/































































Author: Беспалов А.В. Харитонов Н.И.
Tags: химическая промышленность проектирование системы управления химическая технология
ISBN: 978-5-94628-311-3.
Year: 2007
Similar




Text
Глава
ОСНОВЫ ПРОЕКТИРОВАНИЯ
СИСТЕМ УПРАВЛЕНИЯ
ХИМИКО-ТЕХНОЛОГИЧЕСКИМИ
ПРОЦЕССАМИ
Каждая часть хочет быть в своем це-
лом, в коем лучше себя сохраняет.
Леонардо да Винчи
6.1. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ
И ОСОБЕННОСТИ УПРАВЛЕНИЯ
ТИПОВЫМИ ПРОЦЕССАМИ И АППАРАТАМИ
ХИМИЧЕСКОЙ ТЕХНОЛОГИИ
Систему автоматического управления проектируют на основе
анализа объекта управления, т. е. технологического процесса в оп-
ределенном аппаратурном оформлении. И начинают, как правило,
с проектирования одноконтурных САР отдельных технологических па-
раметров, поскольку они являются наиболее простыми и надежны-
ми как в наладке, так и в работе.
Большинство объектов химической технологии характеризуются
большим временем транспортного запаздывания гтап и большой ве-
личиной отношения Tjan/T, что приводит к неблагоприятным дина-
мическим характеристикам каналов управления. Это является причи-
ной того, что даже при оптимальной настройке регуляторов качество
переходных процессов в одноконтурных САР может не соответство-
вать заданному. Чтобы повысить качество управления, применяют
многоконтурные системы управления: каскадные, комбинирован-
ные, взаимосвязанные.
Окончательное решение о применении той или иной схемы уп-
равления ХТП принимают после моделирования различных АСУ и
сравнения качества получаемых процессов управления.
6.1. Динамические характеристики и особенности управления
479
6.1.1. Регулирование
основных технологических параметров
Основные технологические параметры, характеризующие хими-
ко-технологические процессы — это расход, уровень, давление, тем-
пература, pH, а также параметры качества: концентрация готового
продукта и его физико-химические свойства (плотность, вязкость,
влажность и др.).
6.1.1.1. Регулирование расхода
При регулировании расхода нужно учитывать некоторые осо-
бенности, не присущие обычно системам регулирования других тех-
нологических параметров. Первая особенность — небольшая (обыч-
но пренебрежимо малая) инерционность объекта регулирования,
который представляет собой, как правило, участок трубопровода
между первичным измерительным преобразователем для измерения
расхода и регулирующим органом. После перемещения штока регу-
лирующего органа в новое положение новое значение расхода уста-
навливается за доли секунды или, в крайнем случае, за несколько
секунд. Это означает, что динамические характеристики системы
определяются главным образом инерционностью измерительного
устройства, регулятора, исполнительного устройства и линией пере-
дачи сигнала (импульсных линий). Вторая особенность проявляется
в том, что сигнал, соответствующий измеренному значению расхо-
да, всегда содержит помехи, уровень которых высок. Частично шум
представляет собой физические колебания расхода, частота которых
настолько велика, что система не успевает на них реагировать. На-
личие высокочастотных составляющих в сигнале изменения расхода —
результат пульсаций давления в трубопроводе, которые в свою оче-
редь являются следствием работы насосов, компрессоров, случай-
ных колебаний расхода, например, при дросселировании потока через
сужающее устройство. Поэтому при наличии шума, чтобы избежать
усиления в системе случайных возмущений, следует применять ма-
лые значения коэффициента усиления регулятора.
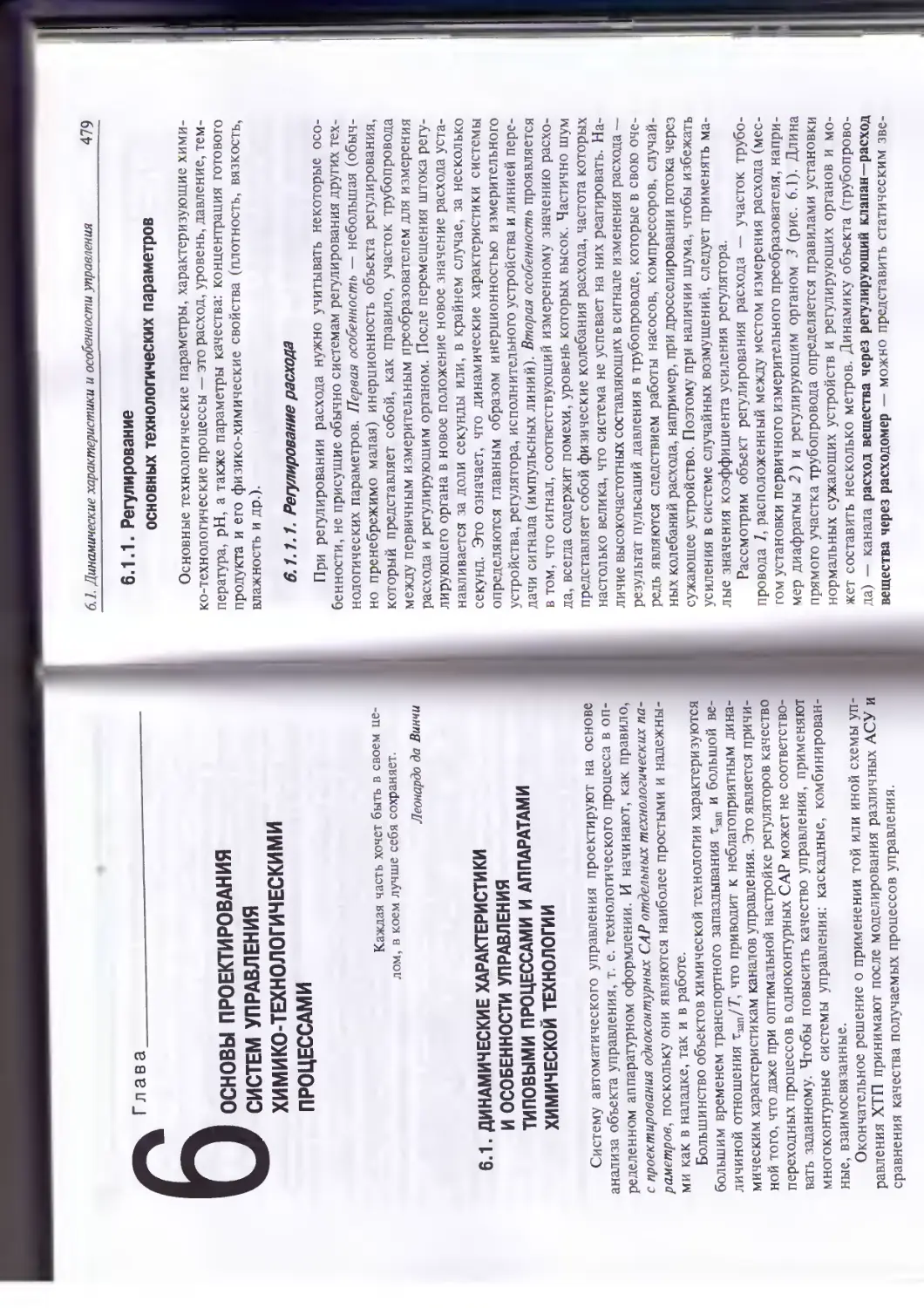
Рассмотрим объект регулирования расхода — участок трубо-
провода /, расположенный между местом измерения расхода (мес-
том установки первичного измерительного преобразователя, напри-
мер диафрагмы 2) и регулирующим органом 3 (рис. 6.1). Длина
прямого участка трубопровода определяется правилами установки
нормальных сужающих устройств и регулирующих органов и мо-
жет составить несколько метров. Динамику объекта (трубопрово-
да) — канала расход вещества через регулирующий клапан—расход
вещества через расходомер — можно представить статическим зве-
480
Глава 6 Основы проектирования систем управления ХТП
Рис. 6.1. Фрагмент системы регу-
лирования расхода. Пояснения см.
в тексте
ном первого порядка с транспортным запаздыванием. Значение по-
стоянной времени Т составляет несколько секунд; время транс-
портного запаздывания т^д для газа — доли секунды, для жидкости —
несколько секунд.
Поскольку инерционность объекта при регулировании расхода
незначительна, к выбору технических средств управления и методов
расчета АСУ предъявляются повышенные требования.
Большинство современных первичных измерительных преобра-
зователей расхода возможно рассматривать как статические звенья
нулевого порядка, а исполнительное устройство (исполнительный
механизм вместе с регулирующим органом) — как статическое зве-
но первого порядка с постоянной времени Т в несколько секунд.
Для повышения быстродействия пневматического исполнительного
устройства применяют позиционеры Пневматические линии связи
представляют статическим звеном первого порядка с транспортным
запаздыванием (постоянная времени Т и время транспортного за-
паздывания т^ определяются длиной линии связи и составляют
несколько секунд).
Если расстояния между функциональными элементами системы
управления велики, то по длине импульсной линии устанавливают
дополнительные усилители мощности, чтобы увеличить быстродей-
ствие системы.
Замечание
Реально существующая нелинейная зависимость между перепадом дав-
ления на стандартном сужающем устройстве (например, диафрагме) и рас-
ходом приводит к тому, что при изменении расхода степень устойчивости
системы регулирования изменяется. Заметим, что увеличение коэффици-
ента усиления объекта с увеличением расхода теоретически может быть
скомпенсировано, если эффективное значение коэффициента усиления
регулирующего клапана будет изменяться обратно пропорционально рас-
ходу. Практически регулирующего клапана с такой характеристикой не
существует. Если требуется обеспечить качественное регулирование расхо-
да при условии, что его значение может изменяться более чем вдвое, то для
получения сигнала, пропорционального расходу, необходимо использовать
преобразователь, осуществляющий операцию извлечения корня. Безуслов-
но, указанная нелинейность отсутствует, если в качестве первичного изме-
рительного преобразователя используется, например, электромагнитный
расходомер или другие средства измерения расхода.
6.1 Динамические характеристики и особенности управления
481
Другой тип нелинейности встречается в случае использования позицио-
нера. Небольшое изменение сигнала на входе в позиционер приводит к тому,
что на регулирующий клапан подается максимальный управляющий сигнал.
При дальнейшем увеличении сигнала на входе в позиционер его выходной
сигнал не изменяется. Таким образом, частотные характеристики системы
зависят от величины сигнала, и настройки регулятора, удовлетворительные
при больших возмущающих воздействиях, не обеспечивают нужного каче-
ства регулирования при малых возмущающих воздействиях.
В системах регулирования расхода применяют различные спосо-
бы изменения расхода:
• дросселирование потока вещества через регулирующий орган
(клапан, заслонка, шибер и др.), установленный на трубопроводе;
• изменение угловой скорости вращения рабочего вала насоса или
вентилятора;
• байпасирование потока (под байпасированием понимается пе-
реброс части вещества из основной магистрали в обводную линию)
6.1.1.2. Регулирование устройств
для перемещения жидкостей и газов
Для транспортировки жидкостей по трубопроводам часто при-
меняют центробежные и поршневые насосы, для транспортиров-
ки газов — вентиляторы, газодувки, центробежные компрессоры
и др. Цель регулирования работы насосов, вентиляторов, ком-
прессоров — поддержать их заданную производительность. Рас-
смотрим для примера схему регулирования расхода, создаваемого
центробежным насосом (рис. 6.2). Датчик расхода 2 устанавлива-
ется после центробежного насоса 1 на линии нагнетания перед
регулирующим клапаном 4. При отклонении расхода жидкости от
заданного значения регулятор 3 формирует командный сигнал, в
соответствии с которым исполнительный механизм перемещает
затвор регулирующего клапана 4. Проходное сечение регулирую-
щего клапана изменяется, что приводит к изменению суммарного
сопротивления гидравлической линии и, следовательно, расхода
жидкости
Замечание
Устанавливать первичный измерительный преобразователь, например
диафрагму, на линии всасывания центробежного насоса не рекомендуется:
дросселирование потока через диафрагму может вызвать кавитацию в на-
сосе, приводящую к его быстрому износу, снижению производительности
и напора насоса.
Предложенный вариант регулирования расхода жидкости не при-
меним, если для перемещения жидкости используют поршневой
16 Бейш, юн Л. В.. Харп гошм» Н. И.
482
Глава 6 Основы проектирования систем управления ХТП
Рис. 6.2. Схема регулирования расхода,
создаваемого центробежным насосом:
1 — насос; 2 — датчик расхода; 3 — регуля-
тор расхода; 4 — регулирующий клапан
Рис 6.3. Схема регулирования расхо-
да, создаваемого поршневым насосом.
Обозначения как на рис. 6.2
насос: по команде регулятора регулирующий клапан может полнос-
тью закрыться, что, в конечном итоге, приведет к разрыву трубо-
провода. Если регулирующий клапан установить на линии всасыва-
ния поршневого насоса, то это приводит к помпажу. Тогда для регу-
лирования расхода используют байпасирование потока (рис. 6.3):
часть жидкости перепускают из нагнетательной линии во всасываю-
щую линию Таким же способом регулируют производительность
шестеренчатых и лопастных насосов.
Примечание
Неустойчивая работа насоса, характеризуемая частой сменой режимов
работы и гидравлическими ударами, носит название помпаж
Производительность центробежных компрессоров стабилизиру-
ют системами регулирования с регулирующим клапаном, установ-
ленным на линии всасывания, и противюпомпажной автоматичес-
кой защитой (рис. 6.4). Для защиты применяется система сброса
части сжатого газа в ресивер, уменьшая при этом расход сжатого
газа в линии потребителя. В случае приближения режима работы
компрессора к области помпажа, регулятор расхода открывает регу-
лирующий клапан, установленный на лингии нагнетания к ресиверу.
Это приводит к увеличению производителгьности компрессора, сни-
жению давления в нагнетательной линии,, повышению давления во
всасывающей линии, что предотвращает >помпаж компрессора.
Регулирование соотношения расходов двух веществ
Существует несколько вариантов регулирования соотношения
расходов двух веществ.
Первый вариант (рис. 6.5). Суммгарный расход двух веществ
не задан, при этом расход одного из веществ F{ может меняться
произвольно. Назовем этот расход «ведупцим». Расход второго веще-
ства Г2 назовем «ведомым». Соотношение: между расходами второго
6.1. Динамические характеристики и особенности управления
483
Рис. 6.4. Схема регулирования произ-
водительности центробежного комп-
рессора с противопомпажной зашитой:
1 — компрессор; 2 — датчики расхода; 3 —
регуляторы; 4 — регулирующие клапаны
Рис. 6.5. Схема регулирования со-
отношения расходов при произволь-
ной нагрузке:
1, 2 — датчики расхода; 3 — регулятор
соотношения расходов; 4 — регулирую-
щий клапан
и первого вещества должно быть постоянным и равным п. Следова-
тельно, «ведомый» расход равен
F2 = nFl. (6.1)
Второй вариант (рис. 6.6). Заданы: соотношение расходов
двух веществ и ведущий расход F}. Помимо регулирования соотно-
шения расходов двух веществ применяют дополнительно еще регу-
лирование «ведущего» расхода. При таком регулировании измене-
ние задания по «ведущему» расходу F, автоматически изменяет и
«ведомый» расход Г2 в заданном соотношении с Рр
Третий вариант (рис. 6.7). При заданном «ведущем» расхо-
де регулирование соотношения расходов двух веществ проводится с
коррекцией по третьему технологическому параметру. Регулирова-
ние соотношения расходов двух веществ является внутренним кон-
туром в каскадной системе регулирования третьего технологическо-
Рис. 6.6. Схема регулирования соот-
ношения расходов при заданной на-
грузке:
/, 2— датчики расхода; 3 — регулятор соот-
ношения расходов; 4 — регулятор расхода;
5, 6 — регулирующие клапаны
16*
484
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.7. Схема регулирова-
ния соотношения расходов
с коррекцией по третьему
параметру (уровню) при за-
данной нагрузке:
/ — реактор-смеситель; 2, 3 —
датчики расхода; 4 — регулятор
соотношения расходов; 5 — ре-
гулятор расхода; 6 — регулятор
уровня; 7, 8 — регулирующие
клапаны; 9 — датчик уровня
го параметра, например, уровня в реакторе-смесителе 1. Заданный
коэффициент соотношения расходов двух веществ устанавливает-
ся внешним регулятором уровня 6 в зависимости от третьего пара-
метра.
Замечание
Особенность настройки каскадных САУ заключается в том, что на за-
дание внутреннему регулятору (в данном случае регулятору соотношения
расходов двух веществ) устанавливается ограничение:
лн £ л<л,,
где п„, п, - нижнее и верхнее соотношения расходов веществ соответ-
ственно
Если выходной сигнал внешнего регулятора (регулятора уровня) вы-
ходит за пределы [«„, и,], то задание внутреннему регулятору (в данном
случае регулятору соотношения расходов двух веществ) не меняется, а ос-
тается на предельно допустимом значении п (а именно или пи или л„).
О выборе регуляторов расхода
Требуемое (заданное) качество переходных процессов предопре-
деляет выбор законов управления. Для регулирования расхода без
установившейся (статической) погрешности в одноконтурных сис-
темах управления применяют ПИ-регуляторы. Если система управ-
ления расходом является внутренним контуром двухконтурной кас-
кадной системы управления, то в качестве регулятора расхода мо-
жет использовать П-регулятор
Замечание
В промышленных САР расхода не рекомендуется применять ПД- или
ПИД-регуляторы. Если в сигнале изменения расхода присутствуют высо-
кочастотные сигналы (помехи), то использование Д-составляющих в зако-
не регулирования без предварительного сглаживания сигнала расхода мо-
жет вызвать неустойчивую работу системы управления.
6.1. Динамические характеристики и особенности управления 485
6.1.1.3. Регулирование уровня
Постоянство уровня жидкости в технологическом аппарате озна-
чает сохранение материального баланса, т. е. приток жидкости равен
ее стоку, а скорость изменения уровня равна нулю:
^=^5 dZ,/dT = 0. (62)
Замечание
Понятия «приток» и «сток» рассматриваются как обобщенные понятия.
Уровень жидкости в аппарате можно регулировать, применяя
различные схемы регулирования.
Первый вариант (рис. 6.8) — регулирование «на притоке»,
изменяя расход жидкости на входе в аппарат.
Второй вариант (рис. 6.9) — регулирование «на стоке», из-
меняя расход жидкости на выходе из аппарата.
Третий вариант (рис. 6.10) — регулирование соотношения
расходов жидкости на входе в аппарат и выходе из него с коррекци-
ей по третьему технологическому параметру — уровню (каскадная
система регулирования).
Если в аппарате (испарителе, конденсаторе, ректификационной
колонне и т. п.) имеют место фазовые превращения веществ, тогда
уровень является характеристикой и гидродинамических, и тепло-
массообменных процессов. Приток и сток должны учитывать фазо-
вые превращения веществ. В этом случае уровень регулируют изме-
лирования уровня «на притоке»:
1 — аппарат; 2 — регулятор уровня; 3
регулирующий клапан
Рис. 6.9. Схема непрерывного регу-
лирования уровня «на стоке» Обо-
значения как на рис. 6.8
486
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.10. Схема непрерывного регу-
лирования уровня каскадной САР
1 — аппарат; 2, 3 — датчики расхода; 4
регулятор уровня (ведущий); 5 — регуля-
тор соотношения двух расходов (ведомый)
6 — регулирующий клапан
Рис. 6.11. Схема непрерывного регу-
лирования уровня в испарителе:
1 — испаритель; 2 — регулятор уровня;
? — регулирующий клапан
нением расхода теплоносителя, например греющего пара или хлада-
гента (рис. 6.11). В указанных аппаратах уровень связан с другими
технологическими параметрами, например давлением. Естественно,
в каждом конкретном случае система регулирования уровня реали-
зуется с учетом других контуров регулирования.
Изменение уровня жидкости в аппарате с постоянной по высоте
площадью поперечного сечения А в общем случае можно предста-
вить уравнением
= Fm - FBUX, (6.3)
ат
где Fm, FBbTX — приток и сток жидкости соответственно с учетом
фазовых и химических превращений.
Выбор непрерывного или позиционного регулятора определяет-
ся требуемой точностью поддержания уровня в аппарате. Если не-
обходимо уровень жидкости в аппарате поддерживать на заданном
значении, а постоянные колебания уровня недопустимы, то исполь-
зуют непрерывный регулятор. Позиционные регуляторы применяются
обычно для поддержания уровня в сборниках жидкости, промежу-
точных емкостях в заданных (достаточно широких) пределах
LH < L < LB,
где LH, LB — нижнее и верхнее значения уровня жидкости в аппарате
соответственно.
6.1. Динамические характеристики и особенности управления
487
Рис. 6.12. Схема позиционного регулирования уровня:
1 — сборник жидкости; 2 — резервный сборник жидкости; 3 — насос;
4 — датчик уровня; 5 — регулятор уровня; б, 7 — регулирующие клапаны
Схема позиционного регулирования уровня приведена на рис. 6.12.
Если уровень достигает своего предельного значения £в (верхнего),
поток автоматически переключается на резервный сборник жидкости
О выборе регуляторов уровня
П-регуляторы применяются, если не требуется высокое каче-
ство регулирования и возмущающие воздействия не имеют посто-
янной составляющей, приводящей к накоплению статической по-
грешности. Но уровень жидкости может оказать значительное влия-
ние на тепловые процессы, например, в паровых теплообменниках
поверхность теплообмена определяется уровнем конденсата. Для
регулирования уровня в таких объектах без статической погрешнос-
ти применяют ПИ-регуляторы.
6.1.1.4. Регулирование давления
Давление является показателем соотношения расходов газовой
фазы на входе в аппарат и выходе из него. Постоянство давления
свидетельствует о сохранении материального баланса аппарата по
газовой фазе, записываемого в виде:
ф/fVU (6.4)
где V — объем аппарата; FBX и FBb,x — приток и сток газа соответ-
ственно с учетом химических и фазовых превращений в аппарате,
как и в (6.3).
Обычно давление в технологической установке стабилизируют в
каком-либо одном аппарате, а по всей системе оно устанавливается
в соответствии с гидравлическим сопротивлением технологических
488
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.13. Регулирование вакуума в выпарной установке:
1,2— выпарные аппараты; 3 — тарельчатый конденсатор; 4 — регуля-
тор вакуума; 5 — регулирующий клапан
линий и аппаратов. Например, в многокорпусной выпарной уста-
новке (рис. 6.13) стабилизируют вакуум в последнем выпарном ап-
парате 2, выбрав в качестве управляющего воздействия изменение
расхода охлаждающей воды, подаваемой в конденсатор 3 (измене-
ние расхода охлаждающей воды влияет на скорость конденсации
вторичного пара, т. е. на FBblx). В остальных аппаратах при отсут-
ствии возмущающих воздействий устанавливается разрежение, оп-
ределяемое из условий материального и теплового балансов с уче-
том гидравлического сопротивления технологической линии.
Если давление значительно влияет на кинетику процесса, то пре-
дусматривается система стабилизации давления в отдельных аппа-
ратах. Таким примером является процесс ректификации, для кото-
рого кривая фазового равновесия зависит от давления. При регули-
1
I 2
Хладагент Z V/ \4/
А.
3 I <.........-(><3—» Газы
6
Дистиллят
Рис. 6.14. Регулирование давления в ректификационной колонне при на-
личии неконденсирующихся примесей:
/ колонна; 2 — дефлегматор; 3 — сборник флегмы; 4 — регулятор
давления; 5 — регулирующий клапан; 6 — гидрозатвор
6.1 Динамические характеристики и особенности управления 489
ровании процесса бинарной ректификации часто в качестве косвен-
ного показателя состава смеси используют ее температуру кипения,
однозначно связанную с составом только при постоянном давле-
нии. Поэтому в продуктовых ректификационных колоннах, как пра-
вило, предусмотрены специальные системы стабилизации давления,
где в качестве управляющего воздействия выбрано изменение рас-
хода не сконденсировавшихся газов, отводимых из верхней части
колонны (рис. 6.14).
Из сравнения уравнений (6,3) и (6 4) следует, что способы регу-
лирования давления аналогичны способам регулирования уровня.
6.1.1.5. Регулирование температуры
Температура — показатель термодинамического состояния систе-
мы — выбирается как выходная координата при регулировании теп-
ловых процессов. Динамические характеристики объектов в системах
регулирования температуры в значительной степени зависят от физи-
ко-химических параметров процесса и конструкции аппарата. Поэто-
му общие рекомендации по выбору систем регулирования температу-
ры сформулировать весьма сложно, и для каждого конкретного тех-
нологического процесса требуется свой детальный анализ.
Но общие особенности системы управления температурой мож-
но выделить. К ним, в первую очередь, необходимо отнести значи-
тельную инерционность тепловых процессов, а также некоторую
инерционность промышленных датчиков температуры. Итак, одной
из основных задач проектирования САР температуры является умень-
шение инерционности примышленных датчиков температуры, и в
этом направлении достигнуты определенные успехи.
Термоэлектрический преобразователь (термопара) широко при-
меняется в ИИС и системах управления. Входной величиной термо-
пары является температура t измеряемой среды, а выходной величи-
ной термоэлектродвижущая сила (ТЭДС). Можно считать (как это
было показано в ряде примеров разд. 3.3.2), что динамические свой-
ства термопары описываются дифференциальным уравнением вида
me d£
aA dx
+ Е = Kt,
(6.5)
где т — масса рабочего спая термопары; с — удельная теплоемкость
спая; а — коэффициент теплоотдачи конвекцией; А — площадь по-
верхности теплопередачи рабочего спая; К — коэффициент усиления.
Рассмотрим динамические характеристики термопары в защит-
ном чехле. Термопару в защитном чехле можно представить как
последовательное соединение трех тепловых емкостей, разделенных
тепловыми сопротивлениями: защитного чехла, воздушной прослой-
490
Глава 6 Основы проектирования систем управления ХТП
ки, отделяющей термопару от стенок защитного чехла и собственно
термопары. Все элементы можно аппроксимировать статическими
звеньями первого порядка.
Как уменьшить инерционность промышленных датчиков темпе-
ратуры? На основе анализа уравнения (6.5) предлагается ряд общих
рекомендаций:
• увеличение коэффициентов теплоотдачи от измеряемой среды
к защитному чехлу в результате правильного выбора места установ-
ки датчика, при этом скорость движения среды должна быть макси-
мальной; при прочих равных условиях более предпочтительна уста-
новка датчика (термопары в защитном чехле) в жидкой фазе (по
сравнению с газообразной), в конденсирующем паре (по сравнению
с конденсатом) и т. п.;
• уменьшение теплового сопротивления и тепловой емкости за-
щитного чехла подбором соответствующего материала и толщины
при его изготовлении;
• уменьшение постоянной времени воздушной прослойки, на-
пример, припаивая рабочий спай термоэлектрических преобразова-
телей (термопар) к защитному чехлу;
• правильный выбор типа первичного измерительного преоб-
разователя; например, при наборе первичных измерительных пре-
образователей: термометр сопротивления, термопара и маномет-
рический термометр, необходимо учитывать, что наименьшей
инерционностью обладает термопара (в малоинерционном испол-
нении), наибольшая инерционность присуща манометрическому
термометру.
6.1.1.6. Регулирование pH
Различают две основные системы регулирования pH в зависи-
мости от требуемой точности регулирования. К первому типу
систем можно отнести позиционные системы регулирования для под-
держания pH в заданных пределах:
РНн <рН<рНв,
где рНн и рНв — нижний и верхний пределы регулирования pH
соответственно.
Такие системы применяются, когда скорость изменения pH мала,
а допустимые пределы ее колебаний достаточно широки.
Пример: регулирование pH в процессе ферментации, в котором благо-
даря большому времени пребывания раствора и медленному исчезновению
реагента можно сравнительно легко осуществить позиционное регулирова-
ние величины pH.
6.1. Динамические характеристики и особенности управления 491
Второй тип систем регулирования точно поддерживает за-
данное значение pH. В этом случае применяются непрерывные ПИ-
или ПИД-регуляторы.
К одному из основных факторов, затрудняющих точное регули-
рование pH в процессе нейтрализации, относят наличие нелиней-
ной зависимости величины pH от расхода реагентов (нелинейная
статическая характеристика процессов). Небольшое изменение за-
дания регулятору может во много раз изменить коэффициент усиле-
ния объекта и привести к неустойчивым колебаниям в системе. Если
наклон статической характеристики объекта резко изменяется, то
настройки регулятора необходимо устанавливать, принимая во вни-
мание изменения коэффициента усиления объекта. Необходимо от-
метить, что эта особенность возникает не только при регулировании
pH, но и при регулировании всех объектов с нелинейной статичес-
кой характеристикой.
Типичная кривая титрования (рис. 6.15) показывает, сколь труд-
ной является задача поддержания заданного значения pH. На кривой
титрования выделяются три характерных участка: первый (в середи-
не) относится к нейтральным средам и характеризуется большим
коэффициентом усиления; второй и третий участки относятся к
сильнокислым или сильнощелочным средам и имеют небольшие
коэффициенты усиления. Если режим работы объекта соответству-
ет первому участку статической характеристики, то допустимый
коэффициент усиления регулятора очень мал и не обеспечивает
нужного качества регулирования при работе в режимах, соответ-
ствующих второму и третьему участкам статической характеристи-
ки. Естественно, при использовании простой системы регулирова-
ния возможны значительные отклонения текущего значения pH от
заданного значения.
Рис. 6.15. Пример кривой титрования
492
Глава 6 Основы проектирования систем управления ХТП
Реакция нейтрализации идет практически мгновенно, поэтому ди-
намические свойства промышленных аппаратов с перемешивающими
устройствами определяются процессом смешения и вполне точно опи-
сываются дифференциальными уравнениями первого порядка с запазды-
ванием. Наблюдается такая тенденция: чем меньше постоянная време-
ни аппарата, тем сложнее обеспечить устойчивое регулирование про-
цесса pH, поскольку проявляются инерционность других элементов
системы регулирования (измерительных и исполнительных устройств,
регулятора) и запаздывание в импульсных линиях.
Необходимо также учитывать, что системы регулирования вели-
чины pH в отработанных средах должны справляться с достаточно
большими возмущениями, вызываемыми изменениями концентра-
ций и расходов. Большие изменения нагрузки влияют на коэффи-
циент усиления объекта и могут даже изменить постоянные време-
ни системы.
Почему при регулировании величины pH возникают проблемы?
Одним из основных источников трудностей является то, что шкала
pH соответствует концентрации ионов водорода от 100 до 10“14 моль/л.
Другого общепромышленного измерения, охватывающего столь ог-
ромный диапазон, не существует. Еще одним источником трудно-
стей, внутренне присущим системам регулирования величины pH,
является то, что измерительные электроды pH-метров могут реаги-
ровать на изменения величины pH даже на 0,001, что делает воз-
можным отслеживание таких маленьких изменений концентрации
ионов водорода, как 5 Ю-10 моль/л при величине pH 7. Другого
общепромышленного измерения с такой огромной чувствительнос-
тью также нет.
Последствия столь большого диапазона измерения и высокой
чувствительности можно проиллюстрировать, рассмогрев систему
регулирования непрерывной нейтрализации сильной кислоты сильным
основанием. Поток реагента, по существу, должен быть пропорциона-
лен разности между концентрацией иона водорода в технологическом
потоке и заданным значением. Следовательно, регулирующий клапан
на линии подачи реагента должен иметь диапазон изменения расхо-
да больше чем 10 000 000 : 1 для заданного значения рНзд 7, когда
величина pH входящего потока изменяется между 0 и 7. Более того,
неопределенность в ходе штока регулирующего клапана преобразу-
ется напрямую в ошибку регулирования pH, так что гистерезис все-
го лишь в 0,00005 % может вызвать отклонение величины pH на 1
при рНзд 7.
Как же все-таки можно регулировать процесс при таких услови-
ях? Ограничения, связанные с большим диапазоном измерения и
высокой чувствительностью, могут быть преодолены приближением
к заданному значению в несколько стадий, последовательно исполь-
6.1. Динамические характеристики и особенности управления
493
зуя регулирующие клапаны меньшего размера с высококачествен-
ными позиционерами
Могут быть предложены различные варианты повышения устой-
чивости и качества регулирования pH.
1. Увеличение объема реактора, где происходит нейтрализация,
увеличивает его постоянную времени и уменьшает отношение т1ап / Т.
Это повышает устойчивость системы регулирования, позволяет ус-
танавливать более высокие значения коэффициента усиления регу-
лятора, что приводит к уменьшению максимальной ошибки регули-
рования Етах. Кроме того, реактор большого объема сам по себе
лучше сглаживает колебания pH, вызванные флуктуациями расхода
и концентрации исходной смеси, поступающей на нейтрализацию.
2. Использование вместо одного реактора двух (или более), со-
единенных последовательно, при этом поток реагента по реакторам
распределяют так (рис. 6.16): большую часть реагента подают в пер-
вый реактор (форнейтрализатор), где, в основном, и происходит
реакция нейтрализации («грубая»). Во второй реактор подают остав-
шуюся (малую) часть реагента, необходимую для окончательного
завершения реакции нейтрализации («точной»), т. е. до достижения
pH0 (точки нейтрализации на кривой титрования). Такое распреде-
ление потока реагента по реакторам связано с особенностями кри-
вой титрования (см. рис. 6.15), которые были обсуждены выше.
3. Регулирование pH с использованием двух регулирующих кла-
панов разного размера (рис. 6.17) позволяет «компенсировать» не-
линейность статической характеристики объекта в большом диапа-
зоне изменения расхода реагента Fv
Клапаном малого размера (с малым условным проходным диа-
метром) 2 с равнопроцентной расходной характеристикой управля-
ет П-регулятор 4, выходной сигнал которого поступает также на вход
ПИ-регулятора 3, имеющего зону нечувствительности. ПИ-регуля-
тор управляет клапаном большого размера 7 с линейной расходной
характеристикой.
Рис. 6.16. Схема регулирования pH с использованием двух реакторов
494
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.17. Схема регулирования pH с двумя регулирующими клапанами.
Пояснения см. в тексте
При небольших отклонениях pH от величины, соответствующей
точке нейтрализации, когда коэффициент усиления объекта велик,
командный сигнал П-регулятора оказывается в зоне нечувствитель-
ности ПИ-регулятора. Выходной сигнал ПИ-регулятора не изменя-
ется и положение затвора большого клапана 7 остается прежним.
Регулирование процесса нейтрализации осуществляется с помощью
малого клапана 2. Изменение командного сигнала регулятора при-
водит к небольшому изменению расхода реагента F{, т. е. коэффи-
циент усиления исполнительного устройства в этом случае мал.
Если значение pH сильно отклоняется от величины, соответ-
ствующей точке нейтрализации, т. е. объект работает в режиме, где
его коэффициент усиления мал, то командный сигнал П-регулятора
выходит из зоны нечувствительности ПИ-регулятора. При этом зат-
вор малого клапана занимает одно из крайних положений, а регули-
рование осуществляется с помощью большого клапана. Изменение
командного сигнала регулятора приводит к большому изменению
расхода реагента F\, т. е. коэффициент усиления исполнительного
устройства в этом случае велик. Таким образом, изменение коэффи-
циента усиления объекта компенсируется изменением коэффици-
ента усиления исполнительного устройства. Естественно, что пол-
ная компенсация изменения коэффициента усиления контура регу-
лирования может быть осуществлена только при определенном
соотношении между величиной pH и степенью открытия обоих кла-
панов (и большого, и малого размеров).
Замечание
Если размер большого клапана превышает размер малого в 20 раз, то
система регулирования с двумя регулирующими клапанами обеспечивает
изменение расхода реагента почти в 700 раз. Если такого изменения
расхода реагента недостаточно, рекомендуется проводить процесс нейтра-
6.1. Динамические характеристики и особенности управления
495
лизации в две или более стадий При изменении величины pH раствора,
подаваемого на нейтрализацию, в обе стороны от точки нейтрализации
pH0, применяется вторая система регулирования (точно такая же, как и на
рис. 6.17), управляющая подачей другого реагента в тот же самый реактор.
6.1.1.7. Регулирование параметров состава и качества
Качественные параметры (концентрация вещества в потоке, со-
став газовой смеси) должны точно поддерживаться на заданном уров-
не. Сложность регулирования качественных параметров определя-
ется, в первую очередь, сложностью их измерения. В последнее вре-
мя одним из способов регулирования качественных параметров
является регулирование по косвенному показателю с дальнейшим
уточнением алгоритма его расчета по данным прямых анализов,
получаемых анализаторами состава газа и жидкости. В разд. 5.14
рассматривались кратко различные анализаторы состава газа и жид-
кости.
6.1.2. Регулирование типовых тепловых процессов
Теплообменные аппараты классифицируются по виду теплооб-
менной поверхности (с поверхностью из трубок, с плоской поверхно-
стью, с поверхностью непосредственного контакта теплоносителей);
по физическому процессу, происходящему с основным технологи-
ческим веществом (нагреватели, холодильники, испарители, кон-
денсаторы); по характеру работы во времени (рекуперативные,
регенеративные и т. д.) и другим признакам. Поверхностные тепло-
обменники довольно широко используются в химической техноло-
гии, поскольку теплоносители в таких аппаратах разделены тепло-
передающей поверхностью: в трубчатых теплообменниках — стенки
трубок, в пластинчатых теплообменниках — плоские или рифленые
листы Распространенной конструкцией теплообменной аппарату-
ры трубчатого типа является кожухотрубный теплообменник. Кожу-
хотрубные теплообменники делят на теплообменники с неизменяе-
мым агрегатным состоянием веществ, например, теплообменники
типа газ—газ, газ—жидкость, жидкость—жидкость, а также теплооб-
менники с изменяющимся агрегатным состоянием веществ (напри-
мер, паро-газовые, паро-жидкостные теплообменники, испарители,
конденсаторы).
Особенностью теплообменников с изменяющимся агрегатным
состоянием веществ, рассматриваемых как объекты регулирования,
является равенство температур жидкой и паровой фаз при постоян-
ном давлении и отсутствии переохлаждения образующегося конден-
сата (перегрева образующегося пара). Поскольку температура жид-
496 Глава 6. Основы проектирования систем управления ХТП
кой и паровой фаз одинакова, она не может служить показателем
процесса испарения или конденсации. Тогда в качестве основного
показателя процесса теплообмена выбирают уровень жидкой фазы.
В испарителях или конденсаторах, предназначенных для испа-
рения или конденсации жидкости, задача регулирования сводится к
поддержанию материального баланса по технологическому потоку (газу
или жидкости).
В кожухотрубных паро-жидкостных теплообменниках, предназ-
наченных для нагревания жидкости до заданной температуры за счет
теплоты конденсации греющего пара, основной задачей регулирова-
ния является стабилизация температуры жидкости на выходе из теп-
лообменника.
6.1.2.1. Динамические характеристики
паро-жидкостного теплообменника
Рассмотрим динамические характеристики теплообменника с
изменяющимся агрегатным состоянием одного из веществ, исполь-
зуя в качестве примера такого теплообменника аппарат с мешалкой,
снабженный паровой рубашкой (рис. 6.18, а). Жидкость нагревается
насыщенным водяным паром (расход Fn, кг/с) до температуры Гвых, °C.
Параметры жидкости: расход F, температура на входе в теплообмен-
ник /вх, °C, удельная теплоемкость сж, Дж/(кг • К).
Входные величины: изменение расхода пара Fn, кг/с; изменение
расхода жидкости F', изменение температуры жидкости на входе в
теплообменник 1ВХ.
Получим уравнение динамики паро-жидкостного теплообмен-
ника, предположив, что теплообменник является стационарным
Рис. 6.18. Схема паро-жидкостного теплообменника (а) и структурная
схема его динамических каналов (б)
б
U О')
6.1. Динамические характеристики и особенности управления
497
объектом с сосредоточенными параметрами, и сделав следующие
допущения:
• температура жидкости в теплообменнике /вых одинакова по всему
объему;
• температура теплопередающих стенок гс одинакова во всех точ-
ках, а их термическое сопротивление пренебрежимо мало;
• коэффициент теплоотдачи а [Вт/(м2 • К)] между жидкостью и
поверхностью металлических стенок, а также удельные теплоемкос-
ти жидкости сж и материала стенок сс постоянны во времени;
• насыщенный водяной пар при прохождении через паровую ру-
башку теплообменника конденсируется полностью, отдавая теплоту
фазового перехода, и выводится в виде конденсата при температуре
конденсации;
• теплота, выделяющаяся при конденсации пара, расходуется
на изменение температуры теплопередающих стенок и нагревание
жидкости.
Запишем уравнение теплового баланса для теплопередающих сте-
нок за время dr, принимая во внимание высказанные допущения:
Fnrndr = mcczdtc + аЛ (/с - /вых) dr, (6.6)
где гп — удельная теплота конденсации пара (теплота фазового пе-
рехода), Дж/кг; тс — масса теплопередающих стенок, кг; А — пло-
щадь поверхности теплообмена, м2.
Запишем уравнение теплового баланса для жидкости за малый
промежуток времени dr, принимая во внимание:
• теплоту, поступившую в теплообменник с жидкостью;
• теплоту, полученную жидкостью от пара через металлическую
стенку теплообменника и пошедшую на увеличение температуры
жидкости Гвых, находящейся в теплообменнике;
• теплоту, уходящую с жидкостью из теплообменника за то же
самое время:
+ есЛ(/с - /вых )dx — 7cx/Bb,xdT — (6.7)
где т* — масса жидкости в теплообменнике, кг.
Приведем уравнения (6.6) и (6.7) к стандартной форме, приня-
той для дифференциальных уравнений:
wccc + аЛ/с = Гпгп + аЛ/„ых; (6.8)
dx
тхсж ” —- + (Л’ж + °^)?вых = (69)
Ж Ж j \ Ж / ВЫЛ Ж Вл v ' '
В уравнениях (6.8) и (6.9) заменим переменные на конечные
приращения, отнесенные к номинальным значениям переменных
498 Глава 6. Основы проектирования систем управления XTП
(/,?, Fn°,F°,). При этом учитываем, что приращение функ
ции двух аргументов f (х, у) определяется равенством
(6.10)
дх ду
Введем новые обозначения (см. рис. 6.18, 6):
v _ . v _ ^'с . х _ Л^п . у _ &F . _ _ ^'вх
У Л ’ Ус - о ’ Л г0 ’ Л1 - г0 ’ i “ Л
'вых *с гп ' *вх
В результате дифференциальные уравнения (6.8) и (6.9) прини-
мают следующий вид:
тсСс1с тг- + аЛ'сУс = Fnrnx + ^°ыхТ; (6.11)
ат
тжсж'вых + сж +С1у4рвых = (6 |2)
= ~ ^вх )Х1 + F^k'bxZ + аЛГсус.
Ж < ВЫХ вл J 1 Ж ВЛ L •< С
Обозначив постоянные времени и коэффициенты усиления в
(6.11) и (6.12) соответствующими буквами, получим:
Г* “Г’ + у<= = кзх + к$у' (6.13)
ат
+ J = -klX} +k2z + k4yc, (6.14)
ат
где
Т
. у»» _ ^*жсж .
аЛ ' 7’°сж + аА '
F°c (t° - (° )
1 ^'вых В* )
(р°сж +аЛЬ” ’
у л f воъл
к
аЛС' 4
к3 =
У^с .'вых
(Г°сж + а4)/^’ 5 ‘с ’
Примечание
Все коэффициенты /с,, к2, к}, к4, к5 меньше единицы
6.1. Динамические характеристики и особенности управления
499
Чторы исключить из уравнений (6.13) и (6.14) переменную ус,
продифФеРенЦиРУем уравнение (6.14) по времени и выразим из него
производную dyc/dT и переменную ус. Полученные выражения для ус
и dyc/dr подставим в уравнение (6.13). Разделив все слагаемые полу-
ченного уравнения на коэффициент при у, равный F°cxc/^>ix/(a4?°),
и учитывая равенство
п 'п
'°
с 'вых
вых
(6.15)
ж
получаем итоговое уравнение динамики теплообменника:
где
7? =
Wccc^x . Т _ тссс тС
aAF ’ 1 ’ аЛ
™ Л *0 _
Т — mcLc . к _ * вых 1 вх
1 " аЛ '
Моэьно прийти к следующему выводу: при сделанных выше до-
пущениях паро-жидкостный теплообменник, представляющий со-
бой аппарат с мешалкой, снабженный паровой рубашкой, является
устойчивым объектом второго порядка. Из уравнения (6.16) следует,
что температура жидкости у на выходе из теплообменника повыша-
ется при увеличении расхода пара х и температуры жидкости z на
входе в теплообменник и понижается при возрастании расхода жид-
кости хр
6.1.2.2. Динамические характеристики
кожухотрубного паро-жидкостного теплообменника
Однородность температуры в той части кожухотрубного теплооб-
менник;^ где конденсируется (или испаряется) вещество, позволяет
рассматривать ее как объект (звено) с сосредоточенными параметра-
ми. Но существует еше другая часть теплообменника, в которой на-
греваете-» (или охлаждается) вещество без изменения агрегатного со-
стоянияЦ и температура вещества изменяется по длине труб тепло-
обменника. Эту часть теплообменника необходимо рассматривать
как объ-ект (звено) с распределенными параметрами.
Пол<учим передаточную функцию кожухотрубного паро-жидко-
стного ^теплообменника в общем виде по каналу регулирования рас-
ход пара—температура жидкости на выходе теплообменника Fn—/вых
500
Глава 6 Основы проектирования систем управления ХТП
Рис. 6.19. Схемы кожухотрубного паро-жидкостного теплообменника (а)
и теплообмена в его трубе (6)
(рис. 6.19), рассматривая теплообменник как объект с распределенны-
ми параметрами, при этом принимая следующие допущения: пар —
насыщенный, а конденсат из теплообменника отводится при темпе-
ратуре конденсации
Нагревание жидкости в кожухотрубном паро-жидкостном теп-
лообменнике идет от tm до гвых (рис. 6.19, а).
Выявим фактору, влияющие на температуру жидкости. Для это-
го составим уравнение теплового баланса:
(^ВЫХ “ ^ВХ ) = (Рп ) ~ ?ПОТ ’ (6- 17)
где Гж — расход жидкости на входе теплообменника, кг/с; сж — удель-
ная теплоемкость жидкости, Дж/(кг • К); /вых и /вх — температура
жидкости на выходе и входе в теплообменник, °C; Fn — расход грею-
щего пара, кг/с; рп — давление греющего пара в заводской магист-
рали, Па; гп — удельная теплота конденсации, Дж/кг; qnm — тепло-
вые потери, зависящие от температуры окружающей среды, Вт.
Запишем уравнение материального баланса для межтрубного
пространства теплообменника:
Л^ = £п-Гк=0, (6.18)
ат
где А — площадь свободного сечения межтрубного пространства,
заполненная конденсатом, м!; LK — уровень конденсата в межтруб-
ном пространстве, м; FK — расход конденсата, кг/с.
Уравнение теплопередачи через стёнку трубы теплообменника:
Й = *т('п (6.19)
где q — тепловой поток через стенку трубы, Вт/м2; К, — коэффици-
ент теплопередачи. Вт/(м2 - К); — поверхность трубы теплообмен--
б. 1. Динамические характеристики и особенности управления
501
ника, м2; tn — температура греющего пара, °C; /ж — температура
жидкости, "С.
По условиям работы теплообменника из всех переменных, вхо-
дящих в уравнения (6.17)...(6.19), основными возмущающими воздей-
ствиями являются изменения расхода и температуры жидкости на
входе в теплообменник ДГЖ и ДГВХ; изменения давления греющего
пара Дрп; изменение тепловых потерь д<?пот; изменение коэффици-
ента теплопередачи ДА^ из-за образования отложений на трубах теп-
лообменника.
Возмущающие воздействия ДГХ, Д/вх и Дрп можно отнести к кон-
тролируемым, а возмущающие воздействия Д<7ПОТ, Д£г относят к не-
контролируемым.
В качестве регулирующих воздействий можно выбрать расходы
греющего пара Fn и конденсата FK
К регулируемым параметрам можно отнести температуру жидко-
сти на выходе теплообменника /вых и уровень конденсата в межтруб-
ном пространстве Лк.
Примечание
Отметим, что /вых и LK связаны между собой через поверхность тепло-
обмена, поскольку эффективность теплопередачи в верхней части межтруб-
ного пространства, заполненной паром, гораздо выше, чем эффективность
теплопередачи между конденсатом и нагреваемой жидкостью.
Из уравнения (6.17) выразим температуру жидкости на выходе
теплообменника:
г = ; + . Z11__(6 20)
'вых 'вх + г Г ’ (0.40,
1 ж еж 1 жиж
Из (6.20) следует, что температура жидкости на выходе теплооб-
менника /вых связана линейной зависимостью с температурой жид-
кости на входе в теплообменник /вх, расходом греющего пара Fn,
удельной теплотой конденсации гп и тепловыми потерями qnm и
обратно пропорциональна расходу жидкости Гж.
В результате линеаризации зависимости (6.20) в окрестности
номинального (заданного) режима, подобно тому, как это было про-
делано в разд. 3.1, получим:
у = kpxp + к1х1 + к2х2 + к3х3 + кАх4, (6.21)
где
_ . О .
У ~ 'вых 'вых ’
о
= г - Г° к
р ‘ п 1 п ’ Лр
д^вых
'п
F°C
1 Ж*-Ж
502
Глава 6 Основы проектирования систем управления ХТП
/Г°.
1 Ж ’
г0 0 . „0
_ *п *п +*7пот .
(Л^Ч ’
д^вых
, ^(7 пот ,
х4 ~ *7 пот 9пот’ Л
-1
Г°С
1 жиж
*1 = Лк
*2 = Лх
Здесь индекс «р» обозначает «по каналу регулирования».
Из (6.21) следует, что коэффициенты усиления линеаризован-
ной модели зависят от входных координат, например, коэффициент
усиления по каналу регулирования кр прямо пропорционален удель-
ной теплоте конденсации пара и обратно пропорционален расхо-
ду жидкости F®.
Найдем динамические характеристики кожухотрубного паро-
жидкостного теплообменника. Для определения динамических ха-
рактеристик по каналу регулирования расход пара—температура жид-
кости на выходе теплообменника, т. е. Fn—гБЫХ составим структурную
схему (рис. 6.20).
Вначале разберем динамику первого, второго и четвертого зве-
ньев. Динамика первого звена соответствует изменению давления
пара в межтрубном пространстве рп при изменении расхода пара Fn
и может быть представлена дифференциальным уравнением перво-
го порядка, имеющим, после процедуры линеаризации, следующий
вид (это дифференциальное уравнение статического звена первого
порядка):
Л^т + Ji = (6.22)
Рис. 6.20. Структурная схема кожухотрубного паро-жидкостного тепло-
обменника по каналу управляющего воздействия Гп— гвых
6.1. Динамические характеристики и особенности управления 503
где
.и = Рп -p°; *Р = Fn -Л?;
Т
' л; 1 1 р '
Здесь И — объем межтрубного пространства, м3; р — безразмер-
ный расходный коэффициент регулирующего клапана на линии
конденсата; R = 8.314 Дж/(моль • К) — универсальная газовая по-
стоянная.
Второе звено представим как статическое звено нулевого по-
рядка (усилительное), в котором находит свое отражение зависи-
мость температуры пара /п от его давления рП. Передаточную функ-
цию этого звена
= = <6 23>
можно найти по диаграмме состояния пара при рп =
Итоговая передаточная функция межтрубного пространства выг-
лядит следующим образом:
= = (6.24)
/ I о + 1
Четвертое звено, учитывающее инерционность выходной каме-
ры для нагретой жидкости, аппроксимируется статическим звеном
первого порядка:
«"ТТЛ'
Теперь рассмотрим третье звено, анализ динамических характе-
ристик которого представляет наибольшие сложности. Это звено
показывает взаимосвязь между температурой пара в межтрубном
пространстве tn и температурой жидкости на выходе из труб (на вхо-
де в верхнюю камеру теплообменника) t(L).
Принимаем следующие допущения:
• температура жидкости распределена по длине труб, в попе-
речном же сечении потока жидкости градиент температуры отсут-
ствует;
• теплопроводность стенки трубы такова, что стенка трубы рас-
сматривается как звено с сосредоточенными координатами1
504
Глава 6. Основы проектирования систем управления ХТП
• тепловой емкостью пленки конденсата и тепловыми потерями
можно пренебречь; теплофизические параметры жидкости и стенки
трубы постоянны.
Запишем уравнение теплового баланса для потока жидкости на
элементарном участке трубы df в виде (рис. 6.19, б):
= Ляаи (4
Ж. Ж Л-, * Ziff В В \ L Ж. / ’
ИЛИ
Т , -г _ гр _ /ИЖСЖ
ж Эт 'ж Э£ с ж’ ж Лвав ’
(6.25)
где /иж — масса жидкости, заполняющая участок трубы длиной 1 м,
кг/м; сж — удельная теплоемкость жидкости, Дж/(кг • К); Лв — пло-
щадь внутренней поверхности теплообмена, м2; ав — коэффициент
теплоотдачи на внутренней поверхности трубы, Вт/(м2 К); v — ско-
рость жидкости, м/с.
Уравнение теплового баланса для стенки трубы:
Э/
wcccd£ = Днссн (?п — tc) d£ - Лвав (/. — 7Ж) d£,
от
или
6.1. Динамические характеристики и особенности управления
505
После преобразования по Лапласу уравнения (6.25) и (6.26) при-
нимают вид:
T,'Y3 + ,T^- + Y3-Y2i (6.27)
ж з ж d£
TcsY2 + Г2(1 + х) = *зХ+*- (6-28)
Если исключить из уравнений (6.27) и (6.28) Г2, получим обык-
новенное дифференциальное уравнение первого порядка с коэффи-
циентами, являющимися функциями комплексной переменной.
va^^Xx + Yj = b^X3 (6-29)
аг
где
, ,_____Г» К»* 17-Х)______________Ss-------;
° W ' (7^ + l)(Tcs + 1 * х) - X TcS „ J - - X -
J gO + J + X
_____________1___________
* 5 ” (Т'ж5 + 1)(Гс5+1 + х)-х’
Решение уравнения (6.29) при граничном условии K3(s, О - 0
для / = 0 и при Х(() = const имеет вид:
гс&+».(1 + х).^хгж;7-с=^;х.^, <б.ад
1
м* г)=*т*)р-ехр^^| •
(6.30)
где тс — масса трубы, отнесенная к 1 м ее длины, кг/м; сс — удель-
ная теплоемкость стенки трубы, Дж/(кг • К); — площадь наруж-
ной поверхности теплообмена, м2; ан — коэффициент теплоотдачи
на наружной поверхности трубы, Вт/(м2 К).
В уравнениях (6.25) и (6.26) переходим к отклонениям перемен-
ных от их номинальных (заданных) значений и обозначаем
Для значения температуры жидкости на выходе из трубы (£ - L)
решение уравнения (6.30) принимает следующий вид.
У3(5, L) = X(s)b(s) 1-ехр(-^
(6.31)
Уз Уз ='с - 'ci x = tn -4
Чтобы получить передаточную функцию звена из дифференци-
альных уравнений в частных производных, применяем преобразо-
вание Лапласа по т, обозначая изображения входных и выходных
координат х(т, £), у2(т), .Уз(Т, О через X(s, £), Y2(s), У3(л, £) соответ-
ственно.
гле - = i/v — время транспортного запаздывания.
Из (6.31) находим передаточную функцию третьего звена (см.
рис. 6.20):
^3М =
Г3(5, А)
b(s) 1 - exp -
тзап
(6.32)
Примечание
Процедура преобразования дифференциальных уравнений в частных
производных в обыкновенные дифференциальные уравнения опущена,
поскольку она детально описана в специальной литературе.
где b(s) может быть представлено как произведение двух простых
сомножителей (двух передаточных функций статических звенье
первого порядка):
,___!______L_
b^~T2s + \ r3s + r
(6.33)
506 Глава 6. Основы проектирования систем управления ХТП
Выражение \/a(s) аппроксимируем линейным двучленом:
l/a(s) = s + a. (6.34)
С учетом (6.34) изменим показатель экспоненты:
ехр -
^зап
а(л)
«expf-т^ (5 +а)].
(6.35)
Окончательно передаточная функция третьего звена выглядит как
= 1-ехр[-Тзап(^ + д)]
(Г25 + 1)(Т35 + 1)
(6.36)
Примечание
Постоянные времени Т2 и 73 близки по значениям к Тс и Т„, а наи-
большая постоянная времени находится в интервале [Г*, Гж + 7J
Таким образом, передаточная функция кожухотрубного паро-
жидкостного теплообменника по каналу Fn—гвых равна
иФ)=»;(*) ^(5).(г4(5) =
= kik2 . ‘-ГСРИзап (^ + Д)] I (6,37)
T\s + 1 (T2s + 1)(Г3$ + 1) T4s+\'
Получим передаточную функцию кожухотрубного паро-жидко-
стного теплообменника в общем виде по каналу возмущающего воз-
действия температура жидкости на входе теплообменника—температу-
ра жидкости на выходе теплообменника, т. е. /вх—гвых (рис. 6.21).
Динамические характеристики кожухотрубного паро-жидкостного
теплообменника по каналу /(0)—t(L) для пятого звена определяются
уравнением (6.29) исходя из следующих условий:
• температура насыщенного пара постоянна и равна тогда ^=0;
• температура жидкости на входе в трубы теплообменника (при
( = 0) является входной координатой.
В этом случае уравнение (6.29) и граничные условия выгля-
дят так:
d У
va(s)-^+Y3 = 0; У, (0) = г(0). (6 38)
Рис. 6.21. Структурная схема ко-
жухотрубного паро-жидкостного
теплообменника по каналу возму-
щающего воздействия /вх—/вых
6.1. Динамические характеристики и особенности управления
507
Решение уравнения (6.38) представляет собой:
Г3(Л, s) = Г3(0, s)-exp
L
va(s)
Теперь получим передаточную функцию пятого звена:
"ч’>' =екр
L
va(s)
(6 39)
Если пренебречь тепловой емкостью стенки трубы теплообмен-
ника и учесть соотношение (6.35), то получим передаточную функ-
цию статического звена нулевого порядка (усилительного) с транс-
портным запаздыванием:
Hz5(s) = /».exp(-T3an5), (6 40)
где Ь = ехр(—отмп).
Теперь запишем полную передаточную функцию теплообменни-
ка по каналу возмущающего воздействия температура жидкости на входе
теплообменника—температура жидкости на выходе теплообменника,
т. е. /вх—/вых, с учетом входной и выходной камер (см. рис. 6.21):
( 1 V
(К(5) = (Г4(5).И<4(5)-^(5)= —— b-exp^s). (6.41)
( 1 да + 1 у
Примечание
Анализ динамики изменения температуры жидкости при колебаниях
ее расхода весьма сложен, поскольку между этими координатами суще-
ствует нелинейная зависимость.
Выводы
Для практических расчетов можно воспользоваться приближенны-
ми передаточными функциями, в которых учитывают только наиболь-
шие постоянные времени и время запаздывания. Особенность про-
мышленных кожухотрубных паро-жидкостных теплообменников, как
объектов управления, — небольшие значения постоянных времени и
времени транспортного запаздывания (секунды). Вследствие малой
инерционности этих теплообменников к выбору и расчету системы
контроля и регулирования предъявляются повышенные требования:
• применение по возможности малоинерционных первичных
преобразователей;
• при расчете системы регулирования учитываются инерцион-
ность измерительного и исполнительного устройств, а также кана-
лов связи.
508
Глава 6. Основы проектирования систем управления ХТП
Теперь с учетом выявленных основных возмущающих и управ-
ляющих воздействий можно предложить несколько вариантов сис-
тем регулирования температуры жидкости на выходе из промыш-
ленных кожухотрубных паро-жидкостных теплообменников.
Первый вариант. Для регулирования выходной темпера-
туры жидкости без статической ошибки можно применить одно-
контурную замкнутую САР с использованием ПИ-регулятора или
ПИД-регулятора (рис. 6.22), изменяющего расход греющего пара.
Недостатки такого регулирования: при сильных возмущающих воз-
действиях по каналам расхода или температуры жидкости на входе в
теплообменник качество переходного процесса оказывается неудов-
летворительным.
Второй вариант. Если имеют место возмущающие воздей-
ствия по каналам расхода F* или температуре жидкости на входе гвх,
то ограничиваются их статической компенсацией. Реализовать такой
подход возможно применением каскадной САР соотношения расхо-
дов пара и жидкости FJF* с коррекцией по третьему параметру -
температуре жидкости на выходе /вых теплообменника (рис. 6.23).
Третий вариант. При сильных возмущающих воздействиях
по каналам изменения давления или температуры греющего пара
возможно применить каскадную систему регулирования температу-
ры (или давления) в межтрубном пространстве теплообменника с
коррекцией задания по /вых (рис. 6.24). Температура (или давление)
Рис. 6.22. Одноконтурная замкнутая САР темпе-
ратуры жидкости в кожухотрубном паро-жидко-
стном теплообменнике
Рис. 6.23. Каскадная САР температуры жид
кости в кожухотрубном паро-жидкостном теп
лообменнике (с регулятором соотношения
расходов во внутреннем контуре)
6.1. Динамические характеристики и особенности управления
509
Рис. в.24. Каскадная САР температуры жидко-
сти в кожухотрубном паро-жидкостном тепло-
обменнике (с регулятором температуры конден-
сата во внутреннем контуре):
1 — регулятор температуры жидкости на выходе из теп-
лообменника; 2 — регулятор температуры конденсата
в кожухе
Конденсат
Жидкость
онденсат рис регулирование жидкости в схеме кожу-
хотрубного паро-жидкостного теплообменника с
’ байпасированием холодного потока:
1 — регулятор температуры жидкости на выходе из теп-
лообменника; 2— регулятор температуры жидкости после
Жидкость
смешения
в межтрубном пространстве теплообменника — промежуточная ко-
ордината, значительно быстрее реагирующая на указанные возму-
щающие воздействия, чем температура жидкости на выходе тепло-
обменника /вых.
Четвертый вариант. Чтобы обеспечить высокое качество
регулирования температуры, желательно иметь дополнительное уп-
равляющее воздействие. Для этого жидкость, поступающую на на-
гревание, перед теплообменником делят на два потока F, и Г2. Часть
жидкости (поток Г]) направляют в теплообменник и нагревают до
температуры несколько выше заданной. Другая часть жидкости (по-
ток Г2) минует теплообменник, оставаясь холодной. За теплообмен-
ником нагретый и холодный потоки смешиваются для получения
жидкости заданной температуры. Таким образом, реализуется схема
с байпасированием (рис. 6.25). В этом случае регулятор температу-
ры 1 стабилизирует температуру после теплообменника (вспомога-
тельная функция). Регулятор температуры 2 регулирует температуру
жидкости после смешения /вых (основная задача). При этом качество
регулирования гвых определяется динамикой основного контура, в
котором объект представляет собой безынерционное звено, поскольку
постоянная времени процесса смешения нагретой и холодной жид-
костей практически равна нулю.
510 Глава 6. Основы проектирования систем управления ХТП
6.1.3. Регулирование массообменных процессов
К массообменным процессам, получившим наибольшее распро-
странение в химической технологии, относят абсорбцию, ректифи-
кацию, экстракцию, кристаллизацию, адсорбцию, сушку. К обшим
особенностям регулирования массообменных процессов можно от-
нести то, что в результате проявления различного рода случайных
возмущающих воздействий нарушаются материальные и тепловые
балансы, изменяются температура и давление, что приводит к нару-
шению состава и качества получаемых продуктов. Поэтому одной
из основных задач регулирования массообменных процессов явля-
ется задача стабилизации режимных параметров, решение которой
позволяет сохранить материальные и тепловые балансы.
Аппараты, в которых осуществляется большинство массообмен-
ных процессов, как правило, — крупногабаритные аппараты колон-
ного типа (диаметр таких аппаратов может достигать несколько мет-
ров, высота равняется нескольким десяткам метрам), поэтому впол-
не естественно, что постоянные времени и запаздывание таких
аппаратов могут составлять десятки минут. Если для регулирования
массообменных процессов использовать одноконтурные системы
регулирования, то они будут характеризоваться большой длительно-
стью переходных процессов и большой максимальной ошибкой.
Чтобы повысить качество переходных процессов, для регулирова-
ния массообменных процессов используют комбинированные САР,
для которых характерно введение коррекции по наиболее сильным
возмущающим воздействиям, а также каскадные САР, характеризу-
емые применением дополнительных сигналов из промежуточных то-
чек массообменных аппаратов.
Рассмотрим особенности регулирования массообменных процес-
сов на примере регулирования ректификационной установки.
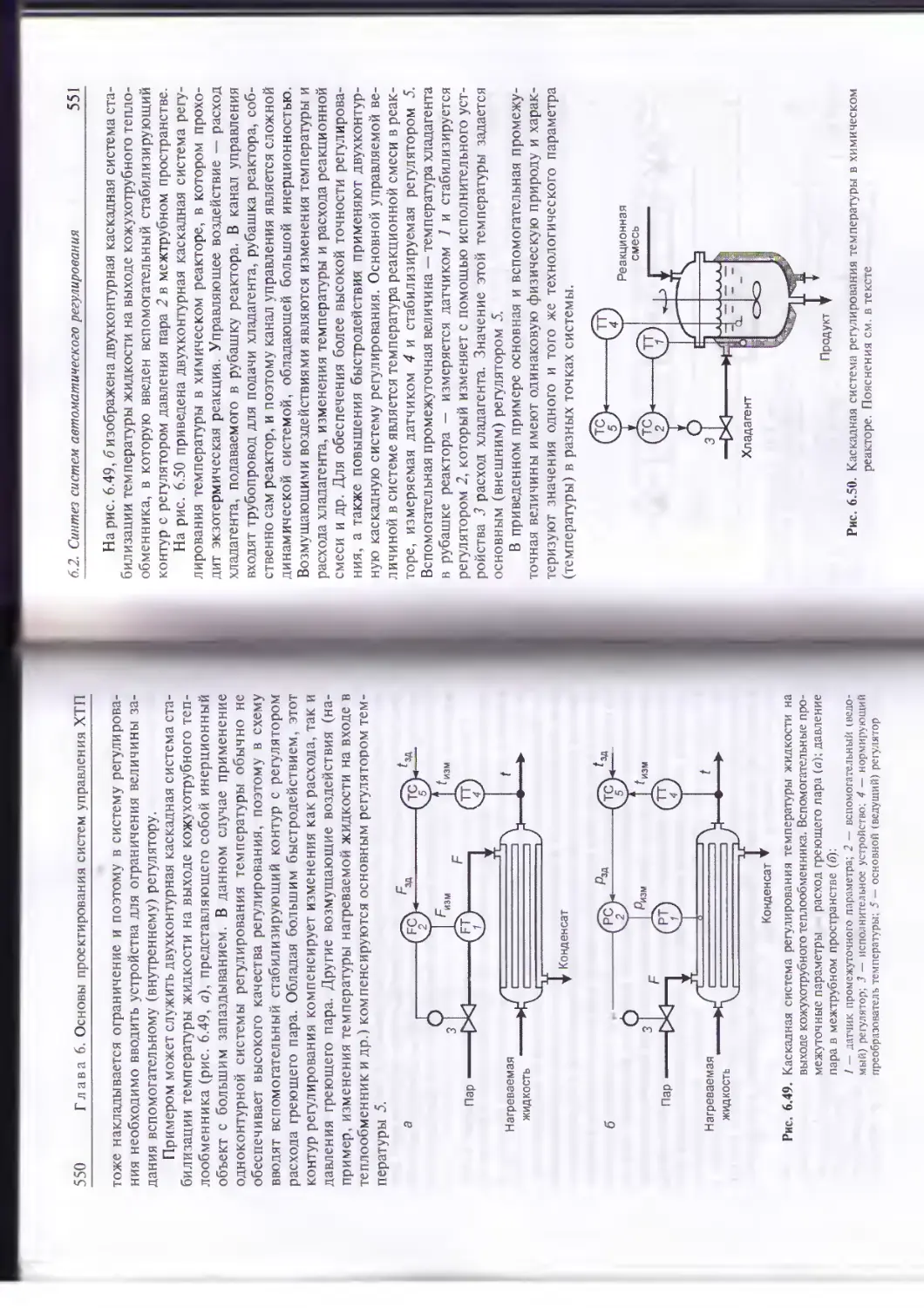
6.1.3.1. Управление ректификационной установкой
Ректификационные установки служат для разделения много-
компонентной смеси на составляющие ее компоненты в результате
противоточного взаимодействия смеси паров и жидкой смеси. Обыч-
но целью любой системы регулирования ректификационной уста-
новки является разделение многокомпонентной смеси с соблюде-
нием качества по одному из конечных продуктов при минимальных
потерях конечного продукта на другом конце колонны. Оптимиза-
ция может иметь своей целью увеличение прибыли за счет, напри-
мер, сокращения эксплуатационных затрат или увеличения произ-
водительности.
Разработка любой стратегии управления обычно начинается с
идентификации всех входов и выходов ректификационной колон-
6.1. Динамические характеристики и особенности управления
511
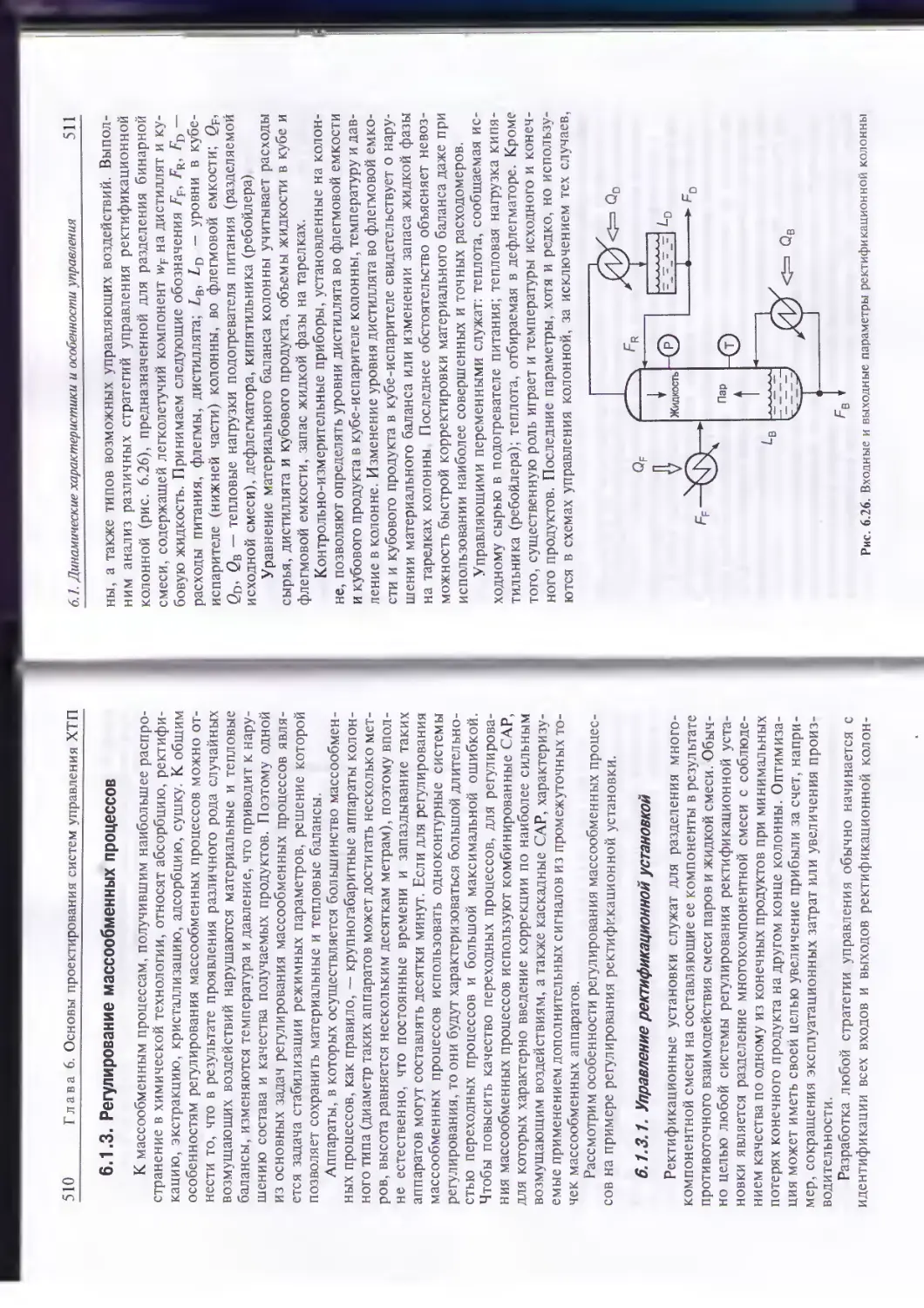
ны, а также типов возможных управляющих воздействий. Выпол-
ним анализ различных стратегий управления ректификационной
колонной (рис. 6.26), предназначенной для разделения бинарной
смеси, содержащей легколетучий компонент wF на дистиллят и ку-
бовую жидкость. Принимаем следующие обозначения Ff, Fr, Fd —
расходы питания, флегмы, дистиллята; £в, Ln — уровни в кубе-
испарителе (нижней части) колонны, во флегмовой емкости; 0F,
Qd, Qb — тепловые нагрузки подогревателя питания (разделяемой
исходной смеси), дефлегматора, кипятильника (ребойлера)
Уравнение материального баланса колонны учитывает расходы
сырья, дистиллята и кубового продукта, объемы жидкости в кубе и
флегмовой емкости, запас жидкой фазы на тарелках.
Контрольно-измерительные приборы, установленные на колон-
не, позволяют определять уровни дистиллята во флегмовой емкости
и кубового продукта в кубе-испарителе колонны, температуру и дав-
ление в колонне. Изменение уровня дистиллята во флегмовой емко-
сти и кубового продукта в кубе-испарителе свидетельствует о нару-
шении материального баланса или изменении запаса жидкой фазы
на тарелках колонны Последнее обстоятельство объясняет невоз-
можность быстрой корректировки материального баланса даже при
использовании наиболее совершенных и точных расходомеров.
Управляющими переменными служат: теплота, сообщаемая ис-
ходному сырью в подогревателе питания; тепловая нагрузка кипя-
тильника (ребойлера); теплота, отбираемая в дефлегматоре. Кроме
того, существенную роль играет и температуры исходного и конеч-
ного продуктов. Последние параметры, хотя и редко, но использу-
ются в схемах управления колонной, за исключением тех случаев,
Рис 6.26. Входные и выходные параметры ректификационной колонны
512
Глава 6. Основы проектирования систем управления ХТП
когда кубовый остаток из колонны направляется на подогрев исход-
ного продукта.
При разработке стратегии системы управления рабочее давле-
ние в колонне обычно считается неизменным, а его значение опре-
деляется, например, физическими свойствами углеводородов исход-
ной смеси и конструктивными параметрами самой колонны. Регу-
лирование рабочего давления в колонне входит в функции контура
регулирования теплового баланса.
Регулируя материальный баланс в колонне на основании пока-
заний уровнемеров, а давление — по количеству теплоты, передан-
ной в кипятильнике (ребойлере), можно наметить в общих чертах
схему регулирования температуры в колонне, определяющую тепло-
вой баланс в колонне. Такой процесс является саморегулирующим-
ся, так как количество переданной теплоты является функцией пе-
репада температур в теплообменнике. Так, например, с увеличени-
ем тепловой нагрузки подогревателя питания температура дистиллята
начнет повышаться, но сама разница температур будет снижаться,
вызывая уменьшение теплового потока, т. е. возникнет обратная от-
рицательная связь, что и приводит к так называемому эффекту са-
морегулирования.
Величина перепада температур потоков в теплообменнике зави-
сит от многих факторов. Чем больше эта разность, тем меньшую
площадь поверхности теплообмена можно использовать. Необходи-
мо учитывать, что слишком большая разность температур способна
привести к такому режиму кипения в трубках теплообменника, при
котором значительно снижается коэффициент теплопередачи. Кро-
ме того, слишком высокая температура может испортить продукт и
повредить трубы теплообменника.
Основным параметром обратной связи системы регулирования
является расход флегмы, тогда как тепловая нагрузка кипятильника
позволяет регулировать расход паровой фазы в колонне.
Составим простейшую матрицу входов и выходов ректификацион-
ной колонны, задающую знак взаимодействия между ними (табл. 6.1).
В рассматриваемом случае уровень жидкости в кубе колонны £в
регулируется изменением расхода кубового продукта Гв, а уровень
дистиллята во флегмовой емкости LD — изменением расхода дис-
тиллята Fd Соответствующие два столбца и две строки матрицы не
могут быть использованы любыми другими контурами регулирова-
ния (табл. 6.1, б).
Регулирование теплового баланса ведется по двум параметрам:
температуре (изменением тепловой нагрузки кипятильника) и дав-
лению (изменением количества теплоты, отбираемой в дефлегматоре).
Таким образом, вся матрица входов-выходов ректификационной
колонны оказывается заполненной
6.1. Динамические характеристики и особенности управления
513
Таблица. 6.1. Матрица входов-выходов ректификационной колонны
Выход- ные пара- метры Входные параметры
Of Ff Fr Ов j On
а Взаимодействие между входами и выходами
Lb - + + 0 - - -
Lq + - - - 0 + +
Т + — - 0 0 + 0
Р + — - 0 0 + -
б. Разработка реальной схемы регулирования
Lb - + + 0 — - -
Ld + - - - 0 + +
Т + - - 0 ° 0
Р + - - 0 0 + -
В предложенном примере регулирования расход флегмы полага-
ется постоянным. Этот параметр может стать одним из управляющих
при добавлении к схеме регулирования дополнительных рабочих па-
раметров, как, например, состав разделяемой исходной смеси. Дру-
гие два параметра, расход сырья и тепловая нагрузка подогревателя
питания, которые также не включены в предложенную схему регули-
рования, являются входами системы, выполняя роль нагрузки и ис-
точника возмущений выбранной схемы регулирования.
Часто для регулирования температуры сырья используют тепло-
вую нагрузку подогревателя питания, выбираемую в некоторых слу-
чаях с учетом сбалансирования нагрузок в верхней (укрепляющей) и
нижней (исчерпывающей) частях колонны.
Использование описанной выше матрицы дает возможность про-
анализировать возможные схемы регулирования. Плюсы матрицы
означают, что при увеличении входного параметра соответствую-
щий выходной параметр увеличивается, тогда как минусы отражают
обратный эффект, т. е. увеличение входного параметра вызывает
уменьшение выходного. Нули матрицы указывают на отсутствие вза-
имосвязи между параметрами входа и выхода. Следует правда учи-
тывать, что некоторые входы могут использоваться для регулирова-
17 Бссшыан Л, В.. Харитонов Н И
514
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.27. Схематическое представление контура регулирования теплового (а)
и материального (б) балансов ректификационной установки
ния произвольного выхода по вспомогательным контурам регулиро-
вания, а не напрямую, что вызывает определенные трудности в реа-
лизации соответствующих схем регулирования. Для выявления по-
добных скрытых взаимодействий рекомендуется построение графи-
ческих диаграмм предлагаемых контуров управления (рис. 6.27).
Из рис. 6.27, а следует, что тепловая нагрузка кипятильника
(ребойлера) QB, используемая для регулирования температуры в
колонне, вносит возмущение и в контур регулирования давления
в колонне, тогда как регулирование давления по варьированию
тепловой нагрузки дефлегматора (конденсатора) QD не оказывает
значительного воздействия на контур регулирования температу-
ры. Расход флегмы, как уже отмечалось выше, считается фикси-
рованным. В контуре же регулирования материального баланса
(рис. 6.27, б) никаких пересекающихся взаимодействий парамет-
ров не наблюдается.
От качественных рассуждений перейдем к количественным
оценкам.
Составим уравнения материального и теплового балансов рек-
тификационной установки, чтобы выявить параметры, влияющие
на качество процесса разделения исходной смеси.
Уравнение материального баланса по ректификационной уста-
новке:
= Fd + FB, (6.42)
где jFf, Fd, Fb — массовые расходы питания, дистиллята и кубового
остатка.
Уравнение материального баланса по легколетучему (низкоки-
пящему) компоненту:
= FDwD+FBwa, (6.43)
где wF, wD, wB — массовые доли легколетучего (низкокипящего) ком-
понента в питании, дистилляте, кубовом остатке.
61 Дин^ические характеристики и особенности управления 515
Уравнение материального баланса для куба-испарителя колонны:
/fB^- = /’L-(JFv + FB) = °, (6.44)
где А ~ площадь поперечного (горизонтального) сечения куба ко-
лонны1’ — уровень жидкости в кубе колонны; FL — расход жидко-
сти в ^ижней части колонны; /у — расход пара в нижней части
колоньны-
Уравнение материального баланса для флегмовой емкости:
4, = ’f’vi - (FR + Fd ) = 0, (6.45)
ат
где Ad ~ лошадь поперечного (горизонтального) сечения флегмо-
вой ем[кости; — Уровень жидкости во флегмовой емкости; fR —
расход' Флегмы; FVi ~ расход пара в верхней (укрепляющей) части
колон Г^Ы'
Уравнение материального баланса по газовой фазе в верхней части
колоньны:
^ = /(^vi-^-Fd-Fr) = 0, (6.46)
где р Давление в колонне; £и — расход инертных газов.
Уравнение теплового баланса для подогревателя питания (исход-
ной см4еси)’
FfCpp (/р - ) = F^c^ (rT1 - tr2) + , (6.47)
где с — Удельная теплоемкость питания; /р — температура пита-
ния (номинальное значение); tF — температура питания (текущее
значен/ие)’ — расход теплоносителя; срт — удельная теплоемкость
теплон,осите 1я; Гт1, /т2 — температуры на входе и выходе подогрева-
теля пкитания5 ~ потери теплоты из подогревателя питания в ок-
ружаю1щУю сРедУ-
Уравнение теплового баланса для кипятильника (низ колонны):
Fnrn = FvrB + q2, (6.48)
где р расход греющего пара; гп — энтальпия греющего пара; гв —
удельн<дая теплота испарения кубовой жидкости; q2 — потери тепло-
ты из ^кипятильника в окружающую среду.
Уравнение теплового баланса для дефлегматора (верх колонны)
-?х1) + 9ъ (6.49)
17*
516
Глава 6. Основы проектирования систем управления ХТП
где Г] — энтальпия парового потока в верхней (укрепляющей) части
колонны; Fx — расход хладагента; срх — удельная теплоемкость хлада-
гента; Гх1, — температуры на входе и выходе в дефлегматоре; q3 —
потери теплоты из дефлегматора в окружающую среду.
Первый вывод
В систему уравнений (6.42)...(6.49) входят переменные, из кото-
рых необходимо выделить возможные возмущающие воздействия,
возможные регулирующие воздействия и регулируемые параметры
(выходные координаты).
Основные возмущающие воздействия: колебания расхода, состава
и температуры питания.
Второстепенные возмущающие воздействия: изменения энтальпии
греющего пара гп (в подогревателе питания), теплоносителя гв (в ки-
пятильнике), хладагента гх (в дефлегматоре); потери теплоты в окру-
жающую среду (q}, q2, q3).
Контролируемые возмущающие воздействия: изменения темпера-
туры питания tF, расхода питания Ff, концентрации легколетучего
компонента wF в питании (исходной смеси).
Неконтролируемые возмущающие воздействия: изменения энталь-
пии греющего пара, теплоносителя, хладагента; потери теплоты в
окружающую среду.
Управляющие воздействия: изменения расходов греющего пара Fn,
теплоносителя FT, хладагента Гх, флегмы FR изменение отбора (рас-
хода) дистиллята FD, кубового продукта Гв.
Примечание
Управляющее воздействие по каналу расхода Ги не рассматриваем.
Регулируемые параметры (выходные координаты): концентрация
легколетучего компонента wD в дистилляте, концентрация легколе-
тучего компонента wB в кубовом продукте, уровень жидкости в кубе
колонны Ав и флегмовой емкости Z,D, давление в колонне рк.
Второй вывод
Из уравнений материального и теплового балансов следует, что
ректификационная колонна с сопутствующими ей элементами пред-
ставляет собой объект с большим числом взаимосвязанных пара-
метров, что находит свое подтверждение при рассмотрении простей-
шей матрицы входов-выходов ректификационной колонны.
На следующем шаге разработки структуры системы регулирования
необходимо определить, как воздействовать на входные параметры.
Регулирование материального баланса можно осуществить за счет
изменения расходов соответствующих потоков с помощью подходя-
6.1. Динамические характеристики и особенности управления
517
Рис. 6.28. Схемы регулирования теплового баланса ректификационной
установки:
а — изменение разности температур путем изменения давления пара в
паровом пространстве теплообменника; б— изменение поверхности теп-
лопередачи за счет изменения уровня конденсата в теплообменнике
щих клапанов. Регулирование теплового баланса возможно двумя
способами, продемонстрированными на рис. 6.28: изменением раз-
ности температур в теплообменнике или изменением поверхности
теплообмена. В данном случае регулировать тепловой баланс ко-
лонны можно, изменяя поверхность теплообмена в дефлегматоре.
На следующем этапе разработки стратегии управления произво-
дится анализ статических и динамических характеристик выбран-
ных схем управления.
Анализ статических характеристик ректификационной колонны
Чтобы определить состояние системы, необходимо иметь четы-
ре независимые переменные. Это могут быть расход питания fF,
состав питания wF, отбор дистиллята FD и расход пара в нижней
части ректификационной колонны Fv.
а б
Рис. 6.29. Влияние ограничений на рабочую область ректификационной
колонны:
а — оптимальные режимы допустимы по условиям ограничений на
Fvmm и fDmln: б — минимальный расход пара недопустим по ограниче-
нию на FVm,„
518
Глава 6. Основы проектирования систем управления ХТП
Рассмотрим статические характеристики колонны на диаграмме
Fd - Fv, принимая, что FP = const, wF = const (рис. 6.29). Для про-
дуктовых ректификационных колонн ставят разные задачи, напри-
мер: минимизировать энергозатраты (Fn~) на получение дистиллята
заданной концентрации wD = Wp при ограничении на производи-
тельность по дистилляту: FD > FD min. Из диаграммы FD-FV следует,
что решение задачи находится в точке А (рис. 6.29, а), где составы
продуктов (дистиллята и кубового остатка) равны заданным, т. е.
wD = , wB = Wg, а расход пара в нижней части колонны принима-
ет оптимальное значение Fy, или в точке А', если значение Fy ока-
зывается меньше минимально допустимого FVmin (рис. 6.29, б).
Примечание
Расчеты диаграммы Fn—Fy при различных значениях и wF показы-
вают, что рабочая область и точки, соответствующие оптимальным режи-
мам колонны, смещаются по диаграмме. Увеличение расхода питания Ft
приводит к сужению рабочей области; существует такое предельное значе-
ние Fr., при котором рабочая область может выродиться в точку. Таким
образом, для поддержания оптимальных режимов работы колонны при раз-
личных возмущающих воздействиях требуется автоматическая коррекция
заданий регуляторам в зависимости от этих возмущающих воздействий
Например, изменения расхода питания можно скомпенсировать пропор-
циональным изменением отбора дистиллята.
Преобразовав уравнение (6.42) с учетом (6.43), получим:
wD <6-50)
‘V> I 'D )
Как следует из уравнения (6.50), при постоянном отношении
Fp/Fp и постоянном составе питания wF составы дистиллята и кубо-
вого продукта также постоянны. Если изменится состав питания wF,
то отношение Ff/Fd тоже должно меняться, чтобы сохранить мате-
риальный баланс.
При стационарном (установившемся) режиме в ректификацион-
ной колонне устанавливается определенный профиль концентраций
по высоте колоны. Наибольшей чувствительностью по отношению
к возмущающим и регулирующим воздействиям обладают промежу-
точные тарелки в верхней и нижней частях колонны, называемые
контрольными тарелками. Коэффициенты усиления для них прини-
мают максимальное значение по сравнению с коэффициентами уси-
ления других тарелок в данной секции колонны. По отношению к
возмущающим воздействиям со стороны питания (т. е. к изменени-
ям Fv и wF) составы на контрольных тарелках являются промежу-
точными координатами и обладают меньшей инерционностью, чем
6.1. Динамические характеристики и особенности управления
519
составы продуктов (дистиллята и кубового остатка), поэтому соста-
вы на контрольных тарелках часто используют в качестве регулиру-
емых координат вместо составов продуктов.
Анализ динамических характеристик ректификационной колонны
Изменение состава жидкой фазы на отдельной изолированной
тарелке, если на ней обеспечивается идеальное перемешивание, свя-
зано с изменением состава паровой фазы (или скорости потоков)
дифференциальным уравнением первого порядка. Значения посто-
янных времени тарелок зависят от наклона кривой фазового равно-
весия, времени пребывания на тарелке, скоростей потоков в колон-
не и расхода питания. Для оценки этого влияния на значения посто-
янных времени тарелок приведем два примера колонн: с одной и
двумя ступенями разделения.
Предположим для одной ступени разделения (одна тарелка), что
состав пара в рассматриваемом диапазоне изменения концентраций
является линейной функцией от состава жидкости (рис. 6.30), т. е.
Wy=a + bwL. (6.51)
Для одной ступени разделения (одной тарелки), изображенной
на рис. 6.31, составим уравнение материального баланса по легколе-
тучему компоненту в виде:
L - - ^в^в ~ ^dwd- (6.52)
ат
Или, учитывая, что
Рис. 6.31 Схема ректификации с од-
ной ступенью разделения
Рис. 6.30. Линейная аппроксимация
кривой фазового равновесия
520
Глава 6. Основы проектирования систем управления ХТП
получим
mL = ~ FbWl ~ Fd + bW^' f6'54)
где wL — количество жидкости на тарелке.
Выведем передаточную функцию одной ступени разделения (та-
релки) по каналу состав питания—состав кубового продукта. Для этого
перепишем уравнение (6 54) в отклонениях переменных (координат)
от их номинальных значений, обозначив их следующим образом:
x = wF-wg, у = wB -и-g = wL -и-g.
Учитывая, что в стационарном режиме на ступени разделения
должно иметь место равенство:
mL = ffwf - fbwr - Fr>wn = 0,
ат
получим уравнение вида:
ML^+(A+FDb)y = FFx (6-55)
или, иначе говоря, уравнение статического звена первого порядка:
Т^- + у=Кх, (6.56)
ат
где
Т mL К = Ff
FB + bFD ’ FB + bFn '
Здесь T — постоянная времени ступени разделения; К— коэффици-
ент усиления.
Преобразовав по Лапласу уравнение (6.63), найдем передаточ-
ную функцию ступени разделения:
^(j) = ^4 = -A--. (6.57)
У(х) Tj + 1 v
Проанализируем выражение для постоянной времени в (6.56).
Положим b = 1, что соответствует точке В на рис. 6.30. Тогда постоян-
ная времени одной ступени разделения будет равна среднему времени
пребывания смеси на ней, поскольку Fr = FB + FD и Т= m-JF? = тср.
При низких концентрациях компонента (например, в точке А на
рис. 6.30) постоянная времени меньше среднего времени пребыва-
ния так как b > 1. При высоких концентрациях компонента b < I
6.1. Динамические характеристики и особенности управления
521
(например, в точке D на рис. 6.30), и
постоянная времени будет больше
среднего времени пребывания.
Для колонны с несколькими сту-
пенями разделения сохраняется такая
же качественная зависимость между
наклоном кривой фазового равновесия
и постоянными времени, как и для
колонны с одной ступенью разделения
(с одной тарелкой), хотя сама зависи-
мость гораздо сложнее.
Рассмотрим колонну с двумя сту-
пенями разделения (двумя тарелками)
(рис. 6.32). Как и в примере с одной
ступенью разделения предположим,
что зависимость между концентраци-
Рис. 6.32. Схема ректификации
с двумя ступенями разделения
ями легколетучего компонента в жид-
кой и паровой фазах подчиняется уравнению (6.51). Тогда уравне-
ния материального баланса для двух ступеней разделения (двух та-
релок) запишутся в таком виде:
• для первой ступени
mLl “ ^FWF - ^BWB + ^L2WL2 ~,^V1WV1> (6.58)
• для второй ступени
WL2 .L2 = ^V1WV1 ~ ГL2WL2 ~ ^DWD' (6.59)
ат
Или, учитывая, что
wB=wLi; WV1 = Я]+/>1wL1, wD = wy2 = а2 + b2wL2,
уравнения материального баланса примут следующий вид:
«ы = FfWf ~ FbWl1 + Fl2Wl2 “ fvl + blWu(6‘60)
WL2 d£2 = Fvi (а1 + A^Ll)-^L2WL2 “ (fl2 +^2H’L2)- (6.61)
Перейдя к отклонениям параметров от их номинальных значений
x = wf-w£; ji = wL1 -w£,; у2 = wL2 -и^,
получим систему уравнений:
wli "а" = ;
™L2 - ^2У2 - Fnb2y2 .
от
(6 62)
522
Глава 6. Основы проектирования систем управления ХТП
Преобразуем уравнения (6.62) по Лапласу и запишем их в виде
алгебраических уравнений в изображениях:
ЛпМСи);
(6.63)
«L2^ {У2 ) = ЛлМ (Jl) “ Л.2^ (У2 ) - FDb2SP (У2 )
Решение системы алгебраических уравнений (6.63) относитель-
но ^(У1) и У(у2) приводит к следующим выражениям:
д> (у.) =-----------F ' L----—----2_x2-----------Ф(х}: (6.64)
+ + ^vA)(wL25 + Fl.2 + ЛА) ~ Ад-^vA
¥>( v,) =________________^F^vA___________________® ,z z-гч
(mL1i + FB + FVibx)(mL2s + FL2 + FD/b)-F^F^
в которых полиномы преобразуются в произведение простейших
сомножителей с приведенными постоянными времени Тх, Т2, Т3.
При этом передаточные функции получаются в таком виде:
И^) =
*(*) (Т,5 + 1)(Г25 + 1)’
(6.66)
»Z2M =
У fa) *2
?(*) (Г15 + 1)(Т25 + 1)’
(6.67)
причем наибольшая постоянная времени в знаменателе передаточ-
ных функций (6.66) и (6.67) (обозначена через Тх) приблизительно
равна среднему времени пребывания тср (при b = 1).
Увеличение наклона линии фазового равновесия, как и для ко-
лонны с одной тарелкой, приводит к уменьшению постоянных вре-
мени и коэффициентов усиления колонны. Если b близко к едини-
це, то наибольшая постоянная времени примерно равна общему
объему жидкости в колонне, деленному на расход питания. Увели-
чение флегмового числа (R - F^/F^) изменяет в основном малые
постоянные времени Т2 и Т3. При очень высокой кратности ороше-
ния постоянные времени Т2 и Т3 стремятся к нулю, и переходные
процессы в колонне при изменении состава питания будут описы-
ваться дифференциальными уравнениями первого порядка с посто-
янной времени 7\.
Выводы о влиянии параметров b, R и /у могут быть применены
к ректификационным колоннам с большим числом тарелок. При
очень больших жачениях флегмового числа реакции веек тарелок
примерно одинаковы, при его малых значениях начальные участки
переходных процессов на различных тарелках будут отличаться зна-
6.1. Динамические характеристики и особенности управления
523
чением транспортного запаздывания Экспериментальное изу-
чение переходных характеристик ректификационных колонн пока-
зывает, что при изменении состава питания, подаваемого на тарелку
питания, состав на тарелках, расположенных вблизи тарелки пита-
ния, изменяется практически сразу, и кривая переходного процесса
хорошо аппроксимируется дифференциальным уравнением первого
порядка (статическим звеном первого порядка). Состав смеси в ниж-
ней и верхней частях колонны изменяется с запаздыванием, превы-
шающим время пребывания на тарелке в кп раз, где п — число таре-
лок между вводом питания и верхом (или низом) колонны; к —
коэффициент, зависящий от числа тарелок (0,5 < к < 1 при п > 10).
Обычно на этапе анализа статических и динамических характе-
ристик каких-либо сложных вопросов не возникает.
При правильном выборе размеров аппарата, оптимальном рас-
положении контрольно-измерительных приборов и корректном вы-
боре регулирующего клапана регулирование уровня жидкости в кубе
ректификационной колонны и во флегмовой емкости сравнительно
легко реализуется и не представляет проблем.
В контуре регулирования давления объект обычно может быть
представлен статическим звеном первого порядка с постоянной вре-
мени, которая на один или несколько порядков меньше постоянной
времени объекта в контуре регулирования температуры. Все это сви-
детельствует об определяющем значении в данном случае именно
контура регулирования давления. Благодаря высокому быстродействию
контура регулирования давления никаких динамических помех регу-
лятору температуры (вследствие наличия перекрестных связей между
этими параметрами, представленных на рис. 6.27) ощущаться не дол-
жно. Следствием такого быстродействия является, кроме того, про-
извольный выбор точки измерения давления в колонне, хотя обыч-
но давление измеряют в верхней части колонны.
Контур регулирования температуры характеризуется значитель-
но меньшим быстродействием и здесь уже требуется тщательный
выбор точки определения температуры. Следует обратить внимание
также на соотношение между расходами тех потоков, изменения
которых используются в качестве регулирующих воздействий До-
пустим, что регулирование температуры верха колонны осуществля-
ется изменением потока флегмы, а уровень во флегмовой емкости
регулируется за счет изменения потока дистиллята, и при этом рас-
ход флегмы много больше расхода дистиллята. Тогда из-за взаимо-
действия между системами регулирования температуры и уровня
расход дистиллята может совершать недопустимо большие скачки.
Потоки с небольшими расходами рекомендуется поддерживать на
постоянном уровне, а необходимую корректировку выполнять как
можно медленнее
524
Глава 6. Основы проектирования систем управления ХТП
Еще одной особенностью, на которую следует обратить внима-
ние при разработке системы управления ректификационной уста-
новкой, является так называемый «обратный ход» температуры, ко-
торый может встретиться при использовании теплообменного обо-
рудования. «Обратный ход» температуры (называемый также реверсом
температуры или инверсией температуры) проявляется в том, что в
ответ на какое-нибудь входное воздействие (например, изменение
одного из потоков теплоносителей) температура вначале изменяется
в сторону, противоположную тому изменению, которое в конечном
счете установится. Такое поведение связано с присущими самой
установке свойствами и часто является результатом противодейству-
ющих процессов, протекающих с разной скоростью и с разной си-
лой влияющих на результат. Окончательное изменение температуры
определяется наиболее сильным, но медленным процессом, тогда
как на начальном этапе скорость и направление изменения темпе-
ратуры определяются наиболее быстрым, хотя и слабым процессом.
На ректификационной установке можно наблюдать «обратный ход»
температуры поступающей на разделение смеси (рис. 6.33), когда
для ее подогрева используется отходящий кубовый продукт и реали-
зована система регулирования температуры с байпасированием час-
ти кубового продукта мимо подогревателя. Инверсную реакцию про-
являет также температура жидкости в кубе колонны в ответ на изме-
нение расхода флегмы. Довольно сложно обеспечить устойчивую
работу таких систем регулирования и поддерживать с их помощью
заданную температуру. Во всех подобных случаях необходимо либо
перейти к другой схеме регулирования, либо внести в используемую
схему регулирования компенсацию реверса температуры.
Рис. 6.33. Инверсная реакция температуры сырья ф на входе в ректифи-
кационную колонну при использовании в качестве теплоноси-
теля отходящего кубового продукта:
/ регулирующее воздействие направлено на повышение температуры;
2 — регулирующее воздействие направлено на понижение температуры
6.1. Динамические характеристики и особенности управления
525
На рис. 6.34 представлена графическая иллюстрация выбора оп-
тимальной схемы регулирования. Возможна реализация двух алго-
ритмов поиска оптимальной схемы регулирования. В первом случае
фиксируется допустимое содержание целевого компонента в кубо-
вом остатке [пунктирная линия в верхней половине рис. 6.34 соот-
ветствует (w-B)J, и задача оптимального регулирования состоит
именно в поддержании этого значения (и»в)м, т. е. реализуется так
называемый алгоритм регулирования по ограничению. Обычно он
осуществляется изменением соотношения расходов разделяемой
исходной смеси Fr и флегмы FR. Во втором случае потери целевого
компонента и»в в кубовом остатке связываются с определенными
материальными штрафами (следовательно, с прибылью). При уве-
личении расхода флегмы FR содержание целевого компонента в ку-
бовом остатке уменьшается (линии А, В, С), а следовательно, поте-
ри целевого компонента с кубовым остатком уменьшаются, но од-
новременно уменьшается и прибыль, поскольку уменьшается выход
дистиллята. С уменьшением расхода флегмы FR выход дистиллята
увеличивается, но при этом увеличиваются потери целевого компо-
нента с кубовым остатком, а за это накладываются штрафные санк-
ции, которые могут «съесть» всю прибыль. Графики зависимости
прибыли Fr (см. кривые 1, 2, 3 на рис. 6.34) оказываются, как пра-
вило, достаточно плоскими вблизи оптимума. Это означает, что оп-
тимальный расход флегмы, найденный для расхода Ff, соответству-
ющего кривой В, будет достаточно близок к оптимальным расходам
флегмы для других расходов разделяемой исходной смеси.
Рис. 6.34. Графическая иллюстрация выбора оптимальной схемы регули-
рования
524 Глава 6. Основы проектирования систем управления ХТП
Еще одной особенностью, на которую следует обратить внима-
ние при разработке системы управления ректификационной уста-
новкой, является так называемый «обратный ход» температуры, ко-
торый может встретиться при использовании теплообменного обо-
рудования. «Обратный ход» температуры (называемый также реверсом
температуры или инверсией температуры) проявляется в том, что в
ответ на какое-нибудь входное воздействие (например, изменение
одного из потоков теплоносителей) температура вначале изменяется
в сторону, противоположную тому изменению, которое в конечном
счете установится. Такое поведение связано с присущими самой
установке свойствами и часто является результатом противодейству-
ющих процессов, протекающих с разной скоростью и с разной си-
лой влияющих на результат. Окончательное изменение температуры
определяется наиболее сильным, но медленным процессом, тогда
как на начальном этапе скорость и направление изменения темпе-
ратуры определяются наиболее быстрым, хотя и слабым процессом
На ректификационной установке можно наблюдать «обратный ход»
температуры поступающей на разделение смеси (рис. 6.33), когда
для ее подогрева используется отходящий кубовый продукт и реали-
зована система регулирования темпера гуры с байпасированием час-
ти кубового продукта мимо подогревателя. Инверсную реакцию про-
являет также температура жидкости в кубе колонны в ответ на изме-
нение расхода флегмы. Довольно сложно обеспечить устойчивую
работу таких систем регулирования и поддерживать с их помощью
заданную температуру. Во всех подобных случаях необходимо либо
перейти к другой схеме регулирования, либо внести в используемую
схему регулирования компенсацию реверса температуры.
Рис. 6.33. Инверсная реакция температуры сырья tr на входе в ректифи-
кационную колонну при использовании в качестве теплоноси-
теля отходящего кубового продукта:
/ регулирующее воздействие направлено на повышение температуры;
2 регулирующее воздействие направлено на понижение температуры
6.1. Динамические характеристики и особенности управления
525
На рис. 6.34 представлена графическая иллюстрация выбора оп-
тимальной схемы регулирования. Возможна реализация двух алго-
ритмов поиска оптимальной схемы регулирования. В первом случае
фиксируется допустимое содержание целевого компонента в кубо-
вом остатке [пунктирная линия в верхней половине рис. 6.34 соот-
ветствует (wB)M], и задача оптимального регулирования состоит
именно в поддержании этого значения (и>в)м, т. е. реализуется так
называемый алгоритм регулирования по ограничению. Обычно он
осуществляется изменением соотношения расходов разделяемой
исходной смеси Ff и флегмы FR. Во втором случае потери целевого
компонента и»в в кубовом остатке связываются с определенными
материальными штрафами (следовательно, с прибылью). При уве-
личении расхода флегмы содержание целевого компонента в ку-
бовом остатке уменьшается (линии А, В, С), а следовательно, поте-
ри целевого компонента с кубовым остатком уменьшаются, но од-
новременно уменьшается и прибыль, поскольку уменьшается выход
дистиллята. С уменьшением расхода флегмы FR выход дистиллята
увеличивается, но при этом увеличиваются потери целевого компо-
нента с кубовым остатком, а за это накладываются штрафные санк-
ции, которые могут «съесть» всю прибыль. Графики зависимости
прибыли Fr (см. кривые 1, 2, 3 на рис. 6.34) оказываются, как пра-
вило, достаточно плоскими вблизи оптимума. Это означает, что оп-
тимальный расход флегмы, найденный для расхода fF, соответству-
ющего кривой В, будет достаточно близок к оптимальным расходам
флегмы для других расходов разделяемой исходной смеси.
Рис. 6.34. Графическая иллюстрация выбора оптимальной схемы регули-
рования
526
Глава 6. Основы проектирования систем управления ХТП
Эволюция систем управления
ректификационной установкой
Первый вариант (рис. 6.35). Простейшая система управле-
ния ректификационной установкой включает шесть одноконтурных
САР и обеспечивает стабилизацию состава дистиллята и поддержа-
ние материального и теплового балансов в установке. Основным ре-
гулятором, стабилизирующим состав дистиллята (при разделении би-
нарной смеси при постоянном давлении), является регулятор тем-
пературы верха колонны, воздействующий на отбор (расход)
дистиллята. Регулятор температуры 2 стабилизирует температуру
питания. Регуляторы уровня 3 и 4 поддерживают материальный ба-
ланс в системе по жидкой фазе. Регулятор расхода 6 стабилизирует
подачу греющего пара в кипятильник.
Если задачей регулирования является стабилизация состава ку-
бового продукта, то расход греющего пара задается регулятором тем-
пературы низа колонны 6а, а расход дистиллята стабилизируется
регулятором 1а.
Рис. 6.35. Система управления ректификационной установкой, основанная
на одноконтурных САР отдельных технологических параметров:
1 — регулятор температуры верха колонны: 1а — регулятор расхода ди-
стиллята; 2 — регулятор температуры питания; 3 — регулятор уровня в
кубе колонны; 4 — регулятор уровня во флегмовой емкости; 5 — регу-
лятор давления в колонне; б — регулятор расхода греющего пара; 6а —
регулятор температуры низа колонны
6.1. Динамические характеристики и особенности управления
527
Примечание
Одновременное регулирование составов (или температур) верха и низа
колонны обычно не применяют, так как эти координаты связаны между
собой, и их одновременное регулирование по обратной связи может при-
вести к снижению запаса устойчивости системы.
Недостатки. Стабилизация расхода греющего пара без учета
реальной обстановки в системе обычно приводит к перерасходу
пара, поскольку регулятору расхода устанавливается завышенное
задание с учетом возможных колебаний энтальпии греющего пара,
переохлаждения флегмы и других возмущающих воздействий в
процессе.
Отсутствие компенсирующих воздействий по возмущениям со
стороны питания приведет к большим динамическим ошибкам ре-
гулирования составов продуктов, так как регулятор состава (или тем-
пературы) на конце колонны получит сигнал об отклонении регули-
руемой координаты от заданного значения лишь после того, как
изменится состав жидкости по всей высоте колонны.
Использование температуры продукта для регулирования его
состава имеет еще один существенный недостаток: колебания тем-
пературы при изменении состава соизмеримы с ее колебаниями при
изменении давления в колонне и часто оказываются соизмеримы с
погрешностью измерительных устройств.
На практике при разделении близкокипящих смесей веществ
сколько-нибудь ощутимые колебания температуры можно наблю-
дать только в средней части каждой секции колонны. Эту особен-
ность следует учитывать при выборе измерительного устройства, а
также места отбора импульса по температуре.
Второй вариант (рис. 6.36). Чтобы обеспечить минимиза-
цию энергозатрат на разделение, применяют регулятор соотноше-
ния расходов греющего пара и питания (или расходов флегмы и
питания) 6. Кроме того, для регулирования температуры продукта
применяют каскадную САР с дополнительным импульсом по произ-
водной от температуры на контрольной тарелке (регуляторы 1 и 1а),
что уменьшает максимальную ошибку регулирования.
Третий вариант (рис. 6.37) реализуется с применением
средств вычислительной техники. Здесь расходы дистиллята и грею-
щего пара регулируются регуляторами 7 и 6, задания которым кор-
ректирует вычислительное устройство 7 в зависимости от расхода и
состава питания и энтальпии греющего пара, учитывая динамичес-
кие характеристики ректификационной колонны. Эта САР должна
обеспечить приближенную инвариантность системы по отношению
к контролируемым возмущающим воздействиям.
530
Глава 6. Основы проектирования систем управления ХТП
тойчивость в «малом», т. е. рассматриваются лишь небольшие от-
клонения от стационарного состояния (режима). Стационарный ре-
жим работы реактора устойчив, если возникшее в некоторый мо-
мент малое отклонение параметра (температуры, давления, концен-
трации и т. д.) химического процесса после устранения причины,
вызвавшей отклонение, исчезает и исходный стационарный режим
восстанавливается; если же отклонения от стационарного состоя-
ния увеличиваются, то рассматриваемое состояние работы реактора
будет неустойчиво.
Пусть на непористом зерне катализатора проходит экзотерми-
ческая химическая реакция первого порядка. Через пограничный
слой у поверхности непористого зерна катализатора происходит не
только массоперенос, но и отвод (подвод) теплоты. Обозначим тем-
пературы на поверхности зерна и в объеме газового потока соответ-
ственно через /п и /г. Скорость тепловыделения определяется проте-
канием химической реакции на поверхности зерна катализатора.
Количество отводимой теплоты от поверхности зерна, представляю-
щее теплоотвод, обозначим через £>т, а тепловыделение в результате
химической реакции на поверхности зерна — как Qp. Количество
отводимой теплоты зависит от (/„—<-).
Другой пример. Допустим, что в реакторе непрерывного дей-
ствия с мешалкой и рубашкой (для отвода теплоты) проходит экзо-
термическая химическая реакция первого порядка с выделением
теплоты Qp. Теплота, выделяющаяся в результате химической реак-
ции, отводится частично из реактора с продуктом и частично хлада-
гентом в рубашке реактора, что представляет суммарный теплоот-
вод 0т- Очевидно, что равновесие как в первом случае, на поверхно-
сти зерна катализатора, так и во втором случае, в реакторе с рубашкой,
достигается, когда количество отводимой теплоты QT и выделив-
шейся 0р будут равны между собой. Зависимости 0Р(/П) для зерна
катализатора и Qp(t) для реактора нелинейны (t — температура в
реакторе) Они представляют собой S-образные кривые, тогда как
зависимости телоотвода £?т(гп) для зерна катализатора и QT(t) для
реактора линейны.
Итак, теплоотвод в реакторе с рубашкой (рис. 6.38) линейно за-
висит от температуры. Прямые 7, 2, 3 соответствуют одному и тому
же значению коэффициента теплопередачи, но различным темпера-
турам в рубашке реактора. Точки пересечения прямых линий тепло-
отвода и S-образной кривой тепловыделения a, b, с, d, е соответ-
ствуют состояниям равновесия Qp = QT в реакторе.
Для первого случая теплоотвода (линия 7) в реакторе воз-
можно одно состояние равновесия — в точке а, которому соответ-
ствует одна стационарная температура ta. Степень превращения в
реакторе низкая, количество выделяемой теплоты незначительно.
6.1. Динамические характеристики и особенности управления
531
Рис. 6.38. Зависимость выделе-
ния и отвода теплоты в химичес-
ком реакторе от температуры:
0р — выделение теплоты в результа-
те химической реакции; 0, — отвод
теплоты
Для второго случая (линия 3 — при высокой температуре в
рубашке) возможно тоже только одно стационарное состояние — в
точке е, и наступает оно при практически полном превращении ре-
агентов и высокой температуре в реакторе. Точке е соответствует
одна стационарная температура te. Два этих случая объединяет то,
что для них характерен один стационарный режим.
Третий случай. Прямая линия теплоотвода 2 пересекает S-
образную кривую тепловыделения в трех точках b, с, d, а это означа-
ет, что в реакторе возможно три стационарных состояния, которым
будут соответствовать три стационарные температуры. На рис. 6.39
показаны три возможных стационарных состояния реактора в точке
b — рис. 6.39, а; в точке с — рис. 6.39, б; в точке d — рис. 6.39, в) как
фрагменты рис. 6.38. Точке b (рис. 6.39, а) соответствует устойчивый
стационарный режим работы реактора при температуре th. Если по
каким-либо причинам температура в реакторе становится выше th
(увеличивается до /2), то тепловыделение и теплоотвод также увели-
чиваются, но теплоотвод QT оказывается больше, чем тепловыделе-
а
Рис. 6.39. Определение устойчивости стационарных состоянии.
а — устойчивое; 6 — неустойчивое; в — устойчивое
532
Глава 6. Основы проектирования систем управления ХТП
ние 0р. В результате температура в реакторе снижается и возвращает-
ся к значению tb. Если же температура в реакторе опускается ниже tb
(до значения Zt), то количество выделяемой теплоты Qp становится
больше, чем теплоотвод 0Т. Это означает, что температура в реакто-
ре будет расти до значения tb, при котором выполняется условие
равновесия Qp = 0Т. Итак, температурный режим реактора само-
произвольно возвращается в первоначальное состояние с температу-
рой tb. Следовательно, стационарное состояние реактора в точке b
устойчиво
Такой же анализ можно выполнить и для точек с, d и устано-
вить, что точка d соответствует устойчивому состоянию реактора, а
точка с — неустойчивому. Для последнего состояния характерно, что
при незначительном отклонении от состояния равновесия темпера-
тура в реакторе будет или увеличиваться до точки d (рис. 6.38 и
6.39, в), или уменьшаться до точки Ь (рис. 6.38 и 6.39, а). Если реак-
тор находился в стационарном состоянии, характеризуемом точкой Ь,
и под действием возмущений температура поднялась в реакторе до
значения t > tc, то после устранения причины, вызвавшей возмуща-
ющее воздействие, режим в реакторе не восстановится в точке Ь, а
окажется в точке d — верхнем стационарном состоянии. Возникнове-
ние неустойчивости в реакторе связано с присутствием в нем внут-
ренней положительной обратной связи при проведении экзотермичес-
кой химической реакции. Рост температуры в реакторе экспоненци-
ально увеличивает скорость реакции, что приводит к увеличению
количества теплоты, выделяемой в результате реакции, а это, в свою
очередь, вновь увеличивает температуру в реакторе и т. д.
Из анализа статических характеристик реактора, т. е. зависимо-
стей Qp(t) и 0T(Z) (см. рис. 6.38), следует критерий устойчивости
стационарного состояния. Стационарное состояние химического ре-
актора будет устойчивым, если теплоотвод зависит от температуры
сильнее, чем тепловыделение:
dOL>^₽
dz dz
(6.68)
Другими словами, для устойчивости стационарного режима не-
обходимо, чтобы наклон линии теплоотвода 0Т был больше (круче)
наклона линии тепловыделения Qp в точке стационарного состоя-
ния (точке пересечения линий тепловыделения и теплоотвода)
Итак, исследование статической характеристики реактора с ме-
шалкой позволило определить возможное число его стационарных
состояний (режимов) и, кроме того, установить наличие гистерези-
са в температурном процессе.
Динамические характеристики химических реакторов весьма раз-
нообразны. Так, например, постоянные времени по основным ка-
6.7. Динамические характеристики и особенности управления 533
налам управления в реакторе синтеза аммиака изменяются от не-
скольких секунд до нескольких минут, а в реакторе кислотного раз-
ложения фосфата они могут достигать десятков минут. Особеннос-
тью промышленных химических реакторов является нелинейность
как статических, так и динамических характеристик, в результате
которой и возникает множественность стационарных состояний,
появляются неустойчивые режимы работы реактора.
Рассмотрим, как может решаться задача управления химичес-
ким реактором непрерывного действия с мешалкой. Одна из основ-
ных задач такого управления — стабилизация заданных значений
температуры и концентрации в химическом реакторе. Решается эта
задача так: анализируется несколько вариантов включения в управ-
ление П-регулятора, при этом рассматривается простое однокон-
турное регулирование. Варианты можно разделить на две группы:
регулирование по отклонению температуры и по отклонению кон-
центрации.
Регулирование по отклонению концентрации реакционной сме-
си в реакторе от заданного значения возможно, изменяя входную
температуру реакционной смеси, воздействуя на входную концент-
рацию реакционной смеси, на время пребывания реакционной сме-
си в реакторе, на температуру хладагента в рубашке реактора. В ли-
тературе [ 11, [71] выполнен анализ стабилизации неустойчивого ста-
ционарного состояния химического реактора непрерывного действия
(с мешалкой) с использованием П-регулятора. Было показано, что
только регулирование входной температуры реакционной смеси,
времени пребывания реакционной смеси или температуры хлада-
гента по температуре в реакторе обеспечивает стабилизацию стаци-
онарного состояния реактора, но при этом должен быть подобран
соответствующий параметр настройки П-регулятора (коэффициент
усиления /Гр). В переходном процессе П-регулятор вносит статичес-
кую ошибку
Применение И-регулятора при регулировании отклонения в не-
устойчивом стационарном состоянии реактора не обеспечивает ус-
тойчивости замкнутой системы (реактор + регулятор).
Использование ПД-регулятора повышает быстродействие и обес-
печивает устойчивость системы.
ПИ-регулятор устраняет статическую ошибку, но уменьшает ус-
тойчивость замкнутой системы.
Для улучшения качества переходного процесса в реакторе ис-
пользуют многоконтурное регулирование: каскадные схемы регули-
рования. Задачами управления химического реактора непрерывного
действия с мешалкой являются также регулирование соотношения
расходов реагентов, поступающих в реактор, стабилизация заданно-
го значения pH в реакторе.
534
Глава 6 Основы проектирования систем управления ХТП
6.2. СИНТЕЗ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
В предыдущих главах были изложены методы анализа различ-
ных элементов САР, объектов управления и типовых регуляторов.
В разд. 4.2 был рассмотрен синтез типовых регуляторов. Теперь рас-
смотрим задачу синтеза САР.
Для синтеза любой системы регулировании (одноконтурной или
многоконтурной) в первую очередь нужно знать динамические ха-
рактеристики технологического объекта управления (неизменяемой
части системы), виды и места приложения возмущающих воздействий,
требования, предъявляемые к создаваемой системе регулировании.
Трудности синтеза: рассмотрение при разработке системы регу-
лировании модели со свойствами реального объекта, а не самого
реального объекта; необходимость учета взаимосвязи свойств средств
управления (например, регуляторов) со свойствами модели; отсут-
ствие информации о характеристиках возмущающих воздействий
(в основном) и т. д. Кроме того, статические и динамические свой-
ства автоматической системы определяются структурными связями
между ее элементами, вариантами их включения (например, вклю-
чение регуляторов по схеме комбинированного регулирования, кас-
кадного регулирования, связанного регулирования и т. д.). На прак-
тике задачу синтеза системы управления решают поэтапно.
Первый этап называют структурным синтезом и выполня-
ют его на стадии разработки (проектирования) системы управления.
На этом этапе уточняются статические и динамические свойства
технологического объекта, составляется его математическая модель
в виде дифференциальных уравнений, описывающих статические
и динамические свойства технологического объекта по различным
каналам прохождения возмущающих и управляющих воздействий.
В том случае, если математическое описание технологического объек-
та неизвестно, можно воспользоваться временнымми или частотны-
ми характеристиками, полученными экспериментально на анало-
гичном технологическом объекте.
По дифференциальным уравнениям или графическим характе-
ристикам (временным или частотным) разрабатывается алгоритми-
ческая структурная схема технологического объекта, подлежащая ав-
томатизации. Объект представляют в виде нескольких звеньев с раз-
личными передаточными функциями, соединенных между собой.
При этом важно помнить, что в алгоритмической структурной схе-
ме отдельные звенья могут не иметь физической целостности, но
структурная схема в целом (соединение звеньев) по статическим и
динамическим свойствам, по алгоритму функционирования должна
6.2. Синтез систем автоматического регулирования
535
быть эквивалентна объекту управления. Рассмотрим пример алго-
ритмической структурной схемы технологического объекта, в кото-
ром требуется поддержать на заданном уровне два параметра (на-
пример, у| и у2). Для этого на объект должны поступать два управля-
ющих воздействия (например, и, и и2). Допустим, что в процессе
работы на объект, а именно на его различные участки, поступают
внешние возмущающие воздействия (например, d} и d2). При со-
ставлении исходной алгоритмической структурной схемы техноло-
гического объекта, во избежание ошибок, отказываются от пред-
ставления объекта как совокупности его конструктивных элемен-
тов. Алгоритмическая структурная схема, изображенная на рис. 6.40,
состоит из звеньев трех видов: звенья с одним входным и одним
выходным сигналом [звенья 1 и 2с передаточными функциями
и звенья с двумя или несколькими входными сигналами и
одним выходным сигналом (например, звено 3), при этом один из
сигналов может поступать в промежуточную точку звена, в резуль-
тате чего передаточные функции звена в общем случае будут раз-
личны по отношению к входным сигналам [передаточные функции
И'з(.у) и И^)]; звенья с двумя или несколькими входными сигнала-
ми и двумя или несколькими выходными сигналами (звено 4). При
этом некоторые входные сигналы оказывают влияние на значение
нескольких выходных сигналов. Звенья с несколькими входными и
выходными сигналами имеют несколько каналов прохождения сиг-
налов с различными передаточными функциями. Так, звено 4 имеет
следующие каналы прохождения сигналов: вход «3—выходу, с пере-
даточной функцией РИ5(л); вход и4—выход у, с передаточной функ-
цией вход м4—выход у2 с передаточной функцией W7(s); вход
d2—выход у2 с передаточной функцией ^(j).
Рис. 6.40. Пример исходной алгоритмической структурной схемы объекта
регулирования
536
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.41. Алгоритмическая структурная схема объекта регулирования
представленная в виде типовых динамических звеньев
Затем звенья с несколькими каналами заменяют более простыми
с соответствующими передаточными функциями по каждому каналу.
Преобразуем алгоритмическую структурную схему технологического
объекта (см. рис. 6.40) в алгоритмическую структурную схему объек-
та, представленную в виде типовых динамических звеньев, динами-
ческие свойства и передаточные функции которых известны.
По преобразованной алгоритмической структурной схеме (рис. 6.41)
определяют каналы управления объектом. Допустим, что входное
воздействие сильнее влияет на выходную величину у,, чем на у2, а
и2 имеет ббльшее влияние на выходную величину у2. В этом случае
объект управления на рис. 6.41 представляют двумя каналами уп-
равления, изображенными на рис. 6.42. Возмущающие воздействия
dy и dy канала управления, представленного на рис. 6.42, а, опреде-
ляются выражениями.
dy (т) = y-'fZ), (s) ИС, (j)]; dy (т) = S?-'[t/2 (s) Wy (j)],
где и U2(s) — изображения по Лапласу возмущающего воз-
действия di(t) и управляющего воздействия и2(т) соответственно
(см. рис. 6.41).
Возмущающие воздействия d4 и d6 канала управления, представ-
ленного на рис 6.42, б, определяются выражениями:
(т) = (5). Wx (5)]; d. (т) = (j). И', (j)],
где Z>2(5) и ^i(J) — изображение по Лапласу возмущающего воз-
действия г?2(т) и управляющего воздействия Н|(т) соответственно
(см. рис. 6.41).
6.2. Синтез систем автоматического регулирования
537
6
Рис. 6.42. Каналы управления объектом регулирования в структурной схеме
рис. 6.41:
а — управляющее воздействие «| — выходной параметр б — управля-
ющее воздействие и2 — выходной параметр
Далее выбирается тип автоматического регулятора (контролле-
ра). Законы регулирования, передаточные функции и характеристи-
ки типовых регуляторов приведены в разд. 4.3.
При синтезе САР необходимо выполнять преобразования струк-
турных схем для приведения к виду, упрощающему определение
оптимальных параметров настройки. Эквивалентные преобразова-
ния структурных схем приведены в разд. 3.2 и в Приложении 3 в [8].
После определения по алгоритмической структурной схеме
(см. рис. 6.41) каналов управления объектом, необходимо выбирать
закон регулирования по каждому из них. Предварительно по каждо-
му из каналов выбирают измерительное устройство для измерения
регулируемого параметра, а также регулирующий орган с исполни-
тельным механизмом для реализации управляющих воздействий.
В общем случае структурная схема САР по каждому из каналов
управления объектом имеет вид, изображенный на рис. 6.43, а, где
^(j), ^(s), РКоу(л) и H'(.s) — передаточные функции реального
регулятора, исполнительного устройства, технологического объекта
управления по данному каналу управления и датчика. Управление
многомерным объектом осуществляется несколькими системами
регулирования со структурными схемами вида, подобного приве-
денному на рис. 6.43, а. Для того чтобы упростить расчет системы
регулирования, ее разбивают на два элемента: управляющее устрой-
ство (регулятор) и объект управления. На рис. 6.43, б представлена
структурная схема САР с передаточными функциями регулятора PKp(j)
538
Глава 6. Основы проектирования систем управления ХТП
а
б
Рис. 6.43. Структурная схема САР по каналу задающего воздействия
a — отражающая основные функциональные элементы; б — упрощенная
и объекта Wo(s). Для исключения неопределенностей при расчете
автоматических систем регулирования в качестве регулятора на струк-
турной схеме (рис. 6.43, б) принимается его линейная модель со
стандартным типовым алгоритмом регулирования (разд. 4.3) Пере-
даточная функция W/pp(j) реального регулятора может быть пред-
ставлена как произведение передаточных функций идеального регу-
лятора W'p(s) и балластного звена ^(s). Балластное звено, а также
исполнительное устройство и датчик условно относят к объекту с
передаточной функцией
(*) = ^иу МИ/оу (,)И"Д (^6 (4 (6.69)
Например, при синтезе системы управления объектом, струк-
турная схема которого изображена на рис. 6.41, можно пользоваться
передаточными функциями
(*) = ^иу (*)ДО, (5) (5) + (5)] (5)Ж6 (5)
И
^02 (*) = ^иу (*) (S) И/7 (S) W. (5)^(5).
Каждый объект регулирования имеет свою локальную автомати-
ческую систему регулирования. В результате приходим к выводу,
что автоматическая система реального объекта состоит из несколь-
ких САР, причем объекты регулирования этих систем в большин-
стве случаев конструктивно и технологически не выделяются из ре-
ального объекта автоматизации. Естественно, что локальные САР
реального объекта автоматизации определенным образом взаимо-
действуют между собой, обеспечивая требуемый алгоритм функци-
6.2. Синтез систем автоматического регулирования
539
онирования. Тем не менее предложенное теоретическое обоснова-
ние позволяет осуществить проектирование, выбор регуляторов и
расчет оптимальных параметров их настройки исходя из локальных
САР, рассматривая воздействия на данную выбранную локальную
САР других локальных САР как внешние возмущающие воздействия,
что значительно упрощает решение задачи.
В структурной схеме локальной САР, приведенной на рис. 6.43, б,
передаточная функция объекта регулирования без учета балластного
звена регулятора известна. Чтобы выполнить дальнейший синтез САР,
определяют оптимальный закон регулирования, а затем и автомати-
ческий регулятор, наиболее близко реализующий этот закон регули-
рования. Разрабатываются способы включения регуляторов, т. е.
разрабатывается структура автоматической системы регулирования.
Второй этап называют параметрическим синтезом. Он вы-
полняется на стадии включения смонтированной автоматической
системы регулирования. Именно на этом этапе определяют опти-
мальные параметры настройки автоматических регуляторов, обес-
печивающие оптимальный ход ХТП.
Синтез инвариантных систем
При проектировании довольно широко используется принцип
инвариантности (независимости) локальных систем по отношению
к наиболее характерным возмущающим воздействиям. В первую
очередь необходимо предусматривать компенсацию возмущающих
воздействий между локальными САР, что обеспечит их работу в
оптимальном устойчивом режиме и повысит надежность работы
объекта.
Замечание
Инвариантность (от лат. invariant) — неизменность, независимость от
некоторых физических условий. Чаще всего инвариантность рассматрива-
ется в математическом смысле: неизменность какой-либо величины по от-
ношению к некоторым преобразованиям.
Для некоторых действующих систем управления известны наибо-
лее характерные возмущающие воздействия, поступающие на объект
управления, и для обеспечения необходимого качества управления
можно, например, выполнить синтез структуры системы, используя
последовательные корректирующие устройства. Сложность синтеза
таких систем состоит в том, что функциональные элементы системы,
включая стандартное управляющее устройство (регулятор или кон-
троллер), реагируют на поступившие возмущающие воздействия не в
момент их поступления на объект управления, а после того, как они
уже прошли через него. Это означает, что имеет место запаздывание,
540
Глава 6 Основы проектирования систем управления ХТП
величина которого определяется инерционностью объекта по каналу
прохождения данного возмущающего воздействия. Следовательно,
выработка управляющего воздействия на объект для предотвращения
нежелательного влияния возмущающего воздействия на управляемую
величину тоже запаздывает, что ухудшает качество управления.
Для большинства промышленных объектов химической техно-
логии характерны значительное запаздывание, большие постоянные
времени (большая инерционность) и значительные возмущающие
воздействия. В таких случаях даже при оптимальных настройках
регуляторов одноконтурные САР не способны обеспечить необхо-
димое качество регулирования (большие динамические ошибки,
длительные переходные процессы и т. д.).
Чтобы повысить качество управления, необходимо перейти от од-
ноконтурных САР к более сложным системам регулирования, исполь-
зующим дополнительные (корректирующие) импульсы по возмущаю-
щим воздействиям или вспомогательным выходным координатам. В
такие системы регулирования, помимо обычного стандартного регуля-
тора, входят вспомогательные управляющие устройства. Назовем их
динамическими компенсаторами или дополнительными регуляторами.
Можно синтезировать такую систему регулирования, которая
начнет вырабатывать дополнительное управляющее воздействие на ре-
гулируемую величину в момент поступления на объект возмущаю-
щего воздействия, чтобы полностью нейтрализовать нежелательное
влияние возмущающего воздействия. Для этого, используя компен-
сирующее устройство с передаточной функцией WK(s), формируют
дополнительное управляющее воздействие. Иначе говоря, будет син-
тезирована нечувствительная, или инвариантная, к данному возму-
щающему воздействию система регулирования.
Сущность синтеза инвариантных систем регулирования, таким
образом, состоит в том, чтобы наряду с естественным прохождени-
ем возмущающего воздействия на объект создать искусственное ком-
пенсирующее воздействие с помощью динамического компенсатора (или
дополнительного регулятора), оказывающего на управляемый пара-
метр такой же эффект по величине, как и возмущающее воздей-
ствие, но противоположный по знаку.
В зависимости от характера корректирующего импульса различа-
ют следующие многоконтурные САР: комбинированные, сочетающие
обычный замкнутый контур регулирования с дополнительным кана-
лом воздействия, по которому через динамический компенсатор вво-
дится импульс по возмущению; каскадные — двухконтурные замкну-
тые САР, построенные на базе двух стандартных регуляторов и ис-
пользующие для регулирования кроме основной выходной координаты
дополнительный промежуточный выход; с дополнительным импульсом
по производной от промежуточной выходной координаты.
6.2. Синтез систем автоматического регулирования
541
6.2.1. Комбинированные САР
Рассмотрим синтез комбинированной системы регулирования
Сформулируем принцип инвариантности-, отклонение выходной ко-
ординаты у(т) системы регулирования от заданного значения под
действием возмущающего воздействия J(t) должно быть тождественно
равно нулю при любых возмущающих воздействиях:
е(т) = 0. (6.70)
От сигналов возмущающего воздействия d(x) и выходной вели-
чины у(т) перейдем к их изображениям по Лапласу D(s) и У($). Тогда
условие инвариантности (6.70) перепишем:
Г(5) = у[у(т)]е0 VD(s) = <р[</(т)]*0. (6.71)
Для заданных характеристик объекта по каналам возмущающего
воздействия ^(s) и управляющего воздействия Wzop(s) применим
тождество (6.71), чтобы получить передаточную функцию динами-
ческого компенсатора H^fs). Рассмотрим два случая.
Первый случай. Сигнал от динамического компенсатора по-
дадим на вход объекта управления (рис. 6.44, а), а структурную схему
комбинированной САР преобразуем к последовательному соедине-
нию системы с передаточной функцией ^(5) и системы регулирова-
ния с обратной связью с передаточной функцией W^s) (рис. 6.44, б).
Передаточная функция системы регулирования без обратной
связи по возмущающему воздействию:
^1(^) = И/оа(^)+И/к(^)И/ои(^) (6.72)
Передаточная функция системы регулирования с обратной связью:
= l + ^p(s)H/ou (s)' (6.73)
Согласно структурной схеме комбинированной САР ее переда-
точная функция
»Fd(s)=^1(s)lF2(s). (6.74)
С другой стороны, изображение выходной величины комбини-
рованной САР
Y(s) = Wd(s)D(s). (6.75)
Подставим (6.74) в (6.75), а (6.75) подставим в условие инвари-
антности (6.71) и получим:
D(s)W{(s W2(s = 0. (6 76)
542
Глава 6. Основы проектирования систем управления ХТП
[ Объект регулирования
б
Рис. 6.44. Структурные схемы комбинированной системы регулирования
(выход динамического компенсатора суммируется с командным
сигналом регулятора):
а исходная схема; б — преобразованная схема
При наличии возмущающего воздействия
(6.77)
а также для замкнутого контура (с обратной связью), имея
(s) * 0, (6.78)
условие инвариантности задается уравнением:
+ = (6.79)
Из (6.79) получаем передаточную функцию динамического ком-
пенсатора.
Инвариантность системы регулирования по отношению к возму-
щающему воздействию обеспечит динамический компенсатор с переда-
точной функцией'.
и/ (j) = -
(6.80)
6.2. Синтез систем автоматического регулирования
543
Второй случай. Сигнал от динамического компенсатора по-
дадим на регулятор (рис. 6.45, а), а структурную схему комбиниро-
ванной САР преобразуем к последовательному соединению систе-
мы без обратной связи ^(s) и системы с обратной связью ^(s)
(рис. 6.45, б).
Аналогично выводу условия инвариантности для первого слу-
чая, имеем для второго случая выражения (6.75) и (6.76) и переда-
точную функцию системы И^($):
(б-81)
Условие инвариантности для второго случая запишется так же,
как и для первого, а именно, как выражение (6.77).
Для второго случая при наличии возмущающего воздействия (6.77)
D ($)* О,
а также для системы 2, имея (6.78)
б
Рис. 6.45. Структурные схемы комбинированной системы регулирования
(выход динамического компенсатора подключен к входу регу-
лятора):
а — исходная схема- б — преобразованная схема
544
Глава 6 Основы проектирования систем управления ХТП
условие инвариантности задается уравнением:
(*) = (^) + (5)JFp (s)>T0U (s) = О,
откуда получим выражение, подобное (6.80):
^ou(WS)
(6.82)
(6.83)
При расчете инвариантных разомкнутых и комбинированных САР
обязательно необходимо учитывать их физическую реализуемость,
иначе говоря, физическую реализуемость динамического компенса-
тора, отвечающего условиям (6 80) и (6.83).
Условия физической реализуемости динамического компенсатора
1. Время транспортного запаздывания по каналу управляющего
воздействия должно быть меньше, чем по каналу возмущающего
воздействия:
тк = - тои > 0. (6.84)
2. В динамическом компенсаторе отсутствуют идеальные диф-
ференцирующие звенья, т. е. в передаточной функции динамичес-
кого компенсатора степень полинома в числителе (wiK) должна быть
не выше степени полинома (лк) в знаменателе. К такому результату
можно прийти при определенном соотношении порядков диффе-
ренциальных уравнений, описывающих динамику каналов возму-
щающего и управляющего воздействий.
Пример
► Рассмотрим систему управления температурой в химическом
реакторе с мешалкой. В реакторе осуществляется экзотермическая
реакция. Основной канал возмущающего воздействия расход реакци-
онной смеси—температура в реакторе аппроксимируем двумя стати-
ческими звеньями первого порядка, соединенными последовательно:
JKd (5) = 7-----------г,
0,1 (7^S + 1)(7’2S + 1)’
где Кой — коэффициент усиления по каналу возмущающего воздей-
ствия; Т|, Т2 — постоянные времени реактора и термометра, изме-
ряющего температуру в реакторе.
Канал управляющего воздействия расход хладагента—температу-
ра в реакторе аппроксимируем тремя статическими звеньями перво-
го порядка, соединенными последовательно:
W (5) =----------—----------
ои(' (Г15 + 1)(Г25 + 1)(Гз + 1)’
6.2. Синтез систем автоматического регулирования
545
где А"ои — коэффициент усиления по каналу управляющего воздей-
ствия; Т3 — постоянная времени охлаждающей рубашки.
Находим передаточную функцию динамического компенсатора
по выражению (6.80), чтобы построить инвариантную систему уп-
равления:
Лои
Такой динамический компенсатор физически нереализуем, по-
скольку
г. е. степень полинома в числителе оказалась выше степени полино-
ма в знаменателе.
При практической реализации разомкнутых и комбинирован-
ных САР необходимо добиться приближенной инвариантности сис-
темы регулирования по отношению к рассматриваемому возмущаю-
щему воздействию в определенном диапазоне частот (юн — нижняя
граница диапазона частот, юв — верхняя граница диапазона частот).
При этом реальный компенсатор выбирают из числа наиболее легко
реализуемых типовых динамических звеньев, параметры которых
можно рассчитать исходя из условия близости частотных характери-
стик идеального | И/к(Хо)]и и реального I И^.(дл))]р динамических ком-
пенсаторов в этом диапазоне частот:
(»]и = (»]р , юн < ю < юв. (6.85)
Диапазон частот (юн, юв] определяется частотным спектром воз-
мущающего воздействия и частотными характеристиками системы
В ХТП сигналы обычно являются низкочастотными, и их мощ-
ность, в основном, сосредоточена в диапазоне частот |0, <ов], т. е.
нижняя граница диапазона частот юн = 0.
Комбинированную САР рассматривают как своеобразный двух-
ступенчатый фильтр определенных частот для сигнала возмущаю-
щего воздействия, состоящий из разомкнутой CAP W\ и замкнутой
одноконтурной CAP W2. Характерной особенностью замкнутой си-
стемы регулирования является наличие пика на АЧХ на частоте ре-
зонанса Юр, в окрестности которой система обладает наихудшими
фильтрующими свойствами.
Поэтому чаще всего условие приближенной инвариантности
(6 85) для комбинированных САР записывают для двух частот: ю = 0
и ю = Юр. Компенсация возмущающего воздействия на нулевой час-
тоте (ю = 0) обеспечивает инвариантность системы в установивших-
18 Бесна-юн А. В.. XapnioiioH I! И
546
Глава 6. Основы проектирования систем управления ХТП
ся режимах, если АЧХ замкнутой системы не равна нулю при и = О
(например, при использовании П-регулятора в замкнутом контуре).
Структуру передаточной функции реального динамического ком-
пенсатора выбирают на основе совпадения его характеристики с ха-
рактеристикой идеального динамического компенсатора на нулевой
частоте (со = 0).
Выбор параметров передаточной функции должен обеспечить
совпадение характеристик реального и идеального динамических
компенсаторов на частоте резонанса (о = о)р замкнутой АСУ. Обыч-
но компенсаторы выбирают как комбинацию из легко реализуемых
типовых динамических линейных звеньев: статического первого по-
рядка и реального дифференцирующего.
Основные этапы расчета комбинированной САР:
1) расчет настроек регулятора и определение частоты резонанса
в замкнутой одноконтурной системе регулирования;
2) вывод передаточной функции идеального компенсатора на
основе принципа инвариантности и анализ его физической реали-
зуемости;
3) выбор структуры реального компенсатора и определение его
параметров на основе принципа инвариантности для нулевой часто-
ты и частоты резонанса.
Область применения-, химико-технологические объекты, подвер-
женные действию значительных контролируемых возмущающих воз-
действий.
Совместное использование в комбинированных САР регулирова-
ния по отклонению и по возмущающему воздействию позволяет по-
лучить высококачественные и быстродействующие системы регули-
рования. На рис. 6.46 приведена схема комбинированной системы
регулирования температуры в химическом реакторе. Влияние основ-
ного возмущающего воздействия (например, изменения расхода ком-
Рис. 6.46. Комбинированная схе-
ма регулирования температуры в
химическом реакторе с меша ткой:
1 — преобразователь расхода, 2 — ди-
намический компенсатор; 3 — сумма-
тор; 4 — исполнительное устройство;
5 — датчик температуры; 6 — регуля-
тор температуры
*6.2. Синтез систем автоматического регулирования
547
Рис. 6.47. Комбинированная система регулирования состава дистиллята в
ректификационной колонне:
1 — ректификационная колонна; 2— подогреватель исходной разделя-
емой смеси; 3 — дефлегматор; 4 — сборник флегмы; 5 — гидрозатвор
для флегмы; 6 — первичный преобразователь расхода; 7 — регулятор
состава дистиллята; Я — динамический компенсатор; 9, 10 — регулиру-
ющие клапаны
понента А) нейтрализуется динамическим компенсатором 2, работа-
ющим по принципу компенсации основного возмущающего воздей-
ствия Влияние других возмущающих воздействий (например, изме-
нение расхода компонента В, изменение температуры окружающей
среды и др.) нейтрализуется регулятором 6, реагирующим на откло-
нение текущего значения температуры (управляемой величины), за-
меряемой датчиком 5, от заданного значения температуры (7ад).
На рис. 6.47 приведен пример комбинированной системы регу-
лирования состава дистиллята в ректификационной колонне. Регуля-
тор 7, изменяя расход флегмы, подаваемой на орошение ректифика-
ционной колонны 7, стабилизирует состав дистиллята. Для повыше-
ния качества регулирования в системе предусмотрена автоматическая
коррекция задания регулятору 7 в зависимости от одного из основ-
ных возмущающих воздействий в процессе ректификации — коле-
баний расхода разделяемой исходной смеси, подаваемой в колонну
через подогреватель 2. Динамический компенсатор <? подает коррек-
тирующий импульс в качестве задания регулятору 7.
6.2.2. Каскадные САР
В каскадных системах регулирования при регулировании основ-
ной технологической величины в объекте с большим запаздыванием
используют также вспомогательные промежуточные величины, реа-
18*
548
Глава 6. Основы проектирования систем управления ХТП
тирующие на изменение основных возмущающих воздействий объекта
и управляющего воздействия с меньшим запаздыванием. В таких
случаях стабилизация вспомогательных промежуточных величин
способствует более качественному регулированию основной техно-
логической выходной величины. Каскадная система регулирования
химико-технологических объектов состоит из нескольких (чаще всего
двух) контуров, каждый из которых регулирует свою величину.
В двухконтурную каскадную систему регулирования входят два
регулятора: основной (во внешнем контуре) с передаточной функци-
ей ^(s), предназначенный для стабилизации основной технологи-
ческой выходной величины у, и вспомогательный (во внутреннем
контуре) с передаточной функцией ^(s), предназначенный для
стабилизация вспомогательной промежуточной величины Выход-
ной сигнал основного регулятора является заданием для вспомога-
тельного регулятора.
Применение каскадных схем управления эффективно только в
том случае, когда запаздывание в контуре регулирования основной
технологической выходной величины у значительно больше, чем в
контуре регулирования вспомогательной промежуточной величи-
ны ур Поэтому назначение регуляторов определяет выбор законов
регулирования.
Закон регулирования основного регулятора должен содержать ин-
тегральную составляющую, чтобы поддерживать основную техноло-
гическую выходную величину у на заданном значении
Вспомогательный контур должен обладать быстродействием. В нем
целесообразно использовать пропорциональный закон регулирования.
Пример структурной схемы двухконтурной каскадной системы
регулирования показан на рис. 6.48. В объекте регулирования (часть
схемы, заключенная в пунктирную рамку) на основную технологи-
ческую выходную величину у и вспомогательную промежуточную
величину у, воздействуют управляющая величина и и основное (наи-
более сильное и быстро изменяющееся) возмущение d{. На основ-
ную технологическую выходную величину у может также действо-
Рис. 6.48. Структурная схема двухконтурной каскадной системы регули-
рования
6.2. Синтез систем автоматического регулирования
549
вать небольшое и редкое проявляемое возмущающее воздействие d2.
Двухконтурная каскадная система регулирования имеет внутренний
(стабилизирующий) контур регулирования и внешний (корректиру-
ющий) контур. Во внутренний контур входит объект регулирования
с передаточной функцией ^(5) (канал регулирования и -> и
стабилизирующий регулятор (называемый также вспомогательным
или внутренним) с передаточной функцией W^s), вырабатываю-
щий управляющее воздействие и. Внешний контур регулирования
состоит из объекта регулирования с передаточной функцией ^(s)
(канал регулирования у1м -»у) и корректирующего основного (внеш-
него) регулятора с передаточной функцией H^^s) и с независимым
заданием На вход основного (внешнего) регулятора поступает
основная управляемая величина у, а на вход вспомогательного
(внутреннего) регулятора — вспомогательная промежуточная величи-
на у|. Выходная величина основного (внешнего) регулятора на-
правляется на вход вспомогательного (внутреннего) регулятора для
изменения его задания. Итак, внутренний контур предназначен для
регулирования вспомогательной промежуточной величины а внеш-
ний — для регулирования основной технологической выходной ве-
личины у.
Применяют различные типы двухконтурных каскадных САР,
отличая их по законам управления: П—ПИ, ПИ—ПИ, ПИ—ПИД
(первый регулятор — вспомогательный во внутреннем контуре, а
второй — основной во внешнем контуре).
Возмущающее воздействие d{ изменяет сначала вспомогатель-
ную промежуточную величину а затем — основную технологи-
ческую выходную величину у, поэтому внутренний контур регули-
рования быстрее, чем корректирующий, вступает в работу и выраба-
тывает управляющее воздействие, частично компенсирующее
отклонение основной технологической выходной величины у от за-
данного значения Нескомпенсированное отклонение основной
технологической выходной величины у от заданного значения
приводит в действие внешний контур регулирования, который по-
степенно сводит это отклонение к нулю. Влияние возмущающего
воздействия d2 на основную технологическую выходную величину у
подавляется внешним контуром регулирования. Внутренний контур
регулирования обладает быстродействием, а внешний контур регу-
лирования является инерционным.
При реализации каскадных систем регулирования следует учи-
тывать, что для многих технологических объектов на вспомогатель-
ную промежуточную величину у{ накладывается ограничение (на-
пример, температура не должна превышать предельно допустимого
значения). Это означает, что на выходной сигнал у1м основного ре-
гулятора. являющийся заданием для вспомогательного регулятора,
550 Глава 6. Основы проектирования систем управления ХТП
тоже накладывается ограничение и поэтому в систему регулирова-
ния необходимо вводить устройства для ограничения величины за-
дания вспомогательному (внутреннему) регулятору.
Примером может служить двухконтурная каскадная система ста-
билизации температуры жидкости на выходе кожухотрубного теп-
лообменника (рис. 6.49, а), представляющего собой инерционный
объект с большим запаздыванием. В данном случае применение
одноконтурной системы регулирования температуры обычно не
обеспечивает высокого качества регулирования, поэтому в схему
вводят вспомогательный стабилизирующий контур с регулятором
расхода греющего пара. Обладая большим быстродействием, этот
контур регулирования компенсирует изменения как расхода, так и
давления греющего пара. Другие возмущающие воздействия (на-
пример, изменения температуры нагреваемой жидкости на входе в
теплообменник и др.) компенсируются основным регулятором тем-
пературы 5.
Конденсат ▼
Рис. 6.49. Каскадная система регулирования температуры жидкости на
выходе кожухотрубного теплообменника. Вспомогательные про-
межуточные параметры расход греющего лара (а); давление
пара в межтрубном пространстве (б):
/ — датчик промежуточного параметра; 2 — вспомогательный (ведо-
мый) регулятор; 3 — исполнительное устройство; 4 — нормирующий
преобразователь температуры; 5 — основной (ведущий) ре(улятор
6.2. Синтез систем автоматического регулирования
551
На рис. 6.49, б изображена двухконтурная каскадная система ста-
билизации температуры жидкости на выходе кожухотрубного тепло-
обменника, в которую введен вспомогательный стабилизирующий
контур с регулятором давления пара 2 в межтрубном пространстве.
На рис. 6.50 приведена двухконтурная каскадная система регу-
лирования температуры в химическом реакторе, в котором прохо-
дит экзотермическая реакция. Управляющее воздействие — расход
хладагента, подаваемого в рубашку реактора. В канал управления
входят трубопровод для подачи хладагента, рубашка реактора, соб-
ственно сам реактор, и поэтому канал управления является сложной
динамической системой, обладающей большой инерционностью.
Возмущающими воздействиями являются изменения температуры и
расхода хладагента, изменения температуры и расхода реакционной
смеси и др. Для обеспечения более высокой точности регулирова-
ния, а также повышения быстродействия применяют двухконтур-
ную каскадную систему регулирования. Основной управляемой ве-
личиной в системе является температура реакционной смеси в реак-
торе, измеряемая датчиком 4 и стабилизируемая регулятором 5.
Вспомогательная промежуточная величина — температура хладагента
в рубашке реактора — измеряется датчиком 1 и стабилизируется
регулятором 2, который изменяет с помощью исполнительного уст-
ройства 3 расход хладагента. Значение этой температуры задается
основным (внешним) регулятором 5.
В приведенном примере основная и вспомогательная промежу-
точная величины имеют одинаковую физическую природу и харак-
теризуют значения одного и того же технологического параметра
(температуры) в разных точках системы.
Рис. 6.50. Каскадная система регулирования температуры в химическом
реакторе. Пояснения см. в тексте
552
Глава 6. Основы проектирования систем управления ХТП
В расчет двухконтурных каскадных систем регулирования вхо-
дит определение настроек основного (внешнего) и вспомогательно-
го (внутреннего) регуляторов.
Выбор типов основного и вспомогательного регуляторов двух-
контурных каскадных САР, а также определение оптимальных зна-
чений их настроечных параметров представляет собой более слож-
ную задачу, чем в случае одноконтурных САР. Естественно, что на-
стройки параметров основного и вспомогательного регуляторов
взаимозависимы. Но если инерционность стабилизирующего кон-
тура значительно ниже инерционности корректирующего контура,
т. е. переходный процесс в стабилизирующем контуре заканчивает-
ся гораздо раньше, чем в корректирующем контуре, то выбор регу-
ляторов и расчет параметров их настройки можно проводить неза-
висимо, как для двух одноконтурных САР.
В основе расчета параметров настройки регуляторов лежит ме-
тод итераций.
Примечание
Итерация — повторное применение какой-либо математической опе-
рации.
На каждом шаге итерации рассчитывают приведенную однокон-
турную САР, в которой один из регуляторов условно относят к эк-
вивалентному объекту. Эквивалентный объект для основного регу-
лятора с передаточной функцией ^(s), как следует из структурных
схем (рис. 6.51), представляет собой последовательное соединение
замкнутого вспомогательного контура и основного канала регули-
Рис. 6.51. Структурная схема
каскадной САР для расчета ос-
новного регулятора:
a — схема внешнего контура (пунк-
тирной линией выделена часть схе-
мы, эквивалентная объекту для ос-
новного регулятора): б — упрошен-
ная схема внешнего контура
6.2. Синтез систем автоматического регулирования
553
рования с передаточной функцией ^(s). Передаточная функция
эквивалентного объекта для основного регулятора равна
^(s) =
^02(s) •(-!).
(6.86)
1 + ^)^)
Эквивалентный объект для вспомогательного регулятора с переда-
точной функцией (Kp2(s), как следует из структурной схемы (рис. 6.52),
можно представить передаточной функцией
(*) = ^о1 (*)[>о2 (*) •(-!)• И'р! (*) - !]• (6.87)
На каждой итерации рассчитывают параметры настройки одно-
го из регуляторов по передаточной функции соответствующего эк-
вивалентного объекта, учитывающей найденные на предыдущей ите-
рации параметры другого регулятора.
Замечание
Если выполняются приближенные расчеты параметров настройки ре-
гуляторов, то можно ограничиться первыми двумя шагами. При выполне-
нии точных расчетов их продолжают до тех пор, пока параметры настрой-
ки регуляторов, определенные в двух последовательных итерациях, не со-
впадут с заданной точностью.
Для одновременного определения параметров настройки регу-
ляторов каскадных САР используют графические зависимости, при-
веденные в литературе [49].
Рис. 6.52. Структурная схема каскад-
ной САР для расчета вспомогатель- °
ного регулятора:
а — схема внутреннего контура (пунктир-
ной линией выделена часть схемы, экви ‘-'W
валентная объекту для вспомогательного
регулятора); б — упрощенная схема внут-
реннего контура
Е2(3)
554
Глава 6 Основы проектирования систем управления ХТП
Значения настроечных параметров регуляторов в каскадных САР
могут быть найдены путем моделирования систем регулирования на
ПЭВМ.
Замечание
Значения настроечных параметров регуляторов в двухконтурных кас-
кадных системах регулирования рассчитывают на ПЭВМ с помощью спе-
циальных математических программ, например, MathCAD, Matlab и др.
Применение вспомогательного контура регулирования приводит
к значительному повышению качества регулирования основной тех-
нологической величины.
Для иллюстрации этого положения на рис. 6.53 приведены пере-
ходные характеристики каскадной системы с П—ПИ регуляторами
(кривая 7) и одноконтурной системы с ПИ-регулятором (кривая 2),
полученные при одинаковом возмущающем воздействии на один
и тот же объект. И в том, и в другом случае отсутствует статическая
ошибка регулирования, а переходные процессы носят колебатель-
ный характер. В то же время при использовании каскадной системы
регулирования максимальная ошибка снижается в несколько раз, и
время переходного процесса тпп имеет меньшее значение по сравне-
нию с одноконтурной системой регулирования. Уменьшается в не-
сколько раз и интеграл от квадрата ошибки ИКО (2.11) (почти на
порядок).
Отметим, что качество регулирования существенно улучшается
с уменьшением соотношения времени запаздывания во внутрен-
нем и во внешнем контурах. Поэтому если есть возможность выбо-
ра вспомогательной промежуточной величины, то предпочтение от-
дают той, для которой запаздывание во внутреннем контуре будет
минимальным.
Рис. 6.53. Переходные процессы в САР:
/ — каскадной (П—ПИ система); 2 — одноконтурной (ПИ-регулятор)
6.2. Синтез систем автоматического регулирования 555
6.2.3. САР с дополнительным импульсом
по производной из промежуточной точки
В объектах с распределенными параметрами (колонные или труб-
чатые аппараты) как основная управляемая величина (температура или
состав), так и возмущающие воздействия распределены по простран-
ственной координате, а управляющее воздействие подается на вход
объекта. Для такого типа объектов характерна большая инерционность
по каналу управления и одноконтурные замкнутые системы регулиро-
вания не обеспечивают необходимого качества переходных процессов.
Для управления объектами с распределенными параметрами
применяют САР с дополнительным импульсом по производной из
промежуточной точки объекта (аппарата), подавая его на вход ре-
гулятора, что дает для регулятора опережающий сигнал и регуля-
тор начинает действовать раньше, чем основная управляемая вели-
чина (температура или состав) на выходе объекта успеет откло-
ниться от заданного значения.
6.2.4. Регулирование многосвязных объектов
Под многосвязными объектами понимают объекты с нескольки-
ми входами и выходами, взаимно связанными между собой.
Химико-технологические объекты управления являются слож-
ными динамическими системами. Реальные химико-технологичес-
кие объекты многомерны. Между регулируемыми (управляемыми)
величинами существуют взаимные связи, обусловленные наличием
общих входных воздействий, изменение каждого из которых приво-
дит к изменению не одной, а нескольких выходных величин. Ана-
лиз взаимных связей регулируемых величин имеет большое значе-
ние для решения задач синтеза системы управления. Необходимо
различать взаимные связи, вызванные наличием общих возмуща-
ющих воздействий и общих управляющих воздействий (рис. 6.54).
В первом случае (рис. 6.54, а) регулировать отдельные параметры
можно с помощью одноконтурных САР. Связь же регулируемых ве-
личин через общие регулирующие воздействия (рис. 6.54. б) требует
изменения структуры системы управления
Замечание
Динамику многосвязных объектов можно описать системой диффе-
ренциальных уравнений. Если дифференциальные уравнения преобразо-
вать по Лапласу, то передаточная функция системы представляет собой
матрицу, элементами которой являются передаточные функции по каждо-
му из каналов вход-выход. Матрица передаточных функций односвязного
объекта является диагональной.
556
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.54. Структурные схемы многомерных объектов:
а — с общими возмущающими воздействиями; б — с общими управля-
ющими воздействиями
Для управления многосвязными объектами используют много-
контурные системы регулирования, представляющие совокупность
большого числа простых контуров регулирования, объединенных
перекрестными связями объекта. Контуры регулирования могут либо
взаимодействовать между собой, либо просто один контур регули-
рования может воздействовать на другой. В случае взаимодействия
контуров регулирования, управляющее воздействие одного контура
является возмущающим воздействием для других, связанных с ним
контуров регулирования. Чтобы компенсировать это возмущающее
воздействие, каждый из связанных контуров в свою очередь изме-
няет управляющее воздействие, создавая тем самым возмущающее
воздействие для первого и всех остальных связанных контуров регу-
лирования. Возникает процесс, называемый «раскачкой», который
может привести к появлению в многоконтурной системе регулиро-
вания незатухающих колебаний.
Пример многоконтурной (двухконтурной) системы регулирования
с двумя выходными величинами (давление в аппарате и расход газа на
выходе аппарата) показан на рис. 6.55.
Рис. 6.55. Пример регулиро-
вания объекта с взаимосвя-
занными параметрами
Расход газа на выходе аппарата, давление
в котором поддерживается постоянным с
помощью регулятора давления, регулиру-
ется регулятором расхода. Возмущающие
воздействия в системе регулирования рас-
хода газа, приводящие к его увеличению
или уменьшению, оказывают влияние на
давление. Аналогично возмущающие воз-
действия в контуре давления могут влиять
на работу контура регулирования расхода
газа: при уменьшении давления расход газа
будет стремиться уменьшиться, а при уве-
личении — увеличиться.
6.2. Синтез систем автоматического регулирования
557
В качестве другого примера рассмотрим регулирование уровня
жидкости в резервуаре, в которую под давлением подается газ. Па-
раметры объекта (уровень жидкости, давление и расход газа) между
собой связаны и управляются отдельными контурами регулирова-
ния (уровня жидкости в резервуаре, давления в резервуаре и расхода
газа, подаваемого в резервуар). Между ними тоже возникает взаи-
модействие, когда один регулятор регулирует давление в резервуаре,
а два других регулятора оказывают регулирующее воздействие на
уровень жидкости и расход газа. Уровень жидкости увеличивается,
газ в резервуаре сжимается (таким образом, изменение уровня жид-
кости в резервуаре является возмущающим воздействием для систе-
мы регулирования давления). Возрастание давления увеличивает сток
жидкости из резервуара (изменение давления является возмущаю-
щим воздействием для системы регулирования уровня). Кроме того,
в рассматриваемой системе может наблюдаться и некоторое само-
выравнивание, проявляющееся в том, что более высокое давление,
возникающее как результат внезапного увеличения уровня жидко-
сти, стремится увеличить расход и жидкости, и газа.
В разобранных выше примерах рассматривалась взаимосвязь вход-
ных и выходных величин объекта. Помимо этого, при регулирова-
нии многосвязных объектов необходимо учитывать дополнительные
каналы передачи воздействий (перекрестные) по каждому отдельно-
му контуру регулирования. Параметры настройки регуляторов, выб-
ранные без учета этих связей, могут привести к «раскачке» при од-
новременной работе нескольких контуров регулирования, причем
эффект взаимодействия будет особенно велик, когда контуры регу-
лирования имеют почти одинаковые критические частоты (wKp).
Существует два различных подхода к регулированию многосвяз-
ных объектов.
Первый подход: несвязанное регулирование отдельных вели-
чин одноконтурными САР. При несвязанном регулировании, учи-
тывая только основные каналы управления, расчет регуляторов вы-
полняют как для одноконтурных систем регулирования. Так можно
поступать, если пренебречь влиянием перекрестных связей на вы-
ходные величины объекта (влияние перекрестных связей намного
слабее, чем основных). Структурная схема несвязанного регулиро-
вания объекта с двумя взаимосвязанными величинами (их -»и{ -> у2
и и2 -> j|, и2 -э у2) приведена на рис. 6.56. В систему несвязанного
регулирования входят объект с двумя перекрестными каналами и
два независимых контура регулирования с двумя регуляторами, пе-
редаточные функции которых и И/р2(^) соответственно.
Второй подход: связанное регулирование с применением мно-
гоконтурного регулирования, в котором внутренние перекрестные
558
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.56. Структурная схема несвязанного регулирования многомерного
объекта
связи объекта компенсируются внешними динамическими связями
между отдельными контурами регулирования. Кроме основных ре-
гуляторов с передаточными функциями W'jfs) и Wzp2(5), в систему
связанного регулирования вводят дополнительные динамические
компенсаторы с передаточными функциями И^С?) и Wk2(s). По-
строение систем связанного регулирования основано на принципе
автономности. Если применить его к объекту с двумя входами и вы-
ходами (рис. 6.57), то это означает, что выходные величины у] и у2
взаимно независимы при работе двух замкнутых систем регулирова-
ния. Принцип автономности включает два условия инвариантности:
инвариантность первого выхода объекта по отношению к сигналу
Рис. 6.57. Структурная схема связанного регулирования многомерного
объекта
0.2. Синтез систем автоматического регулирования
559
на выходе второго регулятора и22 и инвариантность второго выхода у2
по отношению к сигналу на выходе первого регулятора ин, записы-
ваемые следующим образом:
?i(t, и22) = О; у2(т, ип) = 0 Vz, и115 и22.
Сигнал нц на выходе регулятора с передаточной функцией
рассматривают как возмущающее воздействие для выходной вели-
чины объекта у2, а сигнал и22 на выходе регулятора с передаточной
функцией ^(.v) — как возмущающее воздействие для выходной
величины объекта В этом случае перекрестные каналы объекта
регулирования являются каналами возмущающих воздействий. И тогда
для компенсации возмущающих воздействий в систему связанного
регулирования вводят дополнительные динамические компенсато-
ры с передаточными функциями и Wk2(s), сигналы от кото-
рых поступают на объект по соответствующим каналам управляю-
щих воздействий.
Одним из примеров сложного многосвязного объекта регулиро-
вания в химической технологии является ректификационная уста-
новка. Управление процессом в исчерпывающей (нижней) части
ректификационной колонны 1 (рис. 6.58) требует, как минимум,
стабилизации двух технологических параметров, ответственных за
материальный баланс по жидкой фазе и по одному из компонентов,
определяющих состав кубового продукта. Для этого могут подойти
два параметра: температура под первой тарелкой 2 колонны и уро-
вень жидкости в кубе-испарителе 3. В качестве управляющих сигна-
лов (входных величин) выбирают расход греющего пара, подаваемо-
го в кипятильник 4, и отбор кубового продукта. Можно заметить,
что изменение расхода греющего пара оказывает влияние на интен-
сивность испарения кубового продукта, изменяя как уровень кубо-
вого продукта в кубе-испарителе, так и состав пара, т. е. обе выход-
ные величины. Изменение отбора кубового продукта влияет и на
уровень жидкости в кубе-испарителе, и на состав пара в нижней
части колонны
Рис. 6.58. Пример регулирования
исчерпывающей части ректифи-
кационной колонны (многомер-
ного объекта) несвязанными си-
стемами регулирования. Поясне-
ния см. в тексте
560
Глава 6. Основы проектирования систем управления ХТП
Аналогично и для регулирования процессом в укрепляющей ча-
сти ректификационной колоны выбирают две выходные величины
(давление и температуру пара в колонне). В качестве управляющих
сигналов (входных величин) выбирают изменение расхода хладаген-
та, поступающего в дефлегматор, и изменения расхода флегмы, по-
даваемой на орошение колонны.
Замечание
В системах регулирования могут возникнуть и более сложные и разно-
образные взаимные влияния, если пытаться одновременно регулировать
большое количество технологических параметров. Например, вполне оче-
видно, что нельзя управлять величинами расходов всех потоков, поступаю-
щих на вход технологического объекта и выходящих из него: незначитель-
ная ошибка в задании приведет либо к накоплению веществ в объекте с
последующим переполнением его, либо к опорожнению объекта. Естествен-
но, что такие ситуации желательно предвидеть и их избегать.
6.2.5. Регулирование объектов с запаздыванием
Для большинства объектов химической технологии характерно за-
паздывание Объекты могут обладать запаздыванием по каналам воз-
мущающего и управляющего воздействий. Выразим передаточную фун-
кцию системы регулирования по каналу возмущающего воздействия
через передаточные функции объекта и регулятора (см. рис. 4.6):
И^) =
D(s) l + W^ (5)^(5)’
(6.88)
где передаточные функции (s) и И^*и (s) соответствуют объекту
без запаздывания.
Рассмотрим, как изменится передаточная функция (6.88) системы
регулирования в случае, когда объект обладает запаздыванием. Если
запаздывание существует только в канале возмущающего воздействия:
то передаточная функция системы регулирования имеет вид:
W^(5) e-^J
dU D(5) 1 + И/р (s)pro’u (s)’
(6.89)
Присутствие звена запаздывания в передаточной функции систе-
мы регулирования (6.89) сдвигает переходный процесс на время t^.
Однако ни вид переходного процесса, ни устойчивость системы ре-
гулирования при этом не изменяются.
6.2. Синтез систем автоматического регулирования 561
Запаздывание осложнит регулирование объекта, если оно появ-
ляется в канале управляющего воздействия:
^ои(^) = ^;и(5).е-^\
В этом случае передаточная функция системы (6.88) изменится так:
d() D(j) ^еди^е-'-"''
Устойчивость и быстродействие САР с передаточной функцией
(6.90) уменьшатся, ухудшится и точность регулирования.
Если объект обладает запаздыванием, то с помощью обычных
регуляторов трудно добиться высокого качества регулирования.
Максимальное допустимое значение коэффициента усиления ока-
зывается недостаточным, так как запаздывание вносит большое от-
ставание по фазе еще до того, как в достаточной степени начинает
проявляться демпфирующее воздействие инерционных элементов.
Чтобы обеспечить высокое качество переходного процесса в си-
стеме регулирования, используют специальные регуляторы (напри-
мер, регулятор Смита, регуляторы с прогнозирующей моделью),
специальные алгоритмы, способные обеспечить компенсацию за-
паздывания в объекте. Предложено много методов, предусматрива-
ющих использование информации о величине запаздывания tMn, что
позволяет регулятору вводить более точное корректирующее воз-
действие по сравнению с регулятором, который воспринимает толь-
ко сигнал ошибки.
Принципиальная структурная схема САР с регулятором Смита
приведена на рис. 6.59. Корректирующее звено 4^(5) подбирается
так, чтобы передаточная функция по каналу управления для объекта
Рис. 6.59. Структурная схема САР с регулятором Смита
562
Глава 6 Основы проектирования систем управления ХТП
Рис. 6.60. Переходные характеристики в САР:
1 — с ПИ-регулятором; 2 — с регулятором Смита
с запаздыванием 1FO*U (.?)-ехр(-т.ип$) была такой же, как у объекта
без запаздывания IV*U (s):
(*) - = ИС (5). (6.91)
Из равенства (6.91) получают выражение передаточной функции
корректирующего звена:
(5) = И'ои (j)О + е’Твп1) (6.92)
Сравнивая переходные характеристики в САР с ПИ-регулято-
ром и с регулятором Смита (рис. 6.60), легко увидеть преимущество
САР с регулятором Смита. К недостаткам регулятора Смита относят
сложность настройки корректирующего звена, вызванную, в первую
очередь, отсутствием точных динамических и статических характе-
ристик объекта.
Применение регуляторов с компенсацией' запаздывания целесо-
образно при отношении тзап/Г> 0,5...0,7.
6.3. ТЕХНИЧЕСКИЕ СРЕДСТВА
СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Технические средства САУ обычно разделяют на четыре группы
в зависимости от выполняемых ими функций:
• устройства получения информации о состоянии объекта управле-
ния (датчики, нормирующие преобразователи, устройства формиро-
вания алфавитно-цифровой информации);
• устройства приема, преобразования и передачи информации (ком-
мутаторы, преобразователи сигналов и кодов, шифраторы и дешиф-
раторы, согласующие устройства);
6.3. Технические средства систем автоматического управления
563
• устройства обработки информации, формирования команд уп-
равления и представления информации операторам (анализаторы сиг-
налов, логические устройства, устройства памяти, регуляторы, за-
датчики, управляющие вычислительные устройства);
• устройства использования командной информации для воздействия
на объект управления (регулирующие органы, исполнительные меха-
низмы, усилители мощности и вспомогательные устройства к ним).
В основе построения технических средств автоматизации лежат
принципы агрегатизации и унификации, предусматривающие вы-
полнение различных устройств по единым информационным, кон-
структивным и эксплуатационным требованиям Реализация этих
принципов привела к разработке и организации серийного произ-
водства агрегатных комплексов средств автоматизации. Конкретные
технические решения на основе принципов агрегатизации и унифи-
кации зависят от уровня развития средств автоматизации. Эволю-
ция средств, в частности элементной базы, влечет за собой измене-
ние этих решений.
6.3.1. Основные разновидности управляющих устройств,
применяемых в системах управления ХТП
Классификацию управляющих устройств (регуляторов) выпол-
няют по различным признакам.
1. По виду регулируемой величины: регуляторы температуры, рас-
хода, давления, уровня, концентрации, pH и т. д.
Замечание
Созданы регуляторы универсального типа, предназначенные для регу-
лирования различных технологических параметров. В этих устройствах спе-
цифические особенности имеют первичный измерительный преобразова-
тель, измеряющий значение регулируемого параметра, и нормирующий
преобразователь, преобразующий измеренное значение регулируемого па-
раметра в эквивалентное значение унифицированного электрического или
пневматического сигнала.
2. По характеру перемещения регулирующего органа (РО) регулято-
ры делят на регуляторы непрерывного и дискретного действия. В ре-
гуляторах непрерывного действия РО при непрерывном изменении ре-
гулируемой величины перемещается непрерывно. РО регуляторов
дискретного действия перемещается только при достижении изменя-
ющейся регулируемой величиной определенных заданных значений.
3. По источнику энергии для перестановки регулирующего органа
различают регуляторы прямого и непрямого действия. Регуляторы
прямого действия работают без использования постороннего источ-
564
Глава 6. Основы проектирования систем управления ХТП
ника энергии, отбирая энергию, необходимую для функционирова-
ния системы регулирования, у объекта регулирования. В автомати-
ческих регуляторах непрямого действия необходимая для работы сис-
темы регулирования энергия подводится извне. В зависимости от
вида используемой энергии регуляторы непрямого действия подразде-
ляются на электрические, пневматические, гидравлические и комби-
нированные (электропневматические, электрогидравлические и т. д.).
Выбор регулятора по виду используемой энергии определяется
характером объекта регулирования и особенностями автоматичес-
кой системы.
4. По закону регулирования (по виду математической зависимос-
ти между выходной и входной величинами регулятора) регуляторы
делятся на линейные и нелинейные. Регуляторы с линейными закона-
ми регулирования в свою очередь подразделяются на:
• интегральные (И-регуляторы);
• пропорциональные (П-регуляторы);
• пропорционально-интегральные (ПИ-регуляторы);
• пропорционально-дифференциальные (ПД-регуляторы);
• пропорционально-интегрально-дифференциальные (ПИД-ре-
гуляторы).
Типовые линейные законы регулирования подробно разобраны
ранее в разд. 4.3.
Примером регуляторов с нелинейным законом регулирования
могут служить позиционные регуляторы и. в частности, двух- и трех-
позиционные регуляторы.
5. По конструктивным признакам управляющие устройства разде-
ляют на приборные и блочно-модульные.
Приборные управляющие устройства (приборные регуляторы)
предназначены для щитового монтажа. Надежны и просты в эксп-
луатации, служат для построения сравнительно несложных систем
контроля и регулирования.
В большинстве случаев идея агрегатирования пронизывает пост-
роение управляющих устройств — от элементной базы до сложных
многофункциональных устройств регулирования. Различают три уров-
ня агрегатирования: элементный, модульный и блочный. Элемент-
ный принцип предполагает использование формализованных мето-
дов построения схем, реализующих заданный алгоритм, что намно-
го упрощает проектирование новых технических средств. Элементы
унифицированы, возможно многократное применение одного и того
же элемента в одной схеме управляющего устройства и использова-
ние его в схемах самых различных управляющих устройств. Каждый
элемент выполняет вполне определенную функцию, имеет задан-
ные технические характеристики и при включении в схемы управ-
ляющих устройств не требует дополнительной отладки. Модульный
6.3. Технические средства систем автоматического управления
565
принцип предполагает построение устройств из ряда элементов для
выполнения самостоятельных функций. Блочный принцип предпо-
лагает построение устройств из ряда однотипных модулей. На осно-
ве блочно-модульного принципа конструируют управляющие уст-
ройства, предназначенные для построения сложных аналогово-дис-
кретных систем контроля и регулирования с числом параметров до
нескольких сотен.
6.3.2. Автоматические регуляторы
прямого и непрямого действия
6.3.2.1. Регуляторы прямого действия
В регуляторах прямого действия воздействие регулируемой ве-
личины на первичный измерительный преобразователь регулятора
служит своеобразным источником энергии как для формирования
закона регулирования, так и для перемещения затвора регулирую-
щего органа. К таким регуляторам энергия извне не подводится.
Автоматические регуляторы прямого действия широко применяют-
ся в системах стабилизации таких технологических параметров, как
давление, расход, уровень, температура и т. д.
Регуляторы прямого действия имеют определенные преимуще-
ства по сравнению с регуляторами непрямого действия. Первые авто-
номны (не потребляют энергию от
посторонних источников), не име-
ют искрообразующих элементов
(что важно для химической техно-
логии, изобилующей пожароопасны-
ми и взрывоопасными производства-
ми), надежны (имеют небольшое ко-
личество элементов), просты в
изготовлении, монтаже и ремонте.
На рис. 6.61 показан автомати-
ческий регулятор давления прямого
действия, поддерживающий задан-
ное значение давления среды в тру-
бопроводе после регулирующего
клапана, т. е. «после себя». Конст-
руктивно регулятор выполнен в виде
клапана с мембранным приводом.
На мембрану 1 оказывают воздей-
ствие давление измеряемой среды
в трубопроводе и противодейству-
ющая пружина 2.
Рис. 6.61. Регулятор давления пря-
мого действия:
1 — мембрана; 2 — пружина; 3 — шток;
4 — затвор; 5 — седло; 6 — импульсная
трубка
566
Глава 6 Основы проектирования систем управления ХТП
При заданном значении давления условие равновесия сил, воз-
действующих на мембрану, имеет вид:
рмЛм = ch, (6.93)
где рзл — заданное значение давления в трубопроводе, Па; Лм —
эффективная площадь мембраны, м2; с — жесткость пружины, Н/м;
h — перемещение регулирующего органа, жестко соединенного што-
ком с мембраной, м
Если давление р в трубопроводе увеличилось на значение Др по
отношению к заданному значению давления рзд, тогда мембрана 1
прогибается вниз, перемещая регулирующий орган (клапан) на Д/г,
при котором сила сжатия пружины уравновешивает возросшее дав-
ление среды на мембрану. Запишем новое условие равновесия сил
на мембране:
(Ри + Др)Л =С(Л + ДА) (6.94)
или с учетом (6.93)
ДрЛм = сА/г, (6.95)
откуда окончательно получим:
Д/г = ^-Др. (6 96)
С
Таким образом, в приращениях от заданного равновесного со-
стояния регулятор давления прямого действия формирует пропор-
циональный закон регулирования:
Ди = АГрДу,
где Ди = Д/г — выходная величина регулятора прямого действия, рав-
ная приращению перемещения клапана; Кр = Аы/с — коэффициент
передачи регулятора (параметр настройки регулятора); Ду s Др —
входная величина регулятора, равная отклонению давления от за-
данного значения.
Заданное значение давления (регулируемой величины) устанав-
ливается изменением натяжения пружины 2.
Регулятор расхода прямого действия аналогичен регулятору дав-
ления. Отличие состоит лишь в том, что в трубопровод устанавлива-
ют сужающее устройство, перепад давлений на котором, зависящий
от расхода, и воздействует на мембрану /. Примером регулятора уровня
прямого действия может служить поплавковое контактное регулиру-
ющее устройство.
В регуляторах температуры прямого действия используется, как
правило, термометрическая система, состоящая из термобаллона.
6.3. Технические средства систем автоматического управления
567
частично заполненного низкокипящей жидкостью, капилляра и силь-
фона. При изменении температуры среды, в которую помещается
гермобаллон, в термометрической системе изменяется давление па-
ров жидкости, в результате чего сильфон или сжимается, или раз-
жимается, перемещая, аналогично мембране на рис. 6.61, затвор ре-
гулирующего клапана.
Замечание
Заданное значение температуры устанавливается изменением натяже-
ния пружины, воздействующей на сильфон
Все регуляторы прямого действия, как правило, реализуют наи-
более простой закон регулирования — пропорциональный.
6.3.2.2. Регуляторы непрямого действия
Электрические автоматические регуляторы применяются для ре-
гулирования невзрывоопасных объектов при больших расстояниях
от пультов управления до объекта регулирования.
Достоинства', относительная простота реализации сложных схем
автоматического управления; наличие на объектах управления элек-
трической энергии; возможность при необходимости разработки
систем регулирования без подвижных частей; большое быстродей-
ствие при передаче, переработке и отображении информации, вы-
работке и передаче управляющих сигналов.
Недостатки: повышенная стоимость обеспечения безопасности
(при работе во взрывоопасных зонах); повышенная опасность (по-
ражение обслуживающего персонала электрическим током); слож-
ность устройства (особенно электронных, микропроцессорных); не-
обходимость в обслуживающем персонале высокой квалификации.
Пневматические автоматические регуляторы применяются во
взрывоопасных и пожароопасных зонах и помещениях при неболь-
ших расстояниях (до 400 м) от пультов управления до объекта ре-
гулирования.
Достоинства: относительная простота конструкции всех элемен-
тов регулятора; простота в обслуживании и наладке; пожаро- и
взрывобезопасность.
Недостатки: необходимость в специальном источнике питания
систем пневмоавтоматики сжатым воздухом; высокие требования к
очистке воздуха от пыли, влаги и масла; большая инерционность
элементов пневмоавтоматики, линий связи и ограниченность в свя-
зи с этим их протяженности.
Гидравлические регуляторы применяются в пожаро- и взрывобе-
зопасных помещениях, как правило, при непосредственном разме-
щении элементов регулятора в зоне объекта регулирования.
568
Глава 6. Основы проектирования систем управления ХТП
Достоинства-, гидравлические регуляторы надежны в работе, их
исполнительные механизмы при небольших размерах развивают
большие перестановочные усилия
Недостатки-, необходимость в специальном источнике питания
регулятора рабочей жидкостью (в большинстве случаев — маслом);
ограниченность радиуса действия; требование полной герметизации
всех элементов регулятора и линий связи; трудность реализации слож-
ных законов регулирования.
Комбинированные регуляторы применяются в тех случаях, когда
необходимо использовать отдельные преимущества электро-, пнев-
мо- или гидрорегуляторов. Например, если требуется разработать
автоматическую систему регулирования взрывоопасным объектом
при большом удалении пульта управления от объекта, то можно
применить электропневматические регуляторы. Первичный изме-
рительный преобразователь (датчик), исполнительный механизм и
линии связи в пределах взрывоопасных зон выполняют с использо-
ванием энергии сжатого воздуха, а элементы регулятора на пульте
управления и линии связи до объекта управления — с использова-
нием электрической энергии.
Сопряжение линий электрической связи с пневматическими
линиями связи осуществляют на границах взрывоопасных зон с по-
мощью специальной преобразующей пневмоэлектрической и элек-
тропневматической аппаратуры. Так, пневматический сигнал отдат-
чика с помощью пневмоэлектропреобразователя преобразуется в
эквивалентный электрический сигнал (см разд. 5.7), который пере-
дается по электрическим линиям связи на электрические элементы
регулятора в пульт управления, а электрический сигнал от пульта
управления с помощью электропневмопреобразователя преобразу-
ется в эквивалентный пневматический сигнал, который по пневма-
тическим линиям связи поступает на пневматический исполнитель-
ный механизм.
6.3.3. Построение управляющих устройств
с использованием пневматических средств
автоматизации
Наглядно и сравнительно просто можно рассмотреть принципы
построения управляющих устройств и реализацию законов регули-
рования на примере использования пневматических средств авто-
матизации (ПСА).
Поскольку на многих действующих химических производствах
применяются ПСА, остановимся на них несколько подробнее.
6.3. Технические средства систем автоматического управления
569
Пневматические средства автоматизации — технические устрой-
ства, использующие энергию сжатого воздуха.
Достоинства', пожаро- и взрывобезопасны; обладают высокой на-
дежностью (при работе в условиях агрессивных сред, электромагнит-
ных и температурных помех); сравнительно просты в эксплуатации.
Недостатки: низкое быстродействие (по сравнению с электри-
ческими средствами автоматизации), связанное с небольшой скоро-
стью передачи пневматических сигналов по каналам связи; неболь-
шое расстояние от ТОУ (максимальная длина пневматических ком-
муникаций не превышает нескольких сотен метров); сложность
построения высокоточных вычислительных устройств.
Область применения: пожаро- и взрывоопасные производства (на-
пример, в технологии неорганических веществ — производство ам-
миака, в технологии органических веществ — нефтехимический син-
тез, производство полимеров и т. д.).
Примечание
Пневматические средства используются для автоматизации производств,
которые характеризуются сравнительно небольшими скоростями протекания
процессов с предельными частотами изменения параметров около 0,1 рад/с.
Принципы конструирования
Пневматические средства автоматизации ГСП конструируются
на основе компенсации усилий и содержат преобразователи давле-
ний в усилия и мембранные сравнивающие устройства (мембран-
ные компараторы). Эти устройства характеризуются малыми пере-
мещениями чувствительных элементов и большими коэффициента-
ми усиления, т. е. по сути своей являются усилительными звеньями.
6.3.3.1. Первый уровень агрегатизации
Первый уровень агрегатизации — элементный. Основа пневма-
тических средств автоматизации — универсальная система элемен-
тов промышленной пневмоавтоматики (УСЭППА), комплекс ми-
ниатюрных элементов и модулей пневмоавтоматики (КЭМП), сис-
тема элементов струйной техники (частично).
Элемент промышленной пневмоавтоматики — законченная конст-
рукция, предназначенная для выполнения одной какой-либо простой
операции (например, преобразования, усиления, сложения и т. д.). Эле-
менты могут быть простыми (неделимыми) и сложными (составны-
ми). Простые элементы: дроссели, емкости, мембраны, сильфоны,
пружины и т. д. Из них конструируют сложные, например, пневмо-
камеры, усилители, реле и т. д.
По характеру изменения сигналов во времени элементы делятся
на аналоговые и дискретные. Аналоговые сигналы изменяются в
570
Глава 6. Основы проектирования систем управления ХТП
диапазоне от 20 кПа до 100 кПа, дискретные сигналы принимают
условное значение «0» (не более 10 кПа) и «I» (не менее 110 кПа).
Питание элементов УСЭППА и КЭМП осуществляется сжатым воз-
духом под давлением (140 ± 14) кПа. Элементы УСЭППА имеют
небольшие габаритные размеры (в среднем 40 х 40 х 50 мм); линей-
ные размеры элементов КЭМП примерно в 2 раза меньше.
Простые элементы
Дроссели (пневмосопротивления) предназначены для изменения
расхода потока воздуха за счет создания местного сопротивления в
пневматических линиях (рис. 6.62).
Постоянный дроссель (нерегулируемое пневмосопротивление с
постоянной площадью проходного сечения) представляет собой ка-
пилляр (рис. 6.62, а) с отношением его длины (мм) к диаметру (мм),
равным 20/0,18; 20/0,3 и т. д. Большое отношение обеспечивает ла
минарное течение воздуха. Статическая характеристика постоянно-
го дросселя определяется равенством вида
F = аЬр = а(р1-р2), (6.97)
где F— массовый расход воздуха; а — коэффициент проводимости по-
стоянного дросселя; &р — перепад давления на постоянном дросселе.
Примечание
Статические характеристики дросселей (пневмосопротивлении) обыч-
но не линейны, но при небольших перепадах давления их можно линеари-
зовать в виде уравнения (6.97). Такая линеаризация допустима для дроссе-
лей с ламинарным течением при перепаде давления на постоянном дроссе-
ле Др < 30 кПа.
Регулируемый дроссель. Например, типа конус—конус (рис. 6.62, б).
Перемещение внутреннего конуса изменяет площадь кольцевого
а б в
Рис. 6.62. Пневматические сопротивления и их условные обозначения:
а — капилляр; б конус—конус; в — сопло—заслонка
6.3 Технические средства систем автоматического управления
571
шзора регулируемого дросселя и его гидравлическое сопротивление,
при этом проводимость дросселя изменяется примерно в 103 раз.
Регулируемый дроссель настраивается поворотом винта, связанного
с внутренним конусом.
Статическая характеристика регулируемого дросселя определя-
ется равенством вида
F =рдР = р(Р1 -р2), (6.98)
где р — коэффициент проводимости регулируемого дросселя.
Переменный дроссель. Например, типа сопло—заслонка (рис. 6.62, в).
Его гидравлическое сопротивление изменяется при перемещении
заслонки относительно сопла. Режим истечения воздуха в дросселе
типа сопло—заслонка — турбулентный.
Примечание
Статическая характеристика дросселя типа сопло—заслонка динеина
при перемещениях заслонки /? < 0,08 мм.
Пневмоемкости. Их назначение — на-
копить сжатый воздух. Основная харак-
теристика пневмоемкости — постоянный
или переменный объем И (рис. 6.63).
В КЭМП применяется емкость с по-
стоянным объемом И= 25 см3.
Мембраны применяют для преобра-
зования давления р или перепада дав-
ления Др в перемещение h или силу F.
Часто применяют «вялые» плоские или
гофрированные мембраны из тонкой
прорезиненной ткани с малой собствен-
ной упругостью. Такие мембраны име-
ют жесткие центры. При малых пере-
мещениях мембраны рассматривают
как статические звенья нулевого поряд-
ка (усилительные) с передаточной фун-
кцией
f4£(T)]
/'[Др(т)]
Рис. 6.63. Пневматическая ем-
кость постоянного объема (а) и
ее условное обозначение (6)
(6.99)
где А — эффективная площадь мембраны.
Сильфоны преобразуют перепад давления Др в перемещение h
или силу F. Тонкостенные гофрированные сильфоны со значитель-
ным коэффициентом жесткости с при Др < 200 кПа в области низ-
572
Глава 6. Основы проектирования систем управления ХТП
ких частот рассматривают как статические звенья нулевого порядка
(усилительные) с передаточной функцией:
^[АЛ(т)] _ а
W(s) = г , п
#[Дд(т)
(6.100)
с
где А — эффективная площадь сильфона.
Примечание
Эффективную площадь сильфона можно рассчитать по приближенной
формуле А = it(dH + rfB)3 /16, где d„, d„ — наружный и внутренний диамет-
ры сильфона
Пружины преобразуют силу F в перемещение h. В области низ-
ких частот цилиндрические пружины с коэффициентом жесткости с
рассматривают как статические звенья нулевого порядка (усилитель-
ные) с передаточной функцией:
1Г(5) =
ФСО] = 1
с'
(6 101)
Механические рычаги суммируют перемещения и силы.
Сложные элементы
К сложным элементам относят пневматические камеры, дрос-
сельные делители, усилители давления и мощности, сумматоры, реле,
преобразователи перемещений и сил в давление. Рассмотрим неко-
торые из них.
Пневматические камеры. В зависимости от схемы подвода и от-
вода воздуха пневматические камеры могут быть глухими или про-
точными (рис. 6.64). Пневматические камеры в сочетании с дроссе-
лями используют в качестве инерционных элементов.
Пример
» Вывести уравнение динамики глухой пневматической камеры
(рис. 6.64, а) при ламинарном изотермическом истечении воздуха
через постоянный дроссель с коэффициентом проводимости а.
Решение. Запишем уравнение материального баланса для пнев-
матической камеры с учетом (6.97):
F = a(/>l -p) = dm/dt, (6.102)
где F— массовый расход воздуха через постоянный дроссель; dm —
приращение массы воздуха в пневматической камере.
6.3. Технические средства систем автоматического управления
573
Рис. 6.64. Пневматические камеры:
а — глухая; о — проточная и их условные обозначения (в, г)
Из уравнения состояния идеального газа выразим массу воздуха
в пневматической камере т\
т = pV/(RQ), (6.103)
где р — давление воздуха в пневматической камере; V— объем пнев-
матической камеры; R — газовая постоянная воздуха; 0 — темпера-
тура воздуха в пневматической камере. Продифференцируем (6.103)
по времени’
dm=2 dp (6.104)
dr RQ dr
Подставив dw/dr из уравнения (6.104) в (6.102), получим:
где pi — давление воздуха до постоянного дросселя.
Таким образом, по динамическим свойствам глухая пневмати-
ческая камера соответствует статическому звену первого порядка с
коэффициентом усиления К= 1, В установившемся состоянии р = р\.
Передаточная функция глухой пневматической камеры имеет вид:
<61“>
где Т = V/aRQ — постоянная времени камеры.
Уравнение динамики проточной камеры (рис. 6.64, 6), воздух в
которую поступает через постоянный дроссель с коэффициентом
проводимости а и вытекает через регулируемый дроссель с коэффи-
циентом проводимости (3, записывают в таком виде:
Т~ + Р = К[Р' +К2Р2’ (6Л07)
574
Глава 6. Основы проектирования систем управления ХТП
где Т= ¥/[(а + р)ЛЭ] — постоянная времени проточной пневмати-
ческой камеры; Къ К2 — коэффициенты усиления по давлениям р}
и р2 соответственно:
<х'+*г=1)-
Дроссельные делители (или сумматоры) предназначены для сум-
мирования нескольких пневматических сигналов р2, рп с весо-
выми коэффициентами к), к2, к„. Наиболее часто применяется
дроссельный сумматор на два пневматических сигнала (рис. 6.65),
состоящий из постоянного дросселя и регулируемого дросселя с
коэффициентами проводимости аир соответственно. Входные ве-
личины сумматора — давления р\ и р2, выходная величина — давле-
ние р. Уравнение динамики дроссельного сумматора аналогично
уравнению (6.107). В статических условиях уравнение (6 107) при-
нимает вид:
Р
P~^P'+^P2~KlP1 + K2P2'
(6.108)
Величины коэффициентов и К2 можно изменять в пределах
от нуля до единицы (изменяя проводимость регулируемого дроссе-
ля), поэтому сумматор на дросселях называют также делителем.
В пневматических регуляторах выход дроссельного сумматора
обычно подключается к одной из камер элементов сравнения —
мембранных сумматоров. Объем этих камер небольшой, и их посто-
янную времени можно принимать равной нулю. В таком случае ди-
намика дроссельных делителей (сумматоров) может быть представ-
лена статическими звеньями нулевого порядка.
Элементы сравнения предназначены для сравнения двух или че-
тырех пневматических сигналов и получения выходных дискретных
сигналов «0» или «1» в зависимости от знака алгебраической суммы
сравниваемых давлений. Основу конструкции элементов сравнения
составляют два последовательно включенных переменных пневмо-
сопротивления типа сопло—заслонка и мембранный сумматор сил,
формируемых давлениями р{, р2 или р\.-.р^ (рис. 6.66).
Рис. 6.65. Схема дроссельного делителя (а) и его условное обозначение (6)
6.3. Технические средства систем автоматического управления
575
Рис. 6.66. Усилители давления (элементы сравнения):
а — двухвходовой; б — четырехвходовой и их структурные схемы (в, г)
Выходное давление рвых двухвходового трехмембранного элемента
сравнения (рис. 6.66, а) определяется разностью давлений
Др = Р\ -Р2,
а четырехвходового пятимембранного элемента сравнения (рис. 6.66, б)
можно выразить разностью давлений
Ьр - Р\ - Рг + Рз ~ Рь-
Теоретически элементы сравнения представляют собой пневма-
тические реле.
Рвых
1, если Др > 0;
0, если Др < 0.
(6.109)
Фактически при небольшом значении
Др положение мембранного блока и, сле-
довательно, выходное давление рвых од-
нозначно зависят от разности входных
сигналов Др (рис. 6.67):
Рвых ЛГДр = /Г(р,-р2) >1), (6.110)
т. е. элементы сравнения могут рассмат-
риваться как статические звенья нулево-
Рис. 6.67. Статическая харак-
теристика мембранного уси-
лителя давления
576
Глава 6. Основы проектирования систем управления ХТП
го порядка с большим коэффициентом усиления. Поэтому их назы-
вают также усилителями давления
Передаточная функция элементов сравнения при малых значе-
ниях Др:
^(j)= К »1
(6 111)
Элементы сравнения используют
для построения мембранных суммато-
ров, предназначенных для алгебраичес-
кого суммирования непрерывных пнев-
матических сигналов. Например, на
четырехвходовом усилителе суммиро-
вание пневматических сигналов осу-
ществляется введением отрицательной
обратной связи (рис. 6.6S).
С точки зрения динамики мемб-
ранные сумматоры имеют свойства
статического звена нулевого порядка
(усилительного).
Пневмоповторители—усилители
предназначены для увеличения расхо-
да воздуха без существенного измене-
ния его давления. Пневмоповторитель
— усилитель мощности используется как конечный элемент пневма-
тических устройств (например, регуляторов) и позволяет передавать
пневматические сигналы на расстояние до 300 м. Он имеет невысо-
кую точность повторения давления, фактически
Рвых. = Рвх 0 + Б) ’
(6 112)
где 5 — относительная погрешность повторения.
Задатчики служат для формирования пневматических сигналов
определенной величины.
Реле применяют для коммутации пневматических сигналов и
выполнения простейших логических операций.
6.3.3.2. Второй уровень агрегатизации
Второй уровень агрегатизации — модульный. Модуль — устрой-
ство, состоящее из ряда элементов, закрепленных на унифицирован-
ной плате и соединенных внутренними коммуникационными кана-
лами, предназначенное для выполнения самостоятельных функций
(например, интегрирования, дифференцирования, запоминания).
Точные повторители—усилители мощности могут быть сконстру-
ированы на основе двухвходового усилителя давления и повторите-
6.3. Технические средства систем автоматического управления
577
Рис. 6.69. Структурная
схема точного мощно-
го повторителя
ля — усилителя мощности, соединенных последовательно и охва-
ченных стопроцентной отрицательной обратной связью (рис. 6.69)
Его передаточная функция равна
W (5)
АГ (1+5) 1 + 5
1 + Х(1 + 5)-1 (1/АГ)+(1 + 5)"
(6.113)
Поскольку К » 1, величиной \/К в (6.113) можно пренебречь.
Полученная передаточная функция показывает, что такой повтори-
тель реализует операцию повторения с высокой точностью
Интегратор построен на основе пневматической ЛС-цепи, охва-
ченной стопроцентной положительной обратной связью (рис. 6,70).
ЛС-цепь состоит из глухой камеры объемом Ии регулируемого пнев-
мосопротивления с коэффициентом проводимости р. Входной сиг-
нал Др = рм — рвх и сигнал обратной связи суммируются с помощью
пятимембранного сумматора. Динамику модуля интегрирования ха-
рактеризуют передаточной функцией:
1
_ у(Ри) . 7> + 1
।_____1
Ги5 + 1
(6 114)
где Ти = ИДРЛ0).
Дифференциатор строится на основе трехмембранного усилите
ля, в цепь обратной отрицательной связи которого включена пнев
матическая /?С-цепочка, состоящая из глухой камеры и регулируе-
мого пневмосопротивления (рис. 6.71).
а
19 Беспалой А. В.. Харп гонов 11. И
-о р
ги
Рис. 6.70. Пневматичес-
кий модуль интегриро-
вания (а) и его структур-
ная схема (6)
578
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.71. Пневматический модуль дифферен-
цирования (а) и его структурная схема (б)
Если коэффициент усиления трехмембранного усилителя Л"» 1,
а «паразитные» емкости малы, динамику такого дифференциатора
можно представить передаточной функцией:
Ж ------------------Ц— = T-s + ’’ (6-115)
9 ' 1 + к _ 1 ,
Тп5 + 1
где Тп = ИДрЛО).
6.3.3.3. Третий уровень агрегатизации
Третий уровень агрегатизации — блочный. Блок — функциональ-
но законченная конструктивная единица, состоящая из ряда элемен-
тов и модулей. Блочный принцип широко используется для построе-
ния пневматических и пневмоэлектрических комплексов управления
сложными технологическими объектами. На рис. 6.72 приведена
структурная схема пневматической САР, в которую входят датчик Д,
вторичный измерительный прибор ВП, регулирующий блок Р и ис-
полнительное устройство, состоящее из исполнительного механизма
ИМ и регулирующего органа РО. Измеренное с помощью датчика
Рис. 6.72. Структурная схема пневматической САР. Пояснения см в тексте
6.3. Технические средства систем автоматического управления
579
текущее значение регулируемого параметра должно быть преобразо-
вано в унифицированный пневматический сигнал. Преобразование
осуществляется с помощью встроенного в датчик нормирующего
пневматического преобразователя или, если выходной сигнал дат-
чика электрический, с помощью комплекта из нормирующего токо-
вого преобразователя НП и электропневмопреобразователя. Пнев-
матический сигнал от датчика поступает в регулятор и одновремен-
но во вторичный прибор, снабженный станцией управления СУ. В
станцию управления входят переключатель для выбора режима ра-
боты системы регулирования (автоматического, программного или
ручного дистанционного), задатчик ЗД для формирования задающе-
го воздействия в автоматическом режиме и командного сигнала в
режиме ручного дистанционного управления, а также выключатель,
формирующий команду рк отключения регулятора. Регулятор в со-
ответствии с законом регулирования (позиционный, П, ПИ, ПД,
ПИД) вырабатывает командный сигнал и посылает его по каналу
связи на пневматический исполнительный механизм. В целях полу-
чения наибольшей стабильности регулирования и минимального
времени переходного процесса расстояния от измерительного блока
до регулятора и от регулятора до исполнительного механизма долж-
ны быть минимальными (5... 10 м). Вторичные приборы с встроен-
ными в них задатчиками могут устанавливаться на расстоянии до
300 м от регулятора. В случае регулирования процессов, для кото-
рых запаздывание в линиях связи не имеет значения по сравнению с
большим запаздыванием в самих процессах, регуляторы могут уста-
навливаться на значительном расстоянии от исполнительных меха-
низмов и датчиков (до 300 м).
Пневматические регуляторы имеют одинаковую функциональ-
ную структуру (см. рис. 6.72): мембранный сумматор для сравнения
сигналов 1, поступающих от датчика Д и задатчика ЗД, модуль фор-
мирования закона регулирования 2, точный повторитель — усили-
тель мощности 3.
Рассмотрим вариант реализации наиболее распространенного
промышленного регулятора, пропорционально-интегрально-диффе-
ренциального, упрошенная структурная схема которого показана на
рис. 6.73.
Блок ПИД-регулятора можно представить состоящим из рас-
смотренных выше элементов и модулей. Интегральная составляю-
щая закона регулирования формируется с помощью интегратора И
(см. рис. 6.70), дифференциальная составляющая — с помощью диф-
ференциатора Д (см. рис. 6.71). Суммирование рд, ри и рзд осуществ-
ляется на пятимембранном сумматоре (см. рис. 6.68). Полученный
пневматический сигнал умножается на коэффициент усиления Кр в
дроссельном сумматоре П (см. рис. 6.65) и поступает на вход точно-
19*
580
Глава 6 Основы проектирования систем управления ХТП
Р*
Рис. 6.73. Структурная схема ПИД-регулятора
го повторителя — усилителя мощности У для увеличения расхода
сжатого воздуха. В результате ПИД-регулятор формирует пневмати-
ческий сигнал в соответствии с уравнением;
Рвых
'и о u .
где Кр — коэффициент усиления; Ти — время изодрома; Тп — время
предварения; рвх — давление, соответствующее текущему значению
регулируемого параметра; — давление, соответствующее задан-
ному значению параметра.
Следует отметить, что построенный по рассмотренной схеме
регулятор формирует ПИД-закон регулирования только по каналу
текущего значения регулируемого параметра. По каналу задающего
воздействия формируется ПИ-закон регулирования.
Примечание
Работоспособность пневматических регуляторов и измерительных уст-
ройств зависит от качества воздуха, применяемого в системах пневмоавто-
матики, поэтому подготовке воздуха уделяется особое внимание. На про-
мышленных химических предприятиях, где используются пневматические
средства управления, имеются специальные компрессорные станции с ма-
гистральными и распределительными пневмопроводами для питания пнев-
матических регуляторов и измерительных устройств сжатым воздухом оп-
ределенного давления (0,4... 1 МПа), осушенного и очищенного от пыли,
механических примесей, компрессорного масла.
6.3.4. Исполнительные устройства
Устройство автоматической системы управления, воздействую-
щее на технологический процесс в соответствии с полученным от
управляющего устройства командным сигналом, называется испол-
нительным устройством. Выходным параметром исполнительного
устройства (ИУ) является расход вещества или энергии, поступаю-
6.3 Технические средства систем автоматического управления
581
тих в объект управления или выходящих из него, а входным —
командный сигнал управляющего устройства.
Исполнительное устройство содержит, как правило, несколько
функциональных блоков: усилитель мощности; исполнительный
механизм; регулирующий орган; датчик положения; блок обратной
связи; блок сигнализации крайних положений; блок ручного управ-
ления.
В зависимости от конкретных условий структура и конструкция
ИУ могут существенно различаться. Например, если управляющим
воздействием является изменение потока электроэнергии (в аппара-
тах с электрообогревом, в электролитических ваннах, в электроли-
зерах), то необходимость в исполнительном механизме и регулиру-
ющем органе отпадает, а роль исполнительного устройства играет
усилитель. В ряде устройств регулирующий орган является частью
технологического оборудования Например, при формовании поли-
мерных пленок, асбестоцементных плит, металлического проката
толщина изделия регулируется за счет изменения расстояния между
прокатными валками, которые и являются в данном случае регули-
рующим органом.
Замечание
Структура исполнительного устройства может быть разнообразной.
Например, микропроцессорная техника позволяет регуляторы встраивать в
исполнительные устройства, тем самым превращая ИУ в комбинированные
устройства для управления различными технологическими параметрами.
По виду действия ИУ делятся на нормально открытые (НО) и
нормально закрытые (НЗ). При прекращении подвода энергии, со-
здающей перестановочные усилия, проходное сечение нормально
открытого ИУ полностью открывается (рис. 6.74, а), нормально зак-
рытого ИУ — полностью перекрывается (рис 6.74, б).
Исполнительные устройства типа НО целесообразно применять,
когда при аварийном прекращении подачи воздуха в исполнитель-
ный механизм безопасно иметь открытую технологическую линию
(трубопровод). В противном случае применяют исполнительные ус-
тройства типа НЗ. Например, в ректификационной колонне на тех-
нологических линиях подачи исходного сырья и теплоносителя для
его подогрева, а также на линиях отбора высококипяшего и низко-
кипящего компонентов ставят исполнительные устройства типа НЗ;
на линиях же подачи пара в куб ректификационной колонны и оро-
шения в верхнюю часть (укрепляющую) ректификационной колон-
ны устанавливают исполнительные устройства типа НО. В случае
аварийной ситуации ректификационная колонна работает «сама на
себя». Из такого состояния ректификационную колонну легче выве-
сти на заданный режим, чем из состояния полного ее останова.
582
Глава 6 Основы проектирования систем управления ХТП
Рис. 6.74. Схемы клапанов с мембранными исполнительными механиз-
мами:
а — нормально открытый (НО); б — нормально закрытый (Н3); 1 — шток;
2 — пружина; 3 — мембрана; 4 — затвор; 5 — седло
Исполнительное устройство является «рабочей лошадкой» про-
цессов управления. Одно из главных требований к ИУ — высокая
надежность работы. В большинстве современных контуров управле-
ния используются датчики и регуляторы без движущихся частей.
Единственным элементом контура, содержащим движущиеся части,
остается исполнительное устройство. Следовательно, оно наиболее
подвержено износу и коррозии и требует повышенного внимания
для того, чтобы находиться в рабочем состоянии. К сожалению, ис-
полнительное устройство является также и наиболее затратным эле-
ментом контура регулирования. На его долю приходится от 50 % до
75 % капитальных затрат на контур регулирования и до 90 % затрат
на ремонт и текущие расходы.
Правильный выбор и расчет исполнительных устройств имеет
первостепенное значение, поскольку погрешности в их работе не-
посредственно влияют на качество управления.
Основными функциональными блоками ИУ являются исполни-
тельный механизм и регулирующий орган.
6.3.4.1. Регулирующие органы
Регулирующий орган (РО) — техническое средство изменения
материального или энергетического потока, влияющего на регули-
руемую величину в ОУ. Это устройство, непосредственно воздей-
ствующее на ОУ для поддержания заданного значения регулируе-
мой величины или изменения ее по заданному закону. Регулирую-
6.3. Технические средства систем автоматического управления
583
щие органы различаются по непрерывности воздействия на расход
рабочей среды, по конструкции, по пропускным характеристикам,
по типоразмерам, по материалам, применяемым для их изготовле-
ния, области применения.
Для непрерывного регулирования расхода жидкостей и газов в
химической промышленности широко применяются дроссельные РО,
представляющие собой переменное гидравлическое сопротивление
для протекающей рабочей среды. Изменение расхода рабочей среды
осуществляется за счет изменения проходного сечения РО
Распространены также устройства для регулирования расхода
рабочей среды изменением располагаемого напора. К этому классу
РО можно отнести приводы с регулируемой угловой скоростью вра-
щения, устройства для ее изменения.
Для регулирования расхода сыпучих материалов применяются
питатели: ленточные, шнековые, скребковые, дисковые, лопаст-
ные и т. д.
Дроссельные регулирующие органы
К дроссельным РО можно отнести регулирующие клапаны раз-
личных конструкций (односедельные, двухседельные, клеточные,
шаровые, трехходовые, шланговые, диафрагмовые и др.), поворот-
ные заслонки, шиберы, краны и т. д.
Среди регулирующих клапанов дроссельного типа различают
клапаны прямого и обратного действия. У клапанов прямого дей-
ствия (см. рис. 6.74, а) затвор при движении вниз уменьшает про-
ходное сечение РО, а у клапана обратного действия (см. рис. 6.74, 6} —
увеличивает.
Иногда, в зависимости от характера движения и формы затвора,
различные конструкции РО объединяют в конструктивные группы:
с плунжерным затвором (односедельные, двухседельные, клеточные,
трехходовые); бесплунжерные (шланговые, диафрагмовые), с пово-
ротным затвором (шаровые, поворотные заслонки).
По числу затворов дроссельные устройства делятся на односе-
дельные и двухседельные.
В односедельном РО (рис. 6.75, а) проходное сечение образовано
одним цилиндрическим или профилированным затвором 2, кото-
рый перемещается вдоль оси неподвижного седла 3. При перемеще-
нии затвора изменяется проходное сечение и соответственно расход
среды, проходящей через РО. Односедельные РО применяют в ИУ
малых размеров при низких давлениях среды. Для регулирования
расхода особо агрессивных сред применяют футерованные односе-
дельные РО. Материалом футеровки служат пластические материа-
лы, такие как фторопласт, пентапласт и т. д. Основным недостатком
односедельных РО является неразгруженный затвор, поскольку ре-
584
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.75. Схемы регулирующих органов:
а — сщноседельный; б — двухседельный (1 — шток; 2 — затвор; 3 — седло)
гулируемая рабочая среда действует на плунжер сверху и снизу с
разной силой, так как находится под разным давлением. Это приво-
дит к необходимости применять сравнительно мощные исполни-
тельные механизмы.
В двухседельном РО (рис. 6.75, б; 6.76, б) проходное сечение об-
разовано двумя цилиндрическими или профилированными затвора-
ми, перемещающимися вдоль оси двух неподвижных седел. При
перемещении затворов изменяется проходное сечение и соответствен-
но расход среды, проходящей через РО. Двухседельные РО отлича-
ются высокой надежностью и применяются для изменения расходов
жидкостей, паров и газов, параметры которых могут изменяться в
широких пределах. Пропускная способность двухседельного РО при-
мерно в 1,6 раза выше пропускной способности односедельного РО
при одинаковом диаметре условного прохода. Затвор двухседельно-
го РО разгружен, так как усилия, создаваемые регулируемой средой,
действуют на плунжеры в противоположных направлениях. Разгруз-
а б
Рис. 6.76. Конструкция регулирующих органов:
а — клеточного (7 — корпус; 2 — направляющая; 3 — затвор); б
двухседельного (7 — седло; 2 — шток; 3 — сальник; 4 — затвор)
6.3. Технические средства систем автоматического управления
585
ка затвора в двухседельных РО по сравнению с односедельными улуч-
шает качество регулирования и снижает необходимое перестановоч-
ное усилие ИМ, а следовательно, габариты и массу ИМ.
Замечание
Односедельные и двухседельные РО не применяются для изменения
расхода суспензии или пульпы, а также расхода жидкостей, способных к
кристаллизации. В противном случае твердые частицы оседают в нижней
части регулирующего органа, что препятствует нормальному перемеще-
нию его затвора. Кроме того, наличие твердых частиц в движущейся среде
приводит к износу корпуса и поверхностей затвора, а также седел.
В клеточном РО (рис. 6.76, о) проходное сечение образовано
профилированными отверстиями в клетке 2 и затвором 3, перекры-
вающим эти отверстия. Затвор 3 представляет собой полый цилиндр
с отверстиями в верхнем торце для уравновешивания давлений над
затвором и под ним. Затвор перемещается в клетке-направляющей 2,
которая одновременно служит седлом затвора. В данной конструк-
ции затворная пара имеет не одну, а две посадочные поверхности,
что позволяет значительно повысить герметичность регулирующего
органа. В клеточном регулирующем органе устранены недостатки
односедельного РО (неразгруженность затвора) и двухседельного РО
(негерметичность затвора).
В шланговом регулирующем органе (рис. 6.77) регулируемая среда
проходит через эластичный патрубок 3 (шланг), который, деформиру-
ясь под действием усилия, развиваемого исполнительным механизмом,
изменяет площадь проходного сечения и, следовательно, пропускную
способность. В зависимости от среды шланги мшуг быть изготовлены
из бензостойких, маслостойких, химически стойких, эрозионно-стой-
ких материалов. Шланговые регулирующие органы применяются для
изменения расхода сред, содержащих твердые и абразивные частицы,
шламообразующих, а также агрессивных сред, например, кислот, в
которых стойки резиновые шланги соответствующих марок. Основны-
ми преимуществами шланговых РО являются малое гидравлическое
сопротивление, отсутствие застойных зон, отсутствие уплотнения штока
в связи с герметичностью проточной части, надежное перекрытие по-
тока в закрытом положении. К недостаткам шланговых РО относятся
невысокая допустимая температура (до 80 °C), небольшое рабочее дав-
ление (до 1 МПа), значительная неуравновешенность РО, небольшой
срок службы эластичного патрубка.
В диафрагмовом регулирующем органе (рис. 6.78) изменение про-
ходного сечения осуществляется за счет деформации эластичной
диафрагмы 2 относительно неподвижного седла под действием уси-
лия, развиваемого исполнительным механизмом. Эластичная диаф-
рагма может быть изготовлена из резины, фторопласта и т. п. Диаф-
586
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.77. Шланговый регулирующий
орган:
1 — шток; 2— валики-траверсы, 3 — эла-
стичный патрубок
Рис. 6.78. Диафрагмовый регулиру-
ющий орган:
1 — шток; 2 — мембрана
рагмовый РО применяется для изменения расхода агрессивных сред
(например, кислот) при невысоких давлениях и температурах. Внут-
ренняя поверхность корпуса РО футерована химически стойким
материалом, например, полиэтиленом, резиной, фторопластом, или
покрыта эмалью. Основным преимуществом диафрагмовых РО яв-
ляется применение дешевых антикоррозионных материалов вместо
дорогостоящих нержавеющих сталей, а также бессальниковая кон-
струкция. К недостаткам диафрагмовых РО относится их неразгру-
женность и ограниченные давления и температуры регулируемых
сред (до 150 °C).
Шаровой регулирующий орган (рис. 6.79) снабжен поворотным зат-
вором 2 в виде сферы с цилиндрическим отверстием и седлами 3,
уплотнительные поверхности которых имеют форму сферы. Шток 7,
связанный с исполнительным механизмом, осуществляет поворот
шарового затвора, изменяя тем самым площадь проходного сече-
ния. В закрытом положении затвор упирается в пару седел, изготов-
ленных из упругих материалов (например, фторопласта), обеспечи-
вая герметичность перекрытия прохода. Чрезвычайно простая фор-
ма проточной части шарового РО позволяет его применять для
регулирования потоков вязких и кристаллизующихся сред, шламов,
пульп, а также сред, содержащих абразивные частицы. Пропускная
характеристика шарового РО близка к равнопроцентной. При от-
крытом положении затвора сопротивление потоку очень мало. Ша-
ровые РО могут работать, выдерживая перепады давления до 8 МПа
в интервале температур от —60 °C до +230 °C.
Затвор заслоночного регулирующего органа (рис. 6.80) представля-
ет собой заслонку 2 (например, металлический диск), при повороте
б.З. Технические средства систем автоматического управления
587
Нис. 6.79. Шаровой регулирую-
щий орган:
1 — шток; 2 — шаровой затвор; 3 -
седло
Рис. 6.80. Заслоночный регулирующий
орган:
1 — корпус; 2 — затвор (заслонка)
которой изменяется проходное сечение и, следовательно, пропуск-
ная способность РО. Когда заслонка полностью открыта (располо-
жена параллельно оси трубопровода), пропускная способность РО
максимальна. При закрытой заслонке (расположенной перпендику-
лярно оси трубопровода) пропускная способность РО минимальна
(так как затвор не обеспечивает полного перекрытия трубопровода;
всегда остается небольшой кольцевой зазор). Для поворота заслонки
нужен ИМ относительно небольшой мощности. При одинаковых
размерах условного прохода поворотные заслонки обладают ббль-
шей пропускной способностью, чем двухседельные регулирующие
клапаны (примерно на 50 %). Заслоночные РО применяются для
изменения больших расходов газа и пара при невысоких перепадах
давления (до 2,5 МПа) и температурах до 400 °C.
В шиберах затвор, изготовленный в виде полотна, перемещается
перпендикулярно направлению потока (рис. 6.81). Шиберы приме-
няются для регулирования расходов воздуха и газов при небольших
статических давлениях (до 0,01 МПа), а также для дозирования сы-
пучих материалов. Шиберы изготовляют из различных материалов,
А-А
Рис. 6.81. Схема шибера
588
Глава 6 Основы проектирования систем управления ХТП
что определяется условиями эксплуатации. Для работы с инертны-
ми газами (температура до 300 °C) шиберы изготовляют из листовой
стали; при температуре выше 300 °C — из чугуна. Для работы с аг-
рессивными газами шиберы изготовляют из легированных сталей
(или из листовой стали со специальным покрытием). Шиберы уста-
навливают на трубопроводах, коробах и каналах любой геометри-
ческой формы сечения
Основные характеристики регулирующих органов
Для характеристики регулирующих органов используют несколько
групп параметров.
К первой группе относятся параметры, которые определяют ра-
ботоспособность РО в конкретных условиях эксплуатации.
Условным давлением ру называют наибольшее допустимое давле-
ние среды на РО при нормальной температуре. На условное давле-
ние рассчитывается РО, а затем оно выбирается из нормального ряда
значений, принятых по ГОСТу. По значению условного давления,
например, односедельные и двухседельные клапаны подразделяют-
ся на клапаны для низкого давления (до 1,6 МПа), клапаны для
среднего давления (от 2,5 МПа до 16 МПа), клапаны для высокого
давления (от 20 МПа до 150 МПа).
Диаметром условного прохода Dy (мм) называют внутренний диа-
метр сечения в месте присоединения корпуса РО к трубопроводу.
Величина Dy стандартизирована. Условные проходы регулирующих
органов, как правило, выбирают из стандартного ряда чисел. Наи-
большее распространение получили РО диаметром условного про-
хода Dy от 25 мм до 250 мм.
Допустимая температура среды, проходящей через РО, °C:
низкая................до -225
нормальная ...........от -40 до +225
высокая ..............от +225 до +450
Примечание
Приведенное выше деление по допустимой температуре рабочей сре-
ды подходит не для всех РО. Например, шланговые и дифрагмовые РО
рассчитаны только на нормальную температуру.
Перепад давления на РО определяет усилия, на которые рассчи-
тываются все подвижные детали исполнительного механизма, а так-
же износ дроссельных поверхностей. Предельно допустимый пере-
пад давления для многих видов исполнительных устройств устанав-
ливается в зависимости от мощности исполнительного механизма
Ко второй группе относятся параметры, необходимые для расче-
та статической характеристики РО.
6.3. Технические средства систем автоматического управления 589
Пропускной способностью регулирующего органа Ку называют ве-
личину, численно равную расходу в м3/ч среды плотностью 1000 кг/м3
и кинематической вязкостью 10~6 м2/с, протекающей через РО, при
перепаде давления на нем, равном 0.1 МПа
Условной пропускной способностью /Tvs называют номинальную
пропускную способность полностью открытого РО.
Замечание
Условную пропускную способность обозначают также Куу.
По величине условной пропускной способности Ку$ регулирую-
щие органы условно делятся на четыре группы:
для больших расходов.............от 40 до 25 000
для средних расходов.............от 2 до 5000
для малых расходов...............от 0,1 до 4
для микрорасходов...............0,1 и менее
Условная пропускная способность зависит от типа РО, характе-
ризуемого коэффициентом а, и его диаметра условного прохода Dy.
Ниже приведены значения коэффициента а для различных РО:
односедельные и диафрагмовые клапаны.....0,012
двухседельные клапаны.................0,016
поворотные заслонки...................0,02
шланговые клапаны.....................0.05.
Относительная протечка в затворе — отношение величины, чис-
ленно равной расходу (м3/ч) среды с плотностью 1000 кг/м3 и кине-
матической вязкостью 10-6 м2/с, протекающей через закрытый но-
минальным усилием затвор клапана при перепаде давления на нем
0,1 МПа, к условной пропускной способности. Относительная про-
течка в затворе выражается в процентах.
Конструктивная характеристика показывает зависимость пло-
щади проходного сечения регулирующего органа Ау от перемеще-
ния затвора Л:
»v=/(A).
Обычно Ау выражают в процентах от площади проходного сечения
полностью открытого регулирующего органа Xvs.
Пропускная характеристика показывает зависимость пропускной
способности регулирующего органа Ку от перемещения затвора Л:
Ky=f(h). (6.117)
Пропускные характеристики используются для сравнения раз-
личных регулирующих органов. Дроссельные устройства серийно
590
Глава 6: Основы проектирования систем управления ХТП
выпускаемых РО профилируются так, чтобы получить одну из стан-
дартных пропускных характеристик, среди которых наиболее рас-
пространенными являются линейная и равнопроцентная. При ли-
нейной пропускной характеристике приращение пропускной способ-
ности пропорционально перемещению затвора, т. е.
dKv=Cdh, (6.118)
где С — постоянная величина; Л — перемещение затвора.
При равнопроцентной пропускной характеристике приращение
пропускной способности пропорционально ходу затвора и текуще-
му значению пропускной способности:
dKv=CKydh. (6.119)
Расходная характеристика РО является одной из основных ста-
тических характеристик РО. Различают теоретическую и рабочую
расходные характеристики.
Теоретическая расходная характеристика — зависимость между
расходом среды через РО и положением затвора при постоянном
перепаде давления Др^ на РО.
Рабочая расходная характеристика — зависимость между расхо-
дом среды через РО и положением затвора при действительном ра-
бочем перепаде давления Др^ на РО. Изменение расхода вещества
через РО в рабочих условиях происходит в соответствии с рабочей
расходной характеристикой.
Расходные характеристики регулирующих органов в рабочих ус-
ловиях отличаются от теоретических, поскольку перепад давления Дрм
изменяется при увеличении или уменьшении площади проходного
сечения клапана. Регулирующий орган является звеном гидравли-
ческой системы, в которую входит также трубопровод с местными
сопротивлениями, соединяющий два технологических аппарата.
Общий перепад давления на гидравлической системе Ар равен:
Др = Дркл+Дрт, (6.120)
где Дрм — перепад давления на РО; Дрт — потери давления в трубо-
проводе, зависящие от расхода.
Давление в аппаратах, как правило, поддерживается постоян-
ным, а значит постоянным остается и разность давлений Др на кон-
цах гидравлической системы, независимо от расхода протекающего
через нее вещества. При полностью закрытом регулирующем органе
весь перепад давления сосредоточен на нем, т. е. Др^ = Др. При
открытии РО увеличивается расход вещества в трубопроводе, что
приводит к росту Дрт и, следовательно, к уменьшению Дрм.
Отклонение рабочей расходной характеристики от теоретичес-
кой при прочих равных условиях зависит от отношения сопротивле-
6.3. Технические средства систем автоматического управления
591
F, Av, % F, Av, % F, Av, %
О 20 40 60 80 h % 0 20 40 60 80 П %
О 20 40 60 80 Й %
а
Рис. 6.82. Статические характеристики регулирующих органов:
а — затвор с прямоугольным вырезом; б — затвор с треугольным
вырезом; в — затвор с параболическим вырезом: / — конструктивные;
2 — теоретические расходные; 3 — рабочие расходные; h — относитель-
ное перемещение штока; Av — относительная площадь проходного
сечения, %; а, к, п, кх, иь пг — коэффициенты пропорциональности;
с — постоянная, равная относительной площади проходного сечения
при начальном положении штока; с. — постоянная, равная расходу при
начальном положении штока
ния РО к сопротивлению всей гидравлической системы, звеном ко-
торой он является:
о = bp^lbp. (6.121)
Чем больше перепад давления на РО по сравнению с перепадом
давления на остальной части гидравлической системы, тем ближе
рабочая расходная характеристика к теоретической. При о = 1 рабо-
чая и теоретическая расходные характеристики совпадают, а с умень-
шением о — различаются все больше.
Примеры конструктивных и расходных характеристик для двух-
седельного регулирующего клапана приведены на рис. 6.82.
Расчет регулирующих органов
Для расчета регулирующего органа прежде всего необходимо
рассчитать перепад давления на нем Др^, необходимый для созда-
ния расхода F в трубопроводе и регулирующем органе:
ДРкл = Др - Ддт,
(6.122)
592
Глава 6. Основы проектирования систем управления ХТП
где Дркд — перепад давления на регулирующем органе, МПа; Ьр —
располагаемый напор источника давления, МПа; Дрт — потери дав-
ления в трубопроводе и технологических аппаратах (без учета пере-
пада давления на регулирующем органе), МПа
Величину нельзя принимать произвольно, поскольку пере-
пад давления на РО для данного значения расхода зависит от распо-
лагаемого напора источника давления и параметров технологичес-
ких аппаратов и трубопровода (6.122). Эту величину необходимо
определять, выполняя гидравлические расчеты технологических тру-
бопроводов и выбирая разнообразные источники давления (насосы,
вентиляторы, воздуходувки и пр.). При расчете исполнительных ус-
тройств определяют их основные параметры: максимальную про-
пускную способность, типоразмер и условный проход (внутренний
диаметр присоединительного патрубка).
Расчет регулирующего органа для потока жидкости
1. Определяют пропускную способность регулирующего орга-
на max, необходимую для обеспечения максимального расхода
жидкости по уравнению:
*V max = 0,032FmaxV^;, (6.123)
где Рты — максимальный объемный расход жидкости, м3/ч; —
перепад давления на РО при максимальном расходе, МПа; р — плот-
ность жидкости, кг/м3.
2. По каталогам или справочникам из перечня типоразмеров
дроссельных РО выбирают устройство нужного типа с таким диа-
метром условного прохода Z>y, чтобы условная пропускная способ-
ность Kvs была примерно на 20 % больше расчетного значения ATVmax:
*vs >l,2/CVmax. (6.124)
Выражение (6.123) справедливо для маловязких жидкостей, при
протекании которых через РО не происходит кавитации.
Расчет регулирующего органа для потока водяного пара
Пропускная способность РО для потока водяного пара зависит
от режима течения водяного пара. Если режим течения водяного
пара докритический, т. е.
Др|сл<Р1/2, (6.125)
то пропускную способность регулирующего органа max, необхо-
димую для обеспечения максимального расхода пара, определяют
по уравнению:
А\ max
F I Г"
_ ‘ max I 1
103
(6.126)
6.3. Технические средства систем автоматического управления
593
uje ^vmax — пропускная способность РО по ГОСТ 12893—93, не-
обходимая для обеспечения максимального расхода пара; Дро -
перепад давления на РО при максимальном расходе пара, МПа;
Р\ — абсолютное давление пара перед РО, МПа; Fmax — макси-
мальный массовый расход пара, кг/ч; р( — плотность пара при
давлении р{ и рабочей температуре перед РО, кг/м3; р2 — плот-
ность пара при давлении р2 после РО и рабочей температуре
перед РО, кг/м3.
Для критического режима течения водяного пара, когда
ЛРкл Z»i/2,
(6.127)
используют уравнение:
max
_ Лпах j 1
73,5\Р1 Pi'
(6 128)
Расчет регулирующего органа для потока газа
При расчете пропускной способности РО для потока газа следу-
ет учитывать режима течения газа. Если режим течения газа докри-
тический, т. е.
дРкл < Pi/2> (6.129)
то пропускную способность регулирующего органа Ку тах, необхо-
димую для обеспечения максимального расхода газа, определяют по
уравнению:
max
Vm“ 5280
(6.130)
где Fn max — максимальный объемный расход газа, приведенный к
нормальным условиям (pN = 0,1 МПа, rN = 0°С), м3/ч; pN — плот-
ность газа, приведенная к нормальным условиям, кг/м3; к — коэф-
фициент, учитывающий отклонение реального газа от законов иде-
ального газа (величина безразмерная); Т} — абсолютная температу-
ра газа перед регулирующим органом, К; р2 — абсолютное давление
газа после регулирующего органа, МПа.
Для критического режима течения газа, когда
ЬРкл *Р\/2,
(6.131)
следует пользоваться уравнением:
max
ZO4U
(6.132)
594 Глава Ь. Основы проектирования систем управления ХТП
Общие требования к установке регулирующих органов
Регулирующие клапаны устанавливают на прямолинейных уча-
стках трубопровода (до и после клапана длиной не менее 10Лу), пре-
дусматривая при их монтаже байпасную (обводную) линию (рис. 6.83).
В случае неисправности РО его отключают (закрывают запорные
клапаны 2) и, регулируя расход среды клапаном 3, пропускают по-
ток мимо него, тем самым не останавливая работу технологического
оборудования.
Рис. 6.83. Схема установки ре-
гулирующего клапана на трубо-
проводе:
/— основной трубопровод; 11 — бай-
пасная линия; / — регулирующий
клапан с исполнительным механиз-
мом; 2, 3 — запорные клапаны
6.3.4.2. Исполнительные механизмы
Исполнительный механизм (ИМ) предназначен для усиления мощ-
ности командного сигнала, получаемого от регулятора, и воздей-
ствия на регулирующий орган.
По виду используемой энергии ИМ делят на электрические,
пневматические, гидравлические.
При выборе исполнительного механизма учитывают следующие
требования:
• ИМ должен развивать перестановочное усилие, достаточное
для преодоления реакции рабочих частей регулирующих органов;
• ИМ должен обладать детектирующим действием, т. е. переда-
вать воздействие только от исполнительного устройства к объекту
регулирования;
• значения основных величин, характеризующих статические и
динамические свойства ИМ (порог чувствительности, гистерезис,
люфт и т. д.), должны быть соизмеримы со значениями аналогич-
ных величин других элементов системы управления (регулирования);
• в конструкции ИМ желательно иметь дополнительные устрой-
ства, такие как ручной привод местного управления регулирующим
органом и т. д.
Важным параметром регулирующего органа, оказывающим вли-
яние на выбор типа и размера ИМ, является реакция, возникающая
при перемещении рабочих частей. При этом учитывается как вели-
чина реакции, гак и ее постоянство во времени при различных на-
грузках. По этому параметру РО подразделяются на разгруженные,
частично разгруженные и перегруженные.
6.3. Технические средства систем автоматического управления
595
Пневматические исполнительные механизмы
Пневматические исполнительные механизмы просты, надежны
и удобны в эксплуатации. Они взрыве- и пожаробезопасны, поэто-
му широко применяются в химической промышленности. Пневма-
тические ИМ обладают высоким быстродействием и точностью по-
зиционирования при умеренном перестановочном усилии и неболь-
ших габаритах.
Входным сигналом пневматических исполнительных механиз-
мов является давление сжатого воздуха (0,02...0,1 МПа), соответ-
ствующее командному сигналу регулятора.
Замечание
Пневматические ИМ можно использовать в комплекте не только с
пневматическими регуляторами, но и с регуляторами, формирующими элек-
трический командный сигнал. В последнем случае для преобразования элек-
трического сигнала в пневматический используется электропневмопреоб-
разователь.
В зависимости от вида чувствительного элемента, воспринима-
ющего энергию сжатого воздуха и преобразующего ее в перестано-
вочное усилие выходного элемента, пневматические ИМ делятся на
мембранные, поршневые, сильфонные и лопастные.
Наибольшее распространение получили мембранные исполнитель-
ные механизмы (МИМ) (рис. 6.84, а). Прорезиненная мембрана 3 с
жестким металлическим центром зажата между двумя фланцами,
разделяя пространство МИМ на две полости. Жесткий центр мем-
браны связан со штоком 1. Под мембраной расположена противодей-
ствующая пружина 2. Командный сигнал в виде давления сжатого
воздуха подается в рабочую полость нал мембраной, создавая усилие
Л = 4>К>
пропорциональное командному сигналу (А — эффективная площадь
мембраны).
Под действием усилия F{ мембрана вместе со штоком перемеша-
ется вниз. Пружина сжимается, создавая уравновешивающее усилие
F2 = ch>
пропорциональное перемещению штока ИМ (с — коэффициент
жесткости пружины). При равновесии Fx F2. т. е.
А = Й/с)/>к,
откуда следует, что в статическом режиме перемещение штока ИМ
пропорционально командному сигналу. Это позволяет использовать
величину командного давления р¥ в качестве сигнала, определяю-
596
Глава 6 Основы проектирования систем управления ХТП
Рис. 6.84. Исполнительные механизмы:
а — мембранный (7 — шток. 2 — пружина, 3 — мембрана); б — порш-
невой (7 — поршень, 2 — пружина); в — двухфазный асинхронный дви-
гатель; г — электромагнитный (7 — индукционная катушка, 2 — сер-
дечник, 3 — пружина)
шего положение регулирующего органа. Статическая характеристи-
ка, связывающая величину командного давления с положением штока
во всем диапазоне его перемещения, называется ходовой характери-
стикой ИМ.
Шток исполнительного механизма соединен со штоком регу-
лирующего органа (см., например, рис. 6.74, а на стр 582). С уве-
личением давления воздуха в полости над мембраной 3 шток 1
вместе с затвором 4 движется вниз и уменьшает проходное сечение
клапана, что снижает расход рабочей среды. При уменьшении дав-
ления воздуха затвор за счет упругих сил пружины 2 приподнима-
ется, и клапан открывается.
В зависимости от направления движения штока различают мем-
бранные исполнительные механизмы прямого действия (при повы-
шении давления в рабочей полости шток удаляется от плоскости
заделки мембраны) и обратного действия (шток приближается).
6.3. Технические средства систем автоматического управления
597
Для повышения точности и быстродействия пневматических ИУ
при работе в тяжелых условиях (большое давление и повышенная
вязкость регулируемой среды, большая длина пневматической со-
единительной линии и др.) их снабжают позиционерами.
Позиционеры служат для усиления мощности пневматического
сигнала и обеспечения строгой пропорциональности между переме-
щением штока ИМ и давлением рк, соответствующем командному
сигналу регулятора. Это своеобразные усилители с обратной связью
по положению штока. Обязательными конструктивными элемента-
ми позиционера (рис. 6.85) являются чувствительный элемент (на-
пример, сильфон 7), пружина обратной связи 7, одним концом
связанная со штоком ИМ, и золотниковое устройство 3, 4, в кото-
рое подается сжатый воздух от внешнего источника питания (на-
пример, компрессора). Командный сигнал рк поступает в сильфон 7,
который преобразует этот сигнал в параметр, удобный для сравне-
ния, — перемещение или усилие. Вид параметра сравнения предоп-
ределяет принцип действия позиционера — компенсация переме-
щений или компенсация сил. Большее распространение получил
принцип компенсации сил, который легко реализуется конструк-
тивно и обеспечивает высокую точность. Сравниваются усилие,
создаваемое командным сигналом, и усилие, зависящее от текуще-
го положения штока ИМ, создаваемое пружиной обратной связи 7.
При рассогласовании этих сил чувствительный элемент управляет
работой золотникового устройства, которое изменяет расход сжа-
того воздуха, направляемого из внешнего источника питания в вер-
хнюю полость МИМ.
Рис. 6.85. Схема позиционера:
1 — сильфон; 2 — рычаг; 3 — золотник; 4 — золотниковая камера; 5 -
МИМ; 6 — тяга; 7— пружина обратной связи; Я — РО; />„ — давление
питания, />„ — командный сигнал
598 Глава 6. Основы проектирования систем управления ХТП
Замечание
В динамическом отношении МИМ в области частот 0...0,3 рад/с рас-
сматривают как последовательное соединение статического звена перво-
го порядка с небольшой постоянной времени (порядка нескольких се-
кунд) и усилительного звена (с зоной гистерезиса 2... 10 %). При длине
пневмопровода более 100... 150 м МИМ снабжают усилителями мощности и
охватывают жесткой отрицательной обратной связью по перемещению РО.
При использовании таких позиционеров МИМ рассматривают как стати-
ческое звено нулевого порядка (усилительное), не влияющее на динами-
ческие характеристики пневматического регулятора и системы управле-
ния в целом
Поршневые ИМ отличаются большим конструктивным разнооб-
разием и применяются в тех случаях, когда требуются большой ход
штока и большие перестановочные усилия. В поршневой исполни-
тельный механизм (см. рис. 6.84, б) управляющий сигнал в виде
давления сжатого воздуха подается в цилиндр и перемещает пор-
шень /, шток которого соединен с РО.
Гидравлические исполнительные механизмы
Предназначены для преобразования сигнала (разности давления
масла), поступающего от регулятора, в перемещение РО. Выпуска-
ются два типа гидравлических исполнительных механизмов: пря-
мого хода (с поступательным движением штока) и кривошипные
(с поворотным устройством).
Поршневые исполнительные механизмы прямого хода состоят
из цилиндра с поршнем. Масло под высоким давлением подается в
цилиндр и перемещает поршень, шток которого соединен со што-
ком РО. Входным сигналом поршневого ИМ, соответствующим ко-
мандному сигналу регулятора, является объемный расход масла F, а
выходным — перемещение штока h. Взаимосвязь между ними выра-
жается уравнением:
где А — площадь поперечного сечения цилиндра.
Таким образом, поршневой гидравлический ИМ является ин-
тегрирующим звеном.
При соединении штока с кривошипом получается кривошип-
ный ИМ, управляющий поворотными (заслоночными) регулирую-
щими органами.
Пневматические и гидравлические ИМ обладают рядом преиму-
ществ перед электрическими ИМ: высокой надежностью, большим
ресурсом работы, возможностью плавного изменения выходных пара-
6.3. Технические средства систем автоматического управления 599
метров в широком диапазоне, простотой преобразования энергии
потока жидкости или газа в механическую мощность на выходе ИМ,
устойчивостью к вибрации.
Электрические исполнительные механизмы
Устройства данного типа создают большие перестановочные уси-
лия, монтируются на большом расстоянии от пульта управления,
обеспечивают практически любой ход плунжера. К недостаткам мож-
но отнести энергоемкость, сложность обслуживания, высокую сто-
имость для ИМ во взрывозащишенном исполнении. Работают в ком-
плекте с электрическими регуляторами. Различают следующие виды
электрических ИМ: электродвигательные и электромагнитные.
Электродвигательные ИМ состоят из электродвигателя (посто-
янной скорости, переменной скорости или шагового), редуктора с
ручным дублером, контрольно-пусковой аппаратуры (указателя по-
ложения, датчика положения), приставки, формирующей переме-
щение выходного вала. В зависимости от типа ИМ те или иные
блоки могут отсутствовать.
Наибольшее распространение получили электрические ИМ по-
стоянной скорости, что обусловлено использованием простых и на-
дежных электродвигателей, для управления которыми применяются
простые и экономичные усилители мощности. В качестве электро-
привода в ИМ применяют асинхронные трехфазные двигатели, а
также асинхронные однофазные двигатели с полым ротором и рото-
ром типа «беличье колесо» (см. рис. 6.84, в). В таких ИМ ротор
электродвигателя имеет постоянную мгновенную скорость враще-
ния, а требуемый закон перемещения затвора регулирующего орга-
на обеспечивается за счет повторно-кратковременного включения
электродвигателя и соответствующего соотношения между длитель-
ностями включенного и выключенного состояний.
В электромагнитных ИМ усилие, необходимое для перестанов-
ки затвора РО, создается электромагнитом (см. рис. 6.84, г). Когда
по катушке электромагнита 1 протекает ток, сердечник 2, соединен-
ный с затвором РО, втягивается в электромагнит (индукционную
катушку), открывая проход для рабочей среды. Если ток в катушке
электромагнита отсутствует, пружина 3 выталкивает сердечник из
электромагнита, и затвор РО перекрывает проход для рабочей сре-
ды. Электромагнитные ИМ применяются в основном в системах
двухпозиционного регулирования и в системах защиты и блокиров-
ки, так как затвор регулирующего органа может занимать только два
крайних положения (открыто-закрыто).
При установке электромагнитных ИМ на трубопроводах для
жидкостей следует иметь в виду, что их практически мгновенное
действие приводит к гидравлическим ударам.
600 Глава 6. Основы проектирования систем управления ХТП
Замечание
Пневматические и гидравлические ИУ имеют более высокую удель-
ную мощность (мощность на единицу массы) по сравнению с электричес-
кими ИУ с электронными, магнитными усилителями. Так, например, для
пневматических и гидравлических ИУ она в среднем равна 10 кВт/кг, а для
электромеханических — 1 кВт/кг. Как следствие этого, динамические ха-
рактеристики пневматических и гидравлических ИУ превосходят соответ-
ствующие характеристики электромеханических систем.
6.3.4.3. Пьезокерамические исполнительные устройства
Хотя пьезоэффект был открыт в XIX веке, потом во второй поло-
вине XX века развиты теория и технология пьезокерамических мате-
риалов, полагают, что пьезокерамика станет одним из перспективных
материалов XXI века. Действие пьезокерамических ИУ основано на
принципе обратного пьезоэффекта: электрическая величина (напря-
жения или заряда) преобразуется в механическое перемещение (сдвиг)
рабочего тела (преобразование электрической энергии в механичес-
кую). Пьезокерамические ИУ подразделяются на три основные груп-
пы: осевые, поперечные и гибкие. Осевые и поперечные пьезокерами-
ческие ИУ объединены общим названием многослойные пакетные,
поскольку представляют собой несколько пьезоэлементов (дисков,
стержней, пластин или брусков), собранных в пакет. Для многослой-
ных пакетных ИМ характерно то, что они могут развивать значитель-
ное усилие (до 10 кН), при управляющем напряжении 1 кВ и очень
малых отклонениях рабочей части (от единиц нанометров до сотен
микрон). Многослойные пакетные ИУ относят к мощным.
Гибкие пьезокерамические ИУ (биморфы) развивают, как прави-
ло, незначительное усилие при малых (сотни микрон) отклонениях
рабочей части, хотя известны пластинчатые биморфы (ленточные
ИУ), обеспечивающие усилие до 0,25 кН при отклонении рабочей
части до 3 мм. Гибкие ИУ относят к группе маломощных.
Перспективным направлением использования пакетных ИУ яв-
ляется управление гидравлическим клапанами.
Ленточные ИУ благодаря высокой чувствительности, относитель-
но большому усилию и величине отклонения используются в каче-
стве сенсорных выключателей и контакторов, закрывающих и от-
крывающих клапанов различного назначения, в том числе для про-
граммируемой дозированной подачи (например, лекарств).
Дополнительная информация
К техническим средствам систем управления относят также разнооб-
разные выходные устройства (устройства контактной коммутации) и уси-
лительные устройства (усилители и распределители).
Выходные устройства предназначены для передачи командного сиг-
нала на исполнительные механизмы (или на регистрирующие устрой-
ства).
6.4. Стадии проектирования систем управления 601
К ним относятся:
• релейные устройства (электромагнитное реле);
• транзисторная оптопара;
• симисторная оптопара.
Выходные устройства ключевого типа используются для управления
нагрузкой либо непосредственно, либо через мощные управляющие эле-
менты: пускатели, твердотельное реле, тиристоры (или симисторы).
Назначение усилительных устройств (усилителей и распределителей)
САУ — усиление по мощности командного сигнала, поступающего с выхо-
да регулятора, для управления исполнительным механизмом.
В зависимости от способа усиления командного сигнала, недостаточ-
ного для управлением двигателем механизма, электрические исполнитель-
ные механизмы подразделяются на механизмы с контактным и бесконтак-
тным управлением. В первом случае управление производится с помощью
реверсивного магнитного пускателя, а во втором — с помощью специаль-
ного тиристорного или магнитного усилителя.
К группе электрических усилителей относят электромагнитные, элек-
тронные (транзисторные, тиристорные), магнитные и другие усилитель-
ные устройства.
В зависимости от типа распределительного элемента пневматические
и гидравлические усилители классифицируются на распределители расхо-
да и давления золотникового типа, распределители типа сопло—заслонка,
распределители струйного типа.
6.4. СТАДИИ ПРОЕКТИРОВАНИЯ СИСТЕМ УПРАВЛЕНИЯ
Системы управления разрабатывают как для реконструируемых,
так и для вновь строящихся химических производств. Создание си-
стем управления различными химическими предприятиями вклю-
чает пять стадий: разработку технического задания, эскизную разра-
ботку, разработку технического проекта, разработку рабочего про-
екта, внедрение АСУ ТП и анализ ее функционирования.
6.4.1. Разработка технического задания
Стадия технического задания включает следующие этапы:
• определение цели и критериев качества функционирования ХТП
как объекта управления;
• исследование технико-экономических показателей объекта-про-
тотипа (если таковой имеется) и их взаимосвязи с технологически-
ми параметрами;
• определение структуры технологического объекта управления
(ТОУ), входных воздействий (возмущающих и управляющих), вы-
ходных координат, взаимосвязей между ними и построение матема-
тической модели ТОУ;
• исследование статистических характеристик возмущающих воз-
действий.
602 Глава 6. Основы проектирования систем управления ХТП
Наиболее сложная задача на этой стадии — построение матема-
тических моделей ТОУ, в дальнейшем используемых при синтезе
АСУ ТП. При синтезе локальных САР, как правило, используют
линеаризованные модели динамики в виде дифференциальных урав-
нений первого и второго порядка с запаздыванием, которые получа-
ют в результате обработки экспериментальных переходных характе-
ристик по разным каналам воздействия. При решении задач опти-
мального управления статическими режимами используют конечные
соотношения, получаемые из уравнений материального и энергети-
ческого баланса ТОУ (или уравнения регрессии). В задачах опти-
мального управления динамическими режимами используют нели-
нейные дифференциальные уравнения, получаемые из уравнений
материального и энергетического баланса ТОУ, записанных в диф-
ференциальной форме.
Основная задача при разработке системы управления состоит в
подборе технологических параметров, необходимых для контроля
(диагностирования), управления (регулирования) и анализа пред
аварийного состояния ТОУ. Желательно по минимально возможно-
му числу выбранных параметров получить полное представление о
состоянии и свойствах ТОУ.
Выбор контролируемых параметров
Контролю подлежат технологические параметры, по значениям
которых осуществляется управление технологическим процессом, а
также его пуск и останов. К таким параметрам относятся управляе-
мые параметры, а также входные параметры, при изменении кото-
рых в объект управления могут поступить возмущающие воздействия.
Особое внимание должно уделяться контролю технологических
параметров взрывоопасных ТОУ. Для каждого такого объекта уп-
равления определяют совокупность значений критических физико-
химических величин технологического процесса, а также допусти-
мый диапазон их изменений. Для контроля загазованности (по ПДК)
в производственных помещениях, рабочей зоне открытых наружных
технологических установок должны предусматриваться в обязатель-
ном порядке технические средства газового анализа. Параметры,
характеризующие состояние взрывоопасных ТОУ, должны не толь-
ко контролироваться, но и регистрироваться.
Выбор управляемых (регулируемых)
технологических параметров и управляющих воздействий
На этом ответственном этапе выбирают параметры, подлежащие
управлению (регулированию), и параметры, изменяя которые мож-
но вносить управляющие (регулирующие) воздействия в ТОУ При
этом принимается во внимание целевое назначение технологичес-
6.4. Стадии проектирования систем управления 603
кого процесса и его взаимосвязи с другими технологическими про-
цессами. Выбирают критерий управления, его заданное значение и
параметры, изменением которых целесообразно на него воздейство-
вать. Основой выбора являются статические и динамические харак-
теристики процесса.
Статические характеристики позволяют оценить степень влия-
ния входных параметров на выходные, а динамические характерис-
тики помогают уточнить правильность выбора управляющих воз-
действий. Пусть, например, выход С целевого продукта зависит от
температуры Ти давления р в реакторе, а анализ статических харак-
теристик С = /(Т, р) показывает, что изменение давления в реакторе
в меньшей степени влияет на выход целевого продукта, чем измене-
ние температуры. В таком случае выход целевого продукта следует
поддерживать, изменяя температуру в реакторе. Динамические ха-
рактеристики (полученные, например, экспериментально) помога-
ют уточнить правильность выбора управляющего воздействия. Если
они показывают, что канал воздействия на выход целевого продук-
та, связанный с изменением температуры, обладает гораздо боль-
шим запаздыванием, чем канал, связанный с изменением давления,
то целесообразно в качестве управляющего воздействия использо-
вать именно изменение давления, несмотря на более слабое влия-
ние этого параметра на выход продукта.
Канал управления выбирают так, чтобы управляющее воздей-
ствие (например, изменение расхода, температуры) сопровождалось
максимальным и быстрым изменением управляемой величины (на-
пример, выхода целевого продукта), иначе говоря, чтобы коэффи-
циент усиления ТОУ по каналу управления был максимален.
Анализ возмущающих воздействий
После выбора критерия управления и управляющих воздействий
начинается анализ ТОУ с точки зрения выявления возмущающих
воздействий и способов их устранения до поступления в ТОУ. При
этом особое внимание обращается на стабилизацию входных пара-
метров, поскольку их изменения являются наиболее сильными воз-
мущающими воздействиями.
На практике все внешние возмущающие воздействия не удается
устранить до их поступления в ТОУ, невозможно предусмотреть и
устранить внутренние возмущающие воздействия. Необходимо так-
же учитывать, что многие входные и управляемые параметры дан-
ного технологического процесса определяются технологическим ре-
жимом предыдущего и последующего процессов. Например, в про-
изводстве контактной серной кислоты, концентрация кислорода в
обжиговом газе, поступающем в контактный аппарат, зависит от
технологического режима процесса обжига серы.
604
Глава 6. Основы проектирования систем управления ХТП
Не устраненные возмущающие воздействия приводят к измене-
нию технологических параметров, характеризующих технологичес-
кий режим и влияющих на величину критериев управления. Следо-
вательно, появляется необходимость регулирования технологичес-
ких параметров и нового обращения к статическим и динамическим
характеристикам.
В итоге приходят к созданию комбинированной системы управ-
ления, способной осуществить как регулирование критерия управ-
ления, так и номинальных технологических (режимных) и входных
параметров ТОУ.
Замечание
Технологические параметры, как правило, взаимосвязаны между со-
бой, поэтому управляющие воздействия, направленные на регулирование
одного технологического параметра, оказывают влияние и на другие. На-
пример, изменение количества пара, подаваемого в кипятильник ректифи-
кационной колонны, осуществляемое регулятором температуры, влияет не
только на температуру в кубе колонны, но и на уровень жидкости в нем.
Для ослабления внутренних связей между отдельными параметрами в цепь
управления вводят компенсирующие внешние связи между регуляторами
или выбирают в качестве управляемых (регулируемых) величин парамет-
ры, не связанные (или слабо связанные) между собой
Выбор сигнализируемых технологических параметров
Состояние и свойства ТОУ анализируют на предмет его пожаро-
и взрывоопасности, токсичности, агрессивности перерабатываемых
веществ, возможности аварий и затем приступают к выбору пара-
метров сигнализации. Предаварийной (а при необходимости и пре-
дупредительной) сигнализации подлежат параметры, предельные
значения которых могут привести:
• к взрыву и пожару (например, превышение допустимой кон-
центрации взрывоопасных веществ в технологических аппаратах,
производственных помещениях, рабочей зоне открытых технологи-
ческих наружных установок);
• к несчастным случаям (например, превышение допустимой
концентрации токсичных веществ в помещении);
• к выходу из строя технологического оборудования (например,
при нарушении температурного режима может произойти «загипсо-
вание» реактора сернокислотного разложения фосфатов в производ-
стве экстракционной фосфорной кислоты);
• к нарушению технологического режима (например, превыше-
ние допустимого уровня кислоты в емкости-сборнике, с последую-
щим переливом кислоты);
• к выпуску некондиционной продукции и браку (например, на-
рушение наиболее важных номинальных технологических (режим-
ных) параметров).
6.4. Стадии проектирования систем управления 605
Замечание
Сигнализация о выходе наиболее ответственных технологических пара-
метров за допустимые пределы должна осуществляться от двух параллельно
установленных первичных измерительных преобразователей, например, от двух
первичных измерительных преобразователей уровня легковоспламеняющей-
ся жидкости, и срабатывание устройств сигнализации должно фиксироваться.
6.4.2. Эскизная разработка
На стадии эскизной разработки АСУ ТП выполняются следую-
щие виды работ
• выбор критерия оптимального управления ТОУ, математичес-
кая постановка задачи (центральное место), ее декомпозиция (в случае
необходимости) и выбор методов решения основной и локальных
задач оптимального управления, на основе которых строится алго-
ритм оптимального управления;
• разработка функциональной и алгоритмической структуры АСУ
ТП; определение объема информации о состоянии ТОУ и ресурсов
вычислительного комплекса (быстродействие, объем запоминающих
устройств), необходимых для реализации всех функций АСУ ТП;
• предварительный выбор управляющего вычислительного ком-
плекса и комплекса технических средств;
• предварительный расчет технико-экономической эффективно-
сти АСУ ТП (этот завершающий этап эскизной разработки АСУ ТП
выполняют экономисты).
Основным показателем технико-экономической эффективности
АСУ ТП является срок окупаемости системы Ток. Его можно опре-
делить по формуле:
Ток = (К2 - ^)/](Д2 - С2) - (Д, - С,)], (6.133)
где и К2 — капитальные затраты на автоматизированный техно-
логический комплекс до и после ввода в действие АСУ ТП; Д, и Ц2 —
годовые объемы реализации готовой продукции в оптовых ценах до
и после внедрения АСУ ТП; С, и С2 — себестоимость готовой про-
дукции до и после внедрения АСУ ТП.
6.4.3. Разработка технического проекта
Разработка технического проекта (если создается нетиповая АСУ
ТП) предполагает принятие основных технических решений на ос-
нове технического задания. На этом этапе развиваются и углубля-
ются предпроектные научно-исследовательские работы: уточняются
математические модели и постановки задач оптимального управле-
606 Глава 6. Основы проектирования систем управления ХТП
ния, проверяются с помощью имитационного моделирования на
компьютере работоспособность и эффективность алгоритмов, выб-
ранных для реализации информационных и управляющих функций
АСУ ТП. Уточняются функциональная и алгоритмическая структу-
ры системы, прорабатываются информационные связи между функ-
циями и алгоритмами, наконец, разрабатывается организационная
структура АСУ ТП. Наиболее важный и трудоемкий этап на стадии
технического проекта — разработка специалььюго программного
обеспечения системы.
На стадии разработки технического проекта происходит оконча-
тельный выбор комплекса технических средств, и выполняют рас-
четы по оценке надежности как реализации важнейших функций
АСУ ТП, так и системы в целом.
Комплекс реализуемых способов защиты разрабатывают исходя
из особенностей ТОУ, анализа аварийных ситуаций, а также катего-
рии взрывоопасности ТОУ. По заданной программе системы проти-
воаварийной защиты (ПАЗ) автоматически перераспределяют мате-
риальные и энергетические потоки, включают и отключают аппара-
ты, чтобы предотвратить взрыв, аварию, несчастный случай, выпуск
некондиционной продукции и брак. При этом ТОУ переводится в
безопасное состояние, вплоть до его останова.
Автоматические способы защиты должны полностью устранить
возникшую критическую ситуацию, при этом последствия от вме-
шательства устройств зашиты должны быть минимальны. Так, на-
пример, при прекращении подачи одного из веществ в реактор дол-
жна быть отключена магистраль подачи другого вещества в этот же
реактор; при превышении предельного значения давления в реакто-
ре должен сработать предохранительный клапан; при достижении
опасного значения концентрации какого-либо вещества перекрыва-
ется магистраль подачи данного вещества и приводится в действие
аварийная система вентиляции и т. д.
Одна из основных задач систем ПАЗ — уменьшение уровня взры-
воопасности ТОУ, в том числе: предотвращение взрывов и пожаров
внутри технологического оборудования; исключение возможных
взрывов и пожаров в производственных зданиях, сооружениях, на-
ружных технологических установках; защита технологического обо-
рудования от разрушения; максимальное ограничение выбросов из
технологического оборудования горючих и токсических веществ в
атмосферу при аварийной разгерметизации.
Заданные значения и время срабатывания систем ПАЗ устанав-
ливают исходя из категории пожаро- и взрывоопасности ТОУ, воз-
можной скорости изменения параметров технологического процес-
са, класса точности первичных измерительных преобразователей и
нормирующих преобразователей, быстродействия системы ПАЗ и т. д.
6 4. Стадии проектирования систем управления 607
Технологические объекты управления, в которых при отклоне-
ниях от номинального режима возможно образование пожаро- и
взрывоопасных смесей, обеспечиваются системами подачи в них
инертных газов, предотвращающих образование взрывоопасных кон-
центраций. Для производств, в которых имеются блоки первой (I)
категории взрывоопасности, предусматривают автоматическое уп-
равление подачей инертного газа, второй (II) и третьей (III) катего-
рии — дистанционное.
При отключении питания система ПАЗ должна перевести ТОУ в
безопасное состояние, исключая возможность производственных
переключений в системах ПАЗ при восстановлении питания.
Автоматические устройства и средства вычислительной техники,
реализующие функции управления, должны выбираться в рамках ГСИ
с учетом сложности объекта управления и его пожаро- и взрывоопас-
ности, агрессивности и токсичности для окружающей среды, вида
измеряемого технологического параметра и физико-химических
свойств среды, дальности передачи сигналов от первичных измери-
тельных преобразователей и исполнительных устройств до пунктов
управления, требуемой точности и быстродействия, допустимой по-
грешности измерительных систем, места установки устройств, требо-
ваний и правил установки электрооборудования и т. д.
Выбор средств автоматизации для пожаро- и взрывоопасных ТОУ
чрезвычайно ответственен. Производства, в состав которых входят
блоки I категории взрывоопасности, должны оснащаться системами,
базирующимися на резервируемых электронных средствах (включая
ПЭВМ и микропроцессорную технику) с самодиагностикой и свето-
вой индикацией исправного состояния. Такие системы должны рабо-
тать по специальным программам, задающим последовательность и
время выполнения операций отключения при аварийных выбросах.
Для максимального снижения выбросов в окружающую среду при
аварийной разгерметизации блоков I категории предусматривается
установка автоматических быстродействующих запорных и (или) от-
секающих устройств с временем срабатывания не более 12 с.
Технологические блоки II и III категорий взрывоопасности ос-
нащаются эффективными быстродействующими системами приве-
дения технологических параметров к регламентным значениям или
к остановке блоков. Для этих блоков предусматривается установка
устройств с дистанционным управлением и временем срабатывания
не более 120 с.
Примечание
Исполнительные механизмы систем ПАЗ, кроме указателей крайних
положений непосредственно на ИМ, должны иметь обязательно устройства
сигнализации крайних положений в операторских (пунктах управления).
608 Глава 6. Основы проектирования систем управления ХТП
Пример
Производство аммофоса характеризуется наличием агрессивных
сред, запыленности, загазованности, вибрации. В производстве аммо-
фоса имеются также взрывопожароопасные зоны III категории. По-
этому при реконструкции АСУ ТП должны применяться ПЭВМ в про-
мышленном исполнении, а не в офисном. Источники бесперебойного
питания контроллеров и ПЭВМ должны обеспечивать сохранение не-
обходимой мощности в течение 20 минут после исчезновения сетевого
напряжения. Для достижения заданной высокой точности управления
химической реакцией с малым временем пребывания реагентов в труб-
чатых реакторах должны применяться высокоточные измерительные и
исполнительные устройства. В производстве аммофоса не должно быть
невосстанавливаемых в течение 120 с отказов АСУ ТП, если же они
возникнут, то это приведет к аварийной ситуации
6.4.4. Разработка рабочего проекта
В состав рабочего проекта входит рабочая документация. Разра-
ботка рабочей документации является одной из стадий создания АСУ
ТП и включает в себя:
• разработку рабочей документации по информационному, орга-
низационному, методическому, лингвистическому и программному
обеспечению;
• разработку технической документации на технические сред-
ства разового изготовления;
• разработку проектно-сметной строительной документации;
• составление локальной сметы на оборудование и монтаж;
• разработку задания генеральному проектировщику (смежным
организациям или заказчику) на работы, связанные с автоматизаци-
ей объекта управления.
Для простых схем и систем, разрабатываемых с использованием
типовых проектных решений, стадии разработок технического про-
екта и рабочей документации объединяются в одну.
6.4.5. Ввод в действие АСУ ТП,
внедрение и анализ ее функционирования
Цель работ на этой стадии — физическая реализация системы и
передача ее в промышленную эксплуатацию.
Основанием для начала работ по вводу в действие АСУ ТП слу-
жит готовность рабочей документации и несерийных компонентов
средств автоматизации.
Контрольные вопросы 609
Работа по вводу в действие АСУ ТП состоит из следующих этапов:
• подготовка организации к вводу АСУ ТП в действие, обучение
персонала пользователя;
• строительно-монтажные работы;
• комплектация АСУ ТП подготовляемыми комплексами средств
автоматизации, техническими средствами, программными средствами
и т. д.;
• пуско-наладочные работы;
• проведение опытной эксплуатации АСУ ТП;
• проведение приемочных испытаний;
• устранение замечаний, выявленных при испытаниях АСУ ТП;
• приемка АСУ ТП в промышленную эксплуатацию (внедрение
АСУ ТП).
АСУ или отдельно сдаваемая функция АСУ при вводе ее в дей-
ствие должна пройти предварительные и приемочные испытания, а
также испытания, предусмотренные нормативно-техническими до-
кументами заказчика АСУ. Приемочным испытаниям должна пред-
шествовать опытная эксплуатация на объекте управления.
Предварительные испытания АСУ проводят на действующем ТОУ
для определения ее работоспособности и решения вопроса о воз-
можности приемки АСУ в опытную эксплуатацию.
По результатам приемочных испытаний составляется протокол
испытаний и акт о вводе АСУ в действие (или заключение о непри-
емке АСУ с перечнем необходимых доработок и рекомендуемыми
сроками их выполнения).
На стадии анализа функционирования системы проверяют эффек-
тивность решений, принятых при ее создании, определяют факти-
ческую технико-экономическую эффективность АСУ ТП.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Каковы особенности регулирования расхода, уровня, давления, тем-
пературы, pH?
2. Назовите особенности регулирования паро-жидкостного теплооб-
менника.
3. Каким звеном можно представить динамику паро-жидкостного теп-
лообменника?
4. Предложите, учитывая основные возмушаюшие и управляющие воз-
действия, варианты систем регулирования температуры жидкости на выхо-
де промышленного кожухотрубного паро-жидкостного теплообменника.
5. Назовите особенности регулирования массообменных процессов.
6. Предложите варианты регулирования параметров ректификацион-
ной установки.
7. Каковы особенности регулирования химических реакторов?
8. Как выполняется синтез автоматических систем регулирования?
Назовите и поясните этапы синтеза САР.
9. Для чего необходим синтез инвариантных САР?
20 Бсси*1Л0н А. В.. X фитонон II И.
Глава 6. Основы проектирования систем управления ХТП
10. Каковы особенности комбинированного регулирования?
11. Сформулируйте условия физической реализуемости динамическо-
го компенсатора
12. Назовите отличия каскадного регулирования от комбинированного.
13. Приведите примеры двухконтурных каскадных систем регулирования.
14. Объясните понятие «многосвязные системы регулирования». Како-
вы особенности многосвязных систем регулирования?
15. Что характерно для регулирования объектов с запаздыванием?
16. По каким признакам классифицируются регуляторы?
17. Охарактеризуйте регуляторы прямого и непрямого действия.
18. Каковы принципы построения управляющих устройств и как фор-
мируются законы регулирования?
19. Каково назначение исполнительного устройства?
20. Объясните принцип действия регулирующих органов.
21. Перечислите характеристики регулирующих органов.
22. Объясните принцип действия исполнительных механизмов
23. Как происходит выбор исполнительного устройства?
24. Как составляется техническое задание на проектирование систем
управления?
25. Что лежит в основе выбора параметров контроля, сигнализации и
управления?
7Г Л А В A_________________
ОСНОВНЫЕ СВЕДЕНИЯ ОБ АСУ ТП
В ХИМИЧЕСКОЙ ПРОМЫШЛЕННОСТИ
Это такая штука, которую вы спокой-
но можете объяснить два раза, не опаса-
ясь, что кто-нибудь поймет, о чем вы го-
ворите.
А.А. Милн. Винни-Пух и все-все-все
7.1. НАЗНАЧЕНИЕ АСУ ТП
Автоматизированная система управления технологическим про-
цессом — это человеко-машинная система управления, предназна-
ченная для выработки и реализации управляющих воздействий на
технологический объект управления в соответствии с принятым кри-
терием управления при помощи современных средств сбора и пере-
работки информации и вычислительной техники. Под технологи-
ческим объектом управления (ТОУ) в этом случае понимают сово-
купность технологического оборудования и технологического
процесса, реализованного на нем по соответствующим технологи-
ческим инструкциям и регламентам.
Совокупность совместно действующих АСУ ТП и ТОУ называ-
ют автоматизированным технологическим комплексом (АТК).
Создание и функционирование АСУ ТП направлено на получе-
ние определенных технико-экономических результатов (снижение
себестоимости продукции, уменьшение потерь, повышение качества
целевых продуктов, повышение производительности труда и т. п.).
При функционировании ТОУ на границе критических режимов их
эксплуатация без современной АСУ ТП практически невозможна.
Назначение АСУ ТП — обеспечить безопасность и устойчивость тех-
нологического процесса, проводя его в высокоинтенсивных и эко-
номичных режимах. Немного о целях функционирования АСУ ТП
говорилось ранее (см. разд. 2.2). Естественно, что эти цели разнооб-
разны и могут заключаться в обеспечении безопасности функцио-
нирования ТОУ, стабилизации параметров материальных и энерге-
20*