/




















































































































































































































Author: Павленко Ю.Г.
Tags: общая механика механика твердых и жидких тел физика механика теоретическая механика
ISBN: 5-9221-0241-9
Year: 2002




Text
УДК 531@7)
П12
ББК 22.31
Павленко Ю. Г. Лекции по теоретической механике. — М.:
ФИЗМАТЛИТ, 2002. - 392 с. - ISBN 5-9221-0241-9.
Цель учебника — изложить фундаментальные принципы и методы те-
теоретической механики, научить читателя активно применять современный
математический аппарат для решения конкретных задач динамики, под-
подготовить к анализу широкого круга проблем, изучаемых в курсе теорети-
теоретической физики. Основное внимание уделено исследованию классических и
современных задач механики в рамках лагранжева и гамильтонова подходов,
методам «гамильтонизации» систем нелинейных уравнений и новым методам
интегрирования канонических систем.
Для студентов физических и механико-математических факультетов
университетов, студентов втузов, обучающихся по специальностям «Меха-
«Механика» и «Прикладная математика», преподавателей и аспирантов.
Рецензенты:
заведующий кафедрой теоретической механики факультета
физико-математических и естественных наук Российского
университета дружбы народов профессор
Р.Г. Мухарлямов
профессор кафедры теоретической физики физического факультета
Московского государственного университета им. М.В. Ломоносова
В.Р. Халилов
ISBN 5-9221-0241-9 © ФИЗМАТЛИТ, 2002
ОГЛАВЛЕНИЕ
Предисловие .................................... 7
ГЛАВА 1. УРАВНЕНИЯ НЬЮТОНА И ЛАГРАНЖА .......... 9
Лекция 1. Скалирные, векторные и тензорные полн в евклидовом
пространстве ................................. 9
Многообразие. Координаты. Евклидово пространство. Векторы в евклидо-
евклидовом пространстве. Скалярное произведение векторов. Векторное произведение
векторов. Скалярное и векторное поля на многообразии. Тензоры в евклидовом
пространстве. Диагонализация матрицы Производная определителя.
Лекция 2. Кинематика .......................... 19
Система отсчета. Галилеево пространство. Кинематика. Базисные векто-
векторы. Угловая скорость одного базиса относительно другого. Два вращающихся
базиса. Частица в пространстве. Скорость и ускорение в декартовых координа-
координатах. Скорость и ускорение в цилиндрических координатах. Естественные коорди-
координаты.
Лекция 3. Законы Ньютона ....................... 25
Инерциальные системы отсчета. Силы в механике. Второй закон Ньютона.
Третий закон Ньютона. Принцип относительности Галилея. Приближение внешнего
поля.
Лекция 4. Импульс, момент импульса, потенциальнам энергин. За-
Законы изменении динамических переменных .............. 29
Закон изменения импульса системы. Закон изменения момента импульса систе-
системы. Закон изменения кинетической энергии. Потенциальная энергия взаимодей-
взаимодействия частиц Закон сохранения полной энергии. Уравнение Мещерского. Теорема
вириала.
Лекция 5. Движение свободной частицы во внешнем поле ..... 35
Одномерное движение в консервативном поле. Движение заряда в электромаг-
электромагнитном поле. Движение частицы в центрально-симметричном поле.
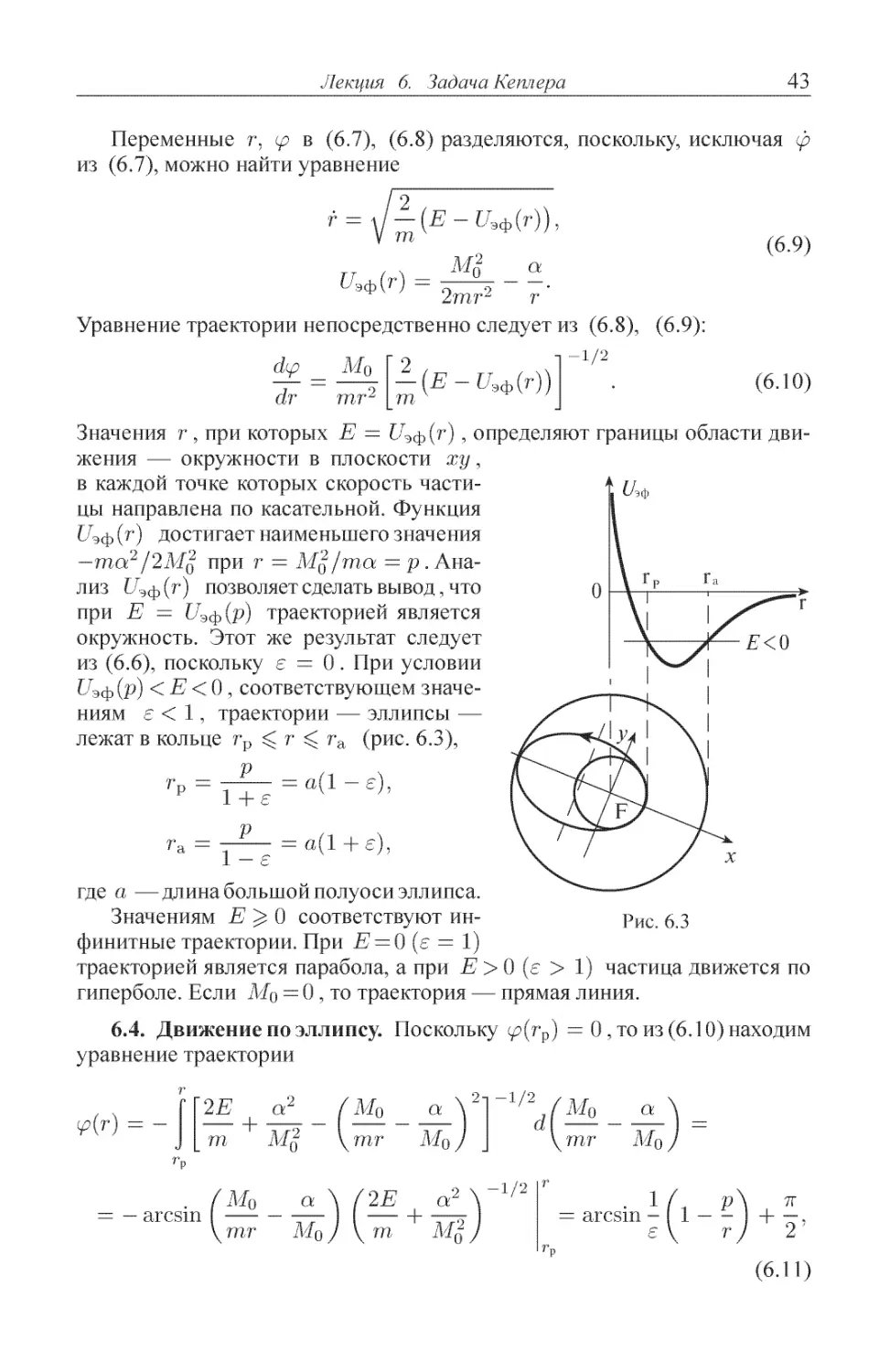
Лекция 6. Задача Кеплера ........................ 40
Потенциальная энергия взаимодействия однородного шара и частицы. Первые
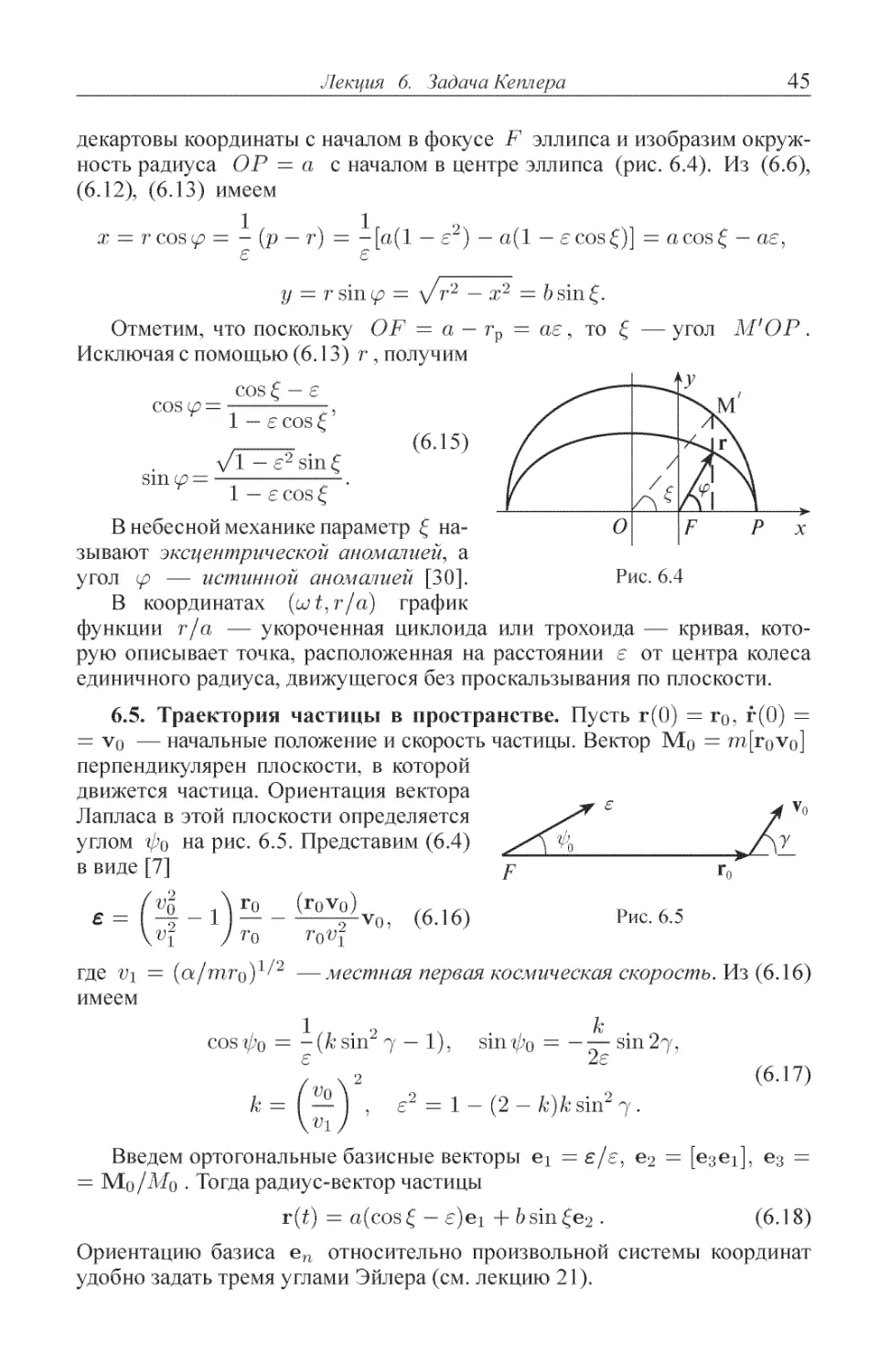
интегралы. Решение задачи Кеплера. Движение по эллипсу. Траектория частицы
в пространстве. Орбитальные полеты. Коррекция траектории.
Лекция 7. Уравнении Лагранжа ..................... 51
Лагранжиан, функционал действия. Принцип Гамильтона-Остроградского (или
принцип наименьшего действия) Первые интегралы. Теорема Нетер. Движение
системы во внешнем поле. Лагранжиан заряженной частицы в заданном электромаг-
электромагнитном поле. Вектор-потенциал магнитного поля соленоида.
Лекция 8. Движение относительно
неинерциальныж систем отсчета ..................... 60
Лагранжиан частицы в поступательно движущейся системе отсчета и во вращаю-
вращающейся системе отсчета.
ГЛАВА 2. ДВИЖЕНИЕ СИСТЕМЫ ЧАСТИЦ .............. 64
Лекция 9. Система N частиц ...................... 64
Лагранжиан системы N частиц. Лагранжевы движения. Уравнения движения
в относительных координатах. Задача трех тел. Переменные Якоби.
Оглавление
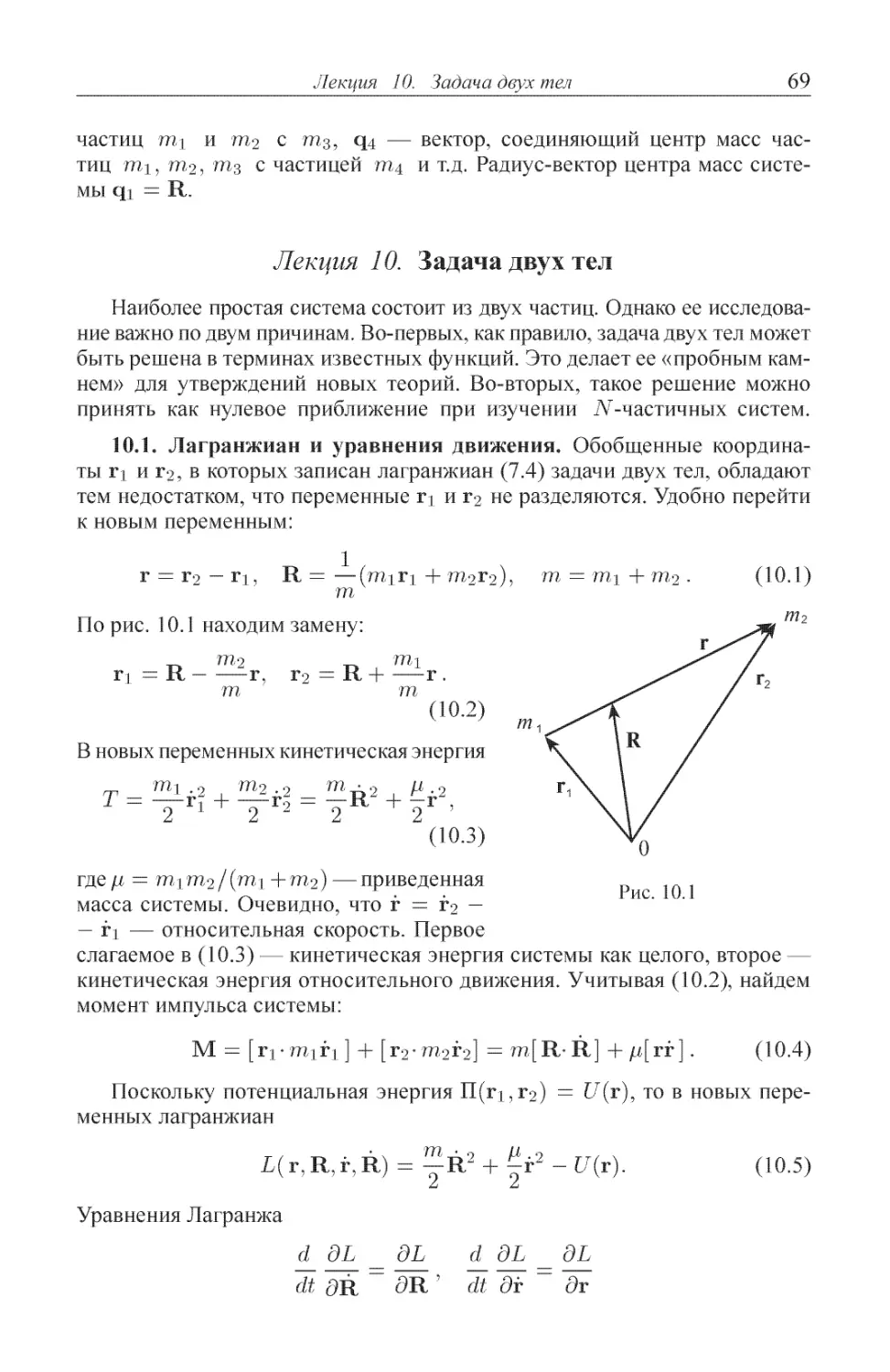
Лекция 10. Задача двух тел ........................ 69
Лагранжиан и уравнения движения. Движение в системе центра масс (СЦМ).
Приближение внешнего поля. Система Земля-Луна в поле тяготения Солнца. Гра-
Гравитационная рогатка. Движение двух зарядов во внешнем поле.
Лекция 11. Упругое рассеиние частиц .................. 75
Кинематика упругого рассеяния. Динамическая теория рассеяния. Сечение
рассеяния реакции pi + Р2 —>• Pi + Р2- Упругое рассеяние. Дифференциаль-
Дифференциальные распределения в лабораторной системе. Обратная задача рассеяния. Условие
классичности рассеяния. Рассеяние тождественных частиц.
Лекция 12. Ограничениям задача трех тел ................ 87
Лагранжиан ограниченной задачи трех тел. Ограниченная круговая задача трех
тел. Точки либрации. Вклад Луны в ускорение свободного падения.
Лекция 13. Межпланетные полеты .................... 93
Солнечная система. Наша Галактика и Вселенная. Полеты к Луне. Полеты к
Венере. Полеты к Марсу. Космический вояж к дальним планетам. Сфера действия.
Вторая космическая скорость. Третья космическая скорость. Четвёртая космическая
скорость. Гомановская траектория перелета. Движение аппарата внутри сферы
действия планеты-цели.
ГЛАВА 3. УРАВНЕНИЯ ЛАГРАНЖА СИСТЕМ СО СВЯЗЯМИ ... 108
Лекция 14. Уравнения Лагранжа 1-го рода ............... 108
Голономные связи. Силы реакции. Виртуальные перемещения. Идеальные
связи. Метод неопределенных множителей Лагранжа. Закон изменения полной
энергии. Принцип Д'Аламбера—Лагранжа. Неголономные связи.
Лекция 15. Уравнении Лагранжа в независимых координатах .... 118
Обобщенные координаты. Уравнения Лагранжа второго рода. Обобщенные
импульс и энергия. Принцип Гамильтона. Движение в неинерциальной системе
отсчета.
Лекция 16. Движение частицы по поверхности ............. 124
Координаты на поверхности. Векторные и тензорные поля на многообразии.
Метрика на поверхности. Поднятие и опускание индексов. Геодезические кри-
кривые. Локально-геодезическая система координат. Ковариантное дифференцирова-
дифференцирование. Тензор кривизны. Тензор внешней кривизны. Расхождение геодезических.
ГЛАВА 4. ЛИНЕЙНЫЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ ...... 136
Лекция 17. Свободные колебания ..................... 136
Одномерные колебания. Осциллятор в среде с линейным трением. Фазо-
Фазовый портрет линейного осциллятора. Система с s степенями свободы. Линейные
колебания консервативной системы. Условия существования ограниченных реше-
решений. Биения. Нормальные координаты.
Лекция 18. Вынужденные колебания ................... 149
Одномерные колебания. Запаздывающая функция Грина. Энергия, потреб™
ляемая системой. Резонанс. Переходный и установившийся режимы. Колебания
связанных систем.
Лекция 19. Общие свойства нелинейных систем ............ 161
Нелинейные системы. Нелинейные системы на плоскости. Синэргетика.
Устойчивость по Ляпунову. Функция Ляпунова. Устойчивость по линейному при-
приближению. Предельный цикл. Бифуркация. Бифуркация Хопфа. Бифуркация
удвоения периода. Переход к хаосу. Детерминированный хаос. Система Лорен-
Оглавление
ца. Странный аттрактор. Размерность Хаусдорфа. Фракталы. Хаос в динамических
системах.
Лекция 20. Нелинейные колебания .................... 184
Решение нелинейных уравнений методом усреднения. Автоколебания. Выну-
Вынужденная синхронизация. Система с медленно изменяющимися параметра-
параметрами. Адиабатические инварианты. Параметрический резонанс в нелинейной си-
системе. Многомерные системы.
ГЛАВА 5. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ................ 198
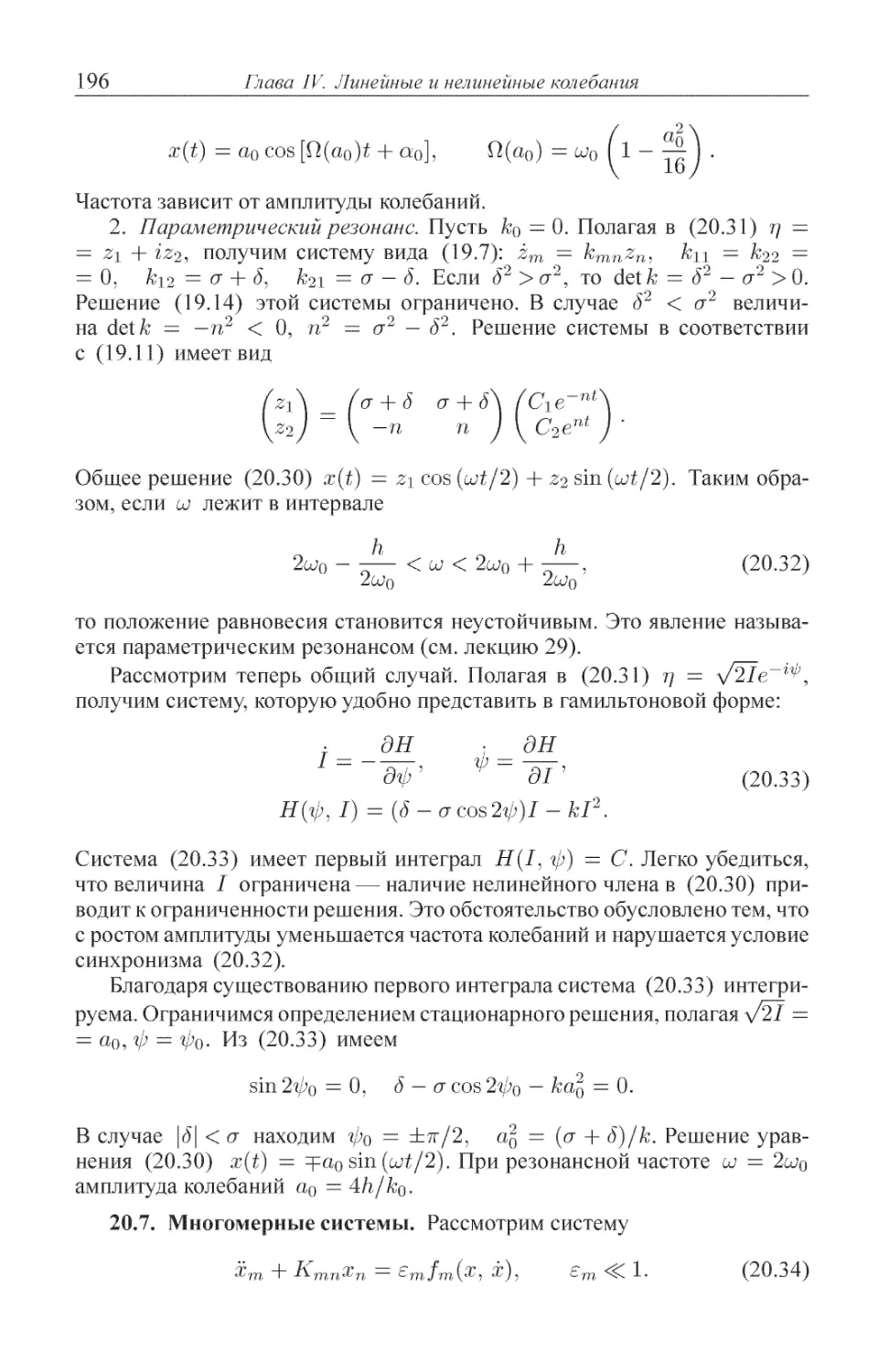
Лекция 21. Кинематика и динамические переменные твердого тела 198
Координаты твердого тела. Углы Эйлера. Угловая скорость. Скорость и
ускорение частиц твердого тела. Мгновенная ось вращения. Чистое качение.
Динамические переменные. Тензор инерции. Твердое тело с одной неподвижной
точкой.
Лекция 22. Уравнении Эйлера ...................... 206
Равновесие твердого тела. Уравнения Эйлера. Движение твердого тела с одной
закрепленной точкой. Движение тела с неподвижной осью. Оси Резаля. Гироско-
Гироскопический момент.
Лекция 23. Уравнении Лагранжа ..................... 221
Движение свободного твердого тела. Обобщенные импульсы и силы. Дви-
Движение твердого тела с одной неподвижной точкой в однородном поле тяжести (слу-
(случай Лагранжа). Плоскопараллельное качение твердого тела. Движение твердого
тела относительно неинерциальной системы отсчета, вращающейся с угловой скоро-
скоростью О(t). Космический аппарат (КА) в ньютоновом поле тяготения. Движение КА
относительно центра масс. Гравилет.
Лекция 24. Электромеханика ....................... 233
Квазистационарные поля и токи. Функция Лагранжа электромеханической си-
системы линейных проводников. Уравнения Лагранжа. Сила Ампера и момент силы
Ампера. Магнитный момент проводника с током. Закон изменения обобщенной
энергии. Нейтральная частица в электромагнитном поле. Твердое неферромаг-
неферромагнитное тело в магнитном поле.
ГЛАВА 6. КАНОНИЧЕСКИЕ УРАВНЕНИЯ ............... 250
Лекция 25. Уравнении Гамильтона .................... 250
Преобразование Лежандра. Гамильтониан. Канонические уравнения. Функ-
Функционал уравнений Гамильтона. Скобки Пуассона. Теорема Пуассона. Расширен-
Расширенное фазовое пространство. Интегрируемость гамильтоновых систем. Фазовый по-
поток. Теорема Лиувилля.
Лекция 26. Канонические преобразовании ............... 261
Метод вариации канонических постоянных Производящие функции канониче-
канонических преобразований Линейные канонические преобразования. Диагонализация
гамильтониана. Операторная форма канонических преобразований. Канонические
преобразования в классической теории магнитного резонанса.
Лекция 27. Уравнение Гамильтона-Якоби ............... 278
Полный интеграл. Теорема Якоби. Метод разделения переменных. Перемен-
Переменные действие-угол. Метод характеристик. Метод Фока. Задача Коши. Класси-
Классическая механика и квантовая механика. Уравнение Гамильтона-Якоби вр - представ-
представлении. Элементы гамильтоновой оптики.
Лекция 28. Каноническая теории возмущений ............. 297
Построение формальных рядов. Структура ряда теории возмущений. Условия
существования решения. Интегрирование уравнений движения. Реакция системы
Оглавление
на внешнее возмущение. Спонтанное и индуцированное излучение классических
систем.
Лекция 29. Метод усреднении канонических систем .......... 314
Секулярные члены. Методы усреднения гамильтоновых систем. Канониче-
Каноническое преобразование к медленным переменным. Локализация энергии в нелиней-
нелинейной системе. Параметрический резонанс. Система в быстроосциллирующем поле.
Заряженная частица в высокочастотном поле.
Лекция 30. Метод удвоения переменных ................. 331
Гамильтониан нелинейной системы первого порядка. Обращение интегралов.
Решение алгебраических и трансцендентных уравнений. Усреднение слабонелиней-
слабонелинейных систем. Линейные сингулярно-возмущенные уравнения. Система общего вида.
Лекция 31. Гамильтонова теории специальных функций ....... 344
Гамильтонова форма линейного уравнения второго порядка. Преобразование
аргумента. Нормализация гамильтониана. Преобразование Лиувилля—Грина. Пре-
Преобразование Беклунда. Высшие ВКБ-приближения. Решение в окрестности обык-
обыкновенной точки. Решение в окрестности регулярной особой (или правильной) точки.
Исследование асимптотических разложений.
ГЛАВА 7. РЕЛЯТИВИСТСКАЯ МЕХАНИКА .............. 357
Лекция 32. Зармд в электромагнитном поле ...............357
Пространство Минковского. Преобразование Лоренца. Четырехмерные ско-
скорость и импульс частицы. Масса системы невзаимодействующих частиц. Элек-
Электромагнитное поле. Лагранжиан и уравнения движения. Заряд в плосковолновом
поле. Уравнения Гамильтона. Канонические преобразования. Уравнение Гамильто™
на—Якоби. Ковариантная теория возмущений в классической электродинамике.
Приложение. Эллиптические функции. ....................381
Список литературы. ................................ 382
Предисловие ко второму изданию
Трагедия науки —
в умерщвлении прекрасной теории
мерзким фактом.
Томас Гексли
Как правило, подлинная научная теория не может со временем не обна-
обнаружить своей несостоятельности, а точнее, ограниченности области приме-
применимости. «Мерзкий факт» заставляет ученых создать новую теорию, в рам-
рамках которой он получает теоретическое обоснование. Так возникли теория
относительности, квантовая теория, открывшие новый этап в познании за-
закономерностей природы. Однако при определенных условиях релятивист-
релятивистские и квантовые эффекты могут оказаться несущественными в описании
поведения частиц. Стало ясно, что область применимости классической ме-
механики ограничена. Эта особенность является признаком любой научной
теории: знания, завоеванные человечеством, не отметаются новой теори-
теорией. Классическая механика по-прежнему остается важнейшим разделом
естествознания и техники.
В основу этой книги положен курс лекций, который в течение ряда лет
читался студентам физического факультета Московского государственного
университета. Теоретическая механика излагается как первый раздел курса
теоретической физики, изучаемого студентами университетов. Предлагае-
Предлагаемый курс теоретической механики существенно отличается от существую-
существующих учебников в трех аспектах: 1) активно используется аппарат и методы
математической физики; 2) значительно расширено изложение гамильто-
нова формализма, представленного как мощный математический аппарат для
решения широкого круга задач; 3) в книгу включены более 100 примеров, ил-
иллюстрирующих реальные прикладные проблемы механики и физики. Выбор
примеров в сильной степени продиктован научными интересами автора.
Первое издание «Лекций» опубликовано издательством МГУ в 1991 г.
При подготовке второго издания были исправлены замеченные опечатки в
тексте и формулах. Написаны новые пункты: 1.9, 2.6, 6.8, 9.5, 10.5, 11.3,
11.6, 16.9, 19.13, 19.15, 20.7, 22.6, 25.8, 26.6, 27.8, 27.10, 28.6, 29.5, 29.7,
32.4,32.6,32.10,32.11 и новые примеры A7). Заново написана лекция 24 —
«Электромеханика». По пожеланиям читателей увеличен объем лекции
«Релятивистская механика».
Первые две главы посвящены уравнениям Ньютона и Лагранжа и впол-
вполне традиционны по содержанию. Лекция 16, посвященная движению час-
частицы по поверхности произвольной кривизны, представляет собой введе-
введение в общий тензорный анализ. В четвертой главе при изучении линейных
Предисловие
колебаний используется аппарат функций Грина. Излагается метод усред-
усреднения для анализа нелинейных колебаний. В примерах рассмотрены систе-
системы, в которых проявляются характерные особенности нелинейной физики. В
лекциях пятой главы рассмотрены проблема гироскопической стабилизации,
движение волчка в случаях Эйлера, Лагранжа, Ковалевской и развит лагран-
жев подход к анализу движения твердого тела в ньютоновом поле тяготения.
Шестая глава посвящена важнейшему разделу механики — гамильто-
нову формализму. Основная цель этого раздела — представить математи-
математические аспекты гамильтоновой динамики как мощный аппарат решения
широкого круга задач механики, физики и прикладной математики. В ла-
гранжевом подходе проблема решения уравнений лежит вне рамок лагран-
жева формализма. Положение меняется в гамильтоновом подходе, который
позволяет получить решение как каноническое преобразование начальных
данных, не обращаясь непосредственно к уравнениям. Вся информация об
эволюции системы содержится в одной функции — гамильтониане; в ре-
результате канонического преобразования можно получить новый гамильто-
гамильтониан, который в определенном смысле «мал». Более того, поскольку все опе-
операции ограничены рамками группы движения ко со симметричной метрики,
то удается создать универсальные алгоритмы построения приближенных
решений. В рамках гамильтонова подхода изложены теория специальных
функций, каноническая теория возмущений, метод усреднения нелинейных
систем, методы анализа движения системы в быстропеременном внешнем
поле и т.д. Особый интерес представляет лекция 30, в которой развит метод
Дирака удвоения переменных, позволяющий представить в гамильтоновой
форме систему нелинейных уравнений общего вида и получить решения
уравнений, описывающих, сингулярно-возмущенные системы, решения ал-
алгебраических и трансцендентных уравнений, разрешить проблему обраще-
обращения интегралов и т.д. В лекции 32 приведено решение задачи о движении
релятивистской частицы в гиперболическом волноводе, представляющей
интерес для проблемы сепарации частиц по энергии и удельному заряду.
В рамках канонического формализма рассмотрена задача о движении про-
протонов в синхрофазотроне.
Предлагаемые «Лекции» вместе с книгой автора «Задачи по теорети-
теоретической механике» (ФИЗМАТЛИТ, 2002 г.), содержащей решения более 550
задач, представляют собой единое руководство по теоретической механике.
Надеюсь, что эти книги окажутся полезными не только для студентов, но и
для профессионалов в области механики и прикладной математики.
Пользуюсь возможностью выразить свою благодарность Марии Нико-
Николаевне Андреевой за интерес к моей работе. Я признателен заведующему
кафедрой теоретической механики Университета дружбы народов профес-
профессору Р.Г. Мухарлямову и профессору кафедры теоретической физики физи-
физического факультета Московского государственного университета В.Р. Хали-
лову за конструктивные замечания, сделанные при чтении рукописи. Я хочу
поблагодарить О.А. Пенину и В.И. Шутова за помощь в работе над книгой.
ЮТ. Павленко
ГЛАВА 1
УРАВНЕНИЯ НЬЮТОНА И ЛАГРАНЖА
Лекция 1. Скалярные, векторные и тензорные поля
в евклидовом пространстве
Начнем с изложения основных математических понятий, исполь-
используемых в курсе механики.
1.1. Многообразие. Координаты. Первичным понятием геометрии
является понятие точки. Рассмотрим пространство М, которое состоит
из точек. Каждой точке Р некоторого подмножества U Е М поставим в
соответствие п вещественных чисел (xi,X2,... ,хп) = х, называемых
локальными координатами. Соответсвие Р —>• х должно быть взаимно
однозначным отображением множества точек из U на подмножество N
координатного пострантва Rn; в этом случае пишут х = (р(Р). Трой-
Тройку (U,(p,N) называют координатной картой на М. Иногда одной карты
недостаточно для введения координат всех точек на М. Тогда вводят еще
одну или несколько карт так, чтобы каждая точка из М была изображена
хотя бы на одной карте. Если (U, <p, N)9 (U',(p',N') — две перекрываю™
щиеся карты на М, то можно установить связь между двумя множествами
координат из пересечения U и U'. Эта связь является взаимно одно-
однозначной: положим х = (р(Р) и х; = (р'(Р), отображение области V =
= (f(U DU') координатного пространства Ш1 на область V' = (p'(UDU')
и его обращение V' ^ F определяются функциями
X'n = /n^!,...,^), Xn = fn(x{,...,Xn). A.1)
Предполагается, что эти функции непрерывны и определенное число раз
дифференцируемы. Тогда карты называются согласованными. На рис. 1.1
схематически изображены согласованные карты.
Говорят, что на множестве М задана структура дифференцируемого
многообразия, если М снабжено конечным или счетным набором согла-
согласованных карт, которые вместе покрывают все М [8—10].
Обычное трехмерное пространство образует трехмерное точечное
многообразие. Введем декартову систему координат. Каждой точке Р со-
ответствует набор координат x.= (x,y,z). Если мы положим х = (pi(P),
х; = (f2(P), то получается связь между х и х;, которую называют преоб-
преобразованием координат. Например, преобразование от декартовых коорди-
координат х\ = ж, Х2 = у, жз = z к цилиндрическим координатам х[ = р,
а?2 = (р, Х3 = z определяется соотношением
х = р cos (р, у = psliup, z — z.
Преобразование от декартовых координат к сферическим х{ = г, х% = в,
10
Глава 1. Уравнения Ньютона и Лагранжа
Ж3 = (f имеет вид
х = г sin в cos ер, у = г sinf9sinc^, z = rcosO.
1.2. Евклидово пространство. Структура многообразия определяется
заданием «расстояния» между парой точек. Пусть хп и хп + dxn — ко-
х2
Рис. 1.1
ординаты двух точек Pi и ?2- Точечное многообразие называетсярима-
новым пространством, если расстояние между ними задано выражением
{dsf =gik(
A.2)
Матрица gik симметрична, все ее собственные значения положитель-
положительны. Набор функций g^(x) называется римановой метрикой [8-10].
Если gik = Sik, то точечное многообразие называется евклидовым
пространством. В этом случае
(cfsJ = (dxJ + (dyJ + (dzJ .
При преобразовании координат A.1) из A.3) следует
i к
A.3)
Лекция 1. Тензорные поля в евклидовом пространстве 11
В новых координатах евклидова метрика задается матрицей
Для цилиндрических координат
Для сферических координат
(dsJ = {drf + г2{йвJ + г2 sin2 0(d(pJ .
Преобразование A.1) называется движением данной метрики, если
Рассмотрим движение, являющееся линейным преобразованием и оставля-
оставляющее неподвижным начало координат. Оно задается матрицей Л:
хп = Л~/ж/ . Из A.4) получаем равенство
из которого следует, что матрица Л является ортогональной: Л™1 = Лт.
Обратное преобразование имеет вид
%к = ^кп%п- A.5)
Движение метрики в случае det Л = 1 называют собственным.
Матрица Л задает поворот пространства как цел ого вокруг некоторой
оси, проходящей через начало координат. При этом форма г2 = х2 + у2 +
+ z2 остается инвариантной ^.
1.3. Векторы в евклидовом пространстве. Изобразим несколько
направленных отрезков. Прежде чем объявлять их векторами, научимся
математическому описанию стрелок. С этой целью введем прямоугольную
систему координат, оси х и у которой лежат в плоскости листа, а ось z
проведена перпендикулярно плоскости. Положительное направление оси z
выбирается по правилу буравчика: буравчик движется в положительном на-
направлении оси z9 если его вращать против направления движения часовой
стрелки — от оси х к оси у.
Поставим теперь в соответствие стрелке а тройку чисел а= (аЖ5 ау,
az) по правилу: число ах равно разности ж-координат конца и начала
стрелки, число ау равно разности у -координат конца и начала стрел-
стрелки, ... Повторяя эту процедуру для каждой стрелки, получим множест-
множество V элементов
а = (ах, ау, az), Ъ = (bXj byj bz), с = (сж, су, cz), ...
От лат. invariant — неизменяемый.
12 Глава 1. Уравнения Ньютона и Лагранжа
Способ, с помощью которого можно задать упорядоченные тройки чисел,
зависит от конкретной задачи. Например, изучается распределение трех
признаков организмов или каких-то предметов. Наличию признака соот-
соответствует число 1, а отсутствию — 0. Мы получим множество элементов
а = @, 0, 0), b = @, 1, 1), ... , которые можно рассматривать как пред-
представление направленных отрезков в декартовом трехмерном пространстве
признаков.
Упорядоченные наборы чисел (не обязательно троек чисел) возникают
естественным образом при описании химических реакций, численности
хищников и их жертв и т.д.
Для любых двух элементов a, b Е V определим элемент с Е V, называ-
называемый суммой, по правилу
сх = «ж + Ьх, су = ау + by, cz = az + bz;
для каждого элемента а Е V и произвольного числа Л определим элемент
с = Ла Е V по правилу сх = Лаж, су = Хау, cz = Xaz. Введенные над
тройками элементов операции удовлетворяют следующим условиям:
" 1) a + b = b + a;
2) (а + Ь) + с = а + (Ь + с);
3) существует такой элемент О Е V, чтоО + а = а для любого элемента
aeF;
4) для любого элемента а Е V существует элемент -aG У такой, что
а+(^а) =0;
5) А(а + Ь) = Ла + ЛЬ ;
6) А(/ха) = (А/х)а;
7) (Л + /i)a = Ла + /ia;
8) 1 • а = а для любого а Е V .
В общем случае множество элементов V называют линейным простран-
пространством, а сами элементы — векторами ^, если операции сложения и умно-
умножения элементов на число удовлетворяют условиям 1—8. Векторное исчис-
исчисление впервые было изложено Д. Максвеллом в 1873 г. в связи с необходимо-
необходимостью «перевода» результатов экспериментальных работ М. Фарадея на язык
математических символов. Благодаря этой работе векторный анализ стал
разделом математики. Американский физик-теоретик Уиллард Дж. Гиббс
в 1879-84 гг. создал ставший классическим курс векторного анализа. Од-
Одновременно в 1882—85 гг. английский физик-теоретик О. Хевисайд развил
векторный метод Максвелла в электродинамике. С 1891 г. он опубликовал
серию статей — первый напечатанный курс векторного анализа.
Абсолютная величина (длина) вектора а определяется выражением
1а1 = (а1 + а1 + а1)г^2- В дальнейшем абсолютную величину вектора а
будем обозначать той же буквой: а=|а|. Три числа ах, ayj az называют
проекциями (от лат. projectio — бросание вперед) вектора на оси ж, у, z.
^ Термин «вектор» (от лат. vector— несущий) принадлежит ирландскому мате-
математику и физику У. Р. Гамильтону A805—1865) [18, с. 206].
Лекция 1. Тензорные поля в евклидовом пространстве
13
Если два вектора равны друг другу, т. е. ma = F, то это означает, что
выполняются три условия:
тах =
тау =
ma
= Fz .
Заметим, что если а = Ь, то векторы лежат на параллельных прямых и
имеют одинаковую величину: а = Ь. Очевидно, что понятия «больше»,
«меньше» применимы только к величинам векторов, но не к самим векторам.
Единичный вектор е. Абсолютная величина этого вектора равна еди-
единице. Если вектор а параллелен вектору е, то его можно представить в
виде а = ае.
Вычитание векторов. Разность d = а — b векторов аиЬ можно опре-
определить как результат сложения векторов аи~Ь. Вектор d = (ах — bXj ау —
-by, az -bz).
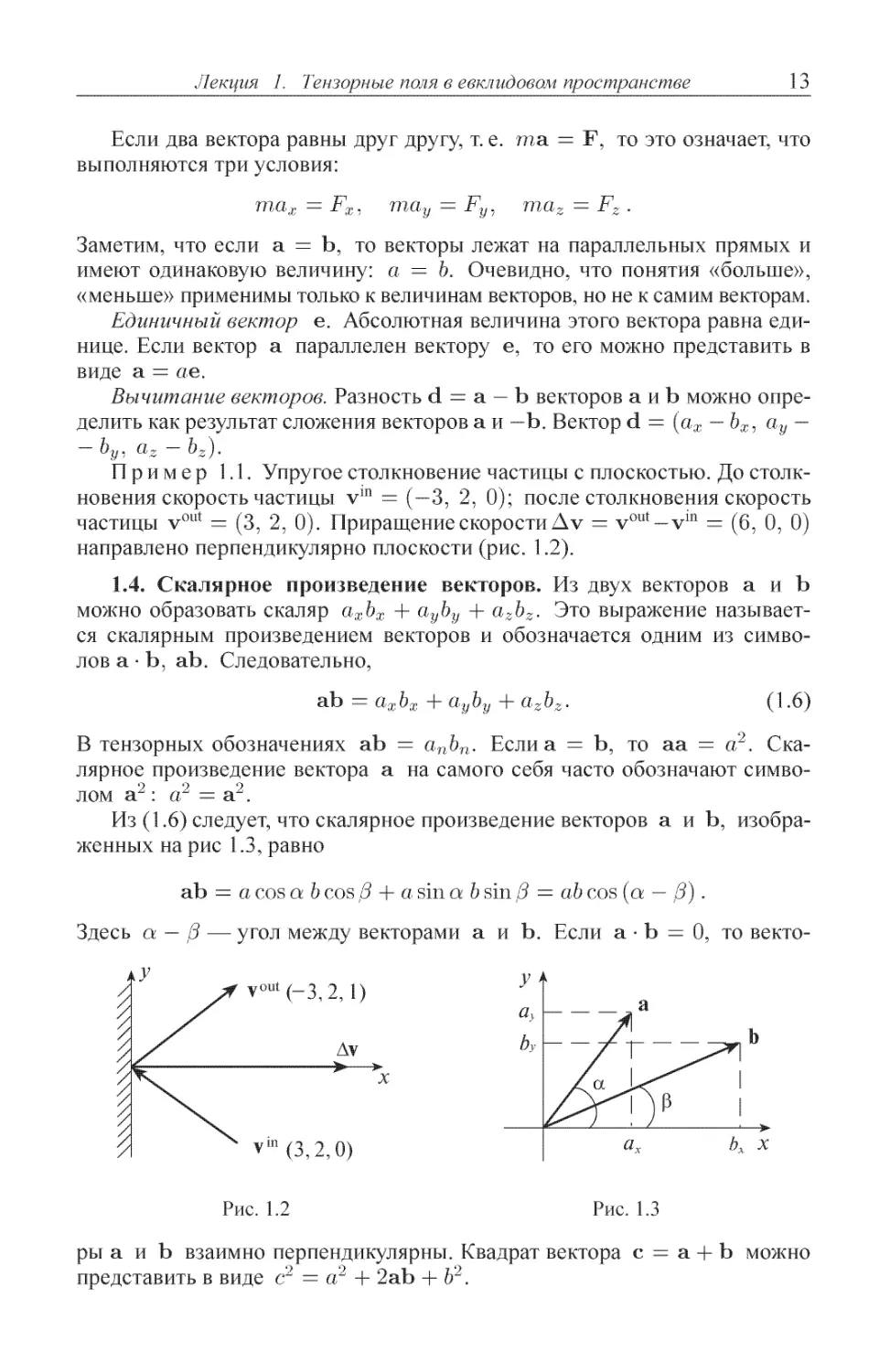
Пример 1.1. Упругое столкновение частицы с плоскостью. До столк-
столкновения скорость частицы vm = (—3, 2, 0); после столкновения скорость
частицы vout = C, 2, 0). Приращение скорости Av = vout- v111 = F, 0, 0)
направлено перпендикулярно плоскости (рис. 1.2).
1.4. Скалярное произведение векторов. Из двух векторов а и b
можно образовать скаляр axbx + ayby + azbz. Это выражение называет-
называется скалярным произведением векторов и обозначается одним из симво-
символов а • b5 ab. Следовательно,
ab = ахЪх
azbz.
A.6)
В тензорных обозначениях ab = anbn. Если а = Ь, то аа = а2. Ска-
Скалярное произведение вектора а на самого себя часто обозначают симво-
9 9 9
лом а : а = а .
Из A.6) следует, что скалярное произведение векторов аиЬ, изобра™
женных на рис 1.3, равно
ab = a cos а Ь cos j3 + a sin а Ъ sin /3 = ab cos (a — E).
Здесь а — /3 — угол между векторами а и b. Если а • b = 0, то векто-
ч
yf vout(-3,
vinC,2
2,1)
А?
X
,0)
У '
пу
Ьу
/
/a
a
ax
b
b
x X
Рис. 1.2
Рис. 1.3
ры а и b взаимно перпендикулярны. Квадрат вектора с = а + b можно
представить в виде с2 = а2 + 2ab + Ь2.
14 Глава 1. Уравнения Ньютона и Лагранжа
1.5. Векторное произведение векторов. Из двух векторов а и b
можно образовать новый вектор с по правилу
сх = aybz ~~ azby, Су = azbx ~~ axbz^ cz = axby ~~ aybx. A-7)
Этот вектор называется векторным произведением векторов а и b и обо-
обозначается одним из символов1^ axb или [ab]: с = [ab].
Для более компактной записи компонент вектора с введем символ —
тензор Леви-Чивита еа/37? полагая [12] ?123 = 1,
{1, если перестановка а, /?, j —>¦ 1, 2, 3 четна,
— 1, если перестановка а,/?,7 ^ 1? 2, 3 нечетна,
О, если любая пара индексов совпадает.
Поэтому A.7) можно записать в тензорной форме:
Например, сз = ?321 «2 Ь\ + ?312^1^2 = «1^2 —
Приведем менее формальное представление тензора Леви-Чивита:
eifeek] = eijk (г, j, к = 1, 2, 3). A.9)
Заметим, что величины еар7 меняют знак при перестановке любых двух
индексов: еар7 = -вра1 = -еа1р.
Сворачивая по одному, двум и трем парам индексов, получим форму-
формулы [12]'
— ^
.. ^.
Пример 1.2. Пусть с = [ab]. Докажем, что ас = be = 0 , т.е. век-
вектор с перпендикулярен векторам а и Ь. Образуем свертку A.8) с аа:
ааса = А7Ь7, где А7 = ?а/37аа%з • Далее, заменяя а о /3, запишем
^а/37а««/з = ?/з«7а/за« • Следовательно, Агу = ^^47 ^ А7 = 0 .
Задача 1.3. Даны три единичных вектора еп (п = 1, 2, 3), не
лежащие в одной плоскости. Показать, что векторы ai = [0162], а2 =
= ei + 62 , аз = ei — 62 взаимно перпендикулярны.
1.6. Скалирное и векторное поли на многообразии. Прежде всего
рассмотрим скалярное поле на многообразии М, т.е. функцию f(P) на М,
принимающую действительные значения. Если f(P) задана во всех точках
Р G М, то с каждой картой связана функция /(х) = /(^i,... , хп),
определяемая соотношениями /(х) = f(P), x = у>(Р). Если (С/, у?, А/"),
(С/;, (/?', N1) —две карты, то связь между соответствующими функциями /
^ Обозначения ab и а х b для скалярного и векторного произведений введены
американским физиком-теоретиком Д.У. Гиббсом A839-1903).
Лекция 1. Тензорные поля в евклидовом пространстве 15
и /' на перекрытии двух карт имеет вид
/(x) = /V), A.11)
где х = (р(Р), х; = (f'(P) . Если воспользоваться A.1), то это соотноше-
соотношение становится тождеством по х\, ... , хп или по х[, ... , х'п : функции
/ и /; принимают одно и тоже значение в данной точке.
Скалярное поле на М определяют как множество функций /(...) увя-
увязанных с каждой картой, а соотношение между двумя функциями на пере-
перекрытии соответствующих карт выражается законом преобразования A.11).
Градиент (от лат. gradiens — шагающий) скалярной функции / опи-
описывается набором трех функций (обозначается grad /, V/ или df/dx). ^
На карте (С/, <р, N), х = (ж, у, z),
дха удх1 ду1 dz
Пример 1.3. 1. Найдем градиент функции /(х) = |х| :
дУх1 1 дх
2. Градиент центрального скалярного поля С/(х) = р(г), г =
найдем как производную сложной функции:
дг <9х 9г |х|
Векторное поле. Пусть (?/, у?, iV), (^7;, cpf, N!) —две карты. Говорят,
что на многообразии М задано векторное поле, если в каждой точке Р е
G М задан набор функций, причем с каждой картой связан один набор
V(x) = (F!(x),F2(xM F3(x)), V;(x;) = (F/CxO, У2;(х;), ^'(х')) . Ha
перекрытии двух карт два соответствующих набора связаны законом пре-
преобразования:
8т'
Т^(х') = 7Г^К(х). A.12)
охп
При преобразовании A.5)
F4(x/) = AmnFn(xn). A.13)
Дивергенцией векторного поля divV называется скалярная величи™
на [10,11]
А. лг dVa dVx dVy dVz
divV = -— = -^— + -^ + -^— .
ажа ox ay oz
^ Максвелл ввел для символа V термин «набла» — так назывался похожий по
форме контур ассирийской арфы.
16
Глава 1. Уравнения Ньютона и Лагранжа
Ротором, или вихрем, векторного поля называется вектор с компонента-
компонентами [12, 13]
'dVj_ дУу дУх dVz дУу дУх
у dz ' dz дх дх ду
В тензорных обозначениях
(rotV)a = [VV]a=^7|^.
rot V =
Пример 1.4. 1. dlvx = 3.
2- t
- /divA.
3. rot/A = [V/A] + /rot А. Действительно, (rot/A)a =
С/3
dx
'/3
dxr-
4. (CV)E = VCE - [C rot El. В тензорных обозначениях Сь тг^ =
дхк
дСкЕк
ь ск
дЕк
f
\ дхк
(8ЕЪ дЕк\
—— =
\ дхк dx
= skim{rom)m.
Формула Тейлора. Разложение скалярного поля /(г) в ряд Тейлора
в точке R имеет вид [13]
"... A.14)
Пример 1.5. Потенциальная энергия взаи-
взаимодействия неподвижного однородного шара и
Рис 1.4 частицы U(r) = -a/r, a = GMm. Пусть
R — радиус-вектор некоторой точки на поверхности Земли (рис. 1.4).
Полагая г = R + х , находим
1
IR
1
R
9 1
д2
1
Поскольку
д2
.RaR/3
S
dRaR
имеем ряд Тейлора:
1
R + x Д Д3 + 2^ Д3 +3~
В новых переменных х потенциальная энергия
Д5
A.15)
где g = -(GM/R3)U, g = 9,8M/c:
Лекция 1. Тензорные поля в евклидовом пространстве 17
1.7. Тензоры в евклидовом пространстве. Тензором второго ранга
(или тензорным полем) называется объект, задаваемый набором девяти
функций Tik (х) в системе координат х , которые при собственном пре-
преобразовании A.5) преобразуются по правилу [8]
^(х') = Л^Л^ЗДх), A.16)
где T^v (х;) — числовая запись тензора в координатах х;.
Тензорная алгебра. 1. Свертка (след или трек). Из компонент тензо-
тензора Tik можно образовать скаляр — след тензора
2. Умножение. Если заданы два тензора Tik и gik , то их произведе-
произведением будет тензор четвертого ранга Nikmn = Tik gmn . Свертка по индек-
индексам к и т приводит к тензору второго ранга Nin = Tik gkn . Скалярное
произведение двух векторов афг является операцией вычисления тензо-
тензора Tik = афк .
Тензор Sik называется симметричным, если Sik = Ski. У симмет-
симметричного тензора имеется шесть независимых компонент.
Антисимметричный тензор удовлетворяет условию Ац. = —Aki. По-
Поэтому все его диагональные элементы равны нулю. Остаются три незави-
независимые компоненты, которым можно поставить в соответствие вектор [10]
сп = ^enikAik . A.17)
При дискретном преобразовании — отражении, состоящем в изменении
знака всех координат, компоненты обычного вектора меняют знак. Такие
векторы называются полярными [10]. Компоненты вектора A.17) при от-
ражении не меняют знак. Такие векторы называют аксиальными.
Двукратная свертка симметричного и антисимметричного тензо-
тензоров Sin Ani = 0 .
Произвольный тензор Т^ можно представить в виде суммы симмет-
симметричного и антисимметричного тензоров: Т^ = Sik + T?k ,
Stk = \{Tik + Tki), Т?к = \{Tik - Tki).
Далее вычислим след Saa = Taa и преобразуем Sik к виду Sik = Т°й^ +
Очевидно, Sp Ts = 0 . В результате мы получили разложение тензора Tik
на неприводимые части:
ik =T Sik +Tik +Tik. A.18)
1.8. Диагонализация матрицы [14, 16, 67, 79]. Приведем квадратич-
квадратичную форму F = GikXiXk к каноническому виду. Для этого произведем
преобразование системы координат xi = Uimx'm, где U — ортогональ-
ортогональная матрица. В новых координатах F = G\\?)\тх'тЬГкпх'п или F =
= {U^1GU)mnxlmx'n. Квадратная матрица может быть приведена к жор™
дановой нормальной форме: и~гСи = J. Пусть собственные значения Аш
18 Глава 1. Уравнения Ньютона и Лагранжа
матрицы G различны. Тогда матрица U приводит матрицу G к диаго-
диагональному виду: Jmn = \тётп. В новых координатах матрица G'mn =
= (U~1GU)mn = XnSmn имеет диагональную форму. Следовательно,
имеем задачу на собственные значения GU = XU. Условие существо-
существования нетривиального решения приводит к уравнению det (G — XI) =
= 0, решение которого — собственные значения Хт (т = 1,2,...)
матрицы G. Подставляя последовательно значения Хп в уравнение GV =
= XV , получим собственные векторы Vk(n) матрицы G , пропорциональ-
пропорциональные константам Сп , которые можно фиксировать условием нормиров-
ки vk(m)vHn)=Smn • Очевидно, что Gk8V^m)V8(n)=KSmn • Собственные
векторы г^(то) являются столбцами матрицы Ukn-
Отметим, что собственные значения не зависят от выбора системы ко-
координат. Две комбинации собственных значений представляют собой ин-
инварианты: определитель g = det G = det G' = Л1Л2 ... и след матри-
цы Sp G = Sp G' = Ai +A2 + ...
Используя полученные равенства, можно представить определитель в
виде
g = exp(SplnG).
Действительно, согласно правилу вычисления функции от матрицы имеем
В специальной системе координат
U^GU = J, U^f(G)U =
Тогда последовательно находим
Sp lnG = Spp7(ln J)U^} = Spin J = In (AiA2 ...) = Ing.
Полагая G = exp A , получим еще одно полезное соотношение: det exp A =
= exp(Sp A) .
Разложение определителя в ряд. Пусть матрица Т = G + eV , е <С 1.
Представим Т в виде
Г = G(I + eG^V).
Тогда
det Г = det G det(/ + e С^ХУ) =
= gexp
[22 1
1 + e Sp(G^V) + у Sp2 (G^V) + у SpCG-^G-1^) + ... .
1.9. Производная определителя. Пусть g = det G —определитель
матрицы G , dG — приращение элементов матрицы G при приращении
dt некоторого параметра t. Из цепочки соотношений
det (G + dG) = det [/ + (dG)G^1} G = det [/ + (dG) G™1] det G и
-1] detG,
Лекция 2. Кинематика 19
получим приращение
det (G + dG) - det G = Sp [{dG)G^} det G.
Следовательно,
f4fV <¦¦">
Лекция 2. Кинематика
Ньютоновская механика описывает движение системы бесструктурных
точечных частиц в трехмерном евклидовом пространстве [16]. Частным слу-
случаем такой системы является твердое тело — система частиц, расстояния
между котороми постоянны. Если размеры твердого тела существенно мень-
меньше характерных масштабов движения, то можно ввести понятие материаль-
материальной точки, т.е. тела, размерами которого можно пренебречь. В дальнейшем не
будем делать различия между терминами материальная точка и частица.
2.1. Система отсчета. Представьте себе, что в ограниченной области
пространства мы построили тело отсчета в виде трех взаимно перпендику-
перпендикулярных стержней, пересекающихся в точке О . Зададим на каждом стержне
единицу масштаба и положительное направление, превратив их в коорди-
координатные оси ж, 2/, z . Тогда говорят, что в пространстве задана система коор-
координат [17]. Проекции точки пространства, в которой находится частица, на
оси ж, у, z определяют три числа, называемые координатами частицы.
Тело отсчета вместе с помещенными на него часами образуют систему
отсчета.
2.2. Галилеево пространство. Важнейшее понятие механики — со-
событие — определяется координатами и моментом времени, в которое оно
произошло. Как определить, где и когда происходит событие? Закрепим на
теле отсчета часы. С помощью световых сигналов можно синхронизировать
друг с другом любое количество часов, находящихся в разных точках про-
пространства. Положение события в пространстве определяется координатами
частицы. Его положение во времени принимается равным моменту време-
времени, которое показывают часы, расположенные в месте нахождения частицы.
Расстояние si2 между двумя одновременными событиями (xi, |/i, zi, t)
и (х2, 2/2 ? Z2, t) определяется выражением
8l2 = [{Х2 - SiJ + B/2 - Vlf + (*2 ^ ^lJ]1/2 .
Совокупность событий называется галилеевым пространством [8,16]. Кри-
Кривую в этом пространстве называют мировой линией. Она проходит через все
события, происходящие с частицей, и позволяет проследить ее пространст-
пространственно-временную «историю».
В нерелятивистской механике физическое пространство-время являет-
является пространством Галилея.
20 Глава 1. Уравнения Ньютона и Лагранжа
2.3. Кинематика. Начальным этапом изучения движения тела является
установление способов задания положения тела в пространстве и определе™
ние характеристик движения — траектории, скорости, укорения. Этот раз-
раздел механики называется кинематикой (от греч. kinematos — движение).
Кинематика дает возможность описать движение, не занимаясь выяснени-
выяснением причины его возникновения. Наиболее типичные в этом смысле задачи
кинематики относятся к теории машин и механизмов: изучаются траекто-
траектории различных звеньев машин, возможность преобразования одного типа
движения в другой, создание движений с заданными свойствами и т.д.
2.4. Базисные векторы. Пусть ei, в2, ез —система трех линейно
независимых единичных векторов. Если а — произвольный вектор, то
существует соотношение Aiei + А2в2 + Азез + Ада = 0, причем не все
константы равны нулю, и, в частности, Aq / 0 . Таким образом, а можно
записать как линейную суперпозицию:
а =
п=1,2,3
Говорят, что векторы еп образуют базис или координатную систему, а
числа ап — компоненты а в этой системе. Векторы еп называют ба-
базисными. Ортонормированные базисные векторы удовлетворяют условию
e^ej = Sij . В этом случае вектор а можно представить в виде
ае„)еп. B.1)
п=1,2,3
2.5. Угловая скорость одного базиса относительно другого. Пусть в
одной точке заданы два ортогональных базиса е'п и еп , причем базис е^
изменяет ориентацию относительно неподвижного базиса еп :
el(t)=Sim(t)em. B.2)
Очевидно, что коэффициенты jni = Sin = е-еп образуют элементы матри™
цы направляющих косинусов — это п -я компонента е/ в нештрихованной
системе. Поскольку e/ej = SimemSjnen , то
dij = Oimbjm = bimomj. v^-^)
Следовательно, S^1 = ST , матрица S —ортогональная.
Преобразование, обратное B.2), имеет вид
& = S-)Sjnen = em^em = 5^-ej . B.4)
Дифференцируем B.2) по времени и, учитывая B.4), находим
ае^ dbifji dbifji j, f f f
¦ж =-&-*» =-drs«**t=u<i*i- B-5)
Таким образом, производная по времени является линейным оператором,
действие которого определяется тензором угловой скорости
i _ dbjm T
Лекция 2. Кинематика 21
Покажем, что Шц = —ш^ . С этой целью, дифференцируя условие ортого-
ортогональности B.3) SST = 1, получим соотношение
«4 + bim dt ~ dt ь»ч + ь™ dt ~u'
dt b«4 + bim dt dt ь»ч + ь™ dt
из которого следует, что изц = —с^ • Очевидно, что диагональные элемен-
элементы и^ равны нулю. Следовательно, антисимметричный тензор Шц имеет
три независимых элемента. В этом случае говорят, что тензор Шц дуален
вектору угловой скорости, компоненты которого определяются по прави-
луA.17):
< = \^Mj ¦ B-6)
Следовательно,
Представим далее B.5) в терминах uj's . С этой целью заменим в B.6)
индексы г, j -> к, п , образуем свертку с ец8 и учтем A.10):
Теперь из B.5), учитывая A.9), находим
^ = eijs^e> = ejsiuy3 = (ej[ej ¦ e/K')ej = (ej[u,e/])ej .
В результате получим
где w = uj'sg's . Для того чтобы найти компоненты вектора ш в базисе
еп , воспользуемся тензорным законом преобразования:
_ Q С I — Q Q ^^i™ qT _ qT dbjn
n - OikOjnUij — oikojn bmj — bki —rjj- . B.У)
Компоненты вектора угловой скорости
1 1 q
^s — ^skn^kn — 2?skn
Из B.2), B.8) следует полезное соотношение:
2.6. Два вращающихся базиса. В теории гироскопов приходится вво-
вводить несколько вращающихся базисов. Пусть е^ — неподвижный базис,
e(b\t), e^(t) —два подвижных базиса. Матрица S^ определяет пере-
ход от базиса е^ к базису е^ (t) , матрица R^ — переход от базиса
e^(t) к базису e^(t). Тогда Р(са^ = R(cb^ S(ba^ — матрица преобра™
зования базиса е(а^ в базис е^ (t) . Обозначим оо^ —тензор угловой
скорости базиса e^(i) относительно базиса е^ , ш^ —тензор угловой
22
Глава 1. Уравнения Ньютона и Лагранжа
скорости базиса
скорости базиса
получим
относительно базиса
относительно базиса е
, иЬа —тензор угловой
. Вычисляя производную,
РТ Р = ST RT (RS + RS).
Согласно определению, и
ты тензоров в базисе e^a\t),
се е^ (t) . Следовательно,
= Рт Р, ш^Ьа^ = ST S — компонен-
компонен= RTR компоненты тензора в бази-
бази«Абсолютная» угловая скорость базиса е^ (t) равна сумме угловой ско-
скорости базиса е^ (t) относительно базиса е^ (t) и «абсолютной» угловой
скорости базиса е^ (t) . Компоненты вектора угловой скорости
(ca) l
,(сЬ)
1Ъа)]
к J
]
2.7. Частица в пространстве. Положение частицы в пространстве
определяется ее радиусом-вектором г = r(t) . Траекторией называется кри-
кривая в пространстве, по которой движется частица. Производная dr/dt = v
называется мгновенной скоростью, а вторая производная d2r/dt2 = а —
ускорением. Обычно в механике производную по времени, следуя Ньютону,
обозначают точкой Ч Вектор а = l/2[rff] называют секторной скоростью.
2.8. Скорость и ускорение в декартовых координатах;. Выберем в
качестве базиса векторы
еу = @,1,
ех = A,0,0),
Тогда
г = хех + уеу + zez
г =
zez
0), ег = @, 0, 1).
> г = (ж, у, z),
г = (х, у, i),
Пример 2.1. Нить перекинута через вертикальную стенку и при-
прикреплена к частице. Нить тянут со скоростью и. Найти скорость части-
частицы (рис. 2.1).
Координата частицы x(i) = h ctg a , длина нити l(t) = h/ sin a , где
h —высота стены. Очевидно, что I = —и .
ш —-т^ Следовательно,
h
cos a
sin a
а
X = —
Рис. 2.1
sin2 a
cos а
^ В начале XIX в. борьба молодых кембриджских математиков с засильем ста-
старой школы приняла, в соответствии с английскими традициями, характер борьбы
за обозначения. Они создали группу «деистов» (применявших обозначения «d»
по Лейбницу) в противовес университетскому dotage (применение точек). Здесь
игра слов: деизм — религия разума, dotage — старческое слабоумие [18].
Лекция 2. Кинематика
23
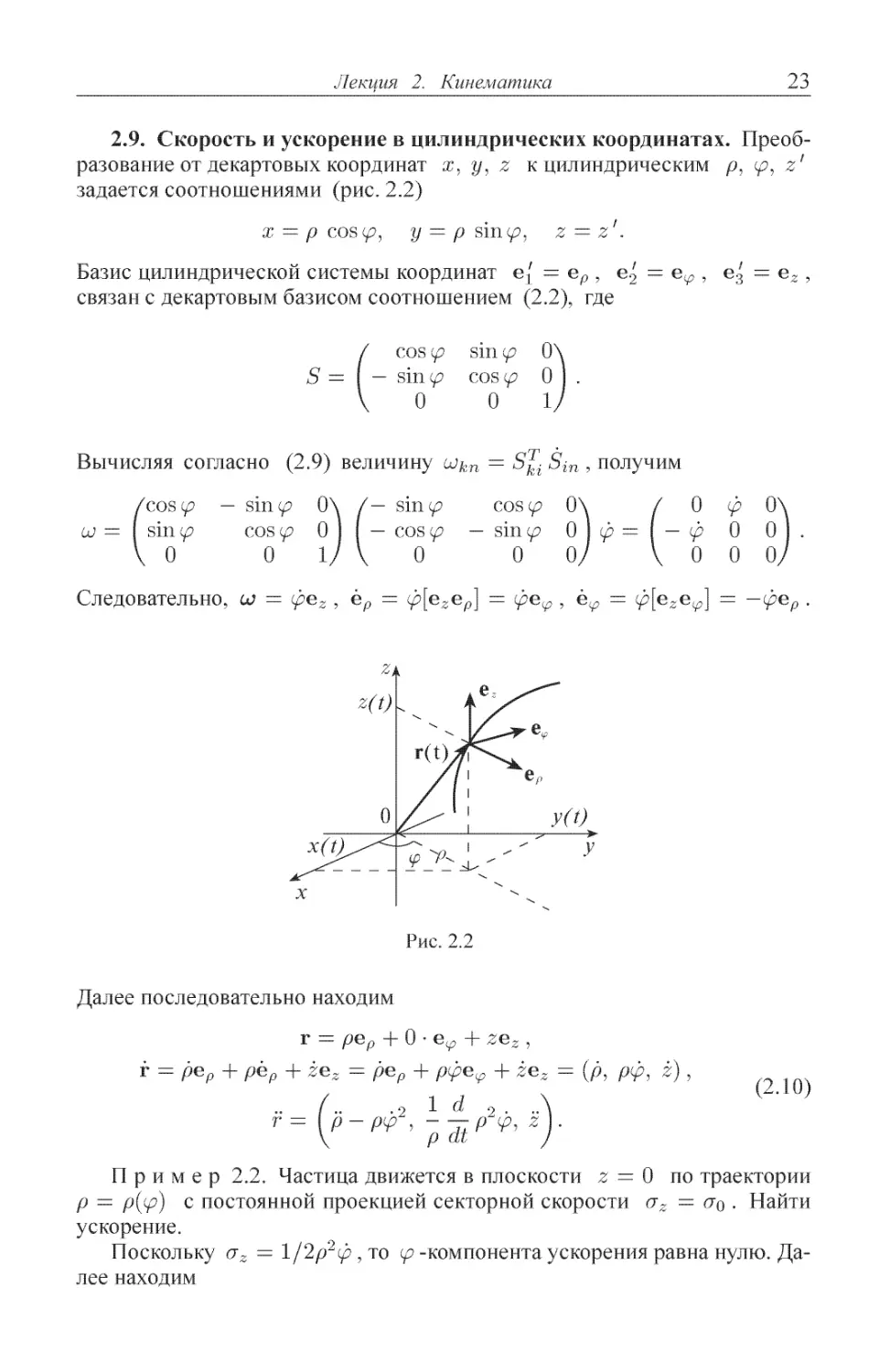
2.9. Скорость и ускорение в цилиндрических координатах. Преоб-
Преобразование от декартовых координат ж, у, z к цилиндрическим р, (р, z1
задается соотношениями (рис. 2.2)
х = р cosip, у = р sine/).
Z =
Базис цилиндрической системы координат е{ = ер ,
связан с декартовым базисом соотношением B.2), где
(cos (p sin Lp 0\
— siny? cos(f 0 I .
0 0 1/
= ez
Вычисляя согласно B.9) величину ujkn = *5^ Sin , получим
/cosy? — sin(^ 0\ /— siny?
= 1 sin c/9 cos 99 Oil — cos if
\ 0 0 1/ V 0
Следовательно, uj =
cose/? 0
= ф[егер] = ^
0 ф 0\
О 0
00 0/
z(t)
0
X
r(t);
i
I >
i ^^" У
^ ^ ^
Рис. 2.2
Далее последовательно находим
г = рер + 0 • е^ + zez
г =
.2 1 d 2.
= (р, рф, z)
B.10)
Пример 2.2. Частица движется в плоскости z = 0 по траектории
р = р(ф) с постоянной проекцией секторной скорости az = ctq . Найти
ускорение.
Поскольку ст^ = 1/2р2ф , то <р -компонента ускорения равна нулю. Да-
Далее находим
24
Глава 1. Уравнения Ньютона и Лагранжа
2G0 . dp . ,2G0 о /1
р = -2<70 ( -
Если частица движется по эллипсу
р=рA
то
V р ) \р
2 Г'1\" 1
р) р
2.10. Естественные координаты. Рассмотрим пространственную
кривую г = r(s), заданную в параметрической форме, где s — дли-
длина дуги. Скорость частицы, движущейся по кривой,
dr
г = —s.
as
Поскольку |dr| = ds , то можно ввести единичный вектор
_ dr
ds '
направленный по касатальной к кривой. Следовательно, г = sei . Повтор-
Повторно дифференцируя, найдем ускорение:
г =
Учитывая, что ef = 1,
i
ds
о -
as
= 0 , введем единичный вектор
as ds2
где R — радиус кривизны. Величину k = R^1 называют кривизной
пространственной кривой. Ускорение частицы приобретает вид
г = sei + —¦те2. B.11)
R(s)
Единичный вектор бинормали определяется соотношением е3 = [eie2].
Найдем угловую скорость ортогонального базиса ел(А = 1, 2, 3). Имеем
de3
ds
е2
de2] Г de2
= [езез]^
e2
ds
- e2
de2
-—
ds
= -e2
de2
-—
ds
Лекция 3. Законы Ньютона 25
Величина к = е3 —г- называется кручением пространственной кривой
as
[19, 201. Следовательно, ^^ = —ке<2 . Далее, находим
ds
de3 1 Г dei"
ei + е3-
as I as J [ as
Окончательно получаем [8]
ёл = [weA], ш = s(ke% + ^ei). B.12)
Эти уравнения называются формулами Френе. По известным кривизне и
кручению можно восстановить кривую в пространстве.
Лекция 3. Законы Ньютона
Огромное влияние на развитие науки оказал величайший древнегрече-
древнегреческий ученый и философ Аристотель C84-322 гг. до н.э.). Он был учеником
Платона D27-348 гг. до н.э.), который, в свою очередь учился у Сокра-
Сократа D69-399 гг. до н.э.). Аристотель создал теорию познания, формальную
логику, теорию поэзии, механику, описательную биологию и физиологию.
Повседневный опыт создает впечатление, что движение тела с посто-
постоянной скоростью требует определенных усилий. В механике Аристоте-
Аристотеля этот вывод получил теоретическое обоснование. Он сформулировал
принцип «природа боится пустоты», т.е. пространство заполнено матери-
материей, которая оказывает сопротивление движению тел. Поэтому для движе-
движения с постоянной скоростью необходимо приложить силу; прекращается
действие сил — прекращается движение. Авторитет Аристотеля в Древ-
Древнем мире и в Средние века был настолько велик, что почти две тысячи
лет его механика не вызывала сомнений. Эпоха Великих географических
открытий, начавшаяся в XVI в., привела к быстрому развитию опти-
оптики, астрономии и механики. Однако нужны были значительные усилия,
чтобы преодолеть сложившиеся догмы и взглянуть на проблему движе-
движения но-новому.
Первый шаг в этом направлении сделал Галилео Галилей A564—
1642 гг). Положив в основу своих исследований экспериментальные фак-
факты, Галилей разрушил механику Аристотеля и заложил фундамент науч-
научного подхода к изучению физических явлений. Соединение принципов
научного мышления и опыта сделало Галилея «отцом» современной фи-
физики [21]. Он утверждал, что «любая скорость, сообщенная телу, устой-
устойчиво сохраняется до тех пор, пока нет никаких причин к возникновению
торможения или ускорения» [21, 22]. Позднее И. Ньютон, родившийся в
год смерти Галилея, сформулировал закон, который теперь понимают как
утверждение о существовании инерциальных систем отсчета.
3.1. Инерциальные системы отсчета. Система отсчета называется ло-
локально инерциальной, если по отношению к ней пространство является одно-
однородным и изотропным, а время однородным. В инерциальной системе отсчета
26 Глава 1. Уравнения Ньютона и Лагранжа
тело, не взаимодействующее с другими телами, покоится или движется с
постоянной скоростью. Утверждение о существовании таких, систем пред-
представляет собой первый закон Ньютона.
3.2. Силы в межанике. В настоящее время все многообразие взаимо-
взаимодействия материи относят к трем классам: сильному, электромагнитно-
слабому и гравитационному. В простейшей форме движения материи —
механической — проявляются лишь электромагнитное и гравитационное
взаимодействия. При движении различных тел обнаруживается одна общая
особенность — движение тела с не равным нулю ускорением обусловлено
его взаимодействием с другими телами или с электромагнитным полем.
Для количественной характеристики этого взаимодействия вводят понятие
силы. Сила, действующая на данное тело, является векторной величиной,
характеризующей его взаимодействие с другими телами или электромаг-
электромагнитным полем. Все силы, кроме сил инерции, удовлетворяют этому опре-
определению. Можно условно выделить три класса сил.
1. Силы, действуюгцие на нейтральное или заряженное тело, находя-
находящееся в электромагнитном поле. Соответствующая группа задач относится
к электромеханике.
Сила, действующая на элементарную частицу зарядом е , движущуюся
в электромагнитном поле [12], равна
F(r, r, t) = eE(r, t) + -c\v, В(г, «)], C.1)
где Е — напряженность электрического поля, В — вектор индукции
магнитного поля. Второй член в C.1) называют силой Лоренца. Электро-
Электромагнитное поле создается внешними токами и зарядами и определяется
решением уравнений Максвелла. Если наша частица не оказывает суще-
существенного влияния на распределение токов и зарядов, то Е и В являются
известными функциями координат и времени.
2. Силы, действующие на расстоянии. Это электромагнитные и грави-
гравитационные силы.
Электромагнитные силы. Для описания взаимодействия заряженных
частиц необходимо рассматривать частицы и поле как самостоятельную
систему с бесконечным числом собственных «степеней свободы». Поэтому
невозможно строгое введение сил взаимодействия частиц, не содержащее
полевых переменных. Однако если скорость частиц v «С с, то удается с
точностью до величин (v/cJ исключить полевые переменные [12]. В ну-
нулевом приближении сила, действующая на частицу а со стороны части-
частицы Ь, определяется законом Кулона:
Fie) / \ ~^Ъ Га
аь'(га, гь) = -еаеЬт- —$ , C.2)
где еа, еь — заряды частиц а и Ь. Напомним, что зарядом называется
характеристика внутреннего свойства частиц, определяющая «интенсив-
«интенсивность» электромагнитного взаимодействия. Выражение C.2) соответствует
приближению, не учитывающему эффект запаздывания: сила, действующая
на частицу а в момент времени t, зависит от положения частицы Ъ тот же
Лекция 3. Законы Ньютона 27
момент времени. В следующем приближении выражение F^ содержит
члены, зависящие от скоростей частиц.
Гравитационные силы. Согласно закону всемирнрго тяготения, откры-
открытому И. Ньютоном в 1665, 1666 гг., сила, действующая на частицу а со
стороны частицы Ь, равна
F<#(rO) ть) = Gmamb *" ~ Г" . C.3)
Г6 г
После создания общей теории относительности выражение C.3) было полу-
получено А. Эйнштейном A916 г.) в приближении v <C с . Последующие члены
в правой части C.3) содержат величины ~ (v/cJ [12,23].
3. Силы реакции и трения, возникающие при соприкосновении твер-
твердых тел. Это силы электромагнитного происхождения. Они приложены в
точках контакта. При скольжении сила реакции образует некоторый угол к
касательной плоскости в точке контакта тел. Силы реакции часто называют
пассивными силами, поскольку они могут быть найдены только в процессе
интегрирования уравнений движения.
Трение — неизбежное следствие молекулярной структуры твердых тел.
Оно обусловлено последовательными образованием и разрывом молекуляр-
молекулярных связей в зонах микроконтактов. Сложность описания возникающих, на
молекулярном уровне электромагнитных явлений затрудняет создание тео-
теории трения. Поэтому силы трения вводятся на основе феноменологического
подхода.
Таким образом, все силы в механике «немеханического» происхожде-
происхождения. Для их определения необходимо использовать электродинамику и те-
теорию тяготения.
3.3. Второй закон Ньютона. В 1687 г. И. Ньютон A643-1727 гг.)
опубликовал фундаментальный труд «Матаметические начала натураль-
натуральной философии», который надолго превратил механику в эталон науки.
Второй закон Ньютона устанавливает связь между массой частицы, ее уско-
ускорением и приложенной к ней силой в инерциальной системе отсчета:
mara = Fa(rb... ,rjv; fb... ,fjv,*), a = 1,... , iV. C.4)
Масса (от лат. massa — глыба, кусок) — одна из характеристик вну-
внутреннего состояния частицы, определяющая ее инерционные свойства и
гравитационное взаимодействие. Система C.4) содержит 3N уравнений,
N — число частиц системы.
Основной задачей механики системы частиц является решение уравне-
уравнений движения C.4) с начальными условиями ra(to) = rao , ra(to) = i*ao .
Общее решение системы C.4) имеет вид
Та = fa(Ci,C2, . • . , Cqn, t) ,
где С — произвольные константы, которые необходимо определить из
уравнений
ra0 = fo(Cl? • • • 5 C6JV, to), rao = fo(Cl? • • • 5 C6JV, to) .
В результате получим решение, удовлетворяющее начальным условиям:
та = га(гю,..., rjvo; rio, • • •, г/voj t) • C.5)
28 Глава 1. Уравнения Ньютона и Лагранжа
3.4. Третий закон Ньютона. При взаимодействии двух тел сила ?аь,
действующая на тело а со стороны тела Ь, равна по величине и противо-
противоположна по направлению силе F&a •> действующей на тело Ь со стороны
тела а:
Fa6 = ^F^a . C.6)
Из C.2) и C.3) следует, что кулоновские и гравитационные силы (получен-
(полученные в приближении и<Сс) удовлетворяют третьему закону Ньютона C.6).
3.5. Принцип относительности Галилея. Пусть К — инерциальная
система отсчета в галилеевом пространстве ж, у, z, t. Перейдем в систе-
му К' с координатами ж;, у\ z\ t1. Преобразование координат зададим
функциями
Ха= SpaXp+Uat + da, t = t' + t0 , C.7)
где uai da, to —действительные постоянные, S@a —произвольная дей-
действительная ортогональная матрица, параметризуемая тремя постоянны-
постоянными углами. Временная координата имеет абсолютный смысл и изменяется
лишь при сдвиге начала отсчета времени. Преобразование C.7) образует
Ю-параметрическую группу всех преобразований галилеева пространства.
Система К1, движущаяся согласно C.7) с постоянной скоростью относи-
относительно системы К , также будет инерциальной.
В 1636 г. Галилей сформулировал утверждение: во всех инерциальных
системах законы механики одинаковы. Это и есть галилеева относитель-
относительность. Отсюда следует, что никакими механическими опытами нальзя опре-
определить, покоится данная система или движется с постоянной скоростью, —
все инерциальные системы равноправны. В этом заключается важное объ-
объективное содержание принципа относительности, выражающее материаль-
материальное единство мира.
Принцип относительности налагает ограничения на структуру уравне-
уравнений C.4): они должны быть ковариантны ^ относительно группы преоб-
преобразований C.7), т. е. иметь одинаковый вид во всех инерциальных системах
отсчета. Нетрудно проверить, что правая часть C.4) может зависеть лишь
от относительных координат и скоростей [16]:
Fa(rb..., гдг,; h,...,rNt) = ]PFab(r6 -га, h -fa,?). C.8)
Ьфа
Таким образом, второй закон Ньютона для замкнутой системы N частиц
имеет вид
Fab(^b - ra, h - га, t). C.9)
Ьфа
Заметим, что существует множество преобразований, относительно ко-
которых уравнения C.9) нековариантны. Например, они не сохраняют свою
^ Ковариантность (от лат. со — совместно и varians — изменяющийся) — тер-
термин, введенный английским математиком Д.Д. Сильвестром A814—1897 гг.)
Лекция 4. Импульс, момент импульса, потенциальная энергия 29
форму, если перейти к ускоренной или вращающейся координатным систе-
системам, т. е. если допустить, что и и Sap зависят от времени.
3.6. Приближение внешнего поли. Рассмотрим систему, состоящую
из N+Ne частиц, и предположим, что подсистема, содержащая N частиц,
не оказывает существенного влияния на движение другой подсистемы. То-
Тогда уравнения движения можно представить в виде
N Ne
mara = ^Fab + ^Fac, a = l,2,...,N, (ЗЛО)
Ьфа сфа
Ne
mcrc^Y,Fcb, с=1, 2,... , Ne. C.11)
Ьфс
После решения уравнений C.11) второе слагаемое в (ЗЛО) является из-
известной функцией времени, координат и скоростей частиц, принадлежащих
первой подсистеме. Уравнение (ЗЛО) приобретает вид
JV
тата = ]Р Fab + Faext(ra, fa, t), (ЗЛ2)
Ьфа
где F^xt(ra, ra, t) — внешняя сила, равная сумме сил, действующих на
частицу а со стороны частиц подсистемы, движение которых известно.
Лекция 4. Импульс, момент импульса, потенциальная
энергия. Законы изменения динамических переменных
4.1. Закон изменении импульса системы. Р. Декарт ввел вектор гпт ,
который назвал количеством движения. Сейчас эту величину называют
импульсом (от лат. impulsus — побуждение, толчок). Импульсом системы
N частиц является вектор
Р = ]Pmara. D.1)
а
Производная импульса системы по времени равна сумме внешних сил,
дейсвующих на систему. Действительно, согласно D.1), C.12)
a a,b
ПОСКОЛЬКУ Fa5 = ^Ffta ,
J2 Fab = 2 J2^Fa
a,b a,6
откуда
30 Глава 1. Уравнения Ньютона и Лагранжа
Следовательно, импульс замкнутой системы сохраняется: Р = Pq .
Если импульс системы Р = 0 , то творят, что она как целое покоится.
Например, для неподвижного атома водорода те ve + mpvp = 0 .
Можно найти инерциальную систему отсчета К1, в которой импульс
системы Р; = J2 та^а равен нулю. Такая система называется системой
а
центра масс (СЦМ). Найдем ее скорость и относительно системы К . Пос-
Поскольку va = u + v^ , то Р = ши + Р;, где т — сумма масс всех частиц
системы. Полагая Р; = 0 , находим
Р 1 ж
и=^^и=^У^ maia . D.3)
т т /-^
а
Правая часть D.3) может быть представлена в виде полной производ-
производной от выражения
R=lVmara, D.4)
т ^^
а
которое определяет радиус-вектор точки, называемой центром масс сис-
системы.
4.2. Закон изменения момента импульса системы. Моментом им-
импульса частицы называется вектор Ма = [га • тга] . Момент импульса
системы N частиц
M = ^[ra.mafa]. D.5)
а
Из D.5) и C.12) имеем
М^ \^\г . то г 1 — \^Гг F J 4- \^Гг Fextl
а о, Ь а
Поскольку в силу C.6)
Fa6] = \ J](KFab] + [тъ?Ьа]) = i ^[(ra - rb)Fa6] = 0,
a,b a, b a, Ь
то производная по времени момента импульса системы равна моменту
внешних сил:
M = ^[ra-maFaext]. D.6)
a
Если система замкнута, то момент импульса сохраняется: М = Mq .
4.3. Закон изменения кинетической энергии. Кинетической энерги-
энергией системы называется сумма кинетических энергий частиц:
Т =
а
Из D.7) и C.12) находим
Г = ^ma(rara) = ^аЬТа + J] Fa^a - D.8)
a a,b a
Таким образом, производная кинетической энергии по времени равна мощ-
мощности сил, действующих на частицы системы.
Лекция 4. Импульс, момент импульса, потенциальная энергия 31
4.4. Потенциальная энергия взаимодействия частиц. Преобразуем
первый член в правой части D.8), подставляя выражения Fab из C.2), C.3):
1 л, 1 %
а, Ь a,b a,b
-(га -гь)(га -гь) -
г. \Lb La\
mamb
а,Ъ |ГЬ Га|
d 1
Здесь мы учли, что г2 = г2 , гг = гг . Введем функции
ТТ(е), ч еавь G), А Gmamb
U{J(raj rb) = г^ -г, U™(ra, п) = — ,
\la lb\ 1о1Ь1
которые называют, соответственно, потенциальной энергией электроста-
электростатического взаимодействия и потенциальной энергией гравитационного
взаимодействия частиц а и Ь . Тогда D.8) можно представить в виде [24]
^¦(Г + U(e) + ?/G)) = ]ГFaextra . D.10)
а
Здесь C/(e)(ri,..., fjv) — потенциальная энергия электростатического
взаимодействия, C/^(ri,..., гдг) — потенциальная энергия гравитаци-
гравитационного взаимодействия всех частиц системы:
тг(е) = ! у еаеь G)=_1уСтЛ
Величину TJrU<ye^Jt U^ называют внутренней энергией системы. Со-
Соотношение D.10) выражает важнейшую теорему механики: производная
внутренней энергии равна мощности внешних сил. Если система замкнута,
то внутренняя энергия сохраняется.
Введение потенциальной энергии оказалось возможным благодаря тому,
что силы C.2), C.3) являются консервативными:
rotflFab(ra, rb) = 0, -^ = 0 . D.12)
В соответствии с D.12), D.11)
дгс ' с дг
32 Глава 1. Уравнения Ньютона и Лагранжа
Действительно,
афЬ
а,
Г
—Л
_/
2
Gmamc (
г _ г з ^Гс
а) ^
Ъ
Gmcmb
rb ~~~ гс
2_^ т
г
Га
3 *
Из D.9) следует, что элементарная работа всех сил ?аЬ
ab(dra - drb) = -dU, где U = ^7(e
a>b
Работа, совершаемая силами Fab и Fba парного взаимодействия на
произвольных траекториях ra = ra(t) и ть = fb(t), зависит только от
начального и конечного положения частиц а и Ь .
4.5. Закон сохранении полной энергии. Предположим, что внешние
силы можно представить в виде F^xt = -dUQXt/dra , где t/ext(rb...
..., г jv , ?) — потенциальная энергия взаимодействия системы с внешними
телами:
Тогда, преобразуя правую часть D.10), получим
а
dt ^-^ a dt dt
а
Из D.10) следует равенство
|(r + tr + t,) = .
Величина Е = T + U + C/ext называется полной энергией системы
частиц, находящихся во внешнем поле. Таким образом, закон изменения
полной энергии имеет вид
Если внешние силы не зависят явно от времени, то полная энергия сохра-
сохраняется:
D.14)
В такой форме закон сохранения полной энергии был получен в 1847 г.
немецким ученым Г. Гельмгольцем A821-1894 гг.). Имея в виду переход
Лекция 4. Импульс, момент импульса, потенциальная энергия 33
от D.8) к D.13), М. Бланк писал: «Как ни незначительным нам кажется это
переобразование — перспектива, которую оно открывает во всех областях
физики, чрезвычайно велика, ибо возможность его обобщения для любых
физических явлений природы легко бросается в глаза».
4.6. Уравнение Мещерского. Рассмотрим движение тела переменной
массы m(t) . Изменение массы тела может быть обусловлено испарени-
испарением, абляцией, выбросами вещества или конденсацией пара, захватом час™
тиц и т.д.
Пусть m(t), v(t) — масса и скорость тела в момент времени t; т +
+ Дт, v + Av —те же величины в момент времени t + At; масса (-Дш)
имеет скорость с . Приращение импульса системы
АР = (т + Am)(v + Av) + (-Дш)с — mv ~ mAv — (с — v)Am .
Разность с; = с — v является скоростью массы (—Am) относительно
тела. Из D.2) следует уравнение
mr = mc; + Fext, D.15)
полученное русским математиком И.В. Мещерским в 1897 г. Для получения
замкнутой системы уравнение D.15), содержащее четыре неизвестные
величины г и т, должно быть дополнено еще одним уравнением ви-
вида /(г, f, m) = 0. В ракетодинамике систему D.15) дополняют условием
экстремума функционала, оптимизирующего расход топлива, время по™
лета и т.д.
Пример 4.1. Оценим скорость сгорания топлива при старте системы
«Saturn-5»—«Apollo-11», доставившей 20 июля 1969 г. первых астронавтов
на Луну. Начальная масса то = 2950 т, скорость истечения с' = 2,6 х
хЮ3 м/с. Пять двигателей первой ступени развивали тягу Fq = 3,4-lG7 H.
Расход топлива
И - Щ- = 13000 кг/с.
с'
Пример 4.2. Однородная цепь сложена в кучу так, что несколько
ее звеньев свешиваются с края стола. В начальный момент скорость цепи
равна нулю. Найдем ускорение цепи.
Направим ось z вертикально вниз, начало координат расположим на
уровне поверхности стола. Пусть z — координата нижнего конца цепи —
точки A, z — проекция скорости точки А. Масса движущейся части це-
цепи т ~ z . Полагая в D.15) с = 0 , получим уравнение
dzz
~ж = ^- G)
Умножая обе части G) на zz , найдем первый интеграл
l(zzJ-±gz3 = C. B)
Рассмотрим частный случай, соответствующий начальным условиям
z@) = 0, i@) = 0 : первоначальная длина свисающей части цепи нич-
ничтожно мала. Согласно начальным условиям С = 0 . Из B) находим z2 =
= 2g2:/3. Дифференцируя по времени, получим ускорение движущейся
34 Глава 1. Уравнения Ньютона и Лагранжа
части цепи z = g/3 — ускорение цепи в три раза меньше ускорения
свободного падения.
Приведем другой интересный результат. Однородная цепь АВ мас-
массой М висит вертикально, касаясь концом В поверхности пола. Цепь от-
отпускают. В момент падения конца А на пол вес цепи равен ЗМ g [25].
4.7. Теорема вириала (от нем. virial — сила). Если движение системы
присходит в ограниченной области пространства, то существует соотноше-
соотношение, связывающее средние по времени значения кинетической энергии и
вириала Клазиуса
Теорема вириала позволяет найти «глобальные» условия удержания систе-
системы частиц в конечной области пространства.
Умножим обе части уравнения C.12) на та и, учитывая, что гг =
1 d2 2 .2
= г — г , получим
Zi (И/
\^р Е m*r* - Е m^'a =
Е m*r* Е
цг—-*\
\ -.1С1
/_^ а '
о. Ь
, \^
а
Произведем усреднение по достаточно большому интервалу времени в со-
соответствии с определением:
— г
Тогда из D.16) имеем теорему вириала:
„ \
D.17)
Пример 4.3. Bl 870 г. Р. Клазиус предложил очень сильный метод по-
получения уравнения состояния газа в тепловом равновесии. Внешние силы,
действующие со стороны стенок сосуда объемом V, создают давление р:
raFaext\ = -pldSr = ^p idVdivr =
/ J J
Левая часть D.17) равна ЗквТМ (кв — постоянная Больцмана). Преоб-
Преобразуя аналогично D.9) оставшийся член, получим [26]
!?) D18)
где таь = ть — та . Энергия взаимодействия молекул зависит от электрон-
электронных состояний [27]. В качестве потенциальной энергии взаимодействия
двухатомных молекул, находящихся в основном состоянии, часто исполь-
используют модель Леннар да-Джонса: 11аь(таь) = /(|ra&|),
Лекция 5. Движение свободной частицы во внешнем поле 35
/(г) = 4С/0
12
D.19)
где U® —глубина потенциальной ямы, г о —расстояние, на котором /(г)
обращается в нуль. Пренебрегая в D.18) взаимодействием молекул, полу-
получим уравнение состояния идеального газа.
Лекция 5. Движение свободной частицы во внешнем поле
Здесь мы рассмотрим важный частный случай, когда частица взаимо-
взаимодействует с системой, движение которой можно считать заданным. Тогда го-
говорят о движении частицы во внешнем поле. В этом случае уравнение C.12)
принимает вид
mr = F(r, r, t). E.1)
Начальные условия: г@) = го , г@) = г о .
Для произвольных функций F(r, r, i) система трех уравнений E.1)
неразрешима в аналитическом виде. Поэтому ограничимся рассмотрением
частных случаев.
Искусство интегрирования состоит в нахождении первых интегралов.
Первым, интегралом называется функция /(г, г, t), остающаяся постоян-
постоянной на траекториях системы: /(г, г, t) = const.
5.1. Одномерное движение в консервативном поле. Пусть
F = -ди/дг] U(г) = V{x). Из E.1) находим
гпх = ^^^, ту = 0, mi = 0. E.2)
ох
Первые интегралы у = уо , z = z® позволяют получить решение:
у = yot + у о , z = zot + zq . Умножая первое уравнение системы E.2)
на х, получим
... .dV d \тх2
Следовательно, существует еще один интеграл:
^ + V(x)=E, E=^ + V(xQ), E.3)
который представляет собой уже уравнение первого порядка. Получим его
решение методом разделения переменных. Пусть xq > 0 . Тогда
откуда
-(E-V(x)), E.4)
ТТЬ
Г1
— (E-V(x) dx = t. E.5)
711
36
Глава 1. Уравнения Ньютона и Лагранжа
Поскольку х2 > 0, то область движения по х -координате определяется
условием Е ^ V(x) . Точки, в которых Е = V(x), называются точками
поворота, т.к. в них скорость обращается в нуль.
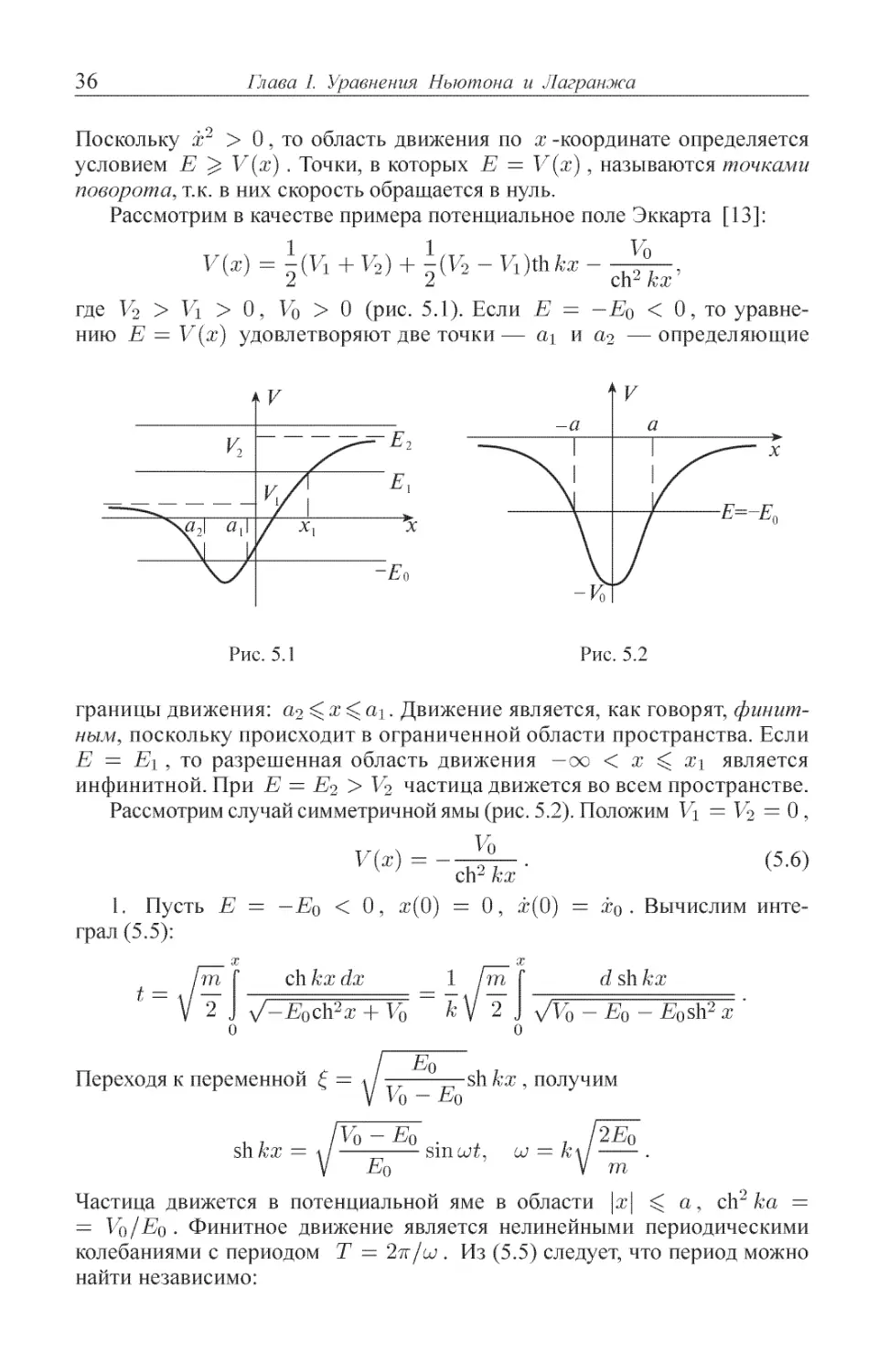
Рассмотрим в качестве примера потенциальное поле Эккарта [13]:
V(x) = i(
V2) + \{V2 - VJihkx -
где F2 > Vi > 0, Vq > 0 (рис. 5.1). Если Е = -Eo < 0, то уравне-
уравнению E = V(x) удовлетворяют две точки— a\ и 02 —определяющие
-Ео
¦Е=-Еп
Рис. 5.1
Рис. 5.2
границы движения: п2 ^ х ^ а\. Движение является, как говорят, финит-
финитным, поскольку происходит в ограниченной области пространства. Если
Е = Ei , то разрешенная область движения ^оо < х ^ х\ является
инфинитной. При Е = Е2 > У~2 частица движется во всем пространстве.
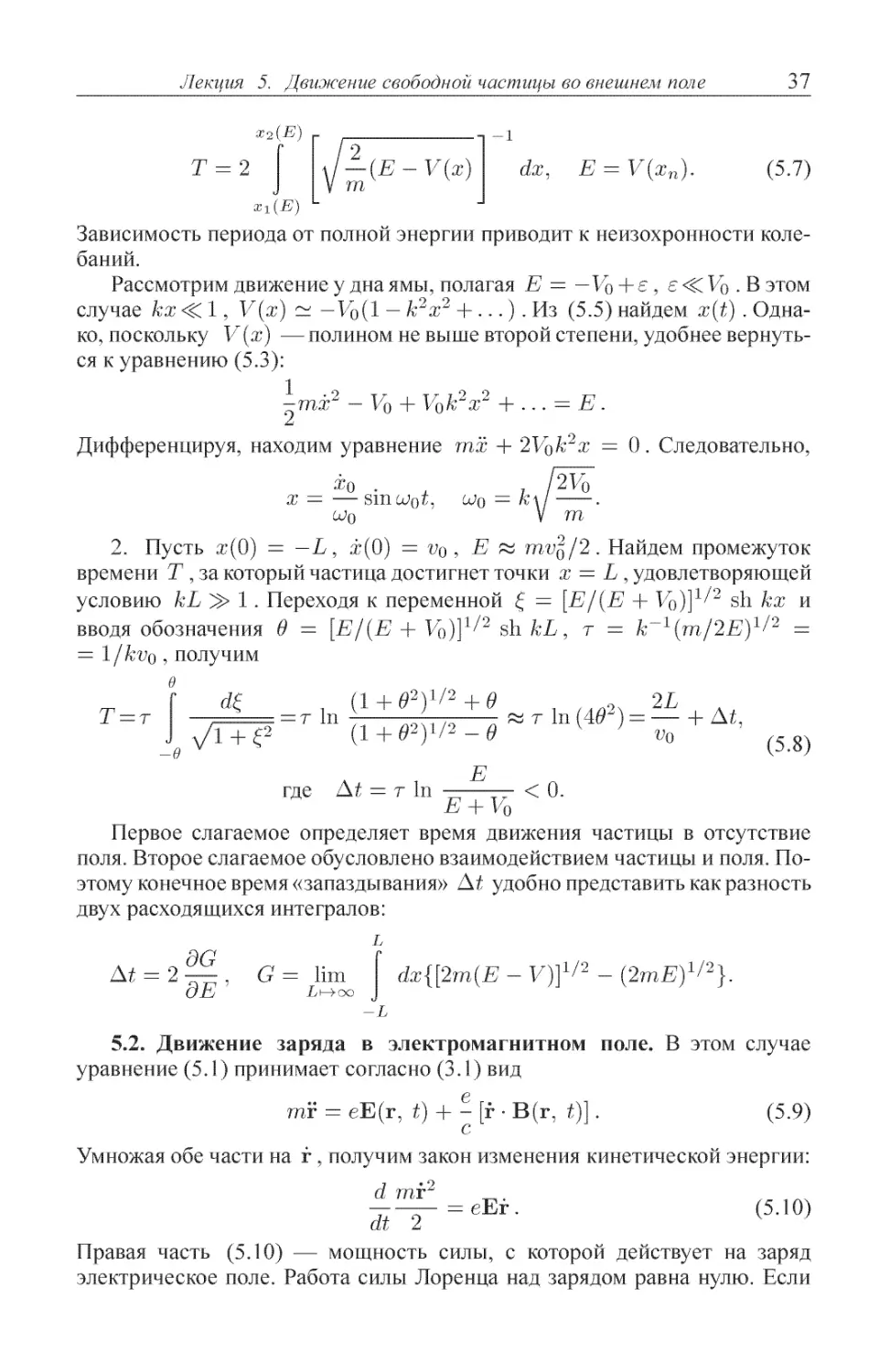
Рассмотрим случай симметричной ямы (рис. 5.2). Положим V\ = V2 = 0 ,
1. Пусть Е =
грал E.5):
V{x) = -Jjrx- E'6)
—Eq < 0, х@) = 0, х@) = хо . Вычислим инте-
интет
ch kx dx
1 fm
d shkx
¦Vq к У 2 J VFo - Eo - E0sh2 x
0
Переходя к переменной ? =
Vq — Eq
sh kx, получим
shkx =
Vq — Eq .
s
Eo
a, ch2 ka =
Частица движется в потенциальной яме в области
= Vq/Eq . Финитное движение является нелинейными периодическими
колебаниями с периодом Т = 2тг/о;. Из E.5) следует, что период можно
найти независимо:
Лекция 5. Движение свободной частицы во внешнем поле 37
¦-'/
-1
2
т
xi(E)
dx, E = V(xn). E.7)
Зависимость периода от полной энергии приводит к неизохронности коле-
колебаний.
Рассмотрим движение у дна ямы, полагая Е = —Vq + е , е <С Vq . В этом
случае fcx <С 1, Т^(ж) ~ — Vo(l — ^2ж2 + ...). Из E.5) найдем ж(?) . Одна-
Однако, поскольку V (х) — полином не выше второй степени, удобнее вернуть-
вернуться к уравнению E.3):
-тх2 - Vq + V0k2x2 + ... = Е.
Дифференцируя, находим уравнение тх + 2Vok2x = 0. Следовательно,
х = oj о \
У т
2. Пусть х@) = —L 5 ж@) = ^о ? ^ ^ mv^/2. Найдем промежуток
времени Т , за который частица достигнет точки х = L , удовлетворяющей
условию fcL > 1. Переходя к переменной ? = [Е/(Е + Fq)]1/2 sh !^ж и
вводя обозначения <9 = [Е/(Е + F0)]1/2 sh kL, т = k^1(m/2EI^2 =
= 1/kvo , получим
где At = r In ——— < 0.
Ь + Vo
Первое слагаемое определяет время движения частицы в отсутствие
поля. Второе слагаемое обусловлено взаимодействием частицы и поля. По-
Поэтому конечное время «запаздывания» At удобно представить как разность
двух расходящихся интегралов:
ь
At = 2 — , G= lim dx{[2m(E^V)]1/2 -
oE Ьн->оо J
5.2. Движение заряда в электромагнитном поле. В этом случае
уравнение E.1) принимает согласно C.1) вид
тт = eE(r, t) + - [г - B(r5 t)]. E.9)
Умножая обе части на f , получим закон изменения кинетической энергии:
Правая часть E.10) — мощность силы, с которой действует на заряд
электрическое поле. Работа силы Лоренца над зарядом равна нулю. Если
38 Глава 1. Уравнения Ньютона и Лагранжа
электрическое поле не зависит от времени, то Е = — Х/ср , где <^(г) — по-
потенциал электрического поля. Из E.10) находим интеграл энергии:
^тт2 + еф) = Е, E.11)
где ecp(r) = C/ext(r) — потенциальная энергия взаимодейсвия заряда с
внешним полем.
Пример 5.1. Протон движется в неоднородном постоянном маг-
магнитном поле В = @, 0, Вдск~2 ку), образующем магнитную стенку,
параллельную оси х. Начальные условия: г@) = @, ^оо, 0), г@) =
— @, йъ 0) • Найти условия прохождения протона сквозь магнитную стенку.
Уравнения движения:
%_ У •• _ ^ z-0' uj - еВ°
eh2 ку' eh2 ку' ' тс
Из третьего уравнения следует, что z(i) = 0 , а из первого находим инте-
интеграл
-г[х- -rth ку) = 0 -»> х = —A + th ку).
dt\ к
Подставляя х, z в интеграл энергии x2jry2jrz2 = Vq , получим уравнение
y2=v2o-f(y), /Ы=(|) A+thfcj/J.
Поскольку 0 ^ /B/) ^ Bш/кJ , то при г;0 < 2ш/к существует точка
остановки — протон отразится от стенки. При vq > 2ш/к протон пройдет
сквозь магнитную стенку.
Пример 5.2. Электрон движется в постоянном однородном магнит-
магнитном поле В = @, В, 0) и электрическом поле квадрупольного конденса-
тора, потенциал которого ср = —-(х — У ) • Найти решение уравнении
движения; г@) = @, у0, 0), f @) = @, 0, v0) .
Из уравнения mr = egVc^ — ^[fB] получим систему:
х = п2х + ujZj у = —ft2y7 z = —шху
где ш = еоВ/тс, п2 = eoUo/ma2 . Из второго уравнения находим y(t) =
= i/o cos U2t. Из третьего уравнения находим интеграл
Теперь первое уравнения приобретает вид
х + (и2 - п1)х = cjvq. B)
Пусть и2 - О2 = Of > 0 . Тогда решение B)
UJ
х= -=pVv(l- eosOii). (J)
Лекция 5. Движение свободной частицы во внешнем поле 39
Подставляя C) в A), получим уравнение
Интегрируя, находим
z = - ( т^ j vo* + тгз vo sin Oit.
5.3. Движение частицы в центрально-симметричном поле. Потен-
Потенциальная энергия взаимодействия П(г) = U(r) . В этом случае сила, дей-
ствующая на частицу, равна
f - ^^L - ^^?^l _ ^^Li
дт дг дт дг г
Найдем первые интегралы. Умножая уравнение движения
dU
тт = - —
дт
на г , получим интеграл энергии
^шг2 + С/(г) =Е.
Далее, вычисляя производную момента импульса
[1 jQF T
rj or
находим еще три интеграла М = Mq . Умножая обе части этого соотноше-
соотношения на г , получим уравнение плоскости, перпендикулярной вектору Mq
и проходящей через начало координат:
Мог = 0.
Четыре интеграла позволяют полностью проинтегрировать уравнения
движения. В общем случае переменные разделяются только в сферической
системе координат.
Пусть г@) = го , f@) = vq .Если ось z декартовой системы координат
выбрать параллельно вектору Mq , то z(t) = 0 . Сферическая координа-
координата 0(t) = тг/2 . Первые интегралы можно записать в виде
^(г2+г2ф2) + и(г)=Е, E.12)
тг2ф = М0. E.13)
Исключая ф из E.12), получим уравнение
lmr2 + ^ + U(r)=E, E.14)
2 2гпг2
описывающее движение по координате г^Ов поле с эффективной потен-
потенциальной энергией
М2
40 Глава 1. Уравнения Ньютона и Лагранжа
Второе слагаемое в последнем выражении называют центробежной
энергией. Область допустимых значений г определяется неравенством
Е ^ иэф . Условие Е = 17Эф(г), соответствующее г = 0, определяет
точки поворота траектории, в которых функция r(t) изменяет сигнатуру.
Если г@) > 0 , то, разрешая E.14) относительно г , получим
[Е-и9ф(г)]. E.15)
Разделяя переменные г it, найдем решение в квадратуре:
И 2 и-1/2
-{Е-и9ф(г))\ dr = t + G0. E.16)
Далее, записывая ф в виде ф = (dip/dr)f, найдем из E.13), E.15)
уравнение траектории:
У= —Т \-{Е-и9ф(г))\ dr + C. E.17)
J rnr2 [т х 7J
Соотношения E.16), E.17) представляют собой закон движения
частицы в параметрической форме.
Лекция 6. Задача Кеплера
6.1. Потенциальная энергия взаимодействия однородного шара и
частицы. Энергия взаимодействия имеет вид
U(r) = -Gm
где ?, г — радиусы-векторы элементарной массы шара dM и части-
частицы (рис. 6.1); М, R — масса и радиус шара. В сферической системе
координат с полярной осью, направленной по вектору г , имеем
R тг 2тг
Г Г Г
U(г) = —Gmp d??2 ёвзтв ёср[г2 + ^2 — 2r^ cos^]^1/2 =
0 0 0
0
Если r > R, то ^ < r, |r — ^| = r
U(t) = —Gmp— «C^C = ^Gmp = . F.1)
r ) 3r r
о
В случае г < R
9^- Гг г 1 п™ м / Г2 \
--55Г • F-2)
Лекция 6. Задача Кеплера
41
Итак, U(x, у, z) = V(r), r = \Jx2 + у2 + z2 . На рис. 6.2 изображен
график функции V(r) :
V(r) =
GmM
, г ^ Д.
Если плотность шара является сферически симметричной функцией
Рис. 6.1
Рис. 6.2
координат, то поле не отличается от поля точечной массы. Этот результат
принадлежит И. Ньютону. Позднее Дж. Бирхгоф заметил, что симметрично
пульсирующее тело создает поле, также не отличающееся от поля точечной
массы.
6.2. Первые интегралы. Рассмотрим движение частицы в приближе-
приближении внешнего поля. (Условия применимости этого приближения будут об-
обсуждаться в лекции 10.)
Поместим начало координат в центр Земли. Сила, действующая на ча-
частицу в поле F.1), равна
dU _ dUdr _ а г
дт дг дт г2 г'
а = GMm = mgR2.
Уравнение движения имеет вид
шг = —а^г.
F.3)
Сохраняются полная энергия и момент импульса.
В 1799 г. французский физик и математик П.С. Лаплас A749-1827 гг.)
открыл еще три интеграла, которые отражают скрытую симметрию задачи
42 Глава 1. Уравнения Ньютона и Лагранжа
Кеплера. Образуем векторное произведение F.3) с М :
[гМ] = ^[гМ] -> ^[гМ0] = ^4(r(rf) ~~ rr2).
Учитывая, что г2 = г2 , rr = rf , получим
— frMol = a—- .
Следовательно, сохраняется вектор, который будем называть вектором Ла-
Лапласа:
?=1[*Мо]--. F.4)
Очевидно, еМ0 = 0, т.е. вектор Лапласа лежит в плоскости траектории.
Найдем величину вектора ? :
е = — r2M(t гМо - + 1 = — И Mi У- + 1 =
az a r а1 та г
= 1+
Умножим далее F.4) на г :
тР
а\2М2 2М§Е
1 •
2М§
= 1 •
1 М2 М2
г — г = —^ — г = р — г, где р = ^
Обозначая через у? угол между векторами ? и г , найдем уравнение тра-
траектории:
г = ^ . F.6)
1 + е cos <p
Из курса аналитической геометрии известно, что F.6) — уравнение кони-
конического сечения, где р — параметр, е — экцентриситет. Следовательно,
вектор Лапласа параллелен оси симметрии траектории частицы.
6.3. Решение задачи Кеплера. Поскольку U (г) = V(r), то в общем
случае решение уравнений движения возможно только в сферических коор-
координатах г, <9, (р : х = г sin в cos ср, у = г sin в sin cp, z = r cos в . Наличие
дополнительного специфического для задачи Кеплера интеграла F.4) при™
водит к тому, что уравнения F.3) могут быть решены в параболических
координатах [28] и, v, cp :
ж = дДш cos (/9, у = \fuv sin (р, z = 1/2(и — v).
Используя начальные условия г@) = г о , r@) = vq , выберем ось z
параллельно вектору Мо , ось х — по вектору е. Обозначим через (р
угол между радиусом-вектором частицы и осью х . Тогда интегралы энер-
энергии и момента импульса приобретают вид
1тг2 + 1тг2ф2^^ = Е1 F.7)
2 2 г
тг2ф = Мо . F.8)
Лекция 6. Задача Кеплера
43
Переменные г, ^ в F.7), F.8) разделяются, поскольку, исключая ф
из F.7), можно найти уравнение
иэф(г)=
а
г
Уравнение траектории непосредственно следует из F.8), F.9):
dr
2
mr2 \т
2
-1/2
F.9)
F.10)
Значения г , при которых Е = 11эф(г), определяют границы области дви-
движения — окружности в плоскости ху,
в каждой точке которых скорость части-
частицы направлена по касательной. Функция
17эф (г) достигает наименьшего значения
—та2/2М§ при г = Mq /та = р . Ана-
Анализ иэф (г) позволяет сделать вывод, что
при Е = 11эф(р) траекторией является
окружность. Этот же результат следует
из F.6), поскольку е = 0. При условии
11эф(р) < Е < 0 , соответствующем значе-
значениям е < 1, траектории — эллипсы —
лежат в кольце rp ^ r ^ ra (рис. 6.3),
гР = т^-=ф-е),
Га =
Р
где а —длина большой полуоси эллипса.
Значениям Е ^ 0 соответствуют ин- рис> 6.3
финитные траектории. При Е = 0 (е = 1)
траекторией является парабола, а при Е > 0 (е > 1) частица движется по
гиперболе. Если Мо = 0 , то траектория — прямая линия.
6.4. Движение по эллипсу. Поскольку (р(гр) = 0 , то из F.10) находим
уравнение траектории
2Е
а2
А/о
-1/2
mr M
= — arcsin
Мо
тг
а
Мо
m
I
-1/2
= arcsin - 1 — - + —
7Г
2'
F.11)
44 Глава 1. Уравнения Ньютона и Лагранжа
совпадающее с F.6). Здесь Е = —Eq < 0 .Длина большой полуоси эллипса
1 I) (У
а — L (г _|_ г ) - - — F 12)
Используя основное свойство эллипса, найдем длину малой полуоси
Р Мо
Ъ=у/а*-(а- грJ =
f\^e2 \/2mE0'
Период обращения Т по эллиптической орбите можно найти из F.8), ин-
интегрируя в пределах 0 ^ t ^ Г :
2тг
T
О
Поскольку площадь эллипса равна ттаЬ, то
Г = 2тг/о;,
ш = Мо/тпаЬ = л/(а/тпа3).
Для спутников Земли период можно представить в виде
Г = Го ( а/R J , Го = 2тгл/К1д = 84, Змин.
Найдем теперь r(t) . Предварительно преобразуем уравнение F.9):
2
™0(-r> + JLr-J!L\=-
т \ Eg 2тЕ® J m
а \2/1 2EqM$ \\ а г/ vz
Разделяя переменные, находим
г
1та Г rdr
гр
Этот интеграл вычисляется в терминах элементарных функций [29]. В
результате получается неявная зависимость r(t) . Удобную форму решения
можно получить, вводя вспомогательный параметр ? соотношением
г = a(l-ecosf). F.13)
Тогда интеграл приводится к виду
ut = ?-esmt. F.14)
Соотношение F.14), определяющее зависимость ?(?), называется урав-
уравнением- Кеплера. Параметр ? имеет наглядный геометрический смысл. Вве-
Введем
Лекция 6. Задача Кеплера
45
декартовы координаты с началом в фокусе F эллипса и изобразим окруж-
окружность радиуса ОР = а с началом в центре эллипса (рис. 6.4). Из F.6),
F.12), F.13) имеем
х = г cos (р=—(р — г) = — [аA — г2) ~~ аA ~~ е cos ?)] = a cos ? — ае,
Отметим, что поскольку OF = а ~~ гр = ае, то ? — угол М'ОР.
Исключая с помощью F.13) г , получим
cos ? — <
F.15)
1-е cos ?
В небесной механике параметр ? на-
называют эксцентрической аномалией, а
угол <? — истинной аномалией [30]. Рис. 6.4
В координатах (out,r/а) график
функции г /а — укороченная циклоида или трохоида — кривая, кото-
которую описывает точка, расположенная на расстоянии е от центра колеса
единичного радиуса, движущегося без проскальзывания по плоскости.
6.5. Траектории частицы в пространстве. Пусть г@) = го, г@) =
= vq — начальные положение и скорость частицы. Вектор Mq =
перпендикулярен плоскости, в которой
движется частица. Ориентация вектора
Лапласа в этой плоскости определяется
углом гро на рис. 6.5. Представим F.4)
в виде [7]
о Oovo)
Л
Lv0, F.16)
Рис. 6.5
где v\ =
имеем
-местная первая космическая скорость. Из F.16)
cos \J)q = —(k sin2 7 — 1), sin ф® = — — sin 27,
с Zc
к= ( —
F.17)
е2 = i-B^
Введем ортогональные базисные векторы ех =е/е, е2 = [e3ei], e3 =
= Mq/Mq . Тогда радиус-вектор частицы
r(t) = a(cos^ — e)ei + bsin^e2 . F.18)
Ориентацию базиса еп относительно произвольной системы координат
удобно задать тремя углами Эйлера (см. лекцию 21).
46
Глава 1. Уравнения Ньютона и Лагранжа
Пример 6.1. Падение с «низкой» орбиты. Космическому аппарату
(КА) на высоте К<Д сообщили начальную скорость vq = vi(l — S)
параллельно поверхности Земли, v± = (gR2/гоI^2 , го = Л + Л, S>0.
Эксцентриситет эллипса е = 1 — /2 , / = vq/v\ , параметр р = го/2 ,
большая полуось а = ro/(l + s). Начальная точка траектории является
апогеем: г (to) = r0 , <р(?о) = ?(^о) = тг, ^о = тг (рис. 6.6). Найдем
интервал времени падения КА на поверхность Земли.
Решение. 1. Полагая в уравнении эллипса <p(to + Atm) = 2тг,
г (to + Atm) = R, получим условие, при котором КА приземлится в
перигее на поверхности Земли: A + ro/R)f2 = 2 или S с± h/4R.
Далее, подставляя в уравнение Кеплера ? (to+Atm) = 2тг, получим и (to +
+ Atw) = 2тг: Atm = Т/2 .
2. Найдем условие приземления в точке (p(to + Ati) = Зтг/2 : R = р
или /2 = Д/го , ^ « h/2R.
3. Пусть в точке приземления c^(to+r) =
= тг + j3m , /?m <C 1. Космический аппарат
падает по «короткой» дуге эллипса:
R = рA - е cos рт) -^ A - /2) cos fjm =
Рис. 6.6
В этом случае / <С A + 2/г/Д)^1/2. Мак-
Максимальное смещение по длине большого кру-
круга xm=v0(hr0/2geR)^2 .
4. В интервале времени to ^ t ^ to + г
угловая координата ^(t) = тг + /3(t), уравне-
уравнение траектории f3 = /[(fo — г)/^^]1/2 . Най-
Найдем теперь функцию r(t) . Поскольку ?(t) —
-тг<1,то cosC(t) = -l + C2(AtJ/2 + ...
Из уравнения Кеплера находим значение производной в начальной точ-
точке: ?о = uj/A + е) . Исходя из параметрического представления r(t) =
= аA — е cos ?), получим явную функцию времени:
r(t) = го - ea?(AtJ/2 + ... = г0 - §эф(А*J/2 + ¦ ¦ ¦,
где g^ = ge(R/roJ . Интервал времени падения на поверхность Земли
г = (ro/R)Bh/ gsI/2 . При i?o <C v\ получим тривиальное решение
At и B/i/gI/2. Полезно найти величину g3(^ из закона сохранения
полной энергии:
тг2 /2 = E + mgR2/r-mg R2pj2r2.
Дифференцируя по времени, получим
г = -
Пример 6.2. 1. Пусть
= — cos 7, sint/jQ = — sin 7 . Следовательно, фо = тг + 7 .
gr2p/r3, r(fo) = -gэф.
= vi . Тогда k = 1, г = cos 7, cos 1^0 =
Лекция 6. Задача Кеплера 47
2. Пусть vq = л/2у± . В этом случае к = 2, г = 1, cos-0o =
= — cos 27, sin фо = — sin 27, ^0 = 7г + 27 .
6.6. Орбитальные полеты. Среди великих достижений XX в. особое
место занимает создание космических кораблей. Четвертого октября 1957 г.
в Советском Союзе был запущен первый в мире исскуственный спутник
Земли (ИСЗ) (масса 83,6 кг, высота перигея hp = 228 км, высота апо-
апогея /г а = 947 км). Тридцать первого января 1958 г. выведен на орбиту
американский спутник «Эксплорер-1» (масса 14 кг, hp = 360 км, h& =
= 2530 км). Этот полет подтвердил гипотезу Дж. Ван Аллена о существо-
существовании радиационных поясов Земли Ч
Возмущенное движение спутников. Вследствие возмущений траекто-
траектория ИСЗ существенно изменяется за конечный промежуток времени.
В этом случае для расчета траектории используют приближенный ме-
метод, предполагая, что в течение периода обращения спутник движется
по эллипсу, а параметры, определяющие его размеры и ориентацию
в пространстве, изменяются адиабатически медленно: | МТ | <С | М |,
\ ||||
Пусть F(r, г, t) — возмущающая сила. Тогда из второго закона Нью-
Ньютона:
гаг = -а -^ + F (г, г, t), F.19)
г6
находим
E = Fr, M = [rF], F.20)
аё = — [FM] + [гМ] = 2r(rF) - f(rF) - F(rr). F.21)
TTh
Влияние несферичности Земли. Наиболее существенное возмущение ор-
орбит спутников обусловлено сплюснутостью Земли у полюсов — ее поляр-
полярный радиус на 21 км короче экваториального. Вследствие этого потенци-
потенциальная энергия приобретает вид [32-34]
где п — единичный вектор, параллельный оси вращения Земли, к =
= 3, 2732 • 10™3 . Плоскость орбиты, ориентация которой определяется
вектором М , непрерывно вращается вокруг вектора п . Этот эффект ис-
используется при запуске синхронно-солнечных спутников, предназначен-
предназначенных для изучения природных ресурсов Земли. Съемка осуществляется при-
приемниками инфракрасного излучения. Для неискаженного восстановления
изображения в условных цветах необходимы постоянные условия освещен-
освещенности. Однако движение Земли вокруг Солнца приводит к перемещению
^ Каждый год на орбитах появляются более ста аппаратов. Срок их службы огра-
ограничен и они, как и последние ступени ракет-носителей, становятся космическим
мусором. Сейчас отслеживаются 9000 объектов, представляющих серьезную опас-
опасность для действующих станций.
48 Глава 1. Уравнения Ньютона и Лагранжа
орбиты через терминатор — линию разграничения дня и ночи. Подбором
угла наклона плоскости орбиты можно добиться того, чтобы прецессия
орбиты компенсировала эффект движения Земли. В этом случае освещен-
освещенность различных участков Земли зависит только от широты и времени года.
На форму траектории спутника влияют также неоднородности в рас-
распределении плотности планеты. Области с повышенной плотностью на
Луне получили название масконов (сокращение от mass concentration).
За двенадцать часов масконы превратили эллиптическую орбиту «Апол-
«Аполлона» в круговую.
Влияние притяжений Луны и Солнца. Наиболее сильно влияние
Луны и Солнца проявляется для спутника на полярной орбите, почти пер-
перпендикулярной плоскости эклиптики. Если апогей находится за орбитой
Луны, то возможно полное разрушение орбиты. Шестого октября 1959 г.
станция Луна^З обогнула Луну и стала спутником Земли с апоге-
апогеем /г а = 480000 км и перигеем hp = 47500 км, период Т = 15 сут. Апо-
Апогей с каждым оборотом возрастал, а перигей уменьшался. Через
полгода, после 11 оборотов, станция вошла в земную атмосферу и сго-
сгорела [34].
Геостационарный спутник движется по круговой экваториальной
орбите с периодом Т = 24 ч. Поэтому он постоянно находится на рас-
расстоянии 35786 км над определенной точкой поверхности Земли. Три таких
спутника, расположенные в вершинах правильного треугольника, обеспе-
обеспечивают глобальную радиосвязь. Стационарные спутники снабжаются кор-
корректирующими двигателями для компенсации влияния Луны, Солнца и
несферичности Земли.
Влияние атмосферы. Сила сопротивления разреженной атмосферы
определяется выражением Fc = —pS\r\r, где р — плотность атмо-
атмосферы, 5 — площадь поперечного сечения спутника. С каждым оборо-
оборотом апогей и перигей снижаются, причем перигей опускается медленней,
чем апогей. Орбита приближается к круговой. Критической является тра-
траектория на высотах 110-г 120 км. Далее она круто изгибается, и спутник,
попадая в плотные слои атмосферы, сгорает. На высоте h = 120 км р =
= 10^8 кг/м3. Полагая S = 1 м2, получим Fc = 0,62 Н. Отноше-
Отношение возмущающего ускорения к ускорению, создаваемому силой тяжести,
составляет m™1 pS(R + К) = 6,5 • 10™4 . На высоте h = 20 км р =
= 0,06 кг/м 3 , Fc = 378 Тс. Здесь возникает ударная волна, образование
которой приводит к потерям полной энергии. Поскольку скорость спут-
спутника в 25 раз превышает скорость звука, то на его лобовой части образу-
образуется слой плазмы с температурой 7^9 тыс. градусов. Для обеспечения
безопасности космонавтов используется способ теплозащиты, получивший
название абляционного (от лат. ablatio — устранение). Лобовая часть по-
покрывается пластмассой, которая плавится и испаряется, поглощая тепло и
уменьшая поток теплоты внутрь космического аппарата.
Парадокс спутника. [6, 34, 35]. Последняя ступень ракеты-носителя
по размерам значительно больше, чем спутник. Казалось, что поскольку
ракета испытывает большее сопротивление, то ее скорость окажется
Лекция 6. Задача Кеплера 49
меньше скорости спутника. Однако наблюдатели обнаружили, что ракета
значительно опережает спутник. Для объяснения этого парадокса восполь-
воспользуемся законом изменения полной энергии. Полагая Fc = —k(v)r, полу-
получим E = —kv2 . Поскольку для орбит, близких к круговым, Е ~ —mv2 /2 ,
то mv = +kv . Это уравнение объясняет наблюдаемый эффект, так как
для ракеты отношение к/т больше, чем для спутника.
Влияние давления солнечного света. Сила давления сообщает спутнику
массой 100 кг, площадью S = 1 м2 ускорение 3 • 1СГ6 см/с2 . В 1960 г.
в США для ретрансляции радиосигналов был запущен на круговую
орбиту высотой 1600 км спутник «Эхо-1». Он представлял собой сферичес-
сферический баллон массой 68 кг, диаметром 30 м. За год его орбита эволю-
эволюционировала от круговой к эллиптической (hp = 900 км, /г а = 220 км)
и снова к круговой меньшего радиуса. Спутник вошел в атмосферу в
мае 1968 г. [34].
Спутник, свободный от сноса. На спутник действуют два типа сил:
гравитационные и поверхностные. В отсутствие поверхностных сил
спутник должен двигаться по траектории, называемой геодезической. Если
внутрь пологого корпуса поместить пробное тело, то оно будет двигаться
по геодезической траектории. Как заставить спутник повторить движение
тела? С этой целью на оболочке размещают газовые двигатели и датчи-
датчики, корректирующие ее положение так, чтобы тело всегда оставалось в
центре масс спутника. Первый такой спутник «Triad-1» запущен в США
A972 г.). Это устройство представляло собой развитие модели искусствен-
искусственной планеты, предложенной К. Шварцшильдом. Небольшой уход спутника
с геодезической траектории B00 м/мес) позволяет ставить вопрос о про-
проверке эффектов теории тяготения [36]. Для обычных спутников суточная
поправка составляет сотни метров.
6.7. Коррекция траектории. Для перевода космического аппарата на
новую орбиту используются корректирующие двигатели. При орбитальном
маневре кораблю сообщают приращение скорости v —»¦ v; = v + Av в
точке г . Теперь положение орбиты в пространстве определяется вектором
момента М; и вектором Лапласса ?':
M'=M + m[rAv], ?'=e +
rv(
Пусть в точке г аппарат получил тангенциальное приращение скорос-
скорости vH^v/ = vjl + ^^ ) . Вектор Лапласа новой траектории
V v )
, Av ( г
V \ Г
Учитывая, что а = —а/2Е, найдем приращение большой полуоси эл-
эллипса:
да А да дЕ v 2m
Аа = Av — = Av i—^ = — aAv.
dv дЕ dv v a
50 Глава 1. Уравнения Ньютона и Лагранжа
Приращение периода
dv 2 а
Пример 6.3. Движение в космосе с малой тягой. В отличие от обыч-
обычных реактивных двигателей плазменные или ионные двигатели развивают
силу тяги F <С т g, слишком малую для старта с поверхности Земли. Одна-
Однако при старте с околоземной орбиты двигатель малой тяги может разогнать
корабль до гиперболической скорости. Рассмотрим характерные особенно-
особенности траектории разгона.
Пусть реактивная сила F = fw/v направлена по касательной к траекто-
траектории, / —константа, а = //m<Cg . В момент времени t = 0 ракета старту-
стартует с круговой орбиты радиусом г о . Начальная скорость v\ = (а/тгоI^2 ,
а = mgR2. Значение полной энергии Е@) < 0. Согласно F.20), F.21)
имеем уравнения
Ё = fv, (/)
М = М-, B)
v
as = [vMJ —. C)
v
Из B) следует, что траектория лежит в плоскости, перпендикулярной век-
вектору М@). Из A) получим уравнение
г
mvv + а^г = fv. D)
г1
Поскольку / <С т g, то ракета начинает движение по спиралеобразной
кривой: на каждом витке скорость и расстояние до центра Земли связаны
соотношением
v2 а . г
т— = ^г —>¦ imvv = —a^r. E)
г г2 г2
Подставляя г в D), получим уравнение
v = —а, F)
из которого следует «новый парадокс»: величина скорости ракеты умень-
уменьшается. Период обращения
T(t) = — = ^^ G)
возрастает. Здесь необходимо учесть, что согласно уравнению A) полная
энергия возрастает и при некотором значении t = tp обратится в нуль. Ве-
Величина скорости vp = v(tp) в этот момент времени достигнет наименьшего
значения i;p = {2а/тгрI^2 , гр = r(ip) . При значениях t > tp скорость
ракеты возрастает и она удаляется от Земли по квазигиперболической тра-
траектории. Из F) находим
v(i) =v!-at, 0 ^ t < tp. (8)
Лекция 7. Уравнения Лагранжа 51
Численные расчеты показали, что при а = 1 мм/с 2 значение E(tp) = О
достигается через 80,8 сут. на расстоянии 554 700 км; скорость vp =
= 3 км/с ^.
Для оценки величины г?р запишем уравнение D) в виде
а
v Н C0S7 = ai
где 7 — Угол между скоростью и радиусом-вектором. Полагая г;(^р) =
= 0, cos 7 ^ 1/2, r(tp) = rp, получим значения гр = (а/2таI^2 ,
V2 = 2Bаа/шI/2 . Согласно E), *р « (vi - г;р)/а.
Найдем теперь полное число витков N в интервале времени разгона
ракеты 0 ^ t ^ tp :
I ^ лг т
о
Вычисляя интеграл, получим
а \г0
«0,041 (R
а \г0
Значительно легче осуществить полет под действием малой радиальной тя-
тяги. В этом случае обнаружены весьма интересные особенности траектории
ракеты [33, 34].
Лекция 7. Уравнения Лагранжа
7.1. Лагранжиан, функционал действия. Рассмотрим систему N
частиц. В зависимости от симметрии взаимодействия может оказать-
оказаться более удобным выбор не декартовых, а каких™либо других коорди™
нат gi, #2? • • • ? Q3N • Их называют обобщенными координатами, а их
производные gi, g25 ••• , 4зм —обобщенными скоростями.
Выразим декартовы координаты частиц через обобщенные коорди-
координаты:
га = fa(tfi, 42, ...дзлг), а = 1, 2, ... , 7?.
Скорость частицы будет иметь вид
кинетическая энергия системы частиц
^ Охоцимский Д.Е. Исследование движения в центральном поле под действием
постоянного касательного ускорения. Космические исследования. 1964. Т. 2. №6.
52 Глава 1. Уравнения Ньютона и Лагранжа
Т, \^ dfa dfa
Потенциальная энергия системы, П = II(ri,... , гдг), в новых перемен-
переменных U = U{qu q2, ... , qm) •
Пусть система переходит из положения Pi = qa(ti) в положение Р2 =
= ga(i2) за время i2 - h . Закон движения qa(t) неизвестен. Рассмотрим
дважды дифференцируемые кривые j : qa (t), ti ^ t ^ t2 , соединяющие
точки Pi и F2 • Каждой кривой j поставим в соответствие определенное
число по правилу
t2
j), G Л)
L(q,q)=T(q,q)-U(q). G.2)
Функция L(q, q), зависящая только от 3N координат и 3N скоростей,
называется лагранжианом или функцией Лагранжа, а интеграл G.1) —
действием. Согласно определению, действие является функционалом [8,
13, 37].
7.2. Принцип Гамильтона™Остроградского (или принцип наи-
наименьшего действии). Этот принцип позволяет дать наиболее общий вы-
вывод уравнения движения механических систем.
Принцип наименьшего действия состоит в том, что при переходе си-
системы из положения Pi в положение Р2 частицы движутся по таким
кривым, для которых действие имеет экстремум. Для того, чтобы найти
экстремум, необходимо испытать всевозможные функции qa (t), соединя-
соединяющие Pi и ?2 • Этот подход нереален. Однако можно использовать одно из
свойств экстремальности: если удалиться от экстремума на величину пер-
первого порядка малости е , то функционал отклонится на величину второго
порядка малости ё2 [38].
Пусть G.1) достигает экстремума на некоторых кривых j: qa = qa(t) .
Найдем, как изменится значение S[j] при замене кривых j кривыми j':
qfa = qa (t) + ет]а (t), где rja (t) — любые гладкие кривые, также идущие из
Pi в Р2 ; Va(ti) — Vaih) =0, ?<1. Приращение функционала можно
записать в виде
f f
AS [7] = dtL(q + ?77, g + eri) - dtL(q, q) =
dL dL
dqa dqa
Лекция 7. Уравнения Лагранжа 53
Интегрируя второй член по частям, имеем
л о г 1 ? , (dL d dL\ dL t2
AS[j]=e\dt[- — t— )f]a + e—ria + ...
J \dqa dt dqaj dqa ti
ti
Условие экстремума функционала приобретает вид
= , а = 1, ... , ЗА/". G-3)
dt dqa dqa
Система ЗЖ уравнений второго порядка называется уравнениями Лагран-
Лагранжа, ра = dL/dqa — обобщенным импульсом , dL/dqa — обобщенной
силой.
Пример 7.1. Рассмотрим систему, состоящую из двух частиц. Выбе-
Выберем в качестве обобщенных координат декартовы координаты х\, yi, z\
частицы массой т\ и координаты ж2, г/2? Z2 частицы массой т2 . Ла-
Лагранжиан системы
т, . . ч 1 .9 1 .9 Gmini2 , J4
b(ri, г2, ri, г2) = -mirf + -w2r| + г. G.4)
Уравнения Лагранжа
d dL dL
и^^ = ъ—' п = Х' 2'
at orn arn
приводят к системе шести связанных уравнений:
Г2 ~ Г1 Г2 ~ Г1 /т ел
G.5)
Q, 22 i2
|г2 - ri л |г2 -
Решение этой задачи, получившей название задачи двух тел, будет обсу-
обсуждаться в лекции 9.
В современной теоретической физике уравнения Лагранжа приобрели
огромное значение, далеко выходящее за пределы механики. Уравнения
Максвелла, Эйнштейна и Шредингера единым образом следуют из вариа»
ционного принципа для соответствующего функционала.
Замечание 1. При переходе от координат qa к другим координатам qfa
с помощью преобразования qa = (pa(qfi? • • • •> ^n) уравнения движения
сохраняют форму G.3).
Замечание 2. Уравнения Лагранжа не изменяются при преобразова-
преобразовании L —>¦ L' = cL , где с — постоянная величина.
Замечание 3. Уравнения G.3) остаются неизменными при замене ла-
лагранжиана L ^ L':
L'(q, q, t) = L(q, q) + ^f(q, t). G.6)
Действительно, поскольку
dt dt dqp
то в левой части G.3) появится слагаемое — -— , а в правой — слагае-
dtdqa
мое — . Таким образом, уравнения движения не изменяются, если к
oq dt
54 Глава 1. Уравнения Ньютона и Лагранжа
лагранжиану добавить полную производную функции, зависящей от коор-
координат и времени. В частности, для произвольной функции ip(t) преобра-
преобразование L —»¦ V = L + (p(t) не изменяет уравнений Лагранжа.
7.3. Первые интегралы. Координата qa называется циклической, ее™
ли лагранжиан не зависит от qa .В этом случае dL/dqa = 0 , а обобщенный
импульс сохраняется:
dL
-г-г- = const.
OQa
Введем динамическую величину
H(q, q) = qa^^L, G.7)
OQa
называемую обобщенной энергией. Учитывая уравнения Лагранжа, находим
dL d dL dL dL dL 3L
dqa dtdqa dt dqa dqa dt
Таким образом, если лагранжиан не зависит явно от времени, то обобщен-
обобщенная энергия сохраняется:
Ча^. L = Я0.
dqa
7.4. Теорема Нетер. В современной теоретической физике фундамен-
фундаментальную роль играет теорема, установленная в 1918 г. немецким математи-
математиком Эмми Нетер [39-41]. Эта теорема определяет связь преобразований
симметрии — преобразований координат и времени, оставляющих инвари-
инвариантным действие, — с законами сохранения соответствующих динамиче-
динамических переменных.
В классической механике действие инвариантно относительно преоб-
преобразований C.7). Параметрическая симметрия порождает десять сохраня-
сохраняющихся величин и соответствующих законов сохранения: энергии A), им-
импульса C), момента импульса C) и скорости центра масс системы частиц C).
Теорема Нетер. Каждому s -параметрическому преобразованию (зави-
(зависящему от s постоянных параметров) координат и времени, обращающему
в нуль вариацию действия, соответсвует s сохраняющихся динамических.
величин.
Рассмотрим бесконечно малое преобразование координат:
где S\p — независимые параметры преобразования. При этом вариация
функции qa(t)
f]a = qla^(la = TaC(q)SX^ G.9)
Если преобразование G.9) не меняет действия, то первая вариация действия
должна быть равна нулю : SS = 0, где
Лекция 7. Уравнения Лагранжа 55
f, *f , / 8L дЬ \ 1! ( dL d dL\ *f , d ( dL
J V dqa dqa ) J V 5fe rft <9fe / J dt\ dqa
tl
Далее, учитывая уравнения Лагранжа, находим
tl
Приравнивая к нулю коэффициенты при независимых параметрах, прихо-
приходим к сохраняющимся величинам:
d dL _ Л dL
dt dqa
= Ср.
Пример 7.2. Рассмотрим систему N частиц и произведем частное
преобразование G.9):
%1 = хаа + Д<, Ахаа = 8аа + еарч6прх%, а = 1, ... , N, а = 1, 2, 3.
1. Пусть Sn = 0, Ssl ф 0. Поскольку Т^ = с5а^ , то из G.10) имеем
^2та±а = Ро.
а
Закон сохранения импульса системы является следствием однородности
пространства — лагранжиан инвариантен относительно параллельного пе-
переноса системы как целого в пространстве.
2. Положим «5п ф 0, <5а = 0 . В этом случае Т^д = ?apj%j • Поскольку
%a?a/3j%j = ?j3ja%j%a •> то из G.10) находим сохраняющуюся величину:
^wa[xa -ха] = Мо.
а
Закон сохранения момента импульса системы является следствием изо-
изотропии пространства — лагранжиан инвариантен относительно поворота
системы как целого в пространстве.
3. Преобразование масштаба. Если действие не изменяется при преоб-
преобразовании Аж^ = х% SX, то согласно теореме Нетер сохраняется величина
С = \^ ха —— или С = У^ waxava .
а а
Дифференцируя по времени, получим более сильное, чем теорема вириа-
ла D.18), утверждение:
0 = ^ та^1 + ^ XaFa6 •
а а,Ь
56
Глава 1. Уравнения Ньютона и Лагранжа
7.5. Движение системы во внешнем поле. Пусть механическая систе-
система состоит из двух частей А и В [28,40]. Функция Лагранжа полной
системы
LabDa, Qb, 4а, Яв) = 1а(яа, 4а) + 1в{чв, Яв) + 1ав{ча, Qb, 4а, Яв)-
G.11)
Если подсистема А не оказывает существенного влияния на движение систе-
системы В , то координаты qs приближенно подчиняются уравнениям (см. C.11))
±91в_=д1в_в GЛ2)
dt 84в 8qB
Вторая группа уравнений
d 8lA _ 9^4 81Ав
dt 84a 8qA 8qA
совпадает с уравнениями Лагранжа, порождаемыми лагранжианом
La{4a, 4а, t) = 1а(яа, 4а) +1ав{ча, 4а, Яв^),яв^)), G.13)
где яв{1) —решение уравнений G.12).
Пример 7.3. Ограниченная задача двух тел. Предположим, что масса
частицы гп2 <С mi, и представим лагранжиан G.4) в виде G.11), полагая
.2 ? От\т2
1а = оШ2Гз, 1в = 77
2 2
.2 f
Г1' 1ав =
I
|г2 -
Найдем решение уравнений G.12) mri = 0 : ri = с + vt. Очевидно,
в этом приближении не выполняется закон сохранения импульса системы.
Лагранжиан G.13) приобретает вид
т ( • 4-\ г -2 , Gm1m2
LA = (г2, г2, t) = -ш2г^ + ту-
2 |г2 — с — vt\
Далее удобно перейти к переменной г : Г2 = ri + г (рис. 7.1). В новых
переменных
:,i)=L(T,i) + ^ +
L(r, r) = -
Благодаря свойству G.6) два по еле д-
%19 них слагаемых в L^(r, г) не дают
вклада в уравнения движения. Лагран-
Рис. 7.1 жиан L приводит к уравнению F.3)
задачи Кеплера. Переходя к сфериче-
сферическим координатам г, 9, ср , запишем лагранжиан задачи Кеплера
1 • о
2 г
Лекция 7. Уравнения Лагранжа 57
Обобщенный импульс mr2 sin вф соответствующий координате if , со-
сохраняется:
mr2 sin2 вф = Mz. A)
Постоянная Mz — проекция момента импульса на ось z . Другой интеграл
следует из G.8):
^(г2 + г2 в2 + г2 sin2 вф2) - - = Е. B)
2 г
Уравнения Лагранжа по координате в имеют вид
^mr2^ = mr2 sin l9 cos I902. C)
Подставим ф из (./) в C):
d 9Л M2cose M2 д 1
dt mr2 sin3 в 2тг2 дв sin2 в
и, умножая обе части на тг2в , получим первый интеграл:
4ъ
sin в
D)
Здесь М — величина момента импульса. Исключая ф, в из B), найдем
следующее уравнение:
тпт2 JVf2 fy
UME ^() E)
+ UME, ^ф(г) 3.
Получим решение системы (/), D), E), предполагая, что г@) >
> 0, <9@) < 0, 0@) > 0. Пусть плоскость орбиты пересекает плос-
плоскость z = 0 по прямой О^ , образующей угол q± с осью ж . Угол между
вектором Лапласа и прямой О^ обозначим д3 • Полагая Mz = M cos g2 ,
из A), D) имеем
в
d ctg g2 ctg g
Г
=
J
F)
VI- (ctgg2ctg^
тг/2
Из F) следует, что ctg g2 ctg в = sin((p — qi) . Далее, из D), E) находим
Г л /о
dr ^^
т
= — sin ede (sin2 в — cos2 о2ч
J Lv
тг/2
58 Глава 1. Уравнения Ньютона и Лагранжа
Произведя замену переменной cos в = sin q2 sin ф , найдем значение
интеграла в правой части, равное —ф. Оставшийся интеграл совпадает
с F.11). В результате из G) находим
г =р[1 + ecos(^ - дз)]-
7.6. Лагранжиан заряженной частицы в заданном электромагнит-
электромагнитном поле. Для того чтобы придать уравнениям движения E.9) лагранжеву
форму, построим лагранжиан
L(r, М) = - mi2 - С/Об(г, f, t). G.14)
Здесь обобщения потенциальная энергия
К>б(г, f, t) = еф, t)-- f A(r, t), G.15)
где ср, А —скалярный и векторный потенциалы электромагнитного поля,
1 дА
Е = --—-Vy>, В = rot A. G.16)
Потенциалы однородных постоянных электрического и магнитного полей
равны [12]
Обобщенный импульс
= -Ег, А = 1 [Вг]. G.17)
6 А / \
= тха + - Aa(r, t).
Уравнения Лагранжа
- тЖа + -А«1=-е^ + -г— G.18)
можно представить в форме второго закона Ньютона:
mr = eE+ -[fB]. G.19)
Действительно, из G.18) следует выражение
dip е . 8Ar е (дАа дАа
тха = -е+ хрх +
+ хр+
ОХ а С ОХ а С \ Ot OXfi
dip 1 дАа\^ е [дАр дА
Жа с at J с\оха охр
Поскольку, согласно G.16),
дАр дАа _
дха дх0 -?"№>
Лекция 7. Уравнения Лагранжа 59
= [тШ]а , то G.20) совпадает с G.19). Заметим, что правая
) может быть предста
обобщенного момента импульса
часть G.19) может быть представлена в виде ~~ ^ + — ^. . Вектор
от dt or
М = г I mr + - А 1 .
Обобщенная энергия определяется соотношением G.4):
ОХа
( е . \ тх2 е . А тих2
— 1* I т 1» 4- Л I ————— J-. ю/п v А — ————— -L. ю/п С1 71 I
V с у 2 с 2
При движении частицы в однородных постоянных полях, задаваемых
потенциалами G.17),
р = тт + ^[Вг], р = еЕ + ^- [гВ],
Я = - wr2 - еЕг.
Хорошо известно, что одному и тому же полю могут соответствовать
различные потенциалы [12]. Производя в G.16) замену
%, /, G.22)
с at
где / — произвольная функция координат и времени, находим, что Е
и В не изменяются. Эта симметрия, называемая калибровочной инвари-
инвариантностью, представляет собой фундаментальный закон природы [12].
Описанная неоднозначность потенциалов позволяет, в частности, обратить
скалярный потециал в нуль. Пусть tp = ™Ег, А = 0. Полагая в G.22)
/ = еЕг t, получим (р1 = 0 , А; = —сЕ? .
7.7. Вектор-потенциал магнитного поля соленоида. Пусть длина со-
соленоида существенно больше радиуса R. Тогда компоненты вектор-по-
вектор-потенциала А(х) в цилиндрических координатах имеют вид Ар = Az = 0 ,
А^р) = A/2)Вр, p<R; А^р) = BR2/2p, p>R, Поскольку, В =
1
р др
p<R; Bz = 0, р > R. Сила Лоренца действует на заряд только в области,
где В / 0 . Вне соленоида магнитное поле не должно влиять на движение
заряда. Однако в 1960 г. был обнаружен эффект, предсказанный Аароно-
вым и Бомом: соленоид, помещенный между двумя щелями в экране, через
которые пропускали пучок электронов, влиял на распределение плотности
= rot А, то Вр = Д^ = 0, Bz = ^—^ . Следовательно, Bz = В,
60 Глава 1. Уравнения Ньютона и Лагранжа
электронов за экраном. Этот эффект обусловлен квантовыми свойствами
заряженных частиц и изменением структуры вакуума полем внутри соле-
соленоида.
Лекция 8. Движение относительно
неинерциальных систем отсчета
Во многих случаях для упрощения решения задачи или в целях прак-
практических приложений удобно рассматривать движение тел относительно
неинерциальной системы отсчета. Здесь рассмотрено движение одной ча-
частицы во внешнем поле. Более содержательные задачи приведены в лекци-
лекциях 9, 12,13.
Лагранжиан частицы в инерциальной системе
L(t,t) = ^--U(t). (8.1)
1. Введем систему отсчета К', движущуюся поступательно отно-
относительно инерциальной системы К: ориентация базисных векторов е^
системы К' остается неизменной относительно базисных векторов еп
системы К. Следовательно ё^ = ёп = 0. Радиусы-векторы частицы
г = хпеп , г; = х'пе'п связаны соотношением г = R + г;. Дифференци-
Дифференцируя последнее равенство, находим г = и + г;, где и — скорость систе-
системы К1. Поскольку ё^ = ёп = 0, то хп = ип ^ х'п.
Функция Лагранжа (8.1) после замены переменных приобретает вид
L(t', г', t) = ^ + ^j- + mur' - C7(R + г').
Преобразуем скалярное произведение:
• / d i • i
ur = — ur — ur
at
и опустим в лагранжиане функцию времени и полную производную. Тогда
лагранжиан
тг12
L/(r/,r/,t) = ^^C/o6(r/,t), (8.2)
^об(г', t) = U(R + r;) + mwr',
где w(t) = u —ускорение системы К'. Уравнения Лагранжа:
8U
тг' = ^т^ — ^^w • (8.3)
Если эти уравнения отождествить со вторым законом Ньютона, то
величину F = ~mw следует интерпретировать как силу инерции, дей-
действующую на каждую частицу в однородном поле, эквивалентном полю
тяготения.
Лекция 8. Движение относительно неинерциалъных систем отсчета 61
2. Введем теперь систему К', которая имеет общее начало с систе-
системой К , однако базисные векторы е^ вращаются относительно нее с уг-
угловой скоростью О: e'n(t) = Anm(t)em . Радиус-вектор частицы г =
= хпеп = xkek ; xk = Aknxn . Дифференцируя г = xkek , находим г =
= xkek + xkek . Согласно B.8) ё^ = [Ое^] . Следовательно,
г = x'ke'k + [Or]. (8.4)
Учитывая B.1), найдем компоненты г в системе К':
re/ = х[ + [Ojej - Xyk] el = х[ + еЩх1
re/ = xnene! = Ainxn , 0/ = Oe/ = Ainun .
Подставляя (8.4) в (8.1), получим лагранжиан
L1 = ^х12 +те-- х'п'х1 + ^\п/2х'2 - (OVJ1 -Uix'e1) (8 5)
Обобщенный импульс
Очевидно, что р = mr = pie' Уравнения Лагранжа — ^r^ = ^r—
of" (IT ^ CJT '
приобретают вид
"(8.6)
Обычно уравнения движения (8.6) записывают в более компактной фор-
форме, вводя обозначения v; = ж/е/ , О' = 0/е/ , где е/ — «постоянные»
единичные орты. Тогда (8.6) приобретает вид
mv1 = -т[П'г'] - 2m[OV/] - m[O;[OV]] - Ш^Р . (8.7)
Если это уравнение сопоставить второму закону Ньютона, то три слагаемых
в правой части можно связать с силами инерции. Вектор —2m[il'vf] на-
называют силой Кориолиса, вектор —m[!V[!Vr']] — центробежной силой.
Лагранжиан, соответствующий уравнению (8.7):
V = Г^- + m[n'r']v' + у [П'г']2 - f/(r'). (8.8)
Обобщенная энергия, равная
Н = ,'д^-1' = ^-^{П'гГ + Щг'), (8.9)
отличается от полной энергии на слагаемое, называемое центробежной
энергией.
62 Глава 1. Уравнения Ньютона и Лагранжа
Пример 8.1. Две системы координат связаны преобразованием х'к =
= Aknxn,mQ
cos out sin out
Л = ( — sincjt coswt 0
0 0 1,
(рис. 8.1). Найдем решение уравнения движения (8.7) свободной частицы.
Поскольку п1 = @, 0, и), то
х' = 2шу' + шЛ'', у' = -2ujx' +uj2y', z1 = 0.
Очевидно, что z' = сз + v%t. Введя комплексную координату и = х' +%',
получим уравнение й + 2гиой — ш2и = 0 . Будем искать решение в виде и ~
~ е~гМ . Характеристическое уравнение имеет кратные корни Ai}2 — ^ •
Следовательно, общее решение и = (А + Bt)e^lujt, где А = ci + ic2 ,
В = Vl+iv2,
х' =Re и = (ci + vit) cos out + (c2 + ^2^) sinwt,
ц' =Imii = -(ci + vit) sin cut + +(c2 + i^21) coswt.
Решение уравнения (8.6) имеет вид х'к = Л^тожто , где жто = ст +
+ %t — закон движения свободной частицы в инерциальной системе
отсчета.
Пример 8.2. Космический лифт. Пред-
Предположим, что на экваторе возведена кон-
конструкция, в которой действует лифт. Найдем
высоту, на которой скорость груза массой
т станет равной местным первой и второй
космическим скоростям.
На груз действуют сила натяжения кана-
каната N, сила тяжести и центробежная сила
р q * инерции. Если груз находится на расстоянии
г от центра Земли, то N = mg{R/rJ —
— mu2r или N = тш2(г^Т/г2 — г), где и угловая скорость вра-
вращения Земли, гст = [gR2 /cj2]1/3 — радиус орбиты геостационарного
спутника (гст = 6,7Д = 42164 км). Если г < гст , то для подъ-
подъема с постоянной скоростью к грузу необходимо приложить силу N =
= mg(R/rJ — muj2r, направленную вертикально вверх. Величина ско-
скорости груза в инерциальной системе отсчета v = шг . На расстоянии гст
от центра Земли N = 0: груз приобретет скорость vCT = urCT , рав-
равную местной первой космической скорости. Если его не удерживать, то
он будет неподвижен относительно лифта. При подъеме груза на рас-
стояние г > гст центробежная сила становится больше силы притяже-
притяжения — груз необходимо удерживать. Из закона сохранения полной энергии
найдем величину расстояния г2 , на котором груз приобретет местную
вторую космическую скорость т(шг2J/2 — mgR2 jr^ = 0 + 0, r^ =
Лекция 8. Движение относительно неинерциалъных систем отсчета 63
= 21/3гст , г2 = 53123 км; если его освободить, то он навсегда поки-
покинет Землю. Вот еще одна возможность запуска космических аппаратов.
Энтузиастом этой идеи выступает известный писатель-фантаст
Артур Кларк. Сейчас он проживает на Цейлоне и уже нашел там ме-
место для привязки лифта. Конструкцию для лифта надо строить с кры-
крыши. Со стационарного спутника выпускают два троса — вверх и вниз.
Затем подбирают их длину так, чтобы в процессе увеличения длины тросов
вся система вращалась как целое с угловой скоростью ш . После зацепле-
зацепления нижнего конца за Землю можно заняться устройством лифта. Основная
трудность — отсутствие материала необходимой прочности.
ГЛАВА 2
ДВИЖЕНИЕ СИСТЕМЫ ЧАСТИЦ
Лекция 9. Система N частиц
9.1. Лагранжиан системы iV частиц. Впервые задача N тел постав-
поставлена И. Ньютоном: в момент времени t = to известны положения и скоро-
скорости частиц; необходимо найти положения частиц в любой момент времени.
Уже при N = 3 уравнения движения неразрешимы в квадратурах, несмо-
несмотря на то, что в задаче N тел известны десять интегралов. Последующие
достижения в решении проблемы связаны с использованием ЭВМ [33, 42]
и применением приближенных методов исследования: теории возмущений
и метода усреднения [30, 43].
Лагранжиан системы N частиц
L(vu...,vN, ru...,vN)=YJ^±-U{ru...,vN), (9.1)
,..,r,) = -f?^- (9.2)
Из уравнений Лагранжа
mf*c = —Gmc
\Гс, ~ Г г
следует, что радиус-вектор центра масс R удовлетворяет уравнению R
= 0. Согласно G.7) обобщенная энергия
* Y*L
совпадает с внутренней энергией системы. Поскольку dL/dt = О, то Н
= const = W:
,2 G v-^ ^а^ь
Перейдем в систему центра масс, полагая ra = R + г;а. Поскольку
J2mara = 0? то кинетическую энергию системы можно представить в
виде
T=lmR2 + lYmar'*, (9.4)
Лекция 9. Система N частиц 65
где т — масса системы. Второй член в (9.4) — «собственная» кинетиче-
кинетическая энергия частиц в системе центра масс, относительно которой система
частиц как целое покоится.
Пример 9.1. Оценим внутреннюю энергию Метагалактики — так
называется видимая часть Вселенной, содержащая ~ Ю20 звезд. Наблюде-
Наблюдения показывают, что 1) Метагалактика в среднем однородна, 2) Метага-
Метагалактика нестационарна — скопления галактик разбегаются друг от друга
со скоростями, пропорциональными расстоянию между ними и одинако-
одинаковыми по всем направлениям. В 1929 г. Э. Хаббл установил, что относи-
относительная скорость vab двух любых галактик а и Ь определяется линей-
линейной зависимостью: vab = НтаЬ, где таЬ = тъ - та, vab = v& - va.
Коэффициент Хаббла Н по современным измерениям составляет от 70 до
75 км/с-Мпс [44].
Внутренняя энергия Метагалактики
„^ \-^\ 1 о Сг V—-л TYlnTflh
а а,Ъ
Пусть Метагалактика занимает шаровой объем радиусом а, в котором
заключены Галактики массой М. Учитывая соотношение J2 тпа^'а = 0?
а
представим внутреннюю энергию Метагалактики в виде
М щг-л .2 G ^^ та^Ъ
о,Ь а,Ь
Для оценки кинетической энергии относительного движения воспользуем-
воспользуемся законом Хаббла:
М ^ 9 1^ „9 9 Я2 Г , 9 ЗМН2а2
10
Потенциальная энергия взаимодействия вещества
а
а>Ъ а 0
Г т dm ^ Г 4тгрг2 dr 4тг ч
ф ^^^ = -G ^рг =
J r J г 3
DтгрJ а5 _ 3 М2
Следовательно,
3Ma
2
Согласно теореме о вириале для гравитационных систем, движущихся
внутри конечного объема, (Т) = —l/2(f/M FF = — (Т) < 0.
66 Глава 11. Движение системы частиц
Если плотность Метагалактики р меньше критического значения ркр =
= ЗН2 /8ttG ~ 10^29 г/см3, то W > 0: процесс расширения продолжа-
продолжается неограниченно. Если же р > ркр, то W < 0 и расширение должно в
будущем смениться сжатием.
9.2. Лагранжевы движении. В 1772 г. Ж. Лагранж нашел решение за-
задачи трех тел, предполагая, что равнодействующая сил, приложенных к
каждой частице, проходит через центр масс С, а их величины пропорци-
пропорциональны расстоянию от С. Эта ситуация соответствует известной теореме
статики о трех силах (одна из них — во вращающейся системе отсчета —
центробежная сила инерции). Покажем, что в этом случае каждая части-
частица движется по коническому сечению, причем в любой момент времени
частицы находятся в вершинах правильного треугольника [30, 35].
Переходя в (9.3) к системе центра масс (та = R + т'а), получим урав-
уравнение движения частицы mi:
т' — y' ' 1
2 Х
Г12 Г13
Полагая т\2 — ri3 = а и учитывая соотношение Yl maT'a = 0? получим
Вторая часть утверждения доказана.
Из определения центра масс следует, что Yl maY'a = mTi ~
а
= 0. Возводя в квадрат последнее равенство, имеем т2г/2 =
+ m|)a2. Следовательно,
^ 4, M=(mi+m2W3+m'K/2
(mi + m2 -
Лагранж показал, что начальные скорости должны составлять один и тот
же угол с прямой, соединяющей частицы с центром масс; величины на-
начальных скоростей пропорциональны расстояниям до центра масс. Тогда
каждая частица будет двигаться по коническому сечению, а расстояния
между частицами всегда будут образовывать правильный треугольник.
Лагранж получил еще одно точное решение задачи трех тел, рассма-
рассматривая движения частиц, расположенных на одной прямой, вращающейся
вокруг центра масс.
9.3. Уравнения движения в относительных координатах. Введем
обозначение таь = гь — та. Масса системы m = mi + • • • + тдг. Су-
Существует несколько замен переменных, позволяющих учесть равномерное
прямолинейное движение системы как целого. Произведем следующую за-
замену: Г1,..., rjv —>• R, Г12,..., rijv, где R — радиус-вектор центра масс.
Лекция 9. Система N частиц 61
Введем вектор г[, соединяющий центр масс с частицей шь Тогда га =
ri+ria. ПОСКОЛЬКУ J]wa(ri+ria) =0, ТО т[ = -ТП^1 J^a ma^la-
Кинетическая энергия системы частиц
m 42
Подставляя сюда г ^, получим
C +E^a- (9.5)
Поскольку Г5 — ra = ria — ri&, то потенциальная энергия в новых
переменных
0,6
r/ _ 1M jjl
2 ^ \г1а -т1Ь
ао
Лагранжиан системы L' = T' ~~ U'. Уравнения Лагранжа имеют вид
тп ^^ dU1
тпт1п > maria = , п = 2,..., N. (9.7)
m ^ дт1п
Из (9.7) следует соотношение
mnrln у marla = —у mcrlc = -
m ^^ m ^i
n a с
учитывая которое, получим
dUf mn^dUf
mnrln = ——- - — ) ——. (9.8)
OTin wi ^ drlc
Покольку
то
68
Глава 11. Движение системы частиц
Выделяя из последней суммы слагаемое с с = п, из (9.8) получим
тпт1п = -Gmn(wn + mi Ь- +G > maw
(9.9)
После решения этой системы уравнений находим г^. Сделаем два замеча-
замечания.
1. Уравнение (9.9) можно пред-
представить в соответствии с G.3) в виде
.. __(№__ ..,
дг1п n 1'
2. Для системы, состоящей толь-
только из двух частиц mi и т2, послед-
последний член в (9.9) равен нулю. По-
Поэтому если mi ^> m2,..., тм, то
он играет роль возмущающей си-
силы, создаваемой частицами rrii (г /
= п) в уравнении кеплерова движе-
движения частицы тп. В планетной систе-
системе mi — масса Солнца. Отношение
mn/mi не превосходит 10^3 даже для Юпитера (его масса в 318 раз
больше массы Земли).
9.4. Задача трех тел. В этом случае лагранжиан системы
, m • 2 Ш1 mi + шз .2 шз mi + m2 .9
Рис. 9.1
m
2
m
m
rim1m2
h(jT
ГП2ГП3
|ri2 -ri:
Уравнения движения (9.9) принимают вид
Г13
rf3
Г13 = -<
Г13 / Г12-Г13 Г12 \
)^ + Gm2 : ^ 3- 1 .
rj3 V Г12 -Г13 J rf2 /
(9.10)
(9.11)
(9 Л 2)
Векторы ri2, ri3, R, соответствующие обобщенным координатам,
изображены на рис. 9.1.
9.5. Переменные Мкоби. Уравнения Лагранжа можно упростить, ес-
если исключить в лагранжиане недиагональные члены вида тпатпьviavi&.
С этой целью удобно перейти к переменным Якоби, которые вводятся сле-
следующим образом: пусть q2 = г 12; Цз — вектор, соединяющий центр масс
Лекция 10. Задача двух тел
69
частиц mi и
тиц mi, 77i2,
мы qi = R.
2 с тз, q4 — вектор, соединяющий центр масс час-
часс частицей w4 и т.д. Радиус-вектор центра масс систе»
Лекция 10. Задача двуж тел
Наиболее простая система состоит из двух частиц. Однако ее исследова™
ние важно по двум причинам. Во-первых, как правило, задача двух тел может
быть решена в терминах известных функций. Это делает ее «пробным кам-
камнем» для утверждений новых теорий. Во-вторых, такое решение можно
принять как нулевое приближение при изучении TV-частичных систем.
10.1. Лагранжиан и уравнения движения. Обобщенные координа-
координаты ri и Г2, в которых записан лагранжиан G.4) задачи двух тел, обладают
тем недостатком, что переменные ri и г 2 не разделяются. Удобно перейти
к новым переменным:
г = Г2—ri, R = —
т
По рис. 10.1 находим замену:
= R г, Г2 = R Н г .
т т
A0.2)
В новых переменных кинетическая энергия
A0.3)
где /i = mim2/(mi +тг) —приведенная
масса системы. Очевидно, что г = i*2 —
— тг — относительная скорость. Первое
слагаемое в A0.3) — кинетическая энергия системы как целого, второе —
кинетическая энергия относительного движения. Учитывая A0.2), найдем
момент импульса системы:
М = [ri-mifi] + [r2-m2r2] =m[R-R] +/i[rf]. A0.4)
Поскольку потенциальная энергия П(г1,Г2) = U(r), то в новых пере-
переменных лагранжиан
^, _ . •, т.
A0.5)
Уравнения Лагранжа
~дг
70 Глава 11. Движение системы частиц
приобретают вид
8U
тШ = 0. Интегрируя, находим R = С + VI
к
Пример 10.1. Пусть 11(тъг2) = —-(г2 — riJ. Из A0.6) следует
уравнение /лг = —кг, решение которого
r(t) = A cos out + В sin ut, ои = л/k/fi.
Общее решение
ri(t) = C + Vt- — (Acosut + Bsinut),
m
r2(i) = C + Vt+ — (A cos out + В sin out)
зависит от двенадцати постоянных. Выберем начальные условия так, чтобы
частицы двигались по окружностям радиусов (m2/m)a и (nii/m)a:
П @) = а, г2 @) = —- а, f i @) = v0 , г 2 @) = —- v0 ,
m m mm
причем vga = 0, v® = oua. В этом случае С = 0, V = 0, А = а, В = vq/cu,
m2 ( vq \
П (t) = — ^^ ( a cos out + — sin out ,
771 V 0U /
r2 (t) = - — ( a cos out + — sin out ) .
771 V CJ /
10.2. Движение в системе центра масс (СЦМ). Перейдем в СЦМ,
движущуюся со скоростью V. Учитывая A0.6),
находим, что здесь сохраняются момент им-
импульса и полная энергия:
//[г-г] = М0, -г2 + ^7(г)=Е. A0.7)
л
Эти уравнения описывают движение фик-
фиктивной частицы массой /л с радиусом-векто-
радиусом-вектором r(t). Ее называют //-точкой. Положение
Рис. 10.2 реальных частиц связано с r(t) соотношени-
соотношениями т[ = — (m2/m)r, Г2 = (nii/m)r.
Пример 10.2. Пусть U(r) = —а/г. Проведя в F.7), F.8) замену
771 —>- /i, получим решение уравнений A0.7) как решение задачи Кеплера.
На рис. 10.2 изображены траектории частиц т\ и т2 и /i-точки в случае
Е < 0,Ш2 < TTli.
Лекция 10. Задача двух тел 71
Первая космическая скорость. Предположим, что частица mi— одно-
однородный шар радиусом а. Начальные условия выбраны так, что центр шара С
и частица гп2 описывают окружности радиусов — а, — а, находясь на
т т
расстоянии а друг от друга. Величину скорости их относительного движе-
движения найдем из уравнения A0.6):
v? a
/i— = —z -> vi =
а а2
Для Земли а = 6371 км, а = m2ga2, mi >» Ш2, v\ ~ y/~ga = 7,91 км/с.
Вторая космическая скорость г?п — наименьшее значение скорости, ко-
которую нужно сообщить частице mi (находящейся на поверхности шара)
относительно шара для того, чтобы они разошлись на бесконечно большое
расстояние. Используя закон сохранения полной энергии A0.7), находим
^п - ^ = 0 "> "и = 1 +
2
а у т2а \ тг
10.3. Приближение внешнего полм. Это переход к представлению о
движении частицы ni2 в поле тяжести, создаваемом частицей mi —
однородным шаром массой шь Пусть pi, p2, Xi, T2, U — импульсы,
кинетические энергии и потенциальная энергия взаимодействия шара и
частицы в момент времени t. Из законов сохранения импульса и полной
энергии системы находим
Pi + Р2 = Pi + P2 1 A0.8)
Ti + Г2 + U = Т[ + Тз + U'. A0.9)
Штрихом отмечены указанные величины в момент времени t'. Обозначая
через q = р2 — р2 = Pi — Pi импульс, переданный частице Ш2, предста-
представим A0.9) в виде
Е'2-Е2 = -АТи г
где Е2 = Т2 + U. Если в процессе взаимодействия выполняются условия
ATi| «С I-E^l? 1^15 то изменением состояния частицы mi можно прене-
пренебречь. В этом случае говорят, что частица mi играет роль источника внеш-
внешнего поля, в котором движется частица Ш2. Вместо A0.8), A0.9) имеем
P2=P2+q, Е'2 = Е2* A0.10)
Следует помнить, что законы сохранения A0.10) выполняются прибли-
приближенно. Если не учитывать это обстоятельство, то можно прийти к множе-
множеству парадоксов. Рассмотрим один из них.
72
Глава 11. Движение системы частиц
Пусть частица Ш2 движется по вертикали вблизи поверхности Земли.
В начальный момент времени V2@) = 0. Из закона сохранения энергии
находим
0 + rri2gh = —v2/
/2
v'2 = \/' 2gAh , А/г = /г — h!.
Перейдем теперь в систему отсчета, движущуюся со скоростью и = \/2gAh
по направлению к поверхности Земли. Из законов сохранения энергии по-
получим
m2gh = 0
Aft = 0 .
Абсурдность этого результата — следствие нарушения условий приме-
применимости законов сохранения A0.10).
10.4. Система Земля-Луна в поле тяготения Солнца. Рассмотрим
систему трех тел массами mi, 7712, тпо, причем то >»
>> TTli, ТП>2-
В инерциальной системе отсчета с началом в
точке О радиусы-векторы частиц равны ri, r2, fq
(рис. 10.3). Построим лагранжиан системы в пере™
менных Икоби, производя замену ri, r2, го —» г,
R, 1, где R — вектор, идущий от частицы то к
центру масс системы частиц mi и 77i2, 1 — радиус-
вектор центра масс всей системы. По рис. 10.3 на-
находим
рис Ю.З
M
m
=1^^Ж, М — Ш\ + 7712 +
M
= ГГЦ +
m
Кинетическая энергия системы
т=мj2 + /|R2
Потенциальная энергия
Gm2m0
Поскольку R ^> г, то, учитывая разложение в ряд Тейлора функ-
функции jR + xl^1 (см. A.15)), получим
GmrriQ
3(rRJ
Лекция 10. Задача двух тел 73
Лагранжиан системы L = Т — U. Уравнения Лагранжа: 1 = 0,
R Gfrnio д [3(rRJ
A0.12)
A0.13)
Пренебрегая в A0.12) вторым членом, заключаем, что радиус-вектор си-
системы Земля-Луна описывает кеплерову траекторию. В этом приближении
уравнение A0.13) порождается лагранжианом
*?!1-41. оси,
где R = R(t) — известная функция времени. Обращаясь к уравнению
A0.13), заметим, что тпо/тп ~ 3,33 • 105, — ~ 2,56 • 10™3; отношение
Л
второго члена к первому в правой части ~ {2nio/m)(r/RK = 0,011. Эта
величина является наибольшей по сравнению с аналогичным отношением
для других планет и их спутников.
Основные особенности движения Луны вызваны возмущающим влия-
влиянием Солнца. Анализ решения уравнения A0.13) показал, что если орбиту
Луны расположить перпендикулярно плоскости эклиптики, то за 55 оборо-
оборотов (за 4,5 года) перигей орбиты достигнет поверхности Земли [33]. Сле-
Следует, однако, учесть, что Луна является телом конечных размеров и может
быть ранее разорвана гравитационными силами при достижении предела
Роша, равного трем радиусам Земли. Предел Роша — расстояние, на кото-
котором сила, действующая на «половинку» Луны со стороны Земли, начинает
превосходить силу притяжения другой «половинкой» Луны [16, 45].
Пример 10.3. Один из методов обнаружения иных планетных систем
основан на исследовании периодического смещения линий поглощения в
спектре звезды. Если щ — частота излучения неподвижным источником,
то источник, движущийся со скоростью vq = dr®/dt излучает в направле-
направлении п электромагнитную волну частотой
v1 = щ/A - nvo/c) и щ + Ai/, Аи = i/0(m/cM)(ndR/dt).
Амплитуда вариаций частоты составляет 2i/o(m/cM)(Gmo/RI^2 .
10.5. Гравитационная рогатка. Двойная звезда, массы компонент ко»
торой mi и 77i2, налетает на черную дыру массой то. В результате захвата
«дырой» звезды массой mi вторая звезда приобретает скорость V2. Пока-
Покажем, что величина V2 намного больше скорости двойной звезды.
Происходит «реакция» т\2 + то —»¦ ttiqi + rri2. Обычно mi, ni2 <C niQ.
Рассмотрим процесс столкновения в системе покоя черной дыры. Скорость
74 Глава 11. Движение системы частиц
двойной звезды — и. До столкновения двойная звезда находилась на бе-
конечно большом расстоянии от черной дыры. Поэтому полная энергия
системы равна сумме т^и2/2 — А\2 кинетической энергии двойной звез-
звезды и полной энергии относительного движения Е\2 = —^4-12? где ^12 —
энергия связи. После столкновения полная энергия системы при достаточ-
достаточно большом расстоянии между новыми объектами равна m2v2/2 + Ещ,
где Ещ = —Aoi — полная энергия связанной системы черная дыра-звезда
массой mi. Из закона сохранения полной энергии получим уравнение
т12и2 m2v2,
— ^12 = — Аи?
из которого следует, что кинетическая энергия звезды массой Ш2 равна
^2VJ TU12U2
-^ = ^— + (Аи - М2).
Энергия связи звезды и черной дыры А01 > АГ2. Поэтому v2 > и.
10.6. Движение двуж зармдов во внешнем поле. В качестве системы
рассмотрим атом водорода. Пусть mi, е — масса и заряд протона, т2, —е —
масса и заряд электрона.
1. Атом водорода б однородном электрическом поле. Потенциальная
энергия атома II(ri, г2) = — eEri + еЕг2 — ё2 /\т2 —т\ \, где Е — напря™
женность электрического поля. После замены переменных A0.2) получим
лагранжиан
Поскольку шЁ = 0, то наличие однородного поля не влияет на движение
центра масс атома. Уравнения Лагранжа
jjlt = —е2 — — еЕ
могут быть решены только в параболических, координатах.
2. Атом, водорода в квадруполъном конденсаторе с потенциалом (р =
= (Vo/2a2)(x2 —у2). Потенциальная энергия атома
П(гь г2) = ^[{х\ -у\) -{х22 ¦
|Г2 - Г1
после замены A0.2) приобретает вид
f/(R,r) = ^-| -2{RlX - R2y) - mi ~'Ш2 (ж2
2a1 m
Из уравнений Лагранжа
i?i - п2х = 0, Ё2 + О2|/ = 0, Д3 = 0, О2 =
та^
Лекция П. Упругое рассеяние частиц 75
/JL rS /JL Г6
¦¦ , е2 2/ , 02/о , 7 ч а о2 eFo 7 т1-т2
/i Н и ^оИ ш
следует, что закон движения центра масс зависит от характера относи-
относительного движения электрона и протона. Заметим, что в мазерах на ам-
аммиаке пространственное разделение атомов, находящихся в основном и
возбужденном состояниях, осуществляется пропусканием пучка молекул
аммиака через квадрупольный конденсатор.
Лекция 11. Упругое рассеяние частиц
Большую часть информации о природе взаимодействия элементарных
частиц получают с помощью ускорителей в результате анализа процессов
столкновений. Сейчас общепризнано, что изучение элементарных частиц
представляет прямой, а возможно, и единственный путь к пониманию фун-
фундаментальных законов Природы. Однако не менее важны проблемы постро-
построения моделей ядер или многоэлектронных систем, в частности биомолекул.
В связи с этим задачей теории является получение характеристик потенци-
потенциальной энергии взаимодействия многочастичных систем по данным рассе-
рассеяния.
Поскольку ядра и молекулы являются типично квантовыми объекта-
объектами, то задача должна быть рассмотрена только в рамках квантовой теории.
Тем не менее при определенных условиях становится возможным описание
рассеяния в терминах величин, ассоциированных с движением по класси-
классическим траекториям.
11.1. Кинематика упругого рассеяния. Предположим, что при t —>¦
—>¦ ^оо скорости бесструктурных частиц равны v™, v™. Это означает,
что при t = —оо траектории частиц приближаются к прямым линиям. В
терминах переменной г = г 2 — ri при t —>¦ ^оо радиус-вектор /i-точки
асимптотически приближается к функции г111 = b + vmt, где bvm =
= 0, v111 = v™ — vf1. Постоянный вектор Ь называют прицельным па-
параметром. Величина Ь равна расстоянию между прямыми линиями, по
которым двигались бы частицы в отсутствии взаимодействия. После столк-
столкновения при t —» сх) скорости частиц равны v®ut и v^. Это означает,
что радиус-вектор r(t) асимптотически приближается к функции r0llt =
= c + v0lltt. Траектории rm(t) и rout(t), являющиеся прямыми линиями,
называются входящими и выходящими асимптотами. В случае упругого
рассеяния величина относительной скорости в in- и out-состояниях сохра-
сохраняется: | v m | = | v out | = v. Процесс упругого рассеяния можно представить
как преобразование
vin-> vout = nv, A1.1)
где п — единичный вектор, определяющий кинематику рассеяния.
76
Глава 11. Движение системы частиц
Пусть и — скорость центра масс. Тогда скорости частиц до рассеяния
1 771 ' 2 771
Согласно A1.1) скорости частиц после рассеяния
out W2 out . rni
Y?m = U VU , Vo Ul = U H UI1 .
771 771
Импульсы частиц после рассеяния
р Jllt = ПЦП — flVIl , p 2Ut = ТП2П +
Угол рассеяния в в СЦМ дается соотношением
A1.2)
Вектор q = P2llt — p™ — fJ>(vn — vm) определяет импульс, передавае-
передаваемый частице Ш2 частицей m\. Его величина q = 2fiv sin @/2).
Рассмотрим рассеяние в случае, когда частица гп\ до столкновения
покоилась: v™ = 0, v™ = V2. Из A1.2) следует
° =
= к
= к/iv2
A1.3)
где к = 77i2/mi. Кинетическая энергия частиц после рассеяния в лабора-
лабораторной системе
you, =
jrout _
7711
771
2
, out\2
2m2
m
На рис. 11.1 а, б изображен процесс рассеяния (случай отталкивания)
Рис. 11.1
Лекция П. Упругое рассеяние частиц
11
соответственно в СЦМ и в лабораторной системе, где в± и 02 — углы
рассеяния мишени и частицы Ш2. На рис. 11.2 изображены импульсы
частиц. Найдем соотношения между 61,62 и 6.
В сферической системе координат с полярной осью z9 параллельной
вектору v, из A1.3) следует
Piut cos 61 = 11V2 A — cos 6), Pillt sin в 1 = /jlv2 sin 6 ,
t cos 02 =
& + cos 0),
sin 02 = 11V2 sin 0,
следовательно,
tg02 =
sin 6
k + cos 0'
A1.4)
= — — -. Из этих соотношений найдем угол разлета 0i2 = 0i + 02:
tg012 =
m2 +
Ш2 —
0
-
2
Очевидно, что при mi = rri2 угол 012 = тг/2. Разрешим A1.4) относи-
относительно eos0:
cosf9i?2 = ^
2 у
1 —
sin2 02 •
A1.5)
Из A1.5) следует, что при к > 1 существует
предельный угол рассеяния 02Ш (sin 02m =
= fc), соответствующий углу рассеяния РГ1
02 в СЦМ. 9т = тг/2 + 02т. Следовательно,
при к > 1 углу рассеяния 02 соответствуют
два угла рассеяния в СЦМ. При к < 1 угол 0
является однозначной функцией 02: cos 0 =
= —к sin2 02 + cos 02 \Д — к2 sin2 02 . Если к <С 1, то 02
Из A1.3) находим
рис
(РГ -
(p2out -
Таким образом, геометрическим местом концов векторов р^ является сфера
радиусом /ii?2. На рис. 11.2 изображены импульсы p°ut и р^ при к > 1.
11.2. Динамическая теория рассеяния. Вектор п, определяющий со-
согласно A1.1) процесс рассеяния, зависит от b и vm. Введем систему
координат с началом в центре масс и осью z, параллельной вектору vin.
В этой системе
b = (b cos C, Ь sin /3, 0), vm = @, 0, v), n = (sin 0 cos <p, sin 0 sin ip, cos I
78
Глава 11. Движение системы частиц
где в — полярный, ср
азимутальный угол вектора п в сферической
системе координат с полярной осью z. Зависи-
Зависимость b = b@, (р) определяется из решения
уравнения fir = —dll/дт с начальным усло-
условием r(t ->- -оо) = b + vmt.
Если dm/dp ф 0, то р ф (р. В этом случае
рассеяние обладает азимутальной симметрией.
Найдем соотношение, связывающее векто-
векторы b и п при рассеянии частиц с потенци-
потенциальной энергией взаимодействия n(ri, гг) =
= U(г). Из уравнений движения находим пер-
первые интегралы A0.7). В соответствии с на-
начальными условиями
Поскольку Mo г = 0, то траектория лежит
в плоскости векторов b и v. По этой причине
Рис. 11.3 ср = /?. Введем в этой плоскости полярные ко-
координаты г, х- Значению х = 0 соответству-
соответствует входящая асимптота. Функция г(х) убывает с ростом х до тех пор, пока
не достигнет минимального значения гт{п = го при х = Хо? где радиаль-
радиальная составляющая скорости обратится в нуль. Значению х = ^Хо соответ-
соответствует выходящая асимптота. Обе асимптоты расположены симметрично
относительно прямой, проходящей через начало координат и ближайшую к
нему точку траектории. В зависимости от величины прицельного парамет-
параметра Ь возможны значения хо в интервале @, 2тг). Наблюдаемый угол
рассеяния <9, по определению измеряемый в интервале @, тг), равен в =
= |тг — 2%о | • На рис. 11.3 изображены входящие и выходящие асимптоты в
случае потенциальной энергии Леннарда—Джонса D.19). Значению Ь\ со-
соответствует отталкивание, а значению &2 — притяжение. Разделяя в A0.7)
переменные, согласно E.17) получим
/ли
~2
— Г — Г ур^/ ТТ(>г\
-1/2
dr.
A1.6)
Следовательно,
U
тг-2 1- - -^ br~2dr
-1/2
A1.7)
Лекция П. Упругое рассеяние частиц
79
Пример 11.1.
1. Пусть U (г) = с/г2. С помощью подстановки г = s^1 находим
HO-c+i)-')
о
2. Положим
-1/2
-{¦
О , г > К
Ипользуя обозначения рис. 11.4, запишем закон сохранения момента им-
импульса:
п —
It
Из (И .6) находим
= «¦
7Г Ь 7Г
= а + — — arcsin ^^ = — + а — р.
2 nR 2
Угол рассеяния в = 2 (а — /?).
3. Энергия взаимодействия нейтронов с ядром
t/(r) = <j 2 V1 Д^' Г"
О, г ^ Д.
Рис. 11.4
Рис. 11.5
80 Глава 11. Движение системы частиц
Положим Е = С/о/2. Из A1.6) получим
bds 1 / тг
1/R
Отсюда находим хо — тг/2 + а/2 (рис. 11.5). Угол рассеяния в = a, sin 6> =
= b/R. Рассеяние частиц с энергией Е = Щ/2 обладает замечательной
особенностью: все частицы независимо от значения прицельного пара-
параметра фокусируются в одной точке на границе ядра. Аналогичная система
в оптике называется линзой Лунеберга.
11.3. Сечение рассеяния реакции pi + Р2 —>- р! + р2. В настоя-
настоящее время исследование столкновений электронов и тяжелых частиц с
атомами и молекулами составляет целую область физики, называемую
столкновительной спектроскопией (collision spectroscopy). Задачей тео-
теории является получение характеристик энергии взаимодействия частиц
для построения моделей многоэлектронных систем по данным рассея-
рассеяния — анализу дифференциального сечения рассеяния.
В начальном состоянии г имеем два пучка частиц, плотности которых
равны п\ ШП21 скорости частиц — vi и?2, относительная скорость час-
частиц v = V2 — vi. Для определения сечения рассеяния сталкивающихся частиц
необходимо перейти в систему покоя одной из частиц, например, частицы с
индексом «1». В этой системе скорость второй частицы vi2 = у 2 — vi = v,
плотность потока сталкивающихся частиц j = 712V21 = ri2V.
Рассмотрим определенный канал реакции — рассеяние, который обо-
обозначим буквой /. Пусть dWif — дифференциальная вероятность того,
что при столкновении частиц произойдут переходы г —»¦ / из начального
состояния в конечное за интервал времени Т. Чтобы получить харак-
характеристику процесса взаимодействия частиц, не зависящую от их плот-
плотности, объема и времени Т, нужно разделить вероятность рассеяния на
плотность потока частиц. Определенная таким образом величина da =
= dWif I\n2vT) называется дифференциальным сечением рассеяния. Раз-
Размерность Асг — [м2].
Сечение принято измерять в специальных единицах — барнах (от
англ. barn — амбар): 16= 1СГ24 см2. Какое отношение имеет амбар к
рассеянию частиц? Радиус протона « 0,13 • 1G~12 см, площадь попе-
поперечного сечения составляет 0,05 барн. Сечение 1 барн — объясняют
физики — такая же большая величина, как амбар в нашей жизни.
Отметим, что направляющие косинусы вектора п в системе покоя од-
одной из частиц и в СЦМ^ совпадают. Поэтому сечение можно представить в
виде плотности дифференциального распределения сечения рассеяния ча-
частиц массой Ш2 в элемент телесного угла dO = sin в d9d(p в направлении
вектора n: da = а(в, ф) dO.
Общее число переходов в объеме V в течение времени Т Ai/if =
= dWiffiiV = vnin2da VT. Следовательно, при переходах г ^ / из
Лекция П. Упругое рассеяние частиц
81
начального состояния в конечное частицы эффективно взаимодействуют в
пределах площадки da, расположенной перпендикулярно относительной
скорости частиц.
11.4. Упругое рассеяние. Предположим, что плотности пучков нас-
настолько малы, что можно пренебречь многократным рассеянием. В случае
упругого рассеяния переход из состояния vm в состояние vout опре-
определяется ветвями неоднозначной функции Ь(в), неявно зависящей от
потенциальной энергии взаимодействия частиц. Если пренебречь кван-
товомеханическими эффектами, то дифференциальное сечение упругого
рассеяния в СЦМ можно представить в терминах якобиана перехода пе-
переменных Ь(в), /3 —> 6, (р:
da = Ъ db dC = а(Е, в, ip)d cos в dip,
д (cos <9, ф)
где Е = [iv2/2. Если потенциальная энергия взаимодействия частиц
п|), то p = ip:
*(Е, 0) = \
A1.8)
Полное сечение рассеяния а(Е) можно найти из A1.8) путем ин-
интегрирования по телесному углу. Отметим, что математический аппарат
квантовой теории рассяния приводит к выражению для сечения а(Е) в
форме интегралов по фазовому объему рассеянных частиц в терминах
интегралов:
+P2 -Pi -Pa)
ei/ ei/ \
— Ьг — Ь2)
содержащих дельта-функции Дирака, явно учитывающие закон сохранения
энергии-импульса. Действительно, в СЦМ
Pi + Р2 = 0,
Ег + Е2 = Е,
Zfi
Первая <5-функция устраняется интегрированием по d 3p{, дифференци-
дифференциал d3p>2 = p/2 dp' dO. Интегрирование по dp' тривиально благодаря
свойству ^-функции:
82 Глава П. Движение системы частиц
*») = о,
Теперь можно перейти к дифференциальному сечению одной из частиц
в любой инерциальной системе отсчета. Эта процедура эквивалентна
вычислению якобиана перехода к новым переменным.
11.5. Дифференциальные распределения в лабораторной системе.
Пусть в этой системе pi = 0, р2 = m2V. Найдем дифференциальное
сечение рассеяния частиц мишени в лабораторной системе. После интегри-
интегрирования по d3p2 остается 5-функция, аргумент которой обращается в нуль
при значении р[ = 2/jlv cos в\. В результате интегрирования
(р2 - Pl' - p^)S(E2 - Е{ -
получим сечение da/dcos9\ = 4| cos#i|cr(i?, 2в\). Здесь мы учли, что в
СЦМ угол рассеяния частицы mi равен тг — 6>. Поскольку в = тг — 29\,
то <г(Е, тг-0) =<т(Е, 201).
Пример 11.2. Прямая задача —рассеяние а-частщ на атомных
ядрах. Пусть mi, Ze(m2, 2e)—масса и заряд ядра (а™частицы). Потенци™
альная энергия взаимодействия U = а/г, а = 2Ze2. Учитывая значение
интеграла F.11), из A1.7) находим
[91 -1/2
/ а \ 2\
\
2ЬЕ
Разрешая это соотношение относительно Ь, имеем
~ 2Е Ctg 2 ~ 2Ё V 1 - cos 6>J
Подставляя Ь в A1.8), получим формулу Резерфорда:
где q = 2/хг; sin 0/2.
11.6. Обратная задача рассеяния. Эксперименты по рассеянию по-
позволяют найти функцию а(Е, в). Можно ли, зная ст(Е, в), опреде-
определить U (г)?
Лекция П. Упругое рассеяние частиц 83
Из определения сечения A1.8) имеем
7Г
Ь2 = 2 \ dO sin ва(в, Е). A1.9)
Обратная функция <9(Ь, Е) в общем случае многозначна: одному значе-
значению в соответствуют несколько траекторий с различными прицельными
параметрами. Правильный учет вкладов всех ветвей в сечение рассея-
рассеяния возможен только в рамках квантовой механики. Здесь проявляется
квантовая интерференция потоков, происходящих от траекторий с раз-
различными прицельными параметрами, но рассеивемых на один и тот же
угол. Эта особенность рассеяния наиболее существенна в окрестности
значений Ь, соответствующих максимумам и нулям функции 6(b, E).
Возникает сложная осцилляторная структура сечений, описывающая эф-
эффекты сияния и атомной радуги [46].
Ограничимся наиболее простым случаем восстановления монотонного
поля U(г), удовлетворяющего в случае отталкивающего потенциала усло-
условиям
lim U(г) ->0. (НЛО)
Учитывая, что \ drbr 2 \ 1 — — 1 =тг/2, представим A1.7) в ви-
J V г2)
де [47]
го b
Поскольку го неявно зависит от Ь, то удобно перейти к переменной z:
^=r2h_U(r)
е
Преимущество новой переменной в том, что теперь пределы интегри-
интегрирования по dz явно зависят от Ь, а именно z(oo) = оо, z{tq) = Ь.
Функция rj принимает вид
b,E)=\ dz(z2 - Ь2I'2 ^-F(z, E), A1.12)
b
84
Глава 11. Движение системы частиц
где F = In (r(z, E)/z). Интегрируя по частям и учитывая A1.10), имеем
оо
rj(b,E) = - [ dz(z2 -Ь2У1/2 zF(z, E). A1.13)
ь
Соотношение A1.13) является интегральным уравнением Абеля, ко-
которое может быть решено следующим методом [48]. Умножим A1.13)
на b(b2 — t2)^1/2 и проинтегрируем по db в пределах от t до бесконеч-
бесконечности:
оо оо
= j dzzF(z,E)
t
dbb
= - | dzzF(z,E).
Здесь мы учли значение интеграла
[ dx (х2 - хУа(х - хг)^1 = -
J si
sinavr
¦, 0 < а < 1.
Следовательно,
2 d
7ft dt
OO
J
Поскольку 7^F = оо, E) = 0, то, интегрируя по частям, получим
V ^ 7Tt dt J db 7Г J db
Учитывая, что в = 2drj/db, находим
оо
F(t,E)=1-\db^
Ь2 - t2'
A1.14)
Теперь мы легко вычислим 17(г). Определяя из A1.14) F(t, E), получим
параметрическое представление решения обратной задачи рассеяния:
Лекция П. Упругое рассеяние частиц
85
Полагая w = \/l — U(r)/E, найдем неявную зависимость
-- db
J
Ь,Е)
w = ехр
а тем самым и U(г) [28].
Рассеяние намалыеуглы. Рассмотрим подробнее восстановление U(r)
по данным рассеяния при высоких энергиях Е ^> \U(r)\. В этом случае
из A1.11), A1.12) находим
2Е
2Е '
Формула A1.14) непосредственно определяет
ОС
U(г) ~ - [
тг J
db
т(Ъ)=Ев{Ъ,Е).
A1.15)
A1.16)
Из A1.16) следует весьма важный вывод о том, что в пределе вы-
высоких энергий Ь является функцией автомодельной (или масштабной)
переменной т = Ев. В этом случае A1.9) можно представить в виде
Ь2(т) ~ I — /о(г), /о(г) = lim 2
Т .Е^оо
A1.17)
Функция /о (т) имеет универсальный характер, поскольку может быть
построена на основе всех данных рассеяния, соответствующих широ-
широкому интервалу энергий. Определяя функцию т(Ь), обратную A1.17),
из A1.16) найдем потенциальную энергию взаимодействия частиц.
ПримерП.З. Восстановим потенциальную энергию взаимодей-
взаимодействия а-частиц и ядер, используя данные рассеяния при малых углах:
<т@, Е) = а2 Е2/т4. Из A1.17), A1.16) находим
2«2
т2
86 Глава 11. Движение системы частиц
11.7. Условие классичности рассеяния. Для того, чтобы говорить о
классическом рассеянии на угол 9 при значении прицельного параметра Ь,
необходимо, чтобы квантовомеханические неопределенности этих величин
были малы: АЬ <С Ь, А9 <С в. Неопределенность угла рассеяния А9 ~
~ Ар/р связана с неопределенностью прицельного параметра АрАЬ > Н.
Следовательно, условие классичности рассеяния
^ Ai. (ЦЛ8)
А6 ^»
рАЪ Ър
8 то же время классический угол рассеяния в приближении малых углов
9 « Арх/р, где Арх — приращение поперечной к скорости составляю-
составляющей импульса. Имеем
*± At
в At
р р Аг р up
Подставляя <9 в A1.18), получим \U(b)\^> hv/b. Таким образом, для
полей U ^ а/гп, убывающих быстрее, чем кулоновское поле, это нера-
неравенство нарушается при значении Ь ~ bo = (a/hvI^n~1\ для которого
А9 ~ \9\. Для параметров Ь > bo классическое описание рассеяния
невозможно [49].
В качестве модели короткодействующего потенциала рассмотрим вза™
имодействие точечных частиц с упругими шариками радиусом а. В этом
случае прицельный параметр и угол рассеяния связаны соотношением
b = a cos 9/2, Полное сечение at = тга2 равно площади поперечного
сечения шарика. Этот результат не согласуется с экспериментальными
измерениями полного сечения рассеяния частиц на ядрах. Правильный
ответ дают вычисления по методу квантовой механики: at = 2тга2. Рас-
Рассеяние частиц описывается волновой функцией, которая представляет
суперпозицию двух слагаемых. Одно из них описывает отражение от
шарика и дает в сечение вклад, равный тта2. Другое — тенеобразую-
щее — появляется в силу того, что за шариком возникает область тени,
в которой вероятность найти частицу мала. Интерференция падающей
волны с тенеобразующей волной и приводит к появлению области тени.
Вклад этого слагаемого в сечение равен па2. Полное сечение at = 2тта2.
Следует отметить, что подобный результат был получен Г.А. Ми в 1908 г.
при вычислении сечения рассеяния света на шариках задолго до создания
квантовой механики. Именно дифракционное отклонение на малые углы
9 < А/а, где А = Н/р, приводит к дополнительному вкладу в сечение
рассеяния. В этой области дифференциальное сечение рассеяния а (9)
имеет острый максимум. Однако при больших углах 9 > А/о сечение
рассеяния стремится к классическому пределу а(9) = а2/4. Какой же
результат получит экспериментатор, наблюдая упругое рассеяние частиц
с импульсами р = 1 ГэВ/с на шаре радиусом о = 1 см? Ответ: at = тта2,
а не 2тта2. Дело в том, что за шаром рассеянная волна формируется
Лекция 12. Ограниченная задача трех тел 87
на расстояниях I ~ а/0 = а2 /X. Поскольку А ~ 1,2 • 1СГ15 см, то I ~
^ 1010 км, т.е. измерения для подтверждения теории придется проводить
на расстояниях, превышающих астрономические. Поэтому эксперимент,
в котором исключены малые углы, приводит к классическому значению
сечения. Однако при рассеянии на ядрах (А ~ a, Z ~ А) классическая
теория неприменима.
11.8. Рассеяние тождественных частиц. Следует отметить, что се-
сечение рассеяния заряженных частиц, вычисленное в рамках квантовой
механики, сопадает с сечением, полученным в примере 11.2. Однако,
положив в формуле Резерфорда wi = w2? получим сечение рассеяния
одинаковых частиц, которое не согласуется с экспериментальными дан-
данными. В рамках классической механики невозможно описание систем
тождественных частиц. Только в квантовой механике разработан матема-
математический аппарат для анализа систем многих частиц — бозонов (частиц с
целым спином) и фермионов (частиц с полуцелым спином). Тождествен-
Тождественность частиц проявляется в несиловом, так называемом обменном взаи-
взаимодействии. Так, согласно теории вероятность обнаружить два фермиона
с одинаковыми значениями проекций спина на расстоянии ^ = |г2 — ri |
уменьшается до нуля при s —>• 0.
Рассмотрим, например, фермионы — ядра 3Не и бозоны — ядра 4Не.
Поскольку заряды ядер одинаковы, то в классической теории сечения
упругого рассеяния процессов 3Не + 3Не, 3Не + 4Не, 4Не + 4Не должны
лишь слегка отличаться из-за различия в массах ядер. Однако установле-
установлено, что при столкновении двух пучков ядер 4Не вероятность рассеяния
на угол 90 ° в четыре раза больше, чем при столкновении ядер 3Не и 4Не.
В другом эксперименте вероятность рассеяния на 90 ° при столкновении
пучков ядер 3Не согласно теории оказалась равной нулю.
Лекция 12. Ограниченная задача трех тел
При решении проблемы космонавтики и астрономии важную роль
играет так называемая ограниченная задача трех тел. Рассматривается
система трех частиц массами Ш1,Ш2,шз, причем масса одной из них,
тпз <С mi, 7П2. Если пренебречь ускорениями, которые сообщает легкая
частица двум массивным частицам, то они будут двигаться по кепле-
ровым траекториям. Задача состоит в интегрировании уравнений дви-
движения частицы массой тз, движущейся во внешнем гравитационном
поле, создаваемом частицами mi и wi2. Примерами ограниченной за-
задачи трех тел являются Солнце-планета-комета, Земля-Луна-спутник
и т.д.
12.1. Лагранжиан ограниченной задачи трех тел. Пусть в инерци-
альной системе отсчета с началом в точке О радиусы-векторы частиц
гъ Г2? гз- Перейдем к переменным Г12, R, г, где R — радиус-вектор
Глава 11. Движение системы частиц
центра масс частиц wi и Ш2 (рис. 12.1):
Wl2
= R
Г12, r2 =
Ш12
2, r3 = R + r; mi2 =
+ m2.
Кинетическая энергия системы
Г = — R2 + — f22 + — г2 + m3Rr, M =
Z Z Z
+ w2 + m3.
В соответствии с принятым приближением представим лагранжиан систе-
системы в виде G.11): Lab = 1а + 1в + ^ав, где
= -^- г , 1В = — R + -— г12 + G
2 z 2 Г12
ТП12
¦ri2 + :
-Г12
Уравнения G.12):
R = 0,
r 12
A2.1)
имеют решение R = С + Vt, r 12 = ?(?). Лагранжиан G.13), описыва-
описывающий движение частицы ш3 в инерциальной
системе отсчета с началом в центре масс частиц
mi и т25 приобретает вид
Т (г т» f\ — — т»^ ТТ(г +\ (\ 1 1\
т2
777-12
mi
Ш12
В A2.2), соответствии со свойством G.6), опу-
опущено слагаемое в m3Vr в 1ав- Далее мы будем
использовать лагранжиан A2.2) для решения ряда задач небесной меха™
ники.
12.2. Ограниченная круговая задача трех тел. В 1834 г. немецко-
немецкому математику К.Г. Якоби удалось получить первый интеграл уравнения
движения. Пусть вектор ? описывает окружность радиусом I, вращаясь
с угловой скоростью О. Перейдем в систему отсчета К1\ вращающу-
вращающуюся с угловой скоростью О. Ось z1 направим по вектору О, а ось х'
Лекция 12. Ограниченная задача трех тел 89
совместим с вектором ?(?). Произведя в A2.2) замену (8.4), запишем
лагранжиан (8.5) (опуская штрихи и полагая w3 = m):
777
L' = - (A2 + f + i2) + тп(ху - ух) - U(x, у, z), A2.3)
-G , mmi _-G—^"a A2.4)
m2 mi
I, x2 =
i2 12 '
Поскольку dL'/dt = 0, то обобщенная энергия (8.9) сохраняется:
Полагая ж = ^ = i = 0, получим уравнение поверхности Е = U(ж, 2/, z),
определяющей границы области пространства, в которой может двигать-
двигаться частица т. Эту проблему впервые поставил американский астроном
Дж.В. Хиллв 1877 г.
12.3. Точки либрации (от лат. libra — весы). Найдем координаты то-
точек, в которых сумма сил тяготения и центробежной силы, действующих
на частицу, равна нулю:
* о, §Uo, * о. (li3)
ох ду oz
Эти точки, определяющие положения относительного равновесия (во
вращающейся системе отсчета), называются точками либрации. Очевид-
Очевидно, что решение системы A2.5) представляет частный случай лагран-
жевых движений трех тел (см. (9.2)). Подставляя в A2.5) производные
1 8U 2 х-Х! х-х2
i + G о h Gт2 «—,
= irx
т дх г{3
т ду
1 dU z
т dz rf3
r23 = \/{x-x2J +y2
90
Глава 11. Движение системы частиц
получим координаты точек либрации двух типов [30, 35].
1. «Коллинеарные» точки Ь\, L2, Ьз находятся на оси х и определя-
определяются корнями уравнения
X — Xi
rp rp t
\Jb dj 1
X - Х2
\Х ~~ Хо
= 0.
Если w2/mi2 = ifc<Cl, то координаты точек Lb L2, L3 образуют после™
довательность (рис. 12.2):
к
1/3
к
1/3
7к
2. «Треугольная» точка L^ с координатами
mi — wi2 l л/3
= Г23 =
Координаты точки L§ — (жо, —г/о? 0) (рис. 12.2). В окрестности точки
обобщенная потенциальная энергия
т
U(x, 2/, z) = U(x0, I/o, 20) - — [feu(ж - xoJ +
+ 2fc12(a; - *<,)(!/ - J/o) + kT2{y - y0J} + Ц П2 z2 + ..., A2.6)
3
hi = 7O2,
4
- W2
3\/3
Ш12
Лекция 12. Ограниченная задача трех тел
91
Переходя к переменным х'п = хп — хпо, запишем уравнения Лагранжа:
х' - 2пу' - kllX' - к12уг = 0, A2.7)
у' + 2пх' - к12х' ~~ к22у' = 0, A2.8)
OV = 0
A2.9)
Найдем условие существования ограниченных решений системы A2.7),
A2.8): х'п = Re ипе^гМ (п = 1, 2). Характеристическое уравнение (А2 +
+ кп)(А2 + к22) ^ DО2А2 + к\2) = 0 представим в виде
т
12
Собственные значения
A-L 2 —
О2
1±4/1-27
п\2
действительны при условии 21т\т2 <{т\ + т2J. Полагая m2/mi2 = k,
получим условие устойчивости в виде [30]
В системе Солнце-Юпитер (к = 0,001)
известны две гуппы астероидов: «греки» — в
окрестности точки L^ и «троянцы» — в ок-
окрестности точки L5. Вблизи треугольных то-
точек в системе Земля-Луна польский астроном
К. Кордылевский обнаружил скопление метеор-
метеорной пыли A961 г.).
12.4. Вклад Луны в ускорение свободного падения. Пусть mi, m2
являются массами Земли и Луны. Перейдем в систему отсчета с нача-
началом в центре Земли. С этой целью произведем в A2.2) замену перемен-
т2
ных г —>¦ ri3: ^^ С + г = 1*13 (рис. 12.3). Имеем
Рис. 123
f2 =
Учитывая A2.1), находим
?г13 = -77(?Пз)-<
G
92 Глава 11. Движение системы частиц
Подставим г2 в A2.2) и опустим функцию времени и полную производную.
В результате получим лагранжиан
b(ri3, ri3, t) = у г?3 - П (пз, t), A2.10)
Предположим, что частица движется в области гхз <С С- Учитывая раз-
разложение в ряд Тейлора A.15), найдем
П(г13) t)~-G— — ^^ -^ j . A2.12)
Вклад Луны в обобщенную потенциальную энергию можно предста-
представить в виде
П (пз, t) = -G ^^ + m 99 (rig, t),
ПЗ
где (/?(х5 t) — приливный потенциал,
г, д2
2 о^ао^/з V С
В общей теории аналогом величины Еар является тензор Римана, опи-
описывающий кривизну пространства-времени [50].
Уравнения Лагранжа имеют вид
Г13 , ^ \ 3(г1з|)С 1*13 1
-Y" + Gmm2 ^ ~ тт • A2.13)
fi3 L s s J
Пусть а — радиус-вектор некоторой точки на поверхности Земли
(рис. 12.4). Полагая гхз = а + г, |г| <С а, ограничимся в A2.13) при-
приближением однородного поля:
wr = mg0
go = -Gmi ^7, Ag = Gm2 ^
В точках поверхности Земли, лежащих на прямой, перпендикулярной век-
вектору ?, величина ускорения свободного падения g ~ go+Gw2a/C3- В точ-
точке ^4 на поверхности, обращенной к Луне, и в точке С на противоположной
стороне Земли величина g одинакова: gA,c = So ~~ 2Gni2a/^3. Относи-
Относительное изменение силы тяжести Ag/g ^ (шг/шх) (а/03 = 5,3 • 10^8.
Ничтожное различие в ускорении свободного падения приводит к повыше-
повышению уровня воды в точках А иС. В результате суточного вращения Земли
Лекция 13. Межпланетные полеты 93
вокруг своей оси двугорбая водяная поверхность перемещается. Это и есть
приливы [51].
Сила трения, действующая со стороны воды на земную поверхность,
приводит к торможению вращения Зем-
Земли. Угловая скорость вращения умень-
уменьшается — продолжительность суток воз-
возрастает. Приливное воздействие Луны
приводит также к деформации Земли как
упругого тела. Когда-то породы Луны
были в расплавленном состоянии. При-
Приливное трение замедляло вращение Лу-
Луны и теперь она обращена к Земле одной
стороной.
Угловая скорость вращения Земли
превышает угловую скорость Луны на ор-
орбите. Поэтому из-за трения приливный
выступ достигает максимума не в точке
на прямой, соединяющей центры Земли р . ~ .
и Луны, а в точке, смещенной в направ-
направлении вращения Земли. Более того, из-за
различия наклонов плоскости земного экватора B3°) и плоскости орби-
орбиты Луны E°) к эклиптике, вращение Земли выносит приливный выступ
из плоскости орбиты. Гравитационное взаимодействие Земли и Луны ста-
становится асимметричным относительно прямой, соединяющей их центры.
В результате возникают моменты сил, действующих на оба тела. Кине-
Кинетическая энергия вращения Земли переходит в тепло и полную энергию
орбитального движения Луны — расстояние между Луной и Землей воз-
возрастает.
Лекция 13. Межпланетные полеты
13.1. Солнечная система. Первые запечатленные наблюдения за дви-
движением Солнца на фоне звездного неба относятся к эпохе IV-III тыс.
до н. э. В III тыс. до н. э. шумерские астрономы определяли начало но-
нового года — день весеннего равноденствия — по вступлению Солнца в
созвездие Тельца. В этот день плоскость экватора совпадает с плоскостью
эклиптики. Интересно, что контур созвездия Тельца, похожий на букву А,
послужил прообразом первой буквы алфавитов большинства языков ин-
индоевропейской группы. Почти за 2000 лет точка весеннего равноденствия
сместилась навстречу видимому перемещению Солнца и во II в. до н. э.
оказалась в созвездии Овна. Сейчас она находится в созвездии Рыб, пере-
передвигаясь ежегодно на 50, 26 . Поэтому Солнце, последовательно прохо-
проходя через все созвездия Зодиака, вернется к исходному положению через
26000 лет. Это явление обнаружил величайший астроном древности Гип-
парх (II в. до н. э.) и назвал его прецессией — предварение равноденствий.
94 Глава 11. Движение системы частиц
Происхождение прецессии объяснил И. Ньютон. Смена сезонов вы-
вызвана обращением Земли вокруг Солнца и наклоном ее оси к плоскости
эклиптики на 23, 5°. Из-за того, что Земля сплюснута у полюсов, мо-
моменты сил, действующих на нее со стороны Солнца и Луны, приводят к
вращению оси вокруг нормали к плоскости эклиптики с периодом 26000
лет.
Человека всегда поражал беспредельный мир небесных светил — эта
грандиозная лаборатория, открытая для любознательного ума. Звезды ка-
казались неподвижными друг относительно друга, а группа, состоящая из
пяти светил (Меркурий, Венера, Марс, Юпитер, Сатурн), перемещалась
на фоне звезд, описывая петли и зигзаги. Отсюда и название — планета
(от греч. planetes — блуждающая). Изучение движений планет и созда-
создание моделей, объясняющих их перемещение, сыграли решающую роль в
развитии астрономии.
По Аристотелю, Земля является центром мира, вокруг которого вра-
щаются сферы с планетами и звездами. В 250 г. до н. э. Аристарх Са-
мосский высказал гипотезу, согласно которой Земля имеет форму шара,
вращается вокруг своей оси и движется вокруг Солнца. Однако эти идеи
явно противоречили обыденным представлениям своего времени и не
сыгрыли заметной роли в античной науке.
Наибольшее распространение получила геоцентрическая теория дви-
движения планет, развитая Птолемеем A50 г. до н. э.) на основе схем, из-
известных античным астрономам. Хуже всего в системе Птолемея оказа-
оказалось то, что она была достаточно точно подогнана под известные данные
наблюдений и во многих отношениях оказалась неуязвимой для опровер-
опровержения [52].
После III —IV вв. античная астрономия приходит в упадок. Только в
XIII в. начинается возрождение и утверждение идей Аристотеля в рамках
христианской религии. Одновременно возрастает политическая, эконо-
экономическая, культурная и научная активность общества, получившая в XIV
столетии название Ренессанса (Возрождения). С началом эпохи Великих
географических открытий (X. Колумб, 1492; Ф. Магеллан, 1519-1521 )
пришлось отбросить представление о Земле как о плоском круге. Несо-
Несостоятельность многих положений Аристотеля привела к развитию новых
идей.
В 1543 г. выходит знаменитое сочинение Н. Коперника A473 - 1543),
в котором впервые в истории астрономии дана правильная схема стро-
строения Солнечной системы [53]. Определены относительные расстояния
от планет до Солнца, периоды обращения планет, получило объяснение
петлеобразное видимое движение планет. В 1605 г. И. Кеплер открыл два
закона, описывающих движение планет. Еще более десяти лет потребо-
потребовалось для установления третьего закона A618—1619). В 1609 году Г. Га-
Галилей впервые направил на небо телескоп. Он обнаружил фазы Венеры,
лунные горы, пятна на Солнце. Открытие спутников Юпитера опровергло
утверждение о Земле как о единственном центре вращения [54].
В 1679 г. И. Ньютон убедился, что если тело движется по коническому
Лекция 13. Межпланетные полеты 95
сечению под действием силы, направленной к фокусу, то величина си-
силы должна изменяться обратно пропорционально квадрату расстояния от
фокуса. Для доказательства этого утверждения он воспользовался техни-
техникой дифференцирования. Прямую задачу решил в 1710 г. И. Бернулли.
Существует ряд предположений относительно того, почему сам Ньютон
не использовал метод интегрирования. Возникла даже дискуссия на тему:
доказал ли Ньютон, что из закона всемирного тяготения следуют законы
Кеплера [55, 56]?
Первым подтверждением закона всемирного тяготения было предска-
предсказание возвращения кометы Галлея. Ее появление отмечалось задолго до
нашей эры. Английский астроном Э. Галлей подметил сходство в опи-
описании хвостов комет 1531, 1607 и 1682 гг. Он предсказал возвращение
кометы через 76 лет в 1758 г. Правда из-за возмущения, вносимого в ее
траекторию Юпитером и Сатурном, комета 'Галлея запоздала и появилась
в'1759 г
В 1781 г. В. Гершелем была открыта новая планета Солнечной систе-
системы. Ее назвали Ураном. Обнаруженные в 1787 г. два е- спутника позволи-
позволили определить массу Урана. В 1801 г. итальянский астроном Дж. Пиацци
обнаружил первый астероид (от греч. asteroid — звездоподобный) — так
назвали небольшие планеты размерами от 200 до 800 км. За два века наблю-
наблюдений открыто 18 000 астероидов. Точные орбиты известны для почти 5 000
астероидов. Большинство этих орбит лежат между орбитами Марса и Юпи-
Юпитера — это так вызываемый главный пояс астероидов. Средние расстояния
от Солнца лежат между 2,1 и 3,3 а.е. Преобладающее возмущение на движе-
движение астероидов оказывает Юпитер — существуют области пространства, в
которых сгущения или зазоры в их распределении связаны с резонансным
отношением периодов вращения астероидов и Юпитера.
К 1820 г. были установлены элементы эллиптической орбиты Урана.
Однако последующие наблюдения расходились с данными теоретических
расчетов. Английский астроном Д. Адаме и французский астроном У. Ле-
верье независимо в 1845- 1846 гг. предположили, что траектория Урана
возмущается неизвестной планетой и предсказали ее положение. Откры-
Открытие в сентябре 1846 г. немецкими астрономами И. Галле и Г. д'Аррестом
новой планеты — ее назвали Нептун — явилось триумфом небесной
механики. История астрономии еще не знала подобных примеров [57].
Наиболее трудной проблемой небесной механики оказалось несоот-
несоответствие между теоретическим и наблюдаемым перемещениями пери-
перигелия Меркурия. Предположения о возмущении, вносимом неизвестной
планетой, не подтвердилось. Только в 1916 г. этот эффект получил объяс-
объяснение в рамках созданной А. Эйнштейном общей теории относительно-
относительности. Согласно Эйнштейну, смещение перигелия Меркурия обусловлено
заметным искривлением пространства-времени в окрестности Солнца.
После уточнения масс всех планет все же остались небольшие
расхождения теории с наблюдаемым положением Урана. Преемник Ле-
верье А. Гайо и американский астроном П. Ловелл в 1908 - 1915 гг. «вы-
«вычислили» новую планету. Через 15 лет она была открыта американским
96 Глава 11. Движение системы частиц
астрономом К. Томбо [57] и названа Плутоном.
13.2. Наша Галактика и Вселенная. Любопытно, что только в два-
двадцатые годы нашего столетия развеялось эгоцентрическое заблуждение
человека относительно его места во Вселенной. Это произошло благо-
благодаря тому, что были найдены способы определения расстояния до очень
удаленных звезд. Солнечная система — ничтожная часть нашей звезд-
звездной системы, называемой Галактикой (от греч. galaxias — молочный).
Она содержит 100 млрд. звезд, распределенных в центральном ядре и
отходящих от него спиральных ветвях, расположенных в плоском слое
толщиной ^ 10 св. лет. Центр Галактики находится в созвездии Стрельца.
Радиус Галактики составляет 50 000 св. лет, причем Солнце отстоит от
центра на 30 000 св. лет. С Земли Галактика предстает в виде Млечного
Пути — совокупности звезд, наблюдаемых в главной плоскости. В поло-
полосе Зодиака (от греч. zodiakos kyklos — звериный круг), перпендикулярной
плоскости эклиптики, расположены 12 зодиакальных созвездий. Галак-
Галактика вращается. Период обращения Солнечной системы (^225 млн. лет)
неофициально назван «космическим годом».
В 1926 г. Хаббл обнаружил звездные системы, находящиеся вне Млеч-
Млечного Пути. Полученное Хабблом доказательство внегалактической при-
природы этих систем явилось выдающимся событием в истории астроно-
астрономии. Оказалось, что галактики часто встречаются группами, образующи-
образующими устойчивую систему. Наша Галактика входит в одну из таких систем,
названную Местной группой. В Местной группе, содержащей 24 члена,
Галактика Андромеда — самая крупная, а наша Галактика — вторая по
величине. Расстояние между ними оценивается в 2,2 млн. световых лет.
Сейчас количество доступных наблюдению внегалактических объек-
объектов составляет порядка 100 млн. Спектральные линии излучения всех
галактик, кроме членов Местной группы, смещены в красную сторо-
сторону, причем, чем дальше расположена галактика, тем больше ее красное
смещение. Отсюда следует, что Веленная в целом расширяется. Хаббл
установил линейную зависимость между расстоянием и скоростью удале-
удаления [44]. В 1960 г. поиск далеких космических объектов привел к удиви-
удивительным результатам — был открыт новый класс объектов, самых дале-
далеких из всех известных; скорость их удаления достигала более половины
скорости света. Эти объекты назвали квазарами (сокр. от quasi-stellar
radios our се — квазизвездный источник радиоизлучения). Ближайший яр-
яркий квазар ЗС273 находится по разным оценкам на расстоянии от 1,5 до
3 млрд. св. лет. Светимость яркого квазара может внезапно в 1000 раз
превысить светимость нормальной галактики, причем основная часть
энергии излучается из области, размерами всего нескольких световых
месяцев. Остаются непонятными процессы, приводящие к такому выде-
выделению энергии, соответствующей возгоранию примерно 10 млн. звезд
в секунду. Согласно одной из гипотез мощное излучение квазаров воз-
возникает благодаря разогреву вещества, перетекающего от звезды-сверхги-
звезды-сверхгиганта к черной дыре. Черная дыра — компактный, сверхплотный объект,
Лекция 13. Межпланетные полеты 97
который ничто, включая свет, не может покинуть. Она возникает в ре-
результате гравитационного сжатия звезды, в недрах которой угасли термо-
ядерные реакции, до размеров, меньших rg = 2GM/c2( M — масса звезды).
Одним из признаков черной дыры было бы обнаружение области с высо-
высокой концентрацией звезд. Наблюдения со спутника в телескоп «Хаббл»
позволяют предположить, что в центре туманности Андромеды нахо-
находится сверхмассивная черная дыра. Другое явление связано с возмож-
возможным наблюдением быстро движущихся звезд, отброшенных от черной
дыры благодаря эффекту «гравитационной рогатки». Если двойная звез-
звезда приблизится к черной дыре, то один ее компонент захватывается на
орбиту вокруг черной дыры, а другой — выбрасывается со скоростью
до 10 000 км/с.
Исходя из наблюдаемых скоростей расширения Вселенной мож-
можно предположить, что 12 млрд. лет назад все первоначальное вещество
должно было находиться в сверхплотном состоянии в области разме-
размером 1СР33 см. Этот размер соответствует времени ~ 1СР43 с с момента на-
начала расширения. Будет ли Вселенная расширяться вечно или она в конце
концов снова сожмется — одна из фундаментальных проблем астрофизики.
С началом космической эры, когда появилась возможность прово-
проводить наблюдения с помощью спутников, пилотируемых и автоматических
станций, наши представления о Вселенной существенно изменились [59,
60]. Невозможно перечислить все множество результатов, полученных
на основе космических исследований. Приведем лишь краткий обзор,
посвященный межпланетным полетам.
13.3. Полеты к Луне. Четырнадцатого сентября 1959 г. советская ав-
автоматическая станция «Луна-2» достигла поверхности Луны. Это был
первый перелет с Земли на другое небесное тело. В октябре того же
года «Луна-3» совершила облет Луны и передала изображение ее обрат-
обратной невидимой стороны. Третьего февраля 1966 г. впервые осуществле-
осуществлена мягкая посадка на поверхность Луны советской станции «Луна-9».
В сентябре 1970 г. станция «Луна-16» совершила рейс Земля-Луна-Земля.
В 1969-1972 гг. предприняты шесть успешных американских, экспеди-
экспедиций по программе «Аполлон». В каждой участвовали три астронавта: двое
совершали посадку на Луну, а третий оставался в основном блоке. Луна
оказалась стерильной, на ней не обнаружено никаких форм жизни.
Анализ лунных пород показал, что возраст Луны и Земли одина-
одинаков: ~ 4, 5 млрд. лет. Луна имеет расплавленное ядро, мантию и кору.
Обнаружены области с повышенной плотностью — масконы. Текто-
Тектонические процессы в недрах Луны закончились: конечная стадия лун-
лунной истории — состояние покоя. Вопрос о происхождении Луны остал-
остался нерешенным. В лунных породах чаще, чем в земных, встречаются
металлы с высокой температурой плавления. Возможно, она образовалась
в более высокотемпературных условиях, чем Земля. Любая теория ее
происхождения должна также объяснить различие в плотностях Луны
(~ 3,36 г/см3) и Земли (~ 5, 56 г/см3).
98 Глава 11. Движение системы частиц
13.4. Полеты к Венере. В настоящее время исследование внезем-
внеземных миров возможно с помощью автоматических межпланетных стан-
станций (АМС). В результате пролета 14 декабря 1962 г. станции «Мари-
нер-2» на расстоянии 35 тыс. км от Венеры было установлено, что пе-
период вращения планеты B43 сут.) больше, чем период вращения вокруг
Солнца B24,7 сут.), т.е. на Венере день длиннее года. Другая интересная
аномалия — Венера вращается вокруг оси в направлении, обратном по
отношению к Земле и большинству планет. В1966 г. станция «Венера-3»
достигла поверхности, осуществив первый полет АМС на другую плане-
планету. В 1967 г. анализ данных, полученных станцией «Венера-4», показал,
что атмосфера планеты состоит из углекислого газа — этот факт явился
фундаментальным открытием в физике планет. «Венера-7», запущенная
в августе 1970 г., передала информацию о давлении 9 МПа (такое дав-
давление на Земле создает вода на глубине 0,8 км) и температуре 475 ° (при
которой кипят свинец и цинк).
13.5. Полеты к Марсу. Эти полеты начались с 1961 г. Четырнадца-
Четырнадцатого ноября 1971 г. АМС «М.аринер-9» была успешно выведена на ор-
орбиту вокруг Марса и стала первым искусственным спутником планеты.
Впервые мягкая посадка на Марс была осуществлена 2 декабря 1971 г.
станцией «Марс-3», запущенной в мае 1971 г. Наиболее удивительным
оказалось разнообразие отдельных его районов; наряду с огромными
потухшими вулканами (Олимп, высота 27 км) существуют большие —
до 2000 км в поперечнике — котловины. Атмосфера состоит из углекис-
углекислого газа, давление у поверхности в сто раз меньше земного.
Получены фотогафии двух спутников Марса — Фобоса и Деймоса.
Фобос по форме напоминает картофелину размером 27 х 20 км со впади-
впадинами и выступом, всегда обращенным к Марсу. Уникальная особенность
Фобоса — наличие системы параллельных борозд, покрывающих более
половины поверхности. Возможная причина образования борозд — грави-
гравитационное растяжение приливными силами.
13.6. Космический вомж к дальним планетам [34, 61, 62]. В авгу-
августе и сентябре 1977 г. начался полет АМС «Вояджер-2» и «Вояджер-1».
Пятого марта 1979 г. «Вояджер-1» пролетел на расстоянии 286 000 км
от Юпитера — самой загадочной и самой большой планеты Солнечной
системы (масса в 318 раз больше массы Земли). Анализ изображения
планеты и спутников привел к поразительным открытиям. Прежде всего,
у Юпитера обнаружено кольцо на расстоянии 3/4 радиуса от центра пла-
планеты. Поскольку граница предела Роша находится на расстоянии 2,4R
то, по-видимому, кольцо образовалось в результате разрушения спутника
приливными силами. Получены уникальные снимки непрерывно изменя-
изменяющегося облачного покрова планеты. Неподвижным осталось Большое
Красное пятно — гигантское возмущение B4 х 40 тыс. км), впервые
описанное более 300 лет назад Р. Гуком. На спутнике Но обнаружены ак-
активно действующие вулканы — единственные вулканы внеземного про-
происхождения.
Лекция 13. Межпланетные полеты 99
Двенадцатого ноября 1980 г. «Вояджер-1» прошел на расстоянии
124 200 км от поверхности Сатурна. Открыты два спутника, не имеющие
аналогов в Солнечной системе, — они находятся на почти одинаковых
орбитах и раз в четыре года «обмениваются» траекториями. Сближение
со спутником Сатурна Титаном — основной целью полета — сделало до-
достижение Урана невозможным; аппарат ушел в отдаленные районы Сол-
Солнечной системы. Другой аппарат «Вояджер-2» совершил 9 июля 1979 г.
пролет Юпитера, а 25 августа 1981 г. — пролет Сатурна. Изображения, пе-
переданные двумя аппаратами, обнаружили тонкую структуру колец Сатур™
на — каждое из них состоит из тысяч отдельных узких полосок (шириной
в несколько километров), образованных частицами льда и пыли разме-
размерами до 10 см, в которые погружены глыбы размерами порядка 15 м.
Система колец представляет чрезвычайно динамическое образование —
удалось наблюдать распространяющиеся по спирали волны плотности.
Самый главный сюрприз — совершенно невероятная структура кольца F
шириной 200 км с внешней границей, лежащей на расстоянии 2,31?. На
снимках можно различить локальные утолщения и отдельные «нити»,
местами переплетенные, местами параллельные друг другу. Кольцо на-
находится между орбитами двух маленьких спутников — гравитационных
пастухов кольца.
После сближения с Юпитером и Сатурном программа полета была
завершена. Тем не менее, учитывая уникальное расположение планет, ко-
которое бывает один раз в 180 лет, удалось направить «Вояджер-2» к Урану.
Исследования спутников планеты были связаны с огромными трудно-
трудностями — низкой освещенностью почти на границе солнечной системы
и быстрым (немногим более суток) пролетом Урана. Кратковременность
сближения обусловлена необычной геометрией системы Урана, который
как бы «лежит на боку», — спутники вращаются вокруг оси, располо-
расположенной в плоскости эклиптики. В .январе 1986 г. «Вояджер-2» прошел на
расстоянии 81 000 км от облачного покрова Урана.
Было открыто одно новое кольцо и 10 его спутников (теперь их 15),
невидимых с Земли из-за малых размеров. Системы колец и спутников
Урана и Сатурна обнаружили поразительное сходство: несколько круп-
крупных спутников на удаленных орбитах и множество мелких, примыка-
примыкающих к кольцам с внешней стороны. Этот переход находится вблизи
предела Роша [62].
Траектория станции прошла на расстоянии 18 260 км от ближайшего
к Урану спутника — Миранды. Положение станции на расстоянии почти
3 млрд. км от Земли определялось с точностью до 25 км. Рельеф Миранды
ошеломил ученых. На снимках видны борозды, длина которых сравни-
сравнима с радиусом спутника, равным 241 км. Наиболее интересная область,
получившая название Шеврон, имеет форму трапеции. Резко выделяется
угол, окаймляющий борозду глубиной 20 км — самое гигантское ущелье
во всей Солнечной системе.
Изменив траекторию под действием Урана, «Вояджер-2» воспользо-
воспользовался преимуществом, которое представляет парад планет, и взял курс
100
Глава 11. Движение системы частиц
на Нептун. В августе 1989 г., через 12 лет после запуска, он прошел под
облачным покровом Нептуна. Управляющие сигналы «запаздывали» на
четыре часа шесть минут, проходя расстояние 4,5 млрд. км. У давно из-
известного спутника—Тритона—обнаружены характерные признаки пла-
планеты — магнитное поле и атмосфера. Фотокамеры поймали изображения
шести спутников и пяти колец, окружающих Нептун. Огромная штормо-
штормовая система, получившая название Великого Темного Пятна, отмечена в
его южном полушарии. К 2015 г. «Вояджер-2» подойд-т к границе Сол-
Солнечной системы. Пеленгация аппарата позволит получить новые данные
о распределении полей тяготения. Этот посланец любознательных землян
в 296 000-е годы пройдет в пределах 4,3 светового года от Сириуса. Шан-
Шансы очень малы, но может быть кто-то обнаружит молчаливого странника
и захочет узнать, кто же его послал.
13.7. Сфера действия. При вычислении траектории космического ап-
аппарата (КА) необходимо учитывать силы, действующие на него со сто-
стороны Солнца и планет. Однако даже
ограниченная круговая задача трех тел
не имеет аналитического решения. По-
Поэтому в астродинамике получило раз-
развитие множество приближенных мето-
методов расчета траекторий КА. Рассмо-
Рассмотрим один из них, ипользующий поня-
понятие сферы действия.
Пусть КА массой т движется
в гравитационном поле, создаваемом
Солнцем и Землей массами mi и т2 (рис 13.1). Поместим начало системы
отсчета на Солнце. Тогда из (9.12) получим уравнение движения КА:
Рис. 13.1
Г13
= ^G (mi + т) -о- +
r13
Г12 - Г13
Г12
Г, г
Представим его в виде
ri3 = W13
12
= w23 - w2i,
-it- ¦ 03.1)
W13 ~ -(
Г12 - 1*13
Г23
-о-
п Г21
w2i = —G m2 -o-.
#21
Если |Аг^1з| <С \w±3|, то КА движется по кеплеровой траектории; wi3
является основным, a Awi% —возмущающим ускорением. В нашем случае
г 12 = 149 600 -103 км, G тг = 1,327 -1011 км3/с2, G т2 = 3,986 -105 км3/с2.
Вектор Awi3 равен разности ускорения w23, сообщаемого Землей аппарату,
и ускорения W2i, сообщаемого Землей Солнцу.
Лекция 13. Межпланетные полеты
101
Пусть КА находится на отрезке Солнце-Земля на расстоянии г2з =
= 1 500 000 км от Земли. Тогда w13 = б, 05 • 10^6 км/с2, w23 = 1, 77 х
х 10~7 км/с2, w21 = 1,78 • 10~п км/с2. Поскольку \Aw13/w13\ ~ 0,03,
то Земля не оказывает заметного влияния на траекторию, которая является
коническим сечением с фокусом в центре Солнца.
Представим теперь, что КА находится на расстоянии г 23 = 500000 км от
Земли [34]. Тогда w13 = 5,97 • 10^6 км/с2, w23 = 1, 594 -10^6 км/с2, w21 =
= 1,7-10~п км/с2. Поскольку \Aw\3/w\3\ ~ 0,267, то Земля оказывает
заметное влияние на траекторию КА. В этом случае попробуем рассмотреть
движение КА в системе отсчета с началом в центре Земли. Вместо A3.1),
произведя замену индексов 1^2, получим уравнение
Г23
Г23 = ^G (m + m2) — + С? mi
' 23
Представим его в виде
Г23 =
Г21 —
Г21 -
= W13 -
Г21
'21
A3.2)
w23 ^ -
r23 ^ r13 ^ r12
-o-, W13 = -Gmi -s-, wi2 = -Gm\ -5-.
ПрО ^O A^O
;23 '13 J12
Полагая г2з = 500 000 км, находим -ш2з = 1,594-10 6 км/с2, w\3 =
= 5,97 • 10^6 км/с2, wi2 = 5,93 • 10^6 км/с2. Следовательно \Aw23\ =
= 0,04 -10~6 км/с2,
= 0,025. Положим теперь г2з = 1 500 000 км.
км/с2, w13 = 6,05-10^6 км/с2, w12 = 5,93 х
-0,678.
Тогда w23 = 1,77 ¦ 10^7
х 10^6 км/с2. В этом случае
Приведенные оценки позволяют понять, что отношение
характеризует величину возмущения геоцентрической кеплеровой траек-
траектории Землей, а отношение (Д^з/^з! — величину возмущения геоцен-
геоцентрической кеплеровой траектории Солнцем. Условие
Aw
23
Aw
13
A3.3)
определяет уравнение поверхности, разделяющей две области простран-
пространства, в которых частица движется по различным кеплеровым траекториям.
При переходе через поверхность траектории необходимо «сшить». Раз-
Разрешая A3.3) относительно Г23 = г@, ф), получим уравнение поверх-
поверхности (в сферических координатах), которая называется сферой дейст™
вия тела с меньшей массой т2 относительно тела с большей массой т\.
102
Глава 11. Движение системы частиц
Поскольку Ш2 <С mi, то г <^ г\2. Учитывая разложение A.15):
9 ( 1 Г21Г23
123
1*21 — 1*23
r3
'21
2 дг23
4
rl
21
23
Г21
получим из A3.3) уравнение
г m\
mo г:
Г21
т2 г?21
которое определяет поверхность, близкую к сфере радиусом
/ \2у/5
Радиус сферы действия Луны относительно Земли s = 66 000 км, радиусы
действия некоторых планет относительно Солнца указаны в приведенной
ниже таблице [34].
Млн. км
Меркурий
0.112
Венера
0,615
Земля
0.925
Марс
0,579
Юпитер
48,1
Сатурн
54,6
Уран
52,0
13.8. Вторая космическая скорость. Если телу сообщить скорость
^п = Bgi^I^2 (vji = 11,186 км/с относительно Земли), то его полная
энергия обращается в нуль. Эту скорость называют второй космической
скоростью. Очевидно, что Уц = л/2у\.
Можно ли утверждать, что на бесконечно большом расстоянии от
Земли скорость тела станет равной нулю? Оказывается — нет, поскольку
радиус сферы действия Земли s = 924 820 км. На расстояниях г >
> s основной силой, действующей на тело, является сила притяжения
Солнца — влиянием Земли на движение тела в этой области можно пре-
пренебречь. Если телу на поверхности Земли сообщить вторую космическую
скорость, то скорость тела на расстоянии s от нее окажется равной vs =
= Bgi?2/sI/2 = 0,926 км/с. Если скорости Земли и тела коллинеарны, то
скорость тела относительно Солнца на 0,926 км/с больше скорости Зем-
Земли относительно Солнца (v = 29, 785 км/с). Следовательно, тело станет
спутником Солнца. Афелий его эллиптической орбиты будет находиться
за Солнцем на расстоянии 21 млн. км от орбиты Земли.
13.9. Третья космическая скорость. Найдем наименьшую скорость,
которую необходимо сообщить КА, для того, чтобы он покинул Солнеч-
Солнечную систему.
Лекция 13. Межпланетные полеты 103
Обозначим через v^ скорость тела г относительно тела к. Очевид-
Очевидно, vik = Vij + \jk. Введем обозначения А, 3, С соответственно для
космического аппарата, Земли и Солнца. Рассмотрим вначале движение
аппарата от места старта на поверхности Земли до пересечения со сферой
действия Земли. Из закона сохранения полной энергии получим
1 2 ^шз 1 ,2 ^тз
4vi3-G— = -vt3-G —,
2 Кз 2 S3
где t/дз — скорость аппарата на расстоянии ^з от центра Земли. Обычно
пользуются приближенной формулой:
v"A3 = V? + 2g Д3 ^ 1 - -^ J ^ v& + 2gЯз. A3.4)
Перейдем далее в гелиоцентрическую систему, в которой Земля дви-
движется со скоростью ^зс — yGmc/гзс — 29, 785 км/с; скорость аппарата в
этой системе
VAC = VA3 + V3C
Для того, чтобы аппарат покинул Солнечную систему, его скорость должна
удовлетворять условию
Поскольку гзс — гас? то ^ас = У^узс — 42,122 км/с. Предполагая, что
векторы ?зс и v;a3 коллинеарны, получим из A3.4) третью космическую
скорость:
, 337J + (П ? 186J = 16j б5з км/с.
13.10. Четвертая космическая скорость. Если на границе сферы
действия Земли v^c = 0, то аппарат упадет на Солнце. Поскольку v^3 =
= —узс? то
vA3 = Jv§c + 2gR3 = 31,816 км/с.
Эту скорость иногда называют четвертой космической скоростью.
13.11. Гомановская траектория перелета. Полет с Земли на другие
планты можно разделить на три фазы: 1) полет в области сферы действия
Земли, 2) полет в поле тяготения Солнца до границы сферы действия
планеты, 3) движение в области сферы действия планеты.
104 Глава 11. Движение системы частиц
Рассмотрим упрощенную модель траектории, предполагая, что орбиты
всех планет являются круговыми и расположены в плоскости эклиптики.
Романовской переходной орбитой называют гелиоцентрическую траекто-
траекторию, касающуюся орбит Земли и планеты. Такие орбиты обеспечивают
перелет максимального груза с наименьшими затратами топлива [34].
Рассмотрим перелет на внешнюю планету — Марс, период обращения
которого равен 686,96 сут. Приведенные ниже расчеты имеют характер
оценок, поскольку орбита Марса имеет значительный эсцентриситет (е =
= 0,093), причем оси орбит Земли и Марса не совпадают. Более того,
плоскость орбиты Марса образует с плоскостью эклиптики угол 1,85°.
Траектория перелета на Марс (рис. 13.2) образует половину эллипса с
большой полуосью а = 1/2 (гмс + гзс)? причем точка 2 является периге-
перигелием, а точка 5 — афелием, г мс = 227,941 млн. км. Поскольку взаимное
расположение Земли и Марса меняется, то моменты старта для движения
Рис. 13.2
по половине эллипса ограничены интервалом времени, называемым «ок-
«окном». (На рис. 13.2 2 — Земля и аппарат в начальный момент времени, 3 —
Марс в начальный момент времени, 4 — аппарат проходит 553 миллиона км
за 237 дней, 5 — Марс и аппарат в конечный момент времени (перигелий
для Марса, афелий для аппарата), 6 — Земля в конечный момент времени.)
Найдем величину скорости v'AC, которую должен иметь аппарат на
границе сферы действия Земли для того, чтобы достичь Марса. Используя
закон сохранения полной энергии:
VG=
получим гелиоцентрическую скорость выхода
, / G тс
V АС =
2 - — ) =v3CJ ГмС = 32, 729 км/с .
Лекция 13. Межпланетные полеты 105
Следовательно, геоцентрическая скорость выхода из сферы действия Земли
г; аз = 2,945 км/с. Из A3.4) найдем начальную скорость аппарата:
1/2
= 11,567 км/с .
'МС
/ Г3 \3/2
Учитывая, что То = 2тт [ _зс I = 365, 256 сут, найдем продолжитель-
V Gmc J
ность перелета:
а3
4л/2 \ гзс
= 259 сут.
13.12. Движение аппарата внутри сферы действия планеты-цели.
Скорость Марса на круговой орбите
умс =
мента импульса: vbx^mc — ^ас^^зс? откуда
Скорость аппарата vBX в точке 5 можно найти из закона сохранения мо~
= 21,48 км/с.
Следовательно, скорость подлета vBX меньше орбитальной скорости
Марса — Марс догоняет космический аппарат. Величина входной скорости
аппарата относительно Марса v^m = ^вх^^мс равна 2,649 км/с. Заметим,
что для реальной траектории vBX = 5, 7 км/с. Сравним ее со второй косми™
ческой скоростью на границе сферы действия Марса
j
Учитывая значения гравитационного параметра Gmu = 4, 282 • 104 км3/с2
и радиуса сферы действия sM = 0,579 млн. км, получим уц = 0,385 км/с.
Следовательно, внутри сферы действия Марса аппарат движется по гипер-
гиперболе. Включая тормозной двигатель, можно перевести аппарат на орбиту
спутника Марса.
13.13. Облет планеты как способ увеличении гелиоцентрической
скорости [31,34]. Поля тяготения массивных планет — Юпитера и Сатур-
Сатурна — можно использовать для разгона аппарата при полете к удаленным
планетам или для отбрасывания его к центру Солнечной системы.
Внешняя по отношению к Земле планета догоняет аппарат, движущий-
движущийся по эллиптической траектории перелета. Поэтому траектория аппарата
внутри сферы действия любой планеты всегда является гиперболой. Эта
ситуация в терминах задачи двух тел соответствует рассеянию частиц.
Пусть величина скорости аппарата относительно планеты г?Ап меньше
значения ^пс- В системе отсчета, связанной с планетой, скорость аппарата
106
Глава 11. Движение системы частиц
на границе сферы действия vm = тдп = vac — vnc- После облета планеты
скорость аппарата на границе сферы действия vout = vAn = vAC - v-Uc-
Угол рассеяния — угол 9 между векторами vm и vout определяется
соотношением
а
tg@/2) =
lli'U~ U
приведенным в примере 11.2, где а = Gmmn, Ь — прицельный параметр.
Аппарат после облета получает приращение скорости Avaii = vout —vm =
= VAC ~ VAC
Производя коррекцию прицельного параметра, можно изменить на-
правление скорости v0llt в пределах 0 ^ в
При достаточно
Рис. 13.3
малом значении прицельного параметра можно было бы изменить направ-
направление скорости почти на противоположное. Вместе с тем, наименьшее зна-
значение Ъ = femin должно соответствовать траектории, касающейся точки,
которая находится на пересечении оси симметрии траектории и границы
атмосферы планеты на расстоянии гр, равном приблизительно радиусу
планеты R. На рис. 13.3 изображен облет внешней планеты, когда она до™
гоняет аппарат. Из законов сохранения полной энергии и момента импульса
имеем систему:
mv
+ 0 =
mvt:
2 2
mbmmv =
Gmmn
Лекция 13. Межпланетные полеты 107
Исключая vp, находим
(Gma\112 n
где v i = —— . Следовательно,
\ К J
tg = — x = —.
Величина приращения скорости
Дг? = 2v sin -^- =
Zi X "т~ Х~"
достигает максимального значения
Д^тах = ^1 При V = Vj] втш = -.
О
На границе сферы действия величина гелиоцентрической скорости вы-
выхода аппарата может существенно превысить значение vm. Двигаясь по
новой траектории, аппарат может достичь следующей планеты. Напри™
мер, при полете американской станции «Пионер-11» к Сатурну был ис-
использован гравитационный удар в поле тяготения Юпитера. «Вояджер-2»
разгоняли по очереди Юпитер, Сатурн и Уран. Полет к Урану по гоманов-
ской траектории продолжался бы 16 лет, а к Нептуну — 30 лет. Подходя-
Подходящая для такого разгона аппарата конфигурация внешних планет ожида-
ожидается в 2155 г. цукнеп
ГЛАВА 3
УРАВНЕНИЯ ЛАГРАНЖА
СИСТЕМ СО СВЯЗЯМИ
Лекция 14. Уравнения Лагранжа 1-го рода
14.1. Голономные связи. Рассмотрим систему N частиц, положение
которой определяется 3N координатами ха, уа, za (а = 1, 2,..., N). Если
в произвольно выбранный момент времени t координаты и скорости ча-
частиц связаны определенными условиями, то система является несвободной.
В этом случае говорят, что на систему наложены связи. Согласно определе-
определению, введенному Г. Герцем, связи называют голономными, если координаты
частиц удовлетворяют к (к < 3N) уравнениям вида [63]
fa (гь г2,. •., гдг, t) = 0, а = 1, 2,..., к . A4.1)
Теперь для задания положения системы достаточно определить 3N — к
координат. Остальные к координат можно найти из уравнений A4.1). 'Голо-
'Голономные связи, ограничивающие положения частиц, реализуются макроско-
макроскопическими не деформируемыми конструкциями: оболочками, стержнями,
плоскостями и т.д.
Пример 14.1.
1. Пусть частицы системы перемещаются по движущейся поверхности
ср (х, |/, z, t) = 0. Тогда уравнения связи имеют вид A4.1):
(p(ra,t) = O, a=l,2,...,N. A4.2)
В частном случае движения частиц по плоскости <p(r, t) = тот — d(i), где
п — единичный вектор, перпендикулярный плоскости, d(i) — расстояние
от плоскости до начала координат.
2. Пусть система состоит из двух частиц, закрепленных на концах тон-
тонкого стержня постоянной длины I. Уравнение связи имеет вид
|г2-п|=/. A4.3)
Голономные связи A4.1) налагают также ограничения и на скорости
частиц. Поскольку на траекториях системы та = га(?), из A4.1) следует
% = °^Етг^ % = о, а = 1 fc. A4.4)
dt I-^ дта at
1
Лекция 14. Уравнения Лагранжа 1-го рода 109
Пример 14.2.
1. Для системы N частиц, подчиняющихся уравнениям связей A4.2),
имеем
J^ra + §=0, a = l,...,i\T. A4.5)
дга at
Мы видим, что компонента скорости частицы а, перпендикулярная по-
поверхности, совпадает с нормальной компонентой скорости поверхности.
Действительно, вводя орт
п(г)=
grad (p |
перпендикулярный поверхности в точке г, запишем нормальную составля-
составляющую скорости частицы f n(r) и нормальную компоненту скорости поверх-
поверхности — (d(p/dt)\ grad(^ I. Условие равенства этих компонент приводит
к уравнению A4.5).
2. Если расстояние между двумя частицами постоянно, то, дифферен™
цируя уравнение связи (г2 — riJ = I2, находим fir = Г2Г, г = Г2 — гь
Следовательно, проекции скоростей частиц на ось, проходящую через обе
частицы, должны быть одинаковы.
Очевидно, что уравнения связи накладывают ограничения и на ускоре-
ускорения частиц. Вычисляя полную производную по времени, из A4.4) находим
*> ^ -L ^у + V* Хац Xbv + ^^ %a[i = 0- A4.6)
14.2. Силы реакции. Пусть Fa — результирующая сила, действую-
действующая на частицу массой та со стороны других частиц системы. Реализация
уравнений связи A4.1), ограничивающих возможные значения координат,
приводит к появлению дополнительных сил, действующих на частицы си-
системы. Эти силы называют реакциями связей. Обозначим силу реакции,
приложенную к частице массой та, через Ra. Тогда уравнение движения
частицы массой та должно иметь вид
mara=Fa + Ra, o = l, ...,iV. A4.7)
Это уравнение является следствием принципа Д'Аламбера A743 г.), соглас-
согласно которому сумма активных сил Fa, сил реакции Ra и «силы» —тата рав-
равна нулю. Таким образом, имеем систему 3N + к уравнений A4.1)
и A4.7), содержащую 3N координат ra, и 3N компонент Ra. Посколь-
Поскольку к < 3N, то задача является неопределенной. Далее мы получим решение
уравнений A4.1), A4.7) в предположении, что связи являются идеальными.
Для того, чтобы ввести идеальные связи, познакомимся вначале с понятием
виртуальные перемещения.
14.3. Виртуальные перемещения. Уравнения A4.1) задают многооб-
многообразие положений системы N частиц на некоторой поверхности в простран-
пространстве 3N измерений. Введем векторы 8та (а = 1, 2, ..., JV), касательные
110 Глава 111. Уравнения Лагранжа систем со связями
к многообразию положений, соотношением
]Г -^6та=0, а = 1,2, ...,fc. A4.8)
а=1 °Га
Набор векторов Sri, 6т2, ..., йг дг называют виртуальными перемещения-
перемещениями. Из A4.8) следует, что 3N — к виртуальных перемещений могут быть
выбраны произвольно, а к остальных будут функциями 3N~~к независимых
перемещений.
Согласно определению A4.8) виртуальные перемещения не связаны с
реальным движением системы [64]. Ниже мы увидим, что виртуальные
перемещения являются изохронными вариациями координат. Тем не менее
отметим, что действительные перемещения dra = та dt за время dt удов-
удовлетворяют, в соответствии с A4.4), уравнениям
Y,?2-dr* + ^?dt = 0, a = l,...,k. A4.9)
uTa Ot
а=1
Если связи стационарны, то dfa/dt = 0. В этом случае действительные
перемещения принадлежат множеству виртуальных.
Рассмотрим, например, движение частицы по плоскости пг — d(t) = 0.
Согласно A4.8) имеем nSr = 0. Следовательно, виртуальные перемещения
связаны, по существу, с возможными положениями частицы, допускаемыми
связями в момент времени t.
14.4. Идеальные связи. Если сумма элементарных работ всех сил
реакций на виртуальных перемещениях равна нулю, то связи называют
идеальными:
N
]Г Ra5ra = 0. A4.10)
о=1
14.5. Метод неопределенных множителей Лагранжа. Соотноше-
Соотношения A4.8) и A4.10) позволяют найти 3N — к уравнений, которые вместе
с A4.1), A4.7) позволяют полностью определить движение системы ча-
частиц. Действительно, разрешим систему A4.8) относительно к зависимых
виртуальных перемещений. Подставляя найденное выражение в A4 Л 0), по-
получим линейную суперпозицию независимых виртуальных перемещений.
Приравнивая к нулю коэффициенты при независимых перемещениях, най-
найдем 3N — к уравнений. Вместе с системой A4.1), A4.8) будем иметь 6N
уравнений и 6N неизвестных функций ra, Ra (a = 1, 25 ..., AT").
Пример 14.3. Рассмотрим движение частицы по плоскости. Уравне-
Уравнение связи A4.1) имеет вид
/(r,t)=O, f(r,t) = nr-d(t).
Лекция 14. Уравнения Лагранжа 1-го рода 111
Уравнение движения A4.7):
тт = mg + R.
Система A4.8), A4.10) имеет вид
7ii 8х + п2ёу + п3 Sz = 0, Й1 8х + R2Sy + R3 Sz = 0. (/)
Исключая Sz, получим
Ri - Rs — ) Sx + ( R2 - R3 — ) Sy = 0.
Следовательно,
П\ П2 Щ
Обозначая это отношение через Л (так называемый множитель Лагранжа),
имеем
шг = mg + An, nr — d(t) = 0.
Далее дифференцируем дважды уравнение связи nr = d и исключаем г,
используя уравнения движения. В результате получим R = An, где А =
= md — rngn. Уравнения движения приобретают вид
г = dn + [n [gn] ].
Интегрируя, находим
t2
r(t) = dm + С2 + Cit + [n [gn] ] -.
Постоянные интегрирования удовлетворяют условиям Cin = 0, С2П = 0.
Наиболее рациональная техника решения системы A4.8), A4.10) состо-
состоит в использовании множителя Лагранжа А. Образуем комбинацию
Жёг - А ^ Sr = 0 -^ (R - An) St = 0 -+
or
-+ (i?i - Ащ) fe + (R2 - Xn2) Sy + (Д3 - An3) ^ = 0. B)
Выберем множитель А так, чтобы коэффициент при зависимом виртуальном
перемещении Sz обратить в нуль: Дз = Апз. Тогда в B) останутся члены
с независимыми перемещениями. Коэффициенты при них должны быть
равны нулю: R\ = Am, R2 — Ari2 —>• R = AV/.
112 Глава 111. Уравнения Лагранжа систем со связями
Следуя методу неопределенных множителей Лагранжа, рассмотрен-
рассмотренному в примере 14.3, построим линейную комбинацию:
У/Ка6га-У/\а^8та=0. A4.11)
а а,а
Выберем к множителей Ха так, чтобы обратить в нуль коэффициенты при к
зависимых перемещениях. Тогда в A4.11) останутся слагаемые с независи-
независимыми 3N ~~ к виртуальными перемещениями. Таким путем находим выра-
выражение для сил реакций:
Теперь уравнения A4.7) и A4.1):
тата = Fa + \^ Ха -z-2-, а = 1, ... , N , A4.13)
/а(гь ..., rN, t) = 0, а = 1, ... , fc, A4.14)
образуют полную систему 3N + fc уравнений относительно 3N функ-
функций га и к функций Ха.
Интегрирование этой системы удобно начинать с определения множи-
множителей Ха. С этой целью, подставляя A4.13) в A4.6), найдем Ха как функции
координат, скоростей и времени. Подставляя затем Xa(r, f, t) в A4.13),
получим систему 3N уравнений относительно 3N неизвестных функций.
14.6. Закон изменения полной энергии. Предположим, что силы,
действующие на каждую частицу системы, потенциальны. Тогда
П(П, . . . , Г*, t) =
о, Ь а
Умножим скалярно каждое уравнение A4.13) на та. Вычисляя сумму по
всем частицам, имеем
marara = - ^ ^— га + ^ Ха — га.
а а а,а
Учитывая A4.4), находим
Tlmarl+Il
d
It
Лекция 14. Уравнения Лагранжа 1-го рода 113
Правая часть A4.15) содержит мощность сил реакции. Заметим, что урав-
уравнения A4.13), A4.15) являются следствием условия идеальности свя-
связей A4.10). Мы приходим к выводу, что при условии dU/dt = 0 полная
энергия сохраняется только в случае стационарных связей.
Пример 14.4. Две частицы масс mi и т2 закреплены на концах
стержня длины I массы m «С mi, m2. Эта система движется в однородном
поле тяжести. Найдем решение уравнений движения и силы реакций.
Отметим, что переход от реального упругого стержня к модели твер-
твердого тела может быть обоснован в рамках квантовой механики. Величина
силы реакции имеет конечное значение при жесткости стержня к —>- оо и
удлинении AI ^> 0, если величина работы внешних сил меньше разности
энергий возбужденного и основного состояний. В этом случае говорят о
«замороженных» степенях свободы.
Из A4.15), A4.16) получим систему уравнений:
/ = (Г2-Г1J^12 = О5 G)
f 1 = -2Л(г2 - гх) + mig, B)
m2r2 = 2A(r2 - ri) + m2g. C)
Перейдем к новым координатам r2, ri —>¦ rc, r = r2 — ri где rc —
радиус-вектор центра масс. Тогда из A)-C) получим систему:
rc = g, D)
r2 = I2, E)
fir = 2Лг. F)
Найдем решение уравнений E), (б). Дифференцируя уравнение связи,
находим
гг = 05 G)
f2 + гг = 0. (8)
Образуем скалярное произведение правой и левой частей F) с г и уч™
тем G). Тогда получим закон сохранения кинетической энергии относи-
относительного движения:
А*~г~ = 4Лгг = 0, г2 = Vq,
где v0 = r@) — начальное значение относительной скорости частиц. Со-
гласно G) i*g vq = 0, где го = г@).
114
Глава 111. Уравнения Лагранжа систем со связями
Подставляя F) в (8), получаем 2Л = — fi(vo/1J. Теперь из (б) следует
уравнение
ОГГ = 0, ОТ =
-т-
(9)
Решение этого уравнения, удовлетворяющее начальным условиям, име-
имеет вид
^) — ro cos ujt Л sin out.
UJ
A0)
Поскольку r(t) — вектор постоянной длины, то он должен удовлетворять
уравнению г = [о;г]. Следовательно ujtq = 0, угловая скорость систе-
системы ш = [roVo]/!2. Силы реакции Ri = ^R2 = fiuj2r.
Пример 14.5. Математический маятник. Рассмотрим движение ча-
частицы по окружности, расположенной в вертикальной плоскости. Посколь-
Поскольку любая кривая является линией пересечения двух поверхностей, систе-
систему A4.13), A4.14) удобно записать в таких координатах, для которых посто-
постоянные значения двух координат определяют заданные поверхности. Вводя
а>
а =
а<
2
2
2
±L \
— ¦
\
\ 0
/
Ж
2
flgl COS (p
^\—
\
, \ ,
ж V 1р
Рис. 14.1
цилиндрические координаты с началом в центре окружности радиусом I,
имеем уравнения связи
Л = р - I = 0, /2 = z = 0. (/)
Азимутальный угол ср отсчитывается от оси ж, направленной вертикаль-
вертикально вниз (рис.14.1). Учитывая, что в цилиндрических координатах V/ =
f df 'I df df\
= -г—, - -г—, "тг— К получим уравнения A4.13) в проекциях на орты
\др р dip dz J'
цилиндрической системы координат:
/.. .9ч ТП d 9 . . ..л
т(р — рФ ) = mg cos ш + Ai, — — р ф = ^mg sin ip, mz = A2.
p dt
B)
Лекция 14. Уравнения Лагранжа 1-го рода 115
Из A), B) находим
Ах = —mg cos 99 - mfc/92, ф + Wq sin ^ = О, А2 = 0, о;0 = \ /у C)
Умножая второе уравнение C) на интегрирующий множитель 0, получим
уравнение
T-^coS?,= —, D)
которое является следствием закона сохранения полной энергии A4.15),
где П(у?) = —mgl cos у?. Если [^Е71 ^ mg/, то область движения определя-
определяется неравенством cos cp ^ —E/mgl. В случае Е > mg/ частица движется
по окружности в одном направлении. Исключая ф, находим
2Е
Ах = ^3mg cos 99 — —-.
Пусть у?@) = 0, ф@) = cjOtt. Тогда Е = -mg/ + (ш/2) u^a2l2.
ИзD) находим
E)
- 4 sin2
При а <С 1 область движения |с^| ^ а определяется неравенством
cos Lp ^ —E/mujgl2 = 1 — а2/2. Полагая в E) sin (<p/2) ~ <р/2, находим
(р = a sin cjq^- Величина а играет роль амплитуды линейных колебаний.
Представим теперь решение E) в терминах эллиптической функции
Якоби sn (?, fc), которая определяется как функция, обратная по отноше-
отношению к интегралу [29, 66-68]:
Здесь к — постоянная, называемая модулем эллиптических, функций; 0 ^
к < 1 (см. приложение). На рис. 14.2 изображен график функции sn (?, к)
при некоторых значениях модуля к.
1. Пусть а < 2. Производя в E) замену sin (<р/2) = (а/2) w, имеем
Г dw
uot= — G)
J V(l2)AZB/4J)
116
Глава 111. Уравнения Лагранжа систем со связями
Следовательно, w = sn (ugt, а/2), к = а/2,
из а ( ах
sin - = -sn(wo*, -у (8)
Максимальное значение угла <р определяется условием sin (срт/2) = а/2.
-ll-
C \0,985
JL
2
Рис. 14.2
Полагая а/2 = sin (а/2), находим <рш = а. Период нелинейных колеба-
колебаний Т = AK/ujq зависит от значения полной энергии Е; К (а/2) — полный
эллиптический интеграл.
На рис. 14.3 изображены графики функции (р = <?>(?), С = ^(Л ПРИ
начальных условиях, приведенных в таблице.
а
0,6
1,97
а
0,63
тг/2
2тг/3
2,79
а°
36°
90°
120°
160°
К (а/2)
1,61
1,85
2,16
3,15
2ж~1К(а/2)
1,03
1,18
1,38
2,01
2. Пусть а = 2. Тогда из G) находим
1 1 + w ш
ujot = - In > sin — =
2 1 — w 2
Очевидно, что ср —>• тг при t ^ oo.
3. Пусть а > 2. Производя в G) подстановку
ш /а 2
sin - = sn - uot, -
2 \ 2 а
= B/a)w;, находим
Лекция 14. Уравнения Лагранжа 1-го рода
117
10
Рис. 14.3
14.7. Принцип Д'Аламбера-Лагранжа. Умножим каждое уравне-
уравнение A4.13) на ёга и просуммируем все уравнения. Согласно A4.10) члены,
содержащие силы реакции, обратятся в нуль. Мы получим соотношение
ra = 0,
которое необходимо дополнить системой A4.8):
N
У^йга=0, а = 1, ..., к.
о=1
дга
A4.16)
A4.17)
Уравнение A4.16) называют общим, уравнением механики. Система A4.16),
A4.17) является формулировкой принципа Д'Аламбера-Лагранжа для
систем с голономными связями [65]. Если принять его в качестве основно-
основного принципа механики, то из A4.16), A4.17) получим уравнения движе-
движения A4.13). Действительно, вводя множители Лагранжа, образуем линей-
линейную комбинацию:
^(mara -Fa)Sra -
Ха —- Sra =
а
Далее, выбором к множителей Ха обратим в нуль коэффициенты при к за-
зависимых виртуальных перемещениях. После этого шага сумма представля-
представляет собой линейную комбинацию независимых виртуальных перемещений.
Коэффициенты при них должны быть равны нулю. В результате получим
уравнение A4.13).
14.8. Неголономные связи. Эти связи ограничивают не только поло-
положение частиц системы, но и скорости частиц. Уравнения неголономных
связей имеют вид
г2, ..
гь f2j ..., rN,t) =
<3iV. A4.18)
118 Глава 111. Уравнения Лагранжа систем со связями
В общем случае A4.18) невозможно привести к виду A4.1). Поэтому
неголономные связи называют иногда неинтегрируемыми. Ограничимся
далее рассмотрением связей A4.18), линейных по скоростям.
Предположим, что система N частиц подчинена к\ голономным свя-
связям A4.1) и ^2 неголономным связям, линейным по скоростям:
/а(гь ...,rN,t) = O, a = l, ...,fci, A4.19)
У \j R d I Г \ . .... Г TV 5 / а ~| 0 \ 15 * • * 5 ./V 5 ^/ — *-'j М — -^ j • • • 5 2 j
A4.20)
причем k\+k2 < SN. Определим виртуальные перемещения соотношениями
Предположим, что связи являются идеальными. Тогда, используя метод
множителей Лагранжа, получим уравнения
тата = Fa + J2 А« ^
а=1 ОТа /3=1
где а = 1,2,...,7?. Дважды дифференцируя A4.19), A4.20) по вре-
времени, исключим вторые производные с помощью A4.21). В результате
найдем систему уравнений относительно множителей Ха и /лр. Подстав-
Подставляя Аа(гЬ ..., Гдг, ГЬ ..., Гдг, t), //^(Гь ..., Tjv, ГЬ ..., fjy, *)
в A4.21), получим систему 3N уравнений относительно функций ra, a =
= 1, 2,..., iV. Наиболее рациональный подход к исследованию этой систе-
системы состоит в замене декартовых координат независимыми координатами.
В целом метод решения системы A4.19)—A4.21) оказывается весьма гро-
громоздким. По этой причине желательно с самого начала иметь уравнения,
описывающие систему в терминах независимых координат. Впервые этот
подход был предложен Жозефом Луи Лагранжем в 1788 г. в его выдающемся
труде «Аналитическая механика».
Лекция 15. Уравнения Лагранжа
в независимых координатах
15.1. Обобщенные координаты. Рассмотрим систему N частиц, ко-
координаты которых удовлетворяют к уравнениям:
/а(гь г2, ..., rjv, *) = 0, а = 1, ..., к. A5.1)
Лекция 15. Уравнения Лагранжа в независимых координатах 119
В этом случае система обладает 3N ~~ к степенями свободы. Введем s =
= 3N — к новых независимых координат q^ (/i = 1, 2, ..., s) соотноше-
соотношениями
га = га(дь • • •, q8, t), a = 1, ..., N, A5.2)
согласованными с уравнениями связей A5.1); в результате подстанов-
подстановки A5.2) в A5.1) мы получим тождество. Поскольку некоторые из коорди-
координат q^ могут быть безразмерными, независимые координаты называют
обобщенными. Дифференцируя A5.2), найдем скорости частиц:
дга . дта
г = ^— ^ + -?Г> а = 1, ...,ЛГ, A5.3)
at
которые являются функциями обобщенных координат q^ и обобщенных
скоростей^.
15.2. Уравнении Лагранжа второго рода. Введение обобщенных ко-
координат позволяет выразить виртуальные перемещения частиц 8та (а =
= 1, ..., N) в терминах независимых виртуальных перемещений обоб-
обобщенных координат:
era = p^eqa. A5.4)
Подставляя A5.2), A5.4) в уравнение Д'Аламбера-Лагранжа A4.20), полу-
получим соотношение
шата Fa -— Sqa = 0.
а V dqa dqa J
Поскольку коэффициенты при независимых виртуальных перемещениях
должны обратиться в нуль, то
? шг 1г - ? F 1г = ° « = 1s е155)
Oqa a Cfqa
Используя соотношения
дта _ дта^ d^ дт^ _ дт^
dqa dqa ' dt dqa dqa'
которые следуют из A5.3), преобразуем A5.5):
Y^ .. дта ^ Г d (. дта \ . d дта
^ dqa ^ [dt V dqa J dt dqa
d (. dra\ . dra] d дТ дТ
dt \ dqa
qa dqa
120 Глава 111. Уравнения Лагранжа систем со связями
Здесь T(g, g, t) — кинетическая энергия системы:
а
Учитывая A5.3), находим, что кинетическая энергия является суммой трех
однородных форм:
T(q, q,t) = - aap(q, t)qaqp + ba(q, t)qa + ф, t), A5.7)
Едта дга ^ дта дта ^ дта dra
oqa oqp ^ t
а
oqa at ^^ at at
Предположим далее, что Fa представляет собой сумму потенциальных и
непотенциальных сил:
отт
Fa(rb ..., гдг, t) = -— + Ga(rb ..., rjv, t).
Тогда величина ]Г ?a(dTa/dqa), называемая обобщенной силой, прини-
а
мает вид
У * h У A58)
s, t) = П(п(д, *),..., riV(g, t), t),
Введем функцию Лагранжа (или лагранжиан) системы:
L{q,q,t)=T(q,q,t)-U{q,t). A5.9)
В результате подстановки A5.6), A5.8) в A5.5) получим уравнение Лагран-
Лагранжа второго рода:
4 7F1 " 7Г1 = <?<*> a = 1, ..., s. A5.10)
Систему A5.10) обычно называют уравнениями Лагранжа.
Решение системы s дифференциальных уравнений второго порядка
A5.10) содержит 2s произвольных постоянных, которые зависят от на-
начальных значений qa@) = qao, ^а(О) — 4ао- Задавая начальные усло-
условия ra@) = ra0, ra@) = ra0, получим из A5.2), A5.3) систему относи™
тельно величин qao, qao.
Лекция 15. Уравнения Лагранжа в независимых координатах 121
15.3. Обобщенные импульс и энергии. Обобщенный импульс, соот-
соответствующий координате qa, равен
8L
Ра = ^--
oqa
Уравнения A5.10) являются, очевидно, законом изменения обобщенного
импульса:
Pa = ^+Qa» A5.11)
oqa
Введем величину, аналогичную полной энергии системы. С этой целью
образуем свертку A5.10) с qa:
и преобразуем полученное соотношение:
d t dL dL dL
Следовательно, закон изменения динамической величины
H(qJq,t) = —qa^LJ A5.12)
oqa
называемой обобщенной энергией, имеет вид
§ = -§ + О^. A5.13)
dt at
Слагаемое Qa4a представляет собой мощность, потребляемую системой
в момент времени t в результате действия непотенциальных сил. Следуя
определению Н, подставим в A5.12) L = Т — Urn учтем, что аа@ = ара.
Обобщенная энергия определяется выражением
н{Чч Ъ^) = - aa/3(q, tLaq$ - c(g5 t) + U(q, t).
Заметим, что Н / T + 17'.
15.4. Принцип Гамильтона A834 г.). Предположим, что непотенци-
непотенциальные силы отсутствуют. Тогда из A5.10) получим уравнения Лагранжа в
стандартной форме:
||^-|^=0, a = l,...,s. A5.14)
dt dqa dqa
122 Глава 111. Уравнения Лагранжа систем со связями
Решение этих уравнений определяет кривую qa = qa (?), соединяющую две
точки Ра и Рь с координатами qa(ta) и qa(tb).
Согласно приведенному выше доказательству, система A5.14) получена
из уравнения Д'Дламбера-Лагранжа:
§||W=0. A5.15)
dt dq dq J
Покажем, что уравнение A5.14) следует также из принципа Гамильтона:
если функционал
I[q]= [ dtL(q,q,t) A5.16)
ta
достигает экстремума на некоторой кривой, соединяющей точки Ра и Рь,
то вдоль этой кривой выполняются уравнения Лагранжа A5.14).
Пусть Т]а = rja(t) — любая гладкая функция, такая, что rja(ta) = О,
rja(tb) = 0. Рассмотрим семейство кривых q^ = qa(t) + ?rja(t), близких к
кривой qa(t) при малых е и проходящих через точки Ра и Р&. Поскольку
первая вариация функционала
должна обратиться в нуль, то после интегрирования по частям находим
. i 8L d dL .
1 ^qa dt dqQ '
Отсюда следует уравнение A5.14).
Сделаем два замечания.
1. Функция erja(t) является изохронной вариацией qa(t): srja(t) =
= Qa(t) ~ Qa(t). Следовательно, виртуальные перемещения в уравнении
A5.15) имеют смысл изохронных вариаций: Sqa(t) = е rja(t).
2. Принцип Гамильтона 61 = 0 справедлив только для систем с голо-
номными идеальными связями.
15.5. Движение в неинерщиалытой системе отсчета. Введем систе-
систему К\ движущуюся поступательно относительно инерциальной системы К
со скоростью и(?) и вращающуюся с угловой скоростью О(?). Перейдем
к обобщенным координатам и запишем кинетическую и потенциальную
энергии системы частиц в терминах qa и qa. В соответствии с (8.2), (8.7)
Лекция 15. Уравнения Лагранжа в независимых координатах 123
лагранжиан системы имеет вид L(q, q, t) = T(g, g, i) — U0Q(q, q, i), где
^об(д, q, t) = U(q, t) + J2 ^aura(gb ...,q8,t)-
a
J2 \Y1 «["r«]2- 05.17)
Здесь векторы ra(g, t), ra(q, OS t) определяются формулами A5.2), A5.3).
Пример 15.1. Маятник с движущейся точкой подвеса. Тонкий стер-
стержень АВ движется в вертикальной плоскости вокруг оси, проходящей через
точку А. На другом конце стержня закреплена частица. Ось перемещает-
перемещается в вертикальном направлении по закону s = s(t). Найдем лагранжиан и
уравнение Лагранжа маятника.
Поместим начало координат в точку А. Ось у направим вверх по вер-
вертикали, а ось х расположим в плоскости движения стержня. Пусть обоб-
обобщенная координата (р — угол отклонения стержня от вертикали, I — длина
стержня. Тогда х = I sin ср, у = —I cos cp, z = 0. Пренебрегая массой
стержня, найдем кинетическую энергию частицы: Т = A/2)тп12ф2. Обоб-
Обобщенная потенциальная энергия П(г) = —mgr + mwr, где w = @, s, 0).
Следовательно, U(с/?, t) = —m(g + s)l cos ip. Лагранжиан системы
L(ip, <?,?) = — I2^2 + m(g + s)l cos (p. A)
Уравнение Лагранжа:
ф Н — sin (p = 0. B)
Обобщенная энергия Н = (m/2) I2^2 + U(ip, t) не сохраняется, посколь-
поскольку Н = —т —— I cos (p.
Пример 15.2. Найдем решение уравнений маятника Фуко в окрест-
окрестности положения равновесия.
Пусть I — длина маятника. Расположим точку подвеса на расстоянии I
от поверхности Земли. Ось z направим по вертикали вверх, а ось х — по
меридиану к полюсу. Уравнение связи имеет вид
/ = Ж2 + у2 + (Z - If -f=0, A)
угловая скорость вращения Земли О = (U cos 0, 0, п sin в), 0 — широта
точки подвеса, 0 > 0. Выберем в качестве обобщенных координат декар-
декартовы координаты ж, у и разрешим A) относительно z, ограничиваясь
учетом величин (ж/1J, (y/lJ: z = A/21)(ж2 + у2). С той же точно-
точностью находим [ilr]r = [rr]O ~ О sin 0(xy — ух). Пренебрегая вкладом
124 Глава 111. Уравнения Лагранжа систем со связями
центробежной энергии, из A5.17) получим
Uo6(x, у) = ^ (х2 + у2) - тп sin в (ху - ух). B)
Лагранжиан маятника L = (т/2)(х2 + у2) — Uoq(x, у). Уравнения Лаг-
Лагранжа:
х — 20 sin в у + uSqX = О, у + 20 sin в х + cjq2/ = О,
где Uq = g/I. Вводя комплексную переменную и = х + iy, получим урав-
уравнение й + 2Ш sin 6> й + cjq'w = 0, решение которого
ti = щ ехр [—гА].?] + и^ ехр [—гАг^],
О sin 6> и о;0 ± О sin 0.
Пусть г@) = (жо, 0, 0), v@) = 0. Тогда щ = щ = жо/2,
x(t) = жо cos (tO sin в) cos (cjo^), (i)
|/(t) = —x® sin (tO sin в) cos (cjgt). D)
Пусть uqT = 2тгп, где Т = 2тг/0 = 24 ч, п — целое число. Вра-
Вращение Земли можно рассматривать как результат циклического медленно-
медленного изменения параметра, внешнего по отношению к маятнику. Сохраняет
ли маятник «память» о вращении Земли? Полагая в C), D) t = Т, нахо-
находим х(Т) = xq cos Bтг sin в), у(Т) = —xq sin Bтг sin в). Следовательно,
через 24 ч маятник не возвращается в исходное положение — плоскость
качаний будет смещена на угол 2тг sin <9, называемый углом Ханнея [69].
Лекция 16. Движение частицы по поверхности
По существу, тема этой лекции — введение в дифференциальную гео™
метрик) и тензорный анализ.
16.1. Координаты на поверхности. Пусть частица подчиняется го-
лономной связи F(x, |/, z) = 0, которая задает уравнение поверхности.
Введем в качестве обобщенных координат криволинейные координа-
координаты на поверхности д1, q2 (гауссовы параметры) соотношениями ха =
= жп(д1, q2) (п = 1, 2, 3), обращающими уравнение связи в тождест-
тождество F(xn(q15 q2)) =0. Очевидно, что
^:^=0, А=1,2.
дхп dqx
В точках, удовлетворяющих условию V F ф 0, векторы е\ =
(А = 1, 2) лежат в плоскости касательной к поверхности.
Лекция 16. Движение частицы по поверхности 125
Пусть P(t) — однопараметрическое множество точек на поверхно-
поверхности, принадлежащее кривой, задаваемой на некоторой карте функция™
ми qa = qa(t) a = 1, 2. Скорость частицы в евклидовом трехмерном
пространстве
X\ A6.1)
Введем вектор п, перпендикулярный к поверхности:
n=-J=[eie2], A6.2)
yg
g= [eie2]2 = e2e2 - (eic2J =
/ dx. \ / 9x 9x
Отметим, что е2 = gn, е2, = g22, ^162 = g12, n2 = 1. Из A6.1), A6.2)
получаем пх = 0: касательные ко всем линиям, лежащим на поверх-
поверхности и проходящим через выбранную на ней точку, находятся в одной
плоскости. Эта плоскость называется касательной плоскостью. Векторы,
касающиеся поверхности в данной неособой точке, образуют двумерное
пространство с локальным базисом е\ (Л = 1, 2). Координатами вектора
скорости Vм в этом базисе служат величины д1, q2 : v^1 = (д1, q2).
На другой карте с координатами q M та же кривая описывается функ-
циями qм = q^(t). Компоненты вектора скорости v = (q\q' ). На пере-
перекрытии двух карт связь между двумя множествами координат определя-
определяется функциями перехода
q^ = q^(q\ q2) , A6.3)
или qv = q^(q). При этом
dqM d(f
dt dqp dt
т.е. мы имеем формулу преобразования компонент вектора при замене
координат:
16.2. Векторные и тензорные поля на многообразии. Напомним,
что двумерное многообразие есть множество точек поверхности вместе
с конечным или счетным множеством согласованных двумерных карт,
покрывающих всю поверхность [8, 70, 71].
В криволинейных координатах необходимо различать два вида векто-
векторов: контравариантные и ковариантные.
126 Глава 111. Уравнения Лагранжа систем со связями
Контравариантное векторное поле на многообразии определяют как
множество наборов двух функций А^ (q) (/л = 1, 2), причем закон преобра»
зования
Т(д) = ^гА"(д) A6.5)
выполняется для любых двух таких наборов на перекрытии соответствую-
соответствующих, карт.
В качестве примера контравариантного векторного поля рассмотрим
градиент скалярного поля. На двух картах градиент состоит из частных
производных функций f(q) и / (д), а именно
Если на перекрытии двух карт взаимно однозначные отображения точек
поверхности описываются функциями A6.3), то согласно правилам диффе-
дифференцирования из A6.4) получим
df(q) = df(q) dq^
dq^ dqv dq^1 '
Таким образом, связь между наборами функций В^ (q) и В (q) на перекры-
перекрытии двух координатных карт выражается равенством
Ковариантным векторным полем на многообразии называют набор
функций B^(q), которые при замене координат q ^ q преобразуются по
закону A6.6). Векторы этого типа иногда называют ковекторами. Рассмо-
Рассмотренные два вида векторов называют тензорами первого ранга.
Приведем формулы преобразования тензоров второго ранга:
а) контравариантный тензор
б) ковариантный тензор
в) смешанный тензор
Лекция 16. Движение частицы по поверхности 127
Алгебраические операции над тензорами — внешнее умножение и
свертка—определяются так же, как и в евклидовом пространстве (см. лек™
цию 1).
Сделаем два замечания.
1. Координаты qa не являются компонентами вектора, поскольку они
не преобразуются по закону A6.5) (за исключением случая линейных
преобразований).
2. Символ Кронекера является смешанным тензором, поскольку
,а =8q^dq^ Эда 8д»
0 d» dP v d
Пример 16.1. Найдем закон преобразования вектора Са = Аа@
16.3. Метрика на поверхности. Пусть задана кривая q^ = gM(t) на
поверхности хп = ^„(g1, q2). Поскольку поверхность лежит в трехмер-
трехмерном евклидовом пространстве, то квадрат элемента длины ds кривой
равен
ds2 = dxndxn = —^ —^ dq^1 dqp'.
oq^ oqv
Это равенство записывается в виде
ds2 = gllv{q)dqPj dqv , A6.7)
где gMl/ = gVjl. Выражение A6.7) представляет собой квадратичную фор-
форму на касательных векторах dq^; ее называют первой квадратичной фор-
формой поверхности [8]. Поскольку элемент длины не должен зависеть от
выбора системы координат, то величины g^v преобразуются при замене
координат по тензорному закону. Этот тензор положительно определен
igiivV^v1' > 0) для любого ненулевого вектора v^. Набор функций g^,
обладающих перечисленными свойствами, называют метрическим тен-
тензором, а квадратичную форму A6.7) —римановой метрикой. Метрика
задает скалярное произведение двух векторов в одной точке:
Угол 9 @ ^ в ^ тг) между векторами ам и W в точке с координатой q
определяется соотношением
cos 9 =
128 Глава 111. Уравнения Лагранжа систем со связями
Обозначим определитель матрицы g^v (q) через g (см. формулу A6.2)).
Функция g(g) не образует скалярного поля, поскольку ее значение в
данной точке многообразия зависит от системы координат. Обозначим
= A»a; тогда
1//з. Следовательно, g = (det AJg,
)^2g. A6.9)
Объект, преобразующийся по закону A6.9), называется скалярной
плотностью с весом —2.
16.4. Поднятие и опускание индексов. Если v^ — любой вектор, то
ковектор va = gap v^3 — внутреннее произведение gap и^ — рассма™
тривается как другое представление i?M; говорят, что va получен из v^3
опусканием индекса. Для обращения этой операции — поднятия индек-
индекса — введем матрицу gaC = g^1a/3, обратную к gal3:
ga/3g/3/, = ^. A6.10)
Из A6.10) находим элементы матрицы ga@ = g™1
?11 - ^ ?12 - ?21 - ^ S22
Набор функций ga/3 (g) представляет собой контравариантный тензор вто-
второго ранга. Для доказательства этого утверждения запишем преобразо-
преобразование смешанного тензора:
" dqa
Следовательно,
Используя тензор g°^, можно получить вектор v@ = g^A^A поднятием
индекса у va . Точно так же можно поднять или опустить индекс любого
тензора, например С(/1 = g^ Cafl7 = gafI C^.
Вектор а связан со своими контравариантными компонентами соотно-
соотношением а = а^е^, где е^ — базисные векторы. Произведение а^а11 = а2
определяет скалярную величину — квадрат длины вектора [8].
Лекция 16. Движение частицы по поверхности 129
16.5. Геодезические кривые. Вернемся к изучению движения части-
частицы по поверхности. Предположим, что частица находится в потенциаль-
потенциальном поле П = П(ж, у, z). В точках поверхности потенциальная энер-
энергия U{q11 q2) = П(х = x(g1; q2)). Квадрат скорости хпхп = g^q^q1'.
Следовательно, в обобщенных координатах лагранжиан
)
Уравнения Лагранжа имеют вид
(л ТП ТП Г/ЁГ CjI'I
dt 2 ^а 2 dqa dqa
Учитывая симметричность тензора g^u, представим уравнение в виде
m\g фм_|_ра vg^ gvl\ — _ A6.11)
ra,Mi/ = - ( ^f + -^- - ^77 ) . A6.12)
2 \ oqv oq^ oqa J
Величины Га? ^у называют символами Крисшоффеля. Образуем сверт-
свертку A6.11) с gXa и, вводя символы Г^ = gXaTaj ц„, получим окончательно
уравнение движения:
7П{q \ *- „vq^ q ) = J . (lo.lij
Здесь fx = gXa fa — контравариантные составляющие ковектора fa =
f = §^Х(§22/1 - gi2/2), f = g'^-g^/i + gii/2).
Если внешнее поле отсутствует (U = 0), то кривая, удовлетворяющая
уравнению
дх + Г^ГГ = 0, A6.14)
называется геодезической.
Интересно проследить, как уравнение A6.11) связано с уравнением
Лагранжа первого рода:
Пт-г
тг = ^—+ A0VF.
дт
Подставляя г = сре^, получим
)^ A6Л5)
130 Глава III. Уравнения Лагранжа систем со связями
Умножая A6.15) на еа и учитывая соотношения
дП _ Ш7 _
имеем уравнение
Сопоставляя с A6.11), заключаем, что Та^и = ea(defl/dql/). Поскольку
О Хп
A6.16)
Пример 16.2. Найдем геодезические на поверхности с метри-
метрикой gn = 1, g22 = exp Bkq1), gi2 = 0, к — постоянная величина. Проще
всего воспользоваться лагранжианом. Полагая q1 = и, q2 = v, имеем
Первые интегралы имеют вид
— mii = mke2kuv2 —»¦ й — fcbv = с,
at
где a,b, с — константы. Если Ь = 0, то частное решение системы v = vo,
и = щ + с?. Исключая г*э й, получим уравнение (с + kbvJ + bv = a2,
решение которого v(i) = (fcb)™1[ ^c + th (kat + a) ]. Далее находим и =
= к~г In [ |b/a|ch (kat + a) ]. В новых координатах ж = к~ге~ки, у = v
траекторией частицы является окружность
16.6. Локально-геодезическам система координат. Найдем закон
преобразования величин Vх^(q) при переходе в систему координат д^.
Исходя из определения A6.16), имеем
=А Г) &q^ д2хп dq^dq^J^ ( дхп
dxn dq^dqv dq* дхп 8q^
dqx dqa ( d2xn dqa dq^ dxn
dxn \dqadq^ dq^ dqv
Лекция 16. Движение частицы по поверхности 131
Снова используя определение A6.16), найдем
-А - dqx dqa
r iq)
A6Л7)
Таким образом, символы Кристоффеля не образуют тензора третьего ран-
ранга. Это обстоятельство дает возможность выбрать систему координат д^,
в которой все Г ^ обращаются в нуль в заданной точке д^ = ам. Такая
система координат называется локально-геодезической. Более того, мож-
можно преобразовать д^ при помощи ортогональной матрицы так, чтобы
метрический тензор в точке аЙ был равен 8^v. В этом случае новые коор-
координаты близки к евклидовым. Отклонение метрического тензора от 8ц„ в
окрестности точки ам отражает неевклидовым характер геометрии.
Пусть дм = а^ — произвольная точка, д^ — соответствующие геоде-
геодезические координаты. Произведем вблизи этой точки преобразования
9; = аЧ?-^Гув)# + ..., A6.18)
t = <f - а< + \ ?)k(a)(q - аУ(д - а)к + ... A6.19)
Тогда
и согласно A6.17)все Г ^ (а) обращаются в нуль. В локально-геодезичес-
локально-геодезической системе координат решение уравнения A6.14) имеет вид g^ = v^t,
где у*1 — постоянный вектор. Таким образом, системы геодезических
координат в окрестности точки играют роль инерциальных систем.
16.7. Ковариантное дифференцирование. Если некоторое соотно-
соотношение, содержащее тензорные величины, справедливо в какой-нибудь
одной координатной карте, то оно справедливо во всех координатных
картах. Рассмотрим производную векторного поля Т^ = дА^ /dqp'. По-
Поскольку Afl(q) = (dqiI/dqa)A (g), то
дА» <9V 9^Ta^ dq^ дАа dqp
= — A. (g) H—— ъ
Таким образом, объекты TJf = (dA^/dq1") и Г^ = (dJa/dqp) не
являются тензорами. Для того чтобы правильно определить операцию
ковариантного дифференцирования, воспользуемся принципом эквива-
эквивалентности: тензор, определенный в геодезических координатах, являет™
ся тензором в любых других координатах. Обозначим ковариантную
132 Глава 111. Уравнения Лагранжа систем со связями
производную символом Vi/ А11. В геодезических координатах (V/з А ) а =
= (дA /dqP)a. Преобразуем этот тензор в исходную систему координат:
1 V )a^ \dq 8q- dq^ ) [dq dq* \dq^ J\a
Г дА^ dq^ d2qa p
dqa dq* a
А^ dq^ d2qa
Учитывая формулы преобразования A6.18), A6.19), находим значение
ковариантной производной в точке а^ системы координат q^:
Я А^
Поскольку d1 — произвольная точка, то это равенство справедливо в
любой точке системы координат дм. Аналогичным путем найдем ковари-
антную производную ковектора:
Операцию ковариантного дифференцирования часто обозначают точкой
с запятой: VVA^ = А^ . Обычную частную производную обозначают
символом dvA^=dA^jdqv или A^=dA^/dq\ Если u^{q)^векторное
поле, то свертку ковариантной производной тензора Та@--- и вектора и^
называют производной тензора по направлению u : VuTa/3 = и^Т?^'".
Полагая и равным одному из базисных векторов, имеем \7е^ТаC--- =
_ xvrpafi... _ гра/3...
— и11А ]v — А ;/х '
Пусть u^{q) — вектор, касательный к некоторой кривой q^ = q^(t).
Говорят, что тензор Та^'" параллельно переносится вдоль этой кривой,
еслиУиТа/3-= 0.'
В том случае, когда переносится сам касательный вектор и, т. е.
Vuii^ = 0, кривая является геодезической. Полагая в уравнении
вектор г^ (#(?)) =4^, получим уравнение A6.14).
Нетрудно показать, что метрический тензор ведет себя по отношению
к ковариантному дифференцированию как константа:
V7p. _ Я сг _Г^ р. ^"Г/3 р. д _ Я р- _р _р ^П
Следовательно, V^F^ = V'Cg^aVa = g^a VpVa.
Лекция 16. Движение частицы по поверхности 133
16.8. Тензор кривизны. Операции ковариантного дифференцирова-
дифференцирования неперестановочны. Для векторного поля А^ (q) имеем
Найдем коммутатор операторов (V^Vq, — V^V^)^. После сокращений
получим
Тензор четвертого ранга R^vap называется тензором кривизны или тен-
тензором Римана [70, 71]. В случае плоской поверхности метрический тен-
тензор g^v не зависит от координат. Следовательно, все Г^ = 0, а потому
и Я^ар = 0. В общей теории относительности отличие тензора Римана
от нуля указывает на искривление пространства-времени.
Из A6.20) следуют свойства симметрии тензора R^a/з — ^a-R^ap-
-К[ivа/3 — -ftvfia/3 — -ft(ivCa ? -ft[iva/3 — -fta/3/iV'
Свернем тензор R^uap по двум индексам. Очевидно, R^^ap — 0? Rjivaa —
= 0. Произведя свертку по первому и третьему индексам, получим Rv$ =
= R^^p. Этот тензор называется тензором Риччи. Двойная свертка тен-
тензора Римана R = g^^R^p = R ^ называется скалярной кривизной [8, 12].
В случае пространства двух измерений, т.е. для поверхности, тензор
Римана имеет лишь одну независимую компоненту [8]. Учитывая соот-
соотношения симметрии, представим тензор Римана в виде
Вычисляя скалярную кривизну:
R = Ra^ = (gaag00 - ga0gi)K = D - 2)К = 2К,
находим К = R/2. Поэтому в любой системе координат
ту
R»va0 = (g[iagvC - g[iCgva)^« A6.21)
Очевидно, i2i2i2 — (-R/2) det g.
Пример 16.3. Найдем скалярную кривизну поверхности с метри-
метрикой gn = 1, g22 = expBfcg1), gi2 = g2i = 0. Отличны от нуля два
коэффициента: Г122 = ^k^1 expBfcg1) и Г221 = fc. Следователь-
Следовательно, Д1212 = -к^2 expBfcg1), R= -2k^2, Мы имеем поверхность посто-
постоянной отрицательной кривизны. Величину К = R/2 называют гауссовой
кривизной.
134 Глава 111. Уравнения Лагранжа систем со связями
16.9. Тензор внешней кривизны. Векторы ei, ег и п образуют ор-
ортогональный базис в R3. Представим тензор Римана в терминах тензора
внешней кривизны:
A6.22)
Поскольку n2 = 1, шеа = 0, то
дп дш деа
Учитывая эти соотношения и определения е^ de^ ^
= gku, представим производные базисных векторов в виде разложения
по базису
Из условий совместности дадре^ = д(здае^ получим
Кар = GWvp - G%Gva, A6.23)
= Txai/GXp - ГЛ^СЛа. A6.24)
Соотношение A6.23) называется уравнением Гаусса, а A6.24) — соотно-
соотношением Петер сон а-Кадацци. Из A6.23) находим Д1212 — det G. Следо-
Следовательно, R = 2 det G/ det g.
Пример 16.4. Найдем гауссову кривизну поверхности z = /(ж, у).
Введем гауссовы координаты х = q1, у = д2. Ортогональный базис
Метрический тензор и определитель
df df df df
В соответствии с определением A6.22) тензор внешней кривизны Gin =
= (d2f/dqzdqn) g^1/2. Гауссова кривизна К = det (d2f/dqzdqn) g~2.
Этот результат мы используем в лекции 25 для анализа устойчивости
двумерного движения частицы.
16.10. Расхождение геодезических. Рассмотрим семейство геодези-
геодезических q^ = g^(t, s), где параметр s нумерует отдельные кривые. Введем
вектор
Лекция 16. Движение частицы по поверхности 135
соединяющий на бесконечно близких геодезических две точки с одина-
одинаковыми значениями момента времени t. Найдем относительное ускоре-
ускорение двух частиц, движущихся по близким геодезическим: дД = g^(t),
q^ = q^ + rj^Ss. Производная вектора Sq^ в точках кривой q^{i) по
направлению вектора скорости v^
Относительное ускорение
Dt2
Учитывая соотношения
vaVarf = vaVav»
имеем
Производя в первом слагаемом замену индексов а о /5, найдем сум-
сумму первых двух слагаемых f]aVa(v^Vpv^), которая в силу уравнения
геодезической vaVav^ = 0 равна нулю. Следовательно,
Мы видим, что две частицы, движущиеся по близким геодезическим,
будут смещаться относительно друг друга.
ГЛАВА 4
ЛИНЕЙНЫЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
Лекция 17. Свободные колебания
По существу, все механические системы описываются нелинейными
уравнениями. Для исследования поведения систем в окрестности положе-
положения равновесия применяют метод линеаризации уравнений движения: пове-
поведение системы приближенно описывается линейными уравнениями. Если
положение равновесия устойчиво, то движение системы называют линей-
линейными колебаниями. Этот вид движения широко распространен в природе и
технике.
17.1. Одномерные колебания. Рассмотрим систему с одной степенью
свободы. Лагранжиан системы
L(q, q) = \ G(q)q2 - U(q) . A7.1)
Уравнение движения
интегрируется в квадратурах.
Произведем линеаризацию этого уравнения. Найдем вначале возмож-
возможные положения равновесия gieq; ^eq? • • • из условия равенства нулю обоб-
обобщенной силы: —dU/dq = 0.
Точки, в которых {d2U /&2q)Qq > 0, называются положениями устойчи-
устойчивого равновесия. Рассмотрим движение системы в окрестности положения
устойчивого равновесия q = с. Полагая q = с + ж, разложим A7.1) в ряд
Тейлора. Тогда получим новый лагранжиан
Введем обозначения m = G(c), k = (d2U/dq2)c > 0 и ограничимся
членами, квадратичными по скоростям и координатам:
1(х,х) = ^х2-^х2. A7.3)
Лекция 17. Свободные колебания 137
Уравнения Лагранжа имеют вид
d dl dl
17 "я7" = Ъ у тх = ^кх'
at ох ох
Полагая Uq = к/т, получим уравнение гармонического осциллятора:
я + Ц^ = 0. A7.4)
Общее решение уравнения A7.4) представляет собой суперпозицию
двух линейно независимых решений cos uot и sin uot:
х = С\ cos uot + C2 sin ugt.
Вместо постоянных С\ и С2 часто вводят амплитуду а и фазу а соотноше-
соотношениями
Ci = a cos a, С2 = ^® sin a.
Решение приобретает вид х = a cos (uot + a).
Периодическая функция f(t) с периодом Т = 2tt/uq должна удовлетво-
удовлетворять тождеству f(t) = f(t + T)B интервале — оо < i < 00. Очевидно, по»
следнее условие является очень сильным, поскольку для реальных систем
оно никогда не выполняется. Поэтому колебаниями называют движения
системы, удовлетворяющие условию x(t) = x(t + Т) для всех t в интерва-
интервале (t0, t0 + tk), tk > T, где t0 — момент времени, в который заданы началь-
начальные координата х(to) = xq и скорость системы х@) = vq.
Замечание. Термин «малые колебания» некорректно отражает эволю-
эволюцию системы, которая описывается функцией x(i). Значения координаты
и скорости в окрестности устойчивого положения равновесия будут «ма-
«малыми», если достаточно малы их начальные значения. Более точно, если
полная энергия Е меньше значения потенциальной энергии в ближайшем
к координате q = с локальном максимуме функции U(q) при q = qm.
Однако, оставаясь «малой» в области Ад = |#ш — с|, координата х удовле-
удовлетворяет нелинейному уравнению, описывающему нелинейные колебания.
Поэтому термин «линейные колебания» наиболее точно соответствует дви-
движению системы у дна потенциальной ямы, где функция x(t) удовлетворяет
линейному уравнению A7.4). Важно отметить, что эволюция исходной си-
системы описывается нелинейными уравнениями.
Для геометрической интерпретации используют понятие фазовой плос-
плоскости (фазового пространства) х, х, точки которой условно изображают
состояние системы. Кривую в фазовом пространстве, изображающую, как
изменяется со временем t состояние системы, называют фазовой траек-
траекторией. Множество фазовых траекторий называют фазовым портретом
системы. Исключая из соотношений
х = a cos (uot + a), х = —аи® sin (u®t + a)
138
Глава IV. Линейные и нелинейные колебания
переменную t, получим уравнения фазовых траекторий в виде семейства
эллипсов
= 1
A7.5)
с центром в точке @, 0). Очевидно, A7.5) — следствие закона сохранения
полной энергии:
т . 2 k 2
Е=-Х +-х.
A7.6)
Отметим, что решение этой задачи в рамках квантовой механики приво-
приводит к дискретным значениям полной энергии Еп = Н(п + 1/2) (п =
= 0,1,2,...).
Пример 17.1. В реальной ситуации потенциальная энергия зависит от
параметров, входящих в уравнения связей. Рассмотрим движение частицы,
которая может перемещаться по гладкой горизонтальной прямой. Частица
прикреплена к одному концу пружины, другой конец пружины закреплен на
U
h>L
h<l0
-la
расстоянии h от прямой (рис. 17.1а). Найдем частоту линейных колебаний
в окрестности положений устойчивого равновесия.
Выберем начало координат оси q в точке пересечения прямой и перпен-
перпендикуляра, проведенного через точку закрепления пружины. Потенциальная
энергия частицы
= l [(h2+q2I/2-lo]\
где к — жесткость пружины, Iq — длина пружины в ненапряженном со-
состоянии. Положения равновесия qeq определяются корнями уравнения
A)
Лекция 17. Свободные колебания 139
Если h > Iq, то единственный корень q = 0 соответствует устойчивому
положению равновесия (cPU/dq2)® = fc(l — lo/h). В случае h < Iq имеем
три решения:
*="¦
Теперь возможны два симметричных положения равновесия (рис. 17.1 б).
Когда мы изменяем параметр /г, то при переходе от значений h > !0 к зна-
значениям h < Iq положение равновесия qeq = 0 становится неустойчивым.
Возникающую неустойчивость можно назвать неустойчивостью, наруша-
нарушающей симметрию: частица может оказаться в левой или правой локальной
потенциальной яме. При движении в окрестности точки geq = q-± дна ямы
с полной энергией Е < (k/2)(h - 10J
q{t) = q± +acos (wit + a), ^ = fc ; ° . B)
Отметим, что потенциальная энергия взаимодействия U(q) — симметрич-
симметричная функция: U(q) = U(—q). Однако решение этого уравнения не обладает
симметрией взаимодействия.
Диаграмма положений равновесия qeq(h), изображенная на рис. 17.1 в,
имеет форму вилки. Поэтому явление потери устойчивости в точке q = О
и возникновение двух устойчивых положений равновесия при переходе па-
параметра h через критическое значение h = Iq называют бифуркацией (от
англ. bifurcation — раздвоение). Обычно термин бифуркация употребля-
употребляется в широком смысле для обозначения качественных перестроек системы
при изменении управляющих параметров.
17.2. Осциллятор в среде с линейным трением. При движении тела
в среде возрастает кинетическая энергия среды, возникают акустические
волны, происходит изменение термодинамического состояния как среды,
так и тела. Таким образом, задача о движении тела в среде лежит вне рамок
механики [28, 73]. Однако при малой скорости тела достаточно огра-
ограничиться феноменологическим подходом, добавляя в правую часть A7.2)
диссипативную функцию F(q, q) = —b(q)q. В приближении линейных
колебаний b(q)q ~ b(c)x. Следовательно, вместо A7.4) имеем уравнение
ж + 7ж + ^ож = 0, A7.7)
где 7 = Ь(с)/т. Решение уравнения A7.7) определяется корнями харак-
характеристического уравнения Л2+7А + Сс;| = 0. Если ujq > G/2J, то имеем
два комплексных корня: Ai?2 — ~(т/2) Т^? ^ = \/^ — (т/2J- В этом
140 Глава IV. Линейные и нелинейные колебания
случае решение A7.7)
х = ae~lt/2 cos (Ш + а) A7.8)
описывает затухающие колебания. Очевидно, функция x(t) — непероди-
ческая. Из A7.7) следует закон изменения полной энергии:
Ё — ^mjX2 # A7.9)
Правая часть A7.9) представляет собой мощность силы трения Р= —rwyx2.
В наиболее важном случае 2ujq ^> j имеем О ^ ujq,
х = ае^11'2 cos (uot + а), ж = ^сшое^7^2 sin (uot + a),
Среднее за «период» То = 2тг/ujq значение мощности силы трения
Важнейшая характеристика затухающего осциллятора—добротность Q —
определяется соотношением [74]
_ (Е)щр _ с^о
Q~ \{P)\ ~ 7'
Величину т = 1/7, равную интервалу времени, за которое энергия умень-
уменьшается в е раз, называют бременем жизни осциллятора.
17.3. Фазовый портрет линейного осциллятора. Представим урав-
уравнение A7.7) в виде системы первого порядка относительно фазовых пере-
переменных ж, р = х:
х = р, р=-7Р^Ц)ж- A7.10)
Исключая переменную ?, получим уравнение фазовой траектории:
% = -1--1Х~- A7Л0а)
Положение равновесия (х = 0, р = 0) называют неподвижной или осо-
особой точкой уравнений A7.10).
Проведем элементарное исследование траекторий р = р(х) и опреде-
определим характер особой точки @, 0) в соответствии с терминологией, пред-
предложенной одним из гигантов математической мысли — Анри Пуанкаре
A854-1912 гг.).
Лекция 17. Свободные колебания
141
Положим р = zx, где z(x) — новая неизвестная функция. Тогда
dp dz dz ( Uq
dx dx dx \ z '
1
x'
Мы получим уравнение с разделяющимися переменными:
zdz dx
A= 4 -
A7.11)
O + 7/2J- А = Т
1. Пусть А = ^О2 < 0. Вычисляя интеграл, находим
In (р2 + 7рж + cjqX2) = — arctg —— h In G2,
где С — постоянная.
Если 7 / 0? то фазовые кривые будут приближаться к особой точке,
которую называют устойчивым, узлом. [75-78]. На рис. 17.2 а стрелка пока-
показывает эволюцию состояния осциллятора. Когда dp/dx > 0, изображающая
Рис. 17.2
142 Глава IV. Линейные и нелинейные колебания
точка движется по фазовой траектории слева направо, при dp/dx < 0 —
в обратном направлении.
Если 7 — 05 то Р2 + ^о%2 = ^2• Фазовые траектории — семейство
концентрических, эллипсов (рис. 17.2 б). Особую точку называют центром.
2. Пусть А = 0: ljq = ^/2. Интегрируя A7.11), находим
2
Фазовые траектории изображены на рис. 17.2 в. Одна из них — прямая ли-
линия р = —('у/2)х. Движение приобретает апериодический характер. Коле™
бания прекращаются; возможно движение, допускающее не более одного
перехода через положение равновесия. При расчете подвески автомобиля
выбирают именно этот вариант [78]. Такую систему называют критически
демпфированной, а особую точку — вырожденным узлом.
3. Пусть А > 0. Преобразуя A7.11), получим
A2 ^ dz _ dx {p-Xix)Xl _
z — A2 J A2 — A
где Aij2 = (—G/2) =p л/А) < О. Фазовые траектории изображены на
рис. 17.2г. Две из них — прямые линиии: р = \\х, р = А2ж. Траектории
становятся все более крутыми, величина скорости очень быстро убывает.
Такая система называется сильно демпфированной. Особую точку называют
устойчивым узлом.
Положим теперь в A7.10 а) Uq =0. Ось х состоит из особых точек.
Фазовые кривые р = —jx + С изображены на рис. 17.2 д. Полагая 7 = 0?
шо = 0, имеем р = С (рис. 17.2 е).
17.4. Система с s степенями свободы. Рассмотрим систему с лагран-
лагранжианом общего вида:
1
L(q, Q) = 2 GiniqwQn - U(q) - Vi(q)qi, г = 1, ..., s.
Положения равновесия определяются из системы уравнений: dU/dqu = 0,
к = 1, 2, ..., s.
Рассмотрим одно из возможных положений равновесия qm = cm. Пе-
Перейдем к новым переменным qm -> хт, полагая qm = ст + хт, и раз™
ложим функцию L(q, q) в ряд Тейлора в окрестности qm = сШ5 qm = 0.
В новых переменных лагранжиан
д217
Лекция 17. Свободные колебания 143
Оставляя в f (ж, х) квадратичные формы координат и скоростей, получим
- 2 k^XiXn - AinXiXn,
1(х, х) = - ginXiin - 2 k^XiXn - AinXiXn, A7.12)
gin :=:: ^in
= I
dqidqnj c \dqn
Учитывая соотношения dxi/dxm = <^m, dxi/dxm = <^m и симметрич-
симметричность матриц gin = gni, fcin = kni, запишем уравнения Лагранжа:
gninXn i ^mnXji — ¦&mn%n-
at oxm axm
Здесь FTOn = Amn — Anm — антисимметричная матрица. Величину fn =
= Fmnxn называют гироскопической силой. Очевидно, мощность, разви-
развиваемая гироскопической силой, Р = fnxn = Fnmxmxn = 0 .
Замечание. Лагранжиан A7.12) можно преобразовать к симметрич-
симметричной форме, добавляя полную производную:
а
inXiXn —> AinXiXn — ~z
z Г z tinXiXn.
17.5. Линейные колебании консервативной системы. Рассмотрим
консервативную систему, которая в окрестности положения равновесия
описывается лагранжианом
1(х, х) = - ginXiXn - -kinXiXn. A7.13)
Уравнения Лагранжа имеют вид
gmnXn + kmnX = 0. A7.14)
Будем искать решение системы линейных уравнений A7.14) в виде
хп = ипех\ A7.15)
где ип — постоянные величины. Подставляя хп в A7.14), получим си-
систему алгебраических уравнений:
(A2gmn + kmn) un = 0, т = 1, ..., s. A7.16)
Для того, чтобы система имела нетривиальное решение, ее определитель
должен обращаться в нуль: det \X2gmn + kmn\ = 0. Это уравнение можно
упростить, введя матрицу gm=gri1, обратную матрице gmi: gTO«gm =
= Sin,
A gmn Н" kfjin = A gmi^in Н" gmig kjn-
144
Глава IV. Линейные и нелинейные колебания
Поскольку det gmi Ф 0, то
det |A2«5in + FJ =0, A7.17)
'kjn. Отсюда находим s вещественных корней А2^ и 2s
где к"п =
значений Аг
В линейной алгебре система A7.16) связана с задачей на собственные
значения. Корни А2^ называют собственными значениями матрицы к; на-
набор чисел iin(i/), удовлетворяющий уравнению
{\
ктп) un(j,) = 0,
A7.18)
называют собственным вектором матрицы к, принадлежащим собствен-
собственному значению А2. В
значения А2^ = к2^ >
ния A7.15) имеют вид
р рц , рд
ному значению А2. В случае невырожденных матриц g и к возможны
значения А2^ = к2^ > 0 и А2Д = -о;2 < 0. Следовательно, частные реше-
A715)
cos
sin
Общее решение уравнений A7.14) является линейной суперпозицией част-
частных решений:
%m{t) = • •
cos
A7.19)
Очевидно, при kit ^ 1 решения экспоненциально растут. Мы приходим
к выводу, что линейные уравнения A7.14) непригодны для описания дви-
движения в интервале t ^ А^.
17.6. Условия существования ограниченных решений. Напомним
определение положительно определенной функции. Пусть функция V =
= V(z), z = (zi, ..., zn) непрерывна вместе со своими частными произ-
производными первого порядка в окрестности D точки z = с. Функцию V(z)
назовем положительно определенной в области D, если [67]
a) V(z) > 0, гфс, б) V(c) = 0.
A7.20)
Поскольку кинетическая энергия системы положительна, то функ-
функция Т(х) = A/2) gmnxmxn положительно определена. В общем случае
критерий существования положительно определенной квадратичной фор-
формы V(z) = Vmnzmzn установлен в 1852 г. Дж. Сильвестром [79,80].
Необходимо и достаточно, чтобы все коэффициенты Vkk (к = 1, 2, ...)
и главные миноры матрицы Vmm были положительными:
A7.21)
V21
v12
V22
>о,
Vn
V21
V31
V\2
У22
^32
V].3
F23
F33
Лекция 17. Свободные колебания 145
Тогда SpF > 0. Если потенциальная энергия в A7.13) представляет собой
положительно определенную форму, то 2s корней уравнения A7.16) бу»
дут чисто мнимыми и попарно сопряженными, а решение системы A7.14)
ограничено.
Обратимся теперь к уравнениям A7.17), A7.18). Пусть все корни урав-
уравнения A7.17) различны. Умножим A7.18) на ит^ и образуем свертку по
индексу т:
(A^gTOn + kmn) um{p)un^) = 0. A7.22)
Производя замену индексов /х о v и учитывая симметричность матриц g
и к, найдем
(A^gTOn + ктп) um^)Un{lj) = 0. A7.23)
Вычитая A7.22) из A7.23), имеем
^ l u) = 0.
Следовательно, gmnwm(M)Wn(^ = Оири/л^ии gTO(i,)MTO(M)Mn(I;) /0 при
li = v. Поскольку gmn — положительно определенная матрица, то можно
ввести нормировку собственных векторов соотношением
gmn%(M)Wn(i/) = S^. A7.24)
Тогда из A7.23) следует, что
p) = -X^S^. A7.25)
Таким образом, если потенциальная энергия представляет собой поло-
положительно определенную функцию, то все собственные значения имеют вид
А2^ = —uj2^ < 0; сиД/i = 1, ..., s) называют собственными частотами.
В этом случае решение уравнений A7.14) приобретает вид
S
Хт = / j У"т(ц)ау cos (^/х^ + ^/х)? A7.26)
где 2s постоянных а^ и а^ определяются из начальных условий.
Движение системы является суперпозицией независимых гармониче-
гармонических движений, происходящих одновременно. Эти гармонические движе-
движения называются нормальными колебаниями или нормальными модами (ли-
(либо просто модами). Определенная мода характеризуется собственной ча-
частотой ujy и пространственной конфигурацией системы, задаваемой век-
вектором ит^у Для возбуждения фиксированной моды необходимо выбрать
специальные начальные условия.
Пример 17.2. Найдем решения системы с лагранжианом
L(x, х) = - х2п - - Rmnxmxn, т, п = 1, 2,
146 Глава IV. Линейные и нелинейные колебания
Rmn = Rnm • Ищем решения уравнений Лагранжа
хт + Rmnxn = 0 (/)
в виде хп = ипем. Вектор ип удовлетворяет системе алгебраических урав-
уравнений:
(А2 + Дц) щ + R12u2 = О, Д21И1 + (А2 + R22) и2 = 0. B)
Условие det | А21 + Д | = 0 приводит к уравнению А4 + A2 Sp Д + det Д =
= 0. Следовательно,
-4det й] . C)
1. Если det Д < 0, то Af > 0, А| < 0. Решение уравнений A) имеет
вид A7.19).
2. Если матрица Д положительно определена, то согласно A7.21)
det Д > 0. Следовательно, А| i = —ojf l5
а;2д = 1 [Sp Д ± v/(SpEJ-4det
Извлекая корень, получим
u2, i = i ^/Sp Д + 2\/det Д ± ^/Sp Д - 2/det Д .
Если Д22 > Дц > 0, то при Д12 = 0 осцилляторы независимы и
колеблются с частотами Oi = \/Rn < ft2 = \/R22. Интересно отме-
отметить, что связь осцилляторов приводит к увеличению расстояния между
собственными частотами ш±, ш2: ш± < п± < п2 < ш2.
Найдем теперь решения уравнения B). Полагая А2 = -ш2, щ = а,
получим и2 = аД12(а;12 — Д22)™1- Полагая А2 = —ш2? и2 = Ь, найдем
щ = bR\2(u22 — Дц)™1 • Имеем два собственных вектора:
1 \ / Й12
R12 I а' wnB) = [ ^ ~ Rl1 I Ь.
Параметризуем решения D), вводя угол 7 соотношением tg 7 — 2Д12 х
х (Д22 -Дц). Тогда
ьз{ - R22 7 ^2 ~ ^22 , 7
о = ^ Ctg -, \ = Ctg -.
Фиксируя нормировку соотношением A7.24): ит^ит^ = 6^и, полу-
получим а = cos G/2), Ь = cos G/2). Собственные векторы приобретают вид
Лекция 17. Свободные колебания 147
G/2) \ /sin G/2)\
G/2O Vcos G/2O
Общее решение A):
жх = ai cos G/2) cos (cjit + a\) + a2 sin G/2) cos (cj2? + «2),
Ж2 = —ai sin G/2) cos {uj\t + «i) + «2 cos G/2) cos (cj2? + «2) •
Замечание. В общем случае уравнения, описывающие поведение некой™
сервативной системы с двумя степенями свободы в отсутствие сил трения,
имеют форму (!). Однако теперь Д]_2 ф Д2]_. Из C) следует, что усло-
условие 4 det Д > (Sp RJ приводит к комплексным значениям A2j х. Возни-
Возникают колебания с возрастающими амплитудами, называемые флаттером.
Для того, чтобы система оставалась в окрестности положения равновесия,
матрица R должна удовлетворять неравенствам
Sp Д > 0, 0 < 4 det R < (Sp ДJ.
17.7. Биении. Если собственные частоты системы принадлежат к от-
относительно узкому интервалу частот, то суперпозицию колебаний A7.26)
можно представить как квазигармоническое колебание с медленно изменя-
изменяющимися амплитудой и фазой, назы-
называемое биением [81]. | х
Рассмотрим биения в системе, кото-
которая состоит из двух нейтральных ато-
атомов, обладающих дштольными момен-
моментами. В качестве модели атома выберем
осциллятор, образованный неподвиж-
неподвижным «центром» положительного за-
заряда е и «центром» отрицательного
заряда —е . Частота колебаний изоли- ис" "
рованного диполя равна ujq. Центры положительных зарядов расположе-
расположены на расстоянии R, радиусы-векторы «центров» отрицательных зарядов
равны соответственно i*i и R + 1*2 (рис. 17.3). Энергия взаимодействия
атомов
-е
^"^ R
+е \ ^
-е
^=R-
Пусть R^>r\, r 2 . Тогда в первом приближении следует учесть диполь-
дипольное взаимодействие. Разлагая [/Вз(гъ Г2) в ряд Тейлора, имеем
е2
е
С/В3(гь г2) = дз [rir2 ~ 3(rin)(r2n)] + ... ,
п = Ж/R. Лагранжиан системы
148 Глава IV. Линейные и нелинейные колебания
2
L = — (г2 + г2) - -^ (г? + г2) - тпп2 [пг2 - 3(гт)(г2п)],
где О2 = е2 /mR3. Уравнения Лагранжа имеют вид
ri + Ц^1 + О2[г2 - Зп(г2п)] = О,
г 2 + 0JqT2 + O2[ri — 3n(rin)] = 0.
Выбирая ось z параллельно вектору п, получим три системы уравнений:
z\ + ujIzx - 202z2 = 0, z2 + Ц^2 - 2O2^i = 0, A7.27)
Х\ + CJqXi + О2Х2 =0, Х2 + Ц)Ж2 + O2Xi = 0,
Ш + ^2!/ = 0 # + w2/2 + ^22/i = 0.
Найдем решение уравнений A7.27). Используя обозначения приме-
примера 17.2, имеем Дц = R22 = cjg, Д12 = Д21 = -2О2, 7 = ^тг/2,
ш\А =о;2=Ь2О2,
1 (А
] L 1 cos (ujxt + ai) + -^ а2 cos (^t + а2).
Поскольку (jJq ^> О, то cji?2 — ^о =Ь O2/o;q. Эффект биений будет
наибольшим, если а\ с^ а2. Для того, чтобы возбудить обе моды, зададим
начальные условия:
2i@) = 0, z2@) = a, ii@) =i2@) = 0.
Тогда «i = «2 = 0, ai = a2 = а/у/2. Полагая cj2,i = ^cp =Ь ^m? ^cp —
= A/2) (oji + uo2) = cjq, ^m = A/2) (aj2 — ^i) = ^2/^o, получим квази-
квазигармонические колебания:
/Л
о 1 C0S (W° ~ ^те)* + о 1 cos
z2j 2 \1J 2 V 1
с амплитудами Ai(t) = a sin a;TOt, -4.2^) = a cos ujmi. Величина иот
представляет собой частоту модуляции. Представление решения в виде
A7.28) имеет смысл только при адиабатически медленном изменении функ-
функции An(t) —величина приращения An(t) за период Т = 2тт/шо должна
быть мала по сравнению с |An(?)|: \An(t)\ <^ ио\Ап\. Если возбуждены
только продольные колебания, то xn(t) = yn(t) = 0. Полная энергия пер-
первого и второго диполей
_ m 2 ma;2 2 2
^п — -^ %п "I 2~~ п "
Лекция 18. Вынужденные колебания 149
Подставляя An(t), находим
#1,2 = -#o(l=Fcos a;6t), Eo = —^а2, шб = 2ит = ,
где ujq = Ш2 ^ ш\ — частота биений. Диполи периодически обмениваются
энергией с частотой биений.
17.8. Нормальные координаты. Найдем преобразование к новым пе-
переменным х —>¦ z, хп = fn(z), в терминах которых лагранжиан является
суммой квадратичных форм: каждая из них соответствует определенной мо-
моде. Из A7.26) следует, что искомая замена переменных должна иметь вид
хп = Anvzv. A7.29)
Здесь Ап1/ — матрица, столбцами которой являютя собственные векто-
векторы: Ani/ = un(vy В соответствии с A7.24), A7.25)
gmn^mju^ni/ = <5/л/> kmnAmiIAni/ = LU^S^. A7.30)
Подставляя A7.29) в A7.13) и учитывая A7.30), получим новый лагран-
лагранжиан:
A7.31)
Новые переменные z^ называют нормальными координатами или коллек-
коллективными переменными. Они описывают движение системы как движение
совокупности новых невзаимодействующих «осцилляторов», представля-
представляющих собой определенные пространственные структуры. Эта интерпрета-
интерпретация нормальных мод приобретает глубокий смысл при квантовомеханиче-
ском подходе к исследованию многочастичных систем.
Лекция 18. Вынужденные колебания
18.1. Одномерные колебания. Рассмотрим систему с одной степенью
свободы, на которую действуют неоднородные переменные силы. В этом
случае движение системы в окрестности положения устойчивого равнове-
равновесия называют вынужденными колебаниями.
Потенциальная энергия взаимодействия системы с внешними телами
U = Uext(g, i) удовлетворяет условиям
lim C/ext(g, t) = 0, lim Uext(g, t) = 0.
t—>—-OO t—> + OG
Лагранжиан системы во внешнем поле
L(q, Q,t) = l G(q)q2 - U(q) - Ue«(q, t). A8.1)
150 Глава IV. Линейные и нелинейные колебания
Положение равновесия невозмущенной системы определяется уравнени-
уравнением dU/dq = 0. Пусть q = с — положение устойчивого равновесия. Пола-
Полагая q = с + ж, разложим C/ext(g, t) в ряд Тейлора:
UQXt(c + ж,
В приближении
t) Uext(c, t) + x
однородного поля
(dUext\
\ dq )c
i I
1 2! V dq*
A8.2)
Используя обозначения, введенные в лекции 17, запишем лагранжи-
лагранжиан, описывающий вынужденные линейные колебания рассматриваемой
системы:
1(т т f') = — т^ — т^ 4- TF(f') A8 31
Уравнения Лагранжа имеют вид
mx + kx = F(t). A8.4)
Рассматриваемая система по существу является открытой, так как обыч-
обычно взаимодействует со средой — другой системой с весьма большим, прак-
практически бесконечным, числом степеней свободы. Ее называют термоста-
термостатом. Если термостат находится в равновесном состоянии, то взаимодей-
взаимодействие системы и термостата приводит к необратимым процессам. Часть
мощности, передаваемой от внешнего источника, расходуется на увеличе-
увеличение полной энергии термостата. Имеется несколько подходов к описанию
подобных ситуаций. Здесь мы учтем взаимодействие системы с термоста-
термостатом введением в правую часть A8.4) диссипативной силы Fg = —mjx,
где 7™1 — время релаксации свободной системы. Такой подход приводит
к уравнению
ж + 7ж + с^ж = —F(t). A8.5)
т
Это уравнение может быть решено несколькими различными методами.
Наибольший интерес представляет построение решения в терминах функ-
функций Грина, которые широко используются в последующих разделах курса
теоретической физики — в квантовой механике, электродинамике, стати-
статистической физике и т. д.
18.2. Запаздывающая функция Грина. Двухвременная функция Гри-
Грина G(t, t') удовлетворяет уравнению
^г + 7 ^т- + uoG = S(t-t') A8.6)
Лекция 18. Вынужденные колебания
151
с начальными условиями
G(t = t' - 0, t') = 0, G(t = t' - 0, t') = 0.
Здесь введено обозначение f(t — 0) = lim f(t — е)9 S(t) — дираковская
e—t 0
дельта- функция.
Поскольку A8.6) является уравнением с постоянными коэффициентами,
то функция Грина зависит только от разности аргументов t — tf. Подстав-
Подставляя в A8.6) фурье-разложения
G(t,t') =
получим
g(u) = (и
), S(t-t')= I ge"
г = — (ш —
Т
i;2 = ^* — =Ь О,
О =
A8.7)
Теперь G(t, t;) можно вычислить с помощью теоремы о вычетах. Траек-
Траектории полюсов uJx^in) в комплексной
плоскости ш = ш' + iuj" показаны на "
рис. 18.1. Важно отметить, что полю-
полюсы всегда лежат в нижней полуплоско-
полуплоскости [82]. Функция g{uj) аналитична в
верхней полуплоскости, по этой причи-
причине G(t, tr) обращается в нуль при t < tf.
Действительно, при t < t1 реальная
часть —icj(t — tf) , равная uj"{t — t') ,
отрицательна в верхней полуплоскос-
полуплоскости, где согласно лемме Жордана можно
замкнуть контур интегрирования. Ес-
-(Bo
* 7«co0
\
ю к
0
I
i7»ft
T
1
©
h7«mof ю'
/
Рис. 18.1
ли t > tl, контур интегрирования замыкается в нижней полуплоско-
полуплоскости. Тогда получаем
G(t, t') = -2т
0=1,2
2тг
Следовательно, в случае 2cjo > 7
(и — UJi)(uJ ~~ UJ2)
A8.8)
152 Глава IV. Линейные и нелинейные колебания
где 9(т) — разрывная функция Хевисайда. Заметим, что функция D(t)
удовлетворяет однородному уравнению с начальными условиями D@) =
= о, i)(o) = 1.
Обратимся теперь к решению уравнения A8.5). Зададим начальные
условия: ж (to) = xq, x(to) = xq. В момент времени te > to включается
взаимодействие с внешним полем: F = 0 при t < te; F = F(t) при t>te.
Общее решение A8.5) можно представить в виде
x(t) = D(t -
oo
Г fit1
D(t-to)xo+\ —G(t^tf)F(tf). A8.9)
J m
Результирующее движение представляет собой суперпозицию колебаний
двух типов: свободных и вынужденных колебаний. При вычислении скоро-
скорости х следует учесть, что 9(t-tf) = S(t-tf), G(t-t') = 6(t-t')D(t-tf).
Верхний предел интегрирования в A8.9), по существу, равен t. Это
означает, что отклик системы в момент времени t зависит от значения
силы F(t'), действующей в предущие моменты. Полученный результат
согласуется с условием причинности: следствие не может предшествовать
причине.
18.3. Энергия, потребляемая системой. Выберем начальные условия
в виде x(to) = 0 , ж (to) = 0, te = to. Мощность, потребляемая системой,
(X)
Г dt'
P(t) = F(t)x = F(t) —G(t,tf)F(tf). A8.10)
Предположим, что взаимодейсвие с внешним полем «включается» в
момент времени to —> ^оо, и определим приращение полной энергии,
обусловленное действием силы:
= ^ I dt I dt'Gfat^FlfiFlt1). A8.11)
ш J J
со
Если функция F{t) достаточно гладкая и интеграл J dt\F{t)\ сходится,
Лекция 18. Вынужденные колебания 153
то F{t) можно представить в виде интеграла Фурье:
оо
F(t)= | ^рие~ш, Fu=
Вследствие вещественности функции F(t) очевидно, что Р^ш = F*.
Подставляя в A8.11) фурье-разложение функции Грина A8.8), получим
Учитывая A8.7), находим
'JLJ 2 2\2
Irngfcj) :=::: — А := (ujf) — uj )
Таким образом, приращение энергии
ъ . 2 '-;¦¦" . .. A8.12)
7гт J (cjg — ^ ) + 7 ^
о
Если затухание отсутствует, то, используя соотношение [82]
lim Im —2 :— = lim —^ — —- = ttS(ujI — о;2),
получим приращение полной энергии:
оо
Г . 2
A8.13)
оо
2 1 Г 2
\F 2 1
2m
е
Этот же результат справедлив и в том случае, когда ширина спектра внешней
силы в A8.12) велика по сравнению с 7- Если ширина спектра существен-
существенно превышает величину ujq, т.е. время действия силы т <С ^о? то
= —, /= dtF(t). A8.14)
Для монохроматического поля F(t) = F® cos uet приращение энергии
A8.12) пропорционально времени взаимодействия 2Т, которое значитель-
значительно превышает характерные времена о;, uJq1', поэтому можно считать,
154
Глава IV. Линейные и нелинейные колебания
что 2Т —»¦ оо. В этом случае следует перейти к определению среднего
значения мощности, потребляемой системой [83]. Учитывая значение ин-
интеграла
lim —
т^оо 2Г
dt
— ou)t]
-T
получим из A8.12) среднюю мощность:
р* = т^ ir = S;
- ujIJ + 72cje2
A8.15)
Пример 18.1. Сила, действующая на незатухающий осциллятор
(рис. 18.2), '
F(t) =F0\f(t + T/2) -/(t-T/2)], f{t) =
В момент времени to
осциллятор покоился в начале координат
F А
-Т/2
Т/2
Рис. 18.2
в положении равновесия. Найдем приращение полной знергии в результате
действия внешней силы. Учитывая значение интеграла
получим
sin (ljT/2)
= 2тгтР0^ U-, AE =
shGTUJT)
Рассмотрим два частных случая.
т
s1i(tfu;gt) J
Лекция 18. Вынужденные колебания 155
1. Плавный фронт импульса силы {ujqt ^> 1). В этом случае передача
энергии экспоненциально мала:
т
2. Импульс силы с крутым фронтом, (ujqt <C 1). В этом случае f(t)
0(t). Передача энергии
m \ujoJ 2
Если и0Т < 1, то АЕ и I|/2w, /0 = F0T, F(t) «
18.4. Резонанс. Переходный и установившийся режимы. Выберем
начальные условия в виде ж (to) = 0, ж (to) = 0, to < 0. Исследуем отклик
системы A8.9) в случае внешней силы
= Г о, t < о, t > г,
1 j [Fo cos cut, 0 ^ t <C T,
T >> 7. Три первых слагаемых в A8.9) экспоненциально убывают со
временем. Через промежуток времени \t — to | ^> j^1 основной вклад дает
последнее слагаемое. В интервале 0 < t < Т
v/ тп
о
= —^ Re e^fwt. A8.16)
1. Установившийся режим колебаний. При 7™1 ^ ^ < ^ решение
A8.16) представляет собой незатухающие колебания с частотой внешней
силы:
Fa p~iojt J7L
x(t) = -^ Re = -^ Re ё(^)е^г^ = С cos
A8.17)
m
m
Re = (cug — oj2)| g(oj)|, siny? = - Im = ~7o;|g(a;)|.
Функцию C(cj) называют амплитудно-частотной характеристикой, гра-
график функции С(а;) — резонансной кривой. Функция С(ш) достигает
156
Глава IV. Линейные и нелинейные колебания
максимума при резонансной частоте ш = шт,
шт =
С(ит) =
Ha рис. 18.3 изображены графики функций С(ш) и (р(и).
Наибольший интерес представляют колебания с малым затуханием, ко-
когда 7 *C ujq . В этом случае шт ~ и®. Шириной резонансной кривой назы-
называют интервал частот \ш - шо\, в пределах которого значение амплитуды
не опускается ниже величины A/V5) С(ит):
:СМ.
Учитывая, что и2 — Uq ~ 2uq Аи, находим | Аи\ = j.
При cj <С шо С (и) с± (j/uq) С(шт) <С С{ьот). Еще слабее отклик
системы при значениях частоты cj >^ о;то: С (о;) ~ (jljq/uj2) С(шт) <С
При частотах ш =
е, близких к собственной частоте ujq, для
которых ш + си® « 2cjq, резонансную
кривую можно представить в виде
Резонансом (от лат. resonans — от-
отзываюсь) называется избирательный
отклик колебательной системы на пе-
периодическое воздействие внешней си-
силы с частотой, близкой к собственной
частоте.
Открытые в последнее время новые
резонансные явления в механических,
гидродинамических, атомных и ядерных системах играют исключительную
роль в современных теоретических и экспериментальных исследованиях.
Умножая A8.5) на тх, получим закон изменения полной энергии:
-я/2 ^-<г
Рис. 18.3
QJL
= -mjx
2 , тгD.\' ^
+ F(t)x, E =
тщх
В установившемся режиме сумма средних значений мощности внешней
силы
(Fext) = (Fx) = -- FouC sin (p
Лекция 18. Вынужденные колебания 157
и мощности сил трения
равна нулю. Вследствие этого среднее значение полной энергии поддержи-
поддерживается на постоянном уровне: (Е) = (т/4) С2{ш1 + а;2).
Пример 18.2. Изложим общий метод вычисления интеграла в реше-
решении A8.9) в случае установившегося режима колебаний. Пусть F(t) =
= f(i) cos out. «Амплитуда» силы удовлетворяет условию \df/dt\ <Ccj|/|.
Переходя к новой переменной г = t — t', получим
oo
x(t) =Re^ \ dt1
m J
to
Tfl
Поскольку в интервале 0 < t < Т величина i — to >> 7 \ то верхний пре-
предел можно положить равным +оо и учесть, что основной вклад в интеграл
дают значения шт <С 1. В результате получим
оо
x(t) = Re ^^ [ dr G(r)eiUT [f (t) - rf + ...} =
Tfl J
cos
Функции C(t) и (p(t) определены соотношениями A8.17), в которых
следует произвести замену F® ^> f(t).
2. Переходный режим. Пусть j <^ ujq, п с± ljq. Исследуем поведе-
поведение x(t) в том случае, когда и находится в окрестности резонансной ча-
частоты: ш = qjq + г, |г| <С ujq. Тогда в интервале 0 < t < Т основной вклад
в A8.16) дает первый член:
ТГп 1 _
e2 + G/2J
В рассматриваемом приближении \dA/dt\ <C ouA, \da/dt\ <C cj|a| — при-
приращения функций A(t) и a(t) за период 2тт/ои достаточно малы. В этом
случае решение уравнения A8.5) является квазипериодической функцией
158
Глава IV. Линейные и нелинейные колебания
с адиабатически медленно изменяющимися «амплитудой» A(i) и «фа-
«фазой» a(t). Это представление, как говорят физики-теоретики, — аналог
7=0, ?Ф0
7 = 0, е=
Рис. 18.4
«слегка искривленой» прямой линии. На рис. 18.4 изображены графики A(t)
при различных значениях е и 7- Исследуем три частных случая:
1) 7 = 0, г ф 0. Тогда
A(t) =
WIU)q\s
et
sm-
2) 7 / 0, е = 0;
3) j = Q, е =
A(t) =
Fot
Область t ^ Т. Интегрируя A8.9) в пределах 0 ^ t ^ Г, получим
затухающие колебания:
x(t) = D(t - Т) х{Т)
- Т) х(Т) + D(t - Т) х(Т) w
и е^^т)/2 А{Т) cos [uot
18.5. Колебания связанных систем. Рассмотрим консервативную си-
систему с s степнями свободы, взаимодействующую с внешним полем. Ла-
Лагранжиан свободной системы имеет вид A7.13). Очевидно, что в прибли-
приближении однородного поля потенциальная энергия взаимодейсвия системы с
внешним полем
Лекция 18. Вынужденные колебания 159
8UQ:
Аналогично A8.3) получим лагранжиан системы:
1 1
Их х t) = — &¦ Х'Х — — к' Х'Х + х- F-(t) A8 18)
V , , ; 2 6m г п 2 гп г п г г\ )• \ ¦ )
Взаимодействие с термостатом приводит в линейном приближении к по-
появлению сил трения. Эти силы можно представить в виде производной от
квадратичной формы:
р .(f) — /? — _ гу. л*.л* Г18 19")
называемой диссипативной функцией Рэлея [73]. Матрица коэффициентов
симметрична: jmn = jnm.
Уравнения движения имеют вид
ётпХп + kmnxn = Fm — . A8.20)
ихт
Очевидно, что для определения вынужденных колебаний необходимо
перейти к нормальным координатам. В соответствии с A7.29), A7.30) Xi =
L(z, z,t) = ^ {zl - uj2azl) + zafa(t), A8.21)
где fa(t) = FiAia. В новых переменных диссипативная функция
Ф) = 2 7а/з^«^/з7 7а/з = 7inAiaAn/3.
Уравнения Лагранжа имеют вид
d dL 8L дг 2 —
В частном случае jmn = jgmn, Ja/3 = 7^«/з,
2 _|_ /у^ 4- w2z = / (t), /i = 1, ..., s. A8.22)
Это уравнение совпадает с A8.5). Функция Грина уравнения A8.22)
Ga(t, tf) = 0(t — t;) Da(t — t'\ Da(r) = sin 0ar,
0^
160 Глава IV. Линейные и нелинейные колебания
па = \JbJ2a - (т/2J- Решение уравнения A8.22)
t
z^t) = a^^2 cos ((V + %) +
to
Амплитуда и фаза определяются начальными условиями %(t0),
(z^ = gmnAmflxn). Таким образом, решение уравнения A8.20)
•^m \t) — С
оо
Г
Jj. / Д Д /~1 (л. -/¦ '\ Е1 (+1\
Ш LAjji^LAfi^ \J(_i\t — t ) Гn\t ).
J
A823)
Вклад каждой моды зависит от соотношений между компонентами си-
силы Fn(t) [84].
Пример18.2. Лагранжиан двумерной системы
L(x, х, t) = у х2 - у UinXiXn + ж2
= Fq cos out, t>0. Найдем решение уравнений движения в устано-
установившемся режиме.
Из уравнения (—\2ётп + Umn)un = 0 получим собственные частоты
^1,1 = ^о ^ ^^2? собственные векторы и матрицу Amfl = ит^у.
т{1) — /7r— lib ит{2) —
В установившемся режиме t — to ^> 7 x- Произведем в интеграле A8.23)
замену t — i' = т и заменим предел интегрирования t — to на оо. В
результате находим
тй А2
2д
Следовательно,
xi (t) = ^ Re 2 А%"А| 2 . e"iwt = Ci cos (out + 71),
x2(t) = -^ Re y^^ ^ ^TT2 / . , e~lujt = C2 cos (wt + 72).
2m (Af - uj2 — ijuj)^ — uj2 — ijuj)
Лекция 19. Общие свойства нелинейных систем 161
Амплитуды колебаний С±(ш) и С2 (ш) определяют две резонансные
кривые. Отношение амплитуд
С2(ш) [(Xj + Л| - 2ш2J + 472с
Если о;>Л2, то Ci/G2<Cl. Для частот a;«CAi отношение C\jC2 < 1;
для частот о;, находящихся в пределах Ai < и < А2, величина С1/С2 < 1. Мы
имеем полосовой фильтр, ослабляющий влияние внешней силы частотой ш,
лежащей вне интервала (Ai, A2) [81].
Лекция 19. Общие свойства нелинейных систем
19.1. Нелинейные системы. Большинство задач теоретической и ма-
математической физики приводят к нелинейным уравнениям [85-93]. Кон-
Консервативные системы с одной степенью свободы всегда интегрируемы. В
предыдущих лекциях мы получили решения одномерных нелинейных си-
систем частицы в поле Эккарта (см. лекцию 5) и математического маятника
(см. лекцию 14), которые демонстрируют типичные свойства нелинейных
колебаний: 1) периодическое решение, разложенное в ряд Фурье, содер-
содержит бесконечное число гармоник основной частоты, 2) период колебаний
зависит от полной энергии.
Системы с несколькими степенями свободы, как правило, неитегриру-
емы. Исключение составляют системы, обладающие определенными сим-
метриями, с каждой из которых связан первый интеграл. Это обстоятель-
обстоятельство позволило, например, найти решение задачи Кеплера (см. лекцию 6).
Однако в настоящее время нет общих методов, позволяющих найти первые
интегралы; не существует и общего метода интегрирования нелинейных си-
систем. Любопытно отметить, что известны случаи, когда удалось догадаться
о существовании скрытого интеграла при помощи численного эксперимен-
эксперимента. Более того, использование ЭВМ в значительной мере способствовало
пониманию характерных особенностей поведения существенно нелиней-
нелинейных систем [93].
Тема настоящей лекции — введение в качественную теорию дифферен-
дифференциальных уравнений. В 1882 г. А. Пуанкаре развил новое представление
о том, что значит решить дифференциальное уравнение [94]. Он писал:
«... именно с качественной стороны должна начинаться теория всякой
функции, и вот почему в первую очередь возникает следующая задача:
построить кривые, определяемые дифференциальным уравнением. Это ка-
качественное изучение; когда оно будет проделано полностью, то принесет
самую большую пользу численному анализу функций. Впрочем, это каче-
качественное изучение и само по себе будет иметь первостепенный интерес.
Различные и чрезвычайно важные вопросы анализа и механики могут быть
сведены к нему».
162 Глава IV. Линейные и нелинейные колебания
19.2. Нелинейные системы на плоскости. Особенно полно разрабо-
разработана качественная теория двумерных систем уравнений [77, 94—97]:
^1 =/i(xb ж2), х2 = /2(^1, х2). A9.1)
Поскольку функции fn(xi, х2) не зависят от времени, то говорят, что
система автономна. Систему называют неавтономной, если dfn/dt Ф 0.
Уравнения вида A9.1) возникают на промежуточных этапах решения нели-
нелинейных уравнений второго порядка:
x = f(x,x), A9.2)
или имеют самостоятельное значение при построении математических мо-
моделей различных процессов. Например, быстрое сокращение мышечного
волокна сердца, а затем быстрое возвращение к прежнему расслабленному
состоянию описывается уравнениями
ех\ = х\ — х\ ~~ x2j х2 = х\ ~~ жю, A9.3)
где х\—длина волокна, х2—- электрохимический потенциал [78]. Сдру™
гой стороны, полагая в A9.2) х = х±, х = х2, получим систему ти-
типа A9.1):
хг=х2, X2=f(xi,x2). A9.4)
В лекции 25 будут рассмотрены уравнения механики в гамильтоновой
форме в виде системы четного числа уравнений первого порядка. В случае
двумерной системы уравнения Гамильтона имеют вид
A9.5)
где Н = И (ж, р) —гамильтониан системы. Полагая для сравнения х = х\,
р = Х2, получим из A9.1), A9.5) соотношение dfi/dxi + df2dx2 = 0.
В этом случае Н(х, р) — интеграл движения:
• 9Я. дН . п
Я = —ж + —р = 0.
ох ар
Далее в лекции 30 будут показано, что уравнения A9.1) можно предста-
представить как гамильтонову подсистему в пространстве R4 с гамильтониа-
гамильтонианом h =pnfn{x):
dh dh
хп = т,—, Pn = -д—, п = 1, 2.
дрп дхп
Лекция 19. Общие свойства нелинейных систем 163
19.3. Синэргетика. В прикладных задачах важны ситуации, в которых
переменные х\, х2 описывают медленную и быструю подсистемы. В этом
случае уравнения A9.1) имеют вид
Рг(хи х2), х2 = -7^2 + F2(xu х2), A9.1а)
где 7 > 0, 7 ^ |^и I- Эволюция быстрой подсистемы начинается с пере-
ходного процесса длительностью т2 ~ 7™1 ^ Ti ~ l^nl- Далее эво-
эволюция системы описывается уравнениями A9.1а), в которых можно поло-
положить х2 = 0:
Fi(xb х2), 0 = -jx2 + F2(xu x2).
Из второго уравнения находим х2 = <p(xi). Подстановка х2 в первое
уравнение позволяет существенно упростить задачу:
хг = кпхг + Ft(xu (р(хг)).
Описанный метод, основанный на выделении характерных временных мас-
масштабов, называют адиабатическим исключением переменной х2. Этот под-
подход впервые предложен Г. Хакеном [72]. Мы приходим к выводу, что поведе-
поведение системы определяется эволюцией медленной подсистемы. Медленная
подсистема управляет быстрой. Именно поэтому переменную х\ называ-
называют параметром порядка.
В многомерных системах можно выделить небольшое число медлен-
медленных переменных, к которым подстраиваются все остальные. Более того,
во многих случаях удается получить решения вида xn(t) = F(t, ф(^п)),
^п = n/at (п = 1, ..., s). Такие решения получили название автомо-
автомодельных, или самоподобных. Для эволюции системы характерны «забыва-
«забывание» начальных условий и формирование структур, определяемых функци-
функциями ф(?п)- Простые структуры объединяются в различные типы сложных
структур, которым можно сопоставить собственные векторы нелинейной
системы уравнений. Такие решения не могут существовать в окрестно-
окрестности состояний равновесия, поскольку диссипативный процесс, связанный
с рассеянием энергии, уничтожает всякую упорядоченность. Новые ко-
когерентные структуры возникают в состояниях, далеких от равновесия в
открытых системах, и стабилизируются в результате обмена энергией с
внешней средой. Таким образом, неравновесность может быть источником
упорядоченности, или самоорганизации. Такую упорядоченность бельгий-
бельгийский ученый И. Пригожий назвал диссипативной структурой [98-101].
В 70-е годы было установлено, что явление самоорганизации широко рас-
распространено в гидродинамике, химии, биологии, астрофизике. Процессы,
приводящие к образованию структур, встречаются также и в других обла-
областях науки: экологии, социологии, экономике и т.д. 'Г. Хакен предложил
назвать теорию самоорганизации синэргетикой (дословно — теорией сов-
совместного действия) [72, 102]. Общий подход к явлениям, совершенно раз-
различным по своей природе, несомненно, приведет к созданию единой науки
об окружающем нас мире.
164 Глава IV. Линейные и нелинейные колебания
19.4. Устойчивость по Ляпунову. Точки хп = ап, в которых правые
части уравнений A9.1) обращаются в нуль:
ЛОъ «2) = 0, /2(«ь «2) = О,
называют особыми, или неподвижными точками [67, 78, 94-96]. В случае
механической системы A9.2) особые точки, удовлетворяющие в соответ-
соответствии с A9.4) уравнениям а2 = 0, /(%, 0) = 0, совпадают с положения™
ми равновесия.
Нас интересует поведение решений A9.1) с начальными условия-
условиями хп@) = хпо, близкими к значениям хп = ап.
Создатель теории устойчивости A.M. Ляпунов A857-1920 гг.) в работе,
изданной в 1892 г., развил два различных метода исследования устойчи-
вости [102].
Особая точка ап называется устойчивой по Ляпунову, если для любого
заданного е > 0 существует такое rj(e), что при условии \хпо — ап\ <rj(e)
будет выполняться неравенство \xn(t) ~~ ап\ <е для всех t, 0 < t < 00.
Если имеется по крайней мере одна траектория, не удовлетворяющая
этим условиям, то особая точка называется неустойчивой.
Особая точка называется асимптотически устойчивой в смысле Ляпу-
Ляпунова, если она устойчива и, кроме того, lim xn(t) = ап.
t—>оо
19.5. Функции Ляпунова. Анализ устойчивости основан на построе-
построении специальной функции — функции Ляпунова [79, 103-105].
Положительно определенная в окрестности D точки х = 0 функция
V(x) называется функцией Ляпунова, если в области D полная производ-
производная по времени вдоль траектории системы dV/dt < 0:
^ = ^xn = ^fn = W(x), W(x) < 0. A9.6)
at oxn oxn
Геометрический смысл функции V(x). Если ввести координату z, то
уравнение z = V(xi, X2) определяет поверхность в пространстве х\,
Х2, z. Линии уровня V(xi, X2) = Ck, к = 1, ..., s, представляют собой
семейство замкнутых кривых, окружающих начало координат. Известны
следующие два утверждения.
1. Теорема Ляпунова об устойчивости. Если в некоторой окрестнос-
окрестности D положения равновесия х = 0 существует функция Ляпунова V(x),
то движение устойчиво в области D.
2. Теорема Ляпунова об асимптотической устойчивости. Если в неко-
некоторой окрестности D положения равновесия х = 0 существует функция
Ляпунова, такая, что функция —dV/dt положительно определена в D, то
положение равновесия асимптотически устойчиво.
К сожалению, неизвестны общие методы построения функций Ляпуно-
Ляпунова, но во многих случаях их можно «угадать». Условия устойчивости, сле-
следующие из двух теорем, являются достаточными и при неудачном выборе
Лекция 19. Общие свойства нелинейных систем 165
функции Ляпунова могут привести к слишком сильным ограничениям на
параметры системы. Достоинства метода Ляпунова в том, что исследование
устойчивости не связано с проблемой интегрирования уравнений A9.1).
Пример 19.1. Очевидно, теоремы Ляпунова справедливы и для мно-
многомерных систем. Исследуем устойчивость положения равновесия консер-
консервативной системы с s степенями свободы:
Qk = ^^—, U = U{qu ..., q8).
OQ
Полагая qu = Xk, qk = Pk, получим систему 2s уравнений первого порядка:
dU
д—
дхк
В качестве функции Ляпунова можно испытать обобщенную энергию
dU
Рк = -д—, %к =Рк-
дхк
Пусть потенциальная энергия имеет изолированный минимум при хп = 0.
Тогда U (х) — положительно определенная функция. Следовательно, Н
также является положительно определенной функций. Поскольку Н = 0,
то положение равновесия рк = 0, хк = 0 (к = 1, ..., s) устойчиво
(в смысле Ляпунова). Это утверждение было сформулировано Лагранжем
и позднее доказано Дирихле.
19.6. Устойчивость по линейному приближению. Любая точка фа-
фазовой плоскости, не являющаяся неподвижной, называется обыкновенной
точкой. В окрестности обыкновенной точки решение A9.1) устроено очень
просто. В ней можно выделить специальную окрестность — трубку траек-
траекторий, образованную траекториями системы. Траектории входят в трубку
на одном ее торце и выходят на другом. Вблизи особых точек решения
устроены намного сложней. Ни одна из траекторий, начинающаяся в обык-
обыкновенной точке, не может прийти в особую точку за конечное время.
Исследуем устойчивость системы A9.1) в окрестности особой точки.
Пусть хп = ап — одна из особых точек системы A9.1). Введем локальные
координаты zn = хп — ап, разложим fn(x) в ряд Тейлора и ограничимся
линейным приближением. Тогда получим систему уравнений:
где постоянная матрица ктп = (dfm/dxn)a. Заметим, что для гамильто-
новых систем A9.5) в линейном приближении
Н(х, р) = — р2 — — х2 + ^о^р, A9.8)
где ко = fen = — &22-
166 Глава IV. Линейные и нелинейные колебания
Простые системы. Линейную систему A9.7) называют простой, ес-
если матрица ктп неособая: det к ф 0, и, следовательно, ктп не имеет
нулевых собственных значений. Тогда единственным решением уравне-
уравнений kmnzn = 0 является zn = 0 (п = 1, 2), и система A9.7) имеет
единственную изолированную неподвижную точку в начале координат. Нас
будет интересовать фазовый портрет линейной системы A9.7) и устойчи-
устойчивость особой точки z = 0. В лекции 17 мы рассмотрели уравнения A7.10),
эквивалентные системе A9.7), где z\ = x, z2 = р с элементами матрицы
fen = 0, к12 = 1, fe2i = — cjg, k22 = -7j
и нашли фазовые траектории в области Sp к = -j < 0, det к = Uq > 0
(рис. 19.1),
Spfc = fcii+fc22j det fc = fen &22 — fel2fe21-
Здесь уравнения A9.7) будут решены другим способом в результате
приведения матрицы ктп к жордановой форме.
Классификация особых точек на плоскости. Перейдем к новым коорди-
координатам z ->• z': zm = Tmnz^, в которых матрица ктп имеет жордановую
форму: / = Т^кТ [67, 79]. Из A9.7) находим
71 .}' — и т1 -у1 —v r; — T^lh T -у1
z{ = IijZj. A9.9)
Тип жордановского блока зависит от собственных значений матрицы ктп,
удовлетворяющих уравнению det |A^ — feijl = 0: A2 ^SpfcA + det к = 0,
A2,i = ^Spfezb y/D, A9.10)
D = -(SpfcJ -det k.
Особая точка устойчива, если действительные части корней характеристи-
характеристического уравнения отрицательны [79].
Критерий устойчивости. В общем случае квадратной матрицы поряд-
порядка п характеристическое уравнение можно записать в виде
ао\п + aiA^1 + • • • + ап^г\ + ап = 0.
Необходимое и достаточное условие того, что корни имеют отрицательные
вещественные части, дается критерием Payсса-Гурвица [79]: все коффици-
енты и все главные миноры матрицы Гурвица:
Ai=ab A2 =
«2
А. =
аг
а0
0
а3
а2
аг
а5
а3
должны быть положительными. Этот критерий, полученный А. Гурвицем
в 1895 г., является обобщением теоремы Э. Раусса A877 г.) [79].
Лекция 19. Общие свойства нелинейных систем 167
Используя критерий Рауса—Гурвица, можно установить условия, при
которых корни уравнения п-то порядка лежат в левой полуплоскости ком-
комплексного параметра Л. Здесь эти условия сводятся к неравенствам Spk <
< О, det k > 0. Найдем фазовый портрет системы A9.7) для значений
элементов матрицы ктп, удовлетворяющих условиям ^оо < Spk < оо,
™оо < det к < оо.
Рассмотрим вначале случай различных собственных значений Ai, A2.
1. Пусть det к < 0. В этом случае D = а2 > 0; корни A9.10) —
действительные и разных знаков. Из курса высшей алгебры известно, что
столбцами матрицы Тш/Х являются собственные векторы ит^ (/х = 1, 2)
уравнения ктпип = Хит:
(fell — A) U\ + к\2Щ = О, k2\U\ + (^22 ~ А) Щ = 0.
Полагая A = Ai, A2, получим
/ *12 \
i J ()(Л , ) 09.11)
Следовательно, Tm/i = ит
¦A*
, ^12 fel2 \ T_i _ 1 /A2 - fell ^12
i — кц А2 — kii) 2к\2®о \fen — Ai fci2
где ctq = A2 — Ai. Уравнения A9.9), z^ = Anz^, определяют траектории
в фазовом пространстве z{, z%:
z( = CieXl\ zi = C2eX2t. A9.12)
Фазовые кривые являются гиперболами. Особую точку называют седлом
(рис. 19.1). На осях координат лежат асимптоты гипербол, называемые се-
сепаратрисами. Они также являются фазовыми траекториями.
Решение системы A9.7) — zm = TmnCneXnt. Пусть zm@) = sm.
Из уравнения sm = ТтпСт находим Сп = T~?sk. Следовательно,
zn(t) = TmnT^eXntSk. Вводя оператор эволюции системы Лто^(^) =
= TmnT~]}eXnt, получим решение A9.7) в виде
zm(t) = Amk(t)zk@), A9.13)
^
^
2. Пусть det k>0, D>0. Если Spfe<0, то оба корня отрицательны.
Решение A9.12) определяет семейство парабол. Особая точка — устойчи-
устойчивый узел. Если Sp к > 0, то оба корня положительны. Особая точка —
неустойчивый узел.
168 Глава IV. Линейные и нелинейные колебания
Пример 19.2. Для иллюстрации явления самоорганизации рассмо-
рассмотрим систему A9.7) в случае к22 = -J < 0, 7> \fai\, D > 0. Из A9.10)
находим
det к к\2к2\
А\ ~ = ^7? ^2 — = fell Н
7
ll
7 7
Если начальные условия заданы при t = 0, то решение zm = Tmnz'n в
интервале t ^ j^1 имеет вид
l122, ^^
7
В соответствии с методом адиабатического исключения (см. второе уравне-
уравнение системы A9.7)) z2 = (fei/7)zi: быстрая подсистема мгновенно, без
запаздывания, следует за медленной подсистемой.
3. Пусть D = 0. Имеем действительные кратные корни Х\ = Х2 =
= Ло и два одинаковых собственных вектора. В простейшем случае ктп =
— Ao<5mn особая точка соответствует узлу специального вида, который
называют дикритическимузлом,. Пусть ктп ф Ао<5топ . Тогда матрицу ктп
нельзя привести к диагональному виду. В этом случае столбцы матрицы
преобразования TmiI = em^ представляют векторы, удовлетворяющие
уравнениям [67, 79]
Из этой системы находим
1
- fell 1 ' еш{2) =
fel2
Следовательно,
1 О'
fcl2
Решение уравнений A9.9)
= А^
имеет вид
z[ = (d + fei2C2t) eAot5 z2' = G2eXot.
z[
Особая точка — вырожденный узел, устойчивый или неустойчивый в зави-
зависимости от знака Aq (рис. 19.1).
Лекция 19. Общие свойства нелинейных систем
169
/
170 Глава IV. Линейные и нелинейные колебания
4. Пусть D = ™о"о < 0. Имеем два комплексно-сопряженных корня:
A2,i = (l/2)Spfc ± гсг0. Из A9.11) получим два собственных вектора.
Используя решение системы A9.9):
z[ = AeXl\ zi = А*еХ2\ А = -ae~ia,
находим решение системы A9.7): zm = Тт^ z'^ Tmfl = ит^,
z\ = а ехр | - Spfc I cos {a®t + а), A9.14)
Z2 = а ехр ( - Sp fc
- Sp k — fen 1 cos ((Tot + a) — erg sin (dot + a) .
Если Sp k < 0, то особая точка — устойчивый фокус; при Sp k > 0
особая точка — неустойчивый фокус. Значению Sp k = 0 соответствует
особая точка, называемая центром (см. рис. 19.1).
Непростые системы. В этом случае det к = 0 и кроме zn = 0 система
имеет другие неподвижные точки. Если Spk = 05 ктп / 0, то все точки
оси z\ являются неподвижными, Ai = A2 = 0. На рис. 19.1 изображены
фазовые портреты в случае Sp к = к^* Если ктп — нулевая матрица, то
вся плоскость z\, z^ заполнена неподвижными точками.
Сделаем несколько замечаний.
1. Для стандартных гамильтоновых систем A9.8) возможны только
седла и центр.
2. Устойчивый узел, вырожденный узел и фокус асимптотически устой-
устойчивы; центр — устойчивая особая точка.
3. Координаты z^ определяют положение точки относительно базиса,
образованного собственными векторами. В старых координатах zn фазо-
фазовый портрет будет искажен, однако сохранит качественное поведение ре-
решения z^(t). Две системы уравнений A9.7) и A9.9) называют линейно
эквивалентными, если существует взаимно однозначное соответствие z =
= Tz' фазовых портретов систем.
4. Решение A9.7) в виде A9.13) описывает все возможные типы фа-
фазовых траекторий, в том числе и вырожденные.
5. Фазовые портреты нелинейной системы и ее линеаризации эквива-
эквивалентны только в том случае, если особая точка не является центром [78].
Пример 19.3. Рассмотрим уравнение Ван-дер-Поля:
х-е A - х2 /с2) х + ш1х = 05 е > 0,
которое описывает осциллятор с нелинейным трением. Полагая х = х±,
х + eF(x) = #2, F(x) = ж3/3с2 — х, получим систему:
xi = x2 -eF{x{), x2 = -ulxi, (/)
Лекция 19. Общие свойства нелинейных систем 171
имеющую неподвижную точку х\ = О, х2 = 0. Линеаризация A) приво-
приводит к уравнениям вида A9.7):
%1 = %2 + ?#Ъ ^2 = ~^о#1 B)
с элементами матрицы кц = г, к±2 = 1, fei = —^о? ^22 = 0. Посколь-
Поскольку Sp к = г > 0, det к = Uq, to, используя критерий Рауса—Гурвица, заклю-
заключаем, что особая точка неустойчива [79]. Если 2ш0 > е, то особая точка —
неустойчивый фокус.
Для исследования устойчивости воспользуемся теоремой Ляпунова.
Образуем положительно определенную функцию, соответствующую обоб-
обобщенной энергии:
Учитывая B), находим
V = Х2Х2 + UJqXiXi = 6UJqX1 > 0.
Однако, используя нелинейную систему (/), имеем
Следовательно, область устойчивости лежит в области х\ > л/Зс. Мы ви-
видим, что для определения устойчивости линейное приближение непригод-
непригодно. Возникает вопрос об эволюции траектории. В нашем случае решение
при t —>• сх) приближается к замкнутой траектории, называемой предель-
предельным циклом (см. пример 20.1).
19.7. Предельный цикл. Замкнутая траектория называется предель-
предельным циклом, если она изолирована от всех остальных замкнутых траекто-
траекторий, точнее, предельный цикл является единственной траекторией, заклю-
заключенной в трубчатой окрестности. Циклы являются предельными траекто-
траекториями и могут быть трех видов.
1. Устойчивый предельный цикл или аттрактор (от англ. attract —
притягивать) — кривая, на которую при t —»¦ оо с обеих сторон нави-
навиваются траектории. Траектории, соответствующие различным начальным
условиям, приближаются к одной и той же периодической траектории. В
трехмерных системах возникает более сложный аттрактор — кривая, обви-
обвивающая поверхность, напоминающую бублик, — тор.
2. Неустойчивый предельный цикл (шшрепеллер) — кривая, от которой
при t —>¦ оо с обеих сторон удаляются траектории.
3. Полуустойчивый предельный цикл — кривая, на которую при t ^ оо
траектории навиваются с одной стороны и удаляются с другой стороны.
Графическое построение интегральных кривых
3—=С, F(xux2)=C; F(xu x2) =
dx
fi(xi,x2)
172 Глава IV. Линейные и нелинейные колебания
дает возможность обнаружить предельный цикл. Известны также условия
(критерий Пуанкаре—Бендиксона), при которых невозможен предельный
цикл: если в одно связной области D выражение divf = 8/1/8x1^8/2/8x2
имеет постоянный знак, то в D не существует замкнутых траекторий.
Действительно, предположим, что 7 — замкнутая кривая в D. Согласно
теореме Гаусса
\dXldx2 (f^ + fj) =i(fidx2-f2dx1). A9.15)
D 7
Поскольку, в силу системы (/), правая часть A9.15) равна нулю, то
div f — знакопеременная функция. Заметим, что в случае осциллятора Ван-
дер-Поля, рассмотренного в примере 19.3, правая часть A9.15) имеет вид
(Л dx2 - /2^1)
Это преобразование может быть использовано для построения функции
Ляпунова многомерных систем.
19.8. Бифуркация. Как правило, функции /n(#i, x2) в правой части
уравнений A9.1) содержат параметры, описывающие влияние внешних
условий на систему. Пусть нам известно решение A9.1) при определен-
определенном значении параметра е. Найдем такое значение ?q, что при малом
отклонении от него (е = €q + Ae) поведение системы качественно меня-
меняется. Если такое значение существует, говорят, что система A9.1) имеет
точку бифуркации при е = во, а изменение фазового портрета называют
бифуркацией. В качестве простого примера найдем точку бифуркации ли-
линейной системы A9.7), полагая кц = е, к\2 = к2\ = 0, к22 = —с < 0.
Поскольку Sp к = е — с, det к = —ее, то при е < 0 особая точка —
устойчивый узел, а для любого е > 0 — седло. Система претерпевает
бифуркацию при е = 0.
19.9. Бифуркация Хопфа. В нелинейных системах изменение пара-
параметра может привести к существенной перестройке фазового портрета —
в окрестности особой точки может возникнуть предельный цикл.
Пусть в новых переменных г, ср : х\ = г cos ср, х2 = г sin cp, систе-
система A9.1) имеет вид
Интегрируя эту или линеаризованную систему, находим, что при е < 0
особая точка — устойчивый фокус. Когда е становится положительным,
г > 0 при г < у/е и особая точка теряет устойчивость. С другой стороны,
поскольку г < 0 при г > у/г, то траектория стремится к предельному
циклу r(t) = у/г, ip(t) = Dot + (fo. В случае обратного изменения пара-
параметра е предельный цикл исчезает при е = 0.
Лекция 19. Общие свойства нелинейных систем 173
Превращение устойчивого фокуса при прохождении е через нуль в
неустойчивый фокус, окруженный предельным циклом, называют бифур-
бифуркацией Хопфа. Самая впечатляющая особенность этого перехода — пере-
перестройка фазового портрета — возникает при сколь угодно малом измене-
изменении управляющего параметра е. Возможно, аналогичный механизм лежит
в основе такого метода воздействия на биологическую систему человека,
как иглоукалывание.
Анализ бифуркаций — сложная задача, но в некоторых случаях удается
упростить проблему. Французский математик Рене Тома создал классифи-
классификацию решений уравнений
. г _ д11(хъ ...,жп)
Хп^ д^ ,71-1,...,*,
по точкам, в которых изменяется устойчивость стационарных состояний.
Эти точки Тома назвал «множеством катастроф» [110, 111].
19.10. Бифуркация удвоения периода. В трехмерных системах воз-
возможны новые бифуркации, анализ которых удобно провести методом се-
сечения Пуанкаре. Выберем в фазовом пространстве ж, у, z поверхность
z = (f(x, у). Тогда координаты рп = {хп, yn) и рп+1 = (хп+ъ уп+1) двух
последовательных пересечений траектории с поверхностью могут быть свя-
связаны соотношением pn+i=F(pn). Оператор F определяется в результате
интегрирования уравнений движения и задает отображение Пуанкаре. Пе-
Периодическому движению соответствует неподвижная точка ро = F(po).
В диссипативных системах фазовый объем в среднем сжимается. Рассмо-
Рассмотрим случай, когда множество точек пересечения поверхности траекториями
оказывается почти одномерным и его можно приближенно аппроксимировать
линией. Отображение Пуанкаре становится одномерным преобразовани-
преобразованием хп+\ = f(xn). Многие многомерные диссипативные системы можно
свести к одномерным отображениям.
Ограничимся «простейшим» интересным случаем, когда f{x) =
= ХхA -х) [109, 112-114]:
Xn+i = АжпA-ж„). A9.16)
Отображение A9.16) было введено еще в 1845 г. для описания эво-
эволюции популяции в среде с ограниченным запасом пищи; хп — значение
относительной численности в дискретный момент времени t = пт, п =
= 1, 2 ... [113, 114].
Функция f(x) имеет максимум, равный А/4, при х = 1/2. Исследуем
решение на отрезке [0, 1] при изменении параметра Л между значениями
Л = 0 и Л = 4.
1. Неподвижные точки отображения / находятся из условия а = /(а):
а0 = 0, а\ = 1 — А. Устойчивость неподвижных точек х = о опреде-
определим из линеаризованного отображения A9.16). Подставляя хп = а + zn
174
Глава IV. Линейные и нелинейные колебания
в A9.16), имеем zn+i ~ f'(a)zn:
zn = [ff(a)]nz0, f'(x)=\(l-2x).
Точка а устойчива, если |/;(аI < 1- Поскольку /;(«о) = A, /;(ai) =
= 2 — Л, то в интервале Л < 1 устойчива только точка clq. При Л =
= 1 происходит бифуркация: точка а® теряет устойчивость. Если 1 <
< Л < 3, то ао — неустойчивая, a ai — устойчивая точка. При Л = 2
последовательность хп —> 1/2, п^>1. В случае 1<А<3 при достаточно
больших п решение A9.16) xn —>¦ a\ (рис. 19.2). В этом можно убедиться,
хп
1
fix)
Л = 2,8
ш
\
Рис. 19.2
заменяя A9.16) дифференциальным уравнением. Полагая хп+± — хп =
= х(пт + т) — х(пт) с^тж, имеем
А
х = —,
т
x(to)[expe(t — t0) -
где е = (Х — 1)т г. Очевидно, при А< 1 x(i) ^ 0.
2. Рассмотрим область Л > 3. Поскольку |/;(ai)| = |2 - А| больше
единицы, то а\ теряет устойчивость. Теперь реализуется качественно но-
новое решение A9.16), такое, что при достаточно больших k X2k+i —> bi,
%2к —>- ^2, fc = 0, 1, 2, ... (рис. 19.3). Значения bi, 62 определяются
системой уравнений:
Из A9.17) следует, что числа
bi), 6i = f(b2).
i, 62 удовлетворяютуравненшо
A9.17)
A9.18)
Лекция 19. Общие свойства нелинейных систем
175
Очевидно, двумя корнями уравнения четвертого порядка A9.18) являются
значения Ьз = «сь ^4 = о>\- Поэтому можно записать тождество
f2(z) -z = -X3z(z - ai)(z
A9.19)
Для вычисления коэффициентов М, N воспользуемся соотношениями
Z2 = /0l)? Z! = f(z2),
df2(z) _ df(Zl) df[z)
A9.20)
dz dz\ dz
В неподвижной точке z = z\ = z^ = а имеем {df2/dz)a = (df jdz)\.
1
fix)
Л = 3,14
fi(x)
r-
/
\
h
Рис. 193
Вычисляя производную от обеих частей A9.19) и полагая
находим N = (Л + 1)/А2, М = -(Л + 1)/А и новые корни
1
Проследим возникновение точек bi, Ь2 при переходе А через значе™
ние А = 3. Вначале отметим, что в неподвижной точке а\ отображения /2
величина |/2;(«i)| = B — АJ меньше единицы в интервале 1 < А < 3 и
больше единицы при А>3. Следовательно, график y = f2(x) пересекает
прямую у = х в точках а0, «i при 1 < А < 3 ив точках а0, ai, Ьь
&2 при А > 3. Члены подпоследовательностей X2A;+i, x<2k генерируются
через промежуток времени 2т. В этом случае говорят, что отображение
имеет устойчивый цикл 21 с периодом 2. Переход от неподвижной точки
с устойчивым циклом 2° к циклу 21 произошел в результате бифуркации,
176 Глава IV. Линейные и нелинейные колебания
которая получила название бифуркации удвоения периода. Главная причина
удвоения периода — равенство производных /2 (ж) в точках Ьь Ь2. Дей™
ствительно, полагая в A9.20) z = z2 = b±, 24=62; z = z2 = b2y z\=b\,
находим /2;(bi) = f2'{b2) =f/(b1)f/(b2) = (А + 1)(А - 3) - 1. Чтобы по™
пять, что происходит при дальнейшем росте А, заметим, что f2(z) имеет
минимум при zm = l/2 и два максимума при z\^ 2 = A/2)A =р \/t — 2/А).
При увеличении А минимум функции /2 понижается и производная в
точках bi, Ъ2 возрастает. При значении А = Ао, Ао = л/б + 1, неподвиж™
ные точки совпадают с экстремальными значениями f2 : Ъ\ = zm = 1/2,
h2 = z2. После достижения значения А2 = 1 + лМ = 3,45 наклон кривой /2;
в точках bi и Ъ2 достигает единицы. При дальнейшем увеличении А обе
неподвижные точки становятся неустойчивыми. За бифуркационным зна-
значением А2 = л/б + 1 = 35 45 возникает 22-цикл с периодом 4: реализуется
решение х4к ->• сь х4к+г -»• с3, ж4^+2 ^ с2, ж4^+з ^ с4, причем
«1=/(«з), «з = /(«2), а2 = /(а4), a4 = /(ai) [93]. Таким образом, про™
изошло второе удвоение периода. Снова увеличиваем А до Аз = 3, 54,
когда каждая точка расщепляется на две и возникает устойчивый 23-цикл.
Последовательность бифуркаций удвоения периода кончается при конеч-
конечном значении А = Ас, Ас = 3, 5699, причем период цикла стремится к
бесконечности, а поведение системы становится апериодическим.
Отображения /(ж), имеющие плавный максимум, в котором вторая
производная, подобно A9.16), отрицательна, подчиняются определенным
закономерностям. Пусть Xs — значение параметра, при котором период
удваивается s-й раз. Тогда оказывается, что последовательность Xs гео-
геометрически сходится к Ас: Ас — Xs ~ S^s. Наиболее впечатляющей осо-
особенностью различных систем, испытывающих удвоение периода, явилось
то, что значение S, впервые вычисленное Фейгенбаумом, одинаково и рав-
равно универсальному числу 6 = 4,6692016 ... Аналогичный результат был
получен и для процесса расщепления устойчивых точек: расстояние ds
от точки х = 1/2 до ближайшей к ней неподвижной точки на 2s-цикле
подчиняется закону ds+i = —a^lds, где а —универсальное число, рав-
равное 2, 503...
19.11. Переход к хаосу. Для выяснения существенных особенностей
эволюции систем широко используется анализ Фурье. Введем «импульс-
«импульсную» функцию g(?), принимающую значение g@) = 1 и спадающую до
нуля в окрестности At <С т. Тогда последовательность хп после N-й
итерации представляет собой значения функции
N
к=1
при t = nr. Разлагая x(t) в интеграл Фурье, имеем
оо оо
x(t)= | Ij^e-*", х(ш)= | Л#ш1 = Ьф,А), A9.21)
Лекция 19. Общие свойства нелинейных систем 111
N
к=1
где gw ~ At — компонента фурье-функции g(t). Спектральную плотность
последовательности определим соотношением [109]
Р(со) = lim hx(cj, Л)|2. A9.22)
JV^oo TV
Для того, чтобы выявить связь между значениями x(t) в разные мо-
моменты времени, введем корреляционную функцию:
Nt oo
1 Г (AtJ Г
<p(t)= lim dtfx(tf)x(tf + t) = ±—J— \ duP(uj) cosut. A9.23)
о о
Например, для периодического процесса x(i) = С cosOt, (/?(t) =
= (C/2) cos Ш. Аналогичным образом убеждаемся, что процесс x(t) =
= С\ cosOit + C2 cosO2t снова приводит к осциллирующей незатухаю-
незатухающей корреляционной функции с максимумами на частотах Oi, O2. Нере-
Нерегулярное поведение системы проявляется в экспоненциальном затухании
корреляций: (p(t) ~ exp(—cjc|t|M где ис — ширина спектра x(i). Для слу-
случайных процессов ip(t) ~ ^2ck8(t — tk); хаотическое поведение системы
характеризуется непрерывным спектром.
Спектральные характеристики отображения A9.16) подробно исследо-
исследованы. Оказалось, что при увеличении Л от единицы до четырех поведение
системы становится как бы стохастическим: не представляется возможным
обнаружить какую-нибудь закономерность в распределении значений хп.
При малых N еще можно обнаружить некую упорядоченность, однако при
N > 1 корреляции совершенно исчезают.
В области 1 <Л< 3 спектральная плотность A9.22) имеет резкий пик
при ш = 0. При 3 < Л < 3,45 в спектре появляются два максимума: при
и = ojq, шо/2 (uq = 2тг/т). Если Л лежит в области 3,45 < Л ^ 3, 54, то
P((jj) имеет максимумы при значениях и = ljq, cjq/4, cjo/2, 3cjq/4. При
Л = Лс число спектральных линий становится бесконечно большим. За этим
значением лежат области хаоса.
19.12. Детерминированный хаос. Отображение A9.16) в области Л>
> Лс становится довольно сложным. Покажем, что при Л = 4 отображение
порождает хаотическую последовательность итераций. В этом случае точ-
точное решение A9.16)
хп = sin2 <квп = - A - cos27r6>n), A9.24)
где 9п = 2n0Q. Добавление целого числа к 0п приводит к тому же зна-
значению хп. Поэтому для исследования свойств последовательности A9.24)
178 Глава IV. Линейные и нелинейные колебания
достаточно использовать двоичное представление начального значения во
в интервале 0 < в0 ^ 1:
av2^v = 0, aia2a3 ..., A925)
где av принимает значения 0 или 1. При во < 1/2 имеем а\ = О,
а при во > 1/2 — а\ = 1. Умножение на 2 означает удаление первого
знака после запятой и сдвиг оставшейся последовательности цифр влево.
Эта операция называется сдвигом Бернулли. Первая итерация даст число
О, (Х2«з • • • 5 вторая — 0, аз«4 • • • и Т-Д-
Существуют особые решения A9.24) — периодические с любым пе-
периодом. Например, полагая во = 1/5, получим циклическое поведение с
периодом 2, при во = 1/3 имеем фиксированную точку жп = 3/4. Однако
почти для всех случайно выбранных во (или хо ) множество хп равно-
равномерно распределено между 0 и 1.
Отметим три замечательных свойства последовательности хп.
1. Переменная хп при больших п чрезвычайно чувствительна к точ-
точности задания начального значения во. Предположим, что два числа во
и в'о различаются на величину е <С 1. Тогда после n-й итерации разница
между ними увеличивается до значения 2пе.
2. Последовательность хп бесконечное число раз приближается к лю-
любой заданной точке х = а, 0 < о < 1. В этом случае говорят, что система
является эргодической. Для механических систем Л. Больцман в 70-е го-
годы прошлого века предложил эрго диче скую гипотезу: фазовая траектория
системы с течением времени проходит через любую точку поверхности
постоянной энергии.
3. Последовательность хп обладает теми же статистическими свой-
свойствами, что и последовательность подбрасывания монеты. По двоичному
представлению A9.25) нетрудно определить, в какой «половинке» еди-
единичного интервала окажется число вп: если в левой части, то вп =
= 0,0ап+2«п+з • • • 5 если в правой, вп = 0,1ап+2 • • • Для произволь-
произвольной последовательности подбрасывания монеты РОРРОРОО... мы всегда
можем найти точку во, реализующую эту последовательность: во =
= 10110100... (Ро 1, ОоО).
Эти особенности отображения A9.24) позволяют понять возникнове-
возникновение хаотического движения в детерминированной системе, описываемой
уравнением A9.16). Прежде всего, необходимо определить понятие слу-
случайности. Согласно теории сложности алгоритма случайная последователь-
последовательность п\п2 ... не может быть «сжата» — не существует правила вычис-
вычисления последовательности, которое было бы короче, чем ее копирование.
Иными словами, последовательность закодирована необратимо, и единст-
единственный способ восстановить последовательность — предъявить ее копию.
Цифры в таких последовательностях невычислимы, а значит, непредска-
непредсказуемы [115]. С другой стороны, если набор цифр oia2 ... не являет-
является случайным, то ошибка в начальных данных экспоненциально растет.
Лекция 19. Общие свойства нелинейных систем 179
Начальные условия, заданные с точностью e~N, полностью забывают-
забываются через N итераций. В нехаотических, системах ошибка проявляется не
так быстро. Таким образом, сильная чувствительность системы к точности
задания начальных условий ведет к непредсказуемости решений на боль-
больших временах. Такое движение системы называют хаотическим, или детер-
детерминированным хаосом. Его синонимы — стохастичность, нерегулярность.
По мере хаотизации движения наряду с резкими спектральными линиями
в A9.22) появляется непрерывный по частоте фон. В этом случае решение
при Лс < Л < 4 представляет области регулярного периодического движе-
ния, случайно прерываемые областями хаотических всплесков. Такой вид
поведения называется перемежаемостью. При полном хаосе спектральная
плотность A9.22) обладает чисто непрерывным спектром, а корреляцион-
корреляционная функция A9.23) убывает по экспоненциальному закону.
Фейнгенбаумский переход наблюдался в многочисленных эксперимен-
экспериментах [114]. В частности, режим стохастических колебаний возникал в резуль-
результате бифуркационных переходов в последовательном контуре с нелинейной
емкостью — варикапом. Другой пример — вынужденное комбинационное
рассеяние в модели, описываемой уравнениями [91, 253]
2а
Щ%\ = ^^х\Х2 + ен cos OHi + ес cos Oci,
nil
•2 a 2
X2 + 72^2 + Ш2Х2 = Xi.
m
Полученные результаты дают основание связать появление шумовых соста-
составляющих х\ (?), Х2 (t) не с шумами накачки или приборов, а с хаотическим
откликом на регулярное внешнее воздействие [116].
19.13. Система Лоренца. Возникает вопрос: возможно ли хаотиче-
хаотическое поведение реальных динамических систем в ограниченной области
фазового пространства? В системах с одной степенью свободы хаотиче-
хаотическое движение невозможно. Действительно, стохастичность возникает при
переттутывании и расходимости траекторий. Однако, в силу того что фазо-
фазовые траектории не пересекаются, единственно возможными аттракторами в
ограниченной области являются предельные циклы и неподвижные точки.
Ситуация меняется в случае трехмерного фазового пространства (систе-
(система с 1,5 степенями свободы). До недавнего времени никто, например, не
сомневался в том, что в принципе можно достичь точного прогноза по-
погоды, обработав достаточное количество информации. От этого подхода
пришлось отказаться благодаря поразительному открытию: детерминиро-
детерминированные системы с малым числом степеней свободы ведут себя хаотически,
причем случайное поведение имеет принципиальный характер — от него
нельзя избавиться, собирая больше информации. Здесь случайный процесс
определяется вероятностью того, что динамическая переменная может при-
принять любое значение из некоторой области фазового пространства.
180 Глава IV. Линейные и нелинейные колебания
В 1963 г. американский метеоролог Э. Лоренц получил систему урав-
уравнений:
A9.26)
Х2 = —Х2 + ТХ\ - XiX3j Хз = —ОХз + ЖЖ
приближенно описывающую двумерную термоконвекцию с целью исполь-
использования непериодического решения стохастического типа для долгосроч-
долгосрочного прогноза погоды [119].
При г < 1 система A9.26) имеет одну устойчивую неподвижную точку
О = @, 0, 0). При г > 1 точка О становится неустойчивой и появляют-
появляются еще две неподвижные, симметрично расположенные точки L\^ = (±s,
±s, r — 1), s = [Ь(г — l)]1^2, устойчивые для значений а < Ь + 1. Ес-
Если же а > Ь + 1, то при г > гсг, гсг = сг(сг + Ь + 3)/(сг — Ь — 1), они
становятся неустойчивыми. Лоренц интегрировал уравнение A9.26) при
сг = 10, Ь = 8/3 (гсг и 24,74) и надкритическом значении г = 28. Оказа-
Оказалось, что каждая траектория приходит в окрестность одной из точек L\ или
L,2, описывает вокруг нее несколько раскручивающихся петель, отходит от
нее на достаточно большое расстояние, переходит в окрестность другой
точки, описывает непредсказуемое количество петель и снова переходит в
окрестность первой точки. Последовательность этих переходов происхо-
происходит на устойчивом множестве — аттракторе Лоренца — в незатухающем
хаотическом режиме, весьма чувствительном к неопределенности задания
начальных условий.
В приложении к метеорологии Лоренц назвал этот общий эффект не-
непредсказуемости «эффектом бабочки» — ураган в Техасе может возник™
нуть в результате взмаха крыльев бабочки в Бразилии. Идеальное измере-
измерение определило бы точку в фазовом прстранстве, но реальное измерение
порождает неопределенность AF0 в задании начальных данных. Истин™
ное начальное состояние может быть где угодно внутри малого элемента
фазового объема AFq. Предсказание становится невозможным: конечное
состояние может оказаться в любой точке аттрактора. Однако в хаотиче-
хаотических системах проявляются закономерности там, где раньше их. никто не
предвидел.
19.14. Странный аттрактор. В хаотических системах возникновение
случайности связано с новой геометрической структурой — странным ат-
аттрактором. В качестве критерия, позволяющего определить существова-
существование в динамической системе странного аттрактора, можно использовать
свойство гиперболичности. Наглядно гиперболичность представляет со-
собой комбинацию растяжения фазового объема в одном направлении и сжа-
сжатия в другом. Растяжение приводит к стохастичности, сжатие необходимо,
чтобы траектории оставались в ограниченной области фазового простран-
пространства. Растяжение и сжатие систематически устраняют начальную инфор-
информацию: при экпоненциальном разбегании траекторий возрастает неопреде-
неопределенность, обусловленная неопределенностью AF0, при сжатии сближаются
далеко отстоящие траектории и стирается различие в начальных данных.
Лекция 19. Общие свойства нелинейных систем 181
Странный аттрактор представляет собой замкнутое множество точек
в конечной области фазового пространства. В то же время согласно тео-
реме Лиувилля [120] любой конечный объем V = § сРх системы A9.26)
экспоненциально сжимается:
V=ld3xdwf -+ V = -(l + a + b)V. A9.27)
Это означает, что при t —»- оо объем аттрактора в трехмерном простран-
пространстве стремится к нулю. С другой стороны, хаотические траектории не могут
существовать на двумерной поверхности. Представление о разбегании тра-
траекторий и стремлении к нулю фазового объема кажется, на первый взгляд,
парадоксальным — с увеличением относительного расстояния между тра-
траекториями поток остается в ограниченной области пространства, хотя его
объем равен нулю. Оказалось, что странный аттрактор представляет собой
множество точек, не являющееся подмногообразием фазового простран-
пространства. Аттрактор является фракталом- — объектом дробной размерности.
Размерность аттрактора Лоренца равна 2,06.
19.15. Размерность Хаусдорфа. Фракталы. Обычная топологическая
размерность кривой d = 1, поверхности— d = 2 и т.д. Рассмотрим мно-
множество точек в s-мерном пространстве. Мы хотим накрыть это множество
наименьшим числом N(e) s-мерных кубиков с ребрами длиной е. Если
множество представляет собой равномерное распределение большого ко-
количества точек вдоль некоторой линии (s = 1), то число квадратиков,
покрывающих линию N(e) « 1/е или N(e) и l/eD, где D = 1. Взяв
логарифм отношения, получим D = In [N(e)/ In A/e)].
Если изобразить теперь траекторию броуновской частицы, то через ко-
конечный промежуток времени эта траектория будет неотличима от плоско-
плоскости. В качестве другого примера рассмотрим попытку измерить длину бе-
береговой линии Норвегии [254]. Пусть квадратные ячейки сетки имеют раз-
размеры г х е, е<1. Если бы береговая линия имела вполне определенную
длину Ljv, то число ячеек N(e), необходимых для покрытия береговой
линии на карте, должно было быть обратно пропорционально е, а вели-
величина L(e) = eN(e) при уменьшении е должна стремиться к постоянной
величине — длине линии L^. Однако наши ожидания расходятся с реаль-
реальностью. Измеренная длина описывается приближенной формулой L(e) =
= Ce^-~D\ D = 1, 52, т.е. в этом случае N(e) = G/eD. Отметим, что для
береговой линии Великобритании D = 1,3; для берега Южной Африки
D = 1. Для обычной кривой С = Ьдг, D = 1.
По определению немецкого матетатика Ф. Хаусдорфа A868-1942) раз-
размерность множества
D = Urn In 1 N.[?) . . A9.28)
e^O In A/e)
Размерность, введенная Хаусдорфом, отражает степень сложности
структуры множества в s-мерном пространстве. Одномерные и двумерные
182 Глава IV. Линейные и нелинейные колебания
множества представляют собой части трехмерного пространства, у которых
один или два характерных размера очень «малы».
Пример 19.4. Кривая Кох. Построим триадное множество, введенное
Хельгой фон Кох в 1904 г. Начнем с отрезка длиной 1. Разделим его на три
равные части, выбросим средний отрезок и добавим два отрезка длиной 1/3
каждый. Длина всей кривой первого поколения из четырех звеньев — 4/3
(рис. 19.4 а). Повторим эту операцию на каждом звене — получим кри-
кривую второго поколения из 16 звеньев длиной 1/9 каждый; длина всей
кривой — D/3J (рис. 19.4 6). В пределе при большом числе операций
получим непрерывную кривую конечной ширины. Определим размерность
кривой Кох [257].
На первом шаге число квадратиков, необходимых для покрытия всех
звеньев Ni(s) = 45 ei = 1/3; на fe-м шаге Nk(e) = 4fe, ek = A/3)*.
Согласно A9.28) размерность
Мы имеем непрерывную кривую с ненулевой «площадью».
Фракталы. Термин фрактал был введен американским математиком Бе-
нуа Мандельбротом в 1975 г. Он предложил назвать фракталом множество,
дробная размерность которого больше топологической D > d. Все фрак™
талы обладают общим свойством: с увеличением масштаба выявляется все
большее число одних и тех же повторяющихся структур, образующих кра-
красивую микроскопическую структуру [121, 254—257]. В целом фрактал мо-
может выглядеть как пейзаж, натюрморт или произведение абстрактного ис-
искусства. Сам Мандельброт, изучая цены на хлопок за 60 лет, обнаружил
одинаковые конфигурации кривых ежедневных, месячных и годовых цен.
Фрактал — геометрический объект, который можно задать набором
ограниченного числа операций. Здесь открываются уникальные возмож-
возможности фрактальной геометрии. Достаточно ввести несколько параметров,
задающих правила копирования изображения точек в масштабе, уменьша-
уменьшающемся с каждым шагом, чтобы получить множество, описание которого
обычными методами потребовало бы сотни тысяч чисел. Кодирование с
помощью фрактальных алгоритмов позволит существенно уменьшить вре-
время передачи информации. Особенно интересна и важна задача построения
трехмерных представлений фракталов для создания моделей эрозии почв,
разломов и трещин в земной коре, береговой линии, облаков и т.д.
Мандельброт пишет: «Ученые с немалым удивлением и восторгом уяс-
уяснят для себя, что многие и многие формы, которые они до сих пор выну-
вынуждены были характеризовать как зернистые, гидратоподобные, ветвистые,
ворсистые морщинистые и т.п., отныне могут изучаться и описываться в
строгих количественных терминах».
19.16. Хаос в динамических системах. В последние годы стало ясно,
что «нехаотические системы столь же редкая вещь, как птичье молоко,
хотя наше физическое понимание природы и опирается в основном на
Лекция 19. Общие свойства нелинейных систем
183
п=\
Рис. 19.4
184 Глава IV. Линейные и нелинейные колебания
их изучение» (Дж. Форд, [115]). Это обстоятельство имеет далеко идущие
последствия во многих областях науки. Удалось найти странный аттрак-
аттрактор в большом числе радиотехнических цепей и механических установок;
в пространственно связанных нелинейных системах, например, в моделях
перехода от ламинарного течения к турбулентному, химических реакциях,
моделях сердца, генетической изменчивости и образовании биологических
структур. Сейчас появилось много других задач, в которых проявляются
хаотические режимы. Даже рождение блестящей мысли, возможно, скры-
скрывает за собой хаотический процесс. С этой точки зрения хаос представляет
нам механизм для проявления свободной воли в мире, который управляется
детерминированными законами [122].
Лекция 20. Нелинейные колебания
20.1. Решение нелинейных уравнений методом усреднения. Рас-
Рассмотрим уравнение
x + uj'qX = ef(x, x, t), ?<Cl, B0.1)
описывающее нелинейные колебания системы с одной степенью свободы.
Поскольку B0.1) не интегрируется в квадратурах, то приходится исполь-
использовать приближенные методы исследования. Простейший из них — ли-
линеаризация уравнения — дает ограниченное представление об эволюции
системы, не содержащее информации о множестве новых типов движения,
принципиально невозможных в линейных системах. В настоящее время из-
известны несколько подходов к исследованию нелинейных колебаний, основы
которых были разработаны Дж. Рэлеем, Г. Дуффингом, Б. Ван-дер-Полем,
Л. И. Мандельштамом, Н. Д. Папалекси, А. А. Андроновым. Наиболее об-
общий метод исследований нелинейных колебаний развит Н. М. Крыловым,
Н. Н. Боголюбовым [123]. Значительный объем исследований был выпол-
выполнен Ю. А. Митропольским, Н. Н. Моисеевым, В. М. Волосовым и другими
математиками [124-128]. Новые методы оказались весьма плодотворными
для анализа слабонелинейных систем [129-133]. Здесь мы рассмотрим один
из вариантов метода усреднения для решения уравнения B0.1). Предпола-
Предполагается, что / —>¦ 0 при t —>• ±оо.
В соответствии с методом Лагранжа вариации постоянных произве-
произведем замену переменных ж, х —>- А, А*, вводя одновременно комплексное
представление координаты и скорости:
х = - Ae^iuJot + к.с, х = -— Ae^iuJot + к.с. B0.2)
Из B0.2) следует уравнение
Ae-iuot + ]^eiu;oi = 0> B0.3)
Лекция 20. Нелинейные колебания 185
Подставляя х в B0.1), имеем
В новых переменных уравнение B0.1) эквивалентно системе первого по-
порядка:
А = — eiuotF(A, A*, uot; t), A* = -—e-iuiotF(A, А*, шо<; t).
UJq UJq
B0.5)
Здесь F — функция /, в которой произведена замена переменных B0.2):
F(A, A*, coot; t) = f(x(t), x(t), t). Правые части B0.5) содержат осцил™
лирующие и медленные переменные. Сущность метода усреднения состо-
состоит в том, чтобы разделить быстрые и медленные переменные и получить
из B0.5) уравнение, описывающее эволюцию медленных переменных.
Будем искать решение B0.5) в виде разложения
A = f + eAi(f,fV) + ..., B0.6)
в котором функцию ? подчиним уравнению
С = ev! (С, С, *) + ^^2 (С, Г, t) + ... B0.7)
Функции АП9 vn подлежат определению, причем vn(^ ?*, t) изме™
няется адиабатически медленно: \dvn/dt\ <C cjo|^n|- Последнее условие
означает, что приращение функции vn(?, ?*, t) за период То = 2tt/uq
существенно меньше величины vn(C? С*? t)- Подставляя B0.6) в B0.2),
получим решение B0.1):
*(*) = \[Z + eA^ C,t) + ...]e-iuot + к.с, B0.8)
*(t) = "^К + eAiit, C,t) + . ..]е-^г + к.с.
Будем называть решение уравнения B0.1) в виде разложения хп (t, e) =
п
= J2ek(fk (t) асимптотическим рядом, если для любых фиксированных nmt
к=0
lime~nlx(t) -xn(t, e)] = 0.
е—¦> О
Для любых фиксированных е и t асимптотический ряд расходится: \x(t) —
— хпA, е)\ —>¦ оо, п —>- оо. Последовательные приближения xn(t, e) вна-
вначале приближаются к x(t), но для п, больших некоторого значения щ(е),
погрешность неограниченно растет. Поэтому если B0.8) — асимптотиче-
асимптотический ряд, то для наилучшей аппроксимации следует ограничиться вычис-
вычислением лишь щ(е) первых членов разложения. Точное и приближенное
186 Глава IV. Линейные и нелинейные колебания
решения, совпадающие при t = to, будут асимптотически близки на конеч-
конечном интервале \t — to\ ~ е^1. В этом случае решение называют равномерно
пригодным на интервале (t — to).
Из B0.6), B0.7) находим
Подставим B0.6) в F(A, А*, шог; t) и, разлагая F в ряд по степеням е:
fdF dF
F(A, A*, uot; t) = F(C, Г, "о*; t) + el — A1 + ^^
получим из B0.5), B0.9) в первом приближении по параметру е соотно-
соотношение
ev1+e*?± = — eiwotF(C, Г, "о*; *)• B0.10)
at ujq
Функция F(?, ^*, ouot; t) является 2тг-периодической по аргументу
и может быть разложена в ряд Фурье:
п= — оо
Произведем усреднение правой части B0.10) за период То с един-
единственной целью выделить слагаемое, изменяющееся адиабатически мед-
медленно:
= -L f dte^Fib Г, ^ot; t) = Ф(С, Г, *)•
t
Дальнейшая процедура является характерной особенностью метода усред-
усреднения— полагая v1 = ({/шо)Ф(^ |*, t), из B0.10), B0.7) находим
'" ' iWOtit " B0.11)
is
Лекция 20. Нелинейные колебания 187
Ограничимся первым приближением метода усреднения. Из B0.8) на-
находим
х = RQ^iLU0\ х = Re (-^ofe"**). B0.12)
Действительно, из B0.11) следует, что за время |? —?о| ^ е^1 функ»
ции ? и А\ получают конечные приращения ~ е°. Поэтому не имеет
смысла сохранять член ~ еА\ в B0.12).
Рассмотрим некоторые частные случаи.
1. Пусть \df/dt\<^ujo\fl Тогда $(?, Г, *) ^*Ж, Г, *),
С = — *Ж, Г,*). B0.13)
В ряде задач удобно использовать действительные переменные. Производя
в B0.13) замену ? = ае^га, получим вместо B0.13) два уравнения:
2тг
г
6^0 /(ж, ж, t) sin -0,
J
B0.14)
а = dtp /(ж, ж, i) co
ZTTttCJo J
где ж = a cos 1/?, ж = ^awo sin фу ф = ujot + a. Система B0.14) совпадает
с уравнениями первого приближения метода Крылова—Боголюбова [123].
Приведем некоторые справочные данные: (cos2 ф) = 1/2, (cos4 ф) = 3/8,
(cos2 ф sin2 ^> = 1/8, (cos6 ф) = 5/16, (cos8 ф) = 35/128.
2. Предположим, что /(ж, ж, t) — периодическая функция с перио-
периодом Г = 2тт/ш. Тогда
Г, "о*; *) = Y,Fn°& C)e^{nuJ0+suj)t:. B0.15)
Усредняя B0.15) за период Го, находим
Г, *) = 5]e^^Fns(C, Г), B0.16)
где числа n, s удовлетворяют условию |($п| -С cjq, ^п = (п — 1)шо + sou.
3. Если и > о;0, то Ф(С, ?*,*) = 0.
Пример 20.1. Осциллятор Ван-дер-Поля. Вернемся к уравнению
ж + UqX = е ( 1 ] ж, е > 0, (!)
188
Глава IV. Линейные и нелинейные колебания
рассмотренному в примере 19.3. Полагая в B0.14)
ef(x, х, t) = —eaujQ slnt/j ( 1 cos ф ) ,
получим
B)
Из B) следует, что
a(t) = аое?
1-1/2
а = а0.
При t ^> е г имеем предельный цикл: a(t) = 2с, а = «о, ^(t) =
= 2с cos (cdgi + ао).
Уравнение A) описывает автоколебательную систему, представляю-
представляющую ламповый генератор на триоде с контуром в сеточной или анодной
цепях [76, 84, 123].
20.2. Автоколебания. Этот термин, введенный в 1928 г. А. А. Андро-
Андроновым, обозначает незатухающие колебания нелинейной диссипативной
системы, в которой потери энергии компенсируются постоянным потоком
энергии от внешнего источника. В отличие от собственных и вынужден-
вынужденных колебаний амплитуда автоколебаний определяется параметрами самой
системы. В стационарном режиме фазовый портрет автоколебаний пред-
представляет собой предельный цикл.
В простейших автоколебательных системах участвуют три компонен-
компонента: колебательная система, механизм обратной связи, регулирующий поток
энергии от источника энергии, и существенно нелинейный ограничитель
амплитуды колебаний.
Рассмотрим призму квадратного сечения, обдуваемую потоком воздуха
Рис. 20.1
со скоростью v (рис. 20.1). Призма опирается на пружины, соединена с
амортизатором и может перемещаться только в вертикальном направлении
Лекция 20. Нелинейные колебания
189
под прямым углом к ветру. При скорости ветра относительно призмы v^
возникает вертикальная составляющая силы Fx = (I/2)pv2SG((p), р —
плотность воздуха, S — площадь фронтальной поверхности. На основа-
основании графика экспериментальной зависимости С(ср) (tgcp = x/v) можно
представить Fx в виде степенного ряда [90]:
pv~b
х
С -
V
• \ 3 / . \ 5 / •
х\ х\ х
- I + Об - - С7 I -
V J \V J \V
Пусть к — жесткость пружин, FJP = —rx — сила, действующая на
призму со стороны амортизатора. Представим уравнение движения призмы
тх + мх = —
X + Ш^Х = g
Fx в виде
v / v
ш0 = —,
9i
G
v) С
pv2SC
2m ' '
cv
B0 Л. 7)
В линейном приближении начальное возмущение будет затухать при
v < vq. При v > vq положение равновесия х = 0 становится неустой-
неустойчивым, x(t) экспоненциально растет. Однако влияние нелинейных членов
в B0.17) приводит к появлению предельного цикла конечной амплитуды.
В первом приближении метода усреднения х = acos-0. Из B0.14) нахо-
находим а = 0,
а —
ga
2v
О-т)
vo\ 3C3
4C V v J 8C V v I 64C V v I
B0.18)
Амплитуда автоколебаний определяется стационарным решением a = a(v)
уравнения a = 0:
/ vo\ ЗСз /^о«\2 _ 5Cs /шоа\4 . 35g? ^оа^6 _ r?n 1Q4
V JCU/ 8G V v ) 64C V v J '" l j
При v ^> vq левая часть B0.19) стремится к единице. Поэтому функ-
функция a(v) имеет асимптоту a(v) = const v, проходящую через начало коор-
координат (рис. 20.2).
Значению a = 0 соответствует неустойчивое состояние, посколь-
поскольку да/да > 0 при a = 0. Полагая С§ = CV = • • • = 0, исследуем
вначале область, в которой наклон С (if) убывает:
4G
2{) {)
190
Глава IV. Линейные и нелинейные колебания
0,6
0,4
a/v0
Рис. 20.2
Для анализа устойчивости этого решения линеаризуем уравнение B0.18):
а = a(v) + z,
да да g
да ' да v2
Следовательно, при v > vq возникает бифуркация Хопфа с устойчивым
предельным циклом. Из анализа экспериментальных данных, приведенных
на рис. 20.2, следует, что в области 1 < v/vq <
< 2 существуют три предельных цикла. Оце-
Оценивая знак производной да/'да, можно за-
заключить, что один из них — неустойчивый
предельный цикл — лежит в области, огра-
ограниченной двумя устойчивыми предельными
циклами. На рис. 20.2 устойчивые циклы
обозначены непрерывной кривой, неустойчи-
неустойчивые — штриховой кривой. Гистерезис про-
проявляется в скачке амплитуды при медленном
изменении скорости ветра.
Рассмотренная неустойчивость называет-
называется галопированием по одной моде. Другой механизм аэроупругой неустой-
неустойчивости — вихревой резонанс — обусловлен периодическим отрывом ви-
вихрей от упругой конструкции при обтекании ветром постоянного напора.
Наиболее впечатляющий пример — автоколебания подвесного моста Тако-
Такома в США, который из-за аэроупругих вибраций разрушился в 1940 г. всего
лишь через четыре месяца после окончания строительства [134].
20.3. Вынужденная синхронизация или «захватывание частоты».
Для автоколебательных систем с несколькими степенями свободы харак-
характерны явления конкуренции мод и синхронизация колебаний [76, 84]. Здесь
мы исследуем частный случай син-
синхронизации — установление автоко-
автоколебаний с частотой, равной частоте
внешнего высоко стабильного генера-
генератора гармонических колебаний. Еще
одним интересным примером являет-
является человеческое сердце: синхронизация
частоты его биений синусовым узлом
или внешним генератором импульсов.
Рассмотрим неавтономный генера-
генератор с контуром в цепи сетки и индук-
индуктивной обратной связью (рис. 20.3). Пусть М — коэффициент взаимоин-
взаимоиндукции, 1а —сила анодного тока, L, R —индуктивность и сопротивление
контура, UCK = и — переменное напряжение на конденсаторе емкостью
С, / — сила тока в контуре. Сеточным током пренебрегаем. Используя
законы Кирхгофа, получим уравнения
Рис. 203
= MIa + S(t), Си = /,
Лекция 20. Нелинейные колебания 191
к которым следует добавить соотношение 1а = (д1а/ди)й, где S(u) =
= д1а/ди = So — S2u2 — крутизна триода. Исключая /а, /, запишем
уравнение
LCu + [ДС - М5(м)]й + и = ?(*),
которое удобно представить в форме уравнения Ван-дер-Поля:
B0.20)
Д 2 7
Пусть ?(t) = fgcosOt, 7 С ojq. В режиме синхронизации реше-
решение B0.20) должно иметь вид u(t) = a® cos (Ш + ао), где ао, «о — по-
постоянные величины. Реализация этого эффекта, обусловленного нелиней-
нелинейностью системы, позволяет управлять процессом генерации автоколебаний
частотой О, равной частоте внешнего стабильного генератора слабого сиг-
сигнала. Наша задача — определить области устойчивости стационарного ре-
решения с постоянными амплитудой и фазой. Вводя расстройку ? = Uq — О2,
представим B0.20) в виде
и + п2и = г/, ef = —?и + 7 I 1 — ^т ) и + cdn
cos Ш.
Из B0.14) находим систему:
z v 4a0/ zu B0.21)
a = cos a.
20 20a
Полагая a = ao, a = «о и исключая «о, получим уранение резонансной
кривой р = р(е):
= Ъ_ ? ^(oU) e2=?^ul B0.22)
4uq ' 7^ 7 ' 2г*о 7^ *
Изменяя параметр е, получим семейство резонансных кривых. Точки на
кривой определяют амплитуду автоколебаний при фиксированном значе-
значении е в зависимости от расстройки.
Из B0.22) следует, что резонансная кривая лежит в области, удовлетво-
удовлетворяющей условию е2 ^ рA — рJ. Функция рA — рJ имеет локальный
максимум, равный 4/27 при р = 1/3. Следовательно, в случае е2 < 4/27
существуют две ветви резонансной кривой, а при е2 > 4/27 — только
одна ветвь (рис. 20.4).
192
Глава IV. Линейные и нелинейные колебания
Найдем теперь условие устойчивости резонансных кривых, линеаризуя
Р Р
8/27 4/27 1/ю
уравнения B0.21) в окрестности а = а®, а = ао. Полагая а = а® +
+ xi, а = «о + #2, получим систему: хт = ктпхп,
Характеристическое уравнение имеет вид Л2 + рХ + g = 0, где
p=^Spk = 7Bр - 1), g = detfc = (|)' [A - Зр)A - р) + г2].
Область устойчивости определяется неравенствами р > 0, g > 0: р > 1/2,
2 ""
Кривая g = 0 представляет собой эллипс. Найдем резонансную кри-
кривую, касающуюся этого эллипса. Дифференцируя B0.22) и q(p) =0 по
р, получим систему:
1 - 4р + Зр2 + е2 + 2ее'/о = 0, -2 + Зр + ее' = 0,
определяющую координату точки касания е1 = 0: ек = 1/л/З, рк = 2/3.
Из B0.22) находим е2 = 8/27.
Граница области устойчивости выделена на рис. 20.4 утолщенной лини-
линией. Для слабого сигнала е <С 1 область синхронизации лежит в окрестности
точки р— 1, \е\ ~ е. Для сильного — область синхронизации определяется
условиями р > 1/2, рA — рJ + е2р > 8/27.
20.4. Система с медленно изменяющимися параметрами. Найдем
асимптотическое решение уравнения
B0.23)
Лекция 20. Нелинейные колебания 193
определяющего эволюцию некоторой системы с одним или несколькими
управляющими параметрами An(t), п = 1, 2,... Пусть G(t) > 0, k(t) > 0.
Тогда величина ou(i) = [fc(t)/G(t)]1/2 играет роль мгновенной частоты;
T(t) = 2тг/о;(?) — мгновенный период. Предположим далее, что функ-
функции G(?), k(t) изменяются адиабатически медленно: \G\<^ujG; \k\<^uk.
Поскольку |cj| <C cj2, то поведение системы характеризуется малым пара-
параметром адиабатичности е а = \и\/и2.
Приближенное решение уравнения B0.23) при е = 0 впервые было
получено в 1837 г. независимо Ж. Лиувиллем и Дж. Грином:
х = Re -JLe-**, ? = Re (^вМе^А , B0.24)
г
где ip = dtu)(t), ea <C 1 [135]. Будем искать решение B0.23) в ви-
виде B0.24). Из B0.24) получим уравнение
2Guj dt
Подставляя х в B0.23), найдем еще одно уравнение:
где F(B, В*, (р; t) — функция Q(x, ж, t), в которой произведена заме»
на B0.24). Исключая из полученных уравнений В*, имеем
"е'"'- <20-25)
В первом приближении метода усреднения
2тг
ге
y
о
Переходя к действительным переменным Л, В* ^Ь, C: В = Ье™г/3, полу-
получим
Ь= - ?/—
2тгуGо;
B0.26)
194 Глава IV. Линейные и нелинейные колебания
х = -== cos {ip + /3), х = -bj% sin (у> + /3). B0.27)
Пример 20.2. Длина математического маятника l(t) = Iq + ut,
<С -\/^- Найдем решение уравнения движения в окрестности положения
равновесия.
Пусть в — угол отклонения нити от вертикали. Скорость частицы v2 =
= 12~^12в2, потенциальная энергия UF) = —mglcosO ~ —mgl(l — 92/2).
Лагранжиан системы
в2 в2
LF, 6, t) =ml2 mgl —
Zj A
приводит к уравнению движения
(l2
A)
Поскольку выполняется условие адиабатически медленного измене-
изменения и = л/g/l (\ш\ <С uj2), то решение имеет вид B0.27). Из B0.26)
находим Ь = 0, J3 = 0. Следовательно, Ъ = Ьо? Р = Аъ
B)
Уравнение A) имеет точное решение в терминах функций Бесселя и
Неймана [29]. Переходя к переменной I, получим
В случае ii <C \fgl можно воспользоваться асимптотиками цилиндрических
функций Zs(x) при x^s [29]:
Тогда решение C) совпадает с B).
20.5. Адиабатические инварианты. Полагая в B0.23) eQ = 0, по-
получим уравнение осциллятора с медленно изменяющимися параметра-
параметрами. В первом приближении метода усреднения (Ъ = Ьо5 Р = Ро) пол-
полная энергия
E{t) = G(*)y +Mi)y = \u>(t)bl. B0.28)
Лекция 20. Нелинейные колебания 195
Следовательно, в пределах точности используемого решения B0.27)
сохраняется величина Е (t) /u)(t), имеющая размерность постоянной План-
Планка. Величины, сохраняющиеся при медленном изменении параметров си-
системы, называются адиабатическими инвариантами. На интервалах време-
времени, значительно превышающих характерное время медленных изменений
в системе, адиабатические инварианты не сохраняются [28, 109, 136].
Соотношению B0.28) можно придать наглядный геометрический смысл.
Введем импульс р = Gx и вычислим величину, называемую действием:
^. B0.29)
и
Интеграл в B0.29) — площадь, охватываемая замкнутой траекторией в
фазовой плоскости ж, р. В квантовомеханической интерпретации величи-
величина I/H определяет число п квантовых состояний с энергиями, не превы-
превышающими значения Еп = !гшп [49]. В этом аспекте представляет интерес
статья Я. Б. Зельдовича «Как квантовая механика позволяет понять класси-
классическую механику?» [137].
С адиабатическими инвариантами систем с несколькими степенями сво-
свободы связаны многочисленные приложения классической и квантовой фи-
физики [138-140]. Новый метод вычисления адиабатических инвариантов из-
изложен в лекции 31 [141].
20.6. Параметрический резонанс в нелинейной системе. Рассмот-
Рассмотрим нелинейный осциллятор с переменными параметрами, описываемый
уравнением
x + (u)Q-h cos ujt)x = -j x3. B0.30)
Наибольший интерес представляет резонансный случай ш ~ 2ujq. Введем
расстройку S = ujq — cj/2, \S\ <C cjq. Полагая в B0.1) ef = hxcosut +
+ (ко /3l)x3, получим из B0.11) в первом приближении метода усреднения
где а = h/Dujo), к = ко/A6шо). Для исключения коэффициента, явно
зависящего от времени, произведем замену ? = r]el6t:
7} = -iSrj + iarf + ik\f]\2f]. B0.31)
Рассмотрим предварительно два частных случая.
1. Ангармонический осциллятор. Пусть /г = 0, E = 0, ко = ooq. Тог-
Тогда B0.30) — уравнение математического маятника х + cjgsinx = 0 в
приближении sin ж ^ х — ж3/3!. Полагая ? = ае^га, находим реше-
решение: а = cxq, a = —(
196 Глава IV. Линейные и нелинейные колебания
x(t) = а0 cos [u(ao)i + а0], 0(а0) = И) ( 1 - т|
Частота зависит от амплитуды колебаний.
2. Параметрический резонанс. Пусть ^о = 0. Полагая в B0.31) rj =
= z\ + г^2, получим систему вида A9.7): im = kmnznj кц = ^2 =
= 0, &i2 = о- + E, ^1=^^ 5. Если с52 > ст2, то detfc = S2 - а2 > 0.
Решение A9.14) этой системы ограничено. В случае ё2 < а2 величи-
величина detk = —п2 < 0, п2 = а2 — S2. Решение системы в соответствии
с A9.11) имеет вид
f
-п п ) \ C2ent
Общее решение B0.30) x(t) = z\ cos (ujt/2) + z2 sin (out/2). Таким обра»
зом, если ш лежит в интервале
h h
2ш0 - — < ш < 2uj0 + -—, B0.32)
то положение равновесия становится неустойчивым. Это явление называ-
называется параметрическим резонансом (см. лекцию 29).
Рассмотрим теперь общий случай. Полагая в B0.31) rj = у/21е~гг^,
получим систему, которую удобно представить в гамильтоновой форме:
дф" ^ " д! ' B0.33)
Н(ф, I) = (S - a cos 2фI ^И2.
Система B0.33) имеет первый интеграл НA, ф) = С. Легко убедиться,
что величина / ограничена — наличие нелинейного члена в B0.30) при-
приводит к ограниченности решения. Это обстоятельство обусловлено тем, что
с ростом амплитуды уменьшается частота колебаний и нарушается условие
синхронизма B0.32).
Благодаря существованию первого интеграла система B0.33) интегри-
интегрируема. Ограничимся определением стационарного решения, полагая л/21 =
= ао,ф = фо. Из B0.33) имеем
sin 2фо = 0, 5 — a cos 2фо — ка% = 0.
В случае \S\ < а находим фо = =Ьтг/2, а§ = (а + 8)/к. Решение урав-
уравнения B0.30) x(t) = =Ftto sin (ut/2). При резонансной частоте и = 2ljq
амплитуда колебаний «о = 4/i/fco.
20.7. Многомерные системы. Рассмотрим систему
хт + Ктпхп = emfm(x, ж), ет <С 1. B0.34)
Лекция 20. Нелинейные колебания 197
Для того, чтобы найти решение системы методом усреднения, перейдем
к новым переменным х —»¦ z: хт = Tm^z^. Здесь Т — матрица, при-
приводящая матрицу К к жордановой форме: T^lKT = J. Умножая обе
части B0.34) на Т, имеем
%li 1 *Jрьу%п "^ J- \±m J'm\-L %i -*- %)^m-
В случае некратных корней J^ = X^S^, Л^ > 0 — собственные значения
матрицы К.
Ищем решение z^ в виде
В первом приближении метода усреднения
А — Р = a p^ia^
Г,
Здесь Fm(^ ^*, t) —вектор-функция /(ж, х), в аргументах которой про-
произведена замена
A P p
ГЛАВА 5
ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Лекция 21. Кинематика и динамические переменные
твердого тела
21.1. Координаты твердого тела. Твердым телом в механике называ-
называют систему N материальных частиц, расстояние между которыми посто-
постоянны: |га — г&| = саь. Наличие связей уменьшает число степеней свободы
от 3N до шести. Действительно, выберем три произвольные частицы, не
лежащие на одной прямой. Поскольку мы имеем три уравнения связи, то
остаются шесть независимых координат. Положение других N ~~ 3 точек
определяется из условий связи.
Каким же образом шесть функций могут однозначно определить по-
положение твердого тела в пространстве? Введем две декартовые системы
координат: инерциальную К с базисом ei, e2, е3
и движущуюся систему координат К', базис ко-
которой е[, е'2, е3 жестко связан с твердым телом
(рис. 21.1). Начало движущейся системы коор-
координат К' можно совместить с любой точкой О'
твердого тела. Пусть радиус-вектор то> соединя-
соединяет начало координат О, О' двух систем. Ориен-
Ориентацию осей системы К' относительно системы
К зададим матрицей направляющих косинусов:
е'{(г) = Sim(t)em. B1.1)
Рис 21 1
Согласно B.3) условие ортогональности матри-
матрицы S приводит к шести соотношениям, связывающим элементы Sim. Сле-
Следовательно, элементы Sim могут быть выражены в терминах трех независи-
независимых параметров. В частности, этими параметрами могут быть углы Эйлера,
Депри, Брайнта-Картаыа, параметры Эйлера и т.д. [15, 142-148].
Рассмотрим произвольную точку а твердого тела. Ее положение в бази-
базисе е^ определяется постоянными координатами х[, х'2, х3. Вектор, соеди-
соединяющий начало координат О' с точкой а, г; = х!те!т. Радиус-вектор
точки а в неподвижной системе отсчета
г = гО' + г' = тО' + х'пе'п B1.2)
определяется тремя функциями yqi и тремя переменными, в качестве кото-
которых выберем углы Эйлера.
21.2. Углы Эйлера. Совершим параллельный перенос базиса еп в точ-
точку О'. В исходном положении базис е'п совпадает с базисом еп. Простран-
Пространственная ориентация базиса е'п, жестко связанного с телом, определяется в
Лекция 21. Кинематика и динамические переменные твердого тела 199
результате трех последовательных поворотов на углы ср, <9, ф, задаваемых
матрицами А, В, С:
Напомним соглашение, в соответствии с которым угол поворота возра-
возрастает при вращении в направлении, противоположном направлению дви-
движения часовой стрелки.
Первый поворот выполняется вокруг оси z на угол (р (рис. 21.2). Ось ж
переходит в новое положение О'?. Прямую О'? называют линией узлов.
Второй поворот на угол в вокруг оси О'? переводит ось z промежуточного
базиса в конечное состояние О1 z1. Третий поворот на угол ф вокруг оси О1 z1
приводит к конечной ориентации базиса (рис. 21.3). Характерной особен-
особенностью введения углов Эйлера является последовательность C, 1, 3) ин-
индексов осей поворотов. Матрицы А, В, С соответственно равны
COS if Sin if
— sin if cos (p
0 0
Далее найдем матрицу S:
sin ф
B1.3)
Здесь использованы сокращенные обозначения: Сф, с#, с^ для cost/j, cosf9,
cos(p и s^, so, % для sini/j, sin^, simp. Отметим, что при в = 0 матрица
S = CA = А( ф)
ф <р
Рис. 21.2
Рис. 21.3
200 Глава V. Движение твердого тела
21.3. Угловая скорость. Во второй лекции мы нашли производную
орта е[(г) подвижного базиса:
Ф) = W]. B1.4)
Поскольку базис е^ жестко связан с твердым телом, то из является век-
вектором угловой скорости. Компоненты вектора из в подвижном базисе опре-
определяются формулой B.6):
2/5 ^'аC = SamSmC. B1.5)
Подставляя S = СВА в B1.5), получим тензор (j'aj3:
ш1 = (СВА + СВА + СВА)АТВТСТ = JW + JW + ШМ^
Найдем вначале матрицы ССТ\ ВВТ\ ААТ:
0 ф 0\ /0 0 0\ / 0 ф 0\
-^00, 0 0 в], -000.
0 0 0/ \0 -в 0/ V 0 0 О/
После умножения матриц получим отличные от нуля элементы антисим-
антисимметричных тензоров:
,Ш ) ,(в) А .
12 — Г? ш 13 — ^»ш^5 ^23
CJ 23 = ^COS@)
Компоненты вектора угловой скорости в системе координат, жестко связан-
связанной с твердым телом:
ш[ = 6^23 — ^ cos Ф + Ф sin
с^2 = CcJgi = —вш\ф + ^cos^sin^, B1.6)
uf3 = o;J_2 = ф + ф cos 0.
Если ввести орт е^ = А2П^п, направленный по линии узлов, то
ш = фе3 + 0ес + ^е3. B1.7)
Компоненты 0, <9, ^ называются соответственно угловыми скоростями
прецессии, нутации и собственного вращения.
Лекция 21. Кинематика и динамические переменные твердого тела 201
Полезно найти компоненты вектора ш в неподвижном базисе еП5 опре-
определяемые формулой B.9а):
qT I qT qT q qT qT q
Отличные от нуля элементы тензора ш = и^ + ш^ + ш^) равны
и12 = ipcosO, u13 = ^sin^cosc^, и 23 = ^
12 = ipcosO, u13 = ^sin^cosc^, и 23
,(в) Л . ,@) А ,(<р)
UJ у = —Osmip, U 23 = <7COS(^, UJ 12 —
Следовательно, компоненты угловой скорости
^1 = ^23 = Ф Sin 0 Sin (f + 6 COS (/9,
cj2 = CJ31 = ^i/jsin^cos^ + 6 simp, B1.8)
^3 = ^12 = Ф cos 6> + ф.
21.4. Скорость и ускорение частиц твердого тела. Дифференцируя
B1.2), получим, учитывая B1.4), скорость точки а
г = то' + х'пё'п = то> + <[we;] = то' + [wr']. B1.9)
Ускорение точки
г = то1 + [cj[cjr;]] + [шг1].
21.5. Мгновенная ось вращения. Согласно B1.9) скорость точки а
можно представить двумя выражениями
, va = vP
где СиР — точки, в которых находятся начала подвижных базисов. Сле-
Следовательно, скорости точек Р ъС связаны соотношением
vp = vc + [шгср]. B1.10)
Очевидно, шva = ujvc : проекции скоростей всех точек тела на направление
вектора ш одинаковы. Если при определенном выборе точки С в некоторый
момент времени шvc = 0, то всегда можно найти такую точку Р, скорость
которой vp = 0:
B1.11)
Точка Р может оказаться и вне объема тела. Скорость какой-либо точки
va =
Движение твердого тела представляет собой чистое вращение вокруг оси,
проходящей через точку Р и параллельной вектору ш. Эту ось называют
202 Глава V. Движение твердого тела
мгновенной осью вращения. Из B1.11) найдем вектор тср, перпендикуляр-
перпендикулярный угловой скорости:
= [о;[о;гср] —>• ^ср =
На рис. 21.4 изображен конус, катящийся по плоскости без проскальзыва-
проскальзывания; его вершина шарнирно закреплена на высоте, равной радиусу основа-
основания а. Угол раствора конуса — 2а. Мгновенной осью вращения является
прямая, проходящая через неподвижные точки образующей АВ. Если точ-
точка С —центр масс, то АС = C/4) АО. Из B1.11) следует, что величина
скорости центра масс
vc—ojtcp, rcp = ^®?osa. B1.12)
4
21.6. Чистое качение. Если движущееся твердое тело соприкасает-
соприкасается с некоторой поверхностью, то число степеней свободы уменьшается.
При чистом качении относительные скорости
соприкасающихся точек тела и поверхности рав-
равны нулю. Это условие выражается уравнениями
связи вида A4.18), содержащими обобщенные
скорости и координаты.
0 г- —f^- — т- -$>М Рассмотрим качение шара по неподвижной
горизонтальной плоскости. Пусть Р — точка
соприкосновения шара и плоскости, С —центр
масс. При чистом качении (vp = 0) имеем
уравнение связи B1.11). Запишем его в явном
Рис. 21.4 виде, в системе координат с осью z, направлен-
направленной вертикально вверх: 0 = хс — ашу, 0 = у с +
С5 0 = zc, где а —радиус шара. Последнее уравнение интегрируется
и дает голономную связь zc — а = 0. Подставляя из B1.8) иХ1 шу, полу-
получим две неголономные дифференциальные связи:
0 = хс + о>(ф sin в cos ср — в sin ср),
0 = ус + а(ф sin в sin (p + в cos ф).
21.7. Динамические переменные. Поскольку в механике твердое те-
тело представляет собой ограниченный объем не деформируемой сплошной
среды, то во всех формулах, относящихся к системе N частиц, мы должны
произвести замену символа суммирования по массам частиц интегралом:
N
2^ тпа • • • ->> dV р(х', у\ г1)-- = \dm ...
а=1 у **
Обозначим буквой R радиус-вектор центра масс тела. Учитывая B1.2),
Лекция 21. Кинематика и динамические переменные твердого тела 203
находим
R = — \ dm г = — \ dm (W + rf) = ro> + R/, R/ = — dm t1 .
m J m J ш J
Если начало О' подвижной системы масс помещено в центр масс, то R/ =
= 05rO'=R.
Импульс твердого тела
Г Г
Р = \dmr= \dm {ro> + [wr']) = wrO' + т[шЩ. B1.13)
Помещая начало О1 подвижной системы координат в центр масс, на-
находим Р = 77iR.
Момент импульса. Согласно определению
Г Г Г
М = \dm [rf] = dm [ro> + г;, г] = [гО', Р] + \ dm [r;, ro> + [wr1]] =
= [го*, Р] +m[R;, fo'] + fdmtr'^r']]. B1.14)
Полагая го' = R, имеем
M = w[R, R] + M(c), М(с) = [dm[r'[o;r']]. B1.15)
Вектор М^с^ является моментом импульса тела относительно центра масс
или, как говорят, собственным моментом. Компоненты векторов М^ и и
в подвижном базисе связаны наиболее простым соотношением:
М'а = (MWe'a) = J dm (ш'ат'2 - хгаш'^) = 1а^, B1.16)
1ар = \dm (rf25aP - х'ах'р). B1.17)
Тензор Iap называется тензором моментов инерции или просто тензо-
тензором инерции в системе координат с началом в центре масс.
Кинетическая энергия
Т = i [dm (ro> + f'J = J*O'+ ттО'[шВ!] + \\dm [wrf. B1.18)
Полагая tq> = R, имеем
204
Глава V. Движение твердого тела
Второе слагаемое, представляющее кинетическую энергию движения тела
относительно центра масс, можно представить в виде
- dm [ujrf = -\dm (ш2т'2 - (ш • г'J) =
1 Г I / / / г /2 , , 1
= — dm {ujnujo0aQT — и)пх,
2 j p
Следовательно, кинетическая энергия твердого тела
_ m • 2 1 ,
~ ? + 2"
B1.19)
21.8. Тензор инерции. 1. Из определения B1.17) следует, что тензор
инерции тела аддитивен по отношению к частям, из которых оно состоит.
Для тела, состоящего из частей А, В,..., получим
1гк(А + В + ...) =
+ 1гк{В) + ...
B1.20)
2. Тензор life симметричен: /^ = 1^^. Поэтому он может быть приве-
приведен к диагональному виду путем поворота системы координат к главным
осям инерции х —>- ж, в которых тензор /^ имеет вид /^ = А^^ (см.
лекцию 1).
3. Найдем соотношение, связывающее тензор
определенный по отношению к системе координат с началом в точке А,
с тензором 1ар, определенным по отношению к системе координат, об-
образованной параллельным переносом в центр
масс. Если АС = с, то г = с + г',
Х%(С
B1.21)
Перечисленные свойства тензора инерции су™
Рис. 21.5 щественно упрощают вычисление элемен-
элементов Iaf3.
Пример 21.1. Найдем тензор инерции тонкостенной полусферы мас-
массой т, радиусом а в системе координат с началом в центре инерции
()
(рис. 21.5). С этой целью вычислим вначале тензор
г
и
(У2
^
dmxy,
(А)
Ч
Т(А)
Лекция 22. Уравнения Эйлера 205
dmyXj J-22 "ш \Х +z )•> ^23 dmyz,
J J J
T(A) f , T(A) f , T(A) Г , / 2 , 2\
l^ = — dm zx, ^32 ®m zV-> Чз ®m \x + У )•
J J J
i
В силу свойства B1.20) I^p (m) = -/^ Bm) и область интегриро-
интегрирования можно распространить на всю сферу. Вследствие симметрии сферы
не диагональные элементы равны нулю. Далее учтем очевидные соотно-
соотношения:
(р dm х2 = ш dm |/2 = ш d?n ^2 = - Ф dm а2, ш dm = 2m.
J J J 3 J J
Следовательно,
t(a) _ r(^) _ r(^) _ I^X^/ 2_2 2
11 22 33 о о j о
Найдем теперь вектор с = @, 0, с):
тг/2
С " 2^а2
о \ dS z = — sin 6> dO dip a cos 9 = —.
па2 J 2тг J J ^ 2
о о
Окончательно из B1.21) получим
т т 2 2 /а\2 5 2 г 2 2
/и = /22 = тг^а - m ^-J = —ma, /33 = -maz.
21.9. Твердое тело с одной неподвижной точкой. Пусть О' — непо-
неподвижная точка твердого тела. В этом случае число степеней свободы рав-
равно трем. Совмещая точку О с точкой О\ получим из B1.13), B1.14),
B1.18) динамические переменные
P = m[wR]5 M= fdmtr'twr']], T=-
В координатах подвижного базиса
р _ pip) i м _ М(О) / т-- 1{о)ш' uj1
р(О) _ I г>1 М(О) _ АО) j
/^ — menskusnk, м^ - ink шк.
Здесь 1пк > — тензор инерции в системе координат с началом в неподвижной
точке.
206 Глава V. Движение твердого тела
Лекция 22. Уравнения Эйлера
Система уравнений, описывающая движение твердого тела, должна со-
содержать шесть независимых уравнений. Поскольку твердое тело является
системой частиц, то согласно D.2), D.6) импульс и момент импульса под-
подчиняются уравнениям
N
Fa, B2.1а)
О=1
N
raFa]. B2.16)
0=1
Можно различать два вида сил, действующих на твердое тело. К первому
относятся силы, действующие на каждый элемент dm массы тела. Эти си-
силы называют массовыми. Ко второму виду относят силы, возникающие при
взаимодействии частиц поверхности тела с другими телами или внешней
средой. Эти силы называют силами реакции.
22.1. Равновесие твердого тела. Необходимым и достаточным усло-
условием того, чтобы твердое тело находилось в покое, является система урав-
уравнений:
N N
о=1 о=1
В этом случае сумма моментов сил не зависит от выбора начала координат.
Действительно, сместим начало координат на вектор 00' = с: г = с + т'.
Тогда
5>aFo] =
Равнодействующая сила. Силы Fi, F2, F3,..., приложенные к твер-
твердому телу, имеют равнодействующую силу F = Fi + F2 + F3 +..., если ее
момент относительно произвольной точки О равен сумме моментов сил
относительно той же точки О. Это определение имеет конструктивный
характер и позволяет получить три уравнения для определения положения
точки приложения равнодействующей силы F.
Пара сил. Силы Fi =^F2 = Fq, приложенные к твердому телу, назы-
называют парой сил. Их сумма равна нулю. Момент пары сил отличен от нуля.
Согласно определению, пара сил не имеет равнодействующей.
22.2. Уравнения Эйлера. Совместим точку О' с центром масс и пе-
перейдем к описанию движения тела в терминах переменных R и эйлеровых
углов ап = (у?, <9, ф). Подставляя Р = mR, ra = R + r;a в B2.1 а), по-
получим
= F(R, an), F = ^Fa(R + r^). B2.3)
Лекция 22. Уравнения Эйлера 207
Мы видим, что равнодействующая сил, действующих на твердое те-
тело F(R, an), зависит от шести переменных. Для получения полной систе-
системы уравнений подставим B1.15) в B2.16):
m[RR] + m[RR] + M<c> = 2JRFa(R + r'J] + ^Jr^FjR + r'J].
a a
Учитывая B2.3), найдем уравнение
N
М(С) = L(O)(Rj anO L(C) = ^[r^Fa(R + r'a)]. B2.4)
a=l
Здесь L(C\R, an) —сумма моментов (относительно центра масс) всех
сил, действующих на тело.
Запишем теперь B2.3), B2.4) в координатах подвижного базиса: R =
= vfne'n, F = F^e'n. Вычислим производную
R = v'ne'n + vfn[ujefn] = i)fnefn + УгкЦе^ efk]
и умножим обе части B2.3) на е[. В результате получим
'^) = Fl(R'n, an). B2.5)
Обратимся теперь к уравнению B2.4). Полагая М^ = М'пе'п1
= L'ne'n, имеем
м;е; + м'пё'п = муп + м>е;] = м;е; + це;., мук] = ь'пе'п.
Умножая обе части на е[, получим
М[ + ефи'Ж = l;«, an). B2.6)
Пусть базисные векторы подвижного базиса направлены по главным осям
инерции: /^ = IiSiSjMl = Iisujfs = /^.Из B2.6) получим три уравнения:
hoo<2 + (Ji - /3)^3^ = 4, B2.6а)
13ш!3 + (/2 - Ii)uj[uj'2 = L3.
Система B2.6а) называется уравнениями Эйлера. Согласно B1.6) компо-
компоненты угловой скорости выражаются в терминах углов Эйлера и их про-
производных. Шесть уравнений B2.5) и B2.6) образуют полную систему
уравнений, описывающих движение твердого тела.
208
Глава V. Движение твердого тела
Пример 22.1.1. Шар движется без проскальзывания по горизонталь-
горизонтальной плоскости, вращающейся вокруг вертикальной оси с постоянной угло-
угловой скоростью О. Найдем закон движения центра масс R(t) и угловую
скорость oj{t).
Тензор инерции шара радиусом а равен /^ = ISiS, I = B/5)та2.
Следовательно, М^ = 1ш. Введем вектор е, перпендикулярный к плос-
плоскости, и вектор г, соединяющий начало координат с точкой Р касания
шара и плоскости: О = Ое, R = r + ае (рис. 22.1). Уравнение свя-
связи /(R) = eR = 0 приводит к уменыне-
д нию числа степеней свободы от шести до пя-
пяти и возникновению нормальной силы реак-
реакции Ле. Силу реакции N, приложенную в
точке Р, представим в виде N = Ле +
+ Т, Те = 0. Уравнения B2.3), B2.4) при-
iC ] обретают вид 0 = mg + Ле5 Л = —mge =
тт = Т,
uj = -а[еТ].
СО
B)
Рис. 22.1
Очевидно, наличие связи привело к системе
из пяти уравнений. Полагая в B1.10) vp =
= [Or], vc = r5 rep = ^ae, дополним систему G) условием отсутствия
скольжения в точке касания:
[Or] = г — а[о;е].
C)
Исключим вначале из уравнений G), B) силу реакции Т. С этой целью
после дифференцирования E) используем уравнения G), B):
[Or] = г + а[еи>] = ^
т
п2
1
т
Т.
2
Следовательно, Т = - т[Or]. Подставляя Т в G), B), имеем уравнения
7
2
г = - [Or],
7
5
ш = —Or.
7 а
D)
Отметим, что первое уравнение совпадает с уравнением движения заряжен-
заряженной частицы в однородном магнитном поле. Выберем начальные условия
г@) = (жсь 05 0), г@) = @, Ож05 0), ш@) = 0. Из уравнений D) находим
/7
r(t) = I -
\2
2 5 7.2 %
) cos — Ш хг\. — хп sin — Qt. 0 ,
7 2 2 7 f
w(t)
Бх0 ( 2
= ^(C0S7
- Ш - 1, sin - Ш, 0 ) .
Лекция 22. Уравнения Эйлера 209
Следовательно, шар движется по окружности радиусом 7/2|жо|. Подста-
Подставляя E) в B1.8), получим систему уравнений первого порядка относи-
относительно углов Эйлера.
Пример 22.1.2. Переход скольжения шара в качение по неподвижной
шероховатой плоскости.
Пусть u(i) — скорость точки шара Р, касающейся плоскости. Тогда
сила трения скольжения Т = —/imgep, где /л —коэффициент трения
скольжения, ер = и/и — единичный вектор. Систему уравнений движе-
движения:
тт = Т, A)
1ш = -а[еТ], B)
дополним соотношением
и = г — а[о;е], C)
связывающим скорости точек С и Р. Теперь продифференцируем C)
и преобразуем правую часть, используя уравнения (/), B) также, как в
предыдущем примере. В результате имеем уравнение
u=-Gfig/2)ep. D)
Начальное значение u@) = uq. Образуя скалярное произведение D) с
вектором и, получим уравнение
E)
решение которого
u(t)=u0--^-, O^t^t8, t8 = -^-; u(t)=0, t>t8.
2 7/ig
В момент времени ts скольжение шара переходит в качение. Из уравне-
уравнений (?), E) следует, что ер — постоянный вектор:
dev и и ii0
—f- = и—=0, ер^с = —.
at и и1 щ
Теперь уравнения A), B) приобретают вид
F)
* = 1г[ес]' G)
Очевидно, ш(г)е = const, u)(t)c = const. В интервале времени 0 ^ t ^ ts
210 Глава V. Движение твердого тела
решение уравнений F), G)
^^ (8)
p (9)
Направим ось z параллельно вектору е. Пусть в начальный момент време-
времени г@) = 0, v@) = (г>1, г?2, 0), v2 > 0, cj(O) = (cji, uj2i cj3), cj2 = ^i/«.
Тогда u@) = @, v2 + uj\a, 0), с = @, 1,0). Отметим, что при движении
шара без проскальзывания v2 + uj\a = 0. Поэтому шар начинает скользить.
Из (8), (9) получим
x(t) =Vlt, y(t) =v2t
2 '
bfigt
Ux{t) =Ui- ——, UJy(t)=UJ2, UJz(t)=UJ3.
В интервале времени 0 ^ t ^ ts шар движется по параболе. Полагая ^(^о) =
= 0, находим to = v2/[ig, ojx(to) = ш\ — bv2/2a — шар по-прежнему
скользит по плоскости. В момент времени ts значения скоростей
Vxs = Vx(t8) = Vi, Vys = Vy(t8) = ^^
xs x(8)
7a
При t ^ ts выполняется соотношение vy + ujxa = 0 — шар движется
без проскальзывания с постоянной скоростью v = (ui, i;^^, 0). Если на-
начальное значение угловой скорости lj\ > 5v2/2a, то ts > t0, vys < 0;
при значениях t> to шар скользит в отрицательном направлении оси по
параболе, а при переходе в режим качения движется по прямой — игроки в
биллиард знают, как заставить шар вернуться назад. При v\ = 0 шар дви-
движется по оси у в обратном направлении, так же как «закрученный» обруч
на соревнованиях по художественной гимнастике.
Рассматривая движение твердого тела, можно наблюдать новые, уни-
уникальные эффекты. Сильное впечатление производят особенности движения
кельтского камня. Эти камни имеют форму вытянутого эллипсоида. Если
раскрутить камень относительно нормали к плоскости в точке контакта, то
его движение будет зависеть от направления начальной угловой скорости.
Например, при закрутке в направлении движения часовой стрелки камень
вращается «нормально». При закрутке в противоположном направлении
угловая скорость уменьшается до нуля и камень начинает вращаться в на-
направлении движения часовой стрелки. Если камень наклонить, а затем от-
отпустить, то его колебательное движение переходит во вращательное [275].
22.3. Движение твердого тела с одной закрепленной точкой. В этом
случае тело имеет три степени свободы. Сила реакции приложена в точке
Лекция 22. Уравнения Эйлера 211
закрепления. В приближении однородного поля тяготения момент силы
тяжести
L = jdm[r'g]=m[R'g].
Подставляя М из B1.22) в B2.16), получим
{ ^ = msa07R'0 g'7 . B2.7)
Полная система уравнений должна содержать соотношения B1.6), свя-
связывающие угловую скорость и углы Эйлера. Образуем свертку B1.5) с
^iivsSvn и учтем A.10):
Поскольку S^S^ = Smn, то
Sfjin = ^iivsSvn^s- B2.8)
Эта система уравнений называется уравнениями Пуассона.
Пусть g = — ge3. Поскольку е3 = S7se'79 то g^ = -gS73. Запишем
полную систему уравнений:
1аш'а + ?ар7шр17и)'7 = -mg^7^S73, B2.7а)
4з =e^sS^uj's. B2.8а)
Для интегрирования системы B2.7), B2.8) достаточно найти четыре неза-
независимых интеграла [146]. Известны три не содержащих явно время инте-
интеграла.
Образуем свертку B2.7а) с и'а и, учитывая B2.8а), получим
^ 2 ^'а = ~т S ^aPj^aRpSjS =-ГП g R'^E^aS^UJ^ = - —
Следовательно, имеем интеграл полной энергии:
^ll!=E. B2.9)
Из B2.8) следует очевидный интеграл S^S^ = 1. Далее, образуем сверт-
свертку B2.7 а) с Яаз, свертку B2.8 а) с I^ou'^ и сложим полученные выражения:
Ia^aSa3 + Ifi^^S^s — ^^«/37^/3^^7^а3 "*" ^Ш^Е^sSV%UJs = 0.
В результате находим интеграл
/а^5а3 = М3. B2.10)
212
Глава V. Движение твердого тела
Следовательно, сохраняется проекция момента импульса на ось z.
1. Случай Л. Эйлера A758): R/ = 0 или g = 0. Образуя сверт-
свертку B2.7а) с Iauj'a, получим интеграл Aаш'аJ = М|, который является
следствием уравнений М = 0. Существование четвертого интеграла по-
позволяет найти решение уравнений движения в терминах эллиптических
функций [146].
Пример 22.2. Найти решение уравнений движения свободного сим-
симметричного волчка. Пусть 7i = /2 = / > /3. Из B2.7а) следуют уравнения
(/^/3L^=0,
^ = 0.
G)
B)
C)
Поставим следующие начальные условия:
<р@) = ф@) = 0, 0@) = 60,
Из B0.6) находим о/@) = ujq: cjqi = 0, CJ02 = ^
+ фо cos ^0 • Выбранные начальные условия соответствуют заданию векто-
вектора Мо, компоненты которого в подвижном базисе М[@) = 0, М^О) =
= /6^02, ^(О) = /з^оз- Полагая в соответствии с рис. 22.2 М{@) =
= 0, А7з@) = Mosin7o, M^fy = Mqcos7o? получим
jq2 = Мо sin 70, /3 uj03 = Mo cos 70.
Компоненты вектора Mq в неподвижном базисе: Mi=0,M2 = ^
— sin^o-^з = ^M)Sin(f9o^7o), M3 = sin^oM^ + cos^oMg = Mo cos F>0 —
— 70). He ограничивая общности, положим 70 = 9q (рис. 22.3).
Рис. 22.2
Рис. 22.3
Лекция 22. Уравнения Эйлера 213
Тогда из D) находим
Фо = ™v~, ^о = Изз — ^о cos 0Q = Mq cos $о I т 7 1 = ^оз —z— = v.
I \h I) I
Из уравнения C) следует, что ujf3 = W03 • Подставляя ujf3 в (./), B), полу-
получим систему
Общее решение, содержащее две константы А и В:
ш[ = A cos vi + В sin vt, ш'2 = — A sin ut + В cos i/t.
В силу начальных условий А = 0, 5 = 0JQ2-
(jj[ = OJ02 Sill I/t, UJf2 = 6^02 COS Z/t.
Мы приходим к выводу, что сохраняется величина проекции угловой скоро-
скорости на плоскость, перпендикулярную к оси волчка: ujq2 = yw'i + ш1^. Ве-
Величина угловой скорости также сохраняется: о;2 = u)q. Поскольку М3 =
= Mq cos^ = /з^оз, то в соответствии с D) 0(i) = <90.
Перейдем теперь к решению кинематических уравнений Пуассона, за-
записанных в форме B1.6):
ф sin ф sin i9q = uq2 sin i/^, ф cos t/j sin 6>o = CJ02 cos i/t5
ф cos во + т/> = ujqs .
Учитывая D), находим ф = фо, ф = фо. Наблюдаемое движение оси
волчка определяется вектором
е3 = sin в sin Lp ei — sin 6> cos ^ e2 + cos 0 ез,
который находим из B1.3).
2. Случай Ж. Лагранжа A775): симметричный волчок в поле тяжести.
Пусть I1=I2=I> I3, R[ = Дз = 0, Дд = /. Тогда из B2.7 а) находим
B2.11)
Далее запишем интеграл B2.10). Учитывая B1.3), найдем Sis= sin ф sin <9,
*52з = cos ф sin 0, 5зз = cos в и, подставляя о;^ из B1.6), получим
^ = M3. B2.10а)
214 Глава V. Движение твердого тела
Из B2.11), B2.10 а) следует, что
где и = cos 6. Учитывая B1.22), B2.11), запишем кинетическую энергию
волчка:
Г = -1(и[2 + ш'2) + -1зс42 = ~~ (б2 + 02 sin2 i
2 3 2 V
и интеграл энергии B2.9):
! + ф2 sin2 6>) Н — + w g Icos 0 = Е. B2.9 а)
Подставляя B2.12) в B2.9 а), найдем
М'2
u2 = F(h), Е' = Е--^-, B2.13)
2 , 9 1 ,9
F(ix) = -(Е1 -mglu)(l - и2) - — (М3 - MgwJ. B2.14)
Поставим начальные условия: tp(O) = ^@) = 0, 6@) = <9q, 0@) =
= 0О, 0@) = 0, ^@) = ф0, из которых следует М{@) = 0, М^@) =
= /ИJ, М"з@) = /з^оз- Полагая М^О) = M"osin7, Л^з@) = M0COS7,
-ж лгО
найдем Мо и 7? ^з = M0cos(9 - 7)? ^ — mglcos0o + —у- sin2 7.
Полагая г = 2Imgf/M|, представим F(ii) в виде
(и - щ)[и - u2o + еA - и2)},
0Oi u2o = cos(<90 -27).
Очевидно, F(u) обращается в нуль в трех точках:
Г-| _^ f-t А ( \А (г)г) 1 ?%\
причем —1^щ^и^и2^1, щ>1 при условии 1 ^4e(ii2o — ?)• Область
движения по углу 0: 02 ^ 6 ^ 0q. Запишем B2.15) в виде
е(и — Ui)(u — U2)(u — 113) B2.17)
Лекция 22. Уравнения Эйлера 215
и преобразуем B2.17), вводя переменную
w = \1 к =
U2 — Щ
Из B2.17) находим уравнение
Aw2 = p2(l^w2)(l^k2w2),
решением которого является эллиптический синус (см. пример 14.5). По-
Поскольку w@) = 0, w@)>0, то
w
pt Г dw
2 J y/(l-w2)(l-k2w2)
Следовательно, w(i) =sn(pt/2),
u(t) =Ul + (u2 - txi)sn2 ( Ц- j . B2.18)
Период движения D/р)К. Рассмотрим некоторые частные случаи.
Свободный волчок. Положим g = 0. Тогда е = 0, щ = cos<90, ii2 =
= cos (Oq — 27), г*з ^ е™1, р = Mq/I. Модуль эллиптического интегра-
интеграла к = 0, поэтому sn^= sin ^; К = тг/2. Решение B2.8) приобретает вид
Ц?) = iii + A*2 — ^i) sin2 — = -(tii + щ) — ^(щ ^ щ) cosut =
Л Л Zi
= cos (во - 7) C0S7 — sin (#o — 7) sin 7 cos cut, и = Mo/L
Волчок движется в области во — 2j ^ в ^ <9q. Это решение можно независи-
независимо получить из B2.15): дифференцируя, получим уравнение осциллятора.
Если 0@) = 0, то 7 = 0, u(t) = cosв0, <p(t) = O, ip(t) = M0/I3.
Спящий волчок. Положим 7 = ^о = 0. В этом случае щ = 1120 =
= 1, F(u) = —(Mq/IJA — uJ[e(t + и) — 1]. Исследуем устойчивость
волчка. Полагая и = 1 —ж, ж«С1, разложим F(ii) в ряд Тейлора: F(ii) =
= ^(М"о//JA — 2е)ж2 + ... Следовательно, колебания по углу в будут
устойчивы при условии 2е < 1 (М§ > Almgl).
Быстрый волчок. Предположим, что е <С 1. В этом случае кинетическая
энергия вращения волчка велика по сравнению с потенциальной энергией.
Из B2.16) получим U2 — Що — еA — w20), ^3 ^ е~1. Мы видим, что
нижняя граница по углу в увеличивается на величину ~ е по сравнению
со случаем свободного волчка. Поэтому функцию F(u) можно аппрокси-
аппроксимировать выражением
F(u) ~ - I —- ) (и - ио)[и - U20 + e(t - ul0)}.
216 Глава V. Движение твердого тела
Подставим F{u) в B2.13). После дифференцирования по времени полу-
получим уравнение
общее решение которого имеет вид
и — A cos out + В sincjt + -(и2 +
Поскольку и@)=щ, й@) = 0, то
Запишем решение в случае 7 = 0- Тогда що = cos ^o?
u(t) = cos 6>о sin2 0o A ~ coswt).
Таким образом, при е <С 1 возникает движение по углу 9 — нутация и пре-
прецессия вокруг вертикальной оси. Вследствие трения в точке закрепления
нутации быстро затухают и волчок движется со средней скоростью прецес-
прецессии (ф) = mgl/Mo. Такое движение волчка называют псевдорегулярной
прецессией.
3. Случай С. В. Ковалевской A888): h=I2 = 2/3, R[ ф 0, R'2 = Rf3 = 0.
Система B2.7а), B2.8а) будет иметь вид
2ш[ - шBш'3 = 0, 2ш2 + uj[ujf3 = kS33j ^з = ^^23, B2.19)
Sl3 = ^3^23 — ^2^335 S23 = ^1*5зз — ^3*^13? ^33 = LU2Sis — ^Х&З,
B2.20)
где k = mgR[/l3. Найдем четвертый интеграл. Из B2.19) имеем
-jr(^i — ^2 ) = —^2*^зз + 2uj[lj!2d3i
2— ш[и'2 = —и'3(и[ — uj'2 )-\-koj[Ss3-
Учитывая B2.20), получим
—
Лекция 22. Уравнения Эйлера
217
Из последних уравнений следует интеграл
К2 - ш'22 - kS13J + Bи[ш'2 - kS23f = С.
Существование четырех интегралов позволяет найти решение задачи в ква-
квадратурах [146-148].
22.4. Движение тела с неподвижной осью. Совместим начало О и О'
двух базисов. Пусть ось вращения совпадает с ортами е2 = ef> : ш = ве2.
Радиус-вектор центра масс R = ге'3. Скорость центра масс R = гё3 =
= г [о;eg] = гве[, момент импульса М = М^е^, М'п = Imn^m = 01П2.
Из B2.5), B2.6) получим систему уравнений:
112
02
I32 = Li, I226 = L'2, I320 - 02I12 = L'3.
B2.21)
B2.22)
Пример 22.3. Однородный тонкий стержень АВ движется в верти-
вертикальной плоскости вокруг горизонтальной оси, проходящей через точку А.
Найдем закон движения и силы реакции, действующие со стороны оси
(рис. 22.4 а).
Пусть т, I — масса и длина стержня. Тогда г = 1/2, цг^ = Ц2 =
= /, / = ш!2/3, Iik=0, гфК
gi = ^gsin^, gf2 = 0, g^ = gcos^, [Rmg] = -mg(I/2)e;.
Из B2.21), B2.22) получим систему:
0 =
^m-02 = Щ + m g cos 6>,
B)
T
б
Рис. 22.4
218 Глава V. Движение твердого тела
19 = mgsin^. C)
Из последнего уравнения следует интеграл
-I92 -mg™ cos 9 = Е,
и решение
I \Г1/2
¦mg^cos^J =t + C.
После определения 9(t) найдем силы реакции
ml2 \ т™
~\Г) ~ ~4
^т^92.
Из D) следует интересная особенность: сила реакции имеет компонен-
компоненту N[. В случае математического маятника длиной 1/2 величина N[=0.
Удар стержня о преграду. Центр удара. Закрепим тонкий прут парал-
параллельно оси вращения стержня, пересекающим ось z в точке К на расстоя-
расстоянии Zk = h от оси (рис. 22.4 б). В начальный момент времени стержень АВ
отклонен на угол 9 = —9q. При ударе по пруту на стержень действует
сила Т = (—Т, 05 0) со стороны прута; момент силы М = @, —Th, 0).
Полагая 9 = 0 в уравнениях A), (J), получим систему уравнений:
- mW = N[-T,
19 = ^hT,
из которой находим N[ = ТA — mlh/21). При значении h = 21/ml = 21/3
поперечная компонента силы реакции обращается в нуль. В этом случае
точка К называется центром удара. Вращающиеся ударные устройства
(маятниковые копры, курки ружей и т.д.) конструируются так, чтобы точ-
точка К была по отношению к оси вращения центром удара.
22.5. Оси Резаля. Для описания ориентации осесимметричного тела
удобно использовать «проскальзывающий» базис. Направим орт пз = е3
по оси симметрии. Он образует угол 9 с осью z. Другой орт ni совместим
с линией узлов. Он образует угол ip с осью х неподвижного базиса. Третий
орт П2 = [П3П1]. Полагая в матрице B1.3) ф = 0, получим
пз = sin 9 sin (pei — sin 9 cos Lpe2 + cos $ез, B2.23 a)
ni = cos <pei + sin cpe2. B2.23 6)
Лекция 22. Уравнения Эйлера
219
Далее находим
п2 = — cos 9 sin (fe\
cos в cos с^е2 + sin
B2.23 в)
Угловую скорость подвижного базиса обозначим О. Поскольку вращение
подвижного базиса не связано с изменением угла ф, то полагая в B1.6)
ф = 0, ф = 09 получим проекции О и ш на орты базиса пд (А = 1, 2, 3):
п = @, ф sin 0, ф cos в), ш = (пъ п2, О3 + ф). B2.24)
Совместим точку О' с центром масс тела. В координатах подвижного бази-
базиса па имеем P = mR, R = vana, M^=Maiia, Ма = /асксс;^. Из B2.3),
B2.4) получим систему уравнений:
mi) а + ?71б:а/з70/зг;7 = Fa, B2.25)
Ма + sa/37uf3 M7 = La, B2.26)
где Fa = Fna, La = Lna — проекция суммы сил и суммы моментов сил
на оси Резаля.
Пример 22.4. Через центр диска С проходит ось G0, располо-
расположенная перпендикулярно к его плоскости. Другой конец оси шарнирно
закреплен в точке, находящейся на расстоя-
расстоянии, равном радиусу диска от горизонталь-
горизонтальной шероховатости плоскости, по которой
диск катится без проскальзывания с посто-
постоянной угловой скоростью. Найдем силы ре-
реакции связей в точках шарнирного закреп-
закрепления и касания диска с плоскостью.
На рис. 22.5 Р — точка соприкосно-
соприкосновения диска с плоскостью, длина ОС = I,
радиус диска PC = а; Т, N — силы реак-
реакции. Пусть угловая скорость вращения оси
диска равна Oq. Угловая скорость диска ш направлена параллельно мгно-
мгновенной оси вращения РО. Следовательно,
777777777777777777777
Р
Рис. 22.4
О = О0п2, ш = O0n2 +w3n3, ш3 = -A/а)п0, R =/п3,
R = I[On3] = Шопь R = -luln3.
Из B2.25) получим уравнения
A)
Поскольку М = /О0п2 + /2cj3n3,
L = Z[n3mg]
= (mg-T)/ni,
220
Глава V. Движение твердого тела
то из B2.26) следует уравнение
Из (/), B) находим N±=Q,
=l(mg-T).
B)
N, = -h
= mg+I3
Заметим, что вследствие вращения системы вокруг оси П2, возникает пара
сил =Ызо;з^оп2? приложенных в точках Р и О.Сила 1з^з^оп2, прило-
приложенная в точке Р, обусловлена дополнительным к статическому давлением
диска на плоскость. Этот эффект используется для размельчения твердых
материалов в дробильных мельницах.
22.6. Гироскопический момент. Назовем гироскопом тело с главны-
главными моментами инерции Д = /2 ^ /Зэ вращающееся вокруг оси симметрии,
закрепленной на неподвижном или движущемся объекте. Существует боль-
большое число устройств, которые содержат быстровращающиеся элементы —
гироскопы: турбины на теплоходах, колеса машин и вагонов, винт самоле-
самолета и т.д. В общем случае положение подвижного объекта как твердого тела
определяется координатами центра масс и углами Эйлера. При движении
объекта изменяется и ориентация осей Резаля, поскольку подшипники, на
которых укреплена ось гироскопа, жестко связаны с объектом.
Запишем теперь уравнения B2.25), B2.26) в приближении заданного
движения объекта. Направим орт пз по оси гироскопа и предположим,
что угловая скорость собственного вращения \ф\ >|О|, |Л|<С|ОД|. В этом
случае МиМоПз, Мо = /за;з, ^з &ф@). Тогда из B2.25), B2.26) имеем
т[пЩ = mg + N, [ОМ] = L,
B2.27 а, б)
N
где IN — сила реакции подшипников, L — момент сил реакции. Сумма
моментов сил Lg, действующих со стороны оси гироскопа на подшипники,
называется гироскопическим момен-
моментом. Следовательно, Lg = — L.
Пример 22.5. Ось ротора турби-
турбины расположена вдоль оси корабля и
закреплена двумя подшипниками в
точках а и Ь на расстоянии I друг
от друга (рис. 22.6). Найдем силы дав-
~ " ления на подшипники при движении
Рис. 22.5 корабля.
Момент сил реакций Na и N5,
действующих на ось турбины, L = A/2)^(N5 — Na)]. Поскольку М =
то из B2.27) получим систему уравнений:
1/2
—
п. w
1/2
¦
J i
- Na)l/2M0,
Лекция 23. Уравнения Лагранжа 221
из которой находим
NM = l/2(m[OR] - mg ± 2M0O/I). B)
Сила давления на подшипники Р&?а = —Т^ь,а- Из (!) можно сделать
общий вывод: если к оси быстрого гироскопа приложить пару сил, то ги-
гироскоп начинает вращаться с угловой скоростью, направленной по прямой,
параллельной силам. Рассмотрим два случая.
1. Корабль выполняет поворот по окружности радиусом R с угловой
скоростью О = Оп2. Подставляяв B) R = Rni, R = i?[Oni] = —
получим
Na = (^mu2R/2, mg/2~ Isuu/l, 0),
Nb = (-шО2Л/2, mg/2 + I3uu/l, 0).
Гироскопический момент Lg = [MO] = —Isujftni, создаваемый парой
сил давления на подшипники, приводит к смещению носа корабля вверх и
кормы вниз. Аналогичный эффект возникает при плоском развороте одно-
одновинтового самолета.
В разделе физики, известном как «Физики шутят», упоминается о ро-
розыгрыше, автором которого был выдающийся американский физик-экспе-
физик-экспериментатор Роберт Вуд. Перед поездкой он укрепил в чемодане гироскоп.
Вышел из вагона, запустил гироскоп с помощью ремня и подозвал носиль-
носильщика. Когда они огибали угол, чемодан стал разворачиваться в вертикаль-
вертикальной плоскости и вырвался из рук испуганного носильщика.
2. Найдем гироскопический момент и силы давления, возникающие при
килевой качке с угловой скоростью О = O(t)ni. Полагая в B) R = 0,
получим
, mg/2, 0).
Гироскопический момент Lg(t) = [МО] = 1зо;Оп2 порождает вынужден-
вынужденные колебания оси корабля в горизонтальной плоскости.
Лекция 23. Уравнения Лагранжа
23.1. Движение свободного твердого тела. Совместим начало под-
подвижной системы отсчета с центром масс. Ориентация базисных векто-
векторов e[(t) = Sim(t)em определяется углами Эйлера. Выберем в качестве
обобщенных координат радиус-вектор центра масс R и три угла Эйлера.
Согласно B1.19) кинетическая энергия Т = T(R, anj an). Потенциаль-
Потенциальная энергия U = f/(R, an). Например, энергия взаимодействия тела с
222 Глава V. Движение твердого тела
однородным шаром массой М
\^гу B3.1)
где dm = p(rf)d3xf, p(r') — плотность тела.
Лагранжиан твердого тела
L(R, an, R, ап) = — R2 + - ики'ги'к ^ U(R, an). B3.2)
Совмещая базисные векторы подвижного базиса с главными осями инер-
инерции, имеем
L = ^ mR2 + ^ Iku'l - U(R, an). B3.3)
Уравнения Лагранжа
^д^=дЬ_ ^д!^ = ^ B3 4а б)
dt (JR <9R' dt дап дап
образуют систему шести связанных уравнений.
23.2. Обобщенные импульсы и силы. Обсудим вначале физический
смысл обобщенных импульсов дЬ/дап = дТ/дап, где Т = /д.и/к/2. По-
Поскольку и1 и = wefe? то из B1.7) имеем
uj'h = ф(езе'и) + ^(e^ei) + ё(е!,е1), B3.5)
Аналогичным путем получим
ВТ ВТ
-^ = Ме6 -^ = Me' B3.6)
Таким образом, обобщенные импульсы являются проекциями момента им-
импульса на векторы ез, е^ и е'3.
Найдем теперь приращение потенциальной энергии при бесконечно ма-
малом повороте твердого тела:
U (К, ап) = ^иа(Я + r'J, AU(R, an) = ? ^ Аг^.
Момент силы относительно центра масс
Лекция 23. Уравнения Лагранжа 223
Поскольку Дг;а = [шт!а] At = [е3г'а] Aip + [есг'а] А0 + [е'3г'а] Аф, то
-AU = L{c)e3A(p + L(c)ecA^ + Ь(СЦД^
Следовательно, производные потенциальной энергии по углам Эйлера
равны соответственно проекциям момента сил на векторы ез, е^5 е^. За-
Заметим, что последнее уравнение системы B2.6а) имеет форму уравнения
Лагранжа:
1дт = дт_ди_
dt дф дф дф- К '
Действительно, поскольку
nJ' дв ~~ [Ч nJ' дф ~ [ 3 nJ'
то из B3.5) находим
^ е^] + <Ц[е!,е'„] + ^е^[е^е'„] = W[e^e^] = e'J^e^],
Следовательно, учитывая B3.6), B3.7), из B3.8) получим
Ме^ = Ь(СЦ -+ Щ + (cj^M^ - с4М{) = Ьз(С)-
Обобщенная энергия. Поскольку dL/dt = 0, то уравнения Лагранжа
имеют первый интеграл
. dL dL
Учитывая B3.5), получим соотношение
dL дТ дТ дТ
ф{>)+§(^+^
дТ дТ
Следовательно,
Но = \mR2 + \lkoj'k2 + U(R, an).
224 Глава V. Движение твердого тела
23.3. Движение твердого тела с одной неподвижной точкой в од-
однородном поле тяжести (случай Лагранжа). Наличие связей уменьшает
число степеней свободы. В качестве обобщенных координат выберем углы
Эйлера. Для симметричного волчка лагранжиан
L = -(<92 +^2sin26>) + ^-(^ + 0cos^J -mgfcos^. B3.10)
Обобщенные импульсы dL/дф, dL/дф сохраняются (см. B2.10а),
B2.11)). Следствием условия dL/dt является интеграл энергии B2.9а).
23.4. Плоскопараллельное качение твердого тела. При качении
твердого тела по некоторой поверхности скорость точки касания равна ну-
нулю. Пусть Р —точка касания, С —центр масс. В соответствии с B1.10)
получим условия
0 = R+[wrCp], B3.11)
которые являются уравнениями связи. В общем случае B3.11) нельзя про-
проинтегрировать и получить соотношения между Rn и ап, позволяющие
ввести обобщенные координаты в количестве,
равном числу степеней свободы. В частном слу-
случае плоскопараллельного движения ш = фе
твердое тело имеет одну степень свободы.
Пример 23.1. Одна из половинок тонко-
тонкостенной полусферы массой т, радиусом а на-
ходится на шероховатой горизонтальной плос-
кости. Найти лагранжиан и частоту колебаний
в окрестности положения равновесия.
Выберем обобщенную координату
между осью z и отрезком ОС, соединяющим
геометрический центр и центр масс (рис. 23.1). Угловая скорость ш =
= @, ф, 0). Обозначая ОС = с, PC = г, из B3.11) получим R2 =
= 02г2, г2 = а2 + с2 — 2ас cos ip. Потенциальная энергия полусферы U =
= —ш g с cos (p. Лагранжиан системы
L((p, ф) = — (а2 + с2 — 2ас cos (р)ф2 Н ф2 + т g с cos (f.
В окрестности положения равновесия c^eq = 0 лагранжиан
771 , х9 .9 /22 .о
L = -(a- c)V + -fv2 + mg
Решение уравнения движения (р = В cos (out + /?),
2
UJ = .
m(a - cJ + I22
Лекция 23. Уравнения Лагранжа
225
Поскольку с = а/2, /22 = E/12)та2 (см. пример 21.1), то из1 =
= C/4) g/о. Пусть (р@) = <ро, <?(°) = 0, тогда <р = <р0 cosut. Из B3.11)
находим
= -a[l- -cosip) ф, Д2 = 0, Дз = - ~ sin рф.
Следовательно, R± = —сир + (а/2) sine/? + а^о, ^2 = О, R3 = (a/2) cosy?.
Из уравнения шЁ = mg + N найдем силу реакции. Чистое качение реа-
реализуется при условии |JVi| ^ /х | АГз |, где /л —коэффициент скольжения.
Пример 23.2. .Гироскопическая стабилизация. На рис. 23.2 изо-
изображен вагон монорельсовой дороги. Устойчивость вагона обеспечивается
гироскопом на кардановом подвесе с осью
ротора, закрепленной на рамке, которая мо-
может вращаться вокруг оси, жестко связанной
с корпусом вагона.
Следует отметить, что термины кардан,
карданов подвес и формула Кардано для кор-
корней кубического уравнения связаны с именем
выдающегося итальянского математика Дже-
роламо Кардано A501-1576 гг.).
Наша система имеет три степени свобо-
свободы. Пусть щ — базисные векторы неподвиж-
неподвижной системы отсчета (к = 1, 2, 3). Обозна-
Обозначим через ip угол поворота вагона вокруг
оси-рельса, а через е^ — единичные векто-
векторы, направленные параллельно главным осям
инерции вагона (п = 1, 2, 3). Две системы ортов связаны преобразовани-
преобразованием вращения:
Рис. 23.2
= — sin (рпз + cos ipni,
| = П2,
ез cos У^з + sin (/9ni •
Вычисляя производную ёп , получим соотношение ёп =
которого найдем компоненты угловой скорости вагона:
], из
UJ-
A)
= о,
,(!)
UJ,
A)
= 0.
A)
Ориентацию рамки относительно вагона задают базисные векторы
повернутые на угол в:
ел ^ = cosf9ei ^
226 Глава V. Движение твердого тела
В результате вычисления производной ё^ = [а;^е^], получим компо-
компоненты угловой скорости рамки:
Со>з — tJg C0S ^ "" ^4
Угол поворота ротора относительно рамки обозначим ф. Преобразование
поворота базиса, жестко связанного с ротором, имеет вид
C) , B) . . / B) A) . , B) . / B)
^ } = cos фе\ + sin фе2 , е2 = — sin фе\ } + cos фе2 ,
C) B)
= e
Теперь имеем ё^ = [й;C^е^3^]: компоненты угловой скорости ротора
ш[ ' = uj[ ' cos %j) + щ sin ip,
C) B) / B) . , /ЭЛ
Uj^ = Ш2 СОБф — Ш\ J 81Пф^ C)
Из A)-C) находим
ш{ } = 9cosф + фcos9sinт/>, о;^ = фcos9со$ф - 9sint/j,
Отметим, что углы (р, 9, ф представляют собой эйлеровы углы поворотов
вокруг осей 2, 1,3.
Пусть ц2 = / — момент инерции вагона, 1{г = /33 = 1^2\ Ц2 =
гB) гC) гC) гC) гC)
= Ц — главные моменты инерции рамки, ig3y = ц , i^ = Ц2 =
главные моменты инерции ротора. Кинетическая энергия системы
К = 1ф2/2 + 1{2\92 + (фзт9J}/2 + /f} (фсоз9J /2 +
Найдем теперь потенциальную энергию системы. Пусть ш, ягз — массы
вагона и ротора, I, h — расстояния от рельса до центра масс вагона и
оси рамки, s — расстояние от оси рамки до центра масс ротора. Пола-
Полагая g = — g пз, получим потенциальную энергию системы:
U = (ml + 7713/2) gn3e^ +m3sgn3ef =
= (ml + msh) g cos tf + ^^3S g cos ^ cos 0.
Лекция 23. Уравнения Лагранжа 227
Лагранжиан системы L — K — JJ. Поскольку I^2\ Iq <С /, 1^3\ Ц ?
то можно пренебречь кинетической энергией рамки. Очевидно, сохраняется
проекция момента Мз = ц (ф — ф sin в). Уравнения Лагранжа:
-^ Aф + /C) ф cos2 в - М3 sin в) =
СП
= (ml + шзУ g sin 99 + W3S g sin <p cos 6>, D)
¦—(I{3H) = -JC)^2cos^sm6>-M3(/)cos6> + W3Sgcos^sm<9. E)
Линеаризуя систему D\ E) в окрестности положения равновесия (рщ = О,
0eq = 0, получим
Ii3<P - М^в =
Здесь /]_з = I + I^3^, m®L = ml + m%l2+m%s, m® = т + т%. Из решения
характеристической системы следует, что положение равновесия устойчиво
при условиях
М| > li3m3s g + IC)m0L g, 5 > 0.
Следовательно, центр масс ротора должен находится выше оси подвижной
рамки.
23.5. Движение твердого тела относительно неинерциалыюй систе-
системы отсчета, вращающейся с угловой скоростью H(i). Пусть п\ —ба-
—базисные векторы неподвижной системы координат, em(t) = Amk(t)nk —
базисные векторы неинерциальной системы координат, вращающейся
с угловой скоростью О:
ёт = [Оето], kmknk = [Оето], пг = пщ = simkAmsAjk.
Расположим начало системы координат с базисными векторами e^(t),
жестко связанными с твердым телом, в центре масс тела. Ориентация си-
системы координат относительно неинерциальной системы определяется ма-
матрицей Sim(t), параметризованной углами Эйлера an(tp, в, ф):
ф) = Sim(t)em(t), [wej] = SimS^e'j = Simem.
Здесь ш (ап, ап) — угловая скорость тела в базисе ef (t). Отсюда получаем
^'i = Simem + Simem = [(о; + О)е;]^.
Радиус-вектор произвольной точки а тела г' = x^e'i, x'i = 0. Радиус-
вектор точки а
г = R + r; = RiBi + x^
228 Глава V. Движение твердого тела
Скорость точки а
г = RiBi + Ri[Qei] + х[ё[ = Щщ + [OR] + [(ш + О)г;].
Обозначая v = Rmem, найдем кинетическую энергию тела:
т о 1 Г
Т = — (v + [OR]J + - I dm [ш + О, г;]2.
2 2 J
Последнее слагаемое можно записать в терминах тензора инерции. Лагран-
Лагранжиан твердого тела
L(Rn^ an, i?m dn) =
= у (v + [OR]J + 1/^@;' + О)^^ + U)k - U(Rnj anj t)
представим в виде
m 2 1
~ ^2V + 2
?/об = -mv[OR] - у [OR]2 - /„
Здесь cj^ = ooefn^ ftfn = Ое^.
23.6. Космический аппарат (КА) в ньютоновом поле тяготения
[151]. Предположим, что размеры твердого тела а <С | R|, где R — радиус-
вектор центра масс. В этом случае подынтегральное выражение в B3.1)
можно разложить в ряд Тейлора (см. A.15)):
1 _ 1 xR I /3(xRJ x2^
I 7Г I T-.C тшО I I • • •
|R + x| R Д3 2 V Д5 R3,
Подставляя х = xfne'n в B3.1), запишем потенциальную энергию в виде
GMm GM DaCR'aR'
) = +
где i?J^ = Re;a = SapRp, Da/3 —тензор квадруполъного момента масс,
который можно связать с тензором инерции тела. Используя соотношения
р
Inn = hi + ^22 + /зз = 2 dmx/2nJ
Г
InnSa{3 - dm{x'ax'^),
Лекция 23. Уравнения Лагранжа 229
представим Da@ в виде
Следовательно,
GMm GM ( R'aR'p Inn\
U(К, ап) = — + — ^3/«/з-д5~ - ^fJ • B3.12)
Очевидно, для КА в виде однородного шара (Iap = ISap, Iaa = 3/)
второе слагаемое равно нулю.
23.7. Движение КА относительно центра масс. Обозначим че-
через ан ' углы Эйлера, определяющие ориентацию подвижной системы
относительно инерциальной системы с базисными векторами п\; радиус-
вектор центра масс R = Щ п^. Лагранжиан КА
B3.13)
Уравнения Лагранжа B3.4а) приобретают вид
3GM
B3.14)
Для реальных КА отношение второго слагаемого к первому и {a/RJ <С
<С 1. Поэтому движение КА (неизменных размеров) относительно центра
масс незначительно влияет на характер траектории. Пренебрегая вторым
членом, получим решение R = R(?), где R(?) — закон движения по кеготе-
ровой траектории. Опуская в B3.13) слагаемые, явно зависящие от времени,
получим лагранжиан движения КА относительно центра масс:
T(O)(fv(O) .(О) /ч _ I т (О) (О) 3GM т с(О) с(О)
2
Далее удобно перейти в систему отсчета, базисные векторы которой ет
вращаются с угловой скоростью O(t) вектора R/Д, em = ATOfc(t)nfe. Углы
Эйлера an задают ориентацию подвижного базиса: e^(t) = Simem =
= SA. В новых координатах
an, anj t) = - Ia0{bj' + U')a(u' + O')/3 - g GM/«/3 ~^Г- B3Л5)
230 Глава V. Движение твердого тела
Здесь R'a = Re'a. Учитывая соотношения ап(дЬ/дап) = и'п(дЬ/ди'п),
получим обобщенную энергию относительного движения:
Н(ап, ап, t) = -lap^Wp + Uo6(an, t), B3.16)
1 ч JRf /¦?'
^бК, t) = -- /а/3ад + - GM/e/3 -^
Если центр масс движется по окружности, то dL/dt = 0; обобщенная
энергия сохраняется.
Пример 23.3. Центр масс осесимметричного спутника движется по
круговой орбите с угловой скоростью О = Опз. Очевидно, U2R3 = GM.
Пусть ез = пз, R = —Rei. Поскольку ш + О = (ф + О)ез + ве^ + фе'3, то
в выражении для кинетической энергии B3.10) следует произвести заме-
НУ Ф —*" Ф + ^- Потенциальная энергия
Вычисляя компоненты R'n = Re^ = ^.Reie^ = —RSn\ с помо-
помощью B1.3), находим
ЗО2
U(an) = —- [/(cos2 ip + sin2 у? cos2 в) + /3 sin2 у? sin2 в] =
= -^ [(I - /3) sin2 у?sin2 6> - /].
Лагранжиан B3.15), описывающий относительное движение,
L(an, ап) = ^ [в2 + (ф + ОJ sin2 в] + ^ [^ + (ф + О) cos^]2 - t/(an).
Используя первый интеграл /з(^ + О) cos в + 1зф = Мд, запишем два
уравнения Лагранжа:
^ fi) sin2 в + М^ cos 0] = ^- (/ - /3) sin 2^sin2 6>,
ЗО2
/0 = [1@ + О) cos6> - Мз]@ + О) sin 19 + — (I - h) sin2 у? sin 20.
Полагая Lp, 0, ф равными постоянным величинам, найдем уравнения, опре-
определяющие положение равновесия sin2 0q sin2 2ipo = 0,
sin0O[(I - I3)u cos 0OA + 3 sin2 (p0) - 13ф0] = О
Лекция 23. Уравнения Лагранжа 231
и одновременно — соотношения между начальными условиями, при кото-
которых реализуется стационарное движение. Положим ipo = 0 и рассмотрим
движение в окрестности (р = 0 = тг/2 с начальными условиями
0@) = тг/2, 0@) = 0о, ?>@) = тг/2, ф@) = у>0, ^@) = 0, ^@) = 0.
Полагая tp = тг/2 + #i, 0 = тг/2 + ж2, получим систему:
и решение
(ро , i/Q , _ , Ufl\L , _
Ш\ UJ2 Шп
7\1/2 / ql\!/2
При / ^> /з частота колебаний в плоскости орбиты cji = \/3O, частота
колебаний в плоскости, перпендикулярной плоскости орбиты, о;2 = 20.
Заметим, что возмущения в этой плоскости приводят к вращению спутника
вокруг оси симметрии.
23.8. Гравилет. Представим КА в виде гантели массой т, образован-
образованной двумя одинаковыми шарами, центры которых находятся на расстоя-
расстоянии l(i) друг от друга. Главные моменты инерции 1ц = /22 = [л12 =
= (m/4)l2(t), /33 = 0. Радиус-вектор центр масс гантели R(t) описывает
эллипс. Базисный орт ех направим по радиус-вектору. Предположим далее,
что ось гантели параллельна базисному вектору ез = пз, угловая скорость
центра масс O(t) = Оез. Согласно B3.12) потенциальная энергия гантели
U(R, t) = -a/R + al2(t)/8R3 + ... ,
где а = GMm. Сила, действующая на КА:
f(R,t) = -3 22
Следовательно, величина силы, действующей на тело конечных размеров,
меньше силы, действующей на материальную точку той же массы. Это
обстоятельство позволило предсказать новый эффект — в результате пери-
периодического изменения распределения массы внутри космического корабля
появляется возможность увеличить полную энергию К А и целенаправлен-
целенаправленно изменять параметры кеплерового эллипса [33]. Действительно, в случае
гантели неизменной длины работа силы тяжести за период обращения равна
нулю. Если в интервале времени, когда выполняется условие fv > 0, длина
гантели равна нулю, а в течение остальной части периода, когда fv < 0,
232 Глава V. Движение твердого тела
длина гантели максимальна, то в результате работы внутренних сил пол-
полная энергия гантели Е возрастает. Значению Е = 0 соответствует вторая
космическая скорость. Появляется возможность покинуть сферу действия
планеты. Этот эффект возможен только в неоднородном поле тяготения.
Сила, «возмущающая» келлеров эллипс:
F(R, t) = 2,al2{t)^. B3.17)
Учитывая F.14), F.18), в обозначениях п. 23.5 запишем
Подставляя B3.17) в F.20), F.21), получим уравнения, определяющие
эволюцию параметров эллипса:
.. . . {3M0l2(t)
М =0, ? = -[
?, П = A — е cos
В соответствии с проведенным анализом функция I (t) должна быть перио-
периодической. Положим
k, 0<i<T/2,
О, T/2<t<T, B3Л9)
где Т = 2тг/О. Подставляя A6.18), B3.19) в B3.18), усредним правую часть
по периоду:
Т 2тг
Ё=^ \dtE=±-
1 } Z7T
О О
За l9 Ое [* sin
ъ A-еcos СL 8тта3 A-,
о
Производя замену переменных Е, е —>¦ а:
а р М2
получим уравнение
аа В Га"
Dа — р) у/а — р 4тгр3
Лекция 24. Электромеханика 233
а@) = ао. При t ^> То = 2тг(mag/аIу/2 получим асимптотику решения:
p'T,J • -г--у а
где T(t) — период обращения по «расширяющейся» эллиптической орбите
с полуосями а ~ t2,b ~ t. Вектор Лапласа смещается на угол —>• тг/2.
Возрастание полной энергии, являющееся следствием параметрическо-
параметрического резонанса, подобно увеличению амплитуды колебаний при периодиче-
периодическом изменении положения центра масс человека на качелях.
Лекция 24. Электромеханика
Электрическое и магнитное поля индуцируют в жидких и твердых телах
(проводниках, диэлектриках и магнетиках) токи, дипольный и магнитный
моменты. В результате взаимодействия наведенных моментов с неоднород-
неоднородным переменным полем на жидкость или твердое тело действуют электро-
электромагнитные силы. Появляются качественно новые возможности управления
движением тел [258, 259]. Такие задачи возникают во многих областях
современной техники и технологии — при создании бесконтактных опор,
новых видов транспорта, устройств для сепарации, транспортировки и упа-
ковки деталей, очистки воды от диэлектрических примесей — нефти, ма-
мазута и пр. [260]. Другое направление исследований связано с созданием
систем пассивной и активной стабилизации спутников, тросовых космиче-
космических систем в режимах тяги или генерации электроэнергии в магнитном
поле Земли [258]. В рамках релятивистской электромеханики показано,
что черная дыра, вращающаяся в магнитном поле, играет роль батареи,
преобразующей энергию вращения в массу покоя и энергию выбросов в
магнитосфере квазаров и активных ядрах галактик.
Последние работы открыли новую перспективную область исследова-
исследований, связанную с разработкой микро- и мезоустройств (от греч. rnesos -
средний, промежуточный) для научных и прикладных целей: микромото-
микромоторов, микроманипуляторов для управления дисководом или конструктив-
конструктивными элементами роботов, микронасосов, микроцентрифуг, датчиков ус-
ускорения. Широко ведутся работы в области ферродинамики по созданию
приборов и устройств, использующих содержащие ферромагнитные части-
частицы жидкости, движущиеся в электромагнитом поле.
24.1. Квазистационарные поля и токи. Мы ограничимся рассмот-
рассмотрением движущихся проводников, которые являются элементами электри-
электрических цепей. С точки зрения электродинамики сплошной среды причиной
возникновения тока является электрическое поле. Уравнение j(t, x) =
= crE(t, x) устанавливает соотношение между плотностью тока в неко-
некоторой точке и напряженностью электрического поля в той же точке; посто-
постоянная а представляет собой удельную проводимость материала провод-
проводника. В дальнейшем мы будем рассматривать токи в тонких проводах —
234 Глава V. Движение твердого тела
линейные токи. В этом случае характер распределения плотности тока по
поперечному сечению проводника становится несущественным. Поэтому
можно ввести понятие силы тока: при интегрировании по объему проводни-
проводника следует произвести замену j(?, x)dF —»¦ I{t)d\ где I(t) —полный ток,
протекающий по проводнику. Изменение тока в различных участках про-
проводника происходит не мгновенно, а через промежуток времени l/v, где
I — размер цепи, v — скорость распространения электромагнитного поля.
Мы будем предполагать, что величина l/v мала по сравнению с характер-
характерным временем изменения поля: l/v<^T. Это означает, что мы пренебрегаем
эффектами запаздывания, связанными с конечностью величины скорости
распространения поля. Поля и токи, удовлетворяющие условию I <C vT,
называются квазистационарными [152, 153]. Если E(i, x) — периоди-
периодическая функция с периодом Г, то I <С А, где А = vT — длина элек™
тромагнитной волны, распространяющейся вдоль проводника. Именно в
этом случае можно ввести понятия сосредоточенных емкостей и индук-
тивностей.
Уравнения электромагнитного поля в среде имеют вид (в СИ)
rotE = -дВ/dt, divB = О, B4Л а, б)
rotH=j + 9D/9*, divD = p, B4.1 в, г)
где В = /io(H + М) — индукция магнитного поля, D = ?qE + Р —
электрическая индукция, Е, Н—векторы напряженности электрического
и магнитного полей, Р, М — плотности дипольного и магнитного момен-
моментов среды, р и j — плотности свободных зарядов и токов, во = l/Dnk) —
электрическая постоянная (к = 9 • 109Н • м2/Кл), /хо = 4тг • 10™7Ы/А2 —
магнитная постоянная; ?ойз = е^2. Размерности: [Е] =В/м, [В] =Тл,
[Н] = А/м, [/io] = Тл • м/А = Гн/м, [а] = 1/Ом • м. В СИ размерности пар
[сД Н], [Е, сВ] и [сР, М] одинаковы.
Уравнения Максвелла для полей в среде представляют собой систему
шести независимых дифференциальных уравнений относительно двена-
двенадцати компонент пар векторов Е, В и D, Н. Для того чтобы система
уравнения поля стала замкнутой, необходимо дополнить ее так называ-
шьти материальными уравнениями, которые связывают векторы D, Н
и Е, В. В случае достаточно слабых полей в изотропной немагнитной сре-
среде материальные уравнения имеют вид D = е^оЕ, В = /i/ioH. Здесь е
и /1 — безразмерные коэффициенты электрической и магнитной проница-
емостей. Для диа- и парамагнетиков /i « 1.
24.2. Функции Лагранжа электромеханической системы линейных
проводников. В случае квазистационарных токов вторым слагаемым в
уравнении B4.1 в) можно пренебречь. В этом приближении divj = 0.
Рассмотрим электрическую цепь, содержащую резисторы, конденсато-
конденсаторы с подвижными пластинами, катушки с переменной индуктивностью
и генераторы напряжения, соединенные с подвижными или неподвижны-
неподвижными проводниками. Для анализа электромеханической системы используем
Лекция 24. Электромеханика 235
лагранжев формализм. В качестве обобщенных координат, определяющих
положение проводника а в пространстве, выберем радиус-вектор центра
масс R^ и углы Эйлера oik (п = 1,2,3).
На участках проводников, соединяющих соседние узлы, зададим про-
извольно положительные направления. Функция Qa(t), определяемая как
количество заряда, протекшего через поперечное сечение проводника а
в положительном направлении за интервал времени [0, i], играет роль
обобщенной координаты, связанной с обобщенной скоростью — силой то-
тока 1а — соотношением Qa = Ia.
Энергия магнитного поля, создаваемого системой линейных проводни-
проводников, может быть представлена в виде [151, 152]
Wm = i JBHdF = 1 ^La6(ga, qb, t)QaQb, B4.2)
a, b
где qa = (R(°), ai ), Laa — коэффициенты самоиндукции проводни-
проводника a, Ьаь = Lba — коэффициент взаимной индукции проводников а и Ь.
Отметим, что Um можно представить в виде
a a>b
Величина
является потоком магнитной индукции через поверхность, ограниченную
контуром проводника а. В частном случае из B4.2) можно выделить вклад
энергии внешнего магнитного поля индукцией Bext(t, r):
W^1 = [dFHBext = ^Qa#ext(ga, t), #ext(ga, t) = |dSaBext. B4.4)
Отметим, что при вычислении потока магнитной индукции следует вы-
выбрать ориентированную выпуклую поверхность, опирающуюся на контур,
включающий проводник. Введение вектора внешней нормали автоматиче-
автоматически задает положительное направление на контуре.
Энергия электрического поля вне проводников [152, 154]
We = ldVe0E2/2 = 1 Y,Cab(Q*> Qb, t)QaQb, B4.5)
J a, b
где Cab — симметричная матрица коэффициентов электростатической ин-
индукции.
236 Глава V. Движение твердого тела
Функция Лагранжа электромеханической системы
^2Lab(qa, ЯЬ, t)QaQb ~ y^CabiQa,, Qb, t)QaQb
a, b а, b
4- \ Г) cf>extffi i) 4- Т, AА f\\
a
где LueK(t, q, 4) — лагранжиан подвижных элементов схемы. Отметим,
что энергия магнитного поля играет роль «кинетической» энергии, энергия
электрического поля — «потенциальной» энергии. При выборе обобщен-
обобщенных координат и токов следует учесть, что заряд изолированной части цепи
сохраняется и в каждом узле выполняется условие соленоидальности токов.
24.3. Уравнения Лагранжа. Джоулевы потери, связанные с выделени-
выделением количества теплоты в проводнике, учитываются введением в уравнения
Лагранжа обобщенной силы, равной —QR (R — сопротивление рези-
резистора), а действие сторонних источников тока — введением обобщенной
cw\bi?(t) (? —электродвижущая сила источника напряжения):
~~ . — ^^ = —QaRa + ?a(t). B4.7)
Подставляя B4.6) в B4.7), имеем
Т, У2 4L«^' *)Qb ^J2Cab(^ *)Qb + QaRa = ?(t) - #f • B4.8)
m ь c b
Другая группа уравнений Лагранжа описывает эволюцию механических
переменных. Для проводника с (с = 1, 2, ...) имеем уравнение
ULjcc Чс _
. B4.9)
at oqc oqc oqc 2 JL^ oqc oqc 2
oqc oqc
Мы имеем самосогласованную систему уравнений, описывающих эволю-
эволюцию механического и электрического состояний электромеханической си-
системы. В соответствии с B4.3) правую часть B4.9) можно записать в виде
соответствующей компоненты обобщенной силы, действующей на провод-
проводник с номером с:
дЬссл а а-имЬ dcj Ql v дссЪ
c% r% Чс I r\ I r\ Чс r\ r\ / j <Л ЧсЧЬ-
2 oqc oqc oqc J oqc 2 ^> oqc
Лекция 24. Электромеханика 237
Пример 24.1. Система с подвижными контурами. Вычислим по-
последнее слагаемое ?(t) = -d#ext/dt в правой части уравнения B4.8),
представляющее собой ЭДС электромагнитной индукции.
Радиус-вектор произвольной точки движущегося проводника г = R +
+ г;, скорость точки
магнитный поток внешнего поля
$ext= I dSB(t, R + r;). B)
S(t)
Для того чтобы вычислить производную интеграла по движущейся по-
поверхности, перейдем к координатам подвижного базиса r; = x^e'i : dS =
= е''kdS'k. После замены переменных получим
= I dS'k ^/та ' -' '
dt
5@)
Поскольку ё'к = [и)е'к], то
S(t)
Далее отметим, что первый и третий члены в подынтегральном выражении
можно преобразовать, используя соотношение
Согласно уравнению B4.1 б) дивергенция индукции дпВп = 0. Учи-
Учитывая уравнения B4.1), найдем значения dnVi = Eimnujmi BndnVi =
= [cuB]i5 dnvn = 0. Следовательно, rot[vB] = [cjB] - vndB/dxn,
S(t)
Подставляя частную производную индукции из уравнения B4.1а), получим
cf#ext Г
J dSt(E [B]) D)
238 Глава V. Движение твердого тела
Следовательно, ЭДС индукции
= J dSrotE', E)
F)
J
S[t)
Используя теорему Стокса, запишем этот результат в виде интеграла по
контуру:
?(t) =
с
Мы приходим к выводу, что Е' — напряженность электрического поля,
измеренная движущимся наблюдателем. Этот результат согласуется с пре-
образованием Лоренца напряженностей полей в случае нерелятивистских
скоростей v <С с, поскольку уравнения Максвелла удовлетворяют принципу
относительности Эйнштейна (см. лекцию 32).
Отметим, что из C) следует выражение для ЭДС индукции в виде
?(t) = - | dS^
S(t) С
24.4. Сила Ампера и момент силы Ампера. Покажем, что производ-
производная /<ЭФех1/5Н в B4.9) является силой Ампера, действующей на провод-
проводник:
a#ext г
FA = I^=I<plB]. B4.10)
Запишем производную потока:
dRj " J г дхт дЩ ' -""¦-'
5(t)
и перейдем от интеграла по поверхности к интегралу по контуру, используя
равенство
SBfc ЗБ,
Здесь мы учли, что divB = дВ^/дхи = 0. Далее, согласно теореме Стокса,
заменим оператор [dSV] вектором Л. Тогда получим соотношение B4.10).
Теперь покажем, что выражение 1дФ/дап является проекцией мо-
момента силы Ампера на базисные векторы ni = ез, П2 = е^, пз = е;з,
введеные в лекции 21 для задания углов Эйлера а± = <р, «2 = в, «з = ф:
б»Фе
т - ¦ г /г „^п B4.11)
Лекция 24. Электромеханика 239
Действительно, поскольку де'к/дат = [пше^]э то в приближении ква-
квазинеоднородного поля
" dS[nroB(R)] =
Перейдем от интеграла по поверхности к интегралу по контуру, используя
равенство
[г;[ЛВ]]ш = етпк?Ысх'пAиВс = dlmx'nBn - dlnx'nBm.
Согласно теореме Стокса заменим в B4.11) вектор dlm операто-
оператором [dSV]m = smckdScd'k. В том же приближении получим [r'[dlB]]m —>¦
[dSB]
24.5. Магнитный момент проводника с током. Силу Ампера и мо-
момент силы Ампера можно представить в терминах магнитного момента
проводника:
рт = ^jdV [r'j(r')] -»• Ц[т'Л] =
С этой целью запишем вклад в энергию магнитного поля, обусловленный
внешним полем:
dS B(t, R
S(t)
*v ' ' ' kdRk '"У
S(t)
Первое слагаемое равно pmB(?, R). Преобразуем второе слагаемое, ис-
используя тождество
dSix'k = \
Вводя тороидальный дипольный момент
[r'dS],
S(t)
получим «кинетическую» энергию взаимодействия:
240 Глава V. Движение твердого тела
Если ограничиться приближением квазинеоднородного поля, то сила Ам-
Ампера Fa = PidBi/дЖ. Компоненты момента силы Ампера
Lnw = §^ = pfk^^ = р!к[ште!к]В = [PwB]nw -> L = [рВ].
24.6. Закон изменения обобщенной энергии. Запишем закон измене-
изменения энергии электромеханической цепи. По общим правилам найдем обоб-
обобщенную энергию: Н = Не + HMQX,
He = Yl ^а^7Г ~ L = ? 5Z L^(^' ^, t)QaQb +
о,6
мех = 2^ ^а -^ ^мех- B4.12)
а, Ь
Учитывая уравнения B4.8), B4.9), получим закон изменения обобщенной
энергии:
? = —
a a
Рассмотрим ряд примеров, иллюстрирующих преимущества лагранже™
вой формы описания электрических цепей с закрепленными и подвижными
элементами.
Пример 24.2. Двухпроводная проводящая линия подключена к источ-
источнику напряжения. Вдоль линии может двигаться проводящая перемычка.
Вся система находится в однородном магнитном поле. Найдем скорость
перемычки.
Предположим, что проводники расположены в горизонтальной плос-
плоскости, а вектор магнитной индукции направлен по вертикали (рис. 24.1).
Пусть т — масса перемычки длиной I, сопротивлением R. Индукция
магнитного поля В. Для вычисления потока магнитной индукции необ-
необходимо ввести вектор п, перпендикулярный плоскости контура. Зада-
Задание п одновременно определяет положительное направление на контуре
по правилу буравчика (показано направленной линией на рис. 24.1). Введем
обобщенные координаты: Q — заряд, прошедший за интервал времени t
через фиксированное сечение проводника в положительном направлении,
х — декартова координата левого торца перемычки. Лагранжиан системы
L = ^L(x)Q2 + ^тх2 + BlxQ,
Лекция 24. Электромеханика
241
где L{x) — коэффициент самоиндукции замкнутого контура. Уравнения
Лагранжа имеют вид
at
B)
Рассмотрим два случая.
1. Поток магнитной индукции внешнего поля значительно превышает
Рис.241
поток LQ собственного магнитного поля тока. Подставляя Q из B)
в A), получим уравнение
... mR ?
Пусть х@) = г>о. Тогда решение системы (/), B)
±{t) =u+(v0-
'т, Q(t) = §(ы -
t
Очевидно, х = и, Q = 0 — скорость перемычки и сила тока при устано-
установившемся движении.
Пусть ? = 0. Тогда х = Уое~*/Т, Q = —Уо(В1/К)е~1/т. Скорость
перемычки убывает, поскольку согласно B) возникает индукционный ток,
а на перемычку согласно (/) действует сила Ампера BIQ. Количество
теплоты, рассеиваемое в перемычке:
dtQ2R =
2. Электромагнитная ускоряющая система. Положим В = 0. Из (/),
B) следует закон изменения полной энергии:
242
Глава V. Движение твердого тела
R
~-^~ v
d
аЧ
где W = A/2)LQ2 — энергия магнитного поля тока, текущего по кон-
контуру. Если ? > QR, то перемычка движется в результате действия сил
давления, создаваемого магнитным полем. Эта система — так называемый
«рельсотрон» — хорошо известна уже десятки лет. Представим (!) в виде
¦¦ dW
тх=-т-. C)
ах
Пусть р — объемная плотность энергии магнитного поля. Тогда dW/dx =
= pS, где S — площадь бокового сечения перемычки. Из C) находим
ускорение: а = pS/m. Величину m/S называют эффективной толщиной.
Положим m/S = 102 кг/м2, р = 400 атм. При таких условиях а = 4 х
х 105 м/с2 = 4 • 104 g. Скорость v = 10 км/с достигается на длине s =
= 125 м. Время разгона ~ 2,5 • 10™2 с. Перемычка массой т = 2 кг
приобретает энергию 100 МДж. В аме-
американской программе СОИ. предпола-
предполагается использование релъсотрона в
качестве кинетического оружия, спо-
способного уничтожить объекты космиче-
космического базирования путем механическо-
механического разрушения [155].
Пример 243. Движение пласти-
пластины конденсатора. В схеме на рис. 24.2.
электрическая цепь образована кон-
конденсатором, резистором и батареей с
ЭДС, равной V. Конденсатор предста-
представляет собой две плоских пластины пло-
площадью S, скрепленные двумя пружи-
пружинами. Нижняя пластина закреплена. Конденсатор помещают во внешнее
поле напряженностью Eext = G(i), G = @, 0, G), потенциал которо-
которого (fQXt(tj z) = -G(t)z.
Положение верхней подвижной пластины конденсатора массой т опре-
определяется значением координаты z на числовой оси с началом на нижней
пластине. Положительное направление тока на рис. 24.2 указано стрелкой.
Лагранжиан системы
L = mz2/2 - U,
U = k(z- !0J + Q2/2G{z) + Q<pext(t, z) =
= k(z - IoJ + mgz + Q2z/2e0S - QGz.
Уравнения Лагранжа имеют вид
mz = -2k(z - I0J -mg- Q2/2e0S + QG,
0 = ^Qz/sqS + Gz + V -QR.
0--
Рис. 24.2
Лекция 24. Электромеханика
243
Пластина б положении равновесия. Полагая
систему уравнений:
= О, Q = 0, получим
О = ^
- !0J -тд- Q2/2e0S + QG, 0 = -Qz/e0S
Равновесные значения координат и заряда можно найти приближенными
методами или численным рассчетом на компьютере.
Теперь получим закон изменения полной энергии. Согласно B4.12)
имеем
dH/dt = -QzdG/dt + QV -
H = mz2/2 + U(z
Здесь Н — полная энергия системы.
Пример 24.4. Электромагнит. В конструкции многих электротехни-
электротехнических устройств входят магнитные цепи — совокупность ферромагнит-
ферромагнитных тел, через которые проходят и замыкаются силовые линии магнитной
индукции. Неразветвленная магнитная цепь является основой устройства
с подвижным якорем — электромагнита, изображенного на рис. 24.3. Сер-
Сердечник выполнен из стали в виде цилиндрического стержня сечением S,
якорь представляет собой пластинку массой т. Обмотка сердечника элек»
тромагнита, содержащая N витков, подключена к генератору напряжения
с ЭДС, равной ?. Сопротивление цепи — R. Получим полную систе-
систему уравнений электромагнита и найдем силу, действующую на пластинку
{? = 1 В, R = 0, 5 Ом, N = 125, S = 10~4 м2, длина средней линии
магаитопроводов — сердечника и якоря — I = 30 см).
Положение пластинки определяется координатой х
между пластинкой и сердечником. По-
Положительное направление на контуре
цепи обозначено стрелкой, сила тока
в цепи — Q = I. Лагранжиан систе-
системы B4.6)
- толщиной зазора
-S2
L = тх /2 + L(x)Q /2
V)
где L(x) — индуктивность электро-
электромагнита с воздушным зазором. Для оп-
определения L(x) необходимо найти
энергию магнитного поля электромаг-
электромагнита Um = Ы2 /2. Это — задача элек-
электродинамики сплошных сред.
Пусть Н, В — напряженность и
Рис. 243
индукция магнитного поля в стали, Но — напряженность поля в зазоре.
Величина индукции данного сорта стали зависит от напряженности поля:
В = f(H), где f(H) — известная функция. Энергия магнитного поля
электромагнита
Um = A/2)(BHIS
B)
244 Глава V. Движение твердого тела
Интегрируя уравнение B4.1 в) по контуру силовой линии, получим закон
Максвелла-Ампера:
Г Ж C)
Пренебрегая краевыми эффектами, найдем из C) соотношение
HI + 2Нох = IN. D)
Поскольку на поверхности раздела сердечник—якорь нормальная к поверх-
поверхности стали компонента вектора В в сердечнике и якоре непрерывна, то
В = /ло Но. Следовательно, имеем два уравнения для определения В и Н:
/х0Ш + 2хВ{Н) = /10Ш, В = /(Я). E)
Положим х = 0. Тогда 1 = 18, 18=е/К = 2А, H = HSJ Hs = sN/Rl =
= 1000 А/м. Из графика функции / (Н) для электротехнической стали 1511
найдем значение индукции Bs = f(Hs): Bs = 1,5 Тл, и коэффициента
магнитной проницаемости: /л8 = В8//лоН8 = 1200. При х / 0 магнитная
индукция в воздушном зазоре в /л8 раз больше индукции в отсутствии
стального сердечника. Поэтому в уравнении D) можно положить В и
и fisfioH. В этом приближении из E) получим
- (б)
Подставляя /лоНо = В в B) и учитывая D\ находим
Um = (BS/2)(Hl + 2хН0) = (BSIN/2) = ЦхI2/2,
L(x) = fisfioN'2S/(l + 2x/is).
Теперь можно получить полную систему уравнений, описывающих
электромагнит с подвижным якорем:
md2x/dt2 =mg + (I2/2)dL/dx, G)
dIL/dt=-IR + ?. (8)
Из уравнений G), E) следует закон изменения полной энергии системы:
dE/dt = ?I - I2R, E = mv2/2 - mgx + L(x)I2/2.
Co стороны магнитного поля на якорь действует сила F = (FXJ 0, 0),
Fx = dUm/dx = (I2/2)dL/dx, которую полезно представить в виде Fx =
= —B2S//jlo. Подставляя значения х = 0, В = Bs, l//i0 = 8 • 105 А2/Н,
получим -Рж@) = -—180 Н, при ж = 1 см ^ = —27 мН.
Лекция 24. Электромеханика 245
24.7. Нейтральная частица в электромагнитном поле.
1. Металлическая частица в электрическом, поле. Внешнее электриче-
электрическое поле индуцирует на поверхности проводника распределение поверх™
ностных зарядов плотностью сг(г), которое в первом приближении опре-
определяет электрический дипольный момент проводника ре, pe(R, an) =
= j dSfrfa(R + г;), ап — углы Эйлера. Сила, действующая на элемент
поверхности dS незаряженного проводника, находящегося во внешнем
поле, dF = aGdS/2, где G — нормальная компонента внешнего поля
в окрестности элемента dS. Полная сила, действующая на незаряженный
проводник в однородном поле равна нулю. В неоднородном поле на про»
водник действует сила Fi(R) = pedG/dRi. В квазинеоднородном поле
компоненты момента являются линейными функциями компонент поля:
Pi = otikGkV, где ait —тензор поляризуемости проводника, V —объем
проводника. Следовательно, энергия взаимодействия проводника с внеш-
внешним полем
Ue = -aikGiGkV/2. B4.13)
Определение коэффициентов aik — проблема электродинамики сплош-
ных сред. В случае сферы а = 3eonG, a^ = oiSik, ог = З^о- Энергия
взаимодействия сферы с внешним полем C/e(R) = —2hsqo^G2{M), a —
радиус сферы [152, 242].
2. Частица б электрическом и магнитном полях. В общем случае сила,
действующая на нейтральную частицу в квазинеоднородных электриче-
электрическом и магнитном полях
Fi(R) = PedG/dxi + 1юртдН/дхг, B4.14)
где G, Н —напряженности электрического и магнитного внешних полей,
Ре 5 Рто — электрический и магнитный дипольные моменты частицы.
3. Коэффициенты поляризуемости частицы. Для диэлектрического
шара радиусом а коэффициент а = Зво[(е — 1)/(г + 2)]. Если шар со™
стоит из «магнито-мягкого» ферромагнетика, то вектор плотности маг-
магнитного момента параллелен вектору напряженности магнитного поля.
Начальный участок кривой зависимости намагниченности от величины
напряженности магнитного поля линеен. Поэтому для слабых полей
*3 ( ~1 \
рто = НУ, /х — магнитная проницаемость материала [260].
fl i Z
24.8. Твердое неферромагнитное тело в магнитном поле. Внешнее
поле индуцирует в диа- и парамагнетиках плотность тока j(t, x), которую
можно представить в терминах плотности магнитного момента: j = rot m.
Энергия взаимодействия проводника с внешним магнитным полем индук-
индукцией В = rot А имеет вид
W(t, R,g) = - \d3x'i(t, x;)A(t, R + x;) = - [dVm(t, x')B(t,
246 Глава V. Движение твердого тела
В приближении квазинеоднородного внешнего поля W(t, R, ап) =
?, R) + ..., где р^то) — магнитный момент проводника:
Vm(i, х') = \ Jd3a:'[x'j(i, x')].
Полагая
Р{т)=р'ке'к(ап),
B'k(t, R, ап) = e'k(an)B(t, R) = Skm(an)Bm{t, R),
получим
W(i, R,an) = -p'kSkm(an)Bm(t, R).
Здесь p'A — компоненты магнитного момента в системе покоя проводника.
Сила и момент силы, действующие на проводник в магнитном поле
Fn(t, R, a.) = -|^ =p'fc^K)||i = Р(га)Ц- B4.15а)
Me(t, R, ae) = -^=p'k^iBi = neP(m) x В. B4.156)
Последнее равенство следует из соотношения ——- = —Skm^mji(I1s)j, где
^mji — тензор Леви—Чивита, ni = ез, пз = е^, П2 = е^ — орт, направ-
направленный по линии узлов. Угловая скорость твердого тела О = nsdas/dt.
Вычисление магнитного момента представляет собой задачу электроди-
электродинамики движущихся проводников. Из решения уравнений Максвелла сле-
следует линейное соотношение р'к(ш) = jkn(^)h'n(u)V//io между фурье-
образами магнитного момента pfk(u) и магнитной индукции brn(t) =
= B'n(t,Il(t),as(t)),
tin(u) = dtb'n{t) exp(ic^), B4.16)
lkn{^) — тензор магнитной поляризуемости не ферромагнитного провод»
ника, V — объем проводника [152]. Магнитный момент, характеризующий
отклик проводника на внешнее поле:
p'k(t) = - | dt'GUt-t1)^^, B4.17)
— сю
можно представить в терминах запаздывающей функции Грина:
u)exp[-i(Lo + i0)T], B4.18)
Лекция 24. Электромеханика 247
{) {)/{) удовлетворяющей условию причиннос-
причинности: Gkn(T) = 0 при т < 0. Производная функции b'n(t) = Smn(as(t)) x
xBm(t,R(t)) в B4.17) равна'
db'n(t) дВ дВ dRn
= S(i)F V= + -[ПВ]. B4.19)
= SnTO(i)Fw, V= +
Согласно B4.17), B4.19) магнитный момент проводника [261 ]
оо
p(r\t) = Skip'k = - [ dt'Ski(t)Gkn(t - t')Snm(t')Vm(t'). B4.20)
Соотношение B4.20) представляет собой интегро-дифференциальное урав-
уравнение Кирхгофа.
Пример 24.5 Не ферромагнитный проводящий шар радиусом а дви-
движется по горизонтальной плоскости в постоянном однородном магнитном
поле с индукцией В. Найдем решение уравнений движения в случае 6
где S — глубина скин-слоя.
Тензор магнитной поляризуемости шара
3/33 \
Ikn = aSkn, а(и) = - ( -J ctg qr — 1 j э q = fea = A + i)rj,
Z \q q J
где к = (iufioaI/2, tj = a/S9 S = (/iocrcj/2)™1/2 — глубина скин-слоя,
a — проводимость материала шара [152]. Фурье-транс форманта функции
Грина B4.19)
Gkn = GSkn, G(u>) = -??
KjJJjLq
Рассмотрим движение шара с угловой скоростью О, соответствующей
приближению S ^> а или г) <^ 1. В этом случае можно разложить а (о;) в ряд
Тейлора и представить G(uj) аппроксимантой Паде в виде рациональной
дроби:
г 20/io
в широкой области частот до значений ш ~ 2/(/iocra2). Функция Z пред-
представляет собой импеданс шара, а величины гq и L — эффективные сопро-
сопротивление и индуктивность; размерности [го] = Ом-м™4, [L] = Гн-м~4.
Используя теорию вычетов, получим функцию Грина B4.19):
Gh -Л, ^[le-ror/L
^кп — °кп т е 1
248 Глава V. Движение твердого тела
где 9{т) — функция Хевисайда. Отметим, что в этом приближении магнит-
магнитный момент шара удовлетворяет уравнению Кирхгофа [261]:
т dp1 , dhf
где правая часть играет роль ЭДС индукции. При условии
db1
<с
L
dt
основной вклад в интеграл B4.20) вносит окрестность точки t' = t. Полагая
в B4.20) t* = t ~~ т, Snm(tf) « Snm(t), V{t') и V(t), получим магнитный
момент в виде
со
Рг^^ \ drG(r)Vi(t) -> р = -[ПВ].
В однородном поле сила Ампера равна нулю, момент силы Ампера М =
= [рВ]. Пусть шар движется без проскальзывания. Радиус-вектор центра
масс R = г + ае, е — орт, перпендикулярный плоскости (см. рис. 22.1).
Дополним уравнения движения шара
A), B)
где I = 2гпа2/5, условием качения без проскальзывания:
0 = f-a[fte], C)
Т — горизонтальная компонента силы реакции. Дифференцируем C) и
преобразуем правую часть, используя уравнения A), B). В результате на™
ходим
Т = —^-
2 I
та^ + 1
Пусть вектор магнитной индукции В = Be перпендикулярен плоско-
плоскости. Тогда
Т = -^-ВР - Т = -|^[Пе]. D)
та1 + 1 7аго
Подставляя Т в A), B), получим систему
гт = -а[Пе], E)
гО = — [е [Ое]], F)
где т = 7тпа2го/5В2.
Поставим начальные условия 0@) = Озо^ + О^0, v@) = vq, vq =
= a[Otoe]. Из F) следует первый интеграл Изо = ^е. После подста™
новки O(t) = Озое + O^(t) получим из F) уравнение, решение которого
Лекция 24. Электромеханика 249
tot(t) = ftto ехр(—?/т). Из E) найдем скорость центра масс шара: v(t) =
= v0 ехр(—?/т). Следовательно, шар катится по отрезку прямой
Магнитный момент и касательная компонента силы реакции
Условие качения Т < /img приобретает вид /i > —, где /i — коэффициент
gr
трения.
Отметим, что из A)-D) следует закон изменения кинетической энер-
энергии K(t):
UK 2 1 .2 1 тгл2 7 2^2 ! 2^2
-^- = -Р г0, К = - mr1 + - 1п2 = — ma^fi; + - ша^О|0.
Следовательно, за время движения в шаре выделяется количество джоулева
тепла
со
Г 7
Q = dtp2r0 = — ma2u2to.
о
ГЛАВА 6
КАНОНИЧЕСКИЕ УРАВНЕНИЯ
Лекция 25. Уравнения Гамильтона
Мы начинаем изучение самого плодотворного метода теоретической
физики — гамильтонова формализма [8, 15, 16, 28, 40, 156, 262]. В со™
временной физике гамильтоновы системы занимают весьма важное место.
С одной стороны, они описывают практически все явления, изучаемые в
классических теориях; гамильтонов формализм является основой кванто-
квантовой механики и теорий вторично-квантовых полей [15, 156—158]. С другой
стороны, теория канонических преобразований позволяет развить универ-
универсальные методы получения точных и приближенных решений систем нели-
нелинейных уравнений.
Знаменитая система канонических уравнений введена ирландским фи-
физиком и математиком У. Гамильтоном в 1834 г. [159]. Оценивая его вклад
в развитие теоретической физики Поль Дирак — один из создателей кван-
квантовой теории — писал: «Гамильтон был, по-видимому, наделен каким-то
удивительным даром проникать в самую суть — удивительнейшим даром
из тех, которыми когда-либо обладал математик. Он нашел для уравнений
механики такую форму записи, значение которой суждено было понять
лишь спустя столетие» [160].
25.1. Преобразование Лежандра. Пусть / = /(г?) — выпуклая функ-
функция, d2f/dv2 > 0. Мы хотим перейти к новой независимой перемен-
переменной р = df/dv. Возникает вопрос — как построить такую функцию h(p),
чтобы ее полный дифференциал dh ~ dp. Преобразованием Лежандра
функции f(v) называется новая функция h(p), которая является огибаю-
огибающей семейства прямых Е(р, v) = vp — f(v). Уравнение огибающей h(p) =
= Е(р, v(p)), где v(p) определяется из условия р = df/dv. Дифферен-
Дифференциал dh = v(p)dp. Функцию f(v) называют производящей функцией
преобразования. Обычно преобразование Лежандра производят в диффе-
дифференциальной форме:
df(v) = pdv = d(pv) ~~ vdp —»¦ d(pv — f) = vdp. B5.1)
При фиксированном р и при v = v(p) имеем f(v) = pv — h(p). Поэто-
Поэтому преобразование Лежандра инволютивно — его квадрат равен тожде-
тождественному преобразованию. Действительно, найдем огибающую семейства
прямых G(v5 р) = pv — h(p). Из условия v = dh/dp находим р =
= p(v),G(v,p(v))=f(v) [16].
Пример 25.1. Пусть f(v) = —тс2A — г?2/*:2I/2. Тогда Е(р, v) =
/2, р = mv(l -у/с2)-1/2, v = рс(т2с2 +р2)^х/2.
Преобразование Лежандра h(p) = сл/т2с2 +р2.
Лекция 25. Уравнения Гамильтона 251
25.2. Гамильтониан. Пусть L(x, ж, t) — лагранжиан системы с s
степенями свободы, хп, хп —обобщенные координаты и скорости (п =
= 1, ..., s). Наша задача — перейти к новым независимым перемен-
переменным хП1 рп = дЬ/дхп и функции Н(х, р, i), являющейся преобразо-
преобразованием Лежандра лагранжиана L(x, ж, t). Предполагая, что квадратич-
квадратичная форма (d2L/dxmdxn)dxmdxn положительно определена, произведем
преобразование Лежандра по переменным хп : Е = рпхп — L(x, x, t),
дЦх, х, t)
Рп = w-. • B5.2)
дхп
Лагранжиан называют невырожденным, или несингулярным, если опреде-
определитель Гессе
дхтдхп
В этом случае согласно теореме о неявной функции соотношение рп =
= дЬ/дхп разрешимо относительно хп = vn(x, p, i). Преобразованием
Лежандра функции L(x, ж, t) по хп является функция
Н(х, р, t) = [Рп%п - L(x, х, t)]A=v(XiPit), B5.3)
которую называют функцией Гамильтона или гамильтонианом.
Пример 25.2. Задача Кеплера. Найдем гамильтониан частицы, дви-
движущейся в гравитационном поле. Лагранжиан в сферических координа-
координатах Х\ = Г, Х2 = О, Ж3 = (f
2 х ' у г
получен в примере 7.3. Разрешая уравнения B5.2):
рг = тг, р2 = mr 2f9, рз = ^п^2 sin2 9ф
относительно обобщенных скоростей, находим
г-— в - Р2 ' - Рз
т ' тг2 ' mr2 sin2 9"
Гамильтониан задачи Кеплера получим из B5.3):
Н{х, р) = -^
2ni 2шг2 + 2mr2 sin2 в г '
25.3. Канонические уравнении. Проведем переход от s уравнений
Лагранжа второго порядка
dL ( 8L
Рп = -я— Рп =
дхп \ дхп
252 Глава VI. Канонические уравнения
к уравнениям относительно независимых переменных хп, рп. Полный диф-
дифференциал
(дН\ fdH\ (дН\
dH=[ — \ dxn+[ — ) dP« + ( "дТ ) dt°
\ OXn J p=const V OPn / x=const \ Ot / x, p=const
Учитывая B5.3), находим
ОН д ч dik dL dL дхк dL
Я = я \Рк%к - L) =Pk ^ ^ ^7- ^ = - ^ = -Рп,
охп охп дхп дхп oxk охп дхп
дН _ . дхк дЬ дхк _ . дН _ дЬ
дрп дрп дхк дрп at at
Следовательно, система уравнений Лагранжа эквивалентна системе 2s
уравнений первого порядка:
*» = Ц, Рп = ~, n = l,...,s, B5.4)
известных как уравнения Гамильтона (или канонические уравнения). Про-
Пространство с координатами ж, р называют фазовым пространством, а па™
ру координат хп и рп — канонически сопряженными. Решение систе-
системы B5.4) зависит от 2s постоянных: хп = xn(ci, ..., C2S, t), pn =
= рп(сь ..., c2s, t).
Первые интегралы. 1. Если дН/дха = 0, то координата ха называ-
называется циклической. В этом случае сохраняется импульс ра = с.
2. На траекториях системы B5.4) функция ро(^) = Н(х, р, t) удовле-
удовлетворяет уравнению
ф0 дН дН дН . 8Н
^Г = ^7 + я—ж?г + я—Рп = "оГ" ^25'5^
at at охп орп ot
Если dH/dt = 0, то Л(ж5 р, t) = со —первый интеграл.
Пример 25.3. Частица в электромагнитном поле. Согласно G.14),
G.15) лагранжиан
L(x, х, t) = —х2 — еу?(х, t) H—хА(х, t).
z2 С
в 1 / в \
Из B5.2) находим рп = тхп + -Ап, хп = vn = — рп Ап . ]
с ш \ с /
е л . 1 , ^ . ,
. Гамиль-
с ш
тониан B5.3)
Шесть уравнений движения B5.4):
жп = — Рп - -^п 1, Рп = — [Р- -A) -z—-e-z—,
т V с / тяс V с / к охп дхп
Лекция 25. Уравнения Гамильтона 253
эквивалентны трем уравнениям второго порядка. Действительно, диффе-
дифференцируя хП9 находим
тх = ' ^^(дА^^ ¦ дА»
Подставляя рп и учитывая соотношения
дА± дАп 1 дАп
получим
тхп = е^ + -enksxkBs.
с
Системы со связями в фазовом пространстве. Если определитель Гессе
равен нулю, то при приведении лагранжевых уравнений к гамильтонову ви-
виду возникают трудности, связанные с тем, что уравнения B5.2) неразреши-
неразрешимы относительно скоростей или некоторые импульсы тождественно равны
нулю [158]. В таком случае существуют соотношения вида tp(x, p, t) =
= 0, играющие роль связей в фазовом пространстве. Метод приведения
систем со связями к гамильтонову виду впервые развил Дирак в работе,
посвященной гамильтоновой формулировке классической теории тяготе-
тяготения [161—163]. Электромагнитное, гравитационное и калибровочное поля
являются бесконечномерными аналогами конечномерной механической си-
системы с равным нулю определителем 'Гессе.
25.4. Функционал уравнений Гамильтона. Введем лагранжиан, за»
висящей от координат ж, р и скоростей х,р:
1(х, р; х, р, t) = рпхп - Н(х, р, t), B5.6)
и рассмотрим гладкие кривые хп = xn(i), pn = pn(t), соединяющие точ-
точку xn(ta), pn(ta) и точку xn(tb)9 Pn(ib)- Каждой кривой поставим в соот™
ветствие функционал
I[x, p]= Idt [pkxk - Н(х, р, t)l B5.7)
ta
Уравнения Лагранжа-Эйлера для функционала B5.7) совпадают с уравне-
уравнениями Гамильтона:
d 81 _ 81 . _ дН
dt дхп дхп п дхп'
d 81 81 8Н
dt дрп дрп дрп
254 Глава VI. Канонические уравнения
Следуя Швингеру [164], можно представить лагранжиан B5.6) в виде
ls(x, p, х, р, t) = L(x, x,t)- -lpn- —™ ) (xn - vn(x, p, t)).
B5.6a)
25.5. Скобки Пуассона. Введем операцию, которую называют скобкой
Пуассона (СП) функций А = А(х, р, t) и В = В(х, р, t):
^(дА дА дА дВ\
Основные свойства скобок Пуассона СП следуют из определения B5.8).
1. Линейность (Ai, А2 —константы):
[AiAi + Х2А2, В] = Хг[Аъ В] + Х2[А2у В].
2. Кососимметричность: [А^ В] = —[В, А].
3. Правила Лейбница: [АгА2, В] = А1[А2, В] + А2[АЪ В],
N 8Л
[A(FU F2, ..., FN), B] = J2g^ Wk, В].
k=l k
4. Тождество Якоби:
[[A, B}C] + [[B, C]A] + [[C, A]B] = 0. B5.9)
Важнейшую роль играют фундаментальные скобки Пуассона:
\т 11 1 — Л Гт 1* 1 — П Гп 11 1 — П ns 10^
i'^mi Рп\ — omri] [^т-) ^п\ — и? [Pmi Рп\ — и- \ZJ.l\J)
В частности, СП B5.8) может быть представлена в терминах фундамен-
фундаментальных СП:
дА _ ,9В 9А г ЛдВ
[А, В\ = -—[хп, хк\- h ^—жп, рл ь
дА дВ дА дВ
Введение СП позволяет представить уравнения механики в компактной,
симметричной форме. Уравнения Гамильтона B5.4) принимают вид
хп = [хп,Н], Рп = \Рп,Н]. B5.11)
Пусть F{x^p^t) — произвольная функция координат фазового простран-
пространства и времени, хп = хп {х', р', t), рп = рп (ж;, pr, t) — решение системы
B5.11), ж^р^ — постоянные интегрирования. На траекториях системы
Лекция 25. Уравнения Гамильтона 255
B5.11) F(x, р, t) = #(t) — функция переменной t. Ее производная в
силу системы B5.11) равна
ёФ _ dF
at at
OF OF _ тг1 3Fr тг1 <9F
at 9ш 9p at
Таким образом, для произвольной динамической величины F(x, p, t) на
траекториях системы B5.11)
Мы видим, что первый интеграл D(x, p, t) = С системы B5.11) удовле-
удовлетворяет уравнению
^ + [ДЯ] = 0. B5.13)
Пример 25.4. Гамильтониан задачи Кеплера имеет вид Н(х, р) =
= Н(хъ рь/(ж2, Р2, Рз)). Поскольку
df/dt + [/, Я] = [/, f](dH/df) = О,
то /(#2, Р2, Рз) = С — первый интеграл. Из B5.13) также следует, что
Н(х, р) = i?, рз = Сз —первые интегралы.
Пример 25.5. Найдем решение системы B5.11) с гамильтонианом
Н(х, р, t) = Н((рг(хъ pi), ..., ip8(x8, p8), t).
В соответствии с B5.13)
, Я] = 5>fc> ^„1— = [^,^]^ = 0.
+ [^, Я] = 5>fc> ^„1
Следовательно, ^(ж^, pt) = Ck — первые интегралы. Разрешая это со-
соотношение относительно рь имеем pk = g^^ic, С1^)- Подставляя pk в
уравнение р^ = —дН/дхи, получим решение в квадратуре:
дёк(Хк, ск)
25.6. Теорема Пуассона. Если А, В — первые интегралы системы
B5.11), то функция С = [А, В] —тоже первый интеграл.
Скобка Пуассона сопоставляет каждой паре функций А, В на фазовом
пространстве новую функцию С = [А, В]. Найдем полную производную
256 Глава VI. Канонические уравнения
C{x^p1t) на траекториях системы B5.11):
Используя тождество Якоби B5.9) [[А, В]Н] = -[[В, Н]А]-[[Н, А]В] =
= [[А, Н]В] + [А[В, Я]], имеем
с = Щ + [А, я], в] + [а,^§ + [в, я]] = [А, в] + [А, в].
С учетом полученного соотношения становится очевидным доказательство
теоремы Пуассона. Применение этой теоремы позволяет в некоторых слу-
случаях получить новые интегралы движения.
25.7. Расширенное фазовое пространство. Систему B5.4) можно
свести к автономной, если увеличить число неизвестных функций. Рас-
Рассмотрим расширенное фазовое пространство с координатами t, хп, рсь Рп
и введем функционал, аналогичный B5.7):
Рп) = dr [Pk^~ ^Рот~ ~ R^^ ж' ^0' Р)) ' B5.14)
где т —параметр, R = И (ж, р, t)—po —новый гамильтониан. Уравнения
Лагранжа-Эйлера:
dxn dR dt dpn dR фо dR
dr dpn dr dr dxn' dr дт
имеют форму автономной системы [8]. Если dH/dt = 0, то время является
циклической координатой, а импульс ро сохраняется.
25.8. Интегрируемость гамильтоновыж систем [16, 144, 165-167].
В XIX веке система уравнений считалась интегрируемой, если решение
можно было получить с помощью алгебраических операций и квадратур —
вычислений интегралов известных функций. Одновременно велись поиски
условий интегрируемости систем [142]. Этот подход развивается и сейчас
в классических и квантовых теориях поля [86, 168, 169].
В 1855 г. Ж. Лиувилль доказал теорему, согласно которой для интегри-
интегрирования гамильтоновых систем с s степенями свободы достаточно иметь s
первых интегралов F\, F2, ..., Fs удовлетворяющих условиям
[Fn,Fk]=0, n,k = l, 2, ...,s.
Говорят, что функции Fn, F^ находятся в инволюции. Системы с пол-
полным набором интегралов в инволюции называют вполне интегрируемыми:
если система с гамильтонианом Н = Н(х, р) имеет s первых интегра-
интегралов Fi = iJ, F2, ..., Fs в инволюции, то ее можно проинтегрировать в
Лекция 25. Уравнения Гамильтона
257
квадратурах. Однако после работ Пуанкаре стало ясно, что динамические
системы общего вида B5 Л. 1) не имеют кроме гамильтониана никаких дру-
других интегралов. В таких системах траектории не лежат на многообразиях
меньшего чем s — 1 числа измерений. Возникают хаотические траектории,
занимающие конечный объем фазового пространства, а их распределение
среди регулярных траекторий ока™
зывается всюду плотным.
В ставшей классической работе
астрономов М. Хенона и К. Хейле-
са A964 г.) изучалось плоское дви-
движение звезды в окрестности поло-
положений равновесия, порождаемое
гамильтонианом [109, 114, 115]
V{xi, x-2) = х2п/2
i - х\1Ъ.
B5.15)
Рис. 25.1
Этот же гамильтониан описывает ге-
генерацию второй гармоники в среде
с квадратичной нелинейностью [6] и колебания протонов в синхрофазо-
синхрофазотроне [131].
Пример 25.6. Динамический хаос в гамилътоновых системах. Кри-
Критерий отрицательной кривизны. Каноническая система Хенона-Хейлеса:
— ?-) Т/" I f^rp Л* —— nr\ *i —— 1 О
П — U V I UX п , X п — рп , 1Ь — ± , ?а ,
эквивалентна уравнению второго порядка
хп = -dV/dxn. (./)
Особые точки системы определяются условием dV/dxn = 0:
dV/dxi = х\ + 2ж]_Ж2 = 0, dV/dx2 = Х2 + х\ — х\ = 0.
Отсюда находим четыре экстремальные точки О, А, В, С и значения по-
потенциальной энергии в этих точках
О: хг =0,
А: хг =0,
В: хг =л/3/2,
С: хг = -V3/2,
Х2 — 0,
%2 = 1,
х2 = -1/2,
Х2 = -1/2,
V = 1/6;
V = 1/6;
V = 1/6.
Можно проверить, что А, В, С являются точками типа седло, точка О —
центр. В трехмерном пространстве жь ж2, ж3 = У[х\, х2) область вну-
внутри треугольника на рис. 25.1 представляет собой впадину, дно которой
258 Глава VI. Канонические уравнения
находится в точке О. Вокруг этой впадины расположены три долины и три
склона, примыкающие к сторонам равностороннего треугольника ABC.
Большое число критериев стохастичности основано на оценке скорости
разбегания первоначально близких, траекторий. Пусть xn(t) — решение
системы. Исследуем девиацию (от лат. deviatio — уклонение) двух близ-
близких траекторий xn(t) и xn(t) + zn(t). Линеаризованные уравнения для
функции zn(t) представляют собой неавтономную систему:
zm + Amn(t)zn = 0, Amn(t) = (d2V/dxmdxn). B)
Если искать решение B) в приближении Лиувилля-Грина B0.25), то
необходимо привести матрицу А к диагональной форме. Согласно п. 1.8
имеем уравнение U~1AU = А2/. Собственные значения А2 матрицы Л
определяются корнями уравнения det |Л — А2/| = 0:
A4-A2SpA + detA = O, E)
где Sp А = 2, det Л = 1 - 4(ж? + х?2) = с. Из C) находим (A2)iJ = 1 ±
При с > 0 решения ограничены. При с < 0 решение содержит экспо-
экспоненциально растущий множитель. Расстояние между первоначально близ-
близкими траекториями экспоненциально возрастает. Отметим, что кривизна
поверхности х% = V(xi, X2) пропорциональна с (см. пример 16.4). Это
наблюдение позволяет предположить, что области регулярного и хаотиче-
хаотического движений разделены кривой нулевой кривизны [263]. Значению с = 0
соответствует окружность х\-\-х\ — 1/4. Полагая х\ = A/2) cosy?, х^ =
= A/2) sin с/9, получим параметрическое представление потенциальной
энергии на окружности
V((f) = - 1 + cos2 cp sin cp - - sin3 ip
8 |_ о
Функция V((f) имеет минимальное значение Vmm = 1/12 при значении
(pmin = тг/2, т.е. в точке х\ = 0, х^ = 1/2. Поскольку Н(х, р) = Е являет-
является первым интегралом, то траектории лежат в трехмерном объеме четырех-
четырехмерного фазового пространства. Если движение регулярно, то траектории
будут пересекать двумерную поверхность х\ = 0 (сечение Пуанкаре) по
некоторой кривой. При Е = 1/12 эти кривые — замкнутые и непрерыв-
непрерывные траектории — лежат на двумерных поверхностях. Значению Е = 1/8
соответствует переход от порядка к хаосу. При Е = 1/6 почти все пары
траекторий, исходящие из близких точек (#2, Р2), экспоненциально рас-
расходятся. Стохастические траектории — обычное явление в гамильтоновой
динамике [109].
25.9. Фазовый поток. Развитие геометрических идей преобразило со-
современную математику. Возникли новые понятия — дифференцируемые
многообразия, расслоенное пространство, алгебра Ли, группы Ли, векторы
Лекция 25. Уравнения Гамильтона 259
как операторы дифференцирования, внешние формы, тензоры как линей-
линейные операторы на векторах и формах. Такое соединение понятий анализа
и геометрии привело к созданию нового аналитического аппарата (диффе-
(дифференциальное исчисление форм, производная Ли, интегралы от форм и т. д.),
играющего важную роль в приложениях анализа [8, 16, 50, 70, 71]. В на-
настоящее время методы современной дифференциальной геометрии широко
используются в теоретической физике. В результате нетривиальных прило-
приложений геометрии и топологии был решен ряд проблем в квантовой теории
поля, теории относительности, динамике диссипативных систем [168-171 ].
Новые математические формулировки известных физических теорий игра-
играют существенную роль в понимании геометрической природы изучаемых
объектов. С другой стороны, введение абстрактных пространств становится
необходимым в теориях турбулентности, фазовых переходов, элементарных
частиц.
Введем новые координаты
(хъ ръ ..., х8, ps) = {zu z2l ..., z28-i, z2s) B5.16)
и антисимметричную матрицу
fa 0 ... (
0 а ... (
чО 0 ... а/
На ее диагонали выстроены 2 х 2-матрицы с элементами ац = а22 = 0,
012 — ^^21 = 1, detwTOn = 1; а;^1 = ит = —ш. В новых координатах
СП B5.8) приобретают форму
[А, В] = штп -— -—. B5.17)
uZ,n OZa
Фундаментальные СП
lzfmzn]=umnj m, n = 1, ..., 2s. B5.18)
В новых переменных уравнения Гамильтона имеют вид градиентной
системы [8, 17]:
zm=umn——-?—, m-1, ...,2s, B5.19)
dzn
где H(z, t) = H(x, р, t). Пусть H = H(z). Тогда правая часть авто-
автономной системы B5.19) представляет 2л-мерное векторное поле Fm =
= ujmn (dH/dzn). Решение системы B5.19) zn = zn{z\ t) с начальными
условиями zn@) = zfn определяет интегральную кривую векторного поля:
zm = Fm(z). B5.19 а)
260 Глава VI. Канонические уравнения
Фазовым потоком называют однопараметрическую группу преобразо-
преобразований
g$(zi,...,z'28) = zm(z',t). B5.20)
Формула B5.20) задает отображение z' -> g^(z'), для которого Fm есть
поле скоростей.
Если D(z, t) = С — первый интеграл, то B5.13) приобретает форму
уравнения непрерывности:
^r±1—DFm = 0. B5.21)
at ozm
25.10. Теорема Лиувилля. Состояние системы определяется точкой
в фазовом пространстве. Пусть М® — ограниченная область фазового
пространства, Mt — область, в которую переходит Мо при отображе»
нии B5.20); Го, Tt — объемы этих областей. Покажем, что
B5.22)
dt J dzm '
Mt
2s
где Tt = J dF, dF = П dza. Производя замену переменных z —>¦ .
Mt o=l
dr = Jdr0, dr0 = Д d4, J = det A, Amk = —^,
a=l ^
имеем
Г drf Г •
t = dr0 J ->• -7- = dr0 J =
J dt J
Mo Mo Mt
В теореме Лиувилля утверждается, что фазовый объем сохраняется. Со-
Согласно A.19) производная определителя
J = JAmkA^ B5.23)
Далее, дифференцируя B5.19а) по z'k, найдем линейное уравнение, кото-
которому удовлетворяет матрица Якоби Атк:
d dzm _ dFm dzj • _ dFm
Подставляя B5.24) в B5.23), получим j = JdFm/dzm и форму»
лу B5.22). Поскольку штп = -шпт, то
dFm. длН
Лекция 26. Канонические преобразования 261
и гамилътонова система сохраняет фазовый объем Tt = Г®. Динамическую
величину Tt называют интегральным инвариантом. Интегральные инва™
рианты разной размерности впервые введены А. Пуанкаре [173].
Пример 25.7. Найдем условия, которым должна удовлетворять функ-
функция D = D(t, z), если С = J dYD{t^ z) — интегральный инвариант. Учи-
Учитывая полученные выше соотношения, имеем
С= ldT0^
} dt
Mt Mt
dt ) dt
Следовательно, функция D(t, z) удовлетворяет уравнению B5.21).
Обобщенные гамилыпоновы системы. В общем случае матрица ш за-
зависит от координат: ш = U(z). В этом случае выполняются условия 1-3
п. 25.5, а тождество Якоби имеет вид
дптп дПпк Шктп п
O O O
В частности, ftmn = Cmlzk. Изучение систем с более сложной зависимо-
зависимостью СП только начинается.
Лекция 26. Канонические преобразования
Настоящая лекция посвящена центральному разделу гамильтонова фор™
мализма — теории канонических преобразований. В отличие от лагражева
формализма, роль которого сводится лишь к выводу уравнений движения,
гамильтонов подход позволяет, в принципе, получить решение как кано-
каноническое преобразование, не обращаясь непосредственно к уравнениям. В
реальной ситуации приходится использовать приближенные методы теории
канонических преобразований, изложенные в лекциях 27-31.
26.1. Метод вариации канонических постоянных. Пусть zi, ...
..., Z28 — координаты фазового пространства, Н = H(z,t) — гамиль™
тониан. В общем случае система B5.19)
Zm = [Zm, H(Z, t)] B6.1)
не интегрируема. Представим Л" в виде Л" = Hq+AH, где Но = Hq{z^ t) —
гамильтониан системы
zm = [zm, H0(z, t)], B6.2)
имеющей решение zm = zm{z\ i). Здесь z1 = (z[, ..., z'2s) —постоянные
интегрирования. В соответствии с методом Лагранжа вариации постоянных
ищем решение B6.1) в виде zm = zm(zr(t)J t). Из B6.1) находим
dzm dzm ., _ 9Я
dt + dz'nZn~"mnbzn'
262 Глава VI. Канонические уравнения
Поскольку
dzm дН0
Ot OZn
ТО
dzm ., О АН
-ац;*» = Штп-д^- B63)
Предположим, что detG™1 ф 0, где G^n = dzm/dz'n. Умножая B6.3) на
матрицу Якоби Gkm = dz'k/dzm, получим систему:
, _
Zk —
Если матрица Якоби удовлетворяет условию
GkmUmjGji =ШЫ, B6 А)
то
Gkm^mn = ^kiG^ , i^ = Wjfei ^~y AH.
OZ^ OZn
Матрица G называется в этом случае симплектической, а замена пере™
менных z ^ z1 — каноническим преобразованием. Новые переменные z'k
удовлетворяют уравнениям Гамильтона:
dH'(z', t)
где Н''(z!\ t) = AH(z(z'J t), t) —новый гамильтониан.
Запишем это уравнение в терминах скобок Пуассона, которые опреде™
лим аналогично B5.8), заменяя z —»¦ z':
4 = [4,Я'B;,<)], k=l,...,2s, B6.5 a)
в и1 вн1
B6.56)
Вследствие условия B6.4) сохраняются фундаментальные СП:
[z'k(z, t), z'i(z, t)]z = ujmj-^- ^-=u)ki = [4, z[]z,. B6.6)
0Zm OZj
Аналогичным путем находим
[zm{z\ t), Zj(z', t)]zf = oumj = [zm, Zj]zi B6.7a)
[xu Pk]X',P' = 5ik, [xu %k]x>,P> = 0, \pu pk]x',p' = 0. B6.76)
Лекция 26. Канонические преобразования 263
Таким образом, преобразование координат является каноническим, если
сохраняются скобки Пуассона.
Сделаем несколько замечаний.
1. В лагранжевом формализме допустимы только преобразования коор-
координат. Класс канонических преобразований существенно шире, поскольку
координаты хп и импульсы рп являются равноправными независимыми
переменными.
2. Метод вариации постоянных лежит вне рамок лагранжевого форма-
формализма.
3. Каноническое преобразование позволяет исключить из гамильтони-
гамильтониана члены, дающие наибольший вклад в решения.
Пример 26.1. Лагранжиан осциллятора, взаимодействующего с внеш-
внешним полем,
L(x, ж, t) = -тх2 тш2х2 ~~ U(x, t)
приводит к уравнению второго порядка типа B0.1):
ж + ш2х = — /(ж, t), /(ж, t) = ^т^-
Вводя импульс р = тх, получим из B5.3) гамильтониан
Н(х, p,t) = ^- + 7^x2 + U(x, t). (/)
Пусть Но = р2/2т + A/2)ти2х2. Тогда уравнения B6.2) имеют вид
х = ^, р = —тш х. B)
т
1. Представим решение B) как замену переменных ж, р —»¦ ж;, j/,
удовлетворяющую B6.7 6):
/ 2рг
ж = \ cos (out + ж;), р = —\/2тшр/ sin (cj? + ж;).
V тш
Новый гамильтониан Нг(хг, р;, t) = 17(ж(ж;, р;, tM t). Уравнения Гамиль-
Гамильтона имеет вид
, он'
дН'
2. Произведем в A) каноническое преобразование к комплексным ко-
координатам и импульсам ж, р —»¦ ж; = а, р; = ш*:
264 Глава VI. Канонические уравнения
Новый гамильтониан Н'(а, ш*, t) = U{x{a1 m*, t), t). Уравнения Га-
Гамильтона (см. B0.5)) имеют вид
. дН1 ,dU дх
а = = -г
i*
= г р
oia* ox да*
да дх да
26.2. Производящие функции канонических преобразований.
Пусть на расширенном фазовом пространстве М задана структура диф-
дифференцируемого многообразия; (zn,t), (z'nJif)—локальные координаты
в двух картах, п = 1, ..., 2s. Положим t = t'. На перекрытии двух карт
связь между координатами— zn = zn(z[, ..., z'2s, t) или
xn =xn{x',p\ t), pn=Pn(x',pr,t), n = l,...,s. B6.8)
.Якобиан преобразования z —>• z1 отличен от нуля: detGmn / 05 Gmn =
= dz'm/dzn. Подставляя B6.8) в B5.7), получим новый функционал:
ta
l'{z\ z\ t) = [pnxn - H(x, p, t)]z=z(z>it) =
= *«• '> (^ + w* + MA) - *<*'• '>• "¦ <Ж9>
Нетрудно убедиться, что уравнения Лагранжа—Эйлера не имеют канони-
канонической формы B6.5). Выбирая определенным образом замену перемен-
переменных B6.8), можно получить новый лагранжиан в виде
l'(z', z\ t) = р'пх'п - Н'{х', р', t) + jt F(x\ p', t), B6.10)
где Н{х\ р;, i), F(xf, p;, i) — известные функции. Теперь уравнения
Лагранжа-Эйлера имеют форму уравнений Гамильтона B6.5), Н' =
= Н' (xf 5 pf 5 t) — новый гамильтониан. Соответствующая замена перемен-
переменных х, р —>- х\ р' является каноническим преобразованием (КП). Следо-
Следовательно, интегрирование системы B6.1) сводится к алгебраической про-
проблеме отыскания КП, обращающего новый гамильтониан Hf(z!, t) в нуль.
В этом случае х'п, р'п — постоянные величины. Если х'п = жп@), pfn =
= Pn@), то решение B6.8) является каноническим преобразованием
начальных условий. Однако в общем случае гамильтоновы системы не ин-
интегрируемы. Поэтому можно попытаться найти такое КП, что гамильтони-
гамильтониан Н' будет в каком-то смысле мал, и получить решение уравнений B6.5)
Лекция 26. Канонические преобразования 265
методами теории возмущений. Возникает вопрос: как найти гамильтони-
гамильтониан Н1', описывающий эволюцию штрихованных переменных? Этого мож-
можно достичь, подбирая замену переменных, удовлетворяющую условию ка-
каноничности B6.7). После подстановки z = z(z', i) в B6.9) получим
лагранжиан в виде B6.10). Другой метод, позволяющий найти преобразо-
преобразование B6.8) и новый гамильтониан Н', связан с использованием произ-
производящих функций.
Пример 26.2. Лагранжиан осциллятора с переменной «массой» и
«жесткостью»
L(x, х, t) = -m{t)x2 k(t)x3
приводит к уравнению типа B0.23). Поскольку импульс р = тх, то га-
гамильтониан
Н(х, р, t) = —
2т
2т 2 т
Произведем КП х, р ^ хг, р1:
rp — a I |Г>ЛО I (Г\ —1— 'T3 I (T\ ~~~™
Подставляя х, р в B6.9), согласно B6.10) находим
Канонические уравнения имеют вид
. 1 dlnmu , |ч . dlnmu , |ч
х1 = -- sin 2(у? + ж'), Р; = ,. cos 2 (if + ж').
z at at
Производящая функция F\ = ^(ж, ж;, t).H3 B6.8) можно найтир'п =
= р^(ж, ж;, i) и выразить функцию F(a;;, p;, t) в B6.10) как функцию
старых и новых координат: Fi(x, x\ i) = F(x'', р;(ж, ж;, t), t). Тог-
Тогда B6.10) можно представить в виде
dF-i
-± = рпхп - р'пх'п + (Я' - Я). B6.11)
Сравнивая это выражение с B5.1), приходим к выводу, что F\ = Fi(x, x\ t)
является производящей функцией преобразования Лежандра от перемен-
переменных хп, х'п к переменным рп, р'п. Поскольку
dFt _ dFx dFt . dF1 .,
^Г ~ 1н + 'dxZ Xn + 9< Xn1
то в соответствии B6.11) функция Fi(x, ж', t) задает каноническое пре-
266 Глава VI. Канонические уравнения
образование соотношениями
H'(x',p',t)= \H(x,p,t) +
\z=z(z',t)
Условие разрешимости второго уравнения B6.12): det (d2Fi/dxndxfn) /0.
Из рассмотренных выше примеров можно заключить, что новые коорди-
координаты и импульсы не имеют своего первоначального смысла, в частности, пере-
переменные х'п не являются пространственными координатами; различие между
координатами и импульсами становится несущественно. Выбирая, напри-
например, Fi(x, x\ t) = хкх'к, получим рп = х'п, р'п = -хп, Н'(х', р1, t) =
= Н(—р', х\ i). Роли координат и импульсов поменялись.
Пример 26.3. Возвращаясь к примеру 26.2, рассмотрим производя-
производящую функцию
/ / ч 1ПШ 9 / /ч
Fi(x, x\ t) = -—x2tg((f + x').
Согласно B6.12)
р = —mujx tg (ip + х'), р' = -тих2 cos™2 (ip + х').
Отсюда получим приведенную в примере 26.2 замену переменных. Далее
находим
dFi I dmuj 2 / /\ 1 2 2 -2/ /\
^г^ = ;— ж tg ((f + ж ) mw х cos (<? + х ).
ot 2 at 2
В новых переменных Н(х, р, t)\z=z(z^t) = cjp',
9Fi 1
at 2 шш at
Новый гамильтониан совпадает с полученным в примере 26.2.
Производягцая функция F2 = i^O^, P;7 ^). Иногда более удобно исполь-
использовать производящую функцию, выбирая за независимые переменные ста-
старые координаты и новые импульсы. Произведем преобразование Лежандра,
записывая B6.11) в виде
ft(Fi + Pnx'n) = Pnin + x'Jn + (Я' - Я).
Выражение ^(ж, р;, t) = Fi(x, х'(х, р;, t), t) + р'пх'п(х, pf, t) является
производящей функцией. Поскольку
cLF2 _ 6>F2 6>F2 . 6>F2 .,
Лекция 26. Канонические преобразования 267
то КП ж, р —>- ж', р1 определяется соотношениями
* = М? <-Щ; <26J4)
Н'[х\ р\ t) = \н(х, р, t) + dF^P'^)} . B6Л5)
L at lz=z(zf,t)
Условие разрешимости системы B6.14) — det(d2F/dp'ndxn) ^ 0.
Пример 26.4. Гамильтониан частицы Н(х, р, t) = р2 /2т. Произве-
Произведем КП, порождаемое функцией
Из B6.14), B6.15)следует, что ж = ж; + (р1/m)t, р = р;, Я;(ж;5 р;, t) = 0.
Производящая функция Fi(x, ж;, t) = (F2 — ж'р')|р/=р/(ж,ж/,*) принима-
принимает вид
В теории канонических преобразований используют еще два типа произ-
производящих, функций, которые можно получить преобразованием Лежандра.
Функция Fs = Fs(p, x\ t) порождает КП ж, р ^ х\ р':
а функция F^ = F4 (р, р;, i) —
дрп др'п
Заметим, что приведение уравнений Гамильтона к возможно более просто-
простому виду определяется удачным выбором канонического преобразования.
Если новый гамильтониан зависит только от импульсов: Hr(zr, t) =
то уравнения Гамильтона B6.5) немедленно интегрируются:
й' - 0 х1 - — ->> т/ - п" х1 - — t + ж/;
В этом случае решение является КП ж', j/ —>¦ ж", р/;, обращающим новый
гамильтониан Н" {х" ^ р", t) в нуль.
Пример 26.5. Частица движется по поверхности отрицательной кривиз-
кривизны с координатами и, v, в которых метрика (dsJ = (duJ -j- expBku)(dv2)
(см. пример 16.2). В новых переменных х\ = k^1e^ku1 X2 = v метрика
приводится к конформному виду (dsJ = (kxi)~2[(dxiJ + (dx2J], называ-
называемому метрикой модели Клейна геометрии Лобачевского [8]. Гамильтониан
268 Глава VI. Канонические уравнения
частицы Н = (kxiJ(p\ + p|)/2m. ПроизведемКП:
xi = ^cii кхг, х2 = x2 + — f ±J
P'2 P'2 \*J
Pi = ^Р2^~кх[, Р2 = P2-
В новых переменных гамильтониан Н' = р[ /2т, р[ = р;/, ж^ = х'{ +
26.3. Линейные канонические преобразования. Линейные КП фазо-
фазового пространства z1 -» z = А^ называются симплектическимм, если А
является матрицей, удовлетворяющей условию B6.4).
1. Исследование устойчивости по линейному приближению. Пусть
zn = ап — особая точка системы B6.1) с гамильтонианом Н = H(z).
Полагая zn = ап + vn, разложим H(z) в ряд Тейлора:
Н(а + v) = iJ(a) H— HijViVj + ... , ii^- =
Очевидно, что Hij = iJj^. Уравнения Гамильтона имеют вид
дН .
vTO = wTOfe- > vm = umkHknvn.
dvk
Поскольку ujH — постоянная матрица, то решение
vm(t) = Amn{i)v'n,
{Zb.lo)
Amn{t) = (QxpujHt)mn, vn = vn@).
Докажем, что Атп — симплектическая матрица. Имеем
и)п = uexp(Hujt),
оо п со
У" (Н)п V
А~г = exp(-uHt), (А~г)Т = exp(-HTuTi) = exp(Hcjt).
Следовательно, Аи = ш(А^г)т, что и требовалось доказать. Учитывая, что
det ш = 1, находим (det AJ = 1.
Пусть s = 1. Для вычисления матричной экспоненты найдем собствен-
собственные значения матрицы шН: det(ujH — XI) = 0. Если а2 = Н^ — НцН^ >
> 0, то А2,1 = ±сг. Введем проекционные операторы
Очевидно, что if = Ри F22 = Р2, Р1Р2 = P2P1 = 0, Рг + F2 = i.
Лекция 26. Канонические преобразования
269
Поскольку иН =
А2Р2, то
п
77».
77».
п=0 п=0
1 /сг ch at + Я12 sh crt Я22 sh at
X2tp2
о \ —Нц sh at a ch at — H12 sh at
Эта матрица совпадает с A9.13), если учесть, что кц = ^22 = iJi2, ^12 =
= U22, ^21 = —Нц. В случае i?f2 ~~ НцН22 = ^с"о ^ О В матричных
элементах А следует произвести замену а -^ гад. Если Hf2 = H11H22, то
2. Каноническое преобразование к вращаюъцейся системе отсчета.
Гамильтониан частицы, движущейся в однородном поле тяжести, равен
р2
Н(х, р) = — - mgx.
Произведем КП х, р —»• ж;, р;, порождаемое производящей функци-
функцией F2(ar, p;, t) = S^ap'^Xa, /1, a = 1, 2, 3, 5Т = S. Из B6.14) находим
Ра — о
Поскольку S™1 = 5Т, то xv = S^x1^. Вычислим вклад производящей
функции в B6.15): (91^/St) = S^aP'^a- Новый гамильтониан
'(х', р\ t) = — Spvp'^SavP'a -mg^ SpjyXp
SS1
где g^ = Spvgj,, О,'^ = S^aSva. Поскольку вектор угловой скорости Ufs
связан с тензором 0^ соотношением B.6): 0^ = e^U8Q's, то
26.4. Диагонализация гамильтониана. В квантовой теории широко
используются канонические преобразования для вычисления собственных
значений гамильтониана методом диагонализации [174-176]. Решение ана-
аналогичной задачи в гамильтоновой механике должно иметь вид Я (ж, р) =
270
Глава VI. Канонические уравнения
Рассмотрим систему с тремя степенями свободы — электрон, движу-
движущейся в электромагнитном поле ловушки Пен-
нинга. Скалярный и векторный потенциалы
поля
Рис. 26.1
А(х) = | {-у, х, 0).
Потенциал ^(х) удовлетворяет уравнению
Лапласа и может быть реализован системой
гиперболических электродов, изображенных
на рис. 26.1: двумя концевыми поверхностя-
поверхностями 2z2 = р2 + В2 с потенциалом ip = —L//2 и поверхностью р2 = 2z2 + R2
с потенциалом (р = U/2, р2 = х2 + у2.
Введем следующие обозначения: заряд электрона е = -е0, О =
= е®В/тс, ы\ = 2eoU/mR2. Переходя к переменным х = х\, у = #2,
z = жз, запишем гамильтониан (см. пример 25.3):
тп
B6.19)
Произведем КП ж, р —>- х\ р':
г
-7=(P2
л/2
Рз =
В новых переменных гамильтониан
B6.20)
где А2 = О2 — 2ш2 > 0. Часть членов имеет диагональный вид. Для полной
диагонализации гамильтониана совершим КП х'п, р'п -> х'^ = ап, р'^ =
Лекция 26. Канонические преобразования 271
х'2 = —=={al + а2), х3 = а3,
/
т/\ у т/л
%
% I
А = 2vmA(a* - о2), р2 ^шЛ(а1 а2^ р% ^аз-
Теперь новый гамильтониан является квадратичной диагональной формой:
Н" = и1а^а1 -ш2а*2а2 + ш3а^а3, ^1,2 = - ± у- B622)
Учитывая значение СП [ап, а|] = ^ic5njfe, запишем уравнения Гамиль-
Гамильтона:
Я TJff
ап = [ап, Htf] = —^ -»> dn = io;n(-l)nan.
Решения этих уравнений
B6.23)
представлены как КП к новым постоянным координатам an, io* —> (рп, I.
Подставляя B6.21), B6.23) в B6.20), получим
F2 =
- yh cos (u2t - (p2)\ ,
J
B6.24)
Нетрудно заметить, что сохраняются СП, вычисленные по перемен-
переменным (рп, 1п. Полная энергия электрона Е = и)\1\ — u2l2 + cj3/3.
Ловушка Пеннинга является уникальным экспериментальным прибо-
прибором [177, 178]. Локализация электрона в ловушке в течение нескольких
суток позволила провести эксперимент по сверхточному определению ано-
аномального магнитного момента электрона [179]. Параметры ловушки: R =
= 0,335 см, U = 9, 2 В, В = 18,3 кГЪ В этом случае ил ~ п - wf/20,
ш2 с^ cj|/20; числовые значения соответственно равны
— = 51206 МГц, — = 34,464 кГц, — = 59,41 МГц.
2тг 2тг 2тг
Ловушка является прибором, в котором возникает индуцированное излуче-
излучение нерелятивистских электронов (см. п. 28.6).
272 Глава VI. Канонические уравнения
26.5. Операторная форма канонических преобразований. Переход
к операторной формулировке КП позволяет описать динамические пере-
переменные наиболее компактным образом. Однако за простой формой записи
скрыты более сложные по сравнению с обычными правила обращения с
операторными величинами [181, 182].
Производная Ли. Представим СП B5.17) функций A{z\ t), B(z/J t) в
операторной форме:
Lb = Втдт, Вт = ujmndnB, дп = d/dz'n.
Оператор Lb называют производной Ли. В операторной форме свойства
СП приобретают следующий вид.
1. Линейность:
LB(XiA1 + Х2А2) = X1LBA1 + \2LBA2.
2. Кососимметричность:
3. Правило Лейбница:
4. Тождество Якоби:
LCLBA + LBLAC + LALCB = 0.
Пример 26.6. Докажем тождество Якоби. Образуем коммутатор опе-
операторов:
(LbLa ~~ LaLb)C = (ВтдтАпдп — АтдтВпдп)С =
= (ВтдтАп - АтдтВп)дпС = ([Ап, В] + [А, Вп])дпС =
= шпкдк[А, В]дпС = L[AiB]C = -LC[A, В].
В результате имеем тождество Якоби в операторной форме.
Преобразование динамических переменных. При достаточно широких
предположениях о функции s{z!) можно построить операторы
L'=^n^r^r, L°t = l, B6.25)
(JZ UZ
-[Lns. B6.26)
п=0 П"
Лекция 26. Канонические преобразования 273
Легко проверить следующие свойства [172]:
ЩХгР + X2G) = ХгЦР + X2LnsG,
k=0
п
Lns[F, СУ =^Скп[ЬиЛ Lns-kG]z,,
k=0
из которых получаем
U(XtF + A2G) = XtUF + X2UG,
U(FG) = {UF){UG), U[F, G\z, = [UF, UG}Z>. B6.27)
Произведем преобразование координат z = z[z\ t): z = Uz1, и пока-
покажем, что UF{z') = F(z). Для вычисления UF{z') введем вспомогательный
параметр е заменой U —>- U? = exp eLs, z ~^t y? = U?z' (прием, широко
используемый в квантовой механике). Очевидно, i/o = z\ y\ = z, F{y\) =
= F(z). Разложим F(y)? в ряд Тейлора около точки е = 0:
п0 ?=0
Далее находим
dF(yE) T dF(ye)
Ly =
Повторим эту процедуру п раз:
Полагая в B6.28) е = 1, получим искомое соотношение:
оо .
F(z) = J2 - LsF{z') = UF(z'). B6.29)
п=0 П
Тогда B6.27) принимает вид
UF(z')G(z') = F^Giz), U[F(z'), G(z%, = [F(z), G(z)]z,.
Из последнего соотношения в случае F(z') = z'm, G(z') = z'n име™
ем штп = [zmj zn]z/. Следовательно, преобразование z = Uz' является
274 Глава VI. Канонические уравнения
каноническим. Динамическая переменная F(z) в новых координатах —
F'{z') = F(z{z')) — определяется формулой B6.29):
оо 1
п=0
Пример 26.7. 1. ПреобразованиеБирхгофа. Гамильтониан системы
Я = Яо + V,
т-}-п=3
Найдем КП, которое исключает из гамильтониана кубические чле-
члены - г) [16, 19].
Произведем КП z = (ж, р) ~~> z1 = (g, тг), генерируемое функцией s(zf).
Согласно B6.30)
H'(z') = H(zf) + [Я(УM s(zf)} + - [[Я (У), s{z')]s{z')] + ...
Генератор преобразования z —>¦ z1 = (#, тг), пропорциональный малой ве-
величине г/, выберем в виде s = 7mn^m^n- Собирая члены одного порядка,
получим
Я/(^) = Яо + [Яо55] + У+ ([Я0, «] + И,
Далее имеем
[Н0, s] + V = (A7mn(^ — n) + f]mn)^mqU'
Полагая 7mn = A^1(n — m)^1r]mn, находим новый гамильтониан:
2А п — т
Замена переменных:
х = q + [g, s] + ... = q + -^
A(s — /cj
2. Преобразование Фрелиха. Гамильтониан системы Н = HQ + У,
з
n=l
Лекция 26. Канонические преобразования 275
Произведем КП z = (а, га*) —>¦ z' = (с, гс*)э исключающее члены ~ г.
Выберем генератор в виде s = ^7с1с2сз + к-с- Используя значение СП
[с*, ck] =iSnkj имеем
[Я0, s] + F = {7(^2 - CJi - Ш3) + ?*}ciC*,C3 + К.С.
Полагая j = -(о;2 — cji — с^з)^*, получим
[есс2сз + к.с, icicles + к.с] =
. .2
к.с. = \е\2
Аналогичное преобразование предложил в 1950 г. Фрелих в теории сверх-
сверхпроводимости. Координаты а\, а2 относятся к электронам, а3 — к фононам.
Если |с3| <С |ci|, |c2|, то гамильтониан Hf(zf) описывает взаимодействие
между электронами, приводящее к их «спариванию».
В резонансном случае, когда ш2 = ш± + ш3, возникает «малый знаме-
знаменатель», препятствующий упрощению гамильтониана [183]. В этом случае
следует произвести КП a, ia* —> ip9 I: ап = -y/i^exp {—iujnt — i(fn)-
Полагая е = еое^га, получим гамильтониан в новых переменных:
h = 2s®\/hhh cos (ср2 - ifi - (рз + «)•
Выбирая производящую функцию
F2((P, I") = (Pll[ + IP3I3 + (^2 - У?1 - У?3 + «)^2»
получим согласно B6.14) КП (р, I —>- (^;, /':
и новый гамильтониан
Очевидно, /{ = Ci, I3 = Сз, h' = Со —первые интегралы, аналогичные
соотношениям Менли-Роу в теории трехволновых взаимодействий [76],
Ji+/2=Ci, Ji-/3=Ci-C3) /2+/з=С3.
Решение уравнений движения выражается в терминах эллиптических функ-
функций.
276 Глава VI. Канонические уравнения
26.6. Канонические преобразования в классической теории маг-
магнитного резонанса. Среднее значение магнитного момента или спина S
удовлетворяет уравнению
f = [«S], B6.31)
где Q(t) = —jB, В — вектор магнитной индукции, j — постоянная. Урав-
Уравнение B6.31) можно представить в гамильтоновой форме, используя под-
подход Швингера, установившего связь между оператором момента импульса
и спаренными операторами «рождения» и «уничтожения», которые можно
ввести при рассмотрении двух гармонических осцилляторов.
Пусть ф — двумерный спинор-столбец с компонентами oi, а2, ф+ =
= (а*, аз), (Jk — матрицы Паули (к = 1, 2, 3) [49, 158, 162, 194]. Опреде-
Определим компоненты вектора S соотношениями St = A/2)ф+акф:
« (altt2 + a2al)i ^2 = ^т(«1«2 - »2«l), 53 = -
B6.32)
Введем теперь «координаты» и «импульсы» Xk = а^5 Рк = ^«^ (^ =
= 1, 2) с фундаментальной скобкой Пуассона [xi, pt] = &ik- Поскольку СП
[Si, Sj] = SijkSk, то уравнение B6.31) приобретает гамильтонову форму
dS/dt = [S, Я] с гамильтонианом Я = OS [276].
Спин находится в магнитном поле с индукцией B(t) = Во + Bp(t),
Во = @, 0, bo), Вр = b(cosu)t, - smut, O)f(t), f(t) = 0 при t < 0, t > т;
f(t) = 1 при 0 ^ t ^ т. Гамильтониан частицы
Я = ~ [ala2npeiujt + а^сцпре^1 + (а^г - а*2а2)п0] , 0 ^ t ^ г,
B6.33)
где По = 7^о, Цз = 7Ь.
Найдем решение уравнений движения спина в случае резонанса и =
= Oq. Произведем вначале КП а —>¦ q: а± = q\elujtl2\ а2 = q2e^lujt^2,
порождаемое ПФ
F2(a, iq*, t) = iq*a2eiujt/2 it/2
Новый гамильтониан не зависит явно от времени:
„, „ С/.Г9 тт/ * *ю .
Hf = Н + ^ -+ Н1 = ^(g
Следующее КП g -)> с:
Лекция 26. Канонические преобразования 277
приводит гамильтониан к диагональной форме Н' —»¦ h,
h = -^(c*lCl-4c2). B6.34)
Решение канонических уравнений, порождаемых гамильтонианом B6.34),
С1 = bieiO^/2, с2 = b2e-ifi**/2, B635)
где Ьх = A + CI/2ei/3/2, Ь2 = A - СI/2е"^/2, Си/^- постоянные.
В новых переменных вектор спина
5( = A - С2I/2 cos (iy + /3), S^ = -A - С2I/2 sin (Opt + /3), S'3 = С.
B636)
Переходя в B632) к переменным а ^ с, получим решение канонических
уравнений S(t) в интервале 0 ^ t ^ г:
Si = S3 cos out + S2 sin cjt, S2 = -5g sin wt + S2 cos wt, S3 = -51.
B637)
Отметим, что КП а ->• с задает преобразование к новому базису щ ->• п^,
в котором вектор В направлен по орту ш'3. Компоненты угловой скорости
в новом базисе п[ = О2 = 0, Оз = —пр соответствуют эффективной
индукции В; = (О, О, Ьр).
Пусть S@) = @, 0, 1). Тогда из B636), B637) находим S;@) =
= (-1, 05 0), С = 0, ^ = тг,
51 = - cos upt, S'2 = sin Upt, S3 = 0. B638)
Следовательно, компоненты вектора S(t) в интервале времени 0 ^ t ^ т
соответственно равны
S\(t) = sin Opt sin Oq^, 5*2(t) = sinOptcosOot, Ss(t) = cosOpt.
B639)
Скалярное произведение SBP = 0 — вектор S вращается вокруг оси z1
с угловой скоростью ftp, оставаясь ориентированным перпендикулярно
вектору Вр (t).
Рассмотрим два случая:
1) « к-импульс ». Если переменное поле включено в интервале г, удовле-
удовлетворяющем условию прт = тг, то S'(t) = A, 0, 0), S(t) = @, 0, —1). При
t ^ т имеем Si(t) = 0, 52(^) = 0, 5з(^) = — 1. Резонансный «тг-импульс»
переворачивает спин;
2) « девяностоградусный импульс». Если переменное поле включено в
интервале т, удовлетворяющем условию О^т = тг/2, то S;(r) = @, 1, 0).
При t ^ т после выключения переменного поля спин прецессирует в плос-
плоскости, перпендикулярной вектору Bq:
Si(t) = S[(t) = sinO0t, S2(t) = S2 = cosO0t, 53(t) = S3 = 0.
278 Глава VI. Канонические уравнения
В результате возникает переменный магнитный поток, который наводит
ЭДС индукции в катушке, содержащей образец из исследуемого материала.
Лекция 27. Уравнение Гамильтона-Якоби
27.1. Полный интеграл. Уникальная особенность канонических пре-
преобразований состоит в том, что, в принципе, можно получить решение
системы алгебраическим способом, угадав преобразование к новым пере-
переменным х, р —>• xf, рг, в которых гамильтониан Н' = 0. Тогда xr, pf —
произвольные постоянные, а КП х, р —>¦ ж', р' является решением уравне-
уравнений Гамильтона. Путь к строгому решению этой задачи нашли У. Гамильтон
и К. Якоби. Полагая, например, в B6.15) Н' = 0 и заменяя в гамильто-
гамильтониане импульсы в соответствии с B6.14) частными производными рп =
= dF/dxn , получим уравнение
(хъ ..., xsi |^, ..., |^, t)
\ дх\ oxs J
= 0, B7.1)
где F — неизвестная функция координат и времени. Это уравнение на-
называют уравнением Гамильтона—Якоби. Следовательно, для определения
производящей функции КП необходимо найти решение B7.1) вида F =
= ^(ж, j/, t), где j/ — постоянные.
Уравнение B7.1) является частным случаем нелинейного уравнения с
частными производными первого порядка:
не содержащим искомой функции F и разрешенным относительно dF/dt.
Теория уравнений B7.2) в достаточной степени разработана [69,184-186].
Для решения поставленной выше задачи необходимо, как показал Якоби,
найти полный интеграл. Полным интегралом уравнения B7.1) называют
решение этого уравнения, зависящее от s + 1 произвольных постоянных.
Поскольку уравнение B7.1) не содержит функцию F, то одна из по сто™
янных содержится в полном интеграле аддитивным образом:
F = S(t, xi, ..., х8, «1, ..., а8) + а0. B7.3)
Характеристическая система. Если F(x, t) — решение B7.1), то
поверхность F = F(x, t) в пространстве переменных х\, ..., xs, t на-
называется интегральной поверхностью уравнения B7.1). Рассмотрим неко-
некоторую кривую хп = xn(t) в пространстве х±, ..., xs, t и решение $(i) =
= F(x(t), i) на этой кривой. Подставляя F = F(x, t) в B7.1), получим
тождество, которое продифференцируем по Xk:
d2F дН дН d2F
U я— + я" я о = °- B7Л)
fii*i fin finr "~
Лекция 27. Уравнение Гамильтона—Якоби 279
Если касательную к кривой выбрать так, чтобы хп = дН/дрп, то B7.4)
можно представить в виде
дрк
dt
Система уравнений
хп =
дН
до„'
opt
1дхп
Рп =
дН
дхк
дН
дх„'
п =
дН
дхк
т-Ч
B7.5)
совпадающая с B5.4), называется характеристической системой уравне-
уравнения B7.1).
27.2. Теорема Якоби. Эта теорема устанавливает связь между полным
интегралом B7.3) и решением характеристической системы B7.5): если
F = S(t^ ж, а) —полный интеграл B7.2) уравнения Гамилътона—Якоби,
удовлетворяющий условию det(d2S/дхтдхп) / 0, то общее решение
уравнений B7.5) определяется соотношениями
к = 1, 2, ..., s, B7.66)
в которых j3k — новые произвольные постоянные. Из уравнений B7.66)
можно найти хп = хп(/3, a, t). Подставляя хп в B7.6 а), получим рп =
= Рп(Р, a, t).
Для доказательства теоремы необходимо убедиться в том, что B7.6 а),
B7.66) представляют интегралы канонической системы B7.5).
Действительно, подставляя в B7.1) полный интеграл B7.3), получим
тождество
f(ffH. B7.7)
Дифференцируя B7.7) по ак и учитывая B7.5), имеем
&2s m_ d2s _ d2s . d2s d os
dtdak dpn dxndak dtdak n dxndak dt dak
Далее, дифференцируя B7.7) no Xk, находим
d2S dH dH d2S
0 =
dWxk cfxk дрп дхпдхк
d2s
дхк дрп дхпдхк
02S d2S d ( OS
dt
чем доказательство и завершается.
280 Глава VI. Канонические уравнения
Таким образом, задача интегрирования системы B7.5) эквивалентна
нахождению полного интеграла уравнения Гамильтона—Якоби.
Выберем постоянные величины ап в качестве новых импульсов р'п, а
постоянные /?п отождествим с новыми координатами х'п (п = 1, ..., s).
Тогда функция ^(ж, р;, t) = S(t, ж, pf) является искомой производящей
функцией КП ж, р —» ж;, р;, обращающего новый гамильтониан в нуль.
Рассмотрим несколько методов нахождения полного интеграла уравне-
уравнения Гамильтона—Якоби и построения производящих функций КП.
27.3. Метод разделении переменных. Сущность метода состоит в
приведении уравнения с частными производными к системе независимых
уравнений с обыкновенными производными. Реализация этого метода воз-
возможна лишь при определенном выборе обобщенных координат, учиты-
учитывающем симметрии гамильтониана относительно группы преобразований
фазового пространства. Если определенная симметрия обнаружена, то в ре-
результате канонического преобразования можно получить первые интегра-
интегралы (fa(xaj pa) = аа. В случае полного разделения переменных гамильто-
гамильтониан имеет вид (см. пример 25.5)
Н = Я(y>i(sb pi), ..., <р8(х8, р8), t). B7.8)
Будем искать полный интеграл уравнения Гамильтона—Якоби в виде
п=1
Подставляя F = S в B7.1), получим уравнение
Поскольку срп(хп, рп) —первые интегралы, то уравнение B7.9) эквива-
эквивалентно системе
( dFA
?>п I х„, -— I = ап, п = 1, ..., s,
\ ахп; B7.10)
Разрешая B7.10) относительно производных, имеем —-^ = gn(xnj an)9
dxn
Г g г
S = - dtH{au ..., а8, t) + ^ dxngn(xnj an).
Согласно теореме Якоби получим из B7.6 а), B7.66) решение канони-
канонической системы B7.5), приведенное в примере 25.5. Это решение можно
Лекция 27. Уравнение Гамильтона—Якоби 281
представить как КП к постоянным импульсам и координатам, порождаемое
производящей функцией F2(xJ р', t) = S(t, ж, а = р').
Если гамильтониан не зависит явно от времени, то полный интеграл
уравнения B7.9) приобретает вид
S = -H(ai, ..., a8)t + W(xu ...,a;8)ai,..., ав), B7.11)
s f
ТР(ж, а) = 5Z ^» Sn(^«, ««)• B7.12)
n=l **
Отождествим постоянные ап с новыми импульсами р^ и выбе-
выберем в качестве производящей функции ^(х, р') укороченное дейст-
действие W(x, a = p'): F2(x, pf) = W(x, р'). Тогда КП ж, р —>¦ ж;,р;,
определяемое формулами B6.14), не зависит от времени. Новый гамиль-
гамильтониан B6.15) Н'{х',р') =Н(р[, ...,p's).
Замечание 1. Почти все интегрируемые задачи механики описываются
гамильтонианами типа
Я = Я(ЖЬ pi, ip2(x2, F2M . . . , ^а(РаM • • • , ^8(х8, Ps))-
Поскольку ха и t являются циклическими переменными, то полный ин-
интеграл можно искать в виде
S = -aot + ааха +
пфа
где функции Fn определяются из уравнений
<Рп | хп, —- ) = ап, п = 2, ..., а - 1, а + 1, ..., s, B7.13a)
Н (хъ —-, а2, ..., ^К), ..., ав ) - а0 = 0. B7.136)
\ хг J
Например, гамильтониан осциллятора
tf(^) = f^ + ^2. B7.14)
Уравнение Гамильтона-Якоби имеет вид
2
mu? 2 35
Ищем полный интеграл в виде S = —Et + W{x). Функция W(x)
удовлетворяет уравнению B7.136):
282
Глава VI. Канонические уравнения
Следовательно, полный интеграл
х
Г /
S(t, х, Е) = -Et + W(x, E), W = dx J<
2т [Е-
B7.15)
Интеграл вычисляется с помощью подстановки х = \j2Ejmuj2 sin ip:
W(x, E) = — \dip cos2 ip = — I(p+-sm2(p
и J ш \ 2
о
Решение уравнений B7.5)
^ = 11 t+p =
mdx
(E -
x =
sin [uj(t
2
p =
ffC
cos [a;(t
Из полученных соотношений видно, что в качестве производящей функции
можно выбрать S или W.
Пример 27.1. Гамильтониан частицы, движущейся по поверхности
отрицательной кривизны Н = {кх\J{р\ + р\)/2т. Полный интеграл
уравнения Гамштьтона-Якоби:
(fcElJ
2т
OS
OS
dS n
77Г =0,
at
A)
ищем в виде S = —Et + p'2X2 + Fi(xi). Из A) получим уравнение с
обыкновенными производными:
2т
/2
Полагая Е = р'\/2т, получим полный интеграл:
Согласно теореме Якоби решение уравнений движения определяется
Лекция 27. Уравнение Гамильтона—Якоби 283
формулами B7.6 а), B7.66):
где iV = {р12Ip'i)~^xi- Разрешая первое соотношение относительно х±,
получим решение, приведенное в примере 26.5.
Замечание 2. В общем случае переменные в уравнении Гамильтона-
Якоби не разделяются. Предположим, что гамильтониан удается предста-
представить в виде И(ж, р5 t) = Hq(x, p, t) + ДИ(ж, р, t), где Но —гамильто-
—гамильтониан интегрируемой системы канонических уравнений. Тогда можно найти
полный интеграл уравнения
ds ds \ as
t + —- = О
ot
и произвести КП ж, р —>¦ ж', р;, порождаемое производящей функцией. В
соответствии с B6.15) новый гамильтониан
H'(x',p',t) =
= AH(x,p,t)\z
z=z(z!,i)
определяет эволюцию штрихованных переменных. Для решения канониче-
канонических уравнений необходимо использовать методы возмущений, изложен-
изложенные в лекциях 28 и 29.
27.4. Переменные действие-угол. Очевидно, что выбор постоянных ап
в качестве новых импульсов р'п в производящей функции ^(ж, р') =
= W(x, a = р') является произвольным; можно выбрать любые s ве-
величин In = /n(ai, ..., а8). Разрешая эти s уравнений, получим ап =
= an(/i, ..., 18). Тогда производящая функция
F2(x,I)=W(x,a(I))
в соответствии с B6,14) определяет КП
dW 8W ,
Рп = ^5 ^Рп = ^Г B7.16)
дхп din
284 Глава VI. Канонические уравнения
к новым координатам ср и импульсам I. В новых переменных гамиль-
гамильтониан зависит только от импульсов Н^х'^р1) = h(I). Из уравнений
Гамильтона находим
Фп = -яГ, 1п = 0^1п=Гп, ^=ол(/')< + ?>;, B7.17)
где uji(I) = dh/dli. Решение уравнений движения является КП <р, I —>>
Удобно выбрать функции /j (а) специальным образом. Пусть на коор-
координатной плоскости Х{, р i 2$-мерного фазового пространства траектория
удовлетворяет условиям
Xi(t)=Xi(t + Ti), Pi(t)=pi(t + Ti) или Pi(xio)=pi(xio + \i).
В первом случае траектория — замкнутая периодическая кривая. Во
втором — движение в плоскости x^pi соответствует вращению. Введем
теперь новые импульсы, называемые действиями [16, 28, 187]:
B7.18)
Интеграл берется вдоль замкнутой кривой 7г- Импульс Ii имеет размер-
размерность постоянной Планка, совпадающую с размерностью действия или мо-
момента количества движения. Поэтому координата ipi — безразмерная ве-
величина, соответствующая угловой переменной. Величина cji(I) в B7.17)
имеет размерность частоты.
Из B7.12) следует, что W(x, «(/)) — многозначная функция на кри-
кривых 7г- При обходе замкнутой кривой 7г приращение AiW равно пло-
площади, ограниченной 7i* ^iW = 2тг Ii. Приращение (fi за период A^i =
= UiTi. С другой стороны
Р О2 ТЖ7" 5^ Р ОТЛ"
^ йжг = Ф ^т— dxi = ^7" т ^^
xi J olfcXi aIk
Следовательно, постоянная Ui — частота колебаний. Если все частоты
несоизмеримы, то det (duji/dlk) = det (d2h/dlidlk) ф 0 [16].
Найдем импульс I для гармонического осциллятора. Из B7.15), B7.18)
имеем
Т г Хл /о (т? mUj2 2\ E Г Л 2 Е
I = — ф dx а / 2пг Е — ^^ х2 = — dip cos </>=—.
1 о
Следовательно, производящая функция
Лекция 27. Уравнение Гамильтона—Якоби 285
Учитывая B6.14), B6.15) находим
[2Г ,
х = \/ sin <z>, р = \/2тш1 cos <z>.
V
В новых переменных гамильтониан B7.14) Н'((р, I) =ш1.
Переменные действие-угол существенно облегчают исследование си-
системы, близкой к интегрируемой, с гамильтонианом
где Hq—гамильтониан невозмущенной задачи, eV((p, I)—возмущение,
являющееся 2тг-периодической функцией угловых переменных [16, 109].
Более того, большой класс нелинейных уравнений с частыми производны-
производными можно представить как гамильтоновы системы с континуальным числом
степеней свободы. Введение переменных действие-угол позволило пред-
представить основной метод решения таких уравнений (метод обратной задачи
рассеяния) как каноническое преобразование [188-192].
Пример 27.2. Движение частицы описывается гамильтонианом
Произведем КП к переменным действие-угол. Полный интеграл уравнения
Гамильтона—Якоби S = —Et + W(x, E)9
У I—7 ^^ fE\1/A
W(x, E)= \dx J2m [E --хЛ, х0 = \/2 I — ) . B)
х
Введем новый импульс B7.18) — действие
1/4 1
Учитывая тождество
проинтегрируем C) по частям и с помощью подстановки ^2 = 1 — z2
запишем результат в терминах полного эллиптического интеграла (см. при-
приложение):
1 11
dz
286 Глава VI. Канонические уравнения
где К A/^/2) ~ 1,85. Следовательно,
Подставляя Е в B), найдем производящую функцию КП ж, р —>¦ tp, I:
F2(x, I) = W(x, E(I)). Из B7.16) после приведения интеграла к нор-
нормальной лежандровой форме получим
-1/2
Ш _ V 2
Далее находим
тг
dF2 / 7 ^д ^- /I
= ^— = -а 2т [Е - 7Ж = ^2уш -
<9ж V ^ 4 / \а/
В новых переменных гамильтониан /i(J) = (I/aL/3. Частота колебаний
<9/г 4 ^4/Чт1/ч
о; = т^ = -а ' I ' •
91 3
Полезно убедиться, что СП [ж, р]<^,/ = 1.
27.5. Метод характеристик. Пусть хп = хп{х'^р\ t), pn =
— Fn(^;5 p;, t) — решение уравнений B7.5), являющееся КП к постоян-
постоянным значениям х'п,р'п; F(x, t)—решение уравнения B7.1). Рассматри-
Рассматривая F(ж, ?) на траекториях системы B7.5), находим функцию /(?, ж;, р') =
= F(x(x', p;, t), t). Дифференцируя /, получим
at ot oxn
Здесь 1(ж;, р;, t) = L(x(x;, p;, t), x(x\ p', t), t), где L(x, ж, t) — ла~
гранжиан. Определим из системы уравнений хп = хп (х', р', t) значе-
значение р'п = 7гп(ж', ж, ?), соответствующее траектории, выходящей из точ-
точки ж ^ с импульсом 7гп и проходящей через точку хп в фиксированной
момент времени t. Функция F = /(t, ж', 7г(ж;5 ж, t)) удовлетворяет урав-
уравнению B7.1). Если ж;, р; — значения координат и импульсов в момент
времени t = 0, то производящая функция КП
г
F1(x,xl,t)=ldt'l(x',n(xl,x,t),t').
B7.19)
Лекция 27. Уравнение Гамильтона—Якоби 287
Пример 27.3. Гамильтониан осциллятора с переменной частотой
Н{х,р, t) = р2 /2^{l/2)w{i)x2 (см. п. 31.3). Найдем производящую функ-
функцию B7.19). Уравнения B7.5) эквиваленты уравнению второго поряд-
порядка х + w(i)x = 0. Пусть ui(i), U2(t) — линейно независимые решения с
вронскианом, равным единице: u\U2 — U2U\ = 1,
^i@) = l, щ@) = 0, ui@) = 0, й2@) = 1.
Тогда решение B7.5)
х = m(t)xf + U2(t)pf, p = ui(t)xf +
является КП к постоянным координатам и импульсам. Поскольку
L{x, ж5 t) = х2/2 — {l/2)w{t)x2, то после интегрирования по частям на-
находим
t t t
dt {x2 — wx2) = xx — \dt{x + wx)x = px — p1 x'. G)
0 о
Следовательно, f(t,x\p') = A/2){px — pfx'). Подставляя в (i) значе™
ние j/ = щг{х — щх')9 имеем
Fi{x, x!, t) = ^—{ii2X2 — 2хх! + ux' )
2li
1. nycTbw(t) = 0.Тогда iii(t) = I,u2{t) = t,F{x, x1', t) = ^{x-x'f.
2. Пусть w{t) = и2. В этом случае iii = coswt, г^2 = w™1 smut,
FAx, ж', t) = \{x2
2smojt
27.6. Метод Фока. Рассмотрим частицу в консервативном поле U =
= U{ж). Поскольку в общем случае переменные в уравнении Гамильтона-
Якоби не разделяются, то необходимо использовать приближенные методы
интегрирования уравнений B7.5). В 1937 г. В.А. Фок предложил новый
метод интегрирования, основанный на приближенном решении уравне-
уравнений B7.1) [193].
Ищем решение B7.1) в виде F = Fi(x, x;, t),
(X)
Fi(x, x', t) = g?2 + X>G»(X> x'), ? = x-x'. B7.20)
n=l
Подставляя B7.20) в B7.1), получим систему рекуррентных уравнений:
{n + ?ada)Gn = Rn, B7.21)
288 Глава VI. Канонические уравнения
Следуя Фоку, запишем тождество
ds^sA(x!
ds
о
учитывая которое, получим решение B7.21):
1
Gn(x, х;) = idss
о
-1
Очевидно, выполняется соотношение взаимности F\ (х, х;, t) = F\ (х;, х, t).
Пример 27.4. Движение в однородном поле f/(x) = —mgx. В этом
случае
2 2
2 feV ' /5 ^«J о "> ° О /f
о Z4
Ряд B7.20) обрывается и мы имеем точное решение уравнения Гамильто-
на—Якоби:
, т(х — -к'J g(x + x;)t mg2t3
i(x, x , j - ^ 2 ^ .
27.7. Задача Коши. Рассмотрим задачу Коши для уравнения Гамильто-
на-Лкоби:
1 о 95
— (VSJ + 17(х) + ^^ = 0. B7.23)
2т at
При начальном значении t = 0 известна функция So(x) = *S(x, 0). Необ-
Необходимо найти 5(х, t), t ^ 0. Характеристическая система B7.5) гах =
= р, р = —VU эквивалентна уравнению тх = ^VU. Интегрируя B7.5),
находим х = х(х;, р;5 t), р = р(х;, р;, i). Решение задачи Коши на тра-
траектории частицы 5(х(х;, р;, t), i) = /(t, x;, p;) имеет вид
B7.24)
Здесь I(x;, p;, t) — функция Лагранжа, в которой произведена замена пе-
переменных х = х(х;, р;, t). Решение канонических уравнений определяет
траекторию частицы, выходящей из точки х; с импульсом р' в момент
времени t = 0. Из начальных условий следует, что в точке х; вектор р;
Лекция 27. Уравнение Гамильтона—Якоби 289
имеет определенное значение: р; = n(x'), n(x) = VSq- Из системы урав-
уравнений
х = х(х;5 р; = n(x;), t) B7.25)
найдем координату точки х; = q(x, i), из которой выходит траектория,
проходящая в фиксированный момент времени t через точку с координа-
координатой х. Следовательно, решение задачи Коши
5(х, t) = /(*, q(x, t), n(q(x, *))). B7.26)
Замечание. Поскольку p'a = —(dFi/dxfa), то условие р' = dSo(x.')/dx.'
и уравнение B7.25) можно записать в виде
дФ
— = 0, Ф(х, х;, t) = Fi(x, x;, t) + 5o(x;). B7.27)
Тогда решение задачи Коши эквивалентно вычислению экстремального зна-
значения функции Ф(х, х;5 t). Из условия экстремума функции Ф(х, х;5 t)
непосредственно следует значение х; = q(x, t). Решение задачи Коши
5(х, t) = Ф(х, q(x, t), t). B7.28)
Пример 27.5. Найдем решение задачи Коши в случае 17(х) = О,
50(х) = ^рох2/2Л.
Решение 1. Решение характеристической системы B7.5) х = х; +
+ (p'/m)t, p = р;. Из B7.24) находим
Поскольку р; = —po(x.'/R), то уравнение B7.25) принимает вид х =
= х; — (pot/mR)iLf. Следовательно, х; = q, q = x(l — 1
Решение задачи Коши
~v ' ' 2R l-ipot/mR)'
Решение!. Поскольку -Fi(x, x', t) = (m/2t)(x - x'J, то
x'2
Из условия B7.27) находим х; = q, а затем — решение задачи Коши.
Задача Коши — нахождение по начальным данным решения уравнения
с частными производными—естественным образом возникает при опреде-
определении напряженности электрического и магнитного пол ей Е(х, t),B(x, t),
поля скоростей v(x, i) в гидродинамике, поля температур Т(х, t) и т.д.
Возникает вопрос: какой физической величине соответствует функция, удо-
удовлетворяющая уравнению Гамильтона—Якоби? Ответ на него стал возмож-
возможным только после создания квантовой механики.
290 Глава VI. Канонические уравнения
27.8. Классическая механика и квантовая механика. На карте «фи-
«физических наук», представленной в декартовых осях v/c,S/h (v —скорость
частицы, S — действие, с — скорость света, h — постоянная Планка),
механика занимает область v/c <C I, S/h^ 1. Она граничит с квантовой
механикой (область и/с<1, 5//г<^С 1) и теорией относительности (область
v/с ~ 15 S/h ^> 1). Примениение методов квантовой механики оказалось
поразительно успешным в решении многих проблем атомной физики. Ее
основные положения принципиально отличаются от представлений клас-
классической механики. Состояние системы частиц описывается комплексной
волновой функцией ^(х, t), динамическим переменным сопоставляются
операторы, наблюдаемые величины могут принимать дискретные значения,
отсутствуют понятия силы, траектории и т. д. Материя может проявлять как
волновые, так и корпускулярные свойства.
Наиболее сильное впечатление производят квантовые интерференци-
интерференционные явления. Об одном из них, эффекте Ааронова—Бома, мы упоминали
в лекции 7: интерференционная картина первоначально расщепленных, а
затем сведенных пучков электронов зависит от напряженности магнитного
поля соленоида в области, недоступной для электронов. Это — типичный
пример «не силового» с точки зрения классической теории взаимодействия.
Другой пример: вследствие принципа Паули вероятность обнаружить два
фермиона в одной точке пространства равно нулю. Эту новую закономер-
закономерность бессмысленно пытаться объяснить введением новых сил отталки-
отталкивания. Однако при известных условиях квантовые эффекты могут стать
несущественными в описании поведения частиц [49, 137].
Проследим, каким образом происходит предельный переход в уравне-
уравнении Шредингера
Ш-^ = Нф, Н = - — Д + 1/(х) B7.29)
к классическому описанию [195, 264, 265]. Будем искать частное реше-
решение B7.29) вида
^(х, t) = a(x, t) exp [^5(х, *)] , B7.30)
где а и S — первые члены разложения амплитуды и фазы в ряд по степе-
степеням Н. Учитывая величины ~ Н°, Н:
(jv
Н2Аф ~ [2ihVaVS - a(VSJ + ihaAS]eiS/h,
из B7.29) получим
^ + [/(x) + f =0, B7.31)
Лекция 27. Уравнение Гамильтона—Якоби 291
—>¦ ~~^ h div a = 0. B7.32)
ul 2m m at m
Мы видим, что B7.31) — уравнение Гамильтона—Якоби, а B7.32) име-
имеет форму уравнения непрерывности. Таким образом, функция H~1S{k, t)
является фазой волновой функции, а2 — плотностью вероятности нахо-
нахождения частицы в точке с координатой х в момент времени t.
Поверхность S(x, t) = const определяет положение фронта волно-
волновой функции в момент времени t. Разлагая S(x, t) в ряд Тейлора в точ-
точке (х0, t0):
5(х, t) = S(x0; t0) + (х - хо)а Ь (t - t0) — + ... ,
можно сделать вывод, что в малой окрестности xq и для малых интерва-
интервалов \t — to| волну можно рассматривать как плоскую, причем волновой
вектор к и частота ш равны, соответственно, к = р/Й, ш = Н/Н,
р = V5, Н = -dS/dt.
Задача Коши. Представляет интерес сопоставить решение задачи Коши
в квантовой и классической теориях. В п. 27.7 решена задача Коши для
уравнения B7.31):
Найдем вначале решение задачи Коши для уравнения B7.32), а затем пе-
перейдем к ее решению в рамках квазиклассического приближения B7.30)
квантовой теории.
Пусть а(х, 0) = «о(х), *5(х, 0) = 5о(х). На траекториях частицы
функция
Дх', t) =a(x(x;, n, t), t)
удовлетворяет уравнению
dA да да да 1 „ а а „ А
— = — + т^х = ¦— Н VaVS = AS = div p.
dt dt ax at m 2m 2m
Преобразуем правую часть, вводя матрицу Якоби Атп = дхт/дх'п и
определитель J(-K\t) = get А:
,. _ дРт дх'п _ _ А a^i__^
Следовательно,
2J
Решение задачи Коши о(х, t) = A(q(x, t), t),
a(x, t) = °o(g(».*)) , B7.33)
/J((x, t), t)
292 Глава VI. Канонические уравнения
Пусть т/>(х, 0) — известная функция координат. Тогда, используя функ-
функцию Грина G(x, i; x;, 0) уравнения B7.29):
Ш^- -HJ G(x, t; х;, 0) = гй?(*)?C)(х-х'), B7.34)
запишем решение [194]
0(*)^(х, t) = [d3ar'G(x, *; х;, 0)^(х;, 0). B735)
В случае t/(x) =0 решение уравнения B7.34)
3/2 1
fe4 <2)
(x, t, x , UJ - г/г
Очевидно, при f40 в соответствии с B7.35)
G(x, t; x;, 0) ^cf (x^x;).
В квазиклассическом приближении, которое мы использовали при пе-
переходе от B7.29) к B7.31), B7.32), функция Грина
G(KB)(x, t; x;, 0) =6>(t)B7fiM)^3/27?1/2(x;x/, t) exp[(i/ft)Fi(x,x', t)],
где Fi(x,x;; t) — производящая функция, 7V(x,x;, t) — функция, удо-
удовлетворяющая уравнению B7.32):
i =0.
dt
Покажем, что iV(x, x;, t) = det С/, Uap = —&2Fi/dxadx'f3 [193]. Для этого
достаточно вычислить частную производную определителя dN/dt. Учиты-
Учитывая соотношения
dFi тт тт дРк дН
у = -PkUkp,
_Я, Ukf!- ,
Ua0 = д2Н = d(pkUk0) dUk0
= =
dt дхадх'р дха ' дха
получим
ON ATdUa0TT MTT dPkUkp Mdpk 8N
= N ^и = NU = -N ^— - рк ^— = -div(iVp).
дх дх
dt dt p дха дхк дхк
Лекция 27. Уравнение Гамильтона—Якоби 293
Отметим, что для квадратичных потенциалов квазиклассическая и точная
функции Грина совпадают [195].
Найдем теперь решение задачи Коши в квазиклассическом приближе-
приближении квантовой механики. Согласно B7.30) начальное состояние ф(х., 0) =
= ao(x)exp|-So(x)J.
Из B7.35) получим решение при t > 0:
^(х, t) = BтгШ)-3/2 [ dViV1/2^, х;, *)е(*/Л)ф(х'х/'*)ао(х;), B7.37)
гдеФ(х, х;, t) = Fi(x, х;5 ?)+S0(x')- Для того, чтобы получить квазиклас™
сическое приближение, вычислим интеграл B7.37) методом стационарной
фазы [195, 198, 242]. Стационарную точку найдем из условия д(р/дж.' = 0.
Разлагая Ф(х, x'5t) в ряд Тейлора в точке х; = q(x, ?), имеем
Ф(х, х;, t) = Ф(х, q(x, t), t) + A/2)(ж; - q)a(x' - q)p4>ap + ... ,
где (/?а/з = д2Ф/дх/адх/^3. Ограничиваясь квадратичным разложением, по»
лучим
, t) w B7riM)^3/2iV1/2(x, q(x, t), t)ao(q(x,
^x1 e
Поскольку (fap — симметричная матрица, то ее можно привести к диа-
диагональному виду. Тогда преобразованием вращения координат интеграл
приводится к произведению трех однократных интегралов Гаусса. Резуль-
Результат интегрирования можно записать в виде B7riMK/2D^1/2(x, q(x, t), ?),
где!)(х, q(x, t), t) = detcp.
Следовательно,
5(x5 t) = Ф(х, q(x, t), t), a(x5 t) = ao(q(x, [^ ^ !il
Преобразуя отношение детерминантов
Д(х, g(x, t), t) ; '
iv(x, q(x, t), t)
получим амплитуду, совпадающую с классическим решением B7.33).
Пример 27.6. Волновая функция свободной частицы в начальный
момент времени представляет пакет гауссовой формы [195]:
</>(х, 0) =
294 Глава VI. Канонические уравнения
Найдем квазиклассическое решение задачи Коши i//KB^(x, t).
Подставляя ф(х, 0) и функцию Грина G(kb)(x, t; x;, 0) в B7.35), найдем
фазу подынтегрального выражения:
тп
Ф(х, х', t) = Fi(x, x', t) + 50(х) = -(х - х'J + Рох'.
Стационарную точку получим из условия
т^ = ^^(х — х ) + ро = У —>- х = q(x, t), q = х — ^—.
ах' t m
Далее находим
92Ф 92Fi m .
= " = (т)"-
дх^дх'р дхадх'р t
Значение фазы в точке экстремума 5(х, t) = ^i^o^ + Рох,
поскольку &et{dxpldx'v) = J = 1. Следовательно, квазиклассическое ре™
шение представляет собой функцию
ехр[-(х - b - p0t/mJ/2R2 + ipox//i - iEot/li] G)
с амплитудой а(х, t) = ao(q(x, ^)) и фазой 5(ж, i) = Ф(ж, q(x, t), t).
Из G) следует, что плотность вероятности найти частицу в элементар-
элементарном объеме \ф^кв)(х, t)|2 имеет максимум, движущийся по классической
траектории х(?) = b + pot/m со скоростью Ро/ув. Решение имеет форму
волнового пакета постоянного размера. Однако функция i/^KB)(x,i) суще-
ственно отличается от точного решения. Вычисляя гауссовы интегралы
в B7.35), получим
= (тге2К2у3/4 ехрИх - b - p0t/mJ/2eR2 + ipo^/h - iEot/H], B)
где е = 1 + it It, t = mR2 /h. Плотность вероятности
№(x, t)\2 =
= [ttR2A + t2/r2)]^3/2 exp[-(x - b - p0t/mJ/(i + t2/r2)i?2].
Следовательно, волновой пакет, первоначально локализованный в объеме
~ i?3, занимает при t ^> т объем F ~ (Rt/тK = (Ы/mRK. Этот результат
согласуется с соотношением неопределенностей: начальная неопределен-
неопределенность величины импульса Ар ~ ft/Д приводит к «расползанию» размеров
за время t до величины tAp/m ~ Ы/mR [82]. Для электрона, локализован-
локализованного в области R ~ 10^8 см, величина г ~ 10^16 с. Для «классической»
частицы массой m = 1 г, локализованной в области R~10~4 см, характер-
ное время расплывания пакета т ~ 300 млрд. лет.
Лекция 27. Уравнение Гамильтона—Якоби 295
27.9. Уравнение Гамильтона-Якоби в /?-представлении. Произве-
Произведем КП ж, р -» х\ j/, порождаемое производящей функцией F3(p, х\ t)
или F^ip, Р\ ?)• В случае F = 1^(р, j/, t) имеем формулы B6.16):
дР4 , дР4
дрп др'п
Полагая Н' = 0 и заменяя в гамильтониане Н координаты производны-
производными хп = —dF/dpn, получим уравнение
dF dF \ dF
- д—, ..., -тг—, pi, ..., pe, t + ^т = 0, B7.38)
где pnj t — независимые переменные. Уравнение B7.38) называют урав-
уравнением Гамидьтона-Якоби в р-представлении [6]. Например, уравне-
уравнение B7.38) для задачи Кеплера имеет вид
+ =0
2т \dFjd^\ dt
Если в полном интеграле уравнения B7.38) F = F(p, с, t) мы отожде-
отождествим произвольные постоянные с с новыми импульсами р;, то получим
производящую функцию КП F4(p, p;, t).
27.10. Элементы гамильтоновой оптики. Если ограничиться пробле-
проблемой определения траектории, то можно использовать для этой цели укоро-
укороченное действие. Пусть гамильтониан не зависит явно от времени. Тогда
полный интеграл уравнения Гамильтона-Якоби следует искать в виде
S = -Et + W(x).
Функция W удовлетворяет уравнению
Я(х, р = dW) -E = 0. B7.39)
Перейдем к представлению, определяющему уравнение траектории в
параметрической форме хп = fn(u)? где и — параметр. С этой целью
по методу Фока [193] введем параметр и и заменим уравнение B7.39)
уравнением
dW
А(х)—+Я(х, р)^Е = 0,
дч
где А(х) — произвольная функция координат, р = dW/d^. Запишем это
уравнение в стандартной форме с новым гамильтонианом /г(х, р):
dW 1
— + Л(х, р) = 0, Л(х, р) = ^—у(Н(х, р) ^ Е). B7.40)
296 Глава VI. Канонические уравнения
Полный интеграл Ш(ж) = F(x, х;, и) должен удовлетворять усло-
условию dF/du = 0 или ft(x, р) = 0. Уравнение траектории в параметри-
параметрической форме определяется соотношениями
OF , dF
123
Характеристическая система имеет гамильтонову форму:
ахп г , иРп г , 1
—— = Жп, Л, —— = рп, ft .
du du
Очевидно, первый интеграл системы ft(x, р) = С. Система канонических
уравнений должна быть эквивалентна уравнению B7.39) на поверхнос-
поверхности ft (х, р) = 0. Для этого достаточно, чтобы начальные условия хпо =
= хп(щ), рпо = рп(щ) удовлетворяли алгебраическому уравне-
уравнению ft(x0, ро) = 0.
Пусть Я(х, р) = p2/2w + U(x).
1. Полагая А = 1, получим гамильтониан
Каноническая система
dxn dpn dU
, Pfl 1 , гч
аи аи дхп
совпадает со стандартной системой; параметр и играет роль времени.
2. Полагая А = п(х)/ш, п(х) = [2m(?J — С/)]1/2, получим гамильто-
гамильтониан
Каноническая система
dxn _ р^ Фп _ 1 /р^ Л J3n^ B14П
du п du 2 \п2 J дхп
имеет первый интеграл р2 = п2. Следовательно, dpn/du = дп/дхПу
\dx/du\ = 1, т.е. du = ds — элемент дуги траектории. Уравнения вто-
второго порядка
d dx. дп
ds ds дж.
совпадают с уравнениями лучевой оптики, где п(х) — коэффициент пре-
преломления изотропной прозрачной среды [152]. Впервые на аналогию клас-
классической механики и оптики указал в 1828 г. Гамильтон.
Лекция 28. Каноническая теория возмущений 297
Единичный вектор ei = dx/ds, касательный к траектории луча, связан
с радиусом кривизны R соотношением Rdei/ds = в2. Вычисляя скобки
Пуассона:
delk I <9n
[efe, h\ = — {okm -
n
ds n oxs
получим
(n/RJ = (VnJ - (eiVnJ = [d-K/ds x VnJ.
Третий орт трехгранника Френе ез = ei x в2. Кручение луча ж опреде-
определяется соотношением ^ = ^de^/ds.
Отметим, что уравнения Максвелла не содержат коэффициентов пре-
преломления. Отклик среды на электромагнитное поле учитывается введением
тензоров диэлектрической и магнитной проницаемостей. Однако, если ис-
искать решение уравнений Максвелла в весьма грубом приближении геомет-
геометрической оптики, то два коэффициента преломления появляются благода-
благодаря условию существования нетривиального решения системы однородных
уравнений. В изотропной однородной среде коэффициенты преломления
волн двух различных поляризаций совпадают. В этом случае решение урав-
уравнений Максвелла имеет вид (в СИ)
Е = e2a(x)cos^, H = ^—^-, ф(х, t) = -ut + —
LJfl С
где Е, Н — напряженности электрического и магнитного полей, ш — ча-
частота волны, к = Уф = (о;/с)р — волновой вектор, //о — магнитная
постоянная. В оптике функцию ф называют эйконалом. Амплитуда а(х) и
фаза ф удовлетворяют уравнениям, аналогичным B7.31), B7.32):
(VWf = n2(x), div(a2VW0 = 0.
Вектор Пойнтинга S = [ЕН] определяет интенсивность волны вдоль
луча J(x) = свопа2. Поскольку S = a2p/c/io = J(x)ei, то интенсивность
можно найти из уравнения div (Jei) = 0.
Семейства лучей и фронты. В классической механике еще можно гово-
говорить о луче как о траектории частицы, однако в оптике лучи представляют
собой математический объект—семейство кривых, ортогональных к фрон-
фронту волны W(x, s) = const.
3. Отметим, что полагая в B7.40) Л = п2/т, получим гамильтони-
гамильтониан h = р2 /2п2 — 1/2. В этом случае параметр и равен значению эйконала
на траектории луча.
Лекция 28. Каноническая теория возмущений
28.1. Построение формальных рядов. Большинство задач матема-
математической и теоретической физики не поддаются точному решению. По-
Поэтому в реальной ситуации для интегрирования системы дифференци-
дифференциальных уравнений приходится использовать приближенные аналитические
298 Глава VI. Канонические уравнения
или численные методы. Используем один из них — теорию возмущений
для решения системы 2 s уравнений:
zfl = [zll,H(z,t)], fi = l,...,2a. B8.1)
Фундаментальные скобки Пуассона [z^, zv\ = ш^.
Представим H(z, i) в таком виде Н = Hq + h, чтобы уравнения
ztA = [ztA,H0(z,t)] B8.2)
имели точное решение z^ = zfl(z!, t). Координаты z'^ удовлетворяют
системе B6.5):
zl = [*;, H\z\ t)} B8.3)
с гамильтонианом H'{z\ i) = h(z(ztJ t), t). Решение этой системы z1^ =
= 2^(ti, i) является КП z^ ^ u^ = z'^{t®) к постоянным координатам и
новому гамильтониану, равному нулю.
Наша задача — получить решение B8.3) в форме итерационного про-
процесса, обобщающего в гамильтоновом формализме метод последователь-
последовательных приближений Пикара [67]. Предварительно докажем лемму.
Лемма. Пусть ip(h) = f(z'(ti), t)—функция класса С1 на выпук-
выпуклом множестве М. Тогда
f(z', t) = /D, t) + jdti [/D, t), H\z[, h)]z[, B8.4)
to
где введено обозначение z1lia = z'^ta), z^ = z'^{t).
Доказательство. Очевидно,что в силу системы B8.3)
Теперь из тождества
t
(f(t) — <p(to) =
to
следует соотношение B8.4).
следует соотношение B8.4).
Перейдем к решению уравнения B8.3). Полагая в B8.4) f(z', t) =
= zfp(t), получим нелинейное интегральное уравнение Вольтерры [48]:
dh [z'^h), H'(z'(h), h)l'(tl), B8.5)
to
Лекция 28. Каноническая теория возмущений 299
эквивалентное B8.3). Построим далее систему уравнений для функ-
функций гм(п)(?п; tu ..., in):
где первый аргумент отражает неявную зависимость z llia = z ^(ta), а по-
последующие — явную зависимость гамильтонианов от времени. Учитывая
B8.4), получим цепочку уравнений:
to
to
Следовательно,
t ti
Г f
J dh\'
to
t
to t0
Мы имеем формальное решение уравнения B8.3). Скобки Пуассона
вычисляются по переменным z'^to), взятым в момент времени to.
Найдем теперь аналогичную форму для решения исходного уравне-
уравнения B8.1). Полагая в B8.4) f{z\ i) = z(z', t), получим уравнение
t
z^z', t) = z^{zl i) + J dh [z^zb t), h(z(z[, ti), ti)]z/,
300 Глава VI. Канонические уравнения
эквивалентное уравнению
Построим далее уравнения для функций Дм(п)(^п, t; ti, ..., tn):
йдB)(*2, *; *ь t2) = [[%D, *), МФ2, *i), h)]h{z{z'2, t2), t2)]
Учитывая B8.4), получим цепочку уравнений:
', t) = z^{z'o, t) +
to
to
Следовательно, решение B8.1) представляет собой ряд
t
z^ = ziJi(zо, i) + dt\ [z^(zо, i),h(z(zq, ii), ti)]^/ +
J °
to
t ti
to to
Введем в целях компактной записи обозначения гм = %(^о, t), z^a =
= 2:^B:0, ta), z'^o =z^(to). Тогда решение B8.6) уравнения B8.1) мож-
можно представить в виде
tn-l
n=Oio to t0
B8.7)
причем СП вычисляются по переменным z '0.
Подынтегральное выражение удобно записать в операторной форме:
tn-l
Г Г ^v ^v ^
\ dt2 • • • dtn h(tn)h(tn-i)... ^(ti)^, B8.8)
п=Ой to t0
T/, ч dh(za, tg) д
ri(ta) = ^ав ^^ ТП—'
Лекция 28. Каноническая теория возмущений
301
Область интегрирования в B8.8) ограничена условиями to ^ t\ ^ i,
ta ^ ia-i {& ^ п). Это ограничение можно устранить введением хро-
хронологического оператора Дайсона Р, который, действуя на произведение
операторов, располагает их в хронологическом порядке:
Ph(h)h(t2). ..h(tn) = h(
Тогда B8.8) можно преобразовать к виду
со
п=0
t t t
^ \dh I dt2 .. Л din Ph(h)h(t2).. .Н{Ьп)г^ B8.9)
to
to
to
z^ = Pexp dth(t) Zfj,.
Отметим, что впервые хронологический оператор ввел выдающийся ита-
итальянский математик В. Вольтерра [79].
Покажем эквивалентность форм B8.8) и B8.9) для члена ряда с ин-
индексом п = 2. Рассмотрим интеграл
J=
= г1 J
to t0
t tl
t = t7
di2
= \dt1\ dt2h(t2)h(ti)-
to to
t t
¦J*J
to ti
dt2h(t1)h(t2).
Рис. 28Л
Область интегрирования изображена на рис. 28.1
в виде квадрата. Первый повторный интеграл J\
в правой части можно рассматривать как двойной интеграл по заштрихо-
заштрихованной области, в то время как область интегрирования во втором интегра-
интеграле J2 — незаштрихованный треугольник. Изменим во втором интеграле J2
порядок интегрирования, а затем произведем замену t\ о t2. Имеем
t t2
Г
J2 = \dt2
to to
dt2h(t2)h(t!) = Jb
to to
Произвольная динамическая величина F = F(z, t) удовлетворяет в
силу системы B8.1) уравнению
dF _ OF
"Ж ^ Ik
[F, Я].
302 Глава VI. Канонические уравнения
Решение этого уравнения также может быть представлено в одной из форм
B8.7), B8.8) или B8.9), например,
оо l fl
F = /С [ dtl [ dh " ¦"
tn-l
¦¦¦ I dtn[...[F(z,t),h(z1,t1)]h(z2,t2)]...]h(zn,tn)]. B8.10)
to
28.2. Структура ряда теории возмущений. При вычислении второго
члена рядов B8.7) или B8.10) возникают СП вида
[A(za, ta), В(гЬ, tb)] = — [z a, Zvb] —,
которые можно представить в терминах запаздывающих функций Грина:
Gap(iaj h; zf0) = —6(ta - tb)[zaaj zpb]z'o, B8.11)
где %(ta) = z^a. При вычислении высших приближений возникают мно-
многовременные функции Грина, которые представляют суперпозицию муль-
тискобок Пуассона.
Заметим, что в качестве гамильтониана нулевого приближения можно
взять Н® = 0. Если гамильтониан Н не зависит от времени, то в этом
случае решение B8.7) уравнения B8.1) приобретает форму ряда Тейлора
(to = 0):
^ = 4о + Ко, H(z'0)]t + [[^0, H(z'o)]H(z'o)] Ц + ... B8.12)
Пример 28.1. Найдем приближенное решение уравнения
дио(х) ^. ч „, ч dU(x, t)
тх = ^ + Q(x, t), Q(x, t) = ^^,
порождаемого гамильтонианом
Представим Н в виде Н = Hq + /г,
= U(x,t),
и предположим, что известно решение уравнений B8.2): х = х(х\ р', t),
р = р(ж;, р', t). Полагаяв B8.7) z^ = ху z^ = х = x(x'0J pr0, t), получим
Лекция 28. Каноническая теория возмущений 303
х = Ж(о) + жA) + жB) + • • • 5 гДе х(о) — # — решение невозмугценного
уравнения,
to
Согласно B8.11)
/ / ч л/. . ч (
G(t, h; xo,po) = -e(t-h)
" 1J \дх'о дР'о дР'о дх'о
следовательно, решение
to
Нетрудно показать, что функции ?i(?) = дх/дх'о, ^(t) — дх/др'о явля-
являются линейно независимыми решениями уравнения
а функция Грина — решением уравнения
Пример 28.2. Найдем решение уравнений, порождаемых гамильто-
гамильтонианом Н=рх2. Каноническая система B8.1) имеет вид
х = ж2, р=—2рх. (/)
Положим в B8.12) z^ = ж, z'm =x'o и учтем значения СП:
Гт иг2-| _ 2 Г 2 21 — 2? -г3 [2' Т3 ПГ21 - ^!т4
В результате имеем
гр г»1 _|_ rn /2f i т* /3f2 4» /¦ 9Л
Положим теперь z^ = р, z ^0 = р q и вычислим СП
Следовательно, р = РоA — XgtJ. Ряд B) сходится в области \x'ot\ <
< 1 и представляет собой функцию x(t) = х'0A — ж^), являющуюся
точным решением первого уравнения (/). Точка t = 1/х'о, зависящая от
начальных условий, называется подвижной особенностью.
304 Глава VI. Канонические уравнения
28.3. Условии существования решения. Скорость сходимости ря-
ряда B8.7) существенно зависит от выбора гамильтониана нулевого прибли™
жения Но. Иногда ряд удается суммировать, т.е. представить в терминах
известных функций. В некоторых случаях ряд оказывается асимптотиче-
асимптотическим. Для суммирования таких рядов можно использовать методы Паде и
Бореля, которые позволяют восстановить решение B8.1) в определенном
интервале t по нескольким первым членам и асимптотике при п —>¦ оо
[162, 199].
Теоремы существования и единственности позволяют исследовать гло-
глобальное и локальное поведение решения B8.7) уравнения B8.1). Осо™
бый интерес представляют решения, определенные в конечной области
ж-пространства [86], и исследование поведения в окрестности сингулярно-
стей решения и особых точек правой части B8.1).
При доказательстве теорем существования используют принцип сжа-
сжатых отображений для исследования сходимости ряда по норме [48] и его
модификации — метод мажорантных рядов Коши [146] или метод аппрок-
аппроксимирующих гамильтонианов [200]. Сущность этих методов состоит в том,
что удается получить решение в конечном виде, мажорирующее ряд B8.7).
Выбор мажоранты определяется конкретными особенностями гамильто-
гамильтониана.
28.4. Интегрирование уравнений движении. Обычно решение инте-
интегрируемых систем в квадратурах позволяет найти неявную зависимость
координат от времени. Для получения явной зависимости координат от
времени необходимо использовать приближенные методы.
Рассмотрим задачу Кеплера. Ее решение F.13)—F.15) представлено в
параметрической форме. Найдем r(t), используя каноническую теорию
возмущений.
Гамильтониан задачи Кеплера
я(х, р) = |^ + иМ> ^(х) = > r = W-
1. Выберем гамильтониан нулевого приближения Но = 0. Вычис-
Вычисляя СП
[Xfl, Н] = -^, \р^ Н] = ^^— = ^а -f,
т дх^ г6
Ш 1 = d2U р^ а
дх^ \ дхдх
и полагая в B8.12) z^ = жм, z1^ = {x'n1 р'п), получим
', B8.13)
Лекция 28. Каноническая теория возмущений 305
г' = |х'|э u\{t) 1x2(t) — два линейно независимые решения уравнений
движения тх^ = ^аж^/|х|3:
.. ,* 1 a t2 За х'р' t3 ,
, ч 1 at2
u2(t) = — t = — + ...
v ; m m2r/3 3!
Ряды, представляющие решение, быстро сходятся и могут быть исполь-
использованы при определении элементов орбит космических аппаратов [30].
2. Выберем гамильтониан Яо = р2/2т. Тогда % = х'^ + (pf^/m)t,
р^ = р'у. Гамильтониан i?;(x, 'p', t) = —а/\ж' + р'^/ш)!. Полагая
в B8.7) z^ = ж^, z^ = % = ж^о +p^o(*/w)? получим
Поскольку [жм, Xjji] = ^т x(t — t^S^, то
, , Z . t — ti j
т — t* 4-T) —- — rv /¦
m j
777/ X + P 61 /771
Свобода в выборе гамильтониана нулевого приближения открывает ши-
широкие возможности построения приближенных решений, отличающихся
различной скоростью сходимости.
28.5. Реакция системы на внешнее возмущение. Рассмотрим сис-
систему, состояние которой определяется фазовыми координатами z^ =
= (#i, pi,..., хп, рп). Конкретно термин «система» может относиться
к заряженным или нейтральным частицам, электрическим цепям, попу-
популяциям бактерий и т.д. Полный гамильтониан, описывающий систему N
частиц и ее взаимодействие с внешним полем,
H(z,t)=H0(z)+H1(z,t), H1=Bp(z)Ep(t). B8.15)
Предположим, что известно решение уравнений движения z^ = %(V, t),
порождаемых гамильтонианом Hq(z). Эволюция штрихованных перемен-
переменных обусловлена гамильтонианом Hi(z(z'', t), t): z' = zr(z'o, t). Общее
306 Глава VI. Канонические уравнения
решение представим в виде КП z(t) = At-toz'o, где At-t0 — оператор эво-
эволюции.
Предположим, что при to —» — оо возмущение отсутствует. Это пред-
предположение известно как адиабатическая гипотеза. Для его реализации га-
гамильтониан взаимодействия умножают на множитель вида ехр(—г|?|M а
затем после всех вычислений берется предел е ->• 0.
Неполнота начальных данных заставляет вводить статистическое опи-
описание. Система описывается совокупностью точек фазового пространства
z^0 — чистых состояний, каждое из которых характеризуется статистиче-
статистическим весом. Пусть начальные состояния распределены с плотностью веро-
вероятности Do(zfo) = D(z'o, t0). Распределение состояний системы в момент
времени t определяется плотностью вероятности [201, 202]
- злг
D(z, t) = dT(z'0)D(zi to)S[z - At-toz'o], dV{z) = Д dxk dpk.
B8.16)
Производя замену переменных z'o = Ato-tu, получим
D(z, t) = \dV{u)D{At^tu, io)S(z -u) = Ato-tD(z, t0).
Отсюда следует, что функция D(z, t) подчиняется уравнению Лиувилля:
— + [D,H]=0. B8.17)
Величина D(z, t)dT(z) представляет собой вероятность того, что в
момент времени t система находится в состоянии, в котором фазовые
координаты частицы а (а = 1, ..., N) лежат в бесконечно малом объ-
объеме diLadpa в окрестности точки (ха5 ра). Очевидно, J dT(z)D(zJ t) =
= 1. Среднее значение микроскопической динамической переменной F(z)
определяется выражением [203-205]
t), B8.18)
tjiqD{z1 t) — решение задачи Коши для уравнения B8.17). Подставляя
B8.16) в B8.18), получим эквивалентное представление среднего значе-
значения, в котором зависимость от времени перенесена на усредняемую вели-
величину:
(F) =jdr(z)F(z)jdr(z'0)D0(z'0)S(z - z(t)) = jdr(z'o)F(z(t))Do(z'o),
B8.19)
Лекция 28. Каноническая теория возмущений 307
где z(t) = z(z!(zfOi t), t). С нашей точки зрения это представление дает
большие преимущества, поскольку для вычисления F(z(t)) можно непо-
непосредственно использовать каноническую теорию возмущений B8.10) или
непертурбативный подход, основанный на методе усреднения.
Полагая в B8.10) h = Hi , F = Fa, найдем согласно B8.19)
B8.20)
Здесь Gap(t ~~ tf) — запаздывающая двухвременная функция Грина:
Ga0(t - t1) = -6{t - t')([Fa(z(z'o, *)), B0(z(z'o, t'))]z,o)o,
зависящая вследствие усреднения с равновесной функцией Dq(z!0) только
от разности t — f. Соотношение B8.20) для линейной реакции системы
называется формулой Кубо [204].
28.6. Спонтанное и индуцированное излучение классических си-
систем. Из решения уравнений Максвелла с заданной плотностью тока мож-
можно найти напряженности полей, создаваемых заряженными частицами, и
интенсивность спонтанного (от лат. sponianeus — самопроизвольный)
излучения электромагнитных волн. Для того чтобы учесть эффекты вза-
взаимодействия частиц с полем, и найти, в частности, интенсивность инду-
индуцированного излучения, необходимо рассматривать частицы и электромаг-
электромагнитное поле как единую систему.
В регулярной электродинамической структуре, стенки которой совпа-
совпадают с поверхностями криволинейной ортогональной системы координат,
можно возбудить счетное число собственных волн, отличающихся про-
пространственной конфигурацией электромагнитного поля и собственными
частотами [94, 180]. Различные типы волн называют модами. Потенциалы
поля излучения cp(t, x) = Ao(t, x), A(t,x) можно представить в терминах
однокомпонентных потенциалов Герца W^ и W^m\ описывающих два
типа волн [6]:
A0(t, х) = div W<e\ A(t, x) = —^— + ro
Потенциалы Герца удовлетворяют однородным волновым уравнениям, ко-
которые следуют из уравнений Максвелла в отсутствии токов, и граничным
условиям.
Эволюция системы частицьшоле определяется решением самосогла-
самосогласованных уравнений движения и уравнений Максвелла. Если разложить
потенциалы по собственным функциям однородных уравнений, то гамиль-
гамильтониан системы можно представить в виде суммы гамильтонианов час-
частиц Hv, поля Hf и взаимодействия частиц с полем Hjnt:
308
Глава VI. Канонические уравнения
Гамильтониан электромагнитного поля
(п)
Здесь q — совокупность канонических координат частиц, ап — коэффи»
циенты разложения потенциалов по собственным функциям, п — набор
собственных чисел. Переменные а^, га\ играют роль канонических, коор-
координат и импульсов, фундаментальные СП [аш, ш*] = Smn. Каноническое
преобразование а^, а% -» с^5 с|: а^ = с*; exp (—го;*^), порождаемое про™
изводящей функцией
гс*, t) =i
исключает Щ из полного гамильтониана. Новый гамильтониан
Н = Hp(q)
, ск ехр (-г
| exp
Отметим, что в квантовой электродинамике координате а соответствует опе-
оператор уничтожения фотона, координате а* — оператор рождения фотона.
Подставляя в B8.10) Н и любую динамическую переменную F, по-
получим решение канонических уравнений в виде
ряда. Отметим, что гамильтониан Н не опи-
описывает непосредственно кулоновское взаимо-
взаимодействие. Однако ряд теории возмущений со-
содержит члены ~ е2, е4, ..., соответствующие
кулоновскому взаимодействию во всех поряд-
порядках по е2 — как и в квантовой электродинамике
взаимодействие частиц реализуется «виртуаль-
«виртуальным» электромагнитным полем.
При взаимодействии частицы с полем резо-
резонатора возможен© индуцированное поглощение
или излучение, которое принципиально отлича-
отличается от спонтанного излучения — направление
распространения, поляризация, частота и фаза излучаемой волны полно-
полностью тождественны характеристикам волны резонатора.
Для генерации вынужденного высокочастотного излучения используют
пучок электронов, движущийся в резонаторе во внешнем электромагнит-
электромагнитном поле.
Найдем мощность излучения электронов в модифицированной ловушке
Пеннинга (рис. 26.1), в которой поверхность бокового электрода гофриро-
гофрирована (от фр. gaufrer — складчатая поверхность) и разделяет р пар ре-
резонаторов. Сечение поверхности в виде гофры изображено на рис. 28.2.
В этой периодической структуре могут распространяться медленные вол™
ны, эффективно взаимодействующие с электронами.
Рис. 28.2
Лекция 28. Каноническая теория возмущений 309
Рассмотрим излучение «магнитной» волны, длина которой Л значи-
значительно больше расстояния между резонаторами. В этом случае потенциал
удовлетворяет уравнению Лапласа. В цилиндрических координатах г, f9, z
потенциал Герца W^ = @, 0, W), скалярый и векторный потенциалы
Ao(t,r,e,z) = 0, Ar = -r^, Ae = -^, A2 = 0.
В резонаторах образуются стоячие волны. В одномодовом приближении
частное решение волнового уравнения в области 0 ^ г ^ R представля-
представляет собой медленную стоячую волну частотой oj, поджатую к поверхнос-
поверхности г = R:
W - Re[/ exp (-iut)], / = (R/p) (r/Rf sin (рв) sin [(тг/2Д) (z + R)].
Здесь опущен множитель, учитывающий угловые размеры резонаторов.
Ограничимся рассмотрением случая плоского движения электронов в
области \z\<€.R, полагая / = (R/p)(r/R)p sin рв. Далее удобно перейти
к декартовым компонентам
Ах = Ar cos в — Aq sin в, Ау = Ar sin в + Aq cos в
и представить вектор-потенциал в виде
Ax(t, r, в) = Bтгс2/иУI/2[сА^(г, в) ехр(-го;*) + к.с], B8.21)
Ay(t, г, в) = Bтгс2/ш?I/2[сА(ут\г, в) ехр(-го;*) + к.с],
А^) = (r/R)*-1 sin [(p - 1) 61], Af) = -{r/Ry-1 sin [(p - 1) в].
B8.22)
Постоянная F, представляющая собой эффективный объем резонатора,
определяется из условия
8тг
=исс
Угловые скобки обозначают усреднение по времени; область интегрирова-
интегрирования ограничена рабочим объемом резонатора.
Энергия электромагнитного поля
Ро = (^с*с. B8.23)
Переменные с, гс* играют роль канонических координат и импульсов,
фундаментальные СП [с, ic*] = 1.
Гамильтониан, описывающий эволюцию системы N электронов и поля,
N 1 2
310 Глава VI. Канонические уравнения
Здесь c^ext(x), Aext(x) — потенциалы статического поля ловушки, которые
с достаточной точностью совпадают с приведенными в п. 26.4 лекции 26.
Потенциалы поля излучения будем искать в виде B8.21), предполагая,
что коэффициенты с, с* зависят от времени.
Найдем приращение энергии поля Р® в рамках канонической теории
возмущений. Для этого представим гамильтониан Н в виде Н = Н® + h,
N I
— [Ра + e0Aext(xa)]2 -
o=l
h = E 7vaA(t, xa)
xa
7 ^ a),
a=l
mva = pa + eoAext(xa). Решение уравнений, порождаемых гамильтониа-
гамильтонианом #о, представляет собой КП х = х(?, х';р'), р = p(i, х;, р;), ко™
торое позволяет исключить вклад Н® в полный гамильтониан Н.
В результате КП B6.24) х, р —»¦ х;, р; —>• ^п, /п новый гамильтони-
гамильтониан h;(t, с, с*, (рп, 1п) представляет собой функцию h, в которой следует
произвести замену переменных. Эволюция полевых и штрихованных пере-
переменных определяется гамильтонианом
2тг \ 1/2 N
— ) (сМ* ехр (-го;*)+к.с), М* = ]Г vaA^(ra, 6a).
Энергия поля излучения. Полагая в B8.10) F = Pq, h = hr и ограни-
ограничиваясь величинами ^ е§, получим
AF0= [rfti[F0, ^;(ti)]+ fdti [dt2[[F0^/(*i)]^/fe)] + ... , B8.24)
to to
[Po,h'(ti)] = -icj^M(ti)c*exp(icc;ti) + к.с,
[Po, h'(t1)]h'(t2)]=L>k2{M(t1)M*(t2) -
, M*(t2)]cc*} exp(iw(ti -t2)) +K.c,
где к = eo(z
Можно устранить ограничение области интегрирования, используя со-
соотношения
t t\ it
T [t2) +K.C.) = aii dt2 ReT(ti)T (t2), B8.25)
to to to to
Лекция 28. Каноническая теория возмущений 311
t t
dt2([T(t1),T*(t2)]-YL.c.)=i\dt1 \dt2lm[T(t1),T*(t2)].
to to to to
Отметим, что СП вычисляются по значениям переменных при t = to.
Для сопоставления с экпериментальными данными необходимо усреднить
B8.24) по начальному распределению электронов и возможным реализации
ям поля излучения B8.21). В результате усреднения приращение энергии
поля B8.24) приобретает вид
<ДРо> = -^ dh dt2{Re(M(ti)M*(t2)>exp(ia;(ti - t2))
), M*(*2)]cc*> exp (i u(h - t2))}.
Поскольку результат усреднения квадратичных величин зависит только от
разности координат t\ —t^ можно ввести двухвременные функции Грина:
Gi(h - t2) = -в (h - t2)( [M(h), M*(*2)]>,
B8.26)
Gs(h-h)=e(h-t2)(M{t1)M*(h)).
Статистические свойства электромагнитного поля резонатора характеризу-
характеризуются корреляционной функцией J(u) = (ее*) [208].
Переходя к переменным t\^ = t ± т/2, получим среднюю мощность
излучения в виде
Ь ^А M}, B8.27)
B8.28)
Величина е —»¦ 0 введена для того, чтобы согласно A8.7) полюсы g^s(uj)
соответствовали запаздывающей функции Грина. Первое слагаемое
в B8.27) — мощность спонтанного излучения, второе — мощность вы-
вынужденного излучения или поглощения.
Вычислим теперь фурье-образы B8.28) функций Gs(r) и Gi(r)
в B8.27). Предварительно отметим, что согласно B8.22)
р-1
R
i .•„.IP
= Re (x + гу){А^ - гА^) = Re (х + iy)
312 Глава VI. Канонические уравнения
Для упрощения счета зададим начальные условия, при которых /2 ^> h.
Тогда, подставляя х и у из B6.4), получим
+ T22 exp (—isuj22t + «57122^2)],
2, Г22 = o;2/f/2, Г21 = и^1)/2 fj2
UJ22 = ( )
Здесь коэффициенты П22 = F, ^21 = (р—1)9 пц = 1; индекс s принимает
значения =Ы.
Среднее по фазам произведения в B8.26)
М*(^)) = NC2
Согласно определению СП
[А, В\ = -— А —— - —— А -
d(fa \ dlaj dla V dip
Учитывая периодичность А и В по угловым переменным, имеем [206]
"->-»- aia \"W
Следовательно, среднее по фазам СП
M*(t2)]> = -iNC2 ?Я (nlk ^- -
Используя фурье-представление 6^-функции:
= I dtS(t)e?t = — \ du 6
— ги т
2тг J u + ie
— оо —ex)
из B8.26), B8.28) получим
l2k
+ it
Лекция 28. Каноническая теория возмущений 313
После вычисления суммы по индексу s имеем
» = -2NC2 co2k (nlk— - n2k — ) T2k[(co2 - co2k)
B8.29)
g,(w) = 2iNC2ujT2k[{uj2 - oj2k) +2ieoj}-1.
Для того, чтобы учесть эффекты, обусловленные столкновениями электро-
электронов с молекулами воздуха в резонаторе, необходимо усреднять B8.26) с
функцией распределения по «времени жизни» электрона. Эта операция со-
соответствует замене е конечной величиной j/2, где j^1—среднее время
жизни электрона. В результате получим необходимые для вычисления мощ-
мощности излучения B8.26) соотношения:
Im[(u2 -Ljl^+ijou}^1 = (^juj)I(uj2 ~~ uj22kf + G ujfY1, B8.30)
Re i[(u2 - ш2к) + t т^Г1 = G^)[(^2 - <4kJ
Теперь, подставляя B8.29) в B8.27), окончательно получим мощность
спонтанного излучения:
и вынужденного излучения:
J(W) im &И cV
П1кЖ + П2к щ) T2k[{uj2 - U2kJ + ^и^~1- B831)
Мы приходим к выводу, что в резонаторе реализуется мазерный эф-
эффект— возникает индуцированное излучение на частоте U22 =Р^2, мощ-
мощность которого
at jmVA \R J
A2 = B/2/171 АI/2. Излучение частотой U2i = (p — 1) 0J2 + cji поглоща-
поглощается при условии (р - lJh > h- В случае гладкого резонатора (р = 1)
вынужденное излучение на частоте Ш2 рассмотрено в рамках классической
и квантовой теорий [209-211].
Отметим, что при условии 1\ ^> 1% возникает индуцированное излуче-
излучение на частоте uj\2 = (р — 1) ш± + Ш2 ^> Ш2.
314 Глава VI. Канонические уравнения
Подставляя F = xa(t), ya(t) (a = 1, 2, ... N) из B6.24) в B8.10),
получим решение уравнений движения в виде ряда, содержащего вклады
кулоновского взаимодействия электронов пучка и взаимодействия электро-
электронов с полем резонатора.
Лекция 29. Метод усреднения канонических систем
29.1. Секулирные члены. Каноническая теория возмущений позволя-
позволяет получить решение уравнений Гамильтона для тех значений t, которые
лежат в области г сходимости ряда B8.7). Однако в реальной ситуа-
ситуации приходится ограничиваться вычислением конечного числа членов ряда.
Обрывая процесс последовательных приближений, мы получим решение,
область применимости которого ограничена отрезком, меньшим т. Пред-
Представить решение для всех t Е г конечным числом слагаемых не удается.
Рассмотрим уравнение Дуффинга:
х3
х + и2ох = еи2о—, е«1, B9.1)
эквивалентное канонической системе с гамильтонианом Н = Hq + h,
Решение уравнения B9.1) выражается в терминах эллиптических функ-
функций. В случае И(ж, р) = Е, Е < 3cjq/2?, x(t)—периодическая функция
с периодом Т:
x(t) =
4 /и2
2\
)¦
/ - Щ
о
cn(
2 —
1
2
+
a),
,/-
2eE
где К — полный эллиптический интеграл. Если е <С 1, то частота колеба-
колебаний и = 2тг/Т ~ иоA - sE/^ujI + ...).
Пусть Е^Ъш^/2е. Найдем решение B9.1), используя каноническую
теорию возмущений. Нормализующее КП
х = \1 cos (ouot +
V
приводит гамильтониан к виду Н'{х!', р\ i) = (—eujq/4\)x4:(x'j pr, t). По-
Полагая в B8.7) z^ = х, получим решение уравнения B9.1):
— жС^ + dh \x(t) x(U )) + Г29 2)
0
Лекция 29. Метод усреднения канонических систем 315
где x(t) = лДЩ> cos(w0i + <р), I = р'@), <fi = х'@), [x(t), x(ti)] =
= (—l/ojo)smuo(t — ti). Вычисляя интеграл, получим x(t) =
+ ..., х{0} =x(t),
,, ? /2/\3/2 г , s 3
{t) = ^4! Wo) \-Ы Ы + V) + 2 C°S
- - COS
) •
Мы видим, что в решении появляется слагаемое t sin(o;o^+^M называемое
секулярным членом. Очевидно, \х^/х^\ ~ sit ^> 1 при ujot ^> 1.
Возникновение секулярного члена обусловлено следующей причиной.
Каноническая теория возмущений является гамильтоновой формой мето-
метода последовательных приближений Пикара [6, 120]. Представим реше-
оо
ние B9.1) в виде х = J2 x(n)(t), где Ж(п) ~ г11. Функция хщ удо™
п=0
влетворяет уравнению гармонического осциллятора:
— )
3/2
[3
правая часть которого играет роль вынуждающей силы. Наличие резонанс-
резонансного слагаемого с частотой и® приводит к линейному росту «амплиту-
«амплитуды» колебаний. Если в B9.2) ограничиться конечным числом членов, то
область применимости полученного решения uj®i < 1. Однако, несмотря
на то что в высших приближениях возникают слагаемые ~ ?п, ряд B9.2)
сходится для произвольных значений t. Еще в 1882 г. Линдстедт заметил,
что при uj®t <C 1 решение можно представить в виде
-ш(-) (! + •••) cos 3
192 \u>oj
и аналитически продолжить в область uot >> 1. Поэтому, суммируя в B9.2)
подпоследовательности, содержащие секулярные члены, можно получить
равномерно пригодное решение. Того же результата проще достичь, ис-
используя метод усреднения гамильтоновых систем.
29.2. Методы усреднения гамильтоновых систем. Основой метода
является КП к переменным, эволюция которых определяется интервалом
времени, существенно превышающим характерный период движения не-
невозмущенной системы. Они получили название медленных переменных.
Во многих модификациях метода усреднение понимается как процедура
исключения из гамильтониана быстроесциллирующих слагаемых. Новый
316 Глава VI. Канонические уравнения
гамильтониан содержит медленные переменные и порождает интегрируе-
интегрируемую систему. Первый вариант метода усреднения гамильтоновых систем
был развит Пуанкаре A886) и Цейпелем A916). Основная трудность мето-
метода — отсутствие алгоритма построения замены переменных — связана с
использованием производящих функций, зависящих от старых и новых ко-
координат. Эта проблема была решена Хори A966) введением канонических
преобразований, порождаемых производящими функциями Ли. Изложе-
Изложение методов усреднения гамильтоновых систем содержится в работах [109,
127, 128, 172, 173, 212]. В рассматриваемом здесь подходе вначале стро-
ится почти тождественное КП, порождаемое фиктивным гамильтонианом,
роль которого аналогична генератору Ли. Затем одновременно выделяются
преобразования к медленным переменным и гамильтониан, определяющий
эволюцию медленных переменных.
29.3. Каноническое преобразование к медленным переменным.
Рассмотрим каноническую систему
iM = [Zll, H(z, t)], ц = 1,...,2з, B9.3)
с гамильтонианом H(z, t) = Hq(z) + AH(z, t). Каноническое преобразо-
преобразование z = z{z\ i), порождаемое решением системы
iM = [z», H0(z)}, B9.4)
позволяет исключить Hq(z) из полного гамильтониана H(z, i). Эволюция
штрихованных переменных определяется каноническими уравнениями
j,1 = [zlll,eh{z',t)]. B9.5)
Новый гамильтониан e/i(z;, t) = AH(z(z', t), t), где е — неотрицатель-
неотрицательный параметр, введение которого — удобный прием, позволяющий полу-
получить КП, обладающее заданными свойствами. Наша задача — найти ре-
решение уравнений B9.5) как каноническое преобразование z' = z'{u^ t)
к новым медленным координатам иа = (д, тг) и гамильтониан еК(и^ е),
определяющий их эволюцию:
% = [%, еК(и, е)}, /i = 1, ..., 2s. B9.6)
Система B9.6) обычно существенно проще исходной, так как не содержит
явно времени.
Пусть z1 = z;(ii, t) — искомое КП. Представим его как решение систе-
системы уравнений, порождаемых неизвестной функцией eW(z', t, e)9 которая
играет роль гамильтониана:
*'» = К, eW(z', t, e)]. B9.7)
Согласно теории канонических преобразований координаты иЙ удовлетво-
удовлетворяют уравнению
и» = [и„, eR(u, t, e)], B9.8)
Лекция 29. Метод усреднения канонических систем 317
еЩи, t, e) = [eh(z', t)-eW(z', t, e)]z,=zl(u>t>e). B9.9)
Определенным выбором функции eW(zfJ t, e) можно добиться того, что-
чтобы гамильтониан eR(u, ?, e) не зависел явно от времени. Тогда мы полу-
получим замену z1 ^ и и гамильтониан eR(u, t, e) = еК(и, е).
Из условия sR{u^ e, t) = еК(и, е) следует, что функция eW(zf', ?, e)
должна содержать постоянную и переменную составляющие:
eW{z\ ?, e) = eS(z', t, e) + eC(z', e). B9.10)
Для определения функций eS и еС наложим следующие два условия.
1. Функция eS компенсирует зависящую явно от времени часть га-
гамильтониана и одновременно дает вклад в замену z' —>• и.
2. Функция еС уничтожает в замене z' —>- и постоянные слагаемые,
которые привели бы к возникновению секулярных членов, и одновремен-
одновременно дает вклад в гамильтониан еК(и, е). В этом заключается основной
принцип интегрирования методом усреднения [6].
Пусть функция f(u,t) = fo(u) + f~{u, t). Введем оператор усред-
усреднения М, действующий на функцию f(u, t) по правилу Mf(u, i) =
= fo(u). Переменную составляющую функции f(u, i) обозначим симво-
символом Vf(u, i) = f~(u, t), Vf = / — Mf. Тогда условия, определяющие
функцию eW(zf, t, e), имеют вид
VeR(u, t, e) =0, B9.11)
Mz'a(u,t,e)=0, a = l,...,2s. B9.12)
Для реализации условий B9.11), B9.12) необходимо найти решение B9.7)
и произвести замену z1 —»• и в гамильтониане eh(zf\ f) ив функции
eW(z'', ?, г), которая неизвестна и в то же время определяет искомую заме-
замену. Эта нереальная на первый взгляд задача осуществляется соотношениями
B8.7), B8.10). Предполагая, что неизвестная пока функция eW(zf', ?, е)
может быть представлена в виде ряда
оо
pWi?1 t f) — \^ pnW G1 t) G9 1l"l
П=1
получим из B8.7) решение B9.7):
оо
J (п. f с-) — \^FnZ; (q, f) BQ }d~)
00 p p pr
^=1 (n) 0 0 0
x [... [ua, Wkl (u, h)]Wk2 (щ t2)]... ]Wkp (u, tp)].
Здесь символ (п) обозначает суммирование по всем наборам неотрица-
неотрицательных целых чисел ki таких, что к\ + к^ + • • • + кр = п. Аналогичным
318 Глава VI. Канонические уравнения
образом из B8.10) получим гамильтониан B9.9) в новых переменных:
оо
eR(u, t, e) = J2?nR^(u? *)' B9.15)
п=1
tp-1
)п{щ t) = ^\dh \dt2-" I dtp[...[
p=10 0 0
oo
- I] Y,W^ f)wki(^ h)]wk2(u, h)]...]wkp(u, tp)].
(n-8) 8=1
Подставляя B9.14), B9.15) в B9.11), B9.12), получим рекуррентные
соотношения для функций M^n+i и Wn (п ^ 1), которые позволяют опре-
определить замену переменных z1 = z'(u, t, e) и гамильтониан
оо
еК(щ е) = УепКп(и)
во всех порядках.
Найдем несколько первых членов разложений B9.14) и B9.15). Пред-
Представим в соответствии с B9.10), B9.13) Wn(zf, t) в виде Wn(zf, t) =
= Sn(z', t) + On(V) и введем обозначения [123]
(гх, t) =\dtf~(u,t), f=\ dtf(u, t).
В низшем приближении ^0 = ua,
z'al =ldt[Uon W!(Ujt)l Rx =h(u,t)-W1(u,t).
Из B9.11) находим Vh{u, t) = 5Ь Д1 = Mft, а из B9.12) следует, что
Ci =0и
Щ(!х, t) = Vh{u, t), Ki(ii) = M/i(ia, t).
В следующем порядке имеем
([ua, W2(t)] + [[ua, Wi(ti)]^i(ti)]),
= [ft-wriW, ^i(t)]-w2(t).
Из B9.11) находим S2 = [i^i, W\]. Учитывая соотношение
[К, Wi]^i] = l-^-f [К, Wi]Wi] + ^ [ua[wu щ]],
Лекция 29. Метод усреднения канонических систем 319
из B9.12) получим С2 = -(l/2)M[Wb Wi]. Следовательно,
za2 = dt ([ua[Ki, Vh(uj i)}] -\-V[[ua, Vh(uj ti)]Vh(u,
Далее можно последовательно определить коэффициенты разложения z'an
и Rn в высших порядках.
Итак, решение системы B9.5) имеет вид
Г
za = ua+e\db [ua, Vh(u, t)} + ... , B9.16)
j
где медленные переменные иа удовлетворяют уравнению B9.6) с гамиль-
гамильтонианом
/ е2 г Г 1 \
еК(щ е) = МиЦи, t) + —Wh(u, t), dtVh(u, t)\ +...J. B9.17)
Замена переменных в произвольной динамической величине F(z) осуще-
осуществляется соотношением
F{z) = F(z(u, t)) + [F(z(u, t)), dtVh(u, t)} + ... B9.18)
Полагая F(z) = z^ получим решение уравнения B9.3).
Сделаем несколько замечаний.
1. Если решение уравнений B9.4) определяет финитные периодиче-
периодические движения с частотами ujk, к = 1, ..., s, то оператор усреднения М
соответствует операции выделения средних значений:
*) = ^ 1 |di' f(u, t'). B9.19)
О
2. Поскольку функция f(u,t) = eh(u, t) + ... может быть пред-
представлена s-кратным рядом Фурье, то результат вычисления B9.19) су-
существенно зависит от величины (пи) = щих + n2uj2 + • • • + nsus, где
пк = О, =Ы, ±2, ... Резонансный ((пш) = 0) и нерезонансный ((пш) ~
^ ojk, к = 1, 25 ..., s) случаи рассматриваются единым методом. При-
Приведенный алгоритм позволяет исследовать поведение системы в окрест-
окрестности резонанса, когда \(пш)\ <€.ouk, к = 1, ..., s. В этом случае следует
предварительно произвести КП z'^ = z'^z"', t), заменяющее медленную
составляющую гамильтониана eh{z\ t) постоянной величиной.
3. Анализ условий, определяющих функцию eW(zf, t)9 позволяет сде-
сделать весьма важный вывод: роль процедуры усреднения состоит только в
320 Глава VI. Канонические уравнения
том, чтобы исключить секулярные слагаемые в замене переменных z' —>¦ и.
В этом смысле можно развить новый подход к решению систем с апериоди-
апериодическими степенями свободы, переопределяя оператор М таким образом,
чтобы избежать появления секулярных членов [6].
Рассмотрим несколько примеров, иллюстрирующих применение метода
усреднения для решения систем нелинейных уравнений.
29.4. Локализация энергии в нелинейной системе. В теории линей-
линейных колебаний хорошо известно явление биения — периодический обмен
энергией двух осцилляторов. Роль осцилляторов могут играть две молекулы
или молекула и электромагнитное поле. Если в начальный момент времени
первый осциллятор неподвижен, а второй возбужден, то через интервал вре-
времени, обратно пропорциональный коэффициенту взаимодействия, энергия
второго осциллятора перейдет к первому. Учет ангармоничности приво-
приводит к подавлению эффекта биений — теперь только малая часть энергии
второго осциллятора участвует в обмене [213].
Рассмотрим два связанных ангармонических осциллятора. Гамильтони-
Гамильтониан системы представим в виде Н = Hq + АН,
Произведем КП хп, рп -»> х'п, р 'п:
хп = i/^^1 cos(a;ot + а4), рп = -у/2шор'п sin (ujot + х'п).
Новый гамильтониан eh(zf, t) представим в виде ряда Фурье:
eh = 2аЛ/^т2 cos (x[ - х'2) - ф'\ +р'22) + J] Hne~inWQt,
3 6
k=l,2 k=l,2
с = ki2/2ouo, tj = A/16cJo5 H^n = H*. Перейдем к медленным перемен-
переменным х',рг—>(р,1. Ограничимся решением в первом приближении метода
усреднения. Из B9.16), B9.17) находим х'п = срп, р'п = 1п,
еК = 2а у/hh cos (<pi - (р2) - f]{ll + if).
Найдем решение системы B9.6). Совершим предварительно КП
В новых переменных гамильтониан
еК1 =
Лекция 29. Метод усреднения канонических систем
321
Уравнения движения приобретают вид
cos 2g2 -
-CJ7T2
, B9.20a)
tt-l =0, 7i2 = 2а\гк2 — тг| si
B9.206)
Очевидно, что тт\ = G, еК' = Со — первые интегралы.
Пусть вначале первый осциллятор неподвижен, а второй смещен от по-
положения равновесия на величину а. Полагая ^@) = 0, /2@) = ш®а2 /2,
tpi(O) = тг/2, Ii@) = 0, находим начальные условия для системы B9.20):
#2, i@) = Т^г/4, 7Г2, i@) = ljqq2/2 = /q. Учитывая значения первых инте-
интегралов С = /о, Со = —т}1^ запишем систему:
7Г2 =2G1
Исключая д2, имеем уравнение
ТзН ¦ B9-2D
Решение B9.21) существенно зависит от соотношения между величина-
величинами/о, G, Г].
1. Пусть 77 = 0, т.е. имеется два связанных линейных осциллятора.
Тогда д2д = 0, /(тг) = -4а2(тт2 -
— Iq). Область изменения |тг2| ^ /о
(рис. 29.1 а). Из B9.21) находим 7Г2 — ^^^^"
= —-\//(тг2), 7Г2 = /о cos 2crt. Полная
энергия осцилляторов а
6
Поскольку #2,i(?) — Т^г/4, то xi =
= ^а sin at sin ujq^, ^2 = a cos at cos c^ot. /
Осцилляторы обмениваются энергией с
частотой биения 2а. 6
2. Пусть ? = 2а/т]1о = 1. В этом
случае /(тг) = -г]27т2(тт2 - /q). Об™
ласть изменения тг2 уменьшается:
0 ^ тг2 ^ /о (рис. 29.1 б). Интегрируя B9.21), находим тг2 (t) =
1
2
При t > (^/q)™1 оба осциллятора имеют одинаковые амплитуды.
Рис. 29.1
\ ж2
322
Глава VI. Канонические уравнения
3. При условии ? < 1 область допустимых значений ограничена нера-
неравенствами /i ^ тг2 ^ /о, h = /оA — С2I^2 (рис. 29.1 б). Если С <С 1, то
/i ~ /0A — С2/2). Максимальное значение энергии первого осциллятора
В этом случае первый осциллятор практически не возбуждается. Подста-
новкой 7Г2 = Iqu решение B9.21):
f]Iot = f
du
JT2/I0
= Iodn(f]Iot, ?) (см.
выражается в терминах эллиптических функций
приложение). Энергия осцилляторов
E2,i = -
Частота биений равна тп]1о/К, где К — полный эллиптический интеграл.
Пример 29.1. Резонансное взаимодействие осцилляторов. В нели-
нелинейной оптике хорошо изучен процесс генерации второй гармоники, т.е.
• i
f I
CIA
v/
C/2 /j _cj
/Л
/< ' >
/ ^ C/4 '
\ Cl2 /
/
/1
Рис. 29.2
возбуждения волны частотой 2uj волной частоты и [76, 152]. В качестве
модели связанных нелинейных осцилляторов рассмотрим пружинный ма-
маятник, колеблющейся в вертикальной плоскости (рис. 29.2 а). Обобщенные
координаты — I и (/?, где I — расстояние от точки подвеса до частицы
массой т, ср — угол отклонения пружины от вертикали.
Потенциальная энергия системы 17A, ф) = —т g I cos Lp + к/2 (I — IqJ.
Положение равновесия определяется условиями
dU_
dl
= —т g cos ip + к (I - Io) = О,
dU_
dip
= w g I sin Lp = 0,
Лекция 29. Метод усреднения канонических систем 323
из которых находим I = L, L = Iq + m g />г, ср = 0.
Перейдем к координатам a?i, ж2э полагая I = L(l + xi), (f = ж2э и
запишем лагранжиан, опуская постоянный коэффициент mL2:
L(x, х) = ^[х2 + A + Xlfx2} - Щхъ х2
2),
0
хъ х2) = -|A + хг) COSX2
Определим далее импульсы р\ = х\, р2 = (l + ^iJi:2. Гамильтониан
системы
Разложим П(ж1, Х2) в ряд, ограничиваясь учетом кубической нелинейности:
П(ап, х2) = П@, 0) + - [w? х\ | |
где oj\ = к/т, ш| = g /Ь. В этом приближении гамильтониан (/) имеет
вид Я = #0 + АЯ,
Пустьcji = 2cj, U2 = ш. ПроизведемКП ж, р —>- х', р':
хп = a /^^cos (u)nt + x'n), pn = -
V w
Новый гамильтониан приобретает вид
eft, = pr2\/ojp[[—2 sin2(out + ж2) + cos2(o;t + ж2)] cos But + x[).
Произведем КП к медленным переменным х1, рг —> 6, I. В первом при-
приближении метода усреднения из B9.16), B9.17) получим
х'п = вп, p'n = In, eK = ah^hcos B02 - вг),
где а = 3^/cJ/4. Очевидно, еК = Со — первый интеграл. Для определе-
определения другого интеграла произведем КП в, I —>¦ q, тг, порождаемое произ-
производящей функцией
F2{0, тг) = @i - 02)тг1 + B^2 - 0i)tt2.
Из B6.14) находим
qi = 6i — в2, q2 = 26>2 — 0i, /i = 7Ti - тг2, /2 = 2тг2 - тг\.
324 Глава VI. Канонические уравнения
Поскольку новый гамильтониан
бК' = (ТB7Г2 — 7Ti) \/ll\ — 7Г2 COS q<i ,
то TTi = G — первый интеграл. Возвращаясь к старым переменным, запи-
запишем систему уравнений:
Л = -aI2^sinB02-0i), 2/i+/2 = G, о-/2Л/^ cos B6>2—6>i) = Со,
из которой находим
it = f(h), f(I)=a2I(C-2IJ-Cl D)
1. Предположим, что вначале первая мода не возбуждена: #i@) = О,
ж1@) = 0, #2@) = «2, ^2@) = 0. В этом случае
Д@) = 0, 0i(O)=O, 12@) = ^иа22, 02(О)=О, Со = 0, С = ш|.
Из рис. 29.2 6 видно, что h(t) изменяется в области 0 ^ 1± ^ С/2.
Интегрируя уравнение D), находим
Следовательно, энергия переходит из основной моды частотой и в первую
моду частоты 2а;. Через интервал времени ^8/3cja2 маятник колеблется
в вертикальном положении.
2. Предположим, что вначале возбуждены обе моды: /i@) = uaf,
/2@) =ша\/2, ai<t.a2. Из рис. 29.2 в видно, что в этом случае происходит
периодический обмен энергией между двумя модами колебаний.
3. В случае /i@) ^> h@) можно воспользоваться приближением, по-
полагая х\ = В cos (out + 7), где В и 7 — постоянные. Тогда мы имеем
маятник переменой длины.
29.5. Параметрический резонанс. Найдем решение уравнения осцил-
осциллятора с переменной частотой
z + (ш1 + k cos ujt)z = 0, B9.22)
где к <С uJq, и и 2cjo- Замена переменных out = 2s, /1 = Bо;о/а;J,
i/ = 2к/ш2, x(s) = zBs/u) преобразует B9.22) к стандартной форме
уравнения Матье [16, 66, 130, 131,214,215,239,270]:
d2x/ds 2 + (/i + 2v cos 2s)a: = 0. B9.23)
Гамильтониан, приводящий к уравнению Матье,
Н(х, р, s) = р2/2 + (/i + 2vcos 2s)x2/2.
Лекция 29. Метод усреднения канонических систем 325
Для нахождения приближенного решения в области /i ~ 1 произведем КП
ж, р —» а, га*:
1 г
х = -^ (а + а*), р = --= (а - а*)
и представим гамильтониан в виде Н = Н® + АН,
Яо = A + I/ cos 2s)a*a,
АЯ = -(//- l)aa* + -(//- 1 + 2i/cos2s)(a2 + a*2).
Отметим, что СП [a, a*] = —г. В первом приближении решение уравне-
уравнений, порождаемых гамильтонианом Но, представляет собой КП к новым
переменным а, га* —>• А, г А*:
da da
— = la, if о I или — = —гA + pcoszsja.
ds ds
Следовательно, а = A exp[—is — *(^/2) sin 2s].
Учитывая соотношения, следующие из теории функций Бесселя:
оо
Jn(z/) exp(—2гпз),
П= —СЮ
г d
cos 2s exp[^ii/sin2s] = — — ехр(—ш sin 2s),
запишем гамильтониан АН в новых переменных:
eh'(A, iA*, t) =
В первом приближении метода усреднения остается слагаемое с номе-
номером п = — 1. Поскольку J_i(i/) = — Ji(V), то
elf = 6A*A + - d(A2 + A*2), B9.24)
Найдем решение уравнений, порождаемых гамильтонианом B9.24). С этой
целью произведем вначале КП А, г А* —>¦ д, тг: А = (д + гтг)/л/2, гдед, тг —
координата и импульс. Это преобразование приводит B9.24) к гамильтони-
гамильтониану гармонического осциллятора:
sN = I [E - а)ж2 + (S + a)q2]. B9.25)
326 Глава VI. Канонические уравнения
На этом этапе решение уравнения B9.23) имеет вид
x(s) = gcos7 + тг sin 7, j = s ~{—sin 2s. B9.26)
Медленные переменные удовлетворяют уравнениям
dq / ч dir
—— = (о — cjjtt, ——- = -—(о + (j)q. B9.27)
ds ds
1. Пусть S2 < а2. В этом случае система B9.27) имеет два собственных
вектора:
'l fl\ (т + S
г =
соответствующих собственным значениям Ai?2 = =Ьгг, гг = (и2 — й2I/2.
Каноническое преобразование д, тт —>¦ д', тг':
приводит гамильтониан B9.25) к диагональной форме: eTV' = nn'q'. Сле-
Следовательно, g; = goexp(ns), тг; = 7r0 exp(-ns). Полагая A/rI/2 =
= Ba/nI/2 cos a, (rI/2 = Ba/nI^2 sin a, получим экспоненциально
возрастающее решение B9.26):
x(s) = ( — ) [exp(ns) cos G + a)qo + exp(-ns) sin G — а)тго].
2. Пусть S2 > а2. Собственные векторы системы B9.27)
соответствуют собственным значениям Ai?2 = ±*Aq, Aq = (S2 —
Каноническое преобразование
приводит гамильтониан B9.25) к диагональной форме: eNf = Aqcc*. Сле-
Следовательно, с = со exp(^iAos). В этом случае решение уравнения B9.23)
ограничено.
Условие S2 = а2 или |/х — 11 = | C — /i) Ji (z/) | задает на плоскости fiu гра-
границы областей, разделяющих в окрестности /л ~ 1 устойчивые и неустой-
неустойчивые решения. В теории уравнения Матье установлено, что каждой точке
Лекция 29. Метод усреднения канонических систем
327
в заштрихованной области на рис. 29.3 соответствуют ограниченные реше-
решения уравнения B9.23). Граничные кривые пересекают ось /i при значени-
значениях /х = 1, 4, 9, ... [270]. Отметим, что при значениях v <C I J\{y) =
= (iy/2)(l —1^2/8+... )э C—аОЛМ ^ у- В обозначениях уравнения B9.22)
неустойчивое, экспоненциально возрастающее решение реализуется при
условии \ш - 2ujq\ < k/2ujQ. Это явление называют параметрическим
резонансом..
29.6. Система в быстроосциллирующем поле. Гамильтониан систе-
системы с s степенями свободы
H(z, t) = H0(z, t) + N(z, t). B9.28)
Пусть ш — характерная частота изменения функции N(z, t), To —
характерный временной масштаб траек-
траекторий za = za(z', t), порожденных
гамильтонианом H®(z^t); uj^Tq. То-
Тогда отклик системы на высокочастотное
возмущение представляет малую добав-
добавку к решению za = za(z', t) (см. лек-
лекцию 18). Поэтому для анализа движения
системы можно применить метод усред-
усреднения. Условие ш >> Tq™1 позволяет
воспользоваться специфическими осо- рис> 29.3
бенностями интегралов, содержащих бы-
строосцштлирующие функции [216]. Представим функцию N(z, t) в виде
) cos uki
) sin Ukt.
Поскольку ujk >> То г, то можно вычислить интеграл VN(z,(u, t), t)
в B9.17), не имея явного выражения функции z = z(u, t). Интегрируя по
частям, получим приближенную формулу:
— D
с погрешностью wfe3. Если |о;^1 — о;
ния B9.17) найдем функцию, зависящую от z:
4 ]
а\} cos cjfet + oj,/ sin a;fet) B9.29)
2тг/То, то после усредне-
S(z)9
B)
B9.30)
328 Глава VI. Канонические уравнения
Полагая в B9.18) F = z^, получим решение канонических уравнений
с гамильтонианом B9.28):
г
Г
dti [z^u, t), zu(u,
|
Движение системы представляет собой перемещение вдоль кривой, осцил-
осциллирующей с частотой ш в небольшой окрестности плавной траектории.
Если H0(z, t) = (l/2)g^paPp + U(x, t), то
ЯЛ(Л)
k
Яп
k k
JL LA/ I, kJ Jb f\/ \У JU Q jt UU J^ \J Jb fV
В этом случае плавная траектория определяется гамильтонианом
= Щ + S:
Щ~~ ' i\ (У./3 ( \ \ Т Т ( 4-\
2
Если комбинационные частоты |aj^1 —си^21 ~ 2тг/Г0, то результатусред™
нения B9.17) можно представить в более общей форме:
Вклад в U3^(x, t) слагаемого, квадратичного по амплитудам внешнего
возмущения, существенно изменяет поведение невозмущенной системы в
окрестности особых точек.
Пример 29.2. Маятник Капицы [217-219]. Однородный тонкий стер-
стержень АВ движется в вертикальной плоскости вокруг горизонтальной оси,
проходящей через точку А. Ось совершает вертикальные колебания по за-
закону s(t) = a cos cjt, u^>uq, ujq — собственная частота линейных колеба-
колебаний маятника. Найдем гамильтониан, описывающий плавную траекторию,
и положения равновесия маятника.
Используя обозначения примера 15.1, запишем кинетическую и потен-
потенциальную энергии:
1 I2 I
Т = -1ф2, I = m—, U = —m(g —аи2 cos out) - cos ср.
Z о 2i
Поскольку импульс р = 1ф, то гамильтониан Н = Но + iV,
Д"о = rng- cos <р, 7? = - та u2l cos cut cos ср.
Лекция 29. Метод усреднения канонических систем 329
Следовательно, эффективная потенциальная энергия
, = mg
2
(Ъаи\ . 2
- cos ш + —— sin
\4lu0J
ujq = mgl/2I. Из уравнения д11эф/д(р = 0 найдем положения равновесия:
(рг =0, (f2 = тг, cos <^з,4 = ^С? С = D1о;о/Заа;J/2. Если ? < 1, то в
окрестности Lp2 = тг возникает потенциальная яма:
4
Ее глубина
При значениях полной энергии Е, лежащих в интервале С/Эф(тг) < Е <
< [/эф(^з)? можно наблюдать устойчивые колебания в окрестности поло-
положения равновесия ср = тг.
Мы рассмотрели принципиально новое явление, которое получило на-
название динамической устойчивости. Аналогичный эффект позволил от»
крыть принцип жесткой фокусировки, положенный в основу работы совре-
современных ускорителей элементарных частиц [220].
29.7. Заряженная частица в высокочастотном поле. Электроны дви-
движутся в резонаторе в статическом электромагнитном поле, заданном по-
потенциалами c^ext(x) и Aext(x), и переменном электромагнитном поле
резонатора. Резонатор представляет собой пространство, ограниченное ме™
таллической поверхностью, совпадающей с координатными поверхностя-
поверхностями криволинейной ортогональной системы координат qn (п = 1, 25 3).
Декартовы и криволинейные координаты связаны соотношениями ха =
= fa(qi, 42, Чз)- Структура поля в резонаторе определяется решениями
уравнений Максвелла. Рассмотрим резонатор, в котором могут быть воз-
возбуждены стоячие волны поперечно-электрического или поперечно-магнит-
поперечно-магнитного типов [152, 154, 266]. Благодаря граничным условиям на проводящих.
поверхностях собственные частоты резонатора оказываются дискретными:
uj = и\(п); индекс А = е; т означает тип волны, п — набор дискретных
собственных чисел.
Рассмотрим в качестве реального примера прямоугольный резонатор,
ограниченный плоскостями в области О^ж^а, 0 ^ у ^ Ь, 0 ^ z ^ с.
Практический интерес представляет стоячая Т1^-волна [266]. Потенциал
Герца волны
W(w) = @, 0, W(A)(x, п)),
/\\, тптгх птгу kwz
WK ' (х, п) ^ cos cos sin cos ojt,
330 Глава VI. Канонические уравнения
где ш = uJmnk, tjJmnk = стг[(тп/аJ + (п/ЬJ + (к/сJ}1/2 — возможные
частоты волн при заданных размерах резонатора, га, n, fc = 0, 1, 2,...
Вектор-потенциал
скалярный потенциал Д) = 0, напряженности электрического и магнит-
магнитного полей волны
1 ЯА(га)
E(t, х) = -- ^—, H(t, x) =
С С/7/
Пусть в резонаторе возбуждена волна ТЕюг. Вектор-потенциал и на-
напряженность электрического поля
A(t, х) = GA(w)(x) cosui, A{w)(x) = (О, А, 0),
7Г ТгХ 7TZ
А = — sin — sin —,
а а с
шА
__ /в \ ^—V |ДД|ЦДДДД"Ч» f ¦ТТ1 ] • fl дддидддд"Ц I 1QO | / ^-% %аДв/ ^ А ^„^ ч
E(t, x) = CEiwj sin о;*, Eiwj = @, , 0),
где ш = cjioi, С — константа.
Запишем гамильтониан электрона
Я = — [р + — Aext(x) + — A(t, i
2тп L с с
в форме B9.28): Н = H0+N,
tfo = i[P+^A-(x)l2-
N = ^vA(t, х) + ^A2(t, x), mv = р + ^Aext(
«Медленная» компонента траектории определяется гамильтонианом B9.17):
Я(х, p) = H0 + (-\N,\ dhN(x, p,
Отсюда находим
я(х,Р) = щ + v"»^" ;~" +...
Этот результат можно представить в более общем виде [221-223].
Я(х, р) = Я0(х, р) + ^-
Метод удвоения переменных 331
Лекция 30. Метод удвоения переменных
30.1. Гамильтониан нелинейной системы первого порядка. Рассмо-
Рассмотрим систему s нелинейных уравнений:
Xm=fm(x,t), Ш = 1, 2, ..., S. (ЗОЛ)
Введем пространство R2s с координатами Zk = Xk, %k+s = Pk, в котором
определена скобка Пуассона функций A(z, t), B(z, t):
дА дВ ( 0 Е
[АВ] = птпд^дГп> п={-Е О
(Е — единичная s-мерная матрица) и гамильтониан [6, 172, 224]:
H(x,p,t)=pnfn(x,t). C0.2)
Первая группа уравнений 'Гамильтона совпадает с C0.1), а вторая группа
уравнений
Рт = -Рп ^ C0.3)
является ассоциированной системой, линейной относительно импульсов.
Если F(x, t) — произвольная динамическая величина, то в силу систе-
системы (ЗОЛ)
dF dF OF dF dF _
at ot cten at at
Решение системы (ЗОЛ), C0.3) является КП хп = хп(х', t), pn =
= pn(xf, р1, t), обращающим новый гамильтониан в нуль. Как и в стан-
стандартном формализме, решение можно представить как КП, порождаемое
одной из производящих функций. Например, функция ^(ж, р;, ?) являет-
является полным интегралом уравнения Гамильтона-Якоби:
OS ^dS f (
^т + Ъ—^{х, t) =0,
at oxn
в котором произвольные постоянные выбраны в качестве новых импульсов.
Метод удвоения переменных позволяет привести к гамильтоновой фор-
форме системы уравнений, полученные феноменологически и не являющиеся
экстремалями какой-либо вариационной задачи. Особый интерес предста-
представляют уравнения, описывающие химические реакции, различные эконо-
экономические или экологические системы. После приведения к гамильтоновой
форме решение уравнений может быть найдено методами интегрирования
гамильтоновых систем.
Пример ЗОЛ. Уравнение Риккати:
х + х2 +w(t) = 0
332 Глава VI. Канонические уравнения
можно представить в гамильтоновой форме с гамильтонианом Н(х1 р, i) =
= —р(х2 +w). Из C0.3) следует уравнение р = 2рх. Подстановка х =
= q/q преобразует исходное уравнение в линейное: q + w(t)q = 0. Пусть
ч\ (?), ii2 (t) — два линейно независимых решения с вронскианом ч\Ч2 ~~
— щщ = 1. Найдем производящую функцию КП ж, р —>- ж;, р;:
, X ,t) =
;р,
которая является полным интегралом уравнения Гамильтона—Якоби
в р-представлении B7.38):
= 0.
-^ч +w(t)
В соответствии с B6.16) находим
ui+u2x; ,
х = -, р = р
щ + щх'
ч2х
)
щ + щх'
Очевидно, [x,p]X'iP' = 1. Новый гамильтониан равен нулю.
30.2. Обращение интегралов. Как правило, решение x(t) интегриру-
интегрируемых уравнений механики определяется в неявной форме:
Функция x(i) удовлетворяет уравнению C0.1) с гамильтонианом C0.2):
х = f(x), Н(х, р) = pf(x).
Найдем x(t), используя каноническую теорию возмущений. Выберем
гамильтониан нулевого приближения Н® = 0. Из B8.12) получим
х = х' + [х1, p'f(x')]t + [[х1, p'fix'^p'fix')} ^ + ¦ ¦ ¦ =
(/(-VJ f^nv C0-6)
П=1 Х f
Пример 30.2. Найдем функцию Якоби — эллиптический синус х —
= sn(t, k). В этом случае / = л/A — х2)A — к2х2) (см. приложение).
Из C0.6) имеем
х = х' + f(x')t - х'A + к2 - 2к2х'2) *—- A + к2 - 6k2x'2)f(x!) *— + ...
Лекция 30. Метод удвоения переменных 333
Поскольку sn@, k) = 0, то, полагая х' = 0, получим известное разложе-
разложение [29]:
sn(i, к) = t- A + к2) |у + A + Ш2 + к4) |у + ...
Пусть F(x) — произвольная функция координат, удовлетворяющая
уравнению C0.4). Тогда в соответствии с B8.10)
Если /(ж) = 1, то имеем ряд Тейлора функции F(xf + t).
30.3. Решение алгебраических и трансцендентных уравнений. Рас-
Рассмотрим задачу об определении корней х = x(t) алгебраического или
трансцендентного уравнения ip(x, t) = 0.
Предполагая, что выполнено условие существования неявной функ-
функции х = x(t), получим
dt дх
Следовательно,
Если известно решение х = х^ уравнения ip(x, t) = 0 в некоторой
точке t = t0, то решение задачи Коши x(to) = x^ для уравнения C0.7)
является одним из корней уравнения ip(x, i) = 0 [225]. Переходя к фа-
фазовому пространству ж, р, запишем гамильтониан Н = pf(x, t). Таким
образом, для определения корней алгебраических или трансцендентных
уравнений необходимо найти решение канонической системы в виде х =
= x(t). Заметим, что в случае (f(x, t) = t — F(x) решение поставленной
задачи позволяет найти функцию x(t), обратную F(i).
Пример 30.3. Найдем корни уравнения (р(х, t) = х2 — 2х — t = 0,
используя канонический формализм.
Положим t = 0. Тогда рассматриваемое уравнение имеет два решения:
4°2 = 0, 2. Из C0.7) находим
Используя C0.6), получим
' t I t2
+
8 (х( - IK + 16 (V - IM
334 Глава VI. Канонические уравнения
Полагая х' — х\ ' — 0, получим первый корень:
t t2 t3 .
Полагая х = х2 = Л найдем второй корень:
30.4. Усреднение слабонелинейныж систем [226]. Найдем методом
усреднения решение уравнения
x + ul(t)x = ef(x, х, t), е<1. C0.8а)
Полагая х = х\, х = х2, запишем систему:
j^ + e f(xi, X2j t). C0.86)
Рассмотрим далее важную для практических приложений более общую
систему:
хт = kmn(t)xn +? fm{xu x2j t), m, n = 1, 2, C0.9)
порождаемую гамильтонианом
H(x, p, t) = kmn(t)pmxn Jrepmfm(xu x2j t). C0.10)
Преобразование гамильтониана к более «простой» форме называют нор-
нормализацией. Нормальные формы в окрестности особых точек подробно ис-
исследовал Дж. Бирхгоф [16, 227]. Произведем линейное КП ж, р -^ х', р'у
диагонализирующее форму ктпртхп. Выберем производящую функцию
в виде
Искомая замена переменных:
f\~fp riff
xk = Allx1^ C0.11)
Потребуем, чтобы выполнялось равенство
Тогда
h АТ А^1 — \ Л -a h 4™1 — X 4™1
Очевидно, что A~^v = um^ — матрица, столбцами которой являются
собственные векторы ит^ системы ктпип = Хит, соответствующие
собственным значениям уравнения det \ктп — \8тп\ = 0.
Лекция 30. Метод удвоения переменных
335
Предположим, что а = det k — I - Sp к ) > 0. Тогда
i,2 = -Spfe =Mo"-
Собственные векторы
1
Заметим, что столбцами матрицы А^^ = vm^ являются собственные
векторы
-г /% -
vm(l) =
vm{2) = -/?
i -fe:
11
ассоциированной системы — fe^n^n — Avm с собственными значения-
значениями Ai 2 := —Ai 2-
В новых переменных гамильтониан принимает вид Н1 = Hq + AiJ;,
AHf = ^
Далее исключим составляющую гамильтониана
C0.12)
^о, совершая КП х[, х'2,
хл =
C0.13)
г
где -0 = dt <т + ср'. Здесь а;, <р' — амплитуда и фаза — основные пере»
менные в методе Крылова-Боголюбова. Из C0.11) находим, что в новых
переменных решение уравнений C0.9) имеет вид
х2 = --
/ /fel2 ,
= а \ — cosw,
V о"
a sin ф - ( -Spfe - fen
C0.14)
Новый гамильтониан
eh(a', ip1, p', I', t) = AH'(x'(a', <p', t), p'(a', <p', p', I', t), t).
336 Глава VI. Канонические уравнения
Ограничимся далее уравнениями первого приближения метода усреднения,
изложенного в лекции 29.
Представим функцию fm(xi(a, </?, t), #2(а, <?? ?)> ?) в виде разложе-
разложения в ряд Фурье:
efm(xu x2j t) = J2Fms(^ t)e~i8*. C0.15)
s
Подставляя C0.15) в C0.12), получим гамильтониан
eh = ^
^) +K.C.1. C0.16)
Предположим, что коэффициенты матрицы kmn изменяются адиабатиче-
адиабатически медленно: |fcmn| <C |crfcmn|. Тогда в соответствии с B9.16) получим
в первом приближении метода усреднения а1 = a, if1 = ср, р1 =р, /; = /.
Гамильтониан B9.17), определяющий эволюцию медленных переменных,
еК =
+ ^P + iI)vn{i)(un{i) +К.С. >. C0.17)
Вернемся к уравнению C0.8 а), полагая в C0.9) кц = 0, к±2 = 1, fei =
= — cjq, fe2 = 0, /1 = 0, /2 = /, сг = cjq- В соответствии с C0.14)
имеем
cos г/?, ^2 = —ua/uq sin г/?, ^ = d^ о" + ш.
J
Пример 30.4. Осциллятор с медленно изменяющейся частотой \uj® | <С
Uq (см. п. 20.4). Рассмотрим уравнение х + и%{?)х = 0. Полагая / = 0,
получим из C0.17) еК = 0. Решение имеет вид
а ([ . , ч
х = -р== cos dto;o(t)+<
Пример 30.5. Осциллятор Ван-дер-Поля описывается уравнением
C0.8а) с правой частью г/(ж, ж) = 7A — ж2/е2)ж(см. примеры 19.3,
20.1). В этом случае коэффициенты разложения C0.15)
F21 = _г./_7а 1-—— , F23 =г
2 V 4cjoc2/ 2 4ujqc2
Лекция 30. Метод удвоения переменных 337
Усредненный гамильтониан C0.17)
а2
еК=^ар[\-
Из уравнений а = [а, еК\ ф = [99, ?J
находим
« = «oe7t/2 1 + y^(e7t - 1) , if = ipQ.
Если 7 > 0, то при t ^> 7^1 имеем предельный цикл а = 2c^/uJq: x =
= 2ccos(o;ot + ifo).
30.5. Линейные сингулирно-возмущенные уравнении. Рассмотрим
задачу Коши и@) = 0, й@) = г; для уравнения
eu + u + ii = 05 е<1. C0.18)
При е = 0 уравнение становится вырожденным: п + и = 0. Общее
решение C0.18)
Поскольку г <С 1, то Аг — — 1, Ai = 1 — 1/е. Решение задачи Коши
u(t) = (eAst - eAlt) ~ ег;(е"* - е*"*/е). C0.19)
Уравнения с малым параметром при старшей производной называют
сингулярно-возмущенными. Смысл этого термина становится понятным при
анализе решения C0.19).
Функция u(t) достигает максимума при t ~ —sine. В области t > e
основной вклад в C0.19) дает решение вырожденного уравнения, кото-
которое близко к C0.19) всюду, за исключением малой окрестности t ~ 0.
Из C0.19) видно, что при t <С е оба слагаемых должны давать одинажн
вый вклад в решение, чтобы удовлетворить начальным условиям. Величина
этой области — пограничного слоя — определяется первым линейно неза-
независимым решением. Таким образом, возмущение ей вырожденного урав-
уравнения приводит к тому, что в интервале t < e решение скачком изменяется
ОТ НуЛЯ ДО ?17.
Системы сингулярно-возмущенных уравнений встречаются в механике,
релятивистской теории поля, в гидродинамике вязкой жидкости и магнитной
гидродинамике. Трудности решения подобных систем явились причиной
338 Глава VI. Канонические уравнения
создания множества приближенных методов [127, 228-230]. Гамильтонов
подход в теории сингулярно-возмущенных уравнений существенно упро-
упрощает вычисления, поскольку необходимость оставаться в группе движений
ко со симметричной метрики позволяет построить единый алгоритм реше-
решения [232, 233].
Рассмотрим вначале линейное уравнение
eq + b(t)q + c(t)q = 0, е < 1. C0.20)
Полагая q = ж, eq + bq = у, получим систему:
ex = у ~~ Ьх, у = (Ь — с)х. C0.21)
Введем пространство R4 с координатами ж, у импульсами р, тг, симп-
лектической структурой и гамильтонианом
Н =-р(у- Ьх) + тг(Ь - с)х. C0.22)
При е = 0 система C0.21) становится вырожденной. Определяя из пер-
первого уравнения х = у/b, получим уравнение у = (Ь — с)у/Ь. Решение
вырожденной системы
=\dtb
у = Ьет, х = (Гт, т =
соответствует медленному движению с характерным временем Т:
гп(Т) - 1.
Структура гамильтониана C0.22) показывает, что первое приближе-
приближение должно определяться составляющей Hq полного гамильтониана Н =
= Яо + АН,
Но = -р(у - Ьх), АН = (Ь- с)ттх.
Соответствующие канонические уравнения
ех = у - Ьх, у = 0, C0.23)
ер = bp, еж = -р C0.24)
существенно проще исходной системы C0.21). Решение системы C0.23),
C0.24): у = у',
= Гж' + - \dte'{t)\e~'){i), 7(*) = е \dtb(t),
ж =
Лекция 30. Метод удвоения переменных 339
Интегрируя по частям:
Ц f Л, 7 d *
d
ej(t) dt
получим
x = x;e^7(t) + ^ + ... , тг = тг; - ^- e7(t) + ... C025a)
о о
Заметим,что ж —>- г//Ь при е —>• 0. Эволюция У =(х/,у1,р/,/к/) перемен-
переменных определяется гамильтонианом Hf = Hq + АН',
Н'° = ~Г {7Т'У' ~ Р V)' ^
Решение уравнений, порождаемых гамильтонианом Д"о '•
., Ь-с , ., Ь-с , ., Ь-с , ., Ь-с ,
х=-—х> у=^у> р=-гр> п=-^п>
имеет форму КП:
х1 = х"Ъ~хет, у1 = у"Ье-т, р1 =p/fbe^m, nf = 7тПЬ^гет.
На этом этапе канонических преобразований решение системы C0.21)
х = х"Ъ-хет-ч + у"е^т, у = у"е^т. C0.256)
Пример 30.6. Применим изложенный метод к решению уравнения
(ЗОЛ 8), полагая в C0.20), C0.21) Ь = с = 1: ех = у - х, у = х. Исклю-
Исключая t, запишем уравнение интегральной кривой (х — y)(dy/dx) = ex.
При е «С 1 для всех точек (ж, г/)э исключая точки, близкие к кривой у =
= ж, поле направлений горизонтально. Следовательно, интегральная кри-
кривая, идущая из произвольной точки, удаленной от кривой у = ж, должна
представлять почти горизонтальную линию, которая по мере приближения
к этой кривой изгибается и совпадает с ней (рис. ЗОЛ. б).
В соответствии с поставленной выше задачей Коши х@) = 0, у@) = ev.
Проследим, как с каждым шагом решения C0.25а), C0.256) приближа-
приближаются к точному решению C0.19).
После первого шага х = х1 е^11? + у\ у = у1. Решение задачи Коши
x(t) = ev(l - e~t/e), y = ev
340
Глава VI. Канонические уравнения
представлено на рис. ЗОЛ а кривой 1. Функция x(t) правильно описывает
быстрое движение в небольшой окрестности t < e. Однако уже второе
приближение приводит к общему решению C0.256):
из которого следует C0.19). Заметим, что гамильтониан
Н" = AH'(z'(z", t), t) = -тг"х"е2*-*'е +p"y"e-2t+t'e
описывает эволюцию переменных z". Полагая в B8.7) z^ = x(t), h
= Нп, получим высшие приближения.
Рис. ЗОЛ
30.6. Система общего вида [233]. Построим второе приближение для
системы
ex = f(x,y),
C0.26а)
у = <р(х, у).
C0.266)
При е = 0 система C0.26а, б) становится вырожденной. В общем слу-
случае уравнение /(ж, у) = 0 имеет несколько действительных корней х =
= ха(у), а = 1, 2, ..., в различных областях Ga переменной у. Подста-
Подставляя х в C0.266), получим уравнение
У = ф(ха(у), I/)-
C0.27)
Решение вырожденной системы у = ya(t), x = xa(ya(t)) соответствует
медленному движению по кривой /(ж, у) = 0.
Составляющая Но полного гамильтониана Н = Hq + АН,
Но = -pf(x, у), АН = тт(р(х, у),
Лекция 30. Метод удвоения переменных 341
порождает систему:
ex = f{x, у), у = 0, C0.28)
SP=-P%, - = -р|- C0-29)
После интегрирования C0.28)
у = у\ x = R(x/,y/,t;e), C030)
уравнения C0.29) — линейная система. Учитывая соотношение
d dR _df dR
dt дх1 дх дх''
получим решение р = p'{dR/dx') г первого уравнения системы C0.29).
Далее, интегрируя по частям, находим
\dx'J 0*/1""
Таким образом, мы имеем КП z = z{z\?). Подставляя z[z\ t)
в AH(zJ t), получим гамильтониан Ы' = H'(z', t), описывающий эво-
эволюцию штрихованных переменных.
Представим Н1 в виде Н' = Hq-\- АН' и ограничимся, как и в преды-
предыдущем параграфе, отысканием гамильтониана Щ, определяющего второе
приближение. Предварительно отметим, что в области Ga
lim J?(V, у', i; e) = lim R(x', у', t; e) = xa{y').
Наложим требование, согласно которому переменные х1, у' определяют
медленное движение в окрестности кривой х = ха{у). Тогда достаточно
ограничиться приближением
х'=0
11У R=Xa
,(dRYl (dyf
Гамильтониан Н'о приобретает вид
H'Q{z', t) = п'фа(у'), у1, t) +р'х' [^дх<р) . C0.31)
х=ха(у')
342
Глава VI. Канонические уравнения
Подставляя в C0.30) решение системы
C032а)
х = х
C0326)
получим в каждой области Ga равномерно пригодное общее решение си™
стемы C0.26) во втором приближении. Заметим, что уравнение C0.32 а)
совпадает с C0.27).
Пример 30.7. Найдем приближенное решение уравнения Ван-дер-
Поля:
eq- (l^
е «С
Положим q = х, eq + F(q) = у, F = q3 /3 — q. Тогда G) эквивалентно
системе
x = y-F(x), y = -x
B)
с гамильтонианом Н = pf(x, у)/е + тгср(х)9 где f = у — F(x)9 ср = —х.
dy
Исключая t, запишем уравнения интегральной кривой: [y — F(x)]— =
= —ex. При ?<1 для всех точек (х, у) (исключая точки, близкие к
кривой у = F(x)) поле направлений горизонтально. Если начальное
положение определяется точкой S (рис. 30.2), то происходит быстрое
2/3
а
Рис. 30.2
(поскольку \х\ ^> 1, х < 0) перемещение по горизонтали к внешнему
участку (\х\ > 1) кубической параболы у = F(x), а затем медленное
движение к точке В. После достижения точки ВA, —2/3) происходит
быстрый скачок в точку G, затем последует медленное движение в обла-
области —2 ^ х ^ — 1 по кривой у = F(x) до точки D(—l, 2/3) и снова
скачок в точку АB, 2/3) [111]. Далее система совершает циклическое
движение по контуру ^4 Л CD А. Период автоколебаний приближенно
Лекция 30. Метод удвоения переменных 343
определяется выражением
-2/3
—
х
2/3
=2 [da ( --ж ) =3-21п2~ 1,614.
} \х J
2
Рассмотрим вырожденную систему. В области ^2/3 ^ у ^ 2/3 урав-
уравнение у = F(x) имеет три действительных корня ха(у), а = 1, 2, 3. При
у < ^2/3 остается корень xi(y), а при у > 2/3 — действительный ко-
корень хз(у). Найдем решение системы B). Для упрощения вычислений
рассмотрим начальное состояние, удовлетворяющее условию у > —2/3,
х > х2(у). Тогда /(ж, у) можно представить в виде
ж, у) = —{х — хз){х3 — 1) — (х — хз) хз + ...
Интегрируя уравнения C0.28), C0.29), получим
/ + \ 1\
C)
Очевидно, [ж, р] = 1. Поскольку thz ~ 1 при z ~ 3, то (J) описывает
быстрое движение системы.
Найдем теперь жз(^), х'(t). 'Гамильтониан C0.31)
Для решения системы C0.32) удобно произвести КП у\ п'
F3 ' п ^'
порождаемое производящей функцией ^з(#з, ^0 = —F(x3)tti. В новых
переменных гамильтониан D)
н, Рзхз , Р'х'
«з-1
приводит к системе
ж3 1 ж3 1
из которой находим
-2 //
1п|х3| - — = t + ж3, ж = ^.
2 жз
344 Глава VI. Канонические уравнения
Лекция 31. Гамильтонова теория специальных функций
31.1. Гамильтонова форма линейного уравнения второго порядка.
Многие проблемы теоретической и математической физики приводят к ли-
линейному уравнению второго порядка с переменными коэффициентами [13,
154, 184, 185]:
^(T)j4 + В^7^ + С(т^ = °* C1-1)
Частные решения уравнения C1.1) получили название специальных функ-
функций. К ним относятся гипергеометрические функции, ортогональные поли-
полиномы, сферические и цилиндрические функции [234—237].
Запишем уравнение C1.1) в лагранжевой форме. Умножим C1.1) на
неопределенный множитель А (г):
d ( A dq\ dXA dq dq „
— [XA—] + XB — + XCq = 0,
dT \ dT J dT dT dT
и, полагая
— XA = XB -»> A = A^1 exp | | dr ^
ат
получим уравнение
4^ш(т)^ + k(r)q = 0, m(r) = XA, k(r) = AC, C1.2)
ат ат
порождаемое лагранжианом
dqx2
В терминах механики лагранжиан L описывает движение частицы пере-
переменной массы, связанной с пружиной переменной жесткости.
Вводя импульс тг = mdq/dr, получим гамильтониан
^ + ^. C1.3)
Уравнения Гамильтона
dq dn dq тг dn
Т1 = fe> Я ZT = ^' Я ^ -Г = ~' Т" =
dr dr dT m dT
являются решением вариационной задачи для функционала
Т2
I[q, тг] = | dr Гтг J - h(q, тг, гI . C1.4)
Лекция 31. Гамилътонова теория специальных функций 345
Пример 31.1. В настоящей лекции для иллюстрации приложений
гамидьтоновой теории специальных функций выбраны функции Бесселя.
Цилиндрические функции q(r) = Zu(Pr) удовлетворяют уравнению
d2q I dq
I +
В этом случае А = 1, Л = т^1, G = /52 - i/2/r2, Л = т,
% ) + \
31.2. Преобразование аргумента т ^> t : т = r(t). Производя
в C1.4) замену q(r(i)) = Q(t), тг(r(i)) = P(i), найдем новый гамиль-
гамильтониан:
R(Q, F5 t) = rh(q, тг, т) = ^F2 + |Q2, C1.5)
=mf~1, x(t) =kr.
Вычисление коэффициентов M(t), x(t) существенно упрощается, если
задать преобразование r->tB дифференциальной форме: f = f(r).
Пример 31.2. Перейдем в уравнении для цилиндрических функций к
новому аргументу t, полагая т = etm. т = т. Новый гамильтониан
R(Q, P,t) = ±Р* + ±@2е* -p*)Q\
Функция Q(t) = Zjj^e1) удовлетворяет уравнению
31.3. Нормализация гамильтониана. Произведем КП Q, Р —>- ж, р,
порождаемое функцией
F2(Q,p, t) =
Из формул B6.14), B6.15) имеем
p/Ii{l^) <316)
? = P(as,p,i)
Новый гамильтониан
C1.7)
346 Глава VI. Канонические уравнения
wit) = —- —
2 df* 4 \dt J M
= --M^1/2^(M^1/2M) + —. C1.8)
Канонические уравнения х = p, p = —гиж эквивалентны уравнению
«iy i^ UJ \v I*L — Uj I J 1,7 I
не содержащему первой производной функции х. Замена C1.6) является
обобщением преобразования Уиттекера [239]. Полагая в C1.5) т = 1,
находим M(t) = \A, q = Q, тг = F,
д = жехр (-- I rfr^J , тг= Ь- — xj ехр ( - I dr^-J , C1.10)
НВ 1 (В\2 С , . ч
Пример 31.3. 1. Произведем преобразование Уиттекера для цилиндри-
цилиндрических функций. Полагая т = t в уравнении (!) примера 31.1, получим
х г / х х . ч ^9 z/2 — 1/4
2. Положим теперь f = 2д/г: т = t2. В этом случае М = у/т/2,
М = 1/2. Из C1.6), C1.8) находим
31.4. Преобразование Лиувилля-Грина [135]. Пусть г^(^) имеет про-
простой нуль при t = 0, причем w(t) ^ 0 при t ^ 0. Произведем КП
х, р —>- ж;, р!, порождаемое функцией [6, 240]
F,(х, x',t) = -^- tg (x'
о
Из формул B6.14), B6.15) находим
t
/ г \
а: = ^/2р/и;™1/4 cos ( х' + dt дД^ 1 ->
°t C1.12а)
р = ^•\/2p/w1/4 sin I x1 + dt ^
о
Лекция 31. Гамилътонова теория специальных функций 347
1
Н'(х',р', t) = --p's|a
о
Старый гамильтониан C1.7) в новых переменных равен y/wp1. Если
выполняется неравенство (wJ <С \w\3, то C1.12а) представляет собой
решение уравнения C1.9) в приближении Лиувилля—Грина (см. п. 20.4).
В области t < 0 замена переменных реализуется функцией
о
Fi(x7 х', t) = — \/—wx2 thf x' + (
Из B6.14) имеем
X = \/ Zp 'l-w
* C1Л 26)
/ г \
В теоретической физике решение C1.12) называют приближением ВКБ на
основании работ Г. Вентцеля A926 г.), Г. Крамерса A926 г.) и Л. Бриллюэна
A926 г.), в которых были установлены формулы, связывающие осциллиру-
осциллирующие и экспоненциальные решения в точке t = 0. Аналогичные формулы
были также получены Г. Джеффрисом в 1924 г.
31.5. Преобразование Беклунда [141]. Найдем условия, при которых
КП, порождаемое функцией
, х1, t) = - [a(t)x2 - 2b(t)xx' + c(t)x'\ C1.13)
сохраняет форму уравнения C1.9). Учитывая B6.12), получим
х = b^1(cx/ +р'), р = Ъ^г(ех' + ар'), C1.14)
х1 = Ъ~г{ах — р), р' = Ь~г(—ех + ср;),
е = ас — Ь2. Новый гамильтониан Н' = H'Q + АН',
н'°= гЬ (а2+w)p'2 + ?Ь(е2+°lw)x'2 + h{ae+cw^p'x'> CLI5)
~2hbc+tb2)x'2 + h{hc~ hb)p'x>-
C1.16)
348 Глава VI. Канонические уравнения
Для того, чтобы гамильтониан Н' сохранял форму Н, необходимо
выбрать коэффициент при р' равным 1/2, а при р'х' — равным нулю:
a2+w + a = b2, b = b(c-a). C1.17)
В результате имеем
/2 / 2
Н'{х', р1, t) = — + w'(t) —, wf = w + a2 - с2 + а + с. C1.18)
Очевидно, что x' + wf(t)x' = 0. Форминвариантные преобразования из-
известны для некоторых нелинейных уравнений в частных производных и
называются преобразованиями Беклунда [241]. Они позволяют получать
новые решения, используя частные (даже тривиальные) решения.
Пример 31.4. Пусть w(t) = -А2 - U(t), wf(t) = -A2 - Uf(t), Ь2 =
= s2 - А2 > 0. Из C1.17), C1.18) находим систему:
а2 - U + а = s2, -U1 = -U + 2а.
Полагая U'(t) = 0, получим тривиальное уравнение х' — Х2х' = 0 и его
решение х1 = n\e~xt + П2вхг. Тогда, исключая U, имеем
2s2
а = а2 — s2 —>- а = ^sth st, JJ — —-
ch
Следовательно, решение более сложного уравнения
ж- | А2 + —^—
V h2
определяется преобразованием Беклунда C1.14).
31.6. Высшие ВКБ-приближения. Асимптотическое решение C1.12)
определяет первое приближение ВКБ, широко используемое в теоретиче-
теоретической физике [49, 152, 242, 264, 265]. Получим высшие ВКБ-приближения,
используя метод последовательных диагонализаций гамильтониана [141].
Пусть w(t) имеет простой нуль в точке t = 0, причем w(t) ^ 0
при t ^ 0. Произведем диагонализацию гамильтониана C1.7) канони-
каноническим преобразованием ж, р —» xi, pi, полагая в C1.15) а = iw1^2,
Ь = 1л/2п)г/А, с = г. В новых переменных гамильтониан C1.7) приобре-
приобретает диагональную форму: Ню = —iw1/2pixi. Мы имеем КП
х = 2^1/2w^1/4(x! - iPl), p = -i2^1/2w1/4(Xl + iPl), C1.19)
порождаемое производящей функцией
Fi(x, xut) = - (w1/2x2 - 2л/2ги1/4ххг + х\).
Лекция 31. Гамилътонова теория специальных функций 349
Вклад производящей функции в новый гамильтониан AHi = —i(w/Sw) x
x(pl + х\). Следовательно, эволюция переменных х\, р1 определяется
гамильтонианом
ffi(m, Ръ t) = -iw1/2plXl -\- (Pi Ч-гс?). C1.20)
о w
Если \w\ <C |w3/2|, то вторым слагаемым можно пренебречь. Гамиль-
Гамильтониан Ню = —iw1/2piXi порождает уравнения
решение которых
t
f
о
является КП х\,р\ -л I, (р к переменным действие^угол. Подставляя
xi, p\ в C1.19), получим решение в первом приближении метода ВКБ:
х = v/2Iw^1/4cos ф, р= -л/21т1/4Б1пф. C1.21)
Неравенство \w\ <C |к;3//2| соответствует условию адиабатически мед-
медленного изменения функции и = л/w, которая играет роль мгновенной
частоты. Записывая его в терминах oj, получим |cj| <w2 —условие того,
что приращение uj(t) за период мало по сравнению с uj(t).
Приближенное решение C1.21) заведомо неприменимо в окрестнос-
окрестности t ~ 0, поскольку здесь w(t) = wot. Определим окрестность t, в
-1 /О
которой еще можно использовать C1.21): \t\ > \w0 ' |. В окрестнос-
окрестности t ~ 0 исходное уравнение C1.9) имеет вид х + wotx = 0. Решением
этого уравнения являются функции Эйри.
Обычно для построения высших приближений исходят из уравнений
для (р, I, порождаемых гамильтонианом
Jsin2[
Однако в гамильтоновом формализме существует уникальная возмож-
возможность получить n-е приближение, не используя предыдущие приближе-
приближения. С этой целью диагонализируем гамильтониан C1.20), совершая КП
ХЪ р1 ->- Х2, Р2'-
xi = х2 ch в - р 2 sh в, pi = -x2 sh в + р 2 ch в, C1.22)
350 Глава VI. Канонические уравнения
порождаемое однопараметрической производящей функцией типа C1.13),
где а = с = — cth в, Ъ = — sh™1 в:
Fi{x\, #2, t) = :—- (ch Ox2 ~~ 2x\X2 + ch Ox2?).
Новый гамильтониан iJ2 = i?20 +
Я20 = г |ti;1/2sh<9ch<9- ^ (ch2 в + sh2 0) | (р2+ж^) -
^/2(ch2
Сущность метода состоит в том, что необходимо, как на первом этапе, обра»
тить в нуль коэффициенты при р| и х \ в гамильтониане iJ2o. Посколь-
Поскольку ch2 в + sh2 в = ch 2 в, то следует положить
--- U ^ C1.23)
угу 4 го
Одновременно находим
Дифференцируя C1.23), получим
2<9 do; • w d и w d w
ch2 2 6> rf
Следовательно, гамильтониан
л
Я2(ж2, р25 t) = -iA2p2^2 + - (р2 - ж2). C1.24)
Используя соотношение
ch2 в, sh2 в = ^ (ch 2^ =Ы) = I (^- ±
2 2 \ А
^ (ch 2^ =Ы) I (^
2 2 \ А2
получим из C1.19), C1.21) явную форму КП:
х = 2~1/2ti;~1/4[(ch в + г sh 0)х2 - г(сЬ 6> - г sh %2].
Лекция 31. Гамилыпонова теория специальных функций 351
Диагонализация гамильтониана C1.24) линейным КП может быть не-
неограниченно продолжена. Если ограничиться вторым шагом, то решение
уравнений, порождаемых гамильтонианом H2q = —i
о
Для получения третьего приближения следует произвести КП
порождаемое производящей функцией
Заметим, что п™е приближение возникает в результате перехода к базису,
вращающемуся с комплексной угловой скоростью.
Пример 31.5. Найдем асимптотику функции Бесселя Jv{j3r) при
значениях /Зт > и, v >> 1. Для этого рассмотрим одно из множества урав-
уравнений, приводящих к цилиндрическим функциям:
Выберем в качестве двух линейно независимых решений A) функции Бес-
Бесселя «ЛД?) и Неймана Nu(?), вронскиан которых равен 2/тг^. Тогда ре-
решение можно представить как КП
q(t) = J^(uiq! + u2pf), p = J^(uiqf + u2pf), B)
где iii(t) = Л()8е*), u2(t) = N^tfe*).
Приближенное решение q(t) в области (Зе1 > v определяется форму™
лой C1.21). Представим C1.21) в виде B), совершая КП (fjl^q'^p':
л/2/cos (^ + 7г/4) = qf, —л/2/sin (у? + тг/4) = pf. В результате подстановки
имеем
dty/w- j
to
где w(t) = C2e2t — v2, /32e2t° — v2 = 0. Вычисляя интеграл с помощью
замены т = e2t, находим
t
J
to
тп/
dt y/w = \f C2т2 — и2 + i/ arcsin — — —.
352 Глава VI. Канонические уравнения
Сопоставляя B) и C), заключаем, что
cos
Асимптотика функции Бесселя при /3r 3> v, v 3> 1 [243]
/2 \ Г г/2
31.7. Решение в окрестности обыкновенной точки. Предположим,
что функция w(t) является аналитической в точке t = 0. В этом слу-
случае t = 0 —обыкновенная точка уравнения C1.9) [239].
Выберем гамильтониан нулевого приближения Но = 0. Тогда х =
= ж', р = р1. Полагая в B8.7) z^ = ж, р, ^м = x'Qip'Q, получим решение
уравнения C1.9):
Г Г f f
= Xq +Pgt - Xq dti dt2 wfe) ^ Po ^i
х =
J
C1.25)
Пример 31.6. Функции Эйри. Найдем решение уравнения x — tx = O.
Из C1.25) имеем [244]
х = 4 + Рoi + 4 ^ i3 + Ро 4? *4 + хо б? ^ + ''" =
= ^i(tL + ^2(t)p[). (./)
Здесь iii(t), ii2(t) — два линейно независимых решения, которые можно
представить в терминах модифицированных функций Бесселя [245]:
1
= i + 11* + ^г'' + • •' = 3'Sr Ц) Л'"' (I'"*
Аналогичным образом найдем р = ui4 + ^2Po- Полученное решение
является КП ж, р —>- ^q, р'о. Действительно, щ@) = U2@) = 1, ui@) =
= и2@) = 0; вронскиан решений равен единице. Следовательно, [ж, р] =
~" U2U1 = 1.
Лекция 31. Гамилыпонова теория специальных функций 353
Другая пара решений может быть получена линейным КП xf0, р f0 —>¦
B)
Поскольку Г I - 1 Г I - 1 = —=, то [х'о, р'о] = 1. Из A), B) находим
\3/ \3/ уЗ'
1_
i/з т
Ll/3
2^3/2
где i^i/з — функция Макдональда [29, 234]; #(t) называют функцией Эй-
ри, (f(t) — присоединенной функцией Эйри. При t < 0 аналитическое
продолжение приводит к выражению [246]
4 Г
График функции #(t) изображен на рис 31 |
рис. 31.1. Функция Эйри естественным
образом возникает в теории дифракции волн, описывая переход от тени к
освещенной области.
31.8. Решение в окрестности регулярной особой (или правильной)
точки. Пусть функция w(t) удовлетворяет в точке t = 0 условиям Фукса
[238,239]:
к
C1.26)
n=l
Представим гамильтониан C1.7) в виде Н = Но + .
354 Глава VI. Канонические уравнения
Решение уравнений
к
х = р, р = — — х
являетсяКП ж, р —>> х\ р':
х = v\x' + v2p', р = щх' + щр'
Пусть 4к < 1. В этом случае
+Ai +Л2 ^
г?1 = —=, v2 = —^, ст = А2 — Ai, А2 1 = - ± \/- — к. C1.27)
у/а у/а 2 V 4
Гамильтониан, определяющий эволюцию штрихованных переменных, ра-
равен Н'(х', р\ t) = (l/2)f(t)x2(xf, p;, t). Полагая в B8.7) ^ = ж, ^ =
= ж(жо, Ро, t), получим решение уравнения C1.9) [224]:
г ъ\
•|rft1j(it2g(t5t1)/(t1)g(tbt2)x
О О
х f(t2)x(t2) + ... C1.28)
Здесь
О-// / \ — __[7p/'f \ Tf(f,\) — /jlA24.Ai _____ #Ai iA2\
{J
7 t;) = 6(t — tf) g(t, t') — функция Грина невозмущенного уравнения
Если a = у/1 — Ак не равно целому числу, то ряд содержит интегралы
вида
г, 5 = 1,2.
о
Интегрируя C1.28), находим
x(t) =u1(t)x'o+u2(t)p'o, C1.29)
Hi (t) = ^^ 1 - ^ -r^y + ^ W ^ + . . . I ,
C1.30)
где Di(m) = mBAi — 1 + m). Второе линейно независимое решение
следует после замены 1 —»¦ 2. Если Vl ~ 4fc — целое положительное
число, то функция щ (t) содержит члены ~\nt.
Лекция 31. Гамилыпонова теория специальных функций 355
Пример 31.7. Найдем решение уравнения для функций Бесселя.
В примере 31.3.1 показано, что х = \ftZv{j3t) удовлетворяет уравне-
уравнению C1.9). Представим w(t) в виде C1.26), где к = 1/4-и2, /(i) = /?2.
В соответствии с C1.27) A2,i = 1/2 ± у. Пусть л/1 — 4к = 2\у
равно целому числу. Поскольку Fm = р2ёт2, то из C1.30) находим
не
2!
Согласно определению функций Бесселя
31.9. Исследование асимптотических разложений. В справочниках
по специальным функциям приведены, как правило, значения функций в
ограниченной области параметров и аргументов. Поэтому приходится ис-
использовать асимптотические разложения.
Гамильтониан первого приближения выберем так, чтобы он включал
члены, дающие наибольший вклад в рассматриваемой области парамет-
параметров и аргументов. Следующие члены разложения можно найти, используя
каноническую теорию возмущений или метод усреднения.
Пример 31.8. Применим метод усреднения для построения решения
уравнения Бесселя в области /%>i/>l. Сохраняя обозначения, введенные
в примере 31.3, запишем гамильтониан C1.7) в виде Н = Н® + АН,
Решением уравнений, порождаемых Но, является КП х = ^/2Г//3 х
х cos (/3t + if'), p = —\j2f3V sin (/3t + cpf). В соответствии с B9.5) новый
гамильтониан eh = (klr/f3t2) cos2(f3t + (pf). Поскольку
hi' — hi1
то в первом приближении метода усреднения
356
Глава VI. Канонические уравнения
Полагая в B9.18) F = х, получим решение C1.9) в виде
kl
cos О +
Решение уравнений B9.6): I = /о, (р = —k/2/3t + ^о- Произведем КП
y?Oj Л) ->- x'jP', соответствующее переходу к стандартной нормировке
функций Бесселя: \/2Jcos(^ + а) = ж;, ^v/2Isin((^ + а) = р;, а =
= (тг/2)(&' +1/2). В результате подстановки находим ж = ui(t)xf ^r
I
k
k
Следовательно, при
/, и ^> 1 асимптотика функции Бесселя
Аналогичное выражение было получено в примере 31.5.
ГЛАВА 7
РЕЛЯТИВИСТСКАЯ МЕХАНИКА
Лекция 32. Заряд в электромагнитном поле
32.1. Пространство Минковского. Напомним вначале основные по-
понятия специальной теории относительности [12,247,248]. Рассмотрим про-
пространство М, состоящее из точек, называемых событиями. Каждой точке
поставим в соответствие четыре числа ж^ = (ж0, ж1, ж2, ж3)—локальные
координаты события. Координаты х1 = ж, х2 = у, х3 = z определя-
определяют положение точки в декартовой системе координат. Первая координа-
координата ж0 = ct, где с — скорость света, t — момент времени, отсчитываемый
по часам, помещенным в точку (ж, у, z).
Предположим, что на множестве М задана структура дифференциру-
дифференцируемого многообразия (см. лекцию 1). На перекрытии двух карт связь между
двумя множествами координат ж^ и хф (/л = 0, 1, 2, 3) определяется
функциями перехода: жт = ж;/1(ж05 ж1, ж2, ж3).
Скалярное поле на М — функция /(ж), для которой на перекрытии
двух карт выполняется соотношение f'(x') = /(ж).
Контравариантное векторное поле на многообразии определяется как
множество наборов четырех функций А^(х) (/х = 0, 1, 2, 3), удовлетво-
удовлетворяющих закону преобразования
А'^х^^^АЦх). C2.1)
Ковариантное векторное поле определяется набором функций В
которые при замене координат ж^ -» жт преобразуются по правилу
Аналогичным образом определяются контравариантные, ковариантные и
смешанные тензоры произвольного ранга.
Метрический тензор. Введем симметричный тензор g^, который по-
позволяет сопоставить каждой паре векторов А^{х), В^{х) скалярное поле
по правилу s(x) = g^p A^BV. Скалярное произведение векторов А^, Bv
определяют соотношением
AB = gtlvA»Bv. C2.2)
Каждому вектору А^ можно сопоставить вещественнозначную функцию
А А = А2 = g^v А^АР, называемую его нормой или квадратом «длины».
Пространство М с метрикой g^ называется пространством Минков-
Минковского, если в нем существует глобальная система координат (покрывающая
358 Глава VII. Релятивиспгкая механика
все М), в которой g —матрица вида g = diag (I, —1, —1, -1). Сле-
довательно, скалярное произведение
АВ = А0 В0 - АВ. C2.3)
Норма вектора А2 = (А0J — А2 может быть положительной, отрица-
отрицательной или нулем. Очевидно, что g^ — ковариантный тензор. Его на-
называют метрическим тензором в связи с определением пространственно-
временного интервала ds между событиями х^ и х11 + dx11:
ds2 = g^ dx^ dx", ds2 = {cdtf - {dxJ. C2.4)
Обозначим через g^v элементы матрицы, обратной к g^: gMl/g^ = 6а^.
Величины g^v = diag(l, — 1, — 1, — 1) представляют собой компоненты
контравариантного тензора второго ранга.
Если v^1 — вектор, то, образуя внутреннее произведение va = ga/3 v^',
получим ковариантный вектор или ковектор va = (v°, — vM va = (г?о, v).
Аналогичным образом можно поднять индекс у вектора или тензора,
используя тензор g^p: va = ga^ vp. Скалярное произведение векторов
приобретает вид
АВ = g^ A^BV = А^В^ = А°В0 + АгВг + А2В2 + А3В3.
32.2. Преобразование Лоренца. Рассмотрим однородное преобразо™
вание координат
х^х1Й = А^аха. C2.5)
Если матрица перехода дх'^/дх1" = А^ удовлетворяет условию
gal3,
ATgA =
то преобразование C2.5) называют преобразованием Лоренца. В соответ-
соответствии с C2.1) закон преобразования 4-вектора имеет вид
A"V) =А^АЦх). C2.6)
Следовательно, скалярное произведение C2.2) инвариантно относительно
преобразования Лоренца: АВ = А'В'. Очевидно, интервал между собы-
событиями C2.4) также инвариантен:
{cdif - (dxJ = (cdtfJ - {dx1J. C2.7)
Если ds2 > 0, то интервал называют времениподобным, а в случае ds2 <
< 0 — пространственноподобным. Значению ds2 = 0 соответствует све-
топодобный интервал.
В релятивистской физике реальное пространство-время в ограничен-
ограниченной области М является пространством Минковского. Координаты х^ в
Лекция 32. Заряд в электромагнитном поле 359
определенной карте соответствуют событию в инерциальной системе от-
отсчета К, а координаты х'^ — событию в инерциальной системе отсче-
отсчета К', движущейся относительно К со скоростью v. Любое однородное
преобразование Лоренца может быть представлено в виде обычного про-
пространственного поворота B1.1) и поворота пространственно-временных
осей. Последнее преобразование называют бустом (от англ. booster — уско-
ускоритель). Матрица Л^, соответствующая бусту, имеет вид
Л°=7, Л2=Л§ = -п*^7, К = 5ik + (г/- 1)щпк,
где г, fc = 1, 2, 3; v = vn — скорость движущейся системы отсчета К1,
7 = A ~~ г;2/с2)/2. Следовательно, преобразование Лоренца имеет вид
х = х; + п [G - l)(nx;) + jvtf], ct = 7 let1 + - nx'l . C2.8)
Вводя параметр а соотношением v/c = th а, получим преобразование в
виде
х = х; + n [(cha - 1)(пх;) + ct'sha], ct = ct'cha + nx; sha.
Два последовательных преобразования вдоль направления п с параметра-
параметрами а\ и «2 эквивалентны преобразованию с параметром ol\2 = «i+«2 —
групповое свойство преобразования Лоренца.
Пример 32.1. Частица движется в плоскости z = 0 по окружности
радиусом R:
x(t) = i?sin out, y(t) = ДA - cosut).
8 момент времени t = 0 скорость частицы v = (ujR, 0, 0). Найдем
уравнение траектории в системе К1, движущейся со скоростью v.
Из C2.8) получим формулы преобразования Лоренца:
/ 9 \
. / V \ ( V \
ct = 7 [ct — - х ->• uot = ч \ ut — — smut \ *
\ с / \ с2 J
x1 = 7(ж - vt) = 7i?(sina;t - ut), y' = у = R(l - cos ut).
Для частиц, движущихся со скоростью v ^ с, величина 7 ^ 1- В ин-
интервале лабораторного времени t, удовлетворяющего условию
имеем t' ~ — ( 1 + -
7 V 6
Уравнение траектории: у' = A?/272)(б72|ж/|/1?J/3. Производная dy1 /dx1
имеет разрыв.
360 Глава VII. Релятивиспгкая механика
32.3. Четырехмерные скорость и импульс частицы. В трехмерном
формализме положение частицы определяется тремя функциями хп =
= xn(t) (п = 1, 2, 3). Скорость частицы v = dx/dt. В системе отсче-
отсчета К', связанной с частицей, dx1 = dy' = dz' = 0. Из C2.7) находим,
что инвариантный пространственно-временной интервал в системе покоя
частицы принимает вид
/ ^2"
C2.9)
Время, отсчитываемое по «часам», движущимся вместе с частицей, назы-
называют собственным^ временем..
В пространстве Минковского кривую, по которой движется частица,
можно задать в параметрической форме хЙ = х^(т), где т, вообще го-
говоря, — произвольный параметр. Определим четырехмерную скорость D-
скорость) частицы соотношением и^ = dx^ /dr. Удобно выбрать в ка-
качестве параметра т инвариантное собственное время частицы. Полагая в
C2.9) tf = т, имеем dr = dt-\fl — v2/с2. Тогда 4-скорость
ds = cdt1 = cdt\ 1 — —.
Квадрат 4-скорости и^иЙ = с2. Ускорение частицы
w =
Далее производную по параметру т будем обозначать точкой:
wfi _ ^ji = х^. Дифференцируя и2 = с2, находим
Введем 4-импульс свободной частицы соотношением
... I тс mv
где w — масса покоя частицы или просто масса [250]. Для квадра-
квадрата 4-импулъса имеем р^р^ = т2с2. Контравариантные компонен-
компоненты 4-импульса р^ = (Е/с, р) представляют собой релятивистскую энер-
энергию и трехмерный импульс:
me2 mv
?= , р= 7 C2.10)
. /1 _ „2 /п2 ' "^ . /1 _ „2 /„2 V 7
Очевидно, что v = рс2 /?. В системе покоя частицы р^ = (тс, 0).
Квадрат 4-импульса (?/сJ - р2с2 = (тс2J, т.е. масса частицы предста-
представляет собой инвариант.
Лекция 32. Заряд в электромагнитном поле 361
Сделаем важное замечание. Означает ли утверждение об эквивалентно-
эквивалентности массы и энергии то, что они сходны по-существу? Нет, не означает. Мас-
Масса — инвариант, энергия — динамическая характеристика состояния части-
частицы совсем другой природы: в качестве временной компоненты 4-импульса
энергия зависит от выбора системы отсчета. Взаимосвязь массы и энергии
имеет смысл только в системе покоя частицы. По этой причине понятие
«массы» т/A — v2/с2I/2, зависящей от скорости, лишено какого-либо
содержания.
32.4. Масса системы невзаимодействующих частиц. Форму-
Формулы C2.10) применимы к любой системе N частиц, причем по известным
4-импульсам частиц р^ можно определить массу системы [12]. Рассмо-
Рассмотрим две частицы с массами mi и т2; 4-импульс системы р^ = р f + р 2:
? = ?\ + &2j Р = Pi + Р2 • Кинематически две частицы эквивалентны
одной частице с энергией ?, импульсом р, скоростью v = рс2 /Е и
инвариантной массой М = (р^р^/с2I/2.
В системе покоя частицы mi имеем р^ = (mic, 0),р% = (?2/с, Р2),
М = Jm\ + 2?2mi/c2 + т2,.
В системе центра масс
Раскрывая 4-произведение (pi + P2YP111 в СЦМ и в системе покоя первой
частицы, получим уравнение М?ю = mi (miс2 + ?2), из которого находим
,2\2
= (пыс2)
М
Раскрывая также 4-произведение (pi + Р2)^Р2/х, получим
М?20 = (ТП2С) + ^2^1? <?10 + <?20 = Мс .
Нерелятивистское приближение. В лабораторной системе ?п « mnc2 +
Мс2 и (mi + m2)c2 + — (vi - v2J, /x =
mi + m2
Отметим, что каждая из частиц mi и m2 может быть рассмотрена как
составная [251].
Рождение новых частиц. Рассмотрим процесс рождения частиц с мас-
массами та, т&,... при столкновении двух частиц массы mi ит2. Если ро-
рождаются две частицы массы mi и т2? то процесс столкновения называет-
называется упругим. При неупругих столкновениях могут рождаться новые частицы.
362 Глава VII. Релятивиспгкая механика
Законы сохранения энергии и импульса
?\ + ? 2 = ? а + ?b + • • • , Pi + Р2 = Ра + РЬ + • • •
выполняются независимо от характера столкновений. Условием реализации
реакции является неравенство
М ^ тх, тх = та + ть + ...
Из этого условия можно найти значение пороговой энергии, т.е. наимень-
наименьшее значение кинетической энергии сталкивающихся частиц, при котором
рождаются частицы общей массой тх. При М = тх все родившиеся
частицы неподвижны в системе отсчета, движущейся со скоростью v.
Рождение антипротона б реакции р + р = Зр + р.
1. Столкновение с неподвижной мишенью. Если первая частица покоит-
покоится, то в лабораторной системе отсчета ?\ = т\(?, pi = 0, <?2 = 2
Инвариантная масса удовлетворяет неравенству
М = у {гп\ + ТП2J + 2т\Ть/с2 ^ та + тъ + .
из которого находим пороговую энергию рождения частиц:
гр ^ гр гр л2 \та '
*- Ьпор 5 -^ Lnop —
В нашем случае массы всех частиц одинаковы и равны массе протона шр.
Следовательно,
Тьпор = 6wpc2.
Подставляя значение трс2 = 0,938 ГэВ, получим Тьпор = 5,628 ГэВ.
При значении Tl = Тьпор масса сталкивающихся протонов М = 4тр.
2. Столкновение встречных пучков. Рассмотрим столкновение одина-
одинаковых частиц, импульсы которых удовлетворяют условию pi + P2 = 0.
Полагая mi = wi2 = mo, ?\ = ?2 = т®с2 + То, получим значение
массы М = 2 (то + То /с2). Из условия рождения новых частиц следует
неравенство
2 I т0 + — ] ^ тпа + тъ + ... ^ То ^ Т0пОр7
I /VVl I /W^ - S I
с2.
В случае реакции рождения пары протон-антипротон получим критерий
рождения: То ^ Топор = тпрс2 = 0,938 ГэВ. При значении То = Топор
инвариантная масса М = 4шр. Таким образом, для рождения четырех
частиц в первом случае необходимо разогнать один протон до энергии TL =
= 6mpc2, а во втором — каждый протон до энергии То = тпрс2. Выигрыш
очевиден, поскольку в первом случае энергия 4трс2 бесполезно переходит
Лекция 32. Заряд в электромагнитном поле 363
в энергию центра масс системы и в процессе взаимодействия протонов не
изменяется.
Специально для детектирования реакции рождения пары протон-анти-
протон-антипротон был построен ускоритель в Беркли (США) — «беватрон» с энергией
пучка протонов 6,3 ГэВ. Антипротон был открыт в 1955 г. ( Нобелевская
премия, 1959 г.).
Пример 32.2. Ускорители на встречных пучках. Рассмотрим столк-
столкновение частиц равных масс mi = Ш2 = т, движущихся навстречу друг
другу; импульсы частиц р^ = (?/с, р), р^ = (?/с, —р). Кинетическая
энергия частицы — Т. Найдем кинетическую энергию относительного
движения частиц:
Тг =
где vr — скорость одной из частиц в системе покоя другой частицы. Для
этого запишем инвариант р \р 2 = (MeJ /2 — (тсJ в системе покоя первой
частицы. Полагая р^ = (тс,0), Рз = (?r/c, pr), ?r = mc2jr, полу-
22
гр FlF2 2 (Me) 2
Tr = тс = 2тс .
т 2т
В лабораторной системе Мс2 = 2(Т + ?пс2). Следовательно, Тг = 4Т +
+ 2Г2/шс2.
Мы получили чрезвычайно важный результат. В ньютоновой меха-
механике всегда Тг = 4Т, т.е. возможен лишь четырехкратный выигрыш
в энергии при использовании встречных пучков частиц. В релятивист-
релятивистском случае, когда Г > we2, получаем существенное увеличение энер-
энергии: Тг и2Т2/(тс2)>4Т.
Самый большой синхрофазотрон — «Тэватрон» Фермиевской нацио-
национальной ускорительной лаборатории в Батавии (США) разгоняет пучки
встречных пучков протонов и антипротонов до энергии Т = 1 ТэВ A ТэВ =
= 1012 эВ). Поскольку масса протона тпр = 938,2796 МэВ/с2, то этот
ускоритель эквивалентен обычному с энергией одного пучка Tr ~ 2 х
хЮ3ТэВ.
Отметим, что соотношение Тг = 4Т + 2Т2 /тс2 можно получить из
условия инвариантности массы М:
Пример 323.Кинематика упругого рассеяния частиц. Вернемся к
задаче рассеяния, изложенной в лекции 11. Законы сохранения энергии и
импульса можно записать в виде закона сохранения 4-импульса:
- (О
364 Глава VII. Релятивиспгкая механика
Пусть в лабораторной системе pf = (mic, 0), р2 = (^2/с, Р2). Найдем
соотношение, связывающее угол рассеяния <9 в СЦМ и угол рассеяния
налетающей частицы 02. Для того, чтобы исключить 4-импульс части-
частицы mi, перепишем (/) в виде
и возведем обе части в квадрат. Поскольку р^Рп^ — V 'пР'пц, = imn?J'', то
р2р'2 = (ш2сJ
В лабораторной системе р±р2 = mi^, Р1Р2 = ^i^2- В СЦМ |рд| =
= |Ро|, <?по = ?по, поэтому
Р2Р2 = (т2сJ + р1A - cosO). C)
Подставляя эти выражения в B), находим
pg(l-cosfl)
<- 2 = ^2
mi
С другой стороны, в лабораторной системе Р2Р2 = ^2 ? 2 / °2 ~ Р 2 Р 2 cos ^2 •
Следовательно, из C) получим
cos 6>2 = [?'2(?2 +mic2) -f2mic2 - (m2c2J]/P2F2c2.
Из D) следует, что в процессе рассеяния энергия первой частицы-мишени
приобретает наибольшее значение при в = тп отношение минимального
значения кинетической энергии налетающей частицы после столкновения
к значению кинетической энергии до столкновения
? 2 ~~ т2С2 (^2 — ?71lJ
=
W2
( }
Предположим, что m2 <C mi. Согласно классической механике легкая части-
частица может передать мишени небольшую часть энергии Т[ « 4(mi/ni2)T2 <C
<С Т2. Ситуация меняется в случае релятивистских, энергий: если Т2 ~ т\с2,
то отношение E) может быть порядка 1/3 [12].
Рассеяние тождественных частиц т\ = ni2 = m. В классической
механике угол между импульсами рассеянных частиц в\2 = тг/2. В ла-
лабораторной системе минимальный угол разлета частиц 9™2 определяется
соотношением cosf9^ = Т2/(Т2 + 4fnc2). При Т2 <С яге2 имеем классиче-
классический предел.
32.5. Электромагнитное поле. Только после создания теории отно-
относительности стало ясно, что электрическое и магнитное поля представля-
представляют собой две формы единого электромагнитного поля, которое характе-
характеризуется 4-потенциалом А^(х). Шесть величин, определяющих векторы
Лекция 32. Заряд в электромагнитном поле 365
напряженностей электрического Е и магнитного В полей, являются ком-
компонентами тензора электромагнитного поля
= ы _ а»
дх ох
Еп = рп^ Вп = _1 епЛ^ы? П; М = l5 2, 3. C2.12)
При преобразованиях Лоренца C2.5) тензор F^v преобразуется по
закону
В частности, если выполнить преобразование C2.8) и учесть C2.12), то
получим
Е; = (Еп)п + 7 f[n[En]] + ^
В; = (Bn)n + 7 ([n[Bn]] + -
Можно проверить, что F^F1"^ = 2(Е2 — В2) —инвариант.
Пример 32.4. В лабораторной системе Е = О, В ф 0. В системе
отсчета, движущейся со скоростью v = vn,
Е; = 7 [- В] , В; = (Bn)n + 7[n[Bn]].
В наиболее интересном случае, когда (пВ) = 0, v ~ с, имеем Е; ~ 7[п^]?
В; = 7В: в системе К' векторы Е;, В;,п, взаимно перпендикулярны,
причем Е1 ~ В1. Структура полей подобна плоской волне.
32.6. Лагранжиан и уравнения движения. Рассмотрим движение ча-
частицы массой т, зарядом е в электромагнитном поле C2.11). Функцио-
Функционал, который приводит к правильным уравнениям движения:
тх» = -F*lv{x)xv, /i = 0,l,2,3, C2.13)
с
имеет вид
/ =
= drL(x, x),
т\
где функция Лагранжа
111 P TY1 f
L(x, x) = ^j xaxa - - Ааха - —. C2.14)
Уравнения Лагранжа
d dL dL
C2.15а)
366 Глава VII. Релятивиспгкая механика
d ( . i* е л А е дАа . «1* е
\ _ е дАа . ..м _ е /&4а
/ С <9ж С \ <9ж
/7Т \ Р / Р Г/Т /^ \ Г/Т Г/7*
' C2.156)
совпадают с уравнениями C2.13). Образуя свертку обеих частей C2.13)
е d
с Xni тх^Хп = - ?^уXuXv —»- —тх^Хп = 0, получим первый интег-
с ат
рал ж^ж^ = const. Нас будут интересовать такие решения ж^ = ж^(т),
для которых const = с2. Для реализации этого условия необходимо, что™
бы выполнялось равенство и^и^ = с2, где и^ = ж/ДО) — начальная
4-скорость частицы.
В трехмерной форме лагранжиан C2.14) имеет вид
ТП • • в ТПС
L = — (х — с t ) — е Ant + - Ах — ^^.
2 с 2
Полагая в C2.156) // = 0, 1, 2, 3, получим
mc2i= eEx, C2.16а)
шх = eEi + - [хВ], C2.166)
с
Е = -А В = rot А. C2.17)
Поскольку md = 7тшо = ?/с, то C2.16а) представляет собой закон
изменения кинетической энергии: ? = еЕх. Полагая в C2.15а) /л = О,
получим закон изменения полной энергии:
Пример 32.5. Движение в кулоновом поле. (Релятивистская задача
Кеплера.) Электрон взаимодействует с протоном, который движется с по-
постоянной 4-скоростью и^ по прямой х^(т) = Ь^ + и^т. Заряд электро-
электрона е = ^ео. Электромагнитное поле, создаваемое протоном, определяется
запаздывающим 4-потенциалом Льенара—Вихерта [12, 38]:
г" (ж) = [х - x{t)Y - 4мм[ж - х{т)]и = (х- ЪУ - \и»{хи - Ъи),
г^г^ = (х — ЪJ т:(хи ~ ЪиJ.
Лекция 32. Заряд в электромагнитном поле 367
Здесь {—г^г^I/2 — инвариантное расстояние от протона до точки наблю-
наблюдения. Лагранжиан системы
Ни = — X цХ ~т~ А^Х .
В системе покоя протона и^ = (с, 0) 4-потенциал совпадает с кулоновским
потенциалом. Помещая протон в начало координат, запишем лагранжиан в
трехмерной форме:
г m ( 212 -2\ , еео;
В сферической системе координат
L = В (г* + г2в2 + г2 sin^V2 - c2t2) + ^i.
Поскольку dL/dt = 0, то dL/di = const = —H,
H = me t — ^—.
r
Учитывая соотношение с2 = c2t2^x2, получим закон сохранения полной
энергии:
т^2 _ J?^ еео _ 1 /^рЛ2 _ г (И2 _ 2 4ч
2 тс2 г 2тс2 V г ) 2тс2 [ Ш С h
Очевидно, что сохраняется момент импульса и проекция момента на ось z:
Mz = т^ = тг2 шпв2ф.
дф
Полагая в = тг/2, получим закон сохранения полной энергии в виде
[„= _ (fl»J] _ JL ?22.
2mH [ V с / J we2 r
Отметим, что это решение имеет смысл при условии (еео/сJ < М2.
В нерелятивистском приближении Л" = ?nc2 + ?J, Е «С тс2 эффектив-
эффективная потенциальная энергия ^7эф(г) совпадает с F.9).
Пример 32.6. Движение частицы б двумерной ловушке Пауля — ги-
гиперболическом волноводе. Открытый волновод образован двумя парами
металлических поверхностей: у2 = х2 — R2 /2 и у2 = х2 + R2/2, к
которым приложено напряжение с постоянной и высокочастотной соста-
составляющими (рис. 32.1). Основная ТЕМ-волна, которую можно возбудить в
368
Глава VII. Релятивисткая механика
волноводе, имеет критическую частоту, равную нулю, и распространяется
со скоростью света в вакууме [266].
Решение уравнений Максвелла, удовлетворяющее граничным условиям
на поверхностях волновода, можно представить в терминах 4-потенциала:
В лабораторной системе
efa = @, 1, 0, 0), е^2) = @, 0, 1, 0),
= A,0,0,1), № = -\
с
где ш — постоянная величина, G(kx) — произвольная функция. Очевид-
Очевидно, 4-потенциал удовлетворяет условию
Лоренца: d^A» = 0; А2 = 0. Напря-
женности электрического и магнитно-
магнитного полей C2.17) соответственно равны
=^(-х,у, 0)G(kx),
= - — (y,x,0)G(kx).
B)
Отметим, что Е2-В2 = ЕВ = 0. Уни™
рис 32 1 кальная особенность рассматриваемой
открытой системы состоит в том, что
конфигурации поля основной волны и поля в статическом случае совпада-
совпадают [266]. В случае движения пучка нерелятивистских частиц эта электроди-
электродинамическая система, предложенная В. Паулем (Нобелевская премия, 1989 г.),
позволила создать масс-спектрометр высокого разрешения [267-269].
Подставляя в C2.16а), C2.166) напряженности поля B), получим си-
систему:
2е
тх = -— [i--] G(ip)x,
it, \ с _
C)
2е / z
¦it \ С
2е
—^(xx-yy)G(cp),
= -^(xx-yy)G(<p).
D)
E)
F)
Лекция 32. Заряд в электромагнитном поле 369
Начальные условия —1@) = 0, х@) = (xOi г/0? 0), i@) = щ, х@) = и.
Из уравнений E), (б) находим первый интеграл:
где g = (iio — uz)/c — константа. Следовательно, на траекториях t — z/c =
= gт, (p(r) = b = wgr. Тривиальный первый интеграл системы (З)-(б)
(ciJ-x2-y2-z2=c2. (8)
Из уравнений G), (8) находим
Подставляя G) в C) и (?), получим уравнения
^]i/. (/2)
Пусть G(y?) = Fq + F cos (p. Переходя в A1\ A2) к безразмерным пе-
переменным s = (f(r)/2, a = 8ecVo/((jj2gR2), b = 4ecF/(w2gi?2), получим
уравнения
d2u
—г + (а + 2Ь cos 2s)ii = 0, G3)
as2
7 - (a + 2Ь cos 2s)v = 0,
ds2
которые представляют собой частные случаи уравнения Матье:
d2M
ds2
2v cos 2s)M = 0. A5)
Для реализации движения частицы необходимо, чтобы решения удовле-
удовлетворяли условиям \х(т)\ < И/л/2, \у(т)\ < R/y/2. Из теории функций
Матье известны два класса решений — ограниченные и неограниченные
[270, 271]. Области устойчивости и неустойчивости решений в плоскости
параметров (/л = a,v = Ь) и (/л = -a, v = —b) разделены семейством
симметричных кривых /л = /^ (^) (см. рис. 29.3). Отметим, что параметры a
370
Глава VII. Релятивисткая механика
и Ь в уравнениях A3), A4) лежат на прямой /х = BVq/V)v в областях
и ^ 0 и г/^0. Ограниченное решение уравнения (/5) существует в
первой области устойчивости, которая лежит справа от кривой /лсо(^) и
ограничена кривыми ficii^) и iisi(v) = /aci(—v). Эта область изображе-
изображена на рис. 32.2. В нашей задаче представляют интерес только те значения
-0,5 0
Рис. 32.2
параметров а и Ь, для которых одновременно устойчивы решения уравне-
уравнений A3), A4).
Для анализа общей области устойчивости произведем преобразова-
преобразование инверсии относительно оси v и найдем множество значений пара-
параметров, на которых области устойчивости решений уравнений A5), A4)
перекрываются. Общая область устойчивости в плоскости (//, v) огра-
ограничена на рис. 32.2 криволинейным треугольником с вершинами в точ-
точках @, 0), (ас, Ьс), @, Ьт), где ас = 0,237, Ъс = 0,706, Ът = 0,92.
Отметим, что в ультрарелятивистском случае, т.е. при vz ~ с, \vx\,
\vy\ <C vz, g « тс2/2Е, ? — начальная энергия. Изменяя отношение
Vq/V в интервале 0 < Vq/V < ас/2Ъс = 0,168, можно управлять разме-
размерами области пересечения рабочей прямой с зоной устойчивости, а изменяя
частоту, можно пропускать через волновод электроны в ограниченном ин-
интервале энергий [212-214].
32.7. Заряд в плосковолновом поле. Рассмотрим движение заряда во
внешнем поле, задаваемом 4-потенциалом
В специальной системе
е" = @, 1, 0, 0), i^ = ^V
с
Тензор электромагнитного поля
= kx.
" = A, 0, 0, 1),
= ut-
dip
Лекция 32. Заряд в электромагнитном поле 371
1. Пусть h((p) = -(c/u)g<p. Тензор F»" = -(c/o;)g/^. Из C2.12)
следует, что векторы напряженности Е = (g, 0, 0), В = @, g, 0) соответ™
ствуют постоянному скрещенному полю.
2. Положим h((p) = —b cos ср. В этом случае тензор F^v = bsimpf^
определяет линейно-поляризованную волну.
Очевидно, что п2 = 0, е2 = — 1, пе = 0. Эти соотношения существен-
существенно упрощают интегрирование уравнений движения G3).
Выберем начальные условия в виде х^@) = 0, х^@) = v^. Запишем
уравнения движения в форме C2.15а):
(mi + he = ^feMei. C2.19)
dr \ с / с dtp
Образуя свертку C2.19) с к ^, найдем первый интеграл кх = kv. Следо-
Следовательно, ф = kv, (p = kvr. Умножив C2.19) на е^, получим еще один
интеграл:
d / в \ в
— I тех — - h) = 0 —»¦ ех = ^^ ^(ф) + ег;.
dr V с / тс
Исключим затем ех из C2.19):
— mi4 -he11) = ^к^1 — ( — /г + ег;) .
ат \ с у с дер \тс /
Интегрируя, находим
i'* = г;'* - — he^ + — fc^ — h + ^^r — h\
тс тс kv 2mlcl kv
Удобно 4-скорость представить в терминах постоянного тензора f^v =
= к ме v — е ^к v. Учитывая, что
получим
!"иуа- C220)
В квантовой электродинамике важную роль играет изучение процес-
процессов взаимодействия ультрарелятивистских частиц, движущихся во внеш-
внешних полях. В этом случае в системе покоя частицы любое слабооднородное
поле близко к скрещенному (см. пример 32.4). Наиболее впечатляющим
оказалось то, что результаты расчетов в скрещенном поле, записанные в
инвариантном виде, определяют характеристики тех же процессов в произ-
произвольных полях.
Пусть h(ip) = —аср. На траектории (р(т) = kvr. Интегрируя C2.20),
получим параметрическое представление решения уравнений движения:
372 Глава VII. Релятивиспгкая механика
еа f»<* 2 . е a
2
x — v i J ua I T
2rnc 6m2c2
32.8. Уравнении Гамильтона. Величину
dL е .
называют обобщенным импульсом. Для перехода к уравнениям Гамильтона
введем пространство R8 с координатами хм,рд и построим лагранжиан
Швингера (см. 25.6а):
1 / е \2
1(х, р, х, р) = L(x, х) + — (р — тх — - А) = —рх — Н(х, р),
2т V с /
+^f. C2.21)
Теперь уравнения Лагранжа-Эйлера по переменным ж, р приобретают
форму уравнений Гамильтона:
d dl dl . 5>Я
d dl dl ,a дН
Введем скобки Пуассона функций А(х, р, т), В{х} р}т) соотно-
соотношением
_ _SA_ дВ_ дА дВ
Фундаментальные СП [ж м, р v] = — g ^v. Уравнения Гамильтона в терми-
терминах СП имеют вид
х^ = \х», Н] ^х^ = — (p--aY, C2.22)
m V с /
е 9^4
р^ = [рм, Я] -»> рм = - ira —-. C2.23)
Покажем, что уравнение C2.13) имеет гамильтонову форму. Для этого
вычислим СП:
[тж", Я] = (р- -А^^тг^, К, тг17] = --F^.
Далее находим
т^ = [[тж", Я]Я] = [тг^, Я] =
тс
Лекция 32. Заряд в электромагнитном поле 373
Система C2.22), C2.23) имеет первый интеграл Н(х, р) = const.
Если начальные данные жд@), рд@) удовлетворяют условию Я(ж@),
р@)) = 0, то const = 0. Следовательно, на траекториях системы C2.22),
C2.23) Н(х, р) = 0.
32.9. Канонические преобразования. Используя методы теории ка-
канонических преобразований, изложенные в лекции 26, можно получить
производящие функции, порождающие замену переменных ж, р —» х\ р'.
Производящая функция F\ = F(x, ж;, т). Предположим, что КП зада-
задано в неявном виде уравнениями
Р^ = Рц(х, х'ч г), р'^= р^(х, х', т),
и потребуем, чтобы новый лагранжиан имел вид 1'(х', р;, т) = —р'х1 —
— Н'(х', р', г). Тогда должно выполняться соотношение, аналогич-
аналогичное B6 Л 0):
^рх - Н{х, р) = -р'х' - Н'(х', р\ т) + -±, C2.24)
где Fi = Fi (ж, ж;, т) — производящая функция КП. Поскольку
dFx dF1 dF1
= 4-
dr дт дх»
то, полагая
т " 4-
р^ = rtl., C2.25)
получим
H'(x , p', t) = \H{x, p) + y— -)x=x(x.<p,<T) ¦
p=p(xf ,p' ,t)
Производящая функция F2 = F2(x, f/, г). Произведем преобразова™
ние Лежандра функции F\(x, x\ r), переходя к независимым перемен-
переменными^ и р1^ = dFi/dx/fI.Шз C2.24) имеем
— (Fi -р'х') = -рх-р'х' + (Н' -Н).
Следовательно, F\ —р'х1 = F2(x, p\ т),
Каноническое преобразование ж, р —>- х', р' определяется соотношениями
374 Глава VII. Релятивиспгкая механика
Новый гамильтониан
( ^S^1)(i,Vt). C2.27)
р=р(х',р' ,т)
Пример 32.7. Произведем КП, порождаемое призводящей фушщи-
ей F2(x, р') = —р'х Н— \{х). Из C2.26) находим х^ = жт, р^ = р^ —
е <ЭА „
—— • Новый гамильтониан
с ох^
А, А дХ
Пусть А^ = —асре^, (р = fcx, А = - а(р(ех). Тогда
= а\ ^
32.10. Уравнение Гамильтона-Якоби. Произведем КП ж, р —>> х\
р\ обращающее новый гамильтониан в нуль. Тогда из C2.27) получим
уравнение с частными производными:
ЭР 1 / дР е \ ( дР е л
т zm \ох^ с ) \охц с
Полный интеграл C2.28) F = Р(х^, См, т) + Со должен удовлетворять
условию дР/дт = 0 [193]. Выбирая постоянные См = р'^ в качестве
новых импульсов, получим производящую функцию i^(^, p;, т).
Например, при движении в плосковолновом поле с 4-потенциа-
лом А^ = h((p)e^ полный интеграл можно искать в виде
F(x, р1, т) = ^р'х + f |— -
где р; = т2с2. Поскольку дР/дх^ = —р^ + (dw/dip)k^, то уравне™
ние C2.28) принимает вид
? = -2рА + ?А.
dip с с2
Следовательно, производящая функция КП
Лекция 32. Заряд в электромагнитном поле 375
Решение уравнений движения C2.22), C2.23) следует из C2.26).
Заметим, что изложенные в лекциях 28 и 29 методы возмущений по-
позволяют получить решение уравнений движения C2.22), C2.23) в форме,
наиболее удобной для приложений в классической и квантовой электроди-
электродинамике [6].
Пример 32.8. Найдем решение уравнений движения C2.22), C2.23),
используя каноническую теорию возмущений. Полагая в B8.12) z^ = х м
и заменяя t —>• т, имеем
т2 т3
+
',р')] = ±- (р'
ьд 2[""д ЗГ"""' (/)
е ,,
А (я
m V" с
тс ^
е е2
тс а ^У т2с2 ^v
Заметим, что для однородных полей из G) следует решение C2.13) в
виде матричной экспоненты: х = ехр ( — Ft) и. В случае скрещенного
поля G) совпадает с решением, полученным в п. 32.7.
Пример 32.9. Ускорение протонов в синхрофазотроне. Пусть на-
напряженность постоянного однородного магнитного поля В = (О, О, —В).
Из уравнений C2.16а) следует, что сохраняется кинетическая энергия про-
протона. Если начальная скорость v@) = vq перпендикулярна вектору В, то
траектория представляет собой окружность, по которой протон вращает-
вращается с угловой скоростью Шр = @, 0, Up), Шр > 0. Радиус окружности R
зависит от начального значения скорости. Из C2.166) получим уравне-
уравнение mjv21R = eBv/с, из которого найдем соотношение между величина-
величинами импульса р = mjv, энергии ? = тс2^ и радиусом:
p=-eBR, ? = [(тс2J + (eBRJ}1/2.
С
Угловая скорость ир = v/R или ир = есВ/'?.
Теперь можно обсудить принцип работы синхрофазотрона — наибо-
наиболее современного циклического резонансного ускорителя, предложенного
в 1943 г. профессором Бирмингемского университета М. Олифантом. Высо-
Высокочастотное поле ускоряет протоны в одном или нескольких промежутках,
расположенных на орбите. Протоны движутся по окружности постоянно-
постоянного радиуса R. Для сохранения постоянного значения радиуса напряжен-
напряженность магнитного поля при увеличении энергии должна возрастать. Рост
энергии частиц обеспечивается тем, что частота высокочастотного на-
напряжения и совпадает с частотой вращения по орбите ир. Однако в отли-
отличии от электронов, для которых скорость v = с[1 — (тс2/ЕJ}1/2 близка
376 Глава VII. Релятивисткая механика
к скорости света уже при небольшой кинетической энергии (г? = 0,98с
при Т = 2 МэВ) и частота обращения ше = v/R практически постоян-
постоянна, скорость протонов становится постоянной лишь при гораздо больших
значениях энергии (v = 0,98с при Т = 4 ГэВ). Следовательно, для сохра-
сохранения резонанса и = ир частота ускоряющего поля и должна быть связана
с законом нарастания напряженности магнитного поля соотношением
есВ
ш = ^—
Аетофазировка. Разработка ускорителей современного типа началась
с анализа механизма автофазировки. Поскольку кинетическая энергия —
возрастающая функция времени, то соотношение ир = ш может выполнять-
выполняться только в том случае, когда и к В также являются функциями времени.
Пусть выполняется условие резонанса ир = ш для частицы, проходящей че-
через ускоряющий промежуток в момент времени to. Прирост кинетической
энергии при прохождении зазора AT ~ eFsin<9o, где во — равновесное
значение фазы, при которой частица попадает в зазор, V — разность по-
потенциалов между электродами зазора. Для нерезонансных частиц это усло-
условие не выполняется. Оказалось, что фазы частиц, пришедших к зазору в
некотором интервале фаз в окрестности равновесной фазы, при последую-
последующих прохождениях зазора совершают колебания в окрестности значения во
(область захвата). Механизм автофазировки приводит к тому, что при доста-
достаточно медленном возрастании величин ш шВ энергия частиц, находящихся
в области захвата, автоматически принимает значение, близкое к резонанс-
резонансному, т.е. все эти частицы ускоряются.
Механизм автофазировки был независимо открыт в 1944 г. советским
физиком В.И. Векслером и в 1945 г. американским физиком Э. Мак-Мил-
ланом. Первая машина такого типа — космотрон на 3 ГэВ (Брукхейвен,
США) была запущена в 1952 г. Синхрофазотрон с максимальной энергией
протонов 6,3 ГэВ, получивший название беватрон A953 г., Беркли, США),
был специально создан для детектирования пары протон—антипротон.
В 1956 г. был открыт антинейтрон, в 1965 г. получено первое антиядро —
антидейтрон — связанное состояние антипротона и антинейтрона.
Жесткая фокусировка. Дальнейшее увеличение энергии связано с при-
применением новых методов фокусировки частиц. Например, для достижения
энергии 10 ГэВ, протон совершает 4,5 млн оборотов, проходя путь, в 2,5
раза больший, чем расстояние от Земли до Луны. Поэтому необходимо
обеспечить такую устойчивость пучка, чтобы небольшие отклонения от
равновесной орбиты не приводили бы к потере частиц. В 1950 г. греком
Н. Кристофилосом и, независимо, в 1952 г. американцами Е. Курантом,
М. Ливингстоном и Г. Снайдером был открыт новый тип магнитной фо-
фокусировки, получившей название сильной или жесткой фокусировки. Они
предложили собрать магнит в виде периодически чередующихся секторов,
каждый из которых фокусирует частицы по одной поперечной к скорости
координате и дефокусирует по другой. В результате возникает эффективная
Лекция 32. Заряд в электромагнитном поле 377
фокусировка по радиальному и вертикальному направлениям. Значительно
сокращается стоимость магнита и системы питания. Именно это открытие
сделало возможным создание синхрофазотронов на сверхбольшие энергии.
Рассмотрим движение протона в синхрофазотроне, используя метод
усреднения канонических систем. Ограничимся анализом ускорения и фа-
фазовых колебаний, не учитывая проблем фокусировки. Протон движется в
переменном однородном магнитном поле и ускоряется в электрическом
поле, создаваемым электродами, расположенными в плоскости х = 0.
Гамильтониан протона, взаимодействующего с электромагнитным по-
полем C2.21),
2 2 1
Ра ШС if в . в
М = —
2т 2 2т Г с mv ' 7 с
Здесь A(i, х) = (A(t, х), 05 0) —вектор-потенциал электрического поля,
Am(t, x) — вектор-потенциал магнитного поля,
Am(t, х) = ^B/, -ж, 0), A(t, х) = — 6(x)f(z) sin g(t),
где S(x) — дельта-функция Дирака.
Представим гамильтониан Н в виде Н = Н® + /г,
2т с
ft«-vAm(t, x), C)
с
mv = р Am(t, х). Произведем вначале КП t, р0 ->• *;, Ро-
Ро=р'о,
порождаемое ПФ
Новый гамильтониан C2.27)
378 Глава VII. Релятивиспгкая механика
формально совпадает с «поперечной» частью гамильтониана B6.19). Для
того чтобы ввести координаты центра окружности и координаты, описыва-
описывающие движение протона по окружности, произведем КП B6.19) ж, у, рХу
Ру ~> Хп, Рп'-
1 i
х = -j=(x1+x2)J у =—у=(х2-хг), E)
Рх = -т= (pi +Р2), РУ = ^е(Р2 -Pi),
V2 у2
и КП xnj рп -» x'nJ р 'п9 порождаемое ПФ
F2{x'n,pln, т) = -i(
где О(т) = eB(t)/mc, t = tf + pfor/mc. Из C2.26) получим замену пере-
переменных:
[i () ]
Pi = --VmU[ip[
Переходя к действительным каноническим переменным х'п = у/Т^ х
х ехр(—г(/?пM р'п = *л/??г exp(i(^n) (n = 1, 2), получим из D)-F) парамет-
параметрическое представление траектории протона:
4'm0L
У VmO1
Очевидно, что B/i /wOI//2—радиус окружности, (г cos <^2, ^^ sin ф2, 0) —
координаты центра окружности, г = BI2 /тОI/2. Каноническое преобра-
преобразование (б), G) позволяет исключить вклад гамильтониана Н® в полный
гамильтониан. Новые переменные In, tpn удовлетворяют каноническим
уравнениям с гамильтонианом C2.27), который представляет собой вклад
производной ПФ:
НЦ = -^(Ii/2I/2 sin (<p + ^ + tp2).
Поскольку среднее за период Т = 2тг/0 значение гамильтониана НЦ рав-
равно нулю, то эволюция медленных переменных определяется гамильтониа-
гамильтонианом C), в котором следует произвести замену переменных D\ G). Полагая
Лекция 32. Заряд в электромагнитном поле 379
в C) z = 0, f(z) = 1, получим
eV
h' = —x6(x)sin g(r), E)
207"
si
T Z
Г f
), g(r) = dT'u)po/mc+ dtu(t).
о о
Производная медленной переменной р0 удовлетворяет уравнению
ldh'\ ldhf eV
S()()
Учитывая правила обращения с S-функцией, вычислим интеграл:
т
1 Г , , 1 dhf eVU v^ sinwn
/ it'
с of ltxc ^ |smfj
0
о о
Здесь wn — корни уравнения \/Т\ cos w + л/Т^ cos y?2 = 0.
Пусть центр окружности находится в окрестности начала координат.
Тогда I2 <C /i, cosw « 0, wi = тг/2, ^2 = Зтг/2. Обозначая энергию
протона f = рос, получим из (9) уравнение
^^ A0)
71
В этом же приближении находим I\ = (—dhf/d(pi), ф\ = (dhf/д1±), или
7ГТЯС
G7)
Равновесная энергия ?o(t), связанная с частотой генератора соотношени-
соотношением uj(t) = u(t)mc2/?o(t), удовлетворяет уравнению, следующему из A0):
eVU
?о = sin^o- A2)
7Г
Поскольку радиус орбиты R = B/i/wOI/2, то
О me2 \ 7Г 2c dt
380 Глава VII. Релятивиспгкая механика
Следовательно, для сохранения постоянного значения радиуса орбиты на-
напряженность магнитного поля должна возрастать по линейному закону со
скоростью dB/dt = BcV/ttR2) sinf9o.
Уравнение фазовых колебаний. Поскольку ф\ = 0, то производная фазы
Из (I0)-(I3) получим уравнение
d в eVU
dr и тттс2
(sin0-sin0o). A4)
В окрестности равновесной фазы sin в = sin во + (в — во) cos во. Протоны,
для которых выполняется условие cos 6>o < 0, находятся в области захвата
и ускоряются высокочастотным полем генератора в режиме нормальной
работы синхрофазоторона.
32.11. Ковариантная теории возмущений в классической электро-
электродинамике. Существенную часть курсов классической электродинамики
составляют разделы, посвященные вычислению радиационных процессов,
к которым относятся излучение частиц, движущихся во внешних полях,
рассеяние частиц и рассеяние электромагнитных волн. Можно заметить,
что все расчеты основываются на использовании потенциала Лиенара-
Вихерта, представляющего собой решение уравнения для 4»потенциала
в приближении заданного 4-тока [12, 38, 153, 247, 248]. Поэтому отсут-
отсутствует анализ индуцированных процессов и эффектов высших, порядков.
С другой стороны, гамильтонов формализм позволяет получить решение
уравнений на основе теории канонических преобразований, не обраща-
обращаясь непосредственно к уравнениям. В частности, в рамках канонической
теории возмущений, изложенной в лекции 28, можно вычислить любую
экспериментально измеряемую динамическую характеристику процесса в
релятивистской ковариантной форме. Кроме упрощения всех вычислений,
теория является универсальной в том смысле, что эволюция динамических
переменных, обусловленная взаимодействием частиц и поля, определяется
единым образом в терминах запаздывающих функций Грина. Результат вы-
вычислений, как и в фейнмановской теории возмущений в квантовой электро-
электродинамики, имеет форму ряда по степеням е2, каждый член которого связан
с соответствующим спонтанным или индуцированным процессом [6].
Лекция 32. Заряд в электромагнитном поле 381
Приложение. Эллиптические функции
Подробные сведения о свойствах эллиптических функций можно найти
в работах [29, 66-68]. Эллиптические функции зависят от переменной z
и вещественного параметра (модуля) fc, который удовлетворяет условию
О ^ к ^ 1. Дополнительный модуль к' = A — к2I/2. Здесь мы пе-
перечислим основные свойства эллиптических функций sn(z, к), 01B;, к),
d.n(z5 к) (или сокращенно sn(z), cn(z), dn(z)) в действительной обла-
области переменной z. Эллиптические функции определяются как функции,
обратные по отношению к интегралам, представленным в лежандровой
нормальной форме:
[A - i2)(i - kh2)}-1'2 = [ dt [A - t2)(k>2 +
= [ dtKl-t2)^2-*;'2)]-1/2.
dnz
При к —»¦ 0 имеем
sn (z, fc) —>• sin z, en (z, fc) —>• cos z, dn (z, fc) —>¦ 1,
а при fc —»¦ 1
sn (z, fc) ->• th z, en (z, fc) ->• ch^1 z, dn (z, fc) ->- ch z.
Область изменения:
Функции sn z и en z — периодические с периодом 4if, а функция dn z —
периодическая с периодом 2К, где if — полный эллиптический интеграл,
1 тг/2
if(fe) =
о о
Приближенные значения
тг / Jb2 \ ,4 1 , 4A + к)
К ^-И+ — + ...], if -^ In — = — In v ;.
Справедливы формулы sn(z + 2if) = ^snz, cn(z + 2if) = ^enz,
, ч enz / ч k'snz , ч к'
sn (z + if) = , en (z + if) = , dn (z + if) = .
dn z dn z dn z
Основные соотношения: sn2z + cn2z = 1, Psn2z + dn2z = 1,
dsnz cfenz ddnz .
= enzdnz, = —snzdnz, = —k snzenz.
dz dz dz
СПИСОК ЛИТЕРАТУРЫ
1. Образованный ученый. - М.: Наука, 1979.
2. Капица П. Л. Эксперимент. Теория. Практика. — М.: Наука, 1981.
3. Ишлинский А. Ю. Механика. Идеи, задачи, приложения. — М.: Наука, 1985.
4. Павленко Ю. Г. Методологические вопросы в курсе теоретической механи-
ки//История и методология естественных наук. Вып. Физика. — М.: Изд-во
Моск. ун-та, 1988. С. 44.
5. Космодемьянский А. А. Теоретическая механика и современная техника. - М.:
Просвещение, 1969.
6. Павленко Ю. Г. Гамильтоновы методы в электродинамике и в квантовой ме-
механике. — М.: Изд-во Моск. ун-та, 1985.
7. Павленко Ю. Г. Задачи по теоретической механике. — М.: Изд-во Моск. ун-
унта, 1988.
8. Дубровин Б. А., Новиков С. П., Фоменко А. Т. Современная геометрия. — М.:
Наука, 1979.
9. Хелгасон С. Дифференциальная геометрия и симметричные пространст-
пространства. -М.: Мир, 1964.
10. Стернберг С. Лекции по дифференциальной геометрии. - М: Мир, 1970.
11. Головина Л. И. Линейная алгебра и некоторые ее приложения. — М.: Наука,
1979.
12. Ландау Л. Д., Лифшиц Е. М. Теория поля. - М.: Наука, 1973.
13. Морс Ф. М., Фешбах Г. Методы теоретической физики. Т. 1, 2. — М.: Наука,
1960.
14. Мэтьюз Дж., Уокер Р. Математические методы физики. — М.: Атомиздат,
1972.
15. Голдстейн Г. Классическая механика. - М.: Наука, 1975.
16. Арнольд В. И. Математические методы классической механики. — М.: Наука,
1989.
17. Тейлор Э., Уилер Дж. Физика пространства^ времени. — М.: Мир, 1971.
18. СтройкД. Я. История математики. Краткий очерк. — М.: Наука, 1964.
19. Татаринов Я. В. Лекции по классической механике. — М.: Изд-во Моск. ун-
унта, 1984.
20. Бюшгенс С. С. Дифференциальная геометрия. -М.: ГИТТЛ, 1940.
21. Липсон Г. Великие эксперименты в физике. — М.: Мир, 1972.
22. Кириллин В. А. Страницы истории науки и техники. — М.: Наука, 1986.
23. Вейнберг С. Гравитация и космология. — М.: Мир, 1975.
24. Терлецкий Я. П. Теоретическая механика. — М.: Изд-во Университета дружбы
народов, 1987.
25. Пановко Я. Г. Механика деформируемого твердого тела. - М.: Наука, 1985.
26. Куб о Р. Статическая механика. — М.: Мир, 1967. С. 163, 237.
27. Хир К. Статическая механика, кинетическая теория и стохастические процес-
процессы. -М.: Мир, 1976.
28. Ландау Л. Д., Лифшиц Е. М. Механика. — М.: Наука, 1973.
Список литературы 383
29. Градштейн И. С, Рыжик И. М. Таблицы интегралов, сумм, рядов и произ-
произведений. -М.: Наука, 1971.
30. Рой А. Движение по орбитам. ~~ М.: Мир, 1981.
31. Охоцимский Д. Е. Динамика космических полетов. - М.: Изд. Моск. ун-та.
1968.
32. Демин В. Г. Движение искусственного спутника в нецентральном поле тяго-
тяготения. — М.: Наука, 1968.
33. Белецкий В. В. Очерки о движении космических тел. - М.: Наука, 1978.
34. Левантовский В. И. Механика космического полета. — М.: Наука, 1980
35. Балк М. Б. Элементы динамики космического полета. — М.: Наука, 1965.
36. Коноплева Н. П. Гравитационные эксперименты в космосе // УФН. Т. 123,
вып. 4. С. 537.
37. Ахиезер Н. И. Лекции по вариационному исчислению. - М.: ГИТТЛ, 1955.
38. Фейнман Р., Лейтон Р., Сэндс М. Фейнмановские лекции по физике. Т. 6. - М.:
Мир, 1977, с. 94.
39. Н—тер Эмми. Инвариантные вариационные задачи//Вариационные причины
механики. — М.: Физматгиз, 1959. С. 611- 630.
40. Медведев Б. В. Начала теоретической физики. ~~ М.: Наука, 1977.
41. Добронравов В. В. Основы аналитической механики. — М.: Высш. школа,
1976.
42. Поттер Д. Вычислительные методы в физике. — М.: Мир, 1975.
43. Себехей В. Теория орбит. - М.: Наука, 1982.
44. Саслау У Гравитационная физика звездных и галактических систем. — М.:
Мир, 1989.
45. Демин В. .Г. Судьба Солнечной системы. - М.: Наука, 1969.
46. Никитин Е. Е., Овчинникова М. Я. Интерференционные явления в атомном
рассеянии//УФН. 1971. Т. 104, вып. 3. С. 379-412.
47. Buck U. Inversion of molecular scattering date // Rev. Mod. Pfays. 1974. V. 46,
№2. P. 369-389.
48. Трикоми Ф. Интегральные уравнения. -М.: ИЛ, 1960.
49. Ландау Л. Д., Лифшиц Е. М. Квантовая механика. - М.: Наука, 1974.
50. МизнерК, Торн К, Уилл ер Дж. Гравитация. Т. 1—3. — М.: Мир, 1977.
51. Мельхиор П. Земные приливы. — М.: Мир, 1968.
52. Ньютон Р. Преступление Клавдия Птолемея. - М.: Наука, 1985.
53. Рябов Ю. А. Движения небесных тел. - М.: Наука, 1988.
54. Шмутцер Э., Шютц В. Галилео Галилей. — М.: Мир, 1987.
55. Вейнсток Р. Разоблачение вековой легенды: "Математические начала нату-
натуральной философии" Ньютона и орбиты при движении в поле центральной
силы, обратно пропорциональной квадрату расстояния // Физика за рубежом.
Сер. Б. Преподавание. - М.: Мир, 1984. С. 178 - 207.
56. Арнольд В. И. Гюйгенс и Барроу. Ньютон и Гук. - М.: Наука, 1989.
57. Гребеников Е. А., Рябое Ю. А. Поиски и открытия планет. - М.: Наука, 1984.
58. Физика космоса. Маленькая энциклопедия. - М.: Сов. энциклопедия, 1989.
59. Гэтланд К. Космическая техника. Иллюстрированная энциклопедия. — М.:
Мир, 1986.
60. Mapoe M. Я. Планеты Солнечной системы. - М.: Наука, 1986.
61. Рэзер Р., Маклафлин У, Вулф Д. Инженерное обеспечение встречи косми-
космического аппарата «Вояджер-2» с планетой Уран // В мире науки. 1987. № 1.
С. 26.
62. КузиД, Эспозито Л. Кольца Урана // В мире науки. 1987. № 9. С. 26.
3 84 Список литературы
Ингерголл Э. Планета Уран // В мире науки. 1987. № 3. С. 16.
63. Аппелъ П. Теоретическая механика. Динамика системы. Аналитическая ме-
механика. Т. 2.-М.: ГИФМЛ, 1960. С. 267.
64. Петкевич. В. В. Теоретическая механика. — М.: Наука, 1981.
65. Лагранж Ж. Аналитическая механика. Т. 1, 2. — М.; Л.: Гостехиздат, 1950.
66. Джеффрис Г., Свирлс Б. Методы математической физики. Вып. 3. -М.: Мир,
1970. С. 300.
67. Федорюк М. В. Обыкновенные дифференциальные уравнения. — М.: Наука.
1985.
68. Янке К, Эмде Ф., Л—ш Ф. Специальные функции. — М.: Наука, 1968.
69. Берри М. Геометрическая фаза // В мире науки. 1989. № 2. С. 14-21.
70. Рихтмайер Р. Принципы современной математической физики. — М.: Мир,
1984. С. 115.
71. Шутц Б. Геометрические методы математической физики. - М.: Наука, 1984.
72. ХакенГ. Синэргетика. -М.: Мир, 1980.
73. Ландау Л. Д., Лифшиц Е. М. Статистическая механика. ~~ М.: Наука, 1979.
С. 401.
74. Киттель Ч, Найт ?., Рудерман М. Механика. -М.: Наука, 1971. С. 238.
75. Арнольд В. И. Обыкновенные дифференциальные уравнения. - М.: Наука,
1984.
76. Рабинович М. И., Трубецкой Д. И. Введение в теорию колебаний и волн.
-М.: Наука, 1984.
77. Немыцкий В. В., Степанов В. В. Качественная теория дифференциальных
уравнений. — М.: Гостехтеориздат, 1947.
78. ЭрроусмитД., Плейс К Обыкновенные дифференциальные уравнения. — М.:
Мир, 1986.
79. Гантмахер Ф. Р. Теория матриц. — М.: Гостехиздат, 1953.
80. Беллман Р. Введение в теорию матриц. - М.: Наука, 1969.
81. Крауфорд Ф. Волны. -М.: Наука, 1974.
82. Нуссенцвейг X. М. Причинность и дисперсионные соотношения. - М.: Мир,
1976.
83. Борн М., Вольф Э. Основы оптики. ~~ М.: Наука, 1973. С. 456.
84. Мигулин В. В., Медведев В. К, Мустелъ Е. Р., Парыгин В. Н. Основы теории
колебаний. -М.: Наука, 1988.
85. Романовский Ю. М, Степанова Н. В., Чернавский Д. С Математическое
моделирование в биофизике. — М.: Наука, 1975.
86. Филиппов А. Т. Нетривиальные решения нелинейных задач теории поля//Фи-
зика элементарных частиц и атомного ядра. 1980. Т. 11, вып. 3. С. 735.
87. ГлейзерЕ. Е., Должанский Ф. В., Обухов А. М. Системы гидродинамического
типа и их применение. - М.: Наука, 1981.
88. Полак Л. С, Михайлов А. С Самоорганизация в неравновесных физико-
химических системах. — М.: Наука, 1983.
89. Марри Дж. Нелинейные дифференциальные уравнения в биологии. Лекции
о моделях. - М.: Мир, 1983.
90. Томпсон Дж. М. Т. Неустойчивости и катастрофы в науке и технике. — М.:
Мир, 1985.
91. Клышко Д. Н. Физические основы квантовой электроники. — М.: Наука, 1986.
С. 137.
92. Заславский Г. М., Сагдеев Р. 3. Ведение в нелинейную физику. — М.: Наука,
1988.
Список литературы 385
93. Компьютеры и нелинейные уравнения. Информатика и современное есте-
естествознание (Сер. Кибернетика — неограниченные возможности и возможные
ограничения). — М.: Наука, 1988.
94. Пуанкаре А. О кривых, определяемых дифференциальными уравнениями. - М.:
Гостехиздат, 1947.
95. Андронов А. А., Леонтович Е. А., Майер А. Г, Гордон И. И. Качественная
теория динамических систем. — М.: Наука, 1966.
96. Рейсиг Р., Сансоне Г., Конти Р. Качественная теория нелинейных дифферен-
дифференциальных уравнений. — М.: Наука, 1974.
97. Брюно А. Д. Локальный метод нелинейного анализа дифференциальных урав-
уравнений. — М.: Наука, 1979.
98. Гленсдорф П., Пригожий И. Термодинамическая теория структуры, устойчи-
устойчивости и флюктуации. - М.: Мир, 1973.
99. Николис Г., Пригожий И. Самоорганизация в неравновесных системах. - М.:
Мир, 1979.
100. Эбелинг В. Образование структур при необратимых процессах. — М.: Мир,
1979.
101. Пригожий И. От существующего к возникающему. — М.: Наука, 1985.
102. Хакен Г Синэргетика. Иерархии неустойчивостей в самоорганизующихся
системах и устройствах. — М.: Мир, 1985.
103. Ляпунов А. М. Общая задача об устойчивости движения. - М.: Гостехиздат,
1950.
104. Ла-Салль Ж, Лефшец С. Исследование устойчивости прямым методом Ля-
Ляпунова. — М.: Мир, 1964.
105. Меркин Д. Р. Введение в теорию устойчивости движения. — М.: Наука, 1987.
106. Марсден Дж., Мак-Кракен М. Бифуркация рождения цикла и ее приложе-
приложения. -М.: Мир, 1980.
107. Иосс Ж., Дж-озеф Д. Элементарная теория устойчивости и бифуркации. — М.:
Мир, 1983.
108. Арнольд В. И. Особенности, бифуркации и катастрофы // УМН. 1983. Т. 141,
вып. 3. С. 569.
109. Лихтенберг А., Либерман М. Регулярная и стохастическая динамика. - М.:
Мир, 1984.
110. Постон Т., Стъюарт И. Теория катастроф и е" приложения. - М.: Мир, 1980.
111. Гилмор Р. Прикладная теория катастроф. Т. 1,2. - М.: Мир, 1984.
112. Фейгенбаум М. Универсальность в поведении нелинейных систем // УФН.
1983. Т. 141, вып. 2. С. 343.
113. Каданов Л. П. Пути к хаосу // Физика за рубежом. Сер. А. Исследования.
М.:Мир, 1985. С. 9.
114. Шустер Г. Детерминированный хаос. Введение. — М.: Мир, 1988.
115. Форд Дж. Случаен ли исход бросания монеты? // Физика за рубежом. Сер. А.
Исследования. -М.: Мир, 1984. С. 186.
116. Голубков А. Л., Макаров В. А., Матвеева А. В. Генерация субгармоник и
хаос в классической осцилляторной модели вынужденного комбинационного
рассеяния // Изв. высш. учеб. заведений. Радиофизика. 1989. Т. 32, № 6.
С. 780^782.
117. ОрнстейнД. Эргодическая теория, случайность и динамические системы. - М.:
Мир, 1978.
118. Борн М. Является ли классическая механика действительно детерминист-
детерминистской? // Физика в жизни моего поколения. - М.: ИЛ, 1963. С. 285.
386 Список л итературы
119. LorenzE. N. Atmos. Sci. V. 20. P. 130, 1963.
Лоренц Э. Детерминированное непериодическое течение // Странные аттрак-
аттракторы. - М.: Мир, 1981.
120. Карташов А. П., Рождественский Б. Л. Обыкновенные дифференциальные
уравнения и основы вариационного исчисления. — М.: Наука, 1986. С. 160.
121. Зельдович. Я. Б., Соколов Д. Д. Фрактали, подобие, промежуточная асимпто-
асимптотика //УФН. 1985. Т. 146, вып. 3. С. 493.
122. Кратчфилд Д., Фармер Дж., Паккрд К, Шоу Р. Хаос // В мире науке. 1987.
№2. С." 16-28.
123. Боголюбов Н. К, Митрополъский Ю. А. Асимптотические методы в теории
нелинейных колебаний. — М.: Наука, 1963.
124. Моисеев Н. Н. Асимптотические методы нелинейной механики. — М.: Наука,
1969.
125. Митрополъский Ю. А. Метод усреднения в нелинейной механике. Киев: На-
укова думка, 1971.
126. Волосов В. М., Моргунов Б. К Метод осреднения в теории нелинейных коле-
колебательных систем. — М.: Изд-во Моск. ун-та, 1971.
127. Найфэ А. Введение в методы возмущений. - М.: Мир, 1984.
128. Гребеников Е. А. Метод усреднения в прикладных задачах. - М.: Наука, 1986.
129. Хейл До/с. Колебания в нелинейных системах. — М.: Мир, 1969.
130. Хаяси Т. Нелинейные колебания в физических системах. - М.: Мир, 1968.
131. Блакъер О. Анализ нелинейных систем. — М.: Мир, 1969.
132. Блехман И. И. Синхронизация в природе и технике. - М.: Наука, 1981.
133. Тондл А. Нелинейные колебания механических систем. — М.: Мир, 1973.
134. Бишоп Р. Колебания. -М.: Наука, 1979. С. 102.
135. Олвер Ф. Введение в асимптотические методы и специальные функции. - М.:
Наука, 1978. С. 241.
136. Арнольд В. И. Дополнительные главы теории обыкновенных уравнений. — М.:
Наука, 1978. С. 156.
137. Парадоксов П. Как квантовая механика позволяет понять классическую ме-
механику? // УФН. 1966. Т. 89, вып. 4. С. 707.
138. Крускал М. Адиабатические инварианты. ~~ М.: ИЛ, 1962.
139. Нортроп Т. Адиабатическая теория движения заряженных частиц. — М.:
Атомиздат, 1967.
140. БакайА. С, Степановский Ю. Н. Адиабатические инварианты. Киев: Наукова
думка, 1981.
141. Павленко Ю. Г., Афиногенов Ю. А., Зеленский С. И. Построение коротко-
коротковолновых асимптотик методом последовательных диагонализаций // Вести.
Моск. ун-та. Сер. 3. Физика. Астрономия. 1988. Т. 29, № 5. С. 29.
142. Уиттекер Е. Т. Аналитическая динамика. М.; Л.: ОНТИ, 1937.
143. Мак-Миллан В. Д. Динамика твердого тела. — М.: ИЛ, 1951.
144. Леви-Чивита Т., Амальди У. Курс теоретической механики. Т. 1, 2. — М.: ИЛ,
1951.
145. Парс Л. Аналитическая динамика. — М.: Наука, 1971.
146. Архангельский Ю. А. Аналитическая динамика твердого тела. — М.: Наука,
1977.
147. Горр Г. В., КудряшоваЛ. В., Степанова Л. А. Классические задачи динамики
твердого тела. Киев: Наукова думка, 1978.
148. Фоменко А. Т. Симплектическая геометрия. - М.: Изд-во Моск. ун-та, 1988.
149. Виттенбург И. Динамика систем твердых тел. — М.: Мир, 1980.
Список литературы 387
150. Николаи Е. Л. Теоретическая механика. Т. 2. - М.: ГИФМЛ, 1958. С. 269.
151. Белецкий В. В. Движение спутника относительно центра масс в гравитацион-
гравитационном поле. - М.: Изд-во Моск. ун-та, 1975.
152. Ландау Л. Д., Лифшиц Е. М. Электродинамика сплошных сред. - М.: Нау-
Наука, 1982.
153. Левин В. П, Вдовин Ю. А., Мямлин В. А. Курс теоретической физики. Т. 2. — М.:
ГИФМЛ, 1962. С. 65.
154. Рамо С, Уиннери Дж. Поля и волны в современной радиотехнике. — М.; Л.:
ГИТТЛ, 1948.
155. Космическое оружие: дилемма безопасности/Под ред. Е. П. Велихова, Р. 3.
Сагдеева, А. Л. Кокошина. -М.: Мир, 1986. С. 51.
156. Д. тер. Хаар. Основы гамильтоновой механики. — М.: Наука, 1974.
157. Макки Дж. Лекции по математическим основам квантовой механики. - М.:
Мир, 1965.
158. Дирак П. А. М. Лекции по квантовой механике. - М.: Мир, 1968.
159. ПолакЛ. С. Уильям Гамильтон. — М.: Наука, 1993.
160. Дирак П. А. М. Пути физики. — М.: Энергоатомиздат, 1983. С. 12.
161. Коноплева К П., Попов В К Калибровочные поля. - М.: Атомиздат, 1980.
С. 157.
162. Ициксон К, ЗюберЖ.-Б. Квантовая теория поля. Т. 2. — М.: Мир, 1984.
163. ГитманД. М., Тютин И. В. Каноническое квантование полей со связями. - М.:
Наука, 1986.
164. Швингер Ю. Частицы. Источники. Поля. Т. 2. — М.: Мир, 1976. С. 473.
165. Якоби К. Лекции по динамике. - М.; Л.: ОНТИ, 1936.
166. Мозер Ю. Лекции о гамильтоновых системах. — М.: Мир, 1973.
167. Козлов В. В. Интегрируемость и неинтегрируемость в гамильтоновой меха-
механике // УМН. 1983. Т. 38, вып. 1. С. 3.
168. Арнольд В. К, Козлов В. В., Нейштадт А И. Математические аспекты клас-
классической и небесной механике // Итоги науки и техники. Сер. Современные
проблемы математики. Фундаментальные направления. Т. 3. — М.: ВИНИТИ,
1985. С. 5.
169. Трофимив В. В., Фоменко А. Т. Геометрия скобок Пуассона и методы инте-
интегрирования по Лиувиллю систем на симметрических пространствах // Ито-
Итоги науки и техники. Сер. Современные проблемы математики. Т. 29. - М.:
ВИНИТИ, 1986. С. 3.
170. Палис Ж., Ди Мелу В., Геометрическая теория динамических систем. Введе-
Введение.-М.: Мир, 1986.
171. Хокинг С. У. Пространственно-временная пена // Геометрические идеи в фи-
физике/Под ред. Ю. И. Манина. -М.: Мир, 1983. С. 47.
172. Джакалья Е. Е. О. Методы теории возмущений для нелинейных систем. - М.:
Наука, 1979.
173. Пуанкаре А. Новые методы небесной механики. Т. 1,2. Избранные труды. - М.:
Наука, 1971-1972.
174. Давыдов А. С. Квантовая механика. — М.: Наука, 1973. С. 227.
175. Марч К, Янг У, Самшнтхар С. Проблема многих тел в квантовой механи-
механике. -М.: Мир, 1969. С. 344.
176. Боголюбов Н. Н. Избранные труды. Т. 2. Киев: Наукова думка, 1970. С. 473.
177. Миногин В. Е. Моноионный осциллятор с радиационным охлаждением //
УФН. 1982. Т. 137, вып. 1. С. 173.
178. Еошек П. Э. Атомные частицы в ловушках // УФН. 1989. Т. 158, вып. 3. С. 451.
388 Список л итературы
179. Филд Дж., Пикассо Э., Комбли Ф. Проверка фундаментальных физических
теорий в опытах со свободными заряженными частицами // УФН. 1979. Т.
127, вып. 4. С. 553 - 592.
180. Соколов А. А., Павленко Ю. Г. Новый метод определения магнитного момента
электрона //ЯФ. 1977. Т. 26, вып. 3. С. 1058.
181. Киржниц Д. А. Полевые методы теории многих частиц. — М.: Атомиздат, 1963.
С. 318.
182. Лъюиселл У. Излучение и шумы в квантовой электронике. - М.: Наука, 1972.
183. Арнольд В. И. Малые знаменатели 3. Малые знаменатели и проблемы устой-
устойчивости в классической и небесной механике // УМН. 1963. Т. 18, № 6. С. 81.
184. Франк Ф., Мизес Р. Дифференциальные и интегральные уравнения матема-
математической физике. Ч. 2. Л.; -М.: ОНТИ, 1957.
185. Курант Р. Уравнения с частными производными. - М.: Мир, 1964.
186. Смирнов В. И. Курс высшей математики. Т. 4. Ч. 2. — М.: Наука, 1981.
187. Борн М. Лекции по атомной механике. Т. 1. Киев: ОНТИ, 1934.
188. Захаров В. Е., Фаддеев Л. Д. Уравнение Кортевега-де-Фриза—вполне интегри-
интегрируемая гамильтонова система // Функциональный анализ и его приложения.
1971. Т. 5, №4. С. 18.
189. Новиков С И Периодическая задача для уравнения Кортевега-де-Фриза. 1 //
Функциональный анализ и его приложения. 1974. Т. 8, № 3. С. 54.
190. Захаров В. Е., Манате С В., Новиков С П., Питаевский Л. П. Теория соли-
тонов. Метод обратной задачи. - М.: Наука, 1980.
191. Фаддеев Л. Д. Гамильтонова интерпретация обратного преобразования рас-
рассеяния // Солитоны/Под ред. С. П. Новикова. ~~ М.: Мир, 1983. С. 363.
192. Абловиц М., Сигур X, Солитоны и метод обратной задачи. — М.: Мир, 1987.
С. 75.
193. Фок В. А. Работы по квантовой теории поля. — М.; Л.: Изд-во ЛГУ, 1957. С. 141.
194. Бь-ркен Дж. Д., Дрелл С. Д. Релятивистская квантовая теория. Т. 1. — М.:
Наука, 1978. С. 88.
195. Фейнман Р., Хибс А. Квантовая механика и интегралы по траекториям. — М.:
Мир, 1968.
196. Копсон Э. Т. Асимптотические разложения. — М.: Мир, 1966. С. 46.
197. Фелсен Л., Маркувиц Н. Излучение и рассеяние волн. Т. 1. — М.: Мир, 1978.
198. Маслов В. П. Асимптотические методы и теория возмущений. - М.: Наука,
1988.
199. Казаков Д. К, Ширков Д. В. Суммирование асимптотических рядов в кван-
квантовой теории поля. Дубна: ОИЯИ, 1980.
200. Боголюбов П. П. (мл.), Садовников Б. И. Некоторые вопросы статистической
механики. — М.: Высшая школа, 1975.
201. Боголюбов П. Н. Проблемы динамической теории в статистической механи-
ке//Избранные труды. Киев: Наукова думка, 1970. Т. 2. С. 99.
202. Ахиезер А. И., Пелетминский С. В. Методы статистической физики. - М.:
Наука, 1977.
203. Пригожин И. Неравновесная статистическая механика. — М.: Мир, 1964.
204. Зубарев Д. Н. Неравновесная статистическая термодинамика. - М.: Наука,
1971.
205. Балеску Р. Равновесная и неравновесная статистическая механика. Т. 1. — М.:
Мир, 1978. С. 76.
206. Боголюбов Н. Н. Об уравнениях Фоккера - ПланкаУ/Избранные труды. Киев:
Наукова думка, 1970. Т. 2. С. 14.
Список литературы 389
207. By Т. Ю., Омура Т. Квантовая теория рассеяния. - М.: Наука, 1969. С. 412.
208. Перина Я. Когерентность света. — М.: Мир, 1974.
209. Павленко Ю. Г., Гольцов Д. В. Классическое рассмотрение индуцированного
излучения электронов в скрещенных полях // Изв. высш. учеб. заведений.
Радиофизика. 1966. Т. 9. С. 1232.
210. Павленко Ю. Г. Индуцированное излучение электрона в скрещенных полях
//ЖЭТФ. 1966. Т. 50, вып. 5. С. 1285.
211. Павленко Ю. Г., Соколов А. А. Вынужденное и индуцированное излучение в
скрещенных полях // Оптика и спектроскопия. 1967. Т. 22, вып. 1. С. 3.
212. Бурштейн Э. Л., Соловьев Л. С. Гамильтониан усредненного движения//ДАН
СССР. 1961. Т. 139. Ш 4. С. 855.
213. Овчинников А. А., Эрихман Н. С. О локализации колебательной энергии при
высоких уровнях возбуждения колебательного экситона // УФН 1982. Т. 138,
вып. 2. С. 289.
214. Якубович В. А., Старшинский В. М. Линейные дифференциальные уравнения
с периодическими коэффициентами и их приложения. — М.: Наука, 1972.
215. Арнольд В. И. Замечания о теории возмущений для задач типа Матье // УМН.
1983. Т. 38, № 4. С. 89.
216. ЗелъдовичЯ. Б., МышкисА.Д. Элементы прикладной математики. -М.: Наука,
1972. С. 79.
217. Капица П. Л. Маятник с вибрирующим подвесом // УФН. 1951. Т. 21, вып. 5.
С. 7.
218. Капица П. Л. Динамическая устойчивость маятника при колеблющейся точке
подвеса //ЖЭТФ. 1951. Т. 21, вып. 5. С. 588.
219. Блехман И. И. Что может вибрация? — М.: Наука, 1988.
220. Ливингстон М. С Ускорители. - М.: ИЛ, 1956.
221. Миллер М. А. Движение заряженных частиц в высокочастотных электромаг-
электромагнитных полях // Известия высш. учеб. заведений. Радиофизика. 1958. Т. 1,
вып. 1. С. ПО.
222. Гапонов А. В., Миллер М. А. О потенциальных ямах для заряженных частиц в
высокочастотном электромагнитном поле //ЖЭТФ. 1958. Т. 34, вып. 1. С. 242.
223. Гапонов А. В., Миллер М. А. Об использовании движущихся высокочастотных
потенциальных ям для ускорения заряженных частиц // ЖЭТФ. 1958. Т. 34,
вып. 3. С. 751.
224. Павленко Ю. Г., Зеленский С. И. Интегрирование негамильтоновых систем
методом удвоения переменных // Вести. Моск. ун-та. Сер. Физика. Астроно-
Астрономия. 1987. Т. 28, №1. С. 8.
225. Моденов В. П. Дифференциально-параметрический метод // ДАН СССР. 1987.
Т. 296, Ш 3. С. 536.
226. Павленко Ю. Г., Зеленский С. И. Гамильтонова форма усреднения систем
общего вида // Вычислительные комплексы и моделирование сложных си-
систем. -М.: Изд-во МГУ, 1989. С. 199.
227. Бирхгоф Дж. Динамические системы. — М.: Гостехиздат, 1941.
228. КоулДж. Методы возмущений в прикладной механике. — М.: Мир, 1972.
229. Васильева А. Б., Бутузов В. Ф. Асимптотические разложения решений сингу-
сингулярно-возмущенных уравнений. — М.: Наука, 1973.
230. Ван-Дайк М. Методы возмущений в механике жидкости. — М.: Мир, 1967.
231. Мищенко Е. Ф., Розов Н. X. Дифференциальные уравнения с малым парамет-
параметром и релаксационные колебания. - М.: Наука, 1975.
232. Павленко Ю. Г. О методах интегрирования гамильтоновых систем // Вести.
390 Список литературы
Моск. ун-та. Сер. Физика. Астрономия. 1984. Т. 25, № 5. С. 35.
233. Павленко Ю. Г., Зеленский С. И. Гамильтонов алгоритм решения сингулярно-
возмущенных уравнений // Программное оборудование и вопросы принятия
решений. — М.: Изд-во Моск. ун-та, 1988. С. 224.
234. ВатсонДж. Теория бесселевых функций. Т. 1, 2. -М.: ИЛ, 1949.
235. Кратцер А., Франц В. Трансцендентные функции. -М.: ИЛ, 1963.
236. Лебедев Н. К Специальные функции и их приложения. — М.: Физматгиз,
1963.
237. Бейтмен Г., ЭрдейиА. Высшие трансцендентные функции. Т. 1. — М.: Наука,
1965.
238. Трикоми Ф. Дифференциальные уравнения. — М.: ИЛ, 1962.
239. Уигпгпекер Э. Т., Ватсон Дж. Н. Курс современного анализа. — М.: Физмат-
Физматгиз, 1963.
240. Павленко Ю. Г. Метод канонических преобразований в задаче потенциаль-
потенциального рассеяния // Вестн. Моск. ун-та. Сер. Физика. Астрономия. 1984. Т. 5,
№ 1.С. 28.
241. УиземДж. Линейные и нелинейные волны. - М.: Мир, 1977.
242. Маслов В. П., ФедорюкМ. В. Квазиклассическое приближение для уравнений
квантовой механики. — М.: Наука, 1976.
243. Соколов А. А., Мурадян Р. М., Арутюнян В. М. Развитие приближенного ме-
метода ВКБ // Вестн. Моск. ун-та. Сер. Физика. Астрономия. 1959. № 4. С. 61;
№ 6. С. 64.
244. Павленко Ю. Г. Новый метод исследования асимптотических разложений //
Вестн. Моск. ун-та. Сер. Физика. Астрономия. 1982. Т. 33, № 2. С. 61.
245. Трикоми Ф. О линейных уравнениях смешанного типа. - М.: ОГИЗ, 1947.
С. 52.
246. Трикоми Ф. Лекции по уравнениям в частных производных. - М.: ИЛ, 1957.
С. 93.
247. Пановский В., Филлипс М. Классическая электродинамика. - М.: ГИФМЛ.
1963.
248. Джексон Дж. Классическая теория поля. — М.: Мир, 1965.
249. Лейтман А., Пресс В., Прайс Р., Тюкольски С. Сборник задач по теории
относительности и гравитации. - М.: Мир, 1979.
250. Окунь Л. Б. Понятие массы //УФК 1989. Т. 158, вып. 3. С. 511.
251. Бюклинг К, Каянши К. Кинематика элементарных частиц. — М.: Мир, 1975.
252. Павленко Ю. Г. Поляризация релятивистских частиц в плосковолновых по-
полях //ЯФ. 1978. Т. 28, вып. 1 G). С. 156.
253. Мун Ф. Хаотические колебания. -М.: Мир, 1990.
254. Mandelbrot В.В. The Fractal Geometry of Nature. W.H. Freeman. New York. 1983.
255. Mandelbrot B.B. Fractals, Form, Chance, and Dimention. W.H. Freeman. San
Francisco. 1977.
256. Фракталы в физике. Под ред. Л. Пьетронеро, Э. Тозатти. ~~ М.: Мир, 1988.
257. Федер Е. Фракталы. - М.: Мир, 1991.
258. Белецкий В.В., Хентов А.А. Вращательное движение намагниченного спут-
спутника. — М.: Наука, 1985.
Белецкий В.В., Левин Е.М. Динамика космических тросовых систем. — М.:
Наука, 1990.
259. Мартыненко Ю.Г. Движение твердого тела в электрических и магнитных
полях. — М.: Наука, 1988.
260. Розенцвейг Р. Феррогидродинамика. -М.: Мир, 1989.
Список литературы 391
261. Павленко Ю.Г., Петров Ю.М. Лагранжевы уравнения движения массивного
проводника в магнитном поле. Изв. Вузов. Физика, 1994. №7. С.63.
Павленко Ю.Г., Петров Ю.М. Об одном механизме формирования потен-
потенциальных ям для неферромагнитного проводника в переменном магнитном
поле. Изв. Вузов. Физика, 1994. №9. С.93.
Павленко Ю.Г., Петров Ю.М. Лагранжиан массивного проводника в квази-
квазистационарном поле. Вестн. Моск. Ун-та. Сер. 1. Математика. Механика, 1995.
№З.С. 48.
Павленко Ю.Г., Бакшеев А.И. Автоколебания проводника в высокочастотном
магнитном поле. Изв. Вузов. Физика, 2001. №1. С.59.
262. Переломов A.M. Интегрируемые системы классической механики и алгебры
Ли. -М.: Наука, 1980.
263. Болотин Ю.Л., Гончар В.Ю. и др. Стохастическая ядерная динамика. ЭЧАЯ.
1989. Т. 20. вып. 4. С. 878.
264. Маслов В.П. Асимптотические методы решения псевдодиференциальных
уравнений. — М.: Наука, 1987.
265. Маслов В.П. Асимптотические методы теории возмущений. — М.: Наука, 1988.
266. Гольдштейн Л.Д., Зернов КВ. Электромагнитные поля и волны. Москва: Сов.
Радио, 1956. С.517.
267. Пауль В. Электромагнитные ловушки для заряженных и нейтральных ча-
частиц. //YOU. 1990. Т. 169. Вып. 12. С. 109.
268. Dawson P.H. Quadrupole Mass Spectrometry and its Application. Amsterdam:
Elsevier, 1976. "
269. PradipK. Ghosh. Ion Traps. Clarendon PRESS. OXFORD. 1995. The international
series of monographs on physics.
270. Мак-Лахлан КВ. Теория и приложения функций Матье. — М.: ИЛ. 1953.
271. Стретт М.Д. Функции Ламе, Матье и родственные им функции в физике и
технике. Харьков, Киев. ГНТИ Украины. 1935.
272. Павленко Ю.Г., Наумов К Д. Релятивистская частица в квадрупольном вол-
волноводе. //ЖТФ. 1997. Т. 67. № 7, С. 98.
273. Павленко Ю.Г., Наумов Н.Д. Интегрируемая гамильтонова система - реля-
релятивистская частица в поле бегущей неоднородной волны . // Вестник Моск.
ун-та, сер. 1. Математика. Механика. 1998. №1. С. 42.
274. Павленко ЮТ Новый класс решений уравнения Дирака. // ТМФ. 1999. Т. 120.
№2, С. 315.
275. Маркеев А.П. Динамика твердого тела, соприкасающегося с твердой поверх-
поверхностью. — М.: Наука, 1992.
276. Павленко ЮТ. Локализация и излучение частиц магнитной ловушкой. ЖТФ.
2000. Т. 70. вып. 2. С. 25.
Учебное издание
ПАВЛЕНКО Юрий Григорьевич
ЛЕКЦИИ ПО ТЕОРЕТИЧЕСКОЙ МЕХАНИКЕ
Редактор О. А. Ленина
Оригинал-макет: В. И. Шутов
Оформление переплета: А.А.Логунов
ЛР№ 071930 от 06.07.99
Подписано в печать 15.05.02. Формат 60x90/16
Бумага офсетная № 1. Печать офсетная
Усл. печ. л. 24,5. Уч.-изд. л. 25. Тираж 3000 экз.
Заказ №
Издательская фирма «Физико-математическая литература»
МАИК «Наука/Интерпериодика»
117864 Москва, Профсоюзная, 90
E-mail: fizmat@maik.ru
Отпечатано с готовых диапозитивов в ФГУП «Московская
типография № 6» Министерства РФ по делам печати,
телерадиовещания и средств массовых коммуникаций
109088 Москва, Ж-88, Южнопортовая ул., 24
ISBN 5-9221-0241-9
785922
0