/





































































































































































































































Text
ДЛЯ ТЕХНИКУМОВ
Л.А.Гоберман
Д-Р ТЕХН. НАУК, ПРОФ.
основы
ТЕОРИИ, РАСЧЕТА
И ПРОЕКТИРОВАНИЯ
СТРОИТЕЛЬНЫХ
И ДОРОЖНЫХ
МАШИН
Допущено Министерством строительного,
дорожного и коммунального машиностроения
в качестве учебника для техникумов
МОСКВА
«МАШИНОСТРОЕНИЕ»
1988
ББК 38.6-5
Г57
УДК 69.002.5+625.7.08
Рецензенты: цикловая комиссия спецдисциплин Челябинского
техникума промышленной автоматики; д-р техн, наук проф. В. И. Алябьев
Гоберман Л. А.
Г57 Основы теории, расчета и проектирования строительных
и дорожных машин: Учебник для техникумов. —М.: Ма-
шиностроение, 1988. — 464 с.: ил.
ISBN 5 217-00092-9
Рассмотрены основы теории, методы расчета и проектирования основных
элементов строительных и дорожных машин, даны анализ и оценка принимаемых
решений. Приведены способы обеспечения эргономических показателей, безопас-
ности, надежности и экономической эффективности.
Изложены тенденции развития дорожно строительной техники, основные
принципы, структура и организация системы автоматизированного проектиро-
вания изделий. Решение многих задач проиллюстрировано числовыми примерами.
, 3204010000- 508
Г —038 j0J) Jgg— 46 -Св. план для сред. спец. учеб, заведений 1988. ББК 38.6 5
ISBN 5-217-00092-9
© Издательство «Машиностроение», 1988
ПРЕДИСЛОВИЕ
В «Основных направлениях экономического и социаль-
ного развития СССР на 1986—1990 годы и на период до 2000 года»,
принятых XXVII съездом КПСС, отмечается, что важными на-
правлениями ускорения научно-технического прогресса являют-
ся разработка, создание и освоение принципиально новых тех-
ники и технологии, многократно повышающих производитель-
ность труда.
В создании такой техники особое место принадлежит ее раз-
работчикам, так как на стадии проектирования предоставляются
широкие возможности оптимизировать конструкцию машины и
среди многих вариантов технических решений выбрать наилуч-
ший. Выполнить эту задачу могут только специалисты, хорошо
знающие теорию и современные методы расчета и проектирования
техники.
Теория и расчет строительных и дорожных машин, как учеб-
ная дисциплина и определенная область научных знаний, охваты-
вает широкий класс машин и оборудования, применяемых для
механизации трудоемких процессов в строительстве и смежных
с ним отраслях народного хозяйства. Это машины для земляных
работ, грузоподъемные и погрузочно-разгрузочные машины, транс-
портирующее оборудование, машины для приготовления строи-
тельных материалов и другие, которые объединяет не только
область применения, но и общие подходы к расчету и проектиро-
ванию. Последнее позволяет отказаться от традиционного — от-
дельно для каждого типа машин, рассмотрения вопросов их тео-
рии, расчета и проектирования и основное внимание уделить
общим теоретическим положениям, методам и принципам изучае-
мой дисциплины. Это дает возможность существенно сократить
объем учебного материала и вместе с тем получить единое пред-
ставление о содержании предмета
В той части учебника, в которой рассматриваются расчеты
статических, кинематических и динамических параметров строи-
тельных и дорожных машин, сделана попытка сблизить и объеди-
нить известные методы теоретической механики с прикладными
задачами, которые приходится решать конструкторам и разработ-
чикам дорожно-строительной техники. При этом при решении
некоторых задач используется не один, а два-три метода и прово-
дится сравнение полученных результатов. Такой подход отве-
!* 3
чает современным научным взглядам о целесообразности решения
одной и той же задачи с использованием различных моделей явле-
ний и методов расчетов.
Современная техника должна быть надежной и одновременно
нематериалоемкой, удобной в управлении и безопасной в эксплуа-
тации, отвечать эргономическим и технико-эстетическим требова-
ниям. Все эти качественные показатели, определяющие в целом
технический уровень и конкурентоспособность машин, заклады-
ваются на стадии проектирования. На этой же стадии оптими-
зируются проектно-конструкторские решения на основе прора-
ботки и анализа различных альтернативных вариантов и выбора
среди них тех, которые по принятым критериям наилучшим об-
разом удовлетворяют поставленной задаче.
Разработке оптимальных решений в немалой степени способ-
ствуют новые приемы и методы конструирования, основанные на
системном подходе к анализу и оценке технических и технико-
экономических проблем, возникающих в процессе проектирования,
применении методов математического моделирования и исследова-
ния операций, на широком использовании вычислительной тех-
ники для автоматизации проектно-конструкторских работ. Все
эти вопросы в кратком изложении включены в настоящий учебник.
Заметим в заключение, что учебник построен таким образом,
что читатель, интересующийся отдельными вопросами учебной
программы, может приступить непосредственно к ознакомлению
с соответствующей главой или параграфом, используя остальные
для справок.
Г Л А В A 1
НАУЧНО-ТЕХНИЧЕСКИЙ ПРОГРЕСС В ОБЛАСТИ
СТРОИТЕЛЬНОГО И ДОРОЖНОГО МАШИНОСТРОЕНИЯ
1.1. ОСНОВНЫЕ НАПРАВЛЕНИЯ РАЗВИТИЯ
КОНСТРУКЦИЙ И СОВЕРШЕНСТВОВАНИЯ СТРУКТУРЫ
ПАРКА МАШИН
1.1.1. Общие тенденции развития
конструкций машин
Направления развития техники зависят как от области
ее применения, так и от общих тенденций научно-технического
прогресса в машиностроении. К наиболее характерным направ-
лениям развития строительного и дорожного машиностроения
относятся:
1) повышение в экономически оправданных пределах единич-
ной мощности машин и оборудования;
2) гидрофикация машин путем замены механических приводов
гидромеханическими и гидрообъемными приводами;
3) автоматизация систем управления, контроля и обеспечения
безопасности работы машин на основе применения микропроцес-
сорной техники и роботов;
4) снижение материале- и энергоемкости машин, повышение
их ресурса и надежности на основе совершенствования методов
расчета и конструирования и применения новых материалов с луч-
шими физико-механическими свойствами и характеристи-
ками ;
5) повышение требований к эргономике и технической эсте-
тике машин и оборудования на основе более полного учета физи-
ческих и функциональных возможностей человека-оператора,
управляющего машиной;
6) создание приводов с форсированными режимными характе-
ристиками, обеспечивающих сокращение времени разгона машин
и соответственно увеличение их производительности;
7) повышение скоростей движения, главным образом транс-
портных скоростей, что также позволяет увеличить производи-
тельность машин;
8) конструирование машин и оборудования из унифицирован-
ных блоков-модулей, что позволяет ускорить процесс создания
машины и сократить время ее простоев в ремонтах;
9) широкая унификация и стандартизация техники с целью
увеличения темпов ее производства, сокращения простоев, свя-
занных с ремонтом и техническим обслуживанием, а также улуч-
шения качества изготовления узлов и деталей машин;
10) увеличение номенклатуры сменных рабочих органов для
расширения области применения машин данного типа;
5
11) создание мобильных машин на короткобазных шасси,
позволяющих улучшить их маневренность, что имеет большое
значение при выполнении строительно монтажных работ в стес-
ненных условиях.
Все возрастающие объемы земляных работ требуют создания
мощных, высокопроизводительных машин. Существуют следующие
пути решения этой задачи.
1. Установка на машинах более мощных двигателей; такое ре-
шение, как правило, связано с увеличением общей массы и габа-
ритных размеров машины.
2. Создание машин, работающих по двухдвигательной схеме
(например, двухдвигательные скреперы), когда один двигатель
устанавливается на тягаче, а другой на прицепе. При этом можно
получить более компактные конструкции, сохранив хорошую
маневренность, скоростные качества и проходимость машины.
Машины, выполненные по двухдвигательной схеме, имеют
соответственно две гидромеханические трансмиссии, каждая из
которых состоит из гидротрансформатора, коробки передач, кар-
данного вала и главной передачи, расположенных в ведущих
мостах тягача и прицепа. Управление обоими двигателями и пере-
дачами осуществляется из кабины оператора, установленной на
тягаче; при необходимости один из двигателей может быть отклю-
чен от трансмиссии.
3. Соединение двух и более машин в один агрегат по схеме
«тандем» или «катамаран». При использовании первой схемы
машины устанавливают одну за другой так, что сзади идущая
машина толкает впереди идущую и таким образом тяговые усилия
всех машин суммируются. По такой схеме работают, в частности,
скреперные поезда. Агрегаты, составленные по схеме «катамаран»,
состоят из двух параллельно движущихся тракторов, связанных
между собой общим рабочим органом, например, отвалом. По схеме
«катамаран» работают бульдозеры (в США фирмой «Катерпиллер»
создан такой агрегат, работающий с бульдозерным отвалом
шириной 12,2 м и высотой 1,8 м).
Чтобы наилучшим образом удовлетворить требования, предъ-
являемые к современной строительной и дорожной технике,
необходимо совершенствовать основные части машин (силовые
установки, передачи, исполнительные механизмы, рабочее обо-
рудование, ходовую часть), что приводит к новым компоновочным
решениям.
В качестве силовых установок вместо карбюраторных двига-
телей, работающих на бензине, все чаще применяют дизели.
Они работают на более дешевом и менее токсичном топливе, имеют
более высокий коэффициент полезного действия. Преимущества
дизелей особенно заметны при установке их на машинах тяжелого
класса.
Одним из средств повышения тяговых свойств машин является
установка индивидуальных двигателей на их колесах; такой
6
тип привода получил название «мотор-колесо» Конструктивное
исполнение его может быть различным. Электродвигатели или
гидромоторы, развивающие большой вращающий момент (такие
двигатели называются «высокомоментными»), встраивают в колесо
или устанавливают рядом с ободом колеса без редуктора. В про-
тивном случае привод «мотор-колесо» состоит из двигателя и ре-
дуктора с обычной или планетарной зубчатой передачей.
В приводах с электродвигателями постоянного тока энергия
к ним через систему электрических цепей подводится от тягового
генератора постоянного тока, приводимого от дизеля тягача.
В гидравлических приводах колесные гидромоторы питаются от
гидронасосов, которые приводятся в действие от главного дви-
гателя машины.
Опыт показывает, что дизель-электрические приводы с мотор-
колесами и электродвигатели целесообразно использовать на
самых тяжелых машинах, тогда как объемный гидропривод нахо-
дит применение и на небольших машинах.
Современные требования к приводам землеройных и земле-
ройно-транспортных машин сводятся к следующим:
широкий диапазон преобразования вращающего момента,
обеспечивающего большие тяговые усилия при малых скоростях
движения;
изменение скорости движения в зависимости от сопротивлений
движению без останова двигателя;
по возможности бесступенчатое регулирование скорости дви-
жения и плавное трогание с места;
возможность реверсирования, т. е. изменения направления
движения.
Этим требованиям в большой степени удовлетворяют гидравли-
ческие приводы, которые в строительных и дорожных машинах
приходят на смену традиционным механическим приводам. Не-
смотря на более низкий КПД, гидравлические приводы механиз-
мов машин и их рабочего оборудования лучше, чем механические
приводы работают в условиях резких колебаний тяговых усилий,
изменения направления движения.
Гидродинамический привод (гидротрансформатор и переклю-
чаемая под нагрузкой передача) обусловливает совершенно опре-
деленную компоновку агрегатов в конструкции машины. В этом
отношении более предпочтительными оказываются гидрообъем-
ные и электрические приводы, элементы которых имеют между со-
бой гибкую связь, что позволяет расширить возможности кон-
структора при компоновке привода и машины в целом.
Развитие гидравлических землеройных машин идет по пути
создания гидросистем высокого давления с регулируемыми порш-
невыми насосами при рабочем давлении 30 ... 45 МПа.
В последние годы значительно увеличился выпуск машин с
шарнирно-сочлененной ходовой рамой, состоящей из двух или трех
секций, соединенных между собой шарнирами (с вертикальными
1
Рис 1 Схема погрузчика с четырехгусеничным ходом и шарнирно-сочлененной
ходовой рамой
осями), позволяющими секциям рамы поворачиваться одной
относительно другой в горизонтальной плоскости.
Некоторые зарубежные фирмы начали выпуск и гусеничных
машин с шарнирно-сочлененной рамой (рис. 1). На передней
секции рамы на портале 4 крепится стрела 6 с ковшом 5, на задней
секции рамы устанавливается двигатель 3 и кабина оператора.
Каждый гусеничный движитель состоит из тележек с рамами 11
и 14, подвешенных к соответствующей секции ходовой рамы на
осях 10 и /5; направляющих колес 8 и 13 и ведущих колес (звездо-
чек) 12 и 2, которые приводятся от двигателя машины; ведущие
колеса сообщают движение гусеницам 9 и 1. Два передних движи-
теля имеют стабилизирующие гидроцилиндры 7. Каждая из четы-
рех гусеничных тележек может, поворачиваясь на своей оси, пере-
мещаться относительно ходовой рамы, хорошо приспосабливаясь
к неровностям поверхности качения.
Землеройными машинами одного из наиболее распространен-
ных типов являются экскаваторы — одноковшовые, многоковшо-
вые и роторные. Современные одноковшовые экскаваторы легкого
и среднего классов имеют гидравлический привод хода и рабочего
оборудования, поэтому совершенствование их конструкций во
многом связано с совершенствованием конструкций гидроприво-
дов и улучшением качества гидроаппаратуры. Традиционно при-
менявшиеся на экскаваторах гусеничные хода в настоящее время
заменяют гусеничными ходами тракторного типа, имеющими зна-
чительно меньшую массу и большую надежность.
В качестве базы для полноповоротных одноковшовых экскава-
торов, а также многоковшовых и роторных экскаваторов, исполь-
зуют, в основном, собственные шасси, так как экскаваторы, создан-
ные на базе промышленных тракторов, имеют существенно боль-
шую массу и на 30 ... 50 % большую стоимость.
В последнее время значительно расширяются области приме-
нения экскаваторов. При этом, кроме основного рабочего обору-
дования — обратной и прямой лопат, их снабжают драглайном,
валочно-пакетирующим устройством для срезания, повала и паке-
8
тирования деревьев, грейферными захватами для перегрузки
сыпучих, кусковых и длинномерных грузов, буровым оборудова-
нием и др. На рис. 2 показаны некоторые сменные рабочие органы,
применяемые на экскаваторах.
Совершенствование конструкций бульдозеров характеризуется
расширением их типоразмерного ряда, содержащего гусеничные
машины с двигателем мощностью 18 ... 600 кВт и в перспективе
до 1200 кВт и колесные машины с двигателем мощностью 50 ...
400 кВт и в перспективе до 900 кВт. Машины среднего и тяжелого
классов оборудуют бульдозерным отвалом, навешиваемым впереди
базового трактора, и рыхлителем, навешиваемым сзади трак-
тора.
В качестве базовых машин для бульдозерно-рыхлительного
оборудования наиболее предпочтительными являются промыш-
ленные гусеничные тракторы, имеющие классическую компо-
новку — переднее расположение двигателя и заднее размещение
кабины оператора. Такие тракторы обеспечивают хорошую види-
мость как переднего, так и заднего оборудования и не вызывают
зарывание передней части машины при работе на мягких грунтах.
Рис. 2. Сменные рабочие органы эк-
скаватора:
а — ковш обратной лопаты; б — ковш для
рытья каиав, в — ковш с рыхлителем; г -
рыхлитель; д — отвал; е, ж, з — грейфер-
ные захваты; и — шнековый бур; к
Iидромолот
9
Рис. 3. Компоновочное решение гусеничного хода базового трактора бульдозера:
а — общий вид бульдозера, б — схема гусеничного движителя
Управление рабочим оборудованием у современных бульдо-
зеров, в основном, гидравлическое. Поэтому базовые тракторы
имеют гидросистему для независимого подъема и перекоса отвала,
а также управления рыхлителем. Увеличение усилий для заглуб-
ления и выглубления отвала достигается путем повышения давле-
ния рабочей жидкости в гидросистеме до 35 МПа и выше
Для повышения надежности отвалов бульдозеров и снижения
энергоемкости копания грунтов особое внимание необходимо обра-
щать на выбор рационального профиля рабочей поверхности от-
валов.
Совершенствование конструкций базовых гусеничных тракто-
ров связано, главным образом, с улучшением компоновочной
схемы трактора и конструкции его ходовой части Характерна
в этом отношении схема ходовой части трактора, показанного
на рис. 3, а. Вал ведущих звездочек 2 (рис. 3, б) располагается
выше натяжных колес 5 и /, вследствие чего гусеничный обвод
ходовой части получает форму треугольника. Верхняя ветвь гусе-
ницы опирается на два поддерживающих катка 3 и 4. Угол р.
образованный основанием и задней ветвью гусеницы, набегающей
на ведущую звездочку, изменяется от 30 .до 90°, а угол а обхвата
ведущей звездочки гусеницей от 115 до 130\
Вынесение вверх и вперед ведущих звездочек и конечной пере-
дачи дает возможность снизить нагрузки от воздействия неров-
ностей поверхности качения и, как следствие, уменьшить их износ
и вероятность повреждения при работе на скальных породах.
Кроме того, описанная компоновка ходовой части базового трак-
тора позволяет уменьшить высоту расположения основных узлов
трансмиссии, повысив устойчивость машины в продольном и по-
перечном направлениях, и одновременно с этим увеличить высоту
расположения кабины оператора, улучшив обзорность при работе
машины.
При разработке скреперов все большее место занимает созда-
ние мощных самоходных двухдвигательных машин с ковшом
вместимостью 25 . 40 м3 и двигателями суммарной мощностью
10
800 кВт и выше. Выпускают скреперы с дизель-электрическим при-
водом и мотор-колесами. Увеличивается выпуск скреперов с при-
нудительной загрузкой ковша с помощью скребкового цепного
элеватора и с принудительной разгрузкой грунта выталкивателем
бульдозерного типа. Элеватор приводится от гидродвигателя
через планетарный редуктор.
Совершенствование конструкций автогрейдеров во многом
связано с внедрением систем управления поворотом машины,
позволяющих улучшить ее маневренность и устойчивость при ра-
боте на склонах. Все большее распространение получают авто-
грейдеры с шарнирно-сочлененной рамой; в этом случае поворот
автогрейдера осуществляется как за счет поворота в плане перед-
них управляемых колес, так и за счет «складывания» рамы в плане,
что позволяет значительно уменьшить площадь, необходимую
для разворота машины. Оригинальную схему поворота имеет одна
из моделей автогрейдера шведской фирмы «Volvo» («Волво»).
У этой машины управляемыми являются передние колеса и зад-
ний ведущий мост, установленный на упорном подшипнике.
Воздействуя на систему рулевого управления машины, можно
одновременно поворачивать передние колеса и изменять в плане
угол поворота заднего моста на 15° в обе стороны. Такое решение
позволяет сохранить большое тяговое усилие при движении ма-
шины на поворотах и вместе с тем обеспечивает ее хорошую ма-
невренность.
В автогрейдерах применяют, в основном, механические и
гидромеханические трансмиссии. Но в последнее время некоторые
зарубежные фирмы начали использовать и гидрообъемные транс-
миссии. В таких машинах главный двигатель (дизель) приводит
в действие гидронасосы, которые подают рабочую жидкость
к гидромоторам, сообщая им вращение; от гидромоторов приво-
дятся ведущие колеса машины.
Гидрообъемные трансмиссии получают все большее распро-
странение в дорожно-строительных и других машинах, напри-
мер в пневмоколесных погрузчиках. Они обладают хорошей тяго-
вой характеристикой и позволяют независимо изменять скорость
движения каждой стороны ходовой части без разрыва потока мощ-
ности. При этом колесная машина может перемещаться вперед,
назад или разворачиваться на месте так же как и гусеничная;
такой способ поворота имеет особенные преимущества для мало-
габаритных строительных и дорожных машин, предназначенных
для работы в стесненных условиях.
Для производства строительно-монтажных работ все большее
применение находят самоходные пневмо колесные краны на базе
грузовых автомобилей, а также мощные самоходные краны с мно-
госекционной телескопической стрелой на многоосном шасси
пзтомобильного типа (рис. 4, а) и краны с телескопической и ре-
шетчатой стрелой на специальном пневмоколесном шасси
(рис. 4, б).
II
5) б)
Рис. 4 Общие виды кранов на пневмоколесном ходу:
а — на многоосном шассн автомобильного типа; б, в — на специальном пневмоколесном
шасси
На некоторых самоходных кранах большой грузоподъемности
устанавливают башенно-стреловое оборудование (рис. 4, в). Оно
позволяет значительно увеличить высоту подъема груза и радиус
его перемещения.
На самоходных кранах последних выпусков для привода
всех механизмов применяют гидравлические системы с аксиально-
поршневыми насосами и редукторами, от которых приводятся во
вращение барабаны грузовой и стреловой лебедок и поворотная
платформа крана. В самоходных пневмоколесных кранах средней
грузоподъемности для подъема и опускания стрелы часто исполь-
зуются гидроцилиндры, что значительно упрощает конструкцию
рабочего оборудования стрелы, так как при этом не нужно при-
менять стреловую лебедку и стреловой полиспаст для изменения
вылета стрелы.
Все большее внимание при проектировании и создании новой
техники уделяется вопросам снижения материалоемкости кон-
струкций. Эта задача решается как конструкторскими, так и тех-
нологическими средствами путем применения легких и вместе с тем
прочных материалов, использования прогрессивной технологии
для изготовления сборочных единиц и деталей машины, выбора
рациональных форм профилей для несущих конструкций, при-
менения активных рабочих органов, действие которых основано,
например, на использовании вибрационного, виброударного или
взрывного эффектов.
1.1.2. Совершенствование структуры парка машин
Под структурой парка машин понимается количествен-
ное соотношение между машинами одного и того же функциональ-
ного назначения, но разными по своим производственным возмож-
ностям (например, количественное соотношение между погруз-
12
чиками малой, средней и большой грузоподъемности) и между
машинами разного функционального назначения (например, коли-
чественное соотношение между одноковшовыми погрузчиками и
экскаваторами, между экскаваторами и скреперами и т. д.).
От того, насколько данная структура парка удовлетворяет по-
требностям народного хозяйства, во многом зависят эффектив-
ность использования техники и стоимость выполняемых ею работ.
Поэтому с точки зрения народнохозяйственных интересов важно
обеспечить не только высокое качество и необходимые пара-
метры и характеристики какого-то определенного типа машин,
но и необходимые (оптимальные) пропорции между раз-
личными видами техники для данной отрасли народного хо-
зяйства
Так, например, для разработки мерзлых грунтов мижно ис-
пользовать дизель-молоты или буровые машины, либо мощные
рыхлители, работающие вместе с траншеекопателями. Однако
производительность машин и стоимость выполняемых работ
в обоих случаях будут не одинаковы: производительность дизель-
молотов или буровых машин ниже, а стоимость производимых
ими работ в 5—6 раз выше. Следовательно, отсутствие мощных
рыхлителей и соответствующего количества траншеекопателей
не позволяет применить передовые технологические приемы для
разработки мерзлых грунтов и неизбежно приводит к снижению
основных экономических показателей.
Вместо одноковшовых строительных экскаваторов, которые
обычно работают вместе с бульдозерами, разравнивающими грунт,
и с самосвалами, отвозящими грунт, наиболее эффективным яв-
ляется применение одноковшовых погрузчиков, которые могут
работать без бульдозеров и самосвалов, перемещая грунт в ковше
к месту разгрузки. К тому же погрузчики с ковшами такой же
вместимостью, что и ковши экскаваторов, имеют в 1,3 ... 2 раза
меньшую массу (и, следовательно, меньшую материалоемкость),
чем экскаваторы. Поэтому, если промышленностью выпускается
слишком большое число одноковшовых экскаваторов и малое
число погрузчиков, то это невыгодно для народного хозяйства,
так как при этом снижается производительность машин и повы-
шается стоимость работ.
То же самое характерно и для скреперов, применение которых
при определенных условиях может оказаться значительно выгод-
нее, чем одноковшовых экскаваторов, так как скрепер без по-
мощи бульдозеров и транспортных средств может разрабатывать
и разравнивать грунт и транспортировать его в ковше на неко-
торое расстояние. При большом объеме земляных работ эконо-
мически целесообразно использовать мощные скреперы с ковшом
большой, а не малой и средней вместимости, что позволяет умень-
шить число скреперов и количество операторов, управляющих
ими; последнее весьма важно с точки зрения экономии трудовых
ресурсов.
13
Невыгодным может оказаться и слишком большое число гусе-
ничных бульдозеров или гусеничных экскаваторов и погрузчиков
по сравнению с геми же машинами на пневмоколесном ходу, так
как последние имеют меньшую материалоемкость, лучшую ма-
невренность, они более быстроходны, чем гусеничные машины и
могут собственным ходом перемещаться по хорошим дорогам.
Таким образом, наряду с повышением качества и технического
уровня строительных и дорожных машин, одновременно должна
решаться и другая задача — совершенствование структуры парка
машин. Решение этих задач является неотъемлемой частью реше-
ния общей проблемы интенсификации использования техники
в народном хозяйстве и повышения на этой основе производитель-
ности труда и экономии трудовых и материальных ресурсов.
1.2. АВТОМАТИЗАЦИЯ РАБОЧИХ ПРОЦЕССОВ
СТРОИТЕЛЬНЫХ И ДОРОЖНЫХ МАШИН НА БАЗЕ
ПРИМЕНЕНИЯ МИКРОПРОЦЕССОРНОЙ ТЕХНИКИ
1.2.1. Цели и задачи автоматизации
рабочих процессов
Потребность в применении микропроцессорной техники
и роботов в строительстве вызвана рядом причин: возрастающим
дефицитом кадров механизаторов, занятых на строительных рабо-
тах; повышенной опасностью многих строительных работ; тяже-
лыми условиями труда операторов дорожно-строительных машин,
сложностью управления дорожно-строительными машинами, не
позволяющей обеспечить высокие качество работ и производи-
тельность труда
Большинство дорожно-строительных машин является источ-
ником опасных уровней шумов и вибраций. При этом средняя
амплитуда ускорения рабочего места оператора в вертикальном
направлении при движении дорожно-строительной машины
в 2 раза выше, чем при движении грузового автомобиля, а ампли-
туда ускорения рабочего места при движении грузового автомо-
биля в 3—4 раза выше, чем при движении легкового автомобиля.
Операторы одноковшовых экскаваторов при копании грунта
и загрузке машин в основном выполняют монотонно повторяю-
щиеся операции, состоящие из 12 элементов, средняя длительность
которых 24 с За смену оператор выполняет более 350 таких
операций; при этом число необходимых включений и выключений
муфты сцепления многих дорожно-строительных машин в 2—3 раза
превышает число включений и выключений муфты сцепления
автомобилей, работающих в большом городе.
Подобные условия работы операторов дорожно-строительных
машин являются причиной их быстрой утомляемости й профес-
сиональных заболеваний, что отрицательно влияет на качество
работ и производительность труда. Качество выполняемых работ
14
снижается и в том случае, когда рабочие органы, с помощью
которых выполняется, например, планировка площадей или про-
филирование откосов, постоянно изменяют первоначально задан-
ное положение из-за колебаний базовой машины при ее движении
по неровным поверхностям. Для устранения указанных недо-
статков, которые усугубляются с усложнением конструкций со-
временных машин, с повышением их скоростей и рабочих нагрузок,
необходимо внедрять средства автоматизации. Основными зада-
чами автоматизации дорожно-строительных машин являются
следующие:
1) повышение производительности труда и высвобождение
рабочей силы на основе внедрения прогрессивных строительных
технологий и сокращения продолжительности операций рабочего
цикла;
2) повышение качества работ путем повышения точности уста-
новки рабочих органов и постоянного слежения и корректировки
их положения в процессе выполнения данного технологического
процесса;
3) улучшение условий труда оператора путем автоматизации
часто повторяющихся операций и освобождения оператора от
больших физических нагрузок;
4) повышение безопасности труда при работе в неблагоприят-
ных и опасных условиях путем дистанционного управления маши-
ной и ее рабочим оборудованием, а также установки датчиков
и контрольно-предохранительных устройств на базе микроком-
пьютеров, сигнализирующих о приближении опасных ситуаций
и блокирующих привод машины при перегрузках и неисправ-
ностях;
5) повышение надежности машин и рабочего оборудования
путем оптимизации силовых и скоростных режимов работы при-
вода и информации оператора о состоянии систем и агрегатов
машины;
6) повышение экономической эффективности работы машин
благодаря оптимальному использованию мощности двигателя,
созданию оптимальных условий сгорания топлива в двигателе,
а также более экономичному расходу строительных материалов
при производстве планировочных работ, бетонировании сооруже-
ний и других видов работ.
1.2.2. Автоматизация систем управления
и контроля за работой машин
Системы автоматизированного управления и контроля
выполняют функции управления приводом машины путем по-
стоянного сравнения фактических характеристик и параметров
машины и ее рабочего оборудования с оптимальными характери-
стиками и параметрами, запрограммированными в памяти микро-
компьютера С помощью такой системы может осуществляться
15
управление моментом искрообразования для воспламенения рабо-
чей смеси в цилиндрах двигателя внутреннего сгорания, либо
управление экономайзером, через жиклер которого топливо по-
дается в смесительную камеру карбюратора, откуда обогащенная
смесь поступает в цилиндры двигателя.
Все большее распространение получают компьютерные си-
стемы, управляющие вращающим моментом и скоростью движе-
ния машины путем воздействия на ее коробку передач.
Автоматические выбор и переключение передач в этих маши-
нах основываются на показаниях датчиков, расположенных на
валу двигателя и выходном валу коробки передач. Эти датчики
воспринимают изменение нагрузочных и скоростных режимов
работы двигателя и трансмиссии и в виде входных сигналов пере-
дают эту информацию компьютеру. Поступающие в компьютер
входные сигналы сравниваются с запрограммированным аналогом
и уже в виде выходных сигналов-команд через усилители сигна-
лов поступают к магнитным переключателям передач, которые
непосредственно осуществляют включение передачи, соответствую-
щей в данный момент времени оптимальному режиму работы
машины.
На рис. 5 показана схема автоматического переключения пере-
дач на базе компьютера. В этой системе микрокомпьютер 4 обра-
батывает данные, поступающие от индукционных датчиков ча-
стоты вращения насосного и турбинного колес гидротрансформа-
тора. При достижении предельного значения скольжения гидро-
трансформатора выдается команда на переключение передач,
чем обеспечивается оптимальное согласование характеристик дви-
гателя, трансмиссии и дорожных условий.
Схемы электронного управления приводами машин обычно
одинаковы для всех машин данного типа, но программы различны
для каждого типоразмера. В таких системах предусматривается
возможность переключения программ при изменении условий
работы.
На одноковшовом экскаваторе фирмы «Оренштейн Коппель»,
(ФРГ) установлена микрокомпьютерная система, предназначенная
для измерения различных характеристик двигателя, узлов и
агрегатов машины с выводом полученной и обработанной компью-
тером информации на дисплей, что позволяет обойтись без мно-
жества контрольных приборов и табло.
Поступающая от датчиков информация сравнивается в микро-
компьютере с номинальными значениями соответствующих па-
раметров, заложенными в его память. При отклонении от нормы
на дисплее появляется предупредительная информация. В крити-
ческих ситуациях или при невнимательности оператора электрон-
ная система сама вмешивается в управление машиной и при не-
обходимости отключает приводы механизмов экскаватора. В слу-
чае отказа какого-либо узла экскаватора на дисплее появляется
информация о причине неисправности и рекомендация по способу
16
2
Рис. 5 Система автоматического переключения передач на базе микрокомпьютера:
/ — педаль отключения; 5 — блок переключения передач; 3 — колодка питания; 4 —.
микрокомпьютер; 6 — гидромеханическая коробка передач; 5, 7, 8, 9 —• кг бели
ее устранения. Например, при увеличении температуры головки
блока цилиндров двигателя на дисплее возникает надпись «Про-
верьте состояние ремня вентилятора»; при засорении фильтра
гидросистемы появляется надпись «Проверьте фильтр гидроси-
стемы» и т. д.
Челябинским заводом дорожных машин им. Колющенко по
проекту ВНИИСтройдормаша начат серийный выпуск автомати-
зированного скрепера с лазерной установкой. Этот скрепер ис-
пользуется для планировки земляных площадей, требующей
особой точности выполнения работ (с погрешностью ±3 см).
Лазерная установка, предназначенная для дистанционного
управления высотным и угловым положением рабочего органа
(ковша), состоит из двух частей: лазерного передатчика (излуча-
теля), установленного неподвижно на местности в некоторой точке
с известной высотной отметкой, и приемного устройства, разме-
щенного на ковше скрепера. Излучатель создает оптическую опор-
ную плоскость, которая может быть горизонтальной или наклон-
ной. Приемное устройство состоит из фотоэлектрического датчика
(индикатора) и опоры, на которой установлен датчик; высотное
17
Рис. 6. Схема автоматической системы управления рабочим оборудованием скре-
пера с лазерной установкой:
1 — лазерный излучатель; 2 — фотоэлектрический датчик приемного устройства; 3 —
лазерный индикатор; 4 — пульт управления; 5 — блок перегрузки; 6 — электрогидра
влнческне исполнительные механизмы (реверсивные золотники) управления приводом
ковша и задней стенкой ковша; 7 — датчики управления задней стенкой ковша; 8 — дат-
чик частоты вращения; 9 — датчик углового положения ковша; 10 — опора приемного
устройства
положение фотоэлектрического датчика в пределах от 0 до 200 мм
задается дистанционно при помощи задатчика с пульта управ-
ления.
Лазерный излучатель и фотоэлектрический датчик устанавли-
вают таким образом, чтобы лазерный луч, имеющий заданный
уклон, попадал в рабочую зону фотоэлектрического датчика.
На рис. 6 показана схема автоматической системы управления
рабочим оборудованием скрепера с лазерной установкой. Прием-
ное устройство связано кабелями с золотником гидравлического
распределителя рабочего оборудования и вместе с ним образует
следящую систему, т. е. такую систему, которая автоматически
устраняет возникающее рассогласование между входными сигна-
лами, поступающими в виде внешних воздействий со стороны
разрабатываемого грунта или материала на рабочий орган ма-
шины, и выходными сигналами, поступающими в виде управляю-
щих воздействий на рабочий орган со стороны гидрораспредели-
теля, непосредственно осуществляющего перемещение рабочего
органа.
При движении скрепера по неровностям изменяется его поло-
жение и соответственно положение фотоэлектрическою датчика
относительно опорной плоскости лазерного луча, что вызывает
рассогласование. В момент попадания луча на фотоэлектрический
датчик возникают импульсы, передающиеся на логическое устрой-
ство. Последнее определяет знак отклонения рабочего органа от
заданного положения и включает электромагнит золотникового
гидрораспределителя, подающего рабочую жидкость к гидро-
цилиндрам подъема ковша скрепера, с помощью которых изме-
няется его положение до устранения рассогласования.
18
Аналогичной лазерной установкой можно оборудовать бульдо-
зеры. В этом случае фотоприемник непосредственно устанавли-
вают на отвале, т. е. он выполняет роль датчика фактического
положения отвала. Команды на соответствующие перемещения
отвала через гидрораспределитель передаются гидроцилиндрам
подъема-опускания отвала.
Описанные микропроцессорные системы выполняют три основ-
ные функции. Одна из них состоит в оптимизации режимов работы
привода машины, что позволяет снизить нагрузки на элементы
привода и металлоконструкцию рабочего оборудования, умень-
шить износ деталей двигателя и трансмиссии, сократить расход
топлива и путем оптимизации скоростных режимов и максималь-
ного использования возможности машины без чрезмерного физи-
ческого напряжения оператора повысить производительность
труда. Вторая функция микропроцессорных систем состоит в по-
стоянном контроле за состоянием и работой узлов и агрегатов
машины, что способствует повышению ее надежности и безопас-
ности. Третья функция —• обеспечение точности и высокого ка-
чества выполняемых работ Применяемые автоматические си-
стемы могут быть рассчитаны на выполнение либо одной функции,
либо двух-трех одновременно.
1.2.3. Роботизация рабочего оборудования
(строительные роботы)
Руки человека хорошо приспособлены для выполнения
самых сложных рабочих операций, связанных с перемещением
и обработкой различных предметов. Однако возможности человека
весьма ограничены и массой, и размерами перемещаемых предме-
тов, и часто опасными условиями выполнения работ (высокие тем-
пературы и давления окружающей среды, образование пыли или
вредных газов, повышенный уровень радиации, шумов и вибраций
и т. п.). Естественно, поэтому, стремление конструкторов создать
так называемые «механические руки», которые как и руки чело-
века, обладали бы большой подвижностью (иначе, большим числом
степеней свободы) и вместе с тем не имели бы тех ограничений,
которые свойственны рукам человека.
С развитием вычислительной и особенно микропроцессорной
техники открылись практические возможности для создания
таких механических систем, получивших название манипуляторов
и роботов.
К манипуляторам обычно относят дистанционно управляемые
системы, в которых всю программу движений и действий механи-
ческой руки задает оператор. Роботами называют системы, имею-
щие то же, что и манипуляторы, назначение, по снабженные про-
граммным управлением. И манипуляторы, и роботы являются
робототехническими системами.
Таким образом, робототехнические системы разделяют на
дистанционно управляемые и автоматические или программные
19
Последние классифицируют на роботы с «жесткой» программой,
рассчитанной на строго определенный технологический процесс,
роботы с переналаживаемым программным управлением, которые
при замене одной программы на другую изменяют и характер дей-
ствий механической руки, и роботы с гибкой программой, автома-
тически изменяющейся в соответствии с фактической обстановкой.
Роботы с гибкой программой называются адаптивными и ин-
теллектуальными. Они снабжены высокочувствительными дат-
чиками, реагирующими на изменение обстановки, и системой обра-
ботки информации, поступающей от датчиков для выработки сиг-
налов адаптивного управления, т. е. гибкого изменения про-
граммы движений механической руки. Адаптивные и интеллек-
туальные роботы отличаются друг от друга уровнем очувсгвова-
ния. Интеллектуальные роботы имеют более совершенную микро-
процессорную систему, которая позволяет им быстро ориентиро-
ваться в изменяющейся обстановке и принимать решения о своих
дальнейших действиях для выполнения нужных технологических
операций.
Робототехнические системы могут быть стационарными, вы-
полняющими различные операции на месте, и мобильными (дви-
жущимися). Мобильные системы состоят из механической руки и
специальной платформы (или шасси), на которой установлены
все исполнительные механизмы. Перемещением шасси управляют
автоматические средства. Они имеют программу маршрута дви-
жения, запрограммированную адресовку цели, а также программу
загрузки и разгрузки. Характерными представителями класса
мобильных роботов являются краны-штабелеры, обслуживающие
автоматизированные склады.
Робототехнические системы различаются и по назначению.
Здесь можно выделить промышленные роботы и манипуляторы,
применяемые для выполнения различных технологических опера-
ций в системе гибких производственных систем в промышленно-
сти; строительные роботы и манипуляторы, используемые в строи-
тельстве.
Требования, которые предъявляются к конструкциям промыш-
ленных и строительных роботов, существенно различны Эти
различия обусловлены следующими факторами:
1) строительные роботы, как правило, работают на открытом
воздухе при повышенной влажности, низких или высоких тем-
пературах, больших перепадах давлений воздушной среды и т. п.,
что предъявляет особо повышенные требования к надежности
электронных систем;
2) масса и размеры предметов, с которыми работают строи-
тельные роботы, по крайней мере на порядок выше массы и разме-
ров предметов, с которыми работают промышленные роботы;
3) рабочая зона, обслуживаемая строительными роботами, и,
следовательно, радиус действия их механических рук может быть
во много раз больше, чем у промышленных роботов;
20
<О1
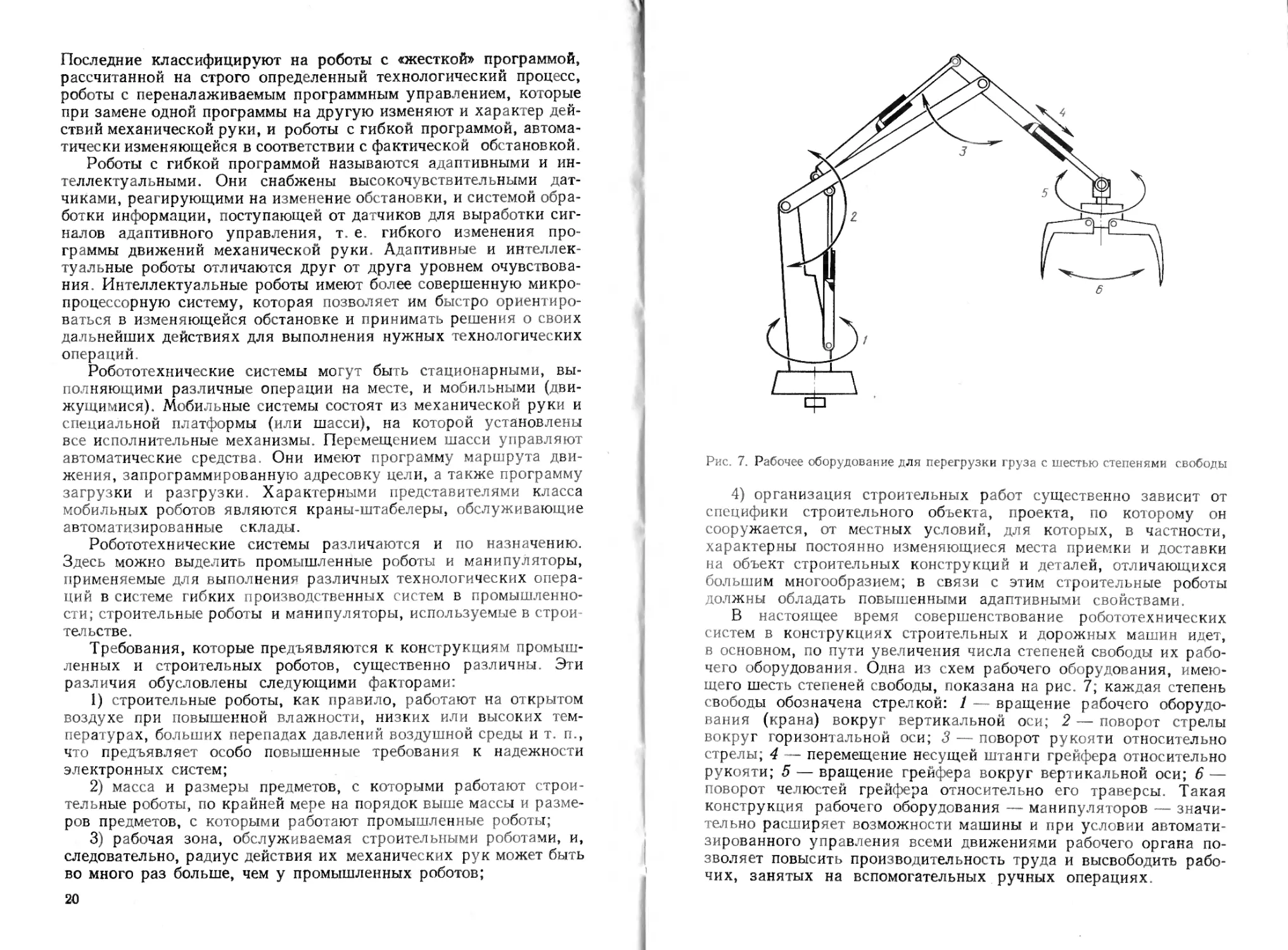
Рис. 7. Рабочее оборудование для перегрузки груза с шестью степенями свободы
4) организация строительных работ существенно зависит от
специфики строительного объекта, проекта, но которому он
сооружается, от местных условий, для которых, в частности,
характерны постоянно изменяющиеся места приемки и доставки
на объект строительных конструкций и деталей, отличающихся
большим многообразием; в связи с этим строительные роботы
должны обладать повышенными адаптивными свойствами.
В настоящее время совершенствование робототехнических
систем в конструкциях строительных и дорожных машин идет,
в основном, по пути увеличения числа степеней свободы их рабо-
чего оборудования. Одна из схем рабочего оборудования, имею-
щего шесть степеней свободы, показана на рис. 7, каждая степень
свободы обозначена стрелкой: 1 — вращение рабочего оборудо-
вания (крана) вокруг вертикальной оси; 2 — поворот стрелы
вокруг горизонтальной оси; 3 — поворот рукояти относительно
стрелы; 4 — перемещение несущей штанги грейфера относительно
рукояти; 5 — вращение грейфера вокруг вертикальной оси; 6 —
поворот челюстей грейфера относительно его траверсы. Такая
конструкция рабочего оборудования — манипуляторов — значи-
тельно расширяет возможности машины и при условии автомати-
зированного управления всеми движениями рабочего органа по-
зволяет повысить производительность труда и высвободить рабо-
чих, занятых на вспомогательных ручных операциях.
Г Л А В A 2
ОБЩИЕ МЕТОДЫ РАСЧЕТА МАШИН
2.1. СИСТЕМНЫЙ ПОДХОД К АНАЛИЗУ
И РАСЧЕТУ МАШИН
2.1.1. Цели и задачи расчета машин
В зависимости от того, какие параметры машины или
ее составных частей необходимо определить, различают три
основных вида расчета: кинематический, силовой и прочностной.
Наряду с этим может выполняться расчет параметров надежности
узлов и деталей машины, параметров и характеристик гидравли-
ческих устройств, электрической аппаратуры или тепловой расчет
машин, работающих в условиях высоких температур и т.п.
Задачей кинематического расчета является определение пере-
мешу 1ий или траекторий движения, скоростей и ускорений рабо-
чего оборудования, элементов привода, исполнительных меха-
низмов машины При силовом расчете вычисляют силы, дей-
ствующие на те или иные части машины, а при прочностном опре-
деляют прочность деталей машин.
При проведении каждого нз этих расчетов можно решать
прямую и обратную задачи. Например, по известным размерам
звеньев рабочего оборудования и его кинематической схеме можно
определить траекторию движения рабочего органа при взаимо-
действии его с разрабатываемым материалом или при холостом
ходе. Но можно по заданной траектории движения рабочего ор-
гана найти необходимые размеры и определить характер движе-
ний связанных между собой звеньев рабочего оборудования.
При силовом расчете какого-либо механизма по заданным
внешним нагрузкам, действующим на его исполнительный орган,
или по сопротивлению движению его ведомого звена определяют
движущее усилие на ведущем звене механизма. Но можно решить
и обратную задачу — по известному движущему усилию опреде-
лить внешние нагрузки или сопротивления, допускаемые для дан-
ного механизма или машины.
В результате прочностного расчета находят напряжения в де-
талях и элементах машины, которые возникают при действии на
них заданных сил. При этом известными являются размеры, форма
и материал деталей. Полученные расчетные напряжения сравни-
вают с их допускаемыми значениями и на основании этого оцени-
вают прочность детали в данных условиях. Такая схема расчета
соответствует так называемым поверочным расчетам на прочность.
При расчетах на прочность, проводимых на стадии проектирова-
22
ния машины, по заданным силам и принятым допускаемым на-
пряжениям определяют размеры деталей, а также выбирают их
форму и материал, удовлетворяющие требованиям прочности.
2.1.2. Общие понятия системы. Классификация
с истем
Понятия «система», «системный подход», «системный
анализ» применяют в самых различных областях при решении
научных, инженерных, экономических задач, которые относятся
к объектам различного уровня, например к машине или отдель-
ным ее частям, к предприятиям или их подразделениям, к от-
дельным отраслям народного хозяйства или к народному хозяй-
ству в целом.
Что же объединяет эти различные по своей природе и слож-
ности объекты, которые рассматриваются как системы? Ответ на
этот вопрос заложен в самом понятии «система», что означает
единство закономерно связанных между собой частей объекта,
будь то детали или сборочные единицы машины, объединение
людей или экономические явления.
Понятия «системный подход», «системный анализ» характе-
ризуют определенные методологические принципы решения задач,
основанные на рассмотрении и анализе составных частей объекта
или явления в их взаимосвязи и взаимозависимости. При этом
исходят из основного положения, свойства объекта зависят от
свойств составляющих его частей, а свойства последних — от
характеристик объекта в целом.
Поэтому при системном подходе необходимо решать задачи
как анализа (разобрать, разложить по «голочкам»), так и син-
теза (воссоединить разрозненные, казалось бы, факторы и собрать
их в единое целое, объяснить множество частностей одной общей
причиной). Изучая, например, работу колесного погрузчика,
можно рассматривать систему машина—поверхность качения,
имея в виду, что свойства грунта и характер поверхности качения
оказывают влияние на поведение машины, а последняя, в свою
очередь, влияет на состояние поверхности качения. При более
детальном изучении из этой системы можно выделить ее основные
части, представляемые как подсистемы, например, поверхность
качения—движители машины, движители—остов машины, дви-
жители—трансмиссия машины и т. д.
В других случаях можно рассматривать более сложную си-
стему, которая помимо машины и поверхности качения (окружаю-
щей среды) включает и человека — оператора, управляющего
машиной.
Можно представить себе систему проектирования объекта,
основными частями которой являются коллектив конструкторов,
орудия их труда — чертежные инструменты и вычислительная
техника, предмет труда — исходные данные по объекту и конеч-
23
ный продукт труда — проект объекта. Информационно, управляю-
щая система включает операторов, орудие их труда — ЭВМ,
предмет труда — входную информацию и продукт труда — вы-
ходную информацию.
При исследовании вопросов надежности машин и оборудова-
ния можно рассматривать систему изготовление—эксплуатация—
ремонт машины, состоящую из нескольких взаимосвязанных
между собой подсистем.
Как видим, понятие системы может быть связано с самыми
различными объектами и явлениями, к исследованию которых
подходят, однако, с единой системной точки зрения. Такой подход
помогает в процессе исследования выявить наиболее существенные
факторы, определяющие характер функционирования системы,
исключив из рассмотрения все малозначащие факторы (что осо-
бенно важно при исследовании сложных систем), а при изменении
условий работы (окружающей среды) или состояния системы —
найти, какие изменения должны быть внесены в составляющие ее
элементы, чтобы действие системы по-прежнему оставалось эф-
фективным.
Различают следующие основные классы систем.
1. Искусственные и естественные системы. К первым отно-
сятся системы, созданные человеком, в частности, различного
рода механические системы, с которыми имеют дело конструкторы
машин и оборудования. Ко вторым относятся системы, созданные
природой, например окружающая среда, с которой постоянно
взаимодействуют искусственные системы. Специалисты, создаю-
щие машины, должны быть хорошо знакомы с основными свой-
ствами среды, в которой работают машины Для строительных
и дорожных машин такой средой являются основания, с которыми
взаимодействуют колеса и гусеницы машины, а также материалы
и грунты, с которыми взаимодействуют рабочие органы машин.
2. Статические и динамические системы. Первые включают
системы, свойства которых не изменяются со временем, а вторые —
системы, изменяющие во времени свое состояние или положе-
ние. Если под движением понимать изменение состояний системы,
то можно сказать, что динамические системы постоянно находятся
в движении. Различают следующие три вида движения* равновес-
ное, когда ни одна координата системы не изменяется; периодиче-
ское, когда система через равные промежутки времени приходит
в одно и то же состояние; переходное, когда система из некоторого
начального состояния переходит к равновесному или периодиче-
скому движению.
Понятия равновесного и периодического движения часто
объединяются общим понятием установившегося движения.
3. Управляемые системы. Особенностью этих систем является
их способность изменять свое движение, переходить из одного
состояния в другое под влиянием различных управляющих воз-
действий. Из этого определения следует, что все управляемые си-
24
стемы одновременно являются и динамическими, так как они
рассматриваются в движении и развитии.
Управляющие воздействия в отличие от возмущающих, оказы-
ваемых на динамическую систему окружающей средой (например
неровностями поверхности качения, порывами ветра и т. п.)
могут по желанию оператора или системой автоматического управ-
ления машиной принудительно изменяться, при этом машине
задаются наиболее предпочтительные в данных условиях движе-
ния. Так, воздействуя на рулевое управление машины, можно
изменить направление ее движения, воздействуя на элементы при-
вода машины — изменить скорость движения и тяговые усилия,
развиваемые ею.
4. Детерминированные и вероятностные системы. К детерми-
нированным относятся системы, поведение которых можно пред-
сказать, если известно, в каком состоянии они находились в преды-
дущий момент времени (иначе, если известны начальные условия),
например машины и механизмы, движение которых подчиняется
строгим законам механики. К детерминированным можно также
отнести систему размещения станков в цехе, исходя из условия
движения деталей по определенным маршрутам, или электронно-
вычислительную машину (ЭВМ), выполняющую только те опера-
ции, которые ей предписаны.
Вероятностными являются системы, состояние которых ха-
рактеризуется значительной неопределенностью из-за случайного
характера начальных условий или факторов, определяющих их
поведение. К вероятностной относится, например, система мас-
сового обслуживания, включающая оборудование, предназначен-
ное для обслуживания какого-либо производственного процесса
(технического обслуживания машин, абонентов телефонной стан-
ции и т. п.), а также персонал, работающий на этом оборудовании
и управляющий процессом. Случайными факторами для такой
системы могут быть момент начала обслуживания, продолжитель-
ность обслуживания, число отказов и длительность простоев
оборудования в ремонте, что не позволяет однозначно определить
состояние и основные показатели системы.
5. Реальные и абстрактные системы. В отличие от реальных
систем, обладающих определенными физическими свойствами,
такими, как масса, связанность или упругость, свойства абстракт-
ных систем не имеют физической природы, они существуют только
в уме исследователя и представляются в виде некоторых символов
и количественных значений. Примером абстрактных систем яв-
ляются математические модели, записанные, например, в форме
алгебраических или дифференциальных уравнений. Такие модели
с разной степенью приближения могут отражать свойства реаль-
ных систем.
Допустим, что к свободному концу пружины, закрепленной
на потолке, подвесили груз. Известно, что при статическом поло-
жении этой системы между ее физическими параметрами — жест-
25
костью пружины с, весом груза G и растяжением пружины Д/
в пределах закона Гука существует зависимость
с AZ = G.
Для математического описания этой системы каждому ее па-
раметру нужно поставить в соответствие некоторый элемент фор-
мализованной схемы, заменив, например, жесткость пружины
символом а, вес груза символом Л, перемещение системы симво-
лом у, и записать математическую модель системы в виде линейного
алгебраического уравнения
ау = А.
Важно подчеркнуть, что оба аналогичные по форме уравнения
отличаются друг от друга тем, что величины, входящие в первое
уравнение, имеют определенный физический смысл (жесткость,
вес и т. п.), тогда как в последнем уравнении все величины носят
абстрактный характер, за которыми стоят лишь численные зна-
чения.
Если грузу, подвешенному к пружине, сообщить какое-то
начальное отклонение, то возникнет колебательное движение,
в котором смещение х груза будет величиной не дискретной,
как в аналогичной статической системе, а непрерывно изменяю
щейся во времени t. Поведение такой динамической системы можно
описать дифференциальным уравнением типа
в -да- = -ь».
аналогичным уравнению свободных колебаний груза на пру-
жине
где В и b — постоянные коэффициенты; g — ускорение свободного
падения.
Проинтегрировав первое из этих уравнений, найдем перемен-
ную у в функции времени. К аналогичному результату приходим
и при интегрировании второго уравнения, находя изменение
длины пружины х в функции времени.
Таким образом, используя аналогию между реальными про-
цессами и соответствующими им математическими (т. е. формали-
зованными) схемами, изучение реальных систем можно свести
к решению чисто математической задачи.
Если математическая модель получается сложной и аналити-
ческие методы ее решения вызывают большие и часто непреодо-
лимые вычислительные трудности, то модель реализуется с по-
мощью ЭВМ. Однако и в таких случаях часто оказывается полез-
ной аналитическая постановка задачи, основанная на построении
некоторой упрощенной модели того же процесса, которая допу-
скает точное аналитическое решение для каких-то частных слу-
26
чаев. Анализ решения такой модели весьма важен: он позволяет
выявить основные закономерности и не всегда очевидные взаимо-
связи между отдельными параметрами системы, а также сравнить
численные расчеты, выполненные ЭВМ, с результатами аналити-
ческого решения, и тем самым оценить, насколько точен метод
расчета.
2.2. ОПРЕДЕЛЕНИЕ СИЛ, ДЕЙСТВУЮЩИХ В МЕХАНИЗМАХ
МАШИН
2.2.1. Классификация сил
В механике под силой понимают меру механического
взаимодействия материальных тел, которое проявляется в изме-
нении их состояния и характеризуется значением и направлением
воздействия одного тела на другое. Поэтому силу можно пред-
ставить в виде вектора, исходящего из точки, к которой она при-
ложена; при этом направление вектора будет соответствовать
направлению действия силы, а его длина будет пропорциональна
ее значению.
Все силы, действующие на материальное тело (или на отдель-
ные элементы машины) можно разделить на две основные группы:
задаваемые силы и силы реакций связей. В отличие от задавае-
мых силы реакций связей в общем случае заранее неизвестны ни
по значению, ни по направлению.
Силы, действующие на материальное тело, разделяют на ста-
тические и динамические. Под действием статических сил тело
не изменяет своего состояния, т. е. остается в покое или сохра-
няет равномерное движение, которое оно имело и до приложения
силы. Динамические силы изменяют первоначальное состояние
тела и обладают свойством сообщать ему ускорение.
В соответствии с характером задаваемых сил реакции связей
также могут быть статическими и динамическими.
Напомним, что в статике связями называются тела, ограничи-
вающие свободу перемещения данного тела. Эти связи носят
только геометрический характер. Так, для колеса связью яв-
ляется основание (поверхность качения), по которому оно ка-
тится; для груза, поднимаемого с помощью лебедки, связью
является канат, исключающий возможность свободного падения
груза и обеспечивающий его перемещение в определенном направ-
лении. В различного рода механизмах связями являются кинема-
тические пары, в которых сочленяются два звена механизма и
которые накладывают определенные ограничения на движение
одного звена относительно другого.
Силы, действующие со стороны связей на движущееся или
находящееся в покос тело, оказывающие противодействие его
движению, называют реакциями связей. Реакции связей могут
быть нормальными по отношению к поверхности связи и каса-
тельными к ней; к последним относятся силы трения. Нормальные
27
реакции связей направлены противоположно нормальной состав-
ляющей равнодействующей задаваемых сил и, согласно принципу
равенства действия и противодействия, равны ей по значению.
По характеру воздействия на тело и по физическому источ-
нику задаваемые силы разделяют на движущие (тормозящие)
силы, силы полезного сопротивления, силы упругости, тяжести,
сопротивления среды. К задаваемым можно также отнести и
силы инерции.
Движущими называются силы, сообщающие движение данному
телу. В машинах источником движущих сил может быть давление
сжатого воздуха или давление рабочей жидкости соответственно
в пневматических и гидравлических системах; давление газов
в цилиндрах двигателей внутреннего сгорания. Движущие силы
могут создаваться электрическим полем или напором ветра.
Звенья машины, к которым приложены движущие силы, назы-
ваются ведущими. Так как движущие силы всегда направлены
в сторону перемещения ведущих звеньев, работа, совершаемая
этими силами на соответствующем пути, будет положительной.
При установившемся движении машины эта работа всегда больше
суммарной работы сил полезных и вредных сопротивлений.
К силам полезного (рабочего) сопротивления относятся силы,
для преодоления которых предназначена машина, например:
сила тяжести поднимаемого груза, силы сопротивления резанию
или копанию материалов и грунтов, силы дробления пород и т. п.
Эти силы воздействуют на рабочие (исполнительные) органы ма-
шины и направлены прочив перемещения точек, к которым они
приложены; следовательно, работа их всегда будет отрицательной.
К силам вредного сопротивления относятся силы, возникаю-
щие при движении тела в жидкой или воздушной среде, направ-
ленные противоположно относительной скорости тела, а также
силы трения в кинематических парах.
Укажем еще на один признак классификации сил: различают
силы внешние и внутренние. Внешними называются силы, прило-
женные к телу извне, а внутренними — силы взаимодействия
между точками (частицами), входящими в данное тело; к внутрен-
ним силам можно также отнести силы взаимодействия между
элементами кинематических пар в сочленениях машин и меха-
низмов.
Деление сил на внешние и внутренние удобно потому, что
при рассмотрении равновесия твердых тел или системы твердых
тел внутренние силы непосредственно не учитываются и исклю-
чаются из уравнения равновесия как взаимно уравновешенные.
Но следует иметь в виду, что реакции связей в кинематических
парах механизмов, являющиеся внутренними силами для какой-то
системы связанных между собой твердых тел, становятся задавае-
мыми внешними силами по отношению к тем же телам, если по-
следние условно рассматриваются как свободные тела, не связан-
ные с остальными частями системы.
28
г
Для иллюстрации этого положения приведем два примера.
Силы, обусловленные ударами в зазорах кинематических пар,
или периодически действующие силы в зацеплении зубчатых колес
коробки передач, вызывающие изгибно-крутильные колебания
валов трансмиссии, не нарушают равновесия самой машины и,
следовательно, по отношению к машине, как некоторой механиче-
ской системе, являются внутренними и не входят в уравнения
равновесия машины. Но те же силы следует отнести к задаваемым
внешним, если коробка передач условно отделена от остальной
части трансмиссии машины; в этом случае при рассмотрении усло-
вий равновесия валов и шестерен коробки передач силы, дей-
ствующие в зацеплении зубчатых пар, являются внешними зада-
ваемыми и их нужно учитывать в уравнениях статики.
Сила давления рабочей жидкости в гидросистеме рабочего
оборудования машины и соответствующая сила на штоке гидро-
цилиндра, приводящая в движение стрелу погрузчика, крана или
экскаватора, не влияют на движение машины в целом и поэтому
по отношению к машине являются внутренними силами. Но если
рассматривается отдельно взятая стрела рабочего оборудования,
которое условно отделено от базовой машины, то та же сила,
действующая со стороны гидроцилиндра на стрелу, будет уже
задаваемой внешней (движущей) силой, которую нужно учиты-
вать при статическом расчете стрелы.
Описанный прием условного расчленения конструкции на
отдельные элементы и рассмотрения равновесия каждого элемента
вне связи с другими частями конструкции основан на так назы-
ваемом принципе освобождаемости от связей. Этот принцип можно
сформулировать следующим образом: механическое состояние
системы (тела) не изменится, если освободить ее от связи, при-
ложив к точкам системы силы, равные реакциям связи.
2.2.2. Силы трения скольжения и качения
Силы трения скольжения возникают при движении
тела по шероховатой поверхности. Они направлены против ско-
рости относительного скольжения и имеют вполне определенное
значение: при трении без смазочного материала сила трения FTp
равна произведению нормальной реакции /?п, численно равной
активной силе АГ, действующей по нормали со стороны тела на
поверхность скольжения, на коэффициент трения скольжения /:
F.P = Rnf = Nf.
Отношение силы трения или касательной реакции поверхности
скольжения к нормальной реакции равно тангенсу угла трения сртр
tg Фтр ~ тр/
ИЛИ
Ftp ---- Rn tg <Ртр.
29
Сопоставляя оба выражения для силы FTp, получаем
f = tg <ртр.
Общая реакция поверхности скольжения равна векторной или
геометрической сумме сил Гтр и Rn;
R ~ + Rn
или __________________________
Я = -/Лр -I - Rn = Rn / 1 + tg- Фтр = Ял/COS фТр.
Из последнего выражения следует, что общая реакция поверх-
ности скольжения при движении тела отклоняется от нормали на
угол трения (ртр.
Одно из принципиальных отличий силы трения от других ре-
акций связей, которые, как отмечалось, всегда равны задаваемым
внешним силам (действие равно противодействию), состоит в том,
что ее значение не может быть больше значения, определяемого
произведением Nf. Если сдвигающая сила Р становится больше
силы трения FTP, то начинается движение тела. В противном
случае (Р с Етр) тело остается в покое.
В отличие от силы трения скольжения при движении, которая
имеет вполне определенные направление и значение, сила трения
скольжс ния в покое может иметь любое направление в касатель-
ной плоскости и принимать любое значение, удовлетворяющее
условию 0 < Етр с Rnfc, где /0 — коэффициент трения сколь-
жения в покое < /).
В табл. 1 приведены ориентировочные значения коэффициента
трения f
Иную природу имеет трение качения, возникающее при ка-
чении какого-нибудь тела вращения по некоторой поверхности,
называемой обычно поверхностью качения. Сопротивление каче-
нию является результатом деформации тела вращения и поверх-
ности качения в зоне их контакта. С этим явлением мы более
подробно познакомимся при рассмотрении процесса взаимодей-
ствия колеса с пневматической шиной с поверхностью качения.
А пока лишь отметим, что из-за указанной деформации соприка-
сающихся тел равнодействующая сил давлений, действующих
со стороны поверхности качения на колесо, равная нормальной
реакции RK на колесе, смещается от его вертикальной оси на не-
которое расстояние (плечо) р в сторону качения, образуя относи-
тельно оси вращения колеса момент сопротивления качению
Mf = направленный против направления качения колеса.
Сопротивление качению по аналогии с сопротивлением трения
скольжения можно также выразить через силу сопротивления
качению Pf. разделив момент Mf на радиус г колеса,
Pf - Mf,'r = R„p./r = R4fv,
где p — коэффициент трения качения, имеющий лицейную размерность; /в =
= ц/г — приведенный коэффициент сопротивления качению
30
1. Значения коэффициентов трения скольжения
Материала пар трения Без смазочного материала Со смазочным материалом
Металл — металл:
бронза — бронза 0,15 0,10... 0,15
сталь — бронза 0,20 0,07 ... 0,10
сталь — сталь 0,15 0,05 ... 0,10
сталь — чугун 0.18 0,05 ...0,15
чугун — бронза 0,15 ... 0,20 0,07 ... 0,15
чугун — чугун Металл — дерево 0,15 0,07 ... 0,12
бронза — дуб 0,3 —
мягкая сталь — дуб 0 4 ..0 6 0,1
чугун — дуб Прочие пары: 0,3 ... 0,5 0,2
глнна — металл 0,3 ... 0,35 —
дерево — дерево 0,2 . . 0,5 0,07 . .. 0,15
дерево — снег средней плотности 0,04 ... 0,10 —
камень — металл 0,2. 0,4 —
кожа — дуб 0,3 . .. 0,5 —
кожа — чугун 0,6 0,15
резина — чугун 0,8 0,5
сталь - баббит — 0,03 ... 0,10
сталь — песок 0.2 ... 0.6 —.
сталь — снег 0,02 ... 0,10 —
Трение качения имеет место не только при качении колес,
•>о и в подшипниках качения, на которых могут быть установлены
лолеса. Для подшипников качения коэффициент сопротивления
качению /п „ — 0,0015 ... 0,003, тогда как для подшипников
скольжения . с = 0,07 ... 0,09. В общем случае с учетом тре-
ния в подшипниках сопротивление качению колеса
=/?кФо. (1)
где f = /п. н для подшипников качения к f = /п.с Для подшипников
скольжения; — диаметр цатфы колеса под подшипник, Рв диаметр колеса;
Фо = /к + / Мк-^к) — суммарный коэффициент сопротивления качению колес.
Для приближенных расчетов можно принять ф0 = 0,01 при
качении по рельсовому пути колес, установленных на подшипни-
ках качения, и ф0 = 0,02 при установю колес на подшипниках
скольжения (значения ф0 даны с учетом трения реборд колес
о рельсы).
Для колес с пневматическими шинами сопротивление в под-
шипниках обычно мало по сравнению с сопротивлением качения
самого колеса и его влиянием, как правило, пренебрегают.
31
2.2.3. Силы упругости
и демпфирующие сопротивления
Многие элементы машин, а также материалы, с кото-
рыми взаимодействуют исполнительные органы машин, обладают
упругостью, т. е. способностью восстанавливать свою форму и
размеры после снятия усилий, вызывающих их деформацию.
В этом состоит основное отличие упругих тел от тел пластиче-
ских, которые после прекращения действия внешних сил сохра-
няют размеры и форму, приобретенные к моменту окончания дей-
ствия внешних сил.
Форма и размеры упругого тела восстанавливаются благо-
даря действию внутренних сил упругости, зависящих от дефор-
мации тела. Силы упругости могут быть пропорциональны ли-
нейной х или угловой <р деформации тела, а направление их всегда
прот ивоположно направлению деформации:
F = сх или Мр — с'<р,
где F и Мр — сила упругости и момент сил упругости соответственно; с и с' -
линейная и угловая жесткость соответственно.
Следовательно, коэффициенты жесткости, называемые обычно
просто линейной или угловой жесткостью тела, представляют со-
бой отношение силы или момента, действующих на данное тело,
к вызванной ими линейной или угловой деформации. Линейная
жесткость измеряется в Н/м, а угловая жесткость — в Н-м/рад.
Коэффициенты жесткости определяют экспериментально или
рассчитывают с учетом модулей упругости первого или второго
рода материала тела, его формы и размеров, характера и места
приложения нагрузки [2].
В зависимости от направления деформаций, вызванных дей-
ствием внешних сил, их разделяют на продольные (радиальные),
тангенциальные (касательные) и боковые (поперечные). В соот-
ветствии с этим различают линейную продольную, тангенциаль-
ную и боковую жесткости тела. В зависимости от характера
угловых деформаций различают деформации кручения или изгиба
и соответственно жесткости тела при кручении или изгибе.
Упругостью обладают и жидкости, но в отличие от твердых
тел они не изменяют объем при всестороннем сжатии, ио могут
изменять форму. Жесткость жидкости для гидроцилиндров одно-
стороннего действия
с = £»^ж, (2)
для гидроцилиндров двустороннего действия
с = 2£жП/Уж, (3)
где Еж — модуль упругости жидкости; Еж = (1.20 ... 1,25) 10s МПа; Ес — пло
щадь поршня гидроцилиндра; Vm — объем жидкости в гидроцилиндре.
32
2. Радиальная приведенная жесткость Сш (кН м) шины 16,00—20,0
Повер хность качения Давление воздуха в шине, МПа
о.оэе 0 147 0.196 0.24 5 0.294 0.34 4
Асфальт 313,3 421.8 515,0 598.4 667.1 735,8
Плотный грунт (стерня) 272,1 347.3 402,2 446,4 475,8 505,2
Свежевспаханное поле 210,9 247,2 269,8 284,5 294.3 301,1
Для гидросистем привода рабочего оборудования погрузчи-
ков, кранов, экскаваторов и других машин суммарную жесткость
можно приближенно определить по формуле
0,7850?,
1^2-Н !.17(AlY2-^- ’ ''
”-Ж \ 1УЛ / С[Г,
где Dn —диаметр поршня, м; sn — ход поршня, м; г!ш — диаметр шлангов, .м.
/ш —-длина шлангов, м; £ш — модуль упругости шлангов гидросистемы, £ш «
0 IJ 10я МПа.
Деформативные свойства пневматической шины, а, следова-
тельно, и ее жесткость зависят от материала, конструкции и
рисунка покрышки, давления воздуха в камере шипы, а также
от твердости поверхности качения. Поэтому при их оценке нужно
исходить не из жесткости отдельно взятой шины, а из некоторой
приведенной жесткости пары шина—поверхность качения
(табл. 2)
В любой системе, совершающей колебания, обусловленные
упругостью ее элементов, имеет место рассеяние механической
энергии из-за трения внутри материала этих элементов или трения,
искусственно созданного специальными демпфирующими (нем.
Dampfer — успокоитель, гаситель котебанин) устройствами. По-
лучаемый при этом эффект затухания колебаний называют демпфи-
рованием, а силы, вызывающие этот эффект, демпфирующими
сопротивлениями. При сравнительно небольших скоростях де-
формации демпфирующее сопротивление /\г приближенно при-
нимают пропорциональным относительной скорости х точки
в среде, сопротивляющейся движению,
РгА
где Рг — коэффициент пропорциональности или коэффициент демпфирования
«Н-сЛм!
Для характеристики демпфирования можно пользоваться ве-
личиной kr, называемой удельным сопротивлением демпфирова-
нию, которая равна отношению коэффициента Р, к удвоенной
массе т упругого элемента:
М2т},
и имеет размерность частоты (1/г),
2 ГпЛррмач Л. 6 33
Ниже приведены средние значения удельного сопротивления
демпфированию (1/с) для некоторых элементов:
Металлоконструкция навесного оборудования кранов, экскава-
торов, погрузчиков..........................................0,07 ... 0,10
Гидроподвеска навесного оборудования .......................0,5... 5
Рессоры автомобильного типа.................................0,5 ... 0,7
Пневматические шины (в зависимости от давления воздуха в шине) 1,2 ... 2,15
Гусеничный движитель .... ........................3 ... 6
Пакет хлыстов .......................................... . . 1,5 ... 3
2.2.4. Массовые силы
К массовым относятся силы, зависящие от массы тела —
это силы тяжести и инерции.
Сила тяжести тела
G = mg,
где т = pV — масса тела (здесь р — объемная масса, кг/ма, V—объем тела, м3)
Ниже приведены объемные массы (т/м3) некоторых материалов:
Асфальт дробленый . . 1,28 Известняк мелкокуско-
Боксит дробленый ... 1,2 ... 1,28 вой 1,13 ... 1.45
Галька 1,8... 1,9 Камень среднекусковой 1,3... 1,4
Гранит дробленый . . . 1,48... 1,52 Кварц дробленый . . . 1,46... 1,76
Дерево- Мрамор дробленый . . 1,5... 1,53
сухое: Торф 0,29 ... 0,50
береза 0,5 ... 0,8 Уголь древесный . . . 0,13 ... 0,25
дуб 0,7 ... 1 Цемент портлакдекий . . 0,9... 1,6
свежесрубленное;
береза 0,6 ... 1,1
дуб 0,8 ... 1,3
Рассмотрим силы инерции. Выше (см. п. 2.2.1) мы уже упоми-
нали о принципе освобождаемости от связей в статике. С приме-
нением того же принципа в динамике, т. е. для тел, находящихся
в любом движении, связано введение так называемых сил инерции.
В отличие от статики, где связи реализуются при помощи тел,
ограничивающих перемещения другого тела, и носят только гео-
метрический характер, в понятие связи в динамике вкладывается
более широкий смысл: здесь ограничения могут касаться не
только перемещений, но и скоростей и ускорений тела в процессе
его движения, т. е. носить и кинематический характер. Чтобы
последние ограничения выполнялись, надо к каждой точке дви-
жущегося тела приложить кроме задаваемых сил и реакций не-
которую дополнительную силу, получившую название силы
инерции.
Роль силы инерции раскрывается в формулировке принципа
Даламберя: несвободное тело, находящееся в движении, можно
считать свободным, т. е. освобожденным от налагаемых на него
условий связей, если к каждой его точке приложить силу инер-
ции, равную по модулю произведению массы па ускорение точки
и направленную против направления ускорения. При выполнении
34
этих условий уравнениям движения тела можно придать форму
уравнений статики.
Физический смысл силы инерции достаточно подробно рас-
сматривается в курсах технической и теоретической механики
Стоит лишь напомнить, что сила инерции Р„ — это сила противо-
действия со стороны тела, которому сообщается ускорение, по-
этому она всегда приложена к телу, являющемуся источником дей-
ствия. Так, например, бульдозер-толкач, перемещая скрепер,
сообщает ему ускорение, направленное в сторону его движения
Яри этом толкач испытывает со стороны скрепера противодей-
ствие, называемое силой инерции, которая направлена против
ускорения, в данном случае — против движения толкача. Если же
движение скрепера условно рассматривается отдельно от движе-
ния бульдозера-толкача, то для того чтобы можно было считать
скрепер условно неподвижным, к центру его масс, согласно прин-
ципу Даламбера, следует приложить силу инерции Рк, равную
произведению массы скрепера на его ускорение, и направленную
против направления движения скрепера, При выполнении этого
условия можно считать, что скрепер под действием задаваемых
сил, реакций на его колесах и рабочем органе и силы инерции
будет находиться в состоянии равновесия. Но если для бульдо-
зера-толкача сила инерции является реальной, вызванной проти-
водействием скрепера, то для самого скрепера, получающего
ускорение от толкача, та же сила инерции, как не имеющая ни-
какого физического источника, является фиктивной, так как
фактически на скрепер действуют только задаваемые силы и реак
ции связей Добавление фиктивной в данном случае силы инер-
ции, приложенной к скреперу, следует рассматривать лишь как
искусственный прием, позволяющий задачу динамики свести
к задаче статики, т. е. условно считать, что скрепер в этом случае
находится в равновесии
При прямолинейном движении тела сила инерции равна про-
изведению его массы т на ускорение j центра масс и направлена
противоположно направлению ускорения
Р„ --- mj
При криволинейном движении с постоянной скоростью воз-
никает центробежная (или нормальная) сила инерции Рпп, на
правленная по нормали к траектории движения от центра ее
кривизны,
= mjn = тыгр„ - (5)
где i„ — ускорение тела, направленное по нормали к траектории движения
к центру ее кривизны; со — угловая скорость тела; и — окружная скорость тела;
рк — радиус кривизны траектории в данной точке.
Центробежная сила инерции, как и сила инерции Р„, дей-
ствует на тело, которое сообщает движение другому телу. Напри
мер, если тело А. удерживаемое нитью В, вращается вокруг неко-
2»
зк
горой оси, то сила инерции Рап действует не на тело Л, а на связь,
т. е. на нить В\ на тело же А действует единственная сила S,
направленная от тела А к центру его вращения. Сила S, удержи-
вая тело А, заставляет его вращаться вокруг данной оси и сооб-
щает ему нормальное ускорение /„. Противодействием силе S
является центробежная сила инерции Рюп, натягивающая нить.
Если нить под действием силы P,m оборвется, то тело А будет
двигаться не в радиальном направлении но линии действия цен-
тробежной силы, а по некоторой касательной траектории, по
которой тело А перемещалось до обрыва нити, так как ни до,
ни после обрыва нити центробежная сила Рнп на тело не дей-
ствовала.
При криволинейном неравномерном движении тела сила инер-
ции помимо нормальной составляющей (силы Рип) имеет еще
составляющую Рях, направленную по касательной к траектории
движения,
П _ - Л' «ч
Лп т]т = гп— т~згрн~ гперк, (6)
где jf — касательное ускорение тела, равное первой производной окружной
скорости движения и по времени, е — угловое ускорение тела, равное первой про-
изводной угловой скорости со движения по времени.
Суммарная сила инерции в этом случае определяется как
геометрическая сумма касательной и нормальной сил инерции:
Рп - т у ji г Д - трк йг.
При плоскопараллельном движении тела, одновременно вра-
щающегося и перемещающегося поступательно (катящееся ко-
лесо), силы инерции приводятся к силе Р„, равной произведению
массы тела т на его ускорение /„ при поступательном движении,
и к инерционному моменту /И„. н, равному произведению момента
инерции тела (колеса) JK относительно оси его вращения на угло-
вое ускорение е:
Ре. к ~ т1к’ к — Jке.
2.2.5. Ветровые нагрузки
и сопротивления воздушной среды
Ветровые нагрузки создаются порывами ветра или за-
вихрением воздуха при движении машины, последние представ-
ляют собой сопротивление воздушной среды.
Ветровые нагрузки, вызываемые порывами ветра, определяют
обычно при расчете нагружения или устойчивости кранов и дру-
гих подобных им машин, работающих на открытом воздухе, по
формуле
Рв - (7)
где — коэффициент аэродинамического сопротивления: <?Е — расчетное дина-
мическое давление ветра (табл. 3), йв — подветренная площадь машины, воспри-
нимающая давление ветра
36
3. Расчетные значения аэродинамического давления ветра
Характеристика ветра, внешние признаки Скорость ветра, м/с "в- Па
Полное безветрие; листья деревьев неподвижны. 0- 0,5 • 0,3
дым поднимается вертикально, на морс штиль Тихий ветер: дым слегка отклоняется, флюгер 0,6 1.7 0,4
неподвижен, море очень спокойное Легкий ветер: листья заметно шевелятся, дви- 1.8 . . 3.3 14
жение воздуха ощущается лицом, море спо- койное Слабый ветер- тонкие ветви деревьев с листьями 3,4 , . 3.5 34
колышутся, флаги развеваются, на море лег- кая зыбь Свежий ветер: колеблются большие ветви, дым 7,5 ... 9.8 120
срывается при выходе из трубы, на море круп- ная зыбь Сильный ветер- качаются толстые сучья и той- 9,9 . 12,4 192
кие стволы деревьев, гудят провода, морс не- спокойное Очень сильный ветер ломаются тонкие ветви, 15,3 18,2 414
гнутся средние деревья, на море слабый шторм Буря; ломаются деревья, срываются крыши, 18,3 ... 21,5 578
на море шторм Сильная буря: деревья вырываются с корнем. 21.6 ... 25,1 788
ломаются телеграфные столбы, иа море сильный шторм Очень сильная буря и ураган разрушаются 25,2 1050
здания, на море ураган и более и более
Ниже приведены приближенные значения коэффициента аэро-
динамического сопротивления:
Конструкции из труб большого диаметра........................ 0,6 . . 0,8
Коробчатые металлоконструкции . . . .........1,4 ... 1,6
Решетчатые конструкции;
трехграииые из труб ....... . . . . . . 1,3 1,6
трехгранные из уголков . . 2,0 . 2,5
четырехгранные из труб . 1,5 . 1,8
четырехгранные из уголков . 2,3 ...2,8
Кабины, контргрузы . 1,2 1,3
Канаты .............. . . 1,2
Подветренная площадь для сплошных геометрических тел
определяется как площадь, ограниченная контуром данного тела.
Для решетчатых ферм она ограничивается внешним контуром
фермы за вычетом проемов между ее стержнями, приближенно
принимают, что подветренная площадь фермы составляет 30
35 % площади, ограниченной ее внешним контуром
Сопротивление воздушной среды при движении машины
Рв == = швц2, (8)
где kB — приведенный коэффициент сопротивления воздушной среды (или коэф-
фициент обтекаемости), Н-с2/м4; для землеройно-транспортных машин, трак-
37
торов, грузовых автомобилей kB - 0,06ч-0,07 Н-с2/м*; йк — подветренная пло-
щадь машины, для тягачей, тракторов н грузовых автомобилей Qe я» 0,775 ВН,
м2, здесь В и Н — соответственно ширина и высота машины, м v — скорость
машины, м/с; и>в — Лвйв —фактор сопротивления; для указанных машин wB =
3,5 ... 6,5 Н-с2/м2.
Для передвижных наземных кранов принимают qu — 125 Па,
для плавучих кранов qB — 400 Па.
Равнодействующая элементарных ветровых нагрузок прило-
жена в так называемом метацентре (центре парусности) машины
или какой-то ее части, положение которого может быть уст анов-
лено только экспериментально. При приближенных расчетах
обычно принимают, что центр парусности близок или совпадает
с положением центра масс машины.
2.3. ОПРЕДЕЛЕНИЕ СИЛ, НАГРУЖАЮЩИХ
РАЬОЧИЕ ОРГАНЫ ДОРОЖНОСТРОИТЕЛЬНЫХ МАШИН
ПРИ ИХ ВЗАИМОДЕЙСТВИИ СО СРЕДОЙ
2.3.1. Основные физико-механические свойства
и характеристики грунтов
Грунт представляет собой систему, состоящую из ми-
неральных частиц, пространство между которыми заполнено водой
или воздухом. При отрицательных температурах в состав грунта
входит и лед.
Минеральные частицы различной крупности и формы образуют
так называемую твердую фазу грунта. В зависимости от крупности
различают глинистые (размером менее 0,005 мм), пылеватые
(0,005 ... 0,05 мм) и песчаные (0,05 ... 2 мм) частицы.
Вода составляет жидкую фазу грунтов.
В зависимости от количественного соотношения в грунте
глинистых, пылеватых и песчаных частиц, определяющего грану-
лометрический состав грунта, различают грунты песчаные или
лесок (крупный, средний, мелкий, пылеватый); супесчаные или
супесь (легкая, тяжелая); суглинистые или суглинок (легкий,
тяжелый); глинистые или глины (песчаные, жирные).
Взаимодействие частиц грунта друг с другом и с водой харак-
теризует связность грунта. Чем больше связность грунта, тем
большие усилия нужно приложить для разъединения частиц,
деформации и разрушения грунта.
Песчаные грунты малосвязны, хорошо водопроницаемы, ие-
пластичны и при увлажнении незначительно снижают сопротив-
ление нагрузкам. Супесчаные грунты в отличие от песчаных,
практически не содержащих мелких (глинистых) частиц, содер-
жат их в небольшом количестве, что придает им связность. Сугли-
нистые грунты содержат большое количество пылеватых частиц,
обладают большой связностью в сухом состоянии, но быстро ее
теряют при увлажнении. Глинистые грунты обладают большой
38
связностью, плотностью и пластичностью, они практически водо-
непроницаемы.
Укажем на некоторые основные характеристики грунтов,
определяющих их свойства и состояние.
Влажность и; (%) определяется отношением массы тв содер-
жащейся в грунте воды к массе тс г сухого грунта
to — 100mB/mc, г.
Разрыхленность грунтов характеризуется коэффициентом раз-
рыхления ky, представляющим собой отношение объема разрых-
ленного грунта к объему, который грунт имел в естественном
залегании. Для большинства грунтов fep = 1,1 . 1,3; для мерз-
лых грунтов йр = 1,5 ... 1,6
При разрыхлении грунта размеры отдельных кусков тем
меньше, чем больше коэффициент fep. Разрыхленность грунта
в определенной степени зависит и от конструкции воздействующего
на него рабочего органа.
Плотность грунта представляет собой отношение массы mv
грунта с учетом содержащейся в нем воды к занимаемому этим
грунтом объему VP:
Р =" mr/Vr.
где тТ — тР г 4- тс. r (1 + W/100)
Плотность сухого грунта определяется как отношение массы
сухого грунта (твердой его фазы или скелета) к занимаемому
грунтом объему V’r (включая имеющиеся в грунте поры):
тг
, mc г 1 + ге/100 р
р "ПйГ- Рг - _w_
юс
Ниже приведены значения плотности для некоторых грун
тов (т/м3).
Грунт песчаный
мелкозернистый ......................................... ... 1,92... 2
крупнозернистый . . . . ........... . 1.98 . 2,05
Грунт глинистый,
твердый . ................... .................... 2,1 . . 2,15
тугопластнчиый .... 2 . 2,05
текучий .... 1,75 .. 1,80
Песок:
сухой . . . . . ......... ...................1,4 1,65
влажный . ....................... ..... . . 19 2
Песчаник ................................. 2,2 . 2,5
Пластичность грунта характеризует его способность под
действием внешних сил изменять форму без изменения объема и
разрушения. Связные грунты находятся в пластичном состоянии
только в определенном, характерном для них интервале влаж-
ности. Верхний предел этого интервала ограничен пределом теку-
чести (если влажность выше то смесь грунта с водой при-
39
обрезает текучесть), а нижний — пределом пластичности wn
(если влажность той же смеси ниже ьу„, то при раскатывании
она начинает крошиться)
Консистенция связных грунтов определяется так называемым
индексом текучести
j _ to —ton
Т ~ “’т — ’
где w — естественная влажность грунта.
В зависимости от значения JT глинистые грунты могут иметь
твеодую консистенцию (JT < 0), полутвердую (JT 0 ... 0,25),
тугопластичную (Jr — 0,25 ... 0,50), мягкопластичную (JT =
=- 0.50 .0,75), гекученластичную (7Т — 0,75 .. 1,00), текучую
(А > I).
Сопротивление грунтов сдвигу зависит от сил трения между
частицами грунта и от сцепления частиц между собой В теории
сыпучих сред и в механике грунтов предельное сопротивление
сдвигу (или, что то же, касательное напряжение) чаще всего
определяют по выражению
т - т0 у- о tg <р' = т0 + erf',
где т0 — начальное сопротивление сдвигу (при а = 0), Па; п — нормальное на-
пряжение (давление I на поверхности г*>унта, Па; f и ф' — соответственно коэф-
фициент внутреннего трепня и угол внутреннего грення. грунта; f = tg tp'
Отношением предельного сопротивления сдвигу к нормальному
напряжению определяется коэффициент (угол) сопротивления
сдвигу fc„B (<рсдв);
/сдв - т/о - т0/п 4 /'
или
tg Федв = Т/Р + tg ср'.
В этих выражениях первый член характеризует ту часть со-
противления сдвигу, которая обусловлена сцеплением частиц
грунта, а второй — сопротивление, обусловленное внутренним
прением между частицами грунта.
Ниже приведены средние значения коэффициента внутреннего
трения для некоторых грунтов и материалов:
Гипс ................................................0.55 ... 0.80
Глииа ........................................ . 0,80 I
Глинозем порошкообразный . ... 0.54 0.56
I равий . ......... . 0 50 1
Земля грс'нговая ... ..... . 0,55 . 1
Зп-а . ............ 0^84 .’ 1.2
Ияв тиях . . ......... 0.6 .. 1,26
Камень ........... ................07 ... 0.8
Кокс ......................... ..............0.7 1 2
рУДв ......... ... 0,7 ... 0,76
Уголь каменный . ... 0,5 . I
Цемент . ....... ... 0^5 ' 0,84
Шлак................................................ 0,56... 1,2
Щебень ................. ... ....... 0,«4 .. 1
Торф ..... ............' Г.. Y,2
40
При возрастании нормального напряжения о отношение т0/о
снижается и значение коэффициента (угла) сопротивления сдвигу
приближается к коэффициенту (углу) внутреннего трения.
Углом естественного откоса насыпного грунта называется
угол между образующей конуса из свободно насыпанного грунта
и горизонтальной плоскостью
Угол естественного откоса зависит от угла внутреннего тре-
ния ср' и начального сопротивления сдвигу т0 — чем больше их
значения, тем больше угол естественного откоса. При этом угол
естественного откоса в покое, когда плоскость, на которую насы-
пан грунт, находится в покое, больше, чем угол естественного
откоса в движении (плоскость совершает вертикальные коле-
бания)
При потере сцепления между частицами (т0 — 0) tg <р0 с f -
Предел прочности ор или временное сопротивление грунтов
сжатию соответствует такому напряжению или давлению на грунт,
при котором начинается его разрушение.
Если на поверхности грунта установить плоский штамп и
непрерывно увеличивать нагрузку на него, то по мере углубления
штампа под ним образуется уплотненное ядро, которое, переме-
щаясь вместе со штампом, смещает в стороны соседние с ним
участки грунта. До образования уплотненного ядра штамп погру-
жается, в основном, за счет нормальной деформации грунта, а после
образования уплотненного ядра — за счет пластических сдвигов
грунта в сторону В конце концов эти сдвиги приводят к разруше-
нию грунтового массива. Напряжение, при котором начинается
такое разрушение, и определяет предел прочности грунта ор.
Предел прочности грунта зависит от его структуры, влаж-
ности и температуры. При нарушении структуры, повышении
влажности и температуры предел прочности или временное сопро-
тивление грунта сжатию снижается. Повышение влажности мерз-
лых грунтов до некоторого предела, соответствующего полному
заполнению пустот грунта водой, приводит сначала к увеличению,
а затем к снижению предела прочности. Для лесовых грунтов
при влажности 12,1 % сгр — 0,312 МПа, а при той же влажности,
но при нарушенной структуре грунта сгр — 0,187 МПа; при влаж-
ности 3,1 % без разрушения структуры оР — 0,562 МПа. Для
мерзлых грунтов предел прочности значительно выше: для гли-
нистых грунтов при температуре—3 °C пр — 2,1 МПа и дости-
гает 3,4 МПа при температуре —9 °C; для супесчаных грунтов
при тех же температурах предел прочности составляет соответ-
ственно 2.5 и 4,9 МПа
2 3.2. Резание и копание грунтов
Для грунтов и материалов применяются различные спосо-
бы воздействия: механический, гидравлический, взрывной, химиче-
ский, электрофизический, термический. Наибольшее распростра-
41
Рис. 8. Схемы рабочих органов дорожно-строительных машин для копания
грунтов и материалов:
а — плоский нож; б — зуб; й — дисковый нож; г — отв*1л; д ковш погрузчика, е —
ковш скрепера
некие получил механически й способ, осущест вл яемый с помощью
различных рабочих органов дорожно-строительных машин: ножей,
зубьев, отвалов, ковшей и др. Основными параметрами этих рабо-
чих органов являются:
для плоского ножа (рис. 8, а) — углы резания у„ и заостре-
ния Р; задний угол 0; длина 1а и ширина ножа;
для зуба (рис. 8, б) — углы резания у0 и заострения р; задний
угол 0; длина и ширина зуба;
для дискового ножа (рис. 8, в) — углы ре ?ания у0 и заостре-
ния р; задний угол 0; диа летр £)„; радиус кривизны г;
для отвала (рис. 8, г) — параметры плоского ножа; углы
опрокидывания ф0 и наклона е; высота отвала Но; радиус кривиз-
ны R;
для ковша погрузчика (рис. 8, д) — параметры зуба; расстоя-
ние между зубьями; длина LK и высота Ян ковша; вместимость
ковша; угол раствора у, образованный задней стенкой и днищем
ковша; угол наклона режущих боковых стенок сс0;
для ковша скрепера (рис. 8, е) - параметры ножа; длина Лк
и высота Нк ковша; вместимость ковша.
Pi 1ание грунта. Результатом взаимодейст вия ножей или
зубьев рабочих органов с грун.огл является отделение части грунта
от основного массива и последующее ее перемещение. Этот процесс
называется резанием грунта.
Процесс резания можно представить как деформирование
грунта под действием движущегося перед ним рабочего органа,
42
Рис 9. Схема резания грунта
Рис 10. Силы, действующие при реза
нии г, унта
имеющего форму клина 1рис. 9). В этом случае со стороны грунта
на клин передается нормальная реакция N и сила трения грунга
с поверхность ножа F р = Nf = N lg q, где f и q — с оответ-
ственно коэффициент и угол трения грунга о поверхность ножа
(рис. 101. Равнодействующая этих сил
Р == / № + Fip = A'yzl + lg Ч = A//cos<jp.
Из этого выражения следует, что равнодействующая реакции N
и силы FTp отклоняется от нормали к рабочей поверхности ножа
(зуба) на угол трепня ср между трущимися поверх, остями 1 рунта
и ножа.
Силу Р можно разложи гь на две составляющие: Рт, касатель-
ную к траектории движения ножа (в данном случае эта сила
направлена по горизонтали), и Рп, нормальную к раектории
движения ножа (в данном случае она направлена по вертикали)
Рх = Р sin (ув + <р); Рп = Р cos + q).
Считают, что сила Рх ~ Wpe3 и есть сила сопротивтения реза-
нию 1 рунта.
Сила сопротивления резанию увеличивается с увеличением
угла резания. Однако при слишком малых углах резания у повы-
шается износ ножей. Поэтому' на практике обычно принимают
для бульдозерных отвалов у„ = 50 ... 55°, для отвалов автогрей-
деров уп = 30 ... 50е, для ковшей скреперов уп — 30 ... 35е, для
экскаваторных ковшей у0 — 20...35'. Для рыхлителей угол
резания при заглублении зуба должен составлять Ь0 ... 80г, сни-
жаясь затем до 40 ... 50 .
При движении клина и деформации грунта веред ним напря-
жения в грунте возрастают, когда они достш ают предела проч-
ности грунта, происходят разрушение и скол последнего (см
рис. 9). Угол скола 6 для суглинков составляет 25 ... 30°, для
глины 36е, для мерзлой глины 30°, для песка 40 .. АТ Форма
сколотой стружки грунга зависит от его состояния, iлубины реза-
ния, профиля и углов установки рабочего органа
43
Сопротивление резанию обычно определяют по формуле
^-рез
где Лрс.) — удельное сопротивление резанию. Па: b и h — ширина ножи и глу-
бина резания соответственно. м.
При разработке связных грунтов сопротивление резанию зави-
сит, в основном, от сопротивления грунта касательным сдвигам,
а ври разработке несвязных грунтов — or коэффициента внутрен-
него трения в массиве грунта.
Копание грунта отвалами. При копании грунта отвалами
стружка после скола перемещается вверх по рабочей поверхности
отвала и на некоторой высоте, зависящей от профиля рабочей
поверхности и углов установки отвала, обрушивается к его осно-
ванию, образуя перед отвалом так называемую призму волочения.
При копании несвязных или малосвязных грунтов разрушение
стружки начинается сразу после отделения ее от основного мас-
сива.
Неправильный выбор параметров и углов установки отвала
без учета грунтовых условий и рельефа местности приводит к уве-
личению энергоемкости процесса копания и снижению качества
выполняемых работ. Так, из-за неправильно выбранных угла опро-
кидывания и кривизны рабочей поверхности отвала, слишком боль-
шого угла наклона его к горизонту происходит залипание отваль-
ной поверхности, призма волочения концентрируется по длине
отвала в каком-то одном месте, что увеличивает сопротивление
перемещению призмы. С другой стороны, уменьшение угла е
наклона отвала, снижая энергоемкость процесса и возможность
заливания отвальной поверхности, увеличивает вероятность пере-
сыпания грунта через верхнюю кромку отвала. Пересыпание на-
блюдается также при несоответствии высоты отвала или глубины
резания тяговому усилию машины. Для бульдозерных отвалов
угол наклона отвала принимают равным 70 80 . угол опроки-
дывания 00 ... 75 , задний угол 30 ... 35 .
Профиль отвальной поверхности должен обеспечить концен-
трацию сил в нижней части отвала. В противном случае значи-
тельно увеличивается энергоемкость процессов формирования
стружки и движения ее по отвальной поверхности. Учитывая это,
рекомендуется выбирать длину нижней прямой части отвальной
поверхности по возможности меньшей, только из расчета размеще-
ния прямых ножей. С точки зрения уменьшения энергоемкости
процесса формирования и движения стружки наиболее рациональ-
ной является отвальная поверхность, выполненная по эвольвенте
е уменьшением кривизны в верхней части или очерченная двумя-
тремя радиусами кривизны, которые увеличиваются от ее нижней
к верхней части (внизу R ж 0,8 Нп, вверху R 1.1 //„). Следует,
однако, отметить, что выполнить профиль отвальной поверхности
по эвольвенте весьма сложно На практике часто профиль отваль-
44
ной поверхности очерчивают дугой одного радиуса равного (0,8
1,1) Но, что обеспечивает удовлетворительное качество работ.
Каждой глубине резания соответствует определенный макси-
мальный объем набираемого перед отвалом грунта, который увели-
чивается по .мере увеличения глубины резания
Сопротивление копанию в общем случае складывается из
следующих сопротивлений: резанию грунта, перемещению призмы
волочения перед отвалом, перемещению грунта вверх по отвальной
поверхности, трения ножа огвала о грунт. Выделить и определить
отдельно эти составляющие, так же как установить и точку прило-
жения па отвале их результирующей, очень сложно и можно
сделать лишь с большим приближением. Поэтому для практиче-
ских расчетов сопротивления копанию за основу берут только
основное сопротивление — сопротивление резанию, а остальные
составляющие учитывают эмпирически, опытным путем В этом
случае по аналогии с сопротивлением резанию касательную (гори-
зонтальную) составляющую /?, общего сопротивления копанию
определяют по формуле, по написанию сходной с формулой для
расчета сопротивления резанию, но в которой коэффициент
заменен удельным сопротивлением копанию &коп (табл. 4), учиты-
вающим все составляющие сопротивления копанию.
Rx = bh. (9)
Нормальную (вертикальную) составляющую /?t. сопротивле-
ния копанию обычно определяют как функцию касательной состав
ляющей из соотношения
Ru - ZRx.
где g =• 0,10 0.45 — коэффициент, зависящий от режима копания (скорости,
подачи, направления движения рабочего органа) и затупления режущей кромки
рабочего органа
Копание грунта ковшами. При копании ковшами срезанная
часть грунта по мере внедрения ковша перемещается вначале по
внутренней поверхности днища ковша к его задней стенке При
этом в зачерпнутой части грунта образуется область уплотнения,
по форме близкая к плоскому клину 1, основание которого опи-
рается па днище ковша (рис. II, а). Этот клин вновь поступающим
в ковш грунтом вытесняется из остальной части грунта, находя-
щегося в ковше, и начинает перемещаться вверх по его задней
стенке При взаимодействии всползающей части 2 клина с задней
стенкой ковша возникает сопротивление отпора, которое препят-
ствует выпиранию клина и его перемещению вверх по задней
стенке ковша (рис. 11, б). Объем уплотненного клина, а, следова-
тельно, и сопротивление отпора зависят от фнзнко-мсханнческнх
свойств грунта, формы задней стенки ковша и направления его
движения в массиве (штабеле).
Кроме сопротивления отпора возникает также сопротивление
вытеснению (обусловленное внутренним трением) при смещении
45
Значения удельного сопротивления копанию £коп, кПа
46
V
Рис. 11. Схема копания грунтов (зачерпывания сыпучих материалов) ковшом:
л и б — начальная и конечная стадии
б)
клина относительно остальной части грунта, находящегося в ков-
ше. В самом клине имеют место касательные сдвиги частиц грунта
(на схеме направление сдвигов показано стрелками); для хорошо
сыпучих материалов сопротивление таким сдвигам невелико,
и поэтому они наступают прежде, чем начинается процесс вытесне-
ния. Наконец, при копании грунтов ковшами действует сопроти-
вление, вызванное внешним трением между i рунтом и рабочими
поверхностями ковша.
Как видим, явления, возникающие при копании грунтов ков-
шами, достаточно сложны и столь же сложно определить каждое
сопротивление в отдельности. Поэтому, как и для отвалов, общее
сопротивление копанию вычисляют обычно по упрощенной фор
муле (9).
Изменение сопротивлений Rx и Rv в процессе разработки пес-
чаного карьера одноковшовым погрузчиком показано на рис. 12.
На первой стадии копания при напорном внедрении ковша в шта-
бель основной является касательная составляющая Rx сопроти-
вления, значение Rv при этом невелико. С момента начала выглу
блепия ковша из штабеля и его
подъема нормальная составляю-
щая сопротивления начинает воз-
растать, а составляющая Rx —
уменьшаться. В конце процесса
копания значения Rx и Rv резко
падают, снижаясь до нуля, и
при выходе ковша из штабеля
силами, действующими на ковш,
будут его сила тяжести и вес за-
черпнутого груза.
Рис. 12. Изменение во времени t горизон-
тального и вертикального сопротивлений
копанию для ковша фронтального по-
грузчика при разработке песчаного карье-
ра
2.3 3. Разрушение мерзлых грунтов
и скальных пород
Для разрушения мерзлых грунтов применяют механи-
ческий, взрывной и термический способы.
При разработке мерзлых грунтов механическим способом
характер их деформации во многом зависит от скорости приложе-
ние разрушающей нагрузки. При статическом приложении на-
грузки сопротивление резанию, составляющее наибольшую чатгь
общего сопротивления коканию мерзлых грунтов, изменяется за
короткие промежутки времени и поэтому сам процесс скола
стружки и разрушения грунта имеет пульсирующий характер.
При этом поверхность контакта режущей части рабогего органа
с грунтом должна быть небольшой для обеспечения более высокого
давления при внедрении рабочего органа в грунт и преодоления
повышенных сопротивлений мерзлых грунтов сжатию и разрыву.
Эффективность разрушения мерзлых грунтов, как и скальных
пород, повышается при динамическом приложении нагрузки.
В этом случае грунты разрушаются как хрупкое тело — в массиве
образуются трещины, приводящие к отделению части грунта от
основного массива. Для динамического разрушения мерзлых грун-
тов часто применяют вибрационное и виброударное оборудование.
При высокой частоте приложения нагрузки (не менее 1000 Гц) уп-
ругие деформации в грунте не успевают восстанавливаться в пе-
риоды между ударами и накапливающиеся деформации быстро
ппивоаят к разрушению грунта.
При разработке грунтов, промерзших на глубину не более
0,5 ... 0,8 м, используют также бульдозеры, экскаваторы, обору-
тованные прямой лопатой, рыхлители. Для разрушения грунгсв,
промерзших на большую глубину (до 1,5 м), применяют специаль-
ное оборудование, например, тяжелые чугунные или с гальные
отливки клиповой или шаровой формы массой 1,4 . 4 т, а также
мощные навесные или припепные рыхлители. Металлические
отливки обычно подвешивают на канате к стреле крана или экска-
ватора и сбрасывают их на грунт с высоты 3 . 5 м и более Недо-
статком такого способа разрушения грунтов является повышен
ный износ каната и рабочего оборудования в целом и низкая точ-
ность удара из-за невозможногти производить многократные удары
по одному месту. Эти недо<татки в значительной степени устра
няются при использовании дизель молота, перемещающегося
вверх-вниз по вертикальной стреле, смонтированной на тракторе
или экскаваторе, которым обеспечивается направленный удар.
При сравнительно небольших объемах р.бот и наличии мест-
ных дешевых источников тепла (пара, горячей вопьг, газа, электро-
энергии и т. д.) применяют оттаивание грунтов путем их наг ре
вания горячим газом (или водой), проходящим по рубам, распо-
ложенным на поверхности, или электродами, погруженными
в массив, и другими способами
48
2.3.4 Цроблеиче каменных материалов
Для дробления и измельчения каменных материалов и
пород применяют разл ичные способы’ для крепких и хрупких мате-
риалов — раздавливание (рис. 13, а); для углей, мягких и твердых
пород — ударное воздействие (рис 13, б); для город средней кре-
пости — изгиб и раскалывание (рис. 13, в, d); для крепких и
вязких пород — раздавливание и истирание (рис. 13, г) и, нако-
нец, взрыв (рис. 13, е). Для выполнения этих процессов исполь-
зуют дробилки различных типов (конусные, щековые, валковые,
молотковые и др-)-
Основными характеристиками, определяющими сопротивле-
ние каменных материалов и пород сжатию, является предел проч
ности ор (табл 5), равный отношению максимального разрушаю-
щего усилия Ртах, вызывающего раздавливание образца, к на-
чальной площади его i юперечного сечения Г:
Ор = Ртах/Р-
Деформация пород оценивается модулем упругости Е (табл. 5)
определяемым путем деления ор на относительную деформацию
образца е — Д/// (|де /—первоначальная длина образца.
Д/ — деформация образца под действием силы Р)
Е = ор/е
Силу, необходимую для дробления материала, мокно опреде-
лить из следующих условий Работа сил деформгции
А ~ РМ/2.
Согласно закону Гука деформация тела при сжатии
Д/ - Р//(Р£).
Рис 13. Схемы дробления каменных материалов и твердых пород.
а — раздавливанием; б — ударным воздействием^ < д — раскалыванием (изгибом);
а истиоанием; £ - взбывом
49
б. Пределы прочности и модули упругос-i и каменных материалов
Материал (порода) Ср. МПа Е, МПа
Базальт Гранит Диабаз Известняк Песчаник 0,3 ... 0,4 0,05 .. 0,25 0,3 . . 0,5 0.015 ... 0,15 0.003 ... 0,1 43,9 46 73,2 22.5 ... 65 26 . 45
Тогда
Если примем, что максимальное значение силы деформации
Р. их = ОрЁ, ТО получим
. _ 1 %Fl j срИ
^шах 2 Е - 2 Е -
где V — FI — объем образца.
С другой стороны, работу сил деформации можно определить
как произведение силы Р11МХ на ход s/2 рабочего элемента дробилки,
при котором насту пает разрушение образца:
^гцах Р тах&№-
Приравнивая правые части обоих выражений для Лгаах, полу-
чаем
1 р _ 1 S1'
2 * max1® — 2 Е ’
откуда
Рmax == ~ • (Ю)
Обычно ход рабочего элемента дробилки при расисте прини-
мают несколько больше максимально во тможной деформации
образца
Д/таХ = CyD/E,
гдр D — няибплкг ий размер дробимых кусков.
При разрушении материалов и пород ударом необходимую ско-
рость рабочего элемента определяют из условия равенства кине-
тической энергии, развиваемой им, работе деформации при сжа-
тии материала, т. е.
±тг?2 = ,| _ J_ Л*
2 z 1 ш а — 2 f? ’
50
откуда необходимая скорость рабочего элемента
°i’
mL ’
(’1)
где т - масса рабочего элемента гробнлки.
2-3.5. Уплотнение грунтов н материалов
Грунты н материалы уплотняют при помещу катков ста-
тического действия (рис. 14, а], трамбовочной плиты (рис. 14, б)
и вибрационного (виброударного) оборудования (рис 14. в)
Если при работе землеройных и землеройно-транспортных
машин возникающие в грунте напряжения всегда превышают пре-
дел его прочности, то при работе уплотняющих машин напряже-
ния должны быть меньше предела прочности, чтобы при их дей-
ствии уплотняемый материал не разрушался. Необходимо отме-
тить, что эти напряжения не должны быть слишком низкими вл
избежание ухудшения качества уплотнения.
Следует иметь в виду, что по мере уплотнения грунтов предел
их прочности увеличиваем я Поэтому для создания оптимальных
условий уплотнения напряжение в зоне контакта рабочею орг. на
с грунтом должно увеличиваться постепенно от одного прохода
к другому. На практике это достигается последовательными про-
ходами сначала легких, а затем более тяжелых катков или изме-
нением давления воздуха в шинах при применении ка-ков на
пневматических шинах. Оптимальное контактное напряжение
равно 0,9 .. 1 от предела прочности грунта.
Эффективность уплотнения зависит также от продолжи-
тельности контакта, а, следовательно, и от скорости движения
уплотняющей машины: чем больше продолжительность контакта,
гем выше качество уплотнения.
И з механики грунтов известно, что при вдавливании штампа
деформации груша и соответствующие напряжения уменьшаются
с глубиной, что приводит к неравномерному уплотнению ра’лич-
ных слоев грунта. Поэтому важно знать, при какой глубине
вдавливания рабочего органа процесс деформации грунта сох-
раняется более или менее равномерным: зона уплотненис. для
которой это условие выполняется, называется активной Ее глу-
бину приближенно можно определить по формулам:
Гис. 14. Схемы угле- не-
ния 1 рунтов и материа-
лен:
а — укатыванием с помощью
катков статического дей-
ствия: б — трамбованием
с помощью падающей плн
ты б — вибрационным (вн
бооударным) воздействием
51
для связных грунтов, уплотняемых гладкими вальцами,
h0 — 0,006 (~7и»0) у/?;
1ля несвязных грунтов, уплотняемых гладкими вальцами,
ha = 0,1 I (w, w0) । qR‘,
для несвязных грунтов, уплотняемых катками на пневмати-
ческой шине,
Л() = 0,20 (о>/ш0) /GKp,
где kj и — абсолютная и от пмалъная вла «ность груг га (аля песчг чых грун-
тов ог. имальная влажность приблизительно < оставляет Ь ... 12 «ля су 1есчан'ых
10 15; для глинистых 18 .. 21. для суглинистых 14 ... 19, для тяжелых гли-
нистых и суглинистых 18 .. 22 %); q — распределенная нагрузка, действующая
со стер, ни катка на грунт и равная огне нению нормальной нагрузки па каток
GH 1. mi риье катка, П/см; б1 — радиус катка, < и; р — давлеш е воздуха в i tnnax.
M.Ia.
Контактное напряжение в конце уплотнения при оптимальной
влажности дотжне находиться в пределах, указанных в табл. 6.
Максимальные напряжения для дорожных покрытий ь конце
их уплотнения катками с гла 1кими жесткими вальцами не должны
превышать для щебеночных оснований 4,5 МПа, для горячего
асфальтобетона 5 МПа, для гравийных оснований 3 МПа.
Ппи уплотнении грунтов гладкими вальцами максимальное
контактное напряжение о|Пах, которое должно удовлетворять
условию о,„ах < Ор, определяют по формуле
O’max
(12)
где Ео — модуль деформации j 1лотняемого грунта.
Модуль деформации грунтов в отличие от модуля упругости
однородных тел (металлов и др.) определяется не по упругой,
а по общей деформации грунта при полном погружении в него
жесткого цилиндрического штампа. Зняче» те модуля деформации
для одного и гоги же грунта зависит от его тотносги и влаж-
ности Дпя несвязных грунтов £() = 10 .. 15 МПа, для связных
6. Контактные напряжения <МПа) в конце уплел нения грунта
Грунт Уплотневне катками на лневмошинах Трамбование
Ча.тосвязчый (песчаный. супесчаный) 0 3 . 4 0, i 0.7
Средней связное i fey гл ин ж) 0 4 . . 0.6 0,7 . . 1,2
Высокой степени связности (тяжелосу- глинистый) 0,6 . . 0,8 1,2 . 2,0
В« ьма связный 0,8 . 1.0 2,0 . 2,3
52
jfc0 —= 15 . 20 МПа, для щебеночных и гравийных оснований
Ео - 30 . . 100 МПа.
При уплотнении грунтов падающей плитой силу удара, дей-
ствующую на грунт, можно определить из теоремы о количестве
движения:
| Р (t) dt — tnv-2,
о
где 'п — м асса плиты: Cj и v2 — скорости плиты до и после улара; <уз — про-
олжительность удара; t — текущее время.
Если принять, что сила удара Р (/), являющаяся функцией
времени, изменяется по линейном} законз ? (0 = тРпмх/2, а ско-
рость трамбующей пли гы после удара = 0, то интегрируя
последнее уравнение, получаем
Р;пах^уд/2 “
о гкуда
Р пах 2/Ш.,
При свободном падении плиты с высоты Н (см рис. 14. б)
Ъ = t '2gP .
Тогда окончательно
, _ 2т jP2gf/
max '— Z
*УД
113)
Зияя си-у удар? трамбующей плиты и ее рабочую площадь,
можно опрсдетигг максимальное напряжение, создаваемое в
грунте при ударе
Pm;.. = | .g,J
Q й/уд
(Н)
Время удара при прочих равных условиях зависит от вида
и состояния rpvi га и при расчетах его можно принять равным
5,011 с для плотных связных rpj ттов; 0.0п8 с для п.'отных не-
связных грунтов, 0,023 с для рыхлых связных грунтов, 0,016 с
для рыхлых несвязных грунтов.
Уплотняющая сила. соз.ч.аваемая трамбовочной плитой вибра-
ционного действия (рис 14, в), равна с\ мме силы тяжести самой
плиты 5 и возмущающей силы ГЕ (/) вибратора, уст новленного
на плите
P(t) = G ( Г „ (Z)
5?
2.4. ПОСТРОЕНИЕ РАСЧЕТНЫХ СХЕМ
СТАТИЧЕСКИХ СИСТЕМ И ОБЩИЕ ПРИНЦИПЫ
ИХ РАСЧЕТА
2.4.1. Построение расчетных схем
статических систем
Реальные конструктивные или кинематические схемы машин
(механизмов), воспроизводящие в пространстве или на плоскости
все его звенья и кинематические пары, являются для расчета
настолько сложными, что в большинстве случаев их необходимо
упрощать, заменяя расчетными. В последних не учитываются вто-
ростепенные элементы конструкции и выделяются лишь те, кото-
рые оказывают наибольшее влияние на исследуемые параметры
или свойства объекта. Но так как различные свойства часто зави-
сят от разных факторов, то для одного и того же объекта расчетные
схемы могут быть разными в зависимости от того, какие свойства
исследуются — прочностные свойства конструкции или тяговые
свойства машины, ее устойчивость против опрокидывания или
путевая устойчивость и т. п. Расчетные схемы должны, кроме
того, учитывать требуемую точность расчетов, от чего зависит
число учитываемых факторов и степень детализации схемы, а
также используемые методы расчета и средства их выполнения.
При построении расчетной схемы необходимо правильно вы-
брать положение исследуемого объекта, например машины на
плоскости или навесного (рабочего) оборудования относительно
базовой части машины.
Расчетными обычно являются такие положения объекта, кото-
рые соответствуют номинальным или максимальным нагрузкам,
последними определяются опасные (критические) положения
объекта и для них чаще всего проводят расчеты на прочность и
устойчивость. Если расчетные положения объекта не очевидны
и отсутствуют необходимые экспериментальные данные, обяза-
тельным условием достоверности расчетов является рассмотрение
достаточно большого числа возможных его положений с исполь-
зованием методов математического моделирования и ЭВМ.
Важной частью построения расчетных схем является выбор
системы координат или, иначе, системы отсчета, относительно
которой рассматривается равновесие данного объекта. Выбор
системы координат произволен и обусловливается, в основном,
простотой и удобством расчета. Так, например, условие равнове-
сия крана удобно рассматривать относительно горизонтальной
или наклонной плоскости, на которой он установлен, и ее целе-
сообразно принять за систему отсчета, расположив в ней две
из трех координатных осей.
В механике систему отсчета часто изображают в виде так
называемых декартовых коордицат, в которых положение любой
точки объекта определяется ее расстоянием от трех взаимно пер-
54
пендикулярных плоскостей XOY, YOZ и ZOX, называемых коор-
динатными плоскостями. Радиус-вектор Ro, соединяющий дан-
ную точку объекта с началом координат точкой О, определяется
через координаты х, у, г и единичные векторы (орты) еъ еа, е3,
направленные соответственно по осям OX, OY и OZ:
Ru - егх -РеаУ I еаг,
По модулю
|Rol=-y> + S/s + z*.
При построении расчетных схем для статических систем сле-
дует придерживаться следующей последовательности:
1) выделить рассчитываемый объект, представляемый в виде
твердого тела или системы твердых тел;
2) нанести на схему задаваемые силы, точки приложения
которых должны соответствовать реальным условиям нагружения
объекта;
3) на основе принципа освобождаемости от связей заменить
их действие реакциями, которые в общем случае можно предста-
вить двумя (для плоской системы сил) или тремя (для простран-
ственной системы сил) составляющими; при этом необходимо убе-
диться, что полученная система является статически определи-
мой (для плоской системы это означает, что чисто сил или момен-
тов, подлежащих определению, не больше трех);
4) выбрать направление осей декартовых координат и точку
(или точки), относительно которой будут составляться уравне-
ния моментов.
Построив таким образом расчетную схему, рассматривают
равновесие данного несвободного тела как тела, освобожденного
от связей и находящегося под действием задаваемых сил и реак-
ций связей. В аналитической форме эти условия записываются
в виде уравнений равновесия, называемых также уравнениями
статики, которые представляют собой приравненные нулю суммы
проекций на оси декартовых координат всех действующих на тело
сил и суммы моментов этих сил относительно произвольно выбран-
ных точек или осей.
2.4.2. Общие принципы расчета статических систем
Общие принципы решения задач статики лучше всего
проиллюстрировать на ряде характерных примеров.
На рис. 15 показана кинематическая схема двухканатного
1рейферного механизма, применяемого для перегрузки сыпучих
материалов в качестве рабочего оборудования самоходных кранов
и экскаваторов Основными элементами грейфера являются двух-
челюстной ковш /, тяги 2, подъемный канат 3, навиваемый на ба-
рабан 4 грузовой лебедки, барабан 5 лебедки для замыкания че-
55
смыкании челюстей происходит з;
смыкания челюстей и наполнения
нимают подъемным и замыкающи
Рнс. 15. Схемы для расчета усилий
в грейферном механизме:
а — общая схема греЯфера; б — рас-
четная схема
люстей грейфера, полиспаст 6
механизма замыкания челюс-
тей, головка 7 и траверса S.
Напомним, как работает
грейфер. На перегружаемый
материал он опускается под
действием силы тяжести с
раскрытыми челюстями Что-
бы последние сомкнулись,
подтягивают замыкающий ка-
нат полиспаста 6, при этом
траверса 8 сближается с го-
ловкой 7 при ослабленном
подъемном канате 3 При
черпывание материала. После
грейфера материалом его под-
,1 канатами до разгрузочной
высоты. Для разгрузки грейфера растормаживают барабан за-
мыкающей лебедки, вследствие чего под действием силы тяжести
траверсы и ковша с материалом замыкающий канат опускается;
при этом челюсти грейфера раскрываются и он повисает на не-
подвижном подъемном канате.
Для определения параметров механизма замыкания прежде
всего необходимо найти усилие Р„, равное суммарному натяжению
ветвей каната замыкающего полиспаста Для этого расчетную
схему грейфера можно упростить, учитывая симметричность его
конструкции и допуская одинаковое нагружение левой и правой
половины грейферного ковша. В этом случае достаточно рассмо-
треть одну из половин грейфера (рис. 15,6). На расчетной схеме
обозначены: ST — усилие в тяге грейфера; 6„ и Q — силы тя-
жести ковша и материала в ковше; 0тр — сила тяжести траверсы;
R'x и Ry — горизонтальная и вертикальная составляющие сопро-
тивления копанию материала, действующие соответственно вдоль
координатных осей ОХ и ОУ; а — угол наклона задней сгенки
ковша.
Допуская, что данная система является статической, составим
для нее уравнения равновесия:
уравнение проекций сил на ось ОУ
Rv - Q4-GTp)-STcos9-0,
уравнение моментов сил относительно точки А
Мл = Srh - Rryx — R’yy | ~ (GK I- Q)r cos fi = 0.
56
Из первого уравнения находим
Р» = (GK -Ь Q + GTp) + 2ST cos 0 - 2Ry,
или, обозначая Grp ~ GH h Q + GTp,
PM = Grp + 2ST cos0 — 2R'y.
Из второго уравнения получаем
Sr = Ry~ + R* f ~^(6К + Q)-Lcos6 = R'„ + R*% -
- 4 (GK + Q r GTp) 4 cos fi — -1- GTp ~ cos 6,
или пренебрегая влиянием последнего члена, получаем
Sr = Ry~ + /?; f - 4 Gr₽ тcos 6-
Это значение ST подставляем в полученное выше выражение
для силы Рп:
Р» = Grp | 2R„ 4-c°s 0 + 2R'X 4 cos 0 - Grp 4 cos 6cos0 2R'
n n n v
Принимая далее, что R’y = Ryj2, R'x = Rx/2 (где Ry и 7?x —
суммарные значения составляющих сопротивления копанию на
обеих челюстях грейфера), получаем
Рв — Grp Q — 4 cos 6 cos б) — Ru ( 1 —cos 0) 4- 7?х 4 cos 8-
На рис. 16, а показана схема подъема груза с помощью поли-
спаста и лебедки. Допустим, что скорость подъема груза постоянна
и поэтому данная система является статической.
Набегающая на барабан лебедки ветвь грузового каната обра-
зует с вертикальной поперечной плоскостью барабана угол 6
(рис. 16,6) и наклонена к горизонту под углом р. Сила Р давления
на зуб колеса (см. рис. 16, а) образует с касательной к его дели-
тельной окружности угол а,; силы Ро и Рг, действующие соот-
ветственно по окружности и радиусу зубчатого колеса, являются
составляющими силы Р-
Ра — Р cos ая; Р, = Р sin а,.
Для построения полной расчетной схемы разложим силу натя-
жения S = Q/an = Q/2 (где ап — 2 — кратность полиспаста)
на три составляющие Sz, Sy и Sx, направленные параллельно
координатным осям OZ, ОУ и ОХ (см рис. 16, б):
S, = S sin Р = (0/2) sin р,
Sy — (Q/2) cos р cos 6;
S* — (Q/2) cos P sin 6
57
Рис. 16. Расчетный схемы тля определения усилий в грузовой лебедке:
а — общая схема сил, на! ружающих лебедку при подъеме груза: б, в, а, д — вспомога
тельные схемы
Обозначая через Gp, — силу тяжести барабана вместе с зубча-
том колесом; da — диаметр делительной окружности зубчатого
колеса; R^ — рабочий радиус барабана, ZA, Zs, Y А, Ув, ХА
реакции в опорах оси лебедки, по схемам, и зображенным на
рис. 16, в -д, составляем следующие уравнения статики:
SZ = 0; ZA YZB-Gr, -Pr F Sz -=0; (рис. 16, e)
L У - 0; Ya F У b 4- Po Sy = 0; (рис. 16, a)
£ X - 0; XA - S.4 - 0; (рис. 16, 0
У, Al д1ярт = 0; ZaL P,l f S.b Gca = 0; (рис. 16, в)
У, MOx — 0; Pod /2 — SyRc — Alr — 0; (рис. 16, а. 6)
XI Л1лгор — 0; У Pol Syb~Q, (рис 16s г)
где Мт — момент сопротивления вращению барабана от трения в опорах.
58
Подставляя в эти уравнения значения сил Sz, Su, Ss> Pr
и Po, получаем:
ZA \- ZB — 0^ — Psin a, r- (Q/2) sin p = 0;
У a *r F P cos a, — (Q/2) cos P cos 6 = 0;
XA (Q/2) cos p cos 6 = 0; (15)
ZBL — Pl sin as ~f- (0/2) b sin P — G6a = 0;
P (dj2) cos as (Q/2) cos P cos 6 Mr — 0;
— YBL — Pl cos as 4 (Q/2) ft cos p cos 6 = 0.
Из третьего уравнения (15) находим
Ха = (0'2) cos р cos 6;
из пятого уравнения
р _ (Q/2) cos р cos 6 4- Мг .
~~ (dR/2) cos ae
из четвертого уравнения
7 Pl sin а, — (Q/2) о sin as 4- Gpa
Zp ------------------------,
из первого уравнения
ZA = G6 -| Psinas (0/2) sin p ZB =
Gp (L — a) 4 P (L — 0 sin — (Q/2) (L — />) sin p
из шестого уравнения
v (Q/2) b cos p cos 6 — Pl cos
———L——;
из второго уравнения
У a = (0'2) cos P cos 6 — P cos a., — Y B =
_ (Q/2) (1 b) cos P "os 6 P (L Z) cos a,
Таким обратом, воспользовавшись уравнениями статики, можно
определить все реакции в опорах барабана лебедки, после чего
по известным методам сопромата рассчитать ось барабана на
прочность, а также выбрать подшипники барабана.
На рис. 17, о приведена кинематическая схема щековой дро-
билки. Ее основными частями являются неподвижная 1 и подвиж-
ная 2 щеки, ось качания 3 подвижной щеки, эксцентриковый вал 4.
шатун 5( механизм 6 изменения ширины разгрузочной шрли,
замыкающая пружина 7, задняя 8 и передняя 9 распорные плиты
и тяга 10 замыкающего устройства.
Материал в дробилках подвергается ра здг вливанию между
неподвижной и подвижней щеками. Одним из основных условий
раздавливания является отсутствие выдавливания kvckob мате-
59
Рис. 17. Схемы щековой дробилки:
а — кинематическая; б — расчетная
риала вверх, для чего угол а между щеками дробилки не должен
быть больше некоторого значения. Для ею определения построим
расчетную схему (рис. 17, б). Координатные оси (на схеме они
не показаны) свяжем с щеками дробилки; при этом вертикальную
ось одной координатной системы направим вверх вдоль неподвиж-
ной щеки ОА, а вертикальную ось другой координатной системы
направим вверх вдоль подвижной щеки ОВ. Между куском мате-
риала и щеками дробилки действуют нормальные силы /V, и М2
и силы трения скольжения F± и F2, направленные вниз, т. е.
против возможного движения материала при выдавливании.
Спроектировав силы М?, F2 и Ft на ось ОА, а силы Ft, N}
и F2 — на ось ОВ, получим два уравнения статики:
sin a — Ft — F2 cos a — 0;
A\ sin a — F2 —= F, cos a — 0.
Сложим эти уравнения:
(N, 4 Л/2) sin a — Fj (1 4 cos a) — F2 (1 4 cos a) — 0
или
(M, 4- M2) sin a - (Fj + Fs) (I F cos a)
Так как
(F, 4 F2) « f (A\ 4 Nt),
можно записать
(Mj 4- AF>) sin a с / 4- Л'2) (I 4- cos a),
где f — коэффициент трения скольжения между материалом и щеками дро-
билки.
60
Разделив обе части последнего выражения на (Л\ + /V2),
получим
sin а < f (1 -1 cos а),
откуда
sin <%/(! 4- cos а) < /.
Так как sin а — 2 sin (а/2) cos (а/2), а (1 4- cos а) — 2 cos2 (а/2),
находим
2 sin (а/2) cos (а/2) . ,
2 cos3 (а/2) - или tg (а;2)< lg фтр.
Следовательно сс/2 < <ртр или а с 2ф. р (где фтр — угол трения
между материалом и щеками дробилки).
Таким образом, дробление материала возможно при угле
между щеками дробилки, не превышающем удвоенного угла тре-
ния.
Решение той же задачи можно упростить, если в качестве
неподвижной координатной системы выбрать систему ОУХ',
направив ось OY по биссектрисе угла АОВ (рис. 17, б). В этом слу-
чае для нахождения искомой величины (угла а) достаточно соста-
вить только одно уравнение равновесия, спроектировав все силы
на ось OY,
N1 sin (а/2) + N2 sin (а/2) — cos (а/2) —
— cos (а/2) — О
или
(Л\ 4 Л'2) sin (а/2) = (F, -1 Г2) cos (а/2),
откуда
F.+f, _ sin (а/2) . , 2) ...... / + М,) а
X Т N, ~ ТБГ^/2) lg или “лт + лГ- tg Т •
После упрощений напучим
f > tg (а/2) или tg <ртр > tg (а/2),
откуда
а 2<ртр.
Как видим, рациональный выбор положения координатных
осей во многом определяет простоту решения задачи.
2 4.3. Примеры расчета
Пример 1. Определить положение центра масс 1 н. rpj ки на 1 сред-
нюю и заднюю оси автоцистерны (рис. 18. табл 7)
Решение. 1. Определяем координаты центра масс системы по соо-ношениям:
v = = —
где ( — порядковый номер элемента, указанного в табл. 7.
6i
Рис 18. Расчетная схема для определения координат центра масс и статических
нагрузок на оси ходовой части автоцистерны
2 Вычисляем произведения (кг-м) и tnlyl (кг-м).
/ПЛ - 3630-1,83 6642.9,
— 221-1,25 = 276,3,
m3x3 = 108-2,32 =- 250.6,
/пЛ = 5861,5-3,5 = 20 515,3.
тьл6 — 98-4,0 = 392,
т^хе ~ 108 3,49 = 376,9,
тгуг = 3630-0.81 = 2940,3.
т2р2 = 221-1,27 = 280,7
msya = 108 0,88 = 95,0,
m4r/4 -- 5861,5-1.55 ~ 9085,3,
~ 98-1,24= 121.5,
твув = 108-1,24 = 133,9.
7. Исходные данные
Элемент автоцистерны Mecca кг Координаты, м
Х1 Vi
1. Мясеа автомобиля ^1 = 3630 1,83 0,81
2. Операторы (3 человека) т? - 221 1,25 1,27
3. Запагное колесо тч -- 108 2,32 0 88
4. Цистерна с водой = 5861 5 3,50 1,55
5. Левый ящик с оборудованием тБ 98 40 1,24
6. Правый ящик с оборудованием тй 108 3,49 1,24
62
3. Определяем суммарные значения массы т— н произведений ^rrijxl
(кг-м) и (кг-м)
yj щ = 363С + 221 + 108 т 5861,5 + 98 108 = 10 026,5;
У rriiXt = 6642,9 + 276,3 + 250,6 + 2С 515.3 -г- 392 -р 376,9 = 28 454;
У,= 2940,3 + 280,7 + 95 + 9085,3 + 121,5 т- 133,9 = 12 656,7.
Находим координаты центра масс хс и ус (м):
Ус =
28 454
10 026.5
= 2,84;
12 656,7
10026,5
= 1,26.
4. Вычисляем нормальную нагрузку RK2 (Н), действующую на задний мост
автоцистерны, из уравнения моментов Действующих сил относительно оси перед-
них колес:
УЛ4к1=0; Gxc-1?k2£=0,
откуда
== °*c/L = mS*c/L-
Принимая базу машины L — 3,8 м, находим
2 84
= 10 026,5-9,81 = 73 511.
0,0
5. Определяем нормальную нагрузку /?в1 (11) на переднюю ось автоцистерны
из уравнения моментов действующих сил относительно осн задних колес
£Л1к2 = 0; G(£-*C)-/?„1L=O1
откуда
L — хг о о__о ял
Рм = G - f с = 10 026,5-9,81 ’ = 24 849.
L- ого
Значение /?К) можно было бы найти и из уравнения проекций всех сил на
вертикальную координатную ось OY:
0; /?к1 RKi — G = 0,
откуда
Яш = G — /?кг = 10 026,5 9,81 — 73 511 = 24 849.
Пример 2. Определить реакции на передних колесах в выносных опорах
(аутригерах) экскаватора при копании вдоль его продольной оси, р; бочее обо-
рудование направлено в сторону заднего моста экскаватора (рнс 19, табл. 8)
Вертикальная составляющая сопротивления копанию Ру = 55 917 Н,
горизонтальная составляющая сопротивления копанию Rx ~ 23 850 Н; расстоя-
ние от линии действия силы Ry до оси вращения поворотной части экскаватора
xR 3,9 м, расстояние от линии действия силы R до опорной площадки =
= 2,85 м х к
В соответствии с обозначениями, приведенными на рис. 19. а с, 0.44 м;
cs ~ 1.703 м, с3 ~ 1,8 м; £ = 2,6 м, £0 3,45 м.
63
Рис. 19. Расчетные схемы для определения статических реакций на опорах экска-
ватора при копании грунта:
□ — общая нагружения экскаватора; б—а — вспомогательные
Решение. 1. Определяем положение центра масс рабочего оборудования
экскаватора относительно оси вращения его поворотной части:
Остр-2,9 + бц. с -1,2 бруК 4,35 4" бц. р’3,65 +
= ^>GiXi = +°Ц « 4,65-4-Gp, к-4,55 |-бт.„ 4,75 к 6К 4,55 =
*° £ G, GP.o
8535-2,9 4 2354-1.2 4- 2796-4,35 4 1619-3,65 4
4 1079 4,65 4 687 4,55 4-490 4,75 4 4365-4 55 75 980 „ ,
==-----±---------1--------------------------------“ямб =3-5 м-
8. Исходные данные для расчета
Элемент экскаватора Сила тяжести G^, Н Расстояние от центра масс элемента до осн вращения поворотной части экскаваторе. М
Моноблочная стрела бстр ^стр# 8 535 2,9
Гидроиилиндр:
подъема стрелы с — тч- с£ — 2 354 1.2
поворота рукояти Сц, р — тп. pg 1 619 3,65
поворота ковша 6д. в тп. кй 1 079 4,65
Рукоять бруц ^рук# 2 796 4,35
Ковш GH - rn^g = 4 365 4,55
Рычаг ковша Gp. к ~ mp. к£ = 687 4,55
Тяга ковша б г. к -- ™т. кВ ~ 490 4,75
Рабочее оборудование б р. о — ^р. о£ “ 21 925
Поворотная платформа б ПЛ — тпл& = 47 137
Ходовая часть 0х.ч = чб = 50 178
64
2. Находим суммарную вертикальную нагрузку на поворотную часть машины
Рп ч = Gp. 0 + Спл + R,, = 21 925 4- 47 137 + 55 917 = 1 24 979 Н.
3. Вычисляем расстояние xi от точки приложения силы Р„, ч ДО оси враще-
ния поворотной части экскаватора. Из рис. 19, б
Рп. Л ~ °р- о*0 + РуХп ~ °пл (°з °1)>
откуда
®р. о*0 + РуХП ^пл (°3 °1)
*1 —---------------- —
‘ п. ч
21 925-3,5 4- 55 917-3,9—47 137-1,36 230 708 _
124 979 124 979
4, Определяем суммарную вертикальную нагрузку Р от кодовой и поворот-
ной части экскаватора:
р = GI4 + Рп.ч=- 50 178+ 124 979 175 157Н.
5. Находим расстояние х2 от точки приложения силы Р до вертикали, про-
кодящей через ось передних колес экскаватора (рис. 19, в),
Рхв — Gx. чОз + PJT. ч (ая + Xi),
откуда
Gx Ча2 + Рп ч(Дз+*1) 50178 1,703+ 124 979(1,8 4- 1,84)
х2 __--- ------------ ' - 175157
540 377
175157
=- 3,085
6. Рассчитываем вертикальную нагрузку RB на выносные опоры экскава-
тора. Из рис. 19, г
откуда
Рх2~ P-y'Ji< 175 157 3,085 — 23 850.2,85 472 386 - ]36 923 Н
/?в~ LB 3.45 3,45
7, Определяем вертикальную нагрузку Рд на передние колеса экскава
тора. Из рис. 19, г
PAL0-P(^-X2)~R^ ^
откуда
п Р (м — Хг) -1- Rx%
L.
175 157 (3.45 —3,085) 4 -23850-2,85
345
= 13’9® = 38 234 Н
4 Л 5
3 ГсберМА® Л А
G5
2.5. ПОСТРОЕНИЕ РАСЧЕТНЫХ СХЕМ
ДИНАМИЧЕСКИХ СИСТЕМ И ОБЩИЕ ПРИНЦИПЫ
ИХ РАСЧЕТА
2.5.1. Параметры, характеризующие
динамические свойства машин
Законы динамики описывают движение механических
систем. Явления, которые возникают в процессе их движения,
зависят, с одной стороны, от характера воздействия внешней среды
на данный объект (машину или отдельные ее элементы), а, с другой
стороны, от таких параметров объекта, как масса т, момент инер-
ции J (кг-м2) относительно оси вращения, маховой момент GD*
(Н-м2) и жесткость. Первые три параметра, характеризуют инер-
ционные свойства системы и связаны между собой простыми
соотношениями:
J = mR\ GD* == 4gJ,
где /? — радиус инерции (расстояние до осн вращения), g ~ 9,81 м/с" — ускоре-
ние свободного падения.
В табл. 9 приводятся формулы для определения моментов
инерции некоторых деталей привода.
Жесткостью, как отмечалось в в. 2.2.3, характеризуются
упругие свойства объекта, которые обусловливают возникновение
колебательных процессов при воздействии на него внешних пере-
менных сил. В некоторых прикладных задачах динамики понятие
жесткость приписывается также телам, нс обладающим свойством
упругости, или для которых область упругой деформации ничтож-
но мала. Такая условность связана с тем, что силы сопротивле-
ния, возникающие, например, при копании грунтов или при
внедрении какого-либо рабочего органа в твердую породу, в пласт
каменного угля или в массив песчаного карьера, проявляются
только при взаимодействии с ними рабочего органа. При этом
по мере углубления рабочего органа в сопротивляющуюся среду
силы сопротивления возрастают. Если возрастание сопротивления
внедрению рабочего органа в нервом приближении можно при-
нять пропорциональным его перемещению х, то в этом случае
динамическая реакция со стороны среды на рабочий орган F = сх,
где с — коэффициент пропорциональности. Формальное сходство
между этой силой сопротивления и силой реакции упругой связи
дало основание коэффициент с в данном случае называть коэффи-
циентом жесткости и в этом смысле термин «жесткость» применять
к материалам, не обладающим упругостью.
66
9. Формулы для расчета моментов инерции деталей приводов
Детель Форма детали Момент инерции
Сплошной цилиндр или •=>' тР®
вал ~8~
Полый цилиндр или вал т (Р* + <Р)
8
Ежжа л
Колесо, шкив, блок, ше-
стерня, блок шестерен,
звездочка, блок звездочек
mD*
7
Муфта
9
Барабан
tnD!
е
Стержень
При а, = 0 ... 90е
т (R2 + Рг + г®)
3
3*
67
2.5.2. Инерциальная и неинерциальная системы отсчета
Построение расчетной схемы для определения сил или
иных параметров динамических систем должно определенным
образом увязываться с так называемой системой отсчета или
системой координат, относительно которой рассматривается дви-
жение объекта. Or выбора системы отсчета во многом зависит
сложность или простота поставленной задачи и получаемых ре-
зультатов .
Исследуя, например, колебания стрелы самоходного крана,
возникающие при движении крана, мы можем принять за систему
отсчета некоторую неподвижную систему координат, жестко свя-
занную с дорогой (поверхностью земли), но можем рассматривать
колебания стрелы не относительно поверхности земли, а относи-
тельно системы координат, жестко связанной с движущимся
краном. В первом случае неподвижная система координат назы-
вается инерциальной, а движение объекта по отношению к этой
системе— абсолютным. Во втором случае подвижная система
координат называется пеиперциальной, а движение объекта отно-
сительно этой системы координат — относительным.
Другой пример. Тягач, движущийся с прицепом, резко тормо-
зит, а прицеп, соединенный с тягачом тросом, продолжая по инер-
ции свое движение, начинает ускоренно сближаться с тягачом.
Посмотрим, как объясняют это явление два наблюдателя, один из
которых находится в движущемся тягаче, а другой находится вне
тягача и стоит па дороге. Наблюдатель, движущийся вместе с тяга-
чом, видит только движение прицепа относительно затормаживае-
мого тягача и ему кажется, что сближение прицепа с тягачом
объясняется тем, что прицеп к тягачу толкает какая-то сила инер-
ции, возникающая при торможении тягача. Но такое толкование
явления нельзя, очевидно, считать правильным, так как из самого
понятия силы инерции, которое дано в п. 2.2.4, следует, что она
приложена в данном случае нс к прицепу, а к тягачу, сообщающему
ускорение прицепу. Следовательно, наблюдатель, находящийся
в тягаче, не вправе объяснять наблюдаемое им сближение при
цена с затормаживаемым тягачом действием па прицеп какой-то
силы, так как нельзя указать па се физический источник. Поэтому
ему нс остается ничего иного, как объяснить это явление
только движением самого тягача, а нс силами, действующими па
прицеп
Иначе представляется то же явление наблюдателю, стоящему
на дороге. Он видит не только движение прицепа относительно
тягача., ио и движение самого тягача, и сближение с ним прицепа
он объясняет действием закона инерции: после торможения тягача
под действием соответствующих сил прицеп продолжает свое
движение вперед с прежней скоростью, которая была сообщена
ему тягачом, но так как скорость тягача при торможении сни-
жается, то происходит сближение прицепа с. тягачом.
68
Если допустить, что гибкая сцепка между тягачом и прицепом
имеет достаточно большую длину и расстояние между тягачом
и прицепом велико, то само движение прицепа к тягачу будет
постепенно замедляться из-за сопротивления качению колес при
цепа и трения в подшипниках колес. Однако, если мысленно осво-
бодить прицеп от всех внешних воздействий и связей, оказываю
щих сопротивление его движению, то движение прицепа относи-
тельно земли будет неограниченно приближаться к равномерному
прямолинейному движению, т. е. происходить по инерции без
воздействия каких-либо других тел.
Таким образом, движение объекта в любой неподвижной системе
отсчета можно объяснить с точки зрения закона инерции, что
и дало название неподвижной системе координат (инерциальная
система координат).
Инерциальные системы координат обладают тем зам нательным
свойством, что они позволяют выявить причины, вызывающие
движение объекта, так как любое отклонение от равномерного и
прямолинейного движения или нарушение состояния покоя,
наблюдаемое в инерциальной системе отсчета, можно объяснить
только одним — соответствующим силовым взе имодействием окру-
жающих тел.
Но следует также отметить, что инерциальной системой.будет
также любая система отсчета, движущаяся относительно инер-
циальной системы отсчета прямолинейно и равномерно, так как
все механические процессы в этих двух системах отсчета проте-
кают одинаково. В механике это положение называется i пинии ним
относительности. При выполнении указанных условий не будет
иметь значения, рассматриваем ли мы движение прицепа относи-
тельно заторможенного тягача или движение тягача относительно
условно заторможенного прицепа, наблюдаем ли мы из вагона
движущегося поезда за каким-либо предметом, установленным па
дороге, или из остановившегося вагона поезда наблюдаем за дви-
жущимся предметом, который относительно ваго ia движется
прямолинейно и поступательно с той же постоянной скоростью,
которую имел поезд.
2.5.3. Основные задачи динамики
и способы их решения
Все многообразие динамических задач можно сис< th
к двум основным: к определению сил и реакций связей но задан-
ному закону движения (прямая задача) и к нахождению закона
движения по заданным силам (обратная задача). Для их решения
можно использовать различные методы и различный математи-
ческий аппарат механики Наиболее широкое применение в сов-
ременной инженерной практике нашли метод кинетостатики
и метод, основанный па описании законов движения дифферен-
циальными уравнениями.
69
10. Уравнения, используемые при кт ематическом анализе механизмов
Движение
Параметр
поступательное
Путь (равномерное
движение)
Путь (равномерно-
переменное Движе-
ние)
Время
Ускорение
Скорость
Скорость свободно-
го падения в без-
воздушном про-
странстве
S г-. з0 + vi
s = sД vrt + j Z2/2;
s = (r 4- t'o) f/2
t =• 2s/ (o F uc)
j = (v — ц )/(;
! - Ф2 -
J — 2 (s — o0£) 7a
v = [ ,± jt;
V = -I 2/s;
o = 2si i ьп
v = gl = /2gh
вращательное
ф - <p0 + <0/
Ф =• <p„ + <t>, r J: t7=/2
<p = (ы + m0) //2
t = 2<p/(« 4- <a0)
e = (co — cc0),7;
a = (m-— coJW.
e — 2 ftp — cocf)/Z?
co = con 4 11
co = V cog т 2e<p;
co = 2<p/f — coo
Условные обозначения: s0 — начальное перемещение; о -—
конечная скорость; и0 — начальная скорость; / — ускорение (знак «плюс» ста-
вится при ускоренном движении, «минус» — при замедленном). А — высота
падения объекта; <р0 — начальное угловое перемещенье; со — конечная угловая
скорость; со0 — начальная угловая скорость; в—-угловое ускорение.
Метод кинетостатика называется так потому, что его приме-
нение связано с предварительным кипемат! ческим анализом и опре-
делением ускорения объекта j (для этого можно воспользоваться
также формулами, приведенными ь табт. 10), по которому затем
определяют ситу инерции Ги, равную произведению массы т
объекта на его ускорение. Если, в соответствии с принципом
Даламбера, эту силу инерции добавить к силам, действующим
нт данный объект, то условно можно считать, что ом будет нахо-
диться в покое и условие его равновесия записать в форме урав-
нения статики, из которого и определить искомые д (Намические
реакции или напряжения. Для поступательного движения это
уравнение имеет вид
PH R ф Ри — 0,
для вращательного движения
M(P) + m(R) । А4(Ри)-0,
где Р — вектор рав «действующей за; «заем; ix сил; R — в< итог равно юй-
ствуюшей реакций связей: М (Р), М ( R), М (Рв) — момента сил Г. Z? и Р„.
70
Записанные в таком виде уравнения справедливы тол ько в инер-
циальной системе отсчета.
При применении дифференциальных уравнений движения для
решения прямой задачи по известному перемещению х, зала иному
в фут:кции времени t дважды дифференцируя его по времени, нахо-
д? т ускорение х = d-xjdt2, а затем, j множая ускорение на массу
объекта т, определяют в функции времени проекцию на ту же
координатную ось равнодействующей всех сил, действующих на
объект, включая и реакции связей:
ШХ — Р и^(5.
В этом уравнении величина РИЗб, представляющая с "бой
силу, сообщающую ускорение объек гу, в общем с туч; е равна
разности между движущими силами, сообщающими объекту дви-
жение, и силами статического сопротивления движению; в при-
кладных зад-чях динамики эта сила часто назыг ается избыточной.
Дифференциальное уравнение вращательного движения имеет
вид
= ^изб>
где М^б — избыточный момент.
Очевидно, что при РПзб = п и^и ^вф = 0, т. е., кегда дви-
жущее усилие (под усилием в дальнейшем будем понимал силу
или момент) равно статическим сопротивлениям, ускорение
объекта равно нулю и он находится в состоянии покоя или равно-
мерного движения.
При постановке обратной задачи заданными следует считать
действующие усилия (Р1Иб или ^изб)> по которым определяют
ускорения
х = PVSf)!m; ф = МП.Л17,
а затем, дважды иптс грируя и я по времени, последовательно нахо-
дят скорости движения и перемещения.
Как известно, в процессе интегрирования дифференциального
уравнения второго порядка получают сначала г грзые производ-
ные , в выражения к< >торых в ходят некоторые функции времени и по-
стоянные интегрирования. Вторые интегралы уже не содержат
производных, но тгкже зависят от времени и постоянных инте-
грирования. Для определения постоянных интегрирования нужно
задать начальные условия движения объекта, указав, с какого
места он начат перемещугься, с какой начальной скоростью и
в каком направлении.
Начальные условия совместно с дифференциальными уравне-
ниями движения составляют так называемую задачу Коши
Записанные з инерциальной системе отсч та дифференциаль-
ные уравнения движения имеют бтег простую форму, неже ж
в неинерциальпой системе. Поэтому в п 2 7.2 рассмотрены неко-
торые примеоы по сс -тавлению дифференциал.л ых уравнений
в инерциальной системе отсчета
71
Рис. 20. Элементы расчетных схем динамических систем
2 5.4. Способы изображения расчетных схем
Расчетные схемы динамических систем отличаются от
расчетных схем статических систем обычно лишь тем, что к зада-
ваемым силам добавляется сила инерции. Расчетные схемы могут
быть также представлены в виде приведенных (эквивалентных)
схем, на которых массы объекта изображают в виде плоскг х или
пространственных фигур, имеющих форму прямоугольников,
кубов, маховиков, соединенных между собой жесткими или упру-
гими связями (рис. 20). Упругие связи изображают в виде пружин
кручения (рис. 20, <?, с) или сжатия растяжения (рис. 20, а, б,
г, и, к) либо над линией, соединяющей соседние массы, указы-
вают значение коэффициента жесткости (рис 20. д) Разрыв
кинематической цепи, обусловленный наличием, например, гид-
равлической муфты, гидротрансформатора или муфты сцепления
(когда ее ведущие и ведомые элементы проскальзывают друг отно-
сительно друга) обозначают так, как это показано на рис. 20, з, и.
Зазоры в кинематической цепи или слабина каната в момент,
предшествующий подъему груза, изображают в виде элемента,
показанного на рис. 20, к.
2.5.5. Приведение масс н моментов инерции
Из-за относительной сложности динамических расчетов
нередко используют искусственный прием — замену нескольких
подвижных масс, расположенных в разных местах механизма,
одной суммарной массой, которая, однако, с точки зрения дина-
мического эффекта будет эквивалентна суммарному динамическому
эффекту заменяемых ею масс. Для этого н<т учитываемые при рас-
72
•л ' ! ы механизма нужно привести к одному, заранее обуслов-
месгу, например к валу двигателя или к иеполнитель-
, . [•гану, а затем все приведенные массы сложить. С той же
ан ио определенным правилам выполняют приведение сил
(и. ' • >в сил) и жесткостей соответствующих звеньев механизма.
1‘.и смотрим вначале правила приведения масс и моментов
о...ши.
1| введенные масса и момент инерции определяются иэ усло-
। шенства кинетической энергии приведенной массы сумме
..и 'ческих энергий масс, которые она заменяет. Аналитически
... г.шило выражается уравнениями:
к к
*2* ЩпрС'пр — Ч 2~ 2
I 1
fi А
4- лР<оьР - 2 т 2 7‘“г’
1=1 г-1
. ", , приведенная масса и приведенный момент инерции; гпр и а>Пр —
....'.ч и‘угловая скорости звена приведения; т, и Ji—масса и момент
., .I го звена механизма; е,- но, — линейная н угловая скорости 1-го звена
'll V.|,
II’. этих уравнений находим
(16)
(17)
и моментом
Между приведенными значениями масс тщ
• - рции Jnp существует соотношение
радиус исполнительного opi апа механизма относительно оси его вра-
। /например, для механизмов передвижения R— это радиус колес илн
"кн гусеничного хода; для механизма вращения стрелового крапа R
.".стояние от головки стрелы до оси вращения крана; для канатно-блочного
г.има подъема R — это радиус барабана лебедки и т. г.).
. ким образом, пе рассматривая отдельно формулы (16) и
г можно воспользоваться одной из них, определив другой
.. ичтый параметр через указанное соотношение.
k
.'иж У) в правых частях формул (16) и (17) обозначает,
I- 1
т и . нищие под ним величины должны быть просуммированы
। ыех k элементов (или звеньев) рассчитываемого объекта.
73
Но какие массы объекта и какое число масс необходимо и доста-
точно учитывать при определении приведенных динамических
параметров? Вопрос этот, как видим, неизбежно возникает при
построении динамической модели объекта и расчете ее параметров.
Ответ на него дан далее, а пока отметим, что значение k не обя-
зательно должно соответствовать общему числу масс рассчитывае-
мого объекта; чаще всего ограничиваются учетом небольшого
числа масс, принимая в отдельных случаях k — 1, т. е. динами-
ческую модель представляют как одномассовую систему.
Рассмотрим определение суммарной приведенной массы (мо-
мента инерции) на примере двухосного колесного тягача с приво-
дом, выполненным по традиционной схеме: двигатель, муфта сцеп-
ления, коробка передач, карданный вал и главная передача, от
которой непосредственно приводятся задние ведущие колеса тя-
гача. Условимся учитывать только три массы: вращающиеся
массы двигателя и соединенных с ним напрямую элементов при-
вода (муфты сцепления, входного вала вместе с шестерней коробки
передач) с моментом инерции /д; вращающиеся массы ведущих
колес с моментом инерции JK и поступательно движущиеся мас-
сы т (т. е. общую массу тягача).
За место приведения выберем сначала ведущие колеса, т. е.
будем считать, что опр = v = <f>ard (где V — поступательная
скорость движения тягача; <о„ — угловая скорость ведущих
колес; rd — динамический радиус колеса, т. е. расстояние от
поверхности качения до оси колеса). Тогда в соответствии с урав-
нением (16) суммарная приведенная к ведущим колесам масса
вращающихся и поступательно движущихся частей машины будет
равна
где и JK — моменты инерции вращающихся частей двигателя и колеса; <од
н <и1( — угловые скорости вала двигателя и колеса.
Так как отношение угловой скорости вала двигателя (од к
угловой скорости ведущих колес ©л есть передаточное число и
привода тягача, получим
^пР.« = пг I- (18)
rd 'd
Соответственно суммарный приведенный момент инерции
J tip и ‘ Шпр. Krd ~ - tW'd -|“ Jk‘ (19)
74
В выражениях (18) и (19) последними двумя членами опреде-
ляются приведенные к ведущим колесам тягача масса и момент
инерции вращающихся частей трансмиссии
^вр. К ~ А 4“ А "Та- > Ар. К ~ AW , At"
' d 1 d
Те же массы можно привести к любому другому месту, напри-
мер, к валу двигателя. В этом случае юпр = юд и по формуле (17)
суммарный приведенный момент инерции Jnp д будет равен:
-"(^)’|АМ«(^)=
Ар. д = tnrdltr - - 7Д Т JkIu7'. (20)
Соответственно суммарная приведенная к валу двигателя
масса тягача тП[). д — /Пр. д/гд или
тдр. д = ~^г 'h А + At (21)
В уравнениях (20) и (21) последними двумя членами опреде-
ляются приведенные (к валу двигателя) момент инерции и масса
вращающихся частей привода
Ар. д ~ A I At ' ,.F > ^вр. д А Л А -А ,2и2 •
w d d
Из этих выражений следует, что чем больше передаточное
число между вращающимся элементом привода и валом двигателя,
тем меньше влияние этого элемента па суммарную приведенную
массу или момент инерции (это влияние убывает пропорциональ-
но второй степени передаточного числа между валом двигателя
и данным элементом). Поэтому влияние элементов привода, распо-
ложенных за двигателем и имеющих сравнительно небольшой
момент инерции относительно оси вращения, можно отдельно не
учитывать, а внести при величине ./д некоторый поправочный коэф-
фяцпент 6, больший единицы (для дорожно-строительных машин
в среднем б 1,2). В этом случае суммарные приведенные пара-
метры определяют по формулам:
твр.к-6Уд-уиа + 7к-^-; (22)
Ар. к 6А«8 + А; (23)
mBV д — 6.7Д Д- 4- -А -Лг; (24)
rd rdu
Ар. д — ^A A A (25)
75
и соответственно
Г^пр. к ““
^пр. к — tnrд -)- 6JдЦг -}-7и;
j = —++jk -V •
”'пр. д — и2 1 Д I К ца
(26)
(27)
(28)
Рассмотрим еще один механизм — лебедку, состоящую из
двигателя, редуктора, барабана и канатного полиспаста, к кото-
рому подвешен поднимаемый груз. Считаем заданными парамет-
рами следующие: и — передаточное число между двигателем и
барабаном лебедки; аа — кратность полиспаста; 7Д — момент
инерции вращающихся частей двигателя и соединенных с ним
напрямую элементов привода (соединительной муфты, входного
вала редуктора и шестерни, вращающейся вместе с входным валом);
Яо — радиус барабана. Будем учитывать вращающиеся массы
двигателя с моментом инерции и массу поднимаемого груза
т — Q/g (гДе Q — сила тяжести груза); инерцию остальных вра-
щающихся масс привода, включая барабан, учитываем поправоч-
ным коэффициентом б.
Выбирая за место приведения вал двигателя, считаем, что
— шд. Определяем суммарный приведенный момент инерции
механизма по формуле (17)
где с — скорость подъема 1 руза.
Как известно, для полиспастов имеет место соотношение
V ’ ^г,/«п (где vc — окружная скорость барабана, равная ско-
рости ветви каната, набегающей на барабан). Тогда
р _ ср и>б7?б _________
шд ОдГОд — ШдАц — ~иап ’
где с>с — угловая скорость барабана.
С учетом этого выражения
Qp't
JnP-л = ~ 1“ (29)
Отсюда можно найти приведенную к валу двигателя массу п
механизма подъема (с грузом)
<3°)
76
Примем теперь за место приведения грузонесущий орган
механизма подъема. В этом случае onp — v и формулу (16) можно
записать так:
гр = (~У I 6Jn(-ir)2 = n2-f <31)
Учитывая, что ыд/п — uaJR,}, получаем
Q с , 1 •.
^пр гр — 1 OJ д И С1и.
Используя зависимость (32), находим
QRi
Зпр. гр — f^up. гр Rc ~ р I 6^д£/ Сп.
(32)
(33)
Последними членами в выражениях (32), (33) определяются
соответственно приведенные масса и момент инерции вра дающихся
частей механизма:
ГИвр. гр — 6Jp ц., П Пл,
. гр — pR йп
(35)
Найдем те же параметры, приведенные к барабану.
Принимая <oup — io6. запишем формулу (17) в виде
(36)
Так как
V Уг>_______<Bq/?6 _ Rf . Гсд
tog auoi6 Сд<Вб u-и ’ соп
получим
J _ _L су 2
'пр. б — ---Н ORR .
& п
Приведенная масса
(37)
(38)
(39)
□формулируем формальные правила приведения рассмотрен-
ных динамических параметров и определения их суммарных зна-
чений.
11ри приведении масс и моментов инерции от двигателя в с то-
рону исполнительного органз механизма нужно соответствующий
параметр каждого учитываемого элемента умножить па квадрат
передаточного числа между данным элементом и местом приведе-
ния и полученные таким образом значения параметров сложить.
При приведении масс и моментов инерции от исполнительного
органа в сторону двигателя нужно соответствующие параметры
каждого учитываемого элемента разделить на квадра-- передаточ-
77
ного числа между данным элементом и местом приведения и полу-
ченные значения параметров сложить.
В общем случае, когда за место приведения выбран какой-либо
элемент, расположенный между двигателем и исполнительным
органом, динамические параметры элементов, расположенные до
места приведения со стороны двигателя, нужно умножить на квад-
раты соответствующих передаточных чисел, а параметры элемен-
тов, расположенных по другую сторону от места приведения
(со стороны исполнительного органа), разделить на квадраты
соответствующих передаточных чисел.
На рис. 21, а показана схема механизма подъема грузовой
стрелы с гидроприводом. Основными составными частями этого
механизма являются стрела 1 массой mlt сосредоточенной в точ-
ке В; шток 2 и поршень гидроцилиндра, имеющие массу т2, сосре-
доточенную в точке Д’; корпус цилиндра <3 с рабочей жидкостью
массой гп3, сосредоточенной в точке Р и грузозахватный орган
с грузом массой т, сосредоточенной в точке А.
Поставив задачу определить приведенную суммарную массу
этого механизма, найдем сначала кинетическую энергию для каж-
дой его массы. Значения масс будем считать заданными. Тогда
для определения кинетической энергии останется определить
скорости отдельных звеньев механизма, если скорость одного
из них, например, угловая скорое гь стрелы = va/(DA) известна
(здесь — линейная скорость точки Л).
Абсолютная скорость точки С, одновременно принадлежащей
звеньям 1 и 2, равна по модулю
vc = иг (DC) = (й^с
и направлена перпендикулярно DA
Скорость vc можно разложись на две составляющие: veC,
перпендикулярную оси ОС качающегося цилиндра, и vrC, напра-
вленную вдоль этой оси (рис. 21, б),
VeC — vc cos р; vrC = sin p.
Здесь veC — переносная скорость точки С, определяющая
скорость поворота цилиндра в его переносном движении относи-
тельно точки О, a vrC — скорость относительного движения,
соответствующая скорости поршня в цилиндре.
Угол р определяется из геометрических соотношений треуголь-
ника DOC (см. рис. 21, г)
(O£))/sin р = Zc/sin р0,
откуда
0D , „
Sin Р = ------Sin ро.
‘с
78
A
Рис. 21. Расчетные схемы механизма подъема стрелы с приводом от гидроцм-
липдров:
а общая; б—г — вспомогательные
Угловая скорость поворота цилиндра (или угловая скорость
его качания)
veC/(OC).
Тогда скорость veK — составляющая абсолютной скорости
точки Д звена 2 будет равна (см. рис. 21, а, г)
ОК
иеК = ^ОС = veC .
Вектор скорости veK перпендикулярен оси цилиндра.
Другая составляющая veK абсолютной скорости точки Л',
направленная по оси цилиндра, равна, очевидно, скорости vrC.
Таким образом, абсолютная скорость точки К. звена 2 равна
по модулю (см. рис. 21, г)
vk = /v;K -f- v?K
(40)
и с осью цилиндра образует угол
Ф — arctg (veKlvrK).
79
Используя теорему об изменения кинетической энергии систе-
мы, находим выражения для кинетических энергий отдельных
элементов механизма:
— у f-Wi (DB)‘\ cof;
Тг = j-msUx +4" ^“2' Тл^-^-mvA,
П = 4‘[Л’+тз (OP)2]^;
где JB, Jp, Jk~- моменты инерции соответствующих звеньев механизма отно-
сительно осей, проходящих через их центры масс и параллельных осям их пово-
рота; индексами 1, 2, 3 обозначены параметры стрелы 1, штока 2 и поршня, кор
пуса цилиндра соответственно.
Теперь, приравнивая кинетическую энергию приведенной
массы mupi£p/2 сумме кинетических энергий масс, которые она
заменяет, и исключая из полученного равенства /пПр, находим
~) t [Jb 4- ( 1 4*
\ ^np / \ Lup /
+ (JP 4 ms (0/T1 У + JK (У. (41)
X rnp / X fup / X t'np / z
Нетрудно заметить, что стоящие в скобках отношения скоро-
стей соответствуют мгновенным значениям передаточных чисел
механизма, а так как эти значения непрерывно изменяются с изме-
нением положения звена 1 (т. е, положения грузовой стрелы),
то и приведенная масса для данного механизма — величина пере-
менная, зависящая от положения его звеньев.
В последнем уравнении наиболее значимыми являются первые
два члена; влияние последних двух, учитывающих инерцию гидро-
цилиндра стрелы, в общем случае пренебрежимо мало. Это позво-
ляет выражение для приведенной массы упростить и записать
его так:
при приведении масс груза и стрелы к головке стрелы, т. е.
к точке А (ипр = цл),
™пР л = т 4 ( JB + mi (DBf] Y «
жт 4-(1,01 .. 1,02)
-4 /
или
((1,01 .. 1,02)т1(-^-У;
\ ЛР /1 /
(42)
80
при приведении тех же масс к шток}’ гидроцилиндра (vUI = v<)
тпр с = т j2 + [JB 4- тв (DB)*] =
или
/ПпрС«т(-^)2 +-(1,01 ... 1,02)тв(^-)2. (43)
В формуле (42) вт орым членом правой части определяется
масса стрелы, приведенная к точке А.
В формуле (43) первым членом правой части определяется
масса груза, приведенная к точке С, вторым членом — масса
стрелы, приведенная к той же точке.
Очевидно также, что произведение приведенной массы тП(1Л
на квадрат расстояния от оси поворота стрелы до ее головки
(£)Л)2 есть ничто иное как момент инерции груза и самой стрелы
относительно оси ее поворота:
•Лтро = 'ппрЛ(Г)/)и. (44)
Зная величину JBpT), массу гппгГ можно определить из соот-
ношения
т ^прГ / DA \2 ('ЛС\
тпрс (Dey 'Па?А\~[>С} ‘ ’
Следовательно, для рассматриваемого механизма массу mnp г
можно определить либо по формуле (43), а если известна вели-
чина тпр А — по формуле (45),
2.5.6. Приведение сил и моментов сил
Приведенные силы или моменты определяют из условия
равенства их работы сумме работ тех сил и моментов, которые
они заменяют, т. е.
к t
^ир^пр ~ S В i^i X'
(-1 Т-1
к к
МПр®пр = X PtVt -+ X Л1/Ю/,
<=-1 fr=l
где Рпр и Л!Пр — приведенная сила и приведенный момент: Pj — проекция
действующей на Ре звено силы на направление движения пеитра масс этого
звена (или, иначе, на направление вектора абсолютной скорости звена); Mi —
момент, действующий на i-e звено.
81
Из этих уравнений находим:
(46)
(47)
Вернемся к только что рассмотренному механизму лебедки
для подъема груза. Пусть /Иц — вращающий момент на валу двн-
гателя лебедки, Q — сила тяжести поднимаемого груза. Найдем
по этим данным момент на барабане лебедки, используя уравне-
ние (47). Решение такой задачи сводится, по существу, к приведе-
нию момента Afu к валу барабана. Поэтому, приняв за место при-
ведения вал барабана и соответственно юпр — сос, 'И11р — -Йс,
Pi = Q и = v и по ю гавив э ги параметры в уравнение (47),
получим
/Ис - Q I — 'j - Q R6 - 57?б,
° \ соБйп йп ° °
где S = Q'an—• втяжение встпи каната грузового полиспаста, набегающей
на барабан лебедки.
Если за место приведения выбрать вал двигателя и принять
соответственно А1ир = А1Д, соир = о>д, то уравнение (47) можно
записать так
Л — О ( - \ — Q аг^г1_______ CRn _ S^fi_ _ Ain
ц \ <од / о>дйи — ййп и - и
В отличие от масс и моментов инерции, которые не зависят
от механических потерь, обусловленных трением в кинематиче-
ских парах механизма (эти потери учитываются КПП ц), силы и
моменты сил зависят от трения в механизме: при передаче дви-
жу щх сил и моментов от ведущего звена механизма, например
вала двигателя, к ведомому звену (барабану лебедки) силы тре-
ния снижают их, что учитывается путем умножения усилия, кото-
рое приводится от ведущего зве па к be д миму, па KI1Д между этими
звеньями (папомним, что значение т] всегда меньше единицы).
При приведении сил или моментов от ведомого звена к ведущему
их нужно разделит ь та КПД, гак как те же си. 1Ы трения в меха-
низме вызывают необходимость несколько увеличить потребное
значение движущего усилия на ведущем звене.
Поэтому оконча гельно найден тые выше выражения для момен-
тов Мд на ведущем звене (вале двигателя) и А1с на ведомом звене
(бяряба ге лебедки) нужно записат! так:
А^ = Л)б/(ш1); Л1Б Л1дглр (46)
в2
Таким образом, используя уравнение работ, получим извест-
ные соотношения между усилиями, действующими на ведущем
и ведомом звеньях механизма.
Иное влияние оказывают силы трения в механизме па тормозя-
щее усилие, передаваемое от тормоза, установленного на валу
двигателя, к исполнительному органу; в этом случае силы тре-
ния усиливают тормозящее во-действие, оказываемое приводимым
к за гормаживаемому органу тоомозящим м эментом, и поэтому еп >
значение следует разделить на П1Д механизма. И, наоборот, пои
приведении тормозящего момента от исполнительного ор гана к двн-
газ елю значение момента нужно умножить на КП Д так 1 зк те же
силы трения в механизме снижают потребное значение тормо-
зящего момента, который должен быть создан на ва.1 у двига-
теля .
Поэтому между тормозящим моментом на валу двигателя _W
и тормозящим моментом на барабане лебедки Мб имеют место
cooi ношения:
Мд = Ип1 Щ; Mg = МцЩтр I Р)
Теперь можно сформулировать общие правила прлведениг си.
и моментов.
1. При работе привода на силовом режиме при приведении
усилия (сил или моментов) от вала двигателя в стороду исполни-
тельного органа его нужно умножить па переда точное число и КПД
передачи между двигателем и звеном приведения.
При приведении усилия от исполнительного органа в сторон}
двигателя его необходимо разделить на шредэточное число и
КП Д передачи между исполни л льным opi ином и звеном пр иве-
дени я.
2. При работе па тормозном режиме при приведении j стгтия
от вала двигателя в сторону исполнительного органа ею нужно
умножить на передаточное число и разделить на КПД п редачи
от двигателя к звену приведения.
При приведении усилия от исполни!единого органа в сторону
двигателя его необходимо разделить на передаточное число и умно-
жить на КПД передачи от исполнительного органа ь звену при-
ведения.
Рассмотрим еще один пример. Нт рис 21, а юкаэапа < хсма
ги дравлического механизма подъема стрел ы; на с семе отмечены
силы тяжести поднимаемого груза Q, стрелы Сщ, ззеча шток -
попщень GK и троцилищра с рабочей жидкостью GP Ч я того
чтобы эти силы заменить сумм<шной приведенной силой, прило
женпой, например, в точке 4 стрелы, нужно предварительно
знать направление векторов абсолютных скоеосгей точек прило
жения этих сил и спроектировать i 1ждую силу нд направление
векторов cooi ветс гвуюших абсолютных скопо! i ей. Обо шачив
проекции отмеченных сил на направление векторов абсоли них
1.3
скоростей через Qr, G'B, G'K и G‘p, находим:
Q' — Q sin 1180 — (a£ + ct0) ] — Q sin a; a — az -f- au;
GB = GB sin a; G'f- = GK cos (<p — y); GP = GP sin y.
Тогда, согласно формуле (46) при пПр = ол, получим
Опр а — Gnv д sin ct = Q GB —J- GK —j- Gp ——,
A 4a VA
откуда
Gnp Л = Q j- GB + GK c^-yL 21L + GP -p-. (50)
1 4a sin a va sin a va 4 7
Если влиянием последних двух членов уравнения пренебречь
и отношение скоростей vv/vA выразить через отношение DB/DA,
то можно получить более простое выражение для определения
силы СсрЛ
Опр а ~ Q ~i~ GB • (51)
Те же силы можно привести к точке С, в которой шток гидро-
цилиндра соединяется со стрелой (рис. 21, в):
г; _ л с °в /г । г
0upc Q Vc -ь GB „с 0 DC F GB Dc . (52)
Силу Gnp с можно разложить по двум направлениям — вдоль
продольной оси гидроцилиндра (бшт) и вдоль стрелы (рис. 21, в);
последняя сила будет восприниматься опорой стрелы в точке D.
Сила ОШ1. нагружает шток гидроцилиндра и преодолевается дви-
жущей силой Рд, создаваемой давлением рабочей жидкости в гид-
росистеме
Р =G sin(P+?) z> DA slti(n + y) г„.
д пр с sin р пр a DC sin ' ' '
К выражению (53) можно прийти и другим путем, рассмотрев
схему сил, действующих в звеньях DC и ОС при нагружении их
в точке С вертикальной силой GupC. Для этого построим в точке С
координатные оси СХ и СУ, как показано на рис. 21, в и спроекти-
руем действующие на систему силы на эти оси:
L X = 0; S cos [90 — (р + у)] |- Ра sin у = 0;
£Г = 0; GnpC — РдСозу — S sin [90 —- (р + у)].
Обозначим р + у через е и перепишем эти уравнения в виде
S sin е + Рп sin у = 0;
Gnp с — Рд cos у — S cos е = 0.
84
Из первого уравнения находим
S = —Рд sin y/sin е.
Подставляя это выражение во второе уравнение, получаем
Gn„ с — Рт, COS у 4' -Рд Sm V COS Е = О
up ь д f I д SU1 g
ИЛИ
„ D Г sine cos у— sinycose'i г D sin й—у) _________r
Опре— -Рд [ ——^-Оирс— Дц sine —О,
р __ г sin е r sin (|.i -ь у)
Г Д — СГпр С sin (е _ у) Ыпр с ijn
2.5.7. Приведение жесткостей
Приведение жесткостей имеет тс же цели, что и приве-
дение других динамических параметров — упростить расчет-
ную схему и вместо учета жесткостей большого числа зве ньев
ввести в расчет некоторую приведенную жесткость, которая
с точки зрения динамического эффекта была бы эквивалентна
жесткостям, которые она заменяет. Для этого жесткости отдель-
ных элементов нужно привести к одному, заранее обусловленному
месту (к тому же, к которому приводились и другие динамические
параметры), а затем приведенные жесткости отдельных элементов
сложить по определенному правилу, заменив их одной суммарной
приведенной жесткостью.
Рассмотрим простой пример. Две шестерни, одна из которых
жестко связана с ведущим валом, а другая — с ведомым валом
редуктора, находятся между собой в зацеплении. Ведущий вал
нагружен вращающим моментом /И1, вызывающим его скручива-
ние на угол (р1э а на ведомый вал действует момент ,-Иа — .-W,u12q
(где Hj2 — передаточное число зубчатой пары; т] — КПД зуб-
чатого механизма), вызывающий его скручивание на угол гр2.
Очевидно, что подобная деформация валов приведет к соответ-
ствующим угловым перемещениям шестерен: ведущей — па угол
<1Т, а ведомой — на угол ф2, причем фт/фг — н]2-
Допустим, надо привести угловую (крутильную) жесткость <4
ведомого вала к ведущему валу редуктора. При этом будем исхо-
дить из следующего условия: потенциальные энергии упругой
деформации ведомого вала и вала приведения (соответственно
1*2 1*2
•уСгфй и — спрф1) должны находиться в том же соотношении,
что и работы моментов Л1Г и Л12 на соответствующих перемеще-
ниях, т. е.
Afi4T 1 ' 2 2 спрЧ 1 или Л1> Спр^1
М2ф2 Y С2(Г 2 Л12 ’ С'^2
85
откуда
, n2 М । .1 М,
C i , — С ’ —-- — С i --
4i кН - и1г
и окончательно
, с"
(54)
Рассмотрим приведение жесткостей отдельных элементов ме-
ханизма 1 одъема лебедки. Условимся учитывать жесткости двух
элементов механизма — угловую жесткость с? вала двигателя,
нагруженного вращающим моментом Л1Д, и . шнейную ж< ctkocti с
каната грузового полиспаста, к которому подвешен груз весом Q.
Под действием этих нагрузок вал двигателя получает деформацию
скручивания <рд, а канат — деформацию 6 растяжения. Задан-
ными яв [яются радиус барабана лебедки /?с, передаточное отно-
шение редуктора и и его 1\11Л г]м, а также кратность полиспаста л
и его КПД т)п.
Приведем сначала жесткость каната к валу двига еля. При
этом будем исходить из условия, что потенциальные энергии уп-
ругой деформации каната и вала приведения (соответственно
-усб2 л -^-СпрФр^ должны находиться в том же соотношении, что
и работы момента Л1Д и силы Q на соответствуй >щих перемещениях:
Мдфд спрФд/2 Мр спр^Д
’ Зб “ ~с&/2~ или ~ ~
от куда
Пользу: ь известными для грузовых полиспастов соотноше-
ния :л, вырази:,; величину £ через перемещение 6„ точки крепле-
ния па барабане набегающей ветви каната и через соответствую-
щее угловое перемещение <р0 обода барабана, а силу тяжести Q —
четез натяжение S набегающей ветви каната полиспаста и крутя-
щий момент ТИс, создаваемый этим натяжением на барабане:
6 сп - сп ’ — ~ ВДп-
Тогда
с' = с Мд /?б /?б Rs
п₽ Ч'д Си Мб ~
и окончательно
Спр
(55)
где 17 — ДлЩп — общий КПД механизма.
Я6
Местом приведения может быть и грузонесущий орган меха-
низма. В эгол с ту чае исходным является соотношение
<25 Спрб“/2 Q слр^
^лЧ’л с„\ „ 2 Л4д с ч
откуда
с _С’.^.0_
пр л б Лд ‘
После преобразований, аналогичных предыдущим, получил:
£пр
—< и а-п1].
г с
И< ходя из П1 щученных результатов, сформулируем формаль-
ные правила приведения жесткостей для силового режима.
1. При приведении жесткости вала двигателя или другого ве-
ду щего звена привода в сторону исполнительного органа (ведомого
звена) нужно эту жесткости умножить на квадрат передаточного
числа и КПД механизма между ведущим звеном и местом приве
дения.
Если при этом угловая жесткость ведущего ^ена приводится
к элементу, обладающему линейной жесткостью (как в рассмо-
тренном п| амере лебедки), то предварительно нужно угловую
жесткость разделить на квадрат радиуса исполнительного органа
(с тем, чтобы размерность угловой жесткости привест) к раз-
мерности линейной жесткости), а затем у множить i а квадрат
передаточного числа и R]1Д механизма.
2. При приведенп! жесткости исполнительного органа (ве-
домого звена механизма) в сторону двигателя (ведущему ззену)
нужно приводимую жестк< >ci ь ра зделить на квадра г передав >чяого
числа и 1\ЛД механизма между ведомым звеном и местом приве-
дения.
Если при этом линейная жесткость ведомого элемента при-
водится к звену, обладающему у глиьой жесткостью, то ну жно
сначала приводимую (т. е. линейную) жесткость умножить на
квадрат радиуса исполнительного органа, а затем эту величину
разделить на квадрат передаточного числа и КПД механизма.
Если рассматривается тормозной режим привода, то, как это
было показано в и. 2 в выражениях приведенных у спли": it-pe-
даточнос число и КПД должны стоят ь в разных стоочках ссе 'вет-
ствуйщего дробного выражения (если и стоит в чнел) геле, го q
должно стоя ь r знаменателе и наоборот). Очевидно, что то же
самое нужно сделать и в выражен) ях, определяющих приведенные
жесткости элементов привода при торможений, которые также
зависят от соотношения моментов. Поэтому для тормозного режима
правило приведения жесткостей мож!о сфо] мулировать следую-
щим образом:
Рис. 22. Эквивалентные схемы механизма подъема стрелы с приводом от гидро-
цилиндровг
а — >бщая; б в — приведенные
при приведении жесткости от вала двигателя в сторону испол-
нительного органа нужно ее умножить на квадрат передаточное
числа и разделит! на КПД передачи между ведущим звеном и
местом приведения;
при приведении жесткости от исполнительного органа в сто-
pt ну двигателя нужно ее разделить па квадрат передаточного
числ а и умножить на КПД пеоедачи между соответствующими
звеньями механизма.
При этом разумеется, и для тормозного режима coxj аняется
правило приведения угловой жесткости к линейной и наоборот.
Па рис 22 показана схема механизма подъема стрелы, в ко-
торой в отличие от схемы, изображенной на рис. 21, принято, что
стрела и элс менты се гидропривода являются уп] угими звеш ями.
Жесткость стрелы, измеренная в точке А. обозначь з через с2
(рис. 22, а), а жесткость гидроподвески стрелы, зависящая от
упругости штока гидроцилиндра, его стенок и рабочей жидкости,
обозначена через сг. Решая задачу упрощения исходной схемы
механизма, заменим жесткост и обоих упрут их звеньев одной сум-
марной приведенной жесткостью
Мес том приведения выберем сначала головку стре. гы - точку А
(рис. 22, б). 13 этом случае для приг° юния жесткости гидронри-
Bcja к точке А согласно изложенному выше правилу величину сх
88
нужно умножить на квадрат передаточного числа и КПД меха-
низма:
С1А =-
(57)
где и — передаточное число механизма, равное отношению скорости поршня
гидроцилиндра стрелы гп (т е. скорости ведущего звена механизма) к скорости
точки А,
U =
с гс sin ц DC
----- ~ sjn н
' д Од Г
Если местом приведения принята точка С (рис. 22, е), то жест-
кость стрелы, измеренная в точке А, будучи приведенной к точке С,
определяется по формуле
С2с = сг/(ы21]) (58)
Приведя жесткости всех элементов к одному месту, их можно
соответствующим образом просуммировать. Суммарная жесткость
последовательно расположенных упругих элементов
с== -----------'--------- (59)
— + — + — +-------h - -
Cj СВ сп
а суммарная жесткость параллельно расположенных элементов
с = су Ч- сг Г С8 +••• + Сп. (60)
Для только что рассмотренного механизма подъема стрелы
с гидроприводом в соответствии с формулой (59.) получим следую-
щее выражение для суммарной жесткости рабочего оборудова-
ния, приведенной к точке Л:
Суммарная жесткость того же рабочего оборудования, приве-
денная к точке С штока гидроцилиндра
Р — 1 -О ___ ___
пр ' 4 +С2С ci/csc4 1 ‘ (G2)
Можно показать, что между величинами спрЛ и сЕрС сущест-
вует определенная зависимость
^пр А — СПрсНгТ],
(63)
т. е. между суммарными приведенными жесткостями сохраняются
те же соотношения, что в между жесткостями составляющих
элементов, приведенными к тем же точкам.
В табл, II даны некоторые расчетные формулы для определе-
ния суммарных приведенных жесткостей некоторых конструктив-
ных элементов.
89
11. Формулы для определения суммарных приведенных жесткостей
с -Svn-
п 1, 2, 3
____‘\'г . <"3rj
‘ 1 Ь ‘ 2 гз + Q
90
Продолжение табл. 11
Схема соединения
упруги г элементов
расчетная формула
(Cj + сг) L3
Cj Ч~ Са+ са
____________(ct + Сг) С3С4_____________
(С1 ч сг) г3 -Г (с, -Г С2) С4 4- С3С4
л
Сх “ S <n cos2 ап
1
п
Cz = S cn sit13 ип
1
2.5.8. Примеры расчета
Пример I. Для механизма подъема, изображенного па рис 23,
определить суммарные динамические параметры, приведенные к валу двигателя,
выходному валу редуктора, барабану и грузу.
Исходные данные: Момент инерции вращающихся масс двигателя и соеди-
ненных с ним элементов привода Jn = 2,8 кг-м2; момент инерции фрикционной
муфты /ф = 0,892 кгм3;
момент инерции барабана
7 б = 1,911 кгм2; сила тя-
жести груза <2 = 15-104 Н,
передаточное число редукто-
ра 2 Up — 20,75; передаточ
ное число первой открытой
зубчатой пары щ --- 2,37;
второй открытой зубчатой
пары пц = 1,85; радиус ба-
рабана Ro = 200 мм, крат-
ность полиспаста аа — 4.
Рис. 23. Схема механизма
подъема груза:
/ — двигатель; 2 — редуктор;
3 — муерта: 4 — барабан
Решение. 1. Находим суммарные значения моментов инерции, приведенных
к валу двиг стеля
Ф?в
I
Мф«’ч Мб «Ж
1
2,2,2
-.,2-2,8 | 0,892 2(Ji752.2 37s F 1.9Н 20,753-2,372-1,853
15 10*-0,23
9,81-20,753-2,372-1,853-43 3,3652 к‘
валу редуктора
1 J QУ?2
=- t>J и' 4- J. — + 7С 4
к выходному
4Р
“1 UfU,, 6'44 4П
1 2 2 8 20 75й 4 °Л92- 4- 1,911 - 4-___________________- -
’ ’ ’ “Г 2,37й 2,37 я- 1,85й 9,81-2,373-1,853-43
= 1448,95 кг-ма;
и к барабану
4р. б = Ml + 4 +“ = 1.2-2,8-20,752.2,372-l,852 +
“пр.гр
! 5 1П4 0 22
4-0,892-1,85*+ 1,9H-|-- 4J - 27818,3 кг-м2.
2. Определяем суммарную приведенную к грузу массу вращающихся частей
привода и груза:
4,2 upu.“llcn Ч- -/ф “ч^п + ‘f15~FF °п + у
1,2-2,8—!=-.20,75г-2,373-1,85г-4й 4 0,892 - — > 1,( 5 :-43 4-
v, z U, Z
1.9П л, , 5 104 ........
о 22 4 4 - 9 8,- - и 141 549 кг.
рабо чего оборудовянт я фронтального погрузчика (см.
сумма| ную массу, триведсиную к точке А
Пример 2. Для
‘ >ис 21) о q -ясли ь
Исходные данные'. длин;- стрелы (по центру ковша) Г)А — 3 м; ОС- ~ 2,7 м;
1,98 м; />С 0,85 м, рагст< яиие oi пен ip; масс стрелы до оси <с топорота
I 23 м расстояние о" центр, i -tact гидроцилиндра подъема стволы до оси
качания С)Р 0,0 м. силы тяжести ковша с грузом (J 21 000 Н. стрелы
420 Н, гидропилиндров (2 И'1 ) бе i поршней и штоков Gp 640 Н, 1 орш-
О!)
IjP,
его
(‘а .... . .
Исз н штоков гидровилиндров Од — 300 Н, скорость подъема рабочее.: органа (но
центру ковша) гл — 1 м/с
Речи пае 1 О| ределяем углы f> и р.
р (О1-)Ч (ОСУ~(ЬС)3
Р^?П0: 2(OC)(OG) --
l,982 J-2,7й —0,85й ЛГ)О, ,,,
----227., ----- arceos 0,981 11 ;
0Г) п I -98
y-Fr sin р -= sin 11J — 0,445;
t-'Lj U»o0
p. - 26,5
/1— strip = J41—Sina 26,5 =0,643,
— art os
si 1 ц
Г ,г р
92
2. Вычисляем скорости соответствующих звеньев м< ханизма:
угловую скорость подъема стрелы
<0, ==7лЛ’~-з “ °-333 Р^/с;
абсолютную скорость точпИ С звена DA
и,, = Wj (ОС) = 0,333-0,85 = 0,28 м/с;
переносную скорость точки С звена ОС
чгС — v(. cos р. 0.28-0,643 0,18 м/с;
относительную скорость точки С тоге же звена
vfC — v(, sin у. = 0.28-0J 45 = 0,125 м/с;
угловую скорость качания звена ОС
°’2 = = °-067 рял/с;
переносную скорость точки К (центра масс звена шток—поршень)
2 2
vcK ®2(°Ю. Принимаем ОК = (ОС) = —- 2,7 = 1,81 м;
О о
<-к= 0,067-1,81 = с.121 м/с;
относит ельную скорость то гкн Л'
ьгх vrc — с ,2s м/с;
абсолютную скорость точки \
’'ц У^^еК + игК ~ У/Г( KI'Z 0?<;Т^ , 0,174 м/с.
3. Определяем суммарную приведенную массу по формуле (II)
С достаточной для подобных мсхапп.чмоп т< чност ю можно г put ять что
[./„ -I- т, (ПЛ)-] l,01mi (ZV )2 =. 1,( 1 - у
[J,, 4 m, (0/’)=] л t,2m3 (OP)2 1.2 (0Г)‘<
Тогда, счюая по условию задами с’Пр -- и пренебрегая влиянием пели-
чины .7 д’, получаем
I 1.2 G/’-(O"V . Г1' f J G\ ' i
Л I , 1 1 ’.4
93
или
+ 1,2
640
9,81
• 0,62
0,067 \2 ,300
1 / + 9,81
2
= 2141 4-73 = 2214 кг.
Пример 3. Используя данные предыдущего примера, для того же рабочего
оборудования фронтального погрузчика определим суммарную силу тяжести,
приведенную к центру рабочего органа (ковша) — к точке А.
Решение. 1. Вычисляем значения углов аг, а, у, <р
а£ = 180е — (₽ + ц)= 180 —(11 +26,5)= 142,5°;
принимая угол а0 = 8°, находим
а = аг+а0 = 142,5 + 8 = 150,5°;
у=Р—а0= 11—8 = 3°;
ф = arctg —— — arctg- д'*— = arctg 0,968 = 44°,
ty и > 1
2. Определяем скорости точек В и Р.
vB = u>1(DB) =0,333-1,23 = 0,41 м/с;
Ор = w2 (ОР) = 0,667-0,6 = 0,04 м/с.
3. Находим су имарную приведенную силу тяжести рабочего оборудования:
бсрд = 0 + ов^4-Ск_£211£_^^ G
р sin а оА 'sin а ид
или
Опр Л = 21000 + 4200 + 300 +
1 о ill lUUfU 1
+ 640 —= 3905 11.
sin 150,5 I
Пример 4 Для рабочего оборудования погрузчика (см. рис. 22) определим
суммарную жесткость, приведенную к точке .4, принимая, что стрела представ-
ляет собой балку постоянного сечения коробчатой прямоугольной формы с раз-
мерами сторон h ~ 0,3 м, b 0.2 м и толщиной стенок 6 = 0,01 м. Модуль
упругости материала стрелы Е 2,1-10s На. Диаметр гидроцилиндров подъема
стрелы (2 шт.) Иц = 125 мм; толщина стенок гидроцилипдров 6Ц = 15 мм. Модули
упругости рабочей жидкости £ж = 1,25-10° 17а, шлангов £ш = 0,11-10° Па;
диаметр шлангов dv- — 0,03 м, их длина f„, 2 м.
Решение. I Определяем момент инерции сечения стрелы
, <0.2-2-0.040.011 2A01 (0.2_2.ОД1) / M wiy _ ,
6 \ 2 2 /
2. Вычисляем жесткость стрелы рабочего оборудования при £>А = 3 м;
DC = 0.85 м:
3£/ 3EJ 3-2,1-10М,24-Ю-1 , оо ,г,
С-~ L(L а)5 (£М) (£М — ПС)2 3(3 —0,85)2 — 110 кН/м.
94
3. Находим жесткость системы гидропривода стрелы по формуле (4), при-
нимая диаметр поршня Da — — 2ёц = 95 мм, ход поршня sn = 0,7 м. Тогда
для одного гидр оцнл индра подъема стрелы
°'785Dn__________= .____________0,785-О,G952_______________
Q l,02sr / дш \2 /ш ~ 1,02-0,7 / 0,03 \2 9
ЕУЛ ’ \Dn) Ет 1,25-10° f \ 0,095 ) 0,11 -10е
= 2,631-10° кН/м;
для двух гидроцилиндров
У] с/= 2сх — 2-2,631 • 103 = 5,262-103 кН/м.
4, Определяем жесткость гидропривода рабочего оборудования, приведен-
ную к точке А,
сгА = с.; sin2 (at + ₽) = 2 ci (S УSin* (a‘‘ ’ ' P)-
Из примеров Зи2й(= 142,5°; g = 11°. Тогда
с1Л = 5,262-103
/ 0 85 \ 2
) sin2 (142,5+И) =-0,02-10* кН/м.
5. Определяем суммарную приведенную жесткость рабочего оборудования
с л — С*С14
прЛ~ + С
1,88-0,02-10°
(1,88 + 0,02) 10*
19,874 кН/м.
По схемам, показанным па рис. 22, можно проследить, как
упрощаются расчетные (эквивалентные) схемы механизма путем
приведения соответствующих параметров. Допустим, первона-
чальная эквивалентная схема рассматриваемого механизма имеет
вид, изображенный па рис. 22, а (здесь тл — масса стрелы и
груза, приведенная к точке А, а тс — масса гидропривода
стрелы).
Приведя по известному правилу масс)’ тс к точке А и про-
суммировав ее с массой тА, получим суммарную приведенную
массу тЕр д (рис. 22, б). Приведя к той же точке жесткость с1(
придем к эквивалентной схеме, изображенной на рис. 22, б.
Схему, изображенную на рис. 22. в, можно получить, если
массу тА привести к точке С и здесь сложить ее с массой тс
(тогда эти массы заменяются суммарной приведенной массой тср <•)
и, кроме того, к той же точке привести жесткость с2.
Но и схемы, изображенные на рис. 22, б, в. можно привести
к еще более простым, просуммировав но известным правилам
жесткость с2 и с1А (как это сделано в примере) и жесткости с2Г
и Oj. В результате мы придем к простым одпомассовым системам
с одной степенью свободы, которые легко рассчитываются анали-
тически.
95
2.6. РЕШЕНИЕ ДИНАМИЧЕСКИХ ЗАДАЧ
С ИСПОЛЬЗОВАНИЕМ МЕТОДА КИНЕТОСТАТИКИ
2.6.1. Общий порядок решения задач
Методом кинетостатики решают обычно только пря-
мые задачи динамики, в которых по известному закону движения
определяют неизвестные силы. В этом случае заданными являются,
массы или моменты инерции объекта или отдельных его частей,
их ускорения, рабочие сопротивления. При расчете силы инерции
составных элементов объекта, например движущейся машины,
обычно не определяют, а заменяют их общей силой инерции, при-
ложенной к центру масс машины с координатами хс, ус и гс:
— ~—> Ус —-«— > *с — ~~
т т т
гр$ mi — масса 1-0 части машины; х(, у{, — координаты центра масс i-Я части
машины; т — суммарная или общая масса машины.
Задачи решают методом кинетостатики в следующей последо-
вательности:
1) выбирают систему координат;
2) на построенной схеме объекта отмечают задаваемые силы,
направления и точки приложения которых должны соответство-
вать реальному случаю;
3) применив принцип освобождаемое™ от связей, заменяют
их соответствующими реакциями связей;
4) определяют силы инерции или общую силу инерции, умно-
жая массу объекта на его ускорение, и добавляют эти силы (или
общую силу инерции) к силам, изображенным на схеме (отме-
тим еще раз, что это фиктивные силы, с применением которых
связаны формальные методы решения задачи, лежащие в основе
метода кинетостатики);
5) составляют уравнения равновесия для каждой части объекта
или для объекта в целом;
6) составленную систему уравнений решают относительно
искомых величин, обычно динамических реакций, воздействую-
щих на объект.
2.6.2 Определение нормальных реакций на колесах
дорожно-строительных машин
при неус танов ившемс я движении
Необходимость в определении нормальных реакций па
колесах машины возникает при решении многих прикладных за-
дач: при исследовании нагружения элементов ходовой части ма-
шин и последующем их расчете на прочность; при исследовании
тяговых свойств машин и расчете их гяговых характеристик; при
96
I
Рис. 24, Расчетные схемы:
а — тягача, работающего с прицелом; б — бульдозера; в — автсрреЛдерг; г — самоход-
ного скрепера
исследовании и расчете устойчивости машин против опрокидыва-
пия и их путевой (курсовой) устойчивости и т п.
Рассмотрим несколько примеров, характерных для дорожно-
строительных машин.
Определение нормальных реакций на колесах тягача, работаю-
щего с прицепом. На рис. 24, а показана расчетная схема тягача,
движущегося на подъем с некоторым положительным ускорением
(с разгоном). На схеме прицеп условно отброшен и его действие
на тягач заменено реакцией связи Ркр — усилием на крюке
тягача. В центре масс гягача приложена его сила тяжести G;
сила G, как и сила Р,!р разложена на составляющие, нормальные
к поверхности качения и продольные, параллельные продольной
оси машины и поверхности качения. К центру масс машины при-
ложена также сила инерции Р„, направленная против ускорения,
в данном примере —- против движения машины. Со стороны по-
верхности качения на колеса машины действуют нормальные ре-
акции /?и1 и /?к2, которые, как отмечалось в п. 2.2.2, смещаются
от вертикальной оси колес на плечо р, равное коэффициенту тре-
ния качения, а также касательные реакции Тх и Ткъ
Положение координатных осей выберем таким образом, чтобы
ось ОХ, лежащая в плоскости качения, проходила через точки А
и В контакта передних и задних колес тягача с поверхностью
качения.
4 Гоберман Л. А.
97
Такое расположение координатных осей позволит в дальней-
шем из выражений, определяющих нормальные реакции поверх-
ности качения, исключить касательные реакции Тк и ТК2. Э^ого же
принципа будем придерживаться и при рассмотрении других
примеров, что позволит не включать в расчетные схемы касатель-
ные реакции поверхности качения на колесах машины.
Для определения суммарной нормальной реакции на передних
колесах тягача составим уравнение моментов всех сил относи-
тельно оси, проходящей через гочку В, лежащей в плоскости
качения и перпендикулярной оси ОХ:
XIр 0; RK1IВ —1 уi) р-ир2 — Ol2 cos сс —Gh^ sin сс —
Ч- BahL ]- Вкц^кр COS у |- /^кр^кр sin у — 0,
где величины L, l2. he, hK$, /Кр покачаны па рис. 24, а.
В этом уравнении
RkiPi Ч- Rn2p2 П Ч- XI— Mf.
где. Л1ц и Л1/2 — моменты сопротивления т ачению передних и задних колес
тягача; Mf — суммарный момент сопротивления ка тению колес.
С учетом этого выражения уравнение моментов запишется
так:
7?kiL — G/2 cos а Д Ghc sin a -I- PKhc Ч~
Ч ЛдДсову |- Рвр/К1 sin у I- М, = 0,
откуда
_ G (!2 cos а - Лс sin а) - Pahc PKp(ZKpsiny4 ftKpcosy) - Mf
^К1 =' ' 1 -------------------------------------------'
Для определения суммарной вертикальной peai ции па задних
колесах тягача ВК2 составим уравнение моментов относительно
точки А:
2 XIА = 0, Rh2(L — Ра) — RkiPi — G/Xcostz — GArsin а —
Bj^h, Р^рккр cos у BKp (L 4 /кр) sin у = 0.
Отсюда, заменяя (RKZp2 4- RkiPi) через Mt, находим
G (lt cos п. 4- ftc sin а) -р Pnhc + FKp [(L 4 lvx>) sin у р hK , cos у] 4 Mf
- I--------------------------•
И i полученных выражений следует, что
Rki Ч -Bn = Gens а 4- PKpsiny.
Определение нормальных реакций на ко тесах бульдо ера.
На рис. 24, б показана схема сил, действующих при движении
бульдозера вверх по > аклонной плоскости в процессе копания
грунта. На схеме указаны /?ь и Rr — нормальная и продольная
составляющие сопротивления копачию (считаем, что силы Rv
98
и Rx приложены к нижней кромке ножа отвала); составляющие
силы тяжести машины G cos а и G sin а; сила инерции Pt и нор-
мальные реакции Pvt и RM на передних и задних колесах 11ашины.
Составим уравнение моментов сил, действующих на машину
относительно точки В,
У Мв — 0; RK1 (£ -г- р) Д- /?к2р — Gl2 cos а + Ghc sina
Ч Pah-C — Р-хУо — хо) = О’
Заменяя, как и в предыдущем примере, сумму величин /?к,р
и RK2p через суммарный момент сопротивления качению Мг,
найдем из уравнения моментов величину Ria:
С (I2 cos а. — hG sin a) — PBhe + Rxy0 + jPs (L — x0) — М/
^ki= -----------------_____ ____________,
Для определения реакции RK2 составим уравнение моментов
относительно точки .4
У 44 д = 0; /?к2(£ — Р) — RKiP — бДсова —
— Ghc sin a — Pshc - - Rxy0 ^-RuxQ^ 0-
Заменяя в этом уравнении RK1p и RKZp через Mj находим
G </! cos a + he sin a) 4 Puhc — RxCc — ДЛо - - Mj
R^--------------------1————————•
Из полученных выражений следует, что
Rn -1 Rk2 = G cos a. I- Ru.
Определение нормальных реакций на колесах автогрей цера.
На рис. 24, а приведена расчетная схема для опредес ения нор-
мальных реакций на колесах автогрейдера, движущегося по i о
ризонтальной плоскости с ускорением. Допускается, что состав-
ляющие силы сопротивления капанию Rx 1: Rp действуют посере-
дине ширины отвала и ппиложены к крайней нижней его точке.
В цен гре масс автогрейдера приложена сила тя жести G и в г 'ри-
зонтальном направлении сила инерции Ра. На передних колесах
действует нормальная реакция поверхности качения RK1, а на
задних колесах 6aj ансирной тележки автогрейдера — нормаль-
ные реакции R'Ki и
4 1я определения нормальной реакции иг передних колесах
явтогрейперя сос гавим уравнение моментов сп (сительно точ-
ки F — проекции точки качания Р ’лансирной тг лежки на по-
верхность качения
У 44р = 0; RK1 (L 4- р) — GL 1 j r*i г4
4 /?к2 («! 4 р) Rk2 (a2 — р) — h ..i „ + R, >1 — л0) = 0
4*
99
или
R«iR — Glz -J- PKhc -f Rxy0 4~ Rv (L — *o) 4-
4 (KkI 4* Rk2 4- Rk2) P 4" (Z?K2aI — Rk2^i) ~ 0.
В этом уравнении
(J?Kl 4- Rk2 4~ Rxi) p — Mf, (Rk2^1 — /?к2Ог) = 0.
Последнее равенство вытекает из очевидного условия равно-
весия балансирной тележки задних колес относительно оси ее
качания (точки 02) в продольной вертикальной плоскости.
Таким образом, уравнение моментов можно записать так:
tfK1L - GZ2 4- Pahc - Rxy0 + Ry (L - x0) 4- Mf -= 0,
откуда
„ _ Gla — P(I/i0 + Rxy0 — Ry(L — x0) — Mf
----------------------L----------------.
Найдем равнодействующую реакций на задних колесах ма-
шины 7?„г = /?кз 4- Rk2, которая воспринимается шарниром ба-
лансирной тележки. Для этого составим уравнение моментов
относительно точки А
У । МА — 0; Т?к2 (R о2 р) 4* Rk2 (L — сц — р) —
— ^4 — RЛ? Т Ryxo 4" Rxyo — RwiP = 0
или
(Z?k2 “Г L {Rk2^2 — Rk2&i) — Gl\ 4 Rn^C 4“ Ryx0 4“ RxUo ~
— (Rk2 4" 4" Z?Kl) p = 0.
После преобразований получим
RiaL Glt J- PBhc 4- RgX0 Rxy0 — Mf = 0,
откуда
P ____ Gli h Pyxo — Rxlfn + Mf
' ———i - -
Реакции R^2 и R'K2 теперь нетрудно найти из условия равнове-
сия задней балансирной тележки относительно точки 02
Rk2 (Oi ( Д2) = RksO2', Rk2 4 O2) — Rk2Qi,
откуда
Дк2 - RK2 a al— ; Р'к2 = /?K2 •
Gl ~Ta2 al “h ^2
Из полученных выражений следует, что
Rki 1 Z?k2 ~~ G — Ru.
Определение нормальных реакций на колесах самоходного
скрепера- На рис. 24, г приведена расчетная схема для определе-
100
ния нормальных реакций 7?К1 и /?к2 соответственно на колесах
тягача и ковша. К раме ковша приложена толкающая сила Тт,
сообщаемая скреперу трактором-толкачом. На схеме также обо-
значены G — общая сила тяжести машины (она представлена
в виде нормальной и продольной составляющих G cos а и Gsina)
и Рв — сила инерции. К режущей кромке ножа ковша приложены
составляющие сопротивления копанию — силы Rx и Ry.
Составим уравнение моментов относительно точки В:
£Л1в = 0; ЯН1(Ь р.) J-/?K2p — G (L —4) cos а 4-
4- GHq sin а ]- РBhc — RxPo — RV(L — А’о) — ТTh0 — О»
Заменяя (RK1 4- /?к2) Р через М/, находим
G [(£. — /1) cos а — Лд sin aj — PBhc + Rxy0 + Ry (б — x0) -f- Trh0— Mf
R«i =--------------- i •
Для определения реакции Дв2 составим уравнение моментов
относительно точки Д:
£ М А — 0; RBi (L — р.) — — Gli cos а —
— Ghc sin а — P„hc 4- Rxy0 — Ryxn 4- 7T/i0 = CL
Отсюда
G (Ztcosa -I- he sin a) + РиЛд — Rxyc -t- Ryxa — T^ + Mg
= —————————£ ———————— .
Из полученных выражений следует, что
Rki + Яв2 — G cos а Ry.
Определение нормальных реакций на колесах фронтального
погрузчика. Рассмотрим ускоренное движение на подъем фрон-
тального погрузчика (рис. 25, а). В центре масс базового шасси
приложена его сила тяжести, представленная на схеме двумя
составляющими — нормальной GT cos а и параллельной опорной
плоскости GT sin а; в том же центре масс приложена сила инер-
ции Ри. т, направленная при разгоне против движения машины.
В центре ковша приложены приведенная сила тяжести рабочего
оборудования (ее составляющие Go cos а и Go sin а) и сила инер-
ции Ри.о.
Для определения нормальных реакций и /?к2 на передних
и задних колесах погрузчика составим уравнения моментов
относительно точек А и В:
У] Мл = 0, Д„г (В р) iP' G-fly cos a
— GThT sin a 4- G0x0 cos a Goyo sin a — PB, Thv — Pa_ By0 — 0;
>; M В = 0; RK1 (L p) 4- — Grlz cos a
Goxo cos a 4 Gxh.t sin a. f G0y0 sin a Pv. T hT Р„. пУо 0
101
Рис. 25. Расчетная схема фронтального погрузчика;
а ЛРИ движении на подъем с ускорением: б — при движении под уклон с торможением.
в “Г пеРсРаспРеДеление нормальных реакций на колесах при изменении положения
рабочего оборудования машины
Из этих уравнений находим
р _ (°tG — Goxo) cos а + (GrhT + Gopo) sin а + Ри ThT + Ри. ои„ + Mf ,
Кк2- г---------------------------------,
(GTk 4~ GqXq) cns и — (GTftT 4~ GqPq) sin а — Ри, ThT — P„, — Mf
Воспользовавшись расчетной схемой, показанной на рис. 25, б,
можно аналогичным образом найти нормальные реакции на коле-
сах того же погрузчика при его движении под уклон с торможе-
нием.
102
Нетрудно также убедиться в том, что при изменении положе-
ния рабочего оборудования и, следовательно, положения общего
центра масс машины, соответственно будут перераспределяться
и нормальные реакции на ее передних и задних колесах
(рис. 25, в).
2,6.3. Примеры расчета
Пример 1. Определить нормальные динамические реакции на коле-
сах автоцистерны (или, что то же, нормальные нагрузки га задний мост и перед-
нюю ось машины) при ее движении с ускорением j = 2,5 м/с2 (рис. 26).
Общая масса автоцистерны tn — 10 026,5 кг; координаты центра масс хс =
= 2,84 м; ус— 1.26 м; база колесного хода L = 3,8 м. Для упрощения расчетов
сопротивление качению ие учитываем.
Решение. 1. Определяем силу инерции
Ли = м/ = >0 026,5-2,5 = 25 066 Н.
2. Из уравнения моментов действующих сил относительно точек А и В
находим
Схс + Рнус 10026,5-9.81-2,84 + 25066-1,26 о, сол
Лк, =-------т----=----------------------------
n G(L — xc) —- Рпус
-----——-
10026,5-9,81 (3,8 — 2,84) —25 066-1,26
=----------------31-----------------16537 Н.
Полученные результаты сравним с данными примера 1, рассмотренного
в п. 2.4.2, в котором определялись нормальные нагрузки на огоры той же авто-
цистерны, находящейся в статическом положении (Рн1 — 24 849 II Лк2 =
= 73 511 11). Как видим, при неуста повившемся движении машины с некоторым
положительным ускорением происходит разгрузка передних и догрузка задних
колес машины. Очевидно, что при замедленном движении, Hanpi мер, при тормо-
жении машины, получается обратная картина — нормальная нагрузка на перед-
ние колеса увеличится, я на задние колеса — уменьшится.
Пример 2. Определим нормальные реакции па колесах автогрейдера, дви-
жущегося с ускорением / = 1 м/с при копании грунта. Сопротивление качению
колес не учитываем.
Исходные данные- сила тяжести автогрейдера G~ 120 000 Н — 120 кН;
база ходовой части L — 5,8 м (см. рис, 24, в); координаты центра масс: /2 =
1,8 м, /г = L — 12— 4 м, he = 1,2 м. заглубление отвала уп — 0,2 м; хе =
= 3,4 м, продольная составляющая сопротивления копанию Rx 50 кН; нор-
мальная составляющая сопротивления копанию Ry = 16,25 кН; плечи балансир-
ной тележки а — = а2— 0.8 м.
Рис. 26. Расчетная схема для определения
нормальных реакций па колесах автоци-
стерны
Решение. I. Определяем силу инерции
2. Находим нормальные реакции на передних колесах:
n 6Z2 + Р ahc -г RxPo — Ru(L — xo)
«К1 = — ——J =
120-1,8—12,23-1,2 + 50-0,2— 16,25(5,8—3,4)
5,0
3. Определяем суммарную нормальную реакцию на задних колесах
Gli + Р Bh<3 — Rx9v — RyX0
Rm = i =
120-4 + 12,23-1,2 — 50 0,2— 16,25-3,4 ллоп ,,
—----------------=—5---------------= 74,03оУ КН.
5 ,о
Проверка:
+ Rkz — G — Ry",
Rki + Rkz = 29,711 + 74,0389 = 103.75 кН;
G — Rv = 120 - 16,25 = 103,75 кН.
4. Рассчитываем нормальные реакции на задних колесах:
*к2 = <2 = ^2 = -2“ —4~89 = 37’°194 КН-
2.7. РЕШЕНИЕ ДИНАМИЧЕСКИХ ЗАДАЧ
С ИСПОЛЬЗОВАНИЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
ДВИЖЕНИЯ
2.7.1, Общий порядок решения задач
Для описания движения механических систем и самых
разнообразных физических явлений — электрических, электро-
магнитных, гидравлических и других — широко применяются мо-
дели, основанные на построении дифференциальных уравнений.
Из механики известно, что перемещения объекта, представляе-
мого в виде некоторой механической системы, зависят с одной сто-
роны от заданных ему движений, а с другой — от ограничений,
которые накладывают на его перемещения связи. Число возмож-
ных для данного объекта перемещений определяет число степеней
его свободы.
Так, для плоского предмета, свободного от связей, препятствую-
щих его движению в пределах координатной плоскости X0Y,
допускается три степени свободы: перемещение в направлении
осей ОХ и 0Y, определяемые соответственно параметрами х
и у, и поворот в этой плоскости на некоторый угол 0 к какой-
либо из координатных осей Параметры х, у и 0 не зависят ври этом
друг от друга, так как при перемещении предмета в любое положе-
104
пие на плоскости не обязательно использовать все три степени
свободы сразу, это можно сделать, совершая по очереди в любом
порядке каждое из указанных перемещений. Например, одно и
то же заданное положение предмета может быть достигнуто пу-
тем последовательного его перемещения вначале в направлении
оси ОХ, затем в направлении оси OY и, наконец, поворотом его
на угол 0; но можно вначале повернуть предмет в плоскости XOY
на угол 6, затем переместить его в направлении оси OY, а потом —
в направлении оси ОХ и т. д.
Такие независимые друг от друга параметры, однозначно оп-
ределяющие в каждый данный момент времени положение пред-
мета, называются обобщенными координатами х, у, 0, а их пер-
вые и вторые производные по времени — соответственно обобщен-
ными скоростями и ускорениями. Силы, вызывающие движение
предмета на соответствующих обобщенных перемещениях, назы-
ваются обобщенными, причем понятие «обобщенная сила» может
относиться и к силе и к моменту В дифференциальных уравне-
ниях движения обобщенные силы обычно стоят ь их правых ча-
стях.
Число независимых обобщенных координат равно числу сте-
пеней свободы данной системы. В свою очередь каждое движение
или каждая степень свободы системы описывается своим диффе-
ренциальным уравнением. Поэтому число уравнений, составляю-
щих систему дифференциальных уравнений, равно числу обоб-
щенных координат.
Рассмотрим общую последовательность решения задач с ис-
пользованием дифференциальных уравнений движения, состав-
ленных па основе принципа Даламбера:
1) выбирают способ изображения расчетной схемы; при исполь-
зовании дифференциальных уравнений движения чаще всего при-
бегают к условной форме изображения расчетных схем, построен-
ных в виде эквивалентных схем. В этом случае с учетом условий
задачи определяют сначала приведенные значения соответствую-
щих динамических параметров, после чего в характерном для
эквивалентных схем виде изображают расчетную схему, отмечая
на ней задаваемые силы, приведенные к соответствующим точкам;
2) выбирают систему отсчета и обобщенные, координаты, соот-
ветствующие исследуемым перемещениям системы;
3) отбросив связи, налагаемые на систему, заменяют их си лами
реакций связей типа сил упругости или сил трения,
4) к силам, изображенным на схеме, добавляют силы инерции
(при вращательном движении — моменты от сил инерции), рав-
ные произведению массы (момента инерции) па ускорение по при-
нятым обобщенным перемещениям; ускорения записывают в диф-
ференциальной форме как вторые производные обобщенных ко-
ординат по времени;
5) по построенной таким образом схеме составляют дифферен-
циальные уравнения движения;
1С5
6) полученные дифференциальные уравнения движения, если
их можно решить аналитически, приводят к виду, удобному для
интегрирования; в противном случае их приводят к «машинному
виду» для последующего решения на ЭВМ;
7) по результатам решения дифференциальных уравнений оп-
ределяют искомую величину.
Решение прямой задачи динамики сводится к дифференциро-
ванию общего решения и нахождению второй производной обоб-
щенного перемещения но времени (т. е. обобщенного ускорения).
Для определения искомой динамической силы эту производную
умножают на массу т перемещаемого объекта или массу его эле-
мента и складывают со статическим сопротивлением. В задачах
с упругими связями динамическое усилие представляет собой
силу упругости, которая определяется путем умножения дефор-
мации (перемещения) упругой связи, найденной из решения
дифференциального уравнения, на жесткость этой связи.
Обратные задачи динамики решают в такой последовательности:
1) изображают на схеме заданные силы и реакции связей,
прикладывая их к соответствующим точкам; при использовании
эквивалентной схемы предварительно определяют приведенные
динамические параметры, в том числе и силы;
2) выбирают систему отсчета;
3) составляют дифференциальные уравнения движения;
4) интегрируют дифференциальные уравнения движения, ис-
пользуя принятые или заданные начальные условия движения
объекта.
2.7.2. Составление дифференциальных уравнений
движения
Одномассовая система с упругой связью с одной сте-
пенью свободы. На рис. 27 изображены схемы одномассовых си-
стем с упругой связью: на рис. 27, а — система с поступательно
движущейся массой т, к которой приложена движущая сила Рр
и сила статического сопротивления Рс; на рис. 27, б— система
с вращающейся массой, имеющей момент инерции J относительно
оси вращения, на которую действует движущий момент /Ир.
Мысленно разрезая упругие связи и заменяя их действие на
массы в одном случае силой упругости F = сх, а в другом случае
моментом от сил упругости при скручивании МР = с'(р (где х
и <р — обобщенные перемещения), и добавляя к ним соответст-
венно силу тх (рис. 27, а) и момент /ф (рис. 27, б), составляем
по полученным таким образом расчетным схемам дифференциаль-
ные уравнения движения:
для системы, изображенной на рис. 27, а,
тх -I сх = Рр — Рс = РизС;
для системы, показанной на рис. 27, б,
Уф -|-с'<р — Мр.
106
Рис. 27. Эквивалентные
схемы одномассовых си-
стем:
а — с поступательно дви-
жущейся массой; б —-с вра-
щающейся массой
Стоящие в правых частях этих уравнений сила и момент (они
называются по аналогии с обобщенными параметрами обобщен-
ными силами) в общем случае могут зависеть от каких-то пере-
менных, например, являться функциями времени Lb этом случае
их записывают в виде Рр (t) или Л1Р (I) ] Тогда в дифференциаль-
ных уравнениях будут присутствовать две переменные (х и t
либо <р и t), одна из которых является независимой (вре-
мя (), а другая (х или ф) функцией от t—зависимой перемен-
ной .
Дифференциальные уравнения с одной независимой перемен-
ной называются обыкновенными дифференциальными уравне-
ниями.
Полученные уравнения характеризуются, кроме того, тем, что
входящие в них зависимые переменные и их производные линей-
ные, т. е. первой степени, а порядок высших производных (х
и ф) —• второй; коэффициенты, стоящие при переменных х и ф —
постоянные. Наконец, правые части этих уравнений не равны
нулю. Такие дифференциальные уравнения относятся к классу
обыкновенных линейных уравнений второго порядка с постоян-
ными коэффициентами с последним (в правой части) членом;
уравнения с правой частью называют также неоднородными, а
уравнения, у которых правая часть (обобщенные силы) равна
пулю — однородными.
Следует отметить, что линейные дифференциальные уравнения
второго порядка играют в технике особенно важную роль
Двухмассовая система с упругой связью с одной степенью
свободы. Весьма часто встречаются динамические системы, в ко-
торых хотя и учитываются две массы, но в силу тех или иных осо-
бенностей в исследуемый отрезок времени они псреме цаютСя
вместе как одно целое и поэтому система имеет одну степень сво-
боды. Примером такой системы может служить груз некоторой
массой /п0, который опускается или свободно падает на подрес-
соренную платформу массой т (рис. 28, а) Исследуем движение
данной системы после соприкосновения масс т0 и т.
10'
(то+гп)д
1...> 1 1 i,
К С д
а) о
Рис. 28. Эквивалентная схема для
определения динамической нагруз-
ки, возникающей;
а —* при падении груза на подрессорен-
ную платформу; б — при плавной уста-
новке груза иа платформу
Отбрасывая упругую связь и заменяя ее силой упругости
(рис. 28, б) F ~ сх (где с — жесткость упругой связи, х — пере-
мещение, соответствующее деформации упругой связи), и добав-
ляя к силам тяжести (гл,, 4~ т) g и реакциям связи силу инерции
(/п0 + т) х, получим следующее уравнение движения
(/По 4 т) х +- сх = (т,, 4- tn) g.
Разделив обе части этого уравнения на (m0 4- т), приводим
его к виду, удобному для интегрирования,
х 4- k2x = g,
где fe2 = с/(тп |- т).
Общее решение однородного уравнения этого типа
Хо = Сл sin kt 4- С2 cos kt.
Частное решение ищем в виде х = А; тогда х = х — 0. Под-
ставляя значения х и х в исходное дифференциальное уравнение,
находим
k2A = g,
откуда
А = х = g/k2 = (то 4- т) g/c.
При этом общее решение принимает вид
х — х0 4- х = sin kt 4- С2 cos kt 4-
F (mv + rn) g/o
и соответственно
x = Crk cos kt — C2k sin kt.
Рассмотрим два случая:
1) плавное опускание груза на платформу, когда можно при-
нять, что в момент касания груза платформы ее скорость еще
равна нулю, т. е. х = 0, а деформация упругого звена (рессор)
равна его статической деформации, т. е. х — ingle,
2) груз свободно падает на платформу с некоторой скоро-
стью х = V.
Оба эти случая движения системы описываются одним и тем же
дифференциальным уравнением, которое мы только что получили,
JOfi
но начальные условия движения системы, для которых должно
решаться это уравнение, будут разными.
Для первого случая: при t = 0, х = mglc, х — 0. Подставляя
эти условия в общее решение дифференциального уравнения и
в производную этого уравнения по времени, получаем:
mg _ £ , (mn + ffi)g .
с 2 с ’
0 = Cyk.
Решая эти уравнения, находим постоянные интегрирования
Сг и С2:
Су — 0; С2 — m^glc.
Тогда общее решение уравнения запишем так:
х = 2^L(i _costt) + (OTa + m)g .
Сила упругости или динамическая сила, нагружающая уп-
ругое звено, F — сх или
F — mog (I — cos kt) 4 (mo + т) g- (64)
Максимальное значение сила F имеет при cos kt — —1:
/щах = 2/Tiog -I- (т ф m0) g. (65)
Как видим, для рассмотренного случая динамическая состав-
ляющая максимальной нагрузки равна удвоенной силе тяжести
опускающегося груза.
Рассмотрим второй случай. Начальные условия для него имеют
вид: при t — 0 х = mg/c, х = v. Подставляя эти значения х
и X в общее решение уравнения и производную этого уравнения
по времени, получаем
v = Cyk.
откуда Су — v/k; С2 = —m^glc. Тогда общее решение имеет
вид
X = -у- sin kt + ~(1 — cos kt) 4- .
При этом сила F — сх будет равна
F = sin kt щ0£(1 cosA.7) -| mg. (66)
Максимальное значение эта сила получает при sin kt = 1,
cos kt — 0:
109
Рис. 29. Эквивалентные схемы систем:
с — двухмассовой с упругой связью: 6 — двухмассовой с упругой связью и демпфирую-
щим сопротивлением’ в — трехмассовой с упругими связями
Лпах = cv/k + mug + mg
ИЛИ
f max — о yfc (m.o -J- m) -j- (m0 -J- m) g. (67)
Двух- и трехмассовые системы с упругой связью с двумя и
тремя степенями свободы. На рис. 29, а показана эквивалентная
схема системы, состоящей из двух масс т, и /п2, связанных между
собой упругой связью с жесткостью с. На ведущую массу
действует сила Рр, па ведомую т2 — сила сопротивления Рс.
Мысленно разрезав упругую связь, заменим ограничения,
налагаемые этой связью на массы, силами упругости F. В каче-
стве обобщенных координат для первой массы принято переме-
щение хъ а для второй массы — перемещение х2.
В соответствии с принципом Даламбера, который применяем
для составления дифференциальных уравнений движения, к за-
даваемым силам Рр и Рс и реакциям связей F нужно добавить
силы тгхх и т2х2, приложив их соответственно к массам тг и т2,
после чего можно считать, что каждая из этих масс находится
НО
в покое, и рассмотреть условия их равновесия в предположении,
что обе массы никак не связаны между собой. Тогда получим си-
стему из двух дифференциальных уравнений, одно из которых
описывает движение массы гпА на обобщенном перемещении лу,
а другое — движение массы на обобщенном перемещении х2:
иц-Xi F = Рр ~ Ргзб | Рс> т.^х.з F — Рс.
Так как здесь сила упругости F = с (х, - х2), где (х± — х2)
есть деформация упругой связи, окончательно находим
r/Zj ху 4 с (х^ лу) Риаб -ф Рс< т~, х2 с (лу х2) Р^-
Преобразуем эту систему уравнений. Для этого первое урав-
нение умножим на т2, а второе па т1г а затем из первого уравне-
ния вычтем второе:
т^т., (ху — х2) -ф с {т1 ф m2) (ху — х2) = т2РкяС I ("к ф- тг) Рс-
Заменяв в этом выражении (лу — х») через новую переменную х
и соответственно (лу— х2) через х и разделив обе части уравнения
на tnLmz, придем к выражению
л с (сп1.-Ь т2) Ризб I mi 4" ni2 р
х т-----------х — ———- Г i с
1 т1т2 nii т1т2
или
х + k2x = + Ml 1 Рс, (68)
1 ГП1 1 т,Шг и
гдеЛ = 1/£<К+^. (69)
Решение однородного уравнения, т. е. дифференциального
уравнения (68) без правой части, имеет вид
х0 — Cj sin kt -ф С2 cos kt.
Частное решение ищем в виде
х — А и соответственно х — 0.
Подставляя эти значения х и х в уравнение (68) и решая его
относительно неизвестной А, находим
л РИзб . nil Ч~ т2 р tn2Pизб I Рс
~ ' tnim2lA с — с(т14та) с
Общее решение уравнения (68), равное сумме решения одно-
родного уравнения и частного решения, имеет вид
х _ С, sin И т C,eos« + + -Ф-
111
Находим также х = dxtdt
х — Cxk cos kt — C.2k sin kt.
Постоянные интегрирования определяем из начальных ус-
ловий, принимая, что при t = 0, х — Pte, х — 0. Подставляя эти
значения х и х в последние два уравнения, при / — 0 получим
Р С — _|___И36________| Р С .
с 2 ' с (nii -|- т2) ' с ’
О - Ctk,
откуда найдем Сх-0; С2 =.
Тогда общее решение уравнения (68) в окончательном виде
запишем так:
х = - (1 COS kt) + .
с [rnt + т2) ' 7 с
Динамическая нагрузка на упругое звено F — сх или
Г"Ч+"ЙГ(1 + (70)
Сила F имеет максимальное значение при cos kt — —1 или
kt — л:
+р- <7|>
Па рис. 29, б показана эквивалентная схема аналогичной двух-
массовой системы, но в которой учитывается действие дисси-
пативных сил при деформации упругой связи. Эти силы пли, иначе,
демпфирующие сопротивления определяются по формуле
R., - ₽гх --= рг (хх - х2), (72)
где Рг — коэффициент демпфирования.
Исходя из тех же правил составления уравнении движения,
для данной системы получим
«'i-i'i Ь (V (*i - Xi) с (хх — х.>) = Рр;
т2х2 — pf (хх х.,) — <;(.'! - х2) = — Рс.
Преобразуем эту систему уравнений, для чего первое уравне-
ние умножим на т2, второе па mlt и затем из первого уравнения
вычтем второе. Получим
ицт» (хх х2) pr (mx . т2) (хт — х2)
Ь с (mi 4“ (*i — х2) = гп2Рр -г т^Рр,
112
откуда
C (Wil { m~)
rriifn^
(Xi — x2)
m2Pv 4- mA
изд
Вводя новую переменную x хг - x3 (тогда x — хг — x2;
x = xt — x2), перепишем последнее выражение так:
j- | Pr (ffil — m2) . c (mt -h m2) __ m*pv + mipc . ™.
mtrn-z mtm2 mtm2
Введя обозначение
2n Pr (mi + mz) /74)
mLm2 ’ ’
окончательно получим
„ . , „ m.,P, + mtPc
x 4- 2nx 4- k2x ==---------——. (75)
1 mLm2
Уравнением (75) описываются вынужденные колебания системы,
возникающие под действием приложенных к ней внешних перемен-
ных сил (они стоят в правой части уравнения). При отсутствии
возмущающих сил уравнение (75) приводится к уравнению
х 4~ 2пх 4- k“x — 0, (76)
которым описываются затухающие собственные колебания си-
стемы, происходящие с частотой k.
На рис. 29, в приведена эквивалентная схема, состоящая из
трех масс: т0, т} и т.2; приведенная жесткость упругих звеньев
соответственно с, и с2. К ведущей массе т0 приложена приведен-
ная движущая сила Рр Рпзб (() 4- (Рю — Ргс)» на ведомые
массы m-t и ш2 действуют приведенные силы сопротивления Р1С
и Р-1С-
Задавая всем трем массам независимые друг от друга переме-
щения х0, хх и х2 и заменяя действие упругих связей силами упру-
гости сх (х0 — Xj) (между массами т0 и тг) и с2 (х0 — х2) (между
массами т0 и ms), добавляем к каждой массе инерционные силы —
соответственно тл и направленные против движущей
силы, и па основе полученной таким образом расчетной схемы,
составляем уравнение динамики для каждой массы системы:
щох(| 4- q (х0 — хх) 4- сч. (хс — х2) =
= Ризб (0 ! (^Ю Pie)?
m1xl — ct (хо -— хх) =- — Ptc;
m2xz — c2 (x0 - Xg) — —Рас.
113
Таким образом получили систему Дифференциальных уравне-
ний. описывающих движение системы, изображенной на
рис. 29, в.
2.7.3. Примеры расчета
Пример 1 Тяг 14 трогает с места прицеп массой т = 10 000 кг.
Какое тэлкаю нее у i.nie Ркр (на крюке прицсг aj нужно солдат ь, чтобы через
время t 6,4 с скор к ть ipnuena < о ггавляла г - 30 км/ч — Ь 33 м/с при силе
сопротивления движению прицеп? Ре = 5000 Н?
Решение. Представляем прицеп как одномассовую систему, на которую
де йствуут толкающая сила PKV- Движение такс й системы о 1и ывастс я уравнением
/71Х ~ р Кр Р £ .
Интегрируя это уравнение, находим скорость движения и— х:
( — Гс ^кр —
х = I ---------dt —----------t + С.
J т т
о
Постоянную интегрирования С находим из начальных условий: при t 0,
х — 0; тогда С = 0 и, следовательно,
Р кр Р с
v =----------/.
т
Из этого уравнения определяем искомое значение Ркр:
р, р = + рс = 10-0-^04--’— I- 5ПП0 18016 Н.
Ту же задачу можно решить, используя другие методы динамики» Пока-
жем это»
Па основании метода кинетостатики уравнение равновесия рассматриваемой
системы можно записать так:
Рдр — Рс — Ра == 0 или РКр —- Рс • — mj = 0»
Г--Ол V
Заменив в этом уравнении ускорение } отношением -------— == -у- (см.
табл. 10) и исключив из него величину Ркр, найдем
о । р
^кр---j г гс-
Для определения силы Ркр можно также воспользоваться теоремой об из-
менении кинетической энергии, которая в общем виде записывается так:
= Z А’
где Т и То — конечная и начальная кинети ческие энергии системы:
7 = у mvz; 7t,
£ 4 — сумма работ лс-"( вующи к на систему сил на заланиом перемещении s;
в рассматр и заемом примере £ А = (Ркр — РС1 s.
114
Так как принимаем, что начальная скорость движения прицепа ve — О
теорему об изменении кинетической энергии запишем г виде
— то2 = (Ркр —?c)s.
Согласно табл. 10 путь з= -?-=—- — —. По1 счалив это выражение s
в уравнение кинетической энергии и исключив из него величину Г г-,, найдем
п — *П|' I р
1 кр — I *0
►
Наконец, для решения задачи можно применить теорему об изменении коли
чества движения:
тп — mvD = Pf,
Для рассматриваемого примера = С, Р = Р,.--------Рс
тогда
mv = (Ркр - Р )f,
откуда
г _ £______к р
г кр с с
Пример 2. Определим максимальную нагрузку на ходовую часть грузовою
автомобиля (самосвала) при падении груза н. середину днища кузова с высоты
h — 0,5 м и плавном опускании груза в кузов мапп ны.
Исходные дс иные: масс > подрессорены ?й части машины т — 3609 кг; масса
груза гпо ~ 3000 ki ; суммарная жесткость рессор тереднего и заднего мост„в
машины Ср — 4316-I02 Н/м; суммарная радиальная жесткость шин колес ма-
шины сш “ 16 873- I02 Н/м
Решение. I. Определяем приведенную суммарную жесткость рессор и плевма
тических шин
сРсш __ сш
ср F СШ । | £ п
сг
1 6 873-1U2
“ “ 3
+ 4316-102
= 3437-102 Н/м.
2. Находим скорость св /бедного падения груза
а=/2^Л= 2-9,81-С,5 — 3 132 м/с.
3. Рассчитываем максимальную на узку на х довую часть машины (на
рессоры) при падений груза е₽ кч . Г.о формиле (0~) находим
£ттах = v j (т ф т„) 4 (т g == 3,132 J 3437 • 102 1 3600 -| 3000)
(3309 ; 3030)9,81 = 2-3 91 7 Н
4. Определяем максимальную нагрузку па рессорь. машины гри плавном
опускании груза По формуле (65) находим
famax = 2mog- -r (m + mc) g = 2-3000-9.81 4 (3600 4- 3000) 9.81 = 123 60811
5. Находим коэффициендз: динамичности (перегрузки) длч обоих случаев,
равные отношению м ксимальчой динамической > агруз' и к . и> еской.
дуг । енИЯ груза в кузов
ь- Рi.nax 3 917 „
Льдин - — , М
115
при плавном опускании груза в кузов
IV ____ ^"йтпах ______ 123 606 _ । _
Ладив- {m^mo)g ~ 64 746 ’
Как видим, при плавном опускании груза в кузов машины значительно сни-
жаются нагрузки на ее ходовую часть.
КОН Г РОЛЫ 1ЫЕ ВОПРОСЫ
К параграфу 2,1
I Что такое система, какие виды систем Вы знаете?
2. В чем отличие статических систем от динамических и детерминированных
от вероятностных? Приведите примеры таких систем
К параграф} 2.2
3. Что понимается под задаваемыми силами и силами реакций связей? Какие
силы относятся к внешним и какие к внутренним?
4. Приведите примеры движущих сил, сил полезного и вредного сопротив-
ления.
5. Что является причиной возникновения сил трения скольжения и сил
трения качения? Как определяются эти силы?
6. Что такое угол трения я как он связан с коэффициентом трения сколь-
жения?
7. Что такое упругость и какие материалы и элементы в машинах обладают
этим свойством? Что такое коэффициент жесткости?
8. Что Вы знаете о силах инерции, какова природа этих сил?
9 Дайте определение касательных и нормальных (центробежных) сил инер-
ции. При каком движении они возникают?
К параграфу 2.3
10. Как классифицируются грунты в зависимости от крупности частиц,
составляющих их твердую фазу?
11. Как определяется влажность грунтов?
12. Что такое объемная масса и плотность грунтов?
13. От каких основных факторов зависит сопротивляемость грунтов каса-
тельным сдвигам?
14. Что представляет собой угол естественного откоса грунтов и сыпучих
материалов?
15. Какие свойства грунтов определяют предел их прочности?
16. Расскажите о физической сущности процесса резания и копания грунтов.
17. Какие факторы влияют на качество уплотнения грунтов и покрытий?
Какие способы их уплотнения Вы знаете? Из какого условия определяется сила
удара трамбовочной плиты?
18. Какие способы дробления каменных материалов Bant известны?
К параграфу 2.4
19 В чем сущность принципа освобождаемое™ от связей? Как этот принцип
используется при построении расчетных схем и решении задач статики?
20. Какие условия аналитически выражаются уравнениями статики? Запи-
шите в общем виде уравнения статики в декартовых координатах.
21. Учитываются ли в уравнениях статики только задаваемые силы или,
кроме них, и силы реакций связей? Учитываются ли в уравнениях статики вну-
тренние силы?
116
К параграфу 2.Е
22. Какими основными свойствами обладает динамическая система? Какие
параметры характеризуют эти свойст ва?
23. Чем отличается эквивалентная схема динамической системы от других
видов расчетных схем? Как изображаются эквивалентные схемы?
24 Какие вопросы решаются в прямой и обратной задачах динамики?
25. В чем сущность принципа Даламбсра и при решении каких задач он
применяется?
26. Какую цель преследует приведение масс (моментов инерции, маховых
моментов), сил (моментов сил) и жесткостей при решении динамических задач?
27. Что такое система отсчета? Какие системы отсчета Вы знаете?
28. Приведите примеры абсолютного и относительного движения.
К параграфу 2.6
29. В чем отличие уравнений равновесия в статике от уравнений «равно
весил» в динамике, которые используются при кинетост атическом методе расчета?
30. Составьте расчетную схему колесной машины сбульдозернь м оборудовав
нием. движущуюся с некоторым ускорением, для которой известны сила тяжести,
приложенная в центре масс машины, а также горизонтальная и вертикал! пня
силы сопротивления, приложенные к отвалу бульдозера, и определите нормаль-
ные реакции на передних и задних колесах машины. Из тех же условий «предо
лите нормальные реакции па колесах фронтального погрузчика, автогрейдера
и скрепера.
К параграфу 2.7
31. Расскажите о порядке составления дифференциальных уравнений дви-
жения и покажите это на примере системы, состоящей из двух масс, соединенных
между собой упругой связью, если па о игу массу .действует движущая сила,
а к другой массе приложена сила сопротивления.
32. Что такое число степеней свободы системы? Изобразите системы с одной,
двумя и тремя степенями свободы. Как число степеней свободы связано с числом
дифференциальных уравнений, описывающих движение данной системы?
Г Л А В A 3
ОСНОВЫ ТЕОРИИ И РАСЧЕТА
РАБОЧЕГО ОБОРУДОВАНИЯ МАШИН
ЦИКЛИЧЕСКОГО ДЕЙСТВИЯ
3-1- КИНЕМАТИКА РАБОЧЕГО ОБОРУДОВАНИЯ
3.1.1 Кинематические схемы рабочего оборудования
и траектории движения рабочих органов
Рабочее оборудование машины, предназначенное для
выполнения определенных операций, состоит из рабочего органа,
непосредственно взаимодействующего с разрабатываемыми, пере-
гружаемыми или перемещаемыми материалами и грузами, испол-
нительных механизмов, обеспечивающих заданные движения ра-
бочего органа, и несущих конструкций, воспринимающих нагрузки
от рабочего органа и передающих их остову базовой машины.
Например, у одноковшовых погрузчиков рабочим органом яв-
ляется ковш, несущей конструкцией — стрела, исполнительными
механизмами—тяги, рычаги и другие элементы, управляющие
движениями ковша. У бульдозеров рабочим органом является
отвал, несущей конструкцией — толкающие брусья или толкаю-
щая рама, исполнительными механизмами — звенья, с помощью
которых отвалу сообщаются необходимые движения. В рабочем
оборудовании с гидравлическим приводом движущее усилие от
привода к соответствующим элементам рабочего оборудования
передается при помощи гидроцилиндров.
В зависимости от характера соединения жестких звеньев раз-
личают шарнирно-сочлененное и телескопическое рабочее обору-
дование. В первом соседние звенья соединены с помощью
оси (шарнира) и образуют вращательную кинематическую
пару; такие звенья могут поворачиваться друг относительно
друга на некоторый угол. В телескопическом оборудовании
одно звено относительно другого может перемещаться только
прямолинейно; два таких звена образуют поступательную
пару.
На рпс. 30, а—в показаны схемы механизмов подъема стрелы,
применяемые в гидравлических одноковшовых экскаваторах,
погрузчиках и самоходных кранах. В этих механизмах шток
гидроцнлиндра непосредственно без каких-либо промежуточных
звеньев соединен со стрелой. Такое же соединение с гндроцилнн-
дром имеют и рукояти рабочего оборудования одноковшовых
экскаваторов (рис. 30, а- е). В первом случае гидроцилиндр сооб-
щает движение стреле относительно остова машины, а во втором
случае сообщает вращательное движение рукояти относительно
стрелы.
118
Рис. 30. Схемы механизмов рабочего оборудования экскаваторов, погрузчиков
и кранов:
а~.о — изменения вылета стрелы одноковшовых экскаваторов погрузчиков и самоходных
(автомобильных) кранов; г—е —* поворота рукояти стрелового оборудования экскавато-
ров; яс—и •— поворота ковша экскаваторов; к—н — поворота ковша погрузчиков; о-—с —
подъема груза в изменения вылета стрелы кранов и экскаваторов
119
Большим разнообразием отличаются кинематические схемы
механизмов рабочих органов, управляющих поворотом ковша
относительно стрелы или рукояти. Приводные гидроцилиндры
в них могут воздействовать на ковш либо непосредственно, либо
сообщать ему движение через систему тяг и рычагов. Гидроци-
линдры устанавливают на стреле, рукояти (рис. 30, ж—и} либо
отдельно от них (рис. 30, к—н).
Па рис. 30, о—с показаны кинематические схемы рабочего
оборудования, применяемого на экскаваторах и самоходных
кранах. В этих механизмах подъем—опускание стрелы, а также
выдвижение секции телескопической стрелы (рис. 30, р), осуще-
ствляется при помощи гидроцилиндров, а подъем опускание
груза — при помощи канатной лебедки и полиспаста.
На рис. 31 показаны кинематические схемы рабочего оборудо-
вания бульдозеров. В общем случае механизмы рабочего обору-
дования бульдозеров позволяют поднимать и опускать отвал /
(рис. 31, а, б) вместе с толкающими брусьями 7 при выглубле-
нии и заглублении отвала в грунт, а также фиксировать положе-
ние толкающих брусьев или толкающей рамы; осуществлять пере-
кос отвала (рис. 31, г—ж), поворачивая его па некоторый угол
(до + 12°) в поперечной вертикальной плоскости; поворачивать
отвал в горизонтальной плоскости относительно толкающей рамы
в обе стороны на угол до + 25 ... 30° но отношению к продольной
оси машины; изменять угол наклона отвала в продольной верти-
кальной плоскости.
На рис. 31, а, б доказаны схемы механизмов подъема — опус-
кания отвала с помощью гидронилипдра 2, а на рис. 31,6 — схема
механизма поворота отвала в плане с помощью гидроцилипдров 6
и 7.
На рис. 31, г—е изображены различные схемы механизмов
перекоса отвала. Перекос отвала выполняется при выдвижении
штока гидроцплиндра 3, установленного па правом или левом
брусе рабочего оборудования; па противоположном брусе разме-
щается винтовой раскос 5, Так как передние концы толкающих
брусьев соединены с отвалом при помощи универсальных шар-
ниров сферического или пальцевого (с двумя взаимно перпенди-
кулярными осями) типа, а в опорных шарнирах брусьев, соеди-
няющих их с остовом трактора, предусмотрен определенный
зазор, то при перекосе отвала он разгружается от скручивающих
усилий. Винтовой раскос обычно используется для изменения
угла наклона отвала в продольной вертикальной плоскости, что
позволяет изменять угол резания; при этом ход винтового рас-
коса 5 и ход штока гидроцилиндра 3 должны быть одинаковыми,
В схеме, показанной на рис. 31, ж, вместо винтового раскоса
установлен гидроцилиндр 8. Это позволяет при помощи гидро-
цилиндров 3 и 8 не только перекашивать отвал в обе стороны,
но и наклонять его вперед или назад. При этом при одинаковом
изменении хода обоих гидроцилипдров достигается наклон от-
120
Рис. 31. Схемы механизмов рабочего оборудования бульдозеров:
а, б * подъема—опускания отпала в — попорота отвала в плане; г—м — переноса
отпала; / — отпал: 2 — гидроцилиидры подтема—опускания отвала; Зт 8 — гидро-
цилиндры наклона и перекоса отняла; 4 — толкающий брус (толкакяцяи рама); 5 — вин-
товой раскос; 6, 7 — гидроцнлиндры поворота отвала в плане
121
Рис. 32. Положения отвала автогрей-
дера
вала вперед или назад, а при
изменении хода только одного
гидроцилиндра или изменении
хода правого и левого гидро-
цилиндров в разные стороны
достигается перекос отвала в
ту или другую сторону.
На рис. 32 показаны воз-
можные положения отвала ав-
тогрейдера, обеспечиваемые си-
стемой управления рабочим
органом. В поперечной верти-
кальной плоскости ZOX может
выполняться (с помощью гидро-
цилипдров) подъем и опускание
левого и правого концов отвала
(по стрелке 7), выдвижение и
вынос отвала в сторону (по
стрелке 2), поворот его по
стрелке <3 (на угол 0—90°). В
горизонтальной плоскости YOX
выполняется поворот отвала
(по стрелке 4). Кроме этих дви-
жений на некоторых типах средних и тяжелых автогрейдеров
предусматривается также наклон отвала в продольной верти-
кальной плоскости для изменения угла резания.
Первым этапом кинематического расчета и анализа рабочего
оборудования является построение его структурной схемы, ко-
торая должна обеспечить заданные движения соответствующих
звеньев механизма и, в частности, необходимую траекторию дви-
жения рабочего органа.
На рис. 33 показаны траектории движения рабочих органов
экскаваторов с различным оборудованием. На рис. 33, а стрелками
1, 2, 3 отмечены направления движения рабочего органа экскава-
тора с оборудованием обратная лопата, а на рис. 33, б — траекто-
рии движения прямой лопаты На рис. 33, в, г показаны траекто-
рии движения грейферов с гидравлическим приводом при разра-
ботке грунтов и перегрузке штучных (длинномерных) грузов.
При установке на экскаваторе телескопического рабочего обору-
дования ковш со ершает движения, изображенные па рис. 33, д.
При разработке откосов рабочее оборудование должно обеспечить
движение ковша по траектории, показанной на рис. 33, е.
Траектория движения рабочего органа во многом определяет
эффективность работы машины Известно, например, что если
траектория движения режущей кромки ковша на активном уча-
122
Рис. 33. Траектории движения рабочих органов экскаваторов:
тел^пХекоТ^ыГ3™: ко^шТп™ X'? грсйфе₽°п; й “ «О’™
123
CL)
Рис, 34. Схема рабочего оборудования, обеспечивающая заданное положение
ковша:
а — при его внедрении в массив; б — при последующем подъеме стрелы
стке при копании и зачерпывании материала близка к направле-
нию плоскостей наименьшего сопротивления сдвига частиц мате-
риала, то в этом случае заметно снижается сопротивление копа-
нию и улучшается наполнение ковша.
Очевидно также, что чем короче путь, который должен пройти
рабочий орган на холостом участке траектории при возвращении
в исходное положение, тем меньше продолжительность рабочего
цикла машины.
Структурная схема рабочего оборудования должна также обе-
спечить такое направление движения рабочего органа, которое
бы позволило получить заданный профиль того или иного земля-
ного сооружения.
Во избежание высыпания материала из ковша в процессе его
подъема желательно,чтобы ковш в течение всего времени подъема
сохранял запрокинутое положение. Достигается это двумя спосо-
бами — либо путем соответствующего перемещения штока гидро-
цилиндра, управляющего положением ковша в процессе его подъ-
ема, либо с помощью соответствующей структурной схемы рабо-
чего оборудования. Так, структурная схема рабочего оборудова-
ния экскаватора, показанная на рис. 34, обеспечивает постоянное
положение ковша при различных высотах его внедрения в разра-
батываемый материал (рис. 34, а) и при различных вылетах рабо-
чего оборудования в процессе выглубления подъема ковша из
штабеля (массива) материала (рис 34. б)
Таким образом, рационально выбранная структурная схема
рабочего оборудования, правильно установленные соотношения
124
между размерами отдельных его звеньев во многом определяют ос-
новные технико-экономические показатели машины и качество
выполняемых ею работ.
3.1.2. Определение скоростей и ускорений
рабочего оборудования
Кроме траектории движения и размеров звеньев рабо-
чего оборудования, определяющих конфигурацию и размеры зоны
его действия, кинематика рабочего оборудования определяется
также скоростями и ускорениями его отдельных звеньев. Оче-
видно, что если нет каких-либо ограничений, налагаемых на ско-
рости рабочих органов, обусловленных спецификой их взаимодей-
ствия со средой, то увеличение скорости с точки зрения повыше-
ния производительности машины является весьма желательным.
Целесообразным может оказаться и повышение ускорений рабо-
чего органа. Так, например, повышение ускорения поворота ковша
при запрокидывании в процессе копания способствует отбрасы-
ванию материала, находящегося в ковше, к его задней стенке, что
улучшает заполнение ковша. При опрокидывании ковша на раз-
грузку наклон его днища к горизонту, составляющий обычно
45... 50°, может оказаться недостаточным для полного опорожне-
ния ковша, особенно при разгрузке липких материалов. В этом
случае повышение ускорения поворота ковша, что достигается
резкой его остановкой в конце разгрузки, способствует более пол-
ному его опорожнению.
В других случаях, в целях снижения динамических нагрузок
на рабочее оборудование процессы их разгона и торможения стре-
мятся несколько растянуть по времени, чтобы сделать их более
плавными.
При кинематическом расчете любых механизмов могут ре-
шаться задачи двух типов: анализа и синтеза. При решении за-
дач анализа нужно ответить на вопрос: какую траекторию, какие
скорости и ускорения будет иметь рабочий орган при выбран-
ных параметрах механизма — его кинематической схемы (эта
схема отличается от структурной тем, что она уже имеет опреде-
ленные размеры звеньев) и заданного движения ведущего звена.
Задача синтеза является как бы обратной и сводится к опре-
делению параметров механизма по заданным траекториям,
скоростям и ускорениям рабочего органа, по заданной глубине
копания, высоте разгрузки ковша и т. п. Задачи синтеза обычно
решаются при проектировании механизмов.
Кинематическое исследование и определение кинематических
параметров рабочего оборудования может ввшолвяться различ-
ными методами: аналитическими, графоаналитическими (построе-
ние планов скоростей и ускорений), экспериментальными. Ана-
литический метод, нс требуя точно вычерченной кинематической
схемы, обеспечивает достаточно высокую точность расчетов, по
125
его применение возможно лишь в том случае, когда получены или
известны формулы для определения необходимых кинематических
параметров. Менсе точен графоаналитический метод, но он более
наглядный.
Для примера определим некоторые кинематические параметры
рассмотренного ранее гидравлического механизма подъема стрелы,
изображенного на рис. 21.
Введем дополнительные обозначения: DA — l^,DO = b; DC =
— /с. Размер ОС в процессе изменения положения стрелы не ос-
тается постоянным, т. е. является некоторой функцией времени t,
поэтому обозначим ОС — s (/). Значение ОС, соответствующее
начальному положению стрелы, обозначим через s0 = smitl, а ход
поршня гидроцилиндра подъема стрелы — через sn (t). Тогда
s(0 = so±sn(0, (77)
здесь и далее верхний знак —для подъема стрелы, а нижний — для ее опускания.
При постоянной подаче рабочей жидкости в гидроцилиндр
величина sn (/) изменяется по прямолинейному закону:
«п (/) = vat,
где vn — скорость поршня гидроцилиндра.
Зависимость между углом поворота стрелы и величиной s (t)
найдем из геометрических соотношений треугольника ODC',
—?(0 b2 + b°0— So
0 = arccos------------arccos---
Для краткости записи введем обозначения:
12 । /2 2
п й + Ч ~ s0 .
0n = arccos-----------,
ig-s2 (О
2Z?/C
(78)
(79)
(80)
и
С учетом этих обозначений зависимость (78) примет вид
6 = arccos и -- 0С при и 0 или (0 Д- 0о) <; 90°:
6 --- arcsin и > (90г — 0О) при и < 0 или (6 + 0о) > 90е.
Угловую скорость
производную функции
поворота стрелы определим
0 (/) по времени
как первую
de de du
dt du at '
Угловое ускорение в при повороте стрелы является второй
производной функции 0 (t) по времени или первой производной
функции со (/) по времени
126
Опуская вычисление указанных производных, приведем окон-
чательные результаты:
ыс ’
(81)
L (1 - tr) t-g — [(s0 — vnt)t>n] и
blc V (1 - i?)s
(82)
в этих выражениях верхние знаки относятся к случаю подъема стрелы,
а | иж-
ние — к ее опусканию.
Зная ю и е, можно определить линейные скорости и ускорения.
Линейная (окружная) скорость стрелы в точке Л
t’A = ^А-
Ускорение стрелы в точке А, направленное по касательной
к траектории ее движения,
/г = ^л-
Ускорение стрелы, направленное по нормали к траектории
движения точки А,
jn = ‘021а.
Суммарное ускорение стрелы в точке А, равное геометрической
сумме ускорений /т и /„,
1л = !а /ю1 + £2-
Графоаналитический метод определения кинематических пара-
метров рабочего оборудования подробно изложен в работе 19]
3.2. ОПРЕДЕЛЕНИЕ РАСЧЕТНЫХ НАГРУЗОК,
ДЕЙСТВУЮЩИХ НА РАБОЧИЕ ОРГАНЫ
3 2.1. Нагрузки, действующие на рабочие органы
бульдозеров и погрузчиков при копании
Нагрузки, возникающие при напорном движении ма-
шины и упоре рабочего органа в труднопреодолимое препятствие.
К машинам напорного действия относятся, например, фронталь-
ные погрузчики и бульдозеры, рабочие органы которых вне-
дряются в массив или штабель материала при движении машины,
когда кроме силы тяги часто используется и кинетическая
энергия машины, развиваемая при разгоне. Характер нагружения
рабочих органов при этом аналогичен характеру нагружения их
при взаимодействии с я руднопреодолимым препятствием, в кот орое
они упираются при движении машины Такие же нагрузки дей-
ствуют и на рабочие органы других машин, например, рыхлите-
лей, автогрейдероп, канаты тяговых лебедок трелевочных трак-
торов, ковши скреперов, встречающие на своем пути трудно-
преодолимые препятствия.
127
В основу расчета динамического нагружения рабочего оборудо-
вания во всех этих случаях может быть положена эквивалентная
схема, изображенная на рис. 29, а. В этой схеме масса т1г к ко-
торой приложено движущее усилие Рр, соответствует суммарной
приведенной (к ведущим колесам) массе mup. к поступательно дви-
жущихся и вращающихся частей машины, а масса т2 соответст-
вует массе т0 препятствия, с которым взаимодействует рабочий
орган машины; со стороны препятствия действует сила сопро-
тивления Рс. Движение такой системы описывается дифферен-
циальными уравнениями:
шп₽. к*1 -г с (хг — ха) = Ризб + Рс;
тохъ — с (хх — хг) = — Рс,
где с — суммарная приведенная жесткость препятствия и рабочего оборудования
в направлении действия движущей силы машины.
Эта система уравнений, как было показано в п. 2.7.2, приводит-
ся после преобразований к уравнению
х ±kzx = т
К ^Пр. к^о
с>
c (mnp. к +
fWnp- к^п
где k =
Общее решение такого уравнения имеет
х = sin kt -J- С2 cos kt + T
1 1 с («пр. к + mn) c
вид:
Рс
и соответственно
х — Ctk cos kt — C->k sin kt.
Постоянные интегрирования С, и С2 найдем из начальных ус-
ловий движения рассматриваемой динамической системы. В мо-
мент времени, непосредственно предшествующий столкновению
рабочего органа с препятствием, деформация упругих элементов
(рабочего оборудования) машины равна, очевидно, нулю, а ско-
рость их движения соответствует скорости движения машины в.
Поэтому начальные условия движения системы запишем так:
при t 0 х = 0, х — и. Подставляя их в общее решение уравнения
и в выражение производной этого уравнения по времени, полу-
чаем:
0 = С2 4 —
с (щпр. к + «п) с
V = Ctfe,
128
откуда находим постоянные интегрирования
_ V . ________изб _______ Рс
1 ~ k ’ 2 ~ С (Л1пр. „ 4- /п„) ” с
Подставляя эти значения Ctn С2е общее решение, находим
х — sin kt ———РизС—r(l — cosfeZ) + — (I — cos AZ).
k с (тор и 4 ««) с '
Искомая динамическая нагрузка F — сх или
F = -^sln« + Р"зС (1 -coskt) ^Рс(1 cos*/). (83)
« тпр. к -+- то
В уравнении (83) первым членом определяются динамические
нагрузки в упругих элементах системы, возникающие вследствие
поглощения кинетической энергии движущихся масс; вторым —
нагрузки, обусловленные движущим усилием привода при встрече
рабочего органа с препятствием; третьим — нагрузки, вызванные
статическим сопротивлением.
Динамическая нагрузка имеет максимальное значение при kt =
= л/2 или при sin kt — 1 cos kt = 0:
F^ --= + Pc- (84)
* fltnp. и Н и,
Если рабочий орган при движении машины упирается в непод-
вижное препятствие, т. е. та -* оо, то
_ 1f с . fTlf-.P изб Р изб___ __ р
’ ^пр. к ^пр.« 4* гп0 mnp. х/гПо 4-1 иаб
и уравнение (84) приводится к виду
=-^- -Ь^„8б 4-^0 = »/с«Пр.к+ Рр. (85)
где движущее усилие Рр Л4дм]/щ (здесь Л1д — момент, ргзвиваемый на валу
двигателя; и и т] — передаточное число и КПД трансмиссии машины, rj— ра-
диус ведущих колес машины)
Анализируя уравнение (85), приходим к выводу, что при за-
данной скорости движения динамическую нагрузку, восприни-
маемую рабочим оборудованием машины, можно уменьшить за
счет снижения суммарных приведенных масс и жесткостей, в свою
очередь зависящих от передаточного числа привода машины и,
следовательно, от ее компоновочного решения и параметров пере-
дачи.
Если внедрение рабочего органа в массив материала или упор
в препятствие сопровождается проскальзыванием ведущих колес
относительно поверхности качения, то движущая сила, которую
может развить машина, ограничивается силой сцепления ТСц
5 Гпбе.рыан Л Д
129
ее ведущих колес с поверхностью качения. Природа этой силы
подробнее будет рассмотрена далее, а пока отметим, что в этом
случае максимальная динамическая нагрузка, воздействующая
на рабочее оборудование машины, определяется но формуле
а> т0{Тск — Рс)
= -у + ------ + Рс. («6)
где
k = l/cjm + mj' (g7)
г tnfnh
При упоре рабочего оборудования в неподвижное препятствие
Ртах = V у ст -ф Т сц, (88)
где m — масса машины.
По отношению максимальной динамической нагрузки к ста-
тической определ якп коэффициент динамичности Каяп, показы
вающий, во сколько раз динамическая нагрузка превышает ста-
тическую; для последнего случая
КДИн ~ F max/Р сц- (89?
Зная коэффициент динамичности, максимальную динамическую
нагрузку можно определить по формуле
Ртах = КдинТсц. (90)
Нагрузки, возникающие при выглублении или заглублении
рабочего органа. Расчетные нагрузки, как и расчетные положе-
ния рабочего оборудования и базовой машины, определяются для
наиболее неблагоприятных ситуаций, которые, например, могут
вызвать поломку рабочего оборудования или опрокидывание ма-
шины. Для машин напорного действия, а также для целого ряда
других землеройн т-тр экспортных машин такие ситуации возни-
кают, когда на их рабочее оборудование при упоре в неподвижное
препятствие действует сила Fmax и одновременно с этим происхо-
дит вывешивание передних или задних колес машины, отрываю-
щихся от основания (поверхности качения)
Рассмотрим возможные расчетные случаи для фронтальных по-
грузчиков и бульдозеров.
1. Упор рабочего органа в препятствие средней точкой при
движении машины по горизонтальной поверхности; гидропилиндры
рабочего оборудования заперты (рис. 35, а, /).
Расчетные условия:
упор рабочего органа в препятствие не вызывает потери устой-
чивости машины;
скорость движения машины равна номинальной скорости
на первой передаче;
на рабочее оборудование действует только продольная сила Fm^.
1ЗД
Риг. 35. Расчетные положения погрузчика и его рабочего оборудования при
копании грунта:
с — упор ковша в препятствие; б — упор ковша в препятствие и одновременное выглуб
ленке; в — упор ковша в препятствие и одновременное заглубление
2 Упор рабочего органа в препятствие средней точкой и одно-
временное его выглубление при движении машины вперед по гори-
зонтальной поверхности (рис, 37, б, II).
Расчетные условия:
в гидропилиндрах поворота ковша (при начальном выглубле-
нии его из массива материала путем поворота относительно не-
подвижной стрелы) или в гидроцилиндрах стрелы (при выглубле-
нии ковша путем подъема стрелы) развиваются усилия, достаточ-
ен 131
ные для опрокидывания машины относительно ее передних опор
(точки 0J; при этом машина вывешивается на рабочем органе
(ковше) и передних опорах;
вертикальная составляющая сопротивления копанию сила Rz
направлена вниз и определяется из условия устойчивости машины
относительно точки С\
U MOt - 0; Rzl + G0l0 - GTlt = 0,
откуда
Rz = GTl, -G^ , (9[)
где Gr и Gc — силы тяжести базового трактора и рабочего оборудования; вели-
чины /, /0, — см. на рис. 35, а;
продольная нагрузка F, действующая на рабочее оборудова-
ние, определяется по формулам (85) или (88).
3. Упор рабочего органа в препятствие крайней точкой и одно-
временное его выглубленис при движении машины вперед по гори-
зонтальной поверхности (рис. 35, б, ///)-
Расчетные условия:
кроме продольной и вертикальной нагрузок на режущей кромке
рабочего органа действует боковая реакция Rv:
D ГспВ/2
Ry — i •
где В — колея ходовой части машины;
остальные расчетные условия те же, что и для предыдущего
случая.
4. Упор рабочего органа в препятствие средней точкой и од-
новременное заглубление при движении машины вперед по гори-
зонтальной поверхности (рис. 35, в, IV).
Расчетные условия:
в гидроцилиндрах рабочего оборудования развивается усилие,
достаточное для опрокидывания машины относительно задних
ее опор (точки 02); при этом машина вывешивается на рабочем
органе (ковше) и задних опорах;
вертикальная нагрузка Rz направлена вверх и определяется
из условия устойчивости машины относительно точки Os
2 Мо, = 0; Rz(l + L)-Go (/0 j L) - GJ2 = 0.
откуда
R____GTlg -|- Gp (l0 ) В) r (62)
продольная нагрузка — сила F, определяется по формулам
(85) или (88).
132
5. Упор рабочего органа в препятствие крайней точкой и
одновременное его заглубление при движении машины вперед по
горизонтальной поверхности (рис. 35, 6, V)
Расчетные условия:
кроме горизонтальной и вертикальной нагрузок действует
боковая реакция Rv:
_ ТспВ/2 _
Г 4- L ’
остальные условия аналогичны условиям для предыдущего
расчетного случая.
3.2.2. Haipy3KH. действующие при копании трунтов
рабочим оборудованием типа обратной лопаты
Основным рабочим оборудованием для одноковшовых
экскаваторов является оборудование типа обратной лопаты, ко-
торое предназначается для копания грунтов ниже уровня уста-
новки машины (см. рис. 33, а).
При работе с этим оборудованием может произойти вывеши-
вание экскаватора на передних или задних опорах, как это было
показано на рис. 35 для погрузчиков. При этом наибольшие на-
грузки на рабочем оборудовании возникают в начале копания
ямы или траншеи с уровня площадки, на которой установлен
экскаватор, при максимальном вылете рабочего оборудования
(рис. 36).
При копании путем поворота рукояти относительно точки О
стрелы (рис 36, й) касательная к траектории движения ковша
сила сопротивления копанию Rr (нормальной составляющей со-
противления копанию можно в этом случае пренебречь) опреде-
ляется из условия равенства моментов движущей силы Р01,
создаваемой давлением рабочей жидкости гидроцилиндр; рукояти,
и силы сопротивления копанию относительно точки О;
Е Мо - 0; Р01йр Ятгр = 0,
откуда
Рис. 36 Расчетные положения рабочего оборудования типа обратной лопаты при
копании грунта;
а — путем поворота рукояти: б — путем поворота копия
133
Из этого выражения следует, что максимальное сопротивление
копанию может быть реализовано при максимальных значениях
усилия POl и плеча Аг, гидроцилиидра рукояти.
При копании путем поворота ковша относительно точки Ол
рукояти (рис. 36, б) силу /Д можно найти из условия равенства
моментов движущей силы Ро„ создаваемой рабочей жидкостью
гидроцилиидра ковша, и силы Pt относительно точки Оу
У] М о. == 0: Po,hK RyK — 0,
откуда
Rz = Р Ofhycirк.
Силу Rx можно разложить на горизонтальную Рх и вертикаль-
ную Ry составляющие. Сила Rx не может быть больше, чем силл
сцепления колес или гусениц машины с опорной поверхностью, и
противном случае экскаватор в процессе копания начнет ползти
в сторону действия силы Rx
3.2.3. Нагрузки, действующие на стреловое
рабочее оборудование при подъеме
и опускании груза
Нагрузки, возникающие в грузовом канате при трогании
груза с места. На рис. 37, а, б показаны схемы, которые мшут
быть положены в основу определения нагрузок, возникающих
в грузовом канате при трогании груза с места, в предположении,
что канат в направлении действия силы тяжести является нерастя-
жимым.
Применяя известный принцип Даламбера и освобождая от свя-
зей массы т1 и т2 (см. рис. 37, б), соответствующие приведенным
массам вращающихся частей привода и поступательно движу-
Рис. 37. Эквивалентные схемы для определения нагрузок, действующих на гру
зовой канат при подъеме груза двумя способами:
с, б — «с веса» для керастяжимого каната, в — «с веса» для растяжимого каната: г, й —
«с подхватом» для рвстяжиыого каната
134
щейся массе груза, рассмотрим отдельна условия равновесия
каждой массы.
На массу т1 действует движущее усилие Рр = Ркяб + Q и
сила инерции тгу, где у — обобщенное ускорение массы в на-
правление оси у. На массу т2 действует сила тяжести Q и сила
инерции т2у. По полученной таким образом расчетной схеме
нетрудно составить дифференциальные уравнения, описывающие
движение каждой массы:
т1У ~ ^иэб + С;
тгу = — Q.
Преобразуя эту систему уравнений путем сложения их левых
к правых частей, получаем:
(ту + т2) у = РизС,
откуда находим ускорение груза
= _Рдэб_ = (93)
+ т2 ' '
Интегрируя уравнение (93), получаем скорость подъема груза
у = f ydt = f dt == Pl'?p -/ф- Сг
° J ntj 4 m.2 J 4 m2 ' 1
Постоянную интегрирования C} находим из начальных усло-
вий: при t = 0 = v = 0, тогда Ci = 0 и
1!те1рируя уравнение (94), получаем закон изменения движе-
ния груза при подъеме
4/= \ydt = -п^- +
Постоянную интегрирования С2 определяем из начальных усло-
вий: при I — 0 у — 0, тогда С2 = 0 и
t> ___Г"3*!__— _ JJi (95)
Как известно, уравнением (95) выражается закон равномерно-
переменного движения.
Умножив ускорение । уза на его массу и сложив полученную
величину со статическим сопротивлением Q, определим искомую
динамическую силу, действующую на грузовой! канат при тро-
। шии его с места,
р = , ЛЧРиЗб . Д_ Q
4"
Если канат рассматривать как упругую связь, то расчетная
схема примет вид, показанный на рис» 37, в На этой схеме связи
135
заменены силами упругости F -= с (уг — уг) (где с — приведенная
жесткость упругой связи, уг и у., — обобщенные перемещения
масс mv и тъ) и для равновесия к каждой массе приложены силы
инерции и пцу^. По этой схеме составляем уравнения дви-
жения системы
4~с (Уг — Уг)= ?изб Ч Q;
m2yz — С (У! — у2) — — Q,
которые после преобразований приведем к виду
у 4 &у -= ( т'^г- Q- (97)
Диффс ренциальное уравнение этого типа рассматривалось
в п. 2.7.2. Если сравнить данное уравнение с уравнением, приве-
денным на с. 111, то можно отметить, что они отличаются только
обозначениями обобщенных координат и статических сил сопро-
тивления : в первом уравнении это силд Рс, а во втором — сила
тяжести груза Q.
Поэтому нет необходимости подробно останавливаться на ин-
тегрировании уравнения (97), общее решение которого имеет вид
у - С, sin kt 4- С, cos kt 4- —Wa-^6-. .. 4- A
» 1 ' c (mt 4 1 c
и соответственно
у = Cjk cos kt — C2k sin kt
Из этих уравнений, как это было показано в п. 2 7.2, для на-
чальных условий при t — 0 находим постоянные интегрирова-
ния и С2, после чего общее решение запишем так:
= _ mtP^ (1 _ cQs k _Q_ .
с(тг F m2) ' ' с
Искомая динамическая сила F — су или
F = -^5^(i-cosW) + Q. (98)
Максимальное значение сила F имеет при cos kt — —1:
F.nax = + Q. (99)
fftj '
Если требуется найти параметры движения груза при извест-
ном значении силы F, т. е. решить обратную задачу динамики,
то в этом случае поступаем так Во втором уравнении исходной
системы дифференциальных уравнений, описывающей движение
массы т2, силу F, выраженную через произведение с (уг — у2),
заменяем известным теперь выражением (98):
т2у2 — (1 - cos kt) — Q = Q,
“в
136
'ткуда
«»«). О»»'
Для определения закона изменения скорости груза при подъеме
проинтегрируем уравнение (100)
у2-------— [ dt------, cos kt dt -=
т1 4- та J т} + та )
РиаС (/ + Сг
т1 - m2 \ k ) 1 1
Постоянную интегрирования находим из начальных условий:
при t — Оу — v — 0 и С\ - 0. Тогда
и = —— (t---------J- sin kA .
mi 4 тг \ k /
Интегрируя это уравнение, находим закон движения груза
при подъеме:
Уъ = Р!Я5 ffdt - , P™r .। sin kt dt -
mx -|- m3 J (тг + тг) k J
- 4 + о-4’~ДТг;т cos kt + C«-
/711 (^1 ^2)
Постоянную интегрирования Сг на кодим из начальных усло-
вий при t = 0 = 0:
р _____ Т-'иаб
2 И» + ">») & '
Тогда
й ~ n,P43t 4 + о - cos *0- (101)
Сравнивая параметры движения, а также выражения, полу-
ченные для динамических нагрузок при допущении, что 1рузовой
канат является неупругим элементом в направлении действия
силы тяжести груза Q, и без это, о допущения видим, что в обоих
случаях законы их движения и динамические нагрузки полу-
чаются неодинаковыми: движение упругих систем в отличие от
движения неупругих систем сопровождается периодическими ко-
лебаниями.
Мы рассмотрели подъем груза «с веса», когда перед началом
трогания с места груз подвешен на канате, которым и восприни-
мается статическая нагрузка Q, вызывающая статическую (на-
чальную) деформацию каната х — Q/c.
Известен и другой способ подъема груза, называемый подъемом
«с подхвата». В этом случае груз перед троганием с места лежит
137
на каком-либо основании и грузовой канат, имеющий слабину,
полностью разгружен от силы тяжести груза, которая восприни-
мается основанием (рис. 37, а). Расчетная схема для определения
динамических сил, действующих на канат в момент отрыва его
от основания, показана на рис. 37, д (зазор, имитирующий сла-
бину каната, обозначен через Д).
Дифференциальные уравнения, описывающие движение такой
системы, ничем не будут отличаться от дифференциальных уравне-
ний, описывающих движение системы, изображенной на рис. 37, в.
Будут отличаться лишь начальные условия движения при отсчете
времени от момента отрыва груза от основания: при t — 0 х — О,
х — V. При этом постоянные интегрирования С1 и С2. входящие
в общее решение дифференциального уравнения (97),
р е . р ntjP изб Q
1 — k ’ 2 с (nii -f ma) с
Тогда
»-•{«»« + (1 - + 4 (1 - COS И).
Искомая динамическая нагрузка F — су или
F = sin kt -I- (1 cos*/) I- Q(1 cosW). (102)
Максимальное значение эта сила принимает при sin kt = 1,
cos kt = 0:
f--T + ^+«. (103)
Нагрузки, действующие на рабочее оборудование при резком
торможении опускающейся стрелы Для определения динамиче-
ских нагрузок для рассматриваемого случая можно использовать
эквивалентную схему, изображенную на рис. 38, а. На этой
схеме 6прл, тпр л испрЛ—суммарные сила тяжести, масса и жест-
кость элементов рабо-
чего оборудования, при-
веденные к точке А
Движение такой си-
стемы описывается
уравнением
^ир аУ I Сир аУ ~
= f «о)
Рис. 38. Расчетные схемы для
определения усилий, возни-
кающих при резком тормо-
жении опускающейся стрелы
138
или
G А
У 4- -= sin (at 4 <ХО),
"‘пр А
, Ч / сарЛ
где k = 1/ —----.
отпр А
Общее решение этого уравнения имеет вид
у = Сх sin kt ф- Сг cos kt пр А sin (<хе - - а0)
спр А
и соответственно
у — Cxk cos kt — C2k sin kt.
Постоянные интегрирования определяем из начальных усло-
вий: при t — 0 у - — прА_ (здесь у — статическая деформация
сгр А
стрелы в точке А), у — v (где v — скорость опускающейся стрелы
перед торможением или скорое гь подъема стрелы при отрыве
груза от основания). Подставляя эти начальные условия в общее
решение и его производную по времени, получаем:
бцр А _ бцр А . . ,
------ — С2 ф- ——- sin (at -j- etc);
сцр Л Lnp А
v — Cik,
откуда
С2 = 0; Сг = v/k.
Общее решение дифференциального уравнения примет вид
V > . ^ПР -Л , , \
у — -т- sin kt ф-----sin (at 4- ао)’
к спу А
Соответствующая динамическая сила, нагружающая стрелу
в точке Л,
FA = спр Ау = sin kt -] Gnp А sin (at ф- <xy)
или, заменяя в этом уравнении k через его значение, находим
Fa v сор Атпр А sin kt 4- Gnp А sin (а, f а0). (104)
Максимальное значение этой силы
FA max ~ П V^np А^пр А "I ^пр A Sin (tXf ф ао)- 0
При этом на шток гидроцилиндра стрелы в точке С будет
действовать сила
г ______ г FA
* С max ~ * A max »
)ЗО
а сила Рд, действующая вдоль оси гидроцилиидра, будет равна
Рд = Fc niax/sln и- (106)
Очевидно, что усилие, развиваемое рабочей жидкостью и
сообщаемое штоку гидроцилиидра, численно равно силе Рд и на-
правлено ей навстречу.
Динамическое давлен не рабочей жидкости в гидроцилиндре
_ 4Р«_
Рдин ”
где Оп — диаметр поршня гидроцилиидра.
34 СИЛОВОЙ И ПРОЧНОСТНОЙ РАСЧЕТ
РАБОЧЕГО ОБОРУДОВАНИЯ
3,4-1. Метод силового расчета, основанный
на законе приведения сил
При силовом расчете рабочего оборудования по извест-
ной силе тяжести рабочего оборудования и полезным сопротивле-
ниям, действующим на него, находят необходимое движущее уси-
лие на ведущем звене механизма (например, на штоке гидро-
цилиидра подъема стрелы или управления рабочим органом),
либо hi । и шест ным движущему усилию и силе тяжести рабочего
оборудования определяют допускаемое для него рабочее сопро-
тив. 1ение.
Силовой расчет можно выполнять различными методами. Один
из них основан на применении закона приведения сил, который
можно с формул и pi ваг ь гак: в любой момент движения механизма
работа движущих сил равна сумме работ полезных и вредных
сопротивлений ( юследние, как отмечалось, обычно учитываются
КПЛ механизма тр,
Применительно к механизму подъема стрелы, схема которого
показана на рис. 21, а, без учета сил тяжести iидроцилиндров
стрелы, этот закон выражается уравнением
Рли<: - (<? vA t GbVB)
где Рц — ппоекииг движущей силы на направление абсолютней скорости
точки. С. Q' и С'в — проекции сил тяжести груз 1 и стрелы н направление Усо-
лкины < скоростей точек их приложения .1 и В.
Так как Рд Рд cos 6 (см рис. 21, б) и соответственно P'Rvr =
= Рдие cos ё P^v-a (где нп скорость ведущего трона, рав-
ная скорости поршня гидроцилиндра стрелы), уравнение работ
можно записать так.
РдГ’п = (0 VA ч G'bVb ) ,
140
)ткуда
va , r- VB । 1
vn fn 1 T]
Обратим внимание на то, что при рассмотри ни е р 2 5.6 во-
просов приведения сил и моментов мы исходили из того же урав-
нения работ, но решали это уравнение О|носвгельно некоторой
суммарной приведенной силы.
В полученном для силы Рд выражении отношения скоростей
представляют собой передаточные числа механизма' va!vA -
= ЙпЛ, va/vB — ипВ, поэтому
J07)
Как видим, силовой расчет, основанный на методе приведения
сил, связан с необходимостью определения переда точных чисел
механизма. Покажем, к; к их рассчитывают на примере механизма
поворота ковша (рис. 39, а)
Абсолютная скорость точки 2 механизма по модулю равна г.рэ
изведению угловой скорости звена 2-4-3 на радиус этого звена /2 4
(длина звена 2-4): v2 = «4/2.4 и направлена по нормали к зве1 ; 2-1.
Ряс. 39 Схемы для расчета механизма
приведения сил при определении
а — передаточных чисел; б — он л
поворота ковша с использованием метода
4
С другой стороны, скорость иг можно выразить через скорость ип
поршня гидроцилиндра ковша’ и2 =• ип/соз у; следовательно
W4Z2-4 = Un/cos у,
откуда
lj.4 cos у ‘
Абсолютная скорость точки 3. тоге же звена равна по модулю
произведению угловой скорости со4 на радиус /3.4 и направлена
г.о нормали к звену 3-4:
из - Ш4/3-4 -
Для определения абсолютной скорости ио точки 5 восполь-
зуемся понятием о мгновенном цена ре скоростей звеньев, совер-
шающих плоское движение. Как известно из механики, мгновен-
ный центр скоростей лежит на пересечении перпендикуляров
к абсолютным скоростям двух точек, принадлежащих одному
звену. В рассматриваемом примере такими точками являются
точки 3 и 5, для первой из которых абсолютная скорость известна
по модулю и направлению, а для второй — i ока только по на-
правлению (скорость и6 направлена по нормали к звену 6-7).
Восставив перпендикуляры к направлению скоростей и8 и и8
получим на пересечении точку р1г которая и является мгновенным
центром скоростей звена 5-5. Найдя положение точки рх, можно
определить угловую скорость этого звена
Ыр, “ ^з/^р,-3 ~
откуда
«5 ” «З^р. 5/fp,-3>
где 1р _3 и 1р _5 радиусы поворота точек S и 5 относительно точки рх.
Абсолютную скорость точки 7, которая как и точка 5 принадле-
жит звену 6-7 и направлена по нормали к нему, найдем из оче-
видной пропорции
— if z/ie о>
откуда
*р,.5*6-7
'и ,
у6 п - г'з 7
*6-5 ‘р, 3*6 8
6-7
12-41р,-515 7
^3-4гр, 3^6-5 COS^
Звено 7-8. как и звени 3-5. совершает плоское движение Мгно-
венный центр скоростей этого звена лежит в точке ря пересечения
перпендикуляров к направлению скоростей точек 7 и 8 (ско-
рость оР направлена по нормали к звену 8-9)
142
Угловая скорость звена 7-8
_Ll_ =
1Р, 7 !р,-6
откуда искомая скорость
V 1р*~*
1Рг7
*2 4 lpt! *6 7lp,-8
П *3-4*pI-3*6-5*pi-7cosT '
Угловая скорость поворота ковша вокруг точки 9
се., =
Абсолютная скорость точки К ковша
, *К-9
Ок -- аэ£ к-9 = о8-------- = V,
£8-9
*2-4*pt-5*G 1Р,-8{К8
*3-4*р,-3*6-5*р,-7*8 9COSV
Теперь можно найти общее передаточное число механизма,
равное отношению скорости ип ведущего звена к скорости vK
точки К ведомого звена
ипК —
V,
VK
l3 4 lpi-3 *6-5 *p,-7
*2-4 *p, Б *6-7 *p,-8
*8-9
*Л-9
cosy.
(108)
Зная передаточное число механизма, можно определить иско-
мые усилия либо движущую силу Ра на штоке гидроцилиндра
ковша, если задано рабочее сопротивление на ковше сила
либо допускаемое значение Rv, если известна сила Р
_vk 1 --
v П «ик4
(109)
или
(ПО)
3.4.2. Графоаналитический метод силового расчета,
основании и на ра сложении с ил
Расчет механизма подъема с гре. 1Ы. Метод определения
сил и реакций в шарнирах мехаш зма путем их разложения имеет
много общего с определением сил и реакций в различного рпда
фермах, как это делается в 1 рафической статике.
Практиченкие приемы, связанные с применением этого метода
дл я силового расчета рабочего оборудования проил; юс грируем
на от [ельных примерах.
Для механизма подъема стрелы, показанного на рчс 49. а,
примем следующие обозначения: /М /л, рв = ifi, DC lc,
PC - l2, PO - Zv
Расчет начнем с распределения сил тяжести кгжлого звена
по соответствующем к нематическим парам (рис. 40, а). Если
какая-либо сила, например раскладывается на параллель-
143
Рис. 40. Схема для расчета механизма изменения вылета стрелы с использованием
графоаналитического метода при решении задачи;
с, б — прямой: б, г — обратной
ные ей силы Gtc и Сл, приложенные в точках С и D механизма,
лежащих за точкой В приложения равнодействующей силы Gr,,
то в этом сл^ чае имеют место соотношения:
/' z~i ^В у-
Gn — GB-----, G1C — (jB . — ,
lc ‘c
GB - G1C Gd,
причем одна из составляющих, меньшая по абсолютной вели-
чине — в рассматриваемом примере это сила GD — направлена
противоположно равнодействующей силы GB
Если равнодействующая сила, например сила тяжести гидро
цилиндра G„, раскладывается на пара"дельные ей силы G2C
и Go. приложенные соответственно в точках С и О механизма
144
и лежащие по обе стороны от точки приложения равнодействую-
щей, то в этом случае имеют место соотношения:
*1 I <2 "Г *2
Gn = G.2c + Go,
причем обе составляющие силы направлены в сторону равнодей-
ствующей.
Условимся под прямой задачей понимать нахождение движу-
щего усилия Рп, действующего на шток гидроцилиндра, по за-
данному полезному сопротивлению, в данном примере по силе Q,
значение и направление которой известны. Под обратной задачей
будем понимать нахождение силы полезного сопротивления Q
по заданному движущему усилию Рд, для которого известны зна-
чение и направление.
Рассмотрим сначала решение прямой задачи. При разложении
силы Q воспользуемся теми же правилами, которые были приме-
нены к силам тяжести GB и Gtl звеньев. Разложив силу Q на со-
ставляющие Qd и Qc, приложенные соответственно в точках D
л С звена DA, найдем суммарное усилие
Т — Qc 4- G1C 4- Ggc.
Сила Т приложена в точке С
Вектор силы Т разложим в направлении звеньев DA (сила Sx,
рис. 40, б) и СО (сила S2). Для определения реакции RD в шар-
нире D механизма перенесем силу S, в точку D и сложим ее с си-
лой F = Q£j 4 Gn
Rd — F 4- Sj -
Для нахождения реакции Ro в шарнире О механизма посту-
пим аналогичным образом, т. е. перенесем вектор S2 в точку О
и сложим его с вектором Go. Если, однако, сила Go пренебре-
жимо мала по сравнению с силой S2, то можно считать, что Ro к-
ъ S2.
И, наконец, очевидно, что искомая сила Рд, направленная
противоположно реакции в опоре О гидроцилиндра, по абсо-
лютной величине равна силе S2.
Решим теперь обратную задачу, определив по заданному зна-
чению и направлению движущей силы Рд допустимое значение
полезного сопротивления Q.
Выполнив указанным выше способом разложение весовых
нагрузок по шарнирам механизма, разложим силу Рв на две
составляющие Рд и Рд, первая из которых нормальна к звену DA,
а вторая направлена вдоль этого звена (рис. 40, в):
Рд — Рд I" Рд-
Сложив силы G1C и G2C, которые являются составляющими со
ответственно сил тяжести GB и Gn, найдем силу Gc, направленную
145
в гу же сторону, что и силы GIC и G2c- После этого силу Gc раз-
ложим на две составляющие — силу G,'-, нормальную к звену DA,
и силу Go, направленную вдоль звена DA.
Теперь из силы Рд вычтем силу Gc (они направлены по одной
шнии в разные стороны); обозначим их разность через Рсд
Рсл -=Р'л-0'с.
Вектор РСя разложим на составляющие Рд и Рл, приложен-
ные соответственно в точках А и D (рис. 40, г):
Л р . р — р 1С
г А — Год , t D — /'сц [
*A A
Далее в точке А вектор P$ разложим по направлению звена DA
(вектор Рд) и по направлению силы Q (т. е. по вертикали) (век-
тор Рд)
Рд — Р а Ра
Сила РА будет воспринимав вся шарниром D, а сила Р'А —
уравновешиваться полезной нагрузкой Q, т. е
Р'А ~ Q-
Т' ким образом, поставленная задача решена
На разобранных выше примерах мы познакомились с методами
определения усилий, действующих на звеньях механизма подъема,
имею дего весьма простую кинематическую схему. Для более
сложных схем механизмов усложняются не только выражения
] ередаточных отношений, но могут встретиться затруднения и
в части правильного выбора поправлений, по которым следует
раскладывать силы. Поэтому укажем на обшее правило, приме-
няемое при разложении -ил:
каждая сила должна раскладываться на две составляющие
таким образом, чтобы одна из них была направлена нормально
к вектору абсолютной скорости точки приложения этой силы (ра-
бот i этой ( илы равна, очевидно, нулю и она не будет оказывать
никакою влияния на движение звена), а другая составляющая,
касательная к траектории движения звена, должна быть движу-
щей силой, которая может быт ь уравновешена силой полезного
сопротивления.
Рясдрт механизма поворота ковша. Пусть требуется по задан-
ной движущей силе Рп на штоке i идропилиндра механизма по-
воро i ковша определить сопротивл( ние зачерпыванию мате
риала РЯВч, которое может быть преодолено усилием привода.
Направление силы Рзач считаем заданным /рис. 41).
Пля упрощения графическ гх построений силы тяжести звеньев
механизма управления ковшом учитывать не будем, так как при
.4fi
Рис. 41. К силовому расчету меха-
низма поворота ковша графоанали-
тическим методом
зачерпывании и разгрузке ма-
териала положения центров
масс этих звеньев изменяются
очень незначительно и соот-
ветственно работа этих сил
мала.
Разложим движущую силу
Рд на составляющие:
Сила Рд направлена вдоль звена DB и воспринимается опо-
рой D. Силу Рд по правилу разложения параллельных сил раскла-
дываем на составляющие PD и Рв, приложенные соответственно
В шарнирах D и В.
FD=P'J^ гп-р'л±=±.
12
Сила PD воспринимается опорой D, а силу Рв в точке В рас-
кладываем на составляющие Т и Н, направленные соответственно
вдоль звеньев В К и DB:
FB = Т 4 Н.
Сила Н, суммируясь с Рй, воспринимается опорой D. Силу Т
по линии ее действия переносим в точку /( и раскладываем на
две параллельные силы: SE, приложенную в точке Е, и S, прило-
женную в точке п, которая лежит на пересечении линии действия
искомой силы Рзач с продолжением линии Р/<:
Т - SE4-S: SE-T^: S - Т-
И, наконец, силу S раскладываем на составляющие
S - L 4 N.
Сила L воспринимается опорой Е, a N уравновешивается си-
лой Рзач. равной ей по значению и противоположной по няправ
лению.
Итак, решением задачи будет
Р - А/
Найденные в ходе расчета силы, действующие на отдельные
звенья механизма, и реакции в кинематических парах можно
в дальнейшем использовать для расчета этих звеньев на проч-
ность или для определения сил трения в шарнирах и КПД г »ха-
НИЗМЯ.
147
Рис. 42, Схема для расчета механизма заглубления вы-
глубления отвала бульдозера графоаналитическим мето-
дом
Расчет механизма заглубления выглубления отвала бульдо-
зера. На рис. 42 приведена схема для графоаналитического сило-
вого расчета механизма заглубления — выглубления отвала буль-
дозера. К режущей кромке ножа отвала приложены силы F
и Ru, определенные для соответствующих расчетных положений
(ем. п. 3.2.1). Сила Rv воспринимается основанием, а продольная
сита F передается через толкающие брусья на корпус машины.
Заданными будем также считать силы тяжести отдельных элемен-
тов рабочего оборудования: GB - толкающих брусьев (толкаю
щей рамы для бульдозеров с поворотным отвалом) и GP - гидро-
цилиндров подъема—опускания отвала.
Действуя в соответствии с принятым методом силового расчета,
распределим сначала силу F но точкам А и D, заменив ее парал-
лельными силами Fa и Fd:
Fa^F^^-\
Заметим, что в зависимости от точки приложения силы F
по высоте отвала вектор Гп может быть направлен в сторону
движения бульдозера и тогда звено DN работает на растяжение,
либо в обратную сторону и тогда звено DN работает на сжатие и
продольный изгиб. Для расчета принимаем, что силы F и Rv
приложены к режущей кромке ножа отвала, причем вертикальная
составляющая сопротивления копанию Rv воспринимается осно-
ванием, на которое опирается отвал при копании.
Вектор Fx, приложенный в точке Д, разложим на составляю-
щие вектора Рд, направленный по нормали к вектору абсолют-
148
ной скорости точки А (вектор абсолютной скорости этой точки
направлен в сторону движения бульдозера) и Рд, направленный
вдоль звена АЕ.
Силу Fa по линии ее действия перенесем в точку С, в которой
шток гидроцилиндра присоединяется к толкающему брусу, и
разложим вектор этой силы на составляющие векторы Нс, на-
правленный по штоку гидроцилиндра, и Sc, перпендикулярный
продольной оси гидроцилиндра. Сила Нс воспринимается опорой
гидроиилиндра в точке О.
Вектор GP разложим на составляющие Gc и Go, приложенные
соответственно в точках С и О;
Сила Go, суммируясь в точке О с силой Нс, определяет реак-
цию в опоре гидроцилиндра, которая по модулю будет равна равно-
действующей этил сил и
рону.
Вектор Gc разложим
в точках А и Е:
направлена в противоположную сто-
на векторы С1Л и GIB, приложенные
ЕС . „ „ АС
Разложим вектор Sc на векторы Sc и Sc, направленные со-
ответственно по вертикали и вдоль звена АЕ. Силу Sc перенесем
по линии действия в точку £, здесь она воспринимается опорой
толкающего бруса на раме трактора. Вектор Sr разложим по
точкам А и Е на векторы Si и S^:
г,' с' . о' с* АС
Sa~Sc~AE' Se = Sc-ae-
Силу тяжести GB разложим на параллельные силы G?E и йгд,
приложенные в точках £ и Л:
____ г* BE в л ~ АВ
2А — Чв , 1,2Е — ЧВ •
Теперь остается векторы всех сил, приложенных в точках А
и £, сложить, чтобы найти по величине и направлению реакции
в опорах толкающего бруса, связанные соответственно с отвалом
и трактором:
R„ - F/ 4 (- с«2д + sx;
Ri- = Gif р G2£ -| Sc 4 Sr•
Расчет механизма заглубления выглубления рыхлителя.
Пусть задана движущая сила £д на штоке гидроиилиндра за-
глубления — выглубления рыхлителя, а также сила его тяже
149
сти G4, приложенная в центре масс в точке В Найдем по этим си-
лам продольную и вертикальную составляющие реакций грунта,
приложенных к концу зуба (рис, 43).
Разложим силу Рл в точке С на составляющие Р'л и Рд. на-
правленные соответственно по вертикали и вдоль звена DA.
Сила Рд воспринимается опорой D звена DA. Разложим силу Рд
на две параллельные силы PD и РА, приложенные соответственно
в точках D и А
р ___ р АС р. — р DC
rD ** AC DC’ А л AC-* DC"
По тем же точкам разложим силу GB.
г _ г ВЛ . г _ r DB
~ СД ’ д ~ DA
Теперь сложим векторы PD и GD, приложенные в точке D.
п векторы РА и Од, приложенные в точке А. Вектор (Рд | 6Л)
разложим на векторы Н' и Н", направленные соответственно
вдоль балки зуба и вдоль звена DA
Силу Н" по линии ее действия перенесем в точку L) и найдем
геометрическую сумму векторов
s = (р;~ н ) । (Рп । gd).
Сила Рп, равная по модулю силе S, и направленная противо-
положно, определяет реакцию в шарнире D.
Реакция в шарнире О гидроцилиндра равна по модулю силе Рд
и направлена в обратную сторону, Ро = Рд.
Силу Н’ перенесем в точку К конца зуба, для чего приложим
в точке К две равные и противоположные силы; тогда получим
пару сил Н' (они отмечены на схеме черточками). Вектор силы II ,
направленный вниз, дает два составляющих вектора Н'ц, направ-
ленный по вертикали, и НЛ, направленный по горизонтали
Очевидно, что искомая реакция Ри основания, действующая на
конце зуба, по модулю равна силе Н'к. и направлена противопо-
ложно, т. е. вверх. Горизонтальная составляющая реакции ос-
нования равна силе II к и направлена против движения рых-
лителя; она преодолевается силой тяги на ei о зубе, создаваемой
тягачом.
Рассмотрим силовой расчет рыхлителя, выполненного по схеме
четырехзвенносо механизма, для случая выглубления зуба
(рис. 44).
Как и в предыдущем примере задаваемыми силами будем счи-
тать движущую силу гидроцилиндра Ра, а также силы тяжести G,
и Ga верхней и нижней тяг, в значениях которых учитывается и
сила тяжести балки зуба рабочего оборудования.
Разложим силу Рд на составляющие Рл, направленную по
вертикали, и Рд, направленную вдоль звена D^i, последняя
сила воспринимается опорой этого звена
150
Рис. 43. Схема для расчета трехзвен-
ного механизма рыхлителя графоана-
литическим методом
Рис 44, Схема для расчета четырех-
звенного механизма рыхлителя графо-
аналитическим методом
Силу Рд разнесем по точкам Dk и
рп = р' AlC р, — р' -
D' р1Л1 , Г A, Гр. П1А1 ,
векторы PD1 и РА, параллельны вектору Рд.
Точно также силу Gj разложим на параллельные силы GlDl
и С1А„ приложенные соответственно в точках D± и Af:
g-« = c'TO7-
В точке сложим векторы PDl и Glf)j, направленные по одной
вертикали в противоположные стороны, и затем найдем геометри-
ческую сумму векторов (Ро, — G1D1) и Рд, приложенных в точке Dt:
Si = (Рр, — Gio,) + Рл
Реакция в шарнире (сила Рр,) по модулю равна силе 5
и направлена в обратную сторону.
В точке Л] сложим векторы РА1 и G1Ai и затем вектор
(Рл,—G1Al) по линии его действия перенесем в точку А2
Силу Gs разложим на параллельные силы G2O, и G2Aj, прило-
женные соответственно в точках D2 и Аг:
02D, -= G2 , G2A, = G2 .
Теперь в точке Л2 сложим векторы (РА, — G1A1) и G2A, и
перенесем, как это сделано в предыдущем примере, вектор
(Рл, - GK), где GK - G1A, -f G2A>, в точку К конца зуба.
Очевидно, что вектор вертикальной реакции на зуб Rp со сте-
роны основания (грунта) будет по значению равен вектору
(Рл, — GK) и направлен противоположно, т. е вниз.
151
Для определения реакции в шарнире D2 перенесем силу Ря
по линии ее действия в точку Оа и здесь вектор Рд сложим с век-
тором G2d,
S2 = Рд G2Dj.
Искомая реакция в шарнире D2 по модулю равна силе S2,
т. е. Rd, = S2, и направлена в обратную сторону.
3.4.3. Аналитический метод силового расчета
При применении аналитического метода силового рас-
чета силы, действующие в механизме, определяются по формулам.
Если расчетные формулы неизвестны, их нужно получить, исходя
из построенной расчетной схемы.
Так, для определения необходимого движущего усилия Рд,
которое нужно обеспечить на штоке гидроцилиидра отвала буль
дозера при его выглублении, можно воспользоваться схемой,
изображенной на рис. 45.
Составим уравнение моментов относительно точки Е:
У, МЕ — 0; Рлг Fd — Rya — Gob — 0,
откуда
р Pd + Rva Gf)h
~ r
где F — продольная сила сопротивления движению отвала для расчетного поло-
жения; Ру — нормальная составляющая реакции грунта на ноже отвала; Go —
сила тяжести отвала и толкающих брусьев.
При заглублении отвала сила Rv меняет свой знак на обрат-
ный.
По схеме, изображенной на рис. 46, можно определить усилие
на шгоке гидроцилиидра рыхлителя. Для этого, предварительно
перенеся в точку А вертикальную реакцию на зуб Ru (т. е. в точ
ке .4 прикладываем две равные и противоположно направленные
силы Ry), получим пару сил, момент которой воспринимается
F
Рис. 45 Схема для расчета механизма
заглублен и я —выглублени я отвал а
бульдозера аналитическим методом
Рис 46. Схема для расчета механизма
рыхлителя аналитическим методом
152
звеном К.А, и «свободную» силу Rv, приложенную в точке А и
направленную вверх. Тогда из условия равновесия звена DA
имеем
Ряг — Fd — Rya -+- CBb — О,
откуда
Fd + RLa — GBb
Рассмотрим теперь механизм поворота ковша, показанного
на рис. 39, б, для которого уже определяли действующие силы,
используя метод их приведения.
Для этого механизма, последовательно, начиная с ведущего
звена (штока гидроцилиидра ковша) и кончая исполнительным
органом, будем составлять уравнения равновесия отдельных звень-
ев, предполагая их движение установившимся.
Составляем уравнение равновесия для звена 2-4-3, выражаю-
щее равенство нулю моментов действующих на звено сил относи-
тельно точки 4,
Xi Л44 — 0; Р2/2« — Рз^з-4 — 0,
от куда
Р3 = Р'2~~ = Рд-,—COS?.
*3 4 *3-4
Из геометрических соотношений находим
Рз = Рз/cosyn
но так как по условию равновесия звена 3-5 Р3 = Рь, получаем
Р6 = -^ = РДА1_-^
cos 71 д г3.4 cos 71
и соответственно
Р6 = Р6 cos у2 = Рд А±- 2^®
А Z34 cos 71 ’
где Ti — угол между звеном 3-5 и нормалью к звену 3-4.
Составляем уравнение моментов сил, действующих на звено 6-7
относительно точки 6,
S Л16 — 0; Р— Рз^е-ъ — 6.
откуда
г> _ г>‘ *65 В ^2-4 ^6 5 COS 7 COS уа
*7 * 5 j л п • I '
*6-7 ^3-4 *6 7 COST!
По построению
р‘- = _ Р *2 4 ^6-5 C»S Т tos Та
' cos Та д 13.4 z6.7 cos 7! cos 7,’
153
где у8— угол между эвеном 7-8 и нормалью к эвену 6-7.
Из условия равновесия звена 7-8 следует, что Рв — Pi; тогда
D ₽ roev Р lz i l(i 5 cos у cos у. cos у4
P8-P8cosy4 рд —— C0sViCOS7e ,
где у4— угол между звеном 7-8 и нормалью к звену 8-9.
Наконец, составляя уравнение моментов сил, действующих
на ковш относительно оси его поворота (точки 9), находим
тИэ = 0; TjPf/g.g — Ry^K-э — 0,
где КПД Т] учитывается уменьшение силы Р'8 из за трения в шариирах.
Из последнего уравнения находим
о ___р *в~9 у,
Лу — *8 г 7]
‘К-Э
или
О — Р ,г 4 ?6" * COS ygOSy, COS Уд Л||\
” И '3-4 /6.7 «К-9 COS Т1 COS Уз < 111
Таким образом, получена формула для определения допускае-
мого полезного сопротивления на ковше рабочего оборудования
по заданному движущему усилию на штоке гидроцилиндра ковша.
Решив уравнение (111) относительно Ря, можно найти необходи-
мое движущее усилие на штоке гидроцилиндра ковша по задан-
ному полезному сопротивлению Rv.
Можно показать, что формулы (НО) и (111) эквивалентны.
Действительно, из косоугольного!реугольника 3-Р,-5 (рис. 39, а)
согласно теореме синусов
*Р,-, *3 5 . *Р,-Б_______^5_
sin (90 — Уз) — sin ф! ’ sin (90 + yL) ~' sin ’
откуда
lpt-t _ sin (90 — yg) _ cos y8
lp sin (90 4-yt) cosyt ’
Из косоугольного i реугольника 7-P2-8 на основании тео-
ремы синусов
1р,-7___Ч 8 . *Р,-8__ __ ^7-8
sin (90 — у,) ~~ sinks’ sin (90—у8) sirups’
откуда
ip,-7 sin (90 — у,) _ cos Уд
_8 — sin (90 — УзУ “ cos у3 *
Если теперь в выражении (108), определяющем передаточное
число механизма иак, отношения 1рг-з^р,-5 и заме-
нить через отношения косинусов соот ветствующи х углов, а за-
154
a)
Рис. 47. К силовому расчету
рабочего оборудования фрон-
тального погрузчика анали-
тическим методом:
а — конструктивная схема ра
бочего оборудования; б и в —
расчетные схемы при зачерпы-
ванин материалов путем пово
рота ковша и подъема стрелы
соответственно
тем иаК подставить в формулу (110), то последняя примет вид
формулы (111).
Итак, мы убедились в том, что независимо си метода, которым
выполн яется силовой расчет рабочего оборудования, его конеч-
ные результаты должны совпадать в пределах точности, допускае-
мой для подобного вида расчетов.
На рис. 47 показана конструктивная схема рабочего оборудо-
вания фронтального одноковшового погрузчика (рис. 47, а) и
приведены расчетные схемы для определения сил, действующих
на штоках гидроцилиндров ковша (рис. 47, б) и стрелы (рис 47, в)
в процессе зачерпывания груза.
Рассмотрим сначала зачерпывание материала путем поворота
(запрокидывания) ковша при фиксированном положении стоелы
(рис. 47, б). Задаваемыми силами будем считать силу тяжести
ковша и зачерпываемого материала GK, а также горизонтальную F
и вертикальную Rv силы сопротивления, приложенные к кромке
ковша.
Разложив предварительно силу Ро„ действующую на штоке
гидроцилиндра ковша, на составляющие Р'Ог и Р'О1, направлен-
ные соответственно перпендикулярно и вдоль рычага 0208, со-
155
ставим уравнение моментов сил, действующих на рычаге, относи-
тельно оси его поворота — точки 0г
Е Мо, = 0; P'0,b2 = So/i или
Ро.Ьг sin (<р + 6) = 50/1,
откуда
Р°' — So, sin ф -
Перенесем силу So,, приложенную в точке О2, в точку К,
для чего, как известно, в точке К нужно приложить две равные и
противоположно направленные силы SK = So,- Тогда получим
пару сил (на схеме они отмечены штрихами) и «свободную» силу SK,
стремящуюся повернуть ковш относительно шарнира А.
Составим уравнение равновесия ковша
2 Мд = 0, SKat — Fa3 — Rvat — Ска2 — 0,
откуда
e Раз "T Rvai + 6ка1 _ e
ok-------------------- — oo,-
Тогда
P 0=(f -PR u-2L-4-Gk-M г—Kx- (1]2)
°* \ at v at K at ) b2 sin (<p + 6) v ’
Рассмотрим процесс зачерпывания материала путем подъема
стрелы при фиксированном положении ковша (рис 47, в). Зада-
ваемыми силами являются приведенная к центру ковша суммар-
ная сила тяжести стрелы, ковша и зачерпываемого материала Go
и те же силы сопротивления F и Rv.
Разложим усилие на штоке гидроцилиидра стрелы Рс на две
составляющие Рс = Рс sin (6 + у) и Рс — Pc cos (6 + у) и
составим уравнение момент ов относительно оси поворота стрелы —
точки D'.
2] М о = 0; Pclc sin (6 4- у) — F {а3 + lA cos 6) —
— Rv (<?i 4 I a sin 6) — Go (a2 I a sin 6) — 0.
Отсюда находим
Pc ~ [F (oB + I a cos Э) + Rv \ay + lA sin 6) +
+ o.fa + bslne)i 013)
3,4.4. Графический метод силового расчета,
основанный на построении плана сил
Из графической статики известно, что если произволь-
ная плоская система сил находится в равновесии, то путем по-
следовательного графического сложения векторов этих сил можно
156
определить значение неизвестных из условия их равновесия,
т. е. равенства пулю векторного уравнения, представляющего со-
бой сумму указанных векторов Графически сумма этих векторов
изображается в виде замкнутого силового многоугольника.
Если систему сил, действующих на тело, можно свести к трем
силам, то при условии их равновесия силовой многоугольник
превращается в силовой треугольник. Следует отметить, что при
расчете механизмов рабочего оборудования строительных и до-
рожных машин это весьма часто встречающийся случай, к ко-
торому можно прийти путем замены нескольких действующих сил
одной суммарной приведенной силой.
Обратимся к примерам.
На рис. 48, а, б показаны схемы механизмов подъема стрелы
с нижним и верхним расположением гидроцилиндров. В произ-
вольном масии абе на схемах отмечены векторы движущей силы Рд,
силы полезного с опротивления Q и силы реакции в опоре ст рель: Rr„
Сила тяжести стрелы либо не учитывается, либо приводится к точке
приложения силы Q и суммируется с ней; тогда действие этих двух
сил заменяется суммарной приведенной силой. Из трех сил, дей-
Рис 48. К силовому расчету механизмов подъема стрелы и поворота рукояти
методом построения плана сил:
а — для механизма подъема стрелы с нижним расположением гидроцилиидра, б —- для
механизма подъема стрелы с верхним расположением гидроцилиидра; 6 — для механизмов
подъема стрелы и поворота рукояти
157
ствующчх на стрелу, одна является неизвестной, и ее требуется
определить по цвум другим силам, которые задаются.
Допустим, что задаваемыми являются силы Рд и Q. Направле-
ние их известно* движущая сила Рд направлена по штоку гидро-
цилиндра, а сила тяжести Q поднимаемого груза — по вертикали.
Если значение одной из задаваемых сил неизвестно, то его можно
предварительно определить из уравнения равновесия стрелы
р'л1с о
или
Pnlc sin р — QlA cos е.
где Рд и Q' — проекции сил Рд и Q на нормали к линии DA; lc — DC; 1д DA-
Зная векторы сил Рд и Q, значение и направление реакции RD
можно определить путем построения силового треугольника.
Для этого от некоторой произвольной точки в принятом масштабе
сил откладываем вектор Рд, конец которого соединяем с векто-
ром Q, после чего находим вектор RD, замыкающий силовой тре-
угольник (рис. 48, а).
Если задача ограничивается только определением направле-
ния силы RD, то можно было бы и не строить силовой треуголь-
ник, имея в виду, что линии действия всех трех сил, находящихся
в равновесии, должны пересекаться в одной точке. В этом слу-
чае находят точку е пересечения линий действия сил Рл и Q,
которую соединяют с точкой приложения силы /?D; линия eD
и будет линией действия силы RD.
Точно так же определяется вектор RD для механизма, изобра-
женного на рис. 48, б.
На рис. 48, в показана схема рабочего оборудования, состоя-
щего из механизмов подъема стрелы и поворота рукояти. При
силовом расчете механизма стрелы предполагается, что рукоять
жестко соединена со стрелой и ее положение по отношению к стреле
не изменяется. При расчете рукояти положение стрелы считают
постоянным. Реакции в опорах стрелы RD и рукояти RB опреде-
ляют путем построения силовых треугольников, как это было по-
казано для предыдущего примера. Если для стрелы задаваемыми
являются силы РД1 и Q, то силу Rn, действующую на опору стрелы,
определяют из силового треугольника, образованного векто-
рами Рд1, Q и Rd Для рукояти реакцию в шарнире В — вектор
RB — находят из силового треугольника, образованного векто-
рами Рд2, Q и R,(.
При неустановившемся движении звеньев механизма возникают
силы инерции. Их учет не вносит каких-либо принципиальных
изменений в методику силового расчета — к действующим силам
добавляются лишь силы инерции (на основании принципа Далам-
бера). При этом, чтобы число сил инерции, действующих на от-
дельные звенья механизма, не было большим, их нужно заменить
158
Рис. 49. К силовому расчёту механизма подъема стрелы с
учетом сил инерции
одной суммарной силой инерции, равной произведению суммарной
приведенной массы на соответствующее ускорение точки приве-
дения.
На рис. 49 показана схема механизма подъема стрелы, на ко-
торый помимо сил тяжести, полезного сопротивления и движу-
щей силы действуют нормальная Рип и касательная Рвх силы инер-
ции. Предварительно все силы тяжести звеньев механизма и
силу тяжести поднимаемого груза заменяем суммарной, приве-
денной (к точке /4) силой Сор к этой же точке приведем и сум-
марную массу движущихся частей механизма тирЛ. Тогда
Л1Л ~ ЩцР А® (а> Р кл ~ Щцр а! ~ Шлр -А»
где со — угловая скорость стрелы при повороте; /д — DA, е — угловое ускорение
стрелы при повороте.
Суммарная сила инерции
Ра = А1А /со1 + еа
отклоняется от линии действия касательной силы инерции на
угол
6 = arctg4-.
'ИТ К
Векторная сумма сил тяжести и инерции (рис. 49, б)
РА — 6Пр А “Ь Рв-
159
Вектор Рл
отклоняется от вертикали на угол
v - arccos ^ра + ^-^и
v“arccos
Реакцию в опоре стрелы определяем из векторного уравнения
Рд+Ра ^Rd = O.
по которому построен силовой треугольник, показанный на
рис. 49, в.
3.4.5. Расчет элементов рабочего оборудования
на прочность
Различают два вида расчетов элементов рабочего обору-
дования на прочность: 1) по заданным усилиям, действующим иа
элемент рабочего оборудования, определяют его размеры, при ко-
торых напряжения, возникающие при работе элемента, меньше
напряжений, вызывающих разрушение материала или появление
остаточных деформаций; 2) по известным размерам элементов ра-
бочего оборудования, исходя из допускаемых для данного мате-
риала напряжений, определяют предельные нагрузки, которые
могут быть допущены для данного элемента по условиям прочности.
Напомним основные положения и понятия, связанные с рас-
четом деталей и конструкций машин на прочность.
Напряжение, при котором наступает разрушение, называется
временным сопротивлением или пределом прочности и обозна-
чается через ав. Напряжение, после которого материал получает
остаточные деформации, называется пределом упругости, а напря-
жение, после которого материал начинает деформироваться без
увеличения нагрузки, называется пределом текучести. Эти вели-
чины являются основными механическими характеристиками,
определяющими сопротивления материалов разрушению и оста-
точному (необратимому) изменению формы.
Зная эти характеристики, можно установить допускаемое
напряжение [о] путем деления временного сопротивления на
коэффициент п запаса прочности:
[<т] = овМ.
Обычно коэффициент запаса прочности и допускаемое напря-
жение регламентируются соответствующими нормами, которыми
руководствуются при расчетах на прочность.
Напряжение, возникающее при растяжении или сжатии де-
тали, определяется как частное от деления силы Р, которая вызы-
вает это растяжение или сжатие, на первоначальную площадь
ее поперечного сечения F:
о — PfF
160
Условия прочности имеют вид
ас Го ] или Р с IР1,
где JP] — допускаемая для данной детали нагрузка, IP|= Jo] Р.
Допускаемую нагрузку рассчитывают в такой последователь-
ности:
1) определяют внешние силы, действующие на данный эле-
мент конструкции и реакции в ее опорах и шарнирах;
2) с учетом найденных значений сил, а также характера их
действия (статического, динамического или периодического) и
условий работы конструкции, выбирают материал и устанавли-
вают значение допускаемого напряжения;
3) задаются размерами поперечного сечения элемента и вы-
числяют допускаемую нагрузку, умножая величину [а] на пло-
щадь поперечного сечения элемента;
4) из условия прочности Р с |Р] находят поперечные раз-
меры элементов конструкции или проверяют, удовлетворяется ли
условие прочности при принятых размерах.
При действии на элемент нагрузок, вызывающих в материале
касательные напряжения сдвига допускаемое касательное
напряжение определяют путем деления напряжения т5, соответ-
ствующего пределу текучести при перерезывании, на коэффи-
циент запаса прочности
[т, ] — т,/п.
Допускаемую перерезывающую силу определяют из условия
[Л] = KI F,,
где Ft — площадь сечения, по которому срезается элемент.
При скручивании элемента, нагруженного крутящим момен-
том Мк, в его материале возникают касательные напряжения
т = Л1К. Wr.
где Wp — полярный момент инерции.
Условие прочности имеет вид
т < 1т],
где [т]—допускаемое касательное напряжение, которое обычно составляет
(0.6 ... 0,8) допускаемого напряжения растяжения.
Допускаемый крутящий момент
[A1J - 1т 1 Wp
При действии на элемент конструкции поперечных сил, вызы-
вающих его изгиб, в общем случае возникают изгибающий мо-
мент Ма и перерезывающая сила Q, действующая вдоль попереч-
6 Гоберман Л А
16!
ного сечения элемента. При этом изгибающий момент вызывает
нормальное напряжение
а = MB/W,
а сила Q — касательное напряжение
т - QSt/(bJ),
где J — момент инерции сечения относительно невральной оси; W7 — осевой
момент сопротивления сечения, равный отношению (здесь гшах — расстоя-
нии от нейтральной оси до наиболее удаленной точки сечения): S2 - статический
момент относительно нейтральной оси площади сечения; b — ширина сечения.
Проверку прочности для рассматриваемого случая изгиба
проводя г по формуле
апг = <ст2 - Зт2 < [ст].
Допускаемые нормальное и касательное напряжения при дей-
ствии статической нагрузки для стали СтЗ принимают равными:
при растяжении, сжатии и изгибе [о] — 160 МПа, при срезе
,тя] = 100 МПа.
При одновременном действии изгибающего момента и про-
дольной силы Р, вызывающей сжатие или растяжение элемента,
условие прочности имеет вид
ст = P/F + < [ст].
Если при сжатии элемента имеет место и продольный изгиб,
условие прочности запишется так
° = 3.0 ' |"1'
а в общем случае
где <рм = 0.15-3-'.0 — коэффициент продольного изгиба в плоскости действия
момента; значение <рм зависит от гибкости элемента; чем меньше гибкость, .ем
больше Фм.
Некоторые особенности имеет расчет на прочность при дина-
мическом нагружении деталей. Отметим два характерных случая.
I. Динамическая нагрузка знакопостоянна и имеет конечное
значение Ря< чет на прочность ведется по той же схеме, что и при
статическом нагружении, но по значению динамической нагрузки;
при этом отношение динамического напряжения стг к статичес-
кому ост будет численно равно коэффш иенту динамичное--и А[пин:
^Сдин ~
2 Тансммческая нагрузка имеет ударный характер, те.
за очень малое время, обычно исчисляющееся долями секунды,
достигает весьма большого значения. Динамическое напряжение
1R2
определяется по кинетической энергии удар2 Т. При продольном
ударе
т/ТГ
°д=У——
где Е и I — модуль упругости материала ударяющего тела и длина последнего.
Из этого выражения следует, что уменьшение модуля упру-
гости или, что то же, уменьшение приведенное жесткости соуда-
ряющихся тел, позволяет снизить динамическое напряжение.
С этой целью в системе рабочего оборудования экскаваторов,
дорожных фрез, бульдозеров и других дорожно-строительных
машин можно установить упругие элементы типа буферных пру-
жин. Меньший эффект дает увеличение площади поперечного се-
чен ия тела, которое к тому же приводит к увеличенью его массы
и металлоемкости конструкции.
Если детали подвержены действию переменных нагрузок, то
их разрушение происходит при наг ряжениях, мензших времен-
ного сопротивления материала, определенного при статических
испытаниях. Явление снижения сопротивления материалов дей-
ствию переменных нагрузок, сопровождающееся возникновением
трещин, называется усталостью, а напряжение, соответствующее
разрушению материала — пределом усталости. При расчете де-
талей на усталость обычно принимают значительно большие за-
пасы прочности, чем при статическом нагружении.
Зная расчетные нагрузки, направленье и место приложения
сил, можно рассчитать элементы рабочего оборудования ь i проч-
ность, используя приведенные выше соотношения. Так, стрелы
кранов в вертикальной плоскость рассчитывают как консольные
балки (фермы) на поперечный изгиб и продольное сжатие от сил,
создаваемых натяжениями грузового и спяжного каналов, а
также весом стрелы. Толкающие брусья бульдозера рассчиты
вают на поперечный изгиб и продольное сжатие от сил, нагру-
жающих отвал при копании грунтг, а при заглублании отвала -
от вертикальной пеакнии грунта и усилия на ш оке i идроцилиндра
подъема—опускания тала. При этом рассчитываемую систему
можно представить как П-образную статически неопределимую
раму, составленную из двух стержней (брусьев), присоединенных
передними концами к отвалу, а задними — к шарнирам ходовой
рамы трактора. Толщину стенок гидронклиндров рабочего об ту-
давания определяют из условия прочности ня разрыв при i акси-
мальном давлении рабочей жидкости. Оси (цапфы) рассчитывают
на изгиб и смятие от воспринимаемой ими нагрузки, валы рассчи-
тывают на изгиб и кручение по приведенному напряжению
л = уМ ] 4(ать)" < )ои],
•де ги и тк - напряжения изгиба и кручения; — коэффициент приведения:
а = О 8-4 ... цо.
6*
1R3
КОНТРОЛЬНЫЕ ВОПРОСЫ
К параграфу 3.1
1. Изобразите кинематические схемы рабочего оборудования одноковшовых
погрузчиков и экскаваторов.
2. В чем отличие рабочего оборудования шарнирно-сочлененного типа от
рабочего оборудования крапов и экскаваторов телескопического типа?
3. Изобразите кинематические схемы рабочего оборудования бульдсц ров
и укажите возможные положения отвала автогрейдеров
4. От каких фахтороз зависит выбор кинематической или структурной схемы
рабочего оборудозания?
К параграфу 3.2
5. Какие условия вызывают и; ибольшее погружение рабочего оборудования
бульдозеров, погрузчиков, автогрейд! ров. скреперов при копании грунтов'*
6 Какие условия работы стреловых кранов вызыват >т наибольшее нагруже-
ние грузовых канатов и стрелы?
7. От каких факторов зависят динамически" силы, действующие на рабочее
оборудование дорожно-строительных машин?
8. Составьте дифференциальное уравнение движения, описывающее про-
цесс внедрения рабочего органа в массив материала (упор в препятствие), и решите
его при заданных начальных условиях.
К параграфу 3.3
9 Качие методы силового расчета Вы знаете? Какие за..ачи решают при сило-
вом пзсче^е оборудсчанил?
10. В "ем сущность аналитического, гряфотсалчтическогп и трофического
методов -.илового расчете? Чем эти методы отличаются друг от друга?
11. В чем с-'тоят задачи расчета рабочего оборудования на прстность?
12. Напишите в аналитическом виде условья прочности для типовых деталей
и элементов конструкций дорожно-стюительных машин, ряб "iai иг их на растяже-
ние и сжатие, срез, поперечный и продольный изгиб, кручение.
ГЛАВА 4
ОСНОВЫ ТЕОРИИ И РАСЧЕТА МАШИН
И ОБОРУДОВАНИЯ НЕПРЕРЫВНОГО
И ВИБРАЦИОННОЮ ДЕЙСТВИЯ
4.1. МАШИНЫ И ОБОРУДОВАНИЕ
НЕПРЕРЫВНОГО ДЕЙС ГВИЯ
4.1.1. Об ла сти г рименения
В качестве рабочего оборудования непрерывного дей-
ствия наибольшее распространение полечили ленточные, цеп-
ные (ковшовые и скребковые) и винтовые (шнековые) конвейеры.
Они применяются как самостоятельное технологическое оборудо-
вание, или явл яют ся оборудованием машин, работающих по
принципу непрерывного действия. Так, экскаваторы непрерыв-
ного действия с помощью ковшовых и скребковых конвейероа
выполняют операции копания траншей, пород, образования глу-
боких выемок и т. д. [ рунт, 11еремещасмы й в ковшах или скреб-
ками таких конвейеров, поступает на другие конгеисры, обычно
ленточные (они называются «отваленными»), которое отбрасывают
его по обе стороны траншеи. В некоторых конструкциях траншей-
ных экскаваторов устанавливают два шнека-от косообразователя,
с помощью которых при движении машины грунт укладывается
в отвал по обе стороны от траншеи.
В п пекороторных cnei оочисти- елях применяют шнеки с пра-
вой и левой навивкой спирали. Такие шнеки разрабатывают забой
и подают снег к ротору лопастного типа; последний отбрасывает
cnei в сторону. В этих машинах шнеки выполняют роль пита-
теля, подающего ма гериал к другому рабочему органу — ро-
тору.
В многоковшовых погрузчиках основным рабочем органом
является ковшовый элеват ор, уст ановленный на самоходном шасси.
Такие погрузчики зачерпывают и пер?, ружа.от е транспортные
средства песок, щебень, каменный j "олъ и другие материалы.
Насыпной груз обычно зачерпывается ковшами при движении
машины вперед, поднимается элеват ором наверх и высыпается
через латок hi л^нч очный конвей* р подающий груз непосредст-
венно в транспортное срецез во, движущееся рядом с погрузчиком
или за ним.
В асфальто- к бетоносмесительных установках лептонные,
пластинчатые и пи винтовые конвейеры являются составной частью
сортировочно до шровочной системы. Через бункеры и специаль-
ные дозаторы материал (песок или щебень) равномерным потоком
подается па конвейер выполняющий роль питателя, и от пего по
сгу пает в мешалку, где приготовляется нужная по составу смесь
165
В асфальтоукладчиках, предназначенных для укладки ас-
фальтобетонных и битумоминсральных смесей на предварительно
подготовленное основание, составной частью рабочего оборудова-
ния являются скребковые конвейеры — питатели и шнеки. Пер-
выми поступающая из бункера асфальтоукладчика смесь по-
дается на основание дороги, а вторыми осуществляется равномер-
ное распределение смеси по основанию.
В комплект машин для скоростного строительства автомобиль-
ных дорог входит ленточный конвейер-перегружатель, который
является навесным оборудованием к профилировщику. С помощью
этого конвейера производится отсыпка излишков грунта и мате-
риалов из рабочей зоны профилировщика в транспортные сред-
ства или на обочину дороги.
4.1.2. Теория ленточных, канатных
и цепных конвейеров
В ленточных и канатных конвейерах ведущими звень-
ями являются приводной барабан или канатоведущий шкив,
приводимые во вращение от двигателя через редуктор, а ведо-
мыми — специальные ленты, чаще всего резинотканевые, или ка-
наты, свитые из стальной проволоки. Движение ленте сообщается
барабаном за счет трения между его поверхностью и лентой, а
канату — также за счет трения между канатом и поверхностью
шкива.
В конвейерах ленты выполняют функции тягового и грузоне-
сущего элементов, а канаты — только тягового элемента, сооб-
щающего движение грузу. Согласно уравнению Эйлера зависимость
между натяжением А’нб гибкого тягового органа в точке набега-
ния его на приводной барабан (канатоведущий шкив) и его натя-
жением Scp в точке сбегания с барабана (канатоведущего шкива)
имеет вид
— ° с Г)с »
гдр е= 2,718 — основание натурального логарифма; f — коэффициент трения
между гибким тяговым элементом и поверхностью барабана; а — угол обхвата
барабана (канатонедуще.го шкива) гибким тяговым элементом, рад.
Для облегчения вычислений efa можно пользоваться данными,
приведенными в табл. 12.
При установившемся движении гибкого тягового элемента
тяговое (окружное) усилие на приводном элементе определяется
по разности натяжений и 5сп
Рп = SHfi - Sc6 = Sc6 (ef“ 1).
Из этого уравнения следует, что тяговое усилие, сообщаемое
гибкому тяговому органу, может быть повышено путем увеличе-
ния начального натяжения тягового элемента, равного Sco,
угла обхвата а или коэффициента трения / между гибким тяго-
166
12. Значения е^“
а f
градус рад. 0,10 0,15 0.20 0,25 0.30 0,35 0.40 0,45 0 50
150 2,61 1,30 1,48 1,78 1 91 2,20 2.5С : 8 3,24 3,64
180 3,14 1,37 1,60 1,87 2 19 2,57 3,0 3,51 4,11 4,81
250 4,40 1,52 1,93 2,4! 3.0 3.74 4,66 5,81 7,24 9,02
270 4.71 1,60 2,0 2,57 3.25 4,11 5,15 6,60 8,15 10,50
300 5.24 1,69 2,19 2,84 3,69 4,58 6,18 8,13 10,50 13,50
330 5.75 1.78 2.34 3,17 4,21 5,63 7,42 10,0 13,20 17,80
360 6,28 1,87 2.57 3,51 4 81 6,59 9,02 12,35 16,90 23,14
540 9,42 2,57 4,11 6,59 10,55 16,90 27,08 43,38 69,49 111,32
ьым элементом и приводным элементом. С точки зрения лучшей
сохранности и надежност и гибкого тягового элемента последние
два способа повышения тягового усили я являются более предпочти-
т ельными.
Для резиновой ленты и чугунного обточенного барабана [ —
= 0,25 ... 0,35; для барабана, футерованного резиной, f — 0,35 ...
0,45. Коэффициент трения для каната, свитого из стальной про-
волоки, и чугунного обода канатоведущего шкива в среднем
равен 0,07 ... 0,12; для шкивов, футерованных деревянными брус-
ками, кожаной лентой или алюминием — 0,20 ... 0,30; для шки-
вов, футерованных специальной пресс-массой — 0,30 ... 0,35.
Коэффициент трения для канатов крестовой свивки несколько
выше, чем для канатов односторонней свивки.
Одним из способов, повышающих коэффициент трения между
канатом и канатоведушим шкивом или барабаном, является уве-
личение поверхности контакта трущихся поверхностей, что до-
стигается нарезанием на ободе приводного элемента специальных
канавок (желобов), в которые при навивке укладываются витки
каната.
В цепных конвейерах ведущими элементами являются привод-
ные звездочки, а ведомыми — цепи, движение которым сообщается
путем зацепления их звеньев с зубьями звездочек.
В цепных конвейерах цепи чаще всего выполняют функции
тягового элемента, а грузонесущими элементами могут быть ковши,
пластины или специальные траверсы, соединенные со звеньями
цепи, либо конструкции, выполненные в виде настклов и лотков
При установившемся движении тяговое усилие определяют
по уравнению
Р 0 = ^Нб
гдр ^иб и -$сб — усилия в набегающей и сбегающей с приводной звездочки вет-
вях цепи.
167
В отличие от лент и канатов тяговые цепи при равномерном
вращении приводной звездочки с частотой п (об/мин) перемещаются
неравномерно, их движение сопровождается продольными и вер-
тикальными колебаниями, период (с) которых соответствует вре-
мени поворота звездочки на один зуб:
I = 60/ (nz),
гле г — число зубьег звездочки
При этом возникает переменное по знаку продольное ускоре-
ние (м/с2) тяговой цепи
/ = ±п2<ц/180,
где /д — шаг цепи.
Ускорение в свою очередь вызывает динамические нагрузки.
Считают, что расчетная динамическая нагрузка 5ДИН, действую-
щая по ходу цепи, равна утроенному произведению приведен-
ной массы т движущейся цепи и груза на продольное ускорение
^дин ~ 3mj,
С учетом этого тяговое усилие, передаваемое цепи, несколько
снижается:
Pq *5нб 5сб *^ДВН'
Рассмотрим движение рабочего органа многоковшового экска-
ватора при копании грунта.
Так как одновременно с копанием грунта машина движется
с некоторой скоростью v, каждый ковш, соединенный с тяговой
цепью ковшового конвейера, установленного на машине, участ-
вует в двух движениях: относительном вместе с цепью, происхо-
дящем со скоростью vr, равной скорости цепи иц, и переносном
вместе с машиной, происходящем со скоростью ив = и (рис. 50).
Абсолютная скорость любой точки ковша равна геометрической
или векторной сумме переносной и относительной скоростей, т. е.
v« = ve + v,.
Чтобы найти модуль абсолютной скорости, спроектируем это
векторное равенство на координатные оси ОХ и OY.
== + v„ = v 4- vu cos P;
Ощ; Щр 4” Щр == Пц Sit! р,
гце 0 — угол наклона конвейера.
Тогда
— Vvvx 4- vlu — у' и2 Пц 4 2пиц cos Р-
Угол наклона вектора v„ к горизонту
168
Рис. 50. Схема для определения скорости
движения ковшей цепного конвейера тран-
шейных экскаваторов
Рис. 51 Схема для определения
скорости материала при инерцион-
ной разгрузке ленточного конвейе-
ра
При подходе к крайнему верхнему положению ковш опроки-
дывается и разгружается под действием силы тяжести частиц
материала (такой способ разгрузки называется гравитационным).
Скорость падения материала в этом случае
<‘м > 2^,
а время, необходимое для прохождения пути hKr
1 __ Лк __ I Г hK
м " < “Г 2g ’
где Ди — высота падения.
Чтобы материал из разгружаемого ковша не высыпался в сле-
дующий за ним ковш, время подхода передней кромки последую-
щего ковша к месту разгрузки переднего ковша, равное $ИДЦ,
должно быть не меньше времени (,л свободного падения материала
из разгружаемого ковша, т. е.
SK/t>4 > или sk,!vv > Vh^g) -
Из этого выражения можно найти необходимое расстояние sK:
> Сц /hB/(2g) -
На ленточных отвальных конвейерах часто применяется инер-
ционная разгрузка, при которой материал разгружается в ос-
новном за счет сообщаемой ему кинетической энергии и отбрасы-
вается в сторону от машины на значительное расстояние. Это рас-
стояние, так же как и характер траектории движения частиц
материала или груза при сходе с конвейера, можно заранее оп-
ределить ,
Для системы, изображенной на рис. 51, составим дифферен-
циальные уравнения движения груза:
тх =0; ту - —mg
169
или
х = 0; у = —g,
где т — масса перемещаемого гр^за.
Интегрируя эти уравнения при начальных условиях — при
t — 0х~ ин, у — 0 (здесь — начальная скорость груза), на-
ходим
х = п„; у = —gt.
Последние уравнения интегрируем при t = 0, х = 0, у = Н
(здесь Н — максимальная высота падения груза):
х = у = Н — gt?!2.
Для составления уравнения траектории движения груза после
схода с конвейера исключим из первого выражения время t -
= х/ин и подставим его во второе; тогда получим
у = Н — X2.
Ч
Эта зависимость представляет собой уравнение параболы.
Как видно из схемы, при х = / у — 0; если эти условия под-
ставим в уравнение параболы, то найдем максимальную даль-
ность I отбрасывания груза
(114)
Из выражения (114) следует, что дальность отбрасывания
груза тем больше, чем выше его начальная скорость в момент
схода его с конвейера и чем больше высота Н или наклон конвейера
к горизонту.
4.1.3. Определение сопротивлений движению
гибкого тягового элемента
Сопротивление движению гибкого тягового элемента
зависит ог его типа и констру цц ы плослости, па которую опи-
рается движущийся тяговый орган или перемещаемый груз,
а также от угла наклона конвейера.
На участках загрузки и разгрузки определенное влияние
на сопротивление движению оказывают конструкции и располо-
жение загрузочных и разгрузочных устройств. При огибании тя-
говым элементом приводных и направляющих барабанов, шкивов
и звездочек и при прохождении криволинейных участков возни-
кают сопротивления, обусловленные трением в подшипниках
барабанов, шкивов и звездочек, а также изгибом тягового эле-
мента на них.
Сопротивления движению на прямолинейных участках пути
обусловливаются трением скольжения (движение ленты, каната
или безроликовой цели ко настилу) или качения (движение тяго-
вого органа по стад гонарным роликовым опорам или движение
170
роликовой цепи по направляющим). Определение сопротивлений
движению, вызванных трением скольжения и качения, рассмо-
трено в п. 2.2.2.
При расчете конвейеров массовые нагрузки обычно выражают
через распределенную массу q (кг/м) грузопссущсго элемента и
перемещаемого груза, приходящуюся на единицу длины. Для
цепных ковшовых конвейеров
q
где VK — вместимость ковш.'1, определенна?, с учетом коэффициента его напол-
нения. м3; р — плотность материала в ковше, кг/м3; tK — шаг расположения ков-
шей на цепи конвейера, м.
При перемещении насыпных грузов на ленточных конвейерах
q = Гр,
где F — площадь (м8) поперечного сечепия матер! ала, расположенного на длине
1 м.
На рис. 52, а показана схема сел, действующих на верхнюю
(груженую) и нижнюю (холостую) ветви гягово] о элемента, опи-
рающиеся при своем движении на опоры качения. На прямоли-
нейных участках сопротивления (Н) движению гибкого тягового
элемента равны:
для верхней ветви
Г гр = {q + qД cos ₽-{-(? + 9т) gbK sin ₽;
для нижней (холостой) ветви
= qvgLK^'o cos р — qTgLK sin |3,
Рис. 52. Схемы для определения сопротивлений движения грузе ^сущих органов:
а — ленточных конвейеров на прямолинейных участках; б — ковшовых цепных конвейе-
ров на прямолинейных участках при копании материала; в — ленточных и цепных кон-
вейероз на криволинейных участках
171
где q и <7Т — распределенные массы перемещаемо! о груза и тягового органа}
LK — длина коьвейсра; "ф0, гр'—суммарные коэффициентъ- сопро-чвления дви-
жению для верхней и ниж [ей ветвей тягового элемента: если имеет место -олько
трение скольжения, эти коэффициенты заменяются коэффи щентом трения сколь-
жения / = 0,3 ... 0,4; 3 — угол наклона конвейера к горизонту.
Общее сопротивление движению гибкого тягового элемента
на прямолинейных участках
wFP+wa
или
W -(q-r- <?т) g-фо cos ₽ } COS 0 {- qgLK sin ₽ =
= (9 + 9т) #Ьф0 - qFgL ,ф' _ qH,
где L и Н — горизонтальная и вертикальная г роекции конвейера.
Принимая для упрощения фо = фо, получаем
F = (9 + 2<?т) й£ф0 ф- qgH (115)
или
W = 9,81(г£ф0 + 9,8lqH + 19,69т£ф0. (116)
Для ковшовых конвейеров, используемых в качестве рабочего
оборудования землеройных машин, груженой является нижняя
ветвь гибкого тягового органа, а холостой — верхняя (см.
рис. 52, б). Нижняя ветвь гягового элемента (цепи) может пере-
мещаться в направляющих, но чаще она является свободно про-
висающим участком цепи; в последнем случае усилия на режущей
кромке ковша уравновешиваются начальным (монтажным) на-
тяжением гибкого тягового органа. Для такого типа ковшового
конвейера общее сопротивление движению гибкого тягового эле-
мента на прямолинейных участках
= -Ркоп Т + (9 + 9т) gLK sin 0 -ь ^g-Лкфо cos 0 - q^gLv sin р
или
= Лгопт + 92# + 9т£М’о, (117)
где J°KonT — касательная составляющая сопротивления копанию.
Для расчетов можно рекомендовать приближенные значе-
ния ф0: при перемещении ленточного тягового элемента по опор-
ным роликам с подшипниками качения 0,03 ... 0,04; при переме-
щении роликовой цепи с роликами на подшипниках скольжения
по направляющим 0,08 ... 0,12; то же, с роликами на подшипни-
ках качения 0,03 ... 0,04; при перемещении безроликовой цепи
по опорным роликам с подшипниками скольжения 0,12 ... 0,16;
то же, но ролики на подшипниках качения 0,05 ... 0,08.
Сспротивл< ние движению при огибании гибким тяговым эле-
ментом приводных и отклоняющих (направляющих) барабанов
(звездочек) (рис. 52, в) определяется по формуле, в которой пер-
172
bi im членом определяются сопротивления трения в опорах бара-
банов (звездочек), а вторым — сопротивления перегиба i ибкого
тягового элемента, зависящие от жесткости лент и канатов и
от сопротивления трения в сочленениях звеньев цепи
(Si+1 ) St), (U8)
где = (<5,-+i -f- Sf) sin (a/2) — реакция в опорах барабана (звездочки), оги-
баемого гибким тяговым элементом; а — угол обхвата барабана (звездочки) гиб-
ким тяговым элементом; Sj+j и St — натяжения в набегающей и сбегающей ветвях
гибкого тягового элемента; L) и dn — диаметры барабана (звездочки) и его цапфы;
[1 — коэффициент трения в цапфах (при подшипниках скольжения р = 0,10 ...
0,15, при подшипниках качения р — 0,025 ... 0,035); — коэффициент жест-
кости гибкого тягового элемента [для резинотканевых лент яа 0,008 .. 0,015,
для стальных лент яэ &/D, для проволочных канатов я» 0,05dtjD, для тяго-
вых цепей £ж « pBdB/D (здесь 6 — толщина стальной ленты; dK — диаметр
каната; rfB— диаметр валика цепи; рв = 0,30 ... 0,35 — коэффициент трения
валика цепи во втулке].
4.1.4. Определение натяжений
гибкого тягового элемента
Натяжения в отдельных точках гибкого тягового эле-
мента определяют путем последовательного обхода его замкну-
того контура, считая, что натяжение St+1 в каждой последующей
по ходу точке контура равно натяжению St в предыдущей точке
плюс сопротивление между этими точками
S,-+i — 5г --
Перед расчетом замкнутый контур тягового элемента разби-
вается на последовательные участки, границы которых отмечаем
цифрами 7, 2, ... (см. рис. 52, а). Отсчет натяжений начинаем
от точки 1 сбегания тягового элемента с приводного барабана
(звездочки); в этой точке натяжение задаем, исходя из экспери-
ментальных данных, или определяем по формуле, зная допускае-
мое провисание А/ гибкого тягового элемента между роликами
на холостой ветви (для ленточных конвейеров) или между ков-
шами (для цепных конвейеров)
Sc6 = S1 = Smln = ^-, (119)
где 1В — расстояние между роликами (ковшами, скребками), м, Si — натяжение
в точке 1, Н.
В соответствии с указанным правилом натяжения в остальных
точках тягового элемента будут равны:
S2 = Si W, -2? S3 = S2 -f- W2-3; S4 = 5нд = S3 -f- W3.4.
Необходимое начальное натяжение гибкого тягового эле-
мента обеспечивается натяжным устройством конвейера, с по-
мощью которого pei улируется осевое расстояние между привод-
173
ным и отклоняющим барабанами (звездочкой). Как видно из схемы
на рис. 52, а, натяжное устройство должно обеспечить усилие
^нат = S-2 S3
или, с учетом выражений, полученных «ля S2 и Х3,
^нат — <$2 ~Н So -f- 2-з — 2S2 j- W2.3 2S[2Wi-г ~1~ W?-3. (120)
Заменяя в этом уравнении по формуле (119), находим
^ = -^ + 2^.2 + ^. (121)
При расчете усилия натяжения принимаем А/ = (0.01 ..
0,03) f0.
Как видим, максимальное натяжение гибкого тягового эле-
мента имеет место в точке его набегания на приводной барабан
(или звезд >чку), в рассматриваемом примере 3„,ах = S„c = $д.
По максимальному натяжению выбираем основные параметры
гибкого тягового элемента, исходя из условия прочности.
Для конвейеров с прорезиненной лентой число прокладок
последней
f S пах
п В [а] ’
где В—ширина ленты; [а] = 40... 65 Н/см — предел прочности на разрыв
одной прокла. ;ки, Н/см ширины прокладки
Для конвейеров с пластинчатой цепью условие прочности звена
цепи и иеет вид
Smax 2S (Ь — (1) [Ор 1,
где 6 — толщина пластины; Ь — ширина пластины; d — диаметр цапфы штыря:
[сг-р ] — допускаемое напряжение на г азрыв, равное для стали С гЗ 40 ... 5G МПа;
С-4 60 ... 80 МР i; Сг5 80 ... 120 МПа, для стали 40 100 ... 140 МПа.
4.1.5. Определение мощности привода
Необходимое тяговое усилие на приводном элементе
конвейера определяют с учетом сопротивления W', возникающего
при огибании приводного элемента лентой (гепью, канатом):
Р'о - SH6 - Sc6 -J- W'. (I22)
Соответствующий этому гяговому (окружному) усилию мо-
мент на валу двигателя прив< да конвейера
Мя - Р'^/(2Ыт,), (123)
где D диаметр приводного элемента (барабана, шкива или звездочки); и и р —
передаточное числе и КПД привода.
При пуске двигателя имеют место дополнительные сопротив-
ления от инерции враги юны « я частей поивода и поступательно
движущихся частей конвейера Для их преодоления на валу дви-
гателя необходимо создать избыточный момент МизС. д, равный:
174
для ленточных конвейеров
(124)
Для цепных конвейеров
М г — Г( I отзв^зв у 1 gj 1 °'105пд (125)
'Иизб.д Ц 5,75 + 8 25 1 « ] 0,/d /р ’
где т$, и m3n — массы вращающихся частей барабана, роликов цепи и звез-
дочки; D$, £>зв и dp — диаметры барабана, звездочки и роликов цепи.
Пусковой момент на валу двигателя
7ИП — Л1д А1иа0, д.
Двигатель выбирают по мощности для установившегося ре-
жима работы конвейера
JV« = m.o/(1000n) (126)
и проверяют на перегрузку при пуске по отношению
Мп/Мя < 1,5,
где Ср. о — скорость движения рабочего (тягового) органа, м/с.
Приближенно потребную мощность двигателя можно опреде-
лить в зависимости от общего сопротивления W движению тяго-
вого элемента на прямолинейных участках по формуле
А/д = Грр.о/(1000т]). (127)
На стадии разработки технического задания, когда известна
только производительность конвейера Пг, потребную мощность
двигателя можно выразить через нее, имея в виду соотношение
q = /7т/(3,6ир.о),
где 7 — распределенная масса перемещаемого материала, кг/м; Лт — в т/ч.
Подставив это выражение q в уравнение (116), определяющее
сопротивление движению IF, а последнее — в формулу (127),
после преобразований получим
^--"6^+4^-Ч-0,02,Лл.^- (128)
В уравнении (128) первым членом правой части определяется
мощность, затр: чиваемая на перемещение материала вдоль кон
вейера, вторым -мощность, затрачиваемая на подъем материала,
и третьим— мощность холостою хода, затрачиваемая на переме-
щение движущихся частей конвейера.
Поступая аналогичным образом для конвейера, рязрабатыв! ю
шего ipvHT, находим
« = ''А' +-W + °-М«. Т • < >29)
175
В уравнении (129) первым членом правой части определяется
мощность, затрачиваемая на копание грунта, вторым — мощность,
затрачиваемая на его подъем, и третьим — мощность холостого
хода.
Для некоторых типов землеройных машин непрерывного дей-
ствия, например, для баровых, предназначенных для нарезания
щелей с помощью специальных зубьев-резцов, закрепленных на
тяговой цепи, сопротивления, учитываемые последними двумя
членами в уравнении (129), отсутствуют. В этом случае
Л'Д « Л«Ш тОр о (1000т|). (130)
Зная величину можно определить окружное усилие на
приводном элементе
Ро 1000Л(д/ир>о
и по нему при заданном угле обхвата а найти натяжения тягового
органа Sc6 и 5нб:
е Ро . с . Р^а
дсб“ ’ Лнб e/a_f
4.1.6. Силовой расчет вспомогательных механизмов
управления рабочим оборудованием
Механизмы управления рабочим оборудованием машин
непрерывного действия служат для установки конвейеров в ра-
бочее и транспортное положения и имеют, как правило, гидрав-
лический привод
Силовой расчет механизма управления рабочим оборудованием
рассмотрим на примере баровой землеройной машины, работа ко-
торой аналогична работе цепных траншейных экскаваторов.
Рабочим органом машины является замкнутая цепь со сменными
резцами, которая при своем движении опирается на часто установ-
ленные направляющие ролики. Цепь вместе с несущей рамой при
переводе в рабочее положение с помощью гидроцилиндров опус-
кается на разрабатываемую поверхность, и резцы цепи врезаются
на необходимую глубину в грунт. При одновременном движении
машины и цепи в грунте прорезается щель. По окончании работы
с помощью тех же гндроцилиндров рама рабочего оборудования
поднимается и переводится в транспортное положение.
На рис. 53, а показана первая стадия перевода рабочего
оборудования баровой машины в рабочее положение — с помощью
гидроцилиндрз рабочее оборудование опускается вниз и упирается
в поверхность грунта. Движущее усилие гидроцилиндра Ра оп-
ределяется при этом по усилию отпора Rora, т. е. реакции со
стороны грунта на раму рабочего оборудования
.76
Рис. 53. Расчетная схема для определения усилий в гидроцилиидрах механизма
управления положением рабочего оборудования ба новой машины;
а — при заглублении рабочего оборудования; б — при разработке грунта; в — при
подъеме рабочего оборудования
Составим уравнение моментов действующих сил относительно
оси поворота рамы (точки Л)
V МА == 0; /?отп/ Gp. о sin <zZn 2Рдл-о = 0,
откуда усилие, развиваемое в одном гидроцилиндре,
р ___ Z?0TnZ — Gp 0Z0sincz /1014
, (131
где Gp. о — сила тяжести рабочего оборудования; а. — угол, образованный про-
дольной осью конвейера и вертикалью.
Максимальное значение силы /?отп определяют из условия
прочности несущей рамы рабочего оборудования, работающей
в рассматриваемом положении на изгиб.
Схема сил, действующих на рабочее оборудование при копании
грунта, показана на рис. 53, б. В этом случае в некоторой точке Л,
расположенной приблизительно посередине глубины разрабаты-
ваемой траншеи, приложена суммарная сила сопротивления копа-
нию: представим ее в виде касательной Ркоп т и нормальной Pm„N
составляющих, связанных между собой соотношением РкопЛ- =
' 1Ркоп т Кроме того, на зачистном ноже действует сила сопро
гивления Рв
177
В данном случае силы Лкои-г и PKonw удобно заменить гори-
зонтальной /?х и вертикальной реакциями сопротивления ко-
панию, представляющими собой сумму проекций сил Р„От и
^кои л соответственно на горизонтальную и вертикальную коор-
динатные оси ОХ и 0Y:
Rx - Люи т cos р 4 PFon jV sin р = Ркоа х (cos PH sin Р); (132)
Ry = Лепт sin р — PmaN cos р = Лопт (sin Р — Е cos Р). (133)
Действие сил Л и Rv перенесем в точку Ki, лежащую на пере-
сечении линии действия силы Rx с продольной осью рабочего обо-
рудования, как это показано па рис. 53, б справа.
После преобразований исходной расчетной схемы получим
систему сил, действующих на рабочее оборудование: силы Rx и Rv,
приложенные в точке («свободная» сила Ry направлена вниз,
а пара сил R,, — на схеме она указана черточками — на движение
рассматриваемой системы влияния не оказывает, а вызывает лишь
напряжения изгиба в несущей раме), составляющие силы тяжести
рабочего оборудования Gp. 0 sin а и Gp.o cos а и сила сопротив-
ления Ря на зачистном ноже.
Составим уравнение моментов этих сил относительно точки А
% Л1 а = 0; Gp. 0/0 sin а — Rx (hA — h/2) Д-
+ Ry (hA -|- Л/2) tg a — P3 (hA -f- ti) Д-2Рцх0 = 0,
откуда
_ ^(Ла + А/2)-^(йа +ft/2)tg<x-LP3 (hA + h)- Gp oZ0sina
д 2x0
(134)
Рассмотрим транспортное положение рабочего оборудования
(рис. 53, в). Составляя уравнение моментов сил относительно точ-
ки А, получаем:
£ Л1Л = 0; Gp oZ0 соз у — 2Рдх0 = О,
откуда
Рл = Gp. □ Zo cos у/(2х0). (135)
4.2. МАШИНЫ И ОБОРУДОВАНИЕ
ВИБРАЦИОННОГО ДЕЙСТВИЯ
4.2.1- Классификация приводов
вибрационного действия и области его применения
Вибрационные приводы сообщают колебательное дви-
жение рабочим органам машин и оборудования, применяемых для
уплотнения, разрушения или перемещения материалов. Возни-
кающие при этом возмущающие силы способствуют лучшему прео-
долению внутренних и внешних сопротивлений при взаимодей-
178
ciвии рабочих органов со средой, что позволяет затрачивать мень-
шие усилия на выполнение эз их процессов.
Источниками колебаний являются вибраторы: механические,
электромагнитные, гидравлические и пневматические.
К механическим относятся инерционные и эксцентриковые виб-
раторы, которые сообщают рабочим органам сотрясательное дви-
жение, В инерционных вибраторах возмущающая сила создается
при вращении одной или нескольких неуравновешенных масс, а
в эксцентриковых — при вращении эксцентрикового вала, кото-
рый через шатун передает колебательные движения рабочему ор-
гану.
Гидравлические и пневматические вибраторы относятся к порш-
невым, в них жидкость или сжатый воздух через определенную
систему отверстий попеременно поступают в подпоршневую и
надпоршневую полости цилиндра, сообщая поршню возвратно-
поступательное движение. Гидравлические вибраторы могут быть
и одностороннего действия; в них прямой ход совершается под
давлением рабочей жидкости, а обратный — под действием воз-
вратных пружин.
В электромагнитных вибраторах якорь при прямом ходе при-
тягивается к электромагниту, обратный его ход совершается с по-
мощью пружин или противоположно расположенного электромаг-
нита.
По характеру действия различают приводы вибрационного и
виброударного действия. Е приводах виброударного действия
в процессе работы одно звено ударяется о другое (например,
якорь, снабженный специальным бойком, ударяется о буфер ста-
тора электромагнитного вибратора). В этом случае рабочему ор-
гану сообщаются не только гармонические колебания, но и пере-
даются дополнительные ударные импульсы.
В оборудовании вибрационного действия, например: в вибра-
ционных отвалах бульдозеров (рис. 54, а), вибромолотах
Рис, 54. Схемы оборудования вибрационного и сотрясательного действия:
а — виброотвал бульдозера; б — вибромолот; в — виброплита; г — виброзалец; д —
качающийся конвейер
179
(рис. 54, б), виброплитах (рис. 54, в), в вибровальцах катков
(рис. 54, г), привод передает рабочему органу лишь силовые им-
пульсы, не накладывая какие-либо дополнительные связи на его
движение. В этом с 1учае вибратор располагается непосредственно
на рабочем органе. Для такого оборудования характерны малая
амплитуда и высокая частота колебаний.
Разновидностью вибрационного оборудования являются уста
новки сотрясательного действия или качающиеся конвейеры, при-
водимые от двитателя через крп воин ино-шатунный механизм
(рис. 54, д}. В этом случае двигатель (возбудитель колебания) рас-
полагается вне конвейера и кинематически егязан с ним через
ведомое звено передаточного механична — шатун.
4.2.2. Принцип действия инерционных вибраторов
Наибол ьшее распространение в дорожно ст] эительных
машинах и оборудовании вибрационного дейст ви я по. [учили инер-
ционные вибраторы, в которых возмущающей силой F (t) является
центробежная сила, создаваемая при вращении неуравновешенной
массы (массы дебаланса) ти, соединенной с валом двигат еля:
F (t) = Рл sin б>/ — mBco2e sin ь>/,
где Рд — центробежная сила; to — угловая скорость геба' апса; е — эксцен-
тр 1СИТС1 небаланса (расстояние центр! масс дебаланса до осн его ьраш>ния).
Как видим, возмущающая сила, создаваемая дебалансом, вра-
щающимся с некоторой постоянной угловой скоростью б>, в каж-
дый момент времени, соответствующий повороту дебаланса на
угол ср — со/, будет непрерывно изменять свое направление по от-
ношению к координатным осям X и У. Такая возмущающая сила
является ненаправленной.
Для того чтобы возмещающая сила была направленной, т. е.
действовала бы только в каком то определенном направлении,
например, только вдоль оси X X или только вдоль оси К—К,
применяют вибраторы типа «самобаланс». Они представляют со-
бой два спаренных вибратора с симметрично расположенными де-
балансами, имеющими одинаковые массы, которые вращаются
с одинаковыми угловыми скоростями навстречу друг другу.
Принцип работы таких тыбраоров можно пояснить схемами,
показанными на рис. 55.
При горизонтально*! расположении вибраторов (рис. 55, а)
в юложении I деба, [ансы создают цепгроб! жные силы, н травлен-
ные по горизонтали навстречу Apyi другу, и так как они равны
по значению, их равнодействующая обращается в нуль. В поло-
жение II дебалансы создают центробежные силы, направленные
го вертикали вниз; поэтому их равнодействующая, соответствую-
щая возмущающей силе, равна удвоенному значению центробеж-
ной силы каждого дебаланса, т. е. F it) = 2Ра. В положении III
180
Рис. Ь5. Принцип действия инерционных вибраторов:
а горизонтально расположенных г. ярящением дебалансов в противоположные стороны;
б •— вертикально расположенных с вращением дебалансов в противоположные стороны;
е •— наклонно расположенных с вращением дебалансов в противоположные стороны
дебалансы создают центробежные силы, действующие по горизон-
тали и направленные в разные стороны; их равнодействующая,
как и для положения 7, равна нулю. При нахождении дебалансов
в положении IV центробежные силы обоих дебалансов действуют
по вертикали вверх и их равнодействующая F ({} — 2Р-а. Для
всех промежуточных положений дебалансов, не отмеченных на
схеме, вертикальные составляющие центробежных сил будут скла-
дываться, а горизонтальные — взаимно уравновешиваться.
Таким образом, рассмотренный вибратор обеспечивает направ-
ленное действие возмущающей силы только по вертикали вверх —
вниз; возмущающая сила F (7) изменяется от нуля до максималь-
ного значения, раьного 2РЦ.
На рис. 55, б приведены схемы действия вибратора того же
типа, но у которого спаренные вибрагоры расположены по вер-
тикали. В положениях дебалансов 7 и 777 центробежные силы на-
правлены по горизонтали в одну сторону (в положении 1 вправо,
а в положении III влево) и так как по значению эти силы равны,
181
1 Л Ш TV
Рис. 56. Принцип действия инерционных вибраторов, создаю-
щих возмущающую силу и возмущающий момент
то их равнодействующие равны удвоенному значению центробеж-
ных сил, т е. F (/) - 2РЦ, только в одном случае возмущающая
сила будет направлена вправо, а в другом — влево. В положениях
II и IV центробежные силы обоих вибраторов направлены по вер
тикали в разные стороны и их равнодействующие, т. е. возмущаю-
щие силы, равны нулю. Во всех промежуточных положениях де-
балансов горизонтальные составляющие центробежных сил каж-
дого вибратора будут суммироваться, а вертикальные составля-
ющие — взаимно уравновешиваться.
Таким образом, при вертикальном расположении вибратора
типа «самобаланс» возмущающая сила действует только по гори-
зонтали вдоль осп X, изменяясь от нуля до 2Р,(.
Чтобы направление действия возмущающей силы было отлично
от горизонтального или вертикального, вибратор «самобаланс»
располагают под некоторым углом р к горизонту (рис. 55, н).
В этом случае возмущающая сила F (I) действует только вдоль
оси г], составляющей с горизонталью угол р, и изменяется от нуля
(в положениях дебалансов II и IV) до 2РД (в положениях дебалан-
соз / и III).
Если в рабочем оборудовании вибрационного действия жела-
тельно получить не только возмущающую силу, но и возмущающий
момент, то можно использовать двухбалансовый вибратор, в кото-
ром дебалансы одинаковой массы смещены на некоторый угол
относительно вертикальной оси и вращаются в разные стороны
(рис. 56).
При нахождении дебалансов такого вибратора в положении I
центробежные силы, создаваемые каждым дебалансом, направлены
в одну сторону и их сумма равна возмущающей силе F (t). Но
в отличие от самобалансного вибратора, показанного на рис. 55, а,
возмущающая сила направлена здесь не по вертикали, а под неко-
торым углом к вертикали. В положении II центробежные силы
каждого дебаланса направлены в противоположные стороны, при-
чем их горизонтальные составляющие, равные по значению, обра-
зуют пару сил с моментом, направленным против часовой стрелки,
а вертикальные составляющие —• пару с моментом, направленным
по часовой стрелке, разность этих моментов определяет резуль-
тирующий возмущающий момент /Ч (/). В положении III центро-
182
бежные силы направлены в одну сторону и их сумма равна резуль-
тирующей возмущающей силе F (7), направленной вверх под не-
которым углом к вертикали. В положении IV центробежные силы,
направленные в разные стороны, дают горизонтальные и верти-
кальные составляющие, образующие соответственно две пары, ре-
зультирующий момент которых является возмущаю дим моментом
/Й (t). В положении IV, как и в положении II, возмущающая сила
равна нулю.
4.2.3. Расчет вибрационного
транспорт но-техно тогического оборудования
На рис. 57. а показана эквивалентная схема вибра-
ционного конвейера, состоящего из грузонссущего органа, опи-
рающегося на упругие опоры каждая жесткостью г'2, и инерцион-
ного привода тина < самобаланс», создающего возмущающие силы
в направлении оси Оц, образующей с горизонталью угол вибра-
ции р.
Прежде чем описать движение такой системы соответствующим
дифференциальным уравнением, рассмотрим физическую сущ-
ность процесса транспортирования и атериала вибрационным кон-
вейером. Обратимся для этого к схемам, изображенным на
рис. 57. б.
Вибрационный привод сообщает грузопесущему органу' кон-
вейера возвратно-поступатслвное движение. Поэтому, если виб-
рация не вызывает отрыв материала от поверхности грузонесущего
органа, т. е. имеет место безотрывный процесс вибротрапснорт» ро-
Рис. 57. Вибрационный конвей-
ер:
а — эквивалентная схема; б прин-
цип действия
183
вания материала, то и последний, следуя за движениями грузо-
несущего органа, перемещается вместе с ним вперед—назад, оста-
ваясь на месте. Для того чтобы этого не произошло и материал
перемещался в заданном направлении, необходимо соблюдать оп-
ределенные условия
Допустим, что грузонесущий орган вибрационного конвейера
совершает прямолинейные гармонические колебания вдоль оси 0q
с амплитудой А при угловой скорости дебаланса ь>. При этом
г] ~ A sin ы/,
а возмущающая сила, действующая по оси От),
Fr (t) = тв A sin cof
Составляющие Fx (t) и Fy (t) последней, направленные соот-
ветственно по горизонтали и вертикали, равны
Fx (t) = Fn (t) cos p; Fy (t) = Fv (/) sin p-
Кроме этих сил на частицы материала действует сила тяжести Gf
а сила трения Frp между материалом и поверхностью грузонесу-
щего органа, пропорциональная нормальной реакции'
- [G( ± Fv (/)] Л
где f — коэффициент трения между материалом и грузонесущим органом кон-
вейера; знак «минус» соответствует направлению силы Fy (/) вверх, а «плюс» —
направлению силы вниз.
Так как возмущающая сила и ее составляющие Fx (t) и Fv (t)
изменяются по гармоническому закону, очевидно, что сила трения
также будет переменной, изменяясь от нуля, когда сила Fy (t)
направлена вверх и равна или больше силы тяжести Д, до неко-
торого максимального значения, соответствующего максимальной
нормальной реакции.
Пусть в данный момент времени грузонесущий орган движется
вперед и вверх и возмущающая сила направлена в сторону транс-
портирования материала, причем ее продольная составляющая
Fx (t) с FTp (рис. 57, б. положение /). Но если сила, действую-
щая в направлении возможного скольжения тела, из-за малого
значения не может сместить его, то между телом и опорной поверх-
ностью возникает касательная реакция, соответствующая силе Fo
трения покоя; она будет численно равна сдвигающей силе и на
правлена в противоположную сторону. Так как в этом случае
проскальзывание материала относительно грузонесущего органа
отсутствует, то материал вместе с последним будет перемещаться
вперед.
По мере увеличения возмущающей силы соответственно увели
чиваются ее составляющие Fx (t) и Fy (t) и наступает момент,
когда сила Fx (t), направленная в сторону транспортирования ма-
териала, становится больше силы трения, которая уменьшается из за
184
возрастания направленной вверх силы Fy (t)- В результате этого
материал под действием силы Fx (/) начнет скользить относительно
поверхности грузонесущего органа в сторону транспортирования,
а величина силы трения, направленной против скольжения тела
(материала), станет равной силе трения скольжения FTp
(рис. 57, б, положение 2).
При движении грузонесущего органа из нейтрального положе-
ния назад, когда возмущающая сила F (t) изменяет свое направ-
ление на обратное, значительно возрастает нормальная реакция
материала, которая в этом случае складывается с силой тяже-
сти Gi, и, как следствие этого, увеличивается сила трения между
материалом и поверхностью грузонесущего органа. В этом слу-
чае составляющая Fx (t) возмущающей силы, направленная те-
перь назад, против направления транспортирования материала,
уже не в состоянии преодолеть силу трения (это будет сила трения
покоя Fo) и вызвать проскальзывание материала назад относи-
тельно грузонесущего органа; вследствие этого материал, связан-
ный с грузонесущим органом, будет двигаться вместе с ним назад
(рис. 57, б, положение 3).
Теперь понятно, почему при возвратно-поступательном движе-
нии грузонесущего органа материал будет все же перемещаться
вперед: при движении грузонесущего органа вперед (рис. 57, б,
положения 1 и 2) материал не только движется вместе с грузо-
несущим органом, но и скользит относительно его вперед, опере-
жая движение, грузонесущего органа, тогда как при движении по-
следнего назад материал смещается назад только вместе с грузо-
несущим органом, не проскальзывая относительно него в том же
направлении. Образно говоря, при правильно выбранных ампли-
тудах и частотах вибротранспортирования материал делает «два
шага вперед и один назад».
Если вибрации грузонесущего органа вызывают подпрыгива-
ние материала над ним, то режим вибротранспортировапия нужно
выбрать таким, чтобы при обратном ходе грузонесущего органа,
против направления транспортирования, частицы материала на-
ходились над ним и опускались на грузонесущий орган при его
ходе в сторону транспортирования.
Рассмотрим движение вибрационного конвейера, представив его
как одномассовую систему, масса которой равна суммарной при-
веденной массе движущихся частей конвейера т и массе двух
дебалансов т„ Движение системы будем рассматривать в системе
координат цО£ (рис. 57, а). Принимаем, что составляющие возму-
щающих сил, создаваемых дебалансами, действующие в направ
лении оси Of, взаимно уравновешиваются, а составляющие, на-
правленные по оси Отр суммируются и их результирующая равна
Fv (0 = щвсо2с sin <р — sin со/.
Движение такой колебательной системы с учетом демпфирую
щих сопротивлений в упругих опорах, учитываемых коэффициен-
те
том демпфирования рг, описывается дифференциальным уравне-
нием
(т (- тр) л ф- ргт) ф- ст] = —mvaze sin at.
Разделим обе части этого уравнения на (т + ,??в) и запишем
его в виде:
т) -р 2/’i] + р\ = qa2e sin со/, (136J
где 2н = Рг/(/п -f- гпв) — удельное сопротивление демпфированию; р =
— с/(т + тв) — частота собственных колебаний системы; q =• mD!(m 4~ тв) —
соотношение вращающейся и общей массы вибрационного конвейера.
Общее решение обыкновенного дифференциального неоднород-
ного уравнения (136) представляет собой, как известно, сумму ин-
теграла соответствующего однородного уравнения т]ода и частного
решения fj неоднородного уравнения. При п > р общий интеграл
однородного уравнения выражается непериодической функцией
Псдн = e~nZ (Сг ch Z^2 р2 t 4 С2 sh Zn2 — р21).
При п = р
Поди = (Ci 4 С2/)
Оба рассмотренных случая соответствуют апериодическому
(т. е. не колебательному) движению.
Для рассматриваемой системы практическое значение имеет
третий случай, когда демпфирующие сопротивления малы и р > п,
при этом
Поди = e~nt (Ci sln /Z cos ZZ ~ О-
Этим уравнением выражаются собственные (свободные) затуха-
ющие колебания.
Частное решение неоднородного уравнения (136) имеет вид
г] = Л sin (со/ — 6),
Где Д — амплитуда вынужденных колебаний системы;
асо2е
3 = ----- . ;
]4 (р- — rn2)2 4и2со2
й — угол сдвига фаз между перемещением ц колебательной системы и смещением
дебалансов вибратора;
2псй
6= arctg^TT^-
Таким образом, общее решение уравнения (136) запишется так:
’l Поди + A sin (ш/1 — й)- (137)
Так как первым членом в уравнении (137) определяется ампли-
туда быстро затухающих собственных колебательных (либо аперио-
дических) движений системы, возникающих вследствие ее откло-
нения от начального положения и сообщения ей некоторой скоро-
186
сти, можно считать, что перемещения системы определяются, в ос-
новном, вторым членом у равнения (137). Тогда
. д ____tn^e_ __________________ ..
йпшх т тв у (р2 _ W2j 4л-2и2 ’
Так как под действием возмущающей силы вибратора центр
масс колебательной системы смещается на величину ту, Получая
ускорение ц, общая возмущающая сила, действующая на колеба-
тельную систему, равна
F (Г) = тва2е sin at — mBf]. (139)
Из уравнения (138) следует, что при заданных параметрах си-
стемы амплитуда колебаний зависит от кинетического i омента
дебалансов, равного тве, и угловой скорости вала приводного
двигателя или, что то же, частоты а возмущающей силы. Ампли-
туда колебаний достигает максимума при наступлении резонанса,
г. е. при а ~ р.
Амплитудное значение возмущающей силы, равное Рд =
— тпа2е, в дорезонансной области растет с увеличением частоты
вращения вала двигателя, достигая максимума при а — р, после
чего начинает снижаться.
При резонансе достигают максимума и затраты энергии на под-
держание колебаний (затраты энергии возрастают пропорциональ-
но второй степени амплитуды колебаний).
Современные конструкции инерционных вибраторов допу-
скают регулирование режимов. Частота колебаний изменяется
обычно путем регулирования угловой скорости вала двигателя,
т. е. путем изменения <о. Изменение возмущающей силы (или мо-
мента) осуществляется путем изменения массы тъ или эксцентри-
ситета е дебалансов, а также путем изменения взаимного располо-
жения дебалансов.
Применять вибраторы инерционного типа наиболее целесооб-
разно в установках со средней частотой колебаний в пределах
16 ... 25 Гц, так как при низких частотах (при малых значениях
со) необходимо соответственно увеличить массы дебалансов, чтобы
получить необходимую возмущающую силу. При слишком больших
частотах вращения вала двигателя резко возрастают нагрузки на
подшипники вибратора.
При использовании вибраторов эксцентрикового типа частоту
вынужденных колебаний выбирают в пределах 10 ... 16 Гц.
Частота колебаний электромагнитных вибраторов, питаемых
от промышленного тока, не должна быть меньше 50 Гц.
При транспортировании насыпных материалов в движение вна-
чале приходят их нижние слои, контактирующие с грузонесущнм
органом. Они получают от вибрирующего рабочего органа силовые
импульсы, сообщающие частицам материала ускорения в направ-
лении действия возмущающей силы Fx (/). В этот процесс вовле-
каются затем и вышележащие слои материала, и постепенно вся
187
масса материала приходит в движение. Средняя скорость транс-
портирования материалов при использовании электромагнитных
вибраторов не превышает 0,2 м/с, инерционных вибраторов —
0,55 м/с и эксцентриковых вибраторов — 0,80 м/с.
4.2.4. Расчет качающегося
транспортно-технологического оборудования
Транспортно-технологическое оборудование исполь-
зуется для перемещения сыпучих и мелкокусковых материалов на
небольшие расстояния, а также для сепарации таких строительных
материалов, как бетон или асфальтобетон, в состав которых входят
щебень или гравий. Получаемые после дробления щебень и гравий
нужно рассортировать по фракциям и отделить от них пылевид-
ные частицы, которые снижают качество асфальтобетонных сме-
сей. Такие операции выполняются с помощью специального техно-
логического оборудования — грохотов.
На рис. 58 показаны схемы грохотов, приводимых от кривошип-
но-шатунного механизма. Последний сообщает грохоту возвратно-
поступательное движение, в результате которого частицы материа-
ла начинают перемещаться относительно днища грохота, выполнен-
ного в виде сита, и просеиваются через него. Чтобы такое движение
материала стало возможным, инерционные силы, действующие на
материал, должны быть больше сил сопротивлениятрению материа-
ла о сито. Для грохота, показанного на рис. 58, б, это условие запи-
сывается так:
Pv cos р -г- Gt sin а (G, cos а — Ра sin Р) /,
где Ри — сила инерции, действующая на частицу материала при движении его
вниз по ситу; р — угол вибрации, равный углу наклона стержней (опор) гро-
хота; Gt —сила тяжести частицы материала (Gt — mtg, здесь mt—масса ча-
стицы материала); а — угол наклона грохота к горизонту.
I8S
Левая часть этого уравнения, равная сумме продольных со-
ставляющих сил инерции и тяжести частиц, является в данном слу-
чае движущей силой; правая часть уравнения равна произведению
суммарной нормальней силы, действующей на частицу, на коэф-
фициент трения f материала о сито, т. е. представляет собой силу
FTp трения скольжения частиц материала, всегда направленную
против движения.
Это неравенство можно записать так:
mJ cos р miS sin °- > cos а — mii sin ₽) f-
Отсюда находим необходимое ускорение для движения мате-
риала вниз по ситу:
gtfcosg sin а) _
1 ' cos Р 4- f sin р ' 7
Для эксцентриковых механизмов грохотов величина / соответ-
ствует нормальному ускорению, т. е.
/ = jn = ю2е,
где со — угловая (круговая) частота колебаний грохота.
Если это значение ускорения подставим в выражение (140) и
полученное уравнение решим относительно со, то найдем такую
частоту колебаний грохота, соответствующую угловой скорости
эксцентрикового вала привода, при которой будет обеспечено дви-
жение материала вниз по ситу:
g(/ cos g — sina)
Я(со5р )-/sinp) ‘
Для горизонтального грохота, т. е. при а = 0 (рис. 58, а), урав-
нения (140) и (141) запишутся так:
gf
cos р j- f sin р ’
1/_________________
Г A (cos Р -|- f sin Р)
(142)
(143)
Аналогичен принцип действия качающихся конвейеров, пред-
назначенных для перемещения сыпучих или кусковых материалов.
Для них условие перемещения груза вверх по настилу имеет вид
(рис. 58, в)
Ри cos р — Gt sin а (Gt cos а — Ра sin Р) /
или
mJ cos р — mtg sin а > (т& cos а — j sin P) f.
Из этого уравнения находим необходимое ускорение желоба
конвейера
; g (/ cos g 4- sin g)
7 cos0 —/sin p ‘ '
189
Сравнивая выражения (140) и (144), видим, что для движения
груза вверх по наклонной плоскости нужно обеспечить большее
ускорение, чем при движении того же груза вниз.
Для горизонтального качающегося конвейера
/>------R • (145)
J cos p — / Sin P ' '
Заметим, что во всех приведенных выражениях угол р является
переменной величиной и изменяется от некоторого минимального
до максимального значения.
4.2.5. Расчет вибрационного
уплотняющего оборудования
Рассмотрим расчет катка вибрационного действия.
Обычно передаваемые на вален катка колебания вызывают его
подпрыгивание и кратковременные отрывы от уплотняемого грун-
та. Поэтому вальцы можно отнести к ударно-колебательным систе-
мам (рис. 59). ,
Вертикальное движение вибрационного вальца описывается
диффер енциалъным ур авнением
ту = sin о>/ 4- (G 4- Рст),
где т — масса колеблющихся частей вальца; Рц — центробеж-
ная (возмущающая) сила, создаваемая вибратором; — угловая
частота колебаний вальца; G — сила тяжести вальца; Рст — ста-
тическая «пригрузка», создаваемая статической силой упругости
подвесок вальца, обычно РСТ = G.
Разделив обе части дифференциального уравнения на т, за-
пишем его в виде
у = -^- sino>/ . (146)
° т ' т
Интегрируя уравнение (146), находим
у = [ Р cos (0Z + ° * + C-
Постоянную интегрирования получим из начальных условий:
при t — 0 скорость у = 0; тогда С — Р^Цты) и
у = -^5-(1 — cos со() { --1 РрТ- gt.
у mo ' ' (j
Этим уравнением опреде-
ляется скорость колебательного
движения вальца, которое, как
было отмечено, сопровождается
его отрывом и ударом об уплот-
няемый грунт.
Рис. Ь9. Схема действия вибрацион-
ного вальца
190
Расчетное значение скорости удара оуд можно найти из условия:
при cos at — 1 at — 2л, откуда t = 2л/«о. В этом случае, обозна
чая в последнем уравнении у через иул, получаем
2-^g G + PCT
(147)
~ <u G~‘
Среднее значение силы, с которой вибровалец действует на
грунт, определяют по формуле
(148)
е ‘ул
где i!yB — время удара; для связных грунтов /ул ~ 0,011 ... 0,023 с, для несвяз-
ных грунтов /уД ~ 0,008 ... 0,016 с.
КОНТРОЛЬНЫЕ ВОПРОСЫ
К параграфу 4.1
1. В каких областях и в каких дорожно-строительных машинах применяются
ленточные, цепные и канатные конвейеры?
2. Как передается тяговое усилие от приводного барабана или капатоведу-
щего шкива к гибкому тяговому органу конвейера?
3. Как передается тяговое усилие от приводной звездочки к гибкому тяго-
вому органу цепных конвейеров?
4. От каких факторов зависит тяговое усилие ленточных и канатных кон-
вейеров?
5. Покажите, как определяются натяжения гибкого тягового органа в раз-
личных точках его замкнутого контура.
6. Как определяется потребная мощность двигателя конвейера с гибким
тяговым органом?
К параграфу 4 2
1. Для выполнения каких работ и процессов применяется оборудование
вибрационного действия?
2. Расскажите о принципе работы инерционных вибраторов и способе полу-
чения направленного действия возмущающей силы, которая создается вибра-
тором.
3. В чем сущность процесса вибротранспортирования сыпучих и мелкокуско-
вых материалов? Какие основные факторы влияют на процесс вибротранспорти-
рования?
4. Расскажите о назначении и принципе действия грохотов
5. По полученным в этой главе расчетным зависимостям объясните, хак
влияют отдельные факторы на параметры колебаний и работу вибрационных
установок.
Г Л А В A 5
ОСНОВЫ ТЕОРИИ И РАСЧЕТА ПРИВОДОВ
И МЕХАНИЗМОВ ОБЩЕГО НАЗНАЧЕНИЯ
5.1. МЕХАНИЧЕСКИЕ И ГИДРОМЕХАНИЧЕСКИЕ
ПРИВОДЫ
5.1.1 Классификация и назначение приводов
Привод является источником движения машины. Сама
машина представляет собой совокупность механизмов, осуществ-
ляющих преобразование одного вида энергии в другой, или,
кроме того, сообщающих движение рабочим органам, с помощью
которых выполняются те или иные рабочие операции.
Примером машин, функции которых ограничиваются преобра-
зованием одного вида энергии в другой, могут служить электро-
двигатели, в которых электрическая энергия преобразуется в ме-
ханическую, или гидравлические двигатели, в которых энергия
потока жидкости преобразуется в энергию движения ведомых
звеньев.
Основным конструктивным признаком машин других типов
является наличие трех основных механизмов: двигательного, пе-
редаточного и исполнительного, а также исполнительных или ра-
бочих органов. К этим машинам относятся, в частности, строитель-
ные и дорожные, грузоподъемные, транспортные и многие другие
машины, которые отличаются своим назначением и конструкцией.
Двигательный механизм, иначе двигатель, является энерге-
тической установкой машины, в которой вырабатываемая энергия
преобразуется в механическую энергию движения выходного
звена. Двигатели могут быть первичными и вторичными. К пер-
вым относятся, например, двигатели внутреннего сгорания (ди-
зели и карбюраторные двигатели), паровые и газовые двигатели.
Применяемые в строительных, дорожных и других машинах эле-
ктрические и гидравлические двигатели являются вторичными,
так как они всегда приводятся от первичных (приводных) двига-
телей и могут работать только совместно с ними.
Передаточный механизм (его называют также силовой переда-
чей или трансмиссией) служит для передачи механической энергии
от двигателя к исполнительному механизму. Последний непосред-
ственно сообщает рабочим (исполнительным) органам заданные
движения.
Передачи могут быть механическими, электрическими, гид-
равлическими. пневматическими и комбинированными.
В качестве механических применяют зубчатые, фрикционные,
а также карданные передачи.
192
При электрическом способе передачи мощности приводной
двигатель соединяют с одним или двумя генераторами, питающими
отдельные двигатели постоянным или переменным током (система
генератор—двигатель). От каждого двигателя передача мощности
к рабочему органу осуществляется механическим способом.
При применении гидравлической передачи приводной двигатель
(чаще всего это дизель) приводит в движение один или несколько
насосов, которые через соответствующие распределительные ус-
тройства подают рабочую жидкость к индивидуальным гидродви-
гателям, сообщающим движение рабочим органам машины.
Двигатель, передача и аппаратура для управления двигателем
и передачей образуют привод машины.
В зависимости от типа привода применяют различные аппара-
туру и способы управления силовыми и скоростными характери-
стиками привода (табл. 13).
По числу двигателей и схеме их соединения с исполнительными
механизмами различают центральный (групповой) и индивидуаль-
ный приводы. При центральном приводе все механизмы приводятся
от одного общего двигателя машины; в этом случае в приводе
обяза гельно должно быть распределительное устройство, например
раздаточная коробка (редуктор) и муфты сцепления между приво-
димыми от двигателя валами и отдельными рабочими органами.
13. Назначение основных элементов систем управления
Выполняемая функция Система управления
механическая электрическая гидравлическая
Однократное из- менение направле- ния Муфта сцепле- ния и редуктор (реверс) Переключатель Расп редел итель- ный клапан
Многократное изменение напра- влений Муфта сцепле- ния и редуктор (или дифферен- циальный меха- низм) Переключатель Распределитель с последователь- ной или параллель- ной схемой работы золотников
Управление скоростью при неполной мощ- ности Изменение ча- стоты вращения вала двигателя или пробуксовка муфты сцепления Регулятор по- тока
Изменение ско- Переключение Изменение ча- Изменение числа
рости или враща- передач в короб- стоты переменно- насосов (двигате-
ющего момента при полной мощ- ности ке передач го тока. Измене- ние мощности по- ля постоянного тока лей) или раз лич ные их соединения
Ограничение на Пробуксовка Выключение Предэхр анитель-
грузки муфты сцепления при перегрузке или плавкий пре- дохранитель ный клапан
7
Гоберы ан Л А
193
При индивидуальном приводе каждый механизм машины приво-
дится от собственного двигателя.
Понятия центрального и индивидуального приводов можно от-
нести и к одному какому-то механизму машины. Например, если
каждая сторона механизма передвижения (колеса или гусеницы
одной стороны) приводится от общего двитателя, говорят, что ме-
ханизм передвижения имеет центральный привод; если каждая
сторона того же механизма приводится от собственного двигателя,
говорят, что механизм имеет индивидуальный привод.
Особую группу составляют приводы, в которых используются
двигатель или двигатель с редуктором, встроенные в исполнитель-
ные органы: мотор-барабаны в лебедках, мотор-колеса в меха-
низмах передвижения и др.
По типу двигателей различают приводы с двигателями внутрен-
него сгорания: гидравлические, электрические, пневматические.
Механизмы приводов разделяют на механизмы общего и спе-
циального назначения. К первой группе относятся механизмы,
находящие применение в машинах многих типов: механизмы
подъема груза, широко применяемые в различных стреловых кра-
нах и других видах грузоподъемного оборудования; механизмы
подъема или изменения вылета стрелы, применяемые в стреловых
кранах, одноковшовых экскаваторах и погрузчиках; механизмы
вращения, служащие для поворота рабочего оборудования машины
в горизонтальной плоскости (такие механизмы имеют самоходные
и башенные краны, экскаваторы, некоторые типы одноковшовых
погрузчиков); механизмы передвижения, предназначенные для
сообщения движения мобильным машинам.
5.1.2. Механические приводы
Механические приводы состоят из двигателя и механи-
ческой передачи. Примерами таких приводов могут служить при-
воды механизмов передвижения шнекороторного пневмоколесного
снегоочистителя и его рабочего оборудования (рис. 601 и механиз-
мов башенного крана (рис. 61).
По классификационным признакам, которые были рассмотрены
в п. 5.1.1, эти приводы можно отнести к индивидуальным, так как
в снегоочистителе механизм передвижения и рабочее оборудование
приводятся каждый от своего двигателя (механизм передвиже-
ния — от двигателя 1, а рабочее оборудование — от двигателя
II), так же как и в башенном кране, в котором механизмы подъема
груза, подъема стрелы, передвижения крана и вращения его по-
воротной части имеют собственные двигатели.
Вместе с тем механизм передвижения снегоочистителя имеет
три ведущих моста (один передний и два задних), вращающий мо-
мент к которым через коробку передач и раздаточную коробку
подводится от общего двигателя. Следовательно, механизм пере-
движения у снегоочистителя имеет центральный привод
194
Рис. 60. Кинематические схемы механизмов передвижения и привода рабочих органов шнек ораторного снегоочистителя:
t — двигатель для привода базовой машина; 2 -- коробка передач; 3 — раздаточная коробка; 4 — ходоуменыпитель; 5 — средний мост;
6 — задний мост: 7 — ведущая звездочка; В — кзтяжиая зьездочка: Р, 10 — звездочка шнгков; II — дополнительный двигатель для
привода рабочего органа: 12 — карданный вал: 13 — пневмокамерняя муфта: 14 — промежуточный редуктор: /5 — цепная передача; 16 —
редуктор рабочего ор!ана, 17 — ротор; — шнек; 19 — передний мост; 20 — редуктор прнчода иасоса; 21 — шестеренный йасос
195
Рис 61. Кинематические схемы механизмов башенного крана:
а — грузовой лебедки: б — лебедки подъема стрелы: в — механизма передвижения; г — механизма вращения крана: 14 — двигатели1
2, 3 — зубчатые муЛты; 5 колодочный тормоз: 6 — барабан; 7 — редуктор: 8, 9 — ходовые колеса: /0 — Шестерня; // зубчатый венец
196
Основными элементами механических приводов являются:
коробка передач, служащая для изменения передаваемого от
двигателя крутящего момента и частоты вращения выходного
вала’
раздаточные коробки, необходимые дл я распределения крутя-
щего момента между отдельными механизмами машины, а также
между ведущими мостами полноприводных колесных машин; раз-
даточные коробки могут быть одноступенчатые и двухступенчатые;
последние позволяют расширить диапазон передаточных чисел,
обеспечиваемых коробкой передач; в состав раздаточной коробки
обычно входит дифференциальный механизм;
коробки (редуктор) отбора мощности — для отбора мощности
от общего двигателя (при групповом приводе) и передачи ее к ис-
полнительным органам (рабочему оборудованию) машины;
карданные передачи, служащие для передачи вращения от од-
ного вала к другому при изменяющемся угле между их продоль-
ными осями (карданная передача состоит из специальных кардан-
ных шарниров, которые закреплены по обоим концам карданного
вала);
редукторы, служащие для дополнительного увеличения пере-
даточного числа трансмиссии; в механизмах передвижения (хода)
такие редукторы образуют так называемую главную передачу
[главные передачи колесных машин включают также дифферен-
циальный механизм, позволяющий ведущим колесам вращаться
с различными угловыми скоростями, и конечные редукторы, рас-
положенные за дифференциалом рядом или в ступицах ведущих
колес; главные передачи гусеничных машин состоят из централь-
ного редуктора, механизма поворота (бортовых фрикционов) и
конечных (бортовых) редукторов, непосредственно связанных
с ведущими колесами]
Общее передаточное число механической передачи определяют
как произведение передаточных чисел ее составных элементов На-
пример, для механической трансмиссии тягачей и тракторов оно
равно произведению передаточных чисел коробки передач и*. п,
раздаточной коробки пр. к и главной передачи и0:
U “ пПр. к^о*
В коробках передач и раздаточных коробках применяют обыч-
но зубчатые передачи с неподвижными геометрическими осями
всех колес. При этом передаточное число каждой пары зубчатых
колес, находящихся между собой в зацеплении, определяют по
отношению числа зубьев z2 ведомого колеса к числу зубьев веду-
щего колеса (шестерни), которое численно равно отношению угло-
вой скорости а?! ведущего колеса к угловой скорости соа ведомого
колеса
«п — Z2/Zj —
197
Рис. 62. Кинематические схемы
планетарных передач:
а — с одним внутренним зацеплением;
б, в — с двумя внутренними зацепле-
ниями
В системе главной переда-
чи механизмов передвиже-
ния, а также в механизмах
вращения, в грузовых лебед-
ках кранов и экскаваторов, в
канатоведущих приводах
лифтов и в других механизмах часто применяют планетарные пе-
редачи, состоящие из центрального колеса 2 (рис. 62), колес /
и 3 — сателлитов, неподвижного колеса 4 и водила h При вра-
щении колеса 2 его зубья увлекают входящие с ними в зацепление
зубья сателлитов 1 и 3, атак как верхние зубья сателлита 1 входят
в зацепление с неподвижным колесом 4, то сателлит поворачива-
ется как рычаг относительно неподвижной опоры. При этом
ось сателлита, укрепленная в подшипниках водила h, переме-
щается и заставляет вращаться водило.
Сателлит совершает сложное движение: вращается относи-
тельно собственной оси (т. е. относительно водила) в одну сторону
и вместе с водилом обкатывается вокруг неподвижного колеса 4
в другую сторону.
Передаточное число планетарной передачи, выполненной по
схеме, изображенной на рис. 62, а, от колеса 2 к водилу h при
закрепленном зубчатом колесе 4
и® = 1
где гл и z2 — число зубьев колес 4 и 2,
Для такой схемы передаточное число изменяется в пределах
3 ... 9.
Для схемы, показанной на рис. 62, б, передаточное число от
водила h к колесу внутреннего зацепления 2 при закрепленном
зубчатом колесе 4
UW________________,
М I -zA/(z2zs)
Диапазон изменения 43 составляет 8 ... 30.
Для схемы, показанной на рис. 62, в, при передаче вращения
от колеса 2 к колесу 5 при неподвижном зубчатом колесе 4
=
*25
I ?2za
198
Диапазон изменения и^з составляет 20 ... 500. Момент на ве-
домом звене механизма Л12 равен произведению момента на веду-
щем звене Ali на передаточное число и12 и на коэффициент полез-
ного действия г)12 между этими звеньями
Afz — AliU12i]12.
Вращающие моменты на колесах планетарных передач опреде-
ляют по соотношениям:
для схемы на рис. 62, а
М3 = -Mh А14 — Afh - ЛД;
Л1, = ксм2 [ (1 + -J-) (Ли’ )Л
для схемы на рис. 62, б
Mh = Ah (Л&)Л АД = - (АД -f- Л12);
М1 = лд = ксаь (1 + -J-) (-J)- < ОъТпсГ1;
для схемы на рис. 62, в
АД = АДЛЙ’; Ah = - (МБ 4- М2);
М, = Л13 - КСЛ1, (1+4) (4) J &’ (ЧЙЧ)-1,
где Кс — 1,1 ... 2 — коэффициент, учитывающий неравномерность распределения
нагрузки между сателлитами; пв — число сателлитов.
Если в механизмах, показанных на рис. 62, колесо 1 сделать
подвижным, то они превращаются в дифференциальный механизм.
На рис. 63, а показана схема дифференциального механизма,
в котором водило h является ведомым звеном, а зубчатые колеса 1
и 3 — ведущими звеньями. Для этого механизма передаточные
числа u/n и им и угловая скорость вращения водила опреде-
ляются по выражениям:
,;(3) _ _1_ _ _£--• U(D — —1— _ ——•
" г1 + г3’“лз ы(1) 2liz,'
ixi «эд
На рис. ЬЗ, б показана схема дифференциала автомобильного
типа, широко применяемого в различных самоходных машинах
для обеспечения возможности правым и левым колесам машины
вращаться с разными угловыми скоростями при движении на по-
вороте. Ведущим звеном является водило h, получающее вращение
от двигателя через коробку передач и коническую зубчатую пару
4-5; в трансмиссиях машин последняя называется главной пере-
дачей. Ведомыми звеньями являются центральные шестерни 7
и 8, жестко сидящие на валах (полуосях) 6 и 9. Водило h, жестко
199
Рис, 63. Кинематическая схема
дифференциального зубчатого ме-
ханизма
связанное с зубчат ым коле-
сом 5, выполнено в виде ко-
робки, в которой неподвижно
закреплены оси сателлитов;
сателлиты свободно насаже-
ны на осях.
При прямолинейном дви-
жении машины пути, прохо-
димые ее правыми и левыми колесами одинаковы и соответственно
одинаковы их угловые скорости ©я = <вв Водило с осями са-
теллитов и сами сателлиты вращаются как одно целое; так как
при этом находящиеся в зацеплении с сателлитами шестерни 7 и
<5 вращаются с одинаковыми угловыми скоростями (<о7 — wG;
<j>s = ы8), сателлиты на своих осях не вращаются и дифферен-
циальный механизм не работает.
На криволинейном участке пути внешние по отношению к
центру поворота машины колеса, например, правые за то же время
проходят путь больший, чем левые колеса, внутренние по отноше-
нию к центру поворота. Соответственно этому, во избежание про-
скальзывания относительно поверхности качения колес, проходя-
щих больший путь, их угловая скорость должна быть большей
(ыв > ы0). При выполнении этого условия одна из центральных
шестерен, в рассматриваемом примере шестерня 7 правого колеса
машины, будет вращаться с большей скоростью чем шестерня 8
левого колеса, вследствие чего сателлиты получат некоторое враще-
ние вокруг своих осей.
В рассматриваемом дифференциале (он относится к так назы-
ваемым симметричным дифференциалам) число зубьев обеих цен-
тральных шестерен одинаково — z7 = zB. В этом случае справед-
ливо уравнение
<й7 -(- <ой — 2<оЛ = 0.
Отсюда следует, что при ш7 = со8 угловые скорости обеих
центральных шестерен равны угловой скорости водила Если
одно из колес машины неподвижно, например ог8 — 0, то
другое колесо, буксующее на месте, будет вращаться с угло-
вой скоростью, вдвое большей угловой скорости водила, т. е. о>7 —
— 2йх.
Следует отметить, что описанный тип дифференциала не изме-
няет передаточного числа главной передачи и, следовательно, об-
щего передаточного числа трансмиссии и = и„ где пк. п —
передаточное число коробки передач. Такой дифференциал только
распределяет подводимый от двигателя вращающий момент —
200
— Л/Дпр по правим и левым колесам машины 'М' и Л/р) в соотно-
шениях
Мр = krMp-, Мр = (1 - kJ Л1р;
м-р,
где kr — коэффициент распределения вращающего момента, подводимого от
двигателя к полуосям ведущих мостов машины, для простых шестеренчатых диф-
ференциалов kr = 0,5 ... 0,6, т. е. вращающий момент примерно поровну рас-
пределяется между' обоими ведущими колесами машины
Указанное свойство дифференциала имеет и свои отрицатель-
ные стороны: если одно из ведущих колес машины попадает на
скользкий участок дороги, вследствие чего подъеденный к нему
вращающий момент не может быть реализован из-за отсутствия сце-
пления этого колеса с поверхностью дороги, тс в силу равенства
моментов на обоих колесах, связанных между собой через диффе-
ренциал, вращающий момент на другом колесе, хотя и не поте-
рявшем сцепления с дорогой, также станет равным нулю и машина
не сможет сдвинуться с места.
При блокировке дифференциала kr — 1 и зависимость между
моментами Л/р и Л/р отсутствует. В этом случае оба ведущих ко-
леса имеют между собой жесткую кинематическую связь и если
одно из них потеряло сцепление с дорогой, то вращающий момент
от двигателя будет подводиться к другому колесу, сохраняющему
сцепление с дорогой.
Б. 1.3. Гидромеханические приводы
Основной частью гидромеханических приводов является
гидродинамическая передача (гидравлическая муфта или гидро-
трансформатор), передающая вращающий момент от двигателя
к исполнительным органам машины через коробки передач, раз-
даточные коробки, карданные валы и другие элементы.
На рис, 64 показан гидромеханический привод механизма пере-
движения пневмоколесного погрузчика, состоящий из двигателя 1,
согласующего редуктора 2, гидротрансформатора 3, коробки пере-
дач и раздаточной коробки 4, главной передачи 5 с концевыми пла-
нетарными редукторами 6 переднего моста, редуктора 7 привода
заднего моста, главной передачи 10 с концевыми редукторами 11
заднего моста. От согласующего редуктора часть мощности отби-
рается на привод гидравлических насосов 8 и 9 для привода рабо-
чего оборудования и рулевого управления.
Основными элементами гидротрансформатора (рис. 65) яв-
ляются насосное колесо 9, непосредственно или через согласую-
щий редуктор соединенное с валом двигателя; турбинное колесо 8,
жестко связанное с выходным валом; направляющий аппарат
(реактор) 10, установленный между насосным и турбинным коле-
201
Рис. 64. Кинематическая схема механизма передвижения пиевмоколесного погрузчика с гидромеханическим приводом
2G2
Рис. 65. Гидротрансформатор:
1 — корпус редуктора отбора мощности; 2 — маховик двигателя; 5 — зубчатый венеп?
4 — зубчатый диск; 5**— первичный вал редуктора; 6 — разбрызгивающая шестерня;
7 — корпус гидротрансформатора; 8 — турбинное колесо; Р — насосное колесо; 10 —
направляющий аппарат: 11 — ведомый вал: 12 — подпиточное отверстие; 13 — веду-
щий вал
сами; шестеренный насос, подающий рабочую жидкость из картера
гидротрансформатора через золотник в рабочую полость, образуе-
мую нясос.ным и турбинным колесами.
Рабочая жидкость, поступающая в рабочую полость, захваты-
вается лопастями насосного кслеса и отбрасывается на лопасти
турбинного, приводя последнее и выходной вал во вращение.
С лопастей турбинного колеса рабочая жидкость поступает на
лопасти реактора, проходя по которым она получает определенное
направление движения, нео^хоп^мое при выходи ее из рнакгоря
в насосное колесо. Описав таким образом круг пиркуляпии (насос-
203
ное колесо —• турбинное колесо —• реактор — наспсное колесо)
жидкость частично через соответствующие отверстия и жиклеры
попадает в картер; при этом ее утечка компенсируется непрерывно
работающим шестеренным насосом.
При переключении золотника подача жидкости в рабочую по-
лость прекращается и масло под влиянием центробежной силы
выливается через щель между насосным и турбинным колесами и
через жиклеры в картер, после чего трансмиссия отключается от
двигателя.
Основные параметры и характеристики гидродинамических
передач. В гидродинамических передачах для сообщения враще-
ния насосному и турбинному колесам используется, в основном,
кинетическая энсршя рабочей жидкости, поток которой гидроди-
намически взаимодействует с лопастными системами обоих колес.
Если в гидродинамической передаче имеется неподвижный реак-
тивный элемент, как в гидротрансформаторах, то такая передача
помимо создания разницы в частоте вращения ведомого и ведущего
валов, может трансформировать, т. е. изменять передаваемый
вращающий момент.
У гидравлических муфт реактор отсутствует и поэтому они
способны только при равенстве моментов изменять передаточное
число в зависимости от частоты вращения.
Условие установившейся работы гидротрансформатора выра-
жается уравнением
Л1Н -J- Л1р. п — Л1 т = 0 или М т = Л1н ф- Л1 р. к,
где Л!п, Мг и Л1р. к — моменты, развиваемые на насосном и турбинном колесах
и воспринимаемые неподвижным реактором.
Из этого выражения видно, что на выходном валу гидротранс-
форматора может развиваться момент больший, чем на ведущем
валу насосного колеса. Таким образом, гидротрансформатор как
бы выполняет роль редуктора; силовое передаточное число такого
«редуктора» или, как его называют, коэффициент трансформа-
ции определяется отношением
Кгт = (149)
Кинематическое передаточное число гидротрансформатора «гт
определяется как отношение частоты вращения пт выходного вала
к частоте вращения па входного вала
игт = nJnR = . (150)
Од
КПД гидротрансформатора
rirT ~ Л4в<0н" ~ ^гт«гт. (151)
где NH и NT — мощности на валу насосного и турбинного колес,
204
Рис. 66. Характеристики гццротра'.сфэрлтгоров:
а — непрозрачного,. б —• прозрачного
Различают два вида гидротрансформаторов — непрозрачные
и прозрачные.
Харг ктеристика непро трачно! о гидротрансформатора показана
на рис. 66, а. Крутящий момент Л1„ о. тается постоянным во всем
диапазоне изменения частоты вращения выходного вада турбин-
ного колеса, тогда как момент М1 выходного вала изменяется в
широких пределах. При этом значения .VI, и п, автоматически из-
меняются при изменении внешнего сопротивленья — с увеличе-
нием последнего снижает ся частота вращения выходного вала и
соответственно увеличивается вращающий момент Л1Т, что по-
зволяет лучше преодолевать возросшие сопротивления. Но во
всем диапазоне изменения выходных параметров гидротрансфор-
матора, частота вращения и вращающий момент на валу
двигателя, с которым связан вал насосною колеса, практиче-
ски не изменяются, что благоприятно сказывается на его ра-
боте.
Характеристика прозрачною гидротрансформ;тора показана
на рис. 66, б. От рассмотри ной выше она отличается тем, что вра-
дающий момент Л1К на входном валу гидротрансформатора не
остается постоянным при изменении момента Лф: увеличен! ie мо-
мента Л!т вызывает увел ичепие момен га VI„. а следовательно, и
момента на валу двигателя. Такой гидротрансформатор уже
полностью не защищает двигатель m г.ерегрузокг но зато
позволяет максимально испопьзоват ь его тяговые возмож-
ное ги.
Степень прозрачности гидротрансформаторов оценивается ко-
эффициентом прозрачности J7rT, равным отношению вращающего
момента Л4Н (дгт п д при рабо е гидротрансформатора в режиме
трогания, г. е. в режиме, когда турбинное 1 олесоеще заторможено
(Леттах, ni — 0), к моменту Мв при р; б, те гипротрансфор-
206
матора в режиме, когда наступает равенство моментов на входном
и выходном валах (Л1Н — Л1т и Кгт — 1):
(^гт max)
(152)
Дтя непрозрачных гидротрансформаторов (кгт пах) —
= Л1Н(КГТ=1) и/7ГТ — 1. Обычно считают, что гидротрансформа-
торы, для которых Пгт = 1 ... 1,2, являются непрозрачными,
гидротрансформаторы, для которых Пгт > 1,2, относятся, к про-
зрачным. Гидротрансформаторы, имеющие /7ГТ < 1, обладают
обратной прозрачностью — для них с увеличением момента на
выходном валу момент на входном валу уменьшает ся.
В качестве расчетных режимов работы гндротраньформа горе в
принимают режимы, близкие к Т]гт пих (на рис. 66, а — это вели-
чина T]i~r (р), которой соответствуют момент на турбинном колесе
МТ(Р), коэффициент трансформации Л'г-т <р) и передаточное чис-
ло Uj-r (Р)).
Вращающие моменты (Н-м) на валах насосного и турбинного
колес определяют в функции плотности рабочей жидкости р (кг/м3),
частоты вращения вала насосного пн и турбинного пт (об/с) колес
и наибольшего (активного) диаметра/? (м) рабочей камеры гидро-
трансформатора:
Л1Н = Xgpn^D6; (153)
М — X.Tpn|D5,
мощность, развиваемая на тех же валах
2VH = Лнрщ)О6;
2VT = ATpniDb,
(154)
(155)
(156)
HieZq и ?.т — коэффициенты моментов насосного и турбинного колес; ЛЕ и Лт —
коэффициенты мощности насосного и турбинного колес.
Кроме того, для оценки свойств гидро шнамических передач
широко применяют безразмерные характеристики, получаемые
экспериментально: Лгт =- ) («гт), т]гт = flu,.) и Хн = / (и,г).
Последнюю часто заменяют зависимсстью р2.я = f (игт)> •опреде-
ляемой по формуле
р2.н = MH/(nWE). (157)
Особенностью безразмерных характеристик ят тяется то, что
они оказываются справедливыми i. гя всего семейства геометри-
чески подобных гидротрансформаторов и легко позволяют пе-
рейти к внешним размерным характеристикам Л1в = [ (игч.) и
/(«п) путем умножения величин (рХн (т>) ня Пт(Т)П®
Согласование работы гидродинамиче» кого трансформатера и
двигателя. Для тою чтобы машина с гидродинамической транс
миссией обладала наиболее дысокими тяговыми и скоростными
206
качествами, необходимо, чтобы двигатель и гидротрансформатор
работали иа согласованных друг с другом расчетных режимах:
для двигателей внутреннего сгорания это режгмы, близкие к ре-
жиму м гксималыюй мощности, а длч гидротрансформаторов —
к режиму максимального КПД.
Согласование совместной работы двигателя и гидротрансфор-
матора осуществляется как путем выбора нужных параметров и
характеристик гидротрансформатора, так и путем установки
между двигателем и гидротрансформатором согласующего редук-
1 ора, позволяющего либо понижать частот у вращения вала на-
сосного колеса но сравнению с частотой вращения вала двигателя
(такой редуктор называется понижающим или замедляющим, его
передаточное число р > 1), либо повышать ч; стоту вращения
вала насосного колеса (такой редактор называется ускоряющим,
его передаточное число zzc. р < 1)
В соотв( т стрии с этим вал двига геля с валом насосноп - колеса
гидротрансформатора может быть соединен напрямую, без ре-
дуктора, или через редуктор.
В зависимости с г схемы соединения двигателя г гидротранс-
форматором между режимными параметрами двигателя, приво-
де иными к валу насосного колеса, и параметрами последнего
имеют место следующие соотношения:
а) при соединении 1 ала дви гателя с валом насосного колеса
напрямую, когда вся мощность Л'л, развиваемая двигателем, пе-
редается через гидротрансформатор
Л1д. пр. В = Ид. пр П = /IjtJ JVд. Пр. я = ( 158)
где Л1 j.Up п, ид пр. п, Л'д пр. н — вращающий момент, частота вращения и мощ-
ность двигателя, приведенные к ве у иасосг ого колеса:
б) при той же схеме соединения валов двигателя и насосного
колеса, но при о гборе части мощност и Nr. на привод вспомогатель-
ных механизмов
К. пр. н ~ Ид. пр. н ~ Дю Л п. Пр. и = | Л/Е, ( 1э9)
где В — к эфф иг иент использования мощности j вигателя
₽ =(Лп- Vo)/.’vH; (160)
в) при соединении двигателе с. п Дрот ране форма гором через
согласующий | едуктир и гри отсутствии отбора мощности
^П . пр. Н = -г -. ГПС. pi «д. пр. п — ~~ , Л д. пр. н = 2 Д In. р, (161)
цс. р
1 де г; . р - К1 (Д согласующего редуктора;
г) при соединении двигателя с гидротрансформатором через
согласующий редуктор и отборе части мощности
Мд. пр. в — Р^дис. p^lc. р> МД-П] . в Л-®- ; ^д. п-l. н РЛ'дГр.р- (162)
t Г
207
Порядок расчета и выбора параметров гидродинамических
трансформаторов. В зависимости от того, какие данные при выборе
гидротрансформатора известны и какой вид гидротрансформатора
выбирают, задачу по согласованию режимов работы системы дви-
гатель — гидротрансформатор решают по-разному.
Если гидвотрансформатор еще не подобран или проектируется
заново, то задача сводится к определению размера D гидротранс-
форматора по заданным регуляторной характеристике двигателя,
графически изображающей зависимости мощности 7УД, вращаю-
щего момента Мд и часового расхода топлива Ge (для двигателей
внутреннего сгорания) от частоты вращения вала двигателя нд,
и безразмерной характеристике гидротрансформатора. Эта задача
решается в такой последовarej ьности:
1) по регуляторной характеристике двигателя строят приве-
денную регуляторную характеристику, графически изображаю-
щую зависимости А1д.пр. и, #д.пр.и и Genp. н в функции пд.пр.и;
2) по приведенной регуляторной характеристике определяют
значения Ч-,. пР.в(р) и пд. пр. н (Р) (или ©д. гр. н <Р>), соответству-
ющие расчетному режиму двигателя; по безразмерной характе-
ристике 1идротрансформатора определяют значение р?.н <р> или
^н(р), соответствующее его расчетному режиму;
3) определяют максимальный диаметр рабочей камеры гидро-
трансформатора
0 = 1/ '?/д-пр.п<р>—. (! 63)
' Р^Н (р)Яр, пр. н (р,
Если гидротрансформатор выбирают из числа выпускаемых
промышленностью и его размер D. внешние размерная или без-
размерная характеристики известны, задана регуляторная харак-
теристика двигателя, то задача сводится к определению переда-
точного числа согласующего редуктора и решается в такой по-
следовательности:
1) регуляторную характеристику двигателя перестраивают
с учетом отбора мощности (если это имеет место) и по приведенной
регуляторной характеристике определяют момент рЛ1д(р), соот-
ветствующий расчетному режиму;
2) есш задана внешняя размерная характеристика, то по ней
определяют момент А4Н <Р) на вату насосного.колеса гидротранс-
фор иатора, соответствующий его расчетному режиму; если задана
внешняя безразмерная характеристика, по ней находят ZH(Pj
и Р^в (р) и по формуле (153) определяют момент М„ ц»;
3) определяют передаточное число согласующего редуктора
—й . (164)
рл/дт]с. р
Из формулы (164) видно, что при 714 н (Р> > ₽А4Д следует уста-
новить понижающий редуктор, при /Ин (р> < —ускоряю-
щий.
Ир. р
208
5.2. ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
5.2.1. Принцип действия объемного гидропривода
В отличие от гидродинамических передач, в которых
передача энергии осуществляется, главным образом, за счет ди-
намического взаимодействия жидкости с соответствующими эле-
ментами привода, в гидрообъемных приводах энергия передается
статически, давлением жидкости, заключенной в некотором объ-
еме, сообщающемся с входом и выходом системы.
Основными элементами объемного гидропривода являются ис-
точник гидравлической энергии — насос или аккумулятор; при-
емник гидравлической энергии — гидродвигатель; органы
распределения и регулирования гидравлической энергии;
органы защиты — предохранительные клапаны; вспомога-
тельная аппаратура и устройства — баки, фильтры, трубопро-
воды.
Насос и гидродвигатель — машины объемного действия. Насос
преобразует механическую энергию, приложенную к его валу,
в энергию жидкости. В этом случае жидкость, заключенная во
внутренней камере насоса, вытесняется из нее с помощью механиче-
ских вытеснителей — поршней, лопастей и др. В гидродвигателе
энергия жидкости преобразуется в механическую энергию его
ведомого звена. Жидкость, поступающая от насоса в камеру гид-
родвигателя, сама является «вытеснителем», сообщающим движе-
ние поршням, лопастям, плунжерам и другим элементам гидро-
двигателя, непосредственно или через передачу связанным с ра-
бочими органами механизмов.
По виду движения выходного элемента насосы и гидродвига-
тели разделяют на гидромашины вращательного и поступательного
движения.
С конструктивной точки зрения насосы и гидродвигатели
обычно являются обратимыми, т. е. каждый из них может быть
использован либо как насос, либо как гидродвигатель.
На рис. 67 показана од-
на из типовых схем объем-
ного гидропривода. Привод
имеет насос 3, к которому
со стороны резервуара 1
с рабочей жидкостью под-
соединен всасывающий
трубопровод 2, а с дру-
гой — напорный трубо-
провод 4. Установка обо-
рудована вакуумметром,
Рис. 67. Схема объемного гид-
ропривода
209
установленным на всасывающем трубопроводе, и манометром,
установленным на напорном трубопроводе после насоса. При
включении насоса жидкость от пего направляется через фильтр
5 и обратный клапан 6 в аккумулятор 7, заполняя его. При этом
давление в аккумуляторе повышается, и как только оно достигает
заданного значения р0, срабатывает специальное регулирующее
устройство (автомат разгрузки) 8, и жидкость через сливной
трубопровод 9 поступает обратно в резервуар и почти полностью
разгружает насос. Так как жидкость из аккумулятора из-за об-
ратного клапана 6 не может поступать обратно в насос, она
через линию 10 из аккумулятора направляется через распредели-
тель 11 к исполнительным механизмам (гидроцилиндру) 12.
Таким образом, аккумулятор вместо насоса начинает выполнять
роль источника гидравлической энергии.
По мере поступления жидкости из аккумулятора в гидроци-
линдр давление в аккумуляторе начинает падать, и при достиже-
нии некоторого значения регулирующее устройство переклю-
чает насос с линии слива на аккумулятор, и давление в нем снова
повышается до значения р0.
Таким образом, рассмотренная система работает попеременно
от двух источников давления — насоса или аккумулятора, вклю-
чение которых определяется давлением в аккумуляторе Органы
управления регулируют только направление потока жидкости,
не управляя ее скоростью и, следовательно, скоростью переме-
щения штока гидроцилиндра; эти функции выполняют другие
элементы привода.
Из гидравлики известно, что напор Н насоса определяется по
разности удельных энергий жидкости в сечениях I—I и II—II
трубопровода (см. рис. 67):
Я = + (165)
где г — расстояние, измеренное между сечениями 1—1 и II—II всасывающего
и напорного участков трубопровода; Pi н рг — давления жидкости в сечениях
/ — I и II—II-, и иа — скорости жидкости в тех же сечениях; р — плотность
жидкости.
Из этого уравнения видно, что передачу энергии жидкостью
можно осуществлять, изменяя любой из членов уравнения: энер-
гию положения, определяемую первым членом; энергию давления,
определяемую вторым членом; кинетическую энергию жидкости,
определяемую последним членом. В объемных гидроприводах из
этих грех видов механической энергии жидкости основной яв-
ляется энергия давления, которая легко может быть преобразо-
вана в работу с помощью гидродвигателей.
5.2.2. Объемные гидромашины
Наибольшее распространение в приводах дорожно-стро-
ительных машин получили шестеренные и аксиально-поршневые
насосы. В качестве гидродвигателей обычно применяют поршне-
210
вые гидроцилиндры (для привода рабочего оборудования) и ра-
диально-поршневые гидромоторы со звездообразным расположе-
нием поршней (для привода механизмов вращения и передвиже-
ния).
Основными элементами шестеренных насосов (рис. 68, а) яв-
ляются валы-шестерни 5 и 6, установленные в корпусе 4 насоса
на плавающих втулках 3, выполняющих роль подшипников сколь-
жения. Корпус насоса закрывается крышкой 2. Перекос втулок-
подшипников из-за неодинакового давления во всасывающей и
напорной камерах насоса устраняется путем установки специаль-
ных пластин 7, обтянутых резиновым кольцом.
Жидкость подается вдоль валов через отверстие 1 в крышке 2
и отверстие в ведомой шестерне во всасывающую камеру на-
соса.
Принцип действия шестеренных насосов основан на том, что
зубья шестерен, входя в зацепление, выталкивают рабочую жид-
кость из впадин между зубьями в напорную камеру двигателя, а
с другой стороны, в местах выхода зубьев из зацепления образуется
вакуум, вызывающий всасывание жидкости.
Шестеренные насосы имеют постоянную подачу, частота их
вращения 500 ... 2500 об/мин при низком пусковом моменте; их
КПД колеблется в пределах 65 ... 85 %.
На рис. 68, б показан регулируемый аксиально-поршневой
насос. Его основными рабочими элементами являются блок цилин-
дров 8, которому сообщается вращение от приводного вала 9 через
упорное кольцо 10, в последнем заделаны головки шатунов 11
поршней 12 цилиндров. Так как ось блока цилиндров наклонена
к оси приводного вала (на угол у), при одновременном вращении
блока цилиндров и упорного кольца происходит относительное
движение поршней в цилиндрах: за одну половину оборота пор-
шень совершает полный ход в цилиндре, за вторую половину
оборота этот же ход он совершает в обратном направлении. При
прямом ходе поршня полость цилиндра сообщается с напорной
линией, а при обратном — со всасывающей.
В регулируемых аксиально-поршневых насосах подача жид-
кости (и, следовательно, скорость выходного звена) изменяется
путем изменения угла у.
На рис. 68, в показан нерегулируемый аксиально-поршневой
насос. Его основными элементами являются корпус 14, приводной
вал 13, шатуны 16, установленные в гнездах фланца приводного
вала, пластина 15, с помощью которой шатуны закрепляются в
своих гнездах, блок пилиндров 17, распределитель 18.
Вращение от приводного двигателя через вал 13 насоса пере-
дается шатунам. Последние выполнены как одно целое с поршня-
ми, либо отдельно выполненные поршни завальцовываются на сво-
бодных концах шатунов. Как и в регулируемых аксиально-поршне-
вых насосах, из-за расположения оси приводного вала под неко-
торым углом к блоку цилиндров одновременное их вращение вы-
211
to
to
Рис. 68 Ги. (ромашины:
лоршневойР насос со Звёадоп«р*™^ра^ием^ТЛ-1*" “* ВИС°° " " " " альио п°Ршве"Ой нерегулируемый насос г - радналь ю
СО
GJ
зываег относительное движение поршней в цилиндрах, в резуль-
тате чего через каналы в распределителе 18 происходит всасыва-
ние и выталкивание жидкости в напорную линию гидросистемы.
Так как в нерегулируемых насосах угол между приводным валом
и блоком цилиндров постоянен, для изменения скорости в гидро-
систему вводят дроссели и клапаны.
На рис. 68, г изображен радиально-поршневой высокомомент-
ный гидромотор со звездообразным расположением поршней. С од-
ной стороны из корпуса 27 гидромотора выходит шлицевой конец
эксцентрикового вала 29, а с другой к нему крепится распреде-
литель торцового типа, состоящий из крышки 28, реактивного 24,
распределительного 25 и опорного 26 дисков. Распределительный
диск приводится во вращение промежуточным валом 30, соединен-
ным шпильками с эксцентриковым валом. В корпусе гидромотора
установлены пять цилиндров 19 с поршнями 20, последние опи-
раются на эксцентриковый вал. Цилиндры упираются в сфериче-
ские диски 21 с отверстиями, вмонтированные в крышки 22.
Рабочая жидкость от насоса через отверстия распределите-
ля 23, внутренние каналы корпуса 27, крышки 22 и отверстия
сферических дисков 21 в требуемой последовательности подается
в гидроцилиндры. Так как поршни, как и цилиндры, выполнены
Рнс. 69. Объемный гидропри-
вод рабочего оборудования кра-
на-манипулятора:
/ — секция стрелы; 2 — телескопи-
ческий гндроинлиндр: 3 — телеско-
пическая стрела; 4 — гидроцилиндр
наклона стрелы; 5 - рукоять; 6 —
колонна; 7 — гндроцилиндр рукоя=
ти: 8 — гндроинлиндр наклона ко-
лонны; 9 — вал тестер ни механиз-
ма вращения; 10 — гидроцилиндр
механизма вращения; И, 14 — ги-
дроцилнндры выносных опор
(аутригеров); 13 — опорная цап-
фа; 15 — гидрораспределнтель
214
в виде полых цилиндрических стаканов с отверстиями, то рабо-
чая жидкость действует непосредственно на сферические поверх-
ности эксцентрикового вала и за счет его эксцентриситета создает
на валу вращающий момент.
На рис. 69 показан общий вид крана-манипулятора, все меха-
низмы которого приводятся от гидроцилиндров.
5.2.3. Основные параметры гидромашин
К основным параметрам насосов и гидродвигателей от-
носятся: рабочий объем У (см3); номинальное давление жидкости
Риом (Па); номинальная частота вращения вала пЕОМ (об/мин;
об/с); подача насоса Q„ (м’/с, см3/с, л/мин); мощность насоса V„
(кВт), а также расход жидкости гидродвигателем (гидромотором)
QM; вращающий момент на валу гидромотора Л1м (Н. м) или уси-
лие (И) на штоке гидроцилиндра.
Теоретической подачей насоса называется количество жидко-
сти, которое проходило бы через его напорный патрубок в единицу
времени при отсутствии внутренних и внешних утечек жидкости
через зазоры в корпусе и в сопрягаемых деталях и при полном за-
полнении жидкостью рабочих камер. Теоретическая подача на-
соса пропорциональна его рабочему объему Ун и частоте вращения
Нц:
Qt ~ нПн-
Действительная подача насоса из-за утечек жидкости (такие
потери называются объемными) QK меньше теоретической подачи
QT. Отношением этих величин определяется объемный КПД
Ли = Qu/Qt*
Отсюда действительная подача насоса
Qh = Qt^V = УцПнЛю (166)
где 1Е -— рабочий объем насоса; пн — частота вращения насоса.
Теоретическая мощность насоса или гидродвигателя
JVT = QT кр == А1т<от,
где \р — перепад давления в подводящем и отводящем трубопроводах; Л1т и
<ат — соответственно вращающий момент и угловая скорость вала гидромаюи ты.
Однако мощность, необходимая для привода гидромашины,
всегда больше теоретической, так как помимо объемных потерь
жидкости все гда имеют место механические потери, возникающие
в результате трения вращающихся и поступательно движущихся
деталей гидромашины, а также гидравлические потери. Последние
вызываются внезапными расширениями и сужениями трубопрово-
дов, например, при поступлении жидкости из трубы в гидроци-
линдры, аккумуляторы, фильтры и прочие емкости, что сопрово-
ждается снижением скорости течения жидкости и потерей давле-
21Б
ния и энергии, происходящей, в основном, в результате вихреоб-
разования после выхода потока жидкости из узкой части капала.
Механические потери в гидросистеме учитываются механическим
КПД т]Мех, а гидравлические потери — гидравлическим КПД т]г.
Полный КПД насоса т]н определяется по отношению полезной
мощности Na ~ ApQn к потребляемой Nu — Мапн. Выражая
перепад давлений во всасывающем и напорном трубопроводах Ад
в МПа, подачу насоса в л/мин, момент на валу насоса Л4Н
в Н- м и частоту вращения вала насоса пп в об/мин, получим:
Пн = ПкПгПмсх = 159,2 - (167)
Из выражения (167) следует, что момент, который необходимо
иметь на валу двигателя для обеспечения заданной подачи Qn,
Л4Н= 159,2 4Ф-- (168)
пн’1н
Зная величину Л1Н, можно найти мощность насоса (кВт)
*7 ___ Л1нюн _ А1и«н HRQI
“ 1000 ~ 9555 '
или с учетом выражения (168)
= <170)
где <2Я — в л/мин; Др — в МПа; Ма — в Н-м; <ин — в рад/с; пв — в об/мин.
5.2.4. Расчет и выбор основных параметров
гидроприводов
Параметры гидропривода с двигателем вращательного
движения. Расчет и выбор параметров гидропривода машин,
исполнительные органы которых непосредственно или через
редуктор (с передаточным числом пгед) приводятся от гидро-
мотора, производят в следующей последовательности:
1) по заданной скорости оисп 0 (м/с) движения исполнитель-
ного органа определяют частоту вращения пм (об/с) вала гидро-
мотора
_ ___ Гиен. рПррд /1711
П-м П > ' >
^Jl7Hcn. о
где гиоп. о — радиус исполнительного органа, м;
2) по заданному или предварительно определенному вращаю-
щему моменту, численно равному моменту /Иисп. о сил сопротив-
ления на исполнительном органе, находят потребный момент на
валу гидро мотора
/Им = Л1ИСП. О/Нред; (1^2)
216
3) рассчитывают перепад давления Дрм в гидромоторе по при-
ближенному соотношению
Дрм ~ 0.9рНОМ» (173)
где рвом — номинальное давление в гидросистеме;
4) находят необходимый рабочий объем VM (м3) гидромотора
= (174)
где Ми — в Н-м, Дрм — в Па; гм = 0,95 — гидромеханический КПД;
5) по величине Уй выбирают гидромотор, имеющий рабочий
объем VM VmI Нм. ноы; Лмтах! Рпом! Ptnaxi
6) определяют расход (м8/с) жидкости, проходящей через гид-
ромотор (обычно эту величину находят для максимальной частоты
вращения вала гидромотора, соответствующей максимальной ско-
рости исполнительного органа)
Qm = Vm^m/Ппм. (175)
где Км — в м8 лм — в об/с; яг 0,96 — объемный КПД гидромотора;
7) рассчитывают объем (м8) насоса, исходя из расхода рабочей
жидкости, потребляемой гидромотором. Принимают Qa = QM;
= пм Тогда
где т]рн — объемный КПД насоса.
Параметры гидропривода с гидроцилиндрами. Основными пара
метрами гидроцилиндров являются номинальное давление рном,
диаметр поршня Dn (и цилиндра), диаметр штока с(Шт и его ход s.
Усилие, развиваемое гидроцилиндром при выдвижении одно-
стороннего штока (рис. 70, а),
[зтР- ytdz 1
V" (^ “ + -f- *4 (! 77)
при втягивании штока
^[-^(Рг-Л)----------^-Р2]Лмех. (178)
гдедз и ра — давления в поршневой и штоковой полостях гидроцилиидра; т;ые1 —
механический КПД гидроцилиидра.
При Рг = 0 усилие втягивания штока
Р — n(Dn~a™-r) _ „
*2 4 РгЛмех- (К 9)
Для гидроцилиидра с двусторонним штоком (рис. 70, б)
__рр2п-^т)г 1
[----4-----Pi---------4------p2J
Лмех- (180)
1
217
s
Рис. 70. Схема сил, действу-
ющих в гидроцилиндрах:
а — с односторонним штоком;
б — с двусторонним штоком;
в — телескопических
Для телескопического гидроцилиндра (рис. 70, в) усилия, не-
обходимые для выдвижения (Рх) и втягивания (Pi) первой ступени
определяются выражениями:
Pl = Р1ЛПМе/. P'l = РгДзПмех. (l81)
а усилия, необходимые для выдвижения (Р2) и втягивания (Р'г)
второй ступени
Р2 = р2/-2Т|мех; Рг == Рз^Лмех» <182
где Fi (i = 1, 2, 3, 4) — активная площадь поршня.
Скорость оп поршня гидроиилиндра выбирают в соответствии
с задаваемой скоростью рабочего оборудования. С расходом рабо-
чей жидкости она связана соотношением
рп = Q/h^lv- О83)
Из выражения (183) при известных значениях vn и Ft опреде-
ляют расход жидкости Q.
Как видим, скорость поршня при одинаковой подаче жидкости
в поршневую и штоковую полости гидроиилиндра будет разной,
так как в первом случае F, — FDt а во втором случае Ft — Fa —
- fan, где Fa и /ш~ — соответственно площади поршня и штока.
Очевидно, что при подаче жидкости в штоковую полость, т. е.
при обратном ходе поршня, его скорость больше, чем при прямом
ходе в Fal(Fa —- /шт) раз.
218
Следовательно, при обратном ходе расход жидкости в линии
слива будет больше расхода жидкости, поступающей в штоковую
полость, что вызывает повышение давления жидкости при сливе.
Во избежание этого сечения трубопроводов, подключенных к
поршневой полости (к линии слива), должны быть больше сечений
трубопроводов, подключенных к штоковой полости.
Мощность (кВт), развиваемую поршнем гидроцилиндра, опре-
деляют в зависимости от усилия Р (Н) на штоке гидроиилиндра
и скорости горения vB (м/с):
Ад = PvD/1000. (184)
5.3. ПЕРЕХОДНЫЕ ПРОЦЕССЫ ПРИВОДОВ
МУФТЫ ПРИВОДОВ И ТОРМОЗНЫЕ СИСТЕМЫ
5.3.1. Переходные процессы приводов
Режимы работы приводов характеризуются продолжи-
тельностью включения двигателя в течение одного цикла; про-
должительностью работы двигателя под нагрузкой и вхолостую
или степенью использования максимальной мощности двигателя;
частотой и значением перегрузок при разгоне и торможении.
По продолжительности включения электродвигателей разли-
чают длительные режимы работы, для которых продолжительность
включения ПВ = 100 %, и повторно-кратковременные режимы,
когда в течение одного цикла двигатель периодически включается
и выключается (ПВ < 100 %). Длительные режимы работы ха-
рактерны для машин непрерывного действия, а повторно-кратко-
временные — для машин периодического действия.
Каждое включение и выключение двигателя сопровождается
его пуском и остановом. В период пуска частота вращения вала
двигателя и связанных с ним элементов привода изменяется от
нуля до заданного (номинального) значения, соответствующего
установившемуся движению; в период торможения («выбегах дви-
гателя) их скорость изменяется от скорости установившегося дви-
жения до нуля. Как видим, в обоих случаях возникают ускоре-
ния — положительные при пуске или разгоне и отрицательные —
при торможении, в результате чего на элементы механизма кроме
усилий, обусловленных полезными сопротивлениями на рабочем
органе и сопротивлениями трения в сочленениях звеньев меха-
низма, действуют еще и инерционные.
Динамические явления, возникающие при разгоне и торможе-
нии, характеризую] так называемые переходные процессы приво-
дов (в эти периоды имеет место переход от неустановившегося
движения к установившемуся и обратно). Рассмотрим основные
характеристики этих процессов.
Разгон машины Для сообщения движения машине при тро-
гании ее с места необходимо затратить работу, равную сумме ра-
бот Ас всех сил сопротивления в течение времени разгона и кине-
219
тической энергии ЕТ, которую при разгоне накапливают движу-
щиеся массы машины,
^дв = Ас 4 .
где Лд8 — работа движущих сил.
Напомним, что при вращательном движении масс У, Т =
= Jnp(Ba/2, а при поступательном движении £ У = (где со
и v — соответственно угловая и линейная скорости движения в
конце разгона; Jnp — суммарный приведенный момент инерции;
тПр — суммарная приведенная масса.
То же условие можно выразить через уравнения моментов и
сил:
= Мс 4 Jnp или Рдв = Ро 4- тпр--,
где А1Дв и jWc — моменты движущих сил и сил сопротивления, создаваемые на
ведущем валу двигателя и на исполнительном органе механизма; Рдв и Рс
движущее усилие и сила сопротивления.
Из этих выражений следует, что на стадии разгона движущее
усилие должно быть больше силы (момента) сопротивления движе-
нию на некоторую величину, которую обычно называют избыточ-
ной силой РИЗб (моментом Л1иа6),
D _____ dv _ . , _ j da>
* изб — mnp i ''lизб ---
Установившееся движение машины. Чтобы машина двигалась
с постоянной скоростью, работа движущих сил должна быть равна
работе всех сил сопротивления, т. е. Лдв = Ас, или избыточное
усилие, развиваемое на движущем звене механизма, должно рав-
няться нулю (Мизб = 0; РИЗб = 0).
Торможение машины. Чтобы остановить машину, нужно погло-
тить кинетическую энергию, накопленную при движении, для
чего необходимо затратить дополнительную работу, численно рав-
ную накопленной кинетической энергии. Это условие аналитиче-
ски можно выразить уравнением
-g- /пр®2 ~ F горм>
где Дторм - работа тормозов.
Эффект торможения можно достигнуть разными способами:
а) выключением двигателя и остановкой механизма за счет
трения в его кинематических парах и внешних сопротивлений
движению;
б) уменьшением момента двигателя до значения, меньшего зна-
чения момента от сил сопротивления, приведенного к валу двига-
теля;
в) изменением направления момента на валу двигателя; этот
способ применяется при резком торможении;
220
г) приложением тормозящего усилия от внешнего источника
(механических тормозов) при работающем или одновременно вы-
ключаемом двигателе.
К переходным процессам относится также стопорение приво-
дов, возникающее при встрече машины или ее рабочего органа
с труднопреодолеваемым препятствием. В этом случае ввиду
скоротечности процесса остановка двигателя и нагружение ма-
шины динамическими силами не сопровождаются какими-либо
перемещениями корпуса машины и ее рабочего оборудования,
что вызывает повышение напряжения в элементах механизма.
Тормозящий момент определяют из условия
MT = Jnp-g-±Mc.
В зависимости от характера сопротивлений, возникающих
в механизме, они могут либо помогать его затормаживанию (на-
пример, силы прения в механизмах передвижения и вращения),
либо препятствовать ему (например, сила тяжести груза в меха-
низмах подъема). В первом случае величину Л1С учитывают со
знаком «минус», так как при этом потребный тормозящий момент
снижается, а во втором случае — со знаком «плюс».
Продолжительность переходных процессов. Пусковой и тор-
мозной режимы работы приводов, а также их стопорение, отно-
сятся к переходным (нестационарным, псустаповившимся) про-
цессам. От характера и продолжительности их протекания во мно-
гом зависит физическая картина формирования динамических
нагрузок в элементах привода и на рабочих органах машины.
От продолжительности процесса разгона зависит такое важное
качество машин, как приемистость, т. е. способность машины бы-
стро набирать заданную скорость движения и переходить от
одного режима движения к другому, а это является немаловаж-
ным фактором, определяющим продолжительность рабочего цикла
машины и ее производительность.
От продолжительности процесса торможения, кроме того, во
многом зависит безопасность работы машины: чем меньше вре-
мя торможения, тем выше безопасность.
Движущее и тормозящее усилия, а следовательно, и избыточ-
ные усилия при разгоне и торможении в общем случае изменяются
во времени в соответствии с характеристиками привода и тормоз-
ных систем. Запишем это условие так:
Миас (0 = /Пр Ршб (t) = тар-^-.
Из этих выражений можно определить время разгона или
торможения
/р(т) = Jni' I mJ’io или J ~Р~Д<Г
221
Для определения времени разгона tp правую часть этих урав-
нений нужно проинтегрировать в пределах от некоторой началь-
ной скорости (юв или он, или от нуля при трогании с места) до
конечной (<ок или в конце разгона).
Для определения времени торможения tr правую часть тех же
уравнений нужно проинтегрировать в пределах от скорости,
которую машина имела перед началом торможения (<вк или «>,.),
до скорости в конце торможения или до нуля при полной оста-
новке машины.
Чтобы упростить интегрирование этих уравнений, допустим,
что избыточные усилие и момент в течение всего времени процесса
остаются постоянными, т. е. Л4изб (0 ~ Л4инС — const и PBs6 (t) =
= Ризе = const. С учетом этого
, j f dtii _______ (о>к — Од) ____ Jnp (wk шн)
tp-Jup j ^ивб - Л1изб “ Мдв-Мс
или
°к
. Г Др mnp (рк — он) «пр (ок — гл) .
Рвз(5 - Ризб Рдв-^с ’
1н
“в
4 J ( До Атр (“н шк) Alp (Он ------------- fl’n)
A-JiipJ Миаб - Mh36 - МТ±Л1С
“к
ИЛИ
VK
1 f До «пр (t’n — Ок) «пр (Он — е«)
т ПР J рв8б ризб рг±Рс ->
°н
Здесь перед значениями Мс и Рс знак «плюс» ставится для механизмов передви-
жения и вращения и знак «минус» — для механизмов подъема И изменения вы-
лета стрелы.
Как следует из выражений, определяющих продолжительность
переходных процессов, значения tp и tt при заданных скоростях
движения снижаются с уменьшением приведенных масс и момен-
тов инерции механизма и с увеличением движущих (тормозящих)
усилий Продолжительность разгона уменьшается также при
снижении статических сопротивлений движению. На продолжи-
тельность процесса торможения статические сопротивления ока-
зывают неодинаковое влияние для различных механизмов: для
механизмов передвижения и вращения с увеличением статических
сопротивлений время торможения /т уменьшается (это и понятно —
так как в данном случае сопротивления движению помогают за-
тормаживанию машины или ее поворотной части), а для механиз-
мов подъема время торможения с увеличением статических сопро-
222
тивлений увеличивается (на затормаживание груза большей массы
при его опускании требуется большее время).
Пуск электродвигателей часто осуществляется при Л1с — О
и при изменении избыточного момента в процессе разгона по
закону
(0 == Л'Тодв Н-
где Мопв — начальный избыточный момент на валу двигателя; при неподвижном
исполнительном органе; k — коэффициент пропорциональности, характеризую-
щий увеличение избыточного момента в процессе пуска двигателя.
В этом случае
°8
I Ч^+g = 11п ~ 1п двЬ
о
5.3.2. Муфты приводов
Для плавного соединения двигателя с трансмиссией ма-
шины и для кратковременного его отключения от остальной части
привода при трогании машины с места, переключении передач и
других режимах движения, которые могут вызвать динамические
перегрузки двигателя, применяют фрикционные муфты (муфты
сцепления). Их устанавливают между двигателем и коробкой
передач, либо в другом месте механизма, например на барабане
фрикционной лебедки.
В зависимости от вида рабочих элементов различают фрик-
ционные муфты двухконусные колодочные (рис. 71, а); одноко-
пусные (рис. 71, б), ленточные с внутренней (рис. 71, в) и на-
ружной (рис. 71, ж) лентой; колодочные (рис. 71, г, е), дисковые
(рис. 71, д, з). По направлению включения муфты разделяют на
осевые и радиальные; к первым относятся дисковые и конусные
муфты — они включаются под действием силы, действующей вдоль
оси, иа которой установлена муфта, ко вторым относятся ленточ-
ные и колодочные — они включаются под действием радиальной
силы.
Любая муфта состоит из двух частей — ведущей /, жестко
связанной с ведущим звеном, и ведомой 2, жестко связанной с ве-
домым звеном механизма.
В конусных муфтах ведущая часть (полумуфта) жестко соеди-
нена с зубчатым колесом, приводимым от ведущей шестерни при-
вода, а ведомая часть — со шкивом, установленным на ведомом
налу механизма или со шкивом, выполненным как одно целое
с барабаном лебедки.
В ленточных муфтах ведущей частью является стальная лента,
облицованная фрикционной обкладкой, шарнирно соединенная со
ступицей, установленной на шпонке (шлицах) ведущего вала,
>|Ли с приводным зубчатым колесом С внутренней или с наруж-
223
Рис. 71. Фрикционные муфты:
а колодочная двухковусвая; б «- одвоконусная; в —• ленточная с внутренней лептой;
радиальная; ж —• ленточная с наружной левтой;
ной стороны лента охватывает шкив, связанный с ведомым эле-
ментом механизма.
На рис. 71, д показана осевая шинно-пневматическая муфта.
Она включается при подаче сжатого воздуха во внутреннюю по-
лость резинокордного баллона 4, прижимающего диск 1 к диску 2,
а отключается с помощью пружины 3. В радиально-пневматиче-
ских муфтах (рис. 71, е) резинокордный баллон 4 жестко связан
с ведущим шкивом (ступицей) / и непосредственно воспринимает
действие передаваемого окружного усилия. К протектору баллона
со стороны ведомого шкива 2 прикрепляют металлические колод-
ки, облицованные фрикционными обкладками. Давление воздуха
в баллоне при включении муфты составляет 0,6 ... 0,8 МПа.
На рис. 71, з показана фрикционная муфта с электромагнит-
ным включением. Включение таких муфт осуществляется элект-
ромагнитом. а выключение — разжимными пружинами. Обмотка
электромагнита в муфтах может вращаться вместе с ее ведущими
и ведомыми элементами или устанавливаться неподвижно. Элект-
224
колодочная^ д — гпинно пневмокамерная дн^/хдисковая^ ₽ хдннно-ппевыокамер кая
дисковая с электромагнитным включением
ромагнитные муфты используют в тех случаях, когда необходимо
обеспечить минимальное относительное скольжение ведущих и
ведомых элементов
По способу включения различают муфты с механическим, гид-
равлическим, пневматическим и электрическим приводом.
Механический привод фрикционных муфт является наиболее
простым и дешевым. Однако усилие на органах управления огра-
ничено (в среднем 300 ... 350 Н) и поэтому передаваемый муфтой
вращающий момент обычно не превышает 350 Н м. Органы управ-
ления такого привода располагаются в непосредственной близости
от муфты, так как управление муфтой на расстоянии приводит
к значительным потерям на преодоление сил трения в механизме
привода.
Гидравлический привод обеспечивает передачу наибольших
крутящих моментов и быстродействие. Давление рабочей жидкости
в системе привода может достигать 3,5 МПа. Основным недостат-
ком гидроприводов муфт является наличие вспомогательного
Гобермвн Л й
225
оборудования, что усложняет обслуживание и ремонт таких
муфт.
Все большее распространение получают пневматические при-
воды, в которых в качестве рабочего тела используется сжатый
воздух: его давление достигает 1,5 МПа.
Фрикционные муфты с пневматическим приводом передают
более высокие вращающие моменты, чем муфты с механическим
приводом или электрические, но уступают в этом отношении гид-
равлическим муфтам Использование воздуха в качестве рабо-
чего тела дает возможность муфтам с пнематическим приводом
долгое время находиться во включенном состоянии, не вызывая
при этом таких тепловых явлений, как в муфтах с электроприво-
дом. Пневматический привод обеспечивает постоянство нажимного
усилия и стабильность коэффициента запаса сцепления муфты
в течение всего срока ее службы.
Недостатком фрикционных муфт с пневмоприводом является
наличие вспомогательного оборудования (компрессора, клапан-
ного механизма, трубопроводов), что усложняет обслуживание
и ремонт привода.
При использовании электрического привода муфт можно по-
лучить высокую частоту их включения (до 1600 циклов в минуту),
однако нельзя осуществить передачу таких больших вращающих
моментов, как в муфтах с гидравлическим или пневматическим
приводом. Из-за возможного искрообразования муфты с электро-
приводом недопустимо применять для работы в условиях легко-
воспламеняемых и взрывчатых сред.
Независимо от типа фрикционных муфт, процесс их включения
в общем случае можно разбить на два периода. Начальный период
характеризуется проскальзыванием рабочего элемента муфты,
жестко связанного с ведущим валом привода, относительно ее
рабочего элемента, жестко соединенного с ведомым валом при-
вода. Этот период продолжается до тех пор, пока возрастающий
в процессе включения вращающий момент, передаваемый муфтой,
не станет равен моменту сопротивления на ведомом валу Второй
период — это частичное проскальзывание рабочего элемента муфты
при разгоне ведомого вала; этот период продолжается до тех
пор, пока частота вращения ведомого вала не будет равна частоте
вращения ведущего вала. При этом часть мощности двигателя рас-
ходуется на нагрев муфты. Очевидно, что чем чаще включается
муфта при работе машины (а для многих дорожно строительных
машин она включается приблизительно в 10 .. 15 раз чаще,
чем для автомобиля, работающего в городских условиях), тем
большие тепловые нагрузки действуют на ее элементы.
Анализ процесса включения фрикционных муфт и их работы
показывает, что при постоянном вращающем моменте муфты ин-
тенсивность выделения теплоты вначале включения больше, чем
в конце; количество выделяемой в муфте теплоты увеличивается
с ростом продолжительности включения; при возрастании вра-
226
14 Коэффициент запаса сцепления муфт
Муфта
Наименование машин и оборудования с механическим приводом, рабо- тающая без сма- зочного материала с механическим н гидравлически и приводами, работающими со смазочным материалом
Тракторы 4,0 3,0
гусеничные тяжелые
гусеничные легкие 2,5 2,0
колесные промышленные 3.0 2,0
колесные сельскохозяйственные Грузовые автомобили грузоподъем- ностью; 2,0 1.5
малой 1,25 1,5
средней 1,5 1.5
большой 2,0 1,5
Вилочные погрузчики 4,0 2,0
Грейдеры Экскаваторы: 3,0 2,0
главная муфта 1,4 . . 1,6 —
муфты барабанов главной лебедки 1,25 ... 1,35 —
Самоходные сельскохозяйственные ма- шины Компрессоры: 2,0 1,5
поршневые 4,0 —
турбинные 3,0 —
Вентиляторы Насосы. 4,0 —
поршневые 3.0 -—
центробежные 1,5
щающего момента на муфте общее количество выделяемой теплоты
увеличивается.
На нагрев муфты значительное влияние оказывает коэффициент
запаса сцепления, определяемый как отношение максимального
момента Л4фШах» передаваемого муфтой, к ее номинальному мо-
менту Л1ф:
Рф Л^фшах/^ф*
Выбор рационального коэффициента запаса сцепления фрик-
ционных муфт имеет большое значение (табл. 14). При малом ко-
эффициенте Рф нельзя обеспечить необходимый для разгона ведо-
мого вала механизма избыточный момент; кроме того, при этом
даже незначительные перегрузки механизма будут вызывать прос-
кальзывание рабочих элементов муфты и, как следствие этого,
ее повышенный нагрев и износ. С другой стороны, завышенное
значение не обеспечит предохранения двигателя или элементов
передачи от перегрузок, возникающих на исполнительных орга-
нах машины
я*
227
Для уменьшения нагрева муфт применяют различные способы
их охлаждения. Наиболее простым является принудительный об-
дув муфты воздухом. Однако более интенсивный теплоотвод обе-
спечивается при применении муфт, работающих со смазочным
материалом и охлаждаемых маслом (табл. 15).
Фрикционные муфты обычно рассчитывают, исходя из макси-
мального вращающего момента, передаваемого двигателем. В от-
дельных случаях с учетом типа привода, расположения и назначе-
ния муфты могут быть приняты другие условия для се расчета,
например, исходя из стопорного статического момента двигателя.
Муфты предельного момента в механизмах вращения рассчитывают
на момент
7Иф=1,1(мр б/д Ц05”д ) пмЛм. (185)
' ‘р '
где им и т]м — передаточное число между валом двигателя и валом муфты и КПД
этой передачи.
Для передачи вращающего момента конусными муфтами необ-
ходимо, чтобы осевое усилие, прижимающее конические поверх-
ности ведущего и ведомого элементов муфты друг к другу, было
равно
р _ Л4ф?1п
ф W ’
где — угол между образующей конуса и горизонтальной осью; Ро = 10 ... 15°;
/?ср — средний радиус рабочих поверхностей муфты; для односторонней муфты
/?Ср = (Rt + /?2)/2 (здесь и R2 — радиусы большого и малого оснований
конуса); / — коэффициент трения рабочих поверхностей муфты [при трении
чугуна по коже (при слабо смазанных поверхностях) f — 0,28, по дубу f ~ 0,34,
по буку f ~ 0,32; стали по дубу f = 0,45].
15. Характеристики материалов муфт, работающих со сма ючным материалом
Материал Коэффициент трения ршах МПа *тах- СС
статический динами- ческий
Асбестовая бумага 0,12 ... 0,18 0,13 ... 0,24 7 94
Пробка 0,15 0,10 ... 0,12 0.7 94
С перфторуглеводородным иапол- 0,10 0,05 . . 0,08 7 176
кителем
Спеченный (металлокерамика) 0.12 ... 0,16 0,08 ... 0,09 70 400
Формованный асбест 0,11 . . 0,16 0,8 70 94
Формованный графитизированный 0,11 ... 0,15 0,08 ... 0,10 52 94
Примечание. рп1ах н /тах — максимальные давление и температура
на поверхности трения.
228
Для ленточных муфт усилие на сбегающем конце ленты, свя-
занном с рычагом системы управления, определяют из соотно-
шения
Q ___ Af ф
с6 ~ R(e^-l) ’
где R — радиус шкива; / — коэффициент трения лен'ы о шкив, в среднем f —
- 0,35 ... 0,4; а — угол обхвата шкива лентой (принимают а ~ 270 . 300 °C).
Радиальное усилие нажатия колодок в колодочных муфтах
.V - Мф/(/Я),
где / — коэффициент трения колодок о шкив.
По этой же формуле определяют и радиальное усилие нажатия
для колодочных пневмокамерных муфт.
Для дисковых муфт осевое усилие нажатия
р Мф
ф fzRcp ’
где f — коэффициент трения между рабочими поверхностями дисков (принимают
f = 0,25);z — число рабочих поверхностей трения; /?ср — средний радиус дисков
трения; Rcp = (Rmax + ЯпипУ2 (здесь 7? max и Rrair — максимальный и мини-
мальный радиусы дисков трения; значение Rmax выбирают, учитывая габаритные
размеры).
5.3.3. Тормозные системы
Назначение и типы тормозов Тормоза применяют для
поглощения инерции движущихся масс, а также для удержания
груза или машины на месте, для регулирования скорости опуска-
ния груза (соответственно стопорные и спускные тормоза). По
типу рабочих элементов тормоза могут быть колодочными, ленточ-
ными, дисковыми, а по принципу действия — открытыми и замк-
нутыми. В открытых тормозах тормозные колодки или лента всегда
разомкнуты и замыкаются но мере надобности рычагом или пе-
далью; в замкнутых тормозах колодки или лента всегда замкнуты
и усилие к ним прилагается только для растормаживания. По
способу управления тормоза разделяют на управляемые (коло-
дочные, ленточные, конические, дисковые) и автоматические
(грузоупорные и центробежные). Управление тормозами может
осуществляться через рычажную систему вручную либо с по-
мощью электромагнитов, гидравлических, пневматических или
пневмогидравлических систем.
Колодочные тормоза. На рис. 72 показаны общий вид и схема
для расчета двухколодочного тормоза с замыканием с помощью
груза и размыканием посредством электромагнита 4 При включе-
нии электромагнита якорь под действием силы Рк, притягиваясь
к сердечнику, поднимается вверх и поворачивает звено 2 относи-
тельно точки К против часовой стрелки. При этом рычаги 1 иЗ
229
Рис. 72. Двухколодочный тормоз замкнутого типа с электромагнитным управ
денисм.
а — общий вид: 6 — схема для расчета
вместе с колодками отходят от шкива. При выключении электро-
магнита груз через тягу 5 поворачивает звено 2 в обратную сторону
и рычаги 1 и 3 вместе с колодками прижимаются к шкиву.
Необходимый вес тормозного груза бгр определяют путем
последовательного рассмотрения условий равновесия рычажной
системы.
Из условия равновесия грузового рычага относительно оси
его поворота — точки К3 (рис. 72, б), находим
Grp/ k G„L 4- <7Р -g- — ~ О,
откуда
Grp-P2-^--(G»4 0,59p)-^,
где G„ и <7Р — силы тяжести якоря электромагнита и грузового рычага; Pt —
усилие на рычаге 5.
Из условия равновесия звена 2 относительно точки /С
Р Ъ ~ PyGy/cit'
а из условия равновесия рычага / от носительно точки
Pr - NaJh,
где Pt — усилие, действующее на кон чс рычага i N - реакция со стороны шкива
на рычаги 1 и 3. численно равная силе давления колодок на тормозной шкив.
Реакцию Л' можно определить, исходя из тормозящего мо
мента Л4Т, который необходимо создать на шкиве
Мг- (WH Л7)| =2^4- Л'Р,
где f — коэффициент трения шкива о рабочие поверхности колодок; £> —диа-
метр тормозного шкива
230
Из этого уравнения определяем необходимые усилия N,
с которыми колодки тормоза должны быть прижаты к его шкиву,
W - MTffD.
Тогда
р ы JL °1 — Л' ' а
2 h а2 fD h cs
и искомый вес тормозного груза
G- = >-r-S-T (G» + 0.^p)4-
Подъемную силу магнита Рм при известном значении Grp
определяют из условия равновесия грузового рычага относительно
точки K-z'
РМР — Grpt GBL — = О,
откуда
Рм — Grp —-J- G„ + О,5*7р.
При радиальном зазоре между шкивом и колодками при раз-
мыкании тормоза 8 — 0,1 0,2 см необходимый ход якоря элект-
ромагнита
1,15)—-,
“р
где ир — передаточное отношение рычажной системы:,
__ а Д1 _£з
ИР ~ h а2 L '
Работоспособность магнита
W'm =-- ₽P«SM,
где В — коэффициент запаса
Колодочные тормоза имеют различные конструктивное ис-
полнение и системы управления. Тормоза некоторых типов по-
казаны в табл. 16; в этой же таблице приведены соответствующие
им упрощенные схемы и формулы для определения усилий, необ-
ходимых для замыкания и размыкания тормозов.
Ленточные тормоза. В ленточных тормозах затормаживание
вращающегося шкива происходит за счет трения между шкивом
и обхватывающей его по некоторой дуге стальной ленгой, рабочая
поверхность которой обшита тормозной асбестовой полосой или
деревянными колодками. Так как тормозная лента является
гибким элементом, при расчете ленточных тормозов используются
известные соотношения теории трения гибких тел, устанавливав
231
$2 16- Параметры двухколодочных тормозов
кэ --------------------— .....—..
Схем»
Принцип действия.
Основные расчетные
зависимости
6)
5)
Замыкание тормоза при рас-
тяжении пружины.
р и
ГпрfD h—c‘
Размыкание тормоза при
включении электромагнита;
Рм ~ ^пр Н" Сгя ——
Замыкание тормоза при par
тяженни пружины,
Л1Т а
Размыкание тормоза при
включении электромагнита;
Р и = Рпр + Ся ~
Замыкание тормоза при рас-
тяжении пружины;
. D
Р С~!~
пр “ fb~ а + с ‘
Размыкание тормоза при
включении элекгпомягннтя
P« = Pup-^-4-<7p -“* t 0„
Замыкание тормоза при ежа
тин пружины;
Размыкание тормоза при
включении электромагнита.
% = ^G.
Примечание Рпр — сила сжатия пружины.
234
ющих зависимость между окружным усилием Ро на ободе шкива
и натяжениями в набегающей Хнб и сбегающей 5се ветвях ленты,
Ро = 5нб - ScC = 5сб (ef“ - 1),
где f — коэффициент трения скольжения между лентой и тормозным шкивом;
а — угол обхвата шкива лентой, рад.
С другой стороны, окружное усилие на тормозном шкиве можно
выразить через тормозной момент
Р„ = 2Mr/D.
Поэтому справедливо равенство
= 5сб (е,га - I),
откуда
О ___ ___2/И7
сб “ £)(е^- 1) '
Ленточные тормоза, как и рассмотренные ранее ленточные
фрикционные муфты, могут быть с наружной и внутренней лен-
тами.
Различают три типа ленточных тормозов: простые, дифферен-
циальные и суммирующие. У простых ленточных тормозов набега-
ющий конец ленты крепится к неподвижной опоре, а сбегающий
конец — к тормозному рычагу (рис 73, а); у дифференциальных
оба конца ленты крепятся к тормозному рычагу на разных рас-
Рис. 73. Принципиальные схе-
мы ленточных тормозов:
л — простого, б дифференциалы
рого; в — суммирующего
6)
235
стояниях от оси его поворота (рис. 73, б), а у суммирующих оба
конца ленты крепятся к тормозному рычагу на одинаковых рас-
стояниях от оси его поворота (рис. 73, в).
Для показанных на рис 73 ленточных тормозов замыкание
происходит с помощью груза, а размыкание — с помощью элект-
ромагнита. Необходимые вес груза и усилие электромагнита опре-
деляют из уравнения моментов сил, действующих на тормозном
рычаге, относительно оси его поворота.
Для простого ленточного тормоза (рис. 73, а)
Gpp/ SrCa { Ф” GqZ. ' 6,
PML бгр/ — qpc — G„L — О,
откуда
/j __ ЧуР GkL.____ 2М-г а с L
гр I D(efa-1) 1 Qv~l G”~r''
/,M = Grp4-+?pf+<?«• (186)
Для дифференциальных тормозов (рис. 73, б)
Grp( — Scca ф- SMb ф- (?рС ф C„L = О,
откуда
_ £Сб«— ^нб®—ЧрС — G„L — be1 %)— qpc — СЯЬ /iq7\
Grp-------------j----------= —j------------------- (Io/)
Для суммирующих тормозов (рис. 73, в)
Gpp/ S^CfCi г G^L. ~ 0,
откуда
q __ (-<Фб F Фб) a — QpC — GhL _ Scp (e^a p l)c — q-pC — G^L (jp^)
Необходимую подъемную силу для дифференциальных и сум-
мирующих тормозов, как и для простых ленточных, определяют
но уравнению (186). Однако ход якоря sM электромагнита для всех
трех типов тормозов при одинаковом зазоре е между лентой и
шкивом при размыкании тормоза будет разным:
для простых тормозов
для дифференциальных тормозов
L 1
«м = fa -—j- ,
для суммарных тормозов
L 1
SM = ea-2T-^->
где — 0,80 0,85 — коэффициент использования хода якоря электромагнита.
236
Рис 74. Схема пластинчатого тормоза
Из полученных зависимос-
тей можно сделать следующие
выводы.
I. Для обеспечения нормаль-
ной работы дифференциального
тормоза необходимо, чтобы
плечо а рычага было значи-
тельно больше значения bda,
так как в противном случае,
как это следует из формулы
(187), при внезапном увеличе-
нии коэффициента трения f (а,
следовательно, и efa) может
оказаться, что вес тормозного
груза станет равным нулю, а
это означает, что тормоз превратится в автоматически действую-
щий останов.
2. Простой и дифференциальный тормоза непригодны для ме-
ханизмов, имеющих реверсивное вращение, так как при изменении
направления вращения тормозного шкива набегающий и сбегаю-
щий концы ленты поменяются местами, что вызовет изменение
потребной величины тормозного груза.
Для суммирующих тормозов нес груза зависит от суммы на-
тяжений SH6 и ScG, и, следовательно, не изменяется при ревер-
сивном вращении тормозного шкива.
3. При прочих равных условиях наименьший ход имеют якори
электромагнитов дифференциальных тормозов (из-за большой раз-
ницы между значениями плеч а и Ь), поэтому последние вызывают
резкое затормаживание механизма и, как следствие этого, боль-
шие динамические нагрузки.
Весьма разнообразны системы управления ленточными тормо-
зами (табл. 17).
Дисковые тормоза. R отличие от колодочных и ленточных
дисковые тормоза (рис. 74) работают под действием осевых нагру-
зок, прижимающих диски 3, вращающиеся вместе с валом 1
механизма, к дискам 2, перемещающимся по направляющим не-
подвижного корпуса 4. Диски прижимаются с помощью пружины 5,
создающей осевое усилие, а размыкаются с помощью системы
управления от рукояти или педали.
Осевое усилие, которое должен обеспечить пластинчатый
тормоз, определяют, исходя из потребного тормозящего мо-
мента,
Qo - MJ(2Rcvf),
где z — число поверхностей трения; Rcp — (RH + RB)/2 — средний радиус
поверхности трения (здесь RH и RB — наружный и внутренний радиусы ; / —
коэффициент трения между рабочими поверхностями дисков.
237
17. Параметры некоторых распространенных систем управления ленточными
тормозами
Схема управления
Принцип действия.
Расчетные зависимости
Замыкание тормоза пружин-
ное, размыкание от педали
через гидравлическою систему.
Усилие замыкающей пружины
Рпр = 5оС -р —— .
1 Чр
Общее передаточное отноше-
ние
_ а тУ
° L \ dp / т '
Усилие на педали
„ е 1
бр — —•
ч₽
Замыкание тормоза с помощью
груза, размыкание от ру-
кояти.
Общее передаточное отноше-
ние
а п-i
1 I т
Усилие на рукояти управле
иия
= Gn>— = S<=°"p ’
Замыкание пружинное, размы
каиие от рукояти
Общее передаточное отношение
а с т-,
Ир — —----------—
b c-t т
Усилие на рукояти управления
— Scc>tD —
Лр
Потребное усилие пружины
Р°р= Se6-^-
238
Схема управления
Продолжение i абл 17
Принцип действии.
Расчетные зависимости
Замыкание с помощью груза,
размыкание с помощью пнев-
мокамеры.
Вес тормозного груза
С1 ^3
Огр = >сб — — .
Усилие иа
меры
=
Требуемый
мокамеры
sn
штоке пневмока-
г. 1 °«
1 гр~7 *
а1 С1
ход штока пиев-
Двустороииий тормоз.
Замыкание с помощью пру-
жины при ее растягивании,
размыкание с помощью элек-
тромагнита.
Усилие пружины
Примечание dB и dp — диаметры; т|р — КПД рычажной системы.
239
18- Характеристика некоторых фрикционных материалов
Допускаемая температура нагрсна обкладок на поверхности треннй, СС 8 00 е4 о сП to 1 сч 1О 05
I Допускаемые даалечия па рабочей поверхности тормозом МПа 1 w масляной ванне 0,59 . 0,78 0,59 ... 0,78 0,59 0.78 0,98 . 1,18
с густым смазочным материалом 0,30 ... 0.39 0,30 0,39 0,39 0,59 0,59 ... 0,98
без смазоч- ного материала 0,20 0,30 0,20 . 0,30 0,20 0,30 0.39 ... 0,59
КОЛОДОЧНЫХ и ленточных спуск- ных 1.47 0,30 0,39
статор 1 кых СО О СП О> | to ио -* о о
Коэффициент трен ня со сма- зочным материа- лом СОСО СЧ хО оо— ООО о"
без смазоч- ного мате- риала 0,15 0,16 0,35 .. 0,37 0,42
Материалы трущихся повео кпостей Чугун по стали и чугуну Бронза по стали Лента тормозная асбесто- вая тканая по металлу Лента вальцованная по ме- таллу
Давление на соприкасаю
щихся поверхностях вращаю-
щихся и неподвижных дисков
р _------------2л___
Ширина кольца, по которо-
му соприкасаются вращающие-
ся и неподвижные диски
ь = /?„ - 2л/? ip|,
гл₽ [р I — допускаемое давление
В табл. 18 приведены дан-
ные по некоторым фрикционным
материалам, применяемым в
тормозах.
5.4, СТАТИКА И ДИНАМИКА
МЕХАНИЗМОВ ПОДЪЕМА И
ИЗМЕНЕНИЯ ВЫЛЕТА СТРЕЛЫ
5.4.1. Статический расчет
механизмов подъема н
изменения вылета стрелы
с канатно-блочной системой
подъема
Основными составны-
ми частями механизмов подъема
и изменения вылета стрелы с ка-
натно-блочной системой подъема
являются привод — грузовая
или стреловая лебедка, и полис-
паст. В механизмах изменения
вылета стрелы применяют также
комбинацию гидроцилиндр -
полиспаст.
К основным характеристи-
кам канатных полиспастов от-
носятся их кратность (или пе-
редаточное отношение) ап и
КПД т]п, который учитывает
механические потери в блоках
полиспаста.
Применяют полиспасты двух
видов — одинарные и сдвоен-
ные; в первых на барабан ле-
бедки набегает одна ветвь ка-
240
Рис. 75. Развернутые схемы грузовых и стреловых полиспастов:
с/ - одинарные полиспасты, б сдвоенные полиспасты
ната (она закреплена на барабане), во-вторых на барабан лебед-
ки набегают одновременно две крайние ветви каната, закреплен-
ные. по обоим концам барабана.
Кратность полиспаста соответствует числу ветвей каната, на
которых висит груз Так, у одинарного двухкратного полиспаста
(рис. 75, а, ап — 2) вес груза воспринимается двумя ветвями
(1 и 2), у трехкратного (ап — 3) — тремя и т. д. Если бы в системе
полиспаста отсутствовали механические потери, связанные с тре-
нием в подшипниках блоков, а также с перегибом каната на блоках,
то вес груза равномерно распределялся бы по всем ветвям каната,
на которых он подвешен Но при учете этих сопротивлений наи-
более нагруженной оказывается последняя ветвь каната, набегаю-
щая на барабан, так как сопротивления, преодолеваемые канатом
па блоках, возрастают от первой его ветви к последней, закреплен-
ной на барабане Усилие в последней ветви каната одинарного
полиспаста
5 — Q (й„г]п). (189)
где Q — вес поднимаемого груза вместе с грузозахватным органом.
Сдвоенные полиспасты состоят из двух одинарных полиспастов,
соединенных между собой через центральный (уравнительный)
блок (на рис. 75, б уравнительные блоки заштрихованы). Крат-
ность сдвоенных полиспастов определяют по кратности одинар-
ного полиспаста (она равна числу ветвей каната, расположенных
по одну из сторон от уравнительного блока), а общее число ветвей
24'
Рис. 76. Схемы для расчета канатно-блочных механизмов подъема груза и изме-
нения вылета стрелы:
а — общая; б нагружения барабанов грузовой и стреловой лебедок от усилий, дей-
ствующих в канатах полиспастов
каната, на которых висит груз, равно, очевидно, 2ап. В соответ-
ствии с этим усилие в каждой крайней ветви каната, набегающей
на барабан,
S = С/(2апПп). fl 90)
На рис. 76 показана схема механизмов подъема iруза и из-
менения вылета стрелы с помощью канатных полиспастов. Для
стрелового полиспаста усилие Sfi в ветви каната, набегающей на
барабан лебедки, и Sj на блоке стрелы связаны соотношением
‘-’б
где ац и т]п — кратность и КПД стрелового полиспаста (для данного примера
Усилие определяется из уравнения моментов сил Sb тя-
жести стрелы G0Tp и груза Q относительно оси поворота стрелы
(точки D).
Пп = ПблГ. б, (191)
где и Т]п. б — КПД неподвижного я подвижного блоков; гиг' — число не-
подвижных и подвижных блоков в одинарном полиспасте.
Средние значения КПД блоков г]б = 0,95, г]п.б = 0,98.
Если силы S6, действующую на барабан стреловой лебедки,
и S, действующую на барабан грузовой лебедки, перенести на оси
этих барабанов соответственно в точки О, и О (рис. 76, б), то
согласно правилу статики получим пары сил (на схеме они отме-
чены двумя черточками), образующие на барабане каждой ле-
бедки моменты сопротивления М'с = ScRc и Л1С = S/?o (где
Де и R6 — радиусы барабанов стреловой и грузовой лебедки
242
соответственно) и «свободные» силы 36 и 3, действующие на валы
(оси) барабанов.
Рассмотрим, как нагружается главный вал лебедки, на котором
установлены зубчатое колесо, сообщающее вращение валу, и ба
рабан (рис. 77). В зацеплении шестерни и зубчатого колеса бара-
бана (если зубчатое колесо прямозубое) действуют окружное Ро
и радиальное Рг усилия. Перенеся силу Ро на ось зубчатого колеса,
так как мы это делали с силами 3 и Зе, получим пару сил с мо-
ментом Pcdai2 (где da — диаметр делительной окружности зуб-
чатого колеса) и «свободную» силу Ро, приложенную к его оси.
При равномерном вращении зубчато! о колеса вращающий момент
P^dR!2 и момент сопротивления Л1С на барабане равны по вели-
чине и направлены противоположно, вследствие чего участок вала
между точками О и О', где установлены зубчатое колесо и муфта,
передающие вращающий момент на барабан, будет работать на
кручение.
На участке между опорами А и В вал работает на изгиб в вер-
тикальной плоскости от сил и 3, а также сил тяжести зубча-
того колеса G3 и барабана G6, а в горизонтальной плоскости —
от силы Рг.
По силе S и коэффициенту запаса прочности к — 5 ... 10 (в за-
висимости от режима работы) определяют разрывное усилие
Р = лЗ
и по его значению по ГОСТ 3241—80 выбирают канат, свитый
из стальной проволоки, и его диаметр
По диаметру каната рассчитывают наименьший допустимый
диаметр барабана
Е)й-4(д-1). (192)
где е — коэффициент, зависящий от типа грузоподъемной машины и режима
работы (для стреловых кранов при легком режиме работы е = 16, при среднем
е — 18!, при тяжелом и весьма тяжелом режиме и продолжительном действии е —
= 20)
Рис 77. Схема нагружения главного вала лебедки
243
При навивке на барабан т слоев каната рабочий диаметр
барабана
D't> = D6 + dK (т — 1)
Число витков каната, укладываемых по длине барабана, опре-
деляют в зависимости от высоты подъема или расстояния Н пере-
мещения груза
г- = -Эг + '2"3>- <193’
Рабочая длина /е (мм) барабана
/б = (dK + 0,5) гв. (194)
Внутренний диаметр барабана в (см) определяют из усло-
вия прочности на сжатие:
Dc. „ = D6 1/ [Псж1-^/(Рб/с) , (195)
’ B'OKj
где [аС(К ] —допускаемое напряжение сжатия, /с — шаг навивки каната на ба-
рабане, равный dK,
Толщина стенки барабана
6б = (ОС - «о. J/2.
5.4.2. Динамика механизмов подъема и изменения
вылета стрелы при разгоне. Выбор двигателя привода
Определение продолжительности процесса разгона. Пу-
сковой момент на валу двигателя, развиваемый при разгоне
механизма, можно представить как сумму двух моментов: момента
Л1СТ сил статического сопротивления, который является постоян-
ным и не зависит от продолжительности процесса, и момента со-
противления Ма (tv) сил инерции вращающихся и поступательно
движущихся масс механизма:
Ма = Л4СТ I- M„(ip).
Из этого выражения, записанного пока в общем виде, можно
определить искомую величину — время разгона любого меха-
низма.
На рис. 78, а показаны силы, действующие на механизм подъ-
ема при разгоне поднимаемого груза В набегающей на барабан
ветви каната кроме усилия S от статической нагрузки Q действует
в этом случае усилие 5Я от инерционной нагрузки Рп, действующей
на груз при его разгоне,
где v — скорость подъема груза.
244
Рис. 78. Схемы сил, действующих в ме-
ханизме подъема груза:
а — при трогании груза с места на подъем,
б — при торможении опускающегося груза
Соотношение между силой
Ра и усилием S„ точно такое
же, как и между статическими
силами Q и S, т. е.
О
S — — & *р —
И °пЧп °п'Пп
__ Qvc _____
g«nVP ’
где об = vaa — скорость ветви грузо-
вого каната, набегающей на барабан
(равна окружной скорости барабана):
— угловая скорость барабана.
Силы натяжения S и 5И направлены по отношению к барабану
вниз и относительно оси его вращения образуют момент сопро-
тивления
Л4С — (S 4- SH) Rr„
направленный при подъеме груза против направления вращения
барабана.
Момент на валу барабана уравновешивается движущим
моментом Мр,
Заменяя в этой формуле величины S и S, их выражениями,
приведенными выше, получаем
М — 4
Приведем теперь этот момент к валу двигателя. Для этого,
как было показано в п. 2.5.6, величину Л4Г нужно разделить на
передаточное число им и КПД Т|м механизма (между двигателем и
барабаном лебедки):
= + (196)
где <0д — ®бим — угловая скорость вала двигателя.
Потребный движущий момент на валу двигателя Мп = Мр д
при пуске определяется как сумма моментов Мс. д и 6/д<0д/(р
[обусловленного сопротивлением от инерции вращающихся частей
привода (включая и барабан), расположенных после двигателя)
Мп = Мс. д + fi/дСОд /р
245
или
0^б
Л/
+ Д
юд
(197)
где л = ДмДп ~ общ«й КПД механизма.
Для краткости записи обозначим величину, стоящую в скоб-
ках, через /пр д и назовем ее суммарным приведенным (к валу
двигяте 1я) моментом инерции движущихся масс механизма и груза
при разгоне
<198>
Тогда уравнение (197) примет вид
+ О")
“М^П*]
В полученном выражении первый член, стоящий в правой части,
определяет момент статических сопротивлений, а второй — инер-
ционных:
Л4с- = , Мн (fp) = /Пр. д
“м^пП *р
Если сравнить выражение для 7„Р. д, с выражением для при-
веденного момента инерции /пр.д того же механизма, определя-
емым уравнением (29), то нетрудно отметить, что они отличаются
друг от друга только тем, что в уравнении (198) присутствует ве-
личина тр В действительности приведенный момент инерции, как
и приведенная масса или маховой момент инерции, не зависит,
конечно, от механических потерь в механизме и, следовательно,
от его КПД т). Присутствие же в выражении (198) величины т|
является только следствием преобразований уравнения (197) и
придания ему более простого и удобного для расчета вида при
определении пускового момента [формула (199)].
Как следует из формулы (199), пусковой момент, который
необходимо обеспечить на валу двигателя при пуске, численно
равен сумме моментов сил статических и инерционных сопро-
тивлений. Последние преодолеваются избыточными усилиями, и
поэтому для данного механизма можно записать, что
мй9б. д = лРД . (2оо)
где Миз« д — избыточный момент на валу двигателя, Н-м, лд — частота враще-
ния вала двигателя, об/мин
Выражая пусковой момент через момент инерции механизма,
получаем
м (201)
“|Ч«иЧ 9,55Zd
246
Из этого уравнения находим время разгона
_______^пр. дпЛ________
9,55 (ми---------------
\ /
<202)
Определение динамических нагрузок, действующих на канат
при разгоне механизма. Избыточное усилие, создаваемое приво-
дом, сообщает элементам механизма и исполнительным органам
машины cooiветсгвующие ускорения, в результате чего на них
действуют динамические силы, вызывающие деформации в упру-
1 их звеньях. Для определения динамической силы, действующей
на грузовой канат механизма подъема, нужно предварительно
найти избыточное усилие, приведенное от вала двигателя к грузо-
вому канату При этом необходимо сначала пусковой момент /1п,
.азвиваемый на валу двигателя, привести к исполнительному ор-
гану (барабану), умножив его на передаточное число им иКПД
цм механизма.-
Л4р — Мпим7]м.
С учетом выражения (197) получим
^p = [«мадмпп + Uxwin'+ 6J«Wm)]
и после преобразований
(202)
<201)
Раздели в выражение
найдем соответствующее
для .Мр на рабочий диаметр барабана,
окружное усилие на нем
Рр. с “ Л4р,‘ Рб>
а умножив величину Рр. е на кратность и КЩ1 полиспаста, по-
лучим выражение для движущего усилия Рр, действующего на
поднимаемый груз,
Рг -(Л4, /?с)адв. (205)
Подставив в формулу (205) зависимость (204) и выразив угло-
вую скорость барабана соб через скорость подъема 1 руза ю (о>б =
tty'Ro — van R6), получим
Rp — Q t 1)-7- •
\ к ^6 lp
(206)
Обозначим величину, стоящую в скобках, через гп'лр. гр и
назовем ее суммарной приведенной (к грузу) массой движущихся
частей механизма и груза при разгоне
/Ппр го = ( 6/д Ьы^пТ] (2071
247
Тогда уравнение (206) примет вид
Рр = Q 4- "inp. rpf/fp- (208>
Заметим, что похожее выражение для суммарной приведенной
массы рассматриваемого механизма подъема мы уже получали
раньше — выражение (32). Отличие между формулами (32) и
(207) состоит лишь в том, что в последней присутствует КПД т>;
это объясняется не зависимостью приведенной массы от механи-
ческих потерь в механизме и полиспасте, а стремлением придать
полученным выражениям более простой и удобный вид при рас-
чете движущего или избыточного усилия 1формула (208)1
Искомое избыточное усилие определяют как разность между
движущим усилием Рр и статическим сопротивлением Q, т. е.
Р«зб — Pp — Q = m'„pv!tv. (209)
Теперь можно воспользоваться полученным ранее уравнением
(99) и найти развернутое выражение для максимальной динамиче-
ской силы Fmax. действующей на грузовой канат при трогании
груза с места. Для этого достаточно массу т2 заменить отноше-
нием Q/g, а массу т2 — суммарной приведенной массой вращаю-
щихся частей привода, равной а Тогда получим
кк
(210)
При необходимости определить динамическую силу, действую-
щую па какой-либо элемент механизма, расположенный между
грузом и двигателем, нужно разделить значение Fmm, определен-
ное по формуле (210), на передаточное число и КПД передачи ме-
жду грузом и данным элементом.
Определение потребной мощности и выбор двигателя. Мощ-
ность, затраченная на разгон механизмов подъема и изменения
вылета стрелы, даже при больших скоростях подъема груза и —
— 1 ... 1,2 м/с и малом времени разгона составляет обычно
3 ... 4 % мощности двигателя при установившемся режиме и
полной нагрузке. Поэтому для данных механизмов двигатель
выбирают по мощности установившегося режима
W = Qv/( 1 000т|),
где N — в кВт; Q в Н; v — в м/с.
При выборе электродвигателей следует учитывать режимы
их работы с точки зрения продолжительности одноразового вклю-
чения. При продолжительном режиме работы (время одного цикла
превышает 10 мин, номинальная продолжительность включения
ПВ — 100 %) по расчетному значению мощности выбирают дви-
гатель, номинальная мощность которого при ПВ = 100 % равна
или несколько больше расчетной.
248
При повторно-кратковременном режиме работы (он характерен
для машин периодического действия) в том случае, когда значе-
ние фактической продолжительности включения ПВФ (%) не
совпадает со стандартным (номинальным) значением ПВ (%),
двигатель выбирают по мощности WH, вычисленной по формуле,
Л’к = N /ПВФ/ПВ .
Фактическую продолжительность включения определяют по
отношению времени включения двигателя в течение цикла
к общей продолжительности цикла Т„:
ПВф = -^-100 %.
Мощность выбранного двигателя должна быть равна или не-
сколько больше значения Na.
Двигатель проверяют на перегрузку при пуске. Для этого по
его номинальной мощности NR и соответствующей этой мощности
частоте вращения вала пл определяют номинальный момент дви-
гателя
7ИД — 9555Лгд/пд,
где Мя — в Н ы; — в кВт; пв — в об/мин.
По отношению пускового момента Л1п, рассчитанного по фор-
мулам (199) или (201), к моменту Л4Д находят коэффициент пе-
регрузки:
Ко ==
Расчетное значение коэффициента перегрузки не должно пре-
вышать допускаемые для данного типа двигателя значения:
1,5 . 2,7 для электродвигателей, 1,05 ... 1,15 для дизелей.
54.3 Динамика механизмов польема
и изменения вылета стрелы при торможении
Определение продол кительности процесса торможения.
На рис. 78, б показана схема сил, действующих на механизм подъ-
ема при торможении опускающегося груза. Так как при этом уско-
рение (замедление) груза направлено против его движения, т. е.
вверх, сила инерции, действующая на груз, направлена вниз и
равна
где V' — скорость опускания груза.
Как видим, в расчетных схемах, построенных для случаев
разгона груза при подъеме и его опускания при торможении, нет
каких-либо различий. Отличны лишь значения сил, действующих
на элементы механизма. Это отличие обусловлено, в частности,
249
тем, что при разгоне силы трения в механизме, препятствуя дви-
жению, вызывают некоторое увеличение нагрузок на элементы
механизма при переходе от исполнительного органа (груза) к ис-
точнику движения (двигателю); при торможении действие сил
трения обратное, они помогают торможению и тем самым несколько
снижают нагрузки на элементы от груза к двигателю. Поэтому
в выражениях, определяющих натяжение в ветви каната, набегаю-
щей на барабан, вызванное статической Q и инерционной Рй
нагрузками, величина будет стоять не в знаменателе, как для
случая разгона, а в числителе:
о, _ Q п
S т|л.
Р» „
где tog — угловая скорость барабана перед торможением.
Момент сопротивления на барабане, образованный силами
S' и
мс - (5 + 5к) Кб - -- 4- ga, tT - ап 4
№л
ёиыап г
где тЦд — угловая скорость вала двигателя перед торможением
Приведем этот момент к валу двигателя Для этого момент Мс
нужно разделить на передаточное число и умножить на КПД
передачи между барабаном и двигателем:
_ WfiWiM I
с я~ Им ~ ИмОп gUfc«n ’
(211)
Кроме момента Л4й.д на валу двигателя при его торможении
действует момент сил инерции вращающихся частей механизма
to'
и барабана, равный Мд-~- и направленный в ту же сторону,
что и момент ЛД. д (в данном случае против направления тормо-
жения) Для уравновешивания этих моментов на валу двигателя
должен быть создан тормозящий момент, численно равный сумме
(д'
моментов Мс,а и 6 Д,—— и направленный в обратную сторону,
*т
со'
мт.д-м;.д кб/ду-
или
М
QR&f\
имап
/О*?!
4 6^)
(212)
ыд
250
Обозначим величину, стоящую в скобках выражения (212),
через Jnp.fi. и назовем ее суммарным приведенным (к валу дви-
гателя) моментом инерции движущихся частей механизма и груза
при торможении:
= (213)
&имп
Тогда
М- <2Н>
“МСП *т
ИЛИ
<2is>
где п'а — частота вращения вала двигателя перед торможением, об/мии.
В этом выражении первым членом, стоящим в правой части,
определяется момент статических сопротивлений при торможении
опускающегося груза, а вторым — момент соответствующих инер-
ционных сопротивлений.
Из уравнения (215) находим время торможения
G —
Aip. дпд
9,ББ (.И,. д
(216)
При практических расчетах величину Мт. п обычно опреде-
ляют по значению статического момента сопротивления при тор
можении с учетом коэффициента запаса торможения
Mt. д —
Offen
Чм“п
По нормам Госгортехнадзора для легкого режима работы
Дт = 1,5, для среднего 1,75, для тяжелого 2,0, для весьма тя-
желого 2,5.
Время торможения механизмов подъема кранов tT — 1 ... Зс.
Определение динамических нагрузок, действующих на канат
при торможении механизма. Если при разгоне механизма источ-
ником возбуждения колебаний и динамических нагрузок в меха-
низме являются движущие силы, то при торможении таким источ-
ником являются тормозящие силы и, в частности, тормозящий
момент на валу двигателя, который мы только что определили.
Приведем момент Мт. п к исполнительному органу. Для
этого, действуя в соответствии с правилами приведения сил и
моментов при торможении, умножим величину АД я на переда-
точное число и разделим на КПД rjM.
~ Л4 г пнм, г|м
261
или
Мт
Г<?^бЧпПм
|_ «МС1|
4 бЛ«м
ИМ
Преобразуя это выражение, получаем
м + (217)
On \ 5СЙ Чм / tv
Уравнением (217) определяется тормозящий момент на бара-
бане. По величине М-, можно определить соответствующее тормо-
зящее усилие, действующее на груз со стороны грузового каната;
для этого момент Мт надо разделить на радиус барабана и полу-
ченное выражение умножить на кратность полиспаста и разде-
лить на его КПД т}п:
Мг 1
Пм •
Подставляя в это выражение значение момента Л!т по урав-
нению (217) и заменяя угловую скорость барабана скоростью
опускания груза (а>б = и'ап/7?с), находим
^=q(4+6/«4-u^"4-)t-- (218)
( S ^<6 ч } ’т
Обозначим величину, стоящую в скобках, полученного урав-
нения через т„р. Гр и назовем ее суммарной приведенной (к грузу)
массой движущихся частей механизма и груза при торможении:
<Р. гр = 4 + 6/д “Ж V - (219)
Тогда
Pi = Q + "inp. rpf'/iy. (220)
Избыточное усилие, действующее на груз при торможении,
Рвэб = Л — Q = т„р. rpv'.'tt. (221)
Зная величину РкЭб, можно определить максимальную дина-
мическую нагрузку, воспринимаемую канатом при рабочем тор-
можении:
2 — Р'
2 „ 'изб
Fmax “ rj ,
(222)
При необходимости определить динамическую нагрузку, вос-
принимаемую каким-либо элементом механизма, расположенным
между грузом и двигателем, нужно величину £тах разделить на
передаточное число передачи между грузом и данным элементом
и умножить на КПД этой передачи.
252
5.4.4. Особенности динамики механизмов подъема
и изменения вылета стрелы с объемным
гидроприводом
Механизмы подъема с гидродвигателями вращатель-
ного движения Механизмы подъема с гидравлическим приводом
выполняют с гидромотором, передающим вращающий момент
на барабан лебедки через редуктор, или с высокомоментным гидро-
мотором, встроенным в барабан грузовой лебедки
Как и для механизмов подъема с механическим приводом движу-
щий момент на валу гидродвигателя при пуске определяют по
формуле (199). С другой стороны, движущий момент на валу
гидромотора при пуске можно выразить через рабочий объем
насоса Ун (м3/об) и давления рг во всасывающей и р.г в сливной
линиях
V
= -Й- (А - р2)« (223)
Приравнивая правые части уравнений (199) и (223), получаем
+ Jn₽-д "V = -йГ{р' ~
Из этого равенства, пренебрегая давлением pt в сливной гидро-
линии, находим максимальное (пиковое) давление pt — р} max,
возникающее при пуске гидромотора на подъем груза,
р> «-77) • (224)
Опускание груза начинается при открытии тормозного клапана,
соединяющего напорную линию гидродвигателя со сливной. При
торможении вала гидродвигателя давление во всасывающей линии
уменьшается, а в напорной увеличивается, достигая максималь-
ного значения
Pi ™ - рн Jnp Д -JT-) 4- рт. к, (225)
гДе Рт к —давление настройки тормозного клапана.
Механизмы изменения вылета стрелы с приводом от гидро-
цилиндра. На рис. 79 показана схема механизма изменения вы-
лета стрелы с помощью гидроцилиндра и стрелового каната.
Усилие Sj в ветви каната, набегающей на блок штока гидрони-
линдра, можно определить из уравнения моментов сил Sj, Q
(вес груза) и GB относительно оси поворота стрелы — точки D
(рис. 79, а):
о (Q(DA)4-GB (£)B)|cos£d
253
Рис, 79 Схемы механизма измене-
ния вылета стрелы с помощью ги
дроцилинлра и стрелового каната:
а — общая, б — схема сил, действую
щих на направляющем блоке штока
г идроцмли ндра
Усилие, действующее
вдоль штока стрелы (рис.
79, б\.
PC^(S\ I- S()sln(az/2),
где аг — угол обхвата блока гид-
роцилиндра стреловым канатом,
При S, Si — S
Рс 2S sin (ct/2).
Расчетное значение Рс определяют при максимальном угле ах.
Переходный процесс от одного установившегося состояния
к другому характеризуется появлением избыточного давления
в гидросистеме, обеспечивающего ускорение или замедление ис-
полнительного органа механизма, а также поршня и рабочей
жидкости, заполняющей гидросистему. Для таких приводов
избыточное усилие, приведенное к штоку гидроцилиндра,
Р^.с-^^, (226)
где 1'п — скорость поршня; £ пьр с — суммарная приведенная масса рабочего
оборудования и жидкости в гидросистеме,
У, р — «Пр. с **“ с,
здесь mnp. с — приведенная масса рабочего оборудования (вместе с грузом),
Л1Ж. 0 — масса жидкости на п участках гидросистемы, приведенная к поршню
(штоку) гидроцилиндра;
где р — плотность рабочей жидкости (для минеральных масел р — 830 ..
840 кг/м3); 1[ и У—длина и площадь поперечного сечения i го участка системы
включая и гидроцилиндр; — скорость жидкости на i-м участке системы
Максимальная динамическая сила, действующая на шток гид-
роцилиндра при разгоне
= (mDp. с + тж с) -?п ) Рс, (227)
при торможении
Fmax = (™np. с F «ж. с) -g- + Рс- (228)
Для гидроприводов рассматриваемого типа tp = 0,15 ... 0,17 с,
/т = 0,05 ... 0,10 с.
254
5.4.5. Примеры расчета
Пример 1. Выбрать двигател! механизм.: подъема стрелы с электро-
приводом Определить коэффициент перегрузки двигателя при пуске.
Исходные данные: грузоподъемгая сила крана Q = 73 500 Н (грузоподъем-
ность 7,5 т), скорость подъема груза v — 0,3 м/с; кратность полиспаста ап — 4
общий КПД механизма и полиспаста т] = 0,85; радиус барабана лебедки меха-
низма подъема = 0,2 м; режим работы двигателя соответствует номинальному
ПВФ = ПВ = 25 % .
Решение. 1. Определяем потребную мощность двигателя
w _ Qt' _ 73 500 0,3 „ п
д 10001) 10000,85 ~26кВт-
По каталогу электродвигателей выбираем дви1 атель трехфазного тока серии
МТМ 511-8: Nn — 27 кВт; пя = 750 об/мин; 7д = 1,075 кг-м».
Выбираем упругую соединительную муфту с моментом инерции JM =
1,55 Ki -м».
2. Определяем передаточное число механизма. Угловая скорость барабана
лебедки
,, to СОП 0,3 4
Шб = -RT = -RT = “01“ = 6’° рад/с
Угловая скорость вала двигателя
щд =
ппя
30
3,14.750
30
= 78,5 рад/с.
Передаточное числе механизма
“м
°>д
(Он
78,5
6.0
13,08
3. Натопим статический момент
гателя
сопротивления, приведенный к валу дви
А1О л —
QRc
73500-0,2
13.08 4-0,85
«331 Н м
4. Рассчитываем суммарный приведенный (к валу двигателя) момент инер-
ции механизма и груза при рязгоне
к _ Q/?6 , А/г , , ч 73500-0,2»
пр А Яа.,«нЧ + ' * 9,81 -4МЗ,08» 0,85 *
4- 1,2 (1,075 j- 1,55) = 0,129 4-3,15 «3,279 кг-м».
5. Определяем избыточный момент, приведенный к валу двигателя при
времени разгона = 3 с
д = 'пР.д-^ = 3,279-^-«86 н-м.
6. Вычисляем движущий момент на валу двигателя
д ~ ^с. д 4“ ^4 изб. Д = ^31 8t> ~ 41 t Н М
7. Определяем коэффициент перегрузки двигателя гри пуске. Момент на
налу двигателя, соответствующий его номинальной мощности
/И„ = 9555 = 9555 = 344 Н м.
п„ 50
255
Коэффициент перегрузки двигателя ири пуске
v _ мр. д 417 _ , 01
Кп - -м^--"344~-1>21'
что допустимо для выбранного двигателя.
Пример 2. Определить необходимый тормозящий момент на валу двигателя
механизма подъема стрелы
Исходные данные', вес поднимаемого груза Q =• 147 150 Н (грузоподъемность
15 т); момент инерции ротора двигателя и элементов механизма, напрямую соеди-
ненных с ротором 7Д1 — 3,15 кг и2; радиус барабана лебедки механизма подъема
Лс = 0,25 м; полиспаст сдвоенный, кратность ап — 4; передаточное число ме-
ханизма им — 47,3; частота вращения вала двигателя лд ~ 750 об>мин; КПД
механизма т)м ~ ОД3! КПД полиспаста t]n —- 0,95; общий КПД т) — Т1Ы>1П =
= 0,88.
Р ешение. 1. Определяем суммарный приведенный (к валу двигателя) момент
инерции поступательно движущихся и вращающихся масс груза и механизма
7пр д~ 5-O36Jsl = 1,03 1,2-3.15 « 3,89 кг м2.
2 Находим избыточный тормозящий момент на валу двигателя при времени
торможения tT — 2,5 с
Мияй. /;р .д= 3,89 = 122.5 Н м
3 . Рассчитываем приведенный (к валу двигателя) статический момент со*
противления при торможении
Л4' = J47150^0^ _ g5н ы
°- « 2аииы 2-4 47.3
4 Определяем тормозящий момент на валу двигателя
Л4Т Д-=М; Д4-М;аб д= «5,6 +122,5» 208 Нм.
Тормоз подбираем по моменту
Л*торм= 1,15Л4т.д= 1,15-208 — 239 Н-м
5 . Уточняем тормозящий момент на валу двигателя с учетом момента инер-
ции вращающихся масс тормоза. Момент инерции вращающихся масс двигателя
и соединенных с ним напрямую элементов механизма
/д = (/ц< ] /т) = 3,15 7-0,268 - 3,418 кг м2.
Суммарный приведенный (к валу двигателя) момент инерции движущихся
и вращающихся масс груза и механизма при торможении
ОД . А, 147150-0,252-0,88
1 6-/Д=—9ДП45-47Д^- + 1.2.3,418-
= 0,023-) 4,102 = 4,125 кг м’.
Избыточный тормозящий момент иа валу двигателя
... - 0,105Пд . 1ОС 0,105-750 „
Л1Иэб.д = ^р A"^-4-125- 2,5' = 130 Н М
Тормозящий момент на валу двигателя
МТ.Д=^.Д +МИ36.Д = 85,6 г 130 = 216 Н-м.
Так как уточненное значение момента Л4Т. д ие превосходит Л4торм, тормоз
выбран правильно.
256
Б.б. СТАТИКА И ДИНАМИКА ЛИФТОВЫХ ПОДЪЕМНИКОВ
Б.5.1. Статический расчет механизмов подъема
лифтов с канатоведущим приводом
Основными элементами лифтовых установок являются
привод, состоящий из двигателя, редуктора и канатоведущего
шкива, кабина, подвешенная к грузовой ветви тягового каната,
и противовес, подвешенный к другой ветви каната (рис. 80, а).
Противовес служит для уравновешивания кабины и уменьшения
потребной мощности электродвигателя привода при ее подъеме.
В отличие от барабанных приводов, в которых канат жестко
закреплен на барабане, в канатоведущих приводах движение от
приводного шкива грузовому канату сообщается за счет трения
между канатом и поверхностью обода шкива [3] Как было от-
мечено в п 4.1.2, в этом случае наибольшее натяжение 5нб на-
бегающей на приводной шкив ветви каната определяется по урав-
нению Эйлера в зависимости от натяжения Sc6 в сбегающей
ветви, угла а обхвата шкива канатом и коэффициента трения f
между канатом и поверхностью шкива.
Вращающий момент, развиваемый на канатоведущем шкиве
Л4К. га — (<SHc — 5Сб)/?т, (229)
где 7?п1 — радиус каиатоведущего шкива.
Рис. 80. Расчетные схемы для определения усилий в грузовой и противовесной
ветвях тягового каната лифтового подъемника:
а — общая схема подъемника; б — при трогании лифта на подъем; 6 — при трогании
лифта на спуск; е при торможении опускающегося лифта, д — при торможении лифта
при подъеме
9 Fобертон Л. А
257
При установившемся движении момент Мк. ш на канатоведу-
щем шкиве механизма подъема лифта можно определить по раз-
ности моментов, создаваемых относительно оси вращения шкива
силами тяжести кабины GKa0, груза Q в кабине и противовеса Gnp:
Мк. ш = (Q + GKaC) - 0ирЯш. (230)
Приравнивая правые части уравнений (229) и (230), получаем
(5кб ScC) ~ (Q -Ь Сваб) ^ГП ^Пр^ПН
откуда находим натяжение в сбегающей ветви грузового каната
Son = sa, - (Q -Ь GKaB - Gdp) = . (231)
5.5.2< Динамический расчет механизмов
лифтовых подъемников
Трогание лифта с места на подъем. Пуск лифта можно
рассмотреть, используя эквивалентную схему, показанную на
рис. 80, б. Ведущей массой является суммарная приведенная
масса привода с моментом инерции = Jap. ш и масса противо-
веса с моментом инерции Jn. К этим массам приложен движущий
момент (Мр. ш + Л4пр), создаваемый приводом и противовесом,
который направлен в сторону подъема лифта. К ведомой массе
(кабина с грузом) приложен момент сопротивления Л1каб = /И1С,
направленный в противоположную сторону.
Движущий момент, передаваемый от привода к канатоведу-
щему шкиву,
(14р. ш ~ Mlc (WDp -)~ МВ8б == (Q 4 GKaB) Gnp-j- ивб,
(232)
где Afinsc — избыточный момент иа канатоведущем шкиве, равный разности
между моментами (Afp. ш + Л4пр) и Л1г-0.
Из уравнения (232) можно найти движущую силу Рр. ш =
— Мр. действующую на канатоведущем шкиве,
Рр. ш = (Q Сваб) Gnp Р 1ИЗб- (233)
Отсюда находим избыточную силу на канатоведущем шкиве
Pi ияС = + GnP - (0 + GKaC). (234)
Динамическая нагрузка, воспринимаемая грузовой ветвью
каната, при разгоне
Ft И1ах = 7-^арР1иа0---- ( (Q + Свас), (235)
+ («каб 4- /лп)
258
где ягКаО и отп — массы кабины и противовеса; Jap_ щ — суммарный приведенный
(к шкиву) момент инерции вращающихся масс привода, включая и канатоведу-
щий шкив;
•/пр. ш == S-/Н Jт ,
где ьм ит] — передаточное число в КПД привода; Jm — момент инерции канато-
ведущего шкива.
Определим нагрузки, действующие на ветвь каната противо-
веса, Наибольшая нагрузка этой ветви каната возникает при тро-
гании лифта на спуск, когда момент от привода /Ир.ш направлен
в сторон у спуска и совпадает по направлению с моментом Л4каС,
создаваемым весом кабины с грузом относительно оси вращения
канатоведущего шкива; момент Л1пр, создаваемый весом проти-
вовеса, будет теперь моментом сопротивления Мор = ЛТ20. Эквива-
лентная схема для этого случая показана на рис. 80, в.
Избыточный момент на шкиве
^2 изб ш = Л1р. пх С^2о — ^каб)1 (236)
откуда избыточное усилие
Рг изб = + (<? + GKa6) - Gnp. (237)
Натяжение ветви каната противовеса при трогании лифта на
спуск
f8n.ax = T-2mnPain!6 ni-----1 Gnp. (238)
~ В2 4 (ткаб + mn) ’
Формулы(235) и (238) получены из предположения, что эле-
менты привода и тяговый канат представляют собой систему
с упругими звеньями, как это показано на рис. 80, б, в.
Для определения тех же динамических нагрузок можно поль-
зоваться и методом кинетостатики.
Торможение лифта при спуске. Наибольшее нагружение гру-
зовой ветви каната при торможении лифта возникает при его спу-
ске. В этом случае тормозной момент Мт ш на шкиве направлен
против движения лифта и совпадает по направлению с момен-
том Л1пр от противовеса, который также оказывает тормозящее
воздействие. Моментом сопротивления торможению является
момент Л11с = Л1каб.
Эквивалентная схема, соответствующая этому режиму работы
лифта, показана на рис. 80, г.
При установке тормоза на валу двигателя тормозящие момент
и усилие, действующие на валу канатоведущего шкива, равны
Мт. га ~ М т. цНм/Т), Р т ш =; М т. их/
где Л1т д — тормозящий момент на валу двигателя
9*
259
Динамические момент и сила, действующие на i рузовую ветвь
каната при торможении спускающегося лифта,
м _ [Мт ш (ЛДаС Мпр)1 I д л . /OQQ1
Л р1"’« Jn, л + (7та6 + /п) + (239)
max = “ “ (? ± ,)[ __ {Q
~~В2 ~ "+ (т«а0 тп)
Эквивалентная схема для определения нагрузок, действующих
на канат противовеса при торможении, показана на рис. 8Э, д.
Наибольщие нагрузки возникают при подъеме лифта, когда проти-
вовес. движется вниз. В этом случае направление тормозного мо-
мента на шкиве Л4Т. ш совпадает с направлением действии момента
Мкас» а момент Л4пр = Л12С оказывает сопротивление торможению.
Для расчета динам ических усилий, дейст! ующих на кана г
противовеса при торможении, можно пользоваться одной из
следующих формул:
дд ________ 27п [Мт, пт (**nP ^каб)1 _ дд
₽2 ° rx JEp га I" (7каб “Г 7П) ПР’
р _______, 2щп [Рт. ш + (7 ’h ^каб) — ^гпр । _
f2 max ~ г _ Опр,
-nL-m- 4 (^аб I- ти)
(241)
(242)
^2 max —
Определение мощности двигателя и его выбор. Тэсбуемую мощ-
ность (кВт) электродви гателя лифта определяют по значению вра-
щающего момента А1К. ш (Н-м) на валу канатоведущего шкива
при установившемся движении кабины:
дг _ ПТПД
д 9555пмт] ’
где пд — часто-a вращения валя двигателе, об/мин
Выбранный электродвигатель следует проверить на нагрев,
используя, например, метод определения эквиьален гной по на-
греву силы тока /8,
} — 1/Г_ /р<р ~ '
в Рр^р I 4 PtG 4 Pi/о
где /р. /у и /т — сила тока ( М при раз) one. установившемся движении и при
алектрическом торможении (при тоэм'-жении механическим путем с пимош яо
тормоза /и. = 0), Рт. Р„ — к" |к тп иеиты. учитывающие ухулгпст иг условий
охлаждения при разгоне, торможении и во врем J пауз (Рр и рт прип 1мают рав
иыми 0,5... 0,75; ₽п = 0.25 . 0,5k /р, /у, Т, и tc — времг (<) раз1 ога. ус~аио
вившегося движения, торможения и паузы за р 1бочгй цикл.
Сила тока /э должна быть меньше номинал кь.>гп значения /н
для выбранного эле, гролвигателя, указанною в каталоге.
260
5.6. СТАТИКА И ДИНАМИКА МЕХАНИЗМОВ ВРАЩЕНИЯ
5.6.1s Статический расчет механизмов вращения
Ста гический расчет механизмов вращения включает
в себя определение с< 'противления сращению повороте эй части
машины, обусловленное трением в опорах и действующими ветро-
выми на] рузками.
13 дорожно-строительных машинах наибольшее распростране-
ние получили опорно-поворотные устройства, выполненные в виде
поворотной платформы, установленной на опорных катках и ли
крупногабаритных радиально-упорных подшипниках. Такие уст-
ройства применяют, в частности, в башенных кранах, одчоковшо
вых экскаваторах, самоходных пневмоколесных и гусеничны к
кранах. Выполняют опорно-повор этные устройства и в виде под-
шипников скольжения или качения, либо горизонтально раснл
ложенных роликов.
На рис. 81 показана схема поворотной части башенного крана
с неповоротной баш..ей. Для кранов этого типа общий момент
от сопротивления трения в опорах складывается из момента тре-
ния А41тр в верхней г.апфе, воспринимающей радиальную реак-
цию ЦхА, Действующую в горизонтальной плоскости, момента
а рения А42тр в верхнем упорно:.: подшипнике, воспринимающем
вертикальную реакцию ЛуА, и момента трения А4зтр в нижней
цапфе, воспринимающей радиальную реакцию Rx-i При этом
(243)
Л4) Гр —
Рис. F1. Схеме поворота! й част а бе сениого кргиа с неповог'01 и 'й б зшней;
/ — оголовок: 2 — верхняя опора; 3 •— багпвя* 4 •— поликн нижней опоры: £ —> стрела;
6 — кольцевая рама нижней опоры; 7 — противовесная консоль
261
для сплошной пяты
мир = адЛ/2, (244)
для кольцевой пяты
.М2 Тр — i (^2 4~ ^2)» (245)
для опоры типа шаровой пяты (см. рис. 81)
М8тр = RvAfa^si (24о)
для опоры, выполненной в виде группы роликов с вертикальными
осями вращения, укрепленными на поворотной части (см. рис. 81),
Мв7р = J?IB (fp р _Р°_, (247)
где fi, и fs — коэффициенты трения в соответствующих подшипниках;^ и dg —-
диаметры цапф; /р — коэффициент трения в осях роликов; £>р и dp — диаметры
роликов и их осей; d2 и d2 — наружный и внутренний диаметры пяты; рр — коэф-
фициент трения качения роликов.
Для подшипников скольжения коэффициенты трения равны
при отсутствии смазочного материала 0,10 ... 0,16, при густом
смазочном материале 0,06 ...0,11; для подшипников качения —
0,01 ... 0,07; цг = 0,4 ... 0,6 мм.
Общий момент сопротивления трения в опорах
Л4тр = A4jTp —j— Alarp f- -MSTp.
Момент сопротивления трения для опорно-поворотных уст-
ройств каткового типа (см. рис. 85) складывается из момента тре-
ния в упорном подшипнике центральной цапфы, нагруженной
вертикальной реакцией ROz, момента трения в подшипниках
опорных катков, находящихся со стороны стрелы, нагруженных
вертикальной реакцией RK, и момента трения в центральной цапфе
от горизонтальной реакции Roy:
Mrp^R0Jn-^+RK(f^ + ^-)^ + Royfk-^-, (248)
где и — коэффициенты трения в упорном и радиальном подшипниках цен-
тральной цапфы; dp — диаметр центральной цапфы; f — коэффициент трения
в подшипниках опорных катков; н dK —диаметры опорных катков и их
осей; рк — коэффициент трения качения катков по направляющим; £>с —- диа-
метр качения опорных катков.
Если равнодействующая сил тяжест и поворотной части Gn
не выходит за пределы ее опорного контура и центральная цапфа
разгружена, то
(219)
262
Для опорно-поворотных катков о обратными катками (распо-
ложены со стороны, противоположной стреле)
-R. (?£ + -%-)4- + К(Г4 Т^)4• <250>
где штрихами обозначены параметры обратный катков, соответствующие ана-
логичным параметрам опорных катков.
При расчете механизмов вращения ветровые нагрузки (АД)
принимают постоянными и учитывают вместе с сопротивлениями
трения в опорах
Л1© = -р А4В.
Как видим, момент сопротивления вращению поворотной части
машин зависит от реакций в опорах поворотной части Покажем,
как определяются опорные реакции на ряде характерных при-
меров.
Определ“ние опорных реакций башенного крана с поворотной
башней, установленной на поворотной платформе (рис. 82). Будем
считать задаваемыми силы тяжести груза и грузозахватного ор-
гана Q, стрелы Go, башни Go и противовеса Gnp; ветровые на-
грузки РЕ1, Рв2 и Рва, действующие соответственно на груз,
стрелу и башню. Неизвестными являются реакции в опорах стрелы
Ryot и RxOt и противовесной консоли Р.в0» и Rxo„ а также
усилия S\ и Sa в расчалах стрелы и противовесной консоли
(рис. 82, а)
Для определения неизвестных рассмотрим отдельно условия
равновесия стрелы и противовесной консоли, построив в точках
0х и О? вспомогательные системы координат и Х'202У2.
Мысленно отбросив расчалы стрелы, заменим их действие на
стрелу силен Sx, которую представим в вице двух составляющих
Si = Si cos <рх и Si == Sx sin <px, и составим уравнения равновесия
в системе координат Xx0iKx:
2 МО1 = 0; Q(x-A/)4-Gr(xc- AZ)-Sj(x-AZlcosq>x-
- Si (х - Д /) tg 6 sin чч 4- РВ1 (х - AZ) tg 0 + РЕ. (х0 - А 0 tg 0:
(251)
Л 1 х = 0; RBo, — Бс — Q — Sx cos <px = 0;
Xi Xi = 0, Rxot — Si sin <px 4 PВ14* PB2 = 0
Из этих уравнений находим:
S Q(^~AD+Gc(x —A/)-ufb] (x-AZ)tg6+rB2(x — A/)tg6.
1 (x — AZ) (cos <pj — sin q>i tg 6)
Rvot — Q h Gc -f- S1cos<p1; sin <p — PBi — Put
263
Рис. 82. Схема нагружения башенного крана с поворотной башней, установленной на поторотний платформе:
а — силы, действующие на поворотную часть; б — силы, действующие на башню
264
Спроект ировав реакции Rg0, и Rxo, на продольную ось
стрелы, определим силу Ко, действующую вдоль стрелы и вызы-
вающую ее продольное сжатие,
До = Rvo, sine 4 RrOt cos О
Условия равновесия противовесной консоли в системе коорди-
нат Х202У2 под действием сил Gnp и Sz = S2 cos <р2, S2 —
— S2 sin cp2 (силу S2, заменяющею действие расчала по отноше-
нию к консоли, следует считать внешней), а также реакции RBo,
и Rxot выражаются уравнениями:
D Мо, = 0; Gni | кп — ДГ) — S2 (хп — ДУ) cos<p2 = 0;
Jj Jza — 0; R,iOt 4 S2cos<p2 Gnp = 0; (252)
Я2 = 0; RxOi — ^2 sin <p2 = G.
Из этих уравнений находим:
S2 =• Gnp/cos<p2, = ^иР S2cos y2: Raox — sin
Силы Sj, S2, Rxo,, Rgot, R*?t и Ry о,, которые заменяют
действие на башню условно отброшенных стрелы и противовесной
консоли, являются внешними задаваемыми силами.. При этом
силы Rxot, Ryo-, RxOi и Ryo„ вызывают в соответствующих
опорах реакции Rxox, Rgo,, Rxo,, и R'go„ равные им 1 о зна-
чению и противоположно направленные (рис. 82, б) Кроме этих
реакций на башню действуют сила тяжести Gr. и ветровая нагрузка
R вз-
Теперь остается определить момент сопротивления трения при
врашении башни, нагруженной силами, показанными на
рис 82, б Этот момент, как было показано, зависит от конструк-
ции опор поворотной части (в рассматриваемом примере — башни)
крана. Заметим, что указанные на схеме силы позволяют также
определить суммарные изгибающий момент и продольную силу,
под действ!.ем которых башня работ ает на изгиб и предо. 1ьное
сжатие.
Определение опорных реакций башейного крана с поворотным
О1 о. ювком и неповоротной башн, й. В отл1 чие от вышерассмо-
тренного крана с поворотной башней, здесь поворотной частью
является устройство, называемое оголовком, которое вместе
со ст релой может пов< фачиваться вокруг неподвижной б^шни.
Оголовок, несущий опоры стрелы, имеет на вершине башни две
опоры — верхнюю с упорным 1 радиальным подшитп икамк и
нижнюю с радиальными роликами (л, 1ткам ), которые передают
горизонтальные реакции на башню через пеилщижно укреплен-
ную I а ней кольцевую раму (рис. 83, б).
Л. гя определения нагрузок на башню крана испол! уют та-
кую । ' < му расчета. I начала и з условия равновесия стрелы и
фотивойесной консоли определяют силы Si и S2, а также реак-
ции в опорах стрелы и противовесной консоли, как -*го было пока-
?65
Рис. 84. Силы, действующие на поворотную часть, установленную на поворотной
платформе стрелового крана (экскаватора)
Будем считать, что центробежные силы РЦ1 и Рцз приложены
в центрах масс груза и противовеса, а сила Рц2 приложена в точ-
ке с координатами:
ри - * A3Zh —; ha = дл (ри - д/) tg е,
где 0 — угол, образованный продольной осью стрелы с горизонталью.
Высотные координаты z± и z2 определяем из геометрических
соотношений:
zr = Mi + (%i — Л/) tg 0; z2 = Aft + (х2 — AZ) tg 0.
Точками приложения ветровых нагрузок Рв1, Рв2, Рвз, дей-
ствующих на груз (при его верхнем положении, условно совпада-
ющем с головкой стрелы), стрелу и противовес, считаем центры
масс соответствующих элементов.
Кроме этих сил на рис. 84 показаны и касательные силы
инерции РВ1, Ри2 и Ри3, которые учитываются только при не-
установившемся вращении поворотной части (так как мы рассма-
триваем статику механизмов вращения, то в дальнейшем послед-
ние силы в расчетах не учитываем).
Прежде чем, исходя из приведенной расчетной схемы, опре-
делять искомые величины, попытаемся упростить расчетную схему,
а вместе с ней и получаемые расчетные зависимости. Заменим
268
силы тяжести, действующие на поворотную часть, их равнодейст-
вующей Go, а моменты, образованные центробежными и ветровыми
силами, действующими в вертикальной плоскости ZOX,суммарным
моментом Мх.
Равнодействующая сил тяжести
Go ~ Q Gc 4~ Gnp,
а ее продольная координата xQ определяется из уравнения
GqXq = (jc%2 Gnpx3,
откуда
о —
При действии ветровых нагрузок в плоскости ZOX, т. е. в той
же плоскости, в которой действуют и центробежные силы, сум-
марный момент
Мх = (РцЛ -j- Рц2^и РцЗ^з) 4h (РвЛ 4~ Rb2^2 ~Ь РвЗ^з),
при действии ветровых нагрузок в поперечной вертикальной пло-
скости X0Y
цз4з
Введя в расчет силу Go и момент МХУ мы от исходной расчетной
схемы перешли к схеме, показанной на рис. 85, а. Под действием
этих нагрузок поворотная часть машины будет стремиться ото-
рваться от неповоротной части, опрокидываясь относительно оси
А—Л, проходящей через опорные катки платформы, находящиеся
со стороны стрелы (рис. 85, б). При этом отрывающее усилие в за-
висимости от конструкции опорно-поворотного устройства может
восприниматься либо центральной цапфой (рис. 85, б), либо
обратными опорными катками (рис. 85, в).
Рассмотрим первый случай (рис. 85, б). Растягивающее уси-
лие ROz в центральной цапфе можно определить из уравнения ста-
тики, записанного для некоторой условной двухопорной балки
с консолью, находящейся под действием силы Go и момента МХУ
Е МА = 0; ROza — Go (х0 — а) — 7ИЖ = 0,
откуда
Roz = [Go (*о — а) + Мх У а,
а = (D0/2) cos (Р/2); Do — диаметр катания опорных катков.
Вертикальную реакцию на передних опорных катках опре-
деляем из уравнения
Р Мо = 0; R^a — Goxo — = 0,
откуда
Рк — (GqXq 4~
269
270
Если поворотная платформа имеет обратные опорные катки,
то центральная цапфа разгружена от растягивающих усилий.
В соответствии с расчетной схемой, приведенной на рис. 85, в,
вертикальную реакцию на обратных опорных катках, воспри-
нимающих опрокидывающую нагрузку, определяем из уравне-
ния
Л4д = 0; 7?к (Ь 4" а) — Gq (xq — д) — Мх = 0,
откуда
Rk — [Gq (xq — а) 4~ Mx]/(b 4~ а).
Вертикальную реакцию на передних опорных катках находим
из уравнения
Е МО1 = 0; /?и (й + а) - Go (х0 4- Ь) - Мх = 0,
откуда
= [Go (х0 + Ь) + Ма]/(Ь + а).
Суммарная вертикальная сила, действующая в одном случае
на центральную цапфу и передние опорные катки (7?к — Roz),
а в другом — на обратные опорные катки и передние опорные
катки (7?к — 7?к), равна силе Go, в чем нетрудно убедиться из
полученных выше уравнений.
Горизонтальные нагрузки, воспринимаемые центральной цап-
фой, создаются силами, действующими в горизонтальной плоскости
по осям ОХ и ОУ, а также окружным усилием Ро в зацеплении
ведущей шестерни механизма вращения с неподвижным зубчатым
венцом (рис. 85, г).
При действии ветровой нагрузки в направлении оси OY про-
дольная горизонтальная реакция ROx и поперечная горизон-
тальная реакция /?Ов, нагружающие центральную цапфу, равны:
Rox = РЦ1 4~ Рц2 4“ Рцз»
Вращение поворотной платформе сообщается ведущим зубча-
тым колесом механизма вращения /, ось которого жестко связана
с рамой поворотной платформы 2 (рис. 85, а). При вращении ве-
дущее зубчатое колесо, находящееся в зацеплении с неподвижным
зубчатым венцом 4. обкатывается по его окружности, увлекая
и поворотную платформу. При этом на ось ведущего зубчатого
колеса (шестерни) действует окружное усилие Ро, которое отно-
сительно оси центральной цапфы 3 образует вращающий момент
Л4вр = Ро ± с4п)/2, (254)
где и — диаметры делительных окружностей венца и шестерни; знак «+»
относится к случаю внешнего зацепления шестерни с венцом, а знак «—> — к их
внутреннему зацеплению (см. рис. 85, а).
271
Рис. 83. Схема нагружения башенного крана с поворотным оголовком и непово-
ротной башней:
а —’ аилы, действующие ия крен; б — вилы, действующие ив поворотную чисть
266
зано в предыдущем примере. В результате находят силы SJ,
Si, Sa и S2; Ryct, R'xOi и R'yo„ Rxo,, которые заменяют дей-
ствие на оголовок условно отброшенных стрелы и противовесной
консоли. Затем из условия равновесия огочовка под действием
этих сил определяют реакции в опорах оголовка RyA, RxA и RxB.
По схеме, приведенной на рис. 83, б, составим три уравнения
статики — уравнения моментов относительно точки В и проекций
сил на координатные оси ОХ и ОУ:
Е Мв = 0; (S( - S2) h0 + (R'x0, - R'xCt) Ah -I- (R'e01 - R'uOt) AZ -
- RxAhAB = 0; (253)
2 A = 0; Rxb -|- Rxo, — R'xOi + Si — $2 — Rxa = 0;
S У — 0; RyA — *$i — S2 — R'yOi — Ruo, ~ 0.
Из этих уравнений, заменяя силы SJ, S' и S2, Sa через
их разнодействующие Sj и S2 и считая, что значения сил R'xo„
R'yOi, R'xo, и R'yOi определены на предыдущем этапе расчета,
находим неизвестные RxA, RxB и RyA:
Г> ($J sin <Pl ^2 sin *F2) fy) (R-xO, ^xOi) (^Ot — RyO,) .
___________,
RyA = Sicos<pj | S2cos<p2 F R'vo,;
RxB = RxA F Rxo, — RxO, — Si Sin <P1 —S2 Sin <J>2.
В этих уравнениях не учтена сила тяжести оголовка.
Зная значения сил RxA, RyA и RxB, можно определить
момент сопротивления вращению оголовка вокруг башни.
При необходимости по расчетной схеме, показанной на
рис. 83, а, можно найти суммарные изгибающий момент и продоль-
ную силу, под действием которых башня работает на изгиб и про-
дольное сжатие.
Определение опорных реакций поворотной части, установлен-
ной на поворотной платформе (рис. 84). В рассмотренных выше
примерах предполагалось, что поворотная часть машины враща-
ется с постоянной и небольшой угловой скоростью. Последнее
позволило не учитывать центробежные силы инерции, возникаю-
щие, как известно, при любом вращательном движении. Теперь
кроме весовых нагрузок и сил ветра, действующих на поворотную
часть, будем учитывать и центробежные силы Рп, РД2 и Рцз,
создаваемые силой тяжести груза Q, стрелы Gc и противовеса
вместе с остальным оборудованием поворотной части Gnp:
Рц, = (Gjg) <0^.;
^пЗ ~ Ю0Х3’
где <в0 — угловая скорость поворотной части.
267
Этот вращающий момент должен преодолеть моменты сопро-
тивления вращению поворотной части, обусловленные силами
трения в опорах и ветровыми нагрузками. При установившемся
вращении поворотной части имеет место равенство между движу-
щими усилиями и силами сопротивления, т. е.
мвр = Мтр + Мв или Ро (dB ± dm)/2 = Л4тр + (255)
откуда
2 (Л?тр + Л4„)
dB ±
(256)
Перенеся силу PQ на ось центральной цапфы, получим пару
сил (на рис. 85, г они отмечены черточками), момент которой
уравновешивается моментами от сил сопротивления, и свобод-
ную силу Ро, которая в горизонтальной плоскости, как и реакции
Rox и Roy* воспринимается центральной цапфой.
Таким образом, суммарная горизонтальная реакция Н в опо-
рах центральной цапфы равна геометрической сумме сил Р(),
Rox и Roy'*_______________________________
н = /Rbx + {RoB + Ро)2.
5.6.2. Динамический расчет механизмов вращения
при разгоне
Определение продолжительности разгона. При неуста-
новившемся вращении поворотной части возникают инерционные
сопротивления, обусловленные инерцией поворотной части ма-
шины вместе со стреловым рабочим оборудованием и инерцией
груза, участвующего во вращательном движении вместе со стре-
лой. Эти сопротивления определяют по уравнению
Ми = (-^-/о + ЛЙ42- = (—*0 4й-, (257)
\ g / tp X ё 1 / utp ' ’
где /0 — расстояние от центра груза до оси вращения поворотной части; /0 —
момент инерции поворотной части машины относительно ее вращения.
Применительно к схеме машины, изображенной на рис. 84,
г 2, 2
*>0 ~ ^сри ^пр-^З»
где тс и щпр — массы стрелы и противовеса.
При разгоне механизма вращения пусковой момент Л4П на
валу двигателя преодолевает момент Л4С от сил трения в опорах
и ветровых на1рузок, момент /Ии, а также момент сопротивле-
ния 6<7п(оц//р от инерции вращающихся частей привода. Таким
образом, необходимый пусковой момент на валу двигателя дол-
жен быть равен сумме моментов от указанных сопротивлений,
т. е.
Мп =
Л4С 1
272
или с учетом выражения (257),
(258)
Обозначим величину, стоящую в квадратных скобках, через
/пр.д и назовем ее суммарным приведенным (к валу двигателя)
моментом инерции вращающихся масс механизма вращения и
груза при разгоне
+ б/д.
(259)
Тогда уравнение (258) примет вид
| 7/ (Од
Мп~т^г~г*,пр-д /р
ИЛИ
ад __ Мс ^пр. дПд
7Ип “ aq 1 9,55/р ’
(260)
(261)
Из уравнения (261) находим время разгона механизма вра-
щения
9,55
^пр . длд
(262)
Определение динамических нагрузок, действующих на пово-
ротную часть при разгоне. Чтобы найти динамические нагрузки,
действующие на поворотную часть машины при разгоне, приведем
движущий (пусковой) момент на валу двигателя к оси вращения
поворотной части. Для этого величину Л4П умножим на переда-
точное число и КПД механизма вращения, получим
Л4р — Л4пиц
или с учетом выражения (258)
Л1Р = Мс + ' ( 4- Zo + Jo) + т
L X S J ч
(263)
где (£>0 — угловая скорость поворотной части машины.
Величину, стоящую в квадратных скобках, обозначим через
/пР. о и назовем ее суммарным приведенным (к оси вращения
поворотной части) моментом инерции механизма вращения и груза
при разгоне
Jnp. о = -§-/о + /о+6Л«2г1- (264)
Б
Тогда
/Ир — —j-' /пр.
(265)
273
Избыточный момент, действующий на поворотную часть,
Миаб — Л4р — AJq — «/пр. д^оДр*
(266)
Максимальный динамический момент, действующий на пово-
ротную часть при разгоне,
MF
r max
2 ( ~~ 4“ -Мизб
у II + 4 + ^д«2
+ 7И0.
(267)
Чтобы найти динамическое усилие, нагружающее какой-либо
другой элемент механизма вращения, расположенный между
поворотной частью и двигателем, нужно величину Л4гтах разде-
лить на передаточное число и КПД между поворотной частью
и рассчитываемым элементом механизма.
Определение мощности двигателя и его выбор. Мощность
двигателя механизмов вращения определяют по его мощности Муст
при установившемся движении и по мощности М13б, расходуемой
на преодоление инерции вращающихся масс механизма враще-
ния и груза:
ЛГд = (^уст + ЛГизб)/2, (268)
где Л/^уст — ^с®о/Л» ^изб — Л4изб®оЛ1*
Мощность, вычисленную по формуле (268), пересчитывают
с учетом фактической продолжительности включения механизма
#н = ЛГд/ПВф/ПВ
и по значению Л/н выбирают электродвигатель, мощность которого
равна или несколько больше мощности Nn.
После выбора двигателя уточняют значение избыточного мо-
мента, зависящее от момента инерции или махового момента дви-
гателя, затем по новому значению 714И8б определяют избыточную
мощность Мзэб» а также мощность и Nn и тем самым прове-
ряют правильность выбранного двигателя.
Как и для механизмов подъема выбранный двигатель нужно
проверить на перегрузки при пуске по отношению пускового мо-
мента к номинальному моменту двигателя.
5.6.3. Динамический расчет механизмов вращения
при торможении
Определение продолжительности торможения. При рас-
чете процесса торможения принимают, что ветровые нагрузки
препятствуют торможению поворотной части и момент от них
направлен против момента ЛТтр сил трения в опорах, помогаю-
щего торможению. Поэтому общий момент сопротивления от
статических нагрузок, действующих на поворотной части при
торможении
м; = Мв — Л4ФР. •
274
Для затормаживания поворотной части на валу двигателя
должен быть создан тормозящий момент, который уравновешивал
бы действие момента ТИа, момента от инерции поворотной части
и груза
М
t <у
и момента инерции вращающихся масс привода, равного 67до)д//р.
В этом уравнении coq и сод — угловые скорости вращения
поворотной части и вала двигателя перед торможением.
Заметим, что при торможении моменты инерции поворотной
части груза и вращающихся масс привода препятствуют тормо-
жению, т. е. направлены в ту же сторону, что и момент М'с —
в сторону вращения поворотной части. Таким образом, на валу
двигателя должен быть создан тормозящий момент
^Т. Д -
М' + М' со
или
Мс
Мт. д —
Л + (” + Л)
_ х S /
(269)
и
В этих выражениях КПД т) механизма вращения стоит в чи-
слителе, так как учитываемые им силы трения в звеньях меха-
низма помогают торможению, уменьшая тем самым необходимый
тормозящий момент на валу двигателя.
Обозначим величину, стоящую в квадратных скобках уравне-
ния (269), через /пр.д и назовем ее суммарным приведенным
(к валу двигателя) моментом инерции механизма вращения и
груза при торможении
Тогда
м _ Men г °Д
д — и т •'пр.д"^’
ИЛИ
ДЛ — I ^ПР- дпд
т-д и 9,55/т ’
(270)
(271)
(272)
где п' — частота вращения вала двигателя перед торможением, об/мин.
Из уравнения (272) находим время торможения
/ __________________________^пр. дпд_____
т I \ в
9,55 Мт д-----—
\ и
(273)
275
Определение динамических нагрузок, действующих на пово-
ротную часть при торможении. Источником динамического на-
гружения поворотной части при торможении является тормозя-
щий момент. Он равен тормозящему моменту на валу двигателя,
приведенному к оси вращения поворотной части. Для приведения
момента Мт, д к оси вращения поворотной части, согласно пра-
вилу приведения сил и моментов при работе механизмов на тор-
мозном режиме, величину /Ит. д нужно умножить на передаточное
число и и разделить на КПД т]
7ИТ = 7ИТ. д^/т]
или
Л1т = м; + Г(4-/о+Л)+6/д«24-1-Г-- (274)
L \ & / Т1 J 4 т
Обозначим величину, стоящую в квадратных скобках, через
Дпр. о и назовем ее суммарным приведенным (к оси вращения
поворотной части) моментом инерции механизма вращения и груза
при торможении
пр. О---
-у- ^0 + Л) + 6 Jjjll2 — .
Тогда
ТИт --- Л1С *4“ «/пр. О^о/^Т»
(275)
(276)
Максимальный динамический момент, действующий на пово-
ротную часть машины при ее торможении
MF
max
(277)
Зная величину 7Игтах, можно определить динамический мо-
мент на любом другом звене механизма вращения при торможении,
для чего момент /Wrmax нужно разделить на передаточное число и
умножить на КПД механизма между поворотной частью и дан-
ным звеном.
Тормоз механизмов вращения выбирается по моменту Л4Т,
определяемому по формуле (276), если тормоз расположен на
одной оси с поворотной частью, или по моменту 7ИТ. д, если тор-
моз расположен на валу двигателя. При расположении тормоза
на любом другом валу механизма вращения его выбирают по
тормозящему моменту на валу двигателя или поворотной части,
приведенных к данному залу.
276
5.6.4. Особенности динамического расчета механизмов
вращения с объемным гидроприводом
Движущий (пусковой) момент (Н. м) гидромотора, при-
водящего во вращение поворотную часть машины, можно выразить
через рабочий объем VH (м3/об) и давление р (Па) рабочей жидкости
во всасывающей линии гидронасоса
Л4Р = 0,159pVHwr].
Приравнивая правую часть этого уравнения к правой части
уравнения (265), получаем
0,159рУнЫт] = Л1о + /;р.о-^
гр
Из этого равенства можно найти передаточное число меха-
низма вращения при заданном ускорении <о0//р при разгоне по-
воротной части, либо определить время разгона при заданной
угловой скорости поворотной части (00*
J' — + М
Пр. О / ~ G
— _ ГР______________ -
0,159pVHT]
____ /пр. О®0
р “ 0,159Кнш] —Л40‘
Мощность насоса (кВт)
N = К-Мизб + Л4С) <00]/Т)2,
(278)
(279)
(280)
где т]2 — общий КПД привода, учитывающий гидромеханические и объемные
потери насоса, гидромотора, магистралей с распределительной аппаратурой,
а также потери в элементах механической передачи; при расчетах можно
принять = 0,7.
5,6.5, Примеры расчета
Пример 1. Выбрать двигатель для механизма вращения крана,
поворотная часть которого установлена на поворотной платформе с обратными
катками.
Исходные данные: силы тяжести груза и грузозахватного органа Q= 35 000 Н,
стрелового оборудования Gc = 40 000 Н, остальной части опорно-поворотного
устройства вместе с кабиной оператора и противовесом Gn = 170 000 Н (см.
рис. 84); ветровые нагрузки (действуют в поперечной плоскости ZOY) РВ1 =
= 900 Н; Рв2 = 2500 Н; Рв3 = 4700 Н; размерные параметры: хг == 22 м; х2 =
= 10 м; х3 = 3 м; ри = 13,2 м; = 7,73 м; Ли — 4,52 м; г3 = 2 м. Частота вра-
щения поворотной части п0 = 3 об/мин; ускорение поворотной части при раз-
гоне е0 — 0,035 1/с2; КПД механизма т] = 0,9. Диаметр катания опорных кат-
ков Do = 3,25 м, обратных катков D'Q = 3,5 м; центральный угол между катками
Р = Р' = 60°; диаметр опорных катков DK = 32 см; диаметр оси опорных кат-
ков dK— 8,5 см; диаметр обратных катков Dk = 40 см; диаметр оси обратных
катков дк — 10 см; коэффициент трения качения катков ц = 0,05 см; коэффициент
трения в подшипниках качения осей катков / = 0,003.
277
Решение. 1. Определяем равнодействующую сил тяжести О0 и ее коорди-
нату х0 относительно оси вращения поворотной части
Go = Q + Gc + Gn = 35 000 + 40 000 + 170 000 = 245 000 Н;
_ QXi + Gcx2 — Gnx3 _ 35000-22 + 40000-10 — 170000-3 _ fi
х° Go 245 000
2. Находим центробежные силы инерции при соо = лпо/30 — 0,314 1/с:
Рщ = 0,3142-22 = 7739 Н;
РЦ2 = -^и2ри = ^р-0,3142-13,2 = 5307 Н;
Рцз = ~ = 4^2. 0,3142-3 = 5126 Н.
3. Вычисляем касательные силы инерции:
Ри1 = ~ V1 = о-035’22 = 2747 И:
РХк2 = -у- еоРи = 0.035-13,2 = 1884 Н;
р-с Gn г _ 170 000 _
риз —Тео*з-------п"8|— 0,035-3 — 1820 Н.
4. Определяем отрывающий момент Мх, образованный центробежными
силами инерции в плоскости Z0X,
Мх = РцЛ + РЦ2/1И — Рцз?3 = 7739-7,73 + 5307-4,52 — 5126-2 = 73 558 Н.
5. Рассчитываем нормальные реакции для опорных катков:
n Goxo + Мх 245 000 • 2,694 + 73 558 „
= (D./2) cos (g/2) = (3,25/2) cos (60/2)' ~ = 521 385 H‘
6. Находим нормальные реакции для обратных катков (рис. 85, в)
п, _ 6р (*о с) 4~ .
7>0 Q/n 3,25 60
а = cos Р/2 = —— cos — 1,407;
, о//о 3,5 60 . -д
Ъ = cos ₽ /2 = cos -у- = 1,52;
245 000 (2,694 — 1,407) + 73 558 __ , QQ й__ „
1,52+ 1,407
7. Вычисляем коэффициенты сопротивления катанию опорных и обратных
• катков (фс и ф'):
4>с = + + f 4г = -Ц^-+ 0,003 -Ц- = 0,004;
% = + + / + = ++ + 0.003 = 0,00325.
278
8. Определяем момент сопротивления трения в опора® опорно-поворотного
устройства
Мтр = -% + = S21 385-0,004
+ 132857-0,0035 = 4145 Н-м.
2^
9. Рассчитываем момент сопротивления вращению, образованный касатель-
ными силами инерции относительно оси вращения поворотной части,
М = РЪх. + Р’„рн + РЪ,хч = 2747-22 + 1884-13,2 + 1820-3 = 90763 Н-м.
И 1 1 и • ио О • 1
10. Находим момент сопротивления вращению от ветровых нагрузок
Л4В = PBi*i + РВ2*2 — РВ8*8 = 900-22 + 2500-10 — 4300-3 = 31 900 Н-м.
11. Определяем момент сопротивления вращению при установившемся
движении
Мо = Л4Тр + Мв = 4145 + 31 900 = 36045 Н-м.
12. Вычисляем избыточный момент на поворотной части. Момент инерции
поворотной части и груза относительно оси ее вращения
ч+л) = = 2593 228 кг’”2-
Суммарный приведенный момент инерции
Лтр. о ~ ("7“
\ о /
= 1,03-2593228 = 2671 024 кг-м*.
Избыточный момент
Л4вай = /' оеп = 2671024-0,035 = 93486 Н-м.
Мои и U
13. Находим потребную мощность двигателя:
„ _ Л4с<5>о _ 36045-0,314
уот 1000ч 1000-0,9
= 12,58 кВт;
_ Л4изб®о 93 486-0,314
И8° 1000ч = 1000-0,9 ~
Расчетная мощность
__^/уст + ^изб _ 12,58 32,61
д= _ . =----------------------
кВт.
= 22,6
кВт.
14. Выбираем двигатель. Принимаем фактическую продолжительность вклю-
чения механизма вращения ПВл = 35 %; стандартную продолжительность вклю-
чения ПВ = 40 %.
Номинальная мощность
= ^д У = 22,6 У ~ = 21,1 кВт.
По этой мощности выбираем трехфазный электродвигатель с фазным ротором
серии МТМ 511-8: 7УД = 22 кВт; пд = 720 об/мин; /д = 1,075 кг-м2.
15. Проверяем правильность выбранного двигателя. Передаточное число
механизма а = пд/п0 = 720/3 = 240.
279
Суммарный приведенный момент инерции вращающихся масс привода и
поворотной части
*^пр. о
о 2
fiУп«2я = 2593228 + 1,5-1,075-240 -0,9 =
= 2676820 кг-м3.
Избыточный момент
= „еп = 2 676 820-0,035 = 93 689 Н-м.
ИЗО Ир. О V
Избыточная мощность
Д7 ~ — Мцзб% _____93 689-0,314 __ з ~
^из6 1000т] ~~ 1000-0,9 d2,b9
Уточненная расчетная мощность
Л^д =
= 22,64 кВт.
Соответствующая номинальная мощность
= Л1д = 22,64 У= 21,18 кВт.
Так как мощность NH не превосходит мощность выбранного двигателя, послед-
ний выбран правильно.
Пример 2. Для крана, рассмотренного в предыдущем примере, определить
потребное значение тормозящего момента для тормоза, установленного на одной
оси с валом двигателя механизма вращения.
Исходные данные: момент инерции поворотной части вместе с грузом относи-
тельно оси ее вращения (=2593228 кг-м2; момент инерции вала
двигателя 7Д = 1,075 кг-м2; передаточное число механизма и = 240; КПД меха-
низма т] = 0,9; момент от ветровых нагрузок Л1в = 31 900 Н-м; момент трения
в опорах поворотной части Л4тр = 4145 Н-м; время торможения /т = 5,2 с;
угловая скорость вала двигателя С0д = = 75,31 1/с.
Решение. 1. Определяем суммарный приведенный (к валу двигателя) момент
инерции вращающихся масс привода и поворотной части при торможении
*^пр. д
— n + 6JL - 2 593228 —
Д 2402
0,9 + 1,5-1,075 =
— 42,13 кг-м2.
2. Находим избыточный тормозящий момент, приведенный к валу двигателя,
^И36. д = ^пр. д= 42,13 -Zg®- = 610,56 Н-м.
3. Рассчитываем потребный тормозящий момент на валу двигателя
44т. д
(Мв —Мтр)1] (31 900 — 4145) 0,9
и г'Иизб. д— 2400
= 714,64 Н-м.
+ 610,56 =
Принимаем момент тормоза
Л4торм=1,15; Мт.д = 1,15-714,64 = 822 Н-м.
Пример 3. Используя данные примеров 1 и 2, определить динамические на-
грузки на элементы механизма вращения и поворотную часть при разгоне.
Исходные данные', мощность двигателя N-^ = 22 кВт; частота вращения вала
двигателя пд — 720 об/мин; статический момент сопротивления Мс — 36 045 Н-м;
передаточное число механизма и — 240; КПД механизма т) ~ 0.9; момент инер-
280
ции поворотной части крана и груза относительно оси ее вращения
+ Jo ] — 2 593 228 кг-м2; момент инерции вращающихся масс двигателя /д =
= 1,075 кг-м2; ускорение при разгоне поворотной части е0 = 0,035 1/с2, соответ-
ствующее ускорение вала двигателя ед — еоц = 8,4 1/с?.
Решение. 1. Определяем суммарный приведенный (к оси вращения поворот-
ной части) момент инерции вращающихся масс привода и поворотной части при
разгоне
J„p. о ~ (— Zo + Jo) + 6/ди2Г) = 2 593 228 + 1,5-1,075-2402-0,9 =
= 2676820 кг-м2.
2. Находим избыточный момент на поворотной части:
мизб 7пр. о8о = 2 676 820-0,035 = 93 689 Н-м.
3. Рассчитываем моменты инерции вращающихся масс крана, приведенные
к оси вращения его поворотной части:
Ji = 8J„u2 = 1,5-1,075-2402 = 92 880 кг-м2;
4. Определяем динамический момент, действующий на поворотную часть
Л4 —
1 max
2ЛМП36 2-2 593228-93 689
J1 + J2 +Л1с- 92 880 + 2 593 228
+ 36045 = 216944 Н-мг
и на вал двигателя
Mf <Д>тах
^тах 216 944
иг) ~~ 240-0,9
= 1004 37 Н-м.
Пример 4. Для того же крана определить динамические нагрузки на эле-
менты механизма вращения и поворотную часть при торможении.
Исходные данные', момент, создаваемый тормозом на валу двигателя Л4торм —
=822 Н-м; статический момент сопротивления при торможении Л4о — Мтр —
— Л4В = 27 755 Н-м; передаточное число механизма и — 240; КПД механизма
т] = 0,9; момент инерции поворотной части крана относительно оси ее вращения
-|- Jo^ = 2 593 228 кг-м2; момент инерции вращающихся масс двигателя
/д — 1,075 кг-м3.
Решение. 1. Определяем тормозящий момент на поворотной части крана
м = = = gig 200 Н • м
t] 0,9
2. Находим динамический момент, действующий на поворотную часть
_ 272(Л4т + Л4') 2-2593228(219 200 + 27 755)
max ~ J, + J2 ° ~ 92 880 + 2 593 228
= 449 080 Н-м.
3. Определяем динамический момент на валу двигателя
Л4к
‘’max
397 397-0,9
240
1490.124
Н-м.
и
281
6.7. ДИНАМИКА МЕХАНИЗМОВ ПЕРЕДВИЖЕНИЯ
5ft7jls Динамика механических трансмиссий
при разгоне
Определение динамических нагрузок в элементах транс-
миссии. При разгоне на валу двигателя механизма передвижения
действует пусковой момент 7ИП, но часть его идет на преодоление
момента сопротивления от инерции вращающихся масс привода,
равного б/д(од//р. Поэтому от двигателя к ведущим колесам под-
водится момент (7ИП—ш] (где и и -ц — передаточное
число и КПД трансмиссии). Но и этот момент не полностью
используется как движущий, так как некоторая часть его расхо-
дуется на преодоление момента сопротивления от инерции самих
ведущих колес, равного А^к^р (где — угловая скорость ве-
дущих колес).
Таким образом, вращающий момент, снимаемый с ведущих
колес машины и сообщающий ей движение,
Л1к = (Л4п-б/д-^-)иг]-4-?-. (281)
Разделив момент Л4К на радиус rd ведущих колес (этот радиус
называется динамическим радиусом пневматика, он измеряется
расстоянием от поверхности качения до оси пневматика с учетом
деформации шины при качении) и заменив в уравнении (281)
угловые скорости через поступательную скорость движения ма-
шины v = (пкга = найдем окружную силу на ее ведущих
колесах:
рк = Рр - (6/д А- + 4 -Ц) , (282)
\ rd rd J ГР
где
Рр == Mnux\!rd.
(283)
Чтобы придать зависимости (282) более компактный и удоб-
ный для расчета вид, величину, стоящую в скобках, обозначим
через /Ипр. к и назовем ее суммарной приведенной (к ведущим
колесам) массой вращающихся частей привода и ведущих колес
машины при разгоне
Отвр. к = S4 4-w2n + Л 4-• (284)
rd rd
Тогда уравнение (273) примет вид
Рк ~ Рр ^вр. кЦ'^р*
(285)
Заметим, что окружная сила по своей природе является
фиктивной, ее нельзя определить физическими методами, а можно
найти только расчетным путем, разделив вращающий момент
282
на ведущих колесах на их радиус. С другой стороны, силу Рк
можно представить равной сумме сил Рс от статических сопротив-
лений движению машины (сопротивления качению колес и др.)
и Ри. п = ти/Ьр сопротивлений от инерции движущейся машины
(где т — масса движущейся машины):
= Рс + mv/tp. (286)
Приравнивая правые части уравнений (285) и (286) и исклю-
чая из полученного равенства величину Рр, находим выражение,
определяющее движущую силу механизма передвижения, при-
веденную к ведущим колесам
Рр = (т + к) v/tp 4- Рс или Рр = пг'пр, Kv/tp Ц- Рс, (287)
где т'пр к — суммарная приведенная (к ведущим колесам) масса вращающихся
и поступательно движущихся частей машины при разгоне;
^пр.К W ~Г твр. К
=т+б7д4-“2г|+/к4-
rd rd
(288)
Сравнивая величину Шпр- к с тпР. к по уравнению (26), видим,
что они отличаются только тем, что в выражении (288) есть КПД
механизма т), а в уравнении (26) его нет. При рассмотрении ди-
намики механизмов подъема и вращения мы уже объясняли по-
добные различия в выражениях суммарных приведенных масс и
моментов инерции, определяемых по общим правилам, изложен-
ным в п. 2.5.5, и при расчете движущих (тормозящих) усилий
привода. Те же объяснения справедливы и для механизмов пе-
редвижения.
Избыточное усилие на ведущих колесах по аналогии с избы-
точным усилием на исполнительных органах других механизмов
равно разности между движущим усилием и статическим сопро-
тивлением:
/изб = ГР — Гс = /ипр. к^Др. (289)
Максимальная динамическая сила, действующая на ведущие
колеса,
Гшах =-----------------7- + Рс. (290)
rd rd
Для определения динамической нагрузки на любом другом
элементе трансмиссии, расположенном между ведущими колесами
и двигателем машины, нужно величину Fmax разделить на переда-
точное число и на КПД механизма между ведущими колесами и
данным элементом.
Определение продолжительности процесса разгона. Если из-
вестно движущее усилие на исполнительном органе машины,
в данном случае момент 7ИК на ведущих колесах, можно опреде-
лить и соответствующий пусковой момент на валу двигателя.
Заменив в уравнении (281) угловую скорость ведущих колес че-
283
рез угловую скорость вала двигателя (ык =
этого уравнения величину Мп, находим
Мп = — + (бЛ + 4 -М
uq ‘ \ д 1 к w2q /
СОд/u) и исключив из
юд
(291)
Если пуск двигателя производится при отключенной с по-
мощью муфты сцепления трансмиссии, то
+ (292)
где /д — момент инерции вращающихся масс двигателя и муфты сцепления.
Принимая, что величина Л4к/(&т]) равна номинальному мо-
менту двигателя 714д, получаем
Л1д == -Л4д === Л1д —|“ 9» 105Jд^д/^р»
откуда находим время разгона
. 0,105/дПд
= Мп-Мд ’
(293)
где Лд — номинальная частота вращения вала двигателя, соответствующая ма-
ксимальной мощности Np\ Л4д = 9555^/лд; Мр — в Н-м, Np — в кВт, лд —
в об/мин.
5.7.2 Динамика механических трансмиссий
при торможении
Если тормоз установлен на одной оси с валом двига-
теля и рассчитан на момент Л1т. д, то тормозящий момент на ве-
дущих колесах
М^=(мт.д-Ыл-^)и-±--(294)
\ •-•г / <|
В отличие от выражения (281), в котором q стоит в числителе,
в уравнении (294) КПД q стоит в знаменателе, так как учитывае-
мые им сопротивления трения трансмиссии помогают торможению
и тем самым увеличивают тормозящее воздействие на колеса ма-
шины.
Соответствующее моменту /Ик окружное усилие на тормозя-
щих колесах
Обозначим величину, стоящую в скобках, через /Пвр.к и
назовем ее суммарной приведенной (к тормозящим колесам) мас-
сой вращающих частей привода механизма передвижения и тор-
мозящих колес при торможении:
^вр. к = б/д -2 и2 -|- JH -^2“. (296)
• rd
284
Тогда
где
Г Г-\ гг
к == * ® /Ивр
Л^т. д^ hA.rp *
rd*] rd ’
= Мт. ди
П
(297)
(298)
(299)
Окружное усилие на тормозящих колесах можно также вы-
разить через алгебраическую сумму силы Ри.п от инерции посту-
пательно движущихся масс машины, равной rnv!tT, и силы Р'с
от статических сопротивлений; последние помогают торможению
машины и поэтому их нужно учесть со знаком минус, так как
они снижают тормозящее усилие, которое нужно создать па коле-
сах машины,
Р'к = mv/t* — Pz. (300)
Приравнивая правые части уравнений (297) и (300), получаем
Р* ~ ГПвр. KV/tT = mvltr — Рс»
откуда
= (т + /Пвр. к) v//T — Pi или Рт = тпр. Kv/tT —
(301)
где к — суммарная приведенная (к тормозящим колесам) масса вращаю-
щихся и поступательно движущихся частей машины при торможении;
т'пр. к = т -f-т'вр. к = т + <5/д -4— и2 + JK (302)
Гсг1 rd
Если торможение машины происходит при выключенной муфте
сцепления, то в выражении (302) учитывают моменты инерции
только тех вращающихся частей трансмиссии, которые располо-
жены между ведущими колесами и муфтой сцепления.
Необходимый тормозящий момент, который должен быть обе-
спечен тормозами, установленными на колесах машины,
AfT — Рd — (^пр. к^/^т — Рс) Г<!•
(303)
Как видим, чем больше приведенная масса движущихся ча-
стей машины, тем больше необходимый тормозящий момент.
При торможении с включенной муфтой сцепления на момент 7ИТ
определенное влияние оказывает момент Мг трения двигателя,
приведенный к ведущим колесам, который действует в сторону,
противоположную действию инерционного момента, снижая тем
самым необходимый тормозящий момент:
Д4Т = (/Ппр. ки//т — P'z) rd — Mr. (304)
Обычно влияние момента Мг оказывается более значимым,
нежели влияние инерции вращающихся масс двигателя на тор-
285
мозящии момент и поэтому торможение машины часто выполняется
при включенной муфте сцепления.
Максимальная динамическая нагрузка на колесах машины
при торможении
max
1
Д г2
rd
Соответствующий динамический момент на валу двигателя
при включенной муфте сцепления
^Fnmax ~ max^(306)
5.7.3. Особенности динамики
гидромеханических трансмиссий
В гидромеханических трансмиссиях муфта сцепления
заменена гидротрансформатором, позволяющим изменять частоту
вращения и вращающий момент, передаваемый к ведущим колесам.
Воспользуемся зависимостями, которые были приведены
в п. 5.1.3 для гидродинамической передачи, и найдем движущее
усилие на ведущих колесах при разгоне машины, привод которой
выполнен по схеме: двигатель — согласующий редуктор — гидро-
трансформатор — коробка передач — главная передача.
Если Л4П — момент, развиваемый на валу двигателя при
пуске, то момент на выходном валу согласующего редуктора
Л^с.р —
^с. рЛс. р»
где мСе р и т)с. р — передаточное число и КПД согласующего редуктора.
Так как между согласующим редуктором и насосным колесом
гидротрансформатора нет каких-либо промежуточных звеньев,
изменяющих передаточное число, то момент 7ИС. р равен моменту
Л1Н на насосном колесе, т. е. 7ИН = Л4С. р.
Вращающий момент на турбинном колесе гидротрансформа-
тора при разгоне
Д4Т = — J
или
М т = - JH , (307)
“ГТ *р
где Ju — момент инерции насосного колеса относительно оси вращения; /Сгт и
^гт — коэффициент трансформации и кинематическое передаточное число гидро-
трансформатора; имех —- передаточное число механической части трансмиссии.
При передаче момента Л4Т к ведущим колесам машины часть
его (67тсот//р) идет на преодоление момента сопротивления от
инерции вращающихся масс турбинного колеса и элементов транс-
286
миссии, расположенных между турбинным колесом и ведущими
колесами. Поэтому к полуосям ведущих колес подводится вра-
щающий момент
о — (А1Т bJ т
®т \
7 ) ^мехЙмех,
Гр /
(308)
где JT и ©т — момент инерции и угловая скорость турбинного колеса.
Вращающий момент 7ИК на ведущих колесах равен моменту
Л4п.о за вычетом момента сопротивления от инерции вращаю-
щихся масс ведущих колес, равного /к(ок//р:
2ИН = Л1п. о •Л^к/^р
или с учетом выражений (307) и (308)
Л4К — -Л^н-^Срт^мехймеж
н '~~ “F т') ИмежЦм!
Этот момент создает окружное усилие
п __________________ Мк ___ Мгт^мехЛмех
К ~~ rd ” rd
. (309)
к
К гт
tZp<f
___ У/2
,2
rd
О
ГР
(310)
к~ъ
Если в уравнении (310) введем обозначения:
п МнКгт^мехЛмех .
Р rd
(311)
^вр. к
л^гт
Н UrT
к rd
(312)
2
то придем к уравнению, аналогичному уравнению (285), полу-
ченному для привода с механической трансмиссией,
РК “ Рр ^вр. к^/^р«
Движущее усилие
rj I а С
P == * К I ^вр. К "7
Гр
= (т + /п;р. к) Л- + Рс
‘р
Избыточное усилие на ведущих колесах
изб --р —
V ____ , V
/ — ^2пр. к “Т •
гр гр
Максимальная динамическая нагрузка на ведущих
при разгоне машины
колесах
2/пР Изб
max — / iz
(г ^гт
I J н
\ «гт
(313)
rd
287
Необходимое тормозящее усилие на тормозящих колесах ма-
шины
где
с>
^вр. К-
1 2 , 7 1
r? мех т к г2 •
ГЛех rd
(314)
(315)
Максимальная динамическая нагрузка на тормозящих колесах
(316)
5.7.4. Примеры расчета
Пример 1. Определить максимальные динамические нагрузки, вос-
принимаемые валами крановой тележки башенного крана при разгоне.
Исходные данные: максимальный вес груза 150-103 Н; вес тележки G —
— 50-103 Н; мощность двигателя = 4,4 кВт; частота вращения вала двига-
теля «д = 1210 об/мин; максимальный пусковой момент Л4П = 1,5Л4д; переда-
точное число механизма передвижения и — 26,4; КПД механизма т] — 0,9;
момент инерции двигателя и соединенных с ним напрямую деталей (муфты,
входного вала редуктора) /д = 0,21 кг-м2; момент инерции ведущих колес JK =
= 0,51 кг-м2; радиус колес г — 175 мм; сила сопротивления движению Рс =
= 4000 Н.
Решение. 1. Определяем пусковой момент на валу двигателя. Номинальный
момент
Л1д = 9555 = 9555== 34,75 Н-м.
и пд 1210
Пусковой момент
Л1Л = 1,5; Мд = 1,5-34,75 = 52,1 Н-м.
2. Находим движущий момент, приведенный к ведущим колесам,
= 52,1-26,4-0,9 = 1238 Н-м.
3. Вычисляем избыточное усилие на ведущий колесах тележки
Ризб = Рр — Ро == -Ро = — 4000 = 3074,3 Н.
г и, 1 / О
4. Рассчитываем приведенную массу движущихся частей тележки крана
Q + G . 1 2 , r 1
ШПр. К---~--h О J д ~И2 + JK —2“ =
s'*
= (150tF?p" +1’2-°>21 -б^-<26’4)2+°’51 олж =2614317 кг-
5. Определяем максимальную динамическую нагрузку на ведущих колесах
шах —
О —
^пр. к
L150.+ 50) 3074,3
-------------------+ 4000 = 8795 Н.
288
6. Находим коэффициент динамичности
Кд = Fmax/Pc = 8795/4000 = 2,2.
7. Рассчитываем динамические нагрузки на валах редуктора, принимая:
передаточное число между валом ведущих колес и выходным валом редуктора
и3 = 2,4; соответствующий КПД т]3 = 0,95; передаточное число между промежу-
точным и выходным валом редуктора и2 = 4 и соответствующий КПД т]2 = 0,95.
Тогда динамический момент на выходном валу редуктора
8795-0.175
2,4-0,95 ~
а на промежуточном валу редуктора
Mf2 —
Mf3 __ 675
ад2 4-0,95 ’
Н-м.
Пример 2. Определить динамическую нагрузку на элементах трансмиссии
пневмоколесной машины при трогании с места.
Исходные данные: масса машины т = 6500 кг; радиус колес rd = 0,53 м;
момент инерции вращающихся масс двигателя и соединенных с ним напрямую
деталей 7Д = 0,50 кг-м2; момент инерции ведущих колес 7К — 26 кг-м2; КПД
трансмиссии т] = 0,866; передаточное число трансмиссии и = 30,865; ускорение
машины при трогании с места /р = 0,4 м/с; сопротивление движению машины
Рс = 1594 Н.
Решение. 1. Определяем суммарный приведенный (к валу двигателя) момент
инерции движущихся частей машины при разгоне
mr2, 1
пр.д = mnp. Ard = и2^ ~
6500-0,532
30,8652-0,866
+ 1,3-0,5 + 26 30 865а.0 8бб 2,894 кг м4.
2. Находим избыточный момент на валу двигателя
Мизб. д = ^пР.д8д = ^р.Д/р7-« = 2.894 1 30,865 = 67,4 Н-м.
d и, ио
3. Определяем максимальное динамическое усилие на валу двигателя
_ 2 Миз6-л Pcrrf =
^дшах mr| 1 + «Л
“ + 0Jn + J«^T
6500-0,53а
30.8652 ' 1594-0,53
6500-0,53а , 1 + 30,865-0,866
30,865а 4 ’3’0,50 + 2Ь зо,865а
2-1,92-67,4
1,92 4-0,677
+ 31,6 = 131,26 Н-м.
4. Определяем максимальный динамический момент, нагружающий полуоси
ведущих колес,
/И/? = Мр == 131,26-30,865-0,866 = 3508,46 Н-м.
Шал Д ШоД ’
10 Г обе рм ев Л А
289
КОНТРОЛЬНЫЕ ВОПРОСЫ
К параграфу 5.1
1. Назовите основные параметры механических передач и укажите, как они
связаны между собой.
2. Изобразите схемы планетарной передачи и дифференциального зубчатого
механизма и объясните, как они работают.
3. Как определяются передаточные числа для зубчатой передачи с неподвиж-
ными осями и для планетарной передачи?
4. Изобразите принципиальную схему гидротрансформатора и объясните
принцип его работы.
5. Назовите основные параметры гидромеханической передачи и укажите,
как они связаны между собой.
К параграфу 5.2
6. Изобразите принципиальную схему объемного гидропривода и объяс-
ните принцип его действия.
7. Назовите основные элементы объемного гидропривода. Какие типы
гидронасосов Вы знаете?
8. Расскажите о принципе действия гидродвигателей вращательного,
возвратно-вращательного и возвратно-поступательного движения.
9. Назовите основные параметры объемного гидропривода.
10. Расскажите, как регулируется скорость потока жидкости в объемных
гидроприводах.
К параграфу 5.3
11. Какие типы муфт Вы знаете? Изобразите принципиальные схемы муфт
и объясните, как они работают.
12. Какие типы тормозов и систем управления тормозами Вам известны?
Изобразите их схемы и объясните принцип действия.
13. В чем принципиальное отличие ленточных муфт от ленточных тормозов?
14. Определите необходимую величину тормозного груза или усилия элек-
тромагнита для размыкания простого, дифференциального и суммирующего
ленточных тормозов.
К параграфу 5.4
15. Какие типы полиспастов Вам известны? Как определяется кратность
(передаточное отношение) полиспаста?
16. Изобразите развернутые схемы одинарных и сдвоенных полиспастов
различной кратности.
17. Известны силы веса поднимаемого груза, кратность полиспаста, радиус
барабана, передаточное число и КПД механизма подъема. Определите потребную
величину вращающего момента на валу двигателя.
18. Решите обратную задачу: по известному моменту на валу двигателя и
другим параметрам, отмеченным в п. 17, определите допускаемую силу веса под-
нимаемого груза.
19. Расскажите, как влияют сопротивления трения в механизме на величину
движущего и тормозящего усилий.
20. Расскажите, как влияют силы инерции вращающихся и поступательно
движущихся масс механизма и исполнительного органа на процессы разгона и
торможения.
21. Как определяются суммарные приведенные массы (моменты инерции)
при разгоне и торможении механизма подъема? От каких параметров они за-
висят?
290
К параграфу 5.5
22. В чем состоит особенность работы канатоведущего привода лифтов?
23. Какую роль выполняет противовес в приводах лифтов?
24. Запишите в общем виде уравнение, определяющее движущую силу на
канатоведущем шкиве при трогании лифта с места на подъем.
25. При каких режимах движения лифта возникают наибольшие усилия
в грузовой ветви каната?
К параграфу 5.6
26. Какие типы опор поворотной части кранов и одноковшовых экскаваторов
Вам известны? Изобразите схемы опор.
27. Какие факторы учитываются при определении потребного вращающего
момента на валу двигателя при установившемся и неустановившемся вращении
поворотной части?
28. Известен пусковой момент на валу двигателя механизма вращения.
Напишите, чему будет равен соответствующий момент на поворотной части
машины.
29. Как определяются суммарные приведенные массы (моменты инерции)
при разгоне и торможении механизма вращения?
К параграфу 5.7
30. Известен пусковой момент на валу двигателя механизма передвижения.
Как определить движущий момент и окружное усилие на ведущих колесах
машины?
31. Будут ли равны значения движущего и тормозящего усилий при одинако-
вых по абсолютному значению ускорениях при разгоне и торможении машины?
32. Как влияет включение или отключение муфты сцепления при разгоне
и торможении машины на пусковой момент на валу двигателя и на тормозящий
момент?
10*
Г Л А В A 6
ОСНОВЫ ТЯГОВОГО РАСЧЕТА
ДОРОЖНО-СТРОИТЕЛЬНЫХ МАШИН
6.1. ВЗАИМОДЕЙСТВИЕ КОЛЕСА
С ПНЕВМАТИЧЕСКОЙ ШИНОЙ С ПОВЕРХНОСТЬЮ
качения
6.1.1. Кинематика качения колеса
В зависимости от выполняемых функций различают
следующие колеса машины:
1) ведущие, к которым от двигателя подводится вращающий
момент и которые путем сцепления с поверхностью качения со-
общают машине поступательное движение; ведущие колеса часто
называют движителями машины;
2) ведомые, служащие для поддержания корпуса машины и
передачи вертикальных нагрузок от машины на поверхность ка-
чения;
3) управляемые, служащие для сообщения машине задавае-
мого направления движения;
4) тормозящие, к которым подводится тормозящий момент
и которые за счет сцепления с поверхностью качения замедляют
движение машины.
В зависимости от конструкции привода и системы управления
машины колеса могут быть одновременно ведущими, управляе-
мыми и тормозящими или одновременно ведомыми, управляемыми
и тормозящими.
Качение колес сопровождается обычно проскальзыванием
их обода или беговой дорожки шины относительно поверхности
качения. Для ведомых и тормозящих колес характерно скольже-
ние в сторону движения колеса, вследствие чего действительная
линейная скорость v их геометрической оси больше теоретической
скорости ит, равной произведению угловой скорости сок колеса
на его радиус г, т. е. для ведомых и тормозящих колес
v > сокг.
Для ведущих колес характерно проскальзывание против дви-
жения колеса (это явление называется буксованием), вследствие
чего действительная скорость качения колеса оказывается меньше
теоретической скорости:
V < (0кГ.
Для колес с пневматической шиной радиус колеса равен рас-
стоянию от его геометрической оси (оси вращения) до поверхности
качения; такой радиус называют статическим радиусом пневма-
292
тика при отсутствии качения или динамическим радиусом rd при
качении.
Одним из основных кинематических параметров колес яв-
ляется радиус качения гк. Это некоторый условный радиус, ко-
торый нельзя измерить непосредственно, а можно определить
лишь экспериментально, исходя из следующего условия: за один
оборот колесо с некоторым радиусом гк проходит путь, равный
длине окружности того же радиуса, т. е. 2лгк, а за пк оборотов
это колесо пройдет путь
$ф = 2лгкик.
Из этого выражения, замерив фактически пройденный колесом
(или машиной) путь и число оборотов колеса п* на этом пути,
определяем радиус качения
гк = 5ф/(2лпк).
При качении колеса со скольжением теоретический путь ко-
леса sT = 2^rdnK будет меньше фактически пройденного пути,
т. е. sT < 5ф и соответственно rK > rd.
При качении колеса с буксованием его теоретический путь
больше фактически пройденного, т. е. sT > £ф и соответственно
rK < rd.
В теоретическом случае, при отсутствии скольжения и буксо-
вания, 5ф = sT, и тогда rK = rd.
На пересечении нормали к поверхности качения, проходя-
щей через ось вращения колеса точку О, с воображаемой окруж-
ностью радиусом гк лежит так называемый мгновенный центр
вращения колеса (МЦВ), скорость которого в данный момент
времени равна нулю. Для колеса, катящегося без скольжения и
буксования, МЦВ совпадает с точкой контакта К колеса с поверх-
ностью качения (рис. 86, а); для колеса, катящегося со скольже-
нием, МЦВ лежит ниже точки К (рис. 86, б); для колеса, катяще-
гося с буксованием, МЦВ лежит выше точки К (рис. 86, в).
Зная положение МЦВ, можно определить направление век-
тора абсолютной скорости любой точки колеса. Для этого нужно
из МЦВ в данную точку колеса провести радиус-вектор и из
его конца восставить перпендикуляр, направив его в сторону
вращения колеса. По модулю абсолютная скорость равна произ-
Рис. 86. Качение колес:
а — без скольжения и бук-
сования; б — со скольже-
нием; в — с буксованием
293
ведению угловой скорости колеса на радиус-вектор. Например,
абсолютная скорость некоторой точки А (рис. 86, а), принадле-
жащей ободу колеса, катящегося без скольжения и буксования,
направлена по перпендикуляру, восставленному из конца радиуса-
вектора рл, и по модулю равна vA == сокрл. Если это колесо ка-
тится по деформируемой поверхности качения и точка А оказы-
вается погруженной в грунт, то скорость vA в этом случае будет
соответствовать скорости вмятия частиц грунта под колесом.
Для того же колеса линейная скорость оси вращения точки О
по направлению совпадает с горизонтальным диаметром колеса,
а по модулю равна v — сокро = (oKrd (здесь р0 — радиус-вектор,
проведенный из МЦВ в точку О). Пользуясь тем же правилом
нахождения абсолютных скоростей точек колеса, легко убедиться
в том, что скорость точки р, лежащей на верхнем конце верти-
кального диаметра колеса, при отсутствии деформации шины
равняется удвоенному значению линейной скорости оси враще-
ния колеса.
Следует отметить, что деформативные свойства пневматиче-
ской шины и, в частности, ее способность сжиматься или растя-
гиваться при входе и выходе ее из зоны контакта с поверхностью
качения, вносят определенные коррективы в кинематику каче-
ния колеса, нарушая равенство между угловыми скоростями
обода колеса и беговой дорожки шины. Неравенство этих ско-
ростей приводит к дополнительному проскальзыванию шины отно-
сительно поверхности качения.
Для количественной оценки скольжения и буксования колеса
пользуются коэффициентами буксования 6 или скольжения 6'.
Первый представляет собой отношение скорости буксования ко-
леса иб к теоретической скорости его качения, а второй — отно-
шение скорости скольжения к теоретической скорости каче-
ния колеса:
ф _ Of •— V ~ “/к Г d Гц . । у \
“ рт - " vT “ oKrd - rd ' * ’
— tcK ~ V — V'r QKrK ®Krd Гк rd (318)
При равных значениях коэффициентов буксования и скольже-
ния скорости цб и цск отличаются только знаком: скорость об
направлена против качения, а иск—в сторону качения колеса.
Скорости Vq и уск можно найти по величине и направлению,
если известно положение МЦВ колеса. Так, проведя из МЦВ
колеса радиус-вектор р = Дг в среднюю точку площадки кон-
такта (точку /С, по скорости которой и судят о буксовании или
скольжении колеса) и восставив из конца этого радиуса-вектора
перпендикуляр в сторону качения для колеса, катящегося со
скольжением (рис. 86, б), и против качения для колеса, катяще-
гося с буксованием (рис. 86, в), найдем векторы vCIt и v6, равные
294
по модулю произведению угловой скорости колеса сок на соот-
ветствующий радиус-вектор:
иск = <ок Дг = (rH — rd); ve = <ок Лг = <он (rd — гк).
Из уравнения (317) нетрудно найти действительную скорость
движения машины (оси колеса)
v — ит (1 — 6)
и соответственно максимальную
^тах “ max (1 6)«
Отсюда следует, что машина в процессе разгона развивает
максимальную скорость в момент достижения максимальной
окружной скорости ведущих колес, равной уттах. Дальнейшее
увеличение скорости движения в этих условиях может быть
достигнуто только за счет снижения буксования ведущих колес.
6.1.2. Сопротивление качению колеса.
Касательные реакции поверхнцсти качения
Качение ведомого колеса. Сопротивление качению ко-
лес с пневматической шиной обусловлено деформацией поверх-
ности качения и шины, а также гистерезисными потерями в шине
вследствие ее радиальной и тангенциальной (касательной) де-
формации. Работа, затраченная на деформацию шины, зависит
от ее конструкции и материала, а такЖе от давления воздуха —
чем больше давление воздуха в шине, тем меньше потери, свя-
занные с ее деформацией.
Деформация поверхности качения зависит от физико-механи-
ческих свойств и состояния грунта (основания) и от нагрузки,
передаваемой через колеса машины. Образование колеи в общем
случае является результатом деформации сжатия и выдавлива-
ния грунта катящимся колесом. При этом грунты с большим со-
держанием воздуха сжимаются, а неуплотняемые (песок, грунты,
насыщенные водой) выдавливаются в сторону.
О характере перемещения частиц грунта под катящимся ко-
лесом можно судить по траекториям (они получены эксперимен-
тальным путем), показанным на рис. 87. Различный характер
траекторий перемещений частиц грунта под ведущим и ведомым
колесами объясняется различием в кинематике их качения.
На рис. 87, а изображены траектории смещения частиц грунта
под катящимся ведущим колесом, расположенные на разных
глубинах от поверхности качения. Частицы грунта, непосред-
ственно расположенные под колесом, перемещаются по траекто-
рии а^а^а^. Вначале, как видно по направлению стрелок,
частицы грунта смещаются вперед (по стрелке и), по направле-
нию качения колеса, а затем — назад, против направления ка-
чения, в результате чего колесо начинает пробуксовывать.
Частицы грунта под катящимся ведомым (или тормозящим) ко-
295
Направление качения колеса
Рис. 87. Траектории перемещения частиц грунта при качении:
а — ведущего колеса; б — ведомого колеса; в — гусеничного движителя
лесом (рис. 87, б) смещаются только вперед, что обусловливает
характерное для этих колес качение со скольжением.
Отмеченные особенности в деформации грунта под ведущими
и ведомыми колесами обусловливают и некоторое различие в со-
противлении их качению. Однако учесть эти различия в расче-
тах чрезвычайно сложно, поэтому сопротивление качению всех
типов колес определяют обычно по одним и тем же формулам.
Сопротивление качению колеса можно также объяснить тем, что
равнодействующая нормальных реакций поверхности качения
при качении колеса смещается от его вертикального диаметра
в сторону качения на некоторое расстояние (плечо) р, образуя
относительно оси колеса момент сопротивления качению
направленный против вращения колеса (рис. 88, а, I),
Al/t =
Рис. 88. Схемы нагружения
колес при качении:
а — ведомого; б — ведущего;
в — тормозящего; I — общая
схема; II — схема, иллюстри-
рующая действие касательной
реакции на качение колеса
296
Разделив момент Mfi на радиус качения колеса rd, найдем
силу сопротивления качению
Р fl — Mfi/rd — Rnil^^d — RkiIk — ^к/к- (319)
Величину fK = p/rd можно назвать приведенным коэффициен-
том сопротивления качению.
Следует отметить, что сила сопротивления качению, опреде-
ленная по формуле (319), является фиктивной и используется
только как некоторая расчетная величина. Реальным является
лишь момент сопротивления качению.
Действие момента Mfi вызывает в зоне контакта колеса с по-
верхностью качения касательную реакцию Tit которая относи-
тельно оси колеса образует момент Tfrd, уравновешивающий
действие момента сопротивления Mfi. Из условия равенства этих
моментов находим, что
Pi ~ М fill'd — Pfi-
Как видим, касательная реакция поверхности качения на
ведомом колесе численно равна силе сопротивления качению.
Если перенести силу 7\ на ось такого колеса, т. е. прило-
жить в точке О две равные и противоположно направленные силы
Т\, то получим пару сил (рис. 88, а, II) с моментом 7\га и «сво-
бодную» силу 7\, направленную против качения колеса. Следо-
вательно, для равномерного движения ведомого колеса по го-
ризонтальной дороге к его оси нужно приложить толкающую
силу, численно равную силе сопротивления качению Pfi и нап-
равленную в противоположную сторону. Отсюда вытекает один
из возможных методов экспериментального определения приве-
денного коэффициента сопротивления качению ведомого колеса;
нужно измерить толкающую силу Ртолк = Pi = Р/ь необхо-
димую для равномерного движения колеса на горизонтальном
участке пути, а затем по известной вертикальной нагрузке GK,
передаваемой через колесо, определить величину /к:
/к ~ Р толк/^к*
Качение ведущего и тормозящего колес. На рис. 88, б, I по-
казана схема нагружения ведущего колеса при равномерном
его движении. Помимо весовых нагрузок и нормальной реакции
поверхности качения РкЬ смещенной от линии действия силы GK
на расстояние р, в сторону качения, ведущее колесо нагружено
вращающим моментом Л4К^. Этот момент в зоне контакта колеса
с поверхностью качения вызывает касательную реакцию поверх-
ности качения ТкЬ направление которой определяется из усло-
вия, что момент силы Тк/ относительно оси колеса должен быть
направлен против направления действия вращающего момента
MKi (так как момент TKird по отношению к колесу является реак-
тивным). Это условие выполняется, если сила Tni направлена
297
в сторону движения колеса (в отличие от касательной реакции
поверхности качения Т\ на ведомом колесе, которая всегда на-
правлена против движения колеса).
Так как активные и реактивные моменты, нагружающие ве-
дущее колесо, должны взаимно уравновешиваться, выполняется
условие
Т= О*
Из этого уравнения находим касательную реакцию поверх-
ности качения
- RKi = Як Л или TKi = Рк< - Pfi
'а ’ а
(320)
и соответственно
Р Ki
(321)
В уравнении (321) PKi ~ MKi/rd — окружная сила на ведущем
колесе, она является фиктивной или условной силой, ее нельзя
непосредственно измерить, как и силу Рц сопротивления каче-
нию; она находится лишь расчетом при делении вращающего
момента на радиус колеса.
Посмотриц, какое действие касательная реакция поверх-
ности качения оказывает на ведущее колесо.
Для этого перенесем силу TKi на ось колеса, приложив
в точке О две равные и противоположно направленные силы TKi
(рис. 88, б, II). Тогда получим пару сил, создающих момент
THird, направленный против направления вращения колеса,
и «свободную» силу ТК1-, направленную в сторону движения ко-
леса. Эта сила от оси колеса передается на остов машины и сооб-
щает ей движение. Как видим, сила Тк/, будучи приложенной
к оси ведущего колеса, играет роль тягового усилия или силы
тяги.
На рис. 88, в, / показана схема нагружения тормозящего
колеса. На колесо действуют тормозящий момент ЛДь направ-
ленный против направления вращения колеса, вес GK, нормаль-
ная Rnt и касательная T'Ki реакции поверхности качения. Направ-
ление касательной реакции поверхности качения Т'к1 должно
быть таким, чтобы реактивный момент этой силы T'Kird относи-
тельно оси колеса был направлен навстречу активному моменту,
в данном случае — тормозящему моменту ЛДь это условие вы-
полняется, если сила Т'уа направлена против направления дви-
жения колеса.
Из условия равновесия тормозящего колеса
M.Ki — ТKt- -]- =
откуда
Р Ki — Myit/Гd -|- d — RkI Pft
(322)
298
и соответственно
р Ki — Т к1 — Р и* (323)
где Р'к( = M'Ki/rd — окружное усилие на тормозящем колесе.
Касательная реакция поверхности качения оказывает тормо-
зящее воздействие на колесо и через него на остов машины.
В этом можно убедиться, перенеся силу * T'Ki на ось колеса
в точку О (рис. 88, в, II). При этом получим пару сил с моментом
T'Kirdy который уравновешивается другими моментами на тор
мозящем колесе, и «свободную» силу T'Ki, направленную против
направления движения колеса; действие этой силы от оси ко-
леса передается на остов машины и затормаживает ее движение.
6.1.3. Сцепление пневматической шины
с поверхностью качения
Сцепление пневматической шины с поверхностью ка-
чения — явление достаточно сложное, в общем случае зависящее
от внешнего трения резины о поверхность качения, характери-
зуемого коэффициентом трения скольжения рс, величины и ха-
рактера распределения давления по площадке контакта шины
с поверхностью качения, тангенциальной деформации шины
в зоне контакта, касательных сдвигов грунта под катящимся
колесом, а также сцепления беговой дорожки шины с поверх-
ностью качения. Совокупное влияние этих факторов на поведение
отдельных участков шины в зоне контакта с поверхностью каче-
ния может быть неодинаковым: одни участки будут проскальзы-
вать в направлении, противоположном направлению движения
оси колеса, т. е. пробуксовывать; другие участки будут проскаль-
зывать в противоположную сторону, т. е. двигаться юзом; нако-
нец, могут быть участки чистого качения, не имеющие сколь-
жения.
Сцепные свойства движителей принято оценивать двумя по-
казателями —- коэффициентом использования сцепления фк и
коэффициентом сцепления <рсц. Первый представляет собой отно-
шение тягового усилия на ведущем колесе к нормальной нагрузке
или, что то же, к нормальной реакции поверхности качения
(поэтому фк называется также относительным тяговым усилием),
а второй — отношение максимального тягового усилия на ко-
лесе Тк max (или максимальной касательной реакции) к нормаль-
ной реакции поверхности качения:
Фк ~ РKi РкЬ (324)
Фсц = РKi max/Rid " Фк max* (325)
Коэффициент фк изменяется с изменением тягового усилия
ОТ О ДО фитах-
299
Рис. 89. Зависимости коэффициента буксования от относительного тягового
усилия при качении колеса:
а *— по рыхлому грунту; б —< по уплотненной снежной поверхности
При качении по грунтовым поверхностям максимальную ка-
сательную реакцию на колесе можно представить как сумму
силы трения скольжения шины о поверхность качения, равной
7?кгрс, и силы сопротивления грунта касательным сдвигам, рав-
ной тйк (где т — сопротивление грунта касательным сдвигам,
— фактическая площадь контакта беговой дорожки шины):
Ki max ~
Отсюда следует, что отношение касательной реакции на ко-
лесном движителе к нормальной нагрузке, передаваемой через
колесо на поверхность качения, не является коэффициентом тре-
ния скольжения шины о поверхность качения и поэтому вели-
чина (рсц не равна коэффициенту трения скольжения. Значение <рсц
в общем случае зависит не только от коэффициента трения ре-
зины о грунт, но и от распределения нормальных давлений по
площадке контакта шины и, главным образом, от характера про-
скальзывания элементов шины в зоне ее контакта с поверхностью
качения.
На рис. 89, а показаны кривые б = f (фк), построенные для
колесного движителя с пневматической шиной И 16,00—20 при
нормальной нагрузке на ось колеса 70 кН для случая качения
по рыхлому грунту. Как видим, при снижении давления воздуха
в шине несколько замедляется развитие процесса буксования и
повышаются сцепные качества шины. Наибольшее значение фк
соответствует максимальным значениям коэффициента буксо-
вания.
На рис. 89, б показаны кривые б = f (фк) для колесного дви-
жителя с пневматической шиной 18,00—25 при качении по уплот-
ненной снежной поверхности. В этом случае сначала наблюдается
увеличение значения фк с увеличением коэффициента буксования,
а затем с ростом коэффициента буксования фк начинает сни-
жаться. Максимальное тяговое усилие колесного движителя раз-
вивается при б 20 %, а не при 90 ... 100 %, как это имело
место для связных грунтов и дорожных покрытий. Объясняется
300
19. Коэффициент сцепления шин со снежной поверхностью
Тип шины Плотность и температура снега фСц при давлении воздуха в шине, МПа
0,2 0,3 0,4 0,5 0,6
18,00—25 мод. Ф-56 21,00—ЗЗР мод. Ф-24 р — 480 ... 530 кг/м’; t = — (5 ... 15) °C р = 510 ... 600 кг/м3 t = — (1 ... 3)°С 0,45 0,24 0,41 0,22 0,39 0,21 0,37 0,20 0,34 0,20
это тем, что при коэффициенте буксования свыше 20% начинается
интенсивное подтаивание снега в зоне контакта с шиной, что
приводит к уменьшению трения скольжения резины по снегу
и к снижению, вследствие этого, тяговых свойств движителя.
Ниже приведены средние значения коэффициента сцепления
пневматических шин с различными поверхностями качения:
Асфальт сухой .... 0,70 ... 0,90 Грязь глубокая .... 0,10 ... 0,15
Болото.................0,10 ... 0,20 Дорога грунтовая сухая 0,50 ... 0,70
Грунт: Песок влажный .... 0,20 ... 0,40
глинистый ...........0,65 ... 0,85
скальный.............0,55 ... 0,70
В табл. 19 приводятся данные, полученные Н. А. Ульяновым,
по коэффициенту сцепления для снежных поверхностей.
Максимальное окружное усилие на ведущем колесе имеет
место при TKi = TKi max, с учетом уравнения (321)
Ki max
к/ max “4“ P ji Pxi (фсц + /к)-
(326)
Максимальное окружное усилие на тормозящем колесе с уче-
том уравнения (323) составляет
РKi max ~ ^к/ max Р fl ~ Pni (фсц /к)« (327)
6.1.4. КПД ведущего и тормозящего колес.
Тяговые характеристики колесного движителя
КПД представляет собой отношение работы Ап. с, расходуе-
мой на преодоление полезных сопротивлений, к работе Ад дви-
жущих сил:
= -^п. С'^д*
Тяговое усилие TEi на ведущем колесе идет на преодоление
полезных (рабочих) сопротивлений и поэтому работа этой силы
на некотором пути, соответствующем, например, одному обороту
колеса s = 2лгк, будет являться работой сил полезных сопротив-
лений:
Tin. с
— Т Eis — Т Ki2nr к.
301
Работа вращающего момента Л4К< на ведущем колесе на том
же пути, равном <р = 2л, есть работа движущих сил, т. е.
Дд = Л1к/ф = A4Ki2n.
Таким образом, для ведущего колеса КПД
т ТК/ГК ТKif j (1 — д) Т
Л1к,2л Р Ki
(1 — 6)
(328)
или
(1-6) = (1-^-)(1-б).
(329)
Введем обозначения
Ч/ == ! Pfi/РкЬ Чб — 1 6,
где — КПД, учитывающий потери, обусловленные сопротивлением качения
колеса; цб — КПД, учитывающий потери от буксования колеса.
Тогда окончательно
Чк = Ч/Чб-
(330)
Как следует из полученных выражений, при Tni = 0 и PKi =
= Pfi (ведомое колесо) величина т), = 0 и КПД т]к = 0. При
нагружении колеса тяговым усилием с ростом величины TBi и,
следовательно, PKi значение коэффициента т]у увеличивается,
а коэффициента т]б снижается, так как повышение тягового уси-
лия приводит к увеличению коэффициента букЪования. В резуль-
тате зависимость КПД ведущего колеса от тягового усилия TKi
приобретает вид, показанный на рис. 90: сначала до какого-то
значения усилия Tni КПД движителя возрастает, достигая Чктах»
а затем начинает уменьшаться до нуля при полном буксовании
(6 = 100 % или 6 = 1,0).
Кривые т)к — f (TKi) и 6 = f (TKi), изображенные на рис. 90,
представляют собой тяговую характеристику колесного движи-
теля. От нее легко перейти к безразмерной тяговой характерис-
тике движителя, отложив по оси абсцисс
шкалу относительного тягового усилия
— ТKi GK.
Фк =
о
Е
Рис. 90. Тяговая харак-
теристика пневмоколес-
ного движителя
302
КПД движителя можно также выра-
зить через отношение мощности 7VTf, от-
водимой от ведущего колеса (эта мощность
называется тяговой и расходуется на
преодоление рабочих сопротивлений), к
мощности подводимой к этому ко-
лесу:
Чк ~~ TkiV{(PkI^t) — NTt/Npi.
Из этого отношения следует, что тяговая мощность движителя
равна произведению мощности Npi на КПД движителя:
Для средних грунтовых условий при коэффициенте буксова-
ния 6 = 20 % значение цк = 0,7 (или 70 %), т. е. потери мощ-
ности составляют 30 %, что почти вдвое больше, чем потери
в трансмиссии машины. При коэффициенте буксования, равном
8 ... 13 %, КПД ведущего колеса имеет максимум, что соответ-
ствует наиболее экономичному режиму работы движителя (рас-
ход топлива — наименьший), но при этом, как видно из тяговой
характеристики, коэффициент использования тягового усилия
или фк оказывается небольшим (в среднем 0,35), что делает не-
целесообразным продолжительную работу движителя на макси-
мальном КПД.
При приближении к полному буксованию, как отмечалось,
тяговое усилие и соответственно фк достигают максимального
значения, которое, однако, может иметь место только в течение
короткого отрезка времени. Максимально допустимое устойчи-
вое тяговое усилие сохраняется при б = 25 ... 35 %.
Для тормозящего колеса выражение КПД имеет вид
Т)« МкГ2л = .. MKf------= ' (331)
Ткг^к ^(1+6) гк((1+б)
6.2. ВЗАИМОДЕЙСТВИЕ ГУСЕНИЧНОГО ДВИЖИТЕЛЯ
С ПОВЕРХНОСТЬЮ качения
6.2.1. Кинематика гусеничного движителя
Основными элементами гусеничного движителя
(рис. 91, а) являются ведущие колеса (звездочки) 5, направляю-
щие (ведомые) колеса 2, опорные 3 и поддерживающие 1 катки и
гусеничная цепь 4, образующая замкнутый обвод.
Рассмотрим движение гусеничной цепи при огибании веду-
щего колеса (рис. 91, б). Абсолютная скорость цепи в некоторой
точке А, лежащей на окружности ведущего колеса, представляет
собой геометрическую сумму двух скоростей — скорости гусе-
ницы v0 во вращательном (относительном) движении вокруг оси
вращения ведущего колеса и скорости v поступательного (пере-
носного) движения вместе с гусеничным ходом:
vA = v2 4- v2 -f- 2w0 cos <р'.
Если переносная скорость равна окружной скорости, т. е.
v = и0, то
= 1^2u2 (1 4 cos <р) = 1/ 4и2
= 2v /1+1^
303
Рис. 91. Схемы гусеничного движителя:
а — общий вид; б — определения скоростей при огибании гусеничной цепью ведущего
колеса (звездочки) движителя
ИЛИ
VA = 2v COS (ф/2).
Когда гусеница придет в точку /// (ср = 0), ее абсолютная
скорость станет равной — 2ц, т. е. удвоенной скорости дви-
жения гусеничного хода. При горизонтальном положении верх-
ней ветви гусеницы эта скорость сохраняется на всем ее протя-
жении до точки IV (см. рис. 91, а). При набегании гусеницы
на ведомое колесо скорость ее начнет убывать по мере увеличе-
ния угла ф от 0 до л в точке VI; в этой точке абсолютная скорость
ovi = 0 и сохраняется на всем протяжении нижней ветви гусе-
ницы до точки /.
Таким образом, нижняя опорная ветвь гусеницы в течение
времени t — L/v, пока задний опорный каток вместе с рамой
гусеничного хода не пройдет опорный участок I—VI, остается
неподвижной. Такое движение гусеницы относительно рамы гу-
сеничного хода носит характер перематывания: как только
задний опорный каток пройдет опорный участок гусеницы, она
начинает перематываться и, следуя за движущимся вперед задним
ведущим колесом, снова укладывается на грунт перед передним
опорным катком.
Если поступательная скорость гусеничного хода оказывается
меньше окружной скорости ведущего колеса (ц < ц0), то опорная
ветвь гусеницы в процессе движения несколько смещается назад,
т. е. имеет место пробуксовывание гусеницы. Степень буксования
гусеничных движителей, как и ведущих колес, оценивается коэф-
фициентом буксования, определяемым по формуле (317). Однако
коэффициент буксования гусеничных движителей на мягких
грунтах значительно меньше коэффициента буксования колес-
ных движителей, что видно из сравнения характера перемещения
304
частиц грунта под колесными и гусеничными движителями (см.
рис. 87, а. в).
При отсутствии проскальзывания гусеницы относительно по-
верхности качения теоретическая скорость vT гусеничного дви-
жителя определяется из соотношений:
VT = СОКГ2 ~ ~ °>о. кго. к»
где сок, ©j и со0> к — угловые скорости ведущих колес, направляющих колес и
опорных катков; га, гъ г0 к — радиусы ведущих колес, направляющих колес и
опорных катков.
Радиус начальной окружности ведущего колеса (звездочки)
определяют, исходя из равенства пути 2лг2, который проходит
колесо за один оборот, периметру описанного многоугольника,
образуемого звеньями гусеницы, укладывающимися на окруж-
ности колеса:
2лгг = /авг2, откуда га = /звг2/(2л),
где /зв — длина (шаг) гусеничного звена; za — число зубьев ведущего колеса.
Радиус качения ведущего колеса гусеничного движителя,
по аналогии с радиусом качения колесного движителя, опреде-
ляют экспериментально по длине пути $ф, пройденного машиной
на мерном участке, и числу оборотов пк ведущих колес на этом
участке пути:
= ^ф/(2ллк).
Из-за изнашивания шарниров гусеничной цепи изменяется
и ее шаг и соответственно фактически пройденный путь, что мо-
жет внести определенную неточность при определении радиуса
качения.
Фактическая скорость гусеничного движителя
v = со2гк = со2г2 (1 — 6) = ит (1 — 6).
6.2.2. Давление гусеницы на основание
и сопротивление качению
Одним из основных показателей проходимости гусе-
ничных машин по слабым грунтам является значение и характер
распределения давлений по длине опорной ветви гусеницы. Лишь
в первом приближении можно считать, что в передаче давления
на основание участвует вся опорная длина гусениц и эпюра дав-
лений в зависимости от положения центра масс машины может
быть изображена в виде трапеции, треугольника или прямо-
угольника (рис. 92).
В действительности в передаче давлений участвуют, в основ-
ном, только те звенья опорного участка гусениц, которые лежат
под опорными катками. В этом случае давление следует опреде-
лять по отношению нормальной нагрузки NKii передаваемой че-
305
Рис. 92. Эпюры давлений гусеницы на основание при различных положениях
центра масс машины
рез Лй опорный каток, к площади гусеничного звена Ьгус/зв (где
ЬГ7С — ширина гусеницы), лежащего под данным катком,
Pi = -^^/(^гус^зв)*
Максимальное давление гусеницы на основание соответствует,
очевидно, наиболее нагруженному опорному катку.
Среднее давление определяют по средней нормальной на-
грузке NK, Ср> найденной из предположения, что общий вес ма-
шины G равномерно распределяется по всем опорным каткам:
ср ~ G/(2/iK),
где лк — число опорных катков на одной стороне гусеничного движителя; если
ведущие и направляющие колеса гусеничного движителя имеют контакт с поверх-
ностью качения, то они также учитываются в значении лк.
Тогда среднее давление
_ Ср G /QQO\
Р« j ~ ah I ~п~ ’ (332)
£'гус*зв Zt?ryCt3B'iK
По отношению максимального давления к среднему опреде-
ляют коэффициент неравномерности распределения давлений по
опорной длине гусениц
Рк max/Рк-
Коэффициент неравномерности зависит, в основном, от поло-
жения центра масс машины в направлении ее продольной оси,
также от конструкции гусеничного хода и характера поверх-
ности качения. Так, для гусеничного погрузчика на базе треле-
вочного трактор; при G = 180 кН, Ьгус = 46 см, /зв = 43,5 см
и пк = 6 среднее давление, вычисленное по формуле (332), рк
— 0,0735 МПа, максимальное давление для наиболее нагружен-
ного переднего опорного катка ркшах = 0,247 МПа и соответ-
стве но I = 3,36.
306
Для гусеничных ма-
шин среднее давление
колеблется в пределах
0,04 ... 0,085 МПа, а для
гусеничных машин бо-
лотной модификации (с
уширенными гусеница-
ми)—0,015 ...0,025 МПа.
Это значительно ниже
давления колесных ма-
рке. 93. Схема для определения центра да вления
гусеничного хода
шин на основание, ко-
торое в зависимости от
давления воздуха в ши-
нах находится в пределах 0,25...0,61 МПа.
Число активных звеньев гусеницы, через которые передаются
нормальные нагрузки, а следовательно, и длина активного
участка гусеницы, зависят от числа и шага /к опорных катков
(расстояния между их центрами). Если отношение шага катков
к шагу гусеничной цепи tj13в не превышает 1,5, то допускают,
что активным является весь опорный участок гусеницы длиною L
и в этом случае давление на основание вычисляют по формуле
Рк — G/(2bFycL).
(333)
При таком допущении эпюра давлений имеет один из видов,
показанных на рис. 92. Равнодействующая этих давлений про-
ходит через центр масс фигуры, соответствующей данной эпюре,
а точка приложения этой равнодействующей, лежащая на опор-
ной плоскости гусеницы, определяет положение центра давления
гусеничного хода хд.
Положение центра давления гусеничного хода можно также
найти из условия равновесия сил, действующих на машину
(рис. 93). Составим для этого два уравнения: уравнение момен-
тов относительно точки К и уравнение проекций сил на оси Y:
Glc cos а —Ghc sin cz —j— Pи^с С кр^кр ~
— Geos a = 0,
где Рв и PKp — сила инерции и усилие на крюке трактора при его работе с при-
цепом.
Из первого уравнения находим
G (Zc cos a — hc sin a) — РИАС — ^кр^кр
хд =- -
Из второго уравнения следует, что
~ G cos a.
Тогда
G (lc cos a — hc sin a) — PBhc — PktAc
x =---------------------------------
M G cos a
(334)
307
Как видим, значение хд в общем случае не совпадает с коорди-
натой центра масс машины /с, т. е. центр давления смещается
от нормали к основанию, проходящей через центр масс машины.
Если Ри = Ркр = 0, то
хд = /с — Лс tg а. (335)
Если, кроме того, и а = 0, то хд = 1С.
Таким образом, центр давления гусеничного хода совпадает
с проекцией центра масс машины на основание только в одном
случае — при отсутствии каких-либо продольных нагрузок, дей-
ствующих на машину, и при установке ее на горизонтальной
площадке.
Распределение давлений оказывает определенное влияние и
на сопротивление качению гусеничного хода. Чем больше давле-
ние и коэффициент неравномерности его распределения, тем
больше деформация поверхности качения и сопротивление каче-
нию. При этом сопротивление качению особенно возрастает в том
случае, когда наибольшая нормальная нагрузка действует на
передние опорные катки гусеничного хода.
Приведенный коэффициент сопротивления качению для гу-
сеничных ходов
£.5 ,1/2 / G
’ Ю3 I/ 12Ь п ’
у к гус к
(336)
где k — коэффициент, обратный коэффициенту объемного смятия грунта, харак-
теризующий деформативные свойства поверхности качения, м3/МН; /к—длина
активного участка гусениц; G — в Н.
Ниже приведены средние значения k (м3/МН) для различных
поверхностей:
Асфальт .............................................. 0,00275-10“3
Гравий ............................................... 0,153-10“®
Грунт болотистый ..................................... 0,82
Грязь глубокая ....................................... 0,71 ... 1,02
Дорога:
грунтовая сухая .......................................... 0,00235
снежная среднеукатанная............................. 0,0082 ... 0,02
снежная предельноукатанная.......................... 0,00153 ... 0,0038
залежь................................................... 0,058
Песок:
влажный.................................................. 0,136
сухой.................................................... 0,344
Покров снежный:
рыхлый................................................ 4,3 ... 9,2
слабоуплотненный ................................... 0,224 ... 0,54
Поле свежевспаханное.................................. 0,133
Стерня.................................................... 0,0224
Длина активного участка гусениц зависит от твердости по-
верхности качения — чем меньше твердость, тем больше дефор-
мируется поверхность качения под звеньями гусеничной цепи и
тем большее число звеньев участвуют в передаче давления. Можно
308
принять, что при качении по стерне, залежи или ср ед псу катан-,
ной снежной дороге ZK « Z8B; для песка и свежевспаханного поля
ZK 21ъв; для болотистых грунтов, глубокой грязи и слабоуплот-
ненного снежного покрова ZK 3Z8B.
Кроме сопротивления качению Pf = GfK из-за деформации
основания у гусеничных движителей имеют место сопротивления,
обусловленные качением опорных катков по внутренней поверх-
ности гусениц и трением между боковыми поверхностями катков
и направляющими гусеничной цепи; эти сопротивления учиты-
вают некоторой силой То. к, которая, как и сила Р/, восприни-
мается осями опорных катков и от них передается на раму гусе-
ничного хода.
6.2.3. Определение тягового усилия
гусеничного движителя
На ведущие колеса гусеничного движителя действует
движущий момент Л1К, равный моменту на валу двигателя ма-
шины за вычетом инерционных сопротивлений, в том числе и
момента сопротивления от инерции ведущих колес движителя,
приведенного к ведущим колесам. При этом, как известно из тео-
рии цепного привода, на набегающую на ведущее колесо ветвь
цепи действует усилие Sr = Знб, а на сбегающую ветвь — уси-
лие S2 = Sc6; разность этих усилий относительно оси вращения
ведущих колес образует момент (Sj — S2) r2, - направленный
в сторону действия большего усилия Slt т. е. против 'момента Л4К
(рис. 94, а).
На ведущих колесах момент (St — S2) г2 вместе с моментом
сопротивления от сил трения в опорах ведущих колес и в шарни-
рах звеньев цепи, огибающих ведущее колесо Л4Г1, уравновеши-
ваются движущим моментом 7ИК; поэтому можно записать, что
Л4К = (Зх — 32) г 2 + Л1Гв.
Разделив обе части этого уравнения на радиус ведущих ко-
лес, получим выражение для окружного усилия Рв на ведущих
колесах
Рк — (^1 — ^2) “h Рrit
(337)
где РГ2 = Л4Г2/г>.
Натяжение З3 лобового участка гусеничной цепи можно найти
из уравнения равновесия сил, действующих на направляющие
колеса (рис. 94, б)
S3 — S2 = MrJrх Ми1/гх»
откуда
5g ~ S2 4- РГ1 4" Ри1»
(338)
309
Рис, 94. Усилия, действующие на элементах гусеничного движителя:
а и б — на ведущих и направляющих колесах; в — в гусеничном движителе
где Р = Mj.Jr-L — сила сопротивления трению в опорах направляющих колес
и в шарнирах цепи, огибающей направляющие колеса, приведенная к их окруж-
ности; РИ1 = Л4и1/гх — касательная сила инерции направляющих колес и соот-
ветствующих звеньев цепи.
Так как сила S2 мала по сравнению с усилиями Sx и S3, дей-
ствующими на ведущем и лобовом участках цепи, пренебрегаем
ее влиянием и посмотрим, какое воздействие оказывают на гусе-
ничный ход силы Sx и S3 (рис. 94, в, на рисунке ро == р2).
Для этого перенесем силу Sx на ось ведущих колес в точку 02,
а силу S3 на ось направляющих колес в точку 0х, приложив в этих
точках две равные и противоположно направленные силы (на
рисунке они отмечены штрихами). Тогда на ведущих колесах
получим пару сил с моментом Sxr2, который уравновешивается
движущим моментом на колесах, и «свободную» силу Sx, которая
дает две составляющие — силу Т2, направленную в сторону
310
движения гусеничного хода, и силу К2> направленную по верти-
кали вниз:
Т2 —- S3 cos p2j Л 2 — sin р2.
Точно так же на направляющих колесах получим пару сил
с моментом S3rt и «свободную» силу S3, которая дает составляю-
щую силу 7\, направленную против движения гусеничного хода,
и силу Rlt направленную по вертикали вниз,
7\ = 53 cos ръ- Кх = S3 sin р1в
На задний опорный каток действует сила /?2Ь равная геоме-
трической сумме двух одинаковых сил 5Х:
R2i = 2SX sin (p2/2).
Силу R2i, действующую на ось задних опорных катков, можно
разложить на горизонтальную Т2 и вертикальную К'2 составляю-
щие:
Т2 = R2i sin (р2/2) = 2Sj sin2 (p2/2) = Si (1 - cos p2);
K2 = R21 COS (p2/2) = 2S1 sin (p2/2) cos (p2/2) = 5i sin p2.
Сила T2 от оси задних опорных катков передается на раму
гусеничного хода и здесь суммируется с силой Т2, действующей
на раму со стороны оси ведущих колес,
£ Т2 = Т2 +- Т2 ==
5i cos р2 4-5i(l — cos р2) = 5).
Как видим, сила У Т2 равна натяжению ведущего участка
гусеничной цепи и не зависит от угла р2 наклона его к опорной
поверхности.
На передних опорных катках действует сила Rli9 равная гео-
метрической сумме двух одинаковых сил 53,
Ru = 2S3 sin (Pi/2).
На оси передних опорных катков эта сила раскладывается
на две составляющие — силы Т\ и К{:
Т{ = 7?1 i-sin pj = 53(1 — cos РО; Ki = Rucos(Pi/2) = S3sin pb
Силы T{ и T19 воспринимаемые рамой гусеничного хода, дают
силу 2 7\:
2i 7*1 — Т1 Т 1 — 53cos Pj 4 *^з(1 — cos pi) — 53.
Таким образом, на раму гусеничного хода в продольном на-
правлении действуют силы 2 Т2 и 2 Т19 первая из которых
направлена по направлению движения, а вторая против направ-
ления движения гусеничного хода. Кроме этих сил рамой гусенич-
ного хода воспринимаются силы сопротивления качению Pf и
70. к, направленные против направления движения. Алгебраи-
ческая сумма всех этих сил, равная Тк, и направленная в сто-
311
рону движения гусеничного хода, и будет для него толкающей
(тяговой) силой, сообщающей ему движение:
к
Рf $1 — S3 То, к Рf
или с учетом выражения (338)
Тк = (S, - S2) - Pf - (Ри1 + РГг + То, н).
Но так как из уравнения (337)
(Sj — S2) — Р к Р Га>
окончательно получим
ТК = Рк - Pf - (РИ1 + Prt + Рг. + Ро. к).
(339)
Величина, стоящая в скобках уравнения (339), определяет
суммарное сопротивление в механизме гусеничного движителя
Рг. м = Рн + Рг, + Ро. к + Риг (340)
С учетом этого выражения уравнение (339) можно записать
так:
Т =
* к
Р/ Рг. м*
(341)
Вертикальные составляющие сил, нагружающие оси ведущих
и направляющих колес, а также оси задних и передних катков
(К2, Аь Л2, Ki) образуют в вертикальной плоскости пары сил,
стремящихся повернуть движитель в вертикальной плоскости,
что приводит к некоторому перераспределению нормальных реак-
ций поверхности качения.
6.2.4. Сцепление гусеницы с поверхностью качения.
КПД гусеничного движителя
Тяговое усилие гусеничного движителя вызывает на
опорном участке гусениц касательную реакцию поверхности ка-
чения. Сравнивая выражения для касательных реакций [тяговых
усилий, полученных для колесного и гусеничного движителей по
уравнениям (320) и (341)], видим, что они отличаются только си-
лой Рг. м, а если влиянием ее пренебречь, то эти выражения
полностью совпадают.
Касательные реакции поверхности качения, как и нормаль-
ные реакции, реализуются, в основном, через активные участки
нижней ветви гусеницы. При этОлМ максимальное значение каса-
тельной реакции ограничивается сцеплением гусениц с поверх-
ностью качения, и определяется по уравнению
к шах
— Нс S + 2Ь
гус
Л3гэт = фсц £ R
Kit
отсюда коэффициент сцепления гусениц с поверхностью качения
1 к шах
У! Ак/
(342)
312
где т — сопротивление грунта касательным сдвигам; рс — коэффициент трения
скольжения гусеницы о поверхность качения; £ — суммарная нормальная
реакция на опорных катках гусеничного движителя; h3 — высота грунтозацепов
гусеницы; z3 — число грунтозацепов на активном участке гусеницы.
Ниже приведены значения коэффициента сцепления для гу-
сеничных движителей:
Асфальт (летом)............................................. 0,3 ... 0,4
Дорога:
грунтовая.................................................... 0,9 ... 1,1
снежная укатанная............................................. 0,6
Песок:
влажный...................................................... 0,4
сухой......................................................... 0,5
Поле свежевспаханное ........................................... 0,7
Стерня влажная.................................................. 0,9
Целина:
болотно-торфяная осушенная................................. 0,4 ... 0,5
плотная залежь .................................... . . . 1 ... 1,2
КПД гусеничного движителя т|гус определяют по отношению
мощности TKvt «снимаемой» с гусеничного движителя, к мощ-
ности Л4к(ок, подведенной к его ведущим колесам:
п = __ ГкС0кГ2 (1 -6) _
Гус Мксок Л4к(ок
= Ь-(1 - 6) = ~Рг-м(I - 6).
Это выражение можно записать и в другом виде:
Т] = (1 _ б)
Г к
Тогда, приняв те же обозначения, что и для КПД колесного
движителя: т]у = 1 — PflP^ Пб = 1 — 6» получим
Tlryc ’ ^/ЛбЛг. м*
(343)
6.3. ТЯГОВАЯ ДИНАМИКА МАШИН
6.3Л. Основные составляющие сопротивления
движению
Если мы знаем, как определяются силы и реакции,
действующие на отдельные колеса и гусеничные движители, то
можем найти и их суммарные значения, которые и будут опреде-
лять силы и реакции, воспринимаемые ходовой частью машины.
Так общее окружное усилие на движителях машины равно сумме
окружных усилий на каждом ведущем колесе машины:
Р* = Xl Put = j,
313
где Л4К — вращающий момент, передаваемый от двигателя к ведущим колесам
машины.
Суммарная приведенная сила сопротивления качению равна
сумме сопротивлений качению на каждом колесе машины:
Р/ ~ /к Zj ~ fifi C°s
где G — общий вес машины; а — угол наклона поверхности качения к горизонту.
При а = 0 приведенный коэффициент сопротивления каче-
нию для колесных машин
fK = 0,19 • 10Л1/3 1 /0(1
у DzKb
+ 8.8-10"4
1 + 10,2р
p2D„b
, (344)
где k — коэффициент, характеризующий деформативные свойства поверхности
качения, м3/МН; р — давление воздуха в шинах, МПа; DK — диаметр шин, м;
b — ширина шин, м; G —в Н.
В формуле (344) первым членом правой части определяется
та часть сил сопротивления качению, которая обусловлена де-
формацией основания при качении колес. Эта часть силы сопротив-
ления, как видим, тем больше, чем больше значение коэффи-
циента k (т. е., чем больше деформируется поверхность качения),
давление воздуха в шинах и нормальная нагрузка на колеса -ма-
шины и чем меньше диаметр и ширина колес.
Вторым членом правой части той же формулы характеризуется
часть силы сопротивления качению, которая вызвана деформа-
цией шин. Это сопротивление практически не зависит от нормаль-
ной нагрузки на колеса машины (что позволяет многим авторам
считать коэффициент не зависящим от нормальной нагрузки
на колеса машины, но такое утверждение правильно лишь для
случая качения колес по твердому основанию). Сопротивление
качению, связанное с деформацией шин, увеличивается при сни-
жении давления воздуха в шинах.
Таким образом, давление воздуха в шинах по-разному влияет
на обе составляющие сопротивления качению. В общем случае
можно подобрать такое значение р ~ р0, при котором сопротив-
ление качению будет наименьшим.
При движении машины на подъем возникает сила сопротив-
ления подъему Ра, которое равно продольной составляющей веса
машины,
Ра = G sin а.
Сила Ра при подъеме машины направлена против ее движения
и поэтому является силой сопротивления; при спуске она направ-
лена в сторону движения машины и является силой, способ-
ствующей движению. Величина sin а играет роль коэффициента
сопротивления подъему.
314
Подъем местности можно также оценивать так называемым
коэффициентом уклона ia, измеряемым в %,
ia — 100 sin а.
Тогда
Ра = 0,01Gta.
Если, например, а = 10°, то ia = 100 sin 10° = 17,4 % и
Ра = 0,016-17,4 - 0,174G.
Для рельсоколесных машин, для которых уклоны пути обычно
не превышают 5°, принимают sin а = tg а и уклон пути изме-
ряют не в сотых, а в тысячных долях, определяя его коэффициентом
1а = lOOOtga°/oo.
Тогда
Ра = 0,001 Gia.
Например, при а = 5°, tg а == 0,0875, ia == 87,5 °/00 и Р& =
= 0,0875G.
При определении сопротивления движению машины сопро-
тивления качению и подъему часто объединяют вместе, выражая
их через коэффициент сопротивления движению фс:
Pj ± Ра = G (fH cos а ± sin а) = Gxpc, (345)
где
% = /к cos ± sin а,
здесь знак «+» ставят при движении машины на подъем и «—» — под уклон.
При движении с большими скоростями, превышающими
30 км/ч, следует учитывать и силу сопротивления воздушной
среды Рв, которая возрастает пропорционально скорости во вто-
рой степени, эту силу определяют по формуле (8).
При движении с разгоном или торможением имеют место инер-
ционные сопротивления. При разгоне
(347)
при торможении
Р'н = (гп +/Ппр. K)v/tT.
(348)
6.3.2. Тяговое усилие машины
Тяговое усилие машины численно равно суммарной
касательной реакции поверхности качения на ее ведущих коле-
сах. По аналогии с выражением (320) для одиночного ведущего
колеса суммарное касательное усилие
TK^PK-fKTiRKl = PK-Pf,
315
или в учетом выражения (285)
Гк Гр Pf ^вр. к^Др*
(349)
Уравнением (349) определяется тяговое усилие, которое мо-
жет быть реализовано по двигателю машины, так как величина Рк
и, следовательно, движущее усилие Рр определяются здесь по
вращающему моменту Л4К, подводимому от двигателя к ведущим
колесам.
Максимальное тяговое усилие, реализуемое по условию сцеп-
ления движителей машины с поверхностью качения
ГСц — Тп шах = бСцфСц,
где Ссц — сцепной вес машины, т. е. вес, приходящийся на ее ведущие колеса;
для гусеничных машин сцепной вес равен общему весу машины.
Сцепной вес машины можно выразить через коэффициент ур,
использования сцепного веса, представляющего собой отношение
сцепного веса 0сц к нормальной составляющей общего веса ма-
шины
Тр = Осц/(О cos а).
Тогда
Гсц = ТрФсцО COS а. (350)
Максимальная
быть реализована
чения,
Г к max
суммарная окружная сила, которая может
по сцеплению движителей с поверхностью ка-
— Гк max Ч~ Г/ — G (ТрФсц Ч~ f к) COS (X,
(351)
для колесных машин со всеми ведущими колесами ур = 1 и
Рк max ~ G (фец Ч~ /к) COS СХ.
Максимальная касательная реакция на тормозящих колесах
Гк max определяется по весу машины GT, приходящемуся на ее
тормозящие колеса,
к max
^тФсц*
Величину Тктах можно выразить через коэффициент исполь-
зования тормозного веса
ут = GJ(G cos а).
Тогда
Г к max — ТтФсц^ COS СХ.
(352)
По аналогии с уравнением (323), определяющим окружное
усилие на одиночном тормозящем колесе, для машины
Р'К = ТК- Pf
316
и соответственно
Р к max
— Тк max Рf — G (ТтФсц fк) COS (X.
(353)
Если у машины все колеса снабжены тормозами,
Рк max = G (фсц fк) COS Ct.
ТО ут = 1 И
(354)
6.3.3. Уравнения тягового и мощностного балансов
Уравнения тягового баланса. Уравнения тягового ба-
ланса показывают, как распределяется движущее усилие, созда-
ваемое двигателем на ведущих колесах, по отдельным видам со-
противлений движению машины. Уравнения тягового баланса
для дорожно-строительных машин обычно составляют для двух
характерных режимов работы — транспортного и тягового. При
работе на транспортном режиме считают, что на рабочие органы
не действуют рабочие сопротивления, а машина движется с до-
статочно высокой (транспортной) скоростью. Для тягового ре-
жима работы дорожно-строительных машин характерны большие
рабочие сопротивления и малые скорости движения, что позво-
ляет не учитывать сопротивления воздушной среды.
Уравнение тягового баланса можно получить либо непосред-
ственно из условия, что тяговое усилие должно быть равно сумме
сил сопротивления движению, либо из условия равенства работы
тягового усилия сумме работ сил сопротивления. И тот и другой
метод приводит, разумеется, к одному и тому же результату.
Воспользуемся последним методом. Уравнение работ анали-
тически выражает условие: работа тягового усилия Тк на неко-
тором пути s должна быть равна работе сил сопротивления
(Ръ ± Ра + Т^р), совершаемой на том же пути, суммированной
с работой Лб, затрачиваемой на буксование движителей, и с кине-
тической энергией поступательно движущихся масс машины:
TKs = (Рв ± Ра + Wv) s + Аб + -В mv*> (355)
где Т7р — рабочее сопротивление; m — масса поступательно движущихся частей
машины.
Разделив обе части этого уравнения на s, получим
'р __ D Л D I TV7 I । 1 mv^
2 к — ^в X Т "Г с
Обозначим отношение AJs, представляющее собой удельную
работу буксования, отнесенную к единице пройденного движи-
телями пути, через Рб. Так как величина Pq имеет размерность
силы, ее можно также назвать приведенной силой сопротивле-
ния буксованию и выразить через окружное усилие Рк: Pq =
= Рк (1 - Пб) = ЛД
317
Величиной mv -- определяется кинетическая энергия, разви-
ваемая машиной при разгоне, также отнесенная к единице пути,
т-г /р^2 /
Для равноускоренного движения s = -у— = -у- (где /р —
ускорение машины при разгоне); тогда
1 mv* v
2 s /р
Таким образом, последнее уравнение можно записать в виде
Тк = рв ± Ра + №р + Рб + rnv/tv.
Заменяя в этом выражении величину Тк по уравнению (349),
получаем
Рр Р/ — ^вр. к^р = Рв ± Ра. 4“ р 4“ Рб Ч- ^W/^p
ИЛИ
Рр = Pf ± Ра + Рв + + Рб + (т + /и;р. к) v/fp. (356)
Уравнение (356) является уравнением тягового баланса,
в котором учтены все основные виды сопротивления движению.
Этому уравнению с учетом выражений (345) и (347) можно придать
такой вид
Рр = + Рв + Рб + ^р + Ри. (357)
Для тягового режима работы дорожно-строительных машин
уравнения тягового баланса без учета сопротивления буксования
запишется так:
Рр = G4>c + Wp + Ри, (358)
а для транспортного режима работы
Рр = + Рв + Ра- (359)
Уравнения мощностного баланса. Уравнение мощностного ба-
ланса показывает, как распределяется мощность, передаваемая
к движителям машины, по отдельным видам сопротивлений дви-
жению. Если на валу двигателя машины развивается мощность Мд,
то мощность, подведенная к ведущим колесам,
Л^р =
где т] — КПД привода машины.
Если часть мощности двигателя, равная No, расходуется на
привод каких-либо вспомогательных механизмов, то
Np = (ЛГД - N„) т].
Мощность, подведенная к движителям машины, расходуется
на преодоление сопротивлений качению колес (гусениц) Nf =
= PfVy подъему машины Na = Pav, воздушной среды Мв = PBvt
буксованию движителей Nq — Рк (vT — и), на выполнение ра-
318
бочих процессов Nr = Wpv и на преодоление инерционных со-
противлений Na = PBv:
Np = Nf + Na + NB + NT + Ми.
(360)
Мощность NT, расходуемая на преодоление рабочих сопротив-
лений, называется тяговой мощностью. Для транспортных ма-
шин тяговая мощность соответствует так называемой мощности
на крюке, расходуемой на движение прицепа.
Входящие в уравнение (360) мощностного баланса мощности
Na и Njh не теряются безвозвратно. Мощность Na при движении
машины на подъем идет на приращение ее потенциальной энер-
гии и «возвращается» при спуске. Мощность Ми при разгоне ма-
шины идет на приращение кинетической энергии и «возвращается»
при замедленном движении (при торможении машины).
Для дорожно-строительных машин с преобладающим транс-
портным режимом работы уравнение мощностного баланса можно
записать так:
Мр = Nf + Na -г Мв + Мб 4- Ми,
(361)
для дорожно-строительных машин с преобладающим тяговым
режимом работы
Л/р = Л/т + Nf + Na + Мб + Л/и. (362)
6.3.4. Удельные (безразмерные) тяговые показатели
машин
Запишем уравнение (359) тягового баланса для транс-
портного режима работы так:
Рр Рв — 4- Р и
и разделим обе его части на G:
(363)
Величина, стоящая в левой части полученного выражения,
называется динамическим фактором машины; обозначим ее
через D:
(364)
Как видим, динамический фактор равен отношению движу-
щего усилия на движителях машины Рр, уменьшенного на силу
сопротивления воздушной среды Рв, к весу машины; величина D
является безразмерной. С другой стороны динамический фактор
численно равен сумме удельных сопротивлений движению, стоя-
щих в правой части уравнения (363),
D = фс + Рж/0.
(365)
319
Динамический фактор весьма полно характеризует тягово-
динамические свойства транспортных машин. Чем он больше, тем,
очевидно, большие сопротивления может преодолеть машина и
тем большие ускорения может она иметь при разгоне, что повы-
шает приемистость машины.
Динамический фактор по сцеплению движителей машины
с поверхностью качения
£>сц = (ТрСфсц - Pb)/G. (366)
Для дорожно-строительных машин, работающих на тяговом
режиме, для оценки тяговых свойств можно использовать по-
казатель относительной силы тяги фк, равный отношению тяго-
вого усилия машины Тк к ее сцепному весу Ссц,
Фк = Т к/Gcn = Т к/(ТрО). (367)
Заметим, что значение фк для машины совпадает со значе-
нием фк для отдельного колесного движителя, определяемым
отношением (324).
Оценить тяговые свойства машин можно также по тяговому
КПД машины т]т, равному отношению тяговой мощности NT
в данный момент времени к соответствующей мощности двига-
теля Nn,
Пт = 4г1 = П = ИкП. (368)
/vp
гДе т)к — КПД движителя.
Как видим, тяговый КПД машины в отличие от КПД движи-
теля, зависящего только от параметров колеса и физико-механи-
ческих свойств поверхности качения, зависит также от характе-
ристики привода машины.
6.3.5. Влияние колесной формулы и схемы
соединения движителей на тяговые свойства машины
Тяговые свойства колесных машин во многом зависят
от колесной формулы их ходовой части, определяющей соотно-
шение между числом ведущих колес (или мостов) и общим числом
колес (мостов) машины. Колесная формула может состоять из
двух или трех цифр. При двух цифрах первая показывает общее
число колес, а вторая — число ведущих колес. Например,
4x2 —это двухосная машина с четырьмя колесами, из которых
два колеса — ведущие; 4x4 — двухосная машина со всеми че-
тырьмя ведущими колесами; 6x4 — трехосная машина с шестью
колесами, из которых четыре колеса, т. е. два моста, ведущие;
6x6 — трехосная машина со всеми ведущими колесами и т. д.
Если колесная формула состоит из трех цифр (такое обозна-
чение принято, в частности, для автогрейдеров), то первая цифра
320
обозначает число управляемых (ведомых) мостов, вторая
число ведущих мостов и третья — общее число мостов. Напри*
мер, автогрейдер с колесной формулой I Х2ХЗ имеет один управ-
ляемый передний и два ведущих задних моста, всего — три моста;
автогрейдер с колесной формулой 1x3x3 имеет все три моста
ведущих, из которых один одновременно является и управляе-
мым; автогрейдер с колесной формулой 3x3x3 имеет три моста,
которые одновременно являются ведущими и управляемыми;
автогрейдер с колесной формулой 2x2x2—- в отличие от пре-
дыдущих трехосных автогрейдеров является двухосным, у ко-
торого все два моста (передний и задний) являются управляемыми
и ведущими; у двухосного автогрейдера с колесной формулой
1X1x2 один мост управляемый и оди'н мост ведущий.
Очевидно, что чем больше мостов из общего числа являются
ведущими, тем полнее используется сцепной вес машины и тем,
при прочих равных условиях, выше ее тяговые свойства. Так,
для автогрейдеров, имеющих колесную формулу 1x2x3 или
1 X 1 х2. коэффициент использования сцепления ур = 0,70 ... 0,75,
а для автогрейдеров со всеми ведущими мостами (3x3x3 или
2x2x2) = 1. ’
В зависимости от конструкции трансмиссии ведущие колеса
машины могут иметь между собой различную связь. Они могут
быть связаны между собой с помощью дифференциальных меха-
низмов, обеспечивающих, как известно, возможность вращения
каждого колеса с различной скоростью, что важно, например,
при движении на повороте, когда внешние по отношению к центру
поворота колеса машины проходят путь больший, чем внутрен-
ние колеса и поэтому должны иметь большую окружную скорость
В других трансмиссиях дифференциалы отсутствуют или блоки-
рованы; в этом случае колеса каждой оси работают совместно
как соединенные между собой жестким валом,
Привод ведущих колес может быть выполнен по традицион-
ной схеме; от общего двигателя через коробку передач и распре-
делительную коробку вращающий момент передастся ведущим
колесам, или по схеме «мотор-колесо», когда Каждое ведущее
колесо непосредственно или через редуктор приводится от инди-
видуального электродвигателя или гидромотора.
Различная кинематическая связь между движителями машины
обусловливает определенные различия в ее тяговых свойствах.
Для двухосной машины с колесной формулой 4x4 предельное
тяговое усилие по сцеплению
7*Си “ (^кХ -Фсц mln*
где /?К1 и Rm — нормальные реакции поверхности качения на передних и задннл
колесах машины.
Если между ведущими колесами передней и задней оси отсут-
ствует межосевой дифференциал или этот дифференциал блокиро
ван, а межколесные дифференциалы каждого моста, распредели-
11 Л А
32)'
ющие вращающий момент между левыми и правыми ведущими
колесами, не блокированы, то предельное тяговое усилие, которое
может быть реализовано по условию сцепления движителей с по-
верхностью качения, будет лимитировано сцеплением колес, для
которых значение срсц будет минимальным
Тсц — ^?к1Фсц1т1п Ч- ^кгФсц 2т1п»
где Фсщ min и Фсцэ тт — минимальные коэффициенты сцепления для ведущих
колес соответственно переднего и заднего мостов машины.
При отсутствии или блокировке межосевого и межколесных
дифференциалов предельное тяговое усилие машины по сцеплению
ее движителей с поверхностью качения
п
Лц ~ ЯкаФсц Л Ч~ ^кьФсц Б Ч~ ^?квФси В Ч~ ^?кДФсц Д ~ Zj ^?к<ФсцЬ
1
где /?кА, #кД — нормальные реакции поверхности качения на каждом
ведущем колесе; фсц д, фсц в, фсц в, фсц д — коэффициенты сцепления для
соответствующих колес; п — число ведущих колес.
Как видим, при блокированных дифференциалах предельное
тяговое усилие машины будет зависеть только от сил сцепления
каждого ведущего колеса с поверхностью качения.
Для машины с колесной формулой 4x2, для которой сцепной
вес Ссц = G2, где С2 — вес, приходящийся на ее ведущий мост,
предельное тяговое усилие по сцеплению при неблокированном
дифференциале
Г*сц ~ С2фсц mln*
при межколесном блокированном дифференциале и RKB = —
= G2/2
Пц = ЯквФсц В Ч~~ ^кДфсц mln = ~~2~ (фсц В 4“ Фсц min)>
здесь предполагается, что для ведущего колеса Д — коэффициент сцепления имеет
минимальное значение.
Степень увеличения предельного тягового усилия при блоки-
ровании межколесного дифференциала характеризуется отноше-
нием
Гсц 0,5G2 (фсц В 4" Фсц mln) 0,5 (фсц В 4~ Фсц mln)
Гсц ^гФсц mln Фсц mln
Например, при фСцтщ = 0,1 и <рсцВ = 0,7
'сц 0,5(0,7 4-0,1) _ л
Тсц . 0,1
т. е. блокирование дифференциала для машины с колесной фор-
мулой 4x2 позволяет в данном случае увеличить тяговое усилие
в четыре раза.
322
Для трехосной машины со всеми ведущими колесами (колесная
формула 6x6) при соединении ведущих мостов и колес каждого
моста через дифференциалы предельное тяговое усилие
ТСц “ (^?к1 4“ ^к2 Ъ Фсц min*
где RMt Rhz, Rk3 — нормальные реакции поверхности качения на колесах пер-
вого, второго и третьего ведущих мостов.
При блокировании или отсутствии межосевого дифференциала
и наличии межколесного дифференциала
СЦ “ ^Н1Фс ц Irnln ^К’зФсц 2min 4" ^нзФсцЗтШ»
т. е. в этом случае ч яговое усилие, развиваемое машиной, зависит
от сил сцепления каждой пары колес, а не ограничивается мини-
мальным сцеплением колеса, находящегося на скользком участке
дороги.
6.3.6. Применение уравнений тягового
и мощностного балансов для решения
практических задач
1. Определение допускаемой грузоподъемности и массы
(веса) машины с преобладающим транспортным режимом работы.
Эти параметры вычисляют исходя из условия установившегося
движения машины на максимальной скорости vmax по горизон-
тальной дороге с небольшим коэффициентом сопротивления каче-
нию При этом уравнение мощностного баланса имеет вид
- N. +- Л/в
или
- л/о) п =
1000 9
где Л'Д1 Ло — в кВт; G — в Н, и — в м/с; — фактор сопротивления воздушной
среды, Н«с2/м2.
Общий вес машины
G = /п#
V4„ “Vmax 1 1000
Д - "оЛ1 1000
Задавшись, исходя из технических требований, коэффициентом
использования массы машины, представляющим собой отношение
ее грузоподъемности Q к собственной массе (т — Q),
Вт ~ Q (т — Qt
определяем допускаемую грузоподъемность машины
Q -тП +• U)
н*
323
2. Определение максимального подъема местности. который
может преодолеть машина. Для решения этой задачи восполь-
зуемся уравнением тягового баланса, записав его в виде
Рр — GfK cos а G sin а + W*L'2 + Р» ~ + G sin a -|- Ц- PB,
откуда
sin а = (Pp — w*v*)/G — f к — PJG
или
а = arcsin — PB/G)].
При установившемся движении
а — arcsin (D — fK).
Максимальное значение угла подъема по условию сцепления
движителей машины с поверхностью качения
^тах ~ arCSin
3. Определение предельного значения рабочего сопротивления
У7ршахч которое может быть реализовано на рабочем органе
машины Запишем уравнение тягового баланса
Рр = G/к cos os + G sin a + + (m + m'^ «) jp
или
Pp “ jp - Gf* cos a = - G sin a + m/p.
Но величина, стоящая в левой части уравнения, есть тяговое
усилие Тк, поэтому уравнение можно записать так:
Тк = + G sin а + mjp,
откуда
№р = Т’к ~ (G sin a + m/p).
При установившемся движении машины и а ~ 0 максимально
возможное значение рабочего сопротивления по условию сцепле-
ния движителей
р max * сц*
4. Определение сопротивления дороги (коэффициента сопротив-
ления движению которое может быть преодолено машиной,
работающей с прицепом. Применительно к данной задаче уравне-
ние тягового баланса запишем так:
Рр = (GT + <?пр) Фс + + Ря,
где GT — mTg — вес тягача, Н (здесь тт — масса тягача, кг); бдр = mDpg —
вес прицепа, Н (здесь тцр — масса прицепа, кг).
Перенеся член в левую часть уравнения и разделив затем
обе части уравнения на Ст, получим
/ ^пр\ Ри
о; ~ V ’ ~ ~аГ
324
или
£) (1 ф рK/GVf
г.д,е |
Из этого уравнения, задавшись значением находим
где
[Чр к + (тт+отпр)]/р
,mTg
-0,102
к
mT
+ (1 + I) /р*
Максимально
движителей
допустимое значение фс по условию сцепления
Фе max
1 + В *
5. Определение максимально возможной скорости движения
тягача с прицепным оборудованием. Для решения этой задачи
воспользуемся уравнением мощностного баланса, записав его так:
1000 1 1000 ' 1000
Отсюда находим скорость (м'с) движения подвижного состава
ЮООЛ^дТ)
Р “Ь 4 Р ц
Так как Ркр — Снрф
с»
ТО
ЮООЛ^дЛ
(GT 4’ СПр) 4 с 4~ Ри
6. Определение предельно возможного ускорения машины при
заданных сопротивлении дороги и инерционных параметрах ма-
шины. Запишем уравнение тягового баланса в такой форме:
Р р — Сфс “Ь Р в ~Г
(т 4' к)/р*
откуда
“ - ОФе РР —G 04с
*’ ш Шдр к G fi] in
шпр , к р° шпр к шпр
и окончательно
/р “ — Фс)С шпр
где rn'jp к ~ «I + етЦр к — суммарная приведенная (к ведущим колесам) масса
поступательно движущихся и вращающихся масс машины при разгонев
325
6.3.7. Особенности тягового расчета машин
с гидрообъемной трансмиссией
Простейшей схемой гидрообъемной трансмиссии яв-
ляется такая, в которой вал насоса непосредственно соединен
с валом двигателя, а вал гидромотора — с ведущим колесом.
При этом используют высокомоментные гидромоторы. Чаще при-
меняют схему с промежуточными редукторами, которые устанав-
ливают между двигателем и насосом и между гидромотором и
колесом.
Для выбора гидромашин необходимо знать:
1) тяговое усилие машины и коэффициент сцепления ее дви-
жителей с поверхностью качения;
2) скорость движения машины;
3) номинальную мощность и соответствующую частоту вра-
щения вала двигателя;
4) радиус ведущих колес;
5) эксплуатационную массу машины;
6) нагрузку, приходящуюся на ведущие колеса (сцепной вес
машины);
7) передаточные числа главной передачи и промежуточных
редукторов и их КПД;
8) общую схему привода, число гидромоторов и их связь
с ведущими колесами.
Тяговый расчет проводят в следующей последовательности.
Вычисляют максимальный вращающий момент, который должен
развиваться одним гидромотором,
Л/f _ max
тГМ max — « ,, „ »
Ip
(369)
где tnax - максимальный момент на движителях машины;
М
К так — с(тРфСц + /к)л/; (370)
ггм — число гидромоторов в трансмиссии; мр и г|р — передаточное число и КПД
конечных передач и промежуточных редукторов.
По значению Л4гмтах или по соответствующей ему мощности
выбирают гидромотор из числа выпускаемых промышленностью,
учитывая его технические характеристики.
Частоту вращения вала гидромотора лгм обычно выбирают
в пределах лгм = (0,70 ... 0,75) пДП1ах, где пДП1ах — максималь-
ная частота вращения вала двигателя с учетом возможного уве-
личения частоты вращения при движении машины с накатом.
По рабочему объему гидромотора VM (м3/об) и по величине
Мгм (Н-м) определяют давление р (Па) рабочей жидкости в гидро-
системе
Л 0,159Vmt)m гм >
где т]м, m — механический КПД гидромотора.
326
(371)
Минимальное давление pmln находят по формуле (371) при
Мгм mm =--(для транспортного режима работы), а макси-
мальное -- при Лентах-
При применении аксиально-поршневых насосов рП1ах — 25 ...
45 МПа; при использовании радиально-поршневых насосов ртах =
= 10 ... 15 МПа.
Требуемое передаточное число конечных передач (промежуточ-
ных редукторов)
.. __ wrMrd
Р 2,654и’
(372)
где v — заданная скорость машины, км/ч.
Правильность выбора гидромотора проверяется по окружному
усилию на ведущих колесах
(373)
Усилие Рк для транспортного режима работы не должно быть
меньше силы сопротивления дороги при установившемся движе-
нии машины и должно удовлетворять условию
(Рк — &ув1»2) С^с,
а при работе на тяговом режиме
(/’к - Сг|>с) > №р.
Насос выбирают по требуемому для гидромоторов расходу
жидкости QM (м3/с) при максимальной скорости движения vmax
машины для транспортного режима и при рабочей скорости v
для тягового режима работы:
Qm max
(374)
VMuUpZrM
Ум mln = 'fdT1.106_ •
(375)
Подачу насоса определяют по формулам:
Qh шах
— Qm niax/^lvt
Qh mln Qm min Пр»
(376)
MrMzrMWpT]p
к -d
l^M^max wp2rM
rjT] Д О6’" ’
где T)D — объемный КПД насоса.
Передаточное число редуктора, установленного между дви-
гателем и насосом,
Нр —
где лд и пн — номинальные частоты вращения валов двигателя и насоса (об/мин).
327
КОНТРОЛЬНЫЕ ВОПРОСЫ
К параграфу 6.1
1. Дайте определение радиусу качения колеса. Как можно определить его
значение при качении колеса с буксованием и скольжением?
2. В чем состоит физическая сущность явления буксования колес и как опре-
деляется коэффициент буксования?
3. От каких факторов зависит сопротивление качению колес с пневматиче-
ской шиной? Как определяется сопротивление качению ведомого колеса?
4. Покажите на схемах, какие силы и реакции нагружают ведомое, ведущее
и тормозящее колеса при их качении.
5. В чем состоит физическая сущность сцепления шины с поверхностью
качения? Какие факторы влияют на сцепление шины с поверхностью качения?
Как определяется коэффициент сцепления?
6. Дайте определение КПД колеса, напишите его выражение в общем виде.
К параграфу 6.2
7. Объясните, какие движения совершает гусеница при качении гусеничного
хода.
8. Какие факторы определяют давление гусеничной машины на основание?
Как определяется давление? Что такое центр давления гусеничного хода и как
найти его положение при установке машины на наклонной плоскости?
9. Какие сопротивления оказывают влияние на силу тяги гусеничной
машины?
К параграфу 6.3
10. Как определить тяговое усилие машины по мощности (вращающему
моменту) двигателя и по сцеплению ее движителей с поверхностью качения?
11. Запишите уравнения тягового и мощностного балансов машины, объяс-
ните физическую природу величин, входящих в эти уравнения.
12. Дайте определение динамическому фактору машины и запишите его
аналитическое выражение.
13. Что такое колесная формула машины, как она обозначается?
14. Какое влияние оказывает дифференциал в трансмиссии машины на ее
тяговые свойства?
15. Исходя из уравнений тягового и мощностного балансов определите:
максимально допустимый вес машины; максимально допустимый угол подъема,
который машина может преодолеть; максимально допустимое рабочее сопротивле-
ние на ее рабочем органе; максимально допустимое сопротивление дороги; пре-
дельные значения скорости и ускорения.
16. От каких факторов зависит тормозной путь, проходимый машиной с на-
чала торможения?
Г Л А В A 7
ОСНОВЫ ТЕОРИИ И РАСЧЕТА УСТОЙЧИВОСТИ МАШИН
ПРОТИВ ОПРОКИДЫВАНИЯ
7.1. СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ МАШИН
ПРОТИВ ОПРОКИДЫВАНИЯ
7.1.1. Общие понятия. Опорные контуры машин
Способность машины противостоять опрокидыванию
характеризует ее устойчивость против опрокидывания, которая,
с одной стороны, зависит от конструктивных параметров машины,
а, с другой стороны, от действий оператора, управляющего ма-
шиной. Условно можно различать собственную и управляемую
устойчивости машины: первая зависит от конструктивных пара-
метров машины, а вторая — от действий оператора, направленных
на сохранение устойчивости машины в критических ситуациях
(наезд или съезд с препятствия, движение на повороте по склону
и т. п.) путем соответствующего изменения скорости движения
или положения машины и ее рабочего оборудования. Элементы
машины, посредством которых оператор управляет устойчивостью,
характеризуют «активную» безопасность машины, так как она
реализуется через активные действия человека-оператора.
Различают статическую и динамическую устойчивость против
опрокидывания. Первая характеризуется равновесным состоянием
машины под действием внешних нагрузок, постоянных по значе-
нию и направлению. При расчете статической устойчивости
определяют условие, которому должна удовлетворять система
сил, нагружающих машину, чтобы последняя находилась в рав-
новесии. Состояние статического равновесия характеризуется
при этом тем, что машина длительное время пребывает в покое.
Нарушение такого состояния вызывает практически мгновенное
опрокидывание машин.
Способность машины противостоять действию максимальных
статических опрокидывающих нагрузок определяет ее предель-
ную устойчивость против опрокидывания. Опрокидывание ма-
шины сопровождается ее поворотом вокруг некоторой воображае-
мой неподвижной оси, которая называется осью опрокидывания.
В статике положение осей опрокидывания постоянно и зависит
от конструкции ходовой части машины.
В зависимости от направления опрокидывания различают оси
бокового и продольного опрокидывания. Замкнутый контур, обра-
зованный осями бокового и продольного опрокидывания, назы-
вается опорным контуром машины. Конфигурация и размеры опор-
ного контура зависят, следовательно, от положения осей опроки-
331
дывания, а также от размеров базы и колеи ходовой части ма-
шины s
На рис. 95, а, б показаны опорные контуры машин с жесткой
ходовой рамой, у которых один из мостов соединен с рамой жестко
(или через рессоры), а другой подвешен к ней с помощью горизон-
тального шарнира (такой шарнир называют обычно балансиром),
позволяющего мосту при наезде его колес на препятствие откло-
няться в поперечной вертикальной плоскости в обе стороны. Как
видим, опорные контуры таких машин представляют собой равно-
бедренные треугольники ГОгВ и БО2А, вершины которых совпа-
дают с точками 0х или 02 балансиров, а основание проходит через
точки контакта колес противоположного моста с основанием.
На рис. 95, в, г показаны опорные контуры машин с шарнирно-
сочлененной ходовой рамой. Такие машины состоят из двух
(а иногда и трех) секций, соединенных между собой шарниром
с вертикальной осью, позволяющим несущей раме «складываться»
в плане, образуя между секциями угол складывания (V Такие
машины могут иметь, кроме того, и шарнир с горизонтальной
осью, установленный в том же месте, что и шарнир с вертикальной
осью (рис. 95, в) или в месте соединения одного из мостов с рамой
(рис. 95, г); в первом случае балансирно соединенные секции могут
не только поворачиваться друг относительно друга в плане, но
и отклоняться в обе стороны в поперечной вертикальной плоскости
на угол 10 ... 25°.
В шарнирно-сочлененных машинах условно различают балан-
сирную часть, несущую ось горизонтального шарнира, и небалан-
сирную, несущую корпус этого шарнира. У погрузчика, пока-
занного на рис. 95, в, балансирной является грузовая часть,
на которой установлено рабочее оборудование, а небалансирной —
моторная часть, на которой установлен двигатель машины и ка-
бина оператора. Такое отличие важно в том отношении, что
каждая из названных частей машины имеет свой опорный контур,
от конфигурации и размеров которого зависит устойчивость ба-
лансирной и небалансирной частей машины.
Опорный контур балансирной части машины представляет со-
бой равнобедренный треугольник Д2АБ с вершиной в точке пере-
сечения продолжения оси балансира с вертикальной плоскостью,
проходящей через ось моста небалансирной части, и с основа-
нием, проходящим через центры площадок контакта колес балан-
сирной части с опорной плоскостью. Опорный контур небалан-
сирной части машины представляет собой неправильный треуголь-
ник ОЛВГ с вершиной в точке пересечения оси балансира с верти-
кальной плоскостью, проходящей через ось моста балансирной
части, и с основанием, проходящим через центры площадок кон-
такта колес небалансирной части с опорной плоскостью.
Боковые стороны описанных опорных контуров соответствуют
осям бокового опрокидывания балансирной (ЛД2 и БД2) и не-
балансирной (OJ3 и ОГГ) частей машины. Определяют боковую
332
ходовой рамой и с жесткой или подрессоренной подвеской мостов
Правильность выбранного насоса проверяют по условию
Tssb - <377>
где н — механический КПД насоса.
При проверке выполнения этого условия в формулу (377)
подставляют значения pmln и Qnmax, если расчет проводят для
транспортного режима, и ртах и QHmlni если расчет проводят
для тягового режима работы
6.3*8. Торможение машины
Тормозные свойства машин характеризуются тремя
основными параметрами: тормозящим моментом Л4Т, который
должен быть обеспечен на колесах машины, временем торможе-
ния /г и расстоянием (тормозным путем) sT, которое машина про-
ходит с момента начала торможения до полной остановки.
Необходимый тормозящий момент можно найти из уравнения
энергетического баланса машины, которым аналитически выра-
жается следующее условие: кинетическая энергия поступательно
движущихся и вращающихся масс при торможении машины,
суммированная с работой сил, препятствующих торможению на
некотором пути $т, должна быть равна работе момента торможе-
ния на том же пути, т. е.
4- «пр 4- (Рв + Ра - Pf) ns, => мте. (378)
Угол 0 поворота тормозящих колес на пути торможения связан
с величиной $т соотношением 0 ~ sT rd. Подставив это выраже-
ние 0 в уравнение (378) и разделив обе его части на получим
но здесь
wnP. г
—одджжжж—ииrr-iTT-niir » —m
s,
1 * 2
у mnp. к °
Т‘'т
О
Шпр к 4 «
I т
С учетом этого выражения окончательно находим
и г - Г(Рв Г ра - Р/) П 4 «пр. К J- rd. (379)
L ‘т J
Соответствующая тормозящая сила
ЛД
{Р* + Р« +
(380)
328
Тормозной путь при условии равномерного замедленного
движения определяем по формуле
s^vt-idL, (381)
где /т — замедление при торможении.
Экстремальное (максимальное) значение функции, описывав’
мой уравнением (381), можно найти, продифференцировав его
по времени и приравняв полученную производную нулю:
= V — = О или и = /т/,
откуда определим время t = Гт
G = эд/т
(382)
Подставив это значение /т в уравнение (381), найдем зависи-
мость между максимальным значением тормозного пути sTniax,
скоростью движения машины перед торможением и ее замедлением
при торможении
(383)
Заменив в уравнении (381) величину /т отношением v/fr. полу-
чим зависимость между скоростью машины перед торможением,
расстоянием и временем торможения
/т - 2sT/ v (384)
Для строительных самоходных пневмоколесных кранов при-
нимают /т — 0,5 м/с2, для рельсоколесных кранов /т == 1 м с2.
В табл. 20 приведены максимально допускаемые значения пути
торможения для дорожно-строительных машин.
20. Значения sT щах Д-пя дорожно-строительных машин
Типы машин Скорость, км/ч Масса машины» т »Т max (Ш при торможении
рабочем аварийном
Хвтогрейдеры 30 До 16 1 1 32
Св 16 14 41
Скреперы 32 До 23 18 55
Св. 23 до 45 2! 64
» 4 5 » 68 27 82
» 68 30 91
Фронтальные по- 24 До 16.3 9 26
грузчики и буль- Св. 16,3 до 32 И 34
дозеры >32 » 64 14 41
» 64 » 127 16 48
» 127 20 53
устойчивость каждой части отдельно и за расчетную устойчивость
машины в целом принимают наименьшую из них.
На рис. 95, г показана схема машины с шарнирно-сочлененной
рамой, секции которой соединены между собой только шарниром
с вертикальной осью, позволяющим раме «складываться» на неко-
торый угол Горизонтальный шарнир соединяет задний мост
с моторной секцией рамы. Таким образом, задний мост является
балансирной частью машины, а вся остальная ее часть — небалан-
сирной. Каждая из частей имеет свои опорные контуры, которые
строятся так же, как и для машины, показанной на рис. 95, в:
опорный контур балансирной части представляет равнобедренный
треугольник Д\ВГ, а небалансирной части — неправильный тре-
угольник О2АБ. Так как для данного типа машины масса балан-
сирно подвешенного заднего моста вр много раз меньше, чем
масса остальной части машины, расчет ее боковой устойчивости
ведется только для небалансирной части.
На рис. 95, д показан опорный контур машины с жесткой хо-
довой рамой, имеющей жесткое (или через рессоры) соединение
с обоими мостами. В таких машинах оси бокового опрокидывания
проходят через центры площадок контакта колес (а при наличии
выносных опор — через центры этих опор) с основанием; при этом
опорный контур машины имеет форму прямоугольника АБГВ.
Аналогичный опорный контур имеют гусеничные машины.
7.1.2. Оценка устойчивости машин
по нормальным реакциям на колесах машины
и по углу устойчивости
Рассмотрим общий случай определения нормальных
реакций на колесах машины, установленной на склоне с продоль-
ным и поперечным уклонами (рис. 96). Обозначая через а0 угол
продольного наклона, а через as угол поперечного (бокового)
наклона машины, из геометрических соотношений нетрудно «уста-
новить их зависимость о г угла склона а и положения машины
на склоне, определяемого углом ф:
sin а0 — sin a sin ф; sin а8 ~ sin a cos ф.
Допустим сначала, что единственной внешней нагрузкой,
действующей на машину, является сила тяжести G, приложенная
в центре масс машины в точке С с координатами и hc Силу G
можно разложить на три составляющие — нормальную Gv
— G cos а0 cos as, продольную Gt — G sin a0 и поперечную Gs -
= G cos a0 sin as. Геометрическая сумма этих сил равна, оче-
видно, равнодействующей силе G:
G = У G2n + Gi + G'j.
Каждая из отмеченных сил со стороны поверхности качения
вызовет соответствующие реакции связей — нормальные на перед-
334
Рис. 96. Схемы для определения нормальных реакций на колесах машины, уста-
новленной на площадке с продольным и поперечным уклонами
них и задних колесах RAt Б = 7?к1 и RBt г = Т?к2» боковые на
левых и правых колесах в и г и касательные реакции Тг
и Т2- При статическом положении машины реакции связей равны
по значению и противоположно направлены соответствующим
активным силам.
Не останавливаясь подробнее на методе определения опорных
реакций, который в принципе ничем не отличается от определения
реакций для плоской системы сил, рассмотренного нами ранее,
запишем окончательные выражения для нормальных реакций
поверхности качения на колесах А и Б (передних), В и Г (задних):
= ^в = 4-°Вв; Яг = 4-<^г.
335
где (( — А , В* В. Г) — коэффициенты перераспределения нормальных реакций,
определяемые по формулам:
^2 cos an cos ot s sin aQ + к u sin ав s« (385)
Ьд L L L b
Е —. ^2 L cos cos a hfi ± —— L sin a0 — t> L hc b cos a(J sin s» (386)
~~ h L cos an cos ae 8 hr + — sin a0 =r 11 L b cos aQ sin ae* s t (387)
£/• ™ 11 L • cos aQ COS <xa s 4^ — L sin &0 — h L hc b cos <zn и sin S' (388)
При установке машины на горизонтальной плоскости а0 =
= аа “ 0 и тогда
1а — is “ 4
= h/L.
Зная коэффициенты перераспределения для каждого колеса,
нетрудно найти суммарные нормальные реакции на передних
и задних колесах машины /?к1 и /?к2 и на ее левых и правых ко-
лесах RK !l и R„ а:
где
\
-г- cos an cos a* fc —у— sin а0 I;
cos afl cos as - cos sin a$;
In — cos a0 cos as — cos a0 sin
(389)
(390)
(391)
(392)
/lc , \ ,
j &1П | »
Из приведенных выражений следует, что при установке ма-
шины на гори зон гальной плоскости (а(, - ссч 0)
ii 3^2 е2 ~ 2/j/L^ = 1; £Г1 “ 1.
В выражениях (389) и (390) верхние знаки, стоящие перед
вторыми членами, относятся к случаю движения машины вниз
по склону или когда машина установлена так» что ее передние
колеса располагаются в нижней части склона, а нижние знаки
относятся к случаю движения машины вверх по склону, когда
ее передние колеса находятся на верхней части склона (см.
рис. 96, а) .
Очевидно, что равенство нулю нормальной реакции на внеш-
них по отношению к оси опрокидывания опорах будет означать
их полную разгрузку и потерю контакта с основанием, что, как
мы уже отмечали, при статическом нагружении машины равно-
сильно ее опрокидыванию. Поэтому можно воспользоваться
только что полученными выражениями для нормальных реакций
на колесах машины и из условия равенства их нулю найти усло-
вия, определяющие предельную устойчивость машины.
Так, применительно к схеме, показанной на рис. 96, а. усло-
вием продольного опрокидывания является
или, что то же = 0.
Тогда с учетом выражения (389)
/о п
-у- cos rzn cos — -у- sin a0 — 0
Обозначив /2 lc и разделив обе части этого уравнения
на cos а(), найдем предельное значение угла наклона машины
в продольной плоскости, превышение которого вызовет ее опро-
кидывание:
I
1& «О = t& а„ = —- cos а.
В дальнейшем угол ссотах мы будем обозначать через <хуот
и называть его углом продольной устойчивости машины
tg ауст ™ — cos ав. (393)
Как видим, в общем случае угол продольной устойчивости
машины зависит и от угла ее бокового наклона as: чем больше
боковой наклон машины, тем ниже ее продольная устойчивость.
При = 0
Ш ^уст " (394)
Для положения машины, показанного на рис. 96, б, потеря
боковой устойчивости наступит при полной разгрузке правых
колес машины, находящихся на верхней части склона, т. е. при
условии RK я ту-б/си 0 или при ~ 0. С учетом выраже-
ния (392) эго условие можно записать так
cos а0 cos as — -у- cos схп sin as = 0.
337
Обозначив в этом уравнении b — Ьс (поперечная координата
центра масс машины) и разделив обе части уравнения на cos а0 X
X cos as, получим:
tg max tg Cts уст (395)
здесь ocs yCT — угол боковой устойчивости машины.
Если машина установлена на склоне, углы которого а0 и as
меньше, чем углы устойчивости машины в соответствующих
направлениях, то в этом случае разности между значениями углов
устойчивости и фактическими углами наклона машины определяют
так называемые углы запаса устойчивости
^зап — О^уст а0 ИЛИ Я8 зап = CCS уСТ CXS. (396)
Аналогичным образом, воспользовавшись выражением (335),
определяющим положение центра давления хд гусеничного хода,
можно найти предельный угол наклона в продольной плоскости
для гусеничной машины. Для этого значение хд нужно прирав-
нять нулю (центр давления выходит за пределы опорной длины
гусениц или опорного контура машины) и полученное равенство
решить относительно угла а:
1с — hc tg а 0,
откуда
tg ОСтах — tgOtyCT — lc! he-
Разумеется, что положения машины, при которых углы ее
наклона достигают критических значений, равных ауст, являются
в определенном смысле теоретическими, и машина поэтому
должна всегда иметь определенный запас устойчивости. Так, для
гусеничных машин можно считать, что предельное положение
центра давления, при котором машина еще сохраняет продольную
устойчивость и может работать, соответствует хд = L, где
L — опорная длина гусениц. В этом случае
— L/6
tg «зап > -------• (397)
пс
Из-за неравномерного распределения нормальных нагрузок
на передние и задние, либо на правые и левые опоры машины,
или из-за неодинакового давления воздуха в шинах машина
получает дополнительный наклон (крен) на угол ап, обусловлен-
ный деформацией ее опор и основания (грунта):
осп —
G cos а
Мзап
L2
(398)
где Мзац — момент запаса продольной или боковой устойчивости машины;
q и с2 — соответственно суммарные приведенные жесткости основания и опор
машины, находящихся со стороны оси опрокидывания, и опор машины, внеш-
них по отношению к оси опрокидывания; L — база ходовой части машины
338
(при определении продольного крена), либо колея ходовой части (при определе-
нии поперечного крена).
При а ~ 0, q — с2 = с и среднем расположении центра масс
машины (Л43ап ~ А1уст ™ GL/2) угол крена ап — 0. С учетом
крена машины
С^зап ауст
(399)
7.1.3. Оценка устойчивости машин
по моменту запаса устойчивости
Обратимся к схеме нагружения фронтального погруз-
чика, показанной на рис. 25, а. Ось продольного опрокидывания
этого погрузчика проходит через точки контакта задних его колес
с основанием, параллельно поперечной оси машины (на схеме
она проектируется в точку В). Относительно оси опрокидывания
нормальная составляющая силы тяжести базового трактора
GT cos а и нормальная составляющая силы тяжести рабочего
оборудования Go cos а образуют так называемый удерживающий
момент, препятствующий опрокидыванию машины:
/Иуд == Gt/2 cos а + Go (Л Xot) cos а.
Продольные составляющие этих сил GT sin а и Go sin а (без
учета сил инерции) относительно той же оси образуют опрокиды-
вающий момент
Л4ОПр ~ GT/iT sin а + G^yo* sin а,
Разность между моментами /Иуд и Л4опр определяет момент
запаса устойчивости
^4зап ““ ^4 уд ^4опр
или
Мзап = [Gt/2 — Go (L + XoJ] cos a — (GT/zT + GGy0>) sin a.
Этому выражению можно придать более общий вид, заменив
силы тяжести базового трактора и рабочего оборудования их равно-
действующей G = GT + Go, которая приложена в общем центре
масс машины с координатами 1С и hc'
Тогда
Л4 зап = Glc cos a — Ghc sin a
(400)
При угле наклона a — 0, т. e. когда машина установлена на
горизонтальной плоскости, момент Л4зап имеет максимальное
значение, равное моменту устойчивости /Иуст:
^4уСТ ' Gig.
(401)
339
Потеря устойчивости машины наступает, очевидно, при ра-
венстве нулю момента запаса устойчивости, в рассматриваемом
случае при условии
Glc cos а — Ghc s*n а = 0.
Из этого равенства можно найти предельное значение угла
наклона машины, равное ауст, превышение которого вызовет
опрокидывание машины:
tga7cT = v-=-^-. 002)
пс с
Как видим, между показателями устойчивости ауст и Муст
существует вполне определенная зависимость и поэтому всегда
можно от одного показателя при оценке устойчивости перейти
к другому показателю.
Если на машину кроме сил тяжести действуют и другие силы,
например, силы ветра, касательные или центробежные силы инер-
ции, образующие дополнительный опрокидывающий момент
АМопр, то в этом случае
аП — cos а — Ghc sin а — Д А4ОпР; (403)
t OtyCT
1,08
?^4уст
— ДЛ40пр
Ghc + AA4onjJ
(404)
7.1.4. Оценка устойчивости машин
по относительным (безразмерным) показателям
Оценка устойчивости машин может основываться на
относительных показателях, в качестве которых служат различные
коэффициенты. Так, по методике Госгортехнадзора, применяемой
для расчета стреловых кранов или одноковшовых экскаваторов
с крановым оборудованием, устойчивость оценивается коэффи-
циентами грузовой Кгр и собственной Кс устойчивости, первый
из которых характеризует устойчивость крана при подъеме
груза, а второй — устойчивость крана без груза.
Коэффициент грузовой устойчивости представляет собой отно-
шение момента всех действующих на кран сил, кроме момента
силы тяжести поднимаемого груза, относительно оси опрокиды-
вания (точки А, рис. 97, а) к моменту, создаваемому весом груза
относительно той же оси опрокидывания. В общем виде
гр — (Д4С< зап ДЛ4опр) Д4гр,
где Л4С< зап — момент собственной устойчивости крана, образованный силами
тяжести (без силы тяжести груза); ДМопр — опрокидывающий момент, созда-
ваемый инерционными и ветровыми нагрузками; Мгр —- опрокидывающий момент
силы тяжести груза.
340
Рис. 97. Расчетные схемы для определения коэффициентов устойчивости:
а — грузовой, б — собственной
Применительно к схеме, показанной на рис. 97, а, эти моменты
определяются по уравнениям:
зап ~ fGn. п (уп и 4“ Ь) G*b -f- Gup (t/np “Ь Ь)] —
[Go (t/0 b) j- Gozo -j- Gn nzn n -j~ Gx^x -j- GnpZnp]i
ДЛ^ОПр " Р^ Г (a C0S O' 4" В1г1 P82^2 ~r PB323 “t- ^Ц. O2O “l”
Г^1 Рц. п- П^П. П ~~ Pц. np^npJ
*Игр — Q (a — b) cos a,
341
где Сд п, G^, GJjp и G' — нормальные составляющие соответственно сил тяжести
поворотной платформы (вместе с кабиной и рабочим оборудованием, установлен-
ным на платформе), ходовой части, противовеса и рабочего оборудования; G" п,
G'*, G^p и Gq — составляющие тех же сил тяжести, направленные вдоль коорди-
натной оси 0Y\ п. п, Рц. пр, Рц. о, Рц. г — центробежные силы, действующие
соответственно на поворотную платформу, противовес, рабочее оборудование и
груз при вращении поворотной части крана; Ри. г — сила инерции поднимаемого
груза; Рв1, Рв2 и Рвз — ветровые нагрузки; остальные обозначения ясны из
представленной схемы.
Коэффициент грузовой устойчивости определяют при следу-
ющих условиях: поднимают груз максимальной массы на макси-
мальном вылете стрелы; кран стоит на площадке, имеющей уклон а
в сторону стрелы (для гусеничных и пневмоколесных кранов,
работающих без выносных опор, а = 3°, для гусеничных и пнев-
моколесных кранов, работающих с выносными опорами, а = 1,5°;
для башенных строительных кранов а = 1,5°); кран наименьшей
базой направлен в сторону уклона; ветровые нагрузки действуют
в сторону груза (как показано на рис. 97, а), параллельно опорной
площадке крана; баки для топлива предельно заполнены, если их
расположение на кране снижает его устойчивость, или пусты,
если их расположение повышает устойчивость крана; центробеж-
ные силы учитывают только при частоте вращения поворотной
части крана п 1 об/мин.
При учете только сил тяжести (АЛ4онр = 0) в соответствии
с нормами Госгортехнадзора принимают Кгр 1,4, а при учете
момента А/Иопр/Сгр 1,15.
Коэффициент собственной устойчивости кранов определяют
при следующих условиях: уклон местности в сторону противовеса;
вылет стрелы минимальный, груза нет; наименьшей базой кран
направлен в сторону уклона; ветровые нагрузки действуют парал-
лельно опорной площадке в сторону противовеса (рис. 97, б);
баки для топлива предельно заполнены, если их расположение
уменьшает устойчивость, или пусты, если их расположение спо-
собствует устойчивости крана.
Коэффициент собственной устойчивости Кс определяют как
отношение удерживающего момента от нормальных составляющих
сил тяжести поворотной платформы, рабочего оборудования и хо-
довой части крана относительно оси опрокидывания, к опрокиды-
вающему моменту, создаваемому относительно той же оси силой
тяжести противовеса, продольными составляющими сил тяжести
поворотной платформы, рабочего оборудования и ходовой части
крана, а также ветровыми нагрузками (рис. 97, б):
К С ~ /14уд.'А1опр»
(406)
где
Муд Gfi Уп. п) 4" (^ 4 Уо) 4“
^опр ^пр (^пр • ^пргпр 4 П2П п
4 ^ого t ‘ 1" ’ ^b2z2 "" ^вЗгЗ«
342
По нормам Госгортехнадзора Кс 1,15.
Устойчивость машины можно оценивать коэффициентом устой-
чивости Куст, равным отношению суммы удерживающего мо-
мента сил тяжести Л4УД и момента от противовеса Л4пр, образован-
ных относительно оси опрокидывания, к опрокидывающему мо-
менту от продольных (поперечных) составляющих сил тяжести
и инерции относительно той же оси опрокидывания:
_______ ^УД “Ь ^пр
уСТ -Л^опр 4" Д^опр
(407)
Применительно к схеме, показанной на рис. 97, а,
^4уд — [^п. п (Уп. п
+ Ь) + G*b] cos а;
Л1пр
“ Gnp (f/np 4“ Ь) COS ОС Znp Sin а -| —- ^/пр^пр
^4опр — (Gn. п^п. п 4~ G^z* 4" GqZq) sin ОС 4”
4- [Go (уо — b) + Q(a — b)] cos а;
ДЛ40пр —
О^О 4~ *ц. А * ц. п. п^п.п
4“ Ри. г(а — 6) cos ОС.
Используя эти выражения моментов, задавшись значениями
коэффициента КуСт = М ... 1» 12, из отношения (407) можно
найти необходимую массу противовеса
мпр
тпр — “““
К уст (^опр 4“ А^опр)
(О2
~г“ #пргпр S
(408)
Запас устойчивости, которым располагает машина, можно
выразить через коэффициент запаса устойчивости
с, ___ азап __ ауст — (а
^зап ~ „—
ССуст ^уст
Коэффициент /?зап показывает, на сколько нужно увеличить
угол наклона машины, чтобы вызвать ее опрокидывание.
(409)
7.1.5. Оценка устойчивости по критической скорости
движения машины на повороте
При движении с поворотом на склоне с поперечным
уклоном с некоторой постоянной скоростью v на машину кроме
силы тяжести G действует центробежная сила
n G 2 G V2
где R — радиус кривизны траектории движения машины (рис. 98).
Наиболее опасным является случай поворота машины в сто-
рону верхней части склона, когда центробежная сила действует
в ту же сторону, что и составляющая силы тяжести G sin а8,
343
Рисв 98. Расчетная схема для определения устойчивости машины при движении
с поворотом на склоне
параллельная плоскости склона. Эти силы относительно оси опро-
кидывания образуют опрокидывающий момент
•Л^опр ~ G/i^sin ots -j — h(^
£5 *
Момент запаса устойчивости
Q v2
М3ап = Gbc cos as — Ghc sin as — hc,
& '
Критическую скорость, соответствующую условию Л4зап = О,
определяем из уравнения
Gbc cos — Ghc sin as — hc = 0,
откуда
— ^кр
cos a8 — sin ccs) Rg.
Заменяя в этом выражении отношение bc!hc величиной tg as уст,
после преобразований получаем
икр =V gR -^)
р Г 6 cosa»vf,T
(410)
Как видим, критическая скорость при движении на повороте
тем меньше, чем меньше устойчивость и радиус поворота машины
и чем больше угол склона.
344
7.1.6. Особенности расчета предельной
устойчивости шарнирно-сочлененных машин
Расчет устойчивости машин с шарнирно-сочлененной
рамой. Расчет устойчивости машин с шарнирно-сочлененной ра-
мой ведется в соответствии с методическими указаниями «Надеж-
ность в технике. Оценка параметров безопасности колесных и
гусеничных машин по опрокидыванию. Характеристики динами-
ческой и статической устойчивости» (РД 50-233—81. М.: Стан-
дарты, 1981).
Здесь мы рассмотрим порядок расчета боковой устойчивости
только двух типов шарнирно-сочлененных машин — с балансир-
ным мостом моторной части (рис. 99, а) и с балансирной секцией
грузовой части (рис. 99, б).
Сначала определим основные геометрические параметры опор-
ных контуров для схемы, показанной на рис. 99, а. Угол между
осями O2d и O2Oi
Ь = arctg ,
*2 Т *1 C0S РО
где /j = Ojd; /2 = O2d.
Угол между осями СХС2 и O2d
Рис. 99. Схемы для определения геометрических параметров опорных контуров
шарнирно-сочлененных машин:
а — с шарнирно-сочлененной рамой и балансирным мостом моторной части: б — с шар-
нирно-сочлененной рамой и с балансирной секцией грузовой части; в — одноосного тя-
гача с одноосным полуприцепом
345
Угол между осями СгС2 и К±02
е = arctg 7
где (С0С2) — (С1С2)
машины и
Угол
Угол
[здесь G1 и G'2 — силы тяжести грузовой части
ее моторной части (без балансирного моста)].
между осями 02d и O2Kt
£2 = Н — 8.
между осями 02d и 02Д
|3 = arctg -t
— b sin р0
Приведенная база небалансирной части машины
» _ 2/2 sin ^2 j ___/2 sin р0
- AXU2 - coT(p—- sin'2"(P0“ 1 sin (Ро- ы *
Расстояние между центрами масс грузовой и моторной частей
(без балансирного моста)
СХС2 = (11 н- aj2 sin2 Ро + [G1 + ai) cos ро 4- (/2 — а2)]2.
Находим геометрические параметры опорных контуров ко-
лесных машин с шарнирно-сочлененной рамой и балансирной гру-
зовой частью (рис. 98, б). Угол между осями 0^Д2 и ОГО2
Ь = arcte I +Тс^Г' ’
»1 “у »2 СОЬ Ро
где li — Old; l2 = O2d.
Угол между осями 01Д2 и 01К2
t p-rt? О* ~ si" Ро
6а - arctg + (/г _ cos ро.
Угол между осями О1Д2 и ОгГ
Ъ = arctg. ...й^А+А^Р»^-,
ь /2 cos Ро + /1 — b sin Ро
где b = В02 = ГО2.
Угол между осями ОХО2 и ОГВ
е - Ь - Bi-
Угол между осями ОгО2 и ВО2
Vj — arcsin
Vll + й + b2 + 2/j (l2 cos p0 — b sin pj
b
sin e.
Угол между осями O1O2 и ОХЛ2
~ Bl ------ &2-
346
Приведенная база балансирной (грузовой) части машины
~ 0хД2 —- -j- /2/cos Pq.
Приведенная база небалансирной (моторной) части машины
£,_ОЛ - [4 4 (/.-a.)cosp0
Далее расчет устойчивости машин проводим в следующей
последовательности.
Для машин с балансирным мостом моторной части:
1) определяем высотную координату центра масс небалан-
сирной части машины
L ____ 4 ^2^2
— Л I Л' ’
где hT — высотная координата центра масс грузовой части машины; — высот-
ная координата центра масс моторной части машины без балансирного моста;
2) вычисляем высотную координату точки приложения силы
(Gx + Gi), приведенной к точке Л\ опорного контура,
где — высота расположения балансира (горизонтального шарнира) над опор-
ной плоскостью;
3) находим расстояние от проекции точки приложения при-
веденной силы тяжести небалансирной части на плоскость опор-
ного контура до оси опрокидывания Л02:
е9 = sin (Е3 — £2);
4) рассчитываем угол устойчивости
as уст = arctg (e8/h8).
Для машин с балансирной грузовой частью (наименьшую
устойчивость чаще имеет моторная часть):
1) определяем силу тяжести грузовой части машины, приве-
денную к точке Д2 ее опорного контура,
012 — —GiaJL^
2) вычисляем силу тяжести моторной части машины, приведен-
ную к точке Л2 ее опорного контура,
G22 — G2 (jL2 — tz2)/Zz2j
3) находим результирующую приведенных сил G12 и G22
4) рассчитываем расстояние между точками приложения сил
С12 и G22
d — 1% tg ро
ctg (vt — v2);
347
5) определяем расстояние между точками приложения сил
и R%
s - d;
6) вычисляем высотную координату точки приложения силы 62Я
^22 “ (^2 ^б) ' г а
•£^2
4"
где h2 - высотная координата центра масс моторной части машины; h$ — высота
расположения балансира над опорной поверхностью, а% — продольная коорди-
ната центра масс моторной части машины,
7) находим высотную координату точки приложения силы R%
— (^22 ^б) (4“ J у 4
8) рассчитываем расстояние от проекции точки приложения
силы R2 на плоскость опорного контура небалансирной части
машины до оси опрокидывания С^В
Р, = U 1 — b + ejCtg (vt -vj . Sin ~ ЬУ.
9) определяем угол боковой устойчивости небалансирной части
машины
ауст = arctg (e,/h,).
Расчет устойчивости машин, состоящих из одноосного тягача
и полуприцепа. К характерным представителям машин., состоя-
щих из одноосного тягача и полуприцепа, относятся самоходные
скреперы. Для них наиболее опасным с точки зрения устойчивости
является положение, при котором ось опрокидывания проходит
через точки контакта с основанием одного из колес полуприцепа
(скрепера) и обоих колес тягача. Обозначим угол складывания
машины, соответствующий этому положению, через ро (рис. 99, в).
В этом единственном положении машины при расчете устой-
чивости можно принять, что тягач и полуприцеп представляют
собой одно целое и имеют общую ось опрокидывания ВБ.
Для этого случая предельную устойчивость машины рассчиты-
ваем следующим образом:
1) определяем угол складывания (острый угол между продол-
жением продольной оси скрепера и продольной осью тягача)
Ро = arcsin VdW ' arctg_T:
2) рассчитываем расстояние между центрами масс тягача
(точкой CJ и полуприцепа (точкой С2):
s = СХС, = /(/т + «)2 + (L - /п)2 + 2 (/т + a) (L - /п) cos ₽0;
348
3) находим положение точки Со приложения равнодействующей
сил тяжести тягача GT и полуприцепа Ga на оси C2CL:
х == s r ~~;
Ou
4) вычисляем высотную координату точки приложения равно-
действующей сил тяжести тягача и полуприцепа
— /iH — (Лп — Лт) —,
где и ha — высотные координаты центров масс тягача и полуприцепа;
5) определяем геометрические параметры
р = arcsin —— — sin ро; Сгп = — —;
r s 1 cos р
6) находим плечо равнодействующей сил тяжести тягача и
полуприцепа относительно оси опрокидывания
е0 = с.р = /т ;
7) рассчитываем угол устойчивости машины
ауст = arctg (e0/h0).
7.2. ДИНАМИЧЕСКАЯ УСТОЙЧИВОСТЬ МАШИН
ПРОТИВ ОПРОКИДЫВАНИЯ
7.2.1. Особенности поведения машины
при динамическом нагружении
При действии на систему динамических сил ей сооб-
щается равномерное или ускоренное (замедленное) движение.
Оно может вызвать небольшие смещения системы, не выходящие
за пределы какой-то наперед заданной малой величины, либо эти
смещения могут оказаться неограниченно большими.
Несколько нарушая строгость определения динамического
равновесия системы, которое дается в аналитической механике,
будем считать, что при нагружении машины динамическими си-
лами, действующими в сторону ее опрокидывания, она будет
находиться в динамическом равновесии, если в этих условиях
сохраняется контакт опор (колес или гусениц) машины с основа-
нием.
В статике нарушение состояния равновесия или покоя машины
неизбежно приводит к отрыву ее внешних опор от основания и
к ее опрокидыванию. При этом переход машины из одного состоя-
ния в другое происходит практически мгновенно.
Потеря динамического равновесия машины, вызывающая отрыв
ее внешних опор от основания, не обязательно связана с ее опро-
кидыванием. Все зависит от изменения движения машины после
потери контакта ее внешних опор с основанием, т. е. от того,
349
как будет развиваться процесс перехода динамической системы
из одного состояния в другое. На характер и продолжительность
переходного процесса в свою очередь влияют такие факторы, как
начальные условия движения системы, предшествующие потери
устойчивости, возмущения, действующие на входах системы, ее
инерционные свойства. В зависимости от сочетания этих факторов
начавшееся движение машины относительно оси опрокидывания
может вызвать либо кратковременный отрыв ее внешних опор от
основания, после чего машина вернется в первоначальное положе-
ние равновесия, либо это движение будет необратимым и приведет
к опрокидыванию машины. В первом случае машина является
динамически устойчивой, а во втором — динамически неустойчи-
вой против опрокидывания.
Таким образом, процесс нарушения устойчивости машины
в результате воздействия на нее внешних возмущений можно
представить состоящим из двух фаз. Первая фаза наступает при
равенстве нулю нормальной реакции на внешних опорах машины;
будем считать, что это условие соответствует состоянию гранич-
ного динамического равновесия. Вторая фаза — это движение
машины в сторону опрокидывания, связанное с отрывом ее внеш-
них опор от основания.
7.2.2. Условия граничного динамического
равновесия
Граничное динамическое равновесие, как отмечалось,
наступает при равенстве нулю нормальной динамической реакции
на внешних опорах машины. Посмотрим, как это условие выпол-
няется, например, для погрузчика, изображенного на рис. 25, б,
который движется с торможением вниз по склону. В этом случае
ось возможного продольного опрокидывания машины проходит
через точку А передних колес, находящихся на нижней части
склона, а силы инерции направлены в сторону движения машины.
Из уравнения моментов относительно точки А находим нор-
мальную реакцию на задних (т. е. внешних по отношению к оси
опрокидывания) колесах:
Rkb —
(GT/i — Goxo) cos а — (GT/zT + Goyo) sin a — (PKThT 4- Рпоу0) 4- My
Рассматривая условие граничного динамического равновесия
(из-за малости не будем учитывать величину Л4у), примем RHn =
= 0, или, что то же,
(GT/^ — GqXq) cos a — (GT/iT 4~ G^y^) sin ex —— (P^k^ /Ио£/о) 0»
Введя обозначения
Л*1усФ Gjl[ - GqXqj, Ghg = G^hy ~г* Pикс Pи^къ - • • PноУоъ
G = Gr + Go,
350
перепишем последнее уравнение так:
Л4уст cos а — Ghc sin а — РЛНС = 0.
При торможении путем полной блокировки тормозящих колес
машины максимальное значение тормозящего усилия, а следова-
тельно, и силы Рп ограничивается силой сцепления тормозящих
колес с поверхностью качения. Поэтому приняв в последнем урав-
нении Ри = С<рсц cos а и разделив обе его части на Ghc cos а,
найдем угол динамической устойчивости машины а = ад. уст:
tg ад. уст ~ Фсц = tg &УСТ “ Фсц*
Если при торможении колеса не доводятся до блокировки, то
^6 ^Д. уст = tg CZyCT ‘ jr» S*
Как видим, угол динамической устойчивости машины тем
меньше, чем меньше ее статическая устойчивость и больше ускоре-
ние /т при торможении. При этом вероятность потери устойчивости
машины возрастает при приближении значения jT/g к <рсц, т. е.
когда тормозящие колеса доводятся до блокировки.
В общем случае нормальная реакция на колесах машины равна
алгебраической сумме двух составляющих: статической, численно
равной силе тяжести mg машины, передающейся через данные
опоры, и инерционной, численно равной произведению массы,
приведенной к тем же опорам, на нормальное ускорение оси ко-
леса yCi
Рк = mg±myCr
В этом уравнении знак «+» перед вторым членом относится
к случаю, когда направление инерционной нагрузки совпадает
с направлением силы тяжести, а знак «—», когда эти силы на-
правлены в противоположные стороны. В последнем случае при
myCi mg или при
Ус^ё (411)
наступает отрыв опор машины от основания.
Для колес с пневматической шиной нормальную динамическую
реакцию поверхности качения можно выразить через радиальную
жесткость сш и радиальную деформацию уш шины. При взаимодей-
ствии колеса с неровностью поверхности качения, профиль кото-
рой описывается некоторой функцией времени ур (t), радиальная
деформация шины (рис. 100)
Уш = Ур (0 - (yct — г),
а нормальная динамическая реакция поверхности качения
— Сш[Ур(0‘ — г)]> (412)
где ус — текущая координата оси колеса; г — свободный радиус колеса.
351
Рис 100. Упрощенная модель
взаимодействия колеса с пневма-
тической шиной с неровностями
поверхности качения
откуда
Отрыв колеса от поверхности не-
ровности наступает при /?« = 0 или
при
[Ур (0 - (f/О, - г)] < о,
0 Ур (0
(413)
Таким образом,, условия гранично-
го динамического равновесия машины
можно также записать в виде выра-
жений (411) или (413), которыми со-
ответственно определяются предель-
ные значения вертикальных ускорений и перемещений колесных
осей машины при действии на нее динамических возмущений.
Оценка динамической устойчивости машин
по ^-критерию
С наступлением граничного динамического равновесия
в следующий момент времени может возникнуть движение машины
вокруг оси ее опрокидывания. Такое движение, как отмечалось,
может быть устойчивым в том смысле, что перемещение центра
масс или иной изображающей точки, принадлежащей машине,
не будет выходить из определенных границ за все время движения,
либо неустойчивым, выходящим за эти границы.
С достаточной для практики точностью изменение угла опро-
кидывания машины после потери контакта ее внешних опор
с основанием можно описать уравнением
д' = [X, sh pt — (ch pt — 1)] tg aaao,
(414)
где = tg ааап (здесь Da — величина, зависящая, в основном, от динами-
ческих параметров машины и возмущений, сообщающих машине опрокидывающее
движение); р — величина, зависящая, в основном, от момента инерции машины
относительно оси опрокидывания и от ее массы; t — текущее время.
Величина вполне определяет характер изменения функ-
ции ф (t) во времени. При Л/ < 1 кривая ср (/), описываемая урав-
нением (414) возрастает от нуля при / ™ 0 до некоторого макси-
мума, соответствующего моменту времени т, после чего начинает
снижаться до нуля (пересекает ось абсцисс в некоторой точке
/ == ta* рис. 101). При таком протекании процесса отрезок времени
от t ~ 0 до / — т определяет продолжительность движения ма-
шины в сторону опрокидывания, а отрезок времени от t ~ т
до t = /а — время движения машины в обратную сторону к поло-
жению равновесия,
352
Момент времени г, в который функция ф (7) достигает макси-
мума» определяется соотношением
т = ^!р- (415)
Из этого выражения следует, что продолжительность движе-
ния машины в сторону опрокидывания и соответственно макси-
мальное значение угла ф будут тем больше, чем больше значе-
ние X/. По мере приближения к единице максимальное значение
угла опрокидывания приближается к критическому значению
Фкр ^загь за которым процесс опрокидывания приобретает не-
обратимый характер.
При > 1 функция ф (t) имеет характер непрерывно возра-
стающей кривой, т. е. угол ф в этом случае неограниченно воз-
растает во времени.
Как видим, величина хотя и не позволяет определить
координаты изображающей точки системы в каждый момент вре-
мени ее движения» но дает возможность судить о качественных
свойствах системы» о ее поведении «в целом», отвечая на вопрос,
уходит ли ее траектория «в бесконечность» или возвращается
в прежние границы, т. е. является ли система неустойчивой
или устойчивой против опрокидывания, В этом основное от-
личие величины X* (назовем ее 1гкритерием) от показателей
устойчивости, оценивающих это свойство системы количест-
венно.
Из кривых состояний системы, приведенных на рис. 101,
видно, что кривая ср (/), соответствующая Xf == 1, асимптотически
приближается к прямой, параллельной оси абсцисс и проходя-
щей через точку ф — Эта кривая является граничной,
разделяющей плоскость состояний на область динамической устой-
чивости, лежащую ниже кривой (на рис. 101 она заштрихована)
и область динамической неустойчивости, расположенную выше
ее. Состояние системы в окрестностях граничной кривой можно
охарактеризовать как состояние неопределенной динамической
устойчивости.
¥
0,22
^зап
0,18
0,14
0,00
0,00
0,02
12,4 TL 08 /6 20 24 281 с
Рис. 101. Кривые состояний машины
при действии возмущений, нарушаю-
щих ее равновесие
От характеристики, по-
строенной по уравнению (414),
можно перейти к безразмерной
характеристике
— (chp/ — 1). (416)
В этом случае шкала ф на
графике состояний (ф, t) заме-
няется шкалой х, при этом
граничная кривая будет асимп-
57 Гоберай®# Д Д
353
I
готически приближаться к прямой, параллельной оси абсцисс и
пересекающей ось ординат в точке % = 1.
Располагая безразмерной характеристикой, можно построить
размерную характеристику состояний. Для этого необходимо
только знать расчетное значение tg азап, на которое умножается
величина %.
Заметим в заключение, что ^-критерий зависит от параметров,
значения которых в общем случае можно изменять в определен-
ных пределах, оказывая соответствующие управляющие воздей-
ствия на движение машины. Благодаря этому может оказаться
возможным довольно продолжительное движение машины со
значительными углами опрокидывания (например при управляе-
мом движении машины на вираже), не превосходящими, конечно,
критических значений.
Для определения значений Хгкритерия для различных кри-
тических ситуаций, можно воспользоваться расчетными зависи-
мостями, приведенными в работах [8, 9].
КОНТРОЛЬНЫЕ ВОПРОСЫ
К параграфу 7.1
1. Дайте определение оси опрокидывания и опорному контуру машины.
2. Постройте опорные контуры машин, отличающихся конструкцией ходо-
вой рамы и местом расположения балансира поперечного качения мостов или сек-
ций шарнирно-сочлененной рамы.
3. По каким показателям оценивается статическая (предельная) устойчи-
вость машин против опрокидывания?
4. Найдите выражение для угла устойчивости машины со стреловым рабо-
чим оборудованием, если заданы силы тяжести ковша с грузом, рабочего обору-
дования и остальной части машины, а также координаты точек приложения этих
сил относительно основания, на котором установлена машина, и оси ее опрокиды-
вания,
К параграфу 7.2
5. Опишите, как ведет себя машина при нагружении ее динамическими
силами, действующими в сторону опрокидывания?
6. Какие свойства машины, как динамической системы, характеризуются
^-критерием?
7. Напишите условия, при которых сохраняется контакт внешних опор
машины с основанием при действии на нее динамических сил.
ГЛАВд8
ОБЕСПЕЧЕНИЕ КАЧЕСТВЕННЫХ ПОКАЗАТЕЛЕЙ
И ТЕХНИЧЕСКОГО УРОВНЯ СОЗДАВАЕМОЙ ТЕХНИКИ
8.1. ТЕХНИЧЕСКИЙ УРОВЕНЬ, КАЧЕСТВО
И НАДЕЖНОСТЬ МАШИН И ОБОРУДОВАНИЯ
8.1.1. Технический уровень,
потребительские свойства и качество машин
и оборудования
Технический уровень — величина относительная, по-
казывающая количественное изменение тех или иных параметров
машины по сравнению с аналогичными параметрами машин,
принятых за эталон. Технический уровень дорожно-строительных
машин оценивают по совокупности параметров, определяющих
грузоподъемность, мощность или номинальное тяговое усилие
машины, ее производительность, точность выполняемых технологи-
ческих операций, безопасность и легкость управления, надеж-
ность и т. п.
Высокий технический уровень в сочетании с экономичностью
и высокими качественными показателями машины определяет и ее
высокие потребительские свойства, т. е. свойства, благодаря кото-
рым машина становится нужной и полезной для человека, удовлет-
воряет определенным его потребностям или потребностям общества.
Качество машины определяется, с одной стороны, ее потреби-
тельскими свойствами, а, с другой стороны, их стабильностью
в заданных режимах и условиях эксплуатации в течение срока
службы машины.
Потребительские свойства машин и оборудования наиболее
полно отражаются в их конкурентоспособности на мировом рынке.
8.1.2. Основные показатели надежности машин
и оборудования
Под надежностью машин понимается их свойство выпол-
нять свои функции в течение заданного периода времени, сохраняя
при этом в установленных пределах технико-экономические и
эксплуатационные параметры.
Надежность характеризуется определенной совокупностью
свойств; к ним относятся:
безотказность, т. е. свойство объекта непрерывно сохранять
работоспособное состояние в течение некоторого времени или
некоторой наработки;
долговечность, т. е. свойство сохранять работоспособность
до наступления предельного состояния при установленной си-
стеме технического обслуживания и ремонтов;
12*
355
ремонтопригодность, характеризующая приспособленность
объекта к предупреждению и обнаружению причин возникновения
отказов и способность восстановления работоспособного состояния
путем проведения технического обслуживания и ремонтов;
сохраняемость — свойство объекта сохранять значения пока-
зателей безотказности в течение и после хранения и транспорти-
рования.
Для оценки надежности объекта используют определенную
систему показателей. Одним из них является вероятность безот-
казной работы, определяющая вероятность того, что в опреде-
ленных условиях и режимах эксплуатации в пределах заданной
продолжительности работы, отказ изделия не возникнет.
Надежность изделия во многом зависит от его прочности, т. е.
соответствия допускаемых напряжений условиям нагружения
изделия. В действительности и напряжения и условия нагружения
не остаются постоянными: первые вследствие технологических от-
клонений, неоднородности материала и допусков, а вторые —
из-за переменных условий эксплуатации изделия. Это обстоя-
тельство не позволяет определить точные значения напряжений
в элементах конструкции, хотя мы часто можем предсказать их
вероятностные значения. В теории вероятностей такие величины
называются случайными.
В силу отмеченных причин нельзя точно определить продол-
жительность работы изделия или число отказов изделия в течение
заданного периода времени. Однако на основании достаточно боль-
шого числа опытов можно с большой достоверностью найти ве-
роятность безотказной работы изделия или судить о вероятном
числе его отказов в течение заданного отрезка времени. Пусть,
например, в результате испытаний п опытных образцов изделия
установлено, что т из них не доработало до заданного периода
времени t; в этом случае вероятность безотказной работы данного
изделия
Р (/) = (п — т)/п.
Случайные величины подчиняются определенным законам рас-
пределения, устанавливающим связь между возможными значе-
ниями случайной величины и вероятности ее появления. Такие
законы распределения часто изображают в виде кривых, построен-
ных в координатах «частота появления того или иного значения
случайной величины (ордината) — возможные значения случайной
величины (абсцисса)».
Знание законов распределения случайных величин (в рас-
сматриваемом случае законов распределения числа отказов изде-
лия или времени его исправной работы, либо напряжений или
износов изделия) позволяет с помощью математического аппарата
теории вероятностей найти их основные числовые характеристики.
В простейшем случае, когда отказы элементов машины про-
исходят только в случайные моменты времени и среднее значение
356
числа отказов одинаково для равных по длительности периодов
их работы, принимается, что показатель вероятности безотказной
работы изменяется по экспоненциальному закону, выражаемому
зависимостью
Р (/) =
где е = 2,718 — основание натурального логарифма; % — постоянная, определяю-
щая интенсивность внезапных отказов; t — произвольное время работы, для
которого определяется величина Р (/), ? — средняя наработка до отказа, ч.
Интенсивность отказов и средняя наработка до отказа свя-
заны между собой соотношением
X = 1/?.
Пусть, например, изделие, рассчитанное на 1000 ч нормальной эксплуатации,
при определенных условиях имеет интенсивность отказов 1= 0,0001. Требуется
определить вероятность безотказной работы изделия за весь 1000-часовой период
его работы, а также для любых 10 ч работы изделия в пределах заданного 1000-
часового периода.
Вероятность того, что изделие не откажет в течение 1000 ч нормальной экс-
плуатации,
Р (0 = е—о.оооыооо = е“0,1 = 0,9048 или Р (0 = 90,4%.
Следовательно, данное изделие с 90,4 %-й вероятностью проработает 1000 ч
с момента начала его эксплуатации.
Вероятность безотказной работы изделия при любых 10 ч его работы в пре-
делах 1000 часового периода
Р (0 = е-°-0001 10 = е“°-001 = 0,9990 или Р (0 = 99,9%.
Таким образом, если изделие безотказно проработало 1000 — 10 = 990 ч,
то вероятность того, что оно безотказно проработает последние 10 ч нормальной
эксплуатации равна 99,9 %.
Если же изделие непрерывно работает сверх 1000 ч, то вследствие увеличи-
вающегося износа возрастает интенсивность его отказов Л и вероятность безот-
казной работы для каждых последующих 10 ч, выходящих за пределы 1000-часо-
вого периода, соответственно уменьшается.
Вероятность безотказной работы машины зависит от вероят-
ностей ри р2, ..., рп безотказной работы составляющих ее элемен-
тов. Если элементы соединены между собой последовательно, то
отказ одного из них приводит к отказу всей машины. Если эле-
менты соединены параллельно, то отказ одного из них не вызывает
отказа всей машины.
На этом основан один из способов повышения надежности
изделия — параллельно с основным элементом устанавливается
такой же резервный элемент. В этом случае пришлось бы, напри-
мер, устанавливать два двигателя и использовать в работе только
один, две трансмиссии, а использовать одну и т. п. Для дорожно-
строительной техники такой способ практически неприемлем.
Для повышения надежности иногда применяют метод, связан-
ный с некоторым ухудшением эксплуатационных показателей
машины. Например, устанавливают на машине двигатель, кото-
рый в нормальных условиях эксплуатации работал бы с нагрузкой
только в 50 % или устанавливают на машине какой-либо узел
357
Рис. 102. Структурные схемы для расчета вероятности безотказной работы машины
при соединении элементов:
а — последовательном; б — параллельном; в, г—• комбинированном
или агрегат, рассчитанный на заведомо большие нагрузки. И хотя
в первом случае двигатель может оказаться менее экономичным
с точки зрения расхода горюче-смазочных материалов, а во втором
случае узел окажется более тяжелым, ресурс или срок их безот-
казной работы при этом повышается.
При последовательном соединении элементов вероятность без-
отказной работы машины (системы) [(рис. 102, а)]
Р (t) = Р1Р2 ... рп,
при параллельном соединении элементов (рис. 102, б)
Р (0 = 1 - [(1 - Р1) (1 - р2) ... (1 - Рп) ].
При составлении структурных схем в качестве критериев
надежности может быть принят либо показатель pit либо тру-
доемкость капитального ремонта машины. При этом в блоки
параллельного соединения включаются элементы, отказ которых
не обусловливает отказ других элементов блока, но для которых
суммарное значение вероятностей pi не превышает единицы.
Для примера рассчитаем вероятность безотказной работы автогрейдера,
для которого известны вероятности безотказной работы следующих элементов:
основной рамы р± ~ 0,91; двигателя и электрооборудования р2 = 0,035; рабочего
358
оборудования и тяговой рамы р3 = 0,24; правого и левого балансиров заднего
моста р4 = 0,32; коробки передач ръ — 0,73; рулевого механизма рв = 0,18;
гидрооборудования р1 = 0,44; заднего моста р8 = 0,20; бульдозерного отвала
р9 = 0,035; колес р10 = 0,26; карданной передачи рп — 0,48. Для данного авто-
грейдера строим структурную схему (рис. 102, г) и по ней определяем вероятность
его безотказной работы:
(0 = Pi 11 — (1 — Р<) (1 - р7)111 — (1 — Рб) (1 ~ Ре)] П - (1 “ ра) (1 - Рз) х
X (1 — р8) (1 - ре) (1 - Рю) (1 - Ри)1 = 0,264.
Для дорожно-строительных машин распространенным показа-
телем надежности является также гамма-процентный ресурс,
определяющий наработку машины tv (ч), в течение которой она
не достигнет предельного состояния с заданной (регламентирован-
ной) вероятностью у, значение которой выражается в процентах.
Если, например, у = 80 %, то это означает, что 80 % машин
данной модификации должны иметь наработку до предельного
состояния (до капитального ремонта) не менее ty часов.
Вероятность обеспечения гамма-процентного ресурса Р (tv)
определяют для машины по тем же выражениям, что и показатель
Р (t) в соответствии с ее структурной схемой. В этом случае
задаются значениями pi для отдельных элементов (сборочных
единиц) машины и согласно структурной схеме вычисляют значе-
ние Р (/Y), которое, например, при 80 %-м у-ресурсе не
должно быть меньше 0,8.
Для более полной оценки надежности изделия, определяющей
не только безотказность работы машины, но и такое ее свойство,
как ремонтопригодность, а также суммарную стоимость и трудоем-
кость технических обслуживаний, применяются комплексные
показатели надежности. К ним относится, в частности, коэффи-
циент готовности /Сгт, равный отношению продолжительности
безотказной работы машины за принятый период эксплуатации
к сумме продолжительности безотказной работы и продолжитель-
ности ремонтов за тот же период:
о»
L Пи
_ Di__________
гт “ D, О2 ’
У! + Xl
Di Oi
О,
где — количество дней работы машины в исправном состоянии за период
(D*—D2) календарных дней, включая простой по организационным и метеоро-
логическим условиям; £)рРМ — количество дней простоя машины в ремонтах.
Г>1
359
8.1.3 Основные причины отказов
дорожно-строительных машин и пути их устранения
Отказы могут быть конструкционными, которые обус-
ловлены просчетами и ошибками, допущенными на стадии проек-
тирования машины, технологическими, являющимися результатом
нарушения технологии изготовления машины; эксплуатационными,
вызванными нарушением правил эксплуатации машины.
Основными причинами отказов дорожно-строительных машин
являются перегрузки, в результате которых действительные на-
пряжения, возникающие в деталях машины, превосходят допускае-
мые значения (неправильный выбор запасов прочности); разруше-
ние сварных соединений вследствие усталостных напряжений
(неправильная конструкция сварных швов, некачественное их
выполнение), коррозионно-механическое и абразивное изнашива-
ние подшипников, зубчатых колес, шарниров цепей, рабочих
органов машины, деталей гидравлического оборудования (неудач-
ный выбор материалов, антикоррозионных покрытий, смазок,
класса чистоты трущихся поверхностей и посадок деталей, твер-
дости поверхностного слоя деталей; конструкции уплотнительных
элементов и т и ).
Серьезной проблемой для колесных дорожно-строительных
машин является повышение сроков службы шин, стоимость
эксплуатации которых составляет около 20 % от общей стоимости
эксплуатации машины и вдвое превышает стоимость эксплуатации
двигателя При этом с увеличением грузоподъемности и размеров
машины стоимость эксплуатации шин возрастает на 40 ... 50 %.
Характерной особенностью работы шин многих дорожно-
строительных машин являются большие нагрузки и сравнительно
невысокие скорости движения (по сравнению со скоростями транс-
портных машин). Такие шины должны обладать высоким сопро-
тивлением абразивному изнашиванию.
Важным является повышение надежности гидроприводов до-
рожно-строительных машин. Считают, что при давлении рабочей
жидкости выше 30 МПа 85 %-й у-ресурс гидронасосов не должен
быть меньше 5000 ч. Для его обеспечения необходимо применять
износостойкие материалы, средства надежной герметизации гидро-
систем ы, н адеж н ы е фильтры.
Характерным режимом работы зубчатых передач дорожно-
строительных машин является частое реверсирование хода машины
и переключение передач под нагрузкой. Для обеспечения ресурса
работы зубчатых передач 5000 ... 8000 ч необходима качественная
термическая обработка и цементация зубьев шестерен, применение
в редуктора х надежных уплотнени й.
На стадии проектирования надежность машины обеспечивается
ее рациональным компоновочным решением, правильным выбором
конструкционных материалов, формы и профилей деталей и эле-
ментов металлоконструкции; применением современных методов
360
21. Классификация процессов, вызывающих изнашивание к поломку
деталей машин, и средства упрочнения
Процессы,
обусловливающие
изнашивание
и поломки
Средетва
упрочнения
Примеры
упрочняемы х
деталей
Повышение
срока
службы
Изменение состоя-
ния и свойств мате-
риала деталей под
действием перемен-
ных напряжений с
большими амплиту-
дами
Изменение состоя-
ния и свойств мате-
риала деталей, рабо-
тающих в условиях
коррозионных сред,
под действием пере-
менных напряжений
с большими амплиту-
дами
Контактная уста-
лость рабочих по-
верхностей деталей
с образованием ми-
кротрещин, шелуше-
ния и других дефек-
тов
Механическое,
главным образом, аб-
разивное и кавитаци-
онно-эрозионное из-
нашивание, механи-
ческое выламывание
частиц: пластическое
деформирование и др.
Применение, каче-
ственных материа-
лов, повышение
твердости и проч-
ности рабочих по-
верхностей детален
и создание остаточ-
ных напряжений
сжатия в поверх-
ностных слоях дета-
лей
Применение каче-
ственных коррози-
онно-стойких мате-
риалов, нанесение
на рабочие поверх-
ности, предваритель-
но упрочненные на-
клепом, антикорро-
зионных покрытии
Повышение меха-
нических свойств
рабочих поверхно-
стей деталей машин
и создание равно-
мерной структуры и
напряженности в
них, применение
смазочного материа-
ла со специальными
присадками
Увеличение твер-
дости рабочих по-
верхностей деталей
и повышение содер-
жания в составе
стали карбидообра-
зующих элементов
для повышения ка-
витационно-эрозион-
ной стойкости, уве-
личения прочности
зерна
Листовые рессоры
и пружины, валы,
оси резьбовых со-
единений, штоки
штамповочных моло-
тов, зубчатые коле-
са, торсионные валы,
и др.
Те же детали, но
работающие в кор-
р < >з и о ни ы х с ре да х
Подшипники ка-
чения и скольже-
ния, направляющие
механизмов возврат-
но- посту нательного
движения, кулачки,
роликовые муфты,
зубчатые колеса, шар-
ниры качения цепей
И др.
Рабочие органы
строительных и до-
рожных машин, ле-
мех и плугов, валки
прокатных станов,
детали х од о в ы х м е
ханизмов транс-
портных машин,
гильзы цилиндров
двигателей и др. Де-
тали клапанов ги-
дравлических ма-
шин, стенки элемен-
тов уплотнения ги-
дравлических систем
и др-
По изно-
су в
2...7 раз
По изно-
су в
2 ..10 раз
По изно-
су в
3...I0 раз
По изно-
су в
10.. Л 2 раз
361
Продолжение табл. 21
Процессы, обусловливающие изнашивание и поломки Средства упрочнения Примеры упрочняемых деталей Повышение срока службы
Молекулярно-меха- нические процессы, вызывающие схваты- вание металлов при трении, вырывание частиц металла с по- верхности одной де- тали и наволакива- ние их на другую, что ведет к появле- нию на рабочих по- верхностях рисок и задиров (заедание) Повышение твер- дости поверхности трущихся пар и со- здание таких темпе- ратурных условий работы, при кото- рых не происходит снижение твердости поверхности. Не до- пускать работы трущихся пар без смазки Детали клапанов гидравлических ма- шин, стенки элемен- тов уплотнения ги- дравлических си- стем и др. По изно- су в 10... 12 раз
Коррозийные про- цессы, сопровождае- мые механическими процессами (корро- зийно-механическое изнашивание) Нанесение на ра- бочие поверхности деталей слоя метал- ла большой твердо- сти и слабо подвер- гающегося окисле- нию. Повышение класса чистоты по- верхности, устране- ние неравномерно- сти остаточных на- пряжений, особенно в тонком приповерх- ностном слое Зубчатые колеса, валы, втулки, шпин- дели станков, ци- линдры двигателей По изно- су в 5...12 раз
расчета при определении нагрузок, параметров прочности и срока
службы деталей и сборочных единиц.
Пока еще нет общепринятых методов расчета деталей на износ.
Однако, основываясь на практическом опыте и исследовании про-
цессов изнашивания и поломок деталей, можно рекомендовать
весьма эффективные средства упрочнения деталей машин
(табл. 21).
8.2. ОБЕСПЕЧЕНИЕ ТЕХНОЛОГИЧНОСТИ КОНСТРУКЦИЙ
8.2.1. Основные факторы, влияющие
на технологичность конструкции
Под технологичностью понимается такая совокупность
свойств изделия, которая при обеспечении установленных пока-
зателей качества и технического уровня и при принятых условиях
изготовления, эксплуатации и ремонта позволяет уменьшить
трудоемкость работ, затраты средств, материалов и времени по
362
сравнению с соответствующими показателями однотипных кон-
струкций изделий того же назначения.
В соответствии с этим отработка технологичности конструкции
должна быть направлена на снижение трудоемкости при изготов-
лении заготовок деталей, их обработки и сборки; снижение расхода
материала на изготовление деталей; сокращение длительности
производственного цикла.
Отработка изделия на технологичность является одной из
главных задач Единой системы технологической подготовки про-
изводства (ЕСТПП), которая выполняется на всех стадиях раз-
работки изделия, его производства и эксплуатации. На этапе
эскизного проектирования выбирают оптимальный вариант прин-
ципиальной схемы и компоновки изделия и его расчленения на
самостоятельные составные сборочные единицы. На этапе техни-
ческого проектирования определяютрациопальные формы деталей,
методы получения заготовок, системы проставления размеров и вы-
бора баз, точность изготовления, чистоту поверхности деталей и т. д.
На этой же стадии обосновывают и назначают точности сборочных
размеров, обеспечивающих технические требования к конструк-
ции, точности сборки узлов и изделия в целом; обеспечивают при-
менение унифицированных и стандартизированных материалов,
деталей и модулей; определяют виды термообработки и покрытий.
На стадии создания рабочего проекта уточняют и конкрети-
зируют условия обеспечения требований технологичности. На этом
этапе производится упрощение геометрических форм деталей и
обеспечение рационального формообразования заготовок; уточ-
няются точность изготовления деталей, чистота их поверхностей
и простановка размеров с точки зрения выбора технологических
баз; решаются вопросы взаимозаменяемости узлов и деталей
в соответствии с требованиями, предъявляемыми к выходным пара-
метрам и сборочным размерам; назначаются посадки и материалы.
На стадии рабочего проектирования обосновываются наиболее
прогрессивные технологические приемы изготовления с учетом
применяемой оснастки, механизированного инструмента, техноло-
гического оборудования и серийности производства.
Применение в конструкции изделия оригинальных деталей,
для изготовления которых требуется специальное оборудование и
сложная технологическая оснастка или переналаживание соответ-
ствующих звеньев гибкого автоматизированного производства,
может быть оправдано лишь при условии, что эго позволит улуч-
шить показатели технологичности, сократить, например, сроки
освоения серийного производства или снизить затраты труда на
изготовление деталей, если это диктуется специальными требова-
ниями к данному изделию.
От конструкции и формы деталей, а также от принятой техно-
логии их изготовления во многом зависит расход металла при
изготовлении литых и особенно кованых деталей. Замена цельно-
363
литых и цельнокованых деталей сварными из проката или комби-
нированными сварно-литыми или сварно-коваными конструкциями
с применением облегченных профилей позволяет сэкономить зна-
чительное количество металла за счет снижения массы деталей и
сокращения отходов при их изготовлении.
Снижение материалоемкости изделия — одна из важнейших
задач, которая решается при технологической отработке. Кон-
структор решает эту задачу путем выбора рациональных кон-
структорских решений, позволяющих снизить нагрузки на соот-
ветствующие элементы машины; выбора такой формы деталей или
профилей, которые обладали бы повышенной прочностью при
заданной схеме их нагружения; обоснованного выбора запасов
прочности и методов расчета, а также материалов, удовлетворя-
ющих заданным свойствам конструкции, но имеющих меньший
удельный вес. Технолог ту же задачу решает на основе разра-
ботки прогрессивных способов изготовления изделий. Совместная
работа конструктора и технолога базируется при этом на прин-
ципе: что и из чего делать решает конструктор, а как делать
решает технолог.
8.2.2. Рекомендации
по выбору конструкционных материалов
К конструкционным относятся материалы, из которых
изготовляются детали машин, подвергаемые механическому на-
гружению. Эти материалы должны удовлетворять эксплуатацион-
ным, технологическим и экономическим требованиям.
Эксплуатационные требования сводятся к обеспечению дли-
тельной и надежной работы материала в заданных условиях.
Для выполнения этих требований материал должен обладать
необходимой прочностью, зависящей от его механических свойств.
Технологические требования направлены на обеспечение наи-
меньшей трудоемкости изготовления деталей и конструкций.
Технологичность материала оценивается такими его свойствами,
как обрабатываемость резанием, давлением, способностью к литью
или свариваемостью, склонностью к деформациям при термической
обработке и т. п.
Экономические требования сводятся к тому, чтобы стоимость
материала была по возможности меньшей.
Критерием прочности при статических нагрузках является
временное сопротивление ав или предел текучести от, характери-
зующий сопротивление материала пластическим деформациям.
Так как при работе большинства деталей пластическая деформа-
ция недопустима, то их несущую способность определяют обычно
по пределу текучести. К важным характеристикам материалов
относятся также относительное удлинение б, равное отношению
приращения длины образца к его первоначальной длине, и отно-
сительное сужение площади поперечного сечения ф, определяемое
364
22. Механические характеристики сталей
Марка стали °в- МПа «’T- МПа 0, % Ф, % Марка стали МПа «’T- МПа в. % -Ф. %
Стали углеродистые качественные (ГОСТ 1050—74**) Стали легированные (ГОСТ 4543—71*)
08 320 200 33 60 15Х 700 500 12 45
10 340 210 31 55 15ХФ 750 550 13 50
20 420 250 25 55 ЗОХГТ 1500 1300 9 40
30 500 300 21 50 25ХГМ 1200 1100 10 45
40 580 340 19 45 12ХНЗА 950 700 11 55
50 640 380 14 40 12ХН4А 1150 950 10 50
60 690 410 12 35 18Х2Н4МА 1150 850 12 50
70 730 430 9 30 ЗОХГСА 1100 850 10 45
80 1100 950 6 30 40ХНМА 1100 950 12 50
85 1150 1000 6 30 38XH3MA 1200 1100 12 50
отношением величины, на которую уменьшается площадь попереч-
ного сечения образца при действии растягивающего усилия,
к первоначальной площади поперечного сечения.
Значения этих характеристик для некоторых сталей приве-
дены в табл. 22.
Стали 15, 20, 25 имеют высокую твердость, износостойкую
поверхность и вязкую сердцевину. Они применяются, в основном,
для изготовления деталей небольшого размера и не сильно нагру-
женных. Среднеуглеродистые стали 30, 35, ..., 55 отличаются
большей прочностью, но меньшей пластичностью, чем низкоугле-
родистые стали. Эти стали применяют для изготовления более
крупных деталей, работающих при невысоких циклических и
контактных нагрузках.
Низкоуглеродистые легированные стали (15Х, 25ХГМ, ЗОХГТ,
20ХНЗА, 12Х2Н4А, 18Х2Н4МА) обладают повышенными проч-
ностными свойствами в сочетании с хорошей пластичностью,
вязкостью, малой чувствительностью к надрезам и высоким сопро-
тивлениям развитию вязкой трещины. Из них изготовляются зуб-
чатые колеса и другие детали, работающие в условиях трения.
Хромоникелевые стали (12ХНЗА, 20ХНЗА, 12Х2Н4А, 20Х2Н4А)
применяют для крупных деталей ответственного назначения.
Среднелегированные углеродистые стали (40Х, 40ХГТР,
ЗОХГСА, 40ХНМА, 38ХНЗМФА, 38Х2МЮА) после термообра-
ботки повышают предел текучести и имеют хорошую вязкость
и высокое сопротивление развитию трещин. Их широко приме-
няют для деталей, работающих как при статических, так и при
циклических нагрузках (валы, штоки, шатуны и др.), концентра-
ции напряжений, а также при пониженных температурах.
Из сплавов на основе железа лучшие литейные свойства имеют
чугуны. Благодаря сочетанию этих свойств с прочностью, износо-
стойкостью, твердостью (НВ) и относительно малой стоимостью
365
23. Механические характеристики чугунов
Марка
чугуна
МПа
В
НВ
Серый чугун (ГОСТ 1412—79*)
СЧ15 СЧ25 СЧ45 150 250 450 1 1 1 1630—2290 1800—2500 2290—2890
Высокопрочный чугун (ГОСТ 7293—79* )
ВЧ 38-7 380 17 1400—1700
ВЧ 50-7 500 7 1710—2410
ВЧ 80-2 800 2 2500—3300
ВЧ 120-6 1200 2 3020—2800
Ковкий чугун (ГОСТ 1215—79)
КЧ 30-6 300 6 1000—1630
КЧ 45-7 450 7 1500—2070
КЧ 60-3 600 3 2000—2690
КЧ 80-1,5 800 1,5 2700—3200
они получили широкое распространение в конструкциях дорожно-
строительных и подъемно-транспортных машин. В табл. 23 при-
ведены механические характеристики для некоторых чугунов.
Кроме механических свойств (показателей прочности) кон-
структор при выборе материала должен учитывать способность
материала принимать требуемую форму. Этим требованиям хо-
рошо удовлетворяют такие материалы, как углеродистые, низко-
легированные стали, жаропрочные и коррозионно-стойкие сплавы,
алюминиевые, медные, магниевые и никелевые сплавы.
На выбор материала оказывают влияние и такие факторы, как
способность материала к чистовой обработке и нанесению покры-
тий, которые могут придать материалу повышенную твердость, из-
носостойкость, устойчивость против коррозии, повышенную про-
водимость, внешнюю привлекательность и т. п.
В случаях, когда в одном материале несовместимы различные
свойства, применяют комбинированные материалы, состоящие из
соединенных в одно целое чередующихся слоев двух материалов,
например металла и пластмассы. При этом в качестве металла мо-
гут применяться сталь, алюминий, медь, а в качестве пластмассо-
вых прослоек — фтористо-углеродистые, виниловые, полиамид-
ные и полиэфирные материалы. Толщина металлических слоев —
от 0,05 до 0,8 мм, пластмассовых — от 0,025 до 0,38 мм. Такие
слоистые материалы используют во многих изделиях, а также
в качестве материалов, снижающих уровни шумов и вибраций.
Все большее применение в машиностроении находят материалы
из прессованных металлических порошков. Горячее прессование
366
металлических порошков можно приравнять к некоторым анало-
гичным процессам: отливке кожухов, литью по выплавляемым
моделям, отливке штампов и инструмента для нарезки шестерен.
Каждая тонна деталей из порошков позволяет сэкономить около
двух тонн проката или литья.
Экономически выгодным является и применение различных
пластмасс (поликарбонат, полиамиды, полиуретаны, полифени-
леноксид и другие). Они имеют небольшую плотность, обладают
сравнительно высокой прочностью в сочетании с хорошими анти-
фрикционными и электроизоляционными свойствами, а также по-
ниженной горючестью. Такие пластмассы можно использовать для
изготовления ответственных нагруженных деталей, работающих
при больших перепадах температур. Один килограмм конструк-
ционных пластмасс позволяет сэкономить 3 ... 5 кг проката чер-
ных металлов, а каждая тонна термопластов экономит для народ-
ного хозяйства 5 ... 10 т цветных металлов и легированных спла-
вов.
Особое место среди конструкционных материалов занимают
композиционные материалы, получаемые по специальной техноло-
гии и представляющие собой композицию из мягкой матрицы
(полимерной, керамической или металлической) и высокопрочных
волокон. В качестве последних применяют углеродные, керами-
ческие, борные, стеклянные и органические волокна. В компози-
ционных материалах основная нагрузка воспринимается волок-
нами, а матрица служит для передачи и распределения нагрузок
между волокнами.
Композиционные материалы, кроме того, отличаются жаро-
стойкостью, абразивной и эрозионной устойчивостью, инертностью
к агрессивным средам. Эти свойства позволяют заменять ими такие
остродефицитные материалы, как никель, хром, вольфрам, молиб-
ден, а также прокат черных и цветных металлов и их спла-
вы.
При выборе материалов необходимо также учитывать влияние
технологического процесса изготовления деталей на свойства мате-
риала. Например, процесс литья под низким давлением (0,035 ...
0,105 МПа) осуществляется под действием сжатого воздуха. При
этом форма из нагретого тигля заполняется медленнее, чем под
влиянием собственного веса, в результате чего вредные газы успе-
вают удалиться, что улучшает структуру металла и его механи-
ческие свойства.
Чтобы объединить положительные свойства и ослабить отри-
цательные для двух процессов —- литья и ковки, создан комбини-
рованный процесс — литье под давлением, при котором сумми-
руются преимущества литья (быстрота процесса) и ковки (высокие
механические свойства).
Известно, что недостатком горячей штамповки является необ-
ходимость нагрева болванок и применение больших давлений
в прессе. Более экономичной является холодная штамповка тяну-
367
тых болванок: сначала болванка вытягивается (до предела теку-
чести), а затем штампуется при низком давлении пресса в нужную
форму.
Все шире в машиностроении используется энергия взрыва для
листовой штамповки малогабаритных детален из коррозионно-
стойкой стали и других сплавов. Наряду с высокой экономич-
ностью такой технологии, с помощью взрыва удается также за-
метно упрочнить многие металлы и сплавы при незначительном
изменении их формы. Применение взрыва при сварке позволяет
соединить любые металлы и сплавы, в том числе и такие, которые
нельзя сварить никакими другими способами.
8.2.3. Оценка уровня стандартизации и унификации
Важными показателями технологичности конструкции
являются уровни стандартизации и унификации. Уровень стан-
дартизации конструкций оценивается отношением числа применяе-
мых в конструкции стандартных деталей к их общему числу. Уро-
вень унификации определяется отношением числа деталей к числу
наименований деталей в конструкции.
Основная цель стандартизации состоит в установлении уровня
норм и требований при выполнении опытно-конструкторских работ,
изготовлении изделий и их эксплуатации. Охватывая все сферы
производства изделия и его эксплуатации стандарты регламенти-
руют терминологию, обозначения и правила выполнения рабочих
чертежей; методы расчета; габаритные и присоединительные раз-
меры деталей; состав и свойства применяемых материалов; со-
держание технологических процессов, параметры оборудования
и контрольно-измерительного инструмента; методы испытания и
оценки основных показателей изделия; правила и нормы эксплуа-
тации.
Унификация необходима для обеспечения рационального со-
кращения многообразия типов конструкций, материалов, техно-
логических процессов, размеров и других параметров изделия
одинакового функционального назначения. На стадии проектиро-
вания унификация позволяет использовать уже готовые чертежи
отдельных деталей или сборочных единиц, что значительно сокра-
щает сроки проектирования изделий.
Уровни стандартизации и унификации должны быть достаточно
высокими, но обязательно экономически целесообразными, чтобы
слишком высокие уровни не снижали потребительские свойства и
конкурентоспособность новой техники.
Стандартизация и унификация техники имеют два основных
преимущества. Во-первых, они обеспечивают более высокие темпы
выпуска продукции и снижают как стоимость ее изготовления,
так и стоимость ремонтов и технических обслуживании при экс-
плуатации. Во-вторых, они служат основой для специализации
производства, что наряду с высокими темпами выпуска техники,
368
позволяет значительно повысить ее качество и технический уро-
вень за счет лучшей отработки конструкций и применения прогрес-
сивной технологии.
8.2,4, Показатели удельной
материале- и энергоемкост к машин и оборудования
Оценка технологичности изделий может быть качест-
венной и количественной. Первая дается на основании опыта спе-
циалистов на всех стадиях проектирования и служит для предва-
рительного выбора варианта конструкции, Количественная оценка
дается с помощью системы показателей» которые устанавливаются
ГОСТ 14.201—83. Такие показатели отражают себестоимость из-
делия, его материале- и энергоемкость, уровни стандартизации и
унификации, а также эксплуатационные качества — удобство
технических обслуживаний и ремонтов.
Оценка технологичности должна проводиться с учетом техно-
логичности конструкции в целом, так как улучшение технологич-
ности отдельных ее элементов не всегда улучшает технико-эконо-
мические показатели изделия.
Одной из наиболее объективных сравнительных характеристик
машин является их удельная материалоемкость. Этот показатель
определяется отношением массы машины к значению ее главного
параметра и в зависимости от последнего выражается в т/т, т/м3,
т кВт, кг/Н. Таким образом, удельной материалоемкостью опреде-
ляется масса машины, приходящаяся на единицу ее грузоподъем-
ности или номинального тягового усилия, емкости рабочего ор-
гана или мощности двигателя машины.
Для погрузчиков и самоходных кранов удельная материалоем-
кость, вычисленная по отношению массы машины (т) к ее грузо-
подъемности (т), изменяется в пределах 3,5 ... 8,0 для одноков-
шовых погрузчиков, 1,40... 2,30 для автомобильных кранов,
0,95 ... 1,50 для колесных самоходных кранов на специальном
шасси. Для одноковшовых экскаваторов удельная материалоем-
кость колеблется в пределах 36 ... 38 т/м3, для самоходных скре-
перов — 2,0 ... 2,6 т/м3.
Для гусеничных бульдозеров с рыхлителями удельная мате-
риалоемкость, определенная по отношению массы машины к но-
минальному тяговому усилию, изменяется в пределах 0,15 ...
0,22 кг/Н
Для таких машин, как самоходные краны и одноковшовые по-
грузчики, удельная материалоемкость определяется также по
отношению массы машины к опрокидывающему моменту, созда-
ваемому грузом при минимальном вылете стрелы.
Иногда удельную материалоемкость относят к обобщенным
параметрам, характерным для определенного типа машин. Так,
удельная материалоемкость одноковшовых экскаваторов с обору-
дованием обратная лопата может быть определена по отношению
369
массы машины к произведению вместимости ковша на максималь-
ную глубину копания [т/(м3-м)], а для башенных кранов — по от-
ношению массы крана к произведению опрокидывающего момента
от веса груза на высоту его подъема [т/(Н-м2)].
Комплексность показателя удельной материалоемкости выра-
жается в том, что он зависит от многих факторов: от рациональ-
ного выбора типа привода с учетом режима работы и условий экс-
плуатации (например, замена механического привода объемным
гидроприводом в общем случае позволяет существенно снизить
материалоемкость машины); от кинематической схемы и передаточ-
ных чисел механизма (от этих параметров во многом зависит ком-
пактность конструкции и, следовательно, ее масса); от методов
расчета деталей и сборочных единиц машины, рационального вы-
бора запасов прочности; от применяемых материалов и технологии
изготовления деталей и машины в целом.
Другим комплексным показателем является удельная энерго-
емкость машин, определяемая через отношение суммарного рас-
хода энергии машиной Н7Э к ее главному параметру. Удельная
энергоемкость выражается иногда и через отношение расхода энер-
гии к какому-либо другому обобщенному параметру, характер-
ному для машин определенного типа.
Суммарный расход энергии
п
Ws = 2 Niti,
i=X
где и ti — расходуемая мощность и время работы t-го механизма машины;
п — число механизмов в машине.
8.3. ПАССИВНАЯ БЕЗОПАСНОСТЬ МАШИНЫ
И СРЕДСТВА ЗАЩИТЫ ОПЕРАТОРА
ПРИ ЕЕ ОПРОКИДЫВАНИИ И ОТ ПАДАЮЩИХ
ПРЕДМЕТОВ
8.3.1. Поведение машины при опрокидывании
Поведение машины после опрокидывания носит, вообще
говоря, случайный характер, что объясняется случайным харак-
тером возмущений, воздействующих на машину со стороны осно-
вания и случайностью начальных условий, определяющих состоя-
ние и положение машины в начальный момент опрокидывания.
Однако с определенным приближением к действительности пове-
дение машины при опрокидывании на склоне можно описать
функциональными зависимостями, исходя из схемы, показанной
на рис. 103. В процессе перевертывания машины на склоне ось ее
опрокидывания последовательно проходит через точки 0, /, 2, 3, ...
и соответственно изменяются места соударения машины и основа-
ния. На первой фазе опрокидывания машина поворачивается от-
370
Рис. 103. Упрощенная модель опрокидывания машины на
склоне
носительно условной оси, проходящей через точку О, а ударяется
об основание в точке 1 с некоторой начальной угловой скоростью
®Н1
где р0 — радиус-вектор, восставленный из точки О к центру масс машины: р0 =
= he cos ауст — (0,5Вк + b) sin ауст (здесь he — высотная координата центра
масс машины; Вк, b — см. на рис. 103), рс — Jcim (здесь Jc — собственный
момент инерции машины относительно оси, проходящей через ее центр масс С
и параллельной оси опрокидывания; т — масса машины, приведенная к месту
удара).
В результате удара часть кинетической энергии, которую раз-
вивает машина при вращательном движении относительно оси
опрокидывания, теряется и соответственно теряется начальная
скорость удара. Конечная скорость машины в конце удара
<ОК1 = ®Н1 (1 — vx),
где vj — коэффициент потерянных скоростей при ударе машины в точке /,
Pl + РоР1
2 i 2 *
Pc + Pl
здесь pi — радиус-вектор, восставленный из точки 1 к центру масс машины
Р1 = /(0,5BK + by + (DK - hrf .
371
Вторая фаза опрокидывания — поворот машины относительно
оси, проходящей через точку /; местом удара при этом является
верхнее ребро рамы кабины (точка 2). По той же причине, что и
для первой фазы опрокидывания, начальная скорость удара в точ-
ке 2, равная (он2, будет больше конечной скорости удара в той же
точке сок2, причем
(0К2 = <0Н2 (1 V2),
где v2 — коэффициент потерянных скоростей при ударе машины в точке 2.
На этой фазе опрокидывания дальнейшее перевертывание ма-
шины на плоскости склона может окончиться, если угловая ско-
рость сок2 окажется ниже некоторого критического значения, рав-
ного сокр. В этом случае оставшаяся после удара машины в точке
2 кинетическая энергия будет недостаточна для сообщения ей
дальнейшего движения.
При сок2 ^кр наступает следующая фаза опрокидывания —
машина переворачивается относительно оси опрокидывания, про-
ходящей через точку 2 и в конце этой фазы движения устанавли-
вается на крыше кабины; в этом случае металлоконструкцией ка-
бины воспринимается полный вес машины G.
При ударе об основание на раму кабины действует боковая
сила Рх и нормальная (вертикальная) сила Ру, которые связаны
между собой соотношением
где рс — коэффициент трения между контактирующими частями кабины и осно-
вания.
Вероятность последующих перевертываний машины возрастает
с увеличением колеи ее ходовой части, уменьшением высоты ка-
бины (если одна из осей опрокидывания проходит через точку 2) и
увеличением крутизны склона.
С увеличением момента инерции машины Jc снижается значе-
ние критической скорости сокр и повышается вероятность много-
кратного перевертывания машины на плоскости склона. Вместе
с тем, чем больше момент инерции машины, тем медленнее проис-
ходит ее опрокидывание.
При средней крутизне склона (а = 30°), плоскость которого
имеет мягкий дерновый слой на глинистом основании, средняя
угловая скорость бокового перевертывания гусеничного погруз-
чика со — 3,0 ... 3,5 рад/с.
8.3.2. Основные характеристики систем
пассивной безопасности дорожно-строительных машин
В отличие от активной безопасности, связанной с воз-
можностью активного воздействия оператора на поведение машины
в критических ситуациях, наступивший процесс опрокидывания
372
практически является неуправляемым. В этом случае безопас-
ность оператора будет зависеть только от средств защиты, кото-
рыми оборудована машина, т. е. от ее пассивной безопасности.
К таким средствам защиты относятся металлоконструкция ка-
бины, спроектированная с соблюдением специальных требований,
либо внешние защитные устройства, ограждающие кабину,
а также ремни безопасности, которыми оператор должен быть
пристегнут к своему рабочему месту.
При ударе кабины об основание происходит деформация ее
рамы, в результате чего оператор может быть травмирован элемен-
тами металлоконструкции. Во избежание этого внутренние раз-
меры кабины должны обеспечить оператору необходимую «зону
безопасности», в которую не проникают деформированные эле-
менты. Считают, что размеры «зоны безопасности» должны быть
такими, чтобы после деформации рамы кабины оставалось
свободное пространство, ограниченное горизонтальной плос-
костью на расстоянии 95 см выше сиденья оператора, вертикаль-
ными продольными плоскостями (слева и справа) на расстоянии
25 см от продольной оси машины и вертикальной плоскостью на
расстоянии 10 см сзади сиденья.
Однако тяжелые последствия для оператора могут наступить
и в результате сильного воздействия на него ударных нагрузок,
передающихся от металлоконструкции кабины. Чтобы уменьшить
ударные нагрузки, воспринимаемые оператором, необходимо «по-
гасить» часть кинетической энергии удара как за счет деформации
основания (грунта), так и за счет деформации элементов кабины
или внешних защитных устройств.
Как видим, защитное устройство кабины, с одной стороны,
должно быть достаточно жестким, чтобы при опрокидывании на
относительно мягкий грунт оно имело по возможности меньшую
деформацию. С другой стороны, защитное устройство не должно
быть слишком жестким, чтобы при опрокидывании на твердое ос-
нование, которое является плохим поглотителем энергии, возмож-
но большая часть энергии удара была бы поглощена за счет дефор-
мации защитного устройства без его разрушения.
Такие требования к защитным устройствам являются противо-
речивыми, так как очень жесткая конструкция хорошо передает
энергию, а очень мягкая — хорошо ее поглощает, но при ударе
сильно деформируется. Поэтому рационально спроектированная
конструкция защитного устройства должна сочетать преимуще-
ства каждого типа и по возможности исключать их недостатки.
Эти свойства защитного устройства зависят от его конструкции,
материала, из которого оно изготовлено, способа его крепления
к несущей конструкции машин. Так, рама кабины, установленная
как одно целое с несущей конструкцией, имеет значительно боль-
шую жесткость, чем рама, связанная с несущей конструкцией шар-
нирным соединением (штифтами). В соответствии с этим при жест-
ком креплении рамы приложенная к ней боковая нагрузка, при
373
которой не достигается предел упругости, примерно в 4 ... 4,2 раза
больше, чем при шарнирном соединении той же рамы.
Прочностные свойства защитных устройств могут быть ис-
пользованы значительно полнее, а их масса — соответственно
уменьшена, если допустить, что металлоконструкция должна
работать в упругом и пластическом диапазонах.
Вспомним известную графическую зависимость между на-
грузкой Ру вызывающей сжатие или растяжение образца, и его
деформацией А/ (закон Гука). На этой кривой могут быть выделены
участки упругой деформации z и пластической деформации
(А/— ?), а площадь, ограниченная этой кривой и осью абсцисс
графика «нагружение — деформация», будет численно равна по-
глощаемой при деформации энергии [/. Исходя из этого, допуская,
что пластические деформации развиваются при постоянном уси-
лии, соответствующем пределу текучести, получаем
и = 4- Pz + Р (Д/ - г).
Из этого выражения можно найти предельное значение силы Р,
превышение которого влечет за собой разрушение конструкции,
Д/ —0,5г ’
(417)
Считают, что металлоконструкцией защитного устройства
должно поглощаться 20 ... 40 % энергии удара; в соответствии
с этим принимают
Gil2
и --(0,20 ... 0.40)^-, (418)
где G — вес машины, Н; пн — начальная скорость удара, м/с.
Если, например, для погрузчика G = 120-103 Н, vH ~ соро = 3,27 м/с,
Д/ = 0,24 м; z — 0,05 м, то при условии, что защитное устройство должно погло-
щать 25 % энергии удара, находим:
U 0,25
120-103-3,272
2-9,81
= 16 350 Дж;
16 350
0,24 — 0,5-0,05
= 76 046 Н.
Для расчета значений Р (Н) и U (Дж) для отдельных видов
дорожно-строительных машин можно также воспользоваться сле-
дующими эмпирическими формулами:
для колесного погрузчика и бульдозера
Р = 60 000 (т/104)1/2; £7 = 12 500 (т/Ю4)1-25;
для гусеничного погрузчика и бульдозера
Р = 70 000 (т/104)1-2; U = 42 830 (т/104)1’25;
для автогреидера
Р = 70 000 (т/104)1’1;
U = 49 410 (т/104)1’25;
374
для самоходного скрепера
Р = 95 000(т/104)Ь2;
U =65 880(/и/104)Ь2\
где т — масса машины.
Вычислим параметры Р и U для того же колесного погрузчика при т =
= 12 000 кг
Р = 60 000
т
10 000 /
60 000
/ 12 000 \ 1.2
\ 10 000 /
= 74 640
/ ТП \1»25
" = 125°о(тпм) -
Вертикальная нагрузка при расчете рамы защитного устрой-
ства принимается обычно равной максимальному весу машины.
Защитные устройства, предохраняющие оператора при опро-
кидывании машины, одновременно используют и как средства его
защиты от падающих предметов. Такое устройство представляет
собой экран из стального листа или сетки, который закрывает
верхний проем защитного устройства.
Главным отличием системы защиты оператора от падающих
предметов от устройств, предохраняющих его при опрокидывании
машины, является то, что они не зависят от массы машины.
При допущении, что падающий предмет является абсолютно
жестким, а жесткость защитного экрана равна с, деформацию
экрана z при падении на него предмета, действующую на экран
силу Р и поглощаемую экраном энергию удара U можно опреде-
лить по формулам:
(419)
(420)
U = опя +
(421)
с
где Gn — вес падающего предмета, Н; Н — высота падения предмета, м.
8.4. ОБЕСПЕЧЕНИЕ ТРЕБОВАНИЙ ЭРГОНОМИКИ
И ТЕХНИЧЕСКОЙ ЭСТЕТИКИ
8.4.1. Основные эргономические показатели машин
и оборудования
Эргономика — это наука о взаимодействии человека
с машиной и производственной средой, изучающая их влияние на
состояние и трудовую деятельность человека-оператора. Можно
сказать и так: эргономика — это наука, занимающаяся исследо-
ванием системы «человек—машина—среда» с целью выработки
требований, которые должны быть предъявлены к проектируемому
375
изделию с точки зрения физических, физиологических и психофи-
зиологических особенностей человека.
К таким требованиям относятся следующие.
Гигиенические требования, определяющие гигиенические усло-
вия жизнедеятельности человека-оператора при его взаимодейст-
вии с машиной и средой. Эти требования устанавливают опреде-
ленные нормы к освещенности, температуре, влажности, запылен-
ности и токсичности воздуха, уровню шумов и вибраций, гравита-
ционным перегрузкам и ускорениям.
Антропометрические требования, определяющие соответствие
размеров, геометрии и конструкции рабочего места, например
кабины машины, антропометрическим характеристикам оператора,
т. е. форме, размерам и массе его тела, а также физиологически
рациональным позам оператора на рабочем месте при управлении
машиной.
Физиологические требования, определяющие соответствие па-
раметров машины силовым и скоростным возможностям оператора
в процессе управления машиной, учитывающие возраст, пол и
тренированность оператора.
Психофизиологические и психологические требования, опреде-
ляющие соответствие машины слуховым, зрительным, осязатель-
ным и обонятельным возможностям человека, а также психофизио-
логическим особенностям его труда, способности концентрировать
внимание, воспринимать и перерабатывать информацию извне.
В соответствии с этими требованиями установлены различные
эргономические показатели, с помощью которых дается количест-
венная или качественная оценка параметров машины и факторов
окружающей среды, которые оказывают влияние на условия ра-
боты оператора и его состояние.
По данным, приведенным в табл. 24, можно судить об удовлет-
ворительных и неудовлетворительных условиях работы опера-
тора, создаваемых рабочей средой.
Оценить микроклимат и комфортность на рабочем месте можно
по таким параметрам, как температура воздуха в кабине опера-
тора, относительная влажность воздуха и скорость его движения.
Имеется некоторый диапазон значений этих параметров, образую-
щих так называемую зону «теплового комфорта», который необ-
ходимо постоянно поддерживать на рабочем месте оператора.
Для определения зоны «теплового комфорта» можно воспользо-
ваться номограммой, показанной на рис. 104. Для этого измеряют
температуру в кабине оператора при сухом и влажном Тв воздухе.
Затем через деления на левой и правой шкалах, соответствующих
измеренным температурам, например через деления 24,5 °C на
левой шкале и 14 °C на правой, проводят прямую линию. Если
точка ее пересечения с линией, соответствующей измеренной ско-
рости воздуха, например 1 м/с, находится в пределах зоны «тепло-
вого комфорта», очерченной на номограмме, то микроклимат
в кабине можно считать удовлетворительным.
376
Рис. 104. Номограмма дли определения зоны «тепло-
вого комфорта» в кабине оператора
При умеренной деятельности оператора температура воздуха
в кабине должна быть 21,1 °C при скорости воздуха 0,1 м/с и
23,9 °C при скорости воздуха 0,5 м/с. При активной деятельности
оператора температуру воздуха в кабине рекомендуется снижать
до 16 ... 5 °C.
24. Оценка условий работы операторов по состоянию рабочей среды
в кабине машины
Параметр Условия
опти- мальные удовлетво- рительные неудовлетво- рительные (вредные)
Температура, °C 20 24,1 40,6
Обмен воздуха, м3/ч 33 24,6 4,92
Скорость течения воздуха, м/с 0,203 0,072 0
Относительная влажность, % 30 ... 70 Менее 30 15
или более 70
Содержание, %:
двуокиси углерода 0,03 3 10
окиси углерода 0 0.01 0,03
Уровень звукового давления, дБ 45 65 120
Амплитуда колебаний, мм 0,0203 0,228 1,525
377
Микроклимат в кабине обеспечивается теплоизоляцией, позво-
ляющей поддерживать в кабине постоянную температуру, а также
установкой в кабине кондиционеров, обеспечивающих заданную
температуру, и теплоэлектровентиляторов для подогрева и равно-
мерного распределения воздуха в кабине.
Физиологическим возможностям человека должны соответст-
вовать усилия и перемещения, создаваемые оператором на рыча-
гах и педалях системы управления. Так, усилия (Н) на рулевом
колесе не должны превышать 100 ... 150 Н, на рычаге переключе-
ния скоростей 10 ... 130 Н, на рычаге ручного тормоза — 100 ...
150 Н, на педали акселератора — 30 ... 50 Н, на педали муфты
сцепления — 170—250 Н, на педали ножного тормоза — 200 ...
300 Н. Перемещения рукояти коротких рычагов не должны пре-
вышать 150 ... 200 мм, длинных рычагов — 300 ... 350 мм; ход педа-
лей не должен быть больше 120 ... 200 мм, а для педалей, переме-
щаемых поворотом стопы, угол поворота не должен превосхо-
дить 30°.
Усилия на рычагах и педалях управления измеряют при дви-
жении машины по твердому основанию и на неуплотненной пло-
щадке. Ход рычагов и педалей можно измерять при неподвижной
машине.
Важным показателем, влияющим на условия и безопасность
труда оператора, является обзорность с рабочего места, которая
характеризуется коэффициентами горизонтальной /Срор и верти-
кальной Кверт обзорности
Кгор = & вид/(^ общ & маш)э ^Сверт = фд/фтр»
где Гвид — видимая с рабочего места оператора часть общей площади; ГОбщ —
общая площадь площадки, для которой измеряется обзорность; FMain— площадь
проекции машины на опорную площадку; <рд и фтр — действительный и требуе-
мый углы обзорности.
Угол обзорности определяют как сумму двух углов <pt и <р2.
Первый образован горизонталью, проходящей на уровне глаз
сидящего оператора, и исходящим из той же точки лучом, направ-
ленным вверх и проходящим через верхнюю кромку лобового окна
кабины, либо через головку стрелы рабочего оборудования ма-
шины при верхнем положении стрелы. Угол <р2 образован той же
горизонталью и направленным вниз лучом, проходящим через
нижнюю точку лобового окна, либо через режущую кромку рабо-
чего органа при его нижнем положении.
Угол обзорности вперед не должен быть меньше 220°; оператор
должен видеть основание (дорогу) на расстоянии не менее 3 м
впереди машины, а также хорошо видеть ее рабочие органы.
Для комплексного определения эргономических свойств ма-
шины часто используют метод экспертных оценок. При примене-
нии этого метода каждому эргономическому показателю, например,
усилиям на рычагах и педалях управления, уровням вибрации и
шума, микроклимату в кабине и т. д., присваивается свой весовой
378
п
коэффициент гщ (при этом для всех и показателей = 1).
i=i
Каждый весовой коэффициент умножают на число баллов, про-
ставленное экспертами для данного показателя (число баллов
тем больше, чем лучше микроклимат, меньше усилиц на рычагах
и педалях, ниже уровни вибрации и шума) и их произведения сум-
мируют. Чем выше полученная сумма, тем выше в целом эргоно-
мические свойства машины.
Комплексную оценку эргономических свойств можно также
определить по формуле
п
•^Сэрг = jZj
i=\
где Ф/ — относительный эргономический коэффициент для r-го показателя;
при полном соответствии норме Ф/ = 1; если данный показатель лучше норма-
тивного, то Ф = 1,1, если хуже, то Ф/ = 0.
8.4.2. Снижение уровня колебаний рабочего места
оператора и его защита от шумов и вибраций
Природа и параметры колебаний. Проблема снижения
уровня колебаний первоначально возникла в связи с усталостным
разрушением конструкций под действием повторно-переменных
нагрузок. Но и в тех случаях, когда эту опасность можно устра-
нить, сохраняется другая опасность — вредное влияние колеба-
ний на человека.
Разные люди в зависимости от физиологических особенностей
и состояния обладают неодинаковой чувствительностью к колеба-
ниям, источником которых являются практически все машины.
Колебания или вибрации (к последним обычно относят колебания,
происходящие с частотой от 1 Гц и выше) возникают при работе
двигателя и трансмиссии машины, при ее движении вследствие
взаимодействия ходовой части машины с неровностями дороги,
при работе кранов из-за раскачивания подвешенного на канате
груза и т. д.
В механике различают три основных вида колебаний:
1) собственные или свободные колебания, происходящие,
когда после нарушения равновесия системы она оказывается пре-
доставленной самой себе (примерами таких' колебаний может
служить качание маятника после того, как ему было сообщено
воздействие извне; раскачивание двигателя машины при его
пуске и остановке);
2) вынужденные колебания, возникающие в системе, когда она
подвергается действию переменной силы, изменяющейся по пе-
риодическому или апериодическому закону;
3) самовозбуждающиеся колебания («автоколебания»); они от-
личаются от вынужденных колебаний тем, что, возникнув от ка-
кого-то источника энергии, затем сами являются источником воз-
379
буждения и внешние силы, действующие на автоколебательную
систему, определяются движением самой системы (примером та-
ких колебаний может служить раскачивание вагонов поезда, кото-
рое возникает при движении с достаточно большими скоростями
из-за соударения реборд колес о боковые поверхности рельсов,
хотя в этом случае на систему не действуют никакие периодиче-
ские внешние возмущения — источником колебаний служит энер-
гия движущихся вагонов).
Колебательные процессы характеризуются следующими пара-
метрами: частотой, амплитудой, скоростью колебаний, ускорением
и скоростью изменения ускорений. Последние три параметра яв-
ляются соответственно первой, второй и третьей производной пере-
мещения (амплитуды) от времени.
Человек может выдерживать весьма большие амплитуды коле-
баний, если направление движения изменяется не слишком часто.
С увеличением частоты колебаний их воздействие на состояние
человека становится более ощутимым; при этом при одинаковой
частоте колебаний человек легче воспринимает меньшие ампли-
туды.
Существуют определенные области неприятных частот. На-
пример, человек, сидящий в кресле, совершающем вертикальные
колебания, остро реагирует на частоту около 5 Гц из-за интенсив-
ного колебания плечевого пояса на этой частоте.
По данным Киевского института гигиены труда и профзаболе-
ваний предельно допустимые значения параметров вертикальных
колебаний в течение восьмичасового рабочего дня должны быть
следующими:
Частота, Гц ... . !
Скорость, см/с . . . 12,6
Ускорение, м/сЗ . . 0,79
2 4 8 16 31,5
7,1 2,5 1,3 1,1 1,1
0,89 0,63 0,65 1,1 2,17
При работе машины уровень горизонтальных ускорений обычно
бывает ниже, чем вертикальных, однако степень чувствительности
к ним сидящего оператора заметно больше.
Защита от колебаний. Высокочастотные колебания или вибра-
ции, создаваемые работающим двигателем и трансмиссией машины,
передаются через металлические элементы кабины. Их воздейст-
вие на оператора может быть ослаблено, если металлическим яв-
ляется только каркас кабины, а ее обшивка выполнена из пластич-
ного материала, не способного к возбуждению вибраций.
Другим направлением изоляции оператора от вибраций, пере-
даваемых от двигателя и трансмиссии, является установка пульта
управления на упругих элементах, поглощающих высокочастот-
ные колебания. Положительные результаты дает также замена
механических механизмов системы управления объемными
гидравлическими.
Вертикальные колебания передаются через сиденье оператора
в том случае, когда их частота по крайней мере вдвое меньше ча-
380
Рис. 105. Схемы механизмов подвеса сидений операторов:
а — х-обраэного со стержнем, работающим на скручивание; б — х-обраэного с пружиной
растяжения; в — параллелограммного с пружиной растяжения; г — параллелограммного
с пружиной сжатия; д — параллелограммного со стержнем, работающим на скручива-
ние; е — с роликовым перемещением и пружиной растяжения; ж — параллелограммного
с пневматическим упругим элементом; з — параллелограммного с пружиной кручения
стоты собственных колебаний сиденья. Практически их частота
должна быть не менее 10 Гц. Поэтому передаваемые через сиденье
колебания от двигателя, работающего с частотой вращения
1000 об/мин, не оказывают на оператора сколько-нибудь замет-
ного влияния. Более чувствительны колебания двигателя, пере-
дающиеся на ноги и руки оператора через педали управления и
рулевое колесо, которые оказывают вредное влияние на сосуды
пальцев, суставы и пр.
Воздействие низкочастотных колебаний машины (до 15 Гц)
обусловлено взаимодействием ее ходовой части с дорогой. Уровень
этих колебаний может быть снижен путем подрессоривания и амор-
тизации всей машины, подрессоривания кабины, что делает ее
движения практически не зависящими от колебаний корпуса
машины, или путем использования специальных конструкций
сидений, обеспечивающих эффективное гашение колебаний, пере-
дающихся оператору. Учитывая, что подрессоривание многих
дорожно-строительных машин ухудшает их устойчивость и каче-
ство выполняемых ими работ, последние два направления, осо-
бенно для машин тяжелого класса, представляются наиболее пред-
почтительными.
На рис. 105 показаны различные схемы подвеса и подрессори-
вания сидений тракторов и прочих самоходных машин, рекомен-
дуемых в качестве устройств, снижающих опасные для операторов
уровни вибраций. Основными являются х-образный (рис. 105, а, б)
и параллелограммный (рис.'105, в, з) механизмы подвеса сидений.
Первый отличается компактностью и отсутствием неприятных
горизонтальных колебаний, что присуще параллелограммным ме-
ханизмам подвеса сидений.
381
Шумы и их измерение. Колебания в диапазоне от 18 до
18 000 Гц являются уже слышимыми; такие вибрации вызывают
еще одно неприятное для человека ощущение — шум.
Для измерения шумов служит прибор, называемый шумоме-
ром. Он показывает уровень звукового давления, измеряемого
в децибелах (дБ).
Весь звуковой диапазон подразделяется на низкочастотный
(до 400 Гц), среднечастотный (400 ... 1000 Гц) и высокочастотный
(свыше 1000 Гц). Но слух различает не только частотный состав,
но и громкость. Понятием громкость обычно обозначается интен-
сивность слухового ощущения, которая является функцией уровня
звукового давления, т. е. частотного состава звука и некоторых
других факторов. Единицей громкости является фон. Громкость
в 1 фон имеет тон частоты 1000 Гц при уровне звукового давления
40 дБ.
Уровень звукового давления (дБ)
Ь = 20 lg (pl р0),
где р — среднее квадратическое значение звукового давления, Па; р0 — исход-
ное значение звукового давления; в воздухе р0 ~ 2-10^ Па.
Мощность источника шума или энергия, переносимая звуковой
волной в единицу времени через поверхность, перпендикулярную
распространению волны J (Вт/м2) (эта величина называется также
интенсивностью звука), пропорциональна р2. Зависимость уровня
звукового давления от интенсивности звука определяется по фор-
муле
L = 101g-/-,
"О
где J — интенсивность звука в данной точке; Jo — интенсивность звука, соот-
ветствующая порогу слышимости при частоте 100 Гц; Jo = 10~12 Вт/м2.
Исследования показывают, что уровень звукового давления
до 85 дБ не представляет неприятности для человека; воздействие
шума с уровнем звукового давления 90 дБ в течение 8 ч снижает
на 20 дБ восприимчивость человека к звуку в диапазоне частот
1000 ...4000 Гц.
На рис. 106 приведена номограмма, позволяющая быстро нахо-
дить уровень звукового давления, измеренный в разных точках
конструкции. Например, нужно определить средний уровень зву-
кового давления, если известны его значения 79, 80 и 83 дБ в раз-
ных условиях. Для этого от деления 79 на шкале А проводят ли-
нию С к цифре 80 на шкале В. На шкале L находят на пересечении
с линией С значение 82,5 дБ. Далее от этого значения 82,5 дБ на
шкале А проводят вспомогательную линию D к делению 83 шкалы
В. На пересечении линии D со шкалой L находят окончательный
результат 85,8 дБ.
Номограмма охватывает уровни звукового давления в преде-
лах 79 ... 100 дБ. Если требуется оперировать с более низкими
382
/9
Рис. 106. Номограмма для
определения характеристи-
ки шума, производимого
машиной
уровнями, то из значении шкал номо-
граммы вычитают 10. Например, нужно
определить среднее значение уровня
звукового давления при 77 и 75 дБ,
которые отсутствуют на номограмме. В
этом случае берут на шкале L цифру
87 (87 — 10 — 77) и проводят вспомо-
гательную линию Е к значению 85
(85 — 10 = 75). Продолжая линию Е
до шкалы В находят искомый резуль-
тат: 82,7 — 10 — 72,7 дБ. Итак, сред-
ний уровень звукового давления равен
72,7 дБ.
Защита от шума и вибраций. Наибо-
лее эффективным способом борьбы с
шумом является уничтожение его в ис-
точнике. Для звуков ударного проис-
хождения это достигается применением
материалов и конструкций, не способ-
ных приходить в интенсивное колеба-
ние. При наличии в механизме металли-
ческих деталей, способных к мембран-
ным колебаниям, хорошие результаты
дает, например, замена этих деталей текстолитовыми и пластмас-
совыми деталями или подклейка к ним демпфирующих мате-
риалов — асбестовой или хлопчатобумажной ткани, войлока, кар-
тона и т. п. Немалое значение имеют точность и чистота обра-
ботки соприкасающихся поверхностей деталей, устранение зазоров
и свободного хода в механизмах.
Другим средством снижения шума и вибраций является амор-
тизация колеблющихся элементов, отделение механизмов, являю-
щихся источником вибраций, от соседних с ними элементов с по-
мощью различных амортизирующих прокладок и пружин. Однако
такой способ снижения шума рационален только в том случае,
когда его источником являются вибрации элементов конструкции,
на которых крепятся механизмы.
Если же механизм излучает шум непосредственно в окружаю-
щую среду, то помимо амортизационных устройств необходимо
применять специальные звукоизоляционные кожухи, выполнен-
ные из звукопоглощающего материала. Так, например, по дан-
ным фирмы «Оренштейн и Коппель» (ФРГ) применение звукопог-
лощающего материала для капота двигателя автогрейдера и усо-
вершенствованной конструкции глушителя позволило уровень
звукового давления в кабине снизить на 18 дБ (из которых 10 дБ —
путем установки звукопоглощающего капота и 8 дБ —путем
установки глушителя).
Для снижения шума могут оказаться весьма эффективными
антивибрационные покрытия, которые сокращают продолжитель-
383
ность вибраций резонирующих поверхностей, уменьшают гром*
кость звука, издаваемого вибрирующей поверхностью, обладают
звукоизолирующими и, кроме того, теплоизолирующими и анти-
коррозионными свойствами.
8.4.3. Требования технической эстетики
при проектировании машин и оборудования
Опыт создания современной техники показывает, что
машины, имеющие красивые и отвечающие их назначению формы
и геометрические пропорции, хорошее цветовое оформление и
удовлетворяющие другим требованиям технической эстетики, от-
личаются, как правило, и высокими технико-эксплуатационными
характеристиками. В большой степени такая связь между техни-
ческим и художественным решениями конструкции объясняется
тем, что эстетически совершенные машины и оборудование наи-
более полно удовлетворяют психофизиологическим и психологи-
ческим особенностям человека-оператора, а это, в свою очередь,
улучшает условия его труда и позволяет лучше использовать тех-
нические возможности машины.
В основу проектирования машин с учетом требований техни-
ческой эстетики положены определенные художественные прин-
ципы и такие понятия, как композиция, пропорциональность,
контр астность, р асчлененность, си мметр и я.
Композиция изделия является наиболее обобщенным понятием.
Она определяет общий облик и силуэт машины, ее формы и цвето-
вое оформление, правильное сочетание масс ее основных частей, |
рациональное размещение органов управления и контрольных
приборов в кабине оператора.
Сточки зрения внешнего вида машины большое значение имеет
пропорциональность размеров отдельных ее частей. Например,
«толстый» сварной шов, соединяющий небольшие по размерам ча-
сти корпуса машины, не только противоречит требованиям эсте-
тики, но и несовершенен с точки зрения технологии. Иногда с по-
зиций технической эстетики приходится несколько увеличивать
размеры отдельных элементов машины по сравнению с теми, кото-
рые получены при расчете на прочность, чтобы избежать диспро-
порции между отдельными частями машины.
Понятие контрастности может относиться к размерам, формам,
массе, направлениям линий или поверхностей машины, к цвету
Контрастность, означающая в технической эстетике различие-
мость отдельных элементов машины, позволяет сделать ее общий
вид выразительным и ярким. Особое значение имеет цветовая кон-
трастность (черное—белое и т. д.), позволяющая различать от- |
дельные части машины, например ее рабочее оборудование и ба- ।
зовое шасси, в условиях плохой видимости, что повышает безо пас- •
ность машины. То же можно сказать и о контрастности форм и
размеров рычагов и педалей управления, что особенно важно для
384
многооперационных машин: соблюдение этого принципа исклю-
чает возможность перепутать рычаги и педали, управляющие раз-
личными движениями рабочего оборудования и базовой машины,
позволяя оператору быстрее и с меньшим напряжением управлять
машиной, а это, в свою очередь, является важным фактором повы-
шения производительности труда.
Расчлененность формы характеризуется разделением масс,
площадей и линий на отдельные небольшие части с помощью
цвета, канавок, валиков или выштампованных ребер жесткости.
Такое членение, с одной стороны, должно быть подчинено требова-
ниям технической эстетики, а с другой стороны — учитывать кон-
структивные и технологические факторы, особенно в тех случаях,
когда машина собирается из блоков-модулей.
Одной из особенностей технической эстетики является необхо-
димость тесной увязки принципов художественного проектирова-
ния с конструкторско-технологическими требованиями к машине.
Последние, исходя из условий прочности конструкции или устой-
чивости машины, возможности применения того или иного мате-
риала с заданными механическими свойствами, снижения мате-
риалоемкости конструкции на основе рационального выбора
формы и размеров ее элементов и т. п., вносят определенные огра-
ничения в художественное оформление машины. Поэтому при
проектировании необходимо найти такие решения, которые, удо-
влетворяя ее функциональному назначению и требованиям тех-
нического задания, позволяли бы создать машину, удовлетворяю-
щую и требованиям технической эстетики.
КОНТРОЛЬНЫЕ ВОПРОСЫ
К параграфу 8.1
1. Дайте определение техническому уровню, потребительским свойствам
и качеству машин и оборудования.
2. Что понимается под надежностью и долговечностью машин и оборудова-
ния? С помощью каких показателей они оцениваются?
3. Какие средства повышения надежности дорожно-строительных машин
Вам известны?
К параграфу 8.2
4. Что понимают под технологичностью конструкции? Какие факторы влияют
на технологичность машин и оборудования?
5. Назовите основные механические свойства конструкционных материалов.
6. Как оцениваются уровни стандартизации и унификации машин и обору-
дования?
7. Какие свойства характеризуются показателями удельной материало-
и энергоемкости машин и оборудования?
13 Гоберман Л. А.
385
К параграфу 8.3
8. Что такое пассивная безопасность машин, какими средствами она обеспе-
чивается?
9. Какие факторы влияют на поведение машины при опрокидывании на
склоне?
10. Назовите основные требования, предъявляемые к защитным устройствам,
предохраняющим оператора при опрокидывании машины и от падающих пред-
метов.
К параграфу 8.4
11. Чем занимается эргономика? Какие требования предъявляет эргономика
к проектируемой машине?
12. Какими параметрами определяется микроклимат в кабине оператора?
13. Какими показателями характеризуется обзорность из кабины оператора?
14. Какие типы механических колебаний Вам известны? Какими параме-
трами характеризуются колебательные процессы?
15. Назовите основные средства защиты от колебаний дорожно-строитель-
ных машин.
16. Какие показатели применяются для измерения шумов?
17. Назовите основные средства защиты от шумов.
ГЛАВА9
ТЕХНИКО-ЭКОНОМИЧЕСКИЕ ОСНОВЫ
ПРОЕКТИРОВАНИЯ МАШИН И ОБОРУДОВАНИЯ
9.1. РАСЧЕТ ПРОИЗВОДИТЕЛЬНОСТИ МАШИН
И ОБОРУДОВАНИЯ
9.1.1. Виды производительности машин
Производительность машины определяет ее способность
выполнять в единицу времени рабочие операции, связанные с пере-
работкой материалов, транспортированием грузов и т. п. Чем
меньше времени затрачивает машина на выполнение таких опера-
ций, тем выше ее производительность.
Производительность машины может совпадать с производи-
тельностью труда, но может и отличаться от нее. Последнее имеет
место тогда, когда один оператор обслуживает несколько машин
или на операции, выполняемой одной машиной, занято несколько
рабочих. В первом случае производительность труда будет выше,
а во втором случае — ниже производительности одной машины.
Различают теоретическую и фактическую производительность
машины. Теоретическая производительность машины измеряется
количеством выполненной за единицу времени работы при усло-
вии, что все факторы, связанные с потерей времени или материала
в течение принятого рабочего периода, отсутствуют. Факти-
ческая производительность машины измеряется количеством вы-
полненной в единицу времени работы в условиях нормальной
эксплуатации.
Теоретическая производительность машин зависит от следую-
щих основных факторов:
количества одновременно перерабатываемого или перемещае-
мого материала (этот фактор определяется, в основном, грузо-
подъемностью машины, вместимостью ковша или шириной захвата
рабочего органа); скорости выполнения рабочих операций, кото-
рая зависит от характеристик и параметров привода машин (меха-
нической характеристики и частоты вращения вала двигателя,
диапазона изменения передаточных чисел механизма), а также
кинематических параметров рабочего оборудования;
принципа действия: периодического (циклического) или не-
прерывного; машины и оборудование периодического действия
выполняют операции циклично — рабочие ходы чередуются с хо-
лостыми; машины и оборудование непрерывного действия обеспе-
чивают непрерывность выполнения технологических процессов;
степени совмещения отдельных операций цикла (для машин перио-
дического действия); этот фактор определяется, в основном, кон-
13*
387
струкцией привода и системы управления машиной и ее рабочим
оборудованием.
Теоретическая производительность машины определяется по
номинальным значениям ее технико-конструктивных параметров.
Максимально возможная фактическая производительность,
найденная с учетом номинальных параметров машины при непре-
рывной работе в течение 1 ч определяет техническую производи-
тельность машины
где /7теор — теоретическая производительность; kH — коэффициент, учитываю-
щий неполное использование номинальной вместимости рабочего органа или уста-
новленной грузоподъемности машины; kD — коэффициент, учитывающий сни-
жение скорости рабочего органа или машины по сравнению с расчетной; Лр —
коэффициент разрыхления грунта.
Производительность, определенная с учетом использования
номинальных параметров машины, а также с учетом потерь рабо-
чего времени из-за обеденных перерывов, по организационным,
техническим и метеорологическим причинам, называется экс-
плуатационной и определяется по формуле
/7Э = = П
теорп'Нп'г>п'в»
где kB — коэффициент использования рабочего времени машины.
Для машин циклического действия коэффициент kB является
отношением времени одного цикла машины, вычисленного без
учета потерь рабочего времени /ц, к фактическому времени цикла,
определенному с учетом указанных потерь,
^В -- *4“ А^ц)
где А/ц — потери рабочего времени, отнесенные к одному циклу.
Так как потери рабочего времени исчисляются обычно на одну
машино-смену, то для определения коэффициента kB потери рабо-
чего времени ЛГСМ за смену нужно предварительно привести ко
времени цикла
д/ = .АТсм /
*-“Ц - гр *ц»
1 см
где Тсм — продолжительность одной машино-смены, ч.
Для машин непрерывного действия коэффициент kB определяют
как отношение 1 ч чистого рабочего времени к суммарному вре-
мени с учетом потерь по указанным выше причинам:
kB - 1/(1 + А/ц),
где А/ц — потери рабочего времени за 1 ч работы машины; А/ц = АТСМ/ТСМ.
Сменная производительность
388
9.1.2. Теоретическая производительность машин
циклического действия
Если VH — номинальная вместимость (м3) рабочего
органа, QH = ' Енр (где р — плотность разрабатываемого или пере-
мещаемого материала, т/м3) — грузоподъемность машины, а пц —
число рабочих циклов машины за 1 ч работы, то ее теоретическая
производительность, измеряемая в м3/ч
П п = 3600^н.
теор v н'^ц / ?
а измеряемая в т/ч
П = 0 п = — °°^н
11 теор Чн'*ц ± >
4Ц
(422)
(423)
где /ц — в с.
По формуле (422) определяется теоретическая производитель-
ность машин, для которых основным рабочим органом является
ковш (одноковшовые экскаваторы, погрузчики, скреперы), а по
формуле (423) — производительность машин, для которых глав-
ным параметром является грузоподъемность.
Для бульдозеров величину Ун рассчитывают в зависимости от
длины отвала Во, его высоты Но и угла естественного откоса раз-
рабатываемого грунта ф0:
1 ЩВ0
н ' 2 tg ф0
Для автогрейдеров, работающих на возведении земляного по-
лотна, объем перемещаемого за один цикл грунта определяется
по длине разрабатываемого участка L (м) и площади сечения на-
сыпи F (м2)
VH = LF.
Для рыхлителей
Гн = Bplph,
где Вр — ширина захвата при рыхлении, м; /р — средняя длина рабочего хода
рыхлителя в одну сторону, м; h — средняя глубина рыхления, м.
Для катков
Гн = L (Вк - b) h0,
где L — длина укатываемого участка, м; Вк — ширина вальца катка, м; b —
перекрытие укатываемой полосы при переходах катка (Ь & 0,2 м); h0 — опти-
мальная толщина уплотняемого слоя, м.
Для машин, разрабатывающих площади, например, для кусто-
резов, корчевателей, а также для автогрейдеров при выполнении
ими планировочных или профилировочных работ производитель-
ность может измеряться в м2/ч или в га/ч; в этом случае
ПТСОр = Гг-//ц, (424)
где Fi — разрабатываемая площадь, м? (га); /ц — время разработки площади, ч.
389
Рис. 107. Грузовая характери-
стика стрелового крана
Для транспортных машин тео-
ретическая часовая производи-
тельность определяется как част-
ное от деления грузоподъемности
машины q (т) на время одной езд-
ки te (ч):
•^теор Q1 (425)
где /е = &Гр/(Р^) + 4ip (здесь &гр — сред-
нее расстояние перевозки груза, км;
(3 — коэффициент использования пробега
с грузом при загрузке в одну сторону
Р = 0,5); v — техническая скорость ма-
шины, км^ч; Znp — время простоя машины
под погрузкой — разгрузкой, ч.
Производительность стрело-
вых кранов определяют, исходя
из их грузовой характеристики,
устанавливающей зависимость
между грузоподъемностью крана
Q, вылетом стрелы R и высотой
ее подъема Н (рис. 107). Произво-
дительность рассчитывают обычно
по максимальному значению гру-
зоподъемности Qmax, которое соот-
ветствует минимальному вылету 7?min и максимальному подъему
//шах стрелы.
Но производительность того же крана можно определить и по
усредненному значению грузоподъемности Qo, вычисленному по
площади графика грузовой характеристики, ограниченной кри-
вой Q (R) и ординатами, проходящими через точки и R2 оси
абсцисс:
f Q(R)dR
________
— R1
Тогда производительность (т/ч) крана
/7теор = 36OOQo/^.
Производительность крана, вычисленная но грузоподъемности
Qo, а не по Qmax, дает более объективную оценку его технического
уровня, так как в этом случае повышение производительности
непосредственно связывается с необходимостью улучшения грузо-
вой характеристики крана и, в частности, с характером протекания
кривой Q (R), определяющей не только допускаемую полезную
нагрузку, но и размеры рабочей зоны, обслуживаемой кра-
ном.
390
Продолжительность рабочего цикла машин циклического дей-
ствия /ц определяют как сумму значений ti времени, затраченного
на рабочие, вспомогательные и холостые операции
/ц ~ ti.
Так, например, для скреперов продолжительность цикла
/ / h | ^2 , ^3 /
— *н “Г „ ~Г т, Г „ "Г*всп,
Uj 1>2 Vq
где /н— время наполнения ковша, с; tH = VHkH/(0,7BhuH) (здесь В — ширина
режущей кромки ножа ковша, м; h — глубина копания грунта, м; г'н — средняя
скорость скрепера при копании грунта); /2 и /3 — пути, проходимые машиной
при разгрузке ковша, с грузом и при обратном (холостом) ходе, м; г2 и и3 —
средние скорости движения машины на участках /х, /2 и /3, м/с; /всп— время,
затрачиваемое на развороты, переключение передач и управление рабочим орга-
ном; /всп = 40 ... 90 с.
Путь, проходимый скрепером при разгрузке ковша зависит от
вместимости последнего и состояния грунта. При вместимости
ковша до 6 м3 — 5 ... 10 м, при вместимости до 10 м3 = 6 ...
12 м и при вместимости более 10 м3 1Х = 8 ... 15 м.
Продолжительность цикла для автогрейдера при планировке
или профилировании и для катков при укатывании поверхности
где L — длина участка профилирования или укатывания; п — число проходов
машины; /пов — время, затрачиваемое на один поворот машины; v — средняя
скорость движения машины.
9.1.3. Теоретическая производительность машин
и оборудования непрерывного действия
Теоретическую производительность машин и оборудо-
вания непрерывного действия определяют по поминальной пло-
щади FH (м2) сечения потока насыпного материала, перемещаемого,
например, ленточным или скребковым конвейером, или по номи-
нальной распределенной массе qn (кг/м) перемещаемого материала
и скорости v (м/с) тягового органа конвейера:
Лтеор = Fnv; (426)
^теор ” (427)
Для ленточных конвейеров
Fn = ?н/р, (428)
для скребковых конвейеров
Fн ~
где Ьс и hc — ширина и высота скребка, м;
для ковшовых конвейеров
391
где — номинальная вместимость каждого ковша, м8; а — расстояние между
ковшами (шаг ковшей) на цепи конвейера, м;
для винтовых конвейеров (шнеков)
= 0,785е£2в,
где е — коэффициент наполнения желоба (для сыпучих материалов в = 0,3 ...
0,45; для кусковых материалов е = 0,25 ... 0,4; для слежавшихся материалов
е = 0,15 ... 0,3); DB — наружный диаметр винта.
Осевая скорость (м/с) перемещения материала винтовым кон-
вейером
v = sBn/60,
где sB — шаг винта, sB = (0,8 ... 1,0) Рв, м; п — частота вращения винта, об/мин
Теоретическая производительность (м3/ч) роторных ковшовых
экскаваторов
Лтеор = 60ViHZKnp, (429)
где zK — число ковшей; — частота вращения ротора, об/мин.
9.1.4. Годовая эксплуатационная
производительность
Годовую эксплуатационную производительность Пр
определяют умножением часовой производительности Пэ на коли-
чество часов Тг работы машины за год и коэффициент &пр, учиты-
вающий потери рабочего времени, которые не были приняты во
внимание при нахождении часовой эксплуатационной производи-
тельности:
ПР = nQTrk
пр-
(430)
Годовая производительность комплекса машин разного назна-
чения определяется в принятых единицах конечной продукции по
формуле
л
(431)
где Qir — объем работ в единицах конечной продукции, выполненный за год
каждой ведущей машиной комплекса и работающих вместе с ней другими маши-
нами данного комплекса.
Продолжительность работы машины в году
Тг = ЪФ/4РИВ, (432)
где Рф — годовой фонд рабочего времени, дн./год (табл. 25) Рф — 365 — Рв — Рм
(здесь Рв — число выходных и праздничных дней в году; Рм — число дней про-
стоя машины по метеорологическим условиям); б/прив — приведенное к одному
машинному часу суммарное число дней, занятых машиной на полезной работе,
392
25. Нормативные значения Рф, дн. маш.-ч для различных зон СССР
Машины Северная зона Южная зона В целом по СССР
Краны башенные 214 249 233
Краны стреловые, трубоукладчики, ма- шины для свайных работ 238 255 247
Машины для ремонта и содержания дорог, уплотнения покрытий, пригото- вления бетонных смесей, асфальтоуклад- чики 130 256 220
Скреперы, автогрейдеры, землеройно-фре- зерные машины, снегоочистители 120 254 200
Экскаваторы многоковшовые 150 255 222
Экскаваторы одноковшовые, погрузчики, бульдозеры, конвейеры, дробилки 238 255 247
на простоях в ремонтах и техническом обслуживании и на перебазировании
с одного объекта на другой, дн./маш.-ч;
, __________1_
ирив j.
(433)
здесь dp/ — продолжительность простоя машины в t-м виде ремонта и техниче-
ского обслуживания, дн.; d0/—продолжительность ожидания машины в ре-
монте и ее доставки к месту ремонта или технического обслуживания и обратно,
дн.; ai —межцикловое количество t-x видов ремонтов и технических обслужи-
вание dn — средняя продолжительность одного перебазирования машины с одного
объекта на другой, дн.; /см — продолжительность рабочей смены, маш.-ч;
^см — коэффициент сменности; Тц — время межремонтного цикла (до первого
капитального ремонта), маш.-ч; Тоб — продолжительность работы машины на
одном объекте, маш.-ч.
Если все виды ремонта, кроме капитального, проводятся
в межсменное или межсезонное время, то суммарное число дней
простоя техники в ремонтах и технических обслуживаниях
— Zj (^р/ 4“ ^Oi) — ^т.
о 1^Т. О 1 Г- ^Т. О 2^Т. о 2
(434)
где индексы «т. о 1», «т. о 2», «т. о ’3», «т. р», «к. р» указывают, что параметр
относится соответственно к техническим обслуживаниям 1, 2, 3, текущему и
капитальному ремонтам.
Значения dp/ для различных видов ремонтов и технических
обслуживаний принимают согласно Положению или Инструкциям
по проведению планово-предупредительных ремонтов. Ориенти-
ровочная средняя продолжительность простоев в ремонтах и тех-
ническом обслуживании для одноковшовых экскаваторов и по-
грузчиков, скреперов, автогрейдеров, бульдозеров составляет
^к. р ~ И дн., ^т. р “ 4 дн., d?, 0 2 “ 1 дн. и t/j. о 1 == (0,3 ...
0,4) дн.
393
Ниже приведены средние продолжительности смены в зависи-
мости от коэффициента сменности (для пятидневной недели):
6СМ.................. 1 1,25 1,50 1,75 2,0 2,5 3,0
/см, ч.............. 8 7,80 7,67 7,57 7,50 7,40 7,33
При отсутствии точных данных, отношение dJTOQ на стадии
проектировочных расчетов принимают равным 0,007 для одноков-
шовых, роторных и цепных экскаваторов; 0,004 для прицепных
скреперов, землеройно-фрезерных машин, катков и трамбующих
машин, одноковшовых погрузчиков, бетоносмесителей; 0,002 для
бульдозеров, рыхлителей, самоходных скреперов, автогрейдеров,
кранов стреловых самоходных, трубоукладчиков, бурильных
машин.
Для стационарных установок, а также при выполнении ремон-
тов и технических обслуживаний машин в межсменное или меж-
сезонное время dn = 0.
Для специализированных машин, таких как автобетоновозы
или автоцементовозы, годовая эксплуатационная производитель-
ность определяется следующим образом. Время работы машины
за год
Тг = 365/П6В,
где /н — суточное время работы машины (для автобетоновозов /н — 12 ч, для
автоцементовозов = 10 ч); 6В — коэффициент использования машины по вре-
мени в течение года (принимают 6В = 0,68).
Число ездок ?г машины за год определяют путем деления вре-
мени ее работы за год на продолжительность одной ездки /е:
Тг 365/Н6В
/е 2гр . . '
fy
Искомая годовая производительность машины равна произве-
дению числа ездок за год на общий пробег машины за одну ездку
(туда и
обратно):
/7р — ^т^тр/Р
пр
или
_ 365/н6в6Гр
Г — ———
v + W
9.2. ОПРЕДЕЛЕНИЕ ЗАТРАТ НА СОЗДАНИЕ
И ЭКСПЛУАТАЦИЮ МАШИН И ОБОРУДОВАНИЯ
9.2.1. Затраты на выполнение
научно-исследовательских и опытно-конструкторских
работ (НИОКР)
При создании новой техники существенными являются
затраты на проведение научно-исследовательских работ, разра-
ботку технической документации (техническое задание, техниче-
394
ский и рабочий проекты), технологическую подготовку производ-
ства, изготовление и испытание опытного образца. Для строитель-
ных и дорожных машин затраты на разработку технической доку-
ментации в среднем составляют 40 %, а изготовление, монтаж, ис-
пытания и доводка опытного образца — 60 % общих затрат.
Затраты на научно-исследовательские и опытно-конструктор-
ские работы (НИОКР) определяются по данным смет на проектные
работы, по прейскурантам или нормативам. Если для проектируе-
мого объекта известен однотипный аналог, то затраты вычисляют
по нормативам, установленным для аналога, но при этом с по-
мощью поправочного коэффициента учитывают сложность новой
конструкции; при меньшей сложности новой конструкции попра-
вочный коэффициент составляет 0,35 ... 0,55, а при большей —
1,8 ... 2,32. При модернизации продукции отношение затрат на
модернизацию к затратам на создание новой техники принимают
равным 0,30 ... 0,55.
При отсутствии нормативов затраты на проведение НИОКР
определяют по фактическим данным для машин-аналогов с учетом
отличительных особенностей новой техники.
Ориентировочно затраты (тыс. руб.) можно рассчитать по эмпи-
рическим формулам [7]:
затраты на научно-исследовательские работы
Зх = — (308,6 ... 250) + 42,9£нв 4- 67,3/гсл - 132/еп. у;
затраты на разработку технического задания, технического и
рабочего проектов
32 = - (179,3 ... 129,0) + 24,4feHB + 59,66сл - 112/гп. у;
затраты на технологическую подготовку производства
З3 = — (272,4 ... 182,4) + 28,8АНВ + 109,6£сл - 155,9£п. у;
затраты на изготовление и испытание опытного образца
34 = — (900,4 ... 1174,4) + 106,4£нв + 153,9&сл - 35,9£п. у + 14/л,
где /гнв и &сл — коэффициенты, учитывающие степень новизны и сложности изде-
лия (#нв = 5 ... 8,5; &сл = 1,0 ... 3,65); kn. у — коэффициент, учитывающий
применяемость в новой конструкции унифицированных и стандартизированных
изделий (принимается по техническому заданию или по картам технического
уровня); т — масса изделия, т.
Затраты (руб./шт.) по НИОКР, приходящиеся на одну машину
где at — коэффициент приведения разновременных затрат; Дср— среднегодо-
вой выпуск новой техники,
б
здесь At — планируемый выпуск новой техники в /-м году, шт. (1 t 5).
395
Ниже даны значения коэффициента приведения затрат:
t, год........................
а* ...........................
Л год.........................
at ...........................
1 2 3 4 5
1,1000 1,2100 1,3310 1,4641 1,6105
6 7 8 9
1,7716 1,9487 2,1436 2,3579
Время t отсчитывают от года начала серийного производства
до соответствующей стадии разработки проектируемой машины.
Например, если выпуск новой машины планируется на 1989 г.,
а стадия разработки технического задания, технического и рабо-
чего проекта выполняется в 1986 г., то / ~ 3 и соответственно
= 1,3310; расчетные затраты на этой стадии разработки соста-
вят 32cxf = 1,331032.
9.2.2. Затраты на изготовление, монтаж
и доставку машины
Затраты на изготовление машины. Затраты на изго-
товление машины, определяющие ее себестоимость, складываются
из затрат на материалы и полуфабрикаты; основную и дополни-
тельную заработную плату производственных рабочих; топливо и
энергию на технологические цели; возмещение износа технологи-
ческой оснастки специального назначения (моделей, штампов,
специальных приспособлений и др.); эксплуатацию и содержание
производственного оборудования; цеховые расходы (износ ин-
струмента, заработная плата ИТР цеха, отчисления на страхова-
ние со всей заработной платы рабочих цеха и т. п.).
Для расчета себестоимости нужно знать вид заготовки и техно-
логический маршрут обработки детали. В общем случае себестои-
мость изделия определяется как сумма затрат на основные мате-
риалы См и на обработку изделия в каждом из цехов Сц:
Затраты на основные материалы
где Цм — цена исходного материала, руб./т; Рм — расход исходного материала,
т; Цо — цена отходов, руб./т, Ом — отходы материала в заготовительных и ме-
ханических цехах.
По технологическому маршруту для каждого цеха рассчиты-
вают затраты, определяющие себестоимость обработки изделия
(детали) в данном цехе без учета затрат на основные материалы,
Сц = Нт (Тп. с/гп. с + Тп. в£п. в + 7П. nka. пЖ + 1) + АС, (437)
где Ят — трудоемкость обработки изделия, нормо-ч; 7П< с — часовая тарифная
ставка производственных рабочих-сдельщиков, руб.; Ти. в — часовая тарифная
ставка рабочих-повременщиков, руб.; Тп. п — часовая тарифная ставка подруч-
ных рабочих, руб.; &п. с*> в! #п. п — коэффициенты, определяющие трудоем-
кость работы сдельщиков, повременщиков и подручных рабочих; — коэффи-
396
циент, определяющий косвенные затраты; АС — возможные дополнительные
затраты на изготовление моделей (для литых деталей), штампов при штамповке,
электродов для сварки, специальных приспособлений при механообработке и т. п.
Приближенное определение себестоимости изделий. Для ориен-
тировочных расчетов можно использовать данные о себестоимости
типовых деталей и сборочных единиц; в этом случае себестоимость
новой детали или сборочной единицы принимают пропорциональ-
ной их массе и при необходимости корректируют с учетом особен-
ностей конструкции.
При ориентировочном определении себестоимости машины для
отдельных ее агрегатов обычно нет необходимости рассчитывать
себестоимость всех сборочных единиц и деталей, можно ограни-
читься нахождением себестоимостей только основных сборочных
единиц и деталей, которые в процентном отношении к общей себе-
стоимости изделия имеют наибольший удельный вес. В этом слу-
чае влияние остальных элементов на общую себестоимость объекта
учитывают с помощью некоторого поправочного коэффициента
р > 1, на который умножают суммарную себестоимость основных
элементов.
Пользуясь данными о структуре себестоимости аналогичных
конструкций, на основе детального расчета одного из основных
элементов затрат по новой технике, можно определить полную ее
себестоимость. Так, если известно, что затраты на основные мате-
риалы для аналогичной машины составляют около 45 % общей
себестоимости конструкции, а для новой машины они равны
4000 руб., то ожидаемая полная себестоимость машины будет при-
близительно равна 4000 X 100 : 55 — 8890 руб.
Себестоимость изготовления машины для ее сборочных единиц
можно определить и по эмпирическим формулам, устанавливаю-
щим корреляционную связь между себестоимостью и главным или
основными техническими параметрами объекта.
Затраты на доставку и монтаж машины. В общем случае за-
траты (руб.) на доставку и монтаж машины
Кд. м ^3. с (^Т. уЦ ^^тр) ^П. Н^МОН» (438)
где £3. с = 1,035 коэффициент, учитывающий заготовительно-складские и про-
чие расходы; kT. у — коэффициент, учитывающий стоимость тары и упаковки
(при стоимости оборудования до 1000 руб. £т, у = 0,015, более 1000 руб. —
^т. у ~ 0,01); Ц — расчетная оптовая цена машины; т — масса машины в транс-
портном состоянии; STp — стоимость транспортирования 1 т массы машины
(при массе машины до 1 т = 21,2, более 1 т — STp = 18,2); kn. н — 1,028 —
коэффициент, учитывающий плановые накопления на монтажных работах;
SMOH — стоимость монтажа.
Величину SMOH принимают по ценникам.
Для машин и оборудования, требующих несложного монтажа
или не требующих его, значение Кд. м можно принять в долях от
цены техники. В этом случае расчетно-балансовую стоимость тех-
ники или капитальные затраты можно определить но формуле
Зк = ж, (439)
397
где — коэффициент, учитывающий затраты на доставку и монтаж машины
(для дорожно-строительных машин, не требующих монтажа, == 1,09; при
необходимости монтажа — k§— 1,12).
Изложенный метод расчета характерен для стадий разработки
технического задания и технического проекта и является наиболее
общим [7]. Если этот расчет выполняется на стадии приемочных
испытаний и постановки на серийное производство, когда уже
известна оптовая цена выпускаемой продукции, то в этом случае
не надо предварительно определять затраты на проведение науч-
но-исследовательских и опытно-конструкторских работ, а также
удельные капитальные вложения в производственные фонды и
капитальные затраты можно рассчитать непосредственно по оп-
товой цене, т. е. принять
Кз - д.
9.2.3. Текущие затраты на эксплуатацию машин
Заработная плата операторов. Заработная плата
(руб./год) операторов, занятых управлением машины,
т
S3.n= l,726Tr X Стг, (440)
где Тг — продолжительность работы машины за год, маш.-ч; Ст/— часовая
тарифная ставка i-ro разряда, руб./ч.; т — число рабочих, занятых управлением
машины за одну смену.
Состав бригады (звена) рабочих, участвующих в технологиче-
ском процессе, принимают по нормативам или по данным органи-
заций, эксплуатирующих машины. Разряды рабочих принимают
по Единому тарифно-квалификационному справочнику или по
другим официальным документам. Для конкретных условий при
расчете заработной платы можно учитывать сложившийся уровень
дополнительных доплат и начислений в фонд социального страхо-
вания.
Затраты на капитальные ремонты. Стоимость капитального
ремонта (руб./год) можно определить по нормам амортизационных
отчислений на капитальный (включая и средний) ремонт Лк. р,
выраженный в % от капитальных затрат Зк:
1,1 Дк
s-p = —100е-- <441)
В табл. 26 приведены значения Лк. р, а также амортизацион-
ных отчислений на полное восстановление (реновацию) машин
(с учетом накладных расходов) Р для некоторых групп дорожно-
строительных машин в зависимости от срока их службы Тсл.
Для машин транспортного назначения и ряда других амортиза-
ционные отчисления на капитальный ремонт относят на 1000 км
398
26. Нормы амортизационных отчислений
Машины •Т'сл» ГОД Р, % Л 0/ 71 к. р» /0
Автогрейдеры с двигателем мощностью, кВт:
до 88 8 13,2 6,1
св. 88 10 10,6 4,0
Бульдозеры гусеничные и колесные с двига- телем мощностью, кВт: »
до 55 7 15,1 16,0
св. 55 до 79 8 13,2 14,0
» 79 » 132 8 13,2 10,6
» 132 9 11,7 10,0
Катки самоходные, прицепные, полуприцепные, вибрационные 8 11,8 6,2
Краны башенные самоходные грузоподъем- ностью, т:
до 10 10 10,6 2,3
св. 10 16 6,6 2,6
Краны стреловые самоходные на пневмоколес- ном и специальном шасси, автомобильные кра-
ны грузоподъемностью, т:
до 16 11 9,6 4,0
св. 16 до 40 12 8,8 3,6
» 40 13 7,6 3,2
Погрузчики одноковшовые на базе тракторов с двигателем мощностью, кВт:
до 55 7 15,1 16,0
св. 55 до 79 8 13,2 14,0
» 79 » 132 8 13,2 10,6
» 132 9 11,7 10,0
Погрузчики одноковшовые на специальном пнев- моколесном шасси грузоподъемностью, т:
до 5 9 11,0 12,0
св. 5 10 12,2 5,5
Рыхлители, корчеватели, кусторезы на базе гусеничных и колесных тракторов 6 19,4 5,8
Скреперы с ковшом вместимостью, м3:
до 3 7 15,1 10,0
св. 3 до 15 7 15,1 6,0
» 15 10 10,6 6,0
Снегоочистители шнекороторные и газоструй- 8 11,0 4,2
ные
Экскаваторы, одноковшовые гусеничные с ков- шом вместимостью, м3:
до 0,15 6 17,6 5,5
св. 0,15 до 0,4 8 13,2 7,0
» 0,4 » 0,8 9 11,8 7,0
» 0,8 » 1,25 10 10,6 7,0
» 1,25 12 8,9 6,9
399
Продолжение табл. 26
Машины Т’сл- ГОД р. % 4r. р» %
Экскаваторы одноковшовые пневмоколесные с ковшом вместимостью, м8:
до 0,25 8 13,2 10,0
св. 0,25 до 0,4 8 13,2 8,0
» 0,4 » 0,8 9 11,8 5.0
» 0,8 » 1,25 10 10,6 5,0
Экскаваторы многоковшовые траншейные (в том числе дреноукладчики) с глубиной копания, м: 17,6
до 2 6 8,0
св. 2 до 3 8 13,2 5,0
пробега. Тогда при годовом пробеге машины (км/год) стоимость
капитального ремонта
__ 1>1^К.рЗк Кг
«• р 100 1000" •
(442)
Затраты на текущие ремонты и техническое обслуживание.
Затраты на текущие ремонты и технические обслуживания скла-
дываются из заработной платы ремонтных рабочих S3. п. р и за-
трат на материалы и запасные части Sa. м
^тр. ТО ~ ^3. п. р “F ^Э. М’
Заработная плата ремонтных рабочих
8. П. р -----
1,56СР (а
т. с/’t. о 1
^Т. О 2^Т. О 2
(443)
или
^8. п. р - 1 >56(7рГр,
где Ср = 0,755 — средняя часовая тарифная ставка рабочих по ремонту машин,
руб.; ат. oi, ат. 02, ат. р — число технических обслуживании (индексы «т. о 1>
и «т. о 2») и текущих ремонтов за межремонтный цикл; гт> о1, гт. о2, гт. р — тру-
доемкость i-ro вида технического обслуживания и текущего ремонта, чел.-ч;
Гц — межремонтный цикл машины, ч; гр == Е а^г^Гг/Гц — годовая трудоем-
кость всех видов технического обслуживания и текущего ремонта за год.
Число ремонтов и технических обслуживаний за межремонтный
цикл определяют по формулам:
Трее 1. __ ^рес .
^*”Т. Р - / 1 » ^Т. О 3 - / 1 ^т. р»
*Т. р 1Т. 0 8
__ Т’рес .
^т. о 2 — ~7 * ^т. р ^т. о 8»
*Т. О 2
__ ^рес .
^т. о 1 ' — ~7 * ^т. р ^т. о 8 ^т. о 2»
‘т. О 1
где Грее — средний ресурс машины, мото.-ч; tT р, 03 /т О2, /То 01 — периоди-
чность текущих ремонтов, технического обслуживания 3, 2 и 1, мото.-ч.
400
Ресурс машины обычно лимитируется продолжительностью
работы двигателя. Так как время Трес определяется при условии
непрерывной работы двигателя на полной мощности, то очевидно,
что соответствующая продолжительность работы двигателя до
первого капитального ремонта в условиях эксплуатации Тц будет
больше времени Трес. При известном значении Трес продолжи-
тельность межремонтного цикла (маш.-ч) можно определить из от-
ношения
ДВ’
(444)
гДе ^дв — коэффициент, учитывающий использование двигателя машины по
времени и мощности; для расчетов можно принять следующие значения /гдп (коэф-
фициент £дв называют также коэффициентом перевода мото-часов в машино-
часы):
Автогрейдеры .............................................. 0,45
Асфальтоукладчики.......................................... 0,234
Бульдозеры ................................................ 0,30
Катки...................................................... 0,395
Краны:
башенные ................................................... 0,123
стреловые автомобильные.................................... 0,133
стреловые гусеничные..................................... 0,27
стреловые пневмоколесные .................................. 0,315
Машины:
бурильно-крановые: на базе гусеничных тракторов............. 0,288
то же, на базе пневмоколесных тракторов и автомобилей . . . 0,33
трамбующие самоходные ..................................... 0,113
Погрузчики одноковшовые ..................................... 0,258
Скреперы самоходные и прицепные.............................. 0,736
Снегоочистители шнекороторные................................ 0,462
Экскаваторы:
одноковшовые.................................................0,45 ... 0,5
роторные и цепные........................................... 0,44
Затраты на материалы и запасные части. Затраты на материалы
и запасные части
5Э. м = 0,846SB. п. р&8р, (445)
где k&p — коэффициент (для землеройных и землеройно-транспортных машин,
одноковшовых погрузчиков, стреловых самоходных кранов, снегоочистителей
&Эр = 1,35).
Затраты (руб./год) на топливо для машин с двигателем внутрен-
него сгорания определяют в зависимости от часового расхода
топлива Wri 4-го вида (кг/ч), цены топлива (руб./кг) и про-
должительности TTi (маш.-ч) работы машины на 4-м виде топлива
m
ST = 1,1 £ U^WvtTTh (446)
1=1
где m — количество видов топлива.
Часовой расход (кг/маш.-ч) топлива
WTi = 1,03- 10-3#д£ЛДв^ • (447)
14 Гоберман Л. А.
401
27. Мощность и удельный расход топлива дизельных двигателей
Тракторные Nn’ кВт 6 g* г/кВт Автомобильные WR‘ кВт г/кВт
Д-130, СМД-17К 103 238 ЯАЗ-М-204А 88 265
Д-180 132 238 ЯАЗ-М-204В 99 292
СМД-7 48 272 ЯАЗ-204К 132 265
СМД-14А 55 269 ЯМЗ-238 176 238
АМ-01 81 252 ЯМЗ-240 158 238
АМ-03 96 252 ЯМЗ-240М 220 238
Д108ГЛ 79 238 В-ЗОБ 265 238
где Л^д — номинальная мощность двигателя, кВт; ge — уд$лънъш расход топлива,
г/кВт (табл. 27); = 0,94 ... 1,20 — коэффициент, учитывающий изменение
расхода топлива в зависимости от степени использования мощности двигателя.
г
Затраты на смазочные материалы для машин с двигателем
внутреннего сгорания рассчитывают в зависимости от затрат ST
на топливо
<SC. м “ (448)
где е — коэффициент перехода от годовых затрат на топливо к затратам на сма-
зочные материалы (для одноковшовых и многоковшовых экскаваторов, бульдо-
зеров, рыхлителей, катков, автобетоновозов е = 0,22; для скреперов, автогрей-
деров, одноковшовых погрузчиков е = 0,19; для стреловых самоходных кранов
е = 0,20).
Затраты (руб./год) на рабочую жидкость для гидросистемы
ж. г
1,65 УгрЛм. гТг/^М. г»
(449)
где Vr — объем гидросистемы, дм3; рг — плотность масла для гидросистемы,
кг/дм3 (рг = 0,790 ... 0,895); £/м. г— оптовая цена масла, руб./кг; /м. г— пе-
риодичность смены масла в гидросистеме, маш.-ч.
Для всех видов машин на пневмоколесном ходу (кроме специа-
лизированного транспорта) затраты на шины
5 == 1Дшпш (^ г^сл — Т с> ш) (450)
СЛ^ с. ш
где Цш — цена шины, руб.; лш—количество шин в комплекте (без запасных
шин); Тсл — срок службы машины, ч; Тс. ш — СРОК службы шин, ч.
Затраты на перебазирование машины. Затраты (руб./год) на
перебазирование машины с объекта на объект и на ее монтаж опре-
деляют по формуле
п. б
Т’об ’
(451)
402
где Snep — затраты на одну перевозку машины, руб.; SMH и 5ДМ — затраты на
монтаж и демонтаж машины, руб.; Toq — продолжительность работы машины на
одном объекте.
Затраты на перевозку техники складываются из заработной
платы рабочих, выполняющих перевозку, и эксплуатационных
затрат на транспортные и монтажные средства. Эти затраты зави-
сят от дальности перевозки и типа транспортных средств.
Затраты на монтаж для строительных и дорожных машин
рассчитывают исходя из трудоемкости и затрат на эксплуатацию
монтажных средств. Затраты на демонтаж определяют в размере
65 % от затрат на монтаж.
9.3. ОЦЕНКА ЭКОНОМИЧЕСКОЙ
ЭФФЕКТИВНОСТИ НОВОЙ ТЕХНИКИ
9.3.1. Показатели экономической эффективности
В самом общем виде экономическая эффективность есть
отношение полезного результата, полученного, например, при
использовании новой техники, к средствам, затраченным на полу-
чение этого результата. Очевидно, что чем выше полезный резуль-
тат и чем меньше средств затрачено на его реализацию, тем выше
экономический эффект.
Сопоставляя отдельные виды затрат со связанными с ними
элементами полезного результата, получим различные показа-
тели эффективности: производительность машины или производи-
тельность труда, коэффициент полезного действия или коэффи-
циент использования машины и т. д.
Показатели эффективности часто выражаются в обратной форме
как отношение затрат к полезному результату: себестоимость
единицы продукции (руб./ед. продукции); капиталовложения или
затраты на эксплуатацию на единицу продукции или на один час
работы машины (руб./ч); стоимость 1 т массы машины (руб./т) или
расход топлива на 100 км пробега машины (л/100 км). Чем выше
значения этих показателей, тем ниже экономический эффект.
К этой же группе экономических показателей можно отнести и по-
казатель приведенных (или удельных приведенных) затрат.
Для современной техники важными показателями эффектив-
ности являются качественные показатели, которые не всегда могут
быть измерены. К ним относятся удобство и легкость управления
машиной; ее внешний вид, форма и общее компоновочное решение;
защищенность кабины оператора от высоких и низких температур;
рациональная конструкция органов управления машиной; нали-
чие оптических и звуковых сигнализаторов; комфортабельность
рабочего места оператора, безопасность машины и т. д. Повышение
этих показателей равнозначно росту ее производительности при
ее эксплуатации или росту выпуска машин при их производстве.
И наоборот — низкий уровень этих показателей всегда будет
связан с потерями.
14*
403
9.3.2. Срок окупаемости капитальных вложений
в создание новой техники.
Коэффициент эффективности
Измерение затрат и результатов социалистического
производства, эффективности труда является одной из главных
задач экономической науки. Решение ее тесно связано с определе-
нием эффективности капиталовложений, расчетом себестоимости,
производительности труда, установлением основных принципов
ценообразования.
В связи с рассмотрением некоторых из этих вопросов полезно
вспомнить, хотя бы в самых общих чертах, об экономической при-
роде затрат общественного труда.
Затраты общественного труда состоят из двух составляющих
прошлого труда (овеществленного, например, в средствах произ-
водства) и живого или предстоящего труда, который должен быть
непосредственно затрачен на производство будущего продукта.
Если к оценке этих составляющих подойти с позиций математики,
то можно сказать, что овеществленный труд — это постоянная ве-
личина, ее нельзя изменять, как нельзя изменить все прошлое;
живой труд — это переменная составляющая общих затрат, зави-
сящая от способа производства продукта и целого ряда других
факторов.
Такое дифференцирование затрат общественного труда оказы-
вается, таким образом, удобным и с точки зрения математических
законов, так как известно, что изменение суммы постоянной и
переменной величин целиком зависит от того, какие значения
будет принимать переменная составляющая. Поэтому при миними-
зации суммарных затрат задача будет сводиться к минимизации
затрат живого труда. Затраты прошлого труда можно учесть
в предстоящих затратах в той мере, в какой их использование бу-
дет экономить живой труд общества.
На указанных положениях основывается решение задач по
минимизации суммарных затрат, выполняемое методами Лаг-
ранжа (нахождение максимума или минимума функции) или ли-
нейного программирования.
Одним из показателей, характеризующих затраты труда, яв-
ляется себестоимость продукции или удельная себестоимость,
отнесенная к единице произведенной за определенный период (на-
пример за год) продукции. Чем меньше значения этих величин,
тем, как это можно было бы ожидать, эффективнее производство
данной продукции. Однако это не всегда так. В практике проекти-
рования при выборе наиболее целесообразных вариантов изделия
часто сталкиваются с тем, что вариант изделия, более дешевый
в эксплуатации, требует больших капитальных вложений на его
изготовление. В таких случаях, необходимо, очевидно, «взвесить»
все «за» и «против», т. е. соразмерить выигрыш, который полу-
чается при эксплуатации данного изделия с теми дополнитель-
404
ними капитальными вложениями, которые приходится вкладывать
в новый (проектный) вариант изделия.
Допустим, что 1/х и Зкх — эксплуатационные затраты и капи-
тальные вложения для первого варианта изделия; U2 и Зк2 —
те же величины для второго варианта изделия. Тогда отношение
дополнительных капитальных вложений (будем считать эту вели-
чину положительной) по второму варианту (3К2 — Зк1) к эконо-
мии эксплуатационных затрат (t/x — U2):
%к = (Зк2 - Зк1)/(иг - U2) (452)
определит время, в течение которого окупятся капитальные за-
траты на производство нового изделия.
В экономических расчетах часто пользуются величиной, обрат-
ной сроку окупаемости — расчетным коэффициентом эффективности
Е = • (453)
гок ^ка — *Эк1
Коэффициент эффективности определяет экономию эксплуата-
ционных затрат, которую дает 1 руб. дополнительных капиталь-
ных вложений в новый вариант изделия.
В практике планирования устанавливают определенные (нор-
мативные) сроки окупаемости капитальных вложений тн и соот-
ветственно нормативные коэффициенты эффективности Ен. Для
дорожно-строительного машиностроения принимается Ен = 0,15,
а для народного хозяйства в целом срок окупаемости ты = 8 лет
и Ен = 0,12. Последнее означает, что 1 руб. дополнительных капи-
тальных вложений должен давать 12 коп. экономии на эксплуата-
ционных затратах. Если это условие не выполняется, т. е. значе-
ние расчетного коэффициента эффективности меньше норматив-
ного или, что то же, фактический срок окупаемости капитальных
вложений по новому изданию больше нормативного срока окупае-
мости изделия, то производство такого изделия будет экономиче-
ски нецелесообразным.
Если, например, для прежней модели изделия 3К1 = 70 руб.,
J7X = 30 руб.; для предполагаемой новой модели (нового варианта)
изделия Зк2 = 120 руб., U2 = 25 руб., то
ток - (120 — 70) /(30 — 25) - 10 лет.
Как видим, здесь срок окупаемости капитальных вложений
больше нормативного и поэтому можно сделать вывод, что несмо-
тря на меньшую себестоимость новой продукции ее производство
экономически нецелесообразно.
9.3.3. Приведенные затраты и прибыль
Наиболее обобщенным измерителем суммарных затрат,
учитывающих затраты в сфере создания и в сфере эксплуатации
техники, являются приведенные затраты, определяемые по формуле
z = и + Зк (Р Ь £н) + ЕНК0, (454)
405
где U — суммарные годовые текущие затраты потребителя, связанные с эксплуа-
тацией техники без учета отчислений на ее восстановление (реновацию), руб./год;
Зк — капитальные затраты, включающие затраты на проектирование, технологи-
ческую подготовку производства, изготовление, доставку техники потребителю
и ее монтаж, руб.; Р — отчисления на реновацию техники в долях от капиталь-
ных затрат; — сопутствующие капитальные вложения, связанные с эксплуа-
тацией техники, например затраты на строительство стоянок для хранения тех-
ники, постов технического обслуживания; шахт для лифтов и т. п., руб.
Доля амортизационных отчислений на реновацию техники
(с учетом накладных расходов) определяется в зависимости от
срока службы техники Тсл.
Капитальные затраты
Зк = [С + £н (Кв. к + /сф)] k6,
(455)
где С — себестоимость изготовления техники, руб./шт.; Кин —затраты на научно-
исследовательские и опытно-конструкторские работы (руб./шт.), определяемые
по формуле (435); Л'ф — капитальные вложения в производственные фонды,
руб./шт.
/Сф — t?T. п) С'А’п,
(456)
где Ф — стоимость основных производственных фондов, тыс. руб.; Ст. п —
себестоимость товарной продукции завода, тыс. руб.; — поправочный коэф-
фициент, учитывающий удорожание или удешевление основных производствен-
ных фондов.
Основные производственные фонды промышленных предприя-
тий составляют: здания и сооружения, силовые установки, про-
изводственное и лабораторное оборудование и приборы, транспорт-
ные средства и др.
Наряду с показателями приведенных затрат в экономических
расчетах используется также показатель удельных приведенных
затрат к годовой выработке машины (руб./ед. продукции):
2УД - Zinv (457)
или
7
^УД
К- УД
(458)
где t/уд и уД — удельные текущие затраты и капиталовложения:
t/уд = ^//7Г;
УД — ^it/Z/r*
Цена и прибыль. Прибыль (руб.) определяется разностью
между оптовой ценой и себестоимостью
Р = ц _ с.
(459)
Очевидно, что прибыль предприятия будет тем выше, чем больше
цена и ниже себестоимость изготовления машины.
Полученная предприятием прибыль частично идет на возмеще-
ние все возрастающих затрат на производство новых моделей ма-
шин, которые по своим основным показателям (производительно-
406
сти, безотказности и долговечности и т. п.) должны существенно
превосходить старые машины. Естественно, поэтому, что цена
новой машины может быть больше, однако относительное ее зна-
чение, соотнесенное с производительностью и другими качествен-
ными показателями, должно быть меньше, чем для машин прежнего
выпуска.
Устанавливаемая оптовая цена должна возможно точнее учи-
тывать все производственные затраты и вместе с тем повышать
экономическую заинтересованность предприятия в производстве
более совершенной техники.
Цены на новую технику устанавливаются на стадиях проекти-
рования и изготовления.
Проектная цена, играющая роль некоторого экономического
норматива для контроля за допустимым уровнем затрат на про-
изводство новой машины, определяется по ее себестоимости С" и
нормативу рентабельности рс — 0,06 ...0,07
Ц" = С" (1+ Рс). (460)
При изготовлении опытного образца устанавливается разовая
цена, а при серийном производстве новой машины — постоянная
цена.
Оптовая цена новой машины определяется как сумма ее себе-
стоимости на второй или третий год серийного производства и нор-
мативного уровня рентабельности. Поэтому себестоимость, вклю-
чаемая в оптовую цену, должна быть пересчитана с себестоимости
первого года серийного производства на условия производства
второго (третьего) года.
По оптовой цене производится уточненный расчет экономиче-
ской эффективности применения новой техники в народном хозяй-
стве.
Приведение капиталовложений по серийности и году выпуска
продукции. Новая техника (НТ) часто оказывается более дорогой
в изготовлении, чем прежде выпускаемая 1или базовая (БТ)],
с которой она сравнивается. Чтобы новая техника была выгоднее
базовой, повышенные затраты в сфере ее производства должны
перекрываться снижением затрат при ее эксплуатации.
Сравнивать НТ и БТ по затратам на их производство нужно
в равных условиях; для этого их необходимо отнести к одинако-
вому числу лет и одинаковому объему выпуска (или к одинако-
вой серийности), так как затраты на изготовление техники сни-
жаются с увеличением серийности и числа лет, прошедших после
начала ее выпуска.
За основу корректировки себестоимости БТ и НТ обычно при-
нимают второй год их выпуска (этот год считается расчетным).
Поэтому для корректировки себестоимости БТ и НТ нужно знать:
для БТ — расчетный год выпуска и отчетный год, по кбторому
имеются данные по себестоимости ее изготовления; по НТ — рас-
четный год выпуска.
407
Себестоимость БТ в отчетном году Cq, скорректированная на
ее расчетный год по серийности и числу лет ее выпуска,
т"
С ___Г' 1о
°ото
где х" — коэффициент, вводимый для пересчета себестоимости БТ в ее расчетном
году на расчетный год НТ; 8'0 — коэффициент, соответствующий изменению се-
рийности БТ в ее отчетном году по сравнению с серийностью ее расчетного года;
если увеличение серийности БТ за этот период не планируется, то 8'0 = 1,0;
х'о — коэффициент, вводимый для пересчета себестоимости БТ в ее отчетном году
на расчетный год ее выпуска.
28. Коэффициенты корректировки себестоимости техники по серийности
выпуска
Аг = 20 Ар = 50 АР = 100 лР = = 500 лр — 1000 Лр = 2500
А бо А бо А бо А бо А бо Л бо
5 1,072 5 1,122 5 1,161 50 1,259 50 1,349 5 000 1,175
10 1,035 10 1,084 10 1,122 60 1,236 100 1,259 10 000 1,096
20 1 20 1,047 20 1,084 70 1,217 200 1,175 15 000 1,053
30 0,98 30 1,023 30 1,062 80 1,200 300 1,127 20 000 1,023
40 0,96 40 1,01 40 1,047 100 1,175 400 1,096 25 000 1,0
50 0,95 50 60 70 80 100 120 150 200 1 0,99 0,983 0,077 0,966 0,957 0,940 0,933 50 60 70 80 100 120 150 200 250 300 350 400 450 500 550 600 650 700 1,035 1,023 1,019 1,01 1 0,99 0,98 0,966 0,955 0,946 0,94 0,933 0,927 0,923 0,918 0,914 0,911 0,908 120 150 200 250 300 350 400 450 500 600 700 800 900 1000 1100 1200 1300 1400 1500 1600 1700 1800 1900 2000 1,153 1,127 1,096 1,072 1,053 1,036 1,023 1,01 1 0,981 0,967 0,954 0,942 0,933 0,916 0,914 0,909 0,902 0,895 0,890 0,884 0,880 0,875 0,871 500 600 700 800 900 1 000 1 100 1 200 1 300 1 400 1 500 1 600 1 700 1 800 1 900 2 000 2 200 2 400 2 600 2 800 3 000 3 500 4 000 4 500 5 000 5 500 6 000 7 000 10 000 1,072 1,053 1,038 1,023 1,009 1 0,991 0,981 0,974 0,967 0,960 0,952 0,948 0,940 0,938 0,933 0,922 0,914 0,907 0,900 0,895 0,880 0,871 0,860 0,851 0,842 0,836 0,823 0,794 30 000 35 000 40 000 45 000 50 000 0,981 0,967 0,954 0,942 0,933
Условные обозначения. Л' — объем (шт.) выпуска БТ в ее
расчетном году; А — объем (шт.) выпуска БТ в отчетном году или выпуска НТ
в расчетном году.
408
Себестоимость НТ, скорректированная с себестоимостью БТ
по серийности и числу лет выпуска,
о
rr
60т0 ’
где бо — коэффициент, соответствующий изменению серийности НТ в ее расчет-
ном году по сравнению с серийностью расчетного года БТ (табл. 28)
Если значения главных параметров БТ и НТ (соответственно
77' и /7") отличаются друг от друга и, кроме того, в конструкцию
новой техники введены определенные усложнения (они учиты-
ваются коэффициентом йсу), то
&n"kc7
с с° 6'^п-
Ниже приведены значения коэффициентов корректировки т0:
Число лет выпуска I .... 1
т0 ............................. 1,05
Число лет выпуска I .... 6
т0 ............................. 0,852
2 3 4 5
1.0 0,962 0,922 0,877
7 8 9 10
0,819 0,793 0,769 0,747
Для иллюстрации нахождения коэффициентов т и б приведем пример. Пусть
для БТ отчетным является 1988 г., а расчетным (т. е. вторым годом выпуска)
1982 г., следовательно, начало выпуска БТ — 1980 г. Объем выпуска БТ в расчет-
ном году Лр = 1000 шт., а в отчетном году А = А' — 1900 шт.
Расчетным для НТ является 1992 г.; объем выпуска НТ в расчетном году
А = А" — 800 шт.
По этим данным находим:
число лет, прошедших с начала выпуска БТ до ее отчетного года (с 1980 по
1988 г.) равно 8, т. е. i ~ 8, тогда т0 = — 0,793;
число лет, прошедших от расчетного года выпуска БТ до расчетного года НТ
(с 1982 по 1992 г.) равно 10, т. е. i — 10, тогда т0 = т0 = 0,747;
для = 1000 и Л ~ А' — 1900 значение 6Q = б£ = 0,938; для Л' = 1000
и А = А* = 800, б0 = б" = 1,023.
9.3.4. Сравнительные показатели
экономической эффективности и их определение
Экономический эффект (руб./ед. продукции) для одной
машины можно определить по разности между приведенными
затратами для базовой и новой машины:
э = - г;д) п;, (461)
а народнохозяйственный экономический эффект (руб.) от годо-
вого производства НТ
энх = (г;д-г;д)/7;лт, (462)
где 7уД и ZyA — удельные приведенные затраты соответственно по БТ и НТ;
Пг — годовая эксплуатационная производительность НТ, ед. продукции/год;
409
F — коэффициент приведения разновременных (по годам) экономических эффек-
тов, зависящий от срока службы Тсл машины:
Тел» г .... 1 2 3 4 5 6
F .... 0,869 1,626 2,285 2,859 3,348 3,784
Тел» г .... 7 8 9 10 11 12
F .... 4,160 4,486 4,769 5,018 5,232 5,424
Тел» г .... 13 14 15 16 17 18
F .... 5,583 5,727 5,850 5,953 6,048 6,129
Тел, г .... 19 20 21 22 23 24
F .... 6,198 6,259 6,313 6,358 6,398 6,433
Суммарные приведенные затраты Z на стадиях приемочных
испытаний и постановки на серийное производство так же как и
на стадии разработки технической документации определяют по
формуле (454). Для расчета экономического эффекта в этом случае
можно использовать формулы
= (Z'P - Z”) FA"-,
(463)
Э = Z'P — Z", (464)
где Р — коэффициент, учитывающий изменение производительности новой тех-
ники по сравнению с производительностью базовой техники; Р = 0,97Л"Д7'.
9.3.5. Определение экономического эффекта
от экономии труда и материалов. Определение срока
окупаемости дополнительных капитальных
вложений
Дополнительными экономическими показателями яв-
ляются показатели экономии труда и материала. Годовые затраты
труда (чел.-ч)
гЕ = Тг (б + + (гда + гмн + гпер + гд. у)-2L., (465)
где Б — число операторов на машине, чел.; гдм и гмн — трудоемкость демонтаж-
ных и монтажных работ, чсл.-ч; гпер— трудоемкость перевозки, чел.-ч; гд, у—
трудоемкость установки дополнительных устройств, чел.-ч.
Экономия затрат труда (чел.)
п;
П' (E^z^i) (E^z^i)
А/? = —£-------, (466)
1 раб
где Z7' и П'г — годовая эксплуатационная производительность БТ и НТ; QjrzGz)r
и (E^zK — суммарные трудоемкости всех видов ремонтов и технических обслу-
живаний БТ и НТ; Траб — годовой фонд времени одного оператора (производ-
ственного рабочего), ч; принимают Грао = 1860 ч.
Если заданы удельные значения трудоемкости текущих и капи-
тальных ремонтов гтр.у и р и технических обслуживаний
гт. о. у, выраженных в чел.-ч/мото.-ч, и средний ресурс работы
410
машины до первого капитального ремонта, то трудоемкость этих
работ можно определить по выражению
= S ~ (^тр. у ^т. о. у) -^рес ' ^к. р* (^67)
Годовые затраты материала (кг/год) на изготовление техники
тг = т/(Т сл/гм), (468)
где т — масса машины, кг; kM — коэффициент использования материала (при-
нимают kM = 0,7).
Экономия затрат материала (кг/год)
П"
Атг = т'г ------т'г, (469)
где т' и т"г — годовые затраты материала по БТ и НТ.
Еще одним показателем экономической эффективности яв-
ляется срок окупаемости дополнительных капитальных затрат,
т. е. тех дополнительных затрат, которые были вложены в созда-
ние и изготовление НТ по сравнению с капитальными вложениями
по БТ. Срок или время окупаемости (год) дополнительных капи-
тальных затрат
(470)
9.3.6. Экономическая эффективность повышения
надежности и безопасности техники
Повышение надежности машин, увеличивающее срок
их службы и, как следствие этого, снижающее потери рабочего
времени на проведение плановых и неплановых (аварийных)
ремонтов, является важным резервом повышения экономической
эффективности использования техники.
Имеется, однако, некоторый целесообразный уровень повыше-
ния надежности техники, превышение которого с экономической
точки зрения нельзя считать оправданным. Во всех случаях уровни
надежности работы отдельных деталей и сборочных единиц должны
быть связаны с надежностью взаимодействующих с ними деталей
и сборочных единиц машины в целом. При невыполнении этого
условия повышенная надежность одних сборочных единиц и дета-
лей по сравнению с надежностью других элементов машин не
позволит сократить время ее простоев в ремонтах и соответственно
получить положительный экономический эффект.
Опыт работы машин и оборудования показывает также, что
после некоторого срока их эксплуатации, который для разных
машин колеблется от 5 до 15 лет, существенно возрастают затраты
411
на их ремонты и технические обслуживания, стоимость которых
может в 2 и более раз превысить первоначальную стоимость ма-
шины. Отсюда очевидно, что важной задачей является установле-
ние экономически целесообразного срока службы машины, ибо
машина, «пережившая» свой срок, становится для народного хо-
зяйства убыточной.
Народнохозяйственный экономический эффект от повышения
надежности машин образуется за счет снижения удельных капи-
тальных затрат на единицу вырабатываемой НТ продукции, сни-
жения доли амортизационных отчислений и за счет уменьшения
текущих затрат на проведение ремонтов
нх
(471)
где А(/ — дополнительная экономия годовых текущих ватрат на проведение
плановых ремонтов, руб./год.
Экономический эффект от применения одной машины в тече-
ние года
За = Д{/+(^ + ^н) (472)
\ 1 г )
Величину Д £7 определяют как сумму экономии годовых теку-
щих затрат на проведение текущих ремонтов и технического об-
служивания (ASTp. т. 0) и капитальных ремонтов (Д£кр):
Д f/ == ДЗтр. т. о “И Д^к. р>
где
А*$тр. т. о = >56Ср Агpj (473)
Л / Т” Т' \
Д£ =—« Р. Е Т" | oz ол, —L—. (474)
к.р 100 н сл^Зн — зн г; г; I 1
Снижение трудоемкости (чел.-ч/год) технического обслужива-
ния и текущего ремонта за год работы техники
Дгр = W - Wc • (475)
1 ц 1 ц
При определении экономического эффекта от применения одной
машины за год Д5кр (руб./год) рассчитывают по формуле
ДЗкр = Ев (з; А - 3' . (476)
Экономическая эффективность от повышения безопасности
машины обусловлена как снижением затрат на неплановые (ава-
рийные) ремонты, так и повышением производительности машин за
счет улучшения условий труда оператора. К последним относятся
снижение уровня шумов и вибраций, поддержание нормальной
412
влажности и температуры в кабине оператора, повышение устой-
чивости машин против опрокидывания, улучшение управляемости
машиной и др.
Влияние указанных факторов на экономическую эффективность
НТ проявляется, в основном, в изменении эксплуатационных по-
казателей машин, таких как сокращение рабочего цикла машины,
увеличение скорости ее движения, более полное использование
мощности и грузоподъемности машины и т. п. Практика работы
многих дорожно-строительных машин показывает, например, что
только за счет повышения безопасности машин против опрокиды-
вания можно добиться увеличения их производительности в сред-
нем на 10 ... 15 %.
9.3.7. Экономическая эффективность стандартизации
Стандартизация деталей и сборочных единиц машины
способствует повышению их качества и технического уровня машин
и оборудования, позволяет увеличить их производительность и
сократить время на технические обслуживания. Стандартизация
позволяет также повысить срок службы машин, улучшить их
эксплуатационные свойства, сократить номенклатуру и расход
запасных частей и материалов, а также затраты средств и время
на разработку проектно-конструкторской документации. По-
следнее обусловливается возможностью использования стандарт-
ных справочных данных и исключением не нужной в этом случае
разработки документации по стандартным деталям и сборочным
единицам.
Стандарты по методам испытаний и правилам приемки новой
техники позволяют сократить затраты и сроки на проведение
испытаний машин.
Народнохозяйственный экономический эффект (руб.) от внед-
рения стандартизации складывается из эффектов в сферах созда-
ния и эксплуатации техники:
*Эпр ^произв “Ь
где Эпр, Эдроизв и ^эк — экономические эффекты, получаемые на стадиях про-
ектирования, производства и эксплуатации техники.
Экономический эффект на стадии проектирования обусловли-
вается сокращением затрат на разработку конструкторской доку-
ментации, изготовление и испытание опытных образцов, техноло-
гическую подготовку к серийному производству в результате
применения при проектировании стандартизированных элементов.
Этот эффект определяют по формуле
(477)
где Эк. д, Эизг. о, ЭТр п — годовая экономия затрат соответственно на раз-
работку конструкторской документации, изготовление опытного образца и тех-
413
нологическую подготовку производства, руб.; /Спр — затраты на разработку
стандарта.
Указанные величины определяют по формулам:
Эк. д = 0,8 Зк. дАГпр; (478)
^ИЗГ. О = *3изг. (Ло» (479)
Эт. п = 0,83т. с^н^пр, (480)
где Зк. Зизг. о и Зт. о — затраты на разработку конструкторской документа-
ции на стандартизируемое изделие, изготовление и испытание опытного образца
и технологическую подготовку серийного производства стандартизированного
изделия; Nnp — среднегодовое планируемое число проектов с применением стан-
дартизированных изделий; No — число опытных образцов.
Годовая экономия в сфере производства определяется сниже-
нием себестоимости изготовления техники
‘Зпроизв (С- - С") пл - Еи (Г - Д'), (481)
где С' и С" — себестоимости изготовления единицы изделия до и после стандар-
тизации, руб.; п'^ — планируемый объем выпуска стандартизируемого изделия
на расчетный год (второй год серийного производства), шт.; /С и К" — общая
сумма капитальных вложений в производство изделий до и после стандартиза-
ции, руб.
Себестоимость изготовления изделия складывается из стои-
мости материалов, полуфабрикатов, комплектующих изделий,
стоимости энергии и топлива для изготовления стандартизируе-
мого изделия и заработной платы производственных рабочих.
Снижение этих затрат достигается за счет уменьшения затрат на
материалы, замены изделий собственного изготовления приобре-
тенными, снижения трудоемкости изготовления изделий и соот-
ветственно экономии заработной платы производственных рабочих.
Капитальные вложения, учитываемые при определении эконо-
мической эффективности стандартизации, включают стоимость
нового оборудования, затраты на модернизацию действующего
оборудования и оснастки, строительство и реконструкцию здания
(в тех случаях, когда для производства стандартизируемого изде-
лия необходимо строительство зданий и сооружений и приобрете-
ние нового оборудования):
<482)
где Д'уд — удельные капитальные вложения на 1000 руб. выпуска изделий,
руб.; Ц" — цена изделия после стандартизации, руб.; k — поправочный коэф-
фициент изменения величины удельных капитальных вложений в зависимости
от выпуска.
В сфере эксплуатации экономическая эффективность от стан-
дартизации достигается в результате повышения надежности стан-
дартизируемого изделия, повышения производительности и сни-
жения текущих затрат в процессе эксплуатации техники. Экономия
414
определяется при этом как разность приведенных затрат в эксплуа-
тации до и после стандартизации изделия за срок его службы:
Ээк = (Z’ - Z"\ Fn'n, (483)
где Z't Z" — годовые приведенные затраты до и после стандартизации, руб.;
П'г и Я" — годовая эксплуатационная производительность техники до и после
стандартизации, ед. продукции; F — коэффициент суммирования годовых эффек-
тов за срок службы стандартизируемого изделия.
Стандарты технических требований, устанавливающие срок
службы и ресурс изделия, обеспечивают экономический эффект
в сфере эксплуатации за счет сокращения времени на ремонт и,
как следствие этого, увеличения продолжительности годового
фонда рабочего времени. В этом случае экономический эффект
(yiz/ .
Z- -=£- - Z"\ Fnn, (484)
1 г /
где Т* и Тр — годовой фонд времени работы изделия до и после стандартизации,
маш.-ч.
9.3.8. Экономическая эффективность стандартизации
методов испытаний
Экономическая эффективность от удешевления и уско-
рения испытаний техники
п"
Э = [(Хисп -ф £н^Сисп) Ь ^исп (Зисп 4“ ^н-Кисп) Ь /исп]~у; 100 ’
1 Г. ИСП ши
(485)
где <$иСП, ^исп — годовые текущие затраты на проведение испытаний до и после
стандартизации, руб.; A^cn, ^исп — капитальные затраты на проведение испы-
таний до и после стандартизации, руб.; b', b" — процент выборочное™ до и после
стандартизации, %; /'сп, /"сп — время проведения испытаний до и после стан-
дартизации; Тг, исц — годовой фонд времени работы испытательного оборудо-
вания, ч.
Величины Хисп и Хисп складываются из затрат на амортизацию
испытательного оборудования (стендов) Хам, годовой заработной
платы испытателей Х3. п. исп и годовых затрат электроэнергии
(топлива), потребляемой испытательным оборудованием Хэл.иси:
5исп = SaM + -5зпписп- + 5ЭЛ. ИСП) (486)
'£маш
где Пмаш — число испытываемых машин, обслуживаемых одним рабочим при
испытаниях.
Затраты на амортизацию
о ____ Аисп ц
°ам — ЮО ^с*
где Лисп — норма амортизационных отчислений, % (Аисп ~ 7 ... 10 %); Цс —
оптовая цена испытательного стенда, руб.
415
Капитальные затраты на проведение испытаний, включающие
стоимость испытательного оборудования и испытываемой машины,
определяются как сумма их оптовых цен:
Цм. исп
(487)
Цал. исп — оптовая цена испытываемой машины.
9.3.9. Пример расчета экономической
эффективности новой машины
Рассчитать экономическую эффективность от внедрения в народное
хозяйство одноковшового экскаватора на гусеничном ходу с ковшом вместимостью
0,80 м8 с гидравлическим приводом. Исходные данные приведены в табл. 29.
3600-0,65 0,8 _ 3
= 78 м8/ч;
3.
Определение годовой эксплуатационной производительности. 1. Часовая
техническая производительность
77' = 3600Ук Лн
ф /ц 20 1,20
ж-ъадо. ад
1 У 1
Часовая эксплуатационная производительность
л; = л;^в = 78-0,40 = 31,2 м’/ч;
Л" = лткв = 101 -0’40 = 40-4 м3/ч;
Продолжительность межремонтного цикла [формула (444)]
^рес 7200 ](;
Т,, — — 16 000 маш.-ч
ц йдв 0,45
тег ^рес 8000 _____
Т" = —- = 17777 маш.-ч
ц k№ 0,45
Количество ремонтов и технических обслуживаний ва межремонтный
цикл
рес
р
‘т. р
7200
900
ат. 01
ат. о2
ат. о2 ~
* рес
Т. 01
рес
т. О1
гтугг 2 рес ач>. р ~ / «т. р - —1 = - 8000 900 -1 = 8;
Т' 4^н_-1- О,' — 7200 - 1 — 7 = 22;
*Т. 02 г. р 240
грГГ 4^-1- Л/ - а ~ 8000 — 1 — 8 = 24;
*Т. 02 т. р 240
7200
1 йт. р ' ат. о2 60 - — 1 — 7 — 22 =
— 1 . . 11т р ст. о2 8000 60 - — 1 — 8 — 24 =
90;
ат, о1
100
416
29. Исходные данные
Параметр Значения Источники получения данных
БТ НТ БТ НТ
Основные параметры
Вместимость ковша обрат- ной лопаты VK, м8 Масса машины т, т 0,65 20,9 0,80 25 Паспорт Паспорт Техническая документация То же
Тип двигателя Дизель
Номинальная мощность дви- гателя Мд, кВт Привод рабочего органа 79 103 »
Меха- ниче- ский Гидрав- личе- ский
Данные для расчета производительности
Продолжительность рабо- чего цикла /ц, с Коэффициент наполнения ковша kn Коэффициент разрыхления грунта kp 20 0,8 1,20 19 1,0 1,20 Акт испытаний Расчет
Данные дл Отчетный год я расчета 1 983 капитальн ых затрат Отчетные данные завода- изготови- теля
Расчетный год Объем выпуска в отчетном году, шт. 1 982 1 900 1 987 То же План созда- ния НТ
Объем выпуска в расчетном году (второй год производ- ства НТ), шт. 1 000 200 План произ- водства
Себестоимость изготовления в отчетном году Cq, руб. 19 260 Отчетные данные завода- изготови- теля То же
Стоимость основных фондов завода-изготовителя Ф, тыс. руб. 32 700 То же »
Себестоимость товарной про- дукции завода-изготовителя Ст.п, тыс. руб. 60 171 >
417
Продолжение табл. 29
Параметр Значения Источники получения данных
БТ НТ БТ НТ
Данные j Продолжительность, дн.: (ля расчет а текущих затрат
капитального ремонта dK,p 23 20 Отчетные Инструкция
текущего ремонта dT>p 11 9 данные завода- изготови- ППР То же
Технического обслуживания: 1,0 0,7 теля
№ 2 dT, 02 0,3 0,2 »
№ 1 dT. 01 доставки из капитального ремонта dn. к. р 20 20 Норматив
Норма амортизационных от- числений на капитальный ре- монт Ак. р, % 7 7 Нормативы Нормативы
Средний ресурс Трес, мото.-ч 7 200 8 000 Карта ТУ Техническое задание
Удельная трудоемкость те- кущих ремонтов rTD гл, чел.-ч/мото/ч 0,27 0,08 То же Расчет надежности
Удельная трудоемкость тех- нических обслуживаний гт. о. у, чел.-ч/мото.-ч 0,96 0,56 » То же
Трудоемкость капитальных ремонтов гк. р, чел.-ч 1 650 1 300 »
Периодичность текущих ре- монтов р, мото-ч Периодичность Т02 tT. оа, мото-ч 900 900 >
240 240 >
Периодичность Т01 fT. 01, мото-ч 60 60 »
Вместимость гидросистемы VT, дм3 Периодичность смены рабо- чей жидкости, г, ч 430 1 500 Техническое задание
Плотность рабочей жидко- сти рг, кг/дм3 0,885 Справочные материалы
Число обслуживающего пер- сонала Б, чел. Способ перевозки Расстояние перевозки LT, км Продолжительность работы на одном объекте 70б, маш.-ч Продолжительность одного перебазирования dn, дн. Число и разряд операто- ров Б, чел. 2 Тра 15 140 1 0,5 (V) 1 (VI) 1 йлер 15 1 1 (VII) ЕНИР ЕНИР
418
5. Суммарное число дней простоя машин в ремонтах и технических обслужи-
ваниях. Принимаем, что все виды ремонтов и технических обслуживание кроме
капитального ремонта, выполняются на месте. Тогда
^р (^pz “Ь ^т. oi) ^т. ol + . о1 + ^т. о2ат. о2 ^т. р+. р
+ (^к. р + ^П. к. р) = 0,3-90 + 1 -22 + 9-7 + (23 + 20) = 155;
Пр = 0,2-100+ 0,7-24+ 11-8+ (20 4-20)= 165.
6. Продолжительность работы НТ на одном объекте
= 108 маш.-ч.
7. Суммарное приведенное число дней, приходящееся на один маш.-ч;
d' = пр / Ь «•см^см + т[+ Т'о6 - °’087 + 1600 + 11о -°’1038;
1 . и = h ПР t b ' ^см^см Гц + тоб ~ 0,087 + 17 777 + 108 -°’1055-
8. Продолжительность работы машины за год [формула (432); Рф = 247, см.
табл. 25]
, _ Пф _ 247
г ^прив 0,1038
= 2379 маш.-ч;
d'
прив
247
0,1055
= 2341 маш.-ч.
9. Годовая эксплуатационная производительность
Пг = ^эЛ^пр = 31,2-2379-0,78 = 57 895 м3/год;
//; = ПЭТ^ = 40,4-2341 -0,78 = 73 770 м3/год.
Значение коэффициента /гпр принимаем в соответствии с установленными
нормативами.
Определение капитальных затрат. 1. Затраты на научно-исследовательские
работы по НТ
37 = —308,6 + 42.96
1 ' НВ
+ 67,3% — 132&п =
= —308,6 + 42,9-8,5 + 67,3-2,25 — 132-0,84 = 96,6 тыс. руб.
2. Затраты на разработку технического задания, технического и рабочего
проектов по НТ
3" = -179,3 + 24,4fe + 59.6Й — 112£ =
НВ vJl и- у
= -179,3 + 24,4-8,5 + 59,6-2,25— 112-0,84 = 68,1 тыс. руб.
3. Затраты на технологическую подготовку производства по НТ
З"3 = -272,4 + 28,86 + 109,6k - 155,9k v =
= —272,4 + 28,8-8,5 + 109,6-2,25 — 155,9-0,84 = 88,0 тыс. руб.
4. Затраты на изготовление и испытание опытного образца
3; = -1174,4 + Ю6,4fe + 153,96 - 35,9k +
* П В I Д И
+ 14m = —1174,4 + 106,4-8,5 + 153,9-2,25 —
-35,9-0,84 + 14-25 = 396,1 тыс. руб.
419
30. Распределение затрат по НИОКР
Год Стадия разработки Затраты 3*, тыс. руб. at
1979 НИР 56 1,7716
1980 » 40,6 1,6105
1981 Технические задание и проект, рабочий 68,1 1,4641
проект
1982 Технологическая подготовка производства 88,0 1,3310
1983 Изготовление и испытание опытного об- 396,1 1,2100
разца
1984 Опытная партия 1 —
1985 Серийное производство — —
5. Затраты по НИОКР, приходящиеся на одну машину
В соответствии с принятым распределением затрат по НИОКР (табл. 30)
по данным, приведенным на с. 396, находим соответствующие значения коэф-
фициента приведения разновременных затрат at и определяем величину
2 = 56-1,7716 + 40,6-1,6105 + 68,1 • 1,4641 +
4- 88-1,3310 + 396,1 • 1,21 =860 710 тыс. руб.
Принимаем планируемый среднегодовой выпуск НТ Лср = 2500 шт., тогда
Кнк = 860 710/2500 = 344 руб./шт.
6. Корректируем себестоимость изготовления БТ по числу лет выпуска на
расчетный год производства НТ (корректирование по серийности не производим,
так как увеличение выпуска БТ нс планируется)
С = Сото/то.
Согласно таблице исходных данных для БТ отчетным является 1983 г.,
а расчетным, т. е. вторым годом ее производства, является 1982 г. Следовательно,
по числу лет выпуска отчетный год является третьим годом выпуска БТ; по дан-
ным, приведенным на с. 409, для третьего года производства техники находим
т0 = % = 0,962.
Теперь себестоимость расчетного года БТ нужно привести к расчетному
году НТ, т. е. к 1987 г. Порядковый номер расчетного (1987 г.) численно равен
разности между расчетными годами НТ и БТ: 1987 — 1982 ~ 5. В соответствии
с этим для пятого года производства техники (i = 5) находим т0 == tJJ = 0,887,
Тогда
С' = 19 260 = 17 758 РУ6-
и,Уо2
7. Удельные капиталовложения в производственные фонды по БТ [формула
(456) ]
Ki —ibc'k- ~ таг |776“-' - 9651 ру6'
8. Приведенные затраты на производство БТ
3' = (С' + ЕнКф) kQ = (17 758 + 0,15-9651) 1,09 = 20 935 руб./шт.
420
Коэффициент k$ принимаем равным 1,09.
9. Проектная себестоимость изготовления НТ
По исходным данным выпуска техники в отчетном и расчетном годах по
табл. 28 находим: 60 ~ — 0,938 (переходим от серийности, равной А' =
= 1900 шт. в отчетном году БТ к серийности А? — 1000 шт. в расчетном году);
60 = 6" — 1,175 (переходим от серийности БТ, равной в расчетном году 1000 шт.,
к серийности НТ, равной 200 шт.). Тогда
С" = 19 260 •1Л = 30 867 руб.
0,93о-0,962-0,65
10. Удельные капиталовложения в производственные фонды по НТ
«I - стт ". - -ётя-30 ю ’-м - 21 472
11. Приведенные затраты на производство НТ [формула (455)]
Зк = F + Ев (*нк + *£)] =
= [30 867 + 0,15(344 + 21 479)]-1,09 = 37 212 руб./шт.
Расчет текущих затрат. 1. Заработная плата рабочих, занятых управлением
машины [формула (440)],
Sb. п = 1J26-2379 (0,702-0,5+ 0,790) = 4685 руб.;
S; п = 1,726-2341-0,790 = 3192 руб.
2. Определим заработную плату при разработке грунта вручную. По дан-
ным эксплуатирующих организаций ручные работы составляют 8 % от годового
объема работ, выполняемых БТ;
/7 = 0,08/7; = 0,08«57 895 = 4632 м3/год.
№ 3 *
Тогда заработная плата
SB. п. руч. = °>769/7руч. = 0,769-4632 = 3562 руб.
Считаем, что при применении НТ ручные работы исключаются.
3. Затраты на капитальный ремонт:
, 1 ’ 1^к. р^К
к- р ~ 166
Р^и
«• Р ~ 100
1,1-7-20935 ,Й1О „ ,
—[об-------= 1612 руб’:
1,1-7-40928 Q1K1 х
—Too------=3151 руб-
Значение величины Дк. р берем из табл. 26.
4, Заработная плата ремонтных рабочих:
^з. п. р “ 1,56Ср J] ^iri;
ГР = 2 (V/)' = Ci. о. у + Р. у) - (°’96 + 0,27).7200 = 8856 чел.-ч;
г'р = 2 (Vif = « о. у + r.. Р. у) Т'^ (°>56 + 0,08)-8000 = 5120 чел.-ч;
«;.п.р= 1-56-0,755-8856-|^9- = 1551 руб.;
SJ. п. р = 1.56-0,755-5120 i 7777 - = 794 руб.
421
5. Затраты на материалы и запасные части:
5;.м = °’8465з. п. р*э. Р = 0,846-1551-1,35 = 1771 руб.
При определении затрат S'' м по НТ следует учесть удорожание ремонтов
и запасных частей, для чего вводится некоторый поправочный коэффициент k,
представляющий собой отношение расходов запасных частей на ремонты НТ (ги-
дравлического экскаватора) к расходу запасных частей на ремонты БТ (механи-
ческого экскаватора). Примем k — 1,15, тогда
SZ u = kS' = 1,15-1771 =2037 руб.
6. Суммарные затраты на текущие ремонты и технические обслуживания:
s;. Р, т. О = П. Р + м = 1551 + 1771 = 3322 руб.;
s;. Р, т. О = п Р + $'э. м = 794 + 2037 = 2831 руб.
7. Определим затраты на топливо для машин с двигателями внутреннего
сгорания (формула (446) ]. Найдем часовой расход топлива:
= 1,03-= 1,03-10~3-79-238-0,45-1,14 = 10 кг/маш.-ч;
= l,03-10~3N gek k'N = 1,03-10“3-103-238-0,45-1,20 = 13,63 кг/маш.-ч.
Значения ge берем из табл. 27.
Принимаем 7Т,• = Т' — 2379 маш.-ч; Т", = Т" = 2341 маш.-ч; Ц £ =
= 0,062 руб./кг.
Затраты на топливо
s; = м у ^т. = -1,1-0,062.10.2379 = 1622 РУб.;
А 4ВММ A A A v Л. в А А л. tr л w
52= 1,Щ.Г/Т". = 1,1-0,062-13,63-2341 =2176 руб.
Л А А А А 1 А
8. Затраты на рабочую жидкость в гидросистеме
«ж. г = 1,65УгргДм. Г-=Т-= 1,65-430-0,885-0,71 -=-= 696 руб.
^м. г а. оии
9. Затраты на смазочные материалы
S' „ = eS'=0,22-1622 = 357 руб-; S" = eSl = 0,22-2176 = 479 руб.
10. Затраты на перебазирование машины с объекта на объект включают
затраты на заработную плату рабочих на перевозку техники п. т и текущие
затраты на эксплуатацию транспортных средств (трайлера, прицепа, тягача)
^п. э. т:
•$3. П. Т = 1,3 [S3 “к (Дт — ^н) *$дсш. в],
где S3 — заработная плата при нормативном расстоянии (10 и 25 км), руб. (по
нормативам для трайлера S3 = 8 руб ); £п = 10 или 25 км — нормативное рас-
стояние перевозки, км; Здоп. 3 — дополнительная зарплата на каждый последую-
щий (сверх нормативного) километр перевозки; по нормативам принимаем
5доп. 3 = 0,5 руб /км.
Таким образом:
п т = s;. П. Т = 1.3 [8 + (15- 10).0,5] = 14 руб.
Затраты на эксплуатацию транспортных средств
•$п. Э. Т ~ 1 »1 Uh 4~ (^Т ^н) /^ДОП. в] ,
где nQ — норматив затрат на перевозку при расстоянии 10 и 25 км, руб. (прини-
маем П(] ~ 8,10 руб); /7 доп. з — норматив дополнительных затрат на каждый
последующий километр, руб./км (принимаем 7/доп. з = 0,8 руб./км).
422
Тогда
i* __ Q"
П. В. W °П. В. W
= 1,1 [8,10 + (15 — 10)-0,8] = 13 руб.
Г
Так как при перевозке экскаватора затраты на монтаж и демонтаж отсут-
ствуют, т. е. SM. н = 5дм = 0, то затраты на перебазирование
Тг .
Тоб ’
2341 кок л
~108~ = 585 РУ6-
5пб - «пер
2379 ,_с
13) “Йо" = 45£
11. Суммарные годовые текущие затраты
£7 = Е == Sa п + *$8. п. руч + р + $т. р, т. о
4“ 4~
Р 4“ $с. м + *$пб*
Для базовой машины
U' = 4685 + 3562 4- 1612 + 3322 + 1622 + ^57 + 450 = 15 619.
Для проектируемой машины
W1 = 3192 + 3151 + 2831 + 2176 + 696 + 479 + 585 = 13 110.
Определение экономического эффекта. 1. Приведенные затраты при отсут-
ствии сопутствующих капитальных затрат = 0)
Z = и + Зк (Р + Ев),
Z' = 15 619 + 20 935 (0,0810 + 0,15) = 20 434 руб.
Z” = 13 110 + 37 212 (0,0810 + 0,15) = 21 669 руб.
2. Удельные приведенные затраты
_ Z' 20434 , ..
2УД П'г 57 895 0,353 ₽Уб’/м >
„„ _ Z" _ 21 669 _ . оо. х .
гуд П" 73 770 0,294 руб-/м ’
3, Народнохозяйственный экономический эффект
5н. X = (2уд - ^уд) П'ГА "F.
По данным, приведенным на с. 410, принимаем для срока службы Тсл =
в 9 лет значение коэффициента F = 4,769; согласно исходным данным годовой
выпуск НТ в расчетном году А” = 200 шт.
Тогда
Эн.х = (0,353 — 0,294) 73 770-200.4,769 = 4 151 347 руб.
4. Экономический эффект от применения одной машины в течение года при
отчислении на реновацию Р = 0,118 (см. табл. 26)
Э = (Z'm - Zr^ л; = (0,367 — 0,313) 73 770 - 3984 руб.,
где Z' « U' + 3' (Р + £н) = 15 619 + 20 935 (0,118 + 0,15) = 21 230 руб.;
Z” == С7" + з; (Р + £н) = 13 110 + 37 212 (0,118 + 0,15) = 23 083 руб.;
= = 0,367 руб-/м3;
ГУД = = = °’’313 руб-/м8<
lip IQ пи
423
Расчет дополнительных показателей экономической эффективности. 1. Опре-
деляем годовые затраты труда. Удельная трудоемкость всех видов ремонта и
технических обслуживаний за межремонтный цикл
гр (гт. о. у + гт. р. у) J*pec + гк. р
= (0,96 + 0,27) 7200 + 1650 = 10 506 чел.-ч;
г" ~ (г"
' р V т. о. у
4- г" \Т
' т. р. у)
гг
рес
к. р
= (0,56 + 0,08) 8000 + 1300 = 6420 чел.-ч,
здесь Гк.р — трудоемкость капитального ремонта.
Нормативная трудоемкость перевозки гпер при расстоянии 10 км равна
5,0; пересчитываем это значение на расстояние 15 км по формуле
гпер = [5 + (Гф - £н) 0,5] = [5 + (15 - 10) 0,5] = 7,5 чел.-ч;
^пер гпер гпер*
Так как монтаж и демонтаж техники отсутствует, то гмн ~ гдм — 0.
Тогда годовые затраты труда
10 506 \ 2379
16 000 / + 140
== 6448 чел.-ч;
6420
17 777
2. Экономия по затратам труда
£____г" слло 73 770 оолп
i ” _ 6448 57 895 3349
I860
Гг
АЯ =
3. Годовые затраты материала
. = = = 3317 кг;
1/7
2341 оолп
— = 3349 чел.-ч.
>п
= 3 чел.
сл^м 9-0,7
25000 =3968 кг.
AG — G
за год
74 770
-'1-^----3968 = 259 кг.
57 895
СЛ^М
4. Экономия по затратам материала
Г7ЛГ
£----о; = 3317
г
5. Срок окупаемости дополнительных капитальных затрат по НТ
пг
Q" ___ Q' ___
‘“’к ‘“'К П'
11 Г
//
г / г r/х । ги/ \
окуп —
г
73 770
37 212 — 20 935. ° я(._-
0/ 1 о
" —• --—' ......- 1 - — 1,8 года.
74 770
(15 619 + 0,0810-20 935) ', ----(13 110 + 0,0810-37 212)
07 оУо
424
КОНТРОЛЬНЫЕ ВОПРОСЫ
К параграфу 9.1
1. Какие виды производительности Вы знаете? В каких единицах измеряется
пр оизводител ьн ость?
2. От каких факторов зависит производительность машин циклического
действия?
3. От каких факторов зависит производительность машин и оборудования
непрерывного действия?
К параграфу 9.2
4. От каких факторов зависят затраты на выполнение научно-исследователь-
ских и опытно-конструкторских работ?
5. Из каких составляющих складываются затраты на изготовление техники?
6. Из каких составляющих складываются текущие затраты на эксплуатацию
техники?
К параграфу 9.3
7. Какие виды затрат включаются в капитальные затраты при определении
экономической эффективности новой техники?
8. Каким показателем характеризуется срок окупаемости капитальных за-
трат (капитальных вложений)?
9. Напишите в общем виде выражение для приведенных и удельных приве-
денных затрат; что определяет эти показатели?
10. Как определяется прибыль и от каких факторов она зависит?
11. Как определяется экономический эффект от создания новой техники и
ее внедрения в народное хозяйство?
12. Объясните, как влияют повышение надежности и безопасности техники
на ее экономическую эффективность.
13. Как влияет на экономическую эффективность стандартизация техники?
ГЛ AB A 10
ОРГАНИЗАЦИОННО-МЕТОДОЛОГИЧЕСКИЕ ОСНОВЫ
ПРОЕКТИРОВАНИЯ МАШИН И ОБОРУДОВАНИЯ
10.1. СОВРЕМЕННЫЕ МЕТОДЫ И ОСНОВНЫЕ СТАДИИ
ПРОЕКТИРОВАНИЯ МАШИН И ОБОРУДОВАНИЯ
ЮЛ Л в Основные стадии проектирования машин
и оборудования
Проектирование начинается с момента постановки за-
дачи на создание машины. Эта задача конкретизируется в техниче-
ском задании на основе детального изучения предшествующих
конструкций, родственных по своему функциональному назначе-
нию проектируемой машине, изучения современных тенденций их
развития и обобщения опыта их эксплуатации.
В соответствии с Единой системой конструкторской документа-
ции (ЕСКД) разработка технического задания является первой
фазой проектирования. Затем следуют техническое предложение
(ГОСТ 2.118—73*); эскизный проект (ГОСТ 2.119—73*); техни-
ческий проект (ГОСТ 2.120—73*); разработка технической доку-
ментации; создание опытного образца (опытной партии); создание
установочных серий.
О роли конструктора и характере выполняемых им работ в про-
цессе создания новой техники можно судить по схеме, показанной
на рис. 108.
Техническое задание представляет собой перечень основных
требований к машине, выполнение которых должно обеспечить:
необходимое качество технологического процесса, выполняемого
машиной; необходимую производительность машины и экономи-
ческую эффективность; необходимые показатели надежности ма-
шины; безопасность использования машины для оператора и окру-
жающей среды; заданный уровень ее унификации и стандарти-
зации.
В техническом задании оговариваются также другие требова-
ния, отражающие специфические условия работы машины, напри-
мер требование к источнику энергии и типу привода, к физико-
механическим свойствам материалов, из которых должна быть из-
готовлена машина, к ее массе и размерам; по укрупненным пока-
зателям устанавливается ориентировочная стоимость изготовле-
ния машины. Техническое задание обязательно должно включать
все те требования, которые обеспечат соответствие качества машины
установленным стандартом.
Чем лучше и полнее будет обосновано техническое задание на
изготовление машины, тем легче будет конструкторам на последую-
щих стадиях проектирования найти наилучшие решения конструк-
426
Рис. 108. Основные этапы проектирования машины
ции. Формирование этих решений начинается с разработки общей
идеи и принципиальной схемы конструкции. При этом необходимо
проанализировать конструкции аналогичных машин, исследовать
современные тенденции их развития, произвести точный техниче-
ский расчет и экономическое обоснование. Разрабатывая общую
идею конструкции, нельзя, например, не учитывать такие факты,
как серийность производства и технологические возможности
предприятия. То, что может оказаться целесообразным при мелко-
серийном производстве и для предприятия, имеющего малопроиз-
водительный станочный парк, потребует иного решения в условиях
автоматизированного производства, специализирующегося на вы-
пуске массовой продукции.
Конструктор должен иметь необходимые сведения о прототипах
и аналогах проектируемой машины, о их преимуществах и недо-
427
статках; должен знать особенности и тенденции развития техно-
логии производства работ, для выполнения которых предназна-
чается машина, условия ее эксплуатации; общие и специальные
требования к основным параметрам машины; предполагаемые усло-
вия и масштаб ее производства.
Техническое предложение содержит техническое и экономиче-
ское обоснования целесообразности разработки документации на
основании технического задания заказчика. Техническое предло-
жение после согласования и утверждения в установленном порядке
является основанием для начала разработки эскизного, а затем
технического проекта.
Эскизный проект содержит документы, дающие общие представ-
ления об устройстве и принципе работы машины, а также данные,
определяющие ее основные параметры.
Дальнейшая отработка схемы и конструкции машины проис-
ходит на стадии технического проектирования. По существу это
стадия расчетов отдельных элементов конструкции и машины
в целом, определение ее экономических показателей, оценка тех-
нологических решений. Пока это еще предварительные расчеты и
оценки, необходимые для сопоставления различных решений по
техническим, экономическим и технологическим критериям. Если
решений, подлежащих анализу, много и нужно сопоставить доста-
точно большое число вариантов, целесообразно использовать
быстродействующую вычислительную технику.
По результатам проведенного расчета и анализа выдвинутых
идей выбирают вариант будущей машины, наилучшим образом
удовлетворяющей требованиям технического задания. После этого
приступают к рабочему проектированию, к разработке чертежей,
а затем — к изготовлению опытного образца.
Следующая стадия — испытание опытного образца для опре-
деления основных рабочих характеристик машины, ее работоспо-
собности, надежности. По данным испытаний вводят окончательные
коррективы в конструкцию, уточняют расчетные данные. При этом
объем работ, связанных с корректировкой конструкции машины
после испытания ее опытного образца, во многом зависит от тща-
тельности выполнения предшествующих стадий проектирования
и отработки параметров конструкции на математических или физи-
ческих моделях. Чем полнее и обстоятельнее было выполнено
такое исследование конструкции, тем меньше может быть объем
испытаний опытного образца и тем меньше будет объем работ по
последующей доводке конструкции.
После испытаний опытного образца разрабатывают техниче-
ские условия, корректируют рабочие чертежи машины, оконча-
тельно отрабатывают технологию ее изготовления, выбирают
станочное оборудование и методы контроля качества машины и
ее элементов, определяют затраты на ее изготовление. На этой
стадии проектирования конструктор работает в тесном контакте
с технологами и экономическими службами предприятия.
428
Важная часть проектирования — экономические расчеты. На
начальной стадии проектирования их основной целью является
экономическое обоснование выдвигаемых предложений, опреде-
ление предполагаемых затрат на изготовление машины, расчет
ее технической производительности и стоимости эксплуатации.
На завершающей стадии производства машины снова возвращаются
к экономическим расчетам; при этом выполняют более детальный
расчет всех технико-экономических показателей машины, исходя
уже из установленной номенклатуры затрат, себестоимости из-
расходованных материалов и скорректированных данных опытной
эксплуатации. Однако в последние годы в связи с разработкой
более совершенных методов экономических исследований и широ-
кого внедрения в практику электронно-вычислительной техники
экономические расчеты изделий не только значительно расшири-
лись, но и приобрели качественно новый характер. Теперь уже их
главная задача состоит не только и, пожалуй, не столько в опреде-
лении технико-экономических показателей данного изделия,
сколько в выборе таких значений его параметров и решений, при
которых экономический эффект от применения машины в народ-
ном хозяйстве будет максимально возможным. В этом случае
конструктору проектируемый вариант машины нужно сравнивать
не с одной или двумя предшествующими его моделями (так назы-
ваемыми базисными вариантами), а с большим числом возможных
вариантов, выбирая среди них лучший.
10.1.2. Прогнозирование изменений
основных параметров машин на стадиях разработки
технического задания и эскизного проекта
Главные и основные параметры машин. Параметриче-
ские ряды. К основным относятся параметры, влияние которых
на конструктивно-технические и экономические свойства маший
является наиболее существенным. Для дорожно-строительных
машин — это габаритные размеры, масса, вместимость или ширина
захвата рабочего органа, нагрузки на колеса и мосты, высота
разгрузки ковша или глубина копания, вылет стрелы и т. п. Среди
основных параметров можно выделить параметр, который наиболее
полно и точно характеризует машину в целом; такой параметр
называется главным. Для грузовых автомобилей главным пара-
метром является грузоподъемность, для одноковшовых погрузчи-
ков — грузоподъемность или вместимость ковша, для скреперов
и одноковшовых экскаваторов — вместимость ковша, для трак-
торов и бульдозеров — номинальное тяговое усилие, для уплот-
няющих катков — масса, для стреловых кранов — грузоподъем-
ность или грузовой момент (произведение грузоподъемности на
минимальный вылет стрелы).
Параметр называется оптимальным, если его значение наилуч-
шим образом удовлетворяет поставленным требованиям с точки
429
зрения технического совершенства, экономичности или иных
свойств изделия.
Между основными параметрами машин существуют определен-
ные корреляционные связи. Они имеются, в частности, между глав-
ным параметром машины и ее основными размерами. С этой зави-
симостью связано еще одно важное понятие — типоразмерный или
параметрический ряд машин.
Под параметрическим рядом понимается совокупность машин
одного и того же назначения, но разных размеров, подчиняющихся
определенному закону убывания или возрастания главного пара-
метра.
Одной из важнейших задач проектирования новой техники яв-
ляется выбор оптимальной частоты ряда, т. е. такого ряда машин,
который наилучшим образом удовлетворяет поставленным требо-
ваниям, например обеспечивает выполнение заданного объема
работ с минимальными затратами.
От понятия параметрический ряд следует отличать другое по-
нятие — конструктивно-унифицированный ряд машин. Отличие
последнего от обычного параметрического ряда состоит в том, что
в него могут входить машины как одного и того же функциональ-
ного назначения, так и машины разного функционального назна-
чения, но созданные на основе конструктивно родственных сбо-
рочных единиц и агрегатов. В такой ряд могут входить, например,
погрузчики разных типоразмеров на колесном и гусеничном ходах,
скреперы, бульдозеры, трайлеры, землевозы и другие типы машин,
которые собираются из унифицированных сборочных единиц и
агрегатов.
Таким образом, если в обычном параметрическом ряду основной
конструктивной и технологической единицей является машина
в целом и на ее основе создаются другие типоразмеры той же ма-
шины, то в конструктивно-унифицированном ряду основной кон-
структивной и технологической единицей является размерный
ряд сборочных единиц и агрегатов, из которых собираются машины
как одного и того же, так и разного функционального назначения.
Использование уравнений регрессии для прогнозирования изме-
нения основных параметров машин в зависимости от их главного
параметра. Объем исходной информации, которую можно исполь-
зовать при создании новой техники, изменяется в зависимости от
стадии проектирования. На стадии разработки технического за-
дания задаются, например, грузоподъемность машины, ее предель-
ная масса и размеры. На стадии разработки технического проекта
к этим данным добавляются данные по кинематическим схемам
механизмов, рабочим скоростям и ряд других.
Одним из распространенных методов приближенного определе-
ния основных параметров машин на стадиях разработки техниче-
ского задания и эскизного проекта является использование корре-
ляционных (регрессионных) уравнений, устанавливающих количе-
ственные связи между основными и главными параметрами машин.
430
Ниже приводятся такие уравнения, полученные для некоторых
типов дорожно-строительных машин и тракторов.
Фронтальные пневмоколесные' погрузчики
(грузоподъемность Q = 1 ... 15 т)
База колесного хода, м ...........
Колея колесного хода, м ..........
Высота разгрузки ковша, м . . . .
Масса, т:
машины *........................
базового трактора...............
Номинальное тяговое усилие базо-
вого трактора, кН ................
Радиус поворота базового трактора
с одинаковой колеей и диаметрами
передних и задних колес, м (здесь В,
L, D — в мм)......................
L = (0,90...1,65) (2,764-0,045Q)
В = (0,90...1,10) (1,92+0,005460
Н = (0,90...1,17) (2,808+0,03750
т = (0,80... 1,25) (7,08+1,4650
т = 0,152+2,143РН
Рн = 10 [0,349+1,555Q—0,00470]
R = —5,17+0,004L
R = —6,80+0,000125В—0,0000028В2
R = 2,42 +0,0015D+0,00000087£>3
Фронтальные гусеничные погрузчики
(грузоподъемность Q — 1,0 ... 7,0 т)
Опорная длина гусениц, мм . . . .
Колея гусеничного хода, мм ... .
Ширина гусеницы, мм...............
Масса машины, т...................
Максимальная высота разгрузки, м
Вылет на максимальной высоте раз-
грузки, м.........................
Мощность двигателя, кВт...........
Lo= U67+302Q— 18,900
В = 1069+250Q—17,200
bryc = 29O+35Q—O,550
т = (0,90...1,15) (0,20+4,50Q)
In Н = 7,682+0,242 In Q
In Lq = 6,543+0,406 In Q
In # = 3,577+0,868 In Q
Масса погрузчиков, т:
пневмоколесных . .
гусеничных . . . .
Погрузчики для леса
. . . . т = 3,2+l,68Q
.... т — 2,55+3,8Q
Пневмоколесные и гусеничные тракторы
Масса колесного трактора, т . . . . т = 0,152+0,2143Рн
т = 0,536 + l,679PH+0,086P2
(Рн — номинальное тяговое усилие, кН)
Масса гусеничного трактора, кг:
общего назначения (мощность
# = 74 ... 380 кВт).............. т = (0,90-4-1,15) (3800+40,8#+
+ 0,2404#2)
трелевочного (мощность N = 30...
75 кВт).......................... т = (0,904-1,15) (3000+69,36#+
+ 1,313#2)
Одноковшовые гусеничные гидравлические экскаваторы
с обратной лопатой (вместимость ковша V = 0,4 ... 2,5 м3)
Масса, т.................................... т = 21,3V+1,9
Ширина ковша, м............................. В — 1,51 j^V— 0,26
* Для сверхмощных колесных погрузчиков с шарнирно-сочлененной рамой
431
Роторные стреловые экскаваторы
Мощность привода ротора, кВт (/7Т —
техническая производительность,
м3/ч):
минимальная.......................МрОт = 0,077/7т
средняя...........................Мрот = 0,137/7т
максимальная......................Мрот — 0,208/7т
Диаметр ротора, м .................../Эроф = 0,337//2/5
Частота вращения ротора, об/мин . . п = 19,67)^
Радиус копания, м (Z — длина отваль-
ного конвейера, м) ...............
Высота забоя, м ..................
Масса машины, т...................
Установочная мощность, кВт:
минимальная ......................
средняя ........................
максимальная ...................
R = (/ < 40 м)
Н = 0,57/ (/ < 32 м)
т = 0,187 (/7Т//)3/4 при ПТ-Н< 15 000
т = 0,275 (77т77)3/4 при ПТН > 15 000
Л' = 0,22577 т
N = 0,375/7т
N = 0,635/7т
Прицепные скреперы (вместимость ковша V = 2 ... 16 м3)
Масса, кг.........................
Размеры, мм:
длина ..........................
ширина .........................
высота..........................
Радиус поворота, мм ..............
т = (0,78...1,22) (1000V)
Lc = (0,92...1,08) (1150+2750 У?)
Вс = (0,86...1,14) (1500 У?)
7/с = (0,8...1,2) (1400 У V) ______________
R = (0,92...1,08) (1900+3300 УV— 2)
Самоходные скреперы (вместимость ковша V — 1 ... 30 м8)
Масса скрепера, кг................
Размеры, мм:
длина ..........................
ширина .........................
высота..........................
Ширина резания, мм ...............
Грузоподъемность, т...............
Диаметр колес, мм:
передних .......................
задних .........................
Колея колес, мм:
передних .........................
задних .........................
т = (0,814-1,19) (1920V)
£с = (0,88...1,12) (400+600 VV—0,08)
Вс = (0,89...1,11) (—200 + 1500 У V—1)
Нс = (0,84...1,16) (900+1025 Vv)
s = (0,90...1,10) (—500+ 16203/ V—4,7)
Q = (0,89...1,11) (1,87V)
Ок = (0,83...1,17) (225+790 УТ)
Ок = (0,87...1,13) (220+820 У V)
В' = (0,90... 1,10) (10004 456 Уу+7,5)
В" = (0,90... 1,10) (450 +780 У V)
Гусеничные бульдозеры (мощность N = 18,4 ... 230 кВт)
Масса, кг:
машины...........................
рабочего оборудования..........
Номинальное тяговое усилие, Н . .
Размеры, мм:
длина ...........................
ширина ........................
высота ........................
т = (0,77...1,23) (1301,9 VN)
тр. о = (0,70...1,30) (255,68/7)
Р„ = (0,755... 12,06) (1271/7)
L6 = (0,82...1,18) (1163,4 У/7)
Вб = (0,80... 1,20) (764,52 У/7)
/76 = (0,80... 1,20) (566,188 УN)
432
Автогрейдеры (мощность /V = 22... 184 кВт)
Масса, т................................. m = (0,73...1,27) (200+122,4М)
Размеры, мм:
длина................................... £г = (ОД..1,10) (1728,48 Y~N)
ширина................................ Br = (0,90...110)(б00+345^1,36W+10)
высота (без кабины)..................НТ == (0,815...1,185) (500+380 У1,36М+3)
Радиус поворота, м....................... R = (0,80... 1,20) (2,349 Y Ю
Диаметр колес, мм:
передних.................................Dk = (0,80... 1,20) (332,4 Yn)_________
задних.................................DK = (0,90... 1,10) (300+240 У 1.36W+6)
Колея колес, мм:
передних................................ В' = (0,80...1,10) (300+376,72 Yn)
задних.................................В" = (0,90...1,10) (450+343,48 У/V)
Самоходные двухосные пневмокатки (масса т = 2... 16 т)
Мощность двигателя, кВт............
Размеры катка, мм:
длина .............................
ширина ..........................
высота ..........................
Ширина полосы укатки, мм . . . .
Радиус поворота (внешний), мм . . .
N = (0,51...0,96) (40+6,2т)
LK = (0,87...1,3) (2800+1230
Вк = (0,8... 1,2) (1300+500 Ут—2)
= (0,84... 1,16) (500+1260 У m—1,5)
s = (0,8...1,2) (970+680 Ут-2)
R = (0,9... 1,1) (304,7N + 2500Ут—1)
10.1.3. Применение ЭВМ для выполнения
вычислительных работ
При использовании ЭВМ числовой материал представ-
ляется в форме аппроксимирующих (приближенных, заменяющих)
выражений, удобных для вычислений. Например, вместо таблиц
и графиков используют аналитические выражения функций;
в других случаях описание исследуемых систем и процессов пред-
ставляют в виде алгебраических соотношений, как в задачах
линейного программирования, или в виде дифференциальных урав-
нений движения, описывающих поведение механических систем.
Такие выражения являются математическими моделями соответ-
ствующих систем и процессов.
Для моделирования на цифровой вычислительной машине
любых систем и процессов, заданных при помощи математической
модели, необходимо построить моделирующий алгоритм, записав
математическую модель в такой форме, которая может быть реа-
лизована ЭВМ.
Под алгоритмом понимается определенная последовательность
действий при решении данной задачи. Правила сложения и вычи-
тания чисел, их умножения и деления — это есть один из видов
алгоритмов. Типичные операции, выполняемые ЭВМ, состоят в сло-
жении, вычитании, умножении, вычитании модулей двух чисел,
15 Гоберман Л. А. 433
выделении целой части числа, сравнении двух чисел и определе-
нии большего или меньшего из них, переносе числа из одной
ячейки памяти в другую и т. д. ЭВМ, реализуя моделирующий
алгоритм, выполняет диктуемую им последовательность опера-
ций.
Алгоритм, предназначенный для реализации на ЭВМ, записы-
вается на формальном искусственном языке, называемом алго-
ритмическим. В отличие от естественных языков алгоритмические
характеризуются однозначностью и определенностью, что
делает их удобными для описания вычислительных процессов
или преобразования какой-либо информации. Алгоритмы, за-
писанные в таком виде, составляют программу данной за-
дачи.
После того, как программа записана на определенном алгорит-
мическом языке (Алгол, Фортран, Пиель, Кобол, Бейсик и др.),
она автоматически специальной программой-транслятором пере-
водится на машинный язык, т. е. записывается в системе команд
данной конкретной ЭВМ. Такая программа составляется на основе
специальных инструкций и содержит конкретные указания машине,
что нужно делать с исходными данными, чтобы получить требуемые
результаты.
Система команд ЭВМ представляет собой арифметические
действия (операции), которые при реализации их на ЭВМ
сводятся к операции сложения; логические операции, прове-
ряющие соответствие условий, которые могут быть положи-
тельными (да, 1) или отрицательными (нет, 0), и операции
перехода и пересылки данных из одной ячейки памяти ЭВМ в
другую.
Стандартные и специальные программы, набор трансляторов
с различных алгоритмических языков и обслуживающие про-
граммы составляют программное обеспечение современных ЭВМ.
Существуют две формы записи алгоритма: операторная и
в виде схемы.
При операторной форме записи операторы обозначаются боль-
шими буквами алфавита с указанием номера оператора. Логиче-
ские операторы обозначаются буквой Р, арифметические — бук-
вой А. Генерирование действий обозначается буквой Г, выдача
результатов на печать — буквой /7, окончание вычислений —
буквой Д.
Для изображения передачи информации (управления) от логи-
ческих операторов справа от них ставятся стрелки с номерами тех
операторов, которым передается управление. Стрелка, направлен-
ная вниз, обозначает направление передачи управления для слу-
чая, когда условие, проверяемое данным логическим оператором,
оказывается невыполнимым; стрелка, направленная вверх, обо-
значает, что условие, проверяемое данным логическим операто-
10 17
ром, выполнено. Например, Р11 f означает, что от логического
434
оператора Р7 управление следует пере-
давать оператору 10, если условие, про-
веряемое Р7, не выполнено, или же опера-
тору 17, если оно выполнено.
Операторная форма записи отличается
компактностью, но она недостаточно на-
глядна, так как требует специальных по-
яснений по обозначению символов каждо-
го действия и условия.
Более наглядной является графиче-
ская форма записи алгоритмов в виде
схем. В этом случае прямоугольником
обозначаются операторы, а ромбом — про-
веряемые условия.
В качестве примера представления ал-
горитма задачи в виде схемы рассмотрим
вычисление корней квадратного уравнения
х2 + рх + q = 0.
Решение этого уравнения, как извест-
но, выражается формулой
Рис. 109. Схема алгорит-
ма решения квадратного
уравнения
уравнения показана
Заметим, что как исходное квадрат-
ное уравнение, так и его решение, запи-
санное в общем виде, могут считаться ма-
тематическими моделями, которые подле-
жат реализации на ЭВМ.
Схема алгоритма решения квадратног
на рис. 109. В соответствии с этим алгоритмом действия вы-
полняются в такой последовательности.
Оператор 2 вычисляет значение величины — р/2 и передает
управление оператору 3, вычисляющему величину D = р2/4 — q.
От оператора 3 управление передается оператору 4, который вы-
числяет величину R — У(р2/4 — q) и передает управление опе-
ратору 5. Логический оператор 5 проверяет условие D 0; если
оно выполняется, оператор вырабатывает знак <С>» (да), если оно
не выполнено (D < 0) оператор вырабатывает знак «<» (нет).
Если D < 0, то оператор 5 передает управление оператору 7,
если D 0 — оператору 6У вычисляющему значения действи-
тельных корней %i, 2 ~ — р/2 ± /?• От оператора 6 управление
передается оператору 8, означающему окончание вычислений и
выдачу на печать значений хг и х2.
Если D < 0, то оператор 7 вычисляет значения комплексных
корней квадратного уравнения и затем передает управление опе-
ратору S.
15*
435
Операторная форма записи рассмотренного алгоритма могла бы
быть представлена в виде
7
б
где А2 — оператор вычисления — р/2; А3 — оператор вычисления D ~ р2/4—q\
А4 — оператор определения Д’ = К(р2/4 — q)\ Рь — оператор проверки усло-
вия D 0; Л6 — оператор определения действительных корней 2 — —р/2 ± /?;
А7 — оператор определения комплексных корней х1|2 = —Pi%±RP
Алгоритмы, записанные в операторной форме или в виде блок-
схем, не учитывают, однако, особенности команд данной конкрет-
ной ЭВМ и поэтому они могут быть реализованы только при про-
граммировании задачи.
10.1.4. Система автоматизированного проектирования
машин (САПР-конструкция)
Под системой автоматизированного проектирования
понимается комплекс аппаратных и программных средств, кото-
рые позволяют автоматизировать процесс проектирования машин
(САПР-конструкция). К таким средствам относятся дисплеи,
телетайпные пульты, специальные графические устройства ввода-
вывода графической информации, средства программирования,
обеспечивающие работу конструктора в режиме диалога и графи-
ческого взаимодействия с ЭВМ и др.
Следует отметить, что САПР никак не может заменить творче-
ского мышления конструктора, за которым по-прежнему остаются
функции выбора и принятия решений. ЭВМ выполняет лишь дей-
ствия, предписанные ей заданным алгоритмом, такие как модели-
рование и вычерчивание графиков, автоматическое управление
чертежными устройствами, проведение расчетов и сравнение раз-
личных компоновочных вариантов по заданным критериям, вы-
числение номенклатуры и количества материалов, обработка и
анализ нормативной документации.
Одним из направлений применения САПР является выполне-
ние чертежных работ. Эго наиболее трудоемкая часть проекти-
рования.
Для автоматизированного выполнения чертежей служат графо-
построители, которые присоединяются к ЭВМ. При этом про-
граммы, заложенные в ЭВМ, решают задачи вычисления и рас-
познавания координат, описывающих геометрическую форму про-
ектируемого предмета; линейной интерполяции (т. е. нахожде-
ние точек между двумя известными координатами); выбора мас-
штаба, видов и проекции изображаемого предмета и т. д. Чертежи
отдельных деталей выполняются управляемым ЭВМ чертежным
устройством графопостроителя из отрезков прямых, окружностей,
эллипсов и других кривых, из которых, как в начертательной
геометрии» строятся сложные фигуры. Для пространственного
436
представления из памяти ЭВМ вызываются стандартные элементы
и плоскости.
Унификация и стандартизация элементов и сборочных единиц —
основное направление рационализации САПР.
Важным условием эффективного функционирования САПР яв-
ляется наличие пакетов программ, рассчитанных на решение це-
лого комплекса взаимосвязанных задач. Эго могут быть программы
для расчета и оптимизации параметров рабочего оборудования
дорожно-строительных машин; расчета металлоконструкций ме-
тодом конечных элементов; расчета и оптимизации элементов гидро-
привода и гидросистемы в целом; расчета ресурса деталей и сбо-
рочных единиц машины, а также оценки их надежности при про-
ведении ресурсных испытаний; расчета устойчивости машины
против опрокидывания.
Другим направлением применения САПР является взаимодей-
ствие конструктора с ЭВМ на уровне текстовой и графической
информации. Это взаимодействие начинается с выбора из каталога
комплекса элементов и механизмов, отвечающих требованиям тех-
нического задания, а также другой справочной информации, зало-
женной в памяти ЭВМ. На основании такой информации и исход-
ных данных по основным параметрам проектируемого объекта,
составленными в соответствии с требованиями программы, кон-
структор на графическом столе-кульмане на ватмане вычерчивает
проектируемый объект.
Выполненный чертеж конструктор может ввести в память ЭВМ,
соединенной с графическим столом. Для этого нужно оцифровать
чертеж, т. е. с помощью специального оцифровывателя, которым
снабжен графический стол, отметить на чертеже координаты соот-
ветствующих линий и плоских геометрических фигур. Для пря-
мых достаточно отметить координаты двух точек, для отрезка
окружности нужно отметить три точки или указать радиус окруж-
ности, более сложные кривые разбиваются на небольшие участки
и для каждого из них отмечаются координаты. При касании оциф-
ровывателем соответствующих точек на чертеже их координаты
вводятся в ЭВМ и по ним затем на экране дисплея воспроизво-
дится чертеж проектируемого объекта.
После этого начинается «графический диалог» конструктора
с дисплеем, который напоминает экран обычных телевизоров.
Водя по экрану дисплея специальным световым карандашом,
конструктор может вносить необходимые изменения в чертеж,
которые тут же отражаются на экране дисплея.
Для ввода числовой информации используется клавиатура,
которая позволяет включать в чертеж стандартные геометриче-
ские элементы.
Комбинируя возможности светового карандаша и клавиатуры,
конструктор вводит в ЭВМ через экран дисплея первоначальный
замысел будущей конструкции. Результаты расчетов также могут
быть выведены на экран дисплея, что обеспечит конструктору
437
1
2
J
Рис. ПО. Общий вид автоматизированного рабочего места конструктора:
/ . графический стол с оцифровывателем; 2 • дисплей; 3 — вычислительное устройство
Рис. 111. Схема проведения работ с помощью САПР при расчете и проектирова-
нии приводов
438
быстрый доступ к данным, которые необходимы для оценки полу-
ченного решения и дальнейшего совершенствования конструкции
проектируемого объекта.
Графический стол, дисплей и вычислительная машина состав-
ляют автоматизированное рабочее место конструктора (АРМ),
рис. НО.
Принципиальное отличие применения ЭВМ в системе автомати-
зированного проектирования состоит, как видим, в том, что кон-
структор получает возможность в ходе выполнения различных
стадий проекта постоянно обмениваться необходимой информа-
цией с ЭВМ и при необходимости «на ходу» вносить нужные из-
менения в проект.
На рис. 111 показана схема проведения работ с помощью САПР
при расчете и проектировании приводов.
Иначе организован процесс проектирования, когда ЭВМ ис-
пользуется вне САПР: в этом случае конструктор не может вносить
какие-либо изменения в рассматриваемый вариант прежде, чем
он получит окончательные выходные данные по рассматриваемому
варианту от ЭВМ; только после этого, вводя в ЭВМ новые исход-
ные данные, можно приступить к исследованию другого варианта
разрабатываемого изделия, что, естественно, увеличивает время,
затраченное на отыскание оптимального варианта.
При большом числе возможных решений обычные способы
перебора вариантов не всегда позволяют найти лучший из них.
Так, при оценке изделия по 10 параметрам, каждый из которых
может принимать 10 значений, общее число вариантов, подлежа-
щих рассмотрению, составит 1010, что непосильно даже для совре-
менных ЭВМ. В этом случае на помощь конструктору приходят
специально разработанные алгоритмические и эвристические ме-
тоды оптимального проектирования.
10 2. ОПТИМИЗАЦИОННЫЕ ЗАДАЧИ И МЕТОДЫ ПОИСКА
НОВЫХ ТЕХНИЧЕСКИХ ИДЕЙ И РЕШЕНИЙ
10.2.1. Задачи оптимального проектирования
Задачи, в которых максимизируется количественная
оценка желательного свойства объекта или минимизируется коли-
чественная оценка нежелательного свойства объекта, называются
оптимизационными. Количественные оценки, максимальное или
минимальное значение которых приводит к решению оптимизацион-
ных задач, т. е. к достижению поставленной цели, называются
критериями оптимальности. В качестве таких критериев в зави-
симости от условий задачи принимаются различные показатели.
Так, в задачах динамического синтеза, связанных с рациональ-
ным выбором размерных, кинематических, жесткостных или инер-
ционных параметров механизмов и машин, за критерии оптималь-
ности могут быть приняты скорости или ускорения различных
439
точек системы, например ускорение спинки сидения оператора
в кабине машины, либо отклонения истинных значений тех или
иных параметров от их идеальных (теоретических) значений.
При решении экономических задач в качестве критерия опти-
мальности принимают удельные приведенные затраты, получае-
мый экономический эффект, производительность, прибыль. В таких
задачах удельные приведенные затраты минимизируются, а эко-
номический эффект, производительность, прибыль максимизи-
руются.
Другие оптимизационные задачи ставят целью минимизировать
число операций и переходов автоматизированного технологиче-
ского процесса или энергетические затраты на обработку загото-
вок; найти оптимальные варианты распределения потоков грузов
или транспортных внутрицеховых и внутризаводских маршрутов
и т. д.
Задачей оптимального проектирования является оптимизация
конструкции проектируемой машины. Эта оптимизация может
быть, в частности, направлена на обеспечение автоматического
управления работой машины на оптимальных нагрузочных и ско-
ростных режимах, позволяющих наиболее полно реализовать
тяговую способность машины при выполнении рабочих операций
и обеспечить возможно меньший расход энергии (топлива) при
работе на транспортных и холостых режимах.
При решении подобных задач конструктор нередко сталки-
вается с необходимостью оптимизировать проектируемую машину
не по одному, а по двум-трем и более критериям, которые
должны удовлетворять разнообразным и часто противоречивым
требованиям заказчика. Вот несколько характерных примеров.
При проектировании конструкций из условия равной прочно-
сти руководствуются принципом: ни одна деталь не должна быть
недостаточно прочной и ни одна деталь не должна быть слишком
тяжелой. В этом принципе наглядно отражается противоречие
между прочностью и массой изделия, так как одновременно удов-
летворить обоим этим требованиям непросто: повышение запаса
прочности детали часто связано с необходимостью увеличения ее
размеров и массы.
Ранее мы говорили о требованиях, предъявляемых к защитным
металлоконструкциям машины при ее опрокидывании. Как от-
мечалось, эти конструкции должны быть, с одной стороны, доста-
точно прочными и жесткими, а с другой стороны, не слишком
жесткими, чтобы часть кинетической энергии удара могла быть
поглощена за счет деформации элементов защитной металлокон-
струкции.
С точки зрения путевой устойчивости и управляемости колес-
ных машин, характеризующих их способность при минимальных
усилиях на рулевом управлении сохранять заданное направление
движения, преимущество имеют длиниобазовые машины, если
движение происходит на прямолинейном участке пути, но при
440
%
движении по криволинейной траектории, на поворотах предпочте-
ние следует отдать короткобазовым машинам.
Надежность муфт сцепления, как и тормозов, зависит от коли-
чества теплоты, выделяемой при их включении. Чем длительнее
процесс включения, тем больше выделяется теплоты и тем меньше
надежность муфт и тормозов. Но с другой стороны, сокращение про-
должительности включения муфт и тормозов приводит к увеличе-
нию динамических нагрузок в системе привода машины.
Эффективность применения рабочих органов вибрационного
действия для разработки грунтов (вибромолотов, виброковшей)
или для перегрузки материалов (виброгрейферов) повышается
с увеличением энергии колебаний, но при этом увеличивается и
расход мощности, снижается срок службы рабочего оборудования.
Во всех этих и многих других случаях возникает необходимость
либо установить иерархию критериев, признать один из них глав-
ным и по нему оптимизировать всю систему, либо принять те или
иные компромиссные решения. Компромиссное решение связано,
по существу, с ответом на вопрос, насколько можно «пожертво-
вать» одним показателем, чтобы выиграть в другом? Насколько,
например, можно увеличить затраты на изготовление машины,
чтобы за счет этого выиграть в ее производительности? И хотя
такое решение не будет оптимальным по критерию стоимости
(так как оно не обеспечивает минимум затрат на изготовление
машины) его можно считать оптимальным с точки зрения дости-
жения общей цели.
В математике задачи, позволяющие найти оптимальные реше-
ния, называют также задачами оптимального управления, так
как в результате их решения находятся такие «управляющие воз-
действия» на свойства системы, которые кратчайшим и наиболее
эффективным путем приводят к поставленной цели. Область мате-
матики, занимающаяся задачами оптимального управления, полу-
чила название «Исследование операций» (под словом «операция»
здесь понимается любое мероприятие, действия или процедуры,
направленные на достижения поставленной цели).
Методы проектирования, связанные с постановкой оптимиза-
ционных задач, пригодных для непосредственной реализации на
ЭВМ, иногда называют алгоритмическими.
Следует заметить, что строгие математические методы оптими-
зации, применение которых всегда связано с наложением опреде-
ленных ограничений на решение задачи, не всегда укладываются
в раМки проектно-конструкторских задач, так как последним
часто не присущи те ограничения, которые позволяют использо-
вать алгоритмы математических методов оптимизации.
Проектно-конструкторские задачи должны учитывать такие,
например, факторы, как технологические возможности производ-
ства, целесообразность применения в конструкциях машин уни-
фицированных деталей и модулей, что в ряде случаев для какого-то
конкретного типа машины может привести к увеличению их массы
441
и к заметному отклонению от рекомендаций, вытекающих из ре-
шения оптимизационных задач, минимизирующих массу конструк-
ции и т. п.
Поэтому в последнее время наряду с алгоритмическими мето-
дами проектирования все большее распространение получают
методы, основанные на творческом обсуждении специалистами
новых технических идей и возможных путей решения поставлен-
ной перед ними задачи. Такие методы проектирования можно
назвать эвристическими, что в переводе с греческого означает
обнаружение истины с помощью соответствующих наводящих
вопросов.
10.2.2. Алгоритмические методы поиска
оптимальных решений
Алгоритмические методы поиска оптимальных решений
базируются на математической постановке задачи и включают
в себя следующие основные этапы: общая (неформализованная)
формулировка цели; выявление основных факторов, влияющих
на конечные результаты (для этого можно использовать опытные
данные или результаты аналитического решения упрощенной
математической модели); выбор критерия оптимальности (иногда
его называют критерием эффективности); формирование и уточне-
ние исходных данных и ограничений; построение математической
модели (или вывод расчетной формулы) системы или процесса;
построение алгоритма решения задачи; реализация вычислитель-
ного алгоритма (в виде программы, разработанной для ЭВМ);
анализ полученных результатов и выбор оптимального решения.
В основу решения оптимизационных задач могут быть поло-
жены различные приемы и методы. Для их иллюстрации приведем
лишь отдельные примеры.
Для оптимизации параметров цистерны автогудронатора может
быть использован метод последовательной частной или локальной
оптимизации. Суть этого метода состоит в том, что решение опти-
мизируется не одновременно для всех переменных с целью нахож-
дения так называемого глобального оптимума, а последовательно
для каждой переменной. Например, вначале рассматривают, как
влияет на стоимость цистерны автогудронатора толщина ее днища
при данных значениях толщины обечайки, внутренних перегоро-
док, длины и внутреннего радиуса цистерны. При этом находят
такие значения толщины переднего и заднего днищ цистерны,
удовлетворяющих условиям прочности, при которых стоимость
цистерны будет минимальной. На следующем этапе решения задачи
производится частная оптимизация стоимости цистерны по тол-
щине обечайки при остальных постоянных параметрах, затем
стоимость оптимизируется по длине цистерны и т. д. В результате
такой последовательной оптимизации находятся оптимальные
соотношения между размерами элементов цистерны, при которых
442
ее стоимость будет минимальной. На решение задачи могут быть
наложены определенные ограничения, касающиеся, например,
длины цистерны, которая должна соответствовать размерам шасси
базового автомобиля или полуприцепа. Ограничения могут от-
носиться также к вместимости цистерны.
Условия и ограничения оптимизационных задач часто удается
выразить в виде линейных соотношений между входными и выход-
ными переменными (задачи линейного программирования). Мате-
матическая формулировка такой задачи может быть показана на
таком примере. Максимизируем функцию
10а + 8b + 12с max, (А)
где а, д, при ограничениях
6а + 9Ь + 7с < 6000;
2а +с-& + Зс<3000;
а + 5Ь + 2с < 4000;
а + b 4-с = 1500.
(В)
В выражениях (А) — функция цели (например прибыль,
которую нужно максимизировать); (В) — ограничения (например,
по использованию фонда времени станочного оборудования, коли-
честву запасных деталей, получаемых от смежников, по трудо-
емкости выполнения отдельных операций при создании новой тех-
ники и т. п.).
Оптимальные решения некоторых задач удобно представлять
«в графической форме. Примером такой задачи может быть опре-
деление оптимальной надежности изделия.
Очевидно, что чем выше значения показателя надежности
Р (f) (вероятность безотказности), тем выше надежность изделия.
Но изделия, имеющие большую надежность, имеют обычно и
большую себестоимость. С другой стороны, более надежные изде-
лия дешевле в эксплуатации. На
рис. 112, показаны характерные
зависимости между показателями
надежности Р (t) и затратами в
сферах производства и эксплуата-
ции изделия.
На этом же графике построена
кривая 3 суммарных затрат в
функции показателя Р (t). Как
видим, эта кривая имеет мини-
мум, соответствующий точке пе-
ресечения кривых 1 и 2. Верти-
Рис. 112. Зависимость стоимости изде-
лия от показателя Р (/):
1 — стоимость эксплуатации изделия; 2 — ка-
питаловложения; 3 — суммарная стоимость
графике, представленном на
О OJ 02 О З ДО 05 06 0,7 0,8 09 P(t)
443
каль, проходящая через эту точку, отметит на оси абсцисс значе-
ние показателя надежности Ро (t), которое можно считать опти-
мальным с точки зрения экономической целесообразности. Повы-
шение этого показателя выше Ро (/) нецелесообразно, так как
в этом случае снижение стоимости эксплуатации изделия не ком-
пенсирует затраты на его создание.
На рис. 20 изображена схема механизма подъема рабочего обо-
рудования фронтального погрузчика. В процессе подъема груза
весом Q движущее усилие Рд в гидроцилиндре, изменяясь по неко-
торому закону, получает максимальное значение при каком-то
угле поворота стрелы а, а затем снова снижается. Изменение соот-
ношения между геометрическими параметрами механизма и поло-
жения присоединительных шарниров стрелы и гидроцилиндра
(точек D и О) не отразится на законе изменения движущего уси-
лия Рд, как функции угла а, но при этом будет изменяться зна-
чение максимума движущего усилия. Очевидно, что с точки зре-
ния нагружения гидропривода механизма подъема стрелы жела-
тельно, чтобы максимум силы Рд был возможно меньшим.
Из этого условия вытекает одна из задач по оптимизации дан-
ного механизма. Она может быть сформулирована так: найти такое
значение угла а0, определяющего положения присоединительных
шарниров стрелы и гидроцилиидра, при котором максимум движу-
щего усилия гидроцилиидра будет наименьшим; математически
это требование можно записать так:
шах Рд (а, а0) = min.
а а0
Покажем общую схему решения этой задачи.
Для краткости записи введем следующие обозначения:
AD = lA; DC = lc; DO = b; ОС = $.
Из условия равновесия рассматриваемой системы находим
Рд/С sin fi = QlA sin (a0 4- a),
откуда
n . /) ZASm(«0_+«)
д lc sin p
(488)
Далее из треугольника ODC, используя теорему синусов,
получаем
ь
sin p = — sin a;
из того же треугольника по теореме косинусов находим
s2 = /с + fr2 ~ 2Zcb cos a.
Очевидно, что
s2m.x = lc + ь2 — 2lcb cos amax; s^ln = ll + b2 — 2lcb cos amln.
444
Обозначим в последних выражениях
01 = 21сЬ\ 02 ~ 1с Ч~
и запишем их так:
Smax — 02 01 COS СХтах» ^min — 02 01 COS
С учетом этих выражений уравнение (488) получает вид
21 . sin (ап 4- сО |/фо — Ф, cos а
P„ = Q —------1 \ — ---------1-----• (489)
д Фг sin а ' '
Уравнением (489) описывается закон изменения движущего
усилия на штоке гидроцилиидра механизма в зависимости от его
геометрических параметров. Поэтому этим уравнением можно
воспользоваться для построения зависимости Рд (а) при заданных
значениях веса поднимаемого груза Q, геометрических параметров
механизма и известных границах изменения величин s (smln и smax),
Ct (O&mln И ОС max) И OCq (ОС0 mln И CCq max) •
Задачу решают в такой последовательности.
Задают шаг изменения угла ссо=(аотах— аот1п)Лп и для
каждого (т + 1) значений этого угла при фиксированных зна-
чениях параметров Фх и Ф2 вычисляют или строят графически
функцию Р (ос). По кривым Р (сс) находят максимальное значение
движущей силы Рд = Рдтах, полученное для каждого значения
ос0 (рис. 113, а).
После этого строят график максимальных значений сил Ртах
в функции угла ос0 и по нему находят оптимальное значение
угла ос0 = осООПт> Для которого максимум силы Рдтах имеет наи-
меньшее значение (рис. 113, б).
Задаваясь затем новыми значениями Фх и 02, описанную про-
цедуру вычислений повторяют снова, и так столько раз, сколько
комбинаций значений задаваемых параметров при принятом шаге
вычислений необходимо рассчитать.
Такую задачу можно решать на ЭВМ, используя метод прямого
перебора всех возможных комбинаций задаваемых параметров
механизма.
В более простых случаях,
когда между входными и вы-
ходными параметрами су-
ществуют функциональные
зависимости, на которые не
накладываются никакие огра-
ничения, и когда аргументы
Рис. 113. К оптимизации геометри-
ческих параметров рабочего обору-
дования:
а — зависимость между усилием на
штоке гидроцилиидра стрелы и углом
ее поворота; б — зависимость между
максимальными значениями силы
рдтах и Углом “0
445
функций изменяются непрерывно (а не дискретно), для нахожде-
ния оптимума можно использовать известный метод дифферен-
циального исчисления, основанный на дифференцировании по
каждой независимой переменной и приравнивании производных
нулю. В результате получают алгебраическое уравнение, из реше-
ния которого находят оптимум, или, иначе, экстремальное значе-
ние исследуемой функции.
Если на выражения, содержащие неизвестные функции, на-
кладываются определенные ограничения, то для нахождения
максимума или минимума можно использовать методы вариацион-
ного исчисления.
10.2.3. Эвристические методы поиска
оптимальных решений
Метод морфологического анализа. Сущность морфоло-
гического подхода к поиску оптимальных решений состоит в состав-
лении возможных комбинаций параметров, состояний или режи-
мов работы системы и в поэтапном отборе на основании логического
анализа идей и решений, наилучшим образом удовлетворяющих
поставленной цели.
Для выполнения этих процедур для каждого этапа проектиро-
вания составляют так называемую морфологическую (структур-
ную) карту, которая дает все возможные решения проблемы с уче-
том заданных ограничений. Представление материала в такой
форме позволяет конструктору сразу охватить все возможные
варианты решений и систематизировать процесс выбора опти-
мального варианта.
Для примера в виде табл. 31 приведена морфологическая кар-
та, составленная для первого этапа отбора возможных вариантов
одноковшовых погрузчиков. Перечисленные в карте параметры
в общем виде дают представление о характерных конструктивных
особенностях машины. Наиболее предпочтительные варианты
подчеркнуты, а остальные исключаются из дальнейшего рассмот-
рения. Число возможных комбинаций параметров для рассматри-
ваемого случая равно 13 824, а число вариантов, оставленных для
дальнейшего анализа, во много раз меньше (12 вариантов).
Морфологическая карта для второго этапа поиска будет содер-
жать только 12 отобранных вариантов, которые нужно сравнить
между собой по некоторым наиболее важным показателям, таким
как стоимость машины, экономичность и КПД привода, безопас-
ность и надежность в работе, масса и габаритные размеры, плав-
ность хода, уровень унификации и т. п. В морфологической карте
варианты, наилучшим образом удовлетворяющие этим показате-
лям, подчеркиваются, а остальные исключаются из дальнейшего
рассмотрения.
Отобранные на этом этапе варианты сравнивают между собой
с учетом их реализации в данных производственных условиях,
446
31. Морфологическая карта (этап 1. Рассмотрение возможных вариантов)
Параметр Варианты одноковшовых погрузчиков Общее число решений Число предпо- чтительных ре- шений
А В С Д
Вмести- мость ковша Малая Средняя Большая 3 1
Тип ходо- вой части Колесный Гусенич- ный Колесно- гусеничный Многогусе- ничный (4-х гусе- ничный) 4 1
Тип транс- миссии Механи- ческая Гидромеха- ническая Г идрообъ- емная «мотор- колесо» Дизель- электриче- ская «мотор- 4 3
колесо»
Скорость движения (транспорт- ная) Малая Средняя Большая 3 1
Способ поворота Поворот передних (задних) колес Поворот передних и задних колес «Склады- вание» шарнирно- сочленен- Торможе- ние колес одной стороны 4 2
ной рамы
Способ соединения мостов с ходовой рамой Жесткое обоих мостов Жестко- балансир- ное одного моста и жесткое другого моста Подрес- соренное одного моста и жестко-ба- лансирное другого моста Рессорно- балансир- ное одного моста и жесткое другого моста 4 2
Тип погру- зочного оборудо- вания Фронталь- ное Перекид- ное Полупо- воротное 3 1
Способ разгрузки ковша Опрокиды- ванием Выдвиже- нием задней стенки 2 1
447
возможностей сбыта и других показателей. Отобранные при этом
варианты заносят в морфологическую карту третьего этапа.
Так, сужая область поиска, выбирают оптимальный вариант
конструкции машины, который и принимают для разработки.
Метод мозгового штурма. Метод мозгового штурма основан
на коллективном обсуждении специалистами различных предло-
жений по решению поставленной перед ними задачи. В ходе об-
суждения каждый участник может выдвинуть свои предложения,
но при этом он должен воздерживаться от критики других пред-
ложений, так как обсуждение должно носить характер свобод-
ного и доброжелательного обмена мнениями.
На совещании ставятся вопросы типа: как это сделать? Где
это может быть сделано? Какую пользу принесет такое решение?
Кто должен этим заниматься? и т. д.
Для того чтобы такое совещание было эффективным, его нужно
хорошо подготовить: собрать необходимый для обсуждения мате-
риал, тщательно подобрать участников совещания, которые по
складу характера и мышления должны быть аналитиками, а не
критиками (последним качеством должны обладать эксперты) и,
разумеется, должны быть квалифицированными специалистами
в тех областях, которые связаны с рассматриваемой проблемой.
Метод синектики. Метод синектики, как и метод мозгового
штурма, основан на коллективном поиске лучших технических
идей. Но к решению задачи подходят иначе: собираются широко
эрудированные специалисты разных профессий, представители
разных областей науки и техники для того, чтобы обсудить выдви-
гаемую проблему с самых разных точек зрения. Отсюда и назва-
ние метода — от греческого «синектика», что означает совмещение
разнородных элементов.
Уже сам подбор участников совещания и постановка вопросов,
на которые они должны ответить, предопределяют новизну и не-
шаблонность выдвигаемых на совещании предложений. Эти пред-
ложения часто основываются на аналогии явлений, наблюдаемых
*в природе и в технических системах, не исключают они и элементов
научной фантастики. В ходе такого обсуждения круг нерешенных
вопросов постепенно сужается и нередко рождаются новые ориги-
нальные идеи по решению данной проблемы.
10.2.4. Функционально-стоимостной анализ
проектируемых конструкций
Одна из главных задач управления потребительскими
свойствами изделий — минимизация составляющих себестоимости.
Эффективным методом ее решения является функционально-стои-
мостной анализ (ФСА).
Главная особенность ФСА состоит в комплексном подходе к вы-
явлению лишних или завышенных функций нового или модернизи-
руемого изделия, с которыми связаны дополнительные затраты
448
при его производстве и эксплуатации, и оптимизации на этой основе
соотношения между потребительскими свойствами изделия и его
себесто и мость ю.
Наиболее ответственным этапом в создании изделия, отвечаю-
щего этим требованиям, является разработка его конструкции, при
которой закладываются решения, во многом предопределяющие
возможность использования экономичной и ресурсосберегающей
технологии, применение автоматизированной системы проекти-
рования и современной организации производства.
Если традиционные методы поиска снижения стоимости изде-
лия чаще всего связывались с выбором материала, способов изго-
товления, с допусками и чистотой обработки поверхности изделия,
то при применении ФСА специалисты пытаются в первую очередь
ответить на такие вопросы: какими способами могут выпол-
няться те или иные работы, какие варианты изделий могут вы-
полнять одни и те же функции с наименьшими затратами? и т. д.
Подобные вопросы могут относиться как к изделию (машине) в це-
лом, так и к отдельным деталям и сборочным единицам, из которых
состоит изделие. Так, например, в процессе функционально-стои-
мостного анализа может решаться вопрос, какие машины или
комплексы машин экономически целесообразно применять для
выполнения данных земляных работ; какие способы воздействия
на данную рабочую среду — механический, гидравлический,
взрывной, термический, химический или электрофизический —
будут связаны с наименьшими затратами в сферах производства
и эксплуатации; какая форма рабочего органа машины обеспечит
надежность в работе и наименьшую стоимость изготовления и т. п.
На все эти вопросы должна ответить творческая группа ФСА,
в которую кроме конструктора, инженера-экономиста и техно-
лога входят специалисты по надежности, контролю качества, тех-
нической эстетике, эксплуатации и сбыту. Эта же группа выраба-
тывает и идеи, которые должны быть заложены в будущее изделие.
Основой для разработки идей является техническая и экономи-
ческая информация по объекту ФСА, отечественный и зарубежный
опыт создания изделий аналогичного назначения, предварительно
проведенная патентно-лицензионная работа.
В процессе обсуждения и анализа выдвинутых идей составляют
таблицы, содержащие наименование функций, выполняемых каж-
дым элементом объекта, и затраты на реализацию каждой функции
в объекте; в сумме эти затраты приблизительно определяют сто-
мость изделия. Все экономические расчеты на этом этапе проводят
по укрупненным методам (некоторые из таких методов рассматри-
вались в п. 9.2).
Для оценки предложений, выдвинутых творческой группой,
создается также группа экспертов, состоящая из наиболее квали-
фицированных специалистов в различных областях знаний.
В группу экспертов кроме специалистов и передовых рабочих-
рационализаторов предприятия могут быть включены ведущие
449
специалисты научно-исследовательских институтов и соответ-
ствующих кафедр вузов.
Задача экспертной группы состоит в оценке и отборе наиболее
предпочтительных вариантов изделия, которые сравнивают между
собой не только по стоимости, но и по таким важным показателям,
как масса и удельная материалоемкость, удельная трудоемкость,
безопасность, надежность, уровни унификации и стандартизации,
легкость обслуживания и др. Результаты работы экспертов могут
быть отражены в специальной таблице, называемой матрицей реше-
ний. Как составляется такая матрица и как она используется для
выработки рекомендаций экспертной группы, будет показано
в п. 10.2.5.
Следующим этапом ФСА является проверка правильности
выбранной концепции и проведенного анализа по варианту объекта,
отобранного экспертной группой. На этом этапе идеи, изложенные
на бумаге, превращаются в реальные вещи: макет, модель или
прототип изделия.
Макет изделия обычно изготовляют в определенном масштабе
из пластмассы, дерева или картона. Макет, конечно, не может
дать исчерпывающей информации об изделии, но он позволяет
лучше представить себе его внешний вид, проверить принятые
методы сборки. Более полную информацию дает физическая модель,
построенная на основе принципа подобия. Являясь геометрически
точным отражением реального объекта, модель позволяет воспро-
извести движения всех основных элементов объекта с учетом огра-
ничений, налагаемых его конструктивными параметрами.
Весьма эффективным при проведении ФСА является построе-
ние математических моделей, реализуемых на ЭВМ. Хотя в отличие
от физических они не имеют очевидного сходства с реальным
объектом, но позволяют учесть многие факторы, влияющие на его
функционирование, и тем самым наиболее точно прогнозировать
поведение объекта в различных условиях.
После выбора оптимального варианта объекта начинают его
эскизную проработку, затем — техническое и рабочее проектиро-
вание, в ходе которых определяют дополнительные затраты, не
учтенные при укрупненных расчетах, вносят необходимые коррек-
тировки, учитывающие производственные возможности предприя-
тия, объем производства, сроки выпуска готовой продукции и т. д.,
что позволяет в итоге определить народнохозяйственный эффект,
ожидаемый от внедрения объекта ФСА.
10.2.5. Применение метода экспертных оценок
для выбора оптимального варианта изделия
В основе метода экспертных оценок лежат заключения
специалистов-экспертов по различным вариантам изделий, пред-
назначенных для выполнения одних и тех же работ, либо по ка-
ким-то частным решениям, связанным, например, с выбором спо-
460
соба крепления той или иной детали или материала, из которого
она должна быть изготовлена. Оптимальным решением признается
то, которое получило наивысшую оценку экспертов.
Для иллюстрации этого метода приведем такой пример.
Для уборки опавших листьев было предложено использовать
различное оборудование, которое отличается не только по конст-
рукции, на и по принципу действия: пресс-подборщик; вакуум-
ный подборщик; измельчитель; устройство, обеспечивающее хими-
ческое разложение листьев; газонокосилка — разбрасыватель из-
вести; переносная печь для сжигания листьев.
Каждый вариант оборудования условимся оценивать по девяти
критериям (показателям). В зависимости от относительной важ-
32. Матрица решений
Оборудование Применение стандартных деталей 0,08 ♦ Безопасность 0,12 Простота и удобство об- служивания 0,10 Прочность 0,10 Отношение со стороны об- щества 0,18 Надежность 0,20 Стоимость разработки 0,03 Цена для покупателя 0,04 Технические характери- стики 0,15 Сумма 1,0
А. Пресс-подбор- щик 3 0,24 5 0,60 2 0,20 4 0,40 9 1,62 6 1,20 1 0,03 1 0,04 3 0,45 4,78
Б. Вакуумный подборщик 9 10 10 8 6 7 10 10 8 8,14
0,72 1,20 1,00 0,80 1,08 1,40 0,30 0,40 1,24
В. Измельчитель 5 0,40 6 0,72 7 0,70 7 0,70 8 1,44 6 1,20 3 0,09 4 0,16 5 0,75 6,16
Г. Устройство, обеспечивающее 8 0,64 10 1,20 9 0,90 8 0,80 9 1,62 7 1,40 2 0,06 8 0,32 8 1,24 8,18
химическое раз- ложение листьев
Д. Подборщик листьев — газоно- косилка — разбра- 6 0,48 8 0,96 3 0,30 2 0,20 6 1,08 4 0,80 2 0,06 2 0,08 6 0,90 4,86
сыватель извести
Е. Переносная печь для сжигания 5 0,40 4 0,48 8 0,80 6 0,60 5 0,90 10 2,00 3 0,09 4 0,16 9 1,35 6,78
листьев
Весовые коэффициенты.
Примечание. В числителе указано число баллов, в знаменателе —
произведение весового коэффициента на число баллов.
451
3 . Матрица решений
Материалы Механиче- ские свойства 0.3 Состав и плот- ность 0,03 Способ- ность к штам- повке 0.2 Чистовая обработка и нанесение покрытия 0.2 Стои- мость 0.3 Сумма 1.0
Алюминий 10 10 9 9 5 8,4
3,0 0,3 1,8 1,8 1,5
Листовая сталь 10 7 8 7 8 8,61
3,0 0,21 1,6 1,4 2,4
Медный сплав 8 8 9 8 3 6,94
2,4 0,24 1,8 1,6 0,9
Реактопласты 3 5 10 10 10 8,05
0,9 0,15 2,0 2,0 3,0
ности в обеспечении требований, предъявляемых к обору-
дованию, каждый критерий имеет свой весовой коэффици-
ент, значения которого изменяются от 0 до 1; сумма всех ве-
совых коэффициентов по всем девяти критериям должна быть
равна 1.
Для выбора наилучшего варианта составляем специальную
таблицу, называемую матрицей решений (табл. 32).
Каждый вариант оборудования, в зависимости от соответствия
его принятым оценочным критериям, оценивают соответствующим
числом баллов (от 0 до 10). Чем больше данный вариант обору-
дования соответствует принятому критерию, тем большее число
баллов он получает. Для каждого варианта оборудования вычис-
ляют сумму произведений баллов на весовой коэффициент и ре-
зультат записывают в последней клетке матрицы (например, для
варианта А — это 0,24 + 0,60 + 0,20 4- 0,40 + 1,62 + 1,20 +
+ 0,03 + 0,04 + 0,45 = 4,78); эта сумма является окончательной
оценкой варианта.
Как видим, варианты Б и Г имеют самые высокие оценки (соот-
ветственно 8,14 и 8,18 при наибольшем возможном числе баллов 10)
и, следовательно, по принятым критериям они оказываются лучше
других. После анализа этих двух вариантов, например с точки
зрения технологических возможностей предприятия, останавли-
вают выбор на одном из них — он будет оптимальным вариантом
оборудования.
Пусть теперь перед экспертами поставлена более узкая задача —
выбрать материал для корпусной детали некоторого объекта, оп-
тимально удовлетворяющего следующим конструктивным требо-
ваниям:
1) материал должен легко штамповаться и приобретать требуе-
мую форму, т. е. быть пластичным, иметь относительно высокую
ударную вязкость и небольшую плотность;
462
2) поверхность материала должна обрабатываться для защиты
от коррозии (естественная защита или покраска);
3) стоимость материала, из которого изготовляется корпус,
должна быть значительно ниже стоимости материала других дета-
лей;
4) корпус должен легко крепиться к несущей раме машины,
быть съемным и выдерживать вибрационные нагрузки.
В соответствии с этими требованиями по правилам, описанным
для первого примера, строим матрицу решений (табл. 33).
Как следует из матрицы решений, по сумме баллов наилучшим
материалом является листовая сталь (например, холоднокатаная
сталь средней твердости).
СПИСОК ЛИТЕРАТУРЫ
1. Волков Д. П., Николаев С. Н. Надежность строительных машин и обо-
рудования. М.: Высшая школа, 1979. 248 с.
2. Гоберман Л. А. Прикладная механика колесных машин. М.: Машино-
строение, 1976. 311 с.
3. Гоберман Л. А. Основы расчета канатоведущих приводов строительных
и лесных машин и установок. М.: ЦНИИТЭстроймаш, 1980. 92 с.
4. Гоберман Л. А., Степанян К. В. Строительные и дорожные машины.
Атлас конструкций. М.: Машиностроение, 1985. 96 с.
5. Домбровский Н. Г., Карт велит в или Ю. Л., Гальперин М. И. Строи-
тельные машины: В 2 ч. Ч. 1. М.: Машиностроение, 1976. 390 с.
6. Дорожные машины: Теория, конструкция и расчет/Н. Я. Хархута,
М. И. Капустин, В. П. Семенов, И. М. Эвентов; Под общ. ред. Н. Я. Хархуты.
2-е изд. перераб. и доп. Л.: Машиностроение, 1976. 471 с.
7. Инструкция по определению экономической эффективности новых строи-
тельных, дорожных, мелиоративных машин, противопожарного оборудования,
лифтов. Ч. 1. М.: ЦНИИТЭстроймаш, 1978.
8. Методические указания: надежность в технике. Оценка параметров
безопасности колесных и гусеничных машин по опрокидыванию. Характеристики
динамической и статической устойчивости. РД 50-233—81. М.: Изд-во Стандартов,
1981. 63 с.
9. Теория, конструкция и расчет строительных и дорожных машин/Л. А. Го-
берман, К. В. Степанян, А. А. Яркин, В. С. Заленский; Под ред. Л. А. Гобер-
мана. М.: Машиностроение, 1979. 407 с.
10. Эргономика. Проблемы приспособления труда к человеку/Под ред.
В. Ф. Венда. М.: Мир, 1971. 421 с.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
А
Автогрейдеры 11, 97, 321
— производительность 389
— реакции на колесах 99
Автоматизация 15
— систем управления и контроля 15
— проектирования 436
Автоцистерны 61, 63
Аккумулятор 210
Алгоритмы 433
— форма записи 434, 435
Аппроксимация 433
Б
Баровая машина 177
Безопасность 15, 378, 411
— активная 331, 372
— пассивная 370, 373
Буксование гусениц 304
— колес 292, 294
Бульдозеры 6, 9, 19, 97, 98, 130
— производительность 389
— реакции на колесах 98
В
Вероятность безотказной работы 356,
358
Вибраторы 179, 187
Вибрации 183, 383
Вибровальцы 179, 190
Виброгрохоты 188
Вибромолоты 179
Виброплиты 51, 179
Влажность 39, 52
— оптимальная 52
Г
Генератор 193
Гидромашины 210
— момент на валу 216, 253. 277
— мощность 206, 215, 216, 219, 328
— объем рабочий 215, 217
— подача 215, 216, 327
— расход 217, 218, 327
Гидрообъемный привод 209
— гидравлический КПД 216
— давление 215, 218, 326
— объемный КПД 215
— полный КПД 216
Гидротрансформатор 201, 203
— момент 204, 206
— мощность 206
— характеристики 205
Графопостроитель 201
Грейферы 9, 56, 123
Грузонесущие органы 183
Грунты 38
— копание 44
— разрушение 48
— резание 42
— уплотнение 51
Гусеничные движители 303
д
Давление аэродинамическое 37
Двигатели (моторы) 6, 192, 193, 420
Движение абсолютное 168, 303
— апериодическое 186
— относительное 78, 168, 303
— переносное 78, 168, 303
— переходное нестационарное, не-
установившееся) 24, 221
— периодическое 24
— плоскопараллельное 36
— поступательное 183, 188
— установившееся 24
Демпфирование 32, 112, 185, 186
Динамический фактор 319, 320
Долговечность 355
Дробилки 49, 59, 61
Дробление каменных материалов 49
Ж
Жесткость 66, 375
— гидросистемы 33, 95
— пневматических шин 33, 35
— приведение 85
3
Задачи линейного программирования
443
455
— оптимального проектирования 439
---- управления 441
Затраты (вложения) капитальные 397,
406, 414, 415, 419
— приведенные 397, 403, 405, 410
— текущие (эксплуатационные) 398,
406, 415, 421
И
Иерархия критериев 441
Избыточная сила 71, 221, 222, 246,
252, 254, 258, 259, 274, 279, 283, 288
Изнашивание 361
Инерциальная система координат 68
— устойчивости 340
— эффективности 404, 405
Краны башенные 196, 261, 263, 266
— на автомобильном шасси 12
— на специальном пневмоколесном
шасси 12
Критерий динамической устойчивости
352, 353
оптимальности 439, 442
Л
Лифтовые подъемники 257, 260
М
К
Кабины (рабочее место оператора) 376
— защитные устройства 373
— зона безопасности 373
— обзорность 378
— подвес 381
Карданная передача 197
Качество 355
Кинетическая энергия 50, 73, 80,
114, 317, 328
Кинетостатика 69, 70, 96
Ковши 45, 47
Колебания вынужденные 113, 379
— защита 308, 381
— параметры 186, 380
— резонанс 187
— собственные (свободные) 113, 379
Колеса с пневматической шиной ве-
домые 292, 295, 296
-------ведущие (тормозящие) 292,
296
Конвейеры вибрационные (качающие-
ся) 183, 189
— ленточные (канатные) 166
— натяжение гибкого тягового эле'
мента 173, 174
— цепные 166
Координаты обобщенные 105
Коэффициент динамичности 115, 130
— запаса прочности 160, 163
— запаса сцепления муфт 227
— использования сцепного веса ма-
шины 315, 316
— объемного смятия грунта 308, 314
приведенный сопротивления каче-
нию 30, 31, 287, 308, 314
— сопротивления грунта сдвигу 40
----движению 315
суммарный сопротивления каче-
нию 31, 278
— сцепления 299, 300, 301, 312, 313
— трения скольжения (качения) 29,
167, 228, 230, 240, 262
Манипуляторы 20, 21
Материалоемкость (энергоемкость) 5,
364, 369, 370
Материалы конструкционные 364
Мгновенный центр скоростей (враще-
ния) 142, 293, 294
Метод мозгового штурма 448
морфологического анализа 466, 467
— синектики 448
— эвристический 442, 446
— экспертных оценок 450
Механизмы вращения 261
дифференциальные 199, 200
— передвижения 282
— подъема и изменения вылета стрелы
240
Модели математические 25, 433
— физические 450
Моделирование 433
Модуль деформации грунта 52
— упругости жидкости 32
---— материалов 49, 50, 163
Момент запаса устойчивости 339
— инерции относительности оси 66,
371, 372
---- сечения 162
— кинетический 187
— статический 162
Муфты гидравлические 204
— фрикционные 223
Н
Нагрузки ветровые 36
Надежность 355, 360, 411
Нормы удельного расхода топлива 402
О
Опорные контуры 231
Оптимизация 437
Оптимум функции 444
Ось опрокидывания 231
456
Отвалы 10, 44, 120, 148, 152, 163, 179
Отчисления амортизационные 399, 415
II
Передаточное число 197, 327
---- зубчатой передачи с негюдвиж-
ними осями 197
----планетарной передачи 198, 199
----рычажных механизмов 143, 154,
231
Погрузчики 8, 101, 130, 20!
— рабочее оборудование i 19, 146,
155
Подветренная площадь 38
Полиспасты 241, 242
Предел прочности 41, 49, 51, 160,
364
— текучести 160, 364, 365
— упругости 160
— усталости 160
Прибыль 406
Приводы 192
— гидромеханические 201
— гидрообъем ные 209, 216, 217
— механические 192, 193, 197
Принцип Даламбера 34, 70, 105
— освобождаемое!и от связей 29, 34
— относительности 69
Программа-транслятор 434
Программное обеспечение 434
Производительность 387, 410, 415
Производственные фонды 406
Р
Работа деформации 49
— сил 220, 301, 317, 328
Радиус-вектор 293, 294, 371
— динамический 293
— качения 293
— кривизны (поворота) 35, 36, 343,
344
Ресурс 400, 401
Роботы 19
Рыхлители 13, 150
Ряды конструктивно-унифицирован-
ные 430
— параметрические (типоразмерные)
430
Сателлиты 198, 200
Себестоимость 396, 404, 406, 409, 414
Силы 27
— внешние (внутренние) 28
— возмущающие 180, 184, 187
— движущие (тормозящие) 28
— динамические 27
инерции касательные 34, 35, 36,
268, 273, 279
----нормальные (центробежные) 35,
180, 182, 192, 267, 278, 343
реакции связей 27, 105, 106
-- сопротивления 28
сцепления 130, 316, 321, 322, 323
— трения 28, 29
— упругости 32, 106
Системы 23
— абстрактные 25, 26
— вероятностные 25
— детерминированные 25
— динамические 24, 66
реальные 24, 25
— робототехнические 19
— статические 24, 54, 55
— управляемые 24, 25
Скорости абсолютные 78, 81, 146,
168, 303, 304
— относительные 33, 78. 168, 303
— переносные 75, 168, 303
— скольжения 294
Скреперы 6, 10, 11, 13, 17, 18, 97, 100
Снегоочиститель 195
Стандартизация 5, 368, 413, 415
Степени свободы 19, 21, 104, 105
Структура парка машин 12
Т
Теорема об изменении кинетической
энергии 114
----— количества движения 53, И 5
Технологичность конструкции 362
— материала 364
Технический уровень 355
Тормоза 229
— дисковые 237
— колодочные 229
— ленточные 231, 235, 238
Трудоемкость 363, 396, 410, 412
Титова я динамика 313
У
Угол естественного откоса 41, 389
— обзорности 378
—- обхвата 166
— сопротивления сдвигу 40
— трения 29, 30; 40
— устойчивости 334, 337, 353
Унификация 368
Ускорение касательное 36, 127
— нормальное 36, 127
— суммарное 127
— угловое 36, 127
Устойчивость динамическая 349
—- статическая 331
шарнирно-сочлененных машин 345
457
ф
Функционально-стоимостной анализ
448
ц
Цена 406, 407
Центр давления гусеничного хода 307,
308
— масс 81, 96, 268
— измерение 382
— средства защиты 383
Э
Экономическая эффективность 403,
409
Эргономика 375, 376
Эстетика техническая 375, 384
Ш
Шумы 379
Языки алгоритмические 434
ОГЛАВЛЕНИЕ
/
Предисловие.......................................................... 3
Глава 1. Научно-технический прогресс в области строительного и до-
рожного машиностроения............................................... 5
1.1. Основные направления развития конструкций и совершен-
ствования структуры парка машин................................ 5
1.1.1. Общие тенденции развития конструкций машин. ... 5
1.1.2. Совершенствование структуры парка машин............ 12
1.2. Автоматизация рабочих процессов строительных и дорож-
ных машин на базе применения микропроцессорной техники 14
1.2.1. Цели и задачи автоматизации рабочих процессов ... 14
1.2.2. Автоматизация систем управления и контроля за ра-
ботой машин......................................... 15
1.2.3. Роботизация рабочего оборудования (строительные ро-
боты) .................................................... 19
Глава 2. Общие мётоды расчета машин................................. 22
2.1. Системный подход к анализу и расчету машин............... 22
2.1.1. Цели и задачи расчета машин........................ 22
2.1.2. Общие понятия системы. Классификация систем . ... 23
2.2. Определение сил, действующих в механизмах машин .... 27
2.2.1. Классификация сил ................................. 27
2.2.2. Силы трения скольжения и качения................... 29
2.2.3. Силы упругости и демпфирующие сопротивления... 32
2.2.4. Массовые силы ..................................... 34
2.2.5. Ветровые нагрузки и сопротивления воздушной среды 36
2.3. Определение сил, нагружающих рабочие органы дорожно-
строительных машин при их взаимодействии со средой... 38
2.3.1. Основные физико-механические свойства и характе-
ристики грунтов............................... 38
2.3.2. Резание и копание грунтов..................... 41
2.3.3. Разрушение мерзлых грунтов и скальных пород. . . 48
2.3.4. Дробление каменных материалов ..................... 49
2.3.5. Уплотнение грунтов и материалов............... 51
2.4. Построение расчетных схем статических систем и общие прин-
ципы их расчета.......................................... 54
2.4.1. Построение расчетных схем статических систем. . . 54
2.4.2. Общие принципы расчета статических систем. ... 55
2.4.3. Примеры расчета ................................... 61
2.5. Построение расчетных схем динамических систем и общие
принципы их расчета .......................................... 66
2.5.1. Параметры, характеризующие динамические свойства
машин.................................................... 66
2.5.2, Инерциальная и неинерциальная системы отсчета... 68
2.5.3. Основные задачи динамики и способы их решения ... 69
2.5.4. Способы изображения расчетных схем................. 72
2.5.5. Приведение масс и моментов инерции................. 72
2.5.6. Приведение сил и моментов сил...................... 81
459
2.5.7. Приведение жесткостей............................. 85
2.5.8. Примеры расчета .................................. 91
2.6. Решение динамических задач с использованием метода ки-
нетостатики .................................................. 96
2.6.1. Общий порядок решения задач....................... 96
2.6.2. Определение нормальных реакций на колесах дорожно-
строительных машин при неустановившемся движении 96
2.6.3. Примеры расчета ................................... 103
2.7. Решение динамических задач с использованием дифференци-
альных уравнений движения............................ 104
2.7.1. Общий порядок решения задач.............. 104
2.7.2. Составление дифференциальных уравнений движения 106
2.7.3. Примеры расчета ................................... 114
Контрольные вопросы ........................................... 116
Глава 3. Основы теории и расчета рабочего оборудования машин цикли-
ческого действия................................................... 118
3.1. Кинематика рабочего оборудования........................ 118
3.1.1. Кинематические схемы рабочего оборудования и тра-
ектории движения рабочих органов......................... 118
3.1.2. Определение скоростей и ускорений рабочего обору-
дования ................................................. 125
3.2. Определение расчетных нагрузок, действующих на рабочие
органы...................................................... 127
3.2.1. Нагрузки, действующие на рабочие органы бульдозеров
и погрузчиков при копании................................ 127
3.2.2. Нагрузки, действующие при копании грунтов рабочим
оборудованием типа обратной лопаты....................... 133
3.2.3. Нагрузки, действующие на стреловое рабочее обору-
дование при подъеме и опускании груза. .................. 134
3.4. Силовой и прочностной расчет рабочего оборудования .... 140
3 4.1. Метод силового расчета, основанный на законе приве-
дения сил................................................ 140
3.4.2. Графоаналитический метод силового расчета, осно-
ванный на разложении сил................................. 143
3.4.3. Аналитический метод силового расчета............. 152
3.4.4. Графический метод силового расчета, основанный на
построении плана сил..................................... 156
3.4.5. Расчет элементов рабочего оборудования на прочность 160
Контрольные вопросы ......................................... 164
Глава 4. Основы теории и расчета машин и оборудования непрерывного
и вибрационного действия .................................... 165
4.1. Машины и оборудование непрерывного действия............. 165
4.1.1. Области применения............................... 165
4.1.2. Теория ленточных, канатных и цепных конвейеров 166
4.1.3. Определение сопротивлений движению гибкого тягового
элемента ................................................ 170
4.1.4. Определение натяжений гибкого тягового элемента 173
4.1.5. Определение мощности привода..................... 174
4.1.6. Силовой расчет вспомогательных механизмов управ-
ления рабочим оборудованием ............................. 176
4.2. Машины и оборудование вибрационного действия ..... 178
4.2.1. Классификация приводов вибрационного действия и
области его применения .................................. 178
4.2.2. Принцип действия инерционных вибраторов. . . . 180
4.2.3. Расчет вибрационного транспортно-технологического
оборудования ............................................ 183
4.2.4. Расчет качающегося транспортно-технологического обо-
460
рудования.......................................... 188
4.2.5. Расчет вибрационного уплотняющего оборудования 190
Контрольные вопросы ......................................... 191
Глава 5. Основы теории и расчета приводов и механизмов общего назна-
чения ............................................................. 192
5.1. Механические и гидромеханические приводы................ 192
5.1.1. Классификация и назначение приводов............... 192
5.1.2. Механические приводы ............................. 194
5.1.3. Гидромеханические приводы ........................ 201
5.2. Объемные гидроприводы .................................. 209
5.2.1. Принцип действия объемного гидропривода .......... 209
5.2.2. Объемные гидромашины ............................. 210
5.2.3. Основные параметры гидромашин..................... 215
5.2.4. Расчет и выбор основных параметров гидроприводов 216
5.3. Переходные процессы приводов. Муфты приводов и тормоз-
ные системы.................................................. 219
5.3.1. Переходные процессы приводов...................... 219
5.3.2. Муфты приводов.................................... 223
5.3.3. Тормозные системы ................................ 229
5.4. Статика и динамика механизмов подъема и изменения вылета
стрелы ...................................................... 240
5.4.1. Статический расчет механизмов подъема и изменения
вылета стрелы с канатно-блочной системой подъема 240
5.4.2. Динамика механизмов подъема и изменения вылета
стрелы при разгоне. Выбор двигателя привода .... 244
5.4.3. Динамика механизмов подъема и изменения вылета
стрелы при торможении ................................... 249
5.4.4. Особенности динамики механизмов подъема и изменения
вылета стрелы с объемным гидроприводом.................. 253
5.4.5. Примеры расчета .................................. 255
5.5. Статика и динамика лифтовых подъемников................. 257
5.5.1. Статический расчет механизмов подъема лифтов с ка-
натоведущим приводом..................................... 257
5.5.2. Динамический расчет механизмов лифтовых подъемни-
ков .................................................... 258
5.6. Статика и динамика механизмов вращения..............., 261
5.6.1. Статический расчет механизмов вращения............ 261
5.6.2. Динамический расчет механизмов вращения при раз-
гоне ................................................... 272
5.6.3. Динамический расчет механизмов вращения при тор-
можении .......................................... 274
5.6.4. Особенности динамического расчета механизмов вра-
щения с объемным гидроприводом .................... 277
5.6.5. Примеры расчета ........................... 277
5.7. Динамика механизмов передвижения ....................... 282
5.7.1. Динамика механических трансмиссий при разгоне. . . 282
5.7.2. Динамика механических трансмиссий при торможении 284
5.7.3. Особенности динамики гидромеханических трансмиссий 286
5.7.4. Примеры расчета .................................. 288
Контрольные вопросы ......................................... 290
Г лава 6. Основы тягового расчета дорожно-строительных машин. . . 292
6.1. Взаимодействие колеса с пневматической шиной с поверх-
ностью качения................................................ 292
6.1.1. Кинематика качения колеса ........................ 292
6.1.2. Сопротивление качению колеса. Касательные реакции
поверхности качения...................................... 295
461
6.1.3. Сцепление пневматической шины с поверхностью ка-
чения .................................................... 299
6.1.4. КПД ведущего и тормозящего колес. Тяговые характе-
ристики колесного движителя .............................. 302
6.2. Взаимодействие гусеничного движителя с поверхностью ка-
чения ........................................................ 303
6.2.1. Кинематика гусеничного движителя .................. 303
6.2.2. Давление гусеницы на основание и сопротивление ка-
чению .................................................... 305
6.2.3. Определение тягового усилия гусеничного движителя 309
6.2.4. Сцепление гусеницы с поверхностью качения. КПД
гусеничного движителя .................................... 312
6.3. Тяговая динамика машин .................................. 313
6.3.1. Основные составляющие сопротивления движению 313
6.3.2. Тяговое усилие машины.............................. 315
6.3.3. Уравнения тягового и мощностного балансов .... 317
6.3.4. Удельные (безразмерные) тяговые показатели машин 319
6.3.5. Влияние колесной формулы и схемы соединения движи-
телей на тяговые свойства машины.......................... 320
6.3.6. Применение уравнений тягового и мощностного ба-
лансов для решения практических задач............... 323
6.3.7. Особенности тягового расчета машин с гидрообъемной
трансмиссией ............................................. 326
6.3.8. Торможение машины.................................. 328
Контрольные вопросы ......................................... 330
Глава 7. Основы теории и расчета устойчивости машин против опроки-
дывания ............................................................ 331
7.1. Статическая устойчивость машин против опрокидывания . . . 331
7.1.1. Общие понятия. Опорные контуры машин............... 331
7.1.2. Оценка устойчивости машин по нормальным реакциям
на колесах машины и по углу устойчивости.................. 334
7.1.3. Оценка устойчивости машин по моменту запаса устой-
чивости .................................................. 339
7.1.4. Оценка устойчивости машин по относительным (безраз-
мерным) показателям ...................................... 340
7.1.5. Оценка устойчивости по критической скорости дви-
жения машины на повороте ....................... 343
7.1.6. Особенности расчета предельной устойчивости шар-
нирно-сочлененных машин................................... 345
7.2. Динамическая устойчивость машин против опрокидывания 349
7.2.1. Особенности поведения машины при динамическом на-
гружении ................................................. 349
7.2.2. Условия граничного динамического равновесия . . . 350
7.2.3. Оценка динамической устойчивости машин по ^-кри-
терию .................................................... 352
Контрольные вопросы .......................................... 354
Глава 8, Обеспечение качественных показателей и технического уровня
создаваемой техники ................................................ 355
8.1. Технический уровень, качество и надежность машин и обо-
рудования .................................................... 355
8.1.1. Технический уровень, потребительские свойства и ка-
чество машин и оборудования............................... 355
8.1.2. Основные показатели надежности машин и оборудова-
ния ...................................................... 355
8.1.3. Основные причины отказов дорожно-строительных ма-
шин и пути их устранения................................' 360
8.2. Обеспечение технологичности конструкций.................. 362
462
8.2.1. Основные факторы, влияющие на технологичность
конструкции................................................ 362
8.2.2. Рекомендации по выбору конструкционных материалов 364
8.2.3. Оценка уровня стандартизации и унификации. . . . 368
8.2.4. Показатели удельной материале- и энергоемкости ма-
шин и оборудования ............................................. 369
8.3. Пассивная безопасность машины и средства защиты опера-
тора при ее опрокидывании и от падающих предметов. . . . 370
8.3.1. Поведение машины при опрокидывании....................... 370
8.3.2. Основные характеристики систем пассивной безопасно-
сти дорожно-строительных машин............................. 372
8 4. Обеспечение требований эргономики и технической эстетики 375
8.4.1. Основные эргономические показатели машин и обо-
рудования ...................................................... 375
8 4.2. Снижение уровня колебаний рабочего места оператора
и его защита от шумов и вибраций......................... 379
8.4.3. Требования технической эстетики при проектирова-
нии машин и оборудования ......................... 384
Контрольные вопросы ................................................ 385
Глава 9. Технико-экономические основы проектирования машин и обо-
рудования ................................................................ 387
9.1. Расчет производительности машин и оборудования................. 387
9.1.1. Виды производительности машин............................ 387
9.1.2. Теоретическая производительность.........машин....цикличе-
ского действия................................. . 389
9.1-3. Теоретическая производительность машин и обору-
дования непрерывного действия . 391
9.1.4. Годовая эксплуатационная производительность . . . 392
9.2. Определение затрат на создание и эксплуатацию машин и
оборудования ..................• ........................... 394
9.2.1. Затраты на выполнение научно-исследовательских и
опытно-конструкторских работ (НИОКР)....... 394
9.2.2. Затраты на изготовление, монтаж и доставку машины 396
9.2.3. Текущие затраты на эксплуатацию машин.................... 398
9.3. Оценка экономической эффективности новой техники .... 403
9.3.1. Показатели экономической эффективности................... 403
9.3.2. Срок окупаемости капитальных вложений в создание
новой техники. Коэффициент эффективности................... 404
9 3.3. Приведенные затраты и прибыль....................... 405
9.3 4. Сравнительные показатели экономической эффектив-
ности и их определение.......................................... 409
9.3.5. Определение экономического эффекта от экономии
труда и материалов. Определение срока окупаемости
дополнительных капитальных вложений ................ 410
9.3.6. Экономическая эффективность повышения надежности
и безопасности техники ........................ 411
9.3.7. Экономическая эффективность стандартизации.... 413
9 3.8. Экономическая эффективность стандартизации мето-
дов испытаний ............. 415
9,3.9. Пример расчета экономической эффективности новой
машины ............................................. 416
Контрольные вопросы ................................................ 425
Глава 10, Организационно-методологические основы проектирования ма-
шин и оборудования ................................................. 426
10.1. Современные методы и основные стадии проектирования ма-
шин и оборудования ........................................... 426
10.1.1. Основные стадии проектирования машин и обору-
дования ............................................... 426
463
10.1.2. Прогнозирование изменений основных параметров
машин на стадиях разработки технического зада-
ния и эскизного проекта................................ 429
10.1.3. Применение ЭВМ для выполнения вычислительных
работ.................................................. 433
10.1.4. Система автоматизированного проектирования ма-
шин (САПР-конструкция) ................................ 436
10.2. Оптимизационные задачи и методы поиска новых техни-
ческих идей и решений .................................. 439
10.2.1. Задачи оптимального проектирования.............. 439
10.2.2. Алгоритмические методы поиска оптимальных ре-
шений .......................................... 442
10.2.3. Эвристические методы поиска оптимальных решений 446
10.2.4. Функционально-стоимостной анализ проектируемых
конструкций ........................................... 448
10.2.5. Применение метода экспертных оценок для выбора
оптимального варианта изделия ......................... 450
Список литературы.................................................. 454
Предметный указатель............................................... 455
УЧЕБНОЕ ИЗДАНИЕ
Гоберман Лев Александрович
ОСНОВЫ ТЕОРИИ, РАСЧЕТА
И ПРОЕКТИРОВАНИЯ СТРОИТЕЛЬНЫХ
И ДОРОЖНЫХ МАШИН
Редактор И. Н. Якунина
Художественный редактор В. В. Лебедев
Технический редактор О. В. Куперман
Корректоры Л. Е. Сонюшкина,
Л. А. Ягупъева
ИБ № 5229
Сдано в набор 30.04 87. Подписано в печать
04.04.88. Т-14998. Формат бОХЭО1/^. Бумага
офсетная Кв 2. Гарнитура литературная. Печать
офсетная. Усл. печ. л. 29,0. Усл. кр.-отт. 29,0
Уч.-изд. л. 30,37. Тираж 9000 экз. Заказ 179.
Цена 1 р. 20 к.
Ордена Трудового Красного Знамени издатель-
ство «Машиностроение*, 107076, Москва, Стро-
мынский пер., 4
Ленинградская типография № 6 ордена Трудо-
вого Красного Знамени Ленинградского объеди-
нения «Техническая книга» им. Евгении Соко-
ловой Союзполиграфпрома при Государственном
комитете СССР по делам издательств, полигра-
фии и книжной торговли.
193144, г. Ленинград, ул. Моисеенко, 10.