/










































Author: Матвеенко В .И.
Tags: детали машин передачи (механические) подъемно-транспортное оборудование крепежные средства смазка транспорт автомобили
Year: 2016



Text
ГОСУДАРСТВЕННОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«БЕЛОРУССКО-РОССИЙСКИЙ УНИВЕРСИТЕТ»
Кафедра «Строительные, дорожные,
подъемно-транспортные машины и оборудование»
АВТОМОБИЛЬНЫЕ
КРАНЫ
Методические рекомендации к практическим занятиям
для студентов специальности 1 36 11 01
«Подъемно-транспортные, строительные,
дорожные машины и оборудование»
ДПТМиО
Могилев 2016
2
УДК 621.867
ББК 39.9
А74
Рекомендовано к изданию
учебно-методическим отделом
Белорусско-Российского университета
Одобрено кафедрой СДПТМиО «10» ноября 2015 г., протокол No 4
Составитель канд. техн. наук, доц. В . И. Матвеенко
Рецензент Ю. С . Романович
Методические рекомендации к практическим занятиям для студен-
тов специальности 1 36 11 01 «Подъемно-транспортные, строительные, до-
рожные машины и оборудование».
Учебно-методическое издание
АВТОМОБИЛЬНЫЕ КРАНЫ
Ответственный за выпуск
И. В . Лесковец
Технический редактор
С. Н. Красовская
Компьютерная верстка
Н. П. Полевничая
Подписано в печать
. Формат 60×84/16. Бумага офсетная. Гарнитура Таймс.
Печать трафаретная. Усл. печ. л .
. Уч.-изд. л.
. Тираж 99 экз. Заказ No
Издатель и полиграфическое исполнение:
Государственное учреждение высшего профессионального образования
«Белорусско-Российский университет».
Свидетельство о государственной регистрации издателя,
изготовителя, распространителя печатных изданий
No 1/156 от 24.01.2014.
Пр. Мира, 43, 212000, Могилев.
© ГУВПО «Белорусско-Российский
университет», 2016
3
Содержание
Введение ........................................................................ 4
1 Устройство и принцип работы телескопической стрелы......... 5
2 Определение параметров маневренности автомобильного
крана...................................................................................... 11
3 Определение нагрузок на выносные опоры автомобильного
крана ..................................................................................... 14
4 Определение необходимых размеров опорного
контура автомобильного крана ..................................................... 18
5 Прочностной расчет телескопической стрелы с жестким
подвесом.................................................................................23
6 Опорно-поворотные устройства автомобильных кранов,
основы их расчета и требования при изготовлении и эксплуатации....... 30
7 Расчет несущей способности телескопической стрелы с
жесткой и гибкой подвесками....................................................... 38
Список литературы............................................................. 45
4
Введение
Рабочей программой по изучению дисциплины «Автомобильные
краны» предусмотрено 16 часов лекций и 16 часов практических занятий.
Данная дисциплина базируется, в основном, на ранее изученных дисцип-
линах «Подъемно-транспортные машины» и «Строительные и специаль-
ные краны».
Задача практических занятий заключается в закреплении теоретиче-
ских и приобретении практических навыков по устройству, основам расче-
та и выбору основных параметров автомобильных кранов при изучении
дисциплины. В тематику практических занятий включены вопросы, свя-
занные с устройством и расчетом основных узлов, присущих только авто-
мобильным кранам, – устройство, работа и основы расчета телескопиче-
ской стрелы и опорно-поворотного устройства, расчет нагрузок на вынос-
ные опоры и определение необходимого размера опорного контура крана,
расчет основных показателей маневренности.
5
1 Устройство и принцип работы телескопической стрелы
Цель занятия – изучить конструктивные особенности и принцип
работы телескопических стрел различных конструкций.
В целях увеличения высоты подъема груза и вылета с одновремен-
ным обеспечением высокой мобильности стреловых самоходных кранов, и
в первую очередь автомобильных, широко используются телескопические
стрелы различных конструкций с разным числом выдвижных секций.
Первые образцы телескопической стрелы имели одну выдвижную
секцию (рисунок 1.1). Выдвижение и втягивание подвижной секции 2 осу-
ществлялись вручную с помощью штурвала 5. На валу этого штурвала за-
креплена звездочка 4, входящая в зацепление с пластинчатой цепью 3,
прикрепленной к выдвижной секции. Фиксация выдвижной секции по от-
ношению к основанию стрелы 1 осуществлялась пальцем 6. Для чего одно
из отверстий 7 в выдвижной секции необходимо совместить с опорным от-
верстием, расположенным в верхней части основания стрелы.
Рисунок 1.1 – Телескопическая стрела с ручным выдвижением подвижной секции
Нагрузка от выдвижной секции на основание стрелы передается че-
рез опорный ролик 8, закрепленный снизу в верхней части основания стре-
лы и опорный каток 9, закрепленный в верхней задней части выдвижной
секции. Такое исполнение телескопической стрелы имеет существенный
недостаток. Для изменения длины стрелы она опускается в положение,
близкое к горизонтальному, после чего производится изменение ее длины.
6
Это требует дополнительных простоев и значительных трудозатрат, осо-
бенно при частом изменении длины стрелы при работе крана. В целях уст-
ранения этого недостатка выдвижение и втягивание подвижной секции
осуществляются гидроцилиндром с ходом штока 6 м (рисунок 1.2).
Рисунок 1.2
–
Телескопическая стрела с выдвижением подвижной секции
гидроцилиндром
Особенностью такого исполнения телескопической стрелы является
то, что шток гидроцилиндра 3 шарнирно крепится в основании неподвиж-
ной секции 1. Нижняя часть штоковой полости гидроцилиндра шарнирно
крепится в нижней части выдвижной секции 2. Шток выполнен пустоте-
лым, внутри которого размещены две трубки для подачи рабочей жидко-
сти в штоковую (при втягивании подвижной секции) или в поршневую
(при выдвижении подвижной секции) полости цилиндра. Кроме того, при
выдвижении подвижной секции на сжатие работает только шток гидроци-
линдра, что позволяет почти в 2 раза увеличить его устойчивость. Вместо
опорного ролика и катка применены плиты скольжения 4 и 5, выполнен-
ные из бронзы БрАЖ 9-4 и обеспечивающие коэффициент трения 0,1. Это
позволяет уменьшить поперечный габарит телескопической стрелы и ее
габарит в транспортном положении.
Длина телескопической стрелы с одной выдвижной секцией состав-
ляет примерно от 10 до 16 м. Для увеличения вылета и высоты подъема в
современных стреловых самоходных кранах, в том числе и автомобиль-
7
ных, применяют телескопические стрелы с двумя, тремя и более подвиж-
ными секциями.
На рисунках 1.3 –1.5 представлены телескопические стрелы с двумя
подвижными секциями.
Рисунок 1.3 – Телескопическая стрела с двумя выдвижными секциями и двумя
гидроцилиндрами
Рисунок 1.4 – Телескопическая стрела с двумя выдвижными секциями и одним
гидроцилиндром
8
Рисунок 1.5 – Трехсекционная телескопическая стрела с двумя гидроцилиндра-
ми и синхронизирующими канатами
В транспортном положении первая 2 и вторая 3 подвижные секции
располагаются внутри неподвижной секции 1. Выдвижение и втягивание
подвижных секций осуществляются гидроцилиндрами 4 и 5. Причем щток
гидроцилиндра 5 шарнирно крепится в нижней части гидроцилиндра 4, а
нижняя часть гидроцилиндра 5 шарнирно крепится к нижней части под-
вижной секции 3. Опирание подвижных секций осуществляется посредст-
вом плит скольжения 6. Длина такой телескопической стрелы составляет
примерно от 10 до 22 м. При включении гидроцилиндра 4 выдвигается или
втягивается секция 2. Секция 3 неподвижна по отношению к секции 2.
При включении гидроцилиндра 5 выдвигается или втягивается секция 3,
секция 2 неподвижна по отношению к неподвижной секции 1. Таким обра-
зом, изменение длины стрелы осуществляется поочередным включением
гидроцилиндров 4 и 5.
На рисунке 1.4 представлена телескопическая стрела с двумя под-
вижными секциями и одним гидроцилиндром.
Для упрощения рисунка плиты скольжения не показаны. Выдвиже-
ние и втягивание подвижной секции 2 осуществляются гидроцилиндром 4,
подвижной секции 3 – синхронно с секцией 2 канатами 7 и 8. Канат 7 вы-
движения секции 3 огибает блок 5, установленный в верхней части секции 2,
а концы этого каната прикреплены к верхней части основания стрелы 1 и
9
нижней части секции 3. Канат 8 втягивания секции 3 огибает блок 6, уста-
новленный в нижней части секции 2, а концы этого каната прикреплены к
верхней части неподвижной секции 1 и нижней части подвижной секции 3.
Такими стрелами оборудуются автомобильные краны КС-45729А Моги-
левского завода «Трансмаш».
На рисунке 1.5 представлена трехсекционная телескопическая стрела
с двумя гидроцилиндрами и синхронизирующими канатами. Выдвижение
и втягивание подвижных секций 2 и 3 осуществляются одновременным
включением гидроцилиндров 4 и 5. Канаты 8 и 9 синхронизируют выдви-
жение и втягивание подвижных секций 2 и 3.
На рисунке 1.6 представлена четырехсекционная телескопическая
стрела, используемая в автокранах КС-55727 завода «Трансмаш».
Рисунок 1.6 – Четырехсекционная телескопическая стрела
Выдвижение и втягивание подвижных секций 2 и 3 осуществляются
гидроцилиндрами 5 и 6. При включении гидроцилиндра 5 выдвигается
секция 2. Секции 3 и 4 остаются неподвижными по отношению к секции 2.
При включении гидроцилиндра 6 выдвигается секция 3 и посредством ка-
ната 10 секция 4. При этом секция 4 выдвигается по отношению к секции 3.
Втягивание секции 4 осуществляется канатом 8 при включении гидроци-
линдра 6 на втягивание секции 3. Длина такой стрелы составляет примерно
от 10 до 28 м. Следует отметить, что изменение длины стрелы без груза на
крюке называют выдвижением или втягиванием секций. Если такая опера-
ция производится с грузом на крюке, то ее называют «телескопирование».
На рисунке 1.7 представлена пятиступенчатая телескопическая стрела.
При включении гидроцилиндра 6 выдвигается или втягивается секция 2.
10
Секции 3, 4 и 5 остаются неподвижны по отношению к секции 2. При
включении гидроцилиндра 7 выдвигается или втягивается секция 3 и по-
средством канатов 11 и 15 синхронно выдвигаются секции 4 и 5, а посред-
ством канатов 10 и 14 секции 4 и 5 втягиваются. Длина такой телескопиче-
ской стрелы составляет примерно от 10 до 34 м.
Рисунок 1.7 – Пятиступенчатая телескопическая стрела
В качестве дополнительного оборудования на оголовке последней
выдвижной секции может быть установлен жесткий гусек длиной до 9 м.
В последнее время «Трансмаш» освоил производство специальных
гидроцилиндров с ходом штока 7 м. Тогда длина стрелы примерно соста-
вит: трехсекционной – от 10 до 24 м; четырехсекционной – от 10 до 31 м;
пятисекционной – от 10 до 38 м.
Порядок выполнения работы
1 Изучить устройство и принцип действия телескопической стрелы с
одной выдвижной секцией.
2 Изучить устройство и принцип действия телескопических стрел с
двумя и более выдвижными секциями.
11
Контрольные вопросы
1 Какими способами опираются смежные секции телескопической
стрелы, их достоинства и недостатки?
2 Как осуществляется крепление штока и гидроцилиндра к смежным
секциям стрелы?
3 Как осуществляется подвод рабочей жидкости к гидроцилиндрам
выдвижения и втягивания?
4 В чем отличие операций «выдвижение–втягивание» и «телескопи-
рование»?
5 Как осуществляется операция «выдвижение–втягивание» третьей,
четвертой подвижных секций. Схемы крепления канатов для выдвижения и
втягивания?
2
Определение
параметров
маневренности
автомобильного крана
Цель занятия – определение минимальной ширины коридора для
проезда автомобильного крана по прямой с поворотом на 90 и 180°.
Основными достоинствами автомобильных кранов являются их вы-
сокая мобильность и автономность. Мобильность крана определяется не
только скоростью его передвижения с объекта на объект, которая в соот-
ветствии с ГОСТом составляет не менее 80–90 % от технической скорости
базового автомобиля, но и его маневренностью. Маневренность автомо-
бильного крана определяется минимальной шириной коридора для проезда
по прямой, для проезда с поворотом на 90°, для проезда с поворотом
на 180°. Минимальная ширина коридора для проезда по прямой в соответ-
ствии со схемами, представленными на рисунках 2.1 и 2.2, составит
,
B
S0
Δ
+
=
(2.1)
где B – габарит базового автомобиля по ширине: для автокранов
КС-3569, КС-45729, КС-55727 производства Могилевского завода «Транс-
маш»В=2,5м;
Δ – дополнительная ширина коридора, учитывающая неточность
маневрирования, Δ = 1,5–2,0 м.
Минимальная ширина коридора для проезда автомобиля S
а
90 или
крана S
к
90 с поворотом на 90° в соответствии с рисунком 2.1 составляет
Δ
+
−
=
в
а
н
a
90
R
R
S
;
(2.2)
12
,
R
R
S
в
к
н
к
90
Δ
+
−
=
(2.3)
где Rв – внутренний радиус поворота автомобиля, т. е . расстояние от
центра поворота, располагаемого на продолжении задней оси автомобиля,
до наименее удаленной точки автомобиля при минимальном радиусе
поворота;
а
н
R,
к
н
R – наружные радиусы поворота автомобиля и крана, т. е .
расстояние от центра поворота, располагаемого на продолжении задней
оси автомобиля, до наиболее удаленной точки автомобиля или крана при
минимальном радиусе поворота соответственно.
Рисунок 2.1 – Схема для определения минимальной ширины коридора для про-
езда с поворотом на 90°
2
к
2
в
к
н
L
2
b
2
B
R
R
+
⎟⎠
⎞
⎜⎝
⎛
+
+
=
;
(2.4)
()2
a
2
в
а
н
L
B
R
R
+
+
=
,
(2.5)
13
где b – габарит по ширине оголовка стрелы;
Lк – расстояние от передней части стрелы до оси задних колес;
Lа – расстояние от передней части автомобиля до оси задних колес.
Рисунок 2.2 – Схема для определения минимальной ширины коридора для про-
езда с поворотом на 180°
Минимальная ширина коридора для проезда с поворотом на 180° в
соответствии с рисунком 2.2 составляет
a
а
180
нв
SRRB;
=
+++
Δ
(2.6)
.
B
R
R
S
в
к
н
к
180
Δ
+
+
+
=
(2.7)
В автокранах на базе трехосных автомобилей (КС-55727) расстояния
Lа и Lк определяются до оси балансира задней двухосной тележки.
Мобильность автокрана в определенной степени зависит и от его га-
барита по высоте в транспортном положении и нагрузки на ось. Так для ав-
токранов Могилевского завода «Трансмаш» габарит по высоте составляет
3,8–3,9 м, что не превышает установленный Правилами дорожного движе-
ния. Максимальная нагрузка на ось для этих кранов составляет 9,9–11,5 т.
14
Порядок выполнения работы
1 Изучить методику определения минимальной ширины проезда.
2 По заданным преподавателем исходным данным определить ми-
нимальную ширину проезда.
Контрольные вопросы
1 Какими параметрами определяется мобильность автокранов?
2 Где располагается центр поворота автомобиля?
3 Как определяются внутренний и наружный радиусы поворота ав-
томобиля и автокрана?
3 Определение
нагрузок на
выносные опоры
автомобильного крана
Цель занятия – изучение методики и приобретение практических
навыков по определению нагрузок на выносные опоры автокрана.
У стреловых поворотных кранов опорные нагрузки на основание
распределяются неравномерно. Они зависят не только от веса крана и гру-
за, но и от положения поворотной части крана относительно неповоротной,
а также от вылета стрелы. У автомобильных кранов нагрузки на опорную
площадку передаются через выносные опоры. При работе автокрана на-
грузка на каждую выносную опору не остается постоянной. Для расчета
металлоконструкции неповоротной рамы, кронштейнов и гидроцилиндров
выносных опор необходимо определить максимальные значения опорных
нагрузок.
На рисунке 3.1 представлена расчетная схема для определения опор-
ных нагрузок. На этом рисунке: ось Х – продольная ось крана; ось У – по-
перечная ось крана, проходящая через центр вращения поворотной части
крана; точки А, В, С, Д – опоры крана; С1 – точка приложения равнодейст-
вующей силы тяжести поворотной части крана с учетом груза G1; С2 – точ-
ка приложения равнодействующей силы тяжести неповоротной части кра-
на G2; R – вылет; 2а и 2в – размеры опорного контура крана; точка О1 – ось
вращения поворотной части крана; Х1, Х2 – координаты точек О1 и С2;
прямая О1–С1 – ось стрелы; α – текущая координата.
С допустимой для инженерных расчетов точностью можно принять,
что опорные нагрузки обратно пропорциональны отрезкам, на которые
проекция точки приложения равнодействующей или плоскость действия
момента делят продольную и поперечную базу крана.
15
Рисунок 3.1 – Расчетная схема для определения опорных нагрузок
Воспользуемся методом теоретической механики о переносе точки
приложения силы, т. е . перенесем силу G1 с точки С1 в точку О1 и добавим
момент G1 · R . С учетом равнодействующей ветровой нагрузки W, прило-
женной на высоте Н, и при неблагоприятном сочетании этот момент
составит
.
H
W
R
G
M1
⋅
+
⋅
=
(3.1)
Для определения составляющих опорных нагрузок момент М разло-
жим по осям координат Х и У.
.
sin
M
M
;
cos
M
M
y
x
α
⋅
=
α
⋅
=
(3.2)
От действия момента Мх опорные нагрузки на опоры С и Д возрас-
тают, а на опоры А и В – уменьшаются. Аналогично, от действия момента Му
опорные нагрузки на опоры А и Д возрастают, а на опоры В и С – умень-
шаются.
Тогда опорные нагрузки на опоры А, В, С и Д от действия момента М
составят:
y
M
x
A
MM
R;
4a 4в
=−
y
M
x
В
MM
R;
4a 4в
=−
−
y
M
x
С
MM
R;
4a 4в
=+
.
в
4
M
a
4
M
R
x
y
M
Д
+
=
(3.3)
16
Рассматривая неповоротную часть крана как балку, суммарные
опорные реакции RАВ и RСД от сил тяжести G1 и G2 (см. рисунок 3.1) опре-
делятся следующим образом:
11221 12 2
АВ
G(вX)G(вX)G X G
X
R1
1
2B
2
в
2
в
−+
+
⎛⎞⎛ ⎞
==
−
+
+
⎜⎟⎜ ⎟
⎝⎠⎝ ⎠
;
(3.4)
11221 12 2
СД
G(вX)G(вX)G X G
X
R1
1
2B
2
в
2
в
++−
⎛⎞⎛⎞
==
+
+
−
⎜⎟⎜⎟
⎝⎠⎝⎠
(3.5)
Нагрузка на опоры:
112 2
ABA
B
1GX
GX
RRR
1
1;
24в
4
в
⎛⎞⎛ ⎞
==
=
−
++
⎜⎟⎜ ⎟
⎝⎠⎝ ⎠
(3.6)
112 2
СДС
Д
1GX
GX
RRR
1
1.
24в
4
в
⎛⎞⎛⎞
==
=
++−
⎜⎟⎜⎟
⎝⎠⎝⎠
(3.7)
Суммарные нагрузки на выносные опоры от действия сил тяжести
G1, G2 и момента М составят:
112 2
A
GXG XM
s
i
nM
c
o
s
R11
;
4
в
4
в
4a
4в
⋅
α⋅α
⎛⎞⎛ ⎞
=−
+++ −
⎜⎟⎜ ⎟
⎝⎠⎝ ⎠
(3.8)
112 2
В
GXG XM
s
i
nM
c
o
s
R11
;
4
в
4
в
4a
4в
⋅
α⋅α
⎛⎞⎛ ⎞
=−
++− −
⎜⎟⎜ ⎟
⎝⎠⎝ ⎠
(3.9)
112 2
С
GXG XM
s
i
nM
c
o
s
R11
;
4
в
4
в
4a
4в
⋅
α⋅α
⎛⎞⎛⎞
=+
+−− +
⎜⎟⎜⎟
⎝⎠⎝⎠
(3.10)
112 2
Д
GXG XM
s
i
nM
c
o
s
R11
.
4
в
4
в
4a
4в
⋅
α⋅α
⎛⎞⎛ ⎞
=+
+−+ +
⎜⎟⎜ ⎟
⎝⎠⎝ ⎠
(3.11)
Анализируя формулы (3.8)–(3.11), можно сделать вывод, что нагруз-
ки на выносные опоры от действия момента М изменяются при повороте
поворотной платформы, а от действия сил тяжести G1 и G2 остаются по-
стоянными. Очевидно, что нагрузка на опору будет максимальной, когда
стрела будет расположена над этой опорой. При этом нагрузка на противо-
положную опору будет минимальной.
Определим, при каком значении угла α нагрузка на опору Д от дей-
ствия момента М будет максимальной. Для этого первую производную
M1
Д
R приравняем к нулю и разрешим относительно α:
17
М1
Д
Mcos Msin М cos
sin
R0
.
4а
4в
4ав
⋅α
⋅α
αα
⎛⎞
=−=
−
=
⎜⎟
⎝⎠
(3.12)
Откуда
.
0
в
sin
a
cos
=
α
−
α
(
3
.
1
3
)
Разделив (3.11) на cos α, получим
,
0
в
tg
а
1
=
α
=
(3.14)
откуда
а
в
tg=
α
.
(3.15)
Так как
,
tg
1
1
cos
,
2
tg
1
tg
sin
2
α
+
±
=
α
α
+
±
α
=
α
(3.16)
окончательно получим
.
в
а
в
а
4
М
а
в
1
в
4
а
в
M
а
в
1
а
4
а
в
M
R
2
2
2
2
2
2
М
max
д
+
⋅
=
+
+
+
=
(3.17)
Максимальная нагрузка на опору Д
.
в
а
в
а
4
М
в
x
1
4
G
в
x
1
4
G
R
2
2
2
2
1
1
max
д
+
⋅
+
⎟⎠
⎞
⎜⎝
⎛−
+
⎟⎠
⎞
⎜⎝
⎛+
=
(3.18)
Порядок выполнения работы
1 Изучить методику определения нагрузок на выносные опоры.
2 По заданным преподавателем исходным данным определить мак-
симальные нагрузки на выносные опоры.
Контрольные вопросы
1 От каких основных параметров крана зависят нагрузки на вынос-
ные опоры?
2 Как зависят нагрузки на выносные опоры от положения оси стре-
лы по отношению к ним?
18
3 При каком положении оси стрелы по отношению к выносной
опоре нагрузка на опору максимальная?
4 Определение необходимых размеров опорного контура
автомобильного крана
Цель занятия – изучение методики и приобретение практических
навыков по определению необходимых размеров опорного контура авто-
мобильного крана по условию обеспечения нормируемого коэффициента
запаса устойчивости.
Устойчивость автомобильного крана зависит от веса неповоротной
части Gн, веса поворотной части с учетом веса груза Gп, координат центров
тяжести этих составляющих и размеров опорного контура. Размеры опор-
ного контура – это расстояние между осями гидроцилиндров выносных
опор вдоль и поперек продольной оси крана. Для автокранов Могилевско-
го завода «Трансмаш» размеры опорного контура составляют от 4,15×5,0
до 5,08×5,4 м.
Очевидно, что для обеспечения устойчивости автокрана его общий
центр тяжести должен располагаться внутри опорного контура, а при рас-
положении за пределами опорного контура – кран опрокинется.
Необходимые размеры опорного контура можно определить на ос-
новании расчетной схемы, представленной на рисунке 4.1, где: ось Х –
продольная ось крана; ось У – поперечная ось крана, проходящая через ось
вращения О; угол α – текущая координата; точка 1 – центр тяжести непо-
воротной части крана; точки 2, 2
1
,2
11
–
центр тяжести поворотной части
крана с учетом груза при вращении вокруг вертикальной оси. Расстояние
от оси вращения О до точек 2 – R.
Координаты точек 1 и 2:
.
sin
R
Y
,
cos
R
X
,
0
Y
,
A
X
2
2
1
1
α
⋅
=
α
⋅
=
=
−
=
(4.1)
Определим текущие координаты общего центра тяжести всего крана
с грузом. Очевидно, что этот центр тяжести при повороте поворотной час-
ти крана вокруг вертикальной оси О будет располагаться в точках 3, 3
1
,3
11
,
расположенных на отрезках 1–2, 1–2
1
, 1–2
11
и делящих эти отрезки на час-
ти 1–3 и 3–2, 1–3
1
и3
1
–2
1
, 1–3
11
и3
11
–2
11
, обратно пропорциональные Gн и
Gп, т. е.
31
31
пп
23н
23н
XX
YY
GG
;.
XXG YYG
−−
==
−−
(4.2)
19
Рисунок 4.1
–
Расчетная схема для определения необходимых размеров
опорного контура
Из выражений (4.2) определим координаты точки 3:
н
1
п
2
н
1
п
2
33
нп
нп
GX GX
GY GY
X;
Y.
GG
GG
⋅+⋅
⋅+⋅
==
++
(4.3)
Подставим в выражения (4.3) координаты точек 1 и 2 выражения (4.1):
нп
п
н
3
нп
нп нп
GAGRc
o
s GRc
o
sGА
X;
GG
GG GG
−⋅
+⋅⋅α
⋅
⋅α
⋅
==
−
++
+
п
3
нп
GRc
o
s
Y.
GG
⋅
⋅α
=
+
(4.4)
Выражения (4.4) являются уравнениями окружности в принятой сис-
теме координат ХОУ. Радиус этой окружности
п
нп
GR
r
GG
⋅
=
+
,
(
4
.
5
)
координаты центра этой окружности, точка 4:
20
н
44
нп
GА
X;
Y
0
.
GG
⋅
==
+
(4.6)
Так как стреловые самоходные краны, в том числе и автомобильные,
оборудуются четырьмя выносными опорами, то вокруг полученной ок-
ружности (4.4) опишем квадрат, стороны которого параллельны и перпен-
дикулярны продольной оси крана. На рисунке 4.1 этот квадрат а1, в1, с1, d1
изображен штриховыми линиями.
Если принять этот квадрат за опорный контур крана, то в точках ка-
сания его сторон с окружностью кран будет находиться в неопределенном
состоянии – то ли опрокинется, то ли нет. Следовательно опорный контур
с каждой стороны квадрата а1, в1, с1, d1 необходимо увеличить на Х, У, Z,
определяемые из условия обеспечения коэффициента запаса устойчивости
без учета сил инерции, ветра и уклона площадки:
,
4,1
M
M
k
0
y
≥
=
(4.7)
где Му – удерживающий момент, создаваемый силой тяжести непо-
воротной части крана Gн относительно ребра опрокидывания;
М0 – опрокидывающий момент, создаваемый силой тяжести пово-
ротной части крана с учетом груза Gп относительно ребра опрокидывания.
Ребро опрокидывания – это одна из сторон прямоугольника а, в, с, d
(см. рисунок 4.1).
Удерживающий момент:
–
относительно ребра опрокидывания сd
;
X
G
G
А
G
A
r
G
M
п
н
н
н
cd
y
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
+
⋅
−
+
=
(4.8)
–
относительно ребра опрокидывания вс или аd
()
вc
y
н
MGr
Y
;
=+
(4.9)
–
относительно ребра опрокидывания ав
ав
н
y
н
нп
GА
MGrA
Z
.
GG
⎛⎞
⋅
=−
++
⎜⎟
+
⎝⎠
(4.10)
Опрокидывающий момент:
–
относительно ребра опрокидывания сd
;
X
G
G
А
G
R
r
G
M
п
н
н
н
cd
0
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
+
⋅
+
+
=
(4.11)
21
–
относительно ребра опрокидывания вс или аd
);
Y
r
R
(
G
M
н
вс
0
−
−
=
(4.12)
–
относительно ребра опрокидывания ав
.
Z
G
G
А
G
r
R
G
M
п
н
н
н
ав
0
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
+
⋅
−
−
=
(4.13)
Коэффициент запаса устойчивости:
–
относительно ребра опрокидывания сd
;
X
G
G
А
G
r
R
G
X
G
G
А
G
A
R
G
M
M
k
н
п
н
н
н
п
н
н
cd
0
cd
y
cd
y
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
+
⋅
+
−
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
+
⋅
−
+
=
=
(4.14)
–
относительно ребра опрокидывания вс или аd
()
()
;
У
r
R
G
Y
R
G
M
M
k
п
н
вс
0
вс
y
вс
y
−
−
+
=
=
(
4
.
1
5
)
–
относительно ребра опрокидывания ав
.
Z
G
G
А
G
r
R
G
Z
G
G
А
G
A
R
G
M
M
k
н
п
н
п
н
п
н
н
ав
0
ав
y
ав
y
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
+
⋅
+
−
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
+
⋅
+
−
=
=
(4.16)
Для упрощения дальнейших преобразований введем обозначения:
нн
пн
пн
GА
GА
RA
М;Rr
N
;
GG
GG
⋅⋅
+−=
−
+=
++
нн
пн
пн
GА
GА
RA
K; Rr
T.
GG
GG
⋅⋅
−
−=
−
−=
++
(4.17)
После подстановки обозначений (4.17) в формулы (4.14)–(4.16) по-
лучим
()
()
()
()
нн
cd
bc
yy
пп
GMX
GrY
k1
,
4
;
k1
,
4
;
GNX
GRrY
++
=≥
=
≥
−−
−
()
().4
,
1
Z
T
G
Z
К
G
k
п
н
ав
y
≥
+
+
=
(4.18)
22
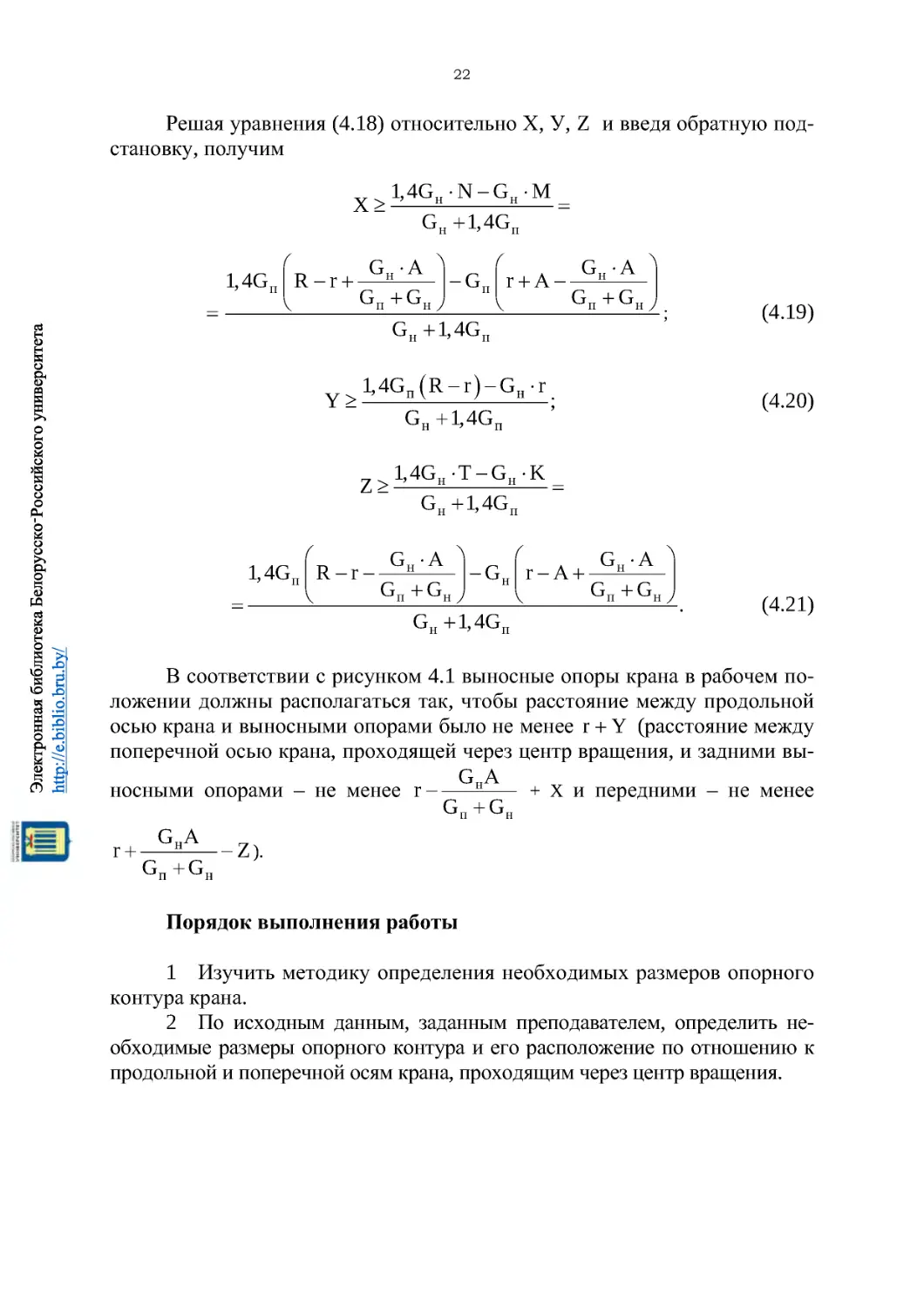
Решая уравнения (4.18) относительно Х, У, Z и введя обратную под-
становку, получим
нн
нп
1,4GNGM
X
G1
,
4
G
⋅
−⋅
≥=
+
нн
пп
пн
пн
нп
GА
GА
1,4GRr
GrА
GG
GG
G1
,
4
G
⎛⎞
⎛⎞
⋅⋅
−+
−
+−
⎜⎟
⎜⎟
++
⎝⎠
⎝⎠
=
+
;
(4.19)
()
пн
нп
1,4GRrGr
Y;
G1
,
4
G
−
−⋅
≥
+
(4.20)
нн
нп
1,4GTGK
Z
G1
,
4
G
⋅
−⋅
≥=
+
нн
пн
пн
пн
нп
GА
GА
1,4GRr
GrА
GG
GG
.
G1
,
4
G
⎛⎞
⎛⎞
⋅⋅
−−
−
−
+
⎜⎟
⎜⎟
++
⎝⎠
⎝⎠
=
+
(4.21)
В соответствии с рисунком 4.1 выносные опоры крана в рабочем по-
ложении должны располагаться так, чтобы расстояние между продольной
осью крана и выносными опорами было не менее
Y
r + (расстояние между
поперечной осью крана, проходящей через центр вращения, и задними вы-
носными опорами – не менее
н
п
н
G
G
А
G
r
+
−
+ X и передними – не менее
н
пн
GА
rZ
GG
+−
+
).
Порядок выполнения работы
1 Изучить методику определения необходимых размеров опорного
контура крана.
2 По исходным данным, заданным преподавателем, определить не-
обходимые размеры опорного контура и его расположение по отношению к
продольной и поперечной осям крана, проходящим через центр вращения.
23
Контрольные вопросы
1 От каких основных параметров крана зависит его устойчивость?
2 Как определяются коэффициент запаса устойчивости и его чис-
ленное значение?
3 По отношению к чему и как определяются момент удерживаю-
щий и момент опрокидывающий?
4 Как зависят размеры опорного контура от силы тяжести неповорот-
ной части крана и силы тяжести поворотной части крана с учетом груза?
5 Прочностной расчет
телескопической стрелы
с жестким подвесом
Цель занятия – приобретение теоретических и практических навы-
ков прочностного расчета телескопической стрелы автомобильного крана.
Расчет на прочность элементов металлоконструкции, изготовленных
из пластичных материалов в соответствии с [1], производится по условию
[],
n
τ
σ
=
σ
≤
σ
(5.1)
где σ – действующее максимальное напряжение без учета кон-
центрации напряжений;
[σ – допускаемое напряжение;
στ – предел текучести материала;
n – запас прочности, n = 1,3...1,8.
Величина σ определяется с учетом действия динамической нагрузки
при работе механизма подъема груза или стрелы, учитываемой динамиче-
ским коэффициентом ψ = 1,1...1,2.
Секции телескопической стрелы работают на изгиб, сжатие и круче-
ние от действия силы тяжести груза, собственной силы тяжести, сил инер-
ции при работе механизма вращения и раскачивания груза с отклонением
от вертикали на угол β до 8°.
Геометрические характеристики составного сечения секций стрелы
определяются на основании рисунка 5.1 .
Площадь поперечного сечения
,
F
F
i
∑
=
(5.2)
где F
i – площадь поперечного сечения i-го элемента.
24
Рисунок 5.1 – Поперечное сечение секции телескопической стрелы
Координаты центра тяжести составного сечения:
ii
ii
ц.т .
ц.т .
FX
FY
X;
Y,
FF
⋅
⋅
==
∑∑(5.3)
где X
i, Yi – координаты центра тяжести i-го элемента.
Для симметричного составного сечения положение центра тяжести
совпадает с геометрическим центром.
Моменты инерции составного сечения:
()()
22
xx
i
i
x
i
yy
i
i
y
i
JI
F
a
;JI
F
a
,
=+
=+
∑∑
(5.4)
где Jxi, Jyi – моменты инерции i-го элемента относительно его цен-
тральных осей;
axi, ayi – расстояния от центра тяжести i-го элемента до центра
тяжести составного сечения.
Полярный момент инерции
.
J
J
J
у
х
р
+
=
(5.5)
Момент сопротивления составного сечения относительно оси Х для
нижних
н
x
W и верхних
в
x
W волокон:
25
.
y
Н
J
W
;
y
J
W
.
т
.
ц
х
в
x
.
т
.
ц
х
н
x
−
=
=
(5.6)
Момент сопротивления составного сечения относительно оси У для
правых
п
у
W и левых
л
у
W волокон:
.
х
J
W
;
Х
В
J
W
.
т
.
ц
у
л
у
.
т
.
ц
у
п
у
=
−
=
(5.7)
Полярный момент сопротивления
p
р
max
J
W,
l
=
(5.8)
где lmax – расстояние от центра тяжести составного сечения до наи-
более удаленной точки этого сечения.
Схема для определения нагрузок, действующих на последнюю сек-
цию телескопической стрелы, представлена на рисунке 5.2.
Рисунок 5.2 – Расчетная схема последней выдвижной секции
26
Наибольший изгибающий момент в вертикальной плоскости
2
р
max
y
гр
q
MG
c
o
s
,
2
l
l
⎛⎞
⋅
=
⋅+
γ
⎜⎟
⎜⎟
⎝⎠
(5.9)
где G
гр – сила тяжести груза с учетом крюковой подвески и ого-
ловка стрелы;
q – равномерно распределенная нагрузка от собственной силы
тяжести выдвижной секции;
lp – рабочая длина выдвижной секции;
γ – угол наклона оси стрелы к горизонтали.
Изгибающий момент в горизонтальной плоскости
max
x
грp
MGt
g
,
l
=
⋅⋅β
(5.10)
где β – угол отклонения груза от вертикали при вращении крана
(см. рисунок 5.2).
Крутящий момент
,
tg
h
G
M
гр
кр
β
⋅
⋅
=
(5.11)
где h – высота оголовка стрелы (см. рисунок 5.2).
Сжимающая нагрузка
сж
гр
p
к
N (Gq)sinS,
l
=
+⋅
γ+
(5.12)
где S
к – натяжение ветви грузового каната, наматываемого на ба-
рабан.
Напряжения от вышеуказанных нагрузок:
.
W
M
,
W
M
,
W
M
,
W
M
у
max
у
у
max
у
сж
х
max
х
их
у
max
у
иу
=
τ
=
σ
=
σ
=
σ
(5.13)
Суммарное эквивалентное напряжение
()
[].
32
2
сж
их
иу
экв
σ
≤
τ
+
σ
+
σ
+
σ
=
σ
(5.14)
Опорные реакции в верхней Rв и нижней Rн плитах скольжения:
max
2
р3
грр
3
y3
вн
33
0,5q(
)G( )cosy
M0
,
5
qc
o
s
R;
R
.
l
ll
ll
l
l
⎡⎤
+++
−⋅
γ⎣⎦
==
(5.15)
На рисунке 5.3 представлена расчетная схема для определения на-
грузок, действующих на предпоследнюю выдвижную секцию стрелы.
27
Рисунок 5.3 – Расчетная схема предпоследней выдвижной секции
Изгибающий момент в вертикальной плоскости
()
max
2
уп
грр
p3
р3
пр
MG
2
()
q
1
,
50
,
5
qc
o
s
.
lll ll
l
⎡⎤
=+
+−
+
⋅
γ
⎣⎦
(5.16)
Изгибающий момент в горизонтальной плоскости
max
хп
гр
MG
2
t
g
.
l
=
⋅⋅β
(5.17)
Крутящий момент
.
tg
h
G
M
гр
кр
β
⋅
⋅
=
(5.18)
Сжимающая нагрузка
()
сжп
гр
р3
пр
к
N
Gq
()qs
i
nS
.
lll
=++
+
⋅
γ
+
(5.19)
Суммарное эквивалентное напряжение определяется аналогично, как
и для последней секции.
Опорные реакции в верхней Rв и нижней Rн плитах скольжения:
max
2
yпп
3
в
3
M0
,
5
qc
o
s
R;
l
l
−
⋅⋅
γ
=
(5.20)
2
гр
р3
р3
р3
пр
3
н
3
G(2 ) q( )0,5(3 ) q0,5( ) cos
R.
llllll
ll
l
⎡⎤
+++
++
+
γ
⎣⎦
=
(5.21)
28
Схема для определения нагрузок, действующих на основные стрелы,
гидроцилиндр и шарнир крепления стрелы, представлена на рисунке 5.4 .
Рисунок 5.4 – Расчетная схема основания телескопической стрелы
Конструктивными параметрами, которые при подъеме и опускании
стрелы не изменяются, являются: AB; AC; n; m; K; ∠ε:
.
к
m
n
arctg
−
=
α
∠
Изменяющиеся параметры при подъеме и опускании стрелы – ВС;
∠φ; ∠ψ; ∠β; ∠γ; ∠ω, h; loг.
За независимую переменную примем угол γ – угол наклона оси стре-
лы к горизонтали. Все остальные изменяющиеся параметры выразим че-
рез независимую переменную γ:
∠β=∠γ+∠α+∠ε;
(5.22)
β
⋅
−
+
=
cos
AB
2
AC
AB
BC
2
2
.
(5.23)
29
Из теоремы синусов
AB DC
AB sin
sin
.
sin
sin
BC
⋅
β
=→
ψ
ψβ
(5.24)
Угол между осью стрелы и осью гидроцилиндра, параметры h и loг
находим по следующим формулам:
ω=ψ+α;
AB sin
hACs
i
nA
Cs
i
n
;
BC
⋅
β
=⋅ψ
=⋅ψ
(5.25)
ог
m
K.
tg
l=+
ω
Угол наклона оси гидроцилиндра к вертикали
θ=ε+φ–90°.
(5.26)
Максимальные изгибающие моменты, действующие на основание
телескопической стрелы:
–
в вертикальной плоскости
max
уо
гр
росог
р3
ро
со
г
3
M[
G
(
2
)
()
q
(
1
,
5
0
,
5
)
lll ll
lll l
=+
−
+
+
⋅
⋅
+
−
−
+
2
пр
3
ро
со
г
3
ос
ос
ог
q 0,5( l)(0,5l
0,5)q 0,5(
)]cos;
ll
l
ll
l
+⋅⋅+
+−− + ⋅⋅+
γ(5.27)
–
в горизонтальной плоскости
max
хо
гр
росог
MG
(
2
)
t
g
.
lll
=+
−
β
(5.28)
Сжимающая нагрузка
()
сжо
гр
п
р3
ос ос
ог
к
N
[Gqq( )q(
)]sin S .
ll ll
=+
++
+−γ
+
(5.29)
Усилие на штоке гидроцилиндра
А
цг
р
р
3
р3
р
3ос
М1
Р
[G(2 )q( )(1,5 0,5
)
hh
lllllll
==
+
+
+−
+
+
∑
2
пр3
р
3оc
ос
ос
q(
)(0,5 0,5
)q0,5]cos.
lllll
l
+⋅+
−
++⋅
γ
(5.30)
Опорные реакции в шарнире А (см. рисунок 5.4):
АХ
ц
гр
p3
1
R0
,
5
Р sin
G tg(2 )cos;
b
ll
=⋅
θ
±
⋅
⋅
β+γ (5.31)
30
АУ
ц
гр
п
р3
ос ос
R0
,
5
РcosG(qq)()q
lll
=
⋅θ
−
−
+ +−⋅
±
гр
р3
1
Gt
g(
2)
s
i
n
.
b
ll
±⋅
β+γ
(5.32)
Порядок выполнения работы
1 Изучить расчетные схемы и методику определения нагрузок, дей-
ствующих на секции телескопической стрелы.
2 По исходным данным, заданным преподавателем, определить из-
гибающие моменты, действующие на секции телескопической стрелы и
опорные реакции.
Контрольные вопросы
1 От каких параметров зависят опорные реакции в плитах сколь-
жения?
2 Какие конструктивные параметры в схеме жесткой подвески теле-
скопической стрелы при ее подъеме-опускании изменяются, а какие не из-
меняются?
3 От каких силовых факторов зависят опорные реакции в шарнирах
крепления гидроцилиндра и основания стрелы?
6 Опорно-поворотные устройства автомобильных
кранов, основы их расчета и требования при изготовлении и
эксплуатации
Цель занятия – изучить конструкции основных типов опорно-
поворотных устройств автомобильных кранов, основы их расчета и выбора.
Опорно-поворотные устройства (ОПУ) служат для соединения пово-
ротной части крана с неповоротной и передачи нагрузок (момента М, вер-
тикальной V и горизонтальной Н составляющих) на неповоротную часть.
Различают ОПУ для кранов с неподвижной или вращающейся колонной,
для тележек с круговым плоским или коническим рельсом. В современных
стреловых самоходных кранах, в том числе и автомобильных, применяют
ОПУ подшипникового типа шариковые и роликовые, одно-, двух- и трех-
рядные (рисунки 6.1 и 6.2). Такие ОПУ компактны (имеют малую высоту и
массу, свободное внутреннее пространство), надежны и долговечны. Они
выполнены в виде колец, раскатанных из заготовки из стали 55.
31
а – однорядные роликовые с зубьями внутреннего зацепления; б – двухрядные шариковые с
зубьями внешнего зацепления
Рисунок 6.1 – Опорно-поворотные устройства
а – с внешним зацеплением; б – с внутренним зацеплением; в – вариант установки ОПУ
Рисунок 6.2 – Трехрядные роликовые ОПУ
32
Одно из колец (при внутреннем зацеплении – наружное, при наруж-
ном зацеплении – внутреннее) делается разрезным в плоскости кольца для
удобства сборки. Можно применять и неразрезные кольца с отверстием в
одном из них для последовательного проталкивания тел качения. Такая
конструкция усложняет сборку и ремонт ОПУ. Дорожки качения подвер-
гаются поверхностной закалке на глубину до 3 мм и шлифуются. Точность
обработки соответствует точности, принятой при изготовлении нормаль-
ных подшипников качения. Тела качения – шарики и ролики – изготавли-
вают из хромистой стали ШХ15, термически обрабатывают и шлифуют.
Рабочие поверхности роликов не прямолинейны, а слегка выпуклы, т. е .
бочкообразны. Это делается для снятия кромочных напряжений и умень-
шения износа кромок ролика.
Для уменьшения износа шариковых тел качения между ними встав-
ляются прокладки из антифрикционного материала – обычно полимерного.
В роликовых ОПУ ролики размещают крестообразно с тем, чтобы часть
роликов (через одного) воспринимала нагрузки при подъеме груза, а ос-
тальные – нагрузки от хвостовой части крана при отсутствии груза.
Ролики размещают вплотную друг к другу. Для улучшения работо-
способности ОПУ в рабочую зону подается смазочный материал, а зазоры
между кольцами перекрываются манжетами.
Основные параметры однорядных роликовых ОПУ представлены в
таблице 6.1. Допускаемые нагрузки (М, V и Н) на эти опорно-поворотные
круги определяются по графику, представленному на рисунке 6.3.
Таблица 6.1
–
Основные параметры однорядных роликовых ОПУ с зубьями
внутреннего зацепления (рисунок 6.1, а)
Но-
мер
ОПУ
D,
мм
H,
мм
Масса,
кг
D1,
мм
D2,
мм
H,
мм
B,
мм
dр, мм
Dб1,
мм
Dб2,
мм
dб,
мм
n
Момент
затяжки Н·м
1 560
55 480 485
535 425
2800659071371754416770660
12 150–170
310007015089289858
20 965 830
16
4 1190 65 180 1082 1090 61
30 1150 1020
16
20 200–220
5 1400 95 350 1275 1285 80
36 1360 1195 20 24 350–400
6 1600 115 590 1443 1445 99
42 1545 1350 24 32 600–650
7 1900 130 900 1712 1728 113
50 1835 1610 27 36 800–850
8 2240 140 1160 2035 2055 125
5
2170 1920
45
9 2500 145 1300 2307 2300 145 10
2430 2210 30
1150–1250
10 2650 165 2200 2407 2429 140
2580 2270 36 48 1900–2000
11 3000 190 3200 2734 2760 162 8
60
2920 2590 42 60 3400–3500
33
Рисунок 6.3
–
Графики для определения допускаемых нагрузок на роликовые
однорядные ОПУ (цифры в кружочках соответствуют номерам кругов в таблице 6.1)
Диаметр трехрядных роликовых ОПУ фирмы Rote Erde достигает
8,22 м. Известно ОПУ для плавучего крана диаметром 11,5 м, рассчитан-
ное на передачу вертикальной и горизонтальной нагрузок 76 и 8,4 МН и
опрокидывающего момента 878,7 МН·м .
Из-за больших размеров по диаметру и небольших в поперечном се-
чении собственная жесткость ОПУ мала. Для нормальной работы, исклю-
чения заедания и перегрузки колец нужно соблюдать очень жесткие требо-
34
вания к конструкции, примыкающей к ОПУ, касающиеся неплоскостности,
шероховатости и жесткости. Так неплоскостность опорной поверхности,
на которую устанавливается ОПУ, не должна превышать 0,0001 диаметра
ОПУ. Шероховатость опорных поверхностей – не более 40 мкм. На опор-
ных поверхностях рам желательны центрирующие окружные бурты с ци-
линдрическими поверхностями или другие способы центрирования. Стяж-
ные болты ОПУ и болты крепления к поворотной и неповоротной частям
крана изготавливают из высокопрочных сталей (сталь 55–σв = 800 МПа,
40Х – σв = 1100–1300 МПа, 40ХФА, 38ХС – σв = 1350 МПа).
Расчет ОПУ заключается в определении наибольших нагрузок на те-
ла качения и установления их размеров.
Все силы, действующие на ОПУ, в соответствии с рисунком 6.4
можно свести к вертикальной V, приложенной в центре ОПУ, горизон-
тальной Н, приложенной по центру тел качения, и моменту М:
М=V ·R+H·h,
(6.1)
где R и h – плечи сил относительно оси вращения поворотной час-
ти крана.
Шариковые и роликовые, а также другие аналогичные многокатко-
вые ОПУ представляют собой статически неопределимые системы.
Распределение общего давления между телами качения в ОПУ зави-
сит от жесткости отдельных их элементов. Наибольшую нагрузку воспри-
нимают элементы, находящиеся в данный момент под основными про-
дольными хребтовыми балками неповоротной рамы крана (рисунок 6.4, б).
Примерная эпюра нагрузок на тела качения представлена на рисунке 6.4, г.
В результате проведенных исследований было установлено, что на-
грузка между опорными элементами распределяется по эпюре, подобной
эпюре реакции упругого основания на балку, нагруженную сосредоточен-
ными в точках, соответствующих местам соприкосновения опорного круга
с продольными и поперечными балками рамы крана. Причем основная
часть нагрузки воспринимается элементами, расположенными между про-
дольными балками, независимо от того, выходит ли равнодействующая на-
грузка за пределы опорного контура ОПУ или нет.
Расчет ОПУ в целом представляет собой специальную задачу, ре-
шаемую в зависимости от применяемых материалов, требуемой долговеч-
ности и др. Обычно, так же как и для всех подшипников качения, изгото-
вителем приводятся значения допускаемых нагрузок – вертикальных, го-
ризонтальных и моментных – для ОПУ конкретного типоразмера
(см. рисунок 6.3), которыми руководствуются при разработке конструкции
крана.
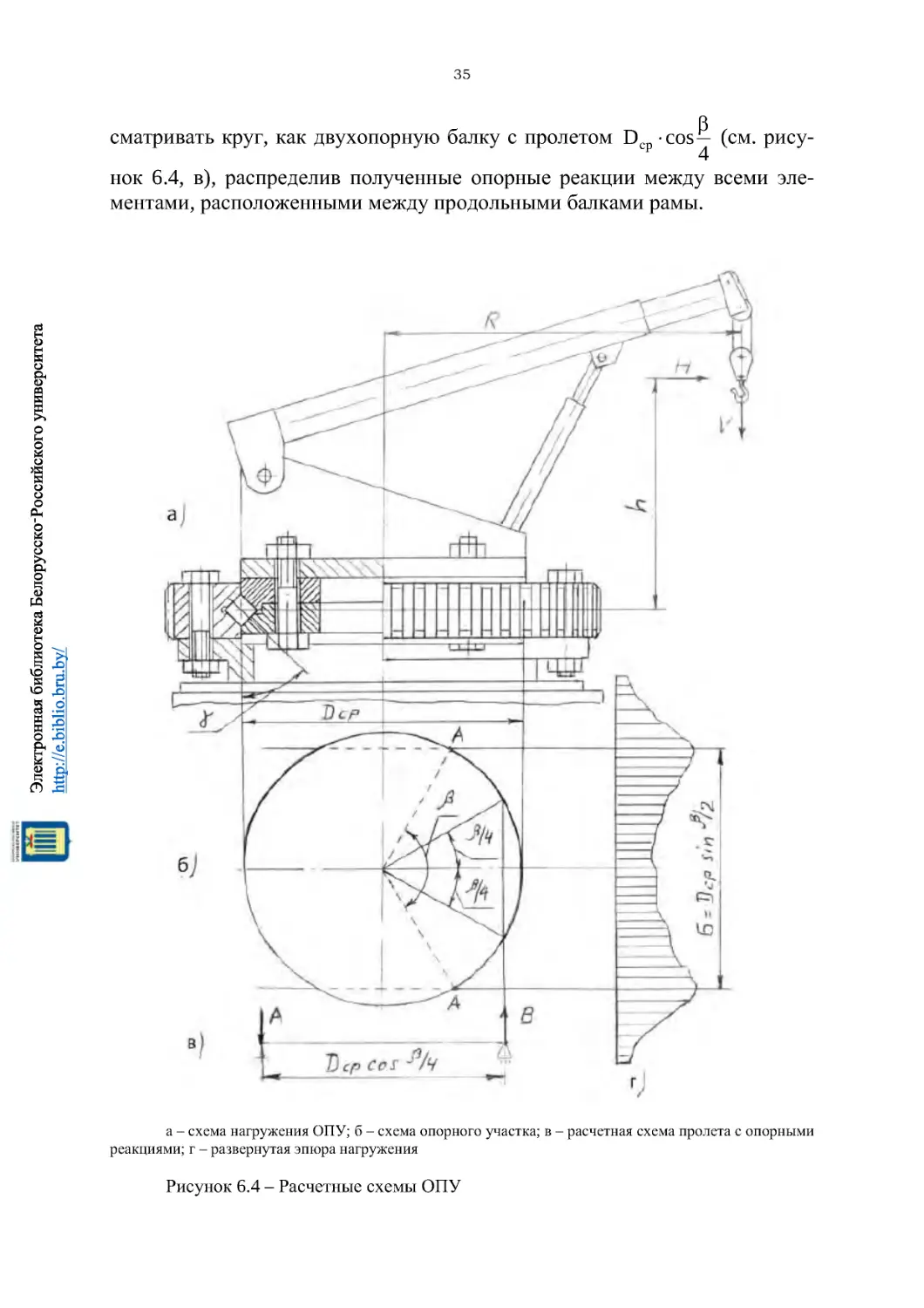
Для приближенного определения нагрузок на тела качения можно
при достаточной жесткости опорного круга и передней части рамы рас-
35
сматривать круг, как двухопорную балку с пролетом
4
cos
Dср
β
⋅
(см. рису-
нок 6.4, в), распределив полученные опорные реакции между всеми эле-
ментами, расположенными между продольными балками рамы.
а – схема нагружения ОПУ; б – схема опорного участка; в – расчетная схема пролета с опорными
реакциями; г – развернутая эпюра нагружения
Рисунок 6.4 – Расчетные схемы ОПУ
36
Опорные реакции А и В:
,
4
cos
D
h
H
R
V
2
V
B
;
4
cos
D
h
H
R
V
2
V
A
ср
ср
β
⋅
⋅
+
⋅
+
=
β
⋅
⋅
+
⋅
−
=
(6.2)
где β – центральный угол, стороны которого проходят через точки А
пересечения окружности среднего диаметра опорного круга с продольны-
ми балками крана.
При общем числе тел качения в ОПУ m в дуге с углом β их будет
m
m.
2
⋅β
′=
π
Средняя нагрузка на одно тело качения
ср
B2MV
T.
mm
2
Dc
o
s
4
⎛⎞
⎜⎟
π
==
+
⎜⎟
β
′
⋅β⎜⎟
⋅
⎝⎠
При наиболее часто встречающемся
120
,
1,5
π
β=
°=
120
ср
13,45
T1
,
5
V
.
mD
°
⎛⎞
=+
⎜⎟
⎜⎟
⎝⎠
В роликовых и шариковых ОПУ, ввиду того, что опорная реакция
роликов или шариков наклонена под углом γ к вертикали, нагрузка на тело
качения роликов или шариков будет составлять
.
cos
T
T.
к
.
т
γ
=
Диаметры роликов и шариков определяют на основании теории кон-
тактных напряжений. Допускаемые напряжения зависят от твердости и из-
носостойкости беговых дорожек. При выполнении колец из хромистой или
марганцовистой стали с поверхностной твердостью 47-55 HRC и стандарт-
ных шариков и роликов из шарикоподшипниковой стали допускаемое на-
пряжение для шариков
ш
см
2250 МПа
δ≈
, для роликов
р
см 1500 МПа
δ≈
.
При диаметре шарика dш и диаметре ролика dр = lр (диаметр ролика равен
его длине) допускаемая нагрузка (МН) на тело качения (шарик или ролик)
составит:
.
d
30
Т
;
d
45
Т
2
р
р
2
ш
ш
=
=
В процессе эксплуатации ОПУ подвергают визуальному осмотру,
37
включающему проверку затяжки болтов, наличие всех болтов и их кон-
тровки (стопорных планок).
В целях выявления обрыва болтов производится их остукивание
молотком с массой его головки примерно 0,5 кг. Звонкий удар и резкий
отскок молотка свидетельствуют о целостности болта и его надежной
затяжке, глухой удар без резкого отскока молотка – об ослаблении за-
тяжки или обрыве болта. Можно нанести удар по головке болта сбоку.
После чего к основанию головки болта у места удара приставляется па-
лец, и вновь ударяют по головке болта с противоположной стороны. Ес-
ли болт оборван или ослаблена его затяжка, то палец почувствует сдвиг
головки.
В случае обнаружения обрыва до двух болтов необходимы замена
оборванных болтов и последовательный контроль всех остальных болтов.
При обнаружении обрыва более двух болтов производится замена всех
болтов.
Контроль болтов осуществляется путем их осмотра при последова-
тельном вывинчивании и завинчивании с целью выявления дефектов: тре-
щин, поврежденной резьбы. В резьбе не должно быть искаженного профи-
ля, забоин и более одной сорванной нитки. Наличие трещин в болте уста-
навливается визуально или, при отсутствии внешних признаков трещин,
методом керосинной пробы (капиллярный метод).
Поверхность контролируемого участка зачищается до блеска, смачи-
вается керосином, а затем протирается насухо и покрывается слоем мела.
При отстукивании болта молотком происходит проявление трещин в ре-
зультате впитывания керосина, проникшего в трещины, в меловую обмаз-
ку. Для более четкого проявления трещин используют смесь, состоящую
из 70 % керосина, 30 % трансформаторного масла с добавлением яркого
красителя из расчета 10 г на 1 л смеси. В этих целях можно использовать
флуэрисцирующий керосин.
Проверку ослабления затяжки болтов можно произвести с помощью
обыкновенного гаечного ключа путем пробного отворачивания –
заворачивания. При обнаружении ослабленных болтов производится их за-
тяжка динамометрическим или специальным ключом с контролем крутя-
щего момента заданной величины. Необходимый момент затяжки прини-
мается по эксплуатационной документации или, применительно к одно-
рядным роликовым ОПУ, в соответствии с таблицей 6.1. Затяжку ослаб-
ленных болтов производят в два этапа: этап 1 – последовательная затяжка
обыкновенным накидным или рожковым ключом до отказа; этап 2 – до-
тяжка динамометрическим ключом или специальным ключом с контролем
крутящего момента. При этом затяжку болтов следует производить плавно
без рывков.
В процессе эксплуатации из-за естественного износа тел качения и
беговых дорожек ОПУ появляется люфт (перекос) поворотной обоймы по
38
отношению к неповоротной. Величина этого перекоса измеряется индика-
тором часового типа в диаметрально расположенных точках в плоскости
оси стрелы при нагрузке крана и без нагрузки. Суммарный перекос не
должен превышать 0,004 диаметра ОПУ (D):
,
004
,
0
D
П
П
3
п
≤
+
где Пп, Пз – передний и задний перекосы поворотной обоймы по
отношению к неповоротной.
Порядок выполнения работы
1 Изучить основные конструкции ОПУ, их назначения и основы
расчета.
2 По исходным данным, заданным преподавателем, подобрать но-
мер однорядного роликового ОПУ и определить нагрузку на тело качения.
Контрольные вопросы
1 Назначение и общее устройство шариковых и роликовых ОПУ.
2 Основные требования, предъявляемые к ОПУ при их изготовле-
нии и эксплуатации.
3 От каких силовых факторов и параметров ОПУ зависит нагрузка
на тело качения?
4 Как определяется допустимая нагрузка на тело качения?
7 Расчет несущей способности телескопической стрелы
с жесткой и гибкой подвесками
Цель занятия – приобретение теоретических и практических навы-
ков по устройству, определению прочностных характеристик стрелового
оборудования автомобильных кранов.
Современные автомобильные краны оборудуются телескопичес-
кими стрелами с жесткой подвеской. Такие стрелы имеют одну, две, три и
более выдвижных секций. Подъем и опускание стрелы c грузом или без
груза осуществляются гидроцилиндром, работающим на сжатие. При этом
телескопическая стрела с жесткой подвеской от действия силы тяжести
груза и собственной силы тяжести работает в основном на изгиб, как кон-
соль. Схема для расчета несущей способности телескопической стрелы с
жесткой подвеской представлена на рисунке 7.1.
39
Рисунок 7.1 – Схема для расчета несущей способности телескопической стрелы
с жесткой подвеской
Выдвижение каждой последующей секции стрелы по отношению к
предыдущей осуществляется на 6 м по длине рабочего хода гидроцилинд-
ров выдвижения.
В соответствии с техническими линейными параметрами, представ-
ленными в таблице 7.1, диапазон изменения угла наклона телескопической
стрелы к горизонту при изменении вылета составляет от 30 до 70°. Длина
секций стрелы составляет: выдвижных – 7,8 м; неподвижной – 8...9 м, в
зависимости от модификации крана.
Основные технические характеристики автокранов, выпускаемых
Могилевским заводом «Трансмаш», представлены в таблице 7.1.
40
Таблица 7.1 – Технические характеристики автомобильных кранов Могилевско-
го завода «Трансмаш»
Тип крана
Наименование показателя
КС-3579
КС-45729А
КС-55727-1
Максимальная грузоподъемность, т
15
16
25
Вылет, м
3,0
3,0
3,2
Длина стрелы, м
8,75
8,75
10,08
Число выдвижных секций
2
2
3
Длина стрелы, м
8,75–20,75 8,75–20,75 10,08–28,08
Максимальный вылет, м
18
18
20
Грузоподъемность, т
0,6
0,6
0,8 0,7
Длина стрелы, м
20,75
20,75
24,08 28,08
На рисунке 7.2 представлен один из вариантов автомобильного крана
с гибкой подвеской телескопической стрелы.
а – в транспортном положении; б – в рабочем положении
Рисунок 7.2 – Автомобильный кран с гибкой подвеской телескопической стрелы
41
Выдвижение подвижной секции стрелы осуществляется выжимным
канатом 1 лебедкой 2. Подъем и опускание телескопической стрелы осущест-
вляется гидроцилиндрами 3, работающими на растяжение, подкосами 4 и ка-
натами 5 стрелового полиспаста. Компенсация длины стрелового каната
для расчаливания стрелы при изменении ее длины осуществляется стрело-
вой лебедкой 6. При этом угол между продольной осью стрелы и подкосом
4 не изменяется и составляет 90°, что при прочих равных условиях обеспе-
чивает наименьшее усилие сжатия стрелы, подкоса и усилие в канатах 5.
Центрирование продольных осей неподвижной и выдвижной секций и
фиксация выдвижной секции с определенным интервалом по длине осуще-
ствляются замками 7 с приводом от гидроцилиндров 8, взаимодействую-
щих с упорами 9. Такое исполнение телескопической стрелы с одной вы-
движной удлиненной (12 м) секцией позволяет изменять длину стрелы
при работе крана от 12 до 21 м. По этим показателям такое стреловое обо-
рудование соответствует автомобильным кранам КС-3579 и КС-4572А, у
которых телескопические стрелы имеют по две выдвижные секции.
Телескопическая стрела с гибкой подвеской от силы тяжести груза в
основном работает на сжатие, а от действия собственной силы тяжести –
на изгиб.
На рисунке 7.3 представлена схема для определения соотношения
между силой тяжести груза и силой сжатия телескопической стрелы с гиб-
кой подвеской.
Рисунок 7.3 – Схема для определения соотношения между силой тяжести груза и
силой сжатия стрелы с гибкой подвеской
42
На рисунке 7.4 представлены поперечные сечения секций телескопи-
ческой стрелы с жесткой и гибкой подвеской.
а – неподвижная секция с жесткой и гибкой подвеской; б – выдвижная секция с гибкой подвеской
Рисунок 7.4 – Поперечные сечения секций телескопической стрелы
Геометрические характеристики этих сечений представлены в таб-
лице 7.2.
Таблица 7.2
–
Геометрические характеристики поперечных сечений секций
стрелы, представленных на рисунке 7.4
Геометрическая характеристика
Неподвижная секция
Выдвижная секция
1 Площадь поперечного сечения F, м
2
0,01262
0,011768
2 Момент инерции J, м
4
:
относительно X
4,179 ⋅ 10
–4
2,446 ⋅ 10
–4
относительно Y
3,075 ⋅ 10
–4
1,669 ⋅ 10
–4
3 Момент сопротивления ω, м
3
:
относительно X
16,7 ⋅ 10
–4
10,41 ⋅ 10
–4
относительно Y
15,4 ⋅ 10
–4
9⋅10
–4
4 Радиус инерции i, м:
относительно X
0,182
0,144
относительно Y
0,156
0,12
5 Равномерно распределенная нагрузка от
действия собственной силы тяжести q, Н/м
966
900
43
Несущая способность телескопической стрелы с жесткой подвеской
определяется на основании схемы, представленной на рисунке 7.1.
Максимальный изгибающий момент, действующий на стрелу,
2
к
max
кг
р
с
р
L
M
LPcos
q
cos ,
2
=⋅⋅ α
+ ⋅⋅α
где q
ср – усредненная распределенная нагрузка от действия собст-
венной силы тяжести,
933
2
900
966
qср
=
+
=
Н/м.
Напряжение изгиба
[]
2
к
ср
кг
р
max
и
xx
x
L
qc
o
s
LPc
o
s
М
2
.
WWW
⋅⋅α
⋅⋅α
δ=
=
+
≤δ
Допускаемое напряжение на изгиб составляет для сталей: Ст 3 –
150 МПа; 09Г2С – 200 МПа; 10ХСНд – 250 МПа.
Дополнительное напряжение от сжатия стрелы из-за действия собст-
венной силы тяжести и груза не учитывается, так как оно составляет не бо-
лее 0,1 от напряжения изгиба при поднятой стреле.
Несущая способность телескопической стрелы
[]
2
к
x
ср
гр
к
L
Wqc
o
s
2
P.
Lcos
⋅
δ−
⋅
⋅
α
≤
⋅α
Несущая способность телескопической стрелы с гибкой подвеской
(см. рисунки 7.2 и 7.3) определяется по условию обеспечения ее устойчи-
вости на сжатие с одновременным действием изгибающего момента от
действия собственной силы тяжести. Расчет на устойчивость производится
для выдвижной секции, как менее прочного элемента.
Гибкость выдвижной секции в двух взаимно перпендикулярных
плоскостях:
x
стр
y стр
xy
xy
LL
;
ii
μ⋅
μ⋅
λ=
λ=
,
где μx, μy – коэффициенты расчетной (приведенной) длины стрелы:
μx=0,7;μy=1;
ix, iy – радиусы инерции поперечного сечения выдвижной сек-
ции относительно оси x и у в соответствии с таблицей 7.2 ix = 0,144 м,
iy=0,12м.
44
xy
121
0,7 21
146;
122, 5
0,144
0,12
⋅⋅
λ==λ=
=
.
Следовательно, коэффициент продольного изгиба (коэффициент по-
нижения допускаемого напряжения) составляет φ = 0,347.
Максимальное напряжение в выдвижной секции с учетом сжатия и
изгиба
[]
2
ср
c
сж
x
qL
P
cos
F8
W
⋅
δ=
+
⋅
α≤φδ,
где F – площадь поперечного сечения выдвижной секции,
F = 0,01178 м
2
;
Wx– момент сопротивления поперечного сечения относительно
осиX,Wx = 10,41⋅10–4
м
3
.
Тогда
[]
2
ср
c
сж
x
qL
PFF
c
o
s
8W
⋅
≤φ⋅δ ⋅
−
⋅
⋅
α.
Несущая способность телескопической стрелы с гибкой подвеской
,
n
P
P
сж
гр≤
где n – соотношение между силой сжатия стрелы и силой тяжести
груза(см.рисунок7.3):приα=30° n≈5,3;приα=70°n≈2,8.
Порядок выполнения работы
1 Изучить конструктивные особенности стрелового оборудования с
жесткой и гибкой подвесками и основы расчета несущей способности.
2 По исходным данным, заданным преподавателем, определить не-
сущую способность телескопической стрелы с гибкой и жесткой подвес-
ками.
Контрольные вопросы
1 Какие основные нагрузки воспринимает стрела с жесткой и гиб-
кой подвесками?
2 Порядок перевода крана с гибкой подвеской телескопической
стрелы в рабочее положение и транспортное.
3 Под каким углом к продольной оси стрелы с гибкой подвеской
необходимо установить подкос в рабочем положении?
45
Список литературы
1 Характеристика материалов и нагрузок. Основы расчета кранов,
их приводов и металлических конструкций : справочник по кранам в 2 т. /
Под общ. ред. М . М . Гохберга.
–
М. : Машиностроение, 1988.
–
Т. 1.
–
536с.:ил.
2 Характеристики и конструктивные схемы кранов. Крановые ме-
ханизмы, их детали и узлы. Техническая эксплуатация кранов : справочник
по кранам в 2 т. / Под общ. ред. М . М . Гохберга. – Л. : Машиностроение,
Ленингр. отд-ние,1988. – Т . 2. – 559 с. : ил.
3 Вайнсон, А. А. Подъемно-транспортные машины : учебник для
вузов по специальности «Подъемно-транспортные, строительные, дорож-
ные машины и оборудование / А. А. Вайнсон. – 4-е изд., перераб. и доп. –
М. : Машиностроение, 1989. – 536 с. : ил.
4 Справочник по сопротивлению материалов / Е. Ф. Винокуров
[и др.] . – Минск : Наука и техника, 1988. – 464 с. : ил.
5 Невзоров, Л. А. Краны башенные и автомобильные / Л. А. Невзо-
ров, М. Д. Полосин. – М . : Академия, 2005. – 416 с. : ил.