т. КРИВОЛИНЕЙНЫЕ ДВИЖЕНИЯ ТОЧКИ. ПРИМЕРЫ
157
стороной 2а. Действительно, в этом случае уравнения движения
принимают вид
х = a sin Bсо/ — 4т) = — a cos 2со/,
у — a sin Г со/ —2~J = — a cos со/.
Из этих двух уравнений время / легко исключается, так как
х = a (sin2 со/ — cos2 со/) = а A — 2 cos2 со/) = а (l — ~г-),
и, следовательно,
2__ а2 а
У — ~2 2~х>
а это есть уравнение параболы с вершиной в точке (а, 0) и
осью Ох, служащей осью симметрии.
Отметим следующее свойство кривых Лиссажу: если частоты
(или периоды) колебаний соизмеримы, то движение будет пе-
периодическим и кривые будут
замкнутыми, т. е. точка будет
описывать одну и ту же кривую,
повторяя ее; если же периоды
несоизмеримы, то точка никогда
не попадет на старое место;
оставаясь в границах квадрата
или прямоугольника и делая все рис# 99.
новые и новые петли, фигура
Лиссажу никогда не замкнется.
Действительно, если между периодами перпендикулярных
колебаний Т\ и Т2 существует соотношение
где п\ и п2 — целые взаимно простые числа, то за время Г =
= п2Т\ = п{Г2 повторяется целое число периодов Т\ и Т2, т. е.
х и у вернутся к прежним положениям, и кривая замкнется.
После этого движение начнет повторяться. Если же периоды
несоизмеримы, то такого значения Т нельзя будет указать и
точка никогда не вернется в прежнее положение.
Пример 23. К р и в о ш и п н о - п о л з у н н ы й механизм. По задан-
заданному закону вращения кривошипа составим уравнения движения точек ша-
шатуна кривошипно-ползунного механизма и определим траектории этих точек.
Возьмем какую-нибудь точку М шатуна (рис. 99), находящуюся на рас-
расстоянии h от пальца кривошипа А. Обозначая абсциссы и ординаты точек Л,
•Mi В соответствующими значками, можем написать
*М - ХА ___ h Ум~ У A _h
ХВ~ХА 1> Ув-УА 1'
158 ГЛ.' X. УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ
Замечая, что
ХА ==в Г C0S CP» ^Л === Г Sin ^'
#в =r cos tp + V /2 — г2 sin2 ф , */в = О,
получим, опуская при х и у значки, относящиеся к точке М:
х = г cos ф + A V^2 - г2 sin2 ф , z/ = (l ~ у-) г sin ф. (i7)
Подставляя сюда вместо ф функцию времени, определяющую заданный
закон вращения кривошипа, получим искомые уравнения движения точки М
шатуна. В частности, предполагая вращение кривошипа равномерным, поло-
положим ф = со/; тогда будем иметь
х = г cos Ы + -у- лА2 - г2 sin2 со^, # = (\ - ~Л г sin со/. A8)
Для разыскания траектории нет необходимости знать закон вращения
кривошипа,- так как зависимость между координатами х и у получается из
уравнений A7) путем исключения угла ф. Это ясно и из того простого сооб-
соображения, что вид траекторий точек механизма зависит от конструкции меха-
механизма, а не от того, как будет вращаться кривошип.
Из второго уравнения A7) имеем
Подставляя эти значения в первое из уравнений A7) и избавляясь от ради-
радикалов, получим
= 4лс»[г»- {l_h?\- О9)
Траектория представляет собой алгебраическую кривую четвертого по-
порядка, имеющую форму овала. Она, в отличие от эллипса, не имеет верти-
вертикальной оси симметрии. Рассмотрим некоторые частные случаи.
1) h = 0, т.е. движение пальца кривошипа Л. В этом случае уравне-
уравнение A9) переходит в такое:
(а:2 + у2 — /2J = О,
т. е. в уравнение окружности.
2) к = I, т. е. движение ползуна В. В этом случае из второго уравне-
уравнения A7) следует
что ясно из рисунка.
3) г = I. В этом случае из уравнений A7) имеем непосредственно
х = {I + К) cos ф, у = (/ — h) sin ф,
откуда получим
(I + АJ + (/ - АJ = Ь
Это — уравнение эллипса с осями симметрии, расположенными по осям
Ох и Оу. Полуоси эллипса равны I + h и l — h. Точка Mi (рис. 100), лежа-
лежащая на шатуне АВ (h > 0)t опишет эллипс С и горизонтальная полуось кото-
которого больше вертикальной; точка М2, взятая на продолжении шатуна выше
пальца кривошипа A (/i<0), опишет эллипс Сг с большей вертикальной
полуосью. Точка Д для которой h = — /, т. е. AD == АВ, описывает отрезок
оси Оу, и поэтому в нее может быть помещен ползунок, перемещающийся
§ 4Т. КРИВОЛИНЕЙНЫЕ ДВИЖЕНИЯ ТОЧКИ. ПРИМЕРЫ
159
по оси Оу, а кривошип отброшен. Такой механизм называется эллипсогра*
фом. Все точки линейки BD описывают эллипсы, вырождающиеся в окруж-
окружность для точки Лив прямые линии для точек F и D.
При г = / уравнение A9) распадается на два уравнения:
(/ - hJ х2 + (/ + /гJ у2 - (/ + hJ (I - К? = О, х2 + у2 - (I - hJ = 0.
Первое соответствует ранее указанному эллипсу, второе — окружности, опи-
описываемой точкой Мт когда кривошип и шатун сливаются в одну линию,, что.
возможно при г s= /.
Рис. 100,
Рис. 101.
Пример 24. Движение по винтовой линии. Проекция М*
(рис. 101) движущейся точки М на плоскость хОу совершает движение
х = a cos
г/
а проекция ее М" на ось Ог движется равномерно по оси согласно уравнен
нию z = ct. Найдем траекторию пространственного движения точки.
Для разыскания траектории исключим время из уравнений движения
х = a cos со/, у = a sin со/,
ct.
B0)
Из последнего уравнения определим / и подставим в первые два. Будем
иметь уравнения траектории
— z, у = a sin -—z. B1)
Из первых двух уравнений движения следует, что проекция движущейся
точки на плоскость хОу описывает полную окружность за время 2я/со q,
За это же время проекция точки на ось Oz перемещается на отрезок
, 2пс
и __ _______
Движение точки, проекция которой на некоторую плоскость совершает
равномерное круговое движение, а на ось, перпендикулярную к этой плоско*
сти, — равномерное прямолинейное движение, называется винтовым двиоке<
нием, а соответствующая траектория — винтовой линией. Винтовая линия
вьется по поверхности цилиндра радиуса а; расстояние h между двумя вит*
ками, взятое по образующей цилиндра, называется шагом винтовой линии*
160 ГЛ. X. УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ
Таков будет след неподвижного резца на равномерно вращающемся и равно-
равномерно перемещающемся вдоль своей оси цилиндре.
Уравнения B1) могут быть переписаны так:
х = a cos 2л —, у = a sin 2я —.
Каждое из этих уравнений в отдельности представляет собой уравнение
цилиндрической поверхности: 1) с образующей, параллельной оси Оу, и на-
направляющей косинусоидой в плоскости xz и 2) с образующей, параллельной
оси Ох, и направляющей синусоидой в плоскости yz. Пересечение этих двух
цилиндрических поверхностей определяет винтовую линию. Проекциями вин-
винтовой линии на плоскости xOz и yOz служат косинусоида и синусоида.
Исключив из первых двух уравнений B0) время, получим уравнение
прямого кругового цилиндра
х2 + У2 = а2
с образующими, параллельными оси Ozy и направляющим кругом радиуса а
с центром в начале координат, лежащим в плоскости ху. Пересечение этого
цилиндра с любой из предыдущих цилиндрических поверхностей определит
винтовую линию.
Глава XI
КИНЕМАТИЧЕСКИЕ ЭЛЕМЕНТЫ ДВИЖЕНИЯ ТОЧКИ
§ 42. Скорость и ускорение
Основными характеристиками движения точки по траекто-
траектории являются пройденный путь, скорость и ускорение.
Предположим, что точка М движется по заданной криволи-
криволинейной траектории и в различные моменты времени t = t0, t\,
fe, ... занимает соответственно положения Mo, Mi, M2, ... Чтобы
определить эти положения точки на траектории, примем произ-
произвольную точку О за начало отсчета дуг и каждому положению
точки М сопоставим свою дуговую координату а, подобно тому
как на прямолинейной оси каждой точке сопоставляется абсцис-
абсцисса. Тогда точкам Мо, М\9 М2, ... будут соответствовать дуговые
координаты сто, cri, стг, ..., положительные или отрицательные в
зависимости от направления отсчета дуг.
Зададим движение точки М по траектории уравнением
A)
Найдем дифференциал дуги
do = F'(t)dt; B)
этот дифференциал может быть положительным при возраста-
возрастании дуговой координаты, т. е. при движении в сторону возра-
возрастания дуг, и отрицательным в противоположном случае. При-
Приращение пути ds будем считать всегда положительным и равным
ds = \do\ = \F'(t)\dt. C)
Пройденный путь sOi за некоторый интервал времени (/0, ^i)
можно определить как сумму дифференциалов пройденного пути
за этот промежуток времени, т. е. как интеграл
%= \\F'(t)\dt. D)
и
6 Л. Г. Лойцянский, А. И. Лурье
162
ГЛ. XI. КИНЕМАТИЧЕСКИЕ ЭЛЕМЕНТЫ ДВИЖЕНИЯ ТОЧКИ
Если движение задано в декартовых прямоугольных коорди*
натах уравнениями
* = М0> У = /2 @, * = fa (О,
то по известной формуле геометрии
{dyf + (dzf =
^2 @ + f?
E)
. F)
G)
Обозначая через 5 текущее значение пройденного пути ш мо-
моменту времени t, будем иметь уравнение пройденного пути
а пройденный путь найдется как определенный интеграл:
dt.
(8)
График функции <b(ty даст график пути. Отличительная черта
этого графика заключается в том, что функция Ф(/) монотонно
возрастает, а кривая на графике
пути поднимается вверх и толь-
только при остановках точки превра-
превращается в прямую, параллельную
оси времени. Приводим (рис.
102) для сравнения график прой-
пройденного пути и график движе-
движения в случае простого гармо-
гармонического колебательного дви-
движения.
Перейдем к выяснению поня-
понятия скорости движения.
Подобно тому как понятие
движения заключает в себе по-
Рис- 102- нятие развития вообще, т. е. яв-
является основным при изучении
всякого явления природы, так же и понятие скорости в механике
является частным случаем более общего представления -— бы-
быстроты, или темпа развития.
В кинематике рассматривают быстроту роста пути, проходи*
мого точкой, с течением времени, и эту величину называют с/со
ростью точки; быстрота изменения угла поворота твердого тела
со временем определяет угловую скорость вращения тела; бы-
быстрота изменения скорости точки с течением времени, так ска«
зать, «скорость скорости», называется ускорением точки и т. д,
\ If/
§ 42. СКОРОСТЬ И УСКОРЕНИЕ 163
Если изменению времени t на At соответствует увеличение
пройденного пути s на As, то отношение As : At характеризует
среднюю быстроту изменения пути со временем за интервал
времени (/, t-\-At), или среднюю скорость движения за интер-
интервал времени (t, t + At):
As /ПЧ
Чем меньше интервал времени А/, тем. точнее подходит ве-
величина (9) к описанию скорости движения в момент L Предел
средней скорости за интервал времени (/, t + At) при А/, стре-
стремящемся к нулю, называется сиростью в данный момент t.
Условимся точкой, поставленной над буквой, в дальнейшем
обозначать производную по времени. По определению производ-
производной функции имеем следующее выражение скорости v в данный
момент (точка над буквой — производная по t):
v= Mm t>cp = lim -rf = -~- = 5. A0)
Итак, величина скорости равна производной пройденного
пути по времени.
Зная уравнение пройденного пути (8), легко найдем скорость
в данный момент по формуле
v^s^O'it). A1)
Из определения следует, что скорость представляет собой фи-
физическую величину, измеряемую в единицах длины, деленных
на единицы времени, т. е, единицей скорости служит величина
1 м/с.
Уравнение пройденного пути позволяет определить скорость
движения, но оно ничего не говорит о направлении движения.
Желая одновременно знать и величину скорости движения и
направление движения, введем понятие вектора скорости. Для
этого будем определять положение движущейся по траектории
точки М вектор-радиусом ее г. Каждому моменту времени соот-
соответствует свой вектор г; по аналогии с обычным понятием функ-
функции можно назвать вектор г вектор-функцией аргумента t и
обозначить через r(t).
Для наглядного представления об изменении вектор-функции
служит следующее геометрическое построение. Отложив от не-
некоторого произвольно выбранного полюса векторы, соответствую-
соответствующие последовательным значениям аргумента, отметим кривую,
образованную концами этих векторов. Эту кривую называют
годографом вектор-функции. Очевидно, что траектория точки
является годографом переменного вектор-радиуса г(t) этой
точки,
164 ГЛ. XI. КИНЕМАТИЧЕСКИЕ ЭЛЕМЕНТЫ ДВИЖЕНИЯ ТОЧКИ
Пусть М и М' >—два положения движущейся точки в мо-
моменты времени t и t-\-AL Вектор (рис. 103)
соединяющий начальное и конечное положения точки, назы-
называется перемещением точки за промежуток времени Д/. Взяв
отношение
Р _ r
д/
получим вектор, имеющий направление р и характеризующий
среднюю быстроту перемещения. Этот вектор называется векто-
вектором средней скорости за промежу-
промежуток времени Д/ и обозначается че-
через vcp. Чем меньше величина про-
промежутка времени Д/, тем более точ-
точно представит средняя скорость
быстроту перемещения. Естествен-
Естественно поэтому перейти к пределу и на-
назвать вектором скорости v движу-
Рис. ЮЗ. щейся точки в данный момент вре-
времени предел отношения вектора пе-
перемещения р к промежутку времени Д?, в течение которого пере-
перемещение происходило, когда этот промежуток стремится к нулю:
,. 1. р ,. г(/ + Д/) — г (/) /1оч
V— lim г>ср= lim -тт = lim v Л —. A3)
Д*->0 Л^0 дг Д/0 АГ
Выражение, стоящее с правой стороны, напоминает обычную
производную, так как, подобно последней, это выражение пред-
представляет собой предел отношения приращения (векторного) век-
вектор-функции (вектор-радиуса точки) к приращению аргумента
(времени), когда это приращение стремится к нулю. По анало-
аналогии с дифференциальным исчислением будем этот предел назы-
называть векторной производной вектор-функции по ее аргументу и
сохраним для векторной производной обычной обозначение. Со-
Согласно A3) имеем
* = -g-==r'@ = r. A4)
Итак, вектор скорости точки равен векторной производной
вектор-радиуса точки по времени. Из A3) следует, что направ-
направление вектора скорости является предельным для направления
вектора перемещения р при стремлении А? к нулю. Вектор р на-
направлен по секущей, предельным положением которой служит
касательная к траектории; поэтому вектор скорости направлен
по касательной к траектории в сторону движения точки.
§ 42. СКОРОСТЬ И УСКОРЕНИЙ
165
Величина вектора скорости определяется равенством
i . \dr\ ^
что совпадает с A1).
В общем случае движение точки происходит с переменной по
величине и по направлению скоростью. Желая охарактеризовать
изменение скорости, вводят меру быстроты этого изменения со
временем — ускорение, которое должно учитывать векторное
Траектория Годограф скоростей
Рис. 104.
(геометрическое) изменение скорости, т. е. изменение ее по ве-
величине и по направлению.
Пусть в момент времени / движущаяся точка, находясь в
положении М (рис. 104, а), имела скорость, величина и направ-
направление которой определяются вектором v. В момент t + At эта
точка заняла положение М\ имея скорость v'. Таким образом,
за промежуток времени At скорость получила геометрическое
приращение
Av = v' — v.
Вектор At; можно построить, перенеся vr в точку М и найдя
геометрическую разность v' и v. Составив отношение прираще-
приращения At; к промежутку времени At, получим вектор, имеющий то
же направление, что и Av. Обозначим его через wcp и будем на-
называть средним ускорением за промежуток времени At. Имеем
"ср '
А*
у' — v
A5)
Таким образом, среднее ускорение характеризует среднее из-
изменение вектора скорости, отнесенное к единице времени.
Чтобы перейти теперь к определению истинного ускорения,
или ускорения в данный момент, остается, уменьшая промежу-
промежуток времени At, найти предел, к которому стремится отношение
Av/At при At. стремящемся к нулю. По определению производ-
производной вектор-функции этот предел равен производной вектора
]66 ГЛ. XI. КИНЕМАТИЧЕСКИЕ ЭЛЕМЕНТЫ ДВИЖЕНИЯ ТОЧКИ
скорости v по времени. Итак, вектор ускорения равен векторной
производной вектора скорости по времени:
dt
A6)
Вспоминая, что сам вектор скорости равен производной по
времени от вектор-радиуса движущейся точки, найдем
•-¦?-?¦-'"• <17>
Как следует из определения, ускорение измеряется в едини-
единицах, равных отношению единиц скорости к единицам времени.
Таким образом, единицей ускорения служит 1 м/с2.
На практике, чтобы нагляднее оценить величину наблюдае-
наблюдаемого ускорения, иногда выражают его в частях ускорения g
свободного падения тел в пустоте, равного приблизительно
9,81 м/с2.
На отдельной диаграмме рис. 104,6 смежные значения век-
вектора скорости v и V отложены от общего полюса О. Концы этих
векторов N и N' располагаются на годографе скорости. Геоме-
Геометрическая разность V — v = Av имеет направление секущей к
годографу скорости. При стремлении А/ к нулю вектор wcv по-
поворачивается вокруг точки N и в пределе занимает положение
касательной к годографу. Отсюда следует, что вектор ускорения
направлен по касательной к годографу скорости.
Для вычисления скорости и ускорения по заданным уравне-
уравнениям движения в декартовых координатах
A8)
представим в формулах A4) и A7) вектор-радиус в виде его
разложения по единичным векторам i, /, ft, направленным по
осям неподвижной системы координат х, у} z\
r = xi + yj + zk. A9)
Дифференцируя обе части этого равенства по времени и учи-
учитывая, что векторы i, /, ft постоянны по величине и направлению,
будем по правилам дифференцирования суммы произведений
иметь
zk.
Замечая, что, с другой стороны, векторы v и w могут быть пред-
представлены в виде
v = vxi + vy1 + vzk, ,
w = wxi + wyj + k
§ 42. СКОРОСТЬ И УСКОРЕНИЕ 167
где через vx, ?.., wx, ¦*.. обозначены проекции векторов скоро-
скорости и ускорения на координатные оси, получим, сравнивая B0)
и B1):
vx = x = f[(t), vy = y = f'2(t), vz = z = f'3(t), B2)
Итак,
1) проекции вектора скорости на неподвижные оси коорди-
координат равны производным по времени от соответствующих ко-
координат;
2) проекции вектора ускорения на неподвижные оси коорди-
координат равны производным по времени от соответствующих проек-
проекций скорости или вторым производным от соответствующих ко-
координат.
Вектор скорости v вполне определяется заданием его проек-
проекций; величина вектора скорости равна
v = ф\ + v\ + v* = У*2 + У2 + i2 ; B4)
направление вектора скорости может быть определено косину-
косинусами углов, составляемых им с осями координат:
cos (v, у) = — = ¦ y . , B5)
v <\x2-\-y 2-\-z2
COS \"Oj 3y — — /—
v л/хг + г
Точно так же определяется величина вектора ускорения:
W =
Направление вектора w задается косинусами углов, состав-
составляемых им с осями координат:
COS (Wy X) = —- = ¦
W
cos {чу) = %L - . У ¦, B7)
СУ V^ + У + Z
ю V^2 + i/2 + 22
Формулы B2) можно рассматривать как параметрические
уравнения кривой, описываемой концом N вектора v (рис. 104,6),
если начало этого вектора помещено в некоторой точке
168 ГЛ. XI. КИНЕМАТИЧЕСКИЕ ЭЛЕМЕНТЫ ДВИЖЕНИЯ ТОЧКИ
(полюсе) О. Действительно, тогда vx, vy, vz могут быть рассма-
рассматриваемы как координаты точки N, и уравнения B2) представ-
представляют параметрические уравнения траектории точки N, т. е. го-
годографа вектора скорости. Точно так же уравнения B3) пред-
представляют параметрические уравнения годографа вектора уско-
ускорения.
Считая vx, vy, vz координатами точки N— конца вектора
скорости, можно согласно B3) рассматривать вектор ускорения
как скорость конца вектора скорости, т. е. точки N при движе-
движении ее по годографу скорости. Отсюда вновь следует, что вектор
ускорения направлен по касательной к годографу скорости в
сторону движения конца вектора скорости.
§ 43. Скорость и ускорение в прямолинейном движении
В частном случае прямолинейного движения можно выбрать
прямую, по которой движется точка, за ось Ох. Тогда положение
точки будет определяться одной координатой (абсциссой) х,
скорость — проекцией vx, ускорение — проекцией wx.
Если точка движется в положительном направлении оси х, то
vx > 0, причем в случае ускоренного движения wx = dvx/dt>Q,
а в случае замедленного wx < 0.
Если точка движется в отрицательном направлении оси х,
и* < 0, то в случае ускоренного движения vx — отрицательная
и возрастающая по модулю, т. е. убывающая, функция времени
и wx = dvx/dt < 0; если же движение замедленное, то vx, как
убывающая по модулю отрицательная функция, является возра-
возрастающей функцией и, следовательно, wx > 0.
Отсюда можно вывести такой общий признак: если в данный
момент времени знаки vx и wx совпадают, движение ускоренное;
если знаки vx и wx различны, движение замедленное.
Рассмотрим равнопеременное прямолинейное движение. По
определению проекция ускорения wx есть величина постоянная.
Направим ось Ох в сторону вектора начальной скорости и0.
Тогда Vox = Vo > 0, a wx = ±а, где а > 0 и знак плюс соответ-
соответствует ускорению, направленному в ту же сторону, что и на-
начальная скорость, знак минус — в сторону, противоположную
начальной скорости.
Интегрируя равенство
dt —->-"">
получим
В начальный момент / = 0 скорость равна v0; поэтому С = v0 и
vx = vQ±at. B8)
§ 43. СКОРОСТЬ И УСКОРЕНИЕ В ПРЯМОЛИНЕЙНОМ ДВИЖЕНИИ 169
Для определения абсциссы х напишем, что
dx
и проинтегрируем это равенство по х. Будем иметь
Для определения постоянной С\ положим, что при / = 0 точка
занимала начальное положение с координатой х = лг0; тогда
С\ = хо и окончательно
nt2
x = xo + vot±~-. B9)
Если начало координат выбрать в начальном положении
точки, то Хо = О и последняя формула принимает вид
at2
x = vQt±~. C0)
Если вектор ускорения w направлен в ту же сторону, что и
начальная скорость, т. е. wx > 0, то во всех формулах следует
взять знак плюс, и из B8) вытекает, что движение ускоренное.
Еслу wx < 0, то в B8) надо выбрать знак минус; тогда при
0 ^ t < Vo/a, vx > 0 знаки vx и wx различны и движение за-
замедленное. При t > Vo/a9 vx < 0 знак vx совпадает со знаком
Wx, и движение становится вновь ускоренным.
Полученные формулы связывают абсциссу, скорость и время.
Исключая из них время, можно найти формулу, связывающую
абсциссу и скорость:
х = хо±?^. C1)
Рассмотрим, например, вертикальное движение тяжелого
тела вблизи поверхности Земли, пренебрегая сопротивлением
воздуха. Ускорение а в данном случае равно ускорению силы
тяжести g = 9,81 м/с2.
При падении без начальной скорости с высоты h будем
иметь, полагая в C1) х0 = 0, х = h, a = g, yo = O, хорошо из-
известную формулу
v =
Наоборот, зная v, можем найти высоту, с которой тело упало,
по формуле
По формуле C1) находится также высота, на которую под-
поднимается тело, имеющее начальную скорость vq. Направим ось
170
ГЛ XI КИНЕМАТИЧЕСКИЕ ЭЛЕМЕНТЫ ДВИЖЕНИЯ ТОЧКИ
Ох вертикально вверх и выберем начало координат в начальном
положении точки. Сохраняя в формуле C1) нижний знак, заме-
заметим, что в тот момент, когда тело займет наивысшее положение,
скорость v обратится в нуль, так что, подставляя в C1) х = h,
v = 0, а = §", #о = 0, найдем
Итак, при отсутствии сопротивления высота, на которую под-
поднимается тяжелое тело, брошенное вверх с вертикальной на-
начальной скоростью, равна той
высоте, упав с которой тело
приобретает ту же скорость.
Исследуем вопрос о скоро-
скорости и ускорении в прямолиней-
прямолинейном гармоническом колеба-
колебательном движении. Дифферен-
Дифференцируя по времени обе части
уравнения движения
х = a sin (со/ + а), C2)
найдем
•ох = асо cos (со/ + а), C3)
wx = — асо2 sin (со/ + а). C4)
Обращаясь к уравнению движения, видим, что ускорение
может быть представлено еще так:
wx = •— со2*. C5)
Отсюда следует, что при гармонических колебаниях точки
ускорение по величине пропорционально расстоянию от центра
колебания, причем точка движется ускоренно, приближаясь к
центру, и замедленно, удаляясь от него. В самом деле, при при-
приближении к центру со стороны отрицательных абсцисс vx > 0,
X < 0 и wx > 0, т. е. движение ускоренное; при х > 0 прибли-
приближение к центру совершается при vx<.0, при этом wx < 0 —
проекции скорости и ускорения имеют опять одинаковый знак и
движение ускоренное. Точно так же можно показать, что при
удалении точки от центра движение будет замедленным.
На рис. 105 представлен график ускорения в колебательном
движении совместно с графиками движения и скорости. Из
Графика видно, что в тот момент, когда х принимает максималь-
максимальное значение, vx = 0 и wx достигает минимума, будучи отрица-
отрицательным; по абсолютной величине оно имеет максимальное зна-
значение. После этого точка движется с убывающим по абсолютной
величине ускорением и растущей по абсолютной величине ско-
§ 43. СКОРОСТЬ И УСКОРЕНИЕ В ПРЯМОЛИНЕЙНОМ ДВИЖЕНИИ 171
ростью. В центре колебания х = О скорость имеет по абсолют*
ной величине максимальное значение, но так как vx < 0, то v*
будет иметь минимум; ускорение при этом равно нулю вместе
с х. При дальнейшем движении х становится отрицательным,
скорость убывает с удалением от центра, ускорение, наоборот,
возрастает, и при х = хт\п скорость опять равна нулю, а уско«
рение достигает максимума.
В качестве примера вычисления скорости и ускорения при
гармоническом колебательном движении найдем максимальные
значения скорости и ускорения средней точки рессоры, если
амплитуда ее колебаний а = 4 мм, а период Т = 0,1 с. По форч
мулам C3) и C4) имеем
— со — — — 02^/
'а= 15,8 м/с2.
Рассмотрим затухающие колебания точки в некоторой среде,
которая тормозит движение, заставляя колебания затухать.
Уравнение движения задается в виде
х = ае-Р* sin (со/ + а), C6)
где а, р и со — положительные постоянные, р — коэффициент,
или фактор, затухания, а и со, как и раньше, — амплитуда и
частота колебания, а — начальная фаза.
Исследуем рассматриваемое движение. Найдем его скорость*
Vx = х = ae~pt [со cos (со/ + о) — р sin (со/ + а)]. C7)
Приравнивая скорость нулю, найдем моменты времени, соответ^
ствующие максимальным и минимальным значениям абсциссы
х, т. е. крайним положениям точки; приходим к уравнению
со cos (со/ + а) — р sin (со/ + а) = 0; m
оно может быть переписано так:
отсюда
. , , со ,
со/ -\- а = arctg -—[- птс9
где предполагается, что для arctg (о/р) взято его наименьшее
положительное значение и п = 0, 1, 2, .., Обозначая д-й корень
этого уравнения через tn и замечая, что
будем иметь
а = arctg ii,
172 ГЛ. XI. КИНЕМАТИЧЕСКИЕ ЭЛЕМЕНТЫ ДВИЖЕНИЯ ТОЧКИ
Итак, моменты обращения скорости в нуль, т. е. моменты, соот-
соответствующие крайним положениям точки, образуют арифмети-
арифметическую прогрессию с разностью я/со.
Найдем закон убывания амплитуд. Для этого определим
абсциссы крайних положений точки. Подставив в уравнение
C6) tn вместо /, будем иметь
xn = ae~ptnsin(<utn + a) = ae рП ® sin (<о/0 + а + пп) —
Замечая, что амплитуда ап равна |*„|, окончательно найдем
Таким образом, амплитуды затухающего колебания убывают
п
в геометрической прогрессии со знаменателем е ы; отношение
двух последовательных амплитуд равно
ап _ "Р^
—— с •
Эта величина меньше единицы, причем чем больше р, тем скорее
происходит затухание амплитуд; р называется фактором зату-
затухания.
Вместо фактора затухания обычно рассматривают натураль-
натуральный логарифм отношения двух последовательных амплитуд:
Эта безразмерная величина называется логарифмическим декре-
декрементом. Логарифмический декремент пропорционален фактору
затухания.
Дифференцируя C7) еще один раз по времени, найдем
хв)х = — pae~pt® cos (со/ + a) — a(s>2e"pt sin (со/ + a) +
+ ap2e~pt sin (со/ + a) — ap(oe~pt cos (со/ + a),
или, после простых преобразований,
C8)
Ускорение складывается из двух слагаемых: одного, пропорцио-
пропорционального отклонению точки от центра колебания, и другого, про-
пропорционального скорости.
Пример 25. Определим скорость и ускорение ползуна кривошипно-пол-
вунного механизма, шатун которого имеет длину /« 1 Ы; отношение длины
кривошипа к длине шатуна % ¦* 1/5; вал делает 100 об/мин.
§ 43. СКОРОСТЬ И УСКОРЕНИЕ В ПРЯМОЛИНЕЙНОМ ДВИЖЕНИИ 173
Приближенное уравнение движения ползуна имеет вид (§ 40, пример 22)
х = 0,99 + 0,2 cos 10,5/ + 0,01 cos 21/.
Дифференцируя по времени, найдем
vx = — 2,1 sin 10,5/ — 0,21 sin 21/,
Wx a — 22 cos 10,5/ — 4,41 cos 21/.
На этом примере видно, что в случае сложных колебаний, составленных
из нескольких гармонических, скорость и ускорение суммарного колебания
складываются из скоростей и ускорений составляющих колебаний.
Sin 3,927t
Рис. 106.
Пример 26. Рассмотрим затухающее колебательное движение точкш
л:=10е~07'sin 3,927/.
На рис. 10b отдельно вычерчены кривые:
Х\ = 10 sin 3,927/, х2 =е
-0,7/
х = jci • х2 = \0e~0Jt sin 3,927/.
Период движения равен
1,6 с.
Фактор затухания и логарифмический декремент равны
р = 0,7— , 6 = 0,7 • -Ьр = 0,56.
Скорость только что рассмотренного колебания будет равна
vx = х = е~°'п C9,27 cos 3,927/ — 7 sin 3,927/).
Полагая 39,27 = Л sin а, 7 = A cos а, найдем:
А = д/39,272 + 72 « 39,9,
а = arctg 5,61 = 79°53Г « 1,39,
vx = — 39,95-0'7^ sin C,927/ — 1,39).
174
ГЛ. XI. КИНЕМАТИЧЕСКИЕ ЭЛЕМЕНТЫ ДВИЖЕНИЯ ТОЧКИ
§ 44. Скорость и ускорение в криволинейном движении
Начнем с рассмотрения криволинейного движения с постоян-
постоянным по величине и направлению ускорением. Такое движение
будет совершать тяжелое тело вблизи поверхности Земли под
действием силы веса, если пренебречь сопротивлением воздуха.
В этом случае ускорение равно по величине g = 9,81 м/с2 и на-
направлено вертикально вниз. Заряженная частица, движущаяся в
однородном электрическом поле (между пластиками плоского
/ i \
f A/ N
По
I L
г
а>0
\
Рис. 107.
конденсатора), также будет иметь постоянное ускорение, пер-
перпендикулярное к поверхности пластин.
Величину ускорения обозначим через а и выберем направле-
направление осей так, чтобы оси Ог и Ох были расположены в плоско-
плоскости, перпендикулярной к вектору ускорения, а ось Оу была
направлена в сторону, противоположную ускорению. Тогда бу-
будем иметь
wx = 09 Wy = — a, wz = 0. C9)
Найдем скорость, уравнения движения и траекторию точки.
Имеем
dv,
dt
dvy
dt
dt
откуда
D0)
Произвольные постоянные интегрирования Ci, C2 и С3 могут
быть выражены через начальные условия, т. е. величину и на-
направление скорости в начальный момент времени; пусть при
t = 0 v — vo, причем начальная скорость z>0 лежит в плоскости
рсу и составляет острый угол а с осью х (рис. 107). В таком слу-
случае проекции начальной скорости на оси будут равны
vOy = v0 sin а,
z*= 0.
§ 44. СКОРОСТЬ И УСКОРЕНИЕ В КРИВОЛИНЕЙНОМ ДВИЖЕНИИ 175
Но по D0) проекция скорости на Ох постоянна в течение
всего времени движения и, следовательно, остается равной
своему начальному значению. Итак,
Аналогично получим, чтд
т. е. вектор скорости v будет в течение всего движения распо-
расположен в плоскости jo/, а траектория точки будет плоской кривой.
Остается определить С2. Подставляя в выражение D0) для
vy вместо / нуль, получим
Но при t = 0
vy = voy = ^o sin a,
следовательно,
С2 = vQy = v0 sin a
и по D0)
vy = — at + vQ sin а. D1)
Перейдем к выводу уравнений движения в плоскости ху.
Имеем
Vx === Iff ~ v° cos а' vy~ llf^ ~~ai "^ v° s'ma> D2)
откуда следует, что
dx = Vq cos a dt, dy = (— at + v0 sin a) dt.
Интегрируя, найдем
x = \v0 cos a dt = vQt cos a + C4,
у =\ (— at -\- Vq sin a) dt — — a\/rf/ + t>0 s*n a\ ^ ^
Результат интегрирования содержит две произвольные постоян*
ные С4, С5. Для определения их используем значения х и у в
начальный момент движения, т. е. начальное положение движу*
щейся точки.
Возьмем начало координат в начальном положении движу-
движущейся точки. Это дает условия:
при t — 0 x = 0t у=0.
Подставляя в выражения для х и у их: .начальные значения, *
вместо t нуль,, получим
176 ГЛ. XI. КИНЕМАТИЧЕСКИЕ ЭЛЕМЕНТЫ ДВИЖЕНИЯ ТОЧКИ
Окончательно найдем
х = vot cos а, у = vo( sin а — ~ •
Это и будут уравнения движения. Очевидно, что х всегда
положительно, так как а — острый угол.
Чтобы получить траекторию, нужно исключить время из
уравнений движения; из первого уравнения D3) находим
/ = ¦
Vq cos a
подставляя во второе уравнение, получим
х2
ах2 /л л\
D4)
—
a
траектория движущейся точки — парабола.
Найдем точки пересечения кривой с осью абсцисс. Полагая
в уравнении траектории у = 0, получим
1 ах2 г\
х tg а s—г" — О,
2vq cos a
откуда найдем
х = 0 или х = ~; sin 2a.
Первый корень соответствует началу координат (х = О,
г/ = 0), т. е. начальному положению точки. Второй корень соот-
соответствует точке пересечения кривой с осью х, если 0<а< я/2,
т. е. sin 2а > 0, так как х должно быть положительным. Если
же —я/2 < а < 0, то траектория располагается целиком под
осью х (рис. 107,6) и точки пересечения с осью Ох в области
х > 0 не существует.
При а > 0 абсцисса L точки пересечения траектории с осью
xt равная
L =-—-sin 2а,
называется дальностью полета.
При заданном vQ максимальное значение дальности дости-
достигается при sin 2а = 1, т. е. при а = я/4; при этом Lmax==vlja.
Заметим, что одна и та же дальность достигается при двух
различных значениях угла а, ибо sin 2а принимает одинаковое
значение при а = а0 и а = я/2 — а0.
Найдем вершину кривой. Для этого достаточно заметить, что
у достигает максимального значения в момент, когда vy обра-
обращается в нуль, так как в этот момент времени скорость и, еле-
§ 44. СКОРОСТЬ И УСКОРЕНИЕ В КРИВОЛИНЕЙНОМ ДВИЖЕНИИ 177
довательно, касательная к траектории параллельны оси Ох.
Приравнивая vy нулю, получаем
Vq sin a — at = 0, т. е. t = -—¦ sin а.
Найдем положение вершины. Подставив в уравнения движения
полученное значение t, будем иметь
4 .
= — sin a cos a = —, ymax =
.2
sin2 a.
На рис. 107, а построены траектории для двух значений угла
а, дополняющих друг друга до 90°. Употребляя принятую в бал-
баллистике терминологию, назо-
назовем параболу, соответствую-
соответствующую меньшему значению угла
а, настильной, а большему
а — навесной траекторией
(пунктирная кривая).
Для иллюстрации произве- {"°
дем следующий расчет.
Струя воды выбрасывается
пожарным рукавом под углом
30° к горизонту. Рукав поддер-
поддерживается на высоте 1,5 м от • Рис 108.
земли, и струя падает на
землю на расстоянии 25 м от места выхода. По этим данным
определим начальную скорость частиц воды. Для этого под-
подставляем в уравнение D4): а = 30°, х = 25 м, у = — 1,5 м,
a = g = 9,81 м/с2; получаем
-1,5=25
V3 9,81
2x6
252
3/4
—-; V0 « 16 м/с.
Построим годограф скорости в движении с постоянным уско-
ускорением. Так как
vx = Vq cos a = const,
то годографом скорости служит прямая, параллельная оси vy и
находящаяся на расстоянии uocosa от начала координат
(рис. 108). Чтобы найти скорость движущейся точки в тот мо-
момент, когда точка занимает положение М на своей траектории,
нужно через полюс О* годографа провести вектор О*М* парал-
параллельный касательной к траектории в точке М. При движении по
восходящей ветви параболы конец вектора скорости описывает
отрезок М*ЛГ годографа, при движении по нисходящей ветви
описывается отрезок АГЛ^.
178
ГЛ. XI. КИНЕМАТИЧЕСКИЕ ЭЛЕМЕНТЫ ДВИЖЕНИЯ ТОЧКИ
Пример 27. Криволинейное движение задается уравнениями
х = a cos kt, у = a sin kt.
Траектория представляет собой окружность радиуса а (рис. 109); проекч
ции скорости и ускорения будут равны
vx = х = — ak sin kt, Vy = y = ak cos kt,
wx = x = — ak2 cos kt, Wy — у = — afc2 sin &/.
Теперь находим величины скорости и ускорения:
v = /\J vx + v2y =ak — const, t<y = <\Jwx + ш^ = а/г2 = const.
Направление скорости определяется косинусами углов:
cos (v, x) = — sin &?, cos (v, у) = cos ^/.
Вектор скорости перпендикулярен к вектор-радиусу ОМ точки М и направ-
направлен в сторону, показанную на рисунке. Направление ускорения определим,
используя равенства
wx = ~ ak2 cos kt = — /г2*, wy = — ak2 sin kt = — k2y,
указывающие на то, что проекции w противоположны по знаку и пропор-
пропорциональны по величине координатам, т. е. проекциям вектор-радиуса г дви*
:кущейся точки. Таким образом,
т.е. ускорение направлено к центру круга (рис. 109).
В рассмотренном примере, несмотря на постоянство величины скорости,
ускорение не обращается в нуль. Это объясняется тем, что движение про-
происходит по криволинейной траектории и скорость
все время изменяет свое направление.
Пример 28. Определим скорость и ускоре-
ускорение середины шатуна кривошипно-шатунного ме-
механизма при равномерном вращении кривошипа
(рис. 99).
Разлагая радикал в уравнениях A7) § 41 в
ряд по степеням К = г/1 и полагая для середины
шатуна h = 1/2, получим уравнения движения
середины шатуна в виде
Рис. 109.
~ri — ~-Я2 sin2
у = -jT- a sin
Дифференцируя эти выражения по времени, получим проекции скорости:
vx = к = — aco f sin со/ + -г sin 2co/ j ,
- ~ aco cos со/.
При переходе механизма через «мертвые положения» со/ = 0 или со/ = jt
Vx = 0, vy = -г- а®> т. е. скорость равна половине скорости пальца криво-
кривошипа aco и направлена перпендикулярно к шатуну.
При со/ = Jt/2 и со/ = Зл/2 проекция скорости vy обращается в нуль,
т.е. траектория имеет касательную, параллельную оси Ох. В эти моменты
§ 44. СКОРОСТЬ И УСКОРЕНИЕ В КРИВОЛИНЕЙНОМ ДВИЖЕНИИ 179
Х)х == -t-aco, т.е. скорость равна по величине скорости пальца кривошипа.
Чтобы найти уравнение годографа скорости, нужно исключить время из вы-
выражений для vx и vy. Имеем
cos ©'•
vx ( Х \ vu Х
= — 11+ rr- ^ COS ®t I sin to^> —^ = ТГ
aco \ 2 / ' aco 2
Отсюда получаем
или
aco v \ aco / \ aco
аш
Если в первом приближении пренебречь членом К по сравнению с еди-
единицей, то уравнение годографа приобретает вид
1^о7+ я|
Это — уравнение эллипса с полуосями аса и -х-aco. Наличие добавочных чле-
членов искажает форму этого эллипса.
Дифференцируя по времени выражения проекции скорости, получим
проекции ускорения:
— aco2 f cos Ы + — A, cos 2co? J ,
wu = — ~aco2
Пример 29. Определим скорость и ускорение при равномерном дви-
движении точки по винтовой линии (рис. ПО, а).
Рис. 110.
Уравнения движения были даны в примере 24 § 41. Дифференцируя
выражения координат по времени, найдем проекции вектора скорости;
vx в — aw sin со/, Vy =а aco cos со/, vz = с%
180 ГЛ. XI. КИНЕМАТИЧЕСКИЕ ЭЛЕМЕНТЫ ДВИЖЕНИЯ ТОЧКИ
Проекция движущейся точки на плоскость ху описывает окружность сб
скоростью
в направлении против движения часовой стрелки, если смотреть вдоль оси О-г*
Вместе с тем точка перемещается вдоль оси Oz со скоростью с. Полная
величина скорости равна
Направление скорости, т.е. касательной к винтовой линии, определяется
формулами
,*^^\ асо sin со/ .^v. асо cos со/
COS {V, X) = , COS (IF, Г/) = -¦ =г,
¦у # со2 4~ с уп(й + с2
cos (v, z)
Ya2to2 -J- c2
Годограф скорости представляет собой окружность радиуса асо с
тром на оси v2 в точке vz = с; его уравнения:
i? + ^ = а2со2, 02 = с.
Отрезки образующих прямого кругового конуса с вершиной в начале
координат, имеющего в основании годограф, дают направление и величину
скорости в различных положениях движущейся точки (рис. 110,6).
Определим величину и направление "ускорения в рассматриваемом дви-
движении. Имеем
wx = х = •— асо2 cos 0/, Wy~ у = ¦— асо2 sin со/, w2 == г = 0,
cos (ta>, ;c) == — cos со/, cos (ty, #) = — sin со/, cos (tw, z) = 0.
Ускорение направлено по перпендикуляру, опущенному из движущейся
точки на ось цилиндра.
§ 45. Натуральный триэдр
(естественный трехгранник) траектории
Прежде всего несколько разовьем ранее сказанное о вектор-
функции и ее производной. Пусть А (и) — непрерывная вектор-
функция скалярного аргумента и, геометрически изображаемая
своим годографом, т. е. траекторией конца Af векторов А при
непрерывно изменяющихся значениях аргумента и, когда начало
этих векторов откладывается от некоторого полюса О (рис. 111),
Производная А" (и) определяется как предел
m
и представляет собой вектор, имеющий направление касатель-
касательной к годографу, проведенной в сторону, соответствующую воз-
возрастанию аргумента и. Вектор А'(и) характеризует быстроту
§ 45 НАТУРАЛЬНЫЙ ТРИЭДР ТРАЕКТОРИИ
181
изменения по величине и направлению вектора А (и) с измене-
изменением аргумента и.
Величину, или модуль, производной А'(и) будем обозначать
через |Л'(и) |. Так как буквой А обозначается величина вектора
Л, то А'{и) будет производной величины А
вектора А. Величина производной вектора
не равна абсолютному значению производ-
производной его величины:
\А'(и)\Ф\А'(и)\. D6)
В самом деле, с одной стороны, речь идет
о величине вектора А"(и), с другой — об
абсолютном значении производной скаля-
скаляра А(и).
Покажем это на примере. Пусть А —
вектор постоянной длины, при всех измене-
изменениях остающийся в некоторой плоскости. Годографом его яв-
является дуга окружности (рис. 112). Касательная к ней, оче-
очевидно, перпендикулярна к вектор-радиусу, проведенному в точ-
точку касания. Итак, если А = const, то вектор А'(и) перпендику-
перпендикулярен к А(и). Вместе с тем, так
как А(и) изменяет свое направле-
направление, то геометрическая разность
не равна нулю; не равно нулю и от-
отношение
А (и + Аи) — А {и)
Аи
Рис. 112.
так же и его предел, т. е. А'(и). Производная же от Д как
производная постоянной величины, равна нулю.
При дифференцировании векторов сохраняются те же пра-
правила, что и при дифференцировании функций. Производная гео-
геометрической суммы равна геометрической сумме производных.
Точно так же сохраняется и правило дифференцирования произ-
произведения скалярной функции %{и) на вектор А (и):
du
du
dA
du
D7)
Как одно из применений рассмотрим производную вектора
постоянного направления. Всякий вектор А может быть пред-
представлен как произведение его величины А на единичный век-
вектор е\
А = Ле. D8)
182 ГЛ. XI. КИНЕМАТИЧЕСКИЕ ЭЛЕМЕНТЫ ДВИЖЕНИЯ ТОЧКИ
Если вектор Л имеет постоянное направление, то е является
постоянным вектором; тогда
— — О
и, применяя формулу D7), получим
du du ч '
Если dA/du > 0, т. е. А возрастает при возрастании и, то
произведение е на положительное число dA/du имеет то же
направление, что и е, т. е. направление век-
1 тора Л; в случае же dA/du <С 0 произведе-
1 ние е на отрицательное число dA/du имеет
направление, противоположное Л. Итак,
производная вектора постоянного направле-
направления имеет то же направление, что и диффе-
дифференцируемый вектор, если величина послед-
последнего возрастает при возрастании аргумента,
*Ш1<а и противоположное направление, если вели-
с1д а чина дифференцируемого вектора с возра-
du
йи станием аргумента убывает (рис. 113).
О Правило дифференцирования скалярно-
Рис. 113. го и векторного произведений двух векто-
векторов также ничем не отличается от соответ-
соответствующего правила в случае произведения функций. Иными
словами,
Ни ^ ' du ' ' ' du ' ^ '
Докажем, что производная вектора постоянной длины пер-
перпендикулярна к самому вектору. Для этого заметим, что
du du *
так как по условию А = const. По формуле E0) находим теперь
d (А а\ — —> А 4- Л- — — 2А .—
Чи~^Я А)— du л+л du —lA du
dA
и, следовательно, Л* -^f^^, что и выражает условие перпен-
перпендикулярности векторов Л и dA/du.
К этому же результату можно было прийти из простого гео-
геометрического соображения: годограф вектора Л постоянной ве-
величины представляет собой кривую, все точки которой одина-
§ 45 НАТУРАЛЬНЫЙ ТРИЭДР ТРАЕКТОРИИ 183
ково отстоят от полюса годографа, т. е. кривую на сфере. Про-
Производная dA/du, будучи направлена по касательной к годогра-
годографу, лежит в касательной плоскости к сфере и, следовательно,
перпендикулярна к радиусу ее, т. е. к вектору А.
Ранее на примере вектор-радиуса г было показано, что про-
проекции его производной по времени, т. е. вектора скорости v, на
оси неизменного направления равны производным по времени
от проекций вектор-радиуса на те же оси. Точно так же проек-
проекции ускорения w на неподвижные оси равны производным от
проекции скорости на те же оси. Вообще, если вектор-функция
А (и) задана своим разложением по единичным векторам не-
неподвижных осей:
ТО
du du ' du J ' du
Следовательно,
/dA\ dAx (dA\ dAy (dA
\ du)x du * \du Jy du * \ du J2~~~ du
Итак, проекции производной вектора на оси постоянного на-
направления равны производным от проекций дифференцируемого
вектора на те же оси*).
Замечая, что величина вектора А выражается через его
проекции по формуле
а величина производной равна
dA
~du
сразу видим, что величина производной не равна dA/duy тац
как, дифференцируя выражение Л, получили бы
dAv dAit dA*
x y
Лх ~ШГ + Лу ~1и~ + Аг
x dAy
dA Л ~ШГ + Л ~1~
du
+ a + aI
Понятия вектор-функции и ее производной облегчают рас-
рассмотрение основных геометрических свойств траектории, необ-
необходимых для дальнейшего развития представления об уско-
ускорении.
*) При проектировании на переменное направление эта теорема не имеет
места: проекция производной вектора на переменное направление не равна
производной от проекции дифференцируемого вектора на это направление
(см. §68).
184
ГЛ. XI. КИНЕМАТИЧЕСКИЕ ЭЛЕМЕНТЫ ДВИЖЕНИЯ ТОЧКИ
Рассмотрим некоторую кривую, не лежащую, вообще говоря^
в одной плоскости (кривую двоякой кривизны). Установим н#
этой кривой начало Мо и положительное направление отсчета
дуг о (рис. 114, а). Возьмем какую-нибудь текущую точку М>
положение которой определим либо дугой а, либо вектор-pa-
диусом г относительно некоторой неподвижной точки О. Через
Касательная
Касательно*
Рис. 114.
точку М проведем касательную к кривой; направление каса-
касательной в сторону возрастающих значений а зададим единичным
вектором касательной т.
Возьмем на кривой весьма близкую к М точку М\; пусть
положение ее определяется значением дуги о + Ао, причем
Да > 0, т. е. М\ лежит за М в сторону положительного отсчета
дуги. Единичный вектор касательной в точке Mi обозначим че-
через ть Проведем через т плоскость П (рис. 114,6), параллель-
параллельную ть чтобы построить ее, достаточно перенести п в точку М;
два вектора т и ti, имеющие начало в точке М, определяют
положение П. При изменении положения М\ плоскость П, оче-
очевидно, также изменяет свое положение, вращаясь вокруг т; если
будем' приближать Mi к М, уменьшая Да до нуля, то эта пло-
плоскость будет приближаться к некоторому предельному положе-
положению По называемому соприкасающейся плоскостью (рис. 114,6).
В точке М проведем плоскость No, перпендикулярную к каса-
касательной. Эта плоскость называется нормальной плоскостью кри-
кривой. Любая прямая, проведенная в этой плоскости через точку
§ 45 НАТУРАЛЬНЫЙ ТРИЭДР ТРАЕКТОРИИ 185
М будет перпендикулярна к т, т. е. будет нормальна кривой;
линия пересечения нормальной и соприкасающейся плоскостей
определяет главную нормаль кривой. Иными словами, главной
нормалью называется нормаль, лежащая в соприкасающейся
плоскости. Нормаль, перпендикулярная к главной нормали, на-
называется бинормалью кривой.
Если, в частности, кривая — плоская, то соприкасающейся
плоскостью будет плоскость, в которой расположена кривая, а
главной нормалью — нормаль кривой, лежащая в этой пло-
плоскости.
Совокупность трех взаимно перпендикулярных осей: 1) каса-
касательной, направленной в сторону возрастания дуги, 2) главной
нормали, направленной в сторону вогнутости кривой, и 3) би-
бинормали, направленной по отношению к касательной и главной
нормали так же, как ось Oz расположена по отношению к осям
Ох и Оу, образует так называемый натуральный триэдр (есте-
(естественный трехгранник) кривой.
Единичные векторы этих осей обозначим соответственно че-
через т, п и Ъ. Найдем выражения этих трех единичных векторов
натурального триэдра через вектор-радиус точки на кривой, за-
заданный как вектор-функция дуги:
г = г(о). E2)
Найдем прежде всего т. По определению векторной производ-
производной вектор dr/do направлен по касательной к годографу век-
вектора г в сторону возрастающих а. С другой стороны, численная
величина производной равна
dr\_\dr\_A
1
do \ da ~~ 1#
Таким образом, векторная производная представляет собой
искомый единичный вектор касательной:
* = ?• E3)
Для определения единичного вектора главной нормали п об-
обратимся к рис. 114,6. Рассмотрим равнобедренный треугольник,
образованный векторами т и х\ в плоскости П. Если точка Mi
взята на весьма малом расстоянии Да от точки Af, то угол е
между касательными т и х\ в смежных точках кривой — его
называют углом смежности — будет также мал и вектор At с
тем меньшей ошибкой, чем меньше Да, можно считать перпен-
перпендикулярным к т и, следовательно, параллельным вектору нор-
нормали п\ лежащему с Дт в одной и той же плоскости П. По
величине |Дт|, как основание равнобедренного треугольника с
малым углом е при вершине и боковыми сторонами, равными
186 ГЛ. XI. КИНЕМАТИЧЕСКИЕ ЭЛЕМЕНТЫ ДВИЖЕНИЯ ТОЧКИ
единице, будет равен
|AT| = 2|T|sin|«2.1.-i = e.
Отсюда найдем (с точностью до малых высших порядков)
Дт = en',
или
.'— -L д — — . J^L
е Да ' е *
Будем приближать Да к нулю, тогда точка М\ будет стремиться
к -М, плоскость П, как уже упоминалось, — к соприкасающейся
Плоскости По, единичный вектор нормали п' — к искомому еди-
единичному вектору я, и мы будем иметь
„=lim|l. lim Щ-, E4)
Ла->0 ао Аа->0 8
Первый предел равен векторной производной
do~da\da)~ do2 ' ^
что же касается второго предела, то заметим, что отношение
t/Ла, определяющее среднюю скорость поворота касательной
к кривой при переходе от данной точки к смежной, характери-
аует среднюю кривизну кривой на участке (ст, e + ^a), а ве-
величина
\im-g- = K E6)
определяет кривизну кривой в данной точке.
Таким образом, имеем следующее выражение единичного
вектора главной нормали:
п~~ К da ~ К do2 '
Величину 1//С = р, имеющую размерность длины, называют
радиусом кривизны кривой в данной точке. Происхождение
ггого понятия станет ясным, если рассмотреть кривизну окруж-
окружности; в этом случае угол смежности е равен центральному углу
между радиусами, проведенными в точки касания, а соответ-
соответствующая дуга равна произведению этого угла на радиус, так
цто отношение е/Ла, характеризующее кривизну окружности,
равно единице, деленной на радиус окружности, а обратная
кривизне величина есть радиус окружности.
В сл'уча! произвольной кривой через данную ее точку и две
смежные с йею точки можно провести круг, который при стрем-
лейий смежных точек к данной рассматриваемой будет стре-
§ 46 РАЗЛОЖЕНИЕ УСКОРЕНИЯ ПО ОСЯМ ТРИЭДРА 187
миться к некоторому предельному кругу, называемому соприка-*
сающимся кругом или кругом кривизны. Радиус этого круга
будет радиусом кривизны кривой, центр круга С (рис. 114, а) —
центром кривизны кривой. Очевидно, круг кривизны лежит в
соприкасающейся плоскости, центр кривизны С — на главной
нормали со стороны вогнутости кривой
Введя радиус кривизны р, получим
dx d2r
Теперь уже не составляет труда найти и единичный вектор
бинормали. Из условия выбора положительного направления
на бинормали следует:
(?&) (?><?)• в»)
§ 46. Разложение ускорения
по осям натурального триэдра траектории
Применяя полученные выражения единичных векторов осей
натурального триэдра траектории, найдем составляющие век-
вектора ускорения по этим осям.
Обозначим через vx проекцию вектора скорости на направле-
направление касательной к траектории. Очевидно, что vx по абсолютной
величине равно численной величине скорости v; что же касается
знака Vx, то vx положительно, если направление движения в
данный момент совпадает с направлением положительного от-
отсчета дуг а по траектории, и отрицательно в противоположном
случае. Будем иметь
v = vxr. F0)
Заметим, что
da , ds , /С1Ч
i,t = —= ±-^-=±1,, F1)
так как da = ds, когда da > 0, и da = —ds, если da <C 0, где
s — пройденный путь.
Вспомнив, что вектор ускорения есть производная по вре-
времени от вектора скорости, получим по F0)
dv d / \ dvx , dx
Далее, имеем
dx dx da m
IT ~"loif*
согласно формулам E7) и F1) найдем
dx l
188
ГЛ. XI КИНЕМАТИЧЕСКИЕ ЭЛЕМЕНТЫ ДВИЖЕНИЯ ТОЧКИ
F3)
разложение вектора
Подставив полученное выражение в равенство F2), будем
иметь
dvx , v2
dt p '
где v\ заменено на равное ему v2.
Равенство F3) представляет собой
ускорения по осям натурального триэдра.
Обозначим коэффициенты при единичных векторах т, п и Ь
в разложении F3), т. е. проекции ускорения на оси натураль-
натурального триэдра, соответственно через wXy wn и ть\ тогда будем
иметь
w = xi\x + wnn + wbb,
причем из F3) следует, что
w* dt — dt2 • Wn ~ p '
Последнее равенство говорит о том, что вектор ускорения
перпендикулярен к бинормали, т. е. ускорение лежит в соприка-
соприкасающейся плоскости.
Первое слагаемое в разложении F4), wxx, дает касательную
(тангенциальную) составляющую ускорения, второе, wntiy —
нормальную составляющую ускорения. Иногда для краткости
их называют просто касательным и нормальным ускорениями.
В случае ускоренного движения знаки шт и vx одинаковы,
в случае замедленного движения — противоположны, т. е. при
ускоренном движении касательное ускорение направлено в ту
же сторону, что и вектор скорости, а при замедленном движе-
движении имеет направление, противоположное скорости (рис. 115).
F4)
F5)
а) Замедленное движение б) Ускоренное ддитение
Рис. 115.
Нормальное ускорение всегда совпадает по направлению с
главной нормалью, так как wn = v2/p — существенно положи-
положительная величина. Вспоминая ранее сказанное о направлении
л, видим, что нормальное ускорение направлено к центру кри-
кривизны траектории (нормальное ускорение иногда еще называют
поэтому центростремительным), т. е. по главной нормали к
§ 46. РАЗЛОЖЕНИЕ УСКОРЕНИЯ ПО ОСЯМ ТРИЭДРА 189
траектории в сторону ее вогнутости. Отсюда вытекает свойство
ускорения: вектор ускорения направлен в сторону вогнутости
траектории.
Итак, вектор ускорения в криволинейном движении может
быть представлен как геометрическая сумма двух ускорений:
касательного и нормального.
Величина ускорения может быть представлена так:
+ ? . F6)
а направление задано косинусами углов, составляемых им с
касательной и главной нормалью к траектории:
cos(Ct) = -^, cos(^) = -^f-. F7)
Отметим два частных случая.
а) Случай равномерного движения; величина скорости по-
постоянна, так что
dvx п v2
Величина ускорения w равна в этом случае wn:
б) Случай прямолинейного движения; кривизна прямой ли-
линии равна нулю, и, следовательно,
г. dvx dvx
w 0 ш т^ ^
Из сопоставления этих двух случаев следует, что в равно-
равномерном прямолинейном движении ускорение равно нулю.
В общем случае движения касательное ускорение обра-
обращается в нуль в тех точках траектории, где скорость принимает
максимальное или минимальное значение (vx = 0). Нормальное
ускорение равно нулю в точках перегиба траектории A/р = 0),
а также в тех точках траектории, где меняется направление
движения, т. е. скорость обращается в нуль.
Отметим, что не следует смешивать \dv/dt\ и \dv/dt\, так
как первое выражение определяет величину полного ускорения,
а второе — абсолютное значение лишь одной его касательной
составляющей. На различие этих величин указывалось уже
выше [формула D6)].
Разложение ускорения на касательную и нормальную части
имеет простое кинематическое значение. Вектор ускорения,
определяющий быстроту изменения вектора скорости по ве-
лнчине и направлению, представляется суммой касательного
190
ГЛ. XI. КИНЕМАТИЧЕСКИЕ ЭЛЕМЕНТЫ ДВИЖЕНИЯ ТОЧКИ
ускорения, характеризующего изменение величины скорости, щ
нормального, характеризующего изменение ее по направлению^
В прямолинейном движении направление скорости не иаме-
няется и нормальное ускорение отсутствует; в движении равно»
мерном не изменяется величина скорости и отсутствует каса-
касательное ускорение.
При движении точки по плоской траектории можно дать
формулу, выражающую непосредственную связь нормального
ускорения со скоростью изменения направления касательной к
^траектории. Для этого введем в рассмотрение угол ф (рис. 116)
х О
Рис. 116.
касательной с неизменным направлением, например с осью Ох.
Тогда в обоих показанных на рисунке случаях будем иметь
~do
~dt
dt
ds
И выражение нормального ускорения wn можно записать в виде
wn=j=>v\9\. F8)
Если движение точки задано уравнениями в декартовых ко-
координатах, то для вычисления проекций ускорения на касатель-
касательную и главную нормаль к траектории нет необходимости в вы-
вычислении кривизны траектории. Замечая, что единичный вектор
касательной может быть представлен формулой т = v/vXi на-
напишем:
- - -¦ '¦•""- + i/ij + zz),
¦¦ ir V(*4f ~ ХУ? + Ш- У*? + (zx - zxf , F9)
§ 46. РАЗЛОЖЕНИЕ УСКОРЕНИЯ ПО ОСЯМ ТРИЭДРА
191
Значения этих выражений непосредственно определяются
дифференцированием по времени уравнений движения E).
Пример 30. Вагон движется по закруглению ABCD (рис. 117, а) с
постоянной по величине скоростью v\ определим ускорение вагона, если
участки АВ я CD прямолинейны, а участок ВС представляет собой дугу
круга радиуса р с центральным углом ос.
Касательное ускорение до? повсюду равно нулю, так как скорость по
величине постоянна; следовательно, ускорение сводится к нормальному, рав-
равному
Г 0 на отрезке АВ,
w = wn~{ v2/p на отрезке ВС,
{ 0 на отрезке CD.
График ускорения получается разрывным (рис. 117,6).
Если скорость материальной точки имеет в некоторый момент времени
разрыв, т. е. ее величина или направление резко изменяется, то говорят, что
Т\
А В С Л $г
Рис. 117.
материальная точка испытывает жесткий удар; если скорость изменяется
непрерывно, а ускорение претерпевает разрыв, то такое явление называют
мягким ударом. Таким образом, при входе и сходе вагона с окружности
имеет место мягкий удар. Во избежание мягкого удара совершают переход
от А В и CD к дуге ВС не сразу, а постепенно, по какой-нибудь кривой,
радиус кривизны которой изменяется непрерывно от бесконечности до тре-
требуемой величины р. При этом график приобретает вид, показанный ' на
рис. 117, в.
Пример 31. Определить радиус кривизны винтовой линии по задан-
заданному ее шагу h и радиусу кругового цилиндра а, на который она навита.
Предположим, что рассматриваемая винтовая линия является траекто-
траекторией в равномерном движении точки. Тогда, как уже известно (пример 29
§ 44), 2_ 2 2 2
Поскольку движение принято,,равномерным, дог
следовательно,
2L
Р ''
асо2 =
Отсюда находим
а2®2 + с2
!
a UJ
192
ГЛ. XI. КИНЕМАТИЧЕСКИЕ ЭЛЕМЕНТЫ ДВИЖЕНИЯ ТОЧКИ
Вспоминая, что шаг винтовой линии h равен 2л;(с/соJ, получим оконча-
окончательно
r \ 4л2а2 )
Пример 32. Колесо радиуса а (рис. 118) катится без скольжения по
неподвижному прямому рельсу. Определить радиус кривизны траектории
(циклоиды), описываемой какой-нибудь
точкой обода колеса.
Рассмотрим движение точки М.
Отложим от точки касания N в сто-
сторону, противоположную движению коле-
колеса, отрезок N0 — NM и примем точку
О за начало координат. Угол MCN обоз-
обозначим через ф.
Из рис. 118 имеем
х == ОК = ON - CS =
= NM — CS = а (ф — sin ф)
у = MK = MS + SK = a A — cos ф).
Так как траектория не зависит от
скорости движения, то можно принять
Рис. 118. скорость центра колеса постоянной и
равной vo. Пройденный им путь будет
s = vot; если движение происходит без скольжения, то s = ON = аф и
аф = vot. Обозначая еще Vg/a = k, получим
ф = &^ х = a (kt — sin kt), у = а A — cos kt).
Найдем проекции скорости точки М:
vx = ak (I — cos kt), Vy = ak sin kt,
и величину скорости:
v = Aj vx -\- Vy = ak у 2 A — cos &/)
Таким образом,
sin
hi
kt
2ak sin — при 0 ^ kt ^ 2зх,
и т. д.,
— 2ak sin
при
и т. д.
Проекция ускорения и величина ускорения будут равны
wx = vx = ak2 slnkt, wy = ak2 cos kt, ш==/уш^ + ш|
Находим (в данном случае vx = v)
av
dt
kt
ak2 cos -ту- при 0 < kt < 2jt, 4jt < ^/ < 6я и т. д.,
— a&2 cos -5- при
6я< ^^ < 8я и т. д.,
§ 46. РАЗЛОЖЕНИЕ УСКОРЕНИЯ ПО ОСЯМ ТРИЭДРА
193
Разрыв в выражении для wx при Ы = 0, 2л, 4я, ... объясняется нали-
наличием точек возврата траектории на оси Ох.
Радиус кривизны равен
v2 . kt \
р=^=4а Sin — |-
Отсюда получается простое правило для построения центра кривизны Ц
циклоиды: соединив рассматриваемую точку М с точкой соприкосновения N
катящегося круга с рельсом, продолжаем отрезок MN на расстояние
ЫЦ = MN. Точка Ц будет центром кривизны; в самом деле,
sin ~ I, МЦ = 2MN = р.
Пример 33. Движение точки М в пространстве задано в функции от вре-
времени величиной скорости точки v и углами ф и 1|) (рис. П9). Найдем уравне*
ния движения точки в декартовой системе координат, касательное и нор-
нормальное ускорения, а также радиус кривизны траектории.
Имеем
vx --= х = v cos i|? cos ф,
Vy = у = v cos o|) sin ф,
v2 = z = v sin -ф.
Интегрируя, будем иметь
х =.
v cos i|) cos ф dt,
z== Уо+ \ v
о
t
= 20 + \
cos -ф sin ф dt,
>J
sin
Рис. 119.
Взяв производную по времени от проекций скрости, получим
х = v cos "ф cos ф — m[) sin "ф cos ф — уф cos г[? sin ф,
у = v cos i|d sin ф — уф sin o|) sin ф + уф cos я]? cos ф,
z «= г) sin "ф + t>ij) cos я|).
Составляем выражения
iz/ — г/;с = у2ф cos2 г|),
г/г — zy = и2/ф sin ф — о2ф sin гр cos г|э cos ф,
ix — xz = — у2(ф cos ф — с2ф cos г(> sin ф sin ф.
Возводим их Bi квадрат и складываем, тогда по второй из формул F9)
получим
1
*Щ — ухJ
'• + №
-zyJ-
_ 1
V
h(zx
\/v*(
— xzJ =
г|52 + ф2 cos21|))
7 Л. Г. Лойцянский, А. И. Лурье
194 ГЛ. XI. КИНЕМАТИЧЕСКИЕ ЭЛЕМЕНТЫ ДВИЖЕНИЯ ТОЧКИ
Вспоминая, что wn = и2/р> найдем
р — _
Касательное ускорение равно
— dv
В частном случае движения точки в плоскости хОу вновь получаем
<ф == ф = 0t cos if» = 1 и выражение нормального ускорения приобретает
вид F8I
я>п = v I ф I.
Глава XII
КИНЕМАТИКА ТОЧКИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ
§ 47. Криволинейные координаты точки
Всякие три числа, однозначно определяющие положение
точки в пространстве трех измерений, могут рассматриваться
как координаты этой точки. Установив закон выбора этих чисел
для любой точки, мы тем самым выберем определенную систему
координат, которую, в отличие от прямолинейной декартовой
системы, условимся называть криволинейной.
Обозначим через ^ь Q2, Qz криволинейные координаты точки
М, имеющей вектор-радиус г по отношению к точке О, выбран-
выбранной произвольно за начало. Тогда в силу однозначного соот-
соответствия между определением положения точки М при помощи
вектор-радиуса г и определением ее положения при помощи
совокупности чисел (qu q% Цъ) можно написать
r = r{qb q2, q3), A)
т. е. утверждать, что вектор-радиус точки М есть вектор-функ-
вектор-функция трех криволинейных координат этой точки.
Кривую, которую вычертит точка М, если изменять одну
только координату qi, а двум другим дать некоторые фиксиро-
фиксированные значения, будем называть координатной линией (q>),
так что кривая
r = r(qu q20, <7зо)>
где индекс «О» обозначает частное, фиксированное значение ко-
координат q2 = 920 и </з= #зо, дает координатную линию (q\)
и т. д.
Через каждую точку М0(#ю, #20, <7зо) можно провести три}
координатные линии:
линия (q{): r = r(qu q20, <7зо),
линия (q2): r = r(ql(h q2, <7зо)>
линия (ft): r = r(ql0, q20t q3).
Касательные к координатным линиям в данной точке Мо,
направленные в сторону возрастания соответствующих коорди-
координат, будем называть координатными осями \q\\, [#2], \qz]4
в данной точке,
7*
196 ГЛ XII КИНЕМАТИКА ТОЧКИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ
Направление этих осей зададим единичными векторами
ku k2, fa.
Если изменять сразу две координаты, а оставшуюся одну
фиксировать, то получим поверхности, заданные следующими
уравнениями:
поверхность (q{q2): r = r{qb q2y <7зо)>
поверхность (q2q3)'- r = r{q{Qy q2, q3),
поверхность (q3q{): r = r{qu q20, q3).
Эти поверхности будем называть координатными поверхно-
поверхностями, а касательные плоскости к ним в точке Мо — координат-
координатными плоскостями.
Из определения ясно, что координатные линии (q\) и (q2)
лежат на координатной поверхности (^71^2), линии (q2) и (^з) —
Мо
V
е2
Рис. 120. Рис. 121.
на поверхности (<72<7з) и линии (q$) и (^i) — на поверхности
(<73?i). Точно так же координатные оси лежат в соответствую-
соответствующих координатных плоскостях.
Рассмотрим для иллюстрации введенных понятий несколько
частных систем криволинейных координат.
а) Декартова прямоугольная система (х\, х2, Хъ). В этом
случае (рис. 120) координатные линии и оси совпадают. Это —
прямые, параллельные осям координат, проведенным через
точку О, и одинаково с ними направленные. Точно так же
и координатные поверхности совпадают с координатными пло*
скостями, параллельными координатным плоскостям, проходя-
проходящим через начало О.
б) Цилиндрическая система координат (р, ср, г). Изменяя
одну лишь координату р, получим (рис. 121) прямую, пересе-
пересекающую ось Oz под прямым углом; это одновременно и коор-
координатная линия (р), и координатная ось [р]. Изменяя ср, полу-
§ 47. КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ ТОЧКИ
197
чим окружность радиуса р, лежащую в плоскости, перпендику-
перпендикулярной к оси Oz и находящейся на расстоянии z от плоскости
Оху. Эта окружность является координатной линией (ф), ка-
касательная к ней в сторону возрастания угла ф — координат-
координатной осью [ф]; наконец, прямая, параллельная оси Oz, будет
одновременно координатной линией (z) и координатной
осью [г].
Координатными поверхностями будут следующие поверхно-
поверхности: поверхность (рф), соответствующая заданному значению
z,— плоскость, перпендику-
перпендикулярная к оси Oz; поверх-
поверхность (ф-г), соответствую-
соответствующая заданному значению
р, — цилиндрическая по-
поверхность радиуса р с осью
Oz и, наконец, поверхность
(гр) — плоскость, проходя-
проходящая через ось Oz и взятую
точку М и соответствующая
заданному значению ф.
в) Сферическая система
координат (г, 9, ф) (рис.
122). Линией (г) и осью
f[r] будет служить прямая,
выходящая из начала координат и проходящая через взятую
точку; линией (8) — окружность большого круга, осью [9] — ка-
касательная к этой окружности в сторону возрастания угла 9 и,
наконец, линией (ф) будет окружность параллельного круга ра-
радиуса г sin 9, осью [ф] — касательная к ней в сторону возраста-
возрастания угла ф.
Координатными поверхностями будут: сфера (г = const),
коническая поверхность (9 = const) с осью Oz в качестве оси
симметрии и с углом раствора 29 и плоскость (ф = const),
проходящая через ось Oz и взятую точку М. Координатные
плоскости найдем как касательные плоскости к этим коорди-
координатным поверхностям.
Для определения единичных векторов координатных осей
вспомним, что координатная ось [qi] направлена по касатель-
касательной к координатной линии {qi), соответствующей возрастанию
координаты qt. На основании известного свойства векторной
производной можно утверждать, что единичный вектор ki имеет
направление вектора dr/dqt. Если эту производную разделить
на ее численную величину
Рис. 122.
дг
198 f Л Xll. КИНЕМАТИКА ТОЧКИ В КРИВОЛИНЕЙНЫХ КООРДИНАТА^
где Hi — так называемые коэффициенты Л яме, то получим
C)
Пользуясь формулой C), легко найти косинусы углов криво*
линейных координатных осей с осями декартовых координат.
В самом деле, например (не суммировать по /!),
/1^^ \ и I дг I дхх
и, вообще (не суммировать по Л),
Таким образом, получим таблицу косинусов углов между
осями криволинейных и декартовых координат:
*з
Ы
1 дХ1
Hi dqt
1 d*2
Я, д?!
1 Зх3
Я, dq,
[Q
1
я2
1
я2
1
я2
»]
1
Я
1
Я
1
я
3 ^3
5Х2
з dq%
дх3
з ^^/з
D)
Если в любой точке пространства координатные оси взаимно
перпендикулярны, то система криволинейных координат назы-
называется ортогональной.
Условие ортогональности имеет вид
или по C)
дх\
dq.
ху , дх2
q ' dq
дх2 , дх3 дх3
E)
dq. dq.
В дальнейшем будем рассматривать лишь ортогональные
системы; в ортогональной системе координат единичные век-
векторы ki определяют не только направление координатной оси
[gi]y но вместе с тем и координатную плоскость, перпендику*
лярную к этой оси.
Легко вывести формулу дифференциала дуги произвольной
кривой в заданной системе криволинейных координат. Для
этого возьмем общее выражение произвольного бесконечно ма«
лого перемещения
§ 48 КИНЕМАТИКА В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ 190
и определим квадрат дифференциала дуги как квадрат вели-
величины этого перемещения:
дг и д. дг л д. дг р
Производя скалярное перемножение, по B) и E) получим вы-
выражение дифференциала дуги в ортогональной криволинейной
системе:
ds2 = Hi dq\ + Hi dql + Н\ dq\. F)
Из этой формулы вытекает простой прием определения ко-
коэффициентов Ляме: полагая поочередно, что изменяется лишь
одна координата, а две другие фиксированы, находим диффе-
дифференциалы дуг координатных линий:
dsx = H \dqx, ds2 = H2dq2, ds3 = H3dq3. G)
Отсюда следует, что коэффициенты Ляме представляют со*
бой множители при дифференциалах координат в выражениях
дифференциалов дуг соответствующих координатных линий.
Определим этим путем коэффициенты Ляме в цилиндриче-
цилиндрической и сферической системах координат.
В цилиндрической системе
ds{ = dp, ds2 — Р dy, ds3 = dz,
следовательно,
Яр = 1, Яф = р, Нг=1. (8)
В частности, в полярной системе координат (р, ф) на пло-
плоскости имеют место первые две из этих формул.
В сферической системе
ds3 = r sin 9 dq>,
следовательно,
#r=l, tfe = r, #<p = rsine. (9)
§ 48. Проекции скорости и ускорения
на оси криволинейных координат
Для разыскания проекций скорости точки на координатные
оси проще всего поступить так: напишем производную вектор-
радиуса г точки по времени, т. е. вектор скорости, в виде
дг . . дг . , дг .
тогда по формулам C) получим
3q3h< (И)
200 ГЛ XII. КИНЕМАТИКА ТОЧКИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ
Это равенство можно рассматривать как разложение вектора
скорости по единичным векторам осей криволинейных коорди-
координат; для проекций скорости на координатные оси будем иметь
vqi = Hiqt (/=1,2,3). A2}
Квадрат величины скорости равен
2 гг2 .2 | тт2 .2 | rr2.2 /1 Q\
в полном соответствии с равенством F) и формулой
9 ( ds\2
Т) = I I
ч dt )
Для определения проекций ускорения представим их в виде
Wq. — W- i — V'-ffJ -Щ '
откуда
dr d Г dr \ d dr
Из равенства A0) непосредственно следует
dq. dq. }
Кроме того, по определению полной производной
d дг _ д2г . . д2г . , д2г .
dt dq. — dqxdqt ^^ dq2dq. ^^ dq3dqt ^
но это же выражение получим, если возьмем от обеих частей
A0) частную производную по qi\ действительно, так как
Ць Цъ Цъ зависят только от времени, а не от q\, q<i, q$, то
dv _ д2г . , д2г . , d2r .
таким образом, имеем
dt dq. ~ dq. '
ачения -^—
A4), получим
Подставляя значения -^— no A5) и -тт-^—по A6) в равенство
( dv
Замечая еще, что
dv d v • v д v
д
dq.
d
V
V
• V
2
• V
dv д v-v д v^_
§ 48. КИНЕМАТИКА В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ 201
на основании A7) окончательно получим выражение проекций
ускорения на оси криволинейной системы координат:
W4~ H\dt дд. d
где для краткости введено обозначение
\q\ + Hlc?2 + Hlc®. A9)
Итак, для разыскания проекций ускорения на координатную
ось [q{\ следует найти выражение квадрата скорости. Тогда по
формуле A8) дифференцированием получим проекции ускоре-
ускорения на ось.
а) Скорость и ускорение в цилиндрической системе коорди-
координат. В этой системе координат по формулам (8) и A2) имеем
ар = р, Уф = рф, vz^z\ B0)
затем по A9)
1
отсюда по A8) определим проекции ускорения:
ч /00\
' B2)
дТ _.. .2
Ж ~df ~ ар" ~ р ~ рф '
d дТ дТ _
~ р ~ р
дТ \ 1 d
d дТ дТ
г
Первые две формулы дают выражения для проекций уско-
ускорения на оси полярной системы координат.
б) Скорость и ускорение в сферической системе координат.
В сферической системе координат получим
B3)
Составляем величину Т:
Т = \{г* + г2ё2 + г2ф2 sin29); B4)
проекции ускорения будут иметь вид
w ==.J_dT__dT_=-f_rQ2_ -2 -2q
wa = 1 f-fL ~ — ^\ = ~[-^- (г2в) - г2Ф2 sin 9 cos el, B5)
w = l (d дТ дТ\_ 1 l(/.2(bsin2e)j
^ r sin 8 \ dt дф <?ф / г sin Q dt ^ *
202 ГЛ. XII. КИНЕМАТИКА ТОЧКИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ
Применим формулы ускорений в полярных координатах
к определению ускорения планеты, считая известными следую-
следующие три закона Кеплера:
1. Планеты обращаются вокруг Солнца по эллипсам, в од-
одном из фокусов которых находится Солнце.
2. Площади, описываемые радиус-векторами планеты, про-
пропорциональны времени.
3. Квадраты времен обращения относятся как кубы средних
расстояний планет до Солнца, или как кубы больших полуосей.
По первому закону Кеплера уравнение траектории планеты
имеет вид
B6)
1 + ? cos
где р=—— параметр, е = ~ =
— эксцентриситет,
а и Ь — большая и малая полуоси эл-
эллипса.
Как легко видеть из рис. 123, прира-
приращение площади S, описываемой радиус-
вектором ОМ, можно определить по
формуле
Рис. 123.
Отсюда получим
dS
Эта величина, характеризующая быстроту изменения площади,
описываемой радиус-вектором точки, называется секториальной
скоростью.
По второму закону Кеплера секториальная скорость по-
постоянна, т. е.
р2ф==С. B8)
По третьему закону Кеплера
где а — большая полуось, т — время обращения планеты во-
вокруг Солнца и k — постоянная, одинаковая для всех планет.
Пользуясь этими соотношениями, определим проекции уско-
ускорения планеты на оси полярных координат.
Прежде всего по второму закону Кеплера B8) и по второй
из формул B2) получим
следовательно, остается найти лишь проекцию ускорения пла-
$ 48 КИНЕМАТИКА В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ 203
неты w9; по первой формуле B2) и первому и второму законам
Кеплера будем иметь
. flfp . ре sjn ф С Се sin ф
" dy ^ (l + ecos<jpJ р2 р '
и, следовательно,
Се cos ф . С2е cos ф
р=___<р==___.
Таким образом, находим
а)п = 6 — рф = т- • (oU)
р ^ гт рр
Если планета сделает полный оборот, то по определению
секториальной скорости
у Сх = nab,
откуда
С2 __ Ап2а2Ь2 __ Ал2а3
Р ~~ Т2_^1 "" ^ '
а
а следовательно, по третьему закону Кеплера B9)
?1-
р
Окончательно будем иметь по формуле C0)
4л2& /от\
т. е. ускорение планет обратно пропорционально квадрату и^
расстояния от Солнца и направлено от планеты к Солнцу —*
закон, открытый впервые Ньютоном и положенный в основу
знаменитого закона всемирного тяготения.
Пример 34. Найти годограф скорости точки, движущейся по кониче*
скому сечению с постоянной секториальной скоростью.
Уравнение конических сечений имеет вид B6), причем е < 1 в случай
эллипса, е = 1 для параболы и е > 1 для гиперболы. Напомним, что началу
системы полярных координат при этом взято в фокусе конического сечения.
Учитывая условие B8) постоянства секториальной скорости, получим
Се .
v~ = р = sin ф,
р
• Р • Р С С п , ч
Vm — РФ = 1—; ф ==: 1—: г* == — A + е cos Ф) •
ф гт 1+есоэф l+ecosq) pz P
Переходя к проекциям у*, иу в декартовой системе, получим
С .
Vx = ^р COS ф — ^ф Sin ф = Sill ф,
Се . С
vy = v9 sin ф + Уф cos ф = 1 cos ф.
р р
204 ГЛ. XII. КИНЕМАТИКА ТОЧКИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ
Из последних двух уравнений следует уравнение годографа
ч2 с2
Это — окружность круга с центром на оси Ovy в точке О' с ординатой
Се/р и радиусом а = С/р. Если е = 1, что соответствует параболе, окруж-
окружность касается оси Ovx\ если е < 1 (эллипс), то а > Се//? — окружность пе-
пересечет ось Ovx\ если е р> 1 (гипербола), то а < Се/р — окружность распо-
расположится выше оси Ovx. На рис. 124, а, б, в показано расположение траекто-
траекторий и годографов скорости. Отрезки Onto, От^ Отг и т. д., не показанные
и.
Рис. 124.
на рисунках, чтобы их не затемнять, соответственно определяют векторы
скоростей в точках Мо, Mi, M2 и т. д.
Пример 35. Движение точки на сфере под постоян-
постоянным углом к меридиану. Угол а между направлением вектора ско-
скорости и меридианом места можно найти по формуле
vq гЭ 1 de
:
г sin
sin 9 dcp
Отсюда следует дифференциальное уравнение траектории в сферических
координатах
rf9
Интегрируя, получим
sin0
In tg — = тф + In С,
или, освобождаясь от логарифмов,
§ 48. КИНЕМАТИКА В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ
205
Здесь С — постоянная, которая является положительной, так как 0 заклю-
заключено в промежутке @, тс).
Пусть m > 0, тогда при стремлении ф к бесконечности угол 0 будет
стремиться к Jt; иными словами, траекторией будет служить сферическая
кривая, спиралью закручивающаяся вокруг Южного полюса (предполагаем,
что ось Oz своей положительной стороной проходит через Северный полюс
Земли). Если m < 0, то при ср, стремящемся к бесконечности, угол 0 будет
стремиться к нулю, т. е. кривая будет завиваться вокруг Северного полюса.
В проекции Меркатора, при которой меридианы переходят в парал-
параллельные прямые, а параллели — в перпендикулярные к ним прямые, траек-
траекторией точки будет служить прямая,
расположенная под углом a = arctg(l/m)
к прямым, изображающим мери-
меридианы.
Полученная в настоящем примере
спиральная траектория на сфере носит
наименование локсодромии. По такой
кривой двигался бы корабль на сфе-
сферическом земном шаре, если бы курс
корабля был неизменен по отношению
к меридианам. В частном случае m = О,
VQ = 0 угол 0 будет постоянным, т. е.
локсодромия вырождается в парал-
параллель. При m = оо, Уф = 0 ф будет по-
постоянным, т. е. движение будет происхо-
происходить по меридиану.
На рис. 125 показан вид локсодро-
локсодромии в проекции на плоскость, перпенди-
перпендикулярную к оси Земли.
Пример 36. Луч прожектора OL (рис. 126) следит за самолетом М,
движущимся с постоянной скоростью v по прямой КК. Поставим перед собой
задачу вычислить первые и вторые производные по времени от углов ф и д,9
задающих направление луча в пространстве; через эти производные выра-
выражаются угловая скорость и угловое ускорение следящего приспособления
прожектора.
Через прямую КК проведем вертикальную плоскость П и обозначим
через К двугранный угол плоскостей П и гОх\ направление КК в плоскости II
определим углом р,, образуемым этой линией с вертикалью Oz. Положение
точки М определим ее сферическими координатами г, 0, ф.
Составим по формулам B3) выражения проекций скорости точки на оси
сферической системы координат:
Рис. 125.
vr = г = v cos (v, kr),
vq = r0 = v cos (v, &e),
иф = гф sin 8 = v cos (v, ?ф),
C2)
где kn &е, &ф — единичные векторы координатных осей сферической системы
(рис. 127).
Для определения косинусов, входящих в выражения C2), воспользуемся
основной формулой сферической тригонометрии (см. далее § 59). Замечая,
что вектор v имеет направление ОК и что сферические координаты точки К
суть zK = щ xR = К, из сферического треугольника KLz получим
cos (v, kr) = cos KL = cos 0 cos ц + sin 0sin ц cos (Л —
C3)
206 ГЛ. XII. КИНЕМАТИКА ТОЧКИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ
К
Рис. 126. Рис. 127.
Аналогично из сферического треугольника KPz получим
cos (v, ko) = cos KP = cos f — + G J cos \x + sin f — + 8 j sin ц cos (X — qp) =
= —- sin 9 cos \x + cos 9 sin \x cos (X — ф). C4)
На рис. 127 для ясности показан вектор (— ?ф), имеющий направление,
противоположное вектору ?ф. Поэтому из сферического треугольника KNP
имеем
•- cos {v,
cos
= cos KN = cos KR cos NR + sin KR sin ,
I*
= cos f —— ix J cos f — + Л — ф|,
и, следовательно,
cos (v, кф) = sin \x sin (Я — ф). C5)
После подстановки полученных значений косинусов в C2) будем иметь
г == v (cos 9 cos [Л + sin 9 sin ji cos a),
— (— sin в cos \i + cos 9 sin \i cos a),
C6)
r sin i
¦ sin Ц sin a,
где
a = X — ф C7)
представляет собой двугранный угол между вертикальными плоскостями П
и zOL (рис. 126).
Последние две формулы C6) решают первую часть задачи. Для опре-
определения вторых производных 9 и ф составим выражения проекций ускоре-
ускорения точки М на оси [9] и [ф] сферических координат и приравняем их
нулю, так как точка М движется равномерно и прямолинейно. Будем иметь
ё = ф2 sin 9 cos 9 — 2 — 9, ф = — 2ф (у + 9 ctg 9Y C8)
В правые части этих выражений надо подставить значения г, 9 ф по C6).
Тогда вторые производные 9, ф выразятся через сферические координаты
точки М и величины2 определяющие вектор скорости точки М*
Глава XIII
ПРОСТЕЙШИЕ ДВИЖЕНИЯ АБСОЛЮТНО ТВЕРДОГО ТЕЛА
§ 49, Поступательное движение твердого тела
Начальные сведения о простейших движениях твердого телаз
поступательном и вращательном вокруг неподвижной оси из-*
вестны из школьных курсов физики.
В настоящей главе будут изложены основные представления
о движении твердого тела и даны характеристики этого дви-
движения.
Под поступательным движением абсолютно твердого тела
понимают такое его движение, при котором прямая, проведен-
проведенная через любые две точки тела и жестко с ним связанная,
остается во все время движения параллельной самой себе.
В этом определении подчеркнуто, что требование сохранения
параллельности относится к любой прямой, жестко связанной
с телом. Так, например, в случае вращения тела вокруг непо-
неподвижной оси прямые, проведенные в теле параллельно оси вра-
вращения, будут вращаться вокруг оси, оставаясь параллельными
самим себе, но это относится только к прямым, параллельным
оси вращения тела. Прямые, наклоненные к оси вращения, уже
не будут перемещаться, сохраняя параллельность.
Понятие «вращения» в дальнейшем сохраняется только для
твердых тел и частей сплошной среды, но не будет применяться
к материальным точкам, движущимся по круговым траекто-
траекториям. Нельзя при этом говорить, что точки «вращаются» во*
круг центров окружностей. К точкам не применимы термины
поступательного или вращательного движений. Можно говорить
лишь о прямолинейном или криволинейном их движении.
Точки поступательно движущегося тела могут описывать
любые криволинейные траектории, в частности окружности, но
Движение тела сохраняет свой поступательный характер.
Докажем, что при поступательном движении твердого тела
все его точки описывают одинаковые траектории и в любой
момент времени имеют одинаковые скорости и ускорения.
Для доказательства рассмотрим в данный момент t какие-
нибудь две точки тела А и В (рис, 128), которые в момент t + At
208
ГЛ XIII ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
займут положения А', В'. По определению поступательного
движения жесткие отрезки АВ и А'В' будут равны и па-
параллельны друг другу. Следовательно, фигура АВВ/А/ является
параллелограммом и отрезки АА/ и ВВ' равны и параллельны.
Отсюда следует, что векторы бесконечно малых перемещений
ААГ и ВВГ равны между собой. Одинаковость во всех точках
бесконечно малых перемещений означает,
что при поступательном движении тела все-
всеми точками будут описываться одинаковые
траектории и будут одинаковы векторы
скорости и ускорения.
К тому же результату можно прийти,
если определять положение любой точки М
твердого тела вектор-радиусом г\ прове-
проведенным из некоторой точки О', также при*
надлежащей телу (рис. 129). Если движе?
ние поступательное, то ло определению
вектор г' остается параллельным самому
себе. Величина вектора г' (г' = О'М) не
изменяется, так как тело твердое. Итак, г' является постоян-
постоянным вектором.
Обозначим через г0 вектор-радиус точки О' относительно
некоторой неподвижной точки О. Равенство
r-го + г' A)
показывает, что траектория точки М получается из траектории
точки О' путем параллельного перенесения ее на постоянный
по величине и направлению вектор гг. Следовательно, траекто-
траектории точек твердого тела, движущегося поступательно, пред-
ставляют собой конгруэнтные кривые,
получающиеся друг из друга путем па-
параллельного переноса.
Дифференцируя обе части формулы
A) по времени и замечая, что производ-
производная постоянного вектора гг равна нулю,
получим
dr dr0
Рис. 128.
Рис. 129.
вли, вспоминая определение вектора ско-
скорости,
*> = ?(), B)
т. е. скорости всех точек твердого тела, движущегося поступа-
поступательно, в любой момент времени друг другу равны как по вели-
величине, так и по направлению.
§ 50 ВРАЩЕНИЕ ВОКРУГ НЕПОДВИЖНОЙ ОСИ
209
Дифференцируя обе части B) еще раз по времени, получаем
w = wQy C)
т. е. ускорения всех точек поступательно движущегося твердого
тела в любой момент времени одинаковы.
Из доказанного следует, что поступательное движение твер-
твердого тела вполне определяется движением какой-нибудь одной
из его точек; следовательно, для изучения поступательного дви-
движения тела достаточно знания кинематики точки.
§ 50. Вращение твердого тела вокруг
неподвижной оси. Угловая скорость. Угловое ускорение
Рассмотрим движение твердого тела, при котором две точки
его остаются неподвижными; такое движение представляет со-
собой вращение тела вокруг проходящей через неподвижные
точки прямой, называемой осью вращения.
Пусть ось вращения тела совпадает с осью Oz. Чтобы опре-
определить положение тела, проведем через ось Oz две полуплоско-
полуплоскости: подвижную Q, твердо связанную с вращающимся телом,
и неподвижную Р (рис. 130). Заданием двугранного угла ср
между этими полуплоскостями положение твердого тела вполне
Г
Рис. 130.
Рис. 131.
определяется. Например, углом поворота визирной трубы во-
вокруг вертикальной оси Oz является не угол а между двумя
положениями оси трубы ТТ и Т'Т (рис. 131), а линейный угол
двугранного угла между плоскостями, проведенными через ось
вращения Oz и ось трубы в двух положениях последней; этот
угол ф и отсчитывается по лимбу ЛЛ.
210 ГЛ. XIII. ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Численное значение угла поворота будем выражать в радиа*
нах, т. е. в частях угла, длина дуги которого равна радиусу.
Углы в радианах выражаются безразмерными числами. Окруж-
Окружность содержит 2л радиан; один радиан эквивалентен углу
выраженному в градусах.
Часто угол поворота выражают числом оборотов N. Оче-
Очевидно, что угол ф в радианах, соответствующий N оборотам,
равен
Ф = 2nN. D)
Положительное направление отсчета углов уже было опре-
определено в § 11.
Движение твердого тела, имеющего неподвижную ось вра-
вращения, определяется заданием угла ф в функции времени:
Ф = /(/). E)
Это уравнение называется уравнением вращения тела.
При изучении вращательного движения вокруг неподвижной
оси вводится в рассмотрение величина, учитывающая быстроту
изменения угла поворота со временем. Эта величина называется
угловой скоростью тела или частотой его вращения.
Остановимся сначала на случае равномерного вращения,
при котором за одинаковые промежутки времени тело повора*
чивается на одинаковые углы. Угол поворота за единицу вре-
времени будет в этом случае численно равен угловой скорости.
Последнюю будем обозначать буквой со. Согласно определению
(D===; Ф2-Ф1 Fч
t2 — t\
где ф1 и ф2 — значения угла поворота ф в моменты t\ и t2.
Если за единицу угла принять 1 радиан, а за единицу вре-
времени 1 секунду, то единицей угловой скорости будет являться
1/с. В технике угловую скорость вала машины обычно харак-
характеризуют числом оборотов в минуту и обозначают буквой п.
Замечая, что п об/мин соответствует -™-об/с и что 1 оборот
соответствует 2я радианам, получим
Например, угловая скорость маховика, совершающего
500 об/мин, выраженная в 1/с, будет равна
со = igl = 52,36 1/с,
§50 ВРАЩЕНИЕ ВОКРУГ НЕПОДВИЖНОЙ ОСИ 211
Угловая скорость вращения Земли, выраженная в 1/с, будет
равна
и-^ОТ 1/с = 0,0000726 1/с.
Для ориентировки полезно запомнить, что в грубом прибли-
приближении угловая скорость, выраженная в об/мин, в 10 раз больше,
чем угловая скорость, выраженная в 1/с. Действительно,
пп
Из определения угловой скорости как отношения прираще-
приращения угла к приращению времени следует, что со может быть
положительно и отрицательно. Если угол поворота возрастает
(ф2>Ф0, т. е. тело вращается в положительном направлении,
то со > 0; если же угол поворота убывает (ф2<фО> то тело
вращается в отрицательном направлении и со < 0. Сохраняя
обозначение со для абсолютного значения угловой скорости,
условимся обозначать алгебраическую величину угловой ско-
скорости символом со». Конечно, jco| = co.
Если вращение неравномерно, то отношение приращения
угла поворота Дф к интервалу времени At, в течение которого
это приращение произошло, определит лишь некоторую сред-
среднюю угловую скорость за время At = ^2 — h\
Желая перейти от средней угловой скорости за некоторый
промежуток времени к истинной угловой скорости в данный
момент, будем стремить интервал времени At к нулю. По опре-
определению производной угловая скорость со в данный момент
будет равна
ш = lim соср = lim -— = •— = ф. G)
Пользуясь этой формулой, по заданному уравнению E) вра-
вращения тела получим
а = Ф = П0.
Если угол ф в данный момент возрастает, й > 0; если угол ф
убывает, со < 0. Знак со говорит о направлении вращения тела,
если принято определенное правило положительного (вспо-
(вспомнить определение положительного поворота тела в § 11) и от-
отрицательного отсчета углов поворота вокруг заданной оси вра-
вращения тела. Если со в данный момент обращается в нуль
и меняет знак, то угол поворота ф достигает своего максималь-
максимального или минимального значения, а тело меняет направление
вращения.
212 ГЛ. XIII. ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
За меру быстроты изменения угловой скорости с течением
времени примем отношение приращения угловой скорости А5
к промежутку времени At, в течение которого это приращение
произошло. Такое отношение назовем средним угловым ускорен
нием за промежуток времени At и обозначим
Аи иг — &1
Конечно, ёср может быть как положительной (©2>ю1), так
и отрицательной (©2<©i) величиной, что и отмечено «тиль-
«тильдой» над буквой е.
Угловое ускорение в данный момент определится как пре-
предел отношения АсЬ/At при At, стремящемся к нулю, т. е.
е= lim ecp = lim -гГ = —= со. (8)
* P Д*-»0 А' dt
Из формулы G) будет также следовать
8 = ^=ф. (9)
Подобно тому как знак © определяет, вращается ли тело
вокруг заданной оси в положительную или отрицательную сто-
сторону, точно так же знак 8 дает суждение о том, является ли
вращение тела в данный момент ускоренным или замедленным.
В самом деле, если знаки й и е совпадают, то или: 1) ©> О
и е> 0, т. е. со положительно и возрастает, или 2) со< 0, е< О,
т. е. о5 отрицательно и убывает. И в том и в другом случае 5
по абсолютной величине возрастает, т. е. вращение ускоренное;
аналогичное рассуждение показывает, что если знаки со и е
различны, то вращение замедленное.
Угловое ускорение равно нулю при равномерном вращении
тела. Условие 8 = 0 в данный момент времени может говорить
о максимуме или минимуме угловой скорости в этот момент.
Рассмотрим случай равнопеременного вращения. Так назы-
называется вращательное движение с постоянным угловым ускоре*
нием. Переписывая формулу (8) в виде
dco = 8 dt9
можем в этом случае при интегрировании вынести ё, как по-
постоянную, за знак интеграла. Получим
5 = е/ + ©0; A0)
постоянная интегрирования со0 есть значение © при t = 0, т. е.
угловая скорость в момент, принимаемый за начало отсчета
времени.
§ 50. ВРАЩЕНИЕ ВОКРУГ НЕПОДВИЖНОЙ ОСИ 213
Решая уравнение A0), найдем
65 — со0
Отсюда следует, что за единицу углового ускорения надо
принять угловое ускорение такого равнопеременного вращения,
в котором в каждую единицу времени угловая скорость возрас-
возрастает на единицу угловой скорости.
Если за единицу угла принять 1 радиан, а за единицу вре-
времени 1 секунду, то единицей углового ускорения будет 1/с2;
если же за единицу угла принять 1 оборот и за единицу времени
1 минуту, то единица углового ускорения будет 1 об/мин2.
Вопрос о переходе от одних единиц к другим поясним на
примерах.
Выразим в 1/с2 угловое ускорение, равное 10 об/мин2,.
Имеем
10 об/мин2 = 10 . Ц- 1/с2 = т^-1/с2.
Выразим в об/мин2 угловое ускорение я 1/с2. Имеем
я 1/с2 = я • -7г- об/мин2 = 1800 об/мин2.
Из формул G) и A0) имеем
dcp = co0 dt + et dt.
Интегрируя, найдем
&t2
Ф = фо + бо'+ —• A1)
Заметим, что приведенные здесь формулы аналогичны фор-
формулам равноускоренного прямолинейного движения точки, если
сопоставить ф—>#, ф—>v> ф->й>.
Постоянная интегрирования ф0 есть значение угла поворота
при t = 0. Формулы A1) и A0) аналогичны соответствующим
формулам равнопеременного прямолинейного движения (§ 43).
Исключая время из A0) и A1), получим (при ф0 = 0) фор-
формулу
аналогичную выражению пройденного пути через скорость
и ускорение. Выведенные формулы часто применяются при ре-
решении задач о пуске в ход и остановке машины в предположе-
предположении, что угловое ускорение (замедление) машины остается по-
постоянным. В динамике будет доказано, что это предположение
справедливо при допущении постоянства вращающего момента.
214 ГЛ. XIII. ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Пример 37. Угловая скорость вала двигателя, равная 1200 об/мин,
вследствие увеличения нагрузки падает в течение 90 с до 800 об/мин. Вы-
Вычислим угловое ускорение, считая его постоянным, и число оборотов, совер-
совершенных двигателем за указанный промежуток времени.
Имеем
соо= 1200 об/мин, со = A200 + It) об/мин;
при t = 90 с со = 800 об/мин, что дает
. 800-1200 400 ., 2 ол_ ., 2
е = т-= = — об/мин2 = — 267 об/минЛ
1,0 1,0
Далее получим
„ , 1200. - «, 1200 ¦ 1,5 - ™: f „ 1500 об.
1 ,о * Ji 1,0 • Z
К этому же результату можно прийти, подставляя найденное значе-
значение е в формулу A2).
Пример 38. Стрелка гальванометра совершает колебания амплитуды
Фо = 15° и периода Т = 4 с. Считая колебания гармоническими, написать
уравнение вращения, найти угловую скорость и угловое ускорение стрелки.
Вопрос о гармоническом колебании в прямолинейном движении подробно
разбирался в § 40. Особенность настоящего случая лишь в том, что вели-
величиной, изменяющейся по гармоническому закону, является не абсцисса дви-
движущейся точки, а угол поворота тела. Имеем
ф = <р0 sin (kt
где k — частота, связанная с периодом формулой k = 2я/Г, фо — амплитуда,
а — начальная фаза.
При заданных численных значениях получим
1 2я 2jx , --. .
& = —= — « 1,57 1/с;
амплитуда, выраженная в радианах, будет равна
__ TL- 15° Я
ф0~""~180^~"Т2#
Итак,
Для определения начальной фазы предположим, что отсчет времени ве-
ведется от того момента, когда конец стрелки занимал крайнее правое положе«
ние на шкале, Тогда при / = 0 <р = <р0; следовательно a = я/2, т. е.
, 71 7lt
^ — cos —.
Угловая скорость стрелки и ее угловое ускорение соответственно равны
п2 . nt л3 nt
Ш = -М-51П-2-' 8 = -ЖС05—•
Пример 39. Средняя угловая скорость четырехтактного одноцилиндро-
одноцилиндрового двигателя равна 300 об/мин; коэффициент неравномерности хода
б = 0,03. Найдем закон изменения угловой скорости, считая, что разность
со — сот ее мгновенного и среднего значений изменяется в течение периода по
гармоническому закону.
При установившемся движении, когда отдаваемая двигателем мощность
равна потребляемой, двигатель или идет равномерно (паровые турбины), или
§ 50. ВРАЩЕНИЕ ВОКРУГ НЕПОДВИЖНОЙ ОСИ 215
имеет периодическую неравномерность хода (поршневые машины); в послед-
последнем случае угловая скорость изменяется периодически, возвращаясь к перво-
первоначальному значению через определенный период. Этот период равен вре-
времени, в течение которого происходит рабочий цикл в двигателе. Например,
в случае двухтактного одноцилиндрового двигателя он равен времени одного
оборота главного вала, для четырехтактного одноцилиндрового двигателя —
времени двух оборотов и т. д.
Величина периодической неравномерности хода характеризуется так на-
аываемым коэффициентом неравномерности 6:
где Wmax — максимальное, comin — минимальное, com — среднее значение угло-
угловой скорости:
«т = у («max + ©rain).
Решая эти уравнения относительно сотах и comin, найдем
СО =0
max m
0+1). •¦.,.-„. 0-4).
По условию разность ю — еот изменяется в течение периода по гармони-
гармоническому закону
со — 0т = a sin {kt + a);
остается определить амплитуду а и частоту k\ величина начальной фазы
может быть принята равной нулю.
Для определения амплитуды а заметим, что о> = сотах при sin kt = 1.
Это дает условие
заменяя 0тах его значением, получаем
сот (l + yJ — 0т = а,
т. е.
В случае одноцилиндрового четырехтактного двигателя период равен
времени двух оборотов вала BГ) и
k=s 2T" = Y@m*
Получаем
или
— sin -
В рассматриваемом численном примере @/п =—' = Юл 1/с,
б = 0,03; находим
со = Юл A + 0,015 sin 5лО 1/с
Дифференцируя, найдем угловое ускорение:
е = 0%75л2 cos 5л/ ^ 7,4 cos 5л/ 1/с2,
216 ГЛ. ХШ. ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
§ 51. Скорости и ускорения точек твердого тела,
вращающегося вокруг неподвижной оси
Траекторией любой точки М твердого тела, вращающегося
вокруг неподвижной оси, является окружность (рис. 130), рас-
расположенная в плоскости, проведенной через М перпендику-
перпендикулярно к оси вращения; центр этой окружности находится в пе-
пересечении только что упомянутой плоскости и оси вращения;
радиус окружности равен расстоянию h точки М от оси враще-
вращения. Дуга а, отсчитанная от начального положения Мо точки
до положения ее М в момент ty соответствующая углу поворота
Ф, равна
а = А<р. A3)
Направление положительного отсчета дуг окружности а соот-
соответствует направлению положительного отсчета углов пово-
поворота ф.
Направляя, как всегда, касательную к траектории точки,
в данном случае к окружности, в сторону возрастания дуги а,
определим скорость в проекции ее на касательную:
do d у , d(p - «, 1Л л\
°х = -зг = -5гЛф = Л^г = Аа>; A4)
величина h вынесена за знак производной по времени, как
расстояние точки до оси, не изменяющееся при вращении твер-
твердого тела.
Численная величина скорости будет равна
0 = юй, A5)
т. е. скорость любой точки тела, вращающегося вокруг непо-
неподвижной оси, равна произведению угловой скорости тела на
расстояние точки до оси вращения.
Чтобы подчеркнуть отличие угловой скорости тела от ско-
скорости какой-либо его точки, последнюю называют часто линей-
линейной скоростью, а иногда окружной скоростью.
Скорости различных точек твердого тела в данный момент
времени будут различаться лишь множителем /г, так как угло-
угловая скорость со для всех точек тела в данный момент времени
одна и та же и определяется законом изменения угла поворота
тела во времени.
Направление вектора скорости v определится касательной
к окружности, по которой движется точка, или, что все равно,
перпендикуляром к плоскости, проходящей через ось вращения
и данную точку, проведенным в сторону вращения тела.
Таким образом, можно установить следующий закон распре-
распределения скоростей в теле, вращающемся вокруг неподвижной
оси: в данный момент времени скорости различных точек тела
§ 51. СКОРОСТИ И УСКОРЕНИЯ ТОЧЕК ВРАЩАЮЩЕГОСЯ ТЕЛА 217
пропорциональны их расстояниям от оси вращения и направ-
направлены в сторону вращения тела перпендикулярно к плоскостям,
проходящим через ось вращения и рассматриваемые точки.
При вычислении линейных скоростей точек вращающегося
тела по формуле A5) необходимо помнить, что угловая ско-
скорость должна быть выражена в 1/с, 1/мин и др., а не в об/с
или об/мин, так как только тогда будет правильно соблюдена
размерность скорости.
Перейдем к рассмотрению ускорений точек тела, вращаю-
вращающегося вокруг неподвижной оси. Воспользуемся для этого фор-
формулами проекций ускорения на касательную и главную нормаль
к траектории — в данном случае к окружности радиуса А,—
выведенными ранее в § 46:
f = (®h) = &h w = = = (i>2h A6)
В рассматриваемом случае вращения тела касательную
и нормальную составляющие ускорения принято называть со-
соответственно вращательной и осестремительной составляющими
вектора ускорения или кратко вращательным и осестремитель-
ным ускорениями и обозначать тг>(в> и w^oc\ Для проекций этих
составляющих на касательную и главную нормаль к траектории
примем обозначения
wW = eh, ^ос) = со2А. A7)
При вычислениях по этим формулам ё и со следует выра-
выражать в 1/с2 и 1/с, а не в об/мин2 и об/мин.
Проекция осестремительного ускорения на главную нормаль
к траектории, как это видно из последней формулы, всегда по-
положительна, т. е. осестремительное ускорение яу(ос) = wioc)ti
всегда направлено по радиусу окружности от точки к оси вра-
вращения, почему его и называют осестремительным ускорением.
Что же касается вращательной составляющей г^(в) = w^t, то
она направлена по касательной в сторону положительного от-
отсчета углов (и дуг), если е > 0, и в противоположную сторону
при е < 0. Если вспомнить, что направление v — vxx = h&t
определяется знаком со, то можно прийти к следующему легко
запоминаемому правилу: вращательное ускорение направлено
в ту же сторону, что и скорость, если вращение тела ускорен-
ное, и в сторону, противоположную скорости, если вращение
замедленное.
На рис. 132 и 133 показано взаимное расположение враща-
вращательного и осестремительного ускорений и скорости при одном
и том же направлении вращения тела. Рис. 132 относится
к ускоренному, рис. 133 — к замедленному вращению. Чтобы
?18
XIII. ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
не затемнять чертеж, само тело опущено и нарисована траек-
траектория (окружность) в том виде, как она представится наблю-
наблюдателю, смотрящему вдоль оси вращения дела.
Пользуясь формулами проекций ускорения A7), найдем
полное ускорение точки вращающегося тела*):
w =
^ f
= h
со4
A8)
В также и острый угол а, образованный вектором ускорения w
(рис. 132, 133) в направлением нормали МО к траектории:
w
г
со2
A9)
В данный момент времени для всех точек вращающегося
тела ё и со одинаковы; следовательно, полные ускорения по ве-
величине будут различаться лишь множителем h, характеризую-
ш
Ускор&нное Зращение
Рис. 132.
Замедленное Вращение
Рис. 133.
щим расстояние рассматриваемой точки от оси вращения; угол,
образованный вектором ускорения с соответствующим радиусом
вращения точки, будет в данный момент времени одним и тем
же для всех точек.
Таким образом, приходим к следующему закону распреде-
распределения ускорений в твердом теле, вращающемся вокруг непо-
неподвижной оси: в данный момент времени ускорения точек тела
пропорциональны расстояниям точек от оси вращения и накло-
наклонены под одинаковыми углами к радиусам вращения.
Обратим внимание на следующие частные случаи.
1. Если тело вращается равномерно, то е=0 и, следова-
следовательно, во все время движения вращательное ускорение точек
тела равно нулю; ускорение сводится к осестремительному.
*) Значок «~» над е и со опускается в тех случаях, когда по смыслу
формулы фигурируют лишь положительные величины»
§ 51. СКОРОСТИ И УСКОРЕНИЯ ТОЧЕК ВРАЩАЮЩЕГОСЯ ТЕЛА 219
2. Если в некоторый момент времени угловая скорость й
тела достигает максимального или минимального значения, то
d(h/dt в этот момент обращается в нуль и вращательное уско
рение всех точек тела также обращается в нуль.
3. Если в некоторый момент угол поворота достигает макси-
максимального или минимального значения, то со = dq/dt обра*
щается в нуль и осестремительное ускорение в этот момент для
всех точек тела равно нулю.
Последние два случая наблюдаются, например, при колебав
тельных вращениях тела.
Пример 40. Сравним скорости и ускорения на ободе маховика паро
вой машины, имеющего диаметр D = 1,5 м и вращающегося с угловой ско-
скоростью п = 240 об/мин, и турбинного диска, имеющего диаметр 0,7 м и со*
вершающего 18 000 об/мин.
В первом случае
яп 240л а , . , D
Ш 8я1/с Л
и, следовательно,
v = о,75 • 8я = 18,85 м/с, w = w{oc) = 0,75 • (8яJ = 473 м/с2-
Окружная скорость и осестремительное ускорение точки обода турбий«
ного диска будут равны
0 = _ШЮ^. 0,35 = 659,7 м/с,
ои
w = ш<ос) = h®2 = 0,35 • 600V = 1,24 • 106 м/с2.
Ускорение частиц на ободе диска в 126 000 раз превосходит ускоренна
силы тяжести g = 9,81 м/с2.
Пример 4L Колесо / вращается с угловой скоростью coi вокруг не*
подвижной оси Oi и находится в зацеплении с колесом //, вращающимся
вокруг неподвижной оси О2 (рис. 134). Ра-
Радиусы окружностей, в точках которых про-
происходит соприкосновение колес, равны со-
соответственно гх и г2. Найдем угловую ско-
скорость колеса //.
При отсутствии скольжения между по-
поверхностями колес линейная скорость
точки соприкосновения одна и та же, будем
ли считать эту точку принадлежащей пер»
вому колесу или второму, т. е.
Обозначая через Z\ и Zz числа зубьев Рис. 134.
первого и второго колеса, а через t—шаг
зацепления, т. е. расстояние между какими-
нибудь соответствующими друг другу точками двух смежных зубьев, изм$1
ренное по начальной окружности, имеем
2nri — z[t1 2nr2 — z2t.
В паре сцепляющихся колес шаги должны быть равны друг другу»
лучаем
со2 a zx'
12120
ГЛ. XIII. ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
т. е. угловые скорости колес обратно пропорциональны числам зубьев или
радиусам начальных окружностей.
В случае внешнего зацепления направления вращения колес противопо-
противоположны, в случае внутреннего зацепления — одинаковы. Желая отметить это,
введем вместо абсолютных значений (Oi и со2 их алгебраические значения coi
й со2. Тогда последняя формула примет вид
«2
] г2 :
где верхний знак относится к внутреннему зацеплению, нижний — к внеш-
внешнему.
Последняя формула применима не только к случаю круглых колес, но
и к любому случаю передачи вращения от одного вала к другому при по-
помощи колес любых очертаний. Разница состоит в том, что в общем случае
отношение г21г\ переменно, и при по-
постоянной угловой скорости coi пер-
первого колеса угловая скорость сог вто-
второго колеса получается переменной.
Пример 42. Лобовая пере-
передача. Ведущий валик // (рис. 135)
лобовой передачи вращается с уг-
угловой скоростью 600 об/мин.
В начальный момент времени
расстояние d плоскости ведущего ко-
колеса от оси вращения ведомого коле-
колеса (диска) / было равно 0,1 м и
Рис. 135. валик начал передвигаться вдоль сво-
своей оси со скоростью 0,004 м/с так,
что расстояние d стало уменьшаться.
Пренебрегая скольжением между поверхностями ведущего валика // и ди-
сда /, определить угловую скорость и угловое ускорение ведомого диска, если
радиус ведущего колеса г равен 0,02 м.
Из условия отсутствия скольжения между колесами в плоскости веду-
ведущего колеса следует равенство окружных скоростей точек соприкосновения
ведущего и ведомого колес:
Закон изменения расстояния d со временем имеет вид
d = 10 — 0,4/;
2 • 600 2я 40л;
следовательно,
(Л, = (Лп
1 d 2
_2я_
10 — 0,4* ' 60
10 — 0,4^
1/с.
Отсюда дифференцированием по времени найдем угловое ускорение ведо-
ведомого колеса:
_._ dan __ 16я 2
81 ~ dt A0-0,402 '
Пример 43. Эллиптические колеса. Передача вращения ме-
между осями Oi и О2 осуществлена при помощи двух равных эллиптических
колес (рис. 136). Оси Oi и О2 проходят через фокусы эллипсов. По заданной
постоянной угловой скорости (Oi первого колеса найдем угловую скорость Ш2
§ 51. СКОРОСТИ И УСКОРЕНИЯ ТОЧЕК ВРАЩАЮЩЕГОСЯ ТЕЛА
221
и угловое ускорение 8г второго колеса. Большая полуось эллипсов равна а,
малая Ь, расстояние между осями О^Ог = 2а, расстояние между фокусами
ОХО[ = О2О2 = 2 дА2 — Ь2 = 2с.
Имеем, поскольку зацепление внешнее (см. пример 41),
со2 = —
Найдем сначала максимальную и минимальную по абсолютным значе-
значениям величины со2. Первая будет иметь место при максимальном г4 и мини-
минимальном Г2, т. е. когда в соприкосновение вступят
точки Mi и Mz: П1 и>г
V'2'KI2 — '2 по-
последовательно,
«2 max =
Точно так же найдем
^2 min =
а + с
а — с
соь
а — с
а + с
Несколько сложнее получить закон передачи вращения. Обозначим
рез ф угол поворота первого колеса. Заметим, что
так как
г2 = О2М = О\М,
и по свойству эллипса сумма
также равна 2а. Из А 0{М0{ имеем
(О[мJ = г22 = г2 + 4с2 - 4cr{ cos ф;
но
r2 = 2a — ги
и, следовательно,
Bа — rjJ = 4a2 — 4ar{ + r\ = r\ + 4c2 — 4cr{ cos Ф,
т. e.
а2 — с2 о а2 — 2ас cos ф + с2
f. = ^g = la — Т\ = 1
а — с cos ф а — с cos ф
Получаем
г2
a2 — c2
а2 — 2ас cos ф + с2
522
ТЛ. ХИТ. ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
При ф = 0 и ф = я получаем результат, уже найденный выше. На рис. 137
Дан график «~gJ/g>i в зависимости от угла поворота ф при с/а -<=¦ 2/3.
*w,
0 arccosf SL
3n
2
jt f
Рис. 137.
-2,5-
Рис. 138.
Дифференцируя сэ2 при постоянном
Лучим угловое ускорение второго колеса:
2ас (а2 — с2) sin ф
и имея в виду, что ф = cdi, по-
по-cot.
2 (а2 — 2ас cos ф + с2)'
График изменения 82 представлен на рис. 138; при ф = 0 и ф = я имеем
е2 ==¦ 0, как и должно быть, так как в этих положениях W2 имеет экстре-
экстремальные значения.
§ 52. Векторные формулы скорости и ускорения точек
твердого тела, вращающегося вокруг неподвижной оси
В дальнейшем при рассмотрении общих случаев движения
твердых тел придется иметь дело с вращениями вокруг подвиж-
подвижных осей, меняющих свое направление в пространстве. В этих
случаях уже нельзя довольствоваться рассмотрением угловой
скорости и углового ускорения как алгебраических величин,
а становится необходимым связывать их с ориентацией в про-
пространстве. Это достигается, если ввести угловые скорости
и ускорения как векторы и в связи с этим для векторов линей-
линейных скоростей и ускорений установить векторные формулы,
представляющие эти величины как по величине, так и по на-
направлению.
Введем в рассмотрение вектор угловой скорости, который
будем обозначать через со.
Величиной вектора угловой скорости со является
52. ВЕКТОРНЫЕ ФОРМУЛЫ СКОРОСТИ И УСКОРЕНИЯ
223
Направление вектора угловой скорости естественно связать
с осью вращения твердого тела. Необходимо указать, в какую
сторону по оси вращения откладывать вектор со.
Выбрав положительное направление оси вращения, усло-
условимся относительно направления положительного отсчета углов
поворота тела, связывая его с направлением поворота оси Ох
к оси Оу на я/2, если смотреть с положительной стороны оси
Ог (§ 11). Такое условие позволяет сохранить одинаковое опре-
определение положительного поворота как в правой, так и в левой
системе координат, хотя положительный поворот в правой си-
системе происходит в сторону, противоположную положительному
повороту в левой системе; при этом
все аналитические формулы (т. е.
формулы, заключающие проекции
на оси координат) сохраняют оди-
одинаковый вид как в правой, так и в
левой системе координат.
Условимся направлять вектор
угловой скорости <о по оси враще-
вращения так, чтобы наблюдатель, смо-
смотрящий с конца вектора <о, видел
вращение тела в положительном
направлении, т. е. против часовой
стрелки при правой системе коор-
координат (рис. 139).
Так, например, при правой системе координат вектор угло«
вой скорости вращения Земли направлен к Северному полюсу*
Направление вектора угловой скорости совпадает с направо
лением осевого движения правого винта при ввинчивании его
в неподвижную гайку.
Вектор со можно расположить в любом месте на оси вра*
щения. Такие векторы, как мы уже знаем, называют скользя*
щами в отличие от закрепленных векторов, какими являются,
например, скорость и ускорение точек. Напомним, что вектор
силы, приложенный к абсолютно твердому телу, также был
скользящим вектором. В этом случае роль прямой, вдоль ко*
торой допускалось скольжение вектора, играла линия действия
силы.
Векторы силы, скорости, ускорения и т. д. имеют опреде-
определенное направление, не зависящее от выбора правой или левой
системы координатных осей. Иначе обстоит дело с вектором
угловой скорости. При замене левой системы координат на пра«
вую вектор угловой скорости твердого тела, вращающегося в
определенном направлении, будет менять свое направление на
противоположное. То же самое можно сказать о векторе мо<»
мента силы относительно точки или о моменте
Рис. 139.
224
ГЛ XIII. ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Векторы, направление которых остается неизменным при пе-
переходе от одной (правой или левой) системы осей к другой
(левой или правой) и определяется направлением той физиче-
физической величины, которая ими описывается, называют истинными
векторами; в противоположность им векторы, направление ко-
которых приходится менять на противоположное при замене ле-
левой системы осей на правую (или правой на левую), назы-
называются псевдовекторами.
Существуют также и скалярные величины, обладающие
свойством менять свой знак при переходе от правой системы
координат к левой. Простейшим примером
служит скалярное произведение истинного
вектора на псевдовектор. Такие скаляры
называют псевдоскалярами.
Псевдовектор со угловой скорости вра-
вращения абсолютно твердого тела получает
применение и в случае вращения элемен-
элементарного объема любой деформируемой
сплошной среды. Вектор ш является «со-
«сопутствующим» вектором (§ 34) дифферен-
дифференциального тензора поля скоростей, кото-
который обозначается символом Grad V (см.
далее § 76). В § 34 было показано, что
«сопутствующий» вектор любого антисим-
антисимметричного тензора при переходе от пра-
правой системы координат к левой или наоборот меняет направле-
направление на противоположное, т. е. ведет себя как псевдовектор.
Свойство псевдовекторности является общим для всех векторов
со, эквивалентных антисимметричной части асимметричного тен-
тензора второго ранга (см. далее § 76).
Откладывая вектор со по оси вращения, можно определить
вектор линейной скорости v любой точки М как векторное про-
произведение вектора угловой скорости на вектор-радиус этой
точки относительно любой точки оси вращения (рис. 140):
v = G>Xr. B0)
В самом деле, величина векторного произведения B0) равна
X) = cor sin a = соЛ, B1)
т. е. величине скорости; пусть, далее, принята правая система
осей, тогда при показанном стрелкой направлении вращения
вектор угловой скорости должен быть отложен по оси враще-
вращения вверх (рис. 140). Векторное произведение соХ*" перпендику-
перпендикулярно к о) и г и направлено так, чтобы, смотря с его конца,
видеть поворот от ш к г на наименьший угол против часовой
стрелки; но это и будет направление скорости v.
Рис. 140.
§ 52 ВЕКТОРНЫЕ ФОРМУЛЫ СКОРОСТИ И УСКОРЕНИЯ 225
К равенству B0) можно прийти также, рассматривая ве-
величину вектора скорости v по B1) как величину момента век-
вектора угловой скорости со относительно центра М. По определе-
определению момента будем иметь
v = mM (©) = г' >< со,
где г' = —г есть вектор-радиус точки О относительно М. От-
Отсюда по известному свойству векторного произведения следует
г; = — г X <*> = <*> X г.
Формула B0) является основной формулой кинематики
твердого тела; как увидим далее, она сохраняет свой вид не
только в случае вращения вокруг неподвижной оси, но и в слу-
случае вращения тела вокруг неподвижной точки.
Проектируя обе части B0) на координатные оси, найдем
проекции скорости. Если принять ось вращения за ось Ог, то
проекции вектора со будут равны
<*х = 0, со^ = 0, со2 = 6 = ф.
По известным формулам проекций векторного произведения
получим
vx= — 8>y, vy = (bx, vz = 0, B2>)
где х и у (z не входит в эти формулы) —координаты точки М.
Если координатные оси ориентированы произвольно, то, обо-
обозначая через оь, щ, (Dz проекции на них вектора ш, получим
формулы Эйлера:
Vx = toyZ — <0гу, Vy = ®2Х — (x>xZ, Vz = ®ху — (дуХ. B3)
Формулам Эйлера B3) можно придать удобный для запоми-
запоминания вид определителя:
г j
х у ;
Выведем теперь векторную формулу ускорения. Для этого
возьмем векторную производную по времени от обеих частей
равенства B0); будем иметь
dv d , ч/ ч d(a w , _ ч . dr
Производную по времени от вектора угловой скорости to
назовем вектором углового ускорения. Так как в рассматривае-
рассматриваемом случае о является вектором постоянного направления (ось
вращения неподвижна), то, согласно сказанному в начале § 45,
величина углового ускорения будет равна абсолютному значе-
значению производной от величины угловой скорости, а направление
8 Л. Г. Лойцянский, А. И. Лурье
226
ГЛ. XIII. ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО
его или совпадает, или противоположно ш сообразно тому, воз*"
растает или убывает с течением времени величина угловой ско-
скорости (рис. 141). Называя вектор углового ускорения в согла-
согласии с ранее введенным обозначением г и замечая еще, что по
определению скорости dr/dt = v, приведем B4) к виду
w = eXr + <*Xv. B5)
Первое слагаемое, еХ^, представляет собой вращательную
составляющую ускорения. Действительно, оно равно по вели-
величине гг sin (e, г) = еЛ, а по направлению совпадает со ско-
скоростью z> = (oXf", если векторы (о и 8 сонаправлены, и проти*
воположно скорости, если о и е разнонаправлены; первое будет
иметь место в ускоренном, а второе — в замедленном вращение
Успоренное Вращение Замедленное бращение
сок ш
Рис. 141.
Второе слагаемое в формуле B5) представляет собой осе*
стремительное ускорение. Его величина равна сои sin(o), v)= co2/t,
так как векторы о) и v взаимно перпендикулярны, а г; = со/г.
Направление векторного произведения о>Х^ перпендикуляр-*
но к оси вращения (вектору о>) и скорости v, т. е. идет по ра*
диусу круга, описываемого точкой, к его центру. Итак, дей*
ствительно,
w(b) = 8 X г, w<oc> = (о X v. B6)
Расположение этих векторов при ускоренном и замедленном
вращении показано на рис. 141.
Формулы B0) и B6) представляют собой векторные обоб*
щения формул A5) и A7).
Глава XIV
ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
§ 53. Уравнения плоского движения
Следующим в порядке сложности движения абсолютно
твердого тела будет плоское движение, при котором ось вра-
вращения остается во все время движения параллельной самой
себе, но движется поступательно в пространстве. Определим
А
Рис. 142.
плоское движение как такое, при котором все точки твердого
тела, расположенные в плоскостях, параллельных некоторой
неподвижной плоскости, во все время движения остаются в тех
же плоскостях. Если разбить мысленно тело на плоские сече-
сечения, параллельные заданной плоскости, то эти сечения будут
оставаться каждое в своей плоскости.
Этот случай движения имеет большое техническое значение:
механизмы, встречающиеся в технике, за немногочисленными
исключениями, представляют собой системы твердых тел, со-
совершающих плоское движение. Плоское движение совершают
механизмы для вычерчивания разных кривых (эллипсограф,
конхоидограф), всевозможные кулисные механизмы, эпицикли-
эпициклические механизмы, применяемые в редукторах скоростей, и т. д.
Пусть тело А (рис. 142) совершает движение, параллельное
плоскости П. Проведем мысленно в теле ряд плоскостей IT,
П", ..., параллельных П. Тело разобьется на ряд плоских фи-
фигур S\ S", ... Все точки, принадлежащие какой-нибудь фигу-
8*
228 ГЛ XIV ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
ре, движутся в плоскости фигуры, и, следовательно, фигура в
целом движется в своей плоскости. Движение одной такой пло-
плоской фигуры вполне определяет движение всего твердого тела,
так как плоскости, которыми мы разбили твердое тело, друг
с другом неизменно связаны и не могут двигаться друг по от-
отношению к другу.
Если мы возьмем в какой-нибудь фигуре S' точку ЬМ и
восставим в ней перпендикуляр к плоскости фигуры S', то
точки ЛГ и М" фигур S' и S", лежащие на этом перпендику-
перпендикуляре, будут иметь одинаковое движение, т. е. будут описывать
одинаковые траектории, иметь оди-
одинаковые скорости, одинаковые
ускорения.
Таким образом, можно значи-
значительно упростить изучение плоско-
плоского движения твердого тела — до-
достаточно изучить движение одной
плоской фигуры в ее плоскости.
Возьмем две системы осей в пло-
скости движения фигуры: одну си-
систему Оху—неподвижную, другую—
Рис. 143. О'х'у', неизменно связанную с дви-
движущейся фигурой (рис. 143). Поло-
Положение точки М фигуры в неподвижной плоскости будем опреде-
определять вектор-радиусом г, проведенным из начала О неподвижной
системы осей; выбор рассматриваемой точки фигуры определя-
определяется указанием вектора г', проведенного из начала О' подвижной
системы. Вектор-радиус начала О' относительно О обозначим
через г0. Проекциями вектора г на оси х и у будут декартовы
координаты х и у в неподвижной системе осей; при движении
фигуры координаты х и у изменяются со временем; в противо-
противоположность этому проекции вектора г' на подвижные оси, т. с.
декартовы координаты х' и у' точки М в системе подвижных
осей, остаются постоянными, как расстояния точек твердой фи-
фигуры до проведенных на ней прямых.
Всякой точке фигуры соответствует определенная пара чи-
чисел х' и у'. В частности, точке О', началу подвижной системы,
соответствуют значения х' и у', равные нулю; значения коор-
координат х я у для этой точки обозначим через хо и у0 (проекции
вектора г0).
Чтобы определить положение подвижной системы осей от-
относительно неподвижной, достаточно задать: 1) положение на-
начала О', т. е. координаты хо и у0 или, что то же, вектор-радиус
г0; 2) угол одной из подвижных осей с одной из неподвижных,
например угол ср оси х с осью х'. Последнее требует некоторого
уточнения. Условимся считать, что перпендикулярная к пло-
§ 53 УРАВНЕНИЯ ПЛОСКОГО ДВИЖЕНИЯ 229
скости фигуры ось z направлена так, что оси хуг и x'y'z' со-
составляют правые системы. Это определит положительное на-
направление отсчета угла ср: смотря с конца оси z(zr), наблюда-
наблюдатель должен видеть поворот оси х к оси х' происходящим про-
против часовой стрелки. В изображенном на рисунке расположе-
расположении осей ось z направлена к читателю.
Заданием трех величин хо, уо и ср положение системы по-
подвижных осей вполне определяется. Вместе с тем по этим дан-
данным определяется и положение плоской фигуры. Поэтому дви-
движение плоской фигуры следует считать известным, если в лю-
любой момент времени известны значения величин хо, уо, ср или,
что то же самое, заданы значения их в функции времени.
Назовем начало О' подвижной системы основной точкой или
полюсом\ угол ф будет в таком случае углом поворота вокруг
полюса.
Плоское движение твердого тела определяется:
1) уравнениями движения основной точки
*о = МО, »<> = МО; (О
2) уравнением вращения фигуры вокруг полюса
Ф = Ф@. B)
Чтобы получить уравнения движения любой точки плоской
фигуры, спроектируем на неподвижные оси х и у очевидное
геометрическое равенство
г = го + г'. C)
Получим (см. рис. 143)
х = х0 + х' соз ф — у' sin ф,
У == Уо + *' sin Ф + у' cos ф.
Здесь л'о, Уо, Ф — заданные функции времени. Уравнения D)
представляют собой уравнения движения точки М или, что то
же самое, параметрические уравнения ее траектории. Исклю-
Исключая из них время, получим уравнение траектории.
Поясним сказанное несколькими примерами, иллюстрирую-
иллюстрирующими отмеченную в начале отдела связь кинематики с геомет*
рией кривых, которые рассматриваются как траектории точек
плоской фигуры.
Пример 44. Эллипсограф. Составить уравнение траектории любой
точки М (рис 144) плоской фигуры S, неизменно связанной с линейкой АВ
длины 2/, концы которой А и В скользят по двум взаимно перпендикуляр-
перпендикулярным осям Ох и Оу.
Примем за полюс середину линейки О' и обозначим через х' и у' коор-
координаты точки М в системе осей О'х'у'\ неизменно связанной с движущейся
плоской фигурой. Составим уравнения движения полюса:
Xq = / sin ф, у о = / cos ф.
230
ГЛ. XIV. ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Угол <р является некоторой функцией времени. Поскольку речь идет
только об определении траектории, вид этой функциональной зависимости не
/г'
Ш1ШМШ1ШГ
Рис. 144.
Рис. 145.
имеет значения. Все точки фигуры 5 описывают вполне определенные траек-
траектории независимо от того, по какому закону изменяется во времени угол (р.
Уравнения D) дают
л; ==* / sin ср + х' cos ф — yr sin ср = (/ — у') sin ф + xr cos ф,
у == / cos ф + х' sin ф + у/ cos ф = (/ + у') cos ф + xr sin ф.
Решая эти уравнения относительно sin ф и cos ф, получим
sin
— (/ + У*)
cos ф =
Х'Х — (/ — у') у
s—-—'
Исключая теперь ф при помощи соотношения cos2 ф + sin2 ф = I, получим
[х'у - (/ + yf) xf + [х'х - (/ - у') у]2 = (х'2 + у'2 - /*J;
это уравнение может быть приведено к виду
Ах2 + By2 - 2Сху = D,
где
B=*x'2+(t-y'J, C =
Полученная кривая второго порядка является эллипсом% так как коэффй*
циенты А, В, С удоблетворяют условию
а это, как известно из аналитической геометрии, характеризует эллипо. Рас;*
смотренный механизм поэтому называют эллипсографом, а движение — эл*
липтическим. Модель такого механизма показана на рис. 145. Центр эллипса
находится в начале координат, так как уравнение его не содержит членов
первой степени относительно х и у*
§ 53. УРАВНЕНИЯ ПЛОСКОГО ДВИЖЕНИЯ
231
Если, в частности, точка взята на линейке (*'= 0), то уравнение эл-
эллипса перейдет в следующее:
или по упрощении:
а-уу ' (i + y'f
В этом частном случае осями симметрии эллипса являются координатные
оси.
Рассмотрим другой частный случай, когда точка М лежит на окруж-
окружности С радиуса / с центром в О'. В этом случае хг и у' связаны уравне-
уравнением окружности и,, следовательно,
= х
'2
у'2 + 12 + 21у' = 21A + у'), В = 2/ (/ - у%
С = 21х' = 2/ У/2 —г/'2, D = 0.
откуда
или
Уравнение эллипса приобретает вид
(/ + у') х2 + A — у') у2 —2 л/l2 — у'2 ху = 0,
WTTV х - V^T7 уJ = о,
Таким образом, точки, лежащие на круге С, описывают отрезки пря-
прямых, проходящих через начало координат.
Этим свойством можно воспользоваться для построения осей эллипса,
описываемого произвольной точкой М. Нужно через эту точку провести диа-
диаметр круга С; прямые OL и О/С, прове-
проведенные через точку О и концы L и К
этого диаметра, будут искомыми осями
эллипса. Чтобы убедиться в этом, до-
достаточно заметить, что траекториями
точек L и К являются прямые OL и
ОК, и, следовательно, LK можно рас-
рассматривать как линейку эллипсографа,
скользящую вдоль двух взаимно перпен-
перпендикулярных прямых OL и ОК.
Пример 45. Обращенное эл-
эллиптическое движение. Движе-
Движение плоской фигуры Si (рис. 146) про-
происходит так, что связанные с этой
фигурой две взаимно перпендикулярные прямые Ох и Оу проходят через
неподвижные точки А и В (это можно осуществить, заставляя стержни Ох и
Оу проходить внутри направляющих трубочек, вращающихся вокруг осей А
и В). Определим траектории любой точки фигуры Si на неподвижной пло-
плоскости О'х'у'.
, Вернемся к предыдущему примеру. Любая точка движущейся плоскости
х'О'у1, связанной с линейкой эллипсографа, описывает эллипс: карандаш,
неизменно связанный с ней (хг и у' — постоянные), вычертит эллипс на листе
бумаги, скрепленном с плоскостью хОу. Представим себе теперь, что каран-
карандаш неизменно связан с плоскостью хОу (х и -у — постоянные), а лист
232
ГЛ. XIV. ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
бумаги скреплен с плоскостью х'О'у'. При этом осуществляется обращенное
эллиптическое движение, рассматриваемое в настоящей задаче.
Уравнения предыдущего примера, устанавливающие связь между коор-
координатами точки М в системах хОу и х'О'у', очевидно, имеют место и в рас-
рассматриваемом случае, так как геометрическая картина рис. 146 ничем не
отличается от той, которая была раньше на рис. 144. Разница лишь в том,
что прежде х' и у' были постоянными, а х и у переменными координатами,
в обращенном же движении постоянными будут х и у, а переменными х'
и у'. Уравнение траектории в обращенном движении представляется, как и
в предыдущем примере, в форме
[ух' - х (I + У')]2 + [хх' -уA- у')]2 = (х'2 + у'2 - /2J,
однако теперь х' и у' — текущие координаты, а х и у — постоянные числа.
Полученное уравнение алгебраической кривой четвертого порядка представ-
представляет собой конхоиду круга*). В частном случае х = у = 0 уравнение упро-
упрощается и принимает вид
т. е. вершина прямого угла О (начало координат) описывает окружность,
что, впрочем, было непосредственно ясно геометрически. Для построения
конхоиды круга можно использовать следующий механизм. В точках А и В
(рис. 147), находящихся на неподвижном устое, помещены два поворачи-
поворачивающихся ползуна. На них надет диск D с крестообразной прорезью, в ко-
которой ползуны могут скользить. Точка О, т. е. центр диска, описывает
окружность радиуса 00' = /, а точка Р на кресте — конхоиду круга. Если
прикрепить к диску лист материала и поднести к нему во время движения
неподвижный резец, то он вырежет из материала эллипс. В самом деле,
резец, будучи неподвижен, принадлежит устою, т. е. линейке АВ. Следова-
Следовательно, по отношению к движущемуся диску D резец выполняет ранее рас-
рассмотренное эллиптическое движение.
Пример иллюстрирует «принцип обращения механизмов», имеющий много
приложений в кинематике механизмов.
*""*" о
J
/
d
К
\
Рис. 147.
Рис. 148.
Пример 46. Конхоидограф. Определим траекторию точки М
(AM = d) стержня AM (рис. 148), проходящего через трубку, вращающуюся
*) Если радиус-векторы плоской кривой относительно некоторой точки
увеличить (или уменьшить) на одну и ту же величину, то геометрическое
место концов полученных радиус-векторов представит конхоиду данной кри-
кривой относительно выбранной точки.
§ 54. ПЕРЕМЕЩЕНИЕ ПЛОСКОЙ ФИГУРЫ 233
вокруг неподвижной оси N (ON = d). Конец А стержня скользит вдоль
неподвижной прямой Ох.
Примем точку А за полюс. Уравнения движения полюса будут иметь
вид
О А = хо = / @, Уо = О»
причем, поскольку речь идет только об определении траектории, вид функ-
функциональной зависимости Хо от t не играет роли. Уравнение вращения полу-
получим, замечая, что
По формулам D) получим (х' == —d, у' = 0)
х = х0 — d cos ф, у = — d sin qp.
Исключим из этих уравнений ср и хо. Получим
x = d (ctg ф — cos ф) = — d (l + у J cos ф, cos ф = —
Пользуясь соотношением cos2 ф + sin2 ф = 1, найдем
Это — уравнение конхоиды прямой; легко построить кривую по точкам,
вычерчивая ряд положений прямой AM. На рис. 148 показаны конхоиды,
соответствующие траекториям различных точек линейки: М, М\у Мг, Мз. При
AM = d кривая имеет угловую точку, при AMi > d — петлю, при АМ2 <С d
кривая не имеет особых точек, так же как и в том случае, когда точка Мз
расположена по другую сторону от ползуна А.
§ 54. Перемещение плоской фигуры
Положение плоской фигуры может быть задано положе-
положением двух ее точек О' и М или положением отрезка О'М
(рис. 149).
Пусть фигура О'М переместилась из положения / в поло-
положение //. Разобьем переход на две части. Сначала переместим
фигуру поступательно в положение /7, причем все точки ее по-
получат перемещения, геометрически равные перемещению О'О\
полюса О', а затем повернем фигуру на Z М О\М\ вокруг оси,
проходящей через точку Ох перпендикулярно к плоскости фи-
фигуры.
Заметим, что вектор поступательного перемещения зависит
от выбора полюса (основной точки), а угол поворота не за-
зависит от этого выбора. В самом деле, тот же переход из по-
положения / в положение // можно осуществить, приняв за по-
полюс точку М и переместив сначала фигуру в положение Г
(рис. 150), причем все точки фигуры получат перемещения, гео-
геометрически равные ММ\ и отличные от O'Oi, а затем повернув
234
ГЛ. XIV. ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
фигуру на ZO"MXOX вокруг оси, проходящей через Мх. Но по
свойству поступательного перемещения О"МХ параллелен О'М
и точно так же OxMf параллелен О'М. Следовательно, О"МХ и
ОХМ' параллельны между собой и ZO"MXOX = ZM'OXMX. Вме-
Вместе с тем поворот вокруг точек Ох и Мх в том и другом случае
Рис. 149.
Рис. 150.
происходит в одну и ту же сторону (на нашем рисунке по ча-
часовой стрелке). Окончательное положение фигуры не зависит
от того, будет ли сначала совершаться поступательное переме-
перемещение или поворот.
Таким образом, приходим к выводу: всякое перемещение
плоской фигуры в своей плоскости, а следовательно, и всякое
плоское перемещение твердого тела можно себе представить
как совокупность двух перемещений: 1) поступательного пере-
перемещения, зависящего от выбора полюса, и 2) вращательного
перемещения вокруг полюса-, угол и направление поворота от
выбора полюса не зависят.
Теорема доказана для любого конечного перемещения. Для
частного случая бесконечно малого перемещения дадим вектор-
векторную формулу. Для этого, возвращаясь к рис. 149, обозначим
перемещение полюса О' через ро, а перемещение точки М че-
через р; тогда
р = Ро + М?М1. E)
Здесь М'МХ представляет собой перемещение течки М при
повороте фигуры вокруг полюса. Обозначая угол поворота че-
через 6, будем иметь из треугольника OiM\M'
М'МХ = ОХМ' -2 sin у.
Принимая поворот бесконечно малым, можно заменить си-
синус его аргументом; тогда величина вектора М'МХ будет равна
§ 54. ПЕРЕМЕЩЕНИЕ ПЛОСКОЙ ФИГУРЫ . 233
Чтобы указать направление вектора М'Мг, введем в рас-
рассмотрение вектор-радиус гг точки М относительно полюса и
вектор бесконечно малого поворота в, определив последний
следующим образом: 1) величина вектора поворота равна ве-
величине угла поворота, 2) вектор в перпендикулярен к плоско-
плоскости перемещения, причем направлен в ту сторону, откуда по-
поворот фигуры виден происходящим в положительном напраз-
лении.
Введя вектор в, можем представить М'М{ в виде
АГМ! = в X г\
Действительно, это векторное произведение имеет величину
и в предельном случае бесконечно малого перемещения направ-
направлено так же, как и М'М{ (т, е. перпендикулярно к г' в сторону
поворота фигуры).
Формула E) дает
P = Po + 6Xr'. F)
Естественно возникает вопрос, нельзя ли, используя произ*
вольность в выборе полюса, осуществить заданное перемещен
ние тела одним поворотом, без поступательного перемещения^
На этот вопрос дает ответ теорема Эйлера*):
Всякое непоступательное перемещение плоской фигуры в ее
плоскости может быть осуществлено одним поворотом вокруг
некоторого центра.
Пусть фигура переместилась из положения / в положение //
(рис. 151).
Восставим из середин перемещений точек Л и В, т. е. из се-
середин отрезков АА' и ВВ\ перпендикуляры и найдем пересече-
пересечение их в точке С.
Докажем, что фигура / может быть переведена в положе-
положение // поворотом вокруг центра С на ZACA'= ZBCB'. В са-
самом деле, треугольники ABC и А'СВ' равны между собой? так
как АВ=А'В' в силу неизменяемости фигуры и АС = А'С,
ВС = В'С по построению. Следовательно,
ZACB= ZA'CB';
прибавляя к обеим частям этого равенства по одинаковому
*) Эта теорема была известна Паппу (III—IV в. н. э.)*
236 ГЛ. XIV. ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
углу ВСА', найдем, что
Z АСА' = z BCB'.
Повернем теперь фигуру / на угол АСА', тогда АС совме-
совместится с Л'С, ВС — с В'С, так как углы равны, и АВ совме-
совместится с А'В\ что и доказывает теорему. Точка С называется
центром поворота.
Рис. 152.
Только что указанное построение не дает результата в двух
случаях: 1) если перпендикуляры, восставленные из середин пе-
перемещений, сливаются в одну линию (рис. 152), но в этом слу-
случае центр поворота лежит на пересечении продолжений отрез-
отрезков АВ и АГВ'\ 2) если перпендикуляры параллельны между со-
собой, что имеет место при поступательном перемещении; этот
случай соответствует положению центра поворота в бесконеч-
бесконечном удалении.
§ 55. Поле скоростей точек плоской фигуры
Основываясь на формуле плоского перемещения и определе-
определении скорости как предела при Д?->0 отношения бесконечно ма-
малого перемещения р к промежутку времени А/, в течение кото-
которого это перемещение произошло (§ 42):
v= lim fr,
получим по F)
lim §¦
lim (|xr')
G)
(8)
Первое слагаемое, lim -77,
д*->о д*
рсновной точки:
представляет собой скорость
(9)
§ 55. ПОЛЕ СКОРОСТЕЙ ТОЧЕК ПЛОСКОЙ ФИГУРЫ 237
Вектор lim — назовем вектором угловой скорости враще-
дг->о А*
ния фигуры:
(о== lim Jt. (Ю)
Д*»0 A* V '
Направление ю совпадает с направлением 0; поэтому век-
вектор со перпендикулярен к плоскости движения, и если смотреть
вдоль него, то вращение фигуры должно представиться про-
происходящим в положительном направлении. Величина со равна
абсолютному значению производной угла поворота ср по вре-
времени. Действительно, если назвать значения угла ср в моменты /
и t + At соответственно через ср и ср + Дер, то 6=|Аф| и, сле-
следовательно,
Как и выше, в тех случаях, когда возможны недоразумения,
будем отличать со = |ф | от со = ф.
Отметим еще, что вектор угловой скорости со не изменяется
при перемене полюса, так как 0 от выбора полюса не зависит.
Это дало право назвать ю вектором угловой скорости фигуры.
Вернемся к формуле (8). Подставляя вместо
lim-?2-, lim JL
их значения (9) и A0), получим поле скоростей точек в плоском
движении фигуры
t> = t>o + «>Xr'. A1)
Рассмотрим два частных случая.
1. Поступательное движение: со = 0; формула (И) дает
т. е. скорости всех точек одинаковы и равны скорости полюса*
2. Вращение вокруг неподвижной оси: vq = 0; получаем
т. е. уже известный нам закон распределения скоростей при
вращении тела вокруг неподвижной оси.
В общем случае плоского движения тела скорость любой
точки складывается из скорости, которую имели бы все точки
тела при поступательном движении тела со скоростью v0 по*
люса О', и вращательной скорости юХг7 точки М вокруг по*
люса О' (рис. 153).
Говоря о вращении тела вокруг какой-либо точки, необхо*
димо указать систему отсчета, по отношению к которой враще*
238
ГЛ XIV ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
ние рассматривается. С этой целью соединим с полюсом О'
(рис. 154) систему координат О'х\у\, оси которой во время
движения остаются параллельными осям неподвижной системы
координат Оху. Движение системы координат Огх\у\ будет по-
поступательным, определяемым движением полюса О'. Эта си-
система и является системой отсчета, относительно которой рас-
рассматривается вращение тела вокруг полюса О'.
Назовем движение плоской фигуры по отношению к непо-
неподвижной системе Оху абсолютным движением, движение той
г
Рис. 153.
Рис. 154.
же фигуры по отношению к подвижной системе О'Х\у\ — отно-
относительным движением и, наконец, поступательное движение са-
самой системы координат О'х\ух по отношению к неподвижной
системе Оху — переносным движением*).
Пользуясь понятиями абсолютного, переносного и относи-
относительного движения, можно сказать, что абсолютное движение
плоской фигуры складывается из переносного — поступатель-
поступательного, определяемого движением полюса, и относительного —
вращательного движения вокруг полюса. При этом вращатель-
вращательная скорость точки М плоской фигуры есть не что иное, как
относительная скорость точки по отношению к системе коор^
динат О'х\у\, а поступательная скорость v0, общая всем точкам
системы О'х'у'у — переносная скорость.
Отметим важное следствие формулы A1). Дифференцируя
по времени уравнение C) § 53, получим
v~
dt
dr'
dt
*) Эта терминология заимствована из теории относительного движения,
которая будет изложена в гл. XVIL
§ 55. ПОЛЕ СКОРОСТЕЙ ТОЧЕК ПЛОСКОЙ ФИГУРЫ 239
но первое слагаемое представляет собой скорость полюса и,
следовательно,
т. е. вращательная скорость вокруг полюса равна производной
вектор-радиуса г' по времени.
В дальнейшем будем часто пользоваться другими обозна-
обозначениями— вектор скорости будем снабжать индексом внизу,
указывающим точку, скорость ко-
которой рассматривается; например,
vAi vB и т. д. будут обозначать ско-
скорости точек Л, В и т. д. Вектор-ра-
Вектор-радиус точки В, если за начало его
принята точка Л, будем обозначать
/АВ\ наконец, вращательную ско-
скорость точки В, когда за полюс при-
принята точка Л, обозначим через vAB.
Формула распределения скоро-
скоростей примет при этом вид
(рис. 155)
Vв = ®А Н~ vAB> A1')
причем Рис. 155.
т. е. вращательная скорость vAb равна по величине со*АВ и
направлена перпендикулярно к АВ в сторону вращения фигуры.
Составим формулы для проекций скорости точек плоской
фигуры. Проектируя обе части основной формулы (И) на не-
неподвижные оси Ох и Оу, найдем по формулам для проекций
векторного произведения
их — Vqx @ \у — i/o/, Vy — Voy -f G) \Х — -М)/» \*<3/
так как проекции г' на оси Ох и Оу в данном случае равны
х — Хо и у — г/о, а вектор угловой скорости имеет проекции
@,0,3).
Если движение плоской фигуры известно, т. е. хо, {/о, ф за*
даны в функции времени, то по этим заданиям вычисляются
Vqx = *0> VOy = у0> 3 = ф,
и скорость любой точки может быть определена по формулам
A3) и D). Проекции скорости на оси подвижной системы О'х'у'
получим, проектируя равенство A1) на оси этой системы:
Vx1 = vox' — G>y' = Vox cos ф + voy sin ф — 5>y\
Vy' = voyf + 5>x' = — vox sin ф + voy cos ф + 5>х'ш
240 ГЛ XIV ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
В заключение укажем на одну часто применяемую теорему:
Проекции скоростей концов отрезка на направление отрезка
равны между собой.
По формуле AГ) будем иметь, проектируя обе ее части
на направление отрезка АВ:
но вектор vAb перпендикулярен к направлению отрезка АВ, еле»
довательно, пр. vAB = 0, и окончательно получим (рис. 155)
\
\
что и доказывает теорему.
§ 56. Мгновенный центр скоростей
В предыдущем параграфе формула распределения скоро-
скоростей в плоском движении была получена из представления о
перемещении точки плоской фигуры в виде геометрической
N[ суммы перемещения полюса и перемеще-
• ния поворота вокруг полюса. Упрощение
-ЛР • Pl —i i& картины распределения скоростей в пло-
=0 ском движении можно получить, основы-
основываясь на представлении перемещения пло-
L, ской фигуры по теореме Эйлера (§ 54).
\«" "f-—**" Докажем следующую теорему:
V ( При всяком непоступательном дви-
движении плоской фигуры существует точка
фигуры, скорость которой в данный мо-
- /<F^f*tL мент равна нулю.
Л ^ *- для доказательства (рис. 156) вос-
восставим из точки А плоской фигуры пер-
Рис. 156. пендикуляр AN к направлению скоро-
скорости vA так, чтобы угол я/2 между vA и
линией AN был отсчитан в сторону вращения фигуры. Тогда по
предыдущему вектор скорости любой точки М на этом перпен-
перпендикуляре будет равен
Ч
= vA + vAM,
а величина скорости
vM = vA — <u • AM.
Изменяя расстояние точки М от точки Л, можно при со ф О
найти такую точку Р, чтобы vAp = —vA\ тогда
§ 56 МГНОВЕННЫЙ ЦЕНТР СКОРОСТЕЙ
при этом будем иметь
241
Точка Р плоской фигуры, скорость которой в данный мо-
момент времени равна нулю, называется мгновенным центром
скоростей фигуры.
Для любых точек фигуры будем иметь, принимая Р за.
полюс (vp = 0):
vA = Vp + со X PA = (о X PA,
так что скорости точек плоской фигуры можно рассматривать
как вращательные скорости их вокруг мгновенного центра ско-
скоростей, а сам мгновенный центр — как мгновенный центр ера-
щения плоской фигуры.
Отсюда можно сделать следующий общий вывод: поле ско-
скоростей в фигуре, совершающей плоское движение, в каждый
момент таково, как будто фигура вращается вокруг неподвиж-
неподвижного мгновенного центра. При этом скорость любой точки пло-
плоской фигуры перпендикулярна к вектор-радиусу, соединяющему
эту точку с мгновенным центром, и направлена в сторону вра-
вращения фигуры, а по величине пропорциональна расстоянию
точки до мгновенного центра (рис. 157).
В отличие от рассмотренного ранее случая вращения твер-
твердого тела вокруг неподвижной оси, где ось вращения была
жестко связана с вращающимся телом и сохраняла одно и то
Рис. 157.
Рис. 158.
же положение в неподвижном пространстве, относительно ко*
торого вращение происходило, в плоском движении мгновенный
центр в каждый новый момент времени занимает другое по-
положение как в движущейся фигуре, так и в неподвижной пло-
плоскости.
242 ГЛ. XIV. ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Рассмотрим качение без скольжения жесткого контура С
(рис. 158) по неподвижному жесткому контуру С; будем пони-
понимать под этим такое движение, при котором контуры сопри-
соприкасаются только в одной точке, а длины дуг, проходимых
точкой соприкасания по обоим контурам, равны между собой:
^РР = )эр'
Докажем, что точка Р соприкосновения контуров служит
мгновенным центром движения фигуры, связанной с подвиж»
ным контуром С, т. е. что скорость той точки фигуры Р, кото-
которая в данный момент совпадает с точкой соприкосновения
контуров, равна нулю. С этой целью вблизи точки соприкосно-
соприкосновения Р возьмем на контурах точки Р{ и Р[, служившие неко-
некоторое малое время А^ тому назад общей точкой Pi соприкосно-
соприкосновения контуров. За время Д^ точка Р[ совершила перемещение
PjPj. По определению качения без скольжения малый треуголь-
треугольник РХРР[ будет равнобедренным, так как его стороны
РР{ и РР[ на малые высших порядков отличаются от равных
между собой дуг РРХ и РР[. Отсюда следует, что отрезок РХР[
перпендикулярен к общей касательной к кривым в точке Р и
представляет собой, таким образом, расстояние между двумя
смежными с точкой касания точками кривых. Это расстояние,
как известно, является малой величиной второго или более вы-
высокого порядка (в зависимости от порядка соприкасания кри-
кривых) по сравнению с малой величиной дуги кривой, так что
Заметим теперь, что скорость точки Р подвижного конту*
ра С может быть определена как предел
РХР[ РР{
lim = lim pp lim
Pi-»p
первый предел в правой части равен нулю, а второй пред-
представляет собой конечную величину, равную скорости движения
точки соприкосновения по контурам. Таким образом, скорость
точки Р действительно равна нулю, т. е. эта точка фигуры,
связанной с контуром С, служит мгновенным центром скоро-
скоростей. Все остальные точки фигуры С в данный момент вре-
времени имеют скорости, соответствующие вращению этих точек
вокруг мгновенного центра. При движении фигуры все новые и
новые точки контура С будут приходить в соприкосновение
с контуром С, причем это соприкасание будет происходить в
§ 56 МГНОВЕННЫЙ ЦЕНТР СКОРОСТЕЙ 243
точке, перемещающейся по контуру С. Таким образом, мгно-
мгновенный центр занимает различные положения в движущейся
фигуре и на неподвижной плоскости.
Если известны направления скоростей двух каких-нибудь
точек фигуры в данный момент, то, восставляя в этих точках
перпендикуляры к направлениям скоростей, в пересечении най-
найдем искомый мгновенный центр. Указанное построение следует
из ранее отмеченного свойства мгновенного центра скоростей
быть центром мгновенного вращения плоской фигуры (рис. 154).
Пользуясь понятием мгновенного центра, легко получить
решение такой задачи: по заданным величине и направлению
скорости одной точки фигуры и по направлению
скорости другой ее точки найти распределение
скоростей в движущейся фигуре. К этой задаче
часто сводится вопрос об исследовании скоро-
скоростей точек звеньев механизма.
Пусть vA — известная по величине и направ-
направлению скорость точки А (рис. 159), МВМ\— ли-
линия, вдоль которой направлена скорость точки
В. Мгновенный центр, как было указано, дол-
должен лежать на пересечении перпендикуляров к Рис. 159.
vA и ММ\, проведенных через точки А и В. Пред-
Предполагая, что эти перпендикуляры пересекаются, найдем положе-
положение мгновенного центра. Чтобы найти распределение скоро-
скоростей, нужно знать еще величину угловой скорости и направ-
направление вращения. Последнее определяется по заданному на-
направлению скорости Va\ что же касается величины со, то, зная
х>а, находим
Ш"~ АР *
После этого уже не составляет труда определить скорости дру-
других точек плоской фигуры.
Рассмотрим некоторые частные случаи этой задачи, когда
указанный способ определения скоростей не приводит к цели.
В том случае, когда скорость Va параллельна линии ВМ,
причем точка В не лежит на перпендикуляре, проведенном че-
через А к vA (рис. 160, а), вышеуказанные перпендикуляры не
пересекаются, т. е. мгновенного центра скоростей в данный мо-
момент не существует (АР = оо) и вращение отсутствует. Распре-
Распределение скоростей в этот момент такое же, как если бы фигура
совершала поступательное движение. В этом случае движение
называется мгновенно-поступательным; скорости всех точек
фигуры в рассматриваемый момент одинаковы.
Возможен еще случай, когда вектор vA параллелен ВМ, при-
нем точка В лежит на перпендикуляре, проведенном к vA через
244
ГЛ. XIV. ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
точку А (рис. 160,6). Имеющихся данных в этом случае недо-
недостаточно для определения распределения скоростей. Необхо-
Необходимо знать скорость Vb точки В не только по направлению, но
и по величине. Положение мгновенного центра и угловая ско-
скорость фигуры определяются из условий
JjL -я JjL_ _ со, РЛ=рРВ = ЛВ, A5)
причем верхний знак соответствует одинаковому направлению
скоростей vA и vb (рис. 160,6), а нижний — противоположному
(рис. 160,б). Из равенств A5) следует, что геометрическим
Рис. 160.
местом концов векторов скоростей точек прямой АВ является
прямая, соединяющая конец вектора Va с мгновенным центром
скоростей Р.
Наконец, если в рассматриваемом случае Va = Vb, to опять
имеем мгновенное поступательное движение фигуры (рис. 160, г).
Найдем координаты мгновенного центра скоростей. Для этой
цели воспользуемся формулами A3) и, подставив в правые
части вместо х и у координаты мгновенного центра х? и у?%
приравняем левые части нулю, так как скорость той точки фи-
фигуры, которая в данный момент времени играет роль мгновен-
мгновенного центра, равна нулю. Будем иметь уравнения
Vox — & (Ур ~ Уо) = 0, vOy + & (хР — х0) = 0,
откуда найдем
р
и0х
СО
A6)
Аналогично по A4) найдем координаты хгр и у'р мгновенного
центра в подвижной системе:
хр = Т
Sin ф ~" % C0S
=*i (vo* cos
voy sin
A60
§ 56 МГНОВЕННЫЙ ЦЕНТР СКОРОСТЕЙ
245
В заданном плоском движении х0, уо, Ф, а следовательно,
и их производные v0Xi vOy, со суть известные функции времени.
Иными словами, уравнения A6) и A6') определяют коорди-
координаты мгновенного центра в любой
момент времени.
К этим же результатам можно
прийти также, решая векторное
уравнение
Умножая обе части векторно на ю,
получим
оХ^о + ®Х(©ХГр) = 0, A7)
или, раскрывая двойное векторное
произведение по известному прави-
правилу векторной алгебры:
<» X (© X г'р) = ©(© • г^) - г^(ю • о>),
хР=хя\ А
Рис. 161.
X
и замечая, что вследствие перпендикулярности векторов <о и гр
получаем
После подстановки в A7) найдем вектор-радиус мгновен-
мгновенного центра в подвижной плоскости:
A8)
A80
В неподвижной плоскости будем иметь
г' —г 1 шХг;(}
fP # О "Г ^2
г —
'Р
Проектируя векторные равенства A87) и A8) на оси коор-
координат, получим вышеприведенные формулы A6) и Об').
В качестве примера рассмотрим эллиптическое движение
плоской фигуры (рис. 161), при котором две точки фигуры А
и б, находящиеся на расстоянии АВ = / друг от друга, дви-
движутся по двум взаимно перпендикулярным осям Ох и Оу. Вы-
Выбрав за полюс фигуры точку А и обозначив ее скорость через
Va9 найдем
л:А = / sin ф, #л = 0,
vAx = *А = ' COS Ф * Ф = ' cos Ф • 5>
246
ГЛ. XIV. ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
откуда по формулам A6) найдем координаты мгновенного
центра в неподвижной системе координат:
*р = *а = О A, yp = -~vAx = t cos ф = OB,
а по формулам A6')— в подвижной:
*р = -i- vax sin ф = / sin ф cos ф, y'p = -fc vAx cos ф = / cos2 ф.
Положение мгновенного центра можно было бы определить
и чисто геометрически, восставив в точках А и В перпендику*
ляры к направлениям движения этих точек.
Пример 47. Найдем скорость любой точки окружности колеса, катя-
катящегося без скольжения по неподвижному рельсу, по заданной скорости Vo
центра колеса (рис. 162).
Обозначим через а радиус колеса. Так как колесо катится без скольже-
скольжения, то мгновенный центр находится в точке соприкосновения Р колеса с
рельсом; получаем
Скорость любой точки М на окружности колеса перпендикулярна к РМ и»
следовательно, проходит через противоположный точке Р конец N диаметра
колеса. Ее величина будет равна
= со • РМ = 2а cos ф •
* 2i>o cos ф.
Из всех точек колеса наибольшую скорость имеет точка N.
Рис. 163.
Пример 48. Конец А линейки эллипсографа движется со скоростью va
Ь отрицательную сторону оси х. Определим скорость конца В и угловую
скорость линейки АВ = / (рис. 163).
По теореме о проекциях скоростей концов отрезка находим для скоро*
стей точек А и В линейки АВ
Далее, имеем
vA cos ф =* vB sin ф, т. е. vB = vA ctg ф.
:©/:
sin ф
т. е.
/ sin
§ 56. МГНОВЕННЫЙ ЦЕНТР СКОРОСТЕЙ
247
Те же результаты легко получить путем построения мгновенного центра
линейки Р.
Пример 49. Найдем мгновенный центр и угловую скорость шатуна, а
также линейную скорость ползуна кривошипно-ползунного механизма по за-
заданной угловой скорости вращения кривошипа со и радиусу кривошипа
ОА = а (рис. 164).
Представим себе, что с шатуном АВ неизменно связана плоская фигу-
фигура S. Скорость точки А по величине равна va = со -О А и направлена перпен-
перпендикулярно к ОА. Скорость точки В направлена по прямой ОВ. Мгновенный
центр Р находим на пересечении перпендикуляров к скоростям, т. е. на пере-
пересечении перпендикуляра ВР к ОВ и про-
продолжения радиуса ОА. Угловую ско-
скорость шатуна найдем по формуле
vA со • О А
^^IF^^AP '
При движении механизма мгновенный
центр Р, как видно из построения, пере-
перемещается, занимая различные поло-
положения в плоскости S и на неподвиж-
неподвижной плоскости. В частности, при ф = О
и ф = я, т. е. в мертвых положениях
механизма, Р совпадает с точкой В, как
это и должно быть, так как при пере-
переходе через мертвое положение ползун
имеет скорость, равную нулю. В эти
моменты скорость любой точки шатуна пропорциональна расстоянию ее от
ползуна. При ф = я/2 скорость Va параллельна vB и движение шатуна
мгновенно-поступательное: все точки его имеют одинаковые скорости, рав-
равные скорости точки А.
Определим еще скорость ползуна В в функции угла ф. Имеем
ОА nD PB
VB = <»1-PB==(»-AP-PB = VA1W-
Обращаясь к рис. 164, находим
Рис. 164.
sin
f- со)
Я sin
где X = a/I — отношение длины
Vl — k2 sina<p
кривошипа к длине
шатуна. Получим
/. , X cos ф \ .
vD = vAi И =- I sin ф.
в Л\ Vl -Я25т2ф У
Пример 50. Коромысло ОХА
(рис. 165), качаясь вверх и вниз во-
вокруг оси Ои при посредстве шатуна
АВ передает движение кривошипу
ОБ, свободно сидящему на оси О.
На этой же оси сидит колесо /, дру-
другое колесо // наглухо соединено с
шатуном АВ и сочленено с кривоши-
кривошипом ОВ с помощью шарнира В. Радиусы колес I и II одинаковы (гj¦ = г2 =*=>).,
ОВ = 2г. Угловая скорость кривошипа ОВ равна со. Найдем угловую ско*
рость 0! колеса /,
Рис. 165.
248 ГЛ. XIV. ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Мгновенный центр Р плоской фигуры, состоящей из шатуна АВ и ко-
колеса //, найдем в пересечении АО\ и ОВ. Угловая скорость этой фигуры
равна
Чтобы перейти к определению угловой скорости колеса /, нужно запи-
записать, что скорость точки соприкосновения С колес I n II останется одной и
той же, будем ли считать ее принадлежащей колесу / или колесу //:
Отсюда
PQ pQ pQ
со, = __ й2 = 2tf со = 2 -р^Т7 со
(знак плюс соответствует положению, изображенному на рисунке). Если
PC значительно больше г, то приближенно можно считать
2со
(О! = « 2CD.
§ 57. Центроиды
При движении плоской фигуры в ее плоскости мгновенный
центр перемещается от одной точки фигуры к другой. Точно
так же и в неподвижной плоскости мгновенный центр занимает
все новые и новые положения. Таким образом, следует отличать
точку плоской фигуры, которая в данный момент времени сов-
совпадает с мгновенным центром и имеет скорость, равную нулю,
от самого мгновенного центра, перемещающегося по фигуре
и имеющего как по отношению к ней, так и по отношению к не-
неподвижной плоскости скорости, вообще говоря, отличные от
нуля и геометрически равные между собой. Последнее сразу
следует из того, что мгновенный центр проходит в данный мо-
момент через точку, которую вследствие ее мгновенной неподвиж-
неподвижности можно одинаково считать принадлежащей как плоской
фигуре, так и неподвижной плоскости.
Траектория мгновенного центра в плоскости, связанной
с движущейся фигурой, образует кривую, называемую подвиж-
подвижной центроидой; точно так же траектория мгновенного центра
в неподвижной плоскости называется неподвижной центроидой.
Так, в указанном ранее примере качения без скольжения
круглого колеса по прямолинейному рельсу (рис. 162) все точки"
контура С колеса при различных положениях его будут слу-
служить мгновенными центрами скоростей, следовательно, окруж-
окружность С является подвижной центроидой. Точки рельса С бу-
будут служить мгновенными центрами в неподвижной плоскости,
а прямая С представит собой неподвижную центроиду.
Подвижная и неподвижная центроиды имеют в каждый мо-
момент времени общую точку — мгновенный центр, траекториями
§ 57. ЦЕНТРОИДЫ 249
которого они служат. Вектор скорости мгновенного центра, оди-
одинаковый, по предыдущему, как по отношению к неподвижной,
так и подвижной плоскости, направлен по касательной к траек-
траектории мгновенного центра; следовательно, касательная — одна
и та же для обеих центроид, т. е. центроиды соприкасаются.
Наконец, из равенства по ве-
величине скоростей мгновенного
центра по центроидам выте-
вытекает равенство путей, прохо-
проходимых мгновенным центром
по подвижной и неподвиж-
неподвижной центроидам за один и тот
же бесконечно малый промежу-
промежуток времени, т. е. равенство
элементарных дуг центроид Рис. 166.
между соответствующими друг
другу смежными положениями на них мгновенного центра*
Отсюда, согласно определению качения без скольжения, сле-
следует, что при движении плоской фигуры в своей плоскости по-
подвижная центроида катится без скольжения по неподвижной.
Пусть С и С7 (рис. 166) представляют собой неподвижную
и подвижную центроиды, соприкасающиеся в данный момент t
в мгновенном центре Р. Точки Pi, Рч и т. д. определяют поло-
положения мгновенного центра в неподвижной плоскости в после-
последующие моменты времени t\> t2, ..., точки ..., Р-2, Р-\ — в пре-
предыдущие моменты. Аналогично, точки Р[, Р2 и т. д. отмечают
положения мгновенного центра в подвижной плоскости в те же
моменты времени tut2, ... точки ..., Р'__2, Р'_х— в предыдущие
моменты. Дуги РР[ и РР1?Р\Р2 и РХР2 и т. д. по предыдущему
равны между собой; в момент времени t\ точка Р[ придет в точ-
ку Pi, а точка Pf2 займет положение Р". В момент времени t%
точка Р2 совпадает с точкой Р2 и т. д. Такое последовательное
совпадение концов равных между собой по длине дуг подвижной
и неподвижной кривых возможно лишь при отсутствии скольже-
скольжения; поскольку при этом кривые соприкасаются, описанное дви-
движение является качением без скольжения подвижной центроиды
по неподвижной.
Пример 51. Две параллельные рейки движутся в противоположные
стороны со скоростями Vi и г>2. Между ними находится диск радиуса а, ко-
который катится по ним без скольжения. Определим скорость Vo центра
диска О, угловую скорость со и мгновенный центр диска, а также центроиды
(рис. 167).
Принимая точку О за полюс, имеем
V{ = v0 + v0Mi, v2 = v0 +
250 ГЛ. XIV. ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Вращение диска происходит по часовой стрелке. Проектируя написанные
выше геометрические равенства на направление скорости vu получим
vx = v0 + соя, — v2 = v 0 — соя.
Из последних уравнений находим
00 = у @1 - V2), О = 7^" @1 + а2).
Если f i = и2, то центр диска останется неподвижным.
Эту же задачу можно решить, отыскивая мгновенный центр диска. По
формулам A5) имеем
- *— —-° ™.+™=^=2«
/
/
4
Г' 1
у//////Д>/,
\ / \
y////////f//////i
—Z—1
Составив производную пропорцию, полу-
получим
у{ + у2 __ РМ{ + РМ2 _ 2а
02 "
Рtjи, следовательно,
РИС. 167.
Скорость центра колеса и о определим из соотношения
2a »! + и2 2 '
которое совпадает с полученным выше результатом; мгновенный центр Р
находится на постоянном расстоянии ОР, определяемом по формуле (*), от
центра колеса О. Следовательно, геометрическое место точек колеса, с кото-
которыми в процессе движения совпадает мгновенный центр, т. е. подвижная
центроида С, есть окружность радиуса ОР, концентрическая с колесом.
Неподвижная центроида С, т. е. геометрическое место мгновенных цен-
центров в неподвижной плоскости, есть прямая, находящаяся на расстоянии ОР
от центра колеса.
Если насадить на ось колеса концентрически с ним диск радиуса
0^a
vx + v2
и покатить его без скольжения по прямой С, сообщив центру диска скорость
1 .
00 —у (»1 — 02),
то рейки, соприкасающиеся с колесом в точках М^ и М2, придут в движение
со скоростями Vi и 02, направленными в противоположные стороны. Движе-
Движение диска С по прямой С кинематически эквивалентно рассматриваемому
движению колеса между двумя рейками.
Пример 52. Центроиды эллипсографа. В изображенном на
рис. 168 положении линейки эллипсографа мгновенный центр занимает поло-
§ 57. ЦЕНТРОИДЫ
251
жение Р. Очевидно, что ОР = АВ\ иными словами, каково бы ни было пси
ложение линейки, мгновенный центр Р всегда находится на постоянном рас«
стоянии АВ = 21 от начала координат О неподвижной системы осей, т. е. нед
подвижная центроида представляет собой ок-
окружность С радиуса 21 с центром в О. С дру- С
гой стороны, О'Р = — ОР •
¦ I также постоян-
Рис. 168.
но и мгновенный центр находится на одном
и том же расстоянии от принадлежащей
фигуре и движущейся вместе с ней точки О''.
Это значит, что подвижной центроидой яв-
является окружность С радиуса / с центром
в О'.
Качение подвижной центроиды по непо-
неподвижной можно осуществить, заменив, напри-
например, окружности С и С подвижным и непо-
неподвижным зубчатыми колесами и покатив пер*
вое по второму с помощью рукоятки ОО'<
Любой диаметр колеса С будет при этом со-
совершать то же самое движение, которое совершала линейка эллипсографа?
любая точка его будет описывать эллипс.
Пример 53. Центроиды в обращенном эллиптическом
движении. Скорости тех точек сторон движущегося прямого угла, кото-
которые в данный момент проходят через оси вращения трубок А и В, направ-
направлены вдоль прямых О А и О В (рис. 169). Следовательно, мгновенный центр
находится на пересечении перпендикуляров, восставленных к АО и ВО в
точках А и В. По построению АОВР — прямо-
прямоугольник, т. е. ОР = АВ = 21. Точка Р нахо-
находится на постоянном расстоянии 21 от верши-
вершины подвижного прямого угла, т. е. подвижной
центроидой С является окружность радиуса
21 с центром в О. Неподвижная центроида
С — окружность вдвое меньшего радиуса /
с центром в О'. Сравнивая этот результат со
случаем эллиптического движения, видим, что
подвижные и неподвижные центроиды поме-
поменялись ролями: если покатить большой
круг по малому, то полученное движение бу-
будет кинематически эквивалентно обращенному
эллиптическому движению. Вообще, меняя
роль центроид, т. е. делая подвижную цен-
центроиду неподвижной, а неподвижную — под-
подвижной, получим движение, называемое об-
ращенным по отношению к первоначальному.
Пример 54. Определим центроиды шатуна BE механизма антиларал-
лелограмма, изображенного на рис. 170 (АВ = ED = 2а, BE = AD = 2с%
а> с).
В плоском движении, совершаемом звеном BE, известны траектории
двух точек В и ?; это — окружности радиусов АВ и ED. Мгновенный центр
лежит на пересечении перпендикуляров к скоростям точек В и Е, т. е. в точ-
точке Р пересечения прямых АВ и ED.
Имеем: ААВЕ = AADE, так как AD = BE, АВ = ED и АЕ — общая
сторона. Следовательно, ZABE => ZADE. Но ZAPD = ZEPB, что при ра*.
венстве AD = BE дает
Рис. 169.
252
ГЛ. XIV. ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
АР = РЕ, ВР = PD,
А Р + PD = АР + РВ = 2а.
D = 2a.
Отсюда получаем
и поэтому
Точно так же
Таким образом, сумма расстояний мгновенного центра Р от двух неподвиж-
неподвижных точек А и D есть величина постоянная. Следо-
Следовательно, неподвижной центроидой С является эл-
эллипс с фокусами в точках А и Д с большой полу-
полуосью а и малой Ь — Уа2 — с2. Подвижная центро-
центроида С — также эллипс с полуосями той же вели-
величины и с фокусами в В и Е.
Движение, при котором эллипс С катится без
скольжения по неподвижному эллипсу С, кинемати-
кинематически эквивалентно движению звена BE антипарал-
антипараллелограмма. Точно так же можно доказать, что
центроидами звена ED при неподвижном звене АВ
(когда звено AD освобождено) служат две одина-
одинаковые гиперболы. Достаточно убедиться, что в этом
Рис. 170. случае разность расстояний мгновенного центра
(точки пересечения линий BE и AD) до неподвиж-
неподвижных точек Л и Б, а также до точек D и Е остается неизменной и равной
AD = ЕВ.
§ 58. Поле ускорений плоской фигуры. Мгновенный
центр ускорений
Для определения ускорения любой точки плоской фигуры
найдем производную по времени от вектора скорости этой
точки.
Имеем согласно (И)
и, следовательно,
Первое слагаемое
dt
i?. A9)
dt
dt '
B0)
одинаковое для всех точек фигуры и равное ускорению полюса
О', называется поступательным ускорением.
Второе слагаемое — обозначим его через яу(в), — равное
B1)
называется вращательным ускорением. Здесь вектор
d(d
8==_
§ 58 ПОЛЕ УСКОРЕНИЙ ПЛОСКОЙ ФИГУРЫ 253
представляет собой вектор углового ускорения. Вектор w{b) пер-
перпендикулярен к г7 и направлен в ту же сторону, что и враща-
вращательная скорость соХ**' точки плоской фигуры вокруг полюса,
или в противоположную, сообразно тому, будет ли вращение
фигуры ускоренным или замедленным; величина w^ равна
= гг' sin (?>) = ег\ B2)
Третье слагаемое, которое обозначим w{oc\ равно
^f-. B3)
Подставив сюда вместо dr'/dt его значение A2), получим
»<<*>==© X (<ъ ХО,
или по известной формуле разложения двойного векторного
произведения:
^(ос) = о) ((О • гО — г' (О • €0).
Но в плоском движении векторы со и г' взаимно перпендику-
перпендикулярны, так что
кроме того,
(О . (О = СО2,
следовательно,
яу(ос) _ _ tfr'm ^24)
Эта составляющая ускорения, направленная от рассматривае-
рассматриваемой точки к полюсу и равная по величине со2/*', называется осе-
стремительным ускорением.
Итак, имеем
w = wo + яу<в> + яу<ос) = w0 + г X г' — coV, B5)
т. е. ускорение любой точки в плоском движении может быть
представлено как геометрическая сумма поступательного уско-
ускорения, равного ускорению полюса, вращательного ускорения
вокруг полюса и осестремительного ускорения к полюсу.
Заметим, что поступательное ускорение w0 равно нулю, если
полюс движется равномерно и прямолинейно; w^ = 0, когда
8 = 0, т. е. когда движение фигуры происходит с постоянной
угловой скоростью, или в моменты времени, когда угловая ско-
скорость имеет экстремальные значения; наконец, w(°v = 0 при
со = 0, т. е. при мгновенно-поступательном движении.
Составим формулы для проекций ускорения на неподвижные
оси х, у. Замечая, что
г' = г — г0.
254
ГЛ XIV ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
найдем, проектируя обе части равенства B5) на неподвижные
оси х и у:
w v = xQ — ф (и — и0) — ф2 (х — х0),
w = " +" (х-х)'- 2( - Bб)
Аналогично найдем проекции ускорения на подвижные оси:
WX' = Wqx' — фу' — ф2х', Wyf = Woy' + фх' — У2 у', B7)
где wox' и woy' обозначают проекции ускорения полюса на по-
подвижные оси координат х'9 у'\ они могут быть легко вычислены
по формулам перехода от одной системы координат к другой.
Ускоренное бращениь Замедленное вращение
Рис. 171.
Если плоское движение задано, то координаты полюса х0
и уо, а также угол поворота ф известны в функции времени, так
что все величины в правых частях этих формул могут быть
вычислены.
Условимся в дальнейшем снабжать обозначение ускорения
индексом, указывающим точку, ускорение которой рассматри-
рассматривается: например, wAi wb и т. д. будут обозначать ускорение
точек Л, В и т. д.; геометрическую сумму вращательного и цент-
центростремительного ускорений точки В, когда за полюс принята
точка Д обозначим через wAB> т. е. положим
*>ав = *Хг'ав-<*2г'ав. B8)
Здесь вектор wAb есть ускорение точки В по отношению к точке
!Д т. е. ускорение по отношению к системе координат, имеющей
начало в точке А и движущейся вместе с этой точкой поступа-
поступательно. Отдельные слагаемые этого вектора — вращательное
ускорение вокруг полюса и осестремительное ускорение к по-
яюсу — будем обозначать так:
§ 58. ПОЛЕ УСКОРЕНИЙ ПЛОСКОЙ ФИГУРЫ
255
Формула B5) примет вид
WB = WA
WAB = WA
, + '
C0)
Построение отдельных слагаемых показано на рис. 171. Заме-
Замечая, что w{lB и «j(o€) взаимно перпендикулярны, получим
/WT^. CD
Обозначим через я — а тупой угол, образуемый векторами
гав и ^лв- Аналогично по формуле A9) § 50, а также и непо-
непосредственно из рис. 171 найдем
W
АВ
VAB
8
СО
C2)
Заметим, что при ускоренном вращении (рис. 171, а) угол
л; — а отсчитывается от г'АВ в сторону вращения фигуры
и в противоположную сторону — при замедленном вращении
(рис. 171,6). В каждый данный момент времени угол а оди-
одинаков для всех точек фигуры.
Докажем, что в любой момент времени существует точка
плоской фигуры — назовем ее мгновенным центром ускорен
ний, — ускорение которой в этот момент равно нулю. Чтобы
убедиться в существовании мгновенного центра ускорений, про-
проведем через какую-нибудь точку А полупрямую AL
Ускоренное вращение Замедленное вращение
Рис. 172.
(рис. 172, а, б) под углом а, определяемым по формуле C2)'f
к вектору Wa, отсчитывая а от wA в сторону вращения фигуры
или противоположно ему, сообразно тому, будет ли вращение
ускоренным или замедленным. Отложим на AL отрезок
r'AQ =
™А
C3)
256
ГЛ XIV. ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Конец Q этого отрезка и будет мгновенным центром ускорений.
В самом деле, согласно формуле C1) имеем
W*n = i
С другой стороны, по построению вектор Waq противоположен
Wa по направлению, т. е.
Отсюда на основании C0) заключаем, что
т. е. Q — мгновенный центр ускорений.
Построение мгновенного центра ускорений на основании
сказанного требует знания ускорения Wa какой-либо точки фи-
фигуры и угла а. Покажем, как
построить мгновенный центр
ускорений, имея ускорения
двух точек фигуры. Заметим
для этого, что, зная Шд и
wBi тем самым можем опре-
определить на основании форму-
формулы C0)
Рис* 173# и, следовательно, угол а будет
вполне определен. Теперь мо-
можем (рис. 173) построить луч AL, на котором лежит мгновенный
центр ускорений Q. Нет надобности вычислять положение точки
Q по формуле C3), так как можно построить ее графически,
проведя еще луч ВМ под углом а к wB. Пересечение лучей AL
и ВМ определит точку Q. Построение произведено на рис. 173.
По заданным wA и wB найдена их разность Wab = Wb — Wa. Это
определяет угол я— а, отсчитываемый от rfAB к wAB, В этом
же направлении отсчета отложен угол а от направлений wa
и wB и проведены лучи AL и ВМ. Их пересечение и дает нам
точку Q.
Имея мгновенный центр ускорений, получаем весьма на-
наглядную картину распределения ускорений в плоской фигуре.
Действительно, применяя формулу C0) в предположении, что
за полюс А принят мгновенный центр ускорений Q, и замечая,
что по определению wQ = 0, получим
*>в = *>qb = »& + »($ = * X r'QB - coV^. C4)
Первое слагаемое в правой части — вращательное ускорение
w{qb — направлено по перпендикуляру к вектор-радиусу, соеди-
соединяющему центр ускорений с рассматриваемой точкой, в ту сто-
§ 58. ПОЛЕ УСКОРЕНИЙ ПЛОСКОЙ ФИГУРЫ
257
¦гг
QB>
рону, куда происходит вращение, или в противоположную,
смотря по тому, является ли вращение ускоренным или за-
замедленным.
Второе слагаемое — осестремительное ускорение w{°$ — на-
направлено всегда от точки к мгновенному центру ускорений.
Расположение этих слагаемых показано на рис. 174. По ве-
величине они равны
C5)
C6)
Их геометрическая сумма Wb по величине равна
wB = fqBj4Ttf. C7)
Таким образом, полное ускорение любой точки фигуры по ве-
величине пропорционально ее расстоянию от мгновенного центра
ускорений и направлено под одинаковым для всех точек фи-
фигуры углом к вектор-радиусу, соединяющему рассматриваемую
точку с мгновенным центром ускорений.
Рис. 174.
Рис. 176.
Не следует смешивать вращательное ускорение w$ с каса-
касательной составляющей ускорения, а осестремительное w^c) —
с нормальной составляющей. В самом деле, касательное wx
и нормальное ускорения wn направлены по касательной и глав-
главной нормали к траектории, т. е. по перпендикуляру к вектор-
радиусу грв, соединяющему рассматриваемую точку с мгно-
мгновенным центром скоростей Р, и вдоль этого вектор-радиуса,
в то время как w(*] и w(gc) направлены перпендикулярно и вдоль
вектор-радиуса rfQB (рис. 175).
Легко получить вектор-радиусы rQ и r'Q центра ускорения
в неподвижной и подвижной системах координат; для этого
решим векторное уравнение
^ = ^o + «X/Q- coV^ = 0. C8)
9 Л. Г. Лойцянсиий, А. И. Лурье
258
ГЛ XIV. ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
С этой целью умножим C6) векторно на е:
* X ю0 + * X (* X г^) - ®*(е X *q)«О,
и раскроем двойное векторное произведение; тогда получим
Заметим, что в плоском движении е«г! = 0; далее, е*8
а по C8) г X r'Q == coVQ — wQ. Подставляя в C8), получим
eXt»a-(e4»V; + «
или, разрешая уравнение относительно
С )( TV О "*г" ® Wo
О,
/
e2 + со4
= г 4- г' = г 4-
/39\
Проектируя первое равенство на подвижные оси координат
х\ у\ а второе — на неподвижные оси х, у, получим формулы
координат мгновенного центра ускорений:
а) в подвижной системе осей
D0)
ф2 +CD4
б) в неподвижной системе осей
— Уо-i
D1)
Пример 55. Найдем ускорение любой точки обода колеса радиуса а,
катящегося без скольжения по прямолинейному рельсу, если центр колеса
имеет постоянную скорость Vo. Мгно-
Мгновенный центр ускорений находится в
центре колеса, так как эта точка
движется прямолинейно и равно-
равномерно.
Имеем
со = — = const
а
и, следовательно, 8 = 0; ускорение
любой точки обода направлено к
центру колеса и равно по величине
w =«coza = —.
а
Рис. 176. Зная величину и направление
скорости точки М и ее полное уско-
ускорение (рис. 176), легко найдем касательную и нормальную составляющие:
4
sin ф = — sin ф,
wn = w cos ф -
• COS ф.
§ 58. ПОЛЕ УСКОРЕНИЙ ПЛОСКОЙ ФИГУРЫ 259
Замечая, что скорость точки М равна
v = со • МР =* 2асо cos ф = 2i>0 cos ф,
находим радиус кривизны траектории точки М (циклоиды):
V2
р в 4а cos ф = 2МР.
Пример 56. Ускорение при внешнем и внутреннем
зацеплении колес. На палец А (рис. 177, а, б) кривошипа ОЛ, вра-
вращающегося вокруг оси О с постоянной угловой скоростью со, свободно на-
насажено зубчатое колесо // радиуса г<>_. При вращении кривошипа оно катится
без скольжения по неподвижному зубчатому колесу / радиуса Г\л имеющему
центр на оси О. Найдем ускорения точек В и С колеса //, а также его мгно-
мгновенный центр ускорений.
Определим угловую скорость со2 колеса //. Так как точка С является его
мгновенным центром скоростей, то
со2 • С А = со • О А,
т. е.
О A r\ ± г2
верхний знак относится к случаю внешнего (рис. 177, а), а нижний — внутрен-
внутреннего (рис. 177,6) зацепления. Так как со2 постоянно, то е2 «= 0.
Переходим к рассмотрению ускорений. За полюс примем точку А;
его ускорение направлено от Л к О и по величине равно
Очевидно, что вращательное ускорение любой точки второго колеса
ад(в) as 0; далее, имеем (г' — вектор-радиус любой точки колеса // относи-
относительно точки А)
Останавливаясь сначала на случае внешнего зацепления, найдем ускоре-
ускорения точек В я С. Для точки В имеем
и ш(ос) направлено от В к А, т. е. так же, как и ускорение Wa. Полное уско-
ускорение будет равно
wB - о»2 (г, + г2) + со* (Г| + г»>* - со* ( + > < + 2)
со
Точно так же для точки С получим
f со2 (О + г,) « со2(п + г.) --.
Ускорения «>? и We направлены к центру колеса.
9*
260
ГЛ. XIV. ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Найдем еще мгновенный центр ускорений колеса //. В этой точке
za/Coc) -^—Wa^ так как вращательное ускорение отсутствует (он *= const),
а точка А принята за полюс; следовательно, мгновенный центр ускорений Q
(on)
Рис. 177,
должен лежать на радиусе АС, так как для точек этого радиуса о/(ос> на-
направлено противоположно wA. Расстояние
от точки А определится из уравнения
мгновенного центра ускорений
откуда
4
Так как в рассматриваемом случае вращательное ускорение отсутствует,
то ускорение любой точки М направлено к мгновенному центру ускорений Q.
В случае внутреннего зацепления
¦ w2 (r. - г,)
- г2) 1 ri - 2г21
При гi > 2г2 вектор wB направлен к точке А, при г4 « 2г2 (в этом случае
точка В совпадает с О) wB = 0, наконец, при г4 < 2г2 вектор wB направлен
в ту же сторону, что и wA. Мгновенный центр ускорений находится на ра-
радиусе АВ% причем расстояние его г' от центра колеса // определится из
уравнения
§ 58. ПОЛЕ УСКОРЕНИЙ ПЛОСКОЙ ФГТГУРЬС
261
хзткуда найдем
Пример 57. Ускорения точек линейки эллипсографа.
Пусть точка А линейки эллипсографа движется с постоянной скоростью va
а отрицательную сторону оси л: (рис. 178). Найдем ускорение любой точки
линейки {А В я 21).
Так как движение точки А равномерное и прямолинейное, то она яв-
является центром ускорений. Имеем
id-
A ^
2/созф ;
no формуле осестремитель^ого уско*
рения
,(ос).
w
шу следовательно,
21 cos2 (pf
я cos ф 2/ cos3 ф *
Ускорение wb направлено по оси у к началу координат, его осестремя-
тельная составляющая идет от В к Л.
На основании свойств центра ускорений ускорения всех прочих точек
линейки пропорциональны расстоянию до точки А и имеют то же направле-
направление, что и Wb. Если соединить конец вектора Ws с мгновенным центром
ускорений прямой линией, то на ней расположатся концы векторов, изобра-
изображающих ускорения точек линейки.
Глава XV
ВРАЩЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
§ 59. Определение положения твердого тела, имеющего
неподвижную точку. Эйлеровы углы
Обратимся к рассмотрению вращательного движения абсо-
абсолютно твердого тела вокруг неподвижной точки. Вопрос этот
имеет большое практическое значение, так как лежит в основе
теории гироскопических явлений, ди-
динамики корабля, самолета, ракеты,
а также движений небесных тел.
Предположим, что рассматривае-
рассматриваемое твердое тело имеет неподвижную
точку (центр) О (рис. 179) и может
как угодно вращаться вокруг этой
точки. Выясним прежде всего число
величин, которое надо задать для
определения положения твердого тела
в пространстве. Для этого проведем
через центр О ось OL, жестко связан-
связанную с телом; положение этой оси
в пространстве определится двумя ве-
величинами: углами аир этой оси с осями Ох и Оу неподвижной
системы координат. Но этих двух величин еще недостаточно для
определения положения твердого тела, так как тело может
вращаться около взятой оси. Задавая еще одну величину —
угол ф поворота тела вокруг оси, — полностью фиксируем поло-
положение тела в пространстве.
Итак, три величины должны быть заданы для определения
положения тела, имеющего неподвижную точку. Условимся
число независимых величин (параметров), определяющих по-
положение твердого тела в пространстве, называть числом степе-
степеней свободы его; твердое тело, вращающееся около неподвиж-
неподвижного центра, имеет три степени свободы. Подробнее о степенях
свободы системы тел будет сказано в отделе динамики.
Приведенный выбор трех углов ос, р и ф (рис. 179) поясняет
наличие трех степеней свободы у твердого тела, имеющего
Рис. 179
§ 59 ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ТЕЛА ЭЙЛЕРОВЫ УГЛЫ
263
г1
\
одну закрепленную точку, но, однако, непригоден для опреде-
определения положения (координат) точек твердого тела, скоростей
и ускорений в этих точках. Один из наиболее практически
удобных выборов трех углов был указан Эйлером, что привело
к наименованию всех возможных систем такого рода углов эй-
эйлеровыми углами. Мы опишем далее общие принципы выбора
систем эйлеровых углов и оста-
остановимся на конкретных выборах
двух систем. Первая из них по-
получила применение в задачах
астрономии и гироскопии, вто-
вторая— в теории корабля.
Соединим жестко с вращаю-
вращающимся телом «подвижную» си-
систему координат Ox'y'z' (рис. 180)
и будем рассматривать вра-
вращение этой системы по отноше-
отношению к «неподвижной», в услов-
условном смысле этого слова, систе- рис 180#
ме Oxyz. В отделе первом уже
применялась таблица обозначений косинусов углов между
осями координат (буквами обозначены не углы, а их косинусы);
введем ее и здесь:
х'
У'
z'
X
аи
a2i
а31
У
<*12
<*22
«32
г
«23
«33
Отметим линию ON пересечения плоскостей хОу и х'Оу'
(рис. 180) и назовем ее, как это принято в астрономических
приложениях, линией узлов. Выберем на этой линии положи-
положительное направление ON так, чтобы, смотря с него, видеть
вращение оси Oz к оси Oz' на наименьший угол в положитель-
положительном направлении (т. е. в правой системе осей — против часовой
стрелки); как легко видеть, плоскость zOzr перпендикулярна
к оси ON.
Первый эйлеров угол — угол прецессии -ф, или прецессион-
прецессионный угол, — образован в плоскости хОу линией узлов с непо-
неподвижной осью Ох; отсчитывается угол ф в • положительном на*
правлении (по часовой стрелке) от оси Ох к оси ON, если
смотреть с оси Oz.
264
ГЛ. XV. ВРАЩЕНИЕ ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
¦*/
Второй угол — угол нутации 9 — расположен в плоскости
zOz' и отсчитывается от оси Oz к оси Qz' в положительном
направлении (против часовой стрелки), если смотреть с поло*
жительного направления линии узлов, т. е. оси ON.
Третий угол — угол чистого вращения ф— расположен
в плоскости х'Оу', причем отсчитывается от линии узлов ON до
оси Ох' в положительном
направлении.
Для установления зави-
зависимостей между косинуса-
косинусами углов осей координат и
эйлеровыми углами приме-
применим следующий прием. Вве-
Введем, кроме единичных век-
векторов осей координат i, jr
fe, i', /', k\ на рис. 181 опу-
опущенных, еще единичные
векторы следующих осей
Рис. 181. (рис. 181), п — линии узлов
ON; rt\ — оси ON\, пер-
перпендикулярной к оси ON и лежащей в плоскости хОу, п\ —
оси ON'V перпендикулярной к оси ON и лежащей в плоскости
х'Оу'.
Направление оси ON\ выберем так, чтобы оси ONN\z обра-
образовали триэдр, сонаправленный (т. е. правый) с системой осей
Oxyz; направление оси ON\ выберем так, чтобы оси ONN\z*
образовали сонаправленный триэдр с системой Ox'y'z\ а следо-
следовательно, и с системой Oxyz. Легко видеть, что угол между
осями ON\ и ON{ представляет собой линейный угол двугран-
двугранного угла между плоскостями х'Оу' и хОу, т. е. угол 0. Тогда,,
замечая еще, что единичные векторы i, / и i\ /' легко могут
быть выражены через единичные векторы л, пх и п\ в форме за-
зависимостей, получаемых из разложения одних единичных векто-
векторов по другим:
* = ncos\|) — nx sin i|),
ir = п cos ф + я' sin ф,
j = n sin if> + nx cos if>,
j' = — n sin ф + n[ cos ф,
найдем
<хи = i • i' = (n cos Ф — «j sin \|э) • (n cos ф + n[ sin ф) =
= (n • n) cos ф cos Ф + (n • n{) cos ф sin ф — (n{ • n) sin -ф cos ф —
— (iij • л7) sin ty sin ф.
$ 59 ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ТЕЛА. ЭЙЛЕРОВЫ УГЛЫ 265
Имеем
откуда
аи = cos -ф cos ф ¦— sin t|) sin ф cos 9.
Аналогично получим остальные косинусы:
<х21 = i • f = (п cos -ф — rtj sin ф) • (— п sin ф + п\ cos ф) =
= — cos i|) sin ф — sin *ф cos ф cos 9,
а3! = i • ft' = (n cos ф — /ii sin -ф) • ft' = — щ • ft' sin ф =
= — sin "ф cos (90° + 9) = sin ф sin 9,
of 12 = / • Г = (n sin \|з + /ij cos i|)) • (я cos ф + n[ sin ф) ==
== sin ф cos ф + cos -ф sin ф cos 9,
«22 =/•/' = (л sin -ф + л{ cos "ф) • (— /i sin ф + «i cos ф) =
= — sin ф sin Ф + cos -ф cos ф cos9t
<x32 = /. kr — (n sin -ф + til cos \|?) • V = ti\ • Л' cos -ф =
= cos г|э cos (90° + 9) = ~ cos -ф sin 9,
<xu = ft • I' = k • (n cos ф + «i sin ф) = ft • «i sin ф =
== sin ф cos (90° — 9) = sin Ф sin 9,
<* 23 = * ' if — Ь " ("" П S'm Ф + Л1 C0S Ф) =ss
= ft • л[ cos ф = cos ф sin 9, a33 == ft • ft' = cos 9.
Выделим полученную группу формул:
cos (х, х') аи ап = cos -ф cos ф — sin "ф sin ф cos 9,
cos (х, у') = ап — — cos t|) sin ф — sin -ф cos ф с &s 9,
cos (jc, г') = a3I == sin ф sin 9,
cos (г/, x') == aI2 == sin i|) cos ф + cos ф sin ф cos 9,
cos (y, if) == a22 == — sin я|) sin ф + cos \J> cos ф cos 9, B)
cos (y, zf) = a32 = — cos г|) sin 9,
cos (г, #0 == a13 =* sin ф sin 9,
cos (z, y') == a23 — cos ф sin 9t
cos (z9 zf) = азз 5= cos 9.
266
ГЛ. XV. ВРАЩЕНИЕ ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
Для установления зависимостей между косинусами углов, образованных
осями подвижной системы (связанной с твердым телом) с осями неподвиж-
неподвижной системы, и эйлеровыми углами можно воспользоваться также формулам»
сферической тригонометрии. Опишем вокруг точки О сферу единичного ра-
радиуса и отметим на поверхности сферы точки пересечения ее с осями коор-
координат и линией узлов (рис. 182). Соединяя эти точки дугами больших кру-
кругов, получаем сферические треугольники, решая которые находим искомые
соотношения между косинусами углов, образуемых координатными осями»,
и тригонометрическими функциями эйлеровых углов.
Используем основную формулу сферической тригонометрии
cos a = cos Ь cos с + sin Ь sin с cos Л,
C)
где дуги а, Ь, с являются сторонами сферического треугольника, а А обозна-
обозначает двугранный угол, противолежащий одноименной стороне (рис. 183).
Чтобы найти, например, cos(x, Jt'), нужно (рис. 182) точки В и С пере-
пересечения осей Ох и Ох' с единичной сферой соединить с точкой А пересечения
линий узлов с этой сферой. Из сферического треугольника ABC по приве-
приведенной только что формуле сферической тригонометрии следует
cos (я, х') = cos ф cos ф + sin i|) sin <p cos A80° — 6) =
= cos -ф cos ф — sin Ф sin ф cos 9.
Аналогично из сферического треугольника ADE найдем
cos (уТу') = cos (90° — -ф) cos (90° + ф) + sin (90° — <ф) sin (90° + ф) cos в =
= — sin \J) sin ф + cos \|з cos ф cos 9„
Сферический треугольник АЕС дает
cos (х, у') == cos ty cos (90° + ф) + sin ф sin (90° + ф) cos A80° — в) =*
= — cos ф sin ф — sin *ф cos ф cos б5
и т. д. , .
Таким путем непосредственно получаются искомые соотношения в любой
системе эйлеровых углов.
§ 59. ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ТЕЛА. ЭЙЛЕРОВЫ УГЛЫ
267
В теории малых колебаний твердого тела (например, в тео-
теории корабля) является существенным требование, чтобы при
малых отклонениях координатного триэдра Ox'y'z* от Oxyz эй-
эйлеровы углы оставались малыми. Предыдущая система эйлеро-
эйлеровых углов этому условию не удовлетворяет. Действительно, из
первого равенства совокупности B) следует, что при малых 0
правая часть близка к cos(i|) + qp), а следовательно, если ось
Ох' мало отклонилась от оси Ох, т. е. дуга хх' близка к нулю,
то и сумма г[) + ф мала, но
слагаемые if и ф по отдельно-
отдельности могут и не быть малыми.
Укажем систему выбора
эйлеровых углов, лишенную
этого недостатка.
Отметим прежде всего три
основных принципа обеспече-
обеспечения правильного выбора эйле-
эйлеровых углов:
1) Выбираются две «основ-
«основные» оси, принадлежащие к
системам осей Oxyz и Ox'y'z*.
Это могут быть как одноимен-
одноименные, так и разноименные оси.
Если оси одноименные, как
это было в только что рас-
рассмотренном случае, то угол между ними обозначается через 0
(угол нутации), если разноименные, то угол полагается равным
л/2 ± 0.
2) Плоскости, перпендикулярные к основным осям, назы-
называются также «основными». В пересечении они дают прямую
линию, а сообщив этой прямой положительную сторону от-
отсчета, получим линию узлов. Углы между основными осями
будем отсчитывать в положительном направлении вокруг ли-
линии узлов,
3) В системах Oxyz и Ox'y'z', наряду с «основными», выби-
выбираются еще «отсчетные оси». Угол между отсчетной осью си-
системы Oxyz и линией узлов, отсчитанный в положительном
направлении около основной оси системы Oxyz, обозначим че-
через \|) (угол прецессии). Угол между линией узлов и второй
отсчетной осью, отсчитанный в положительную сторону вокруг
основной оси системы Oxyz, обозначим буквой ф (угол чистого
вращения).
Пользуясь этими замечаниями, можно указать целый ряд
способов выбора эйлеровых углов. Легко убедиться, что ранее
изложенный способ согласуется с перечисленными только что
принципами.
Рис. 184.
268 ГЛ. XV. ВРАЩЕНИЕ ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
Примем за «основные» оси Ох и Oz' (рис. 184). Угол между
ними по общему правилу обозначим через я/2 + 0. «Основ-
«Основными» плоскостями будут плоскости хОу' и yOz\ следова-
следовательно, линия узлов ON будет лежать в плоскости yOz, т. е.
в плоскости рисунка. Линию узлов ON направим в ту сторону*
чтобы вращение оси Ох к оси Ozr на наименьший угол проис-
происходило в положительном направлении вокруг ON. Углы -ф и q>
выберем, положив yON = if», yf0N = ф. Когда угол G будет
стремиться к нулю, так что угол xOzf будет стремиться к я/2,
то линия узлов ON окажется мало отклоненной от оси Оу
и углы ф и ф будут также малы. Таким образом, условие одно-
одновременной малости всех углов Эйлера при малом отклонении
системы Ox'y'z' от системы Oxyz будет выполнено.
Для составления выражений косинусов углов между осями
системы координат Oxyz и Oxfyrz\ обозначенными в таблице
(см. стр. 263) через ars {г = 1, 2, 3; s = 1, 2, 3), укажем легче
всего приводящий к результатам метод сферической тригоно-
тригонометрии, основанный на применении формулы C).
В сферических треугольниках за одну из вершин всегда бу-
д?м принимать точку N пересечения линии узлов со сферой
единичного радиуса (рис. 184). Чтобы не затемнять чертежа, на
рисунке показаны не все сферические треугольники.
Приведем формулы зависимости косинусов ars от эйлеровых
углов, отмечая в скобках, из каких сферических треугольников
они получены:
{x'Nx) an = cos(#', x) в= cos ф cos 8,
(y'Nx) a2\ = cos (у\ х) = sin cp cos 8,
(по определению 8) a31 = cosB', #)*= — sin 6,
(x'Ny) a12 = cos (x\ y) = — sin cp cos \|) +
+ cos ф sin i|) sin 0„
iy'Ny) a22 = cos (*/', y) = cos ф cos ф +
+ sin Ф sin i|> sine,
(z'Ny) a32 = cos (z\ y) = sin -ф cos 8,
(x*Nz) a13 «= cos (*', z) = sin ф sin \|) +
+ cos ф cos -ф sin 8>
(y'Nz) ааз = cos (*/', z) = — sin ф соз ф +
+ cos "ф sin ф sin О,
{z'Nz) азз == cos {z\ z) = cos ^ cos 8.
§ 60. ПЕРЕМЕЩЕНИЕ ТЕЛА, ИМЕЮЩЕГО НЕПОДВИЖНУЮ ТОЧКУ 269
§ 60. Перемещение твердого тела, имеющего
неподвижную точку
Докажем следующую теорему Эйлера:
Любое перемещение тела, имеющего одну неподвижную
точку, можно осуществить поворотом вокруг оси, проходящей
через эту точку.
Проведем из центра О (рис. 185), вокруг которого вра-
вращается тело, сферу S произвольного радиуса. Эта сфера пере-
пересечет твердое тело по сферической фигуре Г; при движении
Рис. 185.
Рис. 186.
тела вокруг центра фигура Г будет скользить по сфере S. Вся-
Всякому положению фигуры Г соответствует вполне определенное
положение твердого тела, и, наоборот, всякому положению тела
соответствует определенное положение фигуры Г на сфере S.
Поэтому, применяя метод, аналогичный методу замены пло-
плоского движения тела движением плоской фигуры по ее плоско-
плоскости, можно свести изучение перемещений тела вокруг центра
к вопросу о перемещениях сферической фигуры по сфере. По-
Положение сферической фигуры на сфере однозначно связано
с положением отрезка дуги большого круга, проходящего через
точки А и В. Поэтому будем изучать перемещения дуги по
сфере.
Для доказательства теоремы Эйлера рассмотрим два ка-
каких-нибудь положения одной и той же дуги большого круга
(рис. 186): АВ и А'В\ а вместе с тем, следовательно, и два
положения сферической фигуры и самого перемещающегося
твердого тела. Пользуясь в точности тем же рассуждением, что
и при доказательстве теоремы Эйлера для плоской фигуры, со-
соединим концы отрезков дугами больших кругов АА' и ВВ\
отметим их середины А\ и В\ и через них проведем перпенди-
перпендикулярные к предыдущим дугам большие круги. Такие круги
270 ГЛ. XV. ВРАЩЕНИЕ ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
всегда пересекутся; обозначим точку пересечения их через С.
Из равенства сферических треугольников АСВ и А'СВ' (АВ =
= А В' по построению, АС = А'С и ВС = В С, как сферические
наклонные, одинаково удаленные от оснований сферических
перпендикуляров) следует, что треугольник АСВ может быть
совмещен с треугольником А'СВ* одним поворотом на угол
АСА1 вокруг центра С; отсюда следует, что и сферический отре-
отрезок АВ совместится с отрезком АГВ', Так как при таком пере-
перемещении останутся неподвижными две точки О и С, то и пря-
прямая ОС останется неподвижной: эта прямая будет служить
осью поворота тела, что и доказывает тео-
теорему Эйлера. Можно заметить, что приве-
приведенное на рис. 186 построение на сфере, где
роль прямых играют дуги больших кругов,
совершенно аналогично построению центра
поворота в случае плоского движения.
Предположим, что тело совершило ма-
малый поворот. Введем в рассмотрение век-
вектор малого поворота в, равный по величине
углу поворота тела G и направленный по
оси поворота в такую сторону, чтобы с кон-
Рис. 187. ца вектора в вращение представлялось
происходящим в положительную сторону.
Малое перемещение точки М твердого тела с вектор-радиу-
вектор-радиусом ОМ = г с точностью до малых высшего порядка опреде-
определится вектором
р = вХг. D)
Действительно (рис. 187), величина этого векторного про-
произведения равна р = 8rsina = /i0, т. е. величине перемещения,
а направление совпадает с перпендикуляром к плоскости, со-
содержащей векторы 0 и г, в сторону поворота тела.
Пусть тело сначала совершило малый поворот 8ь затем
также малый поворот 02; согласно теореме Эйлера эта сово-
совокупность двух поворотов может быть заменена одним поворо-
поворотом с вектором поворота 0. Чтобы определить вектор резуль-
результирующего поворота 0, возьмем какую-нибудь точку М тела
с вектор-радиусом г, которая после поворота 0i перейдет в по-
положение М' с вектор-радиусом
r'^r + p-r-M^Xr);
при втором повороте 02 точка М' переходит в положение М"
с вектор-радиусом
г" = г' + р'^г' + (82 Хг') = г + @! X г) + 02 X
X [г + Fi X r)] = r + Pi + в2) X г]+ 92X(9iX г).
§ 61 ПОЛЕ СКОРОСТЕЙ 271
Пренебрегая последним слагаемым, как малым вектором
второго порядка (произведением двух малых векторов первого
порядка 01 и 02), будем иметь
Написав формулу результирующего поворота
г" = г + (вХ г)
и сравнивая ее с предыдущим выражением, вследствие произ-
произвольности вектора г получим
0 = 0,+ в2. E)
Если бы сначала был совершен поворот ©2, а потом вь то
было бы
г'/ = г + (в2хг) + е,х[г + (е2хг)] =
= г + [ @2 + ©i) X **] + малые второго порядка.
Итак, приходим к результату: два последовательных малых
поворота тела могут быть заменены одним результирующим
поворотом с вектором поворота, равным геометрической сумме
слагаемых векторов поворота-, от перемены порядка поворотов
результирующий поворот не меняется.
§ 61. Поле скоростей в твердом теле, вращающемся
вокруг неподвижной точки
Уравнениями движения тела, вращающегося вокруг непо-
неподвижной точки, являются уравнения, связывающие параметры
(эйлеровы углы), определяющие положение тела, со временем:
в = /2 @, ф = /з@. F)
Определяя скорость v как предел при Д/->0 отношения ма-
малого перемещения р к промежутку времени А/ и основываясь
на формуле D), найдем
v =
JL = |jm (A x /Л = ( lim ~) X r.
V/.
Вводя вектор угловой скорости
<*> = lim -гт» G)
д*-»о А*
получим
^ = соХг. (8)
Вектор угловой скорости направлен по предельному
положению оси того поворота, который тело совершает за
272
ГЛ. XV. ВРАЩЕНИЕ ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
рассматриваемый бесконечно малый промежуток времени. Ось
эта в отличие от неподвижной оси вращения называется мгновен-
мгновенной осью. Что касается величины вектора со, то уже нельзя, как
раньше, определять ее производной от некоторого угла по вре-
времени; при вращении твердого тела вокруг неподвижного центра,
так же как и в общем случае пространственного движения
твердого тела, такого угла не существует. Иными словами, угол
бесконечно малого поворота
тела не является дифферен-
дифференциалом некоторого угла.
Из формулы (8), в пол-
полной аналогии со случаем
вращения вокруг неподвиж-
неподвижной оси, следует, что вели-
величина скорости равна произ-
произведению величины угловой
скорости на кратчайшее
расстояние точки от мгно-
мгновенной оси:
Рис- 188- вектор скорости направлен
по перпендикуляру к пло-
плоскости, проведенной через мгновенную ось и рассматриваемую
точку, в сторону вращения тела.
Согласно известным правилам проектирования векторного
произведения получим из (8) выражения скорости в проекциях
на неподвижные и подвижные оси (формулы Эйлера):
(9)
- V; vm* =
Покажем, как вычисляется угловая скорость по заданным
уравнениям движения тела F). Для этого заметим, что со-
согласно теореме о сложении малых поворотов (§ 60) всякий ма-
малый поворот тела можно представить в виде геометрической
суммы трех составляющих поворотов:
а следовательно, деля обе части последнего равенства на малый
промежуток времени и переходя к пределу, вектор угловой ско-
скорости этого поворота можно представить в виде суммы трех уг-
угловых скоростей составляющих поворотов:
О) = «! + Щ + Ш3-
§ 61. ПОЛЕ СКОРОСТЕЙ 273
Разложим вектор угловой скорости со (рис. 188) на сле-
следующие векторы:
о>1 — угловая скорость поворота тела вокруг оси Ог,
0J — угловая скорость поворота тела вокруг линии узлов,
о)з — угловая скорость поворота тела вокруг оси Oz'.
Каждый из этих поворотов соответствует изменению лишь
одного из эйлеровых углов, а именно:
($1 — изменению ф,
со2 — изменению 9,
щ — изменению ф.
Отсюда сразу следует, что
Si = 4>, 52 = Э, 53 = ф A0)
и, кроме того,
ф (И)
Пользуясь этим представлением вектора о>, легко найдем
«го проекции на неподвижные оси Охуг:
®х = 9 cos г|э + Ф«зь % = 9 sin г|) + фаЭ2» ©« = Ф + Ф«зз.
или, пользуясь B),
®х = ф sin ф sin 9 + 9 cos 1p,
®У = — ф cos i|> sin 9 + 9 sin ф, A2)
сог = ф cos 9 + Ф-
Аналогично получим и проекции угловой скорости на
движные оси, проектируя равенство A1) на оси координат
Qxri/z\ связанные с движущимся телом:
&х, = ф sin 9 sin ф + 9 соз ф,
<»у/ = ф sin 9 cos ф — 9 sin ф, A3)
юг/= Ф cos 9 + Ф-
Из выведенных только что формул следует
о2 = ф2 + Ф2 + в2 + 2фф cos 9, A4)
Система равенств B) вместе с формулами A2) и A3) ре-
решает вопрос о распределении скоростей в твердом теле, вра-
вращающемся около неподвижного центра.
Проекции угловой скорости можно выразить также и через
направляющие косинусы системы осей, связанной с вращаю-
вращающимся телом. Для этого прежде всего найдем производные па
274 ГЛ XV ВРАЩЕНИЕ ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
времени от единичных векторов подвижной системы, равные
скоростям концов этих векторов. По формуле (8) можем на-
написать
разложим вектор со по тем же единичным векторам:
О) = (Ox,i' + (Oy,f + СОг/Й',
и подставим в предыдущую систему равенств; тогда, вспоми-
вспоминая формулы для векторных произведений единичных векторов,
будем иметь
4
Отсюда, умножая скалярно обе части равенств A5') соот-
соответственно на /', k\ V, получим
"V — dt n dt
®v'— dt l — <ft
или, выражая скалярные произведения через проекции сомно-
сомножителей в системе координат Охуг,
®*/ = ui2ai3 + «22а23 + а32азз = ~ (а12й13 + S2S3 + аз2йзз),
©2/ = й31а32 + апа12 + а21а22 = - (а31а32 + апа12 + а21а22).
§ 62. Мгновенная ось вращения твердого тела; аксоиды
Мгновенная ось была выше определена как ось бесконечно
малого поворота тела. Мгновенную ось можно также опреде-
определить как геометрическое место точек тела, имеющих в данный
момент нулевую скорость. Если обозначить вектор-радиус ка-
какой-нибудь точки М мгновенной оси через г, то из условия ра-
равенства нулю скорости этой точки получим
соХг = 0. A7)
§ 62 МГНОВЕННАЯ ОСЬ ВРАЩЕНИЯ ТВЕРДОГО ТЕЛА
276
Уравнение A7) представляет собой уравнение мгновенной
оси; оно выражает тот факт, что векторы со и г параллельны;
оба вектора имеют общее начало в точке О и, следовательно,
расположены по одной прямой — мгновенной оси вращения
тела.
Проектируя векторное уравнение A7) на неподвижные
и подвижные оси координат, получим уравнения мгновенной
оси:
а) в неподвижной системе координат
— — у —= z
(дх @у @г
б) в подвижной системе координат
A8)
A9)
Проекции угловой скорости будут меняться с течением вре-
времени. Мгновенная ось будет в разные моменты времени зани-
занимать различные положения как в неподвижном пространстве
Oxyz, так и в самом теле, т. е.
в системе Ox'y'z'. Перемеща-
Перемещаясь в неподвижном простран-
пространстве и во вращающемся теле,
мгновенная ось опишет в них
некоторые линейчатые поверх-
поверхности. Так как образующая
эти линейчатые поверхности
мгновенная ось всегда прохо-
проходит через неподвижную точку
О, то поверхности будут кони-
коническими с вершиной в точке О.
Поверхность, образованную
движением мгновенной оси в .01
неподвижном пространстве,
будем называть неподзиоюным
аксоидом, а во вращающемся
теле — подвижным аксоидом. Исключая время из уравнений
A8), получим уравнение неподвижного аксоида, исключая
время из уравнений A9), получим уравнение подвижного
аксоида.
Докажем следующую теорему:
При вращении тела вокруг неподвижного центра подвижный
аксоид катится без скольжения по неподвижному.
Поверхности аксоидов в каждый момент времени имеют об-
общую прямую ОС (рис. 189)—мгновенную ось. Пересечем оба ак-
аксоида плоскостью, проходящей через точку С перпендикулярно
Рис. 189.
276 ГЛ. XV. ВРАЩЕНИЕ ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
к мгновенной оси, и отметим те точки ЛГ и А1, принадле-
принадлежащие подвижному и неподвижному аксоидам, которые в мо-
момент t-\-dt будут находиться на новой мгновенной оси и, таким
образом, совпадут. Перемещение точки АР, т. е. вектор Af'Af,
будет равно по уравнению (8)
МЧЛ = с*> dt X г' = со dt X ОМ' = о) X (ОС + САГ) dt = со X СМ" Л,
так как
Из предыдущего равенства следует, что вектор М'М по
длине представляет собой малую величину второго порядка,
если считать малыми величинами первого порядка промежуток
времени dt и дугу М'С. Это доказывает, что подвижный аксоид
касается неподвижного по общей образующей, т. е. катится по
неподвижному. Остается заметить, что качение происходит без
скольжения. Для этого достаточно вспомнить, что любая точка
тела, находящаяся в данный момент на мгновенной оси, имеет
скорость, равную нулю; следовательно, скольжения на оси быть
не может.
Доказанная теорема о качении аксоидов представляет собой
обобщение ранее выведенной в главе о плоском движении тео-
теоремы о качении без скольжения подвижной центроиды по не-
неподвижной. Собственно говоря, и в случае плоского движения
приходится иметь дело с качением аксоидов, но аксоидов ци-
цилиндрических. Сводя задачу к плоской, естественно вместо ак-
аксоидов брать следы их пересечения с плоскостью движения —-
центроиды.
§ 63. Поле ускорений в твердом теле, вращающемся
вокруг неподвижной точки
Для определения ускорения точки М с вектор-радиусом г
продифференцируем по времени обе части формулы распреде-
распределения скоростей (8). Тогда получим
Производная по времени от вектора угловой скорости опре-
определяет вектор углового ускорения
По величине и направлению этот вектор совпадает со скоростью
движения конца вектора со угловой скорости по его годографу.
§ 63. ПОЛЕ УСКОРЕНИЙ
Замечая, что по предыдущему
277
получим
Первое слагаемое
гг/в) = еХг B3>
представляет собой вращательное ускорение; это — вектор, пер-
перпендикулярный к плоскости, проходящей через вектор углового
ускорения и вектор-радиус взятой точ-
точки тела (рис. 190). В отличие от слу-
случая вращения вокруг неподвижной
оси, вектор углового ускорения не
лежит на той же прямой, что и век-
вектор угловой скорости, а направлен по
некоторой прямой, проходящей через
неподвижную точку; эту прямую
будем называть осью углового уско-
ускорения.
Эта ось, как уже указывалось, па-
параллельна скорости конца вектора со.
Поэтому здесь вектор вращательного
ускорения перпендикулярен не радиу-
радиусу вращения /г, а отрезку /г', пред-
представляющему собой кратчайшее расстояние от точки М до оси
углового ускорения. По величине вращательное ускорение равно
Рис. 190.
Второе слагаемое
w
ДО
= еА'. B4)
w ' = coXi> = <dX(G>X>') B5)
определяет осестремительное ускорение. Оно направлено пер-
перпендикулярно к плоскости, содержащей <о и и, т. е. по кратчай-
кратчайшему расстоянию между точкой М и мгновенной осью, причем
всегда в ту сторону, откуда вращение «о к v на наименьший
угол видно положительным; из рис. 190 видно, что здМос> направ-
направлено к оси со. По величине осестремительиое ускорение равно
w
Хос).
sin -j = ю • ©А =
B6)
Возвращаясь к формуле B2), получаем теорему:
Ускорение точек твердого тела, вращающегося вокруг непо-
неподвижного центра, складывается геометрически из вращательной
и осестремительной составляющих.
278 ГЛ. XV. ВРАЩЕНИЕ ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
Ускорение w легче всего в каждом случае определять по
указанным составляющим. В некоторых случаях, однако, может
представиться необходимым вычислить проекции ускорения на
неподвижные и подвижные оси. Чтобы получить выражения
этих проекций, напишем равенство B2) в форме
w=:eXr + <»(<u.r) — ®2r. B7)
Проектируя равенство B7) по общим правилам векторной
алгебры, получим
wx = eyz - ezy + (дх (<*хх + <s>yy + ®2z) - ю2*,
wy = ezx — exz + toy (<*>xx + <ьуу + а>гг) — со2*/, B8)
= *у,г' — ег,
B9)
— с°2;г'-
Для определения проекций углового ускорения на неподвиж-
неподвижные оси заметим, что
(dto\
dm
так что, дифференцируя по времени обе части равенств A2),
получим выражения проекций углового ускорения на неподвиж-
неподвижные оси через эйлеровы углы и их производные.
Что касается проекций на подвижные оси, то, вообще говоря,
нельзя утверждать, что проекция производной на подвижное
направление равна производной от проекции на то же направ-
направление; однако в случае дифференцирования вектора о и про-
проектирования его на оси координат, связанные с телом, т. е. на
систему осей, вращающуюся с той же угловой скоростью, что
и твердое тело, производная от проекции совпадает с проекцией
производной. Действительно, согласно формулам A5) имеем
do* d , dV d(d~/ , d<uY,
и аналогично для других проекций. Таким образом, для опреде-
определения проекций углового ускорения на подвижные оси следует
вычислить производные по времени от проекций угловой ско-
скорости, приведенных в системе равенств A3).
§ 63 ПОЛЕ УСКОРЕНИЙ
279
z1
Пример 58. Регулярная прецессия. При движении называе-
называемом регулярной прецессией, тело вращается с постоянной угловой ско-
скоростью ц вокруг своей оси Oz' (рис. 191), а эта ось в свою очередь вра-
вращается вокруг оси Oz с постоянной угловой скоростью v, описывая кониче-
коническую поверхность с постоянным углом раствора 26 = 2а.
Разметим эйлеровы углы, как
показано на рис. 191. Уравнения
регулярной прецессии согласно оп-
определению будут иметь вид
•ф = vt, 8 = const = а, ф = \xt. C9
Прежде всего определим про-
проекции вектора угловой скорости на
неподвижные и подвижные оси; по
формулам A2) и A3) найдем
®х = \1 sin a sin vty
<ах/ = v sin а sin \it,
(О = — \х sin а cos vt,
у
®у, =s v sin а cos \itt
<йг = p, cos а + v,
¦ v cos а.
"x*
Рис. 191.
Угловая скорость по величине постоянна и равна согласно формуле A4)
со = V ц2 + v2 + 2jiv cos a ;
по направлению она совпадает с диагональю параллелограмма, построенного
на угловых скоростях (§61) Щ = фЛ = v^, ю3 = ф?'= ц&'. Эта диагональ
определит направление мгновенной оси.
Мгновенная ось описывает конусы в теле и в неподвижном пространстве.
Уравнения этих конусов проще всго написать в декартовой системе; по фор-
формулам A8) и A9) получим уравнения мгновенной оси:
а) в неподвижной системе
х . у г
ц sin a sin vt
в) в подвижной системе
— ц sin а cos vt v + М- cos а *
у'
v sin а sin \it v sin a cos \it ц -f- v cos а '
Исключив из этих пропорций время, получим уравнения аксоидов:
а) неподвижного
б) ПОДВИЖНОГО
(v
cos аJ
\i2 sin2 а
v2 sin2 a (\i -f- v cos aJ
= 0.
Это — прямые круговые конусы.
Для определения углов у и у\ равных половине углов раствора
конусов (рис. 192), проще всего исходить из формул
этих
y=~Q
ctgY'-'(-?
V X
280
ГЛ XV. ВРАЩЕНИЕ ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
Получим
ctg y'
sin a
- + cos a
sin а
+ ctg а,
• + ctg а.
sin а v sin а
Если вектор <0i образует острый угол с вектором <*>з, то прецессия на-
называется прямой, в противном случае — обратной.
Для определения вектора углового ускорения воспользуемся определе-
определением его ка* скорости движения конца вектора угловой скорости со по его
годографу. В данном случае вследствие по-
постоянства величины вектора угловой ско-
скорости ю искомая скорость конца его опре-
определится как скорость точки (с вектор-ра-
вектор-радиусом ш) твердого тела, вращающегося
с угловой скоростью ©I, т. е.
Замечая, что по формуле A1) в слу-
случае регулярной прецессий @ = 0) будет
найдем
X
C1)
Отсюда следует, что вектор е направлен по перпендикуляру к плоскости
г1\ т. е. по линии узлов, в ту сторону, откуда вращение вектора <*>i к <о$
на наименьший угол представляется положительньш. В случае прямой пре-
прецессии вектор углового ускорения совпадает с положительным направлением
линии узлов, в* случае обратной — с противоположным направлением.
Величина вектора углового ускорения равна
е = o&tCOs sin (шь щ) == jav sin a.
К этому же результату можно прийти, дифференцируя по времени вы-
выражения проекций угловой скорости. Будем иметь
ev. =s jxv sin a cos vt, ex, = \iv sin a cos \it,
e^ =sc jiv sin a ski vt, eyf «= —- [iv sin a sin
Отсюда получим величину углового ускорения:
е' ^
Для определения направления е заметим, что
в
cos
= —— =s cos v/ =s cos г|>, cos (e, xr) =« cos ^p,
¦ — =я sin vt ¦¦
e
sin
cos (e, y*) = — sin
cos (e, г) = -^- «= 0; cos (e, zf) == 0.
Отсюда вновь следует, что вектор в направлен по линии узлов.
Глава XVI
ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ АБСОЛЮТНО ТВЕРДОГО ТЕЛА
§ 64. Определение положения твердого тела
в пространстве. Основная теорема о перемещении
абсолютно твердого тела
Чтобы определить положение твердого тела в пространстве,
зададим прежде всего положение какой-нибудь одной его «ос-
«основной точки», или полюса О' (рис. 193), при помощи вектор-
радиуса г0 этой точки или ее
координат (хо, уо, *о). Тело мо-
может вращаться около фикси-
фиксированного положения полюса
О', поэтому для определения
положения тела в простран-
пространстве нужно еще задать три эй-
эйлеровых угла тела по отноше-
отношению к системе О'\ц\„ оси кото-
которой параллельны неподвиж-
ным осям Oxyz, а начало на-
находится в полюсе.
Итак, твердое тело в про-
пространстве имеет шесть степе-
ней свободы, характеризуемых
величинами
z'
и
рис
, 6,
Уравнения движения твердого тела будут иметь вид
*0 = Ы0, #0=72@, 2©=7з@>
¦ = /4@. е = /в</), ф = /•(/).
A)
Имея заданными эти шесть величин, легко составить и урав-
уравнения движения любой точки М тела. Из основного равенства
282
ГЛ. XVI ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
проектированием его на оси неподвижной системы получим
х = х0 + апх' + а{2у' + al3z'\
B)
z = zQ + а31х' + а32у' + a33z'
Здесь направляющие косинусы — обозначения их приняты со-
согласно таблице, помещенной в начале предыдущей главы,—
могут быть выражены через эйлеровы углы согласно формулам
B) предыдущей главы, а углы являются заданными функциями
Рис. 194.
Рис. 195.
времени по A); величины х\ у\ г' — заданные постоянные, оп-
определяющие выбор точки, движение которой разыскивается,
*о, (/о» ?<> — заданные функции времени по A). Таким образом,
при заданных уравнениях движения тела A) уравнения B)
дают уравнения движения точек тела.
Рассмотрение общего случая перемещения тела можно све-
свести к изучению перемещений жесткого треугольника (рис. 194),
имеющего в вершинах какие-нибудь три точки тела Mi, M2r М3.
Положение такого треугольника однозначно связано с положе-
положением твердого тела.
Докажем прежде всего следующую основную теорему
кинематики твердого тела:
Всякое перемещение тела в пространстве может быть осу-
осуществлено поступательным перемещением вместе с полюсом
и одним поворотом вокруг оси, проходящей через полюс.
Для доказательства этой теоремы предположим, что за по-
полюс выбрана точка А тела (рис. 195). Чтобы перейти из поло-
положения / в //, совершим сначала поступательное перемещение
ААи переводящее тело из положения / в положение /'. Пере-
Перемещение тела из положения V в положение // является переме-
перемещением тела вокруг неподвижного центра Ль следовательно,
оно может быть по теореме Эйлера произведено одним враще-
§ 65 СКОРОСТИ И УСКОРЕНИЯ В ОБЩЕМ СЛУЧАЕ ДВИЖЕНИЯ 28$
нием вокруг оси A\Jy проходящей через точку А\, что и доказы-
доказывает теорему.
В дополнение к этой теореме докажем еще, что: 1) вектор
поворота не зависит от выбора полюса, т. е. при перемене по-
полюса будет меняться только поступательное перемещение,
а ось, угол и направление поворота не будут изменяться,
и 2) проекции поступательных перемещений (при различных
полюсах) на общее направление оси поворота равны между
собой.
Для доказательства обратим внимание на то, что в проме-
промежуточных положениях треугольников А\В'С' и А"В\С" стороны
их соответственно параллельны друг другу, а следовательно,
как легко видеть из чертежа, для перехода их в положение
A{B\Ci нужно совершить повороты вокруг параллельных осей
на одинаковые углы и в одинаковом направлении. Далее,
Ш1 = Ш/ + ?b{^Ja1 + вгвх\
но по определению вектора поворота проекция вектора В'В\ на
ось Ail или, что все равно, на ось В\У равна нулю, и, следова-
следовательно, проекции векторов ВВХ и АА\ на это направление
равны друг другу.
Переход тела из одного положения в смежное может быть
совершен при помощи различных поступательных перемещений,
зависящих от выбора той точки тела (полюса), перемещение
которой определяет поступательное перемещение. Все эти по-
поступательные перемещения будут различаться между собой как
по величине, так и по направлению, но проекции их на ось пово-
поворота будут одинаковы. Можно выбрать полюс таким образом,
чтобы перемещение его было наименьшим, т. е. равнялось по
величине общей проекции перемещений всех остальных точек.
Такая точка должна иметь перемещение, направленное парал-
параллельно оси поворота (перемещение будет при этом равно своей
проекции). Совокупность поступательного перемещения и вра-
вращательного вокруг оси, параллельной поступательному переме-
перемещению, называется винтовым перемещением тела. Происхожде-
Происхождение этого наименования следует из рассмотрения совокупности
поступательных и вращательных перемещений винта, ввинчи-
ввинчивающегося в гайку.
§ 65. Поля скоростей и ускорений
в общем случае движения твердого тела
Перемещение любой точки тела, как было показано, скла-
складывается из поступательного перемещения, равного перемеще-
перемещению полюса, и вращательного вокруг оси, проходящей через
284
ГЛ XVf ОБЩИЙ СЛУЧХт ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
полюс. Если рассматривать только бесконечно малые переме-
перемещения тела, соответствующие переходу тела из данного поло-
положения в бесконечно близкое, то с точностью до бесконечно ма-
малых высших порядков можно представить вращательное пере-
перемещение как векторное произведение вектора бесконечно малого
поворота 6 = o)d/ на вектор-радиус тг рассматриваемой точки
по отношению к полюсу.
Обозначим (рис. 196) через р вектор перемещения любой
точки тела, через гг — вектор-радиус ее относительно полюса
и через ро — вектор переме-
перемещения полюса; тогда на ос-
основании только что дока-
доказанной в § 64 теорехмы о пе-
перемещениях будем иметь
Р = Ро + вХг', C)
или, после деления на dt,
tf = t>o + <»Xr' =
=--t,0 + ca(r — r0). D)
Эта основная формула
кинематики твердого тела
дает закон распределения
скоростей в твердом теле в
общем случае его движения.
Слагаемое г/0 определяет
поступательную составляющую скорости, равную скорости по-
полюса, второе слагаемое, о>Хг', представляет собой вращатель-
вращательную составляющую скорости тела вокруг полюса О'.
Дадим другой вывод той же формулы. Продифференцируем
по времени обе части равенства
Рис. 196.
будем иметь
г = го + г' - го + хГ + //' + г'*';
dr ___ dfo , drT ^ dr9
dt !Г~^ dt ss=z' dt
По формулам A5) предыдущей главы
dV
Следовательно,
dh'
. *-«xr. Tr
*
dt
dt
(б)
§ 55 СКОРОСТИ И УСКОРЕНИЯ В ОБЩЕМ СЛУЧАЕ ДВИЖЕНИЯ 285
так что окончательно
» = tio + ©X^
т. е. вновь получаем формулу D).
Зная движение полюса и закон вращения тела вокруг по-
полюса, т. е. имея уравнения движения, можем по формулам D)
определить скорость любой точки тела. Проекции скорости на
оси получим по общим правилам проектирования векторнык
выражений. Выпишем проекции скорости на неподвижные оси:
vy = v0y + ®г* ~~ ®х*> F)
vz = Щх + <*хУ — %х>
и на подвижные оси:
Здесь
что касается проекций скорости полюса на оси подвижных ко-
координат, то их приходится определять по проекциям на непо-
неподвижные оси при помощи формул перехода
«31*0*.
«22%
В формулах G) х\ у\ z' — постоянные координаты выбран-
выбранной в теле точки; координаты той же точки в неподвижной си-
стеме jc, у, г будут выражаться через х', у\ zr по формулам
перехода B). В последних формулах направляющие косинусы
«и, «12, ... выражаются известным уже нам образом через эй-
эйлеровы углы, заданные в функции от времени.
Переходим к рассмотрению вопроса о распределении уско-
ускорений. Для этого продифференцируем левую и правую части
D) по времени; получим
dv dvo . dm r dr'
dt ~ dt ~r dt А г -r°*X —.
или согласно равенству E)
w = wo + eXr' + »X(»Xr'). (8)
Первое слагаемое, w0, определяет поступательное ускорение,
равное ускорению полюса, а второе и третье, ^
286 ТЛ XVI ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
и я;(ос) = ю X (со X О > — вращательную и осестремительную со-
составляющие ускорения вращения тела вокруг полюса. Числен-
Численные величины и направления последних двух слагаемых уже
были исследованы при рассмотрении движения тела вокруг не-
неподвижного центра (рис. 197).
Таким образом, получаем теорему:
Ускорение точки твердого тела в общем случае его движе-
движения складывается из трех составляющих: 1) поступательного
Рис. 197.
ускорения, одинакового в данный момент для всех точек тела
и равного ускорению полюса; 2) вращательного ускорения во-
круг полюса, равного по величине произведению углового уско-
ускорения на кратчайшее расстояние точки до оси вектора углового
ускорения и направленного перпендикулярно к плоскости, про-
проходящей через ось вектора углового ускорения и данную точку,
в ту сторону, откуда вращение вектора углового ускорения
к вектор-радиусу точки на наименьший угол будет видно поло-
положительным, и, наконец, 3) осестремительного ускорения, рав-
равного по величине произведению квадрата угловой скорости на
кратчайшее расстояние точки до мгновенной оси вращения,
проведенной через полюс, и направленного перпендикулярно
к мгновенной оси от точки в сторону этой оси.
Пример 59. Две концентрические сферические поверхности радиусов а
и Ь вращаются с угловыми скоростями «i и бJ вокруг диаметров, составляю-
составляющих между собой угол а. Между сферами помещен шар, касающийся обеих
поверхностей в точках Л и В и катящийся без скольжения. Определим ско-
скорость Vc центра С катящегося шара и его угловую скорость (*).
Вектор-радиусы точек Л, В, С относительно неподвижного центра О сфер
будут равны
rA = ае, rB = be, rc = -^ (а + Ь) еу (9)
где через е обозначен единичный вектор нормали к сферам, проходящий
через точки соприкосновения Л и В. Принимая центр С катящегося шара за
полюс, найдем по формуле D) скорости точек Л и В шара:
VA e VC + .® X (гА - г$, vB^vc + idX(rB- rc). (щ
§ 65. СКОРОСТИ И УСКОРЕНИЯ В ОБЩЕМ СЛУЧАЕ ДВИЖЕНИЯ 287
Составляя сумму этих выражений, получим
VA + VB в 2vc + ю X (гА + гв - 2гс).
По третьему равенству (9) выражение в скобках обращается в нуль,
так что
»сву(»л + »в). 0U
Разность тех же выражений дает
*А-*Вяв0<(гА--Гв). A2)
По условию отсутствия скольжения скорости Va и vb должны быть соот-
соответственно равны скоростям точек Л и В, принадлежащих вращающимся
сферам, так что
VA = ®i X гА = а©1 Xе, ffls(ft2Xrjs = ?<*>2Xв.
Подставив эти величины в равенства (И) и A2), получим
»с«{ («®! + &ю2) X *, (аю1 - 6©2) Хе = (а-6)©Хв. A3)
Введем в рассмотрение постоянный по величине и направлению вектор
U, определив его выражением
ащ + Ьщ
Тогда, очевидно, искомую скорость vc можно представить в виде
Таким образом, вектор-радиус гс описывает прямой круговой конус, ось ко-
которого имеет направление вектора Q; траекторией центра шара С будет
параллельный круг, образуемый пересечением этого конуса со сферой ра-
радиуса {а + Ь)/2. Обозначая через 20 угол раствора конуса, найдем величину
скорости:
vG = Qrc sin 9 = — д/а2со^ + Ь2(?% + 2а6со1со2 соз а sin 9.
Из второго равенства A3) угловая скорость ш шара может быть най-
найдена с точностью до слагаемого, параллельного вектору е:
a — b
Хе.
Здесь Ке определяет угловую скорость «верчения», т. е. составляющую угло-
угловой скорости по общей нормали к сферам в точках соприкосновения
с шаром.
Пример 60. Качение диска по плоскости. Диск радиуса а
катится без скольжения по горизонтальной плоскости Н (рис. 198). Выразим
скорость центра диска через эйлеровы углы и их производные по времени.
Свяжем с диском систему осей O'x'y'z' с началом в центре диска О'
и с осью OV, перпендикулярной к плоскости.лиска. В той же точке. О' от-
отметим направления осей СГх, '0% _~O'*U параллельных^ неподвижным осям,
причем ~6Ъъ~игг направлена по вертикали вверх. Линией узлов O7N является
прямая, лежащая в плоское^и диска и перпендикулярная к плоскости г'О'г.
Эйлеровы углы \|), 9, ф показаны на рис. 180.
288
ГЛ. XVI. ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Вектор-радиус гр = О 'Р точки соприкосновения диска с плоскостью
расположен в вертикальной плоскости г'О'г перпендикулярно к оси О'гг\
2
Рис. 198.
с другой стороны, будучи расположен в указанной плоскости, он будет пер-
перпендикулярен к линии узлов O'N. Отсюда следует, что
Гр^апХк, A4)
где я — единичный вектор линии узлов.
Используя условие отсутствия скольжения в точке Рш напишем для
точки Р9 принадлежащей диску:
vp = vQf + <*> X r'p = 0.
Отсюда, вспомнив формулу разложения A1) § 61 вектора ©>, получим
*О' = гр X © = а (я X к') X (# + ёя + фЛ'). A5)
Применяя известное правило представления двойного векторного произ-
произведения, получим
(я X к') X к = ft' (я • ft) — я (ft' -ft) = — я cos 8,
(я X *0 X n = ft' (я • «) - * (Л' • я) = ft',
(я X *') X кг = ft' (я • ft') - я (ft' • ft') == — я,
после чего равенство A5) дает искомое выражение скорости центра диска;
v0, = a0ft' — a (\j> cos 9 + Ф) я. A6)
Таким образом, вектор скорости центра диска, как и следовало ожидгть,
расположен в плоскости, содержащей ось диска OV и линию узлов, т. е.
перпендикулярен к вектору-радиусу О Р.
Пусть р обозначает радиус кривизны О'С проекции на плоскость Н тра-
траектории центра диска; тогда составляющая вектора скорости точки по линии
§ 66. ВИНТОВАЯ ОСЬ'. ВИНТОВЫЕ АКСОИДЫ
289
узлов будет равна рфя, и из равенства A6) следует, что
— а (ф cos 6 + Ф) = РФ,
или
(р + a cos 9) ф + аф = 0.
Величина р + a cos 0 представляет собой радиус кривизны траектории
точки соприкосновения диска с неподвижной плоскостью Н.
§ 66. Винтовая ось. Винтовые аксоиды
Перемещение твердого тела в пространстве в общем случае
может быть представлено как совокупность некоторого посту-
поступательного перемещения и поворота вокруг
оси, параллельной этому перемещению. Та-
Такую совокупность перемещений, как было
отмечено в конце § 64, называют винтовым
перемещением.
Переход от конечных перемещений к
бесконечно малым перемещениям, а следо-
следовательно и к скоростям, значительно
упрощает рассмотрение вопроса и позво-
позволяет дать ему простое аналитическое ре-
решение.
Докажем прежде всего, что угловая
скорость вращения тела не зависит от вы-
выбора полюса. Перейдем от полюса О' к новому полюсу О"
(рис. 199) и предположим, что при новом полюсе угловая ско-
скорость будет уже не со, а сю'. Тогда
Рис. 199.
Замечая, что
A7)
перепишем предыдущее равенство после очевидных приведений
в виде
<»Х(г'-Го) = <о'Х/-"
или
Из последнего равенства вследствие произвольности век-
вектора г" следует
С0 = (й/,
что и доказывает утверждение об одинаковости векторов угло-
угловой скорости тела при различных полюсах.
Докажем далее также, что проекция поступательной скоро*
сти на направление оси вращения не зависит от выбора полюса.
Умножим обе части равенства A7) скалярно на со, тогда
Ю Л. Г. Лойцянский, А. И. Лурье
290 ГЛ XVT ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
получим
так как
Формула A8) доказывает вышеуказанное предложение.
Принимая различные точки тела за полюс, будем иметь раз-
различные поступательные скорости. Все эти скорости имеют
общую проекцию на направление оси вращения, одинаковой по
направлению для всех полюсов. Те точки тела, которые будут
иметь скорости направленными параллельно оси вращения, бу-
будут вместе с тем иметь и наименьшие скорости. Все остальные
точки будут иметь скорости большие, так как их проекции равны
скоростям предыдущих точек. Докажем прежде всего, что
в теле существует в каждый момент времени ось, все точки
которой имеют скорости, направленные параллельно угловой
скорости.
Вместо того чтобы основываться на теореме о винтовом пе-
перемещении, изложенной в § 64, проще вывести непосредственно
уравнение этой оси из последнего ее определения, пользуясь
основной формулой распределения скоростей D).
Поставим сначала вопрос, можно ли разыскать хотя бы
одну такую точку С с вектор-радиусом r'Cj чтобы скорость ее
была параллельна вектору со, т. е. чтобы выполнялось равенство
*хк+(*хг?)]=о.
Раскрывая произведение, получим
®Х^0 + (дХ(©Хг/с) = (дХг;0 + ш(ш.г/с)~г/с(о2 = 0; A9)
этому уравнению можно удовлетворить, если положить о • г'с =
= 0, т. е. за точку С принять основание перпендикуляра,
опущенного из полюса О на искомую ось; тогда согласно соот-
соотношению A9) найдем
гс Ш2 • \ш)
Одну точку мы, таким образом, определили: ее вектор-ра-
вектор-радиус относительно неподвижного начала О будет равен
но легко видеть, что и все точки с вектор-радиусами
§ 66 ВИНТОВАЯ ОСЬ ВИНТОВЫЕ АКСОИДЫ 291
где к — произвольный скаляр, также удовлетворяют уравнению
A9), а это означает, что геометрическое место точек, скорости
которых параллельны вектору угловой скорости, представляет
собой прямую линию с уравнением
(г7-гух© = 0, B2)
или, переходя к вектор-радиусам по отношению к неподвижной
системе,
(г-гс)Х«> = 0. B3)
Если принять за полюс какую-нибудь точку на этой оси, то
в данный момент времени движение тела можно будет пред-
представить разложенным на поступательное движение вдоль этой
оси и вращательное вокруг нее, т. е. заданное движение можно
рассматривать как винтовое. Такую совокупность движений
иногда характеризуют термином «кинематический винт». Ана-
Аналогия его с «динамой» очевидна. И в статике, и в кинематике
общим является метод приведения совокупности векторов
к простейшему виду.
Общую для всех точек тела поступательную составляющую
скорости назовем скоростью скольжения. Поскольку направ-
направление скорости скольжения дается винтовой осью, причем эта
скорость может быть направлена как в ту же сторону, что
и вектор угловой скорости, так и в противоположную сторону,
будем определять скорость скольжения алгебраической величи-
величиной с, равной по A8)
0 = i to' ш) = i-tox^x + ЯоЛ + 0оА). B4)
где v0 — скорость произвольно выбранного в теле полюса.
Итак, всякое движение твердого тела можно рассматривать
как винтовое, т. е. как совокупность поступательного движения
и движения вращательного вокруг оси, параллельной направ-
направлению поступательного движения. Ось, вокруг которой тело
в данный момент поворачивается и параллельно которой пере-
перемещается поступательно, называется мгновенной винтовой осью.
Уравнения этой оси в векторном виде по отношению к по-
подвижным и неподвижным осям представлены равенствами B2)
и B3) совместно с B0) и B1). Переходя к проекциям на по-
подвижные и неподвижные оси, получим соответственно следую-
следующие уравнения:
B5)
10*
292 ГЛ XVT. ОБПШП СЛУЧАИ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
где координаты точки С определяются по B0) и B1) так:
хс = i («>Л/ - %'%')> Ус = ^ (*V<W - ШЛ)
' B6)
Xq = Xq + -jf (®yVOz — ®zVoy)> Ус = Уо + ^ (<°zVQx — <
, B7)
Как уже упоминалось, точка С выбрана на винтовой оси
так, чтобы вектор-радиус г'с по отношению к полюсу О' был
перпендикулярен к винтовой оси, т. е, чтобы длина вектора r'Q
определяла кратчайшее расстояние от полюса до винтовой оси.
В отличие от мгновенной оси вращения тела, имеющего не-
неподвижную точку, винтовая ось не проходит через одну и ту же
неподвижную точку в разные моменты времени. Как видно из
уравнений B6) и B7), точка С меняет свое расположение в
пространстве с течением времени; поэтому, исключая время из
уравнений B5), мы не получим конических поверхностей.
Линейчатые поверхности, образованные движением винтовой
оси в неподвижном пространстве и в движущемся теле, будем
называть соответственно неподвижным и подвижным аксоидами
винтовых осей.
Подобно тому как это было доказано для аксоидов мгно-
мгновенных осей, можно было бы доказать, что при движении тела
подвижный аксоид винтовых осей катится по неподвижному
и скользит по нему вдоль общей образующей — винтовой оси.
Пример 61. Полюс О' тела описывает в плоскости хОу (рис. 200)
окружность радиуса а с центром в начале координат О; само тело вра-
вращается около этого полюса, совершая регулярное прецессионное движение,
причем угловая скорость обращения полюса О' вокруг точки О равна угло-
угловой скорости v прецессии. Определим вектор угловой скорости, положение
винтовой оси и уравнения винтовых аксоидов.
Уравнения движения будут (угловую скорость ф чистого вращения обо-
обозначим &v)
хо = a cos vf, у о = a sin vi, г0 = 0,
По формулам A2) § 61 найдем проекции угловой скорости на неподвиж-
неподвижные оси:
а>х = kv sin v/ sin 90, ©# = -- kv cos vt sin 6o, <nz = v A + k cos Go).
По равенствам A3) § 61 определим проекции вектора угловой скорости на
подвижные оси:
©Л, = v sin kvt sin 80, со / = v cos Ш sin 90, g>z/ = v(k + cos 90),
§ бб. ВИНТОВАЯ ОСЬ. ВИНТОВЫЕ АКСОИДЫ
По формуле A4) § 61 находим величину угловой скорости:
293
со == v V k2 + 2/e cos Go + 1 .
Чтобы составить уравнения винтовой оси, определим прежде всего коор-
координаты точки С, лежащей на пересечении винтовой оси с перпендикуляром,
опущенным на нее из подвижного начала О'.
х'
Рис. 200.
Для применения формул B7) предварительно вычисляем*
vOx = хо = — av sin vt, vOy = у о = av cos vt, v02 = ?0 = 0;
тогда после простых сокращений получим
¦ cos vt, yc = J*. \^ ,,C°^ °/ . sin vt, zr — 0.
ak(k + cosQ0)
Xr = ,„ , n; s—j
c /г2 + 2/г cos Go +
+ 2/г cos 60 + 1
После этого согласно B5) можно написать уравнение винтовой оси в
неподвижной системе в виде
х — X cos v*
у — Я sin vt
k sin 9o sin vf •— k sin 80 cos vt \ + k cos 90 '
qfe (fe + cos 9o)
B8)
где для краткости положено
Обозначая общую величину отношений B8) через \i, будем иметь
х = Л cos v/ -f ц? sin 90 sin v/,
у = Я sin vf — ц& sin 9o cos v?,
z = \i A + /jcos9o),
и, следовательно,
2k2 sin2 90 = A2 + &2 sin2 90 ¦
A + k cos 90J
294
ГЛ. XVI. ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Уравнение неподвижного акеоида переписывается так:
где введено новое обозначение
Я!-
k sin Во
т. е. неподвижным винтовым аксоидом служит однополостный гиперболоид
вращения с осью симметрии, расположенной по оси Oz.
Аналогичным путем можно показать, что подвижным винтовым аксои-
аксоидом будет служить также однополостный гиперболоид вращения с осью сим-
симметрии O'z'. Уравнение этого акеоида в осях, связанных с телом, будет
иметь вид
где введены обозначения
, / а A + * cos Go)
k + cos Go
sin Go
Заметим, что
+ k cos Go) (k + cos 6q)
+ 2k cos 80 + 1) sinGo
т. е. у обоих гиперболоидов одинаковые мнимые полуоси. Расположение ак-
соидов показано на рис. 201. Подвижный аксоид катится по неподвижному
и скользит по нему вдоль образующей со
скоростью с, определяемой согласно фор-
формуле B4). Вычисление показывает, что в
данном случае скорость скольжения равна
по величине
» fl&v sin Go
V k2 4- 2k cos Go -j- 1 "¦
Она постоянна и при прочих равных
условиях тем меньше, чем меньше угол 0О
между осями гиперболоидов. Благодаря на-
наличию этой скорости скольжения подвиж-
подвижный гиперболоид, накатываясь на неподвиж-
неподвижный, имеет возможность сохранять свой
центр О' постоянно в плоскости хОу.
Угол между осями гиперболоидов со-
сохраняется постоянным; расстояние 00'
между осями тоже постоянно и равняется
а. В силу этих геометрических свойств та-
такие два гиперболовдальных колеса могут
служить для передачи вращения между
двумя непересекающимися осями. Закре-
Закрепим оси Oz и OV; тогда оба гиперболои-
гиперболоида будут вращаться около этих осей, и если
их сцепить при помощи зубьев, то они смогут служить для передачи враще-
вращения между осями.
Пример 62. Движение натурального триэдра траек-
траектории точки, Во многих вопросах механики оказывается полезным рас-
Рис. 201.
§ 66 ВИНТОВАЯ ОСЬ. ВИНТОВЫЕ АКСОИДЫ 29$
смотрение движения твердого тела по отношению к системе координат, сов-
совпадающей с натуральным триэдром траектории одной из точек тела. В связи
с этим необходимо знать движение самого натурального триэдра в простран-
пространстве. Задача ставится так: точка М совершает заданное движение вдоль
траектории со скоростью v\ требуется найти, с какой угловой скоростью
будет при этом вращаться натуральный триэдр осей т, п, Ь траектории.
В дальнейшем будем предполагать, что движение происходит в одну сто-
сторону и в эту сторону направлен вектор т.
Обозначим через о> искомый вектор угловой скорости и представим ею
в форме разложения по единичным векторам натурального триэдра:
со = ©xt + <дпп + щЬ. B9)
Аналогично формулам A5) можно написать
или, вводя величину скорости вершины триэдра v = ds/dt>
-.Xr. % = »Xn, 4г = »Х6 C0)
Подставляя сюда вместо © его разложение B9), будем иметь
(ЮТ + Ш f щЬ) X t
= ~ (ЮТТ + Ш„Я -f щЬ) X t = — (—
*± = J- (сотт + cort/i + щЬ) Xft = ~ (- Щ* + cot6), C2)
— = — (сотт + и>пп + щЬ) х &== — (— сотп + (дп1).
По предыдущему (§ 46) имеем
^ = 1«, C3)
ds p
и сравнение с первой формулой C2) показывает, что
©л — 0, Щ = — v, C4)
Последняя формула C2) после этого принимает вид
Эта формула аналогична C3), с той разницей, что абсолютная величина
\-dxlds\t равная отношению бесконечно малого угла поворота касательной.
(угла смежности) к дифференциалу дуги траектории, определяет кривизну 1/р
траектории, тогда как абсолютная величина \db[ds\ равна отношению бес-
бесконечно малого угла поворота бинормали к тому же дифференциалу дуги.
Это отношение называют кручением кривой и обозначают через 1/х, где
к — радиус кручения. В отличие от кривизны кручение может быть как поло-
положительным, так и отрицательным в зависимости от того, будет ли кривая
закручиваться вокруг своей касательной подобно правому или левому винту,
так что знак кручения будет совпадать со знаком cot. Итак, по формуле C5)
имеем
296 ГЛ XVI. ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
и, значит,
C7)
Подстановка в B9) дает искомое значение вектора угловой скорости
натурального триэдра (вектора Дарбу):
i) C8)
Формулы C2) принимают при этом вид
dx I dn I - 1 db 1 ,om
-— as Л -—- = 6 t, -г— = Л. C9)
ds p ds и р ds x
Это —основные формулы дифференциальной геометрии кривых (формулы
Френе).
Дифференцируя вектор (о по времени и используя вновь формулы C9),
после простых выкладок получим угловое ускорение натурального триэдра:
44V- D0)
р2 ds )
Из последней формулы видно, что как вектор углового ускорения, так
и вектор угловой скорости лежат в спрямляющей плоскости.
Покажем, что величины р и и определяются по заданному уравнению
траектории г = r(s). Для этого вспомним, что
и следовательно, по C3)
dt d2r „ ,,пч
явР-ЗГ-Р-5?-"р^ D2)
Переписывая второе равенство C9) на основании формулы C3) в виде
А — -14--^-Г —\ — JL д. i*PL J*l _j_ /*2t — т Р7
x-p + rfslp(isj"p + ds rfs +p ds2 ~~ p + p
и умножая обе части его скалярно на Ь, получим
I e Р6. ^ = р (т X я) X г'" - р2 (г' X О • г'".
/С
С другой стороны, согласно формулам D2) имеем
-^Г = г"т" = |г"|2.
Итак,
Рассмотренный только что пример служит еще одним под-
подтверждением тесной связи кинематики с геометрией, в данном
случае с дифференциальной геометрией (теорией кривых двоя-
двоякой кривизны).
Глава XVII
ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
§ 67. Абсолютное, относительное и переносное движения
Общая постановка задачи об относительном движении
такова: движение точки определяется наблюдателями, связан-
связанными с двумя различными координатными системами (систе-
(системами отсчета), причем эти системы движутся заданным обра-
образом друг по отношению к другу. Каждый наблюдатель опреде-
определяет кинематические элементы движения: траекторию, скорость
и ускорение в своей системе отсчета.
Ставится задача: зная движение одной системы отсчета по
отношению к другой, найти связь между кинематическими эле-
элементами движения точки по отношению к каждой системе в от-
отдельности.
Рассматривая одно и то же движение точки в различных
координатных системах, заметим, что в одной системе (А) дви-
движение может представиться более сложным, чем в другой (В).
Если движение системы (В) по отношению к системе (А) не-
несложно, то можно сказать, что сложное по отношению к системе
(A) движение точки распадается на два более простых: одно
по отношению к (В) и другое, связанное с движением системы
(B) по отношению к (А). Тогда можно сначала определить
кинематические элементы этих простых движений, а затем уже
по общим формулам теории относительного движения, изложен-
изложенной в настоящей главе, перейти и к элементам сложного, или,
как говорят, составного, движения. В этой возможности разла-
разлагать сложное движение точки на более простые и заключается
основное значение метода относительного движения.
Например, в равномерном движении ползуна по вращаю-
вращающемуся с постоянной угловой скоростью прямолинейному пазу
траекторией ползуна по отношению к неподвижной плоскости
служит архимедова спираль. В то же время это движение мо-
может быть разложено на два простейших движения: равномерное
прямолинейное движение ползуна по пазу и равномерное вра-
вращение твердой линейки, в которой прорезан паз, вокруг не-
неподвижной оси. Точно так же точки шатуна кривошипного
298 Г Л XVII ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
механизма совершают сложное движение по отношению к фун-
фундаменту машины. Но если рассмотреть движение точек шатуна
по отношению к системе отсчета, движущейся поступательно
с пальцем кривошипа, то это будет простое вращение их вокруг
пальца; в свою очередь движение системы координат, связан-
связанной с пальцем, тоже очень просто — это поступательное круго-
круговое движение. Таким образом, сложное движение точек шатуна
можно рассматривать как составное из двух простых: вращения
вокруг пальца кривошипа и поступательного кругового движе-
движения системы координат, связанной с пальцем. Элементы этих
движений разыскиваются без труда, а по ним уже определяются
и элементы составного движения точек шатуна по отношению
к фундаменту машины. На той же идее было основано разло-
разложение общего движения твердого тела на поступательное дви-
движение и вращение по отношению к системе координат, посту*
пательно движущейся вместе с полюсом.
Предположим, что движение точки М в пространстве рас-
рассматривается в двух движущихся друг по отношению к другу
системах координат: Oxyz, O'x'y'z'.
В зависимости от содержания стоящей перед нами задачи
одну из этих систем, Oxyz, примем за основную и назовем абсо-
абсолютной системой координат, а движение по отношению к ней
и все кинематические элементы его — абсолютными. Другую си-
систему, O'x'y'z', назовем относительной и соответственно дви-
движение по отношению к этой системе, а также его кинематиче-
кинематические элементы — относительными. Термины «абсолютный» и
«относительный» имеют здесь условное значение; при рассмот-
рассмотрении движений может оказаться целесообразным то одну, то
другую систему принимать за абсолютную.
Элементы абсолютного движения будем обозначать под-
подстрочным индексом «а», а относительного — индексом «г». На-
Например, Vay wa будут обозначать абсолютные скорость и ускоре-
ускорение, vr, wr — соответственно относительные скорость и уско-
ускорение.
Введем понятие переносного движения, элементы которого
будем обозначать подстрочным индексом «е» (например, ve,
We И Т. Д.).
Переносным движением точки будем называть движение
(по отношению к абсолютной системе) того пункта относитель-
относительной системы, через который в рассматриваемый момент времени
проходит движущаяся точка.
Скорость, ускорение и другие кинематические элементы пе-
переносного движения будем называть переносной скоростью, пе-
переносным ускорением и т. д.
Понятие переносного движения нуждается в пояснении. Не-
Необходимо четко различать точку, абсолютное и относительное
§ 67. АБСОЛЮТНОЕ И ПЕРЕНОСНОЕ ДВИЖЕНИЯ
299
движение которой рассматривается, от той> неизменно связан-
связанной с относительной системой точки, через которую в данный
момент проходит движущаяся точка. На рис. 202 та и другая
точки обозначены одной буквой М, так как рисунок не передает
движения; на самом деле это — две различные точки, движу-
движущиеся друг по отношению к другу.
Остановимся на двух иллюстрациях понятия переносного
движения. Если человек идет по движущейся платформе, то
можно рассматривать, во-первых,
«абсолютное» движение человека
по отношению к Земле, во-вторых,
«относительное» его движение по
платформе. Переносным движени-
движением при этом будет являться дви-
движение по отношению к Земле того
места платформы, по которому
проходит в данный момент человек.
В качестве второго примера
рассмотрим движение жидкости
вдоль трубки, вращающейся вокруг
некоторой оси. В этом случае
переносным движением частицы жидкости является движе-
движение той точки сечения трубки, через которую в данный момент
проходит частица жидкости.
Возвращаясь к рис. 202, найдем зависимость между вектор-
радиусами точки М в разных системах координат. Если обо-
обозначить вектор-радиусы точки М через г в абсолютной системе
Охуг и f в относительной' системе О'д/г/'г7, а вектор-радиус
точки О' по отношению к системе Охуг через г0, то
г = го + г'. A)
По этой формуле можно, зная уравнения относительного
движения точки
B)
Рис 202.
и уравнения движения относительной системы по отношению
к абсолютной, найти уравнения абсолютного движения точки.
Для этого достаточно составить известные зависимости
между координатами точки М в системах координат Охуг
и О'х'у'г'\
х = х0 + апх' + аХ2у' + а13г',
У = Уд + «21*' + а22/ + а23г', C)
г = го + a3lx' + а32у' + а33г'.
Принципиальное отличие равенств C) от имеющих тот же
внешний вид уравнений движения твердого тела C) гл. XVI
300 ГЛ. XVII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
заключается в том, что в данной главе х\ у\ zr уже не постоян-
постоянные величины, определяющие выбор точки твердого тела,
а функции времени, заданные равенствами B) и характеризую-
характеризующие относительное движение точки М.
Уравнения переносного движения получим, фиксируя в ра-
равенствах B) величины х\ у', z'. При этом поскольку коорди-
координаты полюса х0, #о, 2о известны как функции времени, а на-
направляющие косинусы an, oci2, ... выражаются согласно фор-
формулам B) гл. XIII через эйлеровы углы, которые в свою
очередь также заданы как функции времени, то уравнения пере-
переносного движения сведутся к уравнениям движения твердого
тела.
Таким образом, правые части, уравнений C) при заданных
относительном и переносном движениях будут известными
функциями времени, т. е. уравнения C) будут представлять
собой уравнения абсолютного движения.
Исключая по общему правилу из уравнений абсолютного
движения время, получим абсолютную траекторию — след дви-
движения точки М в абсолютной системе координат; точно так же,
исключая время из уравнений относительного движения, полу-
получим относительную траекторию.
Интересно отметить, что одна и та же точка описывает две
различные кривые; благодаря движению относительной коор-
координатной системы точка движется различно по отношению
к абсолютной и относительной системам и при этом, есте-
естественно, описывает разные траектории. Так, например, в пло-
плоском движении мгновенный центр образовывал две различные
центроиды: неподвижную и подвижную.
Уравнения C) упрощаются в случае плоского движения.
Если обозначить через ф угол между положительными направ-
направлениями осей Ох и OV, то формулы C) перейдут в такие:
х = х0 + х' cos ф — у' sin ф,
У = Уо + х' sin ф + Уг cos ф.
В частном случае поступательного плоского движения си-
систем друг по отношению к другу можно выбрать оси так, чтобы
Ф равнялось нулю. При этом формулы D) переходят в такие:
х = хо + х"9 у = Уо + /. E)
В случае вращения относительной системы вокруг непо-
неподвижной оси будем иметь, помещая начало координат на оси
вращения:
х = х! cos ф — у' sin ф,
у в х' sin ф + у' cos ф.
§ 67. АБСОЛЮТНОЕ И ПЕРЕНОСНОЕ ДВИЖЕНИЯ
301
Пример 63. Лента самописца движется с постоянной скоростью с,
перематываясь с правого барабана на левый (рис. 203). Самописец регистри-
регистрирует вертикальные колебания пера М, уравнения движения которого даны
в виде
х = 0, у = a sin (со/ + а).
Найдем уравнения движения пера по отношению к движущейся ленте и урав-
уравнение вычерчиваемой пером на ленте кривой (относительной траектории).
Система О'х'у' движется по отношению к системе Оху поступательно,
так что по формулам E)
0 = х0 + х\ a sin (со/ + а) = у0 + у'.
В данном случае
следовательно, имеем
х' = ct, у/ = a sin (со/ + а).
Относительной траекторией на ленте
является синусоида
1
1
k/f
\
, . /со/ , \
у —a sin I Ь a I •
Рис. 203.
Из выведенного уравнения траектории видно, как надо обрабатывать
запись на ленте. Амплитуда записываемого колебания и фаза его передаются
без искажений; что же касается частоты ю колебания, то она связана с дли*
ной волны L синусоиды на ленте самописца соотношением
со ¦
2яс
L
Пример 64. Найдем кривую, вычерчиваемую пишущим штифтом, дви-
движущимся (рис. 204) по оси Ох согласно уравнению x = f(t)t на диске,
вращающемся равномерно с угловой скоростью со вокруг оси О.
п ./¦
\
Рис. 204.
Рис. 205.
Применим уравнения F), приняв во внимание, что у = 0; тогда, разре-
разрешая эти уравнения относительно х\ у', найдем
х' = х cos ф = / (/) cos со/,
у' = — х sin ф = — /(/) sin со/.
302 ГЛ. XVII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
В данном случае проще применить полярную систему координат г', <р';
будем иметь .
Траектория будет иметь вид
равномерному движению точки М по оси Ох будет соответствовать архиме-
архимедова спираль на диске. При колебании точки с амплитудой а и частотой,
равной угловой скорости диска, получим
тг= a cos со/, q/ = — со/
и, следовательно,
г' = а cos q/,
т. е. полярное уравнение круга диаметра а. На рис. 205 показано располо-
расположение этого круга на диске. За время полного колебания точка М два раза
опишет на диске окружность диаметра а.
§ 68. Сложение скоростей
Рассмотрим некоторую вектор-функцию a{t)> проекции ко-
которой в относительной системе координат ах,, ау,у az, являются
заданными функциями времени, и сравним между собой век-
векторные производные от этой функции, вычисленные наблюдате-
наблюдателями в абсолютной и относительной системах координат. Для
этого, замечая, что
а = ах,г' + ау,Г + аг,к\ G)
составим производную по времени от вектора а в абсолютной
системе координат — абсолютную производную от вектора а по
времени:
dt dt * ' dt
+ а ^L + a -^L+a — (8)
Векторное выражение, стоящее в первой строке правой части
равенства (8), является производной от вектора а, вычисленной
в предположении неизменности направления единичных векто-
векторов осей относительной системы координат, как это предста-
представится наблюдателю, соединенному с этой системой. Такое
выражение естественно назвать относительной производной.
В отличие от абсолютной производной da/dt обозначим относи-
относительную производную через d'a/dt, так что
dt — dt l ^ dt 1 + dt R • W
Для преобразования векторного выражения, стоящего во
второй строке равенства (8), вспомним формулы A5) гл. XV,
§ 68. СЛОЖЕНИЕ СКОРОСТЕЙ- 303
выражающие производные по времени единичных векторов по-
подвижной системы координат:
где (о обозначает вектор угловой скорости вращения относитель-
относительной системы координат O'xryrz'\ получим
dV . d]' . dW
ах>ЧГ + ау>ЧГ + аг>ЧГ~
= © X {aj + ау,Г + az,k') = шХ«. A1)
Таким образом, равенство (8) приобретает вид
и мы приходим к следующей весьма важной для дальнейшего
лемме:
Абсолютная производная по времени от вектора равна гео-
геометрической сумме относительной производной того же вектора
и векторного произведения вектора угловой скорости вращения
относительной системы координат на дифференцируемый
вектор.
Обращаясь к формуле (9), видим, что проекции относитель-
относительной производной d'a/dt на оси относительной системы коорди-
координат равны производным от проекций дифференцируемого век-
вектора на эти оси, так как для наблюдателя, связанного с относи-
относительной системой координат, оси этой системы представляются
неизменными по направлению. Таким образом,
d'a\ _dax, (d'a\ day, (d'a\ _ daz,
Проектируя на те же оси абсолютную производную, будем
иметь согласно равенству A2)
KdtL— at
Применим доказанную лемму для вывода теоремы о сложе*
нии скоростей. С этой целью вычислим абсолютную производ»:
ную по времени от обеих частей равенства A):
г = г0 + г'\
304
ГЛ. XVII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
будем иметь
dr
dr'
A5)
Здесь абсолютная производная по времени от вектор-радиуса г
представляет собой, очевидно, абсолютную скорость va, dro/dt
есть вектор скорости Vo начала О' относительной системы коор-
координат. Второе слагаемое справа —
абсолютная производная по време-
времени от относительного вектор-радиу-
вектор-радиуса— по формуле A2) будет равно
*L=*? + *Xr'. A6)
Рис. 206.
Первое слагаемое в правой части —
относительная производная по вре-
времени от относительного вектор-
радиуса — представляет собой от-
относительную скорость точки vr. Подставляя A6) в A5), по-
получим
*« = *„ +®Хг' + *г. A7)
Но сумма первых двух слагаемых справа по известной фор-
формуле для скоростей точек твердого тела в общем случае его
движения представляет собой скорость той неизменно связан-
связанной с относительной системой координат точки, через которую
в данный момент проходит движущаяся точка. Это по опреде-
определению— переносная скорость ve, равная
ve = v0 + <s>Xr'. A8)
Итак, окончательно получим
va = ve + vn A9)
что приводит к следующей теореме о сложении скоро-
скоростей:
Абсолютная скорость точки равна геометрической сумме пе-
переносной и относительной скоростей.
Полученная теорема носит еще наименование правила па-
параллелограмма или треугольника скоростей. Происхождение
этих названий ясно из рис. 206, представляющего диаграмму
сложения векторов относительной и переносной скоростей.
Пример 65 Воздушный поток набегает на вращающуюся лопасть
ветряного двигателя с абсолютной скоростью va = 10 м/с (рис. 207). Угол
атаки а, образованный направлением вектора абсолютной скорости va с хор-
хордой сечения К лопасти, переменен по ее размаху (лопасть закручена) и
равен ао = 30° в среднем сечении лопасти, находящемся на расстоянии
Го = 2 м от оси вращения. Считая, что относительная скорость частиц воз-
§ 68 СЛОЖЕНИЕ СКОРОСТЕЙ
305
духа направлена вдоль хорды сечений лопасти, найдем угловую скорость
вращения лопасти и зависимость угла атаки а от расстояния г до оси вра-
вращения лопасти.
Сечение К (рис. 207), находящееся
от оси вращения лопасти на расстоянии
г, имеет окружную скорость, равную по
величине
ve = ©г.
Из треугольника скоростей, изобра-
изображенного на рис. 207, получаем
vе = va tg а,
следовательно,
Из условия в среднем сечении нахо-
находим значение угловой скорости:
Vn 10 Рис- 207-
© e ±?- tg а0 - 4r tg 30° « 2,9 1/с
Го ^
Искомая зависимость между углом закрутки и радиусом вращения на-
находится из соотношения
tg (X == tg do.
Пример 66. На рис. 208 схематически представлен механизм мальтий-
мальтийского креста, применяемый в кинопроекционных аппаратах. Пока зуб М ве-
ведущего колеса О4 не вошел в прорезь, крест неподвижен (рис. 208,а); в
момент входа угловая скорость креста ©г равна нулю; затем крест приходит
во вращение (рис. 208, б); при расположении, указанном на рис. 208, в, крест
имеет максимальную угловую скорость и т. д. Найдем закон изменения угло-
угловой скорости креста при заданной постоянной угловой скорости соА ведущего
колеса.
Так как движение креста не должно сопровождаться ударами, то в мо-
момент входа в прорезь скорость зуба должна быть направлена вдоль прорези.
Иными словами, в положении а) угол OiMOi должен быть прямым. По
истечении четверти оборота ведущего колеса О\ крест в течение последую-
последующих трех четвертей оборота будет оставаться неподвижным. В начале сле-
следующего оборота зуб М должен войти в следующую прорезь, которая те-
теперь должна занимать в точности то же положение, какое раньше занимала
первая прорезь. Отсюда нетрудно заключить, что в положении a) ZMO2Oi
в= ZMO1O2 = 45°. Пусть OiM s= г; в силу сказанного найдем 0^2 = г V~
306
ГЛ. XVII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
Обращаясь к схематическому рис. 209, на котором пунктиром показано
начальное положение а), имеем
л ,. о о га>1 cos 8
Ve = О2М •tiJ = Va COS р = rCOi COS P, C02 =
\J2JVL
Далее находим
(O2MJ = (OiMJ + @{02J - 2OXM • OiO2 cos D5° - cp),
или
(O2MJ = r2 + 2r2 — 2г2 V 2 cos D5° — <р) = г2 C — 2 cos <р — 2 sin ф).
Рис. 209.
0 /^? ^Z? 30 45 60 70 80 90 tp°
Рис. 210.
Проектируя теперь стороны треугольника O2MOi на направление
получим
г д/Т cos D5° — ф) — О2М cos E == г,
или
О2М cos р = г (cos ф + sin ф — 1),
и, следовательно,
cos ф -f sin ф — 1
С02 =
3 — 2 (cos qr+ sin ф)
©i.
Таков закон изменения угловой скорости при 0 < ф < я/2. При
я/2 <С ф <С 2я крест неподвижен, т. е. оJ = 0. График угловой скорости
креста показан на рис. 210.
§ 69. Сложение ускорений
Чтобы перейти к ускорениям, вычислим абсолютную произ-
производную по времени от обеих частей соотношения A7), выра-
выражающего теорему сложения скоростей. Получим
dVg
dt
B0)
Преобразуем это равенство так, чтобы производные от век-
векторов брались в той системе координат, к которой дифферен-
дифференцируемый вектор отнесен; так, dva/dt берется в абсолютной
системе Oxyz, так как va есть скорость по отношению к этой
системе; dvr/dt необходимо преобразовать к такому виду, чтобы
выделилась относительная производная d'Vr/dt, так как vr есть
вектор скорости по отношению к системе O'x'y't'. Точно так же
dr'/dt следует выразить через d'r'/dt. Замечая, что на основа-
§ 69. СЛОЖЕНИЕ УСКОРЕНИЙ 307
нии леммы предыдущего параграфа
и что, кроме того,
dva d'vr dv0 d'r' d®
перепишем B0) в виде
wa = Wr + Wo + *Xr' + <>>X(<*Xr') + 2<i>Xvr. B1)
Здесь wa — абсолютное ускорение точки, wr — ее относительное
ускорение; совокупность второго, третьего и четвертого слагае-
слагаемых определяет по формуле (8) § 65 ускорение точки твердого
тела с вектор-радиусом г\ т. е. ускорение того пункта системы
координат O'x't/z', через который проходит в данный момент
движущаяся точка; это будет переносное ускорение
we = w0 + sXr' + <»X(<*X г')\ B2)
последнее слагаемое
wc^2(*Xvr B3)
называют поворотным ускорением или (по имени французского
ученого XIX столетия Кориолиса) кориолисовым ускорением.
Как видно из хода вывода, поворотное ускорение состави-
составилось из двух одинаковых слагаемых шХ^г. Первое из них по-
появилось при вычислении абсолютной производной от вектора
относительной скорости и выражает изменение вектора относи-
относительной скорости, обусловленное поворотом этого вектора вме-
вместе с относительной системой координат. Второе возникло при
вычислении абсолютной производной от переносной скорости
за счет изменения во времени относительного вектор-радиуса
точки.
Итак, имеем
wa = wr + we + wc. B4)
Формула B4) представляет собой теорему сложения
ускорений:
Абсолютное ускорение точки равно геометрической сумме
относительного, переносного и поворотного ускорений.
Относительное ускорение wr определяется в относительной
системе координат по правилам кинематики точки; его проек-
проекции на оси этой системы определяются как первые производные
по времени проекций относительной скорости на те же оси или
как вторые производные относительных координат х', у\ zr.
Можно также для вычисления относительного ускорения wr
308 ГЛ XVII ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
пользоваться разложением его по осям натурального триэдра
относительной траектории.
Переносное ускорение вычисляется методами кинематики
твердого тела. Если относительная система O'x'y'z' движется
поступательно или вращается вокруг неподвижной оси, то при-
применяются простые приемы гл. XIII, в случае плоского движения
относительной системы — приемы гл. XIV и, наконец, для более
сложных случаев вращения вокруг неподвижного центра и об-
общего движения относительной системы придется использовать
методы, изложенные в гл. XV и XVI.
Остановимся специально на определении третьего слагае-
слагаемого в формуле сложения ускорений — поворотного (кориоли-
сова) ускорения. Как непосредственно
следует из B3), величина этого ускоре-
ускорения находится по формуле
wc = 2avr sin (со, vr), B5)
а направление — по общему правилу
векторного умножения: поворотное уско-
ускорение направлено по перпендикуляру к
плоскости, содержащей « и vr, в ту сто-
сторону, откуда вращение <о к vr на наи-
наименьший угол будет видно положитель-
положительные; если со и vr не лежат в одной пло-
плоскости, то можно перенести их парал-
параллельно самим себе так, чтобы они пере-
пересеклись, и уже восставлять перпендикуляр к плоскости, опре-
определенной их пересечением.
Укажем другой часто употребляемый способ (рис. 211): от-
отложим от некоторой точки О вектор 2о>, параллельный вектору
угловой скорости вращения относительной системы, и от этой
же точки — вектор, равный и параллельный вектору vr относи-
относительной скорости точки.
Если вращать вектор vr с угловой скоростью 2со, то окруж-
окружная скорость конца вектора vr будет равна
т. е. как раз представляет собой вектор wc поворотного уско-
ускорения.
Отметим некоторые частные случаи определения поворот-
поворотного ускорения:
1. Поворотное ускорение равно нулю, если:
а) со = 0, т. е. в случае поступательного движения относи-
тельной системы;
б) вектор vr параллелен со, т. е. если точка в относительном
ее движении перемещается параллельно оси вращения системы.
§ 69. СЛОЖЕНИЕ УСКОРЕНИЯ
309
2. Поворотное ускорение по величине равно 2о)Уг, если точка
движется в плоскости, перпендикулярной к оси вращения си-
системы.
Наличием поворотного ускорения объясняются многочислен-
многочисленные явления, происходящие на поверхности Земли вследствие
ее вращения. Рассмотрим точку М (рис. zlL, а), двлжущуюся
со скоростью vr по отношению к Земле (в дальнейшем индекс г
может быть опущен). Направим ось Мх по касательной к па-
параллели на восток, ось My по касательной к меридиану на се-
север; тогда в правой системе координат ось Mz будет направ-
направлена по вертикали вверх. Вектор угловой скорости Земли со
Горизонтальная
плоскость
Рис. 212.
направлен по оси ее вращения к северу. Направление относи-
относительной скорости зададим углом \х (рис. 212,6) вектора v с го-
горизонтальной плоскостью хМу и углом Я проекции скорости v
на эту плоскость с осью х; широту места точки М обозначим
через г|).
Для определения поворотного ускорения wc найдем его про-
проекции на выбранные оси по формулам проекций векторного
произведения:
wcx = 2 (®yvz — &zvy)f
wcy = 2 {®zvx — ®xvz\ B6)
В рассматриваемом случае имеем
= й> sin
vx = v cos [г cos Л, vy =¦ v cos \i sin Я, vz = v sin fx,
310 ГЛ. XVII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
так что проекции поворотного ускорения, вызванного враще-
вращением Земли, будут
wcx = 2аю (ccs я|) sin \x — sin ф cos \x sin Я),
^ = 2a>v sin -ф cos \i cos Я, B7)
a^ = — 2cdcj cos г|з cos \x cos Я.
Так, например, легко убедиться, что составляющая в гори-
горизонтальной плоскости поворотного ускорения wch частиц воды
в реках направлена поперек течения реки к левому берегу
в Северном полушарии и к правому берегу в Южном полуша-
полушарии. Действительно, в этом случае \х = 0, так что проекции wch
на оси х и у будут равны
wcx = — 2®v sin -ф sin Я = 2<о sin -ф • v cos f-~ + ?Ч »
wcy = 2coi> sin я|) cos Я = 2со sin г|) • v sin (—> + Xj .
Замечая, что v cos Г-^- + Я J и у sin f-у + Я] являются проек-
проекциями вектора, получаемого при повороте вектора относитель-
относительной скорости v на угол я/2 влево (от оси х к оси у), если
смотреть вдоль направления вектора, заключаем, что направ-
направление поворотного ускорения можно найти путем поворота век-
вектора относительной скорости на угол я/2 влево при \|) > 0 (Се-
(Северное полушарие) и на угол я/2 вправо при г|) < 0 (Южное
полушарие).
В динамике будет показано, что в относительном движении
на поверхности Земли поворотному ускорению соответствует
поворотная, или кориолисова, сила, направленная в сторону,
противоположную этому ускорению. Кориолисова сила вызы-
вызывает дополнительные движения частиц воды: к правому берегу
в Северном полушарии и к левому берегу в Южном полушарии.
В этом заключается известный закон Бэра. Наблюдающееся
в Северном полушарии преимущественное истирание правого
рельса двухколейных железных дорог также объясняется дей-
действием кориолисовой силы.
В случае вертикально движущегося тела (jm = ±я/2) пово-
поворотное ускорение согласно B6) будет иметь лишь проекцию на
ось х, равную
wcx = ± 2соу cos \|).
Соответствующая кориолисова сила независимо от того, бу-
будет ли движение совершаться в Северном или Южном полуша-
полушарии, действует на тело, движущееся вверх, в западном направ-
направлении, а на движущееся вниз — в восточном.
§ 69 СЛОЖЕНИЕ УСКОРЕНИЙ
311
Пример 67: Найдем абсолютное ускорение точек М ц N (рис. 213)
колеса С{ радиуса г, катящегося без скольжения по неподвижному колесу С
радиуса Rt если рукоятка ООХ вращается равномерно с угловой скоростью оь
а)
Рис. 213.
Свяжем относительную систему Oxfif с вращающейся рукояткой и, за*
мечая, что угловая скорость колеса С\ по отношению к рукоятке OOi равна
п
— cd, найдем:
а) для точки М
шг=( — со J г = со2, we = со2/?, сос = 2сог — 0 =
б) для точки N
Wr = —^_j We = ©2 (^ + 2r), wc = 2co2/?.
Направления соответствующих ускорений показаны на рис. 213,6. Все
ускорения располагаются по одной прямой; поэтому абсолютное ускорение
определится как алгебраическая сумма состав-
составляющих:
а) для точки М абсолютное ускорение рав-
равно
Wa = 2со2/? + -^1 со2 - со2/? = со2# A + -~
и направлено от М к N\
б) для точки W абсолютное ускорение
равно
wa = -—- со2 + со2 (R + 2г) +
= со2/? ^3 + ~- + -?-) Рис. 214.
и направлено от N к М.
Если радиусы i?Hf одинаковы, то шаМ==2аJг' ^aN
312
ГЛ XVII ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
Пример 68. Найдем ускорения точек обода колеса в случае внутрен-
внутреннего зацепления при отношении диаметров внешнего и внутреннего колес
2:1 (рис. 214).
Замечая, что в этом случае угловая скорость малого колеса по отноше-
отношению к рукоятке в два раза больше угловой скорости рукоятки, будем иметь
wr = BсоJ г = 4co2r, we = со2 • О М, wc = 2© • 2сог = 4со2г.
Направления этих ускорений показаны на рисунке. Как видно, в любой
Точке М обода поворотное ускорение равно по величине относительному
ускорению точки и противоположно ему по на-
направлению, так что абсолютное ускорение wa сво-
сводится к ускорению переносного движения. Таким
образом, имеем
та = ©г. 0Mf
причем ускорение всегда имеет направление к
центру О. Это — ускорение прямолинейного гар-
гармонического колебания точки М по прямой, ука-
указанной на рисунке пунктиром, с периодом, рав-
равным периоду полного об.орота рукоятки.
Пример 69. Пользуясь теорией относитель-
относительного движения, найдем проекции скорости и ус-
Рис. 215. корения точки на оси полярной системы коорди-
координат.
Движение точки М по траектории КК
(рис. 215) разложим на два движения: 1) отно-
относительное движение точки по вектор-радиусу ОМ
и 2) переносное движение, т. е. движение той
точки на вектор-радиусе, которую проходит дви-
движущаяся точка М.
Относительная скорость, направленная вдоль
вектор-радиуса ОМ, называется радиальной ско-
скоростью и обозначается через ир; она равна ско-
скорости прямолинейного движения точки вдоль ра-
х диуса, так что
Рис.216. t>p = -^.=p. B8)
Переносную скорость, направленную перпендикулярно к радиусу в сто-
сторону возрастания угла ф, обозначим через v q>; очевидно, что
*ф = рф. B9)
Таким образом, величина абсолютной скорости, т. е. скорость точки, опре-
определится из равенства
02 = р2 + р2ф2. C0)
Легко сообразить, что в данном случае wr = р. Что касается переносного
ускорения, то оно складывается из двух: вращательного w^ и осестремитель-
ного weoc\ равных
w{eB) = рф, w(eoc)« рф2.
Кориолисово ускорение будет равно
= 2фр.
§ 70 СЛОЖЕНИЕ ВРАЩЕНИЙ ВОКРУГ ПАРАЛЛЕЛЬНЫХ ОСЕЙ
313
Из рис. 216 получим проекции дор и доф ускорения на направление ра-
радиуса и перпендикулярное к нему:
¦РФ*
:Рф + 2фр=~-^- (р2ф).
C1)
Формулы эти были получены ранее [см. B2) § 48] из общих выражений
для проекций ускорения в криволинейных координатах.
§ 70. Сложение вращений твердого тела
вокруг параллельных осей
Предположим, что твердое тело вращается вокруг некоторой
оси, которая в свою очередь вращается вокруг другой, непо-
неподвижной оси, ей параллельной. Зная угловую скорость враще-
вращения тела вокруг подвижной оси
и угловую скорость вращения
самой оси вокруг неподвижной
оси, определим абсолютное дви-
движение тела.
Относительным движением в
данном случае является враще-
вращение твердого тела вокруг оси
O'z' (рис. 217) по отношению
к системе координат O'x'y'z, в
свою очередь вращающейся во-
вокруг оси Ох неподвижной (аб-
(абсолютной) системы координат
Oxyz; вектор угловой скорости
вращения тела вокруг оси O'z',
направленный вдоль этой оси,
обозначим через (о, и назовем
относительной угловой скоростью. Вращение самой системы
координат O'x'y'z' по отношению к системе Oxyz будет пере-
переносным движением; вектор угловой скорости этого вращения,
направленный по оси Ог, обозначим через <ое и назовем пере-
переносной угловой скоростью.
Заметим прежде всего, что по условию параллельности век-
векторов (Or и (Не все точки тела как в относительном, так и в пере-
переносном движении остаются в плоскостях, перпендикулярных
к этим векторам, т. е. в параллельных между собой плоско-
плоскостях; следовательно, абсолютное движение тела будет плоским;
располагая оси так, чтобы плоскости О'х'у' и Оху сливались,
сведем задачу к рассмотрению плоского движения фигуры F по
отношению к системам координат О'х'у' и Оху. Точка М этой
плоской фигуры, имеющая вектор-радиус г' по отношению к О'
и вектор-радиус г по отношению к О, будет двигаться с абсо«
лютной скоростью va, равной геометрической сумме относитель*
Рис. 217.
314 ГЛ XVII ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
ной скорости vr = ыг X т' = <ог X (х — г0) и переносной скорости
Соединяя члены с г и г0, получим
Va = Vr + Ve = <дг X (Г — Г0) + <*е X Г = ((О, + ©г) X Г - <*г X Го.
C2)
С другой стороны, рассматриваемое плоское движение
можно представить как мгновенное вращение около оси, прохо-
проходящей через мгновенный центр и перпендикулярной к плоскости
движения. Чтобы найти положе-
положение этой оси, обозначим вектор-
{ша радиус мгновенного центра Р че-
через Гр и напишем условие, что
абсолютная скорость точки плос-
кой. фигуры Р равна нулю. По-
—*- лагая в равенстве C2) г = гРу
У va = Vp = 0, найдем
О = К + ©г) Хгр-<йгХ г0. C3)
и
Умножим обе части этого ра-
Рис. 218. венства векторно на единичный
вектор k оси Oz; тогда, раскры-
раскрывая двойное векторное произведение и пользуясь перпендику-
перпендикулярностью векторов Гр и Го к единичному вектору й, получим
((Og + G)r) Гр = СОгГо,
где (Ье и <Ьг согласно принятым обозначениям представляют со-
собой алгебраические величины угловых скоростей (знак «плюс»,
если вращение положительно для наблюдателя, смотрящего
с положительного направления оси Oz или О'г', знак «ми-
«минус»— в противоположном случае). Итак,
©г _
Из последнего равенства видно, что при любых зависимо-
зависимостях между (Ье и &г мгновенный центр Р находится на линии
00' (рис. 218).
Чтобы найти угловую скорость вращения вокруг мгновенного
центра, вычтем C3) из C2); получим
»а = К + ®г)Х(г-Гр). C5)
Это — формула вращательной скорости фигуры F вокруг точки
Р с абсолютной угловой скоростью, равной
§ 70 СЛОЖЕНИЕ ВРАЩЕНИЙ ВОКРУГ ПАРАЛЛЕЛЬНЫХ ОСЕЙ 315
Итак, рассматриваемое абсолютное движение твердого тела
эквивалентно вращению вокруг мгновенной оси, проходящей
через мгновенный центр Р, с абсолютной угловой скоростью,
равной геометрической сумме переносной и относительной уг-
угловых скоростей.
Отметим возможные случаи расположения мгновенной оси.
1. Направление вращений одинаково, т. е. шг и <Ь е имеют
один и тот же знак, например положительный (рис. 218).
В этом случае из уравнения C4) Zi
видно, что точка Р лежит между
центрами О и О' на расстояниях,
обратно пропорциональных вели-
чинам угловых скоростей, т. е.
ОР:О'Р = ®г:<де.
Абсолютная угловая скорость
вращения вокруг оси, проходящей
через точку Р, по C6) равна
сумме
а Рис. 219.
и направлена в ту же сторону.
2. Направление вращений различно, т. е. йг и &е имеют раз-
различные знаки, например, <Ье > О, а юг < 0, причем положим для
определенности, что со* > сог. В этом случае из формулы C4)
следует
Точка Р, следовательно, лежит за точкой О (рис. 219). Рас-
Расстояние О'Р равно сумме длин г0 и гР:
О'Р = г0+ ае-<йг Г°^ ©е-©г Г°'
так что опять, как и в предыдущем случае,
ОР: О'Р = «г: <se,
т. е. мгновенная ось расположена вне отрезка OQ', со стороны
большей угловой скорости, на расстояниях от точек О и О',
обратно пропорциональных величинам угловых скоростей сое и сог.
Если бы (ое было меньше ov, то было бы
Точка Р при этом оказалась бы вне отрезка 00', но уже за
точкой О\ Легко заметить, что и в этом случае мгновенная
ось опять расположится на расстояниях, обратно пропорцио-
пропорциональных величинам угловых скоростей we и шп
316 ГЛ. XVII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
И в том и в другом случае величина соа оказывается равной
причем вектор <оа направлен в сторону большей угловой ско-
скорости.
3. Направления вращений различны, но угловые скорости
их равны по величине {<ов = —сог).
Этот случай представляет некоторую особенность, так как
векторы со* и сог образуют пару векторов (рис. 220). Обращаясь
Рис. 220.
Рис. 221.
к формуле C2), видим, что все точки тела будут иметь одну и
ту же абсолютную скорость
va = — юг X г0 = в)е X г0,
равную скорости полюса О'; в этом случае имеет место мгно-
мгновенно-поступательное движение тела.
Объединяя все три случая, приходим к следующему резуль-
результату: при сложении вращений вокруг параллельных осей угло-
угловые скорости складываются так же, как параллельные силы в
статике.
При проведении этой аналогии переносная и относительная
угловые скорости рассматриваются как слагаемые силы, а аб-
абсолютная угловая скорость соответствует равнодействующей
силе.
В качестве приложения рассмотрим вопрос об определении
угловых скоростей в эпициклическом зацеплении зубчатых
колес.
Обычно эпициклическим или планетарным механизмом на-
называют сцепление двух или нескольких колес, из которых одно
вращается около неподвижной оси, другие — около осей, за-
закрепленных на подвижной рукоятке (рис. 221), причем зацеп-
зацепление может быть как внешним, так и внутренним. Колеса,
соединенные с вращающейся рукояткой, называют сателлитами.
§ 70. СЛОЖЕНИЕ ВРАЩЕНИЙ ВОКРУГ ПАРАЛЛЕЛЬНЫХ ОСЕЙ
317
Выведем общее соотношение между угловыми скоростями
колес и рукоятки по отношению к основанию механизма в слу-
случаях внешнего и внутреннего зацепления. На рисунке все угло-
угловые скорости показаны в направлении по часовой стрелке; знак
в дальнейшем покажет истинное направление вращений. Угло-
Угловая скорость рукоятки обозначена через Q.
Придадим механизму в целом вращение с угловой скоростью
—Q, равной по величине угловой скорости рукоятки, но проти-
противоположной ей по направлению. Тогда по теореме о сложении
угловых скоростей основание механизма станет подвижным зве-
звеном, имеющим угловую скорость —Q, а рукоятка, наоборот,
станет неподвижной и будет играть роль основания механизма.
Механизм с перемещающимися осями превратится при этом
в систему зубчатых колес с неподвижными осями, но угловые
скорости колес будут уже равны соответственно й — Q и со — Й.
Тогда, пользуясь известным соотношением между угловыми
скоростями и радиусами, найдем
(О — &
= -4 C7)
для внешнего зацепления и
C8)
Рис. 222.
для внутреннего.
Пример 70. Для получения боль-
больших угловых скоростей применяют сле-
следующий механизм (рис. 222). Рукоятка
IV вращается вокруг неподвижного
центра О и несет на своем конце Ot
колесо //, сцепленное с неподвижной
обоймой ///. Полученное таким образом вращение колесо // передает колесу /,
свободно насаженному на ось О. Найти связь между угловыми скоростями
рукоятки и колеса /.
Дадим основанию механизма вращение, обратное вращению рукоятки,
с угловой скоростью, равной угловой скорости рукоятки. Тогда обойма будет
иметь угловую скорость (—со4), рукоятка станет неподвижной, а колесо / по-
получит угловую скорость ©t—с54. При таком рассмотрении оси О и О4 не-
неподвижны, а колесо // становится паразитным, не влияющим на абсолютное
значение передаточного числа, но влияющим на его знак. В данном случае
благодаря паразитному колесу передаточное число отрицательно, и по фор-
формуле зависимости между угловыми скоростями и радиусами сцепленных ко-
колес будем иметь
— ©4
318
ГЛ XVII ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
Отсюда
+
Взяв, например, г3 = 9г4> будем иметь
«1 = 1Осо4>
т. е. колесо / получает угловую скорость
приводящей его в движение рукоятки.
в 10 раз большую, чем скорость
Рис. 223.
§ 71. Сложение вращений вокруг пересекающихся осей
Пусть относительное вращение тела с относительной угловой
Скоростью (дг происходит вокруг оси Oz' (рис. 223), а перенос-
переносным движением является вращение системы Ox'y'z' с перенос-
переносной УГЛОВОЙ СКОрОСТЬЮ (йе ВОКруГ
неподвижной оси Ozy пересекаю-
пересекающейся с осью Oz' в точке О. Абсо-
Абсолютным движением будет движе-
движение тела по отношению к системе
координат Oxyz. Рассматриваемое
абсолютное движение тела являет-
*У ся вращением вокруг неподвижного
центра О.
Всякое вращение тела -вокруг
неподвижного центра можно пред-
представить как вращение вокруг неко-
некоторой мгновенной оси. Определим
направление мгновенной оси и най-
найдем вектор абсолютной угловой
скорости вращения тела.
Для этого возьмем какую-нибудь точку М тела с вектор-ра-
вектор-радиусом г и напишем по теореме о сложении скоростей
va = Vr 4- Ve. C9)
В данном случае
1>в = ювХг. D3)
где Фа — искомая абсолютная угловая скорость тела; относи-
относительная скорость vr равна
vr = *rXr, D1)
а переносная скорость
ve = <*eXr. D2)
По C9) получим после соединения двух произведений в одно
©вХг = (<ог + ©,)Хг. D3)
Отсюда в силу произвольности г следует, что
§ 71. СЛОЖЕНИЕ ВРАЩЕНИЙ ВОКРУГ ПЕРЕСЕКАЮЩИХСЯ ОСЕЙ ЗШ
Таким образом, приходим к следующей теореме:
абсолютная угловая скорость равна геометрической сумме
относительной и переносной угловых скоростей.
Для иллюстрации этой теоремы рассмотрим планетарное ко-
коническое зацепление (рис. 224, а) и, задаваясь углами раствора
конусов 2а и 2|3, определим
абсолютную угловую ско- \^шЛ /С
рость (На вращения колеса//
по неподвижному колесу /,
рсли переносная угловая
скорость а)е вращения оси
Ozr вокруг Oz задана.
Замечая, что в рассмат-
рассматриваемом случае абсолют-
абсолютная угловая скорость (оа на-
направлена по мгновенной
оси ОС, строим треуголь-
треугольник угловых скоростей
(рис. 224, б) по заданной ве-
величиной и направлением переносной угловой скорости (ое и из-
известным направлениям абсолютной (оа и относительной сиг угло-.
вых скоростей.
Из треугольника найдем
Рис. 224.
sin (а + ft)
sin |
sin a
sin В
В предположении, что <де постоянно но величине, нетрудно
найти абсолютное угловое ускорение га колеса //; его можно
определить как скорость конца вектора соа при вращении мгно«
венной оси ОС с угловой скоростью со<?. Так как ©а по величине
постоянно, то будем иметь
Ускорение га равно по величине
и направлено перпендикулярно к плоскости гОг' в сторону вра-
вращения оси Oz'.
Пример 71. Дифференциальное зацепление. Рамка ВВ
(рис. 225) вращается вокруг оси хх с угловой скоростью Q и увлекает с со-
собой ось АЛ. На эту ось надета шестерня (сателлит), состоящая из двух на-
наглухо скрепленных между собой колес радиусов г4 и г2 и свободно вращаю-
вращающаяся на оси АА. Колеса эти спарены с двумя колесами радиусов /?i и fo,
имеющими ту же ось вращения, что и рамка ВВ, но ничем с нею не связан-
связанными. Обозначая угловые скорости, как показано на рисунке, найдем зависи-
зависимости между угловыми скоростями колес и рамки.
320
ГЛ XVII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
Дадим основанию механизма вращение, противоположное вращению
рамки и равное ему по величине. Тогда рамка станет неподвижной, угловые
скорости ©1 и &2 станут равными ©i— Q и ©2 — Q; что касается угловой
скорости сателлита относительно рамки, то обозначим ее через ©. При оста-
остановившейся рамке будем иметь для верхнего колеса
©i — Q _ г\
и для нижнего
©2 ~
©
Г2
В последней формуле выбран знак минус, потому что колеса радиусов Ri
2 вращаются в противоположных направлениях.
Разделив первое соотношение на второе, получим
3 ©1 —— -|- ©2 - D5)
Полагая в этой формуле п = г2 и Ri =» /?2, т. е. беря сателлит не двой-
двойным, а одинарным, получим механизм автомобильного дифференциала.
В этом случае будем иметь
1-Т (». + «.). «-2Г
D6)
Схема автомобильного дифференциала видна из рис. 226. Вращение от
оси мотора передается на коническое колесо А А, жестко соединенное с ко-
Ось колеса
Ось колеса
Рис. 226.
жухом дифференциала ВВ. Кожух, вращаясь вокруг той же оси, около
которой вращаются автомобильные колеса, увлекает оси СС с насажен-
насаженными на них сателлитами S S Сателлиты сцеплены с колесами Rt R, жестко
связанными с задними колесами автомобиля.
Первое условие D6) показывает, что угловые скорости ©i и ©2 каждая
в отдельности произвольны, но их среднее арифметическое должно давать
угловую скорость кожуха. Этим свойстве м дифференциала и пользуются.
На прямолинейном пути угловые ск^ ости колес автомобиля одинаковы:
©i = ©2 и Q = ©i = ©2; при этом © = 0, т.е. сателлиты не вращаются во-
вокруг осей СС.
На поворотах колеса описывают окружности разных радиусов и имеют
разные угловые скорости, ©t^©Y, & может оставаться прежней, лишь бы
полусумма ©1 и ©2 сохраняла свою величину. При движении на поворотах
сателлиты приходят во вращение.
§ 71. СЛОЖЕНИЕ ВРАЩЕНИЙ ВОКРУГ ПЕРЕСЕКАЮЩИХСЯ ОСЕЙ 321
Предположим, что автомобиль описал на повороте колею шириной d;
радиус внешней окружности колеи р, скорость центра тяжести автомобиля а
Зная, что радиус задних колес автомобиля равен а, определим угловую ско-
скорость кожуха дифференциала и скорости вращения сателлитов.
Сначала определяем угловые скорости колес автомобиля, а следователь-
следовательно, и угловые скорости жестко связанных с ними шестерен R, R (рис. 226).
Для внешнего и внутреннего колес получим сооответственно
002 :
v
"ар"
v
Угловую скорость сателлитов и угловую скорость кожуха получим в
виде
@ =
— <й2) R vRd
2г
Пример 72. Шарнир Гука, Для передачи вращения с одного
вала на другой применяют специальное соединение валов-—шарнир Гука.
Устройство этого соединения видно из рисунков. К концам валов /, //
(рис. 227), оси которых пересекаются под заданным углом а, жестко при-
присоединены вилки /// и IV, несущие подшипники, в которых могут вращаться
взаимно перпендикулярные валики АА' и ВВ\ образующие жесткую кресто-
крестовину. При вращении валов крестовина совершает сложное вращательное дви-
движение вокруг неподвижного центра О; при этом передаточное число между
валами / и // меняется в зависимости от углов поворота валов.
Примем вал / за ведущий, вал // — за ведомый и обозначим векторы
угловых скоростей валов соответственно через щ и G>2. Плоскость, в которой
расположены валы, совместим с плоскостью рисунка. Условимся от этой пло-
плоскости отсчитывать угол % поворо-
поворота ведущего вала, определяемый
как двугранный угол между под-
подвижной плоскостью вилки /// и
плоскостью рисунка. На рисунке
пунктиром показано начальное по-
положение валиков крестовины:
AqA0 — в плоскости рисунка,
Яо?о—- перпендикулярно к пло-
плоскости рисунка.
Поставим сначала задачу об
определении передаточного числа
(Ог/coi в функции от угла поворо-
поворота ведущего вала % при задан-
заданном угле а между осями валов.
Для решения применим основную
теорему о сложении вращений.
Представим себе вектор &а угло-
угловой скорости крестовины в ее аб-
абсолютном движении двояким об-
образом: с одной стороны, как гео-
/Во
Я
метрическую сумму вектора i
угловой скорости вилки ///, яв-
являющейся для крестовины переносной
р «27
угловой скоростью, и (й[ — относи-
относительной угловой скорости вращения крестовины вокруг оси АА'\ с другой сто*
И Л. Г. Лойцянский, А. И. Лурье
$22 тл. жтг. отаоситЕЛьеоЕ движение
§ 71. СЛОЖЕНИЕ ВРАЩЕНИЙ ВОКРУГ ПЕРЕСЕКАЮЩИХСЯ ОСЕЙ 323
Аналогичным образом удостоверимся, что минимальное значение пере',
даточного числа равно
I -— I = сев а
\ €»i /rnin
и достигается при перпендикулярности- плоскости ведущей вилки к плоскости,
содержащей оси валов.
Коэффициент нератоаьераосЕИ шредаш б определим как разность
2*~) ~B±) =^^. E5)
Щ /max V «I' Ante С9Ь9
Из этого равенства следует, что только при малых а коэффициент не-
неравномерности будет невелик. С возрастанием- а ктффяцдаент неравномер-
неравномерности резко увеличивается; при а = я/2 движение мехнизма невозможно.
Пользуясь жвяученним» фаршу лями, легко ©п-реяеяить также величину
абсолютной углевой еж©|*©етм «врееяоюины &а я даиршяе»ие мгшвежой оси
вращения, соответствующие данному углу Я поворота ведущего- вала. Дей-
Действительно, по условию перпендикулярности сох и &{ будем иметь
=% 'у 1
a so формулам
coj coj co2 sin a cos Я.сш-»
COi ^% CEfci
«/ V* «i«2 л i/MM2 а CQS2 ¦
iJ
или, после простых пря®ея?ииий;
1 — sin2 а cos Я — sin а sin Я cos л
\ ©1 / A — sin2 а cos2 ЯJ
Таким образом, имеем
V1 — sin2 a cos2 Л — sin4 а sin2 Я cos2 Я /есч
щ, =., 1-faces'Я ' E6)
Поскольку вектор t&a всегда' раяюэаюжен в ий<!пжости -ведущей вилки ///,
направление мгновенной оси мшишю ©й|>«дез?шть по формуле косинусов:
.^^^ ч cot 1—sin2 a cos2 Я
«ЗС№ («®a, #t)" = = Т ¦¦ ,-¦; г—. ¦¦¦;¦:,. :,.,¦'. :: ;;:¦¦¦ ,
4&Ф_ *V 1 """"* SM8 >в'-CiOS1^ A ^~" SOT"^ 6t''ЩТ12 ^u СДШ** A
/ E7)
.^•^^.^v CDj o)| sia a cos a cos Я
©I ©fl *y't—s-m-2 a cos2 Я — sifi4 a sin-2 Я cos2 Я
Если угол а между ведущим и ведомым валами мал, можлш, прене-
пренебрегая четвертыми степенями sin а, получить более простые приближенные
11*
324 ГЛ. XVII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
формулы:
Vl — sin2 a cos2 Л
cos (©a, ©0 « Vl ~ sin2 a cos2 К , E8)
^/\ sin a cos a cos Я
cosi
~ sin2 a cos2
Возвращаясь к точным формулам E6) и( 57), убедимся, что:
1) при к = 0, я, ...
= со2» cos (^a» ®i) — cos a» cos (©a, ©a) = sin a,
a cos a
т.е. при этом мгновенная ось вращения крестовины совпадает с осью ведо-
ведомого вала //, а угловая скорость ее — с угловой скоростью этого вала;
Л я Зя
2) при Я^-тр —, ...
®а — ^l» cos (©fl, ©i) = 1, cos (©a, ©i) = 0,
т.е. мгновенная ось совпадает с осью ведущего вала /, а угловая ско-
скорость — с ©1.
При работе шарнира Гука мгновенная ось крестовины, вращаясь вместе
с плоскостью ведущей вилки, совершает колебания внутри конуса с верши-
Рис. 228.
ной в точке О, углом раствора 2а и осью /. Неподвижным аксоидом будет
являться некоторая коническая поверхность, заключенная внутри только что
указанного конуса.
Кинематическая модель шарнира Гука показана на рис. 228.
§ 72. Общая задача об относительном движении
твердого тела
Рассмотрим следующую задачу в общей постановке. Твердое тело совер-
совершает произвольное движение по отношению к системе координат O'xftfz?
(рис. 229), которая в свою очередь произвольным образом движется по отно-
отношению к неподвижной системе координат Oxyz. Требуется определить абсо-
абсолютное движение твердого тела, т.е. движение по отношению к системе ко-
координат Oxyz.
Движение тела по отношению к системе Q'x'y'z' определим относитель-
относительной скоростью v0» его полюса О" и вектором относительной угловой ско-
скорости ®г вращения вокруг мгновенной оси, проходящей через полюс О'7,
§ 72. ОБЩАЯ ЗАДАЧА ОБ ОТНОСИТЕЛЬНОМ ДВИЖЕНИИ ГЕЛА
325
Переносное движение, т. е. движение системы О'х'у'г' по отношению к Охуг,
зададим абсолютной скоростью vor полюса О' и вектором угловой скорости
&е вращения вокруг мгновенной оси, проходящей через О'. Определению под-
подлежат абсолютная скорость (vO")a полюса О" и абсолютная угловая ско-
скорость тела п)а.
Для произвольной точки М тела, положение которой можно определить
в самом теле вектор-радиусом О"М = г", в относительной системе — вектор-
Г
Рис. 229.
радиусом О'М = г' и, наконец, в абсолютной системе — вектор-радиусом
ОМ = г, по теореме сложения скоростей имеем
va и ve + vr == VO' + ®е X Г' + VOv + G>r X ^, E9)
причем два первых слагаемых дают в сумме переносную скорость ve точки Мщ
а два последних — ее относительную скорость vr. Замечая, что (рис. 229)
будем иметь
X
X 1^ +
°>г X
. F0)
Первые два слагаемых представляют собой переносную скорость полю-
полюса О":
которая в сумме с относительной скоростью i
лютную скорость этого полюса:
{vO")a = VO' + ®е X Г0"
Подстановка в F0) дает
С другой стороны, согласно определению абсолютного движенцд ско-
скорость точки М может быть представлена по формуле D) гл. XVI тат
того же полюса даст абссь
F2)
ско-
F3)
326
ГЛ. XVII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
Сравнивая выражения F2) и F3), вследствие произвольности выбора
вектора г* получим
®а = щ + ©г. F4)
Итак, приходим к следующей теореме сложения движений
т в е р д о г о т е л а:
Распределение скоростей в абсолютном движении твердого тела опреде-
определяется заданием абсолютной скорости полюса тела, равной геометрической
сумме переносной и относительной скоростей полюса, и абсолютной угловой
скорости тела, равной геометрической
сумме переносной и относительной
угловых скоростей тела.
Рассмотренная выше задача об
определении элементов абсолютного
движения твердого тела по задан-
заданным его относительному и перенос-
переносному движениям может быть сформу-
сформулирована также как задача о сло-
сложении винтовых движений, т. е. об
определении элементов абсолютного
винтового движения по известным
винтовому относительному и винто-
винтовому переносному движениям.
Остановимся на определении эле-
элементов абсолютного винтового движе-
движеРис. 230.
ния, представляющего результат сло-
сложения относительного вращения тела
вокруг оси OV, принадлежащей си-
системе OVr/V (рис. 230), и переносного вращения этой системы вокруг не-
неподвижной оси Oz. Угловые скорости относительного и переносного враще-
вращений задаются векторами ©, и ©<?.
Кратчайшее расстояние между осями назовем р и введем в рассмотре-
рассмотрение вектор р, направленный вдоль общего перпендикуляра LU к осям Oz и
O'zf от неподвижной оси к подвижной. Определение элементов винтового
движения может быть значительно упрощено, если за начало неподвижной
системы принять точку L, а за полюс тела принять конец U вектора р. Тогда
абсолютная скорость полюса V будет равна
F5)
Скорость скольжения определим по формуле B4) гл. XVI:
©„ • vr* 1
-7Г- (ов + ©г).(©еХр).
<*V (©* X Р) = 0,
X <*>*) • Р,
Замечая, что
получим
с = -^—
©г . (<де X Р) = (®г X ®е) * Р>
с
F6)
F7)
cos а , F8)
а через а обозначен угшг между осями.
Для определения положения винтовой оси найдем вектор гс, направлен-
направленный по перпендикуляру, опущенному из полюса V на винтовую ось и пере-
где 0а определяется очевидным равенством
§ 72. ОБЩАЯ ЗАДАЧА ОБ ОТНОСИТЕЛЬНОМ ДВИЖЕНИИ ТЕЛА 327
секающему ее в точке С. Воспользуемся для этого формулой B0) гл. XVI:
F9)
Раскроем произведение векторов; будем иметь
©а X К? Хр)=©е (вв ' Р) —Р(*а ' ®е) = — Р (©а * ©е),
так как по условию вектор р перпендикулярен к векторам (ое и »„„ а сле-
следовательно, и к их геометрической сумме т&. Подстановка в F9) дает
G0)
Вектор гс, определяющий подожевие точки С па отношению к неподвиж-
неподвижной точке L, будет по BГ} гл. XVI ра
или окончательно
Таким образом, искомая точка С лежит на общем перпендикуляре LU
к осям отиоенгаяьводо ш яереешенш о вращений. Нетрудна, юршерить* что
доказанные в § 70 теореме сяозшвдя. вращении вокруг пар&щеяьных ост
получаются из формул F4), G0) и G1), если считать, что векторы &е и 0)г
параллельны друг другу.
В заключение остается показать, как по заданным векторам сое и со, сла-
слагаемых вращений и вектор-радиусу г0 полюса О' по отношению к началу
координат системы Oxyz определяются направление, величина и положение
вектора р. Согласно рис. 230 имеем
LL' = 00' + ОЧУ — OL,
или
р = Го + к'(дг — Х(йе, G2)
где X и X' — неизвестные скалярные величины. Для их определения умножим
скалярно обе части соотношения G2) на ыг и соответственно на <ое; тогда
вследствие перпендикулярности вектора р к векторам шг и ше получим си-
систему уравнений
— X ®е • шг + Х($е — г0 • &е.
Решив эту систему уравнений, найдем
/ \ 2 / ч / ч
|/*<л • СО 1 С0„ — I/*п • СО I • 1(д • СО 1
« V и е) т \ и г) \ е г)
328 ГЛ. XVII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
что можно также представить в виде
«/___ (го X <*><?) • (<*>g X <*>г) , _ (Го X ®r) - (<Dg X Or)
I^X%I2 f |юХю|2 в
Для определения вектора р умножаем обе части G2) скалярно на век-
вектор (де X Юг. ПОЛУЧИМ
р. ((де X ©г) = г0 • (<ов X ®г). G5)
Но, поскольку векторы р и (юе X юг) параллельны друг другу, можно
написать
Р = Р- (®в X юг).
Следовательно, по G5)
Гр * ((Qg X ЮГ)
|
и искомый вектор р равен
Если ввести единичный вектор 5, направленный по общему перпендику-
перпендикуляру к осям вращения, положив его равным
<*>g X юг
|©«Хв>гГ
то выражение G6) вектора р примет простой вид:
р = (го. 8) s, G7)
показывающий, что величина вектора р равна проекции вектора Го на на-
направление общего перпендикуляра к осям вращения.
Глава XVIII
ОСНОВЫ КИНЕМАТИКИ СПЛОШНОЙ СРЕДЫ
§ 73. Определение положения и движения сплошной среды.
Переменные Лагранжа и Эйлера
Своеобразие модели сплошной среды как бесконечного мно-
множества точек, непрерывно заполняющих некоторую область
пространства, вынуждает особо подходить к способу задания
ее положения в данный момент времени, а также ее движения
во времени.
Для этой цели можно воспользоваться обычным для кинема-
кинематики точки приемом задания в функции от времени t координат
(хи х2, Хг) отдельных точек сплошной среды, но, чтобы индиви-
индивидуализировать такие уравнения для различных точек среды, не-
необходимо как-то выделить данную точку среды из остальных.
Следуя Лагранжу, в качестве определяющих выбор точки па-
параметров можно принять ее декартовы или, вообще говоря, лю-
любые криволинейные координаты а\, аг, #з в некоторый началь-
начальный момент t = to. Тогда уравнениями движения любой точки
среды будут служить выражения
** = **[(*/);'] (А =1,2,3); A)
величина (а{) здесь и далее будет обозначать совокупность всех
значений at (I— 1, 2, 3).
Уравнения A) отвечают на вопрос, где будет находиться
точка с начальными координатами (ai) в произвольно задан-
заданный момент времени t.
Подчиним выбор координат условию взаимно однозначной
связи между (а{) и (я*), т. е. потребуем, чтобы уравнение A)
однозначно разрешалось относительно переменных (а^). Тогда
будем иметь
at = at[(xk),t] (/=1,2,3). B)
Эти уравнения дают информацию о том, где находилась в на-
начальный момент / == tQ точка, текущие координаты которой рав-
равны (Xk). Можно сказать, что уравнения B) позволяют судить
об «истории» точки (xk).
330 ГЛ. XVIII. ОСНОВЫ КИНЕМАТИКИ СПЛОШНОЙ СРЕДЫ
Совокупность значений (ai) и ( носит наименование перемен-
переменных Лагранжа и применяется повсюду, где приходится иметь
дело с малыми смещениями частиц сплошной среды (например,
в теории упругости, теории волн малой амплитуды, некоторых
вопросах теории турбулентных движений жидкости).
Более широкое применение имеют переменные Эйлера, опре-
определяющие проекции перемещений (р*)' или скоростей (Vk) в
данной фиксированной в пространстве точке Xi при заданном /:
Vk=Vknxt)9t] (ft =1,2,3). C)
Такое представление определяет поле скоростей в данной
области пространства в любой момент времени. Поле,, завися-
зависящее от времени, называют нестационарным, не зависящее от
времени — стационарным.
Метод, Эйлера более соответствует практическим требова-
требованиям, чем метод Лагранжа, так как экспериментальное измере-
измерение скоростей в данной точке пространстаа легко осуществля-
осуществляется существующими приборами* в то время как задание на-
начальных координат отдельных точек среды должно быть отне-
отнесено скорее к «мысленному эксперименту».
Совокупность значений (Vk) и U & иногда (хм) и» / причис-
причисляют к переменным Эйлера.
Установим связь между тем или другим образом определен-
определенными переменными Лахрашка и Эйлера. По определению-.проек-
определению-.проекций скорости имеем
что представляет собой систему трех обыкновенных дифферен-
дифференциальных уравнений первого порядка относительно (х{).
В результате интегрирования ур<шн?шш D) появятся три
постоянные интегрирования Сь С2, Сз и интегралы представятся
в wum
Ч = xk (/; С„ С2, С3) (k = l, 2, 3). (v)
Рассматриная переменные Лагранжа (а/) как значения5 (xi)
при t= to, получим систему уравнений
at =at (/о; Си Съ С3) U = 1, % %
разрешая которую относительно (d) можно выразить Си C2i C3
через uk, после чего уравнения- E) примут вид A). Подставляя
эти значения (xi) в равенства D), найдем выражение проекций
скоростей через переменные Лагранжа (ak) и t, что и будет слу-
служить искомой связью между эйлеровыми и лагранжевыми пе-
переменными.
В дальнейшем, па преимуществу, будем пользоваться эйле-
эйлеровыми переменными.
§ 74 ПЕРЕМЕЩЕНИЯ. СКОРОСТИ И УСКОРЕНИЯ 331
§ 74. Перемещения, скорости и ускорения точек сплошной
среды в переменных Лагранжа
Напомним, что перемещением р точки М из некоторого «а-
чалыюго положения Мо с вектор-радиусом г0 в текущее поло-
положение М с вектор-радиусом г называют вектор
P = r — r0; flk = Xk — xok (Л = 1,2,3). (б)
Начальный вектор-радиус г0 выражается через переменные
Лагранжа:
г о = a tii + a2h + Яз*з> G)
конечный г — через переменные Эйлера (х*):
г = х^ + x2i2 + x3i3. (8)
Обычно проекции перемещений (/>*) частиц среды рассма-
рассматривают как функции координат (а*) начальных их положений.
Тогда по F)
xk = ak + pk (al9 аъ a,; t) (k = 1, 2, 3). (9)
Эти уравнения можно разрешить относительно пиУ считая pk
функциями (xi)\
»0
Условием разрешимости уравнений (9) относительно ak бу-
будет требование отличия от нуля определителя
дх\ дх\
да\
D (аи
да2
дх% дхэ дх
да\ даз да,
называемого якобианом.
Скорости V и ускорения V в лагранже&ых переменных будут
непосредственно определяться путем частного дифференцирова-
дифференцирования по / вектор-радиуса г:
где г предполагается выраженным в функции от аи и /.
В переменных Эйлера скорость будет выражаться как
dr/dt, где г определяется равенством (8).
Ускорение в переменных Эйлера выражается через один «из
дифференциальны* операторов поля скоростей, О такого рода
операторах поля будет сказано в следующем параграфе.
332 ГЛ. XVIII. ОСНОВЫ КИНЕМАТИКИ СПЛОШНОЙ СРЕДЫ
§ 75. Дифференциальные операции поля
В § 37 уже было дано понятие о векторе-градиенте скаляр-
скалярной функции. Для понимания основ кинематики сплошной сре-
среды, в частности для определения ускорения в переменных Эйле-
Эйлера, нех)бдодимо углубить представление о градиенте скалярной
функции, связав его с понятием о производной в пространстве
по любому направлению, причем не
только от скалярной, но и от векторной
функции.
Поле скалярной функции ср (хи х%, хъ\ t)\
можно расслоить семейством замкнутых
поверхностей уровня функции в данный
момент времени, определив их как
геометрические места точек простран-
пространства, занятого полем, в которых функция
Ф имеет одни и те же значения. Уравне-
Уравнением семейства поверхностей уровня бу-
будет служить
A2)
Рис. 231. где const может принимать различные
значения, каждое из которых определяет
одну из поверхностей уровня. Переход от одной поверхности
уровня к другой будет сопровождаться возрастанием или убы-
убыванием значения константы, входящей в определение поверхно-
поверхностей уровня A2).
В отличие от обычных представлений о внешней и внутрен-
внутренней областях пространства по отношению к данной замкнутой
поверхности, условимся называть внешней областью по отно-
отношению к поверхности уровня ту, в которой расположены семей-
семейства поверхностей уровня с возрастающими значениями кон-
констант, внутренней — с убывающими их значениями. Нормаль к
поверхности уровня, направленную во внешнюю область, будем
считать внешней нормалью, а нормаль, направленную во вну-
внутреннюю область, — внутренней нормалью.
В предположениях о непрерывности возрастания функции q>
при переходе от одной поверхности уровня к смежной и о су-
существовании производной dcp/dn от функции ф по направлению
внешней нормали определим градиент функции ф, положив
grad<p = -g.n, A3)
где, по определению внешней нормали, производная dy/dn по-
положительна, так что абсолютная величина градиента равна про-
производной функции по внешней нормали, направление градиента
§ 75 ДИФФЕРЕНЦИАЛЬНЫЕ ОПЕРАЦИИ ПОЛЯ 333
совпадает с направлением единичного вектора (орта) п внеш-
внешней нормали.
Так как (рис. 231) малый вектор MN, направленный по
внешней нормали п к поверхности уровня ф = С, по длине
An = MN короче всякого другого наклоненного под углом а
к нормали отрезка Д/ = MN\9 соединяющего две близкие точки
М и N\ смежных поверхностей уровня ф = С и ф = С + АС,
то величина производной по нормали будет больше, чем произ-
производная по какому-нибудь другому направлению (dq>/dn>dq>/dl),
где обе производные <5ф/<Э/ и ду/дп определяются обычным спо-
способом как пределы (предполагается, что пределы существуют)
дф — IJm Ф (*" + Aft) — ф (Г)
On ~»™Q An
дф _ и™ Ф (г + АЦ -- <р (г)
dl д/-и) Д/
причем, по определению поверхности уровня,
Отсюда следует, что
дф _ цт Ф (у + А/) — ф (г) _ ,. Г Ф (Г + Ал) — ф (г)
^ Т ^ д™о L An
An • A/
-Й-S—?cos a-I.grad,, A4)
где а — угол между направлениями /ил. Таким образом, я/ю-
изводная от функции ф «о любому направлению равна проек-
проекции вектора-градиента на это направление, что лишний раз
подтверждает ранее указанное превышение величины производ-
производной по внешней нормали к поверхности уровня над производ-
производными по другим направлениям.
Вводя в прямоугольной декартовой системе координат сим-
символический оператор V (о нем уже была речь в § 37) как век-
вектор с проекциями
или, в цифровой индексации,
4 (*=1.2,3), A6)
можно градиент функции ф определить в символической форме
произведением векторного оператора V на скалярную функ-
функцию ф:
1«=:Уф, A7)
выражает символЕг^ески Фтгерадао д>иффер^цщшшшхя по лю-
любому ишгртлеято. Ш чжггаости, полагая тккугедааателъно /
равным «диничн*™ векторам осей коорджйат **, будем иметь
так что проекции градмеита фу««свди 'f м,а оси координат будут
равны производным от ср по соответствующим координатам:
(gradqp) =-Ц- (й = 1,2,3). B0)
Операцию 1*У = д/dl можно производить те только над
скалярными, it> м над Бек1>О]рными и т-еизормьшя функциями,
что можно представишь равенствами
4r ^=</.VO\ B1)
Б дальнчейшем %аст<о придется аметъ
где « и * — две векторш&е функция жоордииат х\, &ъ Хъ* Пере-
Переписывая эту операцию в тождественной форме
и замечая, что а/а является единичным вектором, определяю-
определяющим направление вектора а, н, кроме того, вспоминая A9), при-
придем к заключению, что
a-!?, B2)
где символ дЪ/да обозначает производную вектора Ъ по на-
направлению вектора а.
Пользуясь символическим вевггором-аиератором V и соеди-
соединяя его скалярным и вектерньш произведениями с вектор-функ-
дией координат a(xh x2, хг), получим еще две следующие
операции пространственного дифференцирования:
834 ГЛ. ХШШ. ОСНОВЕ! ИСИШМАТИКМ СПЛОШНОЙ СРЕДЫ
а ирэизводвую но любому жа^пряшдавш© I, оогжасно AЦ9 пред-
представить в виде
§ 75. ДИФФЕРЕНЦИАЛЬНЫЕ ОПЕРАЦИИ ПОЛЯ
335
а) дтергенцт нектара ак> выражаемая- символом*
d i v a = V . а
B3)
(суммирование по к от 1! до 3), и
б) &ихръ (рбтор) вектора а, обозначаемый агигволшг rote
и определяемый символической формулой и проекциями на оси
координат:
да2 дах B4)
Можно было бы еще ввести следующее тензорное определен
rot#f (еумчугирявяние от 1 дсм 3> п© трем д>вжкды павторяю-
)
rot a —
даг
где е^г — тензор третьего ранга, носящий имя Леви-Чивита, за-
задаваемый системой равенств
0, если хоть два индекса одинаковы,
1, если рфцфг взяты й порядке круговой
— 1, если рфцфг> но нарушена круговая подстановка.
Пояснение физического смысла величин diva и rota в част-
частном случае поля скоростей будет дано в последних, да^х пара^
графах (§§ 77 и 78) настоящего тома курса.
Присоединим ie сказанному еще символическую операцию
диадного умножения (§ 33) оператора V на вектор а, определив
ее формулами
~ < : •— $ppq -^?— Bо)
н матрицей
D
дЩ
дп\ дйч
да\
дхг
6X2
&Xi
дх%
дхъ
B6)
с компонентами.
Этот тензор, п©> внешней аналогии е градиентом скалярной
фунвдии gradqp, на^>шают градиентом векторной функции н
336 ГЛ XVIII. ОСНОВЫ КИНЕМАТИКИ СПЛОШНОЙ СРЕДЫ
обозначают символом Grada, в котором, в отличие от обозна-
обозначения grad, первая буква — заглавная:
D = Grada. B7)
Сопряженный с D тензор D* условно обозначается как про-
производная вектора а по вектору г, т. е. da/drt и имеет матрицу
дп\ дп\ да\
дх{ дх2 дх3
да2 да2 даъ
дх\ дх2 дхъ
даг да3 да3
дх2 дх*
B8)
Полный дифференциал da вектора а можно представить как
произведение тензора D* на вектор dr справа или D на вектор
dr слева:
da = D*dr^~dr== drD = dr Grada, B9)
с проекциями (суммирование по q)
да
dap = -d^dxi (P= 1,2,3). C0)
Напомним еще (§ 37), что произведение оператора V на тен-
тензор Т определяет вектор дивергенции тензора Т:
Vr = Div7\ C1)
с проекциями (суммирование по q)
(Divr)p = ^- (p= 1,2,3). C2)
§ 76. Ускорение точек среды в переменных Эйлера.
Локальное и конвективное ускорения
Пользуясь введенной в предыдущем параграфе операцией
дифференцирования вектора по направлению другого вектора,
найдем выражение вектора ускорения V в эйлеровых перемен-
переменных.
Рассмотрим движение частицы сплошной среды, которой
приписана некоторая, безразлично — скалярная, векторная или
тензорная, величина Ф.
При определении полного изменения величины Ф за время
dt надо обратить внимание на два обстоятельства, лежащие в
основе этого изменения.
Первое связано с тем, что, если бы даже частица не двига-
двигалась в поле, а совпадала с некоторой фиксированной точкой
§ 76 УСКОРЕНИЕ ТОЧЕК СРЕДЫ В ПЕРЕМЕННЫХ ЭЙЛЕРА 337
пространства, относительно которого поле физической вели-
величины Ф определено, все равно, в силу нестационарности поля,
величина Ф получила бы за время dt изменение -$fdt. Это
изменение назовем локальным (местным), а отношение его к
промежутку времени dt— локальной производной функции Ф
по времени /, что и отметим в обозначении {d/dt)A0Kt Итак,
имеем
ф=±
Второе обстоятельство заключается в том, что частица дви-
движется по отношению к полю величины Ф, занимая в нем после-
последовательно разные положения. Такое движение называют кон-
конвективным. За время dt частица совершит перемещение V dt к
перейдет в новое положение, в котором функция Ф будет
отличаться от своего исходного значения на величину, равную
произведению производной по направлению перемещения, т. е.
по направлению вектора V, на длину перемещения V dt.
Вспоминая определение производной по направлению дан-
данного вектора B2), получим значение конвективного изменения
^конвФ на перемещении V dt:
вФ = (f • V) ФУ dt = (V . V) Ф dt,
или, относя его к единице времени, следующее выражение для
конвективной производной функции Ф по времени:
Принимая во внимание оба эти обстоятельства, найдем сле-
следующее выражение для полной производной функции Ф по /
как суммы локальной и конвективной производных:
Если Ф — скалярная функция, то ее можно подвести под
скобку и, вспоминая, чта \Ф = grad Ф, получить
В случае векторной функции Ф = а равенство C5) сохранит
свою форму:
4f ^ V)a. C7)
Можно получить векторный аналог скалярного равенства
C6), если заметить, что по B5) и B7)
(V • V) а = V (Va) = V Grad a, C8)
338 ГЛ. XVIIT. ОСНОВЫ КИНЕМАТИКИ СПЛОШНОЙ1 СРЕДЫ
и записать это в форме аналопствногв C6> равенства:
^^ , C9)
где, кояечда, последний чжк в правой ч^стн обозначает про-
произведение теаз<&р# Grade aa вектор V «слеаа^.
Полагая в равенстве C6)- а= F, найдем выражение ускоре-
ускорения в переменных Эйлера:
Первый член в правой части этого равенства называют ло-
локальным ускорением, второй — конвективным.
Полное ускорение частицы сплошной среды складывается
из локального и конвективного ускорений.
Полное ускорение V вычислялось при условия, наблюдения
за двяжеаием индивидуальной чясгииы среды, (субстанции);
поэтому полное ускорение V называют еще иногда инди&идуг-
альным или: субстащиФпмльным. Вообще, шшыую/ иромаведную
от скалярной, векторной или т^нзораю» фунвдлй также назы-
называют индивидуальной (субстанциональной} производной,, вводя
для нее обозначения: D/Dt, иногда Dfdt Сохраним для индиви-
индивидуальной производной то же обозначение cU/di*, что и для пол-
полной производной, но будем помнить определение
dt dt ' v '
Проектируя обе части векторного- равенства D0) на оси не-
неподвижной системы координат будем» иметь
Наличие в ^то* сумже конвективной части делает выраже-
выражение ускорения нелинейным, с чем связаны большие трудности
в интегрировании уравнений динажиш1 сшгонигой* среды.
§ 77. Теорема: Гельмгольца о бесконечно малом
перемещении элементарного объема сплошной среды.
Квазитвердое перемещение
В отличие от абсолютно твердой среды, для которой теорема
о ее бесконечно малом- перемещении формулировалась безотно-
безотносительно к размерам перемещающегося тела, причем составляю-
составляющие перемещения: поступательное перемещение и малы* пово-
поворот тела вокруг оси — были одинаковы в данный мсядеент вре-
времени для всех точек тел^, а более ©бщега случае сплошной
§ 77. ТЕОРЕМА ГЕЛЬМПЭЛША
339
деформируемой среды такая тео-рема жягжет (бшъ установлена
лишь для бесконечно малого (элементарного) объема среды,
т. е. имеет локальный хафактер.
Выделим в сплошной среде (рнс. 2*32) элементарный объем
бт и изучим распределение бесконечно малых перемещений в
отдельных его точках. Раосмотршв какие-
нибудь две смежные точки в объеме: точку
М с вектор-радиусом г относительно непо-
неподвижной точки О и точку MW с вектор-
радиусом г^ относительно той же точки О.
Векторы бесконечно малых перемеще-
перемещений точек М и МA), как обычно в настоя-
настоящем отделе*), обозначим через р и рA).
'Вектор-радиус точки МA) по отношению к
точке М будет равен 8г = г^ — г, а его
длину |бг| обозначим через «Ss.
По определению C8) производной от р
по направлению вектора <&г будем лмет^»
Рис. 232.
где лод D паяймается шензор с матрицей B6;), в котором вместо
а взят векгщр р.
Применим выведенное в § 34 разложение любого тензора
второго ранга на симметричную н антисимметричную части,
положив
0 = S + A D3)
где
S=\(D + D\ A = ±r(D-D*). D4)
Равенство D3) может быть теперь переписано в виде
р<1> = р-f 8г • A + tr-S.
D5)
Рассмотрим совокупность первых двух слагаемых. Согласно
.изложенному в § 34 |см. равенства C6)] эту совокупность
можно переписать так:
р + 6Г'А = р + еХ*г, D3)
тде «сопутствующий» вектор с по C3) § 34 будет иметь проек-
проекции с\ = Л23, с2 = Лзь с3 = А\2.
*) Следуя обозначениям, тгоиеятым в § 42 гл. XI для вектора переме-
перемещения точки р, сохраним эти обозначения и в .кинематике сплошной среды.
Использованное в гл. IX обозначение рп для вектора напряжения и та же
буква р для компонент тензора напряжений не должны приводить к недо-
недоразумениям, так как эти обозначения тгриняты в разных отделах настоящего
тома и не встречаются совместно.
340 ГЛ. XVIII. ОСНОВЫ КИНЕМАТИКИ СПЛОШНОЙ СРЕДЫ
Для вычисления этих проекций удобно применить символи-
символические изображения:
D = vp, jr«(Vp)\ A = j
что даст
4
или, в векторной форме,
с = -1 rot р. D7)
Равенство D6) перепишется теперь так:
р + бг-Л = р + уГ0^Хбг. D8)
Сравнивая его с формулой бесконечно малых перемещений
точек абсолютно твердого тела C) § 65, убедимся, что правая
часть D8) выражает совокупность поступательного перемеще-
перемещения р и вращательного, соответствующего вектору бесконечно
малого поворота в = yго* Р« Это позволяет правую часть D8)
рассматривать как перемещение, которое было бы, если бы
элементарный объем на мгновение затвердел. Назовем это пе-
перемещение квазитвердым («квази» — как будто) и обозначим
через ркт. Итак,
Ркт = Р + «ХбГ,
D9>
Оставшееся в равенстве D5) третье слагаемое 8r*S выра-
выражает отличие перемещения элементарного объема деформируе-
деформируемой среды от перемещения того же объема абсолютно твердого
тела и образует деформационное перемещение рдеф, равное по
условию симметрии тензора S
pA^ = 6r.S = S6r. E0)
Таким образом, в равенстве. D5) утверждается, что перемеще-
перемещение любой точки элементарного объема сплошной среды скла-
складывается из квазитвердогоу состоящего из поступательного и
вращательного перемещений, и деформационного перемещений,
В этом заключается теорема Гельмгольца о бесконечно ма-
малом перемещении элементарного объема сплошной среды.
§ 78. ТЕНЗОРЫ ДЕФОРМАЦИЙ И СКОРОСТЕЙ ДЕФОРМАЦИЙ 341
Тензор S, входящий в определение E0) деформационного
перемещения, носит наименование тензора деформаций.
Деля обе части равенства D5) на dt, перейдем от беско-
бесконечно малых перемещений р к векторам скорости V, от вектора
бесконечно малого поворота 0—к вектору угловой скорости »
вращения затвердевшего элемента, а от тензора деформаций
S — к тензору скоростей деформаций $, отличающемуся от S
точкой, стоящей сверху и обозначающей производную по вре-
времени /. При этом справедливо равенство
VA) = VKT + F^ = V + «>X6r + S-6r. E1)
Теорема Гельмгольца, выраженная в скоростях, фор-
формулируется так:
Скорость любой точки элементарного объема сплошной
среды складывается из скорости квазитвердого движения точек
объема, равной сумме поступательной и вращательной скоро-
скоростей затвердевшего объема, и деформационной скорости. Пере-
Перемещения и скорости в квазитвердом движении элементарного
объема были подробно изучены в гл. XVI. Деформационные
перемещения и скорости нуждаются в специальном рассмотре-
рассмотрении, чему посвящен следующий, заключительный, параграф пер-
воголюма.
§ 78. Тензоры деформаций и скоростей деформаций.
Кинематический смысл их компонент
Тензор деформаций 5 имеет матрицу
др\ 1 / др\ , др2 \ 1 ( dpi * др$
дхх ~2 V дх2 ' ajci J lUx3 "¦" "^
ал:2 "*" ЖГ/ дх2 2 V"^jc7 ' а^2
1 / др\ , ар3 \ 1 ^ ^Р2 . <9рз Ч <9р3
2 V <5лг3 ^лг! У 2 V дх3 "*" ^дг2 У ^х3
E2)
Название тензора оправдывается тем, что, как сейчас будет
показано, отдельные его компоненты представляют собой ха*
рактерные для деформации элементы: относительные удлинён
ния бесконечно малых координатных отрезков и скошения коор*
динатных углов (сдвиги).
Введем в рассмотрение проведенную через точки деформи*
руемой сплошной среды систему координат Ох\ХчХ% (рис. 233)]
и отложим по координатным осям бесконечно малые отрезки
б^ь $Г2, бг3, проекции которых на оси координат будут соответ*
ственно иметь вид (б*ь 0, 0), @, бх2, 0), @, 0, 6x3).
342
тл xvm. осно&ы кинематики сплошной среды
Следуя E0) и вспомввая, что по определению бесконечно
малого перемещения >(рис. 233)
p = drt t>p = &dr=p1 — p = dri — dr = d(rl--r) = d 6r,
получим, опуская индекс «деф», основное равенство
E3)
Напоминаем, что здесь и далее символом б обозначаются
произвольные бесконечно малые приращентгя величин при пере-
переходе в данный момент от одной точки пространства к другой, а
Рис. 233.
символом d—приращение величины во времени, т. е. (d/dt)dt.
Применяя E3) к 6гь бг2, бг3, получим
Snbxl = ^6xu S22 6*2 = d 6x2i S33bx3 = dbxZy E4)
откуда сразу следует, что при деформационном перемещении
диагональные компоненты тензора деформаций Skk равны от-
носительным удлинениям ей бесконечно малых ютрезков \8rk\
(не суммировать по k\)z
E5)
Обозначим {рис. 233) через fm утлы между &'-& и l'-ш осями
кос^дннат, равные до деформации я/2* a wacm деформации
^. Заметит, ч^о, в сшгу бесконечной малосги перемещения,
«оорд^яатвые ©си сохранят (с точностью до огкяонений выс-
высшего порядка шшфсгй) свою й
Взяв от обеих частей этих равенств дифференциалы, найдем
Но до деформации (к ф Т)
Ум — \ v s &* Чы — 1, ^к • й*1 = в,
так что
— dYki = Ht^-j^jpd^rk^r^ E6)
Вычисляя дифференциал справа» получим
или, имея в виду E4),
Вычисление правой части легче всего провести, задаваясь по
отдельности значениями k = 1, 2, 3; / = 1;, 2, 3 при k Ф L Вспо-
Вспоминая, что
(вГ1I = бд:1, (бг1J = 0, (бг1K = 0; (бг^О, (*г2J = 0, (бг2K = 0,
E8)
приведем сумму 'скалярных произведений в правой части E7)
к виду
(S 6rxJ6x2 + (S dr2)xt>x{,
а затем, вычисляя проекции произведений тензора на вектор и
используя E8), перепишем E7) в виде
е12 = х Ьх~ (S12 6х{ 6х2 + S12.6^l 6х2) = 23|2.
§ 78. ТЕНЗОРЫ ДЕФОРМАЦИЙ И СКОРОСТЕЙ ДЕФОРМАЦИЙ 343
Изменения при деформаций координатных углем* будут
равны dyki и могут оказаться как положительными, так и отри-
отрицательными. Назовем «скошениями» координатных углов бес-
бесконечно малые величины в^=—ёуы, отличающиеся от изме-
изменений углов только знаком. Под положительным скошением по-
понимается уменьшение координатного угла, и, наоборот, под
отрицательным скошением¦ — его увеличение. Вместо «скошения
координатного угла» используют еще термин «сдвиг» (в соот-
соответствующей координатной плоскости).
Чтобы выразить скошения через компоненты тензора дефор-
деформаций, будем исходить из очевидных соотношений
344 ГЛ. XVIII. ОСНОВЫ КИНЕМАТИКИ СПЛОШНОЙ СРЕДЫ
Аналогично получим
®23 J—: ^*^23> ^31 '— ^*^31«
Отсюда следуют выражения скошений координатных углов
через компоненты тензора деформаций E2):
(у^ др\ . др2 о о др2 I dps
ОХ2 ОХ\ ОХ§ ОХ2 /г*/\\
E9)
в, следовательно,
*S^/ ===== — е^/ (?,/==1,2,3; &=т==/). F0)
Таким образом, недиагональные компоненты тензора дефор-
деформаций равны половинам скошений координатных углов, или по-
половинам сдвигов в соответствующих координатных плоскостях.
Деля только что введенные элементы бесконечно малых де-
деформаций на dt, получим тензор скоростей деформаций S и его
компоненты: диагональные ё% — скорости относительного удли-
удлинения координатных отрезков и гы — скорости скошения коор-
координатных углов, или скорости сдвига в соответствующих коор-
координатных плоскостях.
Отметим еще одну важную характеристику деформации
среды — коэффициент относительного объемного расширения О,
равный по определению
где бт = 6xi 6*2 8хз — исходный элементарный объем, имевший
место до бесконечно малой деформации, 6т' — значение того же
объема после деформации.
Выразим коэффициент относительного объемного расшире-
расширения через компоненты тензора деформаций E2). Для этого, по
определению бесконечно малой деформации, представим числи-
числитель в правой части F1) как
бт/~бт = ^(бт). F2)
Заметим, что по E4)
й (бт) = d (Ьхх 6лг2 6x3) = d (Ьхх) Ьх2 6*з +
+ бдг, d (Ьх2) блг3 + б*! 6а:2 d (б*3) =
= Sn б*! 6*2 б*з + S22 б*! б*2 б*3 + S33 б*! б*2 б*3 =
= (Su + S22 + SmNt. F3)
Подставляя это выражение в F2) и используя матрицу тен-
тензора S E2), получим
§ 78. ТЕНЗОРЫ ДЕФОРМАЦИЙ И СКОРОСТЕЙ ДЕФОРМАЦИЙ 345
или по B3)
ф = div p. F4)
Деля обе части на dtf найдем аналогичное выражение' для
скорости относительного объемного расширения О:
F5)
В разделе динамики сплошной среды второго тома настоя-
настоящего курса будет использована формула
А (бт) = Ь 6т = div V 6т, F6)
являющаяся прямым следствием равенств F3), F5) и выра-
выражающая быстроту изменения со временем элементарного объема
среды (жидкости) в зависимости от заданного поля скоростей.
В главных осях тензора деформаций (скоростей деформа-
деформаций) недиагональные компоненты (сдвиги, скорости сдвига)
равны нулю.
Подробное и более широкое изложение основ кинематики
сплошных сред можно найти в специальных руководствах:
Седов Л. И. Механика сплошных сред. — М.: Наука, 1973,
т. 1, гл. 2 и 3;
Лойцянский Л. Г. Механика жидкостей и газов. — М.:
Наука, 1978, гл. II и III (см. также сводку формул векторного
и тензорного исчислений в § 3);
Лурье А. И. Теория упругости. — М.: Наука, 1970, гл. I
и II, приложения I—III.
В современные программы высшей математики входят эле-
элементы векторного и тензорного исчислений, однако следует ре-
рекомендовать учащемуся для углубления своих знаний в этой
области обратиться к специальным руководствам:
Кочин Н. Е. Векторное исчисление и начала тензорного
исчисления. — М.: Наука, 1965;
Борисенко А. И. Векторный анализ и начала тензорного
исчисления. —М.: Высшая школа, 1972.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Абсолютная производная 302
Абсолютно твердое тело 14
Абсолютное время 143
— пространство 142
Аксиальные векторы 38
Аксоид неподвижный 275
винтовых осей 292
— подвижный 275
винтовых осей 292
Амплитуда колебания 147
— комплексная гармонического коле-
колебания 147
Анализ гармонический 153
Архимеда закон 140% 141
Архимедова сила 141
— физический 124
Векторная производная вектор-функ-
вектор-функции по аргументу 164
Векторное произведение 38
Вектор-радиус мгновенного центра
245
— точки 144, 163, 195
Вектор-функция 163
Векторы аксиальные 38, 123
— единичные 196
— истинные 224
— свободные 45
— скользящие 15, 223
Вихрь (ротор) вектора 335
Вращение твердого тела вокруг не-
неподвижной оси 212 и д.
точки 262
Время 11
— абсолютное 11
Биения 151, 152
Бинормаль кривой 185» 259
Бяйзкодействие 10
Блок идеальный 34
Бэра закоа 310 Гармоники 150
Гаусса — Остроградского формула
133 — 135
Варнньона теорема 39 — , тензорная форма 137
Вектор 12 Главная нормаль кривой 185
— бесконечно малого поворота 235 Главные значения симметричного тен-
— главный 39, 48 зора 127
— Дарбу 295 — направления в пространстве 127
— единичный бинормали 187 — оси симметричного тензора 127
¦ главной нормали 186 тензора напряжений 132
—— касательной 185 Главный вектор 39, 48, 63, 68,. 69
— напряжения 105, 138 объемных сил 105, 108
— поступательного перемещения 233 — — поверхностных сил !05, 106
— скорости 163—165, 167 сил давления жидкости 140
—, сопутствующий антисимметричной — момент совокупности сил относи-
части дифференциального тензора тельно начала координат 69
поля скоростей 224- •¦ — — осей координат 50
*—, — антисимметричному тензору 122 — — — оси 49
— углового ускорения 225, 252, 253, — точки 64
276 центра приведения 49,
— угловой скорости 271 63
вращения фигуры 237 Годограф вектор-функции 163
— ускорения 166, 167 — скорости 177, 180
в криволинейном движении 189 Градиент векторной функции 335
Вектор ускорения свободного паде- — скалярной функции 135, 332
ния 105 График движения 145
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
347
График пути 162
Гука шарнир 321—324
Евклидова геометрия U
Евклидово пространство 142
Давление 130
— гидростатическое 131, 139
— нормальное 75
Дальнодействие 10
Дальность полета 176
Дарбу вектор 295
Движение абсолютно твердого тела,
общий случай 281 и д.
— абсолютное 238
— винтовое 159, 291
— колебательное 8
гармоническое 146
— конвективное 337
— криволинейное 154, 174
— мгновенно-поступательное 243,
316
— натурального триэдра траектории
точки 294
— орбитальное 8
— относительное 238, 297
— переносное 238, 298, 299
— плоское твердого тела 227
— поступательное твердого тела 2W,
208
— прямолинейное 145, 189
равномерное 145, 189
равнопеременное 146, 147, 16В,
189
— регулярное прецессионное 293
— составное 297
— эллиптическое обращенное 23!
Девиатор тензора 125
Действие и противодействие 15
Декартова прямоугольная система
координат 196
Декремент логарифмический 17.2, 173
Деформируемая среда 12
Деформируемость тела 13
Диада 118, 119
— координатная 119
Диадное представление тензора 128
— произведение векторов 119, 335
Дивергенция вектора 335
— тензора 136, 137, 336
Динама 65, 66, 73, 291
Динамика 7
Дифференциал душ 161, 198, 295
Дифференциалы во времени н в про-
пространстве 133
Дифференциальный оператор 135
Дифференцирование по направлению
334
Жидкость тяжелая 14<В
определенная 33, 52
Задача статически неопределенная
33
Закон Архимеда 140, 141
— Бэра 310
— гидростатического давления в тя*
желой жидкости 140
— Ньютона второй 9, 16
первый 9, 16
третий 9, 16
— Паскаля 131
Законы Кеплера 202
Затвердевания принцип 107
Зацепление внешнее 220, 221, 2В9,
317
— внутреннее 220, 259, 317
— дифференциальное 319
— эпициклическое (планетарное) 3H6g
317
коническое 319
Идеально гладкая поверхность 1$
Изотропия тензора 125, 127, 131
— тензорной единицы 121
Инвариант статический второй 69
первый 64, 65, 69
— тензора квадратичный 124
кубический 124
линейный 124
Инвариантность длины вектора 113
— квадрата длины вектора 115
— функции, задающей поле скаляр*
ной величины 113
Интеграл объемный 133
— поверхностный 133
Качение без скольжения 242
подвижной центроиды поме*
подвижной 249
Кеш*ера законы 202
Кинематика 7
— сплошной среды 329 и д.
Колебания затухающие 171, 171
Конус трения 76, 77
Конхоида круга 232
— прямой 233
Конхоидограф 232, 233
348
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Координаты криволинейные точки 195
— центра параллельных сил 91
тяжести 92, 94
, методы определения 94—97
Коши равенства 106, 108, 116, 117,
129, 130
Коэффициенты Л яме 198, 199
— неравномерности передачи 323
хода двигателя 215
— относительного объемного расши-
расширения сплошной среды 344
— трения верчения 78
скольжения 75
Кривизна кривой в данной точке 186
— траектории 295
Кривые разрыва ИЗ
Кронекера символ 120
Круг соприкасающийся (круг кривиз-
кривизны) 187
— трения 82
Кручение кривой 295
Лагранжа переменные 330
Линейное преобразование векторов
115, 116
Линия винтовая 159, 160
— действия силы 14, 24, 67
— координатная 195
— узлов 263
Лиссажу фигуры 154—156
Лобовая передача 220
Локсодромия 205
Л яме коэффициенты 198, 199
Масса 10
Материальная точка 7, 8
Материальное тело 7
, модели 7, 14
Мгновенная ось вращения твердого
тела 272, 274
Мгновенный центр скоростей 240, 241
, его координаты 244, 245
ускорений 255, 256
, его координаты 258
Меркатора проекция 205
Метод Пуансо 46, 47
— сечений 17, 103
Механизм автомобильного дифферен-
дифференциала 320
— кривошипно-ползунный 152, 153,
157, 172
— мальтийского креста 305
— четырехзвенный 27, 28
— эпициклический (планетарный) 316
Механическое движение 7
Момент вектора угловой скорости от-
относительно центра 225
— инерции 10
— пары сил 43
*— силы относительно осей координат
41
оси 36, 40, 41
точки 36—39, 63, 64
— трения качения 79
Наклонная плоскость 80
Напряжение 105
— среднее 105
Напряжения в сплошной среде 9
— давления 109
— касательные 108, 130
— нормальные 109, 130
— трения 109
Натуральный триэдр (естественный
трехгранник) кривой 185, 294, 296
Начальные условия 174
Нормаль внешняя 332
— внутренняя 332
— главная 185
Оператор дифференциальный 135
Опора идеальная 18
Оси координат 195
Ось вращения 209
— мгновенная винтовая 291
— минимальных моментов 67
— углового ускорения 277
— центральная 66, 69
Относительная производная 302
Пара векторов угловой скорости 316
— сил 19, 43
Параметр динамы 69 . .
Паскаля закон 131
Переменные Лагранжа 330
— Эйлера 330
Перемещение 164
— винтовое 283, 289
— деформационное 340
— квазитвердое 340
— точек сплошной среды 331
Период колебаний 146
Плоскости координатные 196
Плоскость пары сил 43
— симметрии однородного тела 94, 95
Плотность распределения массы сред-
средняя 104
сил средняя 104, 105
физической величины по сплош-
сплошной среде 104
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
349
Плотность среды в точке 104
Поверхности координатные 196
— разрыва 113
Поворот положительный 37
Подпятник 19
Подшипник 19
— цилиндрический 53
Поле скоростей в плоском движении
237
• нестационарное 330
стационарное 330
— ускорений в плоском движении
253, 256, 257
в твердом теле, вращающемся
вокруг неподвижной точки 276, 277
— физической величины 112
Ползун 80
Полюс 229, 233, 239, 289
Правило векторного многоугольника
13
— параллелепипеда 13
*— параллелограмма 13, 304
Преобразование компонент тензора
117
обратное 117
— координат 114
обратное 114
Пресс клиновый 85
Прецессия обратная 280
— прямая 280
— регулярная 279
Принцип затвердевания 15, 107, 137,
138
*— обращения механизмов 232
— освобождаемости от связей 18
Проекции скорости на оси криволи-
криволинейных координат 199, 200
— ускорения на оси криволинейных
координат 199, 200
Проекция вектора на ось 114, 115
— Меркатора 205
Производная конвективная 337
— локальная 337
— по направлению 333
нормали 333
Пространство 10
Псевдовекторы 38, 123, 224
Псевдоскаляры 224
Пуансо метод 46, 47
Путь 8, 161
— в равнопеременном прямолинейном
движении 169
Равенства Кощи 106, 108, 116, 129
Равновесие абсолютно твердого сво-
свободного тела 14, 15, 24 ~
Равновесие абсолютно твердого тела
137
—деформируемого тела 137
— идеально текучей среды 130, 139,
140
— при наличии сил трения 74
— тела под действием несходящейся
совокупности сил 50, 51
сходящейся совокупности
сил 24, 32
с двумя закрепленными точка-
точками 55, 56
Равнодействующая сила 23
— совокупности сил 67
— сходящейся совокупности сил 23,
33
Радиан 209
Радиус кривизны 186
винтовой линии 191
циклоиды 192
— кручения 295
Разложение вектора скорости по еди-
единичным векторам осей криволи-
криволинейных координат 199, 200
ускорения по осям натураль-
натурального триэдра 188
Размах колебаний 147
Распределение скоростей в движу-
движущейся плоской фигуре 243 и д.
твердом теле в общем слу-
случае его движения 284
ПрИ вращении вокруг
неподвижной оси 225, 237
_ точки 273
— ускорений в твердом теле в об-
общем случае его движения 285
Распределительность векторного про-
произведения 39
Реакции опорные балки 27, 28
в шарнирах 26
двухарочной фермы 27
Реакция связи 18
Сателлиты 316, 320
Свободные векторы 45
Связи 18
Связь между «старыми» и «новыми»
координатами 113, 122
Сдвиг среды чистый 131, 132
Семейство поверхностей уровня 332
Сила 10, 12
— архимедова (подъемная гидроста*
тическая) 141
— гидростатического давления 93
— как вектор 12
—, модель 12
350
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Сила объемная 105, 138
—- поверхностная элементарная 1Ф
— поворотная (кориолисова) 310
— подъемная 57, 58
-— рашю действующая 22
— трения 18, 74
Силовой многоугольник 22, 23
— треугчэшиник 24, 25
Силы внутренние 9, 17, 103, 166
1#5
яойерговдстиые 1#5
Символ Кронекера 120
Стжетршшсть тензора напряжений
129, 139
Система координат абсолютная 2Ф8
гелиоцентрическая 143
декартова 1§6
криволинейная 195
« — ортогональная 196
" относительная 298
правая 37
« сферическая 197
• цилиндрическая 1Ф6, 197
Системы отсчета 18
Скаляр физический F24
Скорости екошения координатных
углов (скорости сдвига) 344
Скорость 8
— абсолютная 364
— — угловая 3111
— в криволинейном* движении 174—
Ш
• прямолинейном гармоническом
кодаебатеждам движении 170
, равнопеременном' движении
1«
•— — цилиндрической системе коорди-
координат 201
— линейная (окружная) 216
-— относительная угловая 319
*— относительного объемного расши-
расширения 345
•— переносная 298
* угловая 313, 319
— радиальная 312
— секториальная %®2
»— скольжения 291
— то^ек среды в переменных Лаг-
ранжа 331
Эйлера 331
*~ — твердого тела, -вращающегося
вокруг неподвижной оси 216
— точки 162, 143
— угловая тела 210, 211
Сложение векторов 13
.*- винтовых движений1 326
Сложение вращений твердого тела
вокруг параллельных осей 313—317
, пересекающихся осей
318
— гармоник одинаковой частоты 150
разной частоты 156, 151
— скоростей 302, 3J03
— ускорений 306, 367
COfJOfCyiTHOCTb СИЛ 13
несходящаяся 71
, статическая эквивалентность 13
сходящаяся 22, 51, 71
Соприкасающаяся плоскость \Ы
Сплошная среда, модель 103
Статика 7, 8, 12
— абсолютно твердого тела ШЗ
— сплошной деформируемой среды
8, 137
Статическая эквивалентнекпъ сово-
кутгностй сил 13
Статический момент площади относи-
относительно оси 94, Ш
Стрела провисания 26
Тензор антисимметричный (кососим-
метричный) 121
— второго ранга 11S, 116
— деформаций 340—342:
— Леви-Чивита 335
— мультипликативная 118;
— наи§яжешщ 117. 129
— поворота 117
Ф сферической системе координат —
120
&?формаш& 341, 344
р
11Д 129
— сферический {шаровой) 125, 127
— физический 116, 117
Тензорная единица Ш, 120
Теорема Вариыьоыд 39
, общая форма Ш
— Гельмгольца 340, 341
— кинематики твердого тела основ-
основная 282
— о взаимйосш касательных напря-
напряжений'111
— — проекции геометрической суммы
векторов 32
равновесии тела под действием
двух сил 14
. Трех сил 24
сложении движений твердого
тела 326
скоростей 364
й 367
.ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Теорема Шпиа — Гульдшш 96, .9.7
— статики абсолютно твердого тела
49
— Эйлера 23?, 2Ш
Точка основная .(водюь) 229Т 233, 239,
289
Точки разрыва -hlZ
Траектория 8, 145, 163
— навесная 177
— наоилшая 177
Трение верчения 74, 77, 78
— качения 78
— скельженш* 74, Ш, Ы
кр->т 82
Угловая скроет ОД, Ш%, -211
Угел атаки 304
— нутации 264
— -поворот* 2Ш
— прецессии 263
— смежности 185
— трения 7$г 82
— чистого вращение 264
Углы Эйлера 263, 264
Удар жесткий 191
— мягкий 191
Удельный вес 140
Умножение вектора на тензор 118
— тензора на вектор 117, 118
Упругость среды 139
Уравнение вращения тела 210
— конических сечений 202, 203
— мгновенной оси 275
— статики в напряжениях 138
— характеристическое 126
— центральной оси 69, 70, 72
Уравнения движения точки 145
— переносного движения 300
— траектории 145
параметрические 145
— Эйлера гидростатики 139
— эллипса 155
Ускорение 8, 146
— абсолютное 307
— в криволинейном движении 174—
176
прямолинейном гармоническом
колебательном движении 170
¦ сферической системе координат
201
цилиндрической системе коор-
координат 201
— вращательное 217, 226, 252, 257,
277, 285, 286
— индивидуальное (субстанцио-
(субстанциональное) 338
Ускорение касательное 188
— нормальное Ь8&
— осестремительнве 217,226,253,257,
277, 285, 286
— относительное ЗФ7
— переносное 2Ш
— повор©тш>е Ш7
— поступателывде 252, 28&, 286
— точек ереды в переменных Лаграк-
жа 331
¦ конвективное 338
локальше 338
твердого тела,, вращающегося
вокруг неподвижной ©ей 217, 218,
225, 226
— тонки 162, 16S
— угловое 212
— центробежное 105
Условие равновесия абсолютно твер-
твердого тела 14
— — деформируемых тел- 1-5, \*Ш
вдеаль-н© текучей среды 130,
131
плоской совокупности сходя-
сходящихся сил 33
— физической объективности вектор*
ного поля 114, 115-
скалярного поля 113
тензорного поля 117
Фаза колебания 147
начальная 147, 150
Фактор затухания 172, 173
Фигуры Лиссажу 154—156
Формула Гаусса — Остроградского
133—135
— кинематики твердого тела основ-
основная 225, 284
— Эйлера связи показательной и три-
тригонометрической функций 147
Формулы Френе 296
— Эйлера распределения скоростей в
твердом теле, вращающемся око-
около неподвижной оси 225
— — точки
272
Центр давления 93
— кривизны кривой 187
циклоиды 193
— момента 36
— параллельных сил 89, 90, 91
— поворота 236
— приведения 64
— тяжести дуги окружности 98, 99
352
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Центр тяжести линии 91, 93, 97
объема 91, 92, 95
• поверхности 91, 93, 97
тела 92, 95
трапеции 98
треугольника 97
четырехугольника 97, 98
Центральная ось 66, 69, 72
Центроида неподвижная 248
— подвижная 248
Центроиды в обращенном эллиптиче-
эллиптическом движении 251
•— шатуна механизма антипараллело-
антипараллелограмма 251
— эллипсографа 250, 251
Цилиндрическая система координат
196, 197
Частота 147
— вращения тела 210
— круговая колебательного движения
147
Число оборотов 210
Шаг винтовой линии 159
Шарнир Гука 321—324
Шарнир сферический 19, 52
— цилиндрический 19, 53
Эйлера переменные 330
— теорема о перемещении твердого
тела вокруг неподвижной точки
269
плоском перемещении фигу-
фигуры 235
— углы 263, 264
— уравнения гидростатики 139
— формула связи показательной и
тригонометрической функций 147
»— формулы распределения скоростей
в твердом теле, вращающемся око-
около неподвижной оси 225
точки
272
Эквивалентность статическая пар
43—45
Эксцентриситет 202
Эллипсограф 159, 229, 230, 246, 261
Эллиптические колеса 220, 221
Якобиан 331